/










































































































































































Автор: Астрахан В.И. Зорин В.И. Кисельгоф Г.К.
Теги: тяга поездов на железных дорогах подвижной состав железнодорожный транспорт железные дороги сигнализация
ISBN: 978-5-89035-465-5
Год: 2008
Похожие




Текст
УНИФИЦИРОВАННОЕ
КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ
УСТРОЙСТВО
БЕЗОПАСНОСТИ (КЛУБ-У)
Под редакцией В.И. Зорина и В.И. Астрахана
Рекомендовано
Управлением учебных заведений и правового обеспечения
Федерального агентства железнодорожного транспорта
в качестве учебного пособия для профессиональной подготовки
работников железнодорожного транспорта
Москва
2008
УДК 629.42.067
ББК 39.27
У59
Авторы: В.И. Астрахан, В.И. Зорин — введение; В.И. Астрахан, Г.К. Кисель-
гоф, В.М. Малинов, И.Л. Рубин — гл. 1; В.И. Астрахан, В.И. Зорин, Г.К. Кисель-
гоф, И.Л. Рубин, Е.Е. Шухина — гл. 2; С. Г. Константинов, И.Л. Рубин — гл. 3;
В.М. Малинов, Е.Е. Шухина — гл. 4; В.И. Астрахан, ГК. Кисельгоф, С.Г. Кон-
стантинов, В. М. Малиноъ — гл. 5
Рецензенты: начальник отдела ПКБ ЦТ — филиала ОАО «РЖД»
Д.Н. Кромушкин; преподаватель Московской дорожной технической школы № 1
А.С. Сапогов
У 59 У инфицированное комплексное локомотивное устройство безо-
пасности (КЛУБ-У): Учебное пособие / В.И. Астрахан, В.И. Зорин,
Г.К. Кисельгоф и др.; Под ред. В.И. Зорина и В.И. Астрахана. —
М.: ГОУ «Учебно-методический центр по образованию на желез-
нодорожном транспорте», 2008. — 177 с.
ISBN 978-5-89035-465-5
Приведено описание современных отечественных и зарубежных систем обес-
печения безопасности движения поездов. Рассмотрены принципы работы ос-
новных систем автоматической локомотивной сигнализации (АЛС), применяе-
мых на российских железных дорогах (РЖД). Подробно рассмотрена работа
унифицированного комплексного локомотивного устройства безопасности
(КЛУБ-У), которое является основным бортовым средством обеспечения безо-
пасности движения поездов на РЖД и железных дорогах стран СНГ. Приведено
описание структурных схем устройства и его отдельных блоков. Рассмотрены
порядок подготовки КЛУБ-У к работе, порядок действий локомотивной брига-
ды во время движения поезда, а также порядок обслуживания устройства и его
составных частей. Приведено описание приборов для обслуживания КЛУБ-У и
диагностики его исправности, а также устройства формирования электронной
карты (УФК) и стационарного устройства дешифрации (СУД) информации,
записанной на электронную кассету регистрации КЛУБ-У.
Учебное пособие рассчитано на широкий круг специалистов по обслужи-
ванию и эксплуатации этих устройств и может быть использовано студента-
ми и учащимися специализированных вузов, техникумов и колледжей, зани-
мающихся подготовкой специалистов по автоматизации управления и обес-
печению безопасности движения рельсового тягового подвижного состава.
УДК 629.42.067
ББК 39.27
ISBN 978-5-89035-465-5
© Коллектив авторов, 2007
© ГОУ «Учебно-методический центр
по образованию на железнодорожном
транспорте», 2007
Введение
Комплексное локомотивное устройство безопасности различных
модификаций (КЛУБ, КЛУБ-П, КЛУБ-У, КЛУБ-УП) служит основ-
ным бортовым средством обеспечения безопасности движения по-
ездов на сети железных дорог РФ и стран СНГ. Работа КЛУБ бази-
руется на использовании информации о допустимой скорости дви-
жения и числе свободных впередилежащих блок-участков,
передаваемой от путевых устройств систем автоматической локо-
мотивной сигнализации (АЛС). Всего выпущено свыше 14 тыс. ком-
плектов различных модификаций КЛУБ, которыми оборудовано
свыше 10 тыс. локомотивов, пригородных электропоездов и само-
ходных путевых машин. В настоящее время выпускаются более со-
вершенные унифицированные модификации устройства безопасно-
сти — КЛУБ-У и КЛУБ-УП. Они имеют расширенные функциональ-
ные возможности и улучшенные показатели по надежности и
безопасности.
Данное пособие предназначено для изучения КЛУБ-У, а также
приборов для обслуживания его работы и диагностики исправнос-
ти. В пособии приведено описание устройства формирования элект-
ронной карты (УФК) и стационарного устройства дешифрации
(СУД) информации, записанной на электронную кассету регистра-
ции КЛУБ-У.
Список принятых сокращений
и отдельных терминов
АЛСН — автоматическая локомотивная сигнализация непрерыв-
ного типа с числовым кодированием (АЛСН);
АЛС-ЕН — многозначная автоматическая локомотивная сигна-
лизация непрерывного типа с фазоразностной модуляцией несущей
частоты;
КЛУБ-У — комплексное локомотивное устройство безопаснос-
ти унифицированное;
БЭЛ-У — блок электроники локомотивный унифицированный;
БВЛ-У — блок ввода локомотивный унифицированный;
БИЛ — блок индикации локомотивный унифицированный (об-
щее название для блоков БИЛ-У, БИЛ-В, БИЛ-УТ и БИЛ-ВВ);
БИЛ-ПОМ — блок индикации локомотивный для помощника
машиниста;
БКР-У — блок коммутации и регистрации;
БР-У — блок регистрации;
ДПС — датчик пути и скорости;
БС — блок согласования с ДПС (варианты исполнения БС,
БС-САУТ-ЦМ, БС-ДПС);
РБ— рукоятка бдительности;
РБС — рукоятка бдительности специальная;
РБП — рукоятка бдительности помощника машиниста;
РДТ — режим следования локомотива по системе многих еди-
ниц, вторым, последующим или подталкивающим;
РК — цифровой радиоканал;
САУТ — система автоматического управления торможением;
СНС — спутниковая навигационная система;
ТСКБМ — телемеханическая система контроля бодрствования
машиниста;
ЭПК — электропневматический клапан;
КР — кассета регистрации;
4
KOH — блок контроля несанкционированного отключения ЭПК
ключом;
«Б» — белый сигнал (светофора) на БИЛ и БИЛ-ПОМ;
«БМ» — белый мигающий сигнал на БИЛ и БИЛ-ПОМ;
«Ж» — желтый сигнал на БИЛ и БИЛ-ПОМ;
«3» — зеленый сигнал на БИЛ и БИЛ-ПОМ;
«К» — красный сигнал на БИЛ и БИЛ-ПОМ;
«КЖ» — красный с желтым сигналы на БИЛ и БИЛ-ПОМ;
ПТО — пункт технического обслуживания локомотивов и мотор-
вагонного подвижного состава (МВПС);
ПТЭ — правила технической эксплуатации железных дорог Рос-
сийской Федерации;
Vq — допустимая скорость движения при сигнале «Б» на БИЛ и
БИЛ-ПОМ;
Иж — допустимая скорость движения при сигнале «Ж» на БИЛ и
БИЛ-ПОМ;
И3 — допустимая скорость движения при сигнале «3» на БИЛ и
БИЛ-ПОМ;
Иф — фактическая скорость движения локомотива (подвижной
единицы);
И — целевая скорость — скорость проезда места начала ограни-
чения скорости (цели), записанного в электронную карту;
Ид — максимально допустимая скорость движения на участке
пути;
ССПС — специальный самоходный подвижной состав;
МВПС — моторвагонный подвижной состав;
Актуальное препятствие — одно из препятствий на расположен-
ном впереди участке пути длиной в 5 км, для которого значение Ид
будет минимальным на этом участке.
1. СИСТЕМЫ ОБЕСПЕЧЕНИЯ
БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ
1.1. Отечественный опыт
До 1993 г. обеспечение безопасности движения поездов базиро-
валось на совместном использовании систем автоблокировки и ав-
томатической локомотивной сигнализации непрерывного типа
(АЛСН). Однако низкая информативность канала АЛСН (возмож-
ность передачи на локомотив только трех команд) и ограниченность
функциональных возможностей локомотивного дешифратора ко-
манд АЛСН привели к необходимости использования на борту ло-
комотива, кроме дешифратора команд АЛСН, устройства «Дозор»
(Л132), УКБМ, дополнительных устройств безопасности Л77, Л159,
ЛНбидр.
В 1994 г. на сети Российских железных дорог (РЖД) началось
внедрение КЛУБ, созданного во ВНИИАС МПС России с целью
объединения в одном устройстве функций перечисленных выше
средств и увеличения числа принимаемых команд из более инфор-
мативного рельсового канала системы АЛС-ЕН.
В 1999 г. было завершено создание и проведены приемочные ис-
пытания унифицированного комплексного локомотивного устрой-
ства безопасности (КЛУБ-У), которое является усовершенствован-
ным вариантом КЛУБ по числу и качеству выполняемых функций.
КЛУБ-У с 2002 г. используется как основное бортовое устрой-
ство обеспечения безопасности движения поездов на сети РЖД. Оно
входит также в качестве важнейшего устройства в единую комплек-
сную систему (ЕКС) управления и обеспечения безопасности движе-
ния поездов. Аппаратурой этой системы в настоящее время начина-
ет оснащаться локомотивный парк РЖД. В состав ЕКС, кроме
КЛУБ-У, входит также унифицированная система автоведения по-
ездов (УСАВП), система автоматического управления торможени-
ем (САУТ-ЦМ/485) и телемеханическая система контроля бодрство-
вания машиниста (ТСКБМ).
6
УСАВП осуществляет энергооптимальное управление движением
поезда в соответствии с заданным графиком или расписанием.
САУТ-ЦМ/485 обеспечивает прицельное служебное торможение
поездов (с учетом эффективности их тормозных средств) у светофо-
ров с запрещающим показанием. ТСКБМ обеспечивает контроль
работоспособности машиниста по параметрам временной зависи-
мости электрического сопротивления кожи запястья руки. Сигналы
от датчиков, размещаемых в браслете, который одевается на запяс-
тье руки машиниста, с помощью микропередатчика поступают в блок
обработки и индикации.
Отличительными особенностями КЛУБ-У являются:
- модульная архитектура, реализованная в виде открытой локаль-
ной сети, позволяющей бесконфликтно производить реконфигура-
цию устройства (увеличивать или уменьшать количество модулей
и, соответственно, выполняемых функций);
- использование дополнительного канала цифровой радиосвязи
для обмена информацией со стационарными устройствами управ-
ления и интервального регулирования;
- применение аппаратуры спутниковой навигационной системы
(СНС) в качестве средства для определения точного астрономичес-
кого времени и координаты поезда;
- использование регистратора с кассетой регистрации (КР) для не-
прерывной записи параметров локомотивного оборудования и аппа-
ратуры КЛУБ-У во время движения поезда по заданному маршруту.
Локальная сеть КЛУБ-У позволяет также обеспечить взаимодей-
ствие КЛУБ-У с УСАВП, САУТ-ЦМ/485 и другими внешними уст-
ройствами. Аппаратура КЛУБ-У соответствует требованиям функ-
циональной безопасности и сертифицирована в России.
Для оперативной расшифровки и анализа регистрируемой
КЛУБ-У на КР информации применяется стационарное устройст-
во дешифрации (СУД), а для обеспечения надежности функциони-
рования КЛУБ-У используется комплекс средств его предрейсового
контроля.
СУД предназначено для автоматизированного выявления нару-
шений в выполнении режимов движения локомотивов (подвижных
единиц), а также предаварийных и аварийных ситуаций во время
поездки и их причин, создания архивов и отчетных документов о
поездках составов (подвижных единиц) по заданным маршрутам.
7
КЛУБ-У позволяет устранить основные причины столкновений
подвижного состава за счет выполнения заданных функций по обес-
печению безопасности движения поездов. При использовании
КЛУБ-У существенно снижается уровень риска от причинения ущер-
ба пассажирам, обслуживающему персоналу, перевозимым грузам
и подвижному составу вследствие значительного уменьшения числа
случаев превышения скорости, самопроизвольного ухода поездов и
потери машинистами бдительности.
Применение КЛУБ-У позволяет:
1. Повысить уровень эффективности эксплуатационной работы
на участках железных дорог за счет:
- повышения участковой скорости и снижения потерь поездо-ча-
сов;
- получения машинистом дополнительной информации о место-
положении впередиидущих поездов;
- формирования дополнительной информации, передаваемой
машинисту (о числе свободных блок-участков на впередилежащем
пути и др.);
- оперативной передачи информации об ограничениях скорос-
тей движения.
2. Повысить безопасность движения поездов.
3. Обеспечить регистрацию информации о режимах движения
поезда, действиях машиниста и исправности локомотивных техни-
ческих средств.
Экономия эксплуатационных расходов при использовании КЛУБ-У
обеспечивается за счет:
- повышения эффективности эксплуатационной работы на участ-
ках железных дорог путем снижения интенсивности отказов борто-
вой аппаратуры, повышения участковых скоростей и снижения по-
терь поездо-часов, сокращения эксплуатационных расходов на со-
держание и обслуживание технических средств КЛУБ-У;
- сокращения убытков железных дорог вследствие повышения
уровня безопасности движения поездов.
1.2. Зарубежный опыт
В настоящее время наиболее совершенные системы обеспечения
безопасности движения поездов (системы интервального регулиро-
вания движения поездов — СИРДП) применяют на линиях скорост-
8
ного движения. В качестве СИРДП на них используются системы
автоматической локомотивной сигнализации точечного (АЛСТ) или
непрерывного (АЛСН) типа с автоматическим контролем скорости,
которые состоят из стационарных и поездных (бортовых) устройств.
Ниже рассматриваются СИРДП, используемые на железных доро-
гах различных стран.
Франция. В 80-е годы на сети железных дорог Франции (SNCF)
появились высокоскоростные линии, где поезда развивали скорость
до 300 км/ч и допускался минимальный интервал попутного следо-
вания — 4 мин. Основным средством сигнализации на этих линиях
является система АЛС непрерывного типа TVM 300. Так, на линии
«Париж—Лион» (протяженность 390 км, максимальная скорость
270 км/ч) отсутствуют напольные светофоры. Сигналы АЛС пере-
даются на поезд от рельсовых цепей. В качестве несущих для четного
пути использованы частоты 1700 и 2300 Гц, для нечетного — 2000
и 2600 Гц. Несущие частоты модулируются низкими в диапазоне
10,3—29 Гц. При шаге 1,1 Гц может быть получено 18 частотно-мо-
дулированных сигналов, соответствующих различным допустимым
значениям скорости движения.
В связи со строительством «Северной» высокоскоростной ли-
нии (максимальная скорость движения поездов 320 км/ч, минималь-
ный интервал попутного следования 3 мин) было решено создать
для нее более совершенную систему сигнализации типа TVM 430.
Системы TVM 300 и TVM 430 имеют следующие особенности:
- управление движением поездов на высокоскоростной линии
осуществляется из единого центра, в функции которого входит: кон-
троль за движением поездов; дистанционное переключение стрелок
и сигналов; дистанционное управление тяговыми подстанциями;
- на пути через каждые 20 км устанавливаются блоки контроля
скорости;
- на локомотивное табло машиниста постоянно выводится зна-
чение допустимой скорости движения, которое передается посред-
ством частотно-модулированных сигналов, посылаемых в бессты-
ковые рельсовые цепи типа VM 71;
- машинисту позволяется осуществлять самостоятельное управ-
ление поездом, когда фактическая скорость движения поезда мень-
ше допустимой.
9
Более жесткие требования, предъявляемые к системе сигнализа-
ции на «Северной» высокоскоростной линии, обусловили и некото-
рые ее особенности. Так, сокращение минимального интервала по-
путного следования поездов до 3 мин привело к уменьшению длины
рельсовых цепей до 1500 м. Кроме того, в TVM 430 предусмотрено
большее количество градаций значений допустимых скоростей (320,
300,270,230,170,0 км/ч). Поезда, попадающие на такую высокоско-
ростную магистраль с обычных линий, где установлены градации
допустимых скоростей 160 и 200 км/ч, могут двигаться, используя
градации TVM 430 соответственно 170 и 230 км/ч.
С целью уменьшения влияния инерционности системы, проявля-
ющейся при смене сигнальных показаний, в TVM 430 предусмотре-
но, что немигающая индикация значения допустимой скорости ин-
формирует машиниста о том, что и на следующем блок-участке не
ожидается снижения скорости. При мигающей индикации машинист
должен приготовиться к возможному предстоящему снижению ско-
рости на следующем блок-участке. В системе TVM 430 применяется
более жесткий контроль скорости движения поезда, чем в TVM 300.
Непрерывно производится сравнение фактической скорости поезда
(с привязкой к местоположению поезда на участке) со значением
скорости, заложенным в бортовом компьютере. Если допустимое
значение оказывается превышенным, то происходит экстренное тор-
можение. В TVM 430 предусмотрена возможность увеличения коли-
чества информации, передаваемой с пути на поезд. Это достигается
за счет того, что информация на поезд передается 27-битными теле-
граммами. Наличие «1» или «0» в каждом разряде телеграммы опре-
деляется по наличию или отсутствию модулирующей частоты в со-
ответствующем такте принимаемого сигнала. Каждая телеграмма
передает бортовому компьютеру информацию о железнодорожном
адресе (координате на линии) и скорости, что позволяет бортовому
компьютеру определить:
- индицируемое на дисплее машиниста значение допустимой ско-
рости;
- режим индикации (немигающий/мигающий);
- максимальное значение допустимой скорости на данном блок-
участке.
Стационарный компьютер, формирующий телеграммы, обеспе-
чивает ежесекундно посылку нескольких телеграмм в каждую рель-
10
совую цепь. С такой же периодичностью происходит обработка при-
нимаемых бортовым компьютером телеграмм. Центральное стаци-
онарное устройство состоит из двух специализированных компью-
теров. Один формирует и передает информацию в рельсовые цепи
линии, другой находится в горячем резерве. Каждый из специализи-
рованных компьютеров имеет по два процессора, работающих па-
раллельно. Если информация на выходах обоих процессоров основ-
ного компьютера не идентична, то управление передается резервно-
му компьютеру.
Бортовое оборудование системы TVM 430 включает две прием-
ные катушки, установленные над рельсами перед первой осью локо-
мотива. Сигналы, принимаемые катушками из рельсов, поступают
на два независимых входа сигнального процессора. Блок сравнения
процессора сопоставляет результаты на выходах двух независимых
каналов аналого-цифровой обработки. В случае совпадения резуль-
татов принятое сообщение поступает для дальнейшего исполнения
и выдается на дисплей машиниста. Надежность и безопасность ра-
боты TVM 430 основываются на применении помехоустойчивого
кодирования информации, повторной передаче телеграмм и дубли-
ровании аппаратуры. Система TVM 430 прошла сертификацию на
безопасность.
Германия и Австрия. На линиях железных дорог Германии и Ав-
стрии для обеспечения безопасности движения поездов при скорос-
тях движения выше 160 км/ч с начала 80-х гг. было начато внедре-
ние системы АЛС непрерывного типа (АЛСН), в которой для пере-
дачи информации на локомотивы используются укладываемые
вдоль пути индуктивные шлейфы. Система АЛСН, получившая на-
звание LZB (рис. 1.1), обеспечивает: непрерывный контроль скорос-
ти движения поезда; автоматическое снижение скорости поезда на
участках ее ограничения; автоматическую остановку поезда перед
сигналом, запрещающим движение; возможность движения каждо-
го поезда с оптимальной скоростью; поддержание безопасного рас-
стояния между поездами; возможность двустороннего обмена ин-
формацией между локомотивом и центром управления. В системе
LZB информация на поезд передается по шлейфу на рабочей часто-
те 36 кГц, а в обратном направлении — на рабочей частоте 56 кГц.
Длина кодового слова постоянна и составляет 83,5 бит; скорость
передачи кода — 1200 Бод.
И
Рис. 1.1. Структура системы LZB
В начале 80-х годов фирма Siemens разработала для железных
дорог Германии и Западной Европы новое семейство систем ин-
тервального регулирования — ZUB-100 (рис. 1.2) на базе процес-
сора 8085. Замена аналоговой техники цифровой позволила умень-
шить размеры аппаратуры, сократить ее энергопотребление и сни-
зить себестоимость изделий. Ряд модификаций семейства (ZUB-1Н,
ZUB-121, ZUB-122, ZUB-123) предназначен для магистральных
железных дорог, другие (ZUB-40, ZUB-122) — для городских же-
лезных дорог и метрополитенов.
Рис. 1.2. Система интервального регулирования ZUB-100
12
Системы интервального регулирования модификаций ZUB-110
и ZUB-111 могут использоваться на магистральных участках, где
из-за наличия длинных перегонов резко возрастают затраты на ка-
бели, связывающие напольную аппаратуру с постами электричес-
кой централизации. В связи с этим построение напольной аппарату-
ры здесь имеет свои особенности. В выбранных точках пути уста-
навливают передающие индукторы. Для их функционирования не
требуется подводить по кабелям питающее напряжение. Поездные
антенны ZUB-110 и ZUB-111 излучают сигналы на частоте 100 кГц,
которые принимаются путевыми индукторами и используются как
накопители энергии для передачи информационных посылок на по-
езд. Последние формируются путем амплитудной модуляции несу-
щей частоты 100 кГцтональными частотами диапазона 2,7—7,6 кГц.
Используется система кодирования «2 из 7», позволяющая переда-
вать на поезд до двадцати различных сообщений. При этом возмож-
но обнаружение ошибок, возникающих под воздействием помех в
канале передачи информации. Напольная аппаратура ZUB-110 и
ZUB-111 определяет состояние блок-участков непосредственно по
величине сигнальных токов в рельсовых цепях. Поэтому отпадает
необходимость в кабельных линиях для связи постов электрической
централизации с аппаратурой рельсовых цепей.
В конце 90-х гг. фирма Siemens приступила к созданию нового
семейства систем ZUB-200, обладающего расширенными функцио-
нальными возможностями и удовлетворяющего более высоким тре-
бованиям по безопасности. Бортовое устройство ZUB-200 построе-
но по двухканальной схеме. Ядро каждого канала включает вычис-
лительный блок SIMIS-3116 с процессором 80 486. Кроме того, в
состав ядра входят: блок обработки прерываний, блок памяти и схе-
мы сопряжения (оптоэлектрические и релейные). Все устройства
вычислительного блока объединены общей параллельной шиной
MES80. Для связи вычислительного канала с датчиками пути и ско-
рости (осевыми датчиками и радарами) применяется последователь-
ная передача информации по многофункциональной транспортной
шине MVB либо с помощью бортовой информационной системы
IBIS, либо по последовательным интерфейсам RS232 и RS485.
Обмен информацией между бортовым устройством ZUB-200 и
путевым оборудованием может осуществляться как в диапазоне то-
нальных частот (ZUB-212), так и при помощи телеграмм, передава-
13
емых по частотному каналу 850 кГц (ZUB-222) либо по частотному
каналу Евробализ (ZUB-242). Для этой цели бортовые устройства,
кроме стандартной аппаратуры ZUB-200 фирмы Siemens, включа-
ют приемо-передающие блоки для работы по каналу Евробализ или
на частоте 850 кГц. ZUB-222 допускает движение со скоростями до
230 км/ч, a ZUB-242 — со скоростями до 350 км/ч.
В состав бортовой аппаратуры ZUB-212 входит канал индуктив-
ной связи IMU. На несущей частоте 67,4 кГц на поезд передается
информация, связанная с безопасностью движения. В состав борто-
вого устройства входят два параллельных канала с цифровыми сиг-
нальными процессорами, осуществляющими процесс фильтрации
входных сигналов. Только после проверки идентичности инфор-
мации в обоих каналах она принимается к исполнению. Извести-
тельная информация передается с поезда на путь на несущей часто-
те 91 кГц.
В ZUB-242 и ZUB-262 обмен информацией между путем и поез-
дом обеспечивается по стандарту ETCS. Путевые Евробализы уста-
навливаются в середине междупутья. Различают автономные бали-
зы, передающие постоянную информацию, и бализы, передающие
оперативную сигнальную информацию. Последние получают ее от
напольных управляющих устройств. В автономных бализах инфор-
мация запрограммирована жестко и передается в виде телеграмм
длиной 341 или 1023 бита. Причем, полезная информация содержится
там соответственно в 210 или 850 битах.
Оба типа бализ получают энергию от антенн проходящего по-
езда, которые посылают сигнал мощностью около 20 Вт на частоте
27,115 МГц. Заряжаясь этой энергией, путевая бализа посылает на
поезд телеграмму на частоте 4,24 мГц в виде FSK-модулированного
сигнала. Скорость передачи составляет около 565 кбит/с. Для повы-
шения помехозащищенности передаваемой информации использу-
ется ВСН-код (Bose-Chandhuri-Hocquengem) длиной 750 бит.
Бортовые антенны связаны коаксиальным кабелем с поездны-
ми устройствами приема и обработки информации, которые одно-
временно выполняют функции контроля и диагностики всего ка-
нала передачи. Геометрия и расположение путевых бализ и борто-
вых антенн позволяет обеспечить надежную передачу информации
при скоростях движения до 350 км/ч (при использовании длинных
телеграмм) и до 500 км/ч (при использовании коротких телеграмм).
14
Система передачи информации на базе Евробализ удовлетворяет
требованиям для скоростных международных магистралей.
В настоящее время германские железные дороги форсируют раз-
работку новой системы АЛС с расширенными функциональными
возможностями с использованием для обмена информацией канала
радиосвязи (системы FZB). Система FZB включает (рис. 1.3): цент-
ральный пост FZB, бортовые устройства FZB, базовую систему ра-
диосвязи и бализы.
На центральном посту FZB непрерывно поддерживается дина-
мическая модель текущей поездной ситуации на контролируемом
участке. Постоянная составляющая информации берется из путево-
го атласа участка. Переменная составляющая информации поступа-
ет с постов ЭЦ (данные о положении стрелок и сигналов) и от поез-
дов (данные об их местонахождении). На основе оценки текущей
поездной ситуации центральный пост FZB формирует для каждого
конкретного поезда команду, разрешающую дальнейшее движение.
Команда передается на поезда по каналам радиосвязи через базо-
вую систему радиосвязи (GSM-R, ISDN). Эта команда не только
Внешняя система связи (GSM-R, ISDN)
Рис. 1.3. Структура системы АЛС на базе радиосвязи (система FZB)
15
разрешает движение, но и предоставляет машинисту информацию о
координатах ближайшей цели (например, станции) и времени ее про-
следования.
Бортовое устройство сопоставляет эти данные с информацией от бор-
товых устройств измерения пути и скорости, а также с информацией,
получаемой от путевых бализ. Последние позволяют уточнить коорди-
нату пути и получить значение допустимой скорости. В результате бор-
товой компьютер строит программную кривую скорости, в соответствии
с которой поезд прибудет в намеченный пункт в назначенное время.
Непрерывное измерение пути, времени и фактической скорости
позволяет машинисту контролировать движение поезда и своевре-
менно компенсировать его отклонение от программной кривой. Если
при этом фактическая скорость поезда начинает превышать допус-
тимую, то формируются предупредительные световой и звуковой
сигналы. Если машинист не снижает скорость поезда после форми-
рования этих предупреждений, то бортовое устройство FZB выдает
команду автоматического принудительного торможения, воздей-
ствующую на исполнительные цепи поезда.
При приближении поезда к цели на заданное расстояние про-
граммно вырабатывается извещение о «приближении», которое по
каналам радиосвязи передается на центральный пост FZB. Получив
это извещение, центральный пост FZB формирует необходимый зап-
рос посту ЭЦ, например, на установку маршрута приема поезда на
станцию. Каждая из частей системы FZB выполняет, кроме управ-
ляющих, также диагностические функции, что позволяет своевре-
менно обнаружить ошибки и локализовать места их появления.
В телеграммах, которыми обмениваются центральный пост и
бортовые устройства системы FZB, наряду с основной (перечислен-
ной выше) информацией может передаваться большой объем вспо-
могательной информации. Так, в телеграмме, передаваемой с цент-
рального поста на поезд, среди прочих данных может содержаться
информация о допустимой скорости, длине, особенностях плана и
профиля впередилежащего участка, а также указания о режимах дви-
жения поезда, вплоть до команд подъема или опускания пантогра-
фов. В обратной телеграмме, передаваемой с локомотива на цент-
ральный пост FZB, наряду с данными о координатах поезда указы-
ваются длина поезда, его тормозные характеристики и др.
Италия. На скоростной линии «Рим—Флоренция» (протяжен-
ность 260 км, максимальная скорость 260 км/ч) увеличено до 9 чис-
16
ло команд существующей системы АЛСН за счет использования
второй несущей частоты — 178 Гц (табл. 1.1).
При движении по скоростной линии локомотива, оборудованно-
го 4-кодовыми приемными устройствами АЛСН (частота 178 Гц не
воспринимается), на локомотивном светофоре воспроизводятся сиг-
налы, соответствующие только этой системе. Любая неисправность,
приводящая к исчезновению частоты 178 Гц, вызывает переход с
9-кодового режима на 4-кодовый. Исчезновение частоты 50 Гц при-
водит к отсутствию кода как при 9-кодовом, так и при 4-кодовом
режимах. На поезде осуществляется сравнение допустимой скорос-
ти с фактической. При превышении допустимой скорости включа-
ется принудительное торможение, которое можно отключить кноп-
кой «Отмена торможения» после того, как фактическая скорость
станет меньше допустимой.
Таблица 1.1
Кодирование команд АЛСН
Код Модуляция на частоте 50 Гц 178 Гц Содержание информации
270** 270 120 Разрешение движения с V < 250 км/ч (перед поездом свободны не менее 4 рельсовых цепей — РЦ)
270* 270 75 Разрешение движения с V < 230 км/ч (перед поездом свободны не менее 3 РЦ)
270 270 Разрешение движения с V < 200 км/ч (перед поездом свободны не менее 2 РЦ)
180* 180 75 Подготовлен маршрут приема поезда на боковой путь, 2700 м до входного светофора; V< 100—130 км/ч
180 180 — 2700м до светофора с запрещающим показанием
120** 120 180 1350 м до светофора, ограничивающего V< 130 км/ч
120* 120 75 1350 м до светофора, ограничивающего V< 100 км/ч
120 120 — 1350 м до светофора, ограничивающего V < 30—60 км/ч
75 75 — 1350 м до закрытого светофора
ОК ОК — Путь закрыт (отсутствие кода)
*, ** Модификации соответствующих кодов.
17
Финляндия и Норвегия. В связи с повышением скоростей до
220 км/ч на финских государственных железных дорогах было при-
нято решение об увеличении числа показаний (до 21), передаваемых с
пути на поезд. Всего на поезд передаются четыре типа сигналов, два
из которых (показания основных и предупредительных светофоров)
жестко привязаны к координате пути. Третий тип сигналов — пока-
зания об удаленности цели (остановочного пункта) позволяет маши-
нисту формировать стратегию ведения поезда, зная о предполагае-
мой остановке уже на расстоянии до 6000 м, то есть пяти стандартных
(по 1200 м) межсветофорных интервалов от соответствующего
остановочного пункта. Четвертый тип сигналов — указания о сниже-
нии скорости сообщает машинисту информацию об ожидаемом
кратковременном снижении скорости при прохождении поездом
стрелочного перевода.
Первичная информация для системы АЛС поступает от электрон-
ных постов ЭЦ. Система представляет собой АЛС точечного типа
EBICAB-900 разработки шведской фирмы АВВ.
В состав EBICAB-900 входят (рис. 1.4) центральный компьютер
EBILOOP (LC), связанный с аппаратурой ЭЦ, а также путевые бло-
ки, состоящие из концентраторов (КС), объектных контроллеров
(ОС) и блоков обмена информацией с бализами (BIS).
Когда центральный компьютер LC получает известительную ин-
формацию от постов ЭЦ, он организует сеанс связи с устройствами
сопряжения. Связь осуществляется по протоколу HDLC, скорость
передачи информации — 19,2 кбит/с. Сначала LC посылает цикли-
ческую телеграмму для проверки линии связи. После получения ин-
формации о целостности линии LC посылает телеграмму опроса со-
стояния на КС. После получения от КС ответов, подтверждающих их
состояние, LC посылает им соответствующие установочные телеграм-
мы, содержащие информацию, которую нужно передать на поезд.
Для повышения безопасности в системе предусмотрена передача
двух видов телеграмм (А и В). Телеграммы А и В одна за другой
поступают в выбранный объектный контроллер (ОС), где они обра-
батываются соответственно программами А и В. Только после под-
тверждения идентичности информации, содержащейся в обеих
телеграммах, соответствующий сигнал будет передан в путевые дат-
чики. Данная система АЛС функционирует на финских государствен-
ных железных дорогах и на железных дорогах Норвегии.
18
Рельсовая колея
Рис. 1.4. Система АЛСтипа EBICAB-900
Испания. На скоростной железнодорожной магистрали Мад-
рид—Севилья безопасность движения обеспечивается системой
АЛСН типа LZB. Напольная часть этой системы LZB L72 состоит
из девяти связанных между собой центров, каждый из которых по-
лучает необходимую информацию от соответствующего поста мик-
ропроцессорной централизации (МПЦ). Эта информация позво-
ляет сформировать необходимые команды, которые передаются в
виде телеграмм на поезда. Для передачи используются индуктив-
ные шлейфы, уложенные между рельсами. Бортовая антенна поез-
да принимает сигналы из шлейфа и передает их в бортовое логи-
ческое устройство LZB 80. Система индуктивной связи с поездом
позволяет обеспечивать надежный обмен информацией с поездом
при скоростях движения более 300 км/ч.
Бортовое логическое устройство выдает машинисту на дисплей
информацию о показаниях напольных светофоров, а также о ситуа-
ции на участке пути длиной 10 км впереди поезда. Сюда относятся:
19
значения допустимых скоростей, название ближайших целей (стан-
ций) и расстояния до них, координаты мест с ограничениями скоро-
сти, характеристика пути в плане и профиле и другая информация.
Выводится на дисплей также и значение фактической скорости по-
езда, полученной от осевых датчиков. Если фактическая скорость
начинает превышать допустимую, то вырабатывается сигнал пре-
дупреждения для машиниста. При отсутствии реакции со стороны
машиниста бортовая аппаратура LZB 80 воздействует на цепи уп-
равления поездом, вызывая его автоматическое торможение.
Для обеспечения высокой безопасности и надежности работы
системы LZB ее решающие блоки (как на пути, так и на локомотиве)
принимают решение по схеме «два из трех». Каждый из блоков об-
рабатывает входную информацию независимо в асинхронном режи-
ме и затем передает ее в решающее устройство, которое вырабаты-
вает команду лишь в том случае, если выходные сигналы двух из
трех контроллеров совпали.
В системе LZB предусмотрена также передача информации через
шлейф в направлении «поезд—путь», которая включает сведения о
фактической скорости поезда и его координате. Эта информация
поступает в ближайший напольный центр LZB, а от него — в бли-
жайшие центры LZB для организации движения. Информация пере-
дается также в центр управления линией для контроля за движением
поездов, своевременного выявления отклонений от графика и про-
гнозирования ожидаемой поездной ситуации.
Общеевропейская система. На европейских железных дорогах уже
имеются участки, оборудованные аппаратурой Европейской систе-
мы управления поездами ETCS, в которой передача сигнальной ин-
формации на поезд осуществляется при помощи Евробализ. В то же
время для обеспечения возможности беспрепятственного движения
поездов, оборудованных системой ETCS, по разным европейским
железным дорогам, где еще имеются национальные системы АЛС, в
состав бортовой аппаратуры введено устройство EBICAB-2000, раз-
работанное фирмой Bombardier Transportation.
Ядро устройства EBICAB-2000, входящего в бортовую аппара-
туру ETCS, выполняет следующие функции: управление торможе-
нием; измерение пути и скорости; передача информации на пульт
управления машиниста; регистрация режимов движения. Кроме того,
в состав бортового оборудования входят связанные с ядром систе-
20
мы по универсальной транспортной шине (MVB) специальные пе-
редающие модули (STM). Каждый из STM-модулей преобразует сиг-
налы одной из национальных систем локомотивной сигнализации в
стандартные телеграммы принятого в системе ETCS формата. Эти
телеграммы поступают затем в ядро системы, где на основании ин-
формации о фактической скорости поезда, его координатах, плане
и профиле пути формируется программная кривая скорости, выпол-
нение которой затем контролируется бортовой системой.
В Европе реализуются десятки проектов с использованием еди-
ной системы ETCS. Так, например, компания Alstom включилась в
работы в рамках проекта ERTMS / ETCS в начале 1990-х годов. Ком-
пания Alstom разработала семейство систем ATLAS, ориентирован-
ных на применение на различных железнодорожных линиях. При
этом система ATLAS 100 отвечает спецификации ETCS уровня 1,
ATLAS 200 — спецификации ETCS уровня 2, ATLAS 300 — специ-
фикации ETCS уровня 3.
ATLAS 100 (и, соответственно, ETCS уровня 1) — это система
обеспечения безопасности движения поездов (АТР—Automatic Train
Protection), которая накладывается на существующую систему сиг-
нализации и напрямую с ней связана. Таким образом, ATLAS 100
дополняет имеющуюся национальную систему средствами контро-
ля свободности пути (рельсовыми цепями и счетчиками осей), све-
тофорами, постами централизации, средствами связи и центрами
диспетчерского управления.
В системе ATLAS 100 электронные напольные модули (LEU),
соединенные со светофорами или системами централизации, пере-
дают сигнальные показания в напольные приемоотвегчики. Инфор-
мация из приемоотвегчиков считывается бортовыми антеннами,
которыми оборудован каждый поезд, оснащенный устройствами
ETCS. Система дополнена средствами сигнализации в кабине ма-
шиниста. Машинист непрерывно получает информацию о допус-
тимых скоростях движения, постоянных или временных ограниче-
ниях скорости, впередирасположенных остановочных пунктах, ук-
лонах и т.д. При использовании на новых линиях системы ATLAS
200 перестали применяться напольные сигналы. Это стало возмож-
ным благодаря использованию рельсовых цепей (или счетчиков
осей) и передаче функций регулирования движения поездов и обес-
печения безопасности маршрутов постам централизации. Теперь
21
системы централизации оснащаются аппаратурой радиосвязи с по-
ездами и образуют центр блокировки на базе радиосвязи (Radio Block
Centre — RBC), в котором сосредоточены функции управления всей
линией или группой линий. RBC преобразует полученную от сис-
тем централизации информацию в команды разрешения на движе-
ние, которые регулярно по радио передаются на все поезда, находя-
щиеся в зоне действия RBC.
В качестве бортового оборудования фирма Alstom поставляет так
называемый европейский компьютер для выполнения ответственных
функций (European Vital Computer, EVC) и все его интерфейсы с
поездными устройствами, такие как интерфейс пользователя, регис-
трирующий прибор, антенна для считывания информации от наполь-
ных приемопередатчиков, система измерения скорости (устройства
измерения пройденного пути и доплеровский радар), средства ра-
диосвязи стандарта GSM-R.
Система ATLAS 400 дополняет семейство ATLAS для применения
на малодеятельных линиях, которые нуждаются в простых и эконо-
мичных средствах, способных окупить вложенные инвестиции. ATLAS
400 имеет модульную архитектуру, обеспечивающую возможность
наращивания. Каждый поезд оборудован бортовым компьютером
типа EVC системы ETCS и обменивается информацией по радио с
центром управления или станцией на линии. На каждой станции ус-
тановлен компьютер (Radio Object Controller, ROC) — объектный
контроллер с выходом в канал радиосвязи, который обменивается
данными по радио преимущественно с устройствами управления
стрелками в своей зоне действия. Центр управления линией построен
на базе центра RBC системы ETCS. Система ATLAS 400 выдает толь-
ко электронный жезл (разрешение на движение) для каждого участка
пути, а также для каждого крайнего положения стрелки.
В ATLAS 400 используются модули из других систем этого семей-
ства, соответствующие спецификациям ETCS уровней 1 и 2. Так, в
бортовом компьютере установлены идентичные или адаптированные
компоненты и пакеты программ. Для определения местоположения
поездов служит спутниковая система глобального позиционирования
GPS. В основу ATLAS 400 положена система управления и обмена
электронными жезлами, обеспечивающая безопасность движения по-
ездов. Пока жезлы не выданы, они хранятся в соответствующем RBC.
Поезд получает разрешение на движение, если его компьютер полу-
22
чил по радио все необходимые жезлы. Протяженность участка дей-
ствия разрешения на движение зависит от расположения на линии
других поездов. Соответственно, по пути следования поезда проис-
ходит возврат не нужных более жезлов одного за другим в центр RBC.
Благодаря этому становятся возможными передвижения других поез-
дов. Местоположение поездов определяется на основе сигналов от
спутников, причем для получения безопасной информации о место-
положении служит система LOCOPROL. Вместе с тем система ATLAS
400 способна работать и без средств спутникового позиционирова-
ния. Выразили намерения использовать систему ETCS железные до-
роги Китая и Индии. Система ETCS обеспечивает радикальный шаг
вперед по сравнению с существующими системами.
Разработанная компанией Alstom концепция развития ETCS ис-
ходит из того, что во всех существующих системах сигнализации
поезд останавливается, когда нельзя с достаточной достоверностью
сказать, с какой скоростью он двигался. Это — единственная при-
чина, по которой нельзя было использовать информацию о скорос-
ти для сокращения расстояния между двумя движущимися поезда-
ми. Однако в системе ETCS имеется достаточно надежная информа-
ция о скорости движения каждого поезда. Поэтому становится
возможным сократить расстояние между двумя попутными поезда-
ми на величину тормозного пути, требуемого (при известной скоро-
сти движения) впередиидущему поезду до полной остановки. При
этом может использоваться допуск, величина которого достаточна
для безопасного выполнения требуемых функций.
Япония. На высокоскоростных линях (ВСЛ) японских железных
дорог применяются системы АЛС непрерывного типа, использующие
рельсовые цепи для передачи на поезд частотных сигналов. Так, ба-
зовая система АЛС типа 1А функционирует на первой ВСЛ — линия
Токайдо (протяженность 515 км, скорость движения до 210 км/ч).
В этой системе сигнальные показания соответствуют допустимым
скоростям 210, 160, 110, 70 и 30 км/ч. Для выделения полезного сиг-
нала используют систему модуляции по одной боковой частоте с син-
хронизацией от источника сигнала. Каждый блок-участок имеет
длину 3 км и состоит из двух стандартных рельсовых цепей. Каждо-
му сигнальному показанию соответствует одна частота. Всего ис-
пользуется четыре несущих частоты, по две для каждого пути двух-
путного участка.
23
На ВСЛ последующих лет постройки системы сигнализации мо-
дернизированы. На линиях Сан-Ио (протяженность 554 км, скорость
движения до 260 км/ч), Дзеэцу (протяженность 270 км, скорость дви-
жения до 260 км/ч), Тохоку (протяженность 496 км, скорость движе-
ния до 260 км/ч) эксплуатируются модификации IS, IB и ID системы
АЛС. В этих системах значительно повышена достоверность пере-
дачи информации и увеличено число сигнальных показаний. Стан-
дартная длина блок-участка уменьшена до 1,2 км. Для повышения
надежности блоки напольной и бортовой аппаратуры имеют трой-
ное резервирование.
США. На линиях со скоростями движения выше 160 км/ч в США
используются системы АЛС непрерывного типа, информация в ко-
торых передается по рельсовым цепям. Так, на участке Северо-Вос-
точного коридора (Бостон—Нью-Йорк—Вашингтон) внедрена
9-значная система АЛС.
1.3. Системы автоматической локомотивной
сигнализации (АЛСН и АЛС-ЕН)
На железных дорогах России широкое применение нашла авто-
матическая локомотивная сигнализация непрерывного типа с чис-
ловым кодированием (АЛСН). При такой сигнализации в кабину
локомотива непрерывно передается информация о показаниях впе-
редилежащих путевых светофоров. Для передачи на локомотив ин-
формации о показании путевого светофора используются кодовые
комбинации электрических импульсных сигналов, которые посыпа-
ются в рельсовую цепь навстречу поезду.
Формирование кодовых комбинаций производится с помощью
специальных устройств — кодовых путевых трансмиттеров (КПТ).
В настоящее время применяются два типа этих устройств: КПТ-5 и
КПТ-7, которые формируют кодовые комбинации одного и того же
показания светофора с различной продолжительностью цикла. Для
трансмиттера типа КПТ-5 продолжительность одного цикла пере-
дачи сигнала светофора составляет 1,6 с, а для КПТ-7 — 1,9 с. Как
правило, в системе АЛСН к соседним блок-участкам подключают
КПТ различного типа. Это дает возможность на локомотиве опре-
делять момент перехода с одного блок-участка на другой. На неко-
торых станционных участках с целью исключения влияния сигна-
лов АЛСН главного пути на сигналы бокового пути используется
24
специальный защитный код для передачи сигнала КЖ. Кодовые
комбинации, соответствующие определенным показаниям путевых
светофоров, показаны на рис. 1.5.
Для обеспечения устойчивой работы локомотивной сигнализации
в путевые устройства подают сигнальные токи определенной вели-
чины. При электрической тяге постоянного тока минимальный ток
КЖ
1,2
0,4
25
локомотивной сигнализации с частотой 50 Гц на входном конце
рельсовой цепи должен быть не менее 2 А. При электрической тяге
переменного тока минимальный ток локомотивной сигнализации
с частотой 25 и 75 Гц на входном конце рельсовой цепи должен
быть не менее 1,4 А. На участках с автономной тягой ток (с часто-
той 50 Гц) должен быть не менее 1,2 А. В каждой рельсовой цепи
на перегоне или станции передача сигналов на локомотив произво-
дится в направлении от светофора к локомотиву. Уровень сигнала в
рельсах по мере продвижения поезда к светофору непрерывно воз-
растает и может увеличиваться в 10—15 раз.
На российских железных дорогах (РЖД) внедряется перспективная
многозначная система передачи информации на локомотив типа
АЛС-ЕН. В этой системе в рельсовые цепи на несущей частоте
174,38 ±0,1 Гц передаются в двух подканалах кодовые сигналы, по-
лученные с использованием двукратной фазоразностной модуляции
(табл. 1.2 и рис. 1.6). При этом для передачи соответствующей циф-
ровой информации на локомотив используется модифицированный
код Бауэра, разрешенные кодовые комбинации которого для пере-
дачи информации по подканалам АЛС-ЕН приведены в табл. 1.3. Спе-
циальное устройство — формирователь сигналов (ФС), обеспечивает
генерирование фазомодулированных сигналов и кодовых серий в
Рис. 1.6. Векторная диаграмма сигналов
при фазовой модуляции
соответствии с информацией,
поступающей от устройств
автоблокировки или электри-
ческой сигнализации. Кодо-
вые серии передаются от ФС
через устройство защиты и
согласования УЗС в рельсо-
вые цепи, при этом обеспечи-
вается величина тока не ме-
нее 0,25 А. Кодовые значения
разрядов информационных по-
сылок в обоих подканалах фор-
мируются путем соответствую-
щего изменения фазы сигнала
несущей частоты, которое про-
исходит один раз через каждые
16 периодов (рис. 1.7).
26
Таблица 1.2
Кодовые значения сигналов при изменении фазы
Угол изменения фазы, град. Данные
1-й подканал 2-й подканал
0 0 0
л/2 0 1
71 1 1
Зл/2 1 0
Таблица 1.3
Коды Бауэра, разрешенные для передачи информации
по подканалам АЛС-ЕН
Номер кода Код Бауэра
0 00000001
1 00011111
2 00101100
3 00110010
4 01001010
5 01010100
6 01100111
7 01111001
8 10000110
9 10011000
10 10101011
11 10110101
12 11001101
13 11010011
14 11100000
15 11111110
По каналу АЛС-ЕН на локомотив может быть передан один байт
информации за один цикл (около 0,8 с), что значительно превышает
объем информации, передаваемой по каналу АЛСН. Одно сообще-
ние может включать в себя различную информацию (показание све-
тофора, движение прямо или с отклонением, допустимая скорость
движения, количество свободных блок-участков и др.).
27
2пк О
1пк
Фазоманипулированный сигнал
Рис. 1.7. Временная диаграмма формирования кодовых комбинаций (А) для
передачи информации по двум подканалам АЛС-ЕН (Б и С)
1.4. Принципы обеспечения надежности
и функциональной безопасности аппаратуры КЛУБ-У
Системы обеспечения безопасности движения на железно-
дорожном транспорте могут быть использованы лишь при условии
их собственного безопасного и надежного функционирования. По-
этому на всех этапах создания, изготовления и эксплуатации ведут-
ся плановые мероприятия, направленные на выполнение этих тре-
бований. Обеспечение безопасности аппаратуры КЛУБ всех моди-
фикаций базируется на следующих принципах:
- приемопередающая аппаратура строится в виде двухканальных
устройств, обеспечивающих независимую обработку информации в
каналах, после чего производится сравнение результатов этой обра-
ботки с помощью безопасной схемы сравнения;
- устройство состоит из самостоятельных блоков и модулей, ко-
торые могут заменяться во время эксплуатации без дополнительной
настройки;
- для наиболее ответственных модулей предусмотрено «горячее»
резервирование;
- реализованы конструктивные способы снижения вероятности
опасных отказов;
28
- схемотехническая реализация локальных вычислительных се-
тей выполнена таким образом, чтобы отказ отдельных модулей не
блокировал функционирование других модулей;
- в блоке электроники (БЭЛ) элементы каналов обработки и узла
управления работой электропневматического клапана (ЭПК),
обеспечивающего экстренное торможение поезда, топологически
разнесены для исключения взаимных связей;
- входные и выходные, высоковольтные и низковольтные, а так-
же высокочастотные цепи разнесены для исключения взаимных
влияний;
- схемы устройств сравнения, входных цепей и исполнительных
элементов работают только с динамическими сигналами, что необ-
ходимо для выявления одиночных отказов, при этом применяются
преобразователи полярности и гальванические развязки как элемен-
ты защиты от ложных подпиток ответственных цепей;
- предусмотрена встроенная диагностика, выявляющая и инди-
цирующая отказы основного и резервного комплектов или отдель-
ных функциональных устройств (например, канала измерения ско-
рости движения);
- в каналообразующей аппаратуре используется накопление ин-
формации и мажоритирование для принятия решения (по схеме «два
из трех»);
- в каналах передачи данных АЛС-ЕН используются избыточные
коды с минимальным кодовым расстоянием по Хэммингу ^min = 4;
- элементы сравнения и исполнительные элементы для реализа-
ции ответственных команд строятся на принципах самоконтроля
одиночных отказов по полному перечню элементов с учетом воз-
можности накопления неконтролируемых отказов за периоды вре-
мени, определяемые профилактическими осмотрами;
- система запуска при включении аппаратуры КЛУБ-У и ее пере-
запуска при сбоях содержит временную задержку, исключающую
действие выходных сигналов аппаратуры на период перезапуска,
достаточный для приведения объекта управления (локомотива) в
безопасное состояние (торможения и остановки);
- обрабатывающие устройства КЛУБ-У на базе специализиро-
ванных контроллеров имеют мягкую синхронизацию каналов обра-
ботки информации для исключения одинаковой реакции каналов
29
обработки на внешние помехи и схемы контроля сигналов на базе
безопасных элементов сравнения;
- входные сигналы поступают в два обрабатывающих канала, и
сравниваются результаты их обработки в фиксированных по дли-
тельности циклах. В каждом цикле обработки информации про-
изводится тестирование отдельных узлов аппаратуры; независимые
каналы обработки информации содержат специальный преобразо-
ватель контрольной информации в последовательное сообщение,
состоящее из динамических сигналов, с помощью которого обеспе-
чивается связь каналов обработки информации с безопасным эле-
ментом сравнения.
Для КЛУБ-У как устройства безопасности приняты следующие
критерии опасных отказов:
- невключение ЭПК при выходе КЛУБ-У из строя;
- формирование значения допустимой скорости движения выше
требуемого по условиям безопасности;
- формирование значений фактической скорости ниже реальной;
- индикация более разрешающего показания локомотивного све-
тофора, чем показания путевого светофора.
Качественные показатели безопасности обеспечиваются:
- обработкой информации, ответственной за безопасность движе-
ния, двумя независимыми каналами с мягкой синхронизацией;
- периодическим тестированием и аппаратным сравнением ре-
зультатов работы каналов обработки информации;
- периодическим контролем схемы управления индикацией.
Количественный показатель безопасности — допустимая веро-
ятность опасных отказов, должна быть не более 10 " в час.
Исправное состояние и бесперебойное действие устройств КЛУБ-У
обеспечивается соответствующей организацией технического обслу-
живания в условиях эксплуатации. Техническое обслуживание
КЛУБ-У, конкретный порядок которого устанавливается приказом
начальника дороги, производится работниками локомотивных депо.
Установлены следующие виды технического обслуживания:
- предрейсовый осмотр, производимый локомотивной бригадой;
- техническое обслуживание на контрольном пункте и на пункте
технического обслуживания локомотивов;
- техническое обслуживание КЛУБ-У при проведении текущих и
капитальных ремонтов локомотивов, МВПС и ССПС;
30
- периодические регламентные работы по устройствам КЛУБ-У
в контрольном пункте и цехе автостопов и электроники;
- входной контроль на контрольно-ремонтном пункте и в цехе
автостопов и электроники при получении аппаратуры с завода-из-
готовителя;
- приемка в эксплуатацию локомотивов, МВПС и ССПС, вновь
оборудованных устройствами КЛУБ-У;
- ремонт и внесение изменений в схемы устройств КЛУБ-У в те-
чение гарантийного срока, ремонт устройств КЛУБ-У по заявкам
работников контрольного пункта в контрольно-ремонтном пункте
или цехе автостопов и электроники.
2. КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ
УСТРОЙСТВО БЕЗОПАСНОСТИ
УНИФИЦИРОВАННОЕ (КЛУБ-У)
2.1. Функции КЛУБ-У
Пропускная способность железных дорог определяется значени-
ем интервалов между попутно следующими поездами. Традицион-
ным средством интервального регулирования поездов является сис-
тема автоматической блокировки (АБ), дополняемая для повыше-
ния эффективности работы устройствами автоматической
локомотивной сигнализации (АЛС). Путевые устройства АЛС осу-
ществляют передачу сигналов о показаниях светофоров (определя-
ющих допустимые скорости движения) на локомотив, а бортовые
устройства служат для приема этих сигналов, отображения на локо-
мотивном светофоре или индикаторе и контроля допустимой ско-
рости движения. Применяемые ранее локомотивные устройства си-
стемы АЛСН имели недостаточную надежность и ограниченные
функциональные возможности по обеспечению безопасности дви-
жения поезда. Для повышения надежности, безопасности и расши-
рения функций этих устройств было разработано и организовано
серийное производство комплексного унифицированного локомо-
тивного устройства безопасности (КЛУБ-У). Аппаратура КЛУБ-У
устанавливается на локомотиве и обеспечивает выполнение следу-
ющих основных функций:
• прием из рельсовых цепей сигналов автоматической локомотив-
ной сигнализации типа АЛСН и АЛС-ЕН, а также сигналов, пере-
данных по цифровому радиоканалу, сигналов о показаниях путе-
вых светофоров, местных ограничениях скорости, маршруте следо-
вания, сигналов принудительной остановки локомотива и
разрешения проследования светофора с запрещающим показанием;
• определение скорости и координаты локомотива по сигналам
от осевых датчиков пути и скорости и аппаратуры спутниковой на-
32
вигационной системы GPS/ГЛОНАСС; индикация машинисту же-
лезнодорожной координаты локомотива и текущего астрономичес-
кого времени;
• непрерывное формирование значения допустимой скорости дви-
жения поезда на каждом участке пути;
• формирование и индикация машинисту расстояния до акту-
ального препятствия с указанием скорости его проезда (целевой
скорости);
• непрерывный контроль фактической скорости движения поезда
и в случае превышения допустимой скорости — включение экстрен-
ного торможения;
• исключение проезда светофоров с запрещающими сигналами;
• исключение несанкционированного движения локомотива (ска-
тывания);
• индикация необходимой информации машинисту локомотива
и его помощнику;
• контроль бдительности машиниста путем фиксации нажатий на
рукоятку бдительности при световом сигнале «Внимание!» или зву-
ковом сигнале ЭПК;
• регистрация параметров движения поезда и другой необходи-
мой информации на съемную кассету регистрации для последующей
автоматизированной расшифровки с помощью стационарного уст-
ройства дешифрации (СУД);
• формирование кратковременного звукового сигнала при изме-
нении следующих параметров:
- сигналов локомотивного светофора;
- количества свободных блок-участков по ходу движения;
- характера движения (прямо / с отклонением);
- режима работы: «Поездной», «Маневровый» и «Двойная тяга»;
- несущей частоты АЛСН;
- активности каналов АЛСН, АЛС-ЕН и радиоканала;
- первоначальном появлении сигнала «Внимание!»;
• ввод и отображение на индикаторе локомотивных и поездных
характеристик и их сохранение при выключении питания;
• прием и регистрация сигналов от устройств локомотива:
- о включении / выключении тяги;
- номере активной кабины локомотива, из которой осуществ-
ляется управление;
3-3060
33
- положении ключа ЭПК;
- давлении в тормозных цилиндрах, тормозной магистрали
и уравнительном резервуаре (каждое из этих давлений по же-
ланию машиниста может индицироваться на БИЛ);
- включении/выключении генераторов и компрессора;
- использовании тифона и свистка; сигналов ЭПТ («Перекрыта»,
«Контроль цепи» и «Торможение»);
• обмен данными по интеллектуальному интерфейсу с бортовы-
ми устройствами САУТ и другими бортовыми системами.
2.2. Структурная схема КЛУБ-У
Структурная схема КЛУБ-У (состав аппаратуры) определяется
на стадии разработки проекта оборудования локомотива и зависит
от его конструкции. На рис. 2.1 приведена структурная схема аппа-
ратуры КЛУБ-У для установки на локомотиве с одной кабиной. Эта
же структурная схема используется при установке КЛУБ-У в конце-
вых вагонах моторвагонного подвижного состава (МВПС). Струк-
турная схема КЛУБ-У для локомотивов с двумя кабинами приведе-
на на рис. 2.2.
Аппаратура КЛУБ-У состоит из ряда отдельных блоков, каждый
из которых является законченным изделием, выполняющим опреде-
ленный набор функций. Блоки КЛУБ-У связаны между собой через
CAN-интерфейс. Использование этого интерфейса дает возможность
сравнительно просто изменять общую структуру КЛУБ-У с соот-
ветствующим изменением выполняемых функций. Аппаратура,
устанавливаемая на локомотиве, включает в себя:
- блок электроники локомотивный БЭЛ-У;
- блок индикации локомотивный (общее обозначение различных
модификаций блока БИЛ);
- блок индикации помощника машиниста БИЛ-ПОМ;
- блок коммутации и регистрации информации БКР-У;
- блок ввода локомотивный БВЛ-У;
- блок регистрации информации на кассету с долговременной
энергонезависимой электронной памятью БР-У;
- вызывной прибор ВП;
- рукоятки подтверждения бдительности машиниста (РБ, РБС)
и помощника машиниста (РБП);
34
Рис. 2.1. Структурная схема аппаратуры КЛУБ-У для локомотива с одной
кабиной
- приемные катушки КПУ сигналов АЛСН (АЛС-ЕН) и короб-
ку соединительную КС;
- датчики измерения пути и скорости ДПС 1 и ДПС 2;
35
Рис. 2.2. Структурная схема аппаратуры КЛУБ-У для локомотива с двумя
кабинами
36
Рис. 2.3. Схема размещения аппаратуры КЛУБ-У на локомотиве
- блок сопряжения датчиков ДПС с аппаратурой КЛУБ-У —
БС-ДПС;
- датчики измерения давлений в тормозных устройствах локо-
мотива (ДД);
- электропневматический клапан экстренного торможения (ЭПК);
- блок контроля несанкционированного отключения ЭПК клю-
чом (КОН);
- антенно-усилительное устройство (АУУ) спутниковой навига-
ционной системы (СНС) и антенну СНС (АСНС);
- антенну радиоканала (АРК);
- приемо-передающее устройство цифровой радиосвязи ППУ-РС
(радиостанция «МОСТ») и антенну радиосвязи АРС;
- блок согласования интерфейсов (БСИ), который служит для
взаимодействия КЛУБ-У с локомотивным оборудованием и обмена
данными между КЛУБ-У и другими бортовыми устройствами авто-
матики при отсутствии возможности организации обмена данными
через интеллектуальный интерфейс;
- источник питания локомотивный электрический ИПЛЭ;
- центральную клеммную рейку (ЦКР).
Схема размещения аппаратуры КЛУБ-У на локомотиве приведе-
на на рис. 2.3.
2.3. Блок электроники (БЭЛ-У)
Блок электроники БЭЛ-У предназначен для приема сигналов от
внешних устройств, контроля и обработки информации, циркулиру-
ющей между всеми блоками КЛУБ-У, передачи необходимой маши-
нисту информации в блок индикации для отображения на табло и
управления электропневматическим клапаном экстренного торможе-
ния (ЭПК). Блок БЭЛ-У выполнен на базе микропроцессорных ком-
понентов и состоит из следующих логических модулей (рис. 2.4):
- модуля внешних устройств (БВУ);
- модуля радиоканала (РК);
- модуля маршрута (ММ);
- измерителя параметров движения (ИПД);
- модуля центрального обработчика (МЦО).
Обмен информацией между модулями БЭЛ-У производится че-
рез системный CAN-интерфейс. Модули КЛУБ-У конструктивно
выполнены в виде отдельных ячеек. Количество ячеек, входящих в
38
ППУРС
АУУСНС
Рис. 2.4. Структурная схема БЭЛ-У
модуль, может изменяться от одной (модуль РК) до восьми (модуль
МЦО). Информационная связь БЭЛ-У с блоком коммутации и
регистрации (БКР-У) осуществляется как через CAN-интерфейс, так
и по проводным линиям через блок внешних соединений (БВС). Для
обеспечения связей между ячейками в БЭЛ-У используется объедини-
тельная плата. Управление электропневматическим клапаном (ЭПК)
производится с помощью усилителей питания его катушки (УК1 и
УК2), которые входят в состав модуля МЦО и расположены в ячей-
ке УК. Комплектация блока БЭЛ-У приведена в табл. 2.1.
Таблица 2.1
Комплектация БЭЛ-У
Обозначение И код испол- нения Набор логических модулей Набор ячеек
Наименование Кол-во, шт. Обозначение Кол-во в модуле
БЭЛ-У-01 МЦО 2 Ячейка ЦО Ячейка СБ Ячейка КП Ячейка УК 1 1 1 1
ММ 1 Ячейка ЭК Ячейка СНС 1 1
39
Окончание табл 2 1
Обозначение И код испол- нения Набор логических модулей Набор ячеек
Наименование Кол-во, шт. Обозначение Кол-во в модуле
БВУ 1 Ячейка ВУ 1 1
Ячейка ВУ 2 1
ипд Ячейка ИПД 1
БЭЛ-У-01 Ячейка РК 1
Блок внешних со- 1
единений БВС
Плата объедини- 1
тельная
2.3.1. Модуль центрального обработчика (МЦО)
Этот модуль производит обработку всей информации, поступа-
ющей в КЛУБ-У, в соответствии с требованиями функциональной
безопасности, и выработку выходных воздействий.
В состав модуля входят:
- центральный обработчик (ЦО);
- схема безопасного сравнения (СБ) сигналов на выходах двух
одинаковых каналов обработки информации;
- усилители питания катушки электропневматического клапана
(УК1 и УК2);
- ячейка подключения (КП), элементы которой служат для галь-
ванической развязки цепей локомотива и внутренних цепей модуля
МЦО.
Структурная схема модуля МЦО приведена на рис. 2.4.
Конфигурирование КЛУБ-У
Модуль ЦО состоит из двух одинаковых комплектов обработки
информации (ЦО1 и ЦО2), функционирующих независимо друг от
друга и формирующих управляющие команды. При этом один из
комплектов (любой) является основным, а другой находится в «го-
рячем резерве» и его управляющие выходы отключены от интерфейса
обмена данными и цепей управления. Переход на управление от ре-
зервного комплекта осуществляется при сбоях или отказах основ-
ного комплекта.
40
Решение всех задач в ЦО производится циклически. Однократ-
ное решение всех задач в ЦО производится в течение одного техно-
логического цикла ТЦ, длительность которого равна около 500 мс.
Таким образом, в каждом технологическом цикле решаются все тех-
нологические задачи, называемые также технологическими опера-
циями (ТО).
Чтобы использовать данные, формируемые различными модуля-
ми КЛУБ-У, модуль МЦО проверяет достоверность принимаемой
информации. С этой целью производится анализ результатов само-
тестирования модулей (отображенных в соответствующих полях
CAN-сообщений) и контроль периодичности поступающих от мо-
дулей сообщений. Кроме того, для двухканальных модулей (ДКМ)
производится сравнение данных, содержащихся в сообщениях от двух
каналов, причем принципы сравнения отличаются для разных мо-
дулей и описаны ниже.
В случае успешных результатов тестирования и сравнения дан-
ных (для ДКМ) модуль включается в конфигурацию системы (КС),
и передаваемые им данные становятся доступными для дальнейшей
обработки.
Данные модулей, не включенных в конфигурацию, не могут ис-
пользоваться никакими другими модулями для формирования па-
раметров, влияющих на безопасность движения.
После рестарта модулем МЦО в течение интервала времени 2 с
принимаются сообщения от модулей, входящих в состав КЛУБ-У.
По окончании данного периода времени осуществляется включение
модуля в КС, если результаты тестирования положительны (для од-
ноканальных модулей ОМ), а также если совпали данные от двух
каналов (для ДКМ). После этого МЦО переходит в режим цикли-
ческого конфигурирования системы с периодом, равным периоду ТЦ.
В течение ТЦ модуль МЦО осуществляет прием сообщений от дру-
гих модулей, анализ результатов тестирования, определяет КС и за-
писывает полученные данные в выходной буфер. Если от модуля не
было принято сообщений в течение 900—1100 мс, либо результаты
тестирования модуля оказались отрицательными, этот модуль ис-
ключается из КС в очередном ТЦ.
При приеме сообщений от модуля с заданной периодичностью
и положительных результатах его тестирования производится сле-
дующее:
41
1. Для двухканальных модулей (ДКМ) сравниваются данные,
поступившие от обоих каналов этого модуля.
2. Если ДКМ модуль включен в конфигурацию КЛУБ-У и дан-
ные его каналов совпали между собой с заданным допуском, то они
записываются в выходной буфер для ТО. Если же при включенном в
конфигурацию модуле данные двух каналов ДКМ не совпали, то
через число циклов несовпадения, равное N, модуль исключается из
конфигурации КЛУБ-У. При этом, пока модуль остается в конфи-
гурации, в выходном буфере, для ТО находятся значения, получен-
ные при последнем успешном сравнении. После исключения модуля
из конфигурации в выходной буфер для ТО записываются констант-
ные значения. Число N индивидуально для каждого модуля.
3. В случае отсутствия модуля в конфигурации и успешного срав-
нения данных (только для ДКМ) через К циклов ТЦ модуль вклю-
чается в конфигурацию, и с этого момента в выходной буфер для
ТО записываются принятые данные. Если данные не совпали К раз
подряд, то отсчет ТЦ для вхождения в конфигурацию начинается
заново. Число К индивидуально для каждого модуля.
Модуль БВУ. Модуль БВУ — двухканальный, поэтому произво-
дится сравнение данных от двух его каналов. Модуль БВУ форми-
рует следующие параметры:
- показание светофора;
- значение допустимой скорости;
- значение целевой скорости;
- длину блок-участка;
- признаки участка движения (выключена автоблокировка АБ,
включена полуавтоматическая блокировка ПАБ); при выключенной
АБ и включенной ПАБ в КЛУБ-У блокируется обработка сигналов
систем АЛСН и АЛС-ЕН.
Все данные от БВУ сравниваются МЦО, допуск на расхождение
значений отсутствует. В случае расхождения любого из параметров
результат сравнения данных всего блока в целом считается отрица-
тельным. При несовпадении данных в течение четырех ТЦ модуль
исключается из конфигурации, и в последующие 16 ТЦ сохраняется
и используется последняя успешно принятая информация. Для вклю-
чения модуля БВУ в конфигурацию от него в течение трех ТЦ под-
ряд должны приходить одинаковые данные.
42
Константные значения для параметров, принимаемых из БВУ,
если этот модуль исключен из конфигурации:
- показание светофора — «Б»;
- значения допустимой и целевой скорости равны Кд при сигна-
ле «Б»;
- длина блок-участка — 1000 м.
Модуль ИПД. Модуль ИПД — двухканальный, поэтому произ-
водится сравнение данных от двух каналов. Модуль ИПД формиру-
ет и передает следующие данные:
- значение фактической скорости движения;
- значение линейной координаты;
- направление движения (0 — кабиной 1 вперед; 1 — кабиной
2 вперед).
Для данного модуля сравниваются значения фактической скоро-
сти движения и линейной координаты, полученные из разных каналов.
Допуск на расхождение значений фактической скорости — 2 км/ч, для
линейной координаты — 100 м. Если расхождение значений нахо-
дится в пределах допуска, то в выходной буфер для ТО записыва-
ются данные канала А. Допускается количество ТЦ несовпадения
для значений фактической скорости — 2, для линейной координа-
ты — 8, для внутренних тестов — 2.
При несовпадении значений одного из параметров результат срав-
нения всех данных в модуле считается отрицательным, и модуль ис-
ключается из конфигурации. При этом включается экстренное тор-
можение от ЭПК, поскольку работа КЛУБ-У без данного модуля
недопустима.
В выходном буфере для ТО остаются последние успешно приня-
тые значения обоих параметров.
Модуль индикации БИЛ (двухканальный). Из двух каналов прини-
маются: данные о положении рукояток РБ, РБС и РБП. Только из ка-
нала А принимаются данные о положении кнопок ВК и РМП. Эти дан-
ные принимаются по каналу А МЦО и передаются в канал В. Допуск
на расхождение значений параметров, принимаемых из двух каналов,
отсутствует. В случае отрицательного результата сравнения модуль
исключается из конфигурации, а значения параметров обнуляются.
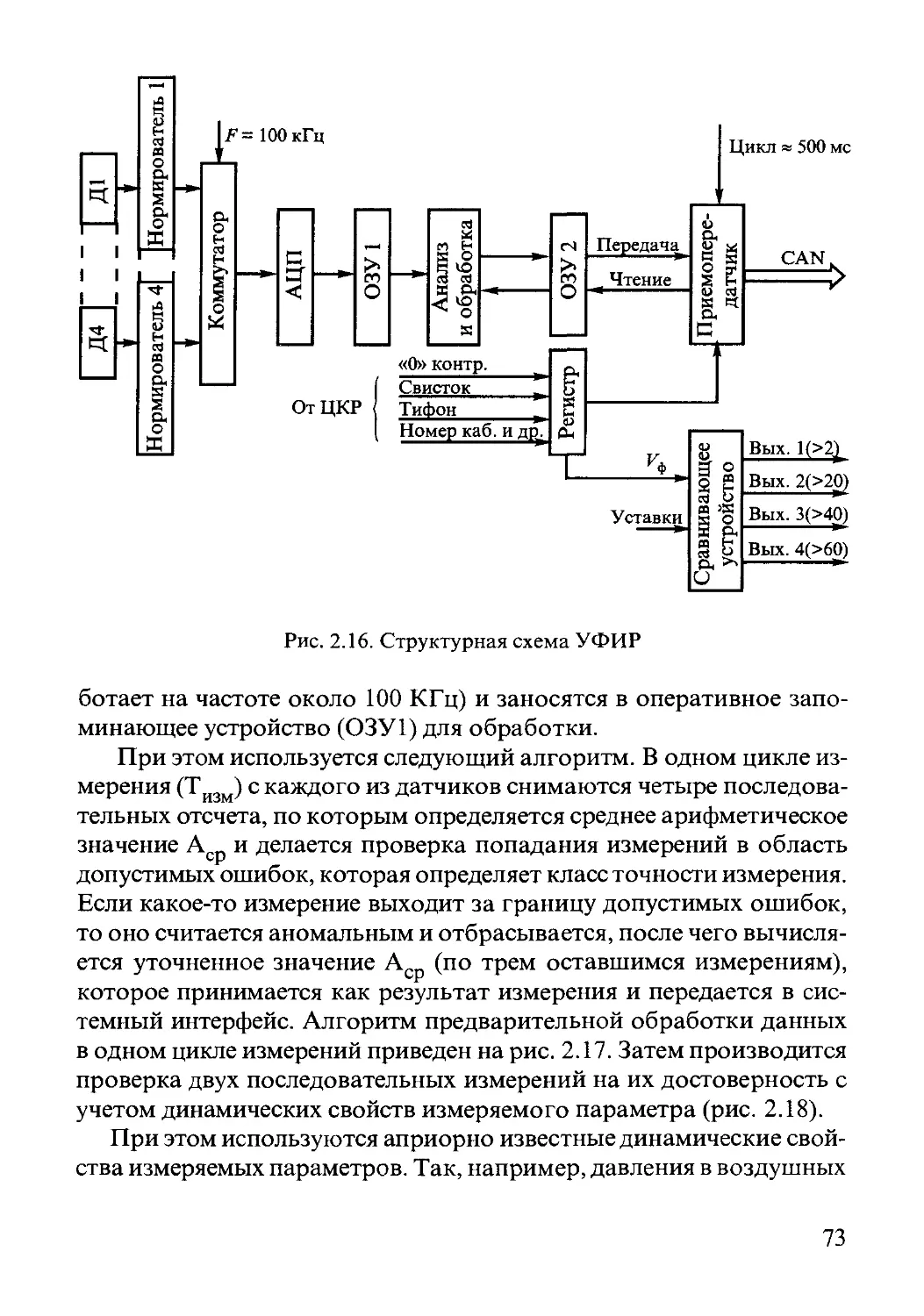
Модуль формирования и регистрации данных УФИР (одноканаль-
ный, входит в состав блока БКР-У). В МЦО анализируются только
наличие сообщений из этого модуля и результат его внутреннего
43
тестирования. При установлении факта неработоспособности мо-
дуля он исключается из конфигурации; при этом нормальная рабо-
та КЛУБ-У не нарушается.
Модуль маршрута ММ (одноканальный). Данные от этого моду-
ля поступают в канал А МЦО и передаются в канал В. Из этого мо-
дуля в МЦО поступают следующие параметры:
- тип цели;
- координата цели;
- длина цели;
- значение целевой скорости.
Если модуль не включен в конфигурацию КЛУБ-У, то его дан-
ные не учитываются, и движение поезда осуществляется без элект-
ронной карты.
Модуль электронной карты ЭК. Входит в модуль маршрута ММ.
Модуль включается в конфигурацию при получении от ММ поло-
жительного результата самотестирования, что означает обнаружение
себя (локомотива, оборудованного данным комплектом КЛУБ-У)
на электронной карте участка.
Основные функции КЛУБ-У по обеспечению безопасности
движения поезда, выполняемые МЦО
1. Контроль превышения допустимой скорости
Входными данными являются значения фактической и допусти-
мой скоростей движения. В случае превышения значения фактичес-
кой скорости над допустимым на усилитель УК выдается управляю-
щий сигнал о снятии напряжения с катушки ЭПК (сигнал включе-
ния экстренного торможения). При снижении значения фактической
скорости до значения, равного или менее значения допустимой ско-
рости, на усилитель УК выдается управляющий сигнал восстанов-
ления напряжения на катушке ЭПК.
2. Однократная проверка бдительности (ОПБ)
Входные данные:
- значение фактической скорости движения;
- значение целевой скорости;
- данные о состоянии РБ (нажата, не нажата);
- данные о состояние РБС (нажата, не нажата);
- данные о работоспособности САУТ (активна, не активна);
- признак режима работы — «маневровый».
44
Выходные данные — сигнал управления подачей / снятием на-
пряжения с катушки ЭПК.
Условиями для реализации алгоритма ОПБ являются:
- снижение целевой скорости при ненулевой фактической скорости;
- появление сигналов «К» или «Б» на БИЛ при ненулевой факти-
ческой скорости поезда;
- начало движения (трогание состава) посредством установки
контроллера машиниста в тяговое положение при сигналах на БИЛ
«К», «КЖ» или «Б».
При возникновении одного из вышеуказанных условий на уси-
литель УК1 (УК2) выдается сигнал о снятии напряжения с катушки
ЭПК. Сигнал снятия напряжения удерживается до тех пор, пока не
будет зафиксировано нажатие одной из рукояток — РБ или РБС,
после чего напряжение на катушке ЭПК восстанавливается. Кроме
того, напряжение на катушке ЭПК восстанавливается, если значе-
ние фактической скорости становится равным 0.
Условие 1 отменяется при активности системы САУТ, но сохра-
няется при появлении сигнала «КЖ» на БИЛ-У.
Условие 3 отменяется при работе локомотива в режиме «манев-
ровый».
3. Периодическая проверка бдительности (ППБ)
Входные данные:
- показания локомотивного светофора;
- значение фактической скорости движения;
- значение целевой скорости;
- признак работоспособного состояния ТСКБМ;
- признак работоспособного состояния САУТ;
- признак наличия электронной карты;
- состояние РБ и РБС (нажата / не нажата).
Выходные данные:
- сигнал управления подачей / снятием напряжения с катушки
ЭПК;
- сигналы управления включением / выключением предвари-
тельной световой сигнализации (ПСС).
Условиями для реализации алгоритма периодической проверки
бдительности являются:
- появление сигнала «Б» на БИЛ при ненулевой фактической ско-
рости; периодичность контроля 60—90 с;
45
- превышение фактической скорости над целевой (периодичность
контроля 30—40 с);
- переход ТСКБМ в состояние «выключена»; периодичность кон-
троля 30—40 с при показаниях «К», «КЖ», «Ж» на БИЛ и 60—90 с —
при остальных показаниях («3» и «Б»).
С целью исключения монотонности периоды подтверждения бди-
тельности изменяются в заданных диапазонах случайным образом.
Условие 1 отменяется при выключении КЛУБ-У. Условие 2 от-
меняется при наличии электронной карты или включенном состоя-
нии САУТ.
Если ни одно из условий запуска алгоритма периодической
проверки бдительности не выполняется (или перестает выполняться
в ходе реализации алгоритма), то период проверки бдительности
устанавливается равным 90 с.
4. Контроль скатывания
Входные данные:
- значения фактической скорости движения;
- положение Контроллера машиниста: «нулевое» / «тяга».
Выходные данные: управление подачей / снятием напряжения на
катушку ЭПК.
В случаях самопроизвольного трогания поезда при нулевом по-
ложении контроллера машиниста (скатывания), когда его скорость
превысит 2 км/ч, МЦО также формирует команду снятия напряже-
ния с катушки ЭПК с задержкой времени (7—8 с). Напряжение бу-
дет снова подано на катушку ЭПК после полной остановки поезда и
появления на блоке БИЛ показания Еф «0 км/ч».
5. Перезапуск КЛУБ-У
В КЛУБ-У производится сравнение логического уровня сигнала
управления ЭПК, формируемого в ячейке ЦО, и логического уровня
сигнала обратной связи, идущего с выхода усилителя УК. При несов-
падении логических уровней сигналов запускается счетчик времени
несовпадения. Как только время несовпадения превысит максималь-
ное время реакции усилителя УК, равное 2 с, производится запрет вы-
дачи информации на безопасную схему сравнения, следствием чего
является формирование команды перезапуска комплекта КЛУБ-У.
6. Проезд запрещающего сигнала светофора
При первом появлении сигнала «К» на локомотивном светофоре
анализируется, была ли остановка на предыдущем участке дли-
46
ной 350 м. Если остановки не было, то снимается напряжение с ка-
тушки ЭПК и производится экстренное торможение.
Грузовым поездам разрешается проследовать без остановки све-
тофор с запрещающим показанием со скоростью ниже 20 км/ч.
Режимы работы
Смена режима работы КЛУБ-У(УП) возможна только на стоян-
ке. КЛУБ-У обеспечивает следующие режимы работы: поездной,
маневровый и режим двойной тяги, а КЛУБ-УП — поездной, ма-
невровый, режим двойной тяги и рабочий режим. В КЛУБ-У основ-
ной комплект периодически 1 раз в течение ТЦ передает в CAN-
интерфейс в сообщении MCO_MODEO(1) информацию о режиме
работы. Дублирующий комплект получает эту информацию, за счет
чего обеспечивается синхронизация режимов работы комплектов.
Переход в поездной режим возможен только на стоянке при всех
показаниях локомотивного светофора на БИЛ. В этом режиме ис-
пользуется информация, поступающая от ЭК, бортового устройства
САУТ, ТСКБМ и осуществляется прием кодов АЛСН и АЛС-ЕН.
Переход в маневровый режим разрешен только на стоянке при всех
показаниях локомотивного светофора, кроме показаний «К» и «КЖ».
В маневровом режиме блокируется прием кодов АЛСН и АЛС-ЕН и
устанавливается фиксированное значение допустимой скорости —
Ед = 60 км/ч для пассажирских категорий поездов (от 1 до 5) и грузо-
вых категорий, для маневровых локомотивов — 40 км/ч.
Переход в режим двойной тяги (РДТ) возможен только на стоян-
ках в течение 30 с после нажатия на рукоятку РБ. В режиме РДТ
блокируется прием кодов из каналов АЛСН и АЛС-ЕН, а на блоке
БИЛ индицируется сигнал светофора «Б». При этом отменяются од-
нократная проверка бдительности машиниста при трогании соста-
ва и контроль скатывания. В блоке БИЛ формируется информация
о впередилежащих местах ограничений скорости. Установить бОль-
шую скорость движения по сигналу «Б» можно командой «К799»
(движение при выключенной автоблокировке).
По команде «К262» из режима РДТ можно перейти в режим дви-
жения по системе многих единиц. Режим движения по системе мно-
гих единиц является расширением режима РДТ, в котором отменя-
ются периодические проверки бдительности.
47
Формирование значений допустимой скорости
В КЛУБ-У предусматривается:
- определение расстояния от головы поезда до ближайшей цели;
- определение значения целевой скорости;
- определение типа цели;
- определение величины допустимой скорости приближения к
актуальной (ближайшей) цели, вычисляемой в каждом ТЦ;
- выдача окончательного значения кода показания локомотив-
ного светофора для БИЛ.
В процессе определения Кд независимо друг от друга определя-
ются и сравниваются текущие значения допустимых скоростей (в
том числе переданные по радиоканалу) проезда светофоров и всех
других препятствий, а также значения допустимой скорости, сфор-
мированные бортовым устройством системы САУТ.
Из всех вычисленных значений скоростей выбирается мини-
мальная, и она принимается в качестве допустимой скорости в
данный момент времени. В сообщении MCO_LIMITS выдается
соответствующий источник актуального (наиболее жесткого) ог-
раничения.
Обработка информации о препятствиях
При наличии в КЛУБ-У(УП) записанной ЭК участков маршрута
и при обнаружении модулями СНС и ММ локомотива внутри дан-
ного участка модуль ММ постоянно передает в CAN-интерфейс дан-
ные о 10 впередилежащих по ходу движения целях на расстоянии до
5 км. В случае, если на участке длиной 5 км находится более 10 це-
лей, ММ передает циклически данные только о 10 ближайших це-
лях. Кроме того, модуль ММ контролирует прохождение хвостом
поезда конца места ограничения скорости (цели) и только после этого
перестает передавать сообщение о данной цели.
При нахождении локомотива или ССПС внутри участка, описан-
ного в ЭК, в модуль МЦО поступают данные (с погрешностью не
более 100 м) о местоположении поезда и координатах всех впереди-
лежащих целей, в том числе светофоров.
Для просматриваемых впереди целей (кроме светофоров), опре-
деленных модулем ММ, модуль МЦО рассчитывает текущее значе-
ние допустимой скорости, для которого при экстренном торможе-
48
нии поезда для каждой цели будет обеспечено снижение скорости
поезда к началу места ограничения до значения целевой скорости,
переданного из ММ.
Обработка сигналов о показаниях светофоров, передаваемых
по непрерывным рельсовым каналам связи
При отсутствии в системе модуля маршрута вся исходная инфор-
мация о значениях допустимой и целевой скорости, а также о длине
блок-участка берется из сообщений BVU_STATE, формируемых по
результатам обработки данных, передаваемых по непрерывным ка-
налам связи АЛСН и АЛС-ЕН. В сообщении передаются данные того
канала, который является в данный момент активным, а если актив-
ны оба, то данные канала АЛС-ЕН.
Если ММ входит в конфигурацию КЛУБ-У, то из данных, полу-
ченных от ММ, выделяются в отдельную группу препятствия типа
«светофор». При этом для дальнейшего анализа из данных ММ вы-
бирается координата ближайшего светофора по ходу движения и
значение скорости его проезда при показании «Ж». Остальные ис-
ходные данные берутся из модуля ВУ-2.
Все показания локомотивного светофора (на БИЛ) можно услов-
но разделить на 4 группы:
1. «Красный» («К») сигнал каналов АЛСН и АЛС-ЕН.
2. «Желтый» («Ж») сигнал канала АЛСН и сигнал «1 свободный
б/у» канала АЛС-ЕН.
3. Остальные разрешающие сигналы — «Белый» («Б»), «Зеле-
ный» («3») обоих каналов, сигналы «2, 3,4, 5 свободных б/у» кана-
ла АЛС-ЕН.
4. Сигнал «Красно-желтый» («КЖ») обоих каналов, сигнал «Бе-
лый мигающий» («БМ») канала АЛС-ЕН.
Определение допустимой скорости
при разрешающих сигналах светофоров
При индикации разрешающих сигналов из групп 2,3 на БИЛ зна-
чение допустимой скорости определяется величиной, полученной от
модуля ВУ. Исключение составляют те случаи, когда фиксируется
смена активности каналов АЛСН, АЛС-ЕН, либо произошло изме-
нение показания светофора внутри групп 2, 3 при уже выполняю-
щемся «алгоритме 500», описанном ниже. В этих случаях сравнива-
49
ются значения фактической скорости Иф и допустимой Ид, получен-
ной от модуля ВУ-2. Если значение Иф больше Ид, то запускается
«алгоритм 500».
«Алгоритм 500». При смене показания локомотивного светофо-
ра на БИЛ в случае одновременного приема данных из каналов
АЛСН и АЛС-ЕН в определенных ситуациях возможно резкое сни-
жение значения И . Чтобы избежать при этом необоснованного
включения ЭПК, используется «алгоритм 500»: сначала значение до-
пустимой скорости Ед устанавливается равным Иф + 3, затем плав-
но снижается на отрезке пути длиной 500 м. Снижение Ид происхо-
дит на 1 км/ч за каждые 20 м пройденного пути.
Когда значение Ид снижается до значения И , полученного из
модуля ВУ, выполнение «алгоритма 500» прерывается и устанавли-
вается значение И , определенное модулем ВУ. После проезда поез-
дом отрезка пути длиной 500 м в любом случае устанавливается зна-
чение Ид, определенное модулем ВУ.
Алгоритм проезда запрещающего сигнала путевого светофора
1. Если, согласно данным ЭК, локомотив находится в пределах
станции, оборудованной аппаратурой радиоканала, на станцию по-
сылаются запросы на проезд запрещающего сигнала светофора.
2. При отсутствии разрешения на проезд от базовой станции допу-
стимая скорость снижается до 0 и ожидается разрешение на проезд.
3. При получении разрешения сигнал на локомотивном светофо-
ре меняется на «БМ», и значение допустимой скорости устанавлива-
ется равным 20 км/ч, если оно было меньше до момента прихода-
разрешения на проезд. Если значение Ид к моменту прихода разре-
шения было больше 20 км/ч, то оно будет снижено до 20 км/ч.
4. Если, согласно данным ЭК, локомотив находится вне станции,
оборудованной устройствами радиоканала, либо на перегоне, то
устанавливается Ид = 0.
5. Если произведена остановка локомотива и значение Ид к мо-
менту остановки было установлено меньше 20 км/ч, то нажатием на
кнопку «ВК» устанавливается скорость Ид = 20 км/ч, с которой по-
езду разрешается проехать светофор с запрещающим показанием.
6. Кривая торможения поезда (перед светофором с запрещающим
показанием) строится таким образом, чтобы было установлено зна-
чение Ид = 0 км/ч за 30 м до светофора.
50
7. При появлении сигнала «КЖ» на локомотивном светофоре
анализируется, на каком расстоянии до ближайшего по ходу движе-
ния светофора появился этот сигнал. Если это расстояние меньше
100 м, то снитается, что сигнал «КЖ» принимается от следующего
по ходу движения светофора, и уже для этого светофора вычисляет-
ся значение К .
Алгоритм проезда без остановки грузовыми поездами
светофоров с запрещающим показанием
Для проследования грузовыми поездами без остановки отдель-
ных светофоров с запрещающим показанием, расположенных на
подъемах, предусматривается следующее:
- в ЭК участка для соответствующих светофоров вносится признак
разрешения проезда без остановки со скоростью не выше 20 км/ч;
- при наличии в ЭК для соответствующего светофора признака
разрешения проезда без остановки значение Ид при движении к это-
му светофору с запрещающим показанием устанавливается 20 км/ч
для всех грузовых поездов;
- после проезда светофора с запрещающим показанием без оста-
новки и смены показания локомотивного светофора с «КЖ» на «К»
экстренное торможение не будет включено.
Алгоритм подъезда пассажирского поезда к светофору
с запрещающим показанием, расположенному перед платформой
на расстоянии менее 100 м
Пассажирским поездам разрешается проезд светофоров с запре-
щающими показаниями, расположенных на расстоянии менее 100 м
перед платформами, чтобы произвести высадку и посадку пассажи-
ров на этих платформах. Для реализации такой возможности при
работе КЛУБ-У предусматривается следующее:
- в ЭК участка для соответствующих светофоров заносится при-
знак разрешения безостановочного подъезда;
- при наличии в ЭК данного признака и движении поезда к све-
тофору с запрещающим показанием устанавливается значение
Ид =10 км/ч для всех типов пассажирских поездов;
- в случае проезда поездом светофора с запрещающим показани-
ем без остановки и при смене показания локомотивного светофора
с «КЖ» на «К» на поезде будет включено экстренное торможение.
51
Алгоритм подъезда длинносоставного грузового поезда
к светофору с запрещающим показанием
Для обеспечения возможности безостановочного подъезда длин-
носоставного грузового поезда к светофору с запрещающим пока-
занием в случае, если светофор расположен на коротких станциях,
предусматривается следующее:
- в ЭК участка для соответствующих светофоров вносится при-
знак разрешения безостановочного подъезда («грузовой подтяг»);
- при наличии в ЭК данного признака и условии, что количество
осей в составе поезда превышает значение 252, устанавливается
Ид = 10 км/ч при движении к светофору с запрещающим показанием
для грузовых и маневровых поездов;
- в случае проезда поездом светофора с запрещающим показани-
ем без остановки и при смене показания локомотивного светофора
с «КЖ» на «К» на поезде включается экстренное торможение.
2.3.2. Блок внешних устройств (БВУ)
БВУ предназначен для приема и обработки сигналов АЛСН и
АЛС-ЕН и состоит из ячеек ВУ-1 и ВУ-2. В каждой из ячеек нахо-
дятся элементы двух идентичных независимых каналов обработки
сигналов. На рис. 2.5 приведена структурная схема одного из кана-
лов ячейки ВУ-1. Функциональное назначение ячейки — прием сиг-
налов АЛСН и АЛС-ЕН от катушек КПУ и передача этих сигналов
(после преобразования в цифровую форму) для дальнейшей обра-
ботки в ячейку ВУ2.
Сигналы АЛСН и АЛС-ЕН воспринимаются приемными катуш-
ками КПУ и поступают на вход фильтра низких частот (ФНЧ) и
далее — в аналого-цифровой преобразователь (АЦП) с частотой
квантования 8 кГц, где они преобразуются в цифровую форму. По-
лученная информация подвергается обработке — фильтрации и де-
тектированию. Фильтрация сигналов осуществляется с помощью
полосовых цифровых фильтров. Центральные частоты этих филь-
тров соответствуют одной из несущих частот сигналов АЛСН (25,
75 или 50 Гц). Коды этих частот из ячейки ВУ-2 поступают в ячей-
ку ВУ-1. Значения несущих частот сигналов АЛСН задаются ма-
шинистом с помощью кнопок блока БВЛ-У (в случае отсутствия
ЭК в КЛУБ-У), а при наличии ЭК считываются из нее. После де-
тектирования сигналов АЛСН производится их сравнение с поро-
52
АЛСН
Рис. 2.5. Структурная схема ячейки ВУ-1
говым уровнем, что повышает помехозащищенность и достовер-
ность приема этих сигналов. Временная диаграмма преобразова-
ния и обработки сигналов в ячейке ВУ-1 приведена на рис. 2.6. Вос-
становленная огибающая сигналов АЛСН поступает в ячейку
ВУ-2 для последующей обработки.
Значения параметров ячейки ВУ-1 приведены в табл. 2.2, а струк-
турная схема модуля ВУ-2 — на рис. 2.7.
53
Гц
Огибающая
сигналов-
АЛСН
t
мшмммМ*
Выход ФНЧ
ВЫХ°Д П~---
Амплитудный
детектор
Плавающий порог<у-ч^/^ Г''*"''1 г~ы~|______________п'-*—-vT, |Л^ГЧ, р-^~т,
——-------------------------------------ЗЗЗЛГ С? t
Восстановленная
огибающая
сигналов
АЛСН
Рис. 2.6. Временная диаграмма преобразования сигналов в ячейке ВУ-1
Рабочий динамический диапазон приемника для всех каналов —
не менее 40 Дб. Сигналы АЛСН и АЛС-ЕН после обработки в ячей-
ке ВУ-1 по отдельным цепям поступают в ячейку ВУ-2, имеющую
двухканальное исполнение. При одновременном приеме кодовых
сигналов систем АЛСН и АЛС-ЕН приоритет имеет информация,
полученная из канала АЛС-ЕН.
Процессор модуля ВУ-2 с периодом 1 мс определяет логическое
состояние огибающей сигнала АЛСН и длительность импульса или
54
Параметры ячейки ВУ-1
Таблица 2.2
№ п/п Наименование параметра Значение параметра
1 1.1 Канал АЛСН Пороговый уровень приемника сигналов на несущих частотах, мВ: 25 Гц 50 Гц (тяга автономная) 50 Гц (тяга электрическая постоянного тока) 75 Гц 55—70 90—110 130—170 150—200
1.2 Номинальный уровень входного сигнала, мВ: 25Гц 50 Гц (тяга автономная) 50 Гц (тяга электрическая постоянного тока) 75 Гц 90 150 250 280
1.3 Половина полосы пропускания, Гц, не менее (для канала 25 Гц измеряется только верхняя полоса пропускания) 7
1.4 Избирательность по соседнему каналу (кроме канала 25 Гц) и на гармониках сети переменного тока 50 Гц, дБ, не менее 40
2 2.1 Канал АЛС-ЕН Несущая частота, Гц 174,38
2.2 Пороговая чувствительность сигнала, мВ 35^40
2.3 Номинальное значение входного сигнала, мВ 80
2.4 Половина полосы пропускания, Гц, не менее 7
2.5 Избирательность на гармониках сети переменного тока 50 Гц, дБ, не менее 40
паузы. Решение о принятом коде светофора принимается после при-
ема большой паузы кодового цикла. Окончательное формирование
байта показания локомотивного светофора на БИЛ происходит, если
два из трех последних принятых кодов совпадают. При таком алго-
ритме принятия решения задержка смены показаний светофоров на
индикаторах БИЛ и БИЛ-ПОМ может составлять от 4 до 8 с.
Если не удается достаточно долго (более 8 с) сформировать ре-
шение о показании светофора (или его смене), то происходит фор-
мирование кодов показаний светофора «Б» или «К» в зависимости
от предыдущего состояния светофора («К» — после «КЖ», «Б» —
после «Ж» или «3»),
55
Отфильтрованный
сигнал АЛС-ЕН
От ВУ-1
Импульсные сигналы
КПТ (АЛСН)
От ВУ-1
На ВУ-1 В CAN-магистраль
Код несущей
частоты АЛСН
Рис. 2.7. Структурная схема ячейки ВУ-2
Процессор ячейки ВУ-2 периодически, через 1 мс, также опраши-
вает вход, на который поступает сигнал из канала АЛС-ЕН. При
дешифрировании кодов поступивших сигналов определяются зна-
чения фазы сдвига несущей частоты. Для этого используется счет-
чик фазы, содержимое которого считывается специальной процеду-
рой. Сдвиг фазы а между сигналами опорной и несущей частоты
АЛС-ЕН определяется по числу импульсов тактовой частоты 1,5 мГц,
поступивших на вход счетчика фазы за период времени между мо-
ментами прихода заднего фронта опорного сигнала и переднего
56
фронта импульсов АЛСН-ЕН (рис. 2.8). Опорный сигнал формиру-
ется генератором ячейки ВУ-2. Его частота в 2 раза ниже частоты
несущего сигнала АЛСН-ЕН. Поступление этих сигналов в ячейку
ВУ-2 не синхронизируется.
Рис. 2.8. Принцип определения значения фазы сдвига сигнала несущей
частоты АЛС-ЕН
Затем из текущего зафиксированного значения счетчика фазы а
вычитается последнее установившееся значение, хранящееся в спе-
циально отведенной ячейке памяти. По величине полученной раз-
ности определяются дискретные значения сдвига фазы несущей час-
тоты сигнала АЛС-ЕН. Расчетным путем получены диапазоны зна-
чений чисел, соответствующие сдвигам фазы (0, 1/2 л, л, 3/2 л). По
величине этих числел определяется, в какой диапазон попало зна-
чение сдвига фазы, и формируется код сдвига фазы в соответствии
с табл. 1.2. Каждый бит информации в канале АЛС-ЕН передается
в течение 16 периодов несущей частоты, что соответствует восьми
периодам опорной частоты, поэтому в предельном случае можно
зафиксировать очередной сдвиг фазы несущей частоты сигнала
АЛС-ЕН восемь раз. Для принятия решения достаточно использо-
вать пять вычисленных значений сдвига фазы, принадлежащих
одному диапазону. Имеются четыре счетчика (для фиксации сдви-
га фазы на 0, 1/2 л, л, 3/2 л) по модулю 5, каждый из которых ин-
крементируется при приходе соответствующего ему кода сдвига
фазы. Как только содержимое одного из счетчиков достигает 5, про-
исходит обнуление всех счетчиков и принимается решение о вели-
чине сдвига фазы, которая запоминается в виде 8-разрядного кода в
счетчике сдвига фазы. Старший и младший биты кода сдвига фазы
заносятся в соответствующие ячейки памяти, которые накапливают
информацию о командах АЛС-ЕН, включая избыточные разряды,
57
определяемые кодом Бауэра. Старшие тетрады ячеек содержат ин-
формационный код, а младшие — коды избыточности. После этого
производится занесение информации в ячейки подканалов и форми-
руется итоговая переменная, которая записывается в две ячейки па-
мяти. Первая из них содержит кодовую комбинацию (КК), вторая —
код синхрогруппы (СГ).
Выполнение алгоритма декодирования информации, переданной
в КЛУБ-У по каналу АЛС-ЕН, заключается в анализе состояния
итоговой переменной и сравнении полученных значений КК и СГ
со значениями, приведенными в табл. 1.3.
Кодовая комбинация (КК) — кодовое слово модифицированно-
го кода Бауэра, передаваемое по первому фазовому подканалу ка-
нала АЛС-ЕН, формируется с учетом синхрогруппы и содержит дан-
ные о показаниях локомотивного светофора, количестве свободных
блок-участков, целевой скорости и др.
Код синхрогруппы (СГ) — кодовое слово модифицированного
кода Бауэра, передаваемое по второму фазовому подканалу канала
АЛС-ЕН для обеспечения защиты передаваемой информации от вли-
яния сигналов соседних путей и смежных блок-участков, содержит
данные о движении по стрелочным переводам прямо либо с откло-
нением и определяется в соответствии с табл. 1.3.
Для защиты от приема ложной информации и определения гра-
ницы блок-участка вводится понятие «настройки». Переменная «на-
стройки» содержит номер группы сопряжения и признак допусти-
мости синхрогрупп, которые считываются из таблицы их характе-
ристик. При приеме очередной синхрогруппы анализируется ее
соответствие группе сопряжения. Предыдущие значения этих пара-
метров хранятся в байте «настройки».
Модуль ВУ-2 принимает из системного интерфейса от других
модулей следующие сообщения, содержащие информацию, необхо-
димую для выполнения своих функций:
- данные о положении рукоятки РБ;
- данные о частоте АЛСН от модуля маршрута при наличии элек-
тронной карты;
- данные о нажатии кнопок F, ВК в БВЛ-У;
- категория поезда;
- локомотивные характеристики;
58
- значения допустимой скорости движения при показаниях на
БИЛ «Ж» и «3»;
- значения скорости движения при показании на БИЛ «Б»;
- длина блок-участка.
Модуль ВУ-2 формирует следующие данные для передачи в CAN -
интерфейс:
- показание локомотивного светофора/количество свободных
блок-участков;
- признак движения по прямому участку или по боковому пути;
- значение целевой скорости;
- значение допустимой скорости;
- код номера синхрогруппы и кодовой комбинации АЛС-ЕН;
- тип путевого трансмиттера;
- код несущей частоты АЛСН;
- код сигнала АЛСН;
- сигнал проследования границы блок-участка при поступлении
сигналов из канала АЛС-ЕН;
- длина впередилежащего блок-участка;
- результат внутреннего теста.
Данные от ВУ-2 передаются в системный интерфейс периодичес-
ки через время около 500 мс. Кроме того, в системный интерфейс
однократно передается сообщение при приходе переднего или зад-
него фронта огибающей сигнала АЛСН.
Модуль ВУ-2 не входит в минимальную конфигурацию, и его вык-
лючение не приведет к срабатыванию ЭПК. Сообщения о неисправ-
ности каналов модуля ВУ-2 поступают в модуль МЦО, который при-
нимает решение о выключении модуля ВУ-2 из конфигурации. Полу-
чив сигнал о выключении из конфигурации, модуль ВУ-2 производит
перезапуск. При положительном результате перезапуска модуль начи-
нает выдавать в системный интерфейс диагностические сообщения.
После фиксации восстановления работоспособности ВУ-2 модуль
МЦО включает его снова в конфигурацию КЛУБ-У.
2.3.3. Модуль-измеритель параметров движения (ИПД)
Модуль ИПД является программно-аппаратным и функциони-
рует в реальном масштабе времени. Аппаратная часть его размеще-
на в ячейке ВПД. Основные функции модуля:
59
- прием информационных сигналов от двух двухканальных дат-
чиков пути и скорости (ДПС1 и ДПС2);
- вычисление значений фактической скорости локомотива и
пройденного пути;
- проверка достоверности принятой информации;
- прием и передача данных в системный интерфейс;
- хранение постоянных параметров.
Постоянные параметры хранятся в электрически перепро-
граммируемом постоянном запоминающем устройстве (ППЗУ),
встроенном в процессор канала А. Постоянные параметры этого
модуля доступны всем модулям КЛУБ-У и передаются циклически
в системный интерфейс через период 500 мс или по запросу. Эти па-
раметры заносятся в КЛУБ-У техническим персоналом на стоянке с
БВЛ-У и регистрируются на кассете регистрации КР.
Параметры, записываемые в КЛУБ-У машинистами и техничес-
ким персоналом:
- табельный номер машиниста;
- номер поезда;
- признак категории поезда;
- длина состава в осях;
- длина состава в условных вагонах;
- номер локомотива или ведущей секции многосекционного ло-
комотива;
- масса поезда;
- признак времени (летнее / зимнее);
- признак типа локомотива;
- значение максимальной скорости движения подвижного соста-
ва при сигнале «Б» на БИЛ;
- значение скорости проследования сигнала «Ж» путевого све-
тофора;
- расчетная длина блок-участка;
- диаметр колеса по кругу катания 1-й и 2-й колесных пар (на них
установлены датчики измерения пути и скорости), мм;
- число зубцов датчика измерения пути и скорости;
- параметры конфигурации аппаратуры КЛУБ-У;
- значение допустимой скорости движения на сигнал «3» БИЛ;
- признак изменения координаты пути (возрастание или убы-
вание).
60
В аппаратуре КЛУБ-У используются датчики пути и скорости
универсальные (ДПС), устанавливаемые на буксах колесных пар.
ДПС формируют электрические сигналы, частота следования кото-
рых пропорциональна скорости движения поезда.
Технические параметры датчика:
- максимальная угловая скорость вращения оси датчика не более
2122 об/мин;
- направление вращения оси датчика — произвольное;
- количество каналов датчика — 2;
- количество импульсов за один оборот оси датчика — 42;
- связь оси датчика с осью колесной пары локомотива — безре-
дукторная.
Каждый ДПС имеет два идентичных канала. Выходные сигналы
одного из каналов сдвинуты на четверть периода следования им-
пульсов, что дает возможность определять направление вращения
датчика скорости и используется для определения направления дви-
жения локомотива.
Микропроцессорный измеритель параметров движения ИПД
обеспечивает двухканальную обработку сигналов. В одном из мик-
ропроцессоров организован прием информационных данных от
двух датчиков ДПС с использованием четырех раздельных счетчи-
ков импульсов для подсчета импульсов на каждом выходе ДПС в
отдельности.
Подсчет количества импульсов осуществляется за период време-
ни 1,2 с. Разность количества импульсов, подсчитанных счетчиками
в двух каналах одного датчика в течение 1,2 с, не должна превышать
двух; при большем значении разности датчик считается неисправ-
ным в данном цикле подсчета, и его сигналы не используются для
расчета фактической скорости.
При нормальном функционировании датчиков ДПС вычисление
скорости производится по формуле:
V = 3,6^N,
ZT
где V — скорость движения локомотива, км/ч;
Д — диаметр колеса оси колесной пары, на которой установлен ДПС, м;
Z — количество импульсов за один оборот оси датчика — 42;
61
N — количество импульсов, зафиксированных счетчиком импульсов в
одном цикле измерения Г;
Т — длительность одного цикла измерения скорости, с;
3,6 — коэффициент перевода единиц измерения;
л — константа (3,14...).
Вычисление фактической скорости и пройденного пути произво-
дится одновременно в двух каналах А и Б отдельными микропро-
цессорами. Вычисление скорости производится для каждого датчи-
ка, затем значения скоростей сравниваются между собой и прини-
мается решение о текущем значении фактической скорости, которое
передается в системный интерфейс. Одновременно производится
анализ исправности датчиков ДПС. Фактическая скорость локомо-
тива измеряется с погрешностью ±1 км/ч в диапазоне от 1 до 80 км/ч
и ±2 км/ч — при скоростях более 80 км/ч.
Также в двух каналах обработки производится вычисление прой-
денного локомотивом пути (при наличии или отсутствии электрон-
ной карты). При движении без электронной карты «вперед» («на-
зад») пройденный путь вычисляется как сумма (разность) предыду-
щего значения пройденного пути и пройденного пути, вычисленного
по результатам подсчета количества импульсов от датчика скорос-
ти за очередной период измерения.
При движении с электронной картой значение пройденного пути
принимается из системного интерфейса от модуля маршрута ММ
периодически один раз в 1 с, где оно определяется на основании ин-
формации, полученной от СНС. При этом принятое значение прой-
денного пути сравнивается с предыдущим. При правильной работе
полученная разность не должна превышать 1000 м.
В ячейке ИПД производится также контроль исправности ка-
налов связи между микропроцессорами. Сбоем модуля ИПД
считается потеря его данных в CAN-интерфейсе на время более 7 с,
о чем сообщается в системный интерфейс.
Алгоритм проверки на обрыв проводов или отказ датчиков ДПС
включается по сигналу перевода контроллера машиниста из нуле-
вого положения в тяговое. При появлении этого сигнала произво-
дится отсчет периода времени 76 с и проверяется пройденный путь.
Если он равен 0, принимается решение, что произошел выход дат-
чиков ДПС из строя, и снимается напряжение с катушки ЭПК.
62
Решение о работоспособности ИПД принимает МЦО. Исключе-
ние ИПД из конфигурации осуществляется при рассогласовании
данных в двух каналах на число >2, пропадании сообщений на вре-
мя >2,4 с или передаче сообщений от ИПД с информацией о внут-
ренних сбоях и сбоях в работе датчиков ДПС. Через 1 с после ис-
ключения ИПД из конфигурации этот модуль вновь перезапускает-
ся. Если после перезапуска модуль работает корректно, он снова
включается в конфигурацию.
2.3.4. Модуль маршрута и электронной карты (ММ)
Модуль ММ содержит микроконтроллер для обработки данных,
энергонезависимую память (объемом 2 Мбайт) для записи в нее ЭК
участка маршрута следования поезда и схемные узлы для подключе-
ния к CAN-интерфейсу.
Связь ММ с приемником СНС, который находится в ячейке СНС,
осуществляется по интерфейсу RS-232. Данные от приемника СНС
обрабатываются процессором ячейки ЭК.
Модуль ММ выполняет следующие функции:
- прием данных от приемника СНС;
- запись и хранение ЭК участка маршрута следования поезда,
введенного от внешнего блока ввода данных БВД-У через интер-
фейс RS-232;
- определение линейной железнодорожной координаты локомо-
тива по географическим координатам, вычисленным в приемнике
СНС (при наличии ЭК);
- вычисление линейной железнодорожной координаты локомо-
тива по данным модуля ВПД, если ЭК не загружена или если поло-
жение локомотива на ЭК не найдено;
- выбор целей впереди поезда на участке пути длиной 5000 м и
отслеживание их до проследования головой или хвостом поезда;
- под держка отслеживания целей до конца маршрута при выходе
из электронной карты или за пределы участка, внесенного в ЭК;
- прием данных, переданных по радиоканалу от ДСП, о времен-
ных ограничениях скорости;
- определение ближайшей цели по ходу движения поезда, вы-
числение расстояния до цели и передача его значения для индика-
ции в БИЛ;
63
- определение положения станций на расстоянии до 10 км по ходу
движения поезда и передача для индикации в БИЛ названия бли-
жайшей станции, а также формирование команды выключения ин-
дикации станции после ее проследования;
- формирование и передача в CAN-интерфейс сообщений с опи-
санием целей (станция, светофор, стрелочный перевод, тоннель и т.п.)
для обработки их другими модулями;
- формирование и передача в CAN-интерфейс сообщений о ли-
нейной железнодорожной и географической координатах поезда;
- формирование и передача в CAN-интерфейс сообщений о ра-
ботоспособности модуля ММ;
- передача в CAN-интерфейс сообщений о текущей дате и времени.
Внутренняя организация памяти данных модуля ММ служит для
описания характерных точек (объектов, целей) пути. Максимальный
объем информации для описания характерной точки пути равен 30
байтам и включает:
- значение железнодорожной координаты точки, м;
- тип объекта (станция, светофор, опасное место, мост, переезд, плат-
форма, переход, путепровод, ПОНАБ, тоннель, стрелка, тупик и т.п.);
- длину объекта, м;
- название объекта;
-допустимую скорость проследования объекта, км/ч.
Для связи со спутниками систем ГЛОНАСС / GPS в аппаратуре
КЛУБ-У используется приемник СНС, который осуществляет при-
ем следующей информации:
- значения географической широты и долготы локомотива;
- текущего времени по Гринвичу и даты.
Для определения текущей железнодорожной координаты локо-
мотива при движении без ЭК в модуле постоянных параметров
(МПП) хранится значение его начальной координаты (километро-
вой отметки) при отправлении.
При движении по ЭК железнодорожные координаты локомоти-
ва определяются на основании данных, полученных из приемника
СНС и записанных в ЭК участка маршрута следования поезда. Же-
лезнодорожные координаты локомотива рассчитываются в модуле
ММ с периодичностью 1 с. После определения местоположения ло-
комотива внутри ЭК производится выбор целей впереди поезда на
расстоянии до 5 км.
64
Номер пути, для которого выбираются цели, вводится машинис-
том с помощью кнопок блока БВЛ-У и принимается модулем ММ
из системного интерфейса.
2.3.5. Модуль радиоканала (РК)
Модуль РК предназначен для обеспечения дуплексной связи меж-
ду КЛУБ-У и стационарным пунктом управления по цифровому
радиоканалу. Его взаимодействие с модулями КЛУБ-У осуществля-
ется через CAN-интерфейс. Модуль осуществляет прием и запоми-
нание следующей информации:
- значений железнодорожных координат локомотива;
- значений допустимой и фактической скорости движения;
- сигналов АЛСН и АЛС-ЕН;
- признака результата контроля бдительности машиниста;
- номера пути движения поезда;
- направления движения поезда;
- количества осей в составе;
- номера поезда;
- номера локомотива;
- признака режима работы локомотива (поездной, маневровый,
двойной тяги).
Вся информация принимается из цифрового радиоканала радио-
станцией типа «МОСТ», входящей в состав КЛУБ-У, и передается в
модуль РК через интерфейс типа RS-232. Кроме того, модуль РК
выполняет следующие функции:
- передачу в радиостанцию «МОСТ» квитирующих сообщений;
- выдачу в CAN-интерфейс управляющих команд («включить
экстренное торможение», «разрешить движение на красный сигнал»
и т.п.) и кодов АЛСН;
- прием из CAN-интерфейса сообщений о смене режима работы
локомотива, команд инициализации и тестирования модуля;
- самотестирование через каждые 500 мс и передачу в CAN-ин-
терфейс сообщений о его результатах.
Плата объединительная
Плата объединительная предназначена для соединения между
собой составных частей блока БЭЛ-У.
5-3060
65
Рис. 2 9 Общий вид блока электроники
БЭЛ-У
Конструкция блока БЭЛ-У
Несущей конструкцией блока является его корпус (рис. 2.9). Все
узлы корпуса выполнены из алюминия и его сплавов методом штам-
пования и литья. Они соеди-
нены между собой винтами.
Внутри корпуса расположен
каркас с направляющими для
размещения плат ячеек моду-
лей. Электрические соедине-
ния БЭЛ-У с другими блока-
ми КЛУБ-У осуществляются
через штепсельные разъемы.
Питание блока осуществ-
ляется от вторичного источни-
ка электропитания постоянно-
го тока ИП-ЛЭ с напряжени-
ем 48±7 В с двойной
амплитудой пульсации не более 3 В. Величина тока потребления
блока — не более 2,5 А, масса — не более 12 кг.
2.4. Блоки индикации локомотивные
В кабине локомотива, как правило, устанавливаются два блока
индикации:
- блок индикации машиниста БИЛ (БИЛ-В, БИЛ-УТ и др.);
- блок индикации помощника машиниста БИЛ-ПОМ.
Основным является блок индикации машиниста, который пред-
назначен для:
- обработки и отображения информации, выводимой на лице-
вую панель;
- выработки светового и звукового сигналов «Внимание» и при-
ема сигналов о положении рукояток РБ, РБС, РБП и от блока БВЛ-У;
- задания режима работы локомотива (поездной, маневровый,
двойной тяги);
- ввода, хранения и записи на кассету регистрации локомотив-
ных и поездных характеристик;
- задания режимов диагностирования модулей КЛУБ-У и внеш-
них устройств (САУТ, ТСКБМ);
66
- регистрации оперативной информации о движении поезда на
кассету регистрации (КР).
В состав БИЛ входят следующие узлы (рис. 2.10):
- модуль управления (МУ);
- модуль индикации (МИ);
- блок ввода локомотивных, поездных характеристик и служеб-
ных команд (БВЛ-У);
- модуль регистрации (МР).
Рис. 2.10. Структурная схема БИЛ
Модуль управления обеспечивает прием информации от других
модулей (блоков) КЛУБ-У, передаваемой через системный CAN-
интерфейс. В этот же модуль поступает информация от рукояток
подтверждения бдительности РБ, РБС и РБП, а также от блока вво-
да БВЛ-У.
Необходимая для индикации информация поступает в модуль ин-
дикации (МИ), в котором производятся ее обработка и вывод в ал-
фавитно-цифровой форме на лицевую панель БИЛ. Регистрацию ин-
формации на кассету регистрации КР обеспечивает модуль МР.
Заводом-изготовителем КЛУБ-У освоен выпуск нескольких мо-
дификаций блоков индикации машиниста, отличающихся конструк-
тивным исполнением:
1) в одном корпусе размещены информационное табло, блок вво-
да БВЛ-У, вызывной прибор и блок регистрации на КР;
67
2) в одном корпусе размещены информационное табло, блок вво-
да БВЛ-У, вызывной прибор, а блок регистрации БР выполнен в
виде отдельного прибора;
3) информационное табло, блок БВЛ-У, вызывной прибор и блок
регистрации БР выполнены в виде отдельных приборов.
На рис. 2.11 приведен общий вид блока индикации машиниста
БИЛ-УТ (вариант 2), а на рис. 2.12 — общий вид БВЛ-У, размещен-
ного в отдельном корпусе.
Расположение индикаторов информации и кнопок ввода данных
на лицевой панели БИЛ-УТ:
1 — координата локомотива (железнодорожная), м;
2 — сообщение о приеме локомотива или поезда на прямой путь;
3 — сообщение о приеме локомотива или поезда на боковой путь;
4 — точка красного цвета указывает на значение допустимой ско-
рости движения локомотива на круговой шкале; ее расположение
соответствует показанию цифрового индикатора 8;
5 — цифровой индикатор зеленого цвета указывает значение фак-
тической скорости движения локомотива; это показание дублирует-
Рис. 2.11. Общий вид блока индикации БИЛ-УТ
68
ся точечными индикаторами зеле-
ного цвета на круговой шкале,
6 — точечный индикатор желто-
го цвета указывает значение целе-
вой скорости локомотива; в случае
совпадения значений целевой и до-
пустимой скоростей желтая точка
совпадает с красной и восприни-
мается как красная;
7 — зона индикаторов сигналов
светофоров (снизу вверх).
- позиция 1 — сигнал «Б»,
- позиция 2 — сигнал «К»;
- позиция 3 — сигнал «КЖ»;
- позиции 4, 5, 6, 7, 8 — сигналы Рис 2 12 Общий вид блока БВЛ'У’
„ , 1 гт^тт размещенного в отдельном корпусе
«3» (при приеме сигналов АЛСН
индицируется сигнал «3» только в
позиции 4; при приеме сигналов АЛС-ЕН индицируются сигналы в
позициях от 4 до 8 и число одновременно светящихся индикаторов
(позиций) указывает на количество свободных блок-участков по ходу
движения);
8 — цифровой индикатор красного цвета указывает значение до-
пустимой скорости движения;
9 — индикаторы фактического направления движения локомо-
тива (верхний индикатор — движение вперед, нижний — назад),
10 — указатель расстояния до ближайшей цели, м;
11 — наименование следующей станции;
12 — указатель маневрового режима работы локомотива;
13 — указатель поездного режима работы локомотива,
14 — указатель зеленого цвета исправности канала регистрации
и наличия кассеты регистрации в кассетоприемнике;
15 — время прибытия по графику на следующую станцию;
16 — сигнал красного цвета «Внимание»;
17 — точное значение московского времени (получаемого от СНС),
18 — давление в тормозной магистрали;
19 — давление в уравнительном резервуаре;
20 — значение несущей частоты сигнала АЛСН;
22 — номер пути, на котором находится локомотив;
69
Рис. 2.13. Общий вид блока
индикации помощника
машиниста БИЛ-ПОМ
23 — ускорение, м/с2;
24 — коэффициент торможения;
25 — индикатор запрета отпуска тормозов (последние три пара-
метра индицируются в случае работы КЛУБ-У совместно с САУТ);
26 — информационная строка;
27 — клавиатура блока БВЛ-У. Блок БВЛ-У служит для ввода в
КЛУБ-У данных и команд машиниста и обслуживающего персона-
ла. Конструктивно блок БВЛ-У размещен внутри блока индикации
машиниста (БИЛ-УТ, БИЛ-В) в отдель-
ном корпусе (рис. 2.12), который, как и
блок индикации, монтируется в пульте
машиниста и соединяется с блоком ин-
дикации с помощью отдельного кабеля.
БВЛ-У обеспечивает:
- ввод и индикацию поездных харак-
теристик;
- ввод и индикацию локомотивных
характеристик;
- ввод команд переключения режи-
мов работы локомотива;
- ввод и индикацию вводимого но-
мера пути.
На клавиатуре БВЛ-У (БИЛ-В, БИЛ-
УТ) имеются следующие функциональ-
ные группы кнопок:
- цифровые кнопки от «О» до «9»;
- кнопки переключения режимов:
«П» — режим чтения и ввода номера пути;
«Л» — режим чтения и ввода локомотивных и поездных харак-
теристик;
«К» — режим ввода команд;
«И» — кнопка изменения яркости свечения индикаторов БИЛ
и БИЛ-ПОМ;
- кнопки управления вводом:
« >0< » — обнуление текущего параметра;
«D» — ввод текущего параметра;
- кнопки управления локомотивом:
«ВК» — выключение красного сигнала;
70
«РМП» — режим маневровый / поездной;
«f» — выбор несущей частоты АЛСН;
- кнопки управления САУТ:
«ПОДТЯГ» — разрешение движения поезда со скоростью не
более 30 км/ч к координате, находящейся на расстоянии 560 м
от точки прицельного торможения;
«Отпр.» — безостановочный проезд поезда по боковому пути
при белом огне АЛСН со скоростью не более 50 км/ч;
«ОС» — отмена ограничения скорости;
«К20» — разрешение проследования светофора с запрещающим
показанием со скоростью не более 20 км/ч;
- кнопки «+» и «-» — увеличение и уменьшение вводимого циф-
рового параметра на единицу;
- кнопка «V» — включение подсветки на клавиатуре.
Блок индикации помощника машиниста БИЛ-ПОМ повторяет син-
хронно с БИЛ индикацию сигналов путевых светофоров. БИЛ-ПОМ
конструктивно выполнен в виде отдельного прибора (рис. 2.13).
На рис. 2.14 и 2.15 показаны соответственно блоки индикации
БИЛ-В и БИЛ-У.
Рис. 2.14. Общий вид блока индикации машиниста БИЛ-В
71
Рис. 2.15. Общий вид блока индикации БИЛ-У
2.5. Блок коммутации и регистрации (БКР-У)
Блок предназначен для:
- приема аналоговых сигналов от датчиков давления в уравни-
тельных резервуарах (ДЦУР1, ДДУР2), тормозном цилиндре (ДДТЦ)
и тормозной магистрали (ДДТМ), а также для представления их в
цифровом виде для индикации на БИЛ;
- приема дискретных сигналов: включения реле генераторов 1 и
2, включения компрессора, контроля цепи «ЭПК», сигнала «Пере-
крыта», сигнала торможения, включения свистка и тифона;
- передачи сигнала управления ЭПК от устройства КОН;
- включения питания аппаратуры КЛУБ-У;
- коммутации цепей контроля, цепей питания ЭПК и цепей при-
емных катушек в соответствии со схемой управления локомотивом
из выбранной кабины;
- приема сигналов от цепей управления локомотива и передачи
их в БЭЛ-У («О» контроллера, номер активной кабины);
- подготовки и передачи информации для регистрации на кассету.
В состав блока входит логический модуль — устройство форми-
рования и регистрации данных (УФИР). Структурная схема блока
приведена на рис. 2.16.
Аналоговые сигналы от датчиков давлений Д1...Д4 через нор-
мирующие преобразователи поступают на вход коммутатора, а за-
тем с помощью АЦП преобразуются в цифровую форму (АЦП ра-
72
Рис. 2.16. Структурная схема УФИР
ботает на частоте около 100 КГц) и заносятся в оперативное запо-
минающее устройство (ОЗУ 1) для обработки.
При этом используется следующий алгоритм. В одном цикле из-
мерения (Тизм) с каждого из датчиков снимаются четыре последова-
тельных отсчета, по которым определяется среднее арифметическое
значение Аср и делается проверка попадания измерений в область
допустимых ошибок, которая определяет класс точности измерения.
Если какое-то измерение выходит за границу допустимых ошибок,
то оно считается аномальным и отбрасывается, после чего вычисля-
ется уточненное значение Аср (по трем оставшимся измерениям),
которое принимается как результат измерения и передается в сис-
темный интерфейс. Алгоритм предварительной обработки данных
в одном цикле измерений приведен на рис. 2.17. Затем производится
проверка двух последовательных измерений на их достоверность с
учетом динамических свойств измеряемого параметра (рис. 2.18).
При этом используются априорно известные динамические свой-
ства измеряемых параметров. Так, например, давления в воздушных
73
Рис. 2.17. Схема предварительной обработки одного цикла измерений
магистралях локомотивов изменяются с низкой частотой, а скорость
измерений составляет 2 изм/с.
В модуле У ФИР вырабатываются сигналы типа «сухой контакт»
превышения скоростей 2, 20,40 и 60 км/ч, которые используются для
управления работой различных устройств локомотива (песочницы,
гребнесмазывателя и др.).
Модуль УФИР обеспечивает передачу в системный интерфейс ин-
Рис. 2.18. Схема проверки измерений
с учетом динамических свойств сигналов
формации от агрегатов и уст-
ройств локомотива через цент-
ральную клеммную рейку ЦКР.
Программное обеспечение
модуля УФИР обеспечивает пе-
риодическое тестирование рабо-
тоспособности ячейки микро-
контроллера с выдачей сообще-
ния о его результатах в
CAN-интерфейс. В случае выхо-
да из строя ячеек микроконтрол-
леров модуль УФИР выключа-
ется из конфигурации КЛУБ-У.
Внешний вид и габаритные
размеры БКР-У приведены на
рис. 2.19.
74
200
БЭЛ1-1 CAN1-1 БЭЛ1-3
L
ключи
280
С
ПК1
ЭПК1
О
ПИТ
5А
8А
ДПС пит
дпс
ПК2
ЭПК2
ЦКР
CAN1
ДДУР1 ДДУР2*ДДТМ ДДТЦ
Рис. 2.19. Общий вид блока БКР-У
75
2.6. Порядок эксплуатации КЛУБ-У
Перед выпуском из депо на линию или при передаче из одного
депо в другое локомотивы, оборудованные КЛУБ-У, должны прой-
ти техническое обслуживание. Если между поездками локомотива,
оборудованного КЛУБ-У, прошло менее 48 ч, то машинист осуще-
ствляет прием и проверку локомотива самостоятельно. В любом слу-
чае для включения в работу КЛУБ-У на локомотиве должна быть
заполнена штамп-справка, подписанная работником контрольного
пункта (КП). В нее вносятся следующие сведения:
- дата заполнения;
- номер локомотивного депо приписки локомотива и название
железной дороги;
- конфигурация КЛУБ-У;
- номер установленной ЭК;
- запись о проведенной проверке и исправности КЛУБ-У.
2.6.1. Порядок включения КЛУБ-У
Перед включением КЛУБ-У на локомотивах (или МВПС) маши-
нист должен:
- удостовериться, что давление воздуха в главных резервуарах
составляет не менее 7 кгс/см2 (0,71 МПа);
- повернуть ключ в замке ЭПК в крайнее правое положение (вык-
лючено);
- на односекционных двухкабинных локомотивах, не имеющих
автоматической схемы переключения кабин, повернуть рукоятку
переключателя направления в положение, соответствующее направ-
лению движения, и установить тумблер «КАБ» в положение, соот-
ветствующее той кабине, из которой будет осуществляться управле-
ние движением.
После этого необходимо вставить кассету регистрации КР в кассе-
топриемник блока БИЛ (БИЛ-В) или кассетоприемник блока БР-У.
Затем нужно включить питание КЛУБ-У, установив тумблер «ПИТ»
в БКР-У в положение, при котором должен включиться индикатор
«ПИТ».
В активной кабине следует проконтролировать включение на
индикаторах блока БИЛ следующих сообщений:
76
- «К: ХХХХ» в информационной строке ХХХХ — десятичные
цифры номера электронной карты, который индицируется на время
от 4 до 6 с. Если индицируется номер FFFF, то ЭК отсутствует;
- индикатор «П» (режим работы поездной) горит постоянно;
- на индикаторе «ВРЕМЯ» (часы, минуты, секунды) индицирует-
ся время внутренних часов КЛУБ-У, а затем через 2—4 минуты —
текущее московское время по данным СНС (по команде «КЗ» с БВЛ-У
в информационной строке БИЛ индицируется текущая дата, приня-
тая от СНС);
- на индикаторе «ДАВЛЕНИЕ, МПа», отображается значение дав-
ления в тормозной магистрали (на блоках БИЛ-В, БИЛ-ВВ, БИЛ-УТ
дополнительно индицируется значение в уравнительном резервуаре
активной кабины);
- на индикаторе «АЛС» отображается одно из значений (25, 50,
75 Гц) несущей частоты канала АЛСН или вместо этих цифр заго-
рается «ЕН» — признак приема сигналов из канала АЛС-ЕН или
«РК» — признак приема сигналов из радиоканала;
- на индикаторе «КООРДИНАТА» отображается «0000.000» (ки-
лометры, метры) или, при наличии ЭК, не более чем через 4 мин
отображается значение соответствующей текущей координаты;
- на индикаторе «N ПУТИ» отображается «0» (на БИЛ-В,
БИЛ-ВВ, БИЛ-УТ);
- на цифровых индикаторах фактической скорости отображает-
ся значение «000»;
- на индикаторах (зеленого цвета) фактической скорости круго-
вой шкалы отображается значение 0 км/ч;
- загорание индикатора готовности кассеты регистрации «йЬ»
(если индикатор не горит, то необходимо переустановить кассету
регистрации).
Затем необходимо включить ЭПК поворотом ключа против ча-
совой стрелки. При этом раздается кратковременный звуковой сиг-
нал, а на БИЛ и БИЛ-ПОМ загорается сигнал светофора «Б» (если
локомотив находится на некодируемом участке пути) или сигнал
светофора, соответствующий коду АЛСН или АЛС-ЕН (если локо-
мотив находится на кодируемом участке). Этот сигнал появляется
не позднее чем через 8 с после включения КЛУБ-У.
77
Также должны загореться точка желтого цвета на круго&ой шка-
ле скорости — значение Кц — и точка красного цвета на круговой
шкале скорости — значение V, и высветить индикаторами красного
цвета значение Кд в цифровом виде.
При работе КЛУБ-У совместно с САУТ — ЦМ/485 на БИЛ
дополнительно загораются индикаторы «запрет отпуска» и «коэф,
торможения». Последовательным нажатием кнопки «И» на БВЛ-У
выбирается степень яркости свечения элементов индикации бло-
ков БИЛ и БИЛ-ПОМ. В блоках типов БИЛ и БВЛ-У имеется тум-
блер включения подсветки «ПОДСВ.».
Далее ключом выключается и включается ЭПК и контролируется
появление однократного звукового сигнала и включение или вык-
лючение индикации сигналов светофора на индикаторах БИЛ,
БИЛ-ПОМ.
При отсутствии ЭК в составе КЛУБ-У нажатиями кнопки «Б> на
БВЛ-У устанавливается по индикации на дисплее АЛС блока БИЛ
рабочее значение несущей частоты канала АЛСН («25», «50» или
«75» Гц). При последующем изменении значения несущей частоты
АЛСН нажатие кнопки «1» производить с интервалом не менее двух
секунд.
На блоке БИЛ должны загореться соответствующий сигнал свето-
фора и высветиться значения целевой (на круговом индикаторе) и
допустимой скоростей в цифровом виде в соответствии с табл. 2.5.
На блоке БИЛ-ПОМ (БИЛ-В-ПОМ) должен включиться соответ-
ствующий сигнал светофора. В односекционных двухкабинных ло-
комотивах в аппаратуре КЛУБ-У в пассивной кабине на блоке БИЛ
отсутствует: индикация сигналов светофоров и количества свобод-
ных блок-участков, индикация давления, целевой скорости, назва-
ний станций и расстояний до препятствий.
2.6.2. Ввод предрейсовой информации
Перед выдачей состава на линию производится проверка исправ-
ности логических модулей КЛУБ-У, для чего с помощью БВЛ-У вво-
дится команда «К71». В информационной строке появятся знаки:
«1 2 3 4 5 6 7 8 9 А В». Вместо некоторых цифр и букв может быть знак
«-». Если цифры и знаки соответствуют информации, указанной в
штамп-справке, аппаратура КЛУБ-У исправна и работоспособна.
Производится проверка двух комплектов аппаратуры КЛУБ-У, и в
78
Сигналы индикации блока БИЛ-У
Таблица 2.5
№ стро- ки Система кодирова- ния Сигналы от путевых устройств Режим работы Сигналы индикаторов блока БИЛ
Режим работы Сигналы локомотивного светофора или количество блок-участков уд. км/ч Уц. км/ч
1 Нет Нет Поездной П
Режим двойной тяги П (мигающий) «Белый» Удб Удб
2 Нет Нет после «Зеленого» и «Желтого» Поездной П
Режим двойной тяги П (мигающий) «Белый» Удб Удб
3 АЛСН «Зеленый» Поездной П «Зеленый»
Режим двойной тяги П (мигающий) «Белый» Удз Удз
4 АЛС-ЕН В соответствии с инструкцией по сиг- нализации Поездной П 1 или более свободных блок-участков Уд* Уц-
Режим двойной тяги П (мигающий) «Белый»
5 АЛСН «Желтый» Поездной П «Желтый» Уз V v КЖ
Режим двойной тяги П (мигающий) «Белый»
6 АЛСН, АЛС-ЕН «Желтый с «Красным» Поездной П «Желтый с красным» не более V * цж 0
Режим двойной тяги П (мигающий) «Белый» — —
Окончание табл. 2.5
№ стро- ки Система кодирова- ния Сигналы от путевых устройств Режим работы Сигналы индикаторов блока БИЛ
7 АЛСН, Нет после «КЖ» Поездной П «Красный» 20 0
АЛС-ЕН Режим двойной тяги П (мигающий) «Белый» — —
8 АЛС-ЕН Пригласи- тельный («Желтый») Поездной П «Белый мигающий» не более Уцж 20
Режим двойной тяги П (мигающий) «Белый» — —
9 АЛСН, АЛС-ЕН Любой Маневровый М «Белый» 60 60
Примечания.
1. Идз — значение допустимой скорости при сигнале «3» на светофоре блока БИЛ; Едб — значение допусти-
мой скорости при сигнале «Б» на светофоре блока БИЛ; — значение целевой скорости при сигнале «Ж» на
светофоре блока БИЛ; Кд* — значение допустимой скорости в зависимости от числа свободных блок-участков
при приеме сигналов «АЛС-ЕН»; 7Ц* — значение целевой скорости в зависимости от числа свободных блок-
участков при приеме сигналов «АЛС-ЕН».
2. В маневровом режиме работы при значении параметра «Категория поезда» — 7 (маневровый) значение
Ед = 40 км/ч.
случае выявления отличий в результатах диагностики последние дол-
жны быть устранены в соответствии с инструкцией по эксплуатации.
При включении КЛУБ-У активизируются оба комплекта аппа-
ратуры, но основным становится один (произвольный) из двух ком-
плектов. Посредством ввода с БВЛ-У команды «К91» в качестве ос-
новного назначается 1-й комплект, а команды «К92» — 2-й. Время
переключения на другой комплект составляет около 2 с.
Ввод предрейсовой информации осуществляет машинист с по-
мощью клавиатуры блока БВЛ-У в активной кабине, для чего ему
следует:
- нажать кнопку «Л» (режим ввода поездных характеристик ма-
шинистом);
- поочередно ввести значения постоянных параметров в соответ-
ствии со строками 1—4, 6 табл. 2.6;
- после ввода каждого параметра нажимать кнопку «А» (при от-
сутствии необходимости изменения значения параметра, отобража-
емого в информационной строке, можно, не вводя нового значения,
нажать кнопку «А» на БВЛ-У);
- нажать кнопки «К», «6»;
- ввести значения координаты в соответствии со строками 5, 19
табл. 2.6;
- после ввода каждого параметра нажимать кнопку «А»;
Таблица 2.6
Значения параметров, вводимых с БВЛ-У
№ стро- ки Наименование параметра Индикация на блоке БИЛ Диапазон Кто вводит
1 Табельный номер машиниста НОМЕР МАШИНИСТА 0—99999 м
2 Номер поезда НОМЕР ПОЕЗДА 0—99999 м
3 Длина в осях ДЛИНА В ОСЯХ 0—500 м
4 Длина в вагонах ДЛИНА В ВАГОНАХ 0—150 м
5 Линейная координа- та (м) КООРДИНАТА (М) 0—9999999 м
6 Масса поезда (т) МАССА ПОЕЗДА (Т) 0—10000 м
81
Продолжение табл 2 б
1 № стро- ки Наименование параметра Индикация на блоке БИЛ Диапазон Кто вводит
7 Категория поезда КАТЕГОРИЯ ПОЕЗДА 5 — высокоскоро- стной (250 км/ч), 4 — скоростной (200 км/ч), 3 — скоростной (160 км/ч), 2 — пассажирский (140 км/ч), 1 — пассажирский и пригородный (120 км/ч), 6 — грузовой (90 км/ч), 7 — маневровый (80 км/ч) тп
8 Время (зимнее или летнее) ВРЕМЯ 0 — зимнее, 1 — летнее тп
9 Тип локомотива ТИП ЛОКОМОТИВА 0—255 тп
10 Номер локомотива или ведущей сек- ции локомотива НОМЕР ЛОКОМОТИВА 0—9999 тп
11 Диаметр колеса по кругу катания колесной пары 1 (ДПС1), мм ДИАМЕТР 1 (ММ) 850—1290 тп
12 Диаметр колеса по кругу катания колесной пары 2 (ДПС2), мм ДИАМЕТР 2 (ММ) 550—2000 тп
13 Число зубьев ДПС ЧИСЛО ЗУБЬЕВ ДПС 32—54 тп
14 Конфигурация КОНФИГУРАЦИЯ 0—255 тп
15 Допустимая ско- рость на «Б», км/ч СКОРОСТЬ НА БЕЛЫЙ 0—250 (для БИЛ-УТ-0-160) тп
16 Допустимая ско- рость на «3», км/ч СКОРОСТЬ НА ЗЕЛ 0—250 тп
82
Окончание табл. 2.6
№ стро- ки Наименование параметра Индикация на блоке БИЛ Диапазон Кто вводит
17 Целевая скорость на «Ж», км/ч СКОРОСТЬ НА ЖЕЛ. 0—250 ТП
18 Длина блок-участ- ка, м ДЛИНА БЛОК-УЧ., М 400—2000 ТП
19 Изменение коорди- наты ИЗМ. КООРДИНАТЫ 1 — увелич. коор- динаты по четному пути, 0 — увелич. коор- динаты по нечетно- му пути м
Примечание. М — машинист; ТП — технический персонал.
- нажать кнопки «К», «5» (режим ввода постоянных локомотив-
ных характеристик);
- поочередно ввести значения постоянных параметров в соответ-
ствии со строками 7—18 табл. 2.6;
- после ввода каждого параметра нажимать кнопку «А».
Операции ввода команд с помощью кнопок блока БВЛ-У произ-
водятся только при установленной в кассетоприемник блока БИЛ
(БР-У) КР. При отсутствии КР в КЛУБ-У возможно только чтение
постоянных характеристик из БВЛ по командам «Л», «К5», «Кб»
без изменения их значений.
Для ввода постоянных характеристик используется подключае-
мый к CAN-магистрали переносной блок БВД-У. Эти характерис-
тики вводятся техническим персоналом с помощью команды К5 и
доступны машинисту для чтения.
Характеристика «Категория поезда» определяет максимально
допустимую скорость движения поезда Ид в соответствии с графой
«Диапазон» табл. 2.6.
Характеристика «Допустимая скорость на зеленый» определяет
допустимую скорость движения поезда при сигнале светофора бло-
ка БИЛ-У «3».
Параметр «Допустимая скорость на белый» определяет допусти-
мую скорость движения при сигнале «Б» светофора на БИЛ.
83
Вводимые значения «Допустимая скорость на зеленый» и «Допу-
стимая скорость проезда светофора с желтым сигналом» необходи-
мо устанавливать в соответствии с установленной допустимой ско-
ростью движения для данной категории поезда согласно ПТЭ или
приказу начальника дороги.
Количество зубьев датчика скорости (количество импульсов на
один оборот колеса) следует программировать в зависимости от типа
датчика. В используемой в настоящее время аппаратуре КЛУБ-У при-
меняются датчики с 42 зубьями. Вводимое значение диаметра колеса
по кругу катания должно соответствовать реально измеренному.
Вводимое в КЛУБ-У расчетное значение длины блок-участка дол-
жно устанавливаться приказом главного инженера дороги на осно-
ве совместного решения служб локомотивного хозяйства, движения,
сигнализации и связи. Оно должно находиться в пределах от 400 до
2000 м, в зависимости от местных условий.
Установка слишком короткой расчетной длины блок-участка
приводит к тому, что на длинных блок-участках после проследова-
ния расчетной длины блок-участка необходимо осуществлять под-
тягивание состава со скоростью не более 20 км/ч.
Установка слишком большой расчетной длины блок-участка при-
водит к тому, что на коротких блок-участках состав будет проез-
жать светофоры с запрещающим сигналом. В процессе движения
локомотива машинист имеет возможность контролировать работо-
способность узлов КЛУБ-У. Для этого используются команды, пе-
речисленные в конце данной главы. Ввод линейной координаты ло-
комотива и характера ее изменения (уменьшение или увеличение)
по команде «Кб», вводимой с БВЛ-У, может производиться- как на
стоянке, так и во время движения при установленной КР. Если КР
не установлена, то возможно только чтение данных параметров, хра-
нящихся в модуле ВУ-2 блока БЭЛ-У.
2.6.3. Выбор режима движения
Выбор маневрового режима «М» и режима двойной тяги «РДТ»
невозможен при показаниях «КЖ», «БМ» или «К» на БИЛ и
БИЛ-ПОМ.
До начала движения необходимо выбрать режим движения ло-
комотива (МВПС), нажимая в блоке БВЛ-У на кнопку «РМП» до
установления индикации соответствующего режима. Поочередно
84
зажигаются индикаторы: «П» — поездной, «М» — маневровый или
«П» — мигающий, что соответствует режиму «РДТ». При этом ус-
танавливаются значения допустимой и целевой скорости для это-
го режима. Смена режимов движения осуществляется только на
стоянках.
Маневровый режим используется при следовании по тракцион-
ным путям депо, а также в процессе прицепки локомотива к соста-
ву. Прием сигналов АЛСН и АЛС-ЕН в маневровом режиме не осу-
ществляется, а на БИЛ и БИЛ-ПОМ индицируется сигнал «Б». Од-
нократная проверка бдительности машиниста в начале движения
в этом режиме отменена. Допустимая и целевая скорости равны
60 км/ч.
Движение в режиме «РДТ» осуществляется:
- при работе локомотивов по системе многих единиц (на ведо-
мых локомотивах);
- на подталкивающем, втором и последующих локомотивах;
- на локомотивах, находящихся в середине состава соединенного
поезда;
- при движении состава с вагонами, кранами, путевыми машина-
ми, снегоочистителями, расположенными впереди локомотива.
Для перехода КЛУБ-У в режим двойной тяги на указанных выше
локомотивах на стоянке необходимо одновременно нажать на 1—2
с рукоятки РБ и РБП. После этого в течение 30 с следует установить
с помощью кнопки РМП на БВЛ-У режим мигающий «П».
При этом аппаратура КЛУБ-У этих локомотивов:
- не осуществляет прием сигналов АЛСН и АЛС-ЕН, а также ко-
дов показаний светофоров от цифрового дублирующего радиока-
нала; на блоках БИЛ и БИЛ-ПОМ индицируется сигнал «Б»;
- обеспечивает изменение скорости движения по сигналу «Б» с
помощью команды «К799»;
- не производит экстренное торможение от блока КОН;
- не осуществляет однократные проверки бдительности при тро-
гании, контроль скатывания и контроль исправности ДПС;
- формирует и отображает на БИЛ информацию о впереди-
лежащих местах ограничений скорости, но фактической отработки
целевой и допустимой скоростей при этом не производит.
Для работы локомотивов по системе многих единиц переход в этот
режим осуществляется для второго и последующих локомотивов пу-
85
тем ввода на них команды «К262». При работе локомотива по системе
многих единиц отменяются периодические проверки бдительности.
2.6.4. Ввод номера пути
Для ввода номера пути необходимо:
1. Нажать кнопку «П» на БВЛ-У. На панели индикации БИЛ по-
явится приглашение для ввода номера пути.
2. Ввести номер пути с помощью кнопок БВЛ-У и нажать кнопку
ввода «А». На панели индикации появится приглашение для ввода
признака правильности пути: «О» — для неправильного пути; «1» —
для правильного. Машинистом реализуется один из предложенных
вариантов.
3. Повторно нажимается кнопка «А». На панели индикации БИЛ
после номера пути загорятся надписи «НП» или «ПР» соответ-
ственно.
Если предварительно была введена электронная карта для эксп-
луатируемого участка пути, то не позже чем через 4 мин с момента
включения питания КЛУБ-У (при условии, что антенна СНС не эк-
ранирована) и не позже чем через 30 с после ввода номера пути, на
котором находится локомотив, на БИЛ-У появится дополнительно
следующая информация:
- в информационной строке — название и тип ближайшей цели
по ходу движения локомотива;
- в строке «Расстояние до цели» — расстояние в метрах до бли-
жайшего препятствия по ходу движения (при приеме сигнала «КЖ»
вводится, но не отрабатывается изменение номера пути и блокиру-
ется вход в электронную карту);
- точка красного цвета на круговой шкале, а также цифровое значе-
ние допустимой скорости — значение максимально допустимой ско-
рости в точке нахождения локомотива Ид, при которой разрешается
проследование актуального препятствия со скоростью не выше Иц;
- точка желтого цвета на круговой шкале — значение целевой
скорости проезда поездом актуального препятствия И .
Проверку наличия ЭК в КЛУБ-У в случае необходимости мож-
но произвести путем ввода с БВЛ-У команды «К522». При этом в
информационной строке на 4 с появится номер ЭК.
Для односекционных локомотивов при смене кабины управления
автоматически изменяется признак правильности направления. На-
86
пример, если в кабине 1 на БИЛ индицировался номер пути «2ПР», то
при переключении на кабину 2 индицируется номер пути «2НП».
Если номер пути не определен, то на индикаторе номера пути
будет высвечиваться надпись «НЕОП».
2.6.5. Порядок работы с КЛУБ-У
в начале движения локомотива
Контроль и исключение несанкционированного движения локо-
мотива являются функциями обеспечения безопасности. Такой кон-
троль производится с момента включения КЛУБ-У.
При нулевом положении контроллера машиниста и самопроиз-
вольном начале движения локомотива, когда фактическая скорость
превысит 2 км/ч, КЛУБ-У включает с выдержкой времени 7—8 с эк-
стренное торможение от ЭПК.
Если при выведенной в тяговое положение рукоятке контролле-
ра в течение более 74 с не происходит движения локомотива или
пройденное им расстояние составляет менее 0,3 м, то также будет
включено экстренное торможение от ЭПК.
Чтобы избежать включения ЭПК до окончания промежутка 74 с,
необходимо кратковременно на 1,5—2 с установить контроллер в
нулевое положение. После этого, чтобы начать движение, нужно
опять перевести контроллер в тяговое положение.
Трогание считается успешным, если скорость локомотива пре-
высит 2 км/ч за время менее 74 с. С этого момента продолжение дви-
жения возможно как в тяговой, так и в нулевой позициях контрол-
лера машиниста.
2.6.6. Взаимодействие КЛУБ-У с вентилем КОН и ЭПК
В состав аппаратуры КЛУБ-У дополнительно введен блок конт-
роля несанкционированного отключения машинистом с помощью
ключа ЭПК (КОН). Блок КОН подключается к электрическим це-
пям локомотива и работает следующим образом:
- в случае выключения машинистом ЭПК ключом во время дви-
жения КЛУБ-У через 11 с после выключения производит анализ ве-
личины давления в тормозных цилиндрах;
- если давление составляет менее 0,7 кг/см2, КЛУБ-У подает пи-
тание на вентиль КОН, что приводит к выпусканию воздуха из по-
лости над срывным клапаном ЭПК и включению экстренного тор-
87
можения без выдержки времени. Этим обеспечивается невозмож-
ность выключения КЛУБ-У при движении путем выключения ЭПК
ключом на время более 11с при неприятии действий машиниста по
остановке поезда.
В случае внезапного загорания сигналов «К» или «КЖ» на блоке
индикации КЛУБ-У и скорости движения выше целевой в соответ-
ствии с действующими инструкциями машинист должен кратковре-
менно (на 5—6 с) выключить ЭПК ключом с обязательным его пос-
ледующим включением и после этого принять меры для снижения
скорости ниже целевой.
На практике также возникают ситуации, когда во время движе-
ния происходят снятие напряжения с катушки ЭПК и включение сви-
стка. Если при нажатии на рукоятки РБ и РБС свисток не прекраща-
ется, машинист должен выключить его ключом ЭПК и включить
снова не позднее чем через 5—6 с и одновременно произвести пол-
ную остановку поезда.
Работа КЛУБ-У в этом случае не должна нарушаться. В против-
ном случае машинист для продолжения движения должен получить
разрешение от диспетчера, а перед началом движения снять фикса-
тор с разобщительного клапана ЭПК, выключить КЛУБ-У и далее
действовать в соответствии с действующими инструкциями.
2.6.7. Проверка бдительности машиниста
Аппаратура КЛУБ-У выполняет два вида проверок бдительнос-
ти машиниста: однократную и периодическую.
Однократные проверки бдительности проводятся:
- при смене сигналов светофоров на БИЛ и БИЛ-ПОМ на более
запрещающие;
- при уменьшении значения целевой скорости в процессе следо-
вания по сигналам АЛС-ЕН;
- при переходе на сигналы «Б» и «К» при Еф > 2 км/ч;
- при трогании в поездном режиме по сигналам «КЖ», «К»,
«Б» или «БМ» на БИЛ и БИЛ-ПОМ и фактической скорости бо-
лее 2 км/ч;
- при проезде желтого и красного сигналов светофора.
Порядок проведения однократных проверок бдительности:
- при появлении на БИЛ мигающего светового сигнала «Внима-
ние», одновременно с появлением которого раздается свисток ЭПК,
88
машинист за время не более 7—8 с должен подтвердить свою бди-
тельность нажатием на РБ или РБС; если ни одна из этих рукояток
(РБ или РБС) не была вовремя нажата, КЛУБ-У включит экстрен-
ное торможение от ЭПК.
Периодические проверки бдительности проводятся с периодом
30—40 с:
- в случае превышения Рф над Уц на 1 км/ч и более;
- в случае движения локомотива на запрещающий сигнал свето-
фора («КЖ», «К», «БМ»);
- при неисправности включенной в конфигурацию КЛУБ-У сис-
темы ТСКБМ (наличие буквы «В» в информационной строке) про-
верка производится с периодом 60—90 с;
- при движении по некодированному пути по сигналу «Б» на бло-
ках БИЛ-У, БИЛ-ПОМ (кроме движения локомотива вторым и пос-
ледующим по системе многих единиц) проверка производится
с периодом 60—90 с.
Периодические проверки бдительности машиниста в КЛУБ-У
производятся следующим образом. Когда на БИЛ появляется мига-
ющий световой сигнал «Внимание», машинист должен подтвердить
свою бдительность нажатием на РБ. Если в течение 6 с рукоятки РБ
или РБС не были нажаты, то при наличии на БИЛ мигающего све-
тового сигнала «Внимание!» раздается свисток ЭПК. В этом случае
бдительность машиниста должна подтверждаться только нажатием
на РБС. Если рукоятка РБС не была нажата, то через 7—8 с КЛУБ-У
включит экстренное торможение.
Время удержания рукояток РБ и РБС в нажатом состоянии долж-
но быть не менее 2±0,5 с. Периодичность проверок бдительности
задается в КЛУБ-У произвольной в интервалах 30—40 или 60—90 с.
2.6.8. Порядок работы КЛУБ-У при движении локомотива
При отсутствии ЭК и движении по участку, оборудованному путе-
выми устройствами АЛСН, при сигнале «3» светофора на БИЛ и
БИЛ-ПОМ индицируются Р'[( и Ид, равные значению И3, записанно-
му в памяти КЛУБ-У. При превышении значения рф над Ид на 1 км/ч и
более снимается напряжение с катушки ЭПК и включается свисток
ЭПК. Свисток прекращается при снижении значения скорости Рф до
рг или ниже. Если с момента включения свистка ЭПК в течение
7—8 с снижения скорости не произошло, то будет включено экстрен-
89
ное торможение. Периодическая проверка бдительности машинис-
та при наличии на БИЛ и БИЛ-ПОМ сигнала «3» не производится.
При следовании по сигналу «Ж» на БИЛ и БИЛ-ПОМ значения
скоростей Еж и Ед соответственно равны значениям параметров
«Скорость на желтый» и «Скорость на зеленый», установленных
приказом начальника дороги.
Если при движении к светофору с желтым сигналом Еф < Еж, пе-
риодическая проверка бдительности машиниста не производится.
Если Еф > Еж, производится периодическая проверка бдительности
машиниста с интервалом 30—40 с.
При движении к светофору с желтым сигналом машинист обязан
проследовать светофор со скоростью не выше Е . Если это условие
не будет выполнено после появления на блоках БИЛ и БИЛ-ПОМ
сигнала «КЖ», значение скорости Ед станет равным значению Еж, и
будет включено экстренное торможение локомотива по превыше-
нию скорости. При появлении на БИЛ и БИЛ-ПОМ сигнала «КЖ»
величина Ец становится равной 0 км/ч, а величина Ед — равной зна-
чению параметра «Скорость на желтый» (Еж).
При движении локомотива (МВПС) к светофору с запрещающим
сигналом КЛУБ-У осуществляет периодический перерасчет значений
допустимой скорости в соответствии с заданной кривой торможения
до Ид = 20 км/ч. Машинист обязан снижать Еф движения локомотива
(МВПС) таким образом, чтобы избежать превышения Еф над Ед бо-
лее чем на 1 км/ч, для предотвращения режима экстренного торможе-
ния по превышению скорости. Периодические проверки бдительнос-
ти машиниста в этом режиме производятся с интервалом 30—40 с.
В случаях проследования светофора с запрещающим сигналом или
пропадания кодов АЛСН или АЛС-ЕН на БИЛ и БИЛ-ПОМ после
сигнала «КЖ» появляется сигнал «К». Сигнал «К» на БИЛ и БИЛ-ПОМ
появляется также при проследовании светофора с запрещающим сиг-
налом пассажирским поездом без предварительной остановки.
КЛУБ-У в этом случае осуществит безусловное экстренное торможе-
ние. Порядок проследования светофора с запрещающим сигналом при
автоматической блокировке установлен ПТЭ (пп. 16.27 и 16.28).
Для предотвращения экстренного торможения машинист при
подъезде к светофору с запрещающим сигналом должен остановить
локомотив на расстоянии не менее 200 м до светофора и убедиться,
что Еф = 0 км/ч.
90
Последующее движение должно происходить только после по-
лучения машинистом разрешения от ДНЦ или ДСП. При этом про-
езд светофора с запрещающим сигналом производится со скорос-
тью, не превышающей 20 км/ч. Проследование светофоров с
запрещающим показанием без предварительной остановки разре-
шается только грузовым поездам со скоростью не более 20 км/ч
в случаях, установленных приказом начальника дороги. После про-
следования светофора с запрещающим сигналом на БИЛ и БИЛ-
ЛОМ индицируется сигнал «К». При этом КЛУБ-У производит од-
нократную проверку бдительности машиниста. Периодические
проверки бдительности машиниста при следовании под сигнал «К»
производятся с интервалами 30—40 с.
При проезде сигнала «К» пользование кнопкой ВК, располо-
женной на БВЛ-У или на клавиатуре БИЛ-В, БИЛ-УТ, и рукоятка-
ми РБ и РБП для перехода на сигнал «Б» запрещается. В других слу-
чаях машинист может переключить сигнал «К» на БИЛ и БИЛ-ПОМ
на сигнал «Б» путем одновременного нажатия на РБ, РБП и кнопку
ВК (при вождении поезда одним машинистом — нажатием на РБ и
кнопку ВК) в случаях, предусмотренных ПТЭ. Данное переключе-
ние можно осуществлять как на стоянке, так и при движении.
После одновременного нажатия на рукоятки РБ, РБП и кнопку
ВК на БВЛ-У (клавиатуре БИЛ-В, БИЛ-УТ) на блоках БИЛ, БИЛ-
ЛОМ появляется сигнал «Б», а также значения и И , равные зна-
чению Иб.
В случае выключения машинистом ЭПК ключом при сигнале «К»
на БИЛ и БИЛ-ПОМ и при Рф > 1 км/ч произойдет включение экст-
ренного торможения от блока КОН.
Перед началом следования по участку пути, оборудованному
полуавтоматической блокировкой, необходимо ввести с БВЛ или
с клавиатуры блоков БВЛ-В, БИЛ-УТ команду «К809». При этом
в информационной строке БИЛ появится сообщение «Введите ско-
рость на белый». Машинист в течение 10 с должен ввести установ-
ленное приказом начальника дороги значение Иб. Дальнейшее дви-
жение в случае отсутствия сигналов АЛСН будет осуществляться
по сигналу «Б» на БИЛ, БИЛ-ПОМ, а в случае поступления кодов
АЛСН на БИЛ, БИЛ-ПОМ высвечивается соответствующий сиг-
нал светофора. Для отключения режима необходимо ввести коман-
ду «К800».
91
Переход в режим движения по сигналам полуавтоматической
блокировки, а также возврат из этого режима осуществляются как
на стоянке, так и при движении локомотива.
Перед следованием по некодированному участку пути или при
отсутствии напольных сигналов (выключена автоблокировка) ма-
шинист должен по команде «К799» ввести значение скорости дви-
жения Р'б аналогично описанному выше. После ввода команды
«К799» прием сигналов АЛСН и АЛС-ЕН блокируется. Дальней-
шее следование локомотива будет происходить только по сигналу
«Б» на блоке БИЛ. Для отмены режима необходимо ввести команду
«К800». Переход в данный режим движения, а также возврат из него
возможны как на стоянке, так и при движении локомотива.
При следовании по сигналу «Б» на БИЛ и БИЛ-ПОМ значения
и Рд одинаковы и равны значению Р'б. При превышении значе-
ния Рф над Р'д на 1 км/ч работа КЛУБ-У будет происходить по опи-
санному выше алгоритму. При этом периодическая проверка бди-
тельности машиниста производится с интервалами 60—90 с.
2.6.9. Движение локомотива без электронной карты по участку,
оборудованному путевыми устройствами АЛС-ЕН
При приеме КЛУБ-У сигналов из канала АЛС-ЕН на индикато-
ре несущей частоты канала АЛСН высвечивается «ЕН», если не по-
ступает из других источников команд более сильного ограничения
скорости. КЛУБ-У автоматически переходит на прием Сигналов
АЛСН при прекращении поступления сигналов АЛС-ЕН, кроме слу-
чая приближения к светофору с запрещающим сигналом. В случае,
если при смене канала АЛС-ЕН на АЛСН Рф больше, чем Ид при
АЛСН, то через 5 с после перехода с канала АЛС-ЕН на АЛСН ско-
рость Р^ начинает уменьшаться на 1 км/ч через каждые 50 м прой-
денного пути до значения УД при АЛСН.
При работе с каналом АЛС-ЕН и наличии на БИЛ и БИЛ-ПОМ
индикации о свободности одного и более блок-участков Р^ц на каж-
дом блок-участке может принимать разные значения, зависящие от
поездной ситуации и определяемые таблицей сигнализации для дан-
ного участка.
При снижении V происходит однократная проверка бдительно-
сти. Значение У также не является постоянной величиной. Порядок
92
следования по сигналам «КЖ», «БМ» и «К» в случае превышения
Рф над Ид (на 1 км/ч и более) аналогичен описанному ранее.
2.6.10. Порядок смены кабины управления
для изменения направления движения
Смена кабины управления для изменения направления движения
в односекционных локомотивах, имеющих две кабины, должна осу-
ществляться следующим образом:
- в кабине, из которой передается управление локомотивом, вык-
лючается ключом ЭПК;
- из блока БИЛ или БР-У вынимается кассета регистрации с запи-
санной информацией о следовании поезда по последнему маршруту;
- машинист переходит в другую кабину локомотива, из которой
будет осуществляться управление;
- в БИЛ или в БР-У устанавливается новая кассета регистрации,
при этом машинист по индикации на БИЛ должен убедиться, что
запись на КР производится;
- включается ключом ЭПК;
- через блок БВЛ-У вводятся локомотивные параметры, номер
пути и (при отсутствии электронной карты) другие необходимые
параметры (с использованием команды «Кб»).
2.6.11. Выключение КЛУБ-У
Выключение КЛУБ-У осуществляется в следующей последова-
тельности:
- поворотом ключа ЭПК в крайнее правое положение выключа-
ется ЭПК;
- тумблер «ПИТ» на блоке БКР-У устанавливается в положе-
ние, при котором индикаторы питания «ПИТ» на БКР-У и БЭЛ-У
гаснут.
2.6.12. Работа КЛУБ-У при приеме команд
по цифровому радиоканалу и наличии электронной карты
Значения VR и определяются в КЛУБ-У на основе данных о
скоростных ограничениях, записанных в электронной карте участ-
ка, а также данных о допустимых скоростях движения, поступаю-
щих из каналов АЛСН, АЛС-ЕН и РК.
93
При работе КЛУБ-У с ЭК на индикаторе частоты АЛСН на БИЛ
индицируется «ЭК» в случае, если по данным ЭК формируется ак-
туальное (действующее в данный период времени) ограничение ско-
рости, а после ввода номера пути также индицируются координа-
та пути и расстояние до препятствия. По мере приближения локо-
мотива к препятствию, на котором предусмотрено ограничение
скорости, значение Кд постепенно снижается в соответствии с за-
данной кривой торможения до значения И , и машинист должен
поддерживать значение фактической скорости в соответствии с из-
менением И .
Следует обратить внимание, что тип и название препятствия фор-
мируются для ближайшего по ходу движения препятствия, располо-
женного перед головой локомотива, а Кд и Кц — для актуального
препятствия, определяющего актуальное ограничение И . При этом
под актуальным понимается препятствие, задающее наиболее жест-
кое ограничение скорости в данный период времени.
В момент проследования локомотивом начала препятствия его
название изменяется на название следующего по ходу поезда пре-
пятствия. После проезда последним вагоном поезда всего текущего
актуального препятствия значения Кд и Кц изменяются соответствен-
но данным следующего актуального препятствия. При проследова-
нии переездов и светофоров значения ограничений скорости изме-
няются сразу после их проезда локомотивом.
При следовании локомотива через места пересечения или сты-
ковки различных участков железной дороги с одноименными путя-
ми возможно появление на БИЛ неправильной информации.
В этом случае машинист однократным или многократным вводом
команды «К1» на клавиатуре БВЛ-У должен добиться отображения
на БИЛ-У информации об актуальном препятствии того участка
пути, по которому происходит движение.
После появления на блоках БИЛ и БИЛ-ПОМ сигнала «КЖ»
аппаратура КЛУБ-У осуществляет прицельное торможение до пол-
ной остановки на расстоянии 20—100 м перед светофором с запре-
щающим сигналом. После остановки поезда дальнейшее его движе-
ние должно производиться только по разрешению от ДНЦ или ДСП,
переданному по поездной радиосвязи.
В ЭК, введенной в бортовую аппаратуру КЛУБ-У, имеется при-
знак включения стационарной аппаратуры радиоканала для каждой
94
станции. Если этот признак не установлен, то значение Ид может быть
увеличено до 20 км/ч нажатием на кнопку ВК пульта БВЛ. В этом
случае на локомотивном индикаторе сохранится показание КЖ. После
получения разрешения проезд светофора с запрещающим сигналом
осуществляется со скоростью, не превышающей 20 км/ч. Дальнейшее
движение поезда осуществляется в штатном порядке.
Разрешается проследование светофоров с запрещающим пока-
занием без остановки грузовым поездам в соответствии с п. 16.27
ПТЭ. Такие светофоры отмечаются в ЭК, и при следовании к ним
значение V снижается до 20 км/ч, а после проследования светофора
с Рф < 20 км/ч и появлении на БИЛ-У сигнала «К» производится
однократная проверка бдительности машиниста.
При наличии коротких платформ с близко расположенными к ним
(менее 100 м) светофорами пассажирским поездам и МВПС по прика-
зу начальника дороги разрешается подтягивание к этим светофорам
вплотную. Указанные светофоры отмечаются в ЭК. При следовании
к ним Уд снижается до значения 10 км/ч, которое определяет скорость
подтягивания к светофорам вплотную. При проследовании этих све-
тофоров без предварительной остановки и появлении на блоке
БИЛ сигнала «К» после «КЖ» произойдет экстренное торможение.
Цифровой радиоканал (РК) может быть использован для переда-
чи на локомотивы информации о временных ограничениях скорос-
тей с указанием границ участка их действия и соответствующих зна-
чений скорости. При передаче по радиоканалу актуальных ограни-
чений, т.е. задающих более сильное ограничение значений Уд и Уд
на индикаторе несущей частоты БИЛ высвечивается «РК». В этом
случае КЛУБ-У производит периодические проверки бдительности
машиниста.
При приближении поезда к светофору с запрещающим показа-
нием на расстояние 300 м и менее КЛУБ-У начинает передавать в
автоматическом режиме по цифровому радиоканалу запросы дис-
петчеру (ДСП) на разрешение проезда этого светофора (в случае
расположения светофора вблизи станции, оборудованной стацио-
нарными устройствами радиоканала). Наличие этих устройств оп-
ределяется введением соответствующего признака для станции в ЭК.
При получении от ДСП по РК разрешения на проследование свето-
фора с запрещающим показанием без остановки на БИЛ устанавли-
вается значение ¥д = 20 км/ч, а на БИЛ и БИЛ-ПОМ появится сиг-
95
нал «БМ» (белый мигающий). При этом, если Рф > 20 км/ч, то на
БИЛ-У будут выводиться значения V согласно расчетной кривой
торможения состава до 20 км/ч. Дальнейшее движение состава осу-
ществляется в штатном порядке.
Если разрешение на проследование светофора с запрещающим
показанием получено после остановки локомотива (МВПС) перед
светофором при Ид < 20 км/ч, на БИЛ и БИЛ-ПОМ появятся сигна-
лы «БМ» и Р'д = 20 км/ч. Движение по сигналу «БМ» осуществляется
в порядке, описанном ранее.
В ближайшей перспективе предусматривается дополнение аппа-
ратуры КЛУБ-У комплексом технических средств (КТС) «Купол».
При наличии этого КТС и нахождении локомотива или МВПС в
зоне действия РК станции и при получении по РК команды от ДНЦ
или ДСП на принудительную остановку КЛУБ-У выключает режим
тяги на локомотиве и включает через приставку крана машиниста
первую ступень служебного торможения. При этом, если темп сни-
жения скорости на первой ступени служебного торможения не
соответствует п. 10.1.2 «Инструкции по эксплуатации тормозов
подвижного состава железных дорог», КЛУБ-У производит останов-
ку состава с помощью ЭПК.
Если локомотив находится в зоне радиосвязи со станцией, локо-
мотивная бригада может при возникновении нештатной ситуации
передать на пост ДСП сигнал о необходимости применения прину-
дительной остановки состава по команде ДСП или ДНЦ. Для этого
используются установленные в кабине локомотива рядом с маши-
нистом и помощником машиниста специальные «тревожные кноп-
ки». Команда на принудительное торможение может быть передана
в КЛУБ-У также по инициативе ДСП или ДНЦ. При получении ап-
паратурой КЛУБ-У команды на принудительную остановку в ин-
формационной строке блока БИЛ появляется сообщение «ПРИН.
ОСТАНОВКА». При начавшемся торможении локомотивной бри-
гаде запрещается его прерывать. После полной остановки состава
машинист должен установить контроллер в нулевую позицию.
2.6.13. Взаимодействие КЛУБ-У с САУТ и ТСКБМ
При включенном на локомотиве или МВПС исправном борто-
вом устройстве (БУ) системы САУТ в КЛУБ-У отменяются следую-
щие функции:
96
- однократная проверка бдительности при смене сигнала «3» на
«Ж» и смене сигнала «Б» на «Ж»;
- периодические проверки бдительности при Иф больше Иц.
При неисправном или выключенном БУ системы САУТ выше-
перечисленные функции автоматически восстанавливаются. При ра-
боте КЛУБ-У совместно с БУ систем С АУТ-МП и САУТ-ЦМ на
БИЛ индицируется значение И , определяемое КЛУБ-У. Экстренное тор-
можение от ЭПК может происходить как по командам КЛУБ-У,
так и по командам САУТ.
При совместной работе КЛУБ-У и БУ системы САУТ-ЦМ/485
значения Ид и Иц выбираются минимальными из переданных от
САУТ и сформированных КЛУБ-У. В случае актуализации Ид и ,ИЦ,
полученных от системы САУТ, на индикаторе несущей частоты бло-
ка БИЛ-У высвечивается буква «С».
При актуализации Ид и И , вычисленных в соответствии с данны-
ми ЭК, на индикаторе несущей частоты блока БИЛ высвечиваются
буквы «ЭК». При получении от системы САУТ любой модификации
команды на включение торможения с помощью ЭПК в информаци-
онной строке БИЛ появляется сообщение «СРЫВ ЭПК ОТ САУТ».
Признак включения на локомотиве (МВПС) системы ТСКБМ
задается в параметре «Конфигурация», вводимом с БВЛ-У. При
включенной и исправной системе ТСКБМ в КЛУБ-У отменяются
все периодические проверки независимо от фактической скорости
движения поезда и показаний светофора на БИЛ и БИЛ-ПОМ.
При неисправности или выключении системы ТСКБМ в КЛУБ-У
происходит автоматический переход в режим работы с включением
функции периодических проверок бдительности при всех показани-
ях светофора на БИЛ и БИЛ-ПОМ независимо от скорости движе-
ния поезда.
При снижении уровня бодрствования на шкале индикатора
ТСКБМ появляется красная черта, а в КЛУБ-У передается инфор-
мация об этом, что приводит к снятию напряжения с катушки ЭПК.
Машинист может восстановить напряжение на катушке ЭПК, под-
твердив свою бдительность нажатием на рукоятку РБС. Если после
нажатия машинистом на РБС уровень его бодрствования по дан-
ным ТСКБМ не был восстановлен, КЛУБ-У через 6 с снова снимет
напряжение с катушки ЭПК. КЛУБ-У позволяет машинисту триж-
ды подтвердить свою бдительность с отсрочкой срыва ЭПК на 6 с
7-3060
97
каждый раз. Если после третьего нажатия на РБС ТСКБМ продол-
жает передавать в КЛУБ-У информацию о снижении уровня бодр-
ствования (красная черта на шкале ТСКБМ не исчезает), то напря-
жение на катушке ЭПК перестает восстанавливаться при нажатии
на РБС до восстановления уровня бодрствования машиниста, либо
выключения ТСКБМ.
В информационной строке блока БИЛ при снятии напряжения с
катушки ЭПК по инициативе ТСКБМ появляется сообщение «СРЫВ
ОТ ТСКБМ».
2.6.14. Работа с блоком БВЛ-У
В блоке БВЛ-У имеется ряд кнопок, назначение которых описа-
но ниже.
1. Кнопка «И» или «К2» — изменение яркости свечения индика-
ции блоков БИЛ и БИЛ-ПОМ.
2. Кнопка «f>> (или «F») — выбор несущей частоты канала АЛСН.
3. Кнопка «РМП» — выбор режима движения (маневровый, по-
ездной или двойной тяги).
4. Кнопка «<0>» — сброс значения вводимого параметра до нуля.
5. Кнопка «ВК» — выключение красного сигнала светофора на
индикаторах БИЛ и БИЛ- ПОМ:
• позволяет осуществить переключение сигнала «К» на «Б» при
одновременном нажатии на кнопку «ВК» и рукоятки РБ и РБП
на блоках БИЛ и БИЛ-ПОМ;
• позволяет установить значение Уд равным 20 км/ч при останов-
ке поезда перед светофором с запрещающим сигналом после от-
работки кривой торможения (построенной в соответствии с дан-
ными, хранящимися в ЭК) и при индикации на блоке БИЛ зна-
чения Ид менее 20 км/ч.
6. Кнопка «Л» — ввод локомотивных характеристик:
Наименование параметра Диапазон значений
Номер машиниста 0—99999
Номер поезда 0—99999
Длина в осях 0—1024
Длина в вагонах 0—150
Масса поезда, т 0—10000
98
7. Кнопка «П» — ввод номера пути и признака его правильности:
Наименование параметра Диапазон значений
Номер пути 0—15
Признак правильности пути (0 — признак движения по неправильному пути; 1 — признак движения по правильному пути) 0 или 1
2.6.15. Команды КЛУБ-У
• «Кб» — ввод начальной координаты поезда и характера ее из-
менения при отсутствии ЭК в КЛУБ-У:
Наименование параметра Диапазон значений
Координата, м 0—9999999
Изменение координаты: (0 — возрастание координаты при движении по нечетному пути в правильном направлении или уменьшение координаты при движении по четному пути в неправильном направлении; 1 — возрастание координаты при движении по четному пути в правильном направлении или уменьшение координаты при движении по нечетному пути в неправильном направлении) 0 или 1
• «К1» —принудительный переход на следующий участок ЭК.
• «К10» или «К522» — вывод номера электронной карты на инди-
катор.
• «К71» — включение режима диагностики КЛУБ-У, по которой
в информационную строку выводится перечень исправных и неис-
правных логических модулей.
• «К70» — выключение режима диагностики КЛУБ-У.
• «К80» — индикация давления в тормозной магистрали.
• «К81» — индикация давления в тормозных цилиндрах.
• «К82» — индикация давления в уравнительном резервуаре 2-й
кабины.
• «К83» — индикация давления в уравнительном резервуаре 1-й
кабины.
• «К 122» — индикация значений давления в МПа.
• «К 123» — индикация значений давления в кгс/см2.
99
• «К262» — переход в режим движения вторым и последующим
локомотивом в режиме двойной тяги.
• «К799» — ввод значения Va при движении по участку с выклю-
ченными сигналами автоблокировки.
• «К809» — ввод значения Кд при движении по сигналам
полуавтоматической блокировки.
• «К800» — отмена значения V, введенного при движении по
участку с выключенными сигналами автоблокировки или по сигна-
лам полуавтоматической блокировки.
• «К 1031» — запись введенного значения пройденного пути (от 0
до 1 млн км).
Команды режимов работы с БУ системы САУТ:
• кнопка «ПОДТЯГ» действует при сигналах «КЖ» и «К» на БИЛ и
БИЛ-ПОМ и позволяет локомотиву или МВПС в необходимых слу-
чаях подтягиваться к светофору с запрещающим сигналом со скоро-
стью не более 20 км/ч;
• кнопка «ОТПР» действует при сигнале «Б» на БИЛ и БИЛ-ПОМ
и позволяет машинисту при отправлении с боковых некодирован-
ных путей после включения БУ системы САУТ вводить в нее значе-
ние допустимой скорости движения 40 км/ч. Кроме того, нажатие
этой кнопки дает возможность сквозного пропуска локомотива или
МВПС по боковым некодированным путям станции;
• кнопка «ОС» действует при любом сигнале на БИЛ и БИЛ-ПОМ
и позволяет машинисту отменить действующее ограничение скоро-
сти после проследования места ограничения скорости хвостовым
вагоном поезда;
• кнопка «К20» действует при сигналах «КЖ» и «К» на БИЛ и
БИЛ-ПОМ. Она позволяет в случаях, предусмотренных ПТЭ, осу-
ществлять проследование светофора с запрещающим сигналом со
скоростью не более 20 км/ч.
Кнопки на клавиатуре необходимо удерживать в нажатом состо-
янии в течение времени 1,5+0,5 с.
2.6.16. Управление поездом при смене показаний
путевых светофоров
На рис. 2.20 представлены кривые скорости движения поезда с
аппаратурой КЛУБ-У, но без электронной карты. В этом случае при
движении на участке действия зеленого сигнала светофора значения
100
Движение без ЭК Наппавление
----Периодическая проверка бдительности (ППБ)
-^-5= Рфх6с->
Рис. 2.20, а. Диаграмма движения поезда с аппаратурой КЛУБ-У без электронной карты без остановки поезда
перед красным сигналом светофора
Направление
Периодическая проверка бдительности (ППБ)
Рис. 2.20, б. Диаграмма движения поезда с аппаратурой КЛУБ-У без электронной карты с остановкой поезда перед
красным сигналом светофора
из электронной карты
Рис. 2.21. Диаграмма движения поезда с аппаратурой КЛУБ-У с электронной картой
допустимой (К ) и целевой (К ) скоростей совпадают и равны допу-
стимой скорости, введенной в память КЛУБ-У.
При появлении сигнала «Ж» на БИЛ значение Иц становится рав-
ным значению Иж (введенному в память КЛУБ-У). На этом участке
машинист должен поддерживать Иф< Иц.
При появлении на БИЛ показаний «КЖ» или «К» значение Ид
становится равным 20 км/ч, а Иц = 0. Машинист должен начать сни-
жение Иф до уровня Ид.
Аппаратура КЛУБ-У отслеживает снижение скорости в соответ-
ствии с рассчитываемыми тормозными кривыми и обеспечивает
обязательную остановку поезда перед светофором с красным сигна-
лом на расстоянии < 200 м. Расчет тормозных кривых производится
с учетом категории поезда, его массы и значения средней длины блок-
участка.
Дальнейшее движение поезда при сигнале «К» возможно (см. рис.
2.20, а) при получении разрешения от ДСП и после одновременного
нажатия машинистом и помощником машиниста на рукоятки РБ и
РБП. В момент проезда светофора с красным сигналом производит-
ся однократная проверка бдительности машиниста.
В случае проезда светофора с красным сигналом без остановки
аппаратура КЛУБ-У производит принудительную остановку поез-
да с помощью ЭПК (см. рис. 2.20, б). Проезд светофора с красным
сигналом без остановки возможен при разрешении ДСП только для
грузовых поездов.
Если в КЛУБ-У имеется электронная карта (рис. 2.21), тормозная
кривая рассчитывается с учетом реальной длины блок-участка, за-
писанной в ЭК. При этом машинист должен произвести остановку
поезда на расстоянии 20-5-70 м до светофора с красным сигналом.
Дальнейшее движение при сигнале «К» осуществляется так же, как
и при движении без ЭК.
3. СЕРВИСНЫЕ УСТРОЙСТВА
ДЛЯ КЛУБ У
3.1. Переносной блок ввода данных
и диагностирования (БВД-У)
БВД-У предназначен для:
- записи данных электронной карты (ЭК) в БЭЛ-У;
- диагностики аппаратуры КЛУБ-У на локомотивах и моторва-
гонных поездах на контрольных и контрольно-ремонтных пунктах,
а также на заводе-изготовителе;
- отдельной проверки БЭЛ-У в контрольно-ремонтных пунктах
и на заводе-изготовителе.
БВД-У позволяет осуществить:
- имитацию внешних сигналов для БЭЛ-У и проверку его выход-
ных сигналов;
- автоматическую проверку функционирования БЭЛ-У и КЛУБ-У.
Электропитание БВД-У осуществляется от блока БЭЛ-У.
Признаком поступления в БЭЛ-У имитирующих сигналов от БВД-У
является включение соответствующих индикаторов на БИЛ. Блок
БВД-У позволяет имитировать выходные сигналы прямоугольной
формы (серии импульсов) каждого из двух двухканальных датчиков
пути и скорости (ДПС), соответствующие движению локомотива
вперед. Частота импульсов в каждом канале может изменяться в
диапазоне от 2 до 2500 Гц, при этом сдвиг фазы импульсов в одном
из каналов ДПС составляет 90±10° по отношению к фазе импульсов
другого канала.
БВД-У позволяет имитировать сигналы «ТСКБМ» длитель-
ностью 840±140 мс и сигналы «АЛС-ЕН» и «АЛСН» с частотами,
указанными в табл. 3.1.
Сопряжение БВД-У с БЭЛ-У осуществляется через CAN-интер-
фейс. В режиме обмена данными с внешней ЭВМ БВД-У осущест-
вляет прием и передачу информации через последовательный ин-
105
Таблица 3.1
Несущие частоты каналов «АЛС-ЕН» и «АЛСН»
Канал Несущая частота, Гц Фактическое значение, Гц
АЛС-ЕН 175 174,5±3,0 (5,75±0,2)
АЛСН 25 25,0±0,5 (40,0±1,0)
АЛСН 50 50,0±0,5 (20,0±0,4)
АЛСН 75 75,0±1,0 (13,3±0,4)
терфейс RS-232, что позволяет также оперативно проводить смену
версии программного обеспечения БВД-У. Комплектация БВД-У
приведена в табл. 3.2.
Таблица 3.2
Комплектация БВД-У
Наименование Количество
Кабель-переходник БЛП 36993-642-00 1
Кабель-переходник КЛУБ 36993-641-00 1
Кабель-переходник КЛУБ-УП 36993-643-00 1
Кабель-переходник ВХ ЦВИЯ.685611.488 1
Кабель-переходник БВД ЦВИЯ.685611.489 1
Дискета с программным обеспечением 1
Ведомость эксплуатационных документов 1
Структурная схема БВД-У представлена на рис. 3.1.
БВД-У содержит следующие узлы:
- микроконтроллеры МК1 и МК2;
- ОЗУ данных;
- контроллер CAN-интерфейса;
- схему согласования с CAN-интерфейсом;
- схему согласования с интерфейсом RS-232;
- 16-символьный дисплей;
- flash-память для хранения программы работы БВД-У и элект-
ронной карты;
- формирователь сигналов ДПС;
- формирователь сигналов АЛСН;
- формирователь сигналов АЛС-ЕН;
106
ОЗУ
Рис. 3.1. Структурная схема БВД-У
- формирователь сигналов ТСКБМ;
- формирователь сигналов ФСС.
Работа БВД-У происходит под управлением микроконтроллера
MKI. Он осуществляет управление ведомым микроконтроллером
МК2, вывод информации на индикацию, программный опрос кла-
виатуры и информационный обмен через интерфейс RS-232 и CAN-
интерфейс. Микроконтроллер МК2 формирует имитируемые сигна-
лы по командам, получаемым от МК1. Компоненты БВД-У разме-
щены на двух платах: плате управления и плате согласования.
107
Плата согласования содержит источник питания А1, осущест-
вляющий питание логических элементов напряжением +5 В, и кас-
кады, осуществляющие гальваническую развязку цепей и преобра-
зование уровней сигналов.
Активные логические компоненты БВД-У размещены на плате уп-
равления. Ведущий микроконтроллер (МК1) имеет совмещенное ад-
ресное пространство памяти программ и памяти данных. В качестве
памяти программ используется внутренняя память микроконтролле-
ра и первые 16 Кбайт ОЗУ DD3. Вторая половина памяти ОЗУ ис-
пользуется для хранения рабочих данных БВД-У. Дисплей состоит из
матричных индикаторов HG1 и HG2, программа управления кото-
рыми записана в памяти данных МК1. Кроме того, имеется 8 точеч-
ных индикаторов HL1—HL8, подключенных к выходам соответству-
ющего регистра, информация в который записывается программно.
Клавиатура блока представляет собой набор кнопок, подключен-
ных по матричной схеме к выходным портам. Сканирование клави-
атуры осуществляется микроконтроллером программно.
Хранение информации (рабочая программа и данные электрон-
ной карты) при выключении питания БВД-У осуществляет микро-
схема flash-памяти с последовательным доступом.
Формирование звукового сигнала осуществляется аппаратно.
Блок формирует программно имитирующие сигналы блока ФСС, а
также сигналы АЛСН и АЛС-ЕН.
Назначение кнопок клавиатуры:
О, 1,2, 3, 4, 5, 6, 7, 8, 9 — цифровая клавиатура, используется для
ввода числовых значений;
«+» — увеличение текущего значения параметра на 1;
«-» — уменьшение текущего значения параметра на 1;
«СТР» — стирание (обнуление) вводимого значения параметра;
«ВВОД» — завершение ввода и установка текущего значения па-
раметра;
«?» — переход к предыдущему параметру в списке;
«ф» — переход к следующему параметру в списке;
«<—» — выбор текущего режима и переход к предыдущему режи-
му работы;
«—>» — выбор текущего значения и переход к следующему режи-
му работы;
«ВК» — управление формированием сигнала ВК для КЛУБ и
КЛУБ-П);
108
«РБ» — управление формированием сигнала РБ;
«РБС» — управление формированием сигнала РБС;
«ЭПК» — управление формированием сигнала «Ключ ЭПК» для
КЛУБ-У и КЛУБ-УП;
«РМП» — для КЛУБ и К ЛУБ-П: управление формированием
сигнала РМП; для КЛУБ-У и КЛУБ-УП — управление формирова-
нием сигнала «Ключ ЭПК 2»;
«0-КТР» — управление формированием сигнала «О контроллера»;
«САУТ» — для КЛУБ и КЛУБ-П: управление формированием
сигнала «САУТ», для КЛУБ-У и КЛУБ-УП — управление сигналом
«Выбор кабины»;
«ПДТ», «К20», «ОТПР» — зарезервированы для расширения
функций;
«ОС» — формирование сигнала «Ключ ЭПК 1» для КЛУБ-У и
КЛУБ-УП;
«F» — зарезервирована для расширения функций;
А, В, С, D, Е, F — расширенная буквенная клавиатура для ввода
параметров в шестнадцатеричной форме (для КЛУБ и КЛУБ-П).
Кнопки «ЭПК», «РМП», «0-КТР», «САУТ», «ОС» имеют фик-
сацию: после первого нажатия соответствующий выходной сигнал
включается и загорается индикатор над нажатой кнопкой; при сле-
дующем нажатии на эту кнопку выходной сигнал выключается и
индикатор гаснет. Остальные кнопки фиксации не имеют, выход-
ной сигнал формируется при нажатии и выключается при отпуска-
нии кнопки.
В любой момент времени БВД-У находится в одном из следую-
щих режимов диалога:
1. Режим ввода численного значения (параметра).
Название вводимого значения (параметра) отображается в вось-
ми левых позициях дисплея, само значение (параметра) — в восьми
правых позициях.
2. Режим выбора варианта меню.
Выбранный вариант отображается на дисплее. Выбор других ва-
риантов осуществляется нажатием кнопок «Ф» и «Т».
3. Режим отображения сообщения.
Выбор требуемого режима осуществляется нажатием кнопок
«Ф», «Т»,« —>», «<—». Подтверждение выбора и ввод выбранного
значения осуществляются нажатием кнопки «ВВОД». В любом
109
режиме возможно управление формированием сигналов с помо-
щью соответствующих кнопок.
Выход из этого режима осуществляется нажатием на кнопку
«ВВОД».
Основные режимы работы:
- режим имитации;
- режим стирания электронной карты в БЭЛ-У;
- режим загрузки электронной карты в БВД-У;
- режим записи электронной карты в БЭЛ-У;
- режим выбора рабочей программы БВД-У;
- режим внутреннего теста.
1. Режим имитации сигналов включает в себя следующие подре-
жимы:
- имитация сигналов АЛСН;
- имитация сигналов (АЛС-ЕН);
- имитация сигналов датчика скорости (ДПС);
- имитация сигналов ТС КБМ.
Нажатием кнопок «Ф», «Т», «—>», «<—» выбрать режим имитации
(на дисплее высвечивается надпись «Имитация—»»). Нажать «ВВОД».
На дисплее появится надпись «Имитация АЛСН». Нажатием кнопок
«Ф», «Т» выбрать режим имитации требуемого сигнала и нажать
«ВВОД». Для выбора или ввода дополнительных параметров, необ-
ходимых для имитации требуемого сигнала, необходимо руководст-
воваться рис. 3.2.
2. Режим стирания электронной карты.
Нажатием кнопок «Ф», «Т», «—>», «<—» выбрать режим стирания
ЭК (на дисплее светится надпись «Очистка ЭК —>»). Нажать «ВВОД».
На дисплее появится надпись «ОЧИСТКА КАРТЫ...». Не позднее
чем через 20 с должно появиться одно из следующих сообщений:
«ЭК НЕ СТЕРТА!» — ошибка стирания в БЭЛ-У;
«НЕТ ОТВЕТА БЭЛ!» — не получен ответ от БЭЛ-У;
«ОК: КАРТА СТЕРТА» — операция выполнена успешно.
Для продолжения работы нажать «ВВОД». БВД-У переходит в
главное меню.
3. Режим загрузки электронной карты в БВД-У.
В этом режиме работы БВД должен быть подключен к персо-
нальному компьютеру. Нажатием кнопок «Ф», «Т», «—>», «<—» выб-
рать режим БПИ-преобразования интерфейса (на дисплее появится
ПО
Рис. 3.2. Система меню режимов работы БВД-У
сообщение «** Режим БПИ **»). Запустить на компьютере програм-
му управления БВД-У. Дальнейшая работа производится в соот-
ветствии со справочным меню указанной программы.
4. Режим записи электронной карты в БЭЛ-У.
Нажатием кнопок «J-»,«?»,«—»>, «<—» выбрать режим записи элек-
тронной карты «ЗАПИСЬ ЭК». На дисплее появится сообщение
«ЗАПИСЬ ЭК —>». Нажать кнопку «ВВОД». Если предварительно в
БВД-У не была записана электронная карта (ЭК) из компьютера, на
дисплее появится сообщение «НЕТ КАРТЫ В БВД». В этом случае
необходимо нажатием на кнопку «ВВОД» выполнить загрузку ЭК в
БВД-У, после чего повторить операцию записи ЭК в БЭЛ-У. Если в
БВД-У была записана ЭК из персонального компьютера, БВД-У ав-
томатически выполняет стирание старой ЭК в БЭЛ-У, после чего на
дисплее появится сообщение «КАРТА: ххххх», где ххххх — адрес за-
писываемого байта в карте. По окончании записи на дисплее по-
явится надпись «ЗАПИСЬ ЗАКОНЧЕНА». Нажатием на кнопку
«ВВОД» осуществляется выход в главное меню.
5. Режим выбора рабочей программы БВД-У.
Нажатием кнопок «J-»,«?»,«—>», «<—» выбрать режим выбора про-
граммы (на дисплее появится сообщение «ПРОГРАММА... —>»).
Нажать на кнопку «ВВОД». Выбрать требуемую программу из спис-
ка и нажать еще один раз кнопку «ВВОД» для загрузки программы.
Во время загрузки на дисплее появится сообщение «Loading...» и
адрес загружаемого байта (от 0 до 16 383). После завершения загруз-
ки БВД-У переходит к выполнению введенной программы.
Инициализация БВД-У при включении питания производится
через цепь сброса. Кроме этого, сброс можно произвести в любой
момент нажатием на кнопку SW1.
6. Режим внутреннего теста БВД-У.
В этом режиме проверяется исправность работы блока.
Работа оператора с блоком БВД-У
Порядок включения
После подключения всех разъемов включить тумблер питания
БВД-У.
На дисплее БВД-У появится сообщение «*** БВД-У ***». После
нажатия на кнопку «ВВОД» блок БВД-У переходит в диалоговый
режим работы.
112
Переключение режимов работы
Переключение режимов работы БВД-У организовано с помощью
меню, структура которого приведена на рис. 3.2. В любой момент
времени БВД-У находится в одном из следующих режимов диалога:
1. Режим ввода числового значения параметров.
Название вводимого параметра отображается в восьми левых
позициях дисплея, а его численное значение — в восьми правых по-
зициях.
2. Режим выбора операции в меню.
Выбранная операция отображается на дисплее. Выбор других
операций осуществляется нажатием кнопок «4-» и «?»;
3. Режим отображения сообщения.
Выбор требуемого режима осуществляется нажатием кнопок «Ъ>,
«?», «—»>, «<—». После нажатия на кнопку «ВВОД» осуществляется
выполнение выбранного режима работы БВД-У. В любом из режи-
мов можно также обеспечить управление формированием сигналов
с помощью соответствующих кнопок. Выход из режима отображе-
ния осуществляется нажатием на кнопку «ВВОД».
3.2. Измеритель параметров локомотивных
катушек (ИПЛК)
Измеритель предназначен для работы на локомотиве и в услови-
ях депо.
Питание измерителя осуществляется от сети переменного тока
220 В, 50 Гц или от встроенного аккумулятора. Измеритель осна-
щен устройством автоматического заряда аккумулятора с защитой
от перезарядки при питании от сети.
Измеритель построен на основе аналого-цифрового преобразо-
вания входной информации с последующей обработкой с помощью
встроенной однокристальной ЭВМ (ОЭВМ). Измеренные данные
выводятся на 4,5-разрядный жидкокристаллический индикатор
(ЖКИ). Для управления режимами работы измерителя предусмот-
рена клавиатура, состоящая из 12 кнопок.
Основные технические характеристики
ИПЛК обеспечивает измерение параметров приемных локомо-
тивных катушек в соответствии с данными табл. 3.3.
ИЗ
Таблица 3 3
Технические характеристики ИПЛК
Режим измерения Диапазоны измерения и отображаемой шкалы Предел допускаемой основной погрешности, ± (% + ед мл.р) Примечания
V Среднеквадра- тическое зна- чение напряже- ния перемен- ного тока 10 мВ—ЗОВ Отображаемые шкалы: 000,0—430,0 мВ 0,300—4,ЗООВ 03,00-АЗ,00 В 6 + 4 Частоты селекции (25,50,75, 175 и 375) Гц ±1 %. Типовое подав- ление соседнего канала не менее 26 дБ (см. Приложение 1)
L Индуктивность 2—5Гн 1,60—19,99Гн 20,0—50,0 Гн 4+(4+0,4*L2) 4+(4+0,04* L2) На частоте 75 Гц и при напряжении 1 В
Q Добротность 2—10 0,00—19,99 20,0—50,0 4+(4+02)4+(4+0,l*L2) На частоте 75 Гц и при напряжении 1 В
R Сопротивление постоянному току до 2 кОм 00,0—199,9 Ом 200—2400 Ом 0,5+2 0,5 + 2 Измерительный ток 1 мА
А, Сопротивление изоляции 1—200 МОм 000,0—5 11,9 МОм 4+(2+0,25 %*R) Измерительное напря- жение 5 В
Примечания
1. Предел допускаемой основной погрешности измерения приведен для
температурного диапазона 23±10 °C в межповерочном интервале 2 года и
выражен в виде суммы мультипликативной (в процентах от измеряемой
величины) и аддитивной (в единицах младшего разряда) составляющих.
В режиме измерения сопротивления изоляции в выражение погрешнос-
ти входит третья составляющая (в процентах), которую получают как про-
изведение нормирующего множителя на измеренное сопротивление, выра-
женное в мегаомах.
В режимах измерения индуктивности и добротности аддитивная состав-
ляющая зависит от величины параметров катушки.
2. Шкала прибора рассчитана на отображение всего диапазона значе-
ний измеряемого параметра, выводимого на индикатор.
114
Во входных цепях прибора предусмотрена защита от перегру-
зок. Измеритель сохраняет свои параметры после воздействия пе-
регрузок.
Дополнительная температурная погрешность на каждые 10 °C в
пределах рабочего температурного диапазона не превышает поло-
вины основной погрешности измерения.
Время непрерывной работы измерителя в автономном режиме без
замены или заряда аккумулятора составляет не менее 24 ч в нормаль-
ных условиях и не менее 8 ч — при минимальной рабочей темпера-
туре. При разрядке аккумулятора осуществляется автоматическое
отключение питания.
Измеритель выполняет следующие виды обработки измеряемых
данных:
- «ReL» — вычисление абсолютного отклонения относительно
опорного (начального) уровня;
- «Avr» — усреднение по алгоритму цифрового фильтра низких
частот первого порядка с постоянной времени около 2 с (десять от-
счетов аналого-цифрового преобразователя — АЦП).
Обработка измеряемых данных выполняется во всех режимах из-
мерений в пределах всей шкалы измерений.
В измерителе обеспечивается подавление помех:
- нормального вида с частотой питающей сети не менее 70 дБ (в
режимах измерения сопротивления);
- общего вида постоянного тока не менее 120 дБ;
- общего вида с частотой питающей сети не менее 80 дБ при из-
мерении переменного напряжения и сопротивлении источника сиг-
нала не более 1 кОм.
Нормальные условия эксплуатации:
- температура окружающего воздуха 23± 10 °C;
- относительная влажность 65±15 %;
- атмосферное давление от 630 до 795 мм рт.ст.;
- напряжение питающей сети 220±22 В частотой 50± 1 Гц.
Рабочие условия эксплуатации:
- температура окружающего воздуха от 5 до 40 °C;
- относительная влажность до 90 % при температуре до 25 °C и
до 70 % — при температуре до 40 °C;
- атмосферное давление от 630 до 800 мм рт.ст.;
- напряжение питающей сети 220±22 В частотой 50±1 Гц.
115
Измеритель обеспечивает нормируемые параметры и характери-
стики через 1 мин с момента включения. Время непрерывной рабо-
ты не ограничено.
Мощность, потребляемая прибором от сети, не превышает 6 ВА.
Масса прибора 2 кг. Габаритные размеры прибора 242 х 85 х 326 мм.
Устройство и принцип действия
В состав измерителя входят узлы, обеспечивающие обработку,
измерение и выдачу данных во всех режимах измерения, которые
выполняются аналого-цифровым преобразователем (АЦП). На вход
АЦП через аналоговый мультиплексор подаются сигналы от раз-
личных источников. Подключение к соответствующей измеритель-
ной схеме осуществляется путем подачи входного сигнала на ее клем-
мы и за счет внутренней коммутации. Цифровая обработка данных,
управление аналоговыми узлами, индикатором и считывание состо-
яния клавиатуры осуществляется однокристальной ЭВМ типа 87С52
(89С52 или 87С51РА).
Аналого-цифровой преобразователь (АЦП) — однокристаль-
ный, интегрирующий, с 16-разрядным представлением данных и
скоростью обработки 50 изм/с, использует принцип сигма-дельта
модуляции. АЦП обеспечивает измерение напряжения в диапазо-
не от 0 до +2,5 В с разрешающей способностью около 40 мкВ. Для
повышения достоверности при действии шумов и помех результат
усредняется по шестнадцати отсчетам данных АЦП и выдается на
индикатор с частотой около трех раз в секунду. АЦП имеет внут-
реннюю цифровую самокалибровку смещения (нуля) и масштаба.
Режим калибровки АЦП включается каждый раз при смене режи-
ма (вида) измерения.
Устройство и работу измерителя иллюстрируют функциональные
схемы, показанные для различных режимов измерения. Схема изме-
рения переменного напряжения (режим селективного вольтметра)
приведена на рис. 3.3.
Fo = 25, 50, 75
Рис. 3.3. Схема измерения переменного напряжения в селективном режиме
116
Вольтметр имеет три предела измерения: 0,3; 3 и 30 В, — которые
выбираются путем переключения коэффициента передачи входного
масштабирующего усилителя. Усилитель способен без искажения
пропускать сигналы, превышающие на 10—12 дБ верхнее значение
включенного предела измерения. Это позволяет измерять сигналы,
величина которых ниже уровня помех.
Полосовой фильтр на переключаемых конденсаторах пропуска-
ет сигналы в заданной полосе частот. Частотная характеристика
фильтра близка к характеристике LC-фильтра четвертого порядка
(два последовательно включенных каскада с частотной характерис-
тикой колебательного контура с добротностью Q = 4,92). Перестрой-
ка резонансной частоты фильтра производится программным пу-
тем за счет изменения тактовой частоты ОЭВМ. Выходной сигнал
фильтра выпрямляется, фильтруется и подается на АЦП.
Определение величины сопротивления (см. схему на рис. 3.4, а)
основано на измерении падения напряжения на сопротивлении при
пропускании через него калиброванного тока величиной 1 мА. Это
а
Рис. 3.4. Схема измерения:
а — активного сопротивления обмотки; б — сопротивления утечки
117
напряжение поступает на вход АЦП через повторитель и фильтр ниж-
них частот с частотой среза около 5 Гц для подавления помех по пере-
менному току. Предел измерения сопротивления составляет 2,5 кОм
при разрешающей способности менее 0,1 Ом. Формула для вычис-
ления сопротивления:
U
R =
х А)
Сопротивление изоляции Rs определяется с использованием схе-
мы делителя, показанной на рис 3.4, б. Делитель образован эталон-
ным резистором величиной RQ = 100 кОм и измеряемым сопротивле-
нием Rs. Для защиты от перегрузок последовательно с измеряемым
сопротивлением включен дополнительный резистор 7?д = 100 кОм.
При известном значении напряжения питания измерительной схемы,
равном 5В, сопротивление изоляции определяется по формуле:
Схема измерения индуктивности и добротности показана на рис. 3.5.
На испытуемую катушку подается калиброванное напряжение
Uq = 1 В с частотой около /=75Гц, ис помощью преобразователя
ток—напряжение производится измерение величины тока, протека-
ющего через катушку, и по ней определяется модуль полного сопро-
тивления.
С помощью компараторов формируется импульсный сигнал,
скважность которого пропорциональна сдвигу фазы между напря-
Рис. 3.5. Схема измерений индуктивности и добротности
118
жением и током в катушке. Частота и скважность (фаза) импульсно-
го сигнала измеряются на программном уровне с помощью ОЭВМ.
На основании трех измеренных параметров: полного сопротив-
ления, частоты и фазы — вычисляется значение индуктивности L и
добротности Q катушки по формулам:
£ = £о_
“ Ux ' 6,28 f ’
Q= tgfo),
где f — фактическое значение частоты генератора;
Rq — сопротивление преобразователя тока в напряжение;
<р — сдвиг фазы между током и напряжением в катушке;
Uq = 1 В — входное напряжение преобразователя;
U — напряжение на выходе преобразователя ток—напряжение.
Питание схемы прибора осуществляется стабилизированным на-
пряжением Ucc = +5 В от импульсного стабилизатора, подключен-
ного к аккумулятору с напряжением 3,8 В. Причем непосредственно
к выходу стабилизатора подключена только микросхема однокрис-
тальной ЭВМ, а остальная часть схемы (аналоговая) может отклю-
чаться от стабилизатора посредством электронного ключа на тран-
зисторах, управляемого микроконтроллером. В свою очередь, мик-
росхемы стабилизатора напряжения и сам микроконтроллер могут
переводиться в режим микропотребления. При этом их суммарное
потребление не превышает 10 мкА, что позволяет осуществлять элек-
тронное включение-выключение прибора без отключения источни-
ка питания от схемы.
При включении прибора импульсный стабилизатор напряжения
начинает работать в нормальном режиме, обеспечивая работу ана-
логовой части и микроконтроллера, находящегося в активном со-
стоянии. Переход во включенное состояние прибора происходит
путем сброса микроконтроллера (подачей высокого уровня напря-
жения на вход «Reset» при нажатии на кнопку «ON» прибора).
При нажатии на кнопку «OFF» микроконтроллер выключает пи-
тание аналоговой части прибора, и импульсный стабилизатор уста-
навливает низкий уровень напряжения на всех выходах своих пор-
тов, а затем выключает собственный тактирующий генератор.
119
При включении сетевого питания аккумулятор подключается к
зарядному устройству, а измеритель получает питание от линейно-
го стабилизатора напряжения.
Зарядное устройство обеспечивает подачу зарядного тока вели-
чиной около 80 мА на аккумулятор. Для защиты от перезарядки на-
пряжение на аккумуляторе контролируется. Когда оно достигает
значения 4,42 В, зарядный ток выключается. Порог срабатывания
изменяется в зависимости от окружающей температуры, обеспечи-
вая оптимальный заряд аккумулятора во всем рабочем температур-
ном диапазоне. Для повторного приведения зарядного устройства в
действие необходимо выключить-включить сетевое питание. При
включении сетевого питания загорается светодиод красного цвета
«Power» («Сеть») на задней панели. При заряде аккумулятора заго-
рается светодиод зеленого индикатора «Charge» («Заряд»),
Порядок работы
Передняя панель измерителя показана на рис. 3.6. На ней распо-
ложены органы управления и индикации, а также входные клеммы
прибора. Задняя панель прибора показана на рис. 3.7.
На задней панели измерителя расположены разъем для подклю-
чения шнура сетевого питания и светодиодные индикаторы «Сеть»
и «Заряд».
Рис. 3.6. Передняя панель измерителя ИПЛК
120
«Зарядка»
«Сеть»
Назначение кнопок измерителя показано на рис. 3.8. Некоторые
из них имеют второе назначение, инициируемое предварительным
нажатием на кнопку «Shift». Это состояние действует в течение 2,5 с
после нажатия кнопки, пока на индикаторе отображается сообще-
ние «Sh» («Shift»). Если повторное нажатие на кнопку «Shift» не про-
изводится, измеритель возвращается к прерванному режиму рабо-
ты. Включение нового режима работы всегда отображается на ин-
дикаторе. На время задержки между нажатием кнопки и появлением
первых показаний на индикатор выводится сообщение «W» («Ожи-
дание»). Для фиксации нажатия необходимо удерживать кнопку не
менее 0,3 с. Следующее нажатие будет зафиксировано только при
отпускании кнопки на время не менее 0,5 с.
Кнопки управления частотой селекции сигналов действуют сле-
дующим образом. После первого нажатия на индикатор выводится
текущее значение частоты селекции и, если второго нажатия не про-
исходит, то через 2,5 с прибор возвращается в прежнее состояние.
Если в течение этого времени повторно нажать эту же кнопку, зна-
чение частоты начинает увеличиваться или уменьшаться (частоты
перебираются по кругу), а отсчет времени индикации частоты начи-
нается сначала. Нажатие любой другой кнопки выводит прибор из
режима индикации частоты.
121
Рис. 3.8. Назначение кнопок измерителя (АВП — автоматический выбор
предела измерений)
На индикаторе прибора отображаются величина и размерность
показаний. В режиме измерения индуктивности размерность отобра-
жается знаком «Н», например «10,ОН» (10 Гн). В режиме измерения
добротности показания безразмерные.
Кроме указанных выше, на индикатор выводятся следующие со-
общения:
«OL» — «Перегрузка». Появляется при превышении уровня вход-
ного сигнала верхней границы диапазона индицируемых значений,
например, при разрыве измерительной цепи в режиме измерения
сопротивления;
122
«Hi» — перегрузка при измерении индуктивности — полное со-
противление измерительной цепи слишком мало (индуктивность
меньше 0,7 Гн);
«Ьо» — недогрузка при измерении индуктивности — полное со-
противление измерительной цепи слишком велико (индуктивность
больше 50 Гн), или она разорвана;
«Fbat» — индикация снижения напряжения батареи питания ниже
допустимого уровня;
«vl_0» — номер версии программы встроенной микро-ЭВМ;
«Auto» — индикация перехода в режим автоматического выбора
пределов измерения;
«Hand» — индикация перехода в режим ручного выбора преде-
лов измерения.
Назначение входных клемм измерителя для всех режимов рабо-
ты показано на рис. 3.9.
Использование режимов обработки измеренных данных
Все виды обработки измеренных данных выполняются во всех
режимах измерений без исключения.
«Rel» — вычисление абсолютного отклонения относительно опор-
ного (начального) уровня, измеренного в момент нажатия кнопки
«Rel» (вызов функции измерения отклонения). Все последующие
отсчеты (до отключения функции) вычисляются по формуле
Rel = X-XQ,
где Хо — начальное (опорное) значение измеряемого параметра;
X — текущее значение измеряемого параметра.
Для выключения выполняемой функции необходимо нажать на
кнопку используемого режима измерения. Режим измерения откло-
нений можно использовать для измерения, например, нестабильно-
сти напряжения, компенсации начального сопротивления измери-
тельной цепи. Включение режима измерения отклонения индициру-
ется символом «R» (слева сверху).
«Avr» — усреднение по алгоритму цифрового фильтра низких
частот первого порядка. Вычисление среднего значения выполняет-
ся по формуле:
л л А, П х
Av = Avp 1 + — ,
I п I п
123
Рис. 3.9. Подключение катушки к клеммам ИПЛК в режиме измерения:
а — напряжения; б — сопротивления; в — сопротивления утечки; г — индук-
тивности и добротности
где Av — усредненный отсчет;
Avp — предыдущий усредненный отсчет;
п — текущее значение параметра усреднения, которое в момент включе-
ния режима усреднения имеет значение п = 1, а затем в течение десяти изме-
рительных циклов уменьшается до п = 0,4. В режиме измерения добротнос-
ти параметр усреднения уменьшается до 0,03 (примерно за 30 с), обеспечи-
вая более высокое качество фильтрации.
При включении режима усреднения на индикаторе появляется
дополнительный значащий разряд справа (за исключением режима
измерения индуктивности, когда на этом месте продолжает оставать-
ся знак размерности «Н» (Генри)).
124
Проведение измерений
Подключение прибора к источнику измеряемого сигнала или к
измеряемому объекту и выбор режима измерения выполняются с
использованием кнопок, показанных на рис. 3.8 и 3.9. При переклю-
чении режима работы на индикатор выводится сообщение «W»
(«Ждите») до появления первых показаний.
Режим селективного вольтметра включается кнопкой «~V».
В режиме селективного вольтметра перед началом измерений необ-
ходимо установить частоту селекции. Прибор откалиброван на цен-
тральной частоте полосового фильтра. При измерении сигналов с
частотами, отличающимися от номинального значения или моду-
лированными, показания прибора могут быть существенно ниже
действительного уровня. Во всех случаях измеритель обеспечивает
выделение сигнала из помехи, если уровень последней не превыша-
ет сигнал на 10—12 дБ (3—3,5 раза). Измеритель также обеспечива-
ет нормальное выделение сигнала (в соответствии с частотной ха-
рактеристикой фильтра), если уровень помехи выше, но не превы-
шает в 3,5—4 раза верхнего значения используемого поддиапазона.
При превышении уровня входного сигнала верхней границы ди-
апазона измерения напряжения на индикаторе появляется сообще-
ние «OL» («Перегрузка»).
Режим измерения сопротивления включается кнопкой «О». При
разрыве цепи или превышении величины сопротивления верхнего
порога шкалы на индикатор выводится сообщение «ОЬ».
При измерении малых сопротивлений (до 100 Ом) рекомендуется
пользоваться режимом «ReL» («Отклонение») для компенсации на-
чального сопротивления измерительного кабеля. Для этого доста-
точно замкнуть концы измерительного кабеля и нажать на кнопку
«ReL». Для выключения режима относительных измерений нужно
повторно нажать на кнопку «ReL» или кнопку «й». Состояние при-
бора в режиме относительных измерений отображается символом
«R» на индикаторе.
Для повышения разрешающей способности при измерении со-
противлений величиной до 0,01 Ом необходимо воспользоваться
режимом «Avr» («Усреднение»). После нажатия кнопки «Avr» на
цифровом индикаторе справа появляется дополнительный знача-
щий разряд.
125
Режим измерения сопротивления изоляции включается кнопкой
«Rs». При разрыве измерительной цепи или при превышении вели-
чиной сопротивления верхнего порога шкалы на индикатор выво-
дится сообщение «ОЬ».
Режим измерения индуктивности включается кнопкой «Ь». Если
полное сопротивление измерительной цепи слишком мало, то на
индикаторе появляется сообщение «Ьо». При разрыве измеритель-
ной цепи или слишком большом значении ее полного сопротивле-
ния индицируется сообщение «Hi».
Погрешность измерения индуктивности испытываемых катушек
зависит от величины и соотношения активной и реактивной состав-
ляющих и ее полного сопротивления, т.е. от величин, определяю-
щих добротность катушки.
Режим измерения добротности включается кнопкой «Q» и отли-
чается от режима измерения индуктивности только способом обра-
ботки измеренных данных.
3.3. Устройство бесшлейфовой проверки (УБП)
приемников сигналов каналов АЛСН и АЛС-ЕН
УБП предназначено для проверки работоспособности приемных ус-
тройств каналов АЛСН и АЛС-ЕН, входящих в аппаратуру КЛУБ-У и
КЛУБ-УП.
УБП имеет три исполнения для подключения к различным ис-
точникам питания:
- УБП-ССПС — питание осуществляется от бортовой сети спе-
циального самоходного путевого состава (ССПС) или вторичного
источника питания напряжением от 18 до 32 В;
- УБП-ЛОК — питание осуществляется от бортовой сети локо-
мотива напряжением от 36 до 65 В;
- УБП-СЕТЬ — питание осуществляется от промышленной сети
переменного тока напряжением от 244 до 253 В частотой 50 Гц.
УБП может использоваться на стационарном контрольном пунк-
те. В этом случае его необходимо дополнить усилителем мощности
со следующими характеристиками:
- мощность — не менее 15 Вт;
- полоса частот 20*500 Гц;
- коэффициент нелинейных искажений (не более) — 3 %;
- сопротивление нагрузки — не менее 4 Ом.
126
Конструкция УБП представля-
ет собой приборный ящик с ручкой
(рис. 3.10), разделенный на две сек-
ции. В левой секции закреплен
блок УБП, уложены кабели пита-
ния, в правой размещается провод-
ная рамка с зажимами, предназна-
ченная для создания электромаг-
нитного поля, наводящего ЭДС в
приемных катушках. Рамка состо-
ит из 10 витков электрического
изолированного провода.
Комплект кабелей и монтаж-
ных изделий обеспечивает воз-
можность электрического соеди-
нения между собой УБП и измери-
теля параметров локомотивных Рис, 3.10. Общий вид УБП
катушек (рис. 3.11).
С помощью УБП проводится проверка правильного приема сиг-
налов АЛСН (АЛС-ЕН) аппаратурой КЛУБ-У, расположенной в
кабине машиниста. Проверка может выполняться на некодирован-
Рис 3 11 Комплект переходных кабелей УБП
127
ных станционных, перегонных, тракционных путях депо и в пунк-
тах технического обслуживания локомотивов. Кроме того, УБП
позволяет осуществлять следующие операции:
- измерение наводимой в приемных катушках ЭДС при номиналь-
ных токах в каналах АЛСН и АЛС-ЕН (рельсовых цепях);
- контроль уровня пороговой чувствительности приемников сиг-
налов АЛСН и АЛС-ЕН, входящих в состав КЛУБ-У. Последние
операции выполняются с использованием ИПЛК.
Проверка правильности приема сигналов из рельсовой цепи
УБП вырабатывает кодовые сигналы систем АЛСН и АЛС-ЕН.
Для перехода из состояния генерации сигналов канала АЛСН в со-
стояние генерации сигналов канала АЛС-ЕН и обратно необходи-
мо нажать кнопку «КАНАЛ» (рис. 3.12). Признаком включения ка-
нала является свечение светодиода «АЛСН» или «АЛС-ЕН».
При включенном канале АЛСН устройство УБП может работать
в режимах выдачи зеленого (3), желтого (Ж) и красно-желтого (КЖ)
кодов, автоматического переключения выдаваемых кодов, а также
в режиме выдачи непрерывного сигнала. Установка нужного режи-
ма происходит с помощью кнопки «РЕЖИМ». Признаком выбора
режима является свечение соответствующего светодиода.
УБП может работать в режиме выдачи сигналов АЛСН на несу-
щих частотах 25, 50 или 75 Гц. Выбор несущей частоты, на кото-
Рис. 3.12. Лицевая панель УБП
128
рой передаются кодовые сигналы АЛСН, производится с помощью
кнопки «ЧАСТОТА».
Кодовые сигналы АЛСН; формируемые кодовыми путевыми
трансмиттерами КПТ5 и КПТ7, выбираются оператором путем на-
жатия на кнопку «КПТ». Выбранный тип КПТ индицируется свето-
диодами «КПТ5» или «КПТ7». Признаком выработки сигналов не-
сущей частоты АЛСН является свечение светодиодов «АЛСН» и
«НЕПР». В последнем случае УБП выдает немодулированный («глад-
кий») сигнал несущей частоты канала АЛСН 25, 50 или 75 Гц.
Признаком генерации кодовых сигналов канала АЛСН-ЕН яв-
ляется свечение светодиодов «3», «Ж» или «КЖ» в зависимости от
выдаваемого кода. Временные характеристики кодовых сигналов со-
ответствуют длительностям, указанным в табл. 3.4.
Таблица 3.4
Длительности кодовых сигналов АЛСН
Тип КПТ Наиме- нование кода Длительность, с
1 импульс 1 интервал 2 импульс 2 интервал 3 импульс Большой интервал
КПТ-5 «3» 0,35 ±0,0035 0,12 ±0,0012 0,22 ±0,0028 0,12 ±0,0012 0,22 ±0,0024 0,57 ±0,0048
«ж» 0,38 ±0,0040 0,12 ± 0,0012 0,38 ±0,0040 — — 0,72 ±0,0068
«КЖ» 0,23 ±0,0040 — — — — 0,57 ±0,0052
КПТ-7 «3» 0,35 ± 0,0035 0,12 ± 0,0012 0,24 ± 0,0036 0,12 ± 0,0012 0,24 ± 0,0036 0,79 ± 0,0060
«ж» 0,35 ± 0,0036 0,12 ± 0,0012 0,6 ± 0,0064 — — 0,79 ± 0,0080
«КЖ» 0,3 ± 0,0036 — — — — 0,63 ± 0,0060
Признаком работы в режиме автоматического переключения ко-
дов канала АЛСН является свечение светодиодов «АЛСН» и «АВТ».
В данном режиме УБП выдает кодовые сигналы, автоматически сме-
няемые в соответствии с циклом:
- КЖ —30 с;
- пауза (К) — 30 с;
- 3—10 с;
- пауза (Б) — 10 с;
9-3060
129
- Ж —30 с;
- пауза (Б) — 10 с.
Длительность цикла проверки составляет 120 с, после чего меня-
ется тип КПТ. Общая продолжительность полного цикла проверки
аппаратуры КЛУБ составляет 240 с.
Текущее состояние выдаваемого кода отображается в мигающем
режиме: мигают соответствующий светодиод («3», «Ж» или «К-Ж»)
и светодиод «КПТ5» или «КПТ7». При выдаче паузы мигает свето-
диод «НЕПР».
В случае работы в режиме генерации сигналов АЛС-ЕН УБП ра-
ботает либо в непрерывном режиме, либо в режиме выдачи задан-
ных кодовой комбинации и синхрогруппы, либо в режиме автома-
тического переключения выдаваемых кодов. Переход из одного ре-
жима в другой осуществляется с помощью кнопки «РЕЖИМ».
Признаком непрерывного режима работы канала АЛС-ЕН явля-
ется свечение светодиодов «АЛС-ЕН» и «НЕПР». В этом режиме
УБП выдает немодулированный («гладкий») сигнал несущей часто-
ты канала АЛС-ЕН (174,38 Гц).
Признаком работы в режиме генерации заданных кодовой комби-
нации (КК) и синхрогруппы (СГ) является свечение светодиодов
«АЛС-ЕН» и семисегментных индикаторов «КК» и «СГ». Кнопками
«КК» и «СГ» производится выбор одной из 16 (от 0 до F) кодовых ком-
бинаций и синхрогруппы. Признаком работы в режиме автоматичес-
кого переключения выдаваемых кодов канала АЛС-ЕН является свече-
ние светодиодов «АЛС-ЕН» и «АВТ». В данном режиме УБП выдает
кодовые сигналы, автоматически сменяемые в соответствии с циклом:
- КК — 0, СГ — 1 («КЖ»);
- пауза («К»);
- КК — F, СГ — 5 (5 свободных блок-участков);
- пауза («Б»);
- КК — 3, СГ — 6(1 свободный блок-участок);
- пауза («Б»).
Длительность формирования сигналов и пауз —10 с. Общая про-
должительность цикла — 60 с. Текущее состояние выдаваемого сиг-
нала отображается в мигающем режиме.
При выдаче кодовой комбинации и синхрогруппы их значения
отображаются на короткое время на семисегментных индикаторах.
При выдаче паузы мигает светодиод «НЕПР».
130
Регулировка силы тока в проводной рамке осуществляется с по-
мощью ручки регулятора тока. Контроль величины тока осуществ-
ляется с помощью встроенного амперметра.
При включении питания УБП включается в автоматический ре-
жим генерации кодовых сигналов АЛСН с несущей частотой 50 Гц.
Измерение ЭДС в приемных катушках,
под которыми установлена проводная рамка
Для измерения наводимой ЭДС в приемных катушках необходи-
мо в УБП установить непрерывный режим работы и выполнить сле-
дующие действия:
1. При проверке локомотивов, оборудованных аппаратурой
КЛУБ-У, подключить ИПЛК к контактам катушек, под которыми
установлена проводная рамка, отсоединить разъем рамки от блока
БКР или БЭЛ-П. При помощи специального переходника, входя-
щего в комплект УБП, подключить ИПЛК к разъему катушек.
2. Установить в блоке УБП режим выдачи непрерывного сигнала
канала АЛСН.
3. Путем переключения кнопки добиться свечения светодиода
«25», «50» или «75» в зависимости от частоты, на которой проверя-
ется ЭДС.
4. Установить величину выходного тока согласно табл. 3.5.
Таблица 3.5
Значения токов в рельсовой цепи и в проводной рамке УБП
Канал Величина номинального рельсового тока, А Величина номинального тока в проводной рамке, мА Примечание
АЛСН, 25 Гц 1,4 140
АЛСН, 75 Гц 1,4 140
АЛСН, 50Гц 2,0 200 Электротяга
1,2 120 Автономная тяга
АЛС-ЕН 0,25 25
5. Включить ИПЛК в режим измерения ЭДС и выбрать ту же
частоту входного сигнала, что и на УБП.
6. Считать с дисплея ИПЛК показание величины наведенной ЭДС.
Значения ЭДС должны находиться в пределах, заданных в табл. 2.2.
Измерение ЭДС в приемных катушках позволяет осуществлять
контроль правильности соединения обмоток между собой. Если по-
казания ИПЛК при всех токах и частотах равны нулю, то это свиде-
тельствует о неправильном соединении обмоток приемных катушек.
В этом случае необходимо поменять местами провода одной из при-
емных катушек.
При работе в этом режиме производится проверка и соответству-
ющая регулировка высоты подвеса приемных катушек в пределах
100—180 мм.
Контроль пороговой чувствительности
каналов приема сигналов АЛСН и АЛС-ЕН
Для контроля уровня пороговой чувствительности каналов при-
ема сигналов АЛСН аппаратуры КЛУБ-У необходимо выполнить
следующие действия:
1. Закрепить проводную рамку под передними катушками с зазо-
ром в пределах 100—180 мм.
2. Установить переключатель направления движения в положе-
ние «Вперед».
3. Отсоединить от разъема «ПК2» БЭЛ-У кабель, подключающий
задние катушки.
4. Подключить к разъему «БВД» БЭЛ-У БВД-М.
5. Подключить к разъему «ПК2» БЭЛ-У разъем «ПК» БВД-М.
6. Установить в КЛУБ-У (при помощи кнопки «ВК») и на УБП
несущую частоту АЛСН (25, 50 или 75 Гц), на которой производит-
ся проверка.
7. Плавно поворачивая ручку регулятора тока блока УБП, увели-
чивать ток в проводной рамке от «0» до величины, вызывающей сра-
батывание контрольных светодиодов «1 АЛСН» и «2АЛСН» БВД-М.
Убедиться в соответствии величины тока в проводной рамке, инди-
цируемой блоком УБП, величине, указанной в столбце 3 табл. 3.2.
4. ФОРМИРОВАНИЕ ЭЛЕКТРОННОЙ
КАРТЫ ДЛЯ КЛУБ-У
4.1. Использование спутниковых навигационных
систем на железнодорожном транспорте
В настоящее время существует несколько вариантов спутниковых
навигационных систем (СНС): американская система GPS, российс-
кая — ГЛОНАСС, европейская — GNSS. Все они базируются на
использовании высокоорбитальных спутников. СНС позволяют
определять различные параметры подвижных объектов, в том чис-
ле и их текущие наземные географические координаты.
Системы GPS и ГЛОНАСС удачно дополняют друг друга, так
как большинство спутников системы GPS находится на экватори-
альных орбитах, а большинство спутников системы ГЛОНАСС —
на орбитах, проходящих в приполярных областях земного шара. Это
особенно актуально при определении местоположения поездов, по-
скольку (в отличие от самолетов) из-за топографических особеннос-
тей трассы железной дороги в отдельные моменты бортовая аппа-
ратура поезда может единовременно принимать сигналы лишь от
4-5 из находящихся над ним 8-9 спутников. Остальные сигналы эк-
ранируются окружающими объектами (горами, земляными насыпя-
ми и т.д.).
Все спутниковые навигационные системы принципиально вклю-
чают в свой состав:
- спутниковую группировку;
- станции слежения и управления;
- спутниковые приемники пользователей.
Спутниковая группировка системы GPS содержит 24 спутника, на-
ходящихся на орбитах на высоте 24 тыс. м. Масса спутника — 500 кг,
мощность передающей антенны — 5 Вт. Сигналы со спутников при-
нимаются до 80-го градуса северной и южной широт.
Каждый спутник имеет сверхточные атомные (рубидиевые и це-
зиевые) часы. С их помощью через каждую 1 мс спутник генерирует
133
свой уникальный псевдослучайный код на частоте 1,5 ГГц. Код из
1024 битов содержит номер спутника. Этот код затем модулирует
несущую (осуществляется фазовая манипуляция) и передается в эфир.
Наземные станции наблюдения следят за спутниками, периоди-
чески уточняют и передают на них координаты группировки и дру-
гую информацию, позволяющую повысить точность определения
координат объектов.
Многоканальный приемник пользователя (именно многоканаль-
ность позволяет одновременно получать сигналы с нескольких спут-
ников за счет их кодового разделения) измеряет расстояния до
нескольких спутников и затем вычисляет свои координаты путем
проекции этих расстояний на поверхность Земли и решения систе-
мы алгебраических уравнений. Дальность (псевдодальность) до каж-
дого из спутников вычисляется умножением скорости распростра-
нения электромагнитной волны несущей (т.е. радиосигнала с часто-
той 1,5 ГГц) на время задержки при прохождении им расстояния от
спутника до пользователя. Скорость распространения несущей
принимается постоянной и равной скорости электромагнитной вол-
ны в вакууме (300 тыс. км/с).
Для нахождения трехмерных координат местоположения пользо-
вателя (долгота, широта, высота), а также величины коррекции вре-
мени для менее точных часов приемника пользователя (четвертая
неизвестная) решается система из четырех уравнений. Исходная ин-
формация для них — сигналы не менее, чем от четырех спутников.
При вычислении плоских координат, т.е. без вычисления высоты,
которая вносится пользователем в память приемника как известная
величина, достаточно сигналов от трех спутников.
После включения в работу (холодный старт) навигационный при-
емник не сразу начинает выдавать достоверные координаты. Это
связано с расхождением реальных характеристик орбит спутников с
такими же характеристиками, записанными в память приемника на
момент их последнего обновления. Поскольку в приемнике отсут-
ствуют точные данные о координатах спутника, от которого он от-
считывает псевдодальность, в расчетах, производимых в приемни-
ке, появляется большая погрешность.
В свою очередь, спутники, кроме псевдослучайного кода, выда-
ют в эфир навигационные сообщения об орбитах, которые называ-
ются альманахами. Эти сообщения достаточно длительные и пере-
134
даются периодически. Только после приема альманаха с данными
об орбитах спутников приемник GPS начинает выдавать достовер-
ные решения. Реально время после холодного старта до формирова-
ния достоверного решения не превышает 5—6 мин.
Как было отмечено выше, для решения различных задач управ-
ления движением поездов требуется достичь точности измерений
географических координат от нескольких десятков метров до не-
скольких метров. В связи с этим целесообразно оценить точность
навигационного метода.
Приемник пользователя ежесекундно формирует географические
координаты местонахождения в виде сообщения, содержащего поля
с широтой и долготой (по 32 бита каждое поле). Исходя из длины
земного экватора, теоретическая погрешность определения коорди-
нат при 32-битном представлении составляет 6 см. Реальная же по-
грешность существенно выше. Она включает следующие составля-
ющие (рис. 4.1):
- погрешность селективности доступа;
- погрешность от ионизированной оболочки;
- погрешность от складок местности;
- погрешность от расположения спутников.
Погрешность селективности доступа вносилась военным ведом-
ством, чтобы частные пользователи не могли влиять на обороно-
способность страны. Эта погрешность достигается хаотическим сдви-
гом времени передачи спутником псевдослучайного кода. Данная
погрешность для обычных приемников составляла 20—30 м. В на-
стоящее время она не вносится (т.е. устранена).
Погрешность от ионизированной оболочки связана с тем, что при
расчете псевдодальности скорость распространения электромагнит-
ной волны принята постоянной и равной ее скорости в вакууме.
В то же время ее реальная скорость при попадании в слои ионосфе-
ры снижается. Эта погрешность увеличивается для спутников, ле-
жащих низко к горизонту. Так, для спутника № 2 (рис. 4.1, б) она
выше, чем для спутника № 1. Поэтому нежелательно использовать
данные спутника № 2. Настройка приемника позволяет автомати-
чески отсекать сигналы от спутников, лежащих ниже заданного угла.
Погрешность от складок местности может возникнуть в том слу-
чае, если в непосредственной близости (до 5 м) от приемника нахо-
дится предмет, от которого отражается сигнал спутника. При этом
135
Рис. 4.1. Типы погрешностей в системе спутниковой навигации:
а — от слоя ионосферы; б — от иометрии местности; в — от взаимного распо-
ложения спутников
отраженный сигнал может быть воспринят приемником, как пря-
мой. Величина этой погрешности не превышает нескольких метров.
Погрешность от расположения спутников зависит от их взаим-
ного местонахождения. Путем расчетов в приемнике проекций на
поверхность Земли расстояний от спутников до приемников сигна-
лов появляются окружности равной дальности. Общая область их
пересечения дает неопределенность — погрешность. Чем ближе друг
к другу спутники, тем больше эта погрешность (больше область пе-
ресечения). Поэтому для снижения величины погрешности следует
136
пользоваться данными спутников, находящихся в разных сегментах
неба. Например, спутники № 2 и 3 (рис. 4.1, в) находятся в одной
области горизонта, поэтому целесообразно данными одного из них
пренебречь.
Суммарная погрешность определения координат с помощью СНС
может достигнуть 100 м. Поскольку в последние годы военное ве-
домство сняло требование по селективности доступа, то суммарная
погрешность снижается до 30 м. Кроме того, существует еще ряд тех-
нических решений, позволяющих снизить суммарную погрешность
до величин, удовлетворяющих требованиям, предъявляемым к сред-
ствам ЖАТ.
Для того, чтобы бортовое локомотивное устройство (КЛУБ-У,
КЛУБ-УП) могло использовать в своей работе информацию от СНС,
оно должно иметь в составе своего оборудования: электронную карту
(ЭК) участков пути, антенну СНС и приемник СНС.
Электронная карта — это база данных, предназначенная для хра-
нения железнодорожных координат и других параметров железно-
дорожных объектов (светофоров, станций, мостов, переездов и т.д.),
а также географических координат километровых столбов в элект-
ронном (кодовом) виде.
Антенна СНС осуществляет непосредственный прием сигналов
псевдослучайного кода и навигационных сообщений со спутников
группировки GPS.
Приемник СНС производит расчет координат своего местополо-
жения, текущей скорости и абсолютного астрономического време-
ни и выдачу этих параметров в блок электроники (БЭЛ) бортового
устройства с периодичностью в 1 с.
В ЭК предварительно записываются координаты последовательно
расположенных километровых столбов по маршруту движения поез-
да. В тот момент, когда координаты, рассчитанные локомотивным
приемником СНС, совпадут с координатами одного из километровых
столбов, БЭЛ определяет свои железнодорожные координаты и нахо-
дит на электронной карте расстояние до ближайшего железнодорож-
ного объекта.
4.2. Устройство формирования электронных карт
Для создания электронной карты служит сервисное устройство
формирования карты (УФК).
137
УФК включает следующие компоненты (рис. 4.2):
- переносной персональный компьютер с установленным на нем
программным комплексом «Конструктор», предназначенный для со-
здания, длительного хранения и редактирования макетов ЭК, привяз-
ки этих макетов к реальным объектам на местности и перезаписи от-
конвертированных электронных карт в память аппаратуры КЛУБ-У
и КЛУБ-УП;
Рис. 4.2. Структурная схема УФК
- блок приемника СНС, в корпусе которого находится вторич-
ный источник электропитания, а также приемник СНС. Источник
электропитания служит для питания переносного компьютера и
приемника СНС и подключается на транспортном средстве к его
бортовой сети с номинальными напряжениями в диапазоне от +18
до +55 В. СНС передает результаты расчетов в виде сообщений че-
рез последовательный порт компьютера;
- антенна СНС, принимающая сигналы от спутников и передаю-
щая их в блок приемника СНС.
В состав УФК, кроме технических средств, входит пакет програм-
много обеспечения «Конструктор», который состоит из следующих
программ:
138
- «Constructor» — предназначена для создания макетов элект-
ронных карт, их хранения в компьютере пользователя и дальней-
шей конвертации в формат, используемый в системах КЛУБ-У и
КЛУБ-УП;
- «Corrector» — осуществляет групповое изменение (корректи-
ровку) свойств объектов в макете электронной карты;
- «Navigator»—служит для заполнения макетов электронных карт
географическими координатами характерных объектов (километро-
вых столбов) непосредственно во время движения поезда по марш-
руту;
- «MapsAdd» («Соединитель карт») — предназначена для «скле-
ивания» карт различных участков между собой;
- «BvdShell» («Загрузчик карт») — служит для перенесения (заг-
рузки) отконвертированных данных электронной карты из памяти
персонального компьютера в память аппаратуры КЛУБ-У или
КЛУБ-УП;
- «Split» («Разъединитель карт») — вырезает из электронной кар-
ты участок указанной протяженности и создает из него новую карту;
- «MapCleaner» («Стиратель карт») — стирает из электронной кар-
ты ошибочно внесенные или испорченные данные.
Пакет «Конструктор» инсталлируется на компьютер пользова-
теля с компакт-диска, поставляемого вместе с УФК. Для установки
программ пользователь запускает программу Setup.exe и далее в про-
цессе установки отвечает на вопросы, задаваемые программой уста-
новки. Готовые к использованию программы пакета «Конструктор»
находятся в папках, ссылки на которые были указаны пользовате-
лем во время установки. Для их запуска на выполнение пользова-
тель последовательно выбирает опции главного меню Windows:
«Start», «Programs» и «Пакет Конструктор» и затем указывает имя
вызываемой программы.
4.3. Этапы создания электронных карт
Разработка каждой электронной карты (ЭК) состоит из трех пос-
ледовательных этапов:
1. Создание макета электронной карты.
2. Привязка макета ЭК к местности, то есть снятие географичес-
ких координат километровых столбов.
3. Запись ЭК в память КЛУБ-У, КЛУБ-УП.
139
Создание макета электронной карты (ЭК)
Создание макета ЭК (файл с расширением «*.тар») удобно осу-
ществлять на стационарном персональном компьютере после пред-
варительной установки на нем пакета ПО «Конструктор».
Перед началом работ оператор должен получить данные по ж.-д.
объектам, находящимся в пределах создаваемой электронной карты
(либо в табличном виде, либо путевые планы станций и перегонов).
Затем необходимо представить весь объем работы: определить
количество вносимых элементарных участков и их протяженность.
Элементарным считается участок пути, у которого на всем его про-
тяжении нет ни одного бокового ответвления или пересечения с дру-
гими участками. Любое станционное развитие считается как много-
путное продолжение того же самого участка, а не нескольких но-
вых. Целесообразность внесения в ЭК каждого из боковых путей на
станции определяется наличием на этом пути хотя бы одного из же-
лезнодорожных объектов: «платформа», «светофор», «тупик»,
«мост», «тоннель» и т.п.
Вводить участки можно в любой последовательности, не обяза-
тельно в той, в которой они следуют друг за другом на местности.
Границами участков служат признаки «начало / конец участка»,
относящиеся к соответствующим километровым столбам («1» — на-
чало, «2» — конец, «О» — промежуточные километровые столбы).
Для ввода элементарного участка запускается для исполнения
программа «Constructor» (рис. 4.3).
В верхнем выпадающем подменю «Карта» производится одно-
кратное нажатие левой кнопкой «мыши» по строке «Новая карта».
В открывающемся затем окне с заголовком «Новая карта...» вво-
дятся свойства карты: «номер карты» и «номер оператора» (рис. 4.4).
Далее следует закрыть диалоговое окно нажатием кнопки ОК. При
этом создается новая ЭК, содержащая пустое рабочее поле (рис. 4.5),
на котором вертикальными светло-серыми линиями обозначены на-
правления, на которых в ходе дальнейшей работы можно размещать
участки пути.
Программа «Constructor» позволяет сформировать на участке до 30
путей. Правильные направления путей вводятся под номерами 1—15,
неправильные — 16—30. Пути, по которым возможно двустороннее
движение, считаются различными и вводятся каждый отдельно.
140
Рис. 4 3. Исходный вид экрана программы «Constructor»
Создание участков пути осуществляется на рабочем поле снизу
вверх, от наименьшей координаты к большей, независимо от направ-
ления движения. Поэтому необходимо установить курсор в низ ра-
бочего поля (рис. 4.5) на соответствующий путь, что отражается в
строке состояния.
Внесение участка начинается с расстановки километровых стол-
бов. Для этого левой клавишей «мыши» выбирается кнопка «Учас-
ток» на панели ж.-д. объектов.
Затем указывается место на
рабочем столе, где необходи-
мо разместить участок. Далее
в открывшемся окне «свой-
ства объекта» указываются:
линейная координата, при-
знак начала участка и направ-
ление изменения координаты.
Затем нажимается кнопка ОК.
После этого введенный кило-
метровый участок появится на
карте. Затем курсор устанав- Рис 4 4 Лист дая заполнения парамет-
ливается в продолжение соз- рОВ новой электронной карты
141
Рис 4 5 Вид экрана перед началом составления новой электронной карты
данного участка, выбирается объект «Участок», нажимается «Enter»,
изменяется признак участка на промежуточный — «О» и нажимает-
ся «Enter» нужное количество раз с тем, чтобы ввести требуемое ко-
личество километровых участков по всему протяжению предпола-
гаемого маршрута движения. В параметрах последнего километро-
вого столба устанавливается признак конца участка — «2». При
формировании участка необходимо учесть, что объекты последнего
километра участка не читаются.
Направление движения на данном участке определяется парамет-
ром «изменение координаты». Поля «Географическая широта» и
«Географическая долгота» на первом этапе создания карты имеют
нулевые значения.
Далее в карту вносятся различные ж.-д. объекты («светофоры»,
«стрелки» и т.п.). Для этого мышью выбирается одна из кнопок верх-
него меню с изображением требуемого объекта, затем нажимается
левая кнопка мыши на той половине километрового участка, на ко-
тором требуется разместить объект. Объект автоматически устанав-
ливается на соответствующем пикете выбранного километра, при
этом его значок отображается справа от пути.
Для просмотра и редактирования свойств уже внесенных объек-
тов следует подвести указатель мыши и щелкнуть левой кнопкой по
142
участку пути, к которому относится объект. Справа от рабочего поля
карты появится панель свойств выбранного объекта (рис. 4.6).
Рис 4.6 Вид экрана после внесения в макет электронной карты железнодо-
рожных объектов
Если возникла необходимость в удалении объекта с рабочего
поля карты, следует подвести указатель мыши и щелкнуть уже не
левой, а правой кнопкой мыши по соответствующему участку пути,
рядом с которым изображен объект. Затем в появившемся диало-
говом окне «Список...» нужно указать тип удаляемого объекта и
подтвердить удаление нажатием кнопки
«Удалить» (рис. 4.7).
При выборе объекта «Путь» надо иметь в
виду, что удаление километрового участка вле-
чет за собой удаление всех расположенных на
нем объектов.
Чтобы сохранить созданную карту под име-
нем, задаваемым пользователем программы,
следует выбрать команду «Карта / Сохранить
карту как...».
Для склеивания отдельно составленных элек-
тронных карт имеется программа «MapsAdd»
Рис 4 7. Лист для уда-
ления ошибочно вне-
сенных железнодорож-
ных объектов
143
Рис. 4.8. Таблица программы «MapsAdd», позволяющая склеивать макеты
электронных карт
После вызова этой программы на экране открывается таблица
(рис. 4.8). С помощью клавиш «Browse» в первой и второй строках
указываются имена склеиваемых карт, а в третьей — имя новой по-
лучаемой карты. Исполнение операции осуществляется нажатием
кнопки «RUN».
Привязка макета электронной карты
к географическим координатам участка
На этом этапе организуются поездки по участкам, для которых
предполагается сформировать электронную карту. Поездки могут
проходить на любом ССПС или локомотиве, оборудованном или
не оборудованном аппаратурой КЛУБ-У. Обязательное требование
к подвижной единице состоит только в одном: должна быть предус-
мотрена возможность подключения к розетке бортовой сети ССПС
(+24 В) или локомотива (+48 В).
Оператор берет с собой в поездку УФК. Перед началом поездки
в кабине локомотива или ССПС он осуществляет следующие подго-
товительные действия:
- подключает аппаратуру в соответствии со схемой включения
УФК. Все подключения проводятся при отключенных блоках пре-
образователя и приемника (тумблеры питания соответствующих
блоков должны находиться в положении «ОТКЛ»);
- магнитное основание антенны СНС прикрепляют к любой го-
ризонтальной поверхности на крыше ССПС или локомотива;
- на блоке преобразователя напряжений приемника СНС осуще-
ствляют переключение тумблеров питания в положение «ВКЛ.»;
144
- включается персональный компьютер, и из программы «Кон-
структор» запускается на исполнение программа «Навигатор» (файл
Navigator.exe) (рис. 4.9);
Рис. 4.9 Рабочее окно программы «Навигатор»
- в работающей программе «Навигатор» из ее главного меню с
помощью мыши выбирается пункт «Карта / Загрузить карту». За-
тем в стандартном диалоговом окне Windows указывается полный
путь к требуемому файлу электронной карты участка пути, по мар-
шруту которого предполагается движение, созданному на первом
этапе при работе с программой «Конструктор»;
- до начала движения по маршруту производится проверка дос-
таточности набранных приемником СНС решений и правильности
монтажа аппаратуры УФК. Для этого в уже работающей програм-
ме «Навигатор» оператор нажимает мышью кнопку «Прием коор-
динат», на которой изображена спутниковая антенна. Программа
реагирует на нажатие кнопки мыши появлением информационного
окна «Идет прием координат». Через 1—2 с это окно исчезает с эк-
рана компьютера. В случае «зависания» окна на время более 3 с не-
обходимо нажать кнопку «Отмена» в самом окне, проверить
правильность коммутации блоков и повторить все действия данно-
10-3060
145
го пункта. Если после исчезновения информационного окна в глав-
ном окне программы появится надпись «Недостоверное решение»,
что свидетельствует о недостаточном количестве принятых приемни-
ком СНС решений, необходимо нажатием на кнопку с изображением
направленной вниз стрелки вернуться к начальной точке карты мар-
шрута и через 1—2 мин заново произвести все действия этого пунк-
та. Случай, когда после исчезновения информационного окна в глав-
ном окне появится надпись «Правильное решение», соответствует
правильной работе устройств УФК и достаточности количества при-
нятых приемником решений. Только после этого можно начинать
движение ССПС или локомотива.
В процессе поездки оператор при работе с персональным компью-
тером фиксирует географические координаты железнодорожных
объектов, которые он проезжает, находясь в кабине. Для програм-
мы «Навигатор» нет необходимости снимать географические коор-
динаты всех интересующих объектов (светофоров, переездов, мос-
тов), достаточно зафиксировать координаты наиболее распростра-
ненных, так называемых «характерных объектов». Такими
«характерными объектами» в программе «Навигатор» являются ки-
лометровые столбы. Географические координаты всех остальных
объектов рассчитываются программно.
Красной пунктирной рамкой на экране компьютера отмечается
тот километровый столб, для которого должна быть определена гео-
графическая координата. Левой клавишей мыши следует нажать на
кнопку с изображением антенны на экране (см. рис. 4.9). Красная
рамка автоматически передвигается к следующему километровому
столбу. Возникает надпись зеленого цвета — «Решение достоверно».
В противном случае координаты не записываются.
После завершения поездки по маршруту оператор выбирает в
программе «Навигатор» пункт главного меню «Карта / Сохранить
как ...» и в стандартном диалоговом окне указывает имя сохраняе-
мого файла карты. Файл соответствует тому же шаблону «*.шар»,
что и исходный файл, загруженный в программу перед поездкой.
В заключение оператор отключает УФК и производит деком-
мутацию всех его блоков в той же последовательности, которая была
при их коммутации и включении.
После завершения всех поездок оператор должен уже в стацио-
нарных условиях проверить целостность снятой с реальной мест-
146
ности карты. Для этого оператор за своим рабочим столом снова
загружает программу «Конструктор», открывает в ней файл, кото-
рый является результатом всех поездок, и просматривает итого-
вые отчетные таблицы. Электронная карта считается окончатель-
но снятой, когда каждому километровому столбу в итоговой таб-
лице поставлено в соответствие значение его географических
координат.
Окончательным результатом второго этапа в создании электрон-
ной карты должно стать формирование компьютерного файла, со-
держащего макет электронной карты, в котором всем километро-
вым столбам приписаны их географические координаты. После этого
требуется конвертировать файл электронной карты из формата
«*.шар» в формат «*.gps». Эта процедура осуществляется в програм-
ме «Конструктор» выбором из главного меню команды «Карта /
Конвертировать в ЭК».
Запись электронной карты в КЛУБ-У
На третьем этапе происходит перезапись электронной карты из
памяти персонального компьютера в память аппаратуры КЛУБ-У,
КЛУБ-УП. Для этого оператор соединяет кабелем переносной ком-
пьютер из состава УФК, в памяти которого находится подготовлен-
ная на двух предыдущих этапах карта, с аппаратурой КЛУБ-У
(КЛУБ-УП). Соединение устройств (рис. 4.10) производится
непосредственно в кабине транспортного средства без демонтажа
аппаратуры КЛУБ-У (КЛУБ-УП).
Поскольку используемый персональный компьютер оснащен
интерфейсом типа RS-232, а аппаратура КЛУБ-У — CAN-интер-
Рис. 4.10. Схема записи электронной карты в БЭЛ-У:
1 — кабель RS-интерфейса; 2 — кабель CAN-интерфейса
147
фейсом, то их стыковка возможна только с помощью специаль-
ного развязывающего устройства, функции которого выполняет
БВД-У(Т).
Оператор, закончив подключение, вводит с пульта БВД-У(Т) ряд
команд, позволяющих стереть старое содержимое электронной кар-
ты внутри аппаратуры КЛУБ-У. Затем оператор запускает в компь-
ютере программу «MapLoad», выбирает в ней по имени тот файл
электронной карты, который он желает записать в память аппара-
туры КЛУБ-У, и включает команду начала записи. Если запись про-
шла успешно, соответствующее сообщение выводится на экран ком-
пьютера.
Электронная карта сохраняется в памяти аппаратуры КЛУБ-У
постоянно и не требует перезаписи после выключения питания.
В любой момент электронная карта может быть считана из КЛУБ-У
для проверки ее целостности. Если возникла необходимость внести
изменения в электронную карту, то оператор вносит необходимые
исправления в компьютерный файл прямо в программе «Конструк-
тор», а затем осуществляет его конвертацию в формат «*.gps» и за-
пись в КЛУБ-У по описанной выше методике.
Предельная протяженность участка дороги, которую можно за-
нести в память КЛУБ-У, составляет 7 тыс. км. Если локомотив или
ССПС в процессе работы вышел за пределы ЭК, записанной в па-
мять КЛУБ-У, то КЛУБ-У продолжает осуществлять контроль за
движением транспортного средства в режиме движения без элект-
ронной карты.
Время, отводимое на выполнение первого этапа (создание маке-
та электронной карты), в общем случае зависит от протяженности
вносимого в ЭК участка дорог. Из опыта работы известно, что вне-
сение в электронную карту двухпутного участка протяженностью
100 км со всеми его объектами может занять у одного оператора два
полных рабочих дня.
Продолжительность второго этапа (привязка ЭК к местности)
равна суммарному времени проезда оператором всех внесенных в
ЭК участков дорог. Время, затраченное на третьем этапе (програм-
мирование аппаратуры КЛУБ-У), целиком определяется количе-
ством программируемых комплектов КЛУБ-У.
Если количество таких комплектов велико, то целесообразно
использовать следующий режим работы. Первоначально ЭК запи-
148
сывается из компьютера только в БВД-У(Т). Для этого в программе
«BvdShell» выбирается режим «Запись ЭК в БВД» и последователь-
но нажимаются кнопки «Загрузить файл», «Включить в связь», «За-
писать». После этого на борту можно работать только с блоком
БВД-У(Т). Достаточно лишь установить на нем режим «Запись ЭК».
При этом сначала будет идти стирание старой электронной карты,
хранящейся в памяти КЛУБ-У, а затем начнется запись новой ЭК.
Запись идет 3—4 мин. Этот режим работы дает выигрыш во времени.
5. РАСШИФРОВКА ИНФОРМАЦИИ
О ПОЕЗДКЕ
5.1. Стационарное устройство дешифрации,
структура и программное обеспечение
Стационарное устройство дешифрации (СУД-У) обеспечивает:
- считывание и расшифровку информации о параметрах движе-
ния поезда и работе КЛУБ-У, записанной на кассете регистрации (КР);
- архивацию считанной информации и хранение ее в соответствии
с установленными инструкциями сроками;
- формирование отчетных документов о поездках (протоколов).
Состав СУД-У:
- персональный компьютер (в дальнейшем—ПК), имеющий: порт
USB, CD-R, видеокарту с разрешением не менее 1024 х 768 пиксе-
лей, ОЗУ — не менее 128 Мб, HDD — не менее 20 Гб;
- цветной монитор с разрешением не менее 1024 х 768 пикселей;
- стандартная клавиатура с латинской и русской раскладкой;
- совместимый с данным компьютером манипулятор «мышь»;
- лазерный принтер (цветной);
- кабель для принтера;
- сетевой фильтр;
- устройство считывания кассеты регистрации У СК (до 8 штук);
- пакет программного обеспечения (ПО СУД-У).
Порт USB необходим для подключения УСК к компьютеру. При
наличии у компьютера нескольких портов USB через них может быть
одновременно подключено несколько УСК. Программное обеспе-
чение позволяет осуществлять одновременное считывание инфор-
мации, записанной на кассеты регистрации с восьми УСК. Общее
время считывания информации с кассет при этом не увеличивается
и составляет 6—8 мин. Таким образом, обеспечивается ускорение
процесса считывания информации с кассет регистрации.
В СУД-У используются также разветвители HUB. Каждый HUB
имеет четыре входа для подключения четырех УСК и один выход
для присоединения к порту USB компьютера.
150
Для устойчивой и надежной работы ПО СУД-У не следует
устанавливать на ПК другие программы, работающие с базами дан-
ных. Кроме того, для лучшей сохранности создаваемой базы дан-
ных желательно скопировать ее на другой ПК или периодически за-
писывать на CD-диски при помощи CD-R/W.
Существующие версии ПО СУД-У предназначены только для
работы в среде WINDOWS-98. В разработке находится очередная
версия — в среде WINDOWS-2000/XP.
Версия ПО СУД-У должна соответствовать версии ПО КЛУБ,
установленной на подвижном составе конкретного депо. Допускается
работа более новой версии ПО СУД-У с предыдущей версией ПО
КЛУБ. Противоположный вариант (сочетание более новой версии
ПО КЛУБ с предыдущей версией ПО СУД-У) недопустим.
Установка программного обеспечения (ПО) СУД-У производится
с инсталляционного CD-диска в корневой каталог диска С. При этом
создается новая директория SUD, в которой формируются три пап-
ки с каталогами.
Папка «Data55» предназначена для хранения базы данных
локомотивных бригад, локомотивов, маршрутов.
Папка «KKR_2006» — входной каталог. При считывании пер-
вой за текущий день кассеты регистрации (КР) внутри этого катало-
га создается новая папка, которой автоматически присваивается на-
звание «KKR_ddmm», где dd — день расшифровки, mm — месяц
расшифровки, а считанные данные записываются в файл-копию КР.
Если в течение дня была считана информация с нескольких кассет
регистрации, то в созданной папке будет помещено несколько фай-
лов-копий КР.
Папка «Sud_arj» предназначена для хранения архива отчетов (про-
токолов) о поездках.
При первом после установки ПО СУД-У запуске программы на
экране компьютера появляется окно, в которое расшифровщик дол-
жен внести название железной дороги и своего подразделения
(рис. 5.1).
Рис. 5.1. Окно для записи данных о депо
151
После этого появляется следующее окно, в которое требуется за-
писать фамилии руководства (рис. 5.2).
Рис. 5.2. Окно для записи данных о руководителях депо
При последующих запусках программы SUD эти два окна уже не
будут появляться. Однако всегда будет открываться окно с фамили-
ями расшифровщиков. Перед началом расшифровки работник дол-
жен выбрать из имеющегося списка свою фамилию.
Если сведения о технике-расшифровщике в списке отсутствуют,
то необходимо вручную ввести эти данные, которые будут хранить-
ся в списке.
После внесения данных о персонале на экране появляется рабо-
чее окно программы СУД-У (рис. 5.3).
Данное окно содержит (сверху вниз):
- заголовок с названием программы;
- строку меню;
- панель кнопок;
- панель управления графиками;
- панель просмотра аварийных ситуаций;
- панель дискретных параметров (справа);
- панель аналоговых параметров (справа);
- окно отображения графиков дискретных параметров (верхнее
из окон);
- окно отображения графиков всех аналоговых параметров, кро-
ме фактической и допустимой скорости (среднее окно);
- окно отображения графиков фактической и допустимой скоро-
сти (нижнее окно).
В строке Меню (см. рис. 5.3) имеются пункты подменю следую-
щего состава:
152
Рис. 5.3. Рабочее окно программы СУД-У
Файл:
- «считать КР» — по данной команде осуществляется считыва-
ние данных с КР на ПК;
- «считать из входного каталога КР» — по данной команде осу-
ществляется открытие окна проводника «Входного каталога» для
последующей расшифровки файла-копии поездки, имеющего рас-
ширение DBD;
- «считать из архива КР» — по данной команде осуществляется
открытие окна проводника «Архива» для повторной расшифровки
файла-копии поездки, хранящейся в архиве, или просмотра отчета,
имеющего расширение KRA;
- «выход» — выход из программы.
Вид (данные команды активизируют или убирают панели с экрана):
- панель кнопок;
- панель управления графиками;
- панель просмотра нарушений;
- панель параметров.
153
Графики:
- «показать» — переключение на просмотр графиков;
- «начало выделения / конец выделения» — отмечается начало/
конец выделения графика для печати или сохранения участка гра-
фика в отчете о поездке;
- «печать» — печать выделенной части графика;
- «добавить к отчету» — добавление к отчету о поездке выделен-
ной части графика в виде приложения.
Протокол:
- «показать» — переключение окна графиков на окно просмотра
отчета;
- «печать» — печать отчета.
Базы данных (БД):
- «локомотивные бригады» — загружает базу данных машинис-
тов депо;
- «локомотивы» — загружает базу данных локомотивов;
- «типы локомотивов» — загружает базу данных по типам локо-
мотивов;
- «маршруты» — загружает базу данных маршрутов;
- «депо» — загружает базу данных депо с приписанными к ним
локомотивами, поездки которых расшифровываются.
Сервис:
- «табличные значения параметров» — отображение включенных
на просмотр параметров поездки в табличном виде;
- «табличные значения всех параметров» — отображение всех
зарегистрированных параметров в табличном виде;
- «постоянные характеристики» — просмотр характеристик, вво-
димых с БВЛ (блока ввода локомотивного);
- «самодиагностика системы КЛУБ-У (-УП)» — просмотр кодов
диагностических сообщений аппаратуры КЛУБ во время поездки;
- «настройка программы» — установка настроек программы (цвет
курсора, цвет выделения графиков, максимальное значение скорос-
ти и т.п.);
- «настройка каталогов» — производится настройка адресов мес-
тонахождения на жестком диске баз данных, входных каталогов и
архивов;
- «установка номера У СК» — изменение и проверка номера под-
ключенного к ПК У СК;
154
- «установка номера КР» — изменение и проверка номера КР,
подключенной к ПК посредством У СК;
- «экспортировать данные из электронной карты» — позволяет
переводить данные об участках маршрута из форматов электрон-
ной карты в форматы ПО СУД-У;
- «объединить базы данных СУД-У и ЭК» — добавляет перене-
сенную из ЭК информацию об участках в базу данных СУД-У;
- «администрация депо» — позволяет редактировать информа-
цию о руководителях депо;
- «оператор» — позволяет редактировать список операторов си-
стемы СУД-У;
- «настройка системы» — позволяет изменять название дороги и
депо;
- «сохранить настройки» — позволяет сохранять настройки про-
граммы (масштаб, смещение, цвет и количество отображаемых гра-
фиков) в файле;
- «загрузить настройки» — позволяет загружать файл с настрой-
ками программы;
- «давление в кгс/см» — преобразование величин давлений из
МПа в кгс/см2 и обратно;
- «очистка архивов» — запускает программу очистки архивов от
отчетов о поездках;
- «справка по тормозам» — опция, позволяющая распечатать
форму ВУ-45 (бланк справки по тормозам);
- «печать списка постоянных характеристик» — активизирует
окно, в котором отображается список записей всех постоянных ха-
рактеристик, что позволяет контролировать значения постоянных
характеристик во время поездки;
- «печать всех ограничений» — данная опция позволяет выб-
рать между присоединением к протоколу списка всех временных
ограничений скорости и присоединением списка только тех вре-
менных ограничений скорости, которые не были выполнены при
ведении поезда.
Окна:
- «графики» — позволяет перейти от табличной формы отображе-
ния параметров движения поезда к их графическому отображению;
- «протокол» — позволяет просмотреть протокол поездки.
155
Справка:
- «помощь» — система помощи программы дешифрирования;
- «о программе» — краткие сведения о программе.
Панель кнопок (см. рис. 5.3)
Панель кнопок предназначена для быстрого доступа к коман-
дам меню и расположена под командным меню. Всплывающие под-
сказки и тематические изображения на кнопках идентифицируют
каждую кнопку с определенной, часто используемой, командой
меню. Данная панель также отображает текущую дату (по линии
среза), направление движения (стрелка вправо — вперед, влево —
назад) и номер пути, по которому следовал поезд или подвижная
единица.
Панель управления отображением графиков (см. рис. 5.3)
Программа СУД-У позволяет отображать в виде графиков ана-
логовые и дискретные параметры, регистрируемые на КР. Данная
панель позволяет настроить цвет и толщину линий графиков, масш-
таб и смещение графиков относительно друг друга.
Панель просмотра аварийных ситуаций (см. рис. 5.3)
Данная панель расположена под панелью кнопок и предназначе-
на для удобства просмотра автоматически выявленных аварийных
ситуаций, помеченных на графике.
Для просмотра необходимо щелкнуть правой клавишей «мыши»
по кнопке перечня выявленных аварийных ситуаций (широкая кноп-
ка с всплывающей подсказкой «Выделить нарушение») и выбрать
необходимую для просмотра аварийную ситуацию. Щелчком левой
клавиши «мыши» по этой же кнопке можно выделить или отменить
выделение цветом текущей аварийной ситуации. Справа и слева от
данной кнопки расположены по две кнопки, позволяющие переме-
щаться по списку выявленных аварийных ситуаций.
Справа от кнопки перечня выявленных аварийных ситуаций на-
ходится кнопка для подтверждения оператором СУД-У вины маши-
ниста в ситуации, выявленной системой. При установке этой кноп-
ки в позицию «Да» текущая ситуация будет сохранена в итоговом
отчете и выведена на печать. При установке в позицию «Нет» теку-
щая ситуация будет сохранена в итоговом отчете, но не будет выво-
диться на печать при распечатке отчетов.
Далее на панели просмотра нарушений расположена кнопка с
надписью «Участок, км» или «Участок, t». Если кнопка находится
156
в положении «Участок, км», то привязка поездки осуществляется к
железнодорожной координате, а в положении «Участок, t» — к ас-
трономическому времени, отображая на горизонтальной оси
соответственно текущие значения времени или координаты на сет-
ке графиков.
На панели просмотра нарушений расположена кнопка «Добавить
к протоколу график текущего нарушения», позволяющая добавить к
формируемому отчету графическое приложение с изображением те-
кущей аварийной ситуации. Также к протоколу можно добавить лю-
бую часть графиков, выделив ее и нажав кнопку «Добавить к прото-
колу выделенный график». Для выделения участка графиков линия
среза значений параметров (рабочий курсор) подводится к началу
участка и нажимается кнопка «Начало участка» или соответствую-
щая команда из меню «Графики». Затем рабочий курсор устанавли-
вается в конец участка и нажимается кнопка «Конец участка» или
соответствующая команда из меню «Графики». Для отмены выделе-
ния нажать на кнопки начала и конца участка, не смещая курсора.
При нажатии кнопки «Добавить к протоколу график текущего
нарушения» отображается информация о том, какая по счету ава-
рийная ситуация из общего количества выявленных аварийных си-
туаций просматривается в данный момент.
Панель дискретных параметров (см. рис. 5.3)
На панели дискретных параметров можно посмотреть текущие
(по расположению рабочего курсора) значения дискретных парамет-
ров. Дискретными называются параметры, которые могут прини-
мать два значения (включено или выключено).
Установка или сброс флажка (осуществляется левой клавишей
«мыши») напротив названия параметра соответственно включает или
отключает отображение графика данного параметра. Цвет, указан-
ный напротив названия параметра, соответствует цвету отображае-
мого графика.
Перечень регистрируемых дискретных параметров:
- ТСКБМ—состояние телемеханической системы контроля бодр-
ствования машиниста (Вкл/Выкл);
- САУТ — состояние системы автоматического управления тор-
мозами (Вкл/Выкл);
- РК — состояние радиоканала (Вкл/Выкл);
- ВклКом — состояние компрессора (Вкл/Выкл);
157
- ЗакрАБ — признак выключенной автоблокировки (Вкл/Выкл);
- ПАБ — признак участка с полуавтоматической блокировкой
(Вкл/Выкл);
- УпрЭПК — признак включения ЭПК (Вкл/Выкл);
- КлЭПК! — состояние ключа ЭПК1 (Вкл/Выкл);
- КлЭПК2 — состояние ключа ЭПК2 (Вкл/Выкл);
- РукРБ — состояние рукоятки РБ (Вкл/Выкл);
- РукРБС — состояние рукоятки РБС (Вкл/Выкл);
- КнВК — состояние кнопки «ВК» (Вкл/Выкл);
- KhF — состояние кнопки «F» (Вкл/Выкл);
- Подтяг — состояние кнопки «Подтяг» (Вкл/Выкл);
- КнОтпр — состояние кнопки «Отпр» (Вкл/Выкл);
- КнОС — состояние кнопки «ОС» (Вкл/Выкл);
- КнК20 — состояние кнопки «К20» (Вкл/Выкл);
- Тифон — признак наличия сигнала тифона (Вкл/Выкл);
- ЭПТтор — признак наличия режима ЭПТ «Торможение» (Вкл/
Выкл);
- ЭПТпер — признак режима ЭПТ «Перекрыта» (Вкл/Выкл);
- ЭПТцеп — признак режима ЭПТ «Контроль цепи» (Вкл/Выкл);
- ЗпСАУТ — запрет отпуска САУТ (Вкл/Выкл);
- АкКЛУБ — активность КЛУБ (вкл/выкл);
- НулКон — состояние контроллера машиниста («1» — контрол-
лер в нулевой позиции, «О» — контроллер в ненулевой позиции (тяга /
торможение);
- Свист. — наличие сигнала «Свисток» (Вкл/Выкл);
- КОН — состояние КОНа (норм./срыв).
Панель аналоговых параметров (см. рис. 5.3)
Под панелью со списком дискретных параметров расположена
панель со списком аналоговых параметров. В панели аналоговых
параметров можно просмотреть текущие (по расположению линии
среза — рабочего курсора) значения аналоговых параметров.
В отличие от дискретных, аналоговые параметры могут прини-
мать множество значений, и графики, отображающие данные пара-
метры, выглядят сложнее, чем графики дискретных параметров.
К числу аналоговых параметров относятся: «Уровень бодрство-
вания», «Давление в тормозной магистрали», «Давление в первом
уравнительном резервуаре», «Давление во втором уравнительном ре-
158
зервуаре», «Давление в тормозном цилиндре», «Режим (поездной,
маневровый)», «Активная кабина», «Допустимая скорость», «Фак-
тическая скорость».
Под панелью аналоговых параметров размещена кнопка с под-
писью «Строка вверх/вниз». С помощью этой кнопки можно уста-
новить порядок расположения аналоговых и дискретных парамет-
ров. Для этого необходимо «мышью» выбрать параметр для пере-
мещения и нажать кнопку (вверх или вниз).
Окна отображения графиков (см. рис. 5.3)
Данные окна занимают наибольшую часть рабочего экрана. Пер-
вое (верхнее) окно отображает графики тех дискретных параметров,
которые были выбраны для отображения в панели дискретных па-
раметров.
Второе окно (среднее) отображает графики тех аналоговых па-
раметров, которые были выбраны для отображения в панели анало-
говых параметров. Исключение составляют только параметры фак-
тической и допустимой скорости, которые отображаются в третьем
(нижнем) окне.
Для просмотра точного значения любого параметра нужно пользо-
ваться рабочим курсором, наблюдая при этом за значениями в пане-
лях списков аналоговых и дискретных параметров. Рабочий курсор
следует передвигать при помощи манипулятора «мышь».
5.2. Работа с кассетами регистрации
Кассета регистрации (КР) служит для записи параметров движе-
ния поезда и работы КЛУБ-У во время поездки. В ее корпусе нахо-
дится электрически перепрограммируемая память объемом 1 Мбайт,
что обеспечивает регистрацию параметров движения за 12 ч работы,
при ежесекундной записи до 40 различных параметров движения.
Кроме ячейки памяти, в состав КР входят контроллер управле-
ния, обеспечивающий процесс записи и считывания, а также схема
развязки с внешними электрическими цепями. При случайном по-
падании высокого напряжения на КР происходит выгорание схемы
развязки. Однако даже в этом случае информация в ячейке памяти
сохраняется и может быть расшифрована на специальной аппарату-
ре, имеющейся на заводе-изготовителе.
При работе с КР необходимо обеспечивать определенную после-
довательность действий, которая гарантирует правильную запись ин-
159
формации и достоверную отчетность. Каждая КР выдается машинис-
ту перед рейсом под роспись. В журнал записываются фамилия ма-
шиниста, дата выдачи, индивидуальный номер КР.
Машинист устанавливает КР в кассетоприемник БИЛ-У аппара-
туры КЛУБ-У (-УП), а затем включает аппаратуру. После включе-
ния аппаратуры машинист при помощи БВЛ-У вводит первичную
информацию о поездке. Вся эта информация автоматически фикси-
руется на КР (например: табельный номер машиниста, номер поез-
да, вес, число вагонов и т.д.).
Без ввода первичной информации или при ее недостатке расшиф-
ровка КР возможна, но при этом не всегда можно будет оценить
правильность действий машиниста. Например, если машинист вел
состав с 50 вагонами, а в первичной информации вагоны указаны не
были, то реальный тормозной путь состава будет больше, чем рас-
четный. Таким образом, правильные действия машиниста могут быть
восприняты при расшифровке как ошибочные.
При длительных остановках поезда аппаратура КЛУБ-У
(КЛУБ-УП) не должна отключаться, а КР не должна извлекаться,
так как машинист на стоянке обязан производить определенные рег-
ламентные работы, которые также должны быть зафиксированы на
КР. После завершения поездки сначала отключается аппаратура
КЛУБ-У (КЛУБ-УП), а уже затем извлекается КР, чтобы вся работа
КЛУБ-У (КЛУБ-УП) оказалась записанной. По возвращении из по-
ездки машинист обязан сдать КР под роспись вместе с другими по-
ездными документами.
При следовании двухкабинного локомотива или ССПС с одним
комплектом КЛУБ-У КР может быть установлена в БИЛ любой ка-
бины, независимо от того, какая кабина является рабочей. При сме-
не кабины не нужно переносить КР в другой БИЛ.
Если время записи превышает 12 ч, то последняя часть информа-
ции начнет записываться в начало ячейки памяти. В результате пер-
вая часть поездки будет стерта.
Для расшифровки КР устанавливается в УСК, предварительно
подключенное к компьютеру. Из пункта «Файл» главного меню
(см. рис. 5.3) запускается команда «Считать КР». На экране появит-
ся изображение согласно рис. 5.4.
Для активизации процесса считывания КР следует нажать кнопку
«Опрос» (см. рис. 5.4), после чего в верхней части окна УСК появится
160
номер КР. Он должен совпадать
с номером, написанным на кас-
сете. При несовпадении номеров
нужно выйти из этого окна в ос-
новное окно СУД-У и зайти в
меню «Сервис», где принуди-
тельно присвоить кассете номер,
указанный на ее корпусе.
При совпадении номеров
нужно нажать кнопку «Чтение»,
после чего начнется считывание
информации с кассеты. Одновре- I
менно можно считывать до вось-
„„ z- Рис. 5.4. Вид экрана при считывании
ми КР без увеличения общего
J кассеты регистрации
времени считывания.
Кроме того, считывание можно производить одновременно с
расшифровкой ранее считанных данных о поездках, находящихся
во входном каталоге. Для этого предварительно следует свернуть
(но не закрыть!) окно УСК.
После считывания данных КР СУД-У формирует файл-копию,
содержащий информацию о поездке, и помещает ее во входной ка-
талог KKR. При этом каждому файлу поездки автоматически при-
сваивается имя, которое состоит из двух частей — самого имени и
расширения «DBD».
Имя состоит из восьми цифр (например: 00241206). Четыре пер-
вые цифры — для записи номера поезда (№ 0024), а следующие че-
тыре цифры — для записи даты этой поездки (12 июня).
После расшифровки каждого файла-копии поездки программа
автоматически преобразует его в файл отчета о поездке, меняя рас-
ширение в имени файла с DBD на KRA. С новым расширением файл
отчета сохраняется в архивном каталоге.
При повторном считывании данных в тот же день с этой же КР
или при считывании нескольких КР, записанных на одном поезде в
один день (ситуация характерна для ССПС, работающих в составе
одного поезда), СУД-У сформирует файл поездки с таким же име-
нем. Но, так как во входном каталоге не может существовать двух
поездок с одинаковым именем и одной и той же датой считывания,
всем последующим файлам поездок будут автоматически присваи-
ваться цифровые расширения (000, 001 и т.д.).
161
5.3. Расшифровка информации о поездке
Для расшифровки файлов поездок следует в меню рабочего окна
СУД-У выбрать пункт «Файл», а в появившемся ниспадающем
меню — команду «Считать из входного каталога». При этом в ра-
бочем окне СУД-У появится окно, в котором следует найти нуж-
ный для расшифровки файл.
Для начала расшифровки следует дважды щелкнуть по имени
файла левой клавишей «мыши». На экране вместо окна «Провод-
ник входного каталога» появится окно «Выбор маршрута». В нем
нужно выбрать маршрут следования поезда.
После закрытия окна «Выбор маршрута» на экране автоматически
появится следующее окно базы данных «БД временных ограничений».
При наличии в этом окне сформированных ранее листов временных
ограничений следует выбрать тот из них, который соответствует дан-
ному маршруту. В противном случае нажатием на кнопку «Не исполь-
зовать» на экран выводится окно формирования листа временных ог-
раничений.
Если временные ограничения вводить не надо, то следует нажать
на кнопку «Предупреждений нет». В противном случае необходимо
нажать кнопку «Новое», ввести название станции и дату выдачи
предупреждения.
Для каждого предупреждения заполняются последовательно все
поля, указанные на рис. 5.5.
После записи последнего ограничения нужно нажать на кнопку
«Ввод завершен». С этого момента начинается процесс расшифров-
ки файлов-копий поездок в автоматическом режиме. В результате
на экране появляется протокол поездки с выявленными системой
СУД-У нарушениями (рис. 5.6).
Разработчики программного обеспечения все время увеличивают
количество типов нарушений, которые могут быть выявлены автома-
тически. В настоящее время список таких нарушений включает:
- проезд запрещающего показания путевого светофора;
- превышение допустимой скорости;
- выключение красного сигнала локомотивного светофора;
- скатывание;
- выключение ЭПК;
- следование с выключенной и исправной системой САУТ;
162
Рис. 5.5. Окно для ввода временных ограничений
Рис 5.6. Протокол расшифровки поездки
163
- следование с выключенной и исправной системой ТСКБМ;
- сбой кодов с 3/Ж на Б;
- перекрытие сигнала 3 на КЖ;
- включение тормозов при включенной тяге.
После автоматической расшифровки файла поездки и ознаком-
ления с выявленными нарушениями необходимо провести эксперт-
ный анализ поездки. Это связано с тем, что часть нарушений не вы-
являются автоматически (например, ошибки в действиях машинис-
та при опробовании тормозов), а часть автоматически выявленных
нарушений таковыми не являются. Например, машинист может про-
ехать запрещающий сигнал по приказу поездного диспетчера, одна-
ко СУД-У все равно зафиксирует его действия как нарушение.
Поэтому расшифровщик должен закрыть протокол отчета о по-
ездке. На экране появится рабочее окно СУД-У с графиками зареги-
стрированных параметров поездки (см. рис. 5.3), и можно будет пе-
рейти к этапу экспертной расшифровки путем прокрутки графиков.
Сначала расшифровщик просматривает в рабочем окне СУД-У
все нарушения, выявленные автоматически. Для этого он пользует-
ся панелью просмотра нарушений (см. рис. 5.3).
Если расшифровщик не находит в конкретной ситуации вины ма-
шиниста или КЛУБ-У, то он левой клавишей «мыши» переводит кноп-
ку подтверждения вины из положения «Да» в положение «Нет».
К протоколу отчета о поездке в виде приложений следует доба-
вить графики параметров, отражающие и в полной мере характери-
зующие наличие нарушения и факта вины локомотивной бригады.
После просмотра всех автоматически выявленных нарушений
расшифровщик должен повторить просмотр данных о поездке на
предмет выявления других возможных нарушений. При их обнару-
жении он заносит информацию в протокол в раздел «Заключение
эксперта» (см. рис. 5.6). Кроме того, он может присоединить к про-
токолу любое количество графических приложений, которые отра-
жают все выявленные им нарушения. Для этого оператор последо-
вательно нажимает на панели кнопки: «начало выделения», «конец
выделения», «добавить к протоколу выделенный график».
Когда файл поездки расшифрован и протокол с приложениями
распечатан, можно закрыть рабочее окно или перейти к расшиф-
ровке другого файла из входного каталога.
164
При этом на экране активизируется окно «Закрытие файла», в
котором расшифровщику предлагается сохранить результаты рас-
шифровки в любом из журналов архива. При выборе журнала рас-
шифровщик руководствуется тем, что:
- в журнале № 1 регистрируются данные о всех поездках, в кото-
рых не обнаружены нарушения;
- в журнале № 2 регистрируются данные о поездках, в которых вы-
явлены нарушения режимов ведения поезда локомотивной бригадой;
- в журнале № 3 регистрируются данные о поездках, в которых
выявлены нарушения в работе аппаратуры КЛУБ-У;
- в журнале № 2—3 регистрируются данные о поездках, в кото-
рых выявлены нарушения как со стороны локомотивной бригады,
так и со стороны аппаратуры КЛУБ-У;
- в журнале № 4 регистрируются данные о поездках, вызвавшие
аварии и требующие особого рассмотрения.
Отчеты в журнале № 1 должны храниться в течение одного меся-
ца, в журналах № 2, 3, 2—3 — в течение одного года. Отчеты в жур-
нале № 4 хранятся не менее пяти лет.
Оператор выбирает клавишей «мыши» номер журнала, а затем
нажимает на кнопку «ОК». При этом исходный файл поездки удаля-
ется из входного каталога. Если возникает необходимость просмот-
ра отчета о поездке или повторной расшифровки файла поездки, то
следует левой клавишей «мыши» нажать на кнопку «Файл» и из нис-
падающего меню выбрать функцию «считать из архива КР». После
этого проводник входного каталога откроет окно (рис. 5.7), в кото-
ром можно выбрать файл нужного отчета.
Рис. 5.7. Окно для работы с архивом
165
5.4. Создание базы данных маршрутов
Одной из функций ПО СУД-У является экспорт данных из элект-
ронной карты (ЭК) в базу данных «Маршруты» СУД-У.
Файлы участков электронных карт, созданные в среде программ-
ного обеспечения «Конструктор», имеют расширение «тар». Эти
файлы следует перенести в базу данных участков СУД-У, а затем
уже из баз данных отдельных участков сформировать базу данных
маршрутов.
Для переноса каждого «тар»-файла создается промежуточная
папка (например: в каталоге «Мои документы» — папка «Времен-
ная»). В рабочем окне СУД-У в строке меню «Сервис» появляется
закладка «Экспортировать данные из ЭК». При этом открывается
окно в виде табл. 5.1.
Таблица 5.1
Эл. карта САМои документы\ Поиск
Экспортируемые данные С:\Мои документы\Временная Поиск
При помощи правых кнопок «Поиск» в верхней строке записы-
вается адрес папки, где хранится «тар»-файл (сам файл не указыва-
ется), а во второй строке указывается адрес папки «Временная».
Далее открывается окно с содержимым папки «Мои документы»,
из которой выбирается переносимый «тар»-файл. Затем откроется
новое окно с предложением указать наименование файла первого
переносимого участка. Вслед за внесением его названия откроется
окно с предложением указать наименование файла второго перено-
симого участка и т.д. После внесения названий всех предложенных
участков должна появиться надпись «Перенесено удачно».
На следующем этапе переноса следует в рабочем окне СУД-У зай-
ти в строку меню «Сервис», где открыть закладку «Объединить БД
СУД и ЭК». В открывшейся таблице уже имеется вся необходимая
информация. Для завершения процесса объединения баз данных сле-
дует только нажать кнопку «Да». После этого рекомендуется пере-
запустить программу СУД-У.
Чтобы базами данных участков можно было воспользоваться в
процессе расшифровки поездок, следует их предварительно объеди-
нить в базы данных маршрутов. Для этого необходимо в рабочем
окне СУД-У в строке меню (см. рис. 5.3) раскрыть левой клавишей
166
I
Пика Ганаро
j j
AA> -trHHn C-sMdf. '
I F4-’«®l-<5
J^Ka-e-aCa^a
2-
I
Рис 5 8 Окно базы данных маршрутов
«мыши» пункт «БД» (базы данных). В открывшемся после этого нис-
падающем меню выделить функцию «Маршруты». На экране появит-
ся окно (рис. 5.8).
Далее нужно осуществить следующие действия:
- выбрать мышью закладку «Маршрут» (см. рис. 5.8) и с помощью
команды меню «Редактировать / новый» создать перечень маршрутов;
- для каждого из маршрутов сформировать перечень участков, вхо-
дящих в данный маршрут; для этого выделить мышью поле с наиме-
нованием маршрута и выполнить команду меню «Редактировать /
Создать маршрут»; появится окно с названием маршрута (рис. 5.9);
- пользуясь кнопкой переноса «<», добавить нужные участки в
маршрут (порядок занесения участков должен соответствовать их
последовательности при движении поезда по данному маршруту);
- для исправления некорректного ввода необходимо восполь-
зоваться кнопками: «>>» — удалить из маршрута все участки,
«>» — удалить из маршрута один участок;
Рис 5 9 Окно для создания маршрутов из отдельных участков
167
- для подтверждения правильности выбора участков маршрута
и возвращения в основное окно редактирования базы данных «Мар-
шруты» нажать кнопку «Да».
5.5. Обновление версии СУД-У
При обновлении версии СУД-У необходимо сохранить имеющу-
юся базу данных, чтобы позднее использовать ее при работе с новой
версией. При этом следует выполнить следующую последователь-
ность действий:
- создать новую папку (например: папку «Временная» в директо-
рии «Мои документы»);
- открыть C:\SUD\ и скопировать базу данных (Data55), а также
входные каталоги и архивы (KKR и Sud_arj) в папку «Временная»;
- удалить старую версию СУД-У, для чего выбрать пункт меню из
программной группы «Пуск»А<Настройка»/«Панель управления»/
«Установка и удаление программ». В открывшемся окне выбрать
удаляемую программу (например: SUD5.6.6). Вслед за нажатием на
экране кнопки «удалить» начинается процесс автоматического уда-
ления (деинсталляции) старой версии СУД-У;
- после удаления старой версии СУД-У произвести перезагрузку
компьютера;
- установить новую версию СУД-У, инсталлировав ее с CD-диска;
- из папки «Временная» перенести в базу данных новой версии
СУД-У папки «Data55», «KKR» и «Sud_arj»;
- в заключение рекомендуется осуществить перезагрузку програм-
мы СУД-У, закрыв и снова открыв ее для последующей работы.
5.6. Примеры расшифровки кассет регистрации
При расшифровке кассет регистрации техник-расшифровщик
сталкивается с большим количеством поездных ситуаций, которым
он должен дать правильную оценку. Ниже рассматриваются наибо-
лее часто встречающиеся ситуации.
На рис. 5.10 отображена ситуация превышения допустимой ско-
рости (выявляется автоматически), которая возникла в результате
отработки кривой торможения перед путевым светофором с запре-
щающим огнем. В момент начала превышения скорости расстояние
до светофора составляло 75 м, что видно из записей в окнах «Вид
168
Рис. 5.10. Превышение поездом допустимой скорости
цели» и «Расстояние до цели», расположенных в правом нижнем углу
рабочего окна СУД-У. Также из данного рисунка видно, что в мо-
мент начала превышения скорости (16 ч 02 мин 05 с) произошло
снятие напряжения с катушки ЭПК, но машинист совершил нару-
шение — прервал автостопное торможение выключением ключа
ЭПК, что видно из графика «Кл ЭПК 1».
На рис. 5.11 показана ситуация несанкционированного движения
поезда (скатывания). Данная ситуация выявляется автоматически.
Она характеризуется тем, что при нулевом положении контроллера
фактическая скорость поезда стала увеличиваться от нуля и превы-
сила 2 км/ч. Аппаратура КЛУБ-У реагирует на это снятием напря-
жения с катушки ЭПК. Такая же реакция наступает, если через 70 с
после перевода контроллера в ненулевое положение скорость по-
прежнему остается равной нулю.
На рис. 5.11 также показано начало санкционированного движе-
ния (13 ч 27 мин 24 с). Перед началом движения был осуществлен
перевод контроллера из нулевого положения в ненулевое.
169
Рис. 5.11. Скатывание поезда
На рис. 5.12 отображен фрагмент поездки, из которого видно,
что в 0 ч 51 мин 32 с на 226 км 7 пк 30 м при фактической скорости
движения 115 км/ч произошло прекращение регистрации парамет-
ров движения, следствием чего стало скачкообразное изменение та-
ких параметров, как фактическая и допустимая скорости, давление
в тормозной магистрали, давление в тормозных цилиндрах, время.
Такая ситуация могла сложиться как по причине выключения локо-
мотивной бригадой КЛУБ-У, так и по причине отсутствия контакта
между КР и кассетоприемником.
На рис. 5.13 отображена ситуация проезда поездом неохраняе-
мого переезда (п. НЕОХР.) без подачи звукового сигнала. Так как
при проезде переездов, мостов, тоннелей, платформ следует пода-
вать звуковой сигнал за 1500—500 м до объекта, а в данном случае
локомотивная бригада последний раз подала звуковой сигнал за
1503 м до светофора № 12, за которым находился переезд (п.
НЕОХР.), можно сделать вывод, что локомотивная бригада про-
ехала данный переезд с нарушением. Контроль подачи машинистом
сигналов осуществляется по графикам изменения параметров «Ти-
170
Рис. 5.12. Прерывание процесса записи на кассету регистрации
Рис. 5.13. Проезд переезда без подачи звукового сигнала
171
фон» и «Свисток». При этом расстояние до светофора указывается в
поле «Расстояние до цели», расположенном в правом нижнем углу
рабочего окна СУД-У.
На рис. 5.14 отображена ситуация автостопного торможения из-
за превышения скорости. В 8 ч 20 мин 46 с на 56 км 4 пк 6 м была
превышена допустимая скорость движения (фактическая скорость
равна 93 км/ч, допустимая скорость 92 км/ч), в результате чего про-
изошло снятие напряжения с катушки ЭПК. Машинист для предот-
вращения автостопного торможения произвел выключение ключа
ЭПК (график КлЭПК1), но, так как данная подвижная единица обо-
рудована устройством КОН, через 7 с произошло автостопное тор-
можение (снизилось давление в тормозной магистрали темпом экст-
ренного торможения, при том, что давление в уравнительном резер-
вуаре не изменилось). После срыва ЭПК блоком КОН началось
автостопное торможение, но машинист произвел подтверждение ав-
тостопного торможения переводом ручки крана машиниста в 6-е
положение (началось снижение давления в уравнительном резер-
вуаре), что видно из графиков «ЭПТтор» и «дУрР-1».
Рис. 5.14. Автостопное торможение из-за превышения скорости
172
Рис. 5.15. Невыполнение операций опробования тормозов
на выделенном участке
На рис. 5.15 отображена ситуация, когда машинист не произвел
опробование автотормозов (ЭПТ) в пути следования на выделен-
ном участке. Это следует из отсутствия изменений графиков давле-
ний и фактической скорости.
Рекомендуемая литература
1. Сороко В.И., Розенберг Е.Н. Аппаратура железнодорожной
автоматики и телемеханики: Справочник: в 2 кн. Кн. 2. — 3-е изд. —
М.: НФП «Планета», 2000. — 1008 с.
2. Методические материалы по курсу «Устройство формирова-
ния электронной карты для системы безопасности КЛУБ-У, КЛУБ-
УП». М.: ВНИИАС МПС России, 2004. — 30 с.
3. Методические материалы по курсу «Стационарное устройство
дешифрации унифицированное (СУД-У) для расшифровки инфор-
мации в системах КЛУБ-У, КЛУБ-УП». — М.: ВНИИАС МПС Рос-
сии, 2006. — 37 с.
4. Розенберг Е.Н., Малинов В.М. Современные зарубежные сис-
темы железнодорожной автоматики. — М.: ВНИИАС МПС России,
2006.— 156 с.
5. Зорин В.И. Унифицированное комплексное локомотивное ус-
тройство безопасности И Автоматика, связь, информатика. 2006,
№2, с. 16—17.
6. Устройство КЛУБ-У // Руководство по эксплуатации. — М.,
2007.
7. Стационарное устройство дешифрации унифицированное
СУД-У // Инструкция по эксплуатации. — М., 2006.
8. Устройство формирования электронной карты УФК // Руко-
водство по эксплуатации. — М., 2007.
Содержание
Введение...............................................3
Список принятых сокращений и отдельных терминов........4
1. СИСТЕМЫ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ
ДВИЖЕНИЯ ПОЕЗДОВ......................................6
1.1. Отечественный опыт................................6
1.2. Зарубежный опыт...................................X
1.3. Системы автоматической локомотивной сигнализации
(АЛСН и АЛС-ЕН) .....................................24
1.4. Принципы обеспечения надежности и функциональной
безопасности аппаратуры КЛУБ-У........................28
2. КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО
БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У)................32
2.1. Функции КЛУБ-У...................................32
2.2. Структурная схема КЛУБ-У.........................34
2.3. Блок электроники (БЭЛ-У).........................38
2.3.1. Модуль центрального обработчика (МЦО).......40
2.3.2. Блок внешних устройств (БВУ) ...............52
2.3.3. Модуль-измеритель параметров движения (ИПД).59
2.3.4. Модуль маршрута и электронной карты (ММ)....63
2.3.5. Модуль радиоканала (РК).....................65
2.4. Блоки индикации локомотивные.....................66
2.5. Блок коммутации и регистрации (БКР-У)............72
2.6. Порядок эксплуатации КЛУБ-У......................76
2.6.1. Порядок включения КЛУБ-У....................76
2.6.2. Ввод предрейсовой информации................78
2.6.3. Выбор режима движения.......................84
2.6.4. Ввод номера пути............................86
2.6.5. Порядок работы с КЛУБ-У в начале движения
локомотива.........................................87
2.6.6. Взаимодействие КЛУБ-У с вентилем КОН и ЭПК....87
2.6.7. Проверка бдительности машиниста.............88
2.6.8. Порядок работы КЛУБ-У при движении локомотива.89
175
2.6.9. Движение локомотива без электронной карты
по участку, оборудованному путевыми устройствами
АЛС-ЕН...........................................92
2.6.10. Порядок смены кабины управления для изменения
направления движения.............................93
2.6.11. Выключение КЛУБ-У........................93
2.6.12. Работа КЛУБ-У при приеме команд по цифровому
радиоканалу и наличии электронной карты..........93
2.6.13. Взаимодействие КЛУБ-У с САУТ и ТСКБМ ....96
2.6.14. Работа с блоком БВЛ-У....................98
2.6.15. Команды КЛУБ-У...........................99
2.6.16. Управление поездом при смене показаний
путевых светофоров..............................100
3. СЕРВИСНЫЕ УСТРОЙСТВА ДЛЯ КЛУБ-У.................105
3.1. Переносной блок ввода данных и диагностирования
(БВД-У).........................................105
3.2. Измеритель параметров локомотивных катушек (ИПЛК).... 113
3.3. Устройство бесшлейфовой проверки (УБП) приемников
сигналов каналов АЛСН и АЛС-ЕН.....................126
4. ФОРМИРОВАНИЕ ЭЛЕКТРОННОЙ КАРТЫ
ДЛЯ КЛУБ-У.........................................133
4.1. Использование спутниковых навигационных систем
на железнодорожном транспорте......................133
4.2. Устройство формирования электронных карт......137
4.3. Этапы создания электронных карт...............139
5. РАСШИФРОВКА ИНФОРМАЦИИ О ПОЕЗДКЕ.................150
5.1. Стационарное устройство дешифрации, структура
и программное обеспечение..........................150
5.2. Работа с кассетами регистрации................159
5.3. Расшифровка информации о поездке..............162
5.4. Создание базы данных маршрутов................166
5.5. Обновление версии СУД-У.......................168
5.6. Примеры расшифровки кассет регистрации........168
Рекомендуемая литература...........................174
Учебное издание
Владимир Ильич Астрахан
Василий Иванович Зорин
Геннадий Карпович Кисельгоф
Сергей Геннадиевич Константинов
Виктор Михайлович Малинов
Илья Львович Рубин
Елена Евгеньевна Шухина
УНИФИЦИРОВАННОЕ
КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ
УСТРОЙСТВО БЕЗОПАСНОСТИ (КЛУБ-У)
Учебное пособие
Редактор А.В. Лужкова
Художественный редактор Г. Б. Климова
Корректоры А.А. Животовская, Н.В. Черножукова
Компьютерная верстка И.Н. Воронцова
Подписано в печать 31.10.2007 г.
Формат 60x84/16. Усл. печ. л. 11,0. Тираж 4000 экз. Заказ 3060.
ГОУ «Учебно-методический центр по образованию
на железнодорожном транспорте»
107078 Москва, Басманный пер., 6
Тел.: +7(495) 262-12-47
E-mail: marketing@umczdt.ru,
http://www.umczdt.ru
ООО «Транспортная книга»
109202, Москва, Перовское шоссе, д. 9, стр. 1
Отпечатано в ОАО «Ивановская областная типография»
153008, г. Иваново, ул. Типографская, 6.
E-mail: O91-O18@rambler.ru