/






























































































































































































































































































































































































































































































































































































































































































































































































Текст
ЦЕНТРАЛЬНЫЙ АЭРОГИДРОДИНАМИЧЕСКИЙ ИНСТИТУТ
имени проф. Н.Е.Жуковского
АЭРОДИНАМИКА
И ДИНАМИКА
ПОЛЕТА
МАГИСТРАЛЬНЫХ
САМОЛЕТОВ
Под редакцией
академика РАН Г. С. Бюшгенса
ИЗДАТЕЛЬСКИЙ ОТДЕЛ ЦАГИ
АВ ИА-И 3ДАТЕЛЬСТВ О КН Р
Москва — Пекин
19 9 5
9. 4. Системы снижения нагрузок от дискретных
порывов ветра ...............................................659
9. 5. Системы увеличения демпфирования упругих колебаний
конструкции самолета ........................................663
9. 6. Системы улучшения комфорта экипажа и пассажиров ...........670
9. 7. Комплексирование активных систем управления................673
9. 8. Оценка надежности активных систем управления ..............676
Литература.......................................................679
Обозначения .....................................................680
Глава 10. Летно-технические характеристики современных
матистральных самолетов— А. В. Климин,
К. Ю. Косминков.......................................682
10.1. Общие положения ...........................................682
10. 2. Взлетные и посадочные характеристики .....................682
10. 2.1. Взлет ..................................................683
10. 2. 2. Заход на посадку и посадка ............................691
10. 3. Расчет транспортной эффективности ........................698
10. 3.1. Крейсерский полет ......................................701
10. 3. 2. Набор крейсерской высоты...............................707
10. 3. 3. Снижение...............................................717
10. 4. Оптимизация режима полета в условиях “четырехмерных”
систем УВД ......................................................720
10. 5. Оптимизация параметров магистрального самолета ...........724
Литература.......................................................728
Глава 11. Переспективы развития дозвуковых
магистральных самолетов— Г. А. Павловец............729
11.1. Общие положения ...........................................729
И. 2. Возможности улучшения топливной эффективности
и себестоимости перевозок ...................................733
11. 3. Перспективы увеличения крейсерской скорости
полета...........................................................755
И. 4. Дальнейшее увеличение пассажировместимости
магистральных самолетов .....................................758
Литература*......................................................767
772
Замеченные опечатки
Страница Строка Напечатано Должно быть
140 16 сверху /Z0-1 JZ Ф /"
181 ПОДПИСЬ . под рис.3.27 z = 30" Z!/<=30°
243 подпись под рис.5.8 частистабилизатора части стабилизатора
285 11 снизу 14 снизу -0,4- •••2 —— Z М —0,8—••• м —2 — м
287 Рис.6.6 О') Ух J | Укр 5") Укр j j Ух j Укр № т 1 | Ух Укр j
308 6 снизу ...коэффициента... ...коэффициента...
333 2иЗ снизу 2 Рдв2дн qSl Рдв^дв 2qS
390 13 снизу 43 о !1 cnls- § |s Аво — с ОНО
407 9 сверху 1 снизу G/San ml • q G/San mlKwq G/S • an ml q G/S • an mlKuiq
421 1 сверху ...систсем... ...систем...
422 2 сверху ...имающей... ...имеющей...
424 13 снизу ...значим ельное... ...значительное...
428 8 снизу ...самолетоам... ...самолетом...
433 Рис.7.13 го ГС2
456 8 сверху 7.1.2 7.2.2
459 8и9 сверху ...привод... ...привода...
470 Рис.7.25 свс-.. .воздушеных... свс-...воздушных...
497 9 снизу ...от их взлетного веса. ...от площади крылаДкр...
498 3 снизу ...органов управленя. ...органов управления.
продолжение
Страница Строка Напечатано Должно быть
522 16 сверху ...сзязей,с... ...связей, с...
576 3 сверху ...расстояние... ...расстояние...
592 4 сверху ...разомкнотому... ...разомкнутому...
598 3 снизу 4 снизу / А'ш / убрать А'ш/
603 7 сверху 8 сверху #г.п &Г.П #п.п &П.П
613 13 сверху Рис.8.35лев. ниж. (l-F(a)]M^=0 аГ.П (l~F(a))uaf=0 <2г.П
640 3 снизу ...раверса... ...реверса...
647 11 сверху Д^(сД2/тсЫт/2 (/^(со) • w2/m(Wm/2
657 9 сверху ...спектралььных... ...спектральных...
672 ось у Рис .9.27 ^Пг! <?W
672 подпись под рис.9.27 ...с системой 1, ...с системой 1,
673 10 сверху ...фювеляж... ...фюзеляж...
678 подпись под рис.9.30 ...снижжения... ...снижения...
679 9 сверху .. .ревервирование... .. .резервирование...
680 5 снизу ...игружения... ...нагружения...
730 подпись под рис. 11.1 (...Гос НИИГА) (...ГосНИИГА)
731 ПОДПИСЬ под рис. 11.2 тоже тоже
752 3 снизу эффкетивность эффективность
КРАТКОЕ СОДЕРЖАНИЕ
Книга “Аэродинамика и динамика полета магистральных самолетов”
написана специалистами ЦАГИ. Она состоит из 11 глав, в которых
изложены научные проблемы аэродинамики элементов самолета (крыла,
фюзеляжа, гондол двигателей), вопросы устойчивости и управляемости,
вопросы механики полета современных пассажирских самолетов.
Книга предназначена для научных работников, специализирующихся в
области аэродинамики и динамики полета самолетов, для сотрудников
конструкторских бюро, а также для преподавателей и студентов высших
учебных заведений.
(С1Р)ЙЖ
(Г. с. Бюшгенс,)±^. 1995. 8
ISBN 7-80046-789-9
1.ЯР- п. и?- ш.
(DV211®V271
CIP »&^(94)Ж 02732 #
01-1995-079^
Авиа-издательство( 100029,Beijing, Xiaoguoan Dongli Anwai,
No.14)
Технические редакторы: В. А. Баринов, Ю. Ф. Шелюхин
Редактор Авиа-издательства: Зан Зинжу
Обложка художника: Гу-хуа
Подписано в печать 01. 08. 95.
Офсетная печать
Формат 880X1230 1/32
Тираж экз. 1—2000
ISBN 7-80046-789-9
V • 171
Beijing xinhua типография
2
ПРЕДИСЛОВИЕ
Настоящая монография написана специалистами Центрального
аэрогидродинамического института(ЦАГИ) и охватывает основные
аспекты аэродинамики магистральных самолетов: аэродинамику
профилей, крыльев, двигательных установок, органов управления,
вопросы устойчивости и управляемости, систем управления и др.
За последние годы на основе расчетных и экспериментальных
исследований достигнут значительный прогресс, обеспечивший
улучшение топливной эффективности и повышение безопасности
полета. Специалисты ЦАРИ в этих направлениях внесли большой
вклад. Нам представляется, что изложенный в этой монографии
материал будет полезен при создании и разработке магистральных
самолетов.
Издание монографии осуществлено в рамках научно-
технического сотрудничества России и КНР. Оно выходит
практически одновременно на русском и китайском языках благодаря
специалистам Chinese Aeronautical Establishment (САЕ). Мы
надеемся, что наше сотрудничество при издании монографии будет
полезным для обеих сторон.
Научные материалы разделов монографии подготовили:
введение—Г. С. Бюшгенс,
глава 1—Г. А. Павловец, В. Д. Боксер, С. В. Ляпунов,
глава 2—Г. А. Юдин, В. А. Баринов, С. И. Скоморохов,
глава 3—Г. А. Юдин,
глава 4—В. В. Каляжнов, В. Ф. Курицын,
глава 5—В. Г. Микеладзе,
глава 6—С. Я. Наумов,
глава 7—В. Я. Бочаров,
глава 8—Ю. Ф. Шелюхин,
глава 9—Г. В. Александров, Ю. Г. Живов, А. С. Устинов,
3
глава 10—А. В. Климин, К. Ю. Косминков,
глава И—Г. А. Павловец.
В заключение все участники работы над монографией считают
своим приятным долгом выразить большую благодарность академику
КНР Гу Сунфен и сотрудникам САЕ за помошь в издании этой книги.
Научный редактор
академик РАН
г. Жуковский, 1995г.
Г. С. Бюшгенс
4
ВВЕДЕНИЕ
Развитие реактивной транспортной авиации было начато широкой
эксплуатацией на линиях пассажирского самолета Ту-104 в 1956
году.
Предпринятые более ранние попытки были неудачными,а
некоторые даже трагическими.Так,созданный в начале 50-х годов
фирмой Де Хавилленд пассажирский самолет “Комета” потерпел ряд
катастроф,так как при его создании не были учтены проблемы
усталости конструкции таких самолетов с многократно меняющимися
нагрузками.
Таким образом,реактивная пассажирская авиация насчитывает
уже опыт около 40 лет. Если учесть, что на создание магистрального
самолета от момента начала предварительных проработок до
эксплуатации затрачивается от 8 до 10 лет, а сама эксплуатация
длится более 20 лет, то можно говорить о создании всего лишь 2-3-х
поколений таких самолетов.
Как видно из рис.1, в начале шли интенсивные работы по
созданию магистральных самолетов двух типов — с двигателями ТВД
и с двигателями ТРД. И в том, и в другом классе широко
использовался опыт военных самолетов.
Реактивные магистральные самолеты,как транспортное средство,
обладают огромным преимуществом по сравнению с другими видами
транспорта за счет больших скоростей. Большие скорости,
приемлемые дальности полета,полет на высоте 10 км, где возмущения
атмосферы встречаются достаточно редко, наличие герметичного
фюзеляжа с давлением порядка 0,6—0,7 земного—все это
обеспечивает высокий комфорт пассажирам и их быструю доставку.
Однако, реактивная авиация потребовала интенсивного развития
аэродромов и всех наземных средств обеспечения эксплуатации.
Развитие реактивной транспортной авиации шло очень быстрыми
темпами. На рис.1 приведена общая картина этого развития и
отмечены только важнейшие образцы.
После 1956—бОг.г. началась интенсивная конкуренция и
5
G К гр 1 Ан-22
40-ВОт - I °
□ 0 с -5А 79т С-5В С
В—747—100Д5—ь, \ г • L_l1
4U и С-141 1-,01 ~ А—300 L1011 ""Ил -86 г
t Ita г,-*"
30 Q Tj DC-10 -114^""^ > / В-7 А-310
CUDC-^ В-707 < Ил-18 । Ан-HL ^Х'Илд-62 4л-62М
UI •* Ту-154
10 Ту-104 гту-11|з^&| Ан-24 Ту-134А
Ан-124 - t> □ 40-120т
ггр^=120т В-747-30 )
С-141В L. Ил-96-30 0
300 Ту U*
G—&Б— В-737-300
1950 1960 1970 1980 1990 2000 Годы
О нлча-ло разработки; t> 1—й вылет,
□ начало серийного производства и эксплуатации
Рис.1 Развитие магистральных самолетов
соревнование в создании различных классов магистральных
самолетов.
Выявилось три основных типа магистральных самолетов:
а)ближние с дальностью порядка 1500—2500 км;
б)средние с дальностью порядка 2500—4500 км;
в)дальние с дальностью порядка 7000—10000 км, а в дальнейшем
и более.
Кроме указанных классов магистральных самолетов, следует
указать на широкий класс самолетов местных воздушных линий.
Современную жизнь нельзя представить без авиации, одного
из главных средств перевозки пассажиров.Резкое увеличение пере-
возок началось с 1962—1963г.г., каждые 10 лет число пасса-
жиров,перевезенных в год, увеличивалось на 350—400 миллионов. В
1987-1988г.г. общее число перевезенных за год пассажиров
впервые превысило 1 миллиард. Большинство авторов прогнозирует на
6
2000-2010 г.г. такой же темп перевозок, т.е. к этому времени
следует ожидать их удвоения. Вероятно, такой прогноз обоснован,
поскольку прогнозируется рост населения земного шара с 4,4 млрд, в
1980г. до 5,5-5,8 млрд, к 2000г.
Кроме того, современная политическая ситуация в мире
способствует усилению связей между населением различных стран. В
этом же направлении будет действовать и фактор роста национального
дохода. Эта тенденция подтверждается значительным ростом связей
на основе туризма, в последние годы, например,число туристов в
Западную Европу превысило 350 млн. в год.
Оценка погребного парка магистральных самолетов
представляется очень важной. По данным ИКАО, к началу 90-х годов
общее число магистральных самолетов составляло около 6500, из
которых около 80%—ближние и средние магистральные самолеты, а
в некоторых странах даже окодо 90%. Можно ожидать изменения в
структуре парка в направлении увеличения числа дальних
магистральных самолетов.
В последние годы среди магистральных самолетов преобладают
самолеты с турбореактивными двигателями(около 80%),некоторое
количество эксплуатируется с турбовинтовыми двигательными
установками (17—18%) и совсем небольшое количество (около 3"Е
5%) с поршневыми двигателями.
Прогнозируемый рост перевозок более чем в два раза к 2000г.
приведет (и уже приводит) к некоторому изменению требований к
магистральным самолетам.
Во-первых, уже ощутимая перегрузка аэропортов потребует
дальнейшего возрастания пассажировместимости, так как трудно
ожидать зиачительного расширения сети аэродромов и увеличения
числа полос. Уже появляются модификации существующих
магистральных самолетов с увеличенной пассажировместимостью до
500 мест. Рассматриваются проекты с увеличением мест до 600 "Е
800 и даже 1000 (фирмы Эрбас Индастри и др.).
Во-вторых, интенсивное экономическое и политическое развитие
“удаленных” стран(Япония, КНР, Корея, Таиланд, Сингапур и др. в
Азии, Австралия, Новая Зеландия) приводит к необходимости
7
увеличения дальности полета дальних магистральных самолетов до
12000—15000 км. При этом проявляется тенденция увеличения
крейсерской скорости полета.
При рассмотрении направлений развития магистральных
самолетов одним из важных факторов является их топливная
эффективность. Ограничение ресурсов углеводородного топлива в
каждом последующем десятилетии будет повышать требования к
снижению расхода топлива. Конъюнктура по цене топлива
изменяется: в 1973—1976г.г. она была кризисной, к 80-м годам
наблюдался резкий рост цен, а в последующие годы кризисная
ситуация ослабилась, на ближайшие годы некоторые авторы
прогнозируют новое повышение цен. Так или иначе, общая тенденция,
так сказать, глобальная,на период 20—30 лет требует все большей
экономии топлива, так как его ресурсы ограничены.С этой точки
зрения важно рассмотреть возможное повышение топливной
эффективности магистральных самолетов. Она определяется
величиной q т как отношение расхода топлива Gy к
ПрОИЗВОДИТеЛЬНОСТИ П 'L тех, ГДе П—ЧИСЛО Пассажиров, Л тех
—техническая дальность полета.
Начиная с 1960г. за 25—30 лет расход топлива снизился
приблизительно на 50%, главным образом благодаря:
—переходу на ТРДД с повышенной степенью двухконтурности
(т~5);
—увеличению пассажировместимости;
—увеличению в последние годы (1980-1988г.г.)
аэродинамического качества на 20^30% вследствие применения
сверхкритических крыльев с удлинением Л~9—10 (Ту-204, Ил-96,
А-310, 320, 340 и др.).
Оценивая дальнейшие возможности на последующие 20—30 лет,
можно ожидать для магистральных самолетов уменьшения расхода
топлива еще в два раза путем:
—применения двигателей со сверхбольшой степенью
двухконтурности(т ~ 15—20) или, может быть, применения ТВВД;
—повышения аэродинамического качества за счет введения
естественной ламинаризации, уменьшения турбулентного трения.
8
Для дальних магистральных самолетов на последующие годы
можно ожидать уменьшения расхода топлива, кроме того, за счет
увеличения пассажировместимости, применения систем управления
пограничным слоем (искусственной ламинаризации),использования для
самолетов с очень большой пассажировместимостью компоновки без
фюзеляжа, т.е. переход к схеме"летающее крыло”.
Следует отметить очень важные новые свойства перспективных
магистральных самолетов.
Во-первых, вследствие значительного улучшения аэродинамики
(повышение аэродинамического качества), дальнейшего уменьшения
расхода топлива новыми двигателями, большая дальность полета будет
достигаться при существенно меньшей взлетной массе самолетов.
Темп увеличения взлетной массы для самолетов нового поколения при
увеличении дальности полета резко уменьшается.
Во-вторых, для перспективных дальних самолетов топливная
эффективность (помимо уменьшения ее общего уровня) при изменении
дальности полета изменяется всего на 10%, это позволяет
эксплуатировать эти самолеты более гибко на маршрутах различной
дальности.
Из перечисленных факторов, способствовавших развитию
магистральных самолетов в последние 10—15 лет, особую роль играло
совершенствование их аэродинамики. Главные результаты в СССР
были получены за счет выполненных в ЦАГИ фундаментальных
исследований профилей, давших возможность применять профили
большей на 25—30% относительной толщины,что позволило
увеличить,без увеличения веса крыла, его удлинение с 7 до 10 и
зиачительно повысить аэродинамическое качество.
Вторым важным вкладом в увеличение аэродинамического
качества был проведенный по инициативе ЦАГИ комплекс
конструктивных и технологических мероприятий, направленных на
резкое уменьшение вредного сопротивления наших магистральных
самолетов. Улучшение отделки поверхности, устранение лишних
надстроек, уступов и щелей позволили уменьшить вредное
сопротивление с 10—15%(от Go)до 3—5%, что дало увеличение
максимального аэродинамического качества на 5—10%.
9
Третьим фактором увеличения аэродинамического качества
магистральных самолетов нового поколения явилось значительное
уменьшение запасов продольной статической устойчивости и
вследствие этого уменьшение потерь на балансировку на крейсерском
режиме. Последнее мероприятие стало возможным при введении
специальной автоматической системы улучшения устойчивости и
управляемости*.
Наконец, оптимизация параметров самолета, рациональная общая
аэродинамическая компоновка также явились важным вкладом в
увеличение аэродинамического качества.Всем этим вопросам
посвящены главы 1-5,10,11 настоящей монографии.
Разработанные новые магистральные самолеты Ил-96 и Ту-204
(см. рис. 2иЗ)и реализация материалов проработок ОКБ по развитию
магистральных самолетов в ближайшие 10-15 лет обеспечит при их
интенсивном серийном производстве значительное увеличение
пассажирских перевозок в России без заметного увеличения общего
потребления топлива.Ориентировочно,замена парка самолетов может
дать удвоение перевозок.
Большую роль в развитии новых магистральных самолетов
играют факторы,связанные с себестоимостью перевозок,на которую
кроме стоимости топлива оказывают влияние стоимость самолета,
стоимость работ по его эксплуатации.Поэтому повышение летно-
технических качеств,достигаемое путем усложнения самолета,в ряде
случаев может не дать уменьшения себестоимости перевозок.
Весьма интересны прогнозы по производству магистральных
самолетов за рубежом. Так, фирма “Боинг”считает, что в ближайшие
15 лет (с 1988—1990г.г. до 2005г.)потребуется и будут изготовлены
7600 самолетов. Общая стоимость потребных самолетов оценивается
в 340-510 млрд, долларов в зависимости от среднего ежегодного
прироста объема перевозок, который, как считают фирмы, может
колебаться от 3 до 6%.
Следует подчеркнуть, что производство и продажа
* Эта же система позволяет использовать крылья большого удлинения с
локальной статической неустойчивостью при Су > СуКрейс.
10
Рис.2 Современный магистральный самолет большой дальности с сверхкритическим крылом Ил-96-300
Рис.З Современный магистральный самолет средней дальности с сверхкритическим крылом Ту-204
магистральных самолетов является одной из самых доходных
отраслей промышленности. Так, например,фирма" Боинг” изготовила в
1986г. 341 магистральный самолет на сумму 19 млрд. долл. , а в
1988г. уже 636-на сумму 29,6 млрд . долл. Следует иметь в виду,
что свыше 50% самолетов экспортируются и приносят фирмам и
странам—изготовителям огромные доходы.
По данным ИКАО, к началу 90-х годов объем грузовых
перевозок достиг 50 млрд, т/км (это примерно 25% всех
авиаперевозок). За последние 20 лет наблюдается непрерывное
увеличение объема этих перевозок. Интенсивность роста, конечно,
сдерживается относительно высокой ценой этих перевозок. Как
правило, к ним прибегают в случаях, когда большую роль играет
фактор времени.
Для многих стран большое значение имеет перевозка уникальных
грузов больших габаритов и тоннажа. Необходимость в их перевозке
возникла в результате новой технологии сборки и изготовления ряда
уникальных агрегатов машиностроения(турбины большой мощности,
химические реакторы и др.). В ряде случаев эти уникальные грузы,
масса которых достигает нескольких сотен тонн,требуют срочной
доставки зачастую (особенно в России) в труднодоступные районы.По
данным ряда ведомств, следует ожидать дальнейшего увеличения
потребности в средствах доставки таких грузов на расстояния порядка
3000-5000 км.
В СНГ развивается производство транспортных самолетов
большой грузоподъемности. На рис. 4 показаны возможности уже
созданных грузовых самолетов ОКБ им. Антонова и ОКБ им.
Ильюшина. На самолете Ан-225 “Мрия”, разработанном под
руководством генерального конструктора П. В. Балабуева, можно
перевозить грузы массой порядка 250т.
Проработки показывают, что в перспективе при взлетной массе
1000—1200т. можно создать транспортный самолет, способный
перевозить грузы массой 500—600т. на расстояние 3000—5000 км.,
при этом с учетом научно-технического уровня 2000—2010 г.г.
удельный расход топлива будет составлять 120г/т. км. В качестве
примера перевозки груза больших габаритов(массой 100т)на наружной
13
подвеске на рис.5 показана фотография Ан-225 “Мрия”, перевозящего
многоразовый орбитальный самолет “Буран”.
Рис. 1 Перевозимый iр\з гранспоршых самохчов. онишпых в СССР
Рис.5 Транспортировка орбитального самолета “Буран” на транспортном
самолете Ан-225“Мрия”
14
Таким образом, развитие транспортной авиации широкого
назначения открывает большие возможности по перевозке различных
грузов. В этом направлении представляет большой интерес
международное сотрудничество в виде организации специальных
компаний при участии ряда заинтересованных стран для обслуживания
всех потребителей. Открывающиеся уникальные возможности уже
сейчас на базе транспортных самолетов Ан-124 и Ан-225 будут
способствовать развитию экономики.
Ожидаемое значительное расширение пассажирских перевозок в
начале XXI века, а также возникшая потребность в дальних линиях
вновь привлекают внимание к проблеме увеличения скорости
магистральных самолетов. В ряде стран уже накоплен опыт создания
самолетов различного назначения для длительного полета на
сверхзвуковых скоростях.
Создание и эксплуатация первых сверхзвуковых пассажирских
самолетов Ту-144 и “Конкорд” позволили накопить ценнейший опыт
для дальнейшего продвижения в этом направлении. Работы по
самолету Ту-144, начатые в начале 60-х годов (первый полет
31 декабря 1968г.) завершились достаточно успешно. Этот самолет
создавался в двух вариантах: с форсажным двитателем НК-144 Н. Д.
Кузнецова и с бесфорсажным двигателем П.А. Колесова. Самолет
Ту-144 с форсажным двигателем прошел национальную сертификацию
и весь необходимый объем летных и наземных испытаний. В 1977г.
был оформлен сертификат на этот самолет.
Самолет Ту-144 с бесфорсажным двигателем прошел летные
испытания в конце 1981г., он мог перевозить 100 пассажиров на
расстояние 6500 км при нормируемом аэронавигационном запасе
топлива. В 1982г. самолеты Ту-144 были подготовлены для
эксплуатационных испытаний. Однако работы по введению самолета в
эксплуатацию в МГА были прекращены. Можно предположить, что
тогдашние руководители МГ А не захотели обременять себя
дополнительными трудностями по освоению этой новой и сложной
техники.
“Конкорд”, начав первые полеты несколько позднее (21 марта
1969г.), прошел цикл летных испытаний и был принят в эксплуатацию
15
в январе 1976г. авиакомпаниями “Эйр Франс” и “Бритиш Аэролайнс”.
Уровень топливной эффективности “Конкорда”,так же как Ту-144,
составляет ~ 100г/пасс.км.
Трудности, возникающие при увеличении числа М крейс.,
соответствующего крейсерской скорости,свыше 2—2,3,связаны с
необходимостью перехода от традиционных конструктивных
материалов на основе алюминия к титану и стали.
Главное преимущество, которое получается при увеличении
скорости—рост часовой производительности самолета,определяемой
произведением Gk.h. ’• ^крейс, который приводит к уменьшению
себестоимости перевозок. Вследствие этого в принципе допустимо, с
точки зрения экономики, некоторое увеличение расхода топлива.
Однако, если учитывать прочие затраты и особенно затраты на
разработку СПС-2, которые могут быть значительными,
экономическая целесообразность создания СПС-2 будет в
значительной степени определяться числом заказанных самолетов.
В связи с этим с целью распределения затрат на разработку
целесообразно рассмотреть объединение усилий ряда стран. Это
важно и потому, что многие вопросы эксплуатации СПС-2 должны
быть согласованы на правительственном уровне, к ним в первую
очередь относятся вопросы воздействия на окружающую среду. Здесь
наиболее сложной проблемой является звуковой удар, вторым важным
вопросом является шум, создаваемый сверхзвуковым самолетом при
взлете с аэродрома.
Из изложенного видно, что развитие сверхзвуковых самолетов
находится в начальной стадии, их создание—дело 2000 годов, поэтому
в нашей монографии ограничимся проблемами аэродинамики
дозвуковых магистральных самолетов. Опыт эксплуатации
магистральных пассажирских самолетов в течение 30-40 лет показал,
что для них оптимальным является диапазон скоростей до чисел М=
0,8-0,9.
При рассмотрении совершенства магистральных самолетов
критериями эффективности являются его производительность,
себестоимость перевозок, расход топлива, условия базирования,
степень неблагоприятного воздействия на окружающую среду,
16
уровень комфорта для пассажиров и др. Все эти показатели
взаимосвязаны, и при проектировании самолета улучшение одних из
них иногда ограничивает возможности совершенствования других.
Попытки выработать всеобъемлющий критерий эффективности
пассажирского самолета пока оказываются безуспешными.
Многолетняя практика самолетостроения свидетельствует о том,что
комплексные критерии в большинстве случаев недолговечны и
эффективны лишь для оценки построенных самолетов и общей
конъюнктуры.
Для определения облика и параметров нового самолета, помимо
большого объема исследований по аэродинамике, прочности,
конструкции, необходимы детальные исследования развития общей
конъюнктуры и возможностей авиастроения. При оценке технического
совершенства современного самолета в качестве определяющих
обычно рассматриваются следующие параметры:
— крейсерские скорость и высота полета;
— потребная длина взлетно-посадочной полосы;
— технический ресурс;
— скорость захода на посадку;
— шум самолета на местности;
К' V крейс.
— параметр дальности полета------------
W сн
— относительная масса снаряженного самолета ------ или его
W о
W2 пн
полная весовая отдача ~~—, где Шо —взлетная масса самолета;
zzZo
тпн—масса полезной нагрузки;
— масса снаряженного самолета, приходящаяся на одно
пассажирское место;
— часовая производительность, отнесенная к массе снаряженного
самолета.
К основным параметрам экономического совершенства самолета
можно отнести следующие:
— расход топлива на единицу транспортной работы, т.е. расход
топлива за полет, отнесенный к рейсовой производительности
самолета,выраженной в тонно-километрах или пассажиро-километрах;
о „ W КН
—массу относительной коммерческой нагрузки ~~— ;
—часовую прибыль или себестоимость перевозок.
Анализ показывает на отчетливый рост параметра дальности с
увеличением протяженности авиалиний. Кроме того, использование на
широкофюзеляжных самолетах двигателей с большой степенью
двухконтурности заметно увеличило параметр дальности по сравнению
с его значениями для самолетов с обычными ТРД.
Широкофюзеляжные самолеты имеют большую относительную массу
снаряженного самолета и, следовательно, меньшую относительную
отдачу по полной полезной нагрузке (m кн+т Топл.). Это объясняется
значительным снижением относительной массы расходуемого топлива,
обсуловленным ростом параметра дальности. Вместе с тем, наряду с
уменьшением полной отдачи по полезной нагрузке, на
широкофюзеляжных самолетах наблюдается увеличение
относительной коммерческой нагрузки—параметра, благоприятно
влияющего на топливную эффективность и рентабельность
пассажирских самолетов. Увеличение относительной коммерческой
нагрузки и использование экономичных двигателей с большой
степенью двухконтурности позволило компенсировать
неблагоприятный эффект уменьшения отдачи по полезной нагрузке и
обеспечить хорошие показатели топливной эффективности. Здесь
уместно отметить, что с ростом цен на топливо возросли требования
к увеличению параметра дальности и возросла относительная масса
снаряженного самолета.
Увеличение цен на топливо еще больше повышает роль
аэродинамического совершенства и экономичности двигателей в
рентабельности магистральных самолетов. Современный уровень цен
на топливо привел к тому, что доля эксплуатационных расходов на
горюче-смазочные материалы значительно возросла.
При ограниченности мировых, как уже указывалось вьше,
запасов нефти и неуклонном росте потребностей народного хозяйства
в нефтепродуктах топливная эффективность становится одним из
основных показателей, определяющих характеристики проектируемых
18
самолетов. В этих условиях обеспечение конкурентоспособности
самолетов требует сокращения расхода топлива часто даже за счет
некоторого ухудшения таких параметров, как крейсерская скорость,
масса снаряженного самолета, масса и стоимость двигателя. В ряде
случаев критерий топливной эффективности изменяет установившиеся
представления о показателях технического совершенства самолета. В
качестве примера можно рассмотреть такой традиционный показатель,
как весовая отдача по полезной нагрузке. Из двух самолетов,
имеющих одинаковые основные параметры, более совершенный по
топливной эффективности самолет может оказаться с меньшей
отдачей по полной полезной нагрузке.
Кроме экономических факторов,для современных магистральных
самолетов важнейшей проблемой является обеспечение высокого
уровня безопасности полета. Большая пассажировместимость,
необходимость обеспечения регулярности полетов в любых
метеорологических условиях, делает эту проблему особенно важной.
Статистика показывает, что большая часть авиационных
происшествий и катастроф (около 70%) связана с “человеческим
фактором”—ошибками и неадэкватными действиями экипажа и
наземного персонала. В связи с этим в последние годы большие
внимание уделяется развитию автоматизации управления самолетом
на всех основных режимах полета,введению средств контроля,
введение “подсказки” экипажу (экспертных систем управления)
правильных действий, особенно в экстремальных условиях, и др.
средств, призванных при высоком уровне их надежности повысить
безопасность полета. Статистика показывает также, что наибольшее
количество происшествий связано с режимом взлета и посадки. В
связи с этим, вопросам устойчивости и управляемости на этих
режимах, их автоматизации уделяется на современных
магистральных самолетах большое внимание.
Основа автоматизации управления магистральных самолетов
была заложена введением необратимого бустерного управления. В
результате его дальнейшего развития возникли практически
неограниченные возможности автоматизации управления на всех
режимах полета. Внедрение бортовых цифровых вычислителей
19
обеспечивает практическое решение проблем автоматизации. Следует
напомнить, что введение систем улучшения устойчивости и
управляемости, особенно с цифровыми вычислителями, позволило
также значительно улучшить и экономические показатели
магистральных самолетов. Так, введение СУУ,позволяющее
использовать аэродинамические компоновки с малыми запасами
статической устойчивости и с зонами местной статической
неустойчивости в продольном канале, способствует повышению
аэродинамического качества. Активные системы управления,
уменьшающие нагрузки на конструкцию, обеспечивают необходимые
запасы по флаттеру,увеличивают полезную весовую отдачу.
Комплексу вопросов устойчивости и управляемости, систем
управления, систем улучшения устойчивости и управляемости в
настоящей монографии посвящены главы 6,8,7,9.
Таким образом, существует два главных фактора,
определяющих прогресс магистральных самолетов—это улучшение
экономических показателей и повышение безопасности полета.
Фактором, определяющим развитие гражданской авиации и
сдерживающим разработку новых программ, является значительное
увеличение затрат на реализацию новых программ. Это заставляет
искать формы международной кооперации при разработке новых
проектов. По оценкам зарубежных специалистов, стоимость
разработки нового магистрального самолета составляет несколько
миллиардов долларов. Начало разработки такой программы возможно
лишь при гарантированной высокой серийности производства нового
самолета. Поэтому заметно расширяется также объем изысканий,
направленных на модификацию существующих самолетов, и
становится актуальным резервирование модификаций самолета,
закладываемых уже на стадии проектирования.
20
СОКРАЩЕНИЯ
ДДТ —аэродинамическая труба
ДНЗ —аэронавигационный запас топлива
АП-25 —авиационные правила, российские нормы летной годности
гражданских самолетов
АРП—автономный рулевой привод
АСДУ—аналоговая система дистанционного управления
БИНС—бортовая инерциальная навигационная система
БУК—блок управления и контроля привода
БЦВМ—бортовая цифровая вычислительная машина
ВЗ—воздухозаборник
ВП—вспомогательный привод
ВПП—взлетно-посадочная полоса
ВСУ—вспомогательная силовая установка
ГМРП—гидромеханический рулевой привод
ГС—гидросистема
ДК—демпфер крена
ДЛУ—датчик линейных ускорений
ДР—демпфер рыскания
ДТ—демпфер тангажа
ДУ С—датчик угловой скорости
ЗУ—загрузочное устройство рычагов управления
ИКАО—международная организация гражданской авиации
КПБ—концевые полосы безопасности
КПД—коэффициент полезного действия
ЛП—летная полоса
МСУ—механическая система управления
MP3—механизм регулировки загрузки
21
НБУ—необратимое бустерное управление
НГЖ—негорючая гидравлическая жидкость
И Л ГС—нормы летной годности гражданских самолетов
ИРУ—непосредственное ручное управление
НУ ПС—непосредственное управление подъемной силой
ОПР—ограничитель предельных режимов полета
ОСТ—отраслевой стандарт
ПЭР—прямые эксплуатационные расходы
Р ДР—располагаемая дистанция разбега
РЛЭ—руководство по летной эксплуатации
РП—рулевой привод
САЗ—система автоматической загрузки рычагов управления
СВС—система воздушных сигналов
САУ—система автоматического управления
СДУ—система дистанционного электрического управления
СП—сервопривод
СПС—сверхзвуковой пассажирский самолет
СУМК—система управления механизацией крыла
СУУ—система улучшения устойчивости и управляемости
СУ У Б—система улучшения устойчивости и управляемости бокового
движения
СУ—силовая установка
СУУП—автомат продольной устойчивости и управляемости
СШУ—система штурвального управления
ТВВД—турбовинтовентиляторный двигатель
ТВД—турбовинтовой двигатель
ТРД—турбореактивный двигатель
ТРДД—турбореактивный двухконтурный двигатель
ТРДД СВ—турбореактивный двухконтурный двигатель
сверхвысокой степени двухконтурности
22
УВД—управление воздушным движением
ЦСДУ—цифровая система дистанционного управления
ЭГРП—электрогидравлический рулевой привод
ЭМРП—электромеханический рулевой привод
ЭС—электросистема
FAR-25—американские нормы летной годности гражданских
самолетов
JAR-25—европейские нормы летной годности гражданских
самолетов
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
X, у, Z —оси правой прямоугольной скоростной системы
координат, ось х — по направлению набегающего
потока, ось У — по направлению подъемной силы, ось
z — вдоль размаха крыла
_ Z2
5, Z, Л —площадь и размах крыла, А—— относительное
удлинение крыла
X —угол стреловидности крыла между осью z и, как
правило, линией 1/4 хорд крыла
Ь —хорда крыла на расстоянии z от оси симметрии
самолета
Х—х/ Ь , —безразмерное расстояние вдоль хорды и вдоль размаха
Z=z! I /2
^2 —средняя аэродинамическая хорда крыла(САХ)
О о
С, Стах —максимальная относительная толщина профиля сечения
крыла
Ко, q<x>. Moo—статическое давление, плотность, скорость,
А» К2
скоростной напор % ~ ' число Маха набегающего
потока
— X ________ Y _______ Mz _ Мх ... ______________ Му
х л Q п е >^2 _ Q.A п с /
tf оа о О'ооЭ q00 О * С? А ^00^ * G
23
* —коэффициенты лобового сопротивления, подъемной силы, момента тангаж а(продольного момента), момента крена и рыскания в скоростной системе координат
K G —аэродинамическое качество, Ктах — максимальное
л Сх м М крейс. М крит. значение аэродинамического качества —число Маха —число М крейсерского полета —критическое число Маха, при котором впервые по мере увеличения числа М в поле течения достигается звуковая скорость
м; —критическое число Маха, при котором dCx/dM=0,l
а —угол атаки между направлением скорости набегающего потока и хордой профилей, а для крыла - хордой контрольного сечения крыла, как правило, совпадающей с бортовым сечением крыла
/9 —угол скольжения между направлением скорости набегающего потока и плоскостью симметрии самолета
Q _ Р Р™ Qco Ср min, Ср крит —коэффициент статического давления —коэффициенты статического давления в точке максимальной скорости течения и в точке, где местное число М = 1
X р —координата положения фокуса самолета относительно
X у носка b а, в долях b а —координата положения центра тяжести самолета относительно носка b а, в долях b а
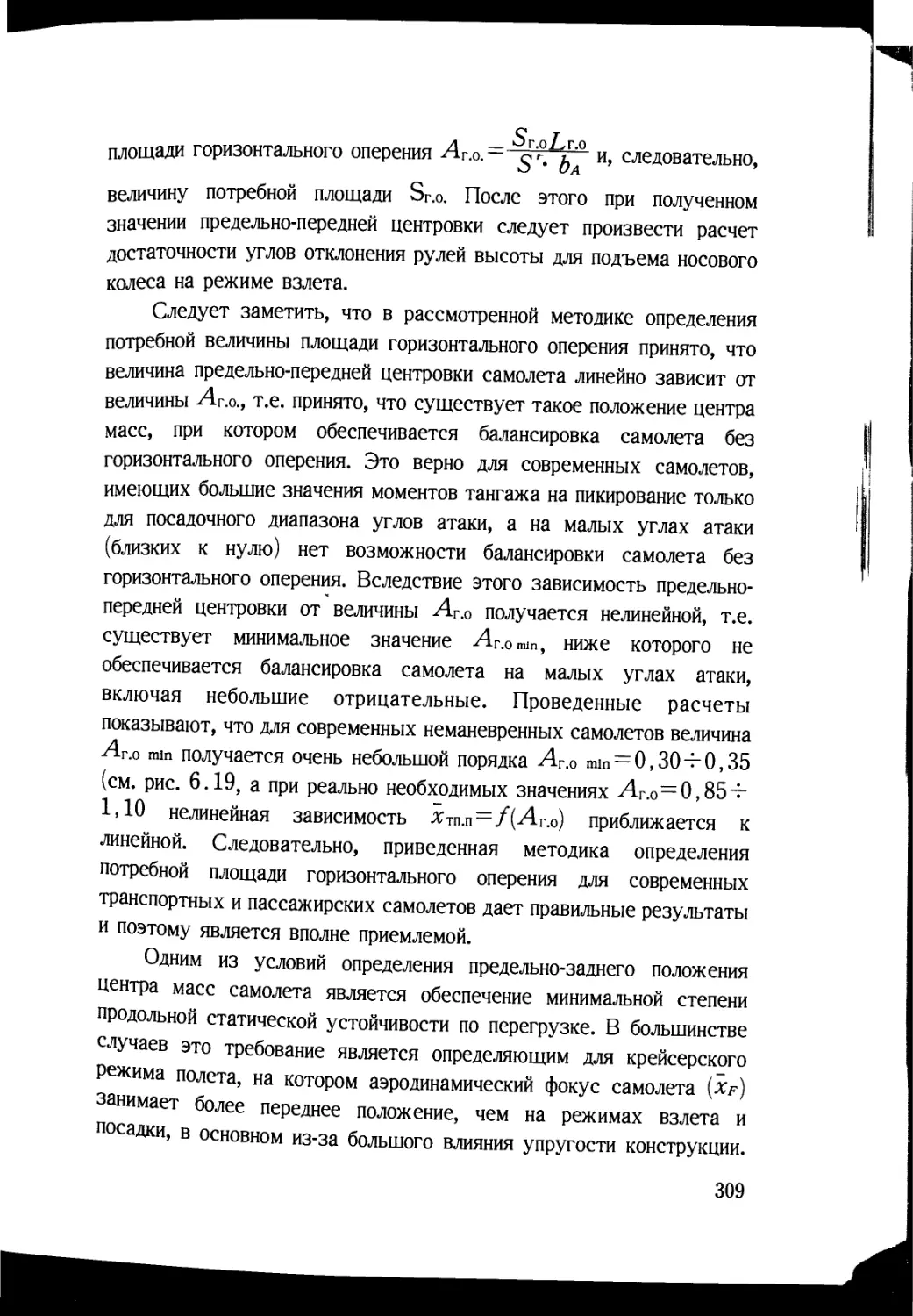
д Sr.o. * -Сг.О Лг-°_ S • Ьа —безразмерный статический момент площади горизонтального оперения, L г.о—плечо горизонтального оперения,измеряется от центра тяжести самолета до 1/4 b а горизонтального оперения
Г) Sb.O ’ G.0 s.z —безразмерный статический момент площади вертикального' оперения, Lb.o — плечо вертикального оперения, измеряется от центра тяжести самолета до 1/4 b а вертикального оперения
24
Глава!. АЭРОДИНАМИКА КРЫЛОВЫХ
ПРОФИЛЕЙ
1. 1. Аэродинамические характеристики крыловых
профилей
Обтекание центральных сечений стреловидных крыльев
дозвуковых пассажирских и транспортных самолетов, ха-
рактеризующихся относительно большими удлинениями (Л = 8~ 12),
близко к плоскому обтеканию аэродинамических профилей (крыльев
бесконечного размаха). В связи с этим возможно исследование
профилей и их проектирование с высокими аэродинамическими
характеристиками в условиях плоского обтекания. Удачный выбор
профилировки крыла в значительной степени обуславливает получение
высоких характеристик всего крыла и самолета в целом. Выбор
профилировки крыла связан с удовлетворением различных требований,
предъявляемых к самолету (обеспечение требуемой дальности полета,
высокой топливной эффективности, крейсерской скорости, обеспечение
безопасных условий взлета и посадки и др.). Необходимо также
учитывать конструктивные особенности самолета, весовые данные и
другие факторы.
Профиль крыла дозвукового самолета (рис. 1.1)
характеризуется следующими основными геометрическими
параметрами:
_ с _
—максимальной относительной тощиной с=~у (с — 8~г20%)и
ее положением по хорде х сСх с=204-50%);
v и 7 _ Утах
—максимальном относительном вогнутостью /шах —
(Утах ~ 2 4-6 %) и ее положением по хорде %(^ = 154-60%);
- _ Рн
—относительным радиусом носка рн~ нередко
характеризуемого параметром ^=0,54-1,5;
С
25
—формой симметричной части ^сим. = ^-г^=0,5Х (^верх.-
— у нижн? И средней ЛИНИИ у сР.л. — =0.5 X (у верх. + У нижн).
Рис. 1.1. Основные геометрические характеристики профиля
Кроме того, важными геометрическими характеристиками
профиля являются угол наклона поверхности в хвостовой части
профиля и толщина задней кромки.
Ниже рассмотрены основные аэродинамические характеристики
профилей и их зависимость от ряда геометрических параметров.
Важной характеристикой профиля является величина коэффициента
профильного сопротивления Схр, которая обычно изображается в виде
поляры (зависимости коэффициента подъемной силы Су от СхР). При
докритических числах Маха профильное сопротивление складывается
из сопротивления трения (результат действия касательных к
поверхности профиля сил трения) и сопротивления давления (результат
действия нормальных к поверхности сил давления). В условиях полета,
типичных для пассажирских и транспортных самолетов, профильное
сопротивление может составлять свыше половины общего лобового
сопротивления крыла и уменьшение профильного сопротивления
позволяет повысить аэродинамическое качество К = Су/Сх.
Величина профильного сопротивления в значительной степени
определяется состоянием пограничного слоя, в частности,
протяженностью участков ламинарного пограничного слоя. Увеличение
этой протяженности снижает профильное сопротивление за счет того,
что коэффициент трения в ламинарном пограничном слое существенно
26
ниже, чем в турбулентном слое. При числах Рейнольдса вплоть до
Re=(15’106-i-20,106), как правило, на участках отрицательного
градиента давления течение является ламинарным, а переход
пограничного слоя из ламинарного в турбулентный происходит при
положительном градиенте давления. Протяженные участки
ламинарного пограничного слоя достигаются путем смещения вниз по
потоку положения точки максимальной скорости и монотонного
ускорения потока до этой точки. Подобная эпюра давления
реализуется за счет специальной формы профиля со смещенным по
потоку положением максимальной толщины и вогнутости профиля
(ламинаризированные профили). При этом важную роль играет
шероховатость поверхности. Повышение степени шероховатости
может вызвать преждевременный переход пограничного слоя даже при
благоприятном (отрицательном) градиенте давления. Кроме того,
увеличение шероховатости поверхности приводит к росту
сопротивления трения в пограничном слое.
В связи с перестройкой зпюры давления при изменении величины
Су, даже для ламинаризированных профилей, добиться малого
профильного сопротивления можно лишь в ограниченном диапазоне
значений Су. Характерный пример поляры ламинаризированного
профиля приведен на рис. 1.2, где хорошо видна область малых
значений сопротивления, связанная с эффектом ламинаризации (Су =
0 — 0,4). Наличие шероховатости приводит к ликвидации эффекта
ламинаризации, турбулизации пограничного слоя на профиле и к
значительному увеличению сопротивления.
Минимальное значение коэффициента профильного сопротивления
на поляре (Сх=Схтщ) обычна увеличивается с ростом максимальной—
относительной толщины профиля с (см. рис. 1.3). С возрастанием
величины Су сопротивление увеличивается все более интенсивно,
что связано с формированием и развитием отрыва пограничного
слоя.
Несущие свойства профилей характеризуются величинами
Сушах и Су доп, смысл которых поясняется ниже. Коэффициент
подъемной силы растет с увеличением угла атаки а до критического
угла атаки акрит., при котором достигается максимальное значение
27
Re = 6 -106 с = 15%
Рис. 1.2. Поляры для гладкой и шероховатой поверхности профиля с
максимальной относительной толщиной с = 15% при числе Re = 6 • 106
Г ладная поверхность
Рис. 1.3. Изменение коэффициента минимального сопротивления по
максимальной относительной толщине для гладкой и шероховатой поверхности
28
Су = Сушах. С дальнейшим увеличением а величина Су
уменынается(рис.1.4).Такое поведение зависимости Су(а)связано с
отрывом потока на верхней поверхности профиля при больших углах
атаки. Обтекание при а = а Крит, соответствует наличию развитого
отрыва (Яотр~0.5)- Д° некоторого значения угла атаки зависимость
Су(а), как правило, близка к линейной. Тангенс угла наклона этой
dCv . .
зависимости количественно слабо зависит от формы профиля и
его максимальной относительной толщины с (рис. 1.5). При
наступлении отрыва определенной интенсивности обычно наблюдается
Рис. 1.4. Несущие и моментные характеристики профиля с = 15% при числе
Re=6 • 106
29
отклонение зависимости СуСа)от линейной. Соответствующее этому
углу атаки значение Су называется допустимым значением
коэффициента подъемной силы СуД0П. (рис. 1.4).Величины Сушах и
Су доп увеличиваются с ростом числа Рейнольдса в связи с
затягиванием отрывных явлений до больших значений угла атаки(рис.
1.6).
Значения Сушах зависят от геометрических параметров
профилей. Эти зависимости не могут быть выражены аналитически,
однако обобщение большого количества экспериментальных
результатов позволяет указать тенденции изменения Сушах в
зависимости от различных геометрических пераметров. Так, например,
зависимость Сушах от максимальной относительной толщины профиля
имеет максимум при с = 12 4-15% (рис. 1.6). Увеличение в
определенных пределах максимальной вогнутости профиля Jmax
приводит к увеличению Сушах. При этом растет и величина
hoi—угол атаки, соответствующий нулевой подъемной силе (угол
нулевой подъемной силы). Росту значения Сушах способствует
- Р н _
увеличение радиуса носка Aj в пределах изменения параметров уг—
О
14-1,3. и выбор формы носовой части профиля.
Рис. 1.5. Изменение производной Су по с при числе Re = 6-106
Важной аэродинамической характеристикой профилей является
- величина коэффициент продольного момента при нулевой
30
подъемной силе. Зависимость коэффициента продольного момента mz
от Су обычно близка к линейной до СУ= СУДОп. и тангенс угла наклона
dwz rv ,
этой зависимости = т* (ПРИ определении величины mz
относительно передней кромки профиля) отличается на 0,02 ~ 0,05 по
абсолютной величине от теоретического значения относительного
положения фокуса для тонкого профиля xF = | ш£у| = 0,25 (рис. 1.4) и
слабо зависит от основных геометрических параметров профиля(с,
7 max). Величина с одной стороны, определяет продольный
момент крыла и потребные потери подъемной силы на балансировку
самолета, а с другой стороны, в некоторой степени определяет
требования к прочности конструкции крыла. Величину I жго|
желательно по возможности уменьшить, что достигается изменением
формы средней линии профиля. Величина I mZo | возрастает^ с
увеличением максимальной относительной вогнутости профиля /max
(рис. 1.7), причем эта зависимость Wzo (/max) близка к линейной.
Величина |жго| возрастает также с ростом xf—положения
максимальной вогнутости. Величина жго обычно пропорциональна
величине оь—углу атаки нулевой подъемной силы.
Рис. 1.6. Изменение коэффициента максимальной подъемной силы по с для
разных чисел Re
Все сказанное выше относится к обтеканию профилей при малых
числах Маха. С ростом числа Маха наступает момент, при котором на
поверхности профиля возникает звуковая скорость.
31
Соответствующее число Маха набегающего потока называется
критическим числом Маха, М кр.. При дальнейшем увеличении числа
Маха набегающего потока увеличиваются размеры местной
сверхзвуковой зоны и интенсивность скачка уплотнения,
замыкающего эту зону. Наличие скачка уплотнения приводит к
возникновению дополнительного сопротивления, называемого
волновым сопротивлением. Кроме того, скачок уплотнения,
представляющий собой область резкого роста давления, при
достаточной интенсивности скачка приводит к отрыву пограничного
слоя, к дальнейшему увеличению сопротивления, изменению
продольного момента и подъемной силы. Комплекс неблагоприятных
Рис. 1.7. Изменение коэффициента продольного момента при нулевой подъемной
силе по максимальной вогнутости для профиля с = 15% при числе Re = 6 • 106
Рис. 1.8. Изменение коэффициента профильного сопротивления и величины
аэродинамического качества по числам М для профиля с = 12% при Су~0,5
32
явлений, связанных с формированием скачков уплотнения, получил
название“волновой кризис”.
В соответствии с изложенным, зависимость коэффициента
сопротивления профиля от числа Маха набегающего потока при Су=
const имеет вид, представленный на рис. 1.8. Сопротивление профиля
при докритических числах Маха слабо зависит от числа М. Рост
сопротивления при закритических числах Маха обусловлен волновым
сопротивлением и возможным отрывом пограничного слоя. Заметный
рост сопротивления начинается не при М=М кр., а при числе Маха,
несколько превышающим М кр.. На практике начало резкого роста
сопротивления принято характеризовать величиной числа Маха Мкр.
при котором выполняется условие_^^_=0,1.
На самолетах малых дозвуковых скоростей использовались
профили с большими местными возмущениями на верхней поверхности
и, соответственно, с небольшими значениями критического числа Маха
(М*р). С увеличением скорости полета первым этапом повышения
величины Мкр. явилось уменьшение возмущений путем ослабления
неравномерности их распределения вдоль хорды. Это достигалось за
счет смещения положения максимальной толщины и вогнутости к
середине хорды, а также некоторого уменьшения максимальной
вогнутости. Применение таких профилей, названных впоследствии
“классическими”или“обычными”скоростными профилями, позволило
увеличить крейсерскую скорость полета на 50 — 100 км/час.
Разработанные в ЦАРИ профили этого класса сравнительно
небольших относительных толщин 12%) использовались на
большинстве послевоенных отечественных самолетов.
1.2. Аэродинамика сверхкритических крыловых профилей
На самолетах малых дозвуковых скоростей использовались
профили с достаточно большими местными возмущениями на верхней
поверхности и, соответственно, с небольшими значениями
критического числа Маха(М кр.).
Активный поиск путей повышения крейсерской скорости полета
33
без увеличения сопротивления самолета привел к необходимости
изыскать способы дальнейшего повышения величины М кр. по
сравнению с классическими скоростными профилями. Таким способом
повышения М кр. оказалось дальнейшее понижение возмущений,
вносимых в поток верхней поверхностью, за счет уменьшения ее
кривизны. Это послужило научной основой создания первого поколения
новых профилей, называемых в дальнейшем сверхкритическими
профилями.
При малой искривленности верхней поверхности сверх-
критического профиля уменьшается доля создаваемой ею подъемной
силы. Для компенсации этого производится “подрезка”хвостового
участка нижней поверхности (рис. 1.9), что является характерной
особенностью сверхкритических профилей.
Количественно особенности обтекания сверхкритического
профиля по сравнению с обтеканием скоростного профиля отражены на
рис.1.9. На примере тонких профилей (5=9%) видно, как при
докритическом обтекании (М=0,6) уменьшение искривленности
верхней поверхности сверхкритического профиля приводит к
заметному снижению возмущений (разрежений) на значительной ее
части. На нижней поверхности сверхкритического профиля за счет
большей ее искривленности по сравнению с обычным профилем эпюра
давлений имеет ярко выраженный неравномерный характер с более
высоким уровнем скоростей в средней части и значительно более
низким их уровнем в области “подрезки”. Именно за счет большей
загрузки хвостового участка нижней поверхности сверхкритического
профиля (повышение давления) происходит компенсация подъемной
силы, теряемой на средней части верхней поверхности (“эффект
закрылка”).
Низкий уровень скоростей на верхней поверхности
сверхкритического профиля приводит при околозвуковом обтекании к
появлению местной сверхзвуковой зоны с меньшим ускорением
потока, более задним расположением замыкающего скачка уплотнения
и ослабленным отрывом из-под скачка по сравнению с обычным
профилем (например, М=0,85, С>=0,55, рис.1.10). Об этом же
свидетельствуют и оптические снимки околозвукового обтекания этих
34
профилей на данном режиме (рис. 1.11). На них отчетливо видно
ослабление интенсивности скачка уплотнения и вызванного им отрыва
пограничного слоя. В итоге на сверхкритическом профиле можно
реализовать дальнейшее продвижение по скорости полета, т.е.
увеличить значение Мкр. при заданной максимальной относительной
толщине.
обычный профи (ь_____
Рис. 1.9. Чертежи обычного и сверхкритического профиля с—9% и
распределение давления вдоль хорды при числе М = 0,6 и значении Су=0,3
35
Рис. 1.10. Распределение давления по верхней поверхности для обычного и
сверхкритического профиля при числе М = 0,85 и значении Су=0,55
Другим направлением использования сверхкритических профилей,
получившим широкое распространение в практике современного и
перспективного самолетостроения, является возможность повышения
относительной толщины профиля крыла при сохранении величины М*р.
Сверхкритические профили по сравнению с обычными
скоростными профилями позволяют повысить величину М*р. примерно
на 0,05А 0,12 или повысить максимальную относительную толщину
на 5 % хорды. Применение утолщенных профилей позволяет
увеличить удлинение крыла на А Л = 2,5 А 3,0 или уменьшить
стреловидность крыла примерно на5°А10°при сохранении значения
м:Р.
Использование сверхкритических профилей в компоновке
стреловидных крыльев является одним из основных направлений
совершенствования аэродинамики пассажирских и транспортных
самолетов. Большой вклад в разработку принципов проектирования и
создание сверхкритических профилей в ЦАРИ внесен профессором
Я. М. Серебрийским.
36
С =9%
М= 0,85
обычный
профиль
Рис.1.11. Оптические снимки обтекания обычного и сверхкритического профиля
с =9% при числе М = 0,85 и значении Су=0,55
Принципы проектирования сверхкритических
профилей. Первым этапом разработки новых скоростных
профилей (рис. 1.12) явилось.
сверхкритически и профил ь
37
создание сверхкритических профилей со слабым ускорением потока в
местной сверхзвуковой зоне и пониженной, по сравнению с обычными
скоростными профилями, интенсивностью замыкающего скачка,
которая определяется величиной числа М перед скачком уплотнения,
(рис. 1.13).Эти профили в дальнейшем получили название
сверхкритических профилей первого поколения.
с=12%
ПооФиль классического типа
Сверхкритический профиль I поколения
Оверхкритический профиль II поколения
Рис. 1.12. Чертежи и формы симметричной части и средней линии обычного и
сверхкритических профилей I и П поколения
Интенсивное продвижение пассажирской и транспортной авиации
в область больших дозвуковых скоростей стимулировало
совершенствование сверхкритических профилей. Результатом
активного поиска путей дальнейшего повышения М кр явилось
создание второго поколения сверхкритических крыловых профилей с
частичным изэнтропическим сжатием потока в местной сверхзвуковой
зоне, приводящим к заметному ослаблению интенсивности
замыкающего скачка уплотнения. Особенностью таких профилей
является уплощенная верхняя поверхность в сочетании с большей
величиной подрезки хвостового участка нижней поверхности по
сравнению со сверхкритическими профилями первого поколения
38
В связи с этим средняя линия сверхкритических профилей
второго поколения имеет характерный S-образный вид. Одним из
возможных путей сохранения подъемной силы на этих профилях
является также плавный отгиб вниз хвостового участка, что может
привести к отрыву пограничного слоя и требует контрольных
исследований, в частности при больших значениях чисел Рейнольдса.
Рис. 1.13. Изменение коэффициента профильного сопротивления по числам М и
распределение давлений по верхней поверхности при числе М ~ М*р по
обычному и сверхкритическим профилям I и II поколения равной максимальной
относительной толщины с = 12% при значении Су=0,5
На рис. 1.13 на примере профилей с максимальной относительной
толщиной с = 12 % при крейсерском значении Су=0,5 наглядно видно
затягивание по скорости момента резкого увеличения сопротивления
(характеризуемого величиной М*р) по мере перехода от обычного
профиля к сверхкритическим профилям первого и второго поколений.
Это происходит по следующим причинам.
При переходе от обычного к сверхкритическому профилю первого
поколения имеет место увеличение значения М*Р (А М*Р~0,07) за
счет резкого уменьшения темпа ускорения потока в местной
сверхзвуковой зоне в сочетании с существенным увеличением ее
протяженности вдоль хорды( АХ mi> i — 0,32 4-0,55). Здесь число
Mi—местное число М на поверхности профиля. Переход от
сверхкритического профиля первого поколения к профилю второго
поколения способствует дальнейшему продвижению по скорости на
39
величину А Мкр ~ 0,03. Это обусловлено частичным изэнтропическим
сжатием потока в местной сверхзвуковой зоне, приводящим к
ослаблению интенсивности скачка уплотнения в сочетании с
дальнейшим увеличением протяженности местной сверхзвуковой
зоны (А х Mj > 1 =0,67). О возможности реализации эффекта
частичного изэнтропического сжатия потока в местной сверхзвуковой
зоне на уплощенной поверхности профиля впервые было указано в
работе [1]. Уменьшение интенсивности скачков уплотнения при
околозвуковом обтекании сверхкритических профилей сопровождается
снижением волнового сопротивления, оценить которое можно на основе
работ [2], [3].
Столь существенные отличия в аэродинамике обычных и
сверхкритических профилей требуют особых подходов к
проектированию последних. Как известно, обычно скоростные профили
проектируют исходя из формы их симметричной части У сим. и средней
линии Уср.л, которые являются, как правило, выпуклыми кривыми (рис.
1.12). Построение серии таких профилей (т.е.группы профилей,
образованных на основе одного или нескольких базовых профилей и
объединенных некоторой общей закономерностью) происходит
следующими способами: 1) изменением ординат верхней и нижней
поверхности пропорционально с; 2) изменением симметричной части
профиля пропорционально с при сохранении средней линии базового
профиля; 3) изменением величины максимальной вогнутости (/max) с
сохранением формы средней линии при неизменных относительной
толщине и симметричной части базового профиля.
Принцип проектирования сверхкритического профиля заданной
максимальной относительной толщины для заданного значения
коэффициента подъемной силы заключается в следующем. Если
имеется обычный скоростной профиль с высоким значением М*р, то
для реализации эффекта сверхкритичности (дальнейшее продвижение
по скорости без увеличения сопротивления) необходимо понизить
кривизну его верхней поверхности, соответственно увеличить
кривизну нижней поверхности для сохранения максимальной
относительной толщины и осуществить “подрезку”ее хвостового
участка для компенсации потери подъемной силы вследствие снижения
40
вогнутости профиля (рис. 1.14, обычный и сверхкритический профили I
поколения). Такая трансформация обычного профиля в
сверхкритический профиль I поколения сопровождается значительным
выигрышем в величине М*р (например, при Су=0.5 А М*р~
0.03).
Рис. 1.14. формы, распределение кривизн вдоль хорды и изменение величины
М*' по Су для обычного и сверхкритических профилей I и II поколения равной
максимальной относительной толщины с=9 %
Дальнейшее совершенствование сверхкритических профилей
осуществляется путем уплощения верхней поверхности (значительное
уменьшение ее кривизны) в сочетании с плавным отгибом вниз ее
хвостового участка и с увеличением “подрезки” хвостовой части
нижней поверхности (рис. 1.14, сверхкритический профиль П
поколения). Подобная деформация геометрии приводит также к
дополнительному существенному выигрышу в величине М*р.. Так,
например, при Су =0,5 АМ*р~0,025 при переходе от
сверхкритического профиля I поколения к сверхкритическому профи-
41
лю П поколения. Общий выигрыш в величине Мк* для
рассматриваемых профилей с максимальной относительной толщиной
с =9% при переходе от обычного профиля к сверхкритическому
профилю П поколения при крейсерском значении Су=0.5 составляет
А М*р —0,055.
Поскольку геометрия сверхкритических профилей, особенно
форма их нижней поверхности и средней линии(рис.1.12> 1.14),
существенно отличается от геометрии обычных скоростных профилей,
должны быть различными и способы построения серии таких профилей.
Принцип построения серии сверхкритических профилей основан на
различных темпах возрастания ординат верхней и нижней
поверхностей с увеличением максимальной относительной толщины
профиля с. При этом искривленность верхней поверхности,
характеризуемая максимальной ее ординатой, Увшах, практически не
изменяется или темп увеличения ее с ростом максимальной
относительной толщины с значительно меньше по сравнению с нижней
поверхностью. Первый путь(Ув и У в max, const) может быть
рекомендован при сравнительно небольшом изменении величины с
сверхкритического профиля, Ас—±(14-1,5%).
При построении серии сверхкритических профилей от исходного
базового профиля в широком диапазоне максимальных относительных
толщин предпочтителен второй путь, когда коэффициент
пропорциональности (kB) при максимальной ординате верхней
поверхности (Увшахс = kB • Увшахваз.) заметно отличается от
соответствующего коэффициента нижней (#н) поверхности (Унтахс-
= &н • Унтах баз ), в ТО Время КЭК у ОбЫЧНЫХ Профилей При
пропорциональном с изменении ординат верхней и нижней поверхности
они равны (#в=#н). Иллюстрацией этому являются зависимости
М<) построенные для разработанной в ЦАГИ одной из серий
сверхкритических профилей П_185 (рис. 1.15), использованной в
компоновке крыла транспортного самолета Ан-124 “Руслан”.При
базовом профиле с = 12% темп нарастания ординат нижней
поверхности (dWdc) более чем втрое выше, чем для верхней
поверхности (d#B/dc).
У обычных профилей в рассматриваемом случае темп нарастания
42
ординат верхней и нижней поверхностей выше, чем для верхней
поверхности свёрхкритических профилей и меньше, чем для их нижней
поверхности (рис. 1.15). Таким образом, при построении серии
сверхкритических профилей увеличение толщины происходит в
большей степени за счет нижней поверхности, что наглядно видно на
рис.1.15 (с = 9% и 15%).
Рис. 1.15. Законы построения серии по с для обычного и сверхкритических
профилей
В ЦАГИ разработан ряд серий сверхкритических профилей,
удовлетворяющих различным аэродинамическим требованиям. Одним
из таких важных требований является высокое значение М*р на
крейсерском режиме. На рис.1.16 приведены зависимости М^(&)при
значении Су=0,5 для большого количества сверхкритйческих
профилей первого и второго поколения в сопоставлении с
соответствующими зависимостями для обычных скоростных
профилей, использованных в компоновках крыльев известных
пассажирских самолетов (Ту~134, Ту-154 М, Ил~62 М и др.).
Виден, во-первых, существенно более высокий уровень М*р у
сверхкритических профилей по сравнению с обычными скоростными
профилями. Так, например, при с = 12% среднее значение М*р~
43
0,7 у обычного профиля, М*р~0,76 у сверхкритического профиля I
поколения и М*р~0,8 у сверхкритического профиля II поколения.
Во-вторых, темп снижения значений М*р с увеличением
максимальной относительной толщины у сверхкритических профилей
значительно ниже по сравнению с обычными профилями. Это
обусловлено тем обстоятельством, что у сверхкритических профилей
увеличение относительной толщины происходит в большей степени за
счет нижней поверхности, что снижает возмущения, вносимые в поток
верхней поверхностью. Этим объясняется больший выигрыш в
Рис. 1.16. Изменение числа М*р по с для обычных и сверхкритических
профилей I и II поколения при значении Су=0,5.
44
величине М*р с увеличением максимальной относительной толщины
профиля. Данный график иллюстрирует также возможность
существенного увеличения максимальной относительной толщины без
снижения значения М*р при использовании сверхкритических
профилей, что находит широкое применение при аэродинамическом
проектировании крыльев.
Методы расчета аэродинамических характеристик
сверхкритических профилей. Развитие численных методов
расчета околозвукового обтекания профилей и разработка
соответствующих программ расчета оказали большое влияние на
проектирование сверхкритических профилей. Эти методы начали
широко использоваться в ЦАГИ с 70-х годов Е4], вначале без учета
влияния вязкости, а затем и с учетом ее влияния. Учет влияния
вязкости является необходимым элементом, поскольку, с одной
стороны, вязкость оказывает существенное влияние на
аэродинамические характеристики профилей, особенно при
околозвуковом обтекании, а с другой стороны, сверхкритические
профили отличаются повышенными неблагоприятными градиентами
давления в хвостовой части как на верхней, так и на нижней
поверхностях, что усиливает влияние вязкости для этих профилей.
Весьма эффективной моделью, описывающей обтекание профиля при
больших числах Рейнольдса, является модель пограничного слоя,
предложенная Прандтлем. При этом область течения разбивается на
две области: внешнюю область невязкого течения (которое с хорошей
точностью можно считать потенциальным при не слишком
интенсивных скачках уплотнения) и область вязкого течения вблизи
поверхности обтекаемого профиля и в следе за ним (пограничный слой).
Сращивание решений в этих двух областях осуществляется путем
“наращивания” толщины вытеснения пограничного слоя по нормали к
контуру обтекаемого профиля и осевой линии следа и последующего
расчета обтекания полученного полубесконечного тела потоком
невязкого газа. Данный прием повторяется итерационно до получения
необходимой точности.
Разработанные в ЦАГИ на базе данной методики
вычислительные программы позволяют рассчитать обтекание
45
профилей при до- и околозвуковых скоростях, т.е. получить
распределение давления и другие распределенные по поверхности
профиля характеристики, а также определить суммарные
аэродинамические характеристики (коэффициенты подъемной силы,
включая Су max [ 5 ], продольного момента, сопротивления и
различных его составляющих). При' этом положение перехода
пограничного слоя из ламинарного в турбулентный может быть либо
задано на основании экспериментальных данных, либо получено в
расчетах с учетом начальной степени турбулентности набегающего
потока и шероховатости обтекаемой поверхности.
На рис. 1.17 в качестве примера приведено сравнение расчетного
и экспериментального распределений давления для сверхкритического
профиля первого поколения^ = 12%). На рис. 1.18 дано сравнение
расчетных и экспериментальных поляр для двух чисел Маха.
Приведенные результаты свидетельствуют о хорошем согласовании
расчета и эксперимента.
Рис. 1.17. Сравнение расчетных и
Рис. 1.18. Сравнение расчетных и
экспериментальных эпюр давления экспериментальных поляр для
для сверхкритическото профиля (М = сверхкритического профиля при
0,75, Су=0,542, Re=4*106) числах М = 0,70 и 0,76
Современные расчетные методы позволяют эффективно и
достаточно надежно проводить сравнительный анализ характеристик
различных профилей. Иллюстрацией тому является рис. 1.19, где
приведено сравнение зависимостей коэффициента сопротивления от
46
числа М, полученных расчетным и экспериментальным путем, для
двух сверхкритических профилей. Видно, что расчетные зависимости
правильно отражают результаты эксперимента по продвижению по
числам М и взаимному расположению кривых.
ою Т Сх,
0.02 4
Эксперимент
Смрхкри ическии Профиль поколетыя
Смрхкритическли профиль пскопетып
Рис. 1.19. Сравнение коэффициента профильного сопротивления по числам М
для сверхкритических профилей I и II поколения (расчет, эксперимент, Су~
0,5, Re=4 • 106)
Численные методы могут быть использованы не только для
оценки характеристик профилей заданной формы, но и для построения
новых форм профилей с теми или иными требуемыми
аэродинамичекими характеристиками. Для этого, в частности, может
быть использовано решение обратной задачи обтекания профиля.
Обратная задача заключается в определении формы профиля, при
обтекании которого реализуется заданное распределение давления. Это
заданное распределение давления может быть выбрано исходя из
следующих соображений: ослабления скачков уплотнения, обеспечения
эпюры давления требуемого типа (“полочная”, “треугольная"),
ослабления неблагоприятных градиентов давления в диффузорной
части профиля и др. Пример приведен на рис. 1.20, где показаны
результаты проектирования профиля с полочной эпюрой давления с
помощью решения обратной задачи. В качестве исходного контура был
взят контур, распределение давления для которого существенно
отличается от требуемого.
Широкое использование современных численных методов расчета
для проектирования профилей свидетельствует об их высокой
эффективности при решении задач практической аэродинамики.
Аэродинамические характеристики сверхкритических
профилей. Существенные отличия в геометрии сверхкритических
47
и обычных профилей приводят к значительным отличиям в их
аэродинамических характеристиках Еб]. Ниже приведен анализ этих
характеристик на примере тонких профилей (с=9%, рис. 1.9).
Рис. 1.20. Распределение давления по хорде профиля(прямая и обратная задача,
М = 0,74)
Несущие свойства сверхкритического профиля заметно выше по
сравнению с обычным профилем вследствие снижения возмущений на
верхней поверхности (рис. 1.21) и наличия “подрезки” в хвостовой
части нижней поверхности сверхкритического профиля (рис. 1.9), что
приводит к несколько более повышенному (по модулю) значению у
него угла нулевой подъемной силы (аь) в исследованном диапазоне
чисел Маха (рис. 1.21).
Величина С у доп, соответствующая моменту появления
нелинейности
48
Рис. 1.21. Несущие и моментные
характеристики для обычного и
сверхкритического профиля (М =
0,74)
у характеристик Су (а), рис. 1.21.,
сверхкритического профиля
существенно выше, чем у
обычного профиля (рис. 1.22). Так,
например, при числе М = 0,8
величина Судоп = 0,44 у обычного
Профиля И Судоп = 0,90 у
сверхкритического профиля.
С точки зрения моментных
характеристик величина производ-
ной m czv (по модулю) у
сверхкритического профиля
несколько выше по сравнению с
обычным профилем (рис. 1.23).
Наряду с этим вследствие более
высокого значения Судоп,
нелинейность в моментных
характеристиках сверх-
критического профиля происходит при больших, по сравнению с
обычным профилем, значениях Су (рис. 1.21.).
Особенностью сверхкритического профиля являются несколько
большие отрицательные значения коэффициента продольного момента
при нулевой подъемной силе (wZo, рис. 1.21), что обусловлено
повышенной аэродинамической нагрузкой в хвостовой части профиля.
В то же время вследствие возникновения развитой местной
сверхзвуковой зоны на искривленной нижней поверхности у
сверхкритического профиля (при 0^ = 0), в отличие от обычного,
величина слабо изменяется в широком диапазоне чисел М
(например М = 0,6 4-0,84, рис. 1.23).
Наиболее ярко преимущество сверхкритического профиля по
сравнению с обычным скоростным профилем равной максимальной
относительной толщины проявляется в продвижении по скорости, т.е.
в величине М^.' На рис. 1.24 на примере тонких профилей (с = 9%)
наглядно виден существенный выигрыш в величине у
сверхкритических профилей в крейсерском диапазоне значений С у =
49
Рис 1 22 Изменение допустимого значения коэффициента подъемной силы
(Судоп) по числам М для обычного и‘сверхкритического профиля
0,4 = 0,6. Так, например, при Су = 0,5 величина М*р = 0,785 у
обычного профиля и М*р=0,84 У сверхкритического профиля.
Отметим качественное отличие зависимостей М*р (Су) у обычного и
сверхкритического профилей. Наличие максимума в последнем случае
является следствием возникновения волнового кризиса у
сверхкритического профиля вначале на нижней (при малых значениях
Су), а затем на верхней поверхности (при больших значениях Су). У
обычного профиля, как известно, волновой кризис при положительных
значениях Су всегда начинает развиваться на верхней поверхности и
усиливается с ростом значений Су (снижение Мкр).
Выигрыш в величине М*р у сверхкритического профиля
сопровождается значительным приращением аэродинамического
качества в околозвуковом диапазоне скоростей по сравнению с
обычным профилем (рис.1.25). Некоторое снижение
аэродинамического качества у сверхкритического профиля по
сравнению с обычным при малых дозвуковых скоростях (например,
при М < 0,7, рис. 1.25) обусловлено как более высоким значением
50
-QI --------------------------------------.--------------—
06 07 08 M
O--с ОБЫЧНЫ ( ПРОФИЛЬ
обычного и сверхкритического профиля
сопротивления давления (сопротивления формы) вследствие
неравномерности распределения давления на нижней поверхности, так
и повышенными неблагоприятными градиентами давления в хвостовой
части на верхней поверхности.
Следует отметить, что при несомненном преимуществе сверх-
критических профилей по сравнению с обычными некоторыми
недостатками их являются повышенное значение wizo и тонкая
хвостовая часть.
51
Рис. 1.24. Изменение величины Мкр по Су дня обычного и сверхкритического
профиля
Влияние масштабного эффекта на аэродинамику
сверхкритических профилей. Наличие развитой местной
сверхзвуковой зоны со скачками уплотнения и вызванного ими отрыва
пограничного слоя на режиме М*р[7], а также повышенная
аэродинамическая нагрузка на хвостовую часть и неблагоприятный
градиент давления на верхней поверхности в этой области,
свойственные сверхкритическим профилям, приводит к большему, по
сравнению с обычными профилями, влиянию числа Рейнольдса на их
распределенные и суммарные аэродинамические характеристики.
На рис. 1.26 приведены зависимости числа Мотр (Су), при
котором возникает отрыв пограничного слоя на сверхкритическом
профиле первого поколения с = 12% при умеренных (Re ~5.106)и
больших (Re= 10* 10 6= 28е 10 6)числах Рейнольдса. Следует
отметить, что на данном профиле при умеренных (“трубных”,
характерных для испытаний в промышленных аэродинамических
трубах) числах Re~5* 106 имеет место три типа отрывного обтекания
52
(диффузорный, диффузорно-волновой и волновой отрывы, три нижних
кривых), последовательно переходящие друг в друга при
фиксированном значении Су по мере увеличения числа М. При
больших числах Re= 10* 106^28* 106, приближенных к натурным, во
всем исследованном диапазоне Су у данного профиля имеет место
лишь волновой отрыв.
Рис.1. 25. Изменение аэродинамического качества по числам М для обычного
и сверхкритического профиля при значении Су = 0,5
Увеличение числа Рейнольдса в крейсерском диапазоне значений
С у = 0,4 4-0,6 (рис. 1.27) приводит к существенному повышению
величины М отр. Так, например, при Су = 0,5 и числах Re~4, 9*106
4-27,4*106 величина М отр~0, 734- 0, 79.
Увеличение числа Рейнольдса при фиксированном числе М
набегающего потока существенно повышает величину Суотр.,
соответствующую Сулоп. (рис. 1.28). Так, например, при числе М =
0,76 увеличение числа Re от 4,9 *106 до 25,84О6 затягивает момент
возникновения отрывного обтекания на величину ДСуОтр=0,43. По
мере увеличения числа М выигрыш в значении Суотр уменьшается
(рис. 1.28.)
53
Рис.1. 26. Изменение зависимости числа М наступления отрыва по значениям
Су для сверхкритического профиля 1 поколения при умеренных (Re = 5*106) и
больших (Re = 10*1064~28*106) числах Рейнольдса.
Таким образом, на сверхкритических профилях в условиях
трубных значений чисел Рейнольдса режим начала резкого роста
сопротивления (М*р~Мотр.) определяется, как правило,
возникновением диффузорно-волнового отрыва. Переход к натурным
значениям чисел Рейнольдса, существенно повышая величину у
сверхкритических профилей, сопровождается качественным
изменением характера отрыва (волновой отрыв).
Момент возникновения нелинейности несущих характеристик
(СУДоп~ Суотр.) сверхкритических профилей при переходе от трубных
к натурным значениям чисел Рейнольдса смещается на существенно
большие значения Су и определяется в обоих случаях волновым
отрывом.
Масштабный эффект существенно проявляется не только на
распределенных, но и на суммарных аэродинамических
54
Рис.1.27. Изменение числа Мотр по значениям Re при Су~0,44-0,6 для
сверхкритического профиря I поколения
Рис.1.28. Изменение приращения АСютр по числам Re при значениях М
0,764-0,80 для сверхкритического профиля I поколения
55
характеристиках сверхкритических профилей. Так, на рис. 1.29 на
примере аэродинамического качества сверхкритического профиля
первого поколения (с = 12%) виден сложный немонотонный характер
влияния числа Рейнольдса на крейсерском режиме (М = 0,74, Су=
0,5). Вначале (Re = 3,8* 106= 10* 106) аэродинамическое качество
существенно увеличивается за счет ликвидации отрыва потока, затем
(при Re= 10* 10 • 19* 106) его величина несколько снижается за счет
смещения области перехода ламинарного пограничного слоя в
турбулентный к носку профиля 0,3, рис. 1.29). При числах
Рейнольдса, близких к натурным (Re ~ 19* 10 6= 25* 10 6)
аэродинамическое качество вновь монотонно увеличивается
вследствие снижения турбулентного трения.
Срерхкритический профиль I ПОКОЛЕНИЯ
Рис.1.29. Влияние числа Рейнольдса на аэродинамическое качество и
положение точки перехода ламинарного пограничного слоя в турбулентный для
сверхкритического профиля I поколения при значениях М = 0,74, Су=0,5
Следует отметить, что при исследовании влияния числа
Рейнольдса на аэродинамическое качество сверхкритических профилей
необходимо учитывать состояние пограничного слоя (положение
перехода и отрыва). Исследование сверхкритических профилей
показывает существенное влияние положения точки перехода
ламинарного пограничного слоя в турбулентный на аэродинамическое
56
качество, особенно при наличии местной сверхзвуковой зоны. Так, на
примере сверхкритического профиля первого поколения с
максимальной относительной толщиной с — 12% расчетами показано,
что на крейсерском режиме (М = 0,756, Су = 0,45,Re = 4* 106)
сокращение ламинарного участка на верхней поверхности с
протяженной областью сверхзвуковых скоростей от хп = 55% (при
фиксированном положении перехода на нижней поверхности хп = 50%)
до Хп=1% приводит к увеличению сопротивления (снижению
аэродинамического качества) примерно на 30%. Подобное изменение
положения точки перехода на нижней поверхности (от 5^ — 50% до
х п = 1 %) при фиксированном положении перехода на верхней
поверхности, (я« = 55%) приводит к увеличению сопротивления
примерно лишь на 6% вследствие существенно более низкого уровня
местных скоростей (дозвуковые скорости), а следовательно, и низкого
уровня трения.
Таким образом, изменение положения точки перехода на верхней
поверхности при малых значениях числа Re = 4’106 примерно на 2%
хорды соответствует изменению сопротивления на 1%. Аналогичный
результат имеет место на этом же профиле и при безотрывном
обтекании в условиях больших чисел Рейнольдса. Так, например, при
изменении чисел Re от 10* 166 до 19* 106 и смещении при этом вперед
точки перехода на величину дхи~0,30 величина аэродинамического
качества снизилась на величину 9 (или Д/С~ —14%), рис.
1.29. Практически все экспериментальные исследования
сверхкритических профилей и крыльев в аэродинамических трубах
ЦАРИ сопровождаются одновременным определением состояния
пограничного слоя.
На рис. 1.30 на примере сверхкритического профиля второго
поколения (с =12%) показано значительное влияние масштабного
эффекта на максимальную подъемную силу в широком диапазоне
чисел М = 0,2 4-0,6.
Обобщая результаты влияния числа Рейнольдса на аэродинами-
ческое качество и максимальную подъемную силу сверхкритических
профилей, следует отметить, что наибольшее количественное влияние
фактора увеличения числа Рейнольдса от трубных до близких к
57
натурным значений сказывается на ослаблении или ликвидации
отрывного обтеканйя. В случае чисто турбулентного безотрывного
обтекания увеличение числа Рейнольдса вплоть до натурных значений
приводит к уменьшению сопротивления в основном за счет снижения
уровня турбулентного трения.
Рис.1.30. Влияние числа Рейнольдса на величину Су мах сверхкритического
профиля II поколения при числах М=0.24-0.6
При наличии протяженных участков ламинарного пограничного
слоя увеличение числа Рейнольдса в условиях безотрывного об-
текания, сопровождающееся постепенным смещением вперед по хорде
58
точки перехода,вначале может не приводить к снижению сопротивления
и даже способствовать некоторому его подрастанию. Лишь начиная со
значения числа Рейнольдса, соответствующего смещению перехода в
область носка профиля, сопротивление его снижается с ростом числа
Рейнольдса по законам турбулентного течения.
Таким образом, в связи с существенным влиянием масштабного
эффекта на аэродинамику сверхкритических профилей, проводить
экспериментальные исследования их аэродинамических характеристик
целесообразно при больших, близких к натурным, числах Рейнольдса,
особенно на режиме отрывного обтекания. Наряду с этим необходимо
развивать методы расчета, позволяющие достаточно надежно
рассчитывать аэродинамические характеристики при натурных
условиях для до—и околозвуковых скоростей.
Литература
1. А.А.Никольский, Г.И.Таганов. Движение газа в местной сверхзвуковой
зоне и некоторые условия разрушения потенциального течения. Прикладная
математика и механика, T.10N4, 1946.
2. Я.М.Серебрийский, С.А.Христианович. О волновом сопротивлении,
Труды ЦАГИ, N 550 ,1944.
3. В.Д.Боксер, Я.М.Серебрийский. Приближенный метод определения
волнового сопротивления профиля при наличии местной сверхзвуковой зоны,
“ученые записки ЦАГИ”,т.9 N 5,1978.
4. Г.А. Павловец. Методы расчета обтекания сечений крыла идеальным
несжимаемым потоком. Труды ЦАГИ, вып. 1344, 1971.
5. С.В.Ляпунов, А.В.Волков. Метод расчета трансзвукового обтекания
профиля с учетом изменения энтропии на скачках уплотнения. “Ученые записки
ЦАГИ”, т.24, N1, 1993.
6. В.Д.Боксер. Некоторые особенности околозвукового обтекания
профилей.“Ученые записки ЦАГИ”,т.11, N 2, 1980.
7. В.Д.Боксер. Развитие отрыва и его влияние на аэродинамику
сверхкритических профилей при околозвуковых скоростях. “Ученые записки
ЦАГИ”, т.19, N 5,1988.
59
Г л а в a 2. АЭРОДИНАМИКА
МАГИСТРАЛЬНЫХ САМОЛЕТОВ НА
РЕЖИМАХ КРЕЙСЕРСКОГО ПОЛЕТА
2. 1. Аэродинамика крыльев дозвуковых магистральных
самолетов. Общие принципы проектирования
Задачей аэродинамического проектирования крыла является
определение формы в плане и параметров его аэродинамической
компоновки, которые удовлетворяют заданным тактико-техническим
требованиям. Применительно к дозвуковым магистральным самолетам
такими требованиями являются высокий уровень аэродинамического
качества при заданных значениях крейсерской скорости (числа М) и
коэффициента подъемной силы горизонтального полета, при
безусловном обеспечении безопасности полета и условий базирования.
Следует отметить, аэродинамическое проектирование крыла
всегда представляет собой сложный многоступенчатый процесс поиска
приемлемого компромисса между порой прямо противоположными
требованиями, предъявляемыми аэродинамикой, технологией,
прочностью, аэроупругостью и другими дисциплинами.
В течение многих лет геометрия крыла дозвукового магистраль-
ного самолета определялась стремлением получить возможно большие
скорости полета, при этом параметр так называемой аэродинамической
дальности (Аллах • М) не должен был быть ниже достигнутого уровня.
В этом случае обеспечивалось получение требуемых для самолета
данного типа практической дальности, но при большей крейсерской
скорости полета и при лучших показателях себестоимости перевозок.
Этим требованиям, в частности, была подчинена разработка
аэродинамических компоновок магистральных пассажирских
самолетов Ту-154, Ил-86, рассчитанных на сравнительно большие
дозвуковые крейсерские скорости полета, соответствующие числам
М = 0,83 То,85. Однако в последние годы определяющей
характеристикой является показатель топливной эффективности,
60
достигаемый даже ценой некоторого снижения крейсерской скорости
полета. В связи с этим возникло новое направление в
аэродинамическом проектировании крыла —повышение
параметра(Атах • М) за счет существенного повышения ^Спах.
Основой для реализации этого направления является применение
сверхкритических профилей.Особенности аэродинамики
сверхкритических профилей изложены выше в главе 1. Использование
сверхкритических профилей позволяет увеличить относительную
толщину крыла без уменьшения критического числа М*р, что дает
возможность применять крылья большого удлинения и тем самым
увеличить параметр (А'тах • М) при той же крейсерской скорости
полета. В данной главе изложены основные вопросы аэродинамики
стреловидных сверхкритических крыльев, являющихся основным
типом крыльев современных дозвуковых магистральных самолетов.
Аэродинамические характеристики крыла зависят при заданных
расчетных условиях от формы крыла в плане и параметров его
аэродинамической компоновки. К числу важнейших геометрических
параметров крыла относятся следующие:
—удлинение крыла A= 12/S, где I — размах крыла, S —
характерная площадь (в отечественной практике обычно площадь
основной трапеции, рис. 2.1),
—угол стреловидности крыла(обычно по линии 0,25 хорды
основной трапеции),,
—сужение т) — bo/ bK,vj^ bo—корневая хорда крыла, а Ьк —
концевая хорда.
В течение последних 30—40 лет основным типом крыла для
дозвуковых магистральных самолетов являлись стреловидные крылья
(/=304-35°) с удлинением А = 7, выполненные с сужением rj —
34-4.
Современные стреловидные крылья, как правило, имеют наплывы
по задней кромке крыла, достигающие 104-15% площади крыла и
распространяющиеся до 40% размаха крыла. В ряде случаев крылья
могут иметь также передние наплывы, например, это характерно для
семейства самолетов Боинг.
Аэродинамическая компоновка крыла—это набор соответствую-
61
щим образом установленных профилей, которые формируют поверх-
ность крыла. Параметрами, характеризующими аэродинамическую
компоновку, являются форма профилей в сочетании с распределением
максимальной относительной толщины (Gnax) и геометрической
круткой сечений крыла по размаху (<р кр), рис.2.1.Крыло образуется
по профилям базовых сечений (обычно 3^5), поверхность между
которыми формируется интерполяцией координат базовых сечений
поверхностями одинарной или двойной кривизны. Последняя
интерполяция применяется обычно в центропланных сечениях крыла.
ТИПИЧНАЯ СХЕМА АЭРОДИНАМИЧЕСКОЙ
Рис.2.1. Типичная схема аэродинамической компоновки крыла
62
I
P Сопротивление крыла конечного размаха можно представить в
виде суммы двух составляющих сопротивления:
Cx=CxP+Cxi
где Схр—коэффициент профильного сопротивления крыла,
Сх г—коэффициент индуктивного сопротивления крыла.
Величина индуктивного сопротивлетия крыла Схг обусловлена
наличием скоса потока, индуцированного вихревой пеленой, сходящей
с крыла и простирающейся вниз по потоку. Как следует из теории
крыла, минимальным индуктивным сопротивлением при заданном
удлинении является крыло, имеющее эллиптическое распределение
циркуляции по размаху.
Для дозвуковых магистральных самолетов, имеющих полетный
Су = 0,5 = 0,6, величина индуктивного сопротивления составляет
значительную долю сопротивления крыла, поэтому первым условием
проектирования крыла является обеспечение максимально близкого к
эллиптическому распределения циркуляции по размаху. Как
показывают расчеты, для стреловидных крыльев /=20°=35° этого
можно достичь, применяя крылья с сужением 7) около 3,5, имеющие
отрицательную геометрическую крутку сечений по размаху.
Поскольку индуктивное сопротивление слабо зависит от сжимаемости
потока, для минимизации его успешно используются расчетные
методы, основанные на решении уравнения Лапласа.
Профильное сопротивление крыла Сх р можно представить в виде
СуММЫ: Сх р Сх тр ~I- Сх давл + Сх в ,
где Сх тр —сопротивление трения поверхности крыла,
обусловленное действием касательных к поверхности сил трения;
Схдавл.—сопротивление давления, обусловленное действием
нормальных к поверхности сил давления в результате вытесняющего
действия пограничного слоя и отрыва потока; Сх в —сопротивление
давления, обусловленное возникновением на поверхности крыла
местных сверхзвуковых зон, заканчивающихся скачками уплотнения.
Задачей аэродинамического проектирования является
д минимизация этих составляющих сопротивления.
Основным средством уменьшения сопротивления трения Сх-ф,
которое рассматривается в настоящее время, является ламинаризация
63
течения, т.е. увеличение доли поверхности, занятой ламинарным
пограничным слоем. Различают два вида ламинаризации—естест-
венную и искусственную. Основным требованием при разработке
крыльев с ламинаризацией является использование профилей,
имеющих на верхней и нижней поверхностях протяженные участки с
благоприятным градиентом давления, способствующие устойчивости
ламинарного пограничного слоя по отношению к внешним
возмущениям. Следует, однако, отметить, что обеспечение
ламинарного течения на поверхности стреловидных крыльев является
сложной задачей, полностью не решенной до настоящего времени,
поэтому проектирование крыльев современных магистральных
самолетов в условиях натурного полета (Ке = 20^~50млн) проводится
для режима полностью турбулентного обтекания; в этом случае Схтр
практически не зависит от аэродинамической компоновки крыла.
Составляющая профильного сопротивления, обусловленная
вытесняющим действием пограничного слоя и отрывом потока—
Схдавл является функцией распределения давления в сечениях крыла.
Исследования показыаают, что при докритических скоростях, когда на
поверхности крыла отсутствуют местные сверхзвуковые зоны, в
условиях безотрывного обтекания сопротивление давления весьма
слабо зависит от формы профилей в сечениях крыла при
фиксированном значении Су, однако возрастает с увеличением
относительной толщины. Поэтому для уменьшения этой
составляющей сопротивления следует, во-первых, обеспечить
безотрывный режим обтекания на расчетных условиях (М, Су), во-
вторых, уменьшать максимальную относительную толщину крыла.
Обеспечение безотрывного обтекания на режиме крейсерского
полета является одной из основных задач проектирования. Как
правило, это осуществляется таким подбором профилей, которые
реализуют безотрывное обтекание в некотором диапазоне значений Су
сечений крыла. С этой целью используются методы расчета профилей
и крыльев в потоке вязкого газа.
Уменьшение относительной толщины крыла всегда является
неблагоприятным фактором с точки зрения полезного объема,
характеристик аэроупругости и веса крыла, особенно для крыльев
64
большого удлинения, используемых на магистральных самолетах.
Поэтому на практике приходится искать компромисс между
требованиями прочности конструкции и аэродинамики. Современные
стреловидные крылья /~35° дозвуковых магистральных самолетов,
рассчитанных на крейсерские скорости М = 0,83 4-0,85, имеют
среднюю относительную толщину крыла 104-11%, а
сверхкритические крылья со стреловидностью 28° 4-30° для
перспективных самолетов около 114-12% и в настоящее время за
счет использования сверхкритических профилей существует
устойчивая тенденция к ее росту. Следует отметить, что
распределение толщин по размаху крыла определяется из условий
реализации заданного полезного объема и минимального волнового
сопротивления.
Как известно, увеличение скорости потока(числа М), начиная с
некоторого числа М, приводит к появлению на поверхности крыла
зоны сверхзвуковых скоростей, которая замыкается скачком
уплотнения. Это явление носит название волнового кризиса и
сопровождается возникновением волнового сопротивления— Схв.
Уменьшение волнового сопротивления является основной задачей при
проектировании крыльев, рассчитанных на большие дозвуковые
скорости полета. Общепризнанным средством снижения волнового
сопротивления является применение стреловидных крыльев, т.е.
крыльев, реализующих известный эффект скольжения. При обтекании
скользящих крыльев имеет значение составляющая скорости,
нормальная к передней кромке, вследствие чего начало волнового
кризиса смещается в область больших чисел Маха ^ДМ*Р=М*Р •
.Трудность заключается в том, что на стреловидном крыле
конечного размаха наряду с областью, реализующей эффект
“скользящего крыла”, имеются области, где этот эффект практически
отсутствует; это имеет место в корне и на конце крыла—“корневой”
и “концевой” эффекты. Вследствие пространственного обтекания
крыла в бортовых сечениях стреловидного крыла наблюдается
смещение области максимального разрежения к задней кромке по
сравнению с участком скольжения, а в концевых сечениях наоборот,
1—cos z)
cos х J
65
к носку крыла. Поэтому линии равных давлений (изобары)
располагаются под меньшими углами к набегающему потоку, чем это
было бы при полной реализации эффекта скольжения. Обеспечение
максимально возможной реализации эффекта скольжения является
необходимым условием разработки аэродинамической компоновки
стреловидного крыла. С этой целью в бортовых сечениях
стреловидных крыльев применяют профили с более передним
положением максимальной толщины по сравнению с остальной частью
крыла.
Важное значение имеет распределение максимальной
относительной толщины по размаху крыла. Исследования показывают,
что относительная толщина крыла должна уменьшаться от бортовых
к концевым сечениям. В настоящее время для анализа волнового
сопротивления крыла широко используются расчетные методы,
основанные на решении уравнений для полного потенциала в
трансзвуковом потоке газа. Сочетание расчетных и
экспериментальных исследований позволяет создавать компоновки
стреловидных крыльев магистральных самолетов, практически не
имеющих волнового сопротивления на расчетном режиме крейсерского
полета.
Наряду с достижением малых величин сопротивления крыла,
исследования по выбору аэродинамической компоновки крыла (формы
профилей, распределения относительных толщин и углов крутки по
размаху) имеют целью обеспечение необходимого значения Су доп.,
соответствующего расчетным режимам полета пассажирского
самолета в условиях неспокойной атмосферы и заданным
эксплуатационным перегрузкам. Величина Судоп согласно НЛГ
должна превьшать Су крейс примерно в 1,5 раза.
Не менее важной задачей проектирования стреловидного крыла
является задача обеспечения характеристик продольной устойчивости
в летном диапазоне углов атаки. Нелинейный характер зависимости
mz(a) определяется развитием срывных явлений на крыле. В
результате исследований показано, что при рассмотрении расчетных
значений Cy(z\ определяемых формой крыла в плане, его
аэродинамической компоновкой, и зависимости Сутж = f(z)
бб
профилей, из которых спроектировано крыло, можно определить место
расположения зоны срыва потока как область, где Cy(z) ~ Су max,рИС.
2.2. Крылья с малонесущим центропланом, характеризующиеся
расположением первоначальной зоны срыва в центроплане,
обеспечивают продольную статическую устойчивость в широком
диапазоне углов атаки, рис.2.3. Крылья с несущим центропланом и с
консольной областью первоначального срыва потока характеризуются
более значительной нелинейностью заисимости wz(a), рис.2.4, и
нуждаются в большей мере, чем крылья с малонесушим
центропланом, в подборе оптимальной размерности горизонтального
оперения.
Рис. 2. 2. Зависимости Сусеч.» Сушах проф=/<£) для крыла с малонесущим(я)
и несущим центропланом(б)
Таким образом, можно сформулировать следующие основные
задачи аэродинамического проектирования стреловидных крыльев:
1. Обеспечение минимальной величины индуктивного
сопротивления при близком к эллиптическому закону распределения
аэродинамической нагрузки вдоль размаха крыла.
2. Обеспечение на режиме крейсерского полета(М, Су) минимума
67
Рис.2.3. Зависимости Су, тг — /(а)при М —0,15, Re —4Х106 для самолета
с малонесущим центропланом с горизонтальным оперением и без него
68
величины волнового сопротивления.
3. Обеспечение безотрывного обтекания сечений крнла при
Су крейс. и по возможности отрывов небольшой интенсивности при
Су доп. ~ 1,5 4-1,6 ’ Су крейс
4. Обеспечение приемлемых характеристик продольной устой-
чивости на больших углах атаки, соответствующих срыву и режимам
глубокого сваливания.
2.2. Аэродинамические характеристики крыльев большого
удлинения со сверхкритическими профилями
Применение сверхкритических профилей для стреловидных
крыльев позволяет значительно увеличить крейсерские скорости
полета и аэродинамическое качество современных магистральных
самолетов. Ниже приведены результаты аэродинамических
исследований ЦАРИ, направленных на решение этих задач. Как уже
отмечалось выше, задача увеличения скорости полета самолета
решается путем использования в аэродинамической компоновке крыла
сверхкритических профилей. В качестве примера рассмотрим
аэродинамические характеристики самолета со стреловидными
крыльями 1 и 2(рис.2.5), имеющими одинаковую относительную
толщину ётах= 12—9—9% соответственно в бортовых, центральных и
концевых сечениях и различающимися только формой профилей:
крыло 1 спроектировано на базе сверхкритических профилей, а крыло 2
на базе обычных профилей. Сравнение форм средних линий профилей
крыльев 1 и 2 и расчетного распределения давления в плоском потоке
по хорде профиля при М = 0 и Су = 0,4 в условиях идеальной
несжимаемой жидкости по методу вихревого слоя приведено на рис.
2.6. В соответствии с формой рассматриваемых сверхкритических
профилей, расположенных в центральных и концевых сечениях крыла,
при малых скоростях в носовой части этих профилей образуется “пик”
разрежения с последующим “полочным” участком давлений
относительно небольшой величины, обеспечивающим меньшие по
сравнению с обычными профилями скорости на верхней поверхности
крыла и приводящим вследствие этого к повышению MX.
69
Рис.2.5. Схема аэродинамической компоновки стреловидного крыла / = 35°,
А = 7,3 с обычными (крыло 2)и сверхкритическими профилями (крыло 1)
Экспериментальные и расчетные исследования аэродинамических
характеристик модели с этими крыльями показали, что применение
сверхкритических профилей в сечениях стреловидного крыла
позволяет сместить волновой кризис в сторону больших чисел М на
А М*р ~0,05 по сравнению с М*р для модели с крылом 2 (рис.2.7),
существенно повысить максимальное аэродинамическое качество при
числах М 0,85 и тем самым расширить область крейсерских
скоростей полета самолета. При докритических числах М и малых
числах Re ~(1,5 ~^2,5) • 106 аэродинамическое качество модели
самолета со сверхкритическими профилями несколько меньше, чем с
обычными профилями. Это снижение ^тах, как и на описанных выше
профилях, вызвано увеличением профильного сопротивления и
сопротивления поверхностного трения сверхкритического крыла
70
вследствие более переднего положения линии перехода пограничного
слоя. При больших числах Re сопротивление и аэродинамическое
качество этих крыльев при докритических числах М сближаются.
Рис.2.6. Сравнение форм средних линий корневых и концевых обычных(крыло
2)и сверхкритических профилей (крыло 1); распределение дввления Ср—f (х)для
этих профилей при М = 0 и С ^, = 0,4
71
Рис.2.7. Зависимости Атах—/(М), CxtCy — 0.4) — f (М) для модели
самолета с крыльями 1 и 2
Применение сверхкритических профилей в стреловидных крыльях
приводит к увеличению коэффициента подъемной силы при заданном
угле атаки, увеличению Су ДОп, повышению в результате этого Су max
при больших числах М и увеличению тго на пикирование вследствие
большей “нагруженности” хвостовой части профиля (рис.2.8).
Рис.2.8. Зависимости Cy,mz— f (а)при М —0,15 и 0,9 для модели самолета
с крыльями 1 и 2
72
Таким образом, применение сверхкритических профилей той же
толщины, что у обычных профилей, в системе стреловидного крыла
/=35°, оказывает такое же качественное влияние на
аэродинамические характеристики, как в плоском потоке.
Выше было показано, что применение сверхкритических профилей
в стреловидном крыле приводит к заметному повышению mZo на
пикирование и снижению аэродинамического качества при
докритических числах М. Увеличить М*р не снижая максимального
аэродинамического качества при докритических числах М, и
уменьшить величину mzo можно в результате применения профилей,
форма передней части которых близка к форме лучших классических
профилей или совпадает с ней, а хвостовая часть спроектирована по
принципу сверхкритического профиля. Такой сверхкритический
профиль при увеличении числа М обеспечивает меньшие(по сравнению
с обычным профилем) местные скорости, позволяет устранить (как
сверхкритический профиль) или заметно уменьшить интенсивность
скачка уплотнения.
На рис.2.9 и 2.10 приведены результаты исследований аэродина-
мических характеристик самолета с крыльями 7=35°; А (без
наплыва) = 7; Стах = 13 — 9 — 9%, различающимися только формой
хвостовой части профиля. Крыло 1 этой модели спроектировано на
базе обычных профилей, а крыло 2-на базе описанных выше
сверхкритических профилей. Как видно из рисунка, сверхкритичность
хвостовой части профиля приводит к увеличению М*р и уменьшению
волнового сопротивления при значениях Су >0,2; но при этом
увеличивается коэффициент лобового сопротивления СХо при Су = 0
во всем исследованном диапазоне чисел М. В результате
максимальное аэродинамическое качество самолета с крылом 2
превышает Ктах этой модели с крылом 1 (см. рис.2.10) во всем
исследованном диапазоне чисел М. Однако выигрыш в величине М*Р
модели с крылом рассмотренного сверхкритического профиля
несколько меньше (на А М* ~0,014-0,015), чем у модели с крылом,
образованным по сверхкритическим профилям с меньшей толщиной
хвостовой части и большей S-образностью средней линии (см.рис.2.7).
Таким образом, исследования показали, что применение
73
сверхкритических профилей для стреловидных крыльев позволяет
значительно увеличить крейсерские скорости самолетов, не уменьшая
толщины крыла Е11.
Рис.2.9. Зависимости Cx-ftCy) при М —0,8 и 0,85 для модели самолета с
обычным стреловидным крылом 1 и сверхкритическим крылом 2
74
Рис.2.10. Сравнение зависимостей Атах=/(М), Сх<С>=г0^-0,4) =/<М)
для модели самолета с обычным стреловидным крылом 1 и сверхкритическим
крылом 2
Существенным преимуществом применения новых профилей в
стреловидных крыльях является дальнейшее увеличение
аэродинамического качества путем применения толстых
сверхкритических крыльев умеренной стреловидности большого
удлинения. При крейсерской скорости полета для решения этой задачи
разработаны сверхкритические профили с большой относительной
толщиной. Для иллюстрации на рис.2.11 приведено сравнение
зависимостей K=f(Cy) для обычного толстого профиля (стах = 15%)
с “полочным” распределением давления и сверхкритического профиля
(Стах =15%) при М = 0,7. Как видно из рисунка, аэродинамическое
качество толстого сверхкритического профиля при заданном числе М
значительно больше, чем обычного профиля той же толщины. Экви-
валент" размена” относительной ТОЛЩИНЫ профиля Gnax на М кр мож-
но определить по рис.2.11. Из приведенных заисимостей следует,что
относительную толщину разработанных в ЦАГИ сверхкритических
профилей можно увеличить почти в 1,3—1,5 раза при сохранении
75
неизменным М*р(или увеличении его на А М*р = 0,04-г0,05 при
сохранении неизменной относительной толщины профиля). Увеличение
толщины можно трансформировать либо в уменьшение массы
конструкции крыла при заданном удлинении, либо в увеличение
максимального аэродинамического качества путем увеличения
удлинения крыла и уменьшения его стреловидности.
Рис.2.11. Сравнение зависимостей К=f (С>)при М = 0,7 для обычного и
сверхкритического ТОЛСТОГО профиля Стах =15%, а также М*р = /(с%) ДЛЯ
этих профилей
Возможности сверхкритических профилей ЦАРИ для увеличения
максимального аэродинамического качества использованы при
разработке аэродинамических компоновок стреловидных крыльев
большого удлинения с различной стреловидностью(/=20,25,30,35°).
Эти исследования позволили установить зависимость М?р от
относительной толщины сверхкритических стреловидных крыльев и
эквивалент"размена”этой толщины на М*р. В отличие от профиля,
установление количественного эквивалента “размена” толщины
стреловидных крыльев на М*р усложняется в связи с нелинейным
распределением толщины, при котором в бортовых сечениях
относительная толщина профиля значительно увеличивается по
сравнению с толщиной профиля консоли крыла. На рис.2.12 приведены
обобщенные зависимости М *р = /(%;с Ср) (здесь с Ср средняя
76
относительная толщина консоли стреловидных крыльев) при толщине
профиля в бортовых сечениях Стах =15%. Число М* определялось
при Су = 0,5. Эти зависимости позволяют определить при заданном
М*р стреловидность крыла и возможное распределение толщины
сверхкритических профилей вдоль крыла, а для прямых крыльев и
крыльев умеренной стреловидности(/ = 20 4- 25°) установить
эквивалент “размена”толщины на М*Р.Так, при М*р = 0,76 для
стреловидных крыльев с 7 = 204-25° применение сверхкритических
профилей позволяет увеличить толщины этих крыльев более чем в 1,5
раза—вместо Стах =9 4- 8% ДЛЯ обычных профилей применить Стах =
154-13%для сверхкритических профилей(см.рис.2.12) соответственно
в бортовых сечениях и на консоли крыла. Исследования также
показали, что утолщенные (Стах = 154-16% в бортовых сечнвиях и
114-10% на консоли) стреловидные крылья с 7 = 30° позволяют
обеспечить высокие значения Ктах(рис.2.13) при М*Р=0,84-0,82
соответственно.
Рис.2.12. Обобщенные зависимости М*р —/(/» СсР) (по консоли) при Стах —
154-16% в бортовых сечениях для модели крыло+фюзеляж
77
Рис.2.13. Влияние относительной толщины профиля в бортовых и центральных
сечениях сверхкритического крыла х=30\ Л=9 на величину Атах и (/Стах ХМ) =
/(М)для модели крыло + фюзеляж
Оптимальными в отношении значений /Стах и параметра(/Стах •
М) являются сверхкритические крылья большого удлинения (Л = ЭН-
10) и умеренной стреловидности (х — 30°), обеспечивающие
крейсерские скорости полета, соответствующие числам М = 0,84-0,82
(см.рис.2.12 и 2.13). Результаты исследования показали связь
величины Атах крыла с фюзеляжем и числа М*р. с формой и толщиной
профиля, расположенного главным образом в центре крыла:
увеличение относительной толщины крыла в бортовых сечениях до 15
~16% незначительно сказывается на аэродинамическом качестве, а
увеличение ее в центральных сечениях от 10 до 12% заметно
снижает
78
Mj и величину Атах при околокритических и закритических
скоростях (см.рис.2.13).
Из зависимостей Атах и Атах • М=/(М), приведенных на рис.
2.14, следует, что толстое (Стах = 16 — И —9%) сверхкритическое
крыло(х = 30°) с удлинением без наплыва Л = 9,5 увеличивает Атах
на ДАтах = 2 и на 15% повышает параметр (Ашах • М) при М—0,8
по сравнению с их значениями у обычного крыла (х=35°,Лб.н.=7,8),
применяемого на пассажирских самолетах, рассчитанных на
крейсерские' скорости полета, соответствующие числам М = 0,83 4-
0,85.
Крьи о+укн елкж; <!
•
«я
1U сОерхкрцтичкс обычнее крыло 2^12-9,7-
£
5'1.
- м, , **—
\\
toot крыла yr 30';
-8,51 । । ।
О,if 0,5 0,6 0,7 0,8 М
Рис.2.14. Сравнение зависимостей Ктах и (Апах * М) — f (М)для модели
фюзеляжа(5ф = 10,5%)со сверхкритическим крылом /=30°, Лб.н. = 9,5 и
обычным стреловидным крылом / — 35°, Лб.н, —7,8
Таким образом, применение в аэродинамической компоновке
крыла большого удлинения сверхкритических профилей позволяет
увеличить его относительную толщину, не вызывая возрастания
волнового сопротивления при крейсерских скоростях полета. Более
79
толстое крыло позволяет увеличить его удлинение, что приводит к
повышению Атах.Это иллюстрирует рис.2.15, на котором приведены
зависимости максимального аэродинамического качества модели
фюзеляжа со сверхкритическими крыльями (/ = 30°) различного
удлинения от числа М. Исследования показали, что изменение
удлинения крыла практически не оказывает влияния на величины
коэффициента лобового сопротивления СХо и М*р, но приводит к
снижению индуктивного сопротивления и увеличению
аэродинамического качества. При докритических числах М *р
зависимость АШах(А) близка к линейной с наклоном производной
dAmax/ dA ~ 1,0 4- 0,8 в исследованном диапазоне удлинений.
Производные dAmax/dA зависят от того, насколько велика доля
индуктивного сопротивления в общем сопротивлении самолета. В
общем случае величина dAmax/dA будет определяться уровнем Атах
и коэффициентом лобового сопротивления Схо, зависящим от
суммарной площади миделевого сечения фюзеляжа и гондол
двигателей.
Рис.2.15. Зависимости Атах, Сх ( Су = 0 4- 0,5 ) = f (М)длЯ
сверхкритических крыльев х=30° различного удлинения^ ~84-10) с
фюзеляжем
80
Как указывалось выше, аэродинамическая компоновка
крыла—это набор соответствующим образом установленных
профилей, которые формируют несущую поверхность стреловидного
крыла. Трудности заключаются в том, что на стреловидных крыльях
конечного размаха существуют области “корневого”и “концевого”
эффекта .Для этих сечений выбор профилировки представляет
дополнительные трудности и проводится в соответствии с
требованиями, чтобы изобары, линии равных давлений, оставались
прямыми линиями и следовали геометрии крыла. Ниже приводятся
некоторые результаты экспериментальных исследований,
иллюстрирующие влияние формы профилей в центральных и
бортовых (корневых)сечениях на коэффициент сопротивления и
аэродинамическое качество стреловидных крыльев.
На рис.2.16 приводятся результаты исследований
аэродинамического качества Атах = /(М), коэффициента
сопротивления Сх— f (М)при СУ=0,5, а также эпюры давлений
Ср—/(%)на верхней поверхности сравнительно толстых
сверхкритических крыльев / = 25°, Л = 10, отличающихся формой
профиля в центральном сечении: крыло 1 (пунктир) составлено из
сверхкритического профиля первого поколения, крыло 2(сплошные
кривые)—из сверхкритического профиля второго поколения.
Отличительной особенностью профиля крыла 1 является умеренное
заднее нагружение, достаточно протяженные участки ламинарного
обтекания при малых числах Re~2,5 • 106 в условиях АДТ~Ю6 и
развитая сверхзвуковая зона, замыкающаяся скачком уплотнения при
М = 0,75, Су=0,5.Замена профиля в базовом сечении, на изломе
задней кромки крыла, на сверхкритический профиль второго поколения
позволила существенно понизить уровень давлений на верхней
поверхности крыла и за счет этого увеличить М£ на А М*р ~ 0.02
при заметном повышении параметра аэродинамической дальности
(Атах • М) при числах М = 0,784-0,8.
Аналогичные результаты получены при испытании модели
самолета с толстыми крыльями / = 28°, (ётах = 15-11-10%),
спроектированными на базе сверхкритических профилей второго
поколения, установленными в центральных и концевых сечениях.
81
Рис.2.16. Зависимости Cx~f (М)при Cy = const, Ктах, (Ктах • М) =/(М),
Ср (%) по верхней поверхности сверхкритического профиля 1 го поколения
(пунктир) и 2 го поколения (сплошная линия) при М = 0,75 в центральном
сечении крыла z=25°,A = 10,Стах= 14,5 —12 —10%
На рис.2.17 приводятся зависимости Kmax = / (М) модели планера
самолета с крыльями /=28% Л = 9,6, отличающимися формой
профилей первого поколения и второго поколения, а на рис. 2.18
приведен расчет околозвукового обтекания крыла при М = 0,75;
0,78 и М = 0,8, Су=0,6 с профилями второго поколения (а) в
различных сечениях по размаху, выполненный порабогэ [2].Этот
. тип профилей при расчетных числах М = 0,78 и Су = 0,6 имеет
на верхней поверхности достаточно развитые передние по хорде
сверхзвуковые зоны с изоэнтропическим сжатием потока,
обеспечивающими крылу практически такие же высокие значения
Атах, как и для крыла с профилем 2 поколения (б), имеющим на
этих режимах полочный характер обтекания (рис.2.16).
82
Рис.2.17. Зависимости Kmax=/(M) планера самолета (77=11 км) со
сверхкритическими крыльями х — 28\ А = 9,6, Стах— 14,5—11 — 9%,
составленными из профилей I поколения (пунктир) и II поколения (сплошная,
штрихпунктир)
Влияние формы и толщины профиля в бортовых (корневых)
сечениях крыла приводится на рис.2.19 и рис.2.20. На обычных
стреловидных крыльях х = 35°, Л = 7-^8 нашли применение в
бортовых сечениях профили ЦАГИ с передним положением
максимальной толщины (хстах = 0,3), положительной и
отрицательной кривизны fmax= ±1%, На рис.2.19 приводятся
результаты испытаний модели самолета с крыльями х = 35°, Л = 7,3,
отличающимися между собой формой бортового сечения : на крыле 1
установлен симметричный профиль с передним положением
максимальной толщины по хорде (хс тах=0,3) и“треугольным”видом
эпюры давления при М = 0, Су=0,4, а на крыле 2-профиль с задним
положением максимальной толщины и кривизны по хорде,-Хс тах =
—%/тах~0,54-0,6.Этот профиль с меньшей полнотой и меньшим
радиусом кривизны носка по сравнению с профилем крыла 1, но с
“пиковым”,полочным обтеканием. Наличие профиля с задним по хорде
83
положением максимальной толщины и кривизны в бортовых сечениях
крыла 2 вызывает существенный прирост волнового сопротивления
АСх=/(М) при М 0,85 и АСх= f (М) при С\=0,5 и
М 0,75. В результате уменьшилась величина М*р крыла и
максимальное аэродинамическое качество модели во всем диапазоне
чисел М.
Рис.2.18. Зависимости Ср — /(х)в различных сечениях по размаху крыла /=
28°, Л = 9,6 при М-0,75, 0,78, 0,8, и Су=0,6
На современных сверхкритических крыльях х=284-30° нашли
применение утолщенные Стах=15 4-16% бортовые профили с
передним положением максимальной толщины и кривизны(%с тах~
=Х/тах=0,3). На рис.2.20 приводятся результаты испытаний двух
84
моделей сверхкритических крыльев с фюзеляжем, отличающихся
формой профиля в бортовых сечениях. На модели со сверхкритическим
крылом 1(/ = 30°,Л = 8,5) установлен профиль с передним положением
(^стах=^/==0,3), а на крыле 2(% = 30°, Л = 9)—профиль с задним
(*cmax = */max =0,4) ПОЛОЖеНИеМ МЭКСИМЭЛЬНОЙ ТОЛЩИНЫ И КРИВИЗНЫ.
Результаты исследований показали, что применение профиля с хстах
=0,3 отвечает принципам компоновки стреловидных
сверхкритических крыльев / 25° в бортовых сечениях и позволяет
максимально реализовать эффект скольжения в этих сечениях.
Систематические исследования аэродинамики обычных и
сверхкритических крыльев различной стреловидности / 254-45°
показали, что для этих крыльев остается в силе основной принцип
проектирования бортовых(корневых) профилей—применять профили с
более передним положением максимальной толщины и максимальной
положительной или отрицательной кривизны. Кроме того, для
обеспечения благоприятной интерференции сверхкритического крыла и
фюзеляжа необходимо в корневых сечениях использовать профили с
Рис.2.19. Зависимости/Стах, Сх=/(М)при Су — 04-0,5 для модели самолета
с крылом 1 с симметричным профилем переднего положения максимальной
толщины и крылом 2 с вогнутым профилем заднего расположения кривизны и
максимальной толщины
85
00
СП
СХ=/(М)
Рис 2 20 Сравнение зависимостей Яшах, (/Сах ’ М),
отличающихся формой бортового профиля и круткой
при Су = 0 — 0,5 для модели крыла 1 и крыла 2
уменьшенным или минимальным градиентом давления с целью
сохранения безотрывного обтекания в местах сопряжения крыла с
фюзеляжем.
Исследованиями также установлено,что для повышения аэродина-
мического качества сверхкритических крыльев с фюзеляжами как в
схеме“низкоплан”,так и в схеме“высокоплан”необходимо применять
прямостенные зализы малого объема с плавным сопряжением их в
носке и хвостовой части крыла с боковыми поверхностями фюзеляжа.
Применение таких форм зализов снижает уровень сопротивления
самолета, повышает аэродинамическое качество.
Применение сверхкритических крыльев большого удлинения на
пассажирских самолетах связано с преодолением ряда
конструктивных трудностей. Как указывалось выше, одной из
особенностей сверхкритических профилей является большее значение
коэффициента момента тангажа mZo на пикирование при нулевой
подъемной силе. Величину этого коэффициента mZo для крыла можно
уменьшить, применяя отрицательную геометрическую закрученность
сечений по размаху крыла.Отрицательную геометрическую крутку
сечений по размаху сверхкритических крыльев применяют с целью
улучшения крейсерских аэродинамических характеристик,“срывных”
характеристик на больших околокритических и критических углах
атаки, а также для снижения массы крыльев.
Известные методы расчета [3] позволяют определить влияние
геометрической крутки сверхкритического крыла на его
аэродинамические характеристики при докритических числах М и
умеренных углах атаки в диапазоне линейной зависимости Су\ mz—
Для иллюстрации на рис. 2.21 и 2.22 приведены расчетные
зависимости коэффициентов подъемной силы, момента тангажа и
индуктивного сопротивления при М = 0,8 для плоского
сверхкритического крыла 1 (/=35°, А = 8,5) и крыльев,
геометрическая крутка которых изменяется по законам <р Кр = 0, -3°,
~3 (крыло 2), ср кр =0, -3°, -6°(крыло 3), кр = 0, -3°, ~4°(крыло
4), соответственно в бортовых, центральных (г=0,4) и концевых
сечениях. Результаты расчетных исследований показывают, что при
докритических числах М геометрическая крутка, изменяющаяся по
87
рассмотренным законам, приводит к уменьшению коэффициента
подъемной силы на заданном угле атаки вследствие роста оь (нулевого
угла атаки); значительному уменьшению коэффициента момента
тангажа на пикирование вследствие уменьшения нулевого момента
тангажа жго; снижению изгибающего момента крыла и индуктивного
сопротивления.
Рис.2.21. Расчетные зависимости Су, mg-fta), Схг —f(Су)при М — 0,8
для плоского и геометрически закрученных сверхкритических крыльев /=35°,
А = 8.5
Уменьшение коэффициента момента тангажа и изгибающего
момента вызвано благоприятным перераспределением коэффициента
подъемной силы по размаху, при котором максимальные значения
сеч. значительно уменьшаются в концевых и возрастают в корне-
вых сечениях крыла. Применение соответствующего закона распределе-
ния угла геометрической крутки по размаху крыла позволяет благопри-
ятно изменить циркуляцию, приблизить ее к эллиптическому закону
88
распределения (см. рис.2.22) и, следовательно, уменьшить
индуктивное сопротивление крыла до значений, соответствующих
крылу минимального сопротивления. Отметим, что результаты расчета
показывают тенденцию уменьшения индуктивного сопротивления
закрученных крыльев (см.рис.2.21).
Рис.2.22. Расчетное распределение циркуляции Г сеч.=/<2), Гэллип — /(2)
для плоского и геометрически закрученных сверхкритических крнльев /=35°,
А = 8.5 при М = 0,8 и Су — 0,5
Экспериментально исследованные крылья были выполнены
плоскими и геометрически закрученными по различному закону
распределения угла крутки по размаху: линейному с изломом в
центроплане, параболическому и др. (рис.2.23 и 2.24).Исследования
показали, что геометрическая крутка уменьшает коэффициент
лобового сопротивления при докритических числах М и заметно
снижает волновое сопротивление при критических и закритических
числах М. В результате этого аэродинамическое качество
геометрически закрученного крыла больше аэродинамического
качества плоского крыла(см. рис.2.23, 2.24).Отметим, что из всех
исследованных законов распределения угла геометрической крутки по
размаху обычного и сверхкритического крыльев более эффективен
линейный закон с изломом в центроплане, а оптимальным значением
угла крутки в отношении аэродинамического качества является
<Ркр.^~ 4° на конце крыла (см. рис.2.23). Экспериментальные
исследования показали также, что геометрическая крутка
сверхкритического крыла приводит к улучшению срывных
89
характеристик самолета на больших углах атаки вследствие
сохранения безотрывного .обтекания концевых сечений до больших
углов атаки, а в результате этого—к повышению значений СУЛОа, при
которых возникает тряска самолета(рис.2.25). Геометрическая крутка
уменьшает коэффициент момента тангажа крыла на пикирование и
заметно улучшает характеристики продольной статической
устойчивости модели самолета при больших углах атаки.
Рис.2.23. Влияние различных законов распределения угла геометрической
закрученности по размаху обычного и сверхкритического крыльев на величину
Km&x=f(<p ср)при М = 0,8
Рассмотренные закономерности влияния геометрической
закрученности крыла на аэродинамические коэффициенты относились
к крейсерской крутке, когда на крыло действуют аэродинамические
силы. В производственных условиях крыло изготавливается в так
называемой стапельной форме, когда аэродинамические силы
отсутствуют. Для того, чтобы в полете конфигурация самолета
соответствовала разработанной аэродинамической компоновке,
необходимо вводить в стапельную форму поправки, соответствующие
90
деформации конструкции в горизонтальном полете под действием
аэродинамических и массовых сил.
Рис.2.24. Влияние геометрической закрученности сечений сверхкритического
крыла /=35° на Атах» Сх(Су = 0,4) =/(М)модели крыло+фюзеляж
Деформации (прогиб) фюзеляжа сказываются незначительно в
изменении общего баланса аэродинамических сил, а изменение угла
атаки горизонтального оперения может быть компенсировано
отклонением стабилизатора. Поэтому целесообразно вносить поправки
в стапельную форму крыла.
Даже в горизонтальном полете деформации крыла зависят от
режима полета (числа М, скоростного напора), а также от массы
самолета в связи с выгоранием топлива. Чтобы минимизировать
изменение аэродинамических характеристик самолета за счет
деформаций конструкции, поправки к стапельной форме следует
рассчитывать для средних полетного веса, крейсерского числа М и
высоты полета.
Чтобы обеспечить в полете сохранение заданного распределения
циркуляции ио размаху крыла, в стапельную форму следует внести
поправки в аэродинамическую крутку крыла за счет деформаций
91
изгиба и кручения.
При положительной стреловидности крыла деформации изгиба
уменьшают местный угол атаки поточных сечений, который может
быть расчитан по формуле:
_________________________
а изг. — sin х о.ж.
где
dy
d£i
—местный угол отклонения касательной к оси жесткости
крыла под действием суммарного нагружения в крейсерском
полете,
X о.ж. —угол стреловидности оси жесткости.
Рис.2.25. Зависимости Су,тг —
fta), Су^а — ^), Шго=f (<р кр)
модели самолета с плоским и
геометрически закрученными
Рис.2.26. Влияние концевых
"крылышек” на Атах = /(М) модели
самолета со сверхкритическим
крылом х=30°, Л = 8,5
сверхкритическими крыльями
Деформации кручения крыла увеличивают поточные углы атаки
сечений, когда фокус профиля находится впереди оси жесткости, но
92
уменьшают их при тго<0 и при выносе двигателей вперед; эти
изменения могут быть подсчитаны по формуле:
А а крут. 0COS/ о.ж.
где д—местный суммарный угол закрутки сечения крыла
относительно оси жесткости под действием суммарной нагрузки.
Таким образом, стапельная крутка крыла будет
ф стал. ф кр. (А а изг. + А С крут.)»
где ф кр. —потребная крутка крыла в крейсерском полете.
Для крыльев с углом стреловидности / = 204-30° наибольший
вклад в изменение крутки крыла вносят деформации изгиба.
Кроме изменения крутки крыла, деформации изгиба меняют угол
поперечного V в сторону его увеличения, что приводит в полете к
повышенной поперечной устойчивости по сравнению с результатами
трубных испытаний жесткой модели.
Местный угол поперечного V крыла в результате изгиба
увеличивается на величину
А^сеч.~ COS X о.ж. (2.5)
При этом поправки на поперечное V крыла будут переменными по
размаху крыла. Вводить такие поправки в стапель сложно по
технологическим причинам. Поэтому приближенно можно уменьшить
поперечное V относительно бортовой хорды крыла на величину
А0Экв.~-у-• 57,3 (2.6)
где У—прогиб крыла под действием нагрузки в крейсерском режиме
на 2/3 его полуразмаха.
Указанные выше деформации крыла расчитываются по обычным
законам строительной механики для заданных в крейсерском полете
аэродинамических и массовых нагрузок. Для дозвуковых
магистральных самолетов характерны большие удлинения крыла,
поэтому для расчета деформаций обычно может быть использована
балочная схематизация конструкции.
Другим способом дальнейшего повышения аэродинамического
качества самолетов со сверхкритическими крыльями большого
удлинения является применение концевых профилированных
93
аэродинамических поверхностей — так называемых "крылышек” с
небольшой относительной площадью (S кр. = (0,011 + 0,02) • S),
расположенных на законцовке крыла. Экспериментальные и расчетные
исследования Е41, проведенные в ЦАГИ, показали, что установка
таких“крылышек”на модели самолета со сверхкритическим крылом
(я = 30°; А = 8,5)позволяет дополнительно увеличить /Стах на
А Атах ~ 0,8 в диапазоне чисел М = 0, 64-0, 8(рис.2.26).Причиной
такого благоприятного влияния “крылышек” на аэродинамическое
качество самолета является снижение индуктивного сопротивления
крыла вследствие уменьшения перетекания потока с нижней
поверхности крыла на верхнюю в районе законцовки. Исследования
показали, что благодаря оптимально выбранной форме “крылышка” в
плане и его профилировки по сверхкритическим профилям они имеют
значительно меньшее профильное сопротивление, чем классические
концевые шайбы. Важным фактором, определяющим увеличение
аэродинамического качества путем установки “крылышек” является
угол их развала, позволяющий увеличить удлинение крыла путем
проекции “крылышка” на строительную горизонталь крыла. Угол
развала должен выбираться из условий минимального прироста
изгибающего момента крыла. Исследования показали также, что
концевые “крылышки” приводят к повышению запаса путевой
устойчивости самолета, и их вклад в этом отношении согласуется с
вкладом их в коэффициент статического момента площади
вертикального оперения. Влияние различных параметров “крылышек”
на аэродинамические характеристики и изгибающие моменты крыла
самолета оценивается по программам, разработанным на основе
теории тонкой несущей поверхности. Оптимальные геометрические
параметры“крылышек”и их расположение на законцовке относительно
вектора скорости набегающего потока отрабатываются в результате
тщательных экспериментальных исследований модели самолета.
Отметим некоторые особенности обтекания моделей самолетов со
сверхкритическими крыльями большого удлинения при дозвуковых
числах М и методику пересчета коэффициента сопротивления и
аэродинамического качества, полученных в результате испытаний
моделей в аэродинамических трубах, на условия натуры. Рассмотрим
94
результаты исследовании распределения давления по поверхности
сверхкритического крыла(я —30°; Аб.н. = 8,5; Стах = 14,5
-10~9%), а также обтекание при помощи жидкой пленки и
каолинового покрытия сверхкритического крыла( z=30°; А б.н. = 9,6;
Стах=16-11~9%)при числе М = 0,8 и угле атаки <2=5,
Рис.2.27. Зависимости коэффициента
давления Ср—f (х)по верхней и
нижней поверхности сверхкритиче-
ского крыла z =30°; А =8,5 в
различных сечениях по размаху;
изобары (линии Ср=const) на
верхней поверхности крыла и А Ср =
Срн.п.— Срв.п, — /(х) при М = 0,8,
а =5°
соответствующих крейсерским
режимам полета. На рис.2.27
приведены изобары на верхней
поверхности крыла(/ = 30°;
А б.н. = 8,5),эпюры давлений Ср =
/(х)и разности давлений на
верхней и нижней поверхностях
/\Ср=f (х) при М = 0,8 и а =
5°. Из результатов этих
исследований следует, что на
крейсерских режимах наблю-
дается обтекание сечений
сверхкритического крыла при
наличии слабых сверхзвуковых
1 зон, расположенных в носке(я ~
0,14-0,25). Изобары следуют
геометрии крыла, не снижая
эффективности его стреловидности
в бортовых и концевых сечениях,
что указывает на максимальное
использование эффекта
скольжения, а следовательно, и на
минимальные величины волнового
сопротивления на этих режимах.
Эпюры давлений в сечениях по
размаху крыла имеют вид,
характерный для сверхкри-
тического профиля. В носке крыла
образуется “пик” разрежения с
последующим “полочным” участком давлений относительно небольшой
95
величины, обеспечивающий докритическое обтекание. Докритическое
обтекание сверхкритического крыла (х=30°; А б.н. = 9, 6)при М=0,8
и а — 5° иллюстрирует рис.2.28, на котором приведены фотографии
обтекания левой консоли при помощи жидкой пленки и граница
перехода пограничного слоя из ламинарного течения в турбулентное на
правой консоли, полученная при использовании каолинового покрытия.
Как следует из результатов исследований, в условиях
аэродинамической трубы Т_106 ЦАГИ при дозвуковых числах М и
числах Re~(2-i-3) • 106 на модели крыла и хвостового оперения
имеются значительные участки ламинарного пограничного слоя,
достигающие Хп~40Ч-50% хорды консоли крыла, 104-50%
центроплана (на фотографии эти участки затенены); Хп~0.2 на
хвостовом оперении и хи~0, 05-на фюзеляже.
Результаты исследований границ перехода пограничного слоя
необходимы для пересчета коэффициента сопротивления и
аэродинамического качества моделей самолетов к условиям натуры.
Одной из важнейших особенностей аэродинамических
характеристик сверхкритических крыльев большого удлинения, как и
обычных стреловидных крыльев, является склонность к
возникновению и развитию при больших углах атаки концевых срывов.
Этому способствует характерное для стреловидных крыльев
распределение истинных углов атаки по размаху, при котором
коэффициент подъемной силы имеет наибольшие значения в концевых
сечениях крыла.Для иллюстрации на рис.2.29 приведены зависимости
Су, (а)и распределение давления в виде эпюр давления в трех
сечениях по размаху сверхкритического крыла (z=30°; А б.н.= 8,5)
и обычного стреловидного крыла (/=35°; А б.н.=7) при М = 0,8 и
а = 1Г. Результаты исследований показывают, что на этих режимах
на поверхности крыльев формируются мощные сверхзвуковые зоны,
замкнутые скачком уплотнения, со срывом потока из-под скачка в
сечениях по консоли крыла. В этих сечениях(2 0,38)не
наблюдается восстановления давления в хвостовой части как у
обычного, так и у сверхкритического крыла. Дальнейшее увеличение
угла атаки до а = 15° при М=0, 8 приводит к образованию двух
мощных вихревых зон, расположенных в центроплане и на консоли
96
Рис.2.28. Картина обтекания сверхкритического крыла х=30°, Л = 9,6 при помощи жидкой пленки при М—0,8; а=5° (левая
jo консоль) и каолинового покрытия (правая коисоль)
сверхкритического крыла. На рис.2.30 представлена фотография
обтекания крыла при а — 15° и М = 0,8 (/=30°; Л б.н. = 9,6; Стах=
16-11-9%). Возникновение и развитие срыва потока на поверхности
крыла определяют величину и характер изменения аэродинамических
характеристик самолета на больших углах атаки. Исследования
показывают, что при до a~8°4-9°(Cj~0,84-0,9)
характеристики подъемной силы и момента тангажа близки к
линейным зависимостям—продольная устойчивость крыла
сохраняется. При а >9° 4-10°, когда на крыле возникает срыв потока,
характеристики подъемной силы и момента тангажа нелинейны,
возникает приращение момента на кабрирование. Величина
приращения коэффициента момента тангажа на кабрирование и
степень местной продольной неустойчивости сверхкритического крыла
большого удлинения с фюзеляжем при больших углах атаки(а>8°4-
9°)при числах М в области крейсерских скоростей зависят от
аэродинамической компоновки не только крыла, но и фюзеляжа,
площади его относительного миделевого сечения и их взаимного
расположения. Исследования распределения давления на крыле и по
фюзеляжу показывают, что крыло индуцирует на фюзеляже
значительное разрежение, приводящее к аэродинамическим силам,
которые заметно усиливают нелинейность изменения коэффициента
момента тангажа крыла с фюзеляжем с увеличением угла атаки[5].
Местная нелинейность моментов тангажа в узком диапазоне углов
атаки (а ~ 8° 4-12°) имеется при М = 0,8 4- 0,85 у самолетов как с Т-
образным, так и с нижним расположением г.о. Для иллюстрации этого
на рис. 2.31 приведены зависимости Су, (а) при М = 0, 8
модели пассажирского самолета с нижним (на фюзеляже)
горизонтальным оперением и двигателями, расположенными на
пилонах под крылом. Здесь же схематически приведены спектры
обтекания крыла. До а 94-10°(Су^ 0,84-0,85) при М > 0,8
крыло обтекается безотрывным потоком, о чем свидетельствуют
восстановление давления в хвостовой части в различных сечениях
крыла и спектр потока, полученный методом шелковинок. При а 10°
4-11° (Су > 0,85) на верхней поверхности крыла в области
расположения гондол двигателей образуются мощные сверхзвуковые
98
зоны обтекания, замкнутые скачком уплотнения, и возникают срывы
потока из-под скачка. При срыве потока на крыле спутная вихревая
пелена расширяется и приводит к увеличению торможения и скоса
потока в области горизонтального оперения. В результате момент на
пикирование горизонтального оперения уменьшается и не превышает
кабрирующий момент от крыла. Появляется так называемая “ложка”
в зависимостях Шг (а) в узком диапазоне углов атаки (а=9°4-12°).
При прохождении спутной вихревой пелены от крыла выше
горизонтального оперения дополнительный скос потока исчезает,
Рис.2.29. Зависимости Су, тг—f (а); Ср—f(x) для трех сечений по размаху
сверхкритического крыла /—30°, Лб.н. —8,5 и обычного стреловидного крыла
/ 35» Л — 7 при М = 0,8, а = 11°
99
Рис.2.30. Фото обтекания сверхкритического крыла z=30° Л —9.6 при а— 15°и М~0,8
что приводит к увеличению подъемной силы оперения, и оперение
снова создает момент тангажа на пикирование. Самолет при а = 12°
статически устойчив. С целью улучшения характеристик продольной
статической устойчивости самолета с низким (на фюзеляже)
расположением горизонтального оперения в узком диапазоне углов
атаки (а =9° 4-11°) при М = 0,8 обычно используются
аэродинамические перегородки, гребни на верхней поверхности крыла,
увеличенный размах горизонтального оперения( большая величина
удлинения Л г.о.),а также V-образность горизонтального оперения.
Применение этих мероприятий на модели пассажирского самолета
обеспечивает продольную статическую устойчивость во всем
диапазоне углов атаки при передних (3&т=0,25) и задних (ят=0,4)
положениях центра масс самолета.
Рис.2.31. Зависимость Су, /Иг = /(с)при М = 0,85и Хт = 0,25; 0,4; спектр
обтекания поверхности стреловидного крыла /=35°, Л=7при а = 9°,10°12°,
полученный при помощи шелковинок
101
Кроме вышеуказанных традиционных мероприятий по
улучшению характеристик продольной статической устойчивости,
могут быть применены и специальные средства—наплывы (“клюв”) на
передней кромке и вихрегенераторы.
На рис. 2.32—2.35 поиводятся результаты экспериментальных
исследований по отработке и применению наплыва по передней кромке
стреловидного крыла /=35°, Л — 1 большого сужения т? = 4 дальнего
магистрального самолета Ил-62. Исследования показали, что
применение специально спроектированного “клюва” по передней
кромке крыла позволило разработать аэродинамическую компоновку с
малонесущим центропланом и высоконесущей консолью. Комплекс
аэродинамических средств, использованных для этой цели (прогрессивно
М = 0 15
Рис.2.32. Влияние наплывов по передней кромке стреловидного крыла на Су,
mz=f (а)при М = 0,15 и М = 0,8
возрастающая кривизна профилей /max=04-2% при z 0, 54-1,0 в
сочетании с оптимальным радиусом кривизны отогнутого вниз носка и
геометрическая закрученность сечений консоли)позволили обеспечить
благоприятные характеристики продольной устойчивости самолету
102
Рис.2.33. Структура трансзвукового
обтекания стреловидного крыла с
наплывом и зависимости Су, mz~
/(а) при М = 0,75
Рис.2.34. Картина обтекания верхней
поверхности стреловидного крыла с
наплывом и распределение статического
давления в трех сечениях по размаху
при М-0,75, а — 10°
на всех режимах полета, включая и режимы глубокого сваливания на
больших углах атаки (рис. 2.2, 2.3) и тем самым внести весомый
вклад в решение проблемы безопасности полета дальнего
пассажирского самолета. Наличие “клюва” приводит к повышению
несущих свойств крыла на взлетно-посадочных режимах полета за
счет увеличения С>тах и критического угла атаки а Крит
механизированного крыла и крыла в крейсерской конфигурации (рис.
2.32, 2.33). Исследования физической картины обтекания модели
самолета в АДТ—106 при помощи метода шелковинок, саже-
масляной пленки и распределения давления по поверхности крыла
позволили объяснить благоприятное влияние “клюва” на несущие
103
свойства и характеристики продольной устойчивости самолета и
зафиксировать сложную структуру вихревого, отрывного
трансзвукового обтекания крыла при больших углах атаки (рис. 2.33
— 2.35). Как видно из приведенных материалов, распределение
давления по верхней поверхности в различных сечениях по размаху
Cp=j\xb согласуется с отрывным течением трансзвукового
обтекания, полученным при помощи шелковинок и сажемасляной
пленки.
Систематические иссле-
Рис.2.35. Картина обтекания и
распределение статического давления
при М = 0,85, о—10°
дования влияния наплывов по
передней кромке стреловидных
крыльев позволили установить,
что наиболее эффективными
наплывами являются наплывы
“концевые”, расположенные на
консоли 2~0,3(0,35) 4-1,0.
Экспериментальными
исследованиями также установлено
(рис.2.36), что“корневые”,
расположенные в центроплане,
наплывы не обеспечивают
улучшения характеристик
продольной устойчивости модели на
больших углах атаки.
Исследования моделей самолетов
со сверхкритическими профилями
I (рис. 2.37, 2.38) и П поколений
(рис.2.39)подтвердили выводы о
положительном влиянии
оптимально спроектированных
концевых наплывов по передней
кромке на характеристики
продольной устойчивости и величину Су&оп в области крейсерских
скоростей полета.
Другим средством улучшения характеристик продольной
104
Рис.2.36. Влияние “корневых” и “концевых” наплывов по передней кромке
стреловидного крыла на Cy,mz=f (а)при М = 0,4 и М = 0,8
статической устойчивости является установка вихрегенераторов в
центроплане крыла, в районе внутренних гондол двигателей. Наличие
вихрегенераторов, как видно из рис.2.40, приводит к устранению
местной продольной статической неустойчивости модели
магистрального пассажирского самолета при а =8° 4-12° и М = 0,8.
Благоприятное влияние вихрегенераторов обусловлено двумя
эффектами. Начиная с а = 8° 4- 9°, вихрегенератор-турбулизатор
вызывает в носке крыла местный срыв потока, который снижает
интенсивность сверхзвуковой зоны, замкнутой скачком уплотнения в
центроплане, и тем самым уменьшает его подъемную силу. В
результате этого возникает дополнительный момент на пикирование
крыла. Изменение скоса потока за крылом приводит к повышению
эффективности горизонтального оперения. Оптимальное расположение
вихрегенераторов и их размеры должны выбираться для каждой
модели с учетом особенностей срывного обтекания крыла на этих
режимах [6].
105
о Крылове^
-а-_а_ Крыло с наллыбоН -Ка/осом*
___________j
Рис.2.38. Влияние наплыва
протяженности на аэродинамические
характеристики сверхкритического
крыла при М = 0,75
оптимальной протяженности на
аэродинамические характеристики
сверхкритического крыла
Рис.2.39. Определение оптимальной протяженности наплыва по его влиянию на
зависимость продольного статического момента от угла атаки
106
Modtte самолета. соclepxupumuнеким крилен Ц =30°, Л6а
М-0,В;Яе>23,-'0
Рис.2.40. Влияние"вихрегенераторов”,
сверхкритического крыла /=30°, Л=9 на
0,8и Re=2,3xi06
расположенных в центроплане
зависимости Cy,m2—f{d) при М =
2.3. Аэродинамика крыльев для околозвуковых
крейсерских скоростей полета
Выше были показаны возможности сверхкритических профилей
ЦАГИ для увеличения аэродинамического качества магистральных
пассажирских самолетов со стреловидными крыльями х=25“^35она
крейсерских скоростях полета М крейс.< 0,8“^0,85.Приведенная на
рис.2.12 обобщенная зависимость М*р.= f (%,с ср.) (здесь с ср.
средняя толщина КОНСОЛИ крыла при ПОСТОЯННОЙ толщине Стах = 15%
в бортовых сечениях крыльев различной стреловидности)позволяет
определить возможный диапазон крейсерских скоростей полета для
самолетов с различными сверхкритическими крыльями. В частности,
современные магистральные самолеты с утолщенными(стах =
15—11—9%)сверхкритическими крыльями х = 28° 'Г ЗО°большого
107
удлинения Л б.н. = 104-9 обеспечивают крейсерские скорости полета,
соответствующие числам М~0,8, а сверхкритические крылья со
стреловидностью z—35°,стах —12 — 9 — 9%—крейсерские скорости
полета, соответствующие числам М = 0,85 (рис^2.12,2.13)
С целью определения дальнейшего увеличения крейсерских
скоростей полета пассажирских самолетов было рассмотрено
применение сверхкритических профилей в аэродинамической
компоновке крыльев большей стреловидности, / = 40°и /=45° с
наплывами по передней кромке, увеличивающими стреловидность в
центроплане этих крыльев до х п.к. = 704-77° (рис.2.41,2.42).
Рис.2.41. Схема общего вида модели 2 самолета со сверхкритическим крылом
7=40°, Л б.н. = 7 и его аэродинамическая компоновка, рассчитанная на
крейсерскую скорость полета, соответствующую числу М = 0,95
108
Рис.2.42. Схема общего вида модели 3 самолета с сверхкритическим
серповидным крылом z = 45°, Л =6, рассчитанным на трансзвуковые
крейсерские скорости полета
Исследования аэродинамических характеристик моделей
самолетов с такими крыльями .показали, что применение
сверх критических профилей Gnax=9 —7 —7% в сочетании с
геометрической закрученностью кр.=О —3~4°, соответственно в
бортовых, на изломе(г — 0,35)и в концевых сечениях по размаху
крыла / = 40° и Ркр.^О —4~5°~для крыла / = 45° позволяет
обеспечить диапазон крейсерских скоростей полета М крейс ~ 0,95
(рис.2.43) и М крейс ~ 1,0 (рис.2.44) с достаточно высокими
значениями величины (К/M). На рис.2.45 приводится сопоставление
эпюр давления в различных сечениях по размаху крыла / = 40° при
<2^ = 3° и М = 0,4; 0,9; 0,95. Сопоставление указывает на одинаковый
109
вид эпюр давления по всей консоли 2к=0,354-1,0. Эпюры давления
имеют характерный для сверхкритического профиля “полочный вид” с
небольшим “пиком” разрежения в носке. С ростом числа М от М =
0,9 до М —0,95 в носке крыла появляются сравнительно узкие (по
хорде) сверхзвуковые зоны обтекания малой интенсивности. В
центроплане сверхкритического крыла, имеющего наплыв по передней
кромке большой стреловидности z = 70° и умеренную толщину Gnax =
9%, “полочный” характер эпюр давления безкризисного обтекания
сохраняется при М = 0,95 и Су = 0,35, соответствующих
максимальному аэродинамическому качеству модели самолета. В
центроплане имеет место вихреобразование,аналогичное обтеканию
крыла малого удлинения,при котором в вершине,начиная с малых углов
атаки, формируется вихрь (рис.2.46). В стыке центроплана с консолью
крыла при М=0,9 4- 0,95 отмечено течение с Л-образными скачками
уплотнения,отличающимися от прямого скачка меньшими потерями
энергии и, следовательно,меньшим приростом сопротивления.
Увеличение крейсерских скоростей магистральных пассажирских
самолетов до М Крейс.~ 1,04-1,15 и возможность полета при
умеренных трансзвуковых скоростях может обеспечить стреловидное
крыло х = 45° с переменной по размаху стреловидностью по передней
кромке (например 77-61—46°). Это крыло спроектировано на базе
сверхкритических профилей 6пах = 9% в бортовых сечениях и стах =
7% в центральных и концевых сечениях(рис.2.42).Результаты
экспериментальных исследований показали, что трансзвуковое крыло
в комбинации с фюзеляжем,выполненным с учетом правила площадей,
обеспечивает изменение коэффициента сопротивления без волновых
потерь и незначительное уменьшение Ктах до чисел М 1,0. Однако,
для достижения трансзвуковых крейсерских скоростей,
соответствующих числам М~1,15, необходимо всю геометрию
самолета настраивать на большие числа М, используя правило
площадей, согласно которому распределение суммарных площадей
поперечных сечений вдоль длины самолета должно соответствовать
распределению площадей тела минимального сопротивления заданного
объема (рис.2.42). При этом следует отметить,что для рассмотренной
выше геометрии сверхкритических крыльев / = 40° и х — 45°
110
Рис.2.43. Зависимости Атах, (Атах • М) =/(М); СхО, Сх(Су = 0,4)==
/(М)для модели 2 фюзеляжа со сверхкритическим тонким (стах = 9 — 7 — 7%
—крыло 2 )и утолщенным (Стах = 12 —11 —9%—крыло 1)крыльями
Рис.2.44. Зависимости Атах, (Атах ’ М) =/(М) для моделей фюзеляжа с
обычным стреловидным крылом х~35° (модель 1), со сверхкритическими
крыльями х~40°(модель 2)и / = 45°(модель 3)
111
возникает трудность обеспечения высоких значений СУтах,
необходимых для удовлетворения требований базирования и
безопасности полета на режимах взлета и посадки, а также
необходимых характеристик продольной устойчивости на больших
углах атаки.
----------М = о,4
------------М-----------= 0.9
--------------М = 0,95
Рис.2.45. Совмещенные эпюры давления Ср—f(x)при a=3°, М —0,4; 0,9;
0,95 по верхней поверхности сверхкритического крыла 2 (модель 2).
Исследования этого направления развития пассажирской авиации
показывают,что переход на большие трансзвуковые крейсерские
скорости полета связан со значительным увеличением взлетного веса
самолета, расхода топлива и себестоимости перевозок. -
112
Рис.2.46. След вихреобразного течения на поверхности сверхкритического
крыла 2(z=4O° модели 2 при М = 0,9 и М = 0,95, а = 3°)
2.4. Аэродинамика фюзеляжей и интерференция крыла с
фюзеляжем
Высокое аэродинамическое совершенство самолета нельзя
обеспечить без надлежащего выбора формы и оптимальных
параметров фюзеляжа, гондол двигателей и их сопряжений,
определяющих взаимную интерференцию элементов самолета.
Пассажировместимость,коммерческая нагрузка и уровень
комфорта магистрального пассажирского самолета определяют
полезный объем и основные геометрические параметры фюзеляжа.
Повышение этих параметров достигается путем увеличения диаметра
фюзеляжей (6 6,5м вместо З-Нм). Характерное для
широкофюзеляжных самолетов значительное повышение
относительной площади миделевого сечения фюзеляжа, как показано
ниже,приводит к снижению аэродинамического качества самолета.
Поэтому выбор оптимального диаметра фюзеляжа и его удлинения
связан со многими факторами и прежде всего с определением влияния
фюзеляжа на массовые и аэродинамические характеристики самолета
СИ.
113
При докритических числах М сопротивление фюзеляжей,близких
к телам вращения, определяется главным образом поверхностным
трением(85^~90% от полного сопротивления фюзеляжа) и
незначительно—сопротивлением давления. Сопротивление трения
фюзеляжей для практических целей может быть оценено
сопротивлением эквивалентного тела вращения такого же удлинения
при заданном числе Re. Для фюзеляжей,заметно отличающихся от
тел вращения, составляющая сопротивления давления возрастает,
однако сопротивление трения их также можно оценить коэффициентом
сопротивления тела вращения.
Величина М*р. фюзеляжа определяется в основном удлинением и
формой его носовой части,поэтому меридиональные обводы и
удлинение носовой части должны быть выбраны такими,чтобы
обеспечить высокое число М*р. и малое волновое сопротивление.
Исследования показывают,что коэффициенты сопротивления
фюзеляжей Схф. (здесь и далее при вычислении этих коэффициентов
аэродинамические нагрузки относились к скоростному напору и
площади миделевого сечения)с различным удлинением носовой части ъ
при числах М^0,85 изменяются практически в соответствии с
изменением коэффициента турбулентного трения. Зависимости
приращения волнового сопротивления д С^ф волн—/(М) при Ан.ч=
const и д С5сф.=/(А н.ч) при М = const представлены на рис.2.47.
Исследования показали, что сжимаемость воздуха не оказывает
существенного влияния на характеристики подъемной силы и момента
тангажа изолированных фозеляжей с различным удлинением носовой
части.
Немаловажное значение при проектировании фюзеляжей имеет
правильный выбор удлинения хвостовой части А хв.ч. Расчетные и
экспериментальные исследования показывают,что при сравнительно
короткой хвостовой части (А хв.ч.^2,5)возникают достаточно большие
разрежения и градиенты давления,которые могут привести к отрыву
потока и заметному приросту волнового сопротивления при больших
скоростях.Изменение удлинения хвостовой части фюзеляжа от 5 до
3,8 незначительно влияет на величину А Схф как для
осесимметричной,так и для отклоненной хвостовой части,однако
114
уменьшение его до 2,5 приводит к существенному приросту волнового
сопротивления^ особенности для фюзеляжа с отклоненной хвостовой
частью.
Рис.2.47. Зависимости приращения волнового сопротивления от удлинения
носовой части фюзеляжа ЛСхф=/<Лн.ч) при различных числах М
Для уменьшения вредной интерференции между носовой и
хвостовой частями фюзеляжа,а также между фюзеляжем и крылом
фюзеляж в области расположения крыла необходимо выполнять с
цилиндрическим участком, что позволит значительно уменьшить
скорости в этой части фюзеляжа.Фюзеляжи, различающиеся только
длиной цилиндрического участка,имеют одинаковые значения числа
Mi£ и волнового сопротивления, а различие в величинах сопротивления
фюзеляжей определяется в основном сопротивлением трения.
115
Таким образом,удлинение носовой части фюзеляжа в пределах
2—2,5 и хвостовой части в пределах 3—3,5 и внешние обводы их,
построенные в соответствии с уравнением
<2-7>
где D,lj и х—геометрические параметры носовой и хвостовой
частей, а т = 0,54 4- 0,95, обеспечивают высокие скоростные
характеристики фюзеляжу,определяемые значениями М*р.^0,92.
Для магистральных пассажирских самолетов,имеющих диаметр
фюзеляжа 5 4-6м,удлинение фюзеляжа находится в пределах 94-10.
Рис.2.48. Зависимость коэффициента сопротивления Схф=/(а) при М =
const и минимального Схфт1п = /(М)для типичного изолированного фюзеляжа
пассажирского самолета
На рис.2.48 приведены зависимости минимального коэффициента
сопротивления Схтщ типичной модели изолированного фюзеляжа
пассажирского самолета от числа М и Схф при различных углах
атаки и фиксированных числах М. Выбранные для этого фюзеляжа
удлинение носовой части А н.ч — 2, хвостовой части Ахв.ч. = 3,2 и
цилиндрической части А ц = 4 и внешние обводы в соответствии с
116
приведенным выше уравнением обеспечивают величину минимального
коэффициента сопротивления, на 10^15% превышающую
коэффициент турбулентного трения С/ омываемой поверхности в
диапазоне чисел М = 0,6 4-0,9. В диапазоне «ф.= -1°4-+3°
величина Сх min фюзеляжа сохраняется практически постоянной,
дальнейшее увеличение угла атаки приводит к заметному приросту
коэффициента сопротивления фюзеляжа.
Исследования показали также,что значительный отгиб хвостовой
части фюзеляжа при виде сбоку)ф отг.>6°-г7°) в сочетании с плоской
или уплощенной формой нижнего меридионального сечения приводит к
заметному повышению С^ф. и уменьшению М*р (рис.2.49).
Специфичность обтекания таких фюзеляжей, как показывают
исследования,вызвана разделением потока и образованием двух
вихрей,расположенных на боковых скулах хвостовой части фюзеляжа.
Возникновение и развитие вихреобразования в хвостовой части
фюзеляжа практически вдвое увеличивают коэффициент
сопротивления фюзеляжа при изменении угла атаки а ф от+4° до—4°.
В диапазоне положительных углов атаки аф.>5°4~8°, при которых
местные углы натекания потока на уплощенной отогнутой хвостовой
части фюзеляжа оказываются незначительными,коэффициент
сопротивления фюзеляжа мало изменяется, а его величина
приближается к Схф. осесимметричного фюзеляжа.
Результаты расчета методом потенциального обтекания
изолированных фюзеляжей в условиях идеальной несжимаемой
жидкости удовлетворительно согласуются с данными эксперимента и
находят применение в практике аэродинамического проектирования
фюзеляжей.
Рассмотрим долю сопротивления изолированного фюзеляжа в
поляре компоновки крыло+фюзеляж. Исследования показали,что
коэффициент сопротивления этой компоновки при докритических
числах М представляет собой сумму сопротивления изолированных
крыла и фюзеляжа и дополнительного сопротивления,обусловленного
их взаимной интерференцией.
На рис.2.50 представлены зависимости от угла атаки
коэффициентов сопротивления и подъемной силы для изолированного
117
фюзеляжа и изолированного крыла при М<М£Р. Как видно из
рисунка, для фюзеляжей с относительным миделевым сечением 5ф =
54-10% изменение коэффициентов сопротивления Схф. и подъемной
силы Суф в диапазоне а = 04-8° пренебрежимо мало по сравнению
Рис.2.49. Зависимости С^ф=/(а)
при М = const для изолированных
фюзеляжей с отгибом хвостовой
части, плоской или уплощенной
формой нижнего меридионального
сечения
Рис.2.50. Зависимости от угла атаки
Су кр, Суф, Сх кр, Сх ф—f (а) при
М = const для изолированного
фюзеляжа и изолированного крыла
с изменением этих характаристик на изолированном крыле.Таким
образом, доля сопротивления изолированного фозеляжа в поляре
компоновки крыло+фюзеляж состоит в основном в увеличении
коэффициента минимального сопротивления Cxmin. Этот вывод
следует также и из поляр изолированного крыла и крыла+фюзеляж,
приведенных на рис.2.51.
Определить величину и характер изменения слагаемого
А Схинт = /(Сх) в экспериментальных исследованиях представляется
затруднительным. При докритическом обтекании крыла(М < М Кр)
сумма сопротивления омываемой части изолированного крыла и
изолированного фюзеляжа близка или равна коэффициенту
118
сопротивления компоновки крыло + фюзеляж, и в этом случае
величина дополнительного сопротивления от интерференции
Рис.2.51. Поляры для изолированных крыльев £ — 30° и £ — 45° и для крыльев
с фюзеляжем при М = 0,4 и М = 0,8
незначитедьна.При числах М > М Кр приближенная оценка суммы
сопротивления изолированного крыла (омываемой его части) и
изолированного фюзеляжа показала положительную интерференцию
крыла с фюзеляжем, вызванную благоприятным влиянием
подфюзеляжной части крыла (рис.2.52).
Исследования показывают,что форма зализа в сопряжении крыла
с фюзеляжем играет определенную роль;путем применения специально
выбранных зализов можно уменьшить коэффициент лобового
сопротивления компоновки крыло+фюзеляж.Пример такого влияния
зализов на поляру самолета со стреловидным крылом расположенным
119
Рис.2.52. Приближенная оценка А С* и А А"(при Су~0,4) — /(М)
интерференции крыла с фюзеляжем
в схеме низкоплан, иллюстрирует рис.2.53. Из рисунка видно,что
применение прямостенных зализов II варианта,устраняющих
диффузорные участки и местные отрывы потока в носовой и хвостовой
120
частях крыла в сопряжениях с фюзеляжем,приводит к снижению
коэффициента лобового сопротивления компоновки крыло + фюзеляж,
и в этом случае величина дополнительного сопротивления от
интерференции практически не зависит от угла атаки и числа М.
Рис.2.53. Зависимости Су—/(СДири М —0,4 и 0,8 для модели самолета с
двумя вариантами зализов в сопряжениях крыла с фюзеляжем
Таким образом, можно считать,что “отвал” (индуктивное
сопротивление) поляры компоновки крыло+фюзеляж при М>МКр
такой же, как у изолированного крыла,а величина коэффициента Сх
определяется через коэффициенты минимального сопротивления
изолированных крыла и фюзеляжа.
Возникновение волнового сопротивления при увеличении числа М
на компоновке крыло + фюзеляж определяется не только формой
зализов и схемой конфигурации (высокоплан,среднеплан, низкоплан),
но и компоновкой крыла. Для современных аэродинамических
компоновок крыльев и прямостенных форм зализов малого объема
121
наличие фюзеляжа как в схеме
Рис.2.54. Зависимости Кт&х =
/(М)для изолированного крыла х~
30% Л —7 и этого крыла с
фюзеляжем
низкоплан, так и в схеме
высокоплан не изменяет величины
МКр компоновки крыло + фюзеляж,
рис.2.54.
Относительная площадь
миделевого сечения фюзеляжа
определяет величину минимального
лобового сопротивления и
аэродинамическое качество
компоновки крыло + фюзеляж. Для
иллюстрации на рис.2.55
приведены зависимости Ктах =
/(3>м.ф.) при М = 0,8 и 0,85, а
также Cx = f(Cy) и K = f(.Cy)
при М = 0,6 и 0,85 для моделей крыла (/=35°) с различными
фюзеляжами (А ф.=9=сопз4), площади миделевого сечения которых
5м.ф, —9,3 и 6,4%. Из этих зависимостей следует, что увеличение
диаметра фюзеляжа приводит к снижению максимального
аэродинамического качества практически по линейному закону с
градиентом dKmax/d 5м.ф, —0,5 в области сравнительно больших
значений миделя (S м.ф.>6%).
2.5. Влияние гондол двигателей на аэродинамические
характеристики самолета
Наиболее распространенными схемами размещения двигателей на
пассажирских самолетах являются крыльевая компоновка на пилонах
или без них(под крылом,над крылом)и на фюзеляже в хвостовой его
части на пилонах.
В зависимости от конструкции и степени двухконтурности ТРДД
обычно размещают в гондолах двух типов:
—гондолы со смешением потоков, вы ходящих из 1то и 2-го
контуров.Эти гондолы имеют одну общую обечайку и в настоящее
время применяются для двигателей малой и умеренной
двухконтурности( m ~ 3 Т 5).
122
Рис. 2.55. Зависимости Су —
fCCy),K = fCCy^ КЮах = /(£ф)
при М = const для модели с
различной площадью миделевых
—гондолы ступенчатого типа
с раздельными соплами 1-го и 2-го
контуров. Ступенчатая форма
гондол обычно применяется для
ТРДД умеренной и высокой
стенени двухконтурности (т >
4^5).
При моделировании гондол
ТРДД на моделях самолетов гондолы
со смешением выполняются в виде
одного контура с протоком,а
гондолы ступенчатой формы—в
виде двух контуров с протоком в
каждом контуре.
Результаты исследования
моделей пассажирских самолетов с
гондолами ТРДД и без них
позволяют установить
закономерности изменения
коэффициента сопротивления Сх с
ростом угла атаки а и числа М
Ш.
), (2.8)
Влияние компоновки гондола
+планер на сопротивление само-
лета при Су — const оценивается,
исходя иа соотношения
сечений фюзеляжей с* — ^кр (Г1 —Г'
^Хг W ^Х2
'I м.Г.
где С *г — коэффициент
сопротивления гондол ТРДД с пилонами, установленными на модели
самолета, отнесенный к площади миделевого сечения гондолы,
называемый ниже “коэффициентом сопротивления компоновки”;
СХ1—коэффициент сопротивления модели самолета с
гондолами двигателей; ।
Сх2—коэффициент сопротивления модели самолета бе!з гондол
123
двигателей;
SKp—площадь крыла(в плане);
п—число гондол двигателей;
S м.г. —площадь миделевого сечения гондолы.
Таким образом,в величине коэффициента сопротивления учтены
значения коэффициентов внешнего сопротивления обечаек
вентилятора,газогенератора и пилона, внутреннего сопротивления
протоков гондол и интерференции с планером самолета. При
испытаниях моделей с протоком воздуха в гондолах не моделируются
струи вентилятора и газогенератора и другие элементы гондолы.
Поэтому величины С *г, определенные по приведенному выше
выражению, не могут быть использованы непосредственно для
вычисления потерь тяги двигателей. Однако испытания моделей гондол
с протоками позволяют выявить основные качественные
закономерности, характеризующие размещение двигателей на
самолете. На рис.2.56 приведены типичные зависимости коэффициента
С*г от коэффициента подъемной силы Су самолета для двух схем
размещения двигателей. Из этих зависимостей следует, что
коэффициент С*г гондол ТРДД, расположенных на пилонах под
крылом,достигает минимальных значений при больших значениях Су,
в то время как в случае гондол ТРДД,расположенных на пилонах в
хвостовой части фюзеляжа,он не изменяется при изменении Су.
Приведенные зависимости C**r=f(Cy) указывают на то,что в случае
расположения гондол ТРДД под крылом интерференция крыла с
гондолами при Cy=Q всегда более значительна,чем гондол с
фюзеляжем в случае размещения их на пилонах по бокам хвостовой
части фюзеляжа.Различие в этих зависимостях для рассматриваемых
схем расположения гондол ТРДД на самолете определяется
характером распределения давления по поверхности фюзеляжа и
крыла с увеличением угла атаки и числа М.Более равномерные и
умеренные поля давления на фюзеляже, в отличие от интенсивно
изменяющегося распределения давления по хорде крыла и главным
образом в носовой его части,не вносят значительных изменений в
характеристики системы пилон+фюзеляж с ростом Су и коэффициент
сопротивления интерференции в этом случае практически постоянная
124
Рис.2.56. Типовые зависимости Су —f (С£г) при М = const для моделей
самолетов с двигателями,расположенными на пилонах под крылом или в
хвостовой части фюзеляжа
величина. Коэффициент сопротивления формы и поверхностного трения
гондол ТРДД в узком диапазоне а (или С») изменяется
незначительно. Поэтому C*v гондол, расположенных на пилонах в
хвостовой части фюзеляжа, практически не зависит от изменения
а (Су), в то время как в случае гондол,расположенных на пилонах под
k крылом,этот коэффициент значительно уменьшается с увеличением
а (Су).
При умеренных углах атаки, соответствующих режимам
крейсерского полета, (Cy = Q,4—0,6), интерференция гондол
двигателей, расположенных на нижней поверхности, с крылом зависит
от развития на крыле волнового кризиса. Исследования показывают,
что при докритических скоростях(М<М ^сопротивление гондол
заданной формы сравнительно слабо зависит от аэродинамической
компоновки крыла. Однако, когда на верхней поверхности крыла
возникают развитые сверхзвуковые зоны, сопротивление гондол, как
правило,существенно возрастает,рис.2.57. Увеличение стреловидности
крыла,смещая развитие волнового кризиса в сторону больших чисел
Маха, соответственно вызывает более позднее увеличение
сопротивления, обусловленное скоростной интерференцией.
Даже существенное изменение формы сверхкритического крыла
за счет развитого наплыва по передней кромке(/ пж=70°) и
увеличение стреловидности до 40° практически не изменяет величины
и характера протекания коэффициента сопротивления гондол с ростом
125
числа Маха в диапазоне докритического для данного крыла режима
обтекания, рис.2.57.
Рис.2.57. Обобщенная зависимость коэффициента сопротивления гондол
двигателей со степенью двухконтурности т~5 на пилонах под крылом при
Су=0,5 для моделей самолетов со стреловидными сверхкритическими
крыльями
Для компоновок гондол, расположенных на пилонах на верхней
поверхности крыла, определяющим соответственно является характер
обтекания верхней поверхности крыла. Поэтому картина изменения
коэффициента сопротивления таких гондол с ростом угла атаки и Су в
целом противоположна той, какая наблюдается для гондол под крылом,
рис.2.58. Т. е. минимальная интерференция для таких компоновок
реализуется на малых углах атаки и их более целесообразно
рассматривать для слабо нагруженных крыльев.
Такой же характер изменения сопротивления гондол наблюдается
и у компоновок, когда гондола расположена непосредственно на
верхней поверхности крыла (без пилонов), рис.2.59. При этом из-за
вредной интерференции с верхней поверхностью сопротивление таких
гондол может существенно возрастать с ростом Су даже при числах
Маха, когда влияние сжимаемости мало.
Стреловидное крыло создает в области расположения гондолы
126
Рис.2.58. Типовая зависимость
С*=/(Су)при М = const для
гондол двигателей, расположенных на
пилонах под и над крылом
двигателя поле скоростей
неоднородное как по величине,так и
по направлению относительно
набегающего потока, рис.2.60, [7].
Величина и направление скорости
зависят от коэффициента
подъемной силы,расстояния от
крыла,угла стреловидности.В
меньшей степени на характер поля
влияют такие параметры крыла,
как удлинение, сужение,
относительная толщина профилей.
Для снижения сопротивления
компоновки пилон+гондола
необходима соответствующая
ориентация гондол и пилонов
относительно потока. Наиболее просто это можно обеспечить выбором
соответствующих углов разворота пилона и гондолы. На рис.2.61
показано типичное влияние угла заклинения и угла разворота гондолы
относительно набегающего потока на сопротивление компоновки пилон
+ гондола для моделей пассажирского самолета. Исследования
показывают, что для гондол, расположенных у передней кромки,
оптимальная величина угла заклинения составляет около + Г 4-3° и
слабо зависит от аэродинамической компоновки крыла.Существует
также определенный угол разворота, при котором сопротивление
компоновки пилона с гондолой является минимальным.Величина
оптимального угла разворота зависит от стреловидности крыла и
положения гондолы по размаху.Для крыльев со стреловидностью 25 4-
30°она находится в пределах от —2 до —0,5°.
Следующим шагом в уменьшении сопротивления интерференции
является ориентация поверхности пилона в соответствии с местными
линиями тока. Исследования показывают, что компоновка пилона с
гондолой, ориентированная точно по линиям тока изолированного
крыла, не является оптимальной.Минимум сопротивления реализуется
при степени деформации ijl составляющей 0,5 4- 0,75 от полной
127
Рис.2.59, Поляры при М 0,4 и М —0,8 для модели самолета с гондолами,
расположенными непосредственно на верхней поверхности стреловидного крыла
Поле скосов в сечении стреловидного крыла
Рис.2.60. Поле боковых и вертикальных скосов потока в сечениях
стреловидного крыла
128
по линиям тока,где ц — 1,рис.2.62.
Подчиняя компоновку пилон+гондола под(над)крылом принципу
разнесения полей скоростей,необходимо обеспечить оптимальный
вынос двигателей по хорде (параметр /к кормы, отнесенный к местной
хорде крыла), оптимальное расположение по высоте гондолы ТРДД
относительно плоскости хорд крыла (параметр /?r=/?r/Dr) и угол
заклинения гондол <р г относительно местной хорды крыла.
Для гондол, расположенных у передней кромки крыла,характерно
уменьшение подъемной силы в сечениях крыла, тем больше, чем
меньше гондолы выдвинуты вперед. Уменьшение несущих свойств
крыла при фиксированном угле атаки наряду с увеличением
индуктивного сопротивления приводит к возрастанию профильного
М = 08 Су = 0 5
Рис.2.62. Зависимость коэффициента
сопротивления гондол двигателей
АС* г —/(//) от расчетной
деформации поверхности пилонов при
М=0.8, С>=0,5.
Рис.2.61. Влияние угла заклинения и
угла разворота гондолы относительно
набегающего потока на С*г=/(«>,
при М = 0,8, Су=0,5.
129
сопротивления крыла, особенно на больших скоростях.При смещении
соплового среза гондолы далеко за заднюю кромку крыла,наоборот,
наблюдается увеличение несущих свойств крыла. Этот факт является
весьма благоприятным,поскольку позволяет уменьшить угол атаки на
крейсерском режиме полета и тем самым уменьшить вклад от
сопротивления гондол при заданном коэффициенте подъемной силы.
Систематические исследования по влиянию выдвижения гондол вдоль
хорды крыла показывают, что наиболее неблагоприятным является
такое положение, когда гондола располагается непосредственно под
крылом, рис.2.63. В этом случае происходит также максимальная
потеря подъемной силы. При выдвижении гондол из этой области как
вперед, так и за заднюю кромку крыла величина сопротивления
существенно уменьшается.
Рис.2.63. Зависимость С* г, С*г=
/(/к)от смещения гондолы вперед
или назад под крылом.
На рис.2.64 приведена
зависимость относительного
изменения коэффициента
сопротивления A C*r=f( Z,hK), а
также С*г=Д<р г) при Су = 0 и
0,5 и М = const. Из этих
зависимостей следует, что С*г
компоновки гондол на пилонах под
крылом можно уменьшить на 30%
путем оптимального выноса по
хорде (7к~0,854-0,9) при Ъг =
const и примерно на 15-20% при
выборе оптимального положения по
высоте(й г = 0,65 4- 1,0) при
фиксированном выносе 1к=0,85.
Располагая гондолы ТРДД с
учетом оптимальных значений Iк
~ 0,9 4- 1,0, /г г ~ 0,6 4- 0,8,
удается обеспечить минимальное
их сопротивление и повысить
аэродинамическое качество самолета.
Одним из перспективных направлений повышения экономичности
130
пассажирских и транспортных самолетов является использование
двигателей сверхвысокой степени двухконтурности ТРДД СВ (т =
12-^20). Поскольку с ростом степени двухконтурности уменьшается
удельная тяга, то компоновки гондол ТРДД СВ характеризуются
увеличенным диаметром вентилятора и, следовательно, увеличенной
относительной площадью миделя гондол по сравнению с компоновками
умеренной степени двухконтурности. Поэтому для крыльевой
компоновки двигателей такие гондолы приходится поднимать как
можно ближе к крылу для обеспечения безопасного просвета между
двигателем и поверхностью земли.
Рис.2.64. Обобщенная зависимость относительного изменения коэффициента
сопротивления гондол от выноса ( I к) и смещения вниз(^г), а также от угла
заклинения (ф г) относительно хорды крыла при С>=0; 0,5 и М = const
Экспериментальные исследования на моделях показывают, что
если сопло вентиляторного контура располагать вблизи передней
кромки крыла, а двигатель располагать достаточно близко к крылу,
можно добиться максимального снижения интерференционного
131
сопротивления на единицу площади миделя гондолы, рис.2.65. И
только при увеличении степени двухконтурности свыше 20 имеет
место некоторое повышение сопротивления интерференции.
Согласно оценкам, в условиях натурного полета увеличение
степени двухконтурности двигателей до т=20, расположенных в
гондолах на пилонах в оптимальном положении перед крылом,
практически не приводит к снижению величины аэродинамического
качества магистрального пассажирского самолета, рис.2.66.
Рис.2.65. Зависимость Схт от
V»/»/
Рис.2.66. Зависимость
степени двухконтурности гондол
двигателей при М = 0,78~ 0,8 и
G=0,54-0,6
максимального аэродинамического
качества самолета Ктах от степени
двухконтурности ТРДД при М =
0,78, Н = П км
Следует отметить, что увеличение степени двухконтурности
двигателей практически не влияет на несущие свойства и продольную
статическую устойчивость модели самолета, рис.2.67.
Исследования показали,что при расположении гондол за крылом
на фюзеляже (рис.2.68) увеличение положителъного угла заклинения
гондол до 2° 4-3° относительно строительной горизонтали фюзеляжа
позволяет уменьшить коэффициент С*г на 25-^30% и вследствие
этого увеличить аэродинамическое качество самолета по сравнению с
его значением в случае ср г=0.
132
Влияние степени двухконтурности гондол ТРДД
Рис.2.67. Влияние степени двухконтурности гондол ТРДД на зависимости Су,
модели самолета при М = 0,78
В случае расположения двигателей в хвостовой части фюзеляжа
для достижения минимума коэффициента сопротивления,
приближающегося к коэффициенту поверхностного трения, боковые
гондолы располагают таким образом, чтобы в местах сопряжения
пилон+гондола+фюзеляж устранить диффузорные участки, которые
могут привести к возникновению отрыва потока. С этой целью
используется разворот гондол в горизонтальной плоскости под углом
/? г ~ + 1,5°...2°(рис.2.69), обеспечивающий заметное снижение
коэффициента сопротивления компоновки.
133
Рис.2.68. Влияние угла заклинения гондол ТРД со степенью двухконтурности
т = 1 и т = 5, расположенных на пилонах в хвостовой части фюзеляжа на
коэффициент сопротивления С*г при М = 0,75 и Су = 0 и 0,4
Рис.2.69. Влияние \гла разворота
(/?) гондол двигателей в
горизонтальной плоскости (от
фюзеляжа) на C*r—f(<p)
При размещении гондол
двигателей на пилонах в хвостовой
части фюзеляжа горизонтальное
оперение располагается над
двигателями в Т-образном, или
высоком,положении относительно
фюзеляжа. В отношении
сопротивления и
аэродинамического качества при
расчетных значениях Су,
соответствующих Ктах,
рассматриваемые схемы
расположения гондод ТРДД при
оптимальных параметрах их
установки соответственно под
крылом и в хвостовой части
фюзеляжа характеризуются
практически одинаковыми
значениями максимального
аэродинамического качества в
диапазоне М~ 0,7 4-0,95(рис.2.70).
134
Рис.2.70. Зависимость Атах и (Ктах • М) =/(М)для модели самолета с
гондолами, расположенными на пилонах под крылом и гондолами двигателей в
хвостовой части фюзеляжа
Исследования показали, что самолет с Т-образным хвостовым
оперением и гондолами двигателей, расположенными на пилонах в
хвостовой части фюзеляжа, характеризуется продольной статической
неустойчивостью при больших углах атаки (а > 16°4-18°). Этот же
самолет с гондолами двигателей под крылом и палубным
расположением горизонтального оперения статически устойчив по
всем исследованном диапазоне углов атаки(рис.2.71).
В ЦАГИ разработаны компоновки пассажирского самолета с
отбором пограничного слоя фюзеляжа в двигатели. В этом случае
двигатели, имеющие кольцевой воздухозаборник,помещаются внутри
хвостовой части фюзеляжа. Как показали исследования ЦАГИ,
хвостовые двигатели через кольцевой воздухозаборник с
последующей системой выброса забирают пограничный слой
фюзеляжа и тем самым несколько уменьшают его сопротивление.
Известно, что при таких компоновках коэффициент внешнего
сопротивления самолета будет зависеть от расхода воздуха через
двигатель, так как при изменении его величины изменяется доля
поступающего в двигатель пограничного слоя. Вследствие забора
135
пограничного слоя фюзеляжа в двигатели и последующего его выброса
с большой скоростью снижаются потери в следе и,следовательно,
уменьшается сопротивление самолета в целом. Кроме того,
аэродинамическое качество самолета увеличивается вследствие
уменьшения суммарной площади миделя самолета.
Рис.2.71. Зависимости Су, тг=/(а)при М = 0,4 и М = 0,85 для моделей
самолетов с гондолами, расположенными на пилонах под крылом, и гондолами
двигателей в хвостовой части фюзеляжа
На рис.2.72 приведены результаты испытаний модели
пассажирского самолета с двумя гондолами ТРДД, расположенными
на пилонах по бокам фюзеляжа, и этой же модели с кольцевым
воздухозаборником (с забором пограничного слоя в двигатели). В
испытаниях приведенный коэффициент расхода воздуха Лпах через
кольцевой воздухозаборник при М = 0,85 составлял примерно 0,38,
однако при этом его значении внешнее сопротивление модели,
136
выполненной под компоновку двух ТРДД в хвостовом отсеке,меньше,
чем при компоновке ТРДД по бокам хвостовой части фюзеляжа. Так,
АСх~0,0025 при Су = 0 и АСх~0,001 при Су = 0,44-0,5, что
позволяет увеличить максимальное аэродинамическое качество модели
самолета на ^Спах~0,8.
Рис.2.72. Сравнение зависимостей Cy — fCCx), -/£=/( Су) при М = 0,85,
Сх=/(М)при Су=0,4 для модели самолета с двигателями, расположенными
на пилонах по бокам фюзеляжа и двигателями, расположенными внутри
хвостовой части фюзеляжа с кольцевым воздухозаборником (с забором
пограничного слоя)
Характеристики подъемной силы и момента тангажа для обеих
компоновок практически совпадают в исследованном диапазоне чисел
М и углов атаки.
137
2.6. Расчет поляры самолета на крейсерском режиме,
пересчет поляры модели на условия полета
Вычислительные методы с использованием современных ЭВМ
позволяют определять качественные особенности обтекания,
количественные значения аэродинамических характеристик элементов
самолета(крыло,фюзеляж...)и широко применяются.Однако в практике
исследований имеется необходимость производить оценку влияния тех
или иных параметров по более простым соотношениям.Такие
соотношения были получены на основе анализа расчетных результатов
и результатов многочисленных экспериментальных исследований на
моделях и летающих лабораториях [8].
Коэффициент сопротивления самолета вычисляется как сумма
коэффициентов сопротивления элементов
CI — (Г' I Г' \ ОМЫВ.КР I I (~'r q I Z"1' С* I
х с-та — (,Cxpi Схв) 2 +Ьх1+Ьхф ОфтСхг Ог+
+ СхГ.О * S ( о + Сх в.о. ’ S В.О.+ А Схвр. (2.3)
Здесь Схр,Схв,Схг—соответственно профильное,волновое и
индуктивное сопротивление; А Схвредн —коэффициент
дополнительного вредного сопротивления,обусловленный
технологическими неровностями поверхности и дополнительными
надстройками. Вклад каждого элемента (крыла, фюзеляжа...) в полное
сопротивление самолета неодинаков. На рис.2.73 приведены оценки
для типичного пассажирского самолета (S кр = 300м2, А = 9, х=30°,
5мф~10%). Видно, что на крейсерском режиме М = 0,8 основная
величина сопротивления (~60%) обусловлена профильным,волновым,
и индуктивным сопротивлением крыла, сопротивление фюзеляжа
составляет~21%, гондол двигателей~8%, в.о. и г.о.~7% и
вредное сопротивление 3% от сопротивления самолета при Су = 0,48.
Как было отмечено ранее(см.2.1), основными видами
сопротивления являются сопротивление трения и давления,волновое и
индуктивное сопротивление. На рис.2.74 для того же пассажирского
самолета приведены эти составляющие. Так,величина сопротивления
трения всех элементов самолета(крыла,фюзеляжа,гондол двигателей,
г.о. и в.о.) составляет ~ 50% полного сопротивления на крейсерском
138
режиме, сопротивление давления —19%, индуктивное сопротивление
— 27%.
Рис.2.74. Расчетная оценка
составляющих коэффициента
сопротивления—трения,давления,
индуктивного сопротивления для
типового пассажирского самолета при
М = 0,8
Cxt„ Схфюз Схм г о+в о С^Вр
37% 33% 12% 13% 5%
Рис.2.73. Расчетная оценка
составляющих коэффициента
сопротивления типового
пассажирского самолета при М =
0,8, Су=0 и G=0,48, Я=11км
Приближенные статистические зависимости коэффициентов
профильного, волнового, индуктивного сопротивления крыла,
сопротивления фюзеляжа С'х$ и гондол двигателей С'хг от
определяющих параметров имеют следующий вид:
Cxp = 2Cf^q, М)(1-хп)[1+3,7с(1+0,25с) +
+ 1,2Су2] + 2С^л • хп(1+2с)
( о и \3
Схв=О, оо38(од1_'м + м.р)
Сх,=^~ С2,-, l + J=l + A-(0,0244-0,022 cosz)
тс л
С'^= CFT(1 - х„) • 3,37 • Я 0,8+• К, +
139
/ 0 37 V
+ °’008( 0,37-М+ М*.Ф )
Схг Cft(4 • Л Г * К-1 4~ S пил.омыв ’ /С2)
Q г __________________0,455__________
дДеСЬ CFT (jg Re)2,58(1 + 0>1.M2)0,75
—коэффициент турбулентного трения пластины;
13
л~77К(Г—к0ЭФФиииент ламинарного трения пластины, х п.=
5лам.в.п. 4“ 5лам.н.п.
f —координата точки перехода ламинарного
*^ОМ
пограничного слоя в турбулентный на крыле, равная отношению
суммы площадей с ламинарным течением по верхней и нижней
поверхности к омываемой поверхности крыла;
/•7 = 1
I c-b'&z
— J2ф
с — —средняя относительная толщина крыла; М*р
/_ b-dz
JZcj)
—критическое числоМаха, определяемое из условия dCx/dM = 0,1,
его величина зависит от коэффициента подъемной силы, угла
стреловидности, формы и относительной толщины профилей в сечениях
крыла.
Д Мкр ~ (Of ®
Рис.2.75. Зависимость М *р. от
коэффициента подъемной силы крыла
Анализ результатов испы-
таний показал,что значения
разности М*р (С^) и М *р при
Су=0,5, характерном для режима
максимального аэродинамического
качества, полученные для
различных вариантов крыльев,
образуют единую зависимость от
Су, рис.2.75. В свою очередь,
величины М*р(Су = 0,5) зависят
от угла стреловидности крыла,
формы и относительной толщины
профилей в сечениях крыла. При
заданной форме профилей крыла
140
значения М*р линейно увеличиваются с ростом угла стреловидности,
рис.2.76, а при заданном угле стреловидности значения М*р
существенно зависят от средней относительной толщины и от формы
профилей в сечениях крыла, при этом для крыльев со
сверхкритическими профилями существует предельная зависимость
М*р (с), для крыльев с классическими скоростными профилями
значения М*Р меньше, рис.2.77.
_ I2
Л——относительное удлинение, площадь крыла S и размах
крыла Z;
5 __ ^Ф .
Лф—уц—относительное удлинение фюзеляжа;
Аф —коэффициент формы (для осесимметричных тел Аф=1, для
фюзеляжей с донным срезом Кф~1,1-г1,3);
М*р.ф—критическое число Маха для фюзеляжа из условия
dC' ——л х
dM ~и’1-
. _ /г
Лг——относительное удлинение гондол двигателей;
АиА2—коэффициенты интерференции гондол и пилонов с крылом
(среднестатистические величины Кг ~ 1,2;К2 ~ 1,3).
141
Коэффициент сопротивления Схг.о представляет сумму трех
слагаемых —профильного сопротивления, индуктивного сопротивления
и коэффициента взаимодействия с крылом вследствие наличия скоса
потока в области г.о. от вихревой системы крыла С'хг о = Cx/>(Re,
С2
Сг.о., М, хп, Суг.о.) + (1 +3“)+С>г.о*£. Величина угла скоса
71Л. г.о.
потока £ может быть определена по результатам испытаний модели
или рассчитана по приближенному соотношению £ —
2Су
тгА ’
где Су
—коэффициент подъемной силы крыла. Величина балансировочного
коэффициента СуГ.о. определяется из условия равенства нулю
Г' _______ VYlz б.г.о.
продольного момента самолета Суг.о.бал——д---------
Д-.О
Рис.2.77. Зависимость М*р. от средней относительной толщины крыла
Приведенные соотношения применяются для пересчета
результатов измерений аэродинамических коэффициентов модели на
условия натурного полета и оценки поляры самолета по заданным
геометрическим параметрам элементов.
142
При оценке сопротивления самолета в натурных условиях
(Rec-та, %п = 0) по результатам измерений коэффициента
сопротивления модели (Re мод, хяФ0) используются соотношения
Сх с-та Сх мод (Сх мод Сх с-та)расч “Ь Сх вреди.
Пример такого пересчета приведен на рис. 2.78 при Л Сбреди =
5%Сх0.
Рис.2.78. Пример пересчета результатов испытаний модели самолета на
условия натурного полета
Величина вредного сопротивления определяется в основном
отношением суммарной величины миделевого сечения неровностей
поверхности (заклепки, лючки, уступы и т.п.) 5м.н. к площади крыла
5кр и измеряется обычно в долях коэффициента сопротивления
самолета при Cj = 0, рис.2.79. Увеличение АСхвредн. приводит к
уменьшению аэродинамического качества самолета, к снижению его
топливной экономичности.
При выполнении расчета поляры самолета наряду с
143
геометрическими параметрами (z> Л, 5ф, Sr.o., SB.O....) должны быть
заданы и аэродинамические параметры (Мкр, Аф, Кц К2). Их
величины могут быть определены либо по результатам испытаний
модели, либо приняты равными среднестатистическим значениям. Как
показала практика расчетов, в зависимости от степени точности
задания определяющих параметров величина максимального
аэродинамического качества может быть оценена с погрешностью
АКтах~ 0,54-1,0.
Аэродинамические характеристики самолетов различного
назначения,полученные путем испытания их моделей в аэродина-
мических трубах, нуждаются в ряде поправок,учитывающих
неизбежное отличие условий испытаний от натурных.
Рис.2.79. Изменение дополнительного вредного сопротивления в зависимости от
суммарной миделевой площади технологических неровностей
Одной из таких поправок является поправка на так называемое
вредное сопротивление, обусловленное наличием на внешней
поверхности самолетов большого количества неровностей:
144
—производственных (шероховатость и волнистость обшивки,
головки заклепок и винтов, уступы на стыках листов обшивки и
панелях, люках, окнах и дверях, зазоры, сварные швы и т.п.);
—конструктивных (щели по органам управления и механизации
крыла, уступы между интерцепторами или воздушными тормозами и
крылом, зазоры по створкам гондол двигателей, необходимые для
компенсации температурных деформаций и т.п.);
—мелких, выступающих в набегающий поток, деталей или
надстроек (приемники датчиков давления и температуры, датчики
аэродинамических углов, антенны, трубки слива, обтекатели
сигнальных огней и тяг органов управления и т.п.). Перечисленные
неровности нарушают аэродинамическую гладкость обтекаемой
поверхности самолета и приводят к увеличению сопротивления.
Большинство из находящихся в эксплуатации самолетов
различного назначения имеют величину вредного сопротивления в
пределах 104-20%, а самолеты с высоким качеством отделки внешней
поверхности 34-6% от коэффициента сопротивления аэродинамически
гладкого самолета при нулевой подъемной силе Сх0.
Существенное отклонение величины вредного сопротивления от
достигнутой при современном уровне технологии производства нижней
границы (34-6% Схо) приводит к существенному ухудшению летно-
технических характеристик самолетов, дополнительному расходу
авиатоплива, уменьшению полезной нагрузки. Так, например,
увеличение сопротивления дозвукового ближне—, средне—и
дальнемагистральных самолетов на 84-10% Схо приводит к
перерасходу топлива в год на 400,690 и 890 т соответственно.
С другой стороны, широкий диапазон изменения величины
вредного сопротивления современных самолетов свидетельствует о
возможности существенного его уменьшения за счет улучшения
качества отделки внешней поверхности.
С целью разработки рекомендации для промышленности по
обеспечению малой величины вредного сопротивления, по инициативе
ЦАГИ в течение ряда лет выполнен комплекс работ по подробному
обследованию состояния внешней поверхности самолетов различного
назначения, накоплению обширного статистического материала по
145
количеству и геометрическим параметрам неровностей перечисленных
типов, а также систематическим экспериментальным исследованиям
их сопротивления в турбулентном пограничном слое.
На основе исследований, выполненных Г. А. Федоренко, и
привлечения имеющихся отечественных и зарубежных,теоретических
и экспериментальных материалов разработаны методика расчета,
позволяющая определить долю каждого из видов неровностей в
суммарном вредном сопротивлении самолета (рис.2.80) и единые
нормативные документы (отраслевые стандарты), определяющие
1 —шероховатость
2 —волнистость
3 —заклепки и винты с потайной головкой
4 —заклепки и винты с выпуклой головкой
5 —уступы по стыкам обшивки, на эксплуатационых люках
6 —уступы на окнах, дверях, грузовых и аварийных
люках,створках шасси и гондол двигателей
7 —уступы по органам механизации
8 —надстройки
9 —щели по органам управления'и механизации крыла
Рис.2.80. Величины дополнительного вредного сопротивления различных видов
неровностей поверхности самолета
146
требования к качеству внешней поверхности самолетов: ОСТ
1 02507-84 и ОСТ 1 02581-86.
Выполнение требований стандартов позволит в 2-3 раза снизить
величину вредного сопротивления, что для дозвуковых пассажирских
самолетов соответствует увеличению максимального
аэродинамического качества на Д/С=0,5—0,7(рис.2.81).
Рис.2.81. Уменьшение аэродинамического качества самолетов от величины
дополнительного вредного сопротивления
Литература
1. Г.А. Юдин, В.А. Баринов, В. В. Дедова, Г.Г. Конец, С.И. Скоморохов,
С.Г. Игнатьев, В.П. Юшин. “Аэродинамические характеристики дозвуковых
и околозвуковых пассажирских и транспортных самолетов”. РДК.
Издательский отдел ЦАГИ, 1981 г., т.1, кн. 1, вып.2.
2. 0. В. Карась, В. Е. Ковалев. Применение обратного метода расчета
трехмерного пограничного слоя к задаче обтекания крыла с учетом влияния
вязкости. “Ученые Записки ЦАГИ”, т.ХХ, 1989, No.5.
3. С.М. Белоцерковский. Тонкая несущая поверхность в дозвуковом потоке
газа. Изд. “Наука” Главная редакция физико-математической литературы,
Москва, 1965 г.
147
4. Н.А. Чичеров. Некоторые результаты параметрических исследований
крыльев с концевыми шайбами. Труды ЦАГИ, вып. 2504, 1991 г.
5. В.А. Баринов, Ю. В. Бочарова, Г.А. Юдин. Исследование течения в следе за
крылом большого удлинения и нелинейных моментных характеристик модели
крыло+фюзеляж при больших углах атаки.
“Ученые записки ЦАГИ” t.XIV, 1983, No.2.
6. Г.А.Юдин. Основные особенности аэродинамики пассажирских самолетов
конструкции Ил.
Изд-во “Наука”, Москва, 1976 г, “Теория и практика проектирования
пассажирских самолетов”.
7. С.И. Скоморохов, Л. Л. Теперин. Об аэродинамическом согласовании крыла
и мотогондолы.
“Ученые записки ЦАГИ”, т. XXI, 1990, Nal.
8. В.А. Баринов. Расчет коэффициентов сопротивления и аэродинамического
качества дозвуковых пассажирских и транспортных самолетов. Труды
ЦАГИ, вып.2205, 1983 г.
148
Г л а в a 3. АЭРОДИНАМИКА
МАГИСТРАЛЬНЫХ САМОЛЕТОВ
НА РЕЖИМАХ ВЗЛЕТА И ПОСАДКИ
Взлетно-посадочная механизация крыльев магистральных
пассажирских самолетов выбирается из условий эксплуатации и в
соответствии с требованиями обеспечения скорости захода на посадку
Уз.п—2404-250 км/час и обеспечения взлета при отказе двигателя.
Пассажирские и транспортные самолеты в отношении
механизации крыльев на режимах взлета и посадки можно разделить
на две основные группы:
—самолеты,стреловидные крылья которых имеют механизацию
задней кромки, но не имеют механизации передней кромки(или
имеют ее на части передней кромки);
—самолеты,стреловидные крылья которых имеют механизацию
задней кромки крыла и снабжены предкрылками (щитками) по всей
передней кромке крыла.
Самолеты первой группы характеризуются значениями Сипах на
посадке в пределах 1,85-2,1(верхний и нижний пределы зависят от
удлинения крыла и относительной площади закрылков). К этой группе
пассажирских самолетов относятся отечественные самолеты первого
поколения. В качестве механизации стреловидных крыльев этих
самолетов применяли однощелевые и двухщелевые выдвижные
закрылки(рис3.24)
Ко второй группе относятся пассажирские самолеты,которые в
качестве механпзации крыла используют двухщелевые или
трехщелевые выдвижные закрылки,предкрылки или носовые щитки
большой кривизны по всему размаху крыла. Коэффициенты Сушах при
посадке этих самолетов имеют значения 2.5—2.7 и более.
Исследование аэродинамических характеристик моделей самолетов со
стреловидными крыльями (х~25°)умеренного удлинения (Л~8,5),
которые в качестве механизации используют предкрылки по всему
размаху и мощные выдвижные трехщелевые закрылки,подтвердили
возможность обеспечения высоких несущих свойств на режимах
149
посадки.Коэффициент Сут&х таких самолетов в посадочной
конфигурации достигает ~3,0(рис. 3. 24).
Ко второй группе пассажирских и транспортных самолетов
относятся отечествешые самолеты второго поколения.
Отечественные самолеты третьего поколения отличаются от
самолетов второго поколения утолщенными сверхкритическими
крыльями умеренной стреловидности 20 4- 25° большого удлинения
А ~ 11; / = 28 — 30°, Л ~ 10 4- 9,5. Эта группа самолетов позволяет
обеспечить также высокий уровень несущих свойств на посадочных
режимах,Су шах ~ 3,24-3,1 с более простой, в конструктивном
отношении, механизацией задней кромки (выдвижные одно-или
двухщелевые закрылки) и с предкрылками по всему размаху
крыла(рис.3.24). Достичь этих результатов оказалось возможным
благодаря рациональному выбору площади закрылков и предкрылков
(S3~0,2H-0,22), выдвижения и углов отклонения.Высокий уровень
аэродинамического качества двух двигательных пассажирских
самолетов, крайне необходимый в условиях отказа одного из
двигателей на режимах взлета(Л’ВЗл~12,54-12 при Су~ 1,54-1,6)
достигнут благодаря реализации кинематики предкрылков и закрылков
типа так называемой “хоккейной клюшки”или выдвижения закрылков
типа Фаулера,обеспечивая максимально возможный ход предкрылка
вперед и вниз, а для закрылка—откат при малых и умеренных углах
их отклонения д з<154-20°, исключая всевозможные конструктивно-
технологические разрывы по размаху с целью обеспеченпя
безотрывного обтекания крыла и всех элементов механизации.
3.1. Эффрективность различных видов
механизации крыла
3.1.1. Механизация передней кромки крыла
Существуют различные виды механизации передней кромки
стреловидных крыльев(предкрылки,носовые щитки различных видов,
отклоняемые носки и др. )Широкое применение на самолетах находят
предкрылки. Они более эффективны, чем другие известные виды
механизации передней кромки крыла. Основные закономерности
150
взаимного влияния прдкрылков и крыла представлены на рис.3.1 для
прямоугольного крыла (А — 5). Предкрылок вносит качественные
изменения в характер распределения давления на профиле крыла лишь
на углах атаки а 15°. Распределение давления у изолированного
профиля и у профиля с предкрылком при одинаковых значениях
Рис.3.1. Зависимости Су =
/(а)для изолированного
предкрылка,для изолированного
профиля и профиля с отклоненным
предкрылком Z = 0, А = 5.
коэффициента подъемной силы
практически одинаково при 0<а<
15°. Предкрылок при больших
значениях а влияет на обтекание и
Сушах профиля И приводит К
значительному увеличению
критического угла атаки.
Максимальный коэффициент
подъемной силы при наличии
предкрылка увеличивается за счет
подъемной силы собственно
предкрылка и отсутствия отрыва на
крыле. Таким образом, приближенно
можно принять
Сушах— Сушах крТ Сушах пр
Следовательно,эффективность
предкрылка оценивается разностью
между значениями коэффициента
максимальной подъемной силы
исходного крыда и крыла с
предкрылком.
Систематические исследования
эффективности предкрылков на
прямоугольном крыле(Аэф = 5)с
концевыми шайбами (рис. 3.15)
позволили установить связь
геометрических параметров
предкрылка с расположением его
относительно крыла. На рис.3.2
приведены зависимости прироста коэффициента максимальной
151
ПОДЪеМНОЙ СИЛЫ Д Сушах — Сушах с пр — Сушах б .пр ОТ УГЛЗ 0ТКЛ0Н6НИЯ
предкрылка £ пр, выноса(координата х = х/Ькр)и снижения
(координата у= у/Ькр) относительно плоскости хорд крыла.
Результаты этих исследований позволили установить оптимальные
величины Xopt и yopt, определяющие максимальную эффективность
предкрылка, в виде зависимостей
Xopt — (1,15 ~ 1,25) 2>np.cos$np,
yopt = (0, 75 4- 0,85) Ъ пр sin д пр
Рис.3.2 Зависимость прироста коэффициента максимальной
подъемной силы АСутах предкрылка от угла отклонения,
выноса и снижения относительно хорды крыла Z = 0, Л = 5
Механизм увеличения коэффициента максимальной подъемной
силы предкрылком, описанный выше для прямоугольного крыла,
реализуется и в сечениях стреловидного крыла.Особенностью работы
предкрылков на стреловидном крыле является то, что предкрылок
уменьшает различие между значениями критического угла атаки а кр
в сечениях стреловидного крыла.Это приводит к тому, что приращение
максимальной подъемной силы от предкрылков на стреловидном крыле
включает приращение Сушах за счет предкрылка и приращение его на
крыле за счет выравнивания в его сечениях критических углов атаки.
Из этой особенности работы предкрылка следует, что с целью
152
достижения максимальной его эффективности в отношении повышения
Сутах и а кр необходимо применение предкрылка не по части передней
кромки, а по всей передней кромке. Ориентировочно оптимальные
значения координат XoptnYopt для предкрылка с относительной хордой
5прср~12“^19% для стреловидных крыльев большого удлинения с
относительной толщиной Стах ~ 9 4-12% могут быть определены по
приведенным выше зависимостям.
Рис. 3. 3. Зависимости Су,
Wz=/(a)модели пассажирского
самолета с крылом Х = 35°, А =
7 в посадочной конфигурации
(М = 0,15, Re ^4Х106)с
гондолами двигаталей и без них с
выпущенными и убранными
(S' пр ~~ 0) предкрылками.
расположения пилонов гондол
двигателей на зависимости Су,
tnz=f(а)модели самолета в
посадочной конфигурации.
Ниже для. иллюстрации приведены результаты исследований,
направленных на повышение эффективности предкрылка на
стреловидном крыле (% — 35°, А = 7) модели пассажирского самолета
15?
Рис.3.5. Влияние угла
отклонения предкрылка(5пр=
25°и 35°) на зависимости Су,
тг=/(а)модели самолета в
посадочной конфигурации
с двигателями, расположенными на пилонах под крылом. На рис.3.3
приведены зависимости коэффициентов подъемной силы и момента
г- т о ———г—-------------тангажа Cy, mz=/(a) пассажирского
самолета в посадочной
конфигураций <5 з — 40°)при Re = 4 • 106
с гондолами двигателей и без них с
выпущенными предкрылками по вер
передней кромке крылаИ пр— 35°)и без
предкрылков (5“ Пр=0). Результаты
испытаний модели в приведенных на
рис. 3. 3 конфигурациях (без гондол
двигателей при наличии пилонов,
расположенных на нижней поверхности
крыла, и без них)позволяют сделать
следующие выводы.
1. Применение предкрылков по
всей передней кромке стреловидного
крыла(^ — 35°)при отклоненных в
посадочное положение выдвижных
трехщелевых закрылках (<5з = 40°)
обеспечивает самолету без гондол
двигателей затягивание срыва потока на
верхней поверхности крыла и в
результате этого значительное
увеличение критического угла атаки
(А а кр~13°) и приращение Сушах На
А Сушах ~ 0,9. При &р = 0 коэффициент
Сушах = 1,8 и а кр = 10°, а с предркылками Сушах = 2,67 и а кр=23°.
Наличие предкрылков обеспечивает продольную статическую
устойчивость самолету до больших углов атаки (порядка 18°), в то
время как у самолета без предкрылков проявляется статическая
неустойчивость при а ^9°.
2. Наличие гондол двигателей на самолете с убранными
предкрылками не приводит к изменению Су=/(а)в широком
диапазоне докритических и критических значений угла атаки
154
12°). При а ^12° в случае возникновения и развития срыва потока
на поверхности крыла гондолы на пилонах под крылом несколько
увеличивают подъемную силу крыла.
3. Наличие гондол двигателей на самолете с выпущенными
предкрылками приводит к неблагоприятной интерференции их с
крылом, к снижению критического угла атаки на А а кр=ЗА4° и в
результате этого к уменьшению Сушах на 0,25—0,3.
Неблагоприятное влияние на обтекание крыла в посадочной
конфигурации на больших углах атаки(а^17°4-18°)оказывают в
основном пилоны гондол двигателей.
Визуальные исследования обтекания и измерения распределения
давления по крылу, пилонам и гондолам двигателей показали, что на
внутренней стороне пилона (к фюзеляжу)в его носовой части
возникает область срыва потока, что обусловливает снижение
эффективности предкрылка, уменьшение критического угла атаки и в
результате этого снижение Сушах модели самолета. В связи с этим
основной задачей является обеспечение безотрывного обтекания
пилонов и предкрылков, расположенных в районе внутренних и
главным образом внешних гондол двигателей. Исследования обтекания
и аэродинамических характеристик самолета с предкрылками
показали, что наличие разрыва в предкрылке по размаху крыла в
районе внутренних и внешних пилонов (секционный предкрылок) также
приводит к возникновению области срыва потока на крыле и в
результате этого к снижению Сушах (рис. 3. 4). Каждая отдельная
секция предкрылков обтекается независимо,образуя свою вихревую
пелену, и в местах разрыва не обеспечивается безотрывное обтекание
всей поверхности крыла при больших углах атаки. С целью
сохранения неразрывности предкрылка по всему размаху и
обеспечения свободного обтекания пилона необходимо изменить форму
передней кромки пилона, примыкающего к нижней поверхности крыла.
Результаты исследования показали возможность сохранения исходной
длины пилона при изменении его формы, так как использование
больших углов отклонения предкрылка на посадке позволяет
обеспечить дальнейшее повышение Су шах (рис. 3. 5). В результате
по передней кромке пилона возникает излом, позволяющий обеспечить
155
неразрывность предкрылка по размаху в посадочной конфигурации при
большом угле его отклонения (д' пр—35°).
Таким образом, исследования по повышению эффективности
предкрылка при наличии пилонов ТРДД, расположенных под крылом,
позволили заметно уменьшить неблагоприятную интерференцию и
значительно уменьшить потери Сушах. Высокая эффективность
предкрылков по всему размаху увеличенной хорды ( 5 пр ср ~ 19%
вместо Ъ пр ср~ 12 4-14%)на самолетах третьего поколения со
сверхкритическими крыльями Z —284-24° большого удлинения Л б.н=
104-10,7 соответственно иллюстрируется на рис.3.6 и 3.7. Как
видно из рис.3. 6,наличие двух гондол двигателей,расположенных на
пилонах под крылом в центроплане сверхкритического крыла х=28°,
Л б.н—10 не помешало обеспечить высокий прирост C>max (A Сушах ~
0,85)и критического угла атаки (А а кр~10°), а также необходимые
характеристики продольной статической устойчивости при больших
углах атаки а~17°модели самолета в посадочной конфигурации при
М = 0,15и Re ~ 3,5 • 106. Еще большая эффективность такого
предкрылка(5 пр ср =19%)получена на модели самолета со
сверхкритическим крылом Х = 24° большого удлинения(Л б.н— 10,7)с
двумя гондолами турбореактивных двигателей,расположенных в
хвостовой части фюзеляжа. Отсутствие вредной интерференции
двигателей с крылом, рациональные геометрические параметры (йпр~
19%, /пр=1,0) и кинематика предкрылков по всему размаху
позволяют реализовать высокий уровень Сушах=3,15 и критического
угла атаки акр=22°на режимах посадки магистральных самолетов
третьего поколения, обеспечивая им требуемые характеристики
продольной устойчивости на этих режимах (рис. 3. 6, 3. 7).
Исследования подтвердили, что и в случае расположения
двигателей на пилонах под крылом применение предкрылка по всей
передней кромке стреловидного крыла(% —35°)является более
эффективным средством повышения СушаХ самолета и обеспечения
необходимых характеристик продольной статической устойчивости и
безопасности полета на взлетно-посадочных режимах, чем
применение, например, носовых щитков.
156
Рис. 3.6. Зависимости Су, mz=/(a)для модели самолета
со сверхкритическим крылом z = 28°, Л = 10 в посадочной
конфигурации с выпущенными и убранными (S' пр=0) пред-
крылками (Re ~ 3,5 X 10б, М = 0,15)
Ниже приведены некоторые результаты исследований влияния
носовых щитков различного вида на аэродинамические характеристики
модели самолета на взлетно-посадочных режимах. На рис. 3.8
приведены зависимости приращения А Сушах модели самолета при
различных углах отклонения плоских носовых щитков различной
хорды и размаха. Результаты этих исследований показали, что
наибольшая эффективность достигается в случае применения щитков,
распространенных практически по всему размаху передней кромки
(7 щ ~0,85 ... 0,9 ) стреловидного крыла(/ = 35°, Л = 7,8), с
157
Рис.3.7. Зависимости Су, тг= f(а), K-ftCy) для
модели самолета со сверхкритическим крылом *=24°,
Л = 10,7 в посадочной конфигурации (закрылки однощеле-
вые) с выпущенными и убранными (S пр=О)предкрылками
(Re~3,2xl06, М=0,15)
относительной хордой Ъ щ ~0,13(аналогично предкрылку)при
оптимальном угле отклонения S' щ=40° относительно плоскости хорд
крыла. С уменьшением хорды носового щитка оптимальный угол его
158
отклонения увеличивается до 5" щ=60°. Исследования показали
также, что изменение формы плоского щитка и приближение его
формы к форме профиля предкрылка путем увеличения толщины
щитка и придания ему в носовой части формы обтекаемого тела
позволяют заметно повысить эффективность щитков(АСУтах~0,1
при З'щ—40°). Придание щитку формы сечения, близкой к форме
предкрылка, эквивалентно увеличению его хорды на 10-15%.
I lot' 0,57 фбар л
Рис. 3. 8. Зависимости приращения AСутах=/(<3~ щ, b щ, 7щ)от применения
плоских и криволинейных носовых щитков различной хорды,размаха и угла их
отклонения
Рассмотрим аэродинамические характеристики модели самолета
в посадочной конфигурации с носовыми щитками при оптимальных их
параметрах(5 щ = 0,13;7 щ=0,87;б'щ = 40°)в сравнении с
характеристиками модели с предкрылками такого же размаха и хорды.
На рис.З. 9 приведены результаты испытаний модели пассажирского
самолета со стреловидным крылом (z = 35°)c отклоненными
трехщелевыми закрылками в посадочное положение (&=45°)без
механизации и с механизацией передней кромки крыла, выполненной в
159
виде предкрылков, плоских носовых щитков и комбинации этих видов
механизации: плоских носовых щитков в центроплане(/щ—0,3)и
предкрылков на консоли(7пр~0,57). Видно, что эффективность
носовых щитков существенно уступает эффективности предкрылков
при тех же значениях хорды (& щ= b пр=0,13)и размаха (Z щ=
I пр —0,87). Исследованные носовые щитки не обеспечивают
безотрывное обтекание стреловидного крыла до больших углов атаки,
а комбинация щитка с предкрылком вдоль размаха уступает по
эффективности предкрылку.
Рис. 3. 9. Зависимости Су =
/(а) модели самолета с крылом
Х = 35° в посадочной
конфигурации с предкрылками,
носовыми щитками,комбинацией
носовых щитков в центроплане и
предкрылками на консоли
одинаковой хорды и размаха
Рис. 3.10. Влияние разрывов в
носовых щитках у пилонов гондол
двигателей на зависимость Су=/( а)
модели самолета с крылом 2 = 37,5°,
Л = 7 в посадочной конфигурации при
М=0,15, Re=3,5xl06
\
На рис. 3.10 приведены результаты исследований эффективности
носовых щитков боз разрыва по всей передней кромке крыла и с
разрывами в районе установки пилонов гондол двигателей на модели
самолета со стреловидным крылом (х — 37,5°, Лс напл —7,Лб. напл~
160
7,7). Носовые щитки имели переменную кривизну:умеренную в
центроплане и прогрессивно увеличивающуюся в консольной части
крыла .Результаты исследований показали, что в условиях аэро-
динамической трубы при изменении чисел Re от 1,5*106 до
3,5* 106 эффективность от применения щитков рассмотренных форм
также невысока—А Сушах~0,45. Разрывы носовых щитков
аналогично разрывам предкрылка неблагоприятно влияют на их
эффективность. И в этом случае при числах Re ~ 3,5 • 106
эффективность исследованных носовых щитков, имеющих
прогрессивно увеличивающуюся кривизну, значительно уступает
эффективности предкрылков Е1, 2, 3].
3.1.2. Механизация задней кромки крыла
Высокие несущие свойства пассажирских самолетов на взлетно-
посадочных режимах полета обеспечиваются применением мощной
механизации задней кромки крыла в виде выдвижных щелевых
закрылков. При отклонении закрылков на стреловидном крыле
большого удлинения,как и в плоском случае на профиле,увеличение
Сушах сеч СВЯВЭНО С увеличением Сушах сечения крыла И Сушах сеч
закрылка.Исследования показали, что Су сеч закрылка мало изме-
няется по углу атаки крыла, а Сушах сечения стреловидного крыла
пропорционально Су закрылка, И зависимость Сушах сеч =
/(АСу(а = о)) линейна. Стреловидность крыла вносит изменение в
угол наклона этой зависимости,которая является функцией размаха
крыла, рис.3.11,3.12.
Одним из основных критериев при оценке эффективности
механизации задней кромки является приращение максимальной
подъемной силы:
А Сушах = Сушах ( & 0) Сушах (5^ з ~ 0)
Однако величина коэффициента СуШах зависит также от многих
факторов, не свяванных непосредственно с механизацией: числа Re,
шероховатости и волнистости поверхности,условий эксперимента и др.
В то же время приращение коэффициента подъемной силы от
отклонения закрылка при угле атаки а = 0 в меньшей степени зависит
от этих факторов и определяется в основном геометрическими пара-
161
Рис. 3.11. Влияние отклонения закрылков (<5" з=46°)на прирост
коэффициента подъемной силы Су=/(а)в бортовых (5=0,19),
центральных (<г~ 0,63) и концевых сеченияхСг=0,9)стреловид-
ного крыла 2=35°, Л = 7.8 и закрылка — ACy=f(.а)
метрами закрылка и его формой.Кроме того,при а=0 крыло
обтекается безотрывным потоком и,следовательно, изменение
аэродинамических характеристик при а=0 связано с обтеканием
самого закрылка.Практически по характеру изменения зависимости
АС,(а=0)=/(&) можно судить об обтекании закрылка так же,
как об обтекании крыла по зависимости C?=f (а),рис.3.13. Вместе
с тем наличие прямой зависимости Сушах крыла с закрылками от
приращения коэффициента подъемной силы делает возможным
использование для оценки эффективности закрылков величины
162
/ = 35°;А=7,8
Рис. 3.12. Линейная зависимость
Сушах стреловидного крыла Х=
35°, А=7,8 от прироста А Су за
счет отклонения закрылка в
сечениях вдоль размаха 2=0,19;
0,63; 0,9
А Су(а = 0), рис.3.14.
Увеличения эффективности
закрылка можно достигнуть путем
применения системы управления
пограничным слоем на закрылке;
обдува закрылка потоком с
большей скоростью,чем скорость
набегающего потока; применения к
однощелевому закрылку принципа
закрылка и предкрылка, что
является основанием для
разработки многощелевых
закрылков различных видов,
представленных на рис.3.15 и
исследованных на прямоугольном
крыле с эффективным удлинением
Л эф=5.
Рис. 3.13. Зависимость А Су(а = 0)=/(<$,) от отклонения однощелевых,
двухщелевых(5' хв = 20°)и трехщеленых выдвижных закрылков на
прямоугольном крыле Z = 0, А = 5, т] — 1 при а —0
163
Рис. 3.14. Зависимость Cymax=/(A Су(а=0))прямого крыла Х = ®, Л = 5 от
прироста коэффициента подъемной силы при отклонении однощелевых,двух,трех
и четырехщелевых выдвижных закрылков различного вида
Рис. 3.15. Модель прямого крыла Х~О, А эф — 5 с концевыми шайбами и
различными видами выдвижных щелевых закрылков
Результаты экспериментальных исследований показали,что
рассмотренные виды многощелевых закрылков образуют единую
линейную зависимость С>тах = /(А Су( а = 0)). Диапазон возможных
164
значений Сушах крыла при различных углах отклонения звеньев
закрылка ограничен максимальным приращением А Сушах =
/(АСу(а=0)), (рис. 3.14).
Применение многощелевых закрылков позволяет увеличить
диапазон значений Су n^Cy{a — Q), при которых коэффициент
сопротивления не увеличивается из-за отрыва потока на закрылке,
рис. 3,13.
Отмеченные выше закономерности изменения аэродинамических
характеристик прямоугольного крыла с многощелевыми закрылками
характерны для стреловидных и сверхкритических крыльев большого
удлинения с закрылками по части задней кромки крыла.
Систематические исследования выдвижных закрылков различных
видов на стреловидных крыльях(% = 25° 4-35°)пассажирских
самолетов позволили установить следующее.
При малых углах отклонения выдвижных закрылков(5‘ 3~15°4-
25°), при которых еще не наблюдается отрывной характер их
обтекания,прирост дополнительной подъемной силы от одно-двух-и
трехщелевых закрылков различается незначительно,рис. 3.16. При
этих значениях угла отклонения закрылка отрабатывается
механизация крыла для достижения максимального аэродинамического
качества пассажирских самолетов на режимах взлета.Исследования
показали,что однощелевые выдвижные закрылки в большей степени
способствуют уменьшению сопротивления при заданной подъемной
силе вследствие минимального профильного и поверхностного
сопротивления трения омываемой поверхности.
Дополнительные щели на выдвижном закрылке приводят к
заметному повышению подъемной силы крыла в случае S' з 30°,
при которых возникает срыв потока на закрылке, рис. 3.16. При углах
отклонения выдвижного закрылка S' 35° 4-40° немаловажное
значение имеет вид двухщелевого закрылка.Исследования показали,
что эффективность обычного двухщелевого закрылка можно
значительно увеличить,выполнив первое его звено-дефлектор—в виде
предкрылка.В этом случае безотрывное обтекание второго основного
звена двухщелевого закрылка можно обеспечить до больших
углов его отклонения и тем самым заметно увеличить
165
Z = 35°, Л=8,5, i/®3,0
T =0,65 b =0,4
3 ’ 3 ’
Рис. 3.16. Зависимость прироста коэффициента подъемной силы
от угла отклонения одно,двух и трехщелевых выдвижных закрылков
на стреловидном крыле X= 35°,Л — 8,5 при а = 0(эффект щели)
Рис. 3.17. Зависимость прироста коэффициента подъемной силы от угла
отклонения однощелевых,двухщелевых закрылков с неподвижным и подвижным
дефлектором (эффект предкрылка-дефлектора)
166
подъемную силу.При малых углах отклонения закрылков (3 з<30°)
аналогочно эффекту предкрылка при малых углах атаки(а = О)крыла
приращение подъемной силы от применения закрылков с дефлектором
заметно снижается(рис. 3.17).
Повышения подъемной силы на посадочных режимах можно
достичь путем применения так называемой изменяемой кривизны
закрылка или дифференциального отклонения его звеньев.Как видно из
рис.3.18, приращение коэффициента подъемной силы существенно
зависит от степени“искривления”закрылков,и можно всегда выбрать
необходимое дифференциальное отклонение отдельных звеньев
закрылков, чтобы удовлетворить требованиям обеспечения
необходимой подъемной силы на режимах посадки.Отметим,что при
этом повышение коэффициента подъемной силы достигается
снижением аэродинамического качества,поэтому на пассажирских
самолетах используются трехщелевые выдвижные закрылки с тремя
подвижными звеньями: на режимах взлета при малых углах
отклонения^ з ~15°) они используются как однощелевые или
двухщелевые при небольшом дифференцированном отклонении двух
последних звеньев (основного звена на S' 3—7° и хвостика на S' З.хв. ~
7°), рис.3.19, а на режимах посадки при полном раздвижении трех
звеньев и полном выдвижении(откате)трехщелевые закрылки
отклоняются на сравнительно большие углы^ З=33°)(рис. 3. 20).
Сопоставление трехщелевых выдвижных закрылков двух видов,
приведенных на рис. 3.19 и 3.20, показывает, что выполнение
первого звена закрылка в виде предкрылка(сравнительно тонкого
искривленного дефлектора)целесообразно на режимах посадки и менее
эффективно при малых углах отклонения закрылков^ 3=154-20°)на
взлетных режимах.Выбор закрылков того или иного вида является
комплексной задачей и всегда подчинен конкретным требованиям
эксплуатации самолета.
На рис.3.21 приведены зависимости Су2=/(а) для самолета
со стреловидным крылом Z = 35°, Л = 7 с различными видами
выдвижных закрылков в посадочной конфигурации: двухщелевыми,
трехщелевыми с жестким и подвижным дефлектором, а также
подвижным и отклоняемым хвостиком. Результаты исследований
167
Рис. 3.18. Зависимости прироста коэффициента подъемной
силы от изменяемой кривизны двух и трехщелевых выдвиж-
ных закрылков
показали,что применение трехщелевых выдвижных закрылков с
подвижным(управляемым)дефлектором и выдвижным отклоняемым
третьим звеном позволяет обеспечить высокие несущие
характеристики самолету в посадочной конфигураций Супах ~ 2,65)
при числах Re ~ 3,6 • 106. Наличие этой механизации на стреловидном
168
Рис. 3.19. Зависимость Су = Рис. 3. 20. Зависимость Су =
/(а), К=f ССу) ддя модели /(а)для модели самолета с
самолета с крылом 2=37,5°, крылом 2=37,5°, А = 7 с
А = 7 с двухщелевым (&i= однощелевым и трехщелевым
<5'з2=7°)и трехщелевым, выдвижными закрылками
переменной кривизны,выдвижным
закрылком
крыле при посадочных углах атаки а = 9° 4-10° обеспечивает
увеличение коэффициента подъемной силы крыла примерно в 2,5~3
раза. Отказ от управляемого дефлектора и применение дефлектора,
жестко связанного с основным звеном закрылка,приводит к более
простой конструкции трехщелевого закрылка, но ценой снижения
А Стах на 0,14-0,12 и к такому же уменьшению коэффициента
подъемной силы на посадочных углах атаки( а = 8° 4-10°). Еще более
заметное снижение Сушах (А Сушах ~ 0,15) и коэффициента
подъемной силы на посадочных углах атаки приводит к отказу от
применения выдвижного отклоняемого звена или применения на этих
режимах двухщелевых закрылков. На режимах взлета, при малых
углах отклонения закрылков (3“ з 25°), используются двухщелевые
169
Рис. 3. 21. Зависимость Су—/(а)
и трехщелевые закрылки при
небольших углах отклонения
третьего звена закрылка-хвостика.
На этих режимах оптимальная
конфигурация механизации крыла
выбирается не только с целью
обеспечения заданной длины
взлетной полосы,но и требуемого
угла наклона траектории набора
высоты,тесно связанного с
уровнем аэродинамического
качества самолета. Обращает на
себя внимание промежуточное
положение закрылков,отклоненных
на малый угол(<5з—15°; &в=0),
соответствующих
незначительному ходу (откату)
закрылков, что имеет место на
самолетах I и П поколения со
для самолета со стреловидным
крылом X=35°, А = 7 в посадочной
конфигурации с трехщелевым
закрылком и подвижным
дефлектором,то же с жестким
(неподвижным) дефлектором и
стреловидными крыльями /=354-
37°. В этом случае дефлектор и
передняя часть основного звена с
малым выдвижением закрылка
находятся под крылом. В
двухщелевым выдвижным результате этого закрылки
закрылком. малоэффективны и обеспечивают
сравнительно малые значения подъемной силы Су и большие значения
коэффициента сопротивления Сх, в результате взлетное
аэродинамическое качество этих самолетов при Су ~ 1,25 4-1,5
достигает небольших величин К Взл ~ 104-8 соответственно,
рис. 3. 19. Для двухдвигательных самолетов третьего поколения со
сверхкритическими крыльями / = 28 4- 24° большого удлинения А б.н.
~ 104-10,7 аэродинамическое качество на режимах взлета при
Су взл. = 1,5 составляет Къзл. ~ 12 4-12,5, что видно на рис. 3. 22 и
3. 23.
170
Рис. 3. 22. Зависимости Су=/(а), K=f(Cy) для
модели самолета со сверхкритическим крылом /=28°,
Л = 10 во взлетной конфигурации
На режимах взлета двухдвигательных самолетов 3-го поколения
применена оптимальная кинематика выдвижения закрылков,при
которой при малых взлетных углах их отклонения (3“ 3~18°)
обеспечивается максимальный ход(выдвижение)закрылков. В этом
случае используется так называемая кинематика" хоккейной клюшки”
или выдвижных закрылков типа Фаулер, обеспечивающих
максимальное использование увеличения площади крыла за счет
большого выдвижения закрылков и предкрылков.
На рис. 3.24 приведены для сравнения зависимости
коэффициента подъемной силы пассажирских самолетов I , II и П1
поколения в посадочной конфигурации,полученные на основании
171
Рис. 3. 23. Зависимости Су=/(а)и K=f(Cy) для модели
самолета со сверхкритическим крылом z=24°, Л = 10,7 во
взлетной конфигурации
исследований аэродинамических характеристик их моделей в аэро-
динамических трубах. Видно,что применение механизации в виде
предкрылков по всему размаху сверхкритических крыльев большого
удлинения А б.н. ~ Ю 4-11 и однощелевых или двухщелевых
выдвижных закрылков,распространенных примерно на 3/4 размаха
крыла самолета, позволяет обеспечить примерно на 20% большую
величину Сутах и большие несущие свойства на режимах посадки,чем
в случае самолетов П поколения с двухщелевыми выдвижными
закрылками.
172
СУёал
—В-737-100^
---DC-9-30
---LC-5A
—В-727-100
=DC-10-10
Z = 25
3,0
2,5
2,0
1,5
1,0
0,5
+ 35
без механизации
0
20
Ту—334
Ту—204
Ил-76
Ил-96-300
Ил-86
Ту-154М
Ту—154А с
10
С
закрылками
+предкрылок
- по всему
размаху
крыла
х=35
VC-Ю с закрылками
DC-8-30> +предкрылки
*и I п0 части
Ил-62 без Ту-154А]размаха крыла
у—104Б предкрылков 4
Ту—114 В-707-320*
Ту-124
а
Рис. 3.24. Зависимости Су = /(а)для пассажирских самолетов I , П и Ш
поколения в посадочной конфигурации.
3.2. Средства улучшения взлетно-посадочных
характеристик
Для современных скоростных пассажирских самолетов, имею-
щих высокие удельные нагрузки на крыло(Со/5 = 5504-650кг/м ),
выдерживание умеренных скоростей захода на посадку ( V3.n —
240 -г 250км /ч) и вертикальных скоростей снижения не более 3—5
м/с, а также учет требований по уходу на второй круг с отка-
завшим двигателем требуют использования механизации,обеспечи-
173
вающей максимальный коэффициент подъемной силы Сушах=3.14-
3,2(рис. 3.24).
Теоретические и экспериментальные исследования,проводимые в
ЦАГИ по созданию высоконесуших профилей,и их использование в
системе механизированных сверхкритических крыльев позволили
разработать высокоэффективную щелевую механизацию крыла,
которая в сочетании с механизацией передней кромки крыла в виде
предкрылков по всему размаху обеспечивает на стреловидных
крыльях (%= 25° 4- 30°) большого удлинения (Л б.н.= 10 — 11) высокий
уровень коэффициента максимальной подъемной силы Сушах~3,24-
3,1 (рис.3. 7).
Следует отметить, что разработанная механизация крыла
удовлетворяет высоким требованиям по взлету (в особенности при
отказе одного двигателя)и требованиям по уровню шума на местности
в отношении обеспечения высокого уровня аэродинамического
качества при реализуемых больших значениях коэффициента
подъемной силы. Из рис. 3.22,3.23 следует, что при взлетной
конфигурации самолета (С у0ТР = 1,54-1,7)аэродинамическое
качество К взл — 12,54-11,5, а при посадочной котфигурации
(Cy3.n = l,64-1,8)-J< ~9,5.
Стремление уменьшить длину ВПП для пассажирских самолетов
требует дальнейшего повышения эффективности взлетно-посадочной
механизации,в особенности на режимах захода на посадку,причем
наряду с обеспечением высоких значений коэффициента подъемной
силы самолета при планирований Су 3. п = 1,6 4-1,8)в системе
механизации крыла предусматриваются высокоэффективные гасители
подъемной силы (интерцепторы,спойлеры)для значительного снижения
Су и увеличения Сх при пробеге самолета. Для улучшения условий
посадки магистральных пассажирских самолетов необходимо
обеспечить планирование на последнем участке глиссады на углах
атаки а ~ 7 4- 8°, тогда посадка самолета будет происходить на углах
атаки, близких к посадочным(84-10°)(угол атаки самолета
увеличивается с 74-8° до посадочных значений на участке
выравнивания). В этом случае посадка самолета происходит
практически без участка выдерживания,и вследствие этого потребная
174
посадочная дистанция самолета уменьшается на 3504-600 м.
Для обеспечения больших углов атаки(а = 7°4-8°)на
планировании при заходе на посадку необходимо, чтобы критические
углы атаки самолета в посадочной конфигурации были не менее 204-
22°;это обеспечивается применением эффективной механизации
передней кромки крыла. В качестве примера на рис. 3. 7 приведены
зависимости Су. =/(а)для самолета со сверхкритическим
крылом(х = 24°)с отклоненными в посадочное положение закрылками и
предкрылками. Видно, что критический угол атаки у самолета с
отклоненной в посадочное положение механизацией без применения
предкрылков а кр ~ 14°. Применение предкрылков увеличивает
коэффициент Сутах от 2,1 до 3,2 и критический угол атаки с 14° до
23°. Исходя из условия обеспечения безопасности полета на режимах
предпосадочного планирования^ з. п 1,3VC), коэффициент
подъемной силы самолета на этом этапе полета Су3.0,59 Сушах.
На рис. 3.7 отмечены значения Су и угла атаки самолета на
планировании при заходе на посадку. Заметим, что самолет с
отклоненными в посадочное положение закрылками без предкрылков
может иметь углы атаки при планировании не более 3°, а при
использовании предкрылков—не более 7°4-8,5°. Как показывают
расчеты и результаты летных испытаний неманевренных самолетов,
углы атаки на участке выравнивания увеличиваются на Д а = 1,54-
2°.Следовательно, в конце участка выравнивания углы атаки у
самолета будут равны: без применения предкрылков по всему раз-
маху крыла 4,54-5°, ас применением предкрылков 8,5°4-10°. На
рис. 3. 25 приведена схема посадки двух рассматриваемых самолетов,
из которых следует, что самолет без предкрылков имеет
отрицательные углы тангажа на планировании, т. е. самолет как бы
“смотрит носом”в землю, а самолет с предкрылками имеет
положительные углы тангажа и практически подготовлен к посадке на
основные(задние)колеса шасси.Самолет,имеющий малые углы атаки в
конце участка выравнивания, не может безопасно приземляться,так
как приземление в этом случае возможно только на основные(задние)
и передние колеса шасси одновременно. При этом самолет будет
находиться практически во “взвешенном”состоянии (подъемная сила
175
сл
DfaSez
ВыраРыаРаш
лриаеталке
бтьшш углы атака
пр» ллалираРаиаа
аРнраяк.*И°’’'В*; .
ВканираРакие
Рис.3.25. Схема посадки двух сам№малые углы атаки при планировании, а„«3-,и большие а.,=6-8
близка к силе тяжести самолета), так как угол атаки после
приземления остался почти неизменным и равным его значению в
конце участка выравнивания(угол атаки такого самолета в момент
приземления равен углу атаки при пробеге, т.е. стояночному углу
атаки). Самолет в этом случае при движении по ВПП и пробеге будет
склонен галопировать,т. е. двигаться скачками,и при движении по ВПП
в течение длительного времени нельзя будет использовать торможение
на колесах,что дополнительно приведет к увеличению потребной длины
ВПП. Кроме того, вследствие малых углов атаки(самолет без
предкрылков)в конце выравнивания посадка самолета без участка
выдерживания возможна с большой степенью вероятности и на
передние колеса, что может сопровождаться“козлением”, и летчик
средней квалификации не всегда сможет удачно справиться с
управлением самолета,что может привести к летному происшествию.
По этой причине для самолетов, не имеющих предкрылков и имеющих
небольшие углы атаки (а пл. ~ 3°) при планировании на режиме захода
на посадку,необходим участок выдерживания,на котором самолет
уменьшает скорость полета и увеличивает угол атаки до посадочных
значений(а = 84-10°).В этом случае приземление происходит на
основные колеса с последующим“переваливанием”на носовые колеса.
При этом угол атаки самолета уменьшается до стояночного значения
а ст— 3°4-4°, подъемная сила самолета по сравнению с ее значением
в момент касания основными колесами шасси ВПП значительно
уменьшается(становится много меньше силы тяжести самолета) и
самолет плотно прижимается к поверхности ВПП.Это позволяет
летчику достаточно эффективно использовать торможение колес.
Таким образом, для повышения безопасности полета
пассажирские самолеты с мошной механизацией задней кромки крыла
(например,трехщелевые закрылки)без предкрылков должны
обязательно иметь участок выдерживания, что приводит к
значительному увеличению потребной посадочной дистанции.
Самолет с предкрылками, имеющими большие углы атаки на
планировании при заходе на посадку(а з.п. =74-8°), может
приземляться сразу после завершения участка выравнивания на
основные колеса шасси при углах атаки а = 8° 4-10° (практически
177
равных посадочным) с последующим переваливанием на носовое
колесо. Подъемная сила самолета становится значительно меньше его
силы тяжести и он плотно прижимается к поверхности ВПП,что
позволяет эффективно и безопасно использовать торможение колес.
Следовательно, самолет с мощной механизацией задней кромки и с
предкрылками по всей передней кромке крыла может безопасно
совершать посадку без участка выдерживания, и фактическая
посадочная дистанция самолета (без коэффициента безопасности
1,67) в этом случае уменьшается на 2004-350 м.
Таким образом,для уменьшения потребной посадочной дистанции
магистральных пассажирских самолетов и для обеспечения их высокой
безопасности на ражимах посадки необходимо,чтобы механизация
самолета обеспечивала не только высокие значения максимального
коэффициента подъемной силы (С^тах = 3,04-3,2), но чтобы при
этом были обеспечены и большие критические углы атаки (а кр=
22° 4-24°).
Наряду с этим следует отметить, что для сокращения длины
посадочной полосы необходимо одновременно с повышением
эффективности механизации крыла повысить эффективность работы
реверса двигателей с доведением до возможности включения его еще
в воздухе в конце участка выравнивания и увеличить эффективность
колесных тормозных устройств с целью обеспечения высоких
значений приведенного коэффициента трения при пробеге f проб —
0,304-0,40 вместо значения его в настоящее время,равного 0,204-
0,25.
В заключение следует сказать,что решение поставленных выше
задач по совершенствованию взлетно-посадочных устройств
пассажирских самолетов позволит существенно повысить
безопасность полета на режимах взлета и посадки, уменьшить
потребную длину ВПП и использовать автоматические системы
управления, обеспечивающие заход самолета на посадку по III
категории ИКАО.
178
3.3. Приближенная оценка аэродинамических
характеристик самолета в условиях натуры
Выше приведенные результаты экспериментальных исследований
аэродинамических характеристик моделей пассажирских и
транспортных самолетов со стреловидными обычными и
сверхкритическими механизированными крыльями большого удлинения
Л б.н.= 7 4-11 получены в АДТ —106 переменной плотности при
различных числах Re и M(Re~(14~4) • 106, М = 0,154-0,4)и в
натурной трубе АДТ—101 при Re~(54-6) • 106 при М = 0,15.
Результаты этих исследований позволили установить следующие
количественные и качественные закономерности:
1. С ростом числа Re при М=const = 0,15 имеет место
заметное нелинейное увеличение Сушах=/(Re) как для моделей
самолетов с прямыми(не стреловидными)» так и для моделей со
стреловидными^ = 25 4-35°) крыльями без механизаций <5з= S' пр=0)
и с механизацией передней и задней кромки,рис. 3. 26. Величина
прироста Сушах находится в пределах А Сушах ~ 0,35 4-0,4 для
самолетов с крыльями х ~25°;А Сушах~0,15—для моделей
самолетов со стреловидными крыльями X — 35° в диапазоне чисел Re
~(б4-5)*106 и М = 0,15. Влияние сжимаемости на Сушах в
пределах от М = 0,15 до 0,4 при Re=const приводит к снижению
Сушах, А Сушах ~ ~ 0,15.
2. На линейном участке зависимостей Су=/(а),где имеет место
безотрывное обтекание крыла(до а а кр),влияние числа Re в
пределах Re ^(54-6) • 106незначительно изменяет величины
подъемной силы и продольного момента моделей самолетов. Величина
критического угла атаки,как и“ложка”в нелинейных характеристиках
коэффициента продольного момента моделей со стреловидными
сверхкритическими крыльями, смещается в сторону больших углов
атаки,А «кр~2,54-3,5° в зависимости от х и А.
3. Предварительная оценка аэродинамических характеристик
перспективного пассажирского и транспортного самолета со
стреловидными крыльями х — 35 4- 25° большого удлинения Аб.н—7 4-11
179
Рис. 3. 26.
Прирост Д С у max — f ( Re ) для самолетов с прямыми и
стреловидными крыльями 2 — 204- 35° во взлетной и посадочной конфигурациях
может быть проведена при условии геометрического подобия внешних
и внутренних обводов модели самолета, выполненной с гондолами ТРД
с протоком. Полученную при исследованиях в аэродинамической трубе
поляру модели самолета, можно пересчитать .на натурные условия,
введя следующие поправки
Сус-та СумодСо) ДСубалН" А Сушах (Re с-та Re max мод)
Схс-та— Схмод+ АСхбал ACx(Re с-та Re max мод) + А Сх вред
Здесь: А Су б ал» А Схбал- потери коэффициента подъемной силы
180
и сопротивления на балансировку момента тангажа при заданных
центровках органами продольного управления-руля высоты или
стабилизатора. А Сушах (М)—поправка на сжимаемость в диапазоне
чисел М = 0,15 А 0,4 составляет АСутах~~0,15(по линейному
закону).
пассажирский самолет со сверхкритическим
С> крылом Z1/4 = 34°, 26н =9,5
Рис. 3. 27. Сравнение зависимостей Су—/(а)для пассажирского самолета
со сверхкритическим крылом % = 30°, А = 9,5 в посадочной , взлетной и
конфигурациях, полученных в летных испытаниях и по результатам
испытаний модели в аэродинамических трубах ЦАГИ
А Сушах (A Re—Re с-та —Re мод)-поправка на Сушах за счет
разности чисел Re модели и самолета,вычисленных по САХ крыла,
рис. 3. 26.
181
Рис. 3. 28. Сравнение зависимостей Cy—f (а)для пассажирского самолета со
сверхкритическим крылом х = 28°, Л=10 в крейсерской,взлетной и посадочных
конфигурациях, полученных в летных испытаниях и по результатам испытаний
модели в аэродинамических трубах ЦАГИ
182
Схмод.—коэффициент сопротивления модели при свободной точке
перехода.
A Cx(Re)—поправка на различие коэффициентов турбулентного
трения за счет чисел Re модели и самолета.
А Сх вред —поправка на коэффициент сопротивления
немоделируемых и не уточненных деталей механизма управления
механизацией; условно’определяется 5^-10%Q mln для модели во
взлетно-посадочной конфигурации.
Рис. 3.29. Сравнение зависимостей Cy—f <а)для транспорт-
ного самолета со сверхкритическим крылом Z = 29°, Л = 9
в посадочной и взлетной конфигурациях,полученных в летных
испытаниях и испытаниях модели в аэродинамических трубах
ЦАГИ
183
На рцс. 3. 27 —3. 30 приводится сопоставление зависимостей
Су — /(а)для моделей самолетов со сверхкритическими
механизированными крыльями,полученными в АДТ~106 при Re ~
3,5 • 106 и пересчитанными в соответствии с выше указанной
методикой, с результатами летных испытаний “из дач”рулями высоты
и“торможений”на режимах двигателей малого газа. Из анализа
результатов летных испытаний и сопоставления с данными,
полученными в АДТ_106 ЦАГИ,следует удовлетворительная
сходимость прогнозирумой подъемной силы и характеристик
устойчивости и управляемости в широком диапазоне углов атаки.
транспортный самолет с крылом
Zi/4 = 25 , ^6н =8,5
Рис. 3.30. Сравнение зависимостей Су—/(а)для тран-
спортного самолета со стреловидным крылом х=25°,
А = 8,5 в крейсерской» взлетной и посадочной конфигу-
рациях, полученных в летных испытаниях и испытаниях
модели в аэродинамических трубах ЦАГИ
106 модель
Фет = ^РВ= О
106
испытания
184
Литература
1. Г. А. Юдин, С.Г.Игнатьев, Г.В.Хозяинова. Аэродинамика крыльев большого
удлинения с механизацией передней и задней кромок дозвуковых и
околозвуковых пассажирских и транспортных самолетов. РДК, т.1, кн.1,
выпуск 1. Издательский отдел ЦАГИ, 1980 г.
2. Г.А.Юдин, Н.И.Маслова, В.В.Дедова. Аэродинамические характеристики
дозвуковых и сверхзвуковых самолетов с механизированными крыльями.
РДК,т.1, кн.1,вып.5,1965 г. Издание бюро научной информ.ЦАГИ
3. Аэродинамика и динамика полета магистральных пассажирских самолетов.
| Под редакцией академика РАН Г.С.Бюшгенса и академика РАН
Ц Г.П. Свищева. Москва, изд. "Машиностроение”, 1982 г.
1
185
Г л а в a 4. АЭРОДИНАМИКА
ДВИГАТЕЛЬНЫХ УСТАНОВОК
МАГИСТРАЛЬНЫХ САМОЛЕТОВ
4.1. Общие положения
На дозвуковых пассажирских самолетах широкое рас-
пространение получили компоновки двигателей в гондолах,
расположенных:
— на пилонах под крылом,
— на пилонах по бокам фюзеляжа,
— в хвостовой части фюзеляжа.
При разработке двигательных установок и, в частности, гондол
двигателей решение задач газовой динамики и аэродинамики
направлено на достижение следующих целей:
— обеспечение высокой экономичности на крейсерском режиме
полета;
— обеспечение устойчивой (без помпажа) работы двигателей в
условиях их компоновки на самолете на всех возможных при
эксплуатации режимах;
— удовлетворение требований по допустимому уровню шума на
местности и в кабине самолета.
Успешное решение перечисленных задач во многом зависит от
совершенства двигателей, расположения их на самолете,
аэродинамического совершенства гондол (воздухозаборников,
реактивных сопл) Ш > E2J. Требования по уровню шума могут
накладывать определенные условия на конфигурацию каналов
воздухозаборников и реактивных сопл, а также на выбор типа
гондолы.
Для магистральных самолетов проблема создания
высокоэкономичных силовых установок (СУ) имеет особо важное
значение.
Уменьшение удельного расхода топлива за счет непрерывного
186
совершенстования узлов двигателя, параметров его газодинамического
цикла, реализации тенденции разработки двигателей с малой удельной
тягой на единицу “обрабатываемой” ими массы воздуха, а
именно—разработки двухконтурных двигателей с большой (т = 4-^
8) и сверхбольшой т = 154-20 степенями двухконтурности.
Стремление обеспечить высокую экономичность в полете привело
также к разработкам компоновок СУ с отбором той или иной части
пограничного слоя планера в двигатель. Проведенные расчетные и
экспериментальные исследования на моделях подтвердили
возможность применения таких компоновок. В этом случае
кинетическая энергия возмущенного в следе за самолетом и
попадающего в двигатель воздуха будет меньщей, чем при обычных
компоновках, что приводит к повышению полетного КПД системы
планер-двигатель, компенсируя с избытком снижение термического
КПД двигателя из-за засасывания в компрессор двигателя воздуха,
имеющего пониженное полное давление (рис.4.1). Степень
эффективности отбора в двигатель пограничного слоя планера зависит
от особенностей компоновки самолета и применяемых двигателей.
Проведенные экспериментальные исследования на моделях показали,
что при применении компоновок с отбором пограничного слоя планера
на двухдвигательном самолете, когда оба двигателя размещены в
хвостовой части фюзеляжа, по сравнению с таким же самолетом, но
с двигателями в гондолах по бокам фюзеляжа при двигателях с малой
степенью двухконтурности дает 10—12% экономии топлива Г31.
Удельный расход топлива у двухконтурных двигателей падает по
мере увеличения степени двухконтурности (рис.4.2), однако лобовая
поверхность двигателей и внешнее сопротивление их гондол при этом
заметно возрастает.
Влияние коэффициента восстановления полного давления в
воздухозаборнике и на тягу R и удельный расход топлива Cr
характеризуется коэффициентом Kr.
£\R/R = &R = Kr • A v
^Cr/Cr = /^cr = G-Kr)^ v
Величина Kr зависит от скорости полета и от удельной тяги
двигателя, т.е. от величины тяги с килограмма расхода воздуха через
ь
187
Рис.4.1. Различные принципы компоновки двигателей на самолете:
а—обычная распространенная компоновка
б—компоновка с отбором пограничного слоя в двигатель
Рис.4.2. Изменение удельного расхода топлива
двигатель. При увеличении скорости полета величина Kr
уменьшается. На рис. 4. 3 приведена зависимость Kr от числа М
полета для одноконтурного двигателя. “Дорожка” разброса зависи-
мости соответствует различным значениям температуры газа перед
турбиной и степени повышения давления в компрессоре.
Увеличение степени двухконтурности и связанное с этим
188
уменьшение удельной тяги двигателя приводит к увеличению величи-
ны Kr (рис.4. 3).
Рис.4.3. Изменение коэффициента влияния при изменении числа М(а)и степени
двухконтурности т(б)
Удельный расход топлива двигателя Ся, как известно, связан с
его полным коэффициентом полезного действия т)о соотношением
_ 3600 •
Ся - „ . гг , где
7)0 Л. и
Ио — скорость полета, Ни — теплотворная способность
топлива. В свою очередь полный КПД (??о) является произведением
пропульсивного (??«) КПД и КПД, характеризующего двигатель как
тепловую машину (77 э)
7)0 = 7) э ' 7)п
Пропульсивный КПД зависит от скорости в отбрасываемой дви-
гателем реактивной струе газов (К)
2
Т7
С увеличением степени двухконтурности величина скорости Vc
уменьшается, что и приводит к увеличению КПД и уменьшению
удельного расхода топлива.
На рис. 4.2 приведено изменение удельного расхода топлива
авиационных двигателей для пассажирских самолетов, начиная с 60-х
годов. Показанное на графике постоянное снижение удельного расхо-
189
да топлива связано как с совершенствованием узлов двигателей, оп-
тимизацией параметров по мере развития авиадвигателестроения и
применения новой технологии, так и с постоянно возрастающей
степенью двухконтурности С 41.
Уменьшение удельного расхода топлива при увеличении степени
двухконтурности сопровождается увеличением лобовой поверхности
двигателя, возрастанием внешнего сопротивления гондол, увеличе-
нием их аэродинамического взаимодействия с планером самолета. Эти
обстоятельства требуют от конструктора самолета и силовой
установки больших усилий по совершенствованию гондолы и ее
элементов и оптимизации компоновки силовой установки на самолете.
Двухконтурный двигатель в зависимости от степени
двухконтурности может размещаться в гондолах различных схем
(рис. 4. 4).ТРДД с малой и умеренной степенью двухконтурности (w
^4) выполняется, как правило, со смешением потоков наружного и
внутреннего контуров и размещаются в гондолах с общим реактивным
соплом (нижняя часть схемы, приведенной на рис. 4. 4). Смешение
потоков контуров приводит к некоторому выигрышу в удельном
расходе топлива (за счет улучшения характеристик
термодинамического цикла). Этот выигрыш при степени
двухконтурности т = 44-5 может составлять 1,5 + 2%. Кроме того,
при смешении потоков контуров наличие камеры смешения и общего
сопла облегчают задачу размещения звукопоглощающих
конструкций, что важно для удовлетворения все возрастающих
требований по снижению уровня шума. В то же время наличие камеры
смешения и относительно длинной обечайки общего реактивного сопла
связано с увеличением массы и длины силовой установки.
При увеличении степени двухконтурности эффективность исполь-
зования смешения потоков наружного и внутреннего контуров на ха-
рактеристики ТРДД уменьшается, а увеличение массы гондолы и ее
длины становится все более значительным. Поэтому при т = 4-г5
используются гондолы как со смешением, так и без смешения потоков
контуров, а при как правило, используются ТРДД с раздель-
ными реактивными струями, размещаемые в "ступенчатой” гондоле
(верхняя часть схемы, приведенной на рис. 4. 4).
190
Рис.4.4. Схема гондолы
ТРДД и принятые обозначения геометрических
характеристик
Тяга двигателя, размещенного в гондоле ступенчатой формы,
должна определяться с учетом сил давления по поверхности а—Ь—
с—d—е (см. рис. 4. 4), у которой две части а—b и с—е "жидкие”.
В этом случае силы, действующие на все обтекаемые внутренним
потоком элементы двигателя, включая внутреннюю часть пилона и
выступающую за обечайку часть газогенератора, рассматриваются
как составляющие реактивной силы. Давление, возникающее на
внешней стороне поверхности а—b—с—d—е, определяет силы,
которые являются составляющими суммарных сил, действующих на
самолет. На практике силы, действующие на "жидкие” поверхности,
отдельно не определяются, они входят составляющими сил,
измеряемых на аэродинамических весах при испытаниях моделей в
аэродинамических трубах.
ТРДД сверхбольшой (т = 154-20) степени двухконтурности,
191
естественно, следует выполнять без смешения потоков контуров
(ввиду малой эффективности смешения и относительно больших габа-
ритов двигателя).
Снижение тяги двигателя с m = 4 4- 6, размещенного в гондоле,
из-за потерь давления в отдельных элементах характеризуется сле-
дующими ориентировонными данными:
Ступенчатая гондола Гондола со смешением
1. В воздухозаборнике теряется 1% тяги 1% тяги
2. В канале и реактивном сопле второго контура 2-3% —
3. На обтекателе газогенераторного контура 3-4% —
4. На внутренней части пилона 0,5% —
5. На обечайке вентилятора 2-3% —
6. На внешней части пилона 0,5% 0,5%
7. В канале и общем сопле — 2-3%
8. На обечайке гондолы — 4-6%
ИТОГО потери составляют 9-12% 7-10%
Потери тяги по п.п. 2 и 7 учитываются в характеристиках
двигателя. Двигатель, дла которого определены эти величины,
называется установленным. Потери тяги по п.п. 5, 6 и 8 учитываются
в поляре самолета.Потери тяги по п.п. 1, 3 и 4 учитываются
дополнительно вместе с потерями на отбор воздуха и мощности на
самолетные нужды при определении ЛТХ самолета.
Для удовлетворения требований по уровню допустимого шума на
местности стенки канала гондолы до вентилятора и за ним выпол-
няются со специальными шумоглушащими устройствами (рис. 4.5). В
случае невозможности размещения на стенках воздухозаборника
необходимой по площади звукопоглощающей конструкции следует или
увеличить длину канала, или установить в канале специальную (спе-
циальные) вставку с аналогичной конструкцией на ее боковых по-
верхностях (рис. 4.6). Наличие вставки в канале приведет к снижению
тяги двигателя на ~ 1% и увеличению удельного расхода топлива
примерно на ~“0, 5% Г53.
192
Збдкояемсицающиа
Рис.4.5. Размещение
звукопоглощающих конструкций в
ТРДД с высокой степенью
двухконтурности
if) я
«=« Jopn /ojA/O.’K'^Oll успмоАри
Рис.4.6. Размещение
звукопоглощающих конструкций в
канале воздухозаборника:
а — обычный воздухозаборник,
б—воздухозаборник с удлиненным коком
двигателя, в—воздухозаборник с соосной
вставкой.
Одним из основных вопросов при разработке силовых установок
пассажирских самолетов является обеспечение газодинамической ус-
тойчивости двигателей в условиях эксплуатации самолета. Запасы
газодинамической устойчивости и максимально возможная в условиях
эксплуатации самолета неоднородность потока в канале воздухоза-
борника, влияющая на величину запасов устойчивости двигателя,
должны быть взаимно связаны. Неоднородность потока, характеризу-
емая стационарной неравномерностью и пульсациями полного давления
или их суммой, может достигать наибольших уровней для самолетов с
дозвуковой скоростью полета на взлетных и посадочных режимах при
наличии скосов потока, а также при взлете с боковым ветром, на
крейсерских режимах при полете в турбулентной атмосфере. Изучение
теоретическими методами характера распространения неоднородного
потока в компрессоре в сочетании с обобщением экспериментального
материала позволили разработать методологию и количественные
критерии для согласования воздухозаборников с одноконтурными
двигателями. Эти разработки были распространены с некоторым
дополнением на гондолы двухконтурных двигателей, однако в какой
мере это приемлемо для гондол двигателей с большой и тем более
сверхбольшой степеней двухконтурности, еще не определено из-за
отсутствия достаточных экспериментальных материалов. Таким
193
образом, вопрос обеспечения устойчивой работы двигателя большой и
сверхбольшой степетни двухконтурности на самолете должен
решаться с учетом указанных выше положений и нормативных
материалов, на основе индивидуальных особенностей двигателя,
самолета и их компоновки.
4.2. Аэродинамика гондол двухконтурных двигателей
Разработка гондол для двухконтурных двигателей базируется на
комплексе расчетных и экспериментальных исследований гондол в
целом и их отдельных элементов.
4.2.1. Воздухозаборники двигателей умеренной и большой
степени двухконтурности
На начальном этапе проектирования целесообразно использовать
приближенную зависимость, с помошью которой для раз-
рабатываемого самолета оценивается влияние геометрических пара-
метров воздухозаборника (ВЗ) на дальность полета самолета.
Принимается, что при малом изменении геометрии воздухозаборника
величина подъемной силы изменяется незначительно. Относительное
изменение дальности полета представляется в виде:
А Т / А А Г' £±Gb3 ’ (1
1
Gb3
In
где
zx и х— относительное изменение внешнего сопротивления при
_ вариантах геометрии ВЗ,
А С у?— относительное изменение удельного расхода топлива из-за
потери полного давления в ВЗ,
А Свз —относительное изменение веса ВЗ, Он, Gk — вес самолета
в начале и конце полета.
В анализе используются данные по рассматриваемому самолету,
194
по расходному сопротивлению ВЗ, коэффициенту сопротивления
трения CxTP = -F(Re), зависимости A Cr = (1 — Kr) А ььР(где v ср
__средний по площади входа в двигатель коэффициент восстановления
давления, <^сР = 1 — РсР), а также зависимость суммарной
неоднородности потока на выходе из канала ВЗ двигателя W от
величины угла раскрытия диффузора <&иф.
В результате анализа получаем характеристики типа приведен-
ных в качестве примера на рис. 4.7 и 4.8.
w%
10
И'/'М«,=0 И„тра= 15м/с с углом 0 = 90°)
М„=0 8 А/ = 0 68 К= 12%
ol____
4 1600
Рис.4.7. Зависимость относительного удельного расхода топлива (ACr),
относительного сопротивления (А Сх) и параметра суммарной неоднородности
от геометрии воздухозаборника
I
195
Рис.4.8. Зависимость относительной дальности от
геометрии воздухозаборника
На рис.4.9 приведены также величины суммарной не-
однородности потока на входе в двигатель W в зависимости от угла
раскрытия диффузора канала
W= е + А (То где
£ — среднеквадратичная величина амплитуды пульсаций полного
давления,
А о-о—параметр окружной неравномерности полного давле ния.
. _ _ 1 W, />о \ ,
А бг0—-----—----5 1—I— )d<p,
<?2 <Р\ <Р\\ Роср /
где <Рг —<Pi — величина зоны пониженного по сравнению со средним
значением давления по окружности.
<7(Аср)—безразмерный расход воздуха.
Воздухозаборник с выбранной геометрией проходит эксперимен-
тальные исследования в аэродинамических трубах на критических
режимах, определяющих (подтверждающих) обеспечение условий,
необходимых для устойчивой работы двигателя. Такими режимами
являются:
— М = 0 и начальный участок разбега самолета без бокового
ветра и при его наличии;
196
— крейсерские режимы полета с выходом на предельные углы
атаки.
При разработках гондол двигателя решение задач аэродинамики
направлено на обеспечение устойчивой (безпомпажной) работы
двигателя в условиях эксплуатации самолета, на обеспечение высоких
аэродинамических характеристик.
На начальной стадии проектирования самолета, если для этого
самолета нет особых требований, возможно использовать накопленный
опыт проектирования ВЗ для дозвуковых самолетов Гб]. В этом
случае целесообразно рассмотреть ВЗ со следующей геометрией
(рис.4.4):
—диаметр "горла” ВЗ выбирается исходя из обеспечения удель-
Q
ного расхода воздуха К'Г1р 200 кг/м2 (Gnp—приведенный расход
воздуха, Fr—площадь "горла” ВЗ), что исключает возможность
возникновения местных зон со сверхзвуковым потоком и позволяет
иметь некоторый запас по площади "горла” для компенсации производ-
ственных допусков на параметры двигателя и воздухозаборника.
£>диф — угол раскрытия диффузора в канале не должен превышать 8°—9°,
что исключает возникновение (развитие) отрывного течения в канале.
do—диаметр ВЗ по передней кромке должен обеспечить выполнение
входного коллектора с коэффициентом коллекторности К =
10-12%, что исключает возникновение отрывного течения на
входе в канал в условиях эксплуатации самолета.
dtt=— диаметр миделевого сечения гондолы выбирается из
обеспечения d^do/du^ 0,86.
Ai — длина ВЗ определяется выбранными выше параметрами. Для
примера приведем геометрические параметры ВЗ двигателя
ПС-90:
— длина воздухозаборника /н —0,64 du,
— входной коллектор с К =12%,
— угол раскрытия диффузора в канале <р диф. — 9°, _
— относительный диаметр обечайки по ее передней кромке do~
0,844-0,86.
197
Рис.4.9. Изменение характеристик воздухозаборника на М = 0 работа на
месте в зависимости от величины коллекторности
а—коэффициент потерь полного давленияt&р = (1-^)3
б—параметр радиальной неравномерности (А б
в—параметр суммарной неоднородности(W).
Выполнение у ВЗ коллектора с /^<304-12% приведет на
М = 0, на начальном участке разбега, а также в крейсерском полете
в условиях турбулентной атмосферы, когда угол атаки самолета
может достигать предельных величин, к срывным явлениям на входе
в ВЗ и, как следствие, к большой неравномерности поля полных
давлений и низким уровням среднего по сечению коэффициента
восстановления полного давления Уср (рис 4.9), что может вызвать
помпаж двигателя. При проектировании ВЗ целесообразно
использовать разработаныые типовые, предельные величины
параметров А о о и W.
Возможно выполнение ВЗ с меньшей входной коллекторностью,
чем приведено выше, но это потребует применения у него специальной
механизации, выполненной, например, в виде окон перепуска с
клапаном в зоне входа и с относительной площадью в критическом
сечении
Рщ=4^=20-?-23%(рис. 4.10), где
Г г
Fui —площадь в критическом сечении окон,
Fr —площадь "горла” ВЗ.
198
Возможно в качестве механизации у ВЗ выполнение щели
вдува воздуха или предкрылка.
От величины относительного
Рис.4.10. Воздухозаборник с
механизацией (вариант 1)
диаметра по передней кромке ВЗ
существенно зависит протекание
зависимости Cxotf ), где /=4=^;
Г о
Foo-площадь струйки, входящей в
воздухозаборник в невозмущенном
потоке; Fo —площадь входа в
воздухозаборник, соответствующая
do, рис.4.11 и 4.12. Если
при ао = 0,85, как это видно из
рисунков, изменение коэффициента
расхода воздуха через ВЗ от 0,8
до 0,5 (например, при дросселировании или при отказе двигателя)
приводит к относительно небольшому возрастанию лобового
сопротивления обечайки вентилятора двигателя Схо, то при обечайке с
б/о=0,938 это приводит к резкому увеличению лобового
сопротивления. Поэтому при проектировании ступенчатых гондол
обечайку вентилятора следует по возможности выполнять с меньшими
величинами d0^ 0,86.
Внешняя часть воздухозаборника (от начала коллектора до
миделевого сечения гондолы) очерчивается контуром
п принимается равным 0,45 для М крейс —0, 64-0, 7 и 0, 6 для
М крейс = 0, 75.
Коэффициент расхода воздуха такого воздухозаборника на
крейсерских режимах полета для обеспечения минимального внешнего
сопротивления должен быть порядка / = 0,65 — 0,75. Если
необходимо повысить коэффициент расхода, то этого можно
достигнуть увеличением угла раскрытия диффузора до диф. — 8°-9°.
Воздухозаборник с выбранной на этапе проектирования предва-
рительной геометрией должен (для его оптимизации) быть эксперц-
199
Рис.4.11. Изменение параметра
(Qo-Cxo(/=0,85)) на М = 0,7 в
зависимости от коэффициента расхода
воздуха(/) для обечаек с различными
диаметрами по передней кромке:
а—при Л = 0,85
б—при г?о = 0,9
в—при d0 = 0,938
ментально исследован на модели,
d =09 -/- = 07
Рис.4.12. Изменение параметра
(Схо-С№(/=0,85)) на М=0,8 в
зависимости от коэффициента
расхода(/)для обечаек с различными
диаметрами по передней кромке:
а—при do — 0, 85
б—при do = 0,9
в—при do = 0,938
схема которой приведен на рис.
4.13, а. При этом определяются следующие характеристики:
—коэффициент восстановления полного давления на входе в
двигатель;
—параметры окружной и радиальной неравномерности потока на
входе в двигатель;
—пульсации полного давления на входе в двигатель.
Для определения этих характеристик на модели в сечении на
входе в двигатель должны быть установлены гребенки с приемниками
полного и статического давления и приемники для измерения пульса-
ций.
Характеристики воздухозаборника определяются в диапазоне .
изменения расхода воздуха, имеющем место при эксплуатации
самолета.
200
Модель для экспериментальных t исследований воздухозаборника
приемники давления и пульсаций
трубе
контура
узлы
' рамы
подвески Т—образной
в трубе
/ исследуемый
воздухозаборник
__ узлы подвески модели в
Модели для исследования обечаек наружного
Т—образная рама
Приемники полного___________
давления на поворотной гребенке
Рис.4.13. Виды моделей элементов ступенчатой гондолы
а—модель для испытаний воздухоаборников;
б—модель для испытаний обечаек наружного контура;
в—модель для испытаний хвостовой части гондолы
4.2.2. Воздухозаборники двигателей со сверхбольшой степенью
двухконтурности
Увеличение экономичности силовой установки может быть до-
стигнуто применением двигателей со сверхбольшой двух-
контурностью. Однако, вследствие ряда особенностей этих двигателей
использование при разработках компоновок с их применением требует
иных принципов, чем при двигателях с малой и умеренней
двухконтурностями. Особенностями двигателей, которые следует
учитывать при разработках воздухозаборников, являются:
— большие диаметры двигателей;
— большие скорости воздуха на входе в двигатель в крейсерском
полете самолета;
— отсутствие выступающих за обводы вентилятора агрегатов;
— высокий коэффициент влияния потерь полного давления на
201
входе в двигатель на его тягу;
— обеспечение реверса тяги поворотом лопастей вентилятора.
Вследствие этих особенностей необходимо применение новых
технических решений при разработках гондол и, в частности, воз-
духозаборников. Применение разработанных для ТРДД с менышей
двухконтурностью технических решений приведет, как зто видно на
рис.4.14 (см. вариант 3), к переразмеренному миделю гондолы,
относительно большой длине обечайки вентилятора, а, следовательно,
к увеличению веса и Сх гондолы.
Основными задачами, которые необходимо решить на первых
этапах разработок силовой установки с ТРДД сверхбольшой двухкон-
турности являются:
— разработка воздухозаборника с оптимальной геометрией, при
которой обеспечиваются условия, необходимые для устойчивой работы
двигателя при минимальном внешнем сопротивлении;
— разработка системы реверса поворотом лопастей вентилятора;
— разработка оптимальной обечайки вентилятора с малым внеш-
ним сопротивлением.
За основу при разработках на начальной стадии представляется
целесообразным принять ВЗ малой длины, обечайку вентилятора
малой длины с минимальным, исходя из габаритов двигателя, миделем,
воспользовавшись при начальном выборе контура той же
зависимостью, что и для ТРДД с умеренной двухконтурностью.
Проведенный комплекс расчетных и экспериментальных иссле-
дований позволил разработать два варианта воздухозаборников для
ТРДД со степенью двухконтурности т = 134-17. Вариант 1 с
механизацией и вариант 2 без механизации.
Вариант 1 имеет относительную длину канала /к=_4^=0,24,
С4м
входную коллекторность К = 4% н относительный диаметр по
передней кромке б7о = 0,94 (рис. 4.15). При этом варианте на одном
из основных критических режимов, определяющих в основном
геометрию ВЗ, а именно при Моо = 0 и на начальном участке разбега,
имеет место характеристики, приведенные на рис. 4.15, Как видно из
рис. 4.15, на М = 0 средние потери полного давления при приведенном
Рис.4.14. Виды воздухозаборников для ТРДД со сверхбольшой
двухконтурностью
а—воздухозаборник с механизацией (вариант 1)
б—воздухозаборник без механизации (вариант 2 и 3)
расходе воздуха, соответствующем <7 (А ср) = О, 66 (является
расчетным для одного из двигателей с w = 13) не превышают 4—2%
уже при И»=20 м/с.
Вариант 2 имеет относительную длину /к=0,45, не имеет
механизации, К =7, 3% и ё/о=0, 944-0, 95 (рис. 4.15). Этот вари-
ант ВЗ на Ио—0 имеет средние потери полного давления~8%, но
уже при К = 20—25 м/с оба варианта имеют одинаковые потери
полного давления. Оба варианта исследовались на моделях без
моделирования работы вентилятора. Оба могут использоваться на
самолетах с нормальным взлетом и со взлетом с “додачей” газа, т.е.
с выводом двигателя на взлетный режим после трогания самолета с
места, для уменьшения зоны сечения, занятой срывным потоком на их
203
входах. На втором критическом режиме работы ВЗ, а именно в
крейсерском полете с выходом на большие углы атаки, оба ВЗ могут
обеспечить условия, необходимые для устойчивой работы двигателя. В
Рис.4.15. Характеристики вариантов воздухозаборников для ТРДД со
сверхбольшой двухконтурностью
а-воздухозаборник с механизацией вариант 1)
б-воздухозаборник без механизации (вариант 2)
обоих случаях обеспечивается безотрывное течение на входе в
двигатель вплоть до углов атаки сваливания самолета. В качестве
примера на рис.4.16 представлены характеристики, полученные в
аэродинамической трубе Т-106, где показано, на примере
характеристик самолета Ту-204, что при этих ВЗ начало
возникновения отрывного течения на их входе можно ожидать при
М = 0,6 4- 0,7 только при достижении самолетом углов атаки
Ct — <Тсвал.
Применяя эти ВЗ, следует иметь ввиду, что вследствие больших
относительных диаметров по их передним кромкам, обусловленных
выбором минимально возможного миделя обечайки, при
дросселировании двигателя возрастает лобовое сопротивление гондолы
(рис.4.11 и 4.12).
4.2.3. Внешнее сопротивление обечайки гондолы
Внешнее сопротивление обечайки гондолы (в ступенчатой
гондоле-обечайки наружного контура) является составляющей сил
204
больших углах атаки.
внешнего сопротивления летательного аппарата, определяемых при
испытаниях аэродинамических моделей с гондолами двигателей в
аэродинамических трубах. Однако в ряде случаев исследования
внешнего сопротивления обечайки гондолы представляют
самостоятельный интерес, например, при оптимизации обводов
гондолы, и проводятся на специальных стендах (см, например, рис.
4.13, б)С6].
Как уже отмечалось, экспериментальное определение сил
внешнего сопротивления может осуществляться двумя методами:
весовым и с использованием теоремы импульсов. В последнем случае
величина коэффициента внешнего сопротивления обечайки (отнесенная
к площади миделя гондолы) выражается следующим образом:
Сх= F 2 . SSidF,
-Г МИД К • М оо F
где Зг — 1—-р^— потери полного давления в следе за обечайкой,
определяемые по величине полного давления Рог, измеряемого
гребенками приемников полного давления за обечайкой.
При определении аэродинамических сил, в том числе сил внешне-
205
го сопротивления, весовым методом, то есть при установке
исследуемой модели на аэродинамических весах, определяются
суммарные силы, действующие на обечайку (на внешней и внутренней
поверхности). Затем с помощью приемников полного и статического
давления определяется внутреннее сопротивление обечайки (протока).
Ниже приводятся некоторые результаты исследований влияния
различных параметров гондолы и режимов полета и работы двигателя
на величину коэффициента внешнего сопротивления обечайки,
полученные Петровым В.К. Все геометрические параметры обечайки
отнесены к диаметру миделя Е73.
Рис.4.17. Изменение коэффициента внешнего сопротивления обечайки в
зависимости от числа М» полета при различных относительных размерах среза
На рис. 4.17 показано влияние числа М» набегающего потока на
величину Сх при различных относительных диаметрах среза обечайки.
При достижении определенного числа Моо = МкрИт на обечайке
образуются зоны сверхзвукового течения, сопровождающегося
резким возрастанием волнового сопротивления. Величина М крит
206
возрастает с увеличением d<^. Увеличение М крит происходит и при
увеличении относительного диаметра входа в воздухозаборник («о),
что объясняется меньшей интенсивностью разгона потока на
поверхности обечайки (рис.4.11 и 4.12).
Как уже упоминалось, значительное влияние на величину коэффи-
циента внешнего сопротивления оказывает коэффициент расхода
воздуха (рис.4.11 и 4.12). Уменьшение коэффициента расхода
воздуха сопровождается увеличением коэффициента внешнего
сопротивления, тем большем, чем больше относительный диаметр
входа в воздухозаборник. Такой характер изменения Сх при
уменьшении f определяется влиянием 2-х факторов: сопротивлением
по “жидкой” линии и возникновением подсасывающей силы вследствие
появления разрежения на носовой части обечайки воздухозаборника,
тем большего, чем меньше величина <4. При коэффициентах расхода
/^0,75 влияние его на внешнее сопротивление, как правило,
невелико.
Следует отметить, что гондола двигателя сверхбольшой степени
двухконтурности, имеющая вследствие особенностей таких
двигателей (большие скорости потока на входе в вентилятор) большие
значения до и малую коллекторность, относится к тому типу гондол,
для которых характерно резкое возрастание внешнего сопротивления
при уменьшении коэффициента расхода. Поэтому при проектировании
гондолы такого двигателя (учитывая также значительное влияние
потерь полного давления на тягу двигателя) необходимо особенно
тщательно комплексное согласование всех геометрических
параметров гондолы и воздухозаборника.
Комплекс исследований обечаек гондол ТРДД позволил получить
обширный материал по влиянию геометрических параметров на
коэффициент внешнего сопротивления, позволяющий в свою очередь
проводить оптимизацию обводов с целью обеспечения минимального
внешнего сопротивления.
На рис.4.18 приведена зависимость Сх от относительной длины
обечайки, построенная для коэффициентов расхода /=0,84-0,95. На
этом же графике нанесена величина турбулентного трения,
определенная при Моо=0,8 по следующим зависимостям:
207
r =____________0, 455__________
О/ / v____Л \ 0,467
(URe)2’58^2^^2.»]
где S -площадь боковой поверхности,
P°O R°o lГ
lv—длина обечайки (гондолы)
Видно, что минимальная величина коэффициента внешнего со-
противления практически совпадает с коэффициентом сопротивления
турбулентного трения.
Рис.4.18. Изменение величины
коэффициента внешнего
сопротивления обечайки в
зависимости от относительной длины
(а) и угла сужения хвостовой
части (б)
Из приведенной на рис. 4.18
зависимости Сх/1 г от угла
сужения обечайки при различных
значениях коэффициента расхода
следует, что при оценке внешнего
сопротивления обечайки с
достаточной точностью можно
принять, что коэффициент
внешнего сопротивления
составляет величину 0,01 на 1
калибр длины обечайки.
4.2.4 Хвостовая часть гондолы
Степень совершенства
реактивного сопла(или сопел при
раздельном истечении реактивных
струй наружного и внутреннего
контура ТРДД)оказывает большое
влияние на характеристики силовой
установки. Основным требованием к хвостовой части гондолы с
реактивными соплами является обеспечение минимальных потерь
эффективной тяги сопел, связанных с потерями тяги двигателя
соотношением
208
А 7?^= kyCА7?эФ.С
ZV двиг
где kyC —коэффициент усиления потерь тяги сопла при пересчете
на потери тяги двигателя, а
А7?,фс=^Ч
-ГСс.ИД
А7?Эфс—потери эффективной тяги сопла, 7?Сад—идеальная
тяга сопла(тяга сопла при полном расширении газа).
Потери эффективной тяги сопла А7?Эф.с включают потери,
связанные с течением в сопле, и силы, возникающие на хвостовой
части гондолы, связанные с взаимодействием внешнего набегающего
потока с реактивной струей. Потери эффективной тяги сопла(сопел)
определяются экспериментально с помощью тензовесов на
специальных стендах(см. например, рис.4.40).
Величина
kyc~
V С.ИД
где Ис.ид —скорость истечения газа из сопла при полном расширении
газа в сопле. С увеличением степени двухконтурности w
уменьшается скорость истечения из сопла, и величина kyc
увеличивается, достигая при ж=15—20 значения £>с = 4—5.
Такие большие значения kyc ужесточают требования к
совершенству реактивных сопл при увеличении степени
двухконтурности ТРДД. Для ТРДД, выполненного по схеме со
смешением потоков, величина потерь эффективной тяги сопла А7?Эф.с
зависит от перепада полного давления в сопле( где рос
Ри
—полное давление газа в сопле, Рн —давление в окружающей
атмосфере), угла сужения хвостовой части и скорости полета. При
оптимальной геометрии хвостовой части гондолы величина А7?Эф.с для
сопла ТРДД со смешением потоков, при степени двухконтурности
w=44-8 может составлять 14-1,5%.
В случае ТРДД без смешения потоков контуров, размещенном в
ступенчатой гондоле, в потери эффективной тяги А7?Эф.с, кроме
209
потерь тяги, связанных с течением в соплах, включаются силы,
возникающие при обтекании реактивной струей наружного контура
обтекателя газогенератора и части пилона, а также силы, связанные с
взаимодействием внешнего набегающего потока с реактивной струей
наружного контура вентилятора.
Рис.4.19. Изменение потерь
эффективной тяги двухконтурного
сопла в зависимости от
Рис.4.20. Изменение потерь
эффективной тяги двухконтурного
сопла в зависимости от
относительного диаметра сопла
внутреннего контура(а)и
относительной длины
газогенератора(б)
относительного диаметра сопла
наружного контура(а)и
относительной длины
газогенератора (б)
На рис.4.19 и 4.20 приведены зависимости потерь эффективной
тяги хвостовой части гондолы от относительного диаметра на срезе
обечаек наружного и внутреннего контуров и относительной длины
газогенератора.(Параметры отнесены к диаметру миделевого сечения
гондолы).Изменение отнсительной длины выступающей за срез сопла
наружного контура части газогенератора I гг при испытаниях
осуществлялось двумя способами: увеличением длины обечайки
210
наружного контура при сохранении общей длины модели и
уменьшением общей длины модели при уменьшении I гг и увеличении
угла сужения газогенератора в гг.
Результаты исследований показывают, что увеличение
диаметров среза сопел наружного и внутреннего контуров приводит к
увеличению потерь эффективной тяги. Это_связано с тем, что при
увеличении диаметров срезов сопл d I и d II уменьшается осевая
проекция сил давления в зоне среза, возникающих при обтекании
внешним потоком хвостовой части гондолы с расширяющейся
реактивной струей.
Рис.4.21. Изменение потерь эффективной тяги двухконтурного сопла в
зависимости от угла сужения обечайки газогенератора
На рис.4.21 представлено значение потерь эффективной тяги в
зависимости от угла поднутрения обечайки газогенератора 0 гг при
постоянном диаметре среза обечайки наружного контура и различных
относительных длинах сужающейся части обечайки наружного
контурра I хв и постоянной длине хвостовой части I хв+ I гг. Из
приведенных материалов видно, что при каждом значении I хв = const
имеется оптимальный угол 0гг, при котором благодаря наилучшему
211
сочетанию направлений потоков из наружного и внутреннего контуров
обеспечиваются минимальные значения потерь эффективной тяги. Эти
минимальные значения потерь эффективной тяги в зависимости от
относительного диаметра среза сопла наружного контура приведены на
рис.4. 22 для диапазона скорости полета М — 0, 5^-0, 85. Данные,
приведенные на рис.4.19—4.22, получены в исследованиях
В.К.Петрова Е83.
При оптимизации геометрии хвостовых частей ступенчатых
гондол представляется целесообразным рассмотреть широкую
вариацию параметров при поиске наилучших решений расчетными
методами.
Рис.4.22. Оптимальные значения потерь эффективной тяги при различных
величинах относительного диаметра сопла наружного контура
<*
На рис.4.23 приведены в качестве примера результаты расчета
поля давлений около хвостовой части ступенчатой гондолы,
полученные интегрированием уравнений Эйлера [81.
212
Mr0.7?:, Kenzos
Р/РН сопзт
Рис.4.23. Поле течения около хвостовой части ступенчатой гондолы
4.3. Реверс тяги двигателя
В отличие от двигателей с малой и большой степенями
двухконтурности у двигателей со сверхбольшой степенью
двухконтурности реверс может обеспечиваться поворотом лопастей
вентилятора. В этом случае на режиме реверса роль воздухозаборника
выполняет сопло вентилятора, а роль сопла—воздухозаборник
двигателя(рис.4.24).То есть воздух через сопло поступает в канал
вентилятора, а выходит через ВЗ двигателя. Поскольку сопло имеет
острые кромки, то, естественно, на входе в канал вентилятора
1 . 1
возникает отрыв потока и зона срывного потока занимает
сечения канала(рис.4.24 и 4.25).Спектр течения получен с помощью
саже-масляного покрытия. Следствием срывного течения являются
большие потери полного давления и неравномерное поле полных
давлений на входе в рабочее колесо вентилятора. Величина этих
потерь давления для гондолы двигателя со степенью двухконтурности
w = 134-17 получена экспериментально в аэродинамической трубе
при испытаниях модели, схема которой представлена на рис.4.24.
213
Режс/^
тяге/
Р/п клолянжц а яс Я
C/77 Рорка
Рас1ие/гля>-ощс( я cp
J"
НяоиЗнот} лоллектс^
-------->—г
£=4- = омчргн
ff
„г
кольцо 6 лара ле
Рис.4.24. Характер течения на режимах реверса тяги при разных вариантах
хвостовой части обечайки
Необходимые расходы воздуха через канал вентилятора и ВЗ
газогенератора на модели обеспечивались с помощью специальной
эжекторной установки. При скорости набегающего потока У°о = 0 и
расчетных значениях <7 (А ср) коэффициент восстановления полного
давления на входе в рабочее колесо вентилятора составляет
214
v ср=0,9 а при скорости набегающего потока Уоо — 60 м/с
уменьшается до v ср = 0,83(рис.4.2б).
Рис.4.25. Спектр потока в зоне сопла вентилятора при У°° — О и 60 м/с
Уменьшение потерь полного давления в канале вентилятора в
зоне размещения рабочего колеса вентилятора, а также обеспечение в
215
этом сечении более равномерных полей v, а следовательно повышение
Чяги двигателя на режиме реверса, как показали исследования,
возможно обеспечить с помощью следующих мероприятий:
—использованием отклоняющихся створок в зоне хвостовой
части обечайки вентилятора (рис.4.24,а);
2 I-
0
1 О
09 ч
08
20 40
60 К» м / с
Рис.4.26. Изменение параметров воздухозабо&ика и ср и сь перед рабочим
колесом вентилятора на режиме реверса
—выполнением хвостовой части обечайки расщепляющейся (рис.
4.24,6);
—применением надувного коллектора во время реверса в зоне
сопла вентилятора (рис.4.24,в);
—размещением в канале вентилятора, в зоне сопла кольца (рис.
4.24,г).
При варианте обечайки с отклоняющейся створкой (вариант 10)
на режиме реверса тяги, как показал комплекс экспериментальных
216
to
Рис.4.27. Спектр потока на входе в канал вентилятора
исследований, возможно обеспечить безотрывное втекание потока в
канал вентилятора, что видно, например, из рассмотрения спектра,
Gnprr «0,17кг / с, GnpB = 2 4кг / с
60
угол отклонения створки
Рис.4.28. Изменение коэффициента восстановления полного давления на входе
в рабочее колесо вентилятора в зависимости от длины и угла отклонения
створки.
приведенного на рис.4.27.В этом случае, как можно видеть из рис.
4.26 и 4.27, характеристики потока на входе в рабочее колесо
улучшаются. Степень улучшения характеристик возрастает по мере
218
Канал вентилятора
потреб н ые <р при
Г =0,053
/ 0
Иоо = 60м / с
угол отклонения створки
Рис.4.29. Влияние относительной длины створки и угла ее отклонения на
приращение коэффициента восстановления полного давления на входе в рабочее
кол со вентилятора.
увеличения угла отклонения створки независимо от ее длины (рис.4.
28).Одинаковое приращение коэффициента восстановления можно
обеспечить при створках разной длины (рис.4.29). отклоняя их на
разные углы. Например, для получения прироста А и ср =
= 14р - Усржх =0,06 створку, имеющую относительную длину
219
I —-^-—0,15, следует отклонить на угол <р — 23°, а створку с
7=0,053 на ~67°. Следует отметить, что при таких углах
отклонения концевые сечения этих разных по длине створок будут
находиться на одинаковом расстоянии от поверхности обечайки.
тавшеися неотклоненнои
Рис.4.30. “Расщепляющаяся1
хвостовая часть обечайки
/-Хбос/т-юЗая час/7?б
оЬечаы^у
Улучшение характеристик потока на входе в рабочее колесо
вентилятора возможно обеспечить также выпол-
нением “расщепляющейся” хвостовой части обечайки, когда обра-
зуется своеобразный изогнутый канал между створками и ос-
средней частью обечайки(см. рис.4.24
и 4.30),обеспечивающий поворот
потока и безотрывное втекание в
канал вентилятора. Величина
положительного эффекта зависит
также от длины образующихся при
расщеплении обечайки створок.
Величины и ср перед рабочим колесом
вентилятора, полученные в
экспериментальных исследованиях
при "расщепляющейся” обечайке на
Voo = 0 и 60 м/с, приведены на рис.
4.26. Там же представлены
результаты экспериментальных исследований, когда в зоне сопла
выполнен надувной коллектор или в канале установлено кольцо с
диаметром б/к=0,858б7с.
4.4. Компоновка силовой установки на самолете
При компоновке силовой установки на самолете возникает ряд
проблем, от успешного решения которых может существенно зависеть
как экономичность, так и безопасность полета.
При установке гондол двигателей на хвостовой части фюзеляжа
на характеристики и устойчивую работу двигателя может оказывать
влияние крыло, расположенное перед воздухозаборником. При
подкрыльевой компоновке неблагоприятное взаимное влияние гондолы
и крыла может приводить к заметной потере аэродинамического
220
качества самолета.
Рассмотрим некоторые результаты исследований различных
компоновок силовых установок на магистральных самолетах £33.
На всех отечественных и зарубежных самолетах с распо-
ложением двигателей на пилонах в хвостовой части фюзеляжа возду-
хозаборники удалены от поверхности последнего на расстояние, ис-
ключающее возможность попадания в канал пограничного слоя с
пониженным полным давлением(это расстояние обычно не меньше
двух толщин местного пограничного слоя) .Гондолы у боковых
поверхностей фюзеляжа должны быть установлены по линиям тока на
крейсерском режиме полета. Положение гондол должно быть
откорректировано в аэродинамической трубе при испытании
соответствующей модели, например, методом визуализации потока.
Углы притекания потока к плоскости входа в гондолы при их
расположении за крылом намного меньше, чем при расположении
гондол перед крылом и возникновение срыва потока с внутренних
поверхностей коллекторного участка на больших углах атаки в этом
случае меньше (рис.4.31— 4.33).
Высокая неоднородность потока в каналах гондол,
расположенных у боковых поверхностей фюзеляжа, связана в
основном с образованием вихревого течения на крыле или с явлениями
срыва потока с поверхности крыла, которые могут иметь место на
самолете во взлетной и посадочной конфигурациях или на крейсерских
режимах при полете в турбулентной атмосфере при выходе на большие
углы атаки. На рис.4.34 наглядно показано, как изменяется поле
давлений перед воздухозаборниками гондол, размещенных на
хвостовой части фюзеляжа, в зависимости от угла скольжения и
отклонения интерцептора. Локальные срывы потока с крыла, которые
могут в полете вызывать помпаж двигателя, возникают также в зонах
между предкрылком и фюзеляжем, если при отклоненном предкрылке
между его торцевой поверхностью и фюзеляжем образуется щель,
которая является достаточно сильным источником завихрения потока.
Торцевые поверхности наплывов на передней кромке крыла или
предкрылков являются также причиной образования свободных вихрей,
интенсивность которых возрастает с увеличением угла атаки крыла.
221
to
to
00
Рис.4.31. Исследование поля течения перед двигателями, /9 = 10°, а = 20° (модель самолета Ил-62)
Рис.4.32. Исследование поля течения перед двигателем (модель самолетаТу-154)с неотклоненным интерцептором
to
Рис.4.33. Исследование поля течения перед двигателем (модель самолетаТу-154)при отклоненном интерцепторе
Завихренный поток, попадающий в воздухозаборник, также может
быть причиной помпажа. В этом случае необходимо линии тока с
завихренностью сместить в сторону от воздухозаборника посредством
специальных конструктивных мероприятий.
Рис.4.34. Влияние отклонения интерцепторов на поля потерь полного давления
перед входом в двигатель на взлетном и посадочном режимах
На крейсерских скоростях при полете в турбулентной атмосфере
или при создании перегрузки, когда возможен выход на большие углы
атаки, на верхней поверхности крыла может возникнуть срыв потока
в широкой зоне перед воздухозаборниками. Полное давление в этой
зоне низкое и неравномерно распределяется в плоскости,
перпендикулярной направлению полета (рис.4.35).Такие условия могут
быть причиной помпажа двигателей в полете и накладывают
дополнительные ограничения на максимально допустимые углы атаки.
При компоновке с размещением двигателя внутри хвостовой
части фюзеляжа с воздухозаборником перед килем(рис.4.3б) особое
внимание должно быть уделено отработке конфигурации канала
S-образной формы и сопряжению реактивного сопла с килем. Потери
полного давления в каналах такой формы в 3—4 раза больше, чем в
225
каналах обычных гондол, и составляют 14-1,3% для двигателей со
степенью двухконтурности w = 44-б.Основные причины сравнительно
больших потерь полного давления в S-образном канале—его большая
длина и кривизна осевой линии. Опытные данные свидетельствуют о
том, что для получения удовлетворительных характеристик такого
г
канала необходимо соблюдать условие ^>3, где г —радиус
кривизны осевой линии канала, a D —диаметр канала. Сопряжение
сопла с килем следует выполнять так, чтобы донные поверхности с
пониженным давлением в зоне среза сопла были минимальными.
Донные поверхности обычно связаны с образованием показанного на
рис.4.37“навеса”со стороны киля над соплом. Действительно,
сравнение двух компоновок, приведенных на рис.4.37,показывает, что
наличие “навеса”над реактивной струей приводит к снижению тяги и
увеличению удельного расхода топлива. Ухудшение характеристик
двигателя из-за потерь в относительно длинном канале (например,
канале S-образной формы) и возможных неблагоприятных донных
эффектов в области реактивных сопл частично компенсируется
уменьшением внешнего сопротивления самолета при размещении
двигателя внутри фюзеляжа.
Рис.4.35. Поля потерь полного давления перед входом в двигатель на
крейсерском режиме
226
/%' о
8а/ЩарТ АхерЯ
С /ш/Ц срезом
rtowsr/r
А/
Зои at Сорбрннего
урю/еммо
по то/ест £ ХояМ?
лобер/с// оать
Qo/ojej/pa^ccf
/> ex горного
ЧЧ&ег*& ttautyta'.
IV
Ф+озелАЖ.
VJ—Hanpofaetfi/t
/7ога*сг 4/ фюзеляжа'
Рис.4.36. Схема течения воздуха на входе в S-образный канал при боковом
ветре
Рис.4.37. Варианты компоновки двигателя в хвостовой части фюзеляжа:
а—с“навесом”над соплом
б—без“навеса”
227
Неоднородность потока в S-образном канале перед двигателем в
условиях полета зависит от кривизны и при не превышает
нормативных данных. При больших углах атаки ее уровень вследствие
положительного влияния фюзеляжа меньше, чем в каналах гондол,
расположенных по бокам фюзеляжа или под крылом и в этом случае
не бывдет критическим. На режимах взлета и посадки при боковом
ветре во входном участке воздухозаборника, расположенного над
фюзеляжем перед килем, наблюдается сложное течение с двумя
зонами сорванного потока: с коллекторного участка канала и с
поверхности фюзеляжа(рис.4.3б).Эти обстоятельства нередко
являются причиной помпажа двигателя.
Для предотвращения явлений помпажа рекомендуются
следующие конструктивные меры:
— смещение воздухозаборника от поверхности фюзеляжа;
— выполнение воздухозаборника с косым срезом, как показано на
рис.4.36;
— выполнение у воздухозаборника механизации в виде окон
подпитки канала(с противопомпажными створками).
Значения допустимых для самолета углов атаки, при которых
неоднородность потока в канале и запасы газодинамической
устойчивости двигателя взаимно согласуются, должны оцениваться в
процессе разработки самолета, доводки двигателя и силовой установки
в целом. Для этого целесообразно использовать данные, полученные
при испытаниях моделей-аналогов в аэродинамических трубах и при
испытаниях двигателя на стенде с имитацией неоднородности потока
на входе.
Сопоставление значений углов атаки самолета, допустимых по
запасам устойчивости силовой установки, с возможными в условиях
полета углами атаки может быть основанием для разработки
рекомендаций на те или иные изменения входных каналов гондол, их
сопряжений с крылом и доработку крыла при расположении гондол в
хвостовой части фюзеляжа или на увеличение запасов устойчивости
двигателя.
При компоновке силовой установки под крылом наиболее
228
существенным фактором является взаимное влияние(интерференция)
гондолы и крыла. Это взаимовлияние определяется полем течения,
возникающим при обтекании компоновки и в особенности характером
течения в пространстве между гондолой и крылом. Это течение
формируется под влиянием скорости полета, геометрических обводов
гондолы, пилона и крыла, параметров входящих и выходящих из
гондолы струй.
Исследования показывают, что силы интерференции,
возникающие при установке силовой установки под крылом, зависят
от большого числа факторов, главным среди которых является
относительная величина расстояния среза реактивного сопла от
передней кромки крыла x=~j—(рис.4.38).На графике представлена
Ммид
зависимость потери аэродинамического качества за счет увеличения
внешнего сопротивления и уменьшения подъемной силы вследствие
взаимного влияния гондолы и крыла. Из графика видно, что с
увеличением величины х происходит заметное увеличение потерь
аэродинамического качества. Это обстоятельство является важным не
только при выборе расположения гондолы относительно крыла, но и
при выборе типа гондолы, со смешением потоков или без него. В
рассматриваемом примере из-за того, что в ступенчатой гондоле срез
сопла наружного контура расположен на меньшем расстоянии х от
передней кромки крыла, потери аэродинамического качества из-за
интерференции вдвое меньше, чем в случае использования двигателя
со смешением потоков. Из приведенного сравнения еще не следует
однозначно необходимость использования ТРДД без смешения
потоков. Так, например, различия во внешнем сопротивлении гондол с
учетом потерь эффективной тяги реактивных сопл (включая потери,
связанные с обтеканием газогенератора потоком из наружного
контура) приводят к результату, приведенному в нижней части рис.
4.38, на котором приведены потери аэродинамического качества как
за счет интерференции, так и различия в аэродинамических
характеристиках гондол разного типа. В таком случае различие
компоновок с ТРДД со смешением потоков и без смешения потоков не
столь велико.
229
Выбор положения гондолы относительно крыла, естественно, не
определяется единственно эффектами интерференции. Следует
учитывать также изменение массы пилона и характеристик флаттера
крыла при увеличении "выноса” гондолы и соответствующего
удлинения пилона.
СУеП? ^'^777^/0
Рис.4.38. Относительное изменение аэродинамического качества
двухдвигательного самолета в зависимости от расположения гондолы ТРДД со
смешением(а) и без смешения потоков контуров (б)
230
Для расширения диапазона углов атаки самолета с безотрывным
обтеканием коллектора воздухозаборника целесообразно ось канала
направить под отрицательным углом атаки а = 4-6° по отношению к
хорде крыла. Гондолу следует располагать по возможности дальше от
поверхности земли для уменьшения возможности попадания в
воздухозаборник посторонних предметов. При невозможности
безопасного удаления воздухозаборника от земли потребуются
специальные меры защиты от засасывания в двигатель предметов с
поверхности или использование разбега с “додачей газа”—с выводом
двигателя на взлетный режим после трогания самолета с места.
Окончательное расположение гондолы относительно крыла
должно корректироваться по данным испытаний моделей с имитацией
условий работающего двигателя(или, по крайней мере с протоком
воздуха через гондолы) в аэродинамических трубах. Имитация
условий, создаваемых работающим двигателем, при испытаниях
моделей в аэродинамических трубах представляется важной и трудной
задачей.
Для полного моделирования при испытаниях аэродинамических
моделей необходимо:
— моделирование скорости набегающего потока(числа Моо);
— моделирование геометрических параметров;
— обеспечение потребного коэффициента расхода воздуха;
— моделирование перепада давлений в реактивном сопле;
— моделирование поля давлений на выходе из сопла.
При испытаниях возникает необходимость полного или частичного
моделирования СУ. Для этой цели разработаны ряд имитаторов,
некоторые из которых приведены на рис.4.39 и в таблице 1.
Как видно, полное моделирование возможно при применении на
исследуемых моделях небольших натурных двигателей, габариты
которых соответствуют масштабу модели, у которой расход воздуха
через воздухозаборник, перепады давления в сопле, поля давлений в
струе на ее выходе из сопла соответствуют потребным. Возможности
такого моделирования ограничены парком таких двигателей.
Возможно моделирование СУ с помощью эжекторных
имитаторов, в которых с помощью воздуха высокого давления в
231
c Slice к горный имища/рор
I L-митатор рса-ипи&ди
Струи
Рис.4.39. Способы имитации двигателей на моделях самолетов
а—гондола с протоком
б—эжекторный имитатор
в—турбинный имитатор
г—имитатор реактивной струи
определенной степени моделируется потребный расход воздуха через
воздухозаборник и обеспечивается реактивная струя с нужными
параметрами(рис.4.39,б).При моделировании с помощью эжекторных
имитаторов расход воздуха через ВЗ будет меньше расчетного, что
естественно скажется на результатах исследований модели. Для
устранения этого недостатка в условиях крейсерского полета
возможно использовать “фиктивное”увеличение расхода воздуха
установкой на входе в ВЗ центрального тела со специально
спрофилированными обводами. Профилирование этого тела
выполняется таким образом, чтобы было обеспечено расчетное
распределение давления по поверхности обечайки гондолы. Но при
наличии центрального тела уменьшается возможный диапазон углов
атаки при испытаниях модели.
В качестве имитаторов СУ на моделях возможно использование
турбинных имитаторов, работающих на сжатом воздухе, подаваемым,
232
как и при эжекторных имитаторах, от внешнего источника. Эти
имитаторы обеспечивают меньшее, чем при эжекторных имитаторах,
неравенство расходов воздуха на входе и выходе модели.
На начальной стадии разработок широко распространено
моделирование с помощью гондол с протоком. Это моделирование
является наиболее простым, но при нем не моделируется течение на
выходе(реактивная струя двигателя)и обеспечение потребного
коэффициента расхода воздуха на входе в ВЗ требует увеличенной
площади сопла модели гондолы.
Для определения потерь эффективной тяги хвостовой части
гондолы в присутствии крыла, а также влияния реактивной струи на
обтекание крыла может быть использована установка, схема которой
приведена на рис.4.40. Установка представляет собой
аэродинамическую трубу, в рабочей части которой на весах
устанавливается отсек крыла, вблизи поверхности которого (в
Рис.4.40. Схема стенда для исследования взаимного влияния крыла и хвостовой
части гондолы с реактивной струей.
различных положениях)на своих весах располагается хвостовая часть
гондолы с реактивной струей. Раздельное измерение сил,
действующих на гондолу и крыло представляет широкие возможности
для исследования их взаимного влияния. В качестве недостатка
установки следует указать невозможность изменения углов атаки и
233
скольжения, а также относительно малая протяженность отсека крыла
при заданном диаметре хвостовой державки.
Таблица 1
Метод моде- пп лирования Достоинства Недостатки
1 2 3 4
1.Небольшие натурные двигатели Возможность воспро- изведения реальных пара- метров Практическое отсутствие малых двигателей с параметрами модели- руем ы х натурных двигателей
2. Гондола с протоком Простота. Малая стои- мость Немоделирование течения на выходе из имитатора
3. Имитатор реактивных струй: а) с выдувом холод- ного сжатого воздуха Простота, малая стоимость имитатора Большие затраты энергии в ДДТ. Возмущения, вноси- мые в поток подводящими воздуховодами. Неточное подобие по импульсу или скорости трубы. Не моделируется течение на входе в ВЗ.
б)с выдувом подогретого сжатого воздуха Возможность изменения режима испытаний Возможны проблемы нагревания внутри- модельных весов
4. Эжекторный имитатор Возможность воспроизве- дения близких к реальным условий по расходу воздуха, давлению на выходе и полному давлению на входе Неравенство расходов воздуха на входе и выходе имитатора без дополнительного отсоса воздуха из ВЗ. Необходимость тарировки
5. Турбинный имитатор Возможность воспро- изведения близких к реальным условий по расходу воздуха, давлению на выходе и полному давлению на входе Высокая стоимость ими- татора. Проблемы технического обслуживания. Необходимость тарировки. Неравенство расходов воздуха на входе и выходе имитатора без дополнительного отсоса воздуха из ВЗ.
234
Литература
1. Г.Н. Абрамович. Прикладная газовая динамика. Издательство“Наука”.
Главная редакция физико-математической литературы.Москва, 1976г.
2. Д. Кюхеман и И. Вебер. Аэродинамика авиационных двигателей.
Издательство иностранной литературы. Москва, 1956г.
3. Проектирование, испытания и производство широкофюзеляжных
пассажирских самолетов. Том II, книга I . Аэродинамика и динамика полета
магистральных пассажирских самолетов. “Машиностроение”, 1982г.
4. В.П. Деменченок, Л.Н. Дружинин, А.Л. Пархомов, В.А. Сосунов, М.М.
Цховребов, С.М. Шляхтенко, А.С. Эльперина. Теория двухконтурных
турбореактивных двигателей. “Машиностроение”, 1979г.
5. Шум реактивных двигателей. Сборник статей. Выпуск пятый.Труды
ЦИАМ № 1226,1987г.
6. Руководство для конструкторов. Том I. Аэродинамика самолета.
Выпуск V- Аэродинамическая компоновка фюзеляжей и гондол. Издание бюро
научной информации. 1952г.
7. В.К. Петров. Экспериментальное исследование внешнего сопротивления
гондолы ТРДД с большой степенью двухконтурности. Труды ЦАГИ. Выпуск.
№2175, 1983г.
8. В.А. Лапин , В.К. Петров, Некоторые особенности обтекания элементов
хвостовых частей ТРДД большой степени двухконтурности. Труды ЦАГИ.
Выпуск.№ 2209,1983г.
235
Г л а в a 5. АЭРОДИНАМИКА ОРГАНОВ
УПРАВЛЕНИЯ
Требования, предъявляемые к магистральным пассажирским
самолетам— большие крейсерские скорости полета, хорошие взлетно-
посадочные характеристики, высокая экономичность—приводят к
необходимости использования сверхкритических крыльев большого уд-
линения, мощной взлетно-посадочной механизации, малых запасов
продольной статической устойчивости. Это, в свою очередь, приводит
к определенным сложностям в обеспечении управляемости—по-
перечной из-за уменьшенных размахов элеронов и влияния упругой
деформации на их эффективность при больших скоростных напорах,
продольной— из-за необходимости балансировки самолета при
выпуске закрылков, связанной с большими пикирующими моментами.
Органы поперечного и путевого управления, кроме того, должны
обеспечить балансировку и достаточную управляемость при отказе
двигателя (в случае 4-х двигательного самолета—крайнего двигателя)
главным образом на взлетном режиме.
5.1. Органы продольного управления
В качестве органов продольного управления магистральных
самолетов со стреловидными крыльями, имеющими мощную взлетно-
посадочную механизацию, может быть использован переставной ста-
билизатор с рулем высоты. В ряде случаев на транспортных само-
летах используется неподвижный стабилизатор с рулем высоты.
Переставной стабилизатор может быть трехпозиционным — взлетное,
посадочное, полетное положение, а также многопозиционным. В этом
случае балансировка самолета осуществляется переставным
стабилизатором, а руль высоты используется для управления. При
этом площадь горизонтального оперения может быть уменьшена,
меньше могут быть и потери аэродинамического качества на
балансировку.
236
Рис.5.1 Зависимость коэффициента момента тангажа
от угла атаки при различных углах отклонения стаби-
лизатора и закрылков
Из представленной на рис. 5.1 зависимости Wz=/(a) видно, что
отклонение закрылков в посадочное положение приводит к
существенному увеличению пикирующего момента, который наиболее
оптимальным способом может быть сбалансирован переставным
стабилизатором с рулем высоты. Как можно видеть из рис. 5.2, где
представлена поляра горизонтального оперения при изменении угла
отклонения стабилизатора и неотклоненном руле (£ в — 0) и при
фиксированном положении стабилизатора и отклонении руля (<р ст —0),
поляра при £ в=0 имеет гораздо более благоприятный характер.
Условия работы горизонтального оперения существенно зависят
от режимов полета и положения взлетно-посадочной механизации. На
рис. 5.3 в качестве примера представлена зависимость угла скоса в
области горизонтального оперения и угла атаки горизонтального
оперения от угла атаки крыла при крейсерской, взлетной и посадочной
237
конфигурации. Видно, что в крейсерской конфигурации углы атаки
горизонтального оперения сравнительно невелики и оперение работает
в благоприятных условиях. При отклонении механизации крыла во
взлетное и посадочное положение углы скоса увеличиваются, что в
сочетании с отрицательными углами отклонения стабилизатора для
балансировки (в данном примере <р ст = ~6,5°4--7°) углы атаки
горизонтального оперения при малых углах атаки крыла могут
достигать а г.о = _8°-г-10°. В ряде случаев, для других компоновок,
эти углы атаки могут достигать и больших величин. Ниже будут
рассмотрены мероприятия, обеспечивающие, где зто нужно,
увеличение несущих способностей горизонтального оперения на
больших отрицательных углах атаки.
Рис.5.2 Поляра горизонтального оперения при 3 в = 0; ср ст —var и
ср СТ —0; 3 B = var
Эффективность горизонтального оперения зависит от ряда
факторов: удлинения г.о., угла стреловидности, профилировки и др. Для
примера на рис. 5.4 показано изменение производной в функции
угла стреловидности при удлинении горизонтального оперения Л = 4 и
С Яго
уго от удлинения горизонтального оперения при
стреловидности Zr.o = 30°. Видно, что при сравнительно малых
удлинениях увеличение стреловидности горизонтального оперения до
238
/г.о=30° при фиксированном удлинении практически не влияет на его
несущие свойства и лишь при больших углах стреловидности
производная С£™ начинает уменьшаться. Увеличение удлинения
весьма существенно влияет на подъемную силу горизонтального
оперения. Так, например, увеличение удлинения с Л = 2до А = 4
приводит к увеличению С£™ в 1.4 раза. С увеличением удлинения
интенсивность роста Су™ по А уменьшается.
<53 = 0
а о 23/29
18/16
Рис.5.3 Зависимость углов скоса и углов атаки горизон-
тального оперения в функции угла атаки при различных
углах отклонения закрылков
239
1
Рис.5.4. Зависимость в функции А го и х пк
Влияние сжимаемости на эффективность горизонтального
оперения существенным образом зависит от его стреловидности.
Увеличение числа М сопровождается некоторым ростом производной
СЯг.о
уг.о, при этом чем меньше угол стреловидности горизонтального
оперения, тем раньше по числам М начинается этот рост (рис.5.5).
Начиная с числа М, при котором на оперении развивается интенсивный
волновой кризис, происходит резкое уменьшение несущих свойств г.о.
Чем больше угол стреловидности, тем позднее по числам М
происходит это падение Су™. Нужно заметить, что в приведенном
примере из-за конструктивных соображений при увеличении
стреловидности уменьшается удлинение оперения. Аэродинамический
фокус горизонтального оперения при критических числах М
смещается назад. Чем больше стреловидность, тем позже по числам
М происходит смещение фокуса (рис.5.5).
Начало роста лобового сопротивления горизонтального оперения
по числам М зависит от относительной толщины профиля и угла
стреловидности оперения. На рис.5.6 показано изменение лобового
сопротивления горизонтального нестреловидного оперения,
240
скомпонованного из симметричных профилей С - 11 с относительной
толщиной 9% и 13%, и стреловидного оперения /г.о=35° с
относительной толщиной с = 12%. Видно, что если на нестреловидном
оперении резкий рост сопротивления при относительной толщине
оперения 13% начинается уже с М = 0,75, то при толщине 9% этот
рост начинается при М = 0,83, а у стреловидного оперения до М =
0,9 “стенки” в росте сопротивления не наблюдается.
Рис.5.5. Зависимость С&8 в функции числа М при различных углах стре-
ловидности горизонтального оперения
Зависимость продольного момента от угла отклонения стаби-
лизатора и от угла отклонения руля высоты носит линейный характер
в широком диапазоне углов отклонения (рис.5.7).
241
Рис.5.6. Зависимость СХого в функции числа М при различной
относительной толщине г.о.
Рис.5.7. Зависимость продольного момента самолета
в функции угла отклонения стабилизатора и руля
высоты
242
Для повышения эффективности горизонтального оперения с рулем
при отклонении на отрицательные углы могут быть использованы
профили с отрицательной кривизной или горизонтальное оперение с
отогнутым вверх носиком. Из рис.5.8 видно, что отклонение носика
вверх приводит к заметному увеличению эффективности оперения при
отрицательных углах атаки горизонтального оперения. Естественно,
что при больших положительных а г.о эффективность г.о.
уменьшается.
Рис.5.8. Эффективность горизонтального оперения
при различной форме носовой частистабилизатора
При заметной несимметрии профиля горизонтального оперения
необходимо проверить характеристики самолета на крейсерских
режимах полета во избежание дополнительного сопротивления от
несимметрии профиля г.о.
243
Характеристики шарнирных моментов рулевых поверхностей
будут рассмотрены ниже в разделе органов поперечного управления и
являются общими для рулей высоты, направления и элеронов.
5.2. Органы поперечного управления
В качестве органов поперечного управления дозвуковых ма-
гистральных пассажирских самолетов обычно используются элероны
сравнительно небольшого относительного размаха и площади в
комбинации с концевыми секциями интерцепторов.
В связи с тем, что эффективность обычных элеронов вследствие
упругих деформаций уменьшается и может быть полностью утрачена
при больших скоростных напорах (реверс элеронов), в качестве
дополнительного органа поперечного управления могут быть
осуществлены корневые элероны, расположенные в зоне внутренних
двигателей. В этом случае на крейсерских режимах полета поперечное
управление производится в основном корневыми элеронами, а
управление на взлетно-посадочных режимах в основном концевыми
(обычными) элеронами в комбинации с интерцепторами.
Следует отметить, что наличие корневых элеронов уменьшает
эффективность взлетно-посадочной механизации.
На рис.5.9 показана схема крыла с органами поперечного управ-
ления: обычными (концевыми) элеронами, корневыми элеронами,
интерцепторами. На ранней стадии проектирования эффективность
элеронов в линейной области изменения характеристик при малых
углах атаки может быть определена расчетным путем. Отклонение
обычных элеронов на стреловидных крыльях при дозвуковых
скоростях приводит к перераспределению давления вдоль всей хорды
крыла, однако область влияния отклонения элерона ограничена
практически размахом элерона, поэтому в приближенном методе
расчета эффективности элеронов используются лишь геометрические
характеристики части крыла, занятой элероном.
На рис.5.10 дано распределение по размаху крыла приращения
коэффициента нормальной силы сечений стреловидного крыла z = 37°
при различных углах отклонения элерона с относительным размахом
244
40%. Видно, что влияние отклонения элерона по размаху
ограничивается практически областью крыла, занятой элероном.
Рис.5.9. Схема полукрыла с органами поперечного управления
Рис.5.10. Зависимость Спсеч в функции относительного размаха
крыла при различных углах отклонения элерона
245
Влияние угла стреловидности на эффективность элерона показано
на рис.5.11. Угол стреловидности нужно брать по оси вращения
элерона. В этом случае, как видно из графика, зависимость wf9
пропорциональна cos2z3.
Рис.5.11. Зависимость производной >Ихэв функции квадрата косинуса угла
стреловидности по оси вращения элерона
Как показывают расчетные и экспериментальные исследования,
эффективность элерона при дозвуконых скоростях пропорциональна
относительному размаху элерона, квадратному корню из
относительной хорды элерона и квадрату косинуса угла
стреловидности по оси вращения элерона.
Эти соотношения можно использовать при определении
характеристик эффективности элеронов по имеющемуся прототипу.
Исследования показывают, что на стреловидных крыльях
практически отсутствует взаимное влияние обычных элеронов,
расположенных на правом и левом полукрыльях, их характеристики
совпадают при симметричном и несимметричном отклонении элеронов,
поэтому во время экспериментальных исследовании можно испытания
проводить при отклонении элерона на одной половине крыла. При
наличии корневых элеронов такого вывода делать нельзя.
Эффективность элеронов во всем диапазоне углов отклонения,
углов атаки при отклонении взлетно-посадочной механизации
определяется экспериментально в аэродинамических трубах.
246
На рис.5.12 для примера показаны зависимости приращения
коэффициента момента крена от отклонения элеронов в функции угла
атаки. Видно, что в крейсерской конфигурации эффективность
элеронов сохраняется во всем летном диапазоне углов атаки. При
отклоненных закрылках и предкрылках (в посадочной конфигурации)
эффективность элеронов уменьшается при углах атаки свыше 14°
вследствие срыва потока с верхней поверхности, а также при
отрицательных углах атаки вследствие срыва потока с носка крыла на
нижней поверхности при отклонении предкрылков.
Рис.5.12. Зависимость эффективности элеронов от угла атаки
На рис.5.13 представлены зависимости приращения
коэффициента момента крена от угла отклонения элеронов,
полученные при испытании модели самолета со стреловидным крылом
^=37 в натурной аэродинамической трубе ЦАГИ Т-101.
Руководствуясь изложенными выше результатами, что
эффективность элерона зависит только
°т части крыла, обслуживаемой элероном, изменение угла
247
стреловидности имитировалось поворотом модели на углы скольжения
ft — 15° и -37°, что соответствовало эквивалентным углам
стреловидности /экв = 52° и 0°. Исследовались элероны с
конструктивной и осевой компенсацией Sok = 29,7% с круглым
носком. Из приведенных зависимостей видно, что при уменьшении
производной т*3 с увеличением угла стреловидности линейность
зависимости mx=f(S э) сохраняется до больших углов отклонения
при больших углах стреловидности крыла. Это особенно заметно для
элерона с осевой компенсацией. Если на линейном участке
зависимости = /(<?' э) эффективность элеронов с осевой и
конструктивной компенсацией близки, то на крыле с малой
стреловидностью элерон с большой осевой компенсацией теряет
эффективность при углах отклонения элерона «S' э = 20^-22°, в то
время как эффективность элерона с конструктивной компенсацией
сохраняется до больших углов отклонения.
Рис.5.13. Сравнение эффективности элеронов с осевой и конструктивной
компенсацией при различных углах стреловидности крыла
248
Эффективность элеронов на прямом крыле несколько увели-
чивается при увеличении числа М, но начиная с числа М = 0,78—0,8
уменьшается. При стреловидности /=35° и выше эффективность эле-
ронов меняется незначительно до крейсерских скоростей полета пас-
сажирских самолетов М = 0,8 4- 0,85 (рис.5.14). Изменение
толщины профиля в диапазоне с = 94-12% в сечениях крыла на
участке элерона заметного влияния на его эффективность не
оказывает.
Выше было сказано, что для уменьшения влияния упругой
деформации могут быть использованы корневые элероны.
Рис.5.14. Влияние стреловидности крыла на эффективность элеронов в функции
числа М
Характеристики эффективности обычных (концевых) и внутрен-
них (корневых) элеронов представлены на рис.5.15. Исследования
проводились на жестких моделях.
Эффективность как корневого, так и концевого элеронов мало
меняется при изменении числа М до М = 0,9. Эффективность корне-
вого элерона в 2,54-3 раза меньше, чем эффективность концевого
элерона на жестком крыле при вдвое меньшей относительной площади.
Следует заметить, что влияние отклоняемого внутреннего элерона на
стреловидном крыле распространяется на часть крыла вниз по потоку.
При наличии упругой деформации при больших скоростных напорах
соотношение это будет меняться в пользу корневого элерона.
249
Рис.5.15 Сравнение эффективности внешних и внутренних элеронов в функции
числа М
Рис.5.16 Шарнирные моменты элеронов в функции угла
атаки при различной степени осевой компенсации
250
„а»
Наряду с эффективностью, важной характеристикой органов
управления являются шарнирные моменты , т.е. моменты отно-
сительно оси вращения, возникающие при изменении угла атаки и угла
отклонения органов управления. Для уменьшения шарнирных моментов
применяется аэродинамическая компенсация. В настоящее время чаще
используется осевая компенсация и сервокомпенсация. Шарнирный
момент зависит от относительной площади осевой компенсации и от
формы носка органа управления. Осевая компенсация и
сервокомпенсация могут использоваться одновременно.
В качестве примера на рис. 5.16 и 5.17 даны зависимости
коэффициента шарнирного момента И2ШЭ от угла отклонения элерона с
конструктивной и осевой компенсацией.
Здесь тшэ=-—, где МШэ —шарнирный момент элерона
" q • г>э • D Аэ
относительно оси вращения элерона, возникающий от воздействия
воздушного потока при обтекании элерона,
5Э—площадь элерона за осью вращения,
Ъ Аэ—средняя аэродинамическая хорда элерона за осью
вращения по перпендикуляру к оси вращения.
Зависимости коэффициента шарнирного момента от угла
отклонения элерона с конструктивной компенсацией близки к
линейным в широком диапазоне углов отклонения. При наличии осевой
компенсации с большой относительной площадью и полным носиком
имеет место нелинейность зависимости тщэ—/(&).
Обобщенные зависимости отношения производной с осевой
компенсацией к w*! с конструктивной компенсацией для прямого и
стреловидного z = 37° крыла приведены на рис.5.18. Производная
М шэ определялась в области малых углов отклонения элерона. Видно,
что с увеличением полноты носка существенно возрастает
эффективность осевой компенсации.
На самолетах больших размеров для обеспечения приемлемых
усилий на рычагах при непосредственно ручном управлении органы
управления должны обладать весьма эффективной осевой
аэродинамической компенсацией, которая отрабатывается на моделях
или натурных отсеках в больших аэродинамических трубах. При
251
большой степени осевой компенсации зависимости шарнирных
моментов от угла отклонения органа управления имеют нелинейный
характер, на величине шарнирных моментов начинают сказываться
производственные отклонения, что может привести к заметной разнице
в усилиях на различных экземплярах самолета.
Рис.5.1/.Шарнирные моменты элерона при различной
форме носка осевой компенсации
Следует отметить также, что при большой величине осевой
компенсации между неподвижной частью крыла и элероном имеются
заметные уступы, увеличивающие лобовое сопротивление.
Проведенные на ряде самолетов замеры уступов и щелей в
органах управления показывают, что увеличение сопротивления за
счет них может составить до 3—4% от сопротивления самолета при
нулевой подъемной силе Схо, что приводит к уменьшению
252
аэродинамического качества на 0,2—0,3. Если принять меры по
уменьшению уступов, щелей, то дополнительное вредное сопротив-
ление можно свести до С целью уменьшения лобового
сопротивления, связанного с уступом между неподвижной частью
крыла (оперения) и элероном (рулем), при необратимой бустерной
системе управления органы управления могут выполняться с малой
осевой или конструктивной компенсацией.
Г, Е 1 О О () Ок ___ / Z \
Рис.5.18. Завимимость ——/а о ок, при различном
форме носка осевой компенсации
Следует отметить, что используемые на новых гражданских
самолетах сверхкритические профили с задним нагружением харак-
терны наличием значительных шарнирных моментов отрицательного
знака при неотклоненных элеронах (т.н. "нулевые” шарнирные
моменты). Это необходимо учитывать при выборе потребной тяги
бустерной системы управлеиия.
253
Для увеличения эффективности органов поперечного управления
на взлетно-посадочных и крейсерских режимах полета помимо
элеронов используются концевые секции интерцепторов.
Интерцепторы на современных самолетах, как правило, уста-
навливаются на верхней поверхности крыла перед закрылками.
На рис.5.19 представлено приращение коэффициента давления
вдоль хорды крыла от отклоненного на 90° интерцептора,
90°) — Ср (5" „нт—0)), расположенного на расстоянии от носка на 0,5;
0,7 и 0,9 хорды прямоугольного крыла на его верхней поверхности
при числе М = 0,6. Видно, что на верхней поверхности крыла перед
интерцептором возникает зона давления, которая простирается до
самого носика крыла. При смещении интерцептора назад величина
положительного коэффициента давления уменьшается, однако зона
действия положительного давления увеличивается. За интерцептором
вследствие срыва потока наблюдается зона разрежения. На нижней
поверхности крыла в связи с дополнительным течением от области
давления в носке к области разрежения в хвостике имеет место
область разрежения. Таким образом, суммарная отрицательная
подъемная сила, характеризующая эффективность интерцептора,
складывается из интеграла распределенной нагрузки на верхней
поверхности перед интерцептором и интеграла нагрузки на нижней
поверхности за вычетом интеграла нагрузки на верхней поверхности
крыла за интерцептором.
При большом угле атаки а = 12° перепады давления от
отклонения интерцептора существенно снижаются, что
свидетельствует об уменьшении эффективности интерцептора.
На рис.5.20 показан вклад отдельных составляющих
эффективности интерцептора. Здесь под индексом А С'п в.п.
обозначено приращение нормальной силы сечения части верхней
поверхности крыла перед интерцептором от отклонения интерцептора,
А С"п в.п. —приращение нормальной силы части верхней поверхности
крыла за интерцептором, А Сп нп —приращение нормальной силы на
нижней поверхности крыла от отклонения интерцептора. Исследование
проведено на стреловидном крыле X=20°. Видно, что положительный
вклад в эффективность интерцептора нижней поверхности крыла
254
компенсирует, в данном примере, отрицательный вклад части крыла,
расположенной за интерцептором.
Рис.5.19. Распределение давления по профилю с
отклоненным интерцептором
При изменении угла атаки эффективность интерцептора
сохраняется в крейсерской конфигурации до углов атаки 8° 4-10°,после
чего начинает резко уменьшаться. При увеличении числа М резкое
уменьшение эффективности интерцептора начинается с меньших углов
атаки (рис.5.21). Начало резкого уменьшения эффективности
255
интерцептора связано с возникновением срыва потока с верхней
поверхности крыла.
Рис.5.20. Зависимость АСпсеч=f (z) при отклоненном интерцепторе
Результаты исследования свидетельствуют о том, что
эффективность интерцепторов, расположенных перед отклоненными
закрылками, существенно больше, чем при неотклоненных закрылках
(рис.5.22). Объясняется этот факт главным образом тем, что
отклонение интерцептора ухудшает работу расположенного за ним
закрылка, уменьшается разрежение на верхней поверхности закрылка,
следовательно, уменьшается приращение подъемной силы от
отклонения закрылка на полукрыле с отклоненным интерцептором.
Отклонение предкрылка способствует сохранению эффективности
интерцепторов до больших углов атаки.
256
Рис.5.21 Эффективность интерцептора по углу атаки при
различных числах М
На самолетах упругая деформация влияет на эффективность
органов управления. На стреловидном крыле при отклонении элерона,
например, на положительный угол приращение подъемной силы,
приложенное во втором фокусе, расположенном обычно позади оси
жесткости крыла, вызывает деформацию кручения и изгиба,
уменьшение угла атаки полукрыла и, следовательно, уменьшение
подъемной силы, а это в свою очередь приводит к уменьшению
257
эффективности элерона. Скорость полета, при которой наступает
реверс элеронов (полная потеря их эффективности) называется
скоростью реверса.
Рис.5.22 Эффективность интерцептора при отклоненной
взлетно-посадочной механизации
На рис.5.23 приведены примеры зависимости коэффициентов
момента крена от отклонения элеронов и суммарного отклонения
элеронов и интерцепторов в функции скоростного напора при
одновременном увеличении числа М, полученные при испытании
упругоподобного полукрыла пассажирского самолета со
стреловидностью 35° в аэродинамической трубе. Из указанных
зависимостей следует, что приращение момента крена с увеличением
258
отклонения элерона на упругом крыле существенно уменьшается при
увеличении скоростного напора и числа М. При числе М = 0,85 и
скоростном напоре, равном 1850 кгс/м2, что соответствует высоте
полета около 8000 м, эффективность элеронов уменьшается примерно
вдвое по сравнению с эффективностью при малых скоростных
напорах. При совместном отклонении элеронов и интерцепторов
эффективность поперечного управления при указанных условиях
составляет примерно 70% его эффективности при малых скоростных
напорах.
Рис.5.23 Зависимость момента крена в функции скоростного
напора от отклонения элерона и суммарного отклонения эле-
ронов и интерцепторов на упругоподобном полукрыле
5.3. Органы путевого управления
В качестве органов путевого управления и стабилизации
используется как правило однокилевое вертикальное оперение с рулем
направления. Лишь в частных случаях (например, при наружной
перевозке крупногабаритных грузов) на транспортных самолетах
259
устанавливается двухкилевое вертикальное оперение.
Эффективность вертикального оперения зависит от многих
факторов: его геометрии, подфюзеляжной части, расположения
горизонтального оперения, крыла и др.
Существенное влияние на работу вертикального оперения
оказывает изменение угла атаки. При увеличении угла атаки с
фюзеляжа сходит вихревая пелена, которая приводит к образованию
двух вихрей с противоположным направлением вращения. С возраста-
нием угла атаки срыв потока с фюзеляжа усиливается и интенсив-
ность вихрей возрастает. При наличии угла скольжения вихри
располагаются несимметрично, что приводит к перераспределению
истинных углов скольжения. Этот эффект в свою очередь приводит к
перераспределению нагрузки по высоте вертикального оперения.
Как видно из представленной на рис.5.24 зависимости боковой
силы сечения вертикального оперения по его высоте, увеличение угла
атаки до а = 20° приводит к существенному возрастанию боковой
силы в верхней части вертикального оперения (благоприятный боковой
скос) и к уменьшению нагрузки в нижней части (неблагоприятный
боковой скос). При этом нагрузка в корневых сечениях вертикального
оперения может менять знак. Наличие крыла смягчает эти процессы,
однако общая тенденция уменьшения нагрузки в корневых сечениях
сохраняется, что приводит к уменьшению эффективности
вертикального оперения по углам атаки. Отсюда можно сделать вывод:
менее подвержено влиянию угла атаки^оперение, имеющее большее
удлинение и меньшее сужение.
Для вертикального оперения удлинение определяется как
отношение квадрата высоты к площади вертикального оперения. Как
показали исследования, влияние удлинения весьма существенно: при
увеличении удлинения вдвое (от Л = 1 до Л = 2) эффективность
вертикального оперения в данном примере возрастает в 1,5 раза.
Ограничением в увеличении удлинения вертикального оперения
является его масса.
Положение горизонтального оперения по высоте также влияет на*
эффективность вертикального оперения. При этом определенное
влияние оказывает и положение крыла. Из приведенного на рис.5.25
- 260
Рис.5.24 Зависимость Сгв.о—/(JO по высоте вертикаль-
ного оперения при различных углах атаки
примера видно, что перемещение горизонтального оперения вверх и
вниз от палубного расположения приводит к увеличению
эффективности вертикального оперения в связи с шайбовым эффектом,
создаваемым горизонтальным оперением. Так, например, при верхнем
расположении горизонтального оперения эффективность вертикального
оперения может быть увеличена на 20^25%, что позволяет
уменьшить площадь вертикального оперения. Влияние угла
стреловидности вертикального оперения на его эффективность зависит
261
Рис.5.25 Зависимость производной (С^в.о)го в функции относи-
тельной высоты положения горизонтального оперения
(С* )
(С* )
' во '/= ]6
без крыла и горизонтального оперения
S лолФч=0.6, а = 0
Рис.5.26 Зависимость эффективности вертикального
оперения от его угла стреловидности
262
от удлинения веретикального оперения. При малых удлинениях порядка
Л = 0,9—1,0 увеличение стреловидности в.о. до /во = 45° практически
не сказывается на его эффективности, а при удлинениях свыше Л =
1.4 эффективность в.о. начинает уменьшаться уже при угле
стреловидности х во=30°(рис.5.2б)
Основным органом путевого управления является руль направ-
ления. Для увеличения надежности системы управления руль
направления обычно конструктивно выполняется из двух секций.
Исследования показывают, что руль сохраняет эффективность до
максимальных углов отклонения, равных 30°, при различных углах
скольжения. Эффективность руля направления незначительно меняется
при изменении числа М в эксплуатационном диапазоне скоростей.
Шарнирные моменты руля направления, также как и других
рулевых поверхностей (руля высоты, элеронов), зависят от площади и
формы осевой компенсации.
Шарнирные моменты руля направления зависят от угла
отклонения руля и от угла скольжения /3. Характерной особенностью
шарнирных моментов руля направления с большой осевой
компенсацией является уменьшение и в ряде случаев обращение знака
коэффициента шарнирного момента при больших и взаимно
противоположных по знаку углах отклонения руля направления 5" н и
угла скольжения /? (рис.5.27).
Эффективным средством уменьшения шарнирных моментов
наряду с осевой компенсацией является сервокомпенсация (рис.5.28).
Преимуществом кинематической сервокомпенсации является
возможность за счет изменения передаточного отношения угла
d т
отклонения сервокомпенсатора к углу отклонения руля,
менять шарнирные моменты органов управления, доводить их в полете
не затрагивая форму органов управления (например форму и величину
осевой компенсации).
Сервокомпенсация, как правило, сочетается с осевой компенсаци-
ей.
263
s =0,305; a=0
«ч
. 0 = 5°
• 0 = 0
S 0 = —5°
x /?=-10°
л 0—15°
^0 = -2O°
Рис.5.27 Шарнирные моменты руля направления при различных
углах скольжения
В связи с тем, что сервокомпенсация влияет только на величину
Жш и не влияет на величину т® и то нелинейнне эффекты,
связанные с влиянием угла атаки и угла скольжения на шарнирные
моменты, будут усиливаться, что необходимо учитывать при отработке
шарнирных моментов конкретного органа управления.
264
всей высоте руля направления
а = 6 ° $ — 0
т
Клин 50" по
с =0307;
ок
0,05
-0,05
д
t=15
?=10‘
т —’5
—0,10
Рис.5,28 Шарнирные моменты руля направления при различных углах отклоне-
ния сервокомпенсатора
265
Г л а в a 6. УСТОЙЧИВОСТЬ
И УПРАВЛЯЕМОСТЬ
МАГИСТРАЛЬНЫХ САМОЛЕТОВ.
6.1. Общие положения
Решение вопросов устойчивости и управляемости современных
магистральных самолетов подчинено следующим основным задачам:
—Обеспечение безопасности полета при всех возможных
условиях эксплуатации.
Эта задача приобрела особую остроту в связи с непрерывным
ростом пассажировместимости магистральных самолетов и
возросшими требованиями регулярности полетов. Рациональный выбор
схемы самолета, его компоновки и органов управления и
использование автоматики создают определенные возможности для
повышения безопасности полета. Применение современных средств
автоматизации управления позволяет значительно повысить уровень
безопасности полета, в частности, за счет уменьшения влияния роли
человеческого фактора, сильно сказывавшегося на уровне аварий и
катастроф.
—Обеспечение высокой экономичности магистральных
самолетов. Выявленные в последние годы возможности увеличения
топливной эффективности за счет оптимального выбора параметров
магистральных самолетов(центровок, размеров оперений,
рациональных схем управления и т.п.)позволяют заметно
воздействовать на повышение аэродинамического качества и
топливную эффективность магистральных самолетов. Развитие в
последние годы средств автоматизации управления позволяет
использовать аэродинамические компоновки с высоким
аэродинамическим качеством, даже имеющих в ряде случаев
неблагоприятные характеристики статической устойчивости.
Автоматизация управления позволяет также улучшить экономику
самолета за счет снижения действующих нагрузок.
266
—Обеспечение пилотажных характеристик, соответствующих
нормам и требованиям, и удовлетворяющих экипаж и пассажиров в
части реакции самолета при полете в турбулентной атмосфере.
Автоматика и здесь позволяет получить оптимальные решения.
Широкое использование автоматики привело к необходимости
пересмотра ряда основных положений, принятых ранее при выборе
основных параметров самолета, определяющих характеристики
устойчивости и управляемости. При этом, как правило, пороводится
детальный анализ указанных выше аспектов с целью получения
оптимальных решений.
Таким образом, при решении вопросов уётойчивости и
управляемости в свете указанных выше задач в настоящее время
используется два основных фактора, это:
—Рациональный выбор параметров самолета, его схемы и
компоновки;
—Широкое применение автоматизации управления.
Первый фактор подробно рассматривается в настоящей главе.
Вместе с тем эти два фактора сильно связаны между собой. Поэтому
здесь целесообразно остановиться и на основных аспектах
автоматизации управления.
На современных магистральных самолетах применяется для
отклонения органов управления необратимое бустерное управление.
Оно получило широкое распространение на основе большого,
многолетнего успешного опыта в военной авиации. В настоящее время
структура бустерных систем управления формируется для
магистральных самолетов так, что она в комплексе всех средств
обеспечивает высокий уровень надежности управления и является
практически безотказной. В нашей практике неизвестны случаи аварий
или катастроф по причине отказа силовой (бустерной) части системы
управления.
Принципы формирования исполнительной части и всего комплекса
управления органами управления рассматриваются в следующей 7-ой
главе
Внедрение бустерных систем управления на современных
магистральных самолетах открыло путь широкому применению
267
автоматизации управления, различным средствам улучшения
пилотажных характеристик, обеспечению безопасности полета,
комфорта, пилотирования за счет возможности перехода к малым
усилиям при управлении.
Наконец, следующий шаг в развитии систем управления
выразился в использовании бортовых цифровых вычислительных
машин, которые при переходе от аналоговых вычислителей
обеспечивают больший возможный объем алгоритмов управления и
дают также более высокую точность. Этот шаг обеспечил широкое
применение автоматизации управления, внедрение экспертных систем,
систем контроля и т.п.
Вопросы, связанные с автоматизацией управления, выбор
алгоритмов систем улучшения устойчивости и управляемости, а
также“активных”систем управления рассматриваются в главах8 и 9.
Применение систем улучшения устойчивости и управля-
емости(СУУ Позволяет по-новому решать вопросы аэроди-
намической компоновки самолета, выбора его основных параметров.
Так, например, известно из первых глав, что применение сверх-
критических профилей на крыльях большого удлинения связано с
появлением местных зон углов атаки с продольной статической
неустойчивостью. Использование соответствующих СУУ позволяет
обеспечить самолету высокую безопасность полета и требуемые
характеристики устойчивости и управляемости и в этом случае. Такие
возможности в итоге дают значительное увеличение
аэродинамического качества и, следовательно, повышают топливную
эффективность самолета.
6.2. Продольная устойчивость и управляемость
На многих современных пассажирских самолетах применяются
крылья умеренной стреловидности(я = 254-35°)и большого
удлинения(Л —9. 04-10,5) с фюзеляжами большого диаметра и с
двигателями, расположенными на пилонах под крылом или на пилонах
в хвостовой части фюзеляжа. Характерным также является большой
диапазон эксплуатационных центровок, достигающий 204-25% САХ,
268
все это приводит к ряду особенностей в характеристиках устойчивости
и управляемости.
Как было показано в главе 2, аэродинамические характеристики
самолета со стреловидным крылом большого удлинения с
суперкритическими профилями, необходимыми для получения высокого
аэродинамического качества при больших дозвуковых скоростях
полета(М = 0,80~г0,85), как правило, имеют местную статическую
неустойчивость.
Обеспечить хорошие характеристики устойчивости и
управляемости таких самолетов на всех эксплуатационных режимах
полета одними аэродинамическими средствами практически
невозможно и экономически невыгодно. В настоящее время они могут
быть обеспечены путем применения автоматических устройств(СУУ)
в системе штурвального управления (СШУ).В этом случае потребные
площади хвостового оперения можно выбрать из условия обеспечения
балансировки самолета, а требуемые динамические и статические
характеристики устойчивости и управляемости обеспечивать
автоматическими устройствами. Это позволяет за счет улучшения
аэродинамики и уменьшения массы конструкции повысить
экономические показатели самолета.
Степень использования автоматических устройств должна
зависеть от режима полета. Это сзязано с тем, что аэродинамические
характеристики изменяются по режимам полета, и с тем, что для
самолетов различного класса вероятность реализации того или иного
режима различна. Требования к характеристикам устойчивости и
управляемости самолета, предъявляемые на одном режиме полета,
нередко оказываются излишне строгими для других. Поэтому их
целесообразно формулировать дифференцированно в зависимости от
режимов полета с учетом вероятности полета самолета на этом
режиме и с учетом возможных отказов в системе штурвального
управления. Все это определяет структурную схему автоматической
системы управления и степень необходимого резервирования
автоматических устройств. Большую роль играет также правильный
выбор эффективности органов продольного управления, выбор запаса
статической устойчивости для креийсерского режима полета.
269
дозвукового пассажирского
Система штурвального(ручного)управления самолета и входящие
в нее автоматические подсистемы должны обеспечивать требуемые
характеристики устойчивости и управляемости самолета и
безопасность полета на всех эксплуатационных режимах. При
разработке системы штурвального управления целесообразно
разделить все области режимов полета(по высотам, скоростям и
перегрузкам) на три области:
—основную, эксплуатационную и предельную.
Для магистральных самолетов эти области рационально
разделить по перегрузкам следующим образом:
0,6 < пу < 1,4 —основная область режимов полета;
0,4 < пу < 1,7 —эксплуатационная область режимов полета;
ИуПЙП < Ну <0,41
I—предельная область режимов полета.
1,7<Иу^ WymaxJ
Наиболее жесткие требования предъявлются в первой области
режимов полета.
Как показали результаты обработки записей многолетней
эксплуатации пассажирских и транспортных самолетов, выход на
большие перегрузки пу > 1,4 встречаются крайне редко.
В качестве примера на рис.6.1
приведены режимы полета для
современного дозвукового
самолета со стреловидным
крылом(/~35°)в координатах
высоты и скорости, ограниченью
минимальной скоростью
полета( Vmin),максимальной
скоростью полета(Vmax) и
максимальным числом Маха
(Мmax ).На рисунке выделены три
характерные области полета:
А—область режимов полета,
в которой происходит достижение
допустимого значения коэффициента подъемной силы(Суогр)раньше,
н
15000
Гтт
10000
5000
А область режимов полета в которой выход
Cv в прои ходит раньше чем иа п
Б-область крейсерских режимов полета
В область режимов полета в которой
достигается раньше чем Cv
Рис.6.1. Области режимов полета
О _
300 400 500 600 700 800 900 1000
При лу тах
И)
самолета
270
чем достижение Иушах;
Б—область крейсерских режимов полета;
В—область режимов полета, в которой max достигается
раньше, чем СУс.
Из графика следует, что основные длительные и часто встречаемые
режимы полета(взлет, набор высоты, крейсерский режим и посадка)
находятся в области, где выход самолета на Сус происходит раньше,
чем на ^>тах и лишь на режимах полета с большими скоростными
напорами самолет может выходить на перегрузки, превышающие
максимальную эксплуатационную. Поэтому на магистральных
самолетах нет особой необходимости в установке ограничителя
перегрузок, но следует предотвратить выход на а > ас.
6.2.1. Характеристики продольной устойчивости и управляемости
Рассмотрим особенности основных аэродинамических ха-
рактеристик современных пассажирских самолетов.
Как было показано в главе 2, аэродинамические характеристики
самолета со стреловидным крылом большого удлинения (А = 9,04-
10,5) с суперкритическими профилями и горизонтальным оперением,
расположенным на фюзеляже, имеют следующие особенности при
больших дозвуковых скоростях полета(М = 0,84-0,85):
—уменьшение производной коэффициента подъемной силы по
углу атаки Су, на больщих углах атаки, несколько превышающие
допустимые а огр‘,
—большие значения продольного момента самолета без
горизонтального оперения на пикирование при Су — 0;
—местная нелинейность в зависимости продольного момента от
коэффициента подъемной силы на углах атаки, иногда близких к углам
атаки горизонтального полета (“ложка”в характеристиках Wz=/(ci)).
Вследствие этих особенностей продольная устойчивость и
управляемость при выходе самолета на перегрузки, большие 1,34-
1,5 ухудшается. Как показывают исследования на пилотажном
стенде, даже при плавном выходе самолета на эти перегрузки его угол
атаки продолжает увеличиваться.
271
Материалы по аэродинамическим характеристикам продольной
устойчивости и управляемости, получаемые в аэродинамических
трубах, являются надежным исходным материалом. Однако, в ряде
случаев в эти результаты необходимо вводить поправки обычно
расчетными методами или по результатам специальных экс-
периментов.
Теоретические и экспериментальные исследования, а также
летные испытания современных самолетов со стреловидными
крыльями большого удлинения показали, что заметное влияние на
основные аэродинамические характеристики устойчивости и
управляемости оказывает упругость конструкции. Это влияние
, определяется многими факторами и зависит не только от жесткости
конструкции, но и от аэродинамической компоновки самолета, от
распределения массы. Это влияние возрастает с ростом индикаторной
скорости, уменьшении толщины крыла и увеличении его удлинения и
угла стреловидности. Влияние упругости конструкции следует
учитывать еще на ранних стадиях проектирования самолета, так как
оно может оказать влияние на выбор конструктивных параметров
самолета. Ниже приведены некоторые данные о влиянии упругости
конструкции на коэффициенты подъемной силы и продольного момента
(см.рис.6.2.).
Для новых аэродинамических компоновок и при использовании
новых авиационных материалов трудно получить с приемлемой
точностью поправки к аэродинамическим характеристикам путем
пересчета их по критериям подобия, исходя из известных
характеристик ’ существующих самолетов. Для получения надежных
результатов по мере разработки конструкции необходимо выполнить
большое количество детальных параметрических расчетов.
Поправки к аэродинамическим коэффициентам из-за упругости
конструкции самолета с хорошей точностью могут быть получены
расчетом по линейной теории при М < 0,8 и при малых углах атаки и
углах отклонения органов управления. При околозвуковых скоростях
полета, а также при углах атаки а = 10 4-15°, на которых возможно
возникновение срывных зон, надежные результаты могут быть
получены только при испытании упругоподобных моделей самолета в
272
аэродинамической трубе.
В качестве примера на рис.6.2 и 6.3 приведены основные
поправки, отражающие влияние упругости конструкции самолета на
стационарные аэродинамические характеристики продольной ус-
тойчивости и управляемости.
Да
0,3
0,2
0,1
0
ла:8, ^а;1000кг/м2
Да (от кручения)
Iff iff 30 4СГ 50
/Да (от изгиба)
-0,2
-0,3
0,2
М = 0,10-0,75, л = 8 q= 1000кг/м
Хож
-0,2
3(Т 4(J 50
Рис.6.2. Влияние упругости
конструкции на величины А а,
и A%f
Рис.6.3. Влияние упругости
конструкции на величины (А С у)а=о
и АСу
Основное влияние деформации конструкции самолета оказывают
на характеристики устойчивости и управляемости при создании
маневров. В прямолинейном полете нагрузки на элементы конструкции
слабо изменяются по режимам полета и деформации могут быть
компенсированы соответствующим изменением стапельной формы.
На производную коэффициента подъемной силы по углу атаки
самолета оказывают влияние деформации крыла, которые изменяют
местные углы атаки. Распределение изменений величин А а по
размаху крыла хорошо описывается деформациями изгиба и кручения
упругой балки, схематизирующей конструкцию крыла.
Изгиб крыла под действием аэродинамических нагрузок приводит
для крыльев с прямой стреловидностью (Z > 0) к уменьшению
местных углов атаки. При дозвуковых скоростях полета линии
фокусов крыла расположена впереди оси жесткости^ F < X о.ж.),
273
из-за чего деформация кручения крыла при увеличении угла атаки
будет увеличивать местные углы атаки, которые для крыльев с
умеренной стреловидностью оси жесткости(/о.ж.<35°)при обычных
соотношениях погонных жесткостей) ДУ, С/Р)при изгибе крыла
изменяются больше, чем при кручении, а при /о.ж.<20°, наоборот, они
изменяются больше от кручения крыла, чем от изгиба. На рис. 6.2.
показаны типичные зависимости относительного изменение местного
угла атаки крыла(концевое сечение) от угла стреловидности оси
жесткости, получаемые от изгиба и кручения. Наибольшее отно-
„ л _____ А Су
сительное уменьшение производной — получается при
С'УЖ.К.
угле стреловидности оси жесткости около /о.ж.~45°.При скоростных
напорах, соответствующих крейсерскому режиму полета
современных магистральных самолетов с умеренными углами
стреловидности крыла 28 4-30°),поправка А Су будет порядка
84-11%. Упругие деформации фюзеляжа и горизонтального оперения
не оказывают существенного влияния на величину Су.
Перераспределение аэродинамической нагрузки по размаху крыла
вследствие его деформации вызывает смещение аэродинамического
фокуса крыла вперед практически при всех углах стреловидности
крыла. Для крыльев с углами стреловидности крыла X ~ 30° смещение
фокуса крыла при Q ~ 1000 кг/м2 обычно имеет порядок 3,04-3.5%.
Существенное влияние на положение аэродинамического фокуса
самолета могут оказывать упругие деформации фюзеляжа и
горизонтального оперения. Деформации фюзеляжа от действия
инерционных сил, возникающих от изменения перегрузки, превышают
деформации его от действия аэродинамических сил и приводят к
увеличению угла атаки горизонтального оперения. Если жесткость
фюзеляжа на изгиб в вертикальной плоскости мала, деформация его
приводит к смещению фокуса самолета назад, т.е. к увеличению запа-
са продольной статической устойчивости самолета по перегрузке.
Существенное влияние на запас продольной статической
устойчивости упругого самолета может оказывать также форма
горизонтального оперения, на смещение аэродинамического фокуса
самолета оказывает влияние угол стреловиднбсти оси жесткости
274
горизонтального оперения. При уменьшении этого угла снижается
влияние упругости на положение аэродинамического фокуса самолета
о /-'а
вследствие возрастания производной Ск.о.
Заметное влияние на величину производной Ся.о. и положение
аэродинамического фокуса самолета может оказать изменение
производной угла скоса потока га по углу атаки самолета в области
горизонтального оперения, вызванное деформацией крыла (в первом
приближении можно считать постоянной производную eCv}.
Упругие деформации крыла от инерционных сил зависят от
распределения массы по крылу и обычно не оказывают большого
влияния на величину производной но могут существенно влиять на
положение аэродинамического фокуса самолета. Вследствие этого при
оценке влияния деформаций конструкции самолета на
аэродинамические характеристики необходимо расчеты выполнять как
минимум для трех вариантов распределения массы:
— для пустого самолета;
— для самолета с максимальным запасом топлива;
— для самолета с 50% запасом топлива.
Деформация фюзеляжа приводит к уменьшению эффективности
органов управления (wl, ^г).Если ось жесткости горизонтального
оперения имеет малый угол стреловидности, тогда изменение его
эффективности определяется в основном жесткостью фюзеляжа на
изгиб в вертикальной плоскости. Для самолета с горизонтальным
оперением, имеющим строительное удлинение А = 44-5(А=/г.о./
5г.о.)и угол стреловидности оси жесткости /о.ж. ~ 35°, эффективность
горизонтального оперения при скоростном напоре q = 1000 кг/м2
может уменьшиться на 104-15%. Для уменьшения потерь от упругой
деформации целесообразно угол стреловидности горизонтального
оперения выбирать минимально необходимым по условиям влияния
числа М на аэродинамические характеристики.
Как известно, эффективность органов управления,
расположенных на задней кромке крыла, зависит от его характеристик
275
жесткости, угла стреловидности и положения органа управления по
размаху крыла. Деформация стреловидного крыла большого удлинения
приводит к уменьшению его местных углов атаки при отклонении
органа управления и, следовательно, к снижению их эффективности.
Чем ближе к концу крыла расположены органы управления, тем в
большей степени уменьшается их эффективность и при некотором
скоростном напоре может наступить их реверс.
Основное влияние на величины поправок к. коэффициентам Суо и
т2о оказывает деформация крыла от аэродинамической нагрузки и
сил тяжести. Деформация крыла большого удлинения при / о.*. >20°
приводит к уменьшению по абсолютной величине эффективных углов
закручивания сечений и, следовательно, к уменьшению величин Суо и
тго.
Обычно жесткие модели неманевренных самолетов испытывают
в аэродинамических трубах с деформациями, соответствующими
единичной нормальной перегрузке( иу = 1,0) для крейсерского режима
полета. Это делается с целью получения для крейсерского режима
полета более достоверных значений коэффициентов подъемной силы,
момента тангажа и аэродинамического качества самолета.
При учете упругости конструкции необходимо также иметь в
виду, что угол атаки концевых сечений при создании положительной
перегрузки под действием кручения уменьшается и вследствие этого
срыв потока с концевых сечений крыла затягивается на большие углы
атаки. Поэтому можно ожидать, что начало продольной статической
неустойчивости самолета по перегрузке также сместится на большие
углы атаки.
Деформация крыла, как показывают расчеты, мало влияет на
устойчивость самолета по перегрузке, так как смещение вперед
фокуса крыла за счет перераспределения нагрузки по размаху крыла
несколько компенсируется смещением фокуса самолета назад за счет
стабилизирующего влияния горизонтального оперения вследствие
уменьшения величины Су крыла.
Изменение балансировочного угла отклонения органов
продольного управления от деформации конструкции самолета при
276
иУ=1 обусловлено изменением момента тангажа, угла атаки и
уменьшением эффективности органов продольного управления. Это
изменение можно определить по формуле:
1
А 6го\ . /1 ^2 упр
Л - ""Ч ml ) к1
Изменение балансировочных значений S от влияния деформаций
конструкций приводит к уменьшению устойчивости самолета по
скорости. Однако необходимо отметить, что поскольку величина
A S' бал. изменяется в первом приближении пропорционально
скоростному напору, то при балансировке по усилию (Р=0) на
фиксированной скорости зависимость P=ft У) будет слабо зависеть
от влияния деформации конструкций самолета.
Влияние деформации конструкции на характеристики
устойчивости и управляемости самолета следует учитывать, когда
хоть один из следующих параметров превышает величины:
С-=1; <у=1, C"J = 0,5; С^ч=о,5-, Сф=0,1,
где:
х^ИЗГ_ qS ом * А Су
Скр (^7)Кр
^круч_ qS2QyiCy
Скр ~7g7aTC0S
£ИЗГ. — ^.ос;г,о.л
(Е/)Г.О
'а
У Г.О. .
COS X ож г.о.»
ом tg/ О.Ж
5 cos х ojk ’
X О.Ж>
г.о
. tg7 о.ж г.о
COS X о.ж г.о
(6. 1)
Г'ЧФУЧ — __
(GA) г.о
Q — Q S Г.О С у г.о
ф X
EJ=^EJ(.2) (l—z)2dz',
GA=£G/(2)(l-2)2^-,
EJ, Gjp—соответественно жесткость на изгиб и кручение
крыла или оперения;
2—безразмерная координата крыла или оперения;
*—сила, приложенная в фокусе горизонтального оперения,
277
вызывающая изменение угла атаки оперения на Г только вследствие
изгиба фюзеляжа;
SoM-площадь крыла без подфюзеляжной части.
Исследования показывают, что основное влияние на устойчивость
самолета с умеренной стреловидностью крыла (Z<35°) оказывает
изгиб фюзеляжа, крыла и оперения. Влияние кручений крыла и гори-
зонтального оперения незначительно.
Деформация конструкции прямого крыла оказывает влияние на
характеристики продольной устойчивости и управляемости самолета.
В этом случае основное влияние оказывает деформация фюзеляжа и
горизонтального оперения.
В настоящее время специалистами ЦАГИ разработаны
программы расчета по определению влияния упругости конструкции
самолета на аэродинамические характеристики и эффективность
органов управления. Результаты этих расчетов хорошо согласуются с
результатами испытаний упругоподобных моделей в аэродинамической
трубе и с результатами летных испытаний самолета.
Как известно, двигатели, установленные впереди центра масс
самолета, заметно влияют на характеристики устойчивости и упра-
вляемости(уменыиается степень продольной и боковой статической
устойчивости, изменяются также несущие свойства самолета).
Величину изменения степени продольной устойчивости по
перегрузке вследствие поворота струи воздуха на входе в
воздухозаборник двигателя можно приближенно определить по
формуле:
Д <7ЯДВ~0,0036 <6.2)
где:Св —весовой расход воздуха через двигатель(кг/с);
Хвх—расстояние от точки поворота струи воздуха при входе в
воздухозаборник двигателя до центра масс самолета.
При оценке влияния двигателя на устойчивость по скорости
необходимо учитывать момент силы тяги и момент реактивной силы на
входе в воздухозаборник двигателя. В этом случае изменение степени
статической устойчивости самолета по скорости(при условии, что тяга
ТРД мало изменяется по скорости)можно определить по формуле:
278
А <7Уда~ Ут+0,0036 Jgy g* Ca 2 , (6.3)
где: +*_сила тяги двигателя;
Ут=Ут/ Ьа- относительное расстояние от центра масс самолета
до оси тяги двигателя.
Двигатели ТВД и ТВВД, установленные на пилонах на крыле,
оказывают очень большое влияние (в зависимости от величины В =
Р/qF, где 7+площадь, ометаемая винтом) на аэродинамические
характеристики самолета; происходит значительное увеличение
подъемной силы на крыле и уменьшение продольной статической
устойчивости самолета за счет смещения фокуса самолета вперед.
Это объясняется следующим:
— в плоскости вращения винтов(на винтах) при косой обдувке
образуется поперечная сила, которая оказывает дестабилизирующее
влияние(смещает фокус вперед);
— на обдуваемой части крыла возрастает подъемная сила и
наблюдается на этой части крыла незначительное смещение фокуса
вперед;
— увеличивается скос потока за крылом, вследствие которого
уменьшается стабилизирующее влияние горизонтального оперения.
Проведенные теоретические расчеты и испытания
крупномасштабных моделей с имитаторами работающих ТВД и
ТВВД показывают, что при числах В ~3 + 4 запас продольной
статической устойчивости может уменьшиться на 20 + 25%САХ,
т.е. самолет на некоторых режимах не будет иметь продольной
статической устойчивости. За счет значительного изменения несущих
свойств крыла при изменении режима работы двигателей происходит
значительное изменение траектории полета, т.е. при увеличении тяги
двигателей растет перегрузка самолета^ > 1,0) и практически не
происходит изменение скорости. Все это будет значительно
сказываться на технике пилотирования самолета. Для сохранения
обычной техники пилотирования таких самолетов возникла
необходимость в разработке специальной автоматики в системе
штурвального(ручного)управления.
Количественно опеделить расчетным путем влияние работающих
'279
ТВД и ТВВД на аэродинамические характеристики довольно сложно.
В настоящее время в ЦАГИ и в ОКБ имеются приближенные
методики по определению влияния работающих ТВД и ТВВД,
установленных на пилонах на крыле, на аэродинамические
характеристики и характеристики продольной устойчивости и
управляемости самолета.
Наиболее точные результаты по влиянию работающих ТВД и
ТВВД на аэродинамические характеристики самолета можно получить
при испытании крупномасштабных моделей с имитаторами
работающих двигателей в натурной аэродинамической трубе Т-101
ЦАГИ.
Характеристики продольной устойчивости и управляемости
самолета можно улучшить при использовании автоматической сис-
темы СУ У (см. главу 8).
Магистральный пассажирский самолет нового поколения с
системой улучшения устойчивости и управляемости(СУУ)должен
обеспечивать:
— требуемые(в соответствии с нормами) характеристики
устойчивости и управляемости;
—заданные характеристики статической продольной
управляемости ХъПу, РвПу в основной области режимов полета;
—предупреждение летчика о выходе самолета из основной
области режимов полета по углу атаки, перегрузке, скорости и числу
М полета; •
— ограничение максимального угла атаки сваливания ас и
ПерегруЗКИ Пу max;
— автоматическую балансировку самолета в основной области
режимов полета с помощью балансировочного стабилизатора;
— автоматически компенсировать возникающие моменты
тангажа при изменении конфигурации самолета;
— автоматическое парирование разворачивающего момента при
отказе двигателя при взлете;
— автоматическое парирование возмущающих моментов при
изменении тяги двигателей, особенно на режиме захода на посадку;
— предупреждение летчика о превышении максимально
280
допустимого угла крена;
—автоматическую стабилизацию углового положения самолета
после окончания вмешательства летчика в управление.
Законы работы автоматики СУ У подробно рассматриваются в
главе 8.
На современных магистральных самолетах удовлетворительные
характеристики продольной устойчивости и управляемости можно
получить с помощью использования системы улучшения устойчивости
и управляемости(СУУ) с так называемым статическим законом
работы автоматики. Лучшие характеристики продольной устойчивости
и управляемости самолета можно получить с СУУ с интегральными
законами. Такая автоматизированная система штурвального
управления позволяет обеспечивать независимые от режимов полета,
центровки и массы самолета характеристики статической
управляемости, сохранить требуемый диапазон реализуемых углов
атаки и перегрузки, реализовать функции предупреждения летчика о
приближении к заданным углам атаки и перегрузки и обеспечить
надежное ограничение выхода самолета на углы атаки и перегрузки,
выше заданных.
Основная идея ограничения параметров движения(а и пу)
заключается в обеспечении заданных зависимостей Агв(а)иАгв(и3,),
реализации практически апериодических переходных процессов по
углу атаки и перегрузке и ограничение управляющего сигнала от
рычага продольного управления.
Принципы системы улучшения устойчивости и управляемости с
интегральными законами были достаточно хорошо исследованы в
ЦАГИ под руководством академика Г.С.Бюшгенса еще в 60-х годах,
а затем позднее отработаны и применены на ряде наших самолетов.
Аналогичная система улучшения устойчивости и управляемости
эксплуатируется в настоящее время на самолете А320. Однако
следует отметить, что реализация такой системы СУУ требует более
высокой технологии вычислителей и исполнительной части системы.
Эти вопросы рассмотрены в главе.8.
Исследования показали, что самолет с автоматикой,
использующей сигналы o>z, пу и а, можно пилотировать энергичным
281
отклонением штурвала управления без опасения выйти на
нежелательные большие углы атаки. Результаты летных испытаний
разрабатываемых пассажирских самолетов подтверждают это;
самолет“плотно сидит”в воздухе, легко управляется и хорошо“ходит”
за штурвалом управления.
6.2.2 Выбор запаса устойчивости по перегрузке
Вопрос о допустимости той или иной местной нелинейности в
характеристике тг=/(а)на крейсерских режимах полета тесно
связан с минимально допустимой степенью продольной статической
устойчивости самолета по перегрузке
В связи с широким использованием автоматических устройств на
современных пассажирских самолетах требование к минимальной
величине производной m^min изменилось. Ранее для получения
хороших характеристик устойчивости и управляемости самолета и
малого разброса в характеристиках статической управляемости Ав
и Рв на всех эксплуатационных режимах полета требовалось,
чтобы минимальная степень продольной статической устойчивости по
перегрузке была достаточно большой ohmm= — 0,104--0,12.На
современных и проектируемых пассажирских самолетах нет
необходимости предусматривать большие запасы продольной
статической устойчивости, так как автоматические системы
улучшения устойчивости позволяют обеспечить хорошие пилотажные
характеристики самолета и при очень малых значениях ти^.Это
особенно важно в связи с тем, что при переходе от больших запасов
продольной статической устойчивости к малым уменьшаются
балансировочные углы отклонения органов продольного управления и,
следовательно, снижаются потери аэродинамического качества и
улучшаются экономические характеристики самолета.
Для пассажирских и транспортных самолетов, по-видимому, пока
нецелесообразно рассматривать переход к нулевым запасам
продольной статической устойчивости и тем более к продольной
статической неустойчивости w^X)),так как при этом должны
282
повыситься требования к надежности автоматических устройств, что
усложнит задачу создания систем управления, обеспечивающих
необходимую безопасность полета.
Поэтому для самолетов нового поколения целесообразно иметь на
крейсерском режиме полета малый запас продольной статической
устойчивости порядка ~0,02. Однако использование таких
малых запасов продольной статической устойчивости самолетов
допустимо только с использованием СУУ.
Исследование на пилотажном стенде и летные испытания
создаваемых самолетов показали, что пилотирование самолета при
малых запасах продольной статической устойчивости без
автоматических устройств затруднительно. По оценке летчиков
самолет очень трудно удержать на заданном угле атаки, при
выполнении маневра требуется непрерывное перемещение штурвала
управления, и летчик средней квалификации не сможет пилотировать
самолет, кроме того, он может выйти на большие углы атаки, выше
предельных.
Для обеспечения безопасности полета самолета при совершении
маневра необходимо, чтобы момент тангажа с ростом угла атаки был
бы пикирующим(^г<0).Существуют только два пути выполнения
этого условия. Первый путь—это реализация такого минимального
значения запаса продольной статической устойчивости, при котором на
всех балансировочных эксплуатационных углах атаки момент тангажа
был бы восстанавливающим. Но этот путь для самолетов, имеющих
значительную местную нелинейность в зависимости момента тангажа
по углу атаки, приводит к необходимости иметь большие запасы
продольной статической устойчивости, что приведет к значительным
потерям аэродинамического качества самолета при балансировке, что
экономически невыгодно. Второй путь—это использование
автоматических устройств в системе продольного управления
самолетом, создающих дополнительный восстанавливающий
(пикирующий) момент тангажа при возрастании угла атаки выше
балансировочного. В этом случае потребные углы отклонения органов
продольного управления от автоматических устройств определяются
величиной кабрирующего момента самолета. Расчеты показывают,
283
что для самолетов с крыльями большого удлинения и умеренной
стреловидности (z = 30°) с суперкритическими профилями потребные
углы отклонения руля высоты от автоматических систем получаются
достаточно большими-порядка A S' в—±10 ±12°.При таких больших
углах отклонения рулей безопасность полета должна обеспечиваться
за счет многократного резервирования. Выбранная степень
резервирования должна обеспечивать надежное завершение полета при
двух последовательных отказах в системе управления.
На современных магистральных самолетах для снижения
физических нагрузок на летчика и его утомляемости, а, следовательно,
и для повышения безопасности полета целесообразно иметь небольшие
усилия на рычагах управления.
На магистральных самолетах целесообразно, чтобы усилия на
штурвале управления при создании нормальной перегрузки имели
небольшие значения(7в”3'= —10-4—20 кг/ед. перегр.).При этом
малые градиенты усилий на штурвале управления самолета могут быть
допущены только при небольших силах страгивания, т.е. при малых
силах трения в проводке управления(не более ±2 кг).
Опыт показывает, что для магистральных самолетов
целесообразно обеспечить следующие показатели продольной
устойчивости и управляемости в определенных пределах:
—характеристики статической управляемости(величину усилий
Рву и расход штурвала управления Х£у на единицу изменения
перегрузки);
—время срабатывания по перегрузке tcp. (время выхода на 0,70
установившейся перегрузки);
—“заброс”по перегрузке в управляемых движениях и.
На современных магистральных самолетах из-за большого
изменения центровок, масс, высоты и скорости полета для обеспечения
требуемых характеристик статической продольной управляемости и
динамики применяются различные автоматические устройства. В
качестве примера на рис.6.4 приведены зависимости Хзу от числа М
полета для двух запасов продольной статической устой-
чивости(^г3'= — 0,22 и _0,02) для одного из современных пас-
сажирских самолетов без использования автоматических устройств.
284
Из графика следует, что значения Хв у по режимам полета изменяется
Рис.6.4. Зависимость расхода
штурвала на единицу нормальной
перегрузки от числа М самолета
без автомата устойчивости
примерно в 10 раз, что
недопустимо.
' Уменьшить разброс в
| характеристиках управляемости
1 (Рву и Хву) можно путем
регулировки по режимам полета
коэффициента кинематической
связи отклонения штурвала
управления и руля высоты (Кш—
dS1 в \ тг
dX ).Как показывают расчеты,
для обеспечения малого разброса
этих характеристик(не более, чем в
три раза), необходимо
регулирование коэффициента Кш в
очень большом диапазоне, что не
рекомендуется по следующим
причинам. Максимальное значение этого коэффициента ограничивается
< к -9 1
ходом рычага управления и обычно не превышает Лш max—2 , а
минимальное его значение определяется из условия обеспечения
посадки самолета при предельно-передней центровке в случае отказа
автомата регулирования и должно быть не менее Кш тщ=0,8 . Из
этих соображений следует, что диапазон регулирования с
помощью автоматических устройств не должен превышать величин
/сш тах//Сш тш=24-2,5. На рис.6.5 приведена зависимость
величины Хву от запаса продольной статической устойчивости
самолета без системы улучшения устойчивости при двух значениях
коэффициента Кш для крейсерского режима полета. График
свидетельствует о том, что при исходном нерегулируемом
конструктивном коэффициенте Кш требуемое минимальное значение
^Gmin может быть обеспечено только при минимальном запасе
продольной статической устойчивости не менее ~ ~ 0,20 и при
285
автоматическом изменении коэффициента Аш в два раза минимальный
запас продольной статической устойчивости может быть уменьшен до
величины mczy—0,10. Следовательно, регулированием только
одного коэффициента невозможно обеспечить требуемые
пилотажные характеристики при малых запасах продольной
статической устойчивости ~0,02. Обеспечить требуемые
характеристики статической продольной управляемости самолета с
малыми запасами продольной статической устойчивости (тсгутслп= —
0,02) можно за счет использования в системе продольного управления
автоматических устройств, например, демпфера тангажа. Из рис.6.5
Рис.6.5. Зависимость расхода
штурвала управления на еди-
ницу нормальной перегрузки
от запаса продольной стати-
ческой устойчивости
Усилия на штурвале
следует, что при работающем
демпфере тангажа при изменении
значений mzcy в большом диапазоне
(от-0,02 до-0,28) и непрерывном
регулировании коэффициента К ш от
Аиех ДО 0,5 Кш исх , МОЖНО ПОЛУЧИТЬ
практически постоянное значение
Хвл\ Из этого рисунка также
следует, что приемлемые значения
Хву можно получить на самолете с
демпфером тангажа и с неизменным
коэффициентом /Сш.Однако самолет
с регулируемым коэффициентом Кш
в случае отказа демпфера тангажа
будет иметь более высокую
безопасность полета, так как при
этом характеристики управляемости
Хзу и Рву будут оставаться
приемлемыми и при малых запасах
продольной статической устой-
чивости.
управления на единицу перегрузки Рву
самолета с необратимым бустерным управлением пропорциональны
величинам Хву (без регулирования загрузочной пружины). На
самолете с работающим демпфером тангажа при автоматическом
286
регулировании коэффициента Кш при полете самолета на крейсерском
режиме можно также обеспечить малые изменения величины Рву
даже без регулирования загрузочной пружины. Однако для получения
небольшого разброса величин Рву на всех эксплуатационных режимах
полета (включая взлет и посадку) требуется регулирование и
загрузочной пружины по скоростям и высотам полета. Исследования
показали целесообразность регулирования загрузочной пружины по
балансировочному углу отклонения стабилизатора; так как угол
отклонения характеризует положение центровки самолета и режим
полета.
При больших запасах продольной статической устойчивости
величина подъемной силы на горизонтальном оперении, потребная для
балансировки самолета, получается отрицательной (направленной вниз)
и составляет до 20% подъемной силы крыла(рис.6.б).В этом случае
потери аэродинамического качества на балансировку самолета
получаются очень значительными (А К ~ 1,0 ). Вследствие
этого большие запасы продольной статической устойчивости в полете
на крейсерском режиме являются экономически невыгодными для
магистральных пассажирских самолетов.
Рис.6.6. Схема действия сил Рис.6.7. Зависимость
аэродинамического качества
самолета от величины- запаса
продольной устойчивости
Величину положительного прироста подъемной силы на
горизонтальном оперении, необходимой для балансировки самолета,
287
вызванной смещением центра масс назад, можно определить по
формуле:
л V7' _ К.О _____ /\Хт zi \
Д^г.о.— — у . (6.4)
Ст х-т.о
Смещение центра масс самолета назад на 104-15% САХ(это
соответствует уменьшению запаса продольной статической
устойчивости самолета также на 104-15% САХ) приводит к
уменьшению относительной подъемной силы на горизонтальном
оперении до 34-5%.
При изменении запаса продольной статической устойчивости
самолета изменяется и балансировочное положение органов
продольного управления. Указанный выше прирост подъемной силы на
горизонтальном оперении приведет к увеличению аэродинамического
качества самолета на крейсерском режиме полета на 34-5%.
Увеличение аэродинамического качества позволит увеличить или
коммерческую нагрузку самолета при сохранении дальности полета,
или увеличить дальность полета при сохранении полезной нагрузки.
Кроме того, при использовании на самолете малых запасов продольной
статической устойчивости можно уменьшить потребную площадь
горизонтального оперения, уменьшить нагрузки на фюзеляж, крыло и
горизонтальное оперение и в итоге уменьшить массу конструкции, т.е.
дополнительно улучшить летно-технические и экономические
характеристики самолета. В качестве примера на рис.6.7 приведена
зависимость балансировочного аэродинамического качества от запаса
продольной статической устойчивости для магистрального пас-
сажирского самолета на крейсерском режиме полета(М = 0,784-
0,81) при различных значениях mZo6.r.o. Из этого рисунка следует,
что при больших запасах продольной статической устой-
чивости(тсгу = -0,2 4- -0,3) потери аэродинамического качества на
балансировку самолета получаются очень большими(А/С ~1,5).
Расчетные исследования показали, что изменение аэро-
динамического качества самолета при этом зависит от следующих
параметров:
—запаса продольной статической устойчивости^^);
—коэффициента момента тангажа самолета без горизонтального
288
оперения при нулевой подъемной силе( W06.r.o.);
—угла скоса потока (е) от крыла в области горизонтального
оперения.
Всегда существует определенная комбинация значений
параметров и жгоб.г.о., при которых аэродинамическое качество
самолета будет максимальным.
Максимальное аэродинамическое качество самолета получается
при определенном положительном значении коэффициента подъемной
силы на горизонтальном оперении. Соотношение между положением
центра масс самолета, коэффициентом mzo б.г.о. и коэффициентом
Суг.о. имеет вид:
__ Жгэб.г.О~^~ СХт Хгб.г.о) Суб.г.0
Суг.о— л тг , \О. 02
-Tiro. -Л. г.о.
где:
Ху Xf^.v.q Wlz бг о -XFy о J
ASf ,.»=К,0 •
Су
Отсюда следует, что одна и та же величина коэффициента Суг.о.
может быть получена при нескольких сочетаниях положения центра
масс самолета (хт) и коэффициента жЛОб.г.о.
При малых абсолютных значениях коэффициента Жгоб.г.о.
максимум балансировочного аэродинамического качества самолета
приходится на малые запасы продольной статической устойчивости
(см.рис.6.7). Однако при больших абсолютных величинах
коэффициента момента тангажа (на пикирование) жгОб.г.о. (что
характерно для современных пассажирских самолетов со стре-
ловидными крыльями и суперкритическими профилями) максимум
аэродинамического качества самолета смещается в область
статической продольной неустойчивости mczy>Q. Поэтому на
самолетах с крыльями, скомпонованными из суперкритических
профилей, аэродинамическое качество даже при использовании малых
запасов продольной статической устойчивости (ж13'т1п = “0,02) будет
несколько меньше оптимального.
На диаграмме рис.6.8 в координатах относительной площади
289
__ *$г.о
г.о— s и положения центра масс
самолета %т приведены граничные линии, на которых обеспечивается
постоянный запас продольной статической устойчивости и на них
указаны величины максимального аэродинамического качества
самолета при значении тг об.г.о=~0,08.
Из рассмотрения этой диаграммы следует, что для самолета, у
которого величина коэффициента тангажа без горизонтального
оперения Woe.r.o значительная(на пикирование) даже при малом запасе
продольной статической устойчивости 02) будут потери
аэродинамического качества на балансировку самолета, т.е. не будет
реализовано максимально возможное аэродинамическое качество.
Рис.6.8. Балансировочное аэродинамическое качество самолета при
различных относительных площадях горизонтального оперения и
центровках
При использовании на самолете малых запасов продольной
статической устойчивости улучшаются также взлетно-посадочные
характеристики самолета; скорость отрыва и скорость захода на
посадку уменьшаются примерно на 2%, что приведет к уменьшению
потребной взлетной и посадочной дистанций. Расчеты показали, что
смещение эксплуатационного диапазона центровок назад на
290
величину А%т—0,10 и использование малого запаса устойчивости
(от mi3’= ~0,12 до mzy = -0,02) позволяет уменьшить потребную
площадь горизонтального оперения примерно на 25%. Детально
проведенный анализ действующих на конструкцию самолета сил
показал, что при уменьшении запаса продольной статической
устойчивости уменьшаются нагрузки на крыло, на горизонтальное
оперение и фюзеляж, при этом происхбдит положительное приращение
подъемной силы на горизонтальном оперении, вследствие чего
потребная подъемная сила на крыле уменьшается. На рис.6.9 показано
изменение нагрузок на горизонтальное оперение Yr.o/G=f(mzv)
при изменении запаса продольной статической устойчивости самолета
для двух расчетных случаев по прочности —А1 (выход самолета на
перегрузку Иу=2,0 при tfmax max с неотклоненной механизацией
крыла) и случай А (выход самолета на Сушах и Иушах). Из
приведенного графика следует, что при смещении эксплуатационного
диапазона центровок назад от т^у = —(0,324-0,12)до—(0,224-0,02)
уменьшаются нагрузки на крыло и горизонтальное оперение. Причем
нагрузки на горизонтальное оперение до запаса продольной
статической устойчивости wT =-0,08 отрицательные, а при
дальнейшем уменьшении запаса устойчивости (вплоть до ~0,02)
становятся положительными. Уменьшение нагрузок на горизонтальное
оперение вызывает также уменьшение изгибающих моментов,
действующих на хвостовую часть фюзеляжа. Таким образом,
вследствие уменьшения запаса продольной статической устойчивости
могут быть уменьшены массы конструкции крыла, фюзеляжа и
горизонтального оперения. Так, например, расчеты показывают, что
при смещении эксплуатационного диапазона назад на Дхт=0,10 за
счет использования малых запасов продольной статической
устойчивости, масса конструкции самолета может быть уменьшена
примерно на 1,0% его взлетной массы.
Таким образом, использование на современных магистральных
самолетах малых запасов продольной статической устойчивости
wPmin ~ ~0,02 (использование более заднего эксплуатационного
диапазона центровок) позволяет: увеличить аэродинамическое
качество самолета на крейсерских режимах полета, уменьшить
291
потребную площадь горизонтального оперения, уменьшить массу
конструкции крыла, горизонтального оперения и фюзеляжа вследствие
уменьшения действующих на них нагрузок и в итоге увеличить
дальность полета или платную нагрузку.
Рис.6.9. Нагрузка на горизонтальное оперение и фюзеляж
В некоторых случаях реализация малых запасов устойчивое™ на
крейсерском режиме полета может быть произведена за счет
смещения положения центра тяжести в полете путем перекачки
топлива в специальный балансировочный бак, расположенный в
хвостовой части самолета.
Рассмотрим теперь вопрос обеспечения требуемых динамических
характеристик самолета в управляемых движениях (параметры ^ср и
у).На рис.6.10 приведено изменение приращения перегрузки по
времени при ступенчатом отклонении рычага для одного из
пассажирских самолетов на крейсерском режиме полета(М~0,78) с
демпфером и без демпфера тангажа при двух запасах продольной
статической устойчивости. Из графика следует, что демпфер тангажа
при малых запасах продольной статической устойчивости уменьшает
время срабатывания самолета по перегрузке в управляемых
движениях, однако оно остается большим)'"'6-^7 с) и превышает
рекомендуемые значения.Уменьшить время срабатывания самолета по
перегрузке(если это необходимо)можно путем введения
дополнительного сигнала по перегрузке в систему улучшения
292
устойчивости и управляемости(СУУ). На рис.6.11 приведена та же
зависимость, что и на рис.6.10 для самолета с СУ У, использующей
сигналы угловой скорости тангажа wz и перегрузки пу.
Рис.6.10 и 6.11 Переходные процессы по перегрузке при ступенчатом
отклонении рычага
Из графика следует, что при одновременном использовании в
системе СУУ этих сигналов можно получить хорошие динамические
характеристики самолета в управляемых движениях.
Таким образом, для обеспечения требуемых характеристик
продольной устойчивости и управляемости современных
магистральных самолетов, имеющих большой диапазон
эксплуатационных центровок и использующих малые запасы
продольной статической устойчивости на крейсерских режимах полета,
целесообразно использовать в СУУ сигналы угловой скорости
тангажа и перегрузки:
S' В — K(i)z К-Пу^Му 1). (6. 6)
Передаточные коэффициенты Кыг и Кп? могут быть выбраны
небольшими и постоянными(см. главу 8), а коэффициент
кинематической связи руля высоты и штурвала управления Кш на
крейсерских режимах полета целесообразно изменять в зависимости
от балансировочного положения стабилизатора по закону:
Кщ—Ашисх (Ai + 7^2<p), (6.7)
где коэффициенты К и Кг выбираются так, чтобы величина Кш
изменялась бы не более, чем в 2,5 раза. В этом случае закон работы
автомата загрузки штурвала управления^* )может быть таким же,
как и закон регулирования К1П. Если при работающей автоматике
величины усилий на штурвале управления при малых скоростях полета
(режимы взлета и посадки) окажутся большими, то можно выполнить
293
дополнительное регулирование загрузки по закону:
/\P& = KpAV - Vo); (6.8)
при этом будет компенсироваться рост усилий на штурвале управления
от автоматических устройств.
Для обеспечения требуемых характеристик продольной
устойчивости и управляемости самолета, имеющего нелинейность в
зависимости Wz=/(a) на крейсерских режимах полета при большом
диапазоне центровок и малых запасах продольной статической
устойчивости могут быть использованы специальные автоматические
устройства с более сложным законом управления. Для иллюстрации
сказанного на рис.6.12 приведены для крейсерского режима полета
характеристики статической управляемостях^, Рву) для
магистрального самолета со стреловидным крылом с
суперкритическими профилями. Эти характеристики управляемости
получены с системой улучшения устойчивости и управляемости
(СУУ), автоматика которой работает по закону:
— Кх ' Хв~\ у р । ' <Z)z~l~ у р | -^Кп.у ( Ну 1 ) +
Ка^СХ Пиастр)F( & з) (6.9),
где:
F(?3) = {o
при
при
#3 = 0
£з>0
Коэффициенты Кыг, Кх,
КПу и постоянные времени фильтров
выбираются из условия обеспечения удовлетворительных статических
и динамических характеристик продольной устойчивости и
управляемости самолета.
На рис.6.12 приведены также оценки летчика пилотажных
характеристик этого самолета’ на крейсерских режимах полета,
полученные на пилотажном стенде. Этот рисунок свидетельствует, что
при использовании в системе управления нелинейной кинематической
связи углов отклонения рулей высоты от перемещения
штурвала(А’ш=с15’ B/dXB) оценки летчика пилотажных
характеристик самолета существенно улучшаются.
Статическая устойчивость самолета по скорости полета
определяется характером изменений балансировочных усилий на
294
Рх=0,2кг / мм Ро = ± Jkf
Рис.6.12. Расход штурвала и усилия на единицу перегрузки
штурвале управления по скорости на режимах горизонтального полета.
Самолет устойчив по скорости, если с увеличением скорости полета
происходит рост усилий на штурвале управления, т.е. производная
усилий по скорости полета была бы положительной (dP/d V>0). При
простейших автоматах загрузки штурвала управления, например, при
обычной загрузочной пружине, характер изменения усилий на
штурвале управления по скорости полета будет определяться
характером изменения перемещения (хода) штурвала от
скорости полета, а для самолета без СУУ характером изменения
295
балансировочного угла отклонения органа продольного управления
(руля высоты) от скорости полета. Таким образом, для обеспечения
устойчивости самолета по скорости полета необходимо в этом случае,
чтобы производная балансировочного угла отклонения руля высоты по
скорости также была бы положительной т.е.сИ B/dAf>0.
Так как :
в = - (б 10)
то производная угла отклонения руля высоты по числу М полета
будет:
,,/l'd»»^ , dmi’r , с*АСу . AmIst Ami \
dg „ _ г\AM + AM Ly mz AM+ AM + AM
(mi )2
С учетом равенства d Cy/d M = — 2 Cy/M условие
устойчивости самолета по скорости полета можно записать в виде:
.„су 2Су , dmzo , dmczy г , dmZls , . dmf . n
- + dir+^лГ C1'+ЧлГ+s ^~AM> °-
(6.11)
Из этого следует, что при т^<0 первый член всегда
положительный, что способствует увеличению степени устойчивости
самолета по скорости.
В качестве примера на рис. 6.13 приведены зависимости балан-
сировочного угла отклонения руля высоты £ В=/(М) для транспорт-
ного самолета со стреловидным крылом для двух значений центровки.
Из этого графика следует, что при передней центровке самолета
(хт=0,15), что соответствует большому значению запаса
продольной статической устойчивости, самолет устойчив по скорости
полета, а при задней центровке (хт = 0,35) самолет нейтрален по
скорости. Следовательно, для современных самолетов, имеющих
большой диапазон эксплуатационных центровок, могут возникнуть
трудности в обеспечении устойчивости по скорости.
Влияние коэффициентов жгО, т%, &mz№, ~’ вх°лящих в
296
Рис.6.13. Балансировочные углы отклонения руля высоты по
числам М
соотношение, различно, оно может быть как стабилизирующим, так и
дестабилизирующим. Например, уменьшение производной коэф-
(dw А
dM/ риводит к
компоновок современных самолетов в диапазоне чисел
уменьшению, так как при этом
динамического фокуса по углу
атаки от числа М
уменьшению устойчивости самолета по скорости, а пикирующего,
наоборот, к увеличению устойчивости по скорости; некоторое
смещение фокуса самолета вперед по числу М, наблюдаемое у
некоторых
М = 0,704-0.83 (рис. 6,14), приводит к увеличению устойчивости
самолета по скорости, а смещение фокуса назад с числа М = 0,83 к
dM
Снижение эффективности руля
высоты (»ф по числам М полета
приводит к уменьшению устойчивости
по скорости, если при этом начальный
балансировочный угол отклонения
руля высоты отрицателен, если же он
положителен, то снижение
эффективности руля высоты с ростом
числа М будет приводить к увели-
297
чению устойчивости самолета по скорости. Поэтому на самолетах,
имеющих балансировочный (подвижный) стабилизатор, устойчивость
самолета по скорости полета можно увеличить путем дополнительного
отклонения стабилизатора на отрицательный угол для создания
кабрирующего момента тангажа с целью получения небольшого
положительного балансировочного угла отклонения рулей высоты.
Двигатели, расположенные на пилонах под крылом (ниже центра
тяжести самолета), создают момент тангажа на кабрирование, что
приводит к уменьшению устойчивости самолета по скорости полета.
Применяемые на современных магистральных самолетах
дистанционные системы управления и различного типа СУУ
позволяют обеспечить устойчивость самолета по скорости полета
(подробно см. главу 8).
Кроме того, возможно применение и более простых автоматов
загрузки в виде:
—автомата, создающего требуемую зависимость хода штурвала
управления по скорости полета путем использования раздвижной тяги
в системе продольного управления самолета;
—автомата, обеспечивающего рост усилий на штурвале
управления при увеличении скорости полета (дополнительный сигнал в
автомат загрузки).
6.2.3 Эффективность продольного управления
При выборе размеров органов продольного управления для обеспе-
чения требуемой их эффективности целесообразно исходить из
использования двух органов управления для создания момента
тангажа: один для балансировки самолета (стабилизатор), а другой для
совершения маневра (руль высоты) и работы системы улучшения
устойчивости и управляемости. Такое разделение органов продольного
управления обусловлено тем, что балансировка самолета по режимам
полета (высоте, скорости, изменению конфигурации) и изменению
массы самолета (вследствие выгорания топлива) происходит довольно
медленно, в связи с этим потребная скорость отклонения органов
продольного управления для балансировки самолета получается
небольшой, в то время как для маневра самолета требуется быстрое
298
изменение момента тангажа, для чего необходимы большие скорости
отклонения органов управления. При использовании в системе
продольного управления этих двух органов можно значительно
управление рулем высоты при неподвижном стабилизатаре ~ уменьшить требуемые размеры горизонтального оперения и руля
высоты.
управление рулем высоты при переставном ^(дискретно) стабилизаторе 1—| # Фпос Ниже приведены возможные схемы продольного управления дозвуковыми самолетами (рис.6.15).
управление^ рулем высоты при балансировочном стабилизаторе —Схема управления рулем высоты при неподвижном стабили-
IM- управление стабилизатором с кинематически связанным рулем высоты заторе. В этой схеме балансировка самолета и управление при маневре на всех режимах полета выполняется только рулем высоты. Располагае-
управление стабилизатором д Рис.6.15. Принципиальные схемы управления мый момент от органов управления по тангажу создается только рулями ВЫСОТЫ WzPac. = <fe max). ПОЭТОМУ для обеспечения балансировки самолета на всех режимах полета
требуются большие размеры как рулей высоты, так и всего
горизонтального оперения. Одна из особенностей этой схемы
управления состоит в том, что рули высоты почти на всех режимах
полета находятся в отклоненном положении, что приводит к снижению
аэродинамического качества. Для снижения потерь аэродинамического
качества при балансировке самолета целесообразно рули высоты
выполнять с минимальной аэродинамической компенсацией, а это, как
известно, приведет к увеличению шарнирных моментов, что требует
дополнительной энергетики. Эта схема продольного управления в
настоящее время имеет очень ограниченное применение (самолеты с
малоэффективной механизацией крыла и небольшим диапазоном
эксплуатационных центровок).
299
—Схема управления с дискретно переставным стабилизатором.
В схеме продольного управления с дискретно переставным стаби-
лизатором управление и балансировка самолета при изменении
высоты, скорости, массы и центровки осуществляются рулем высоты.
Изменение угла отклонения стабилизатора связано (дискретно) с
изменением угла отклонения механизации крыла, т.е. только на
режимах взлета и посадки. Она имеет ограниченное применение на
некоторых пассажирских самолетах, так как имеет существенные
недостатки. А именно, не учитывает изменение массы и изменение
центровки самолета. Кроме того, на самолетах с такой схемой
продольного управления автоматическая балансировка обычно
осуществляется также рулем высоты и на многих установившихся
режимах это приводит к значительному рассогласованию между
штурвалом управления и углом отклонения руля высоты-штурвал
находится в нейтральном положении, а рули высоты могут быть
отклонены на значительный угол, что понижает безопасность полета
самолета. Таким образом, схема продольного управления с дискретно
переставным стабилизатором с рулями высоты не является
перспективной.
—Схема управления рулями высоты при балансировочном
(подвижном) стабилизаторе.
Отличительная особенность этой схемы продольного управления
состоит в том, что стабилизатор используется на всех режимах полета
для полной продольной балансировки самолета, а рули высоты применя-
ются только для управления при маневре и для автоматики (создание
перегрузки, отрыв носового колеса на разбеге и др.). При этом на всех
установившихся режимах полета имеется полное соответствие между
отклонением штурвала управления и рулями высоты. Независимо от
массы, положения центра тяжести самолета располагаемые моменты
тангажа самолета при отклонении рулей высоты (на пикирование и
кабрирование) всегда максимальные, что повышает безопасность
полета даже в случае грубых ошибок загрузки самолета.
В схеме управления с балансировочным стабилизатором полный
располагаемый момент тангажа, используемый на взлете и посадке,
определяется суммой моментов от руля высоты и стабилизатора:
300
тг=1П^8та^ + mzQ<pm&^, вследствие этого требуемые размеры
горизонтального оперения и рулей высоты получаются значительно
меньшими, чем при неподвижном стабилизаторе, что очень важно для
современных пассажирских и транспортных самолетов.
На всех установившихся режимах полета в этой системе
балансировка самолета осуществляется стабилизатором, рули высоты
находятся в неотклоненном положении, и для снижения шарнирных
моментов их можно выполнить с большой осевой компенсацией
(So.k~0,30).
Управление балансировочным стабилизатором обычно
осуществляется с помощью кнопки, расположенной на штурвале
управления.
Опыт эксплуатации отечественных пассажирских и
транспортных самолетов (Ил-62, Ил-76, Ил-86, Ил-96, Ту-204, Як-40,
Як-42), а также самолетов зарубежных фирм (Боинг, Эрбас-Индастри
и др.) с.рулями высоты и балансировочным стабилизатором (кнопочное
управление) показал, что такая схема продольного управления
самолетом обеспечивает простоту управления и высокую безо-
пасность полета, вследствие чего она получила широкое применение на
современных неманевренных самолетах, имеющих
высокоэффективную механизацию крыла и является очень
перспективной.
Сравнение эффективности рассматриваемых схем продольного
управления самолетом приведено на рис. 6.16, из которого следует,
что располагаемый момент тангажа при неподвижном стабилизаторе
даже при очень большой площади горизонтального оперения,
соответствующей коэффициенту статического момента Лг.о. = 0,85 и
большой площади рулей высоты (SB = 0,27), примерно на 30%
меньше, чем для систем с балансировочным стабилизатором при
существенно меньших площадях горизонтального оперения (Дг.о.=
0,65) и рулей высоты (SB = 0,16). Кроме того, на самолете с
неподвижным стабилизатором невозможно при необходимости
увеличить располагаемый момент тангажа от рулей высоты
(например, с увеличением массы самолета или при смещении
301
диапазона центровок вперед), тогда как при использовании балансиро-
вочного стабилизатора это может быть достигнуто путем увеличения
угла отклонения стабилизатора.
Рис.6.16. Эффективность органов продольного управления
На рис. 6.17 приведены зависимости потребных для ба-
лансировки самолета коэффициентов момента тангажа от скорости
полета для различных значений массы и центровки самолета (расчеты
выполнены применительно к тяжелому транспортному самолету).
Потребные коэффициенты момента тангажа определялись из условия
выполнения самолетом следующих маневров :
— выход на нормальную перегрузку Иу = 1±0,3 ;
— отрыв носового колеса на разбеге;
— посадка (с учетом влияния земли).
Из графика на рис. 6.17 можно определить потребные
коэффициенты момента тангажа для совершения маневра и для
302
балансировки самолета. Анализ показывает, что эти моменты можно
разделить на "быстрые” (управление рулями высоты) и "медленные”
(управление стабилизатором). Таким образом, на современных
транспортных и пассажирских самолетах целесообразно иметь два
органа продольного управления — балансировочный стабилизатор с
малой скоростью перекладки (<р = 0,254-0,50 град/с) и рули высоты
с обычной скоростью перекладки (& = 25 4- 30 град/с) для совершения
маневра. В качестве примера на рис.6.18 приведена зависимость
коэффициента статического момента потребной площади
горизонтального оперения от центровки при двух рассматриваемых
системах продольного управления для тяжелого транспортного
самолета.
Рис.6.17. Зависимость потребного для балансировки самолета
коэффициента момента тангажа от скорости полета
Произведнные расчеты показывают, что при использовании на
самолете подвижного (балансировочного) стабилизатора с рулями
высоты суммарная мощность приводов в системе продольного
управления требуется в пять—шесть раз меньшей, чем в системе с
неподвижным стабилизатором. Это обьясняется не только тем, что
геометрические размеры рулей высоты меньше, но и меньшими
величинами шарнирных моментов вследствие возможности
303
использования на них большей осевой компенсации, так как рули
высоты на всех длительных режимах находятся в нейтральном
положении, тогда как в системе с неподвижным стабилизатором рули
высоты отклонены на значительные углы.
Рис.6.18. Зависимость статического момента площади горизонталь-
ного оперения от положения центра масс самолета
При наличии на самолете двух органов управления (балансировоч-
ный стабилизатор и рули высоты) нет необходимости применять
трим мерный механизм для снятия усилий на штурвале управления, так
как балансировка осуществляется стабилизатором; кроме того, проще
решается вопрос обеспечения устойчивости самолета по скорости
полета.
Таким образом, применение на современных пассажирских и
транспортных самолетах системы продольного управления с
балансировочным (подвижным) стабилизатором с рулями высоты
имеет ряд преимуществ по сравнению с системой управления с
неподвижным стабилизатором, среди которых основными являются :
— меньшая потребная площадь горизонтального оперения
примерно на 30%;
— большее аэродинамическое качество самолета при полете на
304
крейсерских режимах;
— более высокая безопасность полета в случае грубых
эксплуатационных ошибок в загрузке самолета (передний отсек
багажного отделения загружен, а задний нет);
— налчиие постоянного располагаемого момента тангажа для
управления самолетом, независящего от массы и положения центра
тяжести самолета;
— полное соответствие между штурвалом управления и рулями
высоты на установившихся режимах полета;
— нет необходимости в установке механического автомата
балансировки;
— проще осуществлять аварийную систему продольного
управления, применяемую в настоящее время на случай выхода из
строя основной и резервной систем управления;
— ослабляется требование к динамическим характеристикам
приводов рулей высоты (зоны нечувствительности, люфты и т.п.),
вследствие меньшей эффективности рулей высоты (wi);
— меньшая мощность рулевых приводов (в 5-4-6 раз) и целый
ряд других преимуществ в структуре системы управления.
Система продольного управления стабилизатором с кине-
матически связанным с ним рулем высоты и система управления це-
ликом управляемым горизонтальным оперением (стабилизатором)
имеют очень большую эффективность и применение их на не-
маневренных дозвуковых самолетах связано с большими кон-
структивными трудностями: для получения удовлетворительных
характеристик продольной управляемости Хву необходимо применять
регулирование Кт по режимам полета в больших пределах (связь
между штурвалом управления и органами продольного управления).
Такие системы продольного управления не нашли применение на
неманевренных дозвуковых самолетах.
6.2.4. Выбор размеров горизонтального оперения и центровок
Определение требуемой площади горизонтального оперения
всегда являлось комплексной и сложной задачей, связанной с
необходимостью выполнения целого ряда требований. В частности,
305
площадь горизонтального оперения должна выбираться из условия
обеспечения балансировки самолета на всех эксплуатационных
режимах полета при всех значениях центровок, предусмотренных
"Руководством по летной эксплуатации” и безопасности полета при
минимальных запасах продольной статической устойчивости.
Для современных пассажирских и транспортных самолетов
существующая методика определения требуемой площади
горизонтального оперения должна быть несколько уточнена.
Необходимость этого вызвана особенностями аэродинамической
компоновки, связанными с использованием эффективной механизации
крыла на взлетно-посадочных режимах, применением
суперкритических профилей, широким применением автоматических
устройств в системе штурвального управления и требованиями к
продольной устойчивости и управляемости. По существу, выбор
площади горизонтального оперения—это также определение
предельно-переднего и предельно-заднего положения центра масс
самолета при заданном (довольно большом) диапазоне центровок.
Для обеспечения приемлемых скоростей полета на режимах
взлета и посадки на самолетах нового поколения, имеющих большие
удельные нагрузки на крыло(CG/S) взл 700 кг/м2 и (G/S) пос ~
550 кг/м2) приходится применять очень эффективную механизацию
крыла (Сушах ~ 2,5-г3,0), создающую большой момент тангажа на
пикирование (А Wmax ~ ~0, 5) и вследствие этого расчетным
случаем для определения предельно-переднего положения центра масс
самолета является балансировка самолета в посадочной конфигурации
на режиме ухода на второй круг с малых высот с перегрузкой Иу =
1,4.
Напомним, что коэффициент момента тангажа самолета без гори-
зонтального оперения определяет подъемную силу на горизонтальном
оперении, потребную для балансировки самолета:
т/ ‘УПхб.Г.О. Q S Ьа (Г -]П\
Y г.о— г (6.12)
-С^г.о.
ИЛИ
Су. г.о = у <6.13)
Л Г.О-^Т-Г.О
306
Как указывалось выше, зависимость момента тангажа
рассматриваемых самолетов без горизонтального оперения от угла
атаки существенно нелинейна с отклоненной механизацией крыла,
особенно на углах атаки, близких к допустимым (а~ 12 4-15°).
Требуемые размеры горизонтального оперения наглядно
показаны на диаграмме граничных линий в координатах коэффициента
статического момента площади горизонтального оперения Аг.о и
положения центра масс самолета Хт. Одна граничная линия определяет
минимальный запас продольной статической устойчивости самолета в
крейсерской конфигурации (например, mzymin =-0,03 с учетом
упругости конструкции самолета) в зависимости от величины Аг,0.т.е.
эта граничная линия будет определять предельно-заднее положение
центра масс, при котором обеспечивается принятый минимальный
запас продольной статической устойчивости. Другая граничная линия
определяет предельно-переднее положение центра масс самолета, при
котором обеспечивается балансировка самолета.
Имея зависимости Cy,mz = f (я) самолета без горизонтального
оперения, полученные при испытании модели в аэродниамических
трубах или по приближенному расчету на основании результатов испы-
таний в аэродинамических трубах моделей самолета, близкого по ком-
поновке к проектируемому самолету, можно построить эти граничные
линии.
Для самолета без горизонталаьного оперения, т.е. при Аг.о=0
определим:
— предельно-заднее положение центра масс самолета в
крейсерской конфигурации, при котором обеспечивается принятый
минимальный запас продольной статической устойчивости при числах
М = о,4 и М крейсерского полета:
X тпз б.г.о — Xf б.г.о+^z>’mln+ ДХкупр, (6.14)
при этом величиной Wz*6.r.o//z можно пренебречь, вследствие ее
малости;
— предельно—переднее положение центра масс самолета с
отклоненной маханизацией крыла в посадочном положении, при
котором будет обеспечиваться балансировка самолета на режиме
захода на посадку:
307
~ ~ _^гб.г.о. ~1~ АЖг зем. б.г.о. /с -i г-\
X т п.п — Хт мод у 'О. 1Ь)
ЧуЗП
где: Ш.г.о, — коэффициент момента тангажа на угле атаки захода
самолета на посадку без учета влияния земли;
Aw* зем — приращение коэффициента тангажа вследствие
влияния земли. Причем, если коэффициент A зем^>0
(положительное приращение), то при определении хт п.п. его следует
принять равным нулю (А^зем = 0), т.е. в этом случае расчетная
высота полета должна быть больше той, на которой еще нет влияния
земли на момент тангажа самолета.
Для самолета с горизонтальным оперением, т.е. при
____________________ 5г.о Lr.O
г.о мод— также определим:
— предельно-заднее положение центра масс самолета в крейсер-
ской конфигурации при двух числах М = 0.4 и М = МКр
X т п.з — Л>мод + 'VVlzymtn “Ь А_Х/гупр. (6. 16)
— предельно-переднее положение центра масс самолета в
посадочной конфигурации на режиме ухода самолета на второй круг (с
посадочной глиссады) с минимально разрешенной высоты полета с
перегрузкой Иу=1.4
~ ~ А мод. 4~ А Жгзем. ~Ь fflz( <Р ф мод)
X т п.п. Хт мод. -I д
1, .п
8 £ в max) g у у
1, 4Су3 .п
где: мод— коэффициент момента тангажа самолета на угле
атаки, при котором Су=1.4 Су3.п, т.е. на котором обеспечивается
перегрузка пу=1,4 на режиме ухода самолета на второй круг.
Соединяя полученные точки прямыми линиями на диаграмме в
координатах коэффициента Аг.о. и положения центровки самолета х т,
получим граничные линии, на одной из которых обеспечивается
минимально-выбранный запас продольной статической устойчивости, а
на второй—балансировка самолета. По заданному в технических усло-
виях на самолет диапазону центровок по полученной диаграмме можно
определить потребную величину коэффициента статического момента
308
Л_ Г.О .L Г.О
_____ . . г.о. -- и> следовательно,
величину потребной площади Sr.o. После этого при полученном
значении предельно-передней центровки следует произвести расчет
достаточности углов отклонения рулей высоты для подъема носового
колеса на режиме взлета.
Следует заметить, что в рассмотренной методике определения
потребной величины площади горизонтального оперения принято, что
величина предельно-передней центровки самолета линейно зависит от
величины Л г.о., т.е. принято, что существует такое положение центра
масс, при котором обеспечивается балансировка самолета без
горизонтального оперения. Это верно для современных самолетов,
имеющих большие значения моментов тангажа на пикирование только
для посадочного диапазона углов атаки, а на малых углах атаки
(близких к нулю) нет возможности балансировки самолета без
горизонтального оперения. Вследствие этого зависимость предельно-
передней центровки от величины Лг.о получается нелинейной, т.е.
существует минимальное значение Ar.Omin, ниже которого не
обеспечивается балансировка самолета на малых углах атаки,
включая небольшие отрицательные. Проведенные расчеты
показывают, что для современных неманевренных самолетов величина
Лг.о mm получается очень небольшой порядка Лг.о mm = 0,30 4- 0,35
(см. рис. 6.19, а при реально необходимых значениях Лг.о=0,854-
1,10 нелинейная зависимость хТп.п = /(Лг.о) приближается к
линейной. Следовательно, приведенная методика определения
потребной площади горизонтального оперения для современных
транспортных и пассажирских самолетов дает правильные результаты
и поэтому является вполне приемлемой.
Одним из условий определения предельно-заднего положения
центра масс самолета является обеспечение минимальной степени
продольной статической устойчивости по перегрузке. В большинстве
случаев это требование является определяющим для крейсерского
режима полета, на котором аэродинамический фокус самолета (Xf)
занимает более переднее положение, чем на режимах взлета и
посадки, в основном из-за большого влияния упругости конструкции.
309
Для самолетов без автоматических устройств предельно-заднее
положение центра масс должно выбираться из условия обеспечения
восстанавливающего (пикирующего) момента тангажа (w2<C0) в
большом диапазоне углов атаки вплоть до углов атаки начала
сваливания (до #с). В рассматриваемом случае это приводит к
необходимости смещать вперед (примерно на Ахт~0,10)
предельно-заднее положение центра масс самолета по сравнению с его
положением, при котором обеспечивается на крейсерских режимах
полета минимальный запас продольной статической устойчивости
mi'ymin=_0,02. Это приведет к большим потерям аэродинамического
качества самолета при его балансировке на крейсерских режимах
полета, что ухудшает экономические показатели самолета. Поэтому
для самолетов без автоматических устройств в системе продольного
управления должны применяться все меры к устранению местной
нелинейности в зависимости момента тангажа до больших углов атаки
ческого момента площади горизонтального оперения от положения
предельно-передней центровки самолета
На современных магистральных самолетах для обеспечения
большого диапазона скоростей применяется очень эффективная
механизация крыла (выдвижные многозвенные щелевые закрылки и
предкрылки, см.главу 3). Такая механизация крыла позволяет
получить большие коэффициенты подъемной силы С-Утах ~ 2,8 •
3,2, но которая приводит к значительному изменению моментов
310
Тангажа самолета (возникают большие пикирующие моменты). Для
иллюстрации сказанного на рис.6.20 приведены приращения
коэффициента подъемной силы в зависимости от углов отклонения
закрылков для 2-х современных магистральных самолетов, имеющих
выдвижные щелевые закрылки (один имеет 2-х звенные, другой 3-х
звенные). Из рисунка видно, что 3-х звенные щелевые выдвижные
закрылки создают приращение коэффициента подъемной силы на 354-
40% больше, чем 2-х звенные. На том же рисунке приведены
зависимости приращения коэффициентов момента тангажа от углов
отклонения закрылков для этих же двух самолетов. Из этих
зависимостей следует, что отклоняемые закрылки создают очень
большие моменты тангажа на пикирование. Моменты тангажа,
создаваемые 3-х звенными закрылками на самолете без
горизонтального оперения по своей абсолютной величине также
значительно больше, чем моменты тангажа, создаваемые 2-х
звенными закрылками. Однако на рассматриваемых самолетах с
горизонтальным оперением моменты тангажа от отклонения закрылков
получаются хотя и большие, но примерно одинаковые. Учитывая это и
большой диапазон эксплуатационных центровок, потребные площади
горизонтального оперения на магистральных самолетах получаются
довольно большие (Sr.o.~ 0,254-0,30 или Аг.0.=0,954-1,2).
Вследствие этого фокус самолета (Xf) будет находиться в довольно
заднем положении (xf —0,504-0,60). Для примера на рис. 6.21
приведены зависимости положения фокусов от чисел М для 2-х
магистральных самолетов с величинами Аг.о. для одного самолета
равными Аг.о.=0,95, для другого Д г.о.= 1,2. Из этого рисунка
следует, что для использования на самолете на крейсерских режимах
полета малых запасов продольной статической устойчивости тс/min ~
~0,02 центровка самолета должна находиться в довольно заднем
положении, особенно у самолета с большим значением коэффициента
^4г.о.=1,2(^тзад=0,554-0,58). Такое заднее положение центра
тяжести самолета по конструктивным соображениям трудно
осуществить. Поэтому на магистральных самолетах для получения
небольших запасов продольной статической устойчивости на
крейсерских режимах полета можно применять перекачку топлива в
311
_ _ задний балансировочный бак или программный расход топлива.
Поверхность ВПП оказывает заметное влияние на аэро-
динамические характеристики самолета, происходит некоторое уве-
личение подъемной силы и значительный рост момента тангажа на
пикирование вследствие уменьшения углов скоса потока в области
горизонтального оперения.
1,0
0,5
- 0,2
гак
самолет с 2хзвенными
закрылками <5ез г.о.
самолет с 2хзвенными
щелевыми закрылками
самолет с Зхзвенными
закрылками <5ез г.о.
самолет £3Х звенными
щелевыми закрылками
Рис.6.20. Приращение коэффициентов подъемной силы и
момента тангажа от угла отклонения закрылка
а = 4 °
а=12
40 $<>'
самолет с 2хзвенными
закрылками сЛго =0,95
самолет с Зхзвенными
закрылками сЛго = 1,2
Существенный рост момента тангажа на пикирование происходит
у самолетов с низким расположением горизонтального оперения. На
312
Рис.6.21. Зависимость положения
фокуса самолета от числа М
Рис.6.22. Зависимость
приращения коэффициента
момента тангажа самолета без
горизонтального оперения от
угла атаки при экранирующей
поверхности
самолетах с высоким расположением горизонтального оперения ("Т”-
образное хвостовое оперение) этот момент тангажа за счет влияния
близости земли уменьшается, и на некоторых самолетах со
стреловидными крыльями от влияния земли может возникнуть даже
небольшой момент тангажа на кабрирование. Это явление объясняется
тем, что на самолетах со стреловидными крыльями без
горизонтального оперения экранирующая поверхность земли
увеличивает несущие свойства в корневых сечениях крыла и тем
самым создает момент тангажа на кабрирование. Этот момент
тангажа может быть даже несколько больше момента тангажа,
обусловленного уменьшением углов скоса потока в области
горизонтального оперения.
На рис. 6.22 приведен для самолета со стреловидным крылом
/ = 35° и углом отклонения закрылков £3 = 40° дополнительный
коэффициент момента тангажа д и^зем бг.о, полученный при
испытании модели самолета в аэродинамической трубе с экраном при
А=0,8 Ch = H/b\\ Н — ресстояние от четверти бортовой хорды
крыла до земли). Из этого рисунка следует, что с увеличением углов
«таки выше 2,5° момент тангажа А и^зем бг.о линейно возрастает.
С уменьшением угла стреловидности крыла д и^зем бг.о уменьшается
и для самолетов с прямыми крыльями (%=0) он равен нулю.
313
Величины коэффициентов моментов тангажа от влияния близости
_ земли (д зем б.г.о, & ж2зем) определяются на основании резуль-
татов испытаний моделей самолета с экраном в аэродинамических
трубах.
Приближенно величина л зем самолета определяется:
А зем Wг зем б.г.о-^ 7Hz£зем, (6,18)
где:
л — А2+4(Я-«2
£42+4(Я+«2 ’
I — (<упос ~Ь А Су зак
Су пос I А Су зак *
0,7/ I зак
Н—расстояние от четверти бортовой хорды крыла до земли;
£—угол скоса потока вдали от земли;
h—расстояние от четверти бортовой хорды горизонтального
оперения до замли;
/—размах крыла
/ зак —размах закрылков.
В качестве примера на рис. 6.23 приведены зависимости прира-
щения коэффициентов подъемной силы (А Сузем) и момента тангажа
(А ю^зем) от угла атаки магистрального самолета со стреловидным
крылом /~30° в положении касания поверхности земли колесами
шасси. Исследование показывает, что на высотах Н~4 Ьа влияние
земли на аэродинамические характеристики практически пропадает.
Таким образом, потребная площадь горизонтального оперения для
магистральных самолетов должна выбираться из следующих условий:
—обеспечение удовлетворительных характеристик продольной
управляемости и балансировки самолета во всем диапазоне эксплуата-
ционных центровок, перегрузок и скоростей полета;
—обеспечение балансировки самолета в посадочной
конфигурации во всем диапазоне эксплуатационных значений угла
атаки и коэффициента подъемной силы (от Cy=Q до Сус), т.е.
включая обеспечение балансировки самолета при уходе его на второй
круг с малых высот (разрешенных РЛЭ) с возможностью создания
перегрузки /г>=1,4;
314
__обеспечение потребных запасов устойчивости.
Рис.6.23. Зависимость коэффициентов подъемной силы и момента
тангажа от угла атаки при экранирующей поверхности
6.3. Боковая устойчивость и управляемость
Пассажирские и транспортные самолеты с крылом большого
удлинения (Л = 9,0 4-10,5) и умеренной стреловидности (z = 254-
35°) имеют ряд особенностей, которые оказывают заметное влияние
на характеристики боковой устойчивости и управляемости:
— большие моменты инерции самолета, особенно относительно
вертикальной оси (I >), вследствие большого удлинения крыла и
размещения топлива в крыле;
— излишняя степень поперечной статической устойчивости (т*),
особенно с отклоненной механизацией крыла вследствие больших
положительных углов поперечного "V” крыла;
__—большие значения перекрестных вращательных производных
(Шух,тху), особенно в посадочной конфигурации самолета;
— большое влияние упругости конструкции на эффективность
элеронов и ряд других особенностей.
6.3.1. Характеристики бокового возмущенного движения
Расширение диапазона высот и скоростей полета приводит к
значительному изменению характеристик боковой устойчивости и
315
управляемости самолета по режимам полета.
В большинстве случаев боковое возмущенное движение самолета
может быть представлено совокупностью трех составляющих
движения:
— боковое колебательное движение;
— апериодическое движение крена;
— апериодическое спиральное движение.
В связи с этим характеристическое уравнение бокового движения
можно представить в виде:
А ={Р -ЛКр)(^ -Лсп)(/>2+2 а/>+ал2)=0 (6.19)
где: Л кр, Л сп —корни движения крена и спирального движения;
&, <01 —декремент затухания и недемпфированная частота
бокового колебательного движения.
Боковое возмущенное движение современных пассажирских и
транспортных самолетов без систем автоматического улучшения
устойчивости и управляемости практически на всех режимах полета
имеет слабое затухание колебаний, а на малых скоростях полета
вследствие взаимосвязи движений крена и рыскания возможно
возникновение колебательной неустойчивости самолета. Апе-
риодические составляющие бокового возмущенного движения са-
молета характеризуются:
—небольшой постоянной времени движения крена (Т кр= 1/Л кр)
практически на всех эксплуатационных режимах полета вследствие
большой величины демпфирующего момента крена (ж£х);
—наличием спиральной устойчивости самолета на малых
скоростях полета из-за излишней степени поперечной статической
устойчивости (/Их).
Известно, что наибольшие трудности в обеспечении удовлетвори-
тельных характеристик боковой устойчивости самолета представляет
получение хороших характеристик колебательного движения —
времени его затухания, которое определяется по времени уменьшения
амплитуды колебаний до 5% начальной величины. На самолетах
прошлого поколения, на которых не применялись автоматические
устройства в системе штурвального (ручного) управления,
удовлетворительные характеристики бокового возмущенного
316
движения обеспечивались за счет выбора поперечного "V” крыла и
площади вертикального оперения, что приводило к значительному
утяжелению конструкции самолета, и в настоящее время—это
экономически невыгодно. Поэтому на современных самолетах удов-
летворительные характеристики бокового возмущенного движения на
всех эксплуатационных режимах полета обеспечиваются путем
использования автоматических устройств (демпферов рыскания и
крена с перекрестной связью и др.).
Проведенные исследования показали, что установка демпфера
крена значительно улучшает характеристики боковой устойчивости и
управляемости, особенно при полете на малых скоростях. Однако
использование демпфера крена приводит к некоторому уменьшению
располагаемых моментов для поперечного управления и, сле-
довательно, к уменьшению максимальных значений угловых ско-
ростей крена и к уменьшению частоты боковых колебаний, что
нежелательно, Кроме того, на самолетах, использующих только
интерцепторы как органы поперечного управления, использование
демпфера крена может привести к увеличению аэродинамического
сопротивления самолета, особенно при полете в турбулентной
атмосфере, что также нежелательно. Как показывают исследования,
на современных пассажирских и транспортных самолетах с крыльями
большого удлинения представляется возможным обеспечить хорошие
характеристики боковой устойчивости и управляемости и без
использования демпфера крена.
На рис. 6.24 приведены постоянные времени движения крена Ткр
и частоты собственных боковых колебании i ряда современных
самолетов с крыльями большого удлинения (Л = 9,5 10,5) для
режима захода на посадку. Из этого графика следует, что с увелче-
нием массы самолета уменьшается собственная частота боковых
колебаний и увеличивается постоянная времени движения крена.
Для этих самолетов на режиме захода на посадку величина
постоянной времени крена не превышает Т кр^ 1,0^“ 1,1с, т.е.
критерий, определяющий движение самолета по крену, получается
удовлетворительный и без использования демпфера крена; хорошие
характеристики колебательной и спиральной устойчивости самолета с
317
крыльями большого удлинения могут быть обеспечены путем
соответствующего выбора закона работы демпфера рыскания.
На тяжелых пассажирских и транспортных самолетах
вследствие неблагоприятного влияния весовой составляющей (g/ V)
на боковое возмущенное движение и большой величины отношения
т?х1у
mfijx обычный демпфер рыскания становится малоэффективным,
особенно при полете самолета с отклоненной механизацией.
। Лр«
с
1,0-
Заход на посадку
"Д
рад/с
— 1,0-
0,5-
I °-
0,5 -
100 200 wnoc,T
100 200 wnoc,T
0
Рис.6.24. Собственная частота боковых колебаний(йл)и постоянная времени
движения крена( Т кр)современных дозвуковых неманевренных самолетов
в зависимости от их массы (заход иа посодку)
Из уравнений бокового возмущенного движения самолета
передаточная функция может быть представлена в виде:
<ру __ М3? (р ~ Лр) (/^ 2 + 2 О>2 )
(/>-Лкр)(/>-Лсп)(/>2+2^+^ )
Исследования показали, что отношение квадратов частот нуля и
полюса о»2 этой передаточной функции является важным
параметром, определяющим эффективность работы демпфера
рыскания. Приближенное выражение этого отношения имеет вид:
"' ТИР
(6.20)
(6.21)
2
(D1
где:
( ‘УУЬх I Ixy VYLy
! \ Т "Г Т Т
ху \ J.X IX Ху
318
qsl ( my_ , Ixy Шх\
My' r2 l т *” T T ]
Ixy \ -ty J-У lx /
1 Ixly
Производные тгх и т'у определяются в полусвязанной системе
координат.
Расчеты показывают, что для неманевренных самолетов на всех
режимах полета значение отношения сог/ал лежит в пределах от нуля
до единицы. Если величина этого отношения мала и близка к нулю, то
применение демпфера рыскания приводит к значительному улучшению
затухания бокового возмущенного движения, а если величина его
близка к единице, то применение демпфера рыскания мало увеличивает
демпфирование боковых колебаний, т.е. эффективность работы
демпфера рыскания мала. Такая малая эффективность работы
обычного демпфера рыскания проявляется на современных магист-
ральных самолетах на малых скоростях полета и на режимах взлета
и посадки.
Очень хорошим средством увеличения эффективности работы
демпфера рыскания на малых скоростях полета является
использование дополнительного сигнала по углу крена, который
компенсирует неблагоприятное влияние весовой составляющей gl V
на боковое возмущенное движение. В этом случае закон работы
демпфера рыскания будет:
ДЗ н — Ка>у • a)y + Kv 'Т (6.22)
где Kv — gl VEl/d
Как уже отмечалось (см.рис.6.24), для пассажирских и транс-
портных самолетов при полете на режимах взлета и посадки (малые
скорости полета) характерны низкие собственные частоты боковых
колебаний и достаточно большие величины собственного
демпфирования движения крена. Это является причиной того, что
изменение угловой скорости рыскания и угла крена в боковом
возмущенном движении близки по фазе. Поэтому дополнинтльный
сигнал по углу крена в законе работы демпфера рыскания является
весьма эффективным средством улучшения работы демпфера
рыскания, особенно на малых скоростях полета самолета.
На рис 6.25 приведены траектории корней характеристического
319
л
уравнения бокового движения самолета при изменении передаточного
числа K^wy демпфера рыскания при двух законах работы. Из анализа
корневых траекторий, построенных для режима захода самолета на
посадку (а~6°), следует, что при выбранном в качестве примера
передаточном числе демпфера рыскания Ка? = Зс декремент
затухания колебаний бокового возмущенного движения при обычном
законе работы демпфера рыскания = • а>у) равен £=
— 0,22, а при использовании дополнительного сигнала по углу крена
декремент затухания колебаний увеличивается до $ = ~0,39;
вследствие этого время затухания бокового возмущенного движения
самолета уменьшается примерно в 1,8 раза.
л/с посадку
Рис.6.25. Траектории корней характеристического уравнения бокового
движения самолета при изменении передаточного числа демпфера рыскания
(заход на посадку и режимы полета на больших углах атаки)
При использовании закона работы демпфера рыскания (6.22) с
увеличением передаточного числа КШу заметно увеличивается
декремент затухания боковых колебаний самолета даже при выходе
самолета на очень большие углы атаки (а~20°). Следовательно,
использование в законе работы демпфера рыскания дополнительно
сигнала по углу крена позволяет значительно повысить
эффективность его работы и тем самым обеспечить хорошие
320
характеристики затухания колебаний бокового возмущенного
движения неманевренного самолета на всех эксплуатационных
режимах полета, включая большие углы атаки. При этом достаточное
быстродействие самолета по крену (7\Р~1с) обеспечивается
собственным аэродинамическим демпфированием крыла самолета.
На современных неманевренных самолетах с демпфером
рыскания для улучшения характеристик боковой управляемости
применяют фильтр ^так назь,ваемь,й “виражный механизм”),
однако введение этого фильтра уменьшает демпфирование боковых
колебаний самолета, что нежелательно. Для устранения этого
недостатка и сохранения свойства “виражного механизма”
целесообразно в демпфере рыскания использовать фильтр с
передаточной функцией
W=Kl Tip+1 Т2Р+1 (6 •23)
Для обеспечения приемлемых характеристик поперечной и
путевой управляемости самолета на всех режимах полета параметры
фильтра Ti и Т2 целесообразно выбирать из следующих условий: в
эксплуатационном диапазоне частот боковых колебаний самолета
амплитудная характеристика этого фильтра должна быть близка к
единице, а его фазовая характеристика должна мало отличаться от
нуля. Эти условия выполняются, если соотношения между
параметрами Ti и Т2 будут:
2 1
_ Ci) mln ____1____
1 2 'Г' 2
Ci) max -i 2Ci) щах
где сощах — максимальная частота боковых колебаний самолета на
крейсерском режиме полета,
comm — минимальная частота боковых колебаний самолета на
малых скоростях полета. Для магистральных самолетов она может
быть принята 0,35 “Ь 0,40 1/с
Таким образом, закон работы демпфера рыскания на малых
скоростях полета для дозвуковых пассажирских и транспортных
самолетов можно записать в виде:
321
Д(5н—Л1
Tip 1
Tip+1 T2P+I
К Шу (ajy + Kvy)
•где коэффициент Кг —1,15.
Обычно в автоматике системы штурвального управления
современных самолетов используют сигналы с датчиков угловых
скоростей. Поэтому в законе работы демпфера рыскания
целесообразно заменить сигнал угла крена у на сигнал угловой
скорости крена со*, используя известную связь у ~ шх. Тогда закон
работы демпфера рыскания можно записать в виде:
О)х
(6.24)
Для обеспечения хороших характеристик боковой устойчивости
самолета на взлетных и посадочных режимах передаточное число
демпфера рыскания КШу обычно близко к -Kw>~2,5~^3c. При этом
передаточное число Kv можно не регулировать по скорости полета и
считать его постоянным и равным Лк ~ 0,12 1/с.
На больших скоростях полета влияние весовой составляющей
(^/Ю на боковое возмущенное движение самолета мало, поэтому
для полета самолета в крейсерской конфигурации можно исключить
сигнал угловой скорости крена по сигналу положения закрылков, и
тогда закон работы демпфера рыскания будет иметь вид:
Д54 н ']'\р-\-1 Т2р~\~А. (6.25)
При этом, как показали исследованя, передаточное число демпфера
рыскания КшУ на этих режимах можно несколько уменьшить.
На рис.625 и 6.26 приведены траектории корней характеристичес-
кого уравнения бокового возмущенного движения для пассажирского
тяжелого самолета с рассматриваемыми законами (6.24) и (6.25)
работы демпфера рыскания (без демпфера крена) при различных
передаточных числах КЫу. Из рассмотрения этих корневых
траекторий следует, что у самолета с демпфером рыскания,
работающим по закону (6.24), с увеличением передаточного числа
К Шу значительно возрастает декремент затухания бокового
322
Рис.6.26. Траектории корней
характеристического уравнения
бокового движения самолета
возмущенного движения (£)
практически без изменения
частоты боковых колебаний
самолета. При К Шу = 3,0 для
взлетных и посадочных режимов и
A\>y=l,0 для полета самолета в
крейсерской конфигурации
обеспечиваются хорошие
характеристики затухания
бокового возмущенного движения
без использования демпфера крена:
время затухания боковых
колебаний самолета ^зат— —
10с; постоянная времени крена
Ткр< 1с; постоянная времени
спирального движения Тсп 40с и
2 7Г
период боковых колебаний Т =-12с.
С1)
Для современных пассажирских самолетов должно быть
проверено наличие спиральной устойчивости, т.е. Л си < 0. Большая
степень неустойчивости спирального движения недопустима
вследствие быстрого ухода самолета от исходного режима полета. В
отечественных рекомендациях, указывается, что время удвоения угла
крена должно быть ^дв.>20 с. Тогда постоянная времени спирального
движения должна быть
Из характеристического уравнения бокового возмущенного
движения Л4 + А3Л3 + А2Х2 + + Ао = О можно приближенно
определить
СП
g_______Шуу — тху тру______
V тхх Шу— тру • т{шух—
А L 1х
И
(6.26)
323
т ~ -----
J- СП— Ч
Л СП
Апериодическая неустойчивость бокового движения определяется
знаком и величиной Ао. Наибольшая степень спиральной
неустойчивости проявляется на малых скоростях полета, так как на
этих режимах полета весовой член"рг оказывает очень большое
влияние.
6.3.2. Поперечное управление
Боковое управляемое движение современного пассажирского или
транспортного самолета в значительной мере зависит от характера
взаимосвязи движений крена и рысканйя. На малых скоростях полета
самолета, особенно с отклоненной механизацией крыла, взаимосвязь
движений крена и рыскания проявляется в значительной степени. В
управляемых движениях это проявляется в возникновении больших
углов скольжения при управлении самолетом по крену, что не только
затрудняет выполнение координированных разворотов (главным
образом, в момент входа в разворот и выхода из него), но и приводит
к заметному “зависанию” самолета по крену, которое выражается в
уменьшении угловой скорости крена при постоянном отклонении
органов поперечного управления и оценивается отношением потери
угловой скорости крена Дшх к максимальной угловой скорости крена
wxmax. При полете самолета на малых скоростях"зависание” по крену
обусловлено большой степенью поперечной статической устойчивости
и возникающими большими углами скольжения вследствие
неблагоприятных моментов рыскания от угловой скорости крена,
низких собственных частот боковых колебаний самолета и малого
собственного демпфирования по рысканию.
На рис. 6.27 приведена зависимость оценки летчиков поперечной
управляемости самолета от степени" зависания” самолета по крену
(А о)х—-------), которая свидетельствует, что при относительной
' бОхтах/
потере угловой скорости крена Д больше 0,75 управление
324
самолетом по крену оценивается неудовлетворительно.
Дсо,
Рис.6.27. Зависимость оценки летчика от степени зависания
самолета по крену
На рис.6.28 для примера показано влияние параметра
у) на переходные процессы по углу и угловой скорости крена при
ступенчатом отклонении органов поперечного управления для режима
H-Q ; У-25О*”/у гп'-УУОг
Рис.6.28. Переходные процессы по углу крена и угловой скорости крена при
ступенчатом отклонении органов управления
захода самолета на посадку одного из современных дозвуковых
неманевренных самолетов. Из графика видно, что уменьшение этого
параметра приводит к уменьшению степени “зависания” самолета по
325
крену, а уменьшение его до нуля практически устраняет" зависание”
самолета по крену при отклонении органов поперечного управления.
Таким образом, уменьшить степень “зависания” самолета по крену
или полностью его устранить можно путем компенсации моментов
рыскания от угловой скорости крена. С этой целью в закон работы
демпфера рыскания следует вводить перекрестный сигнал по угловой
скорости крена с передаточным коэффициентом КШх, про-
K+g/V
порциональным величине -sa---. Тогда закон работы автомата
боковой устойчивости и управляемости (усовершенствованный
демпфер рыскйния) при полете самолета на малых скоростях должен
быть следующим:
д я — 1 +/Г________T1KN_______
дн Тгр+1Кшу MA1(W)(W)
* Кшу * (i)x+* сох (6.27)
Как показывают проведенные исследования, с уменьшением
скорости полета потребные значения передаточного коэффииента КШх,
необходимые для полной компенсации моментов рыскания от угловой
скорости крена, значительно возрастают. Однако приемлемые
характеристики поперечной управляемости на малых скоростях полета
самолета с отклоненной механизацией можно обеспечить и при
постоянном передаточном числе КШх без регулировки его по скорости
полета, при этом его можно принять равным примерно Awx~0,8c.
Для современных магистральных самолетов основными органами
поперечного управления являются элероны и интерцепторы.
Отклонение интерцепторов приводит к снижению подъемной силы
самолета, особенно заметному при полете на режимах с отклоненной
механизацией крыла, и к возникновению моментов тангажа, которые
обуславливают нежелательную взаимосвязь продольного и бокового
движений. Для устранения этой взаимосвязи приходится вводить
перекрестную связь от органов поперечного управления к рулям
высоты.
На самолетах с большой удельной нагрузкой на крыло для
получения сравнительно небольших скоростей отрыва (Уотр~
270 км/ч) и скоростей захода на посадку (И3п~ 250 км/ч)
326
приходится применять очень эффективную механизацию крыла,
занимающую до 80% размаха, а элероны занимают небольшую
плошадь крыла. Кроме того, эффективность концевых элеронов на
стреловидном крыле большого удлинения вследствие упругости
конструкции на крейсерских режимах полета значительно
уменьшаются (в 1,5“^2,5 раза). Поэтому на таких самолетах
приходится дополнительно использовать интерцепторы. Особенностями
интерцепторного управления являются нелинейная зависимость
управляющих моментов от углов их отклонения и значительная
зависимость их от углов отклонения закрылков, что усложняет
кинематику системы управления и может затруднить пилотирование
самолета.
В настоящее время одним из параметров, по которому можно
оценивать эффективность органов поперечного управления, является
располагаемое угловое ускорение крена самолета со х. Для
изолированного движения крена самолета оно определяется:
' Мх (5* э, 5* инт)
т
ix
где в числителе — максимальный располагаемый момент крена от
органов поперечного управления.
На рис.6.29 приведены располагаемые угловые ускорения крена
некоторых самолетов при использовании только элеронов и элеронов
совместно с интерцепторами. Из этого графика следует, что с увели-
чением массы самолета уменьшается располагаемая величина
углового ускорения крена шхрас, обусловленная увеличением момента
инерции самолета относительно оси ОХ при возрастании массы, и что
использование интерцепторов для поперечного управления совместно с
элеронами позволяет в 2,0 “^2,5 раза увеличить располагаемые
угловые скорости крена.
Расчетным режимом полета для определения потребной эффек-
тивности органов поперечного управления для неманевренных само-
летов являются малые скорости полета (заход на посадку). Для
получения удовлетворительных характеристик поперечной
управляемости неманевренного самолета необходимо обеспечить
перекладку самолета из крена в крен ±30° за время не более ~ 6 с.
327
угловые ускорения крена
неманевренных самолетов в
зависимости от их массы (заход
на посадку)
Для этого угловая скорость крена
самолета должна быть порядка 12~^
15 град/с (с учетом времени выхода
на установившуюся угловую
скорость).
Исследования показали, что
летчики оценивают управляемость
самолета по крену не только угловым
ускорением крена, но и степенью
демпфирования движения крена,
которая определяется величиной
постоянной времени движения крена
Т кр; для изолированного движения
величину ТКр можно определить по
формуле:
7'кр= ~ (6'28)
Как видно, постоянная времени
движения крена зависит от момента
демпфирования крена и скорости полета. Проведенные исследования на
пилотажном стенде показали, что при малом демпфировании движения
крена, т.е. при большом значении Ткр управление самолетом по крену
становится затруднительным, поэтому величина Ткр нормируется.
Оценку управляемости самолета по крену целесообразно
проводить по диаграмме, построенной в координатах углового
ускорения крена шх и постоянной времени крена 7\р.
В качестве примера на рис. 6.30 приведены области оценок попе-
речной управляемости самолета в координатах шх, Ткр для режима
захода на посадку, полученные по разультатам эксперимента на пило-
тажном стенде. Из рассмотрения этой диаграммы следует, что
хорошая оценка управляемости самолета по крену соответствует
установившейся угловой скорости крена не менее 15 град/с и
постоянной времени крена менее 1,5 с. Для тяжелых самолетов (ш>
300 т) постоянная времени крена может быть очень большой; в этом
случае удовлетворительные характеристики поперечной уп-
328
равляемости могут быть обеспечены с помощью использования
демпфера крена.
Рис.6.30. Области оценок управляемости самолета по крену
(заход на посадку).
6.3.3 Управление самолетом по курсу
Управление по курсу неманевренных самолетов является слож-
ным видом управления, в процессе которого летчик должен конт-
ролировать одновременно углы крена и курса.
Движение самолета при управлении по курсу можно разделить на
два вида движения:
— апериодическое движение с большой постоянной времени
(движение вектора скорости самолета), которое определяет управление
самолета по курсу;
— колебательное движение самолета с низкой частотой боковых
329
колебаний (движение продольной оси самолета относительно вектора
скорости), которое характеризует устойчивость управляемого
движения.
Таким образом, изменение курса самолета разделяем на два вида
движений:
0=01 + 02
где 01 — характеризует движение вектора скорости самолета;
02 — движение продольной оси самолета относительно вектора
скорости, которое, по существу, определяет изменение угла
скольжения самолета.
При управлении самолета по курсу летчик возбуждает боковые
колебания продольной оси самолета относительно вектора скорости
тем сильнее, чем меньше частота боковых колебаний и чем энергичнее
летчик отклоняет органы управления.
Для неманевренных самолетов с низкими собственными
частотами боковых колебаний хорошую управляемость по курсу на
малых скоростях полета можно обеспечить путем введения в закон
работы автомата боковой устойчивости сигналов по угловой скорости
крена и углу крена. Рассмотренный ранее закон работы автомата
боковой устойчивости (демпфера рыскания) (6.25) включает эти
сигналы и, следовательно, в этом случае будет обеспечена и хорошая
управляемость самолета по курсу. Для иллюстрации этого на рис. 6.
31 приведены переходные процессы 0 и /?=/(/) при управлении
самолетом по курсу с автоматом и без автомата боковой устойчивости
и управляемости. Из анализа переходных процессов следует, что без
автомата при выходе самолета на заданный угол курса (0 = 10°) в,
первые моменты времени возникает нежелательная обратная реакция
изменения курса самолета и только по истечении 3—4с начинает
происходить правильное изменение курса самолета. Причиной
неблагоприятной начальной реакции в изменении курса является
развитие больших углов скольжения, возникающих при отклонении
органов управления вследствие значительных “тормозящих” (не
способствующих правильному изменению курса самолета) моментов
рыскания. Такое запаздывание в изменении курса самолета при
управлении нежелательно и оно оценивается отрицательно летчиками,
330
так как дезориентирует его и затрудняет пилотирование.
Рис.6.31. Переходные процессы 0(0 и /?(0 при управлении
самолетом по курсу(заход на посадку)
Неблагоприятная начальная реакция самолета в изменении курса
при управлении полностью устраняется при использовании
дополнительных перекрестных сигналов в законе работы автомата
боковой устойчивости. В этом случае обеспечиваются хорошие
характеристики боковой устойчивости и управляемости, в том числе, и
хорошая управляемость самолета по курсу (практически
апериодический характер изменения курса самолета см. рис. 6.31).
Как уже отмечалось выше, с уменьшением частоты боковых
колебаний самолета управление по курсу становится зат-
руднительным. Уменьшение частоты боковых колебаний самолета
ниже 0,35 1/с (Т>20с) приводит к ухудшению путевой
управляемости самолета и возможной потере поперечной устойчивости
замкнутой системы управления самолет — летчик, улучшить
управляемость самолета по курсу в этом случае можно путем
использования дополнительного сигнала по углу скольжения или
331
боковой перегрузке в автомате боковой устойчивости и управляемости
(в демпфере рыскания).
6.3.4. Выбор размеров вертикального оперения
На самолетах, не имеющих автоматических устройств в системе
штурвального управления, . удовлетворительные характеристики
боковой устойчивости и управляемости обеспечиваются путем выбора
необходимых запасов путевой и поперечной статической устойчивости
самолета (ту и Это достигалось выбором размеров площади
вертикального оперения (обеспечение Шу} и угла поперечного" V”
крыла (обеспечение W2x). На современных пассажирских и транс-
портных самолетах применяется бустерная необратимая система
управления и широко используются автоматические устройства в
системе штурвального (ручного) управления. Поэтому обеспечение
удовлетворительных характеристик боковой устойчивости и
управляемости целесообразно возложить на эти автоматические
устройства. Такой подход может существенно упростить вопросы
компоновки самолета и позволяет значительно уменьшить потребные
размеры вертикального оперения.
При использовании автоматических устройств требуемые
размеры вертикального оперения и эффективность органов путевого
управления выбираются из условия обеспечения:
— балансировки самолета в случае отказа критического
двигателя на режимах взлета и ухода на второй круг;
— взлета и посадки самолета при заданном боковом ветре;
— путевой статической устойчивости.
Степень путевой статической устойчивости тяжелых
неманевренных самолетов с учетом работы автоматических устройств
должна выбираться так, чтобы обеспечить частоту собственных
боковых колебаний не менее 0,4 1/с, так как при меньших ее
значениях, как показали исследования на пилотажном стенде,
получаются неудовлетворительные характеристики боковой
управляемости самолета.
Приближенно собственную частоту боковых колебаний самолета
можно определинь по формуле:
332
_ / niyqSl
Iy ’
(6.29)
откуда минимальное значение степени путевой статической
устойчивости будет:
2
6"Х"/У (6,30)
Приближенно потребное из условия эффективности путевого
управления значение коэффициента статического момента площади
/ Г> _________________________ Sb.O.Lb.O. \
вертикального оперения (2эв.о,—---о?---) можно определить по
графикам рис.6.32, где. приведена зависимость коэффициента рас-
полагаемого момента рыскания при максимальном угле
Рис.6.32. Зависимость коэффициента
располагаемого момента рыскания от
значения Вв.о(при <5н = 2О°, 5рн =
0,20)
Рис.6.33. Зависимость запаса
путевой устойчивости,
создаваемого вертикальным
оперением, от коэффициента
Вв.О
отклонения руля направления от величины Вв.о.. На рис. 6.33
приведена зависимость степени (запаса) путевой статической
U Q •
устичивости Ю1ув.о., создаваемая вертикальным оперением, от
величины Ввл. Задаваясь относительной геометрией вертикального
оперения (Л в.о., х в.о.,т? в.оД по величине коэффициента момента
рыскания, возникающего при отказе критического двигателя (тУ№.=
qSl ), можно определить по приведенным графикам потребное
значение Вв.о.
333
Форма хвостовой части фюзеляжа, на которой установлено
вертикальное оперение, оказывает влияние на его эффективность,
которую можно определить по коэффициенту Kf. Зависимость
коэффициента Kf от относительной боковой проекции площади
фюзеляжа 5ф=-о~ приведена на рис.6.34, где показано, как
о В.О.
следует определять удлинение вертикального оперения и
относительную площадь проекции хвостовой части фюзеляжа на
вертикальную плоскость.
Рис.6.34. Зависимость коэффициента повышения эффектив-
ности вертикального оперения от относительной площади
проекции хвостовой части фюзеляжа на вертикальную
плоскость
Для определения запаса путевой статической устойчивости само-
лета необходимо определить дестабилизирующее влияние носовой
части фюзеляжа б в.о) по методике ЦАГИ или по результатам
испытаний моделей самолета, близких по компоновке к
разрабатываемому самолету, в аэродинамических трубах. По рис.6.33
приближенно определяем значение в.о. и затем
ту— туб в'о.Кту в.о. (6.31)
Наибольшая эффективность вертикального оперения и руля
направления достигается при выборе удлинения А в.о—1,2^"1,6 и
приемлемой для заданного крейсерского числа М стреловидности
334
вертикального оперения. Для самолетов с палубным (на фюзеляже)
расположением горизонтального оперения целесообразно выбирать
вертикальное оперение с удлинением Ав.о.= 1,2 “Н,6 и сужением
7] в.о. ~ 3,0. Для самолетов с Т-образным хвостовым оперением
А в.о. = 0,8 “Н,0 и л в.о. ~ 1,4. При этом эффективность Т-образного
вертикального оперения получается примерно на 25^30% выше, чем
при горизонтальном оперении, расположенном на палубе фюзеляжа,
при одинаковых параметрах вертикального оперения (А в.о, /в.о.,
7] в.о.).
У самолетов с двигателями, расположенными на пилонах под кры-
лом с большим плечом, отказ критического двигателя на режимах
взлета и ухода на второй круг при посадке создает большой
разворачивающий момент, вследствие которого может развиться
большой угол крена, что недопустимо по условиям безопасности. В
этом случае для уменьшения развития больших углов крена (при
невмешательстве летчика в управление в течение 5 с), целесообразно
применять в системе путевого управления автомат, отклоняющий руль
направления по сигналу отказа двигателя (см гл.8).
6.4. Устойчивость и управляемость на
взлете и посадке
6.4.1 Пилотирование на взлете и посадке
Взлет и посадка являются одним из наиболее сложных этапов
полета. Под взлетом обычно принято понимать движение самолета с
момента трогания до момента набора безопасной высоты Н = 400м и
установки конфигурации самолета для дальнейшего набора высоты и
крейсерского полета.
Взлетная дистанция состоит из участка движения самолета по
ВПП до момента отрыва и воздушного участка до высоты H=\Q,7 м
(35 футов) на границе аэродрома. Примерная схема взлета самолета
с указанием характерных скоростей этапов взлета приведена на рис.
6.35
На этапе разбега происходит разгон самолета до скорости, на
которой самолет может оторваться от поверхности ВПП и безопасно
335
взлет
набор высоты
_______РЛП________
ВПП кпь
>„— скорость начального
набора высоты
1,3 V) при взлетной
конфигурации
РДР—располагаемая дистанция разбега
РЛПВ—располагсмая дистанция прерванного взлета
РЛП—располаг летная полоса (длина впп+одма ki в)
РДВ—располагаемая дистанция взлета
КПВ—к
Рис.6.35. Схема взлета
Рис.6.36. Схема сил, действующих на самолет при разбеге
перейти в набор высоты. На самолет при разбеге действуют силы: вес
G, результирующая аэродинамическая сила 7?а, тяга двигателей Р,
реакция поверхности аэродрома на шасси, которую можно разложить
на нормальные силы Ni и N2 и силы трения колес шасси Pi и Р2 (см.
336
рис.6.36).
Приближенно можно считать, что результирующая
аэродинамическая сила Ra приложена в центре тяжести самолета и
может быть разложена на две проекции:
— на ось ОХа ~ силу лобового сопротивления;
— на ось ОУ а ~ подъемную силу.
Во всех нормах летной годности предъявляются детальные
требования к скоростям полета на этапах взлета, а именно:
— к безопасной скорости взлета 14, которая должна быть
достигнута на высоте не более 10,7 м;
— скорости первоначального набора высоты Т4п, которая должна
быть достигнута до высоты начала уборки механизации крыла Н =
120 м;
— скорости начала изменения взлетного положения механизации
крыла К;
— скорости самолета при полетной конфигурации К;
— скорости подъема носового колеса.
Эти требования к скоростям устанавливаются в зависимости от
скоростей сваливания (Vc) и минимально эволютивной Кнпэв.
Устанавливаются также требования к максимальным скоростям на
всех этапах взлета самолета. Так, например, максимальная расчетная
скорость взлета Ипахвз( Vf)задается с запасом 1,6 от скорости
сваливания.
Нормируемые скорости для каждого самолета назначаются
главным конструктором и записываются в РЛЭ.
Для самолетов с двумя двигателями, расположенными на крыле
и разнесенными относительно плоскости симметрии, в случае отказа
двигателя должна быть обеспечена безопасность продолженного
взлета. Математическое и стендовое моделирование продолженного
взлета самолета показало, что запаздывание летчика в отклонении
руля направления для парирования разворачивающего момента
рыскания от двигателя приводит к развитию значительных отклонений
самолета от оси взлетно-посадочной полосы (ВПП). Для
предотвращения недопустимого развития боковых отклонений и
облегчения пилотирования самолета целесообразно использовать
337
автомат парирования отказа двигателя, обеспечивающий отклонение
руля направления пропорционально разнице в оборотах правого и
левого двигателей.
В качестве примера на рис.6.37 приведены зависимости угла
отклонения руля направления и бокового отклонения самолета от оси
ВПП по времени при отказе двигателя на режиме продолженного
взлета. Из рассмотрения этих зависимостей следует, что летчику
выдерживать необходимое направление самолета, не оборудованного
автоматом, довольно сложно, самолет отклоняется от оси ВПП, а с
автоматом парирования отказа двигателя значительно легче—можно
338
Обработка записей скоростей полета на этапах взлета большого
количества эксплуатируемых пассажирских самолетов в Аэрофлоте
показала, что установленные скорости на каждом этапе взлета имеют
достаточно большую область разброса. Разброс скоростей не зависит
от типов самолетов и районов их эксплуатации, а наименьшие запасы
от скорости сваливания( Ис) реализуются либо сразу после отрыва
самолета, либо в конце уборки механизации крыла. Кроме того, эти
результаты свидетельствуют, что чем больше диапазон скоростей
между минимальной скоростью Кцп(3“ 3 = 0)и максимально
разрешенной в момент начала полной уборки механизации крыла, тем
меньше вероятность достижения Кцп(3“ з = 0)и тем выше
безопасность полета самолета.
Участок взлета—набор высоты от 120м до 400м, где происходит
уборка механизации крыла, является довольно напряженным для
летчиков, так как им приходится непрерывно вмешиваться в
управление вследствие изменения конфигурации самолета и изменения
коэффициента подъемной силы. Летчику приходится не только
контролировать большое количество параметров полета, но и
выдерживать заданное соответствие их. Поэтому в летной
эксплуатации пассажирских самолетов были случаи недопустимого
уменьшения высоты полета (просадки) и даже с соударением с
неровностями поверхности земли. Для повышения безопасности полета
самолетов на этом участке взлета целесообразно уборку механизации
крыла и управление траекторией полета автоматизировать. В
настоящее время для проектируемых и вновь создаваемых
пассажирских самолетов разрабатываются и создаются
автоматические системы управления механизацией крыла(АСУМК).
Такие системы кроме повышения безопасности полета позволяют
иметь наивыгоднейшее сочетание отклонения предкрылков и
закрылков в зависимости от скорости полета с целью обеспечения
наибольшего аэродинамического качества.
Уборка и выпуск механизации крыла осуществляются
электрогидравлическими приводами. Законы включения и выключения
приводов механизации крыла необходимо выбирать из условий
высокой безопасности полета за счет обеспечения при каждой
339
скорости полета определенных углов отклонения закрылков и
предкрылков, при которых выдерживаются заданные запасы до
скорости сваливания Vc. Для наглядности на рис.6.38 в координатах
S' з и Суг.п. приведены линии включения и отключения АСУМК для
режима взлета для одного из создаваемых в настоящее время
пассажирских самолетов и приведены линии потребных значений Суг.п,
для скоростей полета 1,3 Vc и 1,2 Vc. Включение приводов
закрылков осуществляется при выполнении условий З'з^ З'звкл; а
отключение—при S' з^ З'зотк; где З'звкл и З'зотк являются заданными
функциями .скорости. После взлета самолета во взлетной
конфигурации и разгона до скорости V 1,4 Vc система включается
и начинается уборка закрылков, которая продолжается до тех пор,
пока скорость полета не дойдет до линии отключения АСУМК, это
должно быть при скорости несколько больше 1,2 Vc. При э.том
система отключится, и самолет будет разгоняться до скорости, при
которой произойдет повторное включение АСУМК. Процесс будет
повторяться до тех пор, пока механизация крыла не будет убрана
полностью.
Рис.6.38. Закон работы’АСУМК на взлете
Проведенные исследования на пилотажном стенде с участием
летчиков—испытателей показали, что при работе такой
автоматической системы пилотирование самолета значительно
упрощается, запасы до скорости сваливания получаются вполне
340
достаточными и, следовательно, применение АСУМК повысит
безопасность полета самолета на этом участке взлета.
На самолетах, на которых нет автоматической системы
(АСУМК) или в случае ее отказа, уборку закрылков следует
производить в несколько эт^пов(24-3 этапа)с увеличением скорости,
не допуская снижения самолета.
Участок посадки самолета начинается после снижения в зоне
аэродрома назначения и заканчивается полной остановкой самолета.
Условно участок посадки подразделяется на несколько этапов,
отличающихся по назначению и технике пилотирования. На участке
захода на посадку необходимо вывести самолет на высоту
посадочного круга и на курс посадки, обеспечить ему посадочную
конфигурацию и допустимую скорость. На этом этапе производится
снижение скорости, выпуск шасси, закрылков и предкрылков. Полет
самолета при заходе на посадку может происходить по большому
прямоугольному маршруту, называемому“большой коробочкой”,или по
другой схеме, установленной на аэродроме. Пилотирование
производится с использованием бортовой навигационной системы или
по указанию наземной диспетчерской службы. При любой траектории
захода на посадку скорость самолета должна быть уменьшена от
скорости снижения по маршруту до скорости полета по посадочной
глиссаде. Примерная схема захода на посадку современных
транспортных самолетов приведена на рис.6.39.
Рис.6.39. Схема захода самолета на посадку
341
Режим посадки даже на хорошо оборудованных современных
аэродромах является самым напряженным режимом полета.
Непосредственно посадкой самолета считается участок полета от
момента пересечения торцевой кромки ВПП до касания поверхности
земли колесами основных стоек шасси. Пересечение самолетом
кромки ВПП должно быть на высоте не ниже 10м. Участок
выравнивания самолета из положения планирования по глиссаде с
углом наклона 6 гл— ~2°40’ должен начинаться в зависимости от веса
самолета на высоте 54-12 м. С целью сокращения посадочной
дистанции выравнивание современных самолетов должно
производиться с таким расчетом, чтобы к его окончанию самолет
плавно коснулся поверхности земли.
На участке выравнивания самолет должен погасить
вертикальную скорость снижения до скорости, на которой он плавно,
без повторного отделения может коснуться поверхности ВПП. Эта
скорость определяется прочностью шасси и самолета,
характеристикой амортизаторов основных стоек шасси и комфортом
для пассажиров. На самолетах, оборудованных двухкамерными
амортизационными стойками, “мягкая”посадка обеспечивается при
вертикальных скоростях снижения в момент встречи с поверхностью
ВПП до 14-1,5 м/с. Таким образом, современные пассажирские
самолеты вполне могут производить посадку даже с неполным
выравниванием, т.е. без участка выдерживания.
Для обеспечения безопасной посадки самолета с неполным
выравниванием, т.е. без участка выдерживания, в конце участка
выравнивания необходимо, чтобы самолет в момент касания имел
положительный угол тангажа порядка v = 34- 5°, угол атаки при этом
должен быть близок к посадочному <2=84-10°. В этом случае
приземление самолета произойдет на основные задние колеса шасси с
последующим опусканием носа самолета и касанием поверхности
ВПП передними колесами шасси. При этом угол атаки самолета
уменьшится на 34-5°, подъемная сила упадет, будет значительно
меньше веса, и самолет будет плотно двигаться по поверхности ВПП,
что также приведет к существенному повышению эффективности
тормозных устройств на колесах шасси и к более ранней возможности
342
управления передними колесами шасси.
расчеты и летные испытания современных транспортных
самолетов показывают, что для осуществления безопасной посадки в
конце участка выравнивания необходимо, чтобы самолет в посадочной
конфигурации имел большой критический угол атаки порядка #кр=
18 4- 22°. Некоторые транспортные самолеты (без предкрылков) в
посадочной конфигурации имеют небольшие критические углы атаки
124-14° и вследствие этого углы тангажа на планировании по
посадочной глиссаде будут отрицательные, а углы атаки—небольшие
положительные или близкие к нулю. После выравнивания угол тангажа
у таких самолетов будет близок к нулю, и если в этот момент
произойдет приземление, то оно может произойти на передние и задние
колеса шасси одновременно. При этом самолет будет находиться как
бы во“взвешенном”состоянии, подъемная сила близка к силе тяжести
самолета, так как угол атаки после приземления остался почти
неизменным и равным его значению в конце участка выравнивания.
Самолет в этом случае при движении по ВПП будет склонен
галопировать, т.е. двигаться как бы с некоторым “взмыванием”, и в
течение длительного времени нельзя эффективно использовать
торможение колесами шасси. Кроме того, посадка такого самолета без
участка выдерживания может произойти с большой степенью
вероятности на передние колеса шасси, что может соп-
ровождаться“козлением”, и летчик средней квалификации не всегда
сможет удачно справиться с управлением самолета, а это может
привести к летному происшествию. Вследствие этого для самолетов,
у которых в посадочной конфигурации небольшие критические углы
атаки (<Ткр=12 4-14°),необходим участок выдерживания, на котором
самолет уменьшает скорость полета, увеличивает угол атаки до
посадочных значений (а'пос = 84-1Г).Но это приведет к увеличению
потребной длины ВПП и не позволит на таких самолетах применение
автоматической посадки, так как автоматическая посадка самолета
осуществляется с неполным выравниванием.
Суммарная длина посадочной дистанции состоит из воздушного
участка от момента пересечения торцевой кромки ВПП до касания
земли колесами основных стоек шасси и длины пробега самолета до
343
полной остановки. Длины этих участков зависят от скорости захода на
посадку Уз.п. и от эффективности торможения самолета на пробеге.
Для сокращения потребной посадочной дистанции необходимо
стремиться к уменьшению скорости захода на посадку, которая, как
известно, определяется величиной максимального значения
коэффициента подъемной силы Сушах самолета в посадочной
конфигурации и удельной нагрузкой на крыло(С/5).
Анализ статистических данных о летных происшествиях
показывает, что около 50% всех происшествий происходит на
предпосадочных режимах и непосредственно при посадке, а число их с
уменьшением скорости захода самолета на посадку значительно
уменьшается. Так, например, увеличение скорости захода самолета на
посадку с Уз.п. = 220 км/ч до Уз.п. = 280 км/ч приводит, как
показывают статистические данные о летных происшествиях, к
увеличению летных происшествий в 1,7 раза.
Для пассажирских самолетов целесообразно иметь следующие
скорости захода на посадку:
200^210 км/ч для самолетов с посадочной массой до 50 т;
220 "Г 230 км/ч для самолетов с посадочной массой от 50 до
100 т;
240^260 км/ч для самолетов с посадочной массой более 100 т.
Как показали исследования, проведенные на пилотажном стенде,
для получения хорошей управляемости тяжелого самолета на режиме
захода на посадку со скоростями Уз.п. = 240"^260 км/ч необходимо
применять автоматику в системе штурвального управления (демпфер
тангажа). Эти исследования показали, что продольная управляемость
самолета будет хорошей, если значения двух характеристик
управляемости—время срабатывания самолета по угловой скорости
тангажа £ср и установившаяся угловая скорость тангажа «шуст при
ступенчатом отклонении штурвала управления будут находиться
внутри определенных границ. Эти границы зависят от “заброса” по
угловой скорости тангажа и от степени затухания корот-
копериодического движения самолета.
В качестве примера на рис.6.40 приведена область
удовлетворительных характеристик продольной управляемости двух
344
самолетов: самолет № 1—с посадочной массой более 160т и
скоростью захода на посадку Уз.п. = 250км/ч, и самолет № 2—с
посадочной массой 120т и скоростью Уз.п. — 280км/ч. Как видно из
графика, характеристики продольной управляемости у самолета № 2
несколько лучше, чем у самолета № 1, в основном вследствие
большей скорости захода на посадку. Характеристики продольной
управляемости самолета № 1 при скорости захода на посадку Уз.п.—
250км/ч значительно улучшаются при использовании демпфера
тангажа.
V’
град / с
м
0,16
без демпфера
тангажа
. с
0,24
. z
0,2 -
0,3
0,28
самолет N],
V, = 250км / ч
0,066
допустимая граница '
с демпфером
танг
допустимая граница
без демпфера тан-ажа
Самолет N2, V, — 280км / ч
без демпфера тангажа
0,4 0,5 0,6 0,7 0,8
демпфером
тангажа
<«7 =0,077
Рис.6.40. Области оценок управляемости самолета по тангажу в
координатах установившейся угловой скорости тангажа на единицу
отклонения штурвала и времени срабатывания по угловой
скорости тангажа £ср
6.4.2 Выбор допустимых при посадке углов атаки
Скорость захода самолета на посадку в соответствии с
требованиями норм летной годности из условия обеспечения высокой
безопасности полета должна быть не менее 1,3 скорости сваливания
(или минимальной скорости), установленной для посадочной
конфигурации самолета. При этом в процессе летных испытаний
345
самолета должна быть показана возможность безопасного выполнения
посадки и ухода на второй круг без превышения допустимого угла
атаки при минимальной демонстрационной скорости захода на посадку
И3.п.д.тш> которая назначается из следующих условий:
У . —15 км/ч при И3.п> 200 км/ч,
з.п.д.тш [уз п —10 км/ч при Из.п. 200 км/ч,
Максимальная скорость захода самолета на посадку должна быть
не менее Уз.п.+25км/ч независимо от полетной массы самолета.
Во всем диапазоне разрешенных скоростей захода на посадку
самолет должен приземляться на основные колеса шасси без
первоначального касания поверхности ВПП носовыми колесами или
хвостовой частью фюзеляж а(хвостовой опорой);не должны также
возникать капотирование или “козление” самолета.
Эти условия определяют диапазон допустимых углов тангажа
самолета в момент приземления. Посадочный угол атаки определяется
углами тангажа и наклона траектории полета самолета в момент
приземления, зависящими от метода посадки. Изменение угла атаки и
угла наклона траектории по сравнению с их значениями на участке
планирования самолета по посадочной глиссаде при различных методах
посадки могут быть определены расчетом или из статистических
материалов, что позволяет связать диапазон допустимых углов
тангажа в момент приземления с диапазоном допустимых углов атаки
при заходе на посадку, при которых обеспечивается безопасная
посадка.
Такой подход позволяет определить диапазон допустимых углов
атаки при заходе самолета на посадку. Фактический угол атаки на
этом этапе в основном определяется аэродинамической компоновкой
крыла самолета в посадочной конфигурации. Основную роль при этом
играют максимальные несущие свойства крыла, т.е.максимальное
значение коэффициента подъемной силы Сушах и соответствующий
ему угол атаки, а также коэффициент подъемной силы при нулевом
угле атаки.
Для современных транспортных и пассажирских самолетов
применяются три метода посадки:
—посадка с полным выравниванием и выдерживанием, на
346
котором угол атаки самолета увеличивается до посадочного;
—посадка с полным выравниванием без участка выдерживания;
—посадка с неполным выравниванием (в основном при
автоматической посадке).
На всех воздушных этапах режима посадки угол тангажа
самолета v по строительной оси фюзеляжа, угол наклона траектории
полета 9 и угол атаки а связаны соотношением:
v=9+a~ ср кр, (6.32)
где ср кр —угол заклинения крыла относительно строительной оси
фюзеляжа.
На участках выравнивания и выдерживания скорость полета
самолета постепенно уменьшается, а угол атаки увеличивается. Связь
между углами атаки в момент приземления а пос. и на планировании по
глиссаде а з.п. определяются зависимостью
#ПОС = #З.П. "Ь Л. <71 Н" Д (72, (6.33)
где и A<22—приращение угла атаки на участках выравнивания
и выдерживания соответственно.
С учетом (6.31) и (6.32) можно записать
^ПОС= 9 ПОс + #З.П.Н~ & @1 Д #2 ср КР (6.34)
где Vпос и 9 пос —угол тангажа и угол наклона траектории самолета
в момент приземления (касания.)
Результаты расчетов и статистической обработки материалов
летных испытаний и эксплуатации пассажирских самолетов
показывают, что на участке выравнивания угол атаки увеличивается
на 1,5 2°, а на участке выдерживания угол атаки должен возрасти до
посадочного а пос. При посадке самолета с неполным выравниванием
угол атаки должен быть близок к посадочному и вследствие этого угол
атаки самолета на планировании по посадочной глиссаде должен быть
меньше посадочного на 2 *^2,5°. Угол заклинения крыла ср кр для
современных пассажирских самолете® близок к’ 3°.
С учетом принятых допущений связь между углом тангажа в
момент приземления и углом атаки при заходе на посадку можно
определить по формуле(б.ЗЗ):
^пос—й'зл.+(0,54~4°)—при полном выравнивании и полном
выдерживали;
347
v пос ~ а з.п.— (1,04-1}5°)—при полном выравнивании без
участка выдерживания;
vпос= а з.п. —3°—при неполном выравнивании.
На современных пассажирских и транспортных самолетах для
сокращения потребной посадочной полосы целесообразно посадку
производить без участка выдерживания. Тогда минимально
допустимый угол атаки на планировании по глиссаде при заходе на
посадку должен выбираться из условия отсутствия касания ВПП
носовым колесом шасси.
Для определения количественных требований к углу атаки при
заходе на посадку необходимо установить допустимые значения угла
тангажа в момент приземления. Обычно пассажирские и транспортные
самолеты компонуются так, что момент касания носовым колесом
поверхности ВПП соответствует нулевому углу тангажа УКас н.к=0.
Касание ВПП хвостовой частью фюзеляжа (хвостовой опорой)
для различных самолетов происходит при различных значениях угла
тангажа в зависимости от обводов хвостовой части фюзеляжа и
высоты основных стоек шасси. Поэтому в расчетах следует
учитывать угол тангажа, при котором происходит касание ВПП
хвостовой частью фюзеляжа. Среднее значение угла тангажа касания
ВПП ХВОСТОВОЙ ОПОРОЙ МОЖНО ПРИНЯТЬ раВНЫМ ^кас хв = 1Г.
Для выбора рекомендуемого диапазона значений угла атаки
самолета при заходе на посадку, при котором отсутствует
первоначальное касание ВПП носовым колесом или хвостовой частью
фюзеляжа, используем значения разрешенных в эксплуатации
максимальных и минимальных значений угла тангажа:
ЭДпах^= ^кас хв-1 И Цп1п & каскрнк + 1°
(запас по углу тангажа в±1° вводится для обеспечения безопасности
приземления самолета).Таким образом, для обеспечения безопасности
самолета на посадке необходимо, чтобы угол тангажа в момент
приземления был бы больше 1° и меньше 10°.
Расчеты показывают, что в момент приземления для обеспечения
угла тангажа в допустимом диапазоне ^пос — Г 4-10° значения угла
атаки самолета на планировании по посадочной глиссаде должны
находиться в следующем диапазоне:
348
2,5° < а з.п <9°—при посадке самолета без участка
выдерживания; ’
4°<а3.п.<9°—при посадке самолета с неполным выравниванием.
Необходимо также определить допустимые углы атаки при
заходе самолета на посадку с учетом разброса скорости захода на
посадку от рекомендованных значений (А И=15 км/ч и АУ2=
— 10 км/ч). Тогда диапазон угла атаки самолета на режиме захода на
посадку должен быть следующий:
4° < а з.п. 8° —при посадке самолета без участка
выдерживания;
5,5°^ а з.п. 8°—при посадке самолета с неполным
выравниванием.
Для тех компоновок самолета, у которых значения угла тангажа
г^кас н.к и г-’кас хв. отличаются от принятых(0° и 11° соответственно),
диапазон необходимых значений угла атаки самолета на режиме
захода на посадку можно принять:
а з.п. min = г^кас н.к+4°(ограничение от касания ВПП носовыми
колесами при посадке самолета с полным выравниванием без участка
выдерживания); >
а з.п. max =^кас хв_3°(ограничение от касания ВПП хвостовой
частью фюзеляжа);
а з.п. mm = v кас н.к._5,5° (ограничение от касания носовыми
колесами при посадке самолета с неполным выравниванием).
На рис.6.41 приведены области рекомендованных углов атаки для
захода на посадку <2з.п. в зависимости от критических углов атаки
а кр для магистральных самолетов в посадочной конфигурации.
Значение а кр соответствует максимальному значению коэффициента
подъемной силы Сушах, или Сус сваливания, а угол атаки й'з.п.
соответствует значению СуЗ.п. = 0,59 СуС (Сушах) (это отвечает
требованию И3.п.=1,3 Ис).
С целью сокращения потребной длины посадочной полосы для
пассажирских и транспортных самолетов целесообразно принять
методику посадки с неполным выравниванием (угол наклона траектории
0 < 0°). Оценочные расчеты показывают, что при таком методе
349
«кр
25
20
л
ДИ=+15км / ч. j?
<г
И,п = 1.5V,
Ил-114
^кас нк 0 VKac хв II
Ил-76
ДК=
6
касание хвост
Ил-18
5.5-8
0!з.п рек
5
10
неполное
выравн.
«з п рек
Ил-86 Л п =1-3 Ис
«з п mm полное п min ~ 4
выр. (без выд.)неполное Выр.
/ / (без выд.)
касание
нос. кол.
запас
15
10
Ту-204 р
Ил-96-300
АН-124 Ил-62
ЯК-40
Ту-154X
L-610/
АН-24 L 410
запас
%
Q %
5
0
Рис.6.41. Области рекомендуемых углов атаки самолета на пла-
нировании по посадочной глиссаде
посадки потребная длина посадочной полосы уменьшается на 3004-
600 м. Однако метод посадки с неполным выравниванием может
безопасно применяться только на таких самолетах, у которых угол
тангажа в момент приземления будет положительным.
Значения вертикальных скоростей снижения в момент
приземления (касания ВПП) при использовании метода посадки с
неполным выравниванием должны быть приемлемы по условиям
прочности самолета и обеспечения комфорта пассажиров и экипажа.
350
Для применения метода посадки самолета с неполным
выравниванием необходимо, чтобы углы атаки самолета при
планировании по посадочной, глиссаде были бы достаточно болыпими-
не менее 5,5°(здесь учтено, что скорость захода на посадку может
быть больше рекомендованной на 15 км/ч).
Аэродинамическая компоновка крыла современных маги-
стральных пассажирских самолетов должна быть сделана с учетом
возможности посадки самолета с неполным выравниванием, так как на
этих самолетах должна применяться автоматическая посадка, которая
осуществляется с неполным выравниванием 0<О.
Для того, чтобы углы атаки самолета на режиме захода на
посадку находились в рекомендованном диапазоне, необходимо иметь
определенное соотношение между коэффициентами Сушах и Суо.
Необходимую связь между этими коэффициентами можно найти из
следующих соотношений:
Суз.п. — 0,59 Сушах
Суз.п.— Суо+ Cyttз.п.
_ 0,59 Сушах СуО
“з.п.—
Czy
где Суо —коэффициент подъемной силы при а = 0;
С“ —производная коэффициента подъемной силы по углу атаки
(обычно для рассматриваемых самолетов близка к 0,' 1/град).
Если принять, что рекомендованный диапазон углов атаки
самолета при заходе на посадку равен а з.п. = 5,5 4- 8° (для посадки с
неполным выравниванием), то можно определить соотношения между
коэффициентами Су шах и СуО:
Су max=-^-+g^-^^8>0) =1, 69Суо+(0, 934-1, 36)
(6.35)
О, 59
или
Суо = Суз.п. - 0,1 (5, 5 4- 8,0) = 0, 59 Сушах - (0, 55 4- о, 8)
Эти соотношения могут быть использованы при разработке
аэродинамической компоновки самолета в посадочной конфигурации, и
из них, в частности, следует, что из условий эксплуатации самолета
можно определить максимальные несущие свойства самолета или
определить потребное значение Суо самолета в посадочной
351
конфигурации; например, при Су max=2,5 рекомендуемое значение не
должно выходить из диапазона Суо = 0,674-0,92. При выходе
значения Су0 из этого диапазона возникает большая вероятность
приземления самолета на носовые колеса или на хвостовую часть
фюзеляжа, т.е. в этом случае безопасность посадки самолета
снижается.
На рис.6.42 приведены рекомендуемые для пассажирских
самолетов значения Су0 в зависимости от Су max.
Рис.6.42. Рекомендуемая область значений коэффициента подъ-
емной силы при нулевом угле атаки самолета в зависимости
от максимального значения коэффициента подъемной силы
Определение диапазона допустимых углов атаки при заходе
самолета на посадку по условиям безопасности позволяет также
определить соотношения между Сушах и <Ткр и связь между акр и
352
а з.п. Для нахождения этих дополнительных связей можно
использовать соотношение:
#з.п. — #кр ’ ра (б.Зб)
здесь К —коэффициент, учитывающий уменьшение зависимости
Су—f(a')вблизи значения С^тах; коэффициент К можно
приближенно принять равным К=0, 9.
Преобразование формул (6.35)’ и (6.36) позволяет найти
следующие дополнительные рекомендуемые соотношения:
а КР= (5, 5° 4-8, 0°) +4, 55Сутах
Сз,шах=0, 22 а кр- (1, 24-1, 76)1
0,0=0,13^-(1,264-1,85) J ^6-37)
б?кр=7, 7Су) + (9, 7°4-14, 2°)
Пользуясь этими соотношениями, можно правильно разработать
аэродинамическую компоновку крыла самолета в посадочной
конфигурации.
6.4.3. Использование НУПС при посадке
• '^Известно, что неманевренные самолеты большой массы (т>
200 т) характеризуются замедленной реакцией по тангажу и
перегрузке, что снижает точность управления продольным движением
самолета на режиме захода на посадку.
Проведенные исследования показывают, что за счет применения
на посадочных режимах полета на тяжелом самолете системы
непосредственного управления подъемной силой (НУПС) можно
получить следующие существенные преимущества:
— улучшить динамику управляемого движения и точность
управления траекторией полета;
— повысить безопасность полета;
— улучшить комфорт пассажиров и экипажа.
В качестве органа управления подъемной силой можно
использовать секции интерцепторов.
Для самолета с балансировочным (подвижным) стабилизатором и
рулем высоты общий алгоритм работы автоматики в системе
штурвального(ручного) управления с системой НУПС, работающей
353
через предварительно отклоненные интерцепторы совместно с рулями
высоты, можно записать в виде:
& ИНТ — S' ИНТо ИНТ
—Кх ______-_____________к V
LaO ИНТ—Л О ИНТ 'р р । 'Р р
S' В = -Д"ш^вН~ АГуск Р р Р р-^-^^Ш^В^~ А^ИНТ Д S' ИНТ
4“ Д$в САУ
где S' инто—угол предварительно отклоненных интерцепторов:
Хв—перемещение штурвала управления:
dSn
Аш-: -—коэффициент кинематической связи штурвала с
" аЛв
рулями высоты:
Д5всау —отклонение рулей высоты от автоматики.
В этом законе управления за счет дополнительных связей от
штурвала(ручки) управления к органам НУПС и к рулям высоты, а
также связи органов НУПС с рулями высоты обеспечивается:
—форсирование самолета по перегрузке (А>Инт);
—форсирование самолета по угловой скорости тангажа (АГуск);
‘ —компенсация моментов тангажа от отклонения органов НУПС
( АГиНт)
Параметры указанного закона работы системы НУПС(А^Ин-п
Кинт^ Хуск и постоянные времени 71, Т2 и73) зависят от
динамических характеристик самолета, эффективности рулей высоты
и от аэродинамического плеча органов НУПС.
Постоянные времени списывающих фильтров (72 и 73)
определяются из характерных временных параметров, описывающих
начальные фазы движения самолета по угловой скорости тангажа и
перегрузке.
В качестве таких параметров можнЪ пользоваться временами
срабатывания самолета по перегрузке tcpny и угловой скорости
тангажа ^срш* .Отношение t^ny/ tCpa)Z определяет необходимое
соотношение постоянных времени Т2 и 73:
Т2/ Т3 = tcpny/ tcprnz
При этом постоянную времени 72 можно принять равной ^српу
354
для предельно—заднего положения центра масс самолета. Для
современных тяжелых самолетов отношение ^cpn,/ tc9(i>z обычно
близко к~4,а время срабатывания самолета по перегрузке при
предельно-заднем положении центра масс составляет
примерно~4 сек.Поэтому постоянные времени Т2 иТ3 могут быть
легко определены и будут равны Т2 = 4с и Т3 = 1с, а постоянную
времени ТА (апериодических фильтров) можно принять равной Т\ —
О, 2 с.
Исследование на пилотажных стендах ЦАГИ, проведенные с
целью оценки эффективности работы систем НУПС на посадочных
режимах полета тяжелого пассажирского самолета, показали, что
применение системы НУПС работающей через предварительно
отклоненные интерцепторы (<5* инто~Ю°) совместно с рулями высоты
при обычной технике пилотирования,позволяет:
—улучшить продольную управляемость самолета,
—повысить качество и точность управления траекторией посадки
самолета,
—уменьшить загрузку летчика при полете по посадочной
глиссаде,
—упростить технику пилотирования самолета на режиме
посадки,особенно на участке выравнивания(пилотажная оценка
самолета с системой НУПС на 1 балл выше оценок самолета без
системы НУПС),
— улучшить комфорт пассажиров на режимах посадки,
— повысить точность приземления самолета,
— уменьшить среднеквадратичную вертикальную скорость
самолета в момент приземления в 1,5 “^2,0 раза.
6.4.4. Движение самолета по земле
Динамика движения самолета по земле (ВПП) на режимах
взлета и посадки имеет ряд принципиальных отличий от его динамики
на основных режимах полета.Эти отличия обусловлены:
— относительно невысокими скоростями V=04- 300км / час,
— нестационарностью процессов и значительными диапазонами
изменения параметров движения (скорости,угла атаки,угла скольжения
355
при движении с боковым ветром),
—быстрым и непрерывным переходом от одного этапа к другому
(разбег, подъем носового колеса,отрыв самолета,первоначальный
набор высоты или снижение по глиссаде, выравнивание, пробег), на
каждом из которых самолет имеет свои динамические характеристики,
—значительным влиянием близости экранирующей поверхности
ВПП на работу двигателей и их струи (особенно при реверсе),
меняющих аэродинамические характеристики самолета,
— наличием при движении по ВПП дополнительных сил
взаимодействия колес шасси с поверхностью ВПП.
Учитывать все эти обстоятельства, необходимые при расчете
динамики движения современного магистрального самолета по земле,
можно только с помощью сложного математического и стендового
моделирования. В настоящее время в ЦАГИ разработаны такие
программы.
Движение самолета по земле с поднятым носовым колесом
неустойчиво в определенном диапазоне скоростей. На рис. 6.43
приведена схема сил, действующих на самолет при движении его по
земле на задних колесах с поднятым носовым колесом , которая
показывает, что случайное увеличение угла атаки приводит к
увеличению подъемной силы и к уменьшению опорной реакции
самолета на задние колеса. Прирост подъемной силы создает
дополнительное положительное вращение самолета, так как в этот
момент времени (до отрыва) самолет вращается относительно задних
колес шасси. Следовательно, во время движения самолета по земле (с
поднятым носовым колесом) на задних колесах, расположенных сзади
фокуса (xf), самолет будет неустойчив по перегрузке, причем
неустойчивость будет тем больше, чем дальше назад от фокуса
самолета располжены задние колеса шасси.
Степень статической неустойчивости самолета при движении его
по земле с поднятым колесом можно определить по формуле:
__z — — Xi /г z , 1 ( (j 15* \ ( h in y* \
CT»-(xr-Xz)+-^-/+-gj{—- C,J -^f)-
-ДЖрте+-^ (6. 37)
356
Рис.6.43. Схема сил и моментов,действующих на самолет при движении по
земле
Эта неустойчивость самолета приводит к следующему:
—трудно удерживать самолет на заданном угле атаки при его
движении по земле,
, —для подрыва носового колеса при большом выносе задних колес
шасси, особенно при предельно-передней цёйтровке, требуются
большие углы отклонения рулей высоты.
Значение балансировочного угла отклонения рулей высоты при
движении самолета по земле на задних колесах можно приближенно
определить по формуле:
G —
Wlzo ТП^/\ ф ДЖгзем-!- § hf}
$р.в. =
ms2
(6.38)
где: Хш —относительный вынос задних колес шасси в долях САХ;
h —относительная высота расположения центра масс самолета в
долях САХ;
—относительное плечо тяги двигателей в долях САХ;
^<Р - ф взЛ (р М0д
f —коэффициент трения качения шасси.
Величину минимальной скорости самолета, при которой возможен
подъем носового колеса, можно определить по формуле:
V=4 G/S-Xm+G/Shf+
У Шгдръ. + тго + Шг ’ <2раз + Жг А ф + А Жгзем +
(Gyo + Су араз + Су А ф + А Сузем)(Хш + Jlf)
357
Боковой ветер, действующий на самолет во время движения по
земле (разбег или пробег), стремится накренить, развернуть и снести
самолет с ВПП. Для парирования сноса и обеспечения прямолинейного
движения самолета по ВПП необходимо, чтобы ось его была
повернута в наветренную сторону на угол, равный по абсолютной
величине углу бокового увода задних колес шасси. Известно, что если
бы самолет имел шасси с недеформируемыми пневматиками, то
движение его было бы прямолинейным и при положении оси самолета,
совпадающей с направлением движения до тех пор, пока боковая сила
сноса не превысила силы сцепления колес шасси с поверхностью
/
ВПП, а разворачивающий момент от бокового ветра I W~y57,3-
У2 \
'P^—Sl) не превысил бы момент от сил сцепления колес шасси и
/
отклоненного руля направления. Однако из-за упругой деформации
пневматиков задние колеса шасси будут смещаться в сторону
действия ветра, а передние в сторону, зависящую от знака
суммарного разворачивающего момента. Следовательно, если ось
самолета направлена по оси ВПП, то траектория движения самолета
при боковом ветре будет криволинейной. Для прямолинейного движения
самолета по ВПП при боковом ветре необходимо, чтобы сила сноса
уравновешивалась бы боковой силой, возникающей при качении колес
шасси по поверхности ВПП, а разворачивающий момент-моментом от
руля направления и моментом от силы, возникающей на передних
колесах шасси.
На рис. 6.44 приведена примерная схема положения самолета
для прямолинейного движения его по земле при боковом ветре.
Сила сцепления колес шасси с поверхностью ВПП в основном
зависит от нагрузки на колеса (G— У), т. е от угла атаки и
скорости,от упругости пневматиков и от угла <р , образованного
задними колесами шасси с направлением движения. Для обеспечения
возможности прямолинейного движения самолета по ВПП необходимо
стояночный угол атаки выбирать так, чтобы во всем диапазоне
скоростей сила сцепления колес шасси была бы болыше силы сноса.
Угол бокового упреждения самолета <р и значение
358
Рис.6.44. Схема положения самолета на режиме разбега при боковом ветре
движения самолета по ВПП при боковом ветре W можно определить
по формулам:
(6.39)
где Ry3K —нагрузка на задние колеса шасси;
//бс —производная от коэффициента боковой силы по углу
бокового увода <р;
h —высота расположения центра масс самолета;
Хщ —вынос задних колес шасси относительно центра масс.
Изменение всех приведенных выше параметров анализируется по
скорости движения. Из анализа можно выявить особенно опасные
зоны движения. Особенно трудный вопрос оценки устойвости и
управляемости при движении по земле связан с влиянием струй
двигателей при реверсе тяги. Этот анализ можно сделать лишь на
основе детальных испытаний моделей в аэродинамических трубах с
работающими двигателями. Известно, что в некоторых случаях при
359
реверсе тяги значителыно изменяется эффективность управления.
6.5. Устойчивость и управляемость в особых условиях
полета
6.5.1. Устойчивость и управляемость на больших углах атаки
Одним из наиболее важных вопросов при создании пассажирских
и транспортных самолетов наряду с получением их высокой эко-
номической эффективности является обеспечение удовле-
творительных характеристик устойчивости, управляемости и без-
опасности полета на больших углах атаки. Большими углами атаки для
неманевренных самолетов являются углы атаки, превышающие
допустимые <Тдоп., т.е. диапазон от <Тдоп. до <Тс (пределыный угол
атаки). Для определения допустимых эксплуатационных областей
режимов полета необходимо в летных испытаниях проверить поведе-
ние самолета на больших углах атаки до начала сваливания (или до
предельного отклонения "на себя” штурвала управления или включения
ограничения). Необходимо также отметить, что определяемые в
летных испытаниях для каждой конфигурации самолета скорости
начала сваливания являются основой для установления
эксплуатационных скоростей и высот полета.
С целью обеспечения безопасности проведения летных испы-
таний самолета на больших углах атаки проводятся целый комплекс
теоретических расчетов и исследования на пилотажных стендах
динамики самолета в широком диапазоне углов атаки, превышающих
предварительные установленные предельные углы атаки (углы атаки
начала сваливания). Для этих исследований необходимо иметь:
—результаты испытаний моделей самолета в аэродинамических
трубах в большом диапазоне углов атаки (а = -104-60°) и
скольжения (Д = ±20°);
—нестационарные аэродинамические характеристики
(вращательные производные), полученные в результате специальных
испытаний моделей самолета в аэродинамических трубах;
—результаты испытаний динамически подобных самолету
моделей для определения характеристик штопора самолета и методов
360
вывода из него.
Учитывая сложность явлений, связанных с развитием срыва
потока на больших углах атаки, следует особо отметить
необходимость получения результатов испытаний моделей самолета в
аэродинамических трубах при больших числах Re.
Известно, что срывные явления, возникающие при больших
углах атаки, приводят к снижению несущих свойств, уменьшению
эффективности органов управления, к значительному изменению
моментов тангажа, крена и рыскания, что связано с ухудшением
характеристик устойчивости и управляемости самолета. Поэтому при
разработке пассажирских и транспортных самолетов особо об-
ращается внимание на характер зависимостей аэродинамических
характеристик на больших углах а с целью обеспечения возвращения
самолета на малые углы атаки в случае непреднамеренного попадания
его на режимы больших углов атаки.
На первом этапе проектирования самолета его характеристики
устойчивости и управляемости оцениваются на основании
теоретических и экспериментальных исследований по данным,
полученным при испытаниях моделей самолета в аэродинамических
трубах. В полученные аэродинамические характеристики вносят
поправки, связанные с переходом от модели к натуре (влияния числа
Re) и учитывают упругость конструкции самолета (влияние
скоростного напора). В дальнейшем на этапе доводки самолета
возникает необходимость в уточнении полученных ранее
аэродинамических характеристик самолета на основании результатов,
получаемых на первом этапе летных испытаний.
Вопросу поведения самолета на больших углах атаки еще на
ранней стадии проектирования самолета уделяется большое внимание,
так как это связано с обеспечением безопасности полета. Для этого
необходимо, чтобы в случае непреднамеренного выхода самолета из
эксплуатационной области полета на углы атаки свыше допустимых
#доп. не возникало опасной ситуации (сваливание на крыло или
дальнейшее увеличение угла атаки), а самолет должен без
вмешательства летчика в управление вернуться на исходный
балансировочный режим полета.
361
Исследование динамики самолета на больших углах атаки
включает:
—предварительное прогнозирование характеристик сваливания
самолета (на этапах предэскизного и эскизного проектирования) с
помощью использования аэродинамических характеристик в широком
диапазоне углов атаки аналогичных самолетов и их моделей ;
—статические и динамические испытания исполнительных
моделей самолета в аэродинамических трубах в большом диапазоне
углов атаки.
При исследовании динамики неустановившихся движений
самолета на больших углах атаки гипотеза стационарности, согласно
которой действующие на самолет в неустановившемся режиме полета
аэродинамические силы и моменты, определяемые по кинематическим
параметрам движения, становится несостоятельной. В этом случае
значительную роль будут играть производные по времени а, а,/3, /3,
М, ш и т. д. Этим и опредеяется хорошо известное обстоятельство,
что характер протекания зависимости Cy=ftd) в окрестности
критического угла атаки зависит от того, в каком направлении и с
каким темпом изменяется угол атаки—возникает, так называемый,
гистерезис. Это объясняется тем, что режим отрыва при различных
знаках изменения угла атаки а будет различным. При этом также
могут заметно различаться и упругие деформации конструкции
самолета, что в свою очередь будет существенно влиять на
аэродинамические характеристики. При быстром выходе самолета на
большие углы атаки могут повышаться несущие свойства вследствие
запаздывания развития срыва потока с поверхности крыла. При
уменьшении угла атаки области сорванного потока могут сохраняться
до углов атаки меньше критических. *
Процесс развития срыва потока с поверхности крыла с
возрастанием угла атаки и определяет характер сваливания самолета.
Известно, если срывные зоны первоначально образуются в корневых
сечениях крыла (нет концевых срывов), то можно ожидать, что
сваливание самолета будет благоприятное на "нос”, так как срыв
потока в корневых сечениях крыла вызывает уменьшение углов скоса
потока в области горизонтального оперения и, вследствие этого,
362
значительно увеличивается стабилизирующее влияние
горизонтального оперения и происходит рост монента тангажа на
пикирование. Центральные, корневые срывы потока, как правило, не
сопровождаются кренящими и разворачивающими моментами.
Анализ динамики полета самолетов, у которых на критических и
закритических углах атаки происходит значительный рост момента
тангажа на пикирование и не появляются моменты крена и рыскания,
показывает, что такие самолеты при нейтральных органах поперечного
и путевого управления, даже при полностью взятом штурвале
управления "на себя”, не входят в штопор. Такой самолет в режим
штопора можно ввести только преднамеренно с помощью отклонения
органов поперечного и путевого управления по штопору, а при
возвращении их в нейтральное положение режим штопора
прекращается.
Следует также отметить,что для повышения безопасности полета
для современных неманевренных самолетов разработаны
высоконадежные автоматические устройства, препятствующие
непреднамеренному выходу самолета на углы атаки выше заданных.
Для самолетов, у которых горизонтальное оперение расположено
высоко над плоскостью хорд крыла, с так называемым Т—образным
хвостовым оперением, зависимость момента тангажа на больших
углах атаки является, как правило, неблагоприятной. Поэтому для
обеспечения безопасности полета на таком самолете должны быть
установлены резервированные автоматические устройства, надежно
защищающие самолет от выхода его на большие углы атаки. Следует
однако отметить, что путем применения геометрической крутки и
подбором профилей крыла и ряда других мероприятий удается
обеспечить удовлетворительные характеристики устойчивости и
управляемости самолета и с Т—образным хвостовым оперением до
довольно больших углов атаки, даже несколько превосходящих
предельные углы атаки <?с.
В качестве примера на рис. 6.45 приведены зависимости
коэффициента подъемной силы и коэффициента момента тангажа от
угла атаки ССУ, mz=f(a)) при числе М = 0,15 для современного
магистрального самолета со стреловидным крылом и Т-образным
363
Рис.6.45. Аэродинамические Рис.6.46. Аэродинамические
характеристики самолета с Т- характеристики самолета с Т-
образным хвостовым оперением образным хвостовым оперением
при различных положениях
механизации крыла
хвостовым оперением при различных положениях механизации крыла.
Из рассмотрения этих зависимостей следует, что линейная
зависимость Су=/( <2) сохраняется до достаточно больших углов
атаки й?=18-г22°, при этом линейная зависимость mz=fta)
сохраняется до несколько больших углов атаки (при ^з=30°и4О°до
а~24°). На закритических углах атаки происходит падение
коэффициента подъемной силы и значительный рост момента тангажа
на кабрирование. На рис. 6.46 для этого же самолета приведены
зависимости Су, для крейсерского числа М = 0,75. Этот
рисунок свидетельствует, что линейная зависимость Су =f(a)
сохраняется до угла атаки <2=10°, а затем рост коэффициента Су по
углу атаки замедляется, но критический угол атаки получается
значительный а Кр^>22°. Благоприятный характер зависимости
коэффициента момента тангажа сохраняется до углов атаки <2~16°,
затем происходит значительный рост момента тангажа на
кабрирование. Вследствие этого в случае непреднамеренного выхода
364
такого самолета на углы атаки больше <Z>18° произойдет дальнейшее
увеличение угла атаки с резким уменьшением скорости полета, что
недопустимо.
Проведенный анализ аэродинамических характеристик
пассажирских и транспортных самолетов с горизонтальным
оперением, расположенным за крылом на фюзеляже, показывает, что
они обладают благоприятными характеристиками на больших углах
атаки. А именно, на углах атаки выше допустимых (<2доп.) происходит
значительный рост момента тангажа на пикирование. Для
подтверждения сказанного на рис. 6.47 приведены зависимости
коэффициентов подъемной силы и момента тангажа от угла атаки для
одного из современных пассажирских самолетов. На этом же рисунке
нанесена зависимость приращения коэффициента момента тангажа
(AmZpB = mzs~ mzs=o ) от угла атаки для двух углов отклонения
рулей высоты 6в = —25°и <5В= 15°.
Из приведенного рисунка следует, что при числе М~0,15 у
самолета с убранной механизацией крыла коэффициент подъемной
силы с ростом угла атаки растет линейно до а~17°, затем темп роста
снижается и Су достигает своего максимального значения при а =
23°. При этом момент тангажа сохраняет свою линейную зависимость
mz=f(a) до <2=21°, и при дальнейшем/ увеличении угла атаки
происходит значительный рост момента тангажа на пикирование. Из
этого рисунка также следует, что эффективность рулей высоты на
этом самолете сохраняется практически постоянной до очень больших
углов атаки <2~30°, после чего по мере увеличения угла атаки
снижается.
На рис.6.48 приведены зависимости Cy,mz=f (а) современного
пассажирского самолета со стреловидным крылом, скомпонованным из
суперкритических профилей для крейсерского числа М полета (М=
0,78). Из этих зависимостей следует, что линейная зависиностьСу=
/(я) сохраняется до угла атаки <?~8°, затем с ростом угла атаки
происходит значительное уменьшение производной коэффициента
подъемной силы по углу атаки Су и при углах атаки больше 12°
она становится равной нулю ( Су =0). При этом
продольная статическая устойчивость сохраняется до угла атаки
365
Рис.6.47. Зависимости коэффициентов подъемной силы и
момента тангажа от угла атаки и руля высоты.
0~г7, 5°, а в диапазоне углов атаки а =84-12° наблюдается
значительный рост коэффициента момента тангажа на кабрирование
(локальная продольная неустойчивость), т.е. имеется так называемая
"ложка” в зависимости ж2=/ (а). Следует отметить, что локальная
продольная статическая неустойчивость у самолета наступает на
эксплуатационных углах атаки. Вследствие этого, для обеспечения
продольной устойчивости самолета приходится в систему
автоматической устойчивости СУУ включать дополнительный сигнал
угла атаки в виде Ддв=К(а — #зад). Для сравнения на этом рисунке
пунктиром нанесены зависимости Су,т2=/(а), полученные
из обработки материалов летных испытаний этого самолета; они
366
*
свидетельствуют, что локальная продольная статическая
неустойчивость самолета в полете может наступать на углах атаки на
1,0 4- 1,5° раньше, чем по результатам испытания модели этого
самолета в аэродинамической трубе.
Рис.6.48. Зависимость
коэффициентов подъёмной силы
и момента тангажа от угла
атаки
коэффициентов поперечной и
путевой статической
устойчивости тх и ту и
располагаемых моментов крена и
рыскания &тх и Л ту от угла
атаки
Летные испытания самолета на больших углах атаки показали,
что при крейсерской скорости полета М = 0,784-0,80 вывести
самолет с работающей автоматикой на угол атаки 10,2°
невозможно, самолет "опускает нос”, что свидетельствует о наличии
большой величины момента тангажа на пикирование.
На рис.6.49 —6.52 приведены основные статические
характеристики боковой устойчивости и управляемости для
современного магистрального пассажирского самолета для
367
крейсерской и посадочной конфигураций в широком диапазоне.,углов
атаки: степень поперечной Шх и путевой Wy статической
устойчивости, коэффициент располагаемого момента крена от органов
поперечного управления Дтх (<5ИНт) и коэффициент располагаемого
момента рыскания от органов путевого управления Дту(5н). Как
видно из графиков, степень поперечной статической устойчивости при
подходе к критическим углам атаки изменяется незначительно, а
затем в диапазоне углов атаки <2=224-30° снижается. В зависимости
степени путевой статической устойчивости по углу атаки следует
отметить, что в диапазоне углов атаки <2=284-40° величина ее
становится равной нулю. Эффективность органов поперечного и
путевого управления сохраняется во всем испытанном диапазоне углов
атаки до а~50°; на углах атаки <2>15° 4- 20° , располагаемые для
управления момент крена и момент рыскания начинают уменьшаться,
но остаются достаточными для парирования небольших возмущений.
Рис.6.50. Зависимость коэффициента момента крена от угла
атаки самолета в посадочной конфигурации.
На рис. 6.53. н 6.54 приведены зависимости Cy=f(d),
полученные при испытании модели магистрального пассажирского
самолета в аэродинамической трубе и по материалам летных
испытаний. Из рассмотрения этих рисунков следует, что при
небольших скоростях полета М<Со,7 значения коэффициента
подъемной силы Су, полученные из летных испытаний, несколько
выше, чем при испытании моделей самолетов в аэродинанических
368
Рис.6.51. Зависимость коэффициента момента крена от угла
атаки самолета в крейсерской конфигурации
Рис.6.52. Зависимость момента крена от угла атаки самолета во
взлетной конфигурации.
трубах. При отклоненных закрылках как во взлетное, так и в
посадочное положения максимальные значения коэффициентов
подъемной силы, полученные в летных испытаниях, существенно
выше, чем по результатам испытаний моделей этих самолетов в
аэродинамических трубах. Это объясняется влиянием больших
натурных чисел Re. При больших скоростях полета М>0,70
максимальные значения коэффициентов подъемной силы, полученные
по материалам летных испытаний, несколько меньше, чем по
результатам испытаний моделей в аэродинамической трубе. Это
объясняется, по всей видимости, повышенным влиянием упругости
конструкции самолета при больших скоростных напорах, особенно для
самолетов со стреловидными крыльями и большой аэродинамической
круткой крыла.
369
Расчеты динамики самолета на больших углах атаки,
проведенные на основании аэродинамических характеристик,
полученных при испытании моделей самолета в аэродинамических
трубах, позволяют разрабатывать основные рекомендации по
безопасности полета и технике пилотирования для проведения летных
испытаний самолета на больших углах атаки.
Анализ результатов летных испытаний большого количества
современных пассажирских и транспортных самолетов показал
хорошее совпадение их с результатами исследования моделей
самолета в аэродинамических трубах -на скоростях полета, на которых
еще не возникают местные звуковые и сверхзвуковые потоки. На
крейсерских числах М полета при углах атаки, соответствующих
Рис.6.53. Зависимость коэффициента подъемной силы от угла атаки
(крейсерская конфигурация самолета)
"отвалу” от линейной зависимости Cy=f (.а), наблюдается некоторое
несовпадение основных аэродинамических характеристик; в летных
испытаниях локальная продольная статическая неустойчивость
появляется раньше, чем на моделях в аэродинамических трубах и, как
правило, на этих углах атаки появляется тряска самолета, сначала
малозаметная, а затем увеличивающаяся по мере роста угла атаки и
затрудняющая выдерживание режима полета на этом большом угле
атаки. Такой характер изменения тряски служит надежным
370
недопустимых в эксплуатации
Рис.6.54. Зависимости
коэффициента подъемной силы от
угла атаки(взлетная и посадочная
конфигурация)
предупреждающим средством о подходе самолета к зоне
тлов атаки.
Таким образом, летные
испытания пассажирских и
транспортных самолетов на больших
углах атаки подтвердили приемлемый
уровень надежности прогнозирования
характеристик поведения самолета в
области критических режимов,
определяемый на основании
комплекса экспериментальных и
теоретических методов исследований,
сложившихся в практике
проектирования и разработки наших
отечественных самолетов. Эти
методы позволили безопасно
проводить летные испытания всех
опытных пассажирских и
транспортных самолетов на больших
углах атаки. При этом разработанные
мероприятия по ограничению выхода
самолета на углы атаки больше
предельных ас (установленных на
основании предварительных
исследлований), правильно
разработанные рекомендации по технике пилотирования и
прогнозирование по поведению самолета позволили избежать глубоких
сваливаний и входа в штопор при летных испытаниях неманевренных
самолетов на больших углах атаки.
Для своевременного прогнозирования поведения вновь разраба-
тываемого пассажирского самолета на больших углах атаки и
разработки мероприятий, структуры и алгоритмов системы
штурвального управления, обеспечивающей надежное ограничение от
выхода самолета на большие углы атаки, выше заданных, и тем
самым обеспечения высокой безопасности проведения летных
371
испытаний на больших углах атаки, еше на ранней стадии
проектирования (на этапе эскизного проектирования) анализируются
следующие предварительные аэродинамические характеристики,
составленные на основании имеющихся материалов по самолетам,
близким по аэродинамической компоновке к разрабатываемому
самолету:
— аэродинамические характеристики в большом диапазоне углов
атаки (а= —104-60°) и скольжения (/9=±20°);
— аэродинамические характеристики самолета при числах М =
М кр±0,05; М = М кр±0,10; М = М кр—0,15; М=М кр-(0,254-
0,30) в большом диапазоне углов атаки, где М кр —крейсерское число
М полета;
— нестационарные аэродинамические характеристики (вра-
щательные производные и другие материалы).
Эти характеристики впоследствии обычно уточняются на
основании испытаний модели разрабатываемого самолета в
аэродинамических трубах.
Предварительную оценку благоприятного поведения самолета на
больших углах атаки (сваливание"на нос”) можно произвести по
следующим условиям:
ту, = т§ • cosa — mx • sina<0 (6.40)
(при этом Жх<0)
— значительный рост момента тангажа на пикирование на
больших углах атаки и отсутствие моментов крена и рыскания при
нейтральных органах поперечного и путевого управления;
— на больших углах атаки эффективность всех органов
управления должна сохраняться и быть достаточной для создания
угловых скоростей порядка w~0,l рад/с(для парирования небольших
возмущений).
Самолеты, обладающие этими свойствами при нейтральных
органах поперечного и путевого управления,не входят в штопор даже
при полностью взятом штурвале управления"на себя”, а самолет
сваливается" на нос” с последующим уменьшением угла атаки и
увеличением скорости полета. Следует также отметить, что для
повышения безопасности полета для современных пассажирских
372
Н
и
самолетов имеются разработанные надежные( хорошо проверенные в
летных испытаниях) автоматические устройства,препятствующие
непреднамеренному выходу самолета на углы атаки выше заданных.
6 5.2. Полет в условиях обледенения
В связи со значительным расширением условий эксплуатации
пассажирских и транспортных самолетов существенно возрастает
вероятность попадания их в условия интенсивного обледенения,
появление которого наиболее вероятно при температурах наружного
воздуха от + 2°С и ниже, при наличии облачности, тумана, снегопада,
дождя или мороси, т.е. в условиях, когда в воздухе содержатся
переохлажденные мелкие капли воды. В результате соприкосновения
поверхностей самолета с этими переохлажденными каплями и
происходит отложение льда. Наиболее интенсивное обледенение
наблюдается при температуре наружного воздуха от-2 С до-10 С .При
полете в слоистых или слоисто-кучевых облаках на поверхности
самолета может образоваться иней, а при полете в кучевых облаках,
где переохлажденная вода находится в более крупных каплях,
происходит обледенение поверхностей самолета; непосредственно на
передней кромке крыла образуется плотный неровный ледяной нарост
по форме пологого корытца с краями, направленными под некоторым
углом вперед к набегающему потоку. На участках, удаленных от
передней кромки, возникает более тонкий слой шероховатого
бугристого льда.
Опасность обледенения самолета, кроме формы льда,
характеризуется также интенсивностью обледенения.Для определения
интенсивности обледенения применяются специальные приборы. На
современных пассажирских и транспортных самолетах уста-
навливаются указатели обледенения, представляющие собой небо-
льшой профиль с измерительным штырем, с помощью которого мо-
жно измерить интенсивность обледенения.
Обледенение по своей интенсивности условно разделяют:
а) слабая интенсивность со скоростью нарастания льда до 2 мм/
мин;
б) средняя интенсивность—от 2мм/мин до Змм/мин;
373
в) большая интенсивность—более Змм/мин.
При этом толщина льда за время полета самолета в условиях
обледенения(на режиме захода на посадку) на передних кромках
поверхностей может быть:
— до 15мм при слабой интенсивности;
— от 15 до 30мм при средней интенсивности;
— более 30мм при большой интенсивности.
Влияние обледенения на аэродинамические характеристики
обычно исследуются на моделях самолета достаточно крупных
размеров в натурной аэродинамической трубе Т-101 ЦАГИ при
установке имитаторов льда различных форм,а затем проводят летные
испытания самолета как в условиях естественного обледенения, так и
при использовании имитаторов.
Следует заметить, что проводить исследование влияния
обледенения на моделях малых размеров в аэродинамических трубах
не следует, так как получаются ненадежные результаты.
Обледенение передних кромок несущих поверхностей(крыло,
горизонтальное и вертикальное оперение)оказывает сильное влияние на
аэродинамические характеристики на самолетах с нестреловидными
поверхностями. С увеличением стреловидности передних кромок
несущих поверхностей самолета влияние обледенения на аэродинами-
ческие характеристики уменьшается.
В качестве примера на рис.6.55 приведены зависимости Cy>mz=
самолета с прямым крылом большого удлинения с
неотклоненной и отклоненной механизацией в посадочное положение,
без льда и с двурогим льдом на передних кромках крыла и
горизонтального оперения. Из рассмотрения этих зависимостей
следует, что отложение льда на передних кромках несущих
поверхностей приводит к значительному уменьшению критического
угла атаки и падению максимального коэффициента подъемной силы.
Так,например,при неотклоненной механизации прямого крыла
критический угол уменьшается с а = 19° до 10°,а с отклоненными
закрылками с 14° до 8°. Вследствие этого произойдет значительное
уменьшение запасов до скорости сваливания. При уменьшении
скорости полета самолета, ниже рекомендуемой в РЛЭ для
374
Рис.6.55. Зависимости
коэффициентов подъемной
силы и момента тангажа от
угла атаки самолета со льдом
эксплуатационных режимов или при
попадании самолета в небольшое
возмущение произойдет сваливание
самолета, что на малых высотах полета
может привести к катастрофе.
’ Отложение рогообразного льда на
передней кромке горизонтального
оперения приводит к резкому
возрастанию моментов тангажа на
пикирование на углах атаки близких к
нулю. И в случае выхода самолета на
эти углы атаки произойдет так
называемый “клевок” самолета (резкое
опускание носа самолета), что на малых
высотах также может привести к
катастрофе самолета. Таким образом,
отложение льда на передних кромках
нестреловидного крыла и
горизонтального оперения значительно
сужает области углов атаки,на которых
обеспечивается безопасность полета.
Поэтому на самолетах с прямыми
крыльями или с крыльями небольшой
стреловидности (/п.к<25°) необходимо иметь надежно работающую
противообледенительную систему, а в случае ее отказа летчику надо
особо быть внимательным в пилотировании самолета и, если
произошло большое отложение льда на передних кромках несущих
поверхностей, необходимо срочно уйти на большие (безопасные)
высоты и произвести посадку на другие аэродромы, где нет условий
обледенения.
На рис.6.56 приведены зависимости коэффициентов подъемной
силы и момента тангажа от угла атаки для магистрального самолета
с углом стреловидности крыла / = 30° (по передней кромке)без
имитаторов льда и с имитаторами льда,полученные при испытании
крупномасштабной модели в натурной аэродинамической трубе
375
Рис.6.56. Зависимость коэффициентов подъ-
емной силы и момента тангажа самолёта со
льдом и без льда
при <3з = 0 и <5з= 35° с отклоненными предкрылками. Имитаторы льда,
наклеенные на передней кромке крыла,соответствуют образованию
льда на передней кромке крыла при полете самолета в течение 15 мин.
в условиях интенсивного обледенения. Из рассмотрения этих
зависимостей следует, что на таком самолете (со стреловидными
несущими поверхностями х пж. 30°) обледенение не так сильно
влияет на аэродинамические характеристики, как на самолетах с
прямыми крыльями; критические углы атаки за счет нароста льда на
передней кромке крыла уменьшаются на 2^3°. В диапазоне
эксплуатационных углов атаки аэродинамические характеристики
мало изменяются, продольная статическая устойчивость практически
остается неизменной. Вследствие этого на современных
376
магистральных самолетах со стреловидными несущими
поверхностями при х п.к. 30° и оборудованных надежными
ограничителями, препятствующими выходу самолета на углы атаки
выше заданных, нет настоятельной необходимости в установке
противообледенительных систем. Для повышения безопасности полета
таких самолетов обычно вносятся в РЛЭ некоторые дополнительные
рекомендации по технике пилотирования в условиях обледенения.
6.5.3. Динамика полета в условиях сдвига ветра
На траекторию полета самолета оказывает сильное влияние не
только ветер, но и его изменение по высоте и времени (или траектории
полета), которое называют сдвигом ветра. Сдвиг ветра часто
наблюдается в горных районах. Его появлению также способствует
прохождение грозовых и терминальных фронтов атмосферы.
При полете на больших высотах влияние постепенного изменения
скорости ветра по величине и направлению летчик может без особых
затруднений компенсировать рулями и сектором газа. Однако, при
резких изменениях ветра по траектории управление самолетом
усложняется, так как эти изменения ветра могут происходить
быстрее, чем летчик может их компенсировать. В результате могут
возникнуть большие отклонения от намеченной траектории движения.
При полете самолета на малых высотах(режим взлета и посадки)такие
отклонения от траектории полета являются опасными вследствие
близости поверхности земли.
Для удобства расчета скорость и направление ветра целесообраз-
но представлять через составляющие Wxg, Wyg, Wzg в нормальной
земной системе координат. Переход от одной точки пространства к
Другой можно выразить через изменение высоты дальности
полета &L и бокового смещения самолета ^Z. Тогда сдвиг ветра
можно измерять такими соотношениями:
АЛк а'^ а
А Н ’ А Т > 7 > г Х>У>г
(6. 41)
Таким образом,все возможные случаи сдвига ветра будут
описываться девятью соотношениями; число этих вариантов можно
сократить если учесть, что наиболее сильное влияние на траекторию
377
самолета оказывают вертикальная (И^)и горизонтальная( Wxg),
составляющие скорости ветра и их изменения по линии полета.
На режимах взлета и посадки дальность и высота полета
самолета имеют однозначную зависимость (например,при движении
самолета по посадочной глиссаде А Я = АЬ,^г2°40'), поэтому сдвиг
• ветра на этих режимах можно выразить через какую-нибудь
переменную, например, высоту полета. Тогда составляющие сдвига
A Wxg A Wvg
ветра будут выражаться через ~~д-// и д Н ’ где:
A Wxg
—сдвиг горизонтального ветра по высоте полета
/ . х A Wyg
(вертикальный сдвиг горизонтального ветра); л ц—сдвиг
вертикального ветра по высоте полета (вертикальный сдвиг
вертикального ветра).
В природе сдвиги ветров встречаются независимо как
горизонтальные, так и вертикальные, а при больших атмосферных
возмущениях могут быть одновременно как горизонтальный, так и
вертикальный сдвиги ветра. Такое сочетание сдвигов ветра встреча-
ется в грозовом фронте.
Наиболее сильные вертикальные сдвиги ветра наблюдаются в
условиях грозы, ливней, града, шквалов, при приближении мощных
тепловых и холодных фронтов. Воздействие больших сдвигов ветра на
самолет приводит к резкому изменению параметров полета от
заданных (в первую очередь, скорости и высоты полета).
Наиболее опасны возрастающие нисходящие и попутные потоки,
так как они вызывают уход самолета под заданную траекторию
полета, при этом интенсивно уменьшается скорость полета и
возрастает вертикальная скорость снижения самолета. Возвращение
самолета на заданную траекторию полета с учетом запаздывания
вмешательства летчика в управление для парирования возмущений при
больших сдвигах ветра очень затруднено,а иногда и невозможно.
При воздействии на самолет восходящих и возрастающих
порывов ветра, при которых он отклоняется вверх от заданной
траектории полета, управление самолетом тоже может оказаться
378
сложным, так как после окончания действия возмущений для
приведения самолета на заданную траекторию полета требуется
дополнительное маневрирование с большими скоростями снижения.
Сложность распознавания сдвига ветра, трудность определения
требуемого характера управления, а также отсутствие навыков
пилотирования самолета в этих условиях привели к ряду тяжелых
летных происшествий с самолетами.
Количественных данных по реальным сдвигам ветра немного и
они, в основном, относятся к сдвигу горизонтального порыва ветра по
A Wxg
& Н •
высоте
Некоторые данные по повторяемости сдвигов ветра по вы-
соте( Л гт8-), измеряемые
в приземных слоях атмосферы (см.таб.
6.1), получены с помощью шаропилотных измерений в аэропорту
Внуково. Они показывают, что наибольшие сдвиги ветра наблюдаются
в нижнем слое атмосферы (О-^ 100м), и вероятность возникновения их
5м/с
100м
с величиной более
достаточно велика(6,8%).
Таблица 6.1
Вертикальный сдвиг горизон- тального ветра м/с 100м Повторяемость %, по высоте слоя
10 4- ЮОм 1004-200м 200 4-300м 300 4-500м
24-3,0 25,6 19,9 20,9 13,1
3,14-5,0 22,2 18,8 9,7 4,9
больше 5,0 6,8 2,0 2,3 1,3
Приведем данные о повторяемости вертикальных сдвигов
горизонтального ветра в нижнем 30-метровом слое атмосферы (см.
табл.6.2)
Из таблицы 6.2 следует, что очень сильные сдвиги ветра
встречаются достаточно часто (0,3 ^0,5%), а максимальное значение
379
A WXg 30м/с сдвига ветра было замерено порядка Л ~ . Таблица 6.2
Вид сдвига ветра Л Wxg о/ Повторяемость д ц в%
Обнинск Внуково
п f. „ 0~^~6,6 м/с Слабый , ' 100м 78,7 77,2
„ 6,6 3.2 м/с Умеренный ’ 100м 18,4 19,3
п „ 13.2~^~ 19,8 м/с Сильный 100м 2,6 3,0
~ „ более 19,8 м/с Очень сильный 100м 0,3 0,5
Данных по сдвигу вертикального ветра по высоте
vg
j очень
мало,но некоторые имеющиеся материалы позволили принять ее
А \Ууя 10м/с
А Н ~ 100м
равной
Влияние сдвига ветра на траекторию
самолета определяется изменением аэродинамических сил самолета.
При действии нисходящего потока в первый момент угол атаки
~ A Wyg
самолета уменьшается на а а ~, вследствие этого
уменьшается и подъемная сила и самолет начинает проваливаться.
Через некоторое время самолет из-за устойчивости по перегрузке
возвращается к исходному углу атаки, и происходит увеличение угла
_ W
тангажа на А £ =---------у*~. При действии попутного ветра
уменьшается воздушная скорость и, следовательно, падает подъемная
сила самолета. В результате самолет уходит вниз от заданной
траектории полета. Расчеты показывают, что отклонение от исходного
режима полета (по высоте, скорости и скорости снижения) интенсивно
увеличивается по времени.
Начальное изменение нормальной перегрузки самолета при
воздействии вертикального ступенчатого порыва ветра будет:
380
ra W а
. ™ ”у£г, а при действии ступенчатого горизонтального
Пу СуХЯ. ’ У
_.2
ветра у •
Из приведенных формул следует,что наибольшее возмущение
будет на малых скоростях полета. i
Рис.6.57. Влияние сдвига ветра Рис.6.58. Параметры траектории
на параметры движения самолета полета на режиме посадки при
на режиме захода на посадку воздействии нисходящего потока
На рис.6.57 и 6.58 приведены расчетные переходные процессы
самолета на режиме предпосадочного планирования при воздействии
попутного горизонтального и нисходящего порывов ветра при
невмешательстве летчика в управление самолетом. Эти графики
свидетельствуют, что ступенчатые порывы ветра (^Xg~ Ю м/с и
Wyg= — Юм/Доказывают очень сильное влияние на траекторию
полета самолета.При времени действия возмущений порядка 6с
возникают недопустимые отклонения параметров полета от исходных;
381
отклонение самолета от глиссады планирования составляет =
30м,а вертикальная скорость снижения увеличивается в несколько раз
и становится равной Vy^~ 10м/с, что недопустимо,так как такое
отклонение траектории полета от заданной на малых высотах полета
уже невозможно исправить.
Исследования на пилотажном стенде показали, что ступенчатые
порывы ветра легко и быстро распознаются экипажем, так как при
этом резко изменяется нормальная перегрузка и воздушная скорость
самолета и поэтому летчик может с меньшим запаздыванием
вмешаться в управление для исправления траектории полета.
На рис.6.59 приведены переходные процессы при воздействии
& __ 10м/с о
сдвигов ветра Л tT —• Проведенный анализ показывает,
*1 100м
что сдвиг ветра оказывает меньшее влияние на траекторию полета,
чем ступенчатые порывы ветра. Однако сдвиг ветра сложнее
распознать вследствие его постепенного нарастания и поэтому время
запаздывания летчика в управлении самолетом для парирования
возмущения получается значительным (^ зап ~ 10с). Кроме того, при
этом требуется переменный по времени характер управления
самолетом,что создает большие трудности для летчика.Отметим,что
при одинаковых величинах сдвигов ветра действие вертикального
порыва ветра сильнее действия горизонтального ветра.
Исследования показали, что на траекторию полета самолета при
сдвиге ветра аэродинамические и весовые характеристики самолета
(запас продольной статической устойчивости, продольное
демпфирование, удельная нагрузка на крыло и инерционные
характеристики самолета) оказывают незначительное влияние.
Поэтому траектории полета различных самолетов при одинаковой
скорости захода на посадку в условиях сдвига ветра без
вмешатальства летчика в управление мало различаются(см.рис.6.60.)
Это объясняется тем, что аэродинамические и весовые
характеристики оказывают сильное влияние на параметры
короткопериодического продольного движения самолета (изменение
угла атаки и перегрузки), которое,как известно, достаточно быстро
затухает и мало влияет на так называемое, длинно-периодическое
382
движение самолета. Траектория полета самолета в условиях сдвига
ветра и без вмешательства летчика в управление определяется
характеристиками длиннопериодического движения самолета
(изменение его скорости), которое, в основном, зависит только от
исходной скорости полета. Обычно длиннопериодическое движение
слабо затухает, период его колебаний достаточно большой.
Рис.6.59 и 6.60. Изменение параметров траектории самолета на режиме захода
на посадку при воздействии горизонтального градиентного сдвига ветра
Исследование показало,что с уменьшением скорости изменение
угла наклона траектории при полете самолета в условиях одинаковой
интенсивности сдвига ветра возрастает.Поэтому в случае большой
вероятности попадания самолета в условия сдвига ветра скорость
полета самолета на режиме захода на посадку следует несколько
увеличить. При этом увеличится также запас до скорости сваливания
в случае попадания самолета в попутный горизонтальный сдвиг ветра.
Доведенные исследования показали, что для парирования
383
возмущений, вызванных сдвигом ветра, управление самолетом
получается достаточно сложным, так как летчику приходится
одновременно управлять рулями и двигателями. Так, например, при
действии нисходящего порыва ветра угол атаки а сразу уменьшается,
но затем достаточно быстро происходит восстановление исходного
угла атаки с одновременным увеличением угла тангажа самолета &.
Изменение углов а и £ пропорционально скорости вертикального
. _ л wVK 0_ л wyg
ветра А а—------т7 ; -----*
Для сохранения траектории полета в этих условиях необходимо
увеличение угла танажа самолета & и, вследствие этого, увеличение
тяги двигателей пропорционально скорости нисходящего ветралРто=:
= mg......Расчеты показывают, что при воздействии
нисходящего вертикального ветра со скоростью A Wyg= —18м/с
необходимо увеличивать тягу двигателей на ДРдв~0,25т§, т.е.
увеличивать ее до взлетного режима(тяговооруженность современных
неманевренных самолетов лежит в пределах Р = 0,25^0,35).
Исследования также показали,что исправлять траекторию полета
самолета при действии сдвига ветра частично можно при помощи
отклонения рулей высоты за счет потери скорости. Например,для
восстановления потерянной высоты ЬГ = 50м потребуется потерять
скорость на А И~25км/ч,что очень много .Это свидетельствует о
том,что управление только рулями высоты позволяет парировать
слабые сдвиги ветра.
Таким образом,для повышения безопасности полета самолета в
условиях сдвига ветра целесообразно иметь повышенную исходную
скорость полета.
Расчеты показали,что располагаемых запасов по тяге двигателей
и углу отклонения рулей высоты достаточно для парирования даже
очень больших сдвигов ветра, если летчик будет вмешиваться в
управление без запаздывания. Однако, распознавание действия сдвига
ветра очень затруднено и если принять, что летчик замечает
допустимые отклонения параметров полета от заданных: по высоте
Д77~ 10м и по воздушной скорости Д 10км/ч, то
384
возмущения от сдвига ветра
запаздывдние вмешательства летчика в упрвление для парирования
А Wxg _ 10м/с А УИу* _ 10м/с\
АН- 100м И А Н 100м /
будет более t зап 10с.
Известно, что процесс посадки самолета достаточно скоротечный
(например, с высоты Н=100м до момента касания происходит
примерно за 25с), запаздывание в действиях летчика,доходящее до
50% общего резерва времени,может привести к серьезному
осложнению обстановки и,следовательно, к снижению безопасности
полета. Расчеты показывают,что при запаздывании реакции летчика
более t зап> 12с для возвращения самолета на посадочную глиссаду
требуется увеличить угол атаки вплоть до допустимого, резко
увеличить тягу двигателей до взлетного режима. Главное направление
повышения безопасности полета самолета в условиях сдвига
ветра—уменьшение времени запаздывания вмешательства летчика в
управление,что может быть обеспечено за счет своевременной
информации о сдвиге ветра.
У нас в стране и за рубежом интенсивно проводятся работы по
созданию бортовых и наземных средств информации о сдвиге ветра.
Однако надежных и хорошо работающих систем информации о
сдвигах ветра до сего времени не создано.
Проведенные исследования по поведению неманевренных
самолетов в условиях сдвига ветра показали,что безопасность полета
самолета в условиях сдвига ветра может быть повышена за счет
следующих мероприятий:
1. Оборудование аэропортов, имеющих большую вероятность
возникновения сдвига ветра,измерительными системами атмосферных
возмущений;
2. Оборудование самолетов бортовыми системами для измерения
атмосферных возмущений;
3. Применение на самолетах специальных автоматических
устройств, помогающих парировать атмосферные возмущения,
например, автомата тяги, выдерживающего заданную воздушную
скорость полета;
4. Увеличение скорости полета при заходе самолета на посадку
385
на A V = 10^" 15 км/ч;
5. Проведение учебы и тренажа летного состава по
•пилотированию самолета в условиях сдвига ветра.
Литература
1 .Г.С.Бюшгенс,Р. В. Студнев. “Аэродинамика самолета. Динамика
продольного и бокового движения” .Машиностроение,М, 1979 г.
2 . Аэро динамика и динамика полета магистральных пассажирских
самолетов. Машиностроение, 1982 г.
З .Аэродинамика самолета Ту-154.Издательство“Транспорт”,1977 г.,
Москва.
4 .Устойчивость и управляемость дозвуковых неманевренных самолетов.
РДК,том 1,книга 5,выпуск 1.Издательский отдел ЦАГИ, 1981 г.
5 .Г.В.Александров." Влияние деформаций конструкции самолета на его
характеристики продольной устойчивости и управляемости’’Труды
ЦАГИ,выпуск 1098,1968 г.
6 .С.Я.Наумов,В.Г. Дмитриев.” Исследование динамики
магистральныхнассажирских самолетов на режиме взлета и посадки”.
ТВФ,№ 3,1982 г.
7 .С.Я.Наумов,А.Г.Обрубов”.Выбор допустимых углов атаки
неманевренного самолета при заходе на посадку”.ТВФ,№ 6^7,1989 г.
8 .С.Я. Наумов, В.С. Перебатов”.Выбор статического момента площади
вертикального оперения неманевренных самолетов” .ТВФ, К» 8^9,1982
г.
9 .С.Я.Наумов,В.Е.Грязин.А.Г.Обрубов”. Пути повышения безопасности
полета самолета в условиях сдвига ветра.” Издательство КИИГА,
1983 г.
10 .“ Устойчивость и управляемость пассажирских и .транспортных
дозвуковых самолетов”. РДК, Том П,выпуск 1 .Издат.отдел ЦАГИ,
1967 г.
11 .С.Я.Наумов, А. Г.Обрубов “Улучшение летно-технических
характеристик неманевренного самолета при переходе к малым запасам
продольной статической устойчивости”.ТВФ,№ 6, за 1980 г.
12 .С.Я.Наумов.“Исследование взлета и посадки самолетов с
велосипедным шасси” .Труды ЦАГИ,выпуск 1098(Сборник работ 1968
г.).
386
ОБОЗНАЧЕНИЯ
%F—координата положения фокуса самолета,
Хрб.г.о —координата положения фокуса самолета без горизонтального
оперения относительно носка САХ крыла, в долях САХ;
Ярда —координата положения фокуса самолета с учетом работающих
двигателей;
Xj.—координата- положения центра тяжести самолета относительно носка
САХ, в долях САХ;
Хг-н—координата положения нейтральной центровки по перегрузке
самолета с фиксированным рулем;
Хт.н.с —то же,самолета со свободным рулем;
Хт.п.з —координата допустимого предельно-заднего положения центра
тяжести от носка САХ, в долях САХ;
Хт.п.п —то же для предельно-переднего положения центра тяжести;
2 G/S
и = г-—относительная плотность самолета;
9,81рок
ап—степень продольной устойчивости по перегрузке самолета с
фиксированным рулем высоты;
<т„с—то же,самолета со свободным рулем высоты;
dP
-&п~—производная усилия на штурвале управления по перегрузке;
__ 5 Г.О L Г.О _ гЧ т~ — и и
г.о——--------— 5 г.о L г.о —безразмерный статический момент
площади горизонтального оперения;
L г.о —плечо горизонтального оперения(измеряется от центра тяжести
самолета до 1/4 САХ горизонтального оперения);
—эффективность руля высоты и стабилизатора(измеряется при
а=const);
msz
mv —относительная эффективность руля высоты;
т m'B=~oS в^Ь в—«МФициент шарнирного момента руля высоты;
° угол отклонения руля высоты по перпендикуляру к оси вращения;
угол отклонения(установки)стабилизатора относительно хорды крыла
по потоку;
£ угол скоса потока в области горизонтального оперения;
угол скоса потока при нулевой подъемной силе;
387
К г.о —коэффициент,учитывающий торможение потока в области
горизонтального оперения;
т/- _ 1 d3 , ,
Кш- g jjYe—коэффициент передачи от штурвала управления к рулю
высоты;
Шгг—производная коэффициента продольного момента самолета с
фиксированным рулем высоты по безразмерной угловой
скорости (ыг=;
т
С^гв.о
В в.о
G
масса самолета;
У,о1
. дСгв.о_производная коэффициента боковой силы
3/? вертикального оперения по углу скольжения;
S В.О L В.О _ г~ <
---------— о в.о L в.о — коэффициент статического момента
площади вертикального оперения;
Сф —максимальная ширина фюзеляжа;
d-Рэл __производная усилия на штурвале по угловой скорости крена
d шх j- кг!рад j
Зе “
—производная угла скоса потока в горизонтальной плоскости в
? области вертикального оперения по углу скольжения;
h ф —максимальная высота фюзеляжа;
zz— тьАг—безразмерный момент инерции самолета относительно оси Oz;
ix0 — т(~1°2)2—безразмерный момент инерции самолета относительно
главной продольной оси;
iy0— w(//2)2—т0 же относительно вертикальной оси;
ix—безразмерный момент инерции самолета относительно полусвязанной
оси Ох;
iy—безразмерный момент инерции самолета относительно полусвязанной
оси Оу;
ixy— m(//2)2—безразмерный центробежный момент инерции самолета;
V2
Кв.о =——коэффициент, учитывающий торможение потока у
вертикального оперения и неравномерность распределения
нагрузки по размаху вертикального оперения,
установленного на фюзеляже;
388
Лшн=~НЛ—коэффициент передачи от педалей к рулю направления;
аЛн
L ф —длина фюзеляжа;
L пер_расстояние от носовой части фюзеляжа до центра тяжести
самолета;
S ф —площадь боковой проекции фюзеляжа;
5 пер.ф —площадь боковой проекции передней части фюзеляжа(от носка до
центра тяжести самолета);
£ в0 —расстояние от центра тяжести самолета до 1/4 САХ
вертикального оперения (плечо вертикального оперения);
£ в.о= —относительное плечо вертикального оперения;
т х=~^~Г*~—производная коэффициента момента крена по углу
ад
скольжения или степень поперечной статической
устойчивости самолета;
mfy= —производная коэффициента момента рыскания самолета по
углу скольжения или степень статической устойчивости пути;
шг_ дтх
т х ~ дш —производная коэффициента момента крена самолета по
безразмерной угловой скорости крена или степень
демпфирования крена;
Ш V _ t f
ту ~ —производная коэффициента момента рысканья самолета по
безразмерной угловой скорости рысканья или степень
демпфирования рысканья;
„„ Шу_ dlTlx
т х ~ —производная коэффициента момента крена по безразмерной
угловой скорости рысканья;
т ых= дту
у дйх —производная коэффициента момента рысканья по
безразмерной угловой скорости крена;
д& э —эффективность элеронов;
_ д/Пу
* д8ц —эффективность руля направления;
т ш э=-Ж_шз_
qS э Ьаэ —коэффициент шарнирного момента элеронов;
389
ш н
m —коэФФиЦиент шарнирного момента руля направления;
шх—угловая скорость крена;
шу—угловая скорость рысканья;
I .
Ых~~ и>х~2у—безразмерная угловая скорость крена;
I л
шу — шу~2у~—безразмерная угловая скорость рысканья;
и
_ 2т
pSl
—относительная плотность самолета в уравнениях бокового
движения самолета;
_ т
тп — ^у—масштаб времени;
_ t ,
г—---—безразмерное время;
о — S' В.о
о в.о——с-—относительная площадь вертикального оперения;
_ У в.о
У в.о —------относительное расстояние от центра давления
вертикального оперения до продольной оси самолета;
2Zjm
z дв——— относительное плечо тяги двигателей от плоскости
симметрии самолета (в долях полуразмаха крыла);
, __ h в.о
Л в.о——удлинение вертикального оперения;
X—угол стреловидности;
0—угол поперечного V крыла;
Л _ рн
а —-----относительная плотность воздуха;
ро
he.o — размах вертикальноого оперения.
Правило знаков
Углы имеют положительный знак в следующих случаях(см.фиг.А):
а—положительный, если проекция вектора скорости V на ось ОУ
отрицательна;
д—положительный, если ось ОХ самолета находится над горизонтальной
плоскостью, проходящей через центр тяжести самолета;
0—положительный, если вектор скорости V находится над
горизонтальной плоскостью,про ходящей через центр тяжести
390
самолета;
0—полож ительный,
если вектор воздушной скорости V находится справа
от плоскости симметрии самолета;
0—положительный, если проекция оси ОХ
самолета на плоскость
горизонта лежит слева от земной оси OXg
Все коэффициенты аэродинамических сил и моментов даны в
полусвязанной системе координат,когда ось ОХ направлена по
проекции вектора скорости на плоскость симметрии самолета,ось OZ
направлена вправо от летчика перпендикулярно плоскости симметрии
а ось ОУ—вверх,в плоскости симметрии самолета.
Все углы и производные по ним измеряются в градусах.
391
Г л а в a 7. СИСТЕМА УПРАВЛЕНИЯ
МАГИСТРАЛЬНЫХ САМОЛЕТОВ
7.1. Общие положения
Управление современным самолетом осуществляется с
использованием следующих органов управления:
— аэродинамических органов управления (продольного,
поперечного и путевого);
— управление тягой двигателей (и реверсом тяги);
— управление аэродинамическими тормозами;
— управление механизацией крыла, повышающей подъемную
силу и изменяющей аэродинамическое сопротивление.
Управление первыми двумя из перечисленных органами
управления осуществляется по следящему принципу-эффект
воздействия на самолет пропорционален перемещению рычага
управления, либо усилию, прикладываемому к нему.
Два последних органа управления(тормоза и механизация крыла)
как правило, отклоняются по дискретной команде без обратной связи
по динамическим параметрам самолета.
В настоящее время общая структура управления магистральным
самолетом(см. рис.7.1)включает:
СШУ-систему штурвального управления, которая представляет
собой связь рычагов управления с органами управления и позволяет
летчику однозначно осуществлять управление самолетом по любому
параметру. Например, перемещая штурвал (от себя или на себя),
создавать однозначное пропорциональное приращение перегрузки
самолета пу или скорости полета V. На первой стадии развития
авиации такое перемещение штурвала путем механической связи
вызывало определенное отклонение органа продольного управления
(руля высоты и др.).
На современных магистральных самолетах связь рычага
392
Рис.7.1. Структура системы штурвального управления (СШУ)
393
управления (штурвала) с органом управления, как правило,
осуществляется через электро - и гидравлические системы, а в
систему управления включаются автоматические устройства,
улучшающие характеристики устойчивости и управляемости СУУ
(см. схему рис.7.2). Структуры СУУ, их оптимальные алгоритмы
рассматриваются подробно в следующей 8 главе.
Наконец, современные магистральные самолеты имеют также
систему автоматического управления—САУ. Система САУ (или на
более ранней стадии—автопилот) осуществляет автоматическое
комплексное управление самолетом по всем шести степеням сво-
боды(углы тангажа, крена, курса и координатам в пространстве),а
также стабилизацию этих параметров и, наконец, ряд стандарт-
ных режимов управления(разворот, набор высоты и автоматическую
посадку и т.п.). САУ,какправило, работает через СЩУ.
Проблемы САУ в значительной степени связаны с траекторным
управлением и, следовательно, с навигационными системами и
представляют собой специальные вопросы, которые в этой монографии
не рассматриваются.
Здесь будут рассмотрены только вопросы стыковки САУ с СУУ
и СШУ.
балансировка
Рис.7.2 Схема необратимого бустерного управления (НБУ)
СШУ оказывает влияние на формирование облика самолета, его
пилотажные и летно-технические характеристики. Поэтому СШУ
неразрывно связана с компоновкой самолета.
394
Проблема создания системы управления является важнейшим
аспектом проектирования самолета. Система управления в
существенной мере влияет на важнейшие характеристики
пилотирования самолета: устойчивость и управляемость.
СШУ может состоять из отдельных систем различной степени
сложности, выполняющих определенные функции. В соответствии со
сложившейся практикой в СШУ принято включать следующие
системы:
______механическая система, связывающая рычаги управления
летчика с приводами рулей самолета; система связи может быть
также электродистанционной;
— система создания усилий на рычагах управления;
— система сервоприводов и рулевых приводов;
— система регулирования коэффициента передачи между
рычагом управления и рулями(А?ш);
—система ограничения предельных режимов полета (ОПР);
—система управления балансировкой.
Состав, входящих в СШУ перечисленных систем, зависит от
особенностей самолета, требований к его пилотажным и летно-
техническим характеристикам.
Система автоматического управления (САУ) предназначена для
автоматизации полета по типовой траектории (включая практически
полную автоматизацию от взлета до посадки) с целью снижения
загрузки экипажа, особенно при длительном пилотировании самолета,
повышения точности выполнения режимов полета и выдерживания
эшелонов, снижения погодного минимума и, соответственно,
повышения регулярности полетов. На основе САУ может быть
построен режим совмещенного и директорного управления.
Режим директорного управления—это режим, который построен
на автоматизации обработки первичной информации, необходимой для
осуществления управления полетом в условиях отсутствия видимости
земли или каких-либо ориентиров, и выдачи летчику вторичной
информации в удобном для него виде. Эта информация обычно
отображается на специальных командных пилотажных приборах или
395
на лобовом стекле кабины. Используя эту информацию, летчик при
выполнении посадки через систему СШУ осуществляет
корректирующие действия для устранения рассогласования между
заданным и текущим значением параметра управления.
При директорном управлении летчик также, как и при ручном
управлении, является звеном замкнутой системы управления “летчик-
СШУ-самолет”и поэтому качество(точность)пилотирования самолета
при использовании режима директорного управления зависит также от
техники пилотирования самолета летчиком.
Современные САУ имеют большой набор автоматических
режимов, которые существенно облегчают пилотирование самолета
летчиком и повышают безопасность полета. Например, на ряде
самолетов(Ту-204,Ил-96-300,В-747,А300В,DC-10,L-1011)
реализованы режимы (1):
—стабилизация угла тангажа,
—стабилизация угла крена,
—выбор курса,
—стабилизация курса,
—захват высоты,
—стабилизация высоты,
—управление вертикальной скоростью,
—стабилизация вертикальной скорости,
—стабилизация индикаторной скорости,
—стабилизация числа М,
—координированный разворот,
—полет в турбулентной атмосфере,
—взлет,
— заход и посадка по категории П1 ИКАО,
— уход на второй круг,
— режим совмещенного управления.
При автоматическом управлении роль летчика сводится к
осуществлению функций контроля, набора автоматических режимов и
осуществлению в случае необходимости корректирующих действий в
режимы САУ. В ряде случаев с целью обеспечения простого перехода
с режима САУ на ручное управление и обратно предусматривается
396
режим совмещенного управления, который включается путем
приложения усилий (выше пороговых) к обычным рычагам управления
самолетом.
Тенденция расширения функций автоматического управления на
пассажирских самолетах также была обусловлена необходимостью
уменьшения числа ошибок, происходящих по вине человека.
Статистика показывает l2ИЗ], что в настоящее время ~70%
авиационных катастроф происходит по вине человека. Большинство
ошибок—это непреднамеренные действия, неадекватные данной
ситуации. Ошибки человека могут быть существенно уменьшены
путем расширения использования автоматизации сложных задач
пилотирования, при выполнении которых человек склонен допускать
ошибки, например, выполнение посадки в условиях плохой видимости
или компенсация воздействия отказов,, требующих быстрой ответной
реакции. Автоматические системы, как известно, лишены“чувства
страха и усталости”, действуют более точно и быстро, не требуют
постоянной тренировки для сохранения навыков, им не свойственна
забывчивость, но они требуют контроля и высокой надежности.
Однако при “сплошной” автоматизации управления роль человека
сводится в основном к функциям контроля за состоянием систем
самолета, в случае особых ситуаций, вызванных отказами
автоматических систем, летчик должен обеспечить адекватную
реакцию на отказ, ввиду этого недопустима его растренированность,
особенно, если такие события происходят крайне редко.
Это подтверждают результаты статистического анализа данных
опроса пилотов авиакомпаний, проведенных британским институтом
авиационной медицины с целью определения отношения летного
состава к автоматизации управления самолетами. Абсолютное
большинство опрошенных (из 1400 чел)высказалось одобрительно об
автоматизации и внедрении новых систем индикации в кабинах
летчиков. Некоторое беспокойство летчиков вызывает то, что
автоматизация сопровождается некоторой утратой навыков ручного
Управления, которые необходимы при возникновении отказных
ситуаций [41 .Поэтому для сохранения навыков пилотирования при
сильно автоматизированном управлении летчик должен иметь
397
возможность включаться в процесс ручного управления самолетом,
хотя бы в течение ограниченного времени. В связи с этим летчикам
могут оказать существенную помощь специальные тренажеры,
воспроизводящие достаточно полно картину поведения самолета,
включая особые ситуации, воспроизведение которых в полете кроме
того связано с большим риском. Таким образом, должен быть найден
компромисс между ручным и автоматическим управлением, исходя из
условий обеспечения безопасности полета.
По мнению представителя американского комитета по
безопасности перевозок, проблема автоматизации управления
самолетами заключена не в технических аспектах автоматизации, а в
пересмотре подходов в подготовке летчиков. Важными новыми
функциями летчиков являются контроль и оценивание летных
характеристик самолета, контроль за работой автоматики.
Отношение к автоматизации должно определяться на
эмпирически выявленных и научно обоснованных принципах и
правилах, которые обеспечат рациональность взаимодействия
автоматических систем и летчика С4].
В главе 7 рассматриваются в основном вопросы, относящиеся к
СШУ, как основной системе, играющей наиболее важную роль с точки
зрения выполняемых ею функциональных задач и обеспечения
безопасности полета самолета.
Развитие СШУ происходило в течение значительного периода
времени(~90 лет) —от первых полетов самолетов, на которых было
положено начало применения простых систем непосредственно ручного
управления, до самолетов настоящего времени, которые оборудованы
сложными автоматизированными системами штурвального
управления. В процессе эволюции СШУ можно выделить несколько
важных этапов, которые позволили осуществить переход к новому
уровню пилотажных и летно-технических характеристик самолета,
расширению диапазона режимов его полета, повышению безопасности
полета и улучшению комфорта экипажа и пассажиров.
Этап совершенствования механической системы управления
занимал самый длительный период времени. При механической
системе управление самолетом осуществляется непосредственно
398
мускульной силой летчика. Поэтому на этом этапе в основном
решались задачи обеспечения приемлемых характеристик устойчи-
вости, управляемости и эффективности управления. Для этой цели
широко использовались различные аэродинамические средства
снижения аэродинамических шарнирных моментов рулей (триммеры,
осевая компенсация, кинематическая компенсация, сервокомпенсация,
роговая компенсация и др.). Они позволяли обеспечить приемлемую
управляемость, например, такими самолетами как Ил-62, В707, DC-8,
имеющих взлетный вес —150т и число М полета~0,8.Наряду с
этим большая работа была проделана по совершенствованию и
повышению надежности самих механических элементов проводки
управления(тяг, тросов, блоков, качалок и др. элементов), из которых
осуществлялась механическая связь между рычагами управления
летчика и рулями.Применение таких систем ограничивалось
самолетами, имеющими дозвуковой диапазон режимов полета и
умеренные аэродинамические шарнирные моменты рулей, и требовали
большой доводки.
По мере развития авиации возрастала продолжительность полета.
Ручное пилотирование самолета в течение длительного времени было
утомительным.
Важнейшим этапом развития СШУ было внедрение необратимого
бустерного управления(НБУ),что позволило обеспечить “легкое”по
усилиям управление самолетом при аэродинамических шарнирных
моментах, существенно превышающих физические возможности
летчика. С этого момента уровень усилий на рычагах управления
определялся характеристиками специальных загрузочных
устройств(пружины, автоматы усилий). Переход к НБУ
осуществлялся постепенно. В начале были созданы и проверены в
полете система обратимого бустерного управления (ОБУ)* и система
необратимого бустерного управления с переходом на ручное в
аварийном случае. Первыми пассажирскими самолетами с НБУ были
* При ОБУ только часть шарнирного момента воспринимается летчиком, а остальная—
рулевым приводом.
399
Сюд Авиасьен" Каравелла” (1958), Викерс УС-10(1962),Хаукер
Сиддли “Трайдент”(1963).Первый отечественный пассажирский
самолет, на котором было применено НБУ для управления рулями по
всем осям был Ту-154,совершивший первый полет в 1968 г. Самолет
Ту-154 имеет 3-х канальную НБУ, которая сохраняет
работоспособность после отказа двух гидравлических систем.
Принципы построения резервированной НБУ обеспечили ее высокую
надежность. Затем НБУ стало широко применяться на других
отечественных пассажирских и транспортных самолетах—Ту-144,
Ил-76,Ил-86,Ан-124,Ил-96-300,Ту-204.При создании этих систем
широко использован опыт военных самолетов.
С появлением самолета Ту-154 была разработана
автоматическая система управления АБСУ-154 с 3-х кратным
резервированием. По своим техническим характеристикам НБУ
позволяла ввести использование автоматической посадки, удовлетворя-
ющей требованиям второй категории автоматической посадки
ИКАО(30х400м).Система сохраняла работоспособность после одного
отказа.
На самолете Ту-144(1968)была установлена система АБСУ-
144, которая была расчитана на выполнение требований третьей
категории автоматической посадки ИКАО (0x200м). Эта система
имела 4-х кратное резервирование и сохраняла работоспособность
после 2-х последовательных отказов. На базе разработанных СШУ
самолеты Ил-86 и Як-42 были оборудованы системой САУ-П1,
расчитанной на вторую категорию автоматической посадки.
Особенностью этих САУ является их высокая надежность,
обеспеченная резервированием.
Некоторые из указанных самолетов имели СУУ различной
сложности и САУ, которые обеспечивали ряд важнейших функций
управления самолетом.
Рассмотренные СУУ и САУ были построены на аналоговой
технике. Аналоговая техника снижала возможность в реализации
автоматических режимов, контроля системы, обеспечивала меньшую
точность, имела больший вес из-за невозможности, например,
использования мультиплексных шин, позволяющих значительно
400
уменьшить число проводов.
Пассажирские самолеты 90-х годов (Ил-96-300, Ту-204, а также
проектируемые Ту-334, Як-42М) имеют уже цифровые системы СУУ
и САУ с набором всех необходимых автоматических режимов,
охватывающих практически всю типовую траекторию полета,
включая обеспечение полностью автоматической посадки по категории
Ш А ИКАО. СУУ и САУ этих самолетов имеют как минимум 3-х
или 4-х кратное резервирование, что позволяет обеспечить сохранение
работоспособности после 2-х последовательных отказов каналов
системы.
Внедрение НБУ, наряду с обеспечением приемлемых усилий при
управлении, открыло широкие возможности автоматизации управления
с целью улучшения характеристик устойчивости и управляемости и
летно-технических данных. Ранее это обеспечивалось в основном
аэродинамическими средствами(например, увеличением площадей
оперений самолета, выбором компоновки самолета).С помощью
автоматики СУУ можно решить проблемы, связанные с
устойчивостью самолета, улучшить требуемые характеристики
управляемости, осуществить коррекцию характеристик в процессе
летных испытаний, выиграть в весе конструкции и аэродинамическом
качестве, т.е. несколько ослабить требования к аэродинамическим
характеристикам устойчивости и управляемости самолета.
Большое значение для повышения безопасности полетов
гражданских самолетов с автоматизированными системами
управления имела разработка усилиями институтов и ОКБ в 1974 г.
первых Норм летной годности гражданских самолетов(НЛГС) [51.
НЛГС* были созданы на основе обобщения многолетнего опыта
эксплуатации отечественных и зарубежных пассажирских самолетов
и содержат требования к обеспечению безопасности полета. Важной
особенностью требований НЛГС является необходимость
подтверждения работоспособности системы управления в условиях
воздействия различных видов отказов и их комбинаций, в том числе
механических отказов, которые традиционно относились к категории
В дальнейшем новое издание Норм летной годности получило название Авиационные
правила 25(АП-25).
401
крайне маловероятных. Наряду с этим в НЛГС оговорены также
особенности ситуаций, которые допускаются при этих отказах. В
целом требования НЛГС распространяются на системы управления
различного типа, включая резервированные системы управления.
Применение новых технических решений на перспективных
самолетах расширяло использование автоматических систем,
применение электродистанционных систем(СДУ)для обеспечения
характеристик устойчивости и управляемости и безопасности полета
(Ту-2О4,Ил-96-300,Ан-124,A320,MD-11 и др.).Это стало возможным
благодаря большому и успешному опыту применения резервированных
автоматических систем, обеспечения высокой надежности СДУ. Как
правило, применяемые СДУ имеют 4-х кратное резервирование,
обеспечивающее сохранение работоспособности системы после двух
последовательных отказов. Переход к СДУ позволил также улучшить
динамические характеристики системы, повысить точность отработки
сигналов управления, обеспечить легкое управление самолетом £61.
Цифровые СДУ значительно расширяют возможности системы
управления в решении задач по пилотированию самолета, позволяют
реализовать более сложные законы управления, оптимизирующие
характеристики управляемости, включая реализацию ограничений,
осуществить многорежимное управление, производить быструю
перестройку законов работы, включая осуществление реконфигурации
системы, вырабатывать летчику интегральную информацию о
режимах полета и состоянии систем, комплексировать бортовые
системы самолета и осуществить обьединенное управление системой
управления и двигателями, более гибко и эффективно осуществить
контроль систем самолета(см. главу 8).
С переходом на СДУ рычаги управления летчика могут быть
сделаны облегченными при наличии устройств, ограничивающих выход
самолета на опасные режимы полета, поскольку исчезли значительные
усилия, которые имели место при применении механической проводки.
Поэтому в СДУ возможно применение разнообразных рычагов
управления— штурвальных колонок, миништурвалов (Ту-2О4),
центральных ручек, боковых ручек (А320) и даже применение
селекторных устройств управления, типа кнопок и клавиш при
402
автоматическом управлении самолетом. При этом каждый
устройств,
полностью
тип рычага управления, за исключением селекторных
ебует создания определенной гармонии усилий при управлении
Полетом, так как при разных рычагах управления -----------------
управления участвуют разные мышцы тела L7J.
в процессе
В настоящей главе рассмотрены также некоторые проблемы,
связанные с рулевыми приводами, которые в настоящее время на
больших самолетах потребляют большую мощность и, следовательно,
требуют внимательного анализа при выборе их параметров.
Управление тягой обычно рассматривается при разработке
двигателей, поэтому здесь не отражено. В отдельном параграфе
рассмотрены некоторые наиболее важные вопросы управления
механизации крыла. В заключении приведены материалы по системам
управления существующих в эксплуатации самолетов.
7.2 Система необратимого бустерного управления
7.2.1 Общие положения
Появление НБУ без перехода на НРУ было обусловлено
эволюционным процессом развития авиации, характерными
особенностями которого были:
(1) . Увеличение размеров самолета и скорости полета привели к
• существенному росту аэродинамических шарнирных моментов
-Л^шаэр, которые превышали физические возможности летчика даже
при условии применения различных аэродинамических средств для
снижения аэр.
(2) . Как показала авиационная практика, процесс доводки
аэродинамических характеристик органов управления требовал
большого объема аэродинамических исследований в трубах и полете
особенно для самолетов, имеющих близкие к предельным с точки
зрения ручного управления размеры и высокую скорость полета.
(3) . С расширением области режимов полета весьма сложно
стало обеспечивать приемлемые характеристики устойчивости и
управляемости самолета аэродинамическими средствами. Для этого,
403
например, требовались увеличенные размеры хвостового оперения
(Sr.о., S'в.о. и т.д.), реализация которых привела бы к снижению
аэродинамического качества и увеличению веса конструкции.
Поэтому радикальным средством обеспечения приемлемых
характеристик перспективных самолетов было применение
автоматических систем на базе необратимого бустерного
управления(рис.7.2).
Основными элементами НБУ являются рулевой привод(РП),
загрузочное устройство с триммерным механизмом и система
гидравлического (электрического)питания. Все эти устройства должны
иметь очень высокую надежность на уровне механической системы
управления. Это достигается применением многократного
резервирования, при котором вероятность полного отказа НБУ может
быть отнесена к практически невероятным событиям.
Для НБУ характерны следующие особенности:
а) усилия при управлении в НБУ определяются
характеристиками искусственной загрузки рычагов управления
независимо от закона изменения аэр. Усилия на рычагах
управления могут быть сделаны такими, какие необходимы из условий
управляемости и безопасности полета;
б) в НБУ могут быть включены различные автоматические
устройства для улучшения характеристик устойчивости и
управляемости (СУУ).Исполнительные элементы этих устройств
могут быть сделаны небольшой мощности, поскольку они
расчитываются на усилия, действующие во входной части
механической проводки (трение в проводке, трение в золотниках
привода, усилия, создаваемое загрузочным устройством).
Проблема “отдачи” на рычаги управления (обусловленная
трением в золотниках) при работе автоматических устройств,
включаемых дифференциально, может быть решена либо созданием
незначительного предварительного затяга в загрузочном устройстве,
либо применением небольшого вспомогательного привода в
механической проводке управления; >
в) маханическая проводка управления может быть сделана более
легкой, поскольку она должна расчитываться на меньший уровень
404
усилий.
Как уже отмечалось, максимальным противодействующим
усилием для дифференциально включаемых автоматических устройств
тпрние в золотниках рулевых приводов, а для параллельно
является rpcnnv . „
включаемых автоматических устройств (САУ)—трение в проводке и
золотниках рулевых приводов и усилия от загрузочного устройства.
При нормальном управлении самолетом (без отказов) усилия
управления в канале тангажа, например, для гражданских самолетов
не должны превышать — 35 кг, это существенно меньше того уровня
усилий, который может создать один или два летчика, используя свои
физические возможности. (Например, при расчете на прочность при
штурвальном ручном управлении принимается максимальное усилие от
одного летчика 120 кг, от двух—240 кг).
Поэтому для уменьшения усилий в элементах механической
проводки в НБУ от летчика или от исполнительных устройств
автоматических систем (например, в случае несоответствия скоростей
между исполнительными устройствами автоматических систем и
рулевым приводом, т.е.когда исполнительное устройство имеет более
высокую скорость, чем рулевой привод)в проводку управления
целесообразно включение пружинной тяги, расчитаннош на
максимальной уровень противодействующих усилий(с некоторым
запасом).
г) на органах управления(руль высоты, руль направления,
элероны)вместо осевой компенсации, которая могла быть причиной
снижения аэродинамического качества, может использоваться
конструктивная компенсация. Кроме того, нет необходимости
применять такие дополнительные поверхности как сервокомпенсатор и
аэродинамический триммер;
д) НБУ в меньшей степени чувствительно к шарниным моментам
органов управления, поэтому возможно использовать большие углы
отклонения рулей, реализуя максимальную их эффективность; объем
аэродинамических исследований может быть существенно сокращен.
Возможные неточности в определении М ш аэр. могут быть
компенсированы выбором запасов по тяге рулевого привода;
е' отсутствие в НБУ устройств переключения в рулевых
405
приводах и загрузочных механизмах рычагов управления упрощает
конструкцию системы управления, повышает ее надежность;
ж) отпадает необходимость применять триммеры на органах
управления. В НБУ может применяться либо триммерный механизм,
либо триммируемый стабилизатор;
з) летчики в процессе эксплуатации самолета имеют дело только
с одним типом системы—НБУ, обладающей в зависимости от ее
состояния(нормальное или с отказами) незначительным разбросом
характеристик. Это облегчает освоение ее экипажем;
и) могут быть сняты противофлаттерные грузы, а безопасность
в отношении флаттера обеспечна выбором характеристик привода с
учетом отказа систем питания;
к) на самолете с НБУ нет необходимости применения системы
стопорения рулей на земле от порывов ветра. Эту задачу
обеспечивают рулевые приводы.
7.2.2 Загрузочные устройства рычагов управления
Загрузочное устройство(ЗУ)предназначено для создания летчику
приемлемых характеристик управляемости самолетом по усилиям во
всем диапазоне режимов полета. Кроме того, на загрузочное
устройство часто возлагаются функции по ограждению
непроизвольного вывода самолета летчиком на недопустимые по
условиям безопасности полета режимы(пу, а, ых, Vmax max,
ЭДпах max).
Загрузочные устройства могут быть различной степени сложности в
зависимости от особенностей структуры системы управления и
требований, предъявляемых к самолету. Ниже рассматриваются, в
основном, на примере продольного управления основные принципы
построения ЗУ и их конструктивные особенности.
К числу важнейших показателей управляемости относятся
dP/d^y, dPg/dcox..., т.е. производные, характеризующие уровень
усилий для создания единицы перегрузки или угловой скорости крена
при маневре с постоянной скоростью. Показатель dP/d>2y можно
представить в виде(для случаев без СУУ или со статической СУУ)
406
dP dP dXB ,
d^'dXB d£ dw/
(7.1)
где
dd\ ъпу — _ G/S&l
dny •<!
—градиент усилий продольного
управления, создаваемый ЗУ по
перемещению рычага, кг/м;
—коэффициент передачи
продольного управления, м-1;
—характеристика продольной
управляемости самолета.
-тсу-\_____—
On — rVlz I
С точки зрения характеристик управляемости желательно иметь
величину РПу мало меняющуюся (РПу~ const)по режимам полета.
Однако практически реализация значения Рпу = const связана с
существенным усложнением ЗУ. В нормах НЛГС и ARP-842BE8]
задан диапазон изменения РПу и ограничено минимально допустимое
значение РПу. Например, согласно НЛГС РПу должен быть не менее
10 кг (при штурвале).
Обеспечение удовлетворительных характеристик управляемости
по усилиям возможно регулированием параметров РХк и d57dXB.
Поскольку этих параметров два, то фактически могут иметь место три
основные группы загрузочных устройств C9J:
—в первой группе ЗУ производится непосредственно
регулирование
—во второй группе ЗУ производится регулирование Ашв, а
градиент загрузки РХв реализуется постоянным;
—к третьей группе ЗУ относятся устройства, в которых
одновременно производится регулирование РХв и dS'/dXe.
Следует отметить, что при рагулировании dS'/dXn.,наряду с
обеспечением характеристики РПу, изменяется также показатель
Управляемости dXB/dny=Хву
Хву= G/San
mszKmq ’
(7.2)
407
который должен быть не менее 40 мм/ед. перегр.
Загрузочное устройство является функциональным элементом
НБУ, от которого зависит надежная работа НБУ. Если вероятность
отказа НБУ без перехода на НРУ должна быть не менее 1 • 10~9
на час полета, то ЗУ, как элемент НБУ, должно иметь еще более
высокую надежность. ЗУ должно быть малочувствительным к
отказам, при возникновении отказов не должны возникать рывки или
скачки усилий, недопустимые по условиям безопасности.
В связи с очень высокими требованиями к надежности ЗУ его
структуру целесообразно строить так, чтобы она содержала
постоянную часть загрузки, не зависящую от вычислителей и систем
питания (обычно для этого используется простая пружина), и
переменную корректируемую часть, которая должна изменяться в
зависимости от режимов полета (например, q,H,M...)t рис.7.3.В
этом случае обеспечивается разнородное резервирование как наиболее
эффективное средство обеспечения высокой надежности.
Коррекция градиента загрузки (РХв) по режимам полета должна
производиться с ограниченной скоростью ( — 15"^ 20с полная
перекладка) примерно в темпе изменения режимов полета, по которым
эта коррекция производится (например, V, Примером
конструктивного решения такого ЗУ является изменение длины
кинематического плеча механизма передачи сигнала летчика к
рулям(см. рис.7.4).Для повышения надежности ЗУ на случай отказа
вычислителя должна предусматриваться прямая цепь ручного
управления исполнительным устройством ЗУ (в обход вычислителя) с
управлением от отдельного тумблера по специальному указателю.
Корректирующая часть ЗУ обычно выполняется дублированной.
Это обеспечивает сохранение неизменной характеристики загрузки
после одного отказа, после второго отказа корректирующее
устройство выходит из строя. После этого может обеспечиваться
ручное управление коррекцией загрузки, если остаются
работоспособными исполнительные механизмы корректирующей части
ЗУ. В худшем случае остается простая пружинная загрузка, при
которой могут накладываться ограничения на действия летчика при
пилотировании самолета.
408
ЗУ не должно искажать динамические характеристики системы
управления ниже уровня, который рассматривается как неприемлемый.
Например, если ЗУ находится в контуре управления самолетом, то
характеристики контура с учетом ЗУ должны оцениваться летчиком
положительно.
триммироваиие
Рис.7.3. Структура загрузочного устройства,
Рис.7.4. Схема автомата регулирования загрузки
Максимальное усилие, создаваемое ЗУ, не должно превышать
кг, как это оговорено в НЛГС. Это требование относится также
409
к триммерному механизму ЗУ, если он применяется. Выбранный
диапазон триммирования должен гарантировать безопасность
завершения полета с уровнем усилий, указанных в НЛГС, в случае
возможного увода триммерного механизма в крайнее положение. Если
это требование не выполняется, то триммерный механизм должен
иметь резервирование, которое гарантирует практическую
невероятность его отказа.
ЗУ, в функции которого входит создание усилий на рычагах
управления для ограждения выхода самолета на запредельные режимы
полета в случае непроизвольных действий летчика, должно создавать
четко различимое летчиком дополнительное усилие на рычагах
управления. Обычно это усилие накладывается на основную
загрузочную характеристику в виде ступеньки усилий, имеющей
величину 12~Н5 кг.
В связи с особенностями характеристик управляемости
некоторых самолетов вблизи предельных режимов полета (больших а)
возможно применение в ЗУ ограничителей активного типа,
предназначенных для принудительного увода самолета с опасных
режимов. Такие устройства обычно называются толкателями.
Например, на самолете Боинг767 имеется такой толкатель,
воздействующий на штурвальную колонку с усилием —16 кг при
достижении предельного угла атаки.
Следует отметить, что ограничение предельных режимов может
осуществляться путем воздействия непосредственно на рули
самолета, если система управления позволяет осуществить надежную
отработку сигналов системы ОПР на рули. Это наиболее просто
может быть сделано при наличии электродистанционного управления
(напримерг7^320). Однако использование ОПР в рамках ЗУ имеет
целью прежде всего оказать воздействие на летчика, предупреждая
его через усилия об ошибках пилотирования и тем самым препятствуя
их дальнейшему развитию. Такого типа ОПРы могут использоваться
в неавтоматизированных системах бустерного управления.
В настоящее время на большинстве пассажирских самолетов
осуществляется регулирование градиента загрузки, рис.7.5.
Регулирование РХв производится пропорционально скоростному
410
напору и обратно пропорционально степени продольной статической
устойчивости самолета тгу(бп) которая определяется центровкой
самолета. В качестве сигнала о центровке используется сигнал
балансировочного положения триммируемого стабилизатора. Эти ЗУ
получили название автоматов усилий. Автоматы усилий установлены
на большинстве пассажирских самолетов, например, Ил-86, самолетах
Боинг, АЗОО,А31О и др. В основном это автоматы усилий
гидромеханического и электромеханического типа(рис.7.б) ЕЮ!.
Рис.7.5. Характеристика загрузки штурвальной колонки
транспортного самолета
Достоинством указанных автоматов усилий является высокая
степень отказобезопасности. Возникающие отказы в автоматах
усилий практически не создают возмущений в движении самолета.
Рост градиента с увеличением скорости полета служит хорошим
признаком о приближении к скоростным режимам, на которых летчик
должен проявлять определенную осторожность, при пилотировании
самолета.
411
Т риммироваяие
-^полн “полное возушное давление,
Лгат- статическое давление воздуха;
Дл -сливное давление гидросистемы;
^„-давление нагнетания гидросистемы;
Рре,. —регулируемое давление в цилиндре.
’ Р
полн стат
ОТ ВОЗДУШНОЙ
системы
от гидросистемы
Рис.7.6. Схема гидравлического автомата усилий
Другая группа загрузочных устройств строится на
регулировании коэффициента передачи -/f[uB = d<57d Хв
пропорционально степени продольной статической устойчивости и
обратно пропорционально скоростному напору. При этом загрузка на
рычагах управления создается простой пружиной (рис.7.7). На
некоторых самолетах используются две пружины, с помощью
которых создаются взлетно-посадочная (одна пружина) и полетная
(две пружины) загрузки. Реализация автомата услий с dP/dXB=
const характерно для самолетов, имеющих автоматизированную
систему управления, в которой применяется высоконадежная система
СУУ с дифференциальным сервоприводом. При обеспечении заданного
РПу сигнал летчика смешивается с сигналами СУУ. Это обычно
требует увеличения ходов сервопривода. Подобный способ
412
иоования загрузки осуществлен на самолете Ту-154,который
имеет 3-х кратно резервированную СУУ, сохраняющую
работоспособность после одного отказа till.
Рис.7.7. Схема загрузки штурвальной колонки с простой
пружиной и регулятором К ш
С расширением использования автоматизации для улучшения
характеристик устойчивости и управляемости, включая переход к
электродистанционному управлению рулями, этот способ создания
усилий получает все большее применение. По такому принципу, в
частности, формируются усилия современных самолетов Ту-2О4,
А320, АЗЗО, А340.... Электрические сигналы, используемые для
формирования усилий, имеют 3 4- 4-х кратное резервирование.
Третья из перечисленных выше группа загрузочных устройств
построена на регулировании двух параметров и Р\ по режимам
полета(<7, Н...\ рис.7.8.Совмещение функций регулирования загрузки
и коэффициента передачи Ашв основано на том факте, что с
увеличением скоростного напора необходимо увеличение градиента
загрузки РХв и уменьшение коэффициента передачи в.Такие ЗУ
не нашли применения в дозвуковой пассажирской авиации.
Следует отметить, что место установки ЗУ в системе
Управления имеет принципиальное значение. При наличии
механической проводки наиболее целесообразно устанавливать ЗУ как
413
можно ближе к рулевым приводам. Этим достигается:
— устранение влияния люфтов в проводке управления на работу
системы СУУ. Загрузочное устройство является упругой опорой с
предварительным затягом, которая отсекает люфты в большей части
проводки;
— в случае рассоединения или разрушения проводки на участке
от рычагов управления до ЗУ рули”"будут удерживаться ЗУ в
балансировочном положении. Используя триммерный механизм, можно
осуществлять аварийное управление самолетом;
— наличие длинной упругой проводки между рычагами управления
и ЗУ может давать благоприятный эффект увеличения Кш в при
управлении самолетом.
Рис.7.8. Схема загрузки штурвальной колонки при одновременном
изменении загрузки и Ащ
К числу отрицательных эффектов от установки ЗУ в хвостовой
части самолета следует отнести некоторое увеличение трения от
проводки из-за нагружения ее шарниров усилием ЗУ и некоторое
уменьшение градиента ступеньки дополнительной загрузки ОПР из-за
упругости проводки.
Особое место среди загрузочных .устройств занимают
электрогидравлические ЗУ, работающие по сигналам датчиков усилий.
В отличие от ранее рассмотренных ЗУ, эти ЗУ являются следящими
414
устройствами, работающими по замкнутому контуру. В состав ЗУ
входят: датчик усилий, устанавливаемый на штурвале или в проводке
управления; вычислитель, формирующий заданный закон работы ЗУ,
электрогидравлический сервопривод, отрабатывающий сигналы ЗУ и
создающий загрузку рычагов управления; аварийная загрузка
в виде простой пружины, используемая при полном отказе
электрогидравлического ЗУ или при рассоединении механической
проводки между штурвалом и сервоприводом. На рис.7.9 показана
принципиальная схема этого ЗУ С12].
датчик
перемещений
датчик усилии
механическая проводка
аварийная
загрузка
Триммериый
механизм
трим
ад
^ычислигель
СДУ-Р
Сервопривод
Муфта
к рулевым приводам
автотриммиро ванне
U
обр связь
Рду-сигнал с датчика усилий,
хтрнм “сигнал триммирования
Рис.7.9. Схема электрогидравлической загрузки штурвальной колонки
Формирование загрузки осуществляется следующим образом.
Усилие на штурвальной колонке можно представить в виде
ДР=СдДХ (7.3)
где Сд-жесткость датчика усилий, а ДХ-деформация упругого
элемента датчика.
Выходное напряжение с датчика усилий будет равно
ед=ХдДХ (7.4)
где Кл~коэффициент передачи датчика усилий.
Выходное напряжение с датчика обратной связи сервопривода
имеет аналогичное выражение
Qoc = Kqc * Хсп (7.5)
415
где Кос —коэффициент передачи датчика обратной связи, ЛГСП
—перемещение штока сервопривода.
Скорость перемещения штока сервопривода пропорциональна
рассогласованию между входным и выходным сигналами
Хсп = Kcn^Cjy бос), (7.6)
где Л"сп —коэффициент передачи сервопривода.
Для состояния равновесия имеем
Асп=0 (7.7)
Тогда, используя полученные ранее соотношения, можем
написать
ЛР=СдП^/ЛХсп (7.8)
Для перехода к перемещениям штурвала (ДХВ) обозначим
Д Хв _________ ту
отношение “д п — и подставим в предыдущее выражение
ДР= Сл(-^)-^-ДХ. (7.9)
Из этого выражения получим соотношение для градиента
загрузки
(7.Ю)
Здесь Сд, К* —обычно имеют постоянные значения. Изменение
градиента Рх в может осуществляться путем изменения
коэффициентов Кос и Кл. Однако при изменении коэффициента Кос
происходит также изменение динамических характеристик
сервопривода; для уменьшения Рх* необходимо уменьшать Кос, что
ведет к снижению собственной частоты сервопривода, а это
нежелательно. Поэтому регулирование Рх* может производиться
путем изменения коэффициента Кл по заданной программе в
зависимости от режимов полета и других сигналов
Kn—f{q, Н,
Как следует из приведенного выражения для РХъ, для получения
минимальных градиентов Р\ необходимо увеличивать коэффициент
Кл. Практика показала, что при реализации минимальных градиентов
усилий могут возникать проблемы, связанные с устойчивостью
416
замкнутого контура(при Рх в <0.01кгс/мм).Для обеспечения
устойчивости необходимо применение специальных корректирующих
фильтров в прямой цепи, на структуру которых в значительной мере
влияют параметры механической проводки, которая входит в контур
управления ЗУ.
Электрогидравлическому ЗУ с управлением по усилиям
свойственен ряд важных особенностей, которые делают его
многофункциональной системой, что обусловило применение этой
системы на последних отечественных самолетах Ан-124,Ан-225,Ил-
96-300 С131.
Система, построенная на основе этого автомата усилий,
обеспечивает дистанционное управление “по усилию”, осуществляет
резервирование механической проводки, устраняет влияние сил трения
механической проводки и золотников рулевых приводов, отрабатывает
сигналы триммирования и автоматического управления, создает
дополнительную загрузку рычагов управления или воспроизводит
сигналы системы ОПР.
Благодаря этим свойствам ЗУ может быть уменьшен вес
системы управления, например, за счет исключения второй ветви
механической проводки, уменьшения числа исполнительных
приводов(фактнчески все перечисленные функции комплексируются на
одном исполнительном устройстве), а также обеспечивается легкое по
усилиям управление самолетом(малые усилия страгивания
~ 14-1,5 кг, малый градиент усилий на единицу перегрузки РПу ~ 15
4-25 кг/ед. перегрузки).
При этом для улучшения реакции системы на управляющий
сигнал, а также повышения безопасности полета целесообразно
аварийную загрузку устанавливать вблизи рычагов управления, а
сервопривод ЗУ — вблизи рулевых приводов. Аварийная загрузочная
пружина является опорой датчиков усилий (в том числе при
Рассоединении проводки управления) и чем ближе ее расположение к
датчикам усилий, тем лучше будет реакция системы на управляющий
сигнал.
Вместе с тем, как уже упоминалось, данный автомат усилий
является следящей системой, работающей по сигналам летчика,
417
автопилота, системы ОПР и других систем. Поэтому в этой системе:
—возможно возникновение активных отказов, для компенсации
. которых требуется принятие специальных мер, например, применение
резервирования с полным разделением каналов; обеспечение
пересиливания системы при ее уводе или применение устройств
быстрого отключения; разнесение каналов по бортам самолета с
возможностью компенсации отказа одного борта другим;
использование параллельной отработки сигналов для косвенного
контроля системы по движению штурвала и т.д.;
—имеет место фазовое запаздывание как во всякой реальной
следящей системе. Запаздывание в этой системе, в основном,
создается сервоприводом и фильтрами, которые используются для
повышения устойчивости контура, особенно при обеспечении малых
градиентов загрузки, и фактически не зависят от длины механической
проводки. В этом отношении более целесообразно использовать
электрогидравлическую загрузку на самолетах, имеющих длинную
механическую проводку. При этом в качестве механической проводки
целесообразно использовать тросовую проводку, поскольку при ее
характеристиках (упругость, масса, собственная частота, трение)
проще решаются вопросы обеспечения устойчивости системы.
Созданные образцы подобных автоматов успешно применяются на
тяжелых самолетах Ан-124,Ан-225,Ил-96-ЗОО. Эти автоматы
имеют фазовое запаздывание по усилиям не превышающее 40—50°
на частоте 0,5 Гц, что удовлетворяет требованиям, предъявляемым к
фазовому запаздыванию систем управления самолетов такого класса.
Реализованные градиенты загрузки рычагов управления находятся в
пределах 0,15...0,4кгс/мм.
Следует отметить, что при управлении по усилиям практически
отсутствует зона нечувствительности, которая обычно создается
люфтами и трением в системе (если эта зона не введена специально,
например, для создания усилия страгивания). При наличии люфтов и
трения в проводке управления между рычагами летчика и
сорвоприводом при приложении летчиком малейшего усилия система
приходит в движение (т.е. первым реагирует сервопривод в обход
механической проводки);
418
—максимальный градиент загрузки зависит от жесткости
механической проводки между рычагами управления и сервоприводом
ЗУ Обычно жесткость механической проводки существенно
превышает потребные градиенты усилий. Например, жесткость
проводки может составлять ~ 1,54-2,0 кг/мм, тогда как потребные
градиенты усилий на рычагах управления имеют значения 0,154-0,4
кг/мм. Более высокие градиенты загрузки обычно необходимы при
реализации функций ОПР—а,пу. Но и в этом случае данное ЗУ
может обеспечить хорошо различимые летчиком усилия, создаваемые
системой ОПР. При этом вместо “стенки” усилий характеристика
принимает некоторый наклон.
Указанные особенности являются некоторой платой за
преимущества, которые дает комплексирование различных функций по
управлению самолетом на основе электрогидравлической загрузки.
Особенно важно отметить, что использование в этом ЗУ
принципа управления по усилиям позволяет наиболее оптимальным
образом совместить многочисленные функции ряда автоматических
систем с механической системой при обеспечении высокой надежности
управления как при отказах в автоматических системах, так и в
механической системе.
Это касается прежде всего обеспечения безопасности полета в
случае рассоединения, разрушения и заклинения механической
проводки. Благодаря применению датчиков усилий система может
функционировать при полностью неподвижных штурвалах
(заклинение); при отключении и подключении ЗУ не
производится" разрыв” механической связи рычагов управления с
рулями самолета, что повышает надежность управления. Повышение
трения или появление люфтов в проводке между рычагами управления
и сервоприводом, включая ее полное рассоединение или разрушение,
практически не влияют на характеристики системы. Система
управления с использованием рассматриваемого ЗУ позволяет просто
осуществить переход на механическую систему без возмущений в
случае даже полного обесточивания борта, когда происходит отказ
всех автоматических-систем, поскольку все автоматические системы,
связанные с ЗУ, “находятся в руках” летчика и для такого перехода
419
не требуется выполнение специальных процедур по переходу на
механическое управление.
Таким образом, осуществление на основе ЗУ разнородного
резервирования является мощным средством обеспечения безопас-
ности при различных видах отказов.
Однако эта система требует дополнительной стендовой отработки
устойчивости, введения дополнительных фильтров для устранения
остаточных колебаний в системе.
7.2.3. Принципы включения сигналов систем улучшения-
устойчивости и управляемости в НБУ
Под системой улучшения устойчивости и управляемости
(СУУ) понимается автоматическая система, которая обеспечивает
необходимый уровень статических и динамических характеристик
самолета путем преобразования различных электрических сигналов
параметров движения самолета (угловые скорости, перегрузки, угол
атаки и др.), перекрестных связей между каналами управления
(тангаж, крен, рысканье), управляющих сигналов летчика, в сигналы
управления рулями самолета. Преобразование упомянутых связей
обычно осуществляется в зависимости от режимов полета и
конфигурации самолета (см. главу 8).
Система СУУ должна обеспечивать приемлемый стереотип
пилотажных характеристик самолета, который должен быть
ориентирован на определенные психофизиологические возможности
летчика как звена контура управления “летчик—система
управления-самолет”. Фактически для летчика не важно, каким
образом система СУУ обеспечивает заданные характеристики. Ему
важно,чтобы самолет обладал такими пилотажными характеристиками,
которые делают процесс управления самолетом простым,
качественным и безопасным, какие ограничения накладываются на
управление самолетом при отказе системы СУУ.
Сложность структуры СУУ зависит от особенностей аэроди-
намических характеристик исходного самолета (без автоматики) и от
требований,- предъявляемых к его характеристикам устойчивости и
управляемости СУУ могут быть различной сложности. Элементы
420
автоматических систсем применялись в разное время на самолетах,
это автоматы демпфирования колебаний самолета (демпферы тангажа,
крена и рысканья—ДТ, ДК и ДР), иногда с добавлением сигнала
перегрузки, автоматы регулирования параметров штурвального
управления и т.п.
Можно условно рассматривать две функции СУУ: улучшение
устойчивости и улучшение управляемости С14).
функция улучшения устойчивости (рис.7.10) выполняется
частью системы, которая служит для обеспечения устойчивости и
повышения демпфирования короткопериодических колебаний самолета
особенно на тех режимах, где собственная статическая устойчивость
и аэродинамическое демпфирование самолета являются
недостаточными (например, на больших высотах полета). В качестве
основных управляющих сигналов в ней используются сигналы
датчиков угловых скоростей вращения самолета, сигналы датчиков
перегрузки, углов атаки и др. Наряду с улучшением устойчивости,
такая система улучшает также характеристики управляемости
самолета на режимах полета, где параметр ХПу становится весьма
малым и появляется опасность раскачки самолета летчиком (малые
высоты и большие дозвуковые скорости полета). По зарубежной
терминологии эта система обозначается как SAS (Staeility Aug-
mentation System).
421
Функция улучшения управляемости (рис.7.11)—Выпол-
няется системой, имающей как электрическое, так и механическое
управление рулями от рычагов управления летчика. Эта система
обеспечивает заданную реакцию в движении самолета (угловую
скорость, перегрузку и т.д.) на управляющее отклонение рычагов
управления летчика.Обычно электрическое управление превалирует
над механическим управлением. По зарубежной терминологии эта
система обозначается как CAS (Control Augmentation System).
Рис.7.11. Включение системы улучшения управляемости в НБУ
Системы СУУ могут быть статического и астатического типа. В
связи с необходимостью осуществления “жестких” ограничений
предельных режимов на перспективных самолетах, имеющих особенно
легкое по усилиям управление, астатические СУУ позволяют обес-
печить решение этой проблемы.
Сигналы системы СУУ вводятся в основную систему управ-
ления с помощью последовательного привода. При работе системы
СУУ рычаги управления должны оставаться неподвижными, т.е.
должна исключаться “отдача” на рычаги управления. Это условие
может быть выполнено, если усилия от трения проводки и золотников
рулевых приводов, приведенные к выходу сервопривода СУУ, будут
меньше усилий от трения проводки и загрузочного устройства на
422
участке “рычаги управления-сервопривод СУУ”.
Если это условие не обеспечивается, то необходимо либо
увеличение предварительного затяга загрузки рычагов управления,
либо установка вспомогательного привода. Повышение
предварительного затяга ведет к увеличению усилий страгивания и,
следовательно, затяжелению управления (например, на самолете ТУ-
154 усилие страгивания по тангажу составляет~8 кг). Установка
вспомогательного бустера позволяет решить две задачи— уменьшить
усилия от трения на рычагах управления и исключить отдачу на
рычаги управления при работе системы СУУ. Однако
вспомогательный бустер, входящий в цепь управления рулями, должен
иметь высокую надежность.
Сервопривод СУУ целесообразно размещать как можно ближе к
рулевым приводам с тем, чтобы уменьшить влияние люфтов и
упругости в механической проводке на динамические характеристики
системы СУУ. Кроме того, на динамические характеристики и
точность работы системы СУУ могут влиять люфты и упругость в
проводке от рычагов управления до сервопривода СУУ, на которую
должен “опираться” сервопривод СУУ при своей работе. Применение
вспомогательного привода позволяет исключить нежелательное
влияние этой проводки на работу системы СУУ.
Кроме того, вспомогательный привод может быть полезным в
случае несогласованности суммы скоростей перекладки проводки
управления от летчика и сервопривода СУУ с располагаемой
скоростью перекладки рулевого привода. Вспомогательный привод
делает систему необратимой со стороны выхода вспомогательного
привода, что исключает прохождение возмущений от сервопривода
СУУ на рычаги управления летчика. При этом следует иметь ввиду,
что включение сервопривода автопилота по параллельной схеме
возможно только перед вспомогательным приводом, в связи с чем в
тракте управления автопилота имеются два последовательно
установленных привода-вспомогательный и рулевой приводы.
К особенностям дифференциального включения сервопривода
СУУ следует отнести необходимость надежного фиксирования
выходной точки сервопривода в случае отключения или отказа
423
системы СУУ, в противном случае возможен отказ управления
самолетом. Для этой цели применяются либо специальные центри-
рующие пружины (Ту-154,Ил-96-300, Ан-124...), либо механизмы
приведения в нейтраль (Ту-144).
Наряду с этим в случае применения высокоэффективной СУУ,
требующей большого диапазона отклонения рулей, необходимо
обеспечить высокую надежность этой системы. Прежде всего должен
быть исключен непроизвольный увод сервопривода в крайнее
положение, поскольку для компенсации этого увода у летчика
практически нет эффективных средств. В качестве основной меры
обеспечения безопасности в этом случае должно рассматриваться
применение резервирования системы СУУ с полным разделением
каналов, включая также разнесение каналов по двум бортам самолета
таким образом, чтобы в худшем случае такой отказ не
распространялся более, чем на один борт, а система другого борта
могла бы противодействовать этому отказу. Аналогичные меры
приняты на самолетах Ан-124,Ан-225 и Ил-96-300.
Еще на одну особенность дифференциального включения
автоматической системы следует обратить внимание. Она связана с
возможностью возникновения значительных возмущений в движении
самолета при центрировании сервопривода после его выключения, если
это центрирование производится с большой скоростью и перед
выключением было значинельное смещение сервопривода
относительно нейтрального положения. Поэтому скорость приведения
сервопривода в нейтраль должна быть ограничена безопасным
значением.
Принципиальным отличием системы улучшения управляемости от
системы улучшения устойчивости является наличие дополнительной
электрической связи от рычагов управления летчика (см. рис.7.11).
Благодаря этой связи управляющий сигнал летчика может либо
усиливаться, либо ослабляться в зависимости от реакции самолета на
управляющее воздействие. Например, на взлетнопосадочных режимах
обычно происходит уменьшение эффективности органов управления.
Для создания необходимого управляющего момента летчик вынужден
отклонять рычаг управления на значительный ход (т.е. существенно
424
возрастает параметр ХПу), что затрудняет пилотирование самолета
(большие хода, большие усилия). Поэтому система СУУ добавляет
управляющий сигнал к сигналу летчика на этом режиме, а на
режимах, где управление от летчика становится слишком
чувствительным, эта система уменьшает сигнал летчика к рулевым
приводам. Фактически эта система изменяет коэффициент передачи
системы управления рулями в зависимости от режимов полета. Как
известно, аналогичную функцию выполняет система регулирования
Кш с помощью специальных кинематических механизмов.
Однако имеются существенные отличия в работе этих систем:
1. В системе с дифференциальным сервоприводом производится
суммирование выходных сигналов летчика и сервопривода системы
СУУ. Это суммирование производится с большой скоростью, по
крайней мере, в темпе возникновения управляющих сигналов летчика.
Кроме того, в зависимости от уровня управляющих сигналов и
эффективности сервопривода (угла отклонения руля от сервопривода)
коэффициент передачи может меняться в очень широких пределах
даже при ограниченном ходе сервопривода СУУ (рис.7.12). Это
особенно важно на крейсерких режимах полета, где эффективность
управления является чрезмерной и требуется ее существенное
уменьшение для обеспечения приемлемых характеристик
управляемости. На этих режимах управляющие команды летчика
имеют ограниченный уровень, что позволяет при ограниченном ходе
сервопривода СУУ получить весьма малый коэффициент передачи
(.Кш) при выполнении требований безопасности полета. '
В системе регулирования К ш путем изменения плеча
кинеманического звена в проводке управления Кш изменяется в темпе
нарастания скорости полета (полный диапазон изманения за~20-Ь
ЗОс) и в ограниченном диапазоне (А’ш = К’и1тах//Сшт1п~2,04-2,5),
выбранном по условиям обеспечения безопасности полета.
2. На взлетно-посадочных режимах для улучшения управляе-
мости система СУУ увеличивает сигнал летчика, это означает, что
часть отклонения руля используется системой СУУ. Поэтому полное
отклонение руля происходит при ходе рычага управления меньшем
максимального. Оставшаяся часть является холостым ходом
425
штурвала, поскольку при дальнейшем его отклонении руль находится
на упоре. Эта особенность должна учитываться при выполнении
посадки особенно при центровках, близких к предельно передним.
При регулировании Кш с помощью кинематического звена
эффективность управления однозначно связана с ходом рычага
управления. При Кштах полному ходу рычага управления отвечает
полный угол отклонения руля.
3. Ввиду того, что сигналы системы СУУ отрабатываются
последовательным электрогидравлическим сервоприводом, в такой
системе возможны так называемые активные отказы. Для их
предотвращения необходимо применять специальные меры (например,
резервирование). Кроме того может возникать отдача на рычаги
управления, если неправильно выбрано соотношение скоростей
перекладки от летчика, сервопривода и рулевого привода.
В системе регулирования Кш с помощью кинематического звена
возникновение отказов, в том числе активных, не приводит к
вомущениям в движении самолета, а только изменяют величину Кш.
Однако в случае отказа системы в положении -Кшпнп может
потребоваться совершение посадки на повышенной скорости из-за
меньших углов отклонения рулей*.
4. Идея применения системы СУУ основана на использовании
комплексирования сигналов от летчика с сигналами системы
демпфирования, что исключало необходимость применения
дополнительного сервопривода и, соответственно, увеличения веса
системы.
В то же время система регулирования Кш с помощью
кинематического звена фактически представляет автономную систему
со своим исполнительным сервомеханизмом. Конструкция такого
регулятора Кш имеет больший вес, так как его рычажные механизмы
должны быть расчитаны на большие усилия (120 кг на штурвале от
одного летчика).
Необходимые соотношения для системы СУУ обеспечивающей
регулирование Кш, можно получить на основании рис.7.12а.
* ) либо введения аварийной системы изменения Кш летчиком.
426
В соответствии с упомянутым рисунком можно написать:
(7.11)
(7.12)
Так как
• Т?5 — Хв
(1±КХ)
(7.13)
то далее получим
Т?2
RsRl
( 1 ± Кх)---КщВ.о(1 ± Кх)>
(7.14)
Кшво - исходный коэффициент передачи;
Рис.7.12. Характер изменения Ашв в зависимости от изменения коэффициента
427
-/^Сшв ~ изменяемый коэффициент передачи;
Кх ~ регулируемый коэффициент;
Кх= f (7.15)
На рис. 7.126 показан характер изменения Ашв в зависимости от
изменения коэффициента Кх.
В отечественной практике впервые система СУУ была применена
на пассажирском самолете Ту-154 till.
7.2.4. Системы НБУ с триммируемым
стабилизатором
В этой структуре системы управления (рис.7.2) наличие в
системе управления, наряду с рулем высоты, триммируемого
стабилизатора позволяет получить ряд преимуществ, которые состоят
в следующем (см.также главу 6):
— для балансировки самолета на установившихся режимах
служит стабилизатор, а руль высоты используется в основном для
маневра. Это дает возможность сделать руль высоты меньших
размеров и тем самым уменьшить усилия от аэродинамических
шарнирных моментов.
Кроме того, триммируемый стабилизатор с рулем высоты, как
орган продольного управления, имеет большую эффективность, чем
фиксированный стабилизатор с рулем высоты. При равных исходных
эффективностях можно уменьшить площадь триммируемого
стабилизатора и его руля высоты, тем самым уменьшить вес конст-
рукции и энергетические затраты на управление этими органами
примерно в 5-6 раз С153.
— поскольку балансировка самолетоам осуществляется стаби-
лизатором, то рычаги управления и руль высоты после завершения
балансировки устанавливаются в положение, близкое к нейтральному.
Такое положение рычагов управления удобно для пилотирования.
Одновременно происходит также обнуление усилий, в связи с чем
отпадает необходимость в применении триммера на руле высоты,
который может быть источником различных отказов, в том числе
активного.
428
При нейтральном положении рычагов управления летчик
располагает полной эффективностью рулей высоты. При этом по
характеру изменения усилия летчик может контролировать работу
стабилизатора, что весьма важно в случаях активных отказов в цепях
управления стабилизатором.
— так как в установившемся полете руль высоты практически
находится в нейтральном положении, это благоприятно сказывается на
аэродинамическом качестве;
— при меньшем размере руля высоты проще решаются вопросы
обеспечения требуемой характеристики управляемости ХПу в
заданном диапазоне режимов полета в связи с меньшим значением
эффективности руля высоты (»Ф. Кроме того, в этой структуре для
обеспечения требуемого значения ХПу может эффективно
использоваться нелинейный механизм, так как на установишихся
режимах полета отклонение рычага управления практически всегда
происходит в диапазоне малых коэффициентов передачи (Кш);
— в режиме автоматического управления стабилизатор может
использоваться для автотриммирования, чтобы исключить
возможность ударного перехода на ручное управление при отключе-
нии САУ. Автотриммирование может осуществляться как по сигна-
лам отклонения руля высоты (например, начиная ±2° <5в), так и по
сигналам, эквивалентным моменту или усилию на муфте сервопривода
САУ. Поскольку в этой системе усилия при управлении уменьшаются,
соответственно может быть уменьшена мощность исполнительного
привода САУ.
Важно отметить, что рассмотренные преимущества, которые
связаны с применением триммируемого стабилизатора, способствова-
ли широкому внедрению триммируемого стабилизатора на пассажирс-
ких самолетах большой пассажировместимости (от 100 чел. и более),
на которых вопросы обеспечения безопасности имеют первостепенное
значение. По зарубежным данным по состоянию на конец 1990 г.
мировой парк магистральных гражданских самолетов насчитывал
11510 единиц (без СССР) С16). Среди самолетов, имеющих
триммируемый стабилизатор:
4 429
Боинг 7V7/72Q 229
Боинг727 1708
Боинг737 1714
Боинг757 272
Боинг747 727
Боинг767 285
Бритиш Аэроспейс 111 121
Бритиш Аэроспейс ВАе 146 163
Дассо“Меркюр” 11
Макдоннелл-Дуглас DC-8 320
Макдоннелл-Дуглас DC-9 855
Макдоннелл-Дуглас DC-10 379
Макдоннелл-Дуглас MD-80 713
Эрбас Индастри А300 236
Эрбас Индастри А300-600 86
Эрбас Индастри АЗ 10 195
Эрбас Индастри А320 107
Отечественные самолеты с триммируемым стабилизатором Ил-
62, Ил-62М,Як-40, Як-42, Ил-76, Ил-86, Ил-96-300,Ту-204.
Приведенная статистика подтверждает, что применение
триммируемого стабилизатора является целесообразным, что нашло
отражение в широком его использовании на основном парке
пассажирских самолетов. Его применение позволило более комп-
лексно решить вопросы, связанные с конструкцией самолета,
характеристиками управляемости и базопасности полета.
Однако при применении триммируемого стабилизатора должны
учитываться некоторые особенности, свойственные триммируемому
стабилизатору.
1. Если эффективность стабилизатора такова, что при уводе его
в любое крайнее положение эффективности руля высоты недостаточно
для компенсации этого отказа (момента) стабилизатора, его система
управления должна иметь очень высокую надежность, которая может
быть обеспечена только резервированием. В противном случае углы
отклонения стабилизатора должны быть ограничены безопасным
430
значением.
Отклонение руля высоты на большие углы с целью компенсации
отказа стабилизатора может потребовать от летчика больших усилий.
Поэтому, учитывая большую эффективность стабилизатора,активный
отказ стабилизатора должен быть исключен.
Диапазон отклонения стабилизатора может составлять
<р = +14—12°
Скорость отклонения стабилизатора’ при нормальной работе
находится в диапазоне
<£=0,34-0,5 о/с
2. Перед взлетом стабилизатор должен устанавливаться в
положение, которое является функцией положения Ц.Т. и веса са-
молета. Выполнение этой процедуры обязательно. Обычно для этой
цели используются специальные таблицы или вычислители центровки
и веса самолета.
Наиболее характерные отказы, которые рассматриваются при
выборе структуры системы управления триммируемого стаби-
лизатора, —это электрические отказы типа непроизвольного увода
стабилизатора или его несрабатывание при воздействии управляю-
щего сигнала, а также отказы маханических элементов, приводящих
к заклиниванию или рассоединению элементов привода. Для
сохранения работоспособности системы при указанных отказах
применяются специальные меры, включая прежде всего резер-
вирование, а также специальные процедуры, направленные на
исключение ошибок экипажа и обслуживающего персонала.
Наибольшую опасность для самолета представляет электричес-
кий отказ, вызывающий увод стабилизатора. Этот отказ должен быть
исключен всеми возможными мерами, даже если это достигается
ценой увеличения вероятности несрабатывания стабилизатора.
Учитывая, что от сохранения балансировки зависит непосредственно
безопасность полета, структура системы управления триммируемым
стабилизатором строится на основе принципа суммирования скоростей
каналов. В этом случае при отказе одного канала сохраняется
балансировочный угол отклонения стабилизатора, а скорость
отклонения стабилизатора уменьшается на величину составляющей
431
скорости каналов. Хотя при использовании принципа суммирования
каналов увеличивается вероятность возникновения активного отказа
любого из каналов, при этом скорость увода стабилизатора будет
определяться скоростью увода одного канала. При ручном управлении
летчик может противодействовать уводу стабилизатора, используя
другие нормально работающие каналы, суммарная скорость которых
превышает скорость отказавшего канала. В связи с этим летчик
должен периодически возвращать стабилизатор в балансировочное
положение. Для устранения такого эффекта используется система
автоматического контроля, которая обнаруживает и изолирует
отказавший канал.После отключения неисправного канала скорость
отклонения стабилизатора уменьшается на величину скорости
отказавшего канала. В системах управления стабилизатором, наряду с
разервированием,применяются и другие дополнительные меры,
предотвращающие увод стабилизатора или способствующие быстрой
компенсации этого вида отказа летчиком.
Одной из таких мер является дискретное управление
стабилизатором. При таком способе управления стабилизатор
перемещается только на небольшой угол после разового нажатия
кнопки управления стабилизатором. Для перемещения стабилизатора
на больший угол необходимо последовательное неоднократное нажатие
кнопки (Як-40, Як-42). Поэтому в случае попадания ложного сигнала
стабилизатор может переместиться только на небольшой угол,
ограниченный концевиками. При этом шаг установки концевиков
делается переменным. Например, на самолете Як-42 в диапазоне углов
установки стабилизатора от +2 до —2° шаг составляет Г, а от —2
до —12° шаг равен 2°.
На зарубежных пассажирских самолетах одной из распростра-
ненных мер по повышению надежности управления стабилизатором
является применение резервной механической тросовой проводки для
управления приводом стабилизатора. Эта проводка имеет приоритет
над электрической проводкой (рис.7.13). В случае необходимости
летчик может пересилить электрическое управление и остановить увод
стабилизатора. Кроме того, механическая система одновременно
является надежным средством сигнализации (индикации) положения
432
стабилизатора в полете.
Для более четкого и эффективного контроля работы стаби-
лизатора, включая случаи его увода, применяются звуковая и све-
товая сигнализации, которые извещают экипаж о начале движения
стабилизатора.
балансировка
Указатель положения
стабилизатора
j t Сервопривод
[Резервная механическая проводка» го
загрузка механическая проводка
--------------------------------
ТриммерныйА
механизм ’**
РУЛЬ
Муфта пересиливания
Г идромоторы
привод
|_1-рд|гстабилизатора
стабилизатор
Г( ГС гс (гидросистемы)
муфта
СПСАУ
Вычислите
ль
САУ
Рис.7.13. Схема управления балансировочным стабилизатором с резервной
механической системой.
На случай возможного отказа кнопок управления
стабилизатором, расположенных на рычагах управления летчика,
кнопки выполняются дублированными с тем, чтобы при разрушении
одного из контактов кнопки не происходил увод стабилизатора.
В качестве эффективной меры также применяется двухцепевое
управление приводом стабилизатора, исключающее непроизвольный
увод стабилизатора при попадании ложного сигнала в любою цепь (по
плюсу или минусу). Наряду с этим для избежания ложных включений
привода стабилизатора управление приводом осуществляется по двум
независимым цепям — по одной цепи передается управляющий
сигнал, по другой — команда на включение питания. Только при
одновременном срабатывании этих двух цепей возможно перемещение
стабилизатора.
В ряде случаев для повышения надежности дополнительно к
основным цепям управления применяется упрощенная резервная цепь
433
с отдельным переключателем на приборной панели, сигнал от которого
напрямую поступает на привод, минуя основные цепи.
Для сохранения работоспособности триммируемого стабили-
затора при механических отказах применяются специальные меры.
Для исключения рассоединения привода со стабилизатором узлы
навески (карданы) имеют дублированные маханические звенья. На
случай возможного разрушения винта привода предусмотрен стержень
безопасности, который сохраняет связь стабилизатора с конструкцией
самолета при разрушении винта (рис.7.14).
ГС, И ГС2-Гидросистемы
Рис.7.14. Схема привода стабилизатора с двумя независимыми механизмами
— приводами винта и гайки
434
Следует отметить, что несмотря на высокую надежность
механических элементов в большинстве ответственных конструкций
следует использовать дублирование механических элементов, хотя это
связано с некоторым увеличением веса и габаритов. Так, например,
большинство механических элементов привода стабилизатора
самолета Боинг 747, DC-8, -10, имеют дублирование (рис.7.15).
Рис.7.15. Схема привода стабилизатора самолета В747.
В качестве меры безопасности на случай рассоединения
механических элементов в приводе (например, шестерен и валов
435
редукторов) может рассматриваться применение самотормозящегося
винта, который удерживает стабилизатор при нарушении
механических связей мажду винтовым маханизмом и гидравлическим
или электрическим приводом; или применение двух винтовых
механизмов (рис.7.16). Для сохранения работоспособности
Рис.7.16. Схема привода стабилизатора самолета DC-10.
триммируемого стабилизатора при заклинении механических
элементов в приводе стабилизатора применяются специальные
436
конструктивные решения. Одно из них состоит в применении двух
независимых механизмов, один из которых называется приводом
гайки, а другой приводом винта рис.7.14. При заклинении одного из
механизмов, другой механизм продолжает работать, обеспечивая
отклонение стабилизатора, но на несколько меньший угол.
Во всех рассмотренных схемах управления отклонение
стабилизатора производится приводами вращательного типа.При
наличии высоконадежного НБУ возможно также применение для
управления стабилизатором приводов поступательного типа,которые
имеют резервирование,обеспечивающее функционирование системы по
крайней мере после 2х отказов гидросистем. Перемещение золотников
этих приводов обеспечивается медленным вращательным
резервированным приводом (Ту-204 см.рис.7.17)
Стабилизатор
Рис.7.17. Схема привода стабилизатора самолета Ту-204.
7.2.5 Особенности структур НБУ каналов крена и рысканья
Изложенные ранее принципы построения системы управления
канала тангажа могут быть применены к каналам крена и рысканья.
Каналы крена и рысканья определяют динамику бокового движения
самолета. Современным самолетам присуще взаимодействие
Движений крена и рысканья. Эта особенность характеризуется
437
определенной функциональной избыточностью при управлении любым
из упомянутых каналов. Например, при отказе системы управления
канала рысканья, как правило, существует возможность компенсации
отказа канала рысканья и последующего управления самолетом с
помощью канала крена и наоборот. В авиационной практике было
немало случаев безопасного завершения посадки при значительном
разрушении вертикального оперения или заклинении руля направления
при управлении самолетом через канал крена или использования
разнотяговости двигателей (при расположении их на крыле).
Кроме того, в каналах крена и рысканья применяется достаточно
большое число поверхностей управления, которые отклоняются
независимыми приводами. В большинстве случаев отказ какой-либо
поверхности управления или даже нескольких поверхностей не
является критичным с точки зрения безопасности полета.
Эти особенности позволяют уменьшить уровень резервирования
основных устройств систем управления каналов крена и рысканья по
сравнению с каналом тангажа.
Канал кренаЛля управления по крену на пассажирских
дозвуковых самолетах используются различные органы управления:
элероны,интерцепторы, интерцепторы-элероны и элевоны. Следует
отметить, что элевоны на пассажирских самолетах обычной схемы
практически не применяются. Они нашли широкое применение на
сверхзвуковых пассажирских самолетах бесхвостой схемы (Ту-144,
“Конкорд”)> Элероны могут быть как внешними, так и внутренними.
На самолетах В 747, DC-10, L-1011,A300B применяются элероны
обоих видов. При этом внешние элероны обычно используются только
на взлетнно-посадочных режимах (В747, DC-10, А300В...).
Отключение их на больших скоростях вызвано в основном избытком
эффективности по сравнению с посадочными режимами, а также
снижением их эффективности из-за упругости конструкции крыла.
Внутренние элероны, размешенные в средней части крыла, работают
во всем диапазоне режимов полета. Однако все же имеется достаточно
много пассажирских самолетов, которые используют только внешние
элероны (Ан-124, Ил-86, Ту-154, ;Як-42,Ил-62...).
Для управления самолетом по крену обычно используются
438
одновременно две группы органов управления-элероны и интер-
цепторы По соображениям надежности управления и безопасности
полета управление элеронами и интерцепторами производится по
раздельным каналам управления. В случае отказа какого-либо канала
управления (элеронами иди интерцепторами) управление самолетом
осуществляется через исправный канал. При этом эффективность
управления по крену уменьшается и будет определяться
эффективностью тех органов управления, которые сохранили работо-
способность. Если отказ одного из каналов управления был вызван
заклинением механических элементов (например, пороводки
управления), то необходима расцепка штурвалов.
На большинстве пассажирских самолетов 70-х годов (В 747, DC-
10, L-1011, А300В...) управление приводами элеронов и
интерцепторов осуществляется с помощью механических проводок. В
связи с этим возникают сложности с обеспечением минимальных
усилий на штурвале от трения в проводках и золотниках приводов,
поскольку нормируемые усилия по каналу крена ниже, чем в
продольном канале.
На некоторых самолетах эта проблема решается с помощью
вспомогательного привода (DC-10, Ил-86, АЗООВ,...) установленного
в одной из проводок, от левого или правого штурвала Для того чтобы
другая проводка не создавала усилий от трения на штурвале, в ней
устанавливается механизм, который при нормальной работе системы
создает небольшой люфт, и тем самым “отсекает” трение основного
участка проводки от штурвала (Ил-86). При отказе проводки, в
которой установлен вспомогательный привод, производится расцепка
штурвалов и устранение люфта с помощью упомянутого механизма.
Для снижения усилий трения в канале крена может быть
применен принцип управления по усилиям, который был рассмотрен
ранее. Этот принцип управления реализован на самолетах Ан-124 и
Ил-96-300.
Наряду с этим применяется и другой путь, который состоит в
том, что управление каким-либо одним каналом — элеронами или
интерцепторами, осуществляется с помощью электродистанционного
Управления, а другим каналом — механической системой. В этом
439
случае силы трения на штурвале создаются только одной ветвью
механической проводки и связанными с ней рулевыми приводами.
Чаще с помощью СДУ осуществляется управление интерцепторами,
поскольку интерцепторы на современных самолетах являются
многофункциональными органами управления, которые используются
для управления по крену, непосредственного управления подъемной
силой (НУПС) на глиссаде, в качестве воздушных тормозов,
управления нагрузками. Эти функции проще реализовать при
электродистанционном управлении. Комбинированные системы
управления каналом крена (МСУ и СДУ) применены на самолетах Ил-
96-300,Ту-204, Ан-124, Ан-72, АЗ 10, В757, В767,.... Отработка
сигналов СДУ производится либо непосредственно
электрогидравлическими рулевыми приводами с электрическими
входами (Ан-72, Ан-124,А310,В757,В767), либо с помощью общих
для группы интерцепторов полукрыла сервоприводов и
гдромеханических приводов секций интерцепторов (Ту-204,Ил-96-
300...). Первый способ является более перспективным, поскольку
позволяет более гибко использовать возможности секций
интерцепторов при реализации различных функций.
Интерцепторы по конструктивным соображениям и соображе-
ниям безопасности имеют достаточно большое число секций: 8—14
секций на крыло. Каждая секция обычно отклоняется однокамерным
приводом. Контроль работоспособности интерцепторов осу-
ществляется попарно. В случае отказа одной нз секций на другом
полукрыле производится отключение симметрично расположенной
секции для того, чтобы сохранить одинаковую эффективность
управления при создании крена влево и вправо. Гидравлические
системы питания приводов секций интерцепторов распределяются
между отдельными группами интерцепторов так, чтобы отказ гид-
росистемы не вызывал нежелательное изменение управляемости само-
летом (например, разные эффективности управления при выполнении
левого и правого крена).
При использовании интерцепторов в качестве органов управления
системы НУПС, когда они симметрично выдвигаются на угол—10° и
относительно этого положения отклоняются по сигналам системы
440
НУПС, необходимо учитывать, что в случае совместного
использования их для управления по крену их эффективность
увеличивается в два раза по сравнению с режимом ручного управления
по крену при выключенной НУПС.
Кроме того, особенности интерцепторов как аэродинамических
органов управления состоят еще и в том, что для них характерна
аэродинамическая зона нечувствительности при малых отклонениях,
хотя при этом они влияют на коэффициент сопротивления (Сх) и
снижают аэродинамическое качество. Поэтому для исключения этого
эффекта в системе управления интерцепторами часто вводят зону
нечувствительности при малых отклонениях штурвала. Управляемость
самолетом при малых сигналах обеспечивается каналом элеронов, для
которых этот эффект отсутствует. В связи с этим системы СУУ
включаются в канал элеронов.
При отклонении органов управления креном, особенно
интерцепторов, могут возникать моменты рысканья, которые могут
усложнить пилотирование самолета. Для устранения этого нежела-
тельного эффекта между каналами крена и рысканья вводится
перекрестная связь, которая улучшает характеристики управляемости
самолетом в боковом движении. С помощью перекрестных связей
может быть осуществлено разделение движений каналов крена и
рысканья.
На самолетах последнего поколения (А320, Ил-96-300...) с
целью повышения весовой отдачи самолета внедрены автоматические
системы управления нагрузками, которые используют либо элероны,
либо отдельные рулевые поверхности (секции), обслуживающие
только эту систему. Принципы построения систем управления
нагрузками рассматриваются в отдельной главе.
Канал рысканья. Для управления по рысканью в основном
используется руль направления. Для некоторых компоновок
самолетов, у которых отказ двигателя создает существеный момент
рысканья, возможно осуществление автоматического парирования
этого момента рулем направления (см.главу8). При пробеге по земле
достаточно эффективным средством управления по рысканью служит
Управляемое переднее колесо, управление которым осуществляется от
441
педалей летчика, начиная с некоторой скорости пробега.
С целью повышения эффективности руля направления на неко-
торых самолетах с НБУ (DC-10,Ah-72, Ан-74,...) применяется
двухзвенный руль направления. Первое звено отклоняется необра-
тимыми рулевыми приводами, а второе звено с помощью кинемати-
ческих связей. Второе звено для повышения эффективности руля
направления работает в режиме антикомпенсатора. Это приводит к
увеличению аэродинамического шарнирного момента руля, что требует
большей энергетики для управления рулем такого типа. Углы
отклонения первого и второго звеньев, например, для самолета DC~10
составляют соответственно ±23° и ±46,5°.
К особенностям системы управления канала рысканья следует
также отнести:
— широкое применение демпферов рысканья, которые особенно
необходимы для улучшения характеристик устойчивости на больших
высотах. Необходимость применения демпферов рысканья на
самолетах возникла раньше, чем демпферов тангажа или крена. На
самолетах с непосредственно ручным (безбустерным) управлением
при применении демпфера рысканья необходима установка
специального автономного привода, через который осуществляется
отработка сигналов демпфера рысканья (например, привод АРМ-62
самолета Ил-62); при применении в канале рысканья НБУ (часто с
переходом на НРУ-Як-42,Ту-134,Ан-72,Ан-74...) эта задача
решается проще.
Демпферы рысканья включаются в проводку управления по
дифференциальной схеме. Хотя демпферы рысканья не относятся к
критическим с точки зрения безопасности полета системам, их отказ
приводит к усложнению техники пилотирования самолета особенно на
больших высотах и взлетно-посадочных режимах. Поэтому они
обычно выполняются двухканальными, сохраняющими
работоспособность после отказа одного подканала. Обычно
максимальный угол отклонения руля от демпфера рысканья небольшой
и составляет не более 10°.
— применение системы ограничения угла отклонения руля
направления но условиям прочности. Эта цель на разных самолетах
442
достигается различными способами:
(1) . Первый способ состоит в создании, начиная с некоторой
скорости полета, дополнительного усилия, препятствующего
непроизвольному отклонению руля направления летчиком. Это
дополнительное ступенчатое усилие создается пружиной с
предварительным затягом, которая подключается после взлета
специальным электромеханизмом по сигналам уборки шасси или
механизации крыла. Максимальный уровень усилий (ДРн~20кгс)
допускает возможность в критической ситуации пересиливания
ограничения летчиком и отклонение руля направления на больший угол,
например, для парирования отказа двигателя (Ан-22, Ту-144, Ту-154,
Ил-76...), (рис.7.18)
Рис.7.18 Характеристики ограничения руля
' направления дополнительным усилием (Ту-154)
(2) . При втором способе производится программное
регулирование коэффициента передачи (А’шн) в зависимости
от скорости полета (скоростного напора). Это регули-
рование весьма значительное, например, изменение макси-
мального угла отклонения руля может составлять от З'н ~ ± 30 на
443
взлете до ±5° на крейсерском режиме полета. Регулирование
осуществляется в темпе изменения скорости. Система регулирования
А™ обычно имеет два независимых канала управления, которые
работают от датчиков режимов полета, и резервный канал,
управляющий сигнал которого проходит напрямую к приводам
механизма Ащн. Включение резервного канала производится летчиком
от специального тумблера. С помощью резервного канала летчик
должен перевести механизм Ашн в положение соответствующее
Ашнтах Диапазоны регулирования Ашн на самолетах В747 и А300В
составляют соответственно ±25°...±4°, ±30°...±5°. С изменением
Ашн также изменяются углы отклонения руля от демпфера рысканья
(рис,7.19)
Рис.7.19 Характеристика изменения хода руля направления
изменением коэффициента передачи(Азоов)
(3) . При третьем способе ограничение отклонения руля
направления осуществляется ограничением усилий (тяги) рулевых
приводов. Для этого необходимо достаточно точное знание изменения
аэродинамических шарнирных моментов для выбора располагаемой
тяги рулевых приводов. Для осуществления ограничения руля могут
использоваться специальные гидравлические цилиндры, связанные с
рулем направления и подключаемые электрогидрокранами по сигналам
444
скорости полета. Эти цилиндры создают дополнительную к М ш аэр
нагрузку на рулевые приводы. В связи с тем, что в полете возможны
отказы гидросистем и, следовательно, уменьшение располагаемой
тяги рулевых приводов, для сохранения управляемости необходимо
одновременно корректировать нагрузки от ограничителей. Подобная
система ограничения реализована на самолете L-1011 (см. рис 7.47).
(4) . Четвертый способ обычно применяется на самолетах с СДУ.
На таких самолетах ограничение отклонения руля направления
обеспечивается выбором таких алгоритмов управления, при которых
исключается возможность превышения ограничений по условиям
прочности даже тогда, когда летчик непроизвольно создает большой
сигнал управления (А320,Ту-204...), т.е. в этой системе приоритет
отдан автоматике и она подавляет сигнал летчика, если он не отвечает
условиям безопасности.
Для первых трех рассмотренных способов ограничения система
ограничения должна выполняться по крайней мере дублированной,
чтобы обеспечить надежное подключение и отключение ограничителя.
При этом более важной является операция отключения, т.к. в случае
неотключения ограничителя при посадке может не хватить
эффективности руля направления.
В последнем способе система ограничения имеет уровень
резервирования такой же, как и СДУ.
Особенности структур систем управления по крену и рысканью
для ряда пассажирских самолетов приведены в 7.6.
7.3 Структура электрическом системы
дистанционного управления (СДУ)
7.3.1. Общие положения
Успешное применение СУУ в системах управления самолетов
создало предпосылки к переходу на электрическое управление
рулевыми приводами органов управления.
Под электрической системой дистанционного управления
рулями (СДУ) обычно понимается система, в которой управление
приводами рулей осуществляется по электрическим сигналам,
445
передаваемым по проводам. Сигналы управления создаются
электрическими датчиками рычагов управления летчика и в случае
необходимости дополнительно также датчиками параметров движения
самолета. Формирование требуемого закона управления самолетом
осуществляется электронным вычислителем СДУ (см. главу 8)
[6].
В авиационной практике нашли применение несколько видов СДУ,
различающиеся структурой и характером выполняемых функций.
—СДУ, являющаяся фактически аналогом механической
системы, управления (МСУ). Такого вида СДУ используется,
например, для управления интерцепторами, при выполнении функций
резервного управления в случае отказа основной системы управления,
которой, в частности, может быть механическая система управления
или система управления с более сложной структурой. В этой СДУ
отклонение рычага управления вызывает адекватное отклонение
поверхности управления. Из-за простоты структуры иногда такую
СДУ называют прямой связью или “электрической палкой”.
Комбинированная система управления полетом,
представляющая комбинацию электродистанционной (СДУ) и
механической (МСУ) систем управления. В зависимости от
структуры системы управления полетом эти системы могут работать
как совместно, так и поочередно. Обычно функции основного
управления выполняет СДУ как система, обеспечивающая более
высокие пилотажные характеристики, чем МСУ, а МСУ выполняет
функции резервного управления на случай отказа основного
управления. Совместное применение СДУ и МСУ позволяет
реализовать разнородное резервирование, являющееся мощным
средством обеспечения высокой надежности управления при
различных видах отказов. Область применения такой комбинации
систем ограничена возможностями МСУ в обеспечении характеристик
устойчивости и управляемости самолета при отказе СДУ.
В связи с расширением использования волоконно-оптических
линий связей (ВОЛС) для передачи управляющих сигналов к рулевым
приводам, а также при обмене данными появляется новый
перспективный вид СДУ, который получил название световой системы
446
дистанционного управления полетом. Этот вид СДУ практически
ничем не отличается по своим функциям от рассмотренной ранее СДУ
за исключением использования в этой системе световых сигналов
вместо электрических для управления самолетом.
Переход к СДУ был обусловлен рядом обстоятельств, основными
из них были:
(1) . Опыт применения систем СУУ показал, что электрическая
резервированная система может вполне успешно конкурировать по
надежности с механической системой управления. Это было
достигнуто благодаря внедрению совершенных принципов
резервирования, позволивших поднять надежность электрических
систем до уровня механической системы. При этом данные о
надежности были подкреплены летной практикой.
(2) . При увеличении размеров самолета и возрастании числа
органов управления значительно усложнилась механическая система
управления. Все сложнее стало обеспечивать заданные динамические
характеристики системы при наличии люфтов, упругости,
инерционности и трения в проводке; для повышения надежности
проводки необходимо было ее также резервировать, что сказалось на
увеличении ее веса и ухудшении динамических и статических
характеристик.
(3) . Широкая автоматизация управления самолетом,
направленная на улучшение характеристик устойчивости и
управляемости и повышение летно-технических данных самолета,
могла быть наиболее просто реализована на основе электрической
системы дистанционного управления. СДУ, в отличии от МСУ,
обладает существенно большей гибкостью в формировании законов
управления, лучшей динамикой, большей разрешающей способностью,
что очень важно для перспективных самолетов, имеющих малые
запасы статической устойчивости и/или локальную неустойчивость.
(4) . С увеличением размеров самолетов возрастает влияние
изгибных деформаций конструкции самолета и температуры на
характеристики механической системы. Применение СДУ позволяет
существенно уменьшить влияние отмеченных факторов на
характеристики управляемости самолета и устойчивость системы.
447
Вместе с тем СДУ целесообразно прежде всего использовать
для пассажирских и транспортных самолетов крупных размеров,
аэродинамические характеристики которых изменяются в широких
пределах. На самолетах этого класса при использовании СДУ может
быть получено уменьшение веса системы и обьемов под ее
размещение.
Одним из важнейших вопросов при применении СДУ является
защита ее от внешних воздействий, имеющих электромагнитную
природу (разряды электростатического электричества,
электромагнитные импульсы и т.д.). В целом СДУ обладает меньшей
помехозащищенностью, чем механическая система. Поэтому она
требует более тщательной отработки функционирования в условиях
воздействия упомянутых факторов, например, на специальных стендах
с использованием имитаторов источников помех. При этом для
повышения помехозащищенности СДУ могут использоваться
волоконно-оптические линии связи, витая проводка, экранирование,
установка специальных фильтров помех и т.д.
Таким образом, после завершения перехода на НБУ настал
момент замены механической связи между рычагами управления
летчика и приводами органов управления на электрическую связь.
Однако эта замена может быть сделана только при условии
обеспечения высокой надежности СДУ по крайней мере на уровне
надежности механической системы (/><10~9 на час полета). Любое
новое техническое решение в области систем управления,
выполняющее жизненно важные функции, несмотря на очевидные
преимущества, требует летной апробации для подтверждения
преимуществ при соблюдении мер безопасности. В связи с этим в
эволюции систем существуют так называемые переходные варианты
систем (или гибридные, или комбинированные), в которых вопросы
обеспечения безопасности решаются путем совместного
использования с новыми принципами отработанных технических
рашений. Так было, например, при внедрении НБУ без перехода на
НРУ, когда на определенном этапе предусматривался переход на
ручное управление. Только после подтверждения высокой надежности
НБУ отпала необходимость применения резервной системы
448
управления.
При внедрении СДУ таким переходным вариантом системы была
СДУ с механической системой управления (МСУ\ При совместной
работе СДУ и МСУ механическая система управления может
выполнять функции резервного или аварийного управления. Это во
многом зависит от того, какой уровень характеристик управляемости
может обеспечить механическая система при отказе основного
управления (СДУ) для данного самолета, учитывая его
характеристики устойчивости и управляемости.
Под резервной системой управления понимается система
управления, которая предназначена для безопасного пилотирования
самолета при отказе основного управления с некоторым ухудшением
характеристик управляемости и ограничением режимов полета по
сравнению с основным управлением. Функционирование резервной
системы управления осуществляется, как правило, на отличных от
основной системы управления принципах. Например, основная система
электродистанционная, резервная-механическая, либо основная
система-цифровая, резервная -аналоговая.
Под аварийной системой управления понимается система
управления, которая предназначена для пилотирования самолета в
особых ситуациях, вызванных отказами, которые характеризуются
значительными ограничениями в пилотировании самолета и
изменениями в характеристиках управляемости самолета, что требует
немедленного завершения полета. Обычно численно нормируемое
значение вероятности такой ситуации составляет ~1 • 10“6 на час
полета.
Несмотря на существенные структурные различия систем
резервного и аварийного управления с основной системой управления,
которые в общем приводят к различию в их характеристиках, все же
во многих случаях целесообразно совместное применение этих систем
для обеспечения очень высоких требований к надежности управления,
которые предьявляются к пассажирским самолетам. С помощью
резервной или аварийной систем осуществляется разнородное
резервирование в системе управления, которое является наиболее
эффективным средством обеспечения безопасности полета при отказах
449
различного рода, включая наиболее опасные так называемые отказы
общего типа (т.е. полный отказ какой-либо резервированной системы,
например, электронной, построенной на единых физических
принципах).
Основная проблема, связанная с обеспечением совместной
работы основной системы управления (СДУ) с системами резервного
и аварийного управления-это существенное различие в их
функциональных характеристиках, которое является причиной
значительного рассогласования между выходными сигналами этих
систем. Это рассогласование между системами, с одной стороны,
вызывает возмущения в движении самолета во время перехода с
одной системы на другую, а с другой стороны, приводит к ухудшению
выходных характеристик системы управления при совместном
применении основной и резервной (аварийной) систем из-за их
нежелательного взаимодействия друг с другом.
В авиационной практике нашли применение несколько основных
схем совместной работы МСУ и СДУ.
—соединение систем по дифференциальной схеме,
—поочередная работа систем (с замещением отказавшей
системы резервной),
—обьединение двух разнородных систем на основе принципа
управления по усилиям,
—совместная работа систем, каждая имеющая выход на
отдельные органы управления (секции).
7.3.2. Соединение систем по дифференциальной схеме
При этом способе совместной работы систем осуществляется
суммирование выходных сигналов электрической и механической
систем (см.рис 7.10). Обьединение сигналов этих систем может быть
осуществлено во входной части системы управления с помощью
дифференциальной качалки, на которой производится суммирование
выходного звена сервопривода электрической системы и выходного
звена механической проводки управления летчика. Суммарный сигнал
с качалки далее передается на вход приводов рулей (Ту-154, Ту-144,
Ил-96-300, Ан-124, Ан-225...).
450
Особенности этой схемы обьединения систем СДУ и МСУ
имеют много общего с особенностями ранее рассмотренных схем
включения систем СУУ в МСУ. Принципиальным отличием
совместного применения СДУ и МСУ, объединенных по
дифференциальной схеме, от упомянутых систем СУУ является
обеспечение возможности, хотя и ограниченной, управления самолетом
с помощью как СДУ, так и МСУ.
К особенностям этой схемы следует отнести:
_______Общая эффективность управления в этом случае делится
между электрической и механической системами. Обычно большую
эффективность имеет механическая система, как более надежная, и на
ней обычно предусматривается завершение полета. В случае отказа
любой из систем возможно увеличение эффективности исправной
системы, но для этого необходимо изменение коэффициента передачи
системы Кш.
—На функциональные характеристики электрической системы
может существенное влияние оказывать механическая система.
Наличие в механической проводке люфтов, упругости, трения влияет
на точность работы электрической системы и, кроме того, часто
приводит к автоколебаниям замкнутого контура. Для устранения этого
вредного эффекта в системе обычно применяется вспомогательный
привод вблизи дифференциальной качалки, который делает
необратимой точку соединения проводки с дифференциальной качалкой.
Соответственно, вспомогательный привод, находящийся в тракте
управления летчика, должен иметь очень высокую надежность по
крайней мере на уровне надежности механической проводки.
—Дифференциальная качалка, на которой обьединяются сигналы
двух систем-электрической и механической, является общим
элементом системы управления. В случае рассоединения или
разрушения этого звена или механической проводки, связывающей
Дифференциальную качалку с приводами, может быть полный отказ
системы управления. Для исключения этого необходимо дублировать
все указанные механические связи.
—При отказе или отключении электрической системы точка
подсоединения сервопривода к дифференциальной качалке должна
451
надежно фиксироваться с помощью упругого звена с предварительным
затягом (Ту-154, Ан-124, Ил-96-ЗОО) или специального механизма
приведения в нейтраль (Ту-144), или сервопривод должен обладать
свойством самоторможения. При этом скорость приведения в нейтраль
должна быть ограничена для исключения чрезмерных возмущений в
движении самолета.
—Дифференциальное соединение электрической и механической
систем требует четкого согласования скоростей выходных звеньев
этих систем с располагаемой скоростью рулевого привода
еду -f- мсу рп
При превышении суммы скоростей выходных звеньев этих систем
скорости РП будет возникать “отдача” на рычаги управления, если в
механической системе не установлен вспомогательный привод,
который делает механическую систему необратимой, или отсутствует
предварительный затяг в загрузочном устройстве. Однако при наличии
вспомогательного привода может возникнуть взаимонагружение
между вспомогательным приводом и сервоприводом электрической
системы и, соответственно, проводки, связывающей их, если
суммарная скорость вспомогательного привода и сервопривода будет
больше скорости РП. Это вполне реально, поскольку скорость РП
зависит от аэродинамического шарнирного момента.
—При наличии секционирования органов управления может быть
исключена общая точка в системе в виде дифференциального звена.
Это достигается применением двух независимых каналов, каждый из
которых воздействует на свою секцию или группу секций руля одного
борта. В худшем случае при отказе механических звеньев отказывает
управление только по одному борту.
Резюмируя, можно отметить, что дифференциальное включение
автоматики, несмотря на некоторые недостатки этой схемы
соединения систем, нашло широкое применение в системах управления
с умеренной автоматизацией, используемой для улучшения
характеристик устойчивости и управляемости самолета с
механической системой управления (Ту-154, Ту-144, Ан-124, Ил-96-
300, MD-11). Наличие механических звеньев в тракте управления
автоматической системы затрудняет получение хороших
452
динамических характеристик автоматической системы из-за вредного
^даяния трения, люфтов, упругости и инерционности механической
проводки. Кроме того, в этой схеме включения автоматики имеют
место проблемы, вызванные взаимодействием автоматической и
механической систем при их совместной работе. Механическая
система, обладающая массой и упругостью, может иметь несколько
тонов колебаний, которые могут взаимодействовать с упругими
колебаниями конструкции самолета, порождая проблемы обеспечения
устойчивости системы.
7.3.3 Раздельная работа систем (с замещением отказавшей
системы резервной)
Следует напомнить, что СДУ имеет ряд важных преимуществ по
сравнению с МСУ, к которым, в частности, относятся:
— лучшие динамические характеристики и более высокая
точность отработки сигналов (лучшая разрешающая способность);
— большие функциональные возможности за счет более широкого
комплексирования сигналов, характеризующих движение самолета;
— более гибкая возможность реализации, перестройки и
коррекции законов управления по режимам полета.
Из-за существенного различия в функциональных харак-
теристиках СДУ и МСУ (главным образом в динамике) очень тру-
дно обеспечить их совместную работу при параллельном сое-
динении, поскольку для устранения взаимодействия между ними
необходима очень существенная коррекция механической системы.
Для осуществления такой коррекции в МСУ необходимо применение
специального сервопривода, через который должны вводиться в
систему корректирующие сигналы, которые в известной мере
синхронизируют выходные сигналы систем. Все это связано с
усложнением системы.
Поэтому при совместной работе СДУ и МСУ часто
обьединяются по принципу замещения (см. рис.7.20). При этом в виду
наличия у СДУ больших функциональных вовможностей ей отводится
Р°ль основной системы, а МСУ-резервной. При нормальной работе
СДУ либо “пересиливает” МСУ благодоря наличию пружинной тяги,
453
либо МСУ вообще отключена от рулей и СДУ с ней не
взаимодействует. После отказа СДУ обеспечивается доступ МСУ к
приводам рулей самолета.
Балансировка
Загрузка
перемещения
Датчики
Рис.7.2О. Схема резервирования СДУ механической системой по
принципу замещения
В данной схеме основной (активной) системой является СДУ, а
МСУ находится в резерве. Поэтому характеристики системы
управления полностью определяются СДУ. В этом основное
достоинство этой схемы.
Ввиду существенного различия в функциональных
характеристиках СДУ и МСУ между ними имеет место
рассогласование, которое тем больше, чем более существенны
различия в их характеристиках. Для компенсации рассогласования в
МСУ должны устанавливаться специальные устройства.
Это может быть упругий элемент с предварительным затягом.
При рассогласовании между СДУ и МСУ этот элемент обжимается
на величину рассогласования. При этом в нем создается усилие,
которое нагружает проводку управления. Для того, чтобы это усилие
не передавалось на рычаги управления, в МСУ должен быть
установлен вспомогательный привод, который не пропускает это
усилие на рычаги управления. Недостатком применения такого
устройства является возможность возникновения возмущения в
454
движении самолета при переходе с СДУ на МСУ, так как обжатый
упругий элемент может вызвать резкое перемещение рулей самолета.
Это может быть также устройство, состоящее из муфты и
медленного электропривода типа раздвижной тяги. При отказе СДУ
муфта должна мгновенно схватывать проводку управления,
соединяющую МСУ с приводами рулей, при том рассогласовании,
которое было в момент отказа СДУ. Затем с помощью медленного
привода должно обеспечиваться согласование положения рычага
управления и рулей.
Применение совместно с СДУ механической системы затрудняет
применение в СДУ боковых рукояток или мини-рычагов управления,
поскольку при переходе на МСУ на этих рычагах будут иметь место
большие усилия от сил трения механической проводки даже в случае
установки вспомогательного привода.
Для улучшения характеристик СДУ желательно, чтобы
сервопривод и рулевой привод комплексировались в едином агрегате, в
котором исключались бы промежуточные механические связи мажду
сервоприводом и рулевым приводом. Однако при наличии механической
системы каждый привод должен иметь кроме электрического входа
еще и механический вход. Это ведет к усложнению конструкции
привода из-за необходимости применения в нем упомянутых выше
устройств подключения МСУ.
Таким образом, применение основной и резервной (аварийной)
систем, работающих по принципу замещения, позволяет обеспечить
хороший уровень характеристик управляемости на основном
управлении (Ту-204). Резервная система, имеющая худшие
характеристики, не участвует в управлении до тех пор, пока исправна
основная система. При установке в качестве рулевых приводов
перспективных приводов интегральной компоновки, в которой
обьединены в одном агрегате сервопривод и рулевой привод, для
осуществления перехода с основной на резервную систему каждый
такой привод должен иметь электрический и механический входы и
Устройства переключения с основного режима на резервный, что
связано с усложнением конструкции привода. Конструкция привода
подобного типа была осуществлена на пассажирском сверхзвуковом
455
самолете “Конкорд” (Фр.).
7.3.4. Объединение двух разнородных систем на основе принципа
управления по усилиям
На основе принципа управления по усилиям возможно
объединение МСУ и СДУ таким образом, что обеспечивается их
параллельная работа без нарушения целостности механической связи
(проводки) (см рис. 7.21, 7.22, 7.23) Принципы управления по усилиям
были кратко рассмотрены на примере ЗУ в 7.1.2 здесь дается более
полное рассмотрение особенностей этого принципа применительно к
системе управления в целом.
Г
Рис.7.21 Схема исполнительной части системы управления
рулем высоты и стабилизатором широкофюзеляжного пасс-
ажирского самолета
1—штурвалы; 2—датчики усилий; 3—датчики
перемещений; 4—проводка управления стбилизатором;
5—устройства расцепки; 6—аварийная загрузочная
‘ пружина; 7—вычислитель электрогидравлического автомата
усилий; 8—сервопривод; 9—устройство расцепки
и пересиливания; 10 — сервопривод СУУ;
И—регулятор передаточных чисел; 12—пружинные тяги;
13—привод управления стабилизатором; 14—стабилизатор;
15—трехкамерные рулевые приводы секций руля высоты;
16—секции руля высоты
456
Рис.7.22 Схема исполнительной части системы управ-
ления рулем направления широкофюзеляжного пассажир-
ского самолета
1—педали; 2—датчик усилий; 3—переключатель
триммирования усилий; 4—устройство аварийной загрузки;
5 — вычислитель электрогидравлической загрузки;
6—сервопривод электрогидравлической загрузки;
7—устройство отключения и пересиливания; 8—пружинная
тяга; 9—сервопривод СУУ; 10—регулятор
передаточных чисел(Аш); 11—трехкамерные рулевые приводы
секций руля направления; 12—секции руля направления;
13—кинематический механизм регулятора передаточных чисел
Интерес к такой системе был вызван тем, что на ее основе
возможно комплексирование ряда важных функций, для реализации
которых обычно необходимо применение отдельных подсистем,
содержащих набор всех элементов, составляющих подсистему
(датчики, преобразователи сигналов, исполнительные устройства и т.
д.). Естественно, это позволяет уменьшить сложность системы и ее
вес.
К функциям, которые комплексируются этой системой,
относятся:
—р езервирование механической проводки контуром СДУ на
случай возможного ее заклинения или рассоединения. В противном
случае необходима была бы установка второй ветви проводки. Это, как
известно, ведет к ухудшению характеристик системы управления
(большой вес, увеличение трения, усложнение эксплуатации и др.);
457
—создание необходимого градиента загрузки Р* рычагов
управления. При этом градиент загрузки Рх может изменяться в
зависимости от режимов полета, (q, Н, М, ср ст). В случае применения
двух проводок для повышения надежности при механических отказах
необходима установка двух загрузочных устройств (двух пружинных
механизмов);
Рис.7.23 Схема исполнительной части системы управления элеронами и
интерцепторами широкофюзеляжного пассажирского самолета
1—штурвалы; 2—датчики перемещения; 3—датчики усилий;
4—вычислители электрогидравлической загрузки; 5—устройства расцепки;
6—тросовая проводка системы аварийного триммирования; 7—устройство
аварийной загрузки; 8—датчики перемещений; 9—триммерный
механизм; 10—сервоприводы электрогидравлической загрузки;
И—устройства отключения и пересиливания; 12—сервоприводы СУУ ;
13—сервопривод системы непосредственного управления подъемной силой;
14—устройства для создания нелинейности; 15—смеситель;
16—устройства для отключения секций элерона; 17—пружинные тяги;
18—трехкамерный рулевой привод секции элерона; 19—устройство для связи
элерона с секцией интерцептора; 20—однокамерные рулевые приводы секций
интерцепторов; 21—секция элеронов; 22—секции интерцепторов;
458
_______снятие усилий трения на рычагах управления от проводки
управления и золотников рулевых приводов, а также усилий от
обжатия различных центрирующих пружинных тяг, установленных в
системе управления на случай рассоединения и заклинения
механической проводки. Кроме того, в этой системе устраняется
“отдача” на рычаги управления при работе системы СУУ. В этом
отношении эта функция эквивалентна функции вспомогательного
привод. При этом следует иметь в виду, что при установке
вспомогательного привод при двух проводках необходима, во-первых,
его высокая надежность (4-х канальность), а во-вторых, необходимо
введение люфта в проводке, в которой вспомогательный привод
отсутствует. При расцепке проводок этот люфт должен устраняться
специальным механизмом (Ил-86, канал крена);
—создание дополнительных усилий на штурвале для
предотвращения непроизвольного вывода самолета летчиком на
предельные углы атаки и перегрузки (ОПР-а, пу). Это усилие может
иметь разный характер-пассивный (затяжеление управления) или
активный (толкающий), в зависимости от особенностей конкретного
самолета;
—отработка сигналов САУ. При этом одновременно
отрабатывается перемещение штурвальных колонок. Параллельное
включение САУ позволяет летчику контролировать работу САУ и в
случае активного ее отказа у него имеется возможность
“пересиливания” САУ путем приложения усилий к штурвалу выше
значения, установленного на муфте отключения;
—осуществление совмещенного управления в режиме САУ. При
этом вмешательство летчика в режим САУ производится через
штурвал при создании определенного порогового усилия (~3 кг),
после чего производится отключение САУ без отключения
сервопривода СДУ. После снятия усилия на штурвале САУ
автоматически подключается с сохранением режима стабилизации.
Вместе с тем для данной системы характерны особенности, на
которые следует обратить внимание при ее применении.
1) . В случае необходимости улучшения характеристик
устойчивости и управляемости в этой схеме необходима установка в
459
проводке еще сервопривода по дифференциальной (последовательной)
схеме. Через этот сервопривод отрабатываются сигналы обратных
связей движения самолета (&>z, Пу, а), а также в случае
необходимости производится регулирование коэффициента передачи
(/Gu). Выходные сигналы сервопривода СДУ и сервопривода СУУ
суммируются с помощью дифференциальных качалок и передаются на
вход рулевых приводов секций. В конечном итоге получаем ранее
рассмотренную дифференциальную схему соединения систем СДУ
(МСУ) и СУУ. При этом сервопривод СУУ обычно имеет
ограниченный ход ~ ±10°, который выбирается в основном по
условиям обеспечения нормального функционирования СУУ.
Учитывая, что СУУ функционирует независимо от летчика и
физическое воздействие летчика на выходные сигналы СУУ
исключено, по соображениям безопасности полета не следует иметь
ход руля от СУУ выше потребного.
2) . Как уже отмечалось (7.2.2), в рассматриваемой системе
управления по усилиям механическая проводка входит в контур
управления. Поэтому ее статические и динамические характеристики
влияют на устойчивость замкнутого контура системы. Практика
показала, что при обеспечении минимального градиента загрузки Рх <
0,2 кг/мм (большие коэффициенты усиления) могут возникнуть
проблемы с устойчивостью системы. Для ее обеспечения необходимо
введение в систему специальных фильтров. Кроме того, датчик усилий
весьма восприимчив к различного рода возмущениям, действующим на
проводку управления и на летчика при колебаниях конструкции
самолета. В этом отношении более благопрятные характеристики
имеет тросовая проводка (Ан-124), которой свойственна нелинейная
характеристика жесткости и меньшие массовые характеристики.
Имеет значение для устойчивости системы место расположения
датчиков усилий. Здесь возможны два варианта. В первом варианте
датчики располагаются в проводке управления после штурвальной
колонки (Ан-124). Масса колонки в данном случае служит фильтром
высоких частот при воздействии со стороны летчика.
Во втором варианте датчик установлен непосредственно в
штурвальной колонке (Ил-96-300) и связан со штурвалом. Входная
460
масса в этом случае существенно меньше и она определяется
фактически массой штурвала. Поэтому фильтрующие свойства
штурвала будут существенно хуже и в систему со стороны входа
будут попадать более высокие частоты. В то же время за датчиком
усилий увеличивается масса проводки, которая усугубляет вопросы
обеспечения устойчивости.
При автоматическом управлении, когда входной сигнал САУ
поступает на сервопривод СДУ, расположение датчика в проводке
может быть причиной появления сигнала от датчика (выход за пределы
порога) вследствие воздействия инерционных сил от штурвальной
колонки и соответственно искажение процесса управления от САУ.
Поэтому при такой установке датчика может потребоваться его
отключение в режиме САУ или увеличение порога на входе (в слу-
чае использования совмещенного управления).
3) . Для сохранения работоспособности системы управления по
усилию в случае рассоединения проводки управления или при расцепке
штурвальных колонок при заклинении необходима установка в системе
так называемой аварийной пружины. Эта пружина одновременно
служит опорой для датчика при создании управляющего сигнала и
является загрузочной пружиной. Если градиент этой пружины
соответствует градиенту загрузки, создаваемого СДУ, то проводка
управления, связывающая штурвальные колонки с сервоприводом
СДУ, практически не нагружается (только трение). В этом случае
возникновение рассоединения проводки или появление люфта может
оказаться незамеченным.
Резюмируя, можно отметить, что при сохранении в качестве
резервной (аварийной) МСУ использование принципа управления по
усилиям в СДУ позволяет наиболее просто решить вопрос совместной
работы МСУ и СДУ без нарушения целостности механической
проводки; обеспечить легкое по усилиям управление самолетом;
осуществить комплексирование ряда автоматических систем,
требующих параллельной отработки сигналов (САУ, САЗ, ОПР,
балансировка,...); обеспечить возможность летчику “пересиливания”
этих систем в случае их полного отказа, уменьшить число
исполнительных устройств автоматических систем и т.д.
461
Вместе с тем, как уже упоминалось, для качественной отработки
совместной работы МСУ и СДУ, использующей принцип управления
по усилиям, необходимы тщательные исследования системы
управления на специальных стендах, учитывающих характер
взаимодействия между системами и влияние колебаний упругой
конструкции самолета.
Ввиду того, что системы, осуществляющие параллельную
отработку сигналов и требующие большого хода рулей,
комплексированы в СДУ, через последовательный сервопривод СУУ
отрабатываются только сигналы тех систем, которые необходимы для
обеспечения устойчивости и управляемости самолета. В связи с этим
сервопривод СДУ может быть сделан отказобезопасным.
Практика применения структур системы управления,
использующих принцип- управления по усилиям, на самолетах Ан-124
и Ил-96-300 подтвердила высокую структурную надежность систем
управления этого типа и большие ее функциональные возможности.
7.3.5. Совместная работа систем, имеющих отдельные органы
управления (секции)
Для устранения силового взаимодействия между СДУ и МСУ
представляет интерес вариант системы управления, в котором
выходные сигналы СДУ отрабатываются своим органом управления
(секцией), а выходные сигналы МСУ своим (см рис. 7.24).
В такой системе механическая система и СДУ полностью
развязаны, между ними отсутствуют общие точки. Общая
эффективность управления складывается из эффективностей этих
двух систем. Поскольку здесь имеет место аэродинамическое
суммирование выходов систем (т.е. аэродинамических моментов), то
непосредственно силовое взаимодействие между органами МСУ и
СДУ исключается. Вместе с тем для нормального функционирования
системы необходима синхронная работа обеих систем. Так как
механическая система имеет худшие функциональные
характеристики, чем СДУ, то прежде всего необходима коррекция
механической системы. Это может быть сделано с помощью
сервопривода СУУ, который установлен в МСУ по дифференциальной
462
схеме. Ввиду того, что МСУ и СДУ непосредственно связаны с
рычагами управления, на рычагах управления будут создаваться
нежелательные усилия от трения в МСУ и инерционных сил. Кроме
того, при работе системы СУУ возможна “отдача” на рычаги
управления. В связи с этим в МСУ желательна установка
вспомогательного привода, который позволит существенно уменьшить
усилия от сил трения и исключить “отдачу” на рычаги при работе СУУ
(А-40 “Альбатрос”).
Триммирование
Загрузка.
Триммерныи .»
механизм
'Датчики
перемещения
Механическая приводка
СП СДУ
Вычислив
тель
Рис.7.24. Схема совместной работы систем СДУ и МСУ
В этой схеме при отказе СДУ возможно сохранение полной
эффективности управления после отключения сервопривода СДУ. В
худшем случае заклинения МСУ управление сохраняется, но
эффективность управления уменьшается на 50%. При этом
необходима расцепка штурвалов. На схеме второй штурвал не
показан.
При наличии в системе функциональной избыточности имеется
возможность использования механической системы таким образом,
чтобы СДУ и МСУ не работали через один и тот же канал управления,
так как в этом случае исполнительная часть системы управления
Должна строиться с учетом обеспечения функционирования разных по
своим функциональным характеристикам систем.
463
Например, продольное управление может осуществляться двумя
органами управления-стабилизатором и рулем высоты. Хотя эти
органы управления не равнозначны с точки зрения возможностей
продольного управления, однако их раздельное использование
позволяет повысить безопасность полета в критической ситуации.
Если для управления рулем высоты применить СДУ, то это
позволит получить управление с хорошими статическими и
динамическими характеристиками. При этом приводы рулей могут
выполняться только с электрическими входами, что значительно
упрощает конструкцию привода, улучшает его динамику, снижает вес.
Можно использовать боковые ручки, так как в этом случае нет
необходимости переходить на МСУ. Надежность этого канала
достигается резервированием и секционированием органов управления,
что касается системы управления стабилизатором, то управление
стабилизатором целесообразно осуществлять как с помощью
механической системы, так и электрической. При этом механическая
система управления рассматривается в качестве аварийного средства
на случай отказа всех электрических систем. При нормальном
состоянии систем управление стабилизатором производится по
электрическим сигналам (АЗ20).
Система управления стабилизатором строится таким образом,
что приоритет отдается механическому управлению в том смысле, что
у летчика всегда имеется возможность с помощью МСУ “пересилить”
электрическое управление.
Проблема обеспечения управляемости в боковом канале в случае
отказа СДУ может быть обеспечена благодаря наличию в этом канале
функциональной избыточности. Для управления боковым движением
обычно используются элероны, интерцепторы и руль направления.
Учитывая отмеченные особенности, можно для обеспечения
аварийного управления в боковом канале использовать независимое
механическое управление секцией руля направления, а для управления
остальными органами управления (элерономи, интерцепторами и
частью секций руля направления) применить СДУ. При таком подходе
исключается непосредственное взаимодействие между МСУ и СДУ,
влияние отказов в одной системе на другую.
464
резюмируя, можно отметить, что совместное использование
МСУ и СДУ должно строиться таким образом, чтобы различие в их
функциональных возможностях не было причиной ухудшения
характеристик устойчивости и управляемости и характеристик СДУ
как основного управления самолетом. При этом МСУ следует
рассматривать как управление, обладающее ограниченными
возможностями и предназначенное для поддержания самолета на
установившемся режиме в случае крайне маловероятного отказа СДУ
с целью сохранения возможности экипажу в течение ограниченного
времени (~5мин) восстановления работоспособности СДУ.
Такой подход позволяет:
—упростить систему управления главным образом за счет
упрощения механической системы;
—обеспечить высокие летно-технические и пилотажные
характеристики самолета на основном управлении (СДУ), включая
использование мини-рычагов управления,
—применить в основном только приводы с электрическими
входами, что повышает функциональные возможности приводов,
—сохранить на самолете разнородное резервирование (МСУ и
СДУ) в качестве средства обеспечения безопасности в чрезвычайной
ситуации (полный отказ СДУ (кратковременный) или полное
обесточивание борта).
7.3.6. Электрическая система дистанционного управления без
резервной механической системы
Переход на “чисто” электрическое дистанционное управление
(без механической проводки управления) стал возможным благодаря
достижению высокого уровня надежности электрических систем,
соизмеримого с уровнем надежности механической системы
управления. На основе применения совершенной элементной базы,
эффективных методов резервирования, глубокого контроля состояния
системы, надежного электропитания можно обеспечить сохранение
работоспособности СДУ при практически любых возможных отказах
ее элементов и взаимодействующих подсистем.
Как уже упоминалось, основное достоинство СДУ состоит в том,
465
что она позволяет достаточно легко сформировать любой закон
управления и при необходимости его модифицировать без
существенных материальных затрат. Например, известно, что летчик
управляет самолетом в соответствии с общепринятой техникой
пилотирования, основанной на устойчивом объекте пилотирования. Этот
стереотип должен быть сохранен и при неустойчивом объекте. Это
позволяет сделать автоматическая система, которая с учетом команд
летчика формирует нужный сигнал управления самолетом.
Следует отметить, что как и при механической системе
управления (МСУ) с устройствами автоматизации, так и при СДУ на
неустойчивом самолете команда летчика подвергается существенной
коррекции с учетом характеристик самолета. Эта операция может
быть проще решена в рамках СДУ, чем в МСУ, посколько в
последней необходимо механическое суммирование сигналов летчика и
исполнительных устройств автоматики.
На основе СДУ (без механической системы) могут быть
получены следующие преимущества:
— улучшены динамические характеристики системы управления
благодаря исключению механической проводки большой
протяженности, как несовершенного средства передачи сигналов
управления (люфты, трение, упругость, инерционность);
— улучшены характеристики управляемости по усилиям
вследствие существенного уменьшения сил трения в системе. Уровень
усилий в СДУ без механической системы позволяет применить в
качестве рычагов управления боковые ручки или другие небольшие
рычаги управления, что практически невозможно сделать при наличии
резервного механического управления;
— существенно может быть расширен диапазон режимов полета,
который ограничивался возможностями МСУ в обеспечении
характеристик управляемости (например, при неустойчивом самолете);
— при переходе к аэродинамически неустойчивым компоновкам
или компоновкам с малыми запасами устойчивости (Wz®~0) может
быть получен выигрыш в весе конструкции самолета;
— СДУ является хорошей основой для комплексирования
автоматических систем, для осуществления требуемой координации в
466
отклонении имеющихся на самолете органов управления с целью
получения максимального эффекта при управлении самолетом
(например, для управления вертикальной и боковой силами), для
проведения реконфигурации системы управления в случае отказов
части поверхностей управления, направленной на сохранение
требуемого уровня характеристик управляемости в условиях отказов,
и т.д.
Первые СДУ были аналоговыми (АСДУ). По мере развития
цифровой техники аналоговые системы все больше вытесняются
цифровыми (ЦСДУ), которые имеют более широкие возможности в
решении задач, связанных с пилотированием самолета, в реализации
сложных законов управления, в осуществлении многорежимного
управления (изменение форм движения простым нажатием кнопки), в
обеспечении более высокой точности пилотирования, в более глубокой
и эффективной организации контроля системы и обмена данными и
т.д.
Однако слаботочные электронные системы, выполняющие
важные с точки зрения безопасности полета функции, к которым как
раз и относится СДУ, потребовали поиска путей обеспечения их
высокой надежности при различных видах отказов каналов. Практика
показала, что в таких системах возможны так называемые отказы
общего типа (множественные или лавинные отказы), которые обычно
не обнаруживаются системой контроля. Их возникновение во многом
связано с наличием скрытых общих точек между каналами на
различных уровнях (датчики, вычислители, системы контроля,
системы питания и т.д.), а также их чувствительность к внешним и
локальным электромагнитным воздействиям.
Эти особенности в известной мере сдерживали внедрение на
пассажирских самолетах “чисто” электрической дистанционной
системы. В связи с внедрением цифровой техники в системы
управления добавились еще проблемы, специфичные для таких систем.
Как известно, надежность цифровых систем определяется как
аппаратурной надежностью, так и надежностью программного
обеспечения (ПО). При этом для создания надежных средств ПО
требуются не меньшие усилия и материальные затраты, чем при
467
обеспечении аппаратурной надежности. В связи с этим при применении
цифровых систем управления часто для повышения надежности
управления используют прямые методы резервирования как
программного обеспечения, так и всей цифровой системы (например,
использование аналогового резерва). Такие меры осуществлены,
например, на самолетах А320, Ту-204.
Подверженность СДУ, в силу своей природы, электромагнитным
воздействиям требует принятия специальных мер по их защите.
Эффективность этих мер должна быть подтверждена на специальных
установках, воспроизводящих возможные электромагнитные
воздействия. К сожалению, эти испытания практически должны
проводиться уже на самолете с установленным оборудованием, когда
внесение изменений в конструкцию в случае неблагоприятных
результатов испытаний может быть связано с большими сложностями.
Поэтому в последнее время приобретают все большую
актуальность работы по созданию электронных систем с повышенной
помехозащищенностью. В частности, к таким системам, как
указывалось ранее, относятся СДУ на основе волоконно-оптических
линий связи . Через эти связи производится обмен данными между
различным оборудованием расположенным в различных местах
самолета.
На рис.7.25 показана структура СДУ без резервной
механической системы управления, которая включает в себя датчики
положения рычагов управления и датчики параметров полета (o>z, иу,
а...), вычислители СДУ, рулевые приводы интегральной компоновки,
системы электрического и гидравлического питания. Обмен
информацией между этими устройствами осуществляется по
цифровым мультиплексным шинам. До поступления сигналов на шину
от каждого устройства (датчики, вычислители, приводы)
осуществляется оперативный контроль состояния этих устройств с
использованием различных методов контроля, включая контроль с
применением мажоритарных элементов, которые одновременно
осуществляют синхронизацию сигналов каналов (в данном случае
предусматриваются три основных уровня контроля системы-после
датчиков, вычислителей и приводов). В случае применения волоконно-
468
оптических линий связи устройства СДУ должны иметь
преобразователи электрических сигналов в световые и обратно в
электрические. Для исключения полного отказа СДУ из-за отказа
общего типа каждый вычислитель выдает управляющий сигнал только
в одну конкретную шину, а получает информацию от всех шин,
используемую для контроля. Кроме того, каждый вычислитель
состоит из 3-х независимых каналов. Каждый канал вычислителя
отличается типом используемого процессора и языком высокого
уровня для создания ПО. Всего таких вычислителей три. Все эти меры
направлены на обеспечение высокой надежности (вероятность отказа
1 • 10“9...1 ’ 10“10 на час полета) и исключение отказов общего типа.
Если по каким-либо причинам система контроля вычислителей
“пропустит” ложную информацию на шину, то эта информация будет
локализована рамками одной шины. Взаимодействие рулевых приводов
с цифровыми шинами управления осуществляется через блоки
управления и контроля (БУК) приводов, которые выполняют
многочисленные функции. Эти функции БУКов будут рассмотрены
ниже.
Для обеспечения требований к надежности управления и
безопасности полета СДУ без резервной механической системы
должна иметь 3-х—4-х кратный уровень резервирования, при котором
сохраняется работоспособность системы, как минимум, после двух
последовательных отказов ее каналов.
Для обеспечения безопасности полета, особенно на этапе
отработки сложных цифровых СДУ (имеющих ограниченные ресурсы
по быстродействию вычислителей и программному обеспечению)
бывает оправданным применение совместно с ЦСДУ автономной
резервной аналоговой СДУ, имеющей свои датчики, вычислители и
линии связи. Подключение аналоговой СДУ к рулевым приводам в
случае отказа ЦСДУ осуществляется через БУКи приводов.
Учитывая,что надежная работа ЦСДУ непосредственно зависит
прежде всего от надежности систем электро-гидропитания и системы
воздушных сигналов (СВС),эти взаимодействующие с ЦСДУ
системы должны иметь также соответствующий уровень резерви-
рования, обеспечивающий сохранение работоспособности ЦСДУ при
469
Рис.7.25. Система электродистанционного управления без резервной механической системы
470
указанном числе отказов. Принципы построения надежной системы
энергопитания ЦСДУ рассмотрены в разделе 7.3.
7 3 7 Рычаги управления и требования эргономики
На большинстве пассажирских самолетов в качестве основных
рычагов управления летчика применяются штурвальные колонки и
педали. Появление штурвалов и педалей в том виде, в каком они
применяются на большинстве пассажирских самолетов, было
обусловлено необходимостью обеспечения приемлемых характеристик
управляемости самолета прежде всего по усилиям при действующих
на самолете уровнях усилий от механической проводки и рулей
(трения, инерционности, аэродинамических шарнирных моментов и
др,). Для преодоления этих усилий летчику нужны были достаточно
мощные рычаги управления типа штурвальной колонки, штурвала и
педалей. Напримар, для больших тяжелых самолетов с НРУ диапазон
нормируемых величин РПу составлял 304-90 кг/ед. перегр.
Поэтому штурвальные колонки и педали стали наиболее
распространенными рычагами управления на пассажирских самолетах.
В дальнейшем их конфигурация, расположение в кабине, диапазоны
перемещения были в известной мере стандартизированы с тем, чтобы
ввести единообразие рычагов управления и их расположение в кабине
различных типов пассажирских самолетов, создать летчику максимум
удобств при управлении самолетом, упростить освоение экипажем
различных типов самолетов.
Для самолетов с рычагами управления такого типа были
разработаны основные показатели управляемости по усилиям и
перемещениям(РПу, РШх, ХПу...), которые обеспечивали наилучшую
гармонию усилий при управлении самолетом. Эти показатели
основывались на результатах огромного налета самолетов различных
типов в различных эксплуатацуонных условиях и ситуациях. Затем
эти показатели были изложены в виде рекомендаций к
характеристикам управляемости пассажирских самолетов с рычагами
управления типа штурвальных колонок.
При переходе к необратимому бустерному управлению, при
котором аэродинамический шарнирный момент полностью
471
воспринимался рулевым приводом,резко уменьшились усилия на
рычагах управления. При этом виде управления усилия на рычагах
управления определялись уже характеристиками загрузочного
устройства, трением в механической проводке и золотниках рулевых
приводов. Это позволило на некоторых тяжелых военных самолетах
(например., В1, В2(США), Ту-160(СССР)) применить обычные ручки
управления, которые характерны для маневренных самолетов, хотя
при этом потребовалась установка в системе вспомогательного
привода для снижения усилий на рычагах управления от трения в
проводке и золотниках приводов. Соответственно для ручки
управления с учетом класса самолета были выработаны нормативы к
характеристикам управляемости по усилиям, обеспечивающие
гармонию усилий для этого типа рычага управления. Например,
показатель управляемости, характеризующий величину усилия для
содания единицы перегрузки СРПу) уменьшился до значения РПу^
— Юч—20 кг/ед.перегр.,были уменьшены также градиенты усилий
Рх* и усилия страгивания (-Рстр.<Л,0 кг).
Однако наиболее радикальным шагом снижения усилий на
рычагах управления стал переход к. электродистанционному
управлению. В такой системе практически исчезла взаимосвязь
рычагов управления с усилиями от трения в проводке, золотниках
рулевых приводов и от шарнирных моментов органов управления,
которая в основном влияла на конфигурацию рычагов управления.
Вместе с тем следует отметить, что высокий уровень усилий,
который был характерен для тяжелых дозвуковых самолетов с
механической системой управления, служил надежным средством
против непроизвольного вывода самолета на опасные режимы полета
(перегрузки, углы атаки сваливания и т.д.). Однако это достигалось
ценой ухудшения комфорта и повышения психофизиологической
нагрузки летчика при управлении самолетом.
В СДУ основная нагрузка на рычаги управления формируется
загрузочным устройством, создающим искусственную вазаимосвязь
между усилиями летчика и реакцией самолета. В связи с этим СДУ
породила соблазн в применении миниатюрных рычагов управления
(особенно при отсутствии резервного механического управления),
472
поскольку это прежде всего сулило снижение веса рычагов управления
и улучшение обзора приборной доски.
Однако применение облегченных рычагов для управления
самолетом возможно только при условии создания надежной защиты
от выхода самолета на опасные режимы полета. Такую защиту
должна обеспечивать специальная система ограничения предельных
режимов полета (ОПР). При этом указанная система ОПР не должна
ограничивать управление самолетом в пределах разрешенной области
режимов полета. Наиболее эффективно решение данной задачи может
быть выполнено на основе интегральной системы управления (ТУ-
-204,А320)(см. главу 8).
Первый опыт применения боковой ручки на серийном самолете
был получен на истребителе Р-16А(США).При этом главной целью
применения боковой ручки на этом самолете было улучшение
характеристик управляемости самолетом (точности пилотирования) и
повышение боевой эффективности в условиях воздействия больших
перегрузок(^у=5...9), улучшение обзора приборов. Боковая ручка
была установлена в кабине этого самолета после проведения
обширных стендовых и летных исследований различных конфигураций
ручек, на основании которых была выбрана форма ручки, положение ее
в кабине, характеристики загрузки и параметры угловых отклонений
[17] .
Несмотря на успешное применение боковой ручки на самолете
F~16A (на январь 1989г. было поставлено 2267 самолетов) , она все
же не получила широкого распространения на последующих
перспективных самолетах-истребителях с электродистанционным
управлением (без механической резервной проводки): например, ВАе,
ЕАР, EFA, Дассо Бреге “Рафаль A”, IAI “Лави”, JAS 39, F -22.
На этих самолетах используется центральная ручка управления.
Интересно отметить, что на новейшем самолете F~22 предполагалось
применить боковую ручку. Первые летные образцы самолета были
оборудованы такими ручками, однако затем на серийные образцы F-22
было принято решение установить центральную ручку управления.
Такое положение, по-видимому, можно обьяснить тем, что пока
применение боковой ручки не дает ощутимых преимуществ по
473
сравнению с центральной ручкой и требует переучивания пилотов.
Кроме того, при центральной ручке возможно пилотирование самолета
со сменой рук.
Впервые боковая ручка на пассажирском самолете была
применена на самолете Эрбас Индастри А32О, имеющем СДУ без
перехода на резервное управление и СУУ интегрального типа
(астатическое управление). Такое решение имело целью:
—улучшить обзор приборной доски,т.е. улучшить эргономику,
так как считалось, что громоздкие штурвальные колонки частично
закрывали обзор некоторых приборов, а также повысить точность
пилотирования самолета,
—уменьшить вес системы за счет замены штурвальных колонок
боковыми ручками и исключения механических связей между
рычагами управления; выигрыш в весе составляет—30 кг.
Боковые ручки на самолете А320 установлены по бортам кабины
летчиков. Такое расположение боковых ручек нарушило в известной
мере привычную манеру управления самолетом, поскольку первый
летчик должен управлять левой рукой, а второй-правой.В связи с этим
следует отметить, что, как показывают статистические данные С181,
в мире число людей, являющимися правшами и левшами, составляет,
соответственно, 90 и 10%. Так как в полете основные операции по
пилотированию самолета выполняет левый летчик, то согласно этой
концепции управления 90% летного состава должны осваивать заново
управление самолетом левой рукой (за исключением летчиков,
которые владеют правой и левой рукой одинаково). Таким образом, при
переходе с самолетов, имеюших обычные рычаги управления, на
самолет с боковыми ручками требуется специальная подготовка
летчиков как в части приобретения навыков левши, так и освоение
нового рычага управления, имеющего отличные от обычных рычагов
управления конфигурацию, характеристики загрузки и показатели
управляемости.
Практически применение боковых ручек возможно только в СДУ
при условии жесткого ограничения опасных режимов, в которой
уровень усилий на ручках определяется только загрузочными
устройствами СДУ. Этот уровень усилий выбирается с учетом
474
возможностей кистевого управления. Поэтому использование
традиционной резервной механической системы практически
исключается из-за неприемлемых усилий, создаваемых механической
системой на боковых ручках. На самолете А320 для повышения
надежности управления на случай кратковременного обесточивания
СДУ(<5 мин.) в качестве резервного управления рассматривается
управление с помощью триммируемого стабилизатора и руля
направления, имеющих механические аварийные системы,которые не
связаны с боковыми ручками.
Весьма важной особенностью, присущей боковым ручкам А320,
является отсутствие механической связи между ними. Вместо
механической связи предусмотрена электронная логика выбора
сигналов управления, Она строится с учетом особенностей
взаимодействия двух летчиков при управлении:
—наличия как синхронных, так и несинхронных входных
сигналов,
—обеспечения возможности "пересиливания” одного сигнала
другим.
При исключении механической связи учитывалась также
возможность противодействия одного летчика другому в результате,
например, потери сознания летчика, что может быть причиной
непроизвольного отклонения ручки или ее "зажатие” в каком-либо
положении. При этом неразумное поведение летчика не
рассматривается, так как такое поведение также является проблемой
и на самолетах с обычными рычагами управления 7J.
На самолете А320 пределы нормального отклонения ручки и
пределы "пересиливания” установлены в 33 и 75% соответственно,
хотя они могут изменяться и не следует считать их фиксированными.
Например, если какой-либо летчик создает входной сигнал, тогда
противоположное движение другой ручки за пределы этого
внутреннего ограничения вызовит передачу всего управления второму
летчику, создающему компенсирующий входной сигнал. Каждый
летчик предупреждается об этих случаях световыми сигналами.
Следует отметить» что практика применения боковых ручек на
пассажирских самолетах еще незначительна с точки зрения
475
подтверждения уровня безопасности полета с этими рычагами
управления (по состоянию на 1 сентября 1991г.число самолетов А320,
находящихся в эксплуатации,составило 204; с 1988г.было потерено 3
самолета E19D. Еще не получили широкого распространения нормы
летной годности, отражающие специфику этих рычагов управления. В
частности, применительно к самолету А320 в его сертификационном
базисе рассматривается следующее требование: "Конструкция
электронной связи между боковыми ручками управления должна
предусматривать коррекцию и/или пересиливание входных сигналов
с помощью любого летчика при сохранении безопасных характеристик.
Средства извещения летчиков о состоянии блоков управления боковых
ручек не должны давать запутанную информацию экипажу”.
Фирма Боинг при проектировании самолета 777 также
рассматривала возможность применения боковых ручек управления.
При этом отмечалось, что важнейшее значение для безопасности
полета имеют принципы взаимодействия летчиков в процессе
управления. В частности, рассматривались также различные варианты
логики взаимодействия летчиков:
—управляющим сигналом является больший по величине сигнал,
—управляющим сигналом является сумма сигналов обоих
рычагов управления. При одновременных согласованных сигналах
реакция самолета увеличивается, при противоположных сигналах
реакция самолета нулевая,
—управляющим сигналом является сигнал только от одного
рычага управления. При этом рассматривались два варианта выбора
сигнала: либо обеспечивается приоритет левому летчику, либо с
помощью переключателей, расположенных на каждой боковой ручке,
осущствляется взятие управления на себя любым летчиком, но
управление самолетом производится тем летчиком, который нажал
переключатель последним.
Фирма Боинг полагает, что могут быть выдвинуты сильные
доводы в пользу связанных боковых ручек управления, если они будут
применяться. В процессе работ над проектом 777 в качестве
альтернативного варианта рассматривалась возможность установки
рычагов управления в виде мини-штурвалов с механической связью.
476
Как это сделует из предыдущего анализа, вопросы
взаимодействия летчиков при управлении самолетом имеют
принципиальное значение, поскольку их решение непосредственно
влияет на безопасность полета. При принятой в гражданской авиации
методике пилотирования самолета функции командира, как известно,
выполняет левый летчик, которому предоставлен приоритет в
управлении самолетом.
Введение механической связи во всех случаях позволяет:
— синхронизировать рычаги управления, что обеспечивает
передачу управления другому летчику без запаздывания, поскольку
правый летчик принимает рычаг управления в положении, отвечающем
текущей команде;
— обеспечить в случае необходимости совместное управление
двух летчиков по крайней мере на уровне аварийного управления;
реализации такого управления способствует тактильная информация;
— обеспечить непрерывный контроль датчиков и цепей
управления рычага летчика, который в данный момент исключен из
управления;
— ограничить случайное вмешательство в управление со стороны
правого летчика, так как для вмешательства необходимо приложить
усилия к рычагу, превышающие усилия характерные для нормального
управления;
— исключить необходимость применения переключателей для
передачи управления от одного летчика к другому. В экстремальной
ситуации летчик может забыть о переключателе.
В целом, рассматривая применение различных рычагов
управления на пассажирских самолетах с СДУ, можно отметить
тенденцию к уменьшению их размеров вплоть до применения боковых
ручек. Однако с учетом всех факторов, связанных с применением
рычагов управления (вес, габариты, эргономика, точность отработки
сигналов, безопасность полета, нормативы и др,), наиболее
компромиссным вариантом являются рычаги управления в виде, может
быть, уменьшенного размера с механической связью между ними. Эти
рычаги управления позволяют:
— сохранить привычные навыки по управлению самолетом одной
477
или двумя руками левым и правым летчиком;
— использовать существующие нормируемые показатели к
характеристикам управляемости самолета;
— исключить необходимость применения сложной и менее
надежной электронной логики для обеспечения совместной работы
летчиков;
— уменьшить вес рычагов управления и улучшить эргономику в
кабине по сравнению с обычными рычагами управления;
— применить в случае необходимости резервную механическую
систему управления.
На пилотажных стендах ЦАГИ были проведены широкие
исследования характеристик устойчивости и управляемости
применительно к современному магистральному пассажирскому
самолету со стреловидным крылом с боковой ручкой управления,
размещенной слева для командира корабля (левого летчика).
Эти исследования показали, что боковая ручка управления с
интегральной системой оценивается летчиками положитально. Эти
исследования позволили также определить оптимальные значения
статических характеристик управляемости самолета. Оптимальная
величина градиента загрузки боковой ручки управления для
продольного управления(по тангажу) составляет/¥=0,064-0,10
кгс/мм, а для поперечного управления Р*=0,04 4-0,07 кгс/мм.
Наиболее предпочтительные характеристики статической
управляемости получились примерно в 24-3 раза меньше, чем при
штурвальном управлении.Для взлетно—посадочных режимов полета
такие характеристики управляемости как Хау и X$x получились
равными: АвЯу=60мм/ед,пер,и АТ*=8 4-10мм/град.с-1.
Проведенные исследования на летающей лаборатории самолета с
боковой ручкой управления по определению пилотажных
характеристик подтвердили полученные на пилотажном стенде
харектеристики.
478
7 4 Рулевые приводы и структура их энергопитания
7 4.1. Виды самолетных рулевых приводов
Рулевой привод (РП) является одним из основных элементов
автоматизированной системы управления. В первых бустерных
системах управления, применявшихся на аэродинамически устойчивых
самолетах, РП в основном отрабатывали входные сигналы от летчика
и САУ и, соответственно, требования к характеристикам РП
определялись главным образом, исходя из условий обеспечения
приемлемых характеристик ручного управления и САУ. При этом
автоматические системы, как правило, имели свои исполнительные
устройства (сервоприводы), которые через механическую систему
управления передавали сигналы управления на вход РП.
С расширением автоматизации в обеспечении характеристик
устойчивости, управляемости и повышения летных данных
увеличилось число автоматических систем, включая системы
повышения устойчивости самолета, которые требовали все более
качественную отработку сигналов, т.е. значительно ужесточились
требования к динамике, точности, надежности отработки сигналов этих
систем сервоприводами (СП) и РП.
Практически это отразилось на увеличении полосы частот
пропускания сигналов, в повышении скоростей и углов отклонения
органов управления, в уменьшении зоны нечувствительности приводов
или повышении их разрешающей способности, особенно при малом
уровне сигналов, в повышении требований к стабильности
характеристик СП и РП, в том числе при возможных отказах в них
и т.д .
При этом большой уровень нагрузок, действующий на выходные
силовые элементы привода, усложнил условия функционирования РП,
что сказалось на характере взаимодействия СП и РП.
Современный рулевой привод самолета целесообразно
рассматривать как следящую систему, которая содержит
совокупность устройств, обеспечивающих преобразование, усиление,
479
контроль и отработку входных управляющих сигналов в выходные
сигналы в виде перемещений механических звеньев, непосредственно
связанных с органом управления. Поскольку функциональные
характеристики привода тесно связаны с характеристиками систем
энергопитания(гидросистемой, электросистемой), то только
комплексная увязка параметров привода и его систем энергопитания
может обеспечить высокие характеристики.
Степень "жесткости” требований к характеристикам приводов
зависит от особенностей аэродинамических компоновок самолетов,
характера функциональных задач, выполняемых системами,
функциональной значимости системы для безопасности полета.
Наиболее жесткие требования предьявляются к приводам современных
самолетов, имеющих малые запасы аэродинамической устойчивости
или локальную статическую неустойчивость.
В системах управления рулями самолета применяется большое
число разнообразных РП—от простых одноканальных
гидромеханических приводов, управляемых по механическому
входному сигналу, до сложных многоканальных приводов
электродистанционных систем, управляемых по электрическим
входным сигналам и насыщенных электронными элементами.
Структуры этих РП существенно изменялись в процессе эволюции
систем управления и требований к ним.
Ниже приведена классификация основных типов приводов, в том
числе приводов, которые рассматриваются для применения в системах
управления магистральных самолетов (см. таблицу).
К указанной классификации следует сделать пояснения,
касающиеся используемой терминологии, которая, к сожалению, еще
не вполне устоялась, и некоторых конструктивных особенностей
приводов.
Гидромеханический рулевой привод <ГМРП) —это
привод, который имеет механическое входное звено,управление
которым осуществляется механическим перемещением соединенной с
ним проводкой. Этот тип привода длительное время был основным
приводом систем НБУ. Конструктивно привод выполнялся одно-, двух
и трехкамерным. Однако на современных самолетах, где он еще
480
§ о 03 5 X X
CO о X сх с с сх X
ф CU X СО с ’X 3
с; X о о X
о СО х X
S 0Q СО X сх 5 оЗ
со СО с X н
о X 5Х X сх л X
к о X о
х х о S
<и X о
«=5 сх X
ф си о
с; m CU о CQ
со •
Q.
с
>1
систем привода S § о X X сх си S си е- CJ X о
m X Е- X X
о Et О со X CJ о X X <и \о Q см S <и >> S X X и >> X X X си &
Q. о сх сх qj
С о 0J CU X
X § X X X X X <L>
X <и си в
к сх <ъ> Е- § X X 3 X
EJ bd сх сх
ф Св X X s
R О & >< >3
о:
X
ZT
(0
X
X
е X
X S
о н
о Св
со со
СО Ьй о г—1
X
3 X
X <и
X X
сх X
<ъ» (V
Е- X
ь^ СО
сО X
СХ со
сО со
>< X
Вид управляющего сигнала * Механический ’ Гидромеханический • Электрический * Электрогидравлический • Электромеханический • Механический и электрический * Комплексный агрегат управления • Механический или электрический • Комбинированный Восприятие нагрузки • Полное * Необратимый • Частичное * Обратимый
Тип регулирующего устройства ’ Регулирование давления * Дроссельный • Регулирование объема ' Объемный Тип силового выходного • Гидроцилиндр;винтовой механизм, ’ Поступательный устройства преобразующий вращательное движение в поступательное • Гидромотор; электромотор • Вращательный • Гидроцилиндр поворотного действия • Поворотный
481
s OJ s эЕ S E <D эЕ cd CD У S
co CM тономное • Автономный нтрализованное • С централизованным питан имирование перемещений каналов • С суммированием перемет ммирование скоростей каналов * С суммированием скоросте ммирование усилий каналов • С суммированием усилий мещение каналов • С замещением зервированный механическим • С переходом на мехаг лением управление акционирование до первого отказа • Одноотказный (D Ч CD О Е CD S Е (D У 2 ч X Е m 0J о Е CD «5 Е О СО 0D *8 со Св ♦ СЗ эЕ Е Е СО СЗ X Е- О X >> 0Q • CD Ч CD О Е К S Е СЗ Е О S Е О S Е X >> CD § CD Е СЗ CD О Е CD СЗ Е О СО CD ю о со СЗ X Е- о S СЗ со СЗ X Е- о о
CQ CD < >> О >> и >> СЗ и 00 CD Он Щ СЗ а >> А X Е- О со СЗ X О и о m
Принцип питания Принцип объединения каналов • S о m S Е О О Е Е СЗ m о S m 8" со CD Е Принцип обеспечения надежности • S к S Е сЗ m о а S Е О S Е X Е н о • CD Е
»s
X
<u
§ s
s
X
m
о
E
о
E
S
О
X
»s
о
CJ
co
сз
§
x
о
E
s
о
X
’S
о
C3
<u
E-
E
2
§
m
сз
<u
о
m
о
о
m
о
sS
О
СЗ
CO
сз
X
E-
O
О
8
E
C3
X
m
о
E
о
E
s
о
X
к
сз
E
CJ
®4
co
сз
X
E
<u
OJ
о
E
m
о
X
§
о
сз
5
m
о
m
8
<u
s
E
OJ
OJ
Ф
о
<u
E-
сз
8
сз
о
E
о
m
«
4
о
m
482
применяется, отдается предпочтение однокамерным приводам
(модулям). Необходимый уровень резервирования обеспечивается
установкой нескольких однокамерных приводов на поверхность
управления.
Электрогидравлический рулевой привод (ЭГРП) имеет
электрическое входное устройство, на которое поступает
электрический управляющий сигнал. С помощью ЭГРП
осуществляется непосредственное управление рулями самолета по
электрическим сигналам датчиков рычагов управления летчика и
автоматических систем. Для выполнения этой функции ЭГРП должен
располагать достаточной мощностью для преодоления
аэродинамических нагрузок.
Комплексный агрегат управления (КАУ) представляет
собой конструктивное объединение в одном агрегате
гидромеханического привода и электрогидравлического сервопривода.
Такое объединение позволяет, в частности, сократить промежуточные
механические связи между сервоприводом и РП, уменьшить вес и
габариты за счет интеграции компоновки. Объединение выхода
сервопривода с механическим входом в КАУ осуществляется по
дифференциальной схеме. Через КАУ обычно осуществляется
одновременная отработка как электрических сигналов СУУ, так и
механических сигналов ручного управления Этот тип привода нашел
применение на вертолетах и некоторых самолетах, имеющих
ограниченную автоматизацию управления.
Комбинированный привод по своей конструктивной
компоновке весьма близок приводу КАУ, но в отличие от КАУ имеет
два взаимоисключающих режима работы: управление по
электрическому или по механическому сигналам. Режим
электрического управления используется для отработки сигналов
САУ. При этом проводка управления,связанная с комбинированным
приводом, перемещается во время работы САУ. Переход с одного
Режима на другой производится с помощью электрогидравлического
переключателя режимов. Подобный тип привода, наряду с функциями
Рулевого
Функций
привода (DC-10), часто используется для выполнения
вспомогательного привода (уменьшения трения) и
483
исполнительного привода САУ (В747).
Гидравлический следящий привод с дроссельным
регулированием является самым распространенным приводом,
используемым в системах управления самолетов. У дроссельного
привода изменение объема рабочей жидкости в полостях
гидродвигателя(цилиндра, гидромотора,...) осуществляется
изменением давления рабочей жидкости.
В гидравлическом следящем приводе с объемным
регулированием изменение скорости гидродвигателя
(гидроцилиндра) производится изменением рабочих объемов
гидродвигателя (гидроцилиндра, гидромотора...) или источника
гидроэнергии (насоса). Этот привод пока не получил широкого
распространения в системах управления ввиду его более высокой
сложности, большего веса и габаритов по сравнению с дроссельным
приводом. Однако этот привод обладает более высоким КПД, что дает
возможность уменьшить энергопотребление системой управления. В
связи с этим в последнее время существенно возрос интерес к этому
приводу. Более подробно особенности привода с объемным
регулированием рассмотрены ниже.
Под автономным рулевым приводом (АРП) обычно
понимается привод, имеющий изолированный от других потребителей
источник питания. Такие приводы в системах управления самолетов
применяются редко. Чаще под автономным рулевым приводом
понимается привод, который содержит внутри себя автономную
гидросистему, но питание электродвигателя насоса этой гидросистемы
производится от централизованной силовой системы
электроснабж ения.
Привод с централизованным питанием это привод,
питание которого производится от централизованных бортовых
гидросистем или электросистем. Централизованное питание наиболее
распространенный вид питания на современных самолетах.
7.4.2. Основные требования к приводам
1. Скорость привода
Привод должен обеспечивать высокую скорость отклонения
484
органов управления с учетом действующих на них аэродинамических
нагрузок. Это необходимо прежде всего для исключения потери
устойчивости самолета в “большом” при действующих на самолет
возмущениях, в том числе вызванных отказами в самой системе
управления.
Для аэродинамически устойчивых пассажирских самолетов
скорости отклонения рулей, например, в продольном канале без учета
нагрузки на привод имеют примерно величину <5уСт = 204-25°/с.
Обычно максимальная скорость отклонения рулей определяется
взлетно-посадочными режимами и режимом полета в турбулентность.
Для аэродинамически неустойчивых самолетов или слабо
устойчивых потребная скорость отклонения рулей зависит от степени
аэродинамической устойчивости^^), от уровня и характера
возмущений,действующих на самолет (порывы ветра,отказы), от
аэродинамических нагрузок на привод, приводящих к снижению
скорости перекладки органов управления.
В последнее время в системах управления пассажирских
самолетов стали применяться специальные автоматические системы
управления нагрузками, обеспечивающие снижение нагрузок на
конструкцию планера (L-1011 — 500, А320, Ил-96—300, см. главу
9).Некоторые из этих систем требуют весьма высоких скоростей
отклонения органов управления. Например, максимальные скорости
отклонения поверхностей управления, используемых для уменьшения
нагрузок на крыло, приняты на А320:для интерцепторов—200%, для
элеронов—100%. В ряде случаев оказывается целесообразным для
снижения общих энергозатрат для таких систем использовать
отдельные поверхности управления. Ориентировочные скорости
отклонения органов управления для активных систем перспективных
транспортных самолетов, обеспечиваемые приводами, представлены в
таблице:
%Р£ан_Управления град град/с
Руль высоты ±25 50
Элероны + 20 55
Интерцепторы 60 80
/^^направления ±30 45
485
2. Качество регулирования
Привод должен иметь высокую разрешающую способность или
малые зоны нечувствительности для исключения неустойчивости в
"малом”. Ввиду того, что практически полное устранение таких
колебаний связано с большими трудностями,так как это требует
применения фактически линейных элементов, имеющих высокую
точность и стабильность характеристик, принят подход, в соответствии
с которым оговаривается допустимый уровень остаточных колебаний,
имеющих место как при нормальном полете, так и при выполнении
маневров. Таким образом, в процессе управления не должны возникать
остаточные колебания, создающие ускорения и угловые отклонения
больше указанных ниже значений.
Нормальное ускорение в кабине 0, 02 g
Боковое ускорение в кабине 0, 01 g
Угол тангажа 0,1 град
Угол крена 0,15 град
Угол рысканья 0,1 град
Для снижения уровня остаточных колебаний необходимо
повышение разрешающей способности системы управления и особенно
исполнительных устройств (СП и РП). На основании опытных данных
была принята в качестве требования к перспективным приводам
величина нечувствительности, равная 0,1% от максимального
входного сигнала.
Практика создания систем управления для аэродинамически
неустойчивых или слабо устойчивых самолетов показала на
необходимость выполнения требований к частотным характеристикам
приводов как в области малых сигналов управления, так и больших,
рис 7.26, 7.27. Например, привод электродистанционного управления
(СДУ) должен иметь:
—фазовое запаздывание на частоте 1 гц при амплитудах
перемещения выходного звена РП
1, 0 мм не более 25°
486
0,1 мм не более 40°
_______подъем амплитудной характеристики в диапазоне частот от 5
до 15 гц при амплитуде перемещения выходного звена
1, 0 мм не более 1, 5 ДЗ4
0,1 мм не более 3, 5 ДЗ*
В общем случае для получения высокой разрешающей способ-
ности привода требуется весьма высокая технология изготовления
элементов привода, а также применения специальных устройств
коррекции повывающих чувствительность привода. Необходим также
контроль характеристик, устанавливаемого на самолет РП.
Рис.7.26. Фазочастотные Рис.7.27. Фазочастотные
характеристики электрогидра- характеристики электрогид-
влического привода СДУ при малых равлического привода СДУ при
сигналах сигналах среднего уровня
Благоприятным фактором, повышающим разрешающую способ-
ность привода, является увеличение его хода. Ориентировочно
потребную позиционную точность привода (ДХ) с учетом заданного
уровня колебаний можно представить выражением:
Хрп' ' S- (7.15)
где Хрп — полный ход привода; 23^^суммарный угол отклонения
органа управления; 3'”°'—расход руля на единицу перегрузки; &Пу
Уровень перегрузки, который не должен превышаться при
колебательном движении самолета, вызванном нечувствительностью
привода.
487
Отношение параметров <5>л°'/23> в определяется особенностями
принятой компоновки самолета и фактически не зависит от системы
управления. Для тяжелого транспортного самолета, использующего для
продольного управления триммируемый стабилизатор и руль высоты,
минимальная величина отношения 8Пу/Е8в может составлять около
0,075 (крейсерский полет). Если полный ход рулевого привода
находится в пределах ~ 100 мм, то при Аиу = 0, 02 получим, что РП
должен обеспечивать позиционную точность не ниже:
АХ = 0,15 мм
Особенно важное значение имеет увеличение хода РП при
продольном управлении, использующем целиком управляемый
стабилизатор, распологаемая эффективность которого существенно
превышает эффективность руля высоты. Например, для управляемого
стабилизатора самолета Локхид L-1O11 был применен
поступательный РП очень большого хода (Хрп=711 мм), что
позволило при фЯз' = -0,8 гр/ед. neper., Апу = 0, 025 и 2^ = 14°
обеспечить высокую позиционную точность
АХ=1,0 мм (0,02°)
Реализация привода такого большого хода стала возможной
благодаря размещению его в фюзеляже.
Для сравнения в системе управления самолета с рулем высоты,
имеющего $Пу = ~3 гр/ед.перегр.,
2#в=40°( + 15°4--25°) и ход привода ЛрП=175мм, получим
при том же уровне перегрузки А пу — 0, 025 позиционную точность
АХ = 0, 33 мм(0,075°)
Из этого примера видно, что в системе управления с рулем
высоты проще решаются вопросы обеспечения заданного уровня
точности отработки сигнала управления, при котором не превышается
заданная колебательная перегрузка.
Высокая точность отработки управляющего сигнала особенно
необходима для пассажирских самолетов, имеющих малые запасы ус-
тойчивости или неустойчивость (хотя бы локальную), а также при
реализации интегрального закона управления.
Следует отметить, что увеличение хода РП целесообразно также
из соображений увеличения динамической жесткости силовой части
488
системы, так как уменьшается нагрузка на опору, хотя при этом
жесткость самого привода может уменьшаться.
В связи с применением резервирования в системах управления в
ряде случаев, особенно в схемах приводов, использующих принцип
суммирования каналов, появляется дополнительная зона
нечувствительности, вызванная силовым взаимодействием каналов
из-за наличия несинхронное™ работы каналов. Для устранения зоны
при наличии силового взаимодействия применяются специальные
меры, например:
—выравнивание нагрузки с помощью корректирующих связей,
—применение "сильного” и "слабого” каналов,
—применение резервирования с замещением,
—использование "ведущего” и "ведомого” каналов,
—применение резервирования, построенного на суммировании
перемещений (скоростей) каналов,
—использование нечетного числа работающих каналов,
—использование реального и модельного каналов и т.д.
Каждый из этих методов резервирования имеет свои преи-
мущества и недостатки. Выбор того или иного метода резервирования
должен производиться с учетом значимости системы для бе-
зопасности полета, уровня возмущений, создаваемого отказавшим
каналом в движении самолета, стабильности харектеристик привода
при отказах.
В последнее время все большее применение находят схемы
резервированных приводов, в которых в качестве контрольного канала
используется электронная модель реального канала, в которой
воспроизводятся основные физические процессы, характеизующие
работу канала. Это позволяет построить систему привода, состоящую
фактически из самоконтролируемых каналов, не требующих для
выявления неисправного канала перекрестного контроля.
Отработка сигналов автоматических систем через СШУ, в
которой в качестве основной системы рассматривается механическая
система управления, обычно производится с помощью отдельного
сервопривода (электромеханического или электрогидравлического),
который устанавливается в механической системе по
489
последовательной (дифференциальной) схеме. В этом случае
сервопривод преобразует электрический сигнал в механическое
перемещение, которое затем отрабатывается рулевым
гидромеханическим приводом. Эта схема отработки сигналов
управления получила название "каскадной” или "последовательной”.
Каскадная схема широко используется в авиационной практике в
системах управления с механической проводкой управления (Ту-154,
Ан-124, Ил-96-300 и др.). При каскадной схеме установки СП и РП
имеются два независимых контура управления (рис. 7.28). В этой
схеме уровни резервирования СП и РП могут формироваться
раздельно в зависимости от значимости систем для безопасности
полета. Ввиду того, что выходной сигнал СП является общим ко всем
РП, это упрощает синхронизацию входных сигналов, поступающих на
РП. Однако для этой схемы свойственны нежелательные особенности:
—ход сервопривода должен быть значительным,
—при несоответствии скоростей СП и РП возможно нагружение
проводки значительными усилиями. Для исключения этого между СП
и РП устанавливают специальные элементы—пружины,
защищающие проводку управления,
электрическая ОС СП
механическая ОС РП
И'сг, И И^-передаточные функции разомкнутых приводов
Рис.7.28. Схема каскадной установки сервопривода и рулевого
привода
—точность отработки сигнала определяется ошибками этих двух
контуров. Наличие большого участка механической проводки между
СП и РП вносит дополнительные неточности в отработку сигнала
из-за присущих ей люфтов, трения, инерционности и упругости.
Ужесточение требований к точности отработки сигнала
управления в связи с переходом к слабо устойчивым и неустойчивым
компоновкам самолетов потребовало применения более совершенных
490
схем приводов, ориентированных на использование в структурах
электродистанционного управления рулями самолета. Наибольшее
распространение для этой цели получила так называемая схема с
общей обратной связью (рис. 7.29). В этой схеме сервопривод
находится внутри контура, охваченного общей обратной связью с
выхода рулевого привода.
Рис.7.29. Установка сервопривода и рулевого привода по схеме
с общей обратной связью
К особенностям такой схемы объединения СП и РП относятся:
—ход СП определяется величиной хода золотника РП,
—поскольку ход СП не превышает величину хода золотника, нет
необходимости в установке специальных устройств, ограничивающих
усилия между СП и золотником РП, т.е. отпадает проблема
согласования скоростей СП и РП,
—схема обладает более высокой точностью в отработке входного
сигнала по сравнению с каскадной схемой, так как входной сигнал
непосредственно сравнивается с выходным сигналом РП (руля).
Вместе с тем привод, скомпонованный по этой схеме, требует
более точного исполнения СП в связи с его малым ходом (обычно
~10-г15мм). Например, СП должен иметь малые зоны
нечувствительности, высокую разрешающую способность датчиков
обратных связей, характеристики близкие к линейным, высокую
добротность внутреннего контура (~100 1/с). Приводы по схеме с
общей обратной связью нашли применение прежде всего на самолетах
с СДУ.
Вначале приводы по схеме с общей обратной связью выполня-
лись в виде раздельной компоновки сервопривода и рулевого привода,
связанных между собой механическими звеньями. Это приводило к
ухудшению точностных и динамических характеристик привода.
491
Поэтому в дальнейшем эти два агрегата были объединены в единый
блок, в котором были сведены к минимуму промежуточные элементы.
Такая компоновка привода получила название интегральной (рис.
7.30).
входные сигналы
БУК—блок1* управления и контроля;ЭГУ—электрогидравлический| усилитель
Рис.7.30. Схема интегральной компоновки рулевого привода
Интегральный привод содержит в едином корпусе все
необходимые элементы для преобразования и усиления сигналов.
Переход к интегральной компоновке позволяет уменьшить вес,
габариты привода и повысить его надежность за счет устранения
трубопроводов и механических звеньев. В интегральной компоновке
привода стало возможным применение высокоточных механических
обратных связей, отличающихся минимальным запаздыванием,
высокой стабильностью и надежностью. Электрические обратные
связи, как известно, необходимо многократно резервировать, для
обнаружения отказов в них необходима достаточно сложная система
контроля.
Характерной особенностью приводов СДУ является их
насыщенность различными электронными устройствами, выполняю-
щими многочисленные функции по обеспечению работоспособности
привода. Эта электроника в основном сосредоточена в специальном
блоке управления и контроля (БУКе), который
492
__замыкает следящие контуры привода с помощью обратных связей,
__производит коррекцию рассогласования каналов привода,
__корректирует динамические характеристики привода,
__осуществляет контроль работоспособности привода, производит
изоляцию отказавшего канала и выдает сигнал неисправности в
систему сигнализации,
__принимает сигнал от цифровой шины (в том числе от волоконно-
оптической) и преобразует этот сигнал в аналоговый и обратно в
цифровой,
—формирует модельный канал привода, используемый для контроля
привода,
—осуществляет оптимизацию характеристик привода по условию
минимума энергопотребления,
—производит реконфигурацию структуры привода после отказа его
элементов (каналов),
—обеспечивает вторичным питанием элементы привода и т.д.
Реализация перечисленных функций наиболее просто может быть
осуществлена на основе цифровой техники. В связи с этим в
перспективных компоновках приводов рассматривается применение
процессоров, обеспечивающих быстрые и точные вычисления,
перестройку структуры привода с учетом его состояния.
Учитывая тесную взаимосвязь этой электроники с элементами
привода, целесообразно БУК размещать на приводе или вблизи его.
Это позволяет уменьшить число связей привода с вычислителем и
другими устройствами и соответственно уменьшить вес проводки. В
настоящее время наблюдается тенденция приближения электроники к
приводу, хотя это связано с необходимостью обеспечения
работоспособности электроники в более жестких условиях (более
широкий диапазон изменения температур и давлениия, вибраций,
влаги), несколько увеличиваются габариты привода из-за установки
БУКа.
7.4.3. Надежность рулевых приводов
Привод должен иметь высокую надежность. В общем случае
требования к надежности РП зависят от особенностей структуры
493
системы управления. Например, применение секционирования органов
управления, при котором управление каждой секцией осуществляется
отдельным приводом (или несколькими приводами), позволяет
сохранить управление самолетом при отказе одной секции (или более
секций), вызванной отказом привода. Если секционирование органов
управления отсутствует (например, использование единой поверхности
управления как на L-1011 или "Трайденте”) и отказ поверхности
является критичным с точки зрения безопасности полета, то
требования к надежности системы привода существенно возрастают.
Привод такой поверхности должен иметь вероятность отказа по
крайней мере не более Ю~9 на час полета. Такая малая вероятность
отказа может быть обеспечена только при условии 3-х 4- 4-х кратного
резервирования, включая выполнение требований по сохранению
работоспособности при отказах типа заклинения и рассоединения
механических элементов.
В отличие от гидромеханических рулевых приводов электро-
гидравлические приводы СДУ имеют более сложную, структуру, в
которую, как отмечалось ранее, входят электронные, гидравлические и
механические элементы. Соответсвенно возрастает число видов
отказов, при которых привод должен сохранять работоспособность.
Поэтому к структуре рулевого привода СДУ помимо вероятностных
показателей, характеризующих количественно надежность привода,
предъявляются требования к числу и видам отказов. На современных
пассажирских самолетах с автоматизированной системой управления
отклонение поверхностей управления (секций) в основном
производится приводом, состоящим из двух (и более) модулей, каждый
из которых может обеспечить управление поверхностью без
существенного ухудшения характеристик управления. Такая
структура позволяет сохранить управление секцией при отказе типа
рассоединения и предотвратить возникновение флаттера (при
отсутствии весовой балансировки органа управления) в случае
разгерметизации в одном из модулей привода. Обычно к приводу
секции электродистанционного управления предъявляются следующие
требования по сохранению работоспособности:
— после одного отказа гидросистемы;
494
— после одного отказа в электрической части и одного
гидравлического отказа;
— после любого рассоединения в элементах механической связи
привода с секцией.
Число и виды рассматриваемых отказов устанавливаются в
зависимости от принятой структуры системы управления, числа
поверхностей управления (секций), требований к безопасности полета.
При этом основной подход в обеспечении безопасности полета должен
основываться на выборе структуры, имеющей необходимые средства
защиты от определенного числа и видов отказов, которые были
перечислены ранее. При таком подходе упрощается процедура
подтверждения работоспособности привода путем воспроизведения в
нем указанных отказов независимо от вероятности их возникновения.
Однако до создания реального образца привода целесообразно
использовать также вероятностный подход, который позволяет на
этапе разработки структуры привода выявить слабые в отношении
надежности звенья (элементы), и кроме того, спрогнозировать
возможный диапазон значений вероятностей полного отказа привода,
учитывая что достижение вероятностей отказа на уровне 10-9 на час
полета на ограниченном числе реальных образцов приводов
практически невозможно. Разброс значений вероятностных оценок
отказа привода будет зависеть от глубины проработки математической
модели надежности привода и распологаемых статистических данных
о надежности элементов привода, полученных в условиях, близких к
реальным. В частности, представляется важным подтвержение для
привода вероятностей его отказа в результате:
—неконтролирумого отказа, приводящего к неуправляемому
перемещению выходного звена привода в крайнее положение;
—неконтролируемого отказа, приводящего к отсутствию пере-
мещения выходного звена привода при наличии управляющих сигна-
лов на входе в привод.
Первое требование фактически означает исключение воз-
можности появления отказа типа "общей точки”, вызывающей отказ
всего резервированного привода. Вероятность такого отказа должна
быть не более 10-9 на час полета. Второе требование ограничивает
495
возможность накопления так называемых латентных (скрытых)
отказов, которые возможны из-за недостаточной глубины контроля
привода. Вероятность такого отказа должна быть на уровне 10~8 на
час полета. Возможна корректировка значений приведенных вероят-
ностей отказов в зависимости от особенностей характеристик
самолета, структуры системы управления (например, числа секций и
их эффективностей, рассматриваемого канала управления и т.д.).
Учитывая, что при изоляции отказов обычно возникают
возмущения на выходе привода и соответственно в движении
самолета, вводится нормирование уровня этих возмущений в
зависимости от того, какой по счету произошел отказ. Например, при
первом отказе в электронных каналах не должны создаваться
возмущения превышающие ~ 34-5 % хода выходного звена привода
за время ~ 0,14-0, 2 с или возмущения в движении самолета с
перегрузками более ±0, 05 в месте размещения экипажа.
При втором последовательном отказе в электронных каналах
уровень возмущений в движении самолета не должен превышать
значение перегрузок ±0,5.
При полном отказе привода должен обеспечиваться переход его в
режим демпфирования при просадке под нагрузкой.
Большая роль в обнаружении и изоляции отказов в приводе и
ограничении возмущений в движении самолета принадлежит его
системе контроля, которая является важнейшим элементом структу-
ры резервированного привода. Как уже отмечалось, эти функции
контроля работоспособности привода выполняются блоком управления
и контроля привода (БУКом), который является составной частью
привода электродистанционной системы управления. Требования к
надежности этого блока должны быть увязаны с общими тре-
бованиями к надежности всего привода.
7.4.4. Энергетика рулевых приводе
Для автоматизированных систем управления важное значение
имеет энергетическое совершенство рулевых приводов. Одной из
острых проблем, с которой в последнее время сталкиваются раз-
работчики перспективных самолетов, является проблема энер-
496
гетического обеспечения приводов системы управления. Она пос-
тепенно назревала в связи с изменением облика самолетов, расши-
рения использования автоматики для обеспечения характеристик
устойчивости, управляемости и ЛТХ самолетов, расширения диапа-
зона режимов полета, увеличения размеров самолетов и др.
Например, для перспективных компоновок самолетов характерны
такие особенности как:
— большое число поверхностей управления и, соответственно,
приводов, используемых для управления. При этом возможно одно-
временное использование значительного числа поверхностей для
получения высоких ЛТХ;
— большие потребные скорости перекладки поверхностей уп-
равления при значительных аэродинамических шарнирных моментах,
которые в известной мере являются платой за переход к малым за-
пасам аэродинамической устойчивости или локальной неустойчивости;
— наличие на этих самолетах разнообразных перекрестных
связей между каналами самолета (тангаж, крен, курс) повышает
число одновреманно работающих поверхностей управления, т.е.
коэффициент одновременности;
—использование методов реконфигурации структуры системы
управления, особенно при применении СДУ, для сохранения управ-
ляемости самолетом и компенсации отказных состояний, что обычно
требует введения дополнительных запасов по мощности.
В качестве примера на рис. 7.31 показан рост располагаемой
мощности гидравлической системы питания рулевых приводов и
других гидравлических устройств на современных самолетах с НБУ в
зависимости от их взлетного веса. В частности, для сравнения ниже
приведены мощности гидравлических систем самолетов
Боинг 747 (Свзл~323 т) —570 л.с.
МакДоннел-Дуглас DC-10 (СВЗл~ 185 т) —420 л.с.
Локхид L-ЮИ (Свзл~185 т) —420 л.с.
Локхид С5А (GB3j~339 т) —1030 л.с.
Мощность, потребляемая только продольным управлением этих
самолетов, составляет:
Боинг 747 62,0 л.с. (руль высоты)
497
Локхид L-1011
Локхид С5А
60 л.с. (стабилизатор)
39,19 л.с. (руль высоты)
С5АО /
/
/ о АН-124
Хв-747
300-
L-I0II
О DC—10
оТу-144
Ил-86_
О О “Конкорд”
о о
о Ту-154
100 200 300 400 500 600 5гр.м2
Рис.7.31. Рост мощности на управление самолетом в зависимости от
размеров самолета(З'кр)
Следует подчеркнуть, что на этих самолетах практически не
применяются системы улучшения устойчивости (СУУ). Их при-
менение привело бы к еще большему увеличению мощности. При-
веденные значения мощностей, используемых в системе управления,
исключают возможность перехода на непосредственно ручное
управление.
Все это ведет к значительному увеличению потребной для
управления мощности, основными потребителями которой являются
рулевые приводы. Потребная мощность приводов в значительной мере
зависит от характеристик органов управления, т.е. аэродинамических
. шарнирных моментов и скоростей перекладки органов управленя. В
связи с этим на первом этапе проектирования до выбора типа и
структуры привода необходимо проведение исследований по
498
оптимизации органов управления по условиям минимума аэро-
динамических шарнирных моментов. Это касается выбора рациональ-
ной площади поверхностей управления (или их эффективности)» пот-
ребных скоростей отклонания поверхностей управления, использо-
вания различных аэродинамических средств по снижению Мш аэр.
Величина Мш аэр является основным параметром, который фактически
определяет размеры и вес приводов. Если учесть, что приводы должны
иметь многократное резервирование, то ошибка в завышении Мш аэр.
может приводить к существенному завышению потребления энергии и
увеличению веса приводов и, соответственно, системы управления. В
качестве меры безопасности вводится коэффициент запаса по тяге
(моменту), который в зависимости от особенностей поверхности
управления может иметь значения /=1,254-1, 5.
Другим важным параметром, от которого зависит потребляемая
приводом мощность, является потребная скорость отклонения
поверхности управления. Ошибки в определении (завышении) ско-
рости могут быть еще более значительными, поскольку для ее опре-
деления необходимо знать потребные скорости поверхностей управ-
ления для выполнения маневров и реальные уровни возмущений,
воздействующие на самолет, включая возмущения, создаваемые отка-
зами, которые летчик совместно с системой управления должен
парировать. Поэтому для ее определения, помимо расчетов, необ-
ходимо моделирование динамики летательного аппарата в замкнутом
контуре "летчик-система управления-самолет”. Значения величин
аэр и скоростей отклонения поверхностей управления (£) являются
важной исходной информацией для выбора параметров рулевых
приводов.
Положение с энергетикой, потребной для управления, усугуб-
ляется еще и тем, что в системах управления ее исполнительная часть
строится практически на всех самолетах на основе приводов
Дроссельного регулирования, которые хотя и отличаются простотой
конструкции, но имеют невысокий коэффициент полезного действия
(КПД).
Первые шаги в улучшении энергетической эффективности ис-
полнительной части, включающей привод и гидросистему, состояли в
499
замене насосов постоянной производительности на насосы переменной
производительности. Это позволило несколько повысить КПД
исполнительной части, использующей приводы дроссельного регули-
рования.
Затем для уменьшения мощности исполнительной части прово-
дились работы по снижению коэффициента одновременности работы
приводов. Этот коэффициент для аэродинамически устойчивых само-
летов принимался равным ~ О, 7. К сожалению, с расширением авто-
матизации управления наблюдается тенденция его повышения.
В системах электродистанционного управления, в которых при-
меняются рулевые приводы с электрическими входами (рис. 7.32),
возможно алгоритмическое ограничение максимальной скорости
отклонения поверхностей управления. Такое ограничение, в частности,
осуществлено на воздушно—космических летательных аппаратах
"Спейс-Шаттл” (США) и "Буран” (СССР). Максимальная скорость
отклонения элевонов без нагрузки согласно нагрузочной
характеристике составляет £эв=25°/с. Однако эта скорость
отклонения элевонов в полете нереализуема из-за наличия
алгоритмического ограничения. Благодаря ограничению реализуемая
максимальная скорость отклонения элевонов составляет ^эв — 15°/с.
Кроме того, после 2-х последовательных отказов гидросистем
устанавливается новое ограничение скорости отклонения элевонов
равное <5эв = П7с. Введение указанных ограничений позволило
уменьшить затраты энергии на отклонение элевонов. Следует
отметить, что при переходе к меньшим скоростям отклонения элевонов
потребовалось тщательное моделирование динамики полета с учетом
воздействия ожидаемых возмущений на летательный аппарат.
Все рассмотренные до этого средства повышения энергетичес-
кой эффективности системы управления касались в той или иной мере
снижения расходов рабочей жидкости гидросистем, при этом давление
в гидросистемах поддерживалось постоянным (ДР~210 кг/см2).
Радикальным способом снижения энергозатрат является переход
на более экономичные рулевые приводы может быть даже за счет
некоторого усложнения их конструкции. Применение приводов
объемного регулирования или электромеханических приводов является
500
как раз одним из таких путей. Эти приводы обладают важным
качеством—свойством адаптивности к внешним нагрузкам органа
управления. Поэтому применительно к каждому органу управления
привод развивает такую мгновенную мощность, которая требуется в
данный момент для отклонения конкретного органа управления. Кроме
того, привлекательность приводов этого типа состоит еще и в том, что
они позволяют осуществить переход к концепции полностью
электрического самолета (ПЭС), когда отпадает необходимость
применения централизованной гидросистемы. Исключение
гидросистемы значительно упрощает эксплуатацию системы
управления самолета.
СП—сервопривод;РП—рулевой привод; БУК—блок управления и контроля;
ОС, и ОС.—обратные связи
Рис.7.32. Схема рулевого привода дроссельного регулирования.
В последнее время существенно возрос интерес к адаптивным
приводам как у нас, так и за рубежом. Возможны различные
конструктивные решения этих приводов. Один из типов приводов
объемного регулирования представлен на рис. 7.33. Привод выполнен
в виде автономного агрегата, который содержит цилиндр, поршень и
выходное уплотнение штока, насос с электродвигателем, который
обычно устанавливается внутри оребренного корпуса (или бака),
подкачивающий насос, датчик обратной связи, предохранительный
клапан и клапан наполнения бака жидкостью, датчики давления и
температуры для осуществления контроля состояния привода.
Вращение насоса производится электродвигателем с постоянными
501
оборотами (12000-16000 об/мин). Управление наклоном шайбы насоса
осуществляется резервированным электромеханическим
сервоприводом прямого действия. Направление и скорость движения
штока привода зависит от знака и угла наклона шайбы насоса.
Следует отметить, что гидравлическая часть в этом приводе
фактически выполняет функции вариатора. Питание к приводу
подводится по силовым электрическим проводам. В зависимости от
типа электродвигателя питание может быть переменного или
постоянного тока.
Рис.7.33. Схема рулевого привода объемного регулирования с
электродвигателем постоянных оборотов и реверсивным насосом
Могут быть и другие варианты приводов объемного регулиро-
вания. В частности, рассматривается также привод, который со-
держит реверсивный электродвигатель с насосом постоянной про-
изводительности. Управление электродвигателем в этом приводе
осуществляется с помощью полупроводникового блока коммутации и
управления, который является составной частью привода . Этот блок
имеет значительный вес, соизмеримый с весом электрогидро-
механической части привода, так как в нем используются мощные
полупроводниковые элементы, рассчитанные на большие пусковые
токи. В этом приводе, в отличие от ранее рассмотренного привода
объемного регулирования, управление мощностью и положением
выходного звена привода осуществляется одним блоком (рис 7.34).
Принципиальное различие между этими двумя типами приводов
состоит в следующем:
—в первом типе привода электродвигатель, приводящий насос,
502
непрерывно вращается с постоянными оборотами в одну сторону даже
тогда, когда выходное звено привода находится в неподвижном
состоянии и нагрузка отсутствует. Это ведет к холостым потерям
энергии, составляющим 25^30% его номинальной мощности. В
известной .мере эти потери являются платой за динамические
характеристики привода;
Рис.7.34. Схема рулевого привода обьемного регулирования с
электродвигателем переменных оборотов и нереверсивным насосом
—во втором типе привода электродвигатель, приводящий насос,
является реверсивным. Это усложняет достижение высоких
динамических характеристик. Большие надежды на решение этой
проблемы возлагаются на применение перспективных электропри-
водов, использующих высокоэффективные магнитные материалы
(например, на основе самарий-кобальта). Магнитный поток этих
материалов в 5—6 раз выше материалов, применяемых в настоящее
время. Это позволит значительно повысить моментные характерис-
тики электропривода при выдерживании весовых ограничений. В
отличие от первого типа привода в этом приводе отсутствуют
холостые потери энергии при отсутствии нагрузки на привод.
Рассмотренные автономные рулевые приводы (АРП) объемного
регулирования являются совместимыми с концепцией ПЭС, несмотря
на то, что в них присутствует гидравлическая часть, используемая как
вариатор. Современное состояние работ по созданию приводов этого
типа находится на уровне внедрения опытных образцов в системы
Управления пассажирских самолетов.
Следует отметить ряд новых моментов, свойственных этим
503
приводам:
— исследования показывают, Что потери энергии в приводах этого
типа в 2—3 раза меньше потерь энергии в приводах дроссельного
регулирования;
— при работе нескольких АРП на общий орган управления
(суммирование усилий) они должны быть хорошо синхронизированы, в
противном случае будут иметь место значительные потери энергии,
так как адаптивный к нагрузке привод не различает, чем создана эта
нагрузка-аэродинамическим шарнирным моментом или другим
приводом;
— если в резервированном АРП обеспечена синхронизация ка-
налов, то внешняя нагрузка (Мш аэр.) равномерно распределяется на
каждый канал резервированного привода, т.е. независимо от уровня
резервирования привод развивает одно и тоже усилие, определяемое
нагрузкой от органа управления. Суммируются только потери
холостого хода;
— при выборе параметров АРП определяющее значение имеет
циклограмма нагрузок, поскольку от этого зависят настройка клапана
предельного давления и тепловой баланс энергии, который должен
поддерживаться во время работы привода. Кроме того, существует
определенная область в нагрузочной характеристике, где
преимущества приводов типа АРП особенно значительны. Это область
больших скоростей и умеренных нагрузок, что обычно имеет место в
полете;
— в общем случае переход к управлению самолетом на основе
приводов типа АРП означает реализацию необратимого бустерного
управления с силовыми электрическими системами питания. В связи с
этим на самолете должны также предусматриваться довольно мощ-
ные аварийные электрические источники питания на случай полного
отказа двигателей (ветрянки, ВСУ и др.);
—поскольку приводы АРП имеют более сложную конструкцию и
соответственно больший вес и габариты по сравнению с дроссельным,
которая была обусловлена необходимостью получения более
экономичного РП, то непосредственное сравнение этих приводов по
указанным показателям будет не в пользу привода АРП. Например,
504
вес АРП в зависимости от уровня резервирования может превышать
привод дроссельного регулирования в~2, 5 — 6 раз. Последняя цифра
относится к трехканальному приводу. Однако вследствие более
высокой экономичности привода АРП это увеличение веса агрегатов
может быть скомпенсировано за счет экономии топлива, которое
тратится на энергетическое обеспечение приводов системы управ-
ления. Величина затраченного топлива в общем случае будет зависеть
от продолжительности полета самолета. Поэтому при комплексном
подходе к приводу АРП, когда учитывается его влияние на общий вес
самолета, привод АРП будет иметь преимущество над дроссельным.
Наряду с этим при рациональном подходе к циклограмме нагрузок за
полет имеется возможность оптимизировать размеры АРП под
нагрузки, которые превалируют за время полета, и тем самым снизить
вес привода АРП.
Наряду с приводами объемного регулирования (АРП), в группу
высокоэффективных приводов входят также электромеханические
приводы, рис. 7.35. Интерес к этим приводам возрос в связи с
последними достижениями в области электромагнитных материалов и
твердотельной электроники, на основе которых могут быть созданы
более совершенные образцы электромеханических рулевых приводов,
способных в ряде областей применения конкурировать с традицион-
ными дроссельными электрогидравлическими приводами. Если раньше
эти приводы применялись в основном в так называемых вспомогате-
льных системах (системах управления механизацией,балансировки,
автопилота, шасси, управления створками и др.), то в настоящее время
они рассматриваются в качестве приводов основной системы
управления рулями самолета. Большие надежды возлагаются на эти
приводы при реализации концепции полностью электрического
самолета ПЭС. Опытные образцы электромеханических рулевых
приводов прошли летные испытания на летающих лабораториях
(например, самолет С-141).
Наиболее несовершенным элементом в этом приводе пока оста-
ется механический редуктор, который должен иметь очень большое
передаточное отношение, обеспечивающее понижение скоростей
вращения с 12000’’*16000 об/мин электродвигателя к 20-Ь25°/с
505
руля. Для такого редуктора характерны большой вес, трение, люфты,
малый ресурс.
эд*
сигнал
торможения
обратная связы
Рис.7.35. Схема электромеханического рулевого привода
Другие типы приводов. Как уже отмечалось, на самолетах
характерно применение в системах управления большого числа
разнообразных типов приводов—от простых гидромеханических до
сложных резервированных электрогйдравлических приводов. Это было
обусловлено эволюцией систем управления, каждый этай которой
диктовал свои требования к характеристикам приводов как в
отношении их функциональных характеристик-, так и надежности
управления. Привод практически всегда создавался под конкретную
компоновку самолета, в которую он должен вписываться без
нарушения внешних обводов аэродинамических поверхностей и силовой
схемы планера. Этим в известной мере объясняется многообразие
конфигураций приводов.
О выход
7.4.5. Энергопитание системы управления и рулевых приводов
Гидравлическая система. Как уже отмечалось, переход на
необратимое бустерное управление самолетом стал возможным только
при условии обеспечения высокой надежности гидравлических систем
питания. Учитывая высокую функциональную значимость гидро-
системы для безопасности полета, вероятность ее отказа не должна
быть больше Ю“9 на час полета. Такую малую вероятность отказа
гидросистемы можно обеспечить только на основе применения
многократного резервирования. Например, все пассажирские и
транспортные самолеты с НБУ без перехода на непосредственно
ручное управление имеют (в зависимости от числа двигателей
506
самолета) 3х 4-4х кратное резервирование. При таком резервиро-
вании сохраняется работоспособность системы управления после двух
последовательных отказов подсистем. Вероятность отказа 3 х кратно
резервированной системы на уровне 10-9 на час полета может быть
обеспечена при условии, что вероятность отказа гидравлической
подсистемы будет не более 0,5 • 10-3 на час полета.
Одно из основных требований, предъявляемых к резервированной
гидросистеме, —это исключение в ней так называемых общих точек,
т.е. таких мест в системе, которые могут быть причиной полного
отказа всей резервированной системы. Например, из—за нарушения
герметичности общей точки может произойти последовательный выход
из строя всех подсистем резервированной системы. Поэтому при
проектировании резервированной гидросистемы пассажирского
самолета соблюдают принцип полного разделения между
гидросистемами или так называемый принцип ’’кирпичной стены”. Для
соблюдения этого принципа каждая автономная подсистема не должна
иметь точек соприкосновения с другими подсистемами, начиная от
насоса, бака и кончая камерой (модулем) привода. На некоторых
самолетах иногда можно встретить наличие общих точек между двумя
(но не всеми) гидравлическими подсистемами (например, самолет
"Конкорд”). Подключение гидросистем производится через челночный
клапан, расположенный на приводе.
Каждая гидравлическая подсистема имеет один или два насоса,
установленных на двигателях. В некоторых резервированных
гидросистемах на случай отказа двигателей или насосов между под-
системами устанавливаются гидротрансформаторы, обеспечивающие
питание потребителей подсистемы, в которой происходит падение
давления из-за отказов двигателя или насоса, от исправной под-
системы. Гидротрансформатор обеспечивает полное разделение между
подсистемами ввиду наличия механической связи между гид-
роагрегатами обеих подсистем (гидромотор—насос). При
использовании гидротрансформаторов производительность насоса(-ов)
подсистемы должна быть расчитана на обслуживание потребителей
Двух подсистем.
Для надежного функционирования гидравлической системы и
507
системы управления необходимо:
— обеспечение высокой степени чистоты рабочей жидкости. Для
этой цели используется закрытая заправка жидкости, исключающая
попадание грязи и посторонних частиц, а также тонкая фильтрация
жидкости 5—Юмк с индикацией загрязнения фильтров;
— поддержание стабильного давления в каждой подсистеме
(210±15 кг/см2), что весьма важно особенно при питании каналов
резервированных приводов (сервоприводов). В противном случае
возможно снижение запасов по тяге приводов и появление
рассогласования между каналами резервированных приводов;
— исключение чрезмерных пульсаций давления, влияющих на
устойчивость приводов и снижающих ресурс системы;
— сведение к минимуму паразитных утечек внутри гидравли-
ческих агрегатов и практическое исключение перетекания жидкости из
одной подсистемы в другую, а также исключение внешних утечек
через уплотнения выходных штоков и других подвижных элементов;
— выдерживание определенного диапазона положительных темпе-
ратур рабочей жидкости +50-г80°С при температуре окружающей
среды t = — 60-г +50°С. Температура существенно влияет на
вязкость жидкости, от которой зависит скорость перемещения
выходных звеньев каналов сервопривода и, следовательно, в случае
различия скоростей отклонения каналов возможно увеличение
рассогласования между ними. В связи с этим при отрицательных
внешних температурах перед полетом должен производиться разогрев
рабочей жидкости. Для этой цели служат специальные краны
кольцевания системы, пользоваться которыми допускается только на
земле. Охлаждение рабочей жидкости в гидросистемах производится
теплообъем никами;
— применение пожаробезопасной жидкости,- которая не должна
вызывать пожара или взрыва на самолете в случае разрушения
трубопроводов и агрегатов гидросистемы. На отечественных
самолетах в настоящее время такой жидкостью является НГЖ—4,
—5;
—исключение токсичной жидкости, представляющей опасность
для обслуживающего персонала и пассажиров. К сожалению, жид-
508
кость НГЖ—4, являясь пожаробезопасной, не в полной мере безо-
пасна в отношении токсичности;
— исключение в жидкости свойства, вызывающего электростати-
ческую эрозию клапанов и золотников. Эрозия вызывает изменение
характеристик указанных устройств. В частности, “размываются”
рабочие кромки золотников, в результате чего повышаются утечки,
ухудшается точность привода и др;
— иметь высокий объемный модуль упругости. Модуль
упругости характеризует сжимаемость применяемой жидкости.
Сжимаемость является важной характеристикой, которая должна
учитываться при оценке динамических характеристик приводов.
Жидкости, используемые в гидросистемах, имеют объемный модуль
упругости от 13500 до 17500кгс/см2;
— применение в системе подлавливания баков нейтрального газа
(напр., азота) и т.д;
Для сохранения работоспособности системы управления в случае
непроизвольной остановки всех двигателей гидросистема должна
обеспечивать необходимые давление и расход рабочей жидкости для:
— выполнения операций для повторного запуска двигателей;
— обеспечения необходимой управляемости для совершения
вынужденной посадки.
В качестве аварийных источников питания на этот случай могут
быть:
—воздушная турбина (ветрянка), выдвигаемая в поток при
падении давления в гидросистемах; ветрянка приводит гидравлический
насос, который питает одну из гидросистем; обычно ветрянка имеет
турбину (винт) с изменяемым шагом для обеспечения постоянства
оборотов при снижении скоростного напора; жидкость в насос
поступает из бака этой же гидросистемы. Продолжительность работы
ветрянки определяется временем нахождения ее в потоке.
Достоинство ветрянки как аварийного источника питания состоит в
том, что для ее привода не требуется транспортировка на самолете
энергоносителя (топлива, аккумуляторов и др.). Поэтому с точки
зрения веса это самый выгодный вариант аварийного источника.
Большинство пассажирских самолетов с НБУ имеют в качестве
509
аварийного источника ветрянку;
—электрические аккумуляторы, питающие энергией
электродвигатели аварийных насосных станций. В каждой из
гидравлических подсистем обычно устанавливается насосная
станция(НС), которая помимо аварийного случая (отказ двигателей)
используется на земле при неработающих двигателях для проверки
систем перед вылетом. Емкость аккумуляторов должна обеспечивать
энергией насосные станции в течение времени, необходимого для
аварийного снижения самолета с максимальной высоты крейсерского
полета до точки совершения аварийной посадки(~20~^30 мин);
—вспомогательная силовая установка(ВСУ), приводящая
насосы. С точки зрения аварийного средства эта установка имеет
ограничения по высоте запуска. Обычно гарантированный запуск ВСУ
становится возможным с высоты ниже 6000 -г-7000м. Поэтому до
этой высоты снижения должны использоваться другие средства (напр.,
ветрянка, аккумуляторы). На некоторых самолетах, в зависимости от
типа двигателя, питание потребителей системы управления может
осуществляться от насосов, приводимых двигателями в режиме
авторотации. Этот расход жидкости должен быть оценен с точки
зрения его достаточности при осуществлении ограниченного
управления самолетом до высоты запуска ВСУ. Помимо аварийных
функций ВСУ обычно используется на земле при неработающих
двигателях. С помощью ВСУ поддерживаются необходимые условия
на борту во время стоянки самолета с пассажирами при выключенных
двигателях, осуществляется запуск двигателей и др. операции. По
соображениям безопасности полета целесообразно, чтобы питание
топливом ВСУ производилось из отдельного топливного бака, а не из
общего расходного бака. Это позволит сохранить работоспособность
ВСУ в случае отсутствия топлива в топливной системе
самолета(напр., при ошибках в заправке самолета).
Следует отметить, что в аварийном полете должны быть оценены
минимальные потребные скорости перекладки органов управления,
исходя из условий аварийного маневрирования во время снижения
самолета. Это позволит выбрать потребную мощность аварийных
источников питания.
510
На рис. 7.36 показана типовая структурная схема гидравлической
системы питания пассажирского самолета.
Электрическая система. С развитием автоматизированных
систем управления, повышением роли автоматизации в обеспечении
характеристик устойчивости, управляемости и безопасности полета
значительно ужесточились требования к надежности электрического
питания системы управления. Система электрического питания по
своей значимости практически сравнялась с гидравлической системой
питания, особенно на самолетах, на которых осуществлен переход на
электродистанционное управление рулями без резервной механической
системы. По условиям обеспечения безопасности полета полный отказ
электрического питания на самолетах с таким управлением не
допустим, как и отказ гидравлического питания на самолетах с НБУ.
Поэтому к таким системам^электропитания предъявляется требование,
чтобы вероятность полного обесточивания СДУ была бы не более 10-9
на час полета.
Такой высокий уровень надежности электрического питания
можно достигнуть только на основе многократного резервирования
цепей передачи энергии и источников питания. Важным требованием к
электрическому питанию является обеспечение его бесперерывности.
Перерывы питания, даже кратковременные, могут приводить к
нарушению работоспособности прежде всего вычислительных
устройств, электронной логики, устройств контроля и других
электронных устройств. В частности, в Нормах летной годности
(НЛГС) указано (п.5.2.7.3),что электрическое питание СДУ, если она
не резервирована механическим управлением, должно иметь
резервирование, исключающее полное(даже кратковременное)
обесточивание.
Характерной особенностью построения систем распределения
электрической энергии на самолете является необходимость
осуществления в случае отказа какой-либо шины питания(например,
обрыв)коммутации с другими шинами питания для сохранения
работоспособности потребителей отказавшей шины. Как уже
Упоминалось, в гидравлической системе такая“ком мутация” не
допустима из-за опасности утечки рабочей жидкости из всех
511
512
гидросистем. При подключении потребителей отказавшей шины к
исправной возможны значительные провалы напряжения, включая
также и перерывы питания. В общем случае проектирование систем
электроснабжения производилось на основе ГОСТов L201 на системы
электроснабжения, в которых допускаются перерывы питания до 7
сек. Это было приемлемо до тех пор, пока электроника не стала
превалировать в системе управления. Для СДУ, например, можно
говорить о допустимых перерывах питания не более нескольких
миллисекунд(54-Юме). Поэтому в настоящее время в рамках общей
системы электроснабжения самолета приходится строить
применительно к СДУ свою систему электропитания,
удовлетворяющую отмеченным жестким требованиям. В связи с
расширением использования автоматизации управления на
перспективных самолетах и повышения ее роли в обеспечении
безопасности полета подход в формировании системы
электроснабжения самолета должен быть пересмотрен с учетом
предоставления больших приоритетов системе управления самолета.
Учитывая отмеченное, необходимо для питания СДУ создание
независимых шин питания постоянного тока напряжением 28В для
каждого канала СДУ. Для обеспечения высокой надежности питания
на каждую шину должны быть подключены практически все источники
питания самолета, включая питание от:
—генераторов, установленных на двигателях,
—генератора вспомогательной силовой установки(ВСУ),
—генератора ветрянки,
—аккумуляторных батарей.
Если генераторы вырабатывают трехфазный переменный
ток(например, 115/200В номинальной частоты 400Гц), то этот ток
должен быть преобразован в постоянный с помощью выпрямителей.
Могут использоваться также, наряду с генераторами переменного
тока общей системы электроснабжения, генераторы постоянного тока,
обслуживающие только СДУ.
Объединение указанных источников питания на каждой шине
каналов СДУ должно производиться с помощью диодных развязок.
Помимо общесамолетных аккумуляторных батарей большой емкости,
513
установленных в шинах постоянного тока, каждая шина СДУ должна
иметь свой аккумулятор небольшой емкости, который должен
обеспечивать бесперерывное питание шины, т.е. служить буферным
источником питания. Емкость такого аккумулятора должна быть
расчитана на питание шины СДУ по крайней мере в течение — 5мин.
Это время считается достаточным для осуществления попыток по
восстановлению стабильного питания после кратковременного
обесточивания основных источников питания борта самолета.
При реализации концепции ПЭС или переходе на управление
рулями с помощью автономных приводов объемного регулирования
(АРП)или электромеханических приводов необходимо также надежное
электрическое питание силовых рулевых приводов на уровне
необратимого бустерного управления. В общем случае необходимо,
чтобы силовое электрическое питание строилось на основе как
минимум 3-х независимых систем питания по аналогии с
гидравлическими системами НБУ. При этом в отличие от
гидросистемы в электрической системе самолета возможна
коммутация между различными шинами для восстановления питания в
случае отказа какой-либо шины. Силовое электрическое питание
должно содержать все ранее рассмотренные виды аварийных
источников питания на случай отказа(остановки)двигателей самолета.
Для ограничения мощности аварийных источников должно быть также
ограничено число потребителей электроэнергии на приоритетной основе
для такой аварийной ситуации. Для этой цели в системе распределения
энергии должны быть установлены устройства, контролирующие
состояние электрической системы питания и производящие опереции
по изоляции отказавших шин(цепей) и определяющие приоритетные
потребители электроэнергии в аварийном случае. При наличии
секционирования органов управления в зависимости от состояния
системы управления, предшествующего аварийной ситуации,
связанной с отказами двигателей, может быть отключена часть
органов управления.
Вид первичного питания системы электроснабжения (переменный
или постоянный ток) на самолетах с приводами, использующими
силовое электрическое питание, должен выбираться с учетом типа
514
применяемых в этих приводах электродвигателей для того, чтобы
свести к минимуму преобразование энергии первичной системы
электроснабжения во вторичную. Например, в настоящее время в
приводах с электрическим силовым питанием рассматривается
возможность применения как асинхронных двигателей 3-х фазного
переменного тока(115/200В, 400Гц), так и вентильных двигателей
постоянного тока напряжением 270В. На рис.7.37 показан пример
структурной схемы резервированной системы электрического питания
самолета с автоматизированной системой управления.
7.5. Система управления механизацией крыла(СУМК)
Как было показано в главе 3, основное назначение механизации
крыла—это прежде всего снижение взлетно-посадочных скоростей
путем создания большого коэфициента подъемной силы на этих
режимах полета. Как известно, величина посадочной скорости
оказывает существенное влияние на безопасность выполнения
посадки. В связи с этим наблюдается определенная тенденция
применения все более мощной механизации крыла.
Наиболее распространенной конфигурацией механизированного
крыла является крыло, которое содержит в носовой части предкрылки,
а в хвостовой части закрылки. Наряду с предкрылками в носовой части
крыла используются также щитки Крюгера. Конструкция закрылков
может быть различной—от простых однозвенных поворотных
закрылков до сложных многозвенных закрылков типа Фаулера,
которые помимо вращательного движения имеют также и
поступательное движение, чем достигается одновременно изменение
кривизны профиля крыла и увеличение площади крыла. По
соображениям безопасности полета выпуск и уборка предкрылков и
закрылков должны осуществляться в разные моменты времени—при
выпуске вначале отклоняются предкрылки, а затем закрылки; при
Уборке сначала убираются закрылки, а затем предкрылки. Поэтому
предкрылки и закрылки обычно имеют независимые системы
управления со своими исполнительными устройствами.
Традиционно сложилось мнение, что системы управления
515
Рис.7.37. Схема резервированной электросистемы питания рулевых приводов
516
механизацией крыла с точки зрения безопасности полета являются
второстепенными системами, т.е. при их отказе возможно безопасное
завершение полета. Однако значимость этих систем для безопасности
полета существенно возросла в последнее время вследствие
значительного увеличения их эффективности. Поэтому к ним в
настоящее время предъявляются повышенные требования по
надежности.
Аэродинамические поверхности механизации крыла,
используемые на взлетно-посадочных режимах, обычно имеют
небольшие скорости отклонения, например, время полной перекладки из
одного крайнего положения в другое составляет 30 40с. Эта
скорость перекладки ограничивается энергетикой приводов. За это
время летчик имеет возможность компенсировать изменение
балансировки самолета, вызванное изменением конфигурации
самолета.
Поскольку средства механизации размещаются на крыле и4
непосредственно влияют на подъемную силу, в целях обеспечения
безопасности полета к ним предъявляются три основных требования:
1) . Должен исключаться несимметричный выпуск (или уборка)
средств механизации, приводящий к непарируемому моменту крена;
2) . Должен исключаться самопроизвольный выпустили уборка)
средств механизации в полете;
3) . При несрабатывании средств механизации в полете должна
обеспечиваться возможность безопасного завершения полета(включая
возможность ухода самолета на аэродром другого класса(с большей
длиной ВПП).
В общем принципы построения систем управления механизацией
крыла в основном определяются двумя важными вопросами:
—получение максимальной эффективности при использовании
механизации, что в большей степени является аэродинамической
задачей. Эта задача решается выбором определенного типа
механизации для данной компоновки крыла и самолета, места ее
расположения на крыле, координации работы средств механизации на
различных режимах полета с учетом работы органов управления для
получения максимального эффекта(см.главу 3);
517
—обеспечение высокой безопасности полета как при нормальной
работе механизации, так и при возможных отказах в ней. Для решения
этой задачи используются различные конструктивные и структурные
методы.
Далее основное внимание уделено второму вопросу—принципам
обеспечения высокой надежности системы управления механизацией
крыла.
Одно из основных положений, на основе которого строится
концепция безопасности полета при отказе СУМК, состоит в том, что
самолет должен завершать безопасный полет в гладкой конфигурации
крыла при убранных закрылках. Это положение выполняется для всех
пассажирских самолетов. При этом допускается увеличение
посадочной скорости и длины пробега при посадке. При этой ситуации
потребуется более длинная ВПП.
Самолет может оказаться в положении с убранными закрылками
в гладкой конфигурации в результате отказов в СУМК, когда
становится невозможным выпуск закрылков.
Закрылки и предкрылки имеют, как правило, независимые
системы управления со своими приводами. Такая структура позволяет
обеспечить большую эффективность механизации и повысить
безопасность полета. Например, при отказе закрылков возможно
использование предкрылков или, наоборот, если отказывают
предкрылки, то имеется возможность отклонения закрылков на
посадке на некоторый промежуточный угол.
На большинстве пассажирских самолетов отклонение закрылков
и предкрылков производится вращательными электрическими или
гидравлическими приводами и шариковыми или самотормозящимися
подъемниками. Однако имеются самолеты, например, DC-8,-9,-10, на
которых для отклонения закрылков используются поступательные
гидравлические приводы.
Приводы закрылков и предкрылков, как правило, дублированы.
Объединение вращательных приводов осуществляется по
дифференциальной схеме(при наличии единой трансмиссии).При отказе
любого из них выпуск и уборка механизации может быть произведена
одним исправным приводом, но с уменьшенной вдвое скоростью.
518
На некоторых самолетах(например, В747, Ан-124) для
повышения безопасности полета применяются внутренние и внешние
секции закрылков, отклонение которых производится от автономных
подсистем, содержащих свою трансмиссию и привод. При отказе
любой из подсистем обеспечивается возможность работы другой.
Необходимость такой меры безопасности вызвана возможностью
возникновения в СУМК механических отказов типа заклинение или
рассоединение(разрушения). При нерезервированной трансмиссии один
отказ такого типа выводит СУМК из строя. Учитывая, что в
соответствии с последними требованиями FAR-25(CIIIA) и НЛГС
отказ типа рассоединения должен рассматриваться безотносительно к
его вероятности возникновения, разработчики систем вынуждены
принимать дополнительные меры безопасности в структуре СУМК,
чтобы самолет не оказался в результате первого отказа(хотя и
маловероятного рассоединения) прежде всего в гладкой конфигурации
перед посадкой. Хотя и существует положение, согласно которому
самолет должен совершать безопасную посадку и в гладкой
конфигурации, однако ее выполнение производится с отклонением от
нормальных процедур и требует от экипажа повышенного мастерства
и определенных условий для выполнения посадки в этой
ситуации(например, наличие аэродрома с удлиненной ВПП). Что
касается механического отказа типа заклинения, то требования FAR-
25 и НЛГС допускают подтверждение практической невероятности
такого отказа расчетными методами на основании имеющегося опыта
проектирования подобных систем. Вместе с тем применение
резервирования позволяет уйти от “общей точки” в СУМК, какой
является, например, трансмиссия и сохранить ее работоспособность с
некоторой потерей эффективности как при отказах типа рассоединения,
так и заклинения.
Важнейшим условием обеспечения безопасности полета является
синхронное отклонение закрылков и предкрылков на консолях крыла
Эта задача решается с помощью общей механической трансмиссии
Д^я всех секций (или группы секций, например, внутренних и внешних
секций закрылков) левой и правой консолей крыла.
Ввиду того, что механическая трансмиссия практически на всех
519
пассажирских самолетах нерезервирована (главным образом из-за
весовых ограничений), на случай ее рассоединения или разрушения
предусматриваются специальные меры безопасности для исключения
асинхронного отклонения секций закрылков. Эти меры включают:
—применение электрической системы контроля; система
контроля измеряет отклонение секций закрылков и в случае появления
несинхронное™ в их отклонении выше допустимого уровня (А 54 зак
2...5°) выдает сигнал на выключение системы управления
закрылками(предкрылками)и на стопорение системы;
—стопорение системы(трансмиссии) с помощью электро-
магнитных тормозов, размещенных на концевых частях консолей
крыла (на конце трансмиссии).
Кроме того, для повышения надежности работы трансмиссии
предусматриваются специальные меры, ограничивающие на нее
нагрузки. К ним относятся:
—применение муфт предельного момента, с помощью которых
ограничивается момент от привода, в том числе при заклинении
или“затирании”трансмиссии;
—применение системы автоматического ограничения нагрузок на
закрылки (и соответственно на трансмиссию) в зависимости от
скорости полета (В747, А300В, DC-10). При увеличении скорости
полета автоматически уменьшается угол отклонения закрылков.
Наряду с этим применяется также мера, которая защищает
закрылки от “просадки” со скоростью, превышающей допустимую
(например, при разрушении выходного звена привода, связывающего
привод с трансмиссией). В случае превышения скорости просадки
выше допустимой выдается сигнал на электромагнитные тормоза
трансмиссии, которые фиксируют закрылки.
Отмеченные функции защиты от асимметрии и само-
произвольного ухода механизации крыла в СУМК отечественных
пассажирских самолетов(Ил-86, Ил-96-300, Ту-204 и др.) возложены
на автономную систему управления электромагнитными тормозами
типа СУЭТ-5.
Управление приводами СУМК на большинстве зарубежных
самолетов осуществляется с помощью механической(обычно
520
тросовой) системы. В этом случае упрощается решение проблемы,
связанной с самопроизвольным выпуском (или уборкой) закрылков и
предкрылков.
Практически на всех отечественных самолетах длительное время
используется резервированное электродистанционное управление
закрылками и предкрылками(Ил-62, Ту-154, Ил-76, Ил-86, Як-42,
Ил-96-300, Ан-124 и др.). Электродистанционное управление является
более перспективным вследствие большей гибкости в оптимизации
характеристик системы, в расширении автоматизации управления
закрылками и осуществлении унификации системы механизации.
В последнее время существенно расширились функции СУМК
современных и перспективных самолетов. К наиболее существенным
из них относятся:
— приведение закрылков и предкрылков во взлетное, посадочное
и убранное положения, это обычно следящее перемещение закрылков
в положение, заданное рычагом управления закрылком (основное) и
дискретное—от нажимных переключателей(резервный режим);
— защита от ассимметрии при обрыве трансмиссии или вала
привода и от перегрузки приводом или внешней нагрузкой;
— автоматическая уборка закрылков до взлетного положения при
уходе на второй круг;
—автоматическая коррекция положения закрылков на
взлетно—посадочных режимах полета по условиям обеспечения
максимального аэродинамического качества(минимизация расхода
топлива)и безопасности полета путем выдерживания требуемых
запасов по скорости сваливания, а также ряд других функций.
Реализация этих функций осуществляется аналого-цифровыми
или цифровыми блоками управления и контроля. Каждый блок
управления и контроля закрылков имеет два независимых
самоконтролируемых канала. При отказе любого из каналов
управление закрылками производится от исправного канала. В случае
отказа двух каналов вычислителя управление закрылками возможно с
помощью резервной цепи в обход вычислителей СУМК.
На рис.7.38 представлена типовая структура СУМК. В состав
СУМК входят следующие основные элементы: рычаг управления с
521
задатчиками положения закрылков; цифровой вычислитель СУМК;
электромеханический или электрогидравлический привод, состоящий из
двух независимых каналов, объединенных с помощью
дифференциального редуктора; механическая трансмиссия,
обеспечивающая передачу момента от привода к закрылкам и
одновременно осуществляющая синхронизацию их отклонения;
винтовые механизмы(шариковые или самотормозящиеся),
преобразующие вращательное движение трансмиссии в
поступательное перемещение; муфты предельного момента,
защищающие механическую систему от перегрузки;
электромеханические тормоза, фиксирующие трансмиссию закрылков
в случае появления несинхронности в их отклонении, концевые
выключатели, защищающие систему от ударов об ограничители в
крайних положениях; датчики отклонения закрылков, выдающие
информацию о текущем положении закрылков; мультиплексные линии
сзязей, с помощью которых осуществляется комплексирование всех
устройств СУМК.
Указанная типовая структура может использоваться как единая
для всех закрылков крыла(при общей трансмиссии), так и для группы
секций закрылков в зависимости от требований к безопасности полета
конкретного самолета при отказе СУМК. Естественно, что в
последнем случае возрастает число элементов СУМК из-за более
глубокого резервирования.
Дальнейшее развитие СУМК будет направлено на расширение
адаптивности крыла с целью повышения его несущих свойств,
аэродинамического качества не только на взлетно-посадочных
режимах, но и на других режимах, включая крейсерские режимы
полета. Для решения этой задачи необходимо применение механизации
крыла, состоящей из отдальных независимых секций, управляемых
отдельными приводами от цифровой СУМК. Такая СУМК позволяет
придать крылу желаемую кривизну профиля по размаху крыла в
зависимости от режимов полета. Это потребует в связи с увеличением
секций закрылков большого числа приводов для управления
механизацией. Фактически такая структура СУМК будет мало чем
отличаться от структуры СШУ.
522
Рис.7.38. Схема резервированной системы управления механизацией крыла
523
7.6. Некоторые особенности систем управления
эксплуатируемых магистральных самолетов
Структурные схемы систем управления самолетов В747, DC-10,
L-1011, А300В. С 5 А, В757, В767, А310, А320,
Ил-86, и др. приведены на рис.7.39 ”Ь7.65.В результате анализа
этих схем можно отметить перечисленные ниже особенности
штурвального управления этих самолетов.
Рис.7.39. Схема системы управления рулем высоты самолета Боинг
747
1 — штурвальные колонки; 2 — сервоприводы САУ:
3—устройства отключения и пересиливания сервопривода САУ;
4—сигналы выравнивания подканалов САУ; 5—двухкамерные рулевые
приводы внешних секшй руля высоты; 6—комбинированные двухкамерные
рулевые приводы внутренних секций руля высоты; 7—загрузочная
пружина; 8—дублированный гидравлический автомат усилий;
9—внутренние секции руля высоты; 10—внешние секции руля высоты
Все самолеты имеют необратимые бустерные системы
управления без перехода на ручное управление. Питание рулевых
приводов самолетов В747, L-1011, С5А, Ил-86, Ан-124, Ил-96-300
осуществляется от четырех независимых гидросистем, а самолетов
DC-10,A300B,A310,B757_767,A320,Ty-204—от трех; однако во
всех случаях при отказе двух гидросистем обеспечивается безопасное
524
завершение полета. На всех самолетах широко применяется
секционирование органов управления. При этом в канале крена, наряду
с общепринятым секционированием интерцепторов, используется
секционирование элеронов на внешний и внутренний(В747, DC-10,
А300В, А310,—)с подключением внешнего элерона только на взлетно-
посадочных режимах; секционирование руля высоты осуществлено на
всех самолетах, кроме L-1011. Для повышения эффективности
управления по тангажу (особенно на посадочных режимах) на
самолете L-1011 применен управляемый стабилизатор, кинематически
соединенный с рулем высоты. Для повышения эффективности
управления по рысканью на самолете DC-10, Ан-72 и Ан-74
используется двухзвенный руль направления, первое звено которого
приводится рулевыми приводами, а второе—кинематическими связями.
Рули направления этих самолетов имеют также обычное
секционирование по размаху руля. Секции рулей и элеронов
отклоняются рулевыми приводами, имеющими две и более камер. В
последнее время предпочтение отдается рулевым приводам,
состоящим из параллельно установленных однокамерных модулей,
вместо тандемных. Такая конструкция позволяет избежать потери
секции руля при рассоединении штока привода с секцией (Ил-86, Ил-
96-300, Ан-124, Ту-204, А300В, А310, А320,—); на секциях
интерцепторов практически всюду используются однокамерные
приводы. Стабилизатор самолета L-1011 управляется четырьмя
однокамерными приводами.
Для обеспечения управления самолетом в случае заклинения,
разъединения или разрушения механической проводки в каналах
тангажа и крена всех самолетов применяются две механические (чаще
тросовые) проводки со специальными устройствами (муфты расцепки,
пружинные тяги), позволяющими сохранить управление при таких
отказах (B747,DC-10,L-1011,А300В,С5А,В757,В767, АЗ 10,Ил-
86,...). На самолетах Ан-124 и Ил-96-300 применение принципа
управления по усилию позволило решить вопросы безопасности полета
С одной механической проводкой.В случае ее отказа(рассоединение или
заклинение) управление самолетом осуществляется через
электродистанционный контур управления по усилиям. Для снижения
525
трения в системе(особенно при двух механических проводках), наряду
со специальным конструктивным выполнением тросовой проводки, в
каналах крена самолетов В747, А300В, DC-10, Ил-86,... установлены
вспомогательные гидромеханические приводы; в каналах тангажа
самолета В747 и крена самолета L-1011 применена последовательная
установка рулевых приводов секций органов управления(привод
последующей секции управляется от предыдущей секции). Все эти
меры позволяют получить приемлемые для летчиков харектеристики
систем управления.
Рис.7.40. Схема системы управления элеронами и
интерцепторами самолета
1—штурвалы; 2—комбинированные двухкамерные приводы;
3—программные механизмы; 4—устройства отключения внешних
элеронов; 5—двухкамерные рулевые приводы внешних элеронов;
6—двухкамерные рулевые приводы внутренних элеронов;
7—внешние элероны; 8—внутренние элероны; 9—рукоятка
управления воздушными тормозами и интерцепторами; 10—пульт
управления воздушными тормозами; И—суммирующие механизмы
интерцепторов; 12 — гидравлический кран;
13—однокамерные рулевые приводы интерцепторов; 14—секции
интерцепторов; 15—интерцепторы используемые для управления по
крену и торможения; 16—интерцепторы используемые только для
торможения
526
Рис.7.41. Схема системы управления рулем направления самолета
Боинг 747
1—педали; 2—тяга связи педалей правого и левого летчиков;
3—тросовая проводка системы триммирования; 4—загрузочное устройство
с механизмом триммирования; 5—регулятор передаточных чисел Аш;
6—комбинированные двухкамерные рулевые приводы; 7—дублированиный
демпфер рыскания; 8—секции руля направления
Рис.7.42. Схема системы управления рулем высоты самолета DC-10:
1—штурвальные колонки; 2—тросовая проводка; 3—автомат
усилий; 4—сервоприводы САУ; 5—комбинированный
двухкамерный рулевой привод; 6—секции руля высоты;
7—сервопривод системы управления подъемной силой; 8—выход от
системы управления подъемной силой
527
Рис.7.43. Схема системы управления элеронами и интерцепторами
самолета DC-10
1—штурвалы; 2—загрузочные механизмы; 3—механизм
триммирования; 4—устройства отключения; 5—комбинированные
двухкамерные рулевые приводы; 6—внешние элероны; 7—внутренние элероны;
8—вспомогательные рулевые приводы; 9—устройства для балансировки;
10—механизм изменения передачи от элеронов к интернепторам;
11—система управления подъемной силой; 12—устройства включения;
13—выход от закрылков; 14—система автоматического управления
интерцепторами на земле; 15—система управления интерцепторами;
16—однокамерные рулевые приводы интерцепторов; 17—секции итнерцепторов;
18—выход от закрылков и предкрылков
Для уменьшения разброса производных усилий по перегрузке
вследствие изменения режимов полета, центровки и веса самолета
градиент загрузки штурвальной колонки в канале тангажа
самолетов(В747, DC-10, А300В, L-1011, АЗ 10, В757, В767, С5А,
MD-11, Ил-86, Ан-124,—) регулируется в зависимости от
скоростного напора и положения стабилизатора. Самолеты со
значительной автоматизацией продольного управления(Ил-96-300, Ту-
204, А320,...) имеют нерегулируемую пружинную загрузку.
Требуемые значения производных усилий и перемещений по
528
перегрузке на этих самолетах обеспечиваются с помошью автоматики
СУУ и СДУ. В каналах крена и курса практически всех самолетов
применены нерегулируемые пружинные загрузочные устройства.
Рис.7.44. Схема системы управления рулем направления самолета
DC-10
1—педали; 2—тяга связи педалей правого и левого летчиков;
3—тросовая проврдка системы триммирования; 4—загрузочное устройство с
механизмом триммирования; 5—комбинированные двухкамерные рулевые
приводы; 6—демпфер рыскания; 7—передние секции руля
направления; 8—задние секции руля направления
На самолетах В747, DC-10, А300В, С5А, В757, В767, АЗ 10,
Ил-96, Ил-86, MD-11, Ил-96-300, Ту-204, Як-42 для продольной
балансировки используется триммируемый стабилизатор, что
обеспечивает в течение полета нейтральное положение штурвальной
колонки. Летчик всегда имеет возможность отклонить руль высоты на
полный угол (при этом возможно исключить триммерный механизм как
потенциальный источник активных отказов). На самолете L-1011 с
управляемым стабилизатором продольная балансировка
осуществляется с помощью специального “медленного”
электромеханического привода, включенного в проводку управления
Дифференциально. Системы управления стабилизатором всех
самолетов сохраняют свою работоспособность, как минимум, при
одном отказе как в управляющих цепях, так и силовом приводе
529
15
Рис.7.45. схема системы управления рулем высоты и стабилизатором
самолета L-1011
1—штурвальные колонки; 2—устройства расцепки; 3—пружинные тяги
с сигнализаторами заклинения механической проводки; 4—тросовая проводка;
5—сервоприводы САУ; 6—тросовая проводка системы триммирования;
7—цепь балансировки; 8—автомат усилий с механическим триммированием;
9—автомат усилий с электрическим трииммированием и с коррекцией усилий
по числу М; 10—механизмы нелинейности; 11—связи для синхронизации
триммерных механизмов; 12—золотниковые коробки; 13—силовые цилиндры;
14—система обратной связи; 15—стабилизатор; 16—руль высоты
стабилизатора. Управление стабилизатором на всех самолетах(кроме
L-101 ^осуществляется с помощью дублированных электрических
цепей. Однако на случай их отказа на самолетах В747, DC-10,
А300В, С5А, В757, В767, А310, Ту-204, MD-11, имеется
резервное механическое управление от специального штурвальчика
или рычага, который одновременно является индикатором положения
стабилизатора и его движения. Самолеты В747, DC-10, А300В,
В757, В767, АЗ 10, Ил-76, Ил-86 имеют минимальную автоматизацию
ручного управления: в канале курса—демпферы рысканья и механизм
регулирования Кшн(последнее—главным образом по условиям прочности);
в канале тангажа используется улучшение характеристик
управляемости по скорости на предельных числах М, осуществляемое
530
регулированием загрузки штурвальной колонки по числу М. На
самолетах более поздних выпусков(за исключением С5А), Ан-124,
А320, Ил-96-300, Ту-204, MD-11 в продольном управлении
применяются системы улучшения устойчивости и управляемости
(СУУ) различного уровня сложности, включая СУУ для самолетов с
малыми запасами устойчивости (Ан-124, Ил-96-300), а также
системы электродистанционного управления (А320,Ту-204).
Рис.7.46. Схема системы управления элеронами и интерцепторами
самолета L-1011
1—штурвалы; 2—устройство расцепки; 3—пружинные тяги с
сигнализаторами механического заклинения; 4—механизм триммирования;
5—загрузочный механизм; 6—трехкамерные рулевые приводы внутренних
элеронов; 7—пружинная тяга; 8—внутренние элероны;
9—двухкамерные рулевые приводы внешних элеронов; 10—внешние элероны;
И—рычаг управления у летчика; 12—управление подъемной силой;
13 автоматитеский выпуск наземных интерцепторов; 14—селекторы;
15 смесители; 16—выход от закрылков; 17—однокамерные
рулевые приводы интерцепторов; 18—секции интерцепторов;
19 интерцепторы для упранвления по крену и торможения в воздухе;
20 интерцепторы для торможения на земле
531
Рис.7.47. Схема системы управления рулем направления самолета
L-1011
1—педали; 2—тяга связи педалей правого и левого летчиков;
3—тросовая проводка системы триммирования; 4—загрузочное
устройство с механизмом триммирования; 5—гидросистемы А. В С.;
6—демпфер рыскания; 7—блок управления; 8—электрокраны;
9—двухкамерные силовые цилиндры; 10—система обратной сзязи;
11—цилиндры ограничителей отклонения руля направления;
12—электрокраны; 13—система ограничения хода руля направления;
14—руль направления
Для предотвращения попадания на предельные углы атаки все
самолеты оборудованы тактильной сигнализацией (тряска
штурвальной колонки), предупреждающей о приближении к срывным
режимам. На некоторых самолетах, помимо тактильной сигнализации,
применены ограничители опасных режимов(ОПР), которые
препятствуют выводу самолета на предельные режимы полета (Ан-
124, А320, В767, Ил-96-300, Ту-204).
Таким образом, штурвальное управление пассажирских
самолетов большой пассажировместимости—это высоконадежное
необратимое бустерное управление без перехода на ручное, при легком
(по усилиям) управлении самолетом, с автоматизацией, используемой
для улучшения характеристик устойчивости и управляемости. На
смену механическим системам управления с ограниченной
532
автоматизацией все больше внедряются системы, использующие
электродистанционное управление рулями(А320,Ту-204,...). На основе
СДУ осуществляется комплексирование различных автоматических
систем самолета, обеспечивается высокий уровень пилотажных и
летно-технических характеристик самолета, повышается комфорт
экипажа и пассажиров, упрощается эксплуатация системы
управления.
Рси.7.48. Схема системы управления рулем высоты самолета А300В
1—штурвальные колонки; 2—тросовая проводка; 3—выход от
вычислителей загрузки; 4—гидромеханические блоки автомата усилий;
5—загрузочная пружина; 6—автомат усилий; 7—пружинные тяги;
8—выход от стабилизатора; 9—сервоприводы САУ; 10—устройства
отключения сервоприводов; 11—устройство пересиливания сервопривода;
12—однокамерные рулевые приводы руля высоты; 13—руль высоты
Практически все рассмотренные магистральные пассажирские
самолеты оборудованы системами автоматического управления
(САУ), которые по функциональному назначению и уровню
резервирования обеспечивают автоматическое управление на всех
этапах полета, включая посадку по категории Ш ИКАО(В747, DC-
10, L-ЮН, А300В, А310, В757, В767, А320, Ил-96-300, Ту-204,
11»—), САУ самолетов DC-10,L-1011,А300В,... состоят из двух
533
Рис.7.49. Схема системы управления элеронами и интерцепторами самолета
А-300В
1—штурвалы; 2—пружинные тяги с сигнализаторами механического заклинения;
3—вспомогательный рулевой привод; 4—сервопривод САУ; 5—сигнал
зависания от закрылков; 6—механизм триммирования; 7—загрузочный
механизм; 8—загрузочные пружины; 9—центрирующие пружины;
10—устройства отключения; И—трехкамерные рулевые приводы внутреннего и
внешнего элеронов; 12—пружинные тяги; 13—рычаг управления у летчика;
14—сервопривод автоматического управления наземными интерцепторами;
15—селектор управления интерцепторами; 16—гидравлические цилиндры;
17—однокамерные рулевые приводы секций интерцепторов; 18—внешние элероны;
19—внутренние элероны; 20—интерцепторы-элероны; 21—интерцепторы-
воздушные тормоза; 22—интерцепторы наземного торможения; 23—люфтовое устройство
дублированных подсистем (четырех подканалов); при возникновении
отказа в одном из подканалов отключается одна дублированная
подсистема, а при появлении отказа в следующем из подканалов
происходит полное отключение САУ. На крейсерском режиме полета
на этих самолетах работает только одна дублированная подсистема
САУ (другая находится в резерве), при этом обеспечивается
возможность летчику подключить резервную подсистему. При
534
автоматической посадке включаются обе подсистемы и заход на
посадку по категории III ИКАО допускается только при всех
исправных каналах САУ.
Рис.7.50. Схема системы управления рулем направления самолета
А-300В
1—педали; 2—тяга связи педалей правого и левого летчиков;
3—тросовая проводка системы триммирования; 4—загрузочное
устройство; 5—сервопривод САУ; 6—устройство пересиливания;
7—сервопривод демпфера рыскания; 8—демпфер рыскания;
9—регулятор передаточных чисел /Сш; 10—центрирующая пружина;
И—пружинные тяги; 12—однокамерные рулевые приводы руля
направления; 13—руль направления
САУ самолетов В747, В757, В767, Ту-204, Ил-96-300,... имеют
трехкратное резервирование, обеспечивающее сохранение
работоспособности при первом отказе и безопасное отключение САУ
при втором отказе.
Многие самолеты(ПС-К), L-1011, А300В, А310,—) имеют
совмещенное управление на всех режимах полета, включаемое с
начала взлета. Сервоприводы САУ в режиме совмещенного
управления работают от датчиков усилий, установленных на
штурвальных колонках или проводке.
По требованиям нормативных документов (НЛГС, FAR-25) в
САУ должны быть обеспечены пересиливание и отключение
сервоприводов от проводки управления. Создание надежного и
компактного устройства пересиливания и отключения для многократно
Резервированной САУ сложно, особенно, если подканалы
535
резервированного сервопривода связаны общей траверсой. В САУ
рассматриваемых самолетов для упрощения устройства переключения
часть реальных подканалов сервопривода заменяют их электронными
аналогами или делают устройства подключения для каждого
подканала. Например, в дважды сдвоенной САУ самолетов L-1011 и
А300В четырехканальный сервопривод системы состоит из двух
реальных и двух модельных (электронных) подканалов с 'простыми
переключающими устройствами в каждом реальном подканале;
сервоприводы САУ продольного канала DC-10 имеют четыре
отключающих устройства, а на самолетах В747, В757, В767
установлены три таких устройства; безопасность полета в случае
отказов устройств переключения (вероятность которых повышается с
увеличением числа отключающих устройств) достигается
применением на этих самолетах межканальной механической связи по
входу рулевых приводов и пружинных звеньев перед каждым рулевым
приводом.
стабилизатор
управление балансировкой
резервная балансировка
Трнммировоние
секция
нз САУ.
СП САУ
резервное
управление
загрузкой
_____ тгту
ПЗ—пружинная загрузка РП
ПТ—пружинная тяга
Рис.7.51. Схема системы управления рулем высоты и
стабилизатором самолета Ил-86
Механическая проводка
РП ГО
Привод
загрузки
Привод
триммирования
секция
РУЛЬ
ВЫСОТЫ
ПТ
На самолетах, оборудованных СДУ(А320, Ту-204, Ан-124, Ил-
96-300,...) включение САУ производится через сервоприводы(рулевые
приводы) СДУ. Поэтому при отключении САУ сервоприводы
536
продолжают работать, обеспечивая отработку сигналов СДУ и СУУ
Рис.7.52. Схема системы управления элеронами и интерцепторами
самолета Ил-86
Вычислитель
СА>
ПТ—пружинная тяга
ПЗ—пружинная загрузка
ДЗ—дополнительная загрузка
привод триммирования
резервное
управление
Рис.7.53. Схема системы управления рулем направления
руль
направления
самолета Ил-86
537
Рис.7.54. Схема управления рулем высоты и стабилизатором
самолета с помощью комбинированнаой системы (МСУ +
СДУ)
устройство
расцепки
элерон ПТ Пружинная тяга элерон элерон элерон
АЗ—Аварийная загрузка
Рис.7.55. Схема управления
элеронами и интерцепторами
самолета с помощью комбинированной системы
538
из САУ
Вычислитель СДУ
руля направления
ПТ—пружинная тяга
ПЗ—пружинная загрузка
Датчик
'э’м электронная
ЭМ модель
привод г“т|
механизма T
Педали
резервное управление
руль направления
Рис.7.56. Схема управления рулем направления самолета с помощью
комбинированной системы
рис.7.57. Схема системы управления рулем высоты транспортного
самолета
539
штурвальчик
механического
триммирования
штурвал
датчики усилий
Датчик
триммирования
рукоятка
расцепки
Механическая проводка
Рис.7.58. Схема системы управления
элеронами и интерцепторами
транспортного самолета
аварийное управление
рулем направления
Рис.7.59. Схема системы управления рулем направления
транспортного самолета
540
На всех рассматриваемых самолетах с механической проводкой
управления сервоприводы САУ каналов тангажа и крена включены в
механическую проводку по параллельной схеме,обеспечивающей
отработку рычагов управления.
стабилизатор
вычислитель
СДУ
(аналоговый)
Рис.7.60. Схема системы управления рулем высоты и
стабилизатором, использующая разнородное резервирование
Сервоприводы САУ практически всех рассмотренных самолетов
резервированные, электрогидравлические. В связи с тенденцией
ресширения применения систем электродистанционного управления в
качестве основного управления на перспективных пассажирских
самолетах отработка всех сигналов систем, воздействующих на
РУли(СУУ, САУ, ОПР, и др.), производится приводами СДУ. Обычно
это приводы интегральной компоновки, которая объединяет в одном
агрегате сервопривод и рулевой привод и имеет только электрические
входы (А320, Ту-334,...). Поэтому сервоприводы САУ как
самостоятельные исполнительные устройства САУ теряют свое
значение. Функции по отработке сигналов САУ переходят к СДУ.
В начале эксплуатации большинства рассмотренных здесь
пассажирских самолетов применялись в основном аналоговые
ПТ-пружиная тага
ПЗ-пружиная загрузи
ДЗ—дополнительная загрузка
541
автопилоты (В747, DC-10, L-1011, A300B, Ил-86,...). Однако в
дальнейшем при модификациях самолетов аналоговое оборудование
Рис.7.61. Схема системы управления
элеронами и интерцепторами,
использующая разнородное резервирование
Рис. 7.62. Схема системы управления рулем направления, использующая
разнородное резервирование
542
было заменено на цифровое. Применение цифровой техники
существенно расширило возможности автоматического управления,
повысило точность и надежность автоматического управления.
Рис.7.63. Схема системы управления рулем
высоты и стабилизатором
самолета А320
Рис.7.64. Схема системы управления элеронами и интерцепторами самолета
А320
543
Рис.7.65. Схема системы управления рулем направления самолета А320
Таким образом, автоматическое управление современных и
перспективных пассажирских самолетов основано на использовании
САУ на всех этапах полета; это разгружает экипаж, обеспечивает
достаточно точное выдерживание заданных режимов типовой
траектории полета, особенно при подходе к земле. Комфортность
управления самолетом летчиком в режиме САУ обеспечивается
применением совмещенного управления.
7.7. Надежность систем штурвального управления
7.7.1 Резервирование в системе управления
(Общие соображения)
Современные магистральные самолеты, эксплуатирующиеся в
широком диапазоне режимов полета, имеют сложные
автоматизированные системы управления. В соответствии с
требованиями к надежности управления и безопасности полета
вероятность полного отказа таких систем должна быть, по крайней
мере, не более 10-8-М0-9 за час полета. Оценки показывают, что при
существующем уровне надежности элементов выполнить это
требование возможно только на основе резервирования.
Резервирование—способ повышения надежности элемента
(системы), главным образом, введением резервных (избыточных)
элементов (систем) сверх минимально необходимых для выполнения
544
системой заданных функций.
Резервирование может быть раздельным (поэлементным), общим
и смешанным. При раздельном резервировании—резервируются
отдельные элементы системы. При общем—резервируется система в
целом. Смешанное резервирование есть совмещение раздельного и
общего резервирования. Возможны еще и другие виды
резервирования, но не связанные с введением в систему избыточных
элементов (например, функциональное, временное, нагрузочное и др.).
Из теории надежности известно, что надежность системы при
раздельном резервировании выше, чем при общем. Однако при
практической реализации раздельного резервирования для обеспечения
работоспособности резервированной системы при отказах требуется, в
частности, применение дополнительно к резервным элементам
устройств контроля и переключения, которые существенно усложняют
систему и снижают преимущества раздельного резервирования.
Кроме того, при таком резервировании между резервируемыми
элементами в тракте передачи сигнала образуются так называемые
общие цепи (точки) (см.рис.7.66). Попадание ложного сигнала в
общую цепь или обрыв ее может быть причиной полного отказа
резервированной системы.
овщие точки"
И; - переключатель
СВК^-Встроенная система контроля
ajj - элемент системы
Рис.7.66. Схема поэлементного резервирования
545
В связи с этим в системах управления самолетов большее
предпочтение отдается общему резервированию, которое проще при
реализации и позволяет практически полностью избежать образования
общих цепей (точек). При этом раздельное резервирование чаще
используется в электронных цепях. Системы управления самолетов
обычно содержат электрические (электронные), гидравлические и
механические элементы и устройства, для повышения надежности
которых применяется как раздельное, так и общее резервирование.
Поэтому более правильно такие системы управления отнести к
системам со смешанным резервированием. Однако и в этом случае
общее резервирование играет в них определяющую роль.
В зависимости от способа включения в работу резервных
элементов (систем) различают:
—раздельное и общее резервирование с замещением
отказавшего элемента (системы) резервным элементом (системой);
—раздельное и общее резервирование с постоянным включением
резервных элементов (систем).
Характерной особенностью систем, использующих
резервирование с замещением, является неизменность их
характеристик после отказа, так как отказавшая система (элемент)
замещается такой же исправной системой (элементом). Однако этому
способу резервирования, как уже упоминалось, свойственен один
существенный недостаток, который связан с необходимостью
выполнения операции переключения. Эта операция должна
выполняться весьма быстро и, главное, надежно, в противном случае
возможна потеря работоспособности системы. Кроме того, в процессе
замещения на выходе системы может создаваться возмущение,
которое будет тем больше, чем больше рассогласование между
основной и резервной системами и чем больше время запаздывания в
операции переключения. На величину возмущения также оказывают
влияние разные условия работы основной и резервных систем.
Основная система, как известно, в процессе выполнения функций
подвергается воздействию нагрузки, тогда как на резервные системы
она не действует. В полете устройства переключения являются
практически неконтролируемыми. Поэтому существует опасность, что
546
в момент замещения устройство переключения может оказаться
неисправным.
В связи с этим обычно этот вид резервирования должен
применяться с большой осторожностью, особенно в силовых системах,
работающих в условиях воздействия больших нагрузок. Например, на
ЛА“Спейс Шаттл” для управления элевонами используются
однокамерные рулевые приводы, питание которых осуществляется от
3-х гидравлических систем через переключатель гидросистем (рис.7.
67). При отказе работающей на привод гидросистемы производится
переключение на резервную гидросистему в соответствии с заданной
программой. При этом риск, связанный с применением такой схемы
резервирования, обусловлен следующим:
—нарушение герметичности камеры цилиндра(например, в
результате разрушения цилиндра, уплотнений и др.)является отказом
типа общей точки. В этом случае на ЛА произойдет потеря всех 3-х
гидросистем;
—в момент переключения гидросистем на привод действуют
значительные нагрузки, которые в случае задержки в переключении
приведут к просадке руля, которая может привести к потере
управления ЛА;
гнлросмстемы
Рис.7.67. Схема резервированной гидросистемы с
переключателями гидросистем
547
—характер отказа гидросистемы может быть очень сложным и
сопровождаться колебаниями давления в гидросистеме, которые
затрудняют переход с отказавшей гидросистемы на исправную.
Поэтому обычно для повышения эффективности переключения
требуется применение дополнительных мер;
—отсутствие контроля исправности переключателя в полете.
Надежность резервированных систем с постоянно включенными
резервными элементами (системами) в меньшей степени зависит от
надежности операций переключения. Это в значительной мере
определило более широкое применение в авиации резервирования с
постоянно включенными резервными элементами(системами).
Например, практически во всех необратимых бустерных системах
управления рулями самолетов, без перехода на непосредственно
ручное управление, используется этот принцип резервирования.
При практической реализации этого вида резервирования
необходимо выполнение ряда важных условий, к которым прежде
всего относятся: обеспечение приемлемых характеристик
резервированной системы при совместном функционировании
элементов (систем), имеющих разброс характеристик в пределах
установленных допусков; исключение возможности полного отказа
резервированной системы при отказе любого элемента; сохранение
определенного уровня характеристик системы при заданном числе
последовательных отказов. Наряду с этим также практически
исключаются чрезмерные возмущения на выходе системы в момент
отказа какого-либо элемента.
Для выполнения этих условий структура такой резервированной
системы обычно строится на основе следующих принципов—это:
полное разделение систем от входа до выхода; обеспечение
“пересиливания”отказавшей системы исправными системами с
последующим ее отключением; исключение чрезмерного
рассогласования между выходными сигналами систем в том числе с
помощью специальной системы синхронизации; применение
автоматических устройств обнаружения и изоляции отказов.
В качестве примера на рис.7.68 показана принципиальная схема
резервированной электрической системы дистанционного управления,
548
построенной на основе изложенных выше принципов. Система состоит
из 3-х одинаковых независимых цепей. Каждая цепь содержит на
выходе необходимый состав устройств, обеспечивающих
преобразование электрического входного сигнала в механическое
перемещение выходного сигнала. Обычно эту цепь называют
каналом(или подканалом), а саму систему—многоканальной.
Исполнительные устройства каждого канала (сервоприводы, рулевые
приводы) могут непосредственно управлять отдельной поверхностью
управления (например, секцией), если это допустимо с точки зрения
надежности, или объединяться с помощью механических или
гидромеханических связей на общем выходном элементе, которым
I з й э Ш -сечение кон гром
Рис.7.68. Схема резервированной электрической дистанционной
системы управления
может быть траверса, силовой шток привода или непосредственно
орган управления. В рассматриваемом примере усилия исполнительных
устройств каждого канала суммируются на общем выходном
механическом элементе-траверсе. Связь выходного элемента каждого
канала с траверсой может быть жесткой или податливой, начиная с
некоторого усилия (типа пружины или гидромуфты с предварительным
усилием). Применение элементов связей типа гидромуфты с
предварительным усилием дает возможность весьма просто
произвести выбор среднего выходного сигнала (по величине), как
наиболее правильного, и осуществить контроль и изоляцию
неисправного канала по величине обжатия этого элемента. В этом
случае обеспечивается так называемое гидромеханическое
549
кворумирование выходных сигналов (см.рис.7.69). В электрических
цепях выбор среднего по величине сигнала осуществляется с помощью
специальных электронных устройств—кворум—элементов или
селекторов сигналов. Применение кворум—элементов позволяет, в
частности: синхронизировать сигналы различных каналов; обнаружить
и изолировать отказавший канал; сохранить работоспособность
системы при большем числе разнотипных отказов; согласовать
системы с различным числом каналов (например, 3-х канальную с 4-х
канальной). Ввиду того, что кворумирование построено на
использовании межканальных связей, требуются специальные меры
для исключения возможности распространения отказа какого-либо
канала на другие каналы.
Рис.7.69. Характеристика кворумированного выходного
сигнала
При рассогласовании выходного сигнала какого-либо
канала относительно среднего на величину более допустимой
в данной системе производится выключение неисправного канала.
Система будет продолжать функционировать с двумя
исправными каналами. Если при двух работающих каналах рас-
согласование между ними станет больше допустимого, производи-
тся выключение всей системы, так как для определения отказав-
шего канала из двух оставшихся необходимы более сложные
методы контроля.
Таким образом, данная система сохраняет работоспособность
после первого отказа и выключается после второго. Соответственно
четырехканальная система подобной структуры может сохранять
550
работоспособность после двух последовательных отказов и
выключаться после третьего.
В идеальном случае желательно иметь структуру системы
управления, состоящей из самоконтролируемых каналов. В такой
системе исключается возможность распространания любого отказа на
всю систему. Практическая реализация самоконтролируемого канала
сводится фактически к созданию тракта управления, состоящего из
управляющего и контролирующего (модельного) подканалов.
Учитывая последние достижения в области микроэлектроники (малый
вес элементов, их высокая надежность), обычно цепи управления в
обоих подканалах до сервоприводов выполняются практически из
идентичных элементов и только сервопривод, как наиболее тяжелое
энергоемкое и дорогое устройство, оказывающее существенное
влияние на вес контролирующего подканала, заменяется его
электронной моделью. При расхождении выходных сигналов
управляющего и контролирующего подканалов более заданного
значения (порога) оба подканала выключаются. В связи с тем, что в
контролирующем подканале вместо реального сервопривода применена
его электронная модель, для функционирования такого
самоконтролируемого канала не требуется увеличение числа
гидросистем.
В системах управления могут возникать различные отказы
(электрические, механические, гидравлические), которые могут
оказывать различное влияние на работоспособность системы.Поэтому
для сохранения работоспособности системы при рассматриваемых
отказах требуется, наряду с применением специальных методов
резервирования, также применение специальных устройств,
предотвращающих отказ всей резервированной системы, особенно при
отказах типа заклинения (упругие звенья, клапаны перепуска,
устройства расцепки проводок и т.д.).
Особенно следует отметить важное значение для обеспечения
высокой надежности системы управления применение секционирования
РУлей (или аэродинамического резервирования). Это одно из мощных
средств обеспечения высокой надежности не только исполнительной
части, но и всей системы в целом.
551
Применение секционирования дает возможность осуществить
полную независимость каналов резервированной системы на всем
тракте передачи управляющего сигнала (датчик, вычислитель, привод,
орган управления, системы энергопитания), т.е. реализовать
резервированную систему без так называемых общих точек, которые,
как известно, могут быть причиной полного отказа резервированной
системы.
Таким образом, осуществление полной независимости каналов
резервированной системы от датчиков сигналов до секций рулей
позволяет:
—сохранить работоспособность системы управления при любом
отказе одной или более секций в результате электрических,
гидравлических и механических отказов,
—обеспечить в случае необходимости разнородное
резервирование на основе совместного использования
электродистанционного (СДУ)и механического(МСУ Управления без
непосредственного взаимодействия между этими системами,
имеющими, как правило, различные алгоритмы управления;
—применить схемы управления секциями, реализация которых
при несекционированном органе управления является решением с
повышенным риском с точки зрения безопасности полета. Например,
для управления секцией могут быть применены приводы по схеме
резервирования с замещением. В случае отказа одного из
управляющих приводов и невозможности перехода с отказавшего на
исправный управление может быть обеспечено остальными секциями и
стабилизатором.
Секционирование рулей дает также ряд конструктивных
преимуществ, которые здесь не рассматриваются.
В зависимости от характера отказов система может принимать
различные состояния, характеризуемые уровнем изменения ее
выходных характеристик. Экипажу обычно выдается необходимая
информация о состоянии системы, на основании которой экипаж
принимает решение о продолжении полета, или быстрейшем
завершении полета в ближайшем аэропорте.
Резервированные системы, обладающие комплексом указанных
552
выше свойств, часто называют практически безотказными системами.
Следует отметить, что, как показал опыт эксплуатации
самолетов со сложными системами управления, обеспечение
безопасности полета только путем повышения надежности системы
управления является недостаточным. Система управления должна
удовлетворять также требованиям живучести. В соответствии с этим
требованием система управления должна сохранять свои
характеристики в условиях воздействия экстремальных внешних
факторов (напр., обусловленных освобождением энергии в результате
разрушения двигателя, ВСУ, отрыва лопасти воздушного винта,
разрушения балонов сжатого газа, разрушения трубопроводов
высокого давления и др.).
В общих чертах повышение живучести или выживаемости
системы достигается прежде всего применением резервирования, но
при этом необходимо:
— разнесение (или рассредоточение) управляющих каналов,
гидравлических и электрических линий передачи мощности как можно
дальше друг от друга, насколько это позволяет компоновка;
— применение нескольких органов управления со своими
приводами, когда повреждение любого из них не нарушает
функционирования системы управления;
— прокладку проводов и элементов системы осуществлять в
зонах самолета, где их повреждение маловероятно;
— применение защиты жизненно важных элементов системы
управления от возможных источников поражения. При этом в качестве
средств защиты, “прикрытия”может быть использовано оборудование
самолета, повреждение которого допустимо по условиям безопасности;
— для исключения потери всех гидросистем самолета в
результате повреждения или отрыва поверхности управления (секции)
гидравлическое питание приводов любой из секций не должно
производиться от всех гидросистем;
— исключение возникновения флаттера любой поверхности
управления при любом одном повреждении, в том числе приводящем к
вытеканию жидкости из цилиндра привода.
553
7.7.2. Обеспечение надежности управления*
Надежность систем штурвального управления и
взаимодействующих с ними систем может быть достигнута
принципиально двумя путями:
—увеличением надежности элементов систем; исторически это
первый, самый начальный этап работ по надежности управления;
—резервированием элементов, подсистем, систем; это
последующий этап—основное направление работ по обеспечению
практической безотказности управления.
Возможность обеспечения надежности системы путем
увеличения надежности составляющих ее конструктивных элементов
практически весьма ограничена из-за роста количества элементов
систем, вызванного непрерывным усложнением систем. На рис.7.70
для иллюстрации этого показана степень снижения надежности
системы Qcyi составленной из и последовательно соединенных
элементов с надежностью каждого элемента <7эл., когда отказ хотя-бы
одного из элементов приводит к отказу всей системы в целом L23J.
Поэтому, если конструктивные, производственно-
технологические и эксплуатационные меры по повышению надежности
элементов системы не обеспечивают потребной ее надежности,
необходимо резервирование. Оно позволяет радикально увеличивать
надёжность системы, вплоть до принципиальной возможности
получить систему с более высокой степенью надежности. Для
иллюстрации этого на рис.7.70 показана степень повышения
надежности резервированной системы, составленной из тех же и
элементов, но соединенных параллельно, когда полный отказ системы
возможен только при отказе всех элементов системы.
Как показывает отечественная и зарубежная практика, при
среднестатистической интенсивности отказов элементов систем
управления рг не может быть обеспечена необходимая величина
надежности Р не только в одноканальных, но и в дублированных
* Разделы 7.7.2 и 7.7.3 написаны Ю.А.Борисом.
554
системах. Так, например, по данным зарубежной статистики при
10'4-гЮ-6 на 1 час полета одноканальные электронные системы
автоматического управления ряда зарубежных фирм(например,
Сперри, Сименс, Бендикс, Смит, 1940-1955 г.г.)имели вероятность
отказа канала (1,9-т-6)10-5 на 1 час полета; дублированные
системы(Эллиот, Смит, Сперри, Бендикс, Сфена, 1965-1970г.г.)имели
всего лишь />дубл.~(1,1-М,5)10-6 на 1 час полета. Видимо, в
определенной степени это и может быть объяснено непрерывным
ростом числа элементов САу в связи с расширением по годам
количества функций САу 161.
Рис7.70. Надежность системы Qcy. состоящей из п
элементов
Вопрос о необходимости использования больших степеней
резервирования для обеспечения высокой надежности систем
штурвального управления еще более остро стоит сейчас.
555
Главным способом получения заданной надежности системы
штурвального управления и взаимодействующих с ней систем
является обеспечение практической безотказности, которая
достигается суммарно следующими мерами:
—резервированием независимых каналов(подканалов,
элементов), обеспечивающим крайне малую вероятность отказа
системы штурвального управления при всех видах(и количестве)
отказов (возможных в эксплуатации системы штурвального
управления и взаимодействующих с ней систем);
—высокой надежностью элементов системы, подтверждаемой
опытом многолетней массовой эксплуатации самолетов, особенно тех
элементов, которые образуют в самолете “общие точки”;
—исключением возможности возникновения при отказах в
системе штурвального управления возмущений на выходе системы,
которые могут вызывать превышение самолетом установленных
эксплуатационных ограничений и не могут быть парированы
летчиком (экипаж ем) при своевременном вмешательстве последних в
управление самолетом (обеспечение отказобезопасности);
—способностью системы выполнить заданные функции после
отказа канала (подканала, элемента);
—индикацией летчику(экипажу) фактов отказов в системе
управления, если при отказе требуются определенные действия
летчика(экипажа) по парированию отказа и для принятия решения о
продолжении или прекращении полета.
Практически в соответствии с отечественным и зарубежным
опытом для систем штурвального управления и взаимодействующих с
ними систем, особенно для систем энергопитания, резервирование
наиболее надежно осуществляется параллельным соединением
однотипных, полностью автономных, одновременно работающих
каналов (подканалов) системы—принцип т.н. общего резервирования.
В качестве примера такого резервирования на рис.7.71 показана
структура резервированного четырехканального электрогидра-
влического сервопривода автоматизированных систем штурвального
управления отечественных самолетов(Ту-154, Ту-144, Ил-86,
Ан-124, Ан-225, Ил-96-300, Ил-96М). Полная автономия
556
электрогидравлических каналов сервопривода в сочетании с системой
встроенного контроля, построенной на электрогидромеханических
кворум-элементах и работающей на принципе “голосования
большинством”, обеспечивают работоспособность сервопривода после
отказов двух его каналов и индикацию летчику фактов отказов, что
позволяет при необходимости принять решение о безопасном
завершении полета.
жесткостью
Рис.7.71. Пример структуры резервированного
четырехканального электрогидравлического сервопривода
автоматики
На рис.7.72 даны иллюстрании тенденций изменения
характеристик вероятностей А>ез отказов в общерезервированных
системах (типа показанной на рис.7.71)в зависимости от вероятности
отказа pi подканала системы. Рассматриваются случаи:
—первого отказа, характеризующего эксплуатационную
надежность резервированной системы, определяющую объём ее
эксплуатационного обслуживания;
—максимального числа отказов, при которых резервированная
система полностью выходит из строя, характеризующего
безопасность полета.
Максимальное число отказов, при которых резервированная
система полностью выходит из строя, определяется в зависимости от
возможности индикацнии факта отказа—наличия критерия отказа.
Так, характеристики рис.7.72 построены с учетом обнаружения только
557
активных отказов подканалов обеспесчиваемой системой контроля,
показанной на рис.7.71; при этом полный выход системы из строя
происходит при последовательных отказах: в трехканальной системе-
двух подканалов, в четырехканальной системе-трех подканалов.
Рис.7.72. Изменение вероятностей отказов в резервированных
системах й>ез в зависимости от вероятности отказа подканала А
Численные значения вероятностей />рез. отказов в
общерезервированной системе в зависимости от степени ее
резервирования (количества т резервирующих подканалов) и числа
отказов /подканалов в резервированной системе показаны в табл.1.
Здесь для практических расчетов принято, что р рез.= Стр/.
(1 — Pi)m~f, где • Значения вероятностей р рез
определены с учетом возможности индикации как активных, так и
пассивных отказов; в последнем случае имеются в виду, например,
пассивные отказы типа пропадания напряжения в электросистемах,
давления в гидросистемах подканалов.
558
Таблица 1
Вероятности отказов в резервированных системах в зависимости от стетпени
резервирования и числа отказов в системе
число отказов степень резервирования системьГ^~-^ 1 2 3 4
одноканальная двухканальная трехканальная четырехканальная 1 • 10“3 ( 1 )
со со со М 1 1 ООО г—Ч г*Н г—Ч • • • СС тг 1 • ю-6
С© <0 1 1 О о г*Н г—Ч со со 1 • 10“^ (2)
4 • 10~9 1 • 10“12
(1)—граница полного выхода резервированной системы из строя при активных отказах(,система
с «голосованием большинством»), (2)—граница полного выхода резервированной системы из
строя при пассивных отказах
Табл. 1 показывает для каждой из резервированных систем
количество / отказов ее подканалов и отвечающее им значение р рез..
при которых имеет место:
—полный отказ резервированной системы при активных отка-
зах(граница (1) в таблице);
—полный отказ резервированной системы при пассивных
отказах(граница (2) в таблице).
Характеристики рис.7.72 и значения вероятностей полного
выхода общерезервированной системы из строя, приведенные в табл.
1, позволяют сделать следующие выводы.
Выполнение требований надежности системы управления и
безопасности полета, отвечающих условию практической
безотказности управления, как вероятности катастрофического исхода
с р рез. 10-9 на 1 час полета при активных и пассивных отказах,
возможно при трех и четырех канальном резервировании системы
даже при вероятности отказа /’рез подканала, равной всего лишь 10-3
на 1 час полета.
Чем выше степень резервирования, тем выше уровень
безопасности полета, определяемый вероятностью полного выхода
Резервированной системы из строя.
Однако, при этом следует иметь в виду, что чем выше степень
Резервирования, тем больше вероятность появления неисправностей в
559
резервированной системе и соответствующего числа ремонтных
замен, т.е. тем больше объем эксплуатационного обслуживания
системы управления.
Кроме того, с увеличением степени резервирования
увеличиваются вес системы управления, объемы самолета,
необходимые для ее размещения, энергопотребление системы
управления. Все это, по существу, плата за высокую надежность
управления и безопасность jio-дета, обеспечиваемые резервированной
системой штурвального управления.
схемы м • к р а т н о г о
резервирования при числе
элементов п
а)общее резервирование;
б)раздельное резервирование.
Возможно дополнительное
увеличение надежности резервированной
системы управления в сравнении с
приведенными на рис.7.72 характери-
стиками. Оно может быть получено в
случае применения т.н. раздельного
резервирования —по элементам, как это
показано на рис. 7.736 (в отличие от
схемы общего резервирования
рис.7.73а). В этом случае при отказе
п элементов (по одному из т
элементов в каждой группе)
резервированная система далека от
полного отказа. Вероятность отказа
раздельно резервированной системы
/)рр=/>op/^w-1, где Pop—вероятность
отказа системы имеющей общее
резервирование; w —кратность
резервирования; п—число элементов в
одном канале системы. Степень
уменьшения вероятностп отказа
раздельно-резервированной системы, в
сравнении с общерезервированной
системой, пт~х в зависимости от w и п показана на рис.7.73в.
Можно выдеть, что уже при п —10 и т —3 вероятность полного
отказа раздельно—резервированной системы в 100 раз меньше, чем в
560
общерезервированной системе.
Однако следует заметить, что, например, осуществление
раздельного резервирования для гидравлической части системы
штурвального управления оказывается на практике сложным.
Принципиальное условие возможности раздельного резервирования,
согласно которому выход из строя какого-либо из элементов не должен
сказываться на работе остальных, для гидравлической бустерной
системы означает, что во всех резервирующих элементах
категорически недопустим отказ, например, вида внешней или
внутренней негерметичности агрегатов. Надежность трубопроводов,
соединяющих резервированные агрегаты, должна быть несравненно
выше надежности самих агрегатов и т.д. Поэтому для повышения
надежности бустерных систем используют в основном общее
резервирование, дополняемое раздельным резервированием главных по
надежности элементов в каждой гидросистеме (например,
гидронасосов).
Все вышесказанное означает необходимость обоснованного
определения потребной степени резервирования, исходя из минимально
необходимой для обеспечения заданного уровня надежности системы
штурвального управления и обеспечиваемой ею безопасности полета.
7.7.3. Оценка необходимого резервирования систем штурвального
управления
При практическом выборе минимально необходимого
резервирования систем штурвального управления и
взаимодействующих с ней систем с целью обеспечения потребных
надежности управления и безопасности полета исходят из условия
сохранения работоспособности системы при рассматриваемых
отказах. В зависимости от вероятностей возникновения отказов,
наличия критериев отказов и от характера воздействия отказов на
систему, ее работоспособность должна обеспечиваться при
установленном количестве возможных в эксплуатации отказов.
Именно такой принцип принят как в отечественной, так и
зарубежной
«ой практике по существу с самого начала применения
Р зервированных систем управления Е24, 21, 22].
561
В принципе возможен и иной подход, когда требования к степени
резервирования основываются только на количественных показателях
надежности, которым должны отвечать системы в зависимости от
заданных требований надежности управления и безопасности полета
для рассматриваемого самолета.
В связи с этим необходимо заметить следующее.
Количественные требования к уровню безопасности, принятые в ряде
Норм летной годности, имеют, как правило, рекомендательный или
вспомогательный характер. Для установления обязательного
количественного требования к уровню безопасности необходимы
соответствующие статистические данные, полученные из
многолетнего опыта эксплуатации большого парка самолетов
рассматриваемого или достаточно близкого типа самолетов, что далеко
не всегда бывает возможным.
Далее, применительно к системам штурвального управления и
взаимодействующим системам, как правило, нет достаточных и,
главное, достоверных характеристик интенсивностей отказов всех
элементов этих систем, чтобы можно было определить ожидаемую
вероятность, характеризующую надежность управления и
безопасность полета.
Наконец, особенностью систем, вероятность отказа которых
/><10-7 на 1 час полета, является практическая невозможность
доказать (экспериментально проверить) фактическую —реали-
зованную в конструкции системы надежность [6]. На рис.7.74
показана степень увеличения времени испытаний системы на
надежность (ТИСп) с целью ее подтверждения с заданным уровнем
достоверности в зависимости от среднего времени наработки системы
(Тер) и числа отказов /, возможных в процесса испытаний (после
каждого отказа система восстанавливается и испытания
продолжаются). Даже для резервированной системы с полностью
автономными каналами (когда надежность системы может быть
оценена по результатам испытаний только одного канала) при />ср=
10~4 на 1 час полета для канала и отсутствии, сверх всего, отказов в
нем в процессе испытаний (/ = 0, что обычно маловероятно) при
достоверности испытаний 90% время испытаний одного канала ТИсп
562
составляет 2,6 года, а сокращение времени испытаний путем
одновременного испытания большого числа отдельных каналов
практически неосуществимо.
Рис.7.74. Степень увличения времени испытаний
системы в зависимости от отказных состояний
подканалов
Поэтому“чисто вероятностный”подход реально невозможен.
Однако количественные статистические показатели надежности
элементов, частей систем совершенно необходимы при анализе
характеристик надежности управления и безопасности полета,
например, для сравнительной оценки этих характеристик для
различных вариантов резервирования структур систем штурвального
управления и взаимодействующих с ними систем, при оценке
эксплуатационной надежности разных схем систем.
Теперь на основании отечественного и зарубежного опыта
эксплуатации магистральных самолетов различных классов, типов и
назначений можно сформулировать следующие основные положения
по обеспечению недежности систем штуравльного управления и
взаимодействующих с ними систем магистральных самолетов и
безопасности их полета, отвечающей этому уровню надежности.
563
—Система штурвального управления и все взаимодействующие
с ней системы должны быть практически безотказными, если при
отказах этих систем не обеспечивается безопасность полета, оп-
ределяемая условием безопасного завершения полета, включая
посадку самолета. Условия реализации практической безотказности
систем были определены выше.
—Нормальная работоспособность системы штурвального
управления и взаимодействующих с ней систем, обеспечивающих
управление самолетом с заданными характеристиками, должна
сохраняться при любом одном отказе в каждом канале управления(по
тангажу, крену, курсу, включая взаимодействующие системы),за
исключением отказов типа рассоединения, заклинения, разрушения.
—При любой комбинации двух последовательных отказов, не
отнесенной к практически невероятной, допустимо такое ухудшение
работоспособности системы, при котором обеспечивается безопасный
переход на другие режимы, если это необходимо, и продолжение
полета самолета на этих режимах, включая безопасное его
завершение.
—Рассматривается любое заклинение, рассоединение или
разрушение подвижных элементов системы управления, если не
показано, что такой отказ практически невероятен. При этом, если
рассматриваемый отказ отнесен к категории более частой, чем
“практически невероятный”,допустимо ухудшение работоспособности
системы управления в пределах, обеспечивающих безопасное
завершение полета, включая посадку самолета.
—В тех случаях, когда нет достаточной уверенности в
практической безотказности основной системы управления
(обеспечивающей нормальное управление самолетом с заданными
характеристиками), рассматривается применение резервных или
аварийных систем. Примерами таких систем могут быть резервная
аналоговая СДУ при основной цифровой СДУ, аварийная
механическая(гидромеханическая)система при основной СДУ.
Практически применение таких систем связывается с начальным
этапом освоения новых, недостаточно отработанных основных систем
и возможностью последующего исключения резервной или аварийной
564
систем в отлаженной эксплуатации.
—В автоматических системах управления, непосредственно
воздействующих на рычаги управления или рулевые поверхности
самолета (например, системы ограничения предельных режимов
полета, СДУ, совмещенного управления, балансировки самолета, в
том числе,переставным стабилизатором) должна быть обеспечена
возможность в случаях отказов этих систем их “пересиливания”
летчиком(непосредственно усилием летчика, с помощью резервных
систем и т.д.).
—Должны быть предусмотрены меры по защите слаботочных
автоматических систем управления(аналоговые и цифровые СДУ,
САУ и т.п.) на случай возможности внешних воздействий —ударов
молний, электростатических разрядов, электромагнитных полей и т.п.
(специальная защита блоков и соединительных шин, оптоволоконные
связи, резервные и аварийные системы).
—Структура и параметры систем энергопитания(гидросистемы,
электросистемы)должны обеспечивать полет и безопасную посадку
самолета при отказе, как минимум, двух систем энергопитания
каждого вида.
При практически безотказных системах электродистанционного
управления самолетом (СДУ) должны быть исключены перерывы в
любых видах электропитания СДУ длительностью более допустимой
для рассматриваемого типа СДУ.
Распределение источников гидравлического и электрического
питания на двигателях самолета должно выполняться с учетом отказа
минимального числа систем питания при отказах двигателей.
—При отказе всех двигателей самолета должно быть обеспечено
управление самолетом, как минимум,—на время и на режимах,
необходимых для повторного запуска двигателей, как максимум,—для
планирования самолета с неработающими двигателями с максимальной
высоты полета и безопасной посадки самолета.
—Должны быть предусмотрены конструктивные меры,
исключающие ошибки обслуживающего персонала при проведении
регламентных и ремонтно-восстановительных работ (разнотипность
Разъемных соединений-механических, электрических и
565
гидравлических, специальные маркировки каналов и т.п.).
Литература
1 .Ю.А Борис, В.Я. Бочаров, Г.Е. Долгушев и др.
“Аэродинамика и динамика полета магистральных пассажирских самолетов”.
Глава 5 М.“Машиностроение” 1982 г.
2 .Г.С. Бюшгенс "Авиация XXI века”, ТВФ № 1,1990 г.
3 .“Человеческий фактор”,том I под редакцией Солвенди Г. Пер. с англ. М
“Мир” 1991 г.
4 .Lauber John., Do humans like automation?4.1 и 2. Aerospace.
1991.-18N6 c 8-12.
5 .“Нормы летной годности гражданских самолетов СССР”.изд. ЦАГИ,
1984 г.’
6 .Ю.А. Борис, В.Я. Бочаров “Надежность систем управления самолетов и
их структура.” Сборник:“Вопросы автоматизации управления самолетов”.М.:
“Машиностроение” .1978 г.
7.В. Я. Бочаров, Г.И. Полишук. “Системы управления пассажирских
самолетов”.Обзор ЦАГИ № 695,1989 г.
S.Ae rospace Recommended Practice (ARP-842) Deisign objec-
tives for Flying Quailties Transport aircraft, SAE 1970.
9.В.И . Гониодский, Ф.И. Склянский, Шумилов И.С.,“ Привод рулевых
поверхностей самолетов.” М.:“Машиностроение”. 1974 г.
lO .Varibee Feel Simutation Aircraft Engineering,Vlll 1972.
11 .Т.И. Лигум, С.Ю. Скрипниченко, A.B. Шишмарев "Аэродинамика
самолета Ту-154Б”,М.:“Транспорт”,1985 г.
12.Е.И. Абрамов, А.М. Банштык, Ю.А. Борис, Б.В. Гусев и др. “Система
управления самолетом”. Авторское свидетельство№ 545127.
13.Е.И. Абрамов, С.Н. Белозеров, В.Я. Бочаров, Б.В. Гусев Н.П.
Смирнов, Л.К. Семенченко. “Система управления летательного аппарата”.
Авторское свидетельство № 739856,26. X П.1978 г.
14.Г.С. Бюшгенс, Р.В. Студнев. “Аэродинамика самолета. Динамика
продольного и бокового движения”.М.“Машиностроение”, 1979г.
15. Ю.А Борис, В.Я. С.Я. Бочаров, Наумов и др.“Сравнительный анализ
продольного управления неманевренного самолета при подвижном и
неподвижном стабилизаторе.”ТВФ, № 5 1978.
1 б.Экспрес-информация, APT № 1643 21 января 1990г. “Мировой парк
магистральных гражданских самолетов.”
566
1 7.В.Я. Бочаров, П.М. Курилкина“Системы дистанционного управления
рулями самолета”.Обзор ЦАГИ № 394,1972 г.
18 .Cooidbs L.F.E.,Left and Right in cockpit evolution Aeronauti-
cal Jaurnal,Hov. 1974.
19 .“3арубежная гражданская авиация в 1989 г”. ТИ № 8, 1991
2О .“Системы электроснабжения самолетов и вертолетов.” ГОСТ 19705-
81.М.:Изд. стандартов, 1982 г.
2 1.Европейские нормы летной годности гражданских самолетов JAR-25
часть25.
22 .FAR-25 Нормы летной годности гражданских самолетов США. Том
Ш,часть25.
23 .Ю.А.Борис. “управлению самолетом-высокую надежность”
Авиационная промышленность №2,1967.
24 .Авиационные правила, часть 25. Нормы летной годности самолетов
трднспортной категории, МАК, 1994.
Обозначения
Пу — нормальная перегрузка,
V — скорость полета,
Кш — коэффициент передачи между рычагом управления и рулем,
М — число Маха,
Мщ аэр — аэродинамический шарнирный момент руля,
Sj.o — относительная площадь горизонтального оперения,
5 в — относительная площадь руля высоты,
о доп. — допустимый угол атаки,
й>хдоп — допустимая угловая скорость по крену,
Илах max — расчетная предельная скорость,
Mmax max — расчетное число Маха,
Р — усилие на рычаге управления,
Кв — перемещение рычага управления,
— угол отклонения руля,
dP/dny=РПу — градиент усилий продольного управления,
dP/dtox=P"x
производная, характеризующая уровень уровень
усилий для создания единицы перегрузки,
— производная, характеризующая уровень усилий для
создания единицы угловой скорости крена,
567
dPldX>=P^ — производная, характеризующая уровень (градиент)
усилий, продольного управления создаваемый
загрузочным устройством по перемещению рычага,
Кос — коэффициент передачи датчика обратной связи,
Хсп — перемещение штока сервопривода,
— скорость перемещения штока сервопривода,
#сп — коэффициент передачи сервопривода,
— коэффициент передачи,
<р — угол отклонения стабилизатора,
а — угол атаки самолета,
Кщ = Кш шах/Кш min — диапазон изменения коэффициента передачи,
Кш max — максимальное значение коэффициента передачи,
Кш min — минимальное значение коэффициента передачи,
Xi, Хг, Хз — перемещения элементов механической проводки
управления,
7?1, Т?2, Кз — плечи механических звеньев,
Кш в.о — исходный коэффициент передачи,
Кх — регулируемый коэффициент,
К ш н — коэффициент передачи от педалей к рулю направления,
ДРН — дополнительное усилие в канале руля направления,
<5сду — скорость отклонения руля от СДУ,
б'мсу — скорость отклонения руля от МСУ,
d<3'/dXB=Кш в — коэффициент передачи продольного управления, м"1,
d<3k/dWy= $Пу — характеристика продольной управляемости самолета,
G — вес самолета,
S — площадь крыла самолета,
бп — степень устойчивости по перегрузке
dw^/dS'в= Wz — производная, характеризующая величину
изменения продольного момента на
единичное отклонение руля высоты,
q — скоростной напор,
&Хь/&Пу= Х^у — показатель продольной статической
управляемости,
568
— высота полета,
р ____ вероятность отказа управления за час полета,
тУ — степень продольной статической устойчивости самолета,
z
Сл — жесткость датчика усилий,
/±Х — деформация упругого элемента датчика,
— выходное напряжение с датчика усилий,
Кд — коэффициент передачи датчика усилий,
бос — выходное напряжение с датчика обратной связи сервопривода,
£рп — скорость отклонения руля от привода,
(i)Z — угловая скорость тангажа,
Рстр —усилие страгивания,
Р* —градиент усилий поперечного управления,
ХЫх —статическая характеристика управляемости поперечного управления,
<5“ уст —скорость отклонения руля аэродинамически устойчивого самолета,
А Арп —позиционная точность привода,
Арп —полный ход привода,
АИу —уровень перегрузки в колебательном движении самолета, вызванный
нечувствительностью привода,
S' —скорость отклонения органа управления,
S'эв —скорость отклонения элевонов,
569
Г л а в а. 8. СИСТЕМЫ УЛУЧШЕНИЯ
УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ
СУУ
\
8.1. Общие положения
В системах штурвального управления современных
магистральных самолетов автоматические устройства занимают все
более заметное место. На начальном этапе автоматизации эти
автоматы создавались как автономные устройства для выполнения
отдельных функций по улучшению характеристик управляемости, а
затем и устойчивости и встраивались в механическую проводку
управления. Примером таких устройств могут служить автоматы
изменения загрузки рычагов управления АРЗ, автоматы регулировки
управляемости АРУ или изменения передаточного числа КШ)
повышения демпфирования-демпферы, повышения устойчивости по
перегрузке-автоматы устойчивости и т.д. Рост количества
автоматизируемых функций управления по годам для ряда
отечественных самолетов приведен на рис.8.1. Из приведенной
зависимости видно, что от реализации единичных функций в
автоматических устройствах 50х—70х годов в настоящее время имеет
место переход к реализации в них нескольких десятков функций.
С ростом количества автоматизируемых функций изменяется
подход к их проектированию и реализации. Во-первых, отдельные
устройства по мере своего развития стало целесообразным
объединять в единое комплексное устройство-систему повышения
устойчивости и управляемости (СУУ). Во-вторых, проектирование
таких устройств-СУУ,выполняющих большое число функций,
необходимо проводить как единой системы управления. Естественно,
по мере увеличения числа выплняемых функций усложняются и
законы или алгоритмы, реализуемые этими системами. Поэтому,
современная СУУ—это многоконтурная система с переменными
коэффициентами, переменной структурой и элементами
570
самонастройки.
В настоящее время наибольшее распространение получили СУУ
со статическими законами. Они позволяют успешно решать вопросы
обеспечения приемлемых характеристик устойчивости и
управляемости магистральных самолетов, т.е. отвечающих
требованиям существующих норм. Однако, для обеспечения заданных
характеристик управляемости вне зависимости от веса, центровки,
конфигурации и т.д. целесообразно использовать СУУ с астатическим
законом. Переход на астатический закон позволяет решить
дополнительно очеть важную проблему-ограничения предельных
параметров движения.
Количество автомагюирооаннои
функций
Рис.8.1. Изменение количества автоматизируемых функций
управления по годам
Усложнение законов СУУ и ужесточение требований к
выдерживанию характеристик устойчивости и управляемости
потребовало коренного пересмотра требований к динамическим
характеристикам отдельных элементов системы штурвального
управления: приводам, рулевым машинкам, механической проводке,
датчикам, вычислителям и т.д. На определенном этапе стало
очевидным, что использовать механическую проводку как элемент
передачи управляющего сигнала нецелесобразно. Поэтому на ряде
современных магистральных самолетов основной режим штурвального
571
управления осуществляется через систему дистанционного
управления(СДУ). По этой же причине-обеспечения необходимой
точности вычисления управляющих сигналов при использовании
сложных законов СУУ вычислители современных СУУ реализуются
на цифровых модулях. Применение цифровых вычислителей еще
больше расширяет возможности современных СУУ в реализации
реконфигурации сложных законов СУУ, обработки входной
информации, межканального выравнивания промежуточных
параметров и т.д. В результате современные цифровые СУУ
позволяют создать комфортные условия управления магистральным
самолетом и строго ограничить предельные параметры движения, что,
в конечном счете, существенно повышает безопасность полетов.
8.2. Системы улучшения устойчивости и управляемости
статического типа
8.2.1. Статический автомат продольной устойчивости и
управляемости (СУУП)
В системах управления пассажирских самолетов, содержащих
прямую связь рычага управления с аэродинамическим органом (рулем
высоты),автомат продольной устойчивости выполняет роль
“последовательно-параллельного”корректирующего устройства. Цель
его обеспечить в заданных пределах статические и динамические
характеристики устойчивости и управляемости за счет реализации:
—дополнительной прямой цепи передачи управляющего сигнала
летчика Хв или Рв,
—статических обратных связей по различным параметрам
движения, обычно, по угловой скорости тангажа а>г и приращению
нормальной перегрузки &пу.
Условная блок схема автомата приведена на рис.8.2.
Закон отклонения органа продольного управления со статическим
автоматом продольной устойчивости имеет вид:
А <3в=КпКшыг+Кш • Хв (8.1)
Небольшое количество используемых сигналов и высокая
надежность датчиков для их измерения позволяет создать
высоконадежное корректирующее устройство. Автоматы такого типа
572
использованы на ряде отечественных пассажирских самолетах.
Влияние автомата с законом(8.1) на статические и динамические
характеристики самолета очень подробно исследовано в многих
монографиях С1,2] . Как известно, обратная связь по сигналу
нормальной перегрузки может быть приближенно сведена к
повышению продольной статической устойчивости самолета на
величину
Лтсг=К„
гп.
что приводит к увеличению собственной частоты недемпфированных
колебаний самолета и, как следствие, к уменьшению относительного
декремента затухания. Этот факт очень хорошо можно проследить по
корневой траектории доминирующего корня короткопериодического
движения при изменении коэффициента Кп. Из рис.8.3 видно, что с
увеличением коэффициента обратной связи по нормальной перегрузке
Кп траектория доминирующего комплексного корня направлена вверх
вдоль мнимой оси с тенденцией приближения к ней. Это
свидетельствует об увеличении мнимой части корня, т.е. частоты, и
уменьшении относительного декремента затухания.
Рис.8.2.Блок-схема статического автомата продольной устойчивости
Обратная связь по сигналу угловой скорости тангажа может
быть приближенно сведена к искусственному увеличению
демпфирующего момента самолета на величину
573
£\тгг=Кш •
Da
что повышает относительный декремент затухания доминирующего
комплексного корня короткопериодического движения самолета. На
рис.8.4 приведена корневая траектория доминирующего корня при
изменении коэффициента обратной связи Кш. Видно, что
действительная часть доминирующего корня увеличивается, наклон
вектора этого корня уменьшается, что свидетельствует об увеличении
относительного декремента затухания.
Рис.8.3. Траектории домини-
рующих корней короткопери-
одического движения при изменении
передаточного числа Кп СУУП
Рис.8.4. Траектории
доминирующих корней
короткопериодического движения
при изменении передаточного
числа Кш СУУП
Возможность увеличения коэффициентов усиления Кп и Кш
ограничена динамическими характеристиками исполнительной части
системы-динамикой рулевой машинки и привода. Повышение
собственной частоты системы при увеличении коэффициентов
усиления Кп и Кш приводит к увеличению фазового запаздывания
вносимого исполнительной частью и, как следствие, уменьшению
запаса устойчивости системы по фазе, что и приводит к увеличению ее
колебательности. Поэтому используемые на практике значения
коэффициентов Кп и Кш ограничены.
Таким образом, выбором коэффициентов усиления Кп и Кш в
574
законе (8.1) можно решить следующие задачи:
—улучшить продольное демпфирование самолета;
—увеличить степень продольной устойчивости;
—обеспечить приемлемые статические характеристики
управляемости.
Это очень актуально для современных и проектируемых
самолетов, где для повышения топливной эффективности
используются малые запасы продольной статической устойчивости.
Выбор параметров автомата Кп и Кш осуществляется, исходя из
требований к качеству переходного процесса по нормальной
перегрузке Пу для крейсерских режимов полета или нормальной
перегрузке и угловой скорости тангажа a>z для крейсерских и взлетно-
посадочных режимов.
Как известно, эти требования для линейных систем могут быть
трансформированы в требования к расположению нулей и полюсов
замкнутой системы или требованиям к ее частотным характеристикам.
Все эти подходы к выбору Кп и Кш используются на практике.
Однако, метод корневого годографа, очень иллюстративный и
компактный, наиболее целесообразен для приближенной оценки и
качественного анализа влияния тех или иных параметров на
динамические свойства системы. С увеличением порядка
дифференциальных уравнений системы, что неизбежно при учете
динамических характеристик приводов и датчиков, сформулировать
требования к взаимному расположению нулей и полюсов крайне
затруднительно, а выводы, сделанные по расположению
доминирующих корней, дают только приблизительную оценку
системы.
Частотный метод и метод корневого годографа эквивалентны.
Однако требования к частотной характеристике разомкнутого контура
могут быть сформулированы более конкретно, особенно в области
частоты среза.
Наиболее универсальный подход состоит в использовании
требований непосредственно к переходному процессу. В настоящее
время довольно широко используется так называемый С* критерий
[Ц, который определяет требования к переходным процессам по
575
нормальной перегрузке и угловой скорости тангажа: С*(О =
/\пул+Ki-a)z, где Д ПуЛ— Л иуцт+ wzL Jg —нормальная
перегрузка в кабине летчика; ЬЛ —расстолние от центра тяжести до
кабины летчика; Ki —коэффициент пропорциональности.
Универсальность его состоит в том, что он описывает требования к
реакции самолета независимо от того какими дифференциальными
уравнениями описывается движение самолета с СУУП. Он хорошо
формализован, но его реализация трабует проведения большого
объема вычислений и применения методов градиентного поиска
границы С*—критерия в плоскости параметров Кп и Кш.
Для обеспечения требуемых динамических характеристик
самолета с СУУП, реализующим закон (8.1), во всем диапазоне
режимов полета, весов, центровок, конфигураций и т.д. необходимо
осуществлять регулировку коэффициентов обратных связей, как
минимум, по величине скоростного напора Q или приборной скорости
ИпР. Пример изменения коэффициентов Кп и Кш в зависимости от
V пр приведен на рис.8.5.
Рис.8.5. Зависимость передаточных чисел Кп и Кш от приборной скорости
полета Упр.
После выбора Кп и Кш проводится уточнение закона изменения
дополнительного коэффициента передачи ДКШ, Продифферецировав
выражение (8.2) по переменной получим формулу для
определения статическом характеристики управляемости Ав:
(8.2)
Отсюда, задавшись величиной Хв, легко получить соотношение для
определения передаточного коэффициента Хш;
576
(8.3)
здесь <5в—расход руля высоты на единицу нормальной перегрузки;
V—истинная скорость полета;
Ашо—коэффициент передачи, обеспечиваемый жесткой
связью между рычагом управления и рулем высоты.
Для оценки текущего значения <5в обычно используется
соотношение
5в~ К(ф-фо) (8.4)
здесь <р-текущий угол отклонения балансировочного стабилизатора,
фо—некоторая функция, зависящая от числа М полета, углов
отклонения механизации крыла £ з и £ пр, приборной скорости полета
Упр. Физический смысл этой функции-отклонение балансировочного
стабилизатора для получения нормальной перегрузки пу=0.
т<Р
К=—у-соотношение эффективностей стабилизатора и руля высоты.
Окончательно для определения значения дополнительного
коэффициента передачи ААШ получим:
К(.фо~ф) -\—у-Кш^~Кп
/\Кш= _уп Ашо (8.5)
А взад
Такой принцип рагулировки коэффициентов передачи был
использован на самолете Ту-154,позже он был использован в СУУП
самолетов Ил-86, Ил-96 и Ту-204. Многолетняя эксплуатация
самолетов Ту-154 и Ил-86 подтвердила возможность эффективного
решения проблемы обеспечения заданного Х^ таким способом.
Примеры переходных процессов при даче штурвала
пассажирского самолета с таким статическим СУУП приведены на
рис.8.6.
Нет строгого регламентирования величины градиента Х^ в
зависимости от режима полета. Обычно рекомендуют только нижнюю
границу допустимого значения Хв —50 мм/ед.пер. Опыт создания и
эксплуатации пассажирских самолетов с штурвальным постом
управления, когда отклонение рычага осуществляется двумя руками,
577
показывает, что оптимальные значения градиента Хв целесообразно
обеспечивать в пределах: —1704-220мм/ед.пер. на взлетно-
посадочных режимах; —804- 130мм/ед.пер. на крейсерских режимах.
На промежуточных режимах может быть выбрана любая
интерполяция Х% со знакоопределенной производной. Обычно
изменение Х^ осуществляется по скоростному напору <7, приборной
скорости Упр, истинной скорости V и т.д. Примерный вид
зависимости Х^ от приборной скорости Упр приведен на рис.8.8.
Обеспечение постоянства величины Х^ по режимам полета не
рационально.
Рис.8.6. Переходные процессы по
нормальной перегрузке самолета со
статической С У У П (К = var)
Рис.8.7. Переходные процессы по
нормальной перегрузке самолета со
статической СУУП (К—const)
Поскольку обычно загрузка рычага управления (при наличии
необратимого бустерного управления) часто обеспечивается с
помощью механической пружины постоянной жесткости, то изменение
статического критерия управляемости Р”—величины усилия для
создания приращения нормальной перегрузки равной единице, будет
иметь характер аналогичный изменению величины X”. Это вполне
допустимо для нормальной эксплуатации пассажирского самолета.
Однако, стремление обеспечить Р” близкое к постоянной
величине весьма рационально для пассажирских самолетов. С этой
578
целью используют регулировку Рв по режимам полета. Например, на
самолете Ту-154 используется однократная регулировка Рв путем
подключения дополнительной пружины [7].
На ряде зарубежных самолетов используется более сложная
регулировка загрузки рычага путем изменения плеча передачи
перемещения к пружине загружателя.
Большое преимущество в создании необходимой статической
характеристики загрузки рычага управления имеют системы
автоматической загрузки(САЗ), подробно рассмотренные в главе 7.
САЗ позволяет реализовать любой вид зависимости Р(Х), изменяя
ее нужным образом по режимам полета. Такие системы используются
на ряде отечественных пассажирских и транспортных самолетах.
В некоторых системах в целях обеспечения высокой надежности
СУУП коэффициенты Кп,Кш и Кш не регулируются или имеют
одноразовое переключение значений, например, в зависимости от угла
отклонения закрылков £ з. В этом случае выбор Кп и Кш
производится, исходя из обеспечения приемлемых характеристик
устойчивости и управляемости на основных эксплуатационных
режимах. Обычно реализуемые в СУУП значения коэффициентов
лежат в диапазоне Кш = 14-2 с, Кп =24-3 рРад- руля
ед.пер.
Дополнительная прямая связь в этом случае может
отсутствовать на крейсерских режимах полета и подключаться только
при посадке, например, при выпуске механизации крыла. Ее
подключение необходимо для увеличения коэффициента Кш с целью
обеспечения приемлемого значения статической характеристики
управляемости X”. Пример переходных процессов для самолета с
СУУП, имеющей постоянную настройку коэффициентов Кш, Кп и
Кш приведен на рис. 8.7. Действительно, в данном случае можно
говорить об обеспечении удовлетворительных статических и
динамических характеристик управляемости.
В реализации на некоторых самолетах статический закон СУУП
обычно имеет вид:
&8ь = Кп • WnW &пу + KuWwQ)) a)z +KmWx^p) Хъ, (8.6)
где Wn, W„ и Wx-передаточные функции апериодических звеньев с
579
постоянными времени соответственно Тп, Тш и ^.Введение их
обусловлено различными причинами. Фильтр Wn(p) по сигналу
нормальной перегрузки позволяет существенно расширить область
устойчивости и повысить реализуемые коэффициенты Кп. Пример
влияния Тп на область устойчивости приведен на рис.8.9.3начение
постоянной времени Тп выбирается в пределах (0,34*0,6) с.
П г
Хб L им] .
Рис.8.9. Области устойчивости самолета со статической СУУП (7я—vat).
580
Фильтр И'ш^введен для фильтрации высокочастотных
составляющих в сигнале угловой скорости тангажа, обусловленных
упругими колебаниями самолета, то есть для повышения аэроупругой
устойчивости контура демпфирования. Его введение резко сужает
область устойчивости по Кш из-за вносимого фазового запаздывания
(см. рис.8.10) .Поэтому необходимо стремиться использовать как
можно меньшие значения постоянной времени Тш. Обычно ее значение
лежит в пределах(О, 05 4- 0,1)с.
Фильтр в прямой цепи
дополнительного сигнала Хв
выполняет роль префильтра. Он
вводится - с целью уменьшения
резкости переходного процесса
самолета по нормальной
перегрузке. Особо большое
значение он приобретает для
Рис.8.10. Области устойчивости дистанционных систем управления,
самолета со статической СУУП в КОТОрЫХ наличие цифрового
7L=var)
вычислителя вносит
дополнительное временное запаздывание при передаче управляющего
сигнала от летчика Хв. Резкое увеличение быстродействия
переходного процесса по нормальной перегрузке при наличии
начального запаздывания (рис.8.11) очень отрицательно оценивается
летчиком. Для обеспечения приемлемого переходного процесса
префильтр целесообразно выполнить в виде интегро-
GR -А | 1
дифференцирующего звена с передаточной функцией Wx = j •
В этом случае осуществляется частичная фильтрация сигнала летчика
** и реализуется приемлемый переходной процесс. Постоянная
времени Тх выбирается в пределах (0, 34-0, 5) с, а постоянная 71 =
(0,34-0,5) • Тх.
Крылья большого удлинения с суперкритическим профилем,
используемые на современных и проектируемых пассажирских
самолетах, привели к заметному местному ухудшению собственных
характеристик устойчивости самолета на углах атаки больших а г.п.
581
На рис.8.12 приведены зависимости коэффициентов продольного
момента и подъемной силы для крейсерского режима полета
современного пассажирского самолета. Следует отметить две
особенности:
—наличие глубокой “ложки”, то-есть местной статической
неустойчивости в диапазоне углов атаки, близких к углу атаки
горизонтального полета а г.п.;
Рис.8.11. Влияние префильтра на
переходный процесс по нормальной
перегрузке самолета со
статической СУУП
—резкое уменьшение
и Г'О.
производной С у, начиная с
некоторого угла атаки а нл.
Уменьшение Су свидете-
льствует о существенном
ослаблении на этих углах атаки
эффективности обратной связи по
сигналу нормальной перегрузки,
реализуемой СУУП. В случае
совпадения“ложки” (тсгу > 0) с
уменьшением производной для
обеспечения требуемой продольной
устойчивости необходимо
использовать обратную связь по сигналу угла атаки, тем более, что в
этом диапазоне углов атаки следует переходить на управление именно
этим параметром движения самолета. Поэтому в современных СУУП
в этих случаях, начиная с некоторого значения угла атаки оь,
задействуется обратная связь по приращению угла атаки Да=а — ао. •
В закон (1) или (3) необходимо добавить составляющую Ка ' А а,
в которой величина А а определяется соотношением;
д г° о«» (87)
-a —do а ао
Реализация такой обратной связи эквивалентна искусственному
изменению статической моментной характеристики тиДа). Пример
такого изменения показан на рис.8.12 пунктирной линией.
Для современных компоновок пассажирских самолетов также
характерно наличие моментной неустойчивости по скорости (числу М)
на крейсерских режимах (т.е.М~0, 754-0,8.). На этих числах М
582
начинают проявляться
трансзвуковые эффекты смещения
фокуса назад.Для восстановления
моментной устойчивости по
скорости, начиная с некоторого
числа Мо используется обратная
связь на руль высоты сигнала
приращения числа ДМ. В закон (1)
или (3) добавляется составляющая
Км ДМ, в которой величина ДМ
определяется из соотношения:
л у_ 0 при М<М0
LM-Mo М^Мо
(8.8)
Такая обратная связь реализована
в статическом автомате
Рис.8.12. Продольные аэродинамиче- продольной устойчивости самолета
ские характеристики самолета Ил-96-300.
на крейсерском режиме Таким образом, наиболее
полная запись закона отклонения
руля высоты автоматом продольной устойчивости будет иметь вид:
Д£ в = KuiWxXq-^ KnWn^Hy-\- Ка^ tt +
+Км’ДМ, (8.9)
где величины Д а и Д М определяются соотношениями (7)и (8).
8.2.2. Статические системы улучшения устойчивости и
управляемости бокового движения(СУУБ)
Основное назначение автоматических устройств системы
управления—обеспечение требуемых характеристик устойчивости и
управляемости во всем диапазоне режимов полета и конфигураций
самолета. К характеристикам боковой управляемости предьявляются
следующие требования:
—Колебательное боковое движение должно быть устойчивым.
Рекомендуется, чтобы время затухания боковых колебаний до 5%
начальной амплитуды не превышало 12с на режимах начального
набора высоты(при механизации крыла во взлетном положении) и
583
захода на посадку и не превышало 20с для крейсерского режима;
—Спиральное движение должно быть нейтральным или близким к
нейтральному-слабо устойчивым либо умеренно неустойчивым. Время
удвоения или уменьшения крена вдвое должно быть не менее 20с.
7'-=т^>11т>29^
—Эффективность поперечного управления должна обеспечивать
вывод из установившегося разворота с креном 30° и ввод в разворот
противоположного направления с креном _30° (при отклонении
штурвала усилием не более 20 кг) за время 7с. В диапазоне скоростей
Ртахэ Vmax max (Мтахэ Мтахтах) ДОПуСКЗСТСЯ уменьшение
эффективности вдвое;
—Уменьшение угловой скорости крена в процессе накренения не
должно быть более 50%, а по оценке пилота не должно быть
чрезмерного заброса по углу рыскания. Для оценки выполнения этого
требования можно использовать критерий А2, описывающий степень
близости реализуемого движения к изолированному движению крена
[2], при А2 = 1 имеет место изолированное движение крена;
—Самолет должен обладать прямой реакцией по крену на
отклонение педалей. При этом не должно быть чрезмерного, по оценке
пилота, заброса по углу крена.
Зарубежные нормы, например, FAR-25 несколько отличаются
от отечественных НЛГС. Согласно FAR-25 самолет должен
обладать умеренной спиральной устойчивостью, а к уменьшению
угловой скорости крена в процессе кренения жесткие требования не
предъявляются.
Однако четкость требований к статическим и динамическим
характеристикам бокового движения позволяет более строго
формулировать и формализовать критерии выбора структуры и
параметров автоматических устройств улучшения устойчивости и
управляемости. Так, требование к затуханию бокового колебательного
движения почти эквивалентно требованию к действительной части
(декременту затухания) доминирующего колебательного корня
рыскания, т.е.
£><-0,35 для взлетно-посадочных режимов
584
и £><~0,2 для крейсерского.
Для обеспечения приемлемой управляемости самолета по курсу
предъявляются определенные требования к частоте его боковых
колебаний, которая для магистральных самолетов должна быть не
менее 0,35-0,4 1/с. При более низких частотах возможно
ухудшение путевой управляемости из-за чрезмерной
чувствительности управления и нежелательного взаимодействия
движений самолета по рысканию и крену при управлении самолета
летчиком.
К управляемому поперечному движению (движению по крену)
так же предъявляется несколько четких требований. Во-первых,
требование к времени перекладки самолета из крена 30° с одного
крыла на другое—есть требование к максимальной установившейся
скорости крена шх уст max при отклонении рычага управления по крену
с усилием не более 20 кг. Во-вторых, одновременно с требованием к
статике, т.е. установившейся скорости крена, для обеспечения
приемлемой управляемости самолета по крену необходимо выдержать
определенное соотношение между co^max и постоянной времени крена
Ткр. Это соотношение определяется рис.6.30 приведенном в гл. 6 и
Ш.
Вышеприведенные требования к управляемому движению крена в
некоторых случаях удобно объединить в требование к сох уст. max И
постоянной времени крена 7\р или величине действительного корня
А кр. Постоянную крена для магистральных самолетов целесообразно
обеспечить в пределах 1 -i-1,5 с.
Требование к допустимой степени взаимодействия движений
крена и рыскания при управлении самолетом летчиком по крену
эквивалентно требованию к допустимому уменьшению угловой
скорости крена (тенденции к зависанию) во время кренения. Оно
формализуется в требование обеспечения близости частот
комплексного нуля и полюса передаточной функции Wjl и
2 бэ
характеризуется критерием
Для улучшения характеристик устойчивости и управляемости
бокового движения используется несколько автоматических
585
устройств. Демпфер рыскания является неотьемлемой частью
автоматизации управления рулем направления всех современных
отечественных и зарубежных самолетов. Демпфер рыскания (ДР)
очень эффективен для обеспечения требований к времени затухания
бокового колебательного движения Наиболее распространен
закон демпфера рыскания, включающий виражный механизм:
Д £ рн=КШу 1 •Шу, (8.10)
который исключает отработку постоянной составляющей сигнала
угловой скорости а) у рулем направления при выполнении
координированных разворотов.
Эффективность демпфера рыскания иллюстрируется рис. 8.13,
8.14, где приведено изменение времени затухания Тзат бокового
колебательного движения в зависимости от коэффициента КШу для
нескольких режимов полета пассажирского самолета, а также
изменение расположения доминирующих комплексных корней
характеристического уравнения. Видно, что при увеличении КШу
повышается декремент затухания и уменьшается время затухания.
ДР с коэффициентами КШу = 0,54-1,Ос на крейсерском режиме и с
/Гагу = 2,04-2,5 с на взлетно-посадочном режиме позволяет
обеспечить требуемые характеристики затухания бокового движения.
Для реализации необходимых характеристик бокового
колебательного движения и сохранения запасов по аэроупругой
устойчивости контура демпфера рыскания коэффициент ДР КШу
следует регулировать по режимам полета, например, по скоростному
напору Q или приборной скорости Упр.
Для улучшения динамики управляемого бокового движения,
разделения движений крена и рыскания и устранения возможного
зависания самолета по крену в закон ДР вводят дополнительный
сигнал
1 Ку
Т„р+1Л“:‘ х
При достаточно большой постоянной времени Тш эта связь
эквивалентна обратной связи по сигналу угла крена у на руль
586
Рис.8.13.Зависимость времени затухания бокового колебательного
движения от передаточного числа демпфера рыскания
Рис.8.14.Изменение положения определяющих корней
характеристического уравнения бокового движения при установке
демпфера рыскания
587
направления. Сумма этих сигналов достаночно точно соответствует
введению обратной связи по сигналу ускорения по углу скольжения на
руль направления.
Демпфер крена(ДК),отклоняющий элероны по закону:
^э = КШхо)х (8.11)
наиболее часто используется для обеспечения постоянной крена Ткр
(см. раздел 6) и улучшает демпфироваиие колебательной
составляющей крена. Изменение 7\р и распологаемой максимальной
Рис.8.15. Изменение макси-
мальной установившейся скорости
Крена О> х уст max и постоянной
времени крена Ткр при установке
демпфера крена
скорости крена в зависимости от
коэффициента ДК КШх показано
на рис.8.15. Изменение
расположения фигуративной точки
В ПЛОСКОСТИ параметров (ейхусттах,
Ткр) свидетельствует о высокой
эффективности ДК в обеспечении
требуемой динамики крена.
На больших углах атаки
резко падает собственное
демпфирование крена самолета.
Поэтому именно на этих режимах
полета демпфер крена
обеспечивает необходимое
повышение демпфирования и
снижение колебательности
бокового движения.
Эффективным средством
улучшения характеристик
устойчивости и управляемости
бокового движения является
автомат путевой устойчивости.
Закон отклонения руля направления
этим автоматом имеет вид:
Д <5й — — Kmnz+КШу
1 ШуР~\ 1 '
(8.12)
или
588
t ' (8.13)
Обратная связь по сигналам боковой перегрузки пг или углу
скольжения /9 используется здесь для повышения собственной
частоты самолета по рысканию, необходимой для удовлетворительной
оценки управляемости по рысканию. Закон (8.12)более часто
используется на практике. Это связано с особенностями измерения
угла скольжения на самолете. Измерение угла скольжения является
намного более сложной технической задачей, а дальнейший пересчет
измеренного местного угла скольжения в обобщенное для самолета
его значение приводит к большим ошибкам. Для измерения сигнала
боковой перегрузки пх используется отработанный и очень надежный
датчик линейных ускорений (ДЛУ). Однако при использовании сигнала
пх серьезной проблемой становится реализация больших
передаточных чисел КПх в законе (8.12) и необходимость их
регулирования по режимам полета—скоростному напору Q. Кроме
этого появляется необходимость принятия специальных мер по
подавлению высокочастотных составляющих в сигнале боковой
перегрузки обусловленных упругостью конструкции.
В практике автоматизации путевого канала управления
зарубежных самолетов выработан определенный подход. Вычислитель
системы повышения управляемости путевого канала (FAC-Flight
augmentation computer) выполняет следующие функции:
—демпфирование боковых колебаний,
—повышение устойчивости,
—обеспечение координированного разворота.
Структурная схема формирования сигнала управления рулем
направления этим автоматом приведена на рис.8.16.Исходные сигналы
для формирования управляющего сигнала поступают от
общесамолетных цифровых информационных систем IRS-ВИНС,
ADC-CBC. Собственных датчиков аналогового типа система
автоматизации путевого канала FAC не предусматривает.
Рассмотренный автомат повышает флюгерную устойчивость
самолета, повышает частоту колебаний бокового движения, повышает
589
Рис.8.16. Блок-схема автомати-
зации управления рулем напра-
вления пассажирского -самолета
Рис.8.17. Зависимость собст-
венной частоты и декре-
мента затухания бокового
колебательного движения от
передаточного числа КПг
СУУБ
относительный декремент затухания, повышает спиральную
устойчивость. На рис.8.17 приведены результаты расчетов по
влиянию коэффициента КПг на рассмотренные характеристики
бокового движения.
На малых скоростях полета и больших углах атаки резко
возрастает взаимодействие движения крена и рыскания. На рис.8.18
приведена зависимость критерия Л2 от коэффициентов демпферов
крена и рыскания. Для свободного самолета Л2 <0,5, что
свидетельствует о тенденции к зависанию по крену. Установка
демпферов крена и рыскания заметно улучшает характеристики
бокового колебательного движения, однако степень взаимодействия
движения крена и рыскания изменяется слабо. Более эффективным
средством ослабления этого взаимодействия является перекрестная
связь сигнала Хэ в канал руля направления, устраняющая развитие
скольжения. Коэффициент перекрестной связи обычно выбирается
исходя из обеспечения независимости движений крена и рыскания в
первый момент управляемого движения крена и определяется из соот-
ношения:
590
K™=~J« + m^gaK™ <8Л4>
Такой подход позволяет обеспечить величину критерия Л2 близкую 1.
На рис.8.19 показано влияние коэффициента перекрестной связи
на величину критерия Л2. На рис.8.2О, 8.21 приведены переходные
процессы свободного самолета и самолета с автоматизацией при
действии порыва ветра и ступенчатом отклонении рычага поперечного
Рис.8.18. Зависимость
показателя степени
взаимодействия
управляемого движения
крена и рыскания от
передаточных чисел КШу и
КШх.
показателя степени
взаимодействия управляемого
движения крена и рыскания от
коэффициента перекрестной
связи Kf
Шп
Таким образом, наиболее полное выражение законов отклонения
органов поперечного и путевого управления от средств автоматкзации
можно представить в виде:
Дб'н—— Кпг ПгЛ-Кыу Шу + Krf +Л’ШНХЭ (8.15)
-Z (л)уР~\ 1
&& э — КШх (Ох
Помимо вышерассмотренных функций автоматика путевого и
поперечного каналов управления выполняет специальные функции,
например, парирование возмущающего момента рыскания при отказе
двигателя. Особую важность эта функция приобретает при выполнении
взлета. Для ее реализации следует обеспечить отклонение
Руля направления пропорционально разнотяговости двигателей. Мерой
591
. разнотяговости может служить разность сигналов эквивалентов тяги
(ЭТ) правых и левых двигателей. Отклонение руля направления
пропорционально разнотяговости или ДЭТ является примером
построения системы по разомкнотому принципу. По принятой
классификации это система компенсационного типа. Качество ее
работы зависит от точности априорных знаний связи между моментом
рыскания, возникающим при отказе двигателя, и моментом рыскания
Рис.8.20. Динамика бокового
движения самолета с демпферами
рыскания и крена при отклонении
рычага управления креном
------ Самолет с С У у Б
-----Самолет Sei СУУб
Рис.8.21. Динамика бокового
движения свободного самолета и
самолета с СУУБ при действии
порыва ветра
от отклонения руля направления. В качестве ЭТ могут быть
использованы сигналы оборотов турбины или компрессора п\,
которые довольно хорошо коррелированы с тягой двигателей.
Отклонение руля направления для выполнение этой функции может
быть определено следующим выражением:
592
А <5н~ K(V) TnP^-1 (8.16)
Ди — Игпр И2л
коэффициент К (V) регулируется по режимам полета.
Изодром с большой постоянной времени Тп введен для медленного
списывания сигнала рассогласования А и и передачи управления
рулем направления полностью летчику. Особую значимость эта
функция приобретает при отказе двигателя на взлете, когда
запаздывание реакции летчика на парирование отказа весьма сильно
сказывается на безопасности выполнения взлета и в значителъной
степени определяет минимальную эволютивную скорость разбега
Уэв раз. Для примера на рис.8.22 приведены записи параметров
движения самолета при взлете в конфигурации с автоматом
парирования отказа двигателя и без него. Следует отметить
существенное влияние автомата на величину бокового отклонения
самолета от осевой линии ВПП при разбеге.
Рис.8.22. Изменение параметров
движения самолета при
продолженном взлете
Для этого сигнал угла крена
Все коэффициенты в законах
(8.15) и (8.16) следует
регулировать по режимам полета
для того, чтобы обеспечить
необходимый запас устойчивости с
учетом аэроупругости
конструкции. Пример изменения
коэффициентов закона(8.15)
приведен на рис.8.23.
В целях предупреждения
летчика о достижении большого
угла крена с помощью автоматики
резко повышают спиральную •
устойчивость самолета. Это
достигается реализацией обратной
связи по сигналу превышения угла
крена сверх заданного на элероны,
пропускается через нелинейность,
показанную на рис.8.24. В результате при малых и умеренных углах
593
крена I у I < Ttnax сохраняется традиционным стереотип управления
самолета по крену с располагаемыми угловыми скоростями, такой же
стереотип сохраняется и при очень больших углах крена | у | >
Ttnax+A yf но с существенно меньшими угловыми скоростями, при
углах крена в диапазоне 7fnax< | у | <jtnax + A у обеспечивается
пропорциональное управление: отклонению рычага соответствует
приращение угла крена сверх заданного Ttnax. Такое изменение
управляемости самолета по крену летчик четко распознает и тем
самым имеет своевременное предупреждение о достижении угла крена
I у | > Ttnax. Эта мера предусмотрена на самолетах А320 и Ту-204
при углах крена | у | >30° 4-35
летным составом.
и была положительно оценена
Рис.8.23. Зависимость передаточных
коэффициентов СУУБ от приборной
скорости полета Упр
Рис.8.24. Нелинейность в цепи
обратной связи СУУБ по сигналу
угла крена
8.3. Системы улучшения устойчивости и управляемости
астатического типа (интегральная СУУ)
8.3.1. Обеспечение статических и динамических характеристик
управляемости
Астатические системы улучшения устойчивости и управляемости
привлекали внимание создателей систем управления самолетом
начиная с 50~^60 годов.
В тот период Г.С. Бюшгенсом; В.Н.Матвеевым и др. были ис-
•594
следованы вопросы построения таких систем. Достаточно подробное
исследование гироскопического (тангажного) и перегрузочного
астатических автоматов продольного управления проведено в [1,2]. В
этих монографиях рассмотрены статические и динамические харак-
теристики самолета с астатическими автоматами, вопросы устой-
чивости и выбора их параметров, а также некоторые особенности
пространственного движения самолета.
С переходом на дистанционное управление аэродинамическими
органами пассажирских самолетов и появлением достаточно мощных
бортовых цифровых вычислительных машин (БЦВМ), которые
позволяют реализовать необходимую точность алгоритмов любой
сложности, интерес к астатическим (или интегральным) автоматам
устойчивости существенно возрос. Современное состояние
электроники позволяет реализовать с необходимой точностью и
надежностью довольно сложные законы астатических автоматов. В
настоящее время уже эксплуатируется самолет Airbus Industry
А320 с подобной системой в продольном канале управления, выходит
на линии отечественный Ту-204, проектируются другие самолеты с
аналогичными автоматами продольной и боковой устойчивости.
Переход к астатическим автоматам обусловлен тем, что они
позволяют обеспечить заданные характеристики устойчивости и уп-
равляемости, ограничить с высокой точностью параметры движения и
не допустить их выход за пределы эксплуатационной области режимов
полета, тем самым существенно упростить пилотирование самолета.
Суть обеспечения статических характеристик управляемости и
ограничения параметров движения с помощью астатического авто-
мата состоит в формировании подинтегрального выражения,
обнуляемого в процессе управления, а также правильном выборе
параметров самого закона, исходя из обеспечения требуемой динамики
переходных процессов. Аспект вариации подинтегрального выражения
актуален для управления продольным движением, т.к. здесь требуется
обеспечить характеристики управляемости по перегрузке и по углу
тангажа и/или углу атаки, и ограничить предельные их значения (т.е.
Иутах и tfmax), а также скорости и числа М полета. Отсюда следует
существенное усложнение логики формирования подинтегрального
595
выражения, необходимость его реконфигурации в зависимости от
условий полета, т.е. режима полета и конфигурации самолета.
Рассмотрим эти вопросы подробнее. Выражение, определяющее
управляющий сигнал отклонения органа продольного управления
целесообразно разделить на две основные составляющие:
—Статические прямая и обратная связи Мст,
—Интегральные прямая и обратная связи /^dt.
= и а4-и, dt
о
Статические прямая и обратная связи обычно реализуют закон
статического СУУП вида (8.9) с переменными коэффициентами
усиления. Интегральные обратные связи формируются как надстройка
(или дополнение) к закону (8.9). Закон формирования интегральной
составляющей необходимо изменять в зависимости от решаемой
задачи или выполняемой функции. Так на режимах умеренных и
больших скоростных напоров необходимо обеспечить заданные
характеристики управляемости по перегрузке и ограничить ее
предельное значение величиной max. В этом случае вид
подинтегрального выражения обычно имеет вид:
Unj=Km\WjXB~^Кп\ (8.17)
или
Una>f—K\n\WxfXB~^~Кп\ W+ Кш{(х)2к (8.18)
Блок-схема СУУП с астатическим законом формирования
управляющего сигнала в соответствии с (8.17) и (8.18) приведена на
рис’. 8.25. Подинтегральное выражение определяет величину X”. В
первом случае
(8.19)
во-втором,
Кп5+^Кш5
х*= (8-20)
Из выражения (8.19.) видно, что величина X” определяется выбором
двух коэффициентов: интегрального коэффициента прямой цепи и
интегрального коэффициента обратной связи по перегрузке Во втором
случае, выражение (8.20), величина X в зависит кроме того от
596
Рис.8.25. Блок-схема астатической СУУП
истинной скорости полета V и интегрального коэффициента Кш/.
Изменение величины Хв от скорости при постоянных коэффициентах
показано на рис.8.26. Именно такой характер изменения Хв по
режимам полета отвечает как возможностям самолета, так, и
субъективному восприятию летчика. Поэтому наличие сигнала coz под
интегралом позволяет обеспечить желаемое изменение характеристики
А в по режимам полета.
toot)
ntpl
О ____________
Рис.8.26. Зависимость Х*^ от приборной скорости
полета самолета с астатической СУУП с законом 8.18
Для аналогичного изменения X в при использовании подин-
597
тегрального выражения (8.17) необходимо проводить коррекцию
передаточных чисел.
Проблема, возникающая при использовании интегральной
системы по сигналу А пу, состоит в необходимости обеспечения двух
противоречивых требований. Во-первых, при малых отклонениях
рычага Хв, соответствующих А пу — 0,3 4- 0,5, надо обеспечить
оптимальные по управляемости значения Лв; с другой стороны,
необходимо обеспечить возможность вывода самолета на ^даах (или
%(Сутах)) при полном отклонении рычага на себя (Хвтш) и некоторое
минимальное значение нормальной перегрузки'ПУтт при максимальном
отклонении рычага управления от себя -Хитах. Вид желаемой
статической характеристики пу (Хв) показан на рис. 8.27. Таким
образом, излом статических характеристик осуществляется по ходу
рычага в двух точках Хв=Лво и XB=XBi. Теперь, если нам
известно значение Хв, можно легко добиться реализации желаемых
значений перегрузок путем коррекции сигнала Хв по следующему
алгоритму:
(Xb-Xbo)7?xo+JVbo при ^в>Хво
Хв при Xbo>Xb>Xbi ,
Хв+Rxi (.Хв Xbi) при Хв Хю
Rxo
Хв Tlymm -ХвО
max
ХвО
(8.21)
(8.22)
Rxi—
Bl X ЗЭД^Лу max
V V ’
XZ—заданная величина градиента расхода рычага управления
на единицу перегрузки.
пугтЛСу)=СтЛ1^’8з’3щ’) <8.23)
Сугп
^Утах mint Пу max? Пу max (G)], (8.24)
пУтт —заданная величина отрицательной нормальной перегрузки.
При использовании подинтегрального выражения (8.19) величина Кш
f определяется выражением:
Kml=J& , <8.25)
взад
598
а при использовании подинтегрального выражения(8.20)-
К
Х'-п S' irJ^-cof
кш\=——
Таким образом, приведенные соотношения используются для
выбора коэффициентов усиления сигналов входящих в подинтеграль-
ное выражение с целью реализации заданной статической характе-
ристики Хъ (рис.8.27).
Рис.8.27. Желаемая статическая характеристика
управляемости по нормальной перегрузке
Для обеспечения требуемых характеристик переходного процес-
са по перегрузке важное значение приобретает выбор статических
прямых и обратных связей.
На режимах управления перегрузкой статическая часть
астатической системы повышения устойчивости формируется по тем
же выражениям (8.6) или (8.9) как и для статической системы.
Выражение (8.5) для определения Кт позволяет существенно
Уменьшить расходы руля высоты в переходном
процессе, т.е. минимизировать участие интегральных связей
599
в обеспечении требуемого качества. Выполнение этого условия
позволяет снизить коэффициенты интегральных связей и тем самым
увеличить запас устойчивости системы.
Для обеспечения требований к переходному процессу по перег-
рузке современного пассажирского самолета по всему диапазону
режимов полета, весов и центровок необходимо проводить коррекцию
коэффициентов усиления прямых и обратных связей. Типичный
характер изменения коэффициентов по скоростному напору q показан
на рис.8.28.
При использовании
интегральной системы
целесообразно обеспечить по
Рис.8.28. Зависимость
передаточных чисел астатической
СУУП от скоростного напора
возможности независимое
управление продольным и боковым
движением. С этой целью
следует обеспечить стабилизацию
величины нормальной перегрузки
равной
(8.26)
* cos#
Пу=-----
у cos/
т.е. формировать величину
по выражению
Апук = Пу1—(8.27)
ук cos/
Использование сигнала (t)z,
измеренного в связанной системе
координат в подинтегральном
выражении обуславливает допол-
нительную взаимосвязь продольного и бокового движений. Эта взаимо-
связь приводит к опусканию носа самолета при вводе его в крен и,
наоборот, подъему носа при выводе. Поэтому для устранения этой
взаимосвязи, обусловленной самой системой, необходимо проводить
коррекцию сигнала угловой скорости oui в соответствии с
выражением:
600
а)як— —у tg / sin г cost? (8.28)
, ё sin2/
21 V cosy
При малых значениях угла крена допускается использование
выражения
(Dzk^(i)zi—у/2 (8.29)
Спроектированная таким образом система повышения устойчи-
вости и управляемости позволяет обеспечить заданные статические и
динамические характеристики управляемости по нормальной пе-
регрузке и ограничить реализуемые при управлении максимальную и
минимальную их величины.
Для обеспечения предупреждения и предотвращения выхода
самолета на V> Изад и М>М зад подинтегральное выражение
должно формироваться по выражению:
U/=Unj + KyfA. У+Км/А М (8.30)
Самолет с спроектированной системой повышения устойчивости и
управляемости астатического типа обеспечивает требуемые
динамические характеристики, т.е. необходимое быстродействие,
затухание, малые забросы и т.д. Необходимое качество переходных
процессов достигается принятием следующих мер:
1. Согласованием статических характеристик, реализуемых как
позиционными так и интегральными обратными связями, что
достигается регулировкой Кш по закону (8.5).
2. Регулировкой статических и интегральных обратных связей
Кп, Кш и Кп/, Кш/ по скоростному напору Q или приборной скорости
Vnp.
3. Включением дополнительной обратной связи по углу атаки для
компенсации "моментной ложки”.
Эти меры позволяют получить переходные процессы на всех
режимах полета практически без забросов и с необходимым быстро-
действием. Отсутствие забросов позволяет надежно ограничить
перегрузку и угол атаки не только в установившихся режимах, но и
при переходных процессах. На рис. 8.29. 8.30 приведены переходные
601
процессы на двух режимах, подтверждающие вышесказанное.
Рис.8.29. Переходные процессы
самолета с астатической СУУП
Рис.8.30. Переходные процессы
самолета с астатической СУУП
8.3.2. Особенности балансировки самолета с интегральной СУУП
При использовании интегрального закона СУУП придает само-
лету определенные особые свойства, ранее редко встречающиеся у
самолетов без автоматики.
Из анализа продольной балансировки самолета с интегральной
системой, подробно рассмотренной в £41, следует, что при ис-
пользовании закона (8.17) балансировочное положение штурвала
определяется выражением:
ХВбал=-^с<^гп-Иу3а>), (8.31)
здесь —значение сигнала перегрузки, измеренного в связанной
602
системе координат в горизонтальном полете, которое как известно
равно:
^гп^созСягл+^д), (8.32)
где Рд-угол между осью чувствительности датчика перегрузки и
нормальной осью самолета ОУ.
Вообще же в прямолинейном полете перегрузка равна величине:
i 72yrn~COS( $r.n“b $?д), 4 (8.33)
где & гп - угол тангажа при прямолинейном полете.
Отсюда следует, что для того, чтобы балансировочное поло-
жение рычага соответствовало нейтральному, необходимо, чтобы
величина «узм формировалась по выражению:
wy3M=cos(i9 + ^), (8.34)
и приращение сигнала перегрузки &пук определялось соотношением:
Дпук=Пу—со8($ + <Рд), (8.35)
Полученное свойство Ав бал (И)=0 свидетельствует, что
самолет имеет Яейтральную статическую устойчивость по скорости
Pv=0.
В соответствии с требованием п. 3.7 НЛГС должно обеспе-
чиваться Pv>0. Однако, как показывают летные испытания
самолетов с интегральной системой, нейтральная устойчивость по
скорости оценивается летчиками положительно, так как разгружает их
от перебалансировки самолета по усилиям при разгонах и
торможениях.
Формирование ^пук по выражению
Дпук=Пу — 1 (8.36)
приводит к ненулевому балансировочному положению рычага управ-
ления
X^=2(sin агл„+р<)МК (8,37)
Из (8.37) следует, что
dXR бал__ • { । \(1о г.п KnI sq qqa
dу -Sin^o r,„ + <8.38)
Поскольку всегда то имеем Это
свидетельствует о наличии слабой неустойчивости по скорости- при
603
фиксированной ручке управления. Допустимость такой неустой-
чивости зависит и от величины предварительного затяга Рвз рычага
продольного управления, поскольку даже при небольших изменениях
скорости балансировочные усилия будут изменяться на величину
^Рв бал =-Рвз Sign -Хбал» (8.39)
где Рвз —усилйе предварительного затяга.
При К>И3ад балансировочное положение рычага продольного
управления в основном определяется наличием в подинтегральном
выражении (8.30) члена KV; А V. Пренебрегая вышеописанным
эффектом коррекции сигнала пу, из (8.30) получим
в бал
^ЧГ-Узи) ПРИ Кш<У<Гзад + А Ипах
Vmax При ТЛзад-^ A Тгпах
(8.40)
Г радиент
d-Ув бал Ку!
dV ~Кш/’
т.е. определяется только параметрами
системы управления. Выбором параметров Kvs и А Илах можно
создать необходимую степень повышенной устойчивости по скорости
при V> Изад.. Для сохранения запаса продольного управления (на
пикирование) величина tJs А Ртах должна быть ограничена и быть
меньше максимального располагаемого хода рычага управления на
пикирование Хешах с тем, чтобы летчик отклонением рычага
управления "от себя” мог "пересилить” действие обратной связи по
скорости. Требуемая величина запаса по отклонению
х ХЛ __ ХЛ Xv; л X Т
А Л в— Летах —А Утах ЗЗВИСИТ ОТ Характеристик
Лщ/
двигателя, аэродинамических характеристик, эксплуатационных
ограничений режимов полета и т.д. Удобно определить требуемый
запас АХВ) исходя из требуемого запаса нормальной перегрузки на
пикирование при Хв тах.
Определенные особенности проявляются у самолета с интег-
ральной СУУП при разгонах и торможениях в горизонтальном полете.
Как показано в [41, Хв бал в этих условиях можно приближенно
представить в виде:
604
Хвбал= Й(О/[а(1), V(.t>] (8.41)
Видно, что если величина f положительна, знак ХВбал совпадает
со знаком V, т.е. при разгоне Хв бал>0, а при торможении Хв бал
<0. При этом благодаря наличию в системе загрузки рычага
управления усилия предварительного затяга даже при небольших
величинах | Хв бал I при разгонах и торможениях возникают заметные
для летчика балансировочные усилия, которые воспринимаются им как
наличие у самолета слабой устойчивости по скорости, вполне
достаточной для положительной оценки управляемости при изменении
скорости. Наоборот, при /<0 наличие соответствующих усилий
воспринимается как неустойчивость самолета по скорости. Для
примера, на рис.8.31 приведены записи параметров движения
гипотетического неманевренного самолета и управляющих
воздействий летчика при разгонах—торможениях, которые
подтверждают вышесказанное. Пример зависимости Хв бал (И) при
ЙФО приведен на рис. 8.32 пунктирной линией.
V(o6*. G)<V<V max
Рис.8.31. Изменение параметров движения самолета с астатической
СУУП при разгонах-торможениях
Величину У (a, V) можно представить в виде суммы
f=ft+f2+f>+ft, (8.42)
605
где
с;=4г( С!М+2 C?q - 2 Сс,-Ср>,
(8.43)
тг=-^(.т“М+Imlq—2жР Ср>,
Ср - коэффициент тяги.
В таблице № 1 приведена оценка отдельных составляющих / для
следующего случая: ^гу=_0,05, Сур=§, mzp~Q
м : Л /г /з Л /s
0,7 1,065 1,02 —0 -1,-1 0,57
0,78 0,78 0,83 -2,32 -0,71
0,83 0,64 0,71 -10,2 -8,77
Рис.8.32. Балансировочная характеристика самолета с
астатической СУУП
606
Из таблицы видно, что величина /1, которая характеризует
влияние интегральных обратных связей по угловой скорости тангажа
и нормальной перегрузке, всегда положительна. Знак /2 определяется
запасом статической устойчивости и для устойчивого самолета
величина /2 также положительна. Величина /з мала и для оценок ею
можно пренебречь. Знак и величина Л определяется частной
производной продольного момента по скорости wl. Поскольку на
малых скоростях его влияние не является определяющим. В
диапазоне больших дозвуковых скоростей -(М~ 0,7-0,8); где wl
существенно отрицательна, влияние Л становится определяющим.
Следовательно, слагаемые /2 и Л, характеризующие полную
производную продольного момента по скорости, являются
определяющими.
В этой связи статическая обратная связь Ам * А М описанная
в предыдущем разделе остается актуальной и для интегральной
системы, то есть самолет, обладающий моментной устойчивостью по
скорости (wl)>o) и при наличии интегральной системы гаран-
тированно будет положительно оценен летчиком.
8.4. Ограничители предельных значений угла атаки и
перегрузки
л
8.4.1. Ограничители предельных режимов в статической СУУП
Предотвращение выхода самолета на предельные значения
параматров движения (угол атаки и нормальную перегрузку)
преследует цель повышения безопасности полета путем-
предупреждения летчика и активного воздействия на руль высоты, т.е.
предотвращение выхода самолета на такие режимы, где проявляются
существенные изменения характеристик управляемости и имеют
место особые виды движения, например, сваливание и штопор,
обусловленные взаимодействием инерционных и существенно
нелинейных аэродинамических сил. Наиболее актуальным для
пассажирских самолетов является реализация функции ограничения
Угла атаки.
Предотвращение выхода самолета на предельные углы атаки ре-
607
шается несколькими путями:
— звуковой и световой сигнализацией;
— предупреждением путем тряски рычага управления-штурвала
или его дополнительной загрузки;
— активным ограничением посредством воздействия на руль
высоты.
Эти способы предотвращения выхода самолета на закритические
углы атаки применяются для самолетов с любыми типами СУУП.
Звуковая и световая сигнализации являются обязательными мерами
предупреждения, которые реализуются на всех пассажирских
самолетах. Однако в стрессовой ситуации этой меры предупреждения
может оказаться недостаточно для эффективного предупреждения
летчика о возникновении опасной ситуации. Поэтому в дополнение к
ней используется более эффективный способ предупреждения летчика
через тряску штурвала, которую он легко распознает в любой
ситуации. Другим столь же эффективным способом предупреждения
является дополнительная загрузка штурвала путем подключения
специального загружателя или толкателя.
Тряска штурвала осуществляется специальным механизмом.
Сигнал на задействование тряски формируется по следующему усло-
вию:
г/тр—
О при a<Za тр
1 а а тр
(8.44)
где
a = a+Kad или а= а+К^сох
Составляющая Ка а или Кша)г используется для внесения
опережения, т.е. учета прогноза дальнейшего движения самолета по
углу атаки, а тр —значение угла атаки, при котором реализуется
тряска штурвала. За а тр может быть принято значение а доп.
Такой способ предупреждения очень часто используется на
современных пассжирских самолетах, например, на DC-10. Способ
искусственной дополнительной загрузки штурвальной колонки требует
использования более сложного устройства—следящего механизма с
упором. Однако для самолетов, оборудованных специальной системой
608
автоматической загрузки (САЗ, см. главу 7), этот способ реализуется
без привлечения дополнительного оборудования. На привод САЗ,
который обеспечивает перемещение штурвала пропорционально
усилию, приложеному летчиком к штурвалу, подается сигнал
превышения заданного угла атаки ила.
ила=Ка ' А а
где д0=( й-атрприй > (8 45)
О а<^а тр
Появление этого сигнала в тракте отработки приводит к перемещению
рычага "от себя”. Для удержания штурвальной колонки летчику
теперь необходимо прикладывать дополнительное усилие, чтобы
компенсировать сигнал и&а, что по оценкам летчиков является очень
эффективным средством предупреждения.
При отсутствии на самолете САЗ дополнительная загрузка
может быть создана специальным подвижным упором с
предварительно обжатой пружиной. Подвижный упор позволяет
реализовать загрузочную характеристику приведенную на рис. 8.33.
Положение упора должно регулироваться в пределах XBmin max,
т.е. возможно положение упора "от себя” Хв>0, в этом случае упор
выполняет функцию толкателя.
Сложность реализации данного способа предупреждения состоит
в трудности определения положения упора. Для корректного определе-
ния положения упора необходимо знать статическую характеристику
^в(а), которая зависит не только от аэродинамических характеристик
самолета, но и алгоритмов и параметров системы управления. Для
примера на рис. 8.34 приведены статические характеристики
пассажирского самолета со статической СУУП на крейсерском и
посадочном режимах полета. Можно видеть существенную
зависимость характеристики Хв(а) от аэродинамики, конфигурации и
центровки самолета. Если влияние центровки и конфигурации самолета
можно учесть по априорным "трубным” аэродинамическим данным и
текущим сигналам отклонения стабилизатора и механизации,
609
Рис.8.33. Загрузочная
характеристика рычага продольного
управления современного
пассажирского самолета
Рис.8.34. Статические
характеристики управляемости по
углу атаки самолета со
статической СУУП
то влияние нелинейности аэродинамических характеристик учесть с
достаточной точностью не представляется возможным. Поэтому
установка упора в необходимое положение в этих условиях возможна
только в области линейности аэродинамических характеристик. Если
а тр лежит в области линейности зависимостей Су(а) и тг(а), то
установка упора может быть осуществлена по известной (заданной)
величине расхода рычага управления на единицу нормальной
перегрузки Х^. Тогда по величине а тр определяется Сутр(а тр), по
которому расчитывается значение нормальной перегрузки
(8.46)
и далее положение упора
610
(8.47)
Ав тр — Ав зад А 'Пу-гр
где
Суг-П qS
Примером статической СУУП, обеспечивающей примерное
выдерживание Хв зад? является система описаниая в разделе 8.2.
Однако, неточность априорных знаний аэродинамических
характеристик позволяет обеспечить только достаточно грубую
оценку положения упора при использовании СУУП со статическим
законом управления. Поэтому эта задача может быть успешно решена
только при использовании СУУП с астатическим законом, который
обеспечивает точное выдерживание А взад. В этом случае точность
установки упора в требуемое положение определяется точностью
знания соотношения между углом атаки и нормальной перегрузкой. На
линейном участке это соотношение достаточно точно известно и
выражение (8.47) может быть использовано для расчета положения
упора. Такой способ предупреждения летчика через подключение
дополнительного загружателя может быть использован как для
предотвращения выхода на допустимый угол атаки так и за
допустимое значение нормальной перегрузки.
8.4.2 Ограничение предельных режимов в астатической СУУП
Точное решение проблемы предупреждения и ограничения угла
атаки может быть осуществлено только при переходе на астатический
принцип управления по углу атаки. В рамках рассмотренных
астатических алгоритмов такой подход может быть реализован
следующим образом.
Параллельно с формированием подинтегрального выражения,
обеспечивающего стабилизацию заданного значения нормальной
перегрузки, необходимо формировать подинтегральное выражение для
стабилизации заданного значения угла атаки. Для этой цели
необходимо задаться желаемой статической характеристикой Хв(а),
т.е. поставить в соответствие отклонение рычага управления с
величиной угла атаки. Одна точка этого соотношения определяется
предельным углом атаки «шах, который должен достигаться при
611
полном отклонении рычага управления на себя Хв тш. Вторая точка
может быть определена углом атаки #тр, который достигается при
некотором, опреденном заранее, отклонении рычага управления Хв тр.
При этом отклонении рычага или при достижении значения угла атаки
а тр должно происходить предупреждение летчика о приближении к
предельному углу атаки. Для реализации значение а тр целесообразно
выбрать на линейном участке зависимости Су(а), что обеспечит
возможность использования выражения (8.47) для определения
значения Хв тр. Определив две точки статической характеристики
Хв(а), целесообразно принять линейный характер изменения
желаемой характеристики Хъ(а) между этими точками. Вид этой
зависимости приведен на рис.8.35. В данном случае следует иметь в
виду, что на режимах, где Суг.п>Сутр точка Хв (атр) будет
находиться в диапазоне положительны^ значений отклонений рычага
управления Хв. Сформировав таким образом желаемую статическую
характеристику по углу атаки Хъ(а), необходимо обеспечить
своевременный переход с управления перегрузкой на управление по
углу атаки. Для этого следует провести замену подинтегрального
выражения (8.17) или (8.18) на ниже следующее:
Ua5 Кша/СХ# Хв тр) "Т Kaf Q (8.48)
Такой переход может быть обеспечен, например, путем плавной
замены выражения (8.38) на (8.48) проводимой путем умножения
подинтегрального выражения (8.38) на специальную функцию угла
атаки, сформированную по выражению:
с 1 при
Ct max Ct
C?max— aTP
О
Ct тр*\ Q! Qinax
Ct Ct max
(8.49)
и умножения подинтегрального выражения (8.48) на функцию
1 — Fka). Теперь, объединив два подинтегральных выражения путем
суммирования, имеем окончательное подинтегральное выражение
Uj=Fka)Unj + \l — Fka)]uah (8.50)
которое обеспечивает требуемые ограничения.
Для реализации сипах при Хь=Хь min коэффициенты подинтегрального
выражения должен удовлетворять условию
612
J^-af _ Лвтр -Лвт1п /n r-i\
rs — _ 40.31;
J^-uiaf G max Ct тр
из (8.50) и (8.49) видно, что при а<а тр подинтегральное выражение
формируется в соответствии с (8.17) или (8.18) т.е.
Uf==Unf
При а «max и имеет место соотношение:
Z// UaS
Таким образом, диапазон атр^а^атах является переходным, где
статическая характеристика формируется на основе учета как сигнала
нормальной перегрузки пу, так и угла атаки а. В этом диапазоне
углов атаки статические характеристики управляемости определяются
полным выражением
F(ff)a»/ + [l-F(a’)]“‘,;=0 (8.52)
Рис. 8.35. Желаемые
статические характеристики
Управляемости по углу атаки
Рис.8.36. Статические
характеристики управляемости
, по углу атаки самолета с
астатической СУУП с законом
(8.46)
613
Как показывают исследования, этому выражению сответствует при-
емлемая статическая характеристика, приведенная на рис.8.36. Как
видно реальная статическая характеристика Хв(а), полученная из
условия (8.52), не совпадает с заданной желемой характеристикой и не
является однозначной. Это объясняется наличием в подинтегральном
выражении (8.50) составляющей F(a).Wn/, зависящей от величины
А пу, которая заметно влияет на смещение статической
характеристики Хв(а). Этому же способствует и умножение
составляющей иа/ на 1 —F(a)#=l.
Динамические характеристики выхода самолета на предельные
углы атаки приведены на рис. 8.37—38.
При малых приборных скоростях V<V(a > Д' тр )
Рис.8.37. Переходные процессы
самолета с астатической СУУП с
законом (8-46)
Рис.8.38. Переходные процессы
самолета с астатической СУУП с
законом (8-46)
614
балансировочное положение рычага управления определяется со-
отношением:
у _______________Кд/(.а а тр)___________
ВбГал Кш/(атйХ— а)-\-Кша! (а-а тр)
И ПРИ <2 < #тах
Х^вбал т7 (flmax Cl тр) При Cl^ Cl max.
-Л-шаг
(8.53)
Производная Хъ бал по скорости при а<Сатах будет равна:
d^B бал _ Kgf(.q — а тр)[2Аш/(атах~а) +
dV [Кш{(а max
+ СКШ/ + Кша/)(д — а тр) da гп
+ ^шо/(а-атр)]2 dV
Отсюда видно, что при любых Кш/^>0 и Ха/>0 величина
0.
Для примера на рис. 8.32 приведены балансировочные зависи-
мости Хв бал (V) для гипотетического пассажирского самолета, из
Которых видны вышеописанные особенности балансировочной
характеристики.
характеристика управляемости по
Углу атаки
Другим способом перехода на
управление по углу атаки является
формирование подинтегрального
значения по следующему выра-
жению:
W/=max[wn/,Wa/] (8.55)
Тем самым на исполнение подается
та подинтегральная составля-
ющая, которая требует меньшего
отклонения руля высоты на кабри-
рование. Использование
выражения (8.55) позволяяет
обеспечить четкое выдерживание
статической характеристики по
углу атаки Хв(а) при а^>а тр. В
этом его преимущество по сравнению со способом плавной замены
615
подинтегрального выражения ип$ на подинтегральное выражение иа5
путем умножения на специальную функцию, в соответствии с
выражением (8.50). Статическая характеристика, определяемая
выражением (8.55) приведена на рис. 8.39, динамические
характеристики—на рис.8.40-41.
Рис.8.41. Переходные Процессы
самолета с астатической СУУП с
законом (8.51)
Рис.8.40. Переходные процессы
самолета с астатической СУУП с
законом (8.51)
8.5. Цифровая система управления продольным
движением
Интенсивное развитие цифровой техники обеспечило возмож-
ность реализации на ее базе вычислителей СУУ, а затем и дис-
танционной системы. Огромные вычислительные возможности в соче-
тании с приемлемыми весами, габаритами и потребляемой мощностью
616
привел к широкому внедрению бортовых цифровых вычислительных
машин (БЦВМ) в СУУ и ЭДСУ современных пассажирских
самолетов. Цифровая FBW самолета А320 и АСШУ-204 самолета
Ту-204 являются типичными примерами этого направления.
Применение БЦВМ позволяет решить ряд трудно преодолимых для
аналоговой техники проблем. Во-первых, БЦВМ позволяет с
достаточной точностью реализовать сложные интегральные законы
управления с переменными коэффициентами и структурой. БЦВМ
дает возможность проводить многопараметрическое изменение
параметров системы и коэффициентов усиления, осуществлять
селекцию используемых сигналов прямых и обратных связей,
выходных управляющих сигналов, проводить реконфигурацию
алгоритмов (законов) управления в зависимости от режима полета,
оценки состояния оборудования и взаимодействующих систем и т.д.
Очень большим преимуществом является возможность контроля,
выравнивания и восстановления промежуточной информации
(интегральных переменных, выходных значений фильтров с большими
постоянными времени и т.д.). В целом, применение БЦВМ
предоставляет разработчику широкие возможности для реализации
наиболее сложных алгоритмов управления, создающие благоприятные
характеристики управляемости. Помимо этого с помощью БЦВМ
может быть успешно решена проблема ограничения параметров
движения как в штатной конфигурации, так и в случае отказа
элементов авиационной техники.
Однако использование БЦВМ в СУУ приводит к определенным
особенностям при реализации алгоритмов, синтез которых проведен в
рамках теории непрерывных систем. Основная особенность, которую
необходимо учитывать при цифровой реализации алгоритмов, состоит
в дополнительном временном запаздывании передаваемых сигналов,
обусловленном конечной временной дискретностью (тактностью)
работы БЦВМ. Это означает, что на прием сигнала, обработку и
расчет алгоритма затрачивается некоторое время т3, а обновление или
повторение этой последовательности действий осуществляется через
такт То. Из теории дискретных систем известно, что суммарное
время запаздывания в этом случае составляет т3 + о,5То, что и
617
обуславливает дополнительное фазовое запаздывание о» (т3 + 0,5 То).
Поэтому для уменьшения влияния этого фазового запаздывания при
цифровой реализации алгоритма различные составляющие
управляющего сигнала обновляются по разному, т.е. с различными
временными тактами в зависимости от их влияния на устойчивость
замкнутой системы.
При цифровой реализации алгоритмов очень важно выдержать
строгие требования по спектральному составу входных сигналов.
„ \ cos _ Д’
Появление высокочастотых составляющих в спектре
входного сигнала может привести к порождению паразитной
низкочастотной составляющей и неправильному функционированию
системы. Это свойство дискретных систем, называемое транспо-
нированием частот, всегда должно учитываться разработчиком. Поэ-
тому при вводе в БЦВМ аналоговых сигналов очень часто использу-
ют их предварительную фильтрацию с помощью аналоговых
префильтров Жпф, которые резко ослабляют высокочастотные
составляющие в спектре входного сигнала.
Конечная разрядность устройств ввода/вывода (УВВ), т.е.
преобразователей аналог—код и код—аналог, обуславливают дискре-
тизацию сигнала по уровню осуществляемую БЦВМ. Количество
уровней, реализуемое в УВВ современных БЦВМ, составляет
10—14, включая знаковый разряд. Дискретность по уровню в этом
случае будет составлять 2~9^-2~13. Уровень 10~9~0,2% от
максимального значения сигнала не всегда допустим для задач СУУ.
Поэтому в БЦВМ СУУ целесообразно иметь УВВ с количеством
разрядов не менее 12.
Определенные особенности в работу цифровой СУУ вносит-ре-
зервирование БЦВМ, особенно это проявляется при асинхронном ре-
жиме работы БЦВМ. Асинхронность БЦВМ предполагает, что
моменты квантования по времени в БЦВМ реализуются в разные
моменты времени. При выравнивании информации используются
цифровые линии межмашинного обмена, которые вносят
дополнительное запаздывание в выравниваемые сигналы. В
результате временных расхождений выравниваемых переменных
618
возможно искажение динамических и статических характеристик
реализуемых элементов (фильтров, интегралов и т.д.). При достаточно
больших временных сдвижках выравниваемых сигналов эти
искажения могут быть весьма заметны и должны учитываться. Они
хорошо изучены и учитываются при проектировании цифровых СУУ.
Структурное построение цифровых СУУ современных
магистральных самолетов рассмотрено в главе 7. В данной главе
остановимся подробнее на их алгоритмическом обеспечении, функциях
и решаемых ими задачах. Из предыдущих параграфов следует, что
цифровая система улучшения характеристик устойчивости и
управляемости магистрального самолета выполняет следующие
функции:
— обеспечивает заданные статические характеристики управ-
ляемости в основной области режимов полета (Хв и -Рв);
— удовлетворительные динамические характеристики управляе-
мости;
— предупреждение летчика о превышении допустимого угла атаки
<?доп, нормальной перегрузки, угла крена /зад, скорости полета или
числа М;
— автобалансировку самолета через стабилизатор при нейтраль-
ном положении штурвала;
— автоматическое парирование возмущающих продольных
моментов при выпуске—уборке механизации и изменении тяги
двигателей;
—приращение нормальной перегрузки при кренении самолета для
обеспечения независимости продольного и бокового движений.
Структурная схема алгоритма СУУ, выполняющей все выше
перечисленные функции, приведена на рис. 8.42, из которой видна
последовательность действий по преобразованию входных сигналов в
управляющие командные сигналы на отклонение аэродинамических
поверхностей. В приведенной схеме можно выделить:
— ряд аналоговых префильтров для подавления высокочастотных
шумов и помех;
— цепь прямого управления—Хв Кш2;
— статические обратные связи по сигналам угловой скорости
619
тангажа со?к, нормальной перегрузки и углу атаки А а;
— интегральные обратные связи по сигналам отклонения
штурвала Хв, угловой скорости тангажа шгк, нормальной перегрузки
А пук, приращению угла атаки А а, приращению приборной скорости
А V, приращению числа М полета АМ;
— блок вычисления значения допустимого (а доп) и предельного
(а пред) углов атаки, допустимого значения коэффициента подъемной
силы Судоп;
— блок вычисления положения дополнительного загружателя;
— блок коррекции сигналов ш2 и Аиу;
— цепь управления положением стабилизатора.
Рис.8.42. Блок-схема астатической СУУП современного
пассажирского самолета
Цепь прямого управления реализует передачу управляющего
сигнала от летчика %в через регулируемый коэффициент Кш2,
формируемый в соответствии с выражением (8.5). Изменение
позволяет осуществить грубую самонастройку прямой цепи по ра-
зомкнутому принципу. Эта мера позволяет снизить коэффициенты ин-
тегральных обратных связей по сигналам и Аил, что очень
важно для обеспечения требуемых запасов устойчивости по ампли-
620
туде. По этой же причине осуществляется глубокая регулировка
коэффициентов статических обратных связей по сигналам шхк, &Пук
и приращению угла атаки А а.
Интегральные обратные связи по сигналам а>хк и АиЛ
обеспечивают заданные статические характеристики управляемости и
ограничение нормальной перегрузки, коэффицинты обратных связей
также регулируются по режимам полета. При углах атаки а < а доп
реализуется управление по перегрузке, т.е. сигналу %в ставится в
соответствие значение нормальной перегрузки АиУк; при а>аДОп
реализуется плавный переход от управления перегрузкой к
управлению приращением угла атаки А а —а —а доп. При а>а доп
сигналу обжатия дополнительного загружателя АХ=Хв-ХМрз,
ставится в соответствие приращение угла атаки А а.
Сигналы обратных связей по А V и А М задействуются при
превышении соответственно значений V мах или М мах. Самолету
придаются свойства повышенной устойчивости по скорости и числу М,
такие, что летчик не может их проигнорировать.
Блок вычисления значений а доп, а пред и Судоп осуществляет
интерполяцию значений этих параметров по числу М полета, а также
положению закрылков и предкрылков. Блок формирования
управляющего сигнала MP3 производит расчет координаты положения
А^мрз, исходя из величины СУЛОп., допустимой перегрузки ^у~^удоп и
реализуемой статической характеристики управляемости Хвзад.
Блок коррекции сигналов А пу и шг осуществляет формирование
сигналов А пу* и в соответствии с выражениями (8.26) и (8.28)
по сигналу угла крена / и скорости полета V.
8.6. Совмещенное управление (управление через САУ)
При все увеличивающейся автоматизации управления современ-
ного пассажирского самолета на всех этапах полета от взлета до
посадки решение проблемы рационального сочетания режимов штур-
вального (ручного) и автоматического управления заключается в
использовании совмещенного управления, при котором обеспечива-
ются:
621
— автоматическое управление самолетом на всех режимах
полета;
— поканальный переход с режима автоматического управления на
штурвальное при вмешательстве пилота в управление посредством
перемещения рычага управления;
— восстановление режима автоматического управления после
окончания вмешательства летчика в управление самолетом;
— сохранение для летчика динамического стереотипа ручного
управления.
Последнее свойство очень важно в условиях использования
автоматического управления на всех режимах полета при внезапной
необходимости быстрых и четких действий летчика при переходе на
ручное управление (например, для осуществления экстренного
снижения самолета при разгерметизации кабины и т.д.).
Режим совмещенного управления, когда в управлении одновре-
менно участвуют и летчик и система автоматического управления
(САУ), дает определенное улучшение характеристик как штурваль-
ного так и автоматического управления. Улучшение характеристик
штурвального управления обеспечивается стабилизацией самолета
через САУ после окончания вмешательства летчика в управление; при
этом от летчика не требуется затрат энергии на поддержание
заданного режима полета или задействование режима автоматической
стабилизации через пульт управления САУ. Более того, при
вмещательстве летчика в какой-либо отдельный канал управления в
других каналах сохраняется автоматическое управление заданного для
них режима, т.е. реализуется принцип разделения каналов, которое
соответствует наиболее рациональному способу управления.
Совмещенное управление позволяет обеспечить, например, продольное
управление летчиком при автоматической стабилизации бокового
движения, или координированный разворот при управлении штурвалом
только по крену, или плоские развороты при перемещении только
педалей. Совмещенное управление позволяет примерно в 2 раза
уменьшить объем работы летчика при выполнении типовых маневров
(смена эшелона, выпуск закрылков, выход из планирования, разворот
самолета, смена эшелона с изменением курса и т.д. рис. 8.43).
622
f-----1 штурвальное
I----’ управление
Рис.8.43. Загрузка пилота при выполнении типовых
маневров
В настоящее время на большинстве самолетов реализован режим
совмещенного управления угловым движением самолета. В этом
режиме осуществляется автоматическая стабилизация того углового
положения самолета, которое имело место на момент окончания
вмешательства летчика в управление. Так в продольном канале
стабилизируется угол тангажа, а в поперечном канале-угол крена или
курса. Если в момент окончания вмешательства летчика в управление
поперечным каналом угол крена мал, то есть | у | <Супор., то
осуществляется стабилизация угла курса, в противном случае
стабилизируется угол крена.
Режим совмещенного управления в соответствии с
рекомендациями ARINC 701 "Автоматическая система управления
полетом” [б] является одним из режимов этой системы.
В результате пульт САУ не содержит поканальных включателей
режимов стабилизации углов тангажа и крена а также задатчиков
этих параметров (строевых ручек). Включение САУ есть включение
Режима совмещенного управления, а задание углового положения
осуществляет летчик путем естественного управления самолетом
через рычаг управления.
Несколько отличный подход к этому режиму был в свое время
развит В.Я.Вороновым. Режимы автоматической стабилизации,
623
используемые при совмещенном управлении, были реализованы в
рамках автоматизированной системы штурвального управления
(АШУ). Причем перечень используемых режимов был значительно
более широким; кроме режимов угловой стабилизации использовались
режимы стабилизации высоты, приборной скорости и даже стабили-
зации самолета на глиссаде.
Реализация режима совмещенного управления угловым
движением как функции системы улучшения устойчивости и
управляемости актуальна и в настоящее время и рассматривается в
некоторых перпективных проработках.
Для реализации совмещенного управления необходимо:
— определить моменты начала и окончания вмешательства лет-
чика в управление самолетом;
— отключить (снять) или преобразовать режим автоматического
управления с целью.обеспечения летчику на время вмешательства
традиционного стереотипа управления;
— по окончании вмешательства задействовать режим автомати-
ческой стабилизации.
В зависимости от схемы подключения или задействования САУ
можно выделить два основных пути решения вышеперечисленных за-
дач. Различают два способа отработки сигналов САУ.
Параллельный, при котором командный сигнал САУ отрабатыва-
ется всем трактом управления, т.е. и аэродинамическим органом и
рычагом управления. Так реализованы практически все САУ сов-
ременного парка пассажирских самолетов (за исключением, например,
Ту-154, Ту-204, А320). Здесь рулевая машинка САУ параллельно
подключается к механической проводке, либо для отработки сигналов
САУ используется параллельно подключенная рулевая машинка
системы автоматической загрузки (САЗ).
При такой реализации при включенной САУ летчик может
переместить рычаги, только пересилив муфту сцепления, или, создав
усилие, большее зоны нечувствительности по сигналу усилия,
предусмотренной в вычислителе системы автоматической загрузки.
Поэтому распознавание вмешательства летчика в управление
основывается на анализе сигнала усилия, прикладываемого им к
624
рычагу управления. Измерение усилий осуществляется датчиком
усилий, устанавливаемом на рычаге либо в проводке управления.
Схема такой организации САУ и совмещенного управления приведена
на рис 8.44.
Рис.8.44. Блок-схема совмещенного управления при параллельном
подключении РМ САУ
Последовательный способ отработки сигналов САУ не предус-
матривает собственной рулевой машинки САУ. Отработка сигналов
САУ призводится на РМ СУУ, дифференциально подключенной к
проводке управления. Поэтому при работе САУ рычаг не отслеживает
ее командного сигнала. Такой принцип используется и при
дистанционной системе ручного управления (например А320 или Ту-
204). Здесь при работе САУ летчик имеет возможность перемещать
рычаги, поэтому распознать вмешательство летчика можно на основе
анализа как сигнала усилий, так и перемещения рычагов. Однако, пос-
кольку, в частности, для дистанционной системы, предусмотрены
датчики перемещения рычагов, при организации совмещенного
управления целесообразно ориентироваться на этот сигнал. Схема
организации такой САУ и совмещенного управления представленана
рис.8.45.
Наиболее целесообразно организовать логику совмещенного
Управления при наличии дистанционной системы по тому сигналу, на
котором реализована сама СДУ.
625
Рис.8.45. Блок-схема совмещенного управления при
последовательном подключении РМ САУ при дистанционном
управлении
Логика определения вмешательства летчика в управление как для
сигнала усилий, так и для сигнала перемещений может быть описана
единым алгоритмом. Признак вмешательства (ПВ=1) выраба-
тывается в том случае, если сигнал усилия Р или перемещения X
относительно их балансировочных значений превышает некоторый
порог &Р или АХ в течение заданного промежутка времени т0.
Наоборот, признак невмешательства (ПВ = 0) вырабатывается в том
случае, если сигнал усилия Р или перемещения X находятся ниже
заданных порогов АР или АХ в течение промежутка времени
большего тп. Вышеописанную логику формирования признака
вмешательства ПВ удобно представить в следующем виде при
использовании сигнала усилия.
пв=! 1 при/ЧА» Ate[o,ro] .
[О приР(АО<АР, А/е[о,Гя],
здесь А£ харектеризует отрезок времени, прошедший с момента
последнего выполнения условия
|Р(П| = |Р(0)| = АР
При использовании сигнала X в приведенных формулах делается
замена Р на X.
Признаки вмешательства вырабатываются отдельно для
продольного (ПВ £) и поперечного (ПВу) каналов управления.
Признака вмешательства в путевом канале обычно не
626
предусматривается. При вмешательстве летчика в управление
самолетом через педали при работающей САУ либо отключается
только путевой канал САУ, либо отключаются как путевой так и
поперечный каналы. Пороговые величины и времена задержек,
рекомендуемые для выработки признаков вмешательства, приведены в
нижеследующей таблице:
АР, кг ДХ, мм ТО, с Tn, С
Тангаж Крен 14-2 0,54-1,5 СО со 03 03 0,1 14-2
После определения факта вмешательства летчика в управление
самолетом ему необходимо создать условия, сохраняющие традицион-
ный для ручного режима стереотип управления.
Для САУ с параллельным подключением РМ при ПВ=1
командный сигнал автоматической стабилизации обнуляется и
заменяется сигналом усилия А'ш ’ (Р—ДР). Тем самым через
вычислитель САУ организуется контур автоматической загрузки
рычага управления. При наличии САЗ сигнал САУ при ПВ=1
обнуляется. На время вмешательства летчика в управление
соответствующий канал САУ переводится в режим синхронизации
углового положения самолета. Таким образом обеспечивается
безударность вмешательства летчика в управление самолетом и
минимум возмущения движения. Окончание вмешательства летчика в
управление, определяемое в соответствии с (8.56) по условию
ПВ = 0, подразумевает обнуление усилия Р или отклонения рычага X
от заданного значения, например, нуля. Это условие автоматически
выполняется для продольного канала при наличии интегральной СУУ
по нормальной перегрузке или угловой скорости. Задержка по времени
Гл при выработке признака ПВ==0 вводится для учета времени
затухания переходного процесса после окончания перемещения рычага
управления летчиком. Тем самым обеспечивается безударность
перехода на режим автоматической стабилизации.
При статической СУУ возникает задача обнуления усилия Р или
X после вмешательства. Наиболее рационально для этого является
ведение, например, автотриммирования при малых значениях
627
нормальной перегрузки. Так как на время вмешательства рулевая
машинка САУ используется как исполнительная часть САЗ, ее
управляющий сигнал следует формировать по закону.
X=KxW^P+eh (8.57)
где €j=^-AP/
АР При| АИу| < А^упор И #<#доп И $min < $ < $тах
О при|Аиу|^ А^упор или доп. или $>$таха
или #<#т1п
Введение автотриммирования повышает комфорт управления и
положительно оценивается летчиком.
Аналогичным образом может быть решен и вопрос обеспечения
автобалансировки при использовании сигнала Хе (8.56).
Синхронизация углового положения самолета, осуществляемая в
САУ при ПВ=1, производится только в пределах заданных огра-
ничений по углу тангажа, то есть при
t?mln < $ < t?max (8.58)
Сохранение составляющей Ks • At? в составе отрабатываемого
сигнала позволяет получить дополнительное свойство предупреждения
о нарушении режима по углу тангажа. В пределах допустимых углов
t? сигнал Ka^d=Q и летчик имеет традиционный стереотип
управления. Однако для того, чтобы вывести самолет на угол,
например, t? > t?max и сбалансироваться на этом угле летчик должен
приложить усилие или создать перемещение.
AP=-^-At?,
Д(9 = <9~!9тах (8.59)
Автотриммирование в этом случае блокируется (см. 8.57) и летчик
получает информацию о превышении угла через усилие на рычаге.
Нетрудно видеть, что при t? > t?max и t? < t?mln реализуется
пропорциональное управление по приращению угла At?(АР).
Аналогично решается вопрос предупреждения летчика о превышении
угла крена.
Для защиты режимов траекторного управления от непредна-
628
меренного вмешательства летчика обычно предусматривается
увеличение порогового усилия вмешательства АРПор. Эта мера
особенно необходима при заходе на посадку в условиях
турбулентности, когда руки пилотов, находящиеся на рычагах, могут
только от инерционных нагрузок создать пороговые усилия для снятия
режима автоматического траекторного режима. Отключение этого
режима ’’через рычаг” следует считать особым случаем, так как
вмешательство в него свидетельствует либо о неправильной работе
режима, что мало вероятно, либо о создании особой ситуации из-за
внешних факторов, которая требует экстренного изменения нор-
мального режима полета.
Увеличение усилия отключения траекторного режима САУ с па-
раллельным подключением рулевой машинки САУ достигается уве-
личением порогового значения в выражении (8.56).
/ При использовании САУ с последовательно подключенной руле-
вой машинкой САУ целесообразно на рычаге установить поканально
специальную муфту торможения, которая подсоединяется к рычагу
при включении траекторного режима САУ. Для пересиливания ее
необходимо существенно большие усилия АР, чем порог стра-
гивания рычага при совмещенном управлении угловым движением.
При пересиливании муфта должна отключаться, после чего должен
обеспечиваться нормальный режим совмещенного управления угловым
положением.
8.7. Проблемы развития автоматизации управления
В последнее время на авиационных линиях пассажирских
перевозок успешно эксплуатируется самолет концерна Airbus
Industry А320 с электродистанционной системой управления и
высоким уровнем автоматизации ручного управления; начинается
эксплуатация отечественного магистрального самолета Ту-204,
имеющего подобный уровень автоматизации. В стадии разработки
находится ряд отечественных и зарубежных самолетов, ориентиро-
ванных на использование цифровых электродистанционных систем
Ручного управления с еще более высоким уровнем автоматизации. Это
629
отечественные самолеты Ту-334, американский самолет фирмы Боинг
777 и т.д. В целом развитие автоматизации ручного управления
направлено на повышение безопасности полета в широком смысле
этого понятия. Оно предполагает резкое увеличение уровня
автоматизации управления при условии сохранения активного участия
летчика в контуре управления, что позволяет поддержать на
требуемом уровне его профессиональные навыки по пилотированию.
При этом с помощью автоматических устройств предполагается
расширить решение следующих проблем:
1. Обеспечение оптимальных характеристик устойчивости и
управляемости, существенно облегчающих для летчика процесс
пилотирования. Для каждого из этапов полета могут быть реализо-
ваны те характеристики, которые наилучшим образом отвечают
решаемой в настоящий момент задаче. Такая возможность
реализуется широкомасштабной реконфигурацией алгоритмов СУУ в
зависимости не только от этапа полета, но и создавшейся летной
ситуации и решаемой задачи.
2. Реализация принципа независимости управления летчиком
продольным и поперечным движениями самолета, а также управлением
скоростью через изменение тяги двигателей. Независимость каналов
управления существенно облегчает процесс пилотирования, т.к.
разгружает летчика от задачи координации отклонения рычагов при
выполнении того или иного маневра или изменения параметра
движения. Это достигается более широким использованием режимов
автоматической стабилизации параметров движения при невмеша-
тельстве летчика в управление. Если ранее совмещенное управление
предполагало использование только режимов угловой стабилизации
самолета после окончания вмешательства летчика в управление, то в
разрабатываемых системах резко расширяется этот перечень.
Предполагается использовать режимы стабилизации вектора скорости
как по направлению (угла наклона траектории и путевого угла), так и
величины скорости через автомат тяги. Дальнейшее развитие этого
направления охватывает режимы траекторного управления-
стабилизации высоты, захода на посадку, посадки и т.д. Расширение
перечня автоматически подключаемых автоматических режимов
630
позволяет существенно разгрузить летчика от задач стабилизации,
увеличить его резерв времени, уменьшить загрузку пилота и, в
конечном счете, повысить безопасность полета. Комплексирование
автоматических режимов стабилизации параметров движения
самолета через аэродинамические органы и тягу двигателей расширяет
возможности автоматических систем и облегчает для летчика процесс
взаимодействия с ними в рамках совмещенного управления.
Подключение и отключение этих режимов выполняется автоматически
по анализу воздействия летчика на традиционные рычаги ручного
управления. При этом задействуемые режимы комплексной системы
более полно воспроизводят ситуацию автоматического управления,
выступающих как продолжение воли и замыслов летчика.
3. Повышение, в некоторых случаях до абсолютного, уровня
защиты самолета от превышения недопустимых значений параметров
движения во всех возможных летных ситуациях, включая отказные.
Это достигается внедрением многоступенчатыой системый пре-
дупреждения о приближении к границе допустимых значений пара-
метров движения и ограничением их предельно-допустимых значений
путем активного воздействия на рычаги управления, аэроди-
намические органы или тягу двигателей.
4. Автоматическое парирование возмущающих факторов — сил
и моментов, действующих на самолет как в условиях нормальной
эксплуатации, так и при отказах элементов авиационной техники. Это
направление автоматизации предполагает автоматическое отклонение
аэродинамических поверхностей для парирования возмущающих
моментов при изменении конфигурации крыла, изменении режима
работы двигателей, отказе двигателя и т.д. Решение данной проблемы
очень часто ориентировано на использование компенсационных
принципов разомкнутого контура, а не использование принципа
обратной связи. Такой подход позволяет обеспечить парирование
Действий возмущающих факторов, а не последствий их проявлений.
5. Дальнейшее укрупнение и уменьшение режимов автомати-
ческого управления, задаваемых летчиком с пульта. Это будут
опециальные навигационные режимы автоматического выполнения
отдельных режимов траекторного управления: взлет, набор высоты,
631
заход на посадку и т.д.
6. Увеличение уровня автоматизации управления самолетом при
отказах элементов авиационной техники. Это дает возможность
создавать нормальные условия пилотирования за счет введения
автономного управления отдельными аэродинамическими секциями и
отдельными двигателями. За счет широких возможностей цифровых
вычислителей проводить оптимальную реконфигурацию алгоритмов
распределения управляющих воздействий между нормально
функционирующими элементами, что снижает до минимума послед-
ствия отказов.
7. Дальнейшее расширение роли автоматики связано с внедре-
нием экспертных систем, т.е. электронных подсказчиков летчику.
Роль этих систем резко возрастает при возникновении нештатных
летных ситуаций, например, отказах элементов авиационной техники.
Система должна не только обеспечить оценку ситуации, но и выра-
ботать и выдать летчику оптимальную последовательность его дей-
ствий по устранению последствий возникновения нештатной ситуации,
а в будущем и предпринять действия, направленные на автоматическое
парирование последствий нештатной ситуации, если летчик не
предпринимает необходимых действий или запаздывает в их
выполнении.
Литература
1. Г.С.Бюшгенс, Р.В.Студнев "Аэродинамика самолета. Динамика
продольного и бокового движения.” Машиностроение М. 1979г.
2. Ю.П.Гуськов. Г.И.Загайнов "Управление полетом самолетов”.
Машиностроение. М. 1980г.
3. Алашеев О.Ю., Гуськова Н.А., Диденко Ю.И., Клеванский И.И.
Насретдинов Т.Н. "Ограничение предельных режимов в интегральной системе
управления неманевренным самолетом” Труды ЦАГИ, ВТ 2516 1994г.
4. Брагазин В.Ф., Диденко Ю.И., Святодух В.К., Шелюхин Ю.Ф-
"Устойчивость и управляемость по скорости неманевренного самолета с
интегральной системой штурвального управления”. Труды ЦАГИ, ВТ 2516
1994г.
5. APINC-701
632
6. Л.Е.Зайчик, В.В.Родченко, П.М. Чернявский "Влияние характеристик
чувствительности управления на оценку летчиком управляемости самолета”.
Ученые записки ЦАГИ.т.ХУП №5.1986г.
7. Т.И.Лигум,С.Ю.Скрипниченко, А.В.Шишмарев"Аэродинамика самолета
Ту-154Б”. Транспорт.М. 1985г.
8. Г.С.Бюшгенс, Г.В. Ветчинкин, А. Н. Предтеченский., Ю И. Сидоров.,
“Система полуавтоматического продольного управления с гироскопическим
автоматом”?руды ЦАГИ, 1966г.
633
Г л а в a. 9. АКТИВНЫЕ СИСТЕМЫ
УПРАВЛЕНИЯ
9.1. Общие положение
Системы управления рассматриваемого класса в основном
предназначены для снижения нагрузок на конструкцию самолета,
возникающих вследствие воздействия на нее аэродинамических сил.
Использование таких систем позволяет при удовлетворении
требований норм прочности снизить массу конструкции самолета и тем
самым улучшить его основные летно-технические характеристики.
Ниже рассматриваются результаты исследований следующих
активных систем:
—С истемы снижения нагрузок на конструкцию крыла при ма-
невре с максимальной вертикальной перегрузкой;
—С истемы снижения нагрузок от мелкомасштабной
турбулентности атмосферы (система снижения расходуемого ресурса
конструкции);
—С истемы снижения нагрузок на крыло от дискретных порывов
ветра;
—С истемы повышения критической скорости флаттера;
—С истемы улучшения комфорта экипажа и пассажиров.
Прежде, чем перейти к рассмотрению указанных конкретных
систем, необходимо сделать ряд общих замечаний
1. Каждая из рассматриваемых систем может достаточно суще-
ственно снизить нагрузки в расчетных случаях прочности. Так, в табл.
9.1 приведены оценки эффективности каждой системы и соот-
ветствующее уменьшение за этот счет взлетной массы самолета или
увеличения дальности полета при неизменной массе.
Однако возможности реального использования указанных эффек-
тивностей зависят от того, какие расчетные условия определяют
суммарную массу конструкции. Например, если масса крыла
определяется ресурсом конструкции, то уменьшение массы даже на 2
634
4-3% может быть достигнуто только в том случае, если при этом
другие случаи нагружения не станут расчетными; использование
других систем может и увеличить снижение массы более, чем на 24-
3%, если при этом не уменьшается ресурс конструкции. Необходимо
также иметь в виду, что использование в активных системах
аэродинамических органов управления позволяет снизить только
нагружение конструкции от аэродинамических сил; в то же время
большую роль могут иметь нагрузки, связанные со взлетом и посад-
кой (так называемый цикл земля-воздух-земля) и нагрузки, связанные
с движением самолета по ВПП (зависящие от схемы шасси, характе-
ристик амортизации, неровностей ВПП).
таблица 9.1
Назначение системы управления Непосредственный эффект А^% аГ%
Снижение максима- льных нагрузок Уменьшение на 20% изгибающих моментов в корневых и средних сечениях крыла. 54-6 54-7
Снижение расходуемого ресурса конструкции Уменьшение на 60% усталостной пов- реждаемости от воздействия турбулетной атмосферы. ео •1- 03 ео 03
Повышение крити- ческой скорости флаттера Увеличение Гкр.фл. на 30% 24-4 24-4
Таким образом применение активных систем управления является
сложной комплексной проблемой, требующей тщательного учета и
анализа всех условий нагружения конструкции самолета.
Сравнительно медленное внедрение активных систем в практику
серийного авиастроения следует отнести за счет сложности и
ответственности проблемы. Несмотря на это использование активных
систем управления является весьма перспективным, т.к. позволяет
635
повышать весовую отдачу самолета.
2. Комплексность проблемы использования активных систем
управления заключается и в том, что каждая из указанных выше
систем помимо выполнения своего основного назначения в той или иной
мере влияет на решение других задач. В частности, для того, чтобы
активные системы не оказывали существенного влияния на
характеристики устойчивости и управляемости самолета из-за
отклонения органов управления, расположенных на крыле, в ряде
случаев необходимо вводить компенсирующие сигналы на руль
высоты.
3. Активные системы, связанные с уменьшением предельных
нагрузок на конструкцию, не оказывают влияния на аэродинамическое
качество самолета в области эксплуатационных режимов, т.к. большие
отклонения органов управления используются только при приближении
к предельным режимам (например при и>>1,5). Незначительное
уменьшение аэродинамического качества может быть только при
работе системы снижения расходуемого ресурса.
4. Создание активных систем управления требует расширенных
по сравнению с требованиями управляемости самолета исследований
эффективности органов управления: необходимы данные по
распределению нагрузок по размаху крыла при отклонении органов
управления, важен учет влияния скоростного напора (деформаций
крыла), нестационарности обтекания и угла атаки на эти
характеристики.
5. Для активных систем необходимы повышенные по сравнению
с требованиями управляемости самолета скорости отклонения органов
управления. Поэтому, например, использование закрылков в качестве
органов управления в активных системах является проблематичным,
поскольку это потребует резкого увеличения мощности приводов.
Из сделанных общих замечаний следует, что использование
активных систем на самолете должно, как правило, быть
предусмотрено в период проектирования самолета.
636
9.2. Системы снижения нагрузок при маневре
В основе работы системы снижения нагрузок при маневре лежит
принцип перераспределения подъемной силы по размаху крыла с
помощью расположенных на нем органов управления (элеронов,
интерцепторов и закрылков), что при сохранении неизменной
суммарной величины подъемной силы обеспечивает уменьшение
изгибающего момента в корне крыла. При этом система снижения
нагрузок при маневре должна работать- только при 'больших
перегрузках 1,5), обеспечивая сохранение неизменным
аэродинамическое качество самолета на крейсерских режимах полета.
Типичная зависимость максимальной эксплуатационной перег-
рузки при маневре от скорости полета представлена на рис. 9.1.
Случай А определяется Сутях, случай А’ соответствует полету на
режиме Q max max. Несмотря на одинаковую максимальную
перегрузку в случаях А и А' максимальные изгибающие моменты для
самолета с крылом умеренной стреловидности в случае А' обычно
меньше, чем в случае А, вследствие влияния упругости конструкции
на распределение аэродинамических сил по размаху крыла при
больших скоростных напорах.
Рис. 9.1. Типичная зависимость максимальной эксплуатационной
перегрузки от скорости полета
—-исходная —с системой снижения нагрузок
637
Возможны три варианта использования органов управления в
системе снижения нагрузок при маневре с максимальной перегрузкой:
1. В случае, когда используются только органы управления,
расположенные в концевых сечениях крыла (элероны, интерцепторы),
уменьшается изгибающий момент, но одновременно уменьшается и
подъемная сила. Для восстановления заданной перегрузки необходимо
увеличить угол атаки самолета.
На рис. 9.2 показано изменение циркуляции по размаху крыла
при отклонении интерцептора. Необходимость увеличения угла атаки
для восстановления суммарной подъемной силы приводит к тому, что
при £(>0,86 суммарная циркуляция больше, чем для крыла с
неотклоненным интерцептором. Соответственно при £>0,64
изгибающие моменты крыла для самолета с системой снижения наг-
рузок несколько выше, чем для самолета без этой системы. В
корневых сечениях крыла изгибающий моменг при этом уменьшается.
Если в системе используются концевые элероны, изгибающий момент
уменьшается по всему размаху крыла. Следует отметить, что при та-
ком варианте случай А нагружения конструкции может смещаться на
большие значения скорости полета за счет возможного уменьшения
Сушах.
2. Если отклоняется закрылок (вниз), расположенный вблизи
корневого сечения крыла, то подъемная сила и изгибающий момент
увеличиваются. Для сохранения подъемной силы, соответствующей
Wymax, необходимо уменьшить угол атаки самолета. В этом случае
изгибающий момент будет уменьшаться по всему размаху крыла, а
расчетный случай А может смещаться на меньшие скорости полета.
3. Если интерцепторы, элероны и закрылки отклоняются таким
образом, что суммарная подъемная сила остается неизменной, угол
атаки не изменяется. Пример такого перераспределения циркуляции
приведен на рис. 9.3. В этом случае изгибающие моменты уменьша-
ются по всему размаху крыла.
Эффективность органа управления по изгибающему моменту при
постоянной перегрузке существенно отличается от его эффективности
при постоянном угле атаки. В таблице 9.2 приводятся такие данные
для корневого сечения крыла неманевренного самолета, из которых
638
Рис.9.2. Перераспределение циркуляции по размаху крыла при
отклонении интерцепторов (пу=const).
Рис.9.3. Перераспределение циркуляции по размаху крыла при
отклонении закрылков и интерцепторов {пу~const)
1—закрылки, 2—интерцепторы
639
снижения маневренных нагрузок значительная доля уменьшения
изгибающего момента компенсируется соответствующим изменением
угла атаки.
Q—0,7<7maxmax ТЭбЛИЦЗ 9.2
^\ррган управления эффективность^. Концевой элерон Интерцепторы Закрылки
2 = 0,8 2 секции 2 = 0,61 4 секции 2 = 0,55 5=0,2
изг. 0,55 0,455 0,42 -2
Ms‘ (Да=0) ИЗГ.
Для закрылков указанные эффективности отличаются знаками.
Необходимо иметь в виду, что для крыльев с умеренной стрело-
видностью реверс органов управления по подъемной силе наступает
раньше, чем по моменту крена или изгибающему моменту в корне
крыла. На рис. 9.4 приведены типичные зависимости коэффициентов
эффективности элеронов по подъемной силе (&) и изгибающему
моменту в корне крыла (£м), определяемых как отношения
соответствующих параметров
£
Рис.9.4. Влияние упругости конст-
рукции на эффективность системы
снижения маневренных нагрузок
упругого и жесткого крыла.
При скоростях полета,
превышающих скорость реверса
элеронов по подъемной силе, знак
приращения угла атаки,
необходимого для выдерживания
постоянной перегрузки, совпадает
со знаком отклонения элерона. За
счет этого уменьшается
суммарный изгибающий момент
при пу=const и на скоростях
полета, превышающих скорость
раверса элеронов по изгибающему
моменту при а=const.
Ниже приведены примеры
640
оценки эффективности системы снижения нагрузок при маневре для
самолета со стреловидным крылом (/ = 30°, Л = 8). Для этого
самолета в случаеА' максимальные эксплуатационные изгибающие
моменты в корне крыла на 10% меньше, чем в случае А из-за влияния
упругости конструкции.
В качестве органов управления системы рассматриваются
элероны, интерцепторы и закрылки. Коэффициент инерционной раз-
грузки крыла для рассмотренных случаев равен 0,64.
Сочетания органов управления (2^ = 0,8; 0,61;
0,2)приведены в табл. 9.3. В вариантах II и Ш считалось, что при
достигаемых в случаях А и А сист. углах атаки эффективность
интерцепторов нулевая.
Таблица 9.3
Вари- анты Элероны Интерцепторы Закрылки
6" Э S, '-'уж <5" ИНТ 5инт г^<5инт ° уж s3 /^<5з '“'уж
I 20° 0,035 0,004 — —
II 20° 0,035 0,004 20° 0,0115 0,0012 — — —
Ш 20° 0,05 0,0057 20° 0,025 0,0026 — —
IV 20° 0.035 0.004 — — — 20° 0.025 0.008
Результаты оценки эффективности указанных вариантов
системы приведены в таблице 9.4 и позволяют сделать следующие
выводы:
641
Таблица 9.4
Расчетные характеристики Результаты расчетов для вариантов:
Исходый I II Ш IV
Q QAhcx. q, кг/ м2 1100 1100 1100 1100 1100~
Пу 2,5 2,44 2,44 2,41 2,36
amL% — 11. 11 16 19
q, кг/м2 — 1120 1120 ИЗО 1100
q qkaicr Пу — 2,5 2,5 2,5 2,5
— 8,5 8,5 13 19
q, кг/м2 2000 2000 2000 2000 2000
q = q^ Пу 2,5 2,5 2,5 2,5 2,5
лм;зг% — 7 11 19 28
1. Использование элеронов с относительной площадью S э=
0,0354-0,05 позволяет снизить максимальные эксплуатационные
изгибающие моменты в корневом сечении крыла на 84-13% в случае
выхода самолета на иу=2,5 при полете на режимах (/~<7Лисх~
(Мссист. Подключение интерцепторов наиболее эффективно на режимах
q^qk\
2. Использование секций закрылков, близких к корневому сече-
нию крыла ($з =0,025), совместно с концевыми элеронами (5Э=
0,035) позволяет снизить максимальный изгибающий момент в корне
крыла на 204-25%.
Выше приведенные данные соответствуют корневым сечениям
крыла. В остальных сечениях при использовании концевых элеронов
относительный эффект возрастает к концу крыла. На рис. 9.5
приведены результаты летных испытаний системы снижения
маневренных нагрузок самолета L-1011-500 в виде отношения
уменьшения изгибающего момента в сбалансированном полете при
единичном отклонении элеронов к его иходному значению ПВ. В
пересчете на 13° отклонения элеронов и эксплуатационную перегрузку
2,5 выигрыш в изгибающем моменте составляет 6~8% в корневых
сечениях и 50-^70% в концевых сечениях крыла.
642
Рис.9.5. Эффективность элеронов самолета L-1011-500 по снижению
изгибающих моментов крыла в сбалансированном полете
Л/изг — приращение изгибающего момента при отклонении
элерона на Г и балансировке самолета при пу—1.
м изг.г.п —изгибающий момент в горизонтальном полете.
Рассмотрим структуры систем снижения нагрузок,
использующих в качестве органов управления элероны и
интерцепторы. На рис. 9.6а приведена структура системы снижения
нагрузок при маневре, использующей сигнал датчика нормальной
перегрузки, расположенного в центре масс самолета. Этот сигнал
сначала проходит через нелинейный элемент, имеющий зону
нечувствительности Диу~0.5, для того, чтобы не увеличивалось
сопротивление самолета при Диу<С0,5 из-за отклонения элеронов и
интерцепторов; они будут включаться в работу только при А иУХ),5.
Обычно коэффициенты Л1, А’э, А’ннт выбираются таким образом,
чтобы при пу~ Wymax элероны и интерцепторы отклонялись на полный
ход, предусмотренный для работы системы снижения нагрузок. Для
ослабления влияния работы этой системы на статические и
Динамические характеристики самолета в ней предусмотрен
корректирующий сигнал на руль высоты (стабилизатор), коэффициент
643
усиления которого необходимо выбирать из условия компенсации
изменения момента тангажа при отклонении элеронов и интерцепторов.
Если для работы системы снижения нагрузок при маневре
используются элероны и интерцепторы с отклонениями 204-30°, то
суммарный коэффициент как по каналу элеронов (Кл • Кэ), так и по
каналу интерцепторов (Ai ’ Аннт) получается порядка 20'30 град/ед,
перегрузки. При таких больших значениях коэффициентов необходимо
принимать меры по предотвращению неустойчивости контура
разгрузки на частотах упругих колебаний самолета и нагружения
конструкции при воздействии порывов ветра.
Рис.9.6. Блок-схема системы снижения нагрузок, работающей по- сигналам
перегрузки и датчика положения штурвала
Ki, Кэ,Кц, Кв — коэффициенты усиления
РМ —рулевая машина
РП — рулевой привод.
Динамическое влияние упругости конструкции на контур разгруз-
ки исключается в структуре системы, показанной на рис. 9.6б.
Особенностью этой системы является то, что работа ее строится на
возможности создания системы улучшения устойчивости и
управляемости самолета, которая обоеспечивает Абал— Абал зад,?
ХПу = Азад или Рбал = Рбал зад? РПу = Рзам ТОГДЭ ИНТерцеПТОрЫ И
элероны МОЖНО ОТКЛОНЯТЬ ПО сигналу А/2 у зад — А А/ Азад, где ।
к
644
—Хбал зад, или по сигналу АиУЗад= &Р/Рзы, где
др=В— Рбалзад. Гак как в этом случае элероны и интерцепторы'*
отклоняются по сигналу, не связанному с параметрами
движения самолета, то вопросы обеспечения виброустойчивости
системы решаются сравнительно просто.
Основной задачей при выборе параметров настройки такой си-
стемы снижения маневренных нагрузок является выбор постоянной
времени фильтра, обеспечивающей отсутствие заброса в изгибающем
моменте при выходе на заданную перегрузку.
Возможна структура системы снижения нагрузок при маневре, в
которой одновременно используется как сигнал от датчика нормальной
перегрузки, установленного вблизи центра масс самолета, так и
сигналы от датчика перемещения штурвала (или датчика усилий на
штурвале).
На рис. 9.7а, показан один из вариантов системы управления
закрылками. Предполагается,что известно балансировочное положение
штурвала или балансировочное усилие на штурвале. Так как в данной
схеме не используются в качестве управляющих параметры движения
самолета, то она не реагирует на порывы ветра и не подвержена
динамическому влиянию упругости конструкции. Для такой схемы
обязателен корректирующий сигнал на руль высоты, так как
используемые секции закрылков создают большой момент тангажа.
Возможно также управление закрылками автоматически с помощью
сигнала от датчика нормальной перегрузки, установленного вблизи
центра масс (рис.9.7 б). В этом случае,чтобы исключить увеличение
перегрузки вследствие отклонения закрылков при порывах ветра,
необходимо наряду с прямым сигналом Пу вводить сигнал,
скорректированный с помощью специального фильтра, обеспечиваю-
щего необходимые динамические характеристики контура в области
частот движения самолета как твердого тела и упругих колебаний
конструкции.
На рис. 9.8 показан характер переходных процессов самолета с
системой снижения нагрузок при выходе на перегрузку пу=2,3.
Видно, что включение системы снижения маневренных нагрузок не
привело в данном случае к заметному искажению динамических харак-
645
теристик самолета.
Необходимые скорости элеронов и интерцепторов по сигналам
системы не превышают значения скоростей при управлении самолетом
по крену.
Рис.9.7. Блок-схема управления закрылками в системе снижения маневренных
нагрузок с сигналами от датчика перемещения штурвала и датчика перегрузки
К,Кз, Кв — коэффициенты усиления
РМ — рулевая машина
Рис.9.8. Переходные процессы самолета при выходе на 2,3
-—с системой .----без системы
646
9.3. Системы снижения нагрузок от мелкомасштабной
турбулентности атмосферы
Ниже рассматриваются системы снижения расходуемого ресурса
конструкции крыла самолета (СРР), снижающие нагрузки от
воздействия мелкомасштабной турбулентности.
Основным видом нагружения, определяющим усталостные
повреждения крыла самолета, являются изгибающие моменты.
Эффективность системы СРР при полете на заданном режиме может
быть оценена по следующим параметрам Ш:
бм = [/ SmCco) dw]112 — среднеквадратичный изгибающий
момент;
£=[ 7 ЗмС(м)21тс1й)]т12 — повреждаемость элемента конструкции
при ее случайном нагружении;
здесь Sm(<^) — [ — спектральная плотность
изгибающего момента;
(£) — передаточная функция изгибающего момента
при действии порывов ветра;
т — показатель кривой усталости C3J;
Sir (со) — спектральная плотность вертикальных порывов ветра.
Суммарная повреждаемость £ s элемента конструкции с учетом
профиля типового полета определяется выражением
е г=S Ъ СР. гЬ. г + Р2 ibl^ (9.1)
где — время полета на i-м режиме, отнесенйое к времени всего
полета;
Л о Рго 61г, 62г — характеристики турбулентности атмосферы
на i -м режиме полета C2J.
Степень снижения усталостной повреждаемости от турбулент-
ности атмосферы при использовании системы СРР определяется по
отношению величин £е самолета с этой системой и £е самолета без
нее. Следует отметить, что расходуемый ресурс конструкции
самолета определяется переменными нагрузками, возникающими в
конструкции при маневрах, полете в турбулентной атмосфере, а также
от цикла земля-воздух-земля. На рис. 9.9 а, приведены оценки
647
выигрьша в ресурсе конструкции нижней панели крыла
магистрального пассажирского самолета в зависимости от
эффективности системы с учетом всех факторов. Если эффективность
системы снижения ресурса конструкции учитывается на этапе
проектирования самолета, то это позволяет уменьшить массу
конструкции крыла путем увеличения допускаемого напряжения (рис.
9.9 б). Приведенные данные показывают, что целесообразная степень
снижения величины £ с помощью системы СРР лежит в пределах
4—6, так как дальнейшее увеличение эффективности системы не
приводит к существенному уменьшению расходуемого ресурса кон-
струкции. Частотные характеристики SmCco) и SmC(o) (о21т, (т=
= 3),определяющие величины среднеквадратичного изгибающего
момента и повреждаемости для тяжелого самолета, представлены на
рис. 9.10. В зависимости от конструкции самолета и режима полета
вклад упругих гармоник в' величины f и см различен, однако, как
показал анализ динамических характеристик ряда тяжелых самолетов
нормальной схемы, основной вклад (порядка 80-90%) в эти величины
вносят движения самолета как твердого тела и упругие колебания по
первому тону изгиба крыла.
Поскольку система СРР работает в диапазоне малых
возмущений по перегрузке, при ее синтезе следует проверять
возможные изменения характеристик управляемости.
В общем случае система СРР состоит из следующих контуров
(рис. 9.11):
—контура непосредственной разгрузки крыла, включающего
симметрично отклоняемые управляющие поверхности на крыле
(элероны, интерцепторы), управляемые сигналами датчиков
нормальной перегрузки (ДП1) и угловой скорости тангажа (ДУС),
установленных на фюзеляже;
—контура повышения демпфирования упругих колебаний
конструкции, включающего орган управления на крыле, управляемый
сигналами упругих колебаний; необходимые сигналы для этого контура
могут быть получены комбинацией сигналов датчиков нормальной
перегрузки, установленных на консолях крыла (ДП2,ДП3) и датчика
нормальной перегрузки, установленного на фюзеляже (ДП1);
648
Рис.9.10. Спектральные
характеристики нагружения крыла
пассажирского самолета
5м(<у)
— а>2/3
Рис.9.9. Зависимость усталостной
долговечности конструкции и
допустимых напряжений от
эффективности системы снижания
расходуемого ресурса конструкции
^ИСХ, а расч — срок службы и
расчетные напряжения
конструкции самолета
без СРР;
тс сист, а расч — срок службы
расчетные напряжения
конструкции самолета при
использовании СРР.
контура компенсации продольных моментов, включающего руль
высоты, управляемый сигналами датчиков нормальной перегрузки и
угловой скорости тангажа, установленных на фюзеляже.
Целесообразность использования сигнала перегрузки в контуре
непосредственной разгрузки можно объяснить следующими
649
Рис.9.11. Структурная схема системы снижения расходуемого ресура
конструкции
ДП-датчики перегрузки,
ДУС-датчик угловой скорости,
A"i К2 — коэффициенты усиления,
Ф1,Фг—Фильтры
РМ— рулевые машины,
Б — бустера
причинами. Передаточные функции перегрузки в центре масс самолета
и изгибающего момента в некотором сечении крыла можно
представить в виде суммы двух слагаемых:
Ц/ (Р) — ЦЛ (р>тл г jy (/>)упр, (9.2)
650
Мцзг / J_\ _ Л/иЗГ / 1.4 I Л/иЗГ / 4.4 /л П4
—-~цГ-^т.тН—jp~<J>)ynp, (9.3)
Здесь индексы "Т.Т” и "упр” соответствуют составляющим
движения самолета как твердого тела и упругим колебаниям
конструкции.
Составляющую изгибающего момента МИЗг,т.т можно считать
„ цм
практически пропорциональной перегрузке ^утт в диапазоне частот от
нуля до частоты первого тона упругих колебаний. Поэтому отклонение
элеронов (интерцепторов), пропорциональное приращению перегрузки,
позволяет при соответствующем выборе коэффициента К\
практически полностью компенсировать составляющую изгибающего
момента в диапазоне частот от нуля до частоты первого тона упругих
колебаний.
Влияние запаздывания в отклонении органов управления на крыле
по отношению к сигналу перегрузки, вносимого исполнительными
элементами, иллюстрируется на рис. 9.12; рулевые машины и
бустеры элеронов моделировались запаздывающими звеньями первого
порядка с постоянными времени 7\м = 0,04с и Тб=0,05с
соответственно. Видно, что запаздывание, вносимое исполнительными
элементами системы, приводит к снижению эффективности системы с
увеличением частоты. Введение опережающе-запаздывающего
фильтра (Ф1 на рис. 9.11), обеспечивающего частичную компенсацию
этого запаздывания на частотах от нуля до частоты упругих
колебаний по первому тону, позволяет существенно увеличить
эффективность системы по снижению усталостной повреждаемости в
диапазоне низких частот (см. рис. 9.12). Используемый для
непосредственной разгрузки крыла сигнал Кх • пу обеспечивает
одновременно и уменьшение составляющей изгибающего момента на
частоте упругих колебаний по первому тону. Следует отметить, что
для других тонов упругих колебаний отклонение органов управления на
крыле по этим сигналам может привести к усилению возбуждения
упругих колебаний (рис. 9.12).
Уменьшение нагрузок на крыло на частотах упругих колебаний в
Ряде случаев может быть достигнуто увеличением демпфирования
651
Рис.9.12. Частотные характеристики изгибающего момента при использовании
в СРР управления только по сигналам движения самолета как твердого тела.
1—без системы СРР,
2—СРР с идеальными приводами,
3—СРР с реальными приводами,
4—СРР с реальными приводами и опережающими фильтрами.
этих колебаний. Для этого датчики ДП2 и ДПз устанавливаются в том
же месте, что и управляющие органы. Если из сигнала перегрузки
выделить составляющую, зависящую от упругих деформаций, и
пропустить через корректирующий фильтр Фг с отрицательным коэф-
фициентом усиления, который обеспечивает вместе с запаздыванием
от исполнительных органов на частотах упругих колебаний запазды-
вание в 90°, это позволяет создать управляющую силу, увеличиваю-
щую демпфирование упругих колебаний.
Ниже приводятся результаты синтеза систем снижения нагрузок
от воздействия атмосферной турбулентности для ряда отечественных
652
самолетов, основные характеристики которых и оцецка эффективнос-
ти систем СРР сведены в табл. 9.5, 9.6, где х — угол стреловид-
ности крыла по линии 1/4 хорд; — расстояние от оси самолета до
точки приложения сил от органов управления на крыле; —
собственные частоты упругих колебаний в пустоте, в Гц.
Для каждого самолета (кроме самолета А) приведены
результаты оценки эффективности системы трех типов;
система 1, включающая только контуры разгрузки и
компенсации продольных моментов при идеальных приводах;
система 2 — то же, что система 1, но при неидеальных приводах
(рулевые машины и бустеры моделировались запаздывающими
звеньями первого порядка с постоянными времени 0,04-0,05 с);
система 3, включающая все три контура с неидеальными приво-
дами.
Оценивалось изменение среднеквадратичных изгибающих момен-
тов и повреждаемости конструкции в корневом сечении крыла и пе-
регрузки в центре тяжести самолета. Результаты расчетов при 6w =
1м/с представлены в табл. 9.6.
Таблица 9.5
Самолет т,Т X С*9 У Z1 Z/2 V1 У2 Уз
А 94 51° 0,25 0,52 3,0 3,88 6,8
Б 125 37° 0,3 0,8 1,2 2,8 4,2
В 175 0° 0,37 0,8 1,2 2,5 3,1
Г 114 25° 0,35 0,75 1,7 3,5 4,2
Таблица 9.6
Самолет бм с сист/сгм без сист для систем: £ с сист/ £ без сист для систем: с системой 3
1 2 3 1 2 3 5“ э 8 э град/с
А — 0,57 0,31 — 0,37 0,06 0,37° 3,5
Б 0,41 0,62 0,62 0,13 0,4 0,4 1,1“ 5,5
В 0,3 0,41 0,3 0,008 0,2 0,05 1,1° 5,5
Г 0,6 0,62 0,6 0,11 0,42 0,14 1,2° 10,5
653
Данные таблицы 9.6 показывают, что, во-первых,
эффективность системы СРР существенно зависит от динамических
харектеристик приводов, а, во-вторых, что роль контура
демпфирования определяется компоновкой самолета, и целесообразная
структура системы СРР определяется в каждом конкретном случае
после подробного анализа.
В последних двух столбцах таблицы 9.6 приводятся среднеквад-
ратичные значения углов отклонения и угловых скоростей органов
управления. Как показали исследования, проведенные с учетом
статистических данных по среднеквадратичным скоростям порывов
ветра в турбулентных зонах, основные усталостные повреждения
накапливаются при воздействии порывов со среднеквадратичными
скоростями до 4 м/с, следовательно, максимальные углы отклонения
и скорости отклонения органов управления желательно иметь в 4-^5
раз больше приведенных в табл. 9.6.
Большое влияние на работу системы оказывает ограничение
максимальной скорости отклонения органов управления,
расположенных на крыле. Hd рис. 9.13 для самолета Г представлена
зависимость эффективности системы 3 от максимальной скорости
отклонения элеронов. Эффективность системы СРР может быть
оценена при испытаниях динамически подобных моделей самолета с
моделью системы СРР в аэродинамической трубе, где ветровые
возмущения моделируются с помощью отклоняемых решеток,
установленных на входе в рабочую часть трубы. Результаты
испытаний модели самолета Б с системой СРР приведены на рис.
9.14.
Завершающая фаза создания системы СРР включает ее летные
испытания, которые должны проводиться в три этапа:
— определение частотных характеристик самолета при возбуж-
дении его колебаний органами управления системы и на основании
этого расчетная коррекция параметров системы с целью обеспечения
нормируемых запасов устойчивости и заданной эффективности;
654
Рис.9.13. Зависимость эффективности системы СРР от максимальной скорости
отклонения элеронов
— определение частотных характеристик замкнутого контура
при возбуждении колебаний органами СРР и другими органами, не
включенными в СРР, для уточнения расчетной эффективности
системы;
— полет в турбулентной атмосфере с попеременным включением
и выключением системы с записью нагрузок на конструкцию.
Такой цикл испытаний проведен на самолете Ил-86 C9J, где была
установлена система СДК-86 (система демпфирования колебаний).
Блок-схема системы приведена на рис. 9.15. В продольном канале
используются три датчика перегрузки, установленные на фюзеляже и
концах крыла. Для снижения нагрузок, вызванных движением
самолета в вертикальной Плоскости, используется симметричное
отклонение' элеронов. Для восстановления устойчивости самолета,
снижаемой контуром разгрузки крыла используется сигнал
перегрузки, поступающий на руль высоты. Помимо демпфирования
655
симметричных колебаний самолета система СДК-86 демпфирует
антисимметричные колебания крыла. Это осуществляется
специальным контуром, в котором используется разность сигналов
датчков перегрузки, установленных на концах крыла, и
антисимметричное отклонение элеронов. Каждый из контуров
содержит функциональные фильтры, формирующие необходимые
частотные характеристики, и фильтры подавления высокочастотных
сигналов. В качестве последних использовались кворум-фильтры.
Располагаемые отклонения элеронов по сигналам системы СДК-86
ограничены в пределах ±3°.
Рис.9.14. Результаты исследования эффективности системы СРР в
аэродинамической трубе
1 — без системы,
2 — с контуром разгрузки Илф(/>)= 1,
3 — с контуром разгрузки ^(/>) = 0,4
4 — с контуром демпфирования упругих колебаний,
х+одмо.ог/»2
о — с контуром разгрузки И^ф(/>)-1+0 и
контуром демпфирования упругих колебаний.
656
Рис.9.15. Блок-схема системы СДК-86
Ki, Кг, Кз, К—коэффициенты усиления,
Фи Фг> Фз—фильтры.
На рис. 9.16 приводятся частотные характеристики самолета при
возбуждении колебаний рулем высоты. Как следует из приведенных
данных, при включении системы снижаются нагрузки как в области
частот короткопериодического движения, так и низших тонов упругих
колебаний. Результаты полетов в турбулентной атмосфере приводятся
на рис.9.17 в виде отношения спектралььных плотностей изгибающего
момента в сечении 2=0,45 для самолета без системы и при
включении СДК-86. В области низких частот модуль спектральной
плотности снижается системой примерно в два раза, на частоте
первого тона изгиба крыла — в 6 раз. Выигрыши в повреждаемости
конструкции крыла от воздействия турбулентной атмосферы в
различных сечениях крыла иллюстрируются также на рис. 9.17 в виде
отношения соответствующих параметров для самолета без системы и
с включенной СДК-86.
Таким образом, теоретические исследования, моделирование ди-
намики самолета в аэродинамической трубе и летные испытания по-
казали, что с помощью установленных на крыле органов управления с
обычными размерами и скоростями перекладки усталостная повреж-
даемость в различных сечениях крыла может быть существенно
снижена с помощью системы СРР. Потребные отклонения органов
Управления достаточно малы, чтобы обеспечить отказобезопасность
системы.
657
Рис.9.16. Частотные характеристики самолета Ил-86 при
возбуждении колебаний рулем высоты
------СДК выключена
-----“СДК включена
658
Рис.9.17, эффективность системы СДК-86
-----Упр=600км/час.
-----Упр^бООкм/час.
Упр^ЗООкм/час.
9.4. Системы снижения нагрузок от дискретных порывов
ветра
Анализ нагружения конструкции самолета обычно проводится для
трех видов дискретных порывов ветра (см. рис. 9.18) —
градиентного, "вихревого” и "единица минус косинус”, а также для
интенсивной турбулентности.
При воздействии на самолет градиентного порыва ветра
определяющим для расчета самолета на прочность является первый
максимум нагрузок, возникающий почти одновременно с достижением
максимума скорости порыва. По мере увеличения длины участка
нарастания скорости градиентного порыва максимум нагрузки
уменьшается.
При действий на самолет вихревого порыва имеется несколько
максимумов нагрузок и первый из них не обязательно является
наибольшим. Более сложная зависимость имеется в этом случае
между максимальными изгибающими моментами и длиной участка
нарастания порыва.
При минимальной длине участка нарастания скорости порыва
(30 м) нагружение конструкции самолета происходит за сравнительно
короткое время; для дозвукового пассажирского самолета на крейсер-
ской скорости полета оно составляет 0,2-0,3с. Такое резкое на-
659
растание нагрузок значительно усложняет задачу их снижения с
помощью автоматических систем управления. Определяющими в этом
случае являются быстродействие исполнительных органов системы,
своевременность и достоверность используемой информации о дей-
ствующих на самолет порывах ветра.
В качестве чувствительных элементов могут быть использованы
датчики истинных углов атаки, перегрузки, углового ускорения,
изгибающих или крутящих моментов, действующих на конструкцию;
нагрузки снижаются с помощью органов управления на крыле. В
схеме одного из вариантов такой системы, представленной на рис.
9.6а, используется датчик перегрузки, установленный вблизи центра
масс самолета. Его сигналы через вычислительное устройство
поступают на приводы органов управления. По своему принципу эта
схема аналогична контуру непосредственной разгрузки крыла системы
СРР. Эффективность систем этого типа зависит от места
расположения и размеров органов управления и от максимальной
скорости их перекладки.
Очевидно, что степень снижения расчетных нагрузок опреде-
ляется тем, на какой угол отклонится орган управления системы до
достижения максимума нагрузок, и характеристиками переходного
процесса возникновения сил от органов управления. Поэтому при
синтезе системы снижения нагрузок от дискретных порывов ветра и
оценке ее эффективности необходимо учитывать упругие колебания
конструкции самолета, запаздывание в возникновении аэродинамичес-
ких сил при воздействии порывов ветра и отклонении органов уп-
равления. Влияние упругости конструкции проявляется не только в
изменении эффективности органов управления, но и в изменении
значений максимальных нагрузок и, кроме того, в дополнительном
запаздывании (0,08 — 0,2 с) максимумов изгибающих моментов
относительно начала действия порыва. Влияние постепенности входа
самолета в порыв и нестационарности аэродинамических сил приводит
к дополнительному увеличению запаздывания возникновения
максимума изгибающего момента при действии градиентного порыва
ветра. Таким образом, имеется некоторый резерв времени для
отклонения органов управления системы и уменьшения с их помощью
660
действующих на конструкцию самолета нагрузок.
В качестве органов управления системы снижения нагрузок от
дискретных порывов ветра могут быть использованы элероны и ин-
терцепторы; аэродинамические силы от этих органов управления
отличаются не только статическими характеристиками, но и пере-
ходными процессами при их отклонении. Аэродинамическая сила при
резком отклонении элеронов монотонно возрастает до установивше-
гося значения за сравнительно короткое время. Более сложный ха-
рактер имеет переходный процесс при отклонении интерцептора. При
выдвижении его в поток возможно возникновение положительной
подъемной силы в начальные моменты-времени; запаздывание возни-
кновения отрицательной подъемной силы от интерцептора уменьшает
эффективность системы снижения нагрузок от дискретных порывов
ветра так же, как наличие зоны нечувствительности в статической
характеристике силы от интерцептора на больших углах атаки само-
лета.
За основу системы снижения нагрузок от дискретных порывов
ветра может быть принята система СРР (см. рис. 9.11) с большими
углами отклонения органов управления и более высоким уровнем
надежности. Было проведено моделирование движения самолета в
аэродинамической трубе с системой снижения нагрузок, в которой
используются симметрично отклоняемые элероны с относительной
площадью 5э=0,05, расположенные на расстоянии 0,74-0,9
полуразмаха крыла от оси самолета. Воздействие дискретных
порывов ветра на динамически подобную модель неманевренного
самолета с моделью системы снижения нагрузок воспроизводилось
путем резкого отклонения направляющей решетки. Для натурных
условий полета и максимальной скорости порыва = 15 м/с с hw —
30 м эффективность системы снижения нагрузок от дискретных
порывов ветра характеризуется табл.9.7, в которой АЛ/из.—
__АД/ИЗГ
—относительное уменьшение максимального
изгибающего момента в корневом сечении крыла при воздействии
градиентного порыва ветра с учетом нагрузок в горизонтальном
полете (М г.п); Mw —приращение изгибающего момента от
661
воздействия порыва ветра.
Таблица 9.7
Орган управления АЛ/изг. S' э град/с S'
Элерон 0,10 100 12°
0,02 25 3°
Как следует из данных таблицы, для уменьшения максимальных
нагрузок на 10% необходима скорость перекладки элеронов порядка
100град/с, что намного превышает скорости отклонения элеронов,
необходимые для управления по крену. Использование обычных
значений скоростей перекладки элеронов приводит к значительно
меньшему эффекту.
Система снижения нагрузок от дискретных порывов ветра .реа-
лизована на самолете А320 (12). Управляющий сигнал формируется
с помощью датчика перегрузки, установленного на фюзеляже, кор-
ректирующих фильтров и нелинейных звеньев. В качестве органов
управления используются концевые элероны и по две внешних секций
интерцепторов на каждой половине крыла; эти же органы использу-
ются при управлении самолетом по крену. Высокие значения ско-
ростей отклонений — 100°/с для элеронов и 200°/с для интерцепторов
позволили снизить расчетные изгибающие моменты в корне крыла на
15%. Эта система разрабатывалась на ранней стадии про-
ектирования самолета, опытный образец отрабатывался на специаль-
но оборудованном самолете АЗЮ. Расчетными возмущениями при
выборе параметров системы являлись "единица минус косинус” и
интенсивная турбулентность (рис. 9.18 г) с максимумом скорости
порыва 21 м/с. Органы управления системы отклоняются при пре-
вышении приращения перегрузки величины 0,3.
Потребность в больших скоростях органов управления в зна-
чительной мере можно было бы уменьшить при измерении скорости
порыва ветра на некотором расстоянии перед самолетом. В этом
случае можно рассматривать в качестве органов управления и руль
высоты, с помощью которого можно соответствующим образом
изменять угол атаки самолета. Проработки такой системы измерения
662
скорости порывов делались с использова-нием лазерных датчиков
однако промышленного образца создано не было.
Рис.9.18. Формы порывов ветра:
а “ градиентный,
б - “вихревой”,
в _ “единица минус косинус”,
г _ интенсивная турбулентность,
w - вертикальная скорость порыва ветра,
х - координата перемещения по направлению полета.
9.5. Системы увеличения демпфирования упругих
колебаний конструкции самолета
Необходимые запасы по критической скорости флаттера
663
самолета (Икр) или приемлемые значения декрементов колебаний
конструкции обычно обеспечиваются соответствующим выбором ее
жесткостных и инерционных характеристик.
Критическая скорость флаттера в ряде случаев, как показали
исследования, может быть увеличена с помощью автоматических ус-
тройств, выполненных на современном уровне техники. Ниже рас-
сматриваются два примера оценки эффективности таких систем для
тяжелых самолетов с крыльями большого удлинения и умеренной (/=
25°-г 30°) стреловидности.
Повышение критической скорости изгибно-крутилъного
флаттера крыла.
Демпфирование изгибных и крутильных колебаний крыла низших
тонов может быть обеспечено с помощью системы, блок-схема
которой приведена на рис.9.19. Система включает датчики
Рис.9.19. Блок-схема автоматической системы увеличения демпфирования
упругих колебаний конструкции
перегрузок, расположенные симметрично на левой и правой половинах
крыла, корректирующие фильтры, исполнительные элементы и
элероны. В зависимости от симметричности или антисимметричности
664
колебаний конструкции при рассматриваемой форме флаттера в
системе используется сумма или разность сигналов датчиков
перегрузки и соответствующие отклонения элеронов.
Передаточную функцию разомкнутой системы по перегрузке
можно представить в виде
ш (л) — —/д и)
<54 Р gP А(/>) ’ У’ ;
где —характеристический полином системы,
—полином, коэффициенты которого зависят от места
установки датчика и коэффициентов обобщенных сил от элерона; корни
этого полинома обозначим через Л oi.
Поведение корней замкнутой системы в зависимости от коэф-
фициента усиления существенно зависит от взаимного расположения
полюсов Л г—корней полинома А и нулей (Лог) передаточной
функции. Предпочтительным обычно является расположение нулей в
левой полуплоскости и их чередование с полюсами, близко
расположенными к мнимой оси.
Необходимым условием обеспечения эффективности системы
является достаточно большое расстояние от неустойчивого полюса до
ближайшего к нему нуля.
Для рассматриваемого ниже примера самолета массой 150т с
крылом стреловидности Х~25° и удлинением 7,5 в качестве органа
управления рассматривался концевой элерон площади S3=0,025.
При скорости полета V= VKp корень уравнения для системы,
соответствующий четвертому тону колебаний конструкции с частотой
w=201/c, находится в правой полуплоскости (рис. 9.20). Здесь же
показана зависимость значений нулей передаточной функции WnyCp)
от места расположения датчика перегрузки по размаху (zд.п.) и хорде
крыла (А’д.п)для рассматриваемого случая. Положение датчика £дп=
0,7 оказывается приемлемым для всех полюсов, и дальнейшие
результаты приведены для него.
Зависимость граничного коэффициента КПу от A V=(V—
~~ Vкр)/ Vкр приведена на рис.9.21. Как видно из графика,
критическая скорость флаттера может быть увеличена с помощью
линейной системы более чем на 30% при соответствующем выборе
665
Рис.9.20. Изменение нулей переда-
точной функции при перемещении
датчика перегрузки по хорде и размаху
крыла
параметров системы.
Возможность
увеличения критической
скорости флаттера на 204-
30% с помощью системы
указанной структуры
подтверждена рядом
экспериментов в
аэродинамических трубах с
использованием динамически
подобных моделей самолетов
и моделей систем подавления
флаттера C6J.
Наличие в натурных
чувствительных и исполни-
тельных элементах системы
нелинейностей типа зон
нечувствительности и огра-
ничений скорости заставляет
рассматривать устойчивость
системы "в малом” и "в
большом”. Влияние зоны
нечувствительности в
рулевой машине, так же как и
в бустере, приводит к
уменьшению эквивалентного коэффициента усиления и увеличению
фазового запаздывания системы с уменьшением входного сигнала, и,
наоборот, ограничение максимальной скорости перекладки органа
управления приводит к тем же результатам при увеличении входного
сигнала в систему, начиная с некоторого уровня. Эта особенность
натурной системы обусловливает наличие в ней двух предельных
'циклов (при полете на скоростях, превышающих критическую
скорость флаттера самолета без системы): один из них—устойчивый
с малыми амплитудами, второй — с большими амплитудами, но
неустойчивый. На рис. 9.22 приведены параметры предельных циклов
666
в зависимости от коэффициента КПу (У=1,2Укр). Амплитуды
колебаний органа управления и перегрузки в месте установки датчика
отнесены к величине зоны нечувствительности рулевого агрегата (А).
Устойчивость системы при больших ветровых возмущениях определя-
ется максимальной скоростью отклонения органа управления и коэф-
фициентом КПу (рис. 9.23). При скорости полета, превышающей на
20% критическую скорость флаттера самолета без системы, для
обеспечения устойчивости системы с Хпу=0.03 рад/ед. перегр. при
действии дискретного градиентного порыва ветра с максимальной
скоростью Ж —15 м/с оказывается достаточной максимальная
скорость отклонения элерона, равная 22 град/с, причем потребная
величина ее уменьшается с уменьшением коэффициента Кпу.
Рис.9.21. Область устойчивости самолета с системой увели-
чения демпфирования упругих колебаний конструкции
Укр
Повышение демпфирования антисимметричных упругих
колебаний тяжелого самолета с двигателями,
расположенными на пилонахМсыежвэмвйл проводились для
667
пассажирского самолета с взлетной массой 210 т, крылом большого
удлинения со стреловидностью по передней кромке z = 30°. Четыре
двигателя самолета установлены на пилонах в сечениях крыла z =
0,42 и 0,7. Первоначально рассматривалась задача увеличения
критической скорости антисимметричного флаттера крыла самолета.
Для значения собственной частоты боковых колебаний внешних
двигателей 2,2 гц флаттер возникал при И=180м/с.
Рис.9.22. Зависимость амплитуд автоколебаний по перегрузке и отклонению
элеронов от коэффициента усиления КПу
А — зона нечувствительности рулевой машины,
(1) — индекс малого предельного цикла,
(2) — индекс большого предельного цикла.
Увеличение критической скорости флаттера с помощью системы
рассматриваемой структуры осложняется из-за трудности
обеспечения устойчивости замкнутой системы. Более эффективна в
этом случае система, в которой используется дополнительный орган
668
управления, установленный на пилоне и создающий боковую силу.
Орган управления отклоняется по сигналу датчика боковой перегрузки,
установленного на двигателе. При площади его поверхности S =
0,1S пилона, угле отклонения 3° -г 4° и угловой скорости 50 4- 60 град/с
критическая скорость флаттера может быть увеличена на 254-30%.
Для достижения такого же эффекта с помощью весовой балансировки
на каждый внешний двигатель должен быть установлен балансир
весом 400 кг.
Рис.9.23. Границы устойчивости в зависимости от скорости порыва ветра,
максимальной скорости отклонения элеронов и коэффициента усиления
Результаты расчетных исследований, испытаний динамически
подобных моделей самолетов с активными системами управления в
аэродинамических трубах и летных испытаний показали, что можно
увеличить демпфирование упругих колебаний конструкции и повысить
критическую скорость флаттера некоторых форм, с помощью
автоматических систем при соответствующем выборе мест располо-
жения чувствительных датчиков и органов управления, а также
669
быстродействия исполнительных элементов системы.
9.6. Системы улучшения комфорта экипажа и пассажиров
Действующие на экипаж и пассажиров перегрузки являются
одним из факторов, определяющих комфорт. Допустимый уровевь
перегрузок зависит от их частотного спектра, направления и
длительности. Для оценки комфорта и влияния турбулентности на эту
характеристику предлагается использовать так называемый
показатель дискомфорта D, определяемый следующим образом [151:
D=IX”72('/) I I
где ^(7)—весовая функция; “^’(7)—передаточная функция
самолета по перегрузке при воздействии порыва ветра; <Dw(f)
—спектральная плотность порывов ветра;/— частота в герцах.
Весовые функции, характеризующие переносимость человеческим
организмом вертикальных и боковых перегрузок, представлены на
рис.9.24.Как следует из этих зависимостей, боковые перегрузки с
частотами 0,44-3 Гц переносятся человеческим организмом хуже,
чем вертикальные.
Уровень и частотный спектр перегрузок в различных сечениях
фюзеляжа зависит от общей компоновки самолета. Так, для дозву-
ковых неманевренных самолетов нормальной схемы распределение
среднеквадратичных вертикальных перегрузок по длине фюзеляжа
примерно равномерное, и спектр их содержит в основном частоты,
близкие к частоте короткопериодического движения. Некоторое
уменьшение перегрузок может быть обеспечено демпфером тангажа.
Отметим, что в отношении комфорта существует некоторое
оптимальное значение относительного демпфирования коротко-
периодического движения самолета. Использование для управления
рулем высоты совместно с сигналом скорости тангажа сигнала
нормальной перегрузки приводит к уменьшению перегрузок в носовой
части фюзеляжа н увеличению их в хвостовых сечениях (рис.9.25).
670
Рис.9.24. Весовые функции в показателе дискомфорта
1 " вертикальные перегрузки,
2 ~ боковые перегрузки.
Рис.9.25. Распреление верикальных
перегрузок по длине фюзеляжа
1-исходное,
2-система только с рулем высоты,
3-система с органом НУПС и рулем
высоты.
Для значительного умень-
шения перегрузок во всея точках
фюзеляжа необходимо
использование органа непосред-
ственного управления подъемной
силой (НУПС). Исследования
показывают, что снижение
перегрузок от воздействия
турбулентной атмосферы примерно
вдвое может быть достигнуто с
помощью органа НУПС,
эффективность которого ДС>=±
(0,034-0,04) (см.рис.9.25). Блок-
схема системы приведена на рис.
9. 26.
Боковые перегрузки ,
возникающие при полете самолета
нормальной схемы в турбулентной атмосфере, распределены по длине
671
Рис.9.26. Блок-схема системы
улучшения комфорта
Ф -фильтр,
Кх ,К2,КШ—коэффициенты
фюзеляжа более неравномерно, чем
вертикальные. Для широко-
фюзеляжного пассажирского
самолета, распределение перегрузок
которого приведено на рис.9.27, вклад
низкочастотных составляющих в
среднеквадратичную перегрузку
составляет 60% в хвостовых
сечениях фюзеляжа и 30% в
носовых.
усиления.
Рис.9.27. Распределение боковых перегрузок по длине фюзеляжа.
---- — исходное,
---- • -- — с системой 1,
----О---- — с системой 2,
----X---- — с системами 1 и 2.
Заметное улучшение характеристик комфорта экипажа и пасса-
жиров, размещенных в этих сечениях может быть достигнуто систе-
мой, работающей в диапазоне частот как короткопериодического
672
движения самолета, так и собственных частот низших тонов упругих
колебаний конструкции. Блок-схема такой системы приведена на рис.
9.28. Комбинация сигналов датчика угла, скольжения и пропущенной
через фильтр Ф 1 суммы сигналов датчика боковой перегрузки ДП 1,
расположенного вблизи датчика угла скольжения, гировертикали(ГВ) и
датчика угловой скорости рыскания (ДУС), позволяет выделить
сигнал, пропорциональный скорости боковых порывов ветра (система
1). Использование этого сигнала в системе ограничивается по частоте
фильтром Ф2. Сигнал датчика боковой перегрузки ДП2,
расположенного в хвостовом отсеке фювеляжа, используется для
демпфирования упругих колебаний. Необходимая для этого фазовая
характеристика контура демпфирования упругих колебаний (система
2) формируется фильтром Фз. Использование обеих систем позволяет
снизить боковые перегрузки в хвостовых сечениях фюзеляжа более
чем вдвое и на 30% в носовых отсеках (рис.9.27) без заметного
изменения характеристик устойчивости и управляемости самолета.
Система, аналогичная системе 2, используется на самолете
В747.
Рис.9.28. Блок-схема системы снижения боковых перегрузок
9.7. Комплексирование активных систем управления
Важнейшим условием эффективного использования активных
систем управления является их рациональное сочетание и совмес-
673
тимость с системой улучшения устойчивости и управляемости (СУУ).
При использовании комплексной активной системы управления,
включающей системы снижения экстремальных нагрузок, снижения
расходуемого ресурса конструкции, увеличения демпфирования
упругих колебаний конструкции и улучшения комфорта экипажа и
пассажиров основными с точки зрения совместимости систем
являются следующие задачи:
— Обеспечение нормируемых характеристик устойчивости и
управляемости самолета с учетом влияния на них активтных систем
управления.
Для систем, работающих в области частот короткопериодичес-
кого движения самолета (системы снижения нагрузок и улучшения
комфорта) и использующих органы управления, расположенные на
крыле, это достигается введением компенсирующего сигнала на руль
высоты, который должен обнуляться при отключении
соответствующей системы. Для высокочастотной системы
увеличения демпфирования упругих колебаний конструкции эта задача
решается введением в эту систему фильтра высоких частот.
— Обеспечение нормируемых запасов устойчивости комплекс-
ной системы управления на частотах упругих колебаний конструкции.
Использование датчиков перегрузок и угловых скоростей в
активных системах и СУУ создает потенциальную опасность потери
устойчивости системы в области высоких частот. При обеспечении
достаточно высокой эффективности систем в заданной для каждой из
них области частот (частоты короткопериодического движения для
СУУ, СРР, систем снижения экстремальных нагрузок; частота
первого тона изгиба крыла для СРР; частота критической по флат-
теру формы колебаний конструкции для системы увеличения демп-
фирования упругих колебаний) эта задача решается путем рацио-
нального размещения чувстительных датчиков на конструкции са-
молета и выбором корректирующих фильтров систем. Требования к
запасам устойчивости должны выполняться как для полной системы,
так и всех возможных вариантов отключения отдельных систем.
— Рациональное совместное использование органов управления.
Основные вопросы такого типа возникают при использовании
674
элеронов, интерцепторов и закрылков одновременно в СУУ и актив-
ных системах. Решением этой задачи является определение приори-
тетов между сигналами используемых систем для различных облас-
тей режимов полета в зависимости от важности обеспечения соот-
ветствующей характеристики динамики самолета или нагружения его
конструкции.
Одновременное использование в указанных системах руля вы-
соты, как правило, осложнений не вызывает, т.к. максимальные его
отклонения определяются режимом взлета самолета и остающиеся на
других режимах резервы достаточны для эффективного функцио-
нирования активных систем.
— Учет побочных эффектов при использовании отдельных
активных систем.
При оценке эффективности использования активных систем
управления необходим анализ всех факторов динамики самолета и
нагружения конструкции в её контрольных точках. Можно отметить
следующие типичные случаи, когда полезные эффекты от активных
систем дают побочные отрицательные эффекты:
— при использовании в системах снижения нагрузок элеронов,
закрылков, интерцепторов уменьшение изгибающих моментов сопро-
вождается увеличением крутящих моментов;
— при использовании в системах снижения маневренных нагру-
зок корневых секций закрылков и обратной связи по перегрузке
ухудшается комфорт экипажа и пассажиров за счет увеличения
перегрузок при ветровых воздействиях; этот эффект в значительной
мере может быть ослаблен введением в систему фильтра низких
частот;
— при использовании корневых секций закрылков в качестве
органов НУПС для систем улучшения комфорта экипажа и пассажи-
ров увеличиваются нагрузки в средних и концевых сечениях крыла.
В этих и других аналогичных случаях необходим компромисс
между требованиями к снижению заданных факторов и допустимому
измненению других параметров.
675
9 .8. Оценка надежности активных систем управления.
4 Потребная надежность активных систем управления
определяется их назначением. Системы СРР и улучшения комфорта
экипажа и пассажиров требуют малых расходов органов управления,
отказ этих систем не приводит к критическим последствиям, поэтому
они могут быть выполнены в одноканальном варианте, однако для
автоматизации отключения указанных систем при отказах
целесообразно их по крайней мере однократное резервирование.
Потребная степень надежности системы демпфирования упругих
колебаний определяется режимами полета, на которых она
используется. Если она предназначена для самолета, имеющего без
системы лишь уменьшенные запасы по критической скорости
флаттера, то эта система может быть выполнена также в
двухканальном варианте. Если полет самолета с системой происходит
со скоростями, превьшающими критическую скорость флаттера без
системы, то ее потребная надежность определяется вероятностью
пребывания самолета на этом режиме.
Необходимый уровень надежности систем снижения макси-
мальных нагрузок при маневре и при воздействии дискретных порывов
ветра определяется их эффективностью и повторяемостью нагрузок
для рассматриваемого самолета.
Согласно методике, изложенной в [3,10], эффективность
работы автоматической системы управления определим по изменению
повторяемости Ht действующих нагрузок или перегрузок на
соответствующей части самолета в условиях эксплуатации. Будем
также считать, что работа системы характеризуется определенным
уровнем безотказной работы — вероятность безотказной работы <7с
(соответственно вероятность отказа системы />с=1 —<7с)
Самолет, снабженный системой парирования нагрузок с надеж-
ностью О.с, часть срока службы 4 = Qct будет эксплуатироваться с
работающей системой, а часть 4 = (1~<7с) t — с неработающей
системой. Средняя суммарная повторяемость нагрузок, действующих
на самолет, будет равна:
676
H*t=Ht[c)qc+Ht{\-qc)
где Н* — суммарная повторяемость нагрузок на 1ч полета самолета
при наличии системы автоматического управления, обладающей
надежностьюqe, Ht — повторяемость нагрузок на 1ч полета самолета
без системы парирования; определяется расчетом или на основании
материалов испытаний близких по назначению ^амолетов; Ht(с) —
повторяемость нагрузок на 1ч полета самолета при безотказной работе
системы парирования (<7с=1); рассчитывается по повторяемости
нагрузок и характеристикам используемой системы парирования.
Рис.9.29. Определение эффективности системы снижения нагрузок с учетом ее
надежности
Яр — повторяемость превышения перегрузки за полет,
Иувкл — расчетная перегрузка с включенной системой,
Иувыкл — расчетная перегрузке с выключенной системой,
Рс - вероятность отказа системы.
Очевидно, что для выполнения рассматриваемого равенства
величина Ht(c) должна быть несколько ниже Н*, т.е. расчетная
нагрузка для самолета с безотказной системой, должна быть выше,
чем для самолета с системой, имеющей ненулевую вероятность
отказа. Будем считать, что вероятность превышения расчетной
перегрузки для самолета без системы снижения нагрузок должна
677
Рис.9.30. Зависимость эффектив-
ности системы снижжения нагрузок
от ее надежности:
Л/исх —эксплуа тационный
изгибающий момент
самолета без сис-
темы:
ссист —уменьшение
эксплуатационного
изгибающего мо-
мента при исполь-
зовании системы;
Pz—вероятность отказа сис-
темы.
равняться аналогичной величине
для самолета с системой, имеющей
ненулевую вероятность отказа. На
рис.9.29а приведена кривая
повторяемоетн вертикальных
перегрузок за полет для самолета
типа L —1011 [ 10] . Зависимость
расчетной перегрузки для само-
лета с отказавшей системой от
расчетной перегрузки для самолета
с работающей системой при
разных вероятностях отказа
системы приведена на рис.3.29б.
Если, например, использование
системы с вероятностью отказа
Рс = 10-3/полет приводит К
снижению нагрузок на 20%, что
эквивалентно уменьшению с
2,5 до 2, расчетная перегрузка для
самолета с работающей системой
составляет 2,51. Аналогичные
данные для отечественных
пассажирских самолетов
приведены на рис.9.30.
Рассматриваемые самолеты
имеют следующие характеристики
повторяемости перегрузок: ( табл.
9.8).
Таблица 9.8
Самолет Ht час 1
пу = 2,5 пу = 2
1 1,7 ХЮ"5 5 ХЮ'4
2 7,5X10’s 2,2 XI О'4
3 1,15Х 10"5 3,2 XI О"5
678
Предполагалось, что безотказные системы снижают максимальные
нагрузки на 20%, и на рис.9.30 приведены зависимости их расчетных
эффективностей от вероятностей отказов для указанных в таблице
самолетов. Для всех трех самолетов при рс = 0,001 эффективность
рассматриваемых систем практически не отличается от эффек-
тивностей безотказных систем. Указанная надежность систем может
быть обеспечена одноканальным вариантом. Однако системы снижения
максимальных нагрузок не являются отказобезопасными, поэтому
требуется по крайней мере их однократное ревервирование для надеж-
ного отключения по рассогласованию каналов.
Литература
1. В.Л. Райхер. Гипотеза спектрального суммирования и ее применение для
определения усталостной долговечности при действии случайного нагружения,
Труды ЦАГИ, вып. 1134,1969 г.
2. Модель турбулентности атмосферы. ОСТ 02514-84.
3. А.Ф. Селихов, В.М. Чижов. Вероятностные методы в расчетах
прочности самолета. Машиностроение. 1987г.
4. Г.В. Александров, Ю.Г. Живов, И.В. Колин, А.М. Поединок А.С.
Устинов. Активные системы управления. Сб.“ Проектирование, испытания и
производство широкофюзеляжных пассажир-ских самолетов”, том П, книга 1.
Москва “Машиностроение”, 1982 г.
5. В.И. Агапов, В.И. Довбишук, Е.В. Ежов, Ю.Г. Живов, Ч.Д. Зиченков,
А.Ф.Минаев, В.А. Проворов, А.А. Самодуров, П.П. Светличный Исследования
системы снижения ветровых нагрузок в аэродинамической трубе. Сб. “Вопросы
автоматизации управления самолетами” под ред.Г.С.Бюшгенса.
“Машиностроение”, 1978г.
6. В.И. Довбишук, Ч.Д. Зиченков, А.Ф. Минаев, А.А. Самодуров, Э.А.
Столбунова. Исследование системы активного подавления флаттера. Труды
ЦАГИ, вып. 1989, 1979 г.
7, Г .А. Амирьянц, В,А. Транович. Теоретическое исследование влияния
Упругости конструкции на эффективность органов управления самолета. Труды
ЦАГИ, вып. 2088,1980 г.
8. В.М. Кувшинов, Н.Ф. Ляпунова. Исследование автоматической системы
снижения боковых перегрузок широкофюзеляжного пас-сажирского самолета
при полете в турбулентной атмосфере. Труды ЦАГИ, вып. 2214, 1983 г.
679
9. Ю.Г. Живов, Б.Н. Поповский, В.А. Слащев, Б.И. Смирнов, В.В.
Смирнов, А.С. Устинов. Экспериментальная система снижения нагрузок
широкофюзеляжного пассажирского самолета. Техника воздушного флота.
N3—4,1994г.
10. Ramsey H.D., Lewolt J.G.Design Maneuver Loads for an
Airplane with an Active Control System. AIAA Paper N 79—0738.
11. Johnston J.F., Urie D.M.Development and Flight Evaluation
of Active Controls in the L—1011.NASA CP N 2036.
12. Payne B.W.Designing a Load Alleviation System for a Modern
Civil Aircraft. ICAS-86-5. 2. 3.
13. Hitch H.P.Y.Active Control for Civil Aircrft.
Aeranautical Journal, 1979, U.83 X, N 826.
14. Cohen G.G.Schoenman R.L.Use of Active Control Technology
to Improve Ride Qualities of Large Transport Aircraft.AGARD-CP
-157.
15. Townsend J.L.lmpact of New MIL-F-9490 D Requirements
on future Flight Developments. AIAA Paper N 74-914.
16. В.В. Сулименков.“Об эффективности систем управления нагрузками”.
ТВФ No 1, 1993 г.
17. К.С. Колесников, В.Н. Сухов “Упругий летательный аппарат как
объект автоматического управления”. Москва, “Машиностроение”, 1974 г.
Обозначения
а — угол^атаки самолета,
Qc — вероятность безотказной работы системы управления,
рс~ 1—Qc
Ow, (7пУу ом — среднеквадраитческие значения скорости порыва
ветра, перегрузки, изгибающего момента,
<$ — угол отклонения органа управления,
£ — повреждаемость элемента конструкции при случайном
иагружении,
&, — отношения эффективностей элерона с учетом упругости
конструкции к эффективностям для жесткого самолета
по подъемной силе и изгибающему моменту
соответственно,
680
L — дальность полета самолета,
т — показатель кривой усталости материала конструкций,
то — взлетная масса самолета,
изг — изгибающии момент крыла и его производная по
отклонению органа управления,
пУ — нормальная перегрузка,
q — скоростной напор,
Хф — расстояние от сечения фюзеляжа до его носка, отнесенное к
длине фюзеляжа,
ХПу,РПу — характеристики управляемости самолета по
перемещению штурвала и усилию,
z — расстояние от сечения крыла до оси самолета, отнесенное к
полуразмаху крыла,
Ht — повторяемость нагрузок (перегрузок) на 1 час полета,
HF — повторяемость перегрузок за полет,
Sw, Sny, Sm — спектральные плотности порывов ветра, перегрузки,
изгибающего момента,
А, А' — расчетные случаи нагружения конструкции.
681
9
Г л а в a 10. ЛЕТНО-ТЕХНИЧЕСКИЕ
ХАРАКТЕРИСТИКИ СОВРЕМЕННЫХ
МАГИСТРАЛЬНЫХ САМОЛЕТОВ
10.1. Общие положения
К числу основных летных характеристик самолета,
определяющих его транспортные возможности и главные
эксплуатационные показатели, относятся: максимальная коммерческая
нагрузка, пассажировместимость, дальность, скорость и диапазон
высот полета, условия базирования, а также себестоимость перевозок
и показатель топливной эффективности. В отечественной литературе
последний обычно выражается в расходе топлива на пас-
сажирокилометр или на тоннокилометр. В зарубежной литературе чаще
встречается обратная величина — пассажире или тоннокилометры на
единицу расходуемого топлива.
При рассмотрении летных характеристик самолета естественно
выделить этапы взлета, набора высоты, крейсерского полета,
снижения и посадки. Каждый из этих этапов имеет свои особенности
и свои характерные параметры. Указанное разделение полета на
этапы принято и в руководствах по летной эксплуатации самолетов
(РЛЭ) и в нормах летной годности (НЛГ) [1,2].
10.2. Взлетные и посадочные характеристики
Взлет и посадка самолета являются наиболее сложными и
ответственными этапами полета. Ошибки пилотирования на этих
этапах зачастую оканчиваются трагически, поскольку времени для их
исправления практически нет. Дополнительной нагрузкой на летчика
является изменение аэродинамических характеристик самолета,
вызванное влиянием близости земли. Для обеспечения приемлемых
скоростей полета на этих этапах, магистральные самолеты, имеющие
большую нагрузку на крыло, осуществляют полет во взлетно-
682
посадочной конфигурации крыла с выпущенными закрылками и
предкрылками.
10.2.1 Взлет
Условия базирования относятся к основным летно-техническим
характеристикам транспортного самолета. Требования,
предъявляемые к взлетно-посадочным характеристикам, в
значительной мере влияют на выбор таких параметров самолета как
тяговооруженность (Р/G), нагрузка на крыло < G/S), тип
механизации крыла и др. Поэтому необходимость расчета взлетной
дистанции возникает на любом этапе проектирования самолета.
Этап взлета начинается с разбега самолета и заканчивается
достижением скорости, высоты и конфигурации самолета,
необходимых для начала полета по маршруту. Для гражданских
самолетов высота начала полета по маршруту устанавливается НЛГ
и составляет 400 м над уровнем взлетной полосы. Схематически
участок взлете показан на рис. 10.1. На высоте 10,7 м (35 футов)
скорость самолета должна как минимум на 20% превышать скорость
сваливания во взлетной конфигурации и на 10%-минимальную
эволютивную. В целях безопасности до высоты 120 м не допускается
изменение конфигурации крыла. Уборка шасси начинается на высоте
3—-5 м. Начиная с высоты 120 м и разгона до скорости,- на 20%
превышающей скорость сваливания, при новом положении закрылков и
предкрылков происходит поэтапное изменение конфигурации крыла от
взлетной к крейсерской. Одновременно происходит дальнейший набор
высоты. При достижении высоты 400 м и крейсерской конфигурации
взлет считается закончившимся, двигатели переводятся со взлетного
режима на номинальный, и начинается режим набора крейсерской
высоты полета. Взлет самолета осуществляется по возможности
против ветра. Попутный ветер увеличивает потребную для взлета
.длину ВПП. Боковая составляющая ветра затрудняет выполнение
взлета и для каждого самолета существует ее предельно допустимая
величина (не менее 5 м/сек для пассажирских самолетов). В процессе
взлета не допускается уменьшение скорости и высоты полета.
Летная полоса (ЛП) наряду с располагаемой дистанцией разбега
683
(РДР) может иметь концевые полосы безопасности (КПБ), на
которые в случае прекращения взлета при отказе двигателя или какой-
либо системы допускается выкатывание самолета. Взлетная
дистанция складывается из разбега от страгивания до точки отрыва и
воздушного участка от отрыва до достижения высоты 10,7 м над
Движение самолета при разбеге описывается уравнениями
^-= у
(10.1)
y-^f-=P-cos(a + ^)-X-F
где L- длина пробега, t—время, V—скорость, G—вес самолета,
а—угол атаки, Р—суммарная тяга, <р—угол заклинения двигателей,
g—ускорение силы тяжести, Х=Сх • р • V2 • S/2—сила
аэродинамического сопротивления, Сх—коэффициент
аэродинамического сопротивления, р—плотность воздуха, 5
—площадь крыла, F=f' CG— Су • р • V2 • S/2)—сила трения при
движении по взлетно-посадочной полосе, f—коэффициент силы
трения, Су—коэффициент подъемной силы.
До достижения скорости подъема передней стойки шасси-Ип.ст
разбег осуществляется при постоянном угле тангажа. На скорости
Ип.ст отклонением штурвала “на себя” угол атаки увеличивается, и
при равенстве подъемной силы весу самолета на скорости Уотр в
684
момент отрыва основных стоек шасси самолета от ВПП разбег
заканчивается.
Разбег, как правило, осуществляется при максимальной взлетной
тяге двигателей. Основными параметрами, определяющими длину
разбега являются: взлетный вес самолета, суммарная тяга
двигателей, коэффициент сопротивления трения шасси при движении по
ВПП и аэродинамические силы, действующие на самолет при разбеге.
Коэффициент силы трения определяется качеством и состоянием
ВПП и характеристиками колес шасси и имеет следующие значения:
сухое бетонное покрытие 0,02^-0,04
мокрое бетонное покрытие 0,04-Ь 0,06
твердый грунт 0,06-^0,10
ВПП с травяным покровом 0,06-^0,07
ВПП с мокрым травяным покровом 0,10-^0,12
покрытое снегом обледеневшее ВПП 0,10-^0,12
мягкий песчаный грунт 0,12-^0,30
Скорость отрыва в основном определяется нагрузкой на крыло и
величиной коэффициента подъемной силы в момент отрыва.
Максимальная величина Су отр зависит от эффективности механизации
крыла и предельного угла атдки на отрыве, определяемого условием
касания ВПП хвостовой пятой. Расчет длины разбега осуществляется
численным интегрированием уравнений (10.1). Для приближенной
оценки можно пользоваться формулой
Lp= Уд A** <10-2)
Vdrr-
где dV7ckcp.—величина ускорения при разбеге, вычисленная для
значения скорости V— Иотр./V2.
Для многодвигательного самолета расчетным случаем является
отказ двигателя на взлете. В этой ситуации в зависимости от момента
отказа взлет либо прекращается с использованием всех средств
торможения, либо продолжается. Наибольшая скорость на разбеге, при
которой в случае отказа двигателя или какой-либо другой системы
возможно как безопасное прекращение, так и безопасное продолжение
взлета называется скоростью принятия решения—И. Эта скорость
685
зависит от характеристик самолета, параметров ВПП и атмосферных
условий. При обнаружении отказа на скорости, меньшей или равной
Vi, командир самолета обязан прекратить взлет. При обнаружении
отказа на скорости, большей чем И, взлет продолжается. Нормами
летной годности установлено, что скорость принятия решения должна
быть меньше указанной в РЛЭ скорости подъема передней стойки
шасси (Vп.ст) и больше минимальной эволютивной скорости разбега
(Ушт. эр), которая определяется как скорость, на которой при
внезапном отказе критического двигателя обеспечивается
возможность управления самолетом с помощью аэродинамических
органов управления для поддержания прямолинейного движения
самолета. При достаточно большой длине ВПП расчетная скорость
принятия решения может оказаться больше скорости начала подъема
передней стойку шасси. В этом случае при обнаружении отказа
двигателя или какой-либо другой системы на разбеге взлет должен
быть прекращен.
В соответствии с НЛГ дистанция прерванного взлета
представляет собой сумму трех величин:
а)длины участка разгона со всеми работающими двигателями с
момента старта до момента отказа двигателя на скорости Иотк;
б)длины участка разгона с одним неработающим двигателем до
момента обнаружения отказа;
в)длины участка торможения от этого момента до полной
остановки самолета.
Потребная длина разбега при продолженном взлете должна
быть не менее суммы длины разбега до момента отрыва и длины
воздушного участка, равного половине расстояния от точки отрыва до
точки траектории, в которой самолет достигает высоты 10,7 м над
уровнем ВПП. Кроме того, потребная длина разбега при нормальном
взлете должна быть на 15% больше длины разбега и указанного выше
воздушного участка. Минимальная потребная для взлета длина ВПП
определяется как большая из двух вышеуказанных величин,
увеличенная на длину участка выруливания. Для магистральных
самолетов длина участка выруливания принимается равной 50 м.
Для определения скорости принятия решения К рассчитываются
686
дистанции продолженного и прерванного взлета для разных значений
скрорости отказа Утк. Время, отведенное по НЛГ на обнаружение
отказа составляет 3 сек. Поэтому скорость принятия решения К
несколько больше соответствующей ей скорости отказа. На каждое
действие летчика по вводу средств торможения при прерванном взлете
(включение механизма реверса, тормозной системы шасси, спойлеров
и т.п.) отводится не менее чем по 1-ой секунде.
Пример зависимостей V(f), Су(О и lAt) при
прерванном взлете показан на рис. 10.2. Аналогичные зависимости,
включая #(/), при продолженном взлете показаны на рис. 10.3. С
увеличением величины V Отк дистанция прерванного взлета
увеличивается, а дистанция завершенного взлета уменьшается. На
рис. 10.4 приведены зависимости потребной длины ВПП для
завершенного взлета—L3 и дистанции прерванного взлета—Ln,
уменьшенной на длину КПБ, в функции скорости принятия решения
Vi. Равенство длин ВПП, потребных для продолженного и прерванного
взлета, определяет скорость принятия решения Vie и минимальную
(сбалансированную) потребную длину ВПП для расчетного веса
самолета. Поскольку скорость принятия решения К не может быть
больше Уп.ст, может оказаться, что кривые длин завершенного и
прерванного взлетов не пересекаются. В этом случае минимальная
потребная длина ВПП определяется продолженным взлетом с отказом
двигателя на скорости, при которой скорость распознавания отказа
совпадает со скоростью подъема передней стойки.
С увеличением взлетного веса самолета минимальная потребная
для взлета длина ВПП увеличивается как за счет увеличения длины
разбега, так и за счет увеличения длины воздушного участка.
Дополнительным фактором, увеличивающим длину взлетной дистанции
с ростом веса самолета, может быть уменьшение угла отклонения
закрылков на взлете для повышения аэродинамического качества. Это
обусловлено ограничением на установившийся угол наклона
траектории при взлете с отказавшим двигателем.
(Эн=-£—~ (10.3)
687
Рис. 10.3 Параметры движения при завершенном взлете
688
В соответствии с требованиями НЛГ градиент установившегося
набора высоты т) н (тангенс угла наклона траектории набора высоты
0 н, выраженный в процентах)
77H = tg0H* 100%
при отказе критического двигателя на взлете должен быть не менее:
а) 2,4%—для самолетов с двумя двигателями;
б) 2,7%—для самолетов с тремя двигателями;
в) 3,0%— для самолетов с четырьмя и большим числом
двигателей.
Если конструкция механизма выдвижения и уборки закрылков
допускает только дискретные положения механизации, то зависимость
длины ВПП от взлетного веса может иметь ступенчатый характер.
Процедура расчета воздушного участка взлетной дистанции
существенно отлична от расчета длины разбега. Отличие состоит в
том, что дистанция разбега определяется в основном
Характеристиками самолета и взлетной полосы, а на траекторию
воздушного участка взлетной дистанции существенное влияние
оказывает техника пилотирования. Нормы летной годности
непосредственно не регламентируют способ пилотирования на
воздушном участке, а имеющиеся в них ограничения могут
выполняться различным образом. При этом различной оказывается и
протяженность воздушного участка. Метод расчета этого участка
взлета должен отвечать по меньшей мере двум условиям. Положенные
в его основу допущения о способе пилотирования с одной стороны
должны ориентироваться на среднюю квалификацию пилота, а с
другой—соответствовать , такому режиму полета, при котором
дистанция воздушного участка близка к минимальной.
Иногда в расчетной практике траектория воздушного участка
взлетной дистанции считается прямолинейной с углом наклона,
определяемым выражением (10.3).В этом случае полагается, что
выход на установившийся угол наклона траектории происходит
мгновенно. В реальном полете достижение установившегося угла
наклона траектории требует некоторого времени, которое определяется
методикой пилотирования на этом этапе полета. Поэтому более точные
результаты дают методы расчета, учитывающие ограничения в
689
маневренности взлетающего самолета [3,4] .
Рис. 10.4 Сбалансированная длина ВПП
Система четырех уравнений, описывающих' плоское движение
самолета на этом этапе
V • cos© (10.4)
dV_ гР • cos(tf+?>) r z х р • V2 S . П1
“dT“g [----------G--------Cx(<z) ’ 2~' -G~slnel
d©_ g гР • sinCa+p) . r z x p • V2 S
~di~v [---------G-------+Cy(a) "2~ • G~COS0J
имеет пять независимых переменных H,L,V,(d,a. Для решения
системы (10.4) необходимо дополнительное условие. При численном
решении этой системы уравнений в качестве такого условия может
использоваться закон изменения перегрузки пу(Р) или угла атаки.
Детальное исследование системы (10.4) показывает, что с
погрешностью не превышающей 10%, минимальная длина воздушного
участка—LBy, реализующаяся для магистральных пассажирских
самолетов, может быть вычислена по формуле:
%
690
т -н > 2- G/S
LBy~ . (10.5)
Ин Су g р
в которой Н = 10,7м — высота в конце взлетной дистанции,
0 н —установившийся угол наклона траектории с отказавшим
двигателем, определяемый выражением (10.3), Су—производная
коэффициента подъемной силы по углу атаки.
Выражение (10.5) получено в предположении, что управляющим
параметром на начальном этапе взлета является угол атаки самолета.
Использование при расчетах в качестве параметра управления угла
атаки при отрыве отражает реальную практику пилотирования и
упрощает обеспечение необходимого зазора между поверхностью ВПП
и хвостовой пятой самолета. Второе слагаемое в выражении (10.5)
учитывает, что выход на установившийся угол наклона траектории
0 н происходит не мгновенно. В этом случае производная ко-
эффициента подъемной силы по углу атаки в знаменателе второго сла-
гаемого выражения (10.5) определяет приращение перегрузки пу при
выходе на установившийся угол наклона траектории при взлете.
10.2.2. Заход на посадку и посадка
Заход на посадку начинается с предпосадочного маневрирования
самолета. В соответствии с НЛГ заход на посадку должен начинаться
не ниже 400 м и заканчиваться на высоте 15 м над уровнем ВПП. Для
небольших самолетов местных воздушных линий допускается
заканчивать заход на посадку на высоте 9 м. В процессе этого
маневра, который может начинаться с полета по “коробочке” на
постоянной высоте 400 м с разворотами на 90°, осуществляется
поэтапное изменение конфигурации самолета от крейсерской к
посадочной с постепенным уменьшением скорости полета до скорости
захода на посадку—Изп.. Изменение конфигурации самолета
начинается с выпуска шасси, затем осуществляется выпуск
предкрылков и в последнюю очередь закрылков (иногда в несколько
приемов) .Последний разворот на “коробочке” предшествует началу
снижения самолета по глиссаде, которая лежит в одной вертикальной
плоскости с ВПП. Допускается окончание процесса выпуска
закрылков уже на глиссаде.
691
Минимальная скорость полета при заходе на посадку должна не
менее чем на 30% превышать скорость сваливания самолета в
соответствующей полетной конфигурации. При возникновении
отказных ситуаций в некоторых случаях допускается заход на
посадку со скоростью, превышающей скорость сваливания в
соответствующей конфигурации на 25%. Дополнительным
ограничением является требование, чтобы скорость захода на посадку
не менее чем на 5% превышала минимальную эволютивную —
Vmin эп. В качестве последней назначается скорость, на которой при
внезапном отказе критического двигателя должна обеспечиваться
возможность управления самолетом с помощью только
аэродинамических органов управления для поддержания
прямолинейного движения самолета по глиссаде и для ухода на второй
круг с углом крена не более 5° в сторону работающих двигателей.
Величина скорости захода на посадку относится к числу наиболее
значимых эксплуатационных характеристик самолета, поскольку от
нее в значительной степени зависит потребная длина посадочной
дистанции и допустимые (и неизбежные в летной практике) отклонения
от идеального пилотирования при посадке. При* проектировании
самолета определенная техническим заданием величина скорости
захода на посадку реализуется за счет эффективности механизации
крыла (Су max в посадочной конфигурации) и нагрузки на крыло при
расчетном посадочном весе. Имеются некоторые особенности
способов выполнения требований по Узп в зависимости от класса
самолета. К примеру, дальние магистральные самолеты базируются
на аэродромах высокого класса с длиной ВПП не менее 3000 м и
пилотируются летными экипажами самой высокой квалификации. Эти
факторы позволяют применять менее сложную механизацию, чем на
магистральных самолетах средней дальности, базирующихся на
аэродромах с более короткой длиной ВПП. На рис. 10.5 для ряда
магистральных самолетов представлены значения скорости захода на
посадку и нагрузки на крыло при посадке. Приведенные там же
зависимости V’3n(G/S') для фиксированных значений Сутах
позволяют сопоставить реализованные на этих самолетах значения
Сутах в посадочной конфигурации.
692
V„ , кч'ч
Рис. 10.5 Скорость захода на посадку магистральных самолетов
Под глиссадой понимается прямолинейная траектория, по которой
должно осуществляться снижение самолета в процессе захода на
посадку. Номинальное значенние угла наклона глиссады к
горизонтальной плоскости составляет—0,046 рад (~—2,6°).
Глиссада задается в пространстве с помощью глиссадного (ГРМ) и
курсового радиомаяков, входящих в состав аэродромного
оборудования. Высота глиссады над торцом ВПП составляет 15 м (см.
рис. 10.6). Установившееся движение самолета по глиссаде на
скорости Узп осуществляется с тягой, определяемой выражением:
P=G • (l/A'+sin©) (10.6)
где К —соответствующее аэродинамическое качество, и
заканчивается маневром выравнивания непосредственно перед
приземлением, или маневром ухода на повторный заход на посадку
(уходом на второй круг), если отклонения от глиссады по какой-то
причине превысило допустимое значение. Схематически заход на
посадку показан на рис. 10.6.
693
Рис. 10.6 Схема посадки
Необходимость ухода на второй круг может быть вызвана не
только отклонением от глиссады, но и превышением скорости
изменением метеоусловий и т.д. С момента принятия решения об уходе
на второй круг, тяга двигателя увеличивается до взлетного ражима, а
самолет из режима снижения переводится в режим набора высоты.
Минимальная высота ухода на второй круг указывается в РЛЭ
самолета как для захода на посадку со всеми работающими
двигателями, так и с одним неработающим. Для уменьшения
сопротивления самолета допускается изменение положения
механизации и уборка шасси. Последнее разрешается только при
положительном угле наклона траектории. Градиент установившегося
набора высоты при уходе на второй круг с отказавшим двигателем
должен быть не менее:
а) 2,1%—для самолетов с двумя двигателями;
б) 2,4%—для самолетов с тремя двигателями;
в) 2,7%—для самолетов с четырьмя и большим числом
двигателей.
Скорость самолета в любой точке ухода на второй круг должна не
менее чем на 20% превышать скорость сваливания в текущей
конфигурации. При расчете режима ухода на второй круг следует
учитывать, что для операций, выполняемых одним и тем же членом
694
экипажа, вводится интервал времени в 1 секунду с момента
завершения предыдущей операции до начала последующей.
Как видно из рис. 10.6, посадка состоит из этапа полета с высоты
15 м до приземления и пробега до полной остановки. При определении *
потребной посадочной дистанции небольших самолетов допускается
считать посадкой пробег и снижение с высоты 9 м над торцом ВПП.
Воздушный участок посадки является самым сложным участком
полета. Весьма непродолжительный (б~Н0 с), он может включать в
себя несколько различных эволюций:, выравнивание, выдерживание,
парашютирование и приземление. Выравнивание обычно начинается на
высоте 5 4-8 м и заканчивается переводом самолета в режим
выдерживания на высоте 0,5 4-1м. В процессе выравнивания
вертикальная скорость самолета плавно уменьшается практически до
нуля. Выдерживание применяется для дальнейшего уменьшения
высоты полета с постепенным уменьшением скорости и увеличением
угла тангажа до значений, при которых становится возможным
приземление и устойчивый пробег самолета. При уменьшении
подъемной силы в конце участка выдерживания начинается
парашютирование—снижение с увеличивающейся вертикальной
скоростью. Так как высота парашютирования мала, в момент
приземления вертикальная скорость незначительна.
В целях сокращения посадочной дистанции может
использоваться методика посадки без выдерживания, а иногда и без
полного выравнивания. Вертикальная скорость приземления при
неполном выравнивании не должна превышать 1,5 м/сек. Для посадки
без выдерживания посадочная конфигурация самолета должна быть
спроектирована таким образом, чтобы снижение по глиссаде
осуществлялось с небольшим положительным углом тангажа (см. гл.
6). При выравнивании (особенно при неполном выравнивании) угол
тангажа к моменту приземления увеличивается незначительно (на
2 ~4°), а для нормального приземления он должен составлять 4° 4-6°.
В этом случае имеется запас на погрешности пилотирования, и
самолет в достаточной мере застрахован как от приземления на
носовую стойку, так и на хвостовую пяту. Завышенные значения угла
тангажа в момент приземления нерациональны и потому, что
695
затягивается процесс опускания передней стойки после приземления, а
значит и включение тормозов шасси и реверса. Расчет протяженности
воздушного этапа посадки осуществляется интегрированием системы
(10.4) с небольшой положительной перегрузкой на участке
выравнивания = 0,1 ~30,2). При таких значениях перегрузки
высота начала выравнивания составит 3^5 м. Считая постоянной
величину перегрузки на участке выравнивания и пренебрегая
изменением скорости, можно получить приближенную формулу для
расчета длины воздушного участка до выхода в горизонтальный полет:
т _______________________ 15+ Нц,в
ЬвУ~ ©З.П
где Нн.в—высота начала выравнивания, ©з.п =—0,046—угол
наклона траектории при заходе на посадку. Для неполного
<10.7)
выравнивания при тех же предположениях длина воздушного участка
определяется выражением:
+ где 0 п —угол наклона траектории в момент приземления.
Дистанция пробега приземлившегося самолета является одной из
основных составляющих потребной для посадки длины ВПП. При
размерах ВПП, не намного превышающих минимально потребную для
посадки, пробег осуществляется с максимальным использованием
всех средств торможения. Сразу после касания ВПП при наличии
автоматики и не менее чем через две секунды при ее отсутствии
выпускаются интерцепторы для максимального уменьшения
подъемной силы. После опускания передней опоры включаются
тормоза шасси и реверс двигателей. Коэффициент трения при
торможении зависит от характеристик ВПП и колес шасси и от
совершенства антиюзовой системы. Для современных магистральных
самолетов на сухой бетонной ВПП он может иметь значение 0,25
0,35. Использование для торможения реверса двигателей, как правило,
ограничено минимальной скоростью (30 + 50 м/сек.), при достижении
которой реверс выключается. Использование реверса на меньшей
скорости может привести к попаданию в тракт двигателей сдуваемых
с ВПП реверсивной струей предметов. Пример расчета посадочной
696
дистанции представлен на рис. 10.7.
Рис. 10.7 Параметры движения при посадке
В соответствии с требованиями норм летной годности потребная
посадочная дистанция, исчисляемая от торца ВПП, должна быть не
менее:
а)посадочной дистанции при выполнении посадки со всеми
нормально работающими двигателями, умноженной на коэффициент
—1,67—для основных аэродромов,
—1,43—для запасных аэродромов,
б)посадочной дистанции при выполнении посадки с одним
отказавшим двигателем.
697
10.3. Расчет транспортной эффективности
Если этапы взлета и посадки характеризуют возможности
базирования, то транспортная эффективность самолета
характеризуется скоростью и дальностью полета с определенной
коммерческой нагрузкой и рейсовым расходом топлива. Зависимость
перевозимой коммерческой нагрузки от дальности обычно
представляется диаграммой груз-дальность (рис. 10.8). На этой
диаграмме можно выделить три характерных участка:
А—Б—полет на дальность с максимальной коммерческой
нагрузкой, определяемой пассажировместимостью, емкостью
грузовых отсеков и прочностными характеристиками самолета;
Б—В—полет на дальность с максимальным взлетным весом;
В—Г—полет на дальность с максимальной заправкой топливом.
На рис. 10.8 показано соответствующее изменение взлетного
Рис. 10.8 Зависимость от дальности полета веса самолета и его составляющих
698
веса самолета и величины заправляемого топлива. Точка Б на
диаграмме груз_дальность соответствует полету с максимальной
коммерческой нагрузкой при максимальном взлетном весе. Участок
Б—В реализуется при полете с максимальным взлетным весом при
уменьшении коммерческой нагрузки. Уменьшение коммерческой
нагрузки компенсируется увеличением заправляемого топлива.
Дальность полета возрастает за счет увеличения расходуемого
топлива. Точка В на диаграмме соответствует максимально
возможной массе заправляемого топлива, ограниченной емкостью
топливных баков. Дальнейшее увеличение дальности возможно лишь
за счет уменьшения коммерческой нагрузки и снижения километровых
расходов топлива при уменьшении среднего полетного веса самолета.
Максимальная дальность, реализующаяся при полете с нулевой
коммерческой нагрузкой и максимальным топливом, называется
перегоночной.
При расчете дальности полета учитывается аэронавигационный
запас топлива. Аэронавигационный запас топлива состоит из
компенсационного и резервного запасов. В соответствии с нормами
летной годности резервный запас включает топливо, необходимое для
ухода на второй круг с глиссады и перелета на запасной аэродром,
выполнения полета на режиме ожидания над запасным аэродромом в
течение заданного времени и посадки. Компенсационный запас—это
топливо, необходимое для компенсации погрешностей пилотирования и
отклонения от стандартных характеристик самолета и метеоусловий.
Компенсационный запас задается в процентах от необходимого для
полета на расчетную дальность топлива и может составлять от 3% до
10%.
Для оценки основных экономических и транспортных показателей
магистральных самолетов определяющими являются участки
крейсерского полета, набора крейсерской высоты и снижения.
Движение самолета на этих участках описывается системой (10.4), а
изменение полетного веса уравнением:
dC Р’ Се /|а п\
(М 3600
где Се —удельный расход топлива, выражаемый в кг/кг час.
699
Для пассажирских и транспортных самолетов характерны малые
значения тяговооруженности (Р/G), нормальной и тангенциальной
перегрузки. Это обстоятельство позволяет существенно упростить
систему уравнений движения (10.4), принимая d©/dt=O и dF/d£ =
0. Если к тому же считать, что направление вектора тяги силовой
установки совпадает с направлением вектора скорости, т.е.
Р • cos(a-f-<p дв) = Р и Р • sin(a + <p да) = 0 (что на практике
обычно выполняется с высокой степенью точности ввиду малости а и
<Рдв), то получим так называемую квазистационарную систему
уравнений движения, используемую для расчетов летных
характеристик неманевренных самолетов:
dG = Р • Се
df 3600
-^-= V • sin(9 (10.10)
^-= V COS0
G • sin(9=P— Сх • q • S, G • cos<9 = Су • q • S,
где q = P ’ И2/2—скоростной напор.
Для магистральных самолетов, основной задачей которых
является перевозка пассажиров или груза, полет по маршруту
подразделяется на несколько принципиально отличных участков: набор
крейсерской высоты, крейсерский полет, снижение. Когда полет
осуществляется в условиях заданного эшелонирования, то к
перечисленным участкам могут добавляться один или несколько
переходов между эшелонами. Обычно расчет рейсовых характеристик
связан с оптимизацией траектории полета. Критериями оптимальности
в зависимости от вида решаемой задачи могут быть как физически
измеримые величины (максимум дальности полета, минимум рейсового
расхода топлива и т.д.), так и величины, включающие финансовое
содержание, т.е. являющиеся экономическими критериями (например
минимум прямых эксплуатационных расходов—ПЭР).
В настоящее время наиболее употребительным функционалом
является рейсовый расход топлива при заданной коммерческой
нагрузке и расчетной дальности. Этот показатель характеризует
700
топливную эффективность самолета. Стоимость топлива составляет
часть ПЭР. Являясь физически измеряемой величиной, такой
показатель как рейсовый расход топлива, не зависит от конъюнктуры
рынка и способов расчета ПЭР. Последние весьма разнообразны и в
данной монографии не рассматриваются.
Задача минимизации рейсового расхода топлива при полете на
заданную дальность с заданной коммерческой нагрузкой сводится к
более простой задаче—оптимизации траектории, дающей максимум
дальности полета с заданной коммерческой нагрузкой при
фиксированном взлетном весе. Полная вариационная задача о
максимизации дальности полета (включая набор крейсерской высоты и
снижение) даже в квазистационарной постановке представляется
слишком громоздкой для широкого практического использования.
Однако задача существенно упрощается, если такие участки как
набор крейсерской высоты, крейсерский полет и снижение
рассматривать отдельно, а затем определенным образом, о котором
будет сказано ниже, осуществить их траекторное согласование.
Действительно, каждый из упомянутых участков полета имеет свои
управляющие функции, свои ограничения и свои особенности.
10.3.1. Крейсерский полет
В крейсерском полете 0 — QnP=Cx' q' S — G/К. Из первого
и третьего уравнений квазистационарнои системы (10.10) получаем:
GK v Gk К • V
L= -3600 S D dG= -3600 5 —тт dG (10.11)
Сяг • Се СнСе • Cr
где GH и Gk —вес самолета в начале и в конце участка крейсерского
полета.
Задача оптимизации режима крейсерского полета сводится к
поиску для каждого значения G такой скорости и высоты, при
которых обеспечивается максимум подинтегральной функции, т.е.
параметра дальности cp-KV/Ce (рис.10.9). Поиск максимума
гладкой функции двух переменных может быть легко осуществлен с
помощью ЭВМ.
701
Рис.10.9 Параметр дальности полета <р — KV/ Се
Если полет проходит с заданной скоростью (Икр=const или
Мкр—const) или высотой (Я=const), то задача оптимизации еще
более упрощается и сводится к поиску максимума функции только
одной переменной Н или V. В случае гГолета по эшелонам задача
оптимизации крейсерской траектории состоит в выборе оптимальной
высоты эшелона и поиске такого значения G, при котором следует
начинать переход на более высокий эшелон (сам переход
рассматривается как участок набора высоты). Обычно в качестве
критерия начала перехода берут такое значение G, при котором
<р(Н) = ф(Н+&Н), где дя—шаг между эшелонами (рис. 10.10).
Если параметр дальности <р меняется мало в заданном диапазоне
изменения G и можно считать <р = const, то из (10.11) получается
известная формула Бреге L=3600 • <р • ln(GH/GK). Однако, в
практических расчетах, особенно в случае полета по эшелонам,
осреднение часто ведет к неоправданному ухудшению точности
расчетов и формулой Бреге целесообразно пользоваться только для
ориентировочных оценок.
На выбор оптимального режима крейсерского полета, а
702
следовательно и на дальность, могут оказать заметное влияние ряд
ограничений.
Среди них:
—ограничение по максимальной тяге силовой установки, а также
запасу тяги, определяемому НЛГ [ 1 ]. Режим работы
двигателей не должен превышать максимальный крейсерский, а
на любом этапе крейсерского полета при использовании
максимального разрешенного режима работы двигателей
должен обеспечиваться полный градиент набора высоты не
менее 1% (на наивыгоднейшей скорости).
— ограничение по располагаемому диапазону Су, который
определяется рядом регламентирующих нормативных
документов таких, например, как НЛГ. В этих документах
определяются запасы по скорости, углу атаки и Перегрузке.
Для магистральных самолетов, особенно тяжелых, обладающих
малой тяговооруженностью, ограничение по тяге может заметно
уменьшить, высоту крейсерского полета. На рис. 10. И (а,б,в) показан
пример, когда высота полета ограничивается максимальной
крейсерской тягой. Другие ограничения, отмеченные выше, влияют на
крейсерский режим подобным образом.
У н
Н + дН
н
Н - дН
Gnepexoaa Gnepexoja О
Рис. 10.10 Крейсерский полет в условиях эшелонирования
Поскольку указанные ограничения могут заметно повлиять на
выбор оптимального режима полета и, в конечном итоге, на
703
транспортную эффективность самолета, они должны учитываться
уже на этапе предварительного проектирования, когда осуществляется
выбор основных параметров самолета и их согласование £
характеристиками силовой установки.
Рис. 10.11 Изменение тяги и коэффициента подъемной силы при полете
в эшелоне
При разработке численных алгоритмов, предназначенных для
реализации в расчетах ЛТХ и бортовых систем оптимизации режимов
полета, следует учитывать возможность возникновения особенности
при определении наивыгоднейшей высоты полета (когда крейсерский
полет осуществляется не по эшелонам, а проходит на оптимальной
704
высоте). Эта особенность, имеющая место в окрестности Н —11 км,
обусловлена негладким характером зависимостей параметров
атмосферы по высоте в принятых моделях атмосферы. Такие функции
как плотность воздуха р(Н) и скорость звука а(Н) имеют при Н—
11 км угловую точку. В результате функциональная зависимость
<р(Н) тоже имеет угловую точку при Н=11км. При этом в одних
случаях угловая точка в некотором диапазоне изменения массы
самолета является максимумом <р (рис.10.12а), а в других случаях
Рис. 10.12 Изменение параметра дальности в окрестности Н —11 км
могут иметь место два экстремума, один из которых расположен в
области Н>11 км, а другой в области Н<11 км (рис. 10.126). Для
первого варианта в некотором диапазоне G3^ G^ Gi оптимальная
высота крейсерского полета строго равна 11 км (рис. 10.12а, 10.13а).
Доля этого участка в общей дальности полета различна для разных
самолетов и может составлять несколько сот километров (рис.10.14а).
В случае двух экстремумов, возникающих в некотором диапазоне
G3^G^Gi, дистанция между ними невелика (АН на рис. 10.126 и
10.136) и составляет обычно от нескольких метров до нескольких
десятков метров. В принципе можно, ставить задачу об оптимальном
705
переходе с одного экстремума на другой. Но ввиду малого отличия в
положении этих экстремумов по высоте (часто сравнимого с
. размерами самолета) и очень слабого ожидаемого улучшения
функционала практического значения такая задача не имеет. При
расчетах ЛТХ данные особенности можно не учитывать ввиду их
сравнительно слабого влияния на дальность полета. Однако их следует
иметь ввиду при формировании соответствующих расчетных
алгоритмов.
Рис. 10.13 Зависимость оптимальной высоты полета от массы в окрестности
Н = 11 км
Рис. 10.14 Изменение оптимальной высоты по дальности полета
706
10.3.2. Набор крейсерской высоты
Участок набора крейсерской высоты может составлять
существенную долю от всей дальности полета, особенно для
ближнемагистральных пассажирских самолетов. Для расчета
траектории набора и ее оптимизации обычно используется та же
квазистационарная система уравнений, но преобразованная к более
удобному виду путем введения в качестве независимой переменной
удельной механической энергии
которая считается монотонно возрастающей вдоль траектории. При
условии sin0 = 0, cos0 = l, характерном для траекторий
пассажирских самолетов, система уравнений (10.10) принимает вид:
dL _ G
dE СР-Х)
dt G
dE СР-Х) • V
dH _ G-0
‘ dE СР-Х)
dG___ dGr____ G P * Ce
dE~ dE ~ CP-X) • V ’ 3600
Cy=-~^; r=V(E-ff) • 2g
Здесь Gt—вес израсходованного топлива.
В качестве ограничений, определяющих область возможных
режимов полета, рассматриваются следующие:
Q max — максимальный скоростной напор (выбирается, исходя из
требований прочности);
М max — максимальное число М полета (определяется требованиями
устойчивости и управляемости);
Vmin — минимальная скорость полета (определяется из условий
обеспечения нормируемого запаса по а и Су до сваливания
или же тягой двигателей);
Vmax — максимальная скорость полета, определяемая максимальной
тягой двигателей.
707
К этим ограничениям могут добавляться и другие, характеризующие
те или иные параметры полета, например, максимальный угол тангажа
или скорость изменения давления в пассажирской кабине. Из условий
комфорта пассажиров скорость изменения давления в пассажирской
кабине как при наборе высоты, так и при снижении не должна
превышать 0,18 мм рт. ст./сек. Это ограничение может быть
выполнено путем контроля за вертикальной составляющей скорости
самолета, или системой регулирования давления в пассажирской
кабине.
Оптимизация участка набора крейсерской высоты может прово-
диться при неизменном (номинальном) режиме работы силовой
установки. В качестве минимизируемого функционала для участка
набора высоты рассматриваются следующие:
Ек G
Ii '• V * —минимум времени набора,
* т — • Е? G Р- Се
-<2 minj __X) * V * 3600 * —минимум
топлива, затраченного на набор крейсерской высоты.
В приведенных выше выражениях Ен—начальное значениеE(V=
V0,H= Но), а Ек—конечное значение Е, которое определяется
условиями крейсерского полета (Укр и Нкр).
Кроме того, часто используется функционал, определяющий так
называемую "потерянную” дальность Епт. Минимизация именно
этого функционала обеспечивает наибольшую рейсовую дальность
полета самолета. Понятие "потерянной” дальности имеет ясный
физический смысл: "потерянная” дальность показывает, на сколько
при одних и тех же затратах топлива дальность, полученная на
участке набора высоты, меньше дальности крейсерского полета. Если
затраты топлива на набор крейсерской высоты обозначить Ст.наб., то
дальность на режиме крейсерского полета при этих затратах топлива
может быть выражена следующим образом:
Ог.наб 1 Е G*P*C\ , _х
У-dGT=йЕ (10ДЗ)
о <7икр £о<?Укр Л.) V 3,6
где <7vkp —километровый расход топлива в крейсерском полете.
Тогда имеем функционал:
708
I — min (Z/кр ^наб) — / z p y\ • ( q л tz l)d.E
, Eo \± JO 3,6* v *<?VKp
(10.14)
Использование функционала "потерянная” дальность позволяет
решить задачу о максимизации дальности всего полета, отдельно
оптимизируя участки крейсерского полета и набора высоты.
Оптимизацию траектории на этапе набора крейсерской высоты
можно осуществлять различными методами. Одним из наиболее
оперативных, простых и удобных для численной реализации является
метод А. Миеле С5]. В соответствии с этим методом оптимальная
траектория перехода из начального положения (Ео) в конечное (Ек)
состоит из участков движения по границе области возможных
режимов полета и по линии нулей фундаментальной (по А. Миеле)
фунукции .
_ 9F V 9F
ш av g ан
где F—подинтегральная функция в выражении (10.14). При
оптимизации траектории набора для простоты считается, что высота
на этом участке полета должна находиться в пределах отрезка СН0,
Нк].
Для приближенной оптимизации траектории набора высоты можно
пользоваться более простым в реализации способом, который состоит
в поиске таких Н и V, которые обеспечивают локальный экстремум
подинтегральной функции F(E). На рис. 10.15 в плоскости Н, V в
качестве примера изображены траектории набора высоты, полученные
по методу А.Миеле—(А) и описанным выше упрощенным
способом—(Б).
Этап набора крейсерской высоты магистральными самолетами,
особенно тяжелыми, с характерной» для них малой
тяговооруженностью, может иметь довольно большую дальность и
занимать продолжительное время. Это может оказаться
неприемлемым для службы управления воздушным движением (УВД).
709
Рис.10.15 Режимы набора высоты и разгона до крейсерской скорости
А—оптимизация по методу А.Миеле
Б—локальная оптимизация подинтегральной функции
В таких случаях можно решать вариационную задачу оптимизации
траектории при наличии изопериметрического условия, которым может
быть либо дальность, либо время набора крейсерской высоты:
<10.15)
Е с
T™=L СР-ХУ • V йЕ
Тогда минимизируемый функционал будет иметь вид:
• [3,6%Cegw-1+AJd£ (1°-17)
если изопериметрическим условием является дальность набора
высоты;
1= 1* -----1+Т ’ A]dE (1°-18)
Ен 2\.) 3, О * V * Цу кр V
710
если изопериметрическим условием является время набора высоты.
В выражениях (10.17) и (10.18) Л—постоянный коэффициент,
обеспечивающий выполнение условия (10.15) или (10.16).
Предельными случаями при решении сформулированной выше за-
дачи являются поиски траекторий, обеспечивающих минимум
дальности или времени набора крейсерской высоты. При этом
е G
Z=min/ (р—jf) dZT—минимальная дальность набора или
. у d-E—минимум времени набора.
Очевидно, что эти функционалы реализуются при условиях:
, Р * Се , . Р * Се тг
о с . V . п----1 или Л >0-7-.-",------V
0.0 V Qvwp 0,0 Qvkp
Можно доказать, что если оптимальные траектории, дающие
минимум "потерянной” дальности—(А на рис.10.16) и минимум
дальности набора—(Б на рис. 10.16) пересекаются в фазовой
плоскости ZZ, V в некоторой точке ZZ*, V*, то семейство
изопериметрических траекторий, соответствующих различным
значениям Л—(В на рис.10.16), также проходит через точку ZZ*, V*
и заключено между траекториями, дающими min L наб. и min L пот.
Более того, через эту же точку проходит и оптимальная траектория,
дающая min Ст.наб.
Опыт расчетов оптимальных траекторий набора высоты
самолетами с малой тяговооруженностью, характерной для средних и
тяжелых транспортных самолетов, показывает, что несмотря на
большое различие в характере траекторий, обеспечивающих min ЬПот.
и min Ьнаб., разница между значениями ЬНаб. в обоих случаях
невелика, также как и в Lnm. Например, для самолета Ил-96 разница
в дальности набора крейсерской высоты ZZ=10 км с разгоном до
скорости Мкр. — 0,8 при движении по траектории с min Lno-r. и min
Рнаб. составляет 9 км. А разница в “потерянной” дальности будет
около 20 км, что при Go= 230000 кг эквивалентно экономии 180 кг
. топлива. Более результативным средством уменьшения дальности
Участка набора является снижение высоты эшелона. Однако этот
способ связан с дополнительным ухудшением топливной
711
эффективности самолета.
Рис.10.16 Оптимальные режимы набора высоты и разгона до крейсерской
скорости
А—минимум потерянной дальности»
Б—минимум дальности набора высоты»
В—минимум потерянной дальности при заданных дальности или
времени набора высоты.
Определенный интерес представляет задача об оптимальном регу-
лировании тяги двигателей на этапе набора крейсерской высоты. Из-
вестно, что необходимым и достаточным условием целесообразности
дросселирования двигателей с точки зрения улучшения функционала
является удовлетворение неравенства
( дРСе \ \ (РСе) р=ртьх.
max X
(10.19)
\ и Г /Р=Ртах
при Е = const, G = const.
В частном случае, когда функционалом является "потерянная”
дальность,
<К Г/С^крас
712
Геометрический смысл неравенства (10.19) ясен из рис. 10.17.
Рис.10.17 Дросселирование тяги двигателей при оптимизации режима набора
высоты
Для некоторых самолетов приведенное выше неравенство (10.19)
может удовлетворяться в некоторой области HtV, ограниченной
кривыми -А или В на рис. 10.18, содержащей и точку Ек, причем эта
область может быть замкнутой (А на рис. 10.18).
Важная особенность расчета оптимальной траектории набора
высевы при оптимальном регулировании тяги силовой установки (если
это целеообразно по условию (10.19) заключается в асимптотическом ’
выходе на крейсерский режим. Иначе говоря, по мере приближения к
конечной точке Ек оптимальное значение тяги приближается к
значению Р кр, которое, очевидно, равно аэродинамическому
сопротивлению X. В результате дальность участка набора высоты,
также как и время набора, непомерно увеличиваются, что может
оказаться неприемлемым по требованиям УВД. Чтобы избежать
этого, в расчетах требуется ввести дополнительное ограничение. Им
713
Рис.10.18 Области дросселирования тяги двигателей при оптимизации режима
набора высоты
А—замкнутая область,
Б—незамкнутая область.
может быть либо минимальное значение Пх (пх= (Р—Х)/G), либо
минимальное значение Р/Р мах, величина которого заранее
неизвестна. Если изобразить функцию Рopt/Рмах в зависимости,
например, от дальности, то качественно график может иметь вид,
представленный на рис. 10.19.
Практика расчетов оптимальных режимов набора высоты при
наличии оптимального управления тягой показывает, что улучшение
функционала за счет оптимизации тяги для типичных магистральных
самолетов очень мало. Если говорить о “потерянной” дальности, то
обычно ее уменьшение не превышает 1—1,5%, но при этом дальность
набора в зависимости от ограничения Р/Ртгх. возрастает в 1,5—2
раза (рис. 10.20). Таким образом, для получения оптимальной
траектории полета современных магистральных самолетов
оптимизировать тягу на участке набора крейсерской высоты нет
714
необходимости ввиду малого ожидаемого улучшения функционала.
Иногда сравнимый положительный эффект может дать простое
фиксированное снижение тяги на участке набора высоты (в той
области Н, V, где выполняется условие (10.19)).Однако, для
отдельных самолетов, отличающихся повышенной тяговоору-
женностью, оптимизация тяги на этапе набора высоты может дать
больший положительный эффект.
Рис.10.19 Ограничение дросселирования тяги двигателей при оптимизации
режима набора высоты
Как и в случае оптимизации крейсерского режима полета, опти-
мальная траектория набора высоты в фазовой плоскости Ht V может
терпеть разрыв при Н = 11 км. Правда, опыт расчетов
свидетельствует о небольшой величине А V, характеризующей
разрыв траектории (рис. 10.21), и о пренебрежимо малом влиянии
способа перехода с одной ветви траектории (Н^ 11 км) на другую
(-£Г>11 км) на суммарные характеристики набора высоты. А V
обычно не превышает 3 м/сек. Однако при реализации численных
алгоритмов расчета необходимо учитывать возможность подобного
разрыва траектории.
715
Рис. 10.20 Дальность и время набора высоты при ограничении на степень
дросселирования тяги двигателей
Рис. 10.21 Пример разрыва оптимальной зависимости Щ V) при наборе высоты
716-
i
10.3.3. Снижение
Для расчета траектории снижения и ее оптимизации используется
та же система уравнений и те же методы, что и для расчета набора
крейсерской высоты. Такими же являются принятые допущения и
ограничения. При расчете и оптимизации траектории снижения
считается, что двигатели работают на фиксированном режиме (обычно
на режиме “малого газа” или другом, близком к нему режиме).
Считается также, что вдоль траектории снижения удельная
механическая энергия Е является монотонно убывающей функцией. В
качестве функционалов могут рассматриваться следующие:
_ шах £л G , г,
ф‘"(шт)А (Р-Х) d£
—максимум (минимум) дальности снижения,
е G
фг=тт/ (р_Х) . у dE
—минимум времени снижения (этот функционал имеет очевидный
практический смысл, когда рассматривается экстренное снижение)
G • Р ' Се
фз пип/ (р_х> . у . 3600 dE
— минимум топлива, затраченного на снижение.
Величина Ек соответствует Икр и Укр перед началом снижения.
Если при рассмотрении набора высоты функционалом,
обеспечивающим максимальную рейсовую дальность полета, являлась
“потерянная” дальность, то при расчете снижения функционалом,
обеспечивающим максимальную дальность является “приобретенная”
дальность. Величина ''приобретенной” дальности показывает,
насколько при одних и тех же затратах топлива дальность, полученная
на этапе снижения, больше дальности, полученной в условиях
крейсерского полета. Искомый функционал имеет вид:
Ф ~ max (Zzch -Екрейс)=
Для современных магистральных самолетов, обладающих
717
высоким аэродинамическим совершенством, дальность полета на
участке снижения, когда максимизируется функционал (10.20), часто
получается очень большой и по этому параметру может не
удовлетворять требованиям УВД. Чтобы обеспечить максимум
“приобретенной” дальности при заданной дальности снижения,
необходимо решить изопериметрическую вариационную задачу.
Условие изопериметрии имеет вид:
Е С
L^= / (р_Х) d£’ (1°-21)
а функционал примет вид:
Е С Р • С
Ф=/. (Р~Х> ‘ + Л- 3,6 • V-«vj d£ (10'22)
где Л - постоянный коэффициент, выбираемый из условия (10.21).
В отличие от участка набора высоты дальность снижения может
быть сокращена более существенно благодаря соответствующему
изменению траектории полета на этом участке. На рис. 10.22 в
Рис. 10.22 Оптимальные режимы снижения
718
плоскости Н, V в качестве примера показаны оптимальные
траектории снижения, соответствующие различным Л:
А—оптимальная траектория, дающая max Lnp (Л=0);
Б—оптимальные траектории при наличии ограничения на
дальность снижения (Л1<СЛ2<СЛз);
В—траектория, обеспечивающая минимальную дальность
снижения (начальный участок этой траектории соответствует
движению с постоянным углом 0).
На рис. 10.23 на примере магистрального четырехдвигательного
самолета в безразмерном виде показана зависимость “приобретенной”
дальности от дальности снижения, определяемой величиной Л. За еди-
ницу принята дальность снижения по траектории, обеспечивающей
maxLnp (в этом случае коэффициент Л = 0).
Рис. 10.23 “Приобретенная” дальность при снижении
Как и в случае оптимизации траектории набора высоты,
оптимальная траектория снижения в плоскости Н, V может терпеть
небольщой разрыв при Н = 11 км. Способ перехода с одной ветви
траектории (Н 11км) на другую (Н<11 км)мало влияет на
суммарные характеристики снижения, но наличие такого разрыва
719
траектории необходимо иметь ввиду при реализации численных
алгоритмов оптимизации.
10.4. Оптимизация режима полета в условиях
“четырехмерных” систем УВД
Рассмотренные выше методы оптимизации эффективны и при
исследовании возможности повышения топливной экономичности
самолетов за счет введения в практику управления воздушным
движением периодического уточнения времени прибытия в аэропорт
назначения. Система УВД, когда навигация осущестляется не только
по трем пространственным координатам, но и по времени получила
название четырехмерной. В условиях “четырехмерной” навигации
наземная вычислительная система должна, обрабатывая текущую
информацию о всех направляющихся в аэропорт самолетах,
заблаговременно выдавать для них точное время посадки. Экономия
топлива получается за счет того, что скорректировать время прилета
выгоднее на крейсерском режиме и на участке снижения, чем ожидать
разрешения посадки на небольшой высоте в районе аэропорта.
Оптимальный, в смысле расхода топлива, режим полета самолета
на заданную дальность за заданное время может быть получен из
решения любой из двух эквивалентных друг другу изо-
периметрических вариационных задач:
а) при заданных времени полета и запасе топлива требуется
обеспечить экстремальную дальность L;
а) при заданных дальности полета и запасе топлива требуется
обеспечить экстремальное время полета Т.
Для первой задачи выражение
Ъ 3600
• Се
G
dG= ftpdG
Gh
является условием изопериметрии, а выражение
L=T р60Я • VdG=?₽dG
Gh Г • Се Gh
является функционалом. Для второй—наоборот. В первом случае
решение сводится к поиску режима полета, доставляющего максимум
функционалу Pi:
720
Fi= Г(^+/• p)dG; maxF1=max(L+/ • F),
Gh
а во втором - функционалу F2:
G
F2 = \*Gp + e • 0)dG; maxF2=max(e • L+T),
Gh
где e и f—постоянные коэффициенты, выбираемые из условия
изопериметрии. Поскольку задачи а) и б) эквивалентны, то можно
выписать обобщенный функционал
Gk
F= J (е • $?+/ • <p)dG=e • L+/ • Т (10. 23)
Gh
где один из коэффициентов задается, а другой отыскивается из изопе-
риметрического условия. Частными случаями являются:
е=1, /=0 —полет на максимальную дальность,
е = 0, f—1 —полет на максимальное время,
е=0, f=~l —максимально быстрый полет,
в = ~1, /=0 —полет на минимальную дальность (практического
смысла не имеет).
Как и в случае максимизации дальности полета, рассмотренном в
параграфеЮ. 3.1, поиск оптимальных параметров полета в условиях"четы-
рехмерной” системы УВД сводится к поиску таких Н и (или) V, при
которых для заданного значения G обеспечивается максимум
подинтегральной функции е • <p+f • ср, т.е.
-^-(е • У+/)
Для оптимизации траектории набора высоты используется так
называемый “потерянный” функционал, который является обобщением
на условия "четырехмерной” навигации рассмотренного выше(10.14)
функционала “потерянная” дальность. "Потерянный” функционал
показывает, на сколько участок набора высоты хуже по функционалу
F, чем крейсерский полет при одинаковых затратах топлива.
Выражение для потерянного функционала имеет вид:
/=^7р ул ----<е ‘ ^+/>]d£ (10.24)
Ен kr—X) • V L3600 • qf kP J
где <?/ кр= (dGT/dF)Kp—расход топлива на единицу приращения
Функционала в условиях крейсерского полета.
721
Для оптимизации траектории снижения используется так
называемый “приобретенный” функционал, который является
обобщением на условие "четырехмерной” навигации рассмотренного
выше (10.20) функционала “приобретенная” дальность.
"Приобретенный” функционал показывает, на сколько участок
снижения лучше по функционалу 1\чем крейсерский полет при
одинаковых затратах топлива. Выражение для “приобретенного”
функционала имеет вид:
Ф-Z (Р-Х) • 7 • 1(е • У+/) - (10-25)
Оптимизация траекторий набора высоты и снижения
осуществляется при тех же допущениях и теми же методами, которые
описаны в 10.3.2, 10.3.3.
Решение задачи о максимизации F для различных сочетаний
коэффициентов е и f позволяет построить в координатах L,T
некоторую область достижимых дальности и времени при
фиксированном взлетном и посадочном весе самолета (рис. 10.24).
Рис. 10.24 Возможные дальность и время полета при фиксированных
взлетном и посадочном весах самолета
722
Использование оптимального, в смысле расхода топлива, режима
полета самолета на заданную дальность за заданное время позволяет
уменьшить рейсовый расход топлива в случае изменения времени
приема самолета в аэропорту назначения. Если за L км до аэродрома
назначения сообщить на борт об изменении времени приема самолета
на А Т, то это дополнительное время можно провести не в режиме
ожидания посадки на малой высоте, как это делается сейчас, а на
маршруте и участке снижения. Возможная экономия топлива зависит
как от дальности оповещения Lon, так и от дополнительного времени
полета L-Т (рис. 10.25). Например, если экипажу самолета Ил-96 за
3000 км до пункта назначения сообщить о задержке в приеме
самолета на 20 минут, то экономия топлива за счет соответствующей
оптимизации полета может составить около 2т по сравнению с
обычным полетом в режиме максимальной дальности и ожидания в
течение 20 минут на высоте 800 м.
Рис. 10.25 Возможная экономия топлива в условиях “четырехмерной”
навигации
В условиях “четырехмерной” навигации можно существенно
сократить аэронавигационный запас топлива (АНЗ). Уменьшение
723
АНЗ достигается за счет исключения времени ожидания А Тож на
малой высоте в районе запасного аэродрома. Максимальное значение
величины Тож, которое берется в расчет при выборе АНЗ,
определяется регламентирующими документами. Так, в соответствии
с существующими НЛГ Ш, минимальный АНЗ должен выбираться
из расчета А Тож — 30 минут. Если считать, что дальность
оповещения экипажа о времени приема самолета на запасном
аэродроме не меньше, чем расстояние до него, и что экипажу
заблаговременно сообщается о времени приема самолета на запасном
аэродроме, которое находится в диапазоне [Tmin,Tmin+ A7\J
(где Т min—время, соответствующее максимально быстрому
перелету на запасный аэродром), то возможное сокращение АНЗ
может составить около 20%.
10.5. Оптимизация параметров
магистрального самолета
На начальных этапах проектирования самолета проводится выбор
рациональных параметров его аэродинамической компоновки и силовой
установки. Оперативность в проведении численного многопараметри-
ческого анализа достигается использованием сравнительно быстрых
алгоритмов аэродинамического и весового расчета самолета, а также,
если это входит в круг выбираемых параметров, весового и термодина-
мического расчета силовой установки. Целью широкого па-
раметрического анализа является получение области рас-
сматриваемых параметров, в которой при удовлетворении заданных
ограничений обеспечиваются лучшие экономические или другие
показатели самолета. Полученные результаты на следующих этапах
проектирования уточняются с помощью результатов экс-
периментальных исследований и более строгих алгоритмов, тре-
бующих существенной детализации исходных данных и характери-
стик.
Распространенным способом ускорения расчетов при параметри-
ческом анализе, является пересчет показателей от прототипа, при оп-
ределении характеристик которого используются более точные и
трудоемкие методы расчета. Число одновременно варьируемых
724
параметров при оптимизации характеристик самолета, как правило, не
велико. Обычно проектирование осуществляется под .конкретную
силовую установку. Требованиями технического задания определены
пассажировместимость, дальность и скорость полета, условия
базирования и ряд других характеристик. Зависимость экономических
и летно-технических характеристик самолета от этих параметров
исследуется на этапах формирования технического задания на
самолет.
В качестве примера многопараметрического анализа технических
характеристик самолета рассмотрим проблему выбора рациональных
площади—S, удлинения—Л и стреловидности—х крыла самолета с
позиций топливной экономичности. Зависимость расхода топлива от
перечисленных параметров при фиксированных коммерческой нагрузке
и дальности полета, как правило, имеет плавный характер и, как
показывает практика расчетов, хорошо апроксимируется полиномом
второй степени вида:
Gt=<2i + <22 ’ z + <23 ’ Z2 + <®4 * A + <2s • Л2 + <2б • X * Л +
<2? • S + flg • ,$2 + <29 • х ’ S + flio • Л • S, (10.26)
где —постоянные коэффициенты.
Для определения этих коэффициентов необходимо провести
весовые расчеты и расчеты расхода топлива самолета, реализующего
полет на заданную дальность, как минимум для десяти различных
сочетаний параметров S, Л, При большем числе сочетаний
варьируемых параметров коэффициенты а г определяются из условия
минимума суммы квадратов отклонений. Диапазон значений
параметров, представляющий практический интерес, как правило, не
превышает ±204-25% от параметров прототипа. При выборе
расчетных сочетаний параметров встает проблема с одной стороны с
достаточной полнотой охватить исследуемый диапазон значений, а с
другой стороны по возможности сократить объем расчетов. Для выбо-
ра сочетаний параметров, удовлетворяющих этим требованиям, можно
воспользоваться методом ортогональных латинских квадратов E6J.
В соответствии с этим методом исследуемый диапазон каждого
параметра делится на равное число одинаковых отрезков. Для
полинома вида (10.26) ^минимальное число отрезков разбиения равно 3
725
(рис. 10.26). Четыре расчетные комбинации значений удлинения и
стреловидности для каждого значения площади выбираются таким
образом, чтобы в проекции на любую координатную плоскость они
заполняли все 16 узловых точек, не повторяясь ни в одной. Один из
возможных вариантов, удовлетворяющих этому условию,представлен
ниже в таблице и на рис. 10.26.
Рис. 10.26 Сочетания параметров крыла при расчетах по методу
, “ортогональных латинских квадратов”
к
Si X i Л i
S1 Xi Ai Z2A2 Z3A3 Z4A4
s2 Z1A4 Z2A1 Z3A2 Z4A3
S3 Z1A3 Z2A4 Z3A1 Z4A2
S4 Z1A2 Z2A3 Z3A4 Z4A1
Как видно из таблицы, индексы значений удлинений при смене
значения площади крыла подчиняются правилу циклической
перестановки.
На рис. 10.27 представлен полученный по описанной выше
процедуре пример зависимости (10.26) для расходуемого топлива от
726
Рис. 10.27 Влияние параметров крыла проектируемого самолету на рейсовый
расход топлива
параметров крыла магистрального самолета, рассчитанного для полета
на дальность 5000 км с числом М на крейсерском режиме Мкр =
0,8. Точками отмечены 16 расчетных значений. Расходуемое топливо
представлено в безразмерном виде, нормированном величиной расхода
топлива для самолета-прототипа. Соответствующая зависимость
взлетного веса, отнесенного к взлетному весу прототипа,
представлена на рис. 10.28. Крыло самолета-прототипа имело
параметры 5 = 240 м2, z~30°, Л=9,9. Полученные в данном случае
зависимости свидетельствуют о целесообразности некоторого
увеличения всех трех рассматриваемых параметров крыла от
значений, принятых для прототипа, если стоит задача снижения
рейсовых расходов топлива. Но все вариации параметров,
уменьшающие расход топлива, сопровождаются увеличением веса
конструкции и взлетного веса самолета. Что является более
целесообразным в каждом конкретном случае, решается с учетом
таких факторов как стоимость производства, степень технического
риска, возможное будущее развитие самолета и тому подобное.
727
Рис. 10.28 Влияние параметров крыла проектируемого самолета на его
взлетный вес
Литература
г
1. Единые нормы летной годности гражданских транспортных самолетов
стран-членов СЭВ, 1985.
2. Federal Aviation Regulations, Part 25—Airworthiness Stan-
dards: Transport category airplanes, 1986.
3. Perry D. H. The Airbom Path During Take-off for Constant
Rate-of-Pitch Manoeuvres. ARC Carrent Papers N 1042 London 1969.
4. E. В. Яворский , В. В. Меркотан, В.В. Оксимец. Методика определения
взлетно-посадочных характеристик турбореактивных пассажирских самолетов с
учетом отечественных (НЛГС) и зарубежных норм летной годности.
Прикладная аэродинамика, выпуск 2, КНИИГА, 1976.
5. “Методы оптимизации с применениями к механике космического
полета.” Москва, изд. “Машиностроение”, 1965.
6. Jobe С. Е., Kulfan R.M., Vachal J.D. Application of Laminar
Flow Control to Large Subsonic Military Transport Airplanes.”
AIAA £aper 78-95, 1978.
728
Глава 11. ПЕРСПЕКТИВЫ РАЗВИТИЯ
ДОЗВУКОВЫХ МАГИСТРАЛЬНЫХ
САМОЛЕТОВ
11.1. Общие положения
В ближайшие десятилетия, как и в настоящее время, большая
часть воздушных перевозок будет обеспечиваться экономичными
дозвуковыми самолетами. Техническое совершенство гражданских
самолетов определяется прогрессом в аэродинамической компоновке
самолета, его силовой установке, разработкой новых материалов и
авиационных конструкций,внедрением современного оборудования и
систем управления.
Как следует из материалов настоящей книги, для магистральных
пассажирских самолетов одним из важнейших направлений улучшения
аэродинамики является проектирование крыла большого удлинения с
утолщенными профилями, обеспечивающего снижение индуктивного
сопротивления и высокое аэродинамическое качество при крейсерской
скорости полета. Важными являются также проблемы уменьшения
сопротивления трения, снижения сопротивления интерференции,
улучшения взлетно-посадочной механизации.
Основными направлениями технического прогресса в силовых
установках являются разработка высокоэкономичных тур-
бореактивных двухконтурных двигателей с большой и сверх-
большой степенью двухконтурности, снижение веса двигателей, сни-
жение удельных расходов топлива, разработка двигателей большой
тяги.
Технический прогресс в авиационных конструкциях связан с
широким внедрением композиционных материалов и усовер-
шенствованных сплавов, применением новых технических реше-
ний, улучшением технологии производства.
Значительный прогресс достигнут в системах управления са-
молетом. Разрабатываются новые интегральные электро-
729
дистанционные системы управления, включающие в себя упра-
вление аэродинамическими поверхностями, двигателем и другими агре-
гатами самолета, системы улучшения устойчивости и упра-
вляемости, активные системы управления нагрузками. Бортовые си-
стемы обеспечивают оптимизацию режимов полета и перекачку
топлива для изменения центровки. Современная кабина будет иметь во
многих случаях только двух членов экипажа, усовершенствованные
индикаторы и цифровое электронное оборудование.
В результате технических усовершенствований обеспечивается
высокая надежность и безопасность, непрерывное снижение расходов
топлива, упрощение технического обслуживания и снижение
эксплуатационных расходов, удешевление производства, решение
проблем окружающей среды и экологии.
Дальность полета, км
Ррис.11.1. Сравнительная себестоимость перевозок для средних
магистральных самолетов (по данным Гос НИИГА)
В качестве иллюстрации на рис. 11.1 показано, что новые средние
магистральные самолеты семейства Ту-204 смогут обеспечить
снижение на 25-40% эксплуатационных затрат при выполнении
пассажирских перевозок по сравнению с эксплуатируемыми Ту-154 и
Ту-154 б, парком которых в последние годы выполнялось до половины
объема всех пассажирских перевозок в бывшем СССР. На рис. 11.2
730
показана сравнительная себестоимость перевозок(в условиях конца
1993 г.) для ближних магистральных самолетов ОКБ им. А.Н.
Туполева и А.С.Яковлева. Создаваемые на основе современных
технических достижений ближние магистральные самолеты нового
поколения Ту-334 и Як-242 будут иметь экономические показатели на
20-30% лучше.
Рис. 11.2. Сравнительная себестоимость перевозок для ближних
магистральных самолетов (По Данным Гос НИИГА)
Традиционный показатель топливной эффективности
магистральных пассажирских самолетов, характеризующий расход
топлиза при полете на техническую дальность с максимальной
* пассажирской нагрузкой, отражает прогресс в различных
направлениях авиационной науки и техники(рис.11.3).В настоящее
время расход топлива при перевозках пассажиров воздушным
транспортом сравним по порядку величины с соответствующим
показателем для пассажира легкового автомобиля. Однако,
возможности технического прогресса в гражданской авиации далеко
еще на исчерпаны.
Для иллюстрации вышесказанного на рис. 11.4 показано
отношение реально достигнутого аэродинамического качества
пассажирских самолетов к теоретическому пределу, рассчитанному в
731
во* > sn
Ил-62 о
rp/пасс к * । Э 1 Ил-в2Мо д Ту-134
л h О О X в S х 30 8707 О DC—0-30 Д В7Э7-200 8727 0 'Ту- 154В Як-42 Ил-36 Ту—154М □
9 Л С в X 5 2П DC-1C 8747 < < _10 L-1011- ° ° А300 * B747SP ( В737-200А B767-200ER А300-200 4 ‘®-вг /*3 Л ° 1 . Fokker100 Л> д ю-воо пВ7в7-300 I Ил-06-300 о Ил-ОвМ A340-«00„ 1 Ил-ббИ Ту-334-100 iTy-zot Як-242
ч с о 10 В737-300/, в гбт-гоо**1-11 изго-гоо/1 А330-300. / 10-02// О 1 ° Ту-30< \ Аи-218 1 /^н-16( |ту-го4-зоо
Газю-юо
I960 1970 I960 19 90 Голы
Рис. 11.3. Топливная эффективность магистральных пассажирских самолетов
К ota K=Kmax/K' Кт=( .5/яХ/Сх0 mi 1 УЛО п 1 ' \ КУЛО Е 1 ( : ! : IrJ t
7) 7 В-747 л А300-В4 и Ил-96- 4320 ° , 43^10 * ж В-757 ИОЛЕ.IN * 4340 100 Ту-204
0 я Ту-104 о Л В-707 ‘ Ил-62 о * D * Ил В-727 Ту-15< * J-9-40 -66 о о в Ту-154М > Як-42 •
л я * / ГОДЫ
1950 I960 1970 1980 1990 2000 20 •
Рис. 11.4. Отношение максимального аэродинамического качества
теоретическому пределу
732
условиях турбулентного обтекания всей поверхности самолета. Как
видно, аэродинамическое совершенство гражданских самолетов в
настоящее время находится на достаточно выооком уровне, однако
можно предполагать его дальнейшее повышение для традиционных
аэродинамических компоновок по крайней мере на 10-15%.
Резервы дальнейшего улучшения технических характеристик
имеются также в конструкции самолета, материалах, системах
управления, в двигателях.
11.2. Возможности улучшения топливной эффективности
и себестоимости перевозок
Одно из главных направлений дальнейшего улучшения топливной
эффективности пассажирской и транспортной авиации связано с
внедрением в эксплуатацию наиболее совершенных ТРДД нового
поколения. Современные двигатели четвертого поколения отличаются
более высокой степенью двухконтурности т=5-6, высоким уровнем
температуры газа на входе в турбину 1300°-1400°К, значительной
степенью повышения давления 25-35. Улучшение параметров
термодинамического цикла для газотурбинных двигателей приводит к
увеличению весовой отдачи, уменьшению размеров двигателя и
является эффективным способом снижения удельных расходов
топлива. Двигатели ПС-90А и Д-18Т,установленные на новейших
’ пассажирских самолетах Ил-96-300 и Ту-204 и самых больших в мире
транспортных самолетах Ан-124“Руслан” и Ан-225“Мрия”,
характеризуются низким удельным расходом топлива на крейсерском
режиме, равном 0,58-0,6 кг/кг тяги/час.Прогресс в улучшении
экономичности двигателей показан на рис. 11.5, где приводятся
удельные расходы топлива различных двигателей ведущих фирм.
Дальнейшее повышение эффективности турбореактивных
двухконтурных двигателей будет связано с увеличением температуры
газа перед турбиной и- повышением давления в компрессорах.
Исследования и разработки двигательных НИИ и ОКБ показывают,
10 что в перспективе произойдет дальнейшее уменьшение удельного
к расхода топлива на 15-20% за счет перехода к двигателям со
733
О<а>зт
□ РИГ
О RR
А СЕ
О 06 BLTILUUO
Ф RUSSIA
тс □
ВЕВ-4
тоа лап-g ф
CJ0O5 & ° фдЗО-ПС
фвЕв-ег
JTBP-S □ . ~
ф дзо-ко
mD-sitjL) „
JT9D-7A
CF8-3CE/C Д
CF8-80 Д
□ то-п
_q JT8D-18
□JT8D47A
OjTBC-219
О П Д-88 Д сПБв-3
Л
CF8-88E2/C2 А
Д-16Т л__________
| LA СПБ8-8В
ТЗ П Ф ГК-00
। А
076604/11 I
99211-53624
8037 4056 □
4360
П □ 40831
4188 дч
Ф НК-02
КГ<ЧА<?
кг тяги
1.0
о.во
0.60
0.70
0.60
0.60
О 40
1945 1955 1965 1975 1985 1995 2005
ГОД СЕРТИРИК1ЦИИ
Рис. 11.5. Удельные расходы топлива турбореактивных
двухконтурных двигателей
сверхбольшой степенью двухконтурности(/и=10-20)с применением
низконапорного закапотированного винтовентилятора и повышением
параметров термодинамического цикла двигателей и КПД узлов.
Степень повышения давления в компрессорах перспективных
двигателей достигнет 40~60, а температура газа перед турбиной на
крейсерском режиме 1500°-1550°К(рис.11.6).
Использование на перспективных пассажирских- самолетах
двигателей со сверхбольшой степенью двухконтурности и малыми
удельными расходами топлива на крейсерском режиме полета требует
учета многих других факторов. Во-первых, с ростом степени
двухконтурности более интенсивно уменьшается тяга по скорости на
взлетном режиме и наблюдается увеличение удельной массы
двигателя у(рис.11.7).
Во-вторых, увеличение степени двухконтурности, как правило,
приводит к увеличению миделя и других размеров силовой установки.
В результате увеличивается сопротивление аэродинамической
интерференции гондолы двигателя с пилоном и крылом при
734
расположении двигателей на крыле либо с фюзеляжем при рас-
положении двигателей в хвостовой части фюзеляжа. Для крупно-
габаритных двигателей, расположенных на пилонах под крылом
самолета в схеме низкоплан, возникают проблемы поиска
конструктивных решений с целью обеспечения необходимого клиренса
между гондолой двигателя и взлетно-посадочной полосой без
существенного увеличения габаритов и веса шасси.
В третьих, для двигателей сверхбольшой степени
двухконтурности с большим диаметром гондолы" удлинение гондолы
становится много меньше, чем для современных ТРДД. Это
вызывает проблему обеспечения равномерности потока на входе в
двигатель. Наконец, для двигателей сверхбольшой степени
двухконтурности серьезной проблемой является задача обеспечения
реверса тяги.
Учет всех вышеназванных факторов позволяет определить
диапазон рациональных значений степени двухконтурности двигателей
для самолетов различного назначения. Так, например, с целью
Рис. 11.6. Зависимость удельных расходов топлива от степени
двухконтурности двигателя при различных параметрах цикла
735
достижения максимального аэродинамического качества наиболее
предпочтительными являются значения степени двухконтурности
турбореактивного двигателя т —15- 17(рис.11.8),однако с учетом
всех других факторов более рациональным является диапазон
значений w = 10-12. Согласно оценкам, при такой степени
двухконтурности двигателя себестоимость перевозок самолета с
перспективным ТРДД будет минимальна.
Рис. 11.7. Зависимость тяги на взлетном режиме /?отр, удельной
массы и удельного расхода ТРДД от степени двухконтурности т
В настоящее .время ведутся исследования по созданию
высокоэкономичных ТРДД и эффективному использованию
возможностей силовой установки для самолетов различного
назначения.
Заметное повышение топливной эффективности пассажирских и
транспортных самолетов можно было ожйдать от использования
736
усовершенствованных турбовинтовентиляторных двигателей (ТВВД).
Винтовентиляторные двигатели имеют малогабаритные много-
лопастные высоконагруженные винты, рассчитанные на высокие
скорости полета, саблевидную форму лопастей с тонкими
сверхкритическими профилями. Расчеты показывают, что удельный
расход топлива перспективных ТВВД на крейсерском режиме
полета(М = 0,75~0,8)может быть еще ниже, чем у ТРДД,
спроектированных на том же уровне технологии.
Однако разработка и
JfaeucmpaxftHtttl пассажирский
самолет
Рис.11.8. Аэродинамическое качество
самолета с двумя ТРДД с учетом
интерференции
внедрение ТВВД на перспе-
ктивных магистральных само-
летах связаны с определен-
ными техническими трудно-
стями: разработка техноло-
гии изготовления высо-
конагруженных винтов из
композиционных материалов,
обеспечение прочности и ре-
сурса вйнтов в условиях не-
стационарного нагружения,
уменьшение вредного воз-
действия на пассажиров
вибраций и шума от винтов, использование в конструкции фюзеляжа
дополнительных звукопоглощающих материалов. По этой причине
представляется наиболее вероятным применение перспективных ТВВД
на транспортных самолетах, а также на некоторых магистральных
самолетах малой и средней дальности полета.
Вторым главным направлением улучшения топливной эф-
фективности магистральных пассаж ирскгх самолетов является раз-
витие работ в области аэродинамики.
В материалах данной книги отмечены результаты работ по
увеличению аэродинамического качества. В ЦАГИ и самолетных
ОКБ разработаны аэродинамические компоновки самолетов со
сверхкритическими стреловидными крыльями большого удлинения.
Новые сверхкритические, профили в сечениях крыла умеренной
737
стреловидности имеют большую относительную толщину вплоть до
с =15-12-10% и позволяют достигать крейсерской скорости полета
до 800 4- 870 км / час. Главное достижение аэродинамики про-
филя -значительное увеличение его толщины-позволило на 40=50%
увеличить удлинение крыла при сохранении прочности и веса
конструкции крыла.
Прогресс в увеличении максимального аэродинамического
качества /Стах показан на рис. 11.9 в виде зависимости от величины
А / S ом — I2 / S ом(/ -размах крыла, 5 ом —площадь омываемой
поверхности). В ближайшие годы будет сохраняться тенденция
увеличения удлинения стреловидных крыльев за счет использования
усовершенствованных сверхкритических профилей большой толщины.
I Рис.11.9. Повышение аэродинамического качества путем
увеличения удлинения крыла
Однако следует иметь ввиду, что максимальное аэро-
динамическое качество реализуется в крейсерском полете, при оп-
тимальных значениях коэффициента подъемной силы Су Jfmax,
которые увеличиваются с ростом /Спах.Для магистральных
пассажирских самолетов, разработанных в последние годы, значения
СуКтах составляют 0,5=0,6. Отработка аэродинамики крыла при
738
таких высоких значениях Су и числах М = 0, 754-0,85 требует
больших затрат при проведении экспериментальных исследований и
широкого привлечения методов вычислительной аэродинамики.
Наибольшую трудность представляет требование обеспечения запаса
по числам М и значениям Су до начала появления баффтинга.
Для магистральных самолетов большой пассажировместимости
увеличение удлинения крыла затруднено еще тем, что авиационные
компании фактически ограничивают размах крыла перспективных
самолетов из-за установленных в аэропортах размеров стояночных
площадок и мест посадки пассажиров. Как пример можно привести тот
факт, что новый самолет фирмы Боинг В-777 рассматривается с
отклоняемой частью консолей крыла.
Поэтому дальнейшее увеличение удлинения крыла с целью
повышения аэродинамического качества перспективных самолетов
следует осуществлять только с учетом всех обстоятельств.
Удлинение крыла не является единственным средством
уменьшения индуктивного сопротивления самолета. Такими
средствами являются также различные шайбы, законцовки и другие
концевые аэродинамические поверхности. Однако только в последние
годы концевые крылышки стали применяться на современных
гражданских самолетах со сверхкритическими крыльями. Это было
связано со сложностью проектирования концевых крылышек, их
формы и профилировки, обеспечивающих безотрывный характер
обтекания в пространственном околозвуковом поле скоростей около
конца крыла без заметного роста их сопротивления. Решение задачи
было найдено в том, что сама концевая аэродинамическая поверхность
формировалась из профилей сверхкритического типа. Используя
расчетные методы и параметрические экспериментальные
исследования, находились оптимальные форма в плане, угол установки
и крутка концевых аэродинамических поверхностей.
Наиболее рациональными для гражданских самолетов с крыльями
большого удлинения являются односторонние верхние концевые
крылышки небольшой относительной площади, которые нашли
применение на самолетах Ил-96-300,Ту-204, А-340.Следует заметить,
что большой аэродинамический эффект от установки на крыле
739
дополнительных концевых аэродинамических поверхностей
сопровождается дополнительными проблемами в обеспечении
прочности конструкции крыла и создании необходимых запасов
критической скорости трансзвукового флаттера.
Для самолетов с прямым крылом большого удлинения,
рассчитанных на небольшие дозвуковые крейсерские скорости полета,
положительный аэродинамический эффект также имеет место при
малой относительной площади крылышек(1,5—2% площади крыла) и
приводит к увеличению аэродинамического качества самолета более,
чем на единицу. Важно отметить, что эти концевые крылышки по-
зволяют получить прирост аэродинамического качества(А/С~О, 5)
на режиме взлета, т.е.при-отклоненной механизации.
Важной составляющей сопротивления крыла при большой
дозвуковой скорости полета является профильное сопротивление.
Задача проектирования формы профилей и всей поверхности
околозвукового крыла с целью минимизации сопротивления
потребовали развития достаточно точных численных методов решения
прямых и обратных задач в трансзвуковом потоке газа с учетом
влияния вязкости и тонких срывных зон. В настоящее время в
литературе опубликовано много работ, свидетельствующих об
успехах в этой области теоретической аэродинамики. Важным
результатом расчетных методов является возможность достаточно
точного прогнозирования кризисных явлений при обтекании крыла-
появления скачков уплотнения и отрывов пограничного слоя(рис.И.
10).Практическое применение численных методов и параметрические
расчеты сократили время поиска рациональных форм аэродинами-
ческих компоновок самолетов.
Расчетные и экспериментальные исследования показывают, что
для достаточно равномерного распределения давления вдоль размаха
крыла большого удлинения его поверхность должна быть существенно
трехмерной, в особенности в центральной части крыла. До недавнего
времени поверхность крыльев многих самолетов формировалась в виде
линейчатой поверхности на базе ряда профилей в опорных сечениях,
например в бортовом сечении, в сечении, где задняя кромка терпит
излом, и в концевом сечении. Такой способ формирования поверхности
740
крыла удобен для конструктора. Однако с позиций аэродинамики он
является неудачным, поскольку для линейчатой поверхности в
различных сечениях крыла течение получается неоднородным и при
увеличении числа Маха потока волновой кризис развивается
неодинаково, причем, как правило, в центральной части крыла он
наступает раньше всего.
Рис. 11.10. Предельные линии тока и линии равных давлений на
верхней поверхности крыла,М = 0,82, Re = 2 • 106, Су = 0,5
Поэтому перспективным направлением является формирование
поверхности центральной части крыла в виде поверхности двойной
кривизны(например, Ту-204). Даже при большей относительной
толщине консоли крыла построение центральной части крыла в виде
поверхности двойной кривизны может привести к улучшению
741
аэродинамических характеристик при больших дозвуковых числах
Маха.
Важными составляющими сопротивления самолета являются
сопротивление трения и так называемое вредное сопротивление,
связанное с наличием на самолете различных выступающих деталей,
стыков, неровностей и шероховатости. Для магистральных самолетов
каждый процент увеличения вредного сопротивления само-
лета(измеряемого в процентах к минимальному сопротивлению)
понижает уровень аэродинамического качества примерно на 0,1.
Поэтому снижение величины вредного сопротивления является задачей
и постоянной заботой как конструкторов, так и аэродинамиков. В
ЦАГИ совместно с конструкторскими бюро разработан стандарт на
качество внешней поверхности самолетов, предусматривающий
снижение вредного споротивления от выступающих деталей и
неровностей поверхности до 3—5% от минимального сопротивления.
Все новые пассажирские самолеты, включая Ил-96-300,Ту-204 и др.,
разрабатываются в соответствии с этим стандартом.
Перспективными средствами уменьшения сопротивления трения
дозвуковых самолетов являются искусственная и естественная
ламинаризация обтекания. Еще в 1940-х годах исследования,
проведенные в ЦАГИ и других научных центрах, показали, что
используя профили специальных форм с благоприятными-градиентами
давления в передней части крыла, можно осуществить естественную
ламинаризацию на крыльях самолетов сравнительно небольших
размеров и за счет этого уменьшить сопротивление трения.
На ряде современных профилей при околозвуковом обтекании
местная сверхзвуковая зона формируется таким образом, что поток в
ней ускоряется вплоть до замыкающего скачка уплотнения. На
поверхности крыла появляется достаточно протяженная зона с
благоприятными отрицательными градиентами давления. Расчеты
показывают, что при околозвуковом обтекании профилей
сверхкритического типа, имеющих достаточно хорошую отделку
поверхности(при шероховатости ~ 5 микрон), можно ожидать
ламинарный характер течения в пограничном слое на профиле вплоть
до середины хорды даже при очень больших числах Рейнольдса(Ке=
742
30 • 106) .Экспериментальные исследования моделей в околозвуковых
аэродинамических трубах подтверждают эффект естественной
околозвуковой ламинаризации(рис. 11.11).
Рис.11.11. Распределение давления и положение точки перехода на
верхней поверхности сверхкритического профиля, Re=107
Практическая реализация этого эффекта на крыльях малой
стреловидности, когда определяющим является потеря устойчивости в
ламинарном слое,является достаточно очевидной при условии вы-
сокого качества отделки поверхности(рис.11.12).Летные испытания
самолета Фоккер-100 со специально установленной манжетой на
крыле показали возможность уменьшения сопротивления на 10“^
15%.
Применение естественной ламинаризации на крыльях умеренной и
большой стреловидности представляет собой чрезвычайно сложную
проблему из-за эффектов пространственного обтекания в области
передней кромки крыла. Кроме того, наличие механизации передней
743
кромки также является препятствующим фактором для
ламинаризации. Необходима разработка новых эффективных типов
механизации передней кромки, позволяющих по крайней мере
сохранить гладкость верхней поверхности крыла.
I Угол
стпрелобидностпи
Рис.11.12. Границы естественной ламинаризации течения на
поверхности крыла самолета
Другим эффективным средством уменьшения сопротивления
трения является искусственная ламинаризация обтекания путем
отсасывания пограничного слоя с поверхности крыла, вертикального и
горизонтального оперения, а также гондол двигателей. Расчеты
показывают, что в этом случае можно обеспечить протяженность
ламинарных участков до 60^70% хорды стреловидного крыла либо
оперения и снизить суммарное сопротивление на 14"Ь 15%.
Искусственная ламинаризация обтекания принципиально
возможна для крыльев любой стреловидности, однако требует
определенных энергетических затрат и увеличения веса конструкции.
Сложными вопросами, затрудняющими практическую реализацию
системы искусственной ламинаризации, являются вопросы
конструктивного выполнения этой системы (например, рис. 11.13),а
также вопросы эксплуатации.
Для крыльев умеренной стреловидности наиболее перспективным
является так называемое комбинированное управление ламинарным
744
обтеканием(КУЛО).Для системы КУЛО характерно сочетание отсо-
са пограничного слоя в области передней кромки стреловидного крыла
(~20% хорды) и благоприятного отрицательного градиента давления
ПЕРФОРАЦИЯ
рис.11.13. Схема конструкции перфорированной панели для крыла с
искуственной ламинаризацией
на значительной части поверхности крыла(рис.11.14).Специальные
экспериментальные исследования моделей стреловидных крыльев в
аэродинамических трубах малых и больших дозвуковых скоростей
показали, что применение системы КУЛО с весьма малыми
коэффициентами расхода при отсосе пограничного слоя в области
передней кромки(С<? = 0,0005) позволяет получить протяженность
ламинарных участков на поверхности крыла до 60^70% хорды. В
качестве иллюстрации на рис. 11.15 показана область ламинарного
течения на модели крыла, с углом стреловидности 30°, полученная, с
. использованием каолинового покрытия.
В последнее время изучается другая возможность лами-
наризации течения на поверхности крыла путем локального нагре-
745
ва небольшого участка поверхности вблизи передней кромки. Эти
работы, а также исследования сопротивления трения различных
специальных покрытий, являются фундаментальными исследованиями,
направленными на дальнейший прогресс в аэродина-мике.
Исследования по снижению турбулентного трения фюзеляжа и
других элементов самолета связаны с использованием на поверхности
специальных продольных канавок (риблет),а также других устройств,
улучшающих структуру турбулентного пограничного слоя. Опыты на
моделях в аэродинамических трубах(рис.11.1б),а также на летающих
лабораториях показывают устойчивое уменьшение сопротивления
Турбулентное
Обычное обтека-ние
Ламинарное
обтекание
Турбулентное
Рис. 11.14. Комбинированное упра-
вление ламинарным обтеканием
Рис. 11.15. Область ламинарного
течения при отсосе пограничного
слоя в области носка модели
крыла,£ = 30°, М = 0,25
трения на 6 4-10 %. Практическое использование специальных
рифленых пленочных покрытий будет связано с опытом эксплуатации,
возможностью быстрого нанесения и снятия пленочных покрытий,
стоимостью пленок с риблетами и другими вопросами производства,
746
контроля и эксплуатации.
Дальнейшее развитие пассажирской авиации неразрывно связано
с обеспечением прочности, повышением надежности конструкции и
ресурса, а также улучшением весового совершенства самолетов.
Уменьшение веса снаряженного самолета при обеспечении одинаковой
транспортной производительности является важным фактором
повышения топливной эффективности и снижения себестоимости
перевозок.
Р И Б Л Е Т Ы
О 063мм
-4 0 4 8 0 02040608 Су
—•— гладкая модель
—ен- модель о риблетами
Рис.11.16. Коэффициент сопротивления и аэродинамическое качество моделей
с риблетами
Рост весового совершенства магистральных самолетов
достигается благодаря использованию новых материалов, обладающих
повышенными характеристиками прочности, и прогрессу в методах
проектирования и в области технологии. К числу прогрессивных
747
технологических нововведений относятся длинноразмерные панели,
профили, плиты, напряженные крепежные детали, сотовые
конструкции, композиционные материалы и др. Использование
длинноразмерных панелей позволяет на 1% уменьшить массу
конструкции магистрального пассажирского самолета, применение
сотовых элементов дает экономию в массе 1“Н,5т на 1000м2
площади конструкции; напряженный крепеж в три-четыре раза
увеличивает срок службы болтовых соединений.
Значительные резервы для уменьшения массы конструкции
открывает широкое применение композиционных материалов.Эти
материалы на первых этапах внедрения используются в элементах
конструкции самолета, подверженных действию простой системы
нагрузок, легко контролируемых в процессе эксплуатации,
допускающих быструю замену и не являющихся критическими в
отношении безопасности полета. Этим требованиям удовлетворяют
такие элементы фюзеляжа как полы, балки пола, перегородки, щитки,
а также ряд элементов крыла и оперения. Следующий этап
характеризуется изготовлением из композиционных материалов
щитков, элеронов, закрылков, целиком вертикального оперения,
горизонтального оперения. В таблице показаны примеры
использования композиционных материалов в конструкции ряда
пассажирских самолетов. Как видно из таблицы, доля композиционных
материалов в конструкции современных магистральных самолетов
составляет до 10^20%.В перспективе можно ожидать в 2000—2010
годах еще более широкое внедрение в конструкцию самолета
композиционных материалов, алюминиево-литиевых сплавов, других
новых материалов и за счет этого снижения веса конструкции
примерно на 30% по сравнению с самолетами 1980-х годов (рис.11.
17).
Снижение веса оборудования самолета и веса его конструкции в
значительной степени зависит от уровня совершенствования систем '
управления.
Прогресс в системах управления самолетов в 1970-1990г.г.носит
революционный характер и направлен в первую очередь на повышение
безопасности полетов и улучшение летно-технических характеристик.
748
Совершенствование систем управления заключается прежде всего в
широком внедрении интегральных электродистанционных систем.
Современные электродистанционные системы штурвального
управления, как правило,базируются на цифровой технологии, как
например, в новых самолетах Ту-204 и Ил-96-300. Интегральные
алгоритмы позволяют обеспечить ограничения по углу атаки при
малых скоростях полета, ограничения по перегрузке и многие другие
важные функции, что существенно повышает безопасность полета.
ИСПОЛЬЗОВАНИЕ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ В
КОНСТРУКЦИИ ПАССАЖИРСКИХ САМОЛЕТОВ
Таблица!
Ту-204 Ил-96-300 А-300-600 А-310-300 А-320 А-340
максимальная взлети, масса,т 93.5 230 165 150 72 235.5
масса конструкции, т 29.4 65 51 44.7 20.8 76
масса КМ, т 3.2 4.02 6.2 6.2 4.5 11
доля КМ, % 13 6.2 12.1 13.8 22.5 14.5
Рис. 11.17. Снижение веса конструкции самолета за счет применения новых
материалов
Среди новых систем управления весьма эффективными оказались
системы повышения продольной статической устойчивости, которые
сделали возможным полет при малом запасе устойчивости.
Использование автоматики .позволяет снизить запас собственной
продольной устойчивости до значений -mz =0,014-0,05. При этом
749
уменьшаются потери аэродинамического качества на балансировку за
счет уменьшения отрицательной подъемной силы и сопротивления
хвостового оперения, а также уменьшаются необходимые
геометрические размеры и масса конструкции оперения.
Переход на малые запасы устойчивости увеличивает аэро-
динамическое качество самолета на величину 0,34-0,5.
Перспективным является управление центровкой самолета в
полете путем перекачки топлива из крыльевых в хвостовые топливные
баки. Этот способ уже применяется, например, на самолетах А-310,
Ту-204 и позволяет практически обеспечить переход к малым запасам
устойчивости на крейсерском режиме полета.
Крупным достижением является также внедрение
автоматизированных систем активного управления, которые
используются для снижения нагрузок при маневре и при полете в
турбулентной атмосфере. Такая система успешно применяется' на
самолете Ил-96-ЗОО, ее использование дает в конечном итоге
возможность уменьшить вес конструкции крыла при сохранении
безопасности полетов. Кроме того, системы активного управления
дают принципиальную возможность справиться с проблемами больших
углов атаки и флаттера.
Современные интегрированные системы связывают все
элементы управления самолетом и двигателем едиными
электрооптическими шинами. Это дает возможность заметно
уменьшить вес оборудования, повысить защищенность от помех, т.е.
улучшить безопасность полета, комфорт пассажиров и топливную
эффективность самолета. Такой подход дает возможность значительно
расширить число функций, которые может выполнить
автоматизированные системы штурвального управления. Как следует
из материалов данной книги, число функций, выполняемых АСШУ
современных самолетов, достигает 15~20.
Однако, с другой стороны, рост числа функций интегрированных
систем требует увеличения необходимых быстродействия и объема
памяти бортового вычислителя. Программное обеспечение становится
более сложным. В результате должны быть приняты меры повышения
надежности всей системы. Поэтому перспективной является
750
федеральная структура из нескольких вычислителей с распределением
функций между ними при возможности реконфигурации всей системы
в случае отказа какого-либо модуля.
С целью повышения топливной эффективности и снижения
себестоимости перевозок авиационные фирмы и конструкторские
бюро, создавая новые самолеты, предусматривают разработку ряда
модификаций и целого семейства самолетов, включающих в себя
основные элементы и системы базового самолета. Унификация
агрегатов уменьшает себестоимость производства, в то же время
модификации самолетов на различную дальность полета и
коммерческую нагрузку дают возможность снизить себестоимость
перевозок на конкретных авиалиниях. При разработке модификаций
учитываются технические достижения, способствующие улучшению
летно-технических и других характеристик самолета.
Примерами создания семейства самолетов могут служить
программы развития самолетов Ту-204, Ил-96 и Ан-218.
Программа развития самолета Ту-204 направлена в сторону
увеличения коммерческой нагрузки и дальности полета за счет
реализации имеющихся резервов конструкции путем увеличения
максимального взлетного веса. Первый вариант возможной
модификации Ту-204-100 представляет собой базовый самолет Ту-
204 с двумя двигателями ПС-90А с увеличенным на 7 тонн
максимальным взлетным весом за счет топлива, позволяющим
расширить эффективность практического применения самолета до
4500 км (для базового Ту-204 3000км).Новые возможности
открываются для эксплуатационных предприятий гражданской авиации
при появлении варианта самолета Ту-204-200. В результате
увеличения максимального взлетного веса до 111т самолет сможет
перевозить др 25,2т коммерческой нагрузки. Диапазон эффективных
областей применения самолета Ту~204~200 по дальности полета
находится в пределах 6000км.
Модификация самолета Ту-204-230 предусматривает установку
перспективных двигателей с большой степенью двухконтурности
серии НК-93 взлетной тягой 18,0т и удельным расходом топлива на
крейсерском режиме 0,52-0,55 кг/кг тяги. час. Экономичность
751
двигателей позволяет расширить диапазон эффективного применения
самолета до дальности свыше 7000км.
В конструкторском бюро им. А.Н.Туполева рассматриваются
также варианты создания модификации самолета Ту-204 с
укороченным фюзеляжем и пассажировместимостью 166 человек
(Ту-204-300).
Привлекательность использования модификаций самолета Ту-204
с некоторыми иностранными двигателями связана с их высокими
ресурсными характеристиками и наличием соответствующих
оснащенных служб, уменьшающих трудоемкость обслуживания. Так,
на одном из вариантов семейства Ту-204 установлены двигатели RB.
211-535-Г5 с тягой 19,3т.
Топливная эффективность самолетов семейства Ту-204 показана
на рис. 11.18. в зависимости от технической дальности полета.
Рис. 11.18. Топливная эффективность самолетов семейства Ту-204
В классе дальних аэробусов в середине 1993 года получил
сертификат летной годности самолет Ил-96-300. Первый опыт его
эксплуатации показывает эффкетивность применения самолета по
сравнению с имеющимся парком. Так, например, среднечасовой расход
топлива самолета при перевозке 300 пассажиров на дальность 9000км
752
составляет меньше 7 тонн/час.
Программа развития самолета Ил-96-300 предусматривает
создание модификаций с увеличенной коммерческой нагрузкой и
дальностью полета. На первом этапе-это создание самолета Ил-96М
в варианте с двигателями ПС-90 и в варианте с двигателями PW-
2337. Дальнейшее развитие самолета, направленное на существенное
увеличение дальности полета, предполагается путем повышения его
технического уровня на основе применения двигателя НК-92 с тягой
18-20т.Предполагается, что топливная эффективность этой
модификации самолета Ил-96,ЗООД составляет 22-23гр./пасс.км(рис.
11.19).Конструкторское бюро им. С.В.Ильюшина разрабатывает
также проект создания новых дальних широкофюзеляжных самолетов,
способных перевозить 400-750 пассажиров.
Рис.11.19. Топливная эффективность самолетов семейства Ил-96
Топливная эффективность самолетов семейства Ил-96 показана
на рис. 11.19 в зависимости от технической дальности полота.
Для линии средней протяженности предназначен создаваемый-в
АНТК им. О.К. Антонова широкофюзеляжный самолет Ан-218 с
двумя двигателями Д-18ТМ, являющимися развитием двигателей
Д-18,выпускаемых серийно для крупнейших в мире транспортных
753
самолетов Ан-124 и Ан-225. Самолет сможет перевозить до.350
пассажиров со скоростью 850-870 км/час на дальность до 6300 км.
Программа создания и развития самолета показана на рис.11.20и
предусматривает ряд этапов. На первом этапе взлетная масса
самолета будет ограничена 158,5 тоннами, что обеспечит дальность
полета с максимальной пассажирской загрузкой до 4700 км.
Увеличение на втором этапе допустимой взлетной массы до 170т и
дальности полета свыше 6000 км предполагается без существенных
конструктивных доработок самолета за счет имеющихся резервов. На
базе самолета Ан-218 предполагается создание модификации
увеличенной дальности(Ан-218-100), экспортных вариантов с
различными двигателями, а также перспективного варианта с
экономичными двигателями сверхвысокой степени двухконтурности
НК-93.
Рис. 11.20. Развитие самолета Ан-218
Унификация агрегатов с целью снижения себестоимости
производства широко применяется многими авиационными фирмами.
Так, например, • двухдвигательный самолет А-330 и четырех-
двигательный А-340 концерна Эрбас Индастри имеют одинаковое
крыло, секции фюзеляжа и хвостовое оперение. Диаметр фюзеляжа
5,64м—такой же, как у самолетов А-300 и А-310.
754
Рис. 11.21. Линии равных давлений и распределение давления в сечении крыла
самолета Ил-96-М85
Можно ожидать, что в ближайшем будущем ведущие
авиационные фирмы будут максимально использовать накопленный
опыт в организации и технологии производства, а также новые научно-
технические разработки с целью дальнейшего повышения топливной
эффективности перспективных магистральных самолетов и снижения
себестоимости перевозок.
11.3. Перспективы увеличения крейсерской скорости
полета
Разработанные в последние годы магистральные пассажирские
самолеты имеют крейсерские скорости полета 800 “^870 км/час.
Расчетные числа Маха при проектировании аэродинамических
компоновок составляют М = 0,784-0,82, а числа Маха,
соответствующие минимальному расходу топлива при полете на
максимальную дальность, составляют М = 0,754-0,79.
. Указанный выше диапазон скоростей крейсерского полета
отражает успехи в аэродинамическом проектировании
сверхкритических профилей и крыльев в этой области чисел Маха.
755
Исследования сверхкритических крыльев, рассчитанных на более
высокие числа Маха крейсерского полета, М = 0,854-0,95, были
относительно немногочисленными и носили до недавнего времени
фундаментальный характер. Однако в настоящее время создан уже
достаточный научный потенциал для практической разработки
аэродинамических компоновок с высоким аэродинамическим качеством
при числах М = 0,85 4- 0,86.
Повышение числа Маха крейсерского полета и величины
произведения К • М перспективно для дальних магистральных
самолетов, поскольку дает заметный экономический эффект и
сокращает время полета.
Совместные разработки ЦАГИ и конструкторского бюро им.
С.В.Ильюшина показали,что новое сверхкритическое крыло с
относительными толщинами профилей консоли 10% и
стреловидностью 2 — 35° по линии 1/4 хорд может иметь
характеристики сопротивления лучше, чем стреловидное крыло Х~
37,5° самолета В-747 с относительной толщиной профилей консоли
с = 8% (Рис. 11. 21). Сверхкритическое крыло с утолщенными
профилями и меньшей стреловидностью имеет большее удлинение, чем
крыло с тонкими профилями обычного вида, что обеспечивает прирост
в аэродинамическом качестве компоновки. На рис. 11.22 показано
сравнение формы в плане аэродинамической компоновки крыла Ил-96-
М85,рассчитанной на высокие крейсерские числа Маха полета М=
0,85, с формой в плане крыльев самолетов Ил-86 и Ил-96-300.
Приводятся значения произведения /Стах • М для перспективной
компоновки в зависимости от числа Маха и сравнение с современными
самолетами Ту-154, Ил-86, В-747, Ил-96-300. Налицо значительное
(АМ = 0,06) увеличение возможностей крейсерской скорости
полета, а также дальности полета самолета с новым крылом по
сравнению с исходным Ил-96-300.*
Сравнивая аналогичные зависимости произведения /Стах * М от
числа Маха для самолетов семейства Эрбас Индастри(рис. 11.23),
можно видеть значительный прогресс, в аэродинамическом
совершенстве магистральных пассажирских самолетов.
756
И/1-В6
Ил-96-300
ИЛ-96-М85
Рис. 11.22. Форма крыла в плане и величина произведения
Ашах • М для аэродинамических компоновок самолетов Ил-
86, Ил-96-300, ЙЛ-96-М85
Следует еще раз подчеркнуть важнейшую роль в аэро-
динамическом проектировании методов вычислительной аэро-
динамики. Разработанные методы численного решения прямых и
обратных задач для сложных аэродинамических компоновок самолета
и его элементов при трансзвуковом обтекании позволили рассмотреть
большое число различных вариантов и выбрать наилучшие из них. На
рис. 11.24 в качестве иллюстрации показаны результаты расчета при
числе М = 0,85 двух вариантов крыла с различными профилями.
Предельные линии тока на верхней поверхности крыла ясно
указывают на более благоприятный безотрывный характер обтекания
757
первого варианта крыла.
Рис. 11.23. Сравнение величины произведения Атах • М для
различных аэродинамических компоновок
В заключение отметим, что новые разработки крыльев ОКБ им.
С.В.Ильющина и ЦАГИ показывают возможность наряду с
повышением скорости крейсерского полета заметного улучшения
топливной эффективности самолета Ил-96М при числах М = 0,84-
0,82(рис. 11.25).
11.4. Дальнейшее увеличение пассажировместимости
магистральных самолетов
Рост объема пассажирских перевозок в мире продолжается
достаточно высокими темпами. Согласно прогнозам, объем перевозок
более чем удвоится к 2010 году и за это время на рынке гражданских
самолетов будет продано более 11000 магистральных самолетов.
Рост перевозок и численности парка гражданских самолетов
758
происходит в условиях достижения многими крупными аэропортами
мира практического предела их современных пропускных
возможностей и насыщения систем управления воздушным
движением. Это стимулирует интерес авикомпаний к самолетам
с повышенной пассажировместимостью, что отражают соответ-
Рис. 11.24. Сравнение картин предельных линий тока на верхней поверхности
двух вариантов крыльев при числе М = 0,85
ствующие прогнозы. На рис. 11.26 приведен прогноз численности
в 2010 году магистральных самолетов различной
пассажировместимости, условно разделенной i группы. Видно, что
парк магистральных самолетов по сравнению с 1990 годом
значительно пополнился прежде всего самолетами средней и большой
пассажировместимости. На рис. 11.27 покавано, как будет изменяться
среднее число пассажирских мест в новых самолетах, предназначенных
759
для полетов на ближних, средних и дальних лийиях. Если для ближних
И/1—96М С PW-2337
Go= 270 т
Рис. 11.25. Топливная эффективность самолета Ил-96М с
новыми сверхкритическими крыльями
магистральных самолетов средняя пассажировместимость будет
изменяться незначительно(130-140 мест), то среднее число мест в
новых дальних магистральных самолетах увеличится по прогнозам на
30% и составит в 2010 году более 400. Среднестатистический
самолет к 2010 году будет иметь в полтора раза большее число
пассажирских мест, чем в настоящее время, и эта цифра превысит
270.
Эти факты привели к активизации работ многих авиационных
фирм-Боинг, Эрбас Индастри, Макдоннел-Дуглас, ОКБ им. Ильюшина
и др. в области самолетов сверхбольшой пассажировместимости с
760
числом мест более 500-600. Первые опубликованные данные о
некоторых проектах самолетов большой пассажировместимости
приведены в таблице. Здесь же для сравнения указаны
соответствующие данные самолета В-747-400 с его максимальной
пассажировместимостью. Разумеется, все приведенные цифры
являются только предварительными, при дальнейшей работе над
проектами эти цифры будут изменяться. Некоторые из наметившихся
тенденций в развитии магистральных самолетов сверхбольшой
пассажировместимости могут быть отмечены.
Рис Л 1.26. Прогноз парка магистральных самолетов
Большая часть таких проектов разрабатывается в рамках
самолета нормальной схемы. Например, проект “нового самолета”
(В—787)фирмы Боинг(рис.11.28), проект ASX-700 фирмы
Аэроспасьяль (рис. 11.29).Размеры такого самолета, прежде всего
фюзеляжа,по сравнению с обычно принятыми много больше, так,
диаметр фюзеляжа В-787 около 8,5м, размах крыла—80м. Чрезмерно
большой размах крыла заставит в ряде случаев использовать так
называемое складывающееся крыло,т.е. поворот части консоли.
Определенные трудности появляются также с посадкой и выгрузкой
пассажиров.
761
ПРОЕКТЫ САМОЛЕТОВ
БОЛЬШОЙ ПАССАЖИРОВМЕСТИМОСТИ
В-747-400 В-787 MD-12 ASX-700 А-2000 ИЛ-96-550
число пас- сажиров 516-560 612-750 450-600 600-800 600-1000 512-574
взлетный вес, т 395 545 420-545 450-550 530 265
двигатели, т 25,8 ~35 27-35 30-35 ~35 18-20
дальность полета,км 10000-11000 12000-13000 10200-14800 7500-12600 13000 7100-8200
размах крыла,м 64,3 80 64,3 75 80 60,1
длина фюз-жа,м 75,7 71,6 62 70 78 60,5
Рис. 11.27. Число пассажирских мест в среднестатистических
самолетах
762
Рис.11.28. Проект нового самолета большой
пассажировместимости фирмы Боинт В-787
В747—400
НОВЫЙ САМОЛЕТ
Рассматриваются раз-
личные формы сечений
фюзеляжа и компоновки
пассажирских мест(рис. 11.30).
Однако, как правило, предла-
гается трехпалубная компоновка
фюзеляжа, частично использованная
ранее в самолете В-747-
4ОО.Две верхние палубы-для
пассажиров, нижняя-для грузо-
вых контейнеров.
Следует подчеркнуть, что
самолеты сверхбольшой
пассажировместимости
Рис. 11.29. Проект самолета проектируются на большую
ASX-700 фирмы Аэроспасьяль дальность полета, до 10 ~МЗ
тысяч километров. Для таких дальних авиалиний, согласно оценкам,
можно обеспечить снижение прямых эксплуатационных расходов на
пассажирокилометр на 15% по сравнению с уровнем самолета В-747,
что может быть достигнуто прогрессом в технологии планера и
763
двигателя.
ФЮЗЕЛЯЖИ БОЛЬШОЙ пассажировместимости
В-747
ASX-700
DABL-BABBLE
ИЛ-96 -о о О
Рис.11.30. Сечения фюзеляжей самолетов большой
пассажировместимости
В проектах самолетов большой пассажировместимости предпо-
лагается использование четырех двигателей. Большой взлетный вес
самолетов, 400 ^“550 тонн, требует значительного повышения
максимальной тяги двигателей на взлете 30 тонн и более (рис. 11.31).
В настоящее время все ведущие двигателестроительные фирмы
интенсивно занимаются разработкой двигателей со взлетной тягой от
30 до 40 тонн и выше (рис. 11.32).
Как видно из рис. 11.31, создание высокоэкономичных двигателей
очень большой тяги может оказать влияние на облик перспективных
магистральных самолетов, рассчитанных на 300^500 пассажиров.
Эти новые компоновки могут принципиально использовать не 4, а 3
либо 2 двигателя повышенной тяги, что является перспективным с
точки зрения снижения себестоимости производства и обслуживания
двигателей при эксплуатации.
764
о
ю
20
30 Роле
3 дв
2 ДВ
Рис Л 1.31. Зависимость потребной взлетной тяги двигателей от взлетного веса
для самолетов с двумя, тремя и четырьмя двигателями ,
Ддя дальних магистральных самолетов большой пас-
сажировместимости наряду с традиционными схемами рас-
сматриваются новые оригинальные схемы. Одной из них является
схема типа “летающее. крыло“(рис.11.33).Такая аэродинамическая
компоновка имеет небольшое значение относительной площади
омываемой поверхности $ом, малое сопротивление трения и большое
аэродинамическое качество, /Стах=25 4-30, уровень топливной
эффективности может составить 144- 15гр./пасс. км. Однако
практическая реализация идеи“летающего крыла "связана с решением
многих проблем безопасности полета и эксплуатации: устойчивости и
управляемости на различных режимах полета, посадки и высадки
пассажиров, аварийного покидания самолета и др.
В заключение данной главы следует еще раз подчеркнуть, что
перспективы развития дозвуковых магистральных самолетов
765
40 0 -1 Тяга двигателя, т
___________TRENT
GE90
я____________TRENT
<г _ о
зоо
20 0
JT9D-7
□
CF6-6D
Д
4168
НК-63
10 0 -
оо 4—1
'965
CF6-80C2?®2 Ц -O24D4 _______
д RB2y%24₽
CF6-50C Д18Т
JT^D-7A CF6-80A <у
□ □ д
а НК-92
vRB211-524 RB211-524E4 О
JT9D-59AV
□ ф □ PW2037 ПС90А
RB211-535C О
ДЗОКУ
° о НКВ-2У
JT8D-9 JT8D-17
□ о п
ДЗОПС
НК-86
° V2500 CFM56-5C
JTBD-1^™56-3 д Л
ДЗВ
О
РК4000 •
1970 1975
1980 19В5 1990 1995 2000 2005
Год сертификации
Рис. 11.32. Взлетная тяга разрабатываемых турбореактивных ’двухконтурных
двигателей
ДЕТАВНЕЕ КРЫЛО
Рис. 11.33. Вариант магистрального пассажирского самолета в схеме
“летающее крыло”
766
определяются достижениями в области авиационной науки. Поисковые
исследования в ключевых направлениях авиационной науки и техники
должны опережать создание конкретных самолетов и являются
основой для дальнейшего совершенствования авиации.
Литература
1 .Г.С. Бюшгенс. Авиация XXI века. Техника воздушного флота — № 1,
1990.
2 .Д.А.Огородников, М.М. Цховребов. Авиационные двигатели XXI века.
Техника воздушного флота—№ 1,1990.
3 .Poisson-Quinton Ph., Michaut С. Les. future avious de tran-
sport. Supplement la Recherhe, 1987, 07-08,N90.
767
Оглавление
Предисловие ......................................................3
Введение.................................................. -......5
Сокращения.......................................................21
Основные обозначения.............................................23
Глава 1. Аэродинамика крыловых профилей—Г. А. Павловец,
• В. Д. Боксер, С. В. Ляпунов.......................;........25
1.1; Аэродинамические характеристики крыловых профилей ..........25
1. 2. Аэродинамика сверхкритических крыловых профилей ...........33
Литература ......................................................59
Глава 2. Аэродинамика магистральных самолетов на
режимах крейсерского полета—Г. А. Юдин, В. А. Баринов,
С. И. Скоморохов.........................................60
2.1. Аэродинамика крыльев дозвуковых магистральных
самолетов. Общие принципы проектирования.....................60
2. 2. Аэродинамические характеристики крыльев
большого удлинения со сверхкритическими профилями...............69
2. 3. Аэродинамика крыльев для околозвуковых
крейсерских скоростей полета ................................... 107
2. 4. Аэродинамика фюзеляжей и интерференция
крыла с фюзеляжем ...............................’..............113
2. 5. Влияние гондол двигателей на аэродинамические
характеристики самолета ........................................122
2.6. Расчет поляры самолета на крейсерском режиме,
пересчет поляры модели на условия полета...................138
Литература......................................................147
Глава 3. Аэродинамика магистральных самолетов
на режимах взлета и посадки—Г. А. Юдин....................149
3.1. Эффективность различных видов механизации крыла............150
3.1.1. Механизация передней кромки крыла .......................150
3.1.2. Механизация задней кромки крыла .........................161
768
3. 2. Средства улучшения взлетно-посадочных характеристик ..........173
3. 3. Приближенная оценка аэродинамических
характеристик самолета в условиях натуры .......................179
Литература....................................................... ••• 185
Глава 4. Аэродинамика двигательных установок
магистральных самолетов—В. В. Каляжнов,
В. Ф. Курицын ....................................................186
4.1. Общие положения ...............................................186
4. 2; Аэродинамика гондол двухконтурных двигателей ...............-.194
4. 2.1. Воздухозаборники двигателей умеренной и большой
степени двухконтурности ....................................'..... 194
4. 2. 2. Воздухозаборники двигателей со сверхбольшой
степенью двухконтурности .........................................201
4. 2. 3. Внешнее сопротивление обечайки гондолы ....................204
4. 2. 4. Хвостовая часть гондолы..................................208
4. 3. Реверс тяги двигателя ........................................213
4. 4. Компоновка силовой установки на самолете .....................220
Литература..........................................................235
Глава 5. Аэродинамика органов управления—
В. Г. Микеладзе..................................................236
5.1. Органы продольного управления ................................236
5. 2. Органы поперечного управления ................................244
5. 3. Органы путевого управления ...................................259
Глава 6. Устойчивость и управляемость магистральных
самолетов—С. Я. Наумов ...........................................266
6.1. Общие положения................................................266
6. 2. Продольная устойчивость и управляемость.......................268
6. 2.1. Характеристики продольной устойчивости и управляемости ..*..271
6. 2. 2. Выбор запаса устойчивости по перегрузке....................282
6. 2. 3. Эффективность продольного управления ......................298
6. 2. 4. Выбор размеров горизонтального оперения и центровок........305
6. 3. Боковая устойчивость и управляемость .........................315
6. 3.1. Характеристики бокового возмущенного движения...............315
6. 3. 2. Поперечное управление......................................324
6.3. 3. Управление самолетом по курсу ..............................329
6.3. 4. Выбор размеров вертикального оперения.......................332
6. 4. Устойчивость и управляемость при взлете и посадке.............335
6. 4.1. Пилотирование на взлете и посадке...........................335
6. 4. 2. Выбор допустимых при посадке углов атаки ..................345
769
6. 4. 3. Использование НУПС нри посадке ..........................353
6. 4. 4. Движение самолета по земле ..............................355
6. 5. Устойчивость и управляемость в особых условиях полета ......360
6. 5.1. Устойчивость и управляемость на больших углах атаки ......360
6.5. 2. Полет в условиях обледенения..............................373
6. 5. 3. Динамика полета в условиях сдвига ветра .................377
Литература........................................................386
Обозначения ......................................................387
Правило знаков ...................................................390
Глава 7. Система управления магистральных самолетов
— В. Я. Бочаров..................................................392
7.1. Общие положения..............................................392
7. 2. Система необратимого бустерного управления .................403
7. 2.1. Общие соображения ........................................403
7. 2. 2. Загрузочные устройства рычагов управления................406
7.2. 3. Принципы включения сигналов систем улучшения
устойчивости и управляемости в НБУ................................420
7. 2.4. Системы НБУ с триммируемым стабилизатором ................428
7. 2. 5. Особенности структур НБУ каналов крена н рыскания........437
7. 3. Структура электрической системы дистанционного
управления(СДУ) ..................................................445
7. 3.1. Общие соображения ........................................445
7. 3.2. Соединение систем по дифференциальной схеме...............450
7.3. 3. Раздельная работа систем (с замещением
отказавшей системы резервной).....................................453
7. 3. 4. Объединение двух разнородных систем на основе
принципа управления по усилиям .............................456
7. 3. 5. Совместная работа систем, имеющих раздельные
* органы управления (секции) ....................................462
7. 3.6. Электрическая система дистанционного управления
без резервной механической системы .........................465
7.3. 7. Рычаги управления и требования эргономики ............... 471
7. 4. Рулевые приводы и структура их энергопитания ...............479
7. 4.1. Виды самолетных рулевых приводов .........................479
7. 4. 2. Основные требования к приводам...........................484
7. 4. 3. Надежность рулевых приводов ПР ..........................493
7.4.4. Энергетика рулевых приводов ...............................496
7. 4. 5. Энергопитание системы управления и рулевых приводов .....506
7. 5. Система управления механизацией крыла (СУМК) ...............515
770
7.6. Некоторые особенности систем управления эксплуатируемых
магистральных самолетов.......................................524
7. 7. Надежность систем штурвального управления ..................544
7. 7.1. Резервирование в системе управления.......................544
7.7. 2. Обеспечение надежности управления ........................554
7. 7. 3. Оценка необходимого резервирования систем
штурвального управления.....................................561
Литература........................................................566
Обозначения ......................................................567
Глава 8. Система улучшения устойчивости и
управляемости (СУУ) Ю. Ф. Шелюхин.................................570
8.1. Общие положения..............................................570
8.2. Системы улучшения устойчивости и управляемости
статического типа ............................................572
8. 2.1. Статический автомат продольной устойчивости
и управляемости (СУУП) .....................................572
8.2. 2. Статические системы улучшения устойчивости и управляемости
бокового движения (СУУБ) ...................................583
8. 3. Системы улучшения устойчивости и управляемости
астатического типа (интегральная СУУ).........................594
8. 3.1. Обеспечение статических и динамических
характеристик управляемости ................................594
8. 3. 2. Особенности балансировки самолета с интегральной
СУУП........................................................602
8. 4. Ограничители предельных значений углов
атаки и перегрузки ...........................................607
8. 4.1. Ограничители предельных режимов в статической
системе СУУП ...............................................607
8.4. 2. Ограничение предельных режимов в
астатической СУУП...........................................611
8. 5. Цифровая система управления продольным движением ...........616
8.6. Совмещенное управление (управление через САУ) ...............621
8. 7. Проблемы развития автоматизации управления .................629
Литература........................................................632
Глава 9. Активные системы управления — Г. В. Александров,
Ю. Г. Живов, А. С. Устинов........................................634
9.1. Общие положения .............................................634
9. 2. Системы снижения нагрузок при маневре ......................637
9. 3. Системы снижения нагрузок от турбулентности атмосферы ......647
771