/




















































































Автор: Ухов К.С.
Теги: радиотехника военно-морское дело навигация государственное издательство военного транспорта
Год: 1954




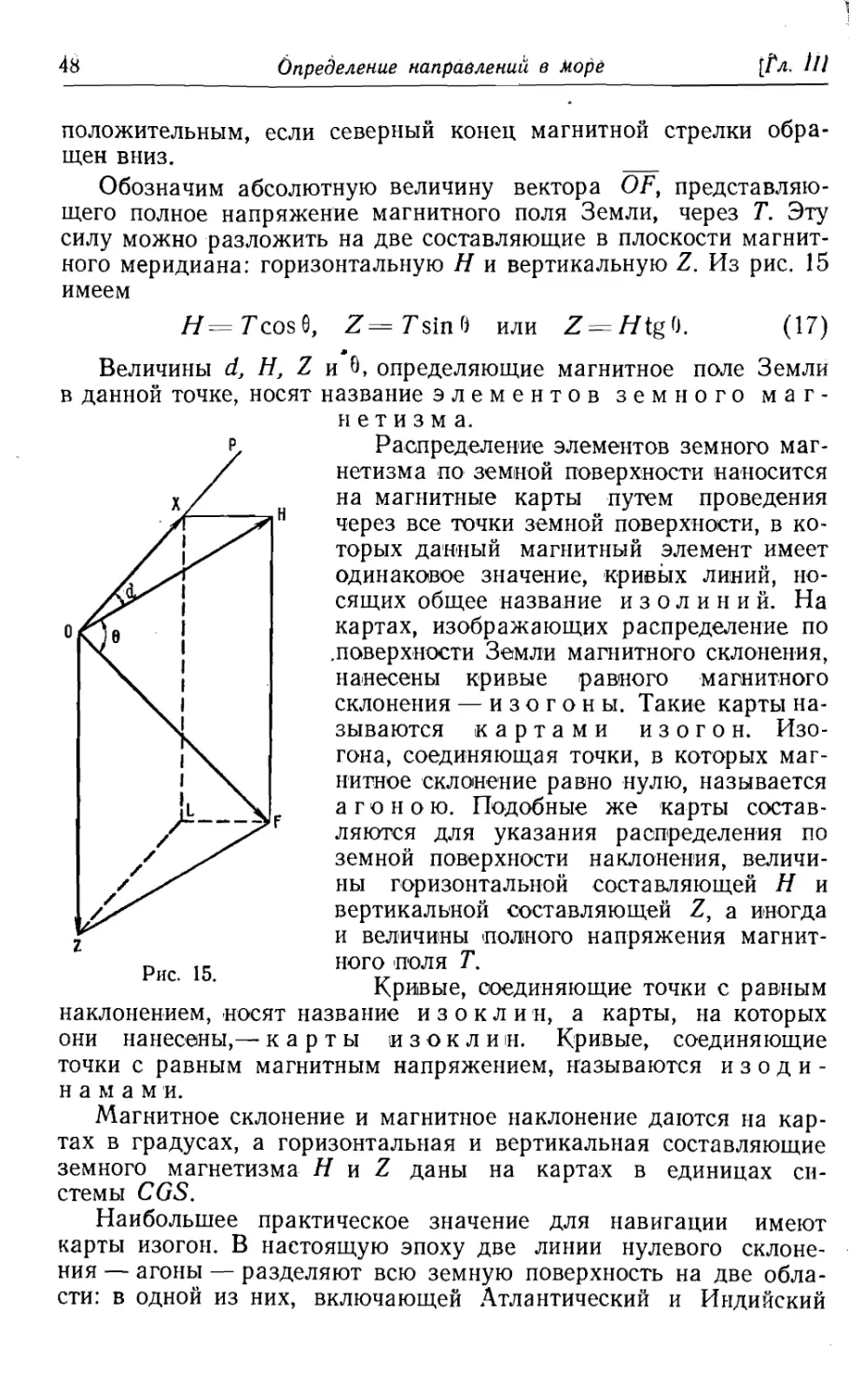
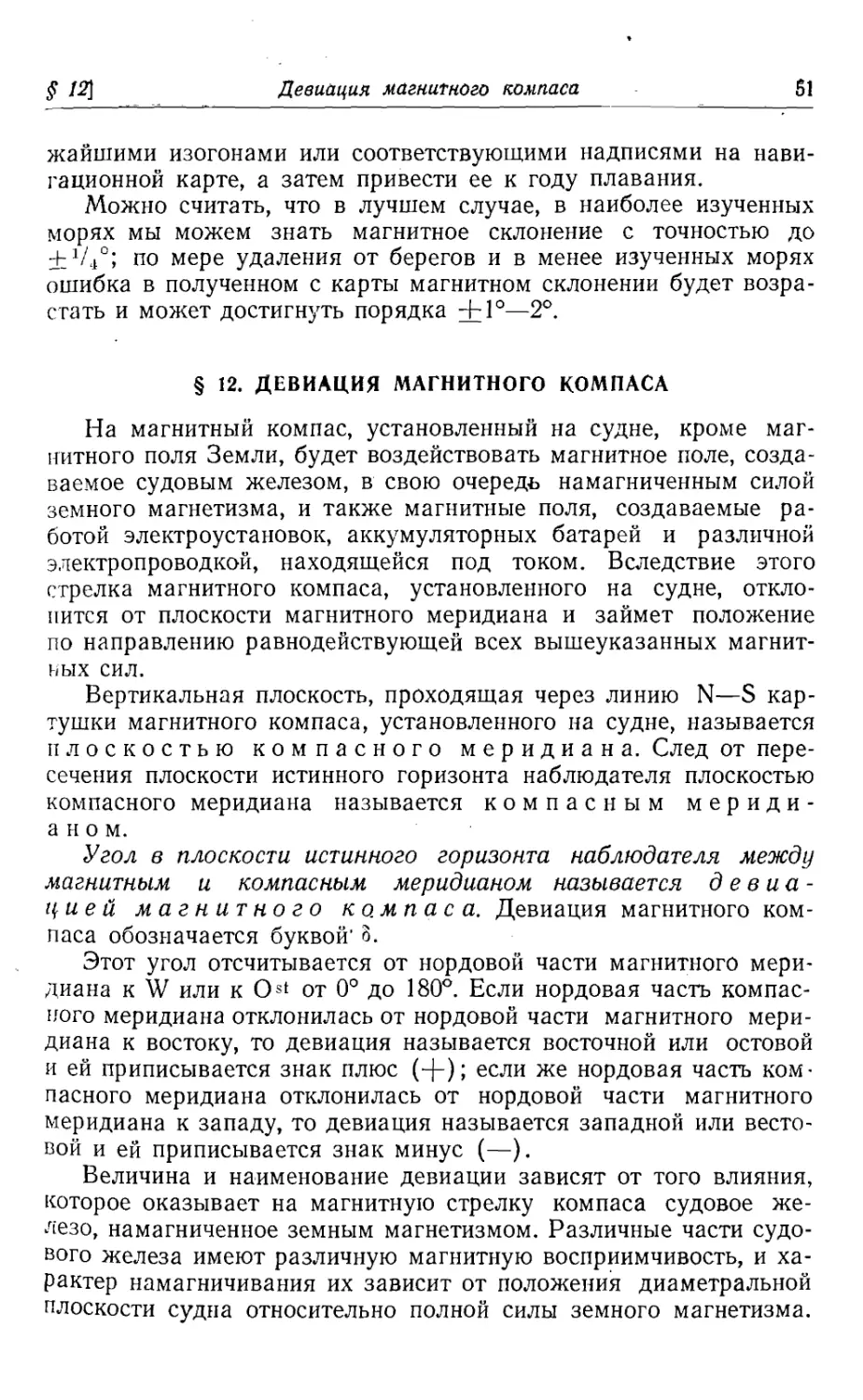
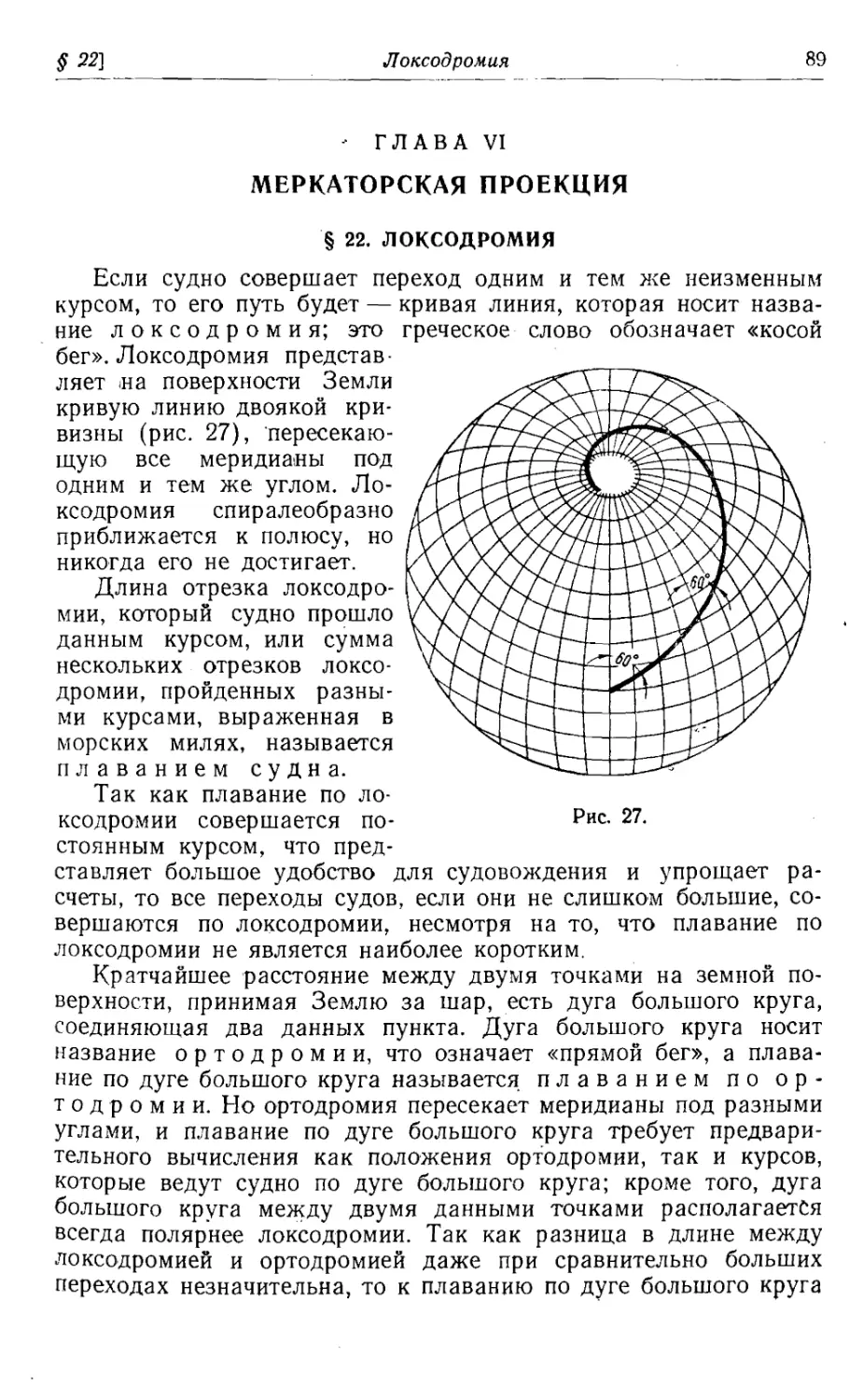
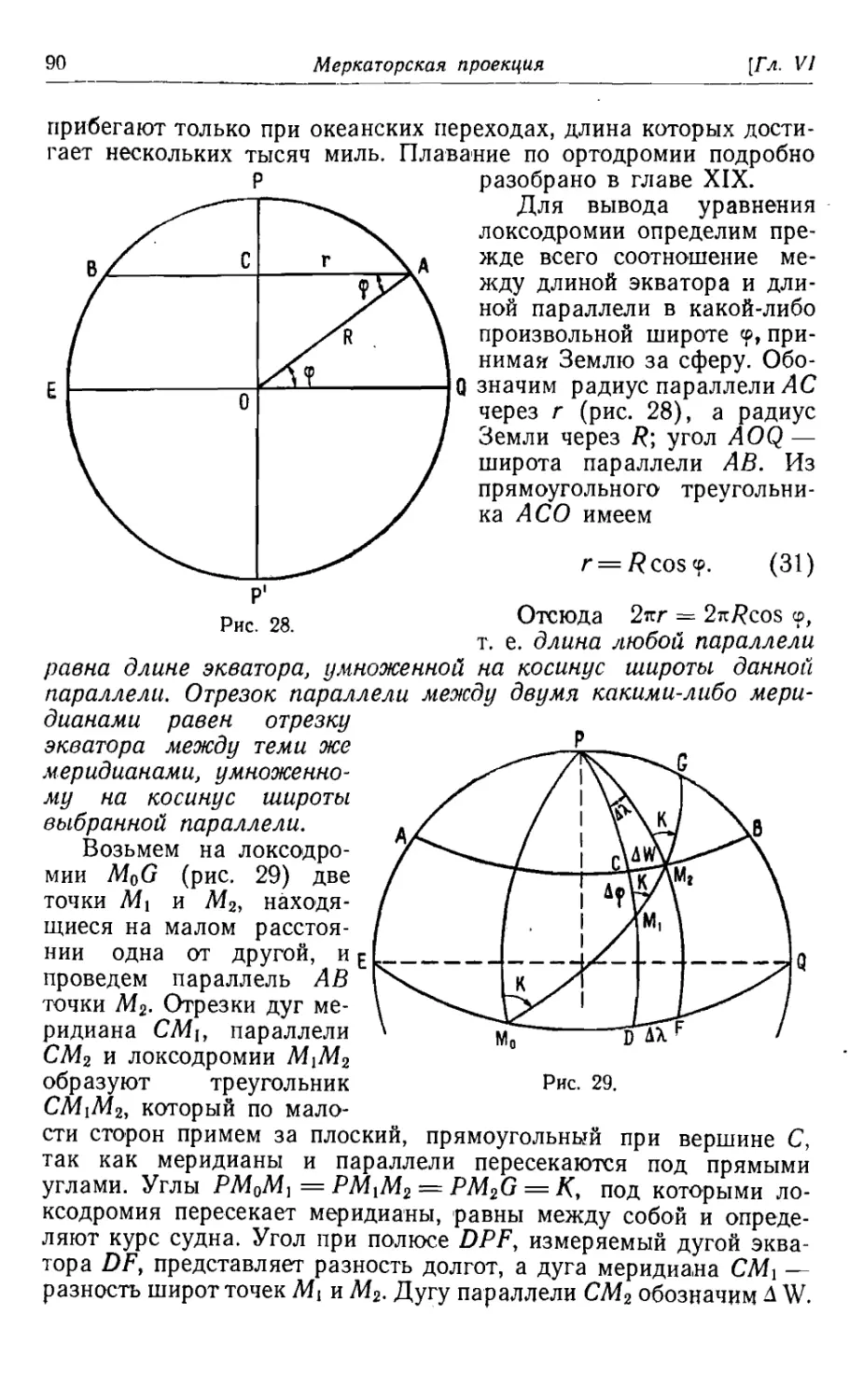
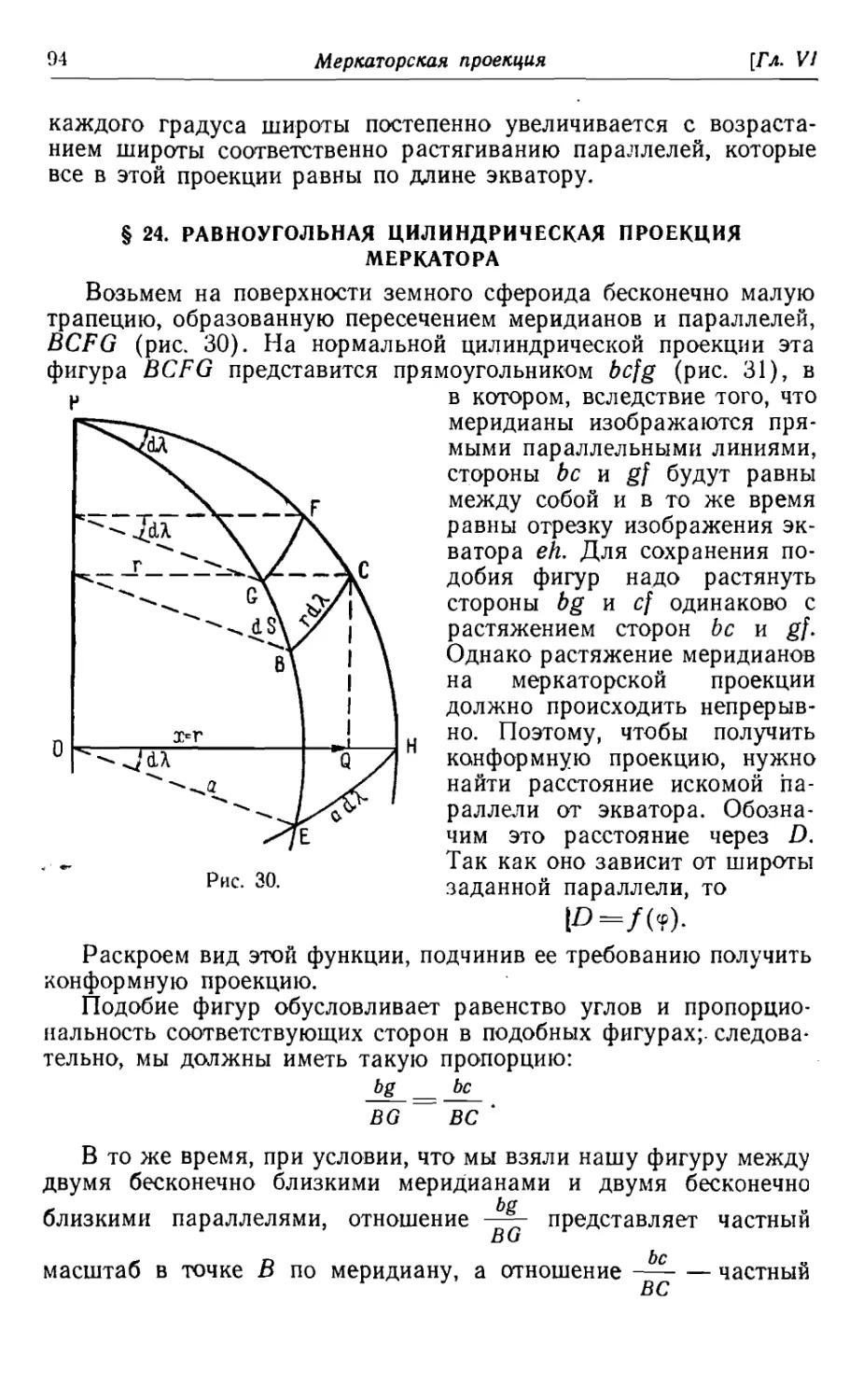
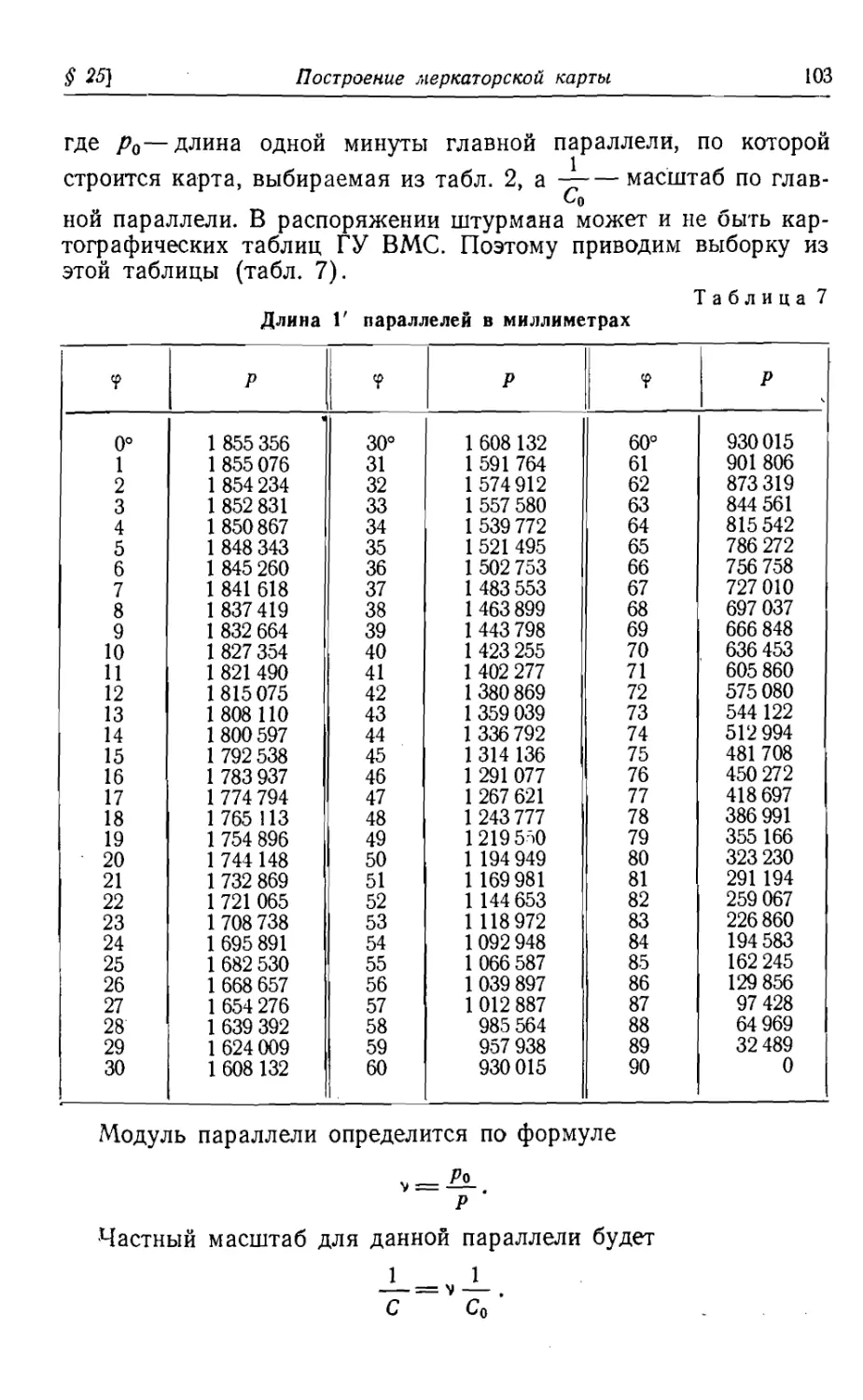
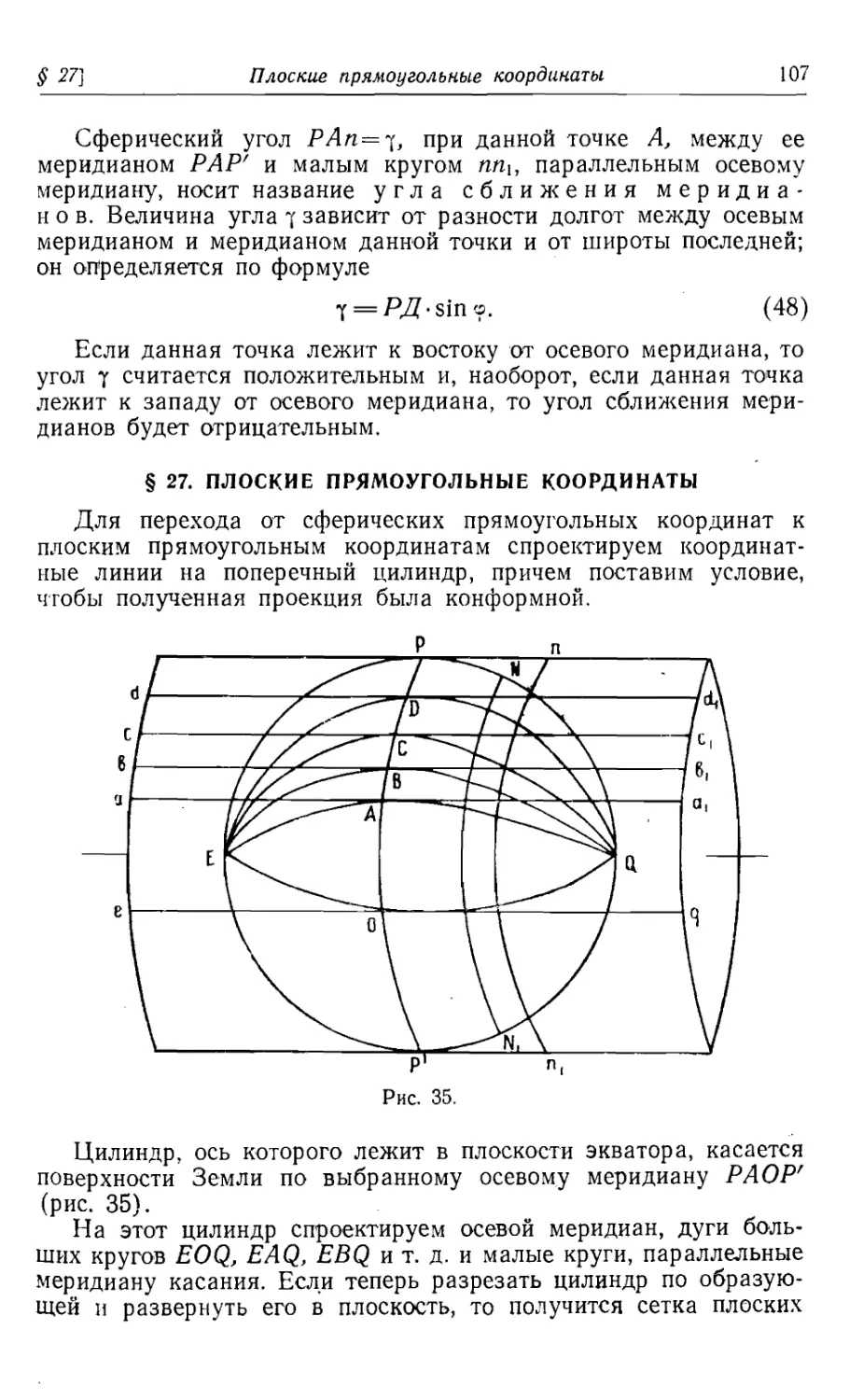
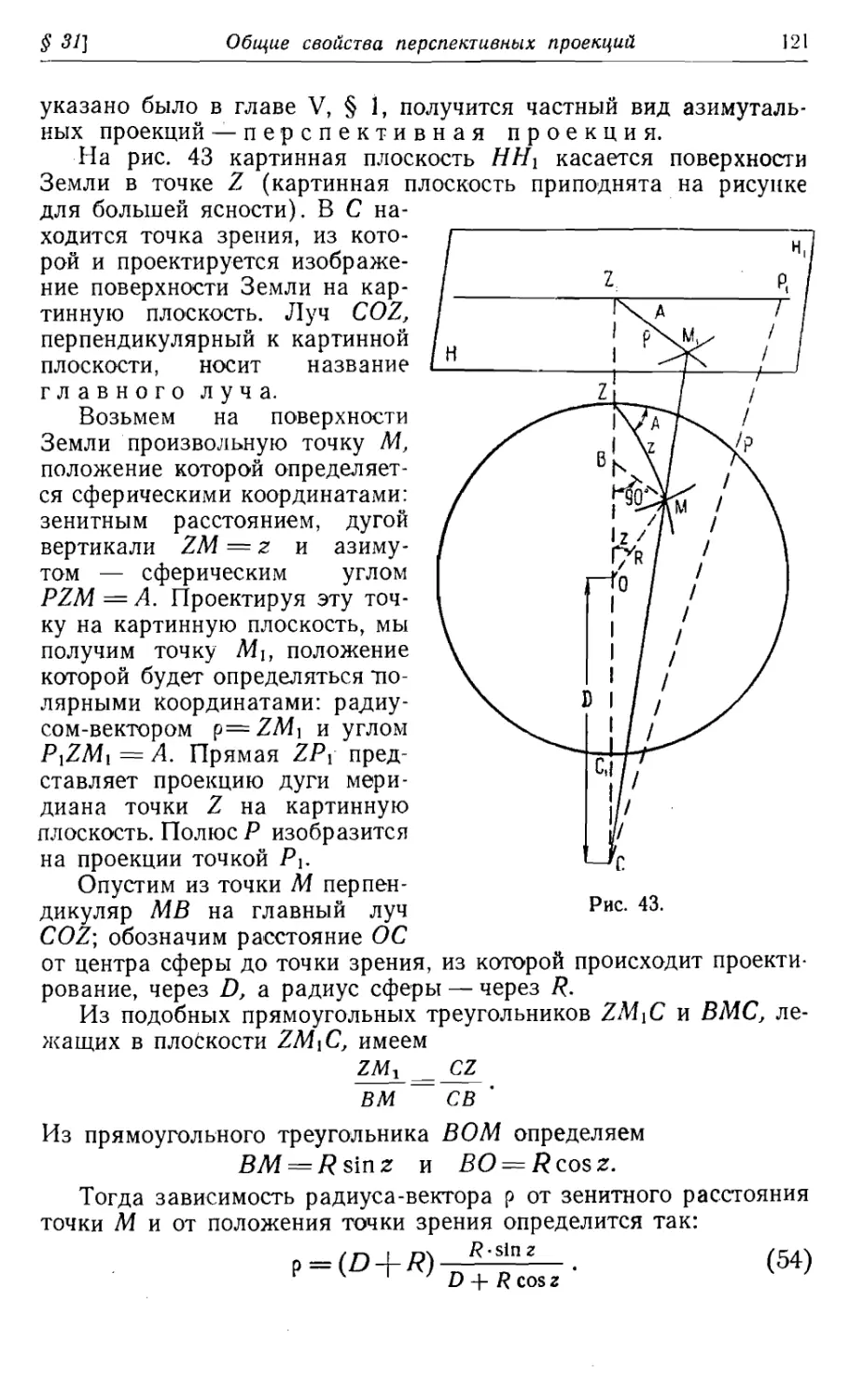
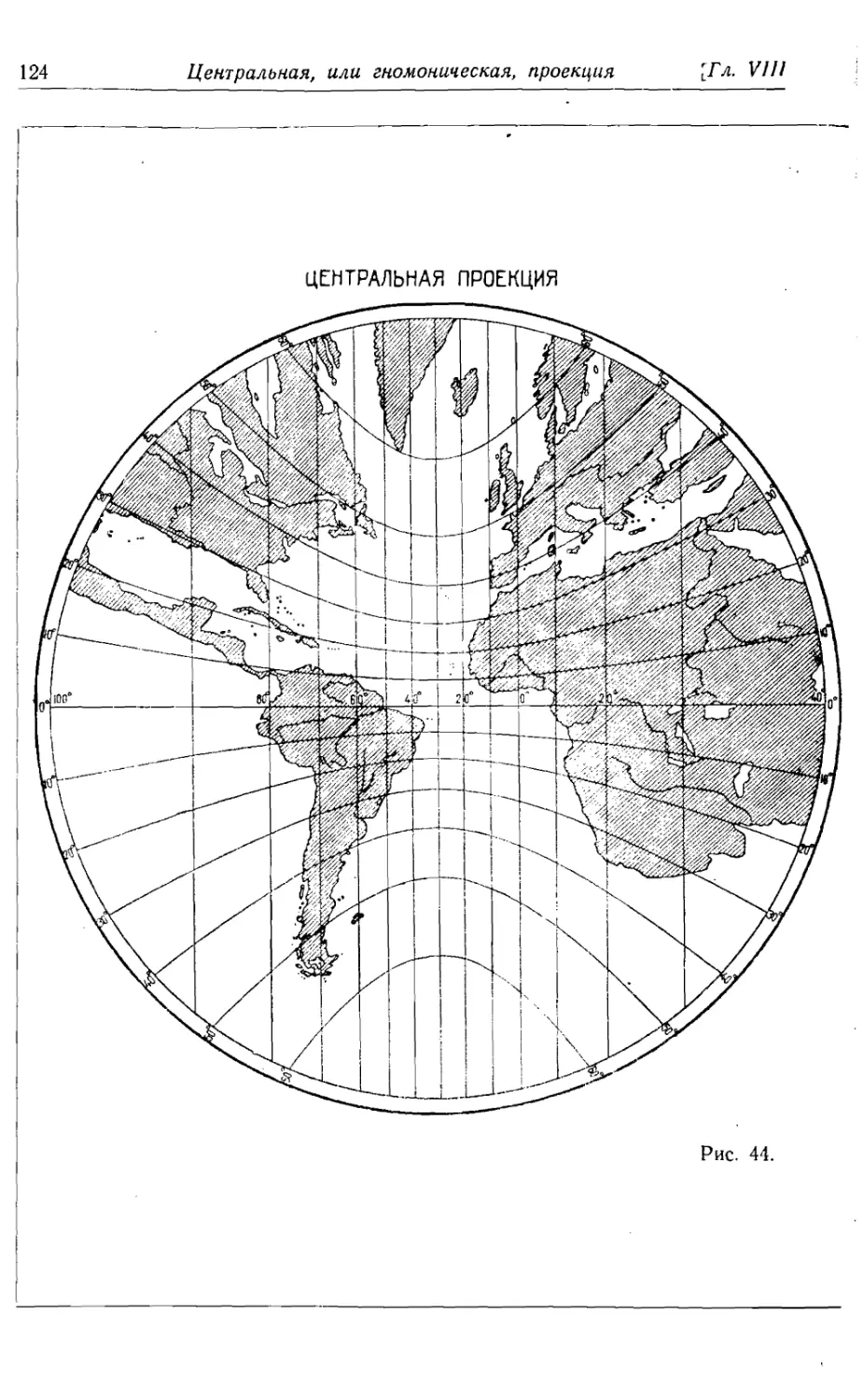
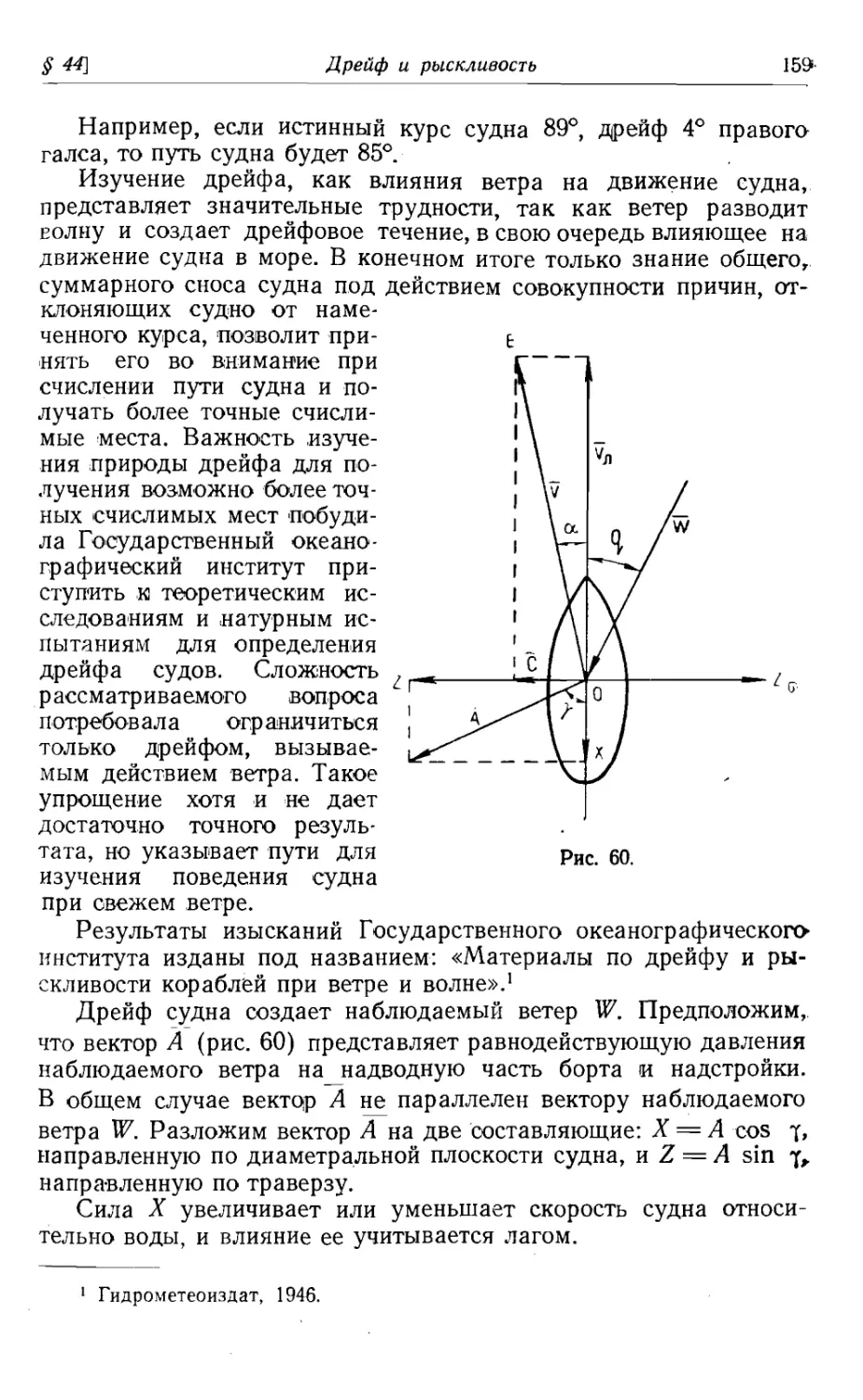
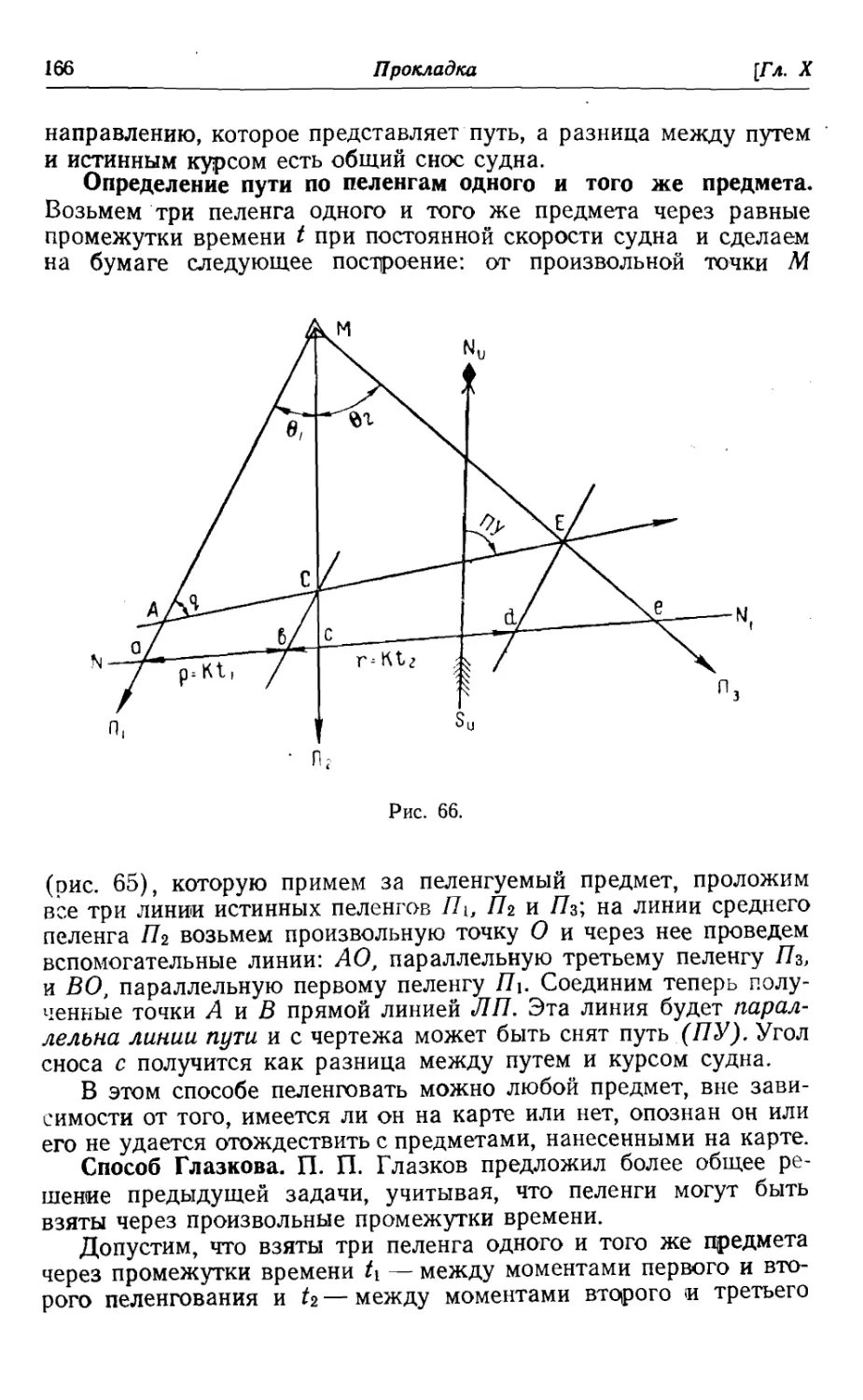
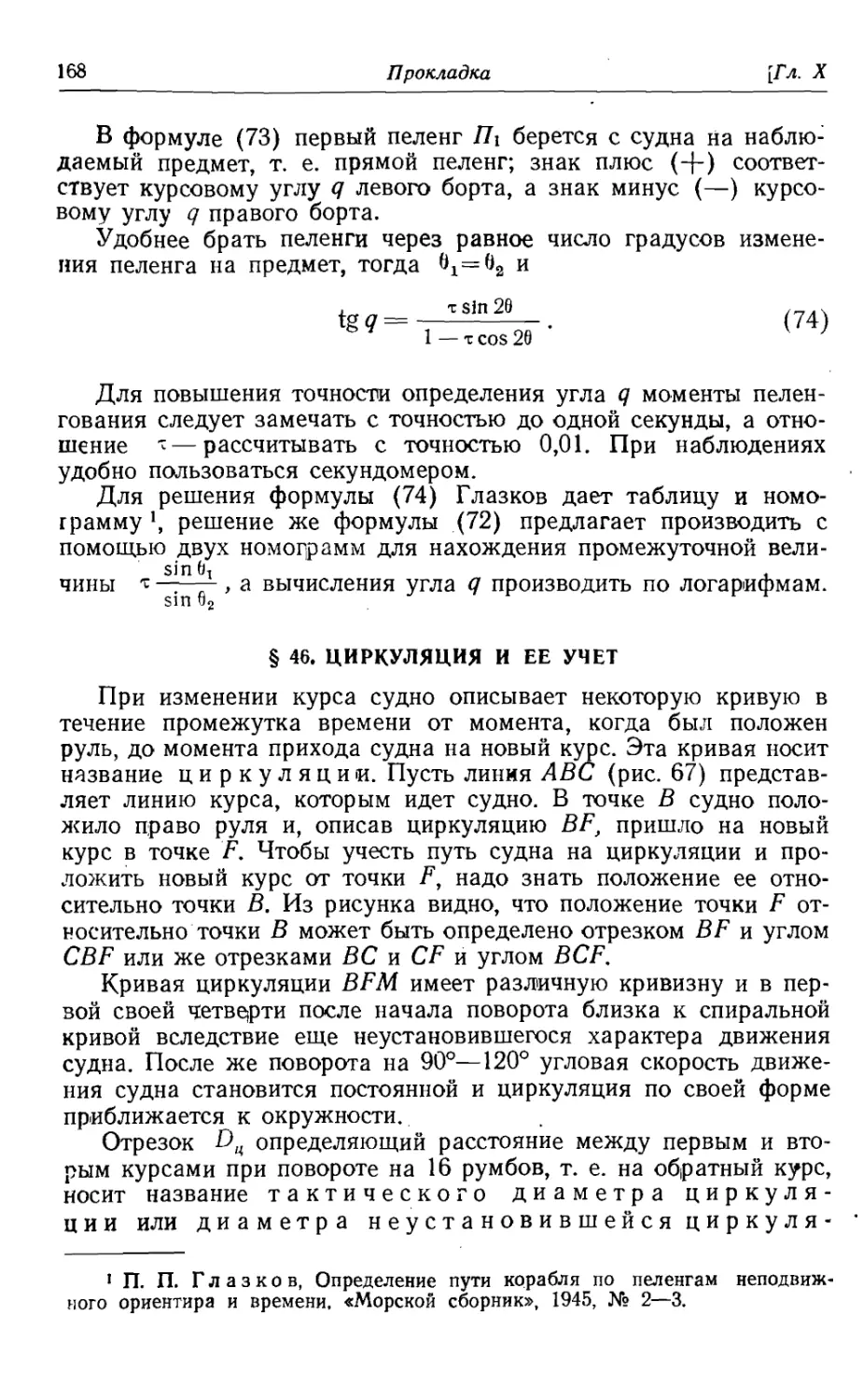
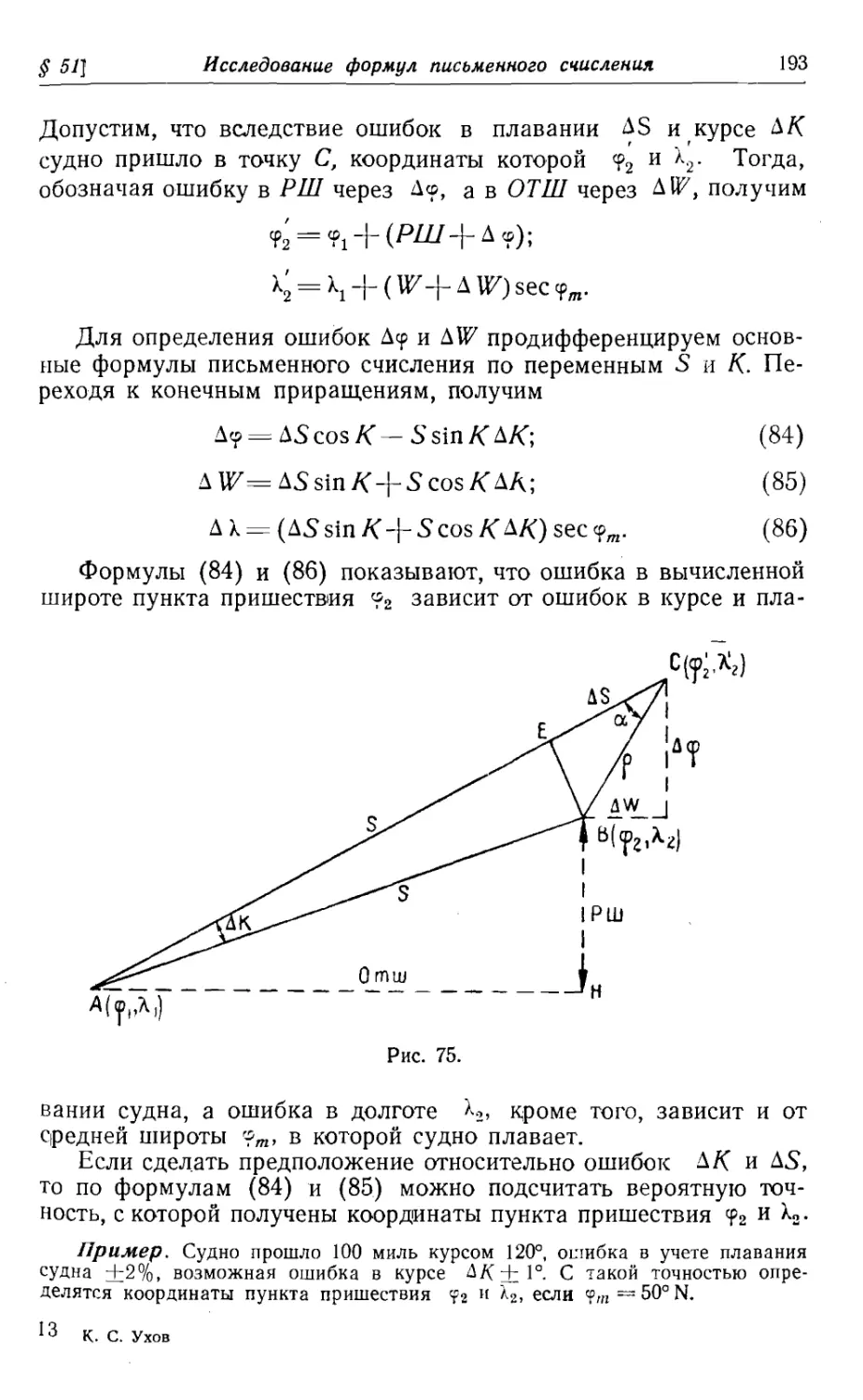
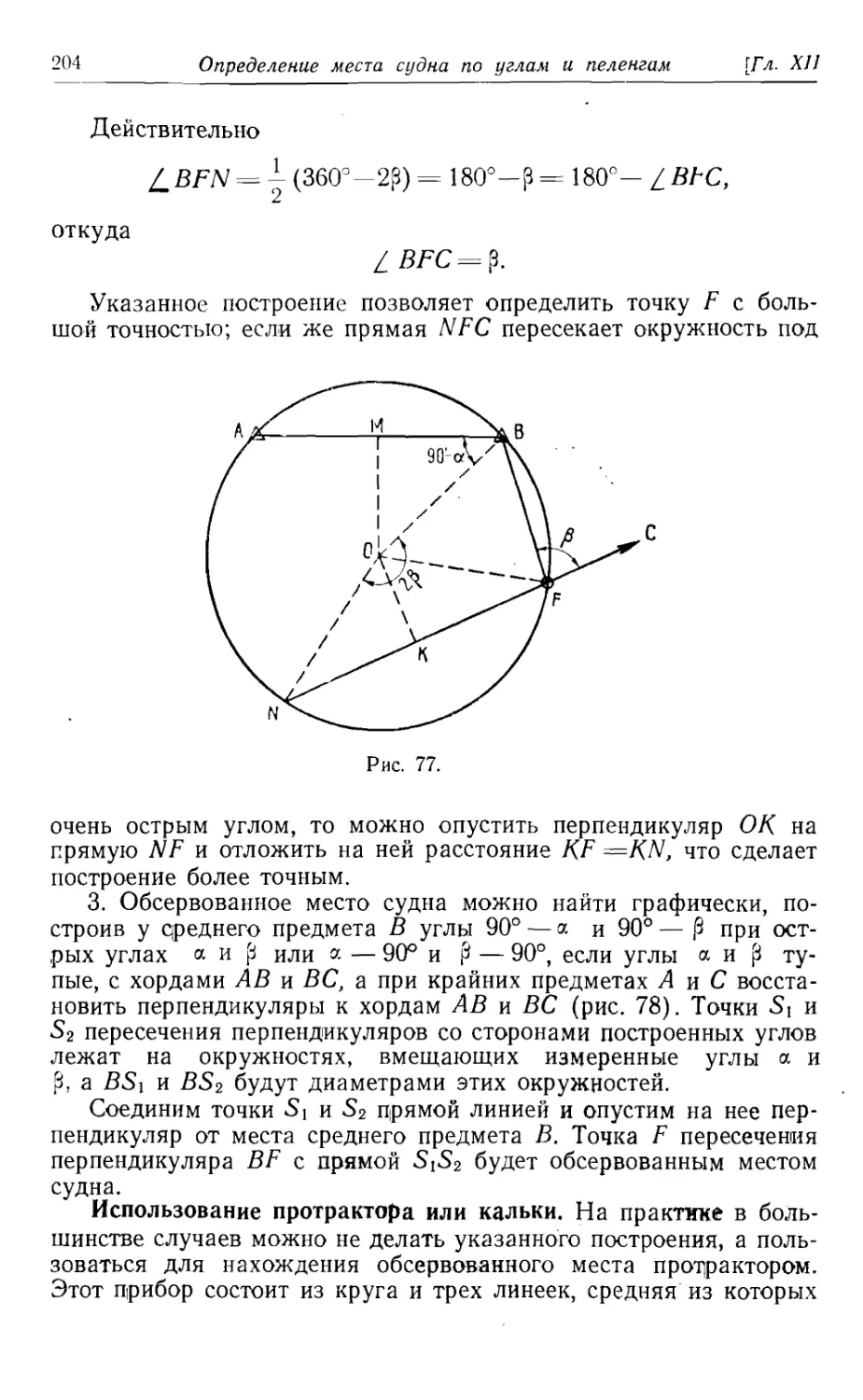
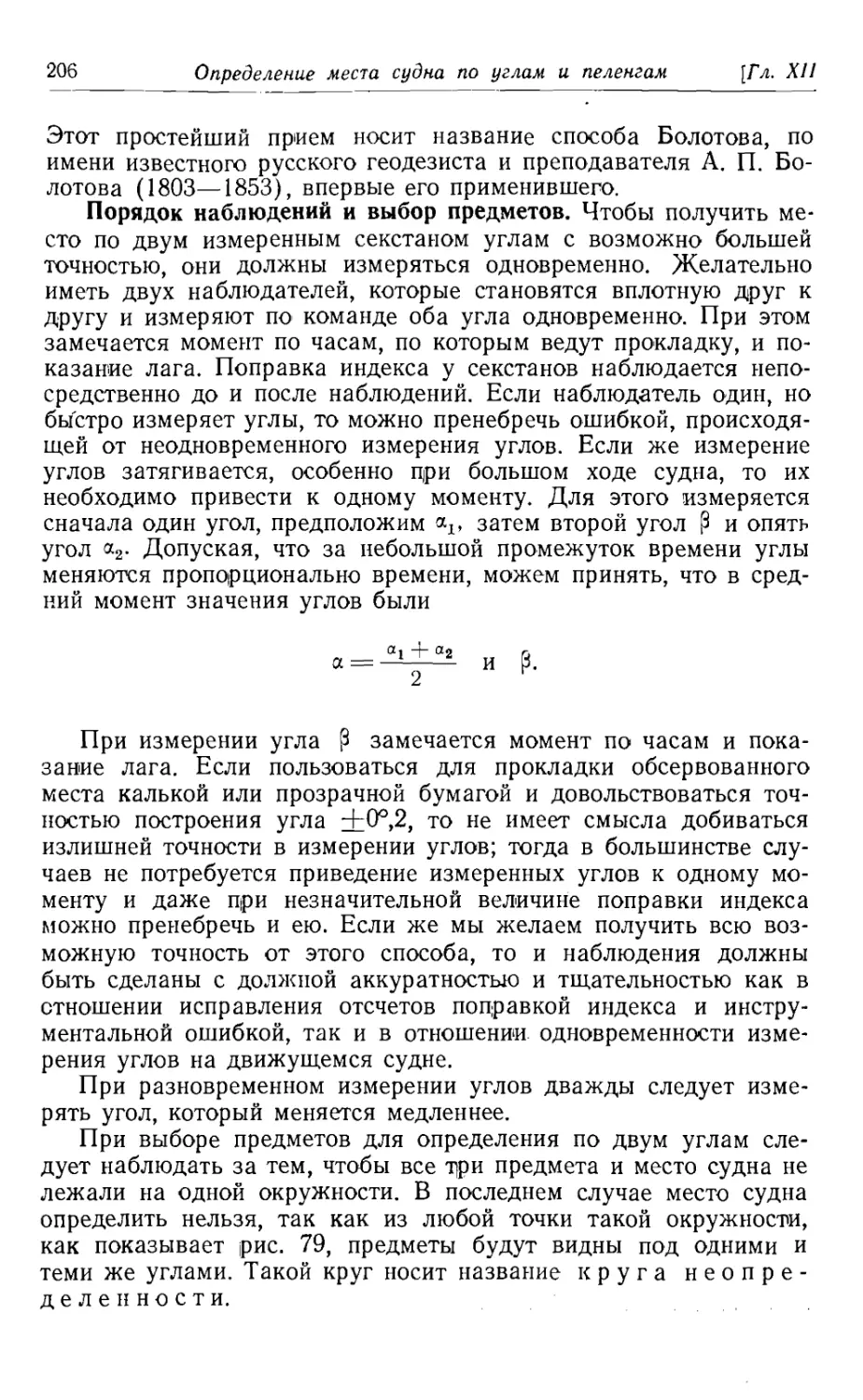
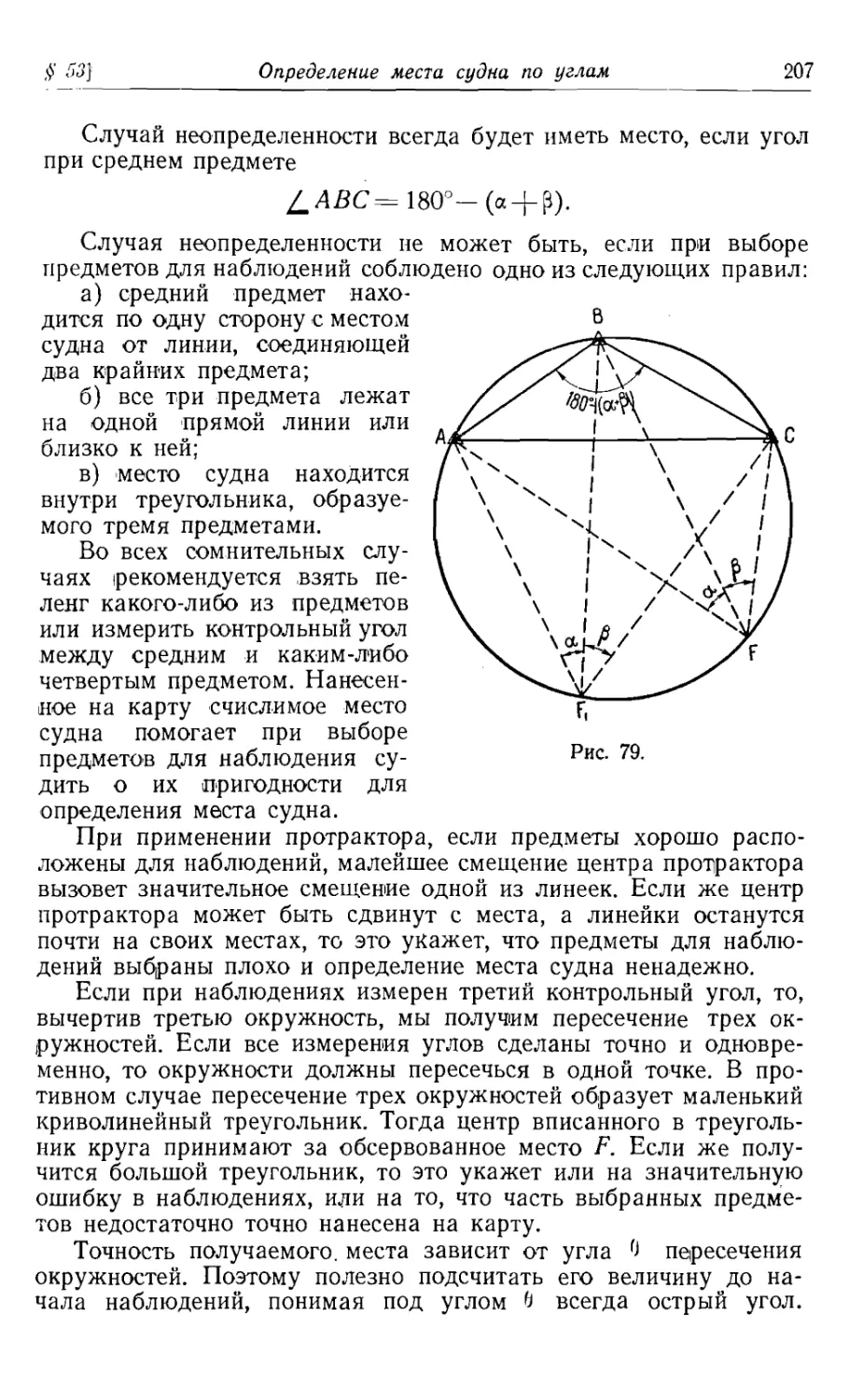
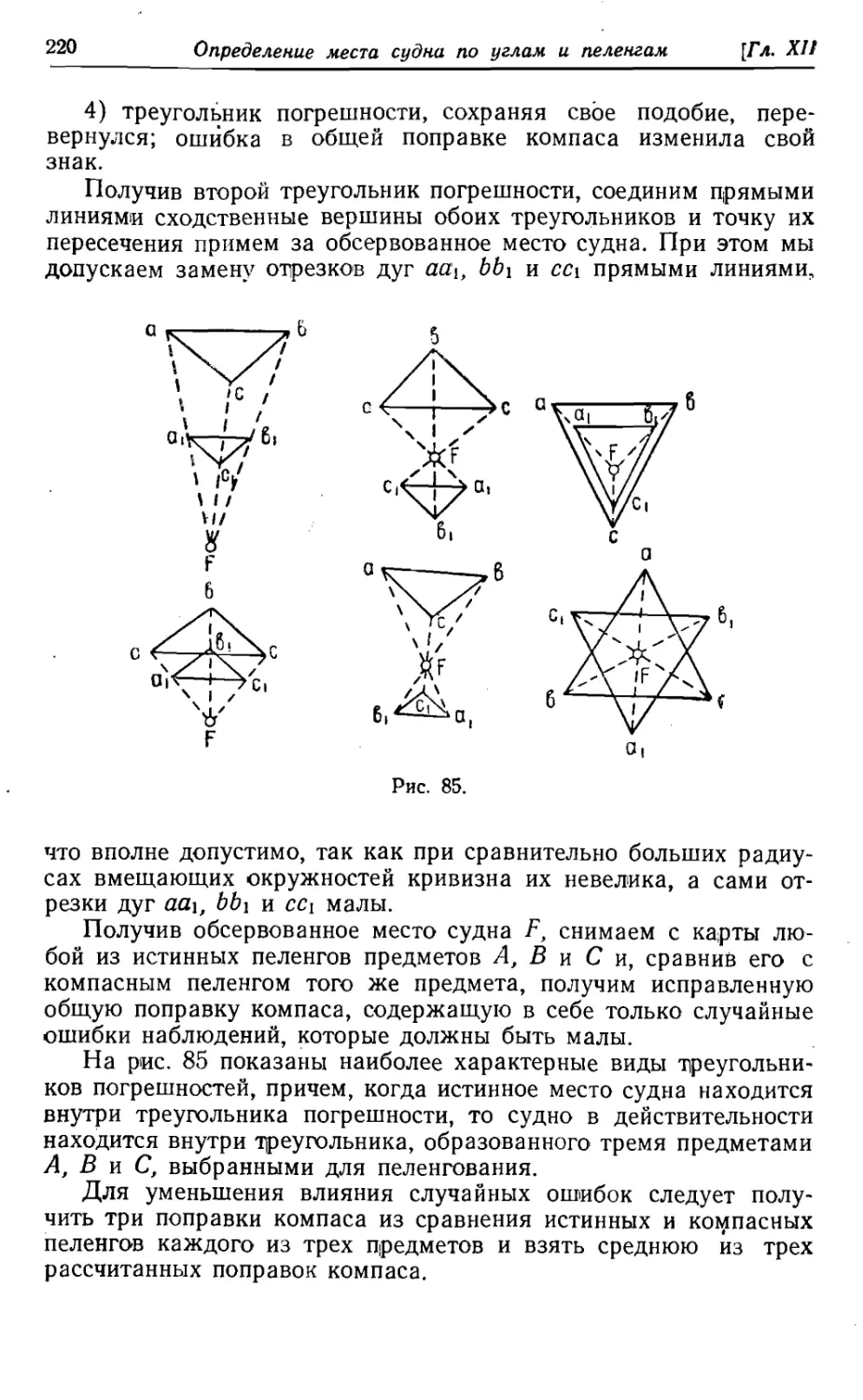
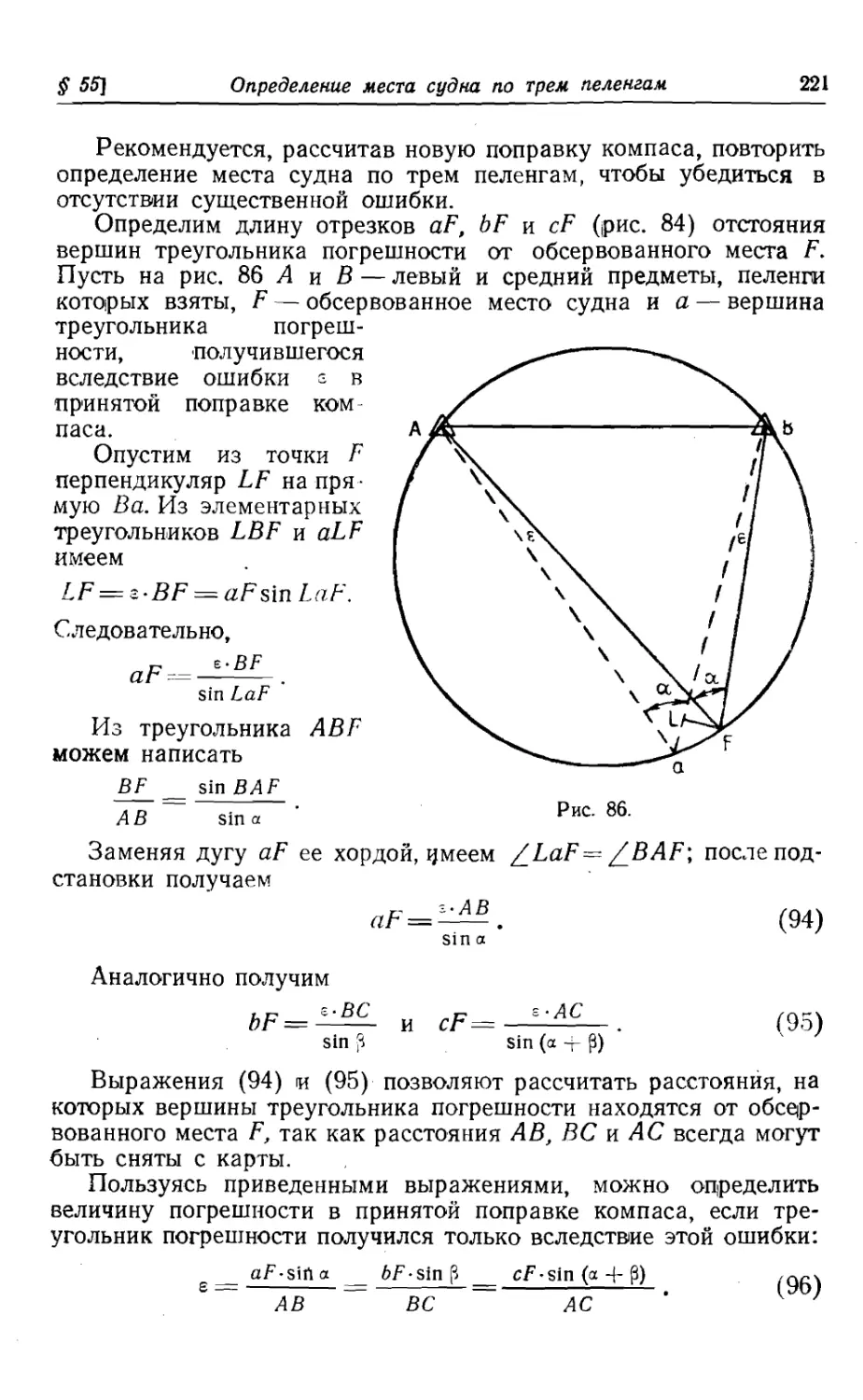
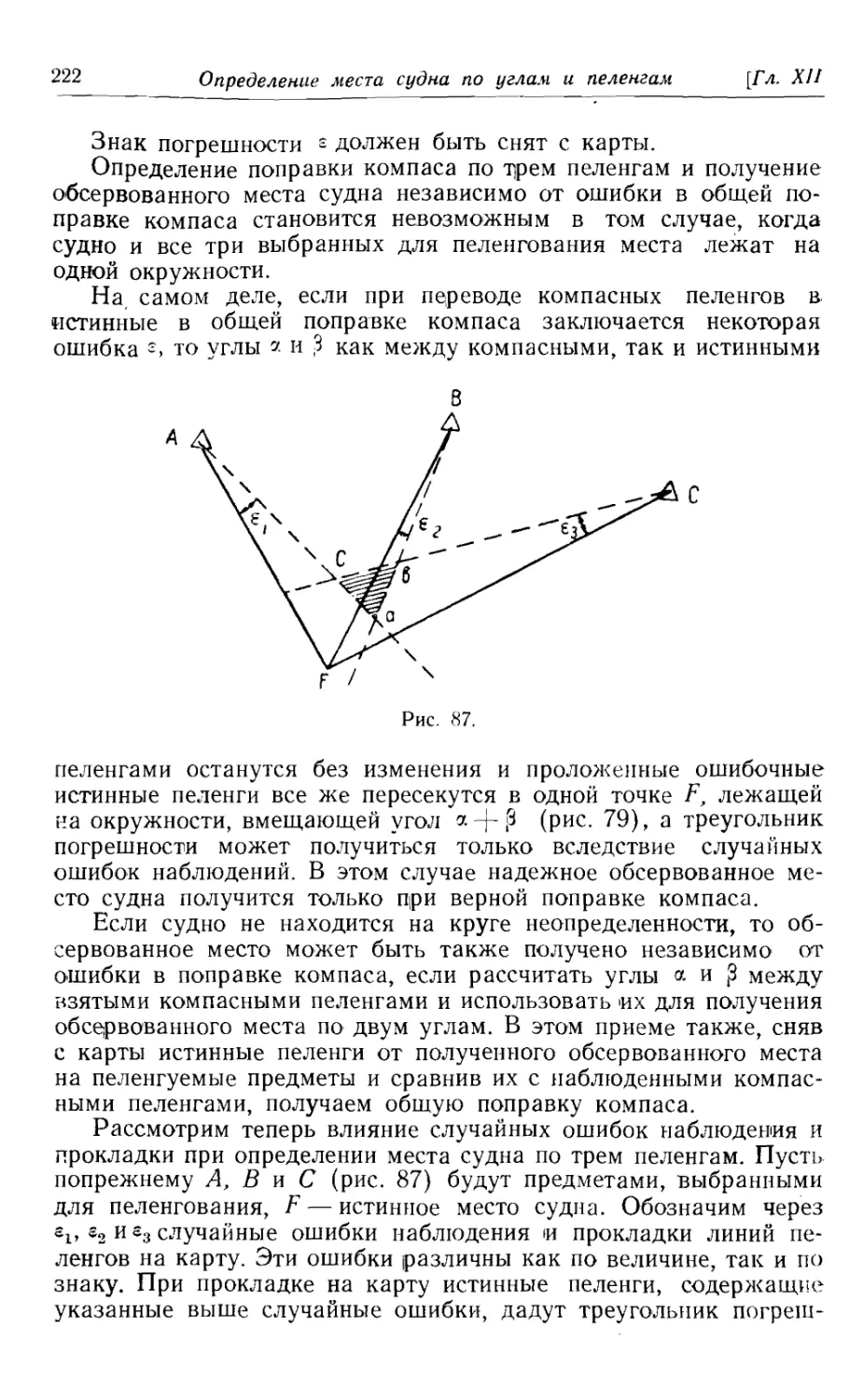
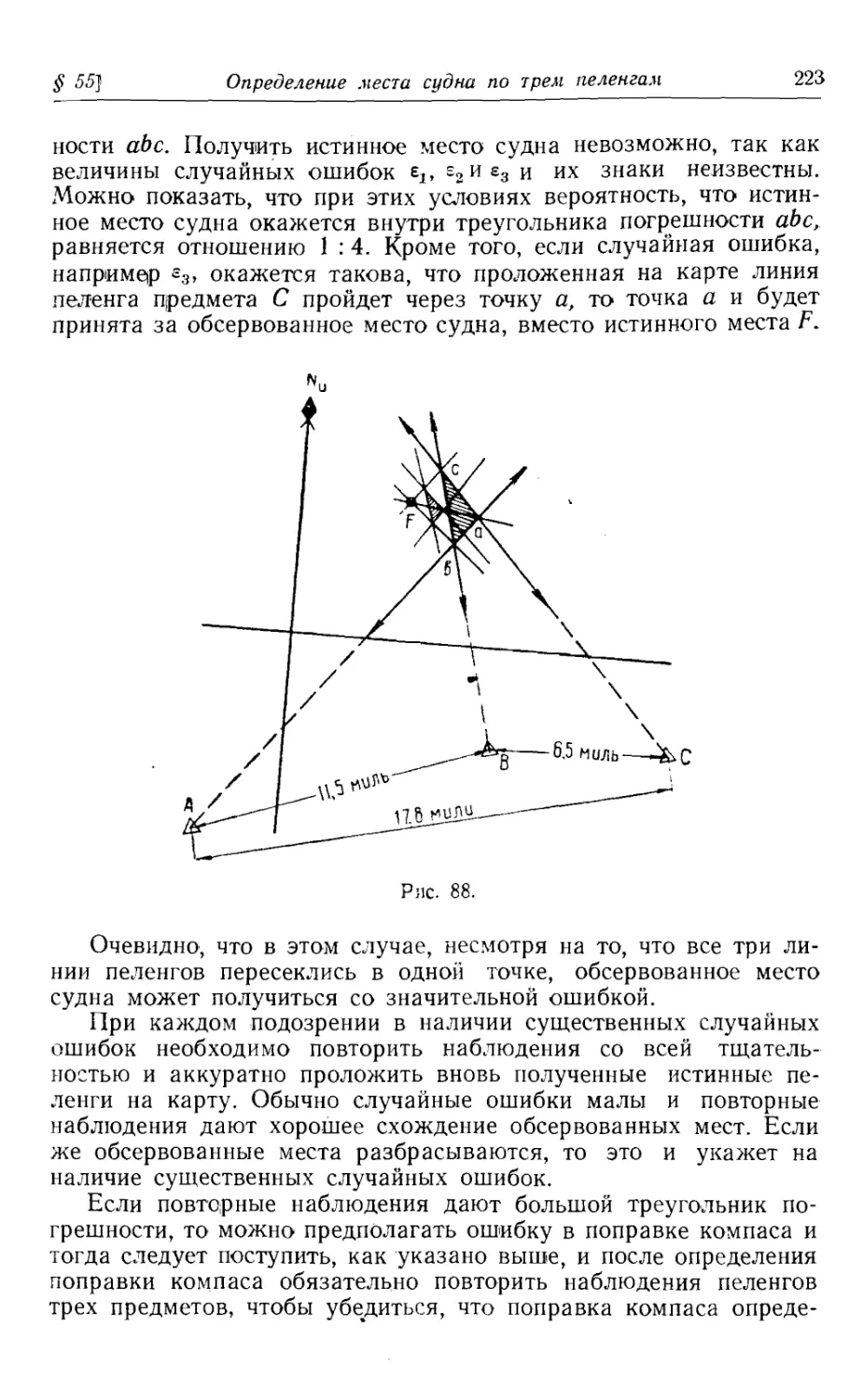
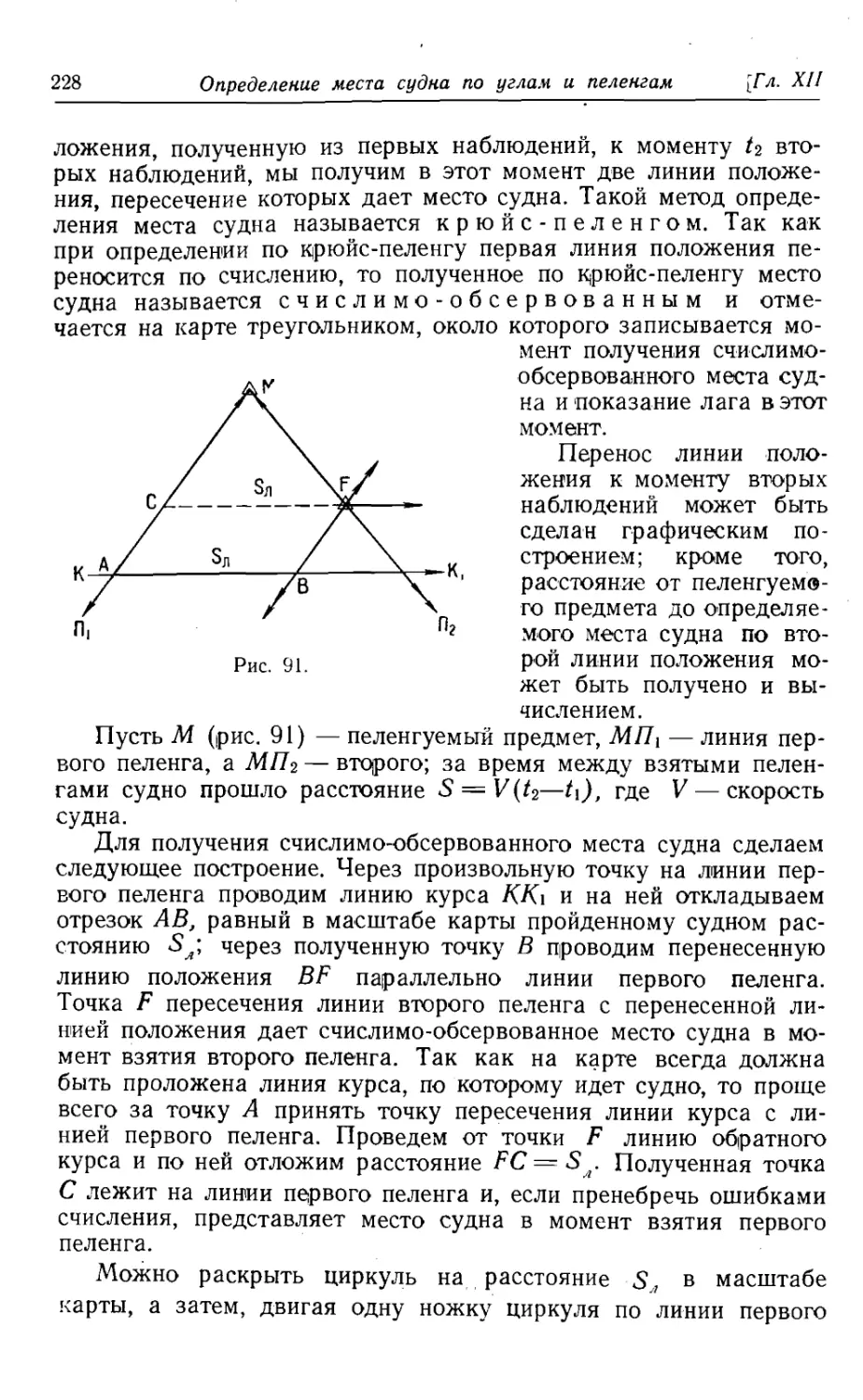
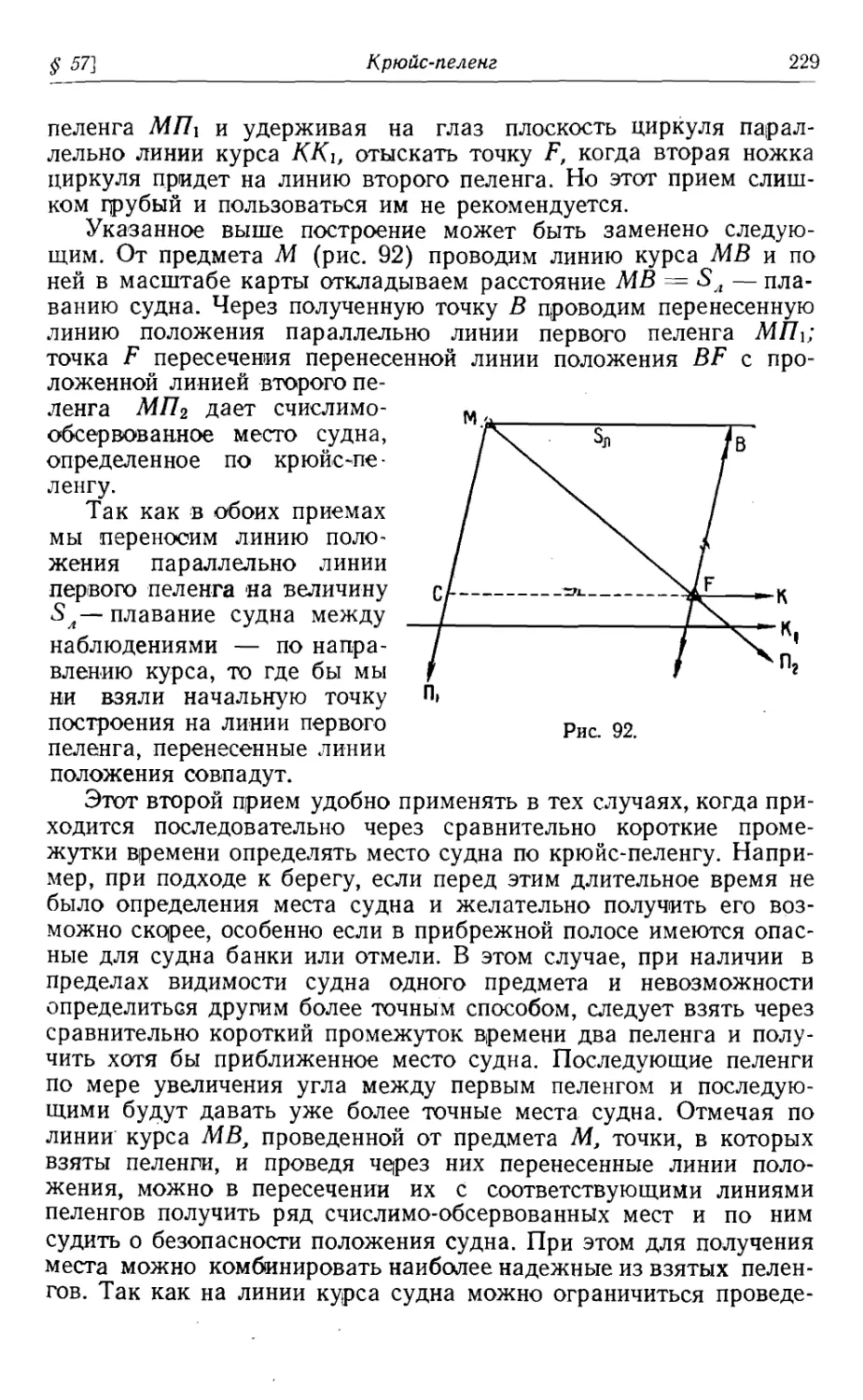
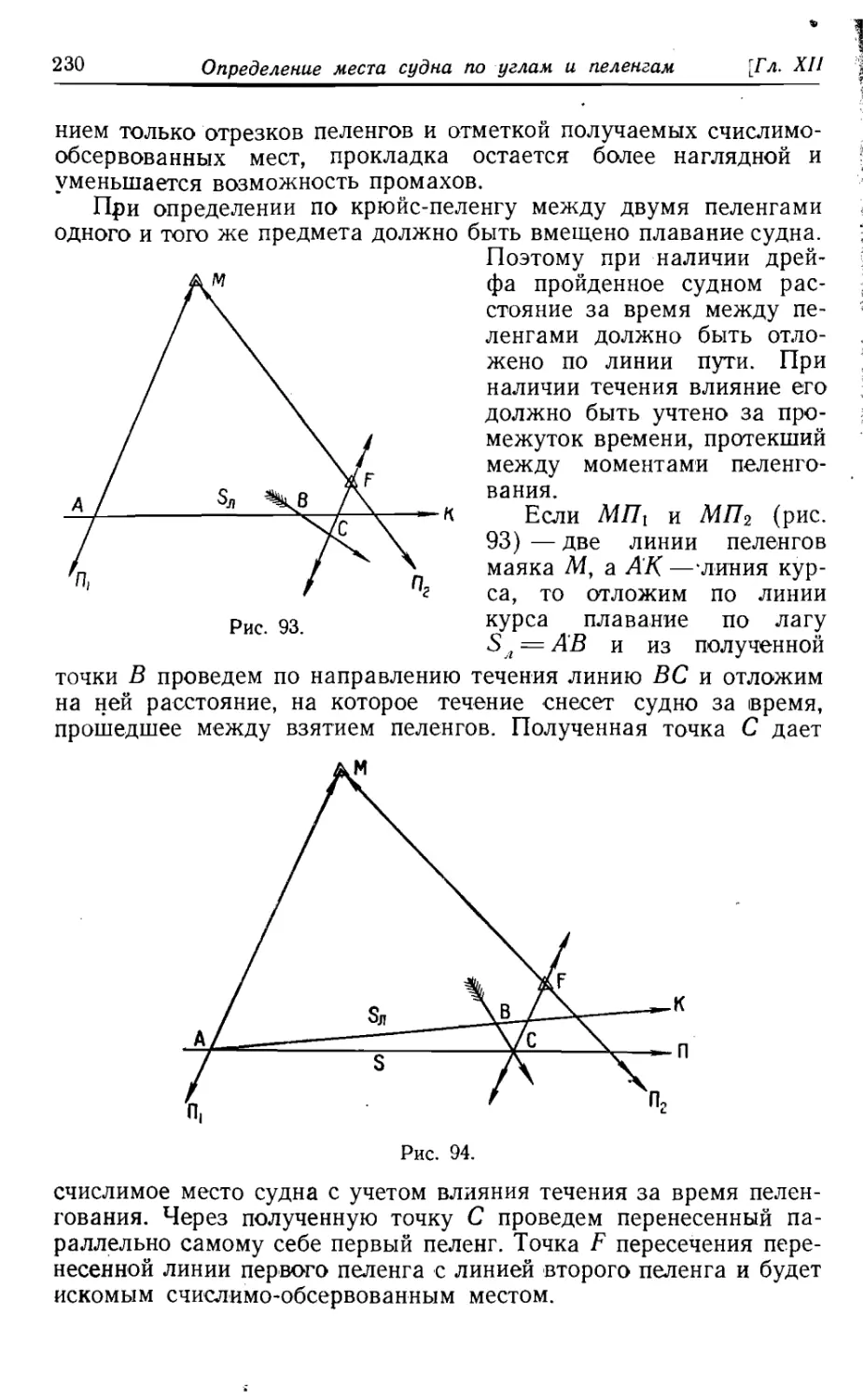
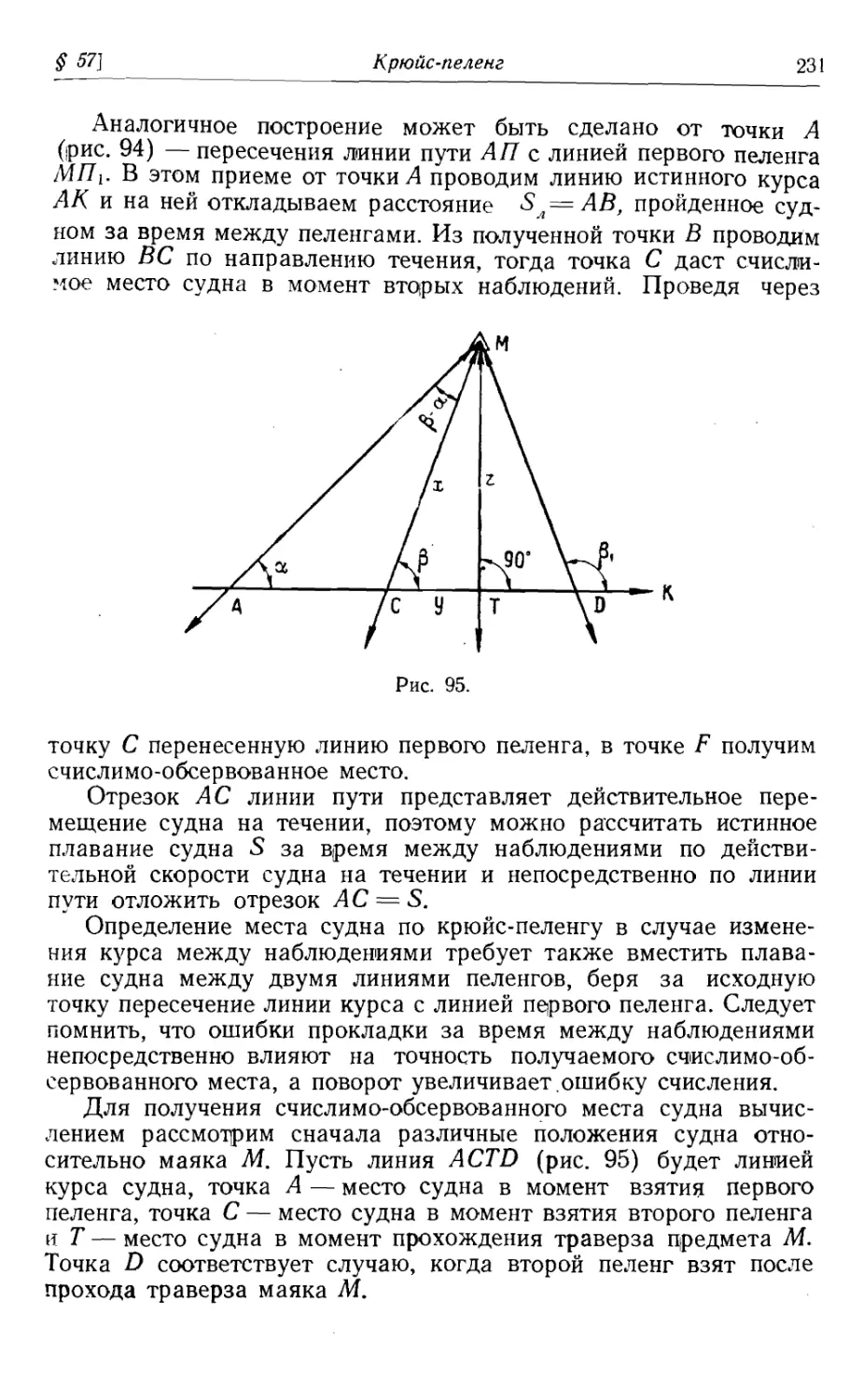
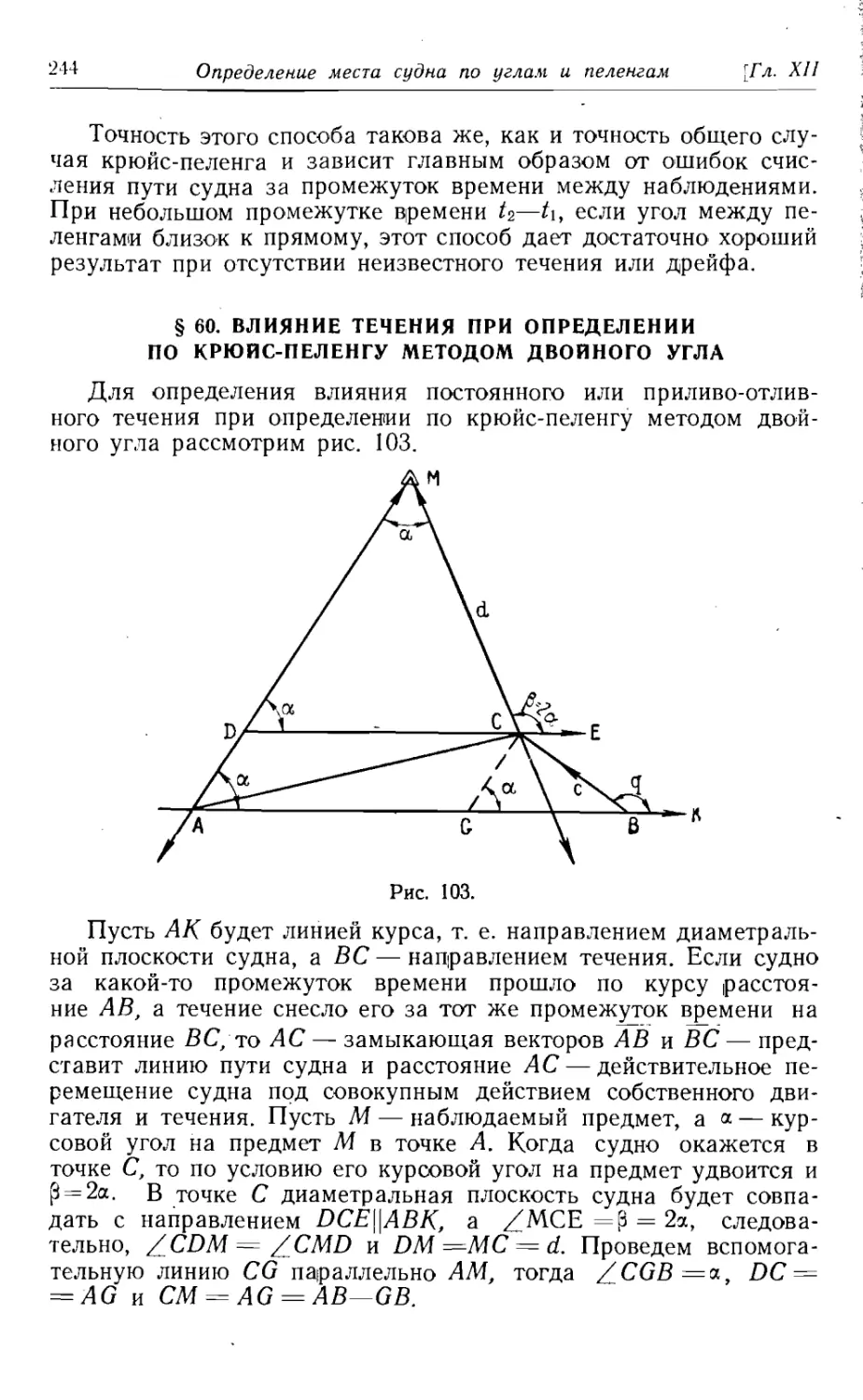
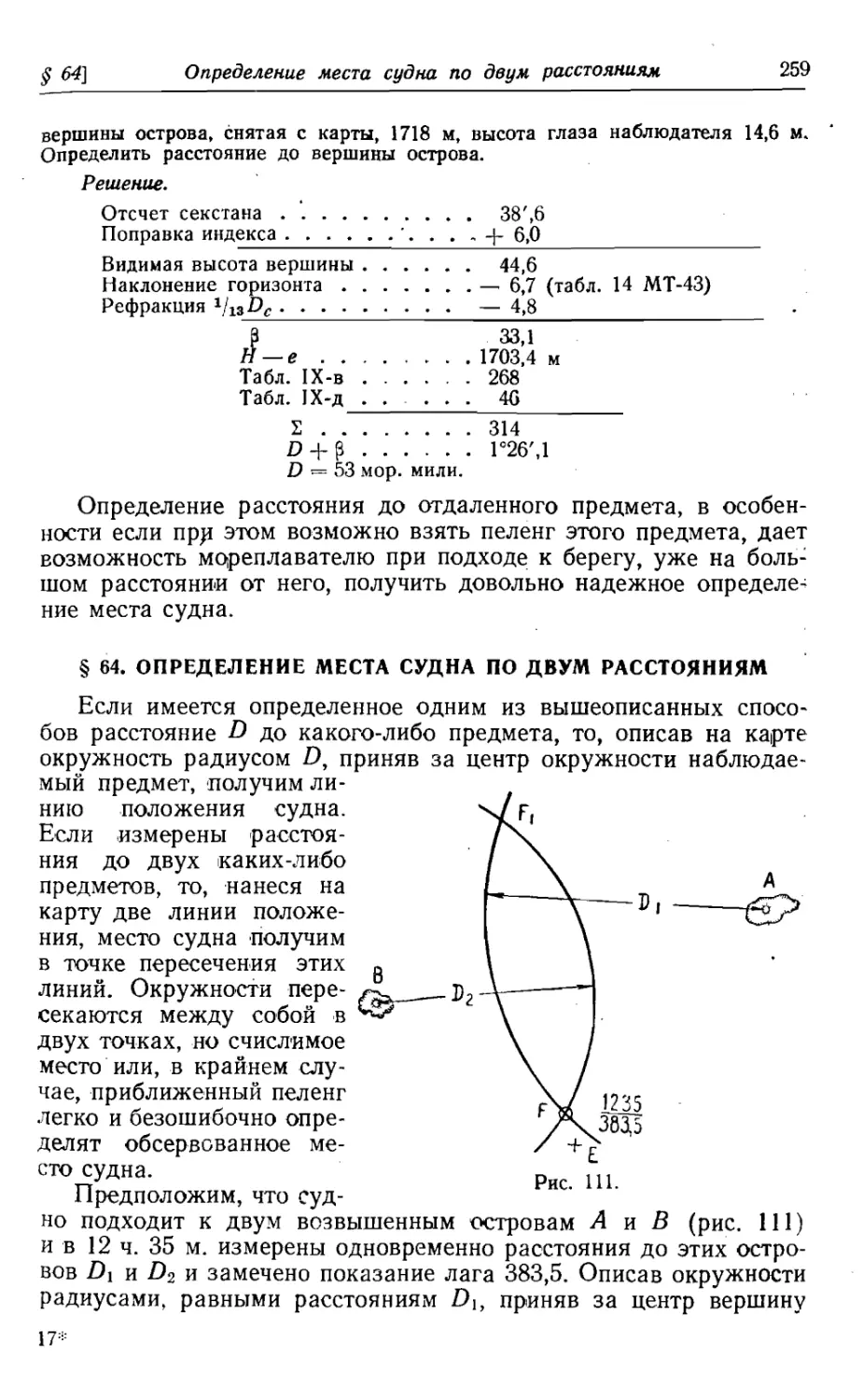
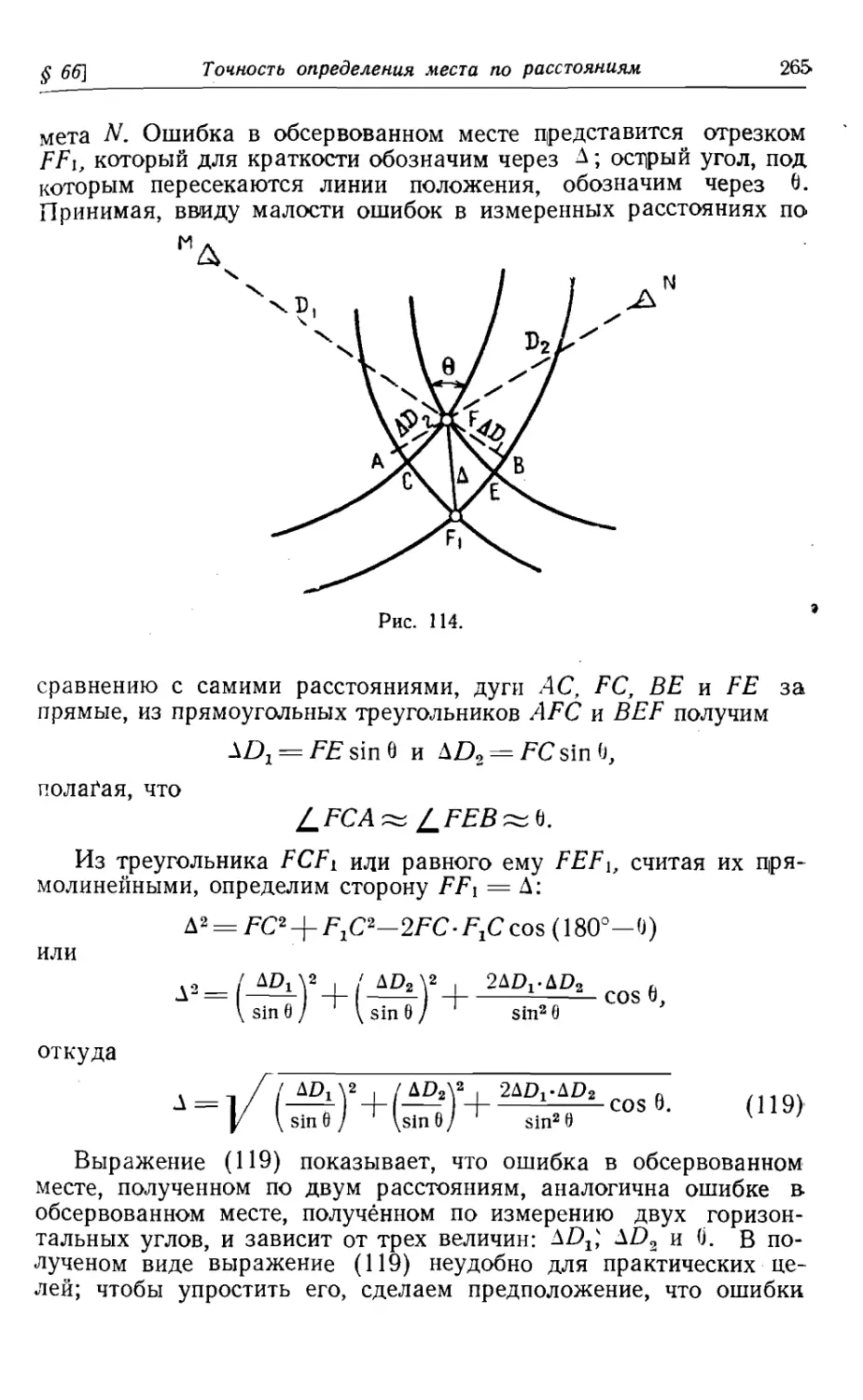
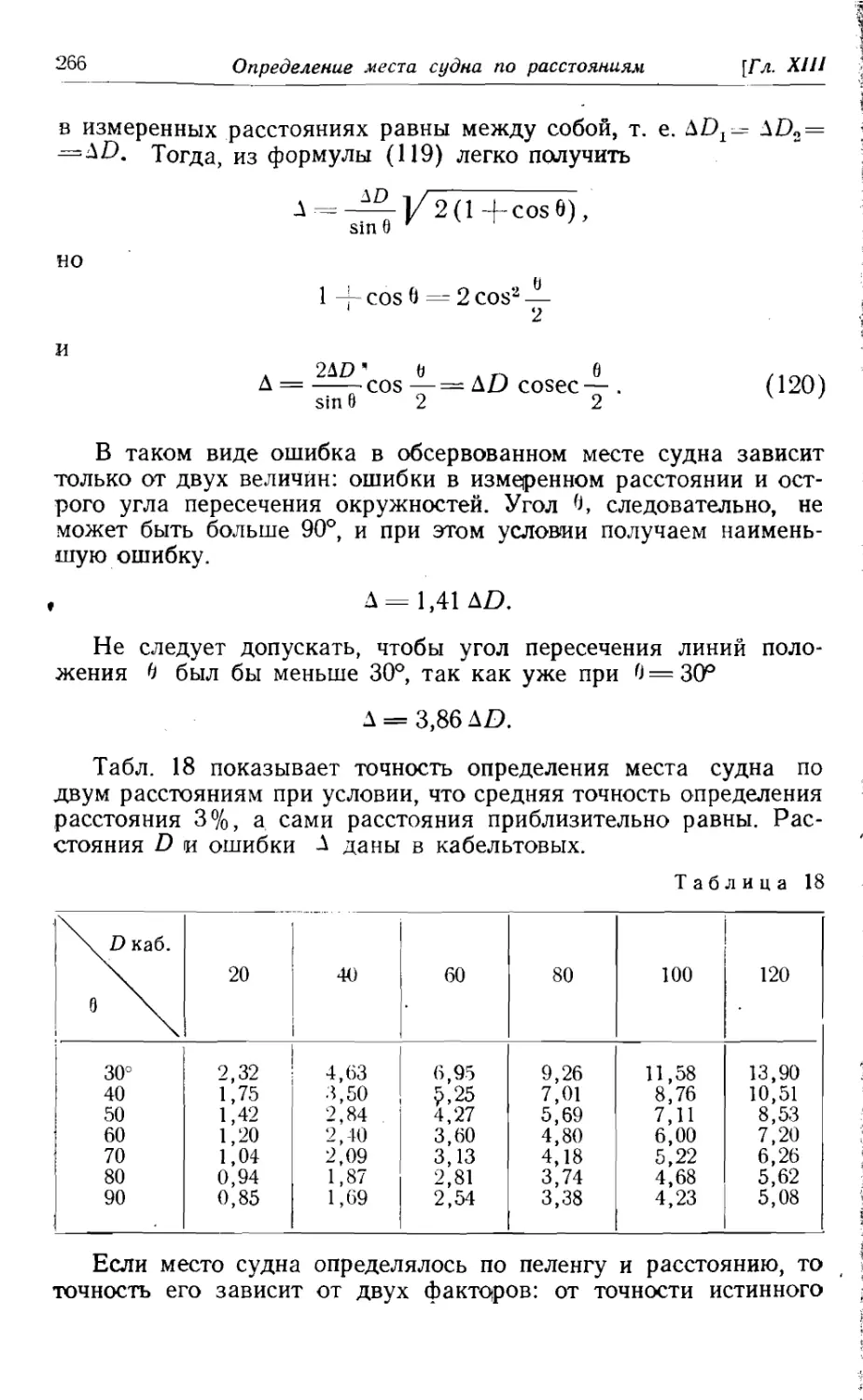
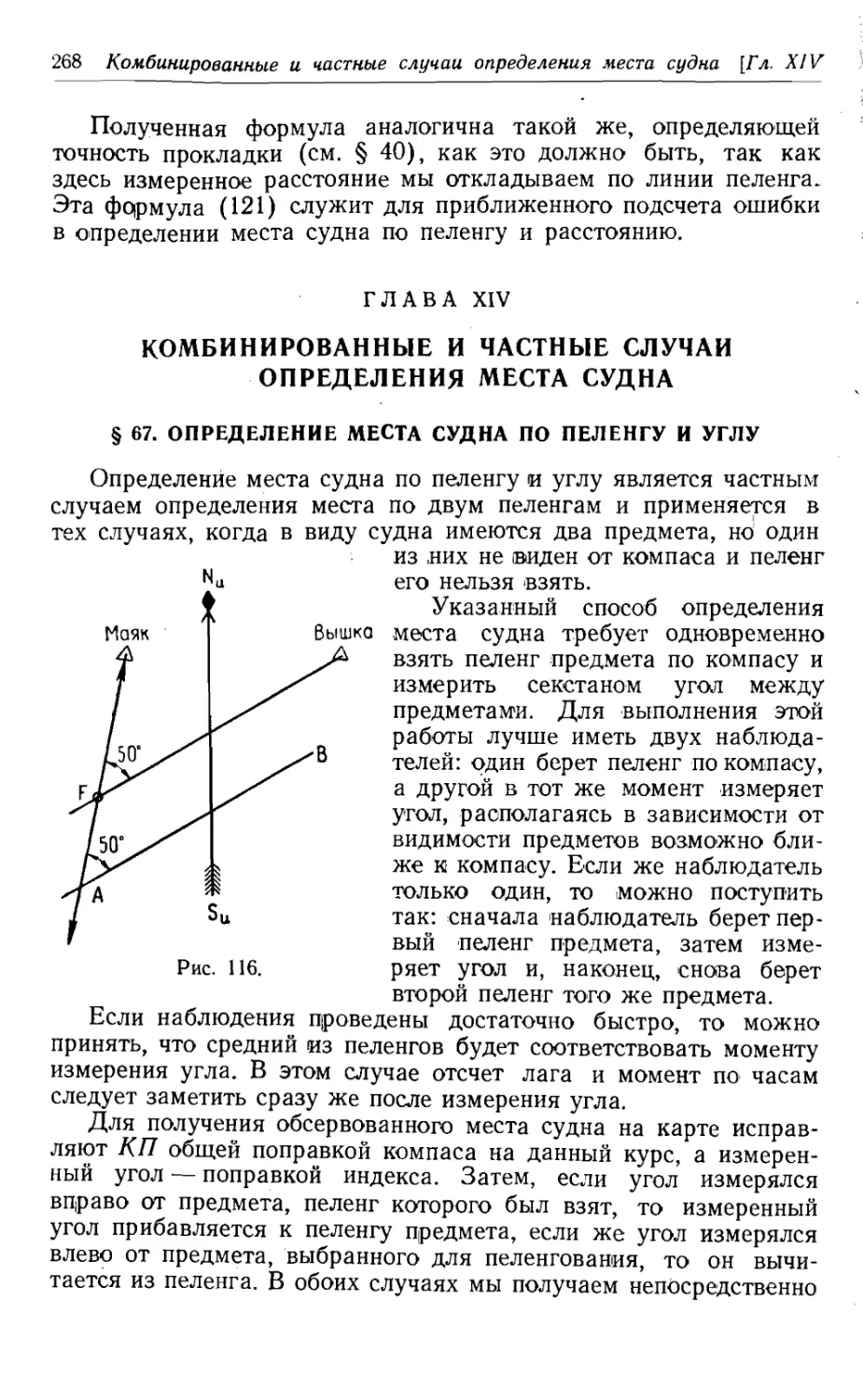
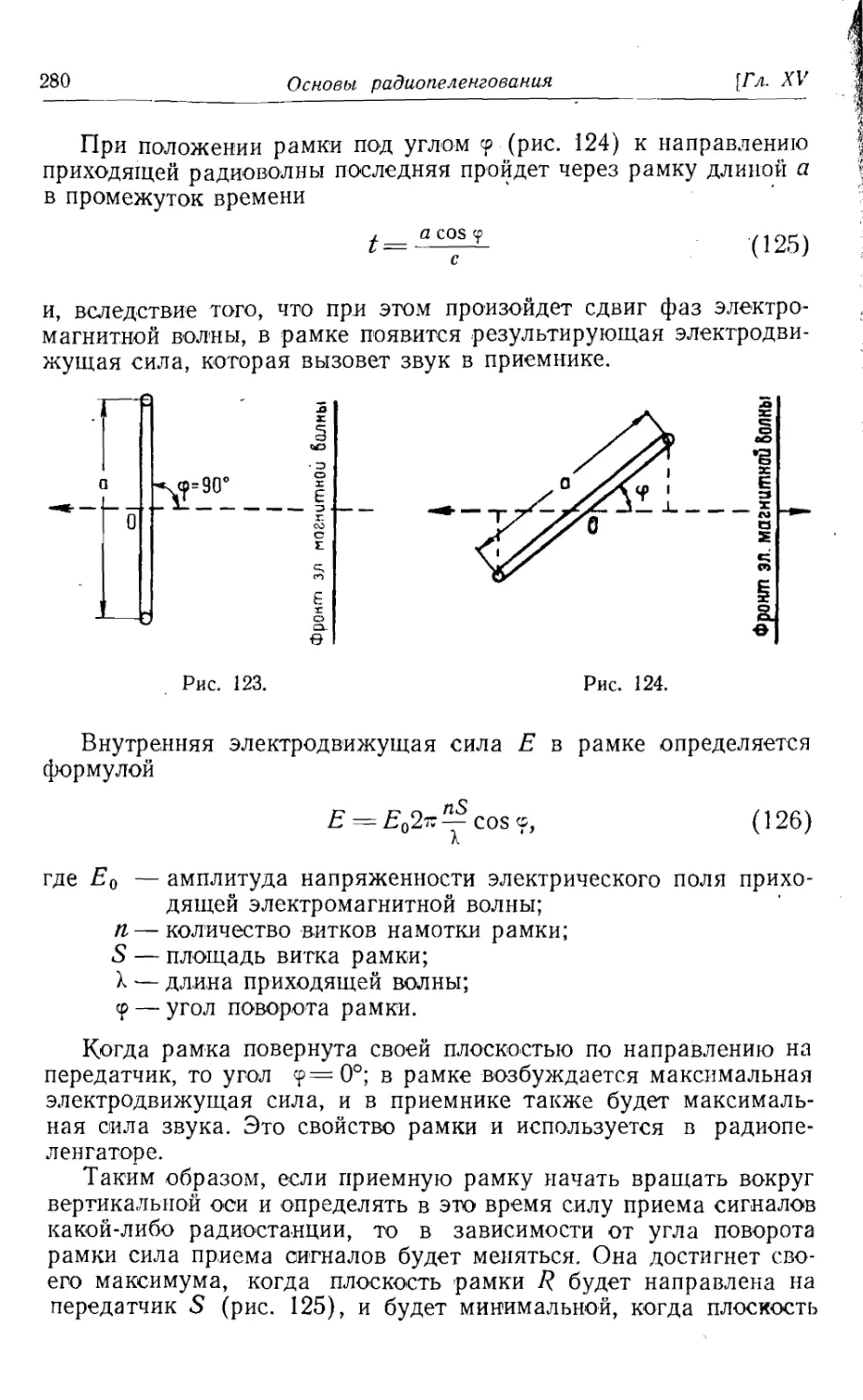
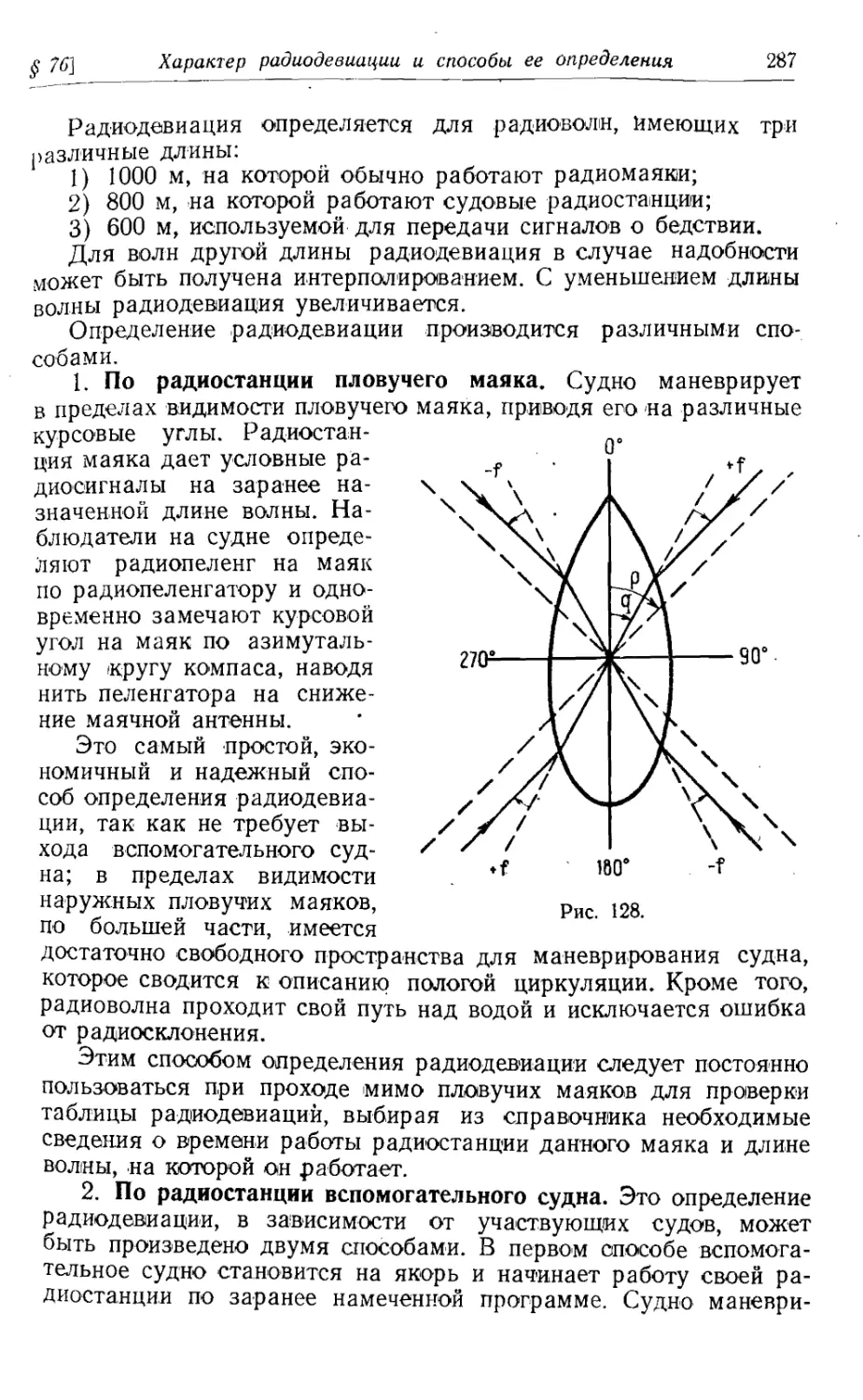
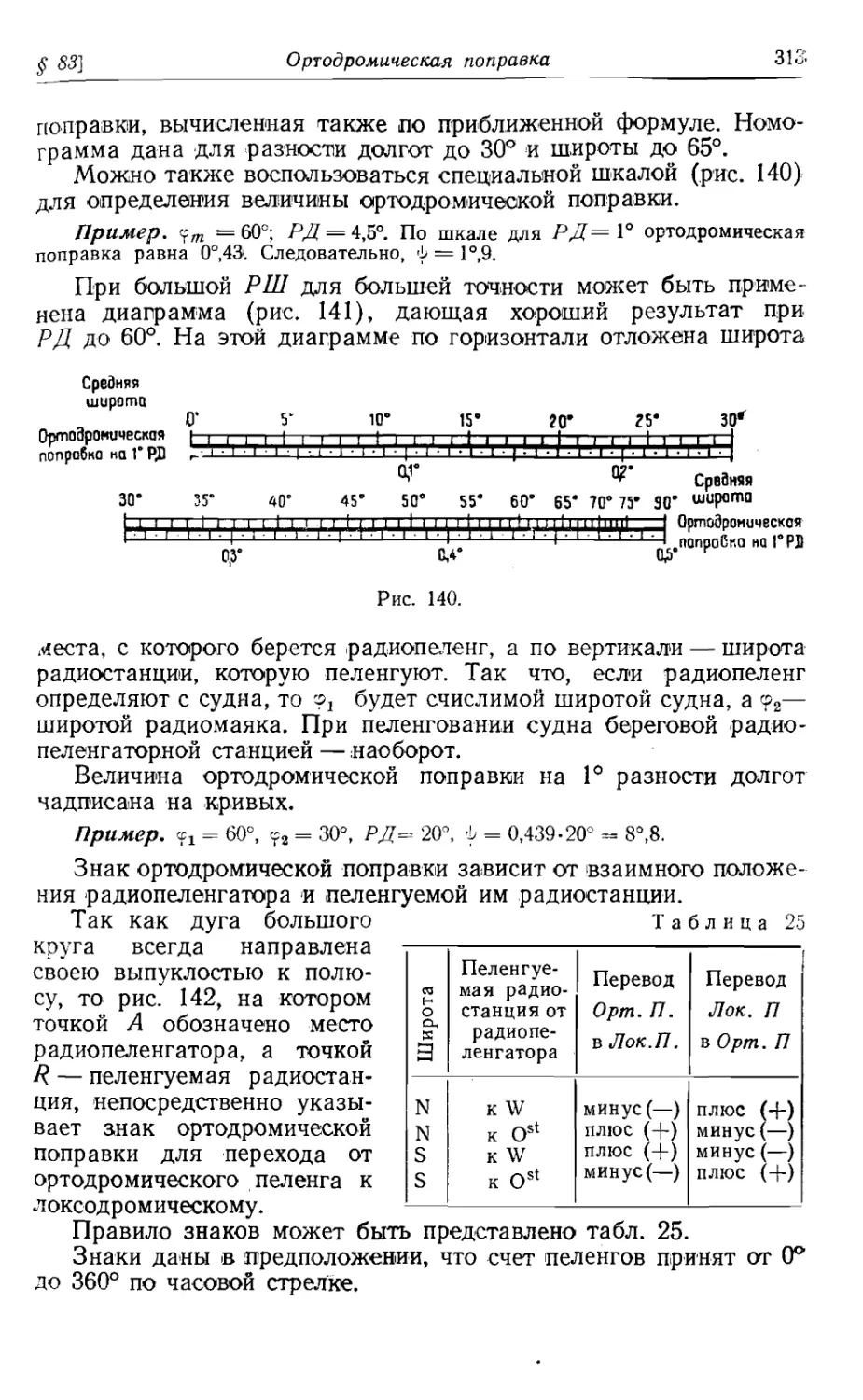
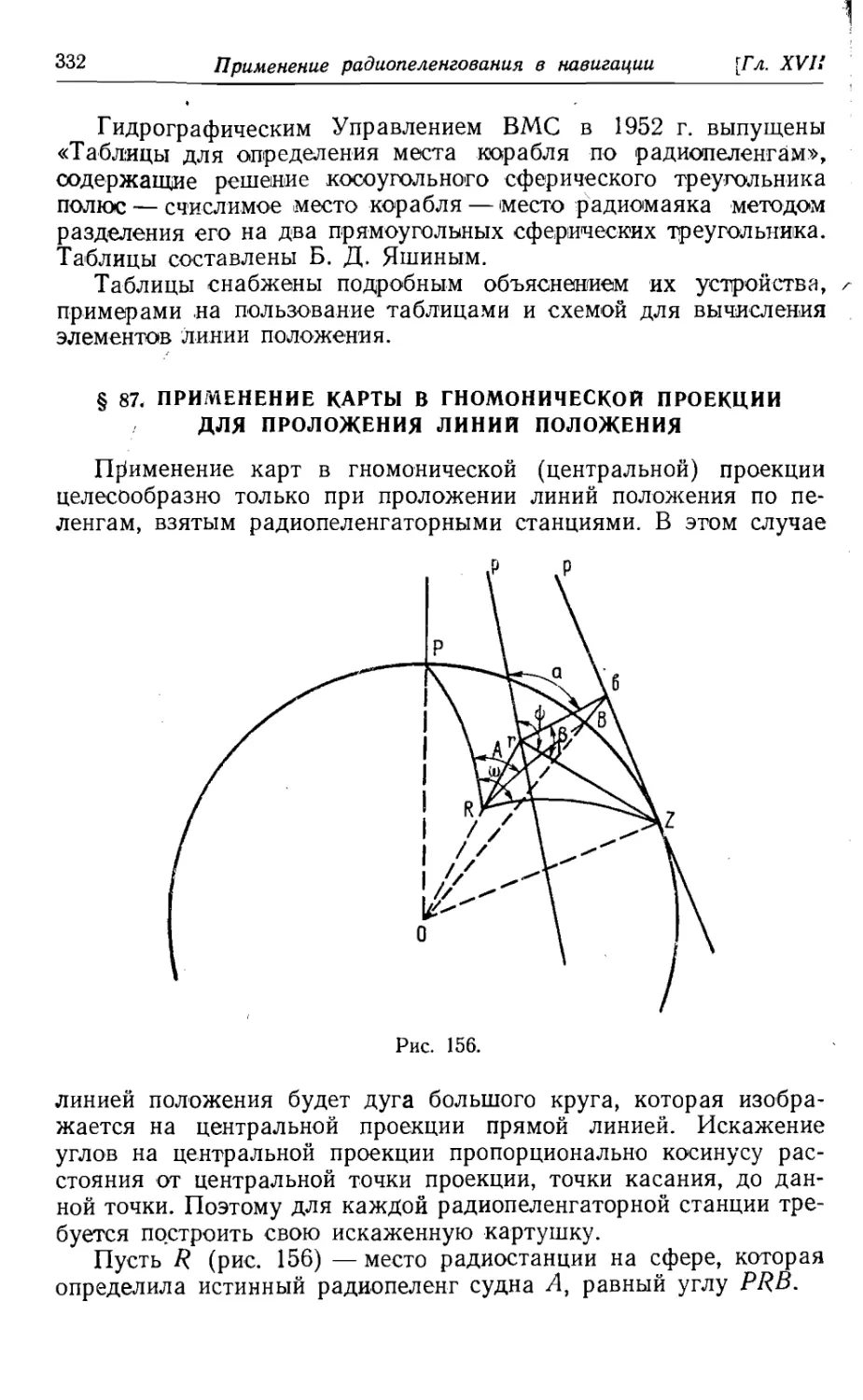
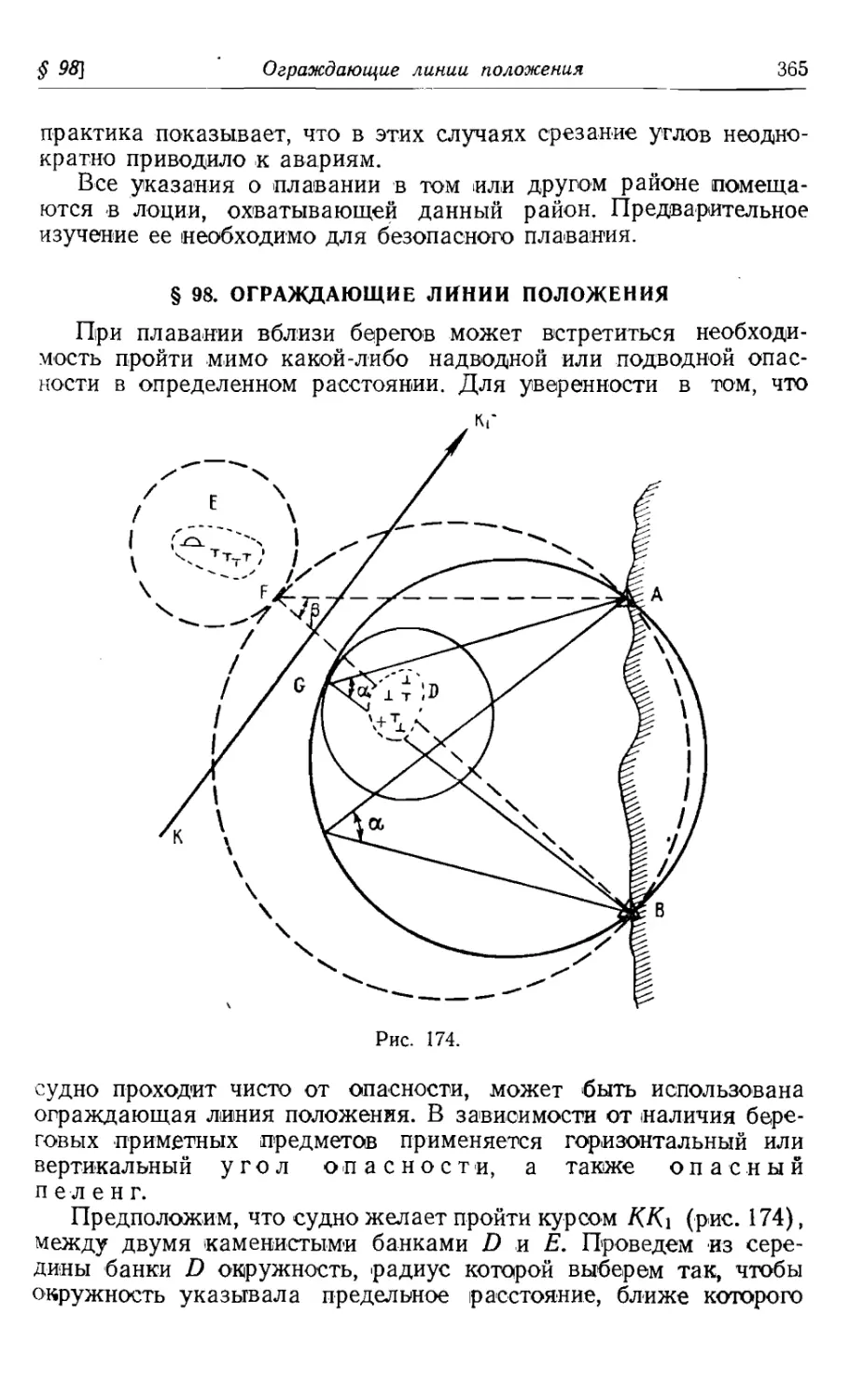
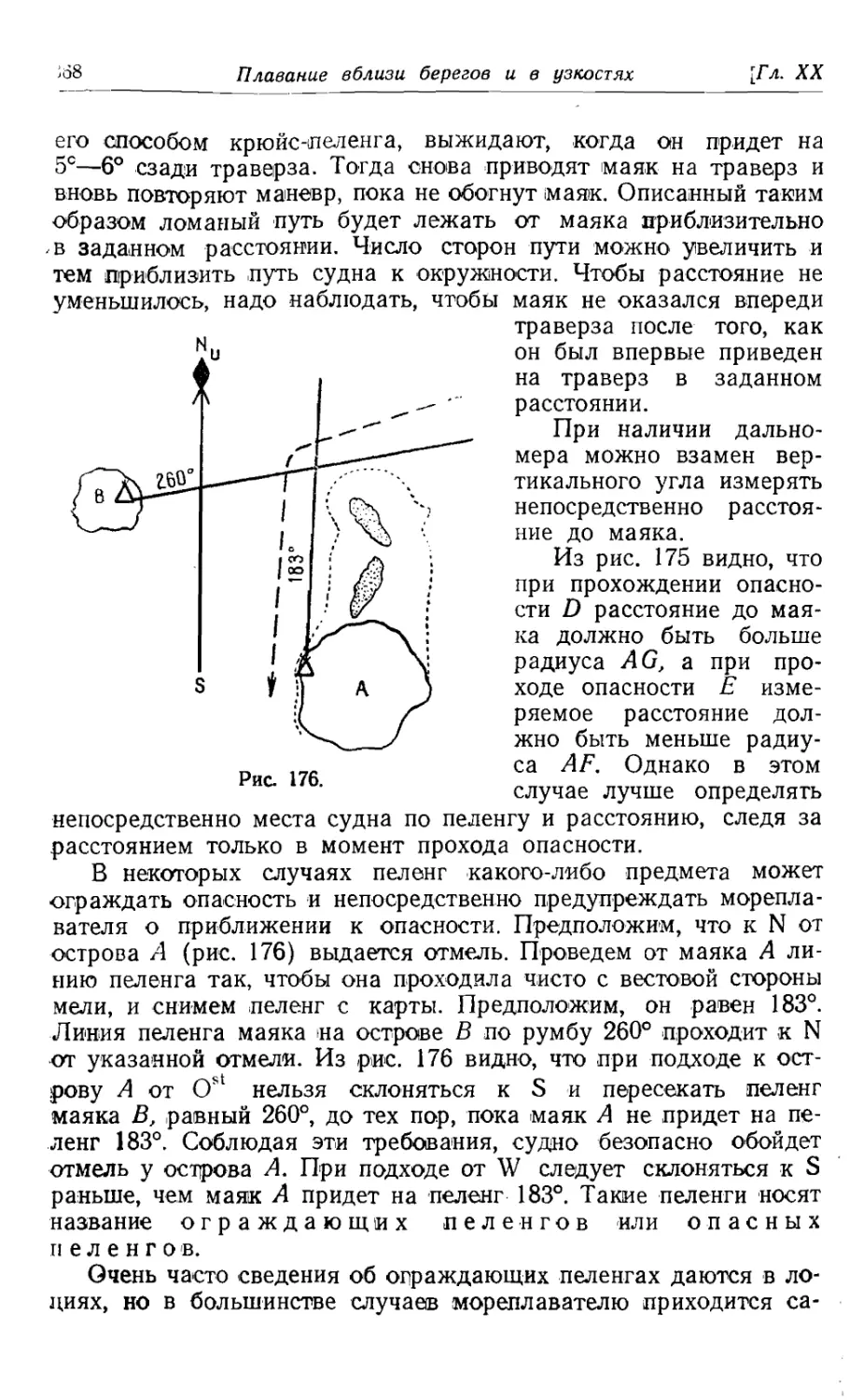
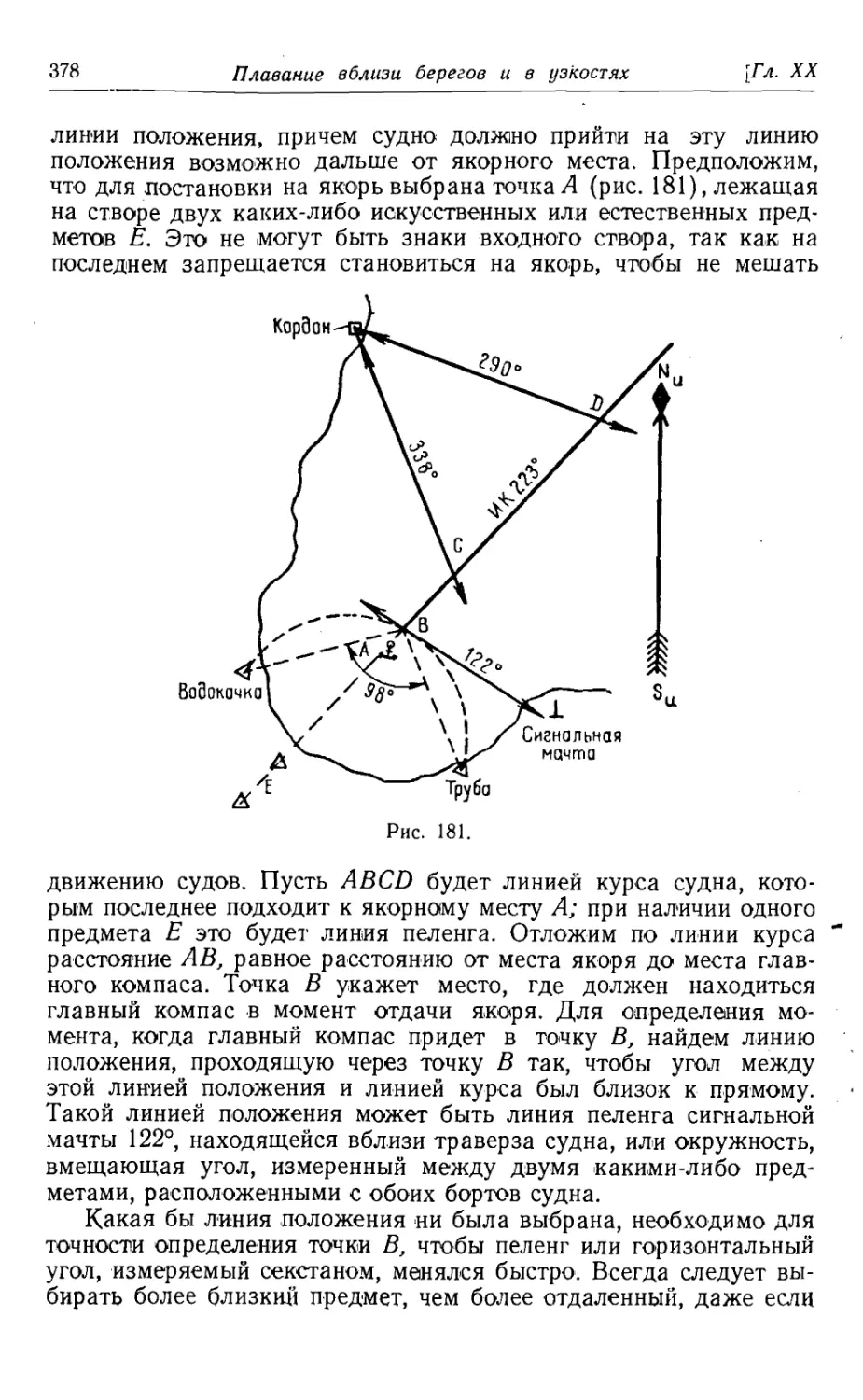
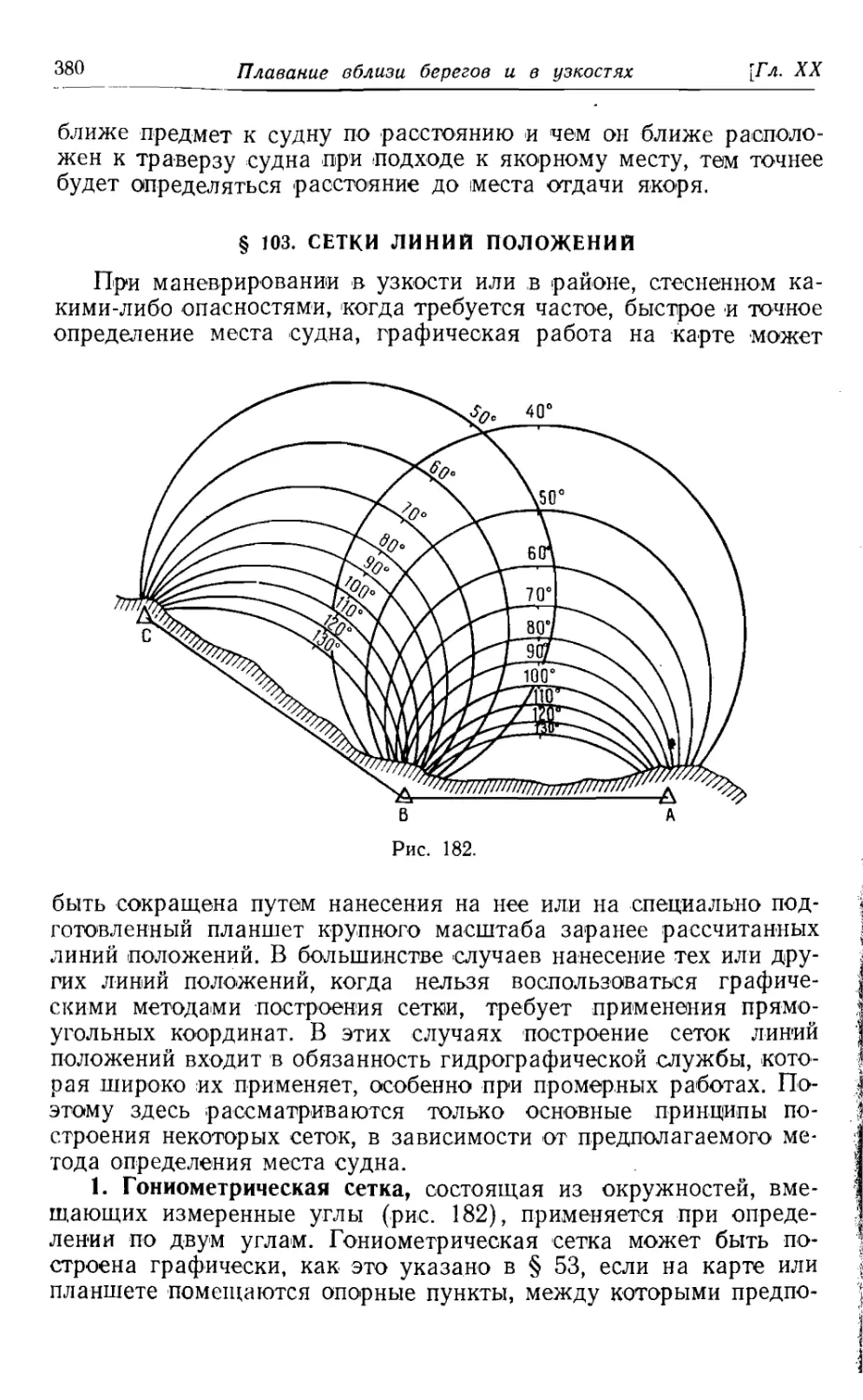
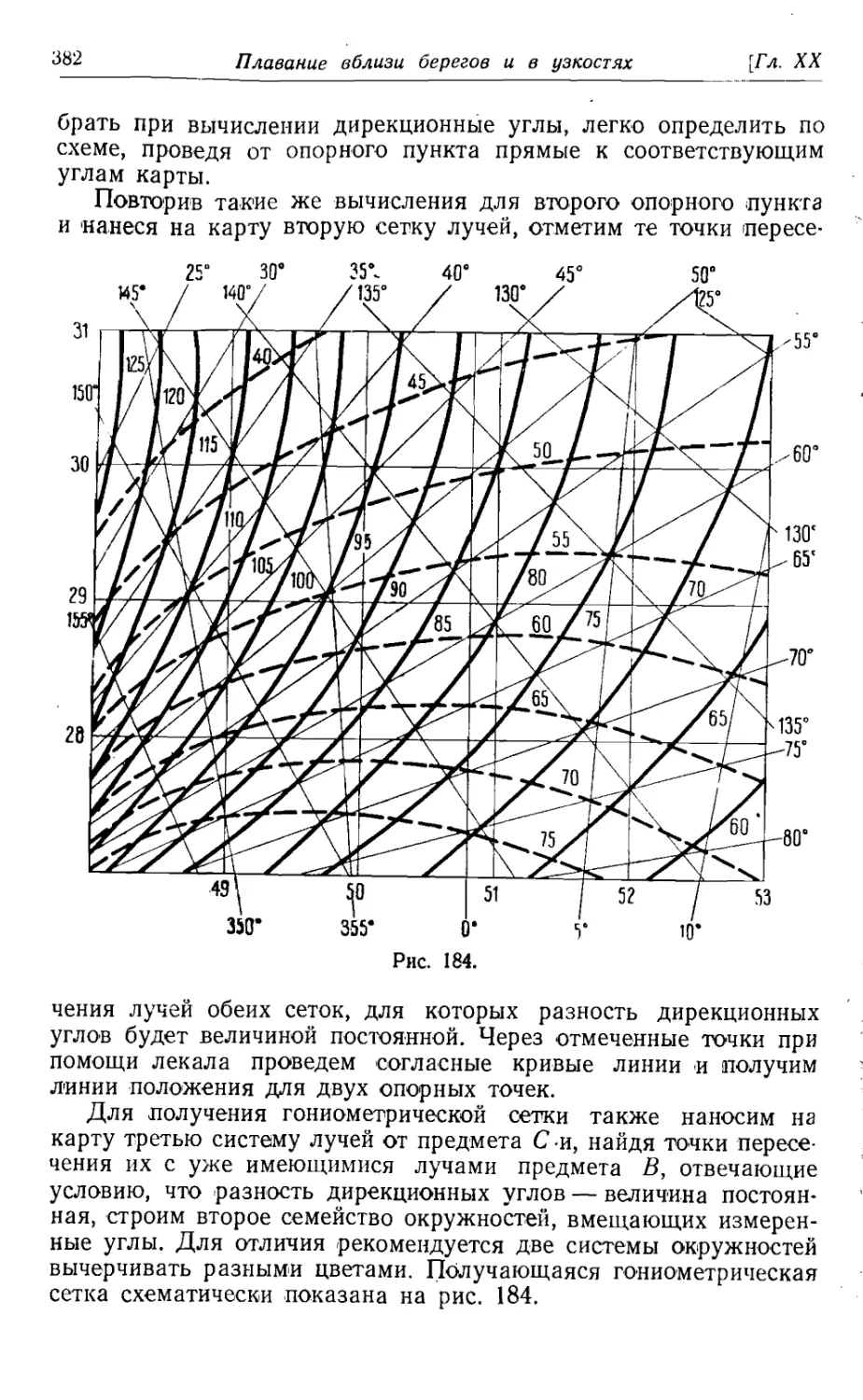
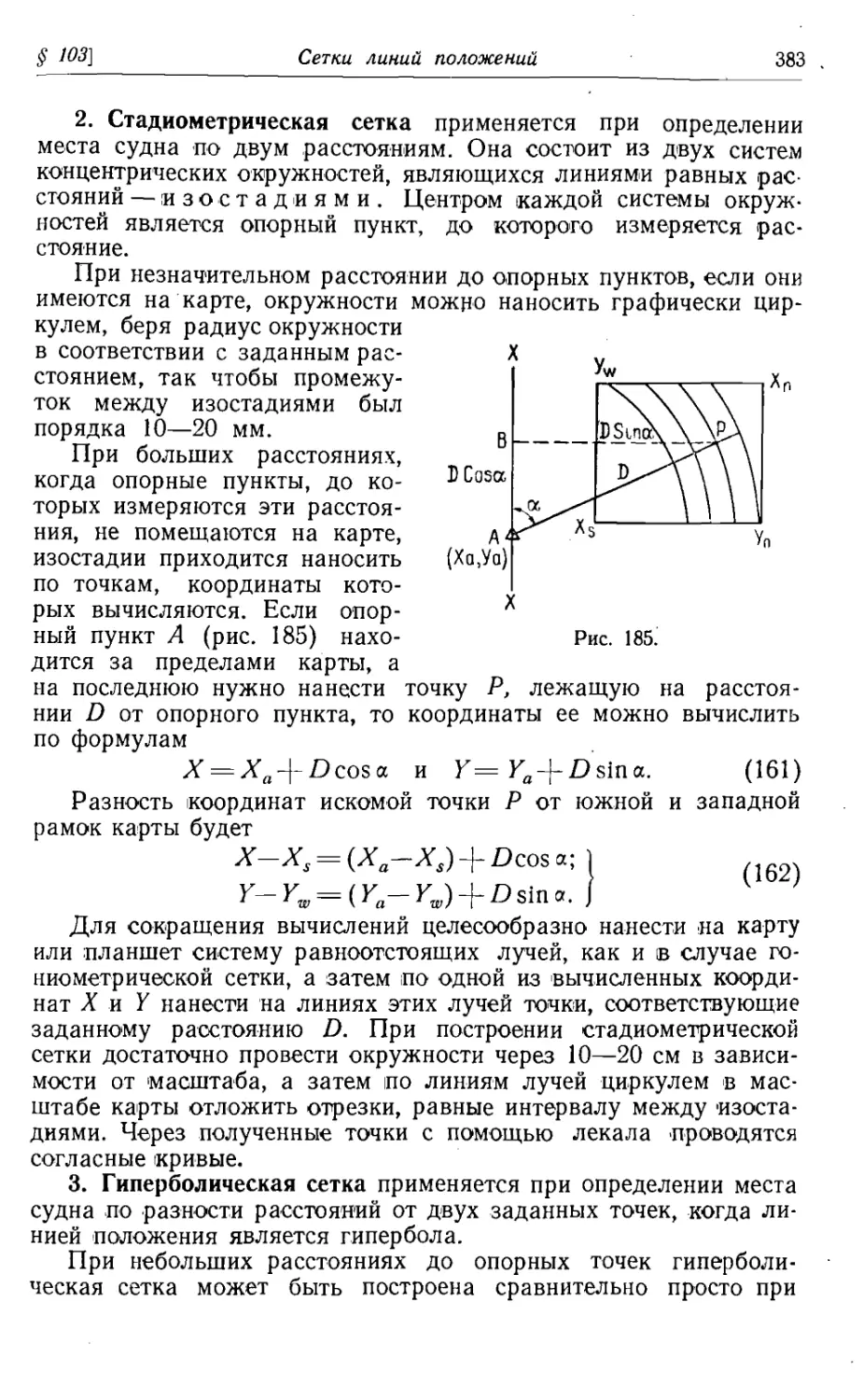
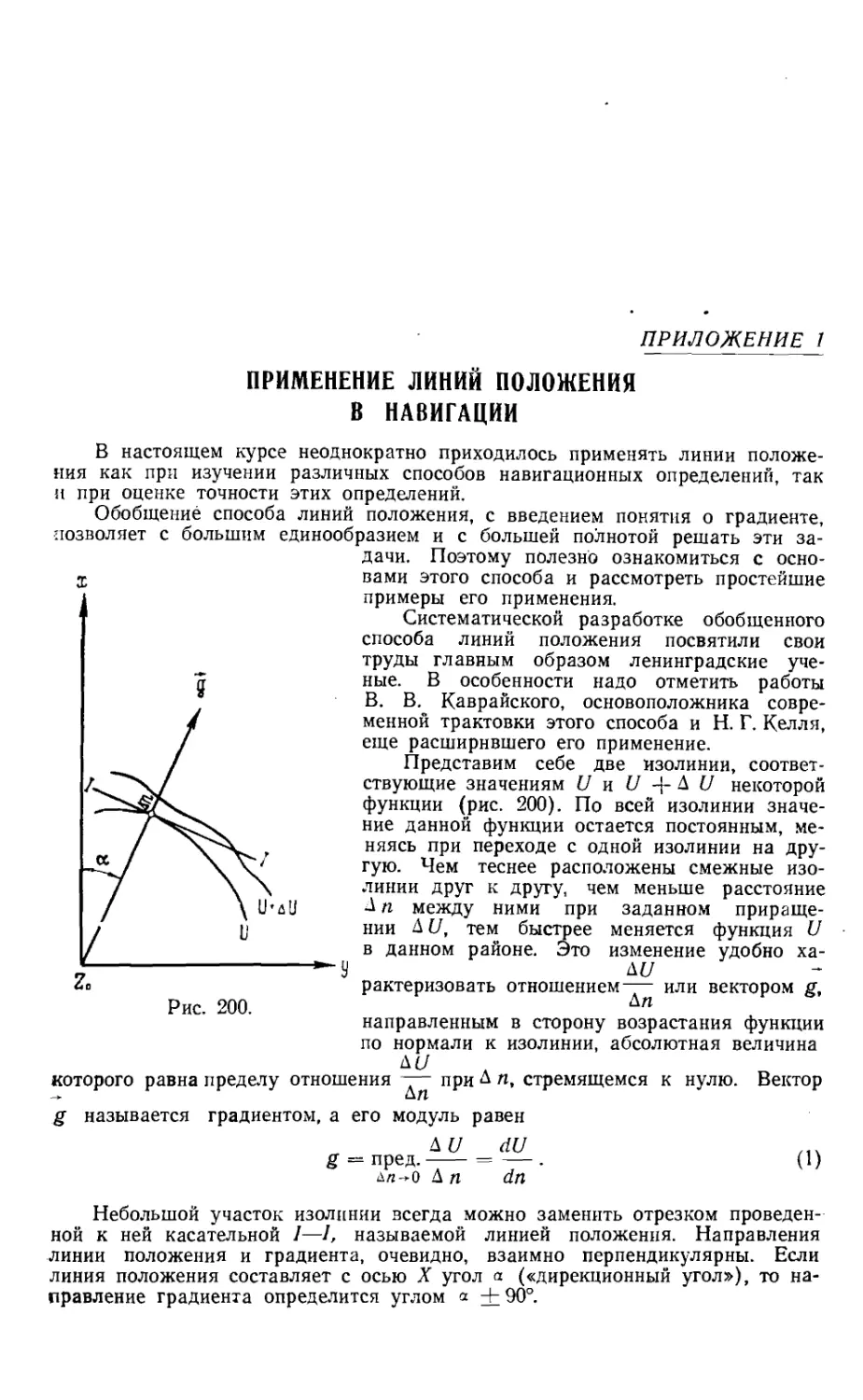
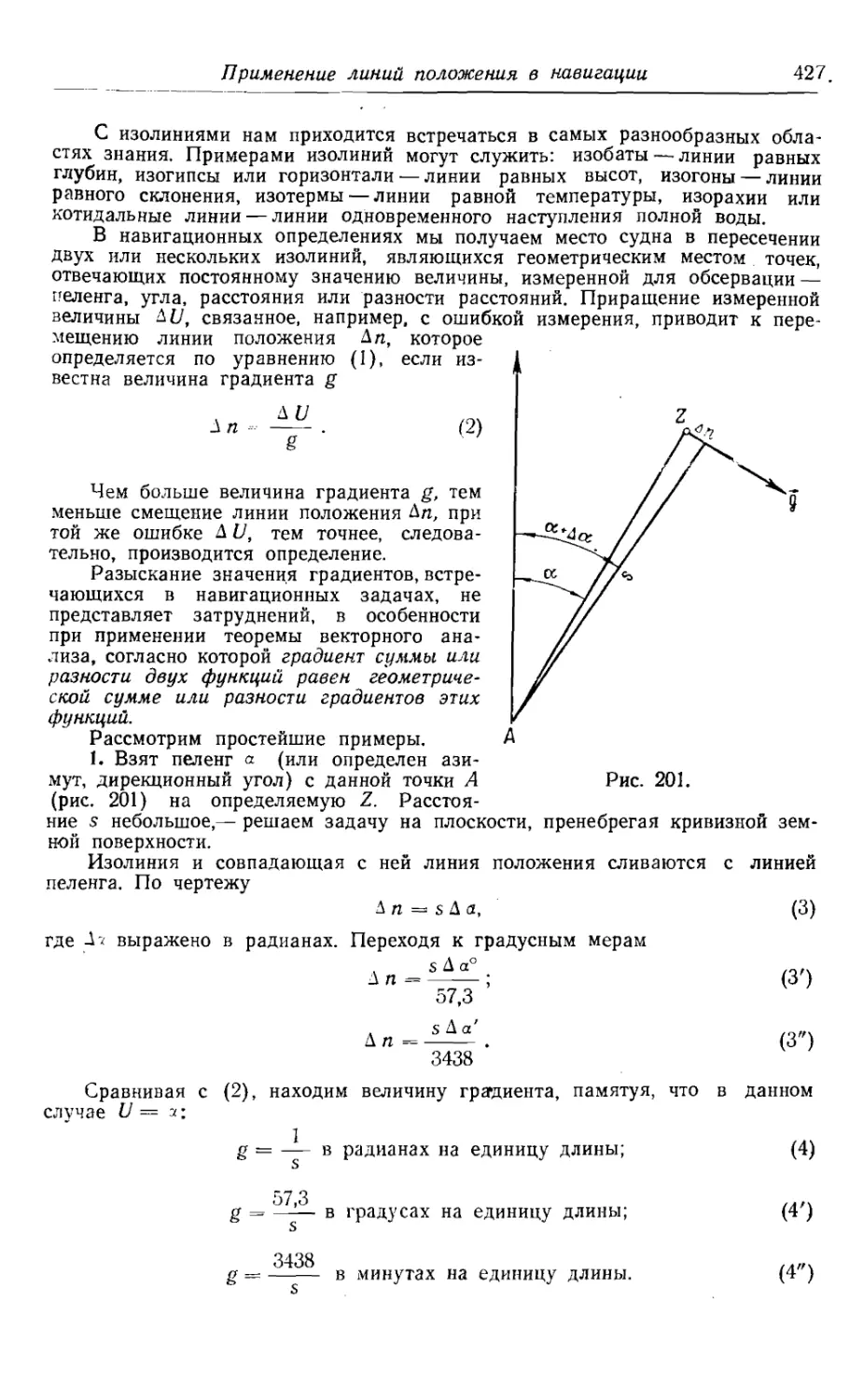
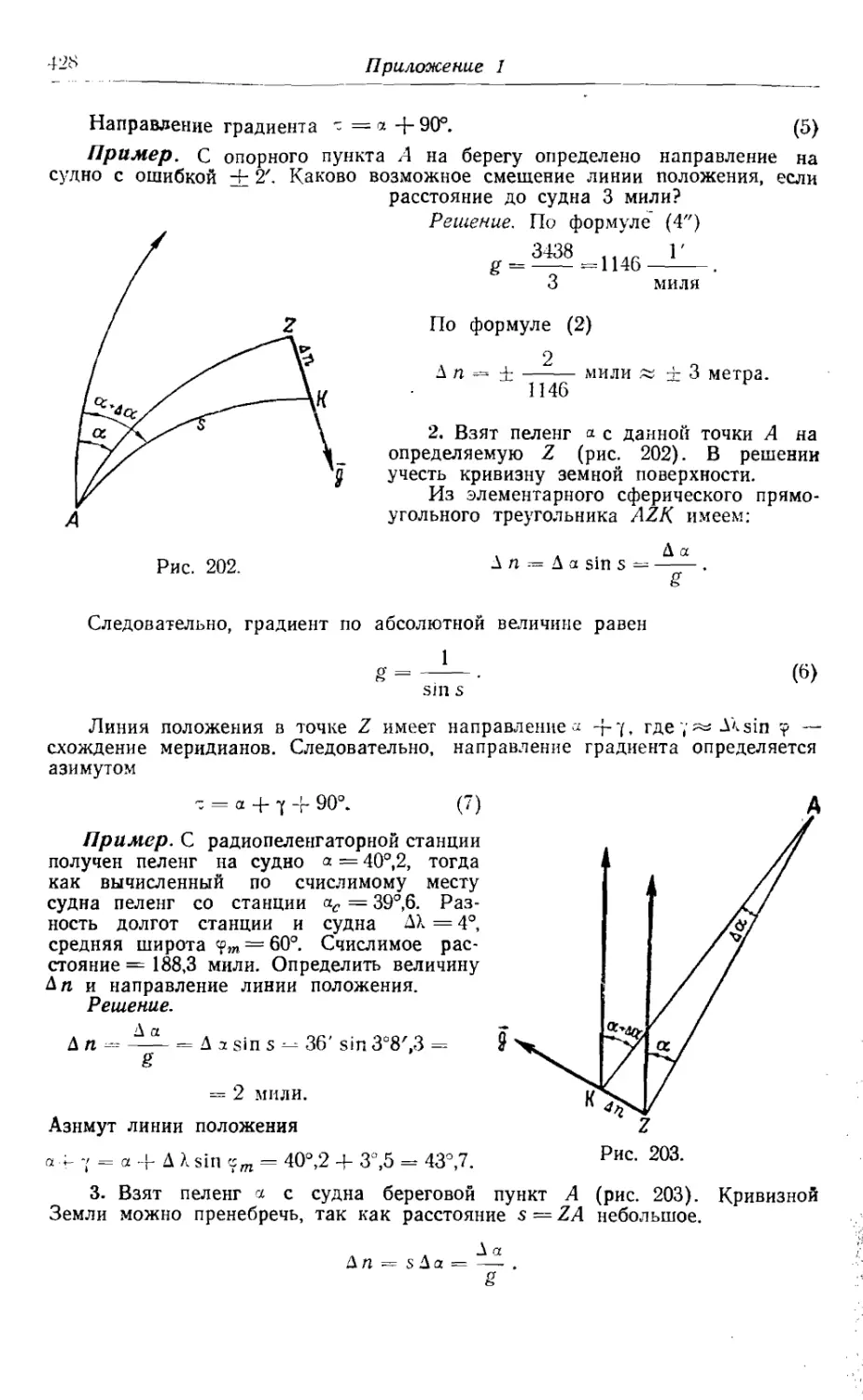
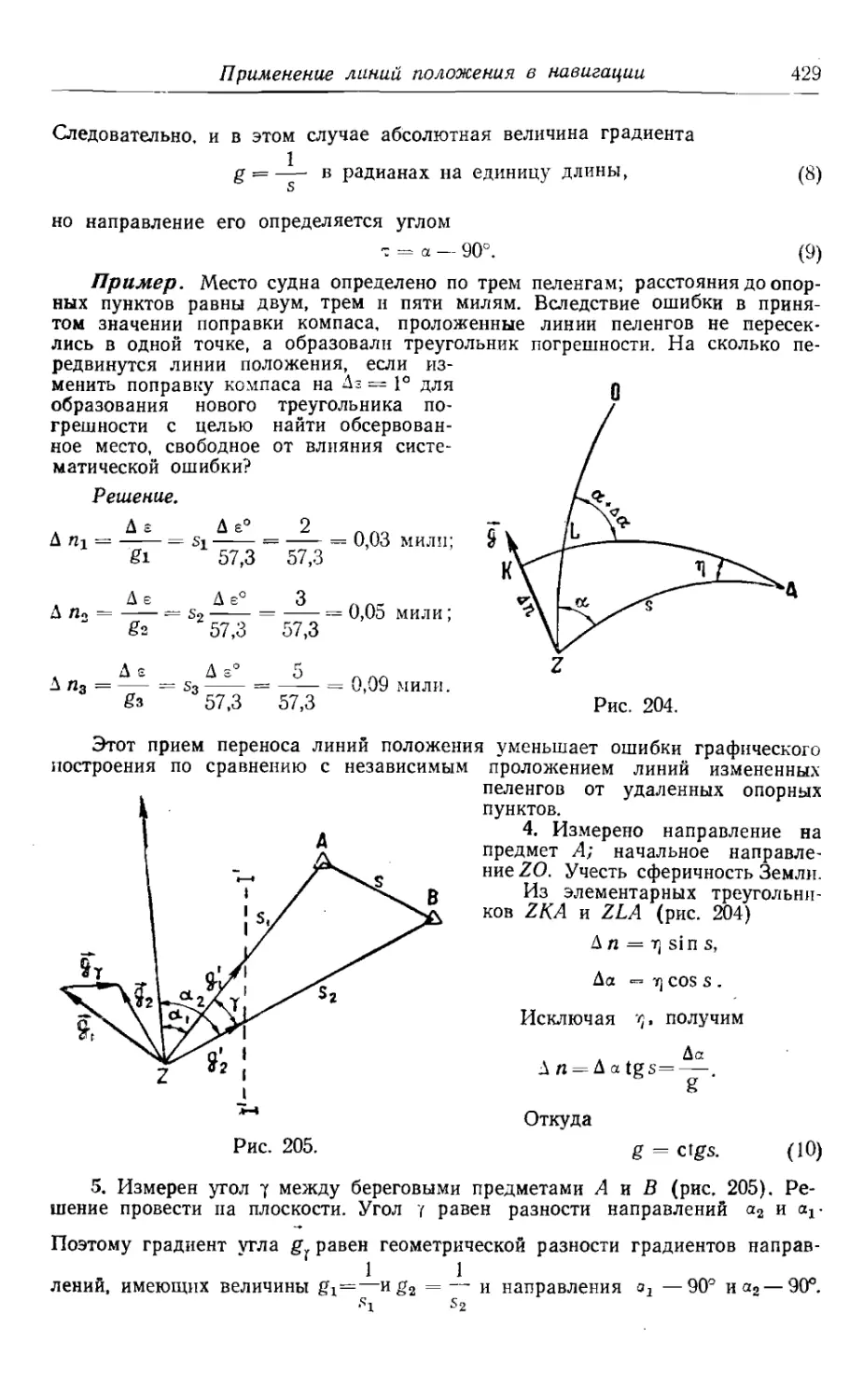
Текст
К. С. УХОВ
ПРОФЕССОР
НАВИГАЦИ
ИЗДАНИЕ ЧЕТВЕРТОЕ
ПЕРЕРАБОТАННОЕ
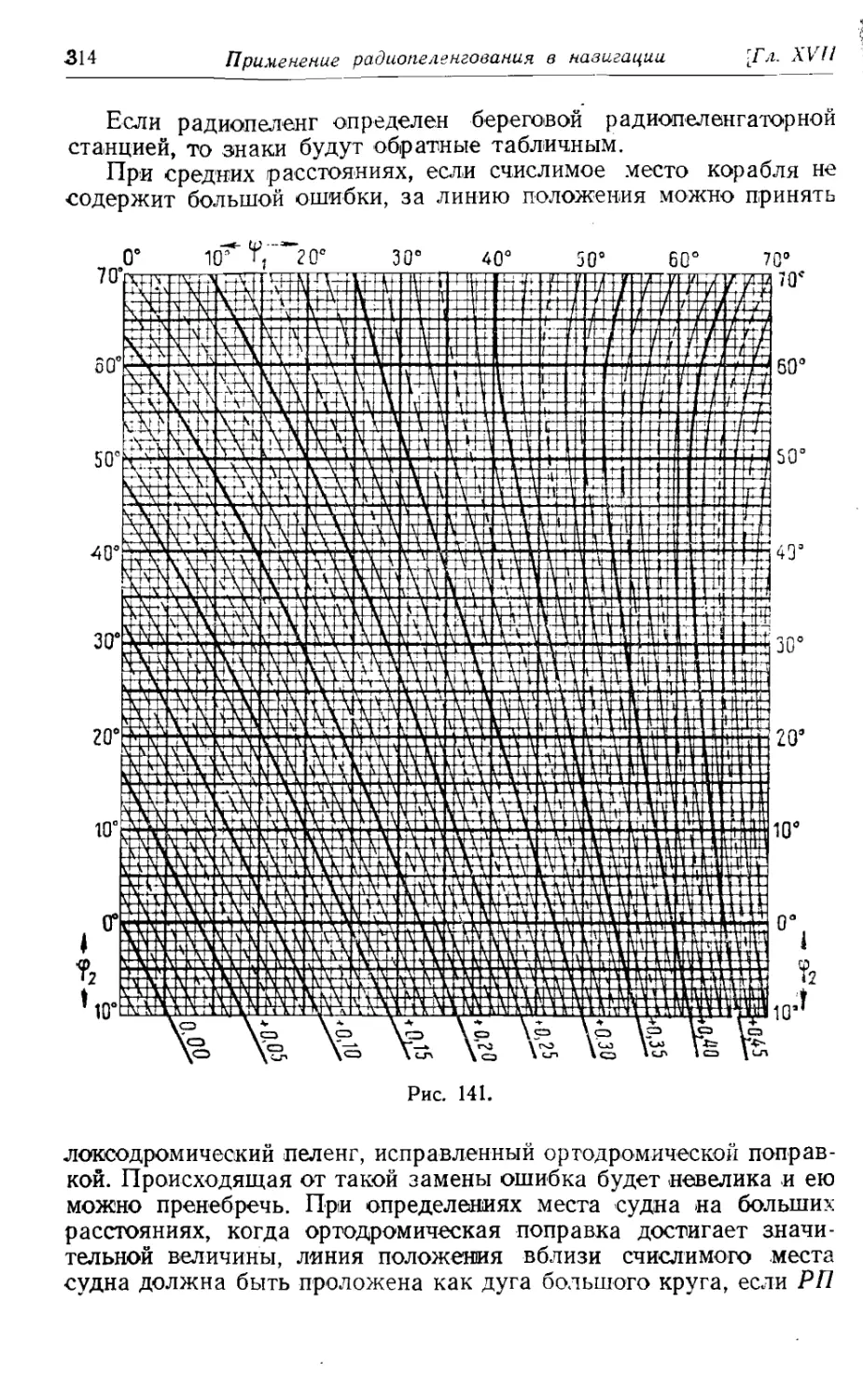
И ДОПОЛНЕННОЕ
Допущено
Гласным управлением учебными заведениями
Министерства морского и речного флота СССР
в качестве учебника
для высших учебных заведений ММРФ
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ВОДНОГО ТРАНСПОРТА
ЛЕНИНГРАДСКОЕ ОТДЕЛЕНИЕ
Ленинград 1954
ПРЕДИСЛОВИЕ К ЧЕТВЕРТОМУ ИЗДАНИЮ
Настоящий учебник предназначен для судоводительских фа-
культетов высших мореходных училищ и составлен по программе
курса «Навигация», читаемого на этих факультетах.
Третье издание учебника было значительно переработано по
сравнению с более ранними изданиями и дополнено с тем, чтобы
возможно полнее удовлетворить требованиям, предъявляемым к
учебникам, предназначенным для студентов высших учебных за-
ведений. Ряд вопросов изложен с достаточной полнотой и снаб-
жен необходимыми примерами, чтобы учебник мог служить по-
собием и практическим руководством для капитанов и штурманов.
Разработанный доктором физико-математических наук, лау-
реатом Сталинской премии, профессором В. В. Каврайским «Об-
общенный способ линий положения» не был включен автором в
основной текст учебника, как не входящий в программу курса
навигации для судоводительских факультетов высших мореход-
ных училищ. Однако, по желанию редакции и ряда лиц профес
сорско-преподавательского состава, в приложении к учебнику
дано «Применение линий положения в навигации», составленное
доктором военно-морских наук, профессором А. П. Ющенко.
При подготовке четвертого издания учебника приняты во вни-
мание замечания, сделанные кафедрой судовождения Ленинград-
ского Высшего мореходного училища, а также пожелания отдель-
ных научных работников в области судовождения.
Ряд ценных замечаний, учтенных при подготовке рукописи
настоящего издания к печати был сделан проф. А. П. Ющенко,
которому автор приносит большую благодарность.
Автор будет признателен читателям за все замечания и по-
правки, направленные к дальнейшему улучшению учебника.
Автор
ВВЕДЕНИЕ
Слово «навигация» происходит от латинского слова «navi-
gare», что значит «ездить по морю». В русский язык это понятие
вошло еще при Петре I, когда все обучавшиеся за границей мор-
скому делу стали называться «навигаторами».
В 1701 г. последовал указ об учреждении в Москве школы
«Математических и Навигацких, то есть мореходных хитростно
наук учению». В школе обучались наукам, знание которых необ-
ходимо для судовождения. С тех пор слово навигация получило
двойственное значение: как «езда по морю» и как одна из дис-
циплин судовождения.
По мере развития науки, судовождение стало распадаться на
ряд отдельных дисциплин. Для того чтобы решить основную за-
дачу судовождения — провести судно из данного места в другое
наивыгоднейшим путем, безопасно и точно, требуется изучение
района плавания в географическом отношении, а также условий
плавания в нем, знание различных правил, относящихся к море-
плаванию, систем ограждений в разных водах и всевозможных
пособий для мореплавания. Круг этих вопросов составляет сущ-
ность дисциплины — лоция.
Определение влияния на магнитный компас судового железа
и различных электроустановок, а также разработка методов ком-
пенсации этого влияния вызвали к жизни с появлением желез-
ного судостроения дисциплину — теория девиации маг-
нитных компасов.
Изучением методов определения места судна в открытом море
по небесным светилам занимается мореходная астро-
номия.
Судно находится одновременно на дне воздушного и на по-
верхности водного океанов, подвергаясь непосредственному влия-
нию перемещающихся в этих океанах масс воздуха и воды.
Изучение законов движения воздушных масс составляет дис-
циплину — метеорологию, а изучением движения масс
воды занимается океанография. Обе эти дисциплины обес-
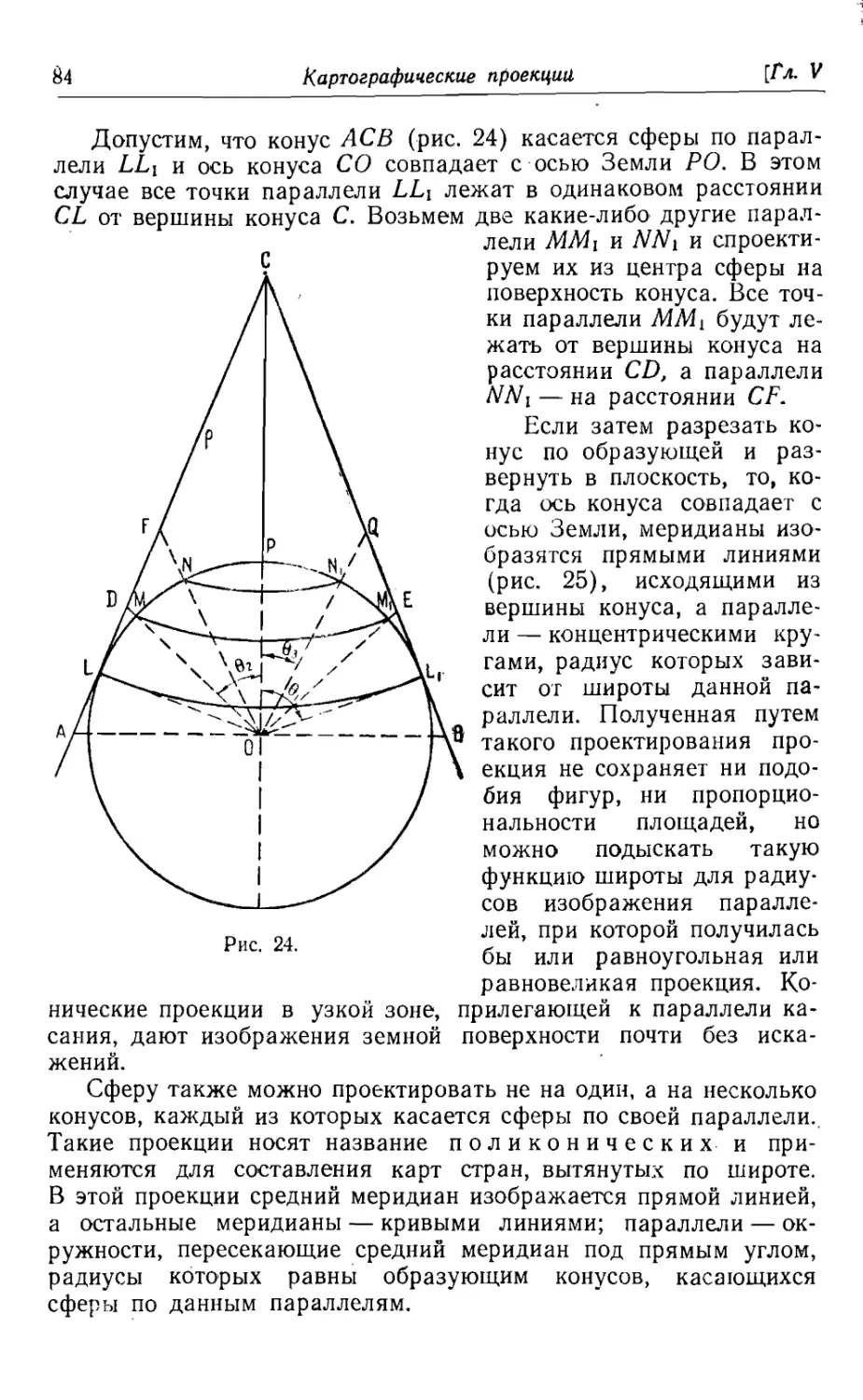
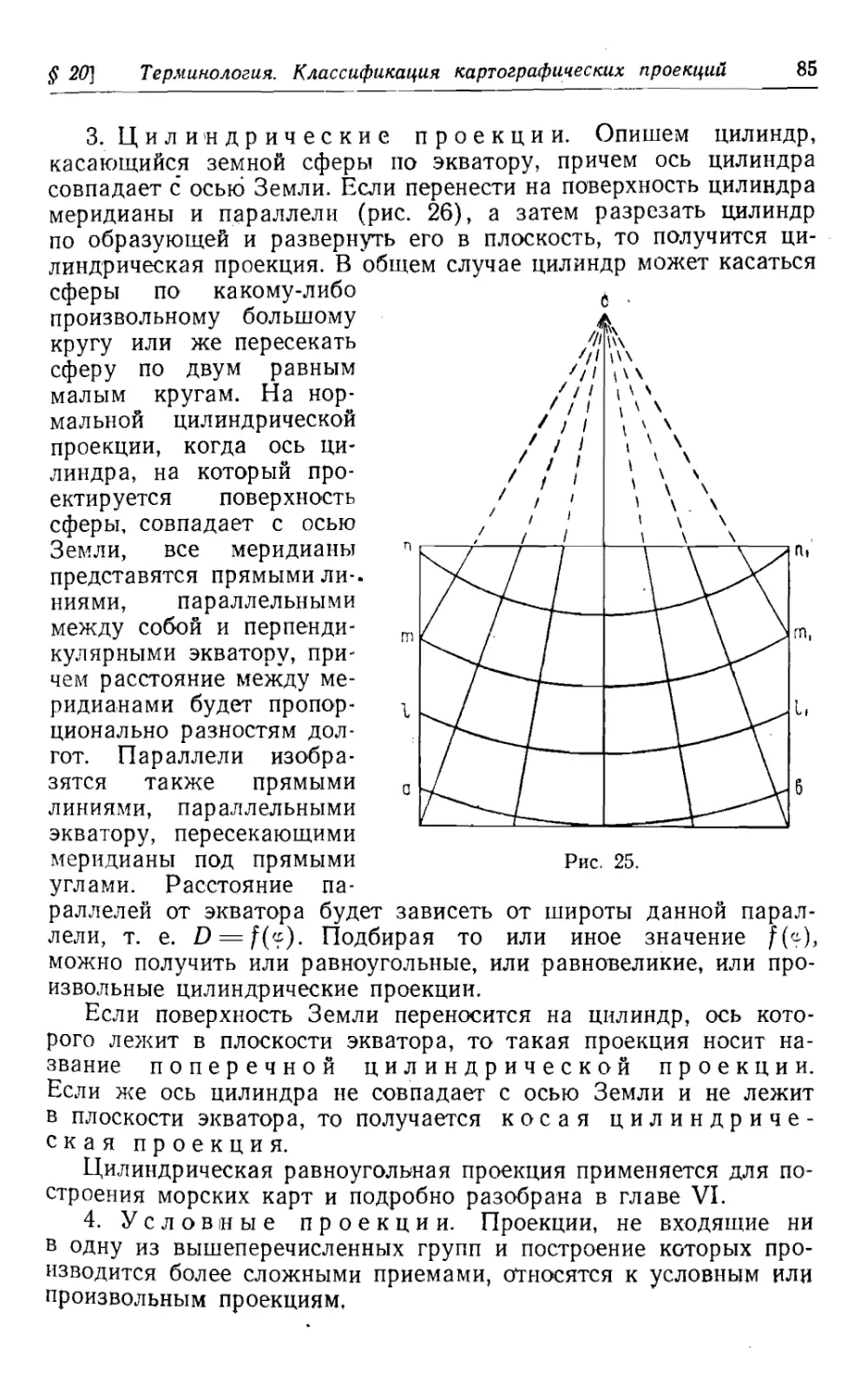
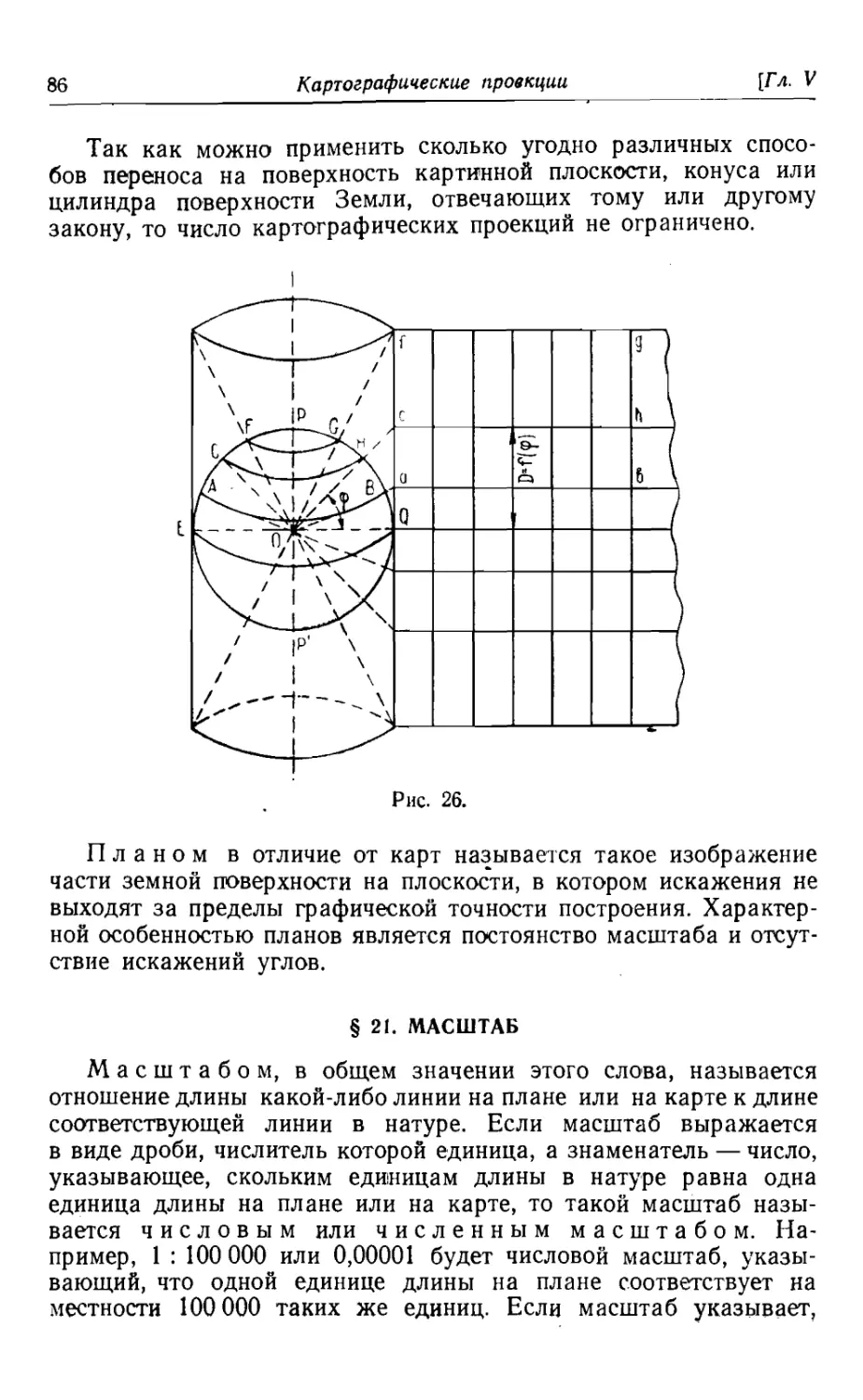
печивают безопасность судовождения.
Развитие техники за последнее время позволило создать ряд
сложных и важных приборов для судовождения, главными из
которых являются гирокомпасы и радиопеленгаторы. Изучение
Введение
материальных средств судовождения также выделяется в отдель-
ную дисциплину.
В ряде указанных дисциплин навигация занимает веду-
щее место, разрабатывая основы судовождения и непрерывного
учета движения судна в море, которое только и может гаранти-
ровать безопасность плавания.
Непрерывный учет движения судна в море в силу ошибок в
определении направления и скорости его движения требует по-
стоянного контроля, основанного на независимых от движения
судна наблюдениях береговых предметов или небесных светил.
Таким образом, комплекс вопросов, охватываемых навигацией,
как ведущей дисциплиной науки о судовождении, заключает
в себе:
а) основные понятия о нашей Земле и определение морепла-
вателем на ее поверхности направлений и расстояний;
б) прокладку на картах пути судна в различных обстоятель-
ствах и рассмотрение применяемых для этого карт;
в) определение в море места судна по береговым предметам
при помощи различных материальных средств, в том числе и
специальных радиоустановок.
Навигация является точной дисциплиной, основанной на ма-
тематической базе. Однако судно на переходе морем находится
под воздействием на него двух стихий — водной и воздушной,
которые вносят свои поправки в навигацию. Обстановка, в кото-
рой находится судно, не всегда позволяет применить точные, раз-
работанные навигацией методы определения места судна. Но
всегда лучше иметь приближенное место, которое судоводитель
определяет при неблагоприятных условиях с большей или мень-
шей точностью, чем никакого.
Уметь разобраться в создавшейся навигационной обстановке,
критически оценить точность имеющегося места судна и принять
правильное решение можно только на основе изучения навигации.
В навигации сталкиваются два начала: теоретические требо-
вания, обеспечивающие точность судовождения, и конкретная
практическая обстановка на море, требующая опытности и искус-
ства от судоводителя. Только искусное судовождение, основанное
на научно-математической базе в соединении с опытом, обеспе-
чит безопасность судна при плавании в любой обстановке и при
любых условиях. Навигация по мере развития точности средств
судовождения изменяет и совершенствует методы судовождения.
То, что мы имеем в настоящее время в этой области, далеко еще
не достаточно, и наша общая задача — способствовать развитию
навигации в соответствии с общими темпами развития нашей
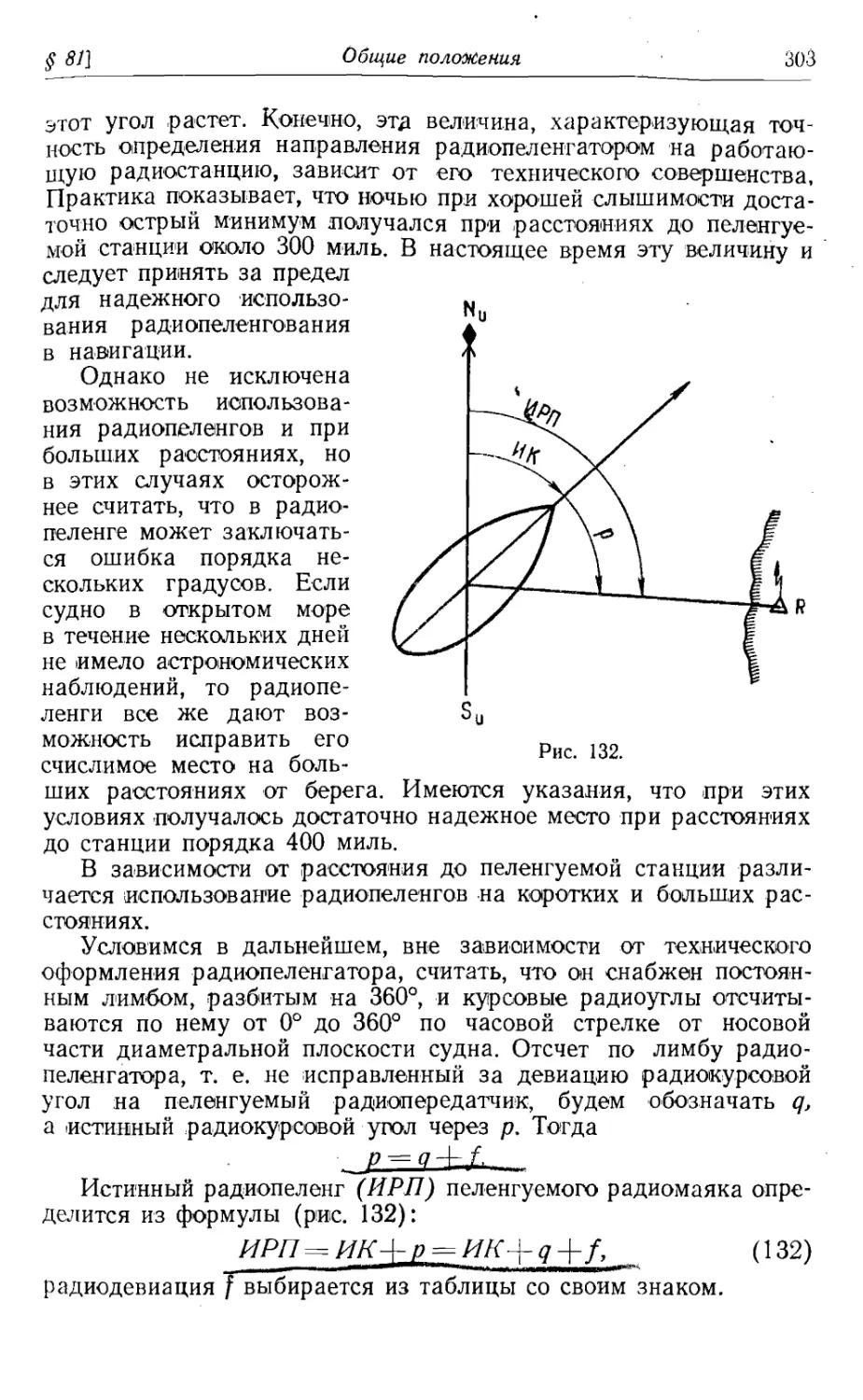
страны и добиваться, чтобы советские моряки при всех обстоя-
тельствах уверенно вели свои суда через все моря и океаны.
КРАТКИЙ ИСТОРИЧЕСКИЙ ОЧЕРК
С древнейших времен наши далекие предки, славяне, были
известны как смелые и искусные мореплаватели. Славянские пле-
мена, расселившиеся по берегам больших рек восточной части
Европы, со временем дошли по течению рек до их устьев и осво-
или берега Черного, Балтийского и Белого морей. Различные
исторические памятники свидетельствуют о плавании славян по
Средиземному морю и прилегающим к нему окраинным морям.
Сохранились сведения о плавании славян по Адриатическому
морю, Славянскому Ядрану, на берегах которого возникла сла-
вянская Венеция — Дубровник. Поморские славяне были равно-
правными хозяевами Балтийского моря и доходили до берегов
Англии, где ими были основаны славянские поселения.
Первые русские морские походы в конце VIII — начале IX вв.
хорошо известны в русской морской истории. Во времена похо-
дов Олега, Игоря, Владимира и Ярослава и их борьбы с Визан-
тией на суше и на море Черное море получает название «Рус-
ского моря». В этот же период русские мореходы, используя реки,
проникают и в Каспийское море.
Появление в XII в. в южных степях кочевого народа — полов-
цев затруднило плавание русских по Черному морю, а нашествие
татар в 1237 г. прекратило плавание русских по южным морям
более чем на три столетия, до появления на Черном море запо-
рожских казаков (XVI и XVII вв.).
На севере и северо-западе Великий Новгород с древнейших
времен развивал свое мореплавание на Балтийском море; Север-
ная Двина и Обь вывели новгородцев в Студеное море. Сотни
лет враждебная деятельность датчан, шведов и ливонских рыца-
рей оттесняла новгородцев от берегов Балтики. В половине XIII
века шведы захватили Финляндию, которую они до этого счи-
тали принадлежащей русским, и в одной из своих современных
хроник отметили: «Русский король мог теперь не досчитаться по-
терянной области».1
На севере наши поморы продолжали прокладывать новые
морские пути. К началу XIV в. по Северному Ледовитому океану
1 Веселаго Ф., Очерк русской морской истории, ч. I, 1875 стр. 37.
Краткий исторический очерк
7
плавало много русских судов, поддерживая связи с западным
побережьем Норвегии. Путь из Белого моря в обход Скандинав-
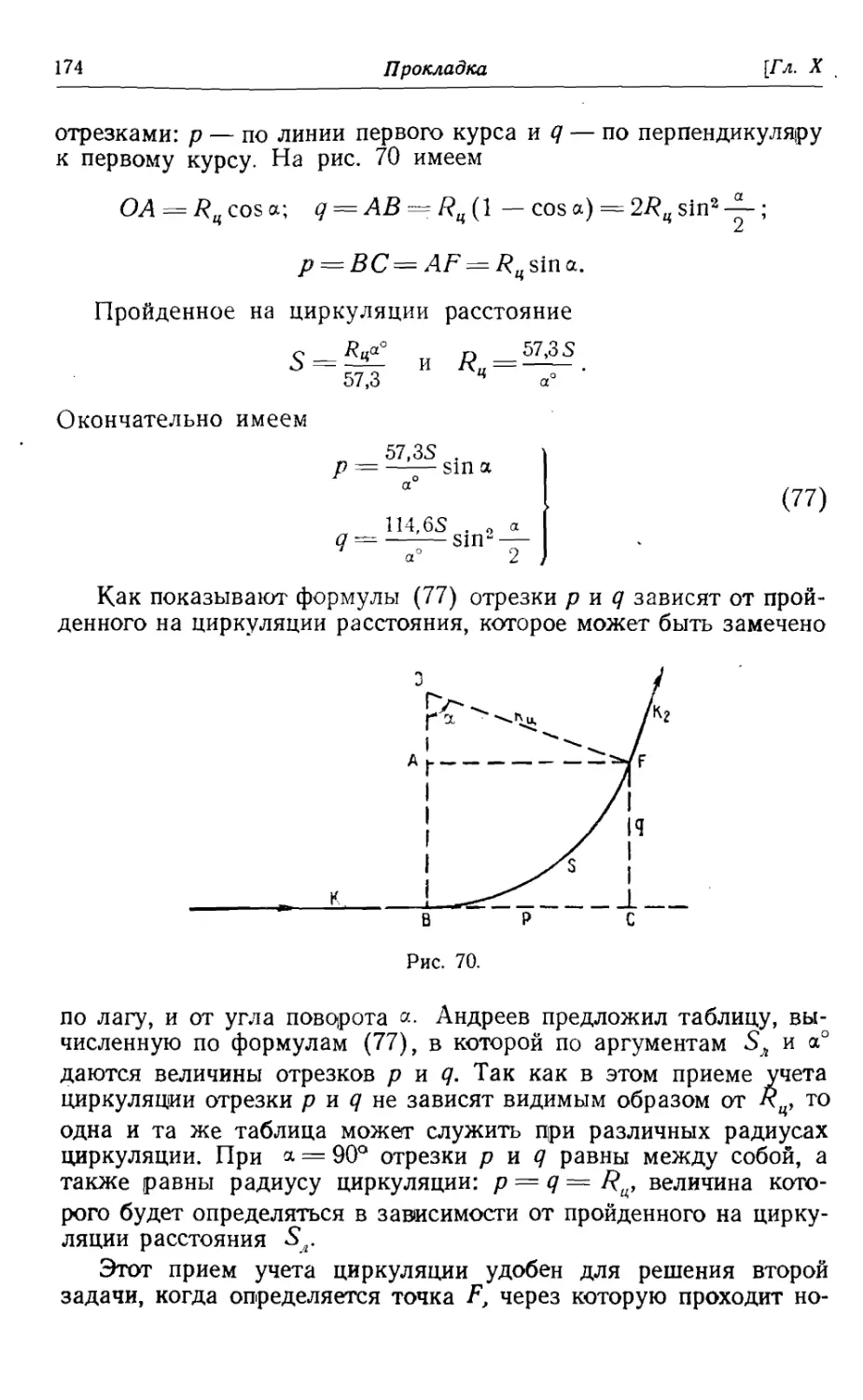
ского полуострова был широко известен русским с конца XV в.
В этот период русские осваивают и пути в Арктику.
Связь с Европой только по Северному пути не могла удовлет-
ворить потребности постепенно развивавшегося и набиравшего
силу Московского государства. Уже в конце XV века внешняя
политика России ориентируется в сторону Балтийского моря.
Особенно ярко она выразилась в борьбе Ивана IV за возвраще-
ние берегов Балтийского моря.
Феодальная раздробленность страны и неблагоприятная меж-
дународная обстановка явились обстоятельствами, в результате
которых на рубеже XVI—XVII вв. Россия оказалась отброшен-
ной от южных морей и Балтики. Возвращение Россией при
Петре I своих исконных владений и возрождение ее как морской
державы явилось исторической справедливостью.
Сохранившиеся письменные источники, служащие для изуче-
ния плаваний наших предков, излагают различные события на
море, описывают маршруты и берега, т. е. носят характер лоций,
но не дают никаких сведений ни о методах судовождения, ни
о технических средствах судовождения, которыми тогда пользо-
вались. Известные в настоящее время материалы по методике
судовождения относятся только к началу XVIII в. Возможно, что
это обстоятельство и явилось причиной ограниченного взгляда на
то, что история русского мореплавания начинается с Петра I.
Находка в 1940—1941 гг. советскими исследователями в Арк-
тике на острове Фаддея, на берегу залива Симса, уникальных
навигационных приборов: медного компаса, бумажных картушек
от компаса и солнечных часов в деревянных футлярах, относя-
щихся к первой четверти XVII в., представляет существенный ин-
терес. Эта находка указывает на сравнительно высокое качество
применявшихся в это время навигационных приборов и их пол-
ное сходство с более поздними приборами, описание которых
можно найти в письменных материалах XVIII в. Можно предпо-
лагать, что найденные предметы представляют типичные русские
навигационные приборы, применявшиеся мореплавателями того
времени, и что часть из них представляет собой изделия русских
мастеров, скорее всего, поморов.
Деятельность Петра I по созданию русского флота, связан-
ная с его успешной борьбой за возвращение России ее исконных
морей, была настолько яркой, что надолго определила дальней-
шее развитие русского флота и оставила глубокий след в истории
России.
14 января 1701 г. Петр издает указ об учреждении навигацкой
школы «.. .во избаву же и пользу православного христианства
8
Краткий исторический очерк
быть Математических и Навигацких, то есть мореходных хитро-
стно наук учению». С этого дня можно считать начало в России
организованного обучения морским математическим наукам.1
Навигацкая школа в первые годы своего существования была
по сути дела политехнической школой, так как, кроме моряков,
подготовляла геодезистов, топографов, артиллеристов, инже-
неров и даже преподавателей для открытых тогда губернских
школ.
Одним из преподавателей школы был Леонтий Филиппович
Магницкий, образованнейший человек того времени. Л. Ф. Маг-
ницким был составлен учебник арифметики, третья часть кото-
рого посвящена навигации и мореходной астрономии. Арифметика
Магницкого по праву является первым учебным пособием, по
которому учились многие прославленные русские моряки.
Магницкий занимал в школе ведущее положение, и, по свиде-
тельству одного современника, иностранные учители школы Грейс
и Грин, «хотя и навигаторами написаны, но до Леонтия наукою
не дошли».
Составленная Магницким «Арифметика» была напечатана
в Москве в 1703 г. славянским шрифтом с арабскими цифрами.
Последняя часть арифметики — логистика, «не ко гражданству
токмо, но и к движению небесных кругов принадлежащая», носит
заглавие «Обще о земном размерении, и яже мореплаванию при-
надлежит». Здесь помещены некоторые сведения из астрономии
и навигации, а для решения задач приложено довольно много
различных таблиц, как, например, склонения Солнца, рефракции,
параллакса, широты и долготы 26 примечательных городов и
мест и др. Широта места определялась посредством астрономиче-
ского кольца, долгота — по сравнению показаний местных сол-
нечных часов с исправными карманными, установленными по
начальному меридиану.
Арифметика Магницкого — первое русское сочинение по мате-
матике и частично по навигации, в котором, по словам самого
автора, он «.. .разум весь собрал и чин, природно русский, а не
немчин».
Для учеников навигацкой школы в 1703 г. в Москве напеча-
таны «Таблицы логарифмов и синусов, тангенсов и секансов».
В этих таблицах текст напечатан славянским шрифтом, цифры —
арабским. Эти таблицы были переизданы в 1716 г. уже граждан-
ским шрифтом. Библиотекарем Куприяновым в 1723 г. в Москве
были изданы «Таблицы склонения солнца, сочиненныя по амстер-
дамскому меридиану, от лета господня 1720 по 1741 год». Под
этим заглавием имеется книга, в которой в одном переплете
1 Еще ранее, в 1697 г., были отправлены три партии стольников в Вене-
цию и четвертая — в Англию и Голландию для усвоения морского искусства.
Заглавный лист «Книги полного собрания о навигации»,
морского корабельного флота капитаном Семеном Мордвиновым
сочинения.
10
Краткий исторический очерк
собраны различные навигационные таблицы, как, например, таб-
лица разности широт и отшествий, меридиональных частей и дру-
гие. Можно предположить, что это были первые русские пособия
по судовождению.
Петр I, обращая исключительное внимание на развитие рус-
ского флота, непосредственно принимал деятельное участие в раз-
витии знаний, необходимых для мореплавателей. Он руково-
дит рядом гидрографических работ; при съемке Финского залива
дает указание, чтобы расстояния между островами мерились
зимою по льду «понеже вернее будет». Ему же принадлежит идея
первого гидрографического трала. В своей инструкции по промеру
Финского залива Петр I предлагает искать подводные камни
«.. .спустя веревку фут на пятьдесят, у которой внизу гири,
а наверху поплавки подлежат быть, якобы неводы дабы мог
зацепить где есть подводный камень».
Океанограф Мори свидетельствует, что «честь первой попытки
достать образцы морского дна с большой глубины принадлежит
Петру Великому».
При Петре I издано около двух десятков различных сочине-
ний по всем отраслям морского дела, как оригинальных, так
и переводных. В числе немногих известных рукописей того вре-
мени, приготовленных к печати, находятся учебные руковод-
ства по навигации и мореходной астрономии. Но наибольшего
развития наука о судовождении достигает уже после смерти
Петра, когда приобрели практический опыт ученики навигацкой
школы и морской академии, учрежденной осенью 1715 г.
2 марта 1721 г. в России состоялось большое производство
моряков в мичманы и унтер-лейтенантьк Среди произведенных
многие оставили свое славное имя в истории развития судово-
ждения. ^Из йних следует отметить Ст. Малыгина, известного
своими описания^Хеверных берегов Сибири. Его труд «Сокра-
щенная навигациЖЙо карте де-редукцион», изданньш в 1733 г.,
является первой русской работой по частному вопросу навигации.
Товарищами Малыгина по производству были Алексей Чириков,
открывший северо-западный берег Америки на полутора суток
раньше Беринга, и Алексей Нагаев, ученый гидрограф. Создан-
ные последним карты и лоции служили нашим мореплавателям
около 60 лет, д^1812 г.
В 1739 г. Ф. Соймонов издает «Экстракт штурманского искус-
ства из наук, принадлежащих к мореплаванию, сочиненный в во-
просах и ответах для пользы и безопасности мореплавания».
Полный курс навигации составляется капитаном морского
корабельного флота Семеном Мордвиновым. Этот труд под загла-
вием «Книги полного собрания о навигации», изданный в 1748 г.,
по справедливости может считаться первым полным курсом на-
вигации и по своей полноте позволяет судить о состоянии науки
Краткий исторический очерк
11
О судовождении в середине XVIII в. Первая часть этого учебника,
состоящая из двух книг, посвящена вопросам геометрии и триго-
нометрии. Вторая часть также состоит из двух книг: первая —
«О сфере небесной» рассматривает вопросы космографии, вто-
рая — «О земноводном корпусе» посвящена географии.
Часть третья — под длинным названием «Наука о взыскании
расстояния светил от главных кругов и времени, по взысканиям
ширины и длины, всякого на земноводном корпусе места и таб-
лицы разные в себе содержащая» относится к мореходной астро-
номии. В первой книге третьей части — «О взыскании расстояния
светил от главных кругов» разбираются вопросы, связанные
с движением небесных светил, а вторая книга — «О взыскании
времени и мест на земноводном корпусе» посвящена вопросам
времени и расчету прилива по прикладному часу. В разделе, где
рассматривается определение широты, приведено подробное опи-
сание современных автору морских астрономических приборов.
Интересно отметить, что в книге определение долготы рассматри-
вается только для астрономов по затмениям Луны и спутников
Юпитера, а для мореплавателей дается указание, что секрет
определения долготы не известен, и только через «много трудные»
разные способы можно рассчитать долготу с погрешностью.
Четвертая часть работы С. Мордвинова подробно разбирает
те вопросы, которые теперь относят к навигации. В этом разделе
указывается, что, по имевшимся тогда сведениям, магнит привез
в Европу Марк Павел Венецианин из своего путешествия в Китай
в 1260 г.; неаполитанский купец Дамалфий открыл способность
магнита указывать на магнитный полюс, а Иоанн Жира построил
магнитный компас в 1300 г. Для определения магнитного склоне-
ния компаса рекомендуются четыре способа: а) по кульминации
светила; б) по двум соответствующим наблюдениям с^ного све-
тила по обе стороны меридиана; в) по двшфшаблюдениям вос-
хода и зах^а одного светила и г) по азим^^ светила в момент
восхода и захода.
Основным содержанием всего раздела является весьма под-
робный разбор плавания по счислению, задачи на которое ре-
шаются графически и по пятизначным логарифмам с точностью,
значительно превышающей возможности навигации того времени.
Для облегчения графического решения задач^по письменному
счислению используется карта де-редюкцион, представляющая
собой простой прямоугольный график, на котором проведены
радиусы, соответствующие румбам, и дополнительные окружно-
сти, разделенные на градусы. Такой график позволяет решать
прямоугольные треугольники, следовательно, и задачи письмен-
ного счисления. Для этой же цели служила и «гонтирская
шкала», составленная из графического изображения таких триго-
нометрических функций, как синус, тангенс и секанс. Получаемые
12
Краткий исторический очерк
по письменному счислению места исправлялись астрономическими
определениями. Отметим, что в книге совершенно не применяются
навигационные определения места судна, хотя пеленги уже из-
вестны и подробно рассмотрены как средство для составления
карт. В книге приведен пример, как два судна, стоя на якоре
на определенном расстоянии один от другого, берут пеленги при-
метных мест и определяют таким образом их положение.
Можно предположить, что навигационные обсервации не при-
менялись в то время, вследствие неточности самих карт. Только
в одном месте имеется указание, что следует взять пеленг бере-
гового предмета при удалении от берега на 5 миль, чтобы в даль-
нейшем вести письменное счисление.
Кроме разобранного капитального труда, Семен Мордвинов
оставил еще несколько сочинений по морским вопросам, в том
числе каталог мореплавателям, содержащий астрономические
таблицы и таблицы приливов.
Вторая половина XVIII в. особенно богата работами русских
ученых в области мореплавания. Разработкой этих вопросов за-
нялась Петербургская Академия наук.
Академик Леонард Эйлер выпускает работу под заглавием
«Полное умозрение строения и вождения кораблей».
Академик Даниил Бернулли пишет трактат по гидродинамике;
уравнение Бернулли до сего времени лежит в основе теории
гидравлических лагов.
Еще более важное значение имеют работы Михаила Василье-
вича Ломоносова.
Рассматривая работы М. В. Ломоносова только в области
судовождения, следует указать, что в своем знаменитом труде
«Рассуждение о большой точности морского пути», доложенном
на собрании Академии наук 8 мая 1759 г., М. В. Ломоносов со
свойственной ему ^шрзорливостыо и точностью ,мысли формули-
рует основы корабтевождения и приводит соображения о необ-
ходимости дальнейшего развития навигационных приборов.
«Двумя, как известно, между собой разными образы положе-
ние корабля на море ищут и определяют. Первое ширину из
вышины светил, долготу по сравнению времени на меридиане
корабельном со временем на первом меридиане. Второе по указа-
нию компаса и но скорости корабельного ходу, которой вервью
измеряют или по силе ветра и по числу и положению парусов
примечают, и по тому долготы и широты места корабельного
ищут»,— говорит Ломоносов и сейчас же предлагает целый ряд
приборов для более точного решения поставленной задачи.
В ряду навигационных приборов, по его собственным словам,
«.. .из сих суть главнейшие: самопишущий компас, дромометр,
клизеометр, циматометр и салометр, которые на своем месте опи-
саны и употребление их истолковано».
Краткий исторический очерк
13
Самопишущий компас, явившийся первым по времени курсо-
графом, состоял из картушки, вокруг которой мог передвигаться
й устанавливаться на заданный курс легкий обод с карандашом.
Часовой механизм передвигал бумагу, а карандаш писал на ней
кривую линию — курсограмму, которая, по словам Ломоносова
«.. .покажет стоящего у правления прошибки и оплошность». Для
определения отклонений от курса Ломоносов предлагал вырезать
из курсограммы отдельно отклонения вправо и влево, а затем
взвешивать куски бумаги на чувствительных весах, что должно
показать, в какую сторону корабль больше отклонялся.
Клизеометр или дрейфомер предназначался для определения
дрейфа по отклонению тонкого линя, на котором буксировался
продолговатый предмет (палка).
Дромометр, предложенный Ломоносовым, явился первым
образцом стационарного лага с вертушкой. Вращение вертушки
с помощью тонкой веревки передается на ряд шестерен, состав-
ляющих счетчик. Так как при качке ось вертушки наклоняется
под некоторым углом к горизонту, что создает небольшую ошибку
в показании лага, Ломоносов предусмотрел специальный прибор
циматометр для учета этой ошибки. Циматометр состоит из тяже-
лого отвеса, установленного в диаметральной плоскости судна,
и двух систем шестеренок. Верхняя пара шестеренок соединена
храповиком с продолжением отвеса, и при отклонении отвеса при
килевой качке храповик поворачивает первую шестеренку на
число градусов, равное отклонению отвеса от вертикали; вторая
шестеренка является счетчиком, суммирующим отклонение отвеса
в градусах. Нижняя пара шестеренок считает число колебаний
отвеса. Таким образом, «имея общее число градусов от всех ко-
лебаний, должно оное разделить на число зыбей или корабель-
ных наклонений; выйдет из того общий угол к горизонту, который
познав, сравнить можно кривую линею общ$я волны с другою,
которая есть путь корабля на поверхности моря, и оттуда истин-
ное его расстояние найдено быть может».
Салометр предназначен для определения направления и ско-
рости течения и состоит из тяжелого шара, «.. .который чем
глубже опустится, тем больше чувствовать будет сопротивление
от тихой воды в глубине». Шар соединен линем со стержнем,
укрепленным на двух взаимно перпендикулярных осях, позволяю-
щих ему, соответственно, наклоняться. Верхний конец стержня
представляет индекс, по которому можно определить наклон
стержня по двум также взаимно перпендикулярным шкалам
«.. .из обоего наклонения удобно сыщется скорость и сторона
течения морского, что все сперва опытами в меру привести
Должно».
Создавая новые приборы, чтобы предотвратить опасности,
«которым не токмо корабли, великими трудами и многим
14
Краткий исторический очерк
иждевением построенные..но и жизни человеческие подвер-
гаются», Ломоносов широко рассматривает все вопросы, связан-
ные с мореплаванием. В третьей части работы, озаглавленной
«О ученом мореплавании», Ломоносов говорит о мореплаватель-
ской академии, о состоянии истинной магнитной теории, о сочине-
нии теории морских течений о предсказании погоды, а «особливо»
ветров. Работы М. В. Ломоносова составляют золотой фонд
истории русского мореплавания.
В этот же период в Петербурге издается ряд переводных
трудов по судовождению, что свидетельствует о большом внима-
нии русских моряков к морскому делу и высоком уровне морской
их подготовки. Из переводных работ следует упомянуть руковод-
ство по навигации Пьера Бугера. «Бугерова навигация» была
переведена и переработана Николаем Гавриловичем Кургановым,
русским ученым, астрономом, сподвижником М. В. Ломоносова,
профессором высшей математики и навигации в морском кор-
пусе. В своем «Уведомлении» в начале книги Бугера Н. Г. Кур-
ганов пишет, что она переведена и напечатана, «.. .оставя
(т. е. пропустив — К. У.) некоторые таблицы, для того, что
весьма полнее и в великом числе прежде при корпусе напеча-
таны. .. коих и в подлиннике нет». А далее указывает, что в кор-
пусе таблицы меридиональных частей полнее, чем у Бугера.
По содержанию «Бугерова навигация» мало чем отличается
от навигации Мордвинова, но перевод ее сделан изящным рус-
ским языком, более современным, чем язык Мордвинова, что
несомненно является заслугой Курганова. Впоследствии,
в 1801 г., Курганов издает свои «Пополнения Бугеровой науки
мореплавания».
Начало XIX в. не было благоприятно для дальнейшего раз-
вития русского флота. Россия сосредоточила все свои силы на
борьбу с Наполеоном I на сухом пути и в этот период, так же
как и в последующие годы, не могла обратить должного внима-
ния на свой флот. Однако отлично подготовленные русские
моряки не могли и не хотели оставаться бездеятельными и сосре-
доточили свою энергию, знание и пытливый ум па гидрографиче-
ских исследованиях дальних стран. На военных судах и судах,
принадлежащих Российско-Американской компании, русские мо-
ряки в первой четверти XIX в. совершили 21 кругосветное плава-
ние и провели ряд научных экспедиций.
Имена замечательных русских моряков, руководителей и
участников этих экспедиций — Крузенштерна и Лисянского, Бел-
лингсгаузена и Лазарева, Головина, Коцебу и других вписаны
в страницы мировой истории мореплавания.
Научные труды этих экспедиций расширили наши географиче-
ские познания и способствовали дальнейшему развитию науки
о судовождении. В этот период создает свой знаменитый учебник
Краткий исторический очерк
15
«Теория и практика кораблевождения» капитан-командор, член
Академии наук Платон Гамалея. Труд Гамалея за период с 1806
по 1830 гг. выдержал три издания и в течение четверти века
являлся» основным учебником по навигации.
Учебник Гамалея «Теория и практика кораблевождения» со-
стоит из трех частей: части первой, рассматривающей вопросы
навигации, части второй, посвященной мореходной астрономии,
и части третьей, содержащей необходимые для судовождения
таблицы.
Первая часть учебника, несколько своеобразно озаглавленная
Гамалеей: «Часть первая, содержащая географические средства
кораблевождения, или собственно называемую навигацию», по
своей структуре уже значительно приближается к современным
учебникам. Она делится на четыре книги, первая из которых
посвящена изучению «Образа Земли» и координированию места
на земной поверхности.
Вторая книга «О измерении пути корабля» рассматривает
в большей своей части магниты и магнитный компас, различные
курсы судна и исправление румбов; причем курсы определяются
по отношению к ветру с учетом дрейфа и по компасу, а скорость
судна измеряется ручным лагом. Гамалея указывает, что лаг
применяется на флотах с 1607 г., но изобретатель его неизвестен;
значительное внимание в книге уделено проверке склянок. В за-
ключение Гамалея проводит описание нескольких образцов меха-
нических лагов, но отмечает, что ими не пользуются по причине
сложности. Эта книга заканчивается главой, рассматривающей
учет влияния течения при судовождении.
Книга третья «О изображениях земноводной поверхности» по-
священа вопросам картографии. После довольно подробного рас-
смотрения меркаторской проекции приводятся сведения об услов-
ных изображениях на картах. Здесь же впервые встречается
указание на ограждение банок вехами, причем говорится, что
в Финском заливе на северных оконечностях банок стоят белые,
а на южных красные вехи (так же как и в наше время).
Специальная глава разбирает вопросы, связанные с использо-
ванием морских карт; решаются основные задачи на карте и
даются методы прокладки и определения места судна по пелен-
гам. Определение расстояния делается или по специально по-
строенному «косому масштабу» для широт через один градус или
довольно сложным способом — через экваториальные мили. При
определении по пеленгам рекомендуется брать не менее трех
пеленгов. В то же время Гамалея указывает: «С другой стороны,
я не могу согласиться с теми, которые советуют брать сколько
можно больше пеленгов, и думаю, что будучи под парусами,
всегда должно довольствоваться тремя или четырьмя исправ-
ными». В книге впервые описан крюйс-пеленг, определение по-
16
Краткий исторический очерк
пеленгу и антретному расстоянию, а также сочетание пеленга
с обсервованной астрономически широтой.
Книга четвертая «О счислении пути корабля» детально разби-
рает вопросы письменного счисления, которое находилось на вы-
сокой степени развития. Отдельная глава отведена «разным
сложным вопросам», решаемым при помощи счисления. Приведем
для примера одну из задач главы. «Есть некоторый порт, в кото-
рый, чтобы войти, надобно его и мельницу, стоящую от него
в 4 милях на Ost, привести прямо на W6t,n в то же время бакан,
находящийся в 5 милях от мельницы на NOtN'AO, видеть на
NtO3AO; тогда должно итти прямо на бакан, и у самого его пово-
ротить в порт. Спрашивается, какой есть лучший ветер в NW-ой
четверти для судна, идущего равно обоими галсами; также какое
расстояние должно пройти на каждый галс от помянутого места
до порта».
К сожалению, размеры краткого очерка не позволяют детально
разобрать методы решения таких интересных задач.
Заключительная часть книги дает указания «О исправах счис-
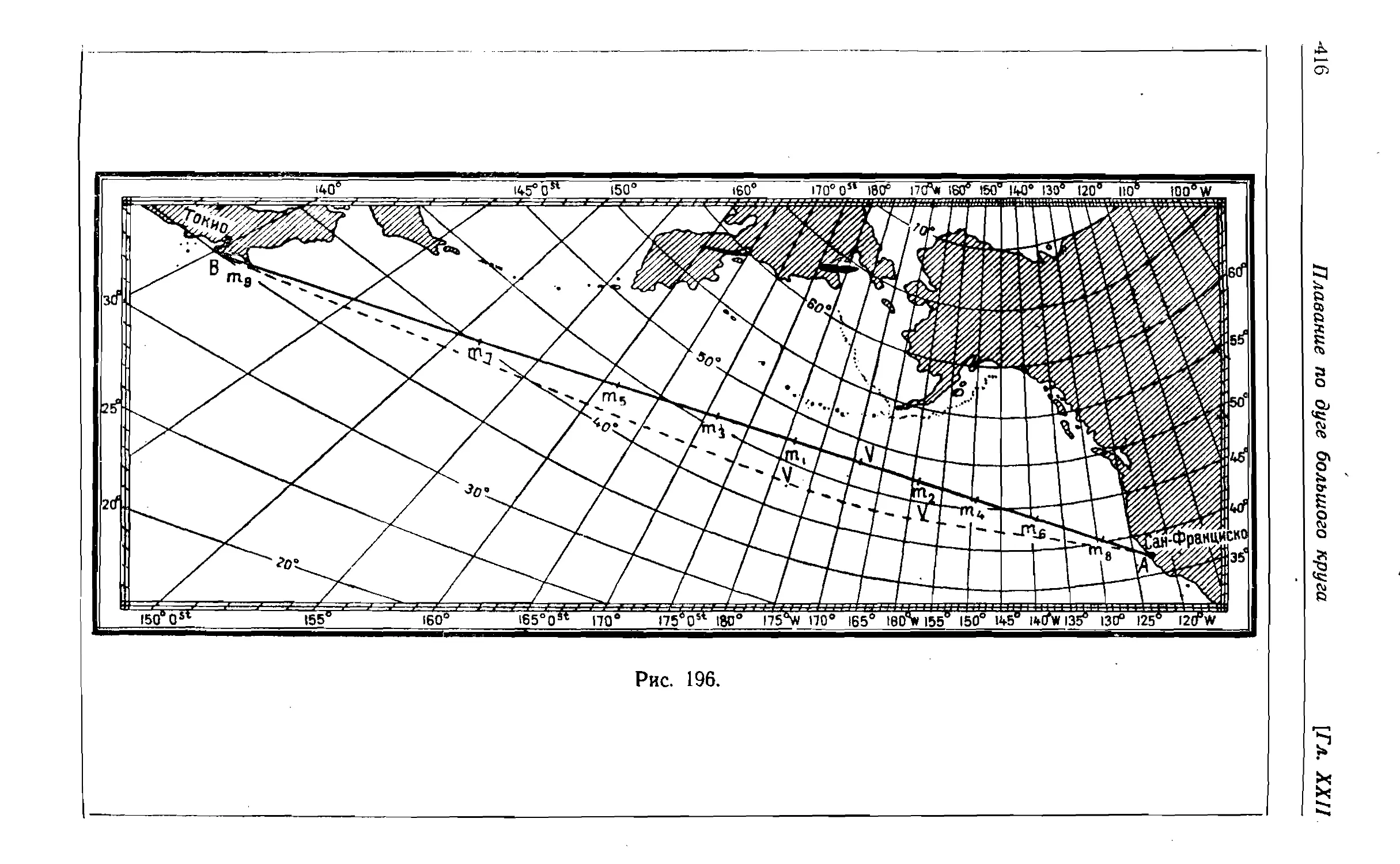
ления», о плавании по дуге «великого круга», а также «содержит
общие примечания на кораблевождение, с показаниями, как рас-
полагать курсы, измерять глубину, вести журнал и пр.». Здесь
впервые дается определение лоции как части морского искусства,
которое заключается в том, чтобы «.. .знать глубины, грунты,
створы, фарватеры, течения, царствующие ветры и прочие мест-
ные обстоятельства, безопасности плавания служащие».
Появление на флоте паровых судов, а затем переход к желез-
ному судостроению, увеличение скорости хода паровых судов
поставило перед судовождением две основные задачи: улучшение
картографического материала и изучение работы магнитного
компаса на железном судне; создается новая дисциплина судово-
ждения— девиация магнитного компаса.
В то время во главе гидрографии находился ученый моряк
Сарычев, организовавший большие гидрографические работы на
Балтийском, Белом, Черном и Азовском морях, в результате'
которых была произведена систематическая опись этих морей и
к середине XIX века получен высококачественный картографиче-
ский материал, сохранивший свое значение до наших дней.
В 1824 г. И. Ф. Крузенштерн производит первое определение
девиации магнитного компаса на Кронштадтском рейде на бриге
«Олимп».
В 1865 г. ученый-моряк И. П. Белавенец издает свой труд
«О девиации компасов и о дигограммах». Труды И. П. Бела-
венца, а особенно его ученика И. П. Колонга ставят изучение
девиации магнитного компаса в России на первое мёсто в мире.
Ученики И. П. Колонга академик А. Н. Крылов, проф. Н. Н. Ог-
лоблинский и В. Я. Павлинов достойным образом продолжали
Краткий исторический очерк 17
развивать компасное дело в русском флоте. Следует указать, что
еще в 1856 г. русский академик Ленц со своим сотрудником
несколько раз опускался на подводной лодке для определения
влияния погружения в море на работу магнитного компаса. Не
обнаружив никаких изменений в показании магнитного компаса
на трех различных глубинах, Ленц пришел к заключению, что
> погружение не оказывает на магнитный компас никакого влияния.
Во второй половине XIX в. основными трудами по навигации
считаются работы Зыбина «Руководство к кораблевождению»
и Лукина «Навигация», в которых продолжает развиваться мето-
дика определения места судна в море.
Существенное изменение в методах определения места судна
в море внесло применение на флоте радиопеленгования, впервые
осуществленное в период первой мировой войны.
Еще А. С. Попов указал на возможность создания радиомая-
ков для навигационных целей. Разработкой и конструированием
судовых радиопеленгаторов при их зарождении занимался рус-
ский ученый академик Н. Д. Папалекси.
Великая Октябрьская социалистическая революция объеди-
нила все советские народы в дружную семью и призвала их
к плодотворной созидательной работе. Выступая на первой сессии
Верховного Совета СССР в 1938 г., товарищ Молотов сказал, что
у могучей Советской державы должен быть соответствующий ее
интересам, достойный нашего великого дела, морской и океан-
ский флот. На эти слова наша страна ответила деятельной рабо-
той как по созданию морского флота в целом, так и по раз-
работке различных вопросов, связанных с судовождением. В Со-
ветском Союзе широко развивается создание самых новых, самых
лучших навигационных приборов, в том числе и радиотехнических
средств судовождения.
Работы академиков Н. Д. Папалекси, Л. И. Мандельштама,
А. И. Берга, проф. Е. Я. Щеголева и других способствуют созда-
нию самой совершенной навигационной радиоаппаратуры. Их
труды служат образцами для иностранных ученых. Советские
ученые Ю. Б. Кобзарев, А. А. Погорелко и Н. Я. Чернецов
в 1941 г. удостоены Сталинской премии за работы в области
радиолокации.
Развитие судовождения в советский период не ограничивается
созданием новых технических средств, создаются также и новые
методы использования этих средств. Проф. Н. А. Сакеллари со-
ставил первый советский учебник навигации, по которому учились
первые советские моряки. П. А. Домогаров работал над созда-
нием еще более совершенного магнитного компаса.
Лауреат Сталинской премии проф. В. В. Каврайский разра-
батывает «Обобщенный способ линий положений» и создает ряд
новых навигационных приборов.
2 К. С. Ухов
18
Краткий исторический очерк
Проф. Н. Н. Матусевич многие из своих работ посвятил во-
просам навигации; среди них наиболее крупные: «Определение
места корабля по радиопеленгам», «О плавании на течении»,
«Прямоугольные координаты и их применение в гидрографии,
картографии и навигации» и ряд других.
Из ряда многочисленных работ по навигации, опубликованных
за последнюю четверть века, следует отметить работы гидрографа
Струйского по изучению скорости хода судна в свежую погоду
и предложенный им метод определения места судна по исправ-
ленному крюйс-пеленгу; М. Н. Андреева «О новом универсальном
методе прокладки циркуляции корабля» и «Определение радиуса
циркуляции по лагу и гирокомпасу».
Большое количество работ за последнее время посвящено во-
просу о точности навигационных определений.
Подводя итоги деятельности флота в Великой Отечественной
войне, товарищ И. В. Сталин сказал, что моряки восприняли и
развили все ценное из вековых традиций русского флота.
В исторических решениях XIX съезда Коммунистической пар-
тии Советского Союза вновь уделяется огромное внимание строи-
тельству флота и оснащению его новейшими техническими сред-
ствами судовождения. Задачей советских моряков является даль-
нейшее совершенствование своих знаний и развитие современных
методов судовождения.
РАЗДЕЛ ПЕРВЫЙ
ОСНОВНЫЕ понятия
ГЛАВА I
ЗЕМНОЙ СФЕРОИД
§ 1. ФИГУРА И РАЗМЕРЫ ЗЕМЛИ
Действительная фигура Земли представляет собой неправиль-
ное геометрическое тело, носящее название геоида. Уровен-
ная поверхность, ограничивающая геоид, нормальна в каждой
данной точке к направлению отвесной линии в этой же точке.
Изучение геоида составляет одну из задач геодезии. В пер-
вом приближении мы можем принять фигуру Земли за сферу, а
во втором — за эллипсоид вращения. Точные геодезические на-
блюдения показывают, что отклонение отвесных линий от норма-
лей к поверхности эллипсоида вращения весьма незначительны
и только в исключительных случаях достигают двух десятков ду-
говых секунд. Эти отклонения вызываются неравномерным рас-
пределением плотностей в толще Земли. Обработка материалов,
полученных из наблюдений, показывает, что разность по высоте
между поверхностью геоида и поверхностью эллипсоида враще-
ния не превышает 150 м. Поэтому во всех вопросах практической
геодезии, астрономии и картографии, требующих большой точно-
сти, поверхность Земли принимается за поверхность эллипсоида
вращения, называемого земным сфероидом.
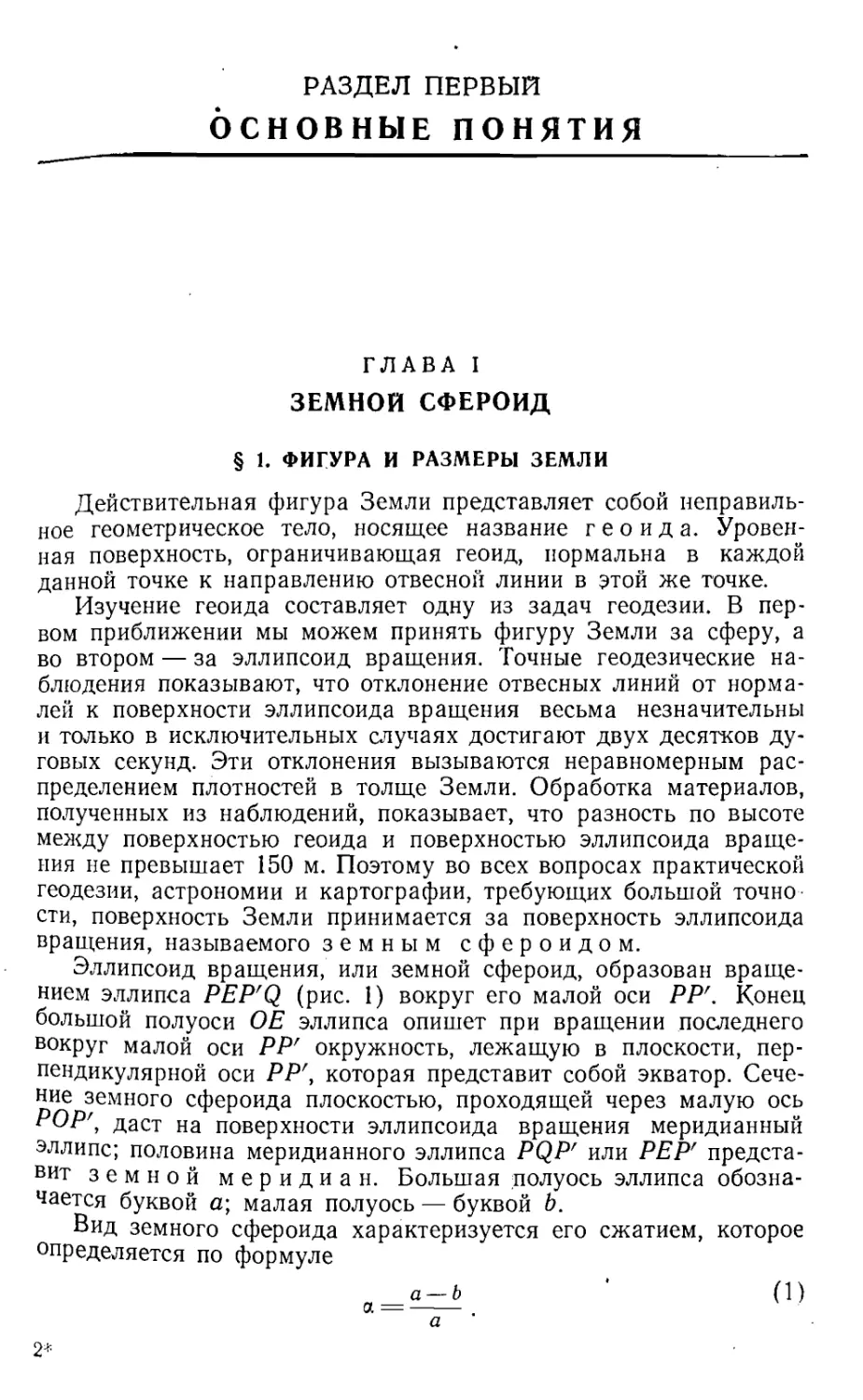
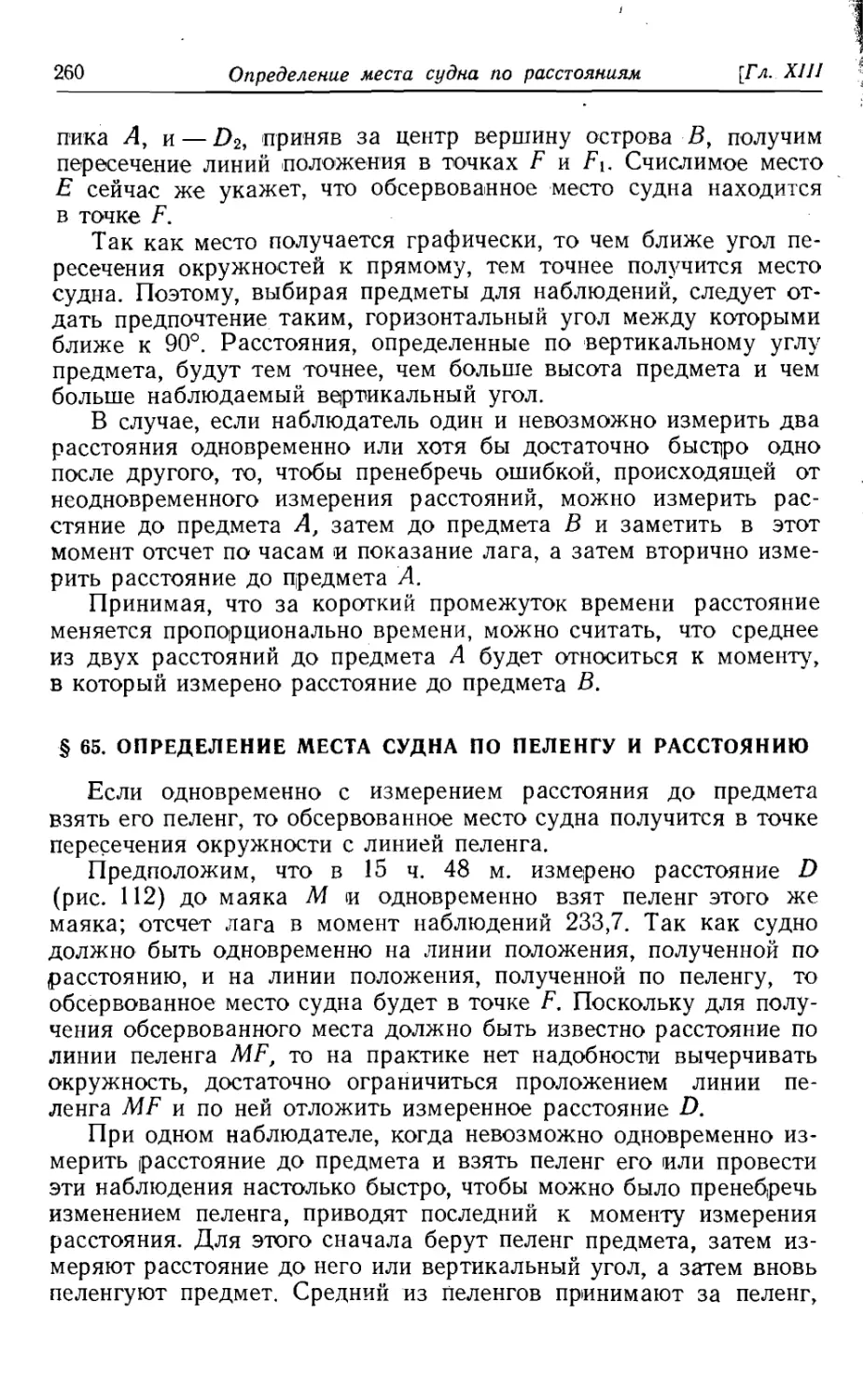
Эллипсоид вращения, или земной сфероид, образован враще-
нием эллипса PEP'Q (рис. 1) вокруг его малой оси РР\ Конец
большой полуоси ОЕ эллипса опишет при вращении последнего
вокруг малой оси РР' окружность, лежащую в плоскости, пер-
пендикулярной оси РР\ которая представит собой экватор. Сече-
ние земного сфероида плоскостью, проходящей через малую ось
POP', даст на поверхности эллипсоида вращения меридианный
эллипс; половина меридианного эллипса PQPf или РЕР' предста-
вит земной меридиан. Большая полуось эллипса обозна-
чается буквой а; малая полуось — буквой Ь.
Вид земного сфероида характеризуется его сжатием, которое
определяется по формуле
a — b (1)
а =----.
а
2*
20
Земной сфероид
[Гл. 1
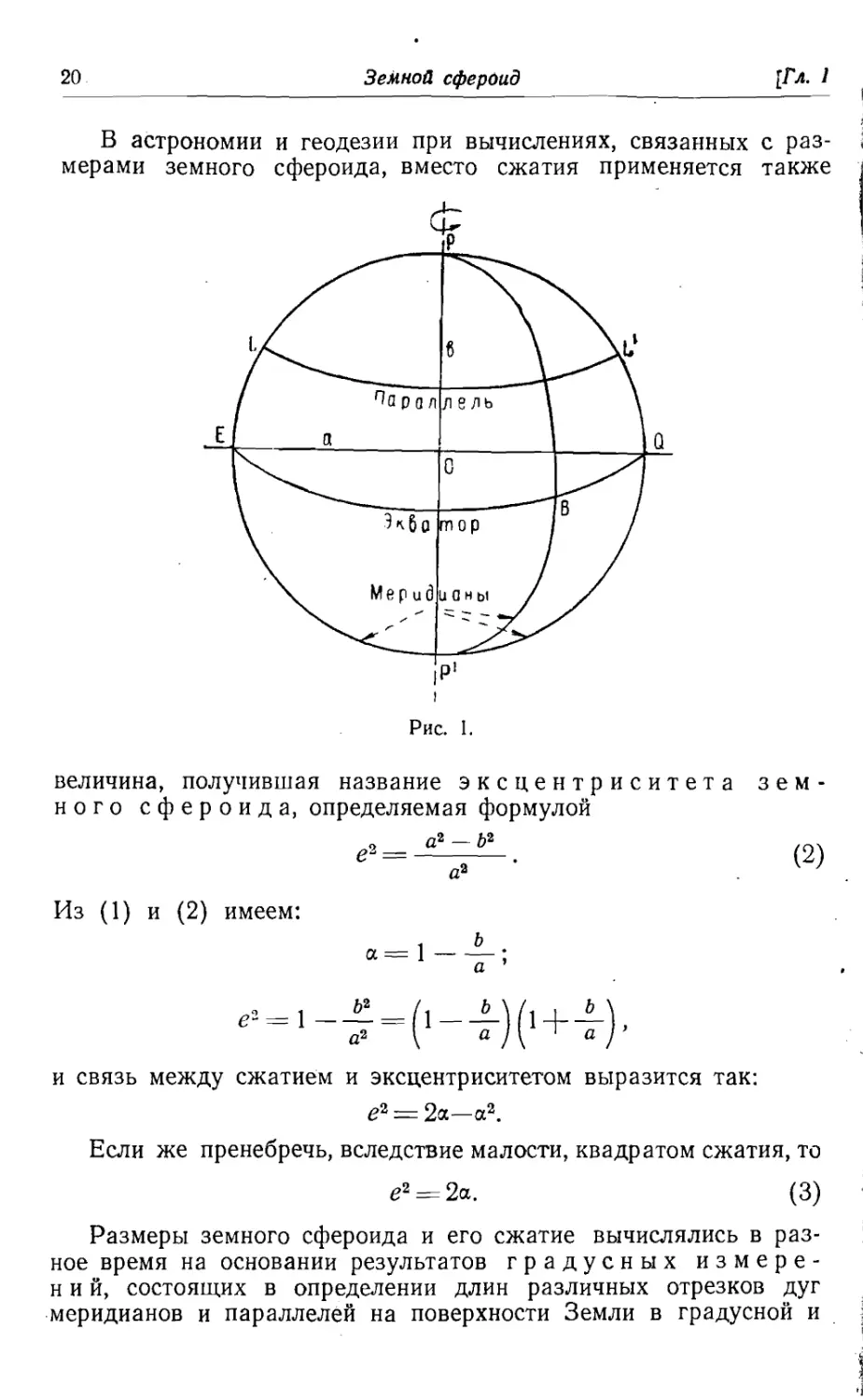
В астрономии и геодезии при вычислениях, связанных с раз-
мерами земного сфероида, вместо сжатия применяется также
величина, получившая название эксцентриситета зем-
ного сфероида, определяемая формулой
Из (1) и (2) имеем:
1 *
а= I-----
а
Ь2
а2
и связь между сжатием и эксцентриситетом выразится так:
е2 = 2а—а2.
Если же пренебречь, вследствие малости, квадратом сжатия, то
е2 = 2а. (3)
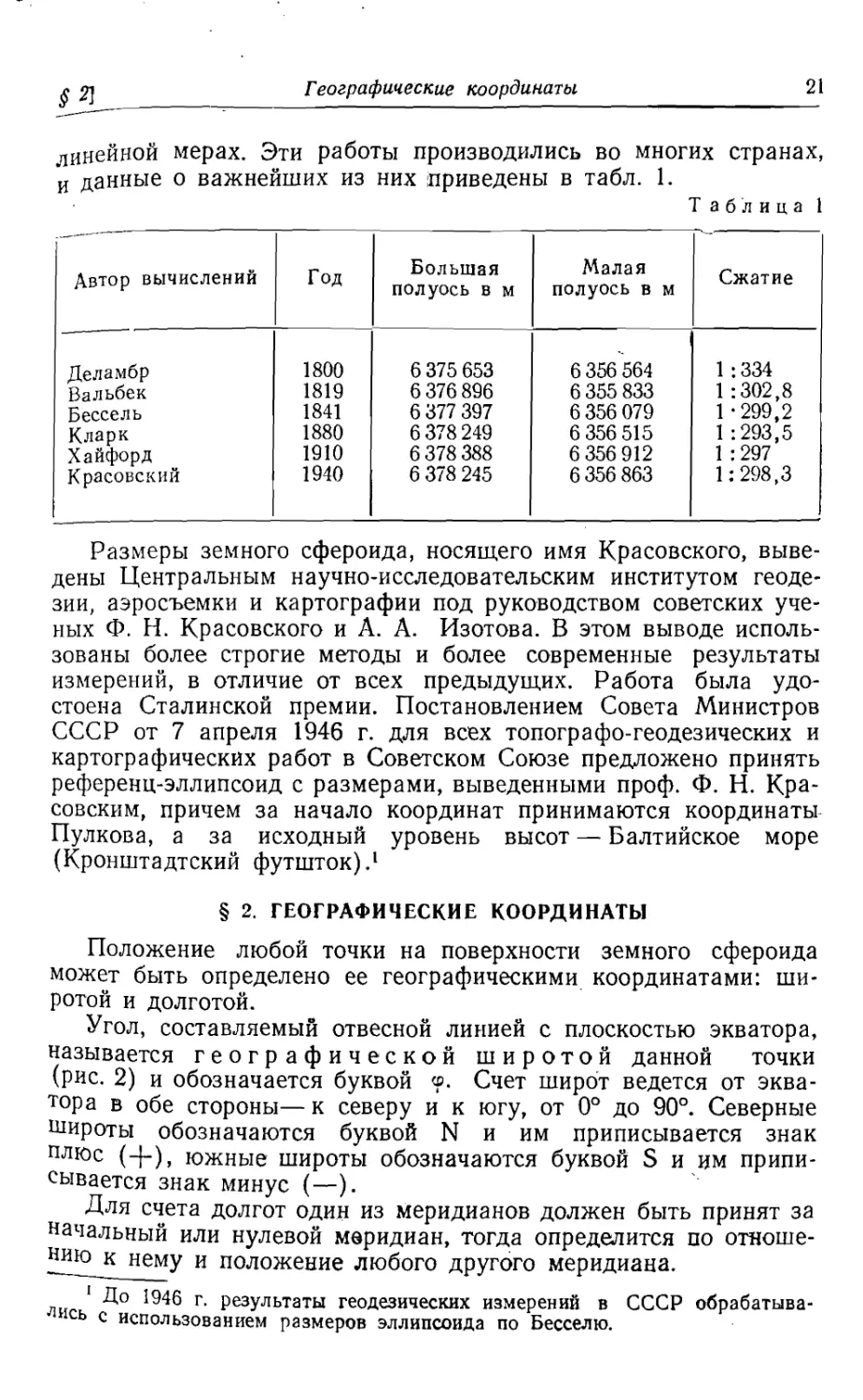
Размеры земного сфероида и его сжатие вычислялись в раз-
ное время на основании результатов градусных измере-
ний, состоящих в определении длин различных отрезков дуг
меридианов и параллелей на поверхности Земли в градусной и
Географические координаты.
21
линейной мерах. Эти работы производились во многих странах,
и данные о важнейших из них приведены в табл. 1.
Таблица 1
Автор вычислений Год Большая полуось в м Малая полуось в м Сжатие
Деламбр Вальбек Бессель Кларк Хайфорд Красовский 1800 1819 1841 1880 1910 1940 6 375 653 6 376 896 6 377 397 6 378 249 6 378 388 6 378 245 6 356 564 6 355 833 6 356 079 6 356 515 6 356 912 6 356 863 1 :334 1 :302,8 1-299,2 1 :293,5 1 :297 1:298,3
Размеры земного сфероида, носящего имя Красовского, выве-
дены Центральным научно-исследовательским институтом геоде-
зии, аэросъемки и картографии под руководством советских уче-
ных Ф. Н. Красовского и А. А. Изотова. В этом выводе исполь-
зованы более строгие методы и более современные результаты
измерений, в отличие от всех предыдущих. Работа была удо-
стоена Сталинской премии. Постановлением Совета Министров
СССР от 7 апреля 1946 г. для всех топографо-геодезических и
картографических работ в Советском Союзе предложено принять
референц-эллипсоид с размерами, выведенными проф. Ф. Н. Кра-
совским, причем за начало координат принимаются координаты
Пулкова, а за исходный уровень высот — Балтийское море
(Кронштадтский футшток).1
§ 2. ГЕОГРАФИЧЕСКИЕ КООРДИНАТЫ
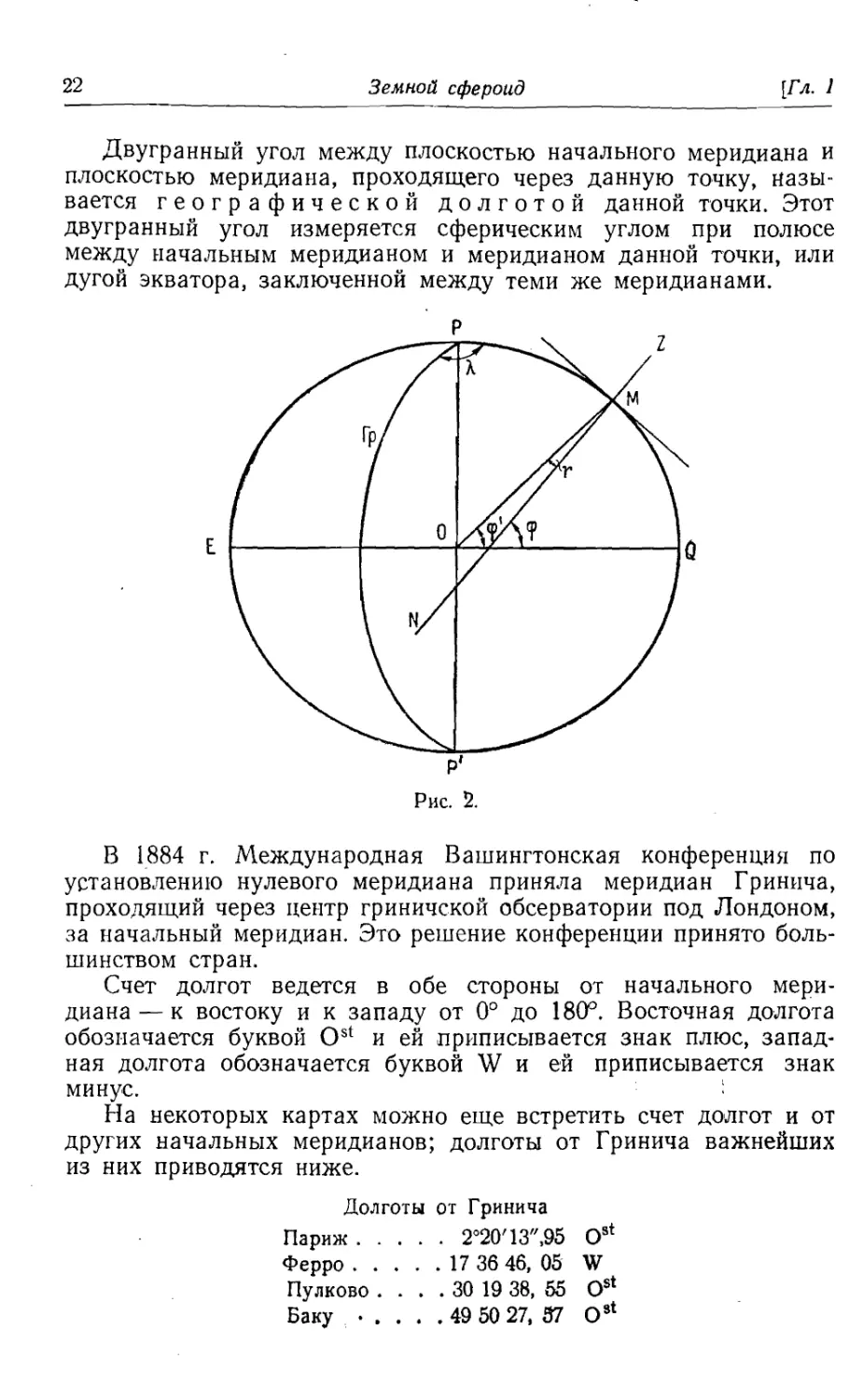
Положение любой точки на поверхности земного сфероида
может быть определено ее географическими координатами: ши-
ротой и долготой.
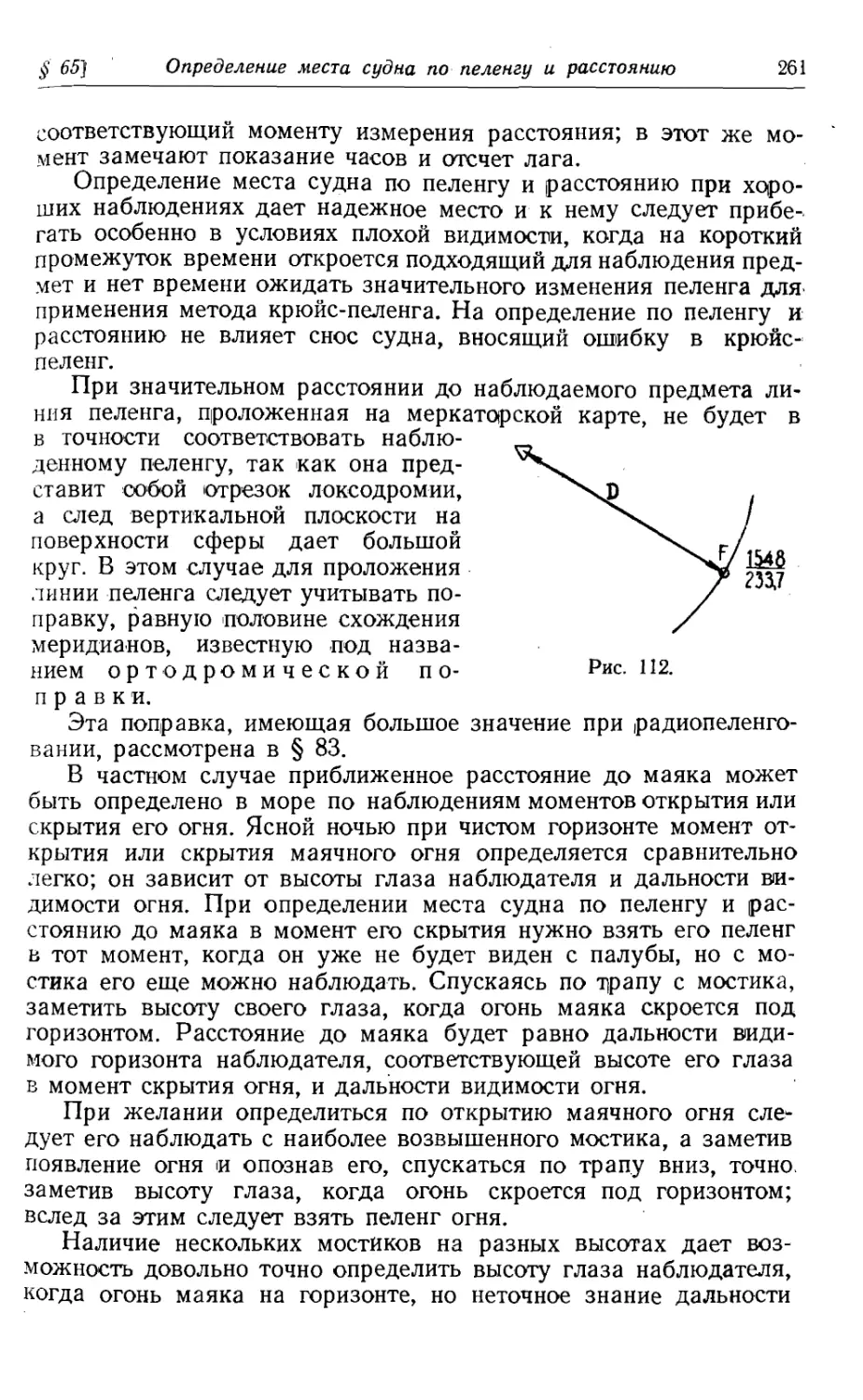
Угол, составляемый отвесной линией с плоскостью экватора,
называется географической широтой данной точки
(рис. 2) и обозначается буквой Счет широт ведется от эква-
тора в обе стороны— к северу и к югу, от 0° до 90°. Северные
широты обозначаются буквой N и им приписывается знак
плюс (-}-), южные широты обозначаются буквой S и им припи-
сывается знак минус (—).
Для счета долгот один из меридианов должен быть принят за
начальный или нулевой меридиан, тогда определится по отноше-
нию к нему и положение любого другого меридиана.
* 1946 г. результаты геодезических измерений в СССР обрабатыва-
ем с использованием размеров эллипсоида по Бесселю.
22
Земной сфероид
[Гл. 1
Двугранный угол между плоскостью начального меридиана и
плоскостью меридиана, проходящего через данную точку, иазьь
вается географической долготой данной точки. Этот
двугранный угол измеряется сферическим углом при полюсе
между начальным меридианом и меридианом данной точки, или
дугой экватора, заключенной между теми же меридианами.
В 1884 г. Международная Вашингтонская конференция по
установлению нулевого меридиана приняла меридиан Гринича,
проходящий через центр гриничской обсерватории под Лондоном,
за начальный меридиан. Это решение конференции принято боль-
шинством стран.
Счет долгот ведется в обе стороны от начального мери-
диана— к востоку и к западу от 0° до 18СГ. Восточная долгота
обозначается буквой Ost и ей приписывается знак плюс, запад-
ная долгота обозначается буквой W и ей приписывается знак
минус. :
На некоторых картах можно еще встретить счет долгот и от
других начальных меридианов; долготы от Гринича важнейших
из них приводятся ниже.
Долготы от Гринича
Париж........2’20'13",95 Ost
Ферро........ 17 36 46, 05 W
Пулково . . . . 30 19 38, 55 Ost
Баку • . . . . 49 50 27, 57 Ost
§3]
Длина одной минуты дуги меридиана
23
Если географические координаты какой-либо начальной точки
получены из астрономических наблюдений,* то такие координаты
называются астрономическими. Координаты точек, полу-
ченные вычислительным путем, исходя из начальных точек, на-
правления и расстояния до которых известны, называются гео-
дезическими.
Сравнение астрономических и геодезических координат позво-
ляет судить о фигуре Земли.
Угол между радиусом-вектором, соединяющим любую точку
на поверхности земного сфероида с его центром, и плоскостью
экватора называется геоцентрической широтой и обо-
значается буквой
Разность между географической и геоцентрической широтами
носит название редукции; она равна углу OMN (рис. 2).
Редукция может быть подсчитана по формуле
= asin2?
arc 1"
Своего максимального значения (11Л,5) редукция достигает в
широте 45°.
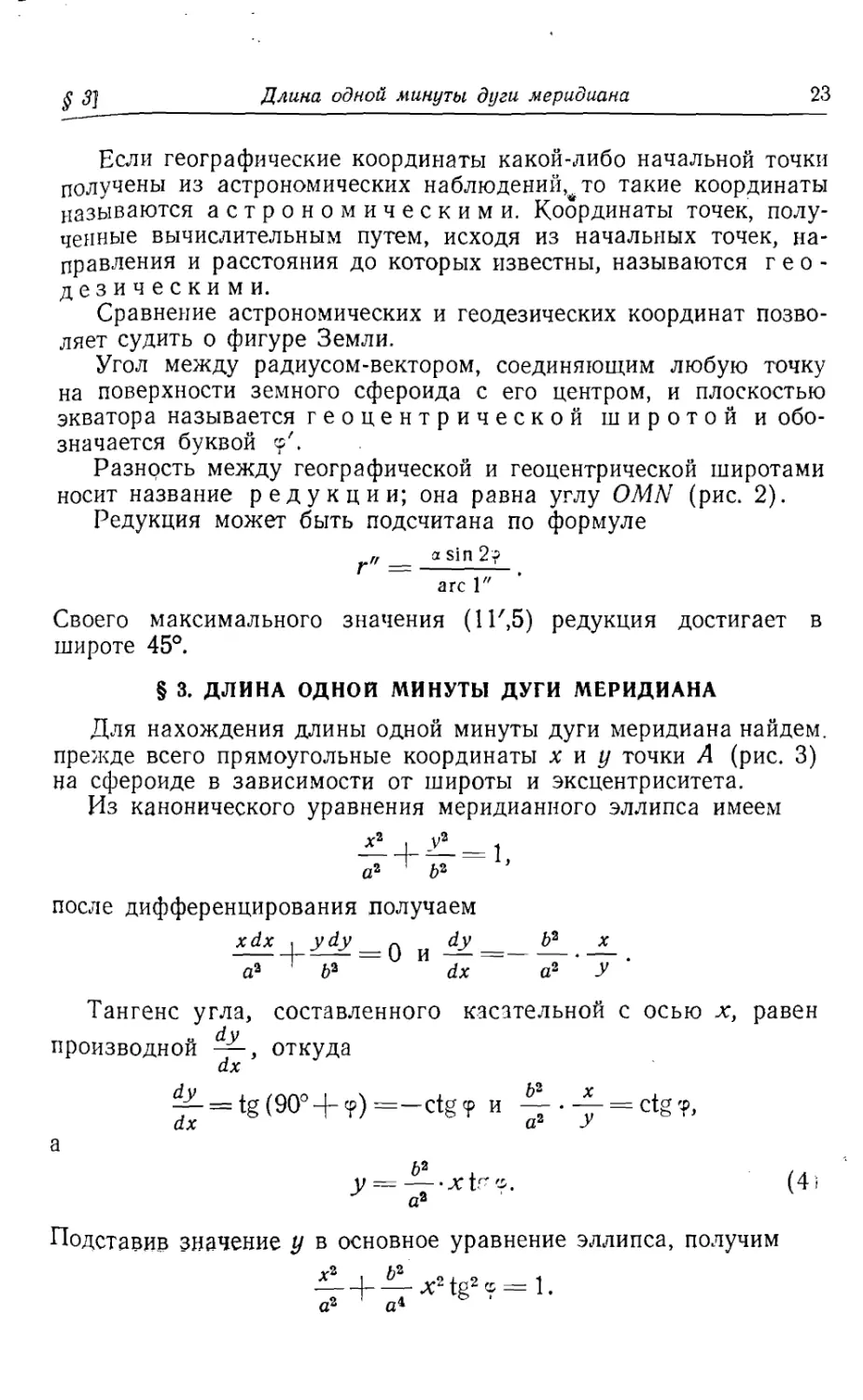
§ 3. ДЛИНА ОДНОЙ МИНУТЫ ДУГИ МЕРИДИАНА
Для нахождения длины одной минуты дуги меридиана найдем,
прежде всего прямоугольные координаты х и у точки А (рис. 3)
на сфероиде в зависимости от широты и эксцентриситета.
Из канонического уравнения меридианного эллипса имеем
а2 р2
после дифференцирования получаем
а2 63 dx а2 * У
Тангенс угла, составленного касательной с осью х, равен
м d V
производной —, откуда
dx
^- = tg(90°+<?)=—ctg<p и -^-.-y = ctg?,
dx а2 У
a
j = (4i
a2
Подставив значение у в основное уравнение эллипса, получим
г2 />2
a2 a4
24
Земной сфероид
[Гл. 1
9 а2 - б2
Из определения эксцентриситета е2 =-------— имеем
&2 = а2(1— е2),
тогда
х2 4- (1 — е2} х2 tg2 ср = а2
и
х2 (1 4" tg2 ср—в3 tg2 ср) = а2; х2 (sec2 ср—е2 tg2 ср) = а2;
х2 (1 — е2 sin2 ср) = a2 cos2 ср,
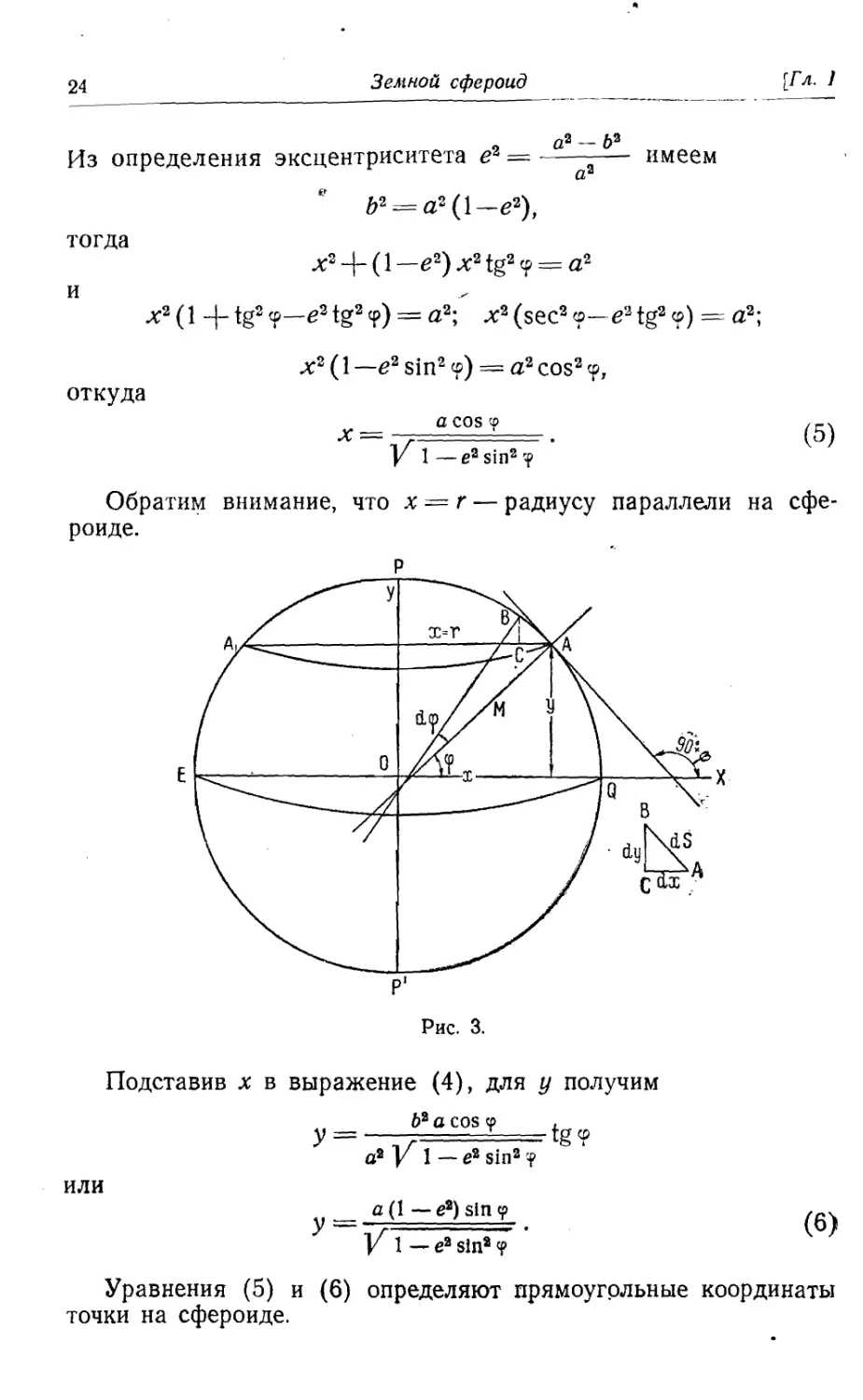
откуда
(5)
V 1 —е2 sin2 у
Обратим внимание, что х = г — радиусу параллели на сфе-
роиде.
Подставив х в выражение (4), для у получим
б2 а cos у ,
У = •• ,7ГГГ ?
а2 У 1 — е2 sin2 у
или
___ а (1 — е2) sin у
V1 —• е2 sin2 у
(6)
Уравнения (5) и (6) определяют прямоугольные координаты
точки на сфероиде.
§3}
Длина одной минуты дуги меридиана
25
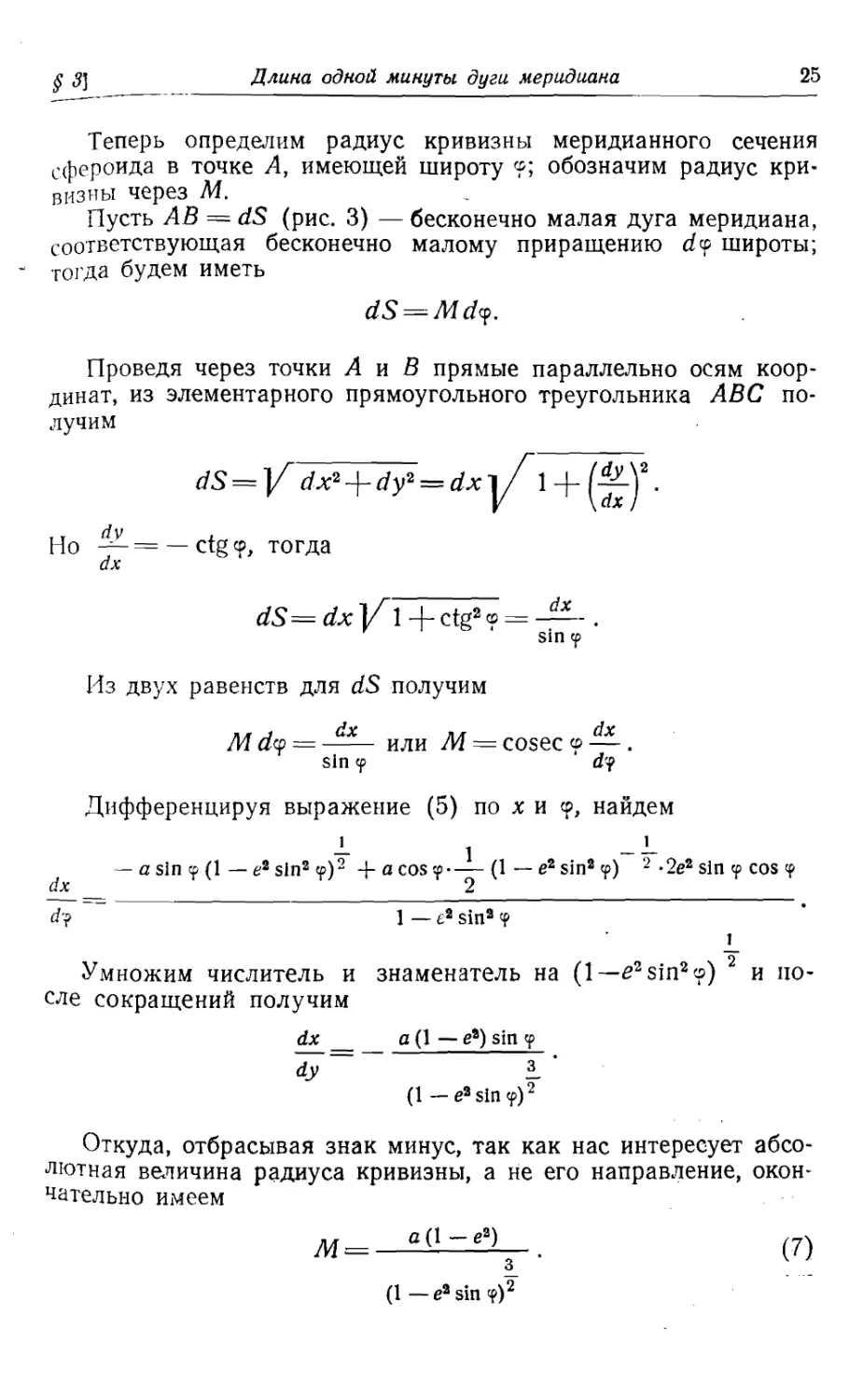
Теперь определим радиус кривизны меридианного сечения
сфероида в точке А, имеющей широту обозначим радиус кри-
визны через М.
Пусть АВ = dS (рис. 3) — бесконечно малая дуга меридиана,
соответствующая бесконечно малому приращению d<? широты;
тогда будем иметь
dS = Md<?.
Проведя через точки А и В прямые параллельно осям коор-
динат, из элементарного прямоугольного треугольника АВС по-
лучим
dS = ]f dx2 + dy2 = dx]/' 1 +
Но — = — ctg <р, тогда
dx
dS= rfx 1Л1 + ctg2 .
sin cp
Из двух равенств для dS получим
М dy = dx— или М = cosec .
sin d'f
Дифференцируя выражение (5) по х и ср, найдем
1 1
— a sin ср (1 — е2 sin2 ср)2 + a cos ср-(1 — е2 sin2 ср) 2 • 2е2 sin ср cos ср
dx __ 2
J? 1 — е2 sin2 ср
1
Умножим числитель и знаменатель на (1—г2 sin2 ср) 2 и по-
сле сокращений получим
dx __ о (1 — е2) sin ср
—
(1 — е2 sin ср)2
Откуда, отбрасывая знак минус, так как нас интересует абсо-
лютная величина радиуса кривизны, а не его направление, окон-
чательно имеем
Ж =—а(1~е^з . (7)
(1 — е2 sin ср)2
26
Основные определения в судовождении
[Гл. II
Длина S одной минуты дуги меридиана может быть опреде-
лена из следующего равенства:
S = М- аге Г = —3 • arc 1'.
(1 — easin2 <р)2
Сделаем следующие преобразования, опуская члены, в кото-
рые эксцентриситет входит в четвертой и выше степенях:
_ з_
S = «(l—е2)(1—е2sin2<р) 2arcl';
S = а(1—е2) ^14--^-e2sin2<p^ arc Г;
S = а — е2 4- ~ е2 sin2 arc 1
S=a(l—^-e2-------e2 -f- e2 sin2 arc Г;
S = afl—^-e2—1-£2(1—2sin2<p)j arc 1';
S — a/1——e2------— e2cos 2'й arc 1';
\ 4 4 /
и окончательно получим
S=a 1 — -1 e2 (1 4- 3cos 2<p) arcl'.
(8)
Подставляя в формулу (8), определяющую длину одной ми-
нуты дуги меридиана в зависимости от широты, значения а и е2,
данные Красовским, имеем
5= 1852,3 9,3 cos 2?. (9)
Формула (9) показывает, что длина одной минуты дуги ме-
ридиана на земном сфероиде — величина переменная и меняется
в пределах от 1843,0 м на экваторе до 1861,6 м на полюсе.
ГЛАВА II
ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ В СУДОВОЖДЕНИИ
§ 4. МОРСКАЯ МИЛЯ И РАЗЛИЧНЫЕ ЕДИНИЦЫ ДЛИНЫ
И СКОРОСТИ
Морская миля. В судовождении за единицу расстояний
принимается морская миля, равная длине одной минуты дуги
меридиана, принимая Землю за сферу. В СССР длина мор-
ской мили установлена в 1852 м.1
1 До 1931 г. в СССР длина морской мили принималась равной 6080 фу-
там (1853,18 м).
Морская миля и различные единицы длины и скорости
27
Ошибка, происходящая от принятия для длины морской мили
постоянной средней величины, не имеет практического значения.
Предположим, что судно идет по меридиану в течение суток с се-
вера на юг в районе экватора со скоростью 25 мор. миль в час
и его начальная широта была 5° N. Судно, пройдя в течение
суток
25-24 = 600 мор. миль,
должно было бы изменить свою широту на 10° к югу и перейти
из широты 5° N в широту 5° S. В действительности, так как вблизи
экватора длина одной минуты дуги меридиана равна всего
1843 м, т. е. меньше установленной длины морской мили, судно
изменит свою широту к югу на
1852-600
--------= 603 мин.
1843
и по прошествии суток придет в широту 5°3Z S.
Принимая морскую милю за величину постоянную, равную
1852 м, мы допускаем наибольшую ошибку около 0,5% проплы-
того расстояния; при плавании в средних широтах эта ошибка
еще меньше.
На указанную постоянную величину морской мили рассчиты-
ваются при постройке лаги — приборы, определяющие пройден-
ное судном расстояние. Ошибки в показаниях лагов, влияние
течения, ветры и случайные уклонения судна от курса настолько
перекрывают ошибки в расчетах, получающихся вследствие при-
нятия морской мили за; величину постоянную, что этой последней
ошибкой можно вполне пренебречь.
Поэтому при рассмотрении многих вопросов практического
судовождения Земля принимается за сферу. Приравнивая мор-
скую милю длине одной минуты дуги меридиана, получаем, что
радиус Земли в этом случае равен:
r-j 360-60 0Л97 7Л7
R = — - = 3437,747 мор. миль.
2тГ
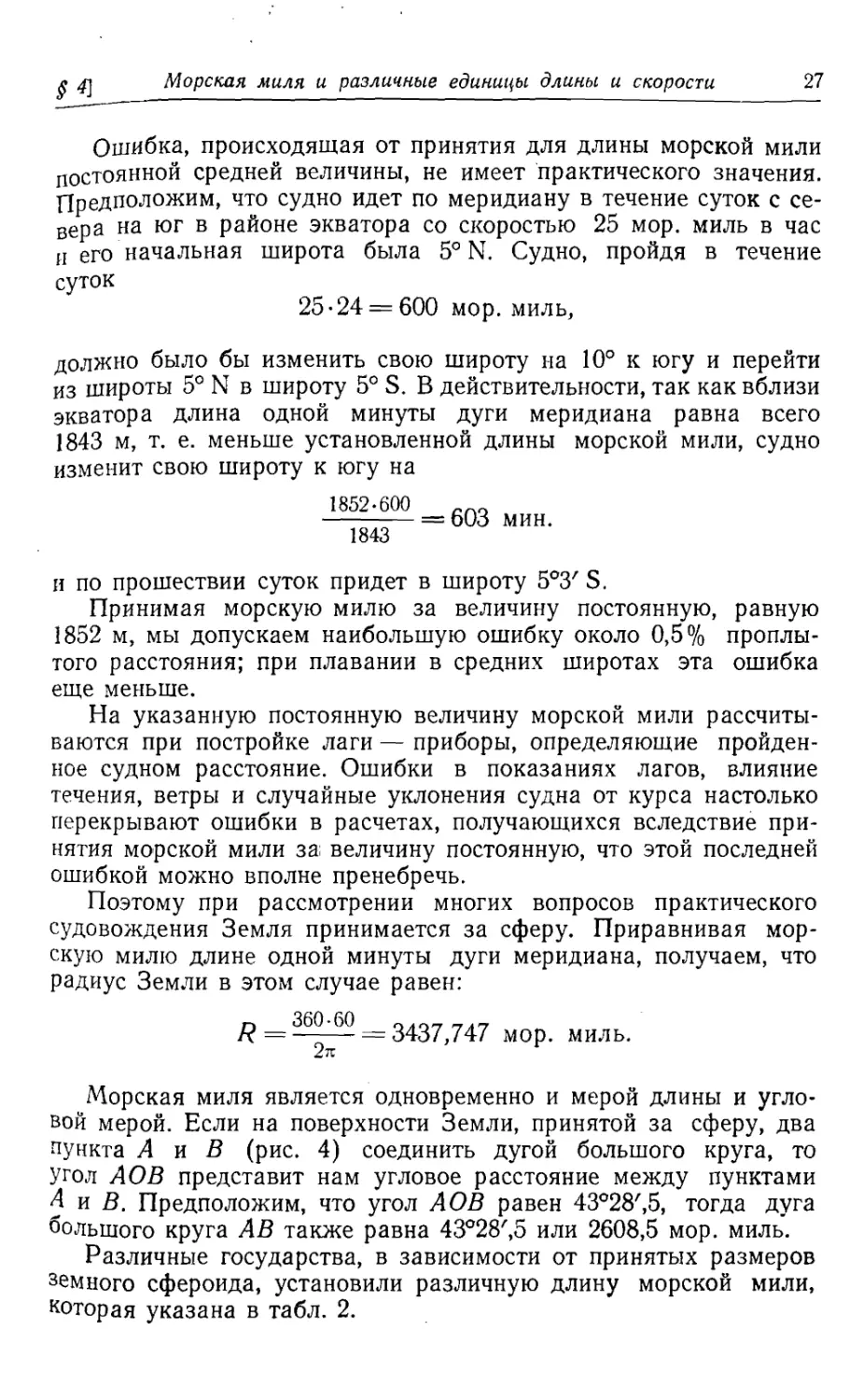
Морская миля является одновременно и мерой длины и угло-
вой мерой. Если на поверхности Земли, принятой за сферу, два
пункта А л В (рис. 4) соединить дугой большого круга, то
угол АОВ представит нам угловое расстояние между пунктами
Л и В. Предположим, что угол АОВ равен 43°28',5, тогда дуга
большого круга АВ также равна 43°28/,5 или 2608,5 мор. миль.
Различные государства, в зависимости от принятых размеров
земного сфероида, установили различную длину морской мили,
которая указана в табл. 2.
28
Основные определения в судовождении
[Гл. II
Таблица 2
Государство Длина мор- ской мили в метрах Государство Длина мор- ской мили в метрах
Англия Германия Голландия Испания Италия 1853,18 1852,00 1851,85 1852,00 1851,85 Португалия США Франция Швеция Япония 1850,00 1853,248 1852,00 1852,00 1853,18
Международное гидрографическое бюро в Монако в 1928 г.
установило стандартную длину морской мили в 1852 м.
Кабельтов — одна десятая часть морской мили; прибли-
женно принимается равным 185 м.
До введения метрической системы мер длина одного кабель-
това составляла 608 футов. На практике кабельтов считался рав-
ным 100 саженям 6-футовой ме-
ры. До настоящего времени в не-
которых приборах, как, например,
в дальномерах, прицелах у пу-
шек, длина одного кабельтова
принимается равной 600 футам.
Поэтому расстояния, снятые с
карты и измеренные дальноме-
ром, расходятся между собой на
1,3%, не считая ошибок самого
измерения.
Морская сажень содер-
жит в себе 6 футов (1,83 м). До
перехода в 1933 г. на указание
глубин в метрах и дециметрах
глубина на морских картах дава-
лась в морских саженях. До по-
рис< 4. следнего времени морская сажень
применяется для указания глубин
на английских картах.
Узел — единица скорости, равная морской миле в час; на-
пример, скорость корабля 15 узлов означает 15 мор. миль в час.
В эпоху парусного флота скорость судна измерялась по длине
выпущенного за борт на ходу судна лаглиня, прикрепленного
к деревянному сектору. Измерение скорости хода судна произво-
дилось в течение 30 сек., что составляет 7i2o часть часа. Лаглинь
Разность широт и разность долгот
29
разбивался также на отрезки, равные части морской мили,
которые отмечались вплесненными в лаглинь кончиками с узел-
ками. Теоретическая длина одного узла получалась равной
=== 50,67 фута (15,4 м). Из практики было установлено, что дере-
вянный сектор не остается неподвижным в воде, а скользит за
судном, и чтобы точнее получить скорость судна, длину одного
узла следует уменьшить до 48 футов (14,6 м). Следовательно,
сколько узлов лаглиня вытравлено за борт на ходу судна в те-
чение 30 сек., столько морских миль в час проходит судно.
Во всех английских пособиях по судовождению, которыми
пользуются советские моряки при плавании в водах, не обслужи-
ваемых советскими пособиями, приняты следующие меры длины
и скорости:
Морская миля (Nautical mile)—6080 футов (1853, 18 м),
что приближенно соответствует длине одной минуты дуги эллип-
тического меридиана в широте Английского канала.
Статутная или береговая миля (Statute mile) —
5280 футов (1609,4 м). Эта миля применяется исключительно для
измерения расстояний на суше.
Кабельтов (Cable) —одна десятая часть морской мили;
приближенно принимается равным 600 футам или 200 ярдам.
Ярд (Yard)—условная мера длины, равная 3 футам; при-
меняется для измерения небольших расстояний.
Узел (Knot) — единица скорости, равная морской миле в час.
§ 5. РАЗНОСТЬ ШИРОТ И РАЗНОСТЬ ДОЛГОТ
Разностью широт, РШ, двух каких-либо точек на зем-
ной поверхности называется дуга меридиана, заключенная между
параллелями этих точек:
РШ =?2 —?!•
Если при переходе от точки А к точке В (рис. 5) широта в
северном полушарии увеличивается, то разность широт сделана
к N, в обратном случае она будет сделана к S. Для расчета раз-
ности широт двух точек, лежащих в одном полушарии, надо вы-
честь из большей широты меньшую и полученной разности при-
писать в северном полушарии наименование «к N», если широта
второй точки больше, чем первой, и наименование «к S», если
широта второй точки меньше, чем первой. В южном полушарии
наименования РШ будут обратные. Если данные точки М и L
нежат в разных полушариях, то разность широт равна сумме
30
Основные определения в судовождении
[Гл. И
широт данных точек и имеет наименование по широте второй
точки. Разность широт не может быть больше 180°.
Примеры: 1. ?2=63°38'N ~ср! = 39°27'N 2. ?2 = 43’25'N ~<рт = 45°08'N
РШ = 24°1Г к 3. <р2 = 1°46'N +!fl = 2°15'S N РШ = 1°43' к 4. <f2 = 7°53'S ~ (fi = 5°28'S s
РШ = 4’01' к N РШ = 2°25' к s
Если нордовой широте приписать знак плюс (+), а зюйдо-
вой— знак минус (—), то разность широт всегда будет равна
Рп
Р5
Рис. 5.
алгебраической разности широты второй точки и широты первой
точки. Знак разности широт покажет в этом случае ее наиме-
нование.
Примеры: 5. cp2 = 4- 17°25' ~Ti = + 15°10' 6. <pg = + 48°40' —<Р! = + 49057'
РШ = + 2’15' или к N РШ = — 1°17' иликЭ
7. <f2 = - 52°30' —(pi = _ 53°00' 8. ?2 = -3°45' У1 = + 2°1(Г
РШ = + 0°30' или kN РШ = — 5°55' или к S
Основные плоскости и линии
31
разностью долгот, РД, двух каких-либо точек на зем-
fioft поверхности называется меньшая из дуг экватора, заключен-
ная между меридианами данных точек:
РД = к2-\.
Если вторая точка лежит к осту от первой, то разность долгот
считается к Ost, в обратном случае она будет к W. Так как раз-
ность долгот меньшая из дуг экватора, заключенных между ме-
ридианами данных точек, то она не может быть более 180°.
Для определения разности долгот двух точек, лежащих в одном
восточном или в одном западном полушарии, надо из большей
долготы вычесть меньшую и разности долгот приписать наимено-
вание «к Ost», если вторая точка лежит восточнее первой, и наи-
менование «к W» — в обратном случае. Если же данные точки
имеют долготы разного наименования, то разность долгот равна
сумме долгот этих точек с наименованием, соответствующим дол-
готе второго пункта. В последнем случае сумма долгот может
получиться более 180° и тогда, чтобы получить меньшую из дуг
экватора, полученную сумму вычитаем из 360° и меняем назва-
ние разности долгот.
Примеры: 9. Х2 = 49°20' Ost 10. Ха = 30°46' W
“Xi = 44°59' Ost —X! = 29°14' W
РД = 4°2Г к Ost РД = 1°32' к W
11. Ха = 1°57' W 12. Х2 - 175°12'Ost
+x1 = 6WOst +xr = 162°05' W
РД = WW к W РД = 337°17' к Ost
= 22°43' к W
Если остовой долготе приписать знак плюс (+), а вестовой —
знак (—), то разность долгот всегда будет равна алгебраической
разности долготы второй точки и долготы первой точки. Знак
разности долгот определит ее наименование.
Примеры: 13. Х2 = + 48°50' ’ 14. Х2 = —18°05'
“Xi = + 47°35' “Xi - — 18°20°
РД = 4- 1°15' или к Ost рц] = 0°15' или к Ost
15._Х2 = — 0°17' 16. Х2 = — 178°10'
Xi = + 1°13' — Xj = 4- 179°30'
РД = — 1°30' или к W РД = - 357°40' или к W
= 4- 2°20' или к Ost
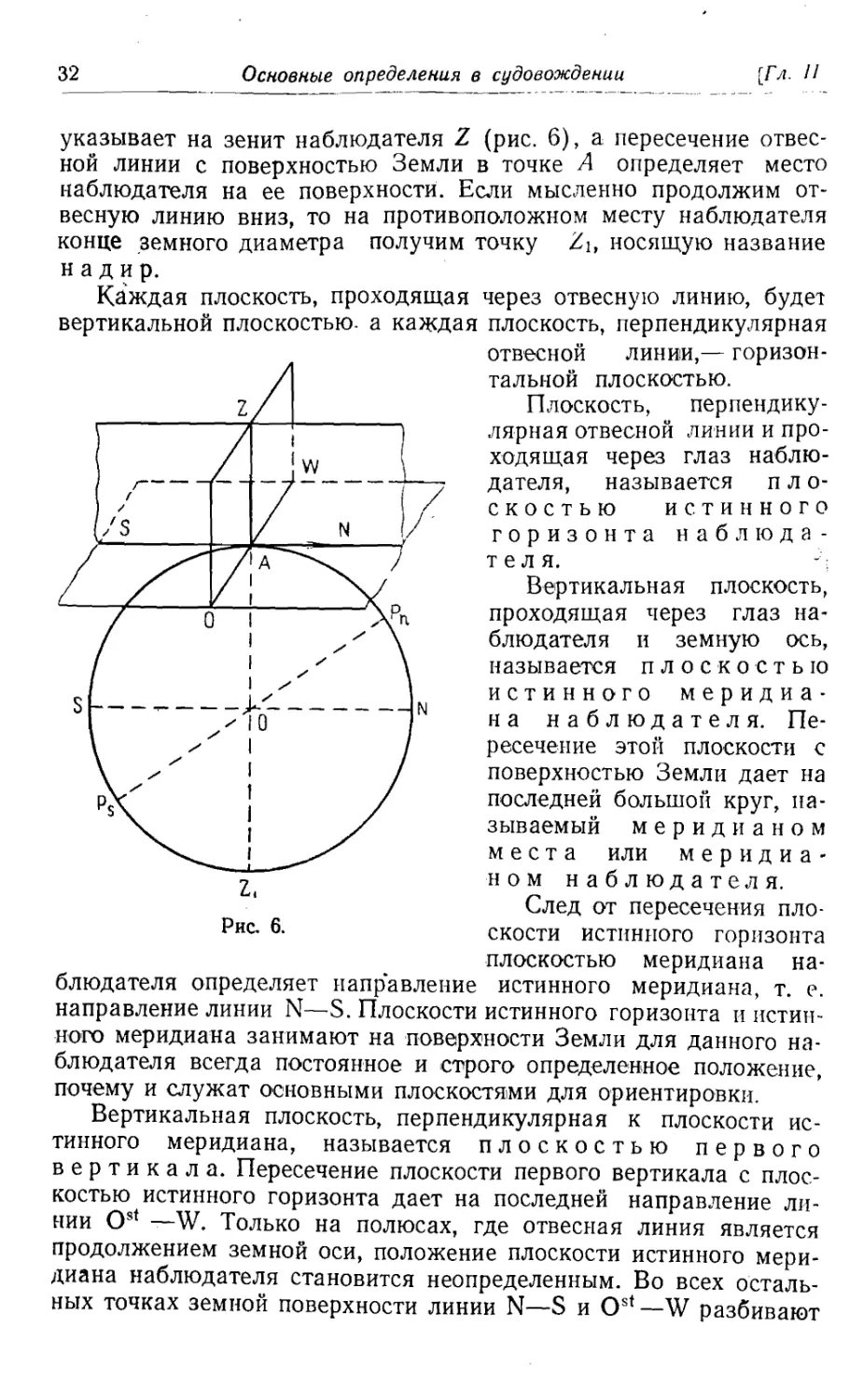
§ 6. ОСНОВНЫЕ плоскости и линии
В каждой данной точке земной поверхности наблюдатель
имеет вполне определенное направление, указываемое ему сво-
бодно висящим отвесом. Направление отвесной Линии вверх
32 Основные определения в судовождении [Гл. //
указывает на зенит наблюдателя Z (рис. 6), а пересечение отвес-
ной линии с поверхностью Земли в точке А определяет место
наблюдателя на ее поверхности. Если мысленно продолжим от-
весную линию вниз, то на противоположном месту наблюдателя
конце земного диаметра получим точку Zi, носящую название
надир.
Каждая плоскость, проходящая через отвесную линию, будет
вертикальной плоскостью- а каждая плоскость, перпендикулярная
Z.
Рис. 6.
отвесной линии,— горизон-
тальной плоскостью.
Плоскость, перпендику-
лярная отвесной линии и про-
ходящая через глаз наблю-
дателя, называется пло-
скостью истинного
горизонта наблюда-
теля.
Вертикальная плоскость,
проходящая через глаз на-
блюдателя и земную ось,
называется плоскостью
истинного меридиа-
на наблюдателя. Пе-
ресечение этой плоскости с
поверхностью Земли дает на
последней большой круг, на-
зываемый меридианом
места или меридиа-
ном наблюдателя.
След от пересечения пло-
скости истинного горизонта
плоскостью меридиана на-
блюдателя определяет направление истинного меридиана, т. е.
направление линии N—S. Плоскости истинного горизонта и истин-
ного меридиана занимают на поверхности Земли для данного на-
блюдателя всегда постоянное и строго определенное положение,
почему и служат основными плоскостями для ориентировки.
Вертикальная плоскость, перпендикулярная к плоскости ис-
тинного меридиана, называется плоскостью первого
вертикала. Пересечение плоскости первого вертикала с плос-
костью истинного горизонта дает на последней направление ли-
нии Ost —W. Только на полюсах, где отвесная линия является
продолжением земной оси, положение плоскости истинного мери-
диана наблюдателя становится неопределенным. Во всех осталь-
ных точках земной поверхности линии N—S и Ost—W разбивают
§ 7}
Видимый горизонт
S3
плоскость истинного горизонта на 4 четверти: NO, SO, SW и
NW, что позволяет определять нужные направления с требуе-
мой точностью, как указано в § 8.
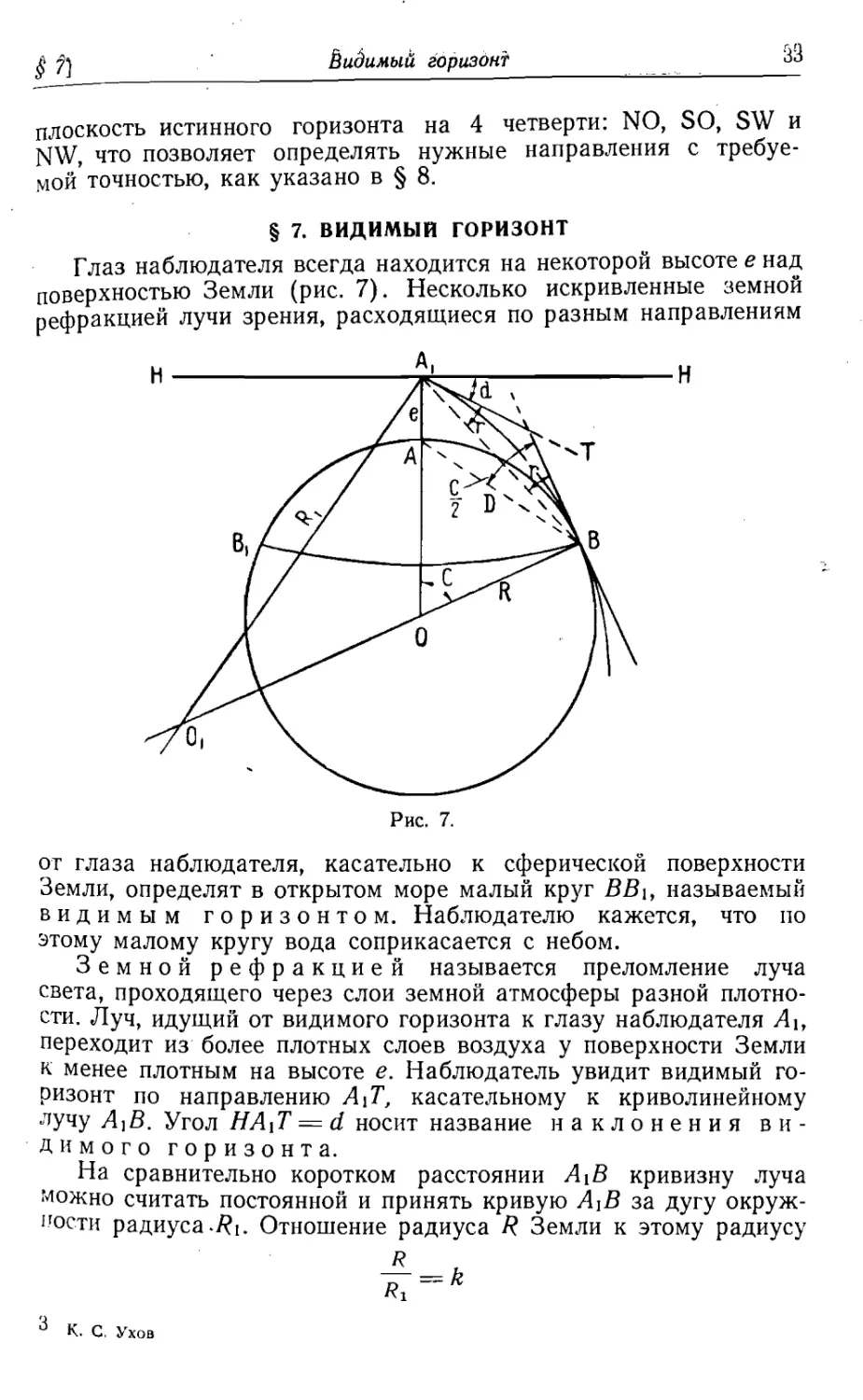
§ 7. ВИДИМЫЙ ГОРИЗОНТ
Глаз наблюдателя всегда находится на некоторой высоте е над
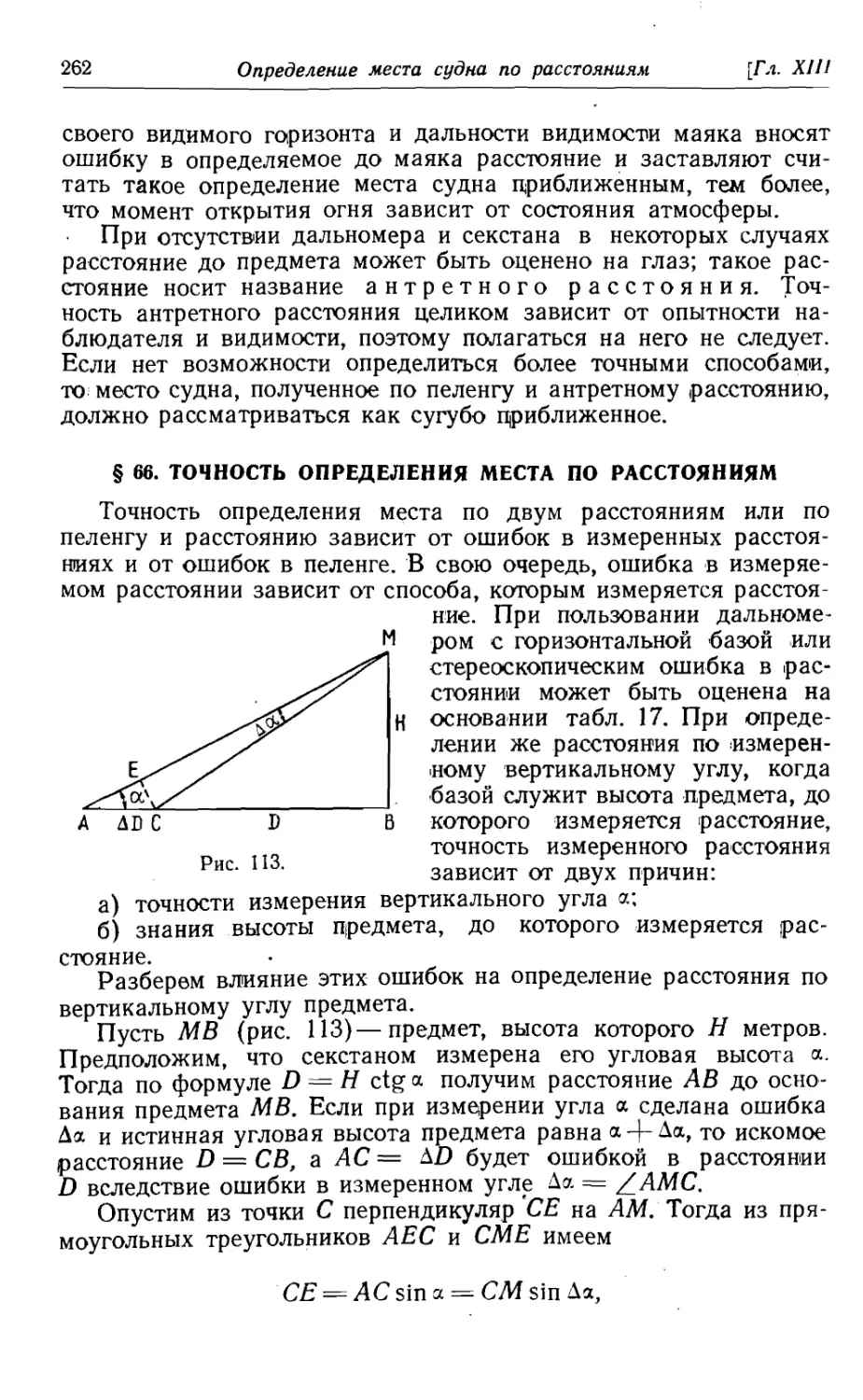
поверхностью Земли (рис. 7). Несколько искривленные земной
рефракцией лучи зрения, расходящиеся по разным направлениям
от глаза наблюдателя, касательно к сферической поверхности
Земли, определят в открытом море малый круг ВВ\, называемый
видимым горизонтом. Наблюдателю кажется, что по
этому малому кругу вода соприкасается с небом.
Земной рефракцией называется преломление луча
света, проходящего через слои земной атмосферы разной плотно-
сти. Луч, идущий от видимого горизонта к глазу наблюдателя Ль
переходит из более плотных слоев воздуха у поверхности Земли
к менее плотным на высоте е. Наблюдатель увидит видимый го-
ризонт по направлению А\Т, касательному к криволинейному
лучу Л]В. Угол НА\Т = d носит название наклонения ви-
димого горизонта.
На сравнительно коротком расстоянии А\В кривизну луча
можно считать постоянной и принять кривую за дугу окруж-
ности радиуса Отношение радиуса R Земли к этому радиусу
R
R1~k
3
К. С. Ухов
34
Основные определения в судовождении
[Гл. J1
носит название коэффициента земной рефракции
и характеризует преломляющую способность земной атмосферы.
Из многочисленных наблюдений, произведенных в различных
странах, оказывается, что величина k изменяется периодически
в течение суток. Кроме того, коэффициент k зависит от темпера-
туры и давления воздуха. При вычислении мореходных таблиц
принято среднее значение коэффициента k = 0,16. Иногда в на-
вигационных пособиях коэффициентом земной рефракции назы-
вают половину этой величины
Л, = —— = 0,08,
1 2 7?!
что расходится с определениями, принятыми в курсах геофизики,
геодезии и астрономии.
Сферический радиус видимого горизонта, т. е. расстояние АВ,
считаемое по земной поверхности, называется дальностью
видимого горизонта. По малости кривизны земной по-
верхности, и тем более зрительного луча, практически безраз-
лично измерять ли это расстояние по дуге АВ, по хорде АВ или
по дуге Л1В.
Для определения дальности видимого горизонта и его накло-
нения воспользуемся простыми выводами, предложенными
А. П. Ющенко (рис. 7). В треугольнике АА{В угол при вершине А
близок к прямому; по малости кривизны земной поверхности
углы С и г выражаются небольшим числом дуговых минут. По-
этому с достаточной точностью можно написать
Но
C = S-; 2r = —= —- —= Л—.
R Ri R, R R
Производя подстановку
e D
D
2R 2R 2Rv '
__ 2Re
~~ 1 -k'
D = y2Re(l-k) 2 =/1 ]/~2Re = 1,08]/~2Re. (10)
Для получения D в морских милях при высоте глаза е, выра-
женной в метрах, примем радиус R Земли — 3437,75 мор. миль,
а высоту глаза е разделим на 1852.
§ Л
Видимый горизонт
Тогда
D = 1,08 1/ 2'3437,75 • У~ё = 2,08 VTM.
’ I/ 1852 Г ж
(П)
Для приближенных расчетов можно считать, что дальность
видимого горизонта в морских милях равна удвоенному квадрат-
ному корню из высоты глаза в метрах.
Рис. 8.
Если высота глаза дана в футах, то дальность видимого гори-
зонта равна
D=1,145P%. (1Г)
Для получения наклонения видимого горизонта d заметим
прежде всего, что
£ ОА±В = 180°—С—(90°—г) = 90°— (С—г);
rf = 90o-r-[90°-(C-r)] = С-2г.
Снова применив уже использованные подстановки для Сиг
и выражая d в минутах дуги, получим
d'=
( R R /аге 1' R v ’ arc 1'
Приняв во внимание значение Z), данное в уравнениях (10)
и (И), и подставив значения R и k, найдем
d'=-^-y\-k\/ 4 = 1.765/^.
arc 1' у R
(12)
Всякий предмет в зависимости от высоты его над уровнем
моря имеет свою дальность видимости.
Пусть CF = Н (рис. 8) — высота предмета, тогда KF = Dh
представит его дальность видимости. Если при этом глаз наблю-
3*
36
Основные определения в судовождении
[Гл. П
дателя находится в точке А на высоте е над уровнем моря, то его
дальность видимого горизонта будет АК — Ве и наблюдатель
увидит вершину предмета CF с расстояния AF. равного
Dn = Dh + De = ^ft{VH-YVl>\ (13)
где Dn — дальность видимости предмета с высоты глаза е,
выраженная в морских милях;
Н и е — соответственно, высоты предмета и глаза наблюда-
теля, выраженные в метрах.
На морских картах и в навигационных пособиях по судовож-
дению дальность видимости маяков дается с высоты глаза 5 м
(на старых картах 15 футов). Если высота глаза наблюдателя
другая, то указанную на карте дальность видимости маяка нужно
исправить поправкой.
Д = 2,08 (Уё-У 5) = 2,08 Vё-4,7. (14)
Формула (14) указывает и знак поправки. Если наблюдения
- в море ведутся с одного мостика, то е — величина постоянная, и
удобно заранее подсчитать поправку 4 и исправлять ею данные
в пособиях дальности видимости предметов.
В приложении к Мореходным таблицам 1943 г. на отдельном
листе даны таблицы дальности видимого горизонта. Табл. IV-a
вычислена по формуле (11') и табл. IV-6 — по формуле (11).
В табл. IV-a высоты в футах даны в пределах от 0 до 23 000 фу-
тов, а в табл. IV-6 — высоты в метрах от 0 до 5100 м. На обрат-
ной стороне листа помещена номограмма IV-А «Дальность види-
мости предметов». Аргументы в номограмме даны и в метрах и
в футах; номограмма очень проста и удобна.
Пример 1. Какова дальность видимости горы, если высота ее 950 м,
а высота глаза наблюдателя 12 м?
По табл. IV-б дальность видимости горы .... 64,1 мор. миль
„ „ „ дальность видимости горизонта
наблюдателя.................................. 7,2 „
Наблюдатель должен увидеть вершину горы на
расстоянии................................. 71,3 мор. миль
Пример 2. Дальность видимости маяка, данная на карте, 21 мор. миля.
Высота глаза наблюдателя 8 м. С какого расстояния должен открыться маяк?
Дальность видимого горизонта наблюдателя . . 5,9 мор. миль
Дальность видимого горизонта с высоты глаза 5 м 4,7 „
Поправка на высоту глаза . . .4-1,2 мор. миль
Три системы деления горизонта
37
Дальность видимости маяка с высоты глаза 8 м будет
21 + 1,2= 22,2 мор. миль.
Прим ер 3. Рассчитать поправку на высоту глаза, если высота мостика 3 м.
Дальность видимого горизонта с высоты глаза 3 м . . 3,6 мор. миль
» в « » « 5 м . . 4,7 „
Поправка на высоту глаза . . — 1,1 мор. миль
Этой поправкой надо исправлять дальность видимости маяков, данную
на морских картах и в пособиях.
Дальность видимости маяка, рассчитанная по приведенным
формулам, носит название геометрической или гео-
графической дальности видимости. Ночью даль-
ность видимости огня зависит не только от его высоты, но и от
силы источника света и системы маячного аппарата. Эта даль-
ность видимости, зависящая от силы света маячного огня, назы-
вается оптической дальностью видимости и оп-
ределяется из многократных наблюдений. В большинстве случаев
геометрическая и оптическая дальности маяков одинаковы, если
же они различны, то в описаниях огней дается наименьшая из
указанных дальностей. Кроме того, приведенная в пособиях даль-
ность видимости каждого маяка рассчитана на ясную погоду и
не учитывает возможного ухудшения прозрачности атмосферы.
Поэтому данные цифры дальностей видимости огней всегда могут
быть значительно искажены в зависимости от состояния атмо-
сферы.
Дальность видимости предметов в условиях пасмурной по-
годы, дымки или тумана будет значительно меньше геометриче-
ской и не поддается предварительному подсчету. В этом случае
определение дальности видимости такого ограниченного гори-
зонта производится на основе опыта, а также определения рас-
стояний до предметов, открывающихся в условиях плохой види-
мости. Расстояния до предметов могут быть измерены непосред-
ственно или сняты с карты.
§ 8. ТРИ СИСТЕМЫ ДЕЛЕНИЯ ГОРИЗОНТА
Любое направление на поверхности Земли может быть опре-
делено углом между плоскостью истинного меридиана и верти-
кальной плоскостью, проходящей через место наблюдателя и
объект, на который определяется направление.
Как указано в § 6, плоскость истинного меридиана наблюда-
теля и плоскость первого вертикала делят истинный горизонт на-
блюдателя на 4 четверти: NO, SO, SW и NW.
Для более точного обозначения направлений еще в древние
времена, в эпоху начала судовождения каждая четверть гори-
зонта была разбита на 8 частей, а весь горизонт на 32 части-
38
Основные определения в судовождении
[Гл. II
Полученные, таким образом, постоянные 32 направления полу-
чили название румбов. Румбом же был назван и угол между
двумя соседними направлениями; отсюда угловая величина румба
получилась равной
360°:32=11 —.
4
Для еще более точного определения направлений румб был
разделен на 4 части, и при приближенных расчетах принима-
лось, что
— румба = 2°48'45"~ 2 — ^2°,8;
4 4
румба = 5°37'30" ~ 5 у 5°,5;
у- румба = 8°26'15" 8 у 8°,5.
Румбы в каждой четверти получили номера от 0 до 8, причем
в NO и SW четвертях нумерация румбов идет по часовой стрелке,
а в SO и NW — против часовой стрелки. Нулевые и восьмые
румбы N, О, S и W называются главными румбами,
а четвертые румбы NO, SO, SW и NW, по которым названы и
четверти,— четвертными румбами.
Названия вторых и шестых румбов составлены из трех букв
путем удвоения названия ближайшего главного румба, для чего
к названию четверти прибавляется название главного ближай-
шего румба; таким образом получились вторые румбы: NNO,
SSO, SSW и NNW и шестые: ONO, OSO, WSW и WNW. Эти
румбы иногда называются трехбуквенными румбами.
Все нечетные румбы составляются из главных или четвертных
румбов с прибавлением голландского слова «ten», означающего
предлог «к», и наименования главного румба, к которому при-
ближается данный нечетный румб, например NtO, NOtO,
SWtS и т. д.
При указании направления с точностью до ’А румба к основ-
ному румбу добавляется число четвертей румба и буква О или W,
в зависимости от того, куда уклоняется данное направление, на-
пример: NNO — О, S—О, SWtW—W, NW — W.
н 4 2 4 4
Указанная система счета направлений с развитием точности
судовождения оказалась недостаточной и в настоящее время со-
храняется только для определения приближенных направлений,
например направления ветра или течения.. В связи с указанным
слово румб потеряло свое первоначальное значение и в настоя-
щее время сохраняется как термин, означающий на море какое-
Три системы деления горизонта
39
либо данное направление. Кроме того, слово румб сохранилось
для определения угловой величины, равной И1/?. Так, например,
когда говорят: «судно повернуло на 4 румба вправо» — это зна-
чит, что судно изменило направление своего движения на 45°
вправо; «ветер зашел на 8 румбов» — направление ветра измени-
лось на 90°; «слева на 2 румба открылся маяк» — слева на 22,°5
от направления движения судна открылся маяк.
Рис. 9.
С увеличением точности судовождения, связанным с появле-
нием паровых судов, каждая четверть горизонта была разбита
на 90°, причем счет градусов начинался от направлений N и S
к направлениям О и W от 0° до 90°. Направление указывается при
такой разбивке горизонта числом градусов и наименованием чет-
верти, например: SW 60°, NO 15°, SO 32°, NW 48°. При этом
счет градусов в NO и SW четвертях идет по часовой стрелке,
т. е. вправо от наблюдателя, а в SO и NW четвертях — против
часовой стрелки, влево от наблюдателя, находящегося в центре
картушки.
В начале настоящего столетия весь горизонт был разделен на
360° и направление стало-указываться числом градусов от 0° до
360 по часовой стрелке от N части меридиана наблюдателя.
40
Основные определения в судовождении
[Гл. 11
Этот счет наиболее простой и удобный; счет по четвертям, однако,
еще сохранился при вычислениях, а румбовая картушка приме-
няется для указания приближенных направлений.
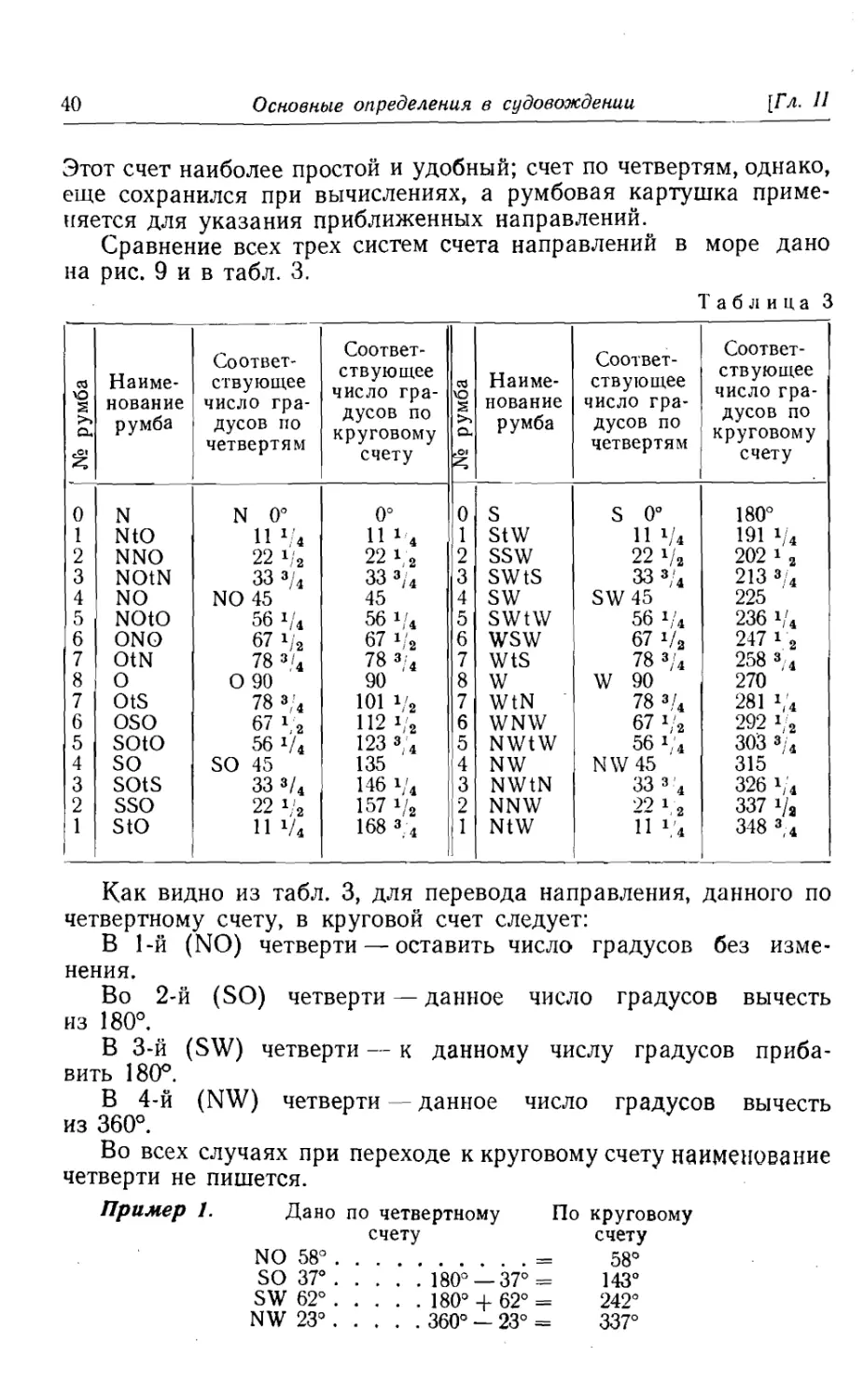
Сравнение всех трех систем счета направлений в море дано
на рис. 9 и в табл. 3.
Таблица 3
[ № румба ( Наиме- нование румба Соответ- ствующее число гра- дусов по четвертям Соответ- ствующее число гра- дусов по круговому счету № румба Наиме- нование румба Соответ- ствующее число гра- дусов по четвертям Соответ- ствующее число гра- дусов по круговому счету
0 N N 0° 0° 0 S S 0° 180°
1 NtO И i/« 11 1 4 1 stw 11 1/4 191 1/4
2 NNO 22 i/2 22 V s 2 SSW 22 1/2 202 1 2
3 NOtN ЗЗз/4 33 3/4 3 swts 33 3/4 213 з/4
4 NO NO 45 45 4 SW SW 45 225
5 NOtO 56 1/4 56 1/4 5 swtw 56 1/4 236 1/4
6 ONO 67 г 67 1/2 6 wsw 67 1/2 247 1 2
7 OtN 78 3/4 78 з/4 7 wts 78 З/4 258 3 4
8 0 О 90 90 8 w W 90 270
7 ots 78 3/4 Ю1 1/2 7 WtN 78 з/4 281
6 OSO 67 1;2 112 1/2 6 WNW 67 i/2 292 1/2
5 soto 56 1/4 123 з,4 5 NWtW 56 i,4 303 3/4
4 SO SO 45 135 4 NW NW 45 ' 315
3 sots ЗЗЗ/4 146 i/4 3 NWtN 33 з 4 326 \ 4
2 SSO 22 \'2 157 1/2 2 NNW 22 12 337 1/я
1 sto Н V4 168 3 4 1 NtW И 1'л 348 3,4
Как видно из табл. 3, для перевода направления, данного по
четвертному счету, в круговой счет следует:
В 1-й (NO) четверти — оставить число градусов без изме-
нения.
Во 2-й (SO) четверти — данное число градусов вычесть
из 180°.
В 3-й (SW) четверти — к данному числу градусов приба-
вить 180°.
В 4-й (NW) четверти — данное число градусов вычесть
из 360°.
Во всех случаях при переходе к круговому счету наименование
четверти не пишется.
Пример 1. Дано по четвертному По круговому
счету счету
NO 58°.................- 58°
SO 37°.........180° —37° = 143°
SW 62°.......180° 4- 62° = 242°
NW 23°....... 360° — 23° = 337°
§
Истинный курс, истинный пеленг и курсовой угол
41
Переход от направлений, данных
правлениям по четвертному счету
образом.
Пример 2.
по круговому счету, к на-
производится следующим
47°
141°
213°
306°
Дано по круговому
счету
180°— 141° =
213° — 180° =
360° — 306° =
По четвертному
счету
47°
39°
33°
54°
NO
SO
SW
NW
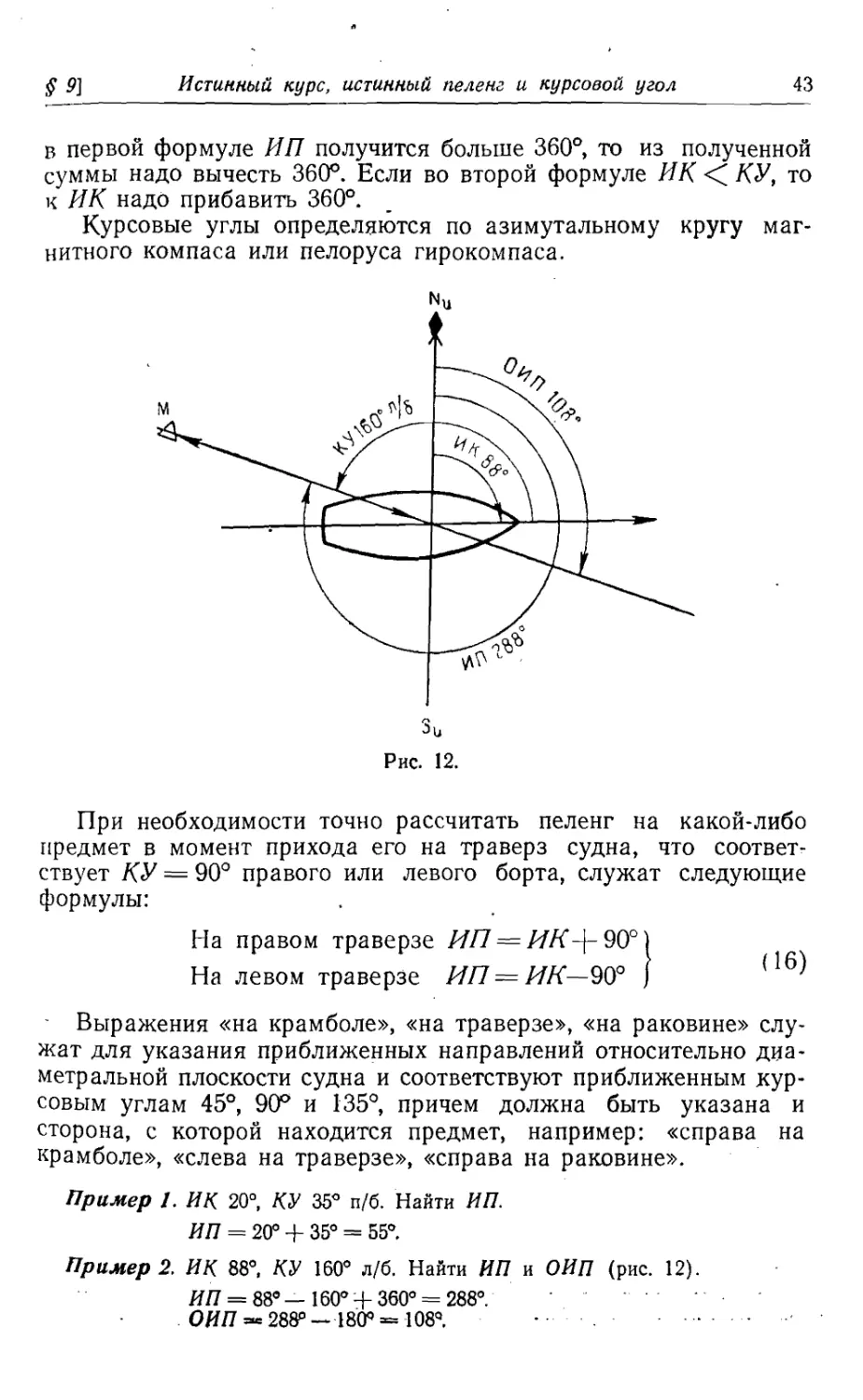
§ 9. ИСТИННЫЙ КУРС, ИСТИННЫЙ ПЕЛЕНГ и курсовой УГОЛ
В навигации постоянно приходится иметь дело с двумя на-
правлениями: направлением движения судна и направлением на
какой-либо объект.
Двугранный угол между плоскостью истинного меридиана и
диаметральной плоскостью судна определяет направление его
движения; этот угол носит название истинного курса
судна.
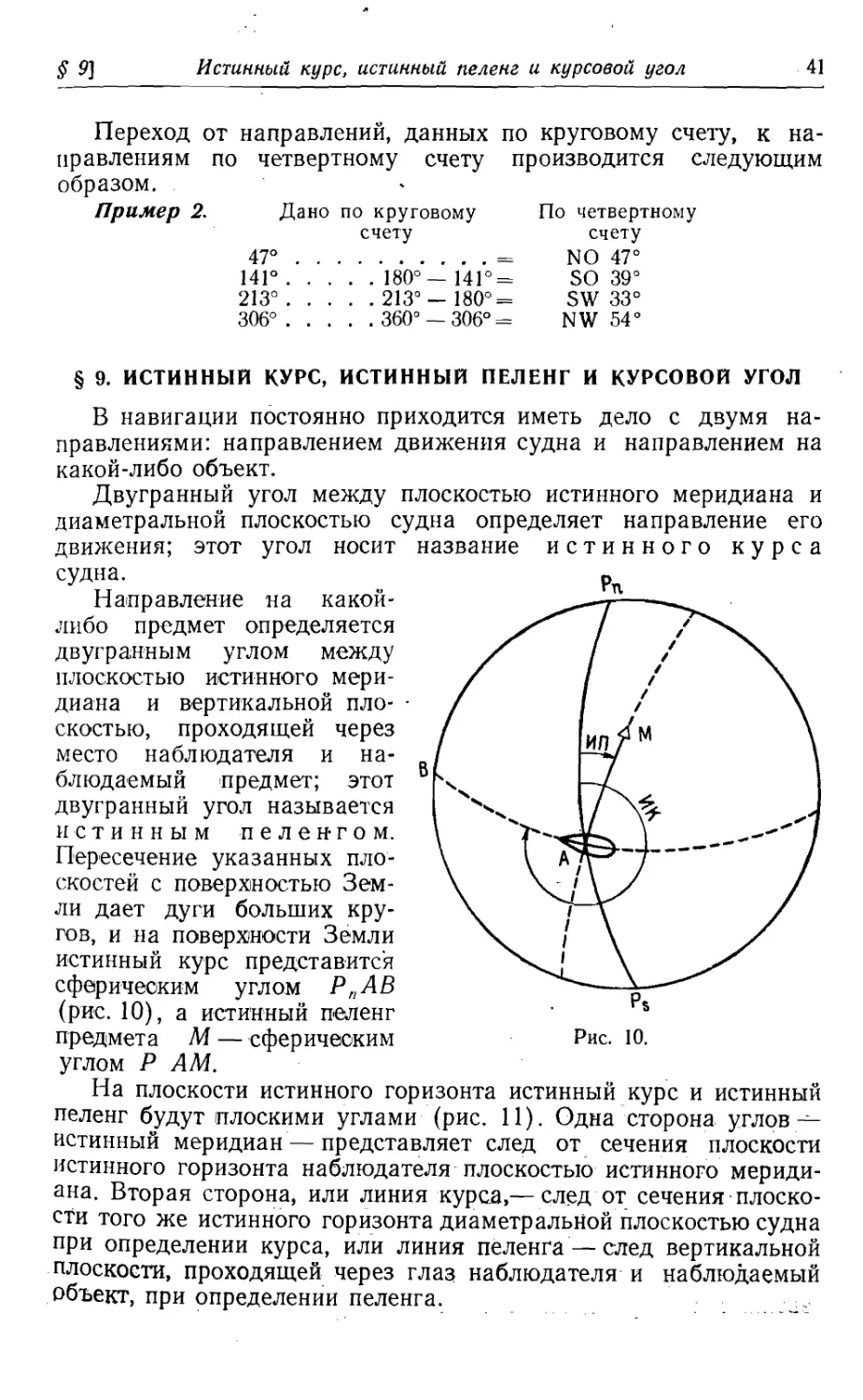
Направление на какой-
либо предмет определяется
двугранным углом между
плоскостью истинного мери-
диана и вертикальной пло-
скостью, проходящей через
место наблюдателя и на-
блюдаемый предмет; этот
двугранный угол называется
истинным пеленгом.
Пересечение указанных пло-
скостей с поверхностью Зем-
ли дает дуги больших кру-
гов, и на поверхности Земли
истинный курс представится
сферическим углом Р п А В
(рис. 10), а истинный пеленг
предмета М — сферическим
углом Р AM.
На плоскости истинного горизонта истинный курс и истинный
пеленг будут плоскими углами (рис. 11). Одна сторона углов —
истинный меридиан — представляет след от сечения плоскости
истинного горизонта наблюдателя плоскостью истинного мериди-
ана. Вторая сторона, или линия курса»—след от сечения плоско-
сти того же истинного горизонта диаметральной плоскостью судна
при определении курса, или линия пеленга — след вертикальной
плоскости, проходящей через глаз наблюдателя и наблюдаемый
объект, при определении пеленга.
42
Основные определения в судовождении
[Гл. 11
Направление, определяемое углом, отличающимся на 180° от
истинного пеленга, называется обратным истинным пе-
ленгом (ОИП).
Истинный пеленг не зависит от направления диаметральной
плоскости судна.
Во многих случаях встречается необходимость определить
направление на какой-либо объект относительно диаметральной
плоскости судна.
Угол между диаметральной плоскостью судна и направлением
на данный объект называется курсовым углом (КУ).
Счет курсовых углов идет от 0°, определяющего направление
диаметральной плоскости судна в нос, до 180° по правому и ле-
вому бортам.
Непосредственно на рис. 11 получаем
ИПг — ИК—КУ левого борта *1
ИП% = ИК-^КУ wpavoro борта )
Формулы (15) связывают курс, пеленг и курсовой угол и по-
зволяют по двум данным величинам рассчитать третью-.- Если
£ 9] Истинный курс, истинный пеленг и курсовой угол 43
в первой формуле ИП получится больше 360°, то из полученной
суммы надо вычесть 360°. Если во второй формуле ИК < КУ, то
к ИК надо прибавить 360°.
Курсовые углы определяются по азимутальному кругу маг-
нитного компаса или пелоруса гирокомпаса.
При необходимости точно рассчитать пеленг на какой-либо
предмет в момент прихода его на траверз судна, что соответ-
ствует КУ = 90° правого или левого борта, служат следующие
формулы:
На правом траверзе ИП = /7/С-(-90о)
На левом траверзе ИП = ИК—§0° |
- Выражения «на крамболе», «на траверзе», «на раковине» слу-
жат для указания приближенных направлений относительно диа-
метральной плоскости судна и соответствуют приближенным кур-
совым углам 45°, 90° и 135°, причем должна быть указана и
сторона, с которой находится предмет, например: «справа на
крамболе», «слева на траверзе», «справа на раковине».
Пример 1. И К 20°, КУ 35° п/б. Найти ИП.
ИП = 20° + 35° = 55°.
Пример 2. И К 88°, КУ 160° л/б. Найти ИП и ОИП (рис. 12).
ИП = 88е— 160° 4- 360° = 288°..............
. ОИП «288е— 180’= 108е ......... ................
44
Определение направлений в море
[Гл. Ill
Пример 3. ИП 260°, КУ 55° л/б. Найти ИК.
ИК = 260° + 55° = 315°.
Пример 4. ИК 78°. Найти ИП маяка, когда он будет на левом траверзе.
ИП = 78° — 90° + 360° = 348°.
Пример 5. ИК 5°, ИП 350°. Найти КУ-
КУ « 5° — 350° + 360° = 15° л/б.
ГЛАВА Ш
ОПРЕДЕЛЕНИЕ НАПРАВЛЕНИЙ В МОРЕ
§ 10. КОМПАСЫ И ИХ ХАРАКТЕРИСТИКА
Основным прибором для определения направлений в море
служит компас, картушка которого у современных компасов раз-
бита от 0° до 360° по часовой стрелке.
В настоящее время в судовождении применяются два типа
компасов:
а) гирокомпасы;
б) магнитные компасы.
Гирокомпас состоит из тяжелого, быстро вращающе-
гося тела — гироскопа, заключенного в камеру и подвешенного
в окружающей его следящей системе. Под влиянием вращения
Земли и силы земного притяжения, при ограничении свободы
поворота гироскопа вокруг одной из его осей, возникает момент
сил, который стремится привести ось гироскопа в плоскость ис-
тинного меридиана.
Гирокомпас является электромеханическим прибором, обла-
дающим направляющей силой, заставляющей ось его гироскопа
указывать направление истинного меридиана. Эта направляющая
сила во много раз больше направляющей силы магнитного ком-
паса. Как сила механическая, направляющая сила гирокомпаса
не зависит ни от магнитного поля Земли, ни от магнитных полей,
создаваемых на судне массами металла и многочисленными элек-
троустановками. Последнее свойство гирокомпаса является осо-
бенно ценным для современных судов. В то же время гирокомпас
является сложным прибором, требующим специального квалифи-
цированного обслуживания.
Электрическая схема прибора служит для приведения во вра-
щение ротора и следящей за его движением системы, а также
для передачи показаний основного компаса на репитеры — ком-
пасы-указатели, которые устанавливаются в различных частях
судна.
Теоретически ось гирокомпаса должна показывать направле-
ние истинного меридиана и давать возможность определять по
Компасы и их характеристика
45
гирокомпасу истинные направления. Но как всякий механический
прибор, гирокомпас имеет свою поправку, и в действительности
ось гироскопа и связанная с ней линия N — S следящей системы
и компасов-указателей установятся в плоскости своего гироско-
пического или компасного меридиана и все направления по гиро-
компасу будут отсчитываться от этого меридиана, как указано
на рис. 13.
Если нордовая часть гироскопического меридиана отклонилась
вправо от нордовой части истинного меридиана (рис. 13), то по-
правка гирокомпаса, равная углу между истинным и гироскопиче-
ским меридианами, носит название остовой и ей приписы-
вается знак плюс (+); если же нордоЬая часть гироскопического
меридиана отклонилась влево от нордовой части истинного мери-
диана, то поправка носит название в'е с т о в о й и ей приписы-
вается знак минус (—).
Поправка гирокомпаса не зависит от курса судна и должна
оставаться постоянной при данном режиме работы гирокомпаса.
Изменение географической широты, изменения скорости и
курса судна вызывают, соответственно, и изменения в поправке
гирокомпаса, которые исключаются из его показаний при помощи
специального корректирующего устройства. Все же ошибки кор-
рективного приспособления, различные механические причины,
вызывающие добавочное трение, значительные колебания напря-
46
Определение направлений в море
[Гл. Ill
жения в электрической цепи, питающей гирокомпас,— могут вы-
звать изменение поправки гирокомпаса. Кроме того, поправка
гирокомпаса меняется в некоторых пределах после каждой оста-
новки и чистки прибора.
За поправкой гирокомпаса надлежит тщательно следить,
никогда не упуская возможности ее определить.
Магнитный компас. Основная часть магнитного ком-
паса состоит из системы нескольких магнитных стрелок, располо-
женных параллельно. Система магнитных стрелок скреплена с
легкой картушкой, представляющей истинный горизонт. У совре-
менных компасов картушка разбита от 0° до 360°, причем диа-
метр картушки, проходящий через деление 0°—180°, совпадает
с направлением магнитной оси всей системы. Картушка вместе
с магнитными стрелками посажена на острие шпильки и может
свободно вращаться вокруг вертикальной оси, проходящей через
центр картушки и шпильку. Система магнитных стрелок, вра-
щаясь вокруг вертикальной оси, всегда стремится занять такое
положение, чтобы ее магнитная ось совпадала с направлением
силовых линий магнитного поля, окружающего картушку. На бе-
регу система магнитных стрелок находится под воздействием
магнитного поля Земли и указывает направление его силовых
линий. На судне, кроме магнитного поля Земли, на систему маг-
нитных стрелок будут действовать магнитные поля, создаваемые
судовым железом, в свою очередь намагниченным магнитным по-
лем Земли; магнитные поля, возникающие на современных судах
от работы многочисленных электроустановок, также окажут свое
влияние на магнитные стрелки. Под совокупным действием маг-
нитного поля Земли и магнитных полей, создаваемых судном, си-
стема магнитных стрелок компаса в каждом отдельном случае
будет занимать свое положение, и для надежной работы магнит-
ного компаса на судне требуется создание специальных условий,
ослабляющих влияние судовых магнитных полей. В курсе нави-
гации рассматривается только использование магнитного компаса
для судовождения.
Зависимость показаний магнитного компаса от изменения
магнитного поля, в котором он находится, является его недостат-
ком. В то же время простота устройства магнитного компаса, его
автономность и малые габариты являются его преимуществом
перед гирокомпасом.
Определение направлений в море — важнейшая задача судо-
вождения, и как гирокомпас, так и магнитный компас одинаково
требуют самого тщательного внимания к себе. Наличие на судне
одновременно гирокомпаса и магнитного компаса дает взаимный
контроль работы этих основных приборов судовождения, постро-
енных на двух различных физических принципах.
£ Н]
Земной Магнетизм
4?
§ 11. ЗЕМНОЙ МАГНЕТИЗМ
Пространство, окружающее Землю, представляет собой есте-
ственное магнитное поле, подобное тому, которое создал бы
очень мощный магнит, помещенный внутри Земли и указываю-
щий своим южным концом на Гудзонов залив, северным — на
Землю Южной Виктории (рис. 14).
При этом условии силовые линии магнитного поля Земли из-
меняются по направлению в различных точках земной поверхно-
сти, становясь вертикальны-
ми в точках, носящих назва-
ние магнитных полю-
сов, и горизонтальными —
на линии, окружающей Зем-
лю и проходящей приблизи-
тельно посредине между по-
люсами. Эта линия носит
название магнитного
экватора и представляет
как бы границу между се-
верным и южным магнетиз-
мом.
Магнитное поле Земли в
каждой данной точке харак-
теризуется величиной его
напряжения, т. е. силой, ко-
торая действует в данной
точке на положительную
единицу магнитной массы, и Рис 14
направлением этой силы. ис’
Пусть сила земного магнетизма в точке О (рис. 15) изобра-
жается по величине и по направлению вектором OF, Вертикаль-
ная плоскость HOZF, в которой расположен вектор OF, носит
название плоскости магнитного меридиана. Эта
плоскость составляет с плоскостью истинного меридиана XOZL
угол РОН, который называется магнитным склонением
и обозначается буквой d.
Магнитное склонение d отсчитывается от северной части ис-
тинного меридиана к востоку и к западу от 0° до 180°. Восточ-
ному магнитному склонению приписывается знак плюс (+),
а западному — знак минус (—).
Угол HOF, образуемый вектором OF с плоскостью истинного
горизонта ХОН, называется магнитным наклонением и
обозначается символом 0. Магнитное наклонение отсчитывается
от горизонтального направления вниз от 0° до 90° и считается
48
Определение направлений в Море
[Гл. 1П
положительным, если северный конец магнитной стрелки обра-
щен вниз. __
Обозначим абсолютную величину вектора OF, представляю-
щего полное напряжение магнитного поля Земли, через Т. Эту
силу можно разложить на две составляющие в плоскости магнит-
ного меридиана: горизонтальную Н и вертикальную Z. Из рис. 15
имеем
//=7cos6, Z=7sin0 или Z = //tgO. (17)
Величины d} Н} Z и А, определяющие магнитное поле Земли
в данной точке, носят название элементов земного м а г -
Рис. 15.
и е т и з м а.
Распределение элементов земного маг-
нетизма по земной поверхности наносится
на магнитные карты путем проведения
через все точки земной поверхности, в ко-
торых данный магнитный элемент имеет
одинаковое значение, кривых линий, но-
сящих общее название изолиний. На
картах, изображающих распределение по
.поверхности Земли магнитного склонения,
нанесены кривые равного магнитного
склонения — изогоны. Такие карты на-
зываются картами изогон. Изо-
гона, соединяющая точки, в которых маг-
нитное склонение равно нулю, называется
а г о н о ю. Подобные же карты состав-
ляются для указания распределения по
земной поверхности наклонения, величи-
ны горизонтальной составляющей Н и
вертикальной составляющей Z, а иногда
и величины полного напряжения магнит-
ного поля Г.
Кривые, соединяющие точки с равным
наклонением, носят название изоклин, а карты, на которых
они нанесены,— карты изоклин. Кривые, соединяющие
точки с равным магнитным напряжением, называются и з о ди-
на м а м и.
Магнитное склонение и магнитное наклонение даются на кар-
тах в градусах, а горизонтальная и вертикальная составляющие
земного магнетизма Н и Z даны на картах в единицах си-
стемы CGS.
Наибольшее практическое значение для навигации имеют
карты изогон. В настоящую эпоху две линии нулевого склоне-
ния — агоны — разделяют всю земную поверхность на две обла-
сти: в одной из них, включающей Атлантический и Индийский
§ Hi
Земной магнетизм
49
океаны, западную часть Европы и Африку, склонение западное,
в другой области, охватывающей Тихий океан, почти всю Азию и
значительную часть Северной и Южной Америки, склонение во-
сточное. Исключение представляет небольшая аномальная об-
ласть, расположенная в Восточной Сибири, где агона делает
петлю, внутри которой склонение западное.
Все изогоны сходятся в магнитных полюсах, где горизонталь-
ная составляющая Н равна нулю, а наклонение 0 = +90°. Все
изогоны также проходят и через географические полюсы. Это
обстоятельство значительно усложняет карты изогон в приполяр-
ных областях. В этих районах магнитное склонение резко ме-
няется и быстро растет, достигая в районах между географиче-
скими и соответствующими магнитными полюсами величины 180°.
Положение магнитных полюсов не остается постоянным,
а медленно перемещается в магнитном поле Земли. По имею-
щимся данным приблизительное положение магнитных полюсов
для эпохи 1950 года:
северного <р = 72°^N, X = 96°fcW
южного cp = 70°S, X=150°Ost
Магнитная ось Земли — прямая, соединяющая магнитные по-
люсы,— составляет с осью вращения Земли угол около 1172° и
не проходит через центр Земли.
Все элементы земного магнетизма подвержены с течением
времени изменениям, носящим название вариаций. Поэтому
все магнитные элементы, указываемые на картах, приводятся
всегда к какой-либо определенной эпохе. Для изучения вариации
какого-либо из элементов земного магнетизма составляются карты
изопор, на которых кривыми линиями — изопорами — соеди-
няются точки с одинаковым вековым ходом изменения данного
элемента земного магнетизма.
Изменения элементов земного магнетизма делятся на перио-
дические и непериодические, или возмущения. К периодическим
относятся вековые, годовые и суточные вариации. Суточные и го-
довые вариации невелики по величине и не имеют практического
значения. Вековые же вариации или вековой ход представляет
сложное явление с периодом порядка нескольких столетий и зна-
чительной амплитудой, доходящей, например, для магнитного
склонения до трех-четырех десятков градусов. Величина векового
хода магнитного склонения колеблется в различных точках зем-
ной поверхности в пределах от 0° до 0°,2 в год. Поэтому на всех
картах, где дается магнитное склонение, обязательно указывается
год, к которому оно приведено, а также величина и знак его го-
дового изменения в предположении, что для сравнительно неболь-
шого промежутка лет можно считать, что вековые вариации про-
текают равномерно.
К. С. Ухов
50
Определение направлений в море
[Гл. Ill
Случайные и редкие колебания в величине элементов земного
магнетизма носят названия магнитных бурь или воз-
мущений. Это явление сравнительно кратковременное и имеет
связь с северными сияниями и количеством пятен на Солнце.
Амплитуда колебаний магнитных элементов во время магнитных
бурь иногда может достигать значительной величины. Проф. Твер-
ской приводит следующий пример. Во время магнитной бури
25—26 сентября 1909 г., зарегистрированной Павловской маг-
нитной обсерваторией, максимальная суточная амплитуда маг-
нитного склонения достигла 7°20', в то время как в спокойные
дни амплитуда суточного хода магнитного склонения составляет
всего 7—10'. Во время дрейфа «Седова» В. X. Буйницкий наблю-
дал амплитуду изменения склонения в 52°2'.
В некоторых районах на поверхности Земли наблюдается рез-
кое уклонение величины и знака магнитного склонения от его
значений в окружающих точках. Это явление носит название
магнитной аномалии. Границы районов магнитной ано-
малии указываются на морских картах, и при плавании в этих
районах приходится особенно внимательно следить за работой
магнитного компаса, так как точность его работы в этих районах
будет нарушена, а иногда он может и совершенно отказать в
работе.
Выборка магнитного склонения с магнитных и навигационных
карт. Определения магнитного склонения в отдельных районах
показывают, что изогоны имеют незакономерный и весьма при-
чудливый вид. Это указывает на то, что магнитное поле вблизи
поверхности Земли распределяется неправильно и является слож-
ной функцией географических координат положения точек на по-
верхности Земли. Карты магнитного склонения отдельных морей
дают только общее представление о величине и знаке магнитного
склонения на поверхности Земли. Точность проведения изогон
непосредственно зависит от подробности магнитной съемки. На
водной поверхности Земли изогоны в большинстве случаев
сглажены.
На навигационных картах, на водной поверхности наносятся
картушки истинных направлений, в центре которых указываются
величина магнитного склонения с точностью 1/4°, эпоха и абсо-
лютная величина годового изменения магнитного склонения. Если
эпоха и величина годового изменения магнитного склонения оди-
наковы для всего района, охватываемого картой, то они указы-
ваются в заголовке карты. Иногда в отдельных местах карты
дается величина магнитного склонения для данной точки.
При выборке магнитного склонения с карты изогон или с на-
вигационной карты, по которой ведется прокладка, необходимо,
имея счислимое или обсервованное место судна, проинтерполи-
ровать на глаз величину магнитного склонения между двумя бли-
J 12\ Девиация магнитного компаса 51
жайшими изогонами или соответствующими надписями на нави-
гационной карте, а затем привести ее к году плавания.
Можно считать, что в лучшем случае, в наиболее изученных
морях мы можем знать магнитное склонение с точностью до
гЬ 1/а°; по мере удаления от берегов и в менее изученных морях
ошибка в полученном с карты магнитном склонении будет возра-
стать и может достигнуть порядка +1°—2°.
§ 12. ДЕВИАЦИЯ МАГНИТНОГО КОМПАСА
На магнитный компас, установленный на судне, кроме маг-
нитного поля Земли, будет воздействовать магнитное поле, созда-
ваемое судовым железом, в свою очередь намагниченным силой
земного магнетизма, и также магнитные поля, создаваемые ра-
ботой электроустановок, аккумуляторных батарей и различной
электропроводкой, находящейся под током. Вследствие этого
стрелка магнитного компаса, установленного на судне, откло-
нится от плоскости магнитного меридиана и займет положение
по направлению равнодействующей всех вышеуказанных магнит-
ных сил.
Вертикальная плоскость, проходящая через линию N—S кар-
тушки магнитного компаса, установленного на судне, называется
плоскостью компасного меридиана. След от пере-
сечения плоскости истинного горизонта наблюдателя плоскостью
компасного меридиана называется компасным мериди-
аном.
Угол в плоскости истинного горизонта наблюдателя между
магнитным и компасным меридианом называется девиа-
цией магнитного компаса. Девиация магнитного ком-
паса обозначается буквой’ 8.
Этот угол отсчитывается от нордовой части магнитного мери-
диана к W или к Ost от 0° до 180°. Если нордовая часть компас-
ного меридиана отклонилась от нордовой части магнитного мери-
диана к востоку, то девиация называется восточной или остовой
и ей приписывается знак плюс (+); если же нордовая часть ком-
пасного меридиана отклонилась от нордовой части магнитного
меридиана к западу, то девиация называется западной или весто-
вой и ей приписывается знак минус (—).
Величина и наименование девиации зависят от того влияния,
которое оказывает на магнитную стрелку компаса судовое же-
лезо, намагниченное земным магнетизмом. Различные части судо-
вого железа имеют различную магнитную восприимчивость, и ха-
рактер намагничивания их зависит от положения диаметральной
плоскости судна относительно полной силы земного магнетизма.
52
Определение направлений в море
[Гл. П1
Таким образом, равнодействующая всех магнитных сил, произво-
димых судовым железом, меняется по величине и по направле-
нию в зависимости от курса судна, следовательно, и девиация
магнитного компаса зависит от курса судна.
Влияние массы судового железа на магнитную стрелку ком-
паса может быть настолько велико, что направляющая сила маг-
нитного компаса станет равна нулю или будет настолько мала,
что окажется не в состоянии преодолеть трение топки картушки
о шпильку и компас будет застаиваться. Это обстоятельство слу-
жит главной причиной необходимости компенсировать влияние
судового железа на магнитную стрелку, т. е. уничтожать девиа-
цию. Кроме того, при большой величине девиации происходит ее
быстрое изменение с переменой курса судна, и тогда угол пово-
рота судна не будет соответствовать изменению курса судна, рас-
считанному по картушке магнитного компаса.
Отклонение магнитной стрелки компаса под влиянием магнит-
ных полей, создаваемых электропроводкой, находящейся под
током, работой аккумуляторных батарей, электродвигателей и
других различных электроустановок получило название элек-
тромагнитной девиации. Величина электромагнитной
девиации, кроме курса судна, зависит еще и от силы тока в
электропроводке.
Способы компенсации влияния на магнитную стрелку судо-
вого железа и уничтожения электромагнитной девиации излага-
ются в курсах «Девиация магнитного компаса». В настоящей
главе рассматриваются только способы определения остаточной
девиации магнитного компаса после ее уничтожения.
Величина остаточной девиации служит критерием качества
работы по уничтожении девиации, но, кроме того, она зависит и
от магнитных условий, в которых работает компас. Если у глав-
ных магнитных компасов, располагаемых по возможности вдали
от больших и подвижных масс судового железа, остаточная де-
виация может быть доведена до величины порядка 1°—2°, то
у путевых компасов в рубках, в центральных постах и в румпель-
ных отделениях она обычно бывает значительно больше.
Как бы хорошо ни была уничтожена девиация магнитного
компаса, как бы тщательно ни была определена остаточная де-
виация, она с течением времени меняет свое значение вследствие
изменения магнитного состояния судна. Поэтому, кроме опреде-
ления остаточной девиации и составления рабочей таблицы де-
виации магнитного компаса, никогда не следует пропускать слу-
чая определить девиацию магнитного компаса, чтобы иметь ее
верное значение на данном курсе и получить суждение о надеж-
ности рабочей таблицы девиации.
# 13\
Три меридиана
53
§ 13. ТРИ МЕРИДИАНА
При использовании для судовождения магнитного компаса
приходится различать три меридиана: истинный, магнитный и
компасный. Пусть точка О (рис. 16) представляет центр кар-
тушки магнитного компаса. Плоскость NUZSU, проходящая че-
рез географический полюс, определит плоскость истинного мери-
диана; магнитная стрелка, находящаяся в магнитном поле Земли,
определит положение плоскости магнитного меридиана N„ZS„,
а магнитная стрелка, помещенная на судне, определит плоскость
Рис. 16.
компасного меридиана NKZSK. Все три плоскости в пересечении
с плоскостью истинного горизонта определят, соответственно, по-
ложение всех трех меридианов; истинного — NUOSUJ магнит-
ного— NMOSAi и компасного NKOSKt Следовательно, в зависи-
мости от того, от какого меридиана мы поведем счет, получается
и три направления: истинное, магнитное и компасное.
Пусть точка О (рис. 17) представляет центр картушки маг-
нитного компаса, установленного на судне, DFI — диаметральную
плоскость судна, NUSU — истинный меридиан, NMSM — магнит-
ный меридиан и NKSK—компасный меридиан. Если в точке М
находится маяк или какой-либо объект, пеленг которого опреде-
ляется, то линия ОМ представляет линию пеленга. Из рис. 17
имеем:
u0D — истинный курс судна;
/JNMOD — магнитный курс судна;
£^NKOD — компасный курс судна;
£NиОМ — истинный пеленг маяка;
£NMOM — магнитный пеленг маяка;
£*NKOM — компасный пеленг маяка.
54
Определение направлений в море
[Гл. Ш 1
Истинным курсом судна (ИК) называется угол между*
нордовой частью истинного меридиана и носовой частью диамет-
ральной плоскости судна, считаемый по часовой стрелке от 0°
до 360°.
Магнитным курсом судна (ЛТК) называется угол
между нордовой частью магнитного меридиана и носовой частью
диаметральной плоскости судна, считаемый по часовой стрелке
от 0° до 360°.
Рис. 17.
Компасным курсом судна (КК) называется угол
между нордовой частью компасного меридиана и носовой частью
диаметральной плоскости судна, считаемый по часовой стрелке
от 0° до 360°.
Истинным пеленгом (ИП) какого-либо предмета на-
зывается угол между нордовой частью истинного меридиана и
направлением на данный предмет, измеряемый по часовой
стрелке от 0° до 360°.
Магнитным пеленгом (МП) какого-либо предмета
называется угол между нордовой частью магнитного меридиана
и направлением на данный предмет, измеряемый по часовой
стрелке от 0° до 360°.
Компасным пеленгом (КП) какого-либо предмета
называется угол между нордовой частью компасного меридиана
и направлением на данный предмет, измеряемый по часовой
стрелке от 0° до 360°.
£ 14] Перевод румбов 55
При определении направлений по гирокомпасу, показания
которого не зависят от магнитного поля Земли, всегда будет
только два направления: истинное и компасное, различающихся
на поправку гирокомпаса, величина которой не зависит от курса
судна.
§ 14. ПЕРЕВОД РУМБОВ
На судне компас дает всегда компасные направления, а для
проложения каких-либо направлений на карте необходимо знать
истинные направления, отсчитываемые от истинного меридиана,
нанесенного на карте. При определении девиации магнитного
компаса приходится иметь дело с магнитными направлениями.
Переход от одних направлений к другим носит название пере-
вода румбов. Переход от компасных направлений к истин-
ным называется также исправлением румбов. С пере-
водом румбов в судовождении приходится встречаться постоянно
и его нужно делать быстро и безошибочно.
На рис. 18 представлены три картушки, указывающие истин-
ные, магнитные и компасные направления. Линия И USU пред-
ставляет истинный меридиан, N„SM — магнитный меридиан и
NKSK — компасный меридиан. Линия ИП указывает направ-
ление диаметральной плоскости судна. определяет
магнитное склонение d, которое в данном случае будет иметь
наименование Ost, так как ИЛ1 отклонился от Nu к Ost.
равен девиации магнитного компаса 3, которая на чертеже взята
остовой. Из чертежа получаем
L NUOD = Z. NKOD 4 L NkONm 4- L КмОКи,
г. e. истинный курс равен компасному курсу плюс девиация, плюс
магнитное склонение.
На аналогичном рис. 19 приняты вестовые магнитное склоне-
ние и девиация. Из рисунка имеем
Z. KUOD = L NKOD- LNMONa,
т. e. истинный курс равен компасному курсу минус девиация,
минус магнитное склонение.
Приписывая остовой девиации и остовому магнитному склоне-
нию знак плюс (+), а вестовой девиации и вестовому магнит-
ному склонению знак минус (—), из двух последних выражений
получим
Истинный курс равен алгебраической сумме компасного курса,
магнитного склонения и девиации.
(18)
56
Определение направлений в море
[Гл. 111
Из этих же чертежей, принимая во внимание знаки магнит-
ного склонения и девиации, получаем
MK=MK-\-d; МК=КК-\-Ъ.
’’'И
SM Sn
Рис. 18.
Истинный курс равен алгебраической сумме магнитного курса
и склонения.
Магнитный курс равен алгебраической сумме компасного
курса и девиации.
§ 14}
Перевод румбов
57
На практике, когда приходится переходить непосредственно
от истинных направлений к компасным или обратно, магнитное
склонение и девиация складываются алгебраически. Полученная
сумма носит название общей поправки компаса и
обозначается Эта поправка имеет свое наименование или
знак, определяемый алгебраической суммой
58
Определение направлений в море
[Гл. 111
Общая поправка магнитного компаса равна алгебраической
сумме магнитного склонения и девиации.
Применяя общую поправку магнитного компаса, из рис. 18
и 19 имеем
ИК=КК-±ЬК.
Истинный курс равен алгебраической сумме компасного курса
и общей поправки компаса.
Пусть на рис. 18 и 19 линии ОМ представляют линии пелен-
гов. Непосредственно из рисунков, так же как для перевода кур-
сов, принимая во внимание знаки магнитного склонения и девиа-
ции, имеем для пеленгов
ИП = КП-\~ 8 4- d = КП^- Д К
ИП = МП~^й
МП=КП-\~Ъ
(19)
При этом следует помнить, что девиация магнитного компаса
зависит от курса судна и при переводе пеленгов должна выби-
раться на тот компасный курс, на котором лежит судно в момент
взятия пеленга.
С помощью приведенных формул решаются все задачи на пе-
ревод и исправление румбов. При переводе компасных курсов
или пеленгов в магнитные или истинные девиация выбирается из
таблицы девиации магнитного компаса по аргументу компасный
курс, а магнитное склонение снимается с карты и приводится
к данному году величиной годового изменения склонения, кото-
рая также указывается на карте. При переходе же от истинного
курса или пеленга к магнитному и компасному иногда приходится
отдельно учитывать величину магнитного склонения и девиации.
Если магнитное склонение и девиация невелики, то истинный
курс мало отличается от компасного курса и девиацию практиче-
ски можно выбирать на истинный курс прямо из таблицы девиа-
ции, составленной для компасных курсов. Если же склонение
сравнительно велико, то приходится сначала истинный курс пере-
родить склонением в магнитный курс, а затем магнитный курс
в компасный. В последнем случае при небольшой девиации,
не превышающей 4°—6°, можно принять, что девиация практи-
чески будет одна и та же как на компасный, так и на магнитный
курс. При большой же девиации приходится составлять две таб-
лицы девиации на компасные и магнитные курсы.
Ниже приводятся все соотношения между истинными, магнит-
ными и компасными направлениями.
$ 14\
Перевод румбов
59
Эти формулы алгебраические и служат для исправления и пе-
ревода как курсов, так и пеленгов:
ИК= ЛУГД-Д/Г
HK=MK-\-d
МК= КК-± 8
кк= ИК-ЬК
МК = ИК-d
КК=МК—Ъ
ЬК= ИК-КК-
d = ИК-МК (20)
8 = МК- КК
Связь между курсами, пеленгами и курсовыми углами з об-
щем случае будет в зависимости от того, какой курс будет при-
нят — истинный, магнитный или компасный, соответственно полу-
чится истинный, магнитный или компасный пеленг:
П — К \-КУ правого борта; П = К—КУ левого борта.
Соотношение между направлениями по гирокомпасу и магнит-
ному компасу. При использовании гирокомпаса мы будем иметь
всего два направления: истинное и компасное.
Для исправления и перевода румбов, определяемых по гиро-
компасу, будут служить только две формулы:
и ККг = ИК-ЬГК, (21)
в которых — компасный курс по гирокомпасу;
&ГК — поправка гирокомпаса.
Поправка гирокомпаса со своим знаком определяется по
формуле
кГК=ИК—ККг.
Для перехода от показаний гирокомпаса к показаниям маг-
нитного компаса и наоборот могут служить следующие формулы,
выведенные из приведенных выше, при условии, что как по-
правка гирокомпаса, так и поправка магнитного компаса из-
вестны:
ККмк=ККг + ^ГК-ЬК)-,
ККг = КК„—(ЬГК-±К}.
Для того чтобы лечь на заданный магнитный курс по гиро-
компасу, когда поправка последнего и магнитное склонение из-
вестны, искомый курс найдется по формуле
ККг = ЖД-(Д ГК-d}
и, в свою очередь,
МК KKt + (Д ГК-d}.
(22)
60
Определение направлений в море
[Гл. 111
Общая поправка магнитного компаса по сличению его пока-
заний с гирокомпасом, при известной поправке последнего, най-
дется так:
Л К = ККг-ККмк + Д ГК. {23)
Все приведенные формулы алгебраические и служат одина-
ково как для курсов, так и для пеленгов.
Для наглядности и контроля иногда полезно делать переводы
румбов чертежом, руководствуясь следующими правилами:
при остовой поправке N компасного
меридиана лежит вправо от N истинного
меридиана на величину поправки, а при
вестовой поправке — влево от последнего.
Для перевода румбов можно также
дать следующие правила, предполагая
наблюдателя в центре картушки.
При остовой девиации магнитные рум-
бы при картушке, разделенной на 360°,
будут больше компасных.
При остовом магнитном склонении
истинные румбы больше магнитных.
При вестовой девиации и вестовом
магнитном склонении — наоборот.
Знак поправки компаса подчинен пра-
вилу: «придай меня к неверному, чтобы
получить верное».
Пример /. Истинный курс 206°, магнитное склонение 12°Ost, девиа-
ция 2°W. Найти магнитный и компасный курсы.
МК = 206° — (К 12°) = 194°; йК = + 12° — 2° = + 10°;
КК - 194° — (— 2°) - 196°; КК = 206° — (+ 10°) = 196°.
Пример 2, Компасный курс 40°, девиация 1°W, магнитное склонение 4° W.
Найти магнитный и истинный курсы.
МК = 40° — 1° = 39°; йК = — 1° — 4° = — 5°;
ИК = 39° — 4° = 35°: ИК = 40° — 5° = 35°.
Пример 3. Компасный пеленг Солнца 245°, истинный пеленг его 238°,
магнитное склонение 8°,5W. Определить девиацию магнитного компаса.
МП = 238° — (— 8°,5) = 246°,5; йК = 238° — 245° = — 7°;
& = 246°,5 — 245° = + 1°,5; & = —7° — (— 8°,5) = + 1°,5.
Пример -/.Истинный курс 55°, магнитное склонение 14°W, девиа-
ция 4° Ost. Найти чертежом компасный курс.
Проводим истинный меридиан (рис. 20) и положение диаметральной
плоскости судна, согласно заданному истинному курсу. Откладываем от
$ 15] Определение девиации магнитндео компаса
61
истинного меридиана угол, равный 14°, влево и получаем магнитный мери-
диан. От магнитного меридиана откладываем вправо угол, равный 4°, и по-
лучаем компасный меридиан. С рисунка снимем компасный курс
КК = 55°+ 10° = 65°.
Пример 5. Требуется лечь на магнитный курс 270° по гирокомпасу, по-
правка которого ЬГК — — 0°,5, магнитное склонение 7° Ost. Найти компас-
ный курс по гирокомпасу.
ККг = 270° — (— 0°,5 — 7°) = 277°,5.
§ 15. ОПРЕДЕЛЕНИЕ ДЕВИАЦИИ МАГНИТНОГО КОМПАСА
Опр целение истинного направления движения судна является
основные требованием судовождения. Точность знания истинного
курса судна зависит от точности знания магнитного склонения в
районе плавания судна и девиации магнитного компаса. Поэтому
на судах должны систематически производиться работы по унич-
тожению девиации магнитного компаса и определению остаточ-
ной девиации. Производство этих работ особенно необходимо
после длительной стоянки в порту, каких-либо переделок на судне
вблизи от места расположения магнитного компаса, изменений
в нагрузке судна, приема грузов, влияющих на показание маг-
нитного компаса, при значительном изменении магнитной ши-
роты и во всех прочих случаях, когда можно предполагать изме-
нение магнитного состояния судна. Если за недостатком времени
или по другим причинам не представляется возможным произве-
сти уничтожение девиации, то определение ее должно быть сде-
лано обязательно.
Кроме полного определения девиации, на ходу в море необхо-
димо пользоваться всяким удобным случаем для определения
поправки магнитного компаса на данном курсе, чтобы получить
ее верное значение и иметь суждение о верности всей таблицы
девиации. В открытом море желательно проверять девиацию
компаса каждую вахту и при каждой перемене курса, однако
если это затруднительно, то девиацию следует определять, по
возможности, не менее двух раз в сутки, а именно: после восхода
Солнца и незадолго до его захода.
Так как девиация магнитного компаса зависит от магнитного
состояния судна, то последнее при определении девиации магнит-
ного компаса должно быть таким же, каким оно будет в море на
ходу. Все большие массы железа должны быть установлены на
свои места и закреплены по-походному. Вблизи магнитного ком-
паса не должно быть никаких посторонних железных предметов.
Для главных компасов, которые устанавливаются так, что
с них можно производить непосредственное пеленгование види-
мых с мостика предметов, определение девиации производится
62 Определение направлений в море [Гл. Ill
сравнением взятого по магнитному компасу компасного пеленга
с известным магнитным пеленгом того же предмета. Девиация
путевых компасов, устанавливаемых часто в закрытых помеще-
' ниях, определяется путем сличения курса по путевому компасу
с курсом по главному компасу, девиация которого известна.
Девиация магнитного компаса является функцией курса судна
и ее определение должно производиться на разных курсах. В на-
стоящее время принято определять девиацию магнитного компаса
на восьми равноотстоящих курсах, а именно: N, NO, О, SO, S,
SW, W, NW, что позволяет легко рассчитать девиацию на желае-
мое число курсов по правилам, излагаемым в «Девиации магнит-
ного компаса».
При определении девиации на восьми курсах наибольшее
время занимает маневрирование судна при перемене курса. Для
ускорения работы еще перед выходом на определение девиации
следует (в зависимости от района, в котором намечено определе-
ние девиации) составить схему маневрирования судна и избрать
такой порядок перехода с курса на курс, чтобы судно тратило
как можно меньше времени на изменение курса. При составле-
нии схемы маневрирования следует предусмотреть, чтобы судно
шло заданным курсом до момента определения некоторое время
(около пяти минут). При данном условии намагничивание судо-
вого железа земным магнетизмом будет соответствовать избран-
ному курсу. Для сокращения случайных ошибок наблюдений на
каждом курсе желательно взять от 3 до 5 пеленгов и для опреде-
ления девиации рассчитать средний из взятых пеленгов или же,
определив девиацию отдельно из каждого наблюдения, взять
среднюю из девиаций на данном курсе.
Для определения девиации главных компасов существует
четыре метода:
а) по створам;
б) по пеленгу отдаленного предмета;
в) по взаимным пеленгам;
г) по пеленгам небесных светил.
Определение девиации по створам. Если в данном районе
имеется створ, магнитное или истинное направление которого из-
вестно, то судно пересекает створ заданным курсом и определяет
компасное направление створа в момент его пересечения. Опре-
деление девиации значительно ускоряется и облегчается, если на
берегу в данном районе имеется несколько створов, дающих ис-
тинное направление. Во многих портах устанавливаются специ-
альные девиационные створы, истинное направление которых
точно определяется. Сведения о таких створах помещаются
в соответствующих лоциях.
Если створ почему-либо плохо виден, то работу по определе-
нию девиации удобнее производить вдвоем: первый наблюдатель
$ /5] Определение девиации магнитного компаса 63
пеленгует задний знак, а второй наблюдатель с биноклем в руках
следит за створом и при приближении к нему подает сначала
предупредительную команду «подходит», а затем в момент пере-
сечения створа — исполнительную команду «створ». По послед-
ней команде первый наблюдатель замечает отсчет по картушке
компаса с точностью до 0°,1. Запись производит один из наблю-
дателей тотчас же по взятии 'пеленга. Второй наблюдатель дол-
жен находиться вблизи компаса, чтобы отметить момент прохода
компаса через створ. При чувствительном створе, если второй на-
блюдатель находится в стороне от компаса, то он может ока-
заться на створе, в то время как компас еще не пришел на створ
или, наоборот, уже пересек его.
При наличии на берегу створа, истинное или магнитное на-
правление которого неизвестно, он все же может быть использо-
ван для определения девиации магнитного компаса. В теории
девиации показано, что средней из восьми компасных пеленгов,
взятых на восьми равноотстоящих курсах^ может быть принят
с достаточной для практических целей точностью за магнитный
пеленг, а именно:
МП = ^-. (24)
При использовании для определения девиации створа, не пред-
назначенного специально для данной цели, следует принимать во
внимание его чувствительность. При хорошем, чувствительном
створе незначительное уклонение судна от оси створа сразу же
определится расстворением створных знаков. При малочувстви-
тельном створе судно будет наблюдать расхождение створных
знаков только при значительном уклонении от оси створа. Вопрос
о чувствительности створа разобран в гл. XX, § 100.
Определение девиации по пеленгу отдаленного предмета. При
отсутствии для определения девиации подходящего створа можно
воспользоваться отдаленным приметным предметом, магнитный
пеленг на который известен или определен по формуле (24).
При определении девиации по пеленгу отдаленного предмета
следует иметь в виду, что магнитный пеленг данного предмета
относится к одному определенному направлению, в то время как
судно на ходу, ложась на разные курсы, описывает некоторую
циркуляцию и пеленги берутся из разных точек.
Во многих портах для определения девиации по пеленгу отда-
ленного предмета установлены специальные палы или бочки.
В первом случае суда небольших размеров швартуются бортом
непосредственно к палу, подавая швартовы с носа и кормы на
бугель, свободно надетый на пал. Разворачиваясь вокруг пала,
судно берет компасные пеленги отдаленного предмета на вы-
бранных курсах; в этом случае судно описывает наименьшую
64
б пределение направлений в море
[Гл. 111
циркуляцию. Во втором случае судно подает с носа швартовы на
среднюю бочку, а кормовые — на стоящие вокруг бочки или на
стенки гавани и разворачивается на швартовых на выбранный
курс, на котором и определяет компасный пеленг отдаленного
предмета.
Сведения об установке в портах бочек или пала для опреде-
ления девиации, а также указания на приметные отдаленные
предметы и на их пеленги помещаются
в соответствующих лоциях.
Если магнитный пеленг отдален-
ного предмета не известен, то он мо-
жет быть определен одним из следую-
щих способов:
1) при наличии достаточно подроб-
ной карты и если место судна известно
точно, то истинный пеленг может быть
снят с карты и затем переведен в маг-
нитный;
2) средний пеленг из восьми рав-
ноотстоящих пеленгов дает магнит-
ный пеленг, рассчитываемый по фор-
муле (24).
Точность определения девиации по
отдаленному приметному предмету за-
висит от величины радиуса циркуля-
ции судна. Следует отдаленный пред-
мет выбирать на таком расстоянии,
чтобы циркуляцией судна можно было
бы пренебречь.
Пусть А (рис. 21)—выбранный для
определения девиации отдаленный
предмет; О — центр циркуляции судна, радиус которой обозна-
чим через г; ОА = D — расстояние от центра циркуляции до
предмета.
Наибольшая ошибка а в определяемом направлении на пред-
мет, которая целиком войдет в определяемую девиацию, выра-
зится отношением
sin а = — .
D
Если мы имеем возможность выбирать расстояние до пелен-
гуемого отдаленного предмета, то, желая определить девиацию
с ошибкой, не превышающей заданной величины, мы должны
выбрать предмет на расстоянии.
£ /5]
Определение девиации магнитного компаса
65
или же по малости угла а
D = ^.
а°
При точности определения пеленга 0°,25 получим
£) = 240г. (25)
Для судна, стоящего на бочке или на якоре, радиус г будет
равен расстоянию по горизонтали от места якоря до места, где
установлен компас, девиация которого определяется. Это рас-
стояние должно быть, по возможности, сокращено; якорь следует
подобрать до панера, а при подаче носового швартова на бочку
его следует выбрать втугую.
Пример. Расстояние по горизонтали от якоря до главного компаса равно
100 м. Какое должно быть расстояние до отдаленного предмета, чтобы ошибка
в пеленге не превышала 0°,25?
240-100 ло .
D =-------— 13 мор. миль.
1852
Для судна на ходу район его маневрирования будет значи-
тельно больше и соответственно должно возрасти и расстояние D.
Определение девиации по взаимным пеленгам. Для определе-
ния девиации магнитного компаса по взаимным пеленгам на бе-
регу устанавливается магнитный компас в месте, где нет магнит-
ной аномалии, вдали от возмущающего влияния железных масс
и где обеспечена взаимная видимость судна.и установленного на
берегу компаса.
Если теперь взять одновременно пеленг судна по компасу,
установленному на берегу, а с судна — пеленг берегового ком-
паса, то первый компас даст магнитный пеленг, а второй — ком-
пасный. Девиация получится из сравнения этих двух пеленгов.
В некоторых больших заграничных портах устроены специ-
альные станции для определения девиации по взаимным пелен-
гам. На этих станциях установлены постоянные визиры, при-
чем 0° визира совпадает с N магнитного меридиана места и при
пеленговании по визиру получаются непосредственно магнитные
пеленги. Для удобства пеленгования над компасом на берегу и
над судовым компасом поднимается по приметному флагу. Для
одновременности взятия пеленгов приняты следующие условные
сигналы:
а) сигнал, поднятый до места, означает «приготовиться»;
б) спуск сигнала означает «взять пеленг».
На оборудованных постоянных береговых станциях пеленг
с берега немедленно передается на судно и девиация опреде-
ляется сразу. Сведения о таких станциях и порядок работы
с ними даются в лоциях.
5 к. С. Ухов
66 Определение направлений в море [Гл- II1
Этот способ имеет некоторое преимущество перед определе-
нием девиации по отдаленному предмету, так как судно может
находиться относительно близко от берегового компаса и этим
способом можно пользоваться в пасмурную погоду; кроме того,
судно может быть на ходу и ограничено в своем маневрировании
только условием взаимной видимости установленного на берегу
компаса и судна.
Определение девиации по пеленгам небесных светил. При
определении девиации по пеленгам небесных светил берут ком-
пасный пеленг Солнца или какого-либо другого небесного све-
тила и замечают момент по часам. По замеченному моменту
рассчитывают истинный пеленг небесного светила по правилам,
указанным в Мореходной астрономии. Истинный пеленг небесного
светила переводят известным для данного места магнитным скло-
нением в магнитный пеленг и, сравнивая последний с получен-
ным из наблюдений компасным пеленгом небесного светила,
определяют девиацию магнитного компаса.
Этот способ определения девиации магнитного компаса может
быть применен везде в открытом море при ясной погоде. Судно,
не стесненное маневрированием, описывает широкую циркуляцию
и задерживаясь последовательно на 8 или 16 равноотстоящих
курсах по 3—4 минуты на каждом курсе, берет каждый раз не-
сколько компасных пеленгов светила. Если представляется воз-
можным, то рекомендуется описать циркуляцию сначала в одну
сторону, например вправо, а затем в другую сторону — влево.
При определении девиации компаса по небесным светилам
следует обращать внимание, чтобы плоскость азимутального
круга котелка оставалась горизонтальной и не была наклонена
визирная плоскость. Исследование показывает, что при наклоне
визирной плоскости на угол а и угловой высоте светила h ошибка
в наблюдаемом компасном пеленге А 77 будет
A77 = atg/z. (26)
Для определения девиации по пеленгам небесных светил сле-
дует выбирать светила, близкие к горизонту, которые можно пе-
ленговать, не прибегая к помощи откидного зеркала. Особенно
удобно определение девиации производить по Солнцу незадолго
до его захода или вскоре после его восхода. Следует принять за
правило в открытом море для проверки показаний компаса
всегда определять его поправку в момент восхода или захода
Солнца или около этих моментов, когда высота Солнца мала и
его можно пеленговать непосредственно без помощи откидного
зеркала.
Если в месте производства наблюдений магнитное склонение
неизвестно, то среднее из поправок компаса, взятых на- 8 или 16
§15] Определение девиации магнитного кокпаса 67
равноотстоящих курсах, дает приближенное значение магнитного
склонения.
Определение девиации у путевых компасов. Установка путевых
компасов на верхнем мостике иногда не позволяет производить
с них непосредственно пеленгования. Тем более пеленгование
невозможно с магнитных компасов, установленных «во внут-
ренних помещениях судна. Поэтому девиация у путевых компа-
сов определяется по сличению их показаний с показаниями глав-
ного компаса, девиация которого определена из непосредственных
наблюдений. При небольшой девиации у главного компаса судно
ложится последовательно на главные' и четвертные румбы по
главному компасу, и, когда оно установится на заданном курсе,
от главного компаса подается звонок или другой установленный
сигнал ко всем путевым компасам. Наблюдатели у путевых ком-
пасов в момент подачи сигнала записывают показания магнит-
ного компаса с точностью до 0°,1. На каждом курсе следует сде-
лать 3—5 сличений, чтобы исключить случайные ошибки наблю-
дений. Старший штурман, руководящий работой у главного
компаса, должен следить за тем, чтобы сигналы подавались в тот
момент, когда судно действительно лежит на курсе, а не пере-
ходит через курс вследствие рыскания. Наблюдатель у главного
компаса записывает для контроля последовательность курсов, на
которые ложится судно, и показание главного компаса в момент
подачи сигнала. Эта запись позволит производить сличение по-
казаний компаса в том случае, если судно не точно лежит на
курсе, а несколько отклонилось от него, но хорошо держится
на курсе.
Девиация путевых компасов, определяемая по сличению, рас-
считывается по формуле
8^ = 8^ + (^-^), (27)
где —девиация путевого компаса;
огл — девиация главного компаса;
КК2лъККпугп—соответственно, компасные курсы по главному и
путевому компасам.
Схемы для вычисления девиации главного магнитного ком-
паса из непосредственных наблюдений и путевых магнитных ком-
пасов по сличению помещены в компасном журнале.
Определение поправки гирокомпаса. Так как показания гиро-
компаса не зависят от магнитного склонения, то его поправка
может быть определена сравнением компасного пеленга, взятого
по гирокомпасу, с известным истинным пеленгом створа, отдален-
ного предмета или небесного светила, только на одном каком-ни-
будь курсе. При пользовании гирокомпасом его поправку также,
следует определять при плавании ввиду берегов при каждой воз-
68 Определение направлений в море [Гл. .111
можности, а в открытом море не менее двух раз в сутки. По-
правка гирокомпаса должна быть обязательно определена, если
производилась чистка контактов или смена каких-либо запасных
частей.
§ 16. РАБОЧАЯ ТАБЛИЦА ДЕВИАЦИИ
После определения девиации магнитного компаса на восьми
главных и четвертных румбах по полученным непосредственно из
наблюдений девиациям вычисляют коэффициенты магнитной де-
виации, характеризующие магнитные силы, действующие на
стрелку магнитного компаса, а затем по коэффициентам вычи-
сляют рабочую таблицу девиации. Теоретическое обоснование
вычислений, вывод формул и схемы для вычислений подробно
рассматриваются в «Девиации магнитного компаса». Имея на-
блюденную девиацию на восьми курсах и вычислив по ним коэф-
фициенты девиации, мы имеем возможность по полученным ко-
эффициентам вычислить таблицу девиации на желательное число
курсов, например через 15°, через 10° и даже через 5°, что имеет
значение при сравнительно большой девиации. Непосредственное
определение девиации на таком большом числе курсов, как 24,
36 или 72, потребовало бы значительного времени, а вычисление
рабочей таблицы штурман может сделать менее Ъем в один час.
Кроме того, при вычислении рабочей таблицы девиации все слу-
чайные ошибки наблюдений раскладываются на всю таблицу
и ошибка в каждой вычисленной девиации будет меньше той
ошибки, какую можно допустить в какой-либо из наблюденных
девиаций.
Всегда следует предпочесть вычисленную рабочую таблицу
девиации таблице, полученной непосредственно из наблюдений.
В табл. 4 приведена рабочая таблица девиации магнитного
компаса, вычисленная через 15°, что при небольшой остаточной
девиации вполне достаточно и в то же время позволяет сравнить
вычисленную и наблюденную девиации на главных и четвертных
румбах и убедиться, что ни в наблюденных, ни в вычисленных
девиациях нет грубых промахов. При хороших наблюдениях вы-
численная и наблюденная девиации не должны расходиться бо-
лее чем на 0°,2—0°,4.
Табл. 4 составлена по схеме, приведенной в навигационном
журнале.
В табл. 5 показана рабочая таблица девиации магнитного
компаса, рассчитанная через 10°. Если величина девиации такова,
что требуется интерполяция ее на промежуточные курсы, то таб-
лица девиации, составленная через 10°, более удобна.
Так как разница между компасными и магнитными курсами
при такой девиации, как это должно быть, невелика, то одна и
та же таблица девиации служит для выборки девиации как на
Рабочая таблица девиации
69
компасные, так и на магнитные курсы. Если при малой девиации
и магнитное склонение невелико, то при переводе истинных рум-
бов в компасные девиацию можно выбирать непосредственно из
рабочей таблицы девиации прямо на истинный курс. Если же
магнитное склонение велико, то при переводе румбов следует
сначала получить магнитный курс, а затем на него выбрать де-
виацию и найти компасный курс.
Таблица 4
Рабочая таблица девиации главного
магнитного компаса
S Компасные курсы В
—0°,2 N 360° N 0° —0°,2
4-0°, 1 345° 15° —0°,5
4-0°, 5 330° 30° —0°,8
4-0°,9 NW 315° NO 45° —1°,0
-г1°,4 300° 60° —1°,2
4-1°,8 285° 75° —1°,3
+2°,3 W 270° О 90° —1°,3
+2° ,7 255° 105° —1°,2
+2° ,9 240° 120° —0°,9
+2° ,9 SW 225° SO 135° —0°,4
+2°,7 210° 150° +о°,з
4-2°, 3 195° 165° 4-Г.О
4-1°,7 S 180° S 180° 4-1°,7
Подпись----------- Дата---------
Таблица 5
Рабочая таблица девиации главного
магнитного компаса
6 Компасные курсы б
4-1°, 7 N 360° N 0° 4-1°,7
4-1°,7 350° 10° 4-1°,7
4-1°, 7 340° 20° 4-1°,7
+Е,6 330° 30° + 1°,8
+1°,3 320° 40° +2°,0
+ 1°,0 310° 50° 4-2°,1
+ 0°,6 300° 60° -42°, 3
0°,0 290° 70°' +2°, 5
—0°,5 280° 80° +2°,6
—1°,3 W 270° О 90° 4-2°, 7
—2°,0 260° 100° +2° ,6
—2°, 6 250° 110° 4-2°,4
—3°,2 240° 120° +2°,0
—3°,5 230° 130° 4-1°, 5
—3°,7 220° 140° 4-0° ,8
—3°,6 210° 150° 4-0°, 1
—3°,4 200° 160° —0°,7
—2° ,9 190° 170° —1°,6
—2°,3 S 180° S 180° - 2°,3
Подпись----------- Дат а--------
Так как компасный курс задается рулевому с точностью, не
превышающей 0°,5, то как магнитное склонение, так и девиацию
достаточно выбирать с точностью 0°,2. Желаемая точность в ис-
комом направлении служит критерием для данной таблицы де-
виации. Она позволяет решить вопрос о возможности вы-
бора девиации непосредственно на истинный курс, не переходя
к магнитному курсу, чтобы получить аргумент для входа в та-
блицу.
В некоторых случаях, когда девиация магнитного компаса
велика или она определена на произвольных курсах, может ока-
заться полезным вычерчивание диаграммы девиации, как указы-
вается в «Девиации магнитного компаса». При малых девиациях
строить диаграмму нерационально - и проще пользоваться таб-
лицей.
70
Определение пройденного расстояния в море
[Гл. IV
ГЛАВА IV
ОПРЕДЕЛЕНИЕ ПРОЙДЕННОГО РАССТОЯНИЯ В МОРЕ
§ 17. ЛАГИ И ИХ ХАРАКТЕРИСТИКА
Знание пройденного судном расстояния в море является, на-
равне со знанием направления движения, необходимым условием
для учета перемещения судна с возможно наибольшей точностью.
Для определения пройденного судном в море расстояния приме-
няются специальные приборы — лаги. Кроме того, пройденное
расстояние также может быть определено по скорости движения
судна и времени его движения, причем скорость судна опреде-
ляется по числу оборотов машины.
В настоящее время применяются два типа лагов:
а) лаги вертушечные и
б) лаги гидравлические.
Лаги вертушечные состоят из вертушки с винтообраз-
ными лопастями, буксируемой за кормой судна на длинном
тросе, носящем название лаглиня, или выстреливаемой на специ-
альном суппорте под днищем. При движении судна вода давит
на лопасти вертушки и заставляет ее вращаться. Если известен
шаг вертушки, т. е. расстояние, на которое она продвигается при
одном полном обороте, и число оборотов вертушки, то может
быть определено и пройденное вертушкой, а следовательно, и суд-
ном, расстояние. Так как шаг вертушки остается постоянным, то
счетное приспособление отмечает число оборотов вертушки и пре-
образовывает его в пройденное судном расстояние, которое и пе-
редает на счетчик пройденного расстояния. Шкала счетчика прой-
денного расстояния разбивается на морские мили и доли их, так
что со счетчика снимается пройденное расстояние в морских
милях.
Вертушечные лаги непосредственно дают пройденное судном
расстояние. При помощи вводимого промежуточного часового
устройства пройденное расстояние перерабатывается в скорость,
указываемую в узлах. Современные вертушечные лаги, кроме
буксируемых, указывают одновременно на двух различных ука-
зателях пройденное расстояние в милях и скорость в узлах.
Гидравлический лаг состоит из двух трубок и реги-
стрирующего механизма. Одна трубка выстреливается под дни-
щем судна так, что ее отверстие направлено в нос; при движении
судна в трубке образуется динамическое давление, зависящее от
скорости хода. Вторая трубка, статическая, устанавливается за-
подлицо с внешней обшивкой днища. Давление в этой трубке
зависит только от осадки судна.
£ /5] Поправка лага и ее определение 71
Работа гидравлических лагов основана на измерении разно-
сти между суммарным давлением, возникающим в трубке от ско-
рости хода судна и его осадки, и давлением в статической трубке,
зависящим только от осадки. Давление от обеих трубок пере-
дается на диафрагму, помещенную в специальном корпусе, а дви-
жение диафрагмы, вследствие разности давлений, передаваемых
на нее от двух трубок, передается, в свою очередь, через стер-
жень и рычаг механизму лага, приводящему в действие указа-
тели лага.
Так как давление, возникающее в динамической трубке, зави-
сит от скорости хода судна, то гидравлические лаги непосред-
ственно указывают скорость в узлах. Промежуточное часовое
устройство связывает скорость с пройденным расстоянием. Гид-
равлические лаги имеют также два указателя: скорости хода
судна в узлах и пройденного расстояния в милях.
Как видно из краткой характеристики лагов, оба типа ла-
гов — и вертушечные и гидравлические — дают пройденное суд-
ном расстояние и его скорость относительно воды. Переносного
движения судна вместе с водой современные лаги не реги-
стрируют.
Вертушка лага работает в воде, уже приведенной в движение
судном, и скорость ее вращения не соответствует в точности ско-
рости судна. Разность между скоростью вращения вертушки и
скоростью судна называется абсолютным скольже-
нием, которое зависит от формы вертушки, ее размера и от ско-
рости судна.
В гидравлических лагах зависимость между динамическим
давлением, возникающим в трубке, и скоростью хода судна, при-
близительно пропорциональна квадрату скорости судна.
Вследствие указанных причин лаги имеют свои поправки,
которые будут различны для разных скоростей судна.
Штурман обязан пользоваться всяким удобным случаем для
проверки работы лага и определения его поправки.
§ 18. ПОПРАВКА ЛАГА И ЕЕ ОПРЕДЕЛЕНИЕ
Как всякий прибор, лаг имеет свою поправку, постоянство ко-
торой на данной скорости судна может служить основанием для
суждения о достоинстве лага.
Поправка лага выражается в процентах и относится к раз-
нице показаний лага. Для определения поправки лага служит
следующее выражение:
Д л % = 100, (28)
ОЛд — ОЛ^ ' 4
72
Определение пройденного расстояния в море
[Гл. IV
где Ал% — поправка показаний лага, выраженная в процентах;
S — истинное плавание судна;
ол — отсчет лага по счетчику пройденного расстояния.
Формула (28) дает поправку лага и по величине и по знаку.
Если лаг показывает пройденное судном расстояние меньше, чем
судно прошло в действительности, то поправка лага имеет знак
плюс (+). Если лаг показывает больше, чем судно прошло в
действительности, то поправка лага имеет знак минус (—).
Расстояние Sл, пройденное судном относительно воды, опре-
деляется из показаний лага по формуле
= + (29)
ИЛИ
$л = (ол.-ол^ 4- (ол2-оа) ,
I ии
причем поправка лага берется со своим знаком.
Чтобы не делать вычислений по формулам (29), в МТ-43, в
приложении, на отдельных листах даны таблицы: VI — для по-
ложительных поправок лага и VI-a—для отрицательных.
Аргументами для входа в таблицы служат разность отсчетов
лага ол2—ол^9 данная в левом вертикальном столбце в преде-
лах от 1 до 100 миль, и поправка лага, приведенная в верхней
горизонтальной строчке в пределах от 1 до 10%. Плавание по
лагу Зл находится непосредственно на пересечении строки и столб-
ца, соответственно, отвечающим заданным значениям ол2—ОЛ1
и А л % '.
Если требуется определить плавание по лагу, когда разность
отсчетов лага превышает 100 миль — предел, данный в таблицах,
то величину (ол2—ол\) следует разбить на две части так, чтобы
каждая из них была меньше 100 миль, и, выбрав из таблицы
плавание раздельно на каждую часть, сложить их.
В этом случае
S. = (ол2- о а) г (1 + + (о А - ОЛ)2 • (1 Ч- ,
а
ОЛ^ ОЛ^ — (<?Л2 ^*^1)1 I (V-^2 ^*^1)2*
где (рл2—<Mi)> 100, а (рл2—ол{)х и (ол2—ОЛ1)2 каждая в от-
дельности меньше 100.
Если поправка лага больше 10%, то для расчета плавания по
лагу, пользуясь таблицами, поправку лага следует разбить на
две части так, чтобы каждая из них была меньше 10%.
£
Поправка лага и ее определение
73
Пусть
Дл % ~~ Дл^ % —Дл2 % ,
где Дл% больше 10%, а ДЛ1% и Дл2%' каждая в отдельности
меньше 10%. Тогда плавание по лагу определяется из выражения
/ \ Л I &Л%\ , \ Л i &лх% I Дл2%\
5л-(ол2-ол1)'Р + —j—(оЛг-олО-^! + -^- + -^00"^’
которое преобразуется так:
S,4= (ол2-олг)-^ + +(ола-ол1)-(1 +^)-(o^2-o^).
Согласно последнему выражению из таблицы надлежит вы-
брать плавание S, отдельно для каждой поправки Д.Л1% и
Дл2% и из суммы этих плаваний вычесть разность отсчетов лага.
Если требуется рассчитать отсчет лага ол2 в момент прихода
судна в заранее заданную точку по известному плаванию S, то
разность отсчетов лага получается путем обратного входа в таб-
лицу, а затем полученную разность отсчетов лага складывают
С ОЛр
Эта же задача может быть решена по формуле
(О Л о О Л л) — .
1
+ 100
Приведенные выше расчеты легко могут быть произведены
при помощи логарифмической линейки. В этом случае для ис-
правления показаний лага применяется коэффициент лага klf
который представляет отношение истинного плавания судна к раз-
ности отсчетов лага:
. (3°)
Из формул (29) и (30) получается зависимость между поправ-
кой лага, выраженной в процентах, и коэффициентом лага:
дло/о=(^-1)100 и йл = 1 + ^.
Плавание по лагу, применяя коэффициент лага, выразится так:
= (ол2 ОЛ]) kA,
а разность отсчетов лага по известному плаванию определится из
выражения
S
О Л2—ОЛу — .
74
Определение пройденного расстояния в море
[Гл. IV
Формулы (29) и (30) показывают, что для определения- как
поправки лага, так и его коэффициента необходимо знать истин-
ное плавание судна и разность отсчетов лага при прохождении
этого известного расстояния.
Поправка лага определяется одновременно со скоростью судна
тремя способами:
1) специальными пробегами на оборудованной мерной линии;
2) сравнением разности показаний лага с расстоянием, сня-
тым с карты между двумя точно определенными местами судна;
3) сравнением с действительно пройденным расстоянием,
определенным с помощью новых радиотехнических средств.
Мерная линия обычно оборудуется ведущим створом
(рис. 22), по которому правит судно, и несколькими секущими
створами, отбивающими на ведущем створе точно измеренные
расстояния. Если по условиям местности не представляется воз-
можным установить ведущего створа, то он заменяется рядом
вех, определяющих направление мерной линии. В некоторых слу-
чаях секущие створы также по условиям местности могут быть
заменены вехами, отбивающими на ведущем створе определен-
ные промежутки. Длины всех отрезков на мерной линии опреде-
ляются при помощи точных геодезических работ.
Определение поправки лага на мерной линии всегда произво-
дится одновременно с определением скорости судна. Для этого во
многих портах или вблизи них устроены оборудованные, как
указано выше, мерные линии, подробные сведения о которых
даны в соответствующих лоциях.
Хорошо оборудованная мерная линия должна отвечать сле-
дующим условиям:
§ /5]
Поправка лага и ее определение
75
1. Длина мерной линии должна быть такова, чтобы на ней
можно было провести ряд наблюдений на каждом пробеге. В на-
стоящее время мерные линии устраиваются длиной от 3 до
10 миль, в зависимости от скорости судов, для которых они пред-
назначены, и разбиваются секущими створами или вехами на от-
дельные участки так, чтобы каждый участок был длиной не менее
одной мили. Прл большой длине мерной линии можно предпола-
гать, что во время пробега судна будут меняться гидрометеоро-
логические условия, нарушая установившийся режим движения.
При слишком короткой мерной линии на точность определяемой
скорости судна и поправки лага будут влиять случайные ошибки
в отсчетах моментов прохождения секущих створов и в показа-
ниях пройденного расстояния на счетчике лага.
2. На концах мерной линии должно быть достаточно свобод-
ного пространства как для разворачивания судна, так и для того,
чтобы оно заранее легло на мерную линию и до пересечения пер-
вого секущего створа развило бы заданную скорость.
3. Глубины на мерной линии должны быть достаточно боль-
шими, чтобы избежать добавочного сопротивления движению
судна увлекаемой им на мелководье массой воды и связанной
с этим потери скорости. По определению А. Н. Крылова глубина
на мерной линии не должна быть меньше, чем
, 1 г 1/2 I 'Г
п = 1,5---Н Т,
g 1
г'де А—глубина в метрах;
: V—скорость хода, выраженная в метрах в секунду;
g—ускорение силы тяжести в м/сек2;
Т—осадка судна в метрах.
4. Мерная линия должна быть устроена в районе, защищен-
ном от ветров и волнения, и где по возможности отсутствует те-
чение. При наличии постоянного течения мерная линия должна
быть расположена так, чтобы направление течения совпадало
с направлением пробегов.
5. Район мерной линии должен быть свободен от навигацион-
ных опасностей. Все знаки на мерной линии должны быть хо-
рошо различаемы.
Скорость хода на мерной линии определяется по
формуле
у_ 3600-S
— t ’
где V — скорость хода судна в узлах;
S — длина участка мерной мили в морских милях;
t—время пробега данного участка мерной линии S, выра-
женное в секундах.
76 Определение пройденного расстояния в море [Гл. IV
Чтобы исключить ошибку в определяемой скорости, получае-
мую от влияния течения, следует делать два пробега на мерной
линии в одну и другую сторону при одном и том же числе оборо-:
тов машины. При двусторонних пробегах за действительную ско-
рость судна принимают среднюю скорость из полученных от-
дельно на каждом пробеге.
Иногда может встретиться надобность определить скорость
хода в километрах в час. В этом случае, если длина мерной ли-
нии дана в морских милях, скорость хода рассчитывается по
формуле
Т7 3600*5.1852 ,
V =-----------= 6667,2 — км/час.
1000/ } t
Если длина мерной линии дана в метрах, то
Т7 36005 5
V =-----= 1,944— узлов
1852/ / J
Т7 36005 о я 5 ,
V =-----= 3,6 — км/час.
1000/ /
Поправка лага и одновременно скорость судна могут быть
определены и на более длинных пробегах, сравнивая расстоя-
ние S, действительно пройденное судном между двумя надеж-
ными обсервованными местами, с разностью отсчетов лага
ол2—ол\. Пробег не должен быть излишне длинным, чтобы в
определяемую поправку лага и скорость не внести существенной
сшибки вследствие переменного неучтенного течения. Курс дол-
жен быть прямым, без поворотов, а глубины достаточными, как
это указано для мерной линии. При одновременном определении
поправки лага и скорости хода судна необходимо следить, чтобы
машины точно держали заданное число оборотов.
Иногда, как, например, в лоции Финского залива, приводятся
расстояния между двумя маяками и направление с одного маяка
на другой, вычисленные на основании геодезических работ. В этом
случае, прокладывая курс параллельно направлению с одного
маяка на другой и замечая моменты прохождения траверзов вы-
бранных маяков и отсчеты лага в эти моменты, определяют по-
правку лага и скорость судна.
Момент прохода траверза маяка должен отмечаться по ком-
пасу, рассчитывая компасный пеленг, перпендикулярный компас-
ному курсу. Определение траверза по азимутальному кругу мо-
жет внести ошибку вследствие неточного нахождения на курсе.
Эта ошибка будет тем больше, чем дальше судно от маяка. По-
этому курс следует прокладывать в этом случае ближе к маякам,
насколько это позволит условие навигационной безопасности и
достаточная для пробега глубина.
$ /9] Определение пройденного судном расстояния по его скорости
77
При отсутствии сведений о расстоянии между маяками и на-
правлении с одного из них на другой эти данные могут быть по-
лучены с несколько меньшей точностью с карты крупного мас-
штаба.
Получив расстояние S либо между надежно обсервованными
местами, либо между траверзами маяков, вычисляют поправку
лага и скорость хода так же, как и в случае пробега на мерной
линии.
С большой точностью пройденное расстояние может быть по-
лучено с помощью новых радиотехнических средств. Позволяя
сделать определения вне видимости берегов, они дают возмож-
ность проводить испытания на больших глубинах, не оказываю-
щих влияния на скорость судна.
Штурман обязан на походе пользоваться всяким удобным
случаем для определения поправки лага и скорости хода судна
при данном числе оборотов машин.
Пример!. Плавание между траверзами маяков S = 18 миль, ол{ = 44,8
и ол2 = 61,5. Рассчитать поправку лага и коэффициент лага.
А 18 — 16,7 1АЛ . 1300 , _ 18 ,
Д л% ----------100= ------= + 7,8%; k, =-----= 1,078
16,7 167 16,7
Пример 2. За 4 часа судно прошло 80 миль при попутном течении 2 узла.
0^! — 17,2; Дд% = — 13%. Найти отсчет лага ол2 в конце плавания.
Относительно воды корабль прошел 80 — 8 = 72 мили.
72
ол2 - олу = — = 82,8. ол2 = 82,8 + 17,2 = 100.
0,87
Пример 3. В 9 час. ОЛ[ == 18,4; в 10 час. ол2 —37,8;Дл =—6%. Рассчи-
тать плавание по лагу за час.
= 19,4-19,4-0,06 = 18,2 или = 19,4-0,94 = 18,2.
§ 19. ОПРЕДЕЛЕНИЕ ПРОЙДЕННОГО СУДНОМ РАССТОЯНИЯ
ПО ЕГО СКОРОСТИ
Скорость судна зависит от шага винта и числа оборотов его
в минуту. Шагом винта называется расстояние, на которое
винт продвинулся бы при одном обороте, если бы вращался в
твердой среде. На это расстояние винт теоретически должен был
бы продвинуть и судно. Но вода под давлением лопастей винта
отбрасывается назад, и поэтому за один оборот винт проходит
расстояние несколько меньшее, чем его шаг. Кроме того, винт
вращается в попутной струе, обладающей некоторой поступатель-
ной скоростью по направлению движения судна вследствие тре-
ния подводной части о воду. Разница между действительной ско-
ростью судна и теоретической его скоростью, соответствующей
78 Определение пройденного расстояния в море [Гл. IV
движению винта в твердой среде, называется скольжением
винта. Скольжение винта выражается в процентах по отноше-
нию к теоретически пройденному винтом расстоянию. Скольже-
ние винта — величина переменная, оно увеличивается, например,
при противном ветре и волне, а также при обрастании днища
судна, т. е. с увеличением сопротивления воды движению судна.
Определение зависимости действительной скорости судна от
числа оборотов гребных винтов определяется на прогрессивных
испытаниях, производимых на мерной линии или на более дли-
тельных пробегах, как указано в предыдущем параграфе. По
результатам испытаний строят кривые зависимости скорости хода
от числа оборотов винта в минуту и составляют таблицы соответ-
ствия скорости хода и оборотов машин. Таблица должна быть со-
ставлена для практического использования для различных режи-
мов работы машин — от самого малого до самого полного хода
через один узел, при работе одной, двумя и тремя машинами.
Эти таблицы помещаются в навигационном журнале и, кроме
того, вывешиваются на ходовом мостике.
Если бы скольжение винта не зависело от скорости судна, то
отношение двух скоростей равнялось бы отношению соответ-
ствующих этим скоростям оборотов. Вследствие же скольжения
отношение скоростей и отношение числа оборотов определяются
для поршневых машин по формуле, данной Афанасьевым,
Уо ~~ \П J ’
где V — скорость при числе оборотов п в минуту;
Уо—скорость при числе оборотов /г0 в минуту.
Для турбинных судов применяется формула
L=M\0,87
Н) W *
Последние формулы позволяют рассчитать по известной ско-
рости при известном числе оборотов скорость судна при другом
заданном числе оборотов или, наоборот, рассчитать, сколько обо-
ротов должна давать машина, чтобы получить заданную скорость.
Формула Афанасьева может служить и для подсчета скорости
судна, определяемой по вертушечному лагу, выверенному на опре-
деленную скорость.
Пройденное судном расстояние — плавание — по скорости и
времени определяется по формуле
S=Vt,
$ /9] Определение пройденного судном расстояния по его скорости • 79
Для быстрого расчета плавания судна в заданный промежу-
ток времени при различных ходах в МТ-43, в дополнении, на от-
дельном листе дана табл. V, вычисленная по формуле
с V-tM
60 *
где S — плавание в морских милях;
V — скорость в узлах;
t — время в минутах.
Аргументами для входа в таблицы служит время, данное от
I до 10 мин., через одну минуту, и скорость в узлах от 1 до
60 узлов, через один узел. Плавание дано с точностью до сотых
долей мили. Это позволяет получить плавания для промежутков
времени в 10 раз больше данных, простым переносом запятой.
Если заданный промежуток времени не может быть получен не-
посредственно в таблицах, то его следует разбить на части и вы-
бранные по отдельности для каждой части расстояния сложить.
Для решения обратной задачи: нахождения промежутка вре-
мени, необходимого для того, чтобы пройти заданное расстояние
при определенной скорости, на обороте табл. V дана табл. V-a,
пользование которой аналогично табл. V.
При определении плавания по скорости судна и времени сле-
дует иметь в виду, что скорость при заданном числе оборотов
винта, во-первых, определяется относительно воды и не учиты-
вает перенос судна течением, так же Хак и лаг, а во-вторых, за-
висит от ряда факторов, которые здесь кратко перечислены.
На мелководье по мере увеличения скорости судна возрастает
и масса приводимой им в движение воды, вызывая тем самым
увеличение сопротивления его движению и, значит, падение ско-
рости. При испытании быстроходных судов на скоростях около
20 узлов разница в скорости хода при одном и том же числе обо-
ротов машин на различных глубинах достигала 2—3 узлов.
Ветер и связанная с ним волна вызывают добавочное сопро-
тивление движению судна и снижают его скорость иногда в зна-
чительных размерах. Качка и перебои машин препятствуют ис-
пользовать полную мощность судовых механизмов. При слабых
(1—3 балла) попутных ветрах замечается незначительное увели-
чение скорости хода. При средних и сильных попутных ветрах
вследствие волнения наблюдается падение скорости судна, хотя
и значительно меньше, чем при противных ветрах. Падение скоро-
сти судна в свежую погоду не поддается предварительному рас-
чету и может быть определено только по наблюдениям.
Изменение осадки судна вызывает и изменение его скорости
при том же числе оборотов. По данным инженер-механика
Афанасьева при перегрузке судна на 5% от его водоизмещения
80
Определение пройденного расстояния в море
[Гл. /V
скорость хода уменьшается на 1%. Поэтому при всех определе-
ниях скорости следует записывать осадку судна.
Крен и дифферент также оказывают влияние на скорость
хода. При дифференте на нос скорость хода уменьшается. Диф-
ферент на корму почти не оказывает влияния на скорость. При
наличии крена вследствие разного давления воды на его борта
судно стремится уйти с курса, и его приходится удерживать на
курсе, имея руль все время отклоненным от диаметральной плос-
кости. Это обстоятельство вызывает уменьшение скорости судна.
Большое влияние на падение скорости оказывает обрастание
подводной части судна ракушками. Если подводная часть не ок-
рашена специальной краской, предохраняющей от обрастания, то
по выводам, сделанным из наблюдений, можно принять, что со-
противление воды движению судна повышается-за каждый день
после выхода из дока на 7з.%. Эта цифра приблизительная и за-
висит от интенсивности обрастания.
Указанные выше факторы, влияющие на изменение скорости
судна при том же числе оборотов машин, не позволяют ограни-
чиваться составленными таблицами соответствия скорости хода и
числа оборотов на прогрессивных испытаниях судна, а требуют
их проверки во время плавания при каждом удобном случае и
внесения необходимых коррективов.
В общем случае исправный лаг при точно определенной по-
правке должен давать более надежное определение плавания
судна, чем расчет плавания по скорости хода и времени. При
навигационных расчетах, связанных с плаванием, штурман всегда
должен производить их, пользуясь и лагом и скоростью судна,
чтобы иметь взаимный контроль. Например, при расчете точки
поворота на другой курс штурман обязан по оставшемуся до по-
ворота расстоянию рассчитать отсчет лага в момент поворота и
время поворота по скорости хода судна, а при плавании вблизи
берегов снять с карты пеленг маяка или другого приметного
предмета, находящегося в пределах видимости. Если все данные
расчета совпадают с наблюдениями, то он может быть уверен в
правильности как счисления пути судна, так и своих расчетов.
Если же хотя бы одно из данных окажется в противоречии с дей-
ствительностью, то штурман обязан проявить сугубую осторож-
ность и сейчас же, в зависимости от обстановки, принять меры
к проверке своего места, поправки лага, скорости хода судна и
своих собственных расчетов, чтобы выяснить, в чем заключается
ошибка.
РАЗДЕЛ ВТОРОЙ
КАРТЫ
ГЛАВА V
КАРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
§ 20. ТЕРМИНОЛОГИЯ. КЛАССИФИКАЦИЯ КАРТОГРАФИЧЕСКИХ
ПРОЕКЦИЙ
Картой принято называть изображение на плоскости в оп-
ределенном масштабе части или всей земной поверхности. Ни
сфероид, ни сферу нельзя изобразить на плоскости без искаже-
ний, так как при развертывании шаровой поверхности на пло-
скость обязательно образуются разрывы. Поэтому каждая карта
дает искаженное изображение земной поверхности. Эти искаже-
ния подчиняют определенному закону, позволяющему строить
карту для наиболее простого решения какой-либо определенной
задачи.
Картой называется такое изображение земной поверхности
на плоскости, в котором искажения подчинены определенным за-
конам, Карта показывает географическое размещение и связи
природных и общественных явлений.
Положение каждой точки на земной поверхности определяется
ее географическими координатами — широтой и долготой. Если
изобразить на плоскости систему координат и перенести по точ-
кам поверхность Земли или часть ее на эту плоскость, то полу-
чится условное изображение земной поверхности, причем вид
координатных линий будет зависеть от тех условий и математи-
ческих законов, которые положены в основу при построении
координатной сетки.
Задачей изображения земной поверхности на плоскости зани-
мается специальная дисциплина — картография, которая рассмат-
ривает различные способы построения карт, отвечающих той или
иной поставленной задаче, и изучает закономерность получаю-
щихся искажений.
Способ, ’примененный для условного изображения на пло-
скости сетки меридианов и параллелей, обоснованный определен-
ным математическим законом, называется картографиче-
ской проекцией, а полученная при данной картографиче-
К. С. Ухов
82
Картографические проекции
[Гл. V
ской проекции система координатных линий — меридианов и па-
раллелей — картографической сеткой.
Все карты различаются между собой способом построения
картографической сетки и характером искажений углов или пло-
щадей. Вот почему все картографические проекции классифици-
руются по этим основным признакам. С практической точки зре-
ния наибольшего внимания заслуживает характер искажений,
свойственный той или другой карте.
Классификация по характеру искажений.
1. Равноугольные проекции. Проекции, в которых
изображения бесконечно малых фигур на картах подобны соот-
ветствующим фигурам на земной поверхности, носят название
равноугольных, или конформных, проекций. Эти проекции иногда
можно встретить под названием изогональных, автогональных
или ортоморфных.
Условие подобия фигур требует, чтобы соответствующие углы
были равны между собой. Следовательно, в равноугольных про-
екциях, как это показывает и само название, углы на местности
между какими-либо направлениями равны углам на карте между
теми же направлениями. В то же время соответствующие стороны
в подобных фигурах пропорциональны между собой, вследствие
чего в равноугольных проекциях масштаб в данной точке не за-
висит от направления. Если же взять на поверхности Земли два
одинаковых по размеру контура, но в различных местах, то в рав-
ноугольной проекции они изобразятся подобными контурами, но
разных размеров, так как при изменении широты и долготы также
будет меняться и масштаб карты.
2. Равновеликие или эквивалентные проек-
ции носят также название равноплощадных, авталических или
гомолографических.
Как показывает само название, основным свойством равно-
великой проекции является сохранение пропорциональности пло-
щадей на карте и в натуре. Причем это сохранение пропорцио-
нальности не зависит от размера фигур. Поэтому по картам,
построенным в равновеликой проекции, можно измерять большие
поверхности. Условие равновеликости несовместимо с условием
равноугольности, так как при одновременном осуществлении этих
двух условий мы получили бы на карте полное подобие конечных
фигур с их очертанием в натуре. Следовательно, на равновеликой
проекции должны быть искажены углы, и если мы возьмем два
равных по площади и по фигуре контура в разных частях земной
поверхности, то на карте они изобразятся двумя равновеликими
по площади, но различающимися по форме фигурами.
3. Произвольные проекции не сохраняют ни ра-
венства углов, ни пропорциональности площадей и не входят ни
в одну из вышеуказанных групп. Произвольные проекции могут
£ 20] Терминология. Классификация картографических проекций
83
обладать какими-либо специальными свойствами, отвечающими
предъявляемым требованиям, и в силу этого применяться для
решения каких-либо частных задач.
Классификация по методу построения картографической сетки.
1. Азимутальные проекции. В азимутальных проек-
циях (раньше называвшихся зенитальными) поверхность Земли
проектируется на касательную к ней плоскость (рис. 23). Точка
касания носит название цен-
тральной точки проекции и
принимается за зенит. Тогда
все вертикалы представятся
на проекции в виде радиаль-
ных прямых, расходящихся
из центральной точки, а аль-
мукантарата — кругами раз-
личных радиусов. Устанав-
ливая определенную зависи-
мость изменения радиусов
альмукантаратов от зенит-
ного расстояния р = f (z),
можно получить равноуголь-
ную, равноплощадную или
произвольную проекцию.
Если поместить глаз на
вертикальной линии в ка-
кой-либо произвольной точ-
ке и, смотря на поверхность
сферы, проектировать все
лучи на плоскость, перпен-
дикулярную к центральному
лучу зрения, то получается
частный вид азимутальных
проекций, носящий название
перспективных проекций.
Плоскость, на которую проектируется изображение поверх-
ности Земли, называется картинной плоскостью. Точка,
из которой проектируется поверхность Земли на картинную пло-
скость, называется точкой зрения.
Перспективные проекции, имеющие применение в судовожде-
нии, будут подробно рассмотрены в главе VIII.
2. Конические проекции. Представим себе конус, ка-
сающийся поверхности Земли по какой-либо параллели или пере-
секающий ее по двум параллелям, причем ось конуса совпадает
с осью Земли. Если на поверхность такого конуса спроектировать
сетку меридианов и параллелей, а затем разрезать его по обра-
зующей и развернуть в плоскость, то мы получим коническую
проекцию.
84
Картографические проекции
[Гл. V
Допустим, что конус АСВ (рис. 24) касается сферы по парал-
лели LLi и ось конуса СО совпадает с осью Земли РО. В этом
случае все точки параллели ЬЦ лежат в одинаковом расстоянии
CL от вершины "
конуса С.
С
Рис. 24.
Возьмем две какие-либо другие парал-
лели ММ[ и NNi и спроекти-
руем их из центра сферы на
поверхность конуса. Все точ-
ки параллели MML будут ле-
жать от вершины конуса на
расстоянии CD, а параллели
A^A^i — на расстоянии CF.
Если затем разрезать ко-
нус по образующей и раз-
вернуть в плоскость, то, ко-
гда ось конуса совпадает с
осью Земли, меридианы изо-
бразятся прямыми линиями
(рис. 25), исходящими из
вершины конуса, а паралле-
ли — концентрическими кру-
гами, радиус которых зави-
сит от широты данной па-
раллели. Полученная путем
такого проектирования про-
екция не сохраняет ни подо-
бия фигур, ни пропорцио-
нальности площадей, но
можно подыскать такую
функцию широты для радиу-
сов изображения паралле-
лей, при которой получилась
бы или равноугольная или
равновеликая проекция. Ко-
прилегающей к параллели ка-
поверхности почти без иска-
нические проекции в узкой зоне,
сания, дают изображения земной
жений.
Сферу также можно проектировать не на один, а на несколько
конусов, каждый из которых касается сферы по своей параллели..
Такие проекции носят название поликонических и при-
меняются для составления карт стран, вытянутых по широте.
В этой проекции средний меридиан изображается прямой линией,
а остальные меридианы — кривыми линиями; параллели — ок-
ружности, пересекающие средний меридиан под прямым углом,
радиусы которых равны образующим конусов, касающихся
сферы по данным параллелям.
$ 20] Терминология. Классификация картографических проекций
85
3. Цилиндрические проекции. Опишем цилиндр,
касающийся земной сферы по экватору, причем ось цилиндра
совпадает с осью Земли. Если перенести на поверхность цилиндра
меридианы и параллели (рис. 26), а затем разрезать цилиндр
по образующей и развернуть его в плоскость, то получится ци-
линдрическая проекция. В общем случае цилиндр может касаться
сферы по какому-либо
произвольному большому
кругу или же пересекать
сферу по двум равным
малым кругам. На нор-
мальной цилиндрической
проекции, когда ось ци-
линдра, на который про-
ектируется поверхность
сферы, совпадает с осью
Земли, все меридианы
представятся прямыми ли-,
ниями, параллельными
между собой и перпенди-
кулярными экватору, при-
чем расстояние между ме-
ридианами будет пропор-
ционально разностям дол-
гот. Параллели изобра-
зятся также прямыми
линиями, параллельными
экватору, пересекающими
меридианы под прямыми
углами. Расстояние па-
раллелей от экватора будет зависеть от широты данной парал-
лели, т. е. D = Подбирая то или иное значение
можно получить или равноугольные, или равновеликие, или про-
извольные цилиндрические проекции.
Если поверхность Земли переносится на цилиндр, ось кото-
рого лежит в плоскости экватора, то такая проекция носит на-
звание поперечной цилиндрической проекции.
Если же ось цилиндра не совпадает с осью Земли и не лежит
в плоскости экватора, то получается косая цилиндриче-
ская проекция.
Цилиндрическая равноугольная проекция применяется для по-
строения морских карт и подробно разобрана в главе VI.
4. Условные проекции. Проекции, не входящие ни
в одну из вышеперечисленных групп и построение которых про-
изводится более сложными приемами, относятся к условным или
произвольным проекциям,
86
Картографические проекции
[Гл. V
Так как можно применить сколько угодно различных спосо-
бов переноса на поверхность картинной плоскости, конуса или
цилиндра поверхности Земли, отвечающих тому или другому
закону, то число картографических проекций не ограничено.
Планом в отличие от карт называется такое изображение
части земной поверхности на плоскости, в котором искажения не
выходят за пределы графической точности построения. Характер-
ной особенностью планов является постоянство масштаба и отсут-
ствие искажений углов.
§ 21. МАСШТАБ
Масштабом, в общем значении этого слова, называется
отношение длины какой-либо линии на плане или на карте к длине
соответствующей линии в натуре. Если масштаб выражается
в виде дроби, числитель которой единица, а знаменатель — число,
указывающее, скольким единицам длины в натуре равна одна
единица длины на плане или на карте, то такой масштаб назы-
вается числовым или численным масштабом. На-
пример, 1 : 100 000 или 0,00001 будет числовой масштаб, указы-
вающий, что одной единице длины на плане соответствует на
местности 100 000 таких же единиц. Если масштаб указывает.
§ 2П
Масштаб
87
сколько более крупных единиц длины содержится в одной более
мелкой единице длины, которой измеряют расстояния на карте,
то такой масштаб носит название линейного масштаба;
например, 3 мили в 1 см или 10 км в 1 см. Линейный масштаб
иногда представляют графически, вычерчивая прямую линию,
разделенную штрихами на равные части, надписи при которых
показывают соответствующие длины в натуре.
При составлении карты сколько-нибудь значительный участок
сферы нельзя развернуть на плоскость без искажений, вследствие
чего масштаб карты меняется от точки к точке, а иногда при
одной и той же точке он меняется по разным направлениям.
Масштабом карты в какой-либо данной точке А называется
предел отношения длины какого-либо отрезка ab, взятого на
проекции от данной точки А по определенному направлению,
к длине соответствующего отрезка АВ на земной поверхности, т. е.
ab
с= hrn ---
дв-о АВ
Масштаб с носит название частного масштаба, и изме-
няемость его на данной проекции служит характеристикой иска-
жений, получающихся на этой картографической проекции. При
изучении искажений, получающихся на данной картографической
проекции, рассматривается изменение масштаба по двум направ-
лениям, например по меридиану и по параллели, но в общем слу-
чае изменение масштаба можно рассматривать и вдоль каких-
либо двух взаимно перпендикулярных направлений.
Главный масштаб, указываемый на карте, обычно близок
к среднему значению частных масштабов, встречающихся на
карте, или же относится к некоторым определенным точкам или
линиям карты.
Отношение частного масштаба в данной точке по данному на-
правлению к главному носит название увеличения или м о -
дуля масштаба.
На морских картах, издаваемых Гидрографическим Управле-
нием, указывается численный масштаб, который относится к па-
раллели, выбранной за главную для данного моря. Эта параллель
может и не быть на карте, но такая система при стандартизиро-
ванных масштабах позволяет соединять вместе несколько карт
одной коллекции, так как в различных широтах их частные
масштабы будут совпадать.
На английских картах также дается численный главный
масштаб, но он относится по большей части к средней параллели
данной карты. Кроме того, в английском каталоге карт указы-
вается или длина в дюймах одной морской мили или одного гра-
дуса широты, равного 60 мор. милям.
88
Картографические проекции
[Гл. V
Для перехода от численного масштаба к линейному надо знаме-
натель численного масштаба разделить на длину морской мили,
выраженную в тех единицах, к которым приводится линейный
масштаб. Например: карта проливов Большого и Малого Бельта;
численный масштаб по главной параллели 60° равен 1 : 200 000.
Рассчитать, сколько морских миль содержится в 1 см?
200 000 . по
- = 1,08 мор. миль.
185 200 н
Линейный масштаб этой карты 1,08 мор. миль в 1 см.
Для перехода от линейного масштаба к численному надо ли-
нейную длину изображения одной морской мили на карте разде-
лить на длину морской мили, выраженную в тех же единицах,
в которых дана длина ее на карте. Например: английская карта
№ 2339, Северное море, длина одного градуса равна 2,5 дюйма
2 5 1
(d = 2",5). Тогда численный масштаб равен ----------=--------.
7 г -6080-12*60 1751 040
В последнем примере взята средняя длина одной морской
мили, принятая в Англии, 6080 футов, но для точного перевода
масштаба надо определить длину одной минуты меридиана
в соответствующей широте, вычисленную на основании тех раз-
меров Земли, которые приняты при построении карты. По ан-
глийскому каталогу численный масштаб карты № 2339 равен
1 : 1 760 000.
Предельная точность масштаба. Предельной точностью мас-
штаба называется наименьшая длина, которая может быть изме-
рена на карте. Если мы примем, что точка, поставленная на карте
тонко очиненным карандашом, имеет в поперечнике 0,2 мм
(0,008 дюйма) и что это наименьшее расстояние, которое может
быть измерено на карте, то линейное расстояние, равное 0,2 мм,
и будет определять для данной карты предельную точность
масштаба. Она зависит от масштаба карты, и надо найти линей-
ное расстояние на местности, соответствующее 0,2 мм на карте.
Например, на путевых картах масштаба 1:300 000 предельная
точность масштаба будет
300 000-0,2 мм = 60 м.
Если дан линейный масштаб 1,62 мор. мили в 1 см, то
1,62 мор. мили • 0,02 = 0,0324 мор. мили или 60 м.
Следовательно, по данной карте не может быть измерено рас-
стояние, меньшее 60 м. Масштаб карты будет определять и сте-
пень подробностей, наносимых на карту.
§22]
Локсодромия
89
- ГЛ АВ А VI
МЕРКАТОРСКАЯ ПРОЕКЦИЯ
§ 22. ЛОКСОДРОМИЯ
Если судно совершает переход одним и тем же неизменным
курсом, то его путь будет — кривая линия, которая носит назва-
ние локсодромия; это греческое слово обозначает «косой
бег». Локсодромия представ-
ляет на поверхности Земли
кривую линию двоякой кри-
визны (рис. 27), пересекаю-
щую все меридианы под
одним и тем же углом. Ло-
ксодромия спиралеобразно
приближается к полюсу, но
никогда его не достигает.
Длина отрезка локсодро-
мии, который судно прошло
данным курсом, или сумма
нескольких отрезков локсо-
дромии, пройденных разны-
ми курсами, выраженная в
морских милях, называется
плаванием судна.
Так как плавание по ло-
ксодромии совершается по-
стоянным курсом, что пред-
ставляет большое удобство для судовождения и упрощает ра-
счеты, то все переходы судов, если они не слишком большие, со-
вершаются по локсодромии, несмотря на то, что плавание по
локсодромии не является наиболее коротким.
Кратчайшее расстояние между двумя точками на земной по-
верхности, принимая Землю за шар, есть дуга большого круга,
соединяющая два данных пункта. Дуга большого круга носит
название ортодромии, что означает «прямой бег», а плава-
ние по дуге большого круга называется плаванием по ор-
тодромии. Но ортодромия пересекает меридианы под разными
углами, и плавание по дуге большого круга требует предвари-
тельного вычисления как положения ортодромии, так и курсов,
которые ведут судно по дуге большого круга; кроме того, дуга
большого круга между двумя данными точками располагается
всегда полярнее локсодромии. Так как разница в длине между
локсодромией и ортодромией даже при сравнительно больших
переходах незначительна, то к плаванию по дуге большого круга
90
Меркаторская проекция
[Гл. VI
прибегают только при океанских переходах, длина которых дости-
гает нескольких тысяч миль. Плавание по ортодромии подробно
разобрано в главе XIX.
Для вывода уравнения
локсодромии определим пре-
жде всего соотношение ме-
жду длиной экватора и дли-
ной параллели в какой-либо
произвольной широте <р, при-
нимая Землю за сферу. Обо-
Cl значим радиус параллели АС
через г (рис. 28), а радиус
Земли через 7?; угол /1OQ —
широта параллели АВ. Из
прямоугольного треугольни-
ка А СО имеем
Рис. 28.
r = /?cos<f>. (31)
К
Q
D Ал.
Рис. 29.
Отсюда 2тсг = 2k/?cos ф,
т. е. длина любой параллели
равна длине экватора, умноженной на косинус широты данной
параллели. Отрезок параллели между двумя какими-либо мери-
дианами равен отрезку
экватора между теми же
меридианами, умноженно-
му на косинус широты
выбранной параллели.
Возьмем на локсодро-
мии MqG (рис. 29) две
точки М\ и М2, находя-
щиеся на малом расстоя-
нии одна от другой, и Е ____
проведем параллель АВ
точки М2. Отрезки дуг ме-
ридиана СМ[, параллели
СМ2 и локсодромии AfiAf2
образуют треугольник
CM[M2t который по мало-
сти сторон примем за плоский, прямоугольный при вершине С,
так как меридианы и параллели пересекаются под прямыми
углами. Углы РМ0М} = РМХМ2 = PM2G = К, под которыми ло-
ксодромия пересекает меридианы, равны между собой и опреде-
ляют курс судна. Угол при полюсе DPF, измеряемый дугой эква-
тора DF, представляет разность долгот, а дуга меридиана СМХ —
разность широт точек Mi и М2. Дугу параллели СМ2 обозначим A W.
£ 22]
Локсодромия
91
Из прямоугольного треугольника СМ1М2 получаем
СМ2 = = Д<р tg
На основании формулы (31)
AUZ=&kcos<? и Akcos?= AcptgAT
или
COS <р *
Переходя от конечных приращений к дифференциалам, напи-
шем уравнение
<Д = drtgK
cos ?
проинтегрировав которое в пределах от до «2, Х2, получим
уравнение локсодромии, tg К — величина постоянная, а —dcp—для
COS <р
интегрирования преобразуем следующим образом:
d'f __________ df ________ dep __
cos 9 , [к , \ п./тс».ф\ / те , ® \
т sin/ h?) 2sin I-h“l*cos---F —
\ 2 7 \ 4 2) \ 4 2)
dtp
~2
Подстановка дает
и после интегрирования получаем уравнение локсодромии на
сфере
= tg К [in tg + ^)-ln tg . (32)
Уравнение (32) показывает, что при К = 0 или при К = 180е
Х2—kj=O или Х2=Х1. Локсодромия при курсах 0° или 180° сорпа-
92
Меркаторская проекция
[Гл. VI
дает с меридианом; в этом частном случае она превращается
в дугу большого круга и проходит через полюсы.
При /С = 90° или /( = 270° tg 7( = оо, но так как разность
Х2— Хт должна оставаться величиной конечной, то второй множи-
тель должен быть равен нулю, т. е.
In tg + In tg(—+-^1 = 0.
Ц 4 2 / \ 4 2 /
Следовательно, = и локсодромия при курсах 90° и 270°
совпадает с параллелью, превращаясь в малый круг.
Если взять начальную точку локсодромии Л40 на экваторе
с координатами ^ = 0 и то уравнение локсодромии при-
мет следующий вид:
K^tgXlntgf-J-h-^-hXo. (33)
Уравнение (33) показывает, что каждому значению ? соот-
ветствует только одно значение X. Локсодромия пересекает каж-
дую параллель только один раз.
Наконец, уравнение локсодромии можно написать в таком
виде:
(34)
где е — основание натуральных логарифмов.
Выражение (34) показывает, что если давать долготе X значе-
ния X, X -1- 2к, Х + 4к и т. д., то каждый раз широта будет
иметь свое определенное возрастающее значение. Следовательно,
локсодромия пересекает каждый меридиан много раз, причем
широта пересечения локсодромии с данным меридианом последо-
вательно увеличивается. Локсодромия стремится к полюсу, но
никогда его не достигает, за исключением, как было указано
выше, тех случаев, когда локсодромия при курсах 0° или 180°
совпадает с меридианом.
Уравнение локсодромии, проходящей через две данные точки
с координатами срь Хт и Х2, на поверхности эллипсоида вра-
щения имеет такой вид:
tg/С
е
In tg f-4-fl.-esin
\ 4 2 / \ 1 + е sin <р2/
тс cpi \ /1 — е sin срЛ2
4 2 / \ 1 + е sin
(35)
§ 23] Требования, предъявляемые к навигационной карте 93
Сравнивая уравнения (32) и (35), мы видим, что в последнее
входят два добавочных множителя, учитывающие сжатие земного
сфероида. Величина е мала, и при решении многих задач практи-
ческой навигации можно пренебречь членами, в которые она
входит.
§ 23. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К НАВИГАЦИОННОЙ КАРТЕ
Для графического учета движения судна во время его плава-
ния на навигационной карте ведется прокладка его пути, а также
прокладываются направления на различные предметы — линии
пеленгов. Для удобства пользования навигационной картой необ-
ходимо, чтобы линия курса изображалась на картографической
проекции, предназначенной для целей судовождения, прямой ли-
нией. Курс и пеленг определяются на поверхности Земли как
углы между меридианом и направлением диаметральной пло-
скости судна или направлениями на выбранные для пелен] ования
объекты. Углы на картографической проекции, применяемой в на-
вигации, должны быть равны углам на поверхности Земли.
Отсюда вытекают два основных требования, предъявляемые
к навигационной карте:
1) линия курса судна, локсодромия, должна быть на карте
прямой линией;
2) картографическая проекция должна быть равноугольной.
Если курс судна будет 0° или 180°, то линия курса совпадает
с меридианом и, следовательно, меридианы должны быть пря-
мыми линиями. Условие, чтобы линия какого-либо произвольного
курса, будучи прямой линией, пересекала различные меридианы
под равными углами, может быть выполнено только в том случае,
если меридианы будут параллельны между собой. По этим же
соображениям экватор должен изображаться прямой линией, ко-
торую все меридианы пересекают под прямыми углами. Парал-
лели также должны изобразиться прямыми линиями, параллель-
ными экватору.
Картографическая проекция, удовлетворяющая поставленным
требованиям, была применена в 1569 г. голландским картографом
Герардом Кремером (1512—1594), носившим латинское имя
Меркатора.
Предложенная Меркатором проекция относится к разряду
нормальных цилиндрических проекций и применяется до настоя-
щего времени для построения морских карт под названием м е р -
каторской проекции. Карты же, построенные в этой
проекции, называются м е р к а т о рек и м и картами.
В этой проекции все меридианы изображаются прямыми па-
раллельными линиями, а параллели — прямыми линиями, пере-
секающими меридианы под прямыми углами; линейная величина
94
Меркаторская проекция
[Гл. VI
каждого градуса широты постепенно увеличивается с возраста-
нием широты соответственно растягиванию параллелей, которые
все в этой проекции равны по длине экватору.
§ 24. РАВНОУГОЛЬНАЯ ЦИЛИНДРИЧЕСКАЯ ПРОЕКЦИЯ
МЕРКАТОРА
Возьмем на поверхности земного сфероида бесконечно малую
трапецию, образованную пересечением меридианов и параллелей,
BCFG (рис. 30). На нормальной цилиндрической проекции эта
фигура BCFG представится прямоугольником bcfg (рис. 31), в
в котором, вследствие того, что
меридианы изображаются пря-
мыми параллельными линиями,
стороны Ьс и gf будут равны
между собой и в то же время
равны отрезку изображения эк-
ватора eh. Для сохранения по-
добия фигур надо растянуть
стороны bg и cf одинаково с
растяжением сторон Ьс и gf.
Однако растяжение меридианов
на меркаторской проекции
должно происходить непрерыв-
но. Поэтому, чтобы получить
конформную проекцию, нужно
найти расстояние искомой па-
раллели от экватора. Обозна-
чим это расстояние через D.
Так как оно зависит от широты
заданной параллели, то
р=/(?).
Раскроем вид этой функции, подчинив ее требованию получить
конформную проекцию.
Подобие фигур обусловливает равенство углов и пропорцио-
нальность соответствующих сторон в подобных фигурах;, следова-
тельно, мы должны иметь такую пропорцию:
bg __ be
BG — вс *
В то же время, при условии, что мы взяли нашу фигуру между
двумя бесконечно близкими меридианами и двумя бесконечно
близкими параллелями, отношение представляет частный
BG
Ьс
масштаб в точке В по меридиану, а отношение----------частный
£
Равноугольная цилиндрическая проекция Меркатора
95
масштаб по параллели. В каждой данной точке меркаторской
проекции масштаб не зависит от направления и на бесконечно
малой площади может считаться постоянным; но масштаб будет
меняться с изменением широты.
Теперь определим значения сторон, входящих в пропорцию:
BG — бесконечно малый отрезок дуги эллиптического мери-
диана, который обозначим через dS;
ВС — длина дуги параллели, которая, при радиусе параллели
г и разности долгот между бесконечно близкими мери-
дианами dk, будет равна rdX;
bg — бесконечно малое приращение расстояния D, которое
обозначим через dD;
be — длина параллели на проекции, равная длине изображе-
ния дуги экватора. Приняв масштаб па экваторе рав-
ным единице, мы должны приравнять be = eh = а • dk.
Подставив значения сторон в написанную пропорцию, получим
dD a-rfX
dS r-d\
Отсюда
dD = у dS. (36)
Последнее выражение
показывает, что растяже-
ние меридианов на мерка-
торской проекции, а также
изменение масштаба не
зависит от долготы выб-
ранной точки и все мери-
дианы растягиваются оди-
наково.
В главе 1 § 3 при вы-
воде длины одной минуты
выражения:
дуги меридиана мы имели следующие
a cos Ф
г —----------1;
(1 — е2 sin2 ср)2
= а (1 - е2)
£
(1 — e2sln®cp)2
96
Меркаторская проекция
Тл. VI
Так как dS = Md®, то, подставляя в (36) полученные вели-
чины г и М после сокращений будем иметь
= Q 0 ~ g2)
(1 — е2 sin2 ср) cos
(37)
Умножим в числителе е2 на 1 = sin2<p -ф- cos2 ср и раскроем
скобки
__& 1-е2 sin2 ср — е2 cos2 ср • dy
1 — е2 sin2 ср cos ср
и
dD = a-dl—a e^oSi—d(f
cos ср 1 — е2 sin2 ср
Для получения на меркаторской проекции расстояния D за-
данной параллели от экватора проинтегрируем выражение (38)
в пределах от D{ = 0 до D2 = D и от <р2= 0° до
D = a С
J cos ср
о
сРя-Т
С е cos Му
J 1 — е2 sin2 р
¥1 = 0
(39)
Подинтегральное выражение второго интеграла преобразуем
следующим образом:
е sin'<p= sin ф, (40)
после дифференцирования
е cos rfcp = cos ф г/ф.
Возведем обе части равенства (40) в квадрат и вычтем их из
единицы
1 — е2 sin2 = 1 —sin2 ф = cos2 ф. (41)
После подстановки полученных преобразований в (39) имеем
Фа = ¥ Фа=Ф ,,
D = a f —ае [ (42)
J COS ср J COS ф
(pj = O pj=O
Решение подобного интеграла дано в § 22 настоящей главы
и приводит к следующему выражению:
D = a In tg (45°+ yl — In tg [45О + • (43)
§24]
Равноугольная цилиндрическая проекция Меркатора
97
Величина D получила название меридиональной части.
Меридиональной частью D называется расстояние
на меркаторской проекции от экватора до параллели с заданной
широтой % при масштабе на экваторе, равным единице.
Первый член правой части уравнения (43) дает меридиональ-
ные части, если принять Землю за сферу, второй член вносит по-
правку за сжатие земного сфероида. Меридиональная часть D
может быть выражена в любых линейных мерах, в зависимости
от того, в каких линейных мерах будет выражена большая полу-
ось земного сфероида а. Для целей навигации меридиональные
части удобнее всего выражать через длину одной минуты дуги
экватора, которая получила название экваториальной
мили.
Для приведения уравнения (43) к виду, удобному для вычис-
лений, преобразуем его следующим образом, принимая во вни-
мание, что разность логарифмов равна логарифму частного:
D = а In
Но так как
то
Подставим вместо sin^ равную ей величину е sin<p из формулы (40)
и тогда получим
е
D = а
lntg(45°+j)(
1 — е sin у'
1 + е sin ср,
(44)
Чтобы получить D в экваториальных милях, определим вели-
чину а в этих единицах:
1 экват. миля = я-arc 1'
и
а = —= 3437,7468 экв. миль.
arc 1'
7
К С. Ухов
98
Меркаторе кая проекция
[Гл. VI
Для перехода от натуральных к десятичным логарифмам вве-
дем модуль, и тогда уравнение (44) примет вид:
е
о = — — letg |45°+А)-*sln?V;
arc Г mod \ 2 / \ 1 -f- е sin ср /
3437,7468 . /450 1 / 1 — gsin у\2
0,4342945 ё 2 Д1 + е sin <j>)
е
D = 7915',704471gtg / 45°+-^ р"651"?)2
\ 1 2 / \1 -J- е sin у /
(45)
Вычисленные по формуле (45) меридиональные части для
эллипсоида даны в табл. 36 «Мореходных таблиц» 1943 г. в эква-
ториальных милях с точностью до одной десятой по аргументу
широты с интервалом в одну минуту. Для нахождения промежу-
точных значений меридиональных частей для десятых долей ми-
нуты или секунд широты достаточно простое интерполирование,
считая, что перемена меридиональных частей пропорциональна
изменению широты в пределах одной минуты.
В табл. 36 Мореходных таблиц 1933 г. приведены меридио-
нальные части, вычисленные для Земли, принимая ее за шар, по
формуле
D = 7915,7045 1g tg ^45° + .
Покажем теперь, что прямая линия на меркаторской проек-
ции действительно представляет собой локсодромию. Напишем
уравнение прямой ML (рис. 31), проходящей через точку b(xiyt)
и наклоненной к оси У под углом К, равным курсу,
х-х1 = (у-у1) igK.
Подставим в полученное уравнение вместо х и у их выраже-
ния через <р и К, .принимая для простоты Землю за шар:
х = аХ;
y = D = aln tg^45° + |-).
Тогда
k-X, = igK [in tg (45° + |)-1п tg (45° + -^-Y .
Последнее уравнение показывает, что прямая линия на мерка-
торской проекции действительно представляет собой локсодромию.
£ 25]
Построение меркаторской карты
99
Таким образом, проводя на меркаторской проекции параллели
в расстоянии D от экватора, мы удовлетворяем обоим требова-
ниям, предъявляемым к навигационной карте: меркаторская про-
екция конформна и локсодромия изображается на ней прямой
линией.
§ 25. ПОСТРОЕНИЕ МЕРКАТОРСКОЙ КАРТЫ
При построении меркаторской карты может быть поставлена
одна из двух задач:
а) построить карту определенного района, ограниченного за-
данными параллелями и меридианами;
б) построить карту в заданном масштабе данного района,
границы которого определены приближенно.
Решение обеих задач ограничивается чисто техническими воз-
можностями издать карту определенного размера. Предельный
размер карт, издаваемых Гидрографическим управлением, огра-
ничивается внутренней рамкой величиной 68 X 93 см. Исходя из
предельных размеров карты, при решении первой задачи опреде-
ляется масштаб карты, позволяющий нанести заданный район.
При решении второй задачи определяются крайние меридианы и
параллели, которые могут быть нанесены на карту при заданном
масштабе.
Зависимость между размерами карты, величиной помещае-
мого на карту района и масштабом карты определяет нарезку
коллекции карт, покрывающей данное море, залив или какой-
либо другой значительный район.
Вычисляя меридиональные части в экваториальных милях,
мы получаем единые меры длины для горизонтальной и верти-
кальной рамок карты.
Длина изображения одной экваториальной мили на меркатор-
ской карте, выраженная в линейных мерах, называется едини-
цей карты.
Единица карты зависит от масштаба карты, который может
быть отнесен к экватору или к любой выбранной параллели, но-
сящей название главной параллели. Построение мерка-
торской карты начинается с вычисления единицы карты. Обозна-
чим через 1 : Сэ главный масштаб по экватору, тогда единица
карты определится так:
Пусть 1 : Со — главный масштаб по главной параллели с ши-
ротой ср0, тогда единица карты равна
__ г0 arc 1' а-аге Г cos у0 /дуч
е с0 ~ Со L’ 1 '
(1 — е2 sin2 <р0)2
7*
100
Меркаторская проекция
[Гл. VI
так как радиус заданной главной параллели
. _ a cos <р0
г°— у-
(1 - e«sln« vo)2
Если при построении карты масштаб определяется тем уело-
вием, чтобы на карту поместился заданный район, то единица
карты может быть рассчитана делением длины горизонтальной
рамки карты на разность долгот между крайними меридианами,
выраженную в минутах.
Предположим для наглядности, что требуется построить сетку
меркаторской карты от экватора до 70° северной широты, огра-
ниченную меридианами 30° и 40° восточной долготы. Ограничим
длину горизонтальной рамки сетки 100 мм. Меридианы и парал-
лели будем проводить через один градус; меридиональные части
выберем из табл. 36 МТ-43.
Определим единицу карты
Для удобства выбранные меридиональные части записываем
в табл. 6.
Таблица 6
1 2 3 4 5 1 2 3 4 о
Y D eD РМЧ е-РМЧ ? D eD РМЧ е-РМЧ
0° 60° 4507,5 751,2 —
1 59,6 9,9 — — 61 4629,1 771,5 121,6 20,3
2 119,2 19,9 — — 62 4754,7 792,4 247,2 41,2
40° 2607,9 434,6 67° 5452,8 908,6
41 2686,5 447,8 78,6 13,1 68 5609,5 934,9 156,7 26,1
42 2766,3 461,0 158,4 26,4 69 70 5773,1 5944,3 962,2 990,7 320,3 491,5 53,4 81,9
В 1-й графе даны географические широты через 1°, во 2-й
графе — соответствующие меридиональные части и в 3-й графе —
произведение меридиональных частей на единицу карты. Послед-
нее произведение дает расстояние параллелей от экватора, выра-
женное в миллиметрах.
£25]
Построение меркаторской карты
101
На листе бумаги проводим отрезок экватора, длина которого,
согласно заданию, будет равна
е-РД = 600-- = 100 мм.
6
Разделив отрезок экватора на 10 частей, проведем через каж-
дое деление меридиан (рис. 32). Откладываем на меридианах
расстояния е£> в миллимет-
рах, взятые из 3-й графы таб-
лицы, и через полученные
деления проводим парал-
лели.
Если южной границей
карты будет являться какая-
либо произвольная парал-
лель, а не экватор, то для
построения карты надо рас-
считать разности меридио-
нальных частей от нижней
рамки карты и выразить их
в миллиметрах. В 4-й графе
таблицы даны разности ме-
ридиональных частей для
трех участков карты, распо-
ложенных между параллеля-
ми 40°—42°, 60°—62° и 67°—
70°, а в 5-й графе произведе-
ние е • РМЧ, дающее рас-
стояние в миллиметрах соот-
ветствующих параллелей от
нижней параллели выбран-
ных участков карты. Рас-
стояния между меридианами
по параллелям остаются без
изменений.
3(Г ЗТ ЪТ ЗУ 34" ЗУ 366 37’ 38я ЗУ 40’
70°
69°
б8а
67°
62°
6Г
60°
42'
4Г
40“
Т
Г
0е
ер=19,9мм
ер"9,9мм
Табл. 6 и рис. 32 нагляд- Рис- 32-
но показывают рост линей-
ной длины одной минуты широты (одной морской мили) с увели-
чением широты и, следовательно, изменение масштаба на мерка-
торской проекции.
Графическое изображение одной минуты дуги меридиана на
меркаторской проекции носит название меркаторской
мили.
Определим теперь числовой масштаб построенной нами карты.
Длина развернутой окружности экватора на карте
2тг/? = 3600 мм, откуда= = 573,1 мм.
102
Меркаторская проекция
[Гл. VI
Большая полуось экватора, по Красовскому, равна
а = 6 378 245-Ю3 мм
1 : C3 = R : а = 1 : 11 132 865,
следовательно, главный масштаб по экватору будет 1:11 132 865.
На построенную карто-
графическую сетку наносятся
по своим широтам и долго-
там опорные тригонометри-
ческие и астрономические
пункты. Причем для контро-
ля вычисляются их отстояния
tzi и а2 от левой и правой
вертикальной рамок карты и
отстояния Ь\ и Ь2 от нижней
и верхней рамок карты
(рис. 33). По опорным пунк-
там накладывается на карту
весь имеющийся картографи-
ческий материал как по
съемке береговой черты, так и по промеру.
Рис. 33 дает
&1 = e(D-D1);
и контроль
^2 = е(Х2—k)'; &ае (D2-D)
+ = a и b1^rb2 = b.
Кроме того, для контроля правильности графического построе-
ния сетки вычисляется и диагональ карты по формуле с=\/д2-И2-
Для упрощения расчетов при построении карт применяются
различные специальные таблицы. Гидрографическим управлением
изданы в 1949 г. «Картографические таблицы». В табл. 1 даны
меридиональные части для эллипсоида Красовского на каждую
минуту широты в экваториальных милях с точностью до одной
тысячной мили и шестидесятые доли их разностей. В табл. 2 даны
длины одной минуты параллели в миллиметрах на каждые пять
минут широты. Эта таблица предназначена для определения еди-
ницы карты и расчета модуля параллели. В табл. 4 даны готовые
значения единицы карты для стандартных масштабов. В табл. 5
даны длины одной минуты дуги меридиана в миллиметрах. По
этой таблице легко может быть определен линейный масштаб
карты. При пользовании картографическими таблицами единица
карты получится по формуле
# 25}
Построение меркаторской карты
103
где Pq—длина одной минуты главной параллели, по которой
строится карта, выбираемая из табл. 2, а----масштаб по глав-
но
ной параллели. В распоряжении штурмана может и не быть кар-
тографических таблиц ГУ ВМС. Поэтому приводим выборку из
этой таблицы (табл. 7).
Таблица 7
Длина V параллелей в миллиметрах
Р Р Р
0° 1 855 356 30° 1 608 132 60° 930015
1 1 855 076 31 1 591 764 61 901 806
2 1 854 234 32 1 574 912 62 873 319
3 1 852 831 33 1 557 580 63 844 561
4 1 850867 34 1 539772 64 815 542
5 1 848 343 35 1 521 495 65 786 272
6 1 845 260 36 1 502 753 66 756 758
7 1 841 618 37 1 483 553 67 727 010
8 1 837 419 38 1463899 68 697 037
9 1 832 664 39 1443 798 69 666 848
10 1 827 354 40 1 423 255 70 636 453
11 1 821 490 41 1 402 277 71 605 860
12 1815 075 42 1380 869 72 575 080
13 1 808 110 43 1359 039 73 544 122
14 1800 597 44 1 336 792 74 512 994
15 1 792 538 45 1 314 136 75 481 708
16 1 783 937 46 1 291 077 76 450 272
17 1 774 794 47 1 267 621 77 418 697
18 1 765 113 48 1 243777 78 386 991
19 1 754 896 49 1219550 79 355 166
20 1 744 148 50 1 194 949 80 323 230
21 1 732 869 51 1 169981 81 291 194
22 1 721 065 52 1 144 653 82 259 067
23 1 708 738 53 1 118 972 83 226860
24 1 695 891 54 1 092 948 84 194 583
25 1 682 530 55 1 066 587 85 162 245
26 1 668 657 56 1 039 897 86 129 856
27 1 654 276 57 1 012 887 87 97 428
28 1 639 392 58 985 564 88 64 969
29 1 624 009 59 957 938 89 32 489
30 1 608 132 60 930 015 90 0
Модуль параллели определится по формуле
v=*L.
р
Частный масштаб для данной параллели будет
104
Меркаторская проекция
[Гл, VI
В двух последних формулах р и С — соответственно, длина
одной минуты дуги параллели, для которой определяется частный
масштаб, и знаменатель -этого частного масштаба.
Линейный масштаб данной карты может быть вычислен по
Формуле 10Со
До
которая дает число морских миль в одном сантиметре, если До --
длина одной минуты дуги меридиана дана в миллиметрах.
Пример, Пользуюсь Мореходными таблицами 1943 г., произвести сле-
дующие вычисления.
1. Рассчитать
карты Финского залива в границах
Xj = 25°15'Ost
Х2 = 29°52'Ost
Масштаб ~
Со
размеры рамки для
?1 = 59°20'N;
?а = 60°45'N;
1
= чап пт П0 паРаллели ср0== 60° N.
Для определения единицы карты выбираем из приведенной выше табл. 7
длину одной минуты дуги параллели в vo = 60°N, тогда
Ро 930 015 _ 1ЛЛ
е = — =----------= 3,100 мм
Со 300000
Рь • • • • Со ... • . . 5.9685 . . 5.4771 ?2 = 60е45'N ?1 = 59°20'N D2 = 4598,4 Di = 4428,4
е . . . . . . 0.4914 D2 - £>1 = 170,0 . . 2.2304 0.4914
2. Вычислить е = 3,100 положение £»i = о2 = РД = 277' .... 2.4425 Ь . . . .2.7218 0.4914 а .... 2.9339 Ь = 527,0 мм а = 858,8 мм параллелей через 20'. 4428,4 4598,4 е 0.4914
1 1 1g (О/ - D.) 1g - Dt) lg 61 lg bi b> ^2 | Контроль
59°40' 4467,7 39,3 130,7 1.5944 2.1163 2.0858 2.6077 121,8 405,2 527,0
60°00' 4507,5 79,1 90,9 1.8982 1.9586 2.3896 2.4500 245,3 281,8 527,1
60°20' 4547,6 119,2 50,8 2.0762 1.7059 2.5676 2.1973 369,5 157,5 527,0
60°40' 4588,2 159,8 10,2 2.2036 1.0086 2.6950 1.5000 495,5 31,6 527,1
£ 25}
Построение меркаторской карты
105
3. Вычислить положение меридианов через Г. е.... 0.4914.
*z ^2 — ^Z ig (2 — Ig «1 lga2 «1 a2 Контроль
26° 45' 1.6532 2.1446 139,5
232 2.3655 2.8569 719,2 858,7
27 105 2.0212 2.5126 325,5
172 2.2355 2.7269 533,2 858,7
28 165 2.2175 2.7089 511,6
112 2.0492 2.5406 347,2 858,8
29 225 2.3522 2.8436 697,6
52 1.7160 2.2074 161,2 858,8
4. Найти частный масштаб карты по параллели cp = 61°0'N. Модуль па-
раллели
да
Р 901 806
pQ.......5.9685
р........5.9551
v.......0.0134 '/= 1,031
С = ^
Знаменатель частного масштаба
Со......... 5.4771 1
........0.0134 Масштаб —
С.......... 5,4637 С = 290 900
300 000
1.031
= 290900
------- по параллели ср = 61°0'N
290 900
При вычислении настоящего примера меридиональные части
выбирались из МТ-43 г. и применялись четырехзначные лога-
рифмы из тех же таблиц, что и вызывает разницу в отстоянии
параллелей от нижней или верхней рамок карты в пределах
0,1 мм. Если же выбирать меридиональные части из картографи-
ческих таблиц и при вычислениях применить пяти- или шести-
значные логарифмы, то контроль должен сходиться в пределах
0,01 мм.
Если принять Землю за шар и, пользуясь МТ-43, рассчитать
приближенные размеры рамки карты, то получим:
Cl COS <₽о . t <i плt
единица карты е ------— аге г = 3,091
Со
а............. 9.8046
аге Г......... 6.4637
cos ср0 ...... 9.6990
5.9673
Со............ 5.4771
е.............. 0.4902 е = 3.091
Горизонтальная рамка а = 856,4 мм меньше на 2,4 мм.
Вертикальная рамка Ь = 525,5 мм меньше на 1,5 мм<
106
Плоские прямоугольные координаты
[Гл, VII
ГЛАВА VII
ПЛОСКИЕ ПРЯМОУГОЛЬНЫЕ КООРДИНАТЫ
§ 26. ПОНЯТИЕ О СФЕРИЧЕСКИХ ПРЯМОУГОЛЬНЫХ
КООРДИНАТАХ
п
начальному меридиану. Тогда
Р
Рис. 34.
rt/R
гу
____и______
|С
Положение любой точки на поверхности Земли, определяемое
географическими координатами, может быть задано также и сфе-
рическими прямоугольными координатами.
Примем меридиан РпВОР' (рис. 34) за начальный и проведем
через заданную точку А большой круг EBAQ, перпендикулярный
положение точки А определится
абсциссой X представляющей
длину дуги ВО начального ме-
ридиана от экватора до боль-
шого круга EBAQ, и ординатой
У, равной длине дуги ВА боль-
шого круга EBAQ.
Сферические прямоугольные
координаты представляют со-
Q бой дуги больших кругов. За
ось абсцисс принимается один
из меридианов, который носит
название начального или
осевого меридиана, а за ось
ординат — экватор. Начало
сферических прямоугольных
координат принимается в точке
gO пересечения осевого мери-
диана с экватором.
Сферические абсциссы X точек, лежащих к северу от эква-
тора, считаются положительными, а точек, лежащих к югу от
экватора,— отрицательными. Сферические ординаты У считаются
положительными к востоку от осевого меридиана и отрицатель-
ными — к западу от него.
Проведем на сфере через точку А малый круг пп^ параллель-
ный осевому меридиану. Все точки, лежащие на этом малом
круге, будут иметь одну и ту же сферическую ординату У. Ра-
диус г такого малого круга определится из треугольника СпСг
о У
г = /?cos —,
R
Y
где ——угол при центре Земли, опирающийся ца дугу. Рп, рав-
ную Yj выраженный в отвлеченной мере.
# 27}
Плоские прямоугольные координаты
107
Сферический угол РАп=у, при данной точке А, между ее
меридианом РАР' и малым кругом пщ, параллельным осевому
меридиану, носит название угла сближения меридиа-
нов. Величина угла у зависит от разности долгот между осевым
меридианом и меридианом данной точки и от широты последней;
он определяется по формуле
T = P7?-sin<p. (48)
Если данная точка лежит к востоку от осевого меридиана, то
угол у считается положительным и, наоборот, если данная точка
лежит к западу от осевого меридиана, то угол сближения мери-
дианов будет отрицательным.
§ 27. ПЛОСКИЕ ПРЯМОУГОЛЬНЫЕ КООРДИНАТЫ
Для перехода от сферических прямоугольных координат к
плоским прямоугольным координатам спроектируем координат-
ные линии на поперечный цилиндр, причем поставим условие,
чтобы полученная проекция была конформной.
Рис. 35.
Цилиндр, ось которого лежит в плоскости экватора, касается
поверхности Земли по выбранному осевому меридиану РАОР'
(рис. 35).
На этот цилиндр спроектируем осевой меридиан, дуги боль-
ших кругов EOQ, EAQ, EBQ и т. д. и малые круги, параллельные
меридиану касания. Если теперь разрезать цилиндр по образую-
щей и развернуть его в плоскость, то получится сетка плоских
108
Плоские прямоугольные координаты
[Гл. VII
прямоугольных координат, на которой прямыми вертикальными
линиями изобразятся осевой меридиан и малые круги, параллель-
ные осевому меридиану, а прямыми горизонтальными линиями —
большие круги, перпендикулярные осевому меридиану.
Так как на полученной проекции малые круги, параллельные
меридиану касания, растянулись и стали равны самому осевому
меридиану, то для соблюдения ус-
ловия конформности должны быть,
соответственно, растянуты и дуги
больших кругов, перпендикуляр-
ные осевому меридиану.
Для определения условия кон-
формности получаемой поперечной
цилиндрической проекции выде-
лим на поверхности Земли сфе-
рическую трапецию NN^FiF
(рис. 36), ограниченную двумя
близлежащими дугами больших
кругов /4Q и BQ и двумя отрезками малых кругов AWi и FFb па-
раллельными осевому меридиану АВ. Пусть расстояние по осе-
вому меридиану между дугами больших кругов /4Q и BQ будет
dX, а расстояние между малыми
кругами NF = dY.
Сторона трапеции
NN1 = dX-cos—.
R
На проекции трапеция изобра-
зится (рис. 37) прямоугольником со
сторонами nrii=dX и nf = dy. Так
как условие конформности требует, чтобы бесконечно малые
гуры на поверхности Земли и на проекции были подобны, то
получим
Рис. 37.
фи-
мы
dy dX < dY
— —--------- и ay =-------
dY Y 7 Y
dX cos — cos—
Я R
Преобразовав правую часть последнего равенства, как это
сделано при выводе уравнения локсодромии, проинтегрируем все
выражение в пределах от 0 до у, тогда получим
J к 4 2R )
О
Плоские прямоугольные координаты
109
Найденное выражение показывает, что для соблюдения кон-
формности прямые линии, изображающие малые круги, па-
раллельные осевому меридиану, на проекции в плоских прямо-
угольных координатах должны отстоять от него на расстоянии у,
определяемом выражением (49), аналогичным формуле для ме-
ридиональных частей на меркаторской проекции. Эта формула
показывает, что точки Е и Q, для которых угол — равен 90°,
R
не могут быть нанесены на этой проекции, так как они уйдут
в бесконечность, как географические полюсы на меркаторской
проекции.
Увеличение масштаба на такой проекции получится из урав-
нения
dy 1
m = — =----------
dY Y
cos —
R
Y
sec —.
R
Это выражение показывает, что масштаб на рассматриваемой
проекции зависит только от ординаты Y и увеличивается, т. е.
становится крупнее, по мере удаления от осевого меридиана про-
порционально sec—.Если главный масштаб на меридиане каса-
R
ния обозначим —, а в произвольно взятой точке с ординатой У
- Со
- 1 . *
обозначим то оба знаменателя масштабов связаны соотно-
С
шением:
С = Со cos —.
0 R
110
Плоские прямоугольные координаты
[Гл. VII
На рис. 38 схематически изображена прямыми линиями сетка
плоских прямоугольных координат и кривыми линиями мери-
дианы и параллели.
Плоские прямоугольные координаты 1 введены в СССР реше-
нием III Геодезического совещания при Госплане в марте 1928 г.
и признаны обязательными для всех учреждений при численной
обработке геодезических измерений. В прямоугольных координа-
тах сейчас даются координаты опорных точек. Кроме того, пло-
ские прямоугольные координаты применяются при составлении
топографических карт крупного масштаба и при составлении карт
более мелкого масштаба незначительных по площади территорий.
§ 28. КИЛОМЕТРОВАЯ СЕТКА
Система линий, параллельных координатным осям, носит на-
звание километровой сетки.
Для практического применения километровых сеток, чтобы
избежать значительных изменений масштаба, вся поверхность
земного шара условно делится по долготе на шестиградусные
зоны. В каждой зоне берут независимое начало плоских прямо-
угольных координат, принимая меридиан касания за осевой
Таблица 8
Номер зоны от Грннича Долгота от Гринича осевого меридиана Ордината осевого меридиана зоны Номер зоны от Гринича Долгота от Грннича осевого меридиана Ордината осевого меридиана зоны
4 21°Ost 4 500 19 111° Ost 19 500
5 27 5 500 20 117 20 500
6 33 6 500 21 123 21 500
7 39 7 500 22 129 22 500
8 45 8 500 23 135 23 500
9 51 9 500 24 141 24 500
10 57 10 500 25 147 25500
11 63 11500 26 153 26 500
12 69 12 500 - 27 159 27 500
13 75 13 500 28 165 28 500
14 81 14 500 29 171 29 500
15 87 15 500 30 177 30 500
16 93 16 500 31 177 W 31 500
17 99 17 500 32 171 W 32 500
18 105 18 500
1 Метод замены географических координат плоскими прямоугольными
координатами был разработан в 1825—1830 гг. знаменитым математиком
Гауссом.
Километровая Сетка
111
меридиан. Таким образом, каждая зона распространяется на 3°
по долготе от осевого меридиана в обе стороны.
В пределах СССР шестиградусные зоны километровых сеток
указаны в табл. 8.
Долгота осевого меридиана в каждой отдельной координатной
зоне может быть рассчитана по формуле
Хо = 6 (п - 1) + 3 = 6п - 3, (50)
где п — целое число, соответствующее номеру зоны.
Номер зоны может быть рассчитан по формуле
Я = (51)
6 — 6 ’
Т 3 ч
причем частное —!— округляется до ближайшего целого
6
числа.
Плоские прямоугольные координаты всегда даются в метрах.
Оцифровка сетки километровых линий дается в километрах и
надписывается у соответствующих линий на полях сетки.
Абсцисса X любой заданной точки А (см. рис. 34) представ-
ляет отстояние ОВ сферического перпендикуляра BAQ от эква-
тора к N или S; выраженное в метрах, а ордината Y — отстояние
точки А от осевого меридиана POP' к Ost или к W. Чтобы
избежать отрицательных значений ординат или их наименований,
осевому меридиану дается значение 500 км. Кроме того, перед
значением ординаты ставится номер зоны. Оцифровка ординат
осевых меридианов указана в табл. 8.
Все точки, ординаты которых меньше 500 км, лежат к западу
от осевого меридиана в расстоянии, равном дополнению их орди-
нат до 500, а точки, ординаты которых больше 500, лежат к во-
стоку от осевого меридиана на расстоянии, равном ординате дан-
ной точки минус 500.
Примеры.
1. Какой осевой меридиан в 17-п зоне?
Хо = 6-16 + 3 = 99°Ost
2. В какой зоне лежит точка, имеющая долготу 113° Ost?
„ п = И2 + 1 = 18 + 1 = 19-я зона.
6
3. Где находится точка, имеющая плоские прямоугольные координаты
X 4 892 800 и У = 5 631 200?
Заданная точка лежит в 5-й зоне, в 131,2 км к востоку от осевого мери-
диана, долгота которого 27° Ost. Ордината этой точки пересекает осевой ме-
ридиан на расстоянии 4892,8 км от экватора.
4. Где проходит километровая линия равных У-ов, при У = 6392 500?
В 6-й зоне, имеющей осевой меридиан 33° Osl в 107,5 км к западу от
осевого меридиана.
112
Плоские прямоугольные координаты
[Гл. VII
§ 29. НАНЕСЕНИЕ КИЛОМЕТРОВОЙ СЕТКИ НА МЕРКАТОРСКУЮ
КАРТУ
Переход от географических координат к прямоугольным, или
обратно, может, быть осуществлен вычислительным путем. Но
для решения ряда задач этот переход производится с достаточной
для практической цели точностью графическим путем. Для этого
на имеющуюся картографическую сетку наносится сетка плоских
прямоугольных координат.
На рис. 39 схематически изображена сетка плоских прямо-
угольных координат на меркаторской карте. Из сравнения рис. 38
и 39 видно, что так как на меркаторской проекции меридианы
изображаются прямыми линиями, расположенными на равных
расстояниях, то километровые линии, соответствующие постоян-
ным ординатам Y, обратились в кривые линии, выпуклостью на-
правленные к осевому меридиану и расходящиеся по мере уда-
ления к северу. Километровые линии, соответствующие постоян-
ным абсциссам X, также стали кривыми линиями, выпуклостью
направленными к полюсу. Сетка километровых линий симмет-
рична относительно осевого меридиана.
Для нанесения на карту заданной километровой линии
У = const достаточно знать долготы точек а, Ь, с (рис. 39), в ко-
торых эта линия пересекает определенные параллели. Также для
нанесения на карты километровой линии X = const, соответствую-
щей заранее заданному ее значению, нужно знать широты точек
d, е, f, g, в которых эта линия пересекает определенные мери-
дианы.
Чтобы не вычислять географические координаты отдельных
точек, проф. Н. Н. Матусевич составил специальные «Таблицы
§ 29] Нанесение километровой сетки на меркаторскую карту 113
Таблица 9
Обозна- чение Широта
/ 32°—36°
J 36°—40°
К 40°—44°
L 44°—48°
М 48°—52°
N 52°—56°
О 56°—60°
Р С0°—64°
Q 64°—68°
R 68°—72°
S 72°—76°
т 76°—80°
километровых линий», изданные ГУ ВМС в 1934 г. Эти таблицы,
перевычисленные для эллипсоида Красовского, с небольшими
изменениями помещены в «Картографических таблицах» издания
ГУ ВМС 1949 г.
В «Картографических таблицах» для нанесения на карты ки-
лометровых линий дана табл. 7, озаглавленная «Километровые
линии»; она состоит из двух частей.
В табл. 7-а даны долготы точек пе-
ресечения километровых линий, соот-
ветствующих постоянной ординате Y с
параллелями. Километровые линии да-
ны через 10 км, а параллели с интерва-
лами в 10'.
В табл. 7-6 даны в верхней ее поло-
вине широты точек пересечения кило-
метровых линий, соответствующих по-
стоянной абсциссе X с меридианами, а
в нижней половине таблицы — мери-
диональные части тех же точек. Кило-
метровые линии даны через 20 км, а
меридианы — через 15' в пределах от
0° до 3°3(У долготы, считая от осевого
меридиана, что дает перекрытие шести-
градусных зон на 30' с каждой стороны.
Таблицы охватывают широты от 32°
до 80° и разбиты по широтным четырех-
градусным поясам, обозначенным буквами латинского алфавита,
согласно сборному листу миллионной карты, как указано в табл. 9.
Для нанесения километровых линий, соответствующих орди-
натам Y, определяют осевой меридиан зоны и находят разность
долгот между осевым меридианом и крайними меридианами, ог-
раничивающими район, охватываемый картой. Эти разности дол-
гот не должны превышать 3°3(У. В табл. 7-а, в соответствующем
широтном поясе, находят значения У-ов для километровых линий,
проходящих в районе карты, и выписывают из таблицы в схему
долготы точек пересечения выбранных километровых линий с па-
раллелями. В схему выписывается окончательная оцифровка ки-
лометровых линий, которая получается добавлением ко всем ор-
динатам 500 км и указанием впереди номера данной зоны.
Для нанесения километровых линий, соответствующих посто-
янным абсциссам X, из табл. 7-6 выбираются широты пересечения
километровых линий с меридианами. После нанесения точек, при-
надлежащих километровым линиям, на карту они соединяются
плавными кривыми.
Для большей точности работы и контроля при нанесении
километровых линий (ординат У) на меркаторскую проекцию
8
К. С Ухов
114 Плоские прямоугольные координаты [Гл. УП
следует составить разности долгот выбранной точки от западной
и восточной рамок карты и, умножив полученные разности долгот
на единицу карты, получить расстояния искомой точки от верти-
кальных рамок карты. При нанесении абсцисс X из нижней поло-
вины табл. 7-6 выписываются меридиональные части для иско-.
мых точек и после составления разностей меридиональных частей
и умножения их на единицу карты получаются расстояния этих
точек от нижней и верхней рамок карты.
При нанесении километровых линий с помощью циркуля и
линейки удобно для сокращения расстояний вычислять отстояния
искомых точек от ближайших меридианов и параллелей, состав-
ляя для этого соответствующие разности долгот' и разности мери-
диональных частей.
Если карта охватывает район, лежащий на границе двух ше-
стиградусных зон, то в этой части карты наносятся две системы
километровых линий: одна—левой зоны, а вторая — правой
зоны, как указано на рис. 40. В этом случае на протяжении од-
ного градуса по долготе одна координатная система будет' пере-
крывать другую, и их следует наносить двумя разными цветами.
На рис. 40 километровые линии правой зоны нанесены прерыви-
стыми линиями. Чтобы не затруднять чтение карты, можно на-
нести полностью одну систему километровых линий, а вторую
только показать выходными отрезками на соответствующих мери-
£ 29) Нанесение километровой сетки на Меркаторскую карту 115
дианах и параллелях или рамках карты, отмечая их другим цве-
том. В случае надобности вторая система километровых линий
может быть легко восстановлена по выходным отрезкам этой
системы.
На картах крупных масштабов километровые линии прово-
дятся через 1—2 км. Для сгущения сетки километровых линий
пересечения соответствующих точек километровых линий с мери-
дианами и параллелями находят простым пропорциональным
интерполированием по вертикальным столбцам.
Пример. Нанести сетку километровых линий на меркаторскую карту №..
Широта северной рамки карты = 40°26'N. Долгота восточной рамки
/ 0 = 50°24' Ost.
Широта южной рамки карты = 39°18'N. Долгота западной рамки
Xw = 49°16'Ost.
Главный масштаб карты 1:200 000, по параллели ?о = 42° N.
Длина горизонтальной рамки карты а = 469,5 мм, а длина вертикальной
рамки b = 609,3 мм.
Из Табл. 4 «Картографических таблиц» выбираем единицу карты:
е = 6,90434 мм.
Участок, охватываемый картой, лежит в 9-й зоне, имеющей осевой мери-
диан £о = 51°0^. Разности долгот между осевым меридианом и меридиа-
нами, соответствующими западной и восточной рамкам карты, будут:
/w=-l°44', /0 = —0°36'.
По широте данный район лежит в поясах J и К.
Вычисление точек пересечения линий, имеющих постоянные ординаты Л
с параллелями карты, проведенными через 10', ведется по схеме, приведенной
в табл. 10.
В первой горизонтальной строке записываются разности долгот между
искомой точкой и осевым меридианом. Во второй и третьей строчках выпи-
саны разности долгот между ограничивающими карту меридианами и долго-
той искомой точки; сумма этих двух строчек должна быть равна разности
долгот рамок карты. В четвертой и пятой горизонтальных строчках вписы-
ваются произведения чисел, помещенных соответственно во второй и третьей
строчках на единицу карты. Эти произведения дают расстояния искомой
точки по заданной параллели от восточной и западной рамок карты; сумма
этих двух последних строчек равна длине горизонтальной рамки карты, что
является контролем вычислений. Положение искомой точки может вычис-
ляться и от ближайших к ней меридианов.
Вычисление точек пересечения постоянных абсцисс X с меридианами,
проведенными через 15', ведется по схеме, приведенной в табл. 11.
В заголовке схемы составляем разность долгот между меридианами
на карте и средним меридианом. По этим разностям долгот и заданному X
из второй части табл. 7-6 выписываются меридиональные части соответ-
ствующих точек. Во второй и третьей горизонтальных строчках состав-
ляются разности меридиональных частей между верхней и нижней рамками
карты; сумма полученных меридиональных частей должна быть равна раз-
ности меридиональных частей параллелей, ограничивающих рамку. В четвер-
тую и пятую строчки вписывается произведение чисел второй и третьей
строчки на единицу карты. Эти произведения дают расстояние искомой точки
по заданному меридиану от верхней и нижней рамок карты; сумма чисел
этих двух последних строчек должна быть равна длине вертикальной рамки
карты. Положение искомой точки может вычисляться также и от ближайших
к ней параллелей.
8*
Таблица 10
У, км^Х 39°20' 39'30° 39°40' 39°50' 40°00' 40°10' 40° 20'
—60 —0°4Г,751 —0°4Г,853 —0°41',954 —0с42',055 —0°42',157 —0°42',260 —0°42',364
— 5,751 — 5,853 — 5,954 — 6,055 — 6,157 — 6,260 — 6,364
9440 + 62,249 + 62,147 + 62,046 + 61,954 + 61,843 4- 61,740 4- 61,636
— 39,7 мм — 40,4 — 41,1 — 41,8 — 42,5 — 43,2 — 43,9
+ 429,8 мм + 429,1 + 428,4 4- 427,7 4- 427,0 4- 426,3 4- 425,6
—70 —0°48',712 —0°48',828 —0°48',946 —0°49',064 —0°49',183 —0°49',303 —0°49',424
— 12,712 — 12,828 — 12,946 — 13,064 — 13,183 — 13,303 — 13,424
9430 + 55,288 + 55,172 + 55,054 + 54,936 4- 54,817 4- 54,697 4- 54,576
— 87,8 мм — 88,6 — 89,4 — 90,2 — 91,0 — 91,8 — 92,7
+ 381,7 мм + 380,9 ' -к 380,1 + 379,3 4- 378,5 4- 377,7 4- 376,8
—140 —1°37°,423 —1°37',655 —1'37',889 —1°38',126 —Г38',364 —1°38',604 —1°38',846
— 61,423 — 61,655 — 61,889 — 62,126 — 62,364 — 62,604 — 62,846
9360 + 6,577 + 6,345 + 6,111 + 5,874 4- 5,636 4- 5,396 4- 5,154
— 424,1 мм — 425,7 — 427,3 — 428,9 — 430,6 — 432,2 — 433,9
+ 45,4 мм + 43,8 + 42,2 + 40,6 ч 4- 38,9 4- 37,3 4- 35,6
Плоские прямоугольные координаты [Гл. VII
§30]
Пользование километровыми сетками
117
Таблица 11
= 40°26'tf
= 39°18W
МЧ = 2641', 802
МЧ = 2553', 554
к 49°30' 49°45' 50°00' 50°15'
—1°30' —1°15' —1°00' —0°45'
X км 4360 2558',453 2558',681 2558',868 2559', 013
— 83,349 — 83,121 — 82,934 — 82,789
+ 4,899 4- 5,127 4- 5,314 4- 5,459
—575,5 мм —573,9 —572,6 —571,6
4- 33,8 мм 4- 35,4 4- 36,7 4- 37,7
4380 2572', 394 2572',623 2572',810 2572', 956
— 69,408 — 69,179 — 68,992 — 68,846
+ 18,840 4- 19,069 4- 19,256 4- 19,402
J —479,2 мм —477,6 —476,4 —475,3
4-130,1 мм 4-131,7 4-132,9 4-134,0
4460 26284521 2628',754 2628',945 2629',093
I — 13,281 — 13,048 — 12,857 — 12,709
4- 74,967 4- 75,200 4- 75,391 4- 75,539
— 91,7 мм — 90,1 — 88,8 — 87,8
-4-517,6 мм 4-519,2 +520,5 4-521,5
§ 30. ПОЛЬЗОВАНИЕ КИЛОМЕТРОВЫМИ СЕТКАМИ
Измерение координат заданной точки. Чтобы снять с кило-
метровой сетки плоские прямоугольные координаты заданной
точки М (рис. 41), нужно измерить в масштабе сетки прираще-
ния координат АХ и ДУ от двух километровых линий, имеющих
меньшую численную величину, чем координаты заданной точки.
Пересечение таких километровых линий всегда образует юго-за-
падный угол квадрата, в котором помещается заданная точка.
Обозначив координаты этого угла через Хо и Уо, получим, что
плоские прямоугольные координаты заданной точки будут
Х = Хо + Д* и У=У0 + АУ.
118
Плоские прямоугольные координаты
[Гл. VII
Измерять небольшие отрезки ДХ и ДУ можно специальной
«координатной маркой» или просто хорошей миллиметровой ли-
нейкой, определив сначала, сколько метров соответствует одному
миллиметру в районе измерения координат, так как на меркатор-
ской карте, вследствие изменения масштаба, расстояния между
двумя соседними километровыми линиями также изменяются.
Например, пусть на рис. 41 расстояние между двумя сосед-
ними километровыми линиями в миллиметрах равно 19,2 мм,
а отрезки ДХ и ДУ, соответственно, равны 13,5 мм и 6,8 мм. Тогда
А „ 2000-13,5 1у11П A1Z 2000-6,8
&Х =----------^ = 1410 м; ДУ=---------l = 720 m
19,2 19,2
и координаты точки М будут X = 4 363 410 и У = 6 432 720.
Для нанесения точки на карту по ее заданным плоским пря-
моугольным координатам поступают обратно. Вычтя из заданных
ной точки на другую определяется
координат координаты ле-
вого нижнего угла, в ко-
тором должна находиться
искомая точка, получают
ДХ и ДУ в метрах, а за-
тем, рассчитав величину
этих отрезков в миллимет-
рах, наносят на карту
искомую точку.
Определение расстоя-
ния между двумя задан-
ными точками и направ-
ления с одной точки на
другую, если заданы пло-
ские прямоугольные коор-
динаты этих точек, сво-
дится к решению плоского
прямоугольного треуголь-
ника. Направление с од-
относительно оси X и носит
название дирекционного угла.
Дирекционный угол считается от положительного направления
оси X по часовой стрелке от 0° до 360°, так же как и пеленги.
Так как при вычислении по формулам дирекционный угол полу-
чается в четвертом счете, то его величина в круговом счете может
быть определена из следующих соображений.
Если Х2^>Хх, то дирекционный угол лежит в первой или чет-
вертой четверти, т. е. в пределах от 0° до 90° или от 270° до 360°.
Если Х2<Х], то дирекционный угол лежит во второй или
третьей четверти, т. е. в пределах от 90° до 180° или от 180°
до 270°.
£ 30]
Пользование километровыми сетками
119
Если У2 > Уь то дирекционный угол лежит в первой или вто-
рой четверти, т. е. в пределах от 0° до 90° или от 90° до 180°.
Если У2 <Z Уь то дирекционный угол лежит в третьей или чет-
вертой четверти, т. е. в пределах от 180° до 270° или от 270°
до 360°.
Допустим, что требуется определить расстояние ММХ=Д
(рис. 41) и направление из точки М на точку Л4ь
В прямоугольном треугольнике M}ML угол при вершине М
равен дирекционному углу а в четвертном счете. Непосредственно
из прямоугольного треугольника MiML имеем:
tg«= 2
D= (У2—rj coseca=-- (Z2— Хг) sec a
(52)
Вычисление по формулам (52) требует, чтобы координаты
обеих точек Л4(ХЬ У1) и Mi (Х2, Уг) лежали в одной и той же
координатной зоне.
Пример. Известны плоские прямоугольные координаты точек:
( Хх = 4417,65 “ ( Х2 = 4407,08
Л1 ! „ ------- П Л411 = 9412,50
заданными точками и направление
[ X1 = 4417,65
I = 9421,88 "
Определить расстояние между
с точки М на точку
Решение.
У2 = 9412,50
У1 = 9421,88
Х2 = 4407,08
Хх = 4417,65
У2 — У1 = — 9,38
У2 — У1 . . . 0,9722
Х2- Xi . . . 1,0241
У 2 - Л .
cosec а .
Х3-Х1 = —10,57
Контроль
Х2 — Хх. . .1,0241
sec а . . . 0,1261
0,9722
0,1780
D . . . 1,1502
D . . . 1,1502
D = 14,13 км
по табл. 40 «Картографических таблиц» нахо-
tg а . . . 9,9481
а = 180° 4-41°35 = 221°35'
По табл. 50-6 МТ-43 или
дим, что D = 7,63 мор. мил.
Если требуется получить расстояние в артиллерийских кабельтовых, то
можно воспользоваться табл. 49-6 МТ-43 или табл. 44 «Картографических
таблиц», принимая артиллерийский кабельтов равным 100 морским саженям
шестифутовой меры. По таблицам D — 77,3 артиллерийским кабельтовым.
Переход от одних единиц длины к другим легко получается вычисли-
тельным путем, что проще, если приходится иметь дело с несколькими рас-
стояниями, так как логарифм для перевода остается постоянным.
D............1,1502
0,18288 . . . 9,2622
D.............1,1502
1,852 . . . .0,2677
0,8825
D = 7,63 мор. миль
1,8880
D = 77,3 арт. каб.
120
Центральная, или гномоническая, проекция
[Гл. VIII
Переход от дирекционного угла к направлениям, рассчиты-
ваемым от меридиана. На километровой сетке, нанесенной на
меркаторскую проекцию, ось А-ов составляет с истинным мери-
дианом угол 7, называемый плоским схождением ме-
ридианов. В пределах 6° зоны плоское схождение меридианов
не превышает 3° и считается
положительным к востоку от
среднего меридиана и отри-
цательным — к западу. Ве-
личина угла у наносится на
картах сбоку обеих ее вер-
тикальных рамок. Численное
значение схождения мери-
дианов приведено в табли-
цах проф. Каврайского по
аргументам — широта через
10' и долгота через 15'; оно
также может быть вычисле-
но по формуле (48).
На рис. 42 через место
наблюдателя О проведены
все три меридиана — истин-
ный, магнитный и компас-
ный, километровая линия, соответствующая оси X, и направление
на предмет М. Непосредственно с чертежа имеем:
МП = а— Д
ЛЛ = а-Д — 8
(53)
Угол Д называется ориентирным у гл о м, он равен
Д = d — 7.
Связь компасного направления с дирекционным углом может
быть выражена так:
ЛЛ = а-(Д/(-Т).
Приведенные формулы алгебраические; они служат для пере-
хода от заданного направления к искомому направлению.
ГЛАВА VIII
ЦЕНТРАЛЬНАЯ, ИЛИ ГНОМОНИЧЕСКАЯ, ПРОЕКЦИЯ
§ 31. ОБЩИЕ СВОЙСТВА ПЕРСПЕКТИВНЫХ ПРОЕКЦИЙ
Если проектировать поверхность Земли на картинную пло-
скость из какой-либо точки, расположенной на вертикальной ли-
нии, проходящей через точку касания и центр Земли, то, как
§ 31]
Общие свойства перспективных проекций
121
указано было в главе V, § 1, получится частный вид азимуталь-
ных проекций — перспективная проекция.
На рис. 43 картинная плоскость НН{ касается поверхности
Земли в точке Z (картинная плоскость приподнята на рисунке
для большей ясности). В С на-
ходится точка зрения, из кото-
рой и проектируется изображе-
ние поверхности Земли на кар-
тинную плоскость. Луч COZ,
перпендикулярный к картинной
плоскости, носит название
главного луча.
Возьмем на поверхности
Земли произвольную точку М,
положение которой определяет-
ся сферическими координатами:
зенитным расстоянием, дугой
вертикали ZM = z и азиму-
том — сферическим углом
PZM = А. Проектируя эту точ-
ку на картинную плоскость, мы
получим точку Mi, положение
которой будет определяться по-
лярными координатами: радиу-
сом-вектором p=ZMi и углом
PiZMi = А. Прямая ZPi пред-
ставляет проекцию дуги мери-
диана точки Z на картинную
плоскость. Полюс Р изобразится
на проекции точкой
Опустим из точки М перпен-
дикуляр МВ на главный луч Рис* 43-
COZ', обозначим расстояние ОС
от центра сферы до точки зрения, из которой происходит проекти-
рование, через D, а радиус сферы — через /?.
Из подобных прямоугольных треугольников ZMiC и ВМС, ле-
жащих в плоскости ZMiC, имеем
ZMj cz
вм св
Из прямоугольного треугольника БОМ определяем
BAf = /?sinz и ВО = R cos z.
Тогда зависимость радиуса-вектора р от зенитного расстояния
точки М и от положения точки зрения определится так:
р = (/) + /?)—R's*nz—
1 D + R cos z
(54)
122
Центральная, или гномоническая, проекция
[Гл. VIII
Обозначим частный масштаб по направлению радиуса-век-
тора р через т, а по перпендикулярному направлению — через п,
тогда
dp
tn = ^-
Rdz
R + D cos z
(D + R cos z)2
n = P- dA P = U> + *)
R sin z-dA Rsmz D R cos z ,
Перспективные проекции в зависимости от положения точки
зрения разделяются на четыре вида.
1. Внешняя, когда точка зрения С лежит на конечном рас-
стоянии от центра сферы О и вне сферы, как в только что разоб-
ранном случае.
2. Ортографическая, когда точка зрения С удалена
в бесконечность, т. е. D = со. В этом случае из (54) и (55)
получим
p = /?*sinz; т = cosz; п=\.
Формулы (54) и (55) показывают, что на этой проекции рас-
стояние заданной точки от точки касания пропорционально си-
нусу зенитного расстояния. При z = 0, т = п= 1, т. е. масштаб
по всем направлениям одинаков и изображение получается без
искажений.
По мере удаления от центральной точки касания масштаб по
направлению радиусов-векторов уменьшается пропорционально
cos z и становится равным нулю при 2 = 90°, а по перпендику-
лярному направлению остается постоянным. Если взять на сфере
какой-либо малый круг в угловом расстоянии z от центральной
точки, то на ортографической проекции он изобразится эллипсом,
который будет растягиваться с увеличением z, и на краю проек-
ции при z = 90° обратится в отрезок прямой линии.
Ортографическая проекция не сохраняет ни равенства углов,
пи пропорциональности площадей. Она применяется для изобра-
жения поверхностей Луны и планет па видимых их дисках, для
изображения полушарий, а также для нанесения границ солнеч-
ного затмения на поверхности Земли.
3. Стереографическая, когда точка зрения находится
на поверхности сферы в точке С\ и D = R.
Из формул (54) и (55) имеем:
2R - sin z
Р =-------
1 Д- cos г
2 1
т =--------=-------;
1 + COS Z о Z
cos2-
2
Равенство масштабов т = п
ская проекция равноугольна, причем масштаб вблизи централь-
(55)
=2Rtgf;
я = 2—,
1 + COS Z _ Z
cos2--
2
показывает, что стереографиче-
§3i]
Общие свойства перспективных проекций
123
ной точки проекции при 2 = 0 равен 1, а на краях карты при
z = 90° масштаб вдвое больше, так как m — п = 2. .
Стереографическая проекция обладает тем важным свойством,
что большие и малые круги на сфере на этой проекции изобра-
жаются также кругами; она может быть использована вследствие
этого для решения отдельных задач судовождения, например на-
несения кругов равных высот.
Стереографическая проекция часто применяется для изобра-
жения полушарий Земли и построения звездных карт.
4. Центральная, или гномоническая1, когда точка
зрения совпадает с центром сферы и D = 0.
Из формул (54) и (55) имеем для центральной проекции
p = /?tg2; m = —; я = —. (56)
cos2 z cos z
Центральная проекция не конформна, не эквивалентна и дает
значительные искажения к краям, так как масштаб m меняется
значительно больше, чем масштаб п, и фигуры будут сильно вы-
тягиваться по направлениям от центральной точки проекции.
Только в точке касания Z, 2 = 0, масштабы равны между со-
бой независимо от направлений; при 2 = 90° оба масштаба m и п
обращаются в бесконечность, и полушарие в этой проекции изо-
бразить нельзя. Но центральная проекция обладает тем свой-
ством, что на ней все большие круги изображаются прямыми ли-
ниями. Благодаря этому свойству центральные проекции приме-
няются в судовождении для прокладки дуг больших кругов при
больших океанских переходах.
Для сравнения на рис. 44 показаны изображения одной и той
же части земной поверхности, ограниченной сферическим ради-
усом, равным 70°, имеющей центральную точку на экваторе в дол-
готе 30° W.
Все три наиболее интересные для судовождения проекции:
центральная (гномоническая), меркаторская и стереографическая
даны в одном и том же главном масштабе.
Все перспективные проекции различаются также в зависи-
мости от того, какая точка сферы взята за центральную точку Z
для данной проекции. Каждая из вышеуказанных перспективных
проекций может быть:
а) прямой или нормальной, если центральная точка
проекции (точка касания) совпадает с одним из полюсов Земли;
б) поперечной, если центральная точка проекции лежит
на экваторе;
в) косой, если центральная точка проекции лежит где-либо
между экватором и полюсом.
1 Гномон — указатель на солнечных часах, тень которого заменяет
часовую стрелку.
124
Центральная, или гномоническая, проекция
[Гл. V1H
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ
Рис. 44.
£ 32] Искажение углов на центральной проекции
125
МЕРКАТОРСКАЯ ПРОЕКЦИЯ
СТЕРЕОГРАФИЧЕСКАЯ ПРОЕКЦИЯ
§ 32. ИСКАЖЕНИЕ УГЛОВ
НА ЦЕНТРАЛЬНОЙ
ПРОЕКЦИИ
Для определения искаже-
ния углов на центральной
проекции возьмем на поверх-
ности Земли малый отрезок
дуги ВВг (рис. 45) и прове-
дем через точки В и Вх вер-
тикаль ZB и ZBi, а через
точку В\ — отрезок альму-
кантарата BiC. Обозначим в
прямоугольном треугольнике
СВВ], который по малости
сторон примем за плоский,
угол СВВ{ через В, тогда
X о__ВгС __sin z-dA
g — ~ВС dz ‘
На проекции треугольник
ВВГС изобразится треуголь-
ником ЬЬ\С, прямоугольным
при вершине с. Обозначим
угол cbb\ через Ь, тогда
be dp
Решая оба полученных
уравнения относительно dA,
получим
dA=-^tgB=*?-tgb
Sin Z Р
или
sin z dp
Подставляя в получен-
ное выражение значения
р = 7?tgz и—, окончатель-
. ^р
но имеем
tgfe = tgB-cosz. (57)
Выведенная зависимость
между углами на сфере и на
центральной проекции пока-
126
Центральная, или гномоническая, проекция
[Гл. V111
зывает, что с удалением от центра проекции к ее краям иска-
жение углов происходит сначала медленно, а затем, по мере
увеличения зенитного расстояния z, быстро возрастает. На цент-
ральной проекции очертания фигур к краям проекции значи-
тельно искажаются, непосредственное снятие углов на этой про-
екции невозможно, и она служит для проложения дуг больших
кругов, которые на этой проекции изображаются прямыми ли-
ниями.
§ 33. КОСАЯ ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ
Возьмем картинную плоскость косой центральной проекции,
касающуюся сферы в точке Z (рис. 46); обозначим широту точки
касания <р2. Меридиан точки касания PZ изображается на проек-
ции касательной к этому меридиану pZ. Проведем на сфере боль-
шой круг ZDZi перпендикулярно меридиану точки касания. Каса-
тельная к нему, лежащая в картинной плоскости, будет Za2. Вы-
берем на сфере две произвольные точки А и A h из которых точка
А лежит на меридиане точки касания. Проекции этих точек на
картинной плоскости будут, соответственно, точки а и (Ц. Проек-
ции всех точек, лежащих на меридиане PAZ, расположатся на
прямой pZ — основном меридиане проекции.
Проведем через точки А и Ai большой круг ААЦ)В; проекция
отрезка его AAi даст на картинной плоскости прямую аа^ Мери-
дианы, как большие круги сферы, проходящие через полюс Р,
изобразятся на проекции прямыми линиями, лучеобразно расхо-
дящимися из точки р — проекции полюса на картинной плоскости.
Косая центральная проекция
127
Обозначим широту точки А через ?л, тогда
PZ= 90° - ?z и РА = 90° - ?л,
а угол
AOZ = <?a — ?z.
Из прямоугольных треугольников pOZ и aOZ имеем
pZ = R> ctg ?z
с
Рис. 46.
И
aZ = 7? tg (<рд-®z).
Йервая из этих формул
дает расстояние на картин-
ной плоскости от точки каса-
ния Z до проекции полюса р,
а вторая — расстояние от
точки касания до любой точ-
ки, лежащей на меридиане
касания, широта которой из-
вестна.
При ?л > <?z проекция
точки А будет лежать между
точкой касания и проекцией
полюса р; если же
то проекция точки А будет
на продолжении основного
меридиана в сторону, проти-
воположную направлению на
проекцию полюса р.
Пусть большой круг
AAjDB также пересекает ме- 1
ридиан точки касания PZ
под прямым углом. Тогда на
основании формулы
проекция отрезка аах также
пересекает основной
диан pZ под прямым углом.
Следовательно, все большие
круги, перпендикулярные основному меридиану, представляются
на центральной проекции прямыми параллельными линиями, пер-
пендикулярными этому же меридиану.
Проведем через точку Аг меридиан PAjA2 до пересечения его
в точке А2 с большим кругом ZDZb Проекция этого меридиана
на картинной плоскости изобразится прямой линией ра^. Обоз-
начим сферический угол ZPA2, представляющий разность долгот
(57)
мери-
128
Центральная, или гномоническая, проекция
[Гл. УШ
точек Z и Л2, через X, а соответствующий ему на проекции угол
Zpa2 — через X'. Тогда на основании формулы (57)
tg= tgX sin (58)
Последнее уравнение определяет
к основному меридиану какого-либо
После подстановки и
на проекции угол наклона
другого меридиана, отстоя-
щего от основного на раз-
ность долгот X. При
?z= 90° в нормальной
проекции Х' = Х.
Определим теперь дли-
ну отрезка aah изобра-
жающего дугу большого
круга AAi. Из подобных
треугольников pa2Z и раха
имеем
Zp
Но
Za2 = /?tgZ42
и
pZ=/?ctgcp2.
Из сферического тре-
угольника A2PZ, прямо-
угольного при вершине Z,
имеем
tgZ42 = tgXcos <р2,
и, наконец,
pa = pZ — aZ —
= /?ctg<?z-/?tg(«A-<f>2).
соответствующего приведения получим
aa1 = Rcos<fA tgksec(®4 — <?z). (59)
Рассмотрим теперь, как изобразятся параллели на косой цен-
тральной проекции. Проекции точек В и D параллели BXDB
(рис. 47), имеющей широту изобразятся на центральной про-
Косая центральная проекция
129
екции точками b и d. Соединим точки D и Z дугой большого
круга; она изобразится на проекции прямой Zd. Обозначим /_DZB
через 0, / bZd будет равен углу 0, как угол между касательными
к большим кругам, пересекающимся в точке Z.
Пусть X и Y будут прямоугольные координаты точки d, отне-
сенные к осям координат ZX и Zp, с началом в точке Z, лежа-
щим в картинной плоскости. Тогда
х = Zd sin 0; y = Zdcos6; х2 -|- у2 =Zd2.
Приняв радиус сферы R. за единицу, имеем
Zd = tgDZ
и
A: = tgZ)Zsin0; y = tgZ)ZcosO.
Из сферического треугольника PDZ, вводя принятые обозна-
чения, получаем:
sin = sin tf>z cos DZ-\- cos <fz sin DZ cos 6;
sin <ps sec DZ = sin cp z -|-у cos ?z.
Ho tg2 DZ — x2 у2 и sec2DZ= 1-j-x2-j-_y2.
Следовательно,
sin2 ср B (1 -1- x2 -y2) = sin2 <f>z +2y sin <pz cos <pz —j— y2 cos2 cpz
или
X2 sin 2<pB -y2 (sin2<pB — COS2 cpz) — 2y sin tf>z COS cpz =
= sin2 <pz — sin2 <?B. (60)
Для каждой данной параллели ее широта и широта точки
касания <pz—величины постоянные, и мы получаем уравнение
параллели на центральной проекции (60).
Если sin <?в > cos <pz, т. e. <ав > 90° — <?z, то параллель пред-
ставит собой эллипс. Если sin<рв < cos<pz, т. е. < 90° — <pz,
то параллель становится гиперболой. Если sin<?в = cos<oz, т. е.
= 90° — <fz, то уравнение параллели (60) будет
х2 — 2у tg<pz— tg2tpz+l =0
и мы получим уравнение параболы.
Кривые, изображающие на косой центральной проекции па-
раллели, могут быть нанесены при помощи выведенных выше
уравнений или путем нанесения на проекцию ряда точек, имею-
щих одну и ту же широту, и соединения их плавной кривой.
К. С. Ухов
130
Центральная, или гномоническая, проекция
[Гл. VI11
Вид параллелей на косой центральной проекции соответствует
сечению картинной плоскостью pZX ряда конусов, имеющих об-
щую вершину в точке О. Например, радиус сферы ONi паралле-
лен картинной плоскости pZX, тогда широта параллели AWi бу-
дет 90° — и сечение кругового конуса N.ON\ картинной пло-
скостью даст параболу.
§ 34. ПОСТРОЕНИЕ КАРТОГРАФИЧЕСКОЙ СЕТКИ КОСОЙ
ЦЕНТРАЛЬНОЙ ПРОЕКЦИИ
Предположим, что заданы географические координаты точки
касания ?Z = 45°S и Xz=120°W.
На рис. 48 точка Z будет точкой касания, а прямая ZM —
основной меридиан. Наклон остальных меридианов к основному
определится по формуле (54)
tg X" = tg X sin <pz = 0,707 tg X,
если в эту формулу последовательно подставлять вместо X раз-
ность долгот между основным меридианом и меридианом, кото-
рый желательно нанести на сетку; в приведенном примере, как
видно из рисунка, взяты разности долгот 10°, 20°, 30° и 40°. Вы-
численные углы X' позволяют провести на проекции желаемые
меридианы, имея проекцию точки полюса на самой сетке или вне
ее рамки. 1 ’
Отстояние проекции полюса от точки касания по основному
меридиану определяется по формуле pZ = 7?ctg?z. На рис. 48
южный полюс находится вне рамки и не показан.
Для нанесения параллелей возьмем точку Аь географические
координаты которой ?л = 50° S и Хл = 150°W. Пусть точка fli
35]
Поперечная центральная проекция
131
представляет на сетке проекцию точки Опустим из точки а\
перпендикуляр аа\ на меридиан касания. Расстояние aZ точки а,
основания перпендикуляра, от точки касания определится по
формуле
aZ = Л tg (<рА - ?2) = R tg (<рл - 45°),
где <Рд — широта точки А на земной поверхности, проекция ко-
торой на сетке и будет точка а.
Широта точки А определится из сферического треугольника
РАAi (рис. 46):
tg<P4 = tg?Ai sec X,
здесь X — разность долгот точек А и At на Земле или соответ-
ствующих им точек а и at на проекции.
Для нашего примера tg®A = tg50°*sec 30° и, следовательно,
величина отрезка aZ может быть вычислена.
По формуле (59) вычисляем длину отрезка аа\
aa{ = R- cos <pAsec (<рЛ—<p2)tg X.
По координатам х = aZ и у = aai точка ai наносится на
сетку. Подобным же образом могут быть вычислены координаты
х и у точек с, bi, и др. Нанеся эти точки на сетку и проведя
через них плавную кривую, получим параллель, широта которой
с = 50° S.
Совершенно так же вычисляются положения точек для нане-
сения других параллелей.
Так как данная проекция симметрична относительно основ-
ного меридиана, то вычисления достаточно сделать для одной
половины сетки.
§ 35. ПОПЕРЕЧНАЯ ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ
Если картинная плоскость центральной проекции касается
земной сферы в какой-либо точке, лежащей на экваторе, то такая
проекция носит название поперечной центральной проекции.
В этом случае экватор и основной меридиан представят две
взаимно перпендикулярные оси координат MMt и Za (рис. 49).
Все остальные меридианы изобразятся прямыми линиями, парал-
лельными между собой и перпендикулярными экватору.
Расстояние искомого меридиана, например точки А, от мери-
диана касания, если последний примем за ось Y, а изображение
экватора — за ось X, определяется из прямоугольного треуголь-
9*
132
Центральная, или гномоническая, проекция
[Гл. VIII
ника ZOa: х = aZ=RtgK
так как угол ZOa — раз-
ность долгот между основ-
ным меридианом и мери-
дианом точки А.
Все параллели изобра-
зятся гиперболами, как
сечения конусов плоско-
стью, параллельной об-
щей оси конусов. Вер-
шины всех гипербол бу-
дут лежать на оси Y в
расстоянии у — R tg ? от
начала координат.
Ордината любой точки,
например g, может быть
вычислена по формуле
|у = bg = R tg <Pg. sec k.
На рис. 49 кривая df
представляет проекцию
отрезка DF параллели
DDi, а прямая fg — про-
екцию отрезка дуги боль-
шого круга FG.
§ 36. НОРМАЛЬНАЯ ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ
Если картинная пло-
скость центральной проек-
ции касается одного из по-
люсов сферы, то получается
нормальная центральная
проекция. В этой проекции
все меридианы изображают-
ся прямыми линиями, ра-
диально расходящимися от
полюса, причем углы ме-
жду меридианами будут
равны соответствующим раз-
ностям долгот. Параллели
на нормальной центральной
проекции изобразятся кон-
центрическими кругами с об-
щим центром в полюсе.
Рис. 50.
§ 37] Классификация морских карт 133
Радиусы параллелей на проекции равны р = R ctg <?.
На рис. 50 представлена нормальная центральная проекция
от 45° до полюса. Экватор в этой проекции изобразить нельзя.
При построении проекции, чтобы получить большую точность,
можно вычислять координаты отдельных точек по следующим
формулам:
х = R ctg <р cos X; у = R ctg sin X.
ГЛАВА IX
СОСТАВЛЕНИЕ И ИЗДАНИЕ МОРСКИХ КАРТ
§ 37. КЛАССИФИКАЦИЯ МОРСКИХ КАРТ
Морские навигационные карты, издаваемые Гидрографиче-
ским управлением ВМС, относятся к разряду технических карт и
являются основным пособием для мореплавания, обеспечиваю-
щим плавание судов военного флота, транспортного флота и су-
дов специального назначения.
По своему содержанию и масштабу морские навигационные
карты делятся на:
а) План ы, предназначенные для руководства при входах
в бухты, на рейды, в гавани, для прохода узкостей; используются
планы также для проектирования гидротехнических сооружений.
б) Частные карты, предназначенные для плавания в не-
посредственной близости к берегам, в стесненных районах, когда
приходится располагать курсы, руководствуясь местными пред-
метами.
Планы и частные карты составляются в масштабах крупнее
1 : 50 000, причем масштаб частной карты относится к средней
параллели карты.
в) Путевые карты, имеющие назначение обеспечить пла-
вание вдоль побережий и иногда вне видимости берега. Путевая
карта содержит все необходимые сведения для безопасного под-
хода к берегу в пределах, допускаемых масштабом. Путевые
карты издаются в масштабах от 1 : 100 000 до 1 : 300 000, причем
масштаб относится к главной параллели моря.
г) Генеральные карты, служащие для общего изуче-
ния условий плавания, для предварительной прокладки на пере-
ход и общих расчетов, связанных с переходом. На генеральных
картах отмечаются также места судна при плавании в открытом
море в значительном удалении от берега, когда вблизи нет нави-
гационных опасностей.
Генеральные карты выпускаются в масштабах мельче
1 : 500 000, причем масштаб относится к главной параллели моря.
Для облегчения перехода с одной карты на другую, а также
чтобы иметь возможность в случае надобности склеить ряд карт
134
Составление и издание морских карт
[Гл. IX
одного и того же масштаба в одну карту, для всех путевых и ге-
неральных карт одного морского бассейна установлена стандарт-
ная главная параллель. Числовой масштаб, указанный в заго-
ловке карты, отнесен к этой главной параллели.
Для следующих морских бассейнов установлены указанные
стандартные главные параллели:
Мурманский берег — главная параллель 69°
Белое море — „ 66°
Балтийское море — 60°
Охотское море — „ Черное и Азовское V 52°
моря — W 44°
Каспийское море — 42°
В зависимости от масштаба карты содержание ее отличается
различной степенью подробностей наносимых на нее сведений.
Маяки, огни и знаки, являющиеся в большинстве случаев
опорными пунктами при построении карты, наносятся:
а) на планах и частных картах все без исключения, включая
внутренние рейдовые и портовые огни;
б) на путевых картах — маяки, огни и знаки, обслуживающие
плавание вдоль побережий; не наблюдаемые с моря внутренние
портовые огни и знаки не наносятся;
в) на генеральных картах — только важнейшие маяки, огни
и знаки, хорошо видимые с моря при плавании вдоль побережий
на значительном удалении от берега.
Навигационные опасности: банки, рифы, мели, подводные,
надводные и осыхающие камни, скалы, буруны, затонувшие суда
и другие — наносятся на морские навигационные карту:
а) на планы и частные карты — с исчерпывающей полнотой
и подробностью;
б) на путевые карты — все навигационные опасности, но
с некоторой разрядкой прибрежных камней и с обобщением мел-
ких близко расположенных друг к другу банок в тех районах, где
рекомендуется пользоваться имеющейся частной картой или
планом;
в) на генеральные карты — все навигационные опасности, рас-
положенные в некотором удалении от берега. Вблизи берега на-
вигационные опасности показаны обобщенно для обшей навига-
ционной характеристики района.
Пловучие средства ограждения наносятся на морские карты
со следующей подробностью:
а) на планы и частные карты — полностью;
б) на путевые карты — полностью; и только на тех участках
карты, где полностью нанести пловучие ограждения без ущерба
для четкости карты нельзя, оно дается разреженно; обязательно
должны быть нанесены буи и вехи, выставляемые у входа в мор-
£
Составление и издание морских карт
135
ские каналы, фарватеры, а также в местах поворота канала или
фарватера;
в) на генеральных картах показывается ограждение, выстав-
ленное у банок и других навигационных опасностей, лежащих
вдали от берегов.
§ 38. СОСТАВЛЕНИЕ И ИЗДАНИЕ МОРСКИХ КАРТ
Морские навигационные карты издаются почти исключительно
в меркаторской проекции. Прежде всего выбираются стандарт-
ный масштаб карты по главной параллели, установленной для
данного моря, и границы карты по широте и долготе. Затем вы-
числяется приближенный размер карты, чтобы убедиться, что он
не выходит из стандартных пределов, обусловленных размером
печатного станка.
После того как установлены окончательно стандартный мас-
штаб и границы карты, подбирается материал для ее составле-
ния. В первую очередь на вычисленную картографическую сетку
наносятся опорные точки, которые служили основанием для съе-
мочных и промерных планшетов. При систематической описи
опорными точками служат триангуляционные пункты, а при ре-
когносцировочной — астрономические. Опорные точки наносятся
на карту по отрезкам рамок, вычисляемым в миллиметрах, по их
географическим координатам, как указано в § 25.
После этого подбираются отдельные планшеты береговой
съемки и промера, которые должны иметь для ориентировки те
же опорные точки, какие уже нанесены на карту.
Если планшеты не имеют нанесенных на них опорных точек,
то они не могут быть использованы для составления карты. Подо-
бранные планшеты уменьшаются до установленного масштаба
карты и вставляются на свои места.
Рамки съемочных и промерных планшетов, составленных
в географических координатах и в крупном масштабе, представ-
ляют собой трапеции, но при уменьшении масштаба расхождение
между прямоугольником и трапецией становится настолько мало,
что остающуюся разность разгоняют графически при вычерчива-
нии карты.
Выбор деталей, наносимых на карту, зависит от масштаба по-
следней. На карту должны быть нанесены все сведения, нужные
для судовождения, причем карта должна быть отчетливой.
При уменьшении промерных планшетов для составления ори-
гинала карты глубины на планшетах несколько разрежаются
в зависимости от масштаба карты, так как поместить на карту
все глубины, имеющиеся на планшете, невозможно. При разре-
жении глубин руководствуются следующими правилами:
а) на картах должно быть видно направление промерных
галсов;
136
Составление и издание морских карт
[Гл. IX
б) на картах должны быть нанесены все опасные для судов
банки и отличительные глубины;
в) все места, не покрытые промером, должны выделяться на
картах в виде белых пятен.
Изобаты проводятся предварительно на подлинных промер-
ных планшетах, а затем переносятся на карту. Грунты указы-
ваются на картах, причем надписи должны быть не ближе 5 см
одна от другой.
После уменьшения съемочных и промерных планшетов до мас-
штаба карты вычерчивается оригинал карты, который подвер-
гается тщательной корректуре. Кроме того, составляется форму-
ляр карты, в котором приводятся все вычисления картографиче-
ской сетки и положения опорных точек, указан способ построения
карты и все материалы, по которым построена карта. К форму-
ляру карты прилагается сборный лист всего использованного кар-
тографического материала и все уменьшенные планшеты.
Карты более мелких масштабов строятся по картам крупных
масштабов, например путевые — по частным, генеральные — по
путевым. Так как меркаторские карты сохраняют подобие фигур,
то построение одной карты по другой сводится к уменьшению
карты более крупного масштаба до вновь заданного, а также
к сокращению и обобщению деталей.
Для издания карт изготовляются клише, представляющие зер-
кальное изображение оригинала карты. В настоящее время наи-
более распространенными являются алюминиевые клише. Может
применяться и медное клише.
При изготовлении медного клише оригинал карты гравируется
на плоской медной доске толщиною около 2 мм, причем рисунок
делается углубленным. Полученная с медного клише карта имеет
все достоинства гравюры. Она отличается четкостью и проч-
ностью рисунка, который не страдает при вытирании с карты ре-
зинкою предыдущей прокладки. Карта, напечатанная с медного
клише, слегка шероховата, так как рисунок имеет выпуклый
рельеф. Медное клише легко корректируется путем счистки с него
подлежащего исправлению места, на которое наносятся исправ-
ленные данные. В случае необходимости подлежащее исправле-
нию место наращивается новым слоем меди в гальванопластиче-
ской ванне.
При больших тиражах карты с оригинала медного клише для
его сохранности изготовляется рабочее медное клише, которое
иногда покрывается еще тонким слоем стали. Печатание с мед-
ного клише производится на станках.
К недостаткам печатания карт с медного клише относится
деформация оттисков, происходящая от увлажнения бумаги при
печатании, а также сравнительно медленное изготовление как гра-
дюры, так и печати, вследствие чего этот способ издания карт
§39]
Степень доверия к картам
137
неэкономичен. В последнее время путем применения для увла-
жнения бумаги при печатании специального, раствора, в который
входят квасцы, деформация полученных оттисков значительно
уменьшилась и не превышает 0,7—0,6 мм на длину рамки карты.
Изготовление алюминиевого клише производится или непо-
средственным нанесением рисунка на плоскую алюминиевую
доску, или путем перевода на алюминий сделанного на бумаге
чертежа, или, наконец, при помощи фотографии; последний спо-
соб носит название фотоальграфии.
С литографских клише оттиски печатаются на скоропечатных
плоских или круглых (офсетных) машинах, при предварительном
переносе во втором случае рисунка с клише на резиновую лепту,
а затем уже на бумагу. Такой процесс ускоряет печатание до не-
скольких тысяч оттисков в час и улучшает качество оттиска. При
литографической печати бумага не увлажняется и оттиски при
печати не деформируются, кроме того, этот способ позволяет пе-
чатать карты в несколько красок.
Отрицательной стороной литографского способа печати яв-
ляется непрочность клише. Рисунок не имеет рельефа, и краска,
постепенно нарастая, уменьшает четкость карты, поэтому прихо-
дится изготовлять новые клише. Кроме того, вследствие быстрого
стирания шероховатой поверхности клише, оно становится непри-
годным для нанесения на него корректуры.
Требование к увеличению тиража морских карт в некоторых
случаях заставляет прибегать к комбинированному способу изда-
ния карт.
Для долговременного хранения карты оригинал изготовляется
как гравюра на меди, а размножение оттисков карты произво-
дится литографским способом с алюминиевых клише, изготовляе-
мых с гравюры на меди фотографическим путем.
§ 39. СТЕПЕНЬ ДОВЕРИЯ К КАРТАМ
Время составления карты и производство описи указываются
на карте внутри рамки на свободном месте берега. Пополнение
карты позднейшими работами также отмечается в этом месте.
Эти даты служат для оценки достоинства карты. Давность
работ указывает, что опись производилась инструментами и прие-
мами менее совершенными, чем современные, а также на то об-
стоятельство, что карта могла в некоторой степени утерять свое
тождество с действительностью по причинам естественным — тек-
тонические явления, вынос рек и прочее, или по причинам искус-
ственным — вырубка лесов, новые сооружения и т. д.
Кроме даты, имеет большое значение и подробность описи:
карты, составленные по рекогносцировочной описи (морская
съемка), дают малую подробность в изображении берега и ред-
кий промер.
138
Составление и издание морских карт
[Гл. IX
На картах, в зависимости от их масштаба, дается определен-
ное количество деталей, сокращающееся с уменьшением масштаба
карты. Такое же обобщение сведений делается и в отношении
ограждения, фарватеров, данных о магнитном склонении, прили-
вах, течении и т. д. Поэтому для каждого района моря следует
пользоваться картой самого крупного масштаба.
Если по каким-либо обстоятельствам пользуются картой не
самого крупного масштаба, то все же необходимо использовать
все сведения, даваемые картой самого крупного масштаба, осо-
бенно при приближении к берегу или к опасным банкам.
Следует иметь в виду, что искажение карты, происходящее
при печати, пропорционально меньше на картах крупного мас-
штаба, чем на картах мелкого масштаба.
Оценка рельефа дна. Прежде всего следует изучить по карте
характер промера и оценить рельеф дна в отношении безопасности
судовождения. Промер заключается в измерении глубин по ряду
направлений — по промерным галсам, которые располагаются
перпендикулярно берегу и параллельно между собой. Чем чаще
расположены эти галсы и чем меньше расстояние между изме-
ренными глубинами на галсах, тем подробнее произведен промер.
Средняя частота промера при подробной описи — 50 м между
галсами и 25 м между глубинами на галсах. При облегченной
описи производится разреженный промер, при котором расстоя-
ния между галсами доходят до 2 000 м, а иногда и больше. Сами
галсы пересекают данный район в различных направлениях, не
всегда соблюдая параллельность между собой. При рекогносци-
ровочном промере галсы располагаются по путям плавания судна
во время работ и не обеспечивают промера на всей площади дан-
ного района.
В случае подробного промера глубины на карте нанесены до-
статочно часто, равномерно, видны направления промерных гал-
сов и нет белых пятен, на которых бы эти галсы прерывались.
При подробном промере все нанесенные изобаты тянутся непре-
рывно. При разреженном промере появляются белые пятна, без
глубин, и изобаты при таком промере часто прерываются. Реко-
гносцировочный промер характеризуется несколькими промер-
ными галсами, вне которых глубин не имеется. Изобат или нет
вовсе, или они отмечены на небольших участках.
Характер промера определяет степень доверия к карте. Сле-
дует иметь в виду, что на белых пятнах, имеющихся на картах,
глубины никогда не измерялись и потому здесь можно встретить
любую малую глубину.
Рельеф дна может быть плавным или сложным. Плавный
рельеф отличается равномерным изменением глубины, отсут-
ствием банок и островов. Сложный рельеф — скачками в измене-
нии глубин, наличием банок и островов. Сложный рельеф опасен.
§ 39]
Степень доверия к картам
139
для судовождения и требует особой осторожности, так как в этом
случае могут встретиться очень малые глубины, не обнаруженные
при промере.
Характер рельефа дна приобретает для надводных судов зна-
чение лишь при сравнительно небольших глубинах, поэтому над-
водные суда с большой осадкой не должны без особой надобно-
сти заходить за 20-метровую изобату, а суда с малой осадкой —
за 10-метровую. В случае захода следует уменьшать ход и бро-
сать лот.
Пересечение судном предостерегательных изобат при сложном
рельефе дна явно опасно, так как лот не может предостеречь
в этом случае от посадки на камень или на отдельную банку.
За предостерегательными изобатами надлежит пользоваться
только проложенными и огражденными фарватерами.
Сложный рельеф, обычно, образуется каменистым грунтом
(за исключением плиты). На картах же часто указаны даже
в подобных случаях поверхностные грунты: ил, песок и т. п. Рез-
кое изменение глубин позволяет считать, что данный район имеет
каменистое дно, и необходимо считаться с возможностью встре-
тить здесь не обнаруженные очень малые глубины. Резкие изме-
нения глубин с амплитудой до Юм могут свидетельствовать
о наличии валунной россыпи на грунте песчаного характера. Ва-
лунная россыпь часто имеет место на северных морях СССР,
включая Финский залив Балтийского моря. Признаком валунной
россыпи является резкая изменяемость глубин и наличие россыпи
на ближайшем побережьи.
Песчаные грунты имеют свойство перемещаться, и поэтому
в районах течений, вблизи устьев рек и при значительных при-
ливо-отливных течениях глубины могут меняться и отличаться от
показанных на картах.
При сложном рельефе дна, а также в местах, где глубины
близки к осадке судна, единственной гарантией, обеспечивающей
отсутствие мелких глубин, является траление твердым тралом.
Все надписи на карте следует обязательно прочесть перед
пользованием картой. В этих надписях дается:
1) название карты или плана, соответствующее району, охва-
тываемому картой, под которым она значится в каталоге карт и
книг. Над верхней рамкой карты слева пишется название всего
моря, а справа — той его части, к которой относится карта. Номер
карты ставится на всех четырех углах ее вне. рамки;
2) масштаб карты, с указанием той главной параллели, к ко-
торой он относится;
3) меры, в которых даны глубины на карте, а также уровень,
к которому эти глубины приведены, т. е. нуль глубин карты;
4) меры, в которых даны высоты гор и сечение проведенных
на карте горизонталей;
140 Составление и издание морских карт [Гл. IX
5) год, к которому приведено склонение компаса, годовое из-
менение склонения компаса, а если склонение одинаковое на всем
районе карты или плана, то величина склонения.
Кроме этого заголовка, под ним или на свободном месте карты
помещаются сведения о прикладном часе и элементах прилива,
а также о течениях.
На картах и планах могут быть даны и другие примечания, со-
держащие важные для обеспечения безопасности судовождения
сведения, например предупреждения об изменяемости глубин,
о непостоянстве ограждения и т. п.
На свободном месте внутри рамки указано, что карта «состав-
лена в . . . году, по работам...............года».
РАЗДЕЛ ТРЕТИЙ
СЧИСЛЕНИЕ ПУТИ
----------------А
ГЛАВА X
ПРОКЛАДКА
§ 40. ВЕДЕНИЕ ПРОКЛАДКИ И ЕЕ ТОЧНОСТЬ
Одним из важнейших условий безопасности плавания является
непрерывное и тщательное нанесение на карту пути движения
судна, чтобы в каждый данный момент знать его место, с наи-
более достижимой при данных условиях плавания точностью, и
иметь возможность ориентироваться по карте в окружающей
судно обстановке.
Учет движения судна в зависимости от условий плавания про-
изводится или непосредственным нанесением на карту курсов
судна и графическим решением различных задач, как это будет
рассмотрено в соответствующих местах, или путем вычислитель-
ного процесса, с нанесением на карту только конечного резуль-
тата. В первом случае учет движения судна называется графи-
ческим счислением или прокладкой, а во втором —
письменным счислением.
Под прокладкой мы будем понимать всю совокупность
графической работы, производимой на карте для обеспечения
безопасности судовождения, например, прокладку истинных кур-
сов судна, навигационных и астрономических определений и т. д.
При плавании вблизи берегов относительно небольшие глу-
бины и наличие подводных и надводных опасностей требуют от
судоводителей особого внимания к ведению прокладки пути
судна. Если в океане и вдали от берегов некоторая ошибка в
знании места может быть исправлена последующими определе-
ниями, то вблизи берегов такая ошибка может быть причиной
аварии и даже гибели судна. Поэтому при плавании вблизи бере-
гов или же при непродолжительном отрыве от берега должна не-
прерывно вестись тщательная прокладка пути судна.
Ведение прокладки при решении отдельных задач будет разо-
брано при рассмотрении соответствующих вопросов. В настоящем
параграфе мы рассмотрим прокладку как непрерывное и после-
довательное нанесение на карту истинных курсов, которыми идет
142
Прокладка
[Гл. X
судно. Полученное таким образом место судна носит название
счислимого места судна.
Прокладка ведется при помощи прокладочного инструмента,
состоящего из транспортира, параллельной линейки и циркуля.
Для прокладки следует пользоваться картой наиболее крупного
масштаба того района, где плавает судно.
По выходе на чистую воду из гавани или из узкости, где при
движении судна руководствуются окружающей обстановкой,
ориентируясь на глаз и пользуясь планом, необходимо возможно
точнее определить место судна по береговым предметам, нанесен-
ным на карту. Полученное по определениям и нанесенное на
карту место судна является той начальной точкой, от которой на-
чинается ведение прокладки.
Предварительно, за несколько времени до определения на-
чальной точки прокладки, опускается лаг с таким расчетом,
чтобы к моменту определения места судна установился нормаль-
ный режим работы лага.
В момент определения начальной точки прокладки замечается
момент по часам с точностью до одной минуты и отсчет указа-
теля пройденного расстояния лага с точностью до 0,1 мили. От
полученного на карте места судна прокладывается истинный
курс, которым он идет в данный момент, и делается надпись в
виде дроби: в числителе — время, а в знаменателе — показание
лага. При изменении курса судна по линии курса откладывается
пройденное расстояние и от полученной точки прокладывается
новый истинный курс. В точке поворота вновь отмечается в виде
дроби момент поворота на новый курс и показание лага.
Расстояние, откладываемое по курсу, получается как разность
двух отсчетов показаний лага, исправленная'поправкой лага.
При отсутствии лага расстояние может быть рассчитано по
времени и скорости судна. Но следует помнить, что если скорость
судна рассчитана по оборотам машины, то при наличии ветра и
течения соответствие числа оборотов машин и скорости хода
судна будет величиной переменной.
Основными данными при счислении пути судна являются
курс и пройденное по курсу расстояние. Оставляя в стороне дру-
гие причины, вызывающие ошибки счисления, точность послед-
него будет зависеть от той точности, с которой нам будут из-
вестны компасный курс, по которому правит судно, и его истин-
ный курс, прокладываемый на карте, а также от точности
показаний лага, иначе говоря, от точности знания общей поправки
компаса и от точности знания поправки показаний лага.
Графическое построение на карте может быть сделано с точ-
ностью, далеко превышающей возможности судовождения, но,
исходя из условий работы на судне, можно принять, что в на-
$ 40]
Ведение прокладки и ее точность
143
правлении прокладываемых линий всегда возможна ошибка по-
рядка 0°,2—0°,3.
Ошибки в принимаемых при расчетах значениях общей по-
правки компаса и поправки лага непосредственно и довольно
значительно влияют на точность рассчитываемого счислимого ме-
ста. Предположим, что судно желает перейти из точки А в точку
В и А В (рис. 51) есть линия истинного курса судна. Судно пра-
вит по компасу, и если общая поправка курса известна с какой-то
румбов истинный курс и па карте будет проложена линия пути
АМ\ или АМ2 в зависимости от знака ошибки ел.
Обозначим плавание судна по курсу АВ через S и отложим
его по линиям AMj и АМ2. Дуги AfiB и М2В представляют собой
ошибку в счислимом месте судна, полученную вследствие
ошибки ± \в общей поправке компаса.
Эта ошибка равна
= М.В = 6° —. (61)
1 2 * 57,3 V 7
Для приближенных расчетов можно принять, что при ошибке
в направлении движения судна равной + 1° и при плавании
S = 60 морским милям ошибка в счислимом месте судна будет
равна одной морской миле.
Вследствие ошибки в принятой поправке лага + плава-
ние S также будет известно с некоторой ошибкой ±AS. Отло-
жим от точек В, Afi и Af2 по соответствующим линиям истинных
курсов расстояния ±aS. Тогда счислимое место судна при за-
данных нами условиях должно быть в одной из шести точек а, Ь,
ct f, е, df в зависимости от сочетания знаков ошибок в \ и AS.
Если предположить, что принятые нами значения и AS
представляют наибольшие возможные ошибки в поправке ком-
144
Прокладка
[Гл. X
паса и в плавании, то можно считать, что действительное место
судна должно быть где-то внутри площади abcfed. Практика по-
казывает, что в настоящее время пройденное судном расстояние
определяется с меньшей точностью, чем направление его движе-
ния, и действительное место судна должно* быть в пределах
эллипса. Большая ось такого эллипса совпадает с направлением
АВ и равна
be = 2 AS,
а малая ось
12 "60
Однако так как ошибки и AS нам неизвестны и мы только
можем предполагать, что они не выходят за некоторые пределы,
зависящие от состояния приборов и степени ухода за ними, то
для упрощения расчетов будем считать, что вероятное место
судна находится внутри окружности, проходящей приближенно
через точки а, с, f и d.
Радиус р окружности определится из треугольника dM\B, ко-
торый примем прямоугольным при вершине М\:
Ошибка в плавании AS зависит от ошибки в поправке лага е
которая выражается в процентах, и от плавания S, т. е.
AS-,—.
л 100
Радиус р в морских милях, в зависимости от ошибок в по-
правке компаса, в поправке лага и от пройденного расстояния S,
выразится так:
или
?=<X/100s«+3&‘- (62)
Пример. Судно прошло одним курсом 87 - миль, возможная ошибка
в курсе £я=+1°, возможная ошибка в поправке лага £л= + 2%. Опреде-
лить радиус круга, внутри которого должно быть вероятное место судна.
Решение.
Q /у______________________ _
р = —1 100 -f- 144 = 0,145V244 = 2,3 мор. мили.
600
$ 41] Прокладка при плавании на течении 145
Этот простой расчет показывает, что при предполагаемых
ошибках в поправке компаса и в поправке лага, указанных в
примере, после перехода в 87 мор. миль возможно ожидать
ошибку в счислимом месте около 2,3 мор. миль. Эту ошибку не-
обходимо принять во внимание при подходе к берегу или к ка-
ким-либо навигационным опасностям.
Влияние на судно течения и ветра отклоняет его от намечен-
ного курса и изменяет скорость его движения. Если бы у нас
были основания предполагать. те ошибки, которые вносят в дви-
жение судна гидрометеорологические факторы, то так же можно
подсчитать ошибку в счислимом месте, вызываемую неточным
учетом влияния течения и ветра, с той разницей, что ошибка в
счислимом месте, получающаяся вследствие ошибок в поправках
компаса и лага, возрастает пропорционально пройденному суд-
ном расстоянию, а ошибка в счислимом месте, получающаяся от
влияния гидрометеорологических факторов, возрастает пропор-
ционально времени воздействия этих факторов на судно.
§ 41. ПРОКЛАДКА ПРИ ПЛАВАНИИ НА ТЕЧЕНИИ
Судно под действием собственного двигателя перемещается
относительно водной среды. Если эта среда неподвижна, то соб-
ственное движение судна относительно воды совпадает с его дви-
жением относительно неподвижных предметов, т. е. относительно
дна моря и берегов. Если же водная среда сама перемещается
вследствие наличия течения, то судно будет находиться под дейст-
вием двух сил: силы, создаваемой работой его собственного дви-
гателя, и силы течения воды. В этом случае действительное дви-
жение судна будет происходить по равнодействующей этих двух
сил, причем диаметральная плоскость судна будет сохранять свое
направление в соответствии с заданным судну курсом.
Предположим, что судно вышло из точки А (рис. 52) истин-
ным курсом АВ со скоростью К, при наличии течения, иду-
щего по направлению AD со скоростью Vm. Отложим по линии
курса судна в условном масштабе вектор АВ, представляющий
пройденное судном расстояние за определенный промежуток вре-
мени, например за час, под действием собственного двигателя.
От конца вектора АВ отложим по направлению течения в том же
условном масштабе вектор ВС, соответствующий перемещению
водной среды за тот же промежуток времени под действием те-
чения. Вектор АС, представляющий геометрическую сумму век-
торов АВ и ВС, определит направление и скорость истинного дви-
жения судна относительно дна.
10
К. С. Ухов
146
Прокладка
[Гл. X
Диагональ АС параллелограмма ABCD, по которой переме-
щается судно
относительно
NU
А
Рис. 52.
неподвижных предметов под дейст-
вием собственного дви-
Р гателя и течения, назы-
вается линией пути
судна, а угол NUAC,
определяющий направ-
ление движения судна,
называется «путь
судна» (ПУ). Путь
судна считается от нор-
довой части истинного
меридиана по часовой
стрелке от 0° до 360°.
Угол ВАС, представ-
ляющий разность меж-
ду путем и истинным
курсом судна, назы-
вается углом сноса
судна от течения
или поправкой на
течение. Снос судна
от течения обозначает-
ся условным симво-
лом р.
Если течение идет с
левого борта судна, то
судно сносит вправо и
путь будет больше, чем
истинный курс. В этом
случае углу сноса ,6
приписывают знак плюс
(+). При течении в
правый борт путь будет
всегда меньше, чем ис-
тинный курс, и углу
сноса р приписывают
знак минус (—).
его истинным курсом и уг-
Соотношение между путем судна, ...........
лом сноса непосредственно получается из рис. 52:
f + течение слева;
ПУ=ИК+ р 1
“ I — течение справа.
На практике при плавании на течении приходится решать две
задачи. Обе задачи для своего решения требуют знания элемен-
тов течения — его направления и скорости.
(63)
§ 41}
Прокладка при плавании на течении
147
1. Заданы истинный курс и собственная скорость судна, тре-
буется найти его путь и истинную скорость судна относи-
тельно дна.
2. Заданы путь судна и его собственная скорость, требуется
найти истинный курс судна, которым оно должно править, чтобы
перемещаться по заданному пути, и его истинную скорость отно-
сительно дна.
Обе задачи решаются графически. При решении первой за-
дачи, когда требуется найти путь и истинную скорость судна,
строится треугольник течения АВС (рис. 52). Для этого от на-
чальной точки А, от которой начинается учет течения, проводим
линию истинного курса АВ и по ней откладываем в масштабе
карты расстояние, проходимое судном за определенный промежу-
ток времени, за час или за полчаса. Из полученной точки В про-
водим по направлению течения линию ВС и по ней в том же мас-
штабе откладываем расстояние, на которое снесет судно течение
за тот же выбранный нами промежуток времени. Соединив
точки А и С, получим линию пути судна. Длина линии АС позво-
ляет получить истинную скорость судна относительно дна. Путь
судна и расстояние, пройденное за избранный промежуток вре-
мени, снимаем непосредственно с карты.
При решении второй задачи, когда задан путь судна, строится
треугольник ACD. От начальной точки А проводим направление
течения и по нему откладываем в масштабе карты расстояние, на
которое снесет судно за час. Из полученной точки D радиусом,
равным собственной скорости судна, засекаем линию пути. Соеди-
нив точки С и D, получаем линию, параллельную истинному
курсу судна. Истинный курс и истинную скорость судна снимаем
непосредственно с карты.
Графическое построение может быть сделано на листе бумаги
в произвольно выбранном масштабе, для построения также мо-
жет быть использован маневренный планшет.
Скорость течения обычно мала по сравнению со скоростью
судна и угол сноса также мал. Он точнее определяется как раз-
ность пути и истинного курса: р = ПУ — И К, чем при непбсред-
ственном снятии его с карты.
Пример /.Истинный курс 210°; скорость судна 12 узлов; направление
течения 75°; скорость течения 3 узла. Найти путь и истинную скорость судна.
Решение. От начальной точки А (рис. 53) прокладываем ЛТК = 210° и по
линии курса откладываем 12 миль (расстояние, проходимое судном за один
час); от полученной точки В прокладываем направление течения и на нем
откладываем 3 мили,— расстояние, на которое течение снесет судно за один
час.
Соединяя точки А и С, получим линию пути судна и вектор его истин-
ной скорости. С чертежа снимаем путь ПУ =197°,8. Истинная скорость
V^10,l мили, угол сноса р= — 12°,2.
10:?
148
Прокладка
[Гл. X
Пример 2. Задан путь 150°; скорость судна 12 узлов; направление тече-
ния 75°, скорость 3 узла. Найти истинный курс, которым должно править
судно, чтобы итти по заданному пути, и его истинную скорость.
Решение. От начальной точки А (рис. 54) прокладываем направление
течения и по нему откладываем 3 мили. Из полученной точки D радиусом,
равным 12 милям, засекаем линию пути. Направление линии DC даст иско-
мый истинный курс, а длина линии пути АС — истинную скорость судна.
С чертежа снимаем искомый истинный курс ПК — 164°; истинная скорость
судна V ~ 12,4 мили, угол сноса Р =—14°.
В навигации все течения могут быть разделены па три вида:
а) постоянные течения;
б) приливо-отливные течения;
в) дрейфовые или ветровые течения.
Необходимые для учета течения данные — скорость и направ-
ление течения — выбираются из атласов течений, лоций или
«Ежегодников приливов и приливо-отливных течений», как это
указывается в пособиях для изучения лоции Однако данные об
1 А. А. Паскин и В. К- Захаров, Лоция морского пути, изд. «Мор-
ской транспорт», 1950.
§ 41]
Прокладка при плавании на течении
149
элементах постоянного или приливо-отливного течения, выбран-
ные из указанных навигационных пособий, могут быть значи-
тельно искажены под влиянием дрейфового течения, вызываемого
ветром.
Ряд ученых,1 занимавшихся изучением дрейфового течения,
установили связь между скоростью ветра U и скоростью дрейфо-
вого течения vm в виде
0,0127 гт
vm = — U м/сек,
У sin 9
если скорость ветра и скорость течения даны в метрах в секунду.
Эта формула показывает, что скорость дрейфового течения
прямо пропорциональна скорости ветра. Направление же поверх-
ностного течения составляет угол в 45° с направлением ветра,
причем в северном полушарии течение отклоняется вправо
от ветра.
Приведенные теоретические соображения не могут дать точ-
ного решения вопроса об элементах течения, так как дрейфовое
течение в данный момент зависит от ряда факторов, например от
нагона и сгона воды предшествующим ветром, при ослаблении
которого происходит сток воды иногда против ветра; от топогра-
фии местности и рельефа дна; от силы и направления ветра в
соседнем районе.
Н. Н. Струйский, изучавший дрейфовые течения на Каспий-
ском море, приходит к следующему заключению:
«Слабые ветры до 3-х баллов не оказывают заметного влия-
ния на поверхностный слой воды. При ветрах 4—5 баллов, на-
блюдаемых на Каспийском море, течения с вероятностью 50%
располагаются близко от направления, отклоненного на 4 румба
вправо (сев. полушарие) от действующего ветра; скорость дрей-
фового течения при этом около узла. При ветрах 6—7 баллов
упомянутая вероятность повышается до 75%, причем скорости
дрейфового течения возрастают до ]/2 узла».2
Можно приближенно принять, что судоводитель редко знает
скорость течения с ошибкой, меньшей чем +0,5 узла, а направ-
ление — с ошибкой меньше половины румба.
Поэтому при плавании на течении необходимо систематиче-
ское определение своих мест по обсервациям. Сопоставление
счислимых и обсервованных мест, при наличии известных попра-
вок компаса и лага, позволяет определить действительную ckoj
рость и направление течения.
При плавании в районе переменного приливо-отливного тече-
ния учет течения производится каждый час, принимая во внима-
1 В. В. Шулейкин, Физика моря, т. I, 1933.
2Н. Н. Струйский, Связь между действующим ветром и поверхност-
ным течением, «Записки по гидрографии», 1903, т. 63.
150
Прокладка
[Гл. X
ние среднее направление и среднюю скорость течения за данный
час. Если нет необходимости прокладывать на карте линию пути>
то эти величины — среднее направление течения и его среднюю
скорость за час — можно принимать как добавочный курс и пла-
вание. В этом последнем прие-
ме прокладка получается в виде
ломаной линии.
При письменном счислении
пути судна действие течения
учитывается как добавочный
курс и плавание (см. § 49).
§ 42. АНАЛИТИЧЕСКИЙ УЧЕТ
ТЕЧЕНИЯ
Чтобы избежать ошибок,
связанных с графическим по-
строением на карте навига-
ционного треугольника при ма-
лом угле |3, проф. Н. Н. Ма-
тусевич предложил аналитиче-
ский учет влияния течения на
движение судна.
Возьмем навигационный
треугольник АВС (рис. 55),
в котором сторона АВ— линия
истинного курса судна и длина
ее в выбранном условном мас-
штабе равна собственной ско-
рости судна V/, сторона ВС —
направление и скорость тече-
ния vm, а сторона АС — линия
пути судна, ее длина в приня-
том масштабе — истинная ско-
рость судна V относительно дна.
Обозначим курсовой угол
течения через qmt а угол между линией пути и направлением те-
чения через р.
1. Для определения угла сноса р и истинной скорости судна К
спроектировав стороны навигационного треугольника на линию
истинного курса судна AD и на линию DC, перпендикулярную
ей, получим
v cos р = <7,,,;
V sin р =-и,, sin
§ 42}
Аналитический учет течения
151
Разделим обе части каждого из полученных уравнений на Ул
и обозначим отношения
vm m т _ У L,
= Ш И = к.
Ул------------Ул
тогда
k cos р = 1 4- m cos qm\
& sin 6 — m sin qm.
Из последних двух уравнений непосредственно получаем
tgp = msin^
l+mcos?m (64)
k = 1 4-2m cosqm-\-m2 ,
Формулы (64) показывают, что при одном и том же значении
угла qm, как угол сноса р, так и коэффициент скорости судна k
не зависят от абсолютных значений скоростей судна и течения,
а зависят только от их отношения т.
Рассчитав по известным У л и vm их отношение т и угол qm>
как алгебраическую разность между направлением течения и
истинным курсом судна, по формулам (64) вычисляется угол
сноса р и коэффициент скорости k. Истинная скорость судна
У=ЬУЛ.
2. Если задан путь судна и его собственная скорость и из-
вестны элементы течения, то требуется найти угол сноса Р, ко-
торый в данном случае для отличия носит название «поправка
на течение», и коэффициент скорости k. В этом случае будет из-
вестен угол р как алгебраическая разность между заданным пу-
тем и направлением течения.
Спроектировав стороны навигационного треугольника на ли-
нию пути судна АС и на перпендикуляр к ней BE, получим
У = 1/7 cos р -г vm cos р и Ул sin р = vm sin р.
Разделив обе части каждого из полученных уравнений на Ул
и введя принятые обозначения, имеем
k = cos Р -ф- т cos р 1 ,
> (оо)
sinp = msinp )
Чтобы избежать вычислений по приведенным формулам, в
Л17-43 в приложении на вкладном листе даны три специальные
таблицы.
152
П рокладка
[Гл, X
Табл. VII, вычисленная по формуле ctg р = cosec -T~ctg<7CT,
m
преобразованной из формулы (64) для удобства вычислений,
дает угол сноса ? по аргументам qm через 10° от 0° до 180° и m
через 0,05 от 0 до 0,50 и через 0,1 от 0,5 до 1,0.
Табл. VII-а, вычисленная по формуле cosec р =----, преоб-
m
разованной из формулы (65), дает поправку на течение ₽ по ар-
гументам — угол р и отношение т. Так как sin р = sin (180° — р),
то в этой таблице в левом вертикальном столбце даны углы р
от 0° до 90°, а в правом — от 90° до 180°.
Табл. VI1-6 дает коэффициент истинной скорости судна k по
аргументам qm через 10° и т через 0,10.
Из рис. 55 видно, что
и формула (65) может быть переписана так:
k cos 3 т cos — 3).
По последней формуле и вычислена табл. VII-б. Эта таблица
является общей для решения обеих задач на течение. Если задан
истинный курс, то, рассчитав угол qm, входят в табл. VII-а непо-
средственно с углом Если же задан путь судна, то сначала
надо рассчитать угол р и выбрать поправку на течение 3, а затем
для приискания коэффициента k входят в таблицу с аргументом
qm Р -г ?•
В дополнение к табл. VII-а на обратной стороне вкладного
листа дана номограмма VII-А для снятия с нее поправки на те-
чение На этой номограмме шкала углов р разбита до 90°.
Если угол р > 90°, то в номограмму следует входить с углом,
равным дополнению угла р до 180°.
Выбрав из таблиц угол сноса путь или истинный курс
судна, получим по общему правилу
^-течение с левого борта;
- течение с правого борта.
Если угол q,„ или р рассчитывать, как указано' выше, алге-
браически, то полученный знак будет отвечать знаку угла сноса Р,
с которым он и должен быть соответственно придан к ПК или
ПУ судна.
Применение таблиц избавляет от графического построения и
связанных с ним ошибок, однако основная ошибка, происходящая
от неточного знания элементов течения, одинаково входит как в
графический, так и в аналитический учет течения.
ПУ = ИК± ,3
§ 42]
Аналитический учет течения
153-
Пример /. ИК = 160°, собственная скорость судна 15 узлов; течение •
на 225° со скоростью 3 узла. Найти путь и истинную скорость судна.
Решение.
qm = 225° - 160° = 4- 65°; m = — =0,20;
15
по табл. VII: 0 = -J- 9°,5; k = 1,095.
/7У= 160°+9°,5= 169°,5; V = 1,095-15 = 16,4 узла.
Пример 2. Путь судна 50°; собственная скорость судна 20 узлов; течение
на 340° со скоростью 2 узла. Найти ИК и истинную скорость судна.
Решение.
р ;= 50° - 340° = + 70 ;
2
m = — = 0,10.
20
По табл. VII-a: 0 = 4- 5°,4;
k = 1,03.
ИК = 50° 4- 5°,4 = 55°,4;
V = 1,03-20 = 20,6 узла.
Примечание. В обоих
примерах коэффициент скоро-
сти k получен вычислением.
Для решения обеих за-
дач на течение вместо гра-
фического построения и
таблиц может быть ис-
пользован маневренный
планшет (рис. 56), с кото-
рого величины 3 и k сни-
маются непосредственно.
Примем на диаграмме
длину АС в условном мас-
штабе равной единице,
радиусы концентрических
окружностей равны отно-
Vm
шениям т а углы,
V л
под котор ы ми п роведены
радиусы, равны углам qm
ИЛИР' , Рис. 56.
Для решения . первой
задачи по известным ,.qm и т нанесем на планшет точку D. Сое-
динив точку D с точкой С, получим угол р, равный углу A CD,.
который, пользуясь параллельной линейкой, легко снять непо-
.154 Прокладка [Гл. X
оредственно с планшета; длина линии CD в условном масштабе,
нанесенном на диаметре планшета, дает коэффициент скорости k.
Для решения второй задачи нанесем на планшет точку Е по
известным р и т, Из точки Е радиусом АВ, равным единице, за-
секаем диаметр АВ.
Угол АВЕ между диаметром планшета и прямой ЕВ равен
углу 0 — поправке на течение; он непосредственно снимается с
планшета. Коэффициент скорости k равен длине прямой ЕВ и
снимается по условному масштабу, принятому для построения
планшета.
Угол сноса (3Макс достигает своего наибольшего значения,
когда sin р = /и=-^-, что легко проверить по планшету.
Если судно плавает с постоянной скоростью, то радиус АВ и
его продолжение можно разбить непосредственно на узлы, при-
писав длине АВ значение постоянной скорости судна. Тогда по
шкале АВ или АС будем непосредственно снимать истинную ско-
рость судна относительно дна.
При переменных же ходах проще разбить длину радиуса АВ
на 10 частей и снимать с планшета коэффициент скорости k в от-
влеченной мере с точностью до 0,01, как это дают таблицы.
§ 43. ОШИБКИ В УЧЕТЕ ТЕЧЕНИЯ
Элементы течения — его направление и скорость — всегда из-
вестны нам с некоторой ошибкой, которая при любом методе
учета течения вызывает ошибки в рассчитываемом угле сноса Р
и в истинной скорости судна V.
Допустим, что скорость течения vm известна с некоторой
ошибкой ±Д^т. Построим навигационный треугольник АВС
(рис. 57), принимая скорость течения ит. Если действительная
скорость течения равна тогда путь судна изобразится
вектором AD, его истинная скорость будет V. Ошибка в величине
откладываемого вектора течения vm вызовет в общем случае
ошибки ДР в направлении и ДУ в длине вектора пути судна АС.
Для определения ошибки A V опустим из точки С перпенди-
куляр CF на вектор AD. Ввиду малости угла Др, отрезок FD
представит ошибку в искомой истинной скорости судна. Обозна-
чим угол между направлением течения и путем судна через р.
Тогда из прямоугольного треугольника CDF имеем
Д V = Д <ит cos р. (66)
Формула (66) показывает, что ошибка в истинной скорости
пропорциональна ошибке в принятой для расчета скорости тече-
ния и зависит от угла р. Ошибка в истинной скорости судна
§43]
Ошибки в учете течения
155
достигает своего наибольшего значения, когда направление тече-
ния совпадает с линией пути, т. е. р = 0° или 180°; в этом случае
ошибка в рассчитанной истинной скорости судна будет равна
ошибке в принятой скорости течения.
При угле р= 90° или 270°, когда направление течения перпен-
дикулярно пути судна, ошибка в принятой скорости течения не
отразится на точности
найденной скорости судна.
Ошибка зр в угле сно-
са р, а следовательно, и в
пути судна определится из
треугольников ACF и CDF\
kvmsinp= Vsin Др
и
Д₽ = -^-sin р. (67)
Отсюда видно, что
ошибка др в угле сноса р
возрастает с увеличением
угла р и достигает сво-
его наибольшего значе-
ния при р = 90°. В то же
время ошибка Др в пути
судна уменьшается с уве-
личением истинной ско-
рости судна V. Неточное
знание скорости течения
дает меньшую ошибку
при определении пути
быстроходного судна, чем
Рис. 57.
судна с малой скоростью.
Предположим теперь, что направление течения известно нам
с некоторой ошибкой Да.
Пусть в навигационном треугольнике АВС (рис. 58) вектор ВС
представляет принятые нами для расчетов направление и скорость
течения. Вектор BD представляет действительное направление
течения и угол DBC равен ошибке Да в принятом направлении
течения. Проведем радиусом, равным vmt дугу DC и соединим
точку D e точкой А. В новом навигационном треугольнике ABD
вектор AD представит’действительный путь судна, а угол DAC =
= Д£—ошибку в пути судна, получившуюся вследствие ошибки
в принятом направлении течения.
156
Прокладка
[Гл. X
Опустим из точки D перпендикуляр DF на вектор АС. По ма-
лости угла Др примем, что отрезок FC равен ошибке ДУ в
истинной скорости судна. Обозначим угол между направлением
течения и линией пути судна
через р, как указано на ри-
сунке, при этом заметим, что
угол ВСА равен углу CDF,
г. е. углу р.
Ошибка Д V в искомой
истинной скорости судна опре-
делится из треугольника CDF:
Рис. 58.
Ошибка в пути судна Др
nF CD:
Д V — CD sin p,
HO
и окончательно
Д1/=^т Да sin/?. (68)
Ошибка в направлении при-
нятого для учета течения вы-
зывает тем большую ошибку
в определяемой истинной ско-
рости судна, чем больше ско-
рость течения и чем угол р бли-
же к 90°. Ошибка в принятом^
направлении течения при силь-
ном поперечном течении может
вызвать значительную ошибку
в определяемой истинной ско-
рости судна.
определится из треугольников AFD
FD = CD cosр = Vsin Др;
Др — Д a cos р.
V
(69)
Ошибка в пути судна вследствие ошибки в принятом для
учета направлении течения достигает своего наибольшего значе-
ния, когда направление течения совпадает с путем судна; с уве-
личением истинной скорости судна эта ошибка уменьшается. При
Дрейф и рыскливость
157
попутном течении ошибка в пути судна будет меньше, чем при
противном течении.
Приведенные выше соображения позволяют анализировать
с известной долей вероятности точность счисления пути судна
при учете течения, элементы которого всегда известны только
приближенно.
§ 44. ДРЕЙФ И РЫСКЛИВОСТЬ
Судно находится на границе между воздушной и водной сре-
дой: на дне воздушного океана и на поверхности водного. При
движении судна перемещение воздушных масс оказывает на него
свое влияние так же, как и течение, отклоняя судно от намечен-
ного курса и изменяя его скорость. В зависимости от угла между
направлением ветра и диаметральной плоскостью судна движе-
ние последнего относительно ветра получает соответствующее
наименование.
Если ветер дует с носа судна против направления его движе-
ния, то судно идет против ветра; при остром угле встречи ветра
с направлением движения судна от 4 до 8 румбов судно идет в
бейдевинд; при боковом ветре, составляющем с направлением
движения судна 8 румбов, судно идет в галфвинд; при ветре с
кормы, когда направление ветра составляет с направлением дви-
жения судна тупой угол от 8 до 16 румбов, судно идет в бакштаг;
когда ветер дует прямо в корму, судно идет на фордевинд, или
попутным ветром.
Если ветер дует с правого борта, то судно идет правым гал-
сом; при ветре с левого борта судно идет левым галсом.
Отклонение судна от выбранного им курса под влиянием дей-
ствия на него ветра называется дрейфом.
На парусных судах величина дрейфа достигает значительной
величины, так как только часть силы ветра расходуется на дви-
жение судна по курсу, а часть сносит судно под ветер, т. е. вы-
зывает дрейф. На самодвижущихся судах величина дрейфа за-
висит от курса судна относительно ветра, скорости его хода, па-
русности надводного борта и осадки.
Низкобортные, глубокосидящие и быстроходные суда будут
дрейфовать меньше, чем высокобортные, с небольшой осадкой и
слабыми машинами. Наиболее надежным способом определения
величины дрейфа является вывод его из непосредственных опре-
делений нескольких последовательных мест судна и сравнения
счислимого пути судна с путем, по которому происходит его дей-
ствительное перемещение. Это особенно важно, так как дрейф
может достигать значительной величины: при штормовом ветре
в бейдевинд на низкобортном, глубокосидящем и быстроходном
судне величина дрейфа, определенная на практике, достигала 5°.
На самодвижущихся судах, более подверженных дрейфу, чем
158
Прокладка
[Гл. X
указанный выше, поправка курса за дрейф может достигать
8°—12° и более, а на парусных судах, в зависимости от силы
и направления ветра, дрейф достигает 5—7 румбов.
Пусть угол NUOD (рис. 59) будет ИК судна, линия OD —
линией истинного курса; стрелка указывает направление ветра.
При ветре достаточной силы, чтобы судно под действием его
дрейфовало, действительное перемещение судна будет происхо-
дить по линии ОП, под углом а к линии истинного курса судна,
равным дрейфу. По аналогии с действием течения линия ОП дей-
ствительного перемещения судна при наличии дрейфа называется
линией пути судна, а угол ИиОП, составляемый ею с
нордовой частью истинного меридиана, называется «путь
судна».
Под действием ветра судно всегда будет сноситься под ветер.
Если судно идет правым галсом, то его линия пути будет распо-
лагаться левее линии его истинного курса на угол, равный дрейфу;
путь судна всегда будет меньше его истинного курса, и дрейфу
правого галса приписывается знак минус (—).
Если судно идет левым галсом, то оно будет сноситься вправо
и его путь будет больше истинного курса; дрейфу левого галса
приписывается знак плюс (+).
Алгебраические формулы
ПУ = ИК-\~а | (70^
ИК=ПУ- а \
позволяют рассчитать путь судна по заданному ИК и известному
дрейфу или найти ИК, которым следует править при наличии
дрейфа, чтобы судно шло по заданному пути.
§44\
Дрейф и рыскливость
159-
Например, если истинный курс судна 89°, дрейф 4° правого
галса, то путь судна будет 85°.
Изучение дрейфа, как влияния ветра на движение судна,
представляет значительные трудности, так как ветер разводит
волну и создает дрейфовое течение, в свою очередь влияющее на
движение судна в море. В конечном итоге только знание общего,
суммарного сноса судна под действием совокупности причин, от-
клоняющих судно от наме-
ченного курса, позволит при-
нять его во внимание при
счислении пути судна и по-
лучать более точные счисли-
мые места. Важность изуче-
ния природы дрейфа для по-
лучения возможно более точ-
ных счислимых мест побуди-
ла Государственный океано-
графический институт при-
ступить к теоретическим ис-
следованиям и натурным ис-
пытаниям для определения
дрейфа судов. Сложность
рассматриваемого вопроса
потребов ала огр аничиться
только дрейфом, вызывае-
мым действием ветра. Такое
упрощение хотя и не дает
достаточно точного резуль-
тата, но указывает пути для
изучения поведения судна
при свежем ветре.
Результаты изысканий Государственного океанографического
института изданы под названием: «Материалы по дрейфу и ры-
скливости кораблей при ветре и волне».1
Дрейф судна создает наблюдаемый ветер W. Предположим,
что вектор А (рис. 60) представляет равнодействующую давления
наблюдаемого ветра на надводную часть борта и надстройки.
В общем случае вектор А не параллелен вектору наблюдаемого
ветра W. Разложим вектор А на две составляющие: X = A cos 7,
направленную по диаметральной плоскости судна, и Z = A sin *5.
направленную по траверзу.
Сила X увеличивает или уменьшает скорость судна относи-
тельно воды, и влияние ее учитывается лагом.
1 Гидрометеоиздат, 1946.
160
Прокладка
[Гл. X
Сила Z сообщает судну поперечное перемещение со скоростью
дрейфа. Скорость поперечного перемещения судна С, складываясь
с собственной скоростью судна Ул, дает действительную ско-
рость V. Угол а представляет дрейф судна.
Теоретические изыскания и опыты по обдувке моделей судов
в ЦАГИ позволили дать следующую приближенную формулу,
выражающую величину силы Z:
sin 7,
где Н' — коэффициент, определяемый по модельным испыта-
ниям;
р — плотность воздуха;
W—скорость наблюдаемого ветра;
q — курсовой угол наблюдаемого ветра;
S — площадь надводной части диаметральной плоскости
судна.
При дрейфе судна появляется гидродинамический эффект,
дающий силу Zo, направленную перпендикулярно диаметральной
плоскости судна в сторону, противоположную силе Z:
р0—Sosma,
где /7"— коэффициент, определяемый по модельным испытаниям;
Ро—плотность морской воды;
V — скорость судна;
So — площадь подводной части диаметральной плоскости
судна;
a — угол дрейфа.
При установившемся движении сила Z должна быть равна Zo,
тогда
Н'
Sin a - —
Н"
При углах дрейфа, не
что sin a^a° аге 1°, и
а° = К° I —) sin q,
_р__
Ро So
превышающих 10°, можно принять,
•sin q.
(71)
где /С°— коэффициент дрейфа, выраженный в градусах, постоян-
ный для данного типа судов. В общем случае
Ка = Ь7°,3----е-- —.
Н" Ро So
Формула для коэффициента дрейфа показывает, что при про-
чих равных условиях угол дрейфа тем больше, чем больше отно-
Дрейф и рыскливость
161
шение площади надводной части к площади подводной части
диаметральной плоскости судна.
Для судов, у которых осадка, а значит и отношение площадей
надводной и подводной частей диаметральной плоскости изме-
няется мало, коэффициент К° можно считать постоянным. Для
грузовых судов, меняющих свою осадку в широких пределах,
коэффициент /С°, зависящий от осадки судна, будет величиной
переменной и он должен быть определен для двух-трех наиболее
характерных осадок судна.
Для определения коэффициента К° данного типа судов тре-
буются длительные и тщательные наблюдения на специальном
полигоне, защищенном от волны.
На таком полигоне не должно
быть сколько-нибудь заметного
течения. Многочисленные (поряд-
ка 25—30) определения угла дрей-
фа « позволяют вычислить коэф-
фициент /С° по формуле (71),а за-
тем применять его на данном типе
судов для расчета угла дрейфа.
Практическое значение коэф-
фициента дрейфа К° и точность,
с которой его можно получить,
в настоящее время трудно оце-
нить, так как при ветре на судно
одновременно воздействуют еще
волна и дрейфовые течения. Тре-
буется дальнейшее накопление опытных данных для решения во-
проса о возможности предварительного знания величины дрейфа
в данных конкретных условиях плавания.
Методы приближенного определения дрейфа. 1. На наличие
дрейфа укажет отклонение кильватерной струи за кормой судна,
которая, вследствие сноса судна, будет составлять с его диамет-
ральной плоскостью угол а, равный дрейфу судна (рис. 61). Если
в этом случае поставить визирную плоскость пеленгатора ab на
глаз параллельно отклоненной кильватерной струе, то отсчет КУ
по азимутальному кругу компаса укажет величину дрейфа а.
Дрейф может быть также определен по отклонению лаглиня
буксируемого лага, который расположится по линии пути судна.
В этом случае такой лаг будет указывать скорость судна по ли-
нии пути.
На парусных судах, а также на других судах при наличии
значительного дрейфа этот способ дает удовлетворительный ре-
зультат; на быстроходных судах и при малых углах дрейфа такое
определение дрейфа ненадежно.
И К. С. Ухов
162
Прокладка
[Гл. X
2. Несоответствие скорости хода судна по оборотам машин
со скоростью по лагу, при наличии проверенной таблицы зависи-
мости скорости хода судна от числа оборотов машин, указывает
на наличие дрейфа.
В этом случае грубое представление о величине дрейфа может
быть получено следующим образом: пусть ОК — линия истинного
курса судна (рис. 62); отложим по линии истинного курса отре-
зок ОВ, равный в масштабе карты скорости судна по оборотам;
от точки В проведем вектор BE по направлению наблюдаемого
ветра и засечем его радиусом ОС, равным скорости судна по
лагу.
Полученную прямую ОЕП можно принять за приближенную
линию пути судна, а угол СОЕ = а даст приближенную вели-
чину дрейфа в градусах. Чем меньше величина дрейфа, тем менее
надежно будет определение его таким способом.
Надежное определение величины дрейфа может быть полу-
чено лишь из непосредственных наблюдений береговых предме-
тов, как указано далее в § 45.
Влияние рыскания судна. Ветер, кроме непосредственного
влияния на движение судна, создает волнение, которое, в свою
очередь, уменьшает ход судна и вызывает рыскание его на курсе.
Особенно сильно рыскание судна происходит при попутной волне
и при волне в бакштаг, что приводит к уходу судна от намечен-
ного курса. Появление при ветре дрейфового течения еще больше
осложняет изучение поведения судна, тем более, что оно зависит
от совокупности таких гидрометеорологических явлений, как ве-
тер, волна, течение, а также от свойств судна: его собственной
скорости, водоизмещения, осадки, парусности надводного борта
и способности удерживаться на курсе.
Гидрограф Струйский в своем исследовании «Скорость хода
судна в свежую погоду» 1 указывает, что уже при встречном и
боковом ветре силою 3—4 балла наблюдается потеря скорости
около 4—5%. При спокойном море суда без груза идут с боль-
шей скоростью, чем с грузом. С увеличением встречного или бо-
кового ветра скорость хода судов без груза падает быстрее, чем
1 Записки по гидрографии, 1932, № 4.
§44]
Дрейф и рыскливость
163
груженых. Одной из причин потери скорости судном следует счи
тать неустойчивость его на курсе под воздействием волнения.
В общем случае рыскание судна на волне не симметрично от-
носительно курса, так как оно выходит на курс под действием
руля медленнее, чем сбивается с курса
волной.
Наблюдения показывают, что при ветре
с носовых курсовых углов рыскание увели-
чивает дрейф судна под ветер. При ветре и
волне, идущей с кормовых курсовых углов,
суда, неустойчивые на курсе вследствие
рыскания, в конечном счете, выходят на
ветер.
На рис. 63 схематически показано ры-
скание судна, идущего в бакштаг по отно-
шению к ветру и волне.
Пусть линия ОК представляет линию
курса, на которой лежит судно в начальный
момент (/). Настигающая его волна подни-
мает корму, судно зарывается носом, и
волна заносит его корму под ветер (II).
Судно приводится вновь на заданный
курс (III) и вновь сбивается с курса после-
дующей волной (IV).
В конечном итоге судно имеет дрейф а
на ветер и его линия пути будет ОП.
На судах водоизмещением 400 т, длиной
56,5 м приходилось наблюдать, что при
волне в бакштаг свыше 4—5 баллов снос на
ветер достигал 2°—4°.
Определение сноса судна при свежих
ветрах и волнении зависит от опытности су-
доводителя и его наблюдений за поведением
судна в различных условиях плавания, так
как суммарный снос, в который входит и
снос от рыскания судна, зависит от его мо-
реходных качеств.
Если судно вследствие каких-либо при-
чин остановило в море машины и свободно
перемещается по водной поверхности под влиянием ветра и
волны, то направление дрейфа будет близко к направлению ветра,
и скорость дрейфа будет определяться по его направлению.
В этом случае для определения направления и скорости
дрейфа может быть использован ручной лаг. При небольших глу-
бинах направление и скорость дрейфа могут быть определены
при помощи балластины, опущенной на ррунт на конце, имеющем
164
Прокладка
[Гл. X
большую слабину (см. § 107). В пределах видимости берега луч-
шие результаты будут получены по последовательным определе-
ниям места судна.
§ 45. ОПРЕДЕЛЕНИЕ ПУТИ ПО НАБЛЮДЕНИЯМ БЕРЕГОВЫХ
ПРЕДМЕТОВ
Для судоводителя наиболее важным является знание пути
судна, по которому оно движется под совокупным влиянием всех
Рис. 64.
отклоняющих его с намеченного курса
факторов: течения, дрейфа и рыскания
на курсе.
Наиболее надежный способ опреде-
ления пути судна заключается в после-
довательном определении на прямом
курсе нескольких мест судна (не менее
трех) способами, указанными в раз-
деле IV; сам способ определения места
судна выбирается в зависимости от об-
становки. Если соединить полученные
места на карте прямой линией, то она
и представит линию пути. Общая по-
правка на снос с = а -|- р рассчиты-
вается по формуле:
с = ПУ — ИК.
При с положительном ПУ 2> ИК и
судно сносит вправо от курса; при
с отрицательном ПУ < ПК и судно
сносит влево от курса.
В большинстве случаев угол об-
щего сноса с невелик, порядка не-
скольких градусов, и снимать его
с карты будет менее точно, чем рас-
считывать как разность ПУ — ИК.
Определение сноса по створу или отдаленному предмету. Если
судно идет по створу, то его снос с может быть определен по не-
посредственному наблюдению за створом. Допустим, что в на-
чальный момент судно легло на створ (рис. 64, I). Если при этом
рулевому дан курс по компасу, то под влиянием сноса судно
через некоторый промежуток времени будет находиться в поло-
жении II, т. е. сойдет со створа, но останется на курсе, парал-
лельном створу.
Если рулевой держит на передний знак створа, то под влия-
нием сноса судно через некоторый промежуток времени окажется
в положении III — сойдет со створа и его курс не будет соответ-
$45)
Определение пути по наблюдениям береговых предметов
165
ствовать направлению створа. Опытным путем надо поставить
судно в положение IV, под углом к линии створа, равным углу
сноса, что при внимательном наблюдении за створом удается
сделать довольно быстро.
В положении IV путь судна будет совпадать с направлением
створа, ИК покажет компас, и угол общего сноса с может быть
легко рассчитан.
Совершенно так же определится общий снос по отдаленному
предмету, если взамен створа взять его пеленг, который должен
совпадать с путем судна.
В этом случае необходимо
следить за изменением пе-
ленга выбранного отдален-
ного предмета, на который
держит судно. Если пе-
ленг отходит вправо (уве-
личивается), то судно отно-
сит влево от курса — и на-
оборот. Взяв поправку на
снос и подправляя ее по на-
блюдениям за изменением
пеленга, следует добиться
постоянства пеленга и курса.
Тогда судно будет переме-
щаться по линии пути, со-
впадающей с линией пелен-
га, а общий снос определит-
ся как разница между путем
и истинным курсом судна.
В этом приеме пеленг от-
даленного предмета может
быть визуальным или радио-
пеленгом, взятым по судовому радиопеленгатору на радиомаяк,
направление на который совпадает с путем судна. Выбранный
предмет или радиомаяк может находиться и за кормой судна,
если направление на него совпадает с путем судна. В этом по-
следнем случае, если пеленг отходит вправо (увеличивается), то
судно сносит также вправо от курса — и наоборот.
При использовании радиопеленгатора общий снос будет равен
радиокурсовому углу на пеленгуемый радиопередатчик.
Этот прием также может быть с успехом использован при
совместном плавании нескольких судов при наличии сильного
сноса. Приняв назначенный курс за путь, сзади идущие суда на-
значают свой курс с учетом поправки на снос, следя за пеленгом
на головное судно. Постоянство пеленга и курса и в этом случае
покажет, что последующие суда движутся по назначенному
166
Прокладка
[Гл. X
направлению, которое представляет путь, а разница между путем
и истинным курсом есть общий снос судна.
Определение пути по пеленгам одного и того же предмета.
Возьмем три пеленга одного и того же предмета через равные
промежутки времени t при постоянной скорости судна и сделаем
на бумаге следующее построение: от произвольной точки Л4
Рис. 66.
(рис. 65), которую примем за пеленгуемый предмет, проложим
все три линии истинных пеленгов ГЦ, П2 и Лз; на линии среднего
пеленга П2 возьмем произвольную точку О и через нее проведем
вспомогательные линии: АО, параллельную третьему пеленгу Пз,
и ВО, параллельную первому пеленгу /7Ь Соединим теперь полу-
ченные точки А и В прямой линией ЛП. Эта линия будет парал-
лельна линии пути и с чертежа может быть снят путь (ПУ). Угол
сноса с получится как разница между путем и курсом судна.
В этом способе пеленговать можно любой предмет, вне зави-
симости от того, имеется ли он на карте или нет, опознан он или
его не удается отождествить с предметами, нанесенными на карте.
Способ Глазкова. П. П. Глазков предложил более общее ре-
шение предыдущей задачи, учитывая, что пеленги могут быть
взяты через произвольные промежутки времени.
Допустим, что взяты три пеленга одного и того же предмета
через промежутки времени Л — между моментами первого и вто-
рого пеленгования и t2 — между моментами второго и третьего
§45]
Определение пути по наблюдениям береговых предметов
167
пеленгования. На листе бумаги сделаем следующее построение
(рис. 66).
От произвольной точки М, руководствуясь выбранным нами
направлением истинного меридиана, проложим линии истинных
пеленгов /71, 772 и /73. Проведем произвольную прямую MVi, пе-
ресекающую линии всех трех пеленгов. Рассчитаем длину отрезков
р = kt\ и г = kt<^ где k — любой выбранный нами коэффициент
пропорциональности, и отложим последовательно в произвольном
масштабе рассчитанные отрезки р и г от точки а. Из концов от-
резков р и г, через полученные точки b и d, проводим линии ЬС и
dE, параллельные линии первого пеленга, до пересечения их с
линиями второго и третьего пеленгов. Соединяем полученные
точки С и Е прямой линией. Эта линия параллельна линии пути
судна; сняв направление СЕ с чертежа, получим путь судна (ПУ).
Так как точки С и £ получаются графически, то для более
надежного их определения углы между пеленгами должны быть
не менее 30°.
Рассматриваемая задача может быть решена аналитически.
Из треугольников МАС и MCE (рис. 66), принимая отрезки пути,
пройденные между пеленгами, равными АС = kih и СЕ = kdz,
где попрежнему k\ — коэффициент пропорциональности, имеем
= Лг/isin q = Лг/2 sin (6t 08 -|- у)
sin 01 sin 62
откуда
sin q /2 sin (01 + 02 + Я)
sin 0г ti sin 68
Обозначим отношение у- через т и заметим, что
sin (Gj 62 + Я) = sin (0i + М cos Я + cos (Oj 4~ &2) sin q.
Решая полученное равенство относительно q, получаем
sin 01 ft
Т---—-sin (61 + оа)
------------• (72)
sin 02
Рассчитав углы между пеленгами и и отношение
х = —, можно вычислить по формуле (72) угол q и путь судна
Л
ПУ=ПХ ± q.
(73)
168
Прокладка
[Гл. X
В формуле (73) первый пеленг П\ берется с судна на наблю-
даемый предмет, т. е. прямой пеленг; знак плюс (+) соответ-
ствует курсовому углу q левого борта, а знак минус (—) курсо-
вому углу q правого борта.
Удобнее брать пеленги через равное число градусов измене-
ния пеленга на предмет, тогда ^i=^2 и
tg?=-Tsi-n26 _
1 — т cos 20
(74)
Для повышения точности определения угла q моменты пелен-
гования следует замечать с точностью до одной секунды, а отно-
шение — рассчитывать с точностью 0,01. При наблюдениях
удобно пользоваться секундомером.
Для решения формулы (74) Глазков дает таблицу и номо-
грамму \ решение же формулы (72) предлагает производить с
помощью двух номограмм для нахождения промежуточной вели-
sin (ь .
чины , а вычисления угла q производить по логарифмам.
S1П 62
§ 46. ЦИРКУЛЯЦИЯ И ЕЕ УЧЕТ
При изменении курса судно описывает некоторую кривую в
течение промежутка времени от момента, когда был положен
руль, до момента прихода судна на новый курс. Эта кривая носит
название циркуляции. Пусть линия АВС (рис. 67) представ-
ляет линию курса, которым идет судно. В точке В судно поло-
жило право руля и, описав циркуляцию BFf пришло на новый
курс в точке А Чтобы учесть путь судна на циркуляции и про-
ложить новый курс от точки F, надо знать положение ее отно-
сительно точки В. Из рисунка видно, что положение точки F от-
носительно точки В может быть определено отрезком BF и углом
CBF или же отрезками ВС и CF и углом BCF.
Кривая циркуляции BFM имеет различную кривизну и в пер-
вой своей четверти после начала поворота близка к спиральной
кривой вследствие еще неустановившегося характера движения
судна. После же поворота на 90°—120° угловая скорость движе-
ния судна становится постоянной и циркуляция по своей форме
приближается к окружности.
Отрезок F)^ определяющий расстояние между первым и вто-
рым курсами при повороте на 16 румбов, т. е. на обратный курс,
носит название тактического диаметра циркуля-
ции или диаметра неустановившейся циркуля-
1 П. П. Глазков, Определение пути корабля по пеленгам неподвиж-
ного ориентира и времени, «Морской сборник», 1945, № 2—3.
§ 46]
Циркуляция и ее учет
169
ц и и, а отрезок Dy— диаметра установившейся цир-
куляции. Для навигационных целей имеет значение диаметр
первой половины циркуляции, т. е. тактический диаметр, который
определяется при испытаниях судна на различных ходах и при
разных положениях руля. Обычно определяют диаметр циркуля-
ции на трех скоростях: наибольшей, средней и малой, при изме-
нении положения руля через каждые 10°—15°.
В случае необходимости узнать диаметр циркуляции для ка-
кого-либо промежуточного хода или положения руля он может
быть получен простым
интерполированием.
Угол ECF = а на-
зывается углом по-
ворота, расстояние
ВС = di — расстоя-
нием до нового
курса, угол CBF —
курсовым углом
промежуточного
курса, а расстояние
BF d — длиной
п ро межуточного
курса. Для непосред-
ственного учета цирку-
ляции указанные дан-
ные сводятся в специ-
альную таблицу цирку-
ляции, в которой рас-
стояния даны в кабель-
товых (табл. 12).
Для составления та-
кой таблицы необходи-
мо знать из непосред-
ственных наблюдений
тактический диаметр
циркуляции и продол-
жительность поворота
судна на обратный курс Ti8o, т. е. продолжительность первой по-
ловины циркуляции. По этим данным таблица может быть соста-
влена путем вычисления или графическим построением.
Допустим, что судно, идущее курсом АВС (рис. 68), в точке В
положило руль и, описав циркуляцию BF, легло на новый курс
CFL в точке F.
Примем в первом приближении путь судна на циркуляции BF
за дугу окружности с радиусом R4, равным половине диаметра
циркуляции.
170
Прокладка
[Гл. X
Таблица 12
Циркуляция при ходе 10 узлов
Руль 30° Угол поворота а Руль 20°
Расстояние до нового курса Промежу- точный курс Путь поворота S Время поворота м Время поворота Путь поворота Промежу- точный курс Расстояние до нового курса
длина КУ КУ длина
d а1г “/а d
0,2 0,3 5 0,3 0,2 10° 0,2 0,4 5 0,4 0,2
0,5 1,0 15 1,0 0,7 30° 0,7 1,3 15 1,3 0,6
0,9 1,7 25 1,7 1,1 50° 1,2 2,2 25 2,1 1,2
1,4 2,2 35 2,4 1,5 70° 1,7 3,0 35 2,8 1,7
2,0 2,8 45 3,1 2,0 90° 2,2 3,9 45 3,5 2,5
2,9 3,2 55 3,7 2,4 110° 2,7 4,7 55 4,0 3,5
4,3 3,6 65 4,5 2,9 130° 3,2 5,6 65 4,5 5,2
7,5 3,8 75 5,2 3,3 150° 3,7 6,5 75 4,8 9,2
= 4 каб. 3,9 85 5,9 3,8 170° 4,2 7,3 85 4,9 D„ = 5 каб.
Т180 = 4мин. 4,0 90 6,3 4,0 180° 4,5 7,8 90 5,0 Т180 = = 4,5 мин.
3,9 100 6,9 4,5 200° 5,0 8,6 100 4,9
3,7 ПО 7,7 4,9 220° 5,5 9,5 110 4,6
3,4 120 8,4 5,3 240° 6,0 10,5 120 4,3
3,0 130 9,1 5,8 260° 6,5 11,3 130 3,8
2,8 135 9,4 6,0 270° 6,8 11,7 135 3,5
2,2 145 10,0 6,4 290° 7,3 12,7 145 2,8
1,7 155 10,7 6,8 310° 7,7 13,5 155 2,1
1,0 165 11,5 7,3 330° 8,2 14,4 165 1,2
0,4 175 12,2 7,8 350° 8,7 15,4 175 0,4
— 12,6 8,0 360° 9,0 15,8 — —
Тогда из прямоугольного треугольника ОВН получим
Л £
= 2/?„ sin= £>ц sin• (75)
и 2 2
Из прямоугольного треугольника ВОС имеем
jBC = rf1 = R4tg-^-. (76)
По формулам (75) и (76) могут быть рассчитаны вели-
чины d — длина промежуточного плавания и di — расстояние
до нового курса.
§46]
Циркуляция и ее учет
171
Если при определении циркуляции судна получено достаточно
наблюдений, которые позволяют вычертить действительную кри-
вую циркуляции, несколько отличающуюся от окружности, осо-
бенно в первой своей четверти, то в этом случае, применяя графи-
ческое построение, можно получить величины d с несколько
большей точностью. Для этого, вычертив на бумаге действитель-
ную кривую циркуляции при точке В (начале циркуляции), про-
водим через 10° хорды под углами ~ к касательной кривой цир-
куляции в точке В. Длины хорд дадут в масштабе чертежа длины
промежуточных плаваний d. Однако следует учесть, что ряд фак-
торов, например волна, ветер, течение, крен, диферент, изменение
осадки судна, оказывают свое влияние на поворотливость и вели-
чину циркуляции судна. Поэтому в дополнение к полученным на
сдаточных испытаниях данным о циркуляции судна требуется
тщательное изучение его поворотливости при различных условиях
плавания. Этот опытный материал будет ценным дополнением
к полученным первоначальным сведениям.
172
Прокладка
[Гл. X •
Время поворота судна рассчитывается по простой пропорции,
если известно время, затрачиваемое судном при повороте на 180°.
Можно принять с достаточной точностью, что время поворота
судна на каждые 10° будет равно
Расстояние, пройденное судном на повороте, принимая цир-
куляцию за окружность, получится из расчета длины дуги окруж-
ности, описываемой судном. Расстояние, проходимое судном при
изменении курса на 10°, будет равно
10 18
где — радиус циркуляции.
На практике может встретиться надобность в решении двух
задач на циркуляцию:
1) найти точку, в которой следует положить руль, чтобы пе-
рейти на новый, заранее проложенный курс;
2) в данной точке положен руль; найти точку, через которую
пройдет новый курс.
Для решения первой задачи из таблицы циркуляции для
данного хода и положения руля выбираем величину d\ — рас-
стояния до нового курса и откладываем его от точки С — пересе-
чения линий старого и нового курсов (рис. 68), обратно по ста-
рому курсу и вперед по новому курсу. Полученная точка В на
старом курсе определит точку, в которой должен быть положен
руль, а точка F на новом курсе укажет точку прихода судна на
новый курс.
Так как расстояние до нового курса растет пропорционально
тангенсу половины угла поворота, то при углах поворота более
150° расстояние d\ становится настолько велико, что пользование
им затруднительно, а иногда и невозможно. Поэтому и в табли-
цах циркуляции di дается для углов поворота а не более 150°.
В случае поворота на угол * более 150° из таблицы циркуляции
выбирают промежуточное плавание d, которое и вмещают между
заданными старым и новым курсами. Истинный промежуточный
курс рассчитывается по следующей формуле:
Для вмещения промежуточного курса и плавания между
двумя данными курсами удобнее всего взять произвольную
точку В\ на старом курсе (рис. 69), от нее провести Кср и от-
£ 46]
Циркуляция и ее учет
173
дожить по нему плавание d. Через полученную точку проведем
линию, параллельную старому курсу, и в пересечении ее с новым
курсом получим точку F, в которую судно должно прийти на но-
вом курсе. Проведя BF параллельно BiF\, получим на старом
курсе точку В, в которой следует положить руль.
При решении второй задачи нам задана точка В (рис. 68), где
судно положило руль. Выбрав из таблицы циркуляции вели-
чину d, отложим от точки В истинный промежуточный курс
чину d, отложим от точки В истинный
тг Ку 4- Кч
Кср =----~-- и по нему промежуточное
плавание d. Полученная точка F будет
начальным местом судна на новом курсе.
Графический учет циркуляции. При
отсутствии таблицы циркуляции, но при
непременном знании диаметра циркуля-
ции D учет последней может быть произ-
веден более простым, но и более грубым
способом. Для этого проведем биссектри-
су СО (рис. 68) внутреннего угла поворота
BCF и, раскрыв циркуль на величину
(в масштабе карты) будем двигать
одну ножку циркуля по биссектрисе, пока
не найдем на ней точку О, отстоящую на
расстоянии /?ч от линий старого и нового
курсов (окружность, проведенная из этой
точки раскрытым циркулем, будет ка-
саться линий первого и второго курсов); точка О и явится цен-
тром циркуляции.
Точка касания В на старом курсе укажет точку, в которой
следует положить руль, а точка касания F на новом курсе будет
начальным местом судна на новом курсе.
Наконец, графически учет циркуляции может быть произведен
еще и следующим простым способом. Имея на карте проведен-
ными линии старого и нового курсов (рис. 68) и зная радиус
циркуляции надо провести внутри угла поворота две прямые
AiO и ЦО, параллельные линиям первого и второго курсов, и в
расстоянии от них, равном /? . Пересечение этих линий даст
точку О — центр циркуляции, а перпендикуляры, опущенные из
этой точки на линии курсов,— точки В и F начала и конца цир-
куляции. Перпендикуляры эти, при не слишком крупном мас-
штабе карты, можно проводить от руки на глаз.
Способ Андреева. М. Н. Андреев 1 предложил определять по-
ложение точки F, в которой судно придет на новый курс, двумя
1 М. Н. Андреев, О новом универсальном методе прокладки циркуля-
ции корабля, «Записки по гидрографии». 1941, № 1.
174
Прокладка
[Гл. X
отрезками: р — по линии первого курса и q — по перпендикуляру
к первому курсу. На рис. 70 имеем
ОА = COS a; q = АВ = (1 — cos а) = 27?q sin2 -у-;
р = ВС= Аг = sin а.
Пройденное на циркуляции расстояние
с Ruf п 57,35
о = и R„ = —— .
57,3 4
Окончательно имеем
57,35 .
р =------sm а
г о
(77)
114,65 . о а
q=---------sin- —
а° 2
Как показывают формулы (77) отрезки р и q зависят от прой-
денного на циркуляции расстояния, которое может быть замечено
по лагу, и от угла поворота а. Андреев предложил таблицу, вы-
численную по формулам (77), в которой по аргументам и а °
даются величины отрезков р и q. Так как в этом приеме учета
циркуляции отрезки р и q не зависят видимым образом от то
одна и та же таблица может служить цри различных радиусах
циркуляции. При а = 90° отрезки р и q равны между собой, а
также равны радиусу циркуляции: р = q = R*, величина кото-
рого будет определяться в зависимости от пройденного на цирку-
ляции расстояния $л.
Этот прием учета циркуляции удобен для решения второй
задачи, когда определяется точка F, через которую проходит но-
§ 47]
Основные формулы письменного счисления
175
вый курс. Так как отрезок q в масштабе карты мал, то перпенди-
куляр CF = q может быть восстановлен от руки на глаз.
Как указано выше, изменение поворотливости судна происхо-
дит под влиянием многих факторов, наиболее значительными из
которых являются ветер и волна. Кроме того, во время поворота
происходит потеря скорости судна, которая достигает 25—30%,
а у некоторых быстроходных современных судов даже до 50—
60%. Каждый поворот вносит некоторую ошибку в счисление
пути судна, и в случае повторных поворотов может накопиться
ошибка, имеющая существенное значение. Приходится считаться
и с тем обстоятельством, что учет циркуляции по указанным пра-
вилам может осуществляться с достаточной точностью на картах
сравнительно крупного масштаба, какие применяются при плава-
нии в прибрежных водах. Во избежание накопления ошибок сле-
дует принять за правило после каждого поворота, если к тому
представится возможность, сейчас же определить место судна,
чтобы убедиться, что судно действительно идет по линии проло-
женного курса. При плавании в открытом море, при прокладке
на картах мелкого масштаба, учет циркуляции производить неце-
лесообразно.
Учет циркуляции при письменном счислении пути судна рас-
смотрен в § 49.
ГЛАВА XI
ПИСЬМЕННОЕ СЧИСЛЕНИЕ ПУТИ СУДНА
§ 47. ОСНОВНЫЕ ФОРМУЛЫ ПИСЬМЕННОГО СЧИСЛЕНИЯ
При плавании вдали от берегов, при океанских переходах,
когда приходится пользоваться картами мелкого масштаба для
получения счислимого места; при астрономических и радиотехни-
ческих определениях места судна, когда прокладка делается на
бумаге; при маневрировании и при решении некоторых частных
задач, когда не требуется иметь проложенным на карте курс
судна,— прокладка заменяется вычислением географических ко-
ординат места судна на заданный момент.
Вычисление географических координат судна по его курсу и
плаванию называется письменным счислением пути
судна.
Если известны географические координаты <рх и Хх пункта от-
шествия и сделанные судном РШ и РД, то географические коор-
динаты пункта пришествия В определятся так:
Ъ = ^ + РШ и +
Формулы письменного счисления позволяют решать и обрат-
ную задачу, а именно определение курса и плавания судна по
176
Письменное счисление пути судна
[Гл, XI
известным координатам и пункта отшествия А и коорди-
натам <р2 и ^2 пункта пришествия В. Письменное счисление точ-
нее прокладки, так как исключаются ошибки графического по-
строения; само вычисление можно делать с желаемой точностью,
но пропадает наглядность прокладки.
Предположим, что точка А (рис. 71) —пункт отшествия, а
точка В — пункт пришествия, в который судно пришло постоян-
Р
Рис. 71.
ным курсом К. Дуга АВ представит собой отрезок локсодромии
между пунктами А и В, равный плаванию судна; длину дуги АВ
обозначим через S, Разделим дугу локсодромии АВ на m равных
частей и длину каждой части обозначим через dS. Проведем ме-
ридианы и параллели через каждую точку деления. Тогда мы по-
лучим пг прямоугольных треугольников АЬ\аь а\Ь2а2, П2&з^з и т. д.,
которые можно принять за плоские, если число m выбрано доста-
точно большим. Эти элементарные треугольники равны между
собой, так как гипотенуза каждого из них равна dS и углы, со-
ставляемые гипотенузой с катетом, расположенным по меридиану,
также равны между собой, потому что локсодромия АВ пересе-
кает все меридианы под одним и тем же углом /С Обозначим в
этих элементарных треугольниках длину каждого расположенного
по меридиану катета АЬЬ п2&3 и т. д. через d?, а длину каж-
дого расположенного по параллели катета 6itzb 62а2, &3а3, и т. д.—
через dW.
§ 47]
Основные формулы письменного счисления
177
На основании формул плоской тригонометрии получаем, что
в каждом элементарном треугольнике
dcp = dScos/C;
t/I^=dSsin К.
Пусть будет широта точки отшествия А, а ?2 — широта
точки пришествия В. Из рисунка видно, что сумма катетов dy от
точки А до параллели точки D равна дуге меридиана AD, кото-
рая представляет разность широт между пунктами А и В.
Следовательно,
Ya s
J d<? = \ ds cos К; ?2 — = *5cos К\
О
откуда получаем
РШ = S cos К, (78)
т. е. разность широт равна плаванию, умноженному на косинус
курса.
Каждый из катетов Ьут^ b2a2t b3a3 и т. д., равный dW, пред-
ставляет собой составляющую перемещения судна по параллели
при последовательном переходе его из точки А в точку а\, затем
в точку а2 и т. д. и называется элементарным отшест-
в и е м. Сумма элементарных отшествий или составляющих по
параллелям, при переходе судна из одного пункта в другой, вы-
раженная в морских милях, называется отшествием.
Интегрируя выражение
f dW= J tZSsintf,
о и
получим
IF = S sin АГ, (79)
т. е. отшествие равно плаванию, умноженному на синус курса.
Формулы (78) и (79) дают точную зависимость РШ и ОТШ
от курса и плавания судна. Но так как отшествие является сум-
мой элементарных отшествий, сделанных в различных широтах,
каждое из которых равняется dW = dkL cos^, то установим
теперь зависимость между отшествием и разностью долгот.
Разделим отрезок локсодромии АВ пополам и через середину
ее, точку Л4, проведем параллель GH, Так как дуга параллели
равна соответствующей дуге экватора, умноженной на косинус
широты данной параллели, то чем больше широта данной парал-
лели, тем меньше длина ее отрезка, заключенного между двумя
одними и теми же меридианами. Поэтому на отрезке локсодро-
12 к. с. Ухов
178
Письменное счисление пути судна
[Гл. XI
мии AM каждое элементарное отшествие dW будет больше, чем
соответствующий отрезок параллели GM, заключенный между
теми же самыми меридианами, а на отрезке локсодромии МВ
каждое элементарное отшествие dW будет меньше, чем соответ-
ствующая ему дуга параллели МН. Обозначим отшествие при
переходе судна из точки А в точку М через Wi, а при переходе
его из точки М в точку В через W2. Тогда имеем
W\>GM И W2<MH.
Если мы допустим, что IFi настолько же больше GM, на-
сколько W2 меньше МН, то можем с достаточной для практики
точностью написать, что
W= W1^-W2 = GM-\-MH=GH.
Следовательно, отшествие численно равно длине средней па-
раллели заключенной между меридианами пункта отшествия
и пункта пришествия, выраженной в морских милях.
Из рис. 71 на основании формулы . (78) имеем
AG = AMcosK и НВ = MB cos К,
но АМ = МВ по условию, значит AG = НВ = GD = -~-РШ.
Отсюда определится широта средней параллели GH, которую
обозначим <?m.:
?т = СО = ЛС+ЛО = Т1 + ^ .
Дуга экватора CF представляет разность долгот между пунк-
том отшествия А и пунктом пришествия В, которую обозна-
чим РД, тогда
GH = CF cos <pm = РД cos <pm)
откуда получаем приближенную формулу, связывающую отшест-
вие с разностью долгот:
W = РД cos <от или РД = W sec фот, (80)
т. е. разность долгот равняется отшествию, умноженному на се-
канс средней широты.
Последняя формула (80) является приближенной, так как мы
при выводе ее допустили, что отшествие равняется длине средней
параллели, заключенной между меридианами пункта отшествия
и пункта пришествия. На самом деле дуга каждой параллели по
сравнению с дугой экватора уменьшается пропорционально cos ф,
т. е. неравномерно, и отшествие должно быть равно длине ка-
§ 47]
Основные формулы письменного счисления
179
кой-то промежуточной параллели, лежащей вблизи средней па-
раллели Происходящая отсюда ошибка в вычислении РД
незаметна в малых широтах и при сравнительно небольшом пла-
вании судна. При плавании же судна в высоких широтах и на
большие расстояния она может иметь реальную величину.
Для вывода точной формулы определим промежуточную па-
раллель срл, длина отрезка которой между меридианами пункта
отшествия пункта пришествия точно равна сделанному судном
отшествию. Возвращаясь к рис. 71,’мы можем напйсать, что
РШ =у% —y^tndy и OTLU=W=tndW.
Разности долгот, которые соответствуют каждому элементар-
ному отшествию и которые для сокращения обозначим Д\, будут
равны:
AX^dlTseccpf,
Ak2 = dU7sec ?2;
Д Х3 = d W sec ср3;
AXB=rfl^sec<pB,
где через ?2 и т. д. обозначены широты точек а\, а2 и т. д.
Складывая эти уравнения, получим
РД = sec cpz.
Умножаем и делим правую часть равенства на число отрез-
ков т:
п тт tTidV7 „ S sec uz
РД =-------S sec W----------— .
m m
Следовательно, промежуточная широта уп найдется из выра-
жения
sec Ssec cpz,
которое перепишем в таком виде:
sec ср = —S sec ср. dy = —S sec ср, dy.
mdy РШ
При увеличении числа m величина d у будет уменьшаться и
<рэ
lim sec cpz dy = J sec cp dy,
d<p-*0 tpt
откуда
sec <p„ = —J— [in tg (— 4~ -77[ — In tg [— +^-[]
т" РШ [ [ 4 1 2 / \ 4 1 2 /J
12*
180
Письменное счисление пути судна
[Гл. XI
Если величину, стоящую в квадратных скобках, выразить в
экваториальных милях, то она представит разность меридиональ-
ных
чим,
частей. Выражая РШ в минутах дуги меридиана, полу-
что
РМЧ
sec ,
п РШ
(81)
т. е. секанс промежуточной широты, отрезок параллели которой,
заключенный между меридианами пункта отшествия и пункта
пришествия, равен сделанному судном отшествию, определяется
отношением разности меридиональных частей к разности широт,
выраженной в минутах.
Таким образом, точная формула для нахождения разности
долгот по отшествию напишется так:
P4=rsec?„=r^. (82)
Если мы разделим уравнение (79) на уравнение (78), то по-
W . „
лучим = поэтому точная формула долгот в зависимости
от курса судна может быть написана и в следующем виде:
РД = РМЧ tg К. (83)
Мы уже видели ранее, что формула (83) выражает уравнение
локсодромии.1 11
Эту формулу не следует применять для нахождения РД при
курсах судна, близких к параллели, так как тангенс угла около 90°
меняется очень быстро и небольшая ошибка в курсе К может
дать значительную ошибку в искомой РДч В этом случае лучше
1 Пользуясь теоремой о среднем значении определенного интеграла,
можно получить уравнения (82) и (83), интегрируя дифференциальное соот-
ношение
dW
= dW sec ср — — sec <p dy — tg К sec cp dy;
dy
* 72
J dk = tg К J sec ср dy.
Стоящий в правой части определенный интеграл можно выразить двоя-
ким образом. Теорема о среднем значении дает
11 = tg К (<?2 — 91) sec = F sec <р„. • (82')
Если же воспользоваться выражением, полученным для РМЧ, то
К - >1 = tg К (Дг - Д1). (83')
Сравнивая (82') и (83'), получим
_Дг-Д1_РМЧ
92 - 91 РШ
(Прим, ред.)
§ 47]
Основные формулы письменного счисления
181
пользоваться приближенной формулой РД = W sec <pm, а в случае
больших широт и значительного отшествия — точной формулой
РД= W sec
Пример. Широта пункта отшествия тХ= 65° N, долгота Xj = 15° W, истин-
ный курс 53°, плавание 800 миль. Найти широту и долготу Х2 пункта при-
шествия.
Решение.
а) по приближенной формуле МТ-43:
И К = 53°; <$ = 890; РШ = 481,5 - 8°Г,5 к N; ОТШ = 638,9; 69°;
= 65°00'N Xi - 15°00' W ОТШ = 600; РД = 1674
РШ = 8°Г,5 к N РД — 29°42',5 к Ost 30 83,7
е. = 73°1',5N Z2 = 14°42',5 Ost 8 22,3
" 0,9 2 5
ОТШ = 638,9; РД = 1782,5' к Ost
б) по точной формуле:
Д1 = 5158,0
Д2 = 6517,6
РМЧ . . 3,1334
РШ . . . 2,6825
РМЧ = 1359,6
<р„ = 69°15',5N
Sec<f„. .0,4508
ОТШ . . 2,8054
РД . . . 3,2562
РД = 1804' к Ost
Xi = 15°00' W
РД = 30°04' к
).2 ~ 15 04' Ost
Последний результат мы полу-
чаем и по формуле (83). Как вид-
но из примера, приближенная
формула при плавании 800 миль
в средней широте около 69° N
дает ошибку в долготе пункта
пришествия, равную 21',5, а сред-
няя арифметическая широта
отличается от промежуточной ши-
роты на 15',5.
Формулы (78) и (79) решают
плоский прямоугольный треуголь-
ник АВС (рис. 72), в котором катетами являются РШ и отше-
ствие, гипотенузой — плавание, а угол, прилежащий к разности
широт, представляет курс судна. Если же оба катета выразить
в экваториальных милях, то катет АС представит РМЧ, а катет
СВ — разность долгот. Из полученного треугольника можно
дегко вывести основные формулы счисления
182
Письменное счисление пути судна
[Гл. XI
Действительно:
PZZZ=Scos/<; OTLU=Ss\nK\ РД = РМЧ^К.
Эти формулы точные и могут применяться при любых значе-
ниях S и К. При обратном решении задачи, если требуется найти
курс и плавание по данным <Рп -Ч и то отшествие должно
быть сперва рассчитано по приближенной формуле W = РДсозсрт
или точной IF = РДсозс?л, а затем вычислен курс по фррмуле
w
tgK=----, или же можно сразу найти курс по формуле
ё РМЧ
Для нахождения плавания S можно воспользоваться любой
из формул
S = /WsecK = Wcosec К.
При больших расстояниях и при плавании в высоких широтах
приближенной формулой W = РД cos пользоваться нельзя,
так как результат получается с существенной ошибкой.
§ 48. ТАБЛИЦЫ ПИСЬМЕННОГО СЧИСЛЕНИЯ
По формулам РШ = S cos К и ОТШ = S sin К составлена
табл. 34 «Мореходных таблиц» 1943 г. под названием «Разности
широт и отшествия». Эта таблица дает решение прямоугольного
треугольника по данной гипотенузе S и прилежащему острому
углу К. В таблицах плавание дано в левом вертикальном столбце
от 0 до 100 миль через одну милю, а курс К вверху или внизу
страницы в горизонтальной строчке от 1 до 359° через один гра-
дус. Курсы первой четверти выделены и напечатаны жирным
шрифтом, а рядом в столбце даны три курса остальных четвер-
тей, так что таблицей можно пользоваться, считая курсы по кру-
говой картушке от 0° до 360°. Ввиду того, что sin (90° —а) = cos а,
то вверху страницы даны курсы К до 45°, а от 45° до 90° они
даны внизу страницы, причем в этом случае РШ и ОТШ меняют
свои места в таблице, на что следует обращать внимание, чтобы
не ошибиться.
Разности широт и отшествие даны в двух вертикальных столб-
цах для каждого курса, с точностью до 0,01 мор. мили. Если
плавание больше 100 миль, то его можно разбить на части, а за-
тем суммировать выбранные из таблицы разности широт и от-
шествия. Так же можно в случае надобности увеличивать или
уменьшать плавание в 10 или 100 раз, а затем полученные вели-
чины соответственно увеличивать или уменьшать в 10 или 100 раз.
При курсах, выраженных не целым числом градусов, таблич-
ные числа следует интерполировать.
Для контроля выбранных из табл. .34 разностей широт и от-
£ 48]
Таблицы письменного счисления
183
шествия следует помнить, что так как курс является острым уг-
лом, прилежащим к катету, представляющему собой РШ, то
при К < 45° всегда РШ > OTLLP,
при /С >45° РШ<ОТШ.
Кроме того, всегда
РШ^ОТШ> S, а РШ-ОТШ<5.
Курсы 0°, 180° и 90°, 270° не даны в таблицах, так как
при К=0° или 180° PLU = S, =
при ^=90o или 270° РШ = (\ a OTLU = S.
Наименование сделанных разностей широт и отшествий опре-
деляется наименованием той четверти, в которой лежит курс
судна.
Пример.Истинный курс судна 132°, плавание 239 мор. мил. Найти раз-
ность широт и отшествия.
Решение.
ИК = 132°
ОТШ^ 148,6
0ТШ2= 29,0
ОТШ = 177,6 к Ost
РШ^= 133,8
РШ2 = 26,1
РШ = 159,9 к S
$!= 200
S2= 39
S = 239
Табл. 34 позволяет решать все случаи прямоугольного тре-
угольника, если известны два какие-либо его элемента. Например,
дан острый угол и прилежащий к нему катет. Тогда, приняв угол
за курс, найдем в столбце РШ известный катет, плавание даст
гипотенузу треугольника, а отшествие — второй катет, противо-
лежащий острому углу.
Формула (80) дает W = РДсоъ vm\ тогда, приняв за курс,
а отшествие — за разность широт, найдем РД в столбце «пла-
вание».
Если даны два катета, то в этом случае следует найти в столб-
цах РШ и ОТШ два числа, стоящие рядом и равные заданным
катетам, тогда наверху страницы найдем острый угол, в столбце
плавание — гипотенузу.
Пример. РШ = 171,9 к N, ОТШ = 166,0 к W; = 36° 14' N. Найти РД,
курс и плавание.
Решение. Принимая за курс, а ОТШ за РШ, в столбце плавание
имеем РД = 205' к W.
По РШ и ОТШ имеем ИК = 316°, a S = 239 мор. миль.
Так как при решении последней задачи интерполирование
представляет некоторое затруднение, то при желании получить
точный ответ проще для РД воспользоваться табл. 35, а курс и
плавание найти вычислением. Но для приближенного решения
задачи этот прием полезен.
184
Письменное счисление пути судна
[Гл. XI
Если в какой-либо момент измерить расстояние до маяка или
знака и заметить КУ на этот объект, то по табл. 34 легко рас-
считать расстояние до траверза маяка и само траверзное расстоя-
ние, как указано в объяснении таблицы.
Для нахождения разности долгот по формуле РД = ITseccpm
построена табл. 35 «Мореходных таблиц» 1943 г. под названием
«Разность долгот по отшествию и средней широте». В верхней
горизонтальной строке дано отшествие от 1 до 9 мор. миль через
1 милю и затем 100 миль, а в левом вертикальном столбце —
широты от 0° до 81°, причем, учитывая ход изменения секанса,
широты, служащие аргументом для входа в таблицы, даны через
разные промежутки, на что при интерполяции следует обращать
внимание. Для выбора РД на десятки и сотни миль отшествия
или на десятые доли надо только переносить запятую соответ-
ственно вправо на один или два знака или влево на один знак.
Пользование таблицей не вызывает затруднения и РД по задан-
ному ОТШ получается суммированием выбранных РД на целые
сотни, десятки, единицы и десятые доли отшествия.
Если заданная средняя широта лежит между данными в таб-
лице, то сначала получаемые из таблицы РД должны быть про-
интерполированы по широте в отдельности, а затем суммированы.
Так как sec > 1, то разность долгот всегда больше отше-
ствия, о чем следует помнить для контроля.
Пример. Отшествие равно 166 мор. миль к W, ?ш=36° 14' N. Найти
разность долгот.
Решение.
Отшествие Разность долгот
= 36°14' N 100 мор. миль .... 124,0
60 , ............ 74,4
6 „ „ . . . . 7,4
166 мор. миль .... 205',8 к W = 3°25',8 к W
§ 49. ПИСЬМЕННОЕ СЧИСЛЕНИЕ
В зависимости от условий плавания письменное счисление мо-
жет быть простым, составным и сложным. Полученное письмен-
ным счислением место судна свободно от ошибок графического
построения, но ошибки в курсе и в плавании судна, входящие в
вычисления, а также неучтенное влияние течения и дрейфа яв-
ляются источником ошибок в полученном счислимом месте судна,
так же как и при прокладке.
Простое счисление. Если судно перешло из пункта отшествия
в пункт пришествия одним курсом, то расчет координат пункта
пришествия называется простым письменным счис-
лением.
Вычисления могут быть произведены по логарифмам или с
помощью табл. 34 и 35 «Мореходных таблиц» 1943 г.
§ 49]
Письменное счисление
185
Выбор формул для нахождения РД по логарифмам произво-
дится в зависимости от плавания S, средней широты <?т и курса
судна.
Пример. Судно прошло 175,6 мор. мили, ИК 146°; координаты пункта
отшествия ?т -42° 327 N; >4=58° 51' W. Найти ?2 и Х2 пункта при-
шествия.
Решение.
По логарифмам:
РШ = S cos К
S 175,6 ..... 2,2445
Ю(=146° cos . . .9,9186
sin ... . 9,7476
РШ = 145',5 к S РШ. . . 2,1631
ОТШ = 98,2 к Ost ОТШ. 1,9921
sec . 0,1243
W = S sin К
?! == 42°32' N
РШ = 2°25',5к<
?2 = 40° 6',5 N
и РД = W sec ?m
= 58°51' W ,
РД - 2°10',7 к Ost
X2 - 56°40',3W
41°19',2N
РД = 130',7 к Ost РД . 2,1164
По таблицам:
И к -146° S 100 табл. 34 75 0,6 РШ 82,9 62,2 0,5
175J5 145',6 к S
ОТШ РД
табл. 35 90 119,9
8 10,6
9я, = -11°, 3 0,1 0,1
ОТШ Ci = 42°32' N
55,9 РШ = 2°25',6 к S
41,9 --------------------
О’З ?2 = 40° 6',4N
98,1 к Ost
Xi =--= 58c51' W
РД = 2°10',6 к O£t
Z2 - 56 40',4 W
98,1 130',6 к Os\
Если судно в своем плавании пересекает экватор так, что ши-
рота пункта отшествия и пункта пришествия имеет различные
наименования, то для расчета РД не следует пользоваться сред-
ней широтой. В этом случае, если плавание сравнительно неве-
лико, можно прямо принять, что отшествие равно разности дол-
гот, так как вблизи экватора меридианы почти параллельны друг
другу; при большом же плавании следует рассчитать отдельно
разность долгот для нордовой и для зюйдовой широты.
Составное счисление. Если плавание судна между пунктами
отшествия и пришествия совершается несколькими курсами, то
вычисления координат пункта пришествия производятся с о -
ставным счислением (рис. 73).
В составном счислении непосредственно подсчитывается алге-
браическая сумма разностей широт и алгебраическая сумма
отшествий, соответствующих каждому отдельному курсу. Алге-
браическая сумма разностей широт, сделанных разными кур-
сами, носит название генеральной разно ст и ш и р о т4
186
Письменное счисление пути судна
[Гл. XI
и по
а алгебраическая сумма отшествий называется генераль-
ным отшествием.
Широта пункта пришествия равна алгебраической сумме ши-
роты пункта отшествия и генеральной разности широт.
Рассчитав широту пункта пришествия, по средней широте
генеральному отшествию рассчитываем гене-
ральную разность
долгот, алгебраическая
сумма которой с долготой
пункта отшествия даст
долготу пункта прише-
ствия.
С оста вное сч исл ени е,
таким образом, предпола-
гает, что отдельные отше-
ствия сделаны приблизи-
тельно в одной и той же
широте, поэтому разность
долгот может быть рас-
считана по генеральному
отшествию и средней ши-
роте.
Это положение вполне
применимо при плавании
в не слишком больших
широтах, и получающаяся
ошибка даже на больших
переходах не имеет прак-
тического значения.
Курс, рассчитанный по
генеральной разности ши-
рот и генеральному от-
шествию, ведущий непо-
средственно из пункта от-
мазывается генеральным
шествия в пункт пришествия,
курсом, а расстояние по генеральному курсу между пунктами
отшествия и пришествия носит название генерального
плавания.
В зависимости от условий плавания приходится применять
простое или составное счисление. Составное счисление может
быть применено' и в случае плавания при постоянном или при-
ливо-отливном течении. Принимая направление течения за курс,
рассчитываем по известной скорости течения и времени его дей-
ствия на судно величину сноса течением, которую принимаем за
плавание. При эволюциях, когда частые перемены курса судна и
§ W
Письменное счисление
187
обстановка затрудняют ведение точной графической прокладки,
достаточно записать моменты, последовательные компасные
курсы и показания лага в моменты поворотов, чтобы, пользуясь
составным счислением, рассчитать генеральную разность широт и
генеральную разность долгот и, следовательно, зная начальную
точку эволюций, получить счислимые координаты точки, в кото-
рой эволюции закончены.
Иногда при отрыве от берега и уходе в открытое море для
большей точности счисления принимают за координаты пункта
отшествия широту и долготу какого-либо маяка или другого при-
метного предмета, координаты которого надежно' определены и
известны. Тогда, взяв обратный пеленг этого маяка за курс, рас-
стояние до него — за плавание, начинают вести письменное счис-
ление непосредственно от маяка.
Для удобства вычислительной работы при ведении составного
счисления необходимо всегда все записи располагать по опреде-
ленной схеме, как указано в приведенных ниже примерах.
Пример /. Судно в 10 час. было в (fc = 540 36' N и \,= 18°57' Ost,
откуда шло переменными курсами, указанными в таблице, до 16 ч. 30 м.
Определить широту и долготу пункта пришествия.
Решение.
Момен- ты кк Поправ- ка ком- паса ИК Пла- вание РШ ОТШ
к N к S к Ost к W
1600 15° —2° 13° 46 44,8 10,4
1305 278 —4 274 16 1,1 — — 16,0
1410 235 —7 228 23 — 15,4 — 17,1
1542 150 —3 147 12 — 10,1 6,5 —
45,9 25,5 16,9 33,1
25,5 — — 16,9
Ген. РШ 20/4 к N Ген. ОТШ 16',2 к W
?1 = 54°36' N ОТШ 10 . .РД = 17,3
Ген. РШ = 20',4 kN 6 . . . . 10,4
ср2 == 54°56',4 N 0,2 .. . 0,3
<rm = 54°46' • 16^2 28',0 к W
Xj = 18°57' Ost
Ген. РД = 28' к W
Х2 = 18°29' Ost
Пример 2. В 8 час. счислимые координаты судна ^=50° 14' N,
Г-= 16° 11' W; курс 140°; ход 15 узлов. В 8 ч. 40 м. курс был изменен на
259°; в 9 ч. 56 м,—на 315°; в 10 ч. 32 м.—на 26°, а в 11 ч. 44 м,—на 109°.
За время перехода средние направления и скорости течения за час были
188
Письменное счисление пути судна
[Гл. XI
следующие: с 8 до 9 час. направление течения на 323°, скорость 2 узла; с 9
до 10 час.— 334°, 2,3 узла; с 10 до 11 час.— 340°, 2,5 узла; с 11 до 12 час.—
324°, 1,6 узла. Найти координаты судна в полдень.
Решение.
Момент . курс к S ЕГ о; S X (U авка ica HI4HF X X Разность широт Отшествие
Комп S га о О Сч д Й 2 О о С х Истш курс 3 га С к N к S к Ost к W
0800—0840 149° —4° —17° —21е 128° 10 6,7 7,4
0840—0956 259 +4 -17 —13 246 19 — 7,7 — 17,4
0956—1032 315 +4 —17 —13 302 9 4,8 — — 7,6
1032—1144 26 + 1 —17 —16 10 18 17,7 — 3,1 —
П44—1200 109 2 — 17 -19 90 4 — — 4,0 —
0800—0900 течен. 323 2 1,6 — — 1,2
0900—1000 ' » 334 2,3 2,1 t — — 1,0
1000—1100 » 340 2,5 2,3 — — 0,9
1100—1200 324 1,6 1,3 — — 0,9
29,8 14,4 14,5 29,0
14,4 14,5
Ген. РШ 15',4 к N; Ген. ОТШ 14,5 к W
= 50°14'N
Ген. РШ = 15',4 к N
?2 = 50°29',4N
= 50°22'
Xi - 16°llzW
Ген. РД = 22',8 к W
Х2 = 16°33',8W
ОТШ 10. . РД = 15,7
4 . . . 6,3
0,5 . . 0,8
14,5 22',8kW
Рассчитаем теперь генеральный курс и генеральное плавание для по-
следнего примера. По табл. 34 «Мореходных таблиц» 1943 г. находим две
наиболее близкие к генеральной разности широт и генеральному отшествию
цифры: РШ 15,36; ОТШ 14,32. Этим цифрам соответствуют ИК = 43° и пла-
вание 5 = 21 мор. мили. Следовательно, приближенно, генеральный курс
будет 317°, а генеральное плавание 21 мор. миля. Точнее и проще, чтобы
избегнуть интерполирования, рассчитать генеральный курс и генеральное пла-
вание по логарифмам, пользуясь формулами
ОТШ
tg к - н S = РШ sec К.
РШ
Тогда
Ген. РШ 15',4 . . . 1,1875 1,1875
Ген. ОТШ 14,5 . . . .1,1614 sec К . . . 0,1379
tgK . . .9,9739 5. . .1,3254
Генеральный курс К = 43°,3 NW — 316°,7, 5 = 21,1 мор. мили.
Если при ведении письменного счисления для получения боль-
шей точности необходимо учесть циркуляцию судца, то, пользуясь
§ 49}
Письменное счисление
189
таблицей циркуляции, рассчитывают промежуточные курсы и
промежуточное плавание и вводят их в таблицу для расчета Ген.
РШ и Ген. ОТШ, Так как промежуточный курс равен среднему
из предыдущего и последующего курсов, то в таблице удобно
основные курсы записывать через одну строчку, в которую затем
и вписывать промежуточный курс. Плавание по основным курсам
в этом случае должно считаться от момента прихода на новый
курс до момента начала циркуляции; плавание на промежуточ-
ном курсе выбирается из таблицы циркуляции в графе d.
Пример 3. ?!— 54°18',8 N; 18°25',6 W; судно шло переменными
курсами, как указано в таблице. Найти координаты пункта пришествия ?2 и
учитывая циркуляцию; при поворотах руль клали на 20°.
Решение.
ИК S РШ ОТШ
к N к S к Ost к Wst
40°, 5 62 47,1 40,3
81 0,3 0,0 — 0,3 —
121,5 53,5 — 27,7 45,2 —
173,8 0,4 — 0,4 0,0 —
226 7,2 — 5,0 — 5,2
258 0,3 — 0,1 — 0,3
290 23,8 8,1 — — 22,4
55,2 33,2 85,8 27,9
33,2 27,9
Ген. РШ 22',0 Ген. ОТШ 57,9
= 54°18',8 N Aj = 18°25'6 W ОТШ РД
Ген. РЦ1 = 22',0 к N Гец. РД= 1°39'7 к Ost 50 86,1
ср2 = 54°40',8 N Х2 = 16°45'9 W 7 12,0
ут = 54° 5' 0,9 1,6
57,9 99'7 к Ost
При составлении схемы для письменного счисления число
граф может меняться в зависимости от того, какие данные жела-
тельно поместить в схему. Но правые шесть граф, включающие
истинный курс или путь, плавание, разности широт и разности
долгот, должны быть обязательны во всякой схеме. Вычисления
следует вести с точностью до О', 1, помня, что лишние цифры яв-
ляются источником лишних ошибок. В табл. 34 и 35 МТ-43, РШ,
ОТШ и РД даны до О',01, чтобы приведенные в них величины
могли быть увеличены в 10 раз, сохраняя точность вычисления
0,1. Чтобы избежать возможных ошибок при записях РШ и ОТШ
190 Письменное счисление пути судна [Гл. XI
в свои графы, после расчета ИК или ПУ следует в соответствую-
щих графах прочеркнуть остающиеся свободными строчки.
Сложное счисление. В составном счислении мы принимали,
что все отшествия сделаны в одной и той же средней широте
На самом деле РД, рассчитанная по двум равным отшествиям,
но сделанным в разных широтах, не будет одна и та же, так как
с изменением широты будет изменяться и разность долгот, соот-
ветствующая'одному и тому же отшествию. Этот допуск в со-
ставном счислении дает заметную ошибку при плавании в высо-
ких широтах, когда ?>60°, и при больших переходах. Для избе-
жания этой ошибки при плавании в полярных бассейнах и при
больших переходах в широтах выше 60° можно рассчитать от-
дельно разности долгот, сделанные на каждом курсе, алгебраи-
ческая сумма которых даст генеральную разность долгот. Счис-
ление, в котором разность долгот вычисляется отдельно для
каждого курса, а долгота пункта пришествия получается как
алгебраическая сумма долготы пункта отшествия и генеральной
разности долгот, получило название сложного счисления.
Для расчета РД необходимо знать широты точек поворота,
чтобы получить среднюю широту. Отсюда вытекает, что сложное
счисление отличается от простого счисления только тем, что не
определяют долготы пункта пришествия, которым является точка
поворота на новый курс, а довольствуются расчетом разностей
долгот, чтобы затем их просуммировать. Такой метод работы
не дает выигрыша ни в рационализации вычислений, ни в точ-
ности получаемого результата. Поэтому более правильно сложное
счисление заменить простым счислением, рассчитывая каждый
раз координаты точки поворота.
§ 50. РАЗЛИЧНЫЕ СЛУЧАИ ПРИМЕНЕНИЯ ПИСЬМЕННОГО
СЧИСЛЕНИЯ
Расчет курса и плавания по локсодромии. По заданным гео-
графическим координатам пункта отшествия и пункта при-
шествия ^2 пользуясь формулами письменного счисления,
можно рассчитать курс и плавание для перехода из одной задан-
ной точки в другую по локсодромии.
Формулы (78) и (83) дают
,;-А' s= ’Ц7с',’ссА'
Для расчета отшествия W по известной разности долгот слу-
жат точные формулы
U7= РД cos ф„ = РД —
,п РМЧ
Различные случаи применения письменного счисления
191
и приближенная
№=РД cos
Последней формулой, как приближенной, не следует пользо-
ваться при большой разности широт и в высоких широтах, так
как ошибка в плавании в этом случае может достигать значи-
тельной величины. В этом случае вычисление нужно вести, поль-
зуясь РМЧ,
Пример. Рассчитать курс и плавание по локсодромии от острова Фарал-
лон у входа в Сан-Франциско = 37°42' N и 123°4' W, до входа в за-
лив Токио <р2 = 34°50' N и Х2=139°53' Ost.
Решение.
<р2 = 34°50'N Р2 = 2219,0 /,2 = 139°53'СМ
<?t = 37°42'N £>i = 2431,4 = 123° 4'W
РШ = 2°52'к S РМЧ= 212,4 РД = 97° 3' к W
= 172' к S = 5823' к W
РД = 5823 . . . 3,7651 РШ = 172. . . . 2,2355
РМЧ = 212,4. . .2,3271 sec К............ 1,4383
tg К.............. 1,4380 S............. 3,6738
К = 87°,9 SW S = 4719 мор. миль.
К = 267°,9
Расчет траверзного расстояния. Так как табл. 34 МТ-43 ре-
шает прямоугольный треугольник, то она может быть использо-
вана для расчета траверзного расстояния и расстояния до тра-
Рис. 74.
верза, если известно расстояние до предмета и курсовой угол на
него. В этом случае, принимая расстояние до предмета за пла-
вание, а курсовой угол — за курс, в графе РШ найдем расстоя-
ние до траверза, а в графе ОТШ — траверзное расстояние
(рис. 74).
192
Письменное счисление пути судна
[Гл. XI
ЯД = 69°, 8Л = 166 миль, РШ = $д',5 к
20/V = 35°10'N = 35°,7
РШ 59',5 к N ОТШ 100 . . РД 123,2
21/V = 36° 9',5 N 59- '
По этой же таблице может быть рассчитан курс, которым
надо править, чтобы пройти предмет в заданном траверзном рас-
стоянии.
Пример. Судно идет ПК = 290°. С высоты глаза 12 м, на КУ = 30° л/б
открылся маяк, высота огня которого 27,5 м. Какой курс следует держать,
чтобы пройти маяк в траверзном расстоянии, равном 7 милям?
Решение. Дальность видимости огня 10,9 + 7,2 = 18,1 мили.
В табл. 34 по плаванию 18,1 мили и заданному траверзному расстоянию
7 миль, которое принимаем за ОТШ, находим курс 23°. Следовательно, маяк
надо привести на КУ, равный 23° л/б, т. е. изменить курс влево на 7°.
Ответ. ИК = 290° — 7° = 283°. Расстояние до траверза равно 16,7 мили.
Расчет сноса. При плавании в открытом море и в океане рас-
чет сноса судна может быть определен, пользуясь письменным
счислением, из сопоставления координат счислимого и обсерво-
ванного мест.
Пример. В полдень 20 мая по обсервации <ро = 35°1О' N; Хо= 134°Г W.
В полдень 21 мая то = 36°3< N; Хо= 131°14' W. За истекшие сутки судно
шло ИК — 69°, плавание по лагу S2 = 166 миль.
а) Найти величину и направление сноса за сутки и, полагая, что снос
вызван течением, рассчитать направление и скорость течения.
б) Найти генеральный курс и генеральное плавание за сутки.
Решение. Рассчитываем счислимые координаты судна на полдень 21 мая.
N, ОТШ = 155 к Ost.
20 V Хо =. 134° 1' W
РД = 3H'KQst
21/V Хс = 130°50' W
35° 3',0 N ---------------------------- Хо~ 13Г14'W
РШ = 6',5 к S _1®,, 191',Oi<Ost рд= 24, k W
° ’* ОТШ = 19',4 к W
По табл. 34 снос на 251°,5 на 20,5 миль; скорость течения 0,85 узла.
21/V у0 = 36° 3' N Хо = 131’14' W = 35°,6
20/V = 35°10' N Хо = 134° 1' W РД = 123 ОТШ = 100
РШ = 53’ к N РД= 2° 47' к Ost З&Я „
= 167' к Ost _______7’-- • ____
167 .... 135,8
Для входа в табл. 34 берем половинные значения РШ и ОТШ, получаем
Ген. курс 68°,7; ген. плавание 146 миль.
§ 51. ИССЛЕДОВАНИЕ ФОРМУЛ ПИСЬМЕННОГО СЧИСЛЕНИЯ
При переходе из точки А («р в точку В (<?2, Х2) на рас-
стояние S, курсом К (рис. 75) точность рассчитанных координат
точки В будет зависеть от ошибок в РШ и в ОТШ, которые, в
свою очередь, являются функциями курса К и плавания S судна.
§ 51]
Исследование формул письменного счисления
193
Допустим, что вследствие ошибок в плавании AS и курсе АЛ
судно пришло в точку С, координаты которой ?2 и Х2. Тогда,
обозначая ошибку в РШ через Аф, а в ОТШ через A IF, получим
?2 = ?! + Д <?);
^ = *i + (W4-A^)sec<pm.
Для определения ошибок Аср и &W продифференцируем основ-
ные формулы письменного счисления по переменным S и К. Пе-
реходя к конечным приращениям, получим
А? = AS cos к - S sin к Ы<\ (84)
A W= AS sin S cos А АЛ; (85)
A k = (AS sin A + 5 cos К A A) sec ут. (86)
Формулы (84) и (86) показывают, что ошибка в вычисленной
широте пункта пришествия ?2 зависит от ошибок в курсе и пла-
вании судна, а ошибка в долготе кроме того, зависит и от
средней широты ?т, в которой судно плавает.
Если сделать предположение относительно ошибок АЛ и AS,
то по формулам (84) и (85) можно подсчитать вероятную точ-
ность, с которой получены координаты пункта пришествия ?2 и к2.
Пример. Судно прошло 100 миль курсом 120°, ошибка в учете плавания
судна +2%, возможная ошибка в курсе Д/С+10. С такой точностью опре-
делятся координаты пункта пришествия и Ч, если = 50° N.
К. С. Ухов
194
Письменное счисление пути судна
[Гл. XI
Решение,
Мг = ± 2 cos 120° + (100*0,0175* sin 120°) = ± 2*0,5 ± 1,75*0,866 - ± 2',5;
ДХ2 = ± 2 sin 120° ± (100* 0,0175* cos 120°) sec50° = ( ± 1,732 ± 0,875) 1,56 = ± 4', 1.
Линейная величина ошибки выразится вектором ВС = р, ве-
личина которого легко определяется из рисунка:
р =]Г д?3 + д W2 = У Д52 + 53Д№,
и мы получим формулу, аналогичную формуле (62). Приняв те же
ошибки ХК и ДЗ, как и в примере, получим
р —1^4-^- (100)2 • (0,0175)2 = 2,7 мор. мили.
Направление вектора ошибки р зависит от величины оши-
бок и XS и от их знаков. Обозначим угол АСВ, составляе-
мый вектором р с вектором .линии пути АС через а. Вследствие
малости угла ДК можно считать, что вектор р составляет тот
же угол а с продолжением вектора линии курса АВ,
Опишем из точки А дугу BE радиусом 3 и примем, вследствие
малости угла дугу BE за прямую, перпендикулярную линии
пути АС. По условию АЕ = АВ = S, а ЕС = XS. Из прямоуголь-
ных треугольников АЕВ и ВЕС имеем
BE = StgXK = AStga,
откуда
Полагая опять, что S = 100 мор. миль, ДЗ = + 2 мор. мили,
Д/<=+10, получим
tg а = 100‘2^-= 0,875
и а = 41°,2, а четверть, в которой лежит этот угол, будет зави-
сеть от знаков А К и ДЗ.
Для перехода от отшествия к разности долгот были выведены
три формулы:
РД = РМЧ^К; = РД = IT sec
Первые две формулы точные, а третья является приближен-
ной. В ней, вместо среднего из суммы секансов широт, взяли се-
канс средней широты. Но так как цредняя широта легко рас-
считывается по известным широтам пунктов отшествия и при-
шествия, то она и применяется для расчета разности долгот при
$ 51] Исследование формул письменного счисления 195
плавании до нескольких сот миль и не в слишком больших ши-
ротах. По табл. 35 МТ-43 можно получать разность долгот с
большей точностью, если входить в нее с
Для перехода от средней широты к промежуточной ши-
роте можно вычислить поправку х. Обозначим
'?п = Чт-\-Х,
тогда
х = & —= arc sec^47 — . (87)
п im РШ 2
По этой последней формуле вычислена табл. 13, в которой по
аргументам и РШ дана поправка х для эллипсоида Кра-
совского.
Если ограничиться применением средней широты то
ошибка в вычисленной разности долгот, которую обозначим С,
может быть подсчитана так:
t = W (sec фп—sec = W (—--------—!—.
v n * l COS COS /
Так как ?n = ?OT4- x, то преобразуем величину, стоящую в
скобках, следующим образом:
1 1 = cos ym — cos (yw + х) =
COS (у + х) cos <fm cos (?m x). cos
2 sin (<?OT + 41 sin 4 tg sln x + 2 sin2 4
\ 2 / z 2
cos (ym + x) cos ym cos (ym -b x)
Следовательно,
tg?mSinx + 2sin2-^-
C = W------------------- . (88)
COS (ym -I- x)
Обозначим
tg sin x +2 sin2 4
----------------- = N,
cos + x)
тогда
[ = NW.
Числовое значение коэффициента 100 N дано в табл. 14 по ар-
гументам <?гп и РШ,
13*
Таблица 13
Сред- няя широта Разности широт — РШ Сред- няя широта
2° 4° 6° 8° 10° 11° 12° 13° 14° 15° 16° 17° 18° 19° 20°
10° —143' —139' —131' —122' —ПО' —103' —96' —87' —80' —70' —62' —52' —41' —31' —20' 10°
15 —83 —81 —77 —71 —63 —59 —54 —49 —44 —38 —32 -26 —19 —12 — 5 15
20 —57 —54 —52 —47 —42 —38 —34 —30 —26 —21 —16 —12 - 6 — 0 + 6 20
25 —40 —39 —36 —32 -27 —24 —21 —18 —14 —10 — 6 — 1 + 4 + 9 + 14 25
30 —30 —28 —26 —22 —17 —14 —12 — 8 — 5 — 1 + з + 7 + 12 +16 +21 30
35 —22 —20 —18 —14 —10 — 7 — 4 — 1 + 2 + 6 +10 + 14 +19 +23 +28 35
40 -16 —14 —12 — 8 — 4 — 1 + 2 + 5 + 9 +12 +16 +20 +25 +30 +35 40
45 —11 —10 — 7 — 3 + 2 + 4 + 8 +П + 14 +18 +22 +27 +31 +36 +42 45
50 — 8 — 6 — 3 + 1 + 6 + 9 +12 +16 +20 +24 +29 +33 +38 +44 +49 50
55 — 5 — 3 0 + 5 +ю + 14 + 17 +21 +26 +30 +35 +40 +46 +52 +58 55
60 — 3 — 0 + 3 + 8 +14 +18 +22 +27 +32 +37 +43 +49 +55 +62 +69 60
65 — 1 + 2 + 6 +12 +19 +24 +28 +34 +40 +46 +53 +60 +68 +76 +85 65
70 0 + з + 8 +16 +25 +31 +37 +44 +51 +59 +67 +77 +87 +97 +109 70
75 + 1 + 5 +12 +22 +34 +42 +50 +60 +70 +81 +94 +107 +122 +138 +155 75
80 + 2 + 8 +18 +34 +54 +66 +81 +97 +116 +138 +163 +194 +234 +289 — 80
Письменное счисление пути судна [Гл. XI
$ 51] Исследование формул письменного счисления 197
Таблица 14
Средняя широта Разность широт — РШ Средняя широта Чт
2° 6° 10° 12°
10° —О',65 — О',60 — О',52 — О',46 10°
20 —0 ,62 — 0 ,57 — 0 ,46 — 0 ,38 20
30 • —0 ,57 — 0 ,40 — 0 ,33 — 0 ,23 30
40 —0 ,51 — 0 ,38 — 0 ,13 + 0 ,06 40
50 —0 ,43 — 0 ,16 + 0 ,03 + 0 ,65 50
60 —0 ,30 + 0 ,30 + 1 ,46 + 2 ,25 60
70 0 ,0 + з ,25 + 5 ,97 + 8 ,23 70
80 + 1 ,91 +23 ,84 +56 ,40 +89 ,05 80
Продолжение
Средняя широта 7 m Разность широт — РШ Средняя широта
14° 16° 18° 20°
10° — О',39 - О',31 — О',21 — О',10 10°
20 — 0 ,29 - - 0 ,18 — 0 ,08 + 0 ,09 20
30 — 0 ,08 + 0 ,06 + 0 ,23 + 0 ,41 30
40 + 0 ,29 + 0 ,51 + 0 ,80 + 1 ,13 40
50 + 1 ,09 + 1 ,59 + 2 ,08 + 2 ,69 . 50
60 + 3 ,29 + 4 ,45 + 5 ,73 + 7 ,25 60
70 + 12 ,46 + 16 ,61 + 21 ,96 +28 ,07 70
80 +136 ,8 +213 ,0 +365 ,2 оо 80
Таблица дает ошибку С в вычисленной по приближенной,
формуле долготе при отшествий W, равном 100 милям.
Для приближенных соображений можно пренебречь малой ве-
личиной 2 sin2^- и тогда получим приближенно
с= U7tg?msinz sec(cpm + x).
(89)
РАЗДЕЛ ЧЕТВЕРТЫЙ
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА В МОРЕ
ПО НАБЛЮДЕНИЯМ БЕРЕГОВЫХ ПРЕДМЕТОВ
ГЛАВА XII
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА В МОРЕ
ПО ИЗМЕРЕННЫМ УГЛАМ И ПО НАБЛЮДЕННЫМ
ПЕЛЕНГАМ
§ 52. ОБЩЕЕ ПОНЯТИЕ О ЛИНИЯХ ПОЛОЖЕНИЯ
Ошибка в поправках, принятых для исправления показаний
основных приборов судовождения — компасам лага; недостаточно
точное знание элементов течения, учтенного при прокладке; за-
труднения в определении величины дрейфа — все эти причины
понижают точность получаемого по прокладке счислимого места
судна.
При надежно определенной поправке компаса, хорошо выве-
ренном лаге, отсутствии течения или при сравнительно точном
знании его элементов, а также благоприятной погоде, исключаю-
щей дрейф, счислимое место судна будет получаться с достаточ-
ной для практики точностью в течение некоторого промежутка
времени. Но и при этих благоприятных условиях плавания даже
небольшие ошибки, накопляясь с течением времени, понижают
достоверность счислимого места судна. При этом ошибка в счис-
лимом месте судна от неточного знания поправок компаса и лага
возрастает с увеличением пройденного судном расстояния, т. е.
находится в прямой зависимости от величины его -плавания.
Ошибка же в счислимом месте судна только от приближенного
знания элементов течения и величины дрейфа зависит от времени
пребывания судна в море.
При плавании в более трудной обстановке, наличии перемен-
ных ветровых течений, свежей погоды, затрудняющей судну ле-
жание на заданном курсе, и значительном дрейфе точность счис-
лимого места судна значительно понижается. Даже хорошо изу-
ченные приливо-отливные течения под влиянием ветров могут
значительно изменять свое направление и скорость. Постоянные
течения также подвергаются значительным изменениям в зави-
симости от различных гидрометеорологических факторов. Так,
Общее понятие о линиях положения
199
например, в некоторых районах существуют течения, меняющие
свою скорость от 10 до 50 миль в сутки.
Каждый мореплаватель для безопасности судна всегда* дол-
жен, на основании наблюдений над условиями плавания, оцени-
вать степень достоверности своего счислимого места. Правиль-
ность такой оценки зависит от искусства и опытности судово-
дителя.
Навигационная безопасность судна, особенно при плавании
вблизи берегов, в стесненных водах, при подходе с океана, зави-
сит прежде всего от точности знания своего места. Поэтому,
вследствие недостаточной благонадежности счислимого места, мо-
реплаватель никогда не должен упускать случая проверить свое
место по непосредственным наблюдениям, позволяющим опреде-
лить место судна независимо от счисления.
При плавании в океане или в открытом море вдали от берегов
место судна может быть определено по наблюдениям небесных
светил; теоретические основания и методы определения места
судна по наблюдениям небесных светил излагаются в курсах мо-
реходной астрономии.
Плавая вблизи берегов, определяют направления на какие-
либо береговые предметы, положение которых точно известно,
т. е. берут их пеленги; измеряют углы между ними или опреде-
ляют расстояния до таких предметов. Применение современных
радиотехнических средств для судовождения позволяет произво-
дить подобные измерения на значительном расстоянии от берега
и вне зависимости от видимости самих наблюдаемых предметов.
Для производства -наблюдений служит самая разнообразная
аппаратура. Определение направления, взятие пеленга, произво-
дится с помощью компаса, для измерения углов служит секстан,
расстояния могут быть определены по угловой высоте предмета
при помощи секстана или дальномером. Судовой радиопеленгатор
позволяет определять пеленги на любую работающую радиостан-
цию. Судовые радиостанции дают возможность определять пе-
ленги на специальные радиомаячные установки, работающие в
определенном режиме. Особые радиоустановки — радиодально-
меры — позволяют определять расстояния до специальных радио-
установок, изменение расстояний или разность расстояний. Для
определения направлений на отправитель подводных звуковых
сигналов и расстояния до него применяются гидрофоны.
Действия, связанные с какими-либо наблюдениями береговых
предметов для определения места судна, носят название нави-
гационного определения места судна, а получен-
ное по результатам наблюдений место судна называется о б с е р -
вов а иным местом судна.
Обсервованное место судна, полученное по наблюдениям, не
связанным со счислением пути судна, исключает все ошибки
200
Определение места судна по углам и пеленгам
[Гл. XU
счисления, накопившиеся с течением времени от ошибок в по-
правках компаса и лага, от влияния течения, ветра и волны. Об-
сервованное место судна берется за исходное место для дальней-
шего ведения прокладки. Разность между обсервованным и
счислимым местами судна носит название общего сноса,
который определяется направлением со счислимого места судна
на обсервованное и расстоянием между этими двумя точками.
Всякое наблюдение береговых предметов, взятие пеленга, из-,
мерение угла или расстояния дает изолинию какого-либо опреде-
ленного вида, отвечающую результатам произведенного наблю-
дения. Небольшой участок изображения изолинии на карте
обычно принимаемый за отрезок прямой линии, называется л и -
нией положения.
Линия положения дает геометрическое место точек, отвечаю-
щих результатам данного наблюдения.
Понятия «изолиния» и «линия положения» нередко отожест-
вляют, и для сокращения письма мы также не будем делать ме-
жду ними различия.
Общую теорию линий положения дал проф. В. В. Каврайский
в своей работе «Обобщенный способ линий положения».1 Здесь
мы остановимся только на общем понятии о линиях положения,
получаемых при навигационных определениях места судна.
Истинный пеленг любого предмета как угол между плоско-
стью истинного меридиана и вертикальной плоскостью, проходя-
щей через глаз наблюдателя и пеленгуемый предмет, представится
на карте как угол между изображениями меридиана и дуги боль-
шого круга, соединяющий место наблюдателя с пеленгуемым
предметом; дуга большого круга получается от сечения поверх-
ности сферы вертикальной плоскостью.
• Таким образом, изолиния на земной поверхности, соответ-
ствующая постоянному пеленгу, должна представиться в виде
кривой, обладающей тем свойством, что если соединить любую
точку ее с наблюденным предметом дугой большого круга, то
последняя в каждой данной точке составит с меридианом этой
точки угол, равный истинному пеленгу.
На меркаторской проекции, строго говоря, линия положения,
полученная по пеленгу (линия равных пеленгов), изобразится
кривой линией, проходящей приблизительно симметрично дуге
большого круга по другую сторону от локсодромии. Однако, при-
нимая во внимание незначительную кривизну этой линии и огра-
ниченные расстояния до пеленгуемых предметов, при визуальном
пеленговании вполне можно, в большинстве случаев с достаточ-
ной на практике точностью, заменить эту кривую линию прямой,
1 Записки по гидрографии 1941/1943, № 2. Краткое изложение способа
приведено в приложении 1.
# 53]
Определение места судна по углам
201
проходящей через пеленгуемый предмет под углом к меридиану,
равным наблюденному истинному пеленгу.
В этом случае линия пеленга, принимаемая за линию положе-
ния, представит на меркаторской проекции отрезок локсодромии.
На этом основании пеленг, прокладываемый на меркаторской
карте, носит название локсодромического пеленга.
При значительных расстояниях до пеленгуемого предмета и
в больших широтах при прокладке локсодромического пеленга
будет допущена ошибка, имеющая существенное значение. В этих
случаях приходится вводить специальную поправку, которая
имеет большое значение в радиопеленговании на больших ди-
станциях. Этот вопрос будет разобран подробно далее.
Если для определения места судна измерен угол между двумя
какими-либо береговыми предметами, то линией положения будет
дуга окружности, на которой лежит вершина измеренного угла.
Эта линия положения может быть на меркаторской карте пред-
ставлена дугой окружности без заметных ошибок.
Аналогично, при измерении расстояния для определения места
судна линия положения будет дугой окружности, описанной ра-
диусом, равным измеренному расстоянию, принимая предмет, до
которого измерялось расстояние, за центр. На меркаторской карте
эта линия положения также изобразится кругом без существен-
ных погрешностей, принимая во внимание, что последние наблю-
дения производятся на ограниченных расстояниях от наблюдае-
мых предметов.
Одна линия положения не дает обсервованного места судна, и
последнее получается как точка пересечения двух линий положе-
ний. В некоторых случаях, однако, одна линия положения служит
для контроля и частичной поправки прокладки.
§ 53. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО УГЛАМ
Два горизонтальных угла, измеренных одновременно между
тремя или четырьмя предметами, позволяют определить место
судна наиболее точным из навигационных способов. В этом слу-
чае получаются две изолинии в виде двух окружностей, вмещаю-
щих измеренные углы, и обсервованное место судна будет в точке
пересечения этих окружностей. Главное преимущество этого спо-
соба определения места судна заключается в том, что углы могут
быть измерены секстаном с точностью до одной дуговой минуты.
Такая точность в настоящее время не может быть получена по
компасу. Измерение углов может быть произведено с любого
места на судне, что увеличивает выбор предметов для наблю-
дений.
В то же время определение по двум углам имеет свои недо-
статки. Для применения этого способа необходимо иметь в виду
202
Определение места судна по углам и пеленгам
[Гл. XII
судна три предмета, расположенных приблизительно в одной го-
ризонтальной плоскости. Ошибка в измерении углов, ошибка в
опознании выбранного для наблюдений предмета, недостаточно
точное место предметов на карте могут быть обнаружены только
повторными наблюдениями; кроме того, этот способ требует не-
сколько более времени, чем определение по пеленгам.
Рис. 76.
Во всех случаях, когда требуется наиболее точное определе-
ние места судна и имеется в пределах его видимости не менее
трех опорных пунктов, как-то больших маяков, 'триангуляцион-
ных знаков, нанесенных на карту с наибольшей точностью, сле-
дует прибегать к определению по двум углам. В районах же, где
карты недостаточно точны, следует предпочесть определение по
трем пеленгам, так как в этом случае неправильное положение
предметов на карте будет обнаружено сразу получившимся боль-
шим треугольником погрешности (см. § 55).
Пусть в виду судна имеются три предмета А, В и С (рис. 76),
лежащих приблизительно в одной горизонтальной плоскости с
глазом наблюдателя. Между предметами А и В измерен гори-
зонтальный угол а, а между предметами В и С — угол ₽; изме-
рение углов произведено одновременно. Окружность, проходящая
через точки А и В и вмещающая угол а, даст одну линию поло-
жения, а окружность, проходящая через точки В и С и вмещаю-
щая угол 3, — вторую линию положения. Точка пересечения этих
окружностей F представит обсервованное место судна. Разберем
методы прокладки линий положения на карте.
Определение места судна по углам
203
Графическое построение. 1. Для отыскания центров и радиу-
сов окружностей, вмещающих углы а и восстановим перпен-
дикуляры MOi и NO2 из середин хорд АВ и ВС и проведем ли-
нии АО} и СО2, составляющие соответственно углы 90°—а и
3 — 90° с хордами АВ и ВС. Если углы аир острые, то их до-
полнения до 90° откладываются от хорд АВ и ВС в сторону
судна; если угол а или р больше 90°, то с соответствующей
хордой строится угол а — 90° или Р — 90° в сторону от судна;
в ту же сторону проводится и перпендикуляр.
Пересечение линий AOi с MOi и СО2 с NO2 дает центры ок-
ружностей, представляющих линии положения. Любой угол, опи-
рающийся на хорду АВ и имеющий вершину на дуге окружно-
сти AFB, будет равен углу а, а угол, опирающийся на хорду ВС
и имеющий вершину на окружности BFC, будет равен углу Р-
Следовательно, два одновременно измеренных угла аир дол-
жны иметь свои вершины в общей точке F, в точке пересечения
окружностей.
Так как обсервованное место получается как точка пересече-
ния двух окружностей, то чем ближе это пересечение к 90°, тем
точнее получится искомая точка. Если обе окружности пересека-
ются под острым углом и есть сомнение в определении точки F,
то для увеличения точности построения можно опустить перпен-
дикуляр из точки В на линию центров OiO2 и отложить на про-
должении его отрезок KF = КВ. Полученная точка F должна
совпасть с точкой пересечения окружностей. При небольших на-
блюденных углах аир углы пересечения радиусов AOi и СО2
с перпендикулярами МО\ и NO2 будут также малы и центры ок-
ружностей будут плохо определяться. В этом случае можно по-
строить при точке В углы 90° — аир — 90° и провести радиусы
ВО\ и ВО2у которые пересекаются с радиусами АО\ и СО2 под
углами вдвое большими измеренных углов аир. Из рисунка
видно, что центры Oi и О2 могут быть также получены, если рас-
считать длину перпендикуляров МО\ и NO2 по формулам
MOi = ^Ctga и NO. = ctg ₽.
2. Если один из береговых предметов значительно удален и
графическое построение затруднено или центр окружности выхо-
дит за пределы карты, то следующее построение позволяет полу-
чить графически обсервованное место как точку пересечения
круга с прямой. Для этого построим окружность ABFN (рис. 77)
для двух более близко лежащих точек, вмещающую угол а. При
центре этой окружности построим угол BON = 2$ и через полу-
ченную вспомогательную точку N проведем црямую NFC по на-
правлению на отдаленный предмет С. Точка F пересечения ок-
ружности с прямой NC даст искомое обсервованное место судна.
204
Определение места судна по углам и пеленгам
[Гл. ХП
Действительно
Z_BFN = | (360°- 28) = 180°-р = 180°- Z ВВС,
откуда
Z BFC = р.
Указанное построение позволяет определить точку F с боль-
шой точностью; если же прямая NFC пересекает окружность под
очень острым углом, то можно опустить перпендикуляр ОК на
прямую NF и отложить на ней расстояние KF =KN, что сделает
построение более точным.
3. Обсервованное место судна можно найти графически, по-
строив у среднего предмета В углы 90° — а и 90° — ₽ при ост-
рых углах аир или а — 90° и р — 90°, если углы аир ту-
пые, с хордами АВ и ВС, а при крайних предметах А и С восста-
новить перпендикуляры к хордам АВ и ВС (рис. 78). Точки Si и
S2 пересечения перпендикуляров со сторонами построенных углов
лежат на окружностях, вмещающих измеренные углы а и
р, a BSi и BS2 будут диаметрами этих окружностей.
Соединим точки Si и S2 прямой линией и опустим на нее пер-
пендикуляр от места среднего предмета В. Точка F пересечения
перпендикуляра BF с прямой S[S2 будет обсервованным местом
судна.
Использование протрактора или кальки. На практике в боль-
шинстве случаев можно не делать указанного построения, а поль-
зоваться для нахождения обсервованного места протрактором.
Этот прибор состоит из круга и трех линеек, средняя из которых
§ 53}
Определение места судна по углам
205
неподвижна, а две крайних могут быть установлены по отноше-
нию к средней линейке на измеренные углы аир; срезы линеек
пересекаются в центре делений круга. Прибор при помощи лимба
и верньера или барабана позволяет устанавливать линейки на
углы с точностью отсчета Г.
Поставив обе линейки на измеренные углы аир так, чтобы
левый угол на протракторе соответствовал левому измеренному
углу, кладут протрактор на карту и, совместив две линейки с на-
Рис. 78.
несенными на карте предметами, двигают его по кривым линиям,
добиваясь совпадения третьей линейки с третьим предметом.
Когда все три линейки пройдут через три предмета, между ко-
торыми измерялись углы, то центр круга протрактора, который
является общей вершиной углов а и {3, укажет искомое об сер-
вованное место судна. В центре протрактора сделано отверстие,
через которое можно отметить карандашом на карте обсервован-
ное место судна.
Протрактор может быть заменен куском прозрачной бумаги
или кальки, на котором при произвольно проведенной прямой ли-
нии строят при какой-либо ее точке левый и правый измеренные
углы аир. Наложив кусок прозрачной бумаги с нанесенными
на нем углами так же, как и протрактор, на карту, добиваются,
чтобы все три проведенные на бумаге линии прошли через соот-
ветствующие предметы. Даже при небольшой практике это
удается сделать достаточно быстро.
При применении прозрачной бумаги или кальки точность по-
строения углов транспортиром не выше 0°,2. Точность эту можно
признать достаточной для практических целей судовождения.
206 Определение места судна по углам и пеленгам [Гл. ХП
Этот простейший прием носит название способа Болотова, по
имени известного русского геодезиста и преподавателя А. П. Бо-
лотова (1803—1853), впервые его применившего.
Порядок наблюдений и выбор предметов. Чтобы получить ме-
сто по двум измеренным секстаном углам с возможно большей
точностью, они должны измеряться одновременно. Желательно
иметь двух наблюдателей, которые становятся вплотную друг к
другу и измеряют по команде оба угла одновременно. При этом
замечается момент по часам, по которым ведут прокладку, и по-
казание лага. Поправка индекса у секстанов наблюдается непо-
средственно до и после наблюдений. Если наблюдатель один, но
быстро измеряет углы, то можно пренебречь ошибкой, происходя-
щей от неодновременного измерения углов. Если же измерение
углов затягивается, особенно при большом ходе судна, то их
необходимо привести к одному моменту. Для этого измеряется
сначала один угол, предположим затем второй угол ₽ и опять
угол а2. Допуская, что за небольшой промежуток времени углы
меняются пропорционально времени, можем принять, что в сред-
ний момент значения углов были
а1 + а2 Q
а = ———- и р.
2 г
При измерении угла ₽ замечается момент по часам и пока-
зание лага. Если пользоваться для прокладки обсервованного
места калькой или прозрачной бумагой и довольствоваться точ-
ностью построения угла +0°,2, то не имеет смысла добиваться
излишней точности в измерении углов; тогда в большинстве слу-
чаев не потребуется приведение измеренных углов к одному мо-
менту и даже при незначительной величине поправки индекса
можно пренебречь и ею. Если же мы желаем получить всю воз-
можную точность от этого способа, то и наблюдения должны
быть сделаны с должной аккуратностью и тщательностью как в
отношении исправления отсчетов поправкой индекса и инстру-
ментальной ошибкой, так и в отношении одновременности изме-
рения углов на движущемся судне.
При разновременном измерении углов дважды следует изме-
рять угол, который меняется медленнее.
При выборе предметов для определения по двум углам сле-
дует наблюдать за тем, чтобы все три предмета и место судна не
лежали на одной окружности. В последнем случае место судна
определить нельзя, так как из любой точки такой окружности,
как показывает рис. 79, предметы будут видны под одними и
теми же углами. Такой круг носит название круга неопре-
деленности.
Определение места судна по углам
207
В
Рис. 79.
Случай неопределенности всегда будет иметь место, если угол
при среднем предмете
ДДВС= 180°-(а + р).
Случая неопределенности не может быть, если при выборе
предметов для наблюдений соблюдено одно из следующих правил:
а) средний предмет нахо-
дится по одну сторону с местом
судна от линии, соединяющей
два крайних предмета;
б) все три предмета лежат
на одной прямой линии или
близко к ней;
в) место судна находится
внутри треугольника, образуе-
мого тремя предметами.
Во всех сомнительных слу-
чаях рекомендуется взять пе-
ленг какого-либо из предметов
или измерить контрольный угол
между средним и каким-либо
четвертым предметом. Нанесен-
ное на карту счисли мое место
судна помогает при выборе
предметов для наблюдения су-
дить о их пригодности для
определения места судна.
При применении протрактора,
ложены для наблюдений, малейшее смещение центра протрактора
вызовет значительное смещение одной из линеек. Если же центр
протрактора может быть сдвинут с места, а линейки останутся
почти на своих местах, то это укажет, что предметы для наблю-
дений выбраны плохо и определение места судна ненадежно.
Если при наблюдениях измерен третий контрольный угол, то,
вычертив третью окружность, мы получим пересечение трех ок-
ружностей. Если все измерения углов сделаны точно и одновре-
менно, то окружности должны пересечься в одной точке. В про-
тивном случае пересечение трех окружностей образует маленький
криволинейный треугольник. Тогда центр вписанного в треуголь-
ник круга принимают за обсервованное место F. Если же полу-
чится большой треугольник, то это укажет или на значительную
ошибку в наблюдениях, или на то, что часть выбранных предме-
тов недостаточно точно нанесена на карту.
Точность получаемого, места зависит от угла 0 пересечения
окружностей. Поэтому полезно подсчитать его величину до на-
чала наблюдений, понимая под углом 6 всегда острый угол.
если предметы хорошо распо-
208
Определение места судна по углам и пеленгам
[Гл. XII
Пусть ТТ и SS (рис. 80) будут касательные к окружностям в
точке их пересечения F, тогда угол Z_SFT = 0 будет углом пере-
сечения этих окружностей. Из рисунка видно, что Z_TFB = /_А
и Z_SFB = /_С, следовательно,
0 = л + с,
но, с другой стороны,
Л + В + С+(а + £) = 360° и 0 = 360°-[(* + ?) +Я].
Угол В при среднем предмете всегда может быть снят транс-
портиром с карты или даже оценен на глаз. Имея на карте счис-
лимое место Е в момент наблюдений, сняв угол АЕС с карты
транспортиром или оценив его на глаз, можно приближенно при-
нять, что
6 = 360°-(В + Л^С).
Если угол 0 при этом получится более 90°, то для получения
острого угла 0 его следует вычислить по одной из следующих
формул:
0 = (В + Л£С)-18О° или 6 = 180°- (В + АЕС),
так чтобы угол 0 всегда был меньше 90°.
§ 54] Точность определения места судна по двум углам 209
Когда все три предмета и судно находятся на одной окруж-
ности, сумма противоположных углов
В + а + р = 180°
и, следовательно,
0 = 0°.
Тогда обсервованное место судна получить нельзя, так как обе
вмещающие окружности сливаются и судно находится на круге
неопределенности, а если угол О близок к О9, то место получится
с большой ошибкой.
§ 54. ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА ПО ДВУМ УГЛАМ
Как уже указывалось выше, определение места судна по двум
углам является наиболее точным из всех навигационных спосо-
бов и всегда применяется, когда требуется знать место судна с
наибольшей достоверностью; при определении места вновь откры-
той банки, при постановке знаков ограждения, при промере и
других гидрографических работах. В гидрографии этот способ
определения места является основным и подробно исследован.
При рассмотрении вопроса о точности получаемого обсерво-
ванного места судйа можно несколько поступиться строгостью в
выводах с целью получения большей простоты и практичности
в конечном результате. Поэтому мы здесь рассмотрим вопрос
о точности определения места судна по двум углам с точки зре-
ния линий положения, применительно к работе проф. Н. Н. Ма^
тусевича.
Допустим, что между предметами А и В должен быть измерен
угол а (рис. 81) и дуга окружности AFB представляет линию
положения для данного наблюдения. Пусть место судна нахо-
дится в точке F; небольшой отрезок дуги около точки F заменим
касательной к ней ТТ, проведенной ч^рез точку F, и примем эту
касательную за линию положения, соответствующую углу а. Если
на самом деле нами измерен вследствие ошибок наблюдений
угол с ошибкой Да = а— ап то линия положения, соответ-
ствующая углу аг, займет другое положение, в зависимости от
величины и знака ошибки Да.
Пусть углу ах будет соответствовать вмещающая окружность
AF{B. Проведем касательную Т\Т\ через точку Fi; это и будет
линия положения, соответствующая углу а;/ Так как ошибка Да
в измеренном угле — величина малая, то примем, что линии по-
ложения ТТ и T\Ti параллельны между собой.
Проведем прямые AF и BF до пересечения их с линией поло-
жения Т'17'i в точках Ау и В\. В треугольнике B\FAi отрезок FF\
равен высоте треугольника, которую обозначим через Др.
14
К. С. Ухов
21J
Определение места судна по углам и пеленгам
[Гл. Х/Г
Расстояние от истинного места F до левого предмета А обо-
значим через rfi, до правого предмета В — через d0 и расстояние
между предметами А и В — через Si.
имеем
F Ay__ sin Да
sin ан
Из треугольника FBAX
По малости угла Да положим, что sin
тогда
= и
sin aL--=:.S ii ar
FA1
sin а
Из прямоугольного треугольника FF\Ai получим
i о л • п л sin Г .
А р = FA± sin B = dQ----Да.
Sin
§ М]
Точность определения места судна по двум углам
211
И, наконец, из треугольника ABF
dr __sin В
sin а
После подстановки получим окончательно
Др = Д а. (90)
Из формулы (90) видно, что величина параллельного смеще-
ния линий положения ТТ пропорциональна ошибке Аа в изме-
ренном угле а и произведению расстояний d\ и d$ от места судна
до наблюдаемых предметов А и В и обратно пропорциональна
расстоянию Si между этими предметами.
Если при измерении второго угла ? между средним и пра-
вым предметами сделана ошибка А{3, то подобным же путем мы
получим, что величина параллельного смещения второй линии
положения Д</ будет равна
Д<7 = ^др, (91)
где d2 — расстояние от точки F до правого предмета С;
S2 — расстояние между предметами В и С.
Рассмотрим теперь ошибку в обсервованном месте судна
вследствие смещения обеих линий положения. Пусть точка F
(рис. 82) будет истинным местом судна, полученным при усло-
вии, что измеренные углы а и р не заключают в себе никаких
ошибок. Касательные ТТ и RR в точке F представляют линии
положения.
Пусть при измерении углов а и р допущены ошибки Да и
А?, которые для простоты примем равными наибольшей возмож-
ной ошибке в измерении угла, и обозначим эту наибольшую по-
грешность через А. Тогда линии положения переместятся парал-
лельно самим себе, соответственно на величины
< d^dn л * d^dn А
А я = — -Д и A q = 2 " A
Si $2
и займут положения T\TX и RiRi. Определенное из наблюдений
место судна получится в точке Fi — пересечения линий положе-
ния TiTi и /?]/?].
Линейная ошибка в полученном обсервованном месте может
быть определена отрезком FFi = о.
Для определения этой наибольшей возможной ошибки 3 обо-
значим острый угол, под которым пересекаются вмещающие
14-
212
Определение места судна по углам и пеленгам
[Гл, XII
окружности или линии положения, через б. Тогда из прямоуголь-
них треугольников FKM{ и FLM2 получим
sin 6 1 sin в
а из треугольника FKFi или равного ему FLFi имеем
77л 32 = [Лр\2^-(Л^\2 __ cos(180n-6)
\sinO/ \sinO/ sin2 О
или после подстановок:
8 = ^1/ (т’)2+(т‘У + 2^У’СО56- (92)
Sin V |/ \ Oj / \ 02 / $2
Обозначим для краткости отношения 7- = И и — = г2 и по-
sx s2
лучим окончательно
8 = G + G + 2Г/-2 cos 6. (93)
§ 54]
Точность определения места судна по двум углам
213
Полученная величина S представляет собой возможный пре-
дел ошибки. Поэтому если на карте из полученного обсервован-
ного места судна, как центра, описать окружность радиусом, рав-
ным 8, то истинное место судна должно оказаться внутри этого
круга. Как показывает формула (93), ошибка 3 есть функция
пяти величин и в таком виде она неудобна для быстрого суж-
дения о точности полученного места. Однако, если положить do
равным какой-либо постоянной величине, вместо А принять наи-
большую возможную ошибку в измерении и построении углов,
а отношения г\ и г2 заменить средним отношением, равным
г = —-—, то представится возможным построить таблицу оши-
бок обсервованного места по двум аргументам: углу 0 и сред-
нему отношению г.
Примем ошибку в измерении угла Д = +30', а расстояние до
среднего предмета В равным 1 мор. мили, или 10 кабельтовым.
Максимальная ошибка обсервованного места, выраженная в ка-
бельтовых, приведена в табл. 15.
Таблица 15
Максимальные ошибки при определении места судна по двум углам
при расстоянии до среднего предмета, равном одной морской миле
Угол 6 „ Н + Га Среднее отношение г =
ч, 1 I1/, 2 21/,
10° 0,5 1,0 1,5 2,1 2,5
20 0,3 0,5 0,8 1,1 1,3
30 0,2 0,4 0,5 0,7 0,9
40 0,1 о,3 0,4 0,6 0,7
50 0,1 0,2 0,3 0,5 0,6
60 0,1 0,2 0,3 0,4 0,5
70 0,1 0,2 0,3 0,4 0,4
80 0,1 0,2 0,2 0,3 0,4
90 0,1 0,2 0,2 0,3 0,4
Так как расстояние до среднего предмета do и погрешность Д
в измерении и прокладке углов входят множителями в фор-
мулу (93), то при увеличении расстояния до среднего предмета
числа, данные в таблице, должны быть умножены на do, выра-
женное в морских милях; аналогично, если измерения углов и их
прокладка сделаны точнее, то табличные цифры могут быть
уменьшены в соответствующее число раз. Измерение углов сек-
станом и пользование протрактором значительно увеличат точ-
ность полученного обсервованного места.
214
Определение места судна по углам и пеленгам
[Гл. XII
Как показывает формула (92) и табл. 15, один угол пересе-
чения окружностей еще не может служить указанием, что об-
сервованное место получится достаточно точно. На самом деле,
пусть в двух случаях имеем данные:
I. /5=170°; n = -; II. /5=100°; G = -;
4 4
/Л5С=160°; г2 = -; / АЕС= 170°; г. = -;
z. 2 4 4
d0 = 2 мор. мили; dQ = 7 мор. миль;
0 = 30°, г=1; 6 = 90°: г = -;
4
5 = 0,4-2 = 0,8 каб. 3 = 0,15-7 = 1,0 каб.
В первом случае острый угол пересечения линий положения
уравновешивается близостью среднего предмета, в то время как
во втором случае при хорошем угле пересечения конечная ошибка
возрастает ввиду увеличения расстояния до среднего предмета.
Практически оба определения равноценны и заслуживают доверия.
Если же мы будем иметь = 120°, /_АЕС = Ш\ =2,
Г2 = 3 и do = 6 мор. милям, то 0 = 20°, г = 2--- и обсервованное
место будет получено со слишком большой ошибкой:
6=1,3-6 = 7,8 каб.
Таким образом, при выборе предметов для измерения углов
их надо подбирать так, чтобы угол пересечения линий поло-
жения был близок к 90°, а средний предмет — по возможности
ближе к месту судна.
Пример Л 050 отсчет лага 73,4. Измерены секстаном горизонтальные углы
маяков: Мэен — 117°48'— Дорнбуш — 81°26'— Дарсерорт (южная часть Бал-
тийского моря). Погрешность индекса +4'. Рассчитать, с какой точностью
получено обсервованное место.
Решение. Получив обсервованное место при помощи протрактора или
графическим построением, снимаем с карты расстояния:
Маяк Мэен — маяк Дорнбуш...............= 25,0 миль
Маяк Дорнбуш — маяк Дарсерорт . . . . 5а = 22,7 мили
Обсервованное место — маяк Мэен . . . = 14,3 „
„ „ — „ Дорнбуш . dQ = 19,4 „
,, „ - „ Дарсерорт . d2 = 14,5 „
Снимаем транспортиром угол при маяке Дорнбуш между направлениями
на маяки Мэен и Дарсерорт: / В = 66°.
§ 55}
Определение места судна по трем пеленгам
215
Рассчитываем угол 0 и среднее отношение расстояний:
О = 66° 4- 199°,2 —180° = 85°,2;
14,3 П ^7. г. = 0,57; 25 14,5 г^л г2 = = 0,64; 22,7 г 0,57 + 0.64 _06 2
По табл. 15 имеем
о = 0,1 *19,4 — 1,9 каб. при Д == 30'.
§ 55. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ТРЕМ ПЕЛЕНГАМ
Для определения места судна достаточно иметь две линии
положения, но в таком случае нет контроля наблюдений и даже
грубая ошибка не всегда может быть сразу обнаружена. Поэтому
во всех случаях, когда представляется возможность, следует при-
бегать к определению места судна по трем пеленгам, спо-
собу, являющемуся наиболее точным при пользовании компасом.
Для определения места судна по пеленгам трех предметов
необходимо предварительно выбрать эти предметы на местности
и удостовериться, что они нанесены на карте, проверить, что они
видны от компаса, и затем в быстрой последовательности взять
один за другим пеленги всех трех предметов, записать отсчет
лага в момент взятия пеленгов и заметить момент по часам. При
выборе предметов для пеленгования следует обращать внимание,
чтобы пересечение каждой пары пеленгов, т. е. 1-го и 2-го, 2-го и
3-го, было по возможности около 60° или 120° и ни в коем случае
не меньше 30° и не больше 150°.
При пеленговании предметов первым следует взять пеленг
предмета, который ближе к диаметральной плоскости судна, т. е.
находится на более остром носовом или кормовом курсовом угле.
Пеленг такого предмета будет меняться медленнее, чем пеленг
предмета, находящегося ближе к траверзу судна. Это последнее
правило не всегда строго соблюдается; так, например, если на
траверзе ночью имеется проблесковый маяк с редкими пробле-
сками, а па более острых курсовых углах маяки с постоянными
огнями, то выгоднее, для сокращения времени пеленгования,
сначала запеленговать маяк на траверзе в момент, когда он пока-
зывает проблеск, а затем взять пеленги постоянных огней. Днем
такое же положение может быть, если предмет, близкий к тра-
верзу, плохо виден и пеленгование его затруднительно. Во всяком
случае следует стремиться к сокращению времени, затрачивае-
мого на пеленгование, что имеет особенно важное значение на
большом ходу судна.
Предположим, что точки А, В и С (рис. 83) представляют
места трех предметов на карте, пеленги которых взяты по ком-
пасу. Так как при визуальном пеленговании расстояния от судна
216
Определение места судна по углам и пеленгам
[Гл. XII
до пеленгуемых предметов не могут быть велики, то в этом слу-
чае линии истинных пеленгов могут быть приняты за линии поло-
жения. Обсервованное место судна должно быть в точке F (пере-
сечения трех линий пеленгов). Для того чтобы все три линии
пеленгов пересекались в одной точке, они должны быть взяты на
движущемся судне одновременно и абсолютно точно. На практике
три линии пеленгов, вследствие ошибок при взятии пеленгов и
при прокладке их на карте, в большинстве случаев не пересе-
кутся в одной точке, а об-
разуют треугольник abc,
который называется тре-
угольником по-
грешности.
Ошибки при определе-
С нии места судна по трем
пеленгам, вызывающие
появление треугольника
погрешности, могут проис-
ходить по следующим
причинам.
1. Случайные ошибки
пеленгования, включаю-
щие и личйую ошибку на-
блюдателя. Последняя
при благоприятных усло-
виях видимости и отсут-
ствия качки мала, если не допущен промах, который будет сразу
виден. Большее значение имеет сравнительно малый размер кар-
тушки магнитного компаса, который позволяет сделать отсчет
пеленга практически с точностью порядка +0°,2—0°,3. При поль-
зовании пелорусами гирокомпасов точность пеленгования будет
того же порядка.
2. Случайные ошибки при прокладке пеленгов. При пользова-
нии транспортиром для прокладки пеленгов, отсчитывая на глаз
0°, 1, ошибка построения угла оказывается на практике рав-
ной +0°,2.
Эти случайные ошибки могут быть одного знака или разных;
в первом случае суммарная ошибка пеленгования и прокладки
пеленга будет порядка +0°,5.
3. Ошибки от неодновременного взятия трех пеленгов. Эти
ошибки, незначительные при быстром пеленговании и небольшом
ходе судна, могут достигнуть существенной величины, если пелен-
гование произведено медленно, судно имеет большой ходи пеленг
предмета меняется быстро. Они могут быть сведены к незна-
чительной величине путем приведения пеленгов к одному мо-
менту. Для этого берут пять пеленгов трех предметов в следую-
§ 55]
Определение места судна по трем пеленгам
217
тем порядке: пеленгуют предметы А, В и С, а затем берут еще
два пеленга предметов В и Л в обратном порядке. Принимая во
внимание, что за небольшой промежуток времени изменение пе-
ленгов происходит пропорционально времени, берем средние из
отсчетов пеленгов предметов Л и В и считаем, что они соответ-
ствуют моменту, когда взят пеленг предмета С. Таким образом,
имеем приведенными к одному моменту:
пеленг предмета А = • g = JZ2 = П3.
2 2
Отсчет лага и момент по часам при этом замечаются в момент
взятия пеленга предмета С.
4. Ошибка, вызванная погрешностью положения предметов
на карте, не может быть исключена, и если повторные наблюде-
ния не дают удовлетворительных результатов, то следует выбрать
другие предметы для пеленгования.
5. Ошибка, возникающая вследствие неверной поправки ком-
паса, принятой для исправления пеленгов, носит постоянный ха-
рактер и может быть определена и уничтожена графическим по-
строением, как указано ниже.
Если полученный вследствие случайных ошибок треугольник
погрешности невелик по размерам, со сторонами на путевых кар-
тах не более 5 мм и к тому же близок к равностороннему, то
место судна принимается в его центре. При очень остром угле
между какой-либо из пар пеленгов треугольник принимает вытя-
нутую форму, и в этом случае место судна следует считать ближе
к его более короткой стороне. При получении большого треуголь-
ника погрешности следует повторить все наблюдения снова,
чтобы убедиться в отсутствии значительных случайных ошибок.
Если повторное пеленгование продолжает давать большой тре-
угольник погрешности и нет оснований сомневаться в положении
на карте пеленгуемых предметов, то следует предположить
ошибку в поправке компаса.
На практике допустимая величина треугольника погрешности
зависит от масштаба карты.
Рассмотрим исключение систематической ошибки, возникаю-
щей вследствие ошибки в поправке компаса, принятой для пере-
вода пеленгов.
Допустим, что во всех трех пеленгах заключается одна и та
же ошибка е, происходящая от неточного знания поправки ком-
паса. Тогда все три проложенные линии пеленгов отклонятся от
своих истинных направлений на один и тот же угол s в одну
и ту же сторону, причем углы между пеленгами, как истинными,
так и компасными, независимо от ошибки в поправке компаса,
останутся постоянными. Отсюда вытекает, что точки пересечения
всех трех пеленгов, взятых попарно, как вершины трех углов,
218
Определение места судна по углам и пеленгам
[Гл. XII
образуемых соответственными пеленгами, должны лежать на
окружностях, вмещающих эти углы.
Пусть взяты пеленги трех предметов А, В и С (рис. 84),
точка" F — истинное место судна. Проложенные на карте линии
истинных пеленгов AF, BF и CF, если при наблюдениях не сде-
лано никакой ошибки и поправка компаса верна, должны пере-
сечься в точке F. Так же, как и при определении по двум углам,
вершина угла а, образованного пеленгами предметов А и В, дол-
жна лежать на окружности AFB, вмещающей этот угол. Вер-
шина угла. образованного пеленгами предметов В и С, лежит
па окружности BFC, вмещающей этот угол, а вершина угла
образованного пеленгами предметов А и Q лежит на окружно-
сти AFC. При отсутствии случайных ошибок наблюдений и ошибки
в поправке компаса точка F будет общей вершиной всех трех
углов.
Допустим теперь, что поправка компаса неверна на вели-
чину г, а случайными ошибками наблюдений можно пренебречь.
Тогда проложенные исправленные неверной поправкой пеленги
дадут треугольник погрешности abc, причем углы между каждой
парой пеленгов останутся теми же a, S и вследствие чего
точки пересечения пеленгов, представляющие вершины треуголь-
ника погрешности abc, должны находиться на тех же самых ок-
ружностях, вмещающих утлы я, р и а--д₽. Как видно из рисунка,
в этом случае истинное место судна будет находиться вне тре-
угольника погрешности. Если при том же знаке ошибка в по-
правке компаса будет меньше ошибки £, то получим соответ-
ственно и меньший треугольник погрешности, например
Если же ошибка в поправке компаса переменит свой знак, то
треугольник погрешности azbtfz расположится по другую сторону
истинного места судна, сохраняя свое подобие и имея свои вер-
шины на соответствующих окружностях.
Это свойство треугольника погрешности позволяет получить
обсервованное место судна независимо от ошибки в общей по-
правке компаса и определить последнюю одновременно с опреде-
лением места судна, по трем пеленгам. Для этого, получив при
принятой общей поправке компаса треугольник погрешности,
изменим общую поправку компаса на 2°—4° и вновь проложим
истинные пеленги. При этом мы можем получить четыре случая:
1) второй треугольник погрешности получится больше пер-
вого; изменение общей поправки компаса только увеличило ее
ошибку;
2) второй треугольник погрешности получился меньше пер-
вого; измененная общая поправка компаса вернее, чем принятая
первоначально;
3) все три пеленга пересеклись в одной точке; измененная
поправка компаса верна;
$ 55]
Определение места судна по трем пеленгам
219
Рис.
220
Определение места судна по углам и пеленгам
[Гл. XU
4) треугольник погрешности, сохраняя свое подобие, пере-
вернулся; ошибка в общей поправке компаса изменила свой
знак.
Получив второй треугольник погрешности, соединим прямыми
линиями сходственные вершины обоих треугольников и точку их
пересечения примем за обсервованное место судна. При этом мы
допускаем замену отрезков дуг aah ЬЬ\ и сс\ прямыми линиями.
Рис. 85.
что вполне допустимо, так как при сравнительно больших радиу-
сах вмещающих окружностей кривизна их невелика, а сами от-
резки дуг аа\, bb\ и cci малы.
Получив обсервованное место судна F, снимаем с карты лю-
бой из истинных пеленгов предметов А, В и С и, сравнив его с
компасным пеленгом того же предмета, получим исправленную
общую поправку компаса, содержащую в себе только случайные
ошибки наблюдений, которые должны быть малы.
На рис. 85 показаны наиболее характерные виды треугольни-
ков погрешностей, причем, когда истинное место судна находится
внутри треугольника погрешности, то судно в действительности
находится внутри треугольника, образованного тремя предметами
А, В и С, выбранными для пеленгования.
Для уменьшения влияния случайных ошибок следует полу-
чить три поправки компаса из сравнения истинных и компасных
пеленгов каждого из трех предметов и взять среднюю из трех
рассчитанных поправок компаса.
£ 55]
Определение места судна по трем пеленгам
221
Рекомендуется, рассчитав новую поправку компаса, повторить
определение места судна по трем пеленгам, чтобы убедиться в
отсутствии существенной ошибки.
Определим длину отрезков aF, bF и cF (рис. 84) отстояния
вершин треугольника погрешности от обсервованного места F.
Пусть на рис. 86 Л и В — левый и средний предметы, пеленги
которых взяты, F — обсервованное место судна и а — вершина
треугольника погреш-
ности, получившегося
вследствие ошибки г в
принятой поправке ком-
паса.
Опустим из точки F
перпендикуляр LF на пря -
мую Ва. Из элементарных
треугольников LBF и aLF
имеем
LF = zBF = aFsm LaF.
Следовательно,
sin LaF
Из треугольника ABF
можем написать
BF ____ sin BAF
АВ sin а
Рис. 86.
Заменяя дугу aF ее хордой, цмеем /_LaF = /_BAF\ после под-
становки получаем
aF='^^. (94)
Sin а
Аналогично получим
и cF= г-АС . (95)
sin р sin (а р)
Выражения (94) и (95) позволяют рассчитать расстояния, на
которых вершины треугольника погрешности находятся от обсер-
вованного места F, так как расстояния АВ, ВС и АС всегда могут
быть сняты с карты.
Пользуясь приведенными выражениями, можно определить
величину погрешности в принятой поправке компаса, если тре-
угольник погрешности получился только вследствие этой ошибки:
__ aF-sifi а 6F-sin р _ cF-sin (д + Р)________\
АВ________________________________________________ВС ~ АС ’ '
222
Определение места судна по углам и пеленгам
[Гл. ХП
Знак погрешности £ должен быть снят с карты.
Определение поправки компаса по трем пеленгам и получение
обсервованного места судна независимо от ошибки в общей по-
правке компаса становится невозможным в том случае, когда
судно и все три выбранных для пеленгования места лежат на
одной окружности.
На самом деле, если при переводе компасных пеленгов в
истинные в общей поправке компаса заключается некоторая
ошибка то углы а и 3 как между компасными, так и истинными
пеленгами останутся без изменения и проложенные ошибочные
истинные пеленги все же пересекутся в одной точке Л лежащей
на окружности, вмещающей угол a-г? (рис. 79), а треугольник
погрешности может получиться только вследствие случайных
ошибок наблюдений. В этом случае надежное обсервованное ме-
сто судна получится только при верной поправке компаса.
Если судно не находится на круге неопределенности, то об-
сервованное место может быть также получено независимо от
ошибки в поправке компаса, если рассчитать углы а и между
взятыми компасными пеленгами и использовать их для получения
обсервованного места по двум углам. В этом приеме также, сняв
с карты истинные пеленги от полученного обсервованного места
на пеленгуемые предметы и сравнив их с наблюденными компас-
ными пеленгами, получаем общую поправку компаса.
Рассмотрим теперь влияние случайных ошибок наблюдения и
прокладки при определении места судна по трем пеленгам. Пусть
попрежнему А, В и С (рис. 87) будут предметами, выбранными
для пеленгования, F— истинное место судна. Обозначим через
г2 и е3 случайные ошибки наблюдения и прокладки линий пе-
ленгов на карту. Эти ошибки различны как по величине, так и по
знаку. При прокладке на карту истинные пеленги, содержащие
указанные выше случайные ошибки, дадут треугольник погреш-
£ 55]
Определение места судна по трем пеленгам
223
ности abc. Получить истинное место судна невозможно, так как
величины случайных ошибок en г2Иез и их знаки неизвестны.
Можно показать, что при этих условиях вероятность, что истин-
ное место судна окажется внутри треугольника погрешности abc,
равняется отношению 1 :4. Кроме того, если случайная ошибка,
например s3, окажется такова, что проложенная на карте линия
пеленга предмета С пройдет через точку а, то точка а и будет
принята за обсервованное место судна, вместо истинного места Л
Очевидно, что в этом случае, несмотря на то, что все три ли-
нии пеленгов пересеклись в одной точке, обсервованное место
судна может получиться со значительной ошибкой.
При каждом подозрении в наличии существенных случайных
ошибок необходимо повторить наблюдения со всей тщатель-
ностью и аккуратно проложить вновь полученные истинные пе-
ленги на карту. Обычно случайные ошибки малы и повторные
наблюдения дают хорошее схождение обсервованных мест. Если
же обсервованные места разбрасываются, то это и укажет на
наличие существенных случайных ошибок.
Если повторные наблюдения дают большой треугольник по-
грешности, то можно предполагать ошибку в поправке компаса и
тогда следует поступить, как указано выше, и после определения
поправки компаса обязательно повторить наблюдения пеленгов
трех предметов, чтобы убедиться, что поправка компаса опреде-
*224
Определение места судна по углам и пеленгам
[Гл. ХП
лена правильно. Надо только всегда помнить, что во всех слу-
чаях следует считать место судна в наиболее неблагоприятном
положении, чтобы тем вернее избежать опасности.
Пример. Взято три отсчета компасных пеленгов маяков: А — 36°, В — 343° 3
и С — 315°; общая поправка компаса Д К = + 2°. Прокладка истинных пе-
ленгов дала большой треугольник погрешности abc (рис. 88). Предполагая
юшибку в поправке компаса, уменьшаем рассчитанные истинные пеленги про-
извольно на 4°, так как по рисунку видно, что для того чтобы уменьшить
треугольник погрешности, надо уменьшить и все три пеленга. Вторичная про-
кладка дает малый треугольник погрешности.
Соединив прямыми линиями соответствующие углы двух подобных тре-
угольников погрешности, получаем обсервованное место F, свободное от
ошибки в поправке компаса.
Снимем с карты истинные пеленги маяков от полученного обсервован-
ного места:
Маяк А ОИП 29° ОКП 36° ДК = — 7°
„ В ОИП 337° ОКП 343°,3 ДК = —6°,3
„ С ОИП 309° ОКП 315° Д£^-4Л0
ДКср = -6°,4
Если хотим воспользоваться расчетом, то снимаем с карты расстояния
между обсервованным местом и вершинами треугольника погрешности, рас-
стояния между маяками и рассчитываем углы между пеленгами:
1. Маяки А — В Fb = 2,4 мили
2. . В—С Ес =1,8 „
3. , А —С Fa = 2,7 „
'Тогда
, г 2,4-0,791-57,3
АВ = 11,5 мили
Z АЬВ = 52°,3
ВС = 6,5 мили
Z Вес = 28°,3
АС = 17,8 мили
/_СаА = 81°,О
1,8*0,474-57,3
о - 2,7*0,988-57.3
о. Gl —----------------— О ,0.
h 17,8
Ошибка в поправке компаса еср = — 8°,5
Принятая поправка компаса &К = 4- 2°,0
Верная поправка компаса Д/( = — 6°,5
§ 56. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ДВУМ ПЕЛЕНГАМ
Так как место судна определяется по пересечению двух линий
положения, то два одновременно взятых пеленга двух предметов
дают обсервованное место судна. Поэтому при наличии в види-
мости судна только двух предметов, благоприятно расположен-
ных и подходящих для пеленгования, приходится довольство-
S 56]
Определение места судна по двум пеленгам
225
ваться только двумя пеленгами и по ним определять свое место,
но, конечно, с несколько меньшей точностью. Предположим, как
и раньше, что случайные ошибки наблюдения малы, тогда точ-
ность обсервованного места будет зависеть, главным образом, от
ошибки в общей поправке компаса, которая при определении ме-
ста судна по двум пеленгам не может быть обнаружена, а тем
более определена.
На основании формулы (94), которая дает линейное отклоне-
ние точки пересечения двух линий пеленгов при изменении самих
пеленгов на небольшой
угол в, можем принять,
что линейная ошибка в
обсервованном месте при
определении по двум пе-
ленгам, происходящая
вследствие ошибки s в об-
щей поправке компаса,
равна
aF = s<Zcoseca.
Последнее выражение
показывает, что при опре-
деленной ошибке s в об-
щей поправке компаса
ошибка в обсервованном
месте будет тем меньше,
чем меньше расстояние d
между предметами, вы- Рис
бранными для пеленгова-
ния, и чем угол а ближе к 90°. Чтобы удовлетворить одновре-
менно обоим требованиям, следует выбирать предметы для пе-
ленгования так, чтобы они были как можно ближе к судну и угол
пересечения линий пеленгов был также возможно ближе к 90°.
Так как при углах а, равных 30° или 150°, ошибка aF — 2zd,
а затем при дальнейшем уменьшении или увеличении угла пере-
сечения пеленгов cosec а начинает быстро возрастать, на прак-
тике обычно избегают определяться по двум пеленгам, если угол
пересечения линий пеленгов меньше 30° или больше 150°.
Ввиду того, что взять одновременно два пеленга двух различ-
ных предметов не представляется возможным, рассмотрим влия-
ние порядка пеленгования выбранных предметов на точность по-
лучаемого обсервованного места. Пусть А и В (рис. 89) — два
предмета, выбранные для наблюдений, а КК\ — линия проложен-
ного на карте курса; в точке М. взят пеленг предмета В, а второй
пеленг предмета А взят в точке в которую перешло судно
К. С. Ухов
226
Определение места судна по углам и пеленгам
[Гл. XII
за время, протекшее между моментами взятия обоих пеленгов.
Обсервованное место судна, как точка пересечения двух линий
положения, получится в данном случае в точке Fi. Если изменить
порядок пеленгования и из точки М взять пеленг предмета AJ а из
точки Mi — пеленг предмета В, то обсервованное место судна
получится в точке F2.
Обозначим курсовые углы на предмет А через qi и на пред-
мет В через ^2- Допустим теперь, что судно в момент взятия вто-
рого пеленга в обоих, случаях находилось действительно в точке
Mi, которая и является его истинным местом.
Тогда отрезок FiMi будет ошибкой определения в первом слу-
чае, а отрезок F2Mi —такой же ошибкой при обратном порядке
пеленгования. Из треугольников MFiMi и MF2Mi имеем: .
Г^М1 sin g2 F2M1 sinqx
ММг sin AFjB ММг sin AF2B
Полагая, что пеленги взяты достаточно быстро, можно при-
нять, что угол Д AFXB /_АВ\В, ,тогда получим
FjMi sin g2
F2Mx sin z/j
Последнее выражение показывает, что FiM} F2Mj если
угол q2<^qir т. е. ошибка в обсервованном месте получается
меньше, когда сначала пеленгуют предмет, находящийся ближе
к диаметральной плоскости судна, иначе говоря, на более остром
курсовом угле. Этот вывод легко может быть проверен и чер-
тежом.
Во всех случаях для уменьшения ошибок наблюдений следует
брать пеленги возможно быстрее, как это указано в предыдущем
параграфе.
Если пеленгование в силу каких-либо причин происходит ме-
дленно, а судно идет большим ходом, то для уменьшения ошибки
от разновременного взятия пеленгов они приводятся к одному
моменту. Для этого берут пеленг первого предмета П\, затем вто-
рого — П2 и снова первого — Пз. Полагая, что за короткий про-
межуток времени пеленги изменяются пропорционально времени,
рассчитывают средний из пеленгов первого предмета и для опре-
деления места прокладывают пеленги —-—1 и П2. Момент и по-
казание лага замечаются при взятии второго пеленга П2.
При достаточно быстром пеленговании и на малых скоростях
приводить пеленги к одному моменту не требуется, так как в
этом случае ошибка будет неощутима.
§ 57]
К.рюйс-пеленг
227
§ 57. КРЮИС-ПЕЛЕНГ
Если в виду судна находится только один предмет, который
может быть использован для взятия пеленга, то один пеленг уже
дает представление о том, что судно в момент наблюдения дол-
жно находиться где-то на полученной линии положения.
Линия положения может быть перенесена параллельно самой
себе на некоторое расстояние к какому-либо определенному мо-
менту по курсу судна и плаванию
его между моментами, когда наблю-
далась данная линия-положения, и
заданным моментом. Пусть в какой-
либо момент взят пеленг маяка М и
после исправления его общей по-
правкой компаса проложен на карте
(рис. 90). Мы можем сказать, что
в момент взятия пеленга судно на-
ходилось где-то на линии пеленга.
Возьмем на этой линии произ-
вольные точки А, В, С, D и от них
проложим курсы судна ВВЬ
СС\ и DD\, по которым отложим
плавание S судна за некоторый про-
межуток времени t. Предположим, что за промежуток времени t
судно точно шло по проложенному курсу с определённой ско-
ростью и на него не действовали ни течение, ни ветер, ни другие
какие-либо причины, уклоняющие его с намеченного курса. Если
судно в начальный момент было В' точке А, то в конце проме-
жутка времени t оно должно оказаться в точке Дь если оно
было в точке В, то должно оказаться в точке Вх и т. д. Так как
линии АА.{, ВВ\, CCi и DDX равны и параллельны, то точки
Дь Вь Ci и Z>i должны лежать на одной прямой A\BxC\Dif па-
раллельной ABCD. Прямая AXB\C]D\ называется перенесен-
ной линией положения; будем ее обозначать двойными
стрелками на концах.
Линия положения также может быть перенесена параллельно
самой себе и в случае ломаных курсов; при наличии же извест-
ного течения оно при переносе линии положения учитывается как
добавочный курс. Точность перенесенной линии положения зави-
сит от ошибок счисления за промежуток времени между момен-
том, когда был взят пеленг предмета, и моментом, к которому
перенесена линия положения.
Допустим теперь, что в какой-то определенный момент 6
взят пеленг П\ маяка М и замечен отсчет лага оль
Через некоторый промежуток времени в момент t2 взят пеленг
П2 того же маяка и замечен отсчет лага ол2. Перенося линию по-
15*
228
Определение места судна по углам и пеленгам
[Гл. ХП
ложения, полученную из первых наблюдений, к моменту /2 вто-
рых наблюдений, мы получим в этот момент две линии положе-
ния, пересечение которых дает место судна. Такой метод опреде-
ления места судна называется крюйс-пеленгом. Так как
при определении по ьфюйс-пеленгу первая линия положения пе-
реносится по счислению, то полученное по црюйс-пеленгу место
судна называется счислимо-обсервованным и отме-
чается на карте треугольником, около которого записывается мо-
мент получения счислимо-
обсервованного места суд-
на и показание лага в этот
момент.
Перенос линии поло-
жения к моменту вторых
наблюдений может быть
сделан графическим по-
строением ; кроме того,
расстояние от пеленгуемо-
го предмета до определяе-
мого места судна по вто-
рой линии положения мо-
жет быть получено и вы-
числением.
Пусть М (рис. 91) — пеленгуемый предмет, МП{ — линия пер-
вого пеленга, а МП2 — второго; за время между взятыми пелен-
гами судно прошло расстояние S = V(t2—t\), где V — скорость
судна.
Для получения счислимо-обсервованного места судна сделаем
следующее построение. Через произвольную точку на линии пер-
вого пеленга проводим линию курса KKi и на ней откладываем
отрезок АВ, равный в масштабе карты пройденному судном рас-
стоянию 5л; через полученную точку В проводим перенесенную
линию положения BF параллельно линии первого пеленга.
Точка F пересечения линии второго пеленга с перенесенной ли-
нией положения дает счислимо-обсервованное место судна в мо-
мент взятия второго пеленга. Так как на карте всегда должна
быть проложена линия курса, по которому идет судно, то проще
всего за точку А принять точку пересечения линии курса с ли-
нией первого пеленга. Проведем от точки F линию обратного
курса и по ней отложим расстояние FC = Sa. Полученная точка
С лежит на линии первого пеленга и, если пренебречь ошибками
счисления, представляет место судна в момент взятия первого
пеленга.
Можно раскрыть циркуль на расстояние в масштабе
карты, а затем, двигая одну ножку циркуля по линии первого
# 57]
Крюйс-пеленг
229
пеленга МП\ и удерживая на глаз плоскость циркуля парал-
лельно линии курса ЛЛь отыскать точку F, когда вторая ножка
циркуля придет на линию второго пеленга. Но этот прием слиш-
ком црубый и пользоваться им не рекомендуется.
Указанное выше построение может быть заменено следую-
щим. От предмета М (рис. 92) проводим линию курса МВ и по
ней в масштабе карты откладываем расстояние МВ = SA — пла-
ванию судна. Через полученную точку В проводим перенесенную
линию положения параллельно линии первого пеленга МП\;
точка F пересечения перенесенной линии положения BF с про-
ложенной линией второго пе-
ленга МП2 дает счислимо-
обсервовэнное место судна,
определенное по крюйс-пе -
ленгу.
Так как в обоих приемах
мы переносим линию поло-
жения параллельно линии
первого пеленга на величину
8л—плавание судна между
наблюдениями — по напра-
влению курса, то где бы мы
ни взяли начальную точку
построения на линии первого
пеленга, перенесенные линии
положения совпадут.
Этот второй прием удобно применять в тех случаях, когда при-
ходится последовательно через сравнительно короткие проме-
жутки времени определять место судна по крюйс-пеленгу. Напри-
мер, при подходе к берегу, если перед этим длительное время не
было определения места судна и желательно получить его воз-
можно скорее, особенно если в прибрежной полосе имеются опас-
ные для судна банки или отмели. В этом случае, при наличии в
пределах видимости судна одного предмета и невозможности
определиться другим более точным способом, следует взять через
сравнительно короткий промежуток времени два пеленга и полу-
чить хотя бы приближенное место судна. Последующие пеленги
по мере увеличения угла между первым пеленгом и последую-
щими будут давать уже более точные места судна. Отмечая по
линии курса МВ, проведенной от предмета М, точки, в которых
взяты пеленги, и проведя через них перенесенные линии поло-
жения, можно в пересечении их с соответствующими линиями
пеленгов получить ряд счислимо-обсервованных мест и по ним
судить о безопасности положения судна. При этом для получения
места можно комбинировать наиболее надежные из взятых пелен-
гов. Так как на линии курса судна можно ограничиться проведе-
230
Определение места судна по углам и пеленгам
[Гл. ХП
нием только отрезков пеленгов и отметкой получаемых счислимо-
обсервованных мест, прокладка остается более наглядной и
уменьшается возможность промахов.
При определении по крюйс-пеленгу между двумя пеленгами
одного и того же предмета должно быть вмещено плавание судна.
Поэтому при наличии дрей-
фа пройденное судном рас-
стояние за время между пе-
ленгами должно быть отло-
жено по линии пути. При
наличии течения влияние его
должно быть учтено за про-
межуток времени, протекший
между моментами пеленго-
вания.
Если МГЦ и МП2 (рис.
93) —две линии пеленгов
маяка М, а АК —‘линия кур-
са, то отложим по линии
курса плавание по лагу
5л = Л’В и из полученной
точки В проведем по направлению течения линию ВС и отложим
на ней расстояние, на которое течение снесет судно за время,
прошедшее между взятием пеленгов. Полученная точка С дает
счислимое место судна с учетом влияния течения за время пелен-
гования. Через полученную точку С проведем перенесенный па-
раллельно самому себе первый пеленг. Точка F пересечения пере-
несенной линии первого пеленга с линией второго пеленга и будет
искомым счислимо-обсервованным местом.
Крюйс-пеленг
231
££]______________
Аналогичное построение может быть сделано от точки А
(рис. 94) — пересечения линии пути АП с линией первого пеленга
МП{. В этом приеме от точки А проводим линию истинного курса
АК и на ней откладываем расстояние 5л= АВ, пройденное суд-
ном за время между пеленгами. Из полученной точки В проводим
линию ВС по направлению течения, тогда точка С даст счисли-
мое место судна в момент вторых наблюдений. Проведя через
точку С перенесенную линию первого пеленга, в точке F получим
счислимо-обсервованное место.
Отрезок АС линии пути представляет действительное пере-
мещение судна на течении, поэтому можно рассчитать истинное
плавание судна S за время между наблюдениями по действи-
тельной скорости судна на течении и непосредственно по линии
пути отложить отрезок AC = S.
Определение места судна по крюйс-пеленгу в случае измене-
ния курса между наблюдениями требует также вместить плава-
ние судна между двумя линиями пеленгов, беря за исходную
точку пересечение линии курса с линией первого пеленга. Следует
помнить, что ошибки прокладки за время между наблюдениями
непосредственно влияют на точность получаемого счислимо-об-
сервованного места, а поворот увеличивает.ошибку счисления.
Для получения счислимо-обсервованного места судна вычис-
лением рассмотрим сначала различные положения судна отно-
сительно маяка М. Пусть линия ACTD (рис. 95) будет линией
курса судна, точка А — место судна в момент взятия первого
пеленга, точка С — место судна в момент взятия второго пеленга
и Т — место судна в момент прохождения траверза предмета М.
Точка D соответствует случаю, когда второй пеленг взят после
прохода траверза маяка М.
232
Определение места судна по углам и пеленгам
[Гл. ХП
Обозначим курсовой угол на маяк М в точке А через а,
а в точке С через Р- Эти углы получаются как разность между
курсом и соответствующим пеленгом. Тогда из треугольника
АМС имеем
7ИС = ЛС—sina ,
Sin (р — а)
а из прямоугольного треугольника СМТ получим
СТ = МСcos р и МТ = МСsin р.
По этим формулам можно рассчитать расстояние до маяка в
момент взятия BTQporo пеленга, расстояние до траверза маяка и,
наконец, траверзное расстояние до маяка М. Чтобы не вычислять
каждый раз этих расстояний, в «Мореходных таблицах» 1943 г.
дана табл. 38, в которой расстояние АС принято равным одной
миле и введены условные обозначения:
МС = х, СТ=у и MT = z.
Тогда приведенные формулы примут следующий вид:
х = sin a cosec ((3—а)
V = sin а cosec (р—а) cos р
z = sin а cosec (Р—а) sin р
(97)
Таким образом, рассчитав углы аир между курсом судна и
обоими взятыми пеленгами, можно по табл. 38 получить расстоя-
ния X, у и Z.
В случае, когда второй пеленг взят в точке D уже после про-
хода судном траверза предмета М, формулы (97) остаются без
изменений, но у получает отрицательный знак, указывающий,
что расстояние до траверза надо откладывать в сторону, обрат-
ную движению судна.
При расчете углов аир можно как курс, так и оба пеленга
не исправлять общей поправкой компаса, а получать их как раз-
ность компасных направлений.
При наличии сноса от дрейфа или течения линия АК предста-
вит линию пути, а углы аир должны быть рассчитаны между
линией пути судна и истинными пеленгами. В этом случае фор-
мула или таблица дадут расстояние z, кратчайшее от маяка (по
перпендикуляру к линии пути), не совпадающее с траверзным
расстоянием. Расстояние у будет соответствовать расстоянию по
пути судна от точки пересечения линии второго пеленга с ли-
нией пути.
Пример.Компасный курс 235°, первый пеленг 267® отсчет лага 26,7 миль,
второй пеленг 289°, отсчет лага 34,8 миль. Склонение 5° W, девиация 1® O?t,
Точность определения места судна по крюйс-пеленгу
233
Дл = О%. Определить расстояние до маяка в момент взятия второго пеленга,
расстояние до траверза и траверзное расстояние.
Решение. « = 267° — 235° = 32°; ол2 — ол^ = 34,8 — 26,7 = 8,1.
р= 289° —235° = 54°.
По табл. 38 МТ-43 получаем
х = 1,41 • 8,1 = 11,4 мили;
// = 0,83-8,1 = 6,7 »
z = 1,14-8,1 = 9,2 »
Проложив по карте ИЛ 285°, откладываем по линии второго пеленга
11,4 мили от маяка и получаем счислимо-обсервованное место судна. На тра-
верзе маяка судно будет, когда пройдет 6,7 мили после взятия второго пе-
ленга; траверзное расстояние до маяка 9,2 мили.
§ 58. ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА
ПО КРЮЙС-ПЕЛЕНГУ
Точность счислимо-обсервованного места судна, полученного
по крюйс-пеленгу, зависит:
1) от случайных ошибок пеленгования и графической про-
кладки на карте;
2) от неточного знания поправок компаса и лага;.
3) от ошибок счисления между наблюдениями.
Случайные ошибки наблюдений при пеленговании и при гра-
фическом построении на карте невелики и практически при угле
между пеленгами ^^>30° ими можно пренебречь. Если же, в
силу условий плавания, при определении по крюйс-пеленгу угол
< 30°, то такое определение нельзя считать надежным и его
необходимо повторить при первой же возможности в более бла-
гоприятных условиях.
Ошибка в поправке компаса и ошибка в плавании оказывают
наибольшее влияние на точность определения места судна по
крюйс-пеленгу при отсутствии течения.
Пусть М (рис. 96) — предмет, пеленгуемый судном; МА и
МВ — линии положения, проложенные на карте и соответствую-
щие первому и второму пеленгам; АВ — плавание судна между
моментами взятия первого и второго пеленгов. Тогда точка В
при верных поправках компаса и лага даст правильное счисли-
мое место судна, которое совпадет с счислимо-обсервованным
местом в момент, когда взят второй пеленг. Допустим теперь,
что поправка компаса известна с некоторой ошибкой +в«- Тогда
на карте будут проложены линии положения МА\ и МВЪ а отре-
зок Л1В1 представит курс и плавание судна между наблюде-
ниями; счислимо-обсервованное место получится в точке В\.
При ошибке в поправке компаса е* треугольник АМВ, изобра-
женный пунктирными линиями, повернется около точки М на
угол и займет положение А\МВХ, изображенное сплошными
234
Определение места судна по углам и пеленгам
[Гл. XII
линиями, а отрезок дуги ВВ{ представит ошибку в счислимо-об-
сервованном месте судна. Треугольники АМВ и А{МВХ равны, так
как АВ = А}ВГ, /МЛВ =/МД1В1 и ^МВА = ^МВХА\. Сле-
довательно, МВ = МВ\ и ошибкой в определяемом месте судна
будет дуга ВВ{, описанная радиусом МВ из точки М. Обозначим
для краткости МВ через d. Тогда, принимая во внимание, что
угол мал, можно написать:
1 к *60
Ошибка в поправке лага +ел даст ошибку в плавании ме-
жду моментами пеленгования AS. Предположим, что в этом
случае счислимое место получилось в точке С. Проведя через эту
точку С перенесенную линию первого пеленга, мы получим счи-
слимо-обсервованное место судна в точке Ff а отрезок BF = X
даст линейную ошибку полученного счислимо-обсервованного
места.
Из треугольника CFBt имеем:
FB1 = Д5^-,
sin й>
§ д8\
Точность определения места судна по крюйс-пеленгу
235
а из треугольника BFBi
А = (s* -[- (ASsin q cosec u)2. (98)
Первый член стоящего под корнем двучлена показывает, что
для уменьшения ошибки в счислимо-обсервованном месте пелен*
гуемый предмет следует выбирать по возможности ближе к судну
и второй пеленг брать около траверза, так как траверзное рас-
стояние является наименьшим. Во втором члене при q = 0°
угол о) также равен 0°, и мы имеем неопределенность, которая
показывает, что в этом случае определение по крюйс-пеленгу не-
возможно. Для уменьшения ошибки в пройденном расстоянии
наблюдения следует располагать так, чтобы угол возрастал при
возможно меньшем плавании. И в этом случае наиболее точное
определение будет вблизи траверза пеленгуемого маяка.
Заметив, что
Д S sin q cosec <о
Згл sin q _ d
100 sin w 100 S
100 ’
мы можем формуле (98) придать большую наглядность
100е’+36'' • (Э8'’
Сравнивая это выражение с формулой (62), мы видим, что
они отличаются лишь множителем перед корнем. Вместо пла-
вания S теперь будет расстояние до пеленгуемого предмета в
момент взятия второго пеленга. Это подтверждает необходимость,
при пользовании способом крюйс-пеленга, выбирать для пелен-
гования близкий предмет и брать второй пеленг около траверза
для уменьшения ошибки в счислимо-обсервованном месте.
Определим теперь влияние ошибки в счислении пути судна
от сноса на точность счислимо-обсервованного места, опреде-
ленного по крюйс-пеленгу. Пусть в какой-то момент t\ взят
пеленг предмета М (рис. 97) и через некоторый промежуток
времени в момент t2 взят второй пеленг того же предмета. Про-
ложим на карте от предмета М линии пеленгов.
От точки А проложим линию курса АВ и по ней отложим
плавание S = АВ, Проведя через точку В перенесенную первую
линию положения BF, получим в точке F счислимо-обсервованное
место. Но, вследствие ошибок счисления, счислимое место судна
через промежуток времени — Л может оказаться где-то в пре-
делах окружности, описанной радиусом г из точки В как из цен-
тра (§ 40).
В этом случае наибольшая возможная ошибка в определяе-
мом месте получится, если счислимое место судна будет нахо-
236
Определение места судна по углам и пеленгам
[Гл. XI/
диться в точке Н или L— на концах диаметра iqpyra, перпенди-
кулярного линии первого пеленга AM, В первом случае счислимо-
обсервованное место получится в точке Fif а во втором — в
точке F2, и наибольшая возможная ошибка в определяемом ме-
сте изобразится отрезками FF} или FF2, лежащими на линии
второго пеленга. Проведем через точку F вспомогательную пря-
мую СЕ, параллельную диаметру HL и, следовательно, перпен-
дикулярную линии первого пеленга. Тогда из треугольника FFiC
или равного ему FF2E имеем
FFr = FF2 = г cosec <о, (99)
где г— круговая ошибка счислимого места судна;
w — разность пеленгов или величина изменения пеленга за
время между наблюдениями.
Если счислимое место судна будет находиться где-либо в про-
извольной точке на окружности, например в точке N, то счи-
слимо-обсервованное место получится в точке F3.
§ 58]
Точность определения места судна по крюйс-пеленгу
237
Для определения ошибки FF3 полученного счислимо-обсерво-
ванного места проведем вспомогательную линию FP, параллель-
ную направлению сноса BN; назовем угол, составляемый направ-
лением сноса BN с линией первого пеленга, через а
Из полученного треугольника FF^P имеем
F3F___sin а
PF sin о) *
или
г cosec <0 sin а. (100)
При наличии течения в районе определения по крюйс-пеленгу
оно снесет судно по своему направлению на величину^ (tz—Л)*
Положив г = vm (tz — 6), получим, что течение вызывает ошибку
в определенном по крюйс-пеленгу месте:
F<3F= vm cosec to sin a. (101)
При a=0° или 180°, т. e. когда течение направлено по линии
первого пеленга, то оно совсем не дает ошибки в счислимо-обсер-
вованном месте.
При a =90° или 270° влияние течения будет наибольшим.
Если ошибка в счислении произошла вследствие ошибок в
курсе и в пройденном расстоянии, то
= V100(eL)2 + 36sl cosec w sin a. (102)
Из приведенных формул видно, что для того чтобы ошибка
в счислимо-обсервованном месте была наименьшей, необходимо,
чтобы величина г была возможно меньше, а так как она прямо
пропорциональна промежутку времени между наблюдениями
tz—Л, то, следовательно, надо второй пеленг взять как можно
быстрее после первого пеленга. Но, с другой стороны, cosec бу-
дет наименьшим при <» = 90°; кроме того, если нам известно в
районе определения по крюйс-пеленгу направление течения, то
первый пеленг желательно взять так, чтобы он был возможно
ближе к направлению течения.
Сопоставляя все требования к наиболее точному определению
по крюйс-пеленгу, на практике обычно выбцрают для определе-
ния предмет, наиболее близкий к судну и его траверзу, пеленг
которого меняется быстро.
Для сокращения промежутка времени t2—1\ при определении
второй пеленг можно брать, когда первый пеленг изменится на
30° или несколько больше.
Реальная обстановка в море иногда не позволяет выжидать,
когда первый пеленг изменится на 30°, и второй пеленг берется
238
Определение места судна по углам и пеленгам
[Гл. ХН
при меньшей разности между пеленгами, но тогда на полученное
место следует смотреть как на приближенное, подлежащее про-
верке при первой возможности путем более надежных определе-
ний или повторения крюйс-пеленга при большем угле <#.
§ 59. ЧАСТНЫЕ СЛУЧАИ КРЮЙС-ПЕЛЕНГА
При графическом построении для определения места судна по
^рюйс-пеленгу строится треугольник АМВ (рис. 98), образован-
ный двумя линиями пеленгов AM и ВМ и линией курса или пути
АК, отрезок которой АВ
равен плаванию судна ме-
жду наблюдениями. Под-
бирая определенные зна-
чения углов МАВ и МВК
между линией курса судна
и линиями пеленгов, мож-
но значительно упростить
решение задачи и непо-
средственно получить рас-
стояние от судна до пе-
ленгуемого предмета в мо-
мент второго пеленга или
же траверзное расстояние, в котором судно пройдет от данного
предмета.
Двойной угол. Если первый пеленг AM (рис. 98) взять под
углом а к линии курса, т. е. под КУ = а второй пеленг МВ под
КУ = 2 а, то треугольник АМВ
получится равнобедренным и
АВ = ВМ. В этом случае рас-
стояние от судна до пеленгуе-
мого предмета в момент взятия
второго пеленга равно пройден-
ному судном расстоянию за
промежуток времени между мо-
ментами взятия первого и вто-
рого пеленгов. Для получения
счислимо-обсервованного места
судна надо проложить на карте
линию второго истинного пе-
ленга и по ней отложить от
маяка плавание судна между
наблюдениями. Полученная точка В и будет счислимо-обсерво-
ванным местом судна.
Траверзное расстояние. Если линия первого пеленга AM
(рис. 99) составляет с линией курса АК угол а линия второго
пеленга ВМ перпендикулярна линии курса, т.* е. второй пеленг
# *5Pj
Частные случаи крюйс-пеленга
239
взят, когда предмет М находился на траверзе судна, то из прямо-
угольного треугольника АМВ получаем
МВ = ABtga.
Обозначим для краткости плавание судна между пеленгами
через S, а траверзное расстояние через d, тогда имеем
d = S tg а
Подобрав теперь угол а так, чтобы тангенс его был целым
числом, получим, что траверзное расстояние d будет кратно пла-
ванию S судна.
Например,
tg45° =1; d = S;
tg63°,5 = 2; 2S;
tg71°,6 = 3; d = 3S;
tg76° =4; tZ = 4S.
Таким образом, в этом случае, проложив линию пеленга пер-
пендикулярно к линии курса, остается отложить по ней расстоя-
ние d, в зависимости от вели-
чины выбранного при первом М
пеленговании угла а. На прак- /X
тике наиболее часто определи-
ются по крюйс-пеленгу, беря У/
первый пеленг, когда пеле'нгуе-
мый предмет будет на КУ=45°, /я/
а второй пеленг, когда предмет /
придет на траверз. / °*
Для того чтобы рассчитать jS /
траверзное расстояние, в кото- /
ром судно оставит пеленгуе- Г
мый предмет, нет надобности ---------------£ **-----------
ожидать прихода предмета на 5 В С
траверз, а достаточно подо- ’ Рис 100
брать пеленги так, чтобы КУ
на предмет в моменты взятия первого и второго пеленгов а и р
удовлетворяли условию.
ctg а—ctg Р = 1. (103)
Из прямоугольных треугольников АМС и ВМС (рис. 100)
имеем
. АС . 0 ВС
Ctg а =-- и Ctg > =-----,
& мс мс
откуда
. . д АС— ВС S
Ctg a—ctg В =---= —
& МС d
240
Определение места судна по углам и пеленгам
[Гл. ХП
Следовательно, если ctg а — ctg 0 = 1, то S = d, т. е. траверз-
ное расстояние d будет как раз равно плаванию S судна между
точками А и В.
Курсовой угол в момент второго пеленга 3 легко находится
по таблицам натуральных величин тригонометрических функций
из выражения
ctg Р = ctg а— 1.
Например, если а = 35°, то ctga= 1,428, a ctg3= 0,428 и
р = 66°,8.
Если желательно найти разность между курсовыми углами а
и р, то после простых преобразований из выражения (ЮЗ) имеем
sin (Р—а) = sin а sin р.
Обозначим 3—а = с, тогда р = аЦ-£ и получаем уравнение
sin (а с) = cosec а sin
откуда
ctg; = cosec2 а—ctg а. (104)
Из уравнения (104), задавшись величиной КУ =а, получаем
по таблицам натуральных величин искомый угол ; = £ — а, ц, на-
конец,
Из треугольника АМВ имеем
МВ ___ sin а ____ sin а
АВ Sin (9 — а) sin £ л
откуда
sin £
Обозначим отношение —па через п, тогда МВ = nS. Рассчи-
sin -
тав коэффициент п и умножив на него плавание S, получим
расстояние до маяка МВ в момент взятия второго пеленга. .
В табл. 16 приведены КУ, разность котангенсов которых равна
единице, и коэффициент п для расчета расстояния до маяка при
втором пеленге.
Приведенная таблица позволяет заранее определить расстоя-
ние в момент взятия второго пеленга от выбранного для пеленго-
вания предмета. КУ, выраженные в целых градусах, указаны звез-
дочкой и являются наиболее удобными для расчетов; однако надо
иметь в виду, что при пеленговании на очень острых КУ будут
соответственно возрастать ошибки наблюдений. Табл. 38 «Море-
ходных таблиц» 1943 г. дает более общее решение задачи при
определении по крюйс-пеленгу, как указано в § 57.
§59]
Частные случаи крюйс-пеленга
241
Таблица 16
Курсовые углы, разность котангенсов которых равна единице
и коэффициент п
1-й КУ 2-й ХУ = ? п 1-й КУ = а 2-й КУ = ₽ п 1-й КУ = <* 2-й КУ = 3 п
20° 29°, 8 2,01 28° 48°, 5 1,34 37° 71°,8 1,05
21 31 ,8 1,91 29* 51 1,29 38 74 ,2 1,04
22* 34 1,80 30 53 ,8 1,24 39 76 ,8 1,03
23 26 ,2 1J1 31 56 ,2 1,21 40* 79 1,02
24 38 ,8 1,60 32* 59 1,17 41 81 ,2 1,02
25* 41 1,53 33 61 ,5 1,14 42 83 ,5 1,02
26 43 ,5 1,46 34 62 ,2 1,11 43 85 ,8 1,01
26,5 45 1,41 35 66 ,8 1,09 44* 88 1,00
27* 46 1,39 36 69 ,2 1,07 45* 90 1,00
Можно подсчитать, что если первый пеленг взять под курсо-
вым углом 2 румба (2272°), а второй 4 румба (45°), то траверз-
ное расстояние приблизительно равно 0,7 плавания судна между
наблюдениями. Если же взять КУ, соответственно 221/2° и 261/2°,
то траверзное расстояние
равно 7/з плавания судна.
Конечно, приведенные
здесь множители прибли-
женные.
Если по условиям-пла-
вания пеленг на КУ = 45°
не удалось взять, но все
же желательно опреде-
лить траверзное расстоя-
ние до пеленгуемого пред-
мета, то можно взять его
пеленг, когда предмет будет виден на 261/2° впереди траверза,
т. е. на КУ = 631/2°, а затем второй пеленг, когда предмет придет
на 261/2° сзади траверза, т. е. на КУ = 11672°. В этом случае
плавание между пеленгами равно траверзному расстоянию до
предмета.
Прямой угол при предмете. Если первый пеленг в точке А
(рис. 101) взят под курсовым углом а, а второй — в точке В под
курсовым углом 90°-[-а, то угол между пеленгами при предмете
М будет равен 90°. Из прямоугольного треугольника АМВ полу-
чаем i
МВ = АВ sin а.
При а = 30° имеем
МВ = - AB = — S.
2 2
16
К- С. Ухов
242
Определение места судна по углам и пеленгам
[Гл. XI/
В этом случае расстояние до предмета при втором пеленге
МВ равно половине плавания судна между пеленгами.
При определении по крюйс-пеленгу, пользуясь любым из част-
ных случаев, необходимо выбранные курсовые углы а и |3 рас-
считать по компасной картушке, так как при использовании для
пеленгования азимутального круга ошибка от виляния рулевого
на курсе целиком войдет в наблюдаемые пеленги. Расчет отсчета
компасного пеленга по заданному курсовому углу производится
на основании формул (20). Так как устройство пеленгаторов
у компасов ГУ дает под призмой отсчет компасного пеленга, от-
личающийся на 180° от направления на маяк, то формулы (20)
перепишутся так:
ОКП = (КК + 180°)Ц-А’У правого борта |
ОКП = (КК+ 180°)- КУ левого борта } (105)
где ОКП означает отсчет компасного пеленга,-т. е. тот отсчет,
который должен быть под призмой пеленгатора
Знак плюс (+) для величины, стоящей в скобках, берется при
курсах меньше 180°, а знак минус (—) при курсах больше 180°.
Во всех частных случаях крюйс-пеленга, когда рассчиты-
ваются КУ, а и при наличии дрейфа или течения эти углы дол-
жны рассчитываться относительно линии пути; они будут отли-
чаться от КУ на угол сноса. Взамен траверзного расстояния в
этом случае мы будем иметь дело с кратчайшим расстоянием до
маяка по перпендикуляру к линии пути.
Пример 1. Компасный курс судна 89°; рассчитать отсчеты компасных пе-
ленгов предмета, когда он будет на курсовых углах а = 32° и 8= 59°. Пред-
мет с левого борта. 1
Решение.
ОКП = 89° + 180° — 32° ~ 237° для первого пеленга;
ОКП = 89° + 180° — 59° = 210° для второго пеленга.
Пример 2. Компасный курс судна 253°; рассчитать отсчеты компасных
пеленгов предмета, когда он будет на курсовых углах а = 40° и ? = 79°.
Предмет с правого борта.
Решение.
ОКП = 253° — 180° + 40° = 113° для первого пеленга;
ОКП = 253° — 180° + 79° = 152° для второго пеленга.
Рассчитав желаемые отсчеты компасных пеленгов, наводят
визирную плоскость пеленгатора на предмет и следят за измене-
нием пеленга. Когда пеленг будет близок к вычисленному, уста-
навливают пеленгатор так, чтобы под его призмой приходился
найденный ОКП, и когда предмет придет в визирную плоскость
пеленгатора, замечают момент по тем часам, по которым ведут
1 Некоторые образцы пеленгаторов дают непосредственно компасное на-
правление на пеленгуемый предмет.
£ 59] Частные случаи крюйс-пеленга 243
прокладку и записывают отсчет лага. Одинаково поступают и
при взятии второго пеленга. При этом нужно следить за тем, как
рулевой держит на румбе, так как при уклонении судна от за-
данного курса пеленгатор будет сходить с ОКП, на который он
установлен.
При наблюдении по азимутальному кругу на котелке компаса
или по таксиметру необходимо следить, чтобы рулевой точно дер-
жал на заданном курсе, а в момент взятия пеленга заметить курс
самому или опросить о курсе рулевого, чтобы убедиться, что
судно лежит на курсе. При зна-
чительном и случайном укло-
нении от курса по замеченному . ...
КУ рассчитывается КП пелен-
гуемого предмета, и если он су- у /
щественно отличается от наме- \ \/
ченного заранее, то в этом слу-' \ с
чае лучше использовать взятые —--------гА-—
пеленги для общего случая \ z \
крюйс-пеленга. \ /
Разновременные пеленги двух
предметов. Если в виду судна Рис. 102.
имеется один предмет, который
скоро должен скрыться, а через сравнительно небольшой проме-
жуток времени откроется другой предмет, то, взяв пеленг первого
предмета незадолго до его скрытия, а пеленг второго вскоре
после того, как он откроется, и вместив между пеленгами плава-
ние судна, получим счислимо-обсервованное место судна. Так как
при этом приходится учитывать плавание судна между пелен-
гами, то этот способ определения места также относится к крюйс-
пеленгу.
Предположим, что незадолго перед скрытием предмета М
(рис. 102) взят его пеленг, замечен момент по часам и записано
показание лага ол\. Проложив на карте после исправления линию
истинного пеленга МА, точку пересечения линии пеленга с линией
курса А примем за место в момент взятия первого пеленга.
Вскоре после открытия второго предмета N, если первый пред-
мет М уже скрылся, возьмем пеленг предмета N, заметим момент
по часам и показание лага 0Л2. Проложим линию второго пеленга
на карту и вместим между линиями обоих пеленгов плавание
судна 5 за время между моментами взятия обоих пеленгов. Для
этого, как указано в § 57, от точки А отложим по курсу АВК рас-
стояние = полученное по разности отсчетов лага исправ-
ленной поправкой лага. Через полученную точку В проведем пе-
ренесенную линию первого пеленга BF параллельно линии пе-
ленга AM и в пересечении ее с линией второго пеленга в точке F
получим счислимо-обсервованное место судна.
244
Определение места судна по углам и пеленгам
[Гл. XII
Точность этого способа такова же, как и точность общего слу-
чая крюйс-пеленга и зависит главным образом от ошибок счис-
ления пути судна за промежуток времени между наблюдениями.
При небольшом промежутке времени t2—6, если угол между пе-
ленгами близок к прямому, этот способ дает достаточно хороший
результат при отсутствии неизвестного течения или дрейфа.
§ 60. ВЛИЯНИЕ ТЕЧЕНИЯ ПРИ ОПРЕДЕЛЕНИИ
ПО КРЮЙС-ПЕЛЕНГУ МЕТОДОМ ДВОЙНОГО УГЛА
Для определения влияния постоянного или приливо-отлив-
ного течения при определении по крюйс-пеленгу методом двой-
ного угла рассмотрим рис. 103.
Пусть АК будет линией курса, т. е. направлением диаметраль-
ной плоскости судна, а ВС — направлением течения. Если судно
за какой-то промежуток времени прошло по курсу расстоя-
ние АВ, а течение снесло его за тот же промежуток времени на
расстояние ВС, то АС — замыкающая векторов АВ и ВС — пред-
ставит линию пути судна и расстояние АС — действительное пе-
ремещение судна под совокупным действием собственного дви-
гателя и течения. Пусть М — наблюдаемый предмет, а а — кур-
совой угол на предмет М в точке А, Когда судно окажется в
точке С, то по условию его курсовой угол на предмет удвоится и
=2а. В точке С диаметральная плоскость судна будет совпа-
дать с направлением DCE\\ABK, а ,/МСЕ = 2а, следова-
тельно, /2CDM = ^CMD и DM =МС = d. Проведем вспомога-
тельную линию CG параллельно AM, тогда /CGB =2., DC =
= AG и CM = AG = ABGB.
£ 60]
Влияние течения при определении по крюйс-пеленгу
245
АВ — плавание судна по лагу или расстояние, пройденное
судном под действием собственных машин, может быть всегда
рассчитано, a GB получим из треугольника GCB:
GB
ВС
sin GCB и sin GCB
sin BGC sin a
Обозначим ВС — снос судна течением за промежуток времени
между моментами взятия пеленгов — через с, а угол ZJCBK
через q. тогда GCB = q — а и, следовательно,
и
= ^Sin (7 —g)
Sin a
CM=d = AB- csin (t?~a) .
Sin a
(106)
Если направление течения и его скорость известны, то легко
можно рассчитать угол q и затем величину GB. Вычисление бы-
стро и просто производится при помощи таблиц разности широт
и отшествия, принимая с за плавание, а (q—а) за курс. С полу-
ченным отшествием, принимая теперь а за курс, обратным вхо-
дом в таблицу в графе «плавание» получаем величину GB.
При помощи формулы (106), таким образом, может быть
определено расстояние СМ = d до пеленгуемого предмета в мо-
мент вторых наблюдений.
Если угол q, составляемый течением с направлением диамет-
ральной плоскости судна, меньше КУ = а, под которым взят пер-
вый пеленг, то подрбным построением можно вывести, что
d=CM=AB+ csin(a~?) . (107)
Sin a
При выводе формул (106) и (107) предполагалось, что- тече-
ние с правого борта, а пеленгуемый предмет с левого борта, т. е.
течение сносит судно к предмету; те же формулы будут справед-
ливы, если течение с левого борта, а пеленгуемый предмет с пра-
вого борта. Если же предмет находится с того же борта, с кото-
рого действует и течение, т. е. судно относит от пеленгуемого
предмета, то легко показать рисунком, что в этом случае
d = AB+ csin(a + ?) . (108)
Sin a
Пример. В 10 ч. 00 м. И К 75°, ход 16 узлов, взят первый пеленг пред-
мета М 40°, течение на 300° со скоростью 3 узла. В 10 ч. 30 м. взят вто-
рой пеленг 5°. Определить расстояние до пеленгуемого предмета.
46
Определение места судна по углам и пеленгам
[Гл. XII
Решение.
1-й КУ в 10 ч. 00 м. а = 35°;
2-й КУ в 10 ч. 30 м. 2* = 70°.
Рассчитываем q = 75°— 300° + 360° = 135°; АВ = 8 миль; с =1,5 мили.
Течение сносит судно влево, и пеленгуемый предмет находится с левого
борта судна, поэтому
, о 1,5 sin (135°-35е) о 1,5 sin 80°
Cl = О----------------“О-------------.
sin 35° sin 35°
По табл. 34 «Мореходных таблиц» находим в графе отшествие по курсу
80е и плаванию 1,5 мили—1,5* sin 80°= 1,48. По курсу 35° и отшествию 1,48
в графе «плавание» находим 2,6 мили.
Следовательно, в 10 ч. 30 м. судно находилось на расстоянии d = 8 —
— 2,6 = 5,4 мили по пеленгу 5° от предмета М. Надо проложить только вто-
рой пеленг и по нему отложить расстояние 5,4 мили от предмета М.
Если течение противоположного направления, допустим оно идет на 120°,
то q= 120° —75° = 45° И
, „ , 1,5 sin (45° + 35°)
d = 8 4---------------- = 10,6 мили.
sin 35°
В некоторых частных случаях решение этой задачи еще более
упрощается, например:
1) если направление течения совпадает с курсом судна, то
q = 0° и d = АВ 4- с;
2) если течение противное и q = 180°, то d = АВ — с;
3) если направление течения совпадает с первым пеленгом,
то q = а и d = АВ;
4) если направление течения обратно первому пеленгу, то
q = 180° — а и d = АВ;
5) если направление течения совпадает со вторым пеленгом,
то q = 2а и d = АВ — с;
6) если направление течения обратно второму пеленгу, то
q = 180 — 2а и d = АВ 4~ С
Все эти частные случаи можно показать на простых чертежах.
§ 61. ИСПРАВЛЕННЫЙ КРЮЙС-ПЕЛЕНГ
Если судно имело надежное определение по двум углам или
по трем пеленгам, а затем через некоторый промежуток времени
в виду его остался один предмет, пригодный для пеленгования,
то для получения более точного места по крюйс-пеленгу может
быть применен следующий прием, предложенный гидрографом
Н. Н. Струйским и названный им «исправленный крюйс-
пелен г».1
Положим, что в точке F (рис. 104) судно имело хорошее опре-
деление места по пеленгам двух или трех маяков или же по
1 Н. Н. Струйский, Исправленный крюйс-пеленг, Записки по гидро-
графии, 1929, т. 57.
§ 61]
Исправленный крюйс-пеленг
247
углам и, следуя дальше курсом FK, определялось по крюйс-пе-
ленгу, имея в пределах видимости предмет М. Пусть в счислимой
точке А судно взяло первый пеленг предмета М, а в счислимой
точке В — второй. Обозначим время, затраченное судном на про-
хождение пути от обсерво-
ванной точки F до первого
пеленга, через 6, а плава-
ние его по линии курса
FA — через /и; соответ-
ственно промежуток вре-
мени между пеленгами
обозначим через /2, а пла-
вание—через п.
За промежуток време-
ни между моментом пер-
вой обсервации судна и
моментом, когда взят вто-
рой пеленг для крюйс-пе-
ленга, равный /1 + /2, на
судно действовало течение
и ветер, вызывавшие снос
судна, а погрешность лага
и ошибки в поправке ком-
паса вносили свою ошибку
в счисление его пути. Если
предположить, что за про-
межуток времени Л + ^2
ход судна был постоян-
ным и также принять по-
стоянным действие раз-
личных причин, уклоняю-
щих судно с линии его
курса в течение того же промежутка времени, то перемещение
судна будет прямолинейным и равномерным. При этих условиях
возможно определить" величину и направление сноса судна за
промежуток времени 6 + /2, понимая под сносом суммарное дей-
ствие на судно всех причин, уклоняющих его с линии курса.
Так как в момент взятия пеленгов судно должно было нахо-
диться соответственно на линии пеленгов MI и МП, то направ-
ление истинного перемещения судна при данных условиях най-
дется, если из точки F проведем линию пути судна FD так, чтобы
отрезки ее, заключенные между точкой F и линией первого пе-
ленга и линиями первого и второго пеленгов, относились между
собой как промежутки времени Л : t2, затраченные на прохожде-
йие этих отрезков пути или как расстояния tn: п, пройденные
по счислению. Тогда будет соблюдено условие равномерности и
248
Определение места судна по углам и пеленгам
[Гл. ХП
прямолинейности перемещения судна, а также условие, что судно
в заданные моменты должно находиться на линиях пеленгов, взя-
тых для крюйс-пеленга.
Для графического нахождения линии пути судна соединим
точку F с точкой М и разделим эту линию в отношении тп : п.
Это проще всего сделать, соединив точку В с точкой М и проведя
прямую АС через точку А параллельно линии ВМ. Тогда =
Проведем через полученную точку С линию второго пеленга,
перенесенную параллельно, а затем соединим точку Е — пересе-
чения линии первого пеленга с перенесенной линией второго* пе-
ленга — с точкой F и продолжим ее до пересечения с линией вто-
рого пеленга в точке D.
Полученная прямая FD и будет представлять путь судна, так
как из построения видно, что эта прямая делится в точке Е в
заданном отношении. Действительно
FA___ FC __ FE _ tn __
АВ~~ CM — ED ~ п — t2
Так как при построении взято отношение тп: п, то если тп и
п получены как разности отсчетов лага, то ошибка в поправке
лага не окажет влияния на конечный результат.
Определив место судна по исправленному крюйс-пеленгу в
точке D и имея счислимое место в точке В, получим с прокладки
отрезок BD — величину сноса за промежуток времени 6 +1%.
Если в дальнейшем предполагается постоянство всех причин, вы-
зывающих снос судна, то направление и скорость сноса, опреде-
ленные таким путем, могут быть приняты во внимание при даль-
нейшей прокладке.
Чтобы сократить графическое построение в способе исправ-
ленного крюйс-пеленга, можно поступить следующим образом:
от обсервованной точки F (рис. 105) прокладываем линию
курса или произвольную линию FN и от точки L — пересечения
этой линии с линией первого пеленга — откладываем отрезок
LP=FL —= FL—. В полученную точку Р переносим линию
Л п
первого пеленга и в точке D получаем счислимо-обсервованное
место.
Прямая FD — путь судна, а его истинная скорость
v=-™-.
Л + ^2
В целях определения величины и направления сноса судна
исправленный крюйс-пеленг может быть применен и в тех слу-
чаях, если надежное определение места судна получено через
# 61]
Исправленный крюйс-пеленг
249
некоторый промежуток времени после определения по крюйс-
пеленгу, а также в случае определения по двум разновременным
пеленгам двух различных предметов.
Исследование точности этого способа, произведенное
Н. Н. Струйским, и сравнение его с общим случаем крюйс-пе-
ленга показывает, что при постоянстве направления и величины
сноса исправленный крюйс-пеленг дает более точное место, чем
общий случай. При изменении величины сноса вследствие изме-
нения силы ветра и возбуждаемого ветром дрейфового течения
исправленный крюйс-пеленг имеет преимущество во всех случаях
усиливающегося течения; при значительном же ослаблении силы
течения общий случай крюйс-пеленга может оказаться точнее,
чем исправленный крюйс-пеленг.
При изменении направления сноса, например, в случае, если
течение следует вдоль берега, изменяющего свое направление, об-
щий случай крюйс-пеленга дает лучший результат при значи-
тельном изменении направления течения, особенно, если это изме-
нение происходит в сторону первого пеленга. При медленном же
изменении направления течения, а также если оно меняется в
сторону от первого пеленга, исправленный крюйс-пеленг должен
дать лучшие результаты.
В общем случае при изменении скорости и направления сноса
исправленный крюйс-пеленг имеет преимущество при увеличении
скорости сноса и изменении направления течения к перпендику-
ляру к первому пеленгу. При резком же уменьшении величины
сноса и при изменении направления его в сторону первого пе-
ленга общий случай крюйс-пеленга дает более точное определение.
250 Определение места судна по расстояниям [Гл. XIII
Прием исправленного крюйс-пеленга применялся в 1928 г. в
бюро по изучению течений Каспийского моря при восстановлении
прокладки судов Каспийского пароходства и дал хорошие ре-
зультаты. Однако его практическая ценность в судовой обста-
новке еще не выяснена. Дополнительные ошибки графического
построения при сравнительно небольшой величине сноса не дают
заметных преимуществ исправленному крюйс-пеленгу, если
нельзя рассчитывать на постоянство направления и скорости
сноса.
ГЛАВА XIII
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО РАССТОЯНИЯМ
§ 62. ОПРЕДЕЛЕНИЕ РАССТОЯНИЙ В МОРЕ
Когда в виду судна имеется только один предмет или когда
почему-либо нельзя полагаться на поправку компаса, например,
магнитного компаса в районах магнитной аномалии, при времен-
ном выходе из меридиана гирокомпаса и т. п., определение рас-
стояний дает возможность быстро и достаточно точно получить
место судна. Точность получаемого при этом способе места судна
зависит от точности измерения расстояний, которые в море опре-
деляются следующими способами:
а) по дальномеру;
б) по вертикальному углу, измеренному секстаном;
в) радиотехническими средствами.
Все оптические дальномеры, применяемые в настоящее ^ремя
на судах, разделяются по принципу своего устройства, на три
группы.
Первая группа — монокулярные горизонтально-базис-
ные дальномеры с базой в самом приборе, в котррых расстояние
получается автоматическим решением горизонтального прямо-
угольного треугольника, один известный катет которого представ-
ляет длина (база) прибора, а противолежащий этому катету
угол измеряется прибором.
Вторая группа — стереоскопические дальномеры, осно-
ванные на бинокулярном свойстве глаза различать глубину про-
странства и, следовательно, оценивать расстояния по шкале, по-
мещенной в поле зрения дальномера.
Третья группа — микрометры, решающие вертикальный
прямоугольный треугольник по известной высоте предмета и про-
тивоположному углу, измеряемому прибором. Существует не-
сколько типов микрометров.
Точность расстояния, измеряемого дальномером, зависит от
ошибок самого прибора «и от точности, с которой наблюдатель из-
меряет угол. Исследования, произведенные над дальномерами
§ 62]
Определение расстояний в море
251
первых двух групп, показывают, что инструментальные ошибки
их одного порядка и проще всего выражаются в процентах от из-
меряемого расстояния. В табл. 17 даны ошибки дальномеров в
зависимости от их базы при увеличении X 28, характеризующие
точность измеренных расстояний в практической судовой обста-
новке.1
Таблица 17
База 2,7 м 3 м 5 м
расстоя- j ние в j кабель- j товых ошибки в кабель- товых в про- центах от ди- станции ошибки в кабель- товых в про- центах от ди- станции ошибки в кабель- товых в про- центах от ди- станции
10 0,03 0,30 0,03 0,30 0,02 0,20
20 0,15 0,75 0,12 0,60 0,06 0,30
40 0,57 1,44 0,51 1,20 0,30 0,75
j 60 1,23 2,04 1,18 1,89 0,66 1,11
80 2,22 2,76 2,01 2,52 1,20 1,50
100 3,45 3,45 . 3,00 3,00 1,89 1,89
! 150 7,77 5,16 7,11 4,50 4,26 2,82
! 200 13,83 6,90 12,66 6,30 7,56 3,84
При уменьшении или увеличении базы дальномера соответ-
ственно должны быть увеличены или уменьшены цифры, приве-
денные в таблице.
Как видно из таблицы, точность, даваемая дальномерами, до-
статочна для навигационных целей, и дальномеры являются цен-
ными приборами для надежно-
го и быстрого определения ме- pi
ста судна.
Точность микрометров, из-
меряющих вертикальный угол,
одного порядка с точностью оп-
ределения расстояния по вер-
тикальному углу, измеренному
секстаном, и будет разобрана
ниже, в § 66.
При определении расстояния по измеренному секстаном вер-
тикальному углу необходимо знать высоту предмета, чтобы найти
искомое расстояние. Пусть М (рис. 106) является вершиной ка-
кого-либо предмета, высота которого над уровнем моря МВ — И.
Допустим, что глаз наблюдателя находится на уровне моря в
точке А и при этих условиях измерена секстаном угловая высота
1 Д. С. Лемтюжников, Дальномеры, теория и устройство, 1929.
252
Определение места судна по расстояниям
[Гл. XII/
предмета М, После исправления отсчета секстана поправкой ин-
декса получим = а. Тогда из прямоугольного треуголь-
ника АМВ, обозначив расстояние АВ до основания предмета че-
рез D, имеем
D = Hctga. (109)
Для того чтобы D получить в морских милях, перепишем, в
зависимости от того, в каких мерах выражено Hf формулу
(109) так:
D — -^ctga = -^- ctg а.
1852 & 6080
По этим формулам составлены табл. IX-а и IX-б, приведенные
на IX вкладном листе «Мореходных таблиц» 1943 г. В табл. 1Х-а
по высоте предмета в метрах от 10 до 100 и по вертикальному
углу от И до 5° дано расстояние до предмета в милях. Табл. IX-6
составлена для тех же пределов аргументов, но высота предмета
Н дана в футах.
Так как в обычных условиях плавания угол а мал (редко пре-
вышает 5°), то, выражая угол а в дуговых минутах, можно при-
нять, что tga=a' аге Г =----, тогда
£) = 3438 —.
Для Н в метрах получим приближенно
7 а' ’
для Н, данного в футах,
D = ±^
7 а' ’
(110)
При выводе формулы (109) мы пренебрегли земной рефрак-
цией, как бы приподнимающей предметы, и кривизной земной
поверхности. Кроме того, предполагалось, что высота глаза на-
блюдателя равна нулю, а угол измерен так, как будто предмет
находится на отвесной линии над береговой чертой. На самом
деле глаз наблюдателя будет находиться на некоторой высоте
СА = е над уровнем моря и на практике, как видно из рис. 106,
вместо угла </Л1ДВ будет измерен угол ZA1CE.
На сравнительно небольших расстояниях, когда видно основа-
ние предмета, влиянием'рефракции и кривизны земной поверх-
ности на измеряемый вертикальный угол можно пренебречь.
Влияние же высоты глаза е на измеряемый угол а рассмотрим
§ 62}
Определение расстояний в море
253
вместе с ошибкой, происходящей от различного положения бере-
говой черты относительно предмета М, до которого измеряется
расстояние.
1. Предмет, до которого измеряют расстояние, находится на
отвесной линии над береговой чертой и можно считать, что мы
видим основание предмета. Пусть точка В (рис. 107) представ-
ляет основание предмета МВ, высота которого над уровне^
моря Н, глаз наблюдателя находится в точке О на высоте АО = е
над уровнем моря. Из точки О
измерена угловая высота пред-
мета /МОВ = а. Опишем ок-
ружность около треугольника
ОМВ\ тогда, полагая глаз на-
блюдателя на уровне моря,
предмет МВ будет виден под
углом а -из точки С. Продол-
жим линию АО и отложим на
ней отрезок АЕ = Н, а также
отметим точку F пересечения
этой линии с проведенной ок-
ружностью. Из рисунка видно,
что расстояние от наблюдателя
до основания предмета D —
= АВ = АС СВ.
На основании свойств секу-
щих, проведенных к кругу из точки, лежащей вне круга, можно
написать
ACAB = AO-AF.
Тогда
ы 4-^ । AO-AF
НО
АО = е- AF=H—e; AB = D,
и мы получаем
D = Hctga+ е(Н~е) •
Если H<ZD, то ~е^ <е.
D
(П1)
Значит, если пренебречь высотой глаза наблюдателя, то
ошибка в определении расстояния будет меньше высоты глаза е,
при условии, что расстояние до предмета D больше высоты пред-
мета.
254
Определение места судна по расстояниям
[Гл. ХНГ
2. Основание предмета скрыто, и угол измеряется между бе-
реговой чертой и вершиной предмета. Пусть М (рис. 108) вер-
шина предмета, высота которого над уровнем моря ВМ = Н;
2_M0N = я — угол, изме-
ренный над точкой N берего-
вой черты, лежащей в вер-
тикальной -плоскости, прохо-
дящей через предмет ВМ и
глаз наблюдателя О; ANB—
уровень моря; АО = е вы-
сота глаза над уровнем моря.
Опишем около треугольника
0MN окружность и отметим
точки С, F и G пересечения
окружности с линией AN и
отвесными линиями, прове-
денными через точки О и ЛЕ
Если пренебречь высотой
глаза е, а также тем обстоя-
тельством, что угол я изме-
Рис. 108.
рен над береговой чертой, то
получим расстояние до предмета ВС вместо истинного расстоя-
ния АВ = D.
Из рис. 108 имеем
D = АВ = АССВ = ИАС.
Аналогично первому случаю, по свойству секущих AN и AF
можем написать
AC-AN = AO-AF.
Отложим от точки F по линии АЕ отрезок FE = е и прове-
дем прямые FK и EL параллельно линии АВ, тогда получим
AF = BK= BG^GK= BG^-H—e.
Сделав подстановки, придем к следующему выражению:
n и ; I BG + (Я -е)
D = H ctg я - - е---—-------- .
& 1 . AN
Так как BG• Н =\BN*СВ, то
И
BQ — CB-BN _ BN (AN — ЛС + BN)
““ И
и
п r_j г । „ Н—е । BN /1 AC । BN\
и = Н ctg я + е---------к е — 1 —---------------* (112 >
S ' AN 1 /7 \ AN 1 AN/ V 7
£62]
Определение расстояний в море
255
Выражение (112) показывает, что, пренебрегая высотой глаза
и измеряя угол над береговой чертой, мы делаем ошибку, вели-
чина которой определяется двумя последними членами. При
что обычно и бывает, 6^^—т. е. 2-й член выражения
(112) меньше высоты глаза е. Если, кроме того, и BN будет
меньше Н, то AN^>H^>BN и можно подсчитать, что максималь-
ная величина третьего члена (112) будет меньше 2е.
Такдм образом, в данном случае, при условии, что
AN^>H^>NB мы, принимая D = Н ctg а, допускаем ошибку в.
измеренном расстоянии меньше
утроенной высоты глаза наблю-
дателя. Однако условие, что
H^>NB, не зависит от наблю-
дателя, и в тех случаях, когда
NB велико по сравнению с Н,
а расстояние все же надо опре-
делить по вертикальному углу,
следует, если имеются данные
о расстоянии NB и о приближенном расстоянии ЛМ, подсчитать
третий член выражения (112). Если при этом поместить глаз на-
блюдателя достаточно низко, то вторым членом и OTHomeHHeMi
АС
—, входящим в 3-й член, можно пренебречь.
3. Видимый горизонт выше основания предмета. При большой
высоте глаза наблюдателя е и при малом расстоянии D до пред-
мета основание последнего может быть видно ниже видимого*
горизонта наблюдателя. В этом случае расстояние до предмета мо-
жет быть найдено по углу снижения, измеренному между види-
мым горизонтом и основанием предмета. Если расстояние изме-
ряется до скалы или какой-либо постройки на воде, то за осно-
вание принимается урез воды; при определении же расстояния
до судна или какого-либо плавающего предмета за основание его-
принимается ватерлиния.
Пусть точка О (рис. 109) представляет глаз наблюдателя, на-
ходящийся на высоте е над уровнем моря; АВ — уровень моря;
ОН — истинный горизонт, a ON — направление на видимый го-
ризонт наблюдателя. Угол ^HON представляет наклонение ви-
димого горизонта d, а угол /NIOB =а —измеренный угол сни-
жения между видимым горизонтом и основанием предмета в
точке В.
На рис. 109 получаем, что
следовательно,
£ ABO £НОВ =
D = AB = ectg(i^-d).
256 Определение места судна по расстояниям [Гл. XIII
Наклонение видимого горизонта d может быть выбрано из
табл. 14 «Мореходных таблиц» 1943 г. по аргументу высота
глаза е.
Во всех случаях влиянием рефракции и кривизной земной по-
верхности мы пренебрегали, так как получающаяся от этих фак-
торов ошибка в определяемом расстоянии не имеет никакого
практического значения вследствие сравнительно малой величины
искомых расстояний.
При измерении угловой высоты предмета над уровнем моря в
районах, где явления приливов ясно выражены, следует вводить
поправку в высоту предмета Н за высоту уровня моря в момент
наблюдений, так как на картах и в различных пособиях по море-
плаванию высоты предметов даются над средним уровнем полной
воды. При определении расстояний до маяков угол должен изме-
ряться от основания маяка или горизонта воды до центра фонаря.
При малых углах, для получения расстояния с большей точ-
ностью, можно рекомендовать двойное измерение угла, сводя сна-
чала вершину предмета с его основанием или с уровнем воды,
а затем, перевернув секстан, свести уровень воды с вершиной
предмета и взять средний из двух отсчетов.
§ 63. ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ ДО ПРЕДМЕТА,
КОГДА ОСНОВАНИЕ ЕГО СКРЫТО ПОД ВИДИМЫМ ГОРИЗОНТОМ
НАБЛЮДАТЕЛЯ
Предположим, что М (рис. ПО) —вершина горы, основание
которой находится ниже видимого горизонта наблюдателя СЕ;
высота горы над уровнем моря ВМ = Н метров. Пусть глаз на-
блюдателя находится в точке С на высоте е метров над уровнем
моря. Искомое расстояние до основания горы представится дугой
АВ = D или соответствующим ей углом при центре сферы —
^АОВ. Наблюдатель, желая определить расстояние до горы ВМ,
измерил секстаном вертикальный угол LCE=&, представляю-
щий видимую угловую высоту горы ВМ. Угол КСЕ = d представ-
ляет наклонение видимого горизонта, а угол LCM == г — земную
рефракцию, приподнимающую вершину горы М так, что мы ви-
дим ее по направлению CL. Истинная высота горы, исправленная
за рефракцию и наклонение видимого горизонта, т. е. угол МСК,
будет равна Р = а—г — d.
В треугольнике СОМ / ОСМ = 90° + р,
£ ОМС = 180°^£>- (90° + р) = 90°-D-p,
следовательно, .
’ cos (D 4- 4 е
cos р R 4 И
где R = радиус Земли.
§
Определение расстояния до предмета
257
Р 1 Q
По формуле cos (D 4~₽) = ———cos р можно вычислить угол D
R И
и получить расстояние D = АВ в морских милях. Наклонение
видимого горизонта d всегда может быть выбрано из табл. 14
«Мореходных таблиц» 1943 г., что же касается величины рефрак-
ции г, то она приблизительно равна — D, так что, пренебрегая
величиной г, мы всегда получим
При желании получить бо-
лее точно величину D сле-
дует с приближенным значе-
нием D определить рефрак-
цию r=~D и вновь вычис-
лить расстояние D, прини-
мая во внимание рефрак-
цию г.
Последняя формула со-
держит в себе радиус R Зем-
ли, выраженный в метрах,
который представляет очень
большое число по сравнению
с высотой горы Н и высотой
глаза наблюдателя е, что вы-
зывает необходимость вычис-
лять величины (R Н) и
(7? 4- е) с большой точ-
ностью. Гораздо удобнее
приближенное расстояние D,
Рис. НО.
привести формулу к виду, независимому от
радиуса Земли. Для
этого прологарифмируем обе части уравнения и напишем его так:
lg cos (D + Р) = lg cos p + lg
e
~R
H
R
Так как отношение — и — — малые дроби, то, разлагая
H’+f) ”ig(1 + v)
в ряды и ограничиваясь первыми чле-
нами разложения, получим
lg/l + — 1 = И
s\ 1 r) r
17
К. С. Ухов
258
Определение места судна по расстояниям
[Гл. XIII
Тогда второй член правой части уравнения напишется так:
R
а
lg cos (О + р)= 1g cos р— ^-(Н-е).
К
* м
Обозначим — (Н—е) через х, тогда
= 1g (^-«О + lg
/\
1
где 1g-----величина постоянная.
R
Полагая радиус Земли, принимая ее за сферу, равным
7? = 3437,7468 X 1852 м = 6 366 707 м,
получим
1g х = lg(77—е)+9,6377843—6,8039149 = lg(77—е) + 2,8338694.
Окончательно имеем
lg cos (D-\ - 3) = Igcos 9—х,
(ИЗ)
где \gx=\g(H—e) + 2,8338694.
Вычисление формулы (113) по логарифмам ввиду малости
угла р требует применения шести- или семизначных логарифмов.
Чтобы избежать вычислений по логарифмам, в «Мореходных
таблицах» 1943 г. на вкладном листе XI приведены табл. IX-в, г и
д, вычисленные по преобразованной формуле
-10к In cos (Г>+ р) =-106 In cos Р+ 10з(Я ~'е) .
В табл. IX-в по аргументу (Н—е) в метрах дана величина
1 ПЗ ^Л1 TV 1
Ю3---------, а в табл. IX-г дана величина Ю6-------по тому же
^км R#
аргументу (Н—е), выраженному в футах. В табл. IX-д даны на-
туральные логарифмы косинусов для углов от 0° до 9°50', умно-
женные на 106.
Для облегчения интерполирования внизу табл. IX-в даны
вспомогательные таблички.
Яражер.При подходе к проливу Лаперуза с расстояния около 62 мор.
миль измерили секстаном угловую высоту вершины острова Рисире над види-
мым горизонтом; отсчет секстанта 38',6, поправка индекса + 6'. Высота
Определение места судна по двум расстояниям
259
вершины острова, снятая с карты, 1718 м, высота глаза наблюдателя 14,6 м.
Определить расстояние до вершины острова.
Решение.
Отсчет секстана................... 38',6
Поправка индекса...........'6,0
Видимая высота вершины............ 44,6
Наклонение горизонта..............— 6,7 (табл. 14 МТ-43)
Рефракция */ 13РС.............. — 4,8_______________________
1 ~ЗЗД
Н — е............... 1703,4 м
Табл. 1Х-в............268
Табл. 1Х-д ..... 46
S ..............314
£> + ₽...........1°26',1
D = 53 мор. мили.
Определение расстояния до отдаленного предмета, в особен-
ности если прр этом возможно взять пеленг этого предмета, дает
возможность мрреплавателю при подходе к берегу, уже на боль:
шом расстояний от него, получить довольно надежное определе-
ние места судна.
§ 64. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ДВУМ РАССТОЯНИЯМ
А
чГ
Если имеется определенное одним из вышеописанных спосо-
бов расстояние D до какого-либо предмета, то, описав на карте
окружность радиусом £>, приняв за центр окружности наблюдае-
мый предмет, получим ли-
нию положения судна.
Если измерены расстоя-
ния до двух каких-либо
предметов, то, нанеся на
карту две линии положе-
ния, место судна получим
в точке пересечения этих &
линий. Окружности пере-
секаются между собой в
двух точках, но счислимое
место или, в крайнем слу-
чае, приближенный пеленг
легко и безошибочно опре-
делят обсервованное ме-
сто судна.
Предположим, что суд-
но подходит к двум возвышенным островам А и В (рис. 111)
и в 12 ч. 35 м. измерены одновременно расстояния до этих остро-
вов А и Д2 и замечено показание лага 383,5. Описав окружности
радиусами, равными расстояниям £>ь приняв за центр вершину
17*
260 Определение места судна по расстояниям [Гл. XIII
пика Л, и — Z>2, приняв за центр вершину острова В, получим
пересечение линий положения в точках F и Л. Счислимое место
Е сейчас же укажет, что обсервованное место судна находится
в точке F.
Так как место получается графически, то чем ближе угол пе-
ресечения окружностей к прямому, тем точнее получится место
судна. Поэтому, выбирая предметы для наблюдений, следует от-
дать предпочтение таким, горизонтальный угол между которыми
ближе к 90°. Расстояния, определенные по вертикальному углу
предмета, будут тем точнее, чем больше высота предмета и чем
больше наблюдаемый вертикальный угол.
В случае, если наблюдатель один и невозможно измерить два
расстояния одновременно или хотя бы достаточно быстро одно
после другого, то, чтобы пренебречь ошибкой, происходящей от
неодновременного измерения расстояний, можно измерить рас-
стяние до предмета А, затем до предмета В и заметить в этот
момент отсчет по часам и показание лага, а затем вторично изме-
рить расстояние до предмета А.
Принимая, что за короткий промежуток времени расстояние
меняется пропорционально времени, можно считать, что среднее
из двух расстояний до предмета А будет относиться к моменту,
в который измерено расстояние до предмета В.
§ 65. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ПЕЛЕНГУ И РАССТОЯНИЮ
Если одновременно с измерением расстояния до предмета
взять его пеленг, то обсервованное место судна получится в точке
пересечения окружности с линией пеленга.
Предположим, что в 15 ч. 48 м. измерено расстояние D
(рис. 112) до маяка М и одновременно взят пеленг этого же
маяка; отсчет лага в момент наблюдений 233,7. Так как судно
должно быть одновременно на линии положения, полученной по
расстоянию, и на линии положения, полученной по пеленгу, то
обсервованное место судна будет в точке В. Поскольку для полу-
чения обсервованного места должно быть известно расстояние по
линии пеленга MFf то на практике нет надобности вычерчивать
окружность, достаточно ограничиться проложением линии пе-
ленга MF и по ней отложить измеренное расстояние D.
При одном наблюдателе, когда невозможно одновременно из-
мерить расстояние до предмета и взять пеленг его или провести
эти наблюдения настолько быстро, чтобы можно было пренебречь
изменением пеленга, приводят последний к моменту измерения
расстояния. Для этого сначала берут пеленг предмета, затем из-
меряют расстояние до него или вертикальный угол, а затем вновь
пеленгуют предмет. Средний из пеленгов принимают за пеленг,
$ 65] Определение места судна по пеленгу и расстоянию
261
соответствующий моменту измерения расстояния; в этот же мо-
мент замечают показание часов и отсчет лага.
Определение места судна по пеленгу и расстоянию при хоро-
ших наблюдениях дает надежное место и к нему следует прибе-
гать особенно в условиях плохой видимости, когда на короткий
промежуток времени откроется подходящий для наблюдения пред-
мет и нет времени ожидать значительного изменения пеленга для-
применения метода крюйс-пеленга. На определение по пеленгу и
расстоянию не влияет снос судна, вносящий ошибку в крюйс-
пеленг.
При значительном расстоянии до наблюдаемого предмета ли-
ния пеленга, проложенная на меркаторской карте, не будет в
в точности соответствовать наблю-
денному пеленгу, так как она пред-
ставит собой отрезок локсодромии, ^4$ /
а след вертикальной плоскости на /
поверхности сферы дает большой Ч. /
круг. В этом случае для проложения Ж?
линии пеленга следует учитывать по- /
правку, равную половине схождения /
меридианов, известную под назва-
нием ортодромической по- р«с. 112.
правки.
Эта поправка, имеющая большое значение при радиопеленго-
вании, рассмотрена в § 83.
В частном случае приближенное расстояние до маяка может
быть определено в море по наблюдениям моментов открытия или
скрытия его огня. Ясной ночью при чистом горизонте момент от-
крытия или скрытия маячного огня определяется сравнительно
легко; он зависит от высоты глаза наблюдателя и дальности ви-
димости огня. При определении места судна по пеленгу и рас-
стоянию до маяка в момент его скрытия нужно взять его пеленг
в тот момент, когда он уже не будет виден с палубы, но с мо-
стика его еще можно наблюдать. Спускаясь по трапу с мостика,
заметить высоту своего глаза, когда огонь маяка скроется под
горизонтом. Расстояние до маяка будет равно дальности види-
мого горизонта наблюдателя, соответствующей высоте его глаза
в момент скрытия огня, и дальности видимости огня.
При желании определиться по открытию маячного огня сле-
дует его наблюдать с наиболее возвышенного мостика, а заметив
появление огня и опознав его, спускаться по трапу вниз, точно,
заметив высоту глаза, когда огонь скроется под горизонтом;
вслед за этим следует взять пеленг огня.
Наличие нескольких мостиков на разных высотах дает воз-
можность довольно точно определить высоту глаза наблюдателя,
когда огонь маяка на горизонте, но неточное знание дальности
262
Определение места судна по расстояниям
[Гл. ХШ
своего видимого горизонта и дальности видимости маяка вносят
ошибку в определяемое до маяка расстояние и заставляют счи-
тать такое определение места судна приближенным, тем более,
что момент открытия огня зависит от состояния атмосферы.
При отсутствии дальномера и секстана в некоторых случаях
расстояние до предмета может быть оценено на глаз; такое рас-
стояние носит название антретного расстояния. Точ-
ность антретного расстояния целиком зависит от опытности на-
блюдателя и видимости, поэтому полагаться на него не следует.
Если нет возможности определиться более точными способами,
то^ место судна, полученное по пеленгу и антретному расстоянию,
должно рассматриваться как сугубо приближенное.
§ 66. ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ МЕСТА ПО РАССТОЯНИЯМ
Точность определения места по двум расстояниям или по
пеленгу и расстоянию зависит от ошибок в измеренных расстоя-
ниях и от ошибок в пеленге. В свою очередь, ошибка в измеряе-
мом расстоянии зависит от способа, которым измеряется расстоя-
ние. При пользовании дальноме-
М ром с горизонтальной базой или
стереоскопическим ошибка в рас-
стоянии может быть оценена на
н основании табл. 17. При опреде-
лении же расстояния по «измерен-
// ному вертикальному углу, когда
базой служит высота предмета, до
А дв С D В которого измеряется расстояние,
точность измеренного расстояния
Рис* 1 * зависит от двух причин:
а) точности измерения вертикального угла а;
б) знания высоты предмета, до которого измеряется рас-
стояние.
Разберем влияние этих ошибок на определение расстояния по
вертикальному углу предмета.
Пусть МВ (рис. 113)—предмет, высота которого Н метров.
Предположим, что секстаном измерена его угловая высота а.
Тогда по формуле D = Н ctg а получим расстояние АВ до осно-
вания предмета МВ. Если при измерении угла а сделана ошибка
Да и истинная угловая высота предмета равна а-]-Да, то искомое
расстояние D = СВ, а АС = AZ) будет ошибкой в расстоянии
D вследствие ошибки в измеренном угле Да = ^/АМС.
Опустим из точки С перпендикуляр СЕ на ЛАТ. Тогда из пря-
моугольных треугольников ЛЕС и СМЕ имеем
СЕ = А С sin а = CM sin Да,
£ 66]
Точность определения места по расстояниям
263
но AM sin а = Н, тогда, перемножив оба равенства, получаем
ДС-Д/Иsin2a =CTHsinAa или &D sin2 a = sin Да.
AM
т СМ
1 ак как угол а обычно мал, то отношение —
AM
можно принять
равным единице, тогда
___ Н sin
Sin2 a
Полагая, что при измерении угла а секстаном ошибка наблю-
дений не превысит одной угловой минуты, получим
Д£) = -—--------
3438 sin2 a
(114)
Если высота предмета И выражена в метрах, то и ошибка ЛЕ)
получается в метрах.
По малости угла а примем sin a = a' аге Е, и тогда формула
(114) перепишется так:
(115)
a'2
Формулы (114) или (115) дают ошибку в радиусе круга по-
ложения при ошибке в измеряемом угле, равной 1'.
Эта же формула (114) может быть получена аналитическим
путем. Для этого продифференцируем формулу D = Н ctg a по
D и я. считая Н величиной постоянной, тогда получим
Sin2 a
Формула (114) показывает, что ошибка в определяемом рас-
стоянии будет тем меньше, чем меньше высота предмета Н и чем
больше измеренный угол а-
Для того чтобы получить зависимость ошибки ЛЕ) от самого
расстояния Е), подставим в формулу (114) значение Н = D tg a,
тогда получим
д£) = _=. (116)
3438 sin2 a 3438sin2a
Формула (116) показывает, что ошибка в определяемом рас-
стоянии будет тем меньше, чем меньше расстояние до пред-
мета D и чем больше измеряемый угол sin 2 a.
Определим теперь влияние на определяемое расстояние D
ошибки в высоте предмета Н. При наблюдениях в море, где часто
264
Определение места судна по расстояниям
[Гл. ХШ
приходится иметь дело с высотами маяков, данными от уровня
мрря, неточный учет высоты уровня воды в момент наблюдений
может быть причиной ошибки в принятой высоте предмета Н.
Обозначим через &Н ошибку в высоте предмета, тогда ошибоч-
ное расстояние D^-XD, определенное по высоте предмета
Н -\-ХН, будет равно
D AZ) = Н ctg а АН сtg а
и
A£) = A//ctga. (117)
Так как нам остаются неизвестными знаки ошибок Да и ХН,
то наибольшее суммарное влияние ошибки в измеряемом угле и
ошибки в' принятой для расчета высоте предмета Н выра-
зится так:
4D = 4//ctga-l------Я Aa' . (118)
& ' 3438 sin2 a V '
Пример. Высота маяка над уровнем моря 51 м; измерили секстаном угло-
вую высоту маяка и получили исправленный поправкой индекса угол
a = 0°37'. Точность измерения угла Да = + 1', ошибка в высоте предмета
Д Н = + 1 м. Определить расстояние до маяка и точность, с которой оно
получено.
Решение.
D = 2,6 мили (по табл. IX-а «Мореходных таблиц» 1943 г.)
AD = 1 -92,9 + 3438-51 = 92,9 + 128,0 = 220,9 м » 1,2 кабельтова.
(37)а
Следовательно, истинное расстояние до маяка лежит в пределах 26 i 1,2
кабельтова.
Если мореплаватель проходит близко от опасности и для из-
бежания ее измеряет расстояние до маяка или знака, ограждаю-
щего. ее, то он всегда должен учитывать вероятную ошибку в из-
меряемом расстоянии и принимать во внимание тот знак ошибки,
который приближает его к опасности.
Рассмотрим теперь ошибку в обсервованном месте, получен-
ном по двум измеренным расстояниям. Пусть М (рис. 114) —
какой-либо предмет, до которого измерено расстояние £>i, а N —
второй предмет, расстояние до которого D2. Проведя отрезки со-
ответствующих линий положений вблизи счислимого места, мы
получим обсервованное место в точке F. Допустим теперь, что
расстояния Di и О2 измерены с ошибками XD^ и &D2. Значит
линии положений сместились параллельно самим себе на вели-
чины, равные ошибкам в измеренных расстояниях, и истинное
место' судна должно находиться в точке Fi, на расстоянии
Di-\-XD{ от предмета М и на расстоянии D.2-J-A£)2 от пред-
$ 66]
Точность определения места по расстояниям
265
мета N. Ошибка в обсервованном месте представится отрезком
FFi, который для краткости обозначим через Д; острый угол, под
которым пересекаются линии положения, обозначим через 6.
Принимая, ввиду малости ошибок в измеренных расстояниях по
сравнению с самими расстояниями, дуги ЛС, FC, BE и FE за
прямые, из прямоугольных треугольников AFC и BEF получим
AZ?! = FE sin 6 и AZX = FC sin О,
полагая, что
LFCA^ LFEB^b.
Из треугольника FCFL или равного ему FEFb считая их пря-
молинейными, определим сторону FFi = Д:
A2 = FC2 + F1C2-2/7C-/71Ccos(180°-9)
или
2ADrAD2
sin2 6
Д =
cos 6,
откуда
2ADX-AD2 д
---------COS 9.
sin2 0
(119)
Выражение (119) показывает, что ошибка в обсервованном
месте, полученном по двум расстояниям, аналогична ошибке в-
обсервованном месте, полученном по измерению двух горизон-
тальных углов, и зависит от трех величин: SD2 и 0. В по-
лученом виде выражение (119) неудобно для практических це-
лей; чтобы упростить его, сделаем предположение, что ошибки
1
266 Определение места судна по расстояниям [Гл. Х1П >
i
в измеренных расстояниях равны между собой, т. е. SD^-- XD2= \
=Д1\ Тогда, из формулы (119) легко получить
но
1 -г cos 6 = 2 cos2 —
1 2
И
Л 2W’ О 6 /1ПЛЧ
А =------cos —= Д£) cosec— . (120)
sin О 2 2 v 7
В таком виде ошибка в обсервованном месте судна зависит
только от двух величин: ошибки в измеренном расстоянии и ост-
рого угла пересечения окружностей. Угол 0, следовательно, не
может быть больше 90°, и при этом условии получаем наимень-
шую ошибку.
, Д = 1,41ДГ>.
Не следует допускать, чтобы угол пересечения линий поло-
жения 0 был бы меньше 30°, так как уже при 0=30°
Д = 3,86 Д/Z
Табл. 18 показывает точность определения места судна по
двум расстояниям при условии, что средняя точность определения
расстояния 3%, а сами расстояния приблизительно равны. Рас-
стояния D и ошибки А даны в кабельтовых.
Таблица 18
D каб. 9 X. 20 40 60 80 100 120
30° 1 2,32 4,63 6,95 9,26 11,58 13,90
40 1,75 3,50 ! , £,25 7,01 8,76 10,51
50 1,42 2,84 4,27 5,69 7,11 8,53
60 1,20 2,40 3,60 4,80 6,00 7,20
70 1,04 2,09 3,13 4,18 5,22 6,26
80 0,94 1,87 2,81 3,74 4,68 5,62
90 - 0,85 1,69 2,54 3,38 4,23 5,08
Если место судна определялось по пеленгу и расстоянию, то ( ]
точность его зависит от двух факторов: от точности истинного ;
§ 66]
Точность определения места по расстояниям
267
пеленга предмета и точности измеренного до пеленгуемого пред-
мета расстояния.
Пусть М (рис. 115) —какой-либо знак, до которого измерено
расстояние D и одновременно взят пеленг этого знака. Если бы в
полученном расстоянии и истинном пеленге не было бы ошибок,
то, проложив на карте линию положения MF, соответствующую
взятому пеленгу, и отложив на ней расстояние D, мы получили
бы обсервованное место судна в точке F. Допустим теперь, что
в измеренном расстоянии имеется ошибка + &D, тогда, в зави-
Рис. 115.
симости от знака ошибки, обсервованное место судна получится
в точке Л или k. Если же допустить, что при верном расстоя-
нии D имеется ошибка +е в истинном пеленге знака М, то обсер-
вованное место судна получится в точках b или g. Так как
ошибка в истинном пеленге не должна быть велика, то, при-
нимая Fb за перпендикуляр, опущенный из точки F на прямую
Mb, из треугольника MbF имеем
П.е°
H> = Fg = r>sine = — .
° дп
При наличии ошибок в измеренном расстоянии и в истинном
пеленге знака М обсервованное место судна получится в одной
из четырех точек а, с, е, или I в зависимости от сочетания знаков
ошибок. Проведем окружность, проходящую через эти точки.
Если ошибки в пеленге и расстоянии не превышают определен-
ных величин е и ДО, то истинное место судна должно находиться
внутри такой окружности. Радиус окружности р легко опреде-
лится из треугольника Fbc, принимая его за прямоугольный:
? = Fc=VFb*-+bc* = ]f ^24-Д£)2 . (121)
268 Комбинированные и частные случаи определения места судна [Гл. XIV
Полученная формула аналогична такой же, определяющей
точность прокладки (см. § 40), как это должно быть, так как
здесь измеренное расстояние мы откладываем по линии пеленга.
Эта формула (121) служит для приближенного подсчета ошибки
в определении места судна по пеленгу и расстоянию.
ГЛАВА XIV
КОМБИНИРОВАННЫЕ И ЧАСТНЫЕ СЛУЧАИ
ОПРЕДЕЛЕНИЯ МЕСТА СУДНА
§ 67. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ПЕЛЕНГУ И УГЛУ
Определение места судна по пеленгу и углу является частным
случаем определения места по двум пеленгам и применяется в
тех случаях, когда в виду судна имеются два предмета, но один
из них не виден от компаса и пеленг
его нельзя взять.
Указанный способ определения
места судна требует одновременно
взять пеленг предмета по компасу и
измерить секстаном угол между
предметами. Для выполнения этой
работы лучше иметь двух наблюда-
телей: один берет пеленг по компасу,
а другой в тот же момент измеряет
угол, располагаясь в зависимости от
видимости предметов возможно бли-
же к компасу. Если же наблюдатель
только один, то можно поступить
так: сначала наблюдатель берет пер-
вый пеленг предмета, затем изме-
ряет угол и, наконец, снова берет
второй пеленг того же предмета.
Если наблюдения проведены достаточно быстро, то можно
принять, что средний из пеленгов будет соответствовать моменту
измерения угла. В этом случае отсчет лага и момент по часам
следует заметить сразу же после измерения угла.
Для получения обсервованного места судна на карте исправ-
ляют КП общей поправкой компаса на данный курс, а измерен-
ный угол — поправкой индекса. Затем, если угол измерялся
вправо от предмета, пеленг которого был взят, то измеренный
угол прибавляется к пеленгу предмета, если же угол измерялся
влево от предмета, выбранного для пеленгования, то он вычи-
тается из пеленга. В обоих случаях мы получаем непосредственно
§ 68]
Определение места судна по пеленгу и глубцне
269
ИП второго предмета и прокладываем на карте две линии поло-
жения, соответствующие пеленгам обоих предметов. Точка пере-
сечения линий положения даст обсервованное место судна.
Точность измерения горизонтального угла секстаном выше,
чем пеленга, взятого по компасу.'Поэтому точность обсервован-
ного места будет зависеть главным образом от точности пеленга
и может быть принята равной точности обсервованного места, по-
лученного по двум пеленгам.
Пример.Ъзпт КП маяка 15° и измерен угол 50° между маяком и при-
метной вышкой, лежащей вправо от маяка. Поправка компаса —3°, поправка
индекса — О'.
ИП маяка 12р, ИП вышки 62°. Обсервованное место получается в пере-
сечении проложенных линий положений.
Можно проложить только взятый пеленг и построить измерен-
ный угол при полученной линии пеленга. Для этого, проложив
линию пеленга маяка (рис. 116), у произвольной точки А на этой
линии строим угол 50°, а затем сторону АВ этого угла переносим
параллельной линейкой так, чтобы она прошла через место
еышки; точка F будет обсервованным местом судна.
§ 68. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ПЕЛЕНГУ И ГЛУБИНЕ
При подходе к берегу в тех районах, где нет возможности
применить более точные способы, приближенное место судна мо-
жет быть получено по пеленгу предмета, нанесенного на карту,
и одновременно взятой глубине. В этом случае, исправив пеленг
поправкой компаса и проложив его на карте, следует исправить
полученную глубину за высоту уровня, приведя ее к нулю карты,
а затем найти на линии положения приближенное место судна,
соответствующее исправленной глубине.
Степень доверия к такому определению места зависит от ха-
рактера изменения глубин. При равномерно и ясно меняющихся
глубинах полученное место будет заслуживать внимания, как
приближенное, до более надежного определения места судна.
При ровном грунте, когда глубины меняются медленно, или, на-
оборот, при резком, но неравномерном изменении глубин, место,
определенное по пеленгу и глубине, не заслуживает доверия.
Если на карте в районе определения места судна нанесены
изобаты или промер сделан настолько часто, что можно нанести
от руки карандашом изобату, соответствующую измеренной глу-
бине, то место судна получится в точке пересечения линии пе-
ленга с нанесенной изобатой, так как измеренная глубина также
дает линию положения в виде изобаты, соответствующей изме-
ренной глубине.
270 Комбинированные и частные случаи определения места судна [Гл. XIV
§ 69. ДИАГРАММА ЗАБЕЛЛО
При некоторых обстоятельствах плавания, например насту-
пающем ухудшении видимости, тумане и т. п., когда судно на
короткий промежуток времени видит один предмет, до которого
нет возможности измерить расстояние, может быть применен сле-
дующий прием приближенного определения места судна.
В § 57 было показано, что расстояние до предмета в момент
взятия второго пеленга х = sin a- cosec(3— а) при плавании в
одну милю. Если в приведенную формулу ввести плавание судна
за одну минуту времени и разность пеленгов 0 — а = ф отнести
также к промежутку времени, равному одной минуте, то формула
примет вид:
V-Sin а
X =-------
60-Sin ф
и расстояние х до маяка может быть определено по известной
скорости судна V, КУ = а и величине изменения пеленга Ф за
одну минуту.
Точность этого способа зависит, как это следует из выражения
(122), главным образом от величины изменения пеленга ф, кото-
рая, в свою очередь, зависит от расстояния х до предмета и от
КУ — а. Чем меньше расстояние х и КУ ближе к 90°, тем больше
будет величина при одной и той же скорости судна, и при этом она
определится из наблюдений с большей точностью. Так как синус
малого угла ф меняется очень быстро, то небольшая ошибка в
величине угла ф вызовет сравнительно большую ошибку в иско-
мом расстоянии х. Поэтому полученное место судна по величине
изменения пеленга следует рассматривать как приближенное и
можно пользоваться этим способом только в тех случаях, когда
нельзя выждать более значительного изменения пеленга для оп-
ределения по способу крюйс-пеленга или определиться по пе-
ленгу и расстоянию. При а<^30° и х более 10 миль пользоваться
этим способом не рекомендуется вследствие малой точности в оп-
ределении ф. Практика показывает, что при х около 100 кабель-
товых ошибка в вычисленном расстоянии до предмета при вто-
ром пеленге достигает 7—10%.
Чтобы избежать расчетов по формуле (122) штурман Забелло
построил диаграмму (рис. 117), состоящую из двух частей; в ле-
вой части диаграммы по скорости судна V и курсовому углу а
находится величина V sin а, перенеся которую в правую часть
диаграммы, по Ф находим расстояние х в кабельтовых. Так как
величина изменения пеленга не остается постоянной, а меняется
с изменением курсового угла, то автор диаграммы рекомендует
для повышения точности расчетов принимать, что величина изме-
нения пеленга ф за одну минуту соответствует среднему пеленгу
69] * Диаграмма Забелло
Расстояние В кабельтовых:
£
90
Ш-1
£
bS>
V\O
10
100
60
Н8ВВа8В8НММКГЛШа'4наа№ПНМаИВаВИ1аВКаа888В
1Н1пм1»11пг<>шг1бК«амммн!аи1!а111»зппм1
нгиг^дди»аг»тма1КШ11!111анан
|ааааашвмшм1шиаммми11£ав1вма1811ваяа|
188ваваагяиипгшиамиивавшваа|ивмнвваваавв1
го
ТО
309 8 > 625а з г 1?0 9 в Т 615 *. 3 г HQ 9 в > б з м
Ог*6 81?46Я??4б в 3 г 41 6 в Z 4 6 8
Изменение пеленга в градусах
Рис. 117.
272 Комбинированные и частные случаи определения места судна [Гл. XIV
или среднему курсовому углу, и входить в диаграмму с по-
следним.
Для практического применения этого способа, таким образом,
требуется:
1) взять пеленг предмета, нанесенного на карту, и в этот мо-
мент пустить секундомер или заметить отсчет по часам с точ-
ностью до секунды;
2) через 2—4 мин., а при медленном изменении пеленга и
через больший промежуток времени, взять второй пеленг и оста-
новить секундомер или заметить второй момент по часам;
3) рассчитать средний пеленг и средний курсовой угол я (при
КУ, близких к траверзу, порядка 80—100°, можно не рассчиты-
вать средний пеленг, а прямо брать второй пеленг) и величину
изменения пеленга ф за одну минуту;
4) по полученным я и ф и известной скорости судна V найти
по диаграмме х;
5) при пользовании диаграммой, если f>30 узлов, выби-
рается расстояние х на половинную скорость, а затем получен-
ный результат удваивается.
Пример. Скорость судна V = 20 узлам,/СК = 80°. Первый /77= 152°,
второй КП = 161°,8. Промежуток времени между наблюдениями 3,6 мин.
Найти расстояние х до пеленгуемого предмета.
Решение. Рассчитываем:
а = 152° —80° = 72°; ш = 161°,8 - 152° = 9°,8 и
ф = 9°,8:3,6 = 2°,7.
аср = 72° + 4°,9 = 76°,9. Средний КП = 152° + 4°,9 = 156°,9.
Находим по V и аср в левой части диаграммы горизонтальную линию и
по ней идем в правую часть диаграммы до пересечения с вертикальной ли-
нией ф = 2°,7; по радиальной линии находим х = 64 кабельтовым.
Из самой диаграммы видно, что при малых КУ и незначи-
тельной величине ф точность расчета по диаграмме невелика.
Впервые на возможность определения места судна по вели-
чине изменения пеленга указал штурман Елисеев, применяя для
этого метода стабилизированный по направлению пеленгатор,
имеющий оптическую трубу и верньер.
§ 70. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО КРЮЙС-УГЛУ
В случае неисправности главных компасов по какой-либо при-
чине и невозможности использовать компасы для пеленгования,
если в виду судна находятся два маяка, между которыми может
быть измерен угол секстаном или получен как разность отсчетов
курсовых углов на эти маяки, взятых по любому лимбу, то счис-
лимо-обсервованное место судна может быть получено по ме-
тоду крюйс-угла. Для этого между двумя линиями положения —
окружностями, соответствующими измеренным углам, должно
быть вмещено плавание судна.
g 70] Определение места судна по крюйс-угЛу
<273
Пусть А и В (рис. 118) два маяка, между которыми в мо-
мент Л измерен горизонтальный угол а, а через некоторый про-
межуток времени в момент /2 вновь измерен между теми же мая-
ками горизонтальный угол ft; плавание судна между наблюде-
ниями, рассчитанное по лагу,— истинный курс известен.
Найдем центры вмещающих окружностей Oi и О2 и проведем
радиусом /*2 часть второй окружности в районе плавания судна.
От центра первой окружности точки Oi проведем линию курса
судна и по ней отложим отрезок равный плаванию судна
за время между наблюдениями t2—Л. Точка О представит
центр окружности, соответствующей первому наблюдению, сме-
щенный на плавание судна. Из точки 0х радиусом первой ок-
ружности Г] засечем вторую окружность и в точке F получим
счислимо-обсервованное место судна, определенное по крюйс-
углу. Если проведем через точку F линию курса, то точка С пере-
сечения первой окружности с линией курса даст место судна в
момент Л первых наблюдений.
Точность полученного по крюйс-углу счислимо-обсервованного
места зависит, как и в способе крюйс-пеленга, от ошибок в счи-
слении за время между наблюдениями и от угла пересечения ли-
ний положения.
Чем меньше промежуток времени между наблюдениями, тем
меньше ошибки в счислении пути судна; чем ближе угол пересе-
I8 к. С. Ухов
274 Комбинированные и частные случаи определения места судна [Гл. XIV
чения окружностей к 90°, тем точнее получается счислимо-обсер-
вованное место. Сопоставляя эти соображения, второе наблюде-
ние можно делать, когда угол пересечения окружностей станет
больше 30°.
В частном случае, если судно может быть направлено на один
из наблюдаемых предметов, счислимо-обсервованное место может
быть получено без проведе-
ния окружностей и независи-
мо от ошибки в курсе судна.
Допустим, что между на-
блюдениями судно шло кур-
сом на маяк В (рис. 119), в
точке С измерен горизон-
тальный угол а, а в точке
F — горизонтальный угол р,
плавание между наблюде-
ниями Как показывает
рисунок, измеренные углы а
и н и плавание судна S < оп-
ределяют треугольник ACF,
продолженная сторона кото-
рого CF проходит через
маяк В.
Для получения счислимо-обсервованного места на листе про-
зрачной бумаги или на кальке проведем прямую, соответ-
ствующую линии CFB, и на ней в масштабе карты отложим
плавание судна 5Л. На концах полученного отрезка, соответ-
ствующих точкам С и F, построим углы а и р; пересечение сторон
этих углов определит точку А. Наложим прозрачную бумагу на
карту так, чтобы точка А совпала с местом маяка А и будем
вращать ее около этой точки, пока продолжение стороны CF не
пройдет через маяк В. Тогда вершина F начерченного на про-
зрачной бумаге треугольника определит счислимо-обсервованное
место судна в момент вторых наблюдений, а вершина С—место
судна в момент первых наблюдений.
В этом частном случае точность полученного счислимо-обсер-
вованного места зависит только от ошибки в определении прой-
денного судном расстояния за время между наблюдениями и от
угла 0 пересечения окружностей, который равен разности углов
р и а.
§ 71. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО КРЮЙС-РАССТОЯНИЮ
Если в силу тех или других причин нет возможности исполь-
зовать компасы для пеленгования, а расстояние может быть из-
мерено дальномером или при помощи секстана по угловой вы-
Определение места судна по крюйс-расстоянию
275
соте маяка и в пределах видимости судна находится только один
объект, пригодный для наблюдения, то счислимо-обсервованное
место судна может быть получено по способу крюйс-расстояния.
Пусть в точке М (рис. 120) находится маяк и в момент t\ до
него измерено расстояние Dx; когда судно прошло по курсу рас-
стояние то в момент t2 до того же маяка вновь измерено
расстояние D2
Проведем радиусом, равным второму измеренному
отрезок второй дуги II
расстоя-
районе
в
нию £>2, из точки Л4, как центра,
нахождения судна. От места
маяка М проложим курс
судна и отложим по нему
плавание судна Полу-
ченная точка М\ представит
перенесенное по счислению
место маяка, а следователь-
но, и перенесенный центр
окружности, соответствую-
щей первому наблюдению.
Из точки Mh как центра, ра-
диусом, равным первому из-
меренному расстоянию Z?i,
засечем окружность //; по-
лученная точка F будет счислимо-обсервованным
Через точку F проведем линию истинного курса
если проведена окружность /, соответствующая первому измерен-
ному расстоянию Di, то в точке А пересечения окружности I с ли-
нией истинного курса судна получим его место в момент первых
наблюдений.
судна.
местом
судна, тогда
Точность полученного счислимо-обсервованного места будет
зависеть от точности счисления пути судна между наблюдениями
и от угла Ь пересечения второй окружности II с перенесенной пер-
вой окружностью I. В этом случае угол 0 легко определяется
как разность направлений на маяк в момент первых наблюдений
в точке Лив момент вторых наблюдений в точке F.
18*
РАЗДЕЛ ПЯТЫЙ
ПРИМЕНЕНИЕ РАДИОТЕХНИЧЕСКИХ СРЕДСТВ
В НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА
СУДНА
ГЛАВА XV
ОСНОВЫ РАДИОПЕЛЕНГОВАНИЯ
§ 72. МЕТОДЫ ИСПОЛЬЗОВАНИЯ РАДИОПЕЛЕНГОВАНИЯ
В СУДОВОЖДЕНИИ
Возможность определять при помощи радиопеленгаторов на-
правление на работающие радиостанции или же при помощи
специальных радиоустановок посылать радиосигналы по заранее
рассчитанному направлению ставит радиопеленгование в один
ряд с другими важнейшими техническими средствами, обеспечи-
вающими безопасность судовождения. В некоторых случаях, на-
пример при тумане, при плохой видимости, вдали от берегов,
применение радиотехнических средств и, в частности, радиопелен-
гования является пока еще единственным средством для опреде-
ления места судна в море.
Радиопеленгование позволяет определить направление на ка-
кое-либо судно, находящееся вне видимости; это имеет особенно
важное значение при оказании помощи терпящему бедствие
судну, место которого точно неизвестно.
В настоящее время задачи определения направления при по-
мощи радиопеленгования решаются двумя путями:
1) методом направленного приема и
2) методом направленной передачи.
При первом методе береговая радиопеленгаторная станция
определяет направление на судно с помощью подаваемых послед-
ним сигналов или судно, снабженное специальной радиопеленга-
торной установкой, определяет направление на какую-либо рабо-
тающую радиостанцию.
Для определения места судна в море методом направленного
приема надо иметь не менее двух направлений. Поэтому две ра-
диопеленгаторные станции должны одновременно пеленговать
судно или же само судно должно определить направление на две
работающие станции, положение которых известно. Для пеленго-
вания судов служат радиомаяки, стационарные радиостанции,
координаты которых точно известны и места нанесены на карты.
§ 72] Методы использования радиопеленгования в судовождении 211
Радиомаяк автоматически подает опознавательные сигналы по
специальному коду, причем сигналы подбираются так, чтобы они
резко выделялись и не могли быть смешаны с сигналами других
сравнительно близко расположенных радиомаяков и с сигналами
какой-либо посторонней станции.
Для пеленгования с берега обычно соединяют в группу две
или три радиопеленгаторные станции, которые одновременно
определяют свои радиопеленги на судно. Центральная станция
в группе передает на судно пеленги, полученные всеми пеленгую-
щими радиопеленгаторными станциями; иногда на этой станции
прокладывают полученные пеленги на карту и передают на судно
его географические координаты.
При втором методе специальные радиостанции посылают
условные радиосигналы по определенному направлению. Судну
достаточно иметь только радиоприемник, чтобы, уловив сигналы
такой установки, определить направление на нее.
Принципиально нет различия в том, будет ли береговая ра-
диостанция пеленговать судно или же, наоборот, судовой радио-
пеленгатор возьмет радиопеленг на работающую станцию.
Однако на практике для определения места судна в море берего-
выми станциями требуется наличие двух-трех одинаково настроен-
ных радиостанций, пеленгующих данное судно в один и тот же
момент. Время, потребное для переговоров с центральной стан-
цией, на радиопеленгование и передачу на судно его места, в
лучшем случае будет порядка 5—10 мин., при условии, что за
этот промежуток времени не было нарушений связи. В случае
одновременного обращения к береговой станции нескольких судов
с просьбами определить их места, задержка неизбежна; кроме
того, возможна ошибка в определении пеленгов. Судоводитель
лишен возможности проконтролировать работу береговых радио-
пеленгаторных станций и принужден считаться с переданными
ему результатами их наблюдений, сами же радиостанции не не-
сут ответственности за определяемое ими место судна. Следует
иметь в виду и то обстоятельство, что при определении места
судна береговыми радиопеленгаторными станциями оно также
может быть определено и посторонними станциями, не имеющими
отношения к навигации.
Преимущества береговой радиопеленгаторной станции заклю-
чаются в возможности ее лучшей настройки и ее лучшей слыши-
мости, чем у судовых радиопеленгаторных установок: на работу
ее не влияет ни погода, ни качка, и она протекает в более спокой-
ной обстановке, вследствие чего увеличивается точность пелен-
гования.
Все же следует отдать предпочтение судовому радиопеленга-
тору, так как он позволяет одновременно пеленговать несколь-
кими судами один и тот же радиомаяк, не мешая друг другу.
278
Основы рад ио пеленгования
[Гл. XV
Судно может взять любое количество пеленгов радиомаяка, пока
последний работает, что дает уверенность в правильности взятых
пеленгов и позволяет проконтролировать определенное по пелен-
гам место судна в море. Если при этом принять во внимание, что
судовой радиопеленгатор позволяет определять направление на
любую работающую береговую или судовую радиостанцию в пре-
делах ее слышимости, в то же время не показывая своего места,
то следует признать, что судовой радиопеленгатор с навигацион-
ной точки зрения имеет все преимущества перед береговой радио-
пеленгаторной станцией.
Эти соображения вызывают за последнее время быстрый рост
радиомаячных установок во всех странах и стремление снабжать
суда торгового флота судовыми радиопеленгаторными уста-
новками.
§ 73. РАСПРОСТРАНЕНИЕ ЭЛЕКТРОМАГНИТНЫХ ВОЛН
Не касаясь подробно вопросов радиотехники, составляющей
особую дисциплину, в последующих параграфах рассмотрим
только принципиальную сторону радиопеленгования.
Если через вертикально расположенный провод пропускать
электрический ток, то вокруг такого провода образуется магнит-
ное поле. При токе, направляющем-
ся вверх по проводу, силовые линии
магнитного поля будут иметь напра-
вление против часовой стрелки (смо-
тря сверху), при токе же, идущем
вниз по проводу, силовые линии
магнитного поля (смотря сверху)
будут иметь направление по часовой
стрелке. Если в таком вертикальном
проводе в быстрой последователь-
ности пропускать ток то вверх, то
вниз по проводу, то он будет созда-
вать магнитное поле, силовые линии
которого будут направлены то вправо, то влево, соответственно
направлению тока в самом проводе (рис. 121). Распространение
магнитного поля можно сравнить с распространением водяных
волн, если при полном штиле начнем ритмично двигать вверх и
вниз палку. Можно принять, что вершины разбегающихся водя-
ных волн соответствуют силовым магнитным линиям, направлен-
ным по часовой стрелке, а подошвы волн — таким же линиям,
направленным против часовой стрелки.
Допустим, что в вертикальном проводе происходит один мил-
лион колебаний в секунду. Распространяясь со скоростью света,
силовые линии магнитного поля одного и того же направления
§ 74] Определение направления на излучатель при помощи рамки
279
будут следовать друг за другом на расстоянии 300 м, т. е. длина
волны в этом случае будет 300 м.
Для определения длины волны X служит следующее простое
соотношение:
. 300 000 000
л =-----------метров,
(123)
окружен электро-
Рис. 122.
Направление^
распространения
зл. магн. Волны
где f — число колебаний в одну секунду, или частота.
С другой стороны, вокруг такого проводника образуется элек-
трическое поле и оказывается, что прово;
магнитным полем, в котором действуют
взаимно связанные электрические и маг-
нитные силы, и сама электрическая энер-
гия переносится по пространству, окру-
жающему этот проводник. Образуется
электромагнитная волна, распространяю-
щаяся во все стороны от отправителя со
скоростью света с = 299 820 000 м в секун-
ду или приближенно 3 • 108 м/сек.
На близком расстоянии от антенны си-
ловые линии обоих полей представляют
кривые линии, но с увеличением расстоя-
ния от отправителя электромагнитные
волны могут рассматриваться как плоские
волны, в которых сила напряжения электрического поля Е на-
правлена вертикально, сила напряжения магнитного поля Н
направлена горизонтально под прямым углом к направлению рас-
пространения электромагнитной волны (рис. 122). Такая волна
носит название нормально поляризованной волны.
В большинстве современных справочников работа отправи-
тельной станции характеризуется, кроме длины волны, еще часто-
той колебаний, выраженной в килогерцах (килоциклах) в се-
кунду. На основании выражения (123) частота
г 300000 , х ,1ГМЧ
т=-------кгц (или килоциклов в сек.) (124)
§ 74. ОПРЕДЕЛЕНИЕ НАПРАВЛЕНИЯ НА ИЗЛУЧАТЕЛЬ
ЭЛЕКТРОМАГНИТНОЙ ЭНЕРГИИ ПРИ ПОМОЩИ РАМКИ
Радиопеленгатор состоит из рамки, по периметру которой на-
мотана проволока, и приемника. Когда плоскость рамки располо-
жена под прямым углом к направлению распространения электро-
магнитной волны (рис. 123), то в ней индуктируется электро-
движущая сила и сила звука в приемнике равна нулю.
280 Основы радиопеленгования [Гл. XV
При положении рамки под углом ? (рис. 124) к направлению
приходящей радиоволны последняя пройдет через рамку длиной а
в промежуток времени
__ a cos
с
(125)
и, вследствие того, что при этом произойдет сдвиг фаз электро-
магнитной волны, в рамке появится результирующая электродви-
жущая сила, которая вызовет звук в приемнике.
Внутренняя электродвижущая сила Е в рамке определяется
формулой
£ = cos«, (126)
X
где Eq — амплитуда напряженности электрического поля прихо-
дящей электромагнитной волны;
п — количество витков намотки рамки;
S — площадь витка рамки;
X — длина приходящей волны;
ср — угол поворота рамки.
Когда рамка повернута своей плоскостью по направлению на
передатчик, то угол <р= 0°; в рамке возбуждается максимальная
электродвижущая сила, и в приемнике также будет максималь-
ная сила звука. Это свойство рамки и используется в радиопе-
ленгаторе.
Таким образом, если приемную рамку начать вращать вокруг
вертикальной оси и определять в это время силу приема сигналов
какой-либо радиостанции, то в зависимости от угла поворота
рамки сила приема сигналов будет меняться. Она достигнет сво-
его максимума, когда плоскость рамки 7? будет направлена на
передатчик S (рис. 125), и будет минимальной, когда плоскость
74] Определение направления на излучатель при помощи рамки 281
рамки R станет перпендикулярной к направлению на передат-
чик S (рис. 126).
Возьмем точку О и от нее по прямым, проведенным под раз-
личными углами к прямой, изображающей направление на пере-
дающую радиостанцию, отложим в произвольном масштабе век-
Рис. 126.
Рис. 125.
торы, характеризующие силу приема приходящих сигналов. Полу-
ченная диаграмма (рис. 127) будет иметь форму двух кругов.
Когда угол между плоскостью рамки и направлением на пере-
дающую радиостанцию ?=15°, сила приема изобразится векто-
ром _ОВ; максимальная сила приема изобразится вектором ОА
или ОР при &=0°, и, наконец, при ^=90° вектор силы приема
равен нулю.
При повороте рамки на угол о = 15° вектор слышимости
уменьшается незначительно и будет составлять примерно 0,95
вектора максимальной слышимости. Такую разницу в силе
приема ухо улавливает с трудом, и в этом случае возможны
большие ошибки из-за несовершенства человеческого слуха. При
незначительных же поворотах рамки, когда ? близко к 90°, век-
тор слышимости OD будет резко меняться. Поэтому, располагая
282
Основы радиопеленгования
\Гл. XV
плоскость рамки перпендикулярно направлению на передатчик,
определение направления на работающую радиостанцию произво-
дится всегда по минимуму слышимости. В этом случае определе-
ние направления на слух может быть произведено с точностью,
достаточной для практических целей.
С помощью рамки можно определить, как показывает диа-
грамма, направление на передатчик, без указания, в какой сто-
роне этого направления находится передатчик, так как при пово-
роте рамки на 180° вектор слышимости О В равен вектору ОВЬ
Для определения стороны, в которой находится передатчик, при-
меняется добавочная антенна, имеющая круговую диаграмму
приема.
Таким образом, для того чтобы определить направление на
радаомаяК т. "еТвзятГ его пзденг^^ при помоЩи ~
"специального штурвала до тех пор, пока полечат дй'йнимума
слыштШОТТЯГ^^нмов^^й^Г^^^то^^ада^якаТ^Угол^поворНЫ^
р а мки определяется по отношению к д и а метральной плоскости
судш^^ отсчета, на указател^^а^дпелец^в Сбудет
соответсггвовать положению плоекости^амки, перпендикулярному
^диаметральнойплоскости судна? дает курсор
^бриЛ&ОЛ ТТ^иОиодТйнцаю'
Сама рамка представляет несколько витков провода, намо-
танного по периметру на четырехугольной, многоугольной или
круглой основе, поставленной вертикально и вращающейся при
помощи штурвала вокруг вертикальной оси симметрии. В настоя-
щее время имеются радиопеленгаторы, состоящие из двух непо-
движных рамок, расположенных перпендикулярно одна к другой
и соединенных электрически с двумя неподвижными катушками,
установленными в штурманской рубке или радиорубке. Внутри
этих катушек помещена третья катушка, вращающаяся на своей
оси. В неподвижных катушках, соединенных каждая со своей рам-
кой, будет индуктироваться электродвижущая сила, в зависи-
мости от направления приходящей радиоволны, а вращающаяся
катушка будет вести себя по отношению к этим неподвижным
катушкам как одиночная поворотная рамка по отношению к элек-
тромагнитной волне. Следовательно, угол поворота такой катушки
будет соответствовать углу поворота ф ординарной рамки.
Такая установка носит название гониометра.
Судовые радиопеленгаторы в техническом отношении имеют
самое различное оформление и здесь не рассматриваются.
§ 75. ТОЧНОСТЬ РАДИОПЕЛЕНГОВАНИЯ
Точность определения курсового угла, под которым радио-
волна достигла судна, зависит от следующих пяти причин:
1) ошибки радиопеленгаторной установки;
2) ночного эффекта;
§ 75]
Точность радиопеленгования
283
3) радиосклонения;
4) радиодевиации;
5) случайных ошибок наблюдения.
Разберем отдельно эти ошибки.
1. К ошибкам, связанным с самим радиопеленгатором как
прибором, относится прежде всего антенный эффект, про-
исходящий вследствие того, что рамка имеет некоторые размеры
и сама принимает приходящие радиоволны, как антенна. При
этом на диаграмму рамки накладывается диаграмма антенны.
Действие антенного эффекта сказывается в различных по вели-
чине максимумах приема и расплывчатости минимумов. Этот
антенный эффект компенсируется применением вспомогательной
вертикальной антенны, дающей диаграмму, равную по величине,
но обратную по знаку диаграмме антенного эффекта. То же явле-
ние наблюдается при приеме на катушки самоиндукции. В этом
случае для улучшения приема применяется экранирование прием-
ного устройства металлом. Сведение к минимуму действия антен-
ного эффекта зависит от технической конструкции прибора.
К ошибкам прибора следует отнести и неточную установку
рамки по отношению к диаметральной плоскости судна. Если эти
ошибки велики, порядка нескольких градусов, то следует переста-
вить рамку, небольшая же ошибка до 1° не окажет влияния на
конечный результат, так как она войдет в радиодевиацию как по-
стоянная величина.
2. Наблюдениями установлено, что в ночное время, а осо-
бенно за час до и час спустя после восхода и захода Солнца ра-
диопеленги получаются со значительными ошибками. Это явление
носит название ночного эффекта.
Исследования показали, что на принимаемую нормально поля-
ризованную волну накладывается пространственная волна, отра-
женная ионизированными слоями атмосферы. Это явление наблю-
дается и в дневное время, но ночью и особенно в сумерки оно
наиболее резко выражено.
Характерные признаки ночного эффекта:
а) расплывчатость, неопределенность минимумов;
б) быстрое изменение радиопеленга станции, минимум «гу-
ляет»;
в) ненормально большая компенсация антенного эффекта при
помощи вертикальной антенны, причем величина компенсации все
время меняется;
г) слышимость пеленгуемой станции быстро и резко меняется,
доходя временами до полного замирания.
Однако ночной эффект может исказить радиопеленги и при
отсутствии указанных выше признаков. Во всяком случае при об-
наружении хотя бы одного из этих признаков к радиопеленгу сле-
дует относиться с большой осторожностью.
284
Основы радиопеленгования
[Гл. XV
Ночной эффект не дает заметной ошибки при расстояниях, не
превышающих 20—30 мор. миль. При расстояниях до 100 миль
ошибки вследствие ночного эффекта обычно не превышают 2°—
3°. На больших же расстояниях или когда волна проходит над
землей ошибки вследствие ночного эффекта могут достигать не-
скольких десятков градусов.
3. Р а д и о с к л о н е н и е м называется искажение в направ-
лении распространения электромагнитной волны, зависящее от
топографических условий, в которых расположена отправитель-
ная станция, а также от пути, по которому проходит волна. Ра-
диосклонение связано с изменением фазовой структуры поля.
На искажение пути электромагнитной волны влияют:
а) подземные металлические руды;
б) телефонные и телеграфные провода, рельсы железных до-
рог, расположенные ближе 100 м от радиопеленгаторной станции;
в) леса и отдельные группы деревьев, расположенные ближе
100 м от станции;
г) горы и холмы, расположенные ближе чем 1—2 длины
волны;
д) водные бассейны — реки и озера, расположенные ближе
чем 2—3 длины волны;
е) здания, имеющие металлическую структуру, и строения
с железными крышами, расположенные несимметрично относи-
тельно радиопеленгаторной станции и ближе чем на расстоянии
1—2 длины волны.
Радиоволна отклоняется также от своего направления при
переходе с суши на воду.
Величина радиосклонения зависит от длины волны и времени
года.
Радиосклонение оказывает влияние главным образом на ра-
боту береговых радиопеленгаторных станций и береговых радио-
маяков.
При установке береговых радиопеленгаторных станций вели-
чина радиосклонения определяется из наблюдений. В справочни-
ках всегда указывается сектор, в. котором работа станции на-
дежна; в тех же направлениях, в которых радиопеленг может
быть значительно искажен радиосклонением, указывается, что
радиопеленг не заслуживает внимания.
При установке радиомаяков принимаются во внимание то-
пографические условия. Все же по возможности следует избегать
брать пеленги радиомаяка, если радиоволна пересекает береговую
черту под углом меньшим 20°, и во всяком случае относиться
к таким радиопеленгам нужно с большой осторожностью.
Радиоволна также отклоняется находящимися вблизи судами,
если расстояние до них меньше 200 м.
§ 75]
Точность радиопеленгования
285
Многочисленными наблюдениями установлено, что на расстоя-
нии около 10 длин волны фронт ее вновь восстанавливается и
ошибки за счет береговой рефракции незначительны.
4. При прохождении электромагнитной волны во всех метал-
лических частях судна индуктируются токи высокой частоты, соз-
дающие свои магнитные и электрические поля, которые взаимо-
действуют с основными полями приходящей волны. Подобные •
колебательные токи индуктируются также в замкнутых и разом-
кнутых цепях, образуемых стоячим металлическим такелажем и
корпусом судна. Кроме того, между штагами, мачтами, антен-
нами, стойками, леерами и т. д. текут емкостные токи. Вторичные
поля, создаваемые отдельными металлическими частями судна,
и влияние его корпуса изменяют направление векторов первичных
электрического и магнитного полей. Рамка радиопеленгатора,
определяющая направление обоих этих векторов, дает искажен-
ное направление на отправительную станцию. Это изменение на-
правлений векторов электрического и магнитного полей носит
название радиодевиации.
Так как замкнутые и-разомкнутые контуры, имея собственные
периоды колебаний, неодинаково реагируют на волны различной
длины, то радиодевиация зависит от длины пеленгуемой волны.
В общем случае электромагнитная волна, встречая на своем
пути металлические части судна, отклоняется к его диаметраль-
ной плоскости. Радиодевиация при пеленговании по диаметраль-
ной плоскости судна и по траверзу практически равна нулю.,
В других направлениях величина радиодевиации может достигать
нескольких десятков градусов при неудачном расположении ра-
диопеленгатора.
Радиопеленгатор на судне должен быть установлен возможно
выше над большими металлическими массами и так, чтобы все
крупные металлические части судна были расположены симмет-
рично относительно рамки. При удачном расположении рамки
радиопеленгатора максимальная девиация не должна превышать
5°—8°. Эта остающаяся девиация определяется по сравнению
радиопеленга с визуальным пеленгом и принимается во внимание
при исправлении радиопеленга.
5. К случайным ошибкам радиопеленгования относятся
ошибки при определении минимума слышимости, зависящие от
величины угла молчания, т. е. угла, в пределах которого пропа-
дает слышимость сигналов, и от остроты слуха оператора. На ос-
новании опытных данных погрешность определяемого радиоугла
бывает от одной десятой до1 четверти угла молчания, в зависи-
мости от величины этого угла и опытности наблюдателя.
На величину этой ошибки оказывают влияние мощность
пеленгуемого радиомаяка, характер работы, тон и настройка, от
которых зависит острота минимума приема. При плохой работе
286
Радиодевиация а ее определение
[Гл. XVI
пеленгуемого радиопередатчика получается расплывчатый ми-
нимум.
Радиопеленг, как указано выше, дает направление относи-
тельно диаметральной плоскости судна. Для использования ра-
диопеленга в целях навигации одновременно должен быть заме-
чен курс по компасу. Ошибки в поправке компаса и ошибки
вследствие неодновременности взятия радиопеленга и отсчета
курса судна по компасу целиком входят в случайные ошибки
радиопеленгования.
ГЛАВА XVI
РАДИОДЕВИАЦИЯ И ЕЕ ОПРЕДЕЛЕНИЕ
§ 76. ХАРАКТЕР РАДИОДЕВИАЦИИ И СПОСОБЫ
ЕЕ ОПРЕДЕЛЕНИЯ
В предыдущем параграфе указано, что радиодевиация есть
отклонение приходящей радиоволны обратными излучателями,
которыми являются корпус и другие металлические части судна.
Величина радиодевиации зависит от длины волны и направления,
с которого радиоволна приходит к судовому радиопеленгатору.
Для пользования последним необходимо иметь таблицу радио-
девиации. Изменение осадки судна при приеме или выгрузке гру-
зов, изменение положения стрел, шлюп-балок, надстроек и т. п.
вызывает изменение и величины радиодевиации. Увеличение
осадки вызывает уменьшение радиодевиации.
На рис. 128 сплошными линиями указан путь радиоволны,
отклоненный под действием металлических масс корпуса судна
к его диаметральной плоскости; пунктирными линиями указано
действительное направление на радиомаяк. Обозначим через р
истинное направление на радиомаяк относительно диаметральной
плоскости судна, через q — то же направление, определенное по
радиопеленгатору, и через f — радиодевиацию, т. е. угол между
истинным направлением на радиомаяк и направлением, получен-
ным по радиопеленгатору. Из рисунка имеем, что в первой и
третьей четвертях р = q + f, а во второй и четвертой четвертях
р = q — f, считая все направления от носовой части диаметраль-
ной плоскости судна по часовой стрелке от 0° др 360°. Величина
радиодевиации, меняя свой знак в каждой последующей четверти,
четыре раза переходит через нуль при q близких к 0°, 90°, 180° и
270°. Таким образом, радиодевиация носит четвертной характер.
Величина радиодевиации определяется из сравнения одновре-
менно определенных направлений р и q на какую-либо работаю-
щую радиостанцию, причем направление р определяется визуаль-
ным наблюдением курсового угла на радиостанцию, a q опреде-
ляется по радиопеленгатору.
§76]
Характер радиодевиации и способы ее определения
287
Радиодевиация определяется для радиоволн, Имеющих три
различные длины:
1) 1000 м, на которой обычно работают радиомаяки;
2) 800 м, на которой работают судовые радиостанции;
3) 600 м, используемой для передачи сигналов о бедствии.
Для волн другой длины радиодевиация в случае надобности
может быть получена интерполированием. С уменьшением длины
волны радиодевиация увеличивается.
Определение радиодевиации производится различными спо-
сооами.
1. По радиостанции пловучего маяка. Судно маневрирует
в пределах видимости пловучего маяка, приводя его на различные
курсовые углы. Радиостан- Q0
ция маяка дает условные pa- «
диосигналы на заранее на-
значенной длине волны. На-
блюдатели на судне опреде-
ляют радиопеленг на маяк
по радиопеленгатору и одно-
временно замечают курсовой
угол на маяк по азимуталь-
ному кругу компаса, наводя
нить пеленгатора на сниже-
ние маячной антенны.
Это самый простой, эко-
номичный и надежный спо-
соб определения радиодевиа-
ции, так как не требует вы-
хода вспомогательного суд-
на; в пределах видимости
наружных пловучих маяков,
по большей части, имеется
Рис. 128.
достаточно свободного пространства для маневрирования судна,
которое сводится к описанию пологой циркуляции. Кроме того,
радиоволна проходит свой путь над водой и исключается ошибка
от радиосклонения.
Этим способом определения радиодевиации следует постоянно
пользоваться при проходе мимо пловучих маяков для проверки
таблицы радиодевиаций, выбирая из справочника необходимые
сведения о времени работы радиостанции данного маяка и длине
волны, на которой он работает.
2. По радиостанции вспомогательного судна. Это определение
радиодевиации, в зависимости от участвующих судов, может
быть произведено двумя способами. В первом способе вспомога-
тельное судно становится на якорь и начинает работу своей ра-
диостанции по заранее намеченной программе. Судно маневри-
288
Радиодевиация и ее определение
[Гл. XVI
рует в пределах его видимости и определяет радиодевиацию, как |
по шювучему маяку. '
При втором методе судно, определяющее радиодевиацию, j
становится на якорь, а вспомогательное судно обходит его кру-
гом, посылая условные радиосигналы на назначенной волне. Этот |
второй способ удобен для определения радиодевиации больших )
судов, маневрирование которых может быть затруднено недостат-
ком чистой воды. \
Этот способ также надежен, как и определение радиодевиа- ;
ции по пловучему маяку, но требует специального выхода вспо-
могательного судна.
3. По береговой радиостанции. В этом случае судно должно
выбрать район для маневрирования с расчетом, чтобы электро-
магнитная волна пересекала береговую черту под углом по воз-
можности близким к 90°. Назначив район для маневрирования,
судно последовательно приводит радиостанцию на различные
курсовые углы по визуальному пеленгатору и определяет направ-
ление на береговую станцию по радиопеленгатору. При этом спо-
собе точность определенной радиодевиации будет зависеть от
ошибок радиосклонения.
В некоторых случаях радиостанция может быть не видна.
Тогда применяют метод определения радиодевиации, подобный
определению девиации магнитного компаса по отдаленному пред-
мету. Определив предварительно место судна, снимают с карты
или рассчитывают истинный пеленг радиостанции. Затем, посте-
пенно разворачиваясь на месте, при каждом радиопеленге бере-
говой радиостанции замечают курс судна; тогда р = ИП — ИК-
Магнитное склонение и девиация магнитного компаса, а при ис-
пользовании репитеров поправка гирокомпаса должны быть
известны.
Какой бы из указанных выше способов определения радиоде-
виации ни применялся, для получения наиболее точных резуль-
татов следует иметь между судном, которое определяет радио-
девиацию, и станцией, по которой эта радиодевиация опреде- ‘
ляется, возможно большее расстояние, чтобы электромагнитная
волна, излучаемая передатчиком, успела принять свое нормаль-
ное направление, свободное от воздействия вторичных излучате-
лей около передатчика. Кроме того, чем больше расстояние, тем
меньше ошибка от параллакса, происходящая вследствие разноса
на судне рамки радиопеленгатора и компаса, по которому опре-
деляют визуальное направление на радиостанцию.
Во всяком случае расстояние до радиостанции должно быть
не меньше одной длины волны. Наибольшее расстояние лимити-
руется возможностью надежного визуального пеленгования и
условиями маневрирования судна.
§ 77] Ёыполнениё работы по Определению радиодевиации 289
Если обнаружены признаки ионного эффекта, то определение
радиодевиации следует отложить до более благоприятных
условий.
§ 77. ПРАКТИЧЕСКОЕ ВЫПОЛНЕНИЕ РАБОТЫ
ПО ОПРЕДЕЛЕНИЮ РАДИОДЕВИАЦИИ
До первого определения радиодевиации производится предва-
рительное испытание установленного радиопеленгатора с целью
определения правильности установки рамки и воздействия на
нее находящихся поблизости электроустановок.
Для определения правильности установки рамки наводят сна-
чала одну из боковых граней рамки на отдаленный предмет и за-
мечают отсчет по лимбу радиопеленгатора. Затем наводят на тот
же предмет другую грань рамки и вновь замечают отсчет. Сред-
ний из отсчетов дает направление плоскости симметрии рамки на
отдаленный предмет. После этого определяют по азимутальному
кругу компаса курсовой угол на тот же предмет. Разность отсче-
тов по лимбу радиопеленгатора и по азимутальному кругу ком-
паса должна быть равна 90°. Если ошибка в установке рамки
радиопеленгатора больше 1°, то ее следует переставить. Расстоя-
ние до пеленгуемого предмета определяется из тех же соображе-
ний, что и при определении девиации по отдаленному предмету.
Для определения помех, создаваемых различными электро-
установками, находящимися вблизи радиопеленгатора, например
гирокомпасом и его репитерами, электрическими вентиляторами,
рулевыми устройствами, умформерами радиостанции и т. д., бе-
рут радиопеленг какой-либо радиостанции, направление на кото-
рую известно, и, включая по очереди испытываемые электроуста-
новки, замечают их мешающее действие. Обнаруженные помехи,
создаваемые той или другой электроустановкой, часто могут быть
устранены вовсе или же значительно ослаблены путем переноса
механизмов или их электропроводки дальше от радиопеленгатора.
Часть электроустановок может быть потребует их остановки при
радиопеленговании. Результаты предварительного испытания ра-
диопеленгатора должны быть записаны в его формуляре. Для
уверенного приема радиопеленгов следует добиваться получения
чистого и ясно выраженного минимума.
Непосредственно перед выходом на определение радиодевиа-
ции должны быть проведены следующие организационные меро-
приятия.
1. При определении радиодевиации с помощью вспомогатель-
ного судна должен быть составлен план работы, предусматриваю-
щий время выхода на определение радиодевиации, район манев-
рирования, порядок определения радиодевиации (которое из су-
дов становится на якорь), на каких волнах будет производиться
определение радиодевиации и в какой последовательности и,
19
К,- С. Ухов
290
Радиодевиация и ее определение
[Гл. XVI
наконец, условные сигналы для начала, конца или перерыва в
работе, а также для перемены длины волны.
Если радиодевиация будет определяться по пловучему маяку
или береговой радиостанции, то в случае возможности следует
договориться с ними о плане работ. Если же это невозможно1, то
необходимо заранее выбрать из соответствующих справочников
все данные, касающиеся времени работы избранной для опреде-
ления радиодевиации станции и длины волны, на которой эта
станция работает. Если для определения радиодевиации выбрана
береговая радиостанция, то следует ограничить район маневри-
рования, чтобы избежать ошибок от радиосклонения.
2. Назначен компас или репитер, по которому будут опреде-
ляться визуальные курсовые углы. Компас или репитер должны
выбираться с расчетом иметь по возможности круговой обзор и
в то же время они должны быть расположены как можно ближе
к рамке радиопеленгатора, чтобы избежать влияния ошибки за
параллакс (см. § 78). При визуальном определении курсового
угла предпочтительно пользоваться оптическим пеленгатором и,
кроме того, считать курсовые углы от 0° до 360° по часовой
стрелке. Для визуального определения курсового угла может
быть использован любой таксиметр, ориентированный по диа-
метральной плоскости судна. При отсутствии на компасе азиму-
тального круга курсовой угол может быть определен как разность
между компасным пеленгом и компасным курсом. Но такой ме-
тод определения курсового угла требует записи компасного курса
в момент взятия компасного пеленга радиостанции и дополни-
тельного расчета.
3. Проинструктирован и подготовлен личный состав. Непо-
средственно в определении радиодевиации должны участвовать
два наблюдателя: один определяет радиопеленги, а другой —
курсовые углы.
4. Организована и проверена сигнализация между радиопе-
ленгатором и компасом при помощи электрических звонков, пере-
говорных труб или свистков, обеспечивающих одновременность
наблюдений.
5. Составлены и розданы наблюдателям бланки для записи
отсчетов наблюдений.
6. Проверено состояние материальной части.
7. Записана осадка судна.
8. Записано при определении радиодевиации положение стрел,
вентиляторов, кранов, палубного груза и других металлических
предметов и частей, могущих оказать влияние на величину радио-
девиации.
9. Отключены судовые антенны.
По окончании всех приготовлений и по приходе на место
судно, определяющее радиодевиацию, дает условный сигнал для
$ 77] Выполнение работы по определению радиодевиации
291
начала работы по намеченному плану. Как только будут приняты
сигналы радиостанции на установленной длине волны, наблюда-
тель у радиопеленгатора сообщает об этом на мостик и судно
ложится на назначенный заранее курсовой угол. Штурман по
приходе судна на курс дает предварительный сигнал — один зво-
нок — в радиорубку. По этому сигналу наблюдатель в радио-
рубке берет радиопеленг с возможной точностью, порядка 0°,2—
0°,3 и в момент взятия радиопеленга подает исполнительный сиг-
нал, по которому штурман у компаса с той же точностью берет
по азимутальному кругу отсчет курсового угла, пеленгуя сниже-
ние антенны, чтобы избежать ошибок от параллакса. Для избе-
жания случайных ошибок наблюдений рекомендуется на каждом
курсовом угле взять от 3 до 5 радиопеленгов.
Когда на первом курсовом угле наблюдения закончены, судно
медленно изменяет курс на 10°—15° и вновь производит наблю-
дения на новом курсовом угле. Далее операция продолжается,
пока не будут произведены наблюдения на всех намеченных кур-
совых углах, после чего дается условленный сигнал, по которому
радиостанция переходит на работу на новой длине волны.
В случае слишком быстрого перехода с одного курсового угла
на другой или сомнений в точности наблюдений, следует повто-
рить отдельные наблюдения или даже всю серию наблюдений,
ворочая в обратную сторону. В последнем случае берется сред-
ний из каждых двух отсчетов.
Записи наблюдателями у компаса и у радиопеленгатора ве-
дутся по следующей схеме (табл. 19):
Таблица 19
Судно------------ Место работы----------------- Длина волны----------
Дата и час работы --------------------------------------------------
1 2 3 4 5 6 7 8
Поряд- ковый номер наблю- дения Момент наблю- дения Курсо- вой угол по компасу Па- рал- лакс Исправ- ленный курсовой угол Радио- курсо- вой угол Радио- девиа- ция При- меча- ние
L
Параллакс учитывается, если его величина больше 0°,2—0°,3,
если же параллакс мал и не принимается во внимание, то графы
4 и 5 не нужны.
По окончании определения радиодевиации записи обоих на-
блюдателей сводятся в* одну таблицу и производится вычисление
наблюденной девиации.
19*
292
Радиодевиация и ее определение
[Гл. XVI
Когда при определении радиодевиации судно становится на
якорь и разворачивается на разные курсовые углы при помощи
буксира, то нужно пользоваться пеньковыми буксирами, а не
стальными. Также следует помнить, что в случае каких-либо пе-
ределок по корпусу и надстройкам, изменения в стоячем таке-
лаже, в положении стрел, лебедок, шлюпбалок и других излуча-
телей вторичных полей, таблица радиодевиации изменится. О всех
таких переделках необходимо ставить в известность штурмана.
§ 78. ПАРАЛЛАКС
Если компас, по которому определяется курсовой угол на ра-
диостанцию при определении радиодевиации, и рамка радиопе-
ленгатора разнесены по судну на значительное расстояние, то
определенные одновременно
с радиопеленгом курсовые
углы будут отличаться на не-
который угол, называемый
параллаксом. Величина
параллакса зависит от рас-
р стояния между компасом и
рамкой радиопеленгатора и
от расстояния до пеленгуе-
мой радиостанции. Его вели-
чина может быть определена
из следующих соображений.
Пусть ДП (рис. 129) будет
ди ам етр а л ьной плоскостью
судна, в которой в точке А
установлен компас, а в точке В—рамка радиопеленгатора; рас-
стояние АВ = а. В точке R находится пеленгуемая радиостанция
на расстоянии d от судна. Наибольшей величины параллакс до-
стигает, когда радиостанция R находится на траверзе судна, как
изображено на рисунке. Угол а при радиостанции между направ-
лениями на нее от компаса и от рамки радиопеленгатора как раз
и будет равен разности курсовых углов DAR и DBR, т. е. парал-
лаксу, и DBR = DAR —а.
Проведя линию RC, перпендикулярную ДП, из
ного треугольника ARC получим:
1 1 . а
— а = a sin —,
2 2
а по малости угла а можно написать
° 57а
а == — .
макс 1
прямоуголь-
(127)
£ 79] Вычисление рабочей таблицы радиодевиации 293
и при данных d и а максимальная величина параллакса может
быть легко подсчитана. Примем, что точность визуальных наблю-
дений курсового угла лежит в пределах 0°,2—0°,3. Тогда при
а 0°»2 параллаксом можно пренебречь, если d > 285 а\ при
d 0°Д d 5> 190 а. Можно принять в среднем, что при d > 200 а
параллакс меньше точности наблюдений.
С достаточной точностью также можно принять, что при кур-
совых углах 30°, 150°, 210° и 330° параллакс равен 1/2амакс, а при
курсовых углах 50°, 130°, 230° и 310° параллакс будет равен
3/4амзкс- Знак параллакса определяется из соображения: полу-
чить курсовой угол на радиостанцию от рамки радиопеленгатора.
Для определения знака параллакса надо стать у компаса и повер-
нуться лицом к рамке радиопеленгатора, тогда в половине окруж-
ности, лежащей справа, знак у параллакса будет плюс, а в поло-
вине окружности, лежащей слева,— минус.
Если при определении радиодевиации пользовались двумя
компасами, или двумя репитерами, установленными на разных
бортах, то величина параллакса должна быть отдельно подсчи-
тана для каждого репитера.
Для определения величины параллакса измеряется лентой или
снимается с чертежа расстояние а между репитером и рамкой
радиопеленгатора и определяются курсовые углы на рамку с каж-
дого репитера. При курсовых углах, направление которых совпа-
дает с направлением репитер — рамка, параллакс равен нулю;
в перпендикулярном направлении — амакс- При малой величине
параллакса достаточно ограничиться приближенным подсчетом
1 3
Лол = —а и а~п = — а
30 2 макс оО макс’
где а30 и аб0 обозначают параллакс при курсовых углах, отличаю-
щихся от курсового угла, совпадающего с направлением репи-
тер — рамка, соответственно, на 3(Р и на 50°. Для большей точ-
ности можно вычертить кривую параллакса на миллиметровой
бумаге и снять с нее величину параллакса для любого значения
курсового угла. При вычерчивании кривой по оси абсцисс откла-
дываем в произвольном масштабе курсовые углы, а по оси орди-
нат, также в произвольном масштабе, величину параллакса.
§ 79. ВЫЧИСЛЕНИЕ РАБОЧЕЙ ТАБЛИЦЫ РАДИОДЕВИАЦИИ
Результаты наблюдений сводят в таблицу наблюденной ра-
диодевиации и подвергают ее обработке, подобной обработке на-
блюдений девиации магнитных компасов. Сами наблюдения
радиодевиации могут быть сделаны не точно на намеченных пла-
ном курсовых углах, а вблизи них. В то же время рабочую таб-
лицу радиодевиации удобно иметь для определенных курсовых
294
Радиодевиация и ее определение
[Гл. XVI
углов, например через 10°. Для вычисления рабочей таблицы ра-
диодевиации необходимо знать наблюденную радиодевиацию на
строго определенных курсовых углах. Если наблюдения произво-
дились на произвольных курсовых углах и в достаточном количе-
стве, то можно построить кривую радиодевиации и снять с нее
нужные величины. В таблице 20 даны наблюденные радиоде^
виации.
Таблица 20
Таблица наблюденной радиодевиации
Радио- пеленг Радио- девиация Радио- пеленг Радио- девиация Радио- пеленг Радио- девиация Радио- пеленг Радио- девиация
0° 0° 100° —2° 180° 0° 280° —2°
10 +2 по —3,5 190 +1 290 —3
20 +3 120 —5 200 +2 300 —4,5
30 +3,5 130 —6, 210 ю со со" + + 310 —5
40 +4 140 —6,5 220 320 —6
50 +3,5 150 —6 230 +3,5 330 —5,5
60 +3 160 —5 240 +3 340 —4
70 +2 170 —3 259 +2 350 -2,5
80 + 1 180 0 260 + 1 360 0
90 —1,5 Правый борт 270 —0,5 Левый 1 борт !
Для построения кривой радиодевиации отложим в произволь-
ном масштабе по оси абсцисс значения курсовых углов, а по оси
ординат наблюденные радиодевиации и через полученные точки
проведем согласную кривую (рис. 130). С полученной кривой
можно снять величину радиодевиации для любого значения кур-
сового угла, а также, пользуясь ею, составить рабочую таблицу
радиодевиации через желаемое число градусов курсового угла.
Случайные ошибки наблюдений в этом случае будут сглажены
графически, как это видно на приведенной кривой.
§ 79]
Вычисление рабочей таблицы радиодевиации
295
Радиодевиация является функцией курсового угла и на осно-
вании соображений, приводимых в курсах девиации магнитного
компаса, может быть разложена в ряд по синусам и косинусам
кратных дуг.
Тогда
/ = Л + В sin ? + С cos 9 D sin * 2 ? + cos +
4-Bsin3^4~Gcos3<7 4~^sin4<7~H • •> (128)
где q — радиокурсовой угол;
А — коэффициент постоянной девиации;
В и С — коэффициенты полукруговой девиации;
D и Е — коэффициенты четвертной девиации;
F и G — коэффициенты шестерной девиации;
Н — коэффициент восьмерной девиации.
Абсолютная величина коэффициентов F и G мала и шестерной
радиодевиацией можно пренебречь. Тогда для вычисления радио-
девиации получаем выражение:
/= А В sin q 4~ С cos q 4~ D sin 2q 4~ Е cos 2q 4~ Н sin \q.(129)
Вычисление коэффициентов радиодевиации позволяет опреде-
лить влияние на нее отдельных факторов в случае несимметрич-
ности ее или ненормально большой величины и принять меры
к созданию более нормальных условий для работы радиопе-
ленгатора.
Вычисление коэффициентов радиодевиации производится ана-
логично вычислению коэффициентов девиации магнитного ком-
паса по формулам:
Д __ А) 4~ /180 Ч~ /15 ~!~ /225 Ч~ Bo ~i~ В 70 ~i~ /135 4~ /э15
8
g __ (fo — Вбо) ‘О 4~ (Во ~~ В25) ‘^4 4~ (Во-В70) Ч~ (Взб — В15)‘^4
4
(В ~~ Вяр) + (Вб f225) ‘ $4 4~ (Во f270) *2 + (В35 В1б) (— S4)
4
D (В5 4-В25) — (В35 /315)
4
(В 4~ Bso) ~~ (Во 4~ В?о)
(130)
4
sin Н = — sin2 D.
2
В формулах (130) значки у радиодевиаций означают, что
в формулу входит радиодевиация на указанном курсовом угле,
296
Радиодевиация и ее определение
[Гл. XVI
Схема для вычисления коэффициентов Л, С,
I II III IV V
9 f Ч f 1 + II 2 I — II 2 Множи- тель Пронзв. IV на множи- тель
0° 45 90 135 +0° +3,8 —1,5 —6,2 180° 225 270 315 ±0° +3,5 —0,5 -5,5 +3,6 —1,0 —5,8 +0°,2 —0\5 -0 ,4 0 s4 1 Si +0,14 —0,50 —0,28
23 = — 0,64 B = — 0°,3
считая последний от 0° до 360° по часовой стрелке; S4 — множи-
тель, означающий sin 45°.
Все коэффициенты по этим формулам получаются в дуговой
мере. Коэффициент Н зависит от коэффициента четвертной де-
виации D, который в радиодевиации имеет наибольшую и иногда
очень значительную величину, достигая 12°—15°.
Формулы (130) даны в предположении, что радиодевиация
наблюдалась на восьми равноотстоящих курсовых углах,
а именно: 0°, 45°, 90°, 135°, 180°, 225°, 270° и 315°.
По вычисленным коэффициентам радиодевиации рассчиты-
вается рабочая таблица радиодевиации на любое число курсовых
углов. Так как коэффициенты вычисляются на основании наблю-
денных радиодевиаций, а по ним вычисляется рабочая таблица
радиодевиации, то случайные ошибки, вошедшие в наблюденную
радиодевиацию, окажут свое влияние и на вычисленную радио-
девиацию. Но при вычислении коэффициентов по наблюденным
радиодевиациям и рабочей таблицы радиодевиации по коэффи-
циентам влияние случайных ошибок наблюдений на вычисленную
радиодевиацию уменьшается и они сглаживаются; изменения ве-
личины радиодевиации получают более закономерный характер.
Таким образом, вычисление таблицы радиодевиации сглажи-
вает случайные ошибки наблюдений и гарантирует от грубого
промаха в величине наблюденной радиодевиации на каких-либо
одиночных курсовых углах.
Поэтому всегда следует вычислять коэффициенты по наблю-
денным радиодевиациям, а по ним уже рассчитывать и рабочую
таблицу радиодевиации.
Формула (128) обычно ограничивается пятью членами при
§79]
Вычисление рабочей таблицы радиодевиации
297
Р, Е и Н по наблюденным радиодевиациям
Таблица 21
~ VI VII VIII IX X .
Множи- тель Произв. IV на множитель Верхняя половина III Нижняя половина III VII + VIII 2 VII —VIII 2
1 s4 0 _s4 +0,14 +0,28 +3,6 -1,0 —5,8 —0,5 —1,1 +0°,5 = Е +4°,7 = D
2А - —1°,6 А --= — 0°,8 sin D 8,9135 sin2£> 7,8270 0,5 9,6990 sin Н 7,5260 И = + 0°,2
2С = + 0,42 С = + 0°,2
условии малости девиации, порядка /<8°—1СУ°. При расчете ра-
диодевиации обыкновенно коэффициент четвертной девиации D
имеет преобладающую абсолютную величину в зависимости от
условий установки рамки пеленгатора. Учитывая коэффициент Н,
зависящий от D, мы можем с достаточной для практики точно-
стью пользоваться формулами (130) для вычисления рабочей
таблицы радиодевиации при величине ее до 20°.
Схемы и пример вычисления коэффициентов и рабочей таб-
лицы радиодевиации приведены в табл. 21 и 22. Вычисления сде-
ланы по наблюденной радиодевиации, данной в табл. 20.
Вычисленная рабочая таблица радиодевиации расходится
с табл. 20 наблюденной радиодевиации, причем на некоторых
курсовых углах эта разность около 1°.
Это расхождение есть результат случайных ошибок радио-
пеленгования. К тому же выводу приведет и анализ кривой ра-
диодевиации (рис. 130).
Таким образом, ограничившись тщательным наблюдением ра-
диодевиации на 8 курсовых углах, которые, по аналогии с кур-
сами, можно назвать главными и четвертными, путем дальнейших
вычислений, как указано', получаем надежную таблицу радио-
девиации .-
Для сокращения вычислений коэффициенты Д В и С как
малые можно определять по упрощенным формулам:
д fo + /эо + /180 ~~Г /27О .
— 4 ’
Однако сокращение вычислений незначительно и во всех слу-
чаях надежнее пользоваться формулами (130).
__/эр /270 . £ /о ~ /180 (131)
Таблица 22
Схема для вычисления рабочей таблицы радиодевиации по коэффициентам на 36 курсовых углах
1 2 3 4 5 6 i 7 8 9
-0°,2 D~ -+4Э,7 £ = = 4-0°,5 Л = -0°,8 -0°,3 c = = 4-0°,2 / f
sin 4(? Hsinlq sin 2(7 D sin 2q cos 2<7 £003 2(7 14-2+34-4 sin <7 | В sin (7 cos <7 | C cos q | 5+6 Q 4+7 Q 4-7
0 — 0 — 1 +0°,50 —0°,30 0 — 1 +0,20 +0°,20 0a —0’,l 180° —0°,5
1 *$40 +0,13 $20 +r,61 $70 +0,48 +1,42 S10 —0,05 $80 +0,20 + 0,15 10 +1,6 190 +1,3
•$80 +0,20 $40 +3,02 $50 +0,38 +2,80 $20 —0,10 $70 +0,19 +0,09 20 +2,9 200 +2,7
*$60 +0,17 $60 +4,07 *$30 +0,25 +3,69 $30 —0,15 $60 +0,17 +0,02 30 +3,7 210 +3,7
$20 +0,07 $80 +4,63 $10 +0,09 +3,99 $40 —0,19 $50 +0,15 —0,04 40 +4,0 220* +4,0
—*$20 —0,07 $80 +4,63 *$10 —0,09 +3,67 $50 —0,23 $40 +0,13 —0,10 50 +3,6 230 +3,8
—*$60 —0,17 •$60 +4,07 —*$30 —0,25 +2,85 $60 —0,26 $30 +0,10 —0,16 60 +2,7 240 +3,0
—*$80 —0,20 $40 +3,02 *$50 —0,38 + 1,64 $70 —0,28 $20 +0,07 —0,21 70 +1,4 250 + 1,9
*$40 —0,13 $20 + 1,61 $70 —0,48 +0,20 $80 —0,30 $10 +0,03 —0,27 80 —0,1 260 +0,5
0 — 0 — — 1 —0,50 —1,30 1 —0,30 0 — —0,30 90 —1,6 270 —1,0
$40 +0,13 —*$20 —1,61 *$70 —0,48 —2,76 $80 —0,30 $10 —0,03 —0,33 100 —3,1 280 -2-, 4
*$80 +0,20 —$40 —3,02 $50 —0,38 -4,00 $70 —0,28 —$20 —0,07 —0,35 110 —4,4 290 ' —3,6
$60 +0,17 —<$60 —4,07 $30 —0,25 —4,95 $60 —0,26 —$30 —0,10 —0,36 120 —5,3 300 —4,6
$20 +0,07 —$80 —4,63 —$10 —0,09 —5,45 $50 —0,23 —$40 —0,13 —0,36 130 —5,8 310 —5,1
• $20 —0,07 $80 —4,63 $10 +0,09 —5,41 $40 —0,19 —$50 —0,15 —0,34 140 —5,8 320 —5,1
•—*$60 —0,17 $60 —4,07 $30 4-0,25 —4,79 $30 —0,15 —$60 —0,17 —0,32 150 —5,1 330 —4,5
*$80 —0,20 —*$40 —3,02 $50 +0,38 —3,64 $20 —0,10 -$70 —0,19 —0,29 160 —3,9 340 —3,4
*$40 —0,13 —*$20 —1,61 $70 +0,48 —2,06 $10 —0,05 $80 —0,20 —0,25 170 —2,3 350 —1,8
§ ОД
Значение коэффициентов радиодевиации
299
§ 80. ЗНАЧЕНИЕ КОЭФФИЦИЕНТОВ РАДИОДЕВИАЦИИ
Таблица 23
Коэффи- циенты Направление от рамки на возмущаю- щий излучатель
4- В 180°
— В 0
-Г с 90
— С 270
Как уже указывалось, коэффициенты ради о девиации позво-
ляют определить влияние на радиопеленгование электрических
условий, в которых находится рамка радиопеленгатора. Рассмот-
рим теперь отдельно' все коэффициенты.
Коэффициент постоянной радиодевиации А может быть меха-
нического и электрического происхождения. Механические при-
чины появления коэффициента А заключаются в неправильной
установке лимба радиопеленгатора относительно рамки и непра-
вильной ориентировки самой рамки от-
носительно диаметральной плоскости
судна. Механическая составляющая
коэффициента А постоянна и не зави-
сит от длины волны.
Если прй большой величине коэф-
фициента А обнаружен дефект в уста-
новке радиопеленгатора, то надлежит
переставить рамку, тщательно ориенти-
ровав ее относительно диаметральной
плоскости судна, а затем установить
лимб, согласовав его показания с поло-
жением рамки.
Электрическая составляющая коэффициента А вызывается не-
симметрично расположенными относительно диаметральной плос-
кости судна обратными излучателями: мачтами, трубами, шта-
гами, антеннами. Эта составляющая обычно мала, она зависит
от длины волны. Электрическая составляющая коэффициента А
может быть уменьшена для определенной длины волны поворо-
том лимба радиопеленгатора относительно рамки. Если коэффи-
циент А имеет знак плюс, то лимб поворачивается влево, при
знаке минус — вправо.
Коэффициенты полукруговой радиодевиации В и С обычно
малы и получаются от обратного излучения мачт, труб, штагов,
антенн и т. д., не настроенных на радиоволну. Знак у коэффи-
циента определяет примерное направление на нарушающий ра-
боту излучатель, как указано в табл. 23.
Коэффициенты D и Е четвертной радиодевиации зависят от
влияния на рамку радиопеленгатора замкнутых и разомкнутых
емкостных контуров. Такие контуры могут быть образованы,
например, корпусом судна, мачтами, стоячим такелажем и палу-
бой. Наибольшее влияние на коэффициент D оказывает корпус
судна, а также контуры, расположенные вдоль и поперек судна.
В большинстве случаев коэффициент D положительный.
Коэффициент Е получается от контуров, расположенных по
диагонали судна под курсовыми углами 457225° или 1357315°, и
300
Радиодевиация и ее определение
[Гл. XVI
в большинстве случаев мал. Контуры, расположенные в других,
отличающихся от указанных, направлениях одновременно вызы-
вают появление коэффициентов D и £*.
При рассмотрении влияния того или иного контура на коэф-
фициенты четвертной радиодевиации необходимо разобрать два
Рис. 131.
а — внешний продольный контур, образован корпусом
судна, штаг-карнак разбит на части изоляторами. Встре-
чается наиболее часто +1?; б—внутренний поперечный
контур, образован мачтой, вантами и палубой + Р;
в — внутренний продольный контур, образован фок-мач-
той, штагом, трубой и палубой —Z); г — внешний попе-
речный контур, образован мачтой, вантами и палу-
бой — D.
случая: 1) рамка радиопеленгатора находится внутри поля кон-
тура и 2) рамка радиопеленгатора находится вне поля контура.
Для определения, с каким из этих случаев мы имеем дело, опу-
стим мысленно перпендикуляр от центра рамки на плоскость
рассматриваемого контура. Если основание такого перпендику-
ляра окажется внутри плоскости контура, то это следует считать
как первый случай; если же основание перпендикуляра окажется
вне самого контура, то это будет второй случай. Рамка при этом
может находиться в любом положении относительно контура, т. е.
быть впереди его, сзади, сверху или снизу.
На рис. 131 схематически указаны некоторые возможные зам-
кнутые контуры и их положение относительно рамки. Разомкну-
тые контуры дают у коэффициентов знаки, обратные замкнутым
контурам. Если рассматривать контуры, расположенные по на-
§80]
Значение коэффициентов радиодевиации
301
правлению 457225° как продольные, а в направлении 1357315°
как поперечные, то все сказанное будет применимо' и к коэф-
фициенту Е.
Для того чтобы облегчить нахождение возмущающего кон-
тура, можно воспользоваться табл. 24, заимствованной из «Судо-
вой радиотехники» Г. А. Положинцева.
Таблица 24
Перпендикуляр от места установки рамки на плоскость контура про- ходит 1. Мимо площади контура . . 2. Сквозь площадь контура . . Замкнутый контур
D Вдоль Поперек
Е 45°/2250 135°/315°
+ +
D Поперек Вдоль
Е 1357315° 45°/225°
Разомкнутый контур
Когда будет найден замкнутый контур, вызывающий большое
значение коэффициента D или Е, то для нейтрализации его вру-
баются изоляторы в образующие его отдельные цепи. Разомкну-
тые контуры также следует разбивать на части изоляторами.
Коэффициент Н зависит только от коэффициента D и не имеет
самостоятельного значения.
Все коэффициенты радиодевиации, следовательно, и сама ра-
диодевиация не зависят от географической широты, в которой
находится судно. В то же время изменение осадки судна, различ-
ные переделки и другие обстоятельства, изменяющие состояние
судна, вызывают изменения соответствующих коэффициентов ра-
диодевиации. Следует всегда пользоваться всяким удобным слу-
чаем для проверки радиодевиации, а если единичные контроль-
ные определения ее покажут значительное расхождение с рабо-
чей таблицей девиации, то необходимо вновь произвести полное
определение радиодевиации не менее как на 8 равноотстоящих
курсовых углах.
По наблюдениям установлено, что крен и диферент оказы-
вают свое влияние на 1величину радиодевиации, если их собствен-
ная величина превышает 10°.
302
Применение радиопеленгования в навигации
[Гл, XVII
ГЛАВА XVII
ПРИМЕНЕНИЕ РАДИОПЕЛЕНГОВАНИЯ
В НАВИГАЦИИ
§ 81. ОБЩИЕ ПОЛОЖЕНИЯ
В начале настоящего раздела было указано значение радио-
пеленгования для судовождения как средства, позволяющего
определить направление на какой-либо объект, посылающий
электромагнитные волны известной длины. Так как возможность
взять радиопеленг определенной радиостанции не требует, чтобы
она находилась в пределах видимости судна, то радиопеленг по-
зволяет получить линию положения в условиях тумана или хотя
бы только плохой видимости. Вдали от берегов при пасмурной
погоде, когда невозможны астрономические определения, радио-
пеленгование дает возможность исправить счислимое место судна.
Полученная по радиопеленгу линия положения может быть
использована в комбинации с другими линиями положения, полу-
ченными иными способами. Например, если одна линия положе-
ния получена, предположим, по наблюдению высоты небесного
светила, а другая по радиопеленгу и обе линии отнесены к од-
ному моменту, то точка их пересечения даст обсервованное место
судна. Радиопеленг и ряд измеренных глубин дают возможность
судну в тяжелых условиях плавания с большой степенью вероят-
ности опознать свое место.
В общем случае применение радиопеленгов аналогично приме-
нению визуальных пеленгов для определения места судна теми же
способами, как, например, крюйс-пеленг, два и три пеленга. Если
взять два радиопеленга двух определенных радиостанций, то,
исправив эти пеленги радиодевиацией и рассчитав разность их,
получим угол между направлениями на радиостанции. При трех
радиостанциях будем иметь два угла и можем определить место
судна по углам.
Пользуясь радиопеленгом, можно подойти к любой точке бе-
рега, пловучему маяку или любому судну, радиостанции которых
работают, хотя судно и не видит цели. При этом судно, снабжен-
ное радиопеленгатором, определяет направление на работающие
станции, оставаясь само необнаруженным.
Предел практического применения радиопеленгования для на-
хождения места судна будет определяться, с одной стороны, уве-
ренным приемом радиосигналов, а с другой стороны — остротой
минимума, дающего точность, с которой может быть найдено на-
правление данным радиопеленгатором. Современные радиопелен-
гаторы обычно дают достаточно острый минимум слышимости
в пределах угла, не превышающего 1°; с увеличением расстояния
§81]
Общие положения
303
этот угол растет. Конечно, этд величина, характеризующая точ-
ность определения направления радиопеленгатором на работаю-
щую радиостанцию, зависит от его технического совершенства,
Практика показывает, что ночью при хорошей слышимости доста-
точно острый минимум получался при расстояниях до пеленгуе-
мой станции около 300 миль. В настоящее время эту величину и
мой станции около 300 миль. В
следует принять за предел
для надежного использо-
вания радиопеленгования
в навигации.
Однако не исключена
воз мож ноеть испол ьзов а -
ния радиопеленгов и при
больших расстояниях, но
в этих случаях осторож-
нее считать, что в радио-
пеленге может заключать-
ся ошибка порядка не-
скольких градусов. Если
судно в откр ыто м море
в течение нескольких дней
не имело астрономических
наблюдений, то радиопе-
ленги все же дают воз-
можность исправить его
счислимое место на боль-
ших расстояниях от берега.
Nu
Рис. 132.
Имеются указания, что при этих
условиях получалось достаточно надежное место при расстояниях
до станции порядка 400 миль.
В зависимости от расстояния до пеленгуемой станции разли-
чается использование радиопеленгов на коротких и больших рас-
стояниях.
Условимся в дальнейшем, вне зависимости от технического
оформления радиопеленгатора, считать, что он снабжен постоян-
ным лимбом, разбитым на 360°, и курсовые радиоуглы отсчиты-
ваются по нему от 0° до 360° по часовой стрелке от носовой
части диаметральной плоскости судна. Отсчет по лимбу радио-
пеленгатора, т. е. не исправленный за девиацию радиокурсовой
угол на пеленгуемый радиопередатчик, будем обозначать q,
а истинный радиокурсовой угол через р. Тогда
Истинный радиопеленг (ИРП) пеленгуемого радиомаяка опре-
делится из формулы (рис. 132):
ИРП= HK-\-p = PIK^rq-\-f, (132)
радиодевиация f выбирается из таблицы со своим знаком.
304
Применение радиопеЛенгйвНния в навигации
[Гл. XVII
Точность полученного ИРП, таким образом, зависит как от
ошибок в отсчете по лимбу и в радиодевиации, так и от ошибки
в поправке компаса. Последняя ошибка может быть исключена,
если одновременно с РП представляется возможность взять пе-
ленг небесного светила и по нему, или каким-либо другим спосо-
бом, определить поправку компаса. Ошибка в поправке гироком-
паса обычно^ меньше, чем в поправке магнитного компаса, так
как исключается ошибка вследствие неточного знания магнитного
склонения в районе плавания судна. Кроме того, репитер гиро-
компаса может быть установлен вблизи радиопеленгатора, что
обеспечивает одновременность взятия радиопеленга и отсчета
компасного курса.
§ 82. ИСПОЛЬЗОВАНИЕ РАДИОПЕЛЕНГОВ НА КОРОТКИХ
РАССТОЯНИЯХ
Прокладывая на меркаторской карте линию пеленга, мы про-
водим отрезок локсодромии. Между тем, как это следует из са-
мого определения, линия пеленга должна быть проложена в виде
дуги большого круга, как след вертикальной плоскости на сфери-
ческой поверхности Земли.
Условимся считать короткими расстояниями такие, на которых
дуга большого круга может быть заменена локсодромией без за-
метной погрешности.
При коротких расстояниях ИРП, проложенные на меркатор-
ской карте прямыми линиями, могут быть использованы совер-
шенно так же, как и визуальные пеленги, взятые непосредственно
по компасу. В этом случае линией положения будет считаться
проложенная на карте линия пеленга, и мы можем использовать
все способы определения места судна по пеленгам. Ошибка в об-
сервованном месте будет зависеть от ошибки в ИРП, которая
определится как алгебраическая сумма ошибок в наблюденном
радиокурсовом угле р и в ИК судна. Однако при определении
места судна по двум или трем ИРП всегда следует иметь в виду,
что радиопеленги для своего определения требуют некоторого про-
межутка времени, который всегда будет больше, чем при взятии
визуальных пеленгов, так как требуется настройка радиопеленга-
тора и определение минимума. Если промежуток времени между
взятыми радиопеленгами невелик, порядка нескольких минут, то
их можно привести к одному моменту, так же как и визуальные
пеленги. При более значительном промежутке времени между
взятыми пеленгами, если судно' за это время прошло некоторое
расстояние, его следует учесть.
Предположим, что судно на курсе КК\ в какой-то момент
взяло радиопеленг радиостанции М и через 15 мин. радиопеленг
радиостанции N; ход судна 12 узлов. Так как промежуток вре-
§ W
Использование радиопеленгов на коротких расстояниях
305
мени между радиопеленгами получается значительный, то в этом
случае вместо приведения пеленгов к одному моменту, что потре-
бует еще потери времени на третье радиопеленгование, проще
определить место способом аналогичным крюйс-пеленгу, вместив
между двумя пеленгами плавание судна по' его курсу. Для этого
от точки А (рис. 133) пересечения курса с проложенной на карте
линией ИРП радиостанции М откладываем в масштабе карты
расстояние АВ, равное плаванию S судна за 15 мин.— 3 мили,
и через полученную точку В проводим перенесенную параллельно
самой себе линию ИРП радиостанции М. Пересечение перенесен-
ной линии ИРП с проложенной на карте линией ИРП радиостан-
ции N дает обсервованное место судна в точке F с учетом плава-
ния судна за промежуток времени между наблюденными радио-
пеленгами.
При определении места судна по трем радиопеленгам, если
в силу каких-либо причин не удается взять их в быстрой после-
довательности, также необходимо учесть плавание судна по курсу
между пеленгами. Для этого может быть применен следующий
простой прием, ясный из примера. Предположим, что в
10 ч. 00 м. взят РП радиостанции Р (рис. 134), через 15 мин.—
радиостанции Q и еще через 5 мин.— радиостанции R; курс
судна 130°, ход 12 узлов. Проложив по карте ИРП, мы получим
треугольник abc, размеры которого будут зависеть, кроме ошибок
радиопеленгования, еще от промежутка времени, в течение кото-
рого взяты все три пеленга. Нанесем произвольно на прозрачном
листе бумаги меридиан, параллель и курс судна. По последнему
отложим в масштабе карты, на которой ведется прокладка, прой-
денные судном расстояния между первым и вторым пеленгом —
3 мили и между вторым и третьим пеленгом — 1 милю и обозна-
чим полученные на листе прозрачной бумаги точки цифрами 1,
2 и 3, соответственно порядку взятых радиопеленгов. Затем нало-
жим на карту прозрачный лист бумаги и будем двигать его по
20
К. С. Ухов
306
Применение радиопеленгования в навигации [Гл. XV11
меридиану или параллели, пока отмеченные на нем точки 1, 2
и 3 не окажутся на соответствующих линиях проложенных ИРП,
Тогда в момент взятия первого РП место судна должно было
находиться в точке 1, второй РП взят в точке 2, а третий —
в точке 3, которую и можем принять за обсервованное место
в момент определения РП радиостанции R.
Надо иметь в виду, что точного совпадения не всегда можно
будет добиться вследствие случайных ошибок в радиопеленгах.
При наличии учитываемого течения или сноса на прозрачной
бумаге должен быть проложен путь судна, по которому и откла-
дываются расстояния, пройденные судном за промежутки вре-
мени между взятыми РП с учетом действия течения или ветра.
Аналогично с методом, применяемым при крюйс-пеленге, для
приведения ИРП к одному моменту можно сместить место первого
пеленгуемого радиомаяка Р по курсу судна на величину плава-
ния Si за промежуток времени между моментами взятия первого
и третьего радиопеленгов, т. е. в, данном примере на 4 мили,
а место второго радиомаяка на плавание S2 за время, протекшее
между моментами взятия второго и третьего радиопеленгов. Из
полученных точек Р' и Qz прокладываем ИРП и в точке их пере-
сечения имеем обсервованное место судна по истинным радио-
пеленгам, приведенным к одному моменту. При этом методе про-
кладки может получиться небольшой треугольник погрешности
за счет случайных ошибок наблюдений и прокладки. Если полу-
чится большой треугольник погрешности, то это укажет на про-
$ 82] Использование радиопеленгов на коротких расстояниях 307
мах в наблюдении или при прокладке радиопеленгов и определе-
ние места судна следует повторить.
Подход к заданному объекту. Радиопеленгатор, установлен-
ный на судне, позволяет подойти при отсутствии видимости к лю-
бому объекту, имеющему работающую радиостанцию, например,
к пловучему маяку, к судну, терпящему бедствие, к береговому
радиомаяку и т. д. В случае возможности править прямо на же-
лаемый объект, определив направление на него по минимуму
силы приема радиосигнала, поворачивают и ложатся на компас-
ный курс, при котором РКУ будет ра-
вен 0°. Контролируя периодически свой %
курс по РКУ, идут прямо на искомый /
объект. Радиодевиация при РКУ = 0° Арку
обычно также равна 0° или незначи-
тельна. Кроме того, так как направлен ----1
ние определено радиопеленгатором, то /
ошибка в поправке компаса также не /
играет роли. Руководствуясь радио- /
пеленгатором, судно непосредственно h /
идет к цели кратчайшим путем по дуге -у
большого круга. Само собой разумеет- У
ся, что при этом предполагается, что у
курс идет чисто от навигационных опас- '
ностей Рис 135
При плавании в стесненных водах
необходимо применять все доступные средства для обеспечения
безопасности своего плавания.
При плавании в стесненных водах может быть поставлена за-
дача подойти к какому-либо радиознаку по определенному курсу.
В этом случае приходится решать две частные задачи: 1) выход
на заданный курс и 2) плавание по заданному пути.
Предположим, что судно должно подойти к радиостанции R
(рис. 135) курсом К, причем до выхода на заданный курс судно
шло курсом Ль Из чертежа, видно, что в момент выхода судна
на заданный курс РКУ должен быть
РКУ = К^К^
При этом предполагается, что как курсы, так и РКУ даны
в круговом счете от 0° до 360°. При повороте на заданный курс Л
должна быть учтена циркуляция судна.
Приведя судно на заданный курс по радиопеленгатору, сле-
дуют дальше, имея РКУ радиомаяка равным 0°. Если при конт-
рольном радиопеленговании окажется, что отсчет РКУ отходит
влево, то значит судно сносит вправо от курса, если же РКУ
становится больше, то—влево. Тогда следует вновь выйти на
начальный курс, пользуясь компасом. Систематическое изменение
20*
308 Применение радиопеленгования в навигации [Гл. XVИ
радиопеленга на радиостанцию, к которой подходят, укажет на
наличие течения в районе плавания судна или на дрейф. Если
известны элементы течения, то его следует принять во внимание.
В этом случае разницу между курсом судна и его путем' укажет
радиокурсовой угол, на котором следует держать радиознак,
чтобы подойти к нему по заданной линии пути.
Пример.Судно должно подойти к радиознаку по И/7 = 70°(путь судна),
течение в районе подхода к радиознаку имеет направление 150°, скорость его
2 узла; ход судна 14 узлов. Определить ИК судна и РКУ для подхода к ра-
диознаку по заданной линии пути.
Решение. На основании § 42 из табл'. Vll-a МТ-43 имеем:
р = 150° — 70° = 80°, а поправка на течение р — + 8°.
Откуда ИК = 62°, а РКУ --= 8°.
Следовательно, удерживая радиомаяк на РКУ = 8°, мы дол-
жны подойти к нему по линии заданного пути.
Осторожный штурман не упустит случая при малейшем сомне-
нии в правильности пути, по которому идет судно, сейчас же про-
верить все расчеты и принять
меры к навигационной безо-
пасности судна, главная из
которых — надежное опреде-
ление места судна при пер-
вой возможности.
Определение по встреч-
ному судну. В открытом море
судно, потерявшее свое ме-
сто, может при помощи ра-
диопеленгатора определить
его по другому судну, имею-
щему надежную обсервацию.
Пусть судно А имеет в
океане ненадежное место, а
судно В имело недавно на-
дежную астрономическую об-
сервацию и уверено в своем
месте. Связавшись по радио с судном В, судно А получает от
него данные: момент, географические координаты ? и а его места,
курс и скорость, а затем определяет радиопеленг на него и за-
мечает момент по часам. Через короткий промежуток времени,
когда РП изменится не менее чем на 30°, судно А вновь берет
радиопеленг на судно В и замечает момент по часам. Свое место
судно А получит графическим построением. По данным, сооб-
щенным судном В, судно А наносит на карту место судна В
(рис. 136) в момент взятия первого радиопеленга и проводит ли-
нию первого ИРП. Рассчитав место судна В в момент взятия
§ 83]
Ортодромическая поправка
309
второго радиопеленга, судно А прокладывает линию второго
ИРП, а затем вмещает свое плавание по курсу между двумя по-
лученными линиями пеленгов. От произвольной точки А на линии
первого пеленга проведем линию курса и отложим на ней рас-
стояние AAi, равное плаванию судна А за промежуток времени
между моментами взятия обоих радиопеленгов; получим точку
Ль Перенос линии 'Первого ИРП в точку А\ дает в точке F место
судна А в момент второго ИРП.
Точность этого способа не может быть велика, так как здесь
суммируются ошибки счисления обоих судов. Если суда расхо-
дятся контркурсами, то скорость изменения РП будет наиболь-
шая и времени на определение потребуется мало. При параллель-
ных курсах РП будет меняться медленно, время между пелен-
гами будет больше и увеличатся ошибки счисления.
§ 83. ОРТОДРОМИЧЕСКАЯ ПОПРАВКА
Предположим, что судно, находясь в точке А (рис. 137), взяло
РП радиостанции В. Радиоволна, распространяясь по дуге боль-
шого круга, придет к судну по направлению, определяемому на
меркаторской карте касательной к дуге большого круга в точке Л,
и истинным радиопеленгом будет угол NUAC, равный в нашем
примере 43°. Линия пеленга АС, проложенная на карте в виде
прямой, не пройдет через место радиостанции В, а отклонится от
него на расстояние СВ. Для того чтобы линия пеленга, проло-
женная на меркаторской карте, прошла через радиостанцию В,
310
Применение радиопеленгования в навигации
[Гл. XVII
полученный истинный пеленг, как видно из рисунка, должен быть
переведен в локсодромический пеленг, равный 5Г, при котором
линия пеленга представит прямую линию, являющуюся хордой
дуги большого круга. Разность в данной точке между направле-
нием дуги большого круга и локсодромией называется о р т о -
дромической п о п р а в к о й и обозначается буквой б.
Для нахождения величины ортодромической поправки прове-
дем дугу большого круга через две заданные точки А и В и ме-
ридианы этих точек (рис. 138).
Обозначим в сферическом треугольнике РАВ угол РАВ через
Л1 и угол РВС через Л2; угол при полюсе будет РД. Пусть раз-
ность углов Л2 — Ai = у. Эта разность носит название схожде-
ния меридианов; она представляет величину изменения
курса при плавании по дуге большого круга.
Из сферического треугольника APBJ применяя к нему анало-
гию Непера, можем написать
РА —РВ
cos-----
РА + РВ
cos----------
2
АРВ
2
При принятых обозначениях, как указано на рисунке, эта фор-
мула перепишется так:
. А% —
ctg 2 —
COS —---—
----------- Ct£J—(X
sinJP2±?l 2
2
§ ед
Ортодромическая поправка
311
или
tg^-^tg — ~Л1 - 5in ?m-tg-дх.
2 2 1 6 2
cos —Ac
2 *
(133)
Формула (133) точная (если принимать Землю за шар) и
пригодна для вычисления схождения меридианов при любом воз-
можном значении РШ и РД.
Если входящие в формулу величины у, Д<? и Дк невелики, то
tg— = — ; cos — Д ф = 1 и tg — Д X = — Д к;
6 2 2 2 s 2 2
тогда формула (133) примет следующий вид:
7 = Дкзт<рот, (134)
т. е. схождение меридианов приближенно равно разности долгот,
умноженной на синус средней широты.
Выражая разность долгот через отшествие, получим
7 = O7Wtg?zn, (135)
т. е. схождение меридианов приближенно равно отшествию на
тангенс средней широты.
На меркаторской карте (рис. 139) угол Ai изобразится углом
между меридианом и касательной к дуге большого круга в
точке А, а угол А2 — углом между меридианом и касательной
312
Применение радиопеленгования в навигации
[Гл. XVH
к большому кругу в точке В. В то же время локсодромия, соеди-
няющая точки А и В, пересекает все меридианы под одним и тем
же углом К. Из рисунка имеем:
Ь = К—А1; ^ = А^-К,
откуда
~ А X sin vm. (136)
Ортодромическая поправка равна половине разности долгот
на синус средней широты.
Ортодромическая поправка определяет разницу между напра-
влением дуги большого круга и локсодромии в одной из двух
точек, между которыми проложена дуга большого круга и локсо-
дромия, и служит для перевода ортодромических направлений
в локсодромические или обратно. Знак ортодромической поправки
определяется тем соображением, что дуга большого круга на
меркаторской карте направлена своею выпуклостью всегда
к полюсу.
Формула (136) приближенная, так как при выводе ее было
допущено, что углы ф между направлением дуги большого круга
и локсодромией в точках А и В равны между собой, что справед-
ливо для ограниченной длины дуги большого круга. Как видно
из формулы, величина ортодромической поправки зависит от раз-
ности долгот и средней широты; с увеличением этих величин уве-
личивается и угол ф.
Обозначив длину локсодромии между точками А и В через т,
получим ортодромическую поправку в следующем виде, удобном
для разных расчетов:
= у /га sin 4 tg (137)
где А — угол между меридианом и локсодромией (курс или пе-
ленг на меркаторской карте).
При определениях по радиопеленгам и прокладке на карту пе-
ленгов отдаленного предмета, когда сравнительно значительны
расстояния, необходимо вводить ортодромическую поправку, так
как пеленг дает угол между меридианом и дугой большого кругд,
а на меркаторской проекции линия пеленга представляет локсо-
дромию. В «Мореходных таблицах» 1943 г. ортодромическая
поправка, вычисленная по приближенной формуле (136), дана
на вкладном листе VIII по аргументам разность долгот до 10° и
широта до 85°. На обратной стороне вкладного листа под номе-
ром VIII-A дана номограмма для определения ортодромической
Ортодромическая поправка
313
поправки, вычисленная также по приближенной формуле. Номо-
грамма дана для разности долгот до 30° и широты до 65°.
Можно также воспользоваться специальной шкалой (рис. 140)
для определения величины ортодромической поправки.
Пример, =60°; РД = 4,5°. По шкале для РД= 1° ортодромическая
поправка равна 0°,43> Следовательно, Ф = 1°,9.
При большой РШ для большей точности может быть приме-
нена диаграмма (рис. 141), дающая хороший результат при
РД до 60°, На этой диаграмме по горизонтали отложена широта
Средняя
широта
„ О’ 5‘ 10* 15* 20" Z5* 30*
ОртоЗроническая I i i ill i i iitiiii liiiil ! , ! il ! ! । т—
поправка на Г РД) i • I I । ~ I • i • 1 ' i - i I • > • i *~1. • I • | • I I -1 • i [ • i • i • I ‘ I
Средняя
30е 35“ 40° 45’ 50е 55* 60’ 65’ 70’ 75’ 90’ широта
Li i l I I i i i l I ill i I j i l i l i i i i I 11 i f! i i ! 11! 11 ti liiiil | Ортодромическая
*-J ‘ J 1 ~ 1 ' i ' 1 ~ ‘ ‘ * 1 ' *7 j ‘ 1 ' 1 ' [ ‘ 1 ‘11 ‘1 1 '1 ' 1 ‘ 1 ~ 1 ' 1 ' 1 * 4 поправка наГРВ
0.3° O’ № H
Рис. 140.
места, с которого берется радиопеленг, а по вертикали — широта
радиостанции, которую пеленгуют. Так что, если радиопеленг
определяют с судна, то будет счислимой широтой судна, а <?2—
широтой радиомаяка. При пеленговании судна береговой радио-
пеленгаторной станцией—наоборот.
Величина ортодромической поправки на 1° разности долгот
надписана на кривых.
Пример. = 60°, ?2 = 30°, РД= 20°, = 0,439-20° - 8°,8.
Знак ортодромической поправки зависит от взаимного положе-
ния радиопеленгатора и пеленгуемой им радиостанции.
Так как дуга большого Таблица 25
круга всегда направлена
своею выпуклостью к полю-
су, то рис. 142, на котором
точкой А обозначено место
р адиопеленгатор а, а точкой
R — пеленгуемая радиостан-
ция, непосредственно указы-
вает знак ортодромической
поправки для перехода от
ортодромического пеленга к
локсодромическому.
Широта Пеленгуе- мая радио- станция от радиопе- ленгатора Перевод 0pm. П. в Лок.П. Перевод Л ок. П в 0pm. П
N к W минус (—) ПЛЮС (+)
N к Ost ПЛЮС (+) минус(—)
S к W плюс (-J-) минус(—)
S к Ost минус (—) ПЛЮС (+)
Правило знаков может быть представлено табл. 25.
Знаки даны в предположении, что счет пеленгов принят от 0°
до 360° по часовой стрелке.
314
Применение радиопеленгования в навигации
[Гл. XVH
Если радиопеленг определен береговой радиопеленгаторной
станцией, то знаки будут обратные табличным.
При средних расстояниях, если счислимое место корабля не
содержит большой ошибки, за линию положения можно принять
локсодромический пеленг, исправленный ортодромической поправ-
кой. Происходящая от такой замены ошибка будет невелика и ею
можно пренебречь. При определениях места судна иа больши?<
расстояниях, когда ортодромическая поправка достигает значи-
тельной величины, линия положения вблизи счислимого .места
судна должна быть проложена как дуга большого круга, если РП
Ортодромическая поправка
315
получен с береговой радиостанции, или как линия равных пелен-
гов, если РП взят судовым радиопеленгатором, как указано
в следующем параграфе.
Ортодромическую поправку следует всегда принимать во вни-
мание, если ее величина больше случайных ошибок наблюдений.
Условимся считать, что случайные ошибки наблюдений не превы-
шают 0°,3. При этом предположении рассчитана номограмма
(рис. 143), которая по средней широте и истинному пеленгу А
дает расстояние в морских милях т, на котором ортодромическая
поправка достигает 0°,3; с увеличением расстояния величина
ортодромической поправки увеличивается, и ее необходимо при-
нимать во внимание. Как показывает номограмма, при плавании
в высоких широтах ортодромическая поправка при пеленгах,
близких 90°—270°, достигает величины 0°,3 на расстояниях до
пеленгуемого объекта порядка 10—20 миль, и ее следует прини-
мать во внимание и при визуальных пеленгах. При плавании
в малых широтах той же величины ортодромическая поправка
достигает на расстояниях 100 и более морских миль, и в большин-
стве случаев ею можно пренебречь.
316
Применение радиопеленгования в навигации
[Гл. XVI!
Подсчитаем ошибку СВ (рис. 137), происходящую вследствие
пренебрежения ортодромической поправкой. Из прямоугольного
г13 90_ 270
- 15 80 100 ; 7 260 250
70 НО - - 250 230
60 120 ’ " 240 300
- 20
50 130 - - 230 310
БО- 30
40 140 - 7 Z2C 320
- 40
-50
30 150 ; - 210 330
50 7
- 100
е
,0 ; 7 “5 X 20 160- - 200 340.
о X .
- X 5
- э QJ -
к К _ гс X X _ О- . -200 03
к- “ (D 5 - с: “ о
- ел с .
- 300 X п -
г
~ 400 о
ЗЕ -
- 500
(0 170- - 190 350
20 - 1
-1000
7 1500
1 2000
Ю _ Рис. 143. 5 175^ _ IE5 355
треугольника АВС, в котором угол С прямой, обозначив расстоя-
ние АВ через т, получим
СВ = АВ sin Ф = mty' arc 1'.
После подстановки имеем
СВ = ~ тг sin A tg arc 1'.
Линия равных пеленгов
317
Для нашего примера т = 1900 миль, а = 35°, тогда
СВ 262 мили. Подсчет показывает, что в реальной обстановке
в зависимости от широты и расстояния проложенная линия пе-
ленга может уклониться на несколько десятков миль в сторону,
если пренебречь ортодромической поправкой.
§ 84. ЛИНИЯ РАВНЫХ ПЕЛЕНГОВ
В предыдущих параграфах за линию положения принималась
линия проложенного на карте локсодромического пеленга. Но
электромагнитная волна распространяется по дуге большого круга
и линия пеленга может быть п
расстояниях, на которых разни-
цей между локсодромией и ду-
гой большого круга можно -пре-
небречь.
Предположим, что несколько
судов, расположенных по дуге
большого круга, принятой за
линию положения, одновремен-
но взяли ИРП одной и той же
радиостанции. Так как разные
меридианы пересекают дугу
большого круга под различ-
ными углами, то все суда дол-
жны получить различные ИРП
в зависимости от расстояния
между ними и радиостанцией.
В этом случае линией поло-
жения, определяемой наблю-
денным пеленгом, будет геоме-
трическое место вершин постоянного сферического угла, образо-
ванного дугой меридиана и дугой большого круга, соединяющей
радиомаяк и судно. Пусть в точке В (рис. 144) находится радио-
маяк, а в точке А —судно, которое взяло РП радиомаяка; пред-
положим, что ИРП = 35°. Геометрическое место точек на земной
поверхности, для которых радиомаяк будет находиться на том
же самом ИРП = 35°, представит кривую, изображенную на ри-
сунке, которая и будет линией положения. Где бы судно ни на-
ходилось, на этой линии оно будет иметь ИРП радиомаяка рав-
ным 35°.
Эта линия постоянного пеленга исследована анали-
тически и получила название линии равных азимутов, но с точки
зрения навигации, для которой она имеет существенное значение,
ее лучше называть линией постоянного пеленга.
На небольших расстояниях между точками А и В (рис. 145)
линия равного пеленга располагается симметрично дуге большого
318
Применение радиопеленгования в навигации
[Гл. XVII
круга по другую сторону локсодромии и угол пересечения этих
двух кривых равен углу схождения меридианов между точ-
ками А и В.
Таким образом, при взятии радиопеленга судовым радиопелен-
гатором линией положения будет линия равного пеленга, а при
определении радиопеленга береговой радиопеленгаторной стан-
цией — дуга большого круга.
Уравнение линии равных пеленгов. На рис. 146 кривая PKiKM
представляет линию равных пеленгов. В точке М находится ра-
диомаяк, а в точке К — судно; из любой точки этой кривой истин-
ный ортодромический пеленг на маяк М будет постоянным и рав-
ным А. Проведем меридианы места судна и радиомаяка, а также
дугу большого круга KDM, соединяющую место судна с радио-
маяком. В полученном сферическом треугольнике РКМ обозна-
чим угол при полюсе между меридианами места судна и радио-
маяка через л; этот угол представит разность долгот между ра-
диомаяком и местом судна. Угол РКМ = А будет истинным
пеленгом с судна на радиомаяк, а угол РЛ47<' = Л1—дополнение
обратного истинного пеленга до 360°. Сторонами этого сфериче-
ского треугольника являются дополнения широты места судна
90°—% дополнение широты радиомаяка 90° — и дуга боль-
шого круга, соединяющая место судна с радиомаяком, обозначим
ее длину через D.
Линия равных пеленгов
319
Из сферического треугольника РКМ, применяя формулу четы-
рех рядом лежащих элементов, имеем:
с1£Л sin X = tg?p cos <?—sin ф cos X. (138).
Это и есть уравнение линии равных пеленгов на сфере, в кото-
ром истинный пеленг А и широта радиомаяка как величины
постоянные, являются параметрами, а широта ? судна и его дол-
гота X, считаемая от меридиана радиомаяка, текущими коорди-
натами, зависящими от места судна.
Задавая ? или X определенные значения, можно соответственно
вычислить по формуле (.138) X или &и по полученным географи-
ческим координатам нанести кривую равных пеленгов на карту
в любой проекции.
Как показывает уравнение, при X — 0° и ср = все линии
равных пеленгов проходят через место радиомаяка; при Х = 180°
и ср= — срр все линии равных пеленгов проходят через точку,
являющуюся антиподом места маяка. При А = 0° или 180° линия
равных пеленгов превращается в большой круг и совпадает с ме-
ридианом радиомаяка.
На рис. 147, составленном в меркаторской проекции, нанесены
линии равных пеленгов через 10° для радиомаяка, находящегося
в Ггр = 20° N. Счет пеленгов дан от 0° до 180° к Ost^ и к W на
радиомаяк.
Линии равных пеленгов составляют два семейства кривых,
проходящих через место радиомаяка и противолежащую ему
точку в широте 20° S.
Границей между этими семействами является линия равного
to
Рис. 147.
Применение радиопеленгования в навигации [Гл. XVII
§ 84 \
Линия равных пеленгов
321
пеленга, соответствующая пеленгу А = 90° — =70°. Так как
полюсы Земли на меркаторской проекции лежат в бесконечности,
то все линии равных пеленгов по мере увеличения широты
ассимптотически приближаются к меридианам.
Линии постоянного пеленга, соответствующие пеленгам, рав-
ным 90° — 9 и 270° состоят каждая из двух ветвей, пересе-
кающихся в двух точках, лежащих на экваторе и отстоящих от
радиомаяка по долготе на 90°.
Чем теснее расположены линии равных пеленгов, тем точнее
можно определить свое место в данном районе при помощи судо-
вого радиопеленгатора. Вблизи указанных выше точек на экваторе
определение места по радиопеленгам невозможно, так как неболь-
шая ошибка в наблюденном радиопеленге резко изменяет поло-
жение линии равных пеленгов. Практически это не имеет значе-
ния, так как эти точки лежат на расстоянии около 5400 миль от
радиомаяка и определение по радиопеленгам на таком расстоя-
нии не достигает своей цели.
Для решения практической задачи определения места судна
в море нужно уметь нанести на карту только небольшой отрезок
линии равных пеленгов вблизи счислимого места судна. Этот от-
резок линии равного пеленга может быть заменен касательной
к ней и принят за линию положения.
Определим угол R, под которым линия равного пеленга пере-
секает меридиан заданной точки (рис. 146). Возьмем на линии
равных пеленгов точку Ki вблизи заданной точки К и проведем
отрезок параллели KiB. Из элементарного треугольника KKJ3,
который по малости принимаем за плоский, прямолинейный и
прямоугольный, имеем
tg (180°—R) = = —oscp-,
'кв д<р
а переходя к пределам,
, о dX
—tg/? = COS ср.
dp
Дифференцируем уравнение кривой равных пеленгов (138) по
ср И к
ctg A cos X dk = — tg срр sin ср dy — cos ср cos X dy 4“ sin ? sin X dl;
dX — (tg cpp sin ? + cos у cos X) —(sin cppsin p-Pcos ypcos cp cos X) sin A
dy ctg A cos X — sin cp sin X (cos A cos X — sin A sin у sin X) cos yp
Из сферического треугольника РКМ:
sin срр sin ср -L cos cpp cos <p cos X = cos D
и
cos A cos X—sin A sin cp sin X = —cos
21
К- С. Ухов
322
Применение радиопеленгования в навигации
[Гл. XVII
После подстановки
dX____ cos Z)-sin А
dy cos Дх cos ’
НО
sin А sin Дг
cos cos ср
dX cos D . .
— =—;—tg/L.
dy coscp & 1
Окончательно получаем
tg7? =—cosDig^p
(139)
Эта формула показывает, что в тех точках, для которых
Л] = 90°, линия равных пеленгов совпадает с параллелью; если
же D = 90° или А = 0°, то линия равных пеленгов совпадает
с меридианом.
Найдем теперь угол i, под которым линия равных пеленгов
пересекает дугу большого круга в заданной точке /С Рис. 146
дает:
i = R-A\
tg/ = tg(/?—4)
tg R — tg Л
1 + tg R tg A
— cos D tg Д j — tg Д
1 — cos D tg Ai tg A
§ 85] Методы проложения линий положения на меркаторской проекции 323
ИЛИ
cos D tg Л1 + tg Л cos Л1 cos А cos D sin Л] cos A + cos Лд sin A
cosD tg Л1 tg Л — 1 созЛхСОзЛ cos D sin Лд sin A — cos Лд cos A
Из сферического треугольника РКМ по формуле пяти рядом
лежащих элементов имеем
sin k sin с? = cos Ад sin А + sin Ат cos A cos D
и
cos X = —cos Ai cos A + sin At sin A cos D.
После подстановки получаем окончательно
tg Z = tg X sin ср. (140)
На ограниченных расстояниях при малом угле i можно при-
нять с достаточной для практических целей точностью
i - - k sin ср — 7 = 2ф. (141)
Формула (141) показывает, что угол пересечения дуги боль-
шого круга и линии равных пеленгов равен величине схождения
меридианов или двойной ортодромической поправке и, следова-
тельно, линия равных пеленгов располагается симметрично с ду-
гой большого круга относительно локсодромии (рис. 148).
§ 85. МЕТОДЫ ПРОЛОЖЕНИЯ ЛИНИЙ ПОЛОЖЕНИЯ
НА МЕРКАТОРСКОЙ ПРОЕКЦИИ
1. Прокладка линий положения от определяющей точки, когда
радиомаяк находится в пределах карты. На сравнительно неболь-
ших расстояниях, если радиомаяк находится в пределах карты,
то рассчитывается локсодромический пеленг и прокладывается
линия этого пеленга. В зависимости от величины пеленга заме-
чаем точку пересечения линии пеленга с счислимым меридианом
или со счислимой параллелью; эту точку назовем опреде-
ляющей точкой. Если пеленг больше 45° в четвертном счете,
то линия пеленга пересекает меридиан под большим углом, чем
параллель, и следует выбрать определяющую точку на счислимом
меридиане; при пеленге меньше 45° определяющая точка выби-
рается на счислимой параллели. Через выбранную определяю-
щую точку проводим в виде прямой линии отрезок дуги большого
круга или отрезок линии равных пеленгов. Направление искомой
линии положения будет отличаться от локсодромического пеленга
на величину ортодромической поправки.
В северном полушарии, если радиопеленг определен с судна,
то когда радиомаяк находится к Ost от судна, линию положения
следует провести, повернув ее относительно линии локсодромиче-
21*
324
Применение радиопеленгования в навигации
[Гл. XVII
ского пеленга на угол ортодромической поправки по часовой
стрелке, так как угол /? > Лок. П. Если же радиомаяк будет к W
м
от судна, то поворот надо
сделать против часовой
стрелки — Л < Л ок. П.
Если линией положе-
ния является отрезок дуги
большого круга, при пе-
ленговании судна берего-
вой радиопеленгаторной
станцией или при исполь-
зовании направленного ра-
диомаяка, то она пройдет
по другую сторону линии
л оксодром ического пелен -
га, составляя с последней
тот же угол 6 , как указа-
но на рис. 148.
2. Радиомаяк за рамкой карты. Если радиомаяк находится за
рамкой карты, то определяющая точка находится вычислением.
Предположим, что радиомаяк на-
ходится в точке М (рис. 149) за
пределами карты, в точке С —
счислимое место судна, КМ — ли-
ния локсодромического пеленга.
Из прямоугольного треугольника
KMMi имеем
РМЧ = РДа^ИП. (142)
Рассчитав РД между радио-
маяком исчислимой долготой суд-
иа, по формуле (142) вычисляем
РМЧ. В зависимости от величины
локсодромического пеленга, при-
бавив или вычтя ее из МЧ , соот-
ветствующей широте радиомаяка,
получим меридиональную часть
определяющей точки К и обратным входом в табл. 36 МТ-43 най-
дем широту определяющей точки.
Если определяющую точку К предпочтительнее найти на счи-
слимой параллели судна, то, как показывает рис. 150, по рассчи-
танной РМЧ между параллелью радиомаяка и счислимой па-
раллелью судна и локсодромическому пеленгу следует найти
РД между радиомаяком и определяющей точкой К. Прибавив
полученную разность долгот к долготе радиомаяка с соответ-
ствующим знаком в зависимости от направления пеленга, пай-
£ 55] Методы проложения линий положения на меркаторской проекции 325
дем долготу определяющей точки. В этом случае формула (142)
перепишется так:
РД = РМШ$ИП. (143)
Следует рекомендовать получать координаты определяющей
точки вычислением в том случае, если прокладка линии пеленга
на карте представляет затруднения из-за своей длины. Кроме
того, при вычислении координат определяющей точки дальней-
шую графическую прокладку для определения места судна
можно сделать на бумаге в любом избранном масштабе.
Пример.1 25 мая ... Тс = 12 ч. 00 м., ус = 54°35'N, кс = 5°6'Ost,
ИК= 135°, скорость 10 узлов, взяты радиопеленги всенаправленных сектор-
ных радиомаяков:
Р/м Бушмильс: ур = 55°12',3 N, \р = 6°28',0 W;
0pm. П на судно = 9Г,1.
Р.м Ставангер: ур = 58°37',5 N, \р = 5°37',8 Ost;
0pm. П на судно = 185°,6.
Р/м Бушмильс Р/м Ставангер
0pm. П 91°,1 185°,6
ф Ч- 4,8 -0,2
Лок. П 95,9 185,4.
Ф -г 4,8 — 0,2
т ------!---!---- направление ----------------
100,7 линий положения 185,2
Определяющие точки берем соответственно на счислимом; меридиане и
на счислимой параллели:
РД = 694' . . . .2,8414 РМЧ = 440,1 . . .2,6436
ctg 95°,9 . . . 9,0143 tg 185°,4 . . . 8,9756
РМЧ .... 1,8557 РД . . . 1,6192
РМЧ= 71,7 РД = 41,6
МЧр = 3970,6 Хр = 5°37',8 Ost
M4kl = 3898,9 X. = 4°56',2 Ost
<fkl = 54°30',9 N
На листе бумаги (рис. 151) в выбранном масштабе наносим определяю-
щие точки Ki и Ка и через них проводим линии положения.
¥о = 54°32' N. Хо = 4<>56' Ost.
Если взятые радиопеленги нельзя принимать как одновремен-
ные, то, рассчитав координаты первой определяющей точки, пере-
носим ее по истинному курсу и плаванию судна на основании
письменного счисления к моменту вторых наблюдений.
1 Данные для примера предоставлены к. т. н. Барановым Ю. К. из его
собственных наблюдений.
326
Применение радиопеленгования в навигации
[Гл. XVII
Таким путем первая линия положения будет перенесена к мо-
менту определения второй линии положения.
В случае, если ошибка в счислимом месте судна достигает
большой величины, порядка нескольких десятков миль, и нет
возможности повторить определение по радиопеленгам, то сле-
дует для получения большей точности счислимого места повто-
рить все вычисления и прокладку, приняв полученные обсерво-
ванные координаты за счислимые.
3. Прокладка линий положения от счислимого места судна.
Чтобы избежать при определении по радиопеленгам прокладки
длинных линий локсодромических пеленгов, линия положения
может быть проложена, исходя из счислимого места судна, ана-
логично тому, как это делается при астрономических наблю-
дениях.
а) Пусть радиопеленг взят судовым радиопеленгатором. На
рис. 152 С — счислимое место судна, М — место радиомаяка.
Обозначим счислимый пеленг, представляемый углом РСМ че-
рез Ас, а полученный из наблюдений через А; предположим, что
кривая MKL представляет отрезок кривой равных пеленгов. Так
как нам надо получить только часть ее вблизи нашего счисли-
мого места, то через точку С проведем дугу большого круга СКН,
перпендикулярную к кривой равных пеленгов, а через получен-
£ 55] Методы проложения линий положения на меркаторской проекции 327
ную точку К— касательную к этой последней кривой, которую и
примем за линию положения. Точку К назовем определяющей
точкой. Соединим точки С и /С с местом радиомаяка М дугами
больших кругов и обозначим для краткости длину дуги большого
круга СМ через D, длину дуги большого круга СК через п, а угол
при точке М между дугами больших кругов СМ и КМ через В,
угол при точке К между
дугой большого круга КМ
и кривой равных пеленгов
через Z.
Угол i, как показано в
предыдущем параграфе,
равен двойной ортодроми-
ческой поправке или ве-
личине
ди а нов.
Из сферического тре-
угольника СКМ имеем
sin п sin $
sin D sin (90° — i)
И
sin n = sin D sin £ sec i.
схождения мери-
Так как схождение ме- Рис. 152.
ридианов между точками
С — М и К — М, вследствие сравнительно небольшой ошибки
в счислимом месте, можно принять одинаковым, то
? = Ас—А.
Если расстояние до радиомаяка будет 300 мор. миль, то
D = 5°, а величина п практически будет выражаться в минутах,
тогда
п = D sec i sin (Ас—А).
При i = 8°, sec i = 1,01, так что, положив sec i = 1, мы сделаем
ошибку порядка одного процента и для практических расчетов
примем
п = D sin (Лг—А). (144)
Формула (144) дает расстояние до определяющей точки К от
счислимого места. Для определения направления отрезка СКН
непосредственно с рисунка получаем, что угол РКН, который обо-
значим через Т, равен
Т = Д + / + 90°, (145)
где угол i = 2ф берется со своим знаком.
При Ае^>А величина п получается положительной и откла-
дывается по направлению, определяемому углом Т. Если Ас < А,
328
Применение радиопеленгования в навигации
[Гл. XVI/
то п имеет знак минус и откладывается по направлению, обрат-
ному 7\
Формулу (145) можно переписать в виде
Т=АЛ-1± 90°
и откладывать величину п, независимо от ее знака, всегда по на-
правлению Т, руководствуясь для определения знака у 90° сле-
дующим правилом:
когда радиопеленг взят с судна, то при АГ^>А прибавляется
90° (знак плюс), а при АС<^А вычитается 90° (знак минус).
б) Если пеленг на судно
Р опр едел ен бер еговой р а ди о -
а пеленгаторной станцией, то
линией положения будет от-
резок дуги большого круга
вблизи счислимого места.
Пусть на рис. 153 точки
С и М соответственно счис-
лимое место судна и место
береговой радиопеленгатор-
ной станции; А и Ас —на-
блюденный станцией радио-
пеленг и счислимый ортодро-
мический пеленг; MChML—
дуги больших кругов, опре-
L деляемые углами Ас и Л.
Н Проведем через точку С от-
Рис. 153. резок дуги большого круга
СКН перпендикулярно к
дуге большого круга MKL. Отрезок дуги большого круга MKL
вблизи определяющей точки представит линию положения. Из
прямоугольного сферического треугольника МСК получаем
sin п = sin D sin (Л—Л J.
Принимая во внимание, что радиопеленгование происходит
практически на ограниченных расстояниях, можно написать с до-
статочной для практики точностью
п = £>51п(Л-ЛД (146)
Формула (146) показывает, что практически величина п не
зависит от того, что определяет радиопеленг —судно или берего-
вая радиопеленгаторная станция.
Для определения направления отрезка п положим, что вели-
чина схождения меридианов для точек С и К одинакова и напра-
£ 85] Методы проложения линий положения на меркаторской проекции 329
вление дуги большого круга MKL вблизи счислимого места опре-
деляется углом, равным А + т, а направление отрезка СКН»
перпендикулярного к линии положения, определится углом
Т=А + т ± 90°, (147)
если А > Ас, то прибавляется 90°, а если А < Ас, то вычи-
тается 90°.
Для вычисления величины п надо составить разность наблю-
денного и счислимого пеленгов и найти расстояние между счи-
слимым местом и радиомаяком или радиопеленгатор ной стан-
цией. Так как разность между ортодромическими пеленгами и
между локсодромическими пеленгами остается одной и той же,
то проще наблюденный ортодромический пеленг перевести в лок-
содромический, а счислимый локсодромический пеленг вычислить
по формуле
tg^Z7 = -^_.
5 РМЧ
Для вычисления расстояния D можно воспользоваться форму-
лой письменного счисления D = РШ sec ИП. Сама величина п
может быть тогда вычислена по логарифмам или выбрана из
330
Применение радиопеленгования в навигации
[Гл. XVII '
табл. 34 МТ-43 «Разности широт и отшествия» в графе отше-
ств'ия, принимая локсодромический пеленг за курс, а расстояние D
за плавание. Величину п достаточно знать с точностью одного де-
сятичного знака, т. е. до одной десятой морской мили.
Определим место судна по данным последнего примера:
Пример. Р/м Бушмильс Орт. П. 9Г,1 ф +4,8 Р/м Ставангер 185°,6 — 0.2
Лок. nQ 95,9 Лок. Пс 95,3 185,4 184,1
ЛП$ — ЛП с + 0°,6 + г,з
РД'= 694 . . РМЧ= 64,7 . 2,8414 1,8109 31,8 . . 440,1 . . . 1,5024 . 2,6436
tg лпс . . . 1,0305 8,8588
ЛПС = 84°49',5SO 4°7',9 SW
sec ЛПС . . . РШ = 2>Т,3 к S . . . 1,0324 . 1,5717 . . .0,0011 242',5 к S . 2,3847
D . . . sin (Л/70 — ЛПС) . . . 2,6041 8,0200 Dx = 401,9 О2 = 243,1 _ 2,3858 8,3558
• • • 0,6241 . . . 0,7416
«1 Т\ = 95s,9 + 4°, 8 + 90° = = 4,2 = 190°,7; п2 = 5,5 Т2 = 184°,5 - 0,2 + 90° = 275°,2
Проложим на бумаге в выбранном масштабе элементы линий положения
и проведем последние (рис. 154).
= 54°32'N; = 4c56'Ost.
§ 86. ВЫЧИСЛЕНИЕ ЛИНИИ ПОЛОЖЕНИЯ ПО ФОРМУЛАМ
СФЕРИЧЕСКОЙ ТРИГОНОМЕТРИИ
В § 84 указано, что географические координаты точек, через
которые проходит линия равных пеленгов, могут быть вычислены
по формуле (138), дающей уравнение линии равных пеленгов.
Для определения места судна, когда требуется провести только
отрезок линии положения вблизи исчислимого места судна, ко-
роче — вычислить одну определяющую точку и направление ли-
нии положения, как это сделано в предыдущем параграфе, или
три определяющие точки и через них провести линию положения.
В этом случае, чтобы вычисления вести по наиболее простым
логарифмическим формулам, сферический треугольник удобнее
разбить на два прямоугольных треугольника, проведя через место
радиомаяка дугу большого круга перпендикулярно к меридиану
определяющей точки.
Пусть в сферическом треугольнике РКМ (рис. 155) точка М.
соответствует месту радиомаяка, широта которого К—опре-
Вычисление линий положения по формулам
331
деляющая точка на меридиане, отстоящем от меридиана радио-
маяка на разность долгот, равную X широту которой мы ищем;
Ап — определенный из наблюдений ортодромический пеленг ра-
диомаяка М. Проведем дугу большого круга МС перпендикулярно
меридиану определяющей точки К. Обозначим широту точки С,
основания перпендикуляра,
через х, а длину перпендику-
ляра МС — через р.
Из прямоугольных сфери-
ческих треугольников КСМ и
СМР имеем
tgp = tg40sin(x-<?z,) =
= tg X cos х,
откуда
. / \ tgXcosx
tgx = sec X
По формулам (148) мо-
жем рассчитать широту
определяющей точки К.
Пример, приведенный в предыдущем параграфе, дает
(ро = 55°12',3 N tg Х= 11°34',0 sec 0,1581 0,0089 tg 9,3110
tg X 0,1670 COS X 9,7503
х =’55°45',3 х— <?к = 1°14,8 О/7 4-7= 109°,7 s tg Ло 9,0613 0,7236
^=54°30',5N sin (x-<pj| 8,3377
Для решения формул (148) можно легко использовать табл. 27
МТ-43. Перепишем формулы (148) применительно к обозначе-
ниям, принятым в этой таблице:
Г(х)=1(^) + 5(0
С(х-?Л)=7'(Д0) + 5(х)-7'(О
tp =55°12',3N X = ll°34',0 I 73886 178 ПА) S(x) 85198 4993
Л = 79°,3 x = 55°45',0 T(x) | 74064 T(X) 90191 56916
x-<?K = 1°14',8 C(x- <fK) | 33245
= 54°30',2N
332
Применение радиопеленгования в навигации
[Гл. XVI!
Гидрографическим Управлением ВМС в 1952 г. выпущены
«Таблицы для определения места корабля по радиопеленгам»,
содержащие решение косоугольного сферического треугольника
полюс — счислимое место корабля — место радиомаяка методом
разделения его на два прямоугольных сферических треугольника.
Таблицы составлены Б. Д. Яшиным.
Таблицы снабжены подробным объяснением их устройства,
примерами на пользование таблицами и схемой для вычисления
элементов линии положения.
§ 87, ПРИМЕНЕНИЕ КАРТЫ В ГНОМОНИЧЕСКОЙ ПРОЕКЦИИ
ДЛЯ ПРОЛОЖЕНИЯ ЛИНИЙ ПОЛОЖЕНИЯ
Применение карт в гномонической (центральной) проекции
целесообразно только при проложении линий положения по пе-
ленгам, взятым радиопеленгаторными станциями. В этом случае
линией положения будет дуга большого круга, которая изобра-
жается на центральной проекции прямой линией. Искажение
углов на центральной проекции пропорционально косинусу рас-
стояния от центральной точки проекции, точки касания, до дан-
ной точки. Поэтому для каждой радиопеленгаторной станции тре-
буется построить свою искаженную картушку.
Пусть R (рис. 156) — место радиостанции на сфере, которая
определила истинный радиопеленг судна Л, равный углу PRB.
£ 88]
Радиопеленгаторные станции
333
Судно находится на дуге большого круга RB. На гномониче-
ской проекции рг будет меридиан радиопеленгаторной станции /?,
a rb — изображение дуги большого круга RB.
Углу на сфере А на проекции будет соответствовать угол
prb = а. Обозначим на сфере угол PRZ через а соответствую-
щий ему на проекции угол prZ через ф. Угол на сфере и угол ф
на проекции будут постоянными для данной радиопеленгаторной
станции, так как зависят только от ее положения на земной по-
верхности и положения точки касания проекции Z\ они связаны
уравнением:
tg ф = tg «о cos Z/?.
Длина дуги ZR и угол могут быть вычислены из сфериче-
ского треугольника PRZ по известным широтам радиопеленга-
торной станции и точки касания проекции, а также разности
долгот между этими двумя точками. Направление дуги большого
круга на гномонической проекции определится углом который
также может быть вычислен по формуле
tg Р = tg (to—A) cos ZR,
и тогда
tg (ф—а) = tg (<о—A) cos ZR.
Задавая различные значения углу А (1°, 2° и т. д.), вычи-
слим соответствующие значения углов а на гномонической про-
екции и, откладывая их от меридиана рг, получим для места
радиостанции на гномонической проекции искаженную картушку,
для прокладки дуг больших кругов.
Если карта в гномонической проекции специально построена
для проложения радиопеленгов, то для каждой радиопеленга-
торной станции строят по указанному расчету картушку, при по-
мощи которой можно провести дугу большого круга, соответ-
ствующую полученному ИРП. Отрезок большого круга вблизи
счислимого места судна может быть перенесен по координатам
двух точек на меркаторскую карту и принят за линию положе-
ния или непосредственно с гномонической карты могут быть
сняты географические координаты судна, если получено обсерво-
ванное место по радиопеленгам двух или трех радиопеленгатор-
ных станций.
§ 88. РАДИОПЕЛЕНГАТОРНЫЕ СТАНЦИИ
Суда, не имеющие собственных радиопеленгаторных устано-
вок, могут пользоваться береговыми радиопеленгаторными стан-
циями, списки которых и все необходимые относящиеся к ним
сведения помещены в справочниках. Для определения места
334
Применение радиопеленгования в навигации
[Гл. XVII
судна нужно иметь одновременно пеленги не менее двух радио-
пеленгаторных станций, поэтому они иногда соединяются в груп-
пы по 2—3 станции, которые управляются контрольной радио-
станцией.
По существующим положениям морские радиопеленгаторные
станции работают на частоте 375 кгц (800 м), являющейся ос-
новной для радиопеленгования, и на частоте 500 кгц (600 м),
предназначенной для пеленгования судов, передающих сигналы
бедствия, и в других исключительных случаях; на этой послед-
ней частоте суда запрашивают свой радиопеленг от береговой,
радиопеленгаторной станции.
Для исключения влияния радиосклонения все береговые ра-
диостанции предварительно производят калибровку своих уста-
новок, которая заключается в сравнении определенных ИРП
с визуальными или вычисленными на другие радиостанции пе-
ленгами. Эта работа позволяет определить постоянную ошибку
в радиопеленгах для любого их значения. Для каждой радиопе-
ленгаторной станции указывается надежный сектор ра-
боты, в котором ошибки из-за береговой рефракции незначи-
тельны и ими можно пренебречь. Секторы указываются в граду-
сах от 0° до 360°. Пеленги, передаваемые радиопеленгаторными
станциями на суда, исправлены за все погрешности, за исключе-
нием ортодромической поправки.
Определение места судна с помощью береговых радиопелен-
гаторных станций производится в следующем порядке:
1) судно запрашивает у радиопеленгаторной станции или
у контрольной пеленг или место; при наличии группы радиопе-
ленгаторных станций контрольная станция по телефону указы-
вает связанным с ней радиостанциям позывные судна, которое
просит его запеленговать;
2) судно дает свои позывные и условный сигнал, одновре-
менно пеленгуемйй береговыми радиопеленгаторными станциями;
3) полученные радиопеленги поступают на контрольную стан-
цию, которая передает их на судно, или же, проложив радиопе-
ленги на карту, сообщает судну его географические координаты.
Когда судно приняло от радиопеленгаторной станции опреде-
ленные ею радиопеленги, оно повторяет их для радиопеленга-
торной станции, которая подтверждает правильность принятых
радиопеленгов или, в случае необходимости, исправляет их, по-
вторяя передачу.
Если радиопеленгаторная станция не уверена во взятых ра-
диопеленгах, она предлагает судну повторить передачу для по-
вторного определения радиопеленга. Радиопеленгаторная стан-
ция, убедившись, что судно правильно приняло переданные ему
радиопеленги, дает сигнал об окончании работы, который судно
репетует.
Направленные радиомаяки
335
ГЛАВА XVIII
ИСПОЛЬЗОВАНИЕ РАЗЛИЧНЫХ РАДИОТЕХНИЧЕСКИХ
СРЕДСТВ В НАВИГАЦИИ
§ 89. НАПРАВЛЕННЫЕ РАДИОМАЯКИ
Для обслуживания судов, не имеющих собственных радиопе-
ленгаторов, устанавливаются различные радиомаяки с направ-
ленной характеристикой излучения, которые в настоящее время
достигли высокой степени совершенства и ими часто пользуются
суда, снабженные и судовыми радиопеленгаторами.
В настоящей главе, не входя в рассмотрение технических во-
просов, даны общие сведения о работе направленных радиомая-
ков с точки зрения использования их для навигации. Подробные
сведения о работе направленных радиомаяков даны в списке ра-
диомаяков и радиопеленгаторных станций, издаваемом Гидро-
графическим управлением.
По своему назначению радиомаяки направленного действия
могут быть двух родов:
1) радиомаяки, предназначенные для обеспечения плавания
по определенному фарватеру и носящие название створных
маяков;
2) радиомаяки, дающие возможность определить пеленг от
направленного радиомаяка.
По своему техническому устройству последние радиомаяки
могут быть с вращающейся рамкой, с неподвижной рамкой и
секторные.
Створные радиомаяки. Антенное устройство створных радио-
маяков состоит из двух симметричных антенн, установленных
под определенным углом одна к другой. Каждая из антенн по-
сылает свой условный сигнал, например «А» и «Н» одновре-
менно так, что тире и точки одного знака приходятся точно на
паузы другого.
На рис. 1^7 изображена схема работы створного радиомаяка.
Вследствие частичного наложения характеристик излучения друг
на друга получаются четыре направления, в которых слыши-
мость сигналов «А» и «Н» одинакова и они, совпадая друг
с другом, дают одно тире. Секторы, внутри которых слышимость
слившихся сигналов практически одинакова, называются рав-
носигнальными зонами. По обе стороны от равносиг-
нальной зоны сила приема одного ’ из сигналов резко умень-
шается, а второго возрастает. Ориентировка антенн створного
радиомаяка производится таким образом, что биссектриса рав-
носигнальной зоны совпадает с фарватером, а сектор равносиг-
336
Использование различных радиотехнических средств [Гл. XVIИ
нальной зоны лежит в пределах безопасного для плавания фар-
ватера.
При плавании по фарватеру
задача сводится к удержанию
при помощи створного маяка
судна в пределах равносигналь-
ной зоны. Отклонение от оси
фарватера за пределы рав-
носигнальной зоны сейчас
же укажет возрастающая
слышимость одного из сигна-
лов, в зависимости от сторо-
ны уклонения. При плавании
с помощью створного маяка
необходимо принимать и
другие меры, обеспечиваю-
щие безопасность плавания,
в частности следить за кур-
сом судна, который должен
Рис- 157.
совпадать с направлением
биссектрисы равносигналь-
ной зоны. Выход из равно-
сигнальной зоны может быть
определен только после пе-
ресечения ее границы, и при резком маневрировании судно будет
легко проскакивать равносигнальную зону, как указано на
рис. 158, а на циркуляции может поставить себя в опасное поло-
жение относительно близлежащих к фарватеру опасностей.
Рис. 158.
Прием сигналов створного маяка может производиться с по-
мощью любого радиоприемника с вертикальной антенной. Поль-
зоваться радиопеленгатором для приема сигналов створного ра-
диомаяка не рекомендуется, так как это может привести к боль-
шим ошибкам.
Радиомаяки с вращающейся рамкой. Радиомаяк имеет ан-
тенну в виде большой рамки со сторонами 2—3 м, вращаю-
щуюся вокруг своей оси со скоростью один оборот в минуту.
Таким путем достигается изменение направления зоны, в кото-
§ S9]
Направленные радиомаяки
337
рой сигналы радиомаяка не слышны; эта зона называется
лучом.
В момент, когда плоскость рамки занимает положение, пер-
пендикулярное географическому меридиану (рис. 159), радио-
маяк подает условный сигнал, отличающийся от посылаемого
в течение всего остального времени вращения рамки; этот сигнал
называется северным. При приеме северного сигнала наблю-
датель на судне пускает в ход секундомер, стрелка которого на-
чинает двигаться с одинаковой угловой скоростью с рамкой ра-
диомаяка.
Когда луч радиомаяка совпадет с направлением на судно,
пропадет слышимость работы радиомаяка. В этот момент на-
блюдатель стопорит секундомер. Так как рамка вращается с уг-
ловой скоростью 6° в одну секунду, то за промежуток времени
t сек., протекший от момента подачи северного сигнала до исчез-
новения работы радиомаяка, рамка повернется на угол, соответ-
ствующий истинному радиопеленгу и
ИРП = Ь°4сек.
Так как в случае нахождения судна на меридиане такого ра-
диомаяка северный сигнал не может быть принят, то, когда
плоскость рамки совпадает с плоскостью меридиана, добавочно
подается восточной сигнал.
Если секундомер будет пущен в момент приема восточного
сигнала, то будет определен перпендикулярный радиопеленг, ко-
торый следует изменить на 90°.
22 К, С. Ухов
338 Использование различных радиотехнических средств [Гл. XVII1
За один оборот рамки на судне могут быть приняты два ми-
нимума. Оба принятых радиопеленга должны отличаться один
от другого на 180°. Для повышения точности наблюдений можно
рекомендовать брать среднее из полученных! радиопеленгов. На
некоторых радиомаяках для устранения двузначности применяется
дополнительная вертикальная антенна.
Рис. 160.
При радиопеленговании на расстояниях от 100 до 300 миль
днем и около 25 миль ночью ошибка радиопеленга, выведенная
опытным путем, была порядка 1° для 50% наблюдений и до 3°
для 95%.
Для большего удобства работы с радиомаяками, имеющими
вращающуюся рамку, применяются специальные секундомеры,
циферблат которых оформлен в виде компасной картушки.
Радиомаяки с неподвижными рамками. Излучающая система
такого радиомаяка состоит из ряда замкнутых антенн-рамок,
расположенных под углом 15° одна к другой. Каждая антенна
посылает сигнал в виде присвоенной ей буквы, как указано на
рис. 160.
Допустим, что судно, определяющее радиопеленг, находится
в направлении на точке С. Тогда сигнал «И» будет принят
с наибольшей силой, сигналы «К» и «3» слабее, а сигнал «В»
совсем не будет принят. Имея схему работы радиомаяка с не-
подвижными рамками, сразу получаем
ИРП = 30° + 90° = 120°.
§ 89]
Направленные радиомаяки
339
При нахождении судна между направлениями плоскостей
рамок, в направлении, указанном на рис. 160 пунктирной ли-
нией, оно примет сигналы «В» и «Г», по слышимость их будет
значительно меньше слышимости других сигналов. Если сигналы
«В» и «Г» будут слышны одинаково, то судно находится на бис-
сектрисе угла, составляемого перпендикулярами к антеннам,
излучающим эти буквы. Если слышимость неодинакова, то их
относительная слышимость покажет, к направлению какой ан-
тенны ближе находится судно.
Всенаправленный радиомаяк состоит из передатчика и трех
высоких вертикальных антенн, расположенных в одну линию на
расстоянии около двух миль одна от другой, что соответствует
приближенно трем длинам волны. В начале цикла передача под-
строена так, что фаза тока в одной внешней антенне опережает,
а в другой отстает от фазы средней антенны на 90°. Характери-
стика излучения такой антенной системы имеет вид, указанный
на рис. 161 сплошной линией. При изменении направления токов
во внешних антеннах диаграмма переворачивается, как это по-
казано на том же рисунке пунктирной линией. При наложении
двух диаграмм излучения получается одновременно несколько
равносигнальных зон. Всенаправленный радиомаяк подает сиг-
налы — точки и тире. Наблюдатель, в зависимости от своего по-
ложения, будет слышать либо точки, либо тире. В очень узкой
равносигнальной зоне он не услышит ни точек, ни тире.
Весь цикл передачи состоит из позывных радиомаяка, 60 то-
чек и 60 тире, передаваемых в течение 30 сек., и паузы в полсе-
кунды перед началом передачи нового цикла. За время передач
точек и тире фаза тока, питающего центральную антенну, плавно
и равномерно изменяется от нуля до 180°, вследствие чего диа-
грамма излучения постепенно переходит из указанной сплошной
линии в показанную пунктиром. При этом все лепестки диа-
граммы, поворачиваясь в направлении стрелок, займут места со-
седних и в тех направлениях, в которых в начале цикла были
слышны тире, в конце цикла будут прослушиваться точки и на-
оборот.
Для определения направления с такого радиомаяка на ко-
рабль, последний должен иметь только радиоприемник для при-
ема незатухающих волн длиной порядка 1000 м.
Наблюдатель после позывных радиомаяка услышит сигналы
либо точки, либо тире, в зависимости от сектора, в котором он
находится. Затем слышимость этих сигналов будет резко умень-
шаться и немедленно, после того как через место наблюдателя
пройдет равносигнальная зона, начнут прослушиваться другие
сигналы. Если сначала были слышны точки, то они меняются па
тире и обратно; эти сигналы заменяют секундомер. Для кон-
троля счет одних знаков дополняется другим до общей суммы
22*
340
Использование различных радиотехнических средств [Гл. XVIН
шестидесяти знаков. Принимая точность счета при отсутствии
помех до одного знака, можно определить направление с радио-
маяка на 'судно с точностью до !/б°. При сильных помехах может
оказаться промежуток, в течение которого невозможно разли-
Рис. 161.
чить сигналы. В этом случае необходимо продолжать счет в том
же ритме до получения следующего ясно распознаваемого сиг-
нала; среднее между двумя отсчетами даст середину зоны. До-
пустим, что ясно принято двенадцать точек, а затем сигналы не
было возможности различить. При счете 17 в том же темпе ясно
принято тире, следовательно, середина зоны соответствовала
14*/2 точкам.
Как показывает рис. 161, у всенаправленного радиомаяка для
определения радиопеленга могут быть использованы секторы
2—11 и 14—23. Секторы, прилегающие к линии расположения
антенн, ненадежны для определения радиопеленга с требуемой
точностью. Кроме того, многолепестковая характеристика излу-
§ 59]
Направленные радиомаяки
341
чения создает неоднозначность в пеленге. Наличие 12 секторов,
посылающих точки, и стольких же секторов, посылающих тире,
дает 12 линий положений, соответствующих одному и тому же
счету тире или точек. Счислимое место должно указать сектор,
в котором действительно находится корабль. При наличии на
судне радиопеленгатора можно взять приближенный радиопе-
ленг, а затем, установив сектор, в пределах которого находится
судно, получить конечный радиопеленг по счету точек и тире.
Число секторов может быть различно у разных радиомаяков,
в зависимости от расстояния между антеннами.
Для использования всенаправленного радиомаяка штурман
должен иметь в своем распоряжении карту-схему, указывающую
расположение секторов радиомаяка, и таблицы или номограммы,
позволяющие по счету знаков быстро определить пеленг. Все эти
сведения даются в справочниках о радиомаяках.
Пеленг по всенаправленному радиомаяку может быть получен
также вычислением угла между нормалью к линии антенн и на-
правлением на судно.
Пусть Л1ЛЛ2 — линия антенн (рис. 162), Л У — нормаль,
к базе, 7? — номер сектора, считая от нормали, при этом сектор,
прилегающий к нормали, считается нулевым, т. е. 7? = 0. Рас-
стояние ЛЛ1 между центральной и крайней мачтами, выра-
женное в длинах волны, вычисляется по формуле С =----Рас-
стояние ЛЛ1 в метрах, частота работы радиомаяка и направле-
ние нормали к линии антенн дается в справочнике. Тогда по
сосчитанному числу сигналов N — тире или точек — угол а между
342
Использование различных радиотехнических средств [Гл. XVIII
нормалью к базе и направлением на судно определится по
формуле
W + 60/?
sin а =-----------
120С
Пример. Из справочника имеем, что рабочая частота радиомаяка
f = 263 кгц, расстояние между мачтами AAi = 2520 м; направление нормали
310°,2; судно, считая себя находящимся в пределах сектора R = 2, сосчитало
15 точек и 45 тире. Тогда
С = 252°-263 = 2,210.
3 105
15 + 60-2 А,АА1
Sin а =----------- = 0,5091.
120-2,210
а = 30°36' и ИРП = 310°,2 + 30°,6 = 340°,8.
Всенаправленные радиомаяки отличаются большой дально-
стью действия, достигающей при благоприятных условиях 1000—
1500 миль. Но пользоваться ими при удалении менее 25 миль не
рекомендуется, так как возможны большие ошибки; в этих пре-
делах радиомаяк может быть использован как обычный с кру-
говым излучением. Всенаправленный радиомаяк дает хорошую
точность определяемого пеленга. По наблюдениям днем вблизи
нормали к базе 50% ошибок оказывается порядка 0°,2, увели-
чиваясь к краям рабочей зоны до 0°,5. Ночью ошибки больше,
особенно на расстояниях 300—350 миль, на которых к краям
рабочей зоны они могут достигать 1°,5.
§ 90. ГИПЕРБОЛИЧЕСКИЕ СИСТЕМЫ
Стремление создать радиотехнические средства, обслуживаю-
щие потребности навигации на больших расстояниях, или, как
принято условно говорить, для дальней навигации, привело
к разработке дистанционных систем, позволяющих измерять рас-
стояние до определенной станции, изменение расстояния или раз-
ность расстояний до двух определенных радиостанций.
Если две радиостанции, координаты которых известны, по-
дают сигналы одновременно или с постоянной, заранее установ-
ленной задержкой по времени, а судно, принимая эти сигналы,
определяет промежуток времени между моментами прихода
к нему этих сигналов, то по скорости распространения радио-
волны оно может определить разность расстояний до этих двух
радиостанций. Так как геометрическое место точек, имеющих
постоянную разность расстояний от двух заданных точек, пред-
ставляет гиперболу, то в данной системе линией положения бу-
§ ОД
Гиперболические системы
343
дет гипербола. Подобные установки получили название гипер-
болических сист ем.
Принцип работы гиперболической системы поясняет рис. 163.
Ведущая радиостанция /?1 излучает короткие высокочастотные
импульсы электромагнитной энергии, которые через промежуток
времени Л принимаются на судне. Эти же импульсы принимает
подчиненная станция R2 и со строго установленным запаздыва-
нием /о, учитывающим время передачи сигнала с радиостанции
/?1 на радиостанцию /?2, время срабатывания аппаратуры и про-
межуток времени, необходимый для возможности надежно раз-
личать сигналы, излучает свой сигнал, который принимается на
судне через промежуток времени /2.
Разность времени приема радиосигналов на судне равна
+
а разность расстояний судна от радиостанций /?1 и /?2
Так как для определения места судна необходимо имень не
менее двух линий положения, то в гиперболическую систему вхо-
дят две пары радиостанций или ограничиваются тремя радио-
станциями, из которых средняя работает одновременно с двумя
крайними. На рис. 164 показано схематически расположение
трех радиостанций и соответствующая сетка гипербол.
Использование импульсной гиперболической системы требует
наличия на судне приемника-индикатора, позволяющего изме-
рять промежутки времени между моментами приема сигналов
от береговых радиостанций с точностью до одной микросекунды.
Погрешность в одну миллионную долю секунды при определении
344
Использование различных радиотехнических средств [Гл. XVIII
интервала М дает ошибку в определении разности расстояний,
равную 300 м, а так как гиперболы при удалении от базиса рас-
ходятся веером, то ошибка в обсервованном месте будет значи-
тельно больше.
Для получения обсервованного места штурман должен иметь
специально составленные карты с нанесенными на них гипербо-
лами, которые оцифровываются в микросекундах. Расчеты, свя-
занные с построением гипербол на картах, достаточно сложны и
не могут быть сделаны на судне с требуемой точностью.
Как видно из рис. 164, расстояния на гиперболической сетке
между линиями одинаковых разностей непостоянны и увеличи-
ваются по мере приближения к концам базы, соединяющей две
радиостанции, и в этом направлении точность определения места
убывает. Поэтому район действия каждой пары радиостанций
ограничивается двумя секторами по 120°, расположенными по
обе стороны базы у перпендикуляра к ее середине.
Район устойчивой и надежной работы этой системы днем над
морем достигает 600 миль. Ночью из-за появления отраженных
волн дальность действия увеличивается до 1200 миль. Мини-
мальное расстояние, на котором можно использовать эту си-'
стему, порядка 100 миль. Опыты показали, что при увеличении
длины волны можно достичь действия такой системы над морем
в дневное время на расстоянии до 1500 миль, а ночью до 3000
миль.
Большой район действия, достаточная точность определения
места судна, превышающая па больших расстояниях точность
определения по радиопеленгам, составляет преимущество этой
£ 90]
Гиперболические системы
345
системы. Американцы называют ее «Лоран» (сокращение англий-
ских слов «Long Range Navigation»). Однако эта система не
получила широкого распространения из-за чрезвычайной сложно-
сти береговых и судовых установок и их неэкономичности.
ми советских ученых академиков
Папалекси еще в 1930 г. был раз-
Фазовые системы. Труда
Л. И. Мандельштама и Н. Д.
работая и запатентован фа-
зометрический метод опреде-
ления расстояний.
Предположим, что А и В
(рис. 165) — две радиостан-
ции, непрерывно передаю-
щие сигналы на частоте f.
В точке К находится судно
на расстояниях Да и Дъ, со-
ответственно, от станций А и
В. Пусть на расстоянии Да
укладывается Na полных фа-
зовых циклов и некоторая
неполная часть цикла, нося-
щая название конечного
Рис. 165.
угла. Конечный угол будет
равен:
где с — скорость распространения радиоволн.
На расстоянии Дь, допустим, будет Nь полных циклов и ко-
нечный фазовый угол
Тогда разность фаз, соответствующая определенной разности
времени, между сигналами радиостанций будет равна:
Таким образом, может быть получена линия положения как
гипербола, соответствующая разности фаз принятых сигналов
радиостанций А и В. Вторая пара радиостанций дает вторую
линию положения и можно получить обсервованное место судна.
На основе фазометрического метода в последнее время
в СССР был разработан ряд дистанционных радиотехнических
установок, имеющих большое значение для навигации.1 Деятель-
ное участие в этих разработках принимал совместно с авторами
этого метода доктор технических наук Е. Я. Щеголев.
1 Построенные в Англии радиотехнические установки для определения
места кораблями и самолетами, известные под названиями «Декка» и «Пи-О-
Пи-Ай», основаны на фазометрическом методе академиков Мандельштама и
Папалекси.
346 Использование различных радиотехнических средств [Гл. XVIII
§ 91. РАДИОЛОКАЦИЯ
Радиолокационные установки, используя явление отражения
радиоволн от объектов, проводящих электрический ток, опреде-
ляют направление на облучаемый объект и расстояние до него.
Основной принцип радиолокации — отражение радиоволны от
различных объектов — был впервые открыт в 1897 г. основопо-
ложником радиотехники проф. Александром Степановичем
Поповым.
В тридцатых годах текущего столетия советские ученые
внесли крупный вклад в развитие радиолокации. Ученые
Ю. Б. Кобзарев, П. А. Погорелко и Н. Я. Чернецов в 1941 г.
были удостоены Сталинской премии. Первоначально радиолока-
ция развивалась как средство, обнаружения и преследовала
в первую очередь военные цели. В применении к потребностям
судовождения радиолокаторы оказались способными решать за-
дачи по определению места судна и предупреждению столкнове-
ния судов в море.
Основными частями радиолокатора являются:
а) направленная антенна,
б) передатчик,
в) приемник,
г) индикатор.
Как передатчик, так и приемник работают через одну общую
антенну, причем переключение происходит автоматически.
Антенна излучает, в пределах ограниченного по определен-
ному направлению пучка, короткие импульсы электромагнитной
энергии, вырабатываемые радиопередатчиком. Если на пути рас-
пространения электромагнитных импульсов окажется какой-либо
объект, способный отражать эти импульсы, то отраженный им-
пульс воспринимается приемником. Промежуток времени между
посылкой импульса и приемом отраженного сигнала дает воз-
можность определить расстояние до обнаруженного объекта,
а направление, по которому посланы импульсы, позволяет опре-
делить в зависимости от выбранного начального направления
курсовой угол или пеленг на облучаемый объект.
В зависимости от назначения индикатор радиолокатора имеет
самое разнообразное оформление.
Для навигационных целей наиболее целесообразным является
индикатор с круговым обзором.
В этом индикаторе электронная трубка, или осциллограф,
имеет экран диаметром 225 мм. Электронный луч движется от
центра к краю экрана, а затем быстро возвращается обратно
к центру. Луч начинает свое движение от центра экрана точно
в момент посылки импульса радиопередатчиком; направление его
Радиолокация
347
движения согласовано с положением антенны. При повороте
антенны на некоторый угол на такой же точно угол изменится
и направление движения электронного луча. Когда антенна сде-
лает полный оборот, электронный луч обойдет, двигаясь по раз-
личным радиусам, всю поверхность экрана. В тот момент, когда
приемник зарегистрирует получение отраженного сигнала, на
экране в том месте, куда в данный момент падает электронный
луч, появится светящаяся точка. Отраженные сигналы, регистри-
руемые приемником, будут различны по своей интенсивности для
каждого направления излучаемых электромагнитных волн, вслед-
ствие различного коэффициента отражения облучаемых объектов.
В результате на экране получится изображение местности и окру-
жающих корабль объектов в виде более или менее ярких кон-
туров.
Скорость вращения антенны устанавливается порядка 15—
20 оборотов в минуту. Чтобы избежать быстрого исчезновения
светящихся точек, при индикаторах кругового обзора применя-
ются специальные электронно-лучевые трубки с экранами, обла-
дающими значительным послесвечением.
Такие экраны позволяют сохранять полученные изображения
в течение времени, большего чем это необходимо для полного
оборота антенны.
На рис. 166 схематически изображен экран с круговым об-
зором.
Место судна находится в центре экрана, а на самом экране
показаны объекты, отражающие посылаемую электромагнитную
энергию.
Если экран кругового обзора поместить внутри азимутального
круга, согласованного с диаметральной плоскостью судна, то
с его помощью можно определить курсовой угол на интересую-
щий судоводителя объект, изображение которого получено на
экране, а от курсового угла перейти к пеленгу.
В некоторых устройствах радиолокатор связывается с гиро-
компасом так, что начало цикла обхода антенной горизонта и
начало работы развертывающего устройства всегда совпадают
с моментом, когда антенна точно направлена на север. В этом
случае с экрана кругового обзора можно прямо снять пеленг на
нужный объект.
Для определения расстояний на экране в определенные
моменты появляются светящиеся точки, которые при движении
луча сливаются и дают концентрические круги, расположенные
на определенных, заранее рассчитанных расстояниях один от
другого.
Такие круги позволяют легко и быстро отсчитывать рас-
стояния от судна до любого видимого на экране предмета.
348
Использование различных радиотехнических средств [Гл. XV111
Достоинство системы кругового обзора заключается в том, что
она дает на экране некоторое подобие навигационной карты.
Масштаб изображения может быть сделан равным масштабу
карты, что дает возможность при помощи специального устрой-
ства совместить изображение, полученное на экране, с очерта-
ниями берегов на карте.
Рис. 166.
Таким образом, в навигационных целях радиолокатор может
быть использован для определения места по пеленгам, по рас-
стояниям и по пеленгу и расстоянию, а также для ориентировки
при подходе к берегу или к какой-либо узкости.
Точность пеленга, определяемого радиолокатором, зависит от
точности совпадения направления излучаемого антенной пучка
электромагнитной энергии с направлением линии развертки на
экране. Кроме того, так как излучение антенны имеет некоторую
ширину в горизонтальной плоскости, то каждый объект на экране
индикатора будет несколько растянут в виде дуги. При изолиро-
ванном предмете правильный пеленг определится по середине
дуги. При изображении береговой черты середину дуги уже
нельзя установить и в отсчете пеленга будет сделана некоторая
ошибка. Для уменьшения этой ошибки стремятся по возможности
сузить излучение антенны. Практически считается, что для нави-
гационных радиолокаторных установок суммарная ошибка от
этих причин не должна превышать 2°.
§
Радиолокация
349
Расстояние определяется по радиолокатору точнее, чем пе-
ленг. При пяти масштабных кольцах, принимая точность интер-
полирования 7го промежутка, точность определения расстояния
будет порядка 2% от максимальной дальности станции. Поэтому
при определении места судна предпочтительнее пользоваться рас-
стояниями. -
При плавании в прибрежных водах дальность обнаружения
берега и его очертания, получаемые на экране, зависят от рель-
ефа местности. Отражения от низкого пологого берега будут зна-
чительно слабее, чем от высокого крутого берега, и дальность
обнаружения последнего будет значительно больше. Кроме того,
сам контур береговой черты, получаемый на экране, непосред-
ственно зависит от расстояния до точек, отражающих электро-
магнитную волну.
На рис. 167 показано влияние расстояния и рельефа местно-
сти на получаемое на экране изображение. Низкая часть берега
АВ не обнаруживается радиолокатором, участок ВС попадает
под облучение и будет изображен на экране, участок СД, закры-
тый возвышенностью, не может быть обнаружен, в то время как
возвышенность ДЕ облучается радиолокатором и изображение ее
получится на экране.
Не меньшее значение имеет для навигации та минимальная
дальность, на которой еще можно видеть окружающую мест-
ность.
При современном развитии радиолокационной техники мини-
мальная дальность действия радиолокатора в 50 м считается
удовлетворительной.
Точность определения пеленга и расстояния, максимальная и
минимальная дальность действия радиолокатора и характер иска-
жения, получаемого на экране изображения береговой полосы,
в конечном итоге зависят от конструктивных особенностей данной
радиолокационной станции и положенных в основу ее конструк-
ции параметров.
При пользовании радиолокатором необходимо тщательно
изучить его тактико-технические данные.
350
Использование аэро- и гидроакустических установок [Гл. XIX
ГЛАВА XIX
ИСПОЛЬЗОВАНИЕ АЭРО- И ГИДРОАКУСТИЧЕСКИХ
УСТАНОВОК В НАВИГАЦИИ
§ 92. ОБЩАЯ ХАРАКТЕРИСТИКА ЗВУКОВЫХ СИГНАЛОВ
Распространение звука в воздухе зависит от распределения
температуры, влажности, давления, а также скорости и направ-
ления ветра в атмосфере. При неравномерном распределении
температуры с высотой распространение звукового луча стано-
вится не прямолинейным и могут появляться районы звуковой
тени, в которых звук или пропадает вовсе или слышен весьма
слабо, в то время как при других атмосферных условиях в этих
районах слышимость звука нормальная.
Среднее значение скорости распространения звука в воздухе
равно 340 м в секунду при t = -ф- 15° С. Для расчета скорости
распространения звука в воздухе, в зависимости от его темпера-
туры, существует приближенная формула:
J/Т м/сек,
где Г=^°С + 273°.
Дальность распространения звукового сигнала зависит от со-
стояния атмосферы, а также от мощности излучателя звука,
высоты тона и условий приема звукового сигнала для данного
места на судне, связанных с наличием и уровнем помех.
Подтвержденное многочисленными опытами неправильное и
непрямолинейное распространение звуковых воздушных сигналов
заставляет рассматривать их в громадном большинстве случаев,
за исключением указанных дальше, только как средство преду-
преждения о приближении к опасности.
Воздушные звуковые сигналы в отечественных водах пода-
ются наутофоном, сиреной, диафоном, колоколом, свистком, пуш-
кой и взрывами. В заграничных водах применяются, также тай-
фон, гонг и горн.
Сирены, диафоны и тайфоны относятся к группе пневматиче-
ских установок и различаются конструкцией излучателя звука.
Дальность слышимости воздушных сигналов, подаваемых пнев-
матическими установками, принимается в среднем равной 6—8
морским милям. Наутофоны являются электромагнитными излу-
чателями мембранного типа, что позволяет подавать звук с раз-
личной характеристикой по его продолжительности и по сочета-
нию коротких и длинных звуков. Одиночно установленный науто-
фон имеет в среднем дальность слышимости в 3—4 мор. мили.
£ 92]
Общая характеристика звуковых сигналов
351
Наутофоны могут устанавливаться группами и в этом случае
дальность их слышимости такая же как у сирен.
В воде звук распространяется приблизительно в 4 раза ско-
рее, чем в воздухе, и правильное распространение звуковой
волны в воде нарушается гораздо меньше. Распространение в воде
звуковой волны происходит по всем направлениям одновременно
и только наличие мелей, резких изломов берега и искусственных
сооружений, например, волноломов, нарушает их правильное
распространение. Таким образом, подводные звуковые сигналы
являются для мореплавателя значительно более ценным сред-
ством для обеспечения безопасности судовождения в туманную
погоду, чем воздушные сигналы. Кроме того, подводные сигналы
распространяются на большие дистанции, чем воздушные, и дают
возможность определять направление на их источник. Однако
применение подводной звуковой сигнализации требует специаль-
ного оборудования как на судах, так и на береговых станциях,
подающих сигналы.
Источником подводных звуковых сигналов служат либо коло-
кола, либо мембранные отправители, устанавливаемые на бере-
говых станциях и пловучих маяках; подводные колокола устана-
вливаются также и на буях, причем действие их является ре-
зультатом движения самого буя на волне.
Оборудование судна для выслушивания подводных звуковых
сигналов состоит из двух гидрофонов, установленных с внутрен-
ней стороны внешней обшивки судна на правом и левом бортах.
Эти гидрофоны соединены с телефоном, установленным в штур-
манской рубке. Двойной коммутатор позволяет переключать те-
лефон на тот или другой гидрофон и, таким образом, выслуши-
вать звук с правого или левого борта судна, по желанию.
Гидрофоны устанавливаются в специальных камерах, плотно
прилегающих к обшивке судна и наполненных водой. В месте
установки камер борт судна должен быть очищен от краски,
а в камерах не должно быть воздушных пузырей. Место для
установки камер с гидрофонами выбирается в зависимости от
типа судна, примерно в расстоянии около 20 м от форштевня и
на глубине около 5,5 м,* причем очень важно, чтобы поблизости,
а главное впереди установки не было бы выступающих частей
подводной части судна, забортных отверстий и других устройств,
нарушающих плавное обтекание корпуса судна водой и соз-
дающих водовороты. Последние препятствуют нормальной ра-
боте установки.
В связи с указанными соображениями, как показывает опыт,
наилучшие результаты по приему подводного сигнала получа-
ются, когда судно идет небольшим ходом.
Указанные выше цифры относятся к судну средних размеров;
в общем случае камеры с гидрофонами должны быть установ-
352
Использование аэро- и гидроакустических установок [Гл. XIX
лены на скульной части обводов судна. При всякой установке
камер с гидрофонами звук будет лучше всего различаться только
в определенном секторе. При установке на скуловых обводах
судна наилучшая слышимость получается, когда источник звука
находится на перпендикуляре к плоскости гидрофона, установ-
ленной параллельно плоскости борта, обычно это направление
составляет угол около 20°—25° к носу от траверза. Звук почти
неразличим при такой установке, когда он приходит с носа под
углом 4°—5° от диаметральной плоскости судна или с кормы
под углом 60°—70° от траверза. Эти цифры, конечно, меняются
несколько в своей величине в зависимости от типа судна.
Специальными исследованиями установлено, что если тол-
щина промежуточного слоя мала по сравнению с длиной звуко-
вой волны, то акустическим сопротивлением промежуточной
среды можно пренебречь и звук, достигший судна, проходя через
борт и воду в камере гидрофона, почти не теряет своей мощ-
ности.
§ 93. ОПРЕДЕЛЕНИЕ ПЕЛЕНГА НА ИСТОЧНИК ПОДВОДНОГО
ЗВУКА
Этот метод определения пеленга на источник подводного
звука требует для своего применения только указанной выше
установки гидрофонов на обоих бортах судна и наличия сигналь-
ной станции, подающей подводные звуковые сигналы.
При приближении к станции, оборудованной подводным зву-
ковым отправителем, судно выслушивает сигнал с помощью
своих гидрофонов. Получение сигнала предупреждает его о при-
ближении к станции, все сведения о которой относительно ха-
рактера посылаемого сигнала выбираются из соответствующих
руководств по мореплаванию, например лоций, описаний маяков
и т. п.
При желании получить пеленг подводного звукового сигнала
судно, услышав сигнал, медленно меняет курс в сторону, откуда
слышен звук, и в момент, когда звук пропадает в гидрофоне, за-
мечает свой курс. Продолжая идти в ту же сторону, переводят
коммутатор на гидрофон другого борта; услышав подводный
звуковой сигнал, судно вновь медленно изменяет курс в обрат-
ную сторону и в момент, когда звук снова пропадет, замечает
отсчет второго курса. Средний курс между двумя наблюденными
даст пеленг на источник подводного звукового сигнала (рис. 168).
Приближенно можно поступать так: заметить курс, когда
звук при медленном повороте судна пропадет, а затем, быстро
переведя коммутатор на гидрофон другого борта, вновь заметить
курс, когда звук появится с другого борта. Среднее из этих двух
курсов и даст искомый пеленг. Однако, в зависимости от уста-
новки гидрофонов, может получиться, что звук с противополож-
§ 93] Определение пеленга на источник подводного звука 353
ного борта появится ранее, чем он исчезнет на том борту, где он
был обнаружен впервые. В последнем случае можно прибли-
женно считать, что пеленг на источник звука равен тому курсу
судна, на котором сила звука в обоих гидрофонах будет оди-
накова.
Если курс судна проложен так, что направление на подвод-
ный туманный сигнал меняется сравнительно быстро, то, повто-
рив 168.
рив через некоторый промежуток времени наблюдения для опре-
деления второго пеленга на туманный подводный сигнал, можно
определить место судна, вмещая между двумя пеленгами его
курс и плавание.
Для контроля пеленгов рекомендуется при их определении
повторить изменение курса судна в обратном порядке.
Подводные звуковые сигналы туманных установок могут
быть сравнительно легко восприняты просто на слух, без специ-
альных установок, если находиться в подводной части судна,
в помещении, где нет собственных шумов, и приложить ухо к на-
ружной обшивке борта. Но в этом случае определить пеленг на
источник звука уже нельзя, да и дальность слышимости значи-
тельно понижается, но все же остается большей, чем дальность
слышимости воздушных туманных сигналов.
По этому способу, носящему название «метод звуковой тени»,
определение пеленга на туманный подводный сигнал может быть
сделано с точностью 1°—2° на дистанциях до 12—15 миль.
Применение этого метода требует простейшей аппаратуры и
в то же время является одним из средств, обеспечивающих
23
К. С. Ухов
354
Использование аэро- и гидроакустических установок [Гл: XIX
безопасность мореплавания в тумане. Недостатком его является
необходимость менять курс для определения пеленга, что вносит
добавочную ошибку в счисление.
§ 94. КОМБИНИРОВАННЫЕ РАДИОМАЯКИ
Если послать одновременно две волны с разными скоро-
стями Vi и v2, то на прохождение определенного расстояния D
они затратят, соответственно, время t\ и /2 и D = viti = u2^.
Разность между моментами получения этих двух волн будет
равна
= = (150)
Если на судне измерить эту разность между моментами при-
хода двух различных волн, то расстояние получится по формуле:
D = V1V2 Af, (151)
t/1 — f 2 V 7
где > v2.
При одновременной посылке звуковых волн в воздухе и воде,
считая скорость распространения звука в воде, примерно, th =
= 1500 м/сек, а в воздухе v2 = 340 м/сек, расстояние D от стан-
ции, посылающей волны, до станции, принимающей эти волны,
равно приблизительно
£^440 А/,
где А/ выражено в секундах.
При одновременной посылке световой и звуковой волн в воз-
духе, принимая соответственно th = 3 • 108 м/сек и v2 = 340 м/сек,
получим
D = 340 АЛ
В настоящее время широкое распространение получили ра-
диомаяки, состоящие из сочетания кругового радиомаяка с воз-
душным или подводным излучателем звука. Такие радиомаяки
получили название комбинированных, а метод определе-
ния расстояний по разности моментов приема радиосигналов и
звукового сигнала называется радиоакустическим ме-
тодом.
При радиоакустическом методе временем прохождения ра-
диоволны на доступных для этого метода расстояниях можно
пренебречь. Условный радиосигнал определяет момент отправки
звукового сигнала, и на судне нужно только заметить промежу-
ток времени, затраченный звуковым сигналом на прохождение
расстояния от излучателя звука до судна.
§ 94]
Комбинированные радиомаяки
355
Принимая скорость распространения звука в воде 1500 м/сек,
а в воздухе 340 м/сек, простым расчетом получаем, что звук
в воде пройдет одну морскую милю за 1,25 сек. или за 1 сек.—
0,8 мор. мили. Соответственно звук в воздухе пройдет одну мор-
скую милю за 5,5 сек, или за одну секунду 0,18 мор. мили. Если
Позыбной раЗио
сигнал
• — •
°)
10 4,58 0,33 5.Z5 0,33 3,25 Секунды
7 шире-36,08с, интервалы-2,98 с
----1---------------------------
5с
ВозЗушный збукобой
сигнал
в момент отправки условного радиосигнала и синхронизирован-
ного с ним звукового сигнала включить секундомер и остановить
его в момент приема звукового сигнала, то в случае подводного
звукового сигнала для определения расстояния число отсчитан-
ных секунд следует помножить на 0,8 или разделить на 1,25,
а при приеме воздушного звукового сигнала — помножить на
0,18 или разделить на 5,5; расстояние получится в морских
милях.
Чтобы избежать отсчета времени по секундомеру, комбиниро-
ванные радиомаяки после посылки звуковой волны подают се-
рию коротких тире, продолжительность которых вместе с интер-
валами равна времени, за которое звук пройдет одну милю.
Число тире, принятых на судне до прихода звукового сигнала,
дает расстояние до излучателя звука в морских милях. На
рис. 169 схематически показана подача таких сигналов для
23*
356
Использование аэро- и гидроакустических установок [Гл. XIX
подводного и воздушного сигналов. Подробные сведения о ком-
бинированных радиомаяках даются в описаниях радиомаяков.
Наблюдатель на судне, снабженный наушниками, соединен-
ными с радиоприемником и гидрофоном, выслушивает сигналы и
ведет счет количества тире. Число тире, сосчитанных до полу-
чения первого звука подводного сигнала, дает число миль от
судна до отправителя. Никаких других пересчетов в этом случае
не требуется. Направление на радиомаяк определяется по радио-
пеленгатору.
Имеющиеся в настоящее время подводные акустические уста-
новки достигают дальности действия 15—20 миль и позволяют
судну определять свое место в тумане по пеленгу и расстоянию.
Точность определения расстояния в этом случае зависит от
опыта наблюдателя, так как, обращая внимание на неполное
совпадение сигналов, можно получить отсчет с точностью до по-
лумили и даже большей.
Следует иметь в виду, что скорость распространения звука
в воде зависит от ее солености и температуры. При отсутствии
резких колебаний в ее плотности скорость распространения
звука меняется не более чем на 3%.
Для каждого комбинированного радиомаяка установлена
своя скорость распространения звука в воде, что отражается на
длительности тире и интервалов между ними.
Комбинированные радиомаяки, работающие синхронно с воз-
душными звуковыми сигналами, обеспечивают, главным образом,
подходы к портам; дальность их действия до 5 миль.
§ 95. РАДИОАКУСТИЧЕСКАЯ ЛИНИЯ ПОЛОЖЕНИЯ
Если радиоакустическим способом представляется возмож-
ным определить два расстояния Da и Db от судна до двух излу-
чателей звука, то место судна может быть определено по этим
двум расстояниям. В этом случае ошибка в обсервованном месте
будет зависеть от знания скорости распространения звука в воде.
Однако возможно получить радиоакустическую линию положе-
ния и независимо от знания точной скорости распространения
звука в воде, если только предположить, что эта скорость
остается постоянной по обоим направлениям РА и РВ (рис. 170).
При этом предположении промежутки времени га и tb пропорци-
ональны расстояниям Da и Db.
Геометрическое место точек, для которых отношение расстоя-
ний до двух данных точек А и В, т. е. -^=,2" постоянно и не
Рь tb
равно единице, лежит на окружности Аполлония, известной
в маневрировании под названием «окружности встреч».
§95\
Радиоакустическая линия положения
357
Центр окружности Аполлония находится на продолжении
прямой АВ, вне отрезка АВ и со стороны точки А или В, имею-
щей меньшее расстояние до определяемой точки Р. Точки М и N
пересечения окружности с прямой АВ и ее продолжением лежат
от точек Л и В в расстояниях, соответственно, пропорциональ-
ных расстояниям Da и Db, т. е.
АМ_ = AV = Da
ВМ ~ BN ~ Db
Хорда РМ есть биссектриса внутреннего угла треугольника
АРВ при вершине Р, a PN перпендикулярна к ней и, следова-
тельно, делит пополам смежный внешний угол.
Угол Т'РВ, образуемый касательной к окружности в точке Р
с меньшей стороной РВ =Db треугольника АРВ, равен 90°—а,
где а есть угол РАВ; угол Т'РА = 90° — р, где ,8 есть угол РВА.
В предельных положениях, при -^-= 1, т. е. когда Da = Db,
Db
касательная совпадает с биссектрисой внутреннего угла Р тре-
угольника АРВ (радиус окружности встреч обращается в беско-
нечность). При—= 0, т. е. когда Da = 0, касательная совпа-
Db
дает с базой АР. Наконец, в частном случае, касательная сов-
падает с большой стороной АР, когда треугольник АРВ прямо-
угольный при вершине В.
358
Использование аэро- и гидроакустических установок [Гл. XIX
Приближенная скорость распространения звука в воде нам
всегда известна, следовательно, известны и приближенные рас-
стояния D' и Db, если мы измерим промежутки временили tb,
затраченные звуком на прохождение этих расстояний. Пред-
полагая, что скорость распространения звука в воде в данном
D' Da
районе одинакова по всем направлениям, мы получаем _£ = _ =
t Db
= —. Последнее отношение показывает нам, что точка Р'9 опре-
деленная по известным нам приближенным расстояниям Da и
Db, будет лежать на той же окружности встреч, что и точка Р,
определяемая по действительным расстояниям ее Da и Db от
концов базы АВ. На этом основании мы можем заменить часть
дуги окружности встреч около точки Р, касательной к этой
окружности, и принять эту касательную за радиоакустическую
ta
линию положения, соответствующую отношению —.
h
Для нанесения радиоакустической линии положения необхо-
димо знать длину базы АВ и ее азимут. Тогда, решая треуголь-
§95]
Радиоакустическая линия положения
359
ник АРВ -по трем известным нам сторонам ЛВ, AP = D'a и
BP = Db, вычисляем сначала полярные координаты определяю-
щей точки Р, отнесенные к началу координат в точке Л, а затем
и прямоугольные координаты этой точки. По прямоугольным
координатам наносим точку Р на график большого масштаба
(рис. 171). На рисунке прямоугольные координаты даны в мет-
рах. Проложив на графике направления РА и РВ по вычислен-
ным азимуту и углу у = АРВ, наносим радиоакустическую ли-
нию положения ТРТ', образующую с меньшей стороной РВ угол
ВРТ = 90° — а.
При наличии второй базы (три станции), соответствующим
образом расположенной относительно первой, можно получить
вторую линию положения, которая в точке пересечения с первой
линией дает искомое место судна.
Комбинируя три станции по две, можно получить три радио-
акустические линии положения, соответствующие трем базам,
в этом случае достаточно вычислить положение трех определяю-
щих точек:
РаЬ — из треугольника АРВ на базе АВ
РЬс— ‘ „ ВРС „ ВС
Рса— А » С А
При таком решении задачи получится повышенная точность,
но выкладки будут довольно длительные.
В некоторых случаях пересечение радиоакустических линий
может происходить под острым углом, что является дополни-
тельным источником ошибок, кроме того, как указано выше,
сама обработка наблюдений при этом методе несколько гро-
моздка.
Чтобы избежать вычислений и получить наилучшие углы пе-
ресечения линий положения, для определения ,места судна ис-
пользуется сочетание радиоакустических линий положения с ли-
ниями положений, представляющими дуги, вмещающие угол, под
которым судно наблюдает комбинированные радиомаяки. На диа-
грамме (рис. 172) одна система кругов представляет окружности
„ АР „ ВР .
встреч, нанесенные по отношениям Д =— и /4 = —, так чтобы
r ВР АР
К и были всегда больше единицы.
Вторая система дуг представляет геометрическое место точек,
из которых акустическая база АВ видна под определенным углом.
В этом случае угол ЛРВ=<р должен быть определен радио-
пеленгатором как разность направлений из точки Р на комбини-
рованные радиомаяки А и В.
Предположим, что разность направлений на А и В, опреде-
ленная на судне по радиопеленгатору, равна 70°, а отношение
360
Использование аэро- и гидроакустических установок [Гл. Л7Л
ta
— промежутков времен, затраченных звуком на прохождение
расстояний Da и Db от судна до станций А и В, т. е. отношение
самих расстояний
его расстояние до
РА
— = 2,0, тогда судно находится в точке Р и
станций Л и В, снятое непосредственно с диа-
Рис. 172.
граммы, равно соответственно 5,1 и 2,6 мили. Одна и та же диа-
грамма может служить для различных комбинированных радио-
маяков, если снабдить ее различными масштабами, соответ-
ствующими действительным расстояниям между радиомаяками.
Для практического применения диаграмма может быть рас-
ширена.
§ 96. МЕТОД РАЗНОСТИ МОМЕНТОВ
Если судно может послать подводный звуковой сигнал, а бе-
реговые станции могут измерить разность Д/ = ta — tb, где ta и
tb — неизвестные нам промежутки времени, затраченные подвод-
ной звуковой волной на прохождение расстояний РА = Da и
РВ = Db (рис. 173) от искомой точки Р до концов базы АВ, на
которых установлены гидрофоны, то этого достаточно для полу-
чения одного направления на искомую точку Р. Произведение
времени № на скорость распространения звука в воде v даст
разность расстояний Da и Db, т. е.
Da-Db = v-M.
£ 96]
Метод разности моментов
361
Искомая точка лежит на гиперболе, действительная ось кото-
рой равна разности расстояний Da и Db, а фокусы находятся
в точках А и В. Знак разности &t = ta— tb определит ветвь
гиперболы, на которой лежит искомая точка Р.
При наличии трех звукоприемных точек (гидрофонов), свя-
занных с береговой станцией, можно получить две гиперболы,
пересечение которых даст место судна. Точка пересечения может
быть получена решением урав-
нений двух гипербол, но этот
путь потребует сложных вычи-
слений и для упрощения за-
дачи можно считать, что ги-
перболы совпадают со своими
асимптотами, а затем
поправку, чтобы
ошибку от этого
жения.
Если гидрофоны установле-
ны в точках А и В, то АВ = q
будет акустической базой. Обо-
значим через <?— угол, состав-
ляемый асимптотой OF с ба-
зой q, а через ф—угол между направлением на искомую точку Р
и базой. Угол ф определится из отношения
ввести
исключить
предполо-
cos ф = — ,
Я
где r = Da — Db=vtd—действительная ось гиперболы.
Величина акустической базы q может быть выражена во вре-
мени, т. е.
q = <vT,
где Т — время, которое необходимо затратить звуку на прохож-
дение расстояния АВ.
Тогда имеем
М
COS ф = —
‘ т
Разность между углами ф и ф, которую обозначим С, выра-
жается формулой
1-1/ 1-—
4п2
1—-
4п»
tg с=tg (?—<|>) -------------
COS ср +
362
Использование аэро- и гидроакустических установок [Гл. XIX
где/г =—t т. е. отношению расстояния от искомой точки Р до
середины акустической базы к длине самой базы.
Из этой формулы видно, что асимптотная поправка зависит
ОР .
от отношения— и от угла ср, а следовательно, может быть вы-
АВ
числена заранее и представлена в виде таблицы или графика.
Для нахождения поправки должна быть известна приближенная
величина расстояния ОР. Если же эта величина ОР неизвестна,
то при наличии двух баз можно вычертить две асимптоты по
найденным углам cpt и ср2 и точку их пересечения принять за при-
ближенное место точки Р. Так как гипербола лежит внутри
своих асимптот, то во всех случаях поправку С следует вычи-
тать из угла ср.
Величина поправки С при ср = 45° и п= 1 достигает 4° и бы-
стро уменьшается с увеличением обоих аргументов.
Зная азимут базы АВ и вычислив угол ф, легко получить пе-
ленг из середины базы на искомую точку Р. Вторая акустиче-
ская база даст второй пеленг, и искомое место судна Р полу-
чается решением треугольника или прокладкой на карте; послед-
ний способ определения потребует меньше времени.
РАЗДЕЛ ШЕСТОЙ
ПЛАВАНИЕ ПРИ ОСОБЫХ ОБСТОЯТЕЛЬСТВАХ
ГЛАВА XX
ПЛАВАНИЕ ВБЛИЗИ БЕРЕГОВ И В УЗКОСТЯХ
§ 97. ОБЩИЕ СООБРАЖЕНИЯ
Безопасность плавания вблизи берегов, в водах, стесненных
навигационными опасностями, и в узкостях прежде всего тре-
бует постоянного, в зависимости от обстоятельств, определе-
ния места судна при помощи находящихся в пределах ви-
димости береговых знаков, маяков и других приметных мест. Вы-
бор курсов, назначение расстояний, в которых оставляются те или
другие опасности, зависит от опытности мореплавателя. Курс
судна должен выбираться с таким расчетом, чтобы вследствие
случайных ошибок судовождения или нашедшего тумана, плохой
видимости, скрывшей маяки, судно не оказалось в опасном по-
ложении.
При подходе к сравнительно мелководным районам,
к порту, к устью реки всегда следует предварительно изучить ко-
лебания уровня воды, наличие приливов и отливов, их высоту и
учесть осадку своего судна. Необходимо выяснить по повторным
определениям мест судна, идет ли оно по назначенному пути, или
его сносит с этого пути вследствие неучтенного течения или недо-
статочного знания его элементов, а также нет ли дрейфа.
Во всех случаях, когда это возможно, следует пользоваться
створами, поставленными специально для этой цели, или подби-
рая на местности створ подходящих приметных предметов, даю-
щий линию положения для безопасного следования вдоль нее.
При отсутствии подходящих створов можно ограничиться выбором
ведущего пеленга какого-либо хорошо заметного предмета. Ли-
ния пеленга, проложенная на карту, дает линию положения,
обеспечивающую точное движение судна. Если пеленг выбранного
предмета по носу или за кормой судна не меняется, то судно на-
ходится на этой линии. Изменение пеленга сейчас же укажет
на отклонение судна в сторону от намеченного курса. Всегда
лучше выбирать створ или предмет по курсу судна, если же это
невозможно, то приходится ограничиваться кормовыми створами
364 Плавание вблизи берегов и в узкостях [Гл. XX
или приводить за корму намеченный объект. В некоторых случаях
для проверки курса судна могут оказаться полезными некоторые
объекты, например просека или приметная группа деревьев, даже
если они не нанесены на карту. Чем ближе выбран к судну при -
метный предмет или створ, тем легче судить о точности, с кото-
рой судно держится на назначенном створе или пеленге.
При плавании в узкостях следует всегда придерживаться ука-
занных фарватеров, держась правой стороны фарватера для рас-
хождения со встречными судами. Никогда не следует слепо дове-
рять установленным пловучим знакам ограждения, так как они
могут быть снесены со своих мест штормами или проходящими
судами. Надежнее всего, даже при наличии пловучего огражде-
ния, выставленного для помощи мореплавателю, руководство-
ваться береговыми знаками. Так как узкие фарватеры часто бы-
вают и извилисты, то необходимо заранее рассчитать, когда сле-
дует класть руль для поворота, чтобы не сойти с фарватера и не
сесть на камни или отмели. При наличии течения требуется осо-
бенно тщательно следить за циркуляцией судна, наблюдая по
береговым предметам, створам или пеленгам, как катится судно,
чтобы во-время отвести руль или, наоборот, положить его на
борт. При наличии течения рулевой должен править по задан-
ному ему курсу, а не по береговому предмету.
При перемене курса на границе двух секторов маяка, светя-
щих различными огнями, следует всегда рассчитать пеленг, на
котором нужно повернуть, и руководствоваться им, так как очень
трудно точно определить момент, когда огонь маяка меняет свой
цвет.
При плавании по огражденным фарватерам всегда следует
проверять название, окраску, топовую фигуру и другие отличи-
тельные признаки знаков ограждения, чтобы избежать возмож-
ности принять один знак за другой; у огней следует всегда прове-
рять их период по секундомеру и цвет. При определении места
судна по пеленгам следует выбирать для пеленгования береговые
предметы, прибегая к пеленгованию пловучих средств ограждения
(пловучие маяки и буи) только в случае невозможности разли-
чить береговые предметы.
Наблюдая за пловучими маяками и другими знаками ограж-
дения, легко определить направление течения и учесть его при
дальнейшем управлении судном. При огибании пловучего маяка,
если место позволяет обходить его с любой стороны, следует
всегда проходить у него под кормой, так как иначе недостаточно'
учтенное течение может быть причиной столкновения.
При огибании мысов или банок, при плавании по фарватерам
в недостаточно исследованных районах, например в шхерах, сле-
дует всегда строго придерживаться фарватеров, не прижиматься
к берегу и не срезать углов на поворотах фарватера, так как
$ 98\
Ограждающие линии положения
365
практика показывает, что в этих случаях срезание углов неодно-
кратно приводило к авариям.
Все указания о плавании в том или другом районе помеща-
ются в лоции, охватывающей данный район. Предварительное
изучение ее необходимо для безопасного плавания.
§ 98. ОГРАЖДАЮЩИЕ ЛИНИИ ПОЛОЖЕНИЯ
При плавании вблизи берегов может встретиться необходи-
мость пройти мимо какой-либо надводной или подводной опас-
ности в определенном расстоянии. Для уверенности в том, что
Рис. 174.
судно проходит чисто от опасности, может быть использована
ограждающая линия положения. В зависимости от наличия бере-
говых приметных предметов применяется горизонтальный или
вертикальный угол опасности, а также опасный
пелен г.
Предположим, что судно желает пройти курсом КК\ (рис. 174),
между двумя каменистыми банками D и £. Проведем из сере-
дины банки D окружность, радиус которой выберем так, чтобы
окружность указывала предельное расстояние, ближе которого
366
Плавание вблизи берегов и в узкостях
[Гл. XX
подходить к банке нежелательно. Найдем на берегу два хорошо
заметных предмета А и В, нанесенных на карту, и проведем окруж-
ность ABG так, чтобы она проходила через выбранные предметы
А и В и касалась окружности, описанной вокруг банки D. Для
этого проще всего соединить точки А и В прямой линией и вос-
становить из середины ее перпендикуляр, а затем найти на этом
перпендикуляре опытным путем центр окружности ABG, Снимем
с карты величину угла AGB = z\ заметим, что вершина любого
угла, равного а, лежит на окружности ABG, включающей банку/).
При проходе судна мимо банки D будем измерять горизон-
тальный угол между выбранными предметами А и В. Пока изме-
ренный горизонтальный угол будет меньше, чем рассчитанный
угол а, судно находится вне круга опасности AGB. Как только
измеряемый горизонтальный угол станет равным углу а, значит
судно пришло на окружность AGB, и если угол а имеет тенден-
цию увеличиваться, то следует немедленно изменить курс, чтобы
отойти от банки.
Для того чтобы пройти в безопасном расстоянии от камени-
стого рифа Е, проведем также окружность, указывающую предел,
ближе которого не следует подходить к рифу. Затем проводим
окружность AFB, проходящую через точки Л и В и касающуюся
окружности, ограничивающей риф Е. Снимем с карты угол
AFB=3h при проходе мимо рифа Е будем измерять горизон-
тальный угол AFB = 3. Пока измеряемый угол будет больше
снятого с карты угла 3, судно будет находиться внутри окружно-
сти AFB, и, следовательно, в безопасности от рифа Е. Если изме-
ренный угол станет меньше угла 3, необходимо немедленно
отойти от рифа Е.
Таким образом, для безопасного прохода между опасностями
D и Е необходимо следить за тем, чтобы угол с судна на точки А
и В оставался в пределах между р и а.
Указанный метод предохранения от опасностей носит назва-
ние горизонтального угла опасности.
Если вблизи опасности находится только один объект, нане-
сенный на карту, высота которого известна, то может быть при-
менен метод вертикального угла опасности.
Пусть судно желает пройти безопасно от скал D и Е
(рис. 175). Проводим окружности радиусами AG и AF. Первая
из окружностей вмещает скалы D, а вторая, наоборот, оставляет
мористее курса судна КК\ риф Е. Сняв с карты длину радиусов
AG и AF и зная высоту маяка AM, рассчитаем вертикальные
углы аир по формулам
, 13 Н ч ы 13 нм
7 AG Г 7 AF
где Нм — высота маяка в метрах.
§^1
Ограждающие линии положения
367
При проходе опасности D измеряемый вертикальный угол дол-
жен быть меньше рассчитанного угла а. Если измеряемый угол
станет равным углу а, то судно пришло на окружность, вмещаю-
щую опасность D, и следует немедленно привести маяк на
траверз, чтобы отойти от него. При проходе опасности Е измеряе-
мый вертикальный угол должен быть больше угла р, и, как.
только он станет равным углу р, нужно немедленно склониться
к маяку, чтобы отойти от опасности.
Рис. 175.
При расчете вертикальных углов следует принимать во вни-
мание высоту уровня воды. Если высота маяка или знака взята
непосредственно с карты или из описания маяков, то вычислен-
ный вертикальный угол будет меньше, чем следует, так как вы-
соты маяков даются от уровня средней полной воды.
В этих случаях судно, измерив вычисленные углы а или р,
будет на самом деле дальше от маяка, чем рассчитывает. В отно-
шении опасности D оно окажется в более безопасном положении,,
а если оно проходит между опасностью и маяком, то оно прибли-
зится к опасности.
Точность, с которой получается в данном случае ограждаю-
щая от опасности линия положения, являющаяся окружностью^
зависит от ошибки в высоте маяка и той точности, с которой из-
меряется угол а; она может быть подсчитана по формуле
(118) § 66.
Если требуется обогнуть маяк, мыс или какой-либо другой
объект, не имея обсервации и в то же время не приближаясь
к нему ближе заданного расстояния, можно поступить следую-
щим образом, если при этом нет течения. Приведя маяк на тра-
верз в заданном расстоянии, воспользовавшись для определения
>68
Плавание вблизи берегов и в узкостях
[Гл. XX
его способом крюйс-пеленга, выжидают, когда он придет на
5е—6° сзади траверза. Тогда снова приводят маяк на траверз и
вновь повторяют маневр, пока не обогнут маяк. Описанный таким
образом ломаный путь будет лежать от маяка приблизительно
в заданном расстоянии. Число сторон пути можно увеличить и
тем приблизить путь судна к окружности. Чтобы расстояние не
уменьшилось, надо наблюдать, чтобы маяк не оказался впереди
траверза после того, как
он был впервые приведен
на траверз в заданном
расстоянии.
При наличии дально-
мера можно взамен вер-
тикального угла измерять
непосредственно расстоя-
ние до маяка.
Из рис. 175 видно, что
при прохождении опасно-
сти D расстояние до мая-
ка должно быть больше
радиуса AG, а при про-
ходе опасности Е изме-
ряемое расстояние дол-
жно быть меньше радиу-
са AF, Однако в этом
случае лучше определять
непосредственно места судна по пеленгу и расстоянию, следя за
расстоянием только в момент прохода опасности.
В некоторых случаях пеленг какого-либо предмета может
ограждать опасность и непосредственно предупреждать морепла-
вателя о приближении к опасности. Предположим, что к N от
острова А (рис. 176) выдается отмель. Проведем от маяка А ли-
нию пеленга так, чтобы она проходила чисто с вестовой стороны
мели, и снимем пеленг с карты. Предположим, он равен 183°.
Линия пеленга маяка на острове В по румбу 260° проходит к N
от указанной отмели. Из рис. 176 видно, что при подходе к ост-
рову А от Ost нельзя склоняться к S и пересекать пеленг
маяка В, равный 260°, до тех пор, пока маяк А не придет на пе-
ленг 183°. Соблюдая эти требования, судно безопасно обойдет
отмель у острова А. При подходе от W следует склоняться к S
раньше, чем маяк А придет на пеленг 183°. Такие пеленги носят
название ограждающих пеленгов или опасных
пеленгов.
Очень часто сведения об ограждающих пеленгах даются в ло-
циях, но в большинстве случаев мореплавателю приходится са-
g 99] Плавание no створам 369
мому подыскивать их по карте, пользуясь нанесенными на карту
приметными предметами. Ограждающий пеленг имеет особо важ-
ное значение, если в виду судна имеется только один предмет
близко от диаметральной плоскости. Тогда обсервация судна по
нему будет ненадежна, но один пеленг сейчас же укажет нахо-
дится ли судно с безопасной стороны ограждающего пеленга или
приблизилось к опасности. Даже при наличии двух предметов
в виду судна могут быть обстоятельства, когда нет времени на
прокладку взятых пеленгов, ограждающий же пеленг дает немед-
ленный ответ, находится ли судно в безопасности или нет.
Ограждающий пеленг может быть заменен иногда створом
двух каких-либо естественных предметов, нанесенных на карту.
Если такой створ легко распознается на местности, то он имеет
преимущество перед ограждающим пеленгом. При недостаточном
знании местности мореплавателем такой створ обязательно дол-
жен быть проверен по компасу, чтобы избежать ошибки в отож-
дествлении выбранных на карте предметов с предметами на
местности.
В ночное время очень часто такими ограждающими пеленгами
служат границы между секторами различных огней одного и того
же маяка, отличающиеся по своему характеру или по цвету. Эта
граница обязательно должна быть проверена по компасу.
§ 99. ПЛАВАНИЕ ПО СТВОРАМ
Во многих районах, требующих для безопасности судна точ-
ного плавания по определенным путям, устанавливаются створы.
След вертикальной плоскости, проходящей через два створных
знака, дает на поверхности Земли линию положения, определяю-
щую путь судна.
Судно, идущее точно по створу, находится на заданной линии
положения. Как только оно сойдет с этой линии, знаки разой-
дутся или, как говорят «расстворятся» и судно будет «в рас-
створе» знаков.
Створы по своему назначению различаются на ведущие, секу-
щие, ограждающие и специальные.
Ведущие створы служат для плавания по ним судов
в узкостях, когда они должны точно держаться на назначенной
линии положения. Если ведущий створ находится по направлению
движения судна, то он называется передним створом,
а если за кормой, то — задним. К ведущим створам относятся
входные створы, устанавливаемые в портах для входа судов по
узкому фарватеру или искусственному каналу.
Секущие створы устанавливаются так, что даваемая
ими линия положения пересекает ведущий створ. Секущие створы
24
К. С. Ухов
370
Плавание вблизи берегов и в узкостях
[Гл, XX
указывают точки поворота на следующий створ юли отбивают
пройденное по ведущему створу точно измеренное расстояние.
Ограждающие створы, как показывает само назва-
ние, ограждают какую-либо опасность и имеют то же назначение,
что и опасные пеленги.
Специальные створы устраиваются для определения
девиации компасов, скорости хода судна или других специальных
целей.
При плавании по створам, особенно при вступлении на вход-
ной створ с моря, всегда следует взять пеленг створа и сравнить
его с данным на карте, чтобы по ошибке не лечь на створ каких-
либо других не створных знаков. При уверенности в правильном
распознании створа сравнение компасного пеленга с истинным
направлением створа, указанным на карте, может служить для
определения поправки компаса на данном курсе.
При наличии течения или дрейфа в районе плавания по
створу судно будет сноситься с линии створа. Тогда непродолжи-
тельными наблюдениями можно опытным путем определить
поправку на течение или дрейф и задать рулевому курс по ком-
пасу с учетом этой поправки. Действительное перемещение судна
будет совершаться по линии створа, причем его диаметральная
плоскость будет составлять с линией створа угол дрейфа.
Наиболее трудную задачу при плавании по створам состав-
ляет переход с одного створа на другой, требующий большой
опытности. Зная циркуляцию своего судна, следует заранее наме-
тить точки поворота на следующий курс с учетом циркуляции
судна, чтобы при повороте не уклониться слишком далеко от
створа и тем не поставить судно в опасное положение.
Если расстворение створных знаков происходит при значи-
тельном уклонении судна от створной линии, то створ «малочув-
ствительный», в противном случае — створ «чувствительный».
Чувствительность створа зависит от относительных положений
наблюдателя и обоих створных знаков. Эта зависимость может
быть выражена математически, как указано в следующем па-
раграфе.
§ 100. КРАТКАЯ ТЕОРИЯ СТВОРОВ
Предположим, что Ан В (рис. 177)—два створных знака,
С — место судна на створе, D — расстояние от переднего знака
до судна, d — расстояние между створными знаками. Если судно
сойдет со створа вправо и переместится в точку F на расстояние
р = CF, то оно увидит, что створные знаки расстворились Ъ рас-
стояние между ними d будет наблюдаться под углом у.
Из рисунка видно, что = р — а, следовательно,
tg7= g(?~a),
§ 100]
Краткая теория створов
371
откуда
tgv = tgp —tg«_
1 + tg a tg fi
Ho
. D x о____D -\- d
tga = —, tg₽=-----------
поэтому
, dp
tg 7 =--------------.
s ‘ Г>2 + Dd + p2
Уравнение (152) связывает величины d, p и D и позволяет
решать все встречающиеся на практике задачи,
ково должно быть расстояние d между зна-
ками, чтобы при заданных расстоянии D и ве-
личине угла у уклонение от створа не пре-
вышало наперед заданного значения р. Имеем
= (Г>2 + р*) tg 7
р — D tg 7
(153)
Формула (153) позволяет проектировщи-
кам створов рассчитать расстояние d между
знаками по заданным величинам D и р.
У мореплавателя чаще возникает вопрос,
насколько судно уклонится от створа при за-
данных D и 7, если створные знаки разнесены
на расстояние d. Этот случай приводит к ре-
шению квадратного уравнения:
р2-—р + (£>2 + £«) = 0,
tgi
откуда
Р = ^Г--------------(D2-\-Dd). (154)
2 tg 7 у 4 tg2 7
(152)
Определим, ка-
Рис. 177.
Перед корнем берем знак минус, так как мы ищем для р
наименьшее значение.
Непосредственное вычисление по формуле (154) будет не-
d
точно, так как по малости угла 7 величина -, а тем более
/ 2tg7
ее квадрат, может достигать очень больших величин. Поэтому
преобразуем эту формулу, положив
D2-\-Dd = B2 и — = —.
tg7 sin<p
1 огда
р=— — 1Z -^--В2=В 1~-С05Ф.
sin} у sin2} sin}
244:
372
Плавание вблизи берегов и в узкостях
[Гл. XX
Выражая -cos<p и sin Ф через половинные дуги, получим
2В sin2 —
2
Р = —7
2 sin — cos —
2 2
Примем, что при наблюдении невооруженным глазом расствор
знаков будет замечен наблюдателем, вследствие физиологических
свойств человеческого глаза, когда угол 7 будет -равен одной ми-
нуте дуги? Тогда чувствительностью створа мы можем назвать
величину уклонения от створной линии, при которой невооружен-
ным глазом будет наблюдаться расхождение створных знаков.
Эта величина, как видно из формулы (154), зависит от расстоя-
ния между створными знаками и от расстояния между судном и
передним створным знаком. Чувствительность створа может быть
всегда подсчитана для данного створа и заданного расстояния D,
если известно расстояние между створными знаками d.
При этих условиях вспомогательный угол ф определится из
соотношения
..2В.,
sin ф =— аге г.
d
Для приближенных расчетов с вполне достаточной для прак-
тики точностью можно принять, что величина р2 очень мала по
сравнению с величиной D2 -ф- Dd. Тогда формула (152) перепи-
шется так:
. dp я
' ~ Р2 + Dd'
Полагаем, как указано выше, угол у = 1', тогда tgf = 1' • arc Г
и величина р, характеризующая чувствительность створа, легко
определится из приближенного выражения
Р = Р(Р/~аГС1/~ (15б)
Обозначая через К отношение —, получим
d
р = D (1 + А^агс Г. (157)
Чем меньше величина р при заданном значении D, тем чув-
ствительнее створ. Формула (157) показывает, что чем ближе
судно к переднему знаку, тем чувствительнее створ; при том же <
1 При рассмотрении теории створов различные авторы принимают разре-
тающую способность человеческого глаза от 30" до Г. J
£ 100]
Краткая теория створов
373
расстоянии D чувствительность створа будет увеличиваться с уве-
личением расстояния между створными знаками.
Пример. При подходе к порту судно ложится на входной створ в 7 милях
от переднего створного знака. В 4,5 милях от переднего знака начинается
мористая часть входного канала. Определить чувствительность входного
створа в этих точках, если расстояние между створными знаками d = 5,4 ка-
бельтова.
Решение.
„ 70 1 о пй jz 45 q 99 7 -13,96• 1852 д
Кл = — = 12,96; ----- — = 8,33; р, —--------------- 52,6 м
5,4 5,4 3438
4,5-9,33-1852 ,
р2 = --------------= 22,1 м.
3438
Расчет по точной формуле дает pi = 52,6 м и р? = 22,7 м.
Иногда нужно знать, на каком расстоянии D судно не откло-
нится от створа более чем на заданную величину р при данных
значениях d и 7. Этот случай также решается квадратным урав-
нением, получаемым из формулы (152):
О2 + Ш-^+р2 = 0,
tg т
откуда
D = -4 + 1//--^ + ^-p2. (158)
2 |/ tg 7 4
Перед радикалом берем знак плюс, так как мы ищем наимень-
шее значение величины Z), которое будет при разных знаках
d
у — и у радикала.
В зависимости от формы и величины знаков, а также от рас-
стояния до них с судна величина угла 7, под которым наблюда-
тель будет видеть, что знаки расстворились, будет меняться. На
тех расстояниях, при которых очертания створных знаков будут
достаточно отчетливо видны, уклонение судна от створа будет за-
метно по несимметричному положению общих очертаний знаков.
При увеличении расстояния это заметить труднее, и уход судна
с линии створа будет обнаруживаться только тогда, когда знаки
разойдутся и образуют между собой просвет.
Действительная величина угла 7 может быть установлена
только опытным путем.
Более подробные соображения о створах приведены в «Гидро-
графии» Г. С. Максимова, являющегося автором теории створов.
Кроме того, подробности расчетов дневных и ночных створов даны
В книге П, И, Башмакова «Навигационные ограждения».
374
Плавание вблизи берегов и в узкостях
[Гл. XX
§ 101. ПОВОРОТ НА ЗАДАННУЮ ЛИНИЮ КУРСА
При плавании в прибрежных районах или по створам переход
с одного курса на другой должен быть произведен так, чтобы
судно после поворота сразу оказалось на новой, уже проложен-
ной на карте линии курса или же на новом створе. Учет циркуля-
ции при прокладке подробно
j'u разобран в § 46. Здесь мы рас-
м смотрим способ определения
Рис. 178.
на местности точки, в которой
следует начинать поворот.
В прибрежных водах почти
всегда можно найти подходя-
щий естественный предмет,
маяк или знак, пеленг кото-
рого точно укажет момент,
когда следует класть руль для
поворота.
Предположим, что судно
идет И К 32° (рис. 178) и дол-
жно повернуть на новый ИК
320° так, чтобы после поворота
оказаться на линии курса
ККъ\ прежний курс и новый
пересекаются в точке К. Тре-
буется найти момент, когда
следует положить руль, чтобы
оказаться на новой линии
курса, считая диаметр циркуляции судна D = 5 кабельтовым.
Из таблицы циркуляции по аргументу угол поворота 72° в пра-
вом крайнем столбце выбираем расстояние до нового курса при
повороте, оно равно 1,8 кабельтова. Откладываем от точки пере-
сечения курсов К в сторону, обратную движению судна, расстоя-
ние АК = 1,8 кабельтова и через полученную точку А проводим
линию АВ параллельно линии нового курса КК%. Где бы судно
ни начало поворот на линии АВ, после поворота оно должно
оказаться на линии нового курса ККъ-
Если на линии АВ окажется знак или какой-либо другой при-
метный предмет, то ИП 140° этого знака укажет момент, когда
должен быть положен руль. В большинстве случаев редко какой-
либо приметный предмет окажется на линии АВ. Тогда найдя
подходящий приметный предмет, проводим линию его ИП 140° —
Вр4ь которая будет параллельна линии АВ, и заметим момент
прихода судна на этот пеленг по компасу. Сняв с карты расстоя-
ние АгА, рассчитаем время, необходимое судну, чтобы пройти это
расстояние, и получим момент по часам, когда надо начинать по*
порот на новый курс,
§ 101]
Поворот на заданную линию курса
375
Допустим, теперь, что судно идет со скоростью 12 узлов по
истинному курсу 297° (рис. 179) и не уверено в своем месте,
а ему требуется лечь на И К 0° и пройти в двух милях от мыса М.
Из таблицы циркуляции судна находим, что для того чтобы судно
оказалось на линии КК2, оно должно начать поворот, не доходя
1,5 кабельтова до нового курса. Откладываем по старому курсу
в обратном направлении расстояние КВ = 1,5 кабельтова. Тогда,
где бы ни было судно на линии, показанной пунктиром, оно после
поворота должно оказаться на
линии нового курса ККг.
Проведем через мыс М ли-
нию AM, параллельную новому
курсу ККг, и снимем с карты
расстояние АВ = 2,2 мили. На-
блюдая по компасу, заметим
момент t, когда мыс придет на
ИП 0°, т. е. судно будет нахо-
диться на линии пеленга AM,
и рассчитаем время, потреб-
ное судну, чтобы пройти рас-
стояние АВ. По расчету судно
придет на линию СВ через
11 мин. после прохода линии
AM, и в момент 14- 11 мин.
следует положить руль и на-
чать поворот.
При наличии в районе пла-
вания течения, элементы которого известны, оно должно быть
принято во внимание при расчете точки или момента начала по-
ворота.
Предположим, что судно идет со скоростью 10 узлов курсом
290° (рис. 180) и должно изменить курс так, чтобы пройти в за-
данном расстоянии D от мыса М по линии пути РР\, направление
которой 10°. В районе плавания имеется течение на W, скорость
которого 1 узел.
Так как на судно действует течение, то линия PPi будет ли-
нией пути судна. Найдем сначала ИК, которым судно должно
проходить мыс М. Для этого при произвольной точке И на линии
пути судна строим навигационный треугольник NLH и опреде-
ляем ИК= 16°.
Из таблицы циркуляции судна выбираем расстояние до нового
курса 2,3 кабельтова и время, потребное на циркуляцию, 2,2 мин.
За время циркуляции течение снесет судно к W на расстояние
1852-2,2
376 Плавание вблизи берегов и в узкостях [Гл. XX
Чтобы принять во внимание действие течения, отложим от
точки Н расстояние HQ = 2,3 кабельтова 426 м по румбу 110°,
а от полученной точки Q расстояние 68 м по румбу 90°. Через
точку проведем пунктирную линию ЕР, параллельную линии
пути РРЬ Если судно положит руль по приходе на линию ЕР и
ляжет на И К 16°, то оно должно оказаться на линии пути PPi.
Рис. 180.
Проведем линию пеленга МС мыса М параллельно линии
пути. Теперь остается определить промежуток времени, который
нужен судну для прохода расстояния СЕ. Для этого при произ-
вольной точке G на старом курсе АТС строим навигационный тре-
угольник ABG, из которого определяем путь судна 293° и его
скорость относительно дна 10,8 узла. Линия пути судна до> пово-
рота пересекает линии МС и ЕР в точках С и Е. Сняв с карты
расстояние ЕС, равное 310 м, получим, что судно пройдет это
расстояние за одну минуту. Поворот должен начаться через ми-
нуту после того, как судно придет на истинный пеленг мыса М,
равный 10°.
В прибрежных водах всегда следует пользоваться указанными
приемами для расчета начала поворотов, причем рекомендуется
пользоваться секундомером. Построение может быть сделано на
карте крупного масштаба или на чертеже в произвольном мас-
штабе при предварительной подготовке к плаванию.
§ /02]
Постановка на якорь
377
§ 102. ПОСТАНОВКА НА ЯКОРЬ
Выбирая место для постановки на якорь, нужно принять во
внимание глубину, качество грунта, направление и силу господ-
ствующих ветров, силу и направление постоянного или прилив-
ного течения и*колебание уровня как от ветра, так и от прили-
вов. Кроме того, должно быть принято во внимание, предпола-
гается ли якорная стоянка на открытом рейде или в защищенной
гавани, наличие свободного места для разворачивания судна на
якоре, а также для маневрирования при постановке на якорь и
съемке с якоря.
Лучше всего держит якорь глина, затем ил, песок и, наконец,
каменистый грунт; особенно внимательно 'следует становиться на
якорь при обрывистом грунте.
Нельзя дать общих правил, насколько близко к опасности
можно становиться на якорь, и выбор якорного места зависит от
местных условий и опытности мореплавателя. Конечно, чем
дальше от опасности, тем лучше, так как судно в этом случае
подвергается меньшему риску быть снесенным на опасность, если
при штормовой погоде его начнет дрейфовать.
Наименьшее пространство, необходимое судну для якорной
стоянки, может быть приблизительно подсчитано из выражения
R = 4H4-2L,
где/? — радиус окружности, центром которой является место
якоря;
Н — глубина;
L — длина судна.
В этом выражении принято, что судно имеет четыре глубины
якорной цепи на клюзе и одна длина судна взята в запас.
При постановке на два якоря направление линий, на которых
лежат якоря, должно по возможности совпадать с направлением
господствующих ветров или приливного течения. Если не имеется
достаточно точной и подробной карты якорного места, то по по-
становке на якорь следует сделать рекогносцировочный шлюпоч-
ный промер в районе якорной стоянки, чтобы убедиться в отсут-
ствии камней или каких-либо других опасностей, не нанесенных
на карту.
Как только выбрано место для постановки судна на якорь, на
карте прокладывают линии положения, обеспечивающие отдачу
якоря точно в назначенном месте. Для этого выбирают на берегу
какой-либо предмет, линия пеленга которого проходит через якор-
ное место; если возможно, то еще лучше подобрать створ двух
предметов, ведущий судно к якорному месту. Путь судна прокла-
дывается так, чтобы он приводил на якорное место по выбранной
378
Плавание вблизи берегов и в узкостях
[Гл. XX
линии положения, причем судно должно прийти на эту линию
положения возможно дальше от якорного места. Предположим,
что для постановки на якорь выбрана точка Л (рис. 181), лежащая
на створе двух каких-либо искусственных или естественных пред-
метов £. Это не могут быть знаки входного створа, так как на
последнем запрещается становиться на якорь, чтобы не мешать
движению судов. Пусть ABCD будет линией курса судна, кото-
рым последнее подходит к якорному месту А; при наличии одного
предмета Е это будет линия пеленга. Отложим по линии курса
расстояние АВ, равное расстоянию от места якоря до места глав-
ного компаса. Точка В укажет место, где должен находиться
главный компас в момент отдачи якоря. Для определения мо-
мента, когда главный компас придет в точку В, найдем линию
положения, проходящую через точку В так, чтобы угол между
этой линией положения и линией курса был близок к прямому.
Такой линией положения может быть линия пеленга сигнальной
мачты 122°, находящейся вблизи траверза судна, или окружность,
вмещающая угол, измеренный между двумя какими-либо пред-
метами, расположенными с обоих бортов судна.
Какая бы линия положения ни была выбрана, необходимо для
точности определения точки В, чтобы пеленг или горизонтальный
угол, измеряемый секстаном, менялся быстро. Всегда следует вы-
бирать более близкий предмет, чем более отдаленный, даже если
£ 102}
Постановка на якорь
379
последний находится ближе к траверзу. Горизонтальный угол не
должен быть малым, а предметы для измерения угла удалены.
Для определения моментов, когда следует уменьшить ход и
затем остановить машины, откладываем по линии курса от
точки В расстояние 2—4 кабельтова и получаем точку С, где ма-
шина должна быть застопорена; отложив от той же точки В рас-
стояние около одной мили, получим точку D, где должен быть
уменьшен ход. Расстояния ВС и BD зависят от величины и
осадки судна и от условий плавания. Полученные точки D и С
фиксируем на местности пеленгами кордона 290° и 338°.
Таким образом, в данном примере судно, приведя заранее на
створ двух предметов Е или на пеленг одного предмета Е,
в точке D, определяемой пеленгом кордона 290°, уменьшает ход;
в точке С на пеленге кордона 338° стопорит машины и в точке В,
определяемой пеленгом 122° сигнальной мачты или горизонталь-
ным углом 98° между водокачкой и трубой, отдает якорь.
При постановке судна на два якоря производятся аналогич-
ные расчеты. Добавочно нужно рассчитать, в зависимости от
предполагаемой длины вытравленных якорных цепей, место вто-
рого якоря и определить момент отдачи его также по пеленгу или
горизонтальному углу. Линия курса судна при подходе к якор-
ному месту должна совпадать с линией, на которой должны быть
положены якоря. Это облегчает решение задачи. В этом случае,
отдав сначала наветренный якорь, чтобы судно не наваливало на
якорную цепь, проходят тем же курсом нужное расстояние и от-
дают второй якорь. После этого выравнивают якорные цепи.
Иногда второй якорь отдают, когда вытравят назначенную длину
якорной цепи первого якоря и она натянется.
Можно рекомендовать всегда выбирать вторую линию поло-
жения для определения момента отдачи якоря на случай, если
выбранный предмет не будет виден с якорного места. Более точ-
ный результат дает определение горизонтального угла. Если его
предварительно поставить на секстане, то момент прихода судна
в точку В определится моментом, когда труба и водокачка ока-
жутся совмещенными в поле зрения трубы секстана. При наличии
дальномера приход судна в точку В может быть определен по
расстоянию до одного из предметов Е.
Штурман А. Забелло рекомендует отложить от точки В в об-
ратном направлении по курсу равные расстояния, например через
один кабельтов до 10, и снять с карты ИП с этих точек на какой-
либо приметный предмет на берегу, который будет хорошо виден
при подходе к якорному месту. Составив табличку расстояний до
якорного места и соответствующих компасных пеленгов (ОКП),
можно, следя за изменением пеленга, в любой момент знать рас-
стояние до якорного места без всяких дополнительных расчетов.
Такой прием облегчает маневрирование ходами судна. Чем
380
Плавание вблизи берегов и в узкостях
[Гл. XX
ближе предмет к судну по расстоянию и чем он ближе располо-
жен к траверзу судна при подходе к якорному месту, тем точнее
будет определяться расстояние до места отдачи якоря.
§ 103. СЕТКИ ЛИНИЙ ПОЛОЖЕНИЙ
При маневрировании в узкости или в районе, стесненном ка-
кими-либо опасностями, когда требуется частое, быстрое и точное
определение места судна, графическая работа на карте может
быть сокращена путем нанесения на нее или на специально под-
готовленный планшет крупного масштаба заранее рассчитанных
линий положений. В большинстве случаев нанесение тех или дру-
гих линий положений, когда нельзя воспользоваться графиче-
скими методами построения сетки, требует применения прямо-
угольных координат. В этих случаях построение сеток линий
положений входит в обязанность гидрографической службы, кото-
рая широко их применяет, особенно при промерных работах. По-
этому здесь рассматриваются только основные принципы по-
строения некоторых сеток, в зависимости от предполагаемого ме-
тода определения места судна.
1. Гониометрическая сетка, состоящая из окружностей, вме-
щающих измеренные углы (рис. 182), применяется при опреде-
лении по двум углам. Гониометрическая сетка может быть по-
строена графически, как это указано в § 53, если на карте или
планшете помещаются опорные пункты, между которыми предпо-
г i03]
Сетки линий положений
381
Рис. 183.
лагается измерять углы, и центры окружностей. Густота сетки
берется такой, чтобы расстояние между двумя смежными окруж-
ностями не превышало 10—15 мм.
Если на карте или планшете не помещаются опорные пункты,
между которыми предполагается измерять углы, то в этом случае
окружности, вмещающие углы, могут быть построены по точкам,
полученным при пересечении двух лучей, проведенных из опор-
ных пунктов.
Пусть А (рис. 183) — один из опорных предметов, выбран-
ных для измерения углов, а прямая AML — одно из направлений,
проходящих через точку А
и составляющих с осью XX
дирекционный угол а. Чтобы
нанести эту линию на карту,
достаточно знать коорди-
наты точек L и ,М пересече-
ния этой прямой с северной
и южной рамками карты. Из
прямоугольных треугольни-
ков BLA и СМА получаем
П—= ^)tga;
Ym-Ya = (Xs-Xa)tgb.
Так как практически
удобнее вычислять разность
координат между западной
рамкой карты и искомой
точкой, то, обозначая коор-
динаты искомых точек на
рамках карты соответствующими значками, получим
И-^=(Га-^) + (Хл-Хо)1ёа; >
Ym-Yw=(Ya-Yw}-\-(Xs-Xa)tga. j
(159)
Если направление от опорного пункта будет пересекать верти-
кальные рамки карты, то совершенно аналогично имеем:
Xm-^=(^-^) + (^-^)ctga. J
Вычислив по формулам (159) или (160) отрезки рамки карты
в метрах, для разных дирекционных углов а, их уменьшают в со-
ответствии с масштабом карты н наносят на рамку. Точки, лежа-
щие на одном и том же луче, соединим прямыми линиями. Тогда
получим на карте ряд лучей, проходящих через опорный пункт
по разным дирекционным углам. В каких пределах следует
382
Плавание вблизи берегов и в узкостях
[Гл. XX
брать при вычислении дирекционные углы, легко определить по
схеме, проведя от опорного пункта прямые к соответствующим
углам карты.
Повторив такие же вычисления для второго опорного пункта
и нанеся на карту вторую сетку лучей, отметим те точки пересе-
чения лучей обеих сеток, для которых разность дирекционных
углов будет величиной постоянной. Через отмеченные точки при
помощи лекала проведем согласные кривые линии и получим
линии положения для двух опорных точек.
Для получения гониометрической сетки также наносим на
карту третью систему лучей от предмета С -и, найдя точки пересе-
чения их с уже имеющимися лучами предмета В, отвечающие
условию, что разность дирекционных углов — величина постоян-
ная, строим второе семейство окружностей, вмещающих измерен-
ные углы. Для отличия рекомендуется две системы окружностей
вычерчивать разными цветами. Получающаяся гониометрическая
сетка схематически показана на рис. 184.
£ 103]
Сетки линий положений
383 ,
2. Стадиометрическая сетка применяется при определении
места судна по двум расстояниям. Она состоит из двух систем
концентрических окружностей, являющихся линиями равных рас-
стояний— изо ста дням и. Центром каждой системы окруж-
ностей является опорный пункт, до которого измеряется рас-
стояние.
При незначительном расстоянии до опорных пунктов, если они
имеются на карте, окружности можно наносить графически цир-
кулем, беря радиус окружности
в соответствии с заданным рас-
стоянием, так чтобы промежу-
ток между изостадиями был
порядка 10—20 мм.
При больших расстояниях,
когда опорные пункты, до ко-
торых измеряются эти расстоя-
ния, не помещаются на карте,
изостадии приходится наносить
по точкам, координаты кото-
рых вычисляются. Если опор-
ный пункт А (рис. 185) нахо-
дится за пределами карты, а
на последнюю нужно нанести
нии D от опорного пункта, то
по формулам
X = Xa-jZ)cosa
Рис. 185.
(162)
точку Р, лежащую на расстоя-
координаты ее можно вычислить
и Y= ya + r>sina. (161)
Разность координат искомой точки Р от южной и западной
рамок карты будет
r-rw=(ro-rj + ^sina. /
Для сокращения вычислений целесообразно нанести на карту
или планшет систему равноотстоящих лучей, как и в случае го-
ниометрической сетки, а затем по одной из вычисленных коорди-
нат X и Y нанести на линиях этих лучей точки, соответствующие
заданному расстоянию D. При построении стадиометрической
сетки достаточно провести окружности через 10—20 см в зависи-
мости от масштаба, а затем по линиям лучей циркулем в мас-
штабе карты отложить отрезки, равные интервалу между изоста-
днями. Через полученные точки с помощью лекала проводятся
согласные кривые.
3. Гиперболическая сетка применяется при определении места
судна по разности расстояний от двух заданных точек, когда ли-
нией положения является гипербола.
При небольших расстояниях до опорных точек гиперболи-
ческая сетка может быть построена сравнительно просто при
384
Плавание вблизи берегов и в узкостях
[Гл. XX
помощи стадиометрической сетки. Допустим, что на рис. 186 точки
А, В и С — опорные пункты и на судне измеряются разности рас-
стояний &Di между пунктами А и В и между пунктами А
и С. Построив стадиометрические сетки для всех трех пунктов,
находим точки пересечений изостадий пунктов А и В, для кото-
рых разность расстояний &D1 постоянна. То же самое делаем
Рис. 186.
для пунктов Л и С. Через отмеченные точки проводим при по-
мощи лекала согласные кривые и получаем два семейства гипер-
бол. При построении сетки изостадии пунктов В и С отмечаются
только засечками.
При больших расстояниях приходится вычислять координаты
ряда точек, лежащих на гиперболе, и строить ее по полученным
точкам. При больших расстояниях до опорных точек гиперболы,
вследствие незначительной их кривизны, получаются практически
в виде прямых линий. Построение сетки гипербол не произво-
дится на судне, и штурман при использовании для определения
места гиперболических систем должен иметь специальные карты
с нанесенными на них сетками гипербол.
4. Комбинированные сетки могут состоять из сочетания раз-
личных линий положений в зависимости от намеченных способов
определения места судна. К таким сеткам относятся сетки для
определения по двум или трем пеленгам, состоящие соответ-
§ 104}
Общие соображения
385
ственно из двух или трех семейств лучей, расходящихся от опор-
ных пунктов ПО' направлениям, соответствующим истинным пе-
ленгам наблюденных объектов; сетки для определения по пеленгу
и расстоянию; сетки для определения по горизонтальному углу
и пеленгу, по горизонтальному углу и расстоянию. Все эти сетки
строятся на основании указанного выше.
Подробные указания о построении сеток линий положений
даны в труде проф. А. П. Белоброва «Гидрографические работы»
издания 1948 г.
ГЛАВА XXI
ПЛАВАНИЕ ВО ВРЕМЯ ТУМАНА И ПРИ НАЛИЧИИ ЛЬДА
§ 104. ОБЩИЕ СООБРАЖЕНИЯ
Густая завеса тумана закрывает от мореплавателя берег и все
приметные места, лишая его возможности контролировать путь
судна по визуальным наблюдениям береговых предметов и пло-
вучих средств ограждения. Остающаяся в его распоряжении про-
кладка, вследствие ошибок компаса и лага, не поддающихся
учету, а также влияния неизвестного течения и дрейфа не дает
полной уверенности в точности и безопасности пути судна. Войдя
в туман, судно в известной степени становится слепым, поэтому
плавание в тумане требует особой осторожности и внимания.
Нужно помнить, что в тумане судну, кроме навигационных опас-
ностей, угрожает еще опасность от столкновения со встречными
судами. Поэтому, если судно вошло в туман, следует уменьшить
ход, начать подачу туманных сигналов, как это требуют «Пра-
вила предупреждения столкновений судов в море», усилить на-
блюдение, располагая наблюдателей на разных уровнях и соблю-
дая тишину на палубе, а при подходе к берегу или к навигацион-
ным опасностям начать бросать лот.
Воздушные туманные сигналы, устанавливаемые на берего-
вых и пловучих маяках, на подходах к портам и в особо опасных
местах, не всегда гарантируют мореплавателя от аварии. Непра-
вильное и непрямолинейное распространение воздушной звуковой
волны создает некоторые зоны молчания, в которых судно не
слышит звукового сигнала, хотя и находится близко от его источ-
ника. Эти сигналы не позволяют также судить и о направлении
на источник звука. Опыт показывает, что если звук приходит
с подветра, то его лучше слышит наблюдатель, помещающийся
по возможности выше, и, наоборот, звук с наветра лучше слышит
наблюдатель на палубе, чем на мостике. Кроме того, в силу тех
или иных причин туманная станция может не работать. Судо-
водитель, подходя к туманной звуковой станции и не слыша ее
сигналов, не вправе делать заключение, что до станции еще да-
леко, а должен обязательно руководствоваться глубинами.
25 к. С. Ухов
386
Плавание во время тумана и при наличии льда
[Гл. XXI
Во время тумана очень важно иметь смотрящего вперед на
баке. Иногда шум прибоя бывает слышен раньше, чем откроется
берег, а белая линия бурунов или прибоя часто обнаруживается
тогда, когда берег еще скрыт туманом.
При плавании вдоль высокого скалистого берега, если слышно
эхо сирены, приближенное расстояние D до скал может быть
определено из следующих соотношений:
£) = ?^=170£ м; £> = 0,09£ мор. миль, (163)
где t — промежуток времени в секундах между посылкой сигнала
сиреной на судне и моментом приема эха этого сигнала.
Если гористый берег перерезан глубокими долинами, то услы-
шанное эхо сирены указывает, что вблизи траверза судна нахо-
дится возвышенность, а если эхо не слышно, то судно против
долины. Указанные приемы дают только приближенную ориенти-
ровку места судна.
Наиболее надежные способы определения места судна во
время тумана:
1) определение при помощи радиотехнических средств;
2) определение по глубинам.
В следующем параграфе будет рассмотрено только определе-
ние по глубинам. Определения при помощи радиотехнических
средств были разобраны в пятом разделе.
Если предвидится наступление тумана, то самое тщательное
определение места судна должно быть сделано заблаговременно
по береговым предметам. При малейшем сомнении в своем месте
при плавании в тумане вблизи опасностей рекомендуется стать
на якорь или изменить курс так, чтобы отойти от опасности.
Иногда по лоту можно подойти к какому-либо приметному
пункту, например, пловучему маяку, береговому маяку, выдаю-
щемуся приметному мысу и т. д., настолько близко, чтобы опо-
знать его и тем точно определить свое место. Но этот прием тре-
бует большой осторожности и тщательного изучения карты. При
выборе приметного объекта для подхода к нему во время тумана
следует удостовериться, что на подходе к нему нет никаких опас-
ностей, промер произведен тщательно и глубины позволяют су-
дить о пути подхода и предупреждают об опасном положении.
Подходить к берегу следует всегда нормально к общему напра-
влению береговой черты.
§ 105. ПРИБЛИЖЕННОЕ ОПРЕДЕЛЕНИЕ МЕСТА ПО ГЛУБИНАМ
Последовательное измерение ряда глубин через определен-
ные промежутки времени дает возможность в тех случаях,
когда глубины в районе плавания судна меняются равномерно,
£ 105] Приближенное определение места по глубинам 387
проконтролировать счислимое место судна и даже определить его
с большей или меньшей степенью вероятности. Для этого изме-
ряют несколько глубин и наносят их на кальку по линии курса,
на которой предварительно прочерчены истинный меридиан, па-
раллель и линия истинного курса. Расстояния между нанесен-
ными глубинами должны соответствовать расстоянию, пройден-
ному судном между моментами измерения глубин в масштабе
карты. Затем накладывают кальку на карту и, двигая ее вблизи
счислимого места судна в разные стороны, сохраняя при этом
параллельность меридианов, параллелей и линии курса, доби-
ваются совпадения глубин, нанесенных на карту, с глубинами,
измеренными лотом и нанесенными на кальку. Тогда места, где
измерены глубины, будут местами судна в моменты измерения.
Для этого на кальке отмечают моменты по часам, когда измерена
данная глубина, и если достали грунт, то и качество грунта. Из-
мерять глубины удобно с той же частотой, с которой они нане-
сены на карту.
В районах, где уровень воды меняется под влиянием приливов
и отливов, измеренные глубины должны быть приведены к нулю
данной карты, вычитая из измеренной глубины высоту прилива
в момент измерения глубины. Следует помнить, что на советских
картах глубины приводятся к наименьшему уровню воды в дан-
ном районе, а на английских картах — к среднему уровню малой
сизигийной воды. Может случиться, что на карте не будет глубин,
совпадающих с измеренными глубинами, но положение нашей
линии курса, при котором все измеренные глубины будут отли-
чаться от глубин, данных на карте, на одну и ту >ке величину,
может быть найдено. Это явление может быть следствием или
неправильно взятой поправки за высоту уровня, или колебания
уровня воды под влиянием ветра.
Если судно находится в районе, где имеется приливо-отливное
течение, элементы которого известны, то на кальку должна быть
нанесена линия пути судна и на ней отмечены измеренные
глубины.
Точность определения места по глубинам небольшая и зави-
сит от:
а) точности измерения глубин лотом;
б) точности нанесенных на карту глубин, как в отношении их
величин, так и места;
в) характера изменения глубин;
г) курса судна по отношению к направлению, по которому
меняются глубины.
Определение места по глубинам будет более надежно, если
сами глубины равномерно увеличиваются или уменьшаются по
направлению курса судна, т. е. последний пересекает изобаты
приблизительно под прямым углом.
25*
388
Плавание во время тумана и при наличии льда
[Гл. XXI
Особенно благоприятно для определения по глубинам, если
курс судна пересекает отличительные глубины, безопасные для
его плавания, но характерно выделяющиеся среди окружающих
глубин. Совершенно невозможно определиться по глубинам, если
они совсем не меняются, или, наоборот, изменения их происхо-
дят очень резко и неравномерно, как это часто бывает при ска-
листом грунте.
В лоциях помещают сведения о надежности использования
лота для безопасного плавания в определенных наиболее важных
для навигации районах.
Рис. 187.
Если судно в тумане пересекает изобаты, проходящие под
некоторым углом одна к другой, то они могут быть использованы
как линии положения. Предположим, что АК (рис. 187) —линия
курса судна и что в какой-то момент tx измерена глубина 50 м,
приведенная к нулю карты. Через некоторый промежуток вре-
мени в момент /2 судно измерило глубину 30 м. Изобаты 50 и
30 м могут рассматриваться как линии положения судна в мо-
менты б и /2, и задача сводится к вмещению между ними плава-
ния судна.
Пусть А — счислимое место судна в момент Л, а В — в мо-
мент /2, тогда АВ — плавание судна за промежуток времени
/2— Л. Перенесем на кальку изобату 50 м и линию курса АК,
а затем будем двигать кальку так, чтобы линия курса на кальке
оставалась совмещенной с линией курса на карте до тех пор,
пока точка А не ляжет на точку В. Перенеся, таким образом,
изобату 50 м параллельно самой себе к моменту /2, в точке F —
пересечения двух изобат, как линий положений, получим счис-
лимо-обсервованное место судна. Из рисунка видно, что действи-
тельное место судна в момент Л должно было быть в точке Л’ь
а линия курса судна — АЛь
Применение этого метода определения места судна в тумане
требует, чтобы изобаты были нанесены на карте и расстояние
$ 106] Установки для обеспечения подхода к портам при тумане
389
между ними менялось неравномерно. В противном случае угол
пересечения изобат будет слишком острым и место определится
ненадежно.
В некоторых случаях, в зависимости от расположения изобат,
целесообразно изменить курс, чтобы получить менее острый угол
пересечения изобат, при использовании их как линий положения.
Если вблизи курса имеются отличительные глубины, оконтурен-
ные изобатой, то можно выбрать такой курс судна, чтобы пере-
несенная изобата и изобата, полученная при втором измерении
глубины, пересекались под углом, возможно близким к 90°.
В тех случаях, когда курс судна проходит между двумя ка-
кими-либо определенными изобатами, нанесенными на карту и
ограничивающими лежащие за ними опасности, можно с доста-
точной долей уверенности итти по курсу, следя по лоту, чтобы
судно не пересекало намеченных изобат.
Применение эхолота, дающего практически непрерывно глу-
бину под судном, значительно облегчает плавание в тумане. Эхо-
лот не дает возможности судить о грунте, который является во
многих случаях хорошим критерием для суждения о месте судна
в тумане — это его единственный недостаток; в настоящее время
ведется ^работа по его усовершенствованию в этом отношении.
§ 106, СПЕЦИАЛЬНЫЕ УСТАНОВКИ ДЛЯ ОБЕСПЕЧЕНИЯ
ПОДХОДА К ПОРТАМ ПРИ ТУМАНЕ
Для обеспечения подхода к портам при тумане разработаны
специальные технические средства, основанные на разнообраз-
ных физических законах. Эти средства непрерывно совершен-
ствуются и меняются в отношении своей аппаратуры. Характер-
ной их особенностью, связанной с их назначением, является
ограниченность района действия. К средствам обеспечения под-
хода к портам при тумане относятся:
Ведущий или лоцманский кабель, представляющий собой изо-
лированный одножильный кабель, укладываемый по дну вдоль
пути, назначенного для плавания судов. На берегу устанавли-
вается источник питания, посылающий в кабель переменный ток
низкой частоты. Два электрода, по одному на каждом конце ка-
беля, служат для возвратного тока. При прохождении по кабелю
тока в воде и над ее поверхностью возбуждается магнитное поле,
силовые линии которого располагаются по концентрическим кру-
гам, центром которых является кабель. Вблизи кабеля это маг-
нитное поле может быть обнаружено судами, оборудованными
приемными рамками. По характеру принятых этими рамками
сигналов можно определить положение судна относительно ка-
беля и удерживать курс по вертикали над кабелем.
Таким образом, судно может войти в порт при тумане, при-
держиваясь курса, указываемого ведущим кабелем.
390
Плавание во время тумана и при наличии льда
[Гл. XXI
Аппаратура для плавания по ведущему кабелю состоит из
двух частей: приемных рамок, устанавливаемых на палубе на
открытом воздухе, и индикаторной системы, монтируемой в руле-
вой рубке.
Приемные рамки состоят из трех одинаковых катушек с осями,
направленными вертикально, горизонтально по диаметральной
плоскости и горизонтально в поперечной плоскости судна. Сиг-
налы, принятые рамками, усиливаются и передаются на индика-
тор, состоящий из двух электроннолучевых трубок. Первая
трубка — индикатор отклонения — указывает сторону, на которой
находится судно относительно кабеля, а вторая — индикатор
относительного направления — указывает направление движения
судна по отношению к направлению кабеля.
Одновременное применение двух индикаторов позволяет сле-
довать по кабелю с точностью, соответствующей точности лежа-
ния на курсе, причем, в случае необходимости, судно может
удерживаться все время на одной стороне кабеля. Повороты в
направлении кабеля указываются сразу; путь судна относительно
кабеля может удерживаться при наличии дрейфа и течения.
Ширина полосы действия ведущего кабеля зависит от силы
тока в кабеле и достигает двух-трех кабельтов. Глубина, на ко-
торой может быть уложен ведущий кабель, превышает 50 м.
Двойной туманный сигнал. Для обеспечения входа в порт во
время тумана разработана комплексная установка двух диафо-
нов. Идея этой установки заключается в следующем: если судно
находится на равных расстояниях от двух источников звука, т. е.
на перпендикуляре, восстановленном из середины линии, соеди-
няющей два звукоотправителя, то для него оба звука сольются
в один, если они будут поданы одновременно. При уклонении
судна в сторону от оси сигналы будут слышны раздельно.
Диафоны приводятся в действие сжатым воздухом под давле-
нием около 2 кг; оба звука различной высоты. Работа диафонов
управляется станцией, расположенной в управлении порта. Диа-
фон правого борта подает два коротких звука, а диафон левого
борта — один длинный звук. Продолжительность и моменты по-
дачи сигналов рассчитаны так, что судно, в зависимости от места
своего нахождения по отношению к оси фарватера, может слы-
шать следующие сочетания сигналов:
— — сигнал ДиаФ°на пРав°г° борта I (по входу в гавань)
2) „ „ левого борта J v J 7
3) сигнал, принимаемый при равном расстоянии от обоих
диафонов;
4) — --- сигнал, принимаемый вправо от оси | (отклонение от оси
5) — „ „ влево от оси J не превышает 10 м);
6) „ » влево от оеи на 30 м;
7) — --- „ , вправо от оси на 30 м.
§ J06] Установки для обеспечения подхода к портам при тумане
391
оба сигнала. Эта кривая
N
Рис. 188.
подходе
Судно, идущее по оси входного канала ЕЕ\ (рис. 188), слы-
шит одновременно оба диафона N и S. На ветви гиперболы 1 — 1
звук диафона N слышен на 1 сек. раньше, чем звук диафона S.
На ветви гиперболы 2—2 звук диафона S слышен на две секунды
раньше, чем звук диафона N.
Посылая один сигнал раньше другого и регулируя разность
моментов отправки сигналов, получим кривую линию, на которой
одновременно будут слышны
ветвью гиперболы, и можно
добиться достаточно точного
приближения ее к действи-
тельному направлению фар-
ватера, если последний не
прямолинейный.
На этом принципе для
обеспечения входа на рейд
при тумане могут быть ис-
пользованы и подводные
звуковые сигналы.
Акустический пеленга-
тор. Этот прибор приобре-
тает особое значение при
расхождении в тумане со в
к туманным станциям и гудящим буям, а также для расхожде-
ния с ледяными горами, используя для этого отраженное ими
эхо судового звукового сигнала.
Акустический пеленгатор состоит из двух улавливателей
звука — параболоидов вращения, фокусы которых одновременно
являются фокусами двух эллипсоидов вращения, соединяющих
улавливатели звуков с ушами наблюдателя. Такое устройство
позволяет слышать звук, идущий слева, только левым ухом,
а звук, идущий справа,— правым. Звук, идущий спереди, попа-
дает одновременно на оба улавливателя звука и, во много раз
усиленный, слышен одновременно обоими ушами наблюдателя.
Падение силы звука вблизи направления на источник звука
очень резкое, так что угол, в пределах которого звук слышен
обоими ушами, очень мал. Этим достигается определение доста-
точно точного направления на источник звука.
Дальность действия акустического пеленгатора зависит от ве
личины улавливателей звука.
Говорящий маяк установлен на острове Little Cumbrae в устье
реки Clyde. Маячная установка состоит из диафона, подающего
воздушные туманные сигналы, и радиотелефона, дающего слово
«Cumbrae», а затем произносящего словами счет расстояний в
кабельтовых и милях до 5 миль. Маяк работает каждые 70 сек.
по следующей схеме:
392
Плавание во время тумана и при наличии льда
[Гл. XXI
а) по радиотелефону передается слово «СитЬгае»;
б) диафон дает группу сигналов из трех звуков;
в) по радиотелефону передается счет расстояний;
г) диафон дает вторую группу сигналов из двух звуков.
Непосредственно перед тем как называется целая миля, по
радиотелефону подается удар колокола.
Для приема воздушного туманного сигнала и счета расстоя-
ний по радиотелефону требуется два наблюдателя. Первый на-
блюдатель слушает воздушный туманный звуковой сигнал, и в
момент, когда он услышит конец третьего звука диафона, он
командует второму наблюдателю на радиофоне отметить счет,
даваемый маяком. Таким образом, по разности скоростей распро-
странения воздушной звуковой волны и электромагнитной волны
определяется расстояние от судна до маяка. Направление на
маяк может быть определено по радиопеленгатору. Если заметить
счет, совпадающий с началом третьего звука диафона, то рас-
стояние получится на два кабельтова меньше действительного.
§ 107. ПЛАВАНИЕ ВО ЛЬДАХ
Большинство морей, омывающих Советский Союз, в зимнее
время частично или полностью замерзает, причем состояние
льда и его структура в отдельных морях весьма различны. Наши
арктические моря имеют ледовый покров круглый год, и плава-
ние по ним возможно 3—3,5 летних месяца при помощи ледо-
кола. Из восточных морей северная часть Японского моря, при-
брежные воды Охотского и Берингова морей в зимнее время
покрываются льдом. Белое море замерзает почти на полгода.
Заливы Балтийского моря и прибрежная полоса самого моря
ежегодно зимой покрываются льдом, причем мощность ледовых
образований и продолжительность замерзания меняются из года
в год в значительных пределах. Каспийское море замерзает зи-
мой в своей северной части, а на Черном море лед затрудняет
судоходство в его северо-западной части.
Плавание во льдах требует специальной подготовки судна в
зависимости от поставленной задачи. Как правило, в сплошном
льду суда идут под проводкой ледокола и подчиняются инструк-
циям, даваемым капитаном ледокола, и установленным для про-
водки во льду сигналам. Общие сведения о льде и правилах пла-
вания во льдах помещаются в лоциях.
Самостоятельное плавание судна возможно только в мелко-
битом и сравнительно разреженном льде.
При подготовке к походу, во время которого ожидается
встреча со льдом, необходимо предварительно получить все са-
мые подробные сведения от гидрометеорологической службы о
состоянии льда и районах его распространения.
£ 107] Плавание во льдах 393
Путь в районах распространения льда следует выбирать так,
чтобы он проходил по возможности по чистой воде или в местах
наиболее слабого и разреженного льда, не считаясь с удлинением
пути. Он должен быть безопасен в навигационном отношении.
Иногда на банках с малой грубиной лед образует торосы, кото-
рые хорошо указывают мелкие места. Обязательно должен быть
учтен дрейф льда и возможное изменение его направления при
перемене ветра. Это особенно важно, так как судно, проходя
в разреженном льду, при перемене направления ветра может
быть зажато льдом, лишено свободы маневрирования и постав-
лено в опасное положение. Не следует придерживаться подвет-
ренного берега, так как под ним лед сгущается и можно встре-
тить торосы, в то время как под наветренным берегом чаще
встречаются районы, свободные от льда.
При подходе к району распространения льда следует тща-
тельно проверить свое счислимое место и, если представляется
возможным, обязательно получить обсервованное место судна,
а также рассчитать время входа в лед. При проходе мимо льдин
не следует близко к ним приближаться, так как при таянии льдов
у них образуются подводные ледовые языки, выступающие иногда
на несколько метров.
Счисление пути при плавании во льду. В зависимости от усло-
вий плавания во льду судну приходится более или менее часто
менять курсы и иметь переменную скорость, что резко уменьшает
точность его счисления. При современном развитии радиотехни-
ческих средств они должны быть наиболее широко использованы
при плавании во льдах для определения места судна, особенно
имея в виду, что плавание во льдах часто сопровождается тума-
нами, пургой или малой дальностью видимости. При благоприят-
ных условиях видимости необходимо при всякой возможности
использовать навигационные или астрономические способы опре-
деления места судна. Только обсервация может дать надежное
место судна при плавании во льдах.
При неблагоприятных условиях плавания, когда приходится
ограничиваться только счислением пути судна, задача сводится
к нахождению генерального курса и генерального плавания судна
за какой-либо определенный промежуток времени. Для нахожде-
ния генерального курса опытные капитаны, много плававшие во
льдах, рекомендуют систематически записывать момент каждой
перемены курса и сам курс. При частой перемене курсов, при
маневрировании между льдинами, когда запись каждого курса
затруднительна, адмирал Макаров рекомендовал записывать
курс каждые 5 мин., а затем выводить средний курс за час. Как
часто надо записывать курсы и моменты их изменения, опреде-
ляется самими условиями плавания во льду.
394
Плавание во время тумана и при наличии льда [Гл. XXI
Для определения скорости хода судна во льду приходится
прибегать к старинному способу. На льду замечают какую-либо
приметную точку, а при отсутствии ее выбрасывают на лед с бака
вперед кусок угля, шлака или дерева. Когда этот предмет поров-
няется с форштевнем судна, первый наблюдатель на баке дает
сигнал свистком или рукой, а штурман на мостике пускает се-
кундомер. Второй наблюдатель на юте в момент, когда наблю-
даемый предмет поровняется с ахтерштевнем, в свою очередь,
подает условленный сигнал, и штурман останавливает секун-
домер.
Пусть длина судна I метров, а время, в течение которого оно
прошло мимо замеченной точки, t секунд, тогда
V 9441.
узл 1852/ t
Так как для данного судна величина I остается постоянной,
то можно заранее составить таблицу, из которой по аргументу t
в секундах (время, затраченное судном на прохождение расстоя-
ния, равного его длине) выбирать его скорость в узлах.
Такие наблюдения должны повторяться систематически не-
сколько раз в час, чтобы в среднем получить более правильные
данные о скорости судна.
Если при подготовке к плаванию во льдах на борту судна
разбить базу такой длины, чтобы при умножении ее на коэффи-
циент 1,944 получить круглое число десятков, то для определения
скорости получим следующие простые соотношения:
30
база 15,43 м..........Уузл = —;
60
, 30,87 м..........vV3Ji = —;
. 46,30 м..........Уузл = -;
/с
7Q т/ 120
. 61,73 М..........Уузл = ---.
/с
Концы базы полезно оборудовать самыми простыми визирами.
• При плавании в сплошном льду для определения скорости
судна может быть применен следующий способ.
К тонкому линю подвязывается какой-либо небольшой груз и
опускается на лед с лотовой площадки. Вытравив за борт опре-
деленную длину линя и заметив при этом время по секундомеру,
можно рассчитать скорость судна. Такие измерения также' надо
повторить несколько раз и взять среднее из полученных резуль-
татов.
Таким образом, штурман будет располагать следующими
данными:
§ 108\ Уравнение дуги большого круга на сфере 395
1) записанными курсами;
2) временем следования каждым курсом;
3) определенными из наблюдений скоростями, которыми шло
судно.
Все эти записи удобно делать в виде таблички. Обработка
этого материала может быть произведена в зависимости опять же
от условий плавания и качества исходных данных тремя мето-
дами.
1. Рассчитав плавание по каждому курсу в отдельности, по
правилам составного письменного счисления получить счислимые
широту и долготу пункта пришествия.
2. Проложить на миллиметровой или простой бумаге в произ-
вольном, достаточно крупном масштабе, свое плавание за опре-
деленный промежуток времени и снять с такой прокладки гене-
ральный курс и генеральное плавание для переноса на карту.
3. При сравнительно небольших и более или менее равномер-
ных изменениях курса и скорости рассчитать средний курс и
среднюю скорость за определенный промежуток времени и про-
ложить на карте средний курс и плавание, полученное по средней
скорости. Следует принять за правило наносить место судна на
карту не реже чем каждый час.
Дрейф, постоянное или приливо-отливное течение должны
быть приняты во внимание.
Скорость и направление дрейфа судна во льду могут быть
определены при помощи лота. Опустив груз лота на дно, измерим
глубину h и заметим момент по часам или пустим в ход секундо-
мер. Вытравливая лотлинь по мере дрейфа судна, через некото-
рый промежуток времени t заметим, сколько лотлиня ушло в
воду; пусть вытравлено I метров лотлиня. Тогда расстояние с/,
на которое сдрейфовало судно, определится так:
d = ]//2—Л2 метров,
а скорость дрейфа, если t в секундах, будет
360CV . П/|„ d
=-----= 1,944—.
узл 18522 t
ГЛАВА XXII
ПЛАВАНИЕ ПО ДУГЕ БОЛЬШОГО КРУГА
§ 108. УРАВНЕНИЕ ДУГИ БОЛЬШОГО КРУГА НА СФЕРЕ
Кратчайшим расстоянием на земной поверхности между
двумя данными точками, принимая Землю за шар, будет мень-
шая из дуг большого круга, проходящего через эти две точки.
При сравнительно небольших расстояниях разность между дли-
396
Плавание по дуге большого круга
[Гл. XXII
ной дуги большого круга, соединяющей две точки, и локсодро-
мией, проходящей через те же точки, незначительна. При боль-
ших же океанских переходах разность в длине пути по дуге
большого круга и по локсодромии может достигать сотен миль
и, в этом случае, следует располагать свои курсы так, чтобы
судно шло по дуге большого круга. Дуга большого круга носит
название ортодромии, что значит «прямой бег», и плавание
по дуге большого круга называется также плаванием по
ортодромии.
Дуга большого круга пересекает все меридианы под различ-
ными углами, и при плавании по ортодромии курс должен ме-
няться от начального курса при выходе из пункта отшествия до
конечного курса при подходе к пункту пришествия. Если пункты
отшествия и пришествия лежат на одном и том же меридиане,
или же на экваторе, дуга большого круга совпадает с локсодро-
мией и при плавании по ортодромии курс остается неизменным.
На рис. 189 FCAV\BGV2 представляет большой круг, прохо-
дящий через две данные точки Л и В, а кривая линия ALBM —
локсодромию, проходящую через те же точки. Так как два боль-
ших круга взаимно делят друг друга пополам, то точки пересе-
чения большого круга с экватором С и Н отличаются по долготе
на 180°. Посредине между этими двумя точками симметрично
лежат точки V\ и V2, в которых большой круг достигает, соответ-
ственно, наибольшей северной и южной широты. В этих точках
# 108]
Уравнение дуги большого круга на сфере
397
большой круг пересекает меридиан под прямым углом и имеет
направление Ost или W. Каждая из этих точек, V} или У2, назы-
вается вертексом большого круга.
Для решения задач, связанных с плаванием по дуге большого
круга, необходимо знать широту и долготу вертекса или долготу,
в которой данный большой круг пересекает экватор, и курс, при
котором он его пересекает. Эти величины определяют положение
данного большого круга на сфере. Обозначим:
Хо — долгота точки пересечения экватора с дугой большого
круга;
Ко — курс по ортодромии в точке пересечения экватора;
— широта вертекса;
—долгота вертекса.
Точка пересечения большого круга с экватором является по-
люсом меридиана вертекса и
?И = 9О°-Ко; Ху = к0 + 90°. (164)
Дуга большого круга между двумя данными точками лежит
полярнее локсодромии, причем разность широт между точками
ортодромии и локсодромии, лежащими на одном меридиане,—
398
Плавание по дуге большого круга
[Гл. ХХП
величина переменная. Та точка ортодромии, в которой эта раз-
ность широт достигает наибольшей величины, называется точ-
кой наибольшего разъединения по широте.
В этой точке курс по ортодромии и по локсодромии будет одина-
ков, так как касательная к ортодромии в точке наибольшего
разъединения по широте параллельна локсодромии.
Дуга большого круга на меркаторской карте изображается
кривой линией, выпуклостью обращенной к полюсу, причем лок-
содромия представляет хорду, стягивающую эту дугу.
Возьмем большой круг V^OABVy (рис. 190), проходящий че-
рез две заданные точки А и В. Пусть PnGPs будет меридиан
Гринича. Обозначим через ? и X координаты точки Л, лежащей
на данном большом круге. Принимая обозначения, указанные
выше, из прямоугольного сферического треугольника OAR по-
лучим
tg? = sin (X—Хо) ctg /<0. (165)
Это уравнение отвечает любой точке большого круга VsOVi и
содержит два параметра: До — курс при пересечении экватора и
Хо — долготу точки пересечения экватора и большого круга.
Эти параметры определяют положение данного большого
круга и могут быть вычислены, если известны географические
координаты двух каких-либо точек большого круга или геогра-
фические координаты одной точки и угол между большим кругом
и меридианом в данной точке (курс), как указано ниже.
Последнее уравнение на основании равенства (164) может
быть записано в таком виде:
tg<p = cos(k—Xv)tg<cy. (166)
Тогда параметрами данного большого круга будут географи-
ческие координаты его вертекса.
Вычисление параметров большого круга по географическим
координатам двух точек. Возьмем на большом круге V^OVz
(рис. 190) две точки — А и В, географические координаты кото-
рых, соответственно, cpj и ср2, Х2 и Х2. Тогда из уравнения (165)
имеем
tg<Pi = ctg^sin Оч-М; | (1б7)
tg<p2 = ctg^sin(X2—Хо). j
Эти два уравнения дают возможность определить Хо и До.
Разделив второе уравнение на первое, получим
tg ?а_ sin (Х2 — Хо)
tg?i Sin (Хх —Хо) '
§ josj
Уравнение дуги большого круга на сфере
399
Для определения к0 сделаем следующие преобразования:
tg '?2 — tg 9i sin (Х2 — Хо) — sin (Хт - Хо) _
tg + tg 9i sin (X, — Хо) 4- sin (Xi — Хо)
Но
tg 9г — tg 91 _ Sin (Уа — 91)
tg <₽a + tg 9i sin (92 + 91) ’
Обозначив для краткости письма
^i 4" Х2 1
получим
Sin (92 — 91) _
sin (92 4- 91)
Ctg (Хот-Х0) tg^),
и окончательно имеем уравнение
tg (xm-4) = tg у (Х2-Xj) sin (<P1 + <?2) cosec (168)
которое позволяет вычислить долготу Хо точки пересечения дуги
большого круга с экватором. После этого угол Ко может быть
определен из любого уравнения (167). Подставив полученные
значения Хо и Ко в (165), мы получим уравнение большого
круга, проходящего через заданные точки А п В.
При составлении сумм и разностей широт и долгот для фор-
мулы (168) следует обратить внимание на наименование геогра-
фических координат и приписать им знаки. Чтобы не допустить
ошибки в знаках, можно считать все долготы по часовой стрелке
как остовые от 0° до 360°.
Пример. Порт Брисбан (Австралия): = 27°28'(S, = 153°7' OstJ
порт Акапулько (Мексика): <р2 = 16°49' N, Х2 = 99°56' W. Найти Хо и /(0 и
написать уравнение большого круга, проходящего через данные точки.
Решение.
= 27°28'S
Уа = 16°49'N
<?1 + ?2 = — 10°39'
Vi — 91 = 4"44о17'
Xi = 153°7'Ost
Х2 = 260°4'Qst
Xl + Xa = 413°ll'
Xm = у (Xj 4- X2) = 206’35',5
X2 — X1= 4- 106’57'
-l(X2-Xi)—I- 53’28'5
400
Плавание по дуге большого круга
[Гл. XXII
tg 53°28',5 . . . .0,1304 ctg27°28' . . .0,2841
sin — 10°39'........... 9,2667 п sinl06°51',5 . . . 9,9809
coses 44°17' . • • • 0.1560 tg /<о . . . 0,2650
tg — хо)............... 9-5531 « Ко = 61°29',3
Хт-Х0 = - 19°40'
Хт = 206°35',5
Хо = 226°15',5 Ost = 133°44',5W
или Хо = 46°15',5 Ost.
Уравнение данного большого круга:
tg ? = ctg 61°29',3 sin (А — 133°44',5W).
Вычисление параметров большого круга по географическим
координатам данной точки на большом круге и углу, составляе-
мому большим кругом с меридианом данной точки. Пусть даны
координаты 9 и л точки А, лежащей на большом круге
(рис. 190), и известен угол PnAVi = К, составляемый большим
кругом с меридианом точки Л, т. е. курс в данной точке. Тогда
из прямоугольного сферического треугольника AOR для опреде-
ления угла Ко имеем
sin KQ = cos с? sin К- (169)
Для определения Хо из того же прямоугольного сферического
треугольника AOR получим
tg (К—Хо) = sin Ср tg К. (170)
Пример. При выходе из порта Брисбан (см. предыдущий пример) на-
чальный курс 82°2',5. Определить Хо и Ко для данного большого круга.
Решение.
<pi = 27°28',S cos .... 9,9481 sin......... 9,6639 п
К = 82° 2',5 sin .... 0,9958 tg.......... 0,8545
sin Ко . . .9,9439 tg(Xi — Xo) . . 0,5184 n
Ko = 61°30' Xi - Xo = —73°8',2
Xx = + 153°7'
Xo = 22645',2Ost
- 133°44',8W
§ 109. ОСНОВНЫЕ ФОРМУЛЫ ДЛЯ ВЫЧИСЛЕНИЯ ДЛИНЫ
ДУГИ БОЛЬШОГО КРУГА, НАЧАЛЬНОГО И КОНЕЧНОГО КУРСОВ
Длина дуги большого круга, а также углы, под которыми
данная дуга большого круга пересекает меридианы точек отшест-
вия и пришествия, могут быть рассчитаны по формулам сфери-
ческой тригонометрии. Пусть А (<рп — пункт отшествия, а В
(<р2, Ю — пункт пришествия (рис. 191). На поверхности сферы
дуга большого круга, проходящая через заданные точки А и В,
и меридианы точек отшествия и пришествия образуют сфериче-
ский треугольник РпАВ, в котором, обозначив для сокращения
£ 109]
Основные формулы для вычислений
401
письма АВ длину дуги большого круга через D, начальный курс
через Кн и конечный курс через Кк имеем:
углы
стороны
РпА =90°-?1
Є = 9(Г-?2
AB = D
Z. АРпВ = \2-\
LPnAB = KH „
£ РпВА = 180 Кк.
а) Применяя для нахождения длины дуги большого круга
основную формулу сферической тригонометрии, связывающую
три стороны и угол, противолежащий, искомой стороне, получаем
cos D = sin ?! sin ?2-[-cos ?icos ?’Cos (k2—kJ. (171)
Для определения начального и конечного курсов применим
формулу, связывающую четыре рядом лежащих элемента, тогда
получим
ctgATK sin (k2—k,) = tg ?2 cos ?!—sin ?i cos (X,—kJ
и
ctg (180°—/Q sin (k2—kJ = tg?t cos ©2—sin ?., cos (k2—kJ,
откуда окончательно имеем
ctg/<„ = tg?.2cos ©i cosec (k2—kJ—sin?t ctg (k2—kJ;
ctg KK = — tg да, cos ?г cosec (k2 —kJ J- sin ?2 ctg (k,—k J.
Формулы (171) и (172) позволяют определить длину дуги
большого круга D, начальный и конечный курсы. Эти формулы
не логарифмические и требуют для вычисления применения лога-
рифмов сумм и разностей, но зато дают независимые решения.
(172)
26 К. с. Ухов
402
Плавание по дуге большого круга
[Гл. XXII
Так как широты и долготы могут иметь одинаковые или разные
наименования, то условимся N широте и Ost долготе приписы-
вать знак плюс, a S широте и W долготе — знак минус. В фор-
мулах (171) и (172) до вычисления должны быть расставлены
знаки. Начальный и конечный курсы получаются, считая от по-
вышенного полюса, т. е. от точки N в северном полушарии и от
точки S при плавании в южном полушарии, к Ost или к W,
в зависимости от наименования разности долгот пунктов при-
шествия и отшествия.
Для расчета начального и конечного курсов вместо формулы
(172) могут быть применены логарифмические формулы:
sin/<H = ^(X2->i)cos?2 и пУ< Sinfis-M-COS^
н sin D к sin D 4 7
дающие зависимое решение. В этих последних формулах курс
получается в четвертном счете и наименование четверти дается
по наименованию разности широт и разности долгот, учитывая
положение вертекса.
Пример. Вычислить длину дуги большого круга, начальный и конеч-
ный курсы для плавания по ортодромии между островом Фараллон (у вхо-
да в Сан-Франциско) <pj = 37°42' N, = 123°4' W и входом в залив Токио
=2 = 34°50' N, Х2 = 139°53' Ost.
Решение.
Х2 = 139°53' Ost cos D = sin sin ?2 — cos ?i cos ?2 cos (A2 — M
X2 = 123°4'W ctg KH = cos ?! tg ?2 cosec (X2 — Xj) + sin ?i ctg (X2 —
X2 — Xj = 97°3'k Ost ctg KK = — cos ?2 tg cosec (X2 — Хг) —sin ?2 ctg(X2 — XT)
?i = 37°42'N ?2 = 34°50'N X2 — X2 = 97°3Z к W sin sin 9,7864 9,7568 cos cos cos 9,8983 9,9142 9,0890 cos tg cosec 9,8983 9,8425 0,0033 sin ctg 9,786+ 9,0923
3 9,5432 9,8875 AP 8,9015 0,6417 a 9,7441 0,0555 AC 8,8787 0,865+
cos D 9,4307 — ctgK« ( 9,7996
D = 74°2Г5 KH = 57°46'NW
= 4461,5 мор. мили = 302°,2
tg 9,8881 — —
cos 9,9142 sin 9,7568
cosec 0,0033 Ctg 9,0923
9,8056 8,8491
a 0,0456 AC 0,9565
ctg К* 9,8512
180°—A\= 54°38'
KK = 125°22'NW
« 234°6
$ 109}
Основные формулы для вычислений
403
.Вычисляя для это^о же примера
мулам (173), получаем
начальный и конечный курсы по фор-
=. 37°42'N — — COS 9,8983
?2 - 34 WN cos 9,9142 - - --
л2 — Xj = 97°3Z к W sin 9,9967 sin 9,9967
D = 74°21',5 cosec 0,0164 cosec 0,0164
sin Кн 9,9273 Sin кK | 9,9114
Кн ==57°46'NW
Л,- = 54°38'SW
б) Чтобы избежать при вычислении применения таблиц сумм
и разностей, вычисления можно вести по логарифмическим фор-
мулам.
Для расчета начального и конечного курсов из аналогий Не-
пера имеем
-ctg|(/<.4 кн) =
= ctgy (хг~4) sin у (<Р1-<р2) sec4- (?14- «,);
ctg|(K<-/Q = ctg^-(Х2-XJcos 1 (<Pj-<f>2) cosec|(?i4-<f>2):
(174)
J
В этих формулах начальный и конечный курсы получаются от
повышенного полюса в пределах до 0° до 180°.
Для вычисления длины дуги большого круга имеем
-tg j = tg7(• “ с04^ Кн) secj (^+кд
или
tgy = ctg 4 (?1 -4 Т2) Sin у (Кк~ К о cosec у (Кк + КН). (175)
Эти формулы дают зависимое решение, но сокращают вычис-
лительный процесс.
Пример. Переход от Сан-Франциско С] 37 48'N122 28'W, до Сид-
нея 42 33 52'S, Л2 = 151с13'Ost. Рассчитать длину дуги большого круга
между заданными точками, начальный и конечный курсы по формулам
(174) и (175).
26*
40!
Плавание по дуге большого круга
[Гл, ХХП
Решение.
?1 = 37°48'N Xi = 122°28'W
= 33°52'S ла = 151°13'Ost
?i — ?s = 71°4(>'kS Ха—Xj = 86°19' к W
?1 + ?2= 3’56' i/a (Х2 - Х0 = 43°9',5
у (Ха - Xi) = 43=9',5 1 ctg 0,0280 ctg 0,0280 secl(KK +K«) + 0,2758 9,8586
2 (?2 — 91) = 35°50' sin 9,7675 cos 9,9089 tg
1 ~2 (?1 + ?г) = 1°58' sec 0,0003 cosec 1,4645 cosy(KK -К») —‘ 9,9997
ctgy (Кк + +KH) 9,7958 1 Jl- ъ * 1 1,4014 4 0,1341
у (*«+*„) = 122’0',0
-(Кк-Кя)= 2°16',3
2
Кн = 119°43',7
124°16',3
— = 53’42',5
2
D = 107°25' или
= 6445 мор. миль.
Начальный курс 240°,3. Конечный курс 235°,7.
в) Сферический треугольник АРВ аналогичен параллактиче-
скому треугольнику полюс — зенит — светило, который подробно
рассматривается в курсах мореходной астрономии. Так как раз- J
ность долгот между пунктом отшествия и пунктом пришествия ;;
соответствует часовому углу, дополнение широты пункта отшест-
вия— дополнению широты счислимого места, дополнение ши-
роты пункта пришествия — дополнению склонения светила и
длина дуги большого круга — зенитному расстоянию или допол- J
нению высоты светила, а начальный курс — азимуту светила,
то любые таблицы, предназначенные для вычисления высоты и
азимута светила, могут быть использованы для определения
длины дуги большого круга и начального курса, входя в них
с аргументами I
CDc :— Y'li - y'o И t /*9 ^*1
и получая }
h - 90° -Z - 90°— D и А = КН. I
§ 110]
Вычисление координат вертекса
405
Для определения конечного курса следует широту пункта от-
шествия принять за склонение, а широту пункта пришествия —
за счислимую широту.
Так как таблицы иногда строятся для ограниченных значений
склонения светила, то и использование таких таблиц для вычис-
ления длины дуги большого круга, начального и конечного кур-
сов лимитируется данными в таблицах величинами склонения
светила.
Расчет начального и конечного курсов также может быть
произведен и по специальным таблицам азимутов, например
«Азимуты светил» А. Ющенко, или по специальным диаграммам,
входя в них с измененными, как выше указано, аргументами.
Некоторые таблицы азимутов светил составлены для ограничен-
ных значений склонения и, кроме того, дают азимуты их при
условии, что высота светила невелика. Эти условия также огра-
ничивают применение таких таблиц для расчета плавания по
дуге большого круга.
§ ПО. ВЫЧИСЛЕНИЕ КООРДИНАТ ВЕРТЕКСА
Так как вертекс является точкой, в которой большой круг
достигает наибольшей широты, то знать его координаты необхо-
димо для суждения о возможных условиях плавания, если вер-
текс лежит на той части дуги большого круга, которую должно
пройти судно. Кроме того, меридиан вертекса пересекает дугу
большого круга под прямым углом и разбивает сферический
треугольник полюс — пункт отшествия и пункт пришествия на
два прямоугольных сферических треугольника, что позволяет
применять для решения их простые логарифмические формулы.
Для определения координат вертекса по координатам точек
отшествия и пришествия на основании соотношений (164) и фор-
мул (167) и (168) или из рис. 191, рассматривая прямоугольные
сферические треугольники АРnV и BPnV, имеем
Ctg = ctg <Рд cos (К,—XJ;
ctg?t,= ctgc?2;cos(>.2-XJ; (]76)
tg Ctg у (*2-X1) Sin (?»-?j) cosec (<f>2~|- <?,).
Вычисление координат вертекса следует начинать с вычисле-
ния долготы
Пример. Вычислить координаты вертекса большого круга, проходящего
через пункты Брисбан и Акапулько, по данным примера в § 108.
406
Плавание по дуге большого круга
[Гл. ХХП
Решение.
(X2 - Xi) = 53°28',5 ctg 9,8696 ?i - 27°28'S ctg 0,2841
= 4447' sin 9,8440 Xi - A,, = 16°51',5 cos 9,9809
?2+?i = —10°39' cosec 0,7333 n Ctg <fv 0,2650
tg Pi — и 0,4469 n
Xf? Xm = X/п = 70°20' 153°24',5 = 28’30,7'S
= 22344'5 W - 13645',5Ost или
= 4344',5W
Координаты вертекса легко могут быть вычислены, если из-
вестен начальный или конечный курс. Из прямоугольного сфери-
ческого треугольника APnV (рис. 191) имеем
cos = cos sin Кн\ ctg ()ч—kJ sin igKH. (177)
Из такого же треугольника ВРпА\
cos — cos sin KK\ ctg (k2—kJ —sin ?2tg^. (178)
Наименование широты вертекса не вызывает сомнений. Для
того же, чтобы правильно рассчитать долготу вертекса по полу-
ченной разности долгот к — кр, надо придерживаться следующего
правила:
а) Если Кн и Кк лежат в одной и той же четверти и КНЖ1Р
то разности долгот к2 — к£, надо дать наименование, обратное
наименованию разности долгот к2—к2; но если Кн<Кк, то раз-
ность долгот J—кг одноименна с разностью долгот к2 — кг
.6) Если Кн и Кк лежат в смежных четвертях, то разности
долгот кг — к.у приписывается то же наименование, что и разности
долгот к3 — кг
Пример. Вычислить координаты вертекса большого круга, проходящего
через пункты Сан-Франциско = 3748' N, Хх = 122°28' W, = 24046',3
и Сидней ?2 = 33°52' S, к2 = 15143' - 235°43'7.
Решение.
ср1= 3748'N
Кн = 24046',3
cos
sin
cos
. . . .9,8977
. . . . 9,9387
. . . 9,8364
= 4640',5N
sin......... 9,7874
tg . . . . .0,2433
ctg (Xi — X J . . .0,0307
d^X^= 42°58',7 к Ost
Xi = 122°28'W
/.v= 79°29',3W
$ ill] Уравнение дуги большого круга на меркаторской карте
407
Для контроля;
?а= 33°52'S cos . . . .9,9193 sin............ 9,7461
= 235°43',7 sin . . . .9,9172 tg.......................0,1666
cos y.v . . . 9,8365 ctg (72 - kv) . . 9,9127 n
= 46c40'S X2 — = 50°43',3 к W
X2 = 151°13'Ost
= 100°29',7 Ost
или 79°30',3 W
Расхождение в &v и \v произошло за счет вычислений по че-
тырехзначным таблицам логарифмов. Однако практически точ-
ность вычислений вполне достаточна.
в) Если известны координаты вертекса, то длина дуги боль-
шого круга, проходящего через заданные точки, может быть вы-
числена по логарифмическим формулам. Обращаясь к рис. 190,
обозначим длину дуги большого круга О А через а ОВ че-
рез Z)2. Тогда длина дуги большого круга АВ, которую обозна-
чим через D, будет D = D% — Di, если обе точки лежат по одну
сторону от вертекса; D= 180°— (Di +£>2), если обе точки ле-
жат'по разные стороны от вертекса, и D = D\ Z)2, если обе
точки лежат по разные стороны экватора.
Из прямоугольных сферических треугольников OAR и ОВТ
имеем
sin = sin cosec и sin D2 = sin cosec %. (179)
Пример, Рассчитать длину дуги большого круга Сан-Франциско — Сид-
ней (см. пример § 109).
Решение.
ег, = 46°40'N cosec . . . 0,1382
epi = 37 18'N sin . . . . 9,7874
?2 = 33=52'N sin .... 9,7461___________________
sin />!... 9,9256 Di = 57°25'
sin D2 . . . 9,8843 P2 = 50Q00'
D = 107°25'
= 6445 мор. миль.
§ 111. УРАВНЕНИЕ ДУГИ БОЛЬШОГО КРУГА НА МЕРКАТОРСКОЙ
КАРТЕ
На меркаторской карте только большие круги, изображающие
меридианы и экватор, будут прямыми линиями; всякий другой
большой круг изобразится кривой. Пусть АВ (рис. 192) будет
отрезок какой-либо дуги большого круга. Примем экватор за
ось Х-ов, а Гриничский меридиан за ось У-ов; прямоугольные
координаты точки В будут х = ОМ и у = МВ.
408
Плавание по дуге большого круга
[Гл. ХХП
Выражая ординату у через меридиональную часть широты
точки В имеем
откуда
У = lntg^45°+-|-
Сделаем следующие преобразования:
1 4- sin у Л । ,
——JL = Sec? + tg?.
1-Hg|
1 — tg—
К 2
]/" 1 + cos у -u|/~l — cos у
V1 4- cos у — |/ 1 — cos у
Аналогично
1 _ tg —
б 9
-------— sec у—tg у.
1 + tg-2
Следовательно,
еу = sec —[—tg ср;
е~у = sec у — tg у,
откуда
На основании формулы (165)
tg у = sin (X—Хо) ctg/<0,
получаем окончательно
еу- <r^2ctgK0sin(X-X0) (180)
)бщее уравнение дуги большого круга на меркаторской проекции.
Это уравнение так же содержит два параметра /Со и Х(), как и
сравнение большого круга на сфере.
Точное положение большого круга на меркаторской карте
южет быть определено, если задаваться координатами х, соот-
ьетствующими долготе, и вычислять координаты у, соответствую-
щие меридиональным частям. Чтобы получить координату if
§ 111] Уравнение дуги большого круга на меркаторской карте 409>
в линейной мере, например в миллиметрах, необходимо знать
величину единицы карты.
Пример. Нанести на меркаторскую сетку большой круг, проходящий че-
рез Брисбан — Акапулько (см. пример § 108).
Решение. Допустим, что длина развернутого экватора равна 180 мм.
Тогда 1 мм = 2° = 120х. В примере уже вычислены
Ао = 61°29',3 и Хо = 133°44',5W
Остальные данные вычислены и сведены в таблице:
ctg Ко . . 9,7350 1g 120 . . . 2,0792
X 0°, 180° 30°, 210° 60°, 240°
Х-Хо ± 133°44',5 ± 163°44',5 7 13’44', 5
sin (X — Хо) . . . 9,8588 9,4471 9,3758
tg ? 9,5938 9,1821 9,1208
? 21°25',8 8’38'9 7°ЗГ,4
D 1308,6 517,4 449,7
lg D 3,1168 2,7138 2,6529 i
lg> 1,0476 0,6346 0,5737 1
У ММ ...... И,2 4,3 3,7 i
X 90°, 270° 120°, 300’ 150°, 330° j
X — Хо T 43°44',5 + 73°44',5 T 103°44',5
sin (X — Хо) . . . 9,8398 9,9823 9,9874
tg? ..... 9,5748 9,7173 9,7224
20°35',3 27°32',7 27°49',3
b 1254,7 1709,7 1728,3
Igp 3,0986 3,2329 3,2376
tg> 1,0194 1,1537 1,1584
У мм ...... 10,5 14,3 14,4
Большой круг располагается симметрично относительно эква-
ора (рис. 193).
410
Плавание по дуге большого круга
[Гл. ХХП
Когда разность к — Xrt отрицательна, то и tg <? отрицателен,
следовательно, <? зюйдовая.
Для практических целей достаточно нанести на меркаторскую
карту только дугу большого круга между пунктами отшествия и
пришествия и рассчитать курсы для плавания по дуге большого
круга.
Эта работа может быть выполнена более простыми методами,
указанными в следующем параграфе.
§ 112. ВЫЧИСЛЕНИЕ КООРДИНАТ ОТДЕЛЬНЫХ ТОЧЕК
ДУГИ БОЛЬШОГО КРУГА
Для прокладки дуги большого круга на карту достаточно вы-
числить географические координаты нескольких промежуточных
точек. Отметив на карте эти точки и проведя через них соглас-
ную кривую, получим дугу большого круга между двумя задан-
ными пунктами.
Расчет промежуточных точек и курсов от вертекса. Возьмем
на дуге большого круга АВ (см. рис. 191) произвольную точку М.
(ът, Sn) и проведем ее меридиан РпМ. Обозначим разность дол-
гот точки М и вертекса — Хг, через 0. Из прямоугольного сфе-
рического треугольника PnMV имеем
tg?m = tg%cosO.
(181)
Задавая углу 0 различные значения, например 5, 10, 15°
и т. д., получим по формуле (181) широты точек дуги большого
круга, соответствующих заданной разности долгот от вертекса.
Применение этого метода расчета промежуточных точек от
вертекса особенно удобно, когда последний лежит между пунк-
тами отшествия и пришествия, так как мы сразу получаем гео-
графические координаты двух точек на нужной нам дуге боль-
шого круга, определяемых вычисленной широтой и заданной
долготой Kv + 0.
Для расчета курса в любой заданной точке дуги большого
круга из того же прямоугольного сферического треугольника PnMV
(рис. 191) имеем
cos К = sin sin 6;
sin К = cos sec
ctg/^sin^tgO.
(182)
По любой из приведенных формул может быть рассчитан
курс для заданной точки при плавании по дуге большого круга,
причем такая точка определяется либо разностью ее долготы от
долготы вертекса, углом 0 либо ее широтой и тем же углом.
$ 112] Вычисление координат отдельных точек дуги большого круга 411
Пример. Вычислить географические координаты промежуточных точек
через 10° долготы от вертекса для нанесения на меркаторскую карту дуги
большого круга между маяком Фараллон и заливом Токио, а также курсы
для этих точек.
В примере § 109 по данным: Фараллон == 37°42' N, = 123°4" W;
вход в залив Токио = 34°50' N, Х3 = 139°53' Ost вычислены Кн = 302°14'
и Кк = 234°38'.
Рассчитаем сначала широту и долготу вертекса.
Решение.
?i= 37°42'N '
Кн = 302°14'
cos . . . 9,8983
sin . . . 9,9273
cos . 9,8256
= 47°59',5N
sin . . . 9,7864
tg . . . 0.2003 n
ctg Pa — • • • 9,9867 n
kz-k.v= 45°52',7 W
123° 4z,0 W
- 168°56',7 W
Найдем координаты промежуточных точек
tg^. • -0,0454
№№ 0 cos 0
1 10° 9,9934 0,0388 47°33',3 mi 178°56',7W m2 158°56',7W
2 20 9,9730 0,0184 46 13 ,0 m3 171 3 ,30st m± 148 56 ,7
3 30 9,9375 9,9829 43 52 ,2 m5 161 3 ,3 mQ 138 56 ,7
4 40 9,8843 9,9297 40 43 ,0 m7 151 3 ,3 ms 128 56 ,7
5 50 9,8081 9,8535 35 31 ,0 m9 141 3 ,3
По полученным координатам 9 точек наносим дугу большого круга на
меркаторскую карту (рис. 194).
Рассчитаем для полученных точек промежуточные курсы (см. таблицу)
и для контроля начальный курс по формуле cos К = sin sin 0.
sin . . . 9,8710
0 sin 0 cos К к ИК ИК
10° 9,2397 9,1107 82°35',2 V mi 270° ,0 262 ,6 m2 277°4
20 9,5341 9,4051 75 16 ,6 m3 255 ,3 284 4
30 9,6990 9,5700 67 11 ,3 m5 247 ,2 292 8
40 9,8081 9,6791 61 28 ,0 m- 241 ,5 298 5
45°52,7 9,8561 9,7271 57 45 ,5 — A 302,2
50 9,8843 9,7553 55 18 ,0 m9 235,3 —
412
Плавание по дуге большого круга
[Гл. ХХП
Из таблицы вычисленных курсов при плавании по дуге большого круга
видно, что на отдельных участках пути, соответствующих изменению долготы
на 10°, курс меняется в пределах от 5°,7 до 8°,1. Чтобы не менять резко курс
и держаться ближе к дуге большого круга, следует или вычислить дополни-
тельно промежуточные точки и курсы через 5° по долготе, или разбить уча-
стки между вычисленными промежуточными точками на 3—4 части, чтобы
менять курс каждый раз, примерно, на 2°.
Рис. 194.
Еще раз напомним, что широта вертекса связана с курсом Ко соотноше-
нием фу =90° — Ко. Поэтому приведенные выше формулы легко преобразо-
вать для выражения их через Ко.
Расчет промежуточных точек и курсов по уравнению большого
круга. В § 108 выведено уравнение большого круга в таком виде:
tg ф = ctgsin (k—Хо) или tg<p =tg^cos(k—
Вычислив предварительно параметры уравнения Ко и Хо или
Фу и и подставляя в выбранное уравнение текущие коорди-
наты X в пределах дуги большого круга между пунктами отше-
ствия и пришествия, можно вычислить ф для заданных долготой
точек и по полученным точкам нанести дугу большого круга на
карту. Задаваясь широтами, также могут быть вычислены дол-
готы промежуточных точек дуги большого круга.
Вычисление по уравнению дуги большого круга производится
так же, как указано в примере, только вместо угла 0 надо за-
J 112] Вычисление координат отдельных точек дуги большого круга 413
даться интересующейся нас долготой Xz или же широтой Чтобы
сократить вычисления в МТ-43 дана табл. 37 а и б, состоящая из
двух частей. Таблица вычислена по формуле
tg? = ctg АГ0 sin (X — Хо).
В табл. 37 а по аргументам Ко и X — Хо находим ?, а в табл. 37 б
по аргументам Ко и? даны значения X — Хо. Табл. 37 а можно
пользоваться при Ко > 209, так как при меньших курсах дуга
большого круга пересекает меридианы под острыми углами; при
Ко <С 20° следует пользоваться табл. 37 б. Пользование табл. 37
требует предварительного вычисления аргументов Ко и Хо. Про-
межуточные курсы при пользовании табл. 37 МТ-43 приходится
рассчитывать по формулам.
Пример, как пользоваться табл. 37, приведен в объяснениях
таблиц. Чтобы избежать лишнего интерполирования и связанных
с ним ошибок, разность долгот X — Х) следует подбирать в целых
числах в соответствии с приведенными в таблицах аргументами.
Истинный курс судна в любой точке большого круга опреде-
ляется из следующих соображений. Элементарный треугольник,
составленный частью дуги большого круга и соответствующими
частями меридиана и параллели dXcos?, дает
dk cos ср
Дифференцируя уравнение дуги большого круга по ? и X,
получаем
dk =___________1________
dcp cos2 ср ctg Ко cos (X— Хо) ’
откуда
tgA'=sec?tgA'osec (л—М- (183)
Расчет*плавания по дуге большого круга при помощи лога-
рифмической линейки или счетной машины. Переписав уравнения
дуги большого круга в таком виде:
tg = ctg Ко sin (kj—л0),
tg <р2 = ctg Ко sin (k2—k0)
и решая их относительно Хо, получим
tg= lgyisln?l-tg yssinM . jМ)
tg cpi С 'S X2 — tg cp2 COS Xi
Для определения величины Xn в формуле (184) требуется рас-
ставить знаки у входящих в нее тригонометрических функций.
Удобно считать долготы к Ost — от 0° до 360°, а широте при-
писывать знак (—) минус, если наименование ее противоположно
наименованию ?Р
414
Плавание по дуге большого круга
[Гл. XXII
Угол Ко, представляющий курс, под которым большой круг
пересекает экватор, определится из уравнения
„ sin (Xi — /.0) sin ().s — ).о)
tg Л о = -------------------------•
tg ?1 tg !f>2
Рис. 195.
Для определения длины дуги большого круга между двумя
данными точками из уравнений (179) имеем:
• гл Sin . т—v SIT1
sin D. ------и sin D., = —,
cos Ко ~ cos Ко
откуда
D = arc sin I sin ?2 arc sin ( sin . (185)
\cos Ко/ \cos Ко/
В зависимости от долгот длина большого круга может опре-
деляться
tg £) = и tg D„ = tg
sin Ko ~ sin Ko
и
D = arc tg [—? 2 — 1 - arc tg ftg ~ 1. (186)
I. sin Ko J L sin Ko J
£ 112} Вычисление координат отдельных точек дуги большого круга
415
Для расчетов может быть применена любая из формул (185)
и (186), в зависимости от величины угла Ко- Если широты пунк-
тов пришествия и отшествия имеют различные наименования^
то в формулах (185) и (186) знак минус меняется на плюс,
а если оба пункта лежат по разные стороны вертекса, то
D= 180°— (Dt + Dz).
Начальный и конечный курсы, так же как и промежуточные
курсы, удобнее вычислять по одной из формул (182).
Пример. Рассчитать плавание по дуге большого круга от Нью-Йорка
= 40°30'N; = 73°50' W до Кэптоуна <р2 = 33°40' S; Х2 - 18°00' Ost
рис. 195).
Решение. Произведем расчет при помощи счетной линейки. По фор-
муле (184) имеем
t , tg 40°30' • sin 18°0' — tg 33°40'-sin 286°10'
tg о = —-------------------------------------- —
tg40°30'-cos 18°0' 4- tg 33°40'-cos 286°10'
_ 0,854-0,309 — 0,666*0,960 _ 0,264 — 0,639 _ - 0,375 _ Q
0,854-0,951 + 0,666-0,278 ~ 0,812 4- 0,185 ~ 0,997 ” ~ ’
Xo = 20°40' W.
ж sin53°10'
tg Ko -------------
tg 40°30'
_ ода;
0,854
4 „ sin 38 40
tg Ko =------------
tg 33°40'
0,625
0,666
= 0,938.
По формуле (185)
м . /sin33°40'
L) = arc sin ----------
\cos 43°10',
4- arc sin
zsin 40°30.'\
(cos 43°10'/
= arc sin
0,547
0,729
4- arc sin
0,649 .
0,729 ’
D = arc sin 0,750 = arc sin 0,890;
D = 48’35' 4- 62°53' = 111°28' = 6688 мор. миль.
Формула искомого большого круга напишется так:
tg т/ = Ctg 43° 10' sin (Xz — 20°40' W) = 1,056 sin (Xz - 20°40'W). *
'416
Плавание по дуге большого круга
[Гл. XXII
Рис. 196.
§ 112] Вычисление координат отдельных точек дуги большого круга
417
Найдем широты промежуточных точек через 10° долготы:
№№ Xz —20°40'№ sin (X,— Xo) tg
1 70°UZ 49°20' 0,759 0,809 38°58'N
2 60 39 20 0,634 0,h76 34 4 N
3 50 29 20 0,490 0,522 27 34 N
4 40 19 20 0,331 0,353 19 27 N
5 30 9 20 0,162 0,173 9 49 N
6 20 — 0 40 —0,012 —0,013 0 45 S
7 10 —10 40 —0,185 —0,197 11 9S
8 0 —20 40 —0,353 —0,377 20 39 S
9 10 Ost —30 40 —0,510 —0,544 28 33 S
Рассчитаем промежуточные курсы для найденных точек по формуле
sin К = cos sec <pz == 0,684 sec^>f
№№ sec cz | sin к ИК
1 38°58'N 1,286 0,879 61°,5 118°,5
2 34 4 N 1,207 0,824 55 ,5 124 ,5
3 27 34 N 1,128 0,770 50 ,5 129 ,5
4 19 27 N 1,060 0,724 46 ,5 133 ,5
5 9 49 N 1,015 0,694 43 ,8 136 ,2
6 0 45 S 1,000 0,684 43 ,2 136 ,8 i
7 11 9S 1,019 0,696 44 ,2 135 ,8 :
8 20 39 S 1,069 0,727 46 ,8 133 ,2 i
9 28 33 S 1,138 0,776 51 ,0 129 ,0 j i
Таблица вычисленных курсов показывает, что на участке между широ-
тами 38°58'N и 34°4'N имеем резкое изменение курса на 6°. Разделим этот
отрезок дуги большого круга на три части и тогда в каждой полученной
точке будем менять курс на 2°. Отрезки дуги большого круга между точками
2—3, 3^—4, 8—9 и последний участок достаточно поделить пополам. Если же
желательно получить большую точность, то следует вычислить курсы для до-
полнительных точек, рассчитав их широты или сняв последние с карты.
Применение карты, составленной в гномонической проекции.
На карте, составленной в гномонической проекции, любая дуга
большого круга изображается прямой линией. Соединив прямой
линией пункты отшествия и пришествия на гномонической карте,
непосредственно получаем искомую ортодромию, которая на-
глядно показывает, как проходит дуга большого круга относи-
тельно лежащих на пути опасностей. Сняв с карты в гномониче-
ской проекции широты и долготы желаемого числа промежуточ-
ных точек, перенесем последние по географическим координатам
на меркаторскую карту и проведем через полученные точки со-
27 К- С. Ухов
418
Плавание по дуге большого круга
[Гл, XXII
гласную кривую. Это и будет ортодромия между данными точ-
ками на меркаторской карте. Пользование гномоническими кар-
тами облегчает нанесение дуги большого круга, исключая вычис-
ление координат промежуточных точек, но так как вследствие
искажений, получаемых на такой проекции, измерение углов и
расстояний на ней затруднено, то эти данные предпочтительнее
получать вычислением, как указано выше.
Английским адмиралтейством издается пять карт океанов в
гномонической проекции для прокладки дуг больших кругов: се-
верной части Атлантического океана в масштабе 1 : 13 000 000,
южной части Атлантического и части Южного Полярного океа-
нов в том же масштабе, части Индийского и Южного Полярного
океанов в масштабе 1 : 32 000 000, северной части Тихого океана
в масштабе 1 : 20 000 000 и южной части Тихого океана с при-
легающей частью Южного Полярного океана также в масштабе
1 : 20 000 000. Эти карты не корректируются и, характерно от-
метить, на самых картах не указан их масштаб.
На рис. 196 представлена часть карты в гномонической про-
екции северной части Тихого океана, на которой нанесена орто-
дромия для плавания от Сан-Франциско до Токио.
Географические широты промежуточных точек, снятые с карты,
совпадают с вычисленными в пределах точности графического по-
строения, учитывая малый масштаб карты.
Американское гидрографическое управление также издает спе-
циальные карты океанов в гномонической проекции для про-
кладки на них дуг больших кругов. На этих картах имеется пре-
дупреждение, что они не предназначены служить как генераль-
ные карты при плавании по дуге большого круга, но являются
только простым средством для определения курса и плавания
при следовании по дуге большого круга.
Дуга большого круга с этих карт также переносится на
карты меркаторской проекции по географическим координатам
выбранных точек. На американских гномонических картах для
определения курса напечатана специальная диаграмма, а для
определения плавания даны дополнительные шкалы расстояний.
Пользование как диаграммой, так и шкалами для определения
плавания требует добавочного графического построения и они
неудобны. Правила пользования диаграммой и шкалами расстоя-
ний напечатаны на самих картах.
§ 113. СОКРАЩЕННЫЕ РАСЧЕТЫ ДЛЯ ПЛАВАНИЯ ПО ДУГЕ
БОЛЬШОГО КРУГА
1. Если известны начальный и конечный курс при плавании
по дуге большого круга, то можно рассчитать через сколько миль
плавания нужно изменить курс на заданное число градусов,
чтобы следовать вдоль дуги большого круга. Если весь переход ;
£ 113] Сокращенные расчеты для плавания по дуге большого круга
419
по дуге большого круга лежит в одном полушарии, то для при-
ближенного расчета возьмем разность между начальным и ко-
нечным курсами, которая представит величину изменения курса
за весь переход, и разделим ее на 1°, 2° или 3°. Полученное ча-
стное укажет число отрезков дуги большого круга, каждый из
которых можно пройти одним курсом, с изменением его при пе-
реходе на другой участок на 1°, 2° или За, а разделив длину дуги
большого круга на число отрезков, найдем количество миль пла-
вания по каждому ‘ из отрезков локсодромии. Таким образом,
обозначив через а число градусов, на которое предположено
менять курс при плавании по дуге большого круга, получим
к«-кн
число отрезков п =——- ;
D
длина отрезка локсодромии т = ~.
При переходе из одного полушария в другое в первую поло-
вину плавания курс будет меняться, приближаясь к меридиану,
а во вторую, после пересечения экватора, курс, будет отходить
от меридиана; поэтому разность между начальным и конечным
курсами не представит величину полного изменения курса. В этом
случае надо знать курс, которым дуга большого круга пересекает
экватор, и сделать приближенный расчет отдельно для северного
и южного полушарий.
Пример. Для перехода маяк Фараллон — вход в Токийский залив рассчи-
тан Kw=302°,2, КЛ- = 234°6 и D — 4461,5 миль. Рассчитать, через сколько
миль плавания следует менять курс, предполагая изменять его через 2°.
Решение. Расчет ведем приближенно.
68° 4461,5 1Q1
п =----=34 и m =--------- st 131 мор. миля.
2° 34
Следовательно, пройдя начальным курсом 131 мор. милю, судно изменяет
курс на 2° влево и повторяет изменение курса через каждые 131 мор. милю.
Для приближенного суждения об изменении курса при пла-
вании по дуге большого круга может быть рассчитано расстоя-
ние, которое надо пройти по дуге большого круга, чтобы курс
изменился на 1°. Изменение курса от начального до конечного
равно величине схождения меридианов, которое в зависимости от
расстояния выражается формулой
7 = s tg sin К.
Принимая 7=1° = 60' и заменяя через точки отше-
ствия, получим с достаточной для практики точностью
s = 60 ctg о cosec Д’.
97
420
Плавание по дуге большого круга
[Гл. XXII
По этой формуле вычислена табл. 26.
Таблица 26
Число миль плавания по дуге большого круга при изменении курса на Iе
к Широта
10° 20° 30° 40° 50° 60° 70°
S
Я 5 10° 1960 950 600 410 290 200 125
О Q. 20 995 480 300 210 145 100 64
g 30 680 330 210 145 100 70 44
** О, 40 530 255 160 ПО 78 54 34
О 50 440 215 135 93 65 45 28
о 60 390 190 120 83 58 40 25
Е 70 360 175 ПО 76 54 37 23
О 80 345 170 105 73 51 35 22
90 340 165 104 72 50 35 22
2. Вследствие ошибок счисления и влияния гидрометеороло-
гических факторов, судно отклоняется от намеченного пути, и
приходится подправлять курс при незначительном уклонении от
рассчитанной дуги большого круга или же рассчитывать новую
дугу большого круга, если снос, полученный по обсервации, ока-
зался велик. Вместо этого может быть применен следующий про-
стой прием.
§114] Составное плавание и плавание по наи выгоднейшим путям
421
Пусть точка А — пункт отшествия, а точка В — пункт прише-
ствия (рис. 197). Рассчитаем одним из указанных ранее спосо-
бов К и в точке А ляжем на него. Предположим, что через не-
который промежуток времени по обсервации судно оказалось в
точке С, вместо своего счислимого места с. Тогда по широтам
точек С и В и по разности долгот этих же точек рассчитаем на-
чальный курс для точки С. Если при следующей обсервации
судно оказалось в точке D вместо счислимой точки d, то совер-
шенно так же по широтам точек D и В и по разности долгот
этих же точек рассчитываем начальный курс для дуги большого
круга, соединяющей точки D и В.
Этот прием особенно удобен при наличии таблиц азимутов,
соответствующих по широте и склонению. Тогда курсы для точек
С, D, Е и т. д. выбираются непосредственно из таблиц азимутов.
3. Разность между начальным и конечным курсами численно
равна величине схождения меридианов, а разность между кур-
сом по ортодромии и курсом по локсодромии равна ортодроми-
ческой поправке. Следовательно, если известен начальный курс
и вычислена величина схождения меридианов, то конечный курс
определится из соотношения:
Кк = Кн + г
§ 114. СОСТАВНОЕ ПЛАВАНИЕ И ПЛАВАНИЕ
ПО НАИВЫГОДНЕЙШИМ ПУТЯМ
Так как дуга большого круга обращена своей выпуклостью
к полюсу, то при плавании по ортодромии судно может зайти в
такие высокие широты, где плавание будет затруднено ледовыми
условиями, неблагоприятной погодой и свежими противными вет-
рами. Наконец, в силу каких-либо других соображений может
быть нежелательно подниматься выше какой-то определенной
параллели. В этом случае рассчитывают плавание от пункта при-
шествия до назначенной параллели, выше которой не хотят под-
ниматься, затем по предельной параллели и, наконец, опять по
дуге большого круга от указанной параллели до пункта прише-
ствия. Такое плавание называется составным плава-
нием. Плавание по составному пути короче всякого другого
пути, не пересекающего назначенной предельной параллели.
Кратчайшим путем до назначенной параллели будет дуга
большого круга, который касается данной параллели, т. е. вер-
текс которого лежит на данной параллели. Таким образом, со-
ставное плавание сложится из плавания по дуге большого круга,
идущего от пункта отшествия до назначенной параллели каса-
тельно к последней, затем по параллели и, наконец, по дуге боль-
шого круга до пункта пришествия; эта дуга также касательна
422
Плавание по дуге большого круга
[Гл. XXII
к данной параллели. Расчет составного плавания может быть
произведен вычислением, при помощи гномонической карты и
графическим методом.
Предположим, что судно желает перейти из точки А в точку В
кратчайшим путем, не пересекая параллель ЬЦ (рис. 198).
Пусть AV\ будет дугой большого круга, проходящей через пункт
отшествия А и касающейся параллели LLX в точке 1Л, которая
является вертексом данного большого круга. V\V2 — отрезок па-
раллели и V2B—дуга большого круга, проходящая через пункт
пришествия В и касающаяся параллели LL{; вертекс этого боль-
шого круга будет в точке
Составное плавание тогда дает путь AV\V2B. Так как дуги
больших кругов AVi и BV2 касаются параллели LLX в точках
У1 и V2, то в этих точках дуги больших кругов пересекают ме-
ридианы PnVi и Р V2 под прямыми углами, и мы получаем два
сферических прямоугольных треугольника AP^Vi и ВР,,У2, эле-
менты которых указаны на рис. 198.
Из прямоугольного сферического треугольника AP^Vt имеем
sin = sec cos
cos/VZ^tg^ctg <?v;
cos Dx = sin cosec
Из такого же треугольника BPnV2 имеем
sin Кк = sec ср2 cos а>„;
cos РД3 = tg ср2 ctg cp„;
cos Ds = sin <p.2 cosec cpr.
(187)
(188)
£ 114} Составное плавание и плавание по наивыгоднейшим путям
423
В треугольнике VjPnV.2 угол при полюсе
РД, = л-рд-у
тогда
О2 = РД2 coscp^.
Общая длина пути составного плавания
Z) = £>х —ZDq “I-" D3 •
Пример. Судно из = 35°40' S, = 118°6' Ost должно перейти в
72= 22°I5' S, Х2 = 4I°30'W кратчайшим путем, не переходя параллели 60° S.
Рассчитать плавание, начальный и конечный курсы.
Решение. Решаем восточный треугольник
7! - 35°40' S sec . . . О,(>902
7г, = 60° S cos . . . 9,6990
sin . . . 9,7892
tg . . . 9,8559 sin . . 9,7657
ctg . . . 9,7614 cosec . . 0,0625
cos РДХ . . .0,6173 cosDx. .9,8282
KH = 37°59' SW РД1 = 65°ЗГ,5 к W D± = 47°4Г
KH = 218° Di = 2861 мор. мили.
Решаем западный треугольник:
72 = 22°15'S sec. . .0,0336 tg . . .9,6118 sin. .9,5782
zv = 60° S cos . . . 9,6990 ctg . . . 9,7614 coces . . 0,0625
sin KK • • • 9,7326 cos РД3 . . . 9,3732 cos D3 . . 9,6407
KK = 32°42'NW РД3 = 76°20',4 к W D3 = 64°4',3
= 327°,3 D3 = 3844 мор. мили.
X2 = 41°30' W
___________Xx = 118°6'Ost
a2 — X1= 159°36' к W
РД1 + РД3 = 141°5Г,9 W
РД2 = 17°44'1
РД2= 1O64',1
= 60° s
1g
cos .
РД1 = 65°ЗГ,5 к W
РДз = 76°20',4 к W
РД1 + РДз = 141°5Г,9 к W
E>i = 2861
D2= 532
D3 = 3844____________
D = 7237 мор. миль.
. o,^72
. 9,6990
1g D2 . . . 2,72262
D2 = 532,3 мор. мили.
Судно достигнет предельной параллели 60°S в< долготе 52°34',5 Ost и
должно сойти с этой параллели в долготе 34°50',4 Ost. По сравнению с пла-
ванием по дуге большого круга составной путь длиннее на 100,5 миль, но он
короче всякого другого пути.
Гномоническая карта. Если на гномонической карте провести
две прямые линии, касательные к назначенной предельной парал-
лели и проходящие через точки отшествия и пришествия, то эти
прямые представят дуги больших кругов между указанными точ-
424
Плавание по дуге большого круга
[Гл. ХХП
ками и заданной параллелью, а точки касания прямых будут
вертексами больших кругов. Остается только полученный состав-
ной путь перенести на меркаторскую карту по географическим
координатам отдельных точек.
'Допустим, что в силу каких-либо соображений судно на пере-
ходе Сан-Франциско — Токио не желает пересекать параллель
43° N. Тогда составной путь изобразится на гномонической карте
пунктирной линией AVVB, указанной на рис. 196.
Графический метод. Следующее графическое построение по-
зволяет приближенно нанести на меркаторскую карту составной
путь. Пусть судно переходит из точки А' (рис. 199) в точку В
и не желает пересекать
--------------------------------------—t параллель LLX. Соединим
L__________________"'Х. 1 пункты Л и В прямой ли-
\ нией и из середины ее
X \ \в восстановим перпендику-
/ \ ляр СЕ до пересечения
/ \ с параллелью LLX в точ-
/ ке Е. Проведем окруж-
I С ность AEG В через точки
I А, В и £. Тогда можем
---------- приближенно принять, что
А-----дуга окружности АЕ
Рис. 199. , представит дугу большого
круга от пункта отшествия
до заданной параллели LLi, а дуга GB— дугу большого круга
от предельной параллели до пункта пришествия В. Весь состав-
ной путь будет состоять из дуги АЕ, отрезка параллели EG и
дуги GB. Разделив дуги АЕ и GB на несколько частей и проходя
каждый отдельный участок пути по локсодромии, все необходи-
мые данные о расстоянии и курсе можно получить по формулам
письменного счисления.
Наивыгоднейшие пути. При выборе пути для большого океан-
ского перехода, кроме расстояния, имеют значение и гидрометео-
рологические факторы, влияющие на плавание судна. В тех слу-
чаях, когда дуга большого круга ведет в район, где плавание
затруднено ледовыми условиями, противными и свежими ветрами
или сильным встречным течением, иногда может оказаться, что
более длинный путь будет выгоднее короткого. Особенно это от-
носится к парусным судам и судам со слабыми машинами. Воз-
можность использовать для перехода наиболее благоприятную
гидрометеорологическую обстановку — тихую погоду, попутные
ветры и течения — требует при подготовке к походу тщательно
изучить условия плавания в данный период времени.
Для облегчения выбора пути в наиболее благоприятных уело-,
виях плавания составляются карты наивыгоднейших путей, на.
£ 11.4] Составное плавание и плавание по наивыгоднейшим путям
425
которые и наносятся эти пути для различных времен года. Эти
карты дают рекомендованные наивыгоднейшие пути с учетом как
возможно кратчайшего расстояния между наиболее часто посе-
щаемыми портами, так и различных гидрометеорологических
факторов, влияющих на условия плавания на данном переходе.
Из наиболее употребительных карт укажем на английские
справочные карты, входящие в первую секцию английского ката-
лога и дающие сведения о гидрометеорологических условиях в
различных районах океанов. Специальная карта составлена для
наивыгоднейших путей в северной части Атлантического океана,
соединяющих Англию с портами Северо-Американских Штатов и
Канады. Пути меняются в зависимости от времени года и на-
правления движения на W или на Ost. Для различия путей они
нанесены на карту синим или красным цветом. Для парусных
судов и судов со слабыми машинами составлена английская
карта № 1078, на которой указаны приблизительные наивыгод-
нейшие пути для них, причем в районе Индийского океана дано
два варианта: для NO и NW муссона. Выбор нужной справочной
карты может быть сделан по английскому каталогу карт. В до-
полнение к указанным картам ежемесячно издаются так назы-
ваемые лоцманские карты (Pilot Charts), содержащие на
месяц вперед данные, полезные для океанского плавания. «Pilot
Charts for all oceans» издаются гидрографическим департамен-
том флота Соединенных Штатов Америки. Эти карты дают све-
дения о силе и повторяемости ветров в различных районах
океана, о вероятных путях штормов, об океанских течениях, ту-
манах и льдах. На эти карты нанесены изобары, изотермы и
изогоны, а также рекомендуемые пути для парусных судов и
судов с механическими двигателями. Кроме того, эти карты дают
краткие справки о радиослужбе в различных районах, о состоя-
нии ограждения, о правилах подхода к некоторым портам и дру-
гие полезные для мореплавателя сведения.
ПРИЛОЖЕНИЕ 1
ПРИМЕНЕНИЕ ЛИНИЙ ПОЛОЖЕНИЯ
В НАВИГАЦИИ
В настоящем курсе неоднократно приходилось применять линии положе-
ния как при изучении различных способов навигационных определений, так
и при оценке точности этих определений.
Обобщение способа линий положения, с введением понятия о градиенте,
позволяет с большим единообразием и с большей полнотой решать эти за-
дачи. Поэтому полезно ознакомиться с осно-
X вами этого способа и рассмотреть простейшие
примеры его применения.
Систематической разработке обобщенного
способа линий положения посвятили свои
труды главным образом ленинградские уче-
ные. В особенности надо отметить работы
В. В. Кдврайского, основоположника совре-
менной трактовки этого способа и Н. Г. Келл я,
еще расширившего его применение.
Представим себе две изолинии, соответ-
ствующие значениям U и U + 4 U некоторой
функции (рис. 200). По всей изолинии значе-
ние данной функции остается постоянным, ме-
няясь при переходе с одной изолинии на дру-
гую. Чем теснее расположены смежные изо-
линии друг к другу, чем меньше расстояние
4 п межру ними при заданном прираще-
нии 4 (/, тем быстрее меняется функция U
в данном районе. Это изменение удобно ха-
-У 4(/
рактеризовать отношением— или вектором g,
Lin
направленным в сторону возрастания функции
по нормали к изолинии, абсолютная величина
46/
которого равна пределу отношения при 4 nf стремящемся к нулю. Вектор
g называется градиентом, а его модуль равен
ьи
g = пред.--------
4 П
dU
dn
(1)
Небольшой участок изолинии всегда можно заменить отрезком проведен-
ной к ней касательной 1—1, называемой линией положения. Направления
линии положения и градиента, очевидно, взаимно перпендикулярны. Если
линия положения составляет с осью X угол а («дирекционный угол»), то на-
правление градиента определится углом а +90°.
Применение линий положения в навигации
427
С изолиниями нам приходится встречаться в самых разнообразных обла-
стях знания. Примерами изолиний могут служить: изобаты — линии равных
глубин, изогипсы или горизонтали — линии равных высот, изогоны — линии
равного склонения, изотермы — линии равной температуры, изорахии или
котидальные линии — линии одновременного наступления полной воды.
В навигационных определениях мы получаем место судна в пересечении
двух или нескольких изолиний, являющихся геометрическим местом точек,
отвечающих постоянному значению величины, измеренной для обсервации —
пеленга, утла, расстояния или разности расстояний. Приращение измеренной
величины Af7, связанное, например, с ошибкой
которое
если
мещению линии положения Ал,
определяется по уравнению (1),
вестна величина градиента g
V А^
А л -----.
ё
из-
измерения, приводит к пере-
Рис. 201.
(2)
тем
при
следова -
Чем больше величина градиента g,
меньше смещение линии положения Ап,
той же ошибке A U, тем точнее,
тельно, производится определение.
Разыскание значения градиентов, встре-
чающихся в навигационных задачах, не
представляет затруднений, в особенности
при применении теоремы векторного ана-
лиза, согласно которой градиент суммы или
разности двух функций равен геометриче-
ской сумме или разности градиентов этих
функций.
Рассмотрим простейшие примеры.
1. Взят пеленг а (или определен ази-
мут, дирекционный угол) с данной точки Л
(рис. 201) на определяемую Z. Расстоя-
ние s небольшое,— решаем задачу на плоскости, пренебрегая кривизной зем-
ной поверхности.
Изолиния и совпадающая с ней линия положения сливаются с линией
пеленга. По чертежу
(3)
А п = s А а,
где А? выражено в радианах. Переходя к градусным мерам S А а° А п = ; (3 ) 57,3 S A CL ff \ кп = . (3 ) 3438
Сравнивая с случае U = х: (2), находим величину градиента, памятуя, что в данном g = в радианах на единицу длины; (4) 57,3 g = —-— в градусах на единицу длины; (4 ) 3438 гг g = 2 в минутах на единицу длины. (4")
428
Приложение I
Направление градиента = а + 90°.
(5)
Пример. С опорного пункта Л на берегу определено направление на
судно с ошибкой + 2'. Каково возможное смещение линии положения, если
Рис. 202.
расстояние до судна 3 мили?
Решение, По формуле (4")
3438 11лг
g =-----1146
3
По формуле (2)
2
Ап ~ ±------- мили
1146
Г
миля
± 3 метра.
2. Взят пеленг а с данной точки А на
определяемую Z (рис. 202). В решении
учесть кривизну земной поверхности.
Из элементарного сферического прямо-
угольного треугольника AZK имеем:
i . Аа
А п = Д a sin s =---.
g
Следовательно, градиент по
абсолютной величине равен
1
sin s
(6>
Линия положения в точке Z имеет направление + ?, где ДХ sin ? —
схождение меридианов. Следовательно, направление градиента определяется
азимутом
- — а + 7 -J- 90°. (7)
Пример. С радиопеленгаторной станции
получен пеленг на судно а = 40°,2, тогда
как вычисленный по счислимому месту
судна пеленг со станции ас = 39°,6. Раз-
ность долгот станции и судна АХ = 4°,
средняя широта ут = 60°. Счислимое рас-
стояние = 188,3 мили. Определить величину
Дм и направление линии положения.
Решение.
Д п — - = Д a sin s 36' sin 3°8',3 =
g
= 2 мили.
Азимут линии положения
а - = а -6 Д X sin = 40°,2 4- 3°,5 = 43°,7.
3. Взят пеленг и с судна береговой пункт А (рис. 203). Кривизной
Земли можно пренебречь, так как расстояние s —ZA небольшое.
. . Д Ct
Д П = s Да = ------
g
Применение линий положения в навигации
429
Следовательно, и в этом случае абсолютная величина градиента
g == в радианах на единицу длины,
(8)
нс направление его определяется углом
т = а — 90°.
Пример. Место судна определено по трем
ных пунктов равны двум, трем и пяти милям,
том значении поправки компаса, проложенные
лись в одной точке, а образовали треугольник
редвинутся линии положения, если из-
менить поправку компаса на Аг — 1° для
образования нового треугольника по-
грешности с целью найти обсервован-
ное место, свободное
матической ошибки?
Решение.
а А з А е° 2
А Пл =-------- si---=------= 0,03 мили;
ё± 57,3 57,3
(fJ)
пеленгам; расстояния до опор-
Вследствие ошибки в приня-
линии пеленгов не пересек-
погрешности. На сколько пе-
от влияния систе-
. А е А е° 3 Л
Л л2 -------$2-------=-------= 0,00 мили;
ё2 57,3 57,3
а А £ А
А п3 = — = s3-----------=
ёз 57,3
Рис. 204.
----= 0,09 мили.
57,3
Этот прием переноса линий положения уменьшает ошибки графического
построения по сравнению с независимым проложением линий измененных
пеленгов от удаленных опорных
пунктов.
4. Измерено направление на
предмет А; начальное направле-
ние ZO. Учесть сферичность Земли.
Из элементарных треугольни-
ков ZKA и ZLA (рис. 204)
А п = т] sin s,
Аа «=> т] cos s .
Исключая у, получим
Да
А П = А а tgS=-^-.
Откуда
g = ergs. (10)
5. Измерен угол 7 между береговыми предметами А и В (рис. 205). Ре-
шение провести па плоскости. Угол ( равен разности направлений а2 и ах«
Поэтому градиент угла g^ равен геометрической разности градиентов направ-
1 1
лений, имеющих величины gj=—и g2 = — и направления —90° иа2- 90°.
sx s2
43 ),
Приложение 1
Треугольник, образованный градиентами, подобен треугольнику ZAB, так
gl 52
как — = — и угол между gz и gi равен «2—3i-
gz 5i
Поэтому
g? __ S
gl s2
откуда
s
с *
^1^2
(11)
Если мы повернем треугольник, составленный градиентами, на 90° по
часовой стрелке, то повернутый вектор gi, обозначенный на чертеже git
ляжет на сторону ZA, вектор g<i на
A D сторону ZB, а их замыкающая будет
-------------------- g параллельна линии положения. Если
\----------------------------------углу у дать приращение А7, то линия
\ А*----/ положения переместится на величину
\ -Ч / (12}
\ // Это выражение выведено другим
1» путем в разделе IV (формула 90).
При выборе опорных пунктов,
Рис. 206. для определения места судна по
двум углам, надо обращать внима-
ние на два обстоятельства: 1) градиенты углов, для уменьшения &п, надо
выбирать наибольшими; 2) угол пересечения линий положения, а следова-
тельно, и градиентов углов должен быть по возможности близок к 90е.
Пример. Для определения места сучна измерено два угла (рис. 206).
Между предметами А и С угол а = 6Г25' и между предметами В и D угол
3 = 49°24'.
. Снятые с карты расстояния от счислимого места судна до опорных пунк-
тов в кабельтовых:
sa = 22,5; sb = 14,0; sc =- 18,0; = 27,5.
Расстояния между пунктами А и С s' = 21,0 между В и D s" = 21Д
а снятые с карты протрактором (или вычисленные) углы между теми же
пунктами из счислимого места
ас = 61°15',
% = 48°24'.
Переносы линий положения в сторону возрастания углов:
А 22,5-18,0
А пг ------------
21,0
10 п 1
-----= 0,1 каб.;
3438
л 14,0-27,5
Д п2 =------------
21,0
60
-----== 0,3 каб.
3438
Применение линий положения в навигации
431
Направления линий положения получим, откладывая по направлениям на
пункты в подходящем масштабе отрезки -— = 0,044 .... —-, — и-----------,
Sa sb sc
и соединяя соответствующие их концы.
При отсутствии протрактора вычисление углов зс и ?с можно произ-
вести по формулам:
tg
2
(У — Sa) (р' — sc)
Р' (pf — s')
tg JL = 1 /' (p” — sb) (P" ~ sd)
2 V p"(p”~s")
где
P = (sa + sf 4- s')
и
P” = — (Sfy + sd -h s").
В пересечении линий положения получаем обсервованное место. Мы ви-
дим. что никаких осложнений не вызвало то обстоятельство, что углы аир
не примыкают друг к другу. Между тем, предла-
N гавшиеся для этого случая аналитические спо-
* собы решения приводили к сложным вычисле-
f НИЯМ.
j 6. Измерен сферический угол 7 между отда-
। ленными предметами А и В (рис. 207), находя-
fl щимися на расстояниях S] и s2 от определяемой
/ точки Z. Определить модуль градиента угла 7.
/ На основании (10) модули градиентов на-
/ правлений ZA и ZB равны:
/
/ £1 = ctg Sb
ja / ^2^CtgS2.
H Следовательно, модуль градиента угла 7, об-
/ разованного этими направлениями, из треуголь-
ника градиентов получится равным
/X'’ 81 = Vctg2sx + ctg2 s2—2 ctgSj ctg s2 cos 7 . (13)
7. Взят радиопеленг a с судна на радио-
* маяк Учесть кривизну Земли.
Приняв в предыдущей задаче первую точку
Рис 208 за полюс- мы должны подставить 51==90° —ср и
gl = tg ср в формулу (13)
ga = V tg2 ср + ctg2 s — 2 tg ср ctg s cos a . (14)
Величина градиента и направление линии положения получаются с по-
мощью построения, показанного на рис. 208, где по изображению меридиана
в произвольном масштабе отложена величина tg ср , а по азимуту а вели-
чина ctg s в том же масштабе.
432
Приложение 1
Градиенту g можно придать более простое выражение. По чертежу
димыми из рассмотрения
ga --= tg <? sin а2 + ctg s sin ar (15)
Слагаемые в правой части преобразуем, пользуясь соотношениями, выво-
рис. 209, представляющего сферический треуголь-
ник ZPR, разбитый на два прямоугольных —
сферическим перпендикуляром ZK-
Из прямоугольного ' треугольника ZPK
имеем*.
ctg flj == tg (90° — ai) = tg Д X sin <p.
Приближенно
90° — ai Д X sin <p.
Следовательно, 90° — выражает угол,
составляемый изопеленгой с ортодромией ZR,
что показано на рисунке.
Кроме того:
ж cosa! + cos а2 /1С.
‘89=-----(16)
tg d tg d
градиента (15), получим
cos a, sin a2 -r sin a± cos a2 _ sic (ai 4- a2)
ga
Подставляя в выражение
tgd
tgrf
или окончательно
sin а
tgrf
При изменении угла а на перенос Ап
линии положения равен
. Да Да ,
Д п = — =--------tg d.
Sa Sin a
(17)
(18)
Поэтому можно сразу нанести линию по-
ложения следующим
(рис. 210).
По изображению
Д а
величину-----tg s, а
sin а
простым
меридиана
по азимуту
построением
откладываем
Д а
-----ctg а. Линия I—К соединяющая получен-
sin а
ные точки, представит собой линию положения,
реноса Дп.
Действительно, на основании формул (16) и
а величину
отрезок ZK величину пе-
(18)
а
„„Да Да
ZK ----tg s cos a2 =-
Sin a Sin a
tg d = Д n.
Применение линий положения в навигации
433
Этот прием непосредственного проложения линии положения проще пред-
лагавшихся до сих пор (в отношении вычислений), но иногда ведет к неудоб-
ным графическим построениям. Тогда лучше применять формулу (18) для
вычисления переноса Ап, что еще облегчается применением табл. 27 МТ-43.
» Для получения направления переноса можно с достаточной точностью
принять
я2 = а — £1 = а — 90° + 7 = а Ц- X sin <р — 90°. (19)
Пример. С судна взят радиопеленг на радиомаяк а = 48°,0s. Пользуясь
счислимым местом судна = 40°0'N, = 25°0zW и координатами радио-
маяка = 50°2' N, Xr=5°16'W, вычислены с помощью табл. 27 МТ-43
счислимые азимут = 47°,55 и расстояние s = 17°5',8. Нанести линию по-
ложения.
Решение. Располагаем вычисления в следующую схему. Цифрами в скоб-
ках обозначен порядок действий
(7) — tgs=12',5
sin а
(5) tg s . . 1.0971
Sin а
(3) tg s . . . . . 9.4880
(1) Да = а-а£,. 1.4771
(2) cosec ас . . . 0.1320
(4) ctg <p . . . . 0.0762
(6) -— ctg <f . 1.6853
Sin а
(8) -^Lctg® = 48',4
Sin а
Полученные отрезки 12,5 мили и 48,4 мили откладываем по направле-
ниям 0° и 47°,6 и через их концы проводим линию положения. Откладывание
в нужном масштабе отрезка в 48,4 мили может представить некоторые за-
труднения. Поэтому можно проверить построение, вычислив направление а?
и величину Ап переноса.
Пользуясь табл. 27 МТ-43, произведем вычисления по следующим фор-
мулам:
Т (90° - аА) - Т (А X) - С (ср);
аг = ас - ai = (90° - а,) + (ас - 90°);
Т (х) = Т (?) + S (Д X);
Т (Д п) = Т (Д X) - S (х) + С (ас) - С (Д «).
28 к. С. Ухов
434
Приложение 1
дх = ? = 19° 44' W Т С 61820 3839 S Т 526 69201 Т 61820
40 0 N
90° - oi = 12 59 т 57981
ас-90’ = - 42 27 X Т 69727 S 2540
а2 = — 29° 28' ас d = 47°32',4 т с 59280 2642
Д а = 0°30',0 с 61922 41183
Д п = + 10',9 т 20739
Если о-с не было вычислено, то предварительно вычисляется
S(a2) = T (s) — T(d),
после чего а = aj 4- а2.
8. Радиодальномером измерено рас-
стояние s до отражающей радиостан-
ции (рис. 211).
Изолиния — окружность с радиу-
сом s. Совершенно очевидно, что пере-
мещение линии положения Д п равно
приращению расстояния Д s.
Поэтому градиент
е = = 1- (20)
Д п
рис 211. Его направление совпадает с на-
правлением от радиостанции, а линия
положения ему перпендикулярна.
Пример. Счислимое место судна <рс = 73°14',0 N; = 129°45',0 Ost; коор-
динаты отражающей радиостанции Tr = 73°55',3N; = 124°30'32Ost . Изме-
ренное дальномером расстояние s= 97,58 мили. Определить элементы пере-
носа Дл и а, принимая Землю за шар.
Вычисления произведем с помощью табл. 27 МТ-43.
= 73°55',ЗМ Т 81531
ДХ= 514,68 S 37
х = 73 59,2 т 81568
ус = 73 14,ОМ
X ~ = 45,2
ас = 62°,6
sc= 1°38,06 = 98',06
s = 97,58
49981
11186
76418
38795
37623
33102
6729
39831
Т
т
Д п — sc — s = 0,48 мили в сторону отражающей станции.
Применение линий положения в навигации
435
9* Одним из новых радиотехнических приборов определена разность рас-
стояний —S2 до двух станций 7?! и R<> (рис. 212).
Геометрическим местом точек, разность расстояний которых от двух фо-
кусов — величина постоянная, является гипербола. Следовательно, в данном
случае изолинии дают семейство гипербол, в фокусах которых помещаются
станции.
Для нахождения градиента воспользуемся теоремой о градиенте разности
двух функций. Согласно предыдущей задаче ^i=^2=l-
Треугольник градиентов равнобедренный. Если угол между радиусами-
векторами RiZ и R$Z обозначить у, то
g = 2 sin -I- , (21)
а линия положения является биссектрисой угла 7
Д п = А-х ~ Sa) . (22)
2 sin
2
Пример, Способом фазового зонда определена разность —$2 =13,1 мили,
а та же счислимая разность, вычисленная с помощью табл. 27 МТ-43 по
координатам станций и счислимым координатам судна ($i — s2)c =14,3 мили.
Найти перенос линии положения от счислимого места, если угол
7 =105°, 7.
Решение.
— s2)c — (si — s2) =
2 sin
2
14,3 - 13,1
= «----ranri , ~ мили, в сторону второй станции.
2 sin 52 ol
28*
436
Приложение 1
Рассмотренные примеры показывают, что даже простейшие соображения
по теории линий положения, с введением понятия о градиенте, оказываются
полезными в штурманском деле и позволяют просто и наглядно разрешать
основные навигационные задачи.
Тем не менее полезно вкратце рассмотреть некоторые дополнительные
выводы.
Пусть значение функции, представленное изолинией, выражено в зави-
симости от координат х и у, причем измененное ее значение обозначено
U = U (х, у), а вычисленное для
счислимого места Uc= U^(xc, ус).
Пользуясь разложением в ряд и ог-
раничиваясь первыми членами раз-
ложения, при достаточно хорошем
определении по счислению, получим
и = ис + (—} Дх +
\ дх ]с
I dU\ д
н—
\ду 4
или
/ ди \ д . / ди \ . 17/ 7/ л
----I Ах + I---1 А у -h U с U — О,
\ дх \ ду )с
(23)
где введены обозначения
А х = х — хс\ j
Ьу=У~Ус /
для разностей обсервованных и счи-
слимых координат. Легко показать,
что уравнение (23) представляет со-
бой уравнение линии положения.
Действительно, по рис. 213, перенос
А п = = д х cos т -|- А у sin т,
откуда
g cos т.Д х + g sin т>by + Uc — U = 0. (24)
Сравнивая с уравнением (23), получим
g cos -г = ------ ; g sin т = --------- .
\ /е \ ду /с
(25)
Из этих уравнений находим величину и направление градиента
Применение линий положения в навигации 437
(27)
Уравнения (26) и (27) позволяют применять способ линий положения
при производстве навигационных определений с помощью измерения значений
аналитических функций U произвольного вида. Это не только легко проверить
на рассмотренных уже примерах, но и распространить на любые другие.
Введем еще обозначения:
(28)
I - v = Uc - U,
где v — ошибка измерения величин U. Тогда уравнения (23) и (24) примут
вид
v = abx + bby+l. (29)
Это широко применяемое в способе наименьших квадратов уравнение
ошибок (поправок).
Таким образом, линия положения представляет собой ничто иное, как
геометрическое выражение уравнения ошибок, благодаря чему устанавли-
вается тесная связь между способом линий положения и теорией уравнива-
ния косвенных определений по способу наименьших квадратов. Выводы этой
теории по оценке точности произведенных определений также получают на-
глядное геометрическое истолкование.
Пусть обсервованное место Р (рис. 214) получилось в пересечении ли-
ний положения / и /4 а самые линии, в силу ошибок измерения, в действи-
тельности могут лежать в пределах полос, ограниченных пунктирными ли-
ниями Pt I" и IP. II".
Перекрываясь, эти полосы образуют параллелограмм и применение тео-
рии вероятностей позволяет доказать, что вписанный в этот параллелограмм
эллипс дает кривую равновероятного положения определяемой точки. Этот
эллипс, называемый эллипсом ошибок, хорошо характеризует точность про-
438
Приложение 1
изведенного определения. Очевидно, что в направлении большой полуоси Л
можно ожидать наибольшую ошибку, а в направлении малой полуоси В —
наименьшую ошибку определения.
Обозначив острый угол между линиями положения 7, а сопряженные
полудиаметры эллипса, имеющие направление линий положения, как пока-
зано на рисунке, щ и v2, можно доказать, что
Л- ! В - j/~ 2v±v2 sin 7 ;
В = J/ у? + —2yiv2siii7;
а sin 27
^ = 7^42----------— •
( — ) + COS 27
V2/
(30)
Уравнения (30) позволяют вычислять величину большой и малой полу-
оси А и В эллипса ошибок, а также угол а, между большой полуосью А и
полудиаметром vlt направленным по линии положения II.
Вычисления по этим формулам едва ли приобретут популярность в штур-
манской рубке. Поэтому в настоящее время делаются попытки облегчить вы-
вод элементов эллипса ошибок применением номограмм, таблиц и упрощен-
ных формул.
Во всяком случае даже вписанный на глаз, от руки, эллипс ошибок дает
штурману наглядное представление о точности его определения и о возмож-
ной величине ошибок в различных направлениях.
А. Ющенко
ПРИЛОЖЕНИЕ 2
ОСНОВНЫЕ ТРИГОНОМЕТРИЧЕСКИЕ ФОРМУЛЫ
1. Соотношение между тригонометрическими функциями одного и того же
угла: sin2 a 4- cos2 а = 1; sin a cosec a — 1; sec2 а—tg2a = 1; cos a sec а =1; cosec2 а — ctg2 а =1; tg a Ctg a = 1; sin a 1 = tg a = . COS a ctg а
2. Формулы сумм и разностей:
sin (а ± р) = sin а cos р ± cos а sin р;
cos (а ± р) = cos а cos р =F sin а sin Р;
. . Оч Ctg а Ctg Р =р 1
Ctg (а ± р) = —---;
Ctg а ± Ctg р
_ а 4~ 3 а — 8
sin а 4- sin р = 2 sin —!— cos-- :
2 2
а р . а — Р
sin а — sin р = 2 cos ——- sin---;
2 2
cos а 4- cos р == 2 cos а cos -—- ;
2 2
□ аЦ-8.а — р
cos а — cos 3 = — 2sin —— sin----
2 2
tgq±tgp=-sin(a±f:);
COS a cos p
ctg Л ± ctg P = + —n ± .
sin a sin p
440
Приложение 2
3. Формулы произведений функций:
Sin а sin р == —у COS (а 4- Р) 4- -i- cos (а — Р);
COS а COS Р = ~ COS (а 4- р) 4- 1- COS (а — р);
sin ot cos р,== sin (а 4- Р) 4- -1- sin (а — р);
4.
cos a sin p = -- sin (a 4- P) — -y sin (a — P).
Формулы двойного угла:
sin 2a — 2 sin a cos a = ——
1 4- tg2 «
или
sin а = 2 sin —
2
а
COS — =
2
2 tg —
6 2
1+tg2f
COS 2а = COS2 а — sin2 а = 1 — 2 sin2 а = 2 COS2 а — 1 =
1 — tg2 а
14 tg2 а
или
cos а = cos2 —— sin2 — = 1 — 2 sin2 — = 2cos2 —— 1 = -----;
2 2 2 2 1 + tg2|
5.
tS2a = - ?tga-;
1-tg’a
, Q ctg2 a — 1 1
Ctg 2а = —S-------= — (ctg а — tg a).
2 Ctg a 2
Формулы половинного угла:
а
Sin — = ±
2
1 — COS а
2
а
COS — =- ±
2
± а sin а
tg — =-------------
2 1 4- COS а
1 4" COS а
2 ’
1 - COS а
Sin а
t а 14- cos а
ctg--- = ----;----
2 sih а
sin а
1 — cos а
Основные тригонометрические формулы
441
6. Плоский прямоугольный треугольник, угол А = 90°:
sin С - пР°™™емУ катету с .
гипотенузу а
cos q _ прилежащему катету b
гипотенузу а
tgC
противолежащему катету
прилежащий катет
ctg С =
прилежащему катету
противолежащий катет
с
b
Ь^
с ’
sec С - гипотенузе _ а
прилежащий катет — ’
cosec С — гипотенузе а
противолежащий катет с
7. Плоский косоугольный треугольник:
а _ b _ 4?
sin A sin В sin С
62 = а2 4- с2-- 2ас cos В;
+ Д4-В + С
tg----------- ctg —
а 4- b __ sin A -k sin В 2 _ 2
а — b sin А — sin В х Д — В х Д —В ’
tg—
a -j - с _ sin A -j - sin С _ 2 _ 2
а~с sin Д—sinC А— С А-С'
; и-2
1/;
2 " be
cos —l /
2 |/ ac
CoS£ = t/BZH1L,
2 ' ab
где p - — (a J - b J - c).
sinA = 1/’(P-b)(p-c) .
2 |/ 6C
. в 1/(P —a) (p — c)
siny = V-----ы-----;
2 1/ ab
Если
TO
, В r C r
2 p — b 2 P —c
442
Приложение 2
8. Сферический косоугольный треугольник:
1. cos а = cos b cos с 4- sin b sin с cos А,
косинус стороны равен произведению косинусов двух других сторон плюс
произведение синусов этих же сторон, умноженное на косинус угла, противо-
лежащего искомой стороне.
2 sin а _ sin b _ sine
sin A sin В sin С
синусы сторон пропорциональны синусам противолежащих углов.
3. ctg В sin А = ctg b sin с — cos A cos с,
котангенс крайнего угла, умноженный на синус среднего угла, равен котан-
генсу крайней стороны, умноженному на синус средней стороны, минус про-
изведение косинусов средних частей (стороны и угла).
4. sin a cos В = cos b sin с — sin b cos с cos At
синус стороны, умноженной иа косинус прилежащего угла, равен косинусу
стороны, противолежащей этому углу, умноженному на синус третьей стороны,
минус произведение синуса противолежащей стороны на косинус третьей сто-
роны и на косинус угла, противолежащего первой стороне.
5. cos А = — cos В со * С 4- sin В sin С cos а,
косинус угла равен минус произведение косинусов двух других углов плюс
произведение синусов этих же углов, умноженное на косинус стороны противо-
лежащей первому углу.
Уравнения Гаусса:
. А 4~ В с
sin------cos — -= cos
а — b С
-----cos —
2 2
. A —B e . a — b C
sin----stn— — sin-----cos —;
2 2 2 2
2 2
A — В
А 4 В с
cos------- cos — =
2 2
а b . С
cos------sin —;
2 2
cos
, c . a 4- b , C
sin— = sin----sin— .
2 2 2 2
Аналогии Непера:
“ 2
cos—(a - b)
2 C
—----------c,g7:
cos — (a 4- b)
tg
—i------"gp
sin— (a+ 6)
A —В
2
cos — (A — B)
a 4- b 2 c ,
---------------- = tg — f
2---------------1 / л m----2
cos — (A — B)
tg
sin 1(Л-В)
sin-i- (A + B)
a — b
2
Сферический избыток:
. 1 . 1 ,
sin— a sin— b
e 2 2
s = A 4- В 4- C — 180°; sin — =------------------sin C.
cos — c
2
Основные тригонометрические формулы
443
9. Сферический прямоугольный треугольник, угол А ~ 90°:
1. cos а — cos b cos с, косинус гипотенузы равен произведению косину-
сов катетов.
2. cos а = ctg В ctg С, косинус гипотенузы равен произведению котан-
генсов косвенных углов.
3. sin b = sin a sin В, синус катета равен произведению синуса гипоте-
нузы на синус противолежащего косвенного угла.
4. tg b = tg a cos С, тангенс катета равен произведению тангенса гипо-
тенузы на косинус косвенного угла, лежащего между ними.
5. tg b — tg В sin с, тангенс катета равен произведению тангенса про-
тиволежащего косвенного угла на синус другого катета.
6. cos В = cos b sin С, косинус косвенного угла равен произведению ко-
синуса противолежащего катета на синус другого косвенного угла.
10. Тригонометрические ряды:
X3 , X5 X7
sin X = X-------------------------------------- + ...
1-2*3 1-2-3-4-5 1-2-3-4.5-6-7
рлс У 1 . _£2. X4 X6 1 Л'8
г Т
1-2 1-2-3-4 1-2-3-4-5-6 1-2-3-4-5-6-7-8
х3 . 2x5 , 17х7 . 62х9 ,
tg X = X + — ч- Ч И - •
3 15 315 2835
1 х х3 2х5________ х7 2х9
х 3 45 945~4725 —93 555
1 . х2 . 5х4 , 61х6 . 277х8 .
secx- 1 Ч---------------------------И ...
2 24 720 8064
1 , х , 7х3 , 31x5 , 127х7 ,
cosec х —-----}---------Ч---------h--------Ч~ * •
х 6 360 15 120 604 800
11. Логарифмический ряд.
lg (1 Ч- х) -- М х-—х2Ч- — х3-----х4 Ч- . •
2 3 4
где Ч- 1 > х > — 1. М = 0,43429448 ...
12. Бином Ньютона:
(а ± b)m = am ± mam~Xb + TlSUL-----D ±
1-2
ч tn (m — — 2) а,л_3&3
1-2-2
13. Углы в отвлеченной мере.
а = l°-arc 1° =— = 0,0174533 ... - — 1
360 57,3 ' 60
а = Г-агсГ 2к =0,00029 = —-—s —;
360-60 3437,7 3500
а = 1" • arc 1" =--—--- = 0,000004848 ... =------?----~ ?----.
360-60-60 206 264,8 200 000
ЛИТЕРАТУРА
1. Вагнер П. Н., Записки по навигации, СПБ, 1906.
2. Шейков с кий А. И., Навигация, СПБ, 1914.
3. Сакеллари Н. А., Навигация, М., 1936.
4. Корнилов Н. А., Навигация, Л., 1935.
5. Безпятов М. М., Учебник по навигации, П., 1919.
6. Молчанов П. А., Курс аэронавигации, М., 1937.
7. Будников К. В., Основы кораблевождения, Л., 1938.
8. Па скин А. А., Лоция морей Л., 1937.
9. К а в р а й с к и й В. В., Математическая картография,
М.—Л., 1934.
10. Траур А. В., Математическая картография, Л., 1938.
11. Ар а нов Н. М., Тактическая навигация, М., 1938.
12. Цингер Н., Курс высшей геодезии, СПБ, 1898.
13. П о л о ж и н ц е в Г. А., Судовая радиотехника, Л.—М.,
1939.
14. Кар малин П. В., Радионавигация в морском деле,
Л.—М., 1939.
15. Мессер П. В., Гидрографические работы и морские
навигационные карты, Л., 1933.
16. М а кс и м о в Г. С., Гидрография, Л., 1935.
17. Руководство для штурманов, Л., 1924.
18. Матусевич Н. Н., Мореходная астрономия, П., 1922.
19. Ряд статей, помещенных в различных журналах.
ОГЛАВЛЕНИЕ
Предисловие к четвертому изданию 3
Введение ............................................................. 4
Краткий исторический очерк ........................................... 6
РАЗДЕЛ ПЕРВЫЙ
основные понятия
Глава I. Земной сфероид
§ 1. Фигура и размеры Земли......................................19
§ 2. Географические координаты.................................21
§ 3. Длина одной минуты дуги меридиана.........................23
Глава II. Основные определения в судовождении
§ 4. Морская миля и различные единицы длины и скорости ... 26
§ 5. Разность широт и разность долгот...........................29
§ 6. Основные плоскости и линии.................................31
§ 7. Видимый горизонт...........................................33
§ 8. Три системы деления горизонта............................ .37
§ 9. Истинный курс, истинный пеленг и курсовой угол.............41
Глава III. Определение направлений в море
§ 10. Компасы и их характеристика.............................44
§ 11. Земной магнетизм............................................47
§ 12. Девиация магнитного компаса.................................51
§ 13. Три меридиана...............................................53
§ 14. Перевод румбов..............................................55
§ 15. Определение девиации магнитного компаса.....................61
§ 16. Рабочая таблица девиации ...................................68
Глава IV. Определение пройденного расстояния в море
§ 17. Лаги и их характеристика....................................70
§ 18. Поправка лага и ее определение.............................71
§ 19. Определение пройденного судном расстояния по его скорости . 77
РАЗДЕЛ ВТОРОЙ
КАРТЫ
Глава V. Картографические проекции
§ 20. Терминология. Классификация картографических проекций . . 81
§ 21. Масштаб...............................................86
Глава VI. Меркаторская проекция
§ 22. Локсодромия...........................................89
§ 23. Требования, предъявляемые к навигационной карте.......93
§ 24. Равноугольная цилиндрическая проекция Меркатора .... 94
§ 25. Построение меркаторской карты.........................99
446
Оглавление
Глава VIL Плоские прямоугольные координаты
§ 26. Понятие о сферических прямоугольных координатах.........106
§ 27. Плоские прямоугольные координаты........................107
§ 28. Километровая сетка.......................................ПО
§ 29. Нанесение километровой сетки на меркаторскую карту . . . .112
§ 30. Пользование километровыми сетками.......................117
Глава VIII. Центральная, или гномоническая, проекция
§ 31. Общие свойства перспективных проекций...................120
§ 32. Искажение углов на центральной проекции.................125
§ 33. Косая центральная проекция..............................12G
§ 34. Построение картографической сетки косой центральной проекции 130
§ 35. Поперечная центральная проекция.........................131
§ 36. Нормальная центральная проекция.........................132
Глава IX. Составление и издание морских карт
§ 37. Классификация морских карт..............................133
§ 38. Составление и издание морских карт......................135
§ 39. Степень доверия к картам................................137
РАЗДЕЛ ТРЕТИЙ
СЧИСЛЕНИЕ ПУТИ
Глава X. Прокладка *
§ 40. Ведение прокладки и ее точность.........................141
§ 41. Прокладка при плавании на течении.......................145
§ 42. Аналитический учет течения..............................150
§ 43. Ошибки в учете течения..................................154
§ 44. Дрейф и рыскливость.....................................157
§ 45. Определение пути по наблюдениям береговых предметов . . . 164
§ 46. Циркуляция и ее учет....................................168
Глава XI. Письменное счисление пути судна
§ 47. Основные формулы письменного счисления..................1'5
§ 48. Таблицы письменного счисления...........................182
§ 49. Письменное счисление....................................184
§ 50. Различные случаи применения письменного счисления .... 190
§ 51. Исследование формул письменного счисления...............192
РАЗДЕЛ ЧЕТВЕРТЫЙ
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА В МОРЕ ПО НАБЛЮДЕНИЯМ
БЕРЕГОВЫХ ПРЕДМЕТОВ
Глава XII. Определение места судна в море по измеренным углам
и по наблюденным пеленгам
§ 52. Общее понятие о линиях положения.........................198 ‘
§ 53. Определение места судна по углам.........................201 > ~
§ 54. Точность определения места судна по двум углам..........209
§ 55. Определение места судна по трем пеленгам................215
§ 56. Определение места судна по двум пеленгам................ 224 ,
§ 57. Крюйс-пеленг............................................227
§ 58. Точность определения места судна по крюйс-пеленгу .... 233
§ 59. Частные случаи крюйс-пеленга............................238
§ 60. Влияние течения при определении по крюйс-пеленгу методом
двойного угла.................................................244
§ 61. Исправленный крюйс-пеленг...............................246
Оглавление
447
Глава XIII. Определение места судна по расстояниям
§ 62. Определение расстояний в море ... -..............................................250
§ 63. Определение расстояния до предмета, когда основание его
скрыто под видимым горизонтом наблюдателя.....................256
§ 64. Определение места судна по двум расстояниям......................................259
§ 65. Определение места судна по пеленгу и расстоянию..................................260
§ 66. Точность определения места по расстояниям .......................................262
Глава XIV. Комбинированные и частные случаи определения места судна
§ 67. Определение места судна по пеленгу и углу............... . 268
§ 68. Определение места судна по пеленгу и глубине.....................................269
§ 69. Диаграмма Забелло................................................................270
§ 70. Определение места судна по крюйс-углу............................................272
§ 71. Определение места судна по крюйс-расстоянию......................................274
РАЗДЕЛ ПЯТЫЙ
ПРИМЕНЕНИЕ РАДИОТЕХНИЧЕСКИХ СРЕДСТВ В НАВИГАЦИИ
ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА
Глава XV. Основы радиопеленгования
§ 72. Методы использования радиопеленгования в судовождении . . 276
§ 73. Распространение электромагнитных волн............................................278
§ 74. Определение направления на излучатель электромагнитной энер-
гии при помощи рамки..........................................279
§ 75. Точность радиопеленгования.......................................................282
Глава XVI. Радиодевиация и ее определение
§ 76. Характер радиодевиации и способы ее определения....286
§ 77. Практическое выполнение работы по определению радиодевиации 289
§ 78. Параллакс.........292
§ 79. Вычисление рабочей таблицы радиодевиации.293
§ 80. Значение коэффициентов радиодевиации.........299
Глава XVII. Применение радиопеленгования в навигации
§ 81. Общие положения..........................................302
§ 82. Использование радиопеленгов на коротких расстояниях . . . 304
§ 83. Ортодромическая поправка.........................................................309
§ 84. Линия равных пеленгов...........................................................317
§ 85. Методы проложения линий положения на меркаторской проекции 323
§ 86. Вычисление линий положения по формулам сферической три-
гонометрии ............................................................................330
§ 87. Применение карты в гномонической проекции для проложения
линий положения...............................................332
§ 88. Радиопеленгаторные станции......................................................333
Глава XVIII. Использование различных радиотехнических средств в на-
вигации
§ 89. Направленные радиомаяки...................................335
§ 90. Гиперболические системы...................................342
§ 91. Радиолокация.........................................................346
Глава XIX. Использование аэро- и гидроакустических установок в на-
вигации
§ 92. Общая характеристика звуковых сигналов . .......................................350
§ 93. Определение пеленга на источник подводного звука .... 352
§ 94. Комбинированные радиомаяки . . . ................................................354
§ 95. Радиоакустическая линия положения...............................................356
§ 96. Метод разности моментов.........................................................360
448
Оглавление
раздел шестой
ПЛАВАНИЕ ПРИ ОСОБЫХ ОБСТОЯТЕЛЬСТВАХ
Глава XX. Плавание вблизи берегов и в узкостях
§ 97. Общие соображения..................................... 363
§ 98. Ограждающие линии положения............................365
§ 99. Плавание по створам....................................369
§ 100. Краткая теория створов.............................. 370
§ 101. Поворот на заданную линию курса..................... 374
§ 102. Постановка на якорь...................................377
§ 103. Сетки линий положений.................................380
Глава XXI. Плавание во время тумана и при наличии льда
§ 104. Общие соображения.....................................385
§ 105. Приближенное определение места по глубинам . 386
§ 106. Специальные установки для обеспечения подхода к портам
при тумане...................................................389
§ 107. Плавание во льдах................................... 392
Глава XXII. Плавание по дуге большого круга
§ 108. Уравнение дуги большого круга на сфере...............395
§ 109. Основные формулы для вычисления длины дуги большого
круга, начального и конечного курсов ...................... 400
§ 110. Вычисление координат вертекса........................405
§ 111. Уравнение дуги большого круга на меркаторской карте . . . 407
§ 112. Вычисление координат отдельных точек дуги большого круга 410
§ 113. Сокращенные расчеты для плавания по дуге большого круга 418
§ 114. Составное плавание и плавание по наивыгоднейшим путям . 421
Приложения
1. Применение линий положения в навигации.......................^26
2. Основные тригонометрические формулы..........................439
Литература..................................................... 444
Автор: Ухов Константин Сергеевич
Редактор А. П. Ющенко
Техн, редактор К. 7И. Волчок Корректор Е. II. Худякова
Сдано в набор 3/IV 1954 г. Подписано к печати 31/VII 1954 г. Бумага 60Х92/1й Физ. печ. л. 28.
Усл. печ. л. 28. Уч.-изд. л. 28,4. Тираж 17000 экз. М-41830 Изд. № УВ-ЛО-0191 Заказ № 771
' Цена 11 руб. 45 коп.
Государственное издательство водного транспорта. Ленинградское отделение,
Ленинград, ул. Герцена, 37
Типография № 2 Ленгорполиграфиздата. Ленинград, Социалистическая, 14.