/















































































Автор: Мерзликин В.Е.
Теги: физическая культура и спорт конструирование летательные аппараты планеры
Год: 1982


Текст
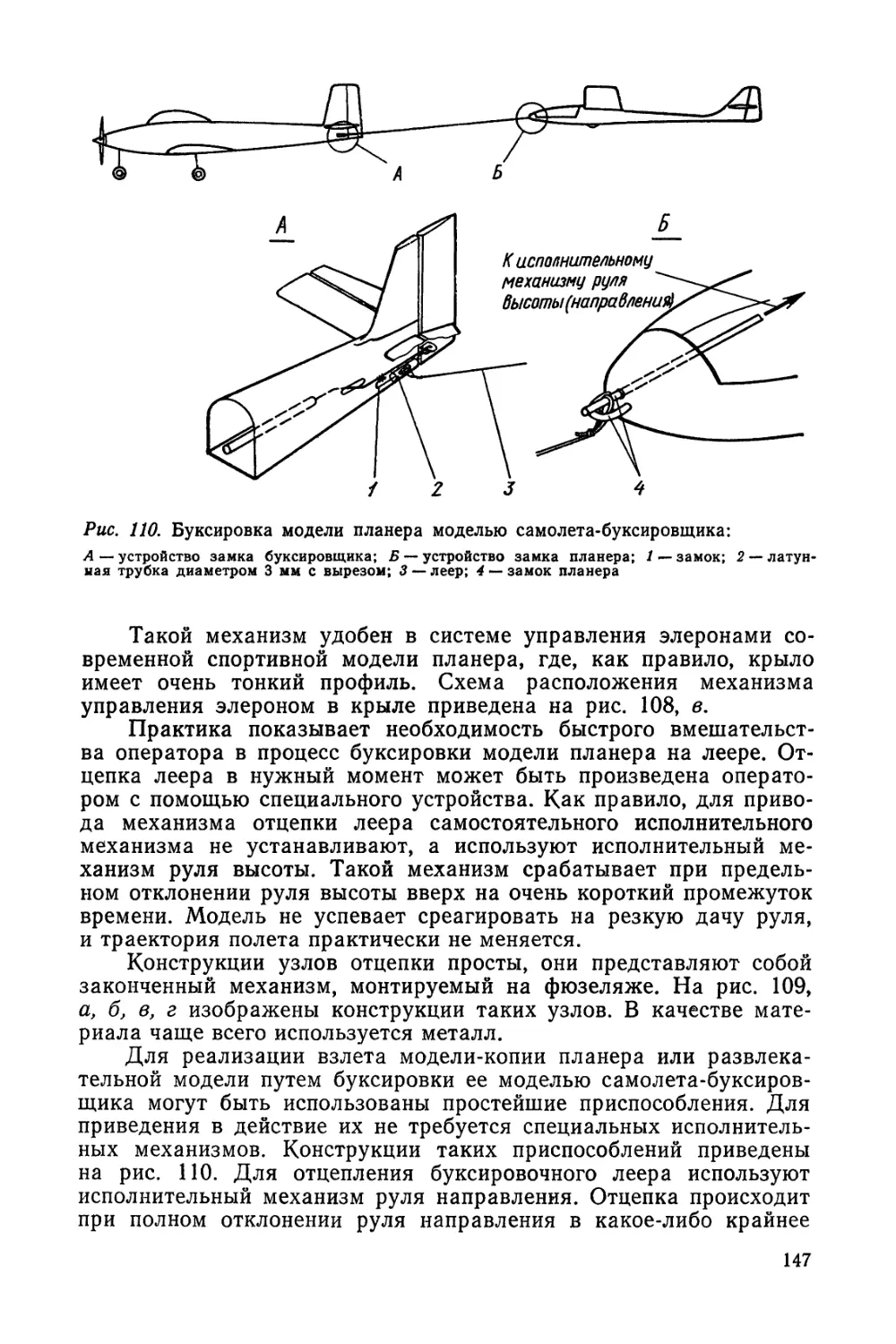
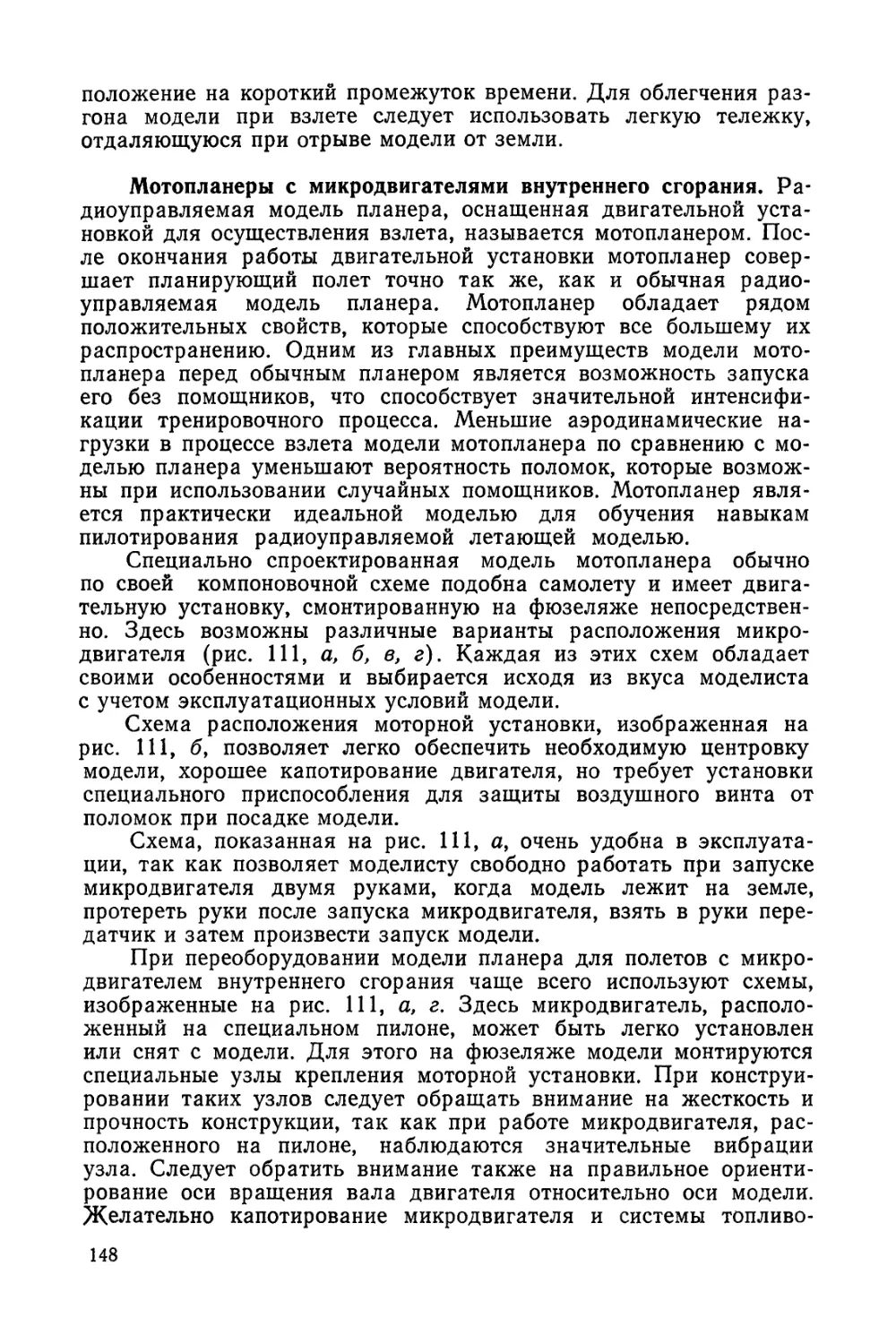
В. Е. МЕРЗЛИКИН
РАДИОУПРАВЛЯЕМЫЕ
МОДЕЛИ ПЛАНЕРОВ
Москва
Издательство ДОСААФ СССР
1982
ББК 75 725
М81
Рецензент Л. Алдошин
Мерзликин В. Е.
М81 Радиоуправляемые модели планеров.— М.:
ДОСААФ, 1982.—160 с.
60 к.
В книге рассказывается о том, как авиамоделисту можно спро-
ектировать и сделать модель радиоуправляемого планера.
Для авиамоделистов.
4202000000—085
М 072(02)—82 96“”82
ББК 75.725
7А7.3
© Издательство ДОСААФ СССР, 1982 г.
Валерий Ефимович Мерзликин
РАДИОУПРАВЛЯЕМЫЕ МОДЕЛИ ПЛАНЕРОВ
Заведующий редакцией А. В. Островский
Редакторы Д. А. Петухов, В. Н. Ионов
Художественный редактор Г. Л. Ушаков
Технический редактор 3. И. Сарвина
Корректор В. Д. Синева
ИБ № 1066
Сдано в набор 17.02.82. Подписано в печать 22.07.82. Г-54382. Формат 60X90’/ie. Бумага ти-
пографская № 2. Гарнитура литературная. Печать высокая. Усл. п. л. 10,0. Уч.-изд. л. 10,88.
Тираж 40 000 экз. Зак. № 796. Цена 60 к. Изд. 3/д-93.
Ордена «Знак Почета» Издательство ДОСААФ СССР
129110, Москва, И-110, Олимпийский просп., 22.
Ордена Трудового Красного Знамени типография издательства ЦК КП Белоруссии, 220041,
Минск, Ленинский проспект, 79.
ВВЕДЕНИЕ
Авиационный моделизм является едва ли не самым популяр-
ным техническим видом спорта. Им увлекаются школьники и сту-
денты, рабочие и инженеры, люди разных возрастов и профессий.
Очень многие начинают свои занятия авиационным моделизмом
в школьных кружках, а также кружках Домов пионеров и стан-
ций юных техников, клубах ДОСААФ. Нередко детское увлечение
определяет весь жизненный путь моделиста, в частности выбор
профессии. Стремление познать, проанализировать и добиться бо-
лее высоких результатов заставляет моделиста изучать специаль-
ную литературу, сопоставлять и размышлять, приучаясь к систе-
матической работе над собой, над своим самообразованием. В про-
цессе изготовления модели моделист обучается пользоваться
различными инструментами, применять на практике различные
технологические приемы, привлекать нужные сведения из самых
различных областей техники.
Трудно переоценить роль занятий авиационным моделизмом в
политехническом образовании, так как игровая и соревновательная
сторона, непременно сопутствующая этому увлечению, ненавязчи-
во заставляет трудиться, учиться и заниматься творчеством, срав-
нивать плоды своего труда с работой своих товарищей.
Запуски летающих моделей обычно привлекают внимание не
только уже занимающихся авиамоделизмом, и в результате у это-
го интереснейшего вида технического творчества и спорта появля-
ются все новые и новые поклонники.
Авиационный моделизм как спорт зародился в нашей стране
более 50 лет назад. За это время летающие модели достигли уди-
вительных результатов, пройдя путь от неуклюжих и беспомощных
сооружений из дерева, проволоки и бумаги, почти нелетающих, до
современных моделей, покрывающих расстояние в сотни километ-
ров, набирающих высоту в несколько тысяч метров, достигающих
скорости сотен километров в час.
Сейчас строят модели, используя самые современные техно-
логические приемы, новейшие данные в области теории полета,
аэродинамики и механики. Оборудование моделей — сгусток до-
стижений в области механики и микромеханики, электроники и
радиотехники. Научно-технический прогресс позволил создать со-
вершеннейшие системы дистанционного управления моделями.
Еще 20—30 лет назад модель, выпущенная в полет, летела
обычно «куда ветер дунет». Однако стремление подчинить себе
модель, заставить делать ее то, что хочет спортсмен, проявилось
3
уже в первые годы развития авиамоделизма, хотя дальше про-
стейших устройств дело не шло.
Сейчас же модели снабжаются программными механизмами и
устройствами автоматического управления, радиомаяками для
быстрого поиска модели и другими специальными приспособле-
ниями.
Энтузиастам, построившим первые радиоуправляемые модели,
поистине пришлось совершить чудеса инженерного поиска и на-
ходчивости. Аппаратура, предназначенная для первых моделей,
была крайне несовершенной, громоздкой и тяжелой.
Постепенно по мере совершенствования конструкций радио-
аппаратуры авиационные модели с дистанционной системой управ-
ления выделились в самостоятельный класс радиоуправляемых
летающих моделей.
Сейчас Международная авиационная федерация (ФАИ) куль-
тивирует несколько классов радиоуправляемых летающих моделей.
В соответствии с классификацией ФАИ все радиоуправляемые
летающие модели, обозначенные индексом F-3, подразделяют на
следующие классы:
F-3A — пилотажные радиоуправляемые модели самолетов,
предназначенные для выполнения комплекса (комплексов) фигур
высшего пилотажа;
F-3B — радиоуправляемые модели планеров, предназначенные
для проведения соревнований в трех упражнениях: упражнение
«А» — продолжительность полета модели с ограниченной высоты,
упражнение «В» — дальность полета модели на базе 150 м, упраж-
нение «С» — скорость прохождения дистанции 300 м на базе
150 м в двух направлениях;
F-ЗД— радиоуправляемые гоночные модели самолетов, пред-
назначенные для соревнований на скорость прохождения дистан-
ции 4000 м по треугольному маршруту с периметром 400 м (10 про-
летов).
В данной книге речь будет идти о моделях планеров, выпол-
няющих полет без использования силовой установки, за счет по-
тенциальной энергии, накопленной при подъеме модели на высоту.
Различают модели, предназначенные специально для участия
в соревнованиях, и модели для развлечения и получения навыков
пилотирования (тренировочные).
Класс радиоуправляемых моделей планеров охватывает целую
группу моделей, отличающихся своими размерами, способами
управления, использованными материалами и использованной си-
стемой управления.
Модели могут быть как простейшими с использованием лишь
одного аэродинамического элемента управления и простейшей
аппаратуры, позволяющей посылать только одну команду, так и
сложными с многоканальными системами пропорционального
управления, позволяющими управлять всеми аэродинамическими
рулями, изменять геометрию модели, выпускать и убирать шасси
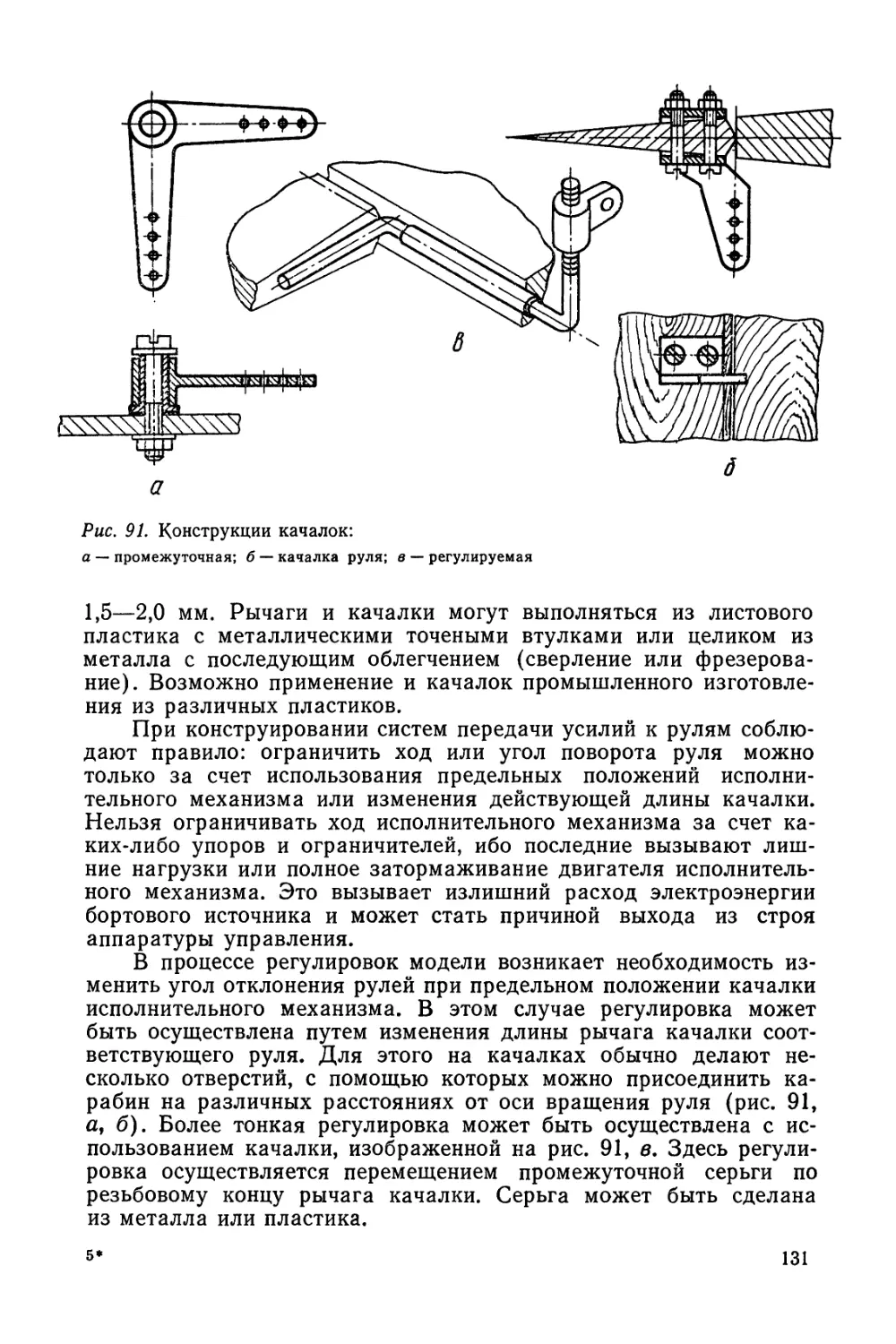
и выполнять различные вспомогательные функции.
4
Радиоуправляемые модели планеров привлекают моделистов
тем, что на них нет силовой установки, а значит, отпадает необ-
ходимость в ее обеспечении топливом и другими необходимыми
для эксплуатации средствами, модель не загрязняется топливом
и продуктами его сгорания.
Даже простейшие модели планеров, управляемые по радио,
позволяют получить навыки пилотирования, достаточно глубоко
познакомиться с аэродинамикой и динамикой полета. Постройка
и эксплуатация такой модели дадут достаточную подготовку для
постройки и пилотирования моделей, предназначенных участво-
вать в соревнованиях по специальному многоборью для радио-
управляемых моделей планеров.
Требования и ограничения на модели планеров определяются
Правилами проведения соревнований по авиамодельному спорту
в СССР, которые соответствуют кодексу ФАИ, просты и позво-
ляют легко построить модель даже при использовании недефи-
цитных материалов.
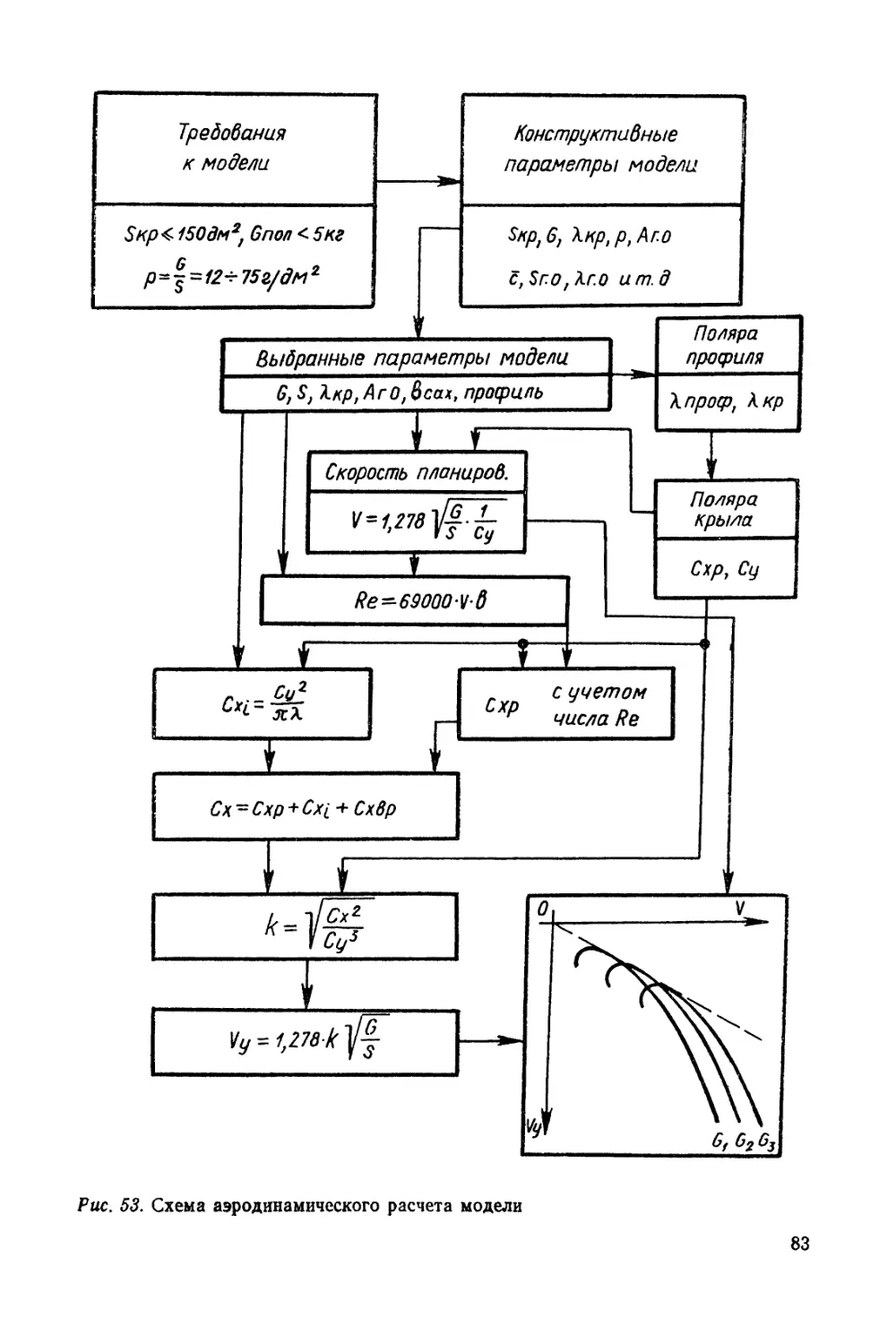
В данной книге приводятся сведения по аэродинамике моде-
лей, аэродинамическому и конструктивному расчету, технологии
изготовления отдельных узлов, эксплуатации аппаратуры управ-
ления, объясняются способы запуска модели.
НЕКОТОРЫЕ СВЕДЕНИЯ
ИЗ АЭРОДИНАМИКИ
Движение тел в воздухе. Перемещение любого тела в воздухе,
в том числе полет летающей модели, вызывает взаимодействие
определенных сил, которые могут быть определены по законам
механики. Силы взаимодействия, возникающие при движении
тела в воздухе или, наоборот, воздуха относительно тела, называ-
ются аэродинамическими. Величина этих сил и точки приложения
их будут зависеть от различных факторов. Среди них скорость
перемещения, положение тела в потоке, форма тела, состояние
воздуха и т. д. Независимо от того, что находится в движении,—
тело, обтекаемое потоком, или поток, обтекающий это тело,— при
условии их неизменного положения друг относительно друга аэро-
динамические силы оказываются одинаковыми.
Таким образом, движение тела в потоке можно заменить дви-
жением воздуха при неподвижном теле. Этот принцип называется
принципом обратимости движения.
Для изучения характера обтекания тел воздухом, определе-
ния величины сил и моментов, точек приложения этих сил, а так-
же для экспериментальной проверки и уточнения теоретических
выводов производят эксперименты на специальных установках —
аэродинамических трубах, где используется принцип обратимости
движения. Аэродинамическую модель или ее отдельные части, за-
крепленные неподвижно, обтекает поток, искусственно сформиро-
ванный таким образом, чтобы в наибольшей степени создать усло-
вия, приближающиеся к условиям полета натурного летательного
аппарата. Модель с помощью специальных подвесок соединяют
с аэродинамическими весами, которые измеряют силы, воздейст-
вующие на тело в потоке.
Для понимания физической картины явлений, происходящих
с моделью в полете, и для правильной оценки их, а также для
безошибочного определения путей совершенствования конструк-
ции необходимо изучить влияние на полет модели отдельных ее
параметров и свойств воздуха.
К сожалению, теория полета моделей сложна и в отдельных
своих аспектах даже несколько сложнее теории полета больших
самолетов и планеров. Это объясняется тем, что полет модели
происходит в области чисел Рейнольдса, в которой все аэродина-
мические характеристики претерпевают резкие скачки, зависящие
от направления изменения скорости полета, которые еще мало
изучены.
€
Полет модели даже в спокойной атмосфере можно сравнивать
с полетом самолета при скорости звука, причем модели приходит-
ся летать в критических условиях постоянно. Самое небольшое
возмущение атмосферы (ветер 5—10 м/с) приводит к значитель-
ным изменениям скорости полета и, следовательно, аэродинамиче-
ских сил. Исследования полета больших самолетов и планеров,
а также летающих моделей и сравнение результатов этих иссле-
дований показывают существенную разницу в числовых значениях
параметров, но общие положения теории остаются одинаковыми.
Взаимодействие тела и воздушного потока. При обтекании
тела, находящегося в потоке, скорость частиц воздуха у поверх-
ности под влиянием ее шероховатости и вязкости воздуха (вну-
треннего трения) становится равной нулю. При удалении от по-
верхности тела скорость частиц начинает возрастать и на опре-
деленном расстоянии достигает скорости воздушного потока.
Слой воздуха, примыкающий к поверхности тела, в котором
происходит изменение скорости частиц, называется пограничным
слоем.
Толщина пограничного слоя, измеренная в миллиметрах, за-
висит от формы тела, шероховатости его поверхности, скорости
обтекания, положения поверхности относительно потока, от вязко-
сти и плотности воздуха.
В пограничном слое всегда происходит вращательное движе-
ние частиц воздуха, причиной которого является разность их ско-
ростей. Это вращение называется завихрением потока.
Позади тела пограничные слои верхней и нижней поверхно-
стей смыкаются и образуют довольно широкую струю, называе-
мую спутной. Скорость спутной струи, образованной завихренны-
ми пограничными слоями, несколько ниже скорости самого потока.
По мере удаления от тела спутная струя постепенно размывается
и исчезает.
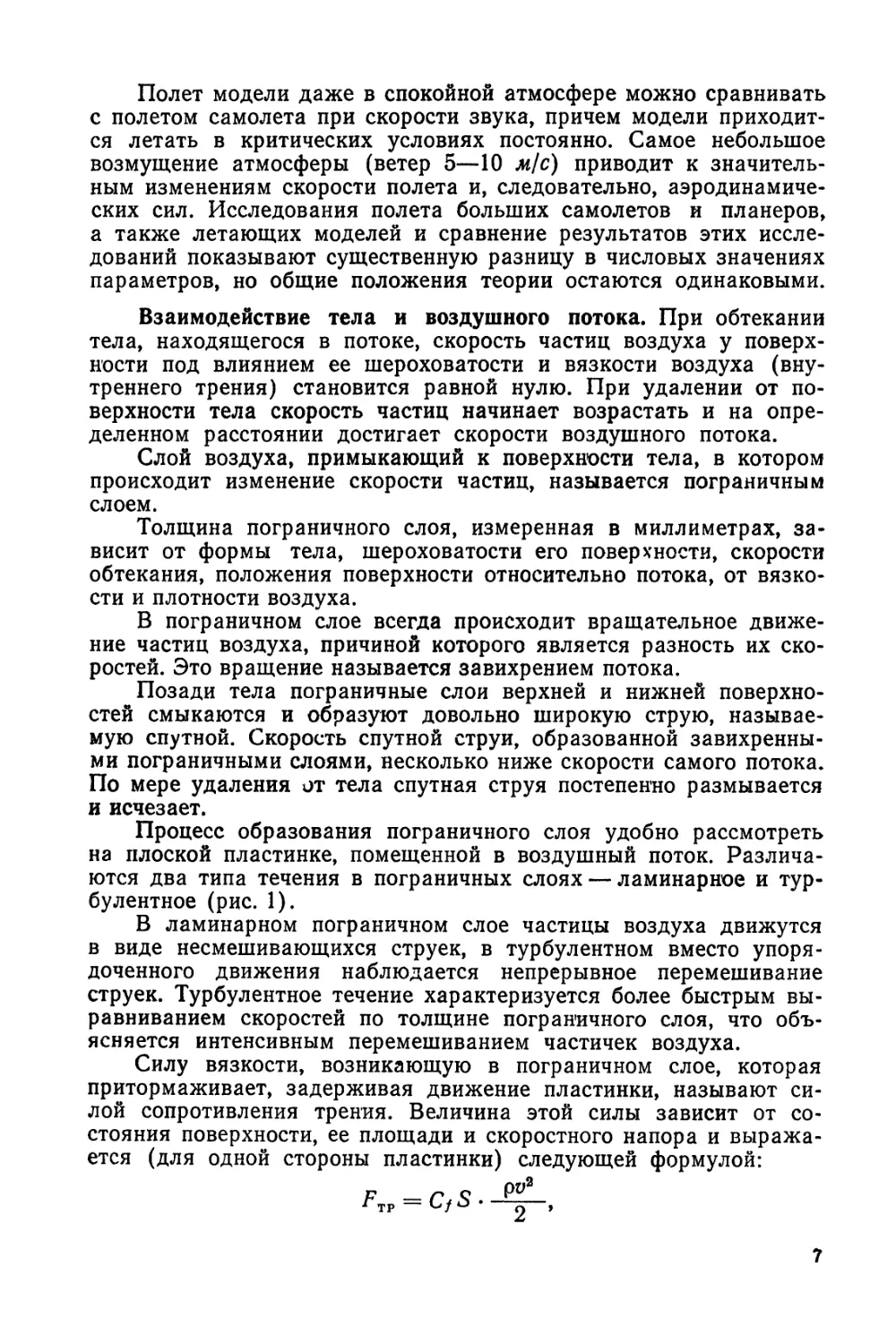
Процесс образования пограничного слоя удобно рассмотреть
на плоской пластинке, помещенной в воздушный поток. Различа-
ются два типа течения в пограничных слоях — ламинарное и тур-
булентное (рис. 1).
В ламинарном пограничном слое частицы воздуха движутся
в виде несмешивающихся струек, в турбулентном вместо упоря-
доченного движения наблюдается непрерывное перемешивание
струек. Турбулентное течение характеризуется более быстрым вы-
равниванием скоростей по толщине пограничного слоя, что объ-
ясняется интенсивным перемешиванием частичек воздуха.
Силу вязкости, возникающую в пограничном слое, которая
притормаживает, задерживая движение пластинки, называют си-
лой сопротивления трения. Величина этой силы зависит от со-
стояния поверхности, ее площади и скоростного напора и выража-
ется (для одной стороны пластинки) следующей формулой:
7
где FTP — сила сопротивления трения, Н;
Cf — коэффициент сопротивления трения, характеризующий со-
стояние (шероховатость) поверхности пластинки и тип тече-
ния в пограничном слое;
S — площадь пластинки, м2;
РУ2 ГТ 9
-у — скоростной напор, Н-м-2.
£
При установившемся ламинарном течении проявляется толь-
ко внутреннее трение (вязкость) воздуха, которое по величине
очень мало, поэтому и сопротивление движению тела в ламинар-
ном течении невелико.
Турбулентное течение требует большего количества энергии
для поддержания своего вихревого движения и, следовательно,
создает большее сопротивление движущемуся в потоке телу.
Для характеристики условий обтекания различных тел ис-
пользуется число Рейнольдса (/?е), которое определяет состояние
течения в пограничном слое и тем самым сопротивление трения
и другие аэродинамические свойства потока.
Число Рейнольдса представляет собой отношение инерцион-
ных сил частиц воздуха к силам трения воздушного потока; при
этом воздух принято рассматривать как несжимаемую жидкость.
Зависимость коэффициента сопротивления трения от числа
Рейнольдса показана на рис. 2. Здесь линия 1 относится к лами-
нарному потоку, линия 2 — к переходному, а линия 3 показывает
границу турбулентного участка пограничного слоя потока.
Из сказанного следует, что для уменьшения сопротивления
трения нужно стремиться обеспечить ламинарное обтекание ча-
стей летательного аппарата.
При обтекании плоской пластинки, расположенной вдоль по-
тока, давление по всей ее длине остается неизменным и вследст-
вие вязкости возникает только сила трения, которая в данном
случае равна силе сопротивления воздуха, тормозящей движение
пластинки.
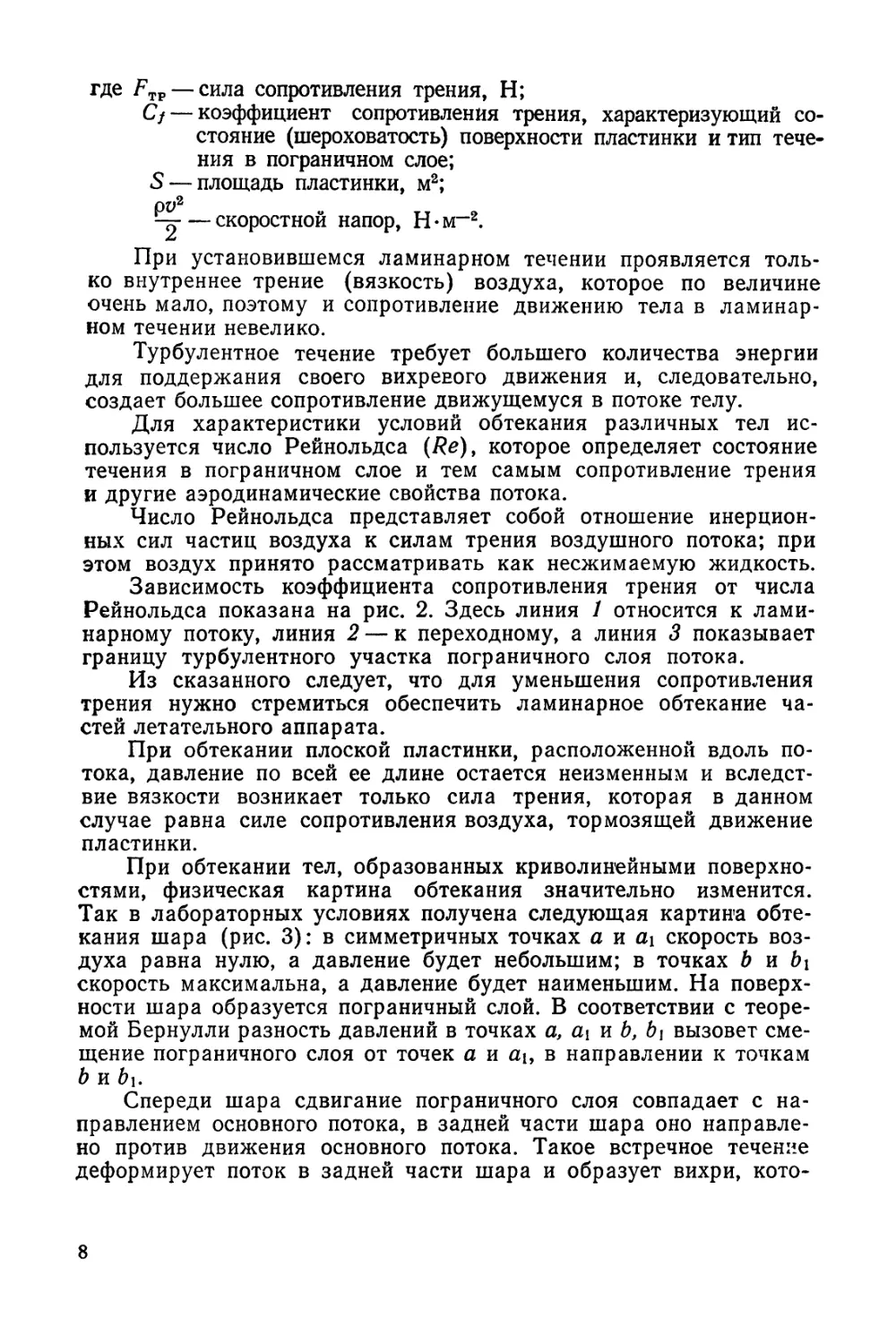
При обтекании тел, образованных криволинейными поверхно-
стями, физическая картина обтекания значительно изменится.
Так в лабораторных условиях получена следующая картина обте-
кания шара (рис. 3): в симметричных точках а и at скорость воз-
духа равна нулю, а давление будет небольшим; в точках b и bt
скорость максимальна, а давление будет наименьшим. На поверх-
ности шара образуется пограничный слой. В соответствии с теоре-
мой Бернулли разность давлений в точках a, at и b, bt вызовет сме-
щение пограничного слоя от точек а и а1} в направлении к точкам
Ь и bt.
Спереди шара сдвигание пограничного слоя совпадает с на-
правлением основного потока, в задней части шара оно направле-
но против движения основного потока. Такое встречное течение
деформирует поток в задней части шара и образует вихри, кото-
8
Рис 1. Течения в пограничном слое при обтекании плоской пластинки:
/ — ламинарное; 2 —• переходное; 3 — турбулентное
Рис. 2. Коэффициенты трения о плоскую пластину:
/ —• для ламинарного течения; 2 — для переходного течения; 3 — для турбулентного
течения
Рис. 3. Спектры обтекания шара:
а —' при малых числах Рейнольдса; б — при больших числах Рейнольдса
9
рые выбрасываются в свободный поток, образуя за телом спутную
струю (вихревую дорожку) и зону пониженного давления. Разни-
ца давлений в передней и задней частях шара является источни-
ком сопротивления давления (или сопротивления формы). Вели-
чина этого сопротивления существенно зависит от формы тела и
скорости потока.
В случае малых скоростей потока отрыв пограничного слоя
происходит на экваторе шара, т. е. в точках b и Ь\. Увеличение ско-
рости воздушного потока (что равносильно увеличению числа
Рейнольдса) переводит пограничный слой из ламинарного состоя-
ния в турбулентное, при котором благодаря интенсивному пере-
мешиванию слоев скорости течения оказываются больше. Это по-
зволяет потоку сдвинуть точку отрыва из передней полусферы
шара в заднюю и тем самым сузить вихревую дорожку. Таким об-
разом, зона действия пониженного давления на поверхности шара
сужается и сопротивление падает. Можно также сделать вывод,
что сопротивление формы снижается при увеличении числа Рей-
нольдса благодаря смещению точки отрыва пограничного слоя
назад по потоку.
Многочисленные исследования и наблюдения показали, что
формой тела, создающей наименьшее сопротивление движению в
воздушном потоке, является форма, близкая к каплеобразной.
При обтекании тела такой формы зона отрыва пограничного слоя
смещается почти на самый конец тела, а вихревой след имеет не-
значительную величину.
Для удобства дальнейшего изложения необходимо ввести по-
нятие профиля. Если какое-либо тело, обтекаемое воздушным по-
током или жидкостью, условно рассечь плоскостью, совпадающей
с направлением потока, то фигуру, полученную в плоскости сече-
ния, принято называть профилем.
Количественно оценить сопротивление формы можно из ма-
тематического выражения, аналогичного выражению сопротивле-
ния трения:
^ = cPs.-^-,
где Еф — сила сопротивления формы, Н;
СР — коэффициент сопротивления формы (профиля);
S — площадь поперечного сечения исследуемого тела, м2;
----скоростной напор, Н • м-2.
Коэффициент сопротивления формы (профиля) определяется
экспериментально в аэродинамических лабораториях.
Сопротивление трения и сопротивление формы при экспери-
ментах бывает трудно разделить. В частях модели, не создающих
подъемной силы, они в сумме дают коэффициент сопротивления
Сх, а для крыла и оперения Схр.
ю
Таблица 1
Наименование, назначение Характеристика и размеры Коэффи- циент сопроти- вления
Нить плетеная #0,5 1,40
Проволока #1,0 1,10
Стойки, подкосы у и >\э 0,25
A=J в J 0,15
Фюзеляжи ъ. 0,10
и 0,15
а<в л 0,20
а<в 0,12
Сфера 0,47
Полусфера 0,40
Конус 0,5
Диск 1,17
Ку5 1,10
Цилиндр 1,17
Рейка
Детали
Рейка.
размерами
h и I
Наименование,
назначение
конструкции
на обтекаемой
поверхности
модели
Характеристика и размеры Коэффи- циент сопроти- вления
1,55
c' 1,03
1,00
К 1,28
R=h Лк*' 0,80
| <г| 1,25
l*2h 0,74
I I
L^2h J L-Й 0,48
~j-$y 0,40
-r a^h 0,80
. a^2h I -I .. H 0,75
0,07
2,05
В табл. 1 приведены значения коэффициента сопротивления,
определенные для наиболее часто встречающихся в практике
авиамоделизма конструктивных элементов, не создающих подъ-
емной силы.
Аэродинамические силы. При обтекании реального твердого
тела воздушный поток подвергается деформации, что приводит к
изменению скорости, давления, плотности в потоке. Около поверх-
ности обтекаемого тела создается область переменных скоростей
11
и давлений воздушной среды. Различные по величине давления
около поверхности тела создают аэродинамические силы и мо-
менты. Распределение этих сил и моментов зависит от формы
тела, шероховатости поверхности, положения тела относительно
потока и, следовательно, от состояния пограничного слоя Карти-
ну обтекания тела воздушным потоком называют аэродинамиче-
ским спектром обтекания.
Для качественной оценки спектра обтекания и получения ви-
димой картины его используются специальные водяные каналы
с подкрашенными струйками, дымовые каналы, метод щелкови-
нок и другие простые и наглядные способы исследования. По кар-
тинам обтекания в водяном или дымовом канале можно судить
об аэродинамическом совершенстве исследуемого тела. По поло-
жению шелковинок в пространстве судят о характере движения
потока вблизи поверхности исследуемого тела или системы тел.
Для количественной оценки спектров обтекания, т. е. величи-
ны сил и моментов, действующих на тело в потоке, используют
специальные исследования в аэродинамических трубах.
Различная степень деформации струек потока свидетельству-
ет о различных скоростях этих струек и, следовательно, о возник-
новении разницы в давлениях у поверхности профиля. Эта разни-
ца в давлениях и вызывает возникновение аэродинамических сил.
Кроме сил давления на поверхность, как было выяснено ранее,
действуют силы трения, обусловленные вязкостью воздуха (рис. 4).
Суммарное воздействие всех этих факторов на поверхность
обтекаемого потоком тела составляет полную аэродинамическую
силу.
Действие этой силы 7? направлено под некоторым углом к по-
верхности обтекаемого тела и отклонено в направлении потока
(рис. 5).
Полную аэродинамическую силу можно разложить на состав-
ляющие — силу лобового сопротивления Q, действующую вдоль
направления воздушного потока, и подъемную силу У, действую-
щую перпендикулярно направлению потока.
Аэродинамика и авиационная практика показали, что одной
из главных задач следует считать получение наименьшего сопро-
тивления движению тела в воздушном потоке. Решению этой за-
дачи подчинены поиски наиболее совершенных профилей обтека-
ния, которые принято называть удобнообтекаемыми.
Применяя специальные ламинизированные профили, умень-
шая шероховатость их поверхности, добиваются наибольшего сме-
щения точки отрыва потока к задней части профиля.
По мере удаления от передней кромки профиля трение тормо-
зит воздух в пограничном слое и снижает его скорость, пока она
не упадет до нуля. Снижение скорости в пограничном слое вызы-
вает повышение давления за точкой отрыва. Кроме того, в погра-
ничном слое благодаря возрастающему давлению в кормовой ча-
сти профиля возникают противотоки — обратное течение, направ-
ленное против основного.
12
Рис. 4. Профили скоростей вблизи точки отрыва потока от криволинейной по-
верхности
Рис. 5. Аэродинамические силы,
действующие на профиль в воздуш-
ном потоке
Рис. 6. Отрыв и последующее прилегание пограничного слоя:
а — оторвавшийся слой; б — оторвавшийся и примкнувший слой; / — точка отрыва; 2—
застойная эона
13
Вблизи точки нулевой скорости происходит накопление возду-
ха и отрыв пограничного слоя. Оторвавшийся ламинарный погра-
ничный слой переходит в турбулентный (рис. 6, а), который, рас-
ширяясь, может вновь примкнуть к крылу, если кривизна поверх-
ности профиля не слишком велика (рис. 6, б).
При увеличении скорости потока ламинарный участок погра-
ничного слоя может сократиться или исчезнуть совсем и тогда
весь пограничный слой станет турбулентным. Отрыв такого потока
будет происходить значительно ближе к задней части профиля
и, несмотря на более высокое сопротивление трения, может ока-
заться более выгодным, чем сорванный ламинарный поток.
Сорвавшийся пограничный слой значительно увеличивает со-
противление профиля из-за образования вихревой зоны.
Исследования характеристик различных профилей показали,
что коэффициент сопротивления Сх в значительной мере зависит
от числа Рейнольдса (Re). Характеристики профиля при некото-
ром числе Re изменяются скачкообразно. Это число называют
критическим числом Рейнольдса и обозначают /?екрит. Увеличение
этого числа приводит к улучшению обтекания и других характе-
ристик профиля.
Подъемная сила. Плоская пластина, помещенная поперек по-
тока, создает резкое изменение направления движения потока,
обтекающего ее. Перед пластиной наблюдается резкое торможе-
ние потока, поджатие струек у краев пластины и образование зо-
ны вихрей сразу за кромкой пластины. Давление перед пластиной
повышается, а за пластиной вследствие разрежения оно значи-
тельно ниже (рис. 7).
Симметричнное каплеобразное тело имеет более плавный
спектр обтекания. В зоне наибольшей толщины тела наблюдается
некоторая деформация элементарных струек потока и их суже-
ние, что свидетельствует об увеличении скорости потока и сниже-
нии давления в этой зоне профиля.
В хвостовой части профиля образуется едва заметная вихре-
вая зона, которая быстро размывается (рис. 8, а).
Несимметричное каплеобразное тело имеет спектр обтекания,
аналогичный спектру предыдущего профиля. Здесь на менее ис-
кривленной поверхности тела наблюдаются меньшие деформации
струек и некоторое отклонение потока в сторону нижней поверх-
ности (рис. 8, б).
При обтекании воздушным потоком удобнообтекаемого тела,
помещенного под некоторым углом а к вектору скорости воздуш-
ного потока, получим спектр обтекания, аналогичный тому, что
получили при обтекании каплеобразного тела.
Здесь также наблюдается отклонение потока.
Для удобства сравнения профилей различных очертаний в
формулы для определения этих сил вводят коэффициенты про-
порциональности, которые характеризуют сам профиль, состояние
поверхности и другие факторы. Эти коэффициенты получили на-
14
Рис. 7. Аэродинамический спектр об-
текания плоской пластины
Рис. 8. Аэродинамический спектр обтекания удобообтекаемого тела:
а — симметричного; б — несимметричного; в — симметричного, находящегося под уг-
лом а к вектору скорости воздушного потока
звание в соответствии с силами, которые они характеризуют. Ве-
личины этих коэффициентов находят опытным путем при продув-
ках специальных аэродинамических моделей в трубах.
Величина подъемной силы профиля определяется по формуле
у = CyS-p-f, Н,
15
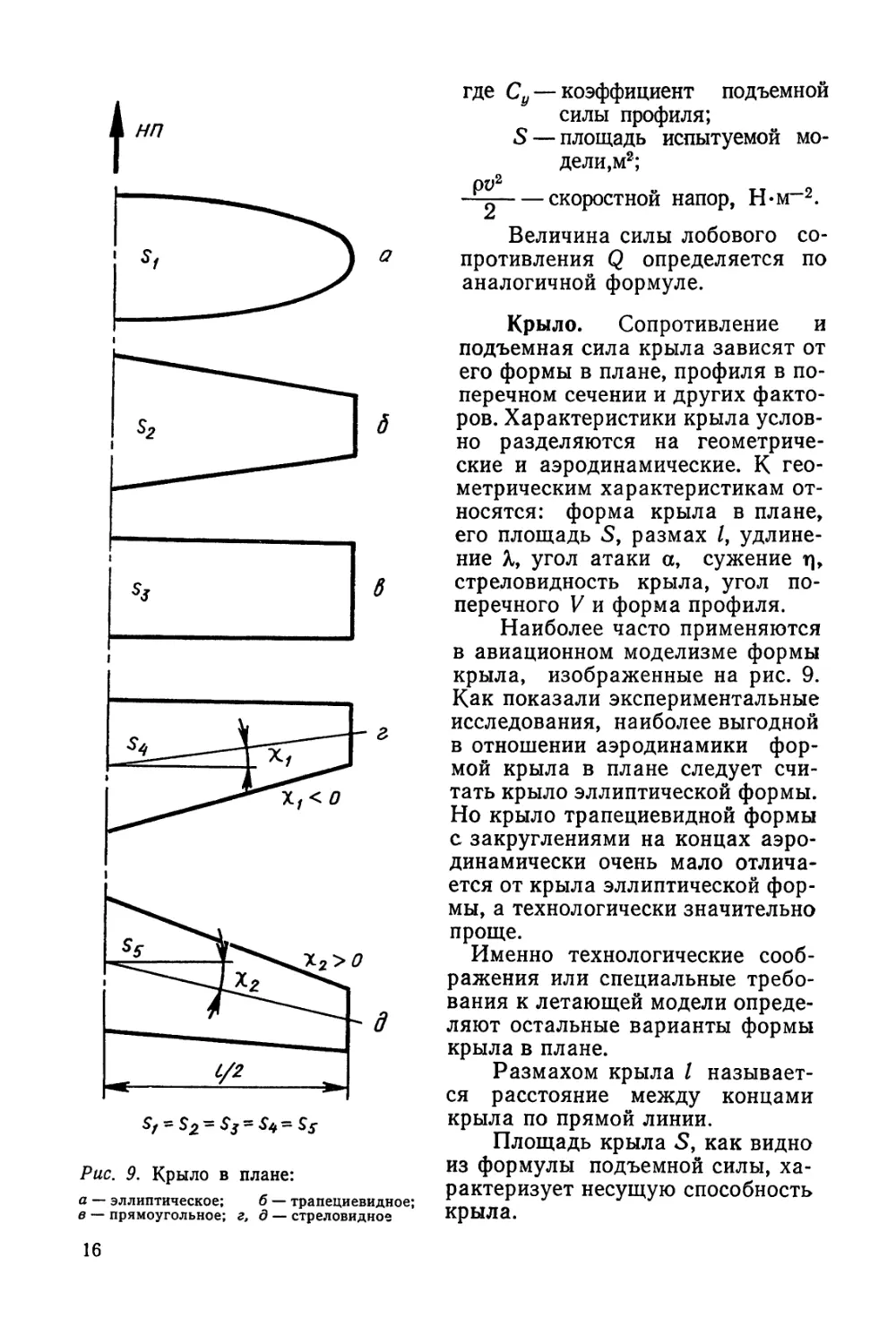
Рис. 9. Крыло в плане:
а — эллиптическое; б — трапециевидное;
в — прямоугольное; г, д — стреловидное
где Су — коэффициент подъемной
силы профиля;
S — площадь испытуемой мо-
дели,м2;
pV2 U о
-^2----скоростной напор, Н-м-2.
Величина силы лобового со-
противления Q определяется по
аналогичной формуле.
Крыло. Сопротивление и
подъемная сила крыла зависят от
его формы в плане, профиля в по-
перечном сечении и других факто-
ров. Характеристики крыла услов-
но разделяются на геометриче-
ские и аэродинамические. К гео-
метрическим характеристикам от-
носятся: форма крыла в плане,
его площадь S, размах I, удлине-
ние %, угол атаки а, сужение т],
стреловидность крыла, угол по-
перечного V и форма профиля.
Наиболее часто применяются
в авиационном моделизме формы
крыла, изображенные на рис. 9.
Как показали экспериментальные
исследования, наиболее выгодной
в отношении аэродинамики фор-
мой крыла в плане следует счи-
тать крыло эллиптической формы.
Но крыло трапециевидной формы
с закруглениями на концах аэро-
динамически очень мало отлича-
ется от крыла эллиптической фор-
мы, а технологически значительно
проще.
Именно технологические сооб-
ражения или специальные требо-
вания к летающей модели опреде-
ляют остальные варианты формы
крыла в плане.
Размахом крыла I называет-
ся расстояние между концами
крыла по прямой линии.
Площадь крыла <$, как видно
из формулы подъемной силы, ха-
рактеризует несущую способность
крыла.
16
Отрезок прямой Ъ, соединяющий переднюю и заднюю точки
профиля, называется хордой.
Различают в общем случае корневую и концевую хорды. Кор-
невая хорда крыла 6КОрн — хорда, расположенная по оси симме-
трии модели, концевая хорда крыла &Кощ расположена на конце
крыла.
Очень большое влияние на характеристику крыла, как будет
показано дальше, оказывает величина удлинения крыла X (опе-
рения), т. е. отношение размаха к его хорде:
_ I _ I • I _ /2
Л~ Ь ~~ Ь-1 ~ S •
Сужение крыла т] рассчитывают как отношение корневой и
концевой хорд крыла:
„ _ ^КОРН
h
иконц
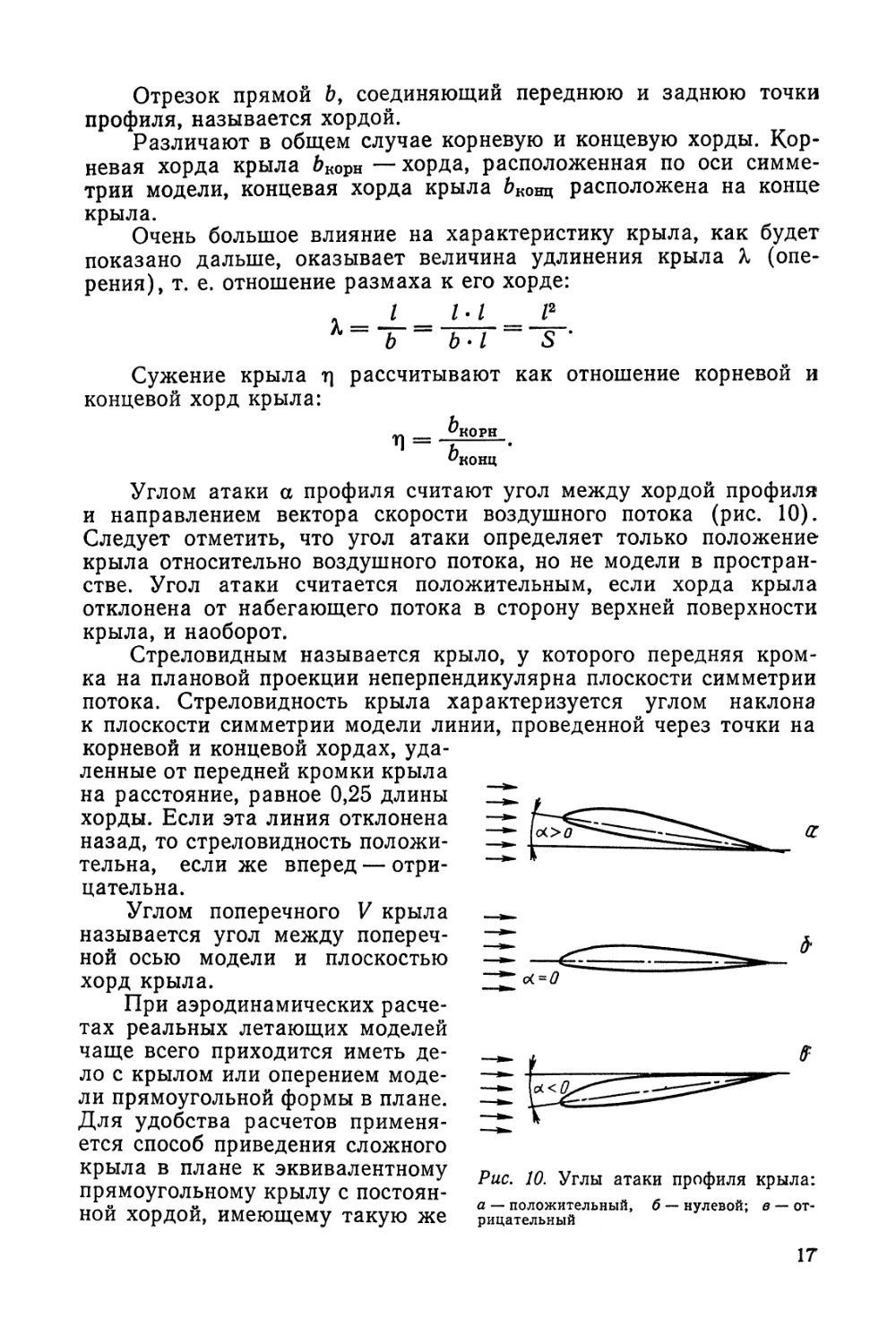
Углом атаки а профиля считают угол между хордой профиля
и направлением вектора скорости воздушного потока (рис. 10).
Следует отметить, что угол атаки определяет только положение
крыла относительно воздушного потока, но не модели в простран-
стве. Угол атаки считается положительным, если хорда крыла
отклонена от набегающего потока в сторону верхней поверхности
крыла, и наоборот.
Стреловидным называется крыло, у которого передняя кром-
ка на плановой проекции неперпендикулярна плоскости симметрии
потока. Стреловидность крыла характеризуется углом наклона
к плоскости симметрии модели линии, проведенной через точки на
корневой и концевой хордах, уда-
ленные от передней кромки крыла
на расстояние, равное 0,25 длины
хорды. Если эта линия отклонена
назад, то стреловидность положи-
тельна, если же вперед — отри-
цательна.
Углом поперечного V крыла
называется угол между попереч-
ной осью модели и плоскостью
хорд крыла.
При аэродинамических расче-
тах реальных летающих моделей
чаще всего приходится иметь де-
ло с крылом или оперением моде-
ли прямоугольной формы в плане.
Для удобства расчетов применя-
ется способ приведения сложного
крыла в плане к эквивалентному
прямоугольному крылу с постоян-
ной хордой, имеющему такую же
17
Рис. 11. Графический способ определения средней
аэродинамической хорды крыла:
а —. трапециевидного; б — сложной формы
площадь, подъемную силу и момент, как и рассчитываемое крыло.
Хорда такого эквивалентного прямоугольного крыла называется
средней аэродинамической хордой (САХ).
По этому способу любое крыло или комбинация крыльев (би-
план, триплан) могут быть заменены эквивалентным прямоуголь-
ным крылом, имеющим такое же сопротивление, подъемную силу
и продольный момент.
Для определения положения САХ используется как аналити-
ческий, так и графический способы.
Крыло сложной формы (рис. 11) заменяется подходящей тра-
пецией равной площади. Концевую хорду Ь\ проводят так, чтобы
отрезанная часть площади законцовки была равна добавленным
площадкам.
18
Для трапециевидного крыла величина 6а=САХ, и ее положе-
ние относительно корневой хорды крыла может быть определено
по следующим соотношениям:
Ь __ 2 /t > L X ^КОРН ' ^конц
°а — о Wkoph Т •'конц! Т ПГТ ’
° |_ •'корн “Г •'конц .
„ __ Х /1 I______^конц \
Ла —’ "о" I 1 "Г к Л-h Г
° \ •'КОРН Г •'КОНЦ /
I _ I (1 I ^конц \
бу ^КОРН 4~ ^конц /
Величина средней аэродинамической хорды крыла (оперения)
может быть определена также геометрическим построением. На
чертеже крыла в плане проводят концевую 6Ковд и корневую &КОрв
хорды. На продолжении концевой хорды откладывают отрезок,
равный Ькорн, а на продолжении корневой хорды откладывают от-
резок, равный &конц, в противоположном направлении. Концы от-
резков в точках А и В соединяют прямой линией. Концевую и кор-
невую хорды делят пополам и середины их соединяют прямой ли-
нией CD. Средняя аэродинамическая хорда ЬЛ=САХ лежит на
пересечении вспомогательных линий АВ и CD.
Для трапециевидного крыла с центропланом прямоугольной
формы определяется САХ отдельно для центроплана и трапецие-
видной части крыла. Средняя аэродинамическая хорда всего крыла
находится между Ь2 и Ь'а на расстоянии от них, обратно пропор-
циональном площадям Si и S2:
а_______St
d Si -J- S2
где Si — площадь прямоугольного центроплана, м2;
S2 — площадь трапециевидной части, м2.
Тогда
а — d -а о—.
$1 + $2
Необходимо отметить, что средняя аэродинамическая хорда
(САХ) всегда несколько больше полусуммы корневой и концевой
хорд, которую иногда ошибочно принимают за среднюю аэроди-
намическую хорду.
Если крыло образовано дугами эллипсов, то величину и рас-
положение САХ можно рассчитать аналитически.
Величина САХ=&Ср=0,85ft, где Ь — корневая хорда.
Расстояние САХ от плоскости симметрии модели в этом слу-
чае равно 0,425Zi, где li— полуразмах крыла.
Площадь эллиптического крыла при этом может быть найдена
по формуле SKp=0,785 lb.
Средняя аэродинамическая хорда, найденная любым из рас-
смотренных способов, наносится на боковую и фронтальную про-
екции модели для определения других параметров модели.
19
Характеристики профилей. Едва ли не самым главным пара-
метром крыла является форма его профиля. Профилем крыла
(горизонтального или вертикального оперения) считается местное
сечение крыла, сделанное плоскостью, параллельной плоскости
симметрии модели. На профиле различают верхнюю и нижнюю
линии (дужки), переднюю и заднюю точки (кромки для крыла).
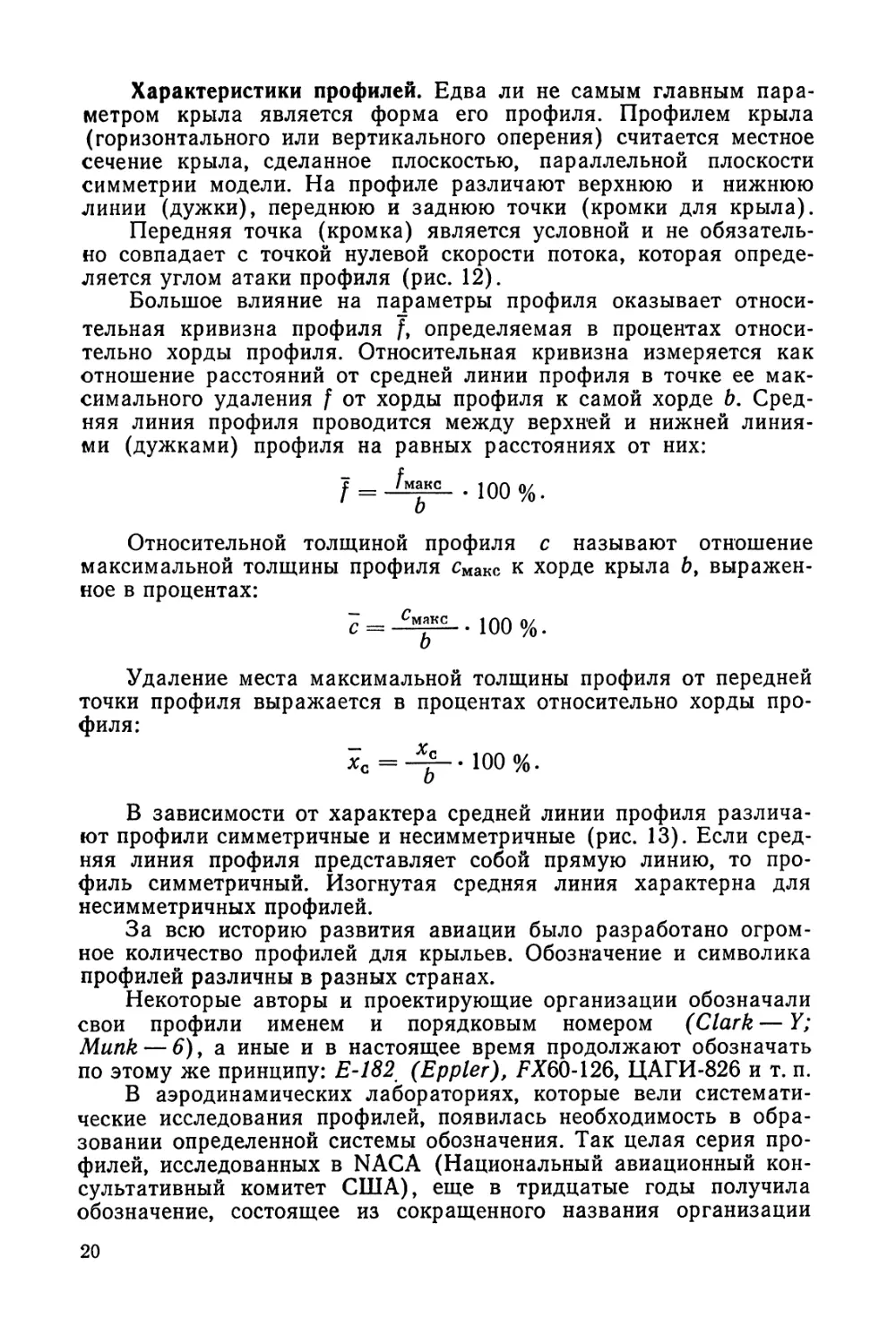
Передняя точка (кромка) является условной и не обязатель-
но совпадает с точкой нулевой скорости потока, которая опреде-
ляется углом атаки профиля (рис. 12).
Большое влияние на параметры профиля оказывает относи-
тельная кривизна профиля f, определяемая в процентах относи-
тельно хорды профиля. Относительная кривизна измеряется как
отношение расстояний от средней линии профиля в точке ее мак-
симального удаления f от хорды профиля к самой хорде Ь. Сред-
няя линия профиля проводится между верхней и нижней линия-
ми (дужками) профиля на равных расстояниях от них:
f = l^. 1000/
о
Относительной толщиной профиля с называют отношение
максимальной толщины профиля смакс к хорде крыла 6, выражен-
ное в процентах:
- = £макс. ЮО %.
О
Удаление места максимальной толщины профиля от передней
точки профиля выражается в процентах относительно хорды про-
филя:
хс= —^—•100%.
В зависимости от характера средней линии профиля различа-
ют профили симметричные и несимметричные (рис. 13). Если сред-
няя линия профиля представляет собой прямую линию, то про-
филь симметричный. Изогнутая средняя линия характерна для
несимметричных профилей.
За всю историю развития авиации было разработано огром-
ное количество профилей для крыльев. Обозначение и символика
профилей различны в разных странах.
Некоторые авторы и проектирующие организации обозначали
свои профили именем и порядковым номером (Clark — Y;
Munk — 6), а иные и в настоящее время продолжают обозначать
по этому же принципу: Е-182 (Eppler), FX60-126, ЦАГИ-826 и т. п.
В аэродинамических лабораториях, которые вели системати-
ческие исследования профилей, появилась необходимость в обра-
зовании определенной системы обозначения. Так целая серия про-
филей, исследованных в NACA (Национальный авиационный кон-
сультативный комитет США), еще в тридцатые годы получила
обозначение, состоящее из сокращенного названия организации
20
Рис. 13. Формы профилей:
а — симметричный; б — двояковыпуклый;
в — плосковыпуклый; г — вогнутое ыпу к-
лый; д — S-образный
Рис. 14. Построение профиля по ко-
ординатам
(NACA) и четырех цифр. Некоторые из профилей этой серии ис-
пользуются еще и теперь: NACA 6409, 6412, 0009, 0015.
Набор цифр характеризует основные относительные пара-
метры профиля.
Например, в обозначении профиля NACA 6409 первая цифра
указывает кривизну средней линии (6 %), вторая — максимальную
кривизну средней линии (40 %), две последние — максимальную
толщину профиля (9 %) •
Пятизначная система обозначения была применена на более
поздних разработках. В этой системе была сделана попытка уточ-
нить положение максимальной кривизны профиля.
Например, в обозначении профиля NACA 23015 первая цифра
указывает кривизну средней линии (2 %), две следующие — поло-
жение максимальной кривизны средней линии (30 % : 2—15 %),
две последние — максимальную толщину профиля (15%).
21
Развитие теоретической и прикладной аэродинамики в соро-
ковые годы привело к появлению ламинаризованных профилей»
выгодно отличающихся от классических профилей меньшим со-
противлением, особенно в области больших чисел Рейнольдса.
Эти предпосылки привели к появлению профилей серии NACA6.
Эта серия профилей стала основой для разработки нового ряда
профилей.
Здесь система обозначений отличается от рассмотренной вы-
ше. Так, в профиле NACA64A2-215 первая цифра (6) указывает
серию профилей, вторая (4) — протяженность ламинарного обте-
кания (40 %), буква (А) —тип задней части профиля (управляе-
мый), индекс буквы (2) —ширину ламинарной области в десятых
частях Су (Су=±0,2), первая цифра после черты (2) —середину
области ламинарного обтекания и низкого сопротивления в деся-
тых частях Су (Cv=0,2), две последние цифры (15)—толщину
профиля в процентах.
Серия профилей Go, разработанная в Геттингене, в своей сим-
волике имеет порядковые номера. Серия была исследована в аэро-
динамической трубе, оборудованной приборами, рассчитанными на
низкие числа Рейнольдса, и может служить для базовых расчетов
моделей.
Серия профилей проф. Эпплера разработана специально для
низких чисел Рейнольдса (от 40 000 до 200 000). Эта серия обозна-
чается буквой Е и порядковым номером. Некоторые профили из
серии Е были исследованы в Геттингене и подтвердили свои вы-
сокие параметры.
Профессор Бортман известен успешными разработками лами-
наризованных профилей для спортивных планеров. Профили рас-
считаны теоретически и исследованы в аэродинамических трубах
с очень низкой турбулентностью. Обозначаются так: FX62—К—131,
где первые две буквы (FX) — обозначение автора (инициалы его
имени), следующие две цифры указывают год разработки (62),
буква К. — профиль с отклоняемой кромкой, последние три циф-
ры— толщину профиля (13,1 %).
Некоторые моделисты создавали профили специально для мо-
делей и добивались отличных результатов. К сожалению, иссле-
дованию в аэродинамических трубах эти профили не подвергались
и их поляры неизвестны. Среди наиболее удачных любительских
профилей можно отметить профили венгерского инженера Бене-
дека, обозначаемые буквой В и набором цифр.
Специально для небольших моделей разработан очень про-
стой, технологически пригодный для изготовления в любительских
условиях профиль (Se delsky).
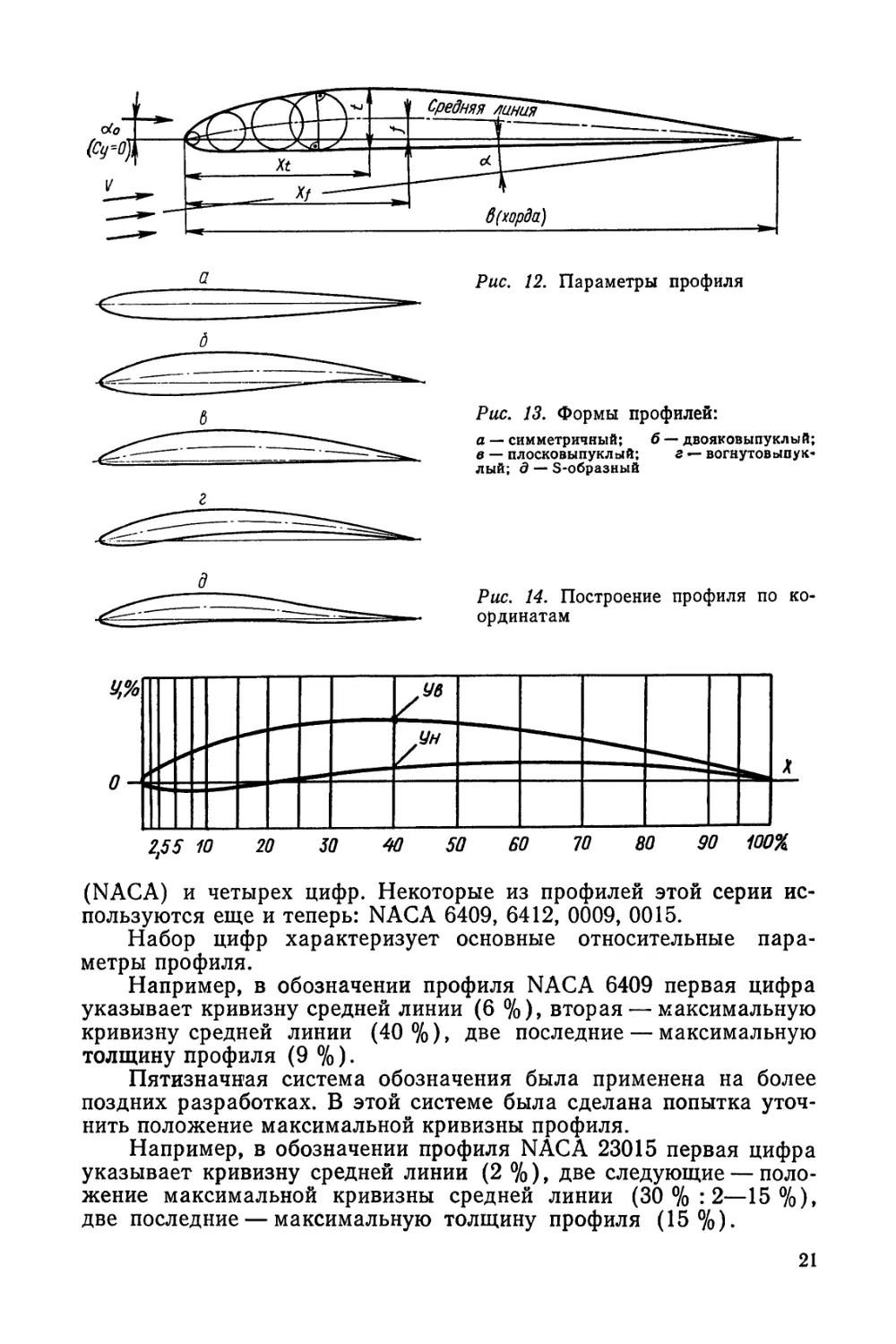
Для построения профиля пользуются прямоугольной системой
координат. Прямую, на которой строят профиль, размечают в со-
ответствии с принятой системой построения. Обычно эту размет-
ку ведут в долях хорды, выраженной в процентах. В соответствии
с разметкой перпендикулярно к этой прямой откладывают отрез-
ки с координатами для верхней линии ув и нижней уя (вверх и
22
вниз в зависимости от знака). Полученные точки соединяют плав-
ной кривой, которая и образует контур профиля (рис. 14).
Некоторые современные профили имеют систему координат,
не парных для верхней и нижней линий (дужек), а «обегающих»
профиль от задней точки (хвостика) по верхней дужке к перед-
ней точке (носику), затем переходящих на нижнюю дужку и воз-
вращающихся к хвостику.
Такая система профилей задается таблицами координат, вы-
раженных в процентах от хорды профиля. Для построения вы-
бранного профиля координаты пересчитывают на нужную хорду
и составляют рабочую таблицу, по которой в натуральную вели-
чину строят профиль для реального сечения крыла (оперения)
модели.
Старые профили, разработанные в двадцатых—тридцатых го-
дах и исследованные в аэродинамических трубах в Геттингене,
имели систему координат, построенную на отрезках прямой, со-
единяющей переднюю и заднюю точки профиля. Увеличение и
уменьшение толщины профиля достигалось простым пропорцио-
нальным увеличением координат для верхней и нижней поверхно-
стей. Так возникла целая серия профилей, которые были исследо-
ваны при малых числах Рейнольдса. При таком способе модифи-
кации кроме толщины профиля менялась и кривизна профиля,
а следовательно, и аэродинамические характеристики.
Характеристики параметров крыла. Для определения харак-
тера изменения коэффициента подъемной силы в зависимости от
угла атаки модель крыла исследуют в аэродинамической трубе,
руководствуясь положениями теории подобия для учета влияния
числа Рейнольдса и параметров воздуха. Для каждого угла ата-
ки замеряют величину подъемной силы и затем подсчитывают со-
ответствующие значения коэффициента Су. По результатам этих
вычислений строят график зависимости коэффициента Су от
угла а.
Типичная форма графика зависимости Су от угла атаки а
приведена на рис. 15. На рис. 16 показаны зависимости Су от а
для симметричного и несимметричного профилей различных ха-
рактерных форм.
Из графика видно, что несимметричный профиль при угле
атаки а=-0° уже имеет какую-то подъемную силу, в то же время
симметричный профиль на угле атаки а=0° не имеет подъемной
силы (6^ = 0).
При каком-то отрицательном угле атаки (а<0°) и несимме-
тричный профиль имеет Су=0.
Угол атаки, при котором коэффициент подъемной силы крыла
равен 0, называется углом атаки нулевой подъемной силы и обо-
значается oto. У несимметричных профилей этот угол обычно отри-
цателен и мал по абсолютной величине (от 0,5 до 6°), зависящей
в основном от кривизны профиля.
С ростом угла атаки Су возрастает почти по линейному за-
23
Су
Рис, 15. Зависимость коэффициентов подъемной силы Су и сопротивления Сх
от угла атаки а
кону. Угол атаки, при котором коэффициент Су достигает макси-
мального значения, называется критическим и обозначается акрИт-
Для большинства современных авиамодельных профилей величи-
на Су тах находится в диапазоне 0,8—1,3, а величина акрИт состав-
ляет 8—16°.
Углы атаки, заключенные между ао и аКрит, представляют со-
бой диапазон летных углов атаки. Полеты моделей при углах
атаки, близких к критическому, практически не совершаются, по-
24
Рис, 16. Зависимость коэффициента подъемной силы Су от угла атаки а для
профилей различной формы:
1 — вогнуто-выпуклого; 2 — плоско-выпуклого; 3 — двояковыпуклого: 4 — симметричного
тому что при этих углах атаки модель теряет устойчивость и
управляемость и чаще всего срывается в штопор.
При углах атаки, близких к аКрит, наблюдается нарушение
линейности возрастания Су. Это объясняется тем, что нарушается
плавность обтекания крыла и начинает развиваться отрыв погра-
ничного слоя, сопровождающийся быстрым возникновением вих-
ревой области в хвостовой части профиля. При углах атаки, боль-
ших критического, коэффициент подъемной силы начинает умень-
шаться, так как изменяется картина обтекания, и зона оторвавше-
гося пограничного слоя значительно смещается вперед, как бы
выключая из работы часть крыла за точкой отрыва пограничного
слоя. Степень уменьшения коэффициента Су при закритических
углах атаки зависит от формы профиля. Предпочтение при выборе
профиля следует отдать такому профилю, у которого уменыпе-
25
ние Су при закритических углах атаки менее резкое. В этом слу-
чае, выйдя на закритические углы атаки, модель менее интенсив-
но будет реагировать на уменьшение Су и быстрее вернется в диа-
пазон летных углов атаки.
Характер поведения кривой Су в области, близкой акрит, осо-
бенно существенное значение имеет для моделей планеров, запу-
скаемых на леере и становящихся на большие углы атаки в на-
чальной фазе взлета.
Сваливание модели на крыло при больших углах атаки
(а>акрит) объясняется тем, что при случайном крене опускающе-
еся крыло имеет большие углы атаки, чем поднимающееся. Если
модель перевалила за Cj,MaK0, большему углу атаки соответствует
меньшая подъемная сила. Чем резче падение кривой Су, тем энер-
гичнее будет модель увеличивать крен. Даже наличие элеронов
на крыле не позволит ликвидировать этот крен из-за малой их
эффективности при небольшой скорости полета и развивающегося
срыва потока на задней части профиля крыла.
Разность величин подъемной силы на концах крыла застав-
ляет модель двигаться по криволинейной траектории с некоторым
углом к горизонту. Вращательное движение, совершаемое при
этом крылом, называется авторотацией (рис. 17). Для модели
планера это довольно опасное явление, так как запаса высоты для
выравнивания обычно нет. Для устранения опасности используют
специальный прием — концы крыла «закручивают» на небольшие
отрицательные углы относительно основной части крыла. Крутка
может быть геометрической (рис. 18, а) или аэродинамической
(рис. 18, б).
Для увеличения СУкакс крыла на моделях применяют механизи-
рованные крылья, позволяющие изменять кривизну профиля и его
площадь. Механизированные крылья дают возможность подобрать
наивыгоднейшие параметры профиля для выбранного режима полета.
Толщина профиля оказывает очень большое влияние на С!/макс.
С увеличением толщины профиля до 10—12% длины хорды проис-
ходит быстрое увеличение Сумакс, при дальнейшем увеличении тол-
щины профиля (до 15—18%) рост Cj,MaKC замедляется и начинает
уменьшаться.
Максимальное значение коэффициента подъемной силы С{,макс
зависит от его кривизны, относительной толщины и числа Re.
Сопротивление движению крыла в воздухе называется лобо-
вым сопротивлением.
В зависимости от причин, его породивших, лобовое сопротив-
ление крыла подразделяется на профильное и индук-
тивное.
Qkp = Qnp4" фивд.
Профильное сопротивление, в свою очередь, разделяют на
сопротивление трения и сопротивление давления:
Qnp=Qip+Qfl.
26
Сопротивление давления вызывается разностью давлений на
носовой и кормовой частях крыла. Чем больше эта разность, тем
больше сопротивление давления. Разность давлений зависит от
формы профиля, т. е. от его относительной толщины и относитель-
ной кривизны. Чем больше относительная толщина профиля с,
тем больше будет разница давлений в носовой и кормовой ча-
стях профиля и, следовательно, его сопротивление давления.
При обтекании крыла без отрыва пограничного слоя, когда
он прилегает к поверхности профиля до самой задней кромки,
величина сопротивления давления составляет незначительную ве-
личину. Возникновение этого сопротивления связано в основном
с образованием слабых вихрей в спутной струе.
У профилей, обтекаемых с отрывом пограничного слоя, т. е.
со срывом потока, сопротивление давления значительно воз-
растает. При этом размеры завихренной зоны увеличиваются, что
вызывает значительное повышение сопротивления давления. Срыв
потока на крыле модели начинает развиваться, как правило, на
углах атаки, близких к критическому.
27
Рис. 18. Крутка крыла:
а — геометрическая; б — аэродинамическая
28
Сопротивление трения возникает благодаря проявлению сил
вязкости в пограничном слое. Величина сил трения зависит от со-
стояния пограничного слоя. Исследования показывают, что в ла-
минарном пограничном слое силы трения меньше, чем в турбу-
лентном. Следовательно, чем большую часть профиля будет за-
нимать ламинарный пограничный слой, тем меньше сопротивление
трения.
На положение точки перехода от ламинарного к турбулентно-
му пограничному слою оказывают влияние форма и шерохова-
тость поверхности профиля крыла, а также скорость обтекания.
Чем выше скорость обтекания и чем более шероховата поверх-
ность, тем ближе к передней кромке профиля сместится точка
перехода ламинарного пограничного слоя в турбулентный и тем
большая часть поверхности профиля будет обтекаться турбулизи-
рованным потоком. Сопротивление трения при этом увеличится.
Обычно точка перехода ламинарного пограничного слоя в тур-
булентный находится в зоне максимальной толщины профиля. Это
объясняется тем, что, начиная от передней кромки и до макси-
мальной толщины профиля, элементарные струйки в потоке сужа-
ются, разгоняясь на криволинейной поверхности профиля. После
прохождения зоны максимальной толщины струйки начинают рас-
ширяться и поток переходит в турбулентное состояние, что приво-
дит к увеличению сопротивления трения.
Для увеличения длины ламинарного участка пограничного
слоя и уменьшения сопротивления трения в последнее время часто
применяют так называемые ламинаризованные профили, у кото-
рых максимальная толщина расположена на расстоянии 50—60 %
длины хорды от носка профиля.
Во всем летном диапазоне углов атаки крыла сопротивление
трения практически не изменяется.
Профильное сопротивление, являющееся суммой сопротивле-
ния трения и давления, как показывают эксперименты, в диапа-
зоне летных углов атаки изменяется незначительно.
Величина профильного сопротивления может быть рассчитана
по формуле
Qm = Cx
ХПр 2 ’
где QnP — профильное сопротивление, Н;
СХпр — коэффициент профильного сопротивления;
ру2
----скоростной напор, Н/м2.
S — площадь поверхности в плане, м2.
Минимальная величина коэффициента профильного сопротив-
ления (СХпр мин) является важной характеристикой крыла и модели
в целом и обозначается Сх„. Характеристика эта для модели являет-
ся определяющей максимальную скорость полета данной модели.
Поэтому при конструировании спортивной модели планера определе-
нию величины этого коэффициента придается большое значение.
29
Индуктивное сопротивление крыла. К профильному сопротив-
лению крыла добавляется индуктивное сопротивление, которое
учитывает энергетические потери на создание подъемной силы.
При обтекании крыла воздушным потоком на нижней его по-
верхности создается повышенное давление, на верхней — пони-
женное
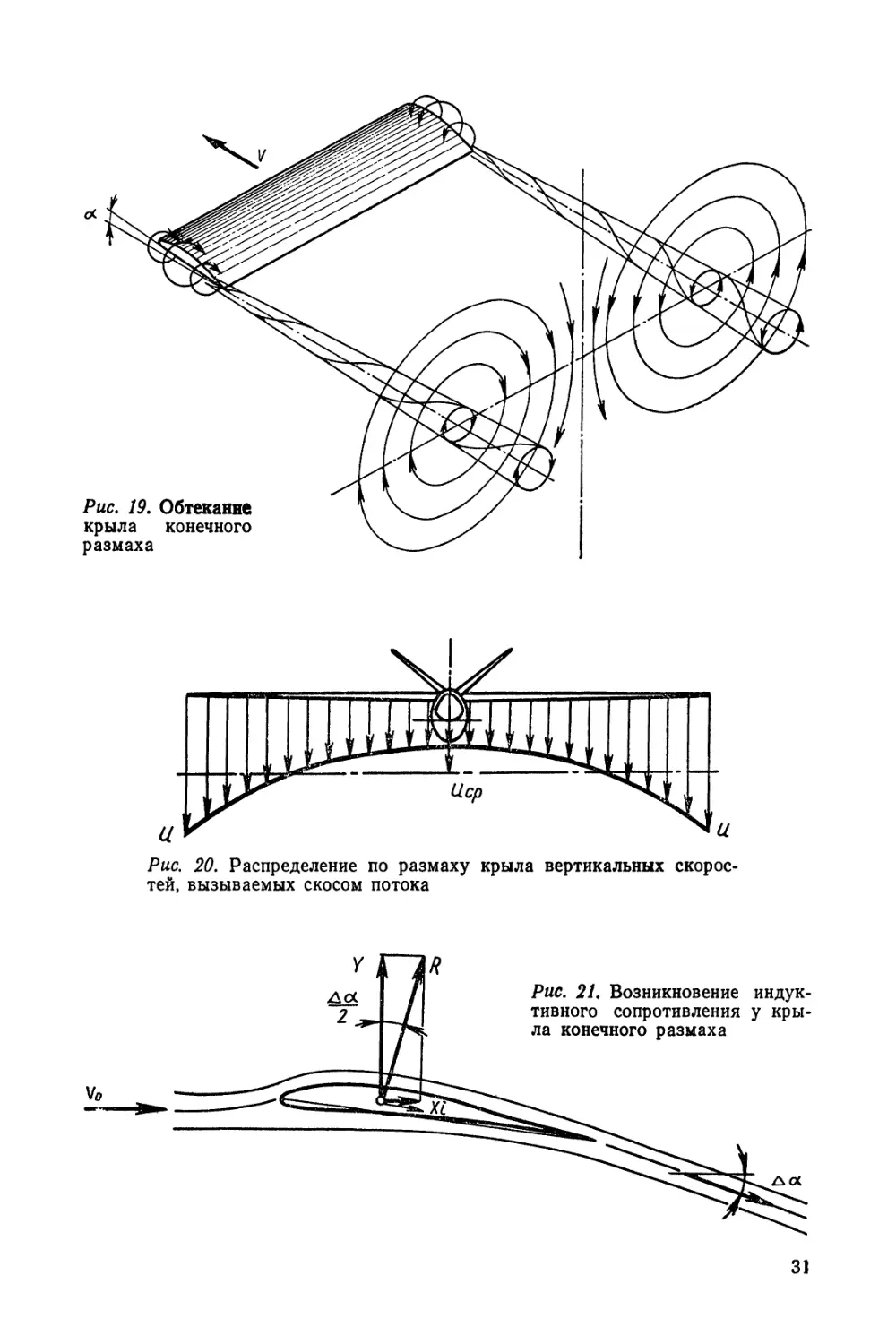
Реальное крыло модели имеет конечный размах. Под дейст-
вием разности давлений на нижней и верхней поверхностях крыла
какая-то масса воздуха будет перетекать через концы крыла сни-
зу вверх, т. е. из зоны повышенного давления в зону понижен-
ного давления. В результате наложения поступательного движе-
ния потока, набегающего на крыло, и перетекания части воздуха
с нижней поверхности на верхнюю за концом крыла образуется
завихренная воздушная масса (рис. 19).
Эти вихри вращаются в противоположные стороны. Такое
движение сообщает воздушному потоку дополнительную скорость,
направленную вниз. Величина этой дополнительной скорости за-
висит от расстояния от конца крыла, т. е. от удлинения крыла; от
разности давлений на верхней и нижней поверхностях крыла,
т. е., в конечном счете, от Cv крыла; от формы крыла в плане и его
законцовки. Наведенная (индуцированная) вертикальная скорость
потока отклонит воздушный поток, обтекающий крыло, на какой-
то угол, который называют углом скоса потока. Пример-
ный график интенсивности скоса потока по размаху крыла по-
казан на рис. 20.
Итак, поток, обтекающий крыло, скашивается и после крыла
течет уже под некоторым углом к своему первоначальному на-
правлению. Угол этот, выраженный в радианах (1 радиан = 57,3°),
равняется
А 2СУ
Поток отклоняется не только за крылом, но и в области са-
мого крыла. Считают, что скос потока в зоне самого крыла ориен-
тировочно составляет половину скоса за крылом. Так как подъем-
ная сила перпендикулярна потоку в области крыла, то наклонена
она под углом Да по отношению к набегающему потоку. Проек-
ция этой силы на направление движения дает силу <2инд, направ-
ленную против самого движения. Эта сила и есть сила индуктив-
ного сопротивления (рис. 21).
Коэффициент индуктивного сопротивления равен
Г —Г о?" Да
---------------------- Сд ’ SIH g .
г, Да .Да Да
Ввиду малости угла —можем заменить sin—на —, тогда
£ £ £
с с2
р ___р . _ У
xl “лХ ” л% •
30
Рис. 20. Распределение по размаху крыла вертикальных скорос-
тей, вызываемых скосом потока
Уо
31
42 4/
С ) 4 8 12 16 20 24 28 32 X
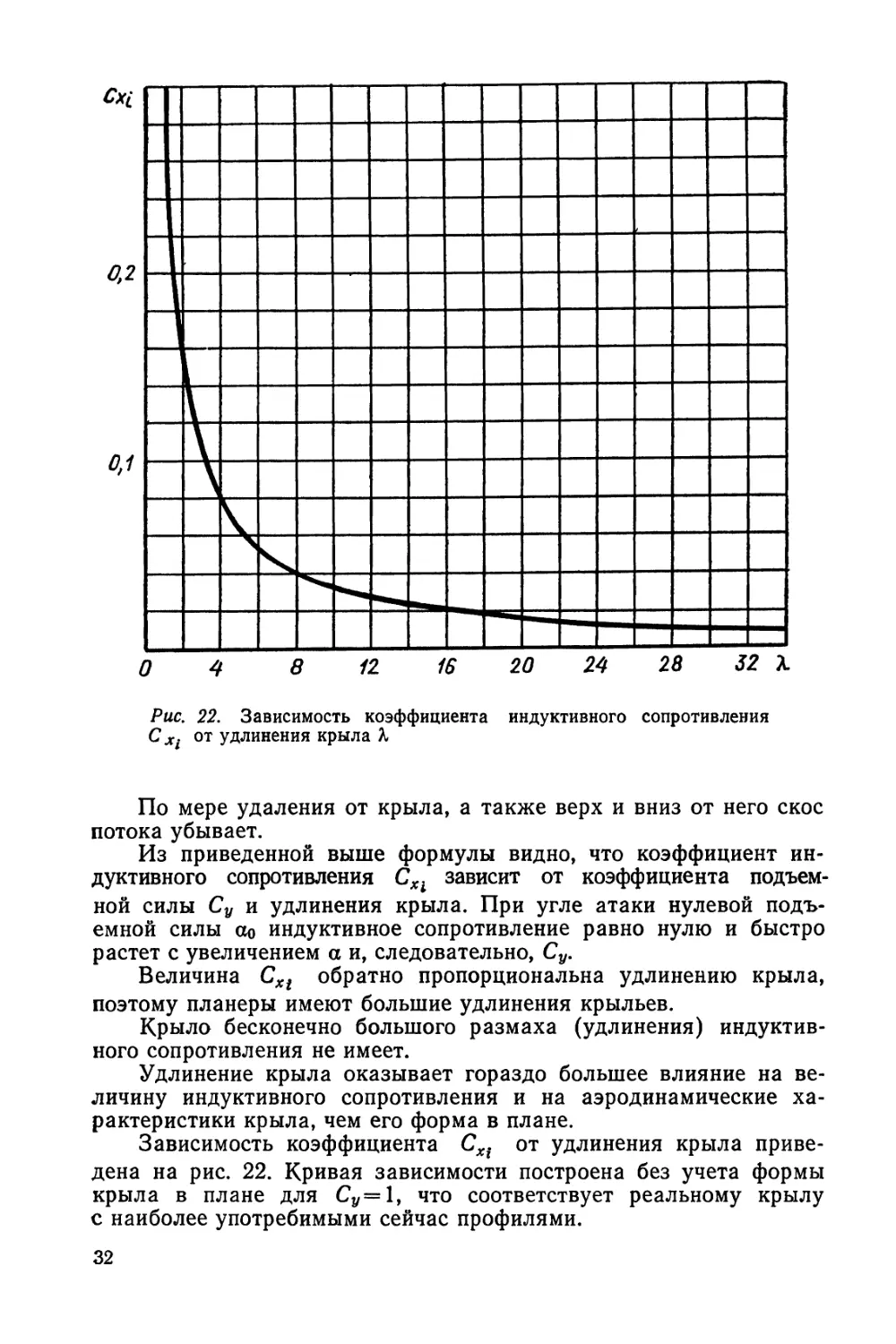
Рис. 22. Зависимость коэффициента индуктивного сопротивления
С х. от удлинения крыла %
По мере удаления от крыла, а также верх и вниз от него скос
потока убывает.
Из приведенной выше формулы видно, что коэффициент ин-
дуктивного сопротивления CXi зависит от коэффициента подъем-
ной силы Су и удлинения крыла. При угле атаки нулевой подъ-
емной силы ао индуктивное сопротивление равно нулю и быстро
растет с увеличением а и, следовательно, Су.
Величина CXi обратно пропорциональна удлинению крыла,
поэтому планеры имеют большие удлинения крыльев.
Крыло бесконечно большого размаха (удлинения) индуктив-
ного сопротивления не имеет.
Удлинение крыла оказывает гораздо большее влияние на ве-
личину индуктивного сопротивления и на аэродинамические ха-
рактеристики крыла, чем его форма в плане.
Зависимость коэффициента Cxi от удлинения крыла приве-
дена на рис. 22. Кривая зависимости построена без учета формы
крыла в плане для Cv=l, что соответствует реальному крылу
с наиболее употребимыми сейчас профилями.
32
При малых удлинениях крыла кривая падает очень круто,
а с ростом удлинения — более полого. Если кривую продолжить
до бесконечно больших удлинений, то индуктивное сопротивление
станет равным нулю. Можно сделать вывод, что крылья наших
моделей всегда имеют индуктивное сопротивление.
Изучая кривую, можно заметить, что уже в области Л=18—20
она идет достаточно полого, так что увеличение удлинения более
20 практически не дает уменьшения сопротивления. Кроме того,
построить такое крыло — задача довольно сложная. Его жест-
кость и прочность будут, очевидно, недостаточными, особенно для
спортивной модели. Следует также не забывать о числах Рей-
нольдса при выборе размеров хорды крыла.
Поляра крыла. Результаты измерений, полученные при иссле-
довании различных профилей крыла в аэродинамических трубах,
представляют собой большое количество цифровых данных о ве-
личине подъемной силы Су и профильного сопротивления при раз-
личных углах атаки. Для наглядности и удобства работы с этими
взаимосвязанными данными, характеризующими конкретный про-
филь, для сравнения различных профилей обычно строят график
зависимости коэффициента профильного сопротивления Сх и ко-
эффициента подъемной силы Су от угла атаки. Этот график назы-
вают полярой крыла.
Поляра строится на взаимно перпендикулярных осях. По вер-
тикальной оси откладывают значения Су, по горизонтальной — Сх.
Для удобства пользования таким графиком принято масштаб для
Су брать в 5 или 10 раз больший, нежели масштаб для Сх, так
как диапазон изменения коэффициента Су значительно больше,
чем Сх. Любая точка на графике соответствует какому-то опре-
деленному углу атаки.
Поляра строится для каждого конкретного профиля с опре-
деленными размерами. Обычно аэродинамические модели крыла
имеют удлинение %=5. Полученные результаты пересчитывают
на удлинение Х=оо (рис. 23). Измерения проводят на определен-
ных числах Рейнольдса (Re).
Угол атаки нулевой подъемной силы ао находится на пересе-
чении поляры с осью Сх. Здесь коэффициент Су=0. Когда угол
атаки равен ао, модель разовьет максимальную скорость при от-
весном пикировании.
Угол атаки минимального сопротивления определяют про-
хмин
ведением касательной к поляре параллельно оси Су. Этот угол на-
ходится в точке касания. При угле атаки a q модель развивает
хмин,
максимальную скорость планирования.
Наивыгоднейший угол атаки аНаив — угол, при котором мо-
дель может обеспечить максимальную дальность полета. Этот
угол атаки определяют проведением касательной к поляре из на-
чала координат.
Критический угол атаки аКрит находят, проведя касательную
к поляре параллельно оси Сх. Координата точки касания будет
2 Зак. 796
33
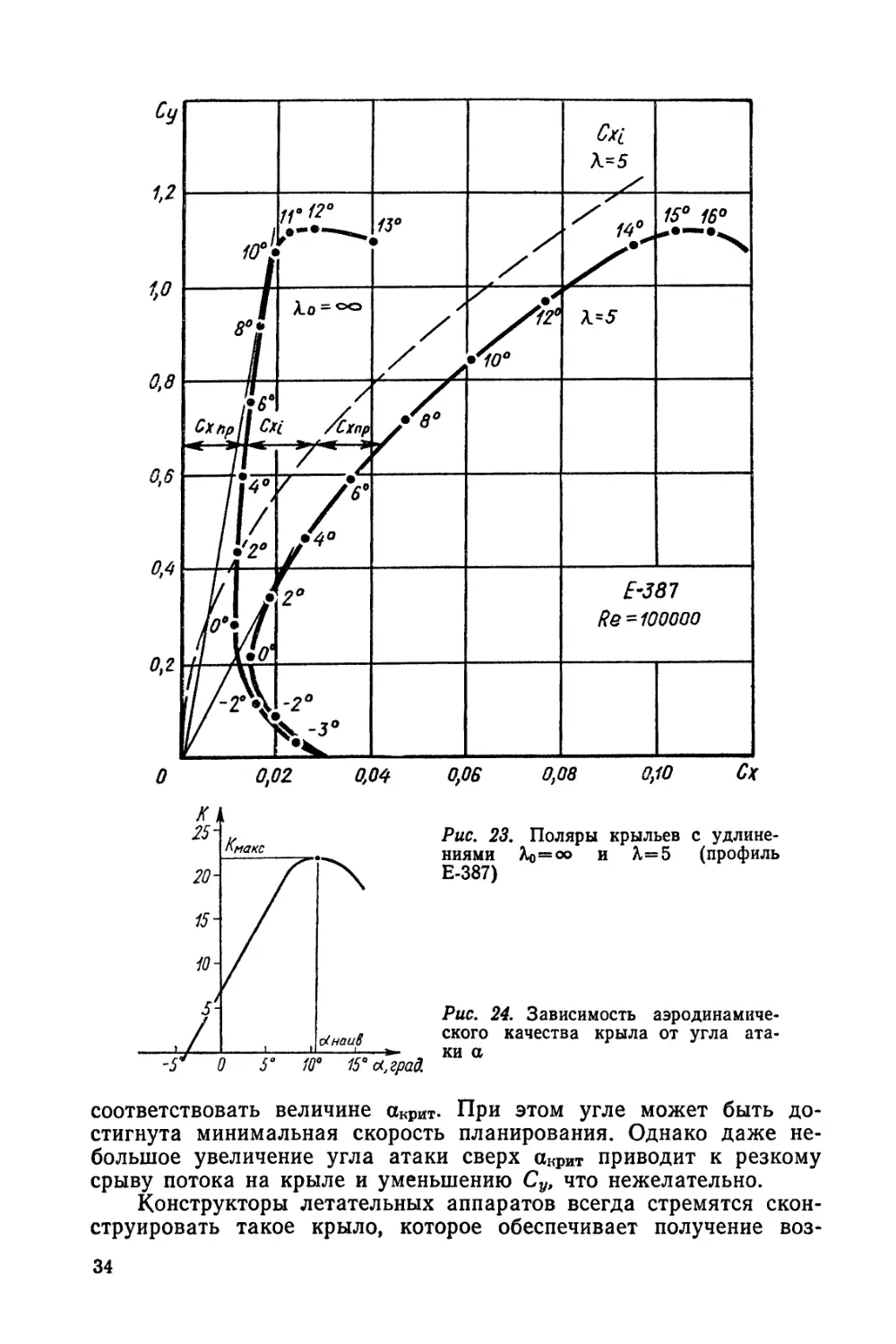
Рис, 23, Поляры крыльев с удлине-
ниями Х0=оо и Х=5 (профиль
Е-387)
Рис. 24, Зависимость аэродинамиче-
ского качества крыла от угла ата-
ки а
соответствовать величине аКрит. При этом угле может быть до-
стигнута минимальная скорость планирования. Однако даже не-
большое увеличение угла атаки сверх аКрит приводит к резкому
срыву потока на крыле и уменьшению Су, что нежелательно.
Конструкторы летательных аппаратов всегда стремятся скон-
струировать такое крыло, которое обеспечивает получение воз-
34
можно большей подъемной силы при наименьшем лобовом сопро-
тивлении. Для оценки аэродинамического совершенства кры-
ла принято понятие аэродинамического качества
крыла.
Аэродинамическое качество крыла — отношение подъемной
силы к силе лобового сопротивления крыла:
Q’
где У — подъемная сила, Н;
Q — сила лобового сопротивления, Н.
Так как коэффициенты Сх и Су полностью характеризуют силы
Q
Q и У, то получим К — Угол, заключенный между векторами
R и У, представляет собой угол качества 6. Угол качества получае-
тся из соотношения
Чем больше аэродинамическое качество крыла, тем оно совер-
шеннее. Аэродинамическое качество зависит от тех же факторов,
что и сами коэффициенты Су и Сх, т. е. от угла атаки, формы про-
филя, формы крыла в плане, скорости полета и шероховатости
поверхности крыла.
Из ориентировочного графика зависимости аэродинамическо-
го качества крыла от различных углов атаки (рис. 24) видно, что
с увеличением угла качество растет и, достигнув максимального
значения при угле атаки анаив, снова падает. Современные радио-
управляемые модели планеров достигают КМакс = 22—25.
Форма крыла оказывает на качество такое же влияние, как и
на коэффициент Су.
Как правило, в современной литературе аэродинамические
характеристики профилей приводятся для крыла, имеющего бес-
конечно большое удлинение %=со.
Для определения характеристик реального крыла модели не-
обходимо произвести перерасчет поляры теоретического крыла на
удлинение реального крыла. Таким образом получим поляру изо-
лированного крыла модели.
Коэффициент Су, который получен по результатам исследова-
ния в аэродинамической трубе при определенных углах атаки, бу-
дет отличаться для тех же углов атаки, если крыло модели имеет
удлинение, отличающееся от лабораторного крыла.
Как уже указывалось ранее, величина удлинения крыла Л
влияет на сопротивление, называемое индуктивным. Величина ин-
дуктивного сопротивления характеризуется коэффициентом Cxt.
Величина этого коэффициента связана с удлинением крыла сле-
дующей зависимостью:
с -S-
" л?. '
2»
35
Величина CXi для разных Су определяется расчетным путем и
наносится на поляру крыла. Кривая Cxi по Су называется параболой
индуктивного сопротивления и строится обычно вместе с полярой
крыла.
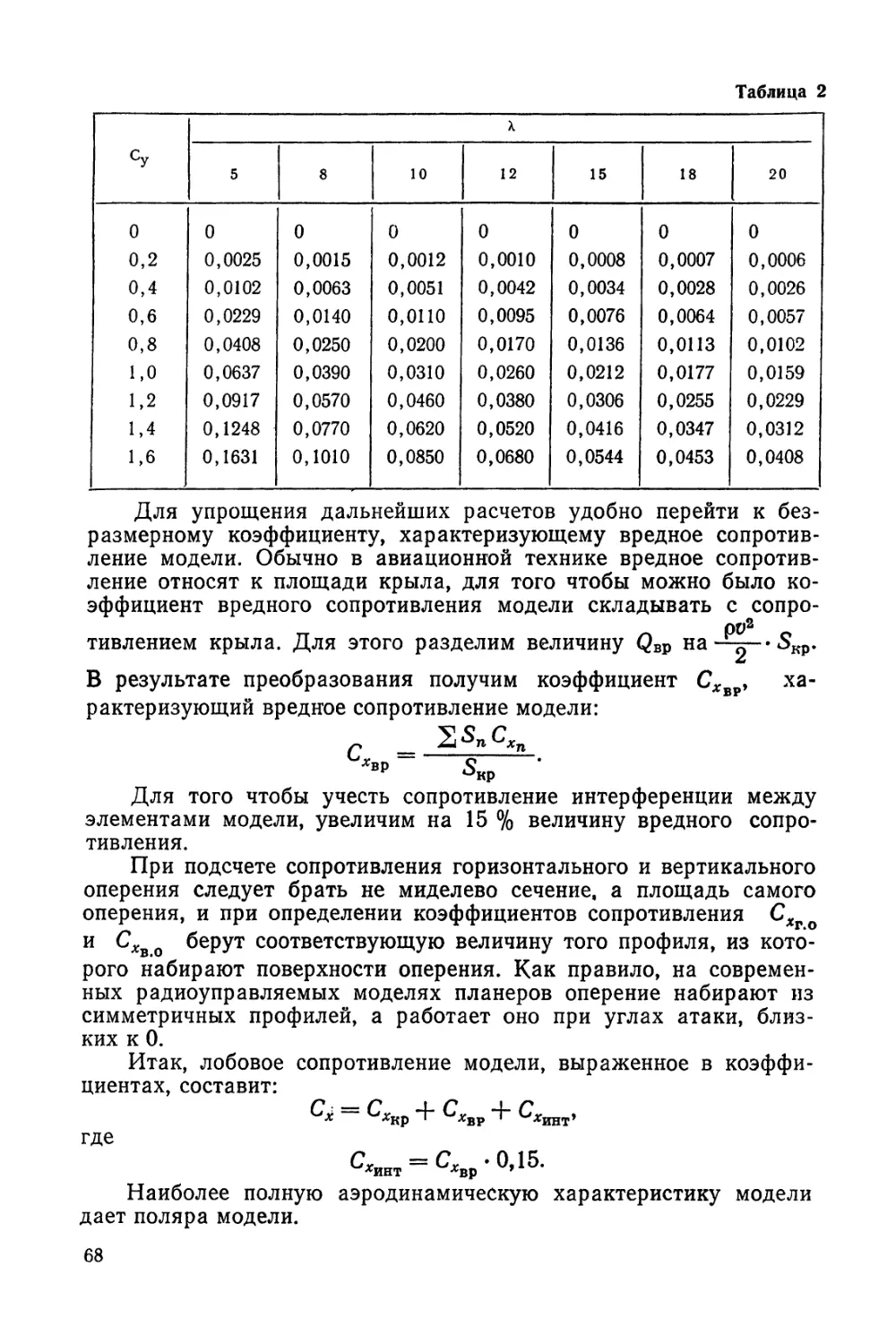
В табл. 2 даны расчетные коэффициенты для построения па-
раболы индуктивного сопротивления Cxi при различных удлинениях
крыла %.
На рис. 23 изображены поляры профиля Е 387 с удлинениями
А = оо и к = 5. Так как при к = оо, согласно формуле CXi = Сгу, ве-
личина индуктивного сопротивления СХ1 = 0, то величина СХкр будет
представлять собой в чистом виде величину СХар — профильное соп-
ротивление.
Для любого крыла, имеющего удлинение, отличающееся от
к — оо, к профильному сопротивлению СХир будет добавляться ин-
дуктивное сопротивление CXi. На графике (рис. 23) пунктирной ли-
нией изображена парабола индуктивного сопротивления, соответст-
вующая удлинению к — 5. Таким образом, для крыла с удлинением
к = 5 к профильному сопротивлению СХар добавляется индуктивное
сопротивление СХ{ при любом значении коэффициента Су. Здесь, на
графике, горизонтальный отрезок от вертикальной оси до поляры,
соответствующей к = оо, есть величина профильного сопротивления
СЖпр; отрезок прямой от вертикальной оси до параболы, соответству-
ющей к = 5, есть величина индуктивного сопротивления Сх.. Отрезок
СХпр от параболы до поляры крыла при к = 5 равен соответственно
отрезку СХпр поляры крыла при к — со.
Следовательно, величина коэффициента сопротивления Сх ре-
ального крыла есть сумма коэффициентов сопротивления профиль-
ного СХда и индуктивного CXi:
Сх ~~ Сх -I- Сх..
х хпр * Х1
Крыло модели, отличающееся своим удлинением от исходно-
го крыла, будет иметь, очевидно, и другой коэффициент сопротив-
ления Сх при одинаковых коэффициентах подъемной силы Су на
величину ДСх, тогда
Величина Д Сх может быть подсчитана по формуле
дс _ _______Ц
« \ к0 кКРГ
В связи с изменением удлинения крыла изменится также и
величина скоса потока, и реальный угол атаки крыла станет
другим:
акр=ао~ Да.
36
Рис. 25. Построение поляры крыла с заданным удлинением К
Величина этой разницы Д а может быть определена по фор-
муле
С I 1 1 \
да = 57,3 .-hU-A--—Ц.
Величина 57,3 введена для перевода угла из радианной меры
в градусную.
Пересчеты величин ДСХ и СХкр, Да и ОцР производят для нес-
кольких значений Су исходного профиля.
С достаточной для практики точностью можно сделать графи-
ческий «пересчет» поляры исходного крыла на поляру реального
крыла с заданным удлинением.
В качестве примера приведем здесь расчеты поляры крыла
модели планера с профилем Е 387, с удлинением Л=15, Re=
= 100 000. В качестве исходных данных располагаем полярой
крыла с профилем Е 387, с удлинением Ао=5.
Для выполнения расчета делаем следующие построения:
1. Строим поляру исходного крыла и график зависимости
СУ1> от а (рис. 25, кривая Л).
С2
2. По данным табл. 2 или по формуле СХ1 = —строим пара-
болу индуктивного сопротивления для исходного и заданного крыльев.
3. Откладывая величину СХр от параболы индуктивного сопро-
тивления CXi (% = 15), получаем координаты поляры реального изо-
лированного крыла с удлинением % = 15 (кривая В).
4. На графике функции Cv=f (а) производим пересчет вели-
чины Д а. Для этого вычисляем Д а по формуле
37
А 57,ЗС„ /1 1 \
Да -----!--Е_| —-------—1.
л у Л А»0 у
Задавшись значением коэффициента Су=1, определяем вели-
чину разности скосов потока для исходного и расчетного крыла:
57,3-1 /J_______1\ 57,3-1.2 _
3,14 (15 5 ) 3,14-15 -
Знак «минус» показывает, что угол скоса необходимо умень-
шать относительно исходного профиля. Полученное значение
Да=—2,42° откладываем против значения Су = \ влево от оси и
через полученную точку проводим прямую С.
Кривую Cyo=f(a) (кривая Л1) поворачиваем на угол Да
влево (кривая Bt).
По полученной зависимости Cy=f(a) производим разметку
углов а на поляре крыла с удлинением Л=15.
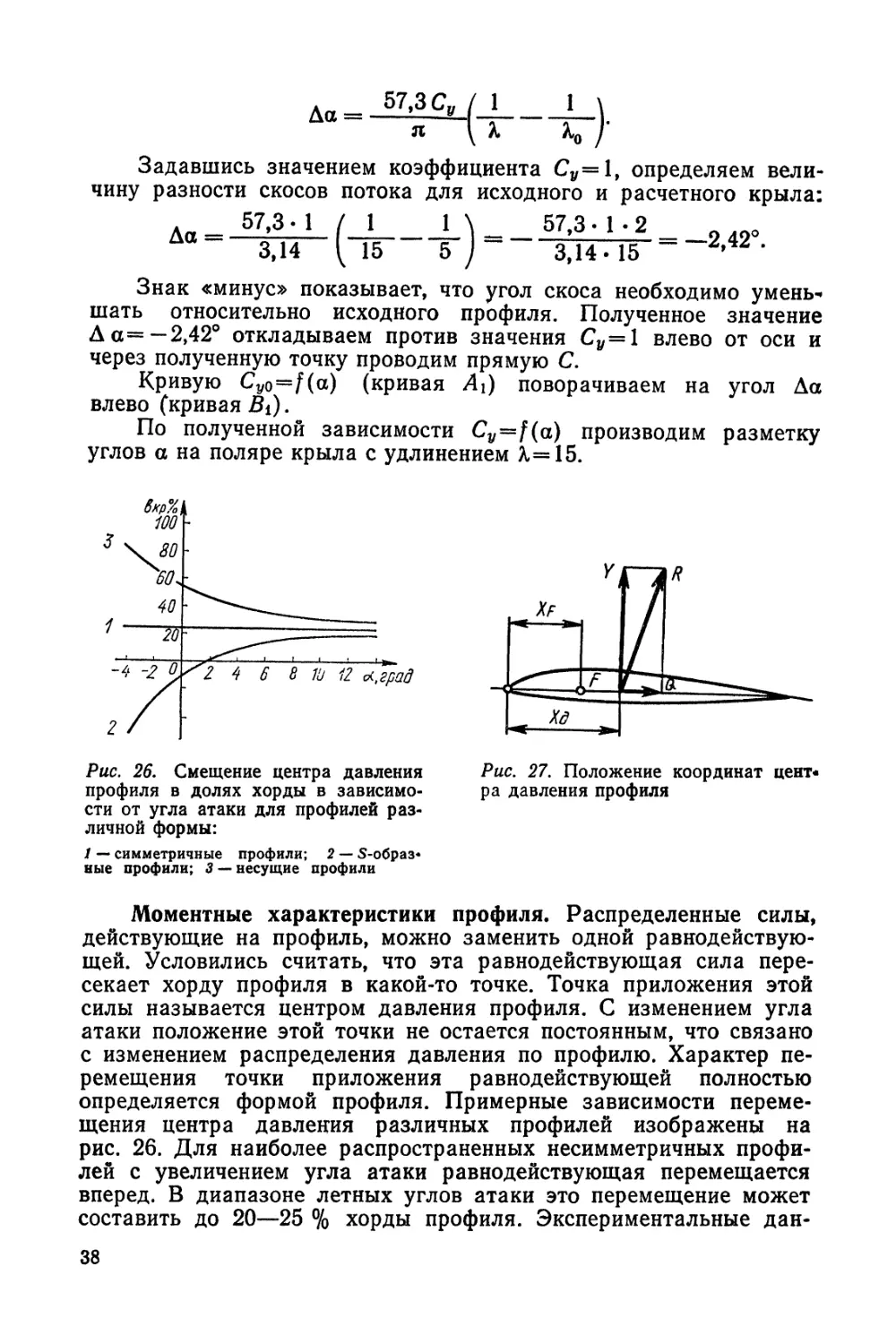
Рис. 26. Смещение центра давления
профиля в долях хорды в зависимо-
сти от угла атаки для профилей раз-
личной формы:
1 — симметричные профили; 2 — S-образ-
ные профили; 3 — несущие профили
Рис. 27. Положение координат цент-
ра давления профиля
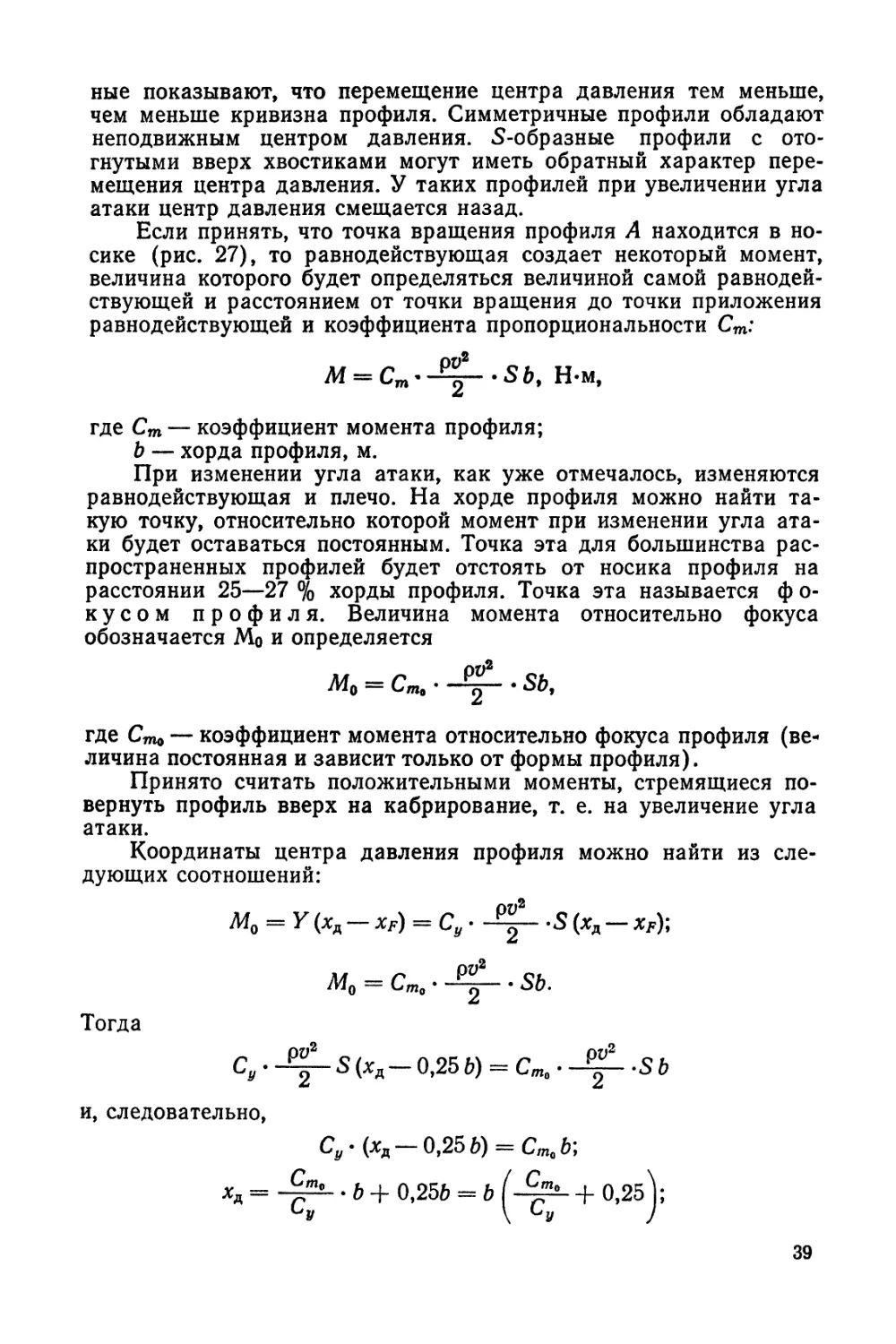
Моментные характеристики профиля. Распределенные силы,
действующие на профиль, можно заменить одной равнодействую-
щей. Условились считать, что эта равнодействующая сила пере-
секает хорду профиля в какой-то точке. Точка приложения этой
силы называется центром давления профиля. С изменением угла
атаки положение этой точки не остается постоянным, что связано
с изменением распределения давления по профилю. Характер пе-
ремещения точки приложения равнодействующей полностью
определяется формой профиля. Примерные зависимости переме-
щения центра давления различных профилей изображены на
рис. 26. Для наиболее распространенных несимметричных профи-
лей с увеличением угла атаки равнодействующая перемещается
вперед. В диапазоне летных углов атаки это перемещение может
составить до 20—25 % хорды профиля. Экспериментальные дан-
38
ные показывают, что перемещение центра давления тем меньше,
чем меньше кривизна профиля. Симметричные профили обладают
неподвижным центром давления. S-образные профили с ото-
гнутыми вверх хвостиками могут иметь обратный характер пере-
мещения центра давления. У таких профилей при увеличении угла
атаки центр давления смещается назад.
Если принять, что точка вращения профиля А находится в но-
сике (рис. 27), то равнодействующая создает некоторый момент,
величина которого будет определяться величиной самой равнодей-
ствующей и расстоянием от точки вращения до точки приложения
равнодействующей и коэффициента пропорциональности Ст:
М = Ст*-^— • Sb, Нм,
где Ст — коэффициент момента профиля;
b — хорда профиля, м.
При изменении угла атаки, как уже отмечалось, изменяются
равнодействующая и плечо. На хорде профиля можно найти та-
кую точку, относительно которой момент при изменении угла ата-
ки будет оставаться постоянным. Точка эта для большинства рас-
пространенных профилей будет отстоять от носика профиля на
расстоянии 25—27 % хорды профиля. Точка эта называется ф о-
кусом профиля. Величина момента относительно фокуса
обозначается Мо и определяется
Mo = Cmo--^-.S6,
где Сто — коэффициент момента относительно фокуса профиля (ве-
личина постоянная и зависит только от формы профиля).
Принято считать положительными моменты, стремящиеся по-
вернуть профиль вверх на кабрирование, т. е. на увеличение угла
атаки.
Координаты центра давления профиля можно найти из сле-
дующих соотношений:
Ч = У(хд-хл) = Су • -S(xn-xFy,
2
мо = Ст. • . Sb.
£
Тогда
Су • S (хд - 0,25 Ь) = Ст, • -S b
и, следовательно,
Су * (^д 0,25 6) = С/п0 Ь\
хл = • ь + 0,256 = b (+ 0,25^
Ьу у Су J
39
ХД = -^-4-0,25.
'•'и
Таким образом, у симметричных профилей Сто=0 центр дав-
ления при изменении углов атаки своего положения не меняет, т. е.
хд=const.
Если Сто>0, что характерно для S-образных профилей, то
центр давления его перемещается назад при увеличении угла ата-
ки. Такие профили считаются устойчивыми.
Если Сто<0, то центр давления профиля с увеличением угла
атаки перемещается вперед. Такие
профили называются неустойчивыми
(в основном вогнутые профили).
Графическая зависимость Ст от
величины Су изображена на рис. 28.
Здесь видно, что кривая Ст в диа-
пазоне летных углов атаки близка
к прямой. Это обозначает, что мо-
мент крыла линейно зависит от ве-
личины подъемной силы.
Нетрудно заметить, что точка при-
ложения равнодействующей аэроди-
намических сил в общем не совпа-
дает с положением фокуса крыла.
Как известно из механики, вся-
кую силу можно перенести парал-
лельно самой себе без изменения
равновесия системы сил, если при
таком перемещении добавить мо-
мент, равный произведению данной
Рис. 28. График зависимости коэф- силы на расстояние, на которое пе-
фициентов подъемной силы Cv реносится сама сила. Исходя из
и аэродинамического момента Ст тако§ предпосылки, можно пере-
нести силу Y из центра давления
крыла (ц. д.) в фокус F, добавив при этом постоянный момент:
2
Л4в = Ст.--4-«5&.
При угле атаки крыла, соответствующем нулевой подъемной
силе (а=ао), сила Y равна нулю и действует только момент Mq.
Если изменить угол атаки, то получим приращение подъемной
силы ДУ, что, конечно, не изменит момента Л40. Это равносильно
тому, что любое приращение подъемной силы, связанное с изме-
нением угла атаки, можно считать приложенным в фокусе крыла.
Это рассуждение дает право считать фокус крыла точкой прило-
жения приращения аэродинамических сил при изменении угла
атаки.
40
Аэродинамические схемы летающих моделей. Ранние этапы
развития авиации характеризовались тем, что усилия авиаконст-
рукторов были направлены на создание такой схемы летательного
аппарата, которая могла бы обеспечить устойчивое положение его
в пространстве, управляемость. На этих этапах создавались са-
мые невероятные схемы и конструкции.
По мере развития авиационной науки и накопления практи-
ческого опыта наибольшее развитие получила схема летательного
аппарата с крылом в передней части и хвостовым оперением, рас-
положенным на некотором расстоянии позади и обеспечивающим
управляемость аппарата. Однако существуют и другие схемы, до-
казавшие свою жизнеспособность.
Эта схема является основной и привычной для большинства
классов летательных аппаратов самого разнообразного назначе-
ния и поэтому ее называют нормальной.
Можно упомянуть схему без хвостового оперения. Она так и
называется теперь — бесхвостка. Некоторое распространение име-
ет еще схема летательного аппарата с оперением, расположенным
впереди крыла. Эта схема получила название «утка».
Схемы летательных аппаратов были перенесены и в авиаци-
онный моделизм. Моделисты практически определяли оптималь-
ные параметры своих моделей и за много лет работы сейчас сло-
жились вполне определенные традиции, геометрические соотно-
шения и размеры моделей.
Спортивные правила и ограничения также повлияли на раз-
витие современных летающих моделей.
Как уже отмечалось выше, отсутствие специальных экспери-
ментальных исследований вопросов аэродинамики и динамики
полета современных летающих моделей заставляет моделистов
использовать данные большой авиации. Однако, как показывает
анализ, условия полета модели и большого самолета (или плане-
ра) значительно отличаются. Например, влияние вертикальных и
горизонтальных потоков (термические потоки, ветер) на модель
значительно сильнее, чем на большие самолеты или планеры. Это
связано со значительной разницей в скоростях полета модели и
самолета или планера.
Скорость полета модели часто соизмерима со скоростью ветра.
Кроме того, нагрузка на крыло модели и нагрузка на крыло само-
лета или планера значительно отличаются.
Способность модели самостоятельно возвращаться в состоя-
ние равновесия, после того как воздушный фактор перестанет
воздействовать на нее, называют устойчивостью. Для упро-
щения изучения устойчивости модели рассматривают отдельно
проблемы продольной, поперечной и путевой устойчивости.
Характер движения модели определяется направлением и ве-
личиной его скорости в различные моменты времени. Различают
установившееся и неустановившееся движение модели.
Установившимся называют такое движение, когда ско-
рость движения модели не изменяется по направлению и по вре-
41
мени При установившемся движении все внешние силы и момен-
ты, действующие на модель, взаимно уравновешены. Н е у с т а-
новившееся движение такое, когда скорость модели изменя-
ется или по величине, или по направлению, или одновременно по
величине и направлению. Неустановившееся движение возможно
тогда, когда на модель воздействуют неуравновешенные силы или
моменты. К неустановившимся движениям модели планера отно-
сятся взлет модели на леере, выполнение разворотов, выполнение
фигур пилотажа, полет в условиях порывистого ветра.
Разнообразные сложные движения модели в пространстве
рассматривают обычно как сумму поступательных и вращатель-
ных движений (относительно центра тяжести в некоторой систе-
ме координат). Система координат в пространстве — это обычно
три заданных взаимно перпендикулярных направления, исходя-
щих из одной точки, называемой началом координат.
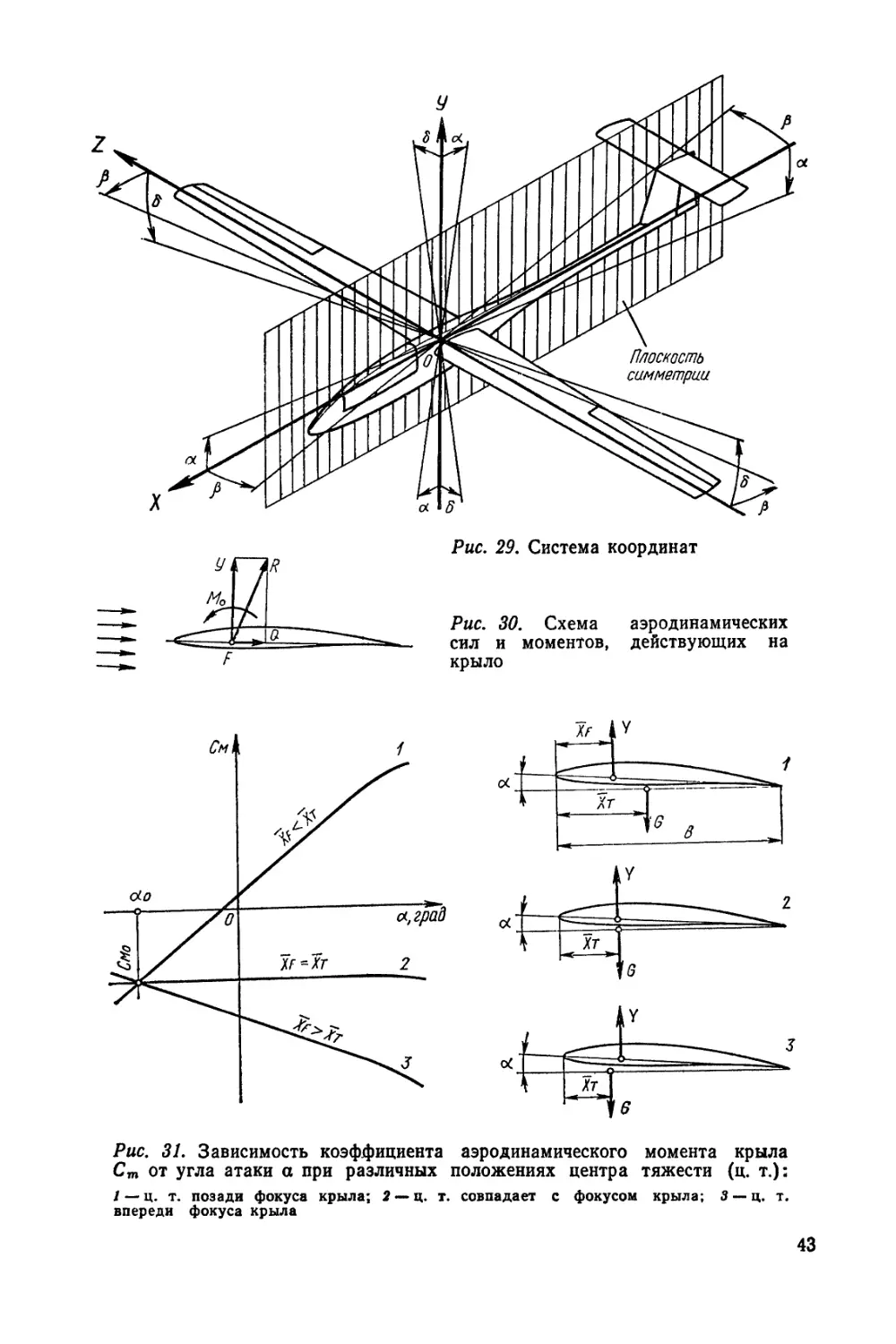
Здесь будет использоваться в основном скоростная система
координат (рис. 29). Оси координат в этой системе связаны с на-
правлением скорости полета. Начало координат при пользовании
этой системой помещают в центре тяжести модели. Продольная
ось ОХ совпадает с направлением полета, т. е. направлена против
скорости набегающего потока о. Поперечная ось OZ направлена
перпендикулярно к плоскости симметрии модели вдоль правого
крыла. Вертикальная ось OY направлена перпендикулярно плоско-
сти, проходящей через оси ОХ и OZ в плоскости симметрии.
В скоростной системе координат подъемная сила и сопротив-
ление модели параллельны соответственно осям ОУ и ОХ.
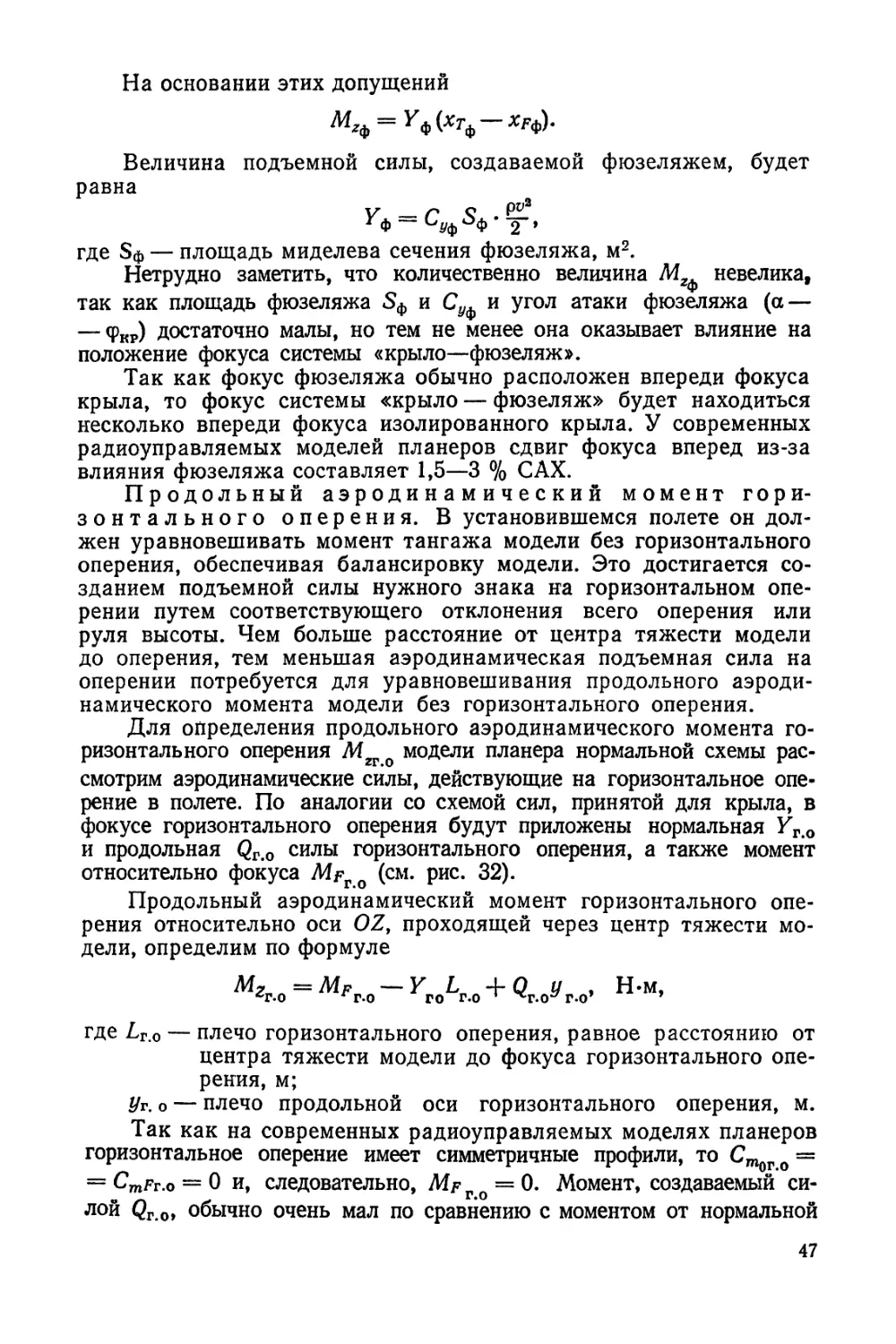
Устойчивость модели. Модель, находящаяся в полете, может
одновременно вращаться вокруг всех трех осей. Для упрощения
изучения законов этих перемещений равновесие модели рассма-
тривают или относительно каждой оси отдельно, или, что удоб-
нее,— отдельно только продольную устойчивость, а боковую и
поперечную устойчивости — совместно.
Продольная устойчивость модели особенно важна, так как
нарушение этого параметра приводит обычно к неоправданным
аварийным ситуациям, особенно при первых запусках модели.
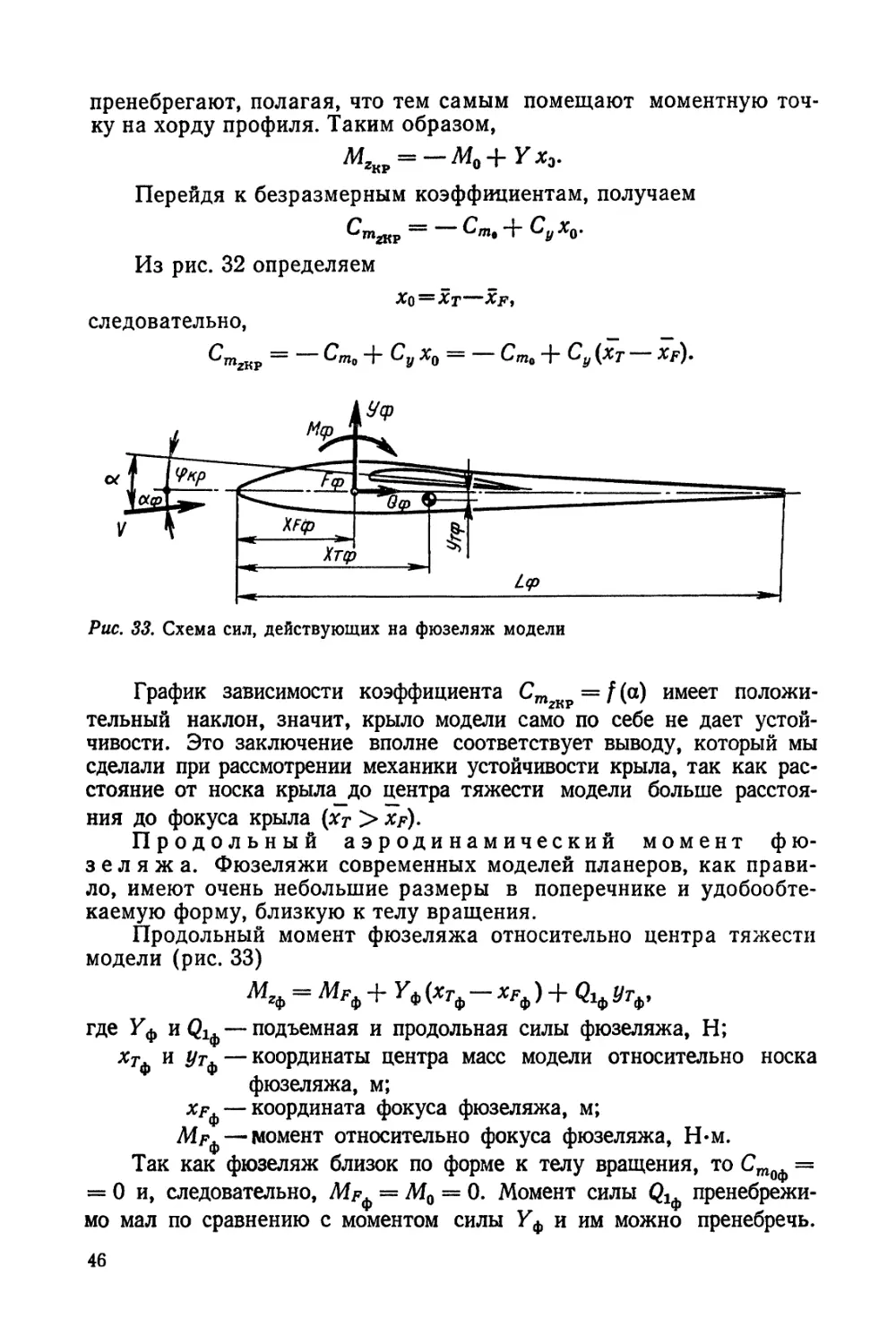
Продольная устойчивость. Для уяснения физиче-
ской сущности устойчивости модели, находящейся в полете, рас-
смотрим механику устойчивости крыла.
На крыло, обтекаемое воздушным потоком, действует рав-
нодействующая R, приложенная в фокусе крыла, которую мы
можем разложить на силу сопротивления Q и подъемную силу У.
Величина подъемной силы У изменяется с изменением угла атаки
крыла. Действует на крыло и момент Л40, который не зависит от
угла атаки (рис. 30).
Как известно из курса физики, под действием каких-либо сил
твердое тело, находящееся в состоянии движения, совершает вра-
щение около своего центра тяжести. В нашу задачу входит ре-
шить вопрос, где должен находиться центр тяжести крыла, обте-
42
Рис, 31, Зависимость коэффициента аэродинамического момента крыла
Ст от угла атаки а при различных положениях центра тяжести (ц. т.):
/ — ц. т. позади фокуса крыла; 2 ~ ц. т. совпадает с фокусом крыла; 3 — ц. т.
впереди фокуса крыла
43
каемого воздушным потоком, чтобы его положение было устойчи-
вым, т. е. чтобы при изменении угла атаки крыла возникал мо-
мент, стремящийся вернуть крыло к прежнему углу атаки.
Рассмотрим возможные варианты положения центра тяжести
крыла относительно его фокуса и проанализируем устойчивость
крыла (рис. 31).
При хр<хт центр тяжести располагается позади фокуса кры-
ла. Любое изменение угла атаки а вызывает прирост подъемной
силы АСУ, создающий момент Mt, направленный на кабрирование
при увеличении угла а и на пикирование при уменьшении этого
угла. Крыло с таким положением центра тяжести не проявляет
признаков устойчивости.
При хр=*хт центр тяжести совпадает с фокусом крыла. Это
означает, что сила веса, приложенная в центре тяжести, не создает
никаких моментов и при изменении угла атаки ДЛ42=0, следова-
тельно Mz — Мг, или, что то же самое, Cmz = СОТо. При изменении
угла атаки а под действием внешних сил крыло будет вращаться
вокруг центра тяжести до тех пор, пока эта сила будет действовать.
Такое крыло также нельзя назвать устойчивым.
Если расположить центр тяжести впереди фокуса крыла, то
л>>*т. Любое изменение угла атаки а вызовет прирост подъем-
ной силы ДС„, приложенной в фокусе, что вызовет появление мо-
мента ДМ2.
Увеличение угла атаки а создает момент, направленный на
пикирование, а при уменьшении — на кабрирование. Крыло в этом
случае показывает признаки устойчивости.
Итак, крыло с центром тяжести, расположенным впереди фо-
куса, устойчиво, но не сбалансировано, т. е. момент от силы тя-
жести должен быть компенсирован каким-то моментом, равным
ему по величине и направленным в противоположную сторону.
Причем заметим, что необходимость в этом возникает только
в том случае, когда крыло изменяет угол атаки. Элементом моде-
ли, создающим балансирующий момент, является стабилизатор.
Как мы убедились ранее, крыло устойчиво по углу атаки
только в том случае, если центр тяжести находится перед фоку-
сом. То же справедливо и для крыла с горизонтальным оперением.
Это обозначает, что модель будет устойчивой в том случае, если
ее центр тяжести находится впереди фокуса всей модели. Это яв-
ляется необходимым условием устойчивости полета.
Роль стабилизатора состоит в том, чтобы сбалансировать мо-
дель на заданном режиме полета.
Каждая часть модели, находящаяся в потоке обтекания, взаи-
модействует с ним и создает некоторый момент относительно
оси OZ, проходящей через центр тяжести модели.
Для обеспечения условий установившегося режима полета не-
обходимо, чтобы сумма всех моментов относительно оси OZ была
равна нулю: S Л42=0.
44
Чтобы определить условия равновесия продольных моментов
частей модели, рассмотрим подробнее отдельно момент крыла М2кр>
момент горизонтального оперения М2то, момент фюзеляжа М2& Та-
ким образом, условие равновесия моментов модели можем записать
подробнее: £ М2 = М2кр + М2то + М2ф = 0.
С достаточной для практики точностью величину продольного
аэродинамического момента модели можно получить как алгебраи-
ческую сумму моментов отдельных его частей, найденных рас-
четом.
Рис. 32. Зависимость коэффициента аэродинамического момента модели См
от угла атаки крыла а: мод
а — схема действующих сил; б — график моментов
Подъемная сила модели создается крылом, поэтому рассмо-
трение вопросов равновесия моментов целесообразно начать с
крыла.
Продольный аэродинамический момент кры-
л а. Определим величину ЛТ2кр относительно точки хт, через которую
проходит ось Z (рис. 32).
^кр = — Мо + гкр ♦ х0 + Q • Н-м,
где Мо — момент профиля относительно фокуса крыла, Н • м;
Y — подъемная сила крыла, Н;
Хо — расстояние от центра тяжести модели до фокуса
крыла, м;
Q — сопротивление крыла, Н;
У? — расстояние от центра тяжести модели до средней аэро-
динамической хорды крыла, м.
Так как сила Q по своей величине значительно меньше си-
лы У и ее плечо мало, то моментом этой силы (Qyp) на практике
45
пренебрегают, полагая, что тем самым помещают моментную точ-
ку на хорду профиля. Таким образом,
MZkv = -Mq+Yx3.
Перейдя к безразмерным коэффициентам, получаем
^mzKp = ^т, СУ Х°'
Из рис. 32 определяем
Xo = Xt~Xf,
следовательно,
^m2KP = Су Х° = ”Ь Су (^3 Хр).
Рис. 33. Схема сил, действующих на фюзеляж модели
График зависимости коэффициента Cm*KP = /(a) имеет положи-
тельный наклон, значит, крыло модели само по себе не дает устой-
чивости. Это заключение вполне соответствует выводу, который мы
сделали при рассмотрении механики устойчивости крыла, так как рас-
стояние от носка крыла_до центра тяжести модели больше расстоя-
ния до фокуса крыла (хТ > xf).
Продольный аэродинамический момент фю-
зеляжа. Фюзеляжи современных моделей планеров, как прави-
ло, имеют очень небольшие размеры в поперечнике и удобообте-
каемую форму, близкую к телу вращения.
Продольный момент фюзеляжа относительно центра тяжести
модели (рис. 33)
мгф = МРф + Уф (хГф - хРф) + уТф,
где Уф и (?1ф— подъемная и продольная силы фюзеляжа, Н;
хТф и уРф — координаты центра масс модели относительно носка
фюзеляжа, м;
хРф— координата фокуса фюзеляжа, м;
Л4/?ф — момент относительно фокуса фюзеляжа, Н-м.
Так как фюзеляж близок по форме к телу вращения, то СГОоф =
= 0 и, следовательно, МРф — Мо = 0. Момент силы ф1ф пренебрежи-
мо мал по сравнению с моментом силы Уф и им можно пренебречь.
46
На основании этих допущений
М?ф = (*тф Х/?ф).
Величина подъемной силы, создаваемой фюзеляжем, будет
равна
у _________________________р е ,
где Бф — площадь миделева сечения фюзеляжа, м2.
Нетрудно заметить, что количественно величина Мг& невелика,
так как площадь фюзеляжа 5ф и СУф и угол атаки фюзеляжа (а —
— Фкр) достаточно малы, но тем не менее она оказывает влияние на
положение фокуса системы «крыло—фюзеляж».
Так как фокус фюзеляжа обычно расположен впереди фокуса
крыла, то фокус системы «крыло — фюзеляж» будет находиться
несколько впереди фокуса изолированного крыла. У современных
радиоуправляемых моделей планеров сдвиг фокуса вперед из-за
влияния фюзеляжа составляет 1,5—3 % САХ.
Продольный аэродинамический момент гори-
зонтального оперения. В установившемся полете он дол-
жен уравновешивать момент тангажа модели без горизонтального
оперения, обеспечивая балансировку модели. Это достигается со-
зданием подъемной силы нужного знака на горизонтальном опе-
рении путем соответствующего отклонения всего оперения или
руля высоты. Чем больше расстояние от центра тяжести модели
до оперения, тем меньшая аэродинамическая подъемная сила на
оперении потребуется для уравновешивания продольного аэроди-
намического момента модели без горизонтального оперения.
Для определения продольного аэродинамического момента го-
ризонтального оперения Mzr о модели планера нормальной схемы рас-
смотрим аэродинамические силы, действующие на горизонтальное опе-
рение в полете. По аналогии со схемой сил, принятой для крыла, в
фокусе горизонтального оперения будут приложены нормальная Уг,о
и продольная Qr.o силы горизонтального оперения, а также момент
относительно фокуса Mfto (см. рис. 32).
Продольный аэродинамический момент горизонтального опе-
рения относительно оси OZ, проходящей через центр тяжести мо-
дели, определим по формуле
Mz = MF —YL + О и , Н-м,
где Аг.о — плечо горизонтального оперения, равное расстоянию от
центра тяжести модели до фокуса горизонтального опе-
рения, м;
Ут. о — плечо продольной оси горизонтального оперения, м.
Так как на современных радиоуправляемых моделях планеров
горизонтальное оперение имеет симметричные профили, то 0 =
= CmFT.o — 0 и, следовательно, Affro = 0. Момент, создаваемый си-
лой Ог.о, обычно очень мал по сравнению с моментом от нормальной
47
силы, так как Qr.o < Уг.о, а плечо угл по сравнению с также
мало.
На основании этих допущений с достаточной для практики
точностью можно считать, что продольный момент горизонтально-
го оперения
Л^гГф0 = ^г.о ^т.о*
Плечо Lr.o обычно мало изменяется в зависимости от режима
полета, поэтому в практических расчетах его считают постоянным
и равным расстоянию от центра тяжести модели до фокуса гори-
зонтального оперения.
При подсчете Мгр о следует учесть, что условия обтекания по-
током горизонтального оперения отличаются от условий обтекания
крыла. Скорость потока, обтекающего горизонтальное оперение,
вследствие влияния частей модели, стоящих перед оперением, бу-
дет отличаться по величине и по направлению от скорости полета.
Величина нормальной силы
Гг.о = ^уГ0 ‘-'г.О<?Г.О> Н,
где СУро — коэффициент аэродинамической подъемной силы горизон-
тального оперения;
Sr.o — площадь горизонтального оперения, м2;
qr,Q— скоростной напор воздушного потока, обтекающего го-
ризонтальное оперение, Н-м-2.
Следовательно,
Мгг.о = Сут.О ‘^г'° ^Г-°
Разделив это выражение на q S ba, получим коэффициент про-
дольного аэродинамического момента горизонтального оперения
^тЛг 0 = СУГ 0КГ.о Лг0,
q 1,2
где Кг.о = ----коэффициент торможения потока в об-
ласти горизонтального оперения, состав-
ляющего для современных моделей 0,85—
—0,9;
Лго = —Г~д~гг'°--коэффициент статической устойчивости
о иа
модели, оказывающий значительное влия-
ние на устойчивость и управляемость
модели и равный 0,45—1,0.
Коэффициент подъемной силы горизонтального оперения СУг о
зависит от истинного угла атаки горизонтального оперения аг 0 и
угла отклонения руля высоты. Эффективность руля высоты несколь-
ко ниже, чем полностью поворотное горизонтальное оперение, и вы-
ражается коэффициентом эффективности руля высоты пь. Величина пь
48
в основном зависит от отношения площадей руля высоты Sb и го-
ризонтального оперения Sr.o:
Истинный угол атаки горизонтального оперения зависит от
скоса потока за крылом модели, угла деградации крыла и гори-
зонтального оперения. Определение аналитическим путем всех
этих величин требует привлечения высшей математики, поэтому
здесь не приводится.
В практических расчетах можно пользоваться эмпирической
формулой для определения величины смещения фокуса крыла при
наличии горизонтального оперения:
Ахгг 0 = 0,36 Лго.
Величина Axf „ значительна по величине и положительна
г.о
по знаку, т. е. сдвигает положение фокуса модели назад. Это сви-
детельствует о том, что при наличии горизонтального оперения
разность Хт—Хр увеличивается.
Продольный аэродинамический момент моде-
ли планера в установившемся полете. Коэффициент
аэродинамического продольного момента относительно оси OZ,
проходящей через центр тяжести модели, в установившемся по-
лете
Стг — Ст. 4" Стг. 4* Ст •
* гкр 2Г.О
Подставив выражение каждого члена правой части уравне-
ния, получим
<4 — Ст г, + (ХГ — XFM) Су + Стг 8,
где Стг> — коэффициент продольного аэродинамического момента мо-
дели при нулевой подъемной силе;
Стг — величина изменения коэффициента момента модели при
отклонении руля высоты на 1 град.
Пользуясь зависимостью Стг =f(8), можно судить о степени
устойчивости модели. Предположив, что руль высоты неподвижно
зажат в нейтральном положении 6=0 (тогда Csm =0), получим
уравнение, аналогичное уравнению момента крыла. Из этого мож-
но заключить, что коэффициент момента модели, так же как и
крыла, зависит от взаимного расположения центра тяжести и фо-
куса и от величины Су.
Задаваясь различными значениями а, строим графическую за-
висимость Стг=/(а). При изменении угла отклонения руля вы-
соты или всего горизонтального оперения график сдвигается вверх
или вниз параллельно себе в зависимости от направления откло-
нения руля высоты, т. е. происходит переход модели с одного ре-
жима полета на другой. Здесь изменяется величина коэффициен-
те
та Сд таким образом, что моменты уравновешиваются, т. е.
Л4г=0 и, следовательно, модель перешла на новый установивший-
ся режим полета.
О степени устойчивости модели судят по величине наклона гра-
фика Cmz=f(a). В самом деле, чем больше отрицательный наклон
С„,2 = f(a), тем больший отрицательный прирост ДСГОг возникает при
некотором увеличении Су на ACj,, т. е. при возрастании угла атаки
появляется пикирующий момент, стремящийся вернуть модель к перво-
начальному режиму полета. При уменьшении угла атаки картина об-
ратная, появляется кабрирующий момент, восстанавливающий нару-
шенное равновесие.
Для оценки степени устойчивости модели о принимается тан-
генс угла наклона зависимости Ст^ — f (а) к оси а:
а =
АС, Ст‘
Степень устойчивости а — величина безразмерная и выражается
в долях хорды САХ. Величина Стг характеризуется расстоянием
между центром тяжести модели хТ и фокусом модели xF:
О = — Стг — ~XF — ХТ-
Если приближать центр тяжести модели к фокусу, степень
устойчивости уменьшается и при xF=xT наклон зависимости Стг=-
=f(a) исчезает, т. е. востанавливающие моменты не возникают и,
следовательно, модель становится нейтральной. Такая центровка
модели называется критической. Полеты модели при такой
центровке становятся невозможными, тем более невозможны по-
леты при центровке больше критической.
Для радиоуправляемых моделей планера допускается цен-
тровка в интервале 0,05—0,15 САХ.
Итак, для обеспечения устойчивости модели планера необхо-
димо, чтобы центровка модели была меньше критической. Для
этого необходимо определить положение фокуса модели.
Фокус модели
^м=^Кр+ДЧ + А^г.о-
Подставив значения хгкр, Дхрф, Ах^г о , получим
xf = 0,25 — 0,03 + 0,36 А =0,22+0,36 А .
Полученное эмпирическое выражение Xfm с достаточной сте-
пенью точности позволяет определить положение фокуса модели
и, следовательно, положение центра тяжести модели Хт:
хт = xfm — 0,10;
Хт~ 0,12+0,36Аг.о.
50
Чем ближе к носку крыла сдвинут центр тяжести модели, тем
более устойчива модель, однако при слишком больших значени-
ях а величина отклонения руля высоты или всего оперения может
оказаться недостаточной, чтобы сбалансировать модель на желае-
мом режиме. Поэтому выбирается такая предельно передняя цен-
тровка модели, при которой отклонение руля высоты на 75—80 %
полной величины отклонения позволяет еще вывести модель на
режим полета на Су , т. е. на критический угол атаки.
Предельная задняя центровка модели определяется из сооб-
ражений устойчивости. Пределом здесь служит фокус модели.
Центр тяжести всегда должен располагаться впереди фокуса мо-
дели. Не рекомендуется, чтобы расстояние от центра тяжести мо-
дели до фокуса было ближе, чем 0,05 САХ. Интервал между пре-
дельными положениями центровок называется запасом центровок.
Практически для обеспечения необходимой продольной устойчи-
вости и управляемости модели следует выбирать центровку в диа-
пазоне около 0,1 САХ впереди фокуса модели.
Боковая устойчивость модели. Устойчивость мо-
дели относительно осей ОХ и ОУ в комплексе представляет собой
боковую устойчивость модели. Обычно крен (относительно оси ОХ)
и поворот (относительно оси ОУ) рассматриваются совместно, так
как в полете всякий поворот модели приводит к появлению крена,
а крен вызывает поворот. Явления, происходящие при нарушении
боковой устойчивости модели, более сложны, чем явления, проис-
ходящие при нарушении продольной устойчивости. Конечной це-
лью расчета боковой устойчивости модели служит определение
необходимой площади вертикального оперения при заданном угле
поперечного V крыла.
Поперечное равновесие — это такое положение модели, при
котором она не изменяет своего положения относительно продоль-
ной оси и движется прямолинейно. Условием поперечного равно-
весия является равенство моментов относительно оси ОХ
(рис. 34, а): S Мх—0.
Поперечное равновесие обеспечивается весовой и аэродина-
мической симметрией модели. Моменты, вращающие модель во-
круг оси ОХ, создаются в основном подъемными силами и весом
полукрыльев. Любое нарушение симметрии справа или слева от-
носительно оси ОХ вызовет появление моментов крена в ту или
иную сторону.
Нарушенное поперечное равновесие во всех случаях можно
восстановить, изменяя с помощью элеронов величину подъемных
сил полукрыльев. В результате создается момент на восстановле-
ние нарушенного равновесия относительно продольной оси
модели.
Способность модели восстанавливать состояние поперечного
равновесия называется поперечной устойчивостью.
Рассмотрим поведение модели при случайном нарушении по-
перечного равновесия. Пусть, например, модель, летящая по пря-
51
Рис, 34, Схема сил и моментов, действующих на модель, относительно оси ОХ:
а — в нормальном полете; б — полет с креном; в — полет со скольжением
52
молинейной горизонтальной траектории, под действием возмуще-
ния (боковой порыв ветра, восходящий поток) внезапно наклони-
лась на угол у. В результате появится проекция подъемной силы
на горизонтальную плоскость, равная Ysiny (рис. 34, б). Накре-
нившаяся модель начнет скользить на опущенное крыло под дей-
ствием этой силы. При полете модели со скольжением характер
обтекания полукрыльев и распределения давления на них изме-
нится. Если крыло модели имеет положительное поперечное V,
т. е. концы его подняты кверху, то та половина крыла, в сторону
которой происходит скольжение, будет встречать поток под боль-
шим углом, чем противоположная. В результате у крыла, в сторо-
ну которого имеется крен, создается большая подъемная сила,
которая и создает восстанавливающий момент (рис. 34, в).
Величина восстанавливающего момента, степень статической
поперечной устойчивости зависят от площади крыла, его удлине-
ния, угла поперечного V.
Площадь крыла сильно влияет на величину демпфирующего
момента. Демпфирующий момент МХдем возникает при вращении
модели вокруг оси ОХ, в результате чего возникает разница в уг-
лах атаки полукрыльев и, следовательно, разница в величинах
подъемных сил:
ДУ = ДС,-^-5.
Сила эта всегда направлена противоположно возмущающей
силе. Следовательно, зависит от площади крыла <$. Чем
больше площадь крыла, тем труднее модель вывести из состоя-
ния равновесия, и наоборот, демпфирующий момент будет сдер-
живать быстрое восстановление моделью состояния равновесия.
Угол поперечного V крыла оказывает значительное влияние
на поперечную устойчивость модели. Как видно из рис. 34, в, при
скольжении крыла, имеющего положительный угол поперечного
V, полукрылья обтекаются потоком под разными углами атаки.
С увеличением угла поперечного V разница в углах атаки и подъ-
емных силах опущенного и поднятого полукрыльев также увели-
чивается. Вследствие этого будет иметь место увеличение восста-
навливающего момента. Современные радиоуправляемые модели
планеров имеют обычно угол поперечного V в интервале от 2 до
8 град.
Величина удлинения крыла к оказывает влияние на попереч-
ную устойчивость модели. Чем больше удлинение крыла, тем на
большем плече действует восстанавливающая сила Д У, тем боль-
ше будет восстанавливающий момент и, следовательно, лучше по-
перечная устойчивость модели.
Путевое равновесие модели — это такое состояние ее в поле-
те, когда она не изменяет своего положения относительно верти-
кальной оси OY.
Условием путевого равновесия является равенство моментов
рыскания относительно оси OY, т. е. Af„ — Mv
1 ’ Уттпяп Улеп
53
Путевое равновесие модели обеспечивается аэродинамиче-
ской, геометрической и весовой симметрией модели относительно
оси OY.
Способность модели восстанавливать состояние путевого рав-
новесия называется путевой устойчивостью.
Для обеспечения путевой устойчивости предназначено верти-
кальное оперение модели. При вращении модели вокруг оси OY
на боковой поверхности фюзеляжа и вертикального оперения раз-
виваются аэродинамические силы, препятствующие вращению мо-
дели, т. е. возникает демпфирующий момент Л1лдем. С прекра-
щением вращения прекращается действие демпфирующего мо-
мента и остается восстанавливающий момент.
Величина восстанавливающего момента зависит от площади
вертикального оперения, соотношения боковых площадей носовой
и хвостовой частей фюзеляжа и положения центра тяжести.
Основная доля восстанавливающего момента создается вертикаль-
ным оперением. Благодаря наличию вертикального оперения мо-
дель, подобно флюгеру, стремится стать по потоку и тем самым
восстановить путевое равновесие.
Величина восстанавливающего момента может быть записана
следующим выражением (рис. 35):
^Увосст ~ ^в-° 'W ^Фнос а‘
Рассматривая путевое и поперечное равновесие модели, мож-
но заметить, что при нарушении путевого равновесия за счет не-
симметричного обтекания происходит нарушение поперечного рав-
новесия, и наоборот. Такое взаимное влияние поперечного и путе-
вого равновесия называется боковым равновесием.
Поперечная и путевая устойчивость раздельно не существу-
ют, так как проявление одного вида устойчивости сказывается на
другом. Совокупность поперечной и путевой устойчивости назы-
вается боковой устойчивостью.
Для обеспечения нормальной боковой устойчивости недоста-
точно еще того, чтобы модель обладала поперечной и путевой
устойчивостью. Необходимо, чтобы параметры той и другой на-
ходились в определенном соотношении.
Любое нарушение симметричного обтекания модели вызывает
появление скольжения. При полете со скольжением появляется
восстанавливающий момент Му, который стремится уничтожить
скольжение Скольжение должно быть ликвидировано как раз
в тот момент, когда будет выравнен крен.
Если модель обладает слишком большим вертикальным опе-
рением, то вследствие большой путевой устойчивости скольжение
ликвидируется задолго до того, как восстанавливающий момент
Мх успеет устранить крен. Отсутствие скольжения не дает воз-
можности развитию восстанавливающего момента Мх. Модель
с креном будет описывать вираж, причем внешнее крыло модели
с большей скоростью, и, следовательно, на нем будет развиваться
большая подъемная сила, что еще заметнее увеличит крен мо-
54
Рис, 35, Возникновение восстанавливающего момента при несимметричном путе-
вом обтекании модели
дели. С увеличением крена модель будет описывать все более
крутую спираль, которая может закончиться катастрофой. Такой
вид нарушения боковой устойчивости называется спиральной не-
устойчивостью модели (рис. 36).
Преобладание поперечной устойчивости над путевой (при
большом поперечном V крыла и малом вертикальном оперении)
может сопровождаться явлением колебательной неустойчивости.
Если восстанавливающий момент Му слишком мал, то модель
энергично устраняет крен и переходит положение равновесия.
При этом начинается скольжение в противоположную сторону,
которое, в свою очередь, устраняется моментом Мх и т. д. Модель
летит, раскачиваясь с крыла на крыло, по извилистой траектории
(рис. 37).
Соотношение поперечного и путевого восстанавливающих мо-
ментов, исключающих как спиральную, так и колебательную не-
устойчивость, является вполне определенным, однако величина
этого соотношения зависит не только от размеров и форм крыла,
55
Рис. 36. Спиральная неустойчи-
вость модели
вертикального оперения и фюзеляжа модели, но и от моментов
инерции модели относительно осей ОХ и OY. Теоретически этот
вопрос достаточно сложен и чаще всего решается эксперимен-
тально.
Статистическая обработка данных по хорошим моделям по-
зволила разработать метод для определения соотношений угла
поперечного V крыла, площади вертикального оперения, формы
и размеров фюзеляжа модели.
Сущность метода заключается в том, что строится проекция
модели на плоскость XOY (рис. 38).
56
Через точку, определяющую положение центра тяжести мо-
дели, проводится вертикальная линия, которая делит проекцию
модели на две части — носовую и хвостовую.
Силы, возникающие при несимметричном обтекании модели,
можно условно разделить на создающие дестабилизирующие и
стабилизирующие моменты. Величины этих сил обычно пропор-
циональны площадям тех поверхностей, на которые они действу-
ют, и, следовательно, дестабилизирующие и стабилизирующие мо-
менты, возникающие от этих сил, пропорциональны моментам этих
площадей.
Таким образом, момент площадей проекции модели на пло-
скость симметрии, лежащей слева от разделительной линии, оче-
видно будет пропорционален дестабилизирующему моменту носо-
вой части модели. А момент площадей проекции модели, лежа-
щей справа от разделительной линии, будет пропорционален ста-
билизирующему моменту модели.
Для облегчения нахождения момента площади достаточно
сложной конфигурации эту площадь обычно разбивают на ряд
простых фигур, у которых легко найти центр давления, или, что
то же самое, центр тяжести фигуры, и определить момент элемен-
тарной площадки. Сумма этих элементарных моментов дает мо-
мент площади необходимой сложной поверхности.
Отношение моментов площадей стабилизирующих и дестаби-
лизирующих достаточно точно характеризует боковую устойчи-
вость модели. Статистическая обработка по этому методу, хорошо
зарекомендовавших себя радиоуправляемых моделей планеров,
дает такое соотношение этих моментов:
S $хв 1хв е о
2 •Shoc 4ioc
Маневренность и управляемость. Для выполнения программы
полета, предусмотренной условиями проведения соревнований,
модель должна совершать различные маневры.
Маневр модели в общем случае — это любое изменение од-
ной или нескольких координат, характеризующих его положение
в пространстве.
Наиболее важными из параметров являются координаты цен-
тра тяжести модели, величина и направление вектора скорости.
Поэтому маневренностью называют обычно способность
модели изменять свое положение в пространстве, т. е. скорость,
высоту и направление полета. Показатели маневренности в этом
случае будут связаны с предельными значениями скорости и вы-
соты полета, с возможной быстротой изменения скорости по ве-
личине и направлению и характеризуются величиной перегрузок.
Для оценки маневренных характеристик обычно определяют-
ся диапазоны возможных скоростей и перегрузок. Величины пере-
грузок обычно ограничиваются допустимыми эксплуатационными
значениями, связанными с прочностью элементов конструкции мо-
дели, усилиями исполнительных механизмов и т. п. Перегруз-
57
к a — величина безразмерная и показывает, во сколько раз сумма
всех аэродинамических и инерционных сил, действующих на мо-
дель в данный момент, больше или меньше ее веса.
Надежное выполнение программы полета модели возможно
только в том случае, если модель обладает достаточной устойчи-
востью и управляемостью, чутко реагируя на отклонение опера-
тором ручек управления на пульте.
Под управляемостью модели понимается способность
ее выполнить по желанию оператора любой маневр, предусмотрен-
ный условиями соревнований.
Если в процессе управления моделью оператору приходится
совершать простые по характеру перемещения рычагов управле-
ния на пульте и при этом модель быстро и без заметных колеба-
ний изменяет параметры движения, то говорят, что модель обла-
дает хорошей управляемостью.
Между устойчивостью и управляемостью имеется определен-
ная связь, которую можно обнаружить, если рассмотреть поведе-
ние модели после отклонения органов управления.
Так как при отклонении рулей аэродинамические силы и мо-
менты, действующие на модель, изменяются, то отклонение рулей
можно рассматривать как некоторое возмущение, нарушающее
исходный режим полета. После отклонения рулей движение мо-
дели станет возмущенным по отношению к новому режиму, соот-
ветствующему отклоненному положению органов управления. Если
модель устойчива, то собственное возмущенное движение с тече-
нием времени будет затухать. Чем быстрее произойдет это затуха-
ние, тем точнее модель будет следить за отклонениями рулей, точ-
ней выдерживать новую траекторию полета и тем лучше будет ее
управляемость. При достаточном запасе устойчивости модели
упрощается характер перемещения рычагов управления и повы-
шается точность управления при выполнении различных маневров.
Маневренность модели определяется не только аэродинамиче-
скими и прочностными характеристиками, но и ее управляемостью.
Если модель имеет плохую управляемость в каком-либо режиме
полета, то это ограничивает ее маневренные возможности.
Требования устойчивости и управляемости модели иногда сов-
падают, иногда они противоречат друг другу. Так, например,
слишком передняя центровка наряду с увеличением продольной
устойчивости приводит к ухудшению важных характеристик
управляемости и маневренности, к увеличению потребных усилий
на исполнительных механизмах, к увеличению «заброса» в пере-
ходном процессе.
Принимая во внимание условия эксплуатации модели как
звена замкнутой управляемой системы «модель — оператор», при-
оритет при выборе тех или иных параметров следует отдавать
характеристикам управляемости. Только при хорошей управляе-
мости могут быть в полной мере реализованы все возможности
модели, заложенные в его аэродинамической схеме и конструкции.
Некоторое ухудшение устойчивости практически не снижает лет-
58
ных характеристик модели, а нарушение управляемости обычно
приводит к аварийным последствиям.
Выполнение различных маневров осуществляется с помощью
рулей. Рули выполняют следующие функции: балансируют модель
на определенных режимах полета и служат для временного на-
рушения балансировки с целью перевода модели с одного режима
полета на другой или для выполнения маневров. Все рулевые по-
верхности называются органами управления моделью. Для выпол-
нения различных тактических задач на радиоуправляемой модели
планера могут быть использованы руль высоты, руль направле-
ния, элероны, элевоны, интерцепторы, закрылки.
На моделях с обычной схемой управления поворот и балан-
сировку относительно поперечной оси OZ осуществляют рулями
высоты и часто полностью поворотным стабилизатором, относи-
тельно продольной оси ОХ — с помощью элеронов, расположенных
на задних частях крыла и отклоняющихся, как правило, в проти-
воположные стороны, относительно оси OY — с помощью руля по-
ворота.
Аэродинамический руль представляет собой обычно откло-
няющуюся часть аэродинамической поверхности модели — крыла,
стабилизатора, киля. При отклонении руля на аэродинамической
поверхности развивается дополнительная аэродинамическая сила,
которая, будучи приложена на некотором расстоянии от центра
тяжести модели, создает момент, необходимый для балансировки
и управления моделью относительно ее центра тяжести.
Действие рулей объясняется перераспределением давления на
руле и на неподвижной части аэродинамической поверхности,
оснащенной рулем. Если, например, отклонить руль высоты вниз
на какой-либо угол (рис. 39), то это вызовет дополнительное раз-
режение сверху стабилизатора и повышение давления внизу, что
приведет к созданию дополнительной подъемной силы на горизон-
тальном оперении. Дополнительная подъемная сила А У на гори-
зонтальном оперении создаст дополнительный момент относитель-
но центра тяжести и заставит модель совершить маневр, заду-
манный оператором.
Анализ упражнений, которые должна выполнять современная
радиоуправляемая модель планера, показывает, что наиболее
сложным является упражнение на достижение максимальной ско-
рости полета. Здесь модель должна иметь максимальную на-
G
грузку р = и минимальное сопротивление. Это означает, что
несущая поверхность должна иметь минимальную площадь и мак-
симальный вес (в пределах ограничений, предусмотренных прави-
лами соревнований). Но здесь возникает проблема буксировки
модели на леере. Для обеспечения взлетно-посадочных характе-
ристик модели, а также возможностей выполнения упражнений
на дальность и продолжительность полета требуется крыло с про-
филем, удовлетворяющим противоположным требованиям — полу-
59
Рис. 39. Принцип действия аэродина-
мических рулей
Рис. 41. Зависимость коэффициента
подъемной силы Су крыла от угла
атаки а при отклоненном щитке на
угол 61 = 15° и 62=40°
Рис. 42. Расположение интерцепто-
ров на крыле модели планера
Рис. 40. Виды механизации крыла:
а — исходный профиль; б — простой щи-
ток; в — выдвижной щиток; г — закрылок;
д — щелевой закрылок; е — отклоняемый
носок; ж — интерцепторы; 3 — тормозной
щиток; « — специальный щелевой поворот-
ный канал
чению больших скоростей планирования и минимальных скоростей
снижения, а это задача трудновыполнимая.
Поэтому при проектировании модели и выборе профилей кры-
ла стремятся в первую очередь обеспечить максимальную ско-
рость полета, а для решения остальных задач на крыле использу-
ют специальные устройства, называемые механизацией крыла.
60
Использование механизированного крыла (рис. 40, а) позво-
ляет значительно расширить диапазон режимов полета модели.
Суть механизации крыла состоит в том, что с помощью спе-
циальных приспособлений увеличивают кривизну профиля крыла,
а в некоторых случаях и площадь его. В результате изменяется
картина обтекания и увеличивается максимальное значение коэф-
фициента подъемной силы крыла.
Щитки, закрылки, отклоняемые носки крыла, интерцепторы,
элевоны и другие приспособления, обеспечивающие механизацию
крыла, делают, как правило, управляемыми в полете.
Щиток (рис. 40, б) представляет собой отклоняющуюся по-
верхность, которая в убранном положении примыкает к нижней
задней поверхности крыла. Увеличение СУмак0 при отклонении
щитка объясняется изменением формы профиля крыла, которое
можно условно свести к увеличению кривизны профиля и эффек-
тивного угла атаки. Иногда одновременно с отклонением щиток
сдвигается назад к задней кромке, тогда эффективность его по-
вышается за счет увеличения площади крыла (рис. 40, в). Углы
отклонения щитка выбирают в пределах 15—30°. На рис. 41 по-
казан график зависимости СУкр от угла отклонения щитков. При
отклонении щитка кривая СУщ = /(а) смещается влево в зависи-
мости от угла отклонения бщ. Рост коэффициента подъемной силы
профиля с отклоненным щитком вызывает значительное сопро-
тивление. Аэродинамическое качество крыла при этом уменьшает-
ся. Приращение Суа1 составляет в этом случае около 60 % ис»
ходного. Щиток является одним из самых простых средств меха-
низации крыла. В практике авиамодельного спорта мало приме-
няется.
Закрылок (см. рис. 40, г, д) представляет собой отклоняю-
щуюся часть задней кромки крыла. Использование закрылка уве-
личивает коэффициент подъемной силы профиля CVa8l№ за счет
увеличения кривизны профиля. Различают закрылки простые и
щелевые (многощелевые). Специально спрофилированная щель
между носиком закрылка и крылом значительно увеличивает эф-
фективность закрылка за счет перетекания воздуха с нижней по-
верхности крыла на верхнюю с большой скоростью через сущест-
вующую щель. Это перетекание предотвращает преждевременный
срыв потока обтекания на профиле большой кривизны. Эффек-
тивность щелевого закрылка несколько выше нещелевого. Исполь-
зование закрылков выгоднее, чем щитков, так как рост коэффици-
ента лобового сопротивления Сх несколько меньше.
Закрылки, как и щитки, обычно устанавливаются на крыле,
на участке между элеронами и фюзеляжем модели. На крыльях
большого удлинения щитки и закрылки часто разрезают на сек-
ции для обеспечения их работоспособности при прогибе крыла.
Графики изменения Су при отклонении закрылков похожи на ана-
логичные зависимости профиля крыла со щитками.
Отклоняемый носок (см. рис. 40, е) применяется на крыльях
61
с тонким профилем и малым радиусом носика профиля, которые
могут использоваться для достижения высоких скоростей полета.
Этот вид механизации крыла позволяет обеспечить безотрывное
обтекание профиля на больших углах атаки. Изменяя угол откло-
нения носика, можно получить значительный прирост коэффици-
ента подъемной силы профиля крыла без заметного увеличения
коэффициента лобового сопротивления. Аэродинамическое качест-
во при этом будет возрастать. Искривление профиля отклонением
носика мало изменяет также критический угол атаки.
Интерцепторы (рис. 40, ж) представляют собой небольшие
пластины, выдвигаемые или поворачиваемые поперек потока об-
текания на верхней или на верхней и нижней поверхностях крыла
для срыва потока обтекания. Их применяют для снижения скоро-
сти планирования при заходе на посадку. На крыле интерцепторы
располагают, как правило, на участке между элероном и фюзеля-
жем модели в зоне наибольшей толщины профиля крыла (рис. 42).
Для сохранения эффективности работы хвостового оперения мо-
дели интерцепторы следует располагать так, чтобы вихревой след
от сорванного потока не захватывал хвостовое оперение, что очень
существенно для управляемости модели на малых скоростях
полета.
Элевоны чаще всего применяют на моделях планеров, постро-
енных по схемам «бесхвостка» и «утка», и представляют собой
аэродинамические рули, совмещающие функции управления по
крену (элероны) и по тангажу (рули высоты). Возможно исполь-
зование элевонов и на моделях планеров, построенных по нор-
мальной схеме, для расширения возможностей модели при выпол-
нении маневров. Совмещение функций руля высоты и элеронов од-
ной и той же аэродинамической рулевой поверхностью обеспечи-
вается специальным механическим устройством, так называемым
смесителем, который позволяет отклонять эту поверхность двумя
отдельными исполнительными механизмами. Исполнительный ме-
ханизм руля высоты отклоняет элевоны согласно, т. е. в одном на-
правлении. Исполнительный механизм управления по крену откло-
няет элевоны в противоположных направлениях.
Летно-тактические характеристики модели можно изменять
также с помощью различных тормозных щитков (см. рис. 40, з),
тормозных парашютов, специальных каналов для обеспечения пе-
ретекания воздушного потока с нижней поверхности крыла на
верхнюю (см. рис. 40, и) и других средств аэродинамического воз-
действия. Как правило, эти виды управления применяются на спе-
циальных моделях, например на рекордных.
Любой управляемый орган модели выполняет свою основную
функцию, но при этом возникают различные вторичные эффекты,
которые могут быть вредными, и для их устранения требуется
вмешательство оператора. Так элерон, отклоненный вниз, особен-
но при больших углах атаки, вызывает в три раза большее со-
противление, чем при отклонении вверх на тот же угол. На прак-
тике это вызывает разворот модели в сторону отклоненного вниз
62
Рис. 43. Взаимное влияние крыла и фюзеляжа модели
элерона, что в случае необходимости полета по прямой вызовет
потребность в парировании этого разворачивающего момента ру-
лем направления.
Любые манипуляции рулями вызывают увеличение сопротив-
ления модели и, следовательно, уменьшение скорости и аэродина-
мического качества. Эти явления являются крайне нежелательны-
ми на спортивных моделях, где все подчинено достижению наи-
высших результатов.
Для устранения вредного вторичного эффекта при управлении
моделью по крену с помощью элеронов конструкцию системы
управления элеронами проектируют таким образом, чтобы опу-
скающийся элерон отклонялся на меньший угол, чем поднимаю-
щийся. Благодаря этому коэффициент подъемной силы крыла с
опущенным элероном возрастает на меньшую величину. Индук-
тивное сопротивление полукрыла с опущенным элероном возра-
стает меньше, следовательно, меньше будет и разворачивающий
момент. На крыле с поднятым элероном увеличивается профиль-
ное сопротивление, так как часть элерона выходит за пределы
безотрывного обтекания.
При дифференциальном (различном) обтекании увеличивает-
ся кренящий момент в сторону поднятого элерона и уменьшается
разворачивающий момент. Разница в углах отклонения элеронов
может составить более 50 %. Практически реализация дифферен-
циального отклонения элеронов осуществляется с помощью специ-
альной конструкции качалок в системе управления.
Понятие об аэродинамической интерференции. Исследования
в аэродинамических трубах показали, что полное сопротивление
63
Рис. 44. Зализы для уменьшения со-
противления интерференции
Рис. 45. Прирост сопротивления хво-
стового оперения за счет интерферен-
ции между фюзеляжем, вертикаль-
ным и горизонтальным оперением
при различных компоновочных схе-
мах
аэродинамической модели летательного аппарата нельзя рассма-
тривать как арифметическую сумму сопротивлений отдельных его
частей. Тела, близко расположенные друг от друга в воздушном
потоке, оказывают взаимное влияние на обтекание. При этом из-
64
меняются линии токов и, как следствие, распределение сил давле-
ния и трения на поверхностях тел, а значит, аэродинамической си-
лы в целом. Это взаимное влияние частей аэродинамической моде-
ли называется интерференцией.
В большинстве случаев интерференция увеличивает лобовое
сопротивление модели. Она проявляется, как правило, на стыках
тех частей модели, где может возникнуть интенсивный срыв вих-
рей, а именно: между крылом и фюзеляжем, между фюзеляжем и
оперением. Одной из причин появления этого сопротивления явля-
ется то, что боковая поверхность фюзеляжа и поверхность крыла
или оперения в месте их стыка образуют канал переменного се-
чения. На входе в этот канал поток как бы сужается, и скорость
потока увеличивается. В расширяющейся части канала скорость
потока уменьшается, а давление увеличивается (рис. 43). Под дей-
ствием разницы давлений в сечениях б—б и в—в канала погра-
ничный слой будет перетекать из зоны высокого давления в зону
низкого давления, т. е. в сторону, противоположную движению
основного потока обтекания. Таким образом создаются условия
для отрыва пограничного слоя и образования вихревой зоны.
В результате срыва потока завихренная зона в месте сочлене-
ния крыла (оперения) и фюзеляжа увеличивается, давление в этой
области уменьшается, следовательно, разность давлений перед
крылом и позади крыла увеличивается. В итоге появляется допол-
нительное лобовое сопротивление, возникающее вследствие взаим-
ного влияния частей модели.
Как показывают опыты, величина этого сопротивления зави-
сит от формы фюзеляжа в местах стыка с крылом и оперением,
от места расположения крыла и оперения по высоте фюзеляжа.
Для радиоуправляемых моделей планеров с поперечным сечением
фюзеляжа, близким к сечению тела вращения, верхнее располо-
жение крыла является наиболее выгодным, т. е. вызывающим наи-
меньшую интерференцию.
Основной мерой уменьшения влияния интерференции являет-
ся заполнение зоны расширения потока установкой зализов
(рис. 44).
Серьезное влияние на величину сопротивления интерферен-
ции в зоне оперения оказывает конструктивная схема. На основа-
нии испытаний в аэродинамической трубе определена величина
сопротивления интерференции между элементами оперения и фю-
зеляжем в процентах от профильного сопротивления оперения
(рис. 45).
Наименьший прирост сопротивления интерференции имеет
V-образное оперение. Хорошие параметры имеет нормальное опе-
рение с развитыми зализами, а также Т-образное оперение.
Интерференция всех частей модели может составлять до 8—
15 % от СХвр модели.
3 Зак. 796
АЭРОДИНАМИЧЕСКИЙ РАСЧЕТ
На основании «Правил проведения соревнований по авиамо-
дельному спорту», а также статистических данных по параметрам
моделей рассматриваемого класса, показавших лучшие результа-
ты на соревнованиях, и данных аэродинамики производится пред-
варительная разработка проекта радиоуправляемой модели пла-
нера. При разработке проекта следует учитывать технологические
возможности, используемые материалы, габариты и массу радио-
аппаратуры управления, особенности эксплуатации и транспор-
тирования модели.
С учетом перечисленных факторов выполняют конструктив-
ную разработку модели, определяют ее геометрические очертания
и размеры. На основании требований к полетным характеристи-
кам модели выбирают профили крыла и оперения. Затем произво-
дят аэродинамический расчет модели, основной целью которого
является определение полетных характеристик модели.
Расчет и построение поляры. Ознакомившись с работой отдель-
ных элементов модели, рассмотрим модель в целом, находящуюся
в потоке.
Модель кроме крыла обычно имеет еще и другие элементы:
фюзеляж, хвостовое оперение, антенну и различные детали обору-
дования. Все эти элементы увеличивают лобовое сопротивление
модели и практически очень мало влияют на величину подъемной
силы крыла.
Подъемная сила модели Ум складывается из подъемной силы
крыла, фюзеляжа и горизонтального оперения:
Ум= Укр~Ь Уф+ Уг.о-
Подъемная сила крыла модели равна:
Y ___с . .S
1 к₽ — 2 °'
Некоторая часть площади крыла занята фюзеляжем. Эта пло-
щадь выключена из работы, однако при расчетах используют ее
полную площадь, так как полагают, что подъемная сила, созда-
ваемая фюзеляжем и остальными элементами модели, примерно
компенсирует потери подъемной силы участка крыла, занятую
фюзеляжем.
Следовательно, можно считать, что подъемная сила модели
равна подъемной силе крыла: Ум = УКр-
66
Коэффициент подъемной силы модели в таком случае равен
коэффициенту подъемной силы крыла: Cyjt = СУкр.
На основании этих рассуждений можно заключить, что основ-
ным элементом, создающим подъемную силу, является крыло.
Поэтому крыло называют несущим элементом модели. Все осталь-
ные элементы модели подъемной силы не создают, и их принято
называть ненесущими элементами.
Сопротивление модели складывается из сопротивлений всех
элементов конструкции, находящихся в воздушном потоке. Сила
этого сопротивления
Q — Qkp+ <?ф+Qr.o+QB.o+Рант+<?пр.э.
Сопротивление всех ненесущих элементов модели (фюзеляжа
<?Ф, горизонтального оперения Qr. о, вертикального оперения QB. о,
антенны Qam и прочих элементов Qnp. 9 называют вредным
сопротивлением и обозначают QBp.
Предыдущее выражение можно записать тогда следующим
образом:
Q — Qkp+Qbp,
где
QBp = Фф4" Qf.o~I~Qb.o~I~ QaBT“b Qnp.3-
Величина QBP практически остается постоянной, не зависящей
от угла атаки а (вплоть до углов, близких к критическим).
Значительную долю вредного сопротивления составляет со-
противление фюзеляжа модели. Величина этого сопротивления во
многом зависит от положения его в воздушном потоке. Для умень-
шения сопротивления фюзеляжа на наиболее часто применяемых
режимах полета крыло крепят к фюзеляжу под некоторым углом,
который называют установочным. Этот угол образуется
продольной осью модели и корневой хордой профиля крыла.
Для количественной оценки величины вредного сопротивления
произведем расчет величин сопротивлений каждого ненесущего
элемента модели.
Сопротивление любого тела, находящегося в воздушном по-
токе, можно определить, если известен коэффициент аэродинами-
ческого совершенства этого тела СЖт и размеры максимальной
лобовой площади его ST:
Q^cx^-^- sv, н,
роа
где -------скоростной напор воздушного потока, Н-м2.
Сумма этих сопротивлений отдельных несущих элементов мо-
дели и даст величину вредного сопротивления модели QBp. При
этом величины коэффициентов Сх для каждого элемента могут
быть взяты из табл. 1. Площади этих элементов определяют по
теоретическому чертежу модели.
з*
67
Таблица 2
СУ X
5 8 10 12 15 18 20
0 0 0 0 0 0 0 0
0,2 0,0025 0,0015 0,0012 0,0010 0,0008 0,0007 0,0006
0,4 0,0102 0,0063 0,0051 0,0042 0,0034 0,0028 0,0026
0,6 0,0229 0,0140 0,0110 0,0095 0,0076 0,0064 0,0057
0,8 0,0408 0,0250 0,0200 0,0170 0,0136 0,0113 0,0102
1,0 0,0637 0,0390 0,0310 0,0260 0,0212 0,0177 0,0159
1,2 0,0917 0,0570 0,0460 0,0380 0,0306 0,0255 0,0229
1,4 0,1248 0,0770 0,0620 0,0520 0,0416 0,0347 0,0312
1,6 0,1631 0,1010 0,0850 0,0680 0,0544 0,0453 0,0408
Для упрощения дальнейших расчетов удобно перейти к без-
размерному коэффициенту, характеризующему вредное сопротив-
ление модели. Обычно в авиационной технике вредное сопротив-
ление относят к площади крыла, для того чтобы можно было ко-
эффициент вредного сопротивления модели складывать с сопро-
тивлением крыла. Для этого разделим величину QBP на-^-к-^кр.
В результате преобразования получим коэффициент СХвр, ха-
рактеризующий вредное сопротивление модели:
С — $п с**
Лвр ” SKP •
Для того чтобы учесть сопротивление интерференции между
элементами модели, увеличим на 15 % величину вредного сопро-
тивления.
При подсчете сопротивления горизонтального и вертикального
оперения следует брать не миделево сечение, а площадь самого
оперения, и при определении коэффициентов сопротивления СХро
и СХво берут соответствующую величину того профиля, из кото-
рого набирают поверхности оперения. Как правило, на современ-
ных радиоуправляемых моделях планеров оперение набирают из
симметричных профилей, а работает оно при углах атаки, близ-
ких к 0.
Итак, лобовое сопротивление модели, выраженное в коэффи-
циентах, составит:
= С*Кр + CcBP + Осин,»
где
С, =С, -0,15.
*ИНТ •К'ВР 9
Наиболее полную аэродинамическую характеристику модели
дает поляра модели.
68
Как мы выяснили, коэффициент подъемной силы модели Cv
равняется коэффициенту подъемной силы крыла С„кр, а коэффи-
циент лобового сопротивления Сх больше коэффициента сопро-
тивления крыла СХкр на величину СХвр, т. е.
Су ~ Сукр' С* = С*кр +1’15
По аналогии с крылом нетрудно построить графическую зави-
симость коэффициентов подъемной силы и сопротивления модели
по углу атаки. Этот график будет представлять собой поляру
модели.
Если на одном графике построить поляру изолированного ре-
ального крыла и поляру модели, то легко убедиться, что поляра
модели эквидистантна поляре крыла и сдвинута вправо по оси Сх
на величину 1,15 СХрр. Практически поляру модели строят на поля-
ре крыла модели. Для этого начало координат графика смещают
влево на величину! 15 СХврмодели. Затем производят новую размет-
ку оси Сх. В дальнейших расчетах все отсчеты Сх необходимо де-
лать от нового начала координат (рис. 46).
Аэродинамические характеристики и характерные углы атаки
на поляре модели определяют так же, как это делалось на поляре
крыла.
Отношение подъемной силы к силе лобового сопротивления
модели при любом угле атаки называют аэродинамиче-
ским качеством модели.
к = JL. — су =____________Он_________ctg ©
Лмод Q - Сх СХкр+1,15СХвр CrgfcL
Здесь угол 0 является углом планирования.
Из приведенного уравнения получаем очень важное следствие:
Сд
если изменяем отношение-уА, то в уравнении все другие отноше-
ния изменяются во столько же раз. Или другими словами: чем
меньше вредное сопротивление модели, тем выше ее аэродинами-
ческие характеристики.
Еще один существенный вывод из того же уравнения заклю-
чается в том, что аэродинамическое качество модели при любом
угле атаки меньше аэродинамического качества крыла.
По аналогии с изолированным крылом на поляре модели мож-
но отметить ряд характерных точек, которым соответствуют опре-
деленные режимы полета модели.
Как можно заметить из поляры, величина вредного сопротив-
ления модели на наиболее часто применяемых режимах полета
составляет значительную часть полного сопротивления модели.
Поэтому в процессе проектирования основной задачей является
выбор таких форм крыла (в плане), фюзеляжа, оперения и других
деталей модели, чтобы они имели наименьшее сопротивление.
Значительную часть вредного сопротивления модели создает
фюзеляж.
69
Рис. 47. Фазы полета модели планера
70
Чаще всего современные радиоуправляемые модели планеров
имеют веретенообразную форму при виде сбоку, а в сечении явля-
ются телом вращения. Сопротивление формы мало изменяется с
увеличением удлинения фюзеляжа. Основную долю сопротивления
составляет сопротивление трения. Оно снижается с уменьшением
поверхности фюзеляжа.
Поэтому фюзеляж модели должен иметь минимальные разме-
ры, но внутренний объем его должен быть достаточным для раз-
мещения радиоаппаратуры, источников питания, рулевых механиз-
мов и полезных грузов.
Исследования в аэродинамических трубах с малой турбулент-
ностью потока показывают, что наиболее выгоден в отношении
сопротивления фюзеляж с достаточно заостренной носовой частью
и тонкой хвостовой балкой, имеющей плавный переход, который
соединяет ее с передней частью.
Тщательные исследования сопротивления фюзеляжа с крылом
показали, что коэффициент сопротивления модели с верхним рас-
положением крыла на 13 % меньше, чем модели со средним рас-
положением крыла. Кроме того, коэффициент подъемной силы мо-
дели высокоплана имеет большую величину.
У модели такой конструкции наблюдается также более бла-
гоприятная картина перехода ламинарного обтекания к турбулент-
ному. Отрыв пограничного слоя происходит в задней части про-
филя крыла, в то время как у модели со средним расположением
крыла отрыв пограничного слоя начинается примерно в середине
профиля, а затем клинообразно и интенсивно распространяется
вдоль крыла.
Хвостовое оперение модели практически не создает подъем-
ной силы, поэтому, конструктивно обеспечивая свое назначение,
оно должно обладать наименьшим аэродинамическим сопротивле-
нием. Для уменьшения сопротивления модели необходимо обеспе-
чить минимальные щели между неподвижными поверхностями
стабилизатора (или киля) и рулями (высоты и направления),
а также рационально сконструировать и разместить качалки си-
стемы управления.
Уменьшению вредного сопротивления модели способствует
удаление из потока различных конструктивных элементов, вы-
ступающих деталей и надстроек. В процессе конструирования и
эксплуатации модели следует обратить внимание на подгонку
элементов модели, отделяемых друг от друга по конструктивным,
технологическим или эксплуатационным соображениям.
Современные радиоуправляемые модели планеров имеют со-
вершенные в аэродинамическом отношении формы. Большая часть
сопротивления модели приходится на долю сопротивления трения.
Величина сопротивления трения в значительной мере зависит от
состояния поверхности модели, которую для обеспечения наимень-
шей шероховатости шлифуют и полируют.
Искажение внешних форм модели, появление вмятин, шеро-
ховатостей в процессе эксплуатации модели или ее ремонта мо-
71
гут оказать влияние на сопротивление модели. Даже незначитель-
ное повреждение поверхности крыла может нарушить ламинарное
обтекание и вызвать преждевременный переход к турбулентно-
му и, следовательно, увеличение сопротивления.
Режимы полета. Полет радиоуправляемой модели планера со-
стоит обычно из двух фаз (рис. 47) — взлета и планирования.
Планированием называют равномерное установившееся движение
модели по наклонной траектории. Планирование модели является
основным режимом полета.
Угол, образованный траекторией планирования и линией го-
ризонта, называется углом планирования модели 0ПЛ.
Планирование модели с углами 0ПЛ, превышающим 30°, называет-
ся пикированием.
Для определения параметров движения модели рассмотрим
силы, действующие на модель в обеих фазах полета. Рассмотре-
ние взаимодействия сил начнем с режима планирования.
Планирование. При планировании на модель действует
сила веса модели G и полная аэродинамическая сила R (рис. 48).
Сила веса модели направлена вертикально вниз и может быть
представлена в виде составляющих Gi и О2. Сила (?i направлена
перпендикулярно траектории планирования. Сила О2 направлена
вдоль траектории планирования.
Полная аэродинамическая сила R может быть представлена
в виде составляющих У и Q. Составляющая У представляет собой
подъемную силу модели. Составляющая Q является полным со-
противлением модели.
Как видно из схемы сил, действующих на модель при плани-
ровании, подъемная сила У уравновешивается силой Qj. Так как
силы У и Qi равны между собой: Y—Q\ = G • cos0, то можно сделать
вывод, что движение модели будет прямолинейным.
Сила сопротивления модели Q уравновешена силой О2. Таким
образом, силы, действующие вдоль траектории, равны между со-
бой: Q=G2 = G • sin0, следовательно, движение по траектории бу-
дет равномерным.
Так как соответствующие составляющие сил веса G и полной
аэродинамической силы R равны по величине и направлены проти-
воположно друг другу, то можно заключить, что при установив-
шемся режиме планирования полная аэродинамическая сила урав-
новешивает силу веса модели.
Система сил уравновешена. Любое изменение одной из сил
этой системы вызовет изменение других сил. Так, увеличение подъ-
емной силы У вызовет увеличение составляющей G\, а это может
произойти только при уменьшении угла планирования 0.
Составляющая силы веса G2 при планировании выполняет
роль тяги. Если угол планирования увеличивается, то возраста-
ют последовательно зависимые друг от друга скорость движения
по траектории и сила сопротивления Q, которая уравновесит О2,
и движение снова станет равномерным.
При рассмотрении схемы сил, действующих на модель в ре-
72
73
tge =
жиме планирования, не трудно выявить соотношения, связываю-
щие эти силы и скорости модели:
С s
Q _ х 2 к₽ _ Сх _ 1
Г ри2 С„ К •
2 °кр
Расстояние L, которое может пролететь модель с высоты Н за
время I, может быть определено из соотношения
g t L угор К*
Скорость планирования модели по траектории находят из со-
отношения
Prop = v • COS 0.
Угол планирования современных моделей планеров обычно
меньше 10° и, следовательно, cos0=l, а тогда можно считать, что
Угорек. Скорость планирования модели мало отличается от гори-
зонтальной скорости модели.
Полная аэродинамическая сила R, равная весу модели G, мо-
жет быть определена из соотношения
r = g =
cos©
Ввиду малости угла планирования полагаем, что cos0?=«l,
тогда =
Из выражения подъемной силы модели
можем определить потребную скорость планирования:
_ 1/"g72“_ Гв~ /И-
v~ |/ poscy - v s • у су ' V р0 •
В этом выражении: р0 — плотность воздуха (р0= 1,225 кг/м3);
---удельная нагрузка на крыло модели (Н • м~2).
/ 2
Так как I/ -т-ннс- = 1.278, то формула расчета скорости пла-
у I
пирования модели по траектории приобретает следующий вид:
Скорость снижения модели vy может быть определена из по-
лученных ранее соотношений:
1 __
К Су УГОР
74
Учитывая, что Vrop—v, получим выражение для определения
вертикальной скорости модели:
Сх 1
V»~V' С„ ~V' К'
Подставляем в полученное выражение значение скорости пла
пирования и получаем формулу для вычисления скорости сниже
ния модели:
1 /С5
Величина 1/ характеризует скорость снижения модели,
Y G „
так же как и величина удельной нагрузки на крыло -g-. Мини-
мальная скорость снижения модели соответствует наименьшей ве-
С2
личине Этим соотношением пользуются при подборе профи-
лей крыла модели и для сравнения их.
Режим полета модели с максимальным качеством (наивыгод-
нейший режим) и режим с минимальной скоростью снижения
(экономический режим) совершаются при разных углах атаки
Сх
крыла и характеризуются соответственно соотношениями и
Q v
Удобно наблюдать эти зависимости на графике для конкрет-
ного профиля крыла модели (рис. 49). Построив такие графики
для различных профилей крыла, нетрудно выбрать наиболее пред-
почтительный профиль крыла. Ясно, что такие характеристики
профиля необходимо строить для конкретного крыла с учетом вы-
бранного удлинения А..
Анализ полученных выражений для скорости планирования v
и скорости снижения vv позволяет сделать следующие выводы:
при увеличении подъемной силы крыла Cv (увеличении угла
атаки) скорость планирования v уменьшается;
. G
при увеличении удельной нагрузки на крыло скорость
планирования v увеличивается, так как при увеличении нагрузки
в два раза скорость планирования увеличится в V2 = 1,4 раза;
при увеличении угла планирования 0 скорость планирова-
ния v и скорость снижения vv увеличиваются;
угол планирования не зависит от полетного веса модели при
постоянном угле атаки крыла и, следовательно, постоянном ка-
честве;
для уменьшения угла планирования следует увеличивать
аэродинамическое качество модели и уменьшать удельную нагруз-
ку на крыло.
75
Расстояние, которое может пролететь модель с данной высо-
ты, является одной из важнейших характеристик модели.
Вернемся к рис. 48 и определим, какое расстояние сможет про-
лететь модель с высоты Н, если угол планирования ее равен 0.
Из рисунка видно, что расстояние L, проходимое моделью,
можно определить из следующей формулы:
Так как
Н
tg0 = 4-, то L-—^- = HK.
л Л
Из полученного выражения видно, что дальность планирова-
ния модели тем больше, чем больше высота начала планирования
и выше аэродинамическое качество модели. Наибольшая даль-
ность полета может быть достигнута при наивыгоднейшем угле
атаки.
Выражение для дальности планирования справедливо лишь
при «идеальных» условиях, т. е. при отсутствии ветра и вертикаль-
ных воздушных потоков.
Дальность полета можно также определить через скорость
планирования и время, в течение которого совершается полет:
L = Vropt,
где Drop=t> — скорость планирования.
При наличии ветра дальность полета изменяется, так как
относительно земли модель будет перемещаться со скоростью,
складывающейся из скорости ветра и скорости планирования.
Здесь необходимо учитывать направление ветра.
Дальность планирования в этом случае можно рассчитать по
формулам:
£= (o-f-Оветра) -t — при попутном ветре;
L= («—у ветра) — при встречном ветре.
Наиболее полную характеристику эксплуатационных пара-
метров радиоуправляемой модели планера дает график, показы-
вающий зависимость вертикальной скорости снижения модели от
горизонтальной скорости при различных углах атаки и называе-
мый скоростной полярой модели (или указательницей
глиссад планирования).
Такой график позволяет быстро, не производя громоздких вы-
числений, решать различные тактические задачи, которые возни-
кают у спортсмена в процессе соревнований с изменением условий
соревнований.
Скоростную поляру модели планера строят обычно по резуль-
татам расчета горизонтальных и вертикальных скоростей модели.
На горизонтальной оси графика откладывают горизонтальную ско-
76
рость модели, а на вертикальной — скорость снижения модели.
Для удобства пользования графиком масштаб изображения вер-
тикальной скорости выбирают в 5 раз большим, чем масштаб ско-
рости планирования. На рис. 50 изображена скоростная поляра
произвольной модели планера. На скоростной поляре можно отме-
тить ряд характерных точек, определяющих скорости и углы ата-
ки планирования.
Точка А на графике характеризует минимальную скорость
планирования модели и может быть определена проведением ка-
сательной к кривой, параллельной оси вертикальных скоростей.
Полет происходит при угле атаки акрит и характеризуется крайней
неустойчивостью.
Точка Б на графике, лежащая на горизонтали касательной к
кривой, характеризует наименьшую скорость снижения модели.
Этот режим полета называется экономическим. При угле
атаки, соответствующем экономическому режиму, достигается мак-
симальная продолжительность полета.
Касательная к кривой, проведенная из начала координат гра-
фика, совпадает с точкой В, характеризующей режим полета с
максимальным качеством. Режим этот называется наивыгод-
нейшим. Угол атаки, характеризующий этот режим полета, и
скорость планирования при этом угле атаки также называют наи-
77
выгоднейшими. Угол снижения 0 при планировании модели на
наивыгоднейшем режиме минимальный, а дальность полета мак-
симальная.
Соединив любую точку кривой с началом координат графика,
можем получить промежуточный режим планирования модели.
Нетрудно заметить, что любая прямая, проходящая через на-
чало координат графика и пересекающая кривую, показывает на-
клон к горизонту траектории планирования модели при различных
углах атаки.
Скоростная поляра модели поможет определить наивыгодней-
шие режимы полета не только в спокойном воздухе, но и при на-
личии встречного или попутного ветра, при полетах в условиях
восходящих и нисходящих воздушных потоков.
Для определения наивыгоднейшего режима полета достаточ-
но перенести начало координат графика в соответствующем на-
правлении по горизонтальной или вертикальной оси и провести
касательную к кривой от нового начала координат.
Например, модель летит против ветра. Для определения наи-
выгоднейшего режима планирования в этих условиях начало коор-
динат смещают по горизонтали вправо на отметку, соответствую-
щую г»гор=1’ветра, и проводим из этой точки касательную к кривой.
Точка касания на графике покажет наивыгоднейший угол ата-
ки си полета, горизонтальную скорость модели гн и скорость сни-
жения vyi.
При полете модели по ветру необходимо сместить начало ко-
ординат влево на отметку, соответствующую скорости ветра, и,
произведя соответствующие построения, определить наивыгодней-
ший режим полета.
Аналогично определяют наивыгоднейшие режимы для условий
полета в восходящих и нисходящих воздушных потоках. Для вос-
ходящих потоков начало координат смещают по оси vy вниз, а для
нисходящих — вверх на соответствующую отметку и, проведя ка-
сательную к кривой, определяют наивыгоднейшие режимы полета.
Взлет модели на леере. Начало планирующего поле-
та модели происходит с определенной высоты. Для подъема пла-
нера на эту высоту моделисты обычно используют несколько ме-
тодов. Наиболее распространенным методом является буксировка
планера на леере — длинном прочном шнуре, который закрепля-
ют на специальном устройстве модели. Помощник спортсмена, пе-
редвигаясь в направлении взлета, натягивает леер и сообщает мо-
дели поступательное движение.
На крыле модели развивается подъемная сила, которая за-
ставляет модель подниматься вверх по криволинейной траекто-
рии. После достижения необходимой высоты помощник ослабляет
натяжение леера и тот отделяется от модели. Отделение леера от
модели может осуществлять также спортсмен-оператор с помощью
радиокоманды. Планирующий полет начинается с момента осво-
бождения модели от леера.
В качестве «буксировщика» может использоваться энергия,
78
накопленная при растяжении специального резинового амортиза-
тора, входящего в конструкцию леера.
Иногда для осуществления взлета модели применяют специ-
альную электролебедку, которая с помощью электродвигателя на-
матывает леер на рабочий барабан. Скоростью намотки леера
управляет оператор с помощью педального реостата. Второй ко-
нец леера прикреплен к буксировочным устройствам модели.
Правила проведения соревнований допускают также исполь-
зование для набора высоты моделью специальной двигательной
установки, представляющей собой микродвигатель внутреннего
сгорания поршневого типа с ограниченным рабочим объемом и
временем работы.
Подъем модели с помощью простого леера, леера с амортиза-
тором или двигательной установки происходит по-разному.
Рассмотрение сил, возникающих при подъеме модели, важно
для расчета прочности модели, так как перегрузки при взлете
имеют значительную величину, особенно при буксировке модели
на леере. Знать величину этих сил необходимо также для выбора
правильных действий оператора при осуществлении взлета моде-
ли. Всякое нарушение взлета обусловлено, как известно, внешни-
ми силами. Силы эти могут действовать очень короткое время,
например, резкая манипуляция рулем высоты при буксировке,
но и кратковременной перегрузки может оказаться достаточно для
того, чтобы разрушить модель.
Скорость и направление воздушного потока о, обтекающего
модель, являются геометрической суммой векторов поступатель-
ной скорости буксировщика Об. скорости ветра ов и скорости мо-
дели по траектории ом. Схема сложения векторов скоростей дви-
жения системы «буксировщик — модель» изображена на рис. 51.
Угол между вектором скорости потока, обтекающего модель,
и хордой крыла есть не что иное, как угол атаки крыла а.
Всегда желательно иметь в режиме взлета на леере угол атаки,
соответствующий наибольшей величине коэффициента подъемной
силы крыла или близкий к нему.
Взлет модели планера начинается с того, что выпускающий
сообщает ей некоторую скорость. Затем следует этап разгона до
определенной скорости и переход в режим набора высоты. Взлет
является неустановившимся видом движения модели и характе-
ризуется наличием неуравновешенных сил и ускорений.
Для удобства дальнейших рассуждений силу натяжения леера
будем считать постоянной.
Из схемы сил, действующих на модель планера в наборе вы-
соты, видно, что в режиме набора высоты на леере на модель дей-
ствуют силы веса G и сила натяжения леера Рл-
Так как модель летит с углом подъема 0, то, разложив силу
веса на составляющие, направленные вдоль траектории полета и
перпендикулярно ей, получим
Gi = G«cos0; G2=G«sin0.
79
Рис. 51. Буксировка модели на леере:
а — схема действующих сил; б — диаграмма скоростей
На модель действует подъемная сила Y, возникающая на
крыле при движении по траектории взлета vy, и сила сопротивле-
ния X. Подъемная сила Y действует перпендикулярно траектории
и направлена противоположно силе Gj. Сила сопротивления X на-
правлена вдоль траектории движения модели и действует в на-
правлении, совпадающем с составляющей G2.
Сила натяжения леера Ра приложена к модели под углом ф
и может быть разложена на составляющие:
Р1=Рл-8Шф; Р2 = Рл,СОЗ'ф.
Составляющая Pi действует перпендикулярно траектории по-
лета и совпадает по направлению с силой Gt. Составляющая Р2
действует вдоль траектории и направлена в сторону, противопо-
ложную действию сил G2 и X.
Таким образом, при движении модели планера по траектории
набора высоты на леере необходимым условием является равно-
весие сил, действующих вдоль траектории движения и перпенди-
кулярно ей:
P2=G2+X=G-sin0+X;
y=Pi4-Gi=Pa-sini|j+G-cos 0.
Нетрудно заметить, что в режиме набора высоты моделью на
леере вертикальные нагрузки на крыло существенно возрастают
за счет составляющей силы тяги леера Р1 = РЛ’81Пф, которая,
складываясь с составляющей силы веса Gi-— G • cos 0, вызывает
необходимость увеличения подъемной силы крыла. Это обстоя-
тельство следует серьезно учитывать при расчете нагруженности
модели и в первую очередь крыла и узлов крепления его к фю-
зеляжу.
80
Единственным способом контроля нагруженности конструкции
модели в этой фазе полета является натяжение леера. Отсюда
ясна роль высокой спортивной квалификации буксировщика моде-
ли и его способности «чувствовать» модель и леер. При сильном
ветре буксировщику часто приходится двигаться навстречу моде-
ли, чтобы обеспечить необходимую скорость обтекания модели воз-
душным потоком и не превысить максимально допустимых нагру-
зок на крыло модели.
Для обеспечения устойчивого взлета устройство, к которому
крепят леер, обычно располагают несколько впереди центра тя-
жести модели. Точное расположение этого устройства подбирают
при регулировочных полетах модели. Ориентировочно положение
ад
Рис. 52. Определение положения
буксировочного узла модели
10 -15°
его может быть определено проведением прямой через центр тя-
жести модели с углом 75—80° к продольной оси модели. Первона-
чальное положение устройства может быть проконтролировано
путем подвешивания модели за буксировочное устройство (рис. 52).
Модель можно готовить к первым запускам в том случае, если
угол между продольной осью модели и линией горизонта состав-
ляет 10—15°.
Проектирование и аэродинамический расчет. Статистическая
обработка параметров моделей, показавших высокие результаты
на различных соревнованиях, свидетельствует, что размеры моде-
лей в какой-то мере стабилизировались, однако остаются до сих
пор достаточно разнообразными. Размах крыла моделей колеб-
лется в диапазоне от 2000 мм до 3500 мм. Удлинение крыла нахо-
дится в пределах 10—20. Удельная нагрузка на крыло обычно
составляет от 30 до 60 г/дм2 (от 29,4 до 58,8 Н/м2). Следует заме-
тить, что этот параметр для большинства моделей является вели-
чиной переменной, так как с помощью дополнительного балласта
нагрузку увеличивают для достижения высоких скоростей в
упражнении «скорость на базе».
Большинство современных моделей имеют крыло с углом по-
перечного V в пределах от 0 до 3°. Наиболее популярными про-
филями крыла в последние годы стали специальные профили се-
рии «эпплер», однако часто применяются и другие профили, на-
пример NACA, «вортман» и др.
Для обеспечения устойчивости модели полезно учитывать ста-
тистические данные по относительным размерам площадей гори-
81
зонтального и вертикального оперения моделей. У современных
моделей планеров для многоборья эти параметры обычно находят-
ся в пределах:
Атл = 0,45 — 0,7; = 8—12; Хг.о = (0,25 — 0,35) %RP;
Мнос __ г о
2ЖВ 8’
Выбрав с привлечением статистических данных основные па-
раметры модели и учтя все перечисленные выше факторы, можно
приступить к конструктивной разработке проекта модели.
Чертеж модели лучше всего выполнить в масштабе 1 : 10 для
уточнения отдельных деталей проекта.
По имеющимся полярам выбранного профиля необходимо по-
строить поляру изолированного реального крыла модели с учетом
величины удлинения Хкр и исходных данных.
По полученной поляре изолированного реального крыла моде-
ли определяют наивыгоднейший режим полета (ОнВ, СЖнв, Ci,HB).
Дальнейшие расчеты и вычисления ведут в соответствии со
схемой, изображенной на рис. 53, в такой последовательности.
Вначале находят скорость планирования модели на различ-
ных режимах при значениях Gp=0,2; 0,3; 0,4; 0,5; 0,6; 0,7; 0,8;
0,9; 1,0:
„=.,278^/
Затем определяют числа Рейнольдса Re для средней аэроди-
намической хорды крыла САХ и из серии поляр данного профиля
выбирают ту, которая наиболее близка по этому параметру для
проектируемой модели: Re=69000 • v b.
По конструктивной величине Л и коэффициенту Су находят
величину индуктивного сопротивления крыла для всего диапазона
значений Су:
По конструктивным размерам фюзеляжа, оперения и других
элементов модели, а также вычисленным значениям Cxi вычисля-
ют коэффициент сопротивления модели Сх для нескольких значе-
ний Су:
Сх == Су -р Су. -4- Су •
X Хр I ^Х1 » <ВР
По нескольким заданным значениям величины Су и соответст-
вующим им значениям Сх определяют значения коэффициента
мощности:
82
Рис. 53. Схема аэродинамического расчета модели
83
Затем находят скорость снижения модели vy при соответст-
вующих значениях Су крыла.
По результатам вычислений легко построить скоростную по-
ляру модели.
Аналогичные вычисления необходимо провести и для загру-
женной специальным балластом модели, имеющей полетный
вес Gi, G2 и т. д. при неизменных остальных параметрах модели.
Полученные значения v и vy для значений Gi и G2 и т. д. нано-
сят на тот же график.
Полученная система скоростных поляр модели поможет хо-
рошо ориентироваться в различных условиях тренировочных по-
летов и соревнований, определить тактику ведения спортивной
борьбы.
Внимательное рассмотрение схемы аэродинамического расче-
та позволяет сделать вывод, что большая часть вычислительной
работы может быть выполнена безотносительно к какой-либо мо-
дели для определенного диапазона выбранных параметров. Такой
вывод дает возможность построить серию графиков, отображаю-
щих зависимости всех параметров проектируемой модели, и все
расчеты заменить определением этих параметров по графикам.
Скорость полета модели v находят с помощью графика
рис. 54. Задаваясь каким -либо значением коэффициента подъем-
ной силы модели Су, проводят прямую, перпендикулярную оси ор-
динат, до пересечения с кривой, соответствующей заданному зна-
G 7Х
чению нагрузки на крыло модели р=—~~. Из точки пересечения
О
проводят прямую, параллельную оси Су, до пересечения с осью
скорости полета v. Порядок пользования графиком указан пунк-
тирной линией со стрелками.
По скорости полета v и хорде крыла b находят число Рей-
нольдса для данного сечения крыла (рис. 55). Порядок пользова-
ния графиком аналогичен предыдущему.
Из найденных значений и и Re берут те, которые наиболее
близко соответствуют наивыгоднейшему режиму планирования, и
по значению Re выбирают из серии поляр профиля крыла наибо-
лее близкую этому параметру. Затем уточняют значения коэффи-
циентов СХр для заданных значений Су.
По графику рис. 56 находят значения коэффициентов индук-
тивного сопротивления CXi для всех значений Су при расчетном
значении величины удлинения крыла X.
С помощью табл. 1 и чертежа модели вычисляют величину
коэффициента вредного сопротивления модели СХрр и определяют
значение полного коэффициента сопротивления модели Сх.
По графику рис. 57 определяют значение коэффициента k =
, /сТ
= |/ -Q3~‘ Минимальное значение этого коэффициента соответ-
ствует экономическому режиму полета модели и, следовательно,
84
минимальной скорости снижения модели. Порядок пользования
графиком указан пунктирными линиями со стрелками.
Скорость снижения модели (вертикальную скорость vy) опре-
деляют по графику рис. 58, по найденному значению коэффициен-
та к и заданной величине нагрузки на крыло р.
85
Рис. 55. График для определения числа Рейнольдса обтекаемых поверхностей по
линейным размерам и скорости потока
По результатам вычислений строят скоростную поляру про-
ектируемой модели.
Пример компоновочного и аэродинамическо-
го расчета. Исходя из технологических возможностей, нали-
чия конструкционных материалов, используемой радиоаппаратуры
управления и назначения модели, задаемся следующими пара-
метрами модели:
масса модели G=l,6 кг =15,68 Н;
удельная нагрузка р = 30 г/дм2=29,4 Н/м2;
86
Рис. 56. График для определения коэффициентов индуктивного сопротивления
Сс1 модели по величине коэффициента подъемной силы и удлинению Л крыла
профиль крыла Е 211;
профиль оперения NACA 009;
удлинение крыла %кр= 16.
Компоновочный расчет модели.
1. Определяем полную несущую площадь модели:
5 _ 6____15,68 _ g 2
°мод — р — 29 4 ~ м
87
Рис. 57. График для определения коэффициента мощности модели на выбранном
режиме полета
2. Определяем площадь стабилизатора и площадь крыла из
условия:
О ____ о I о . __ о
° мод °кр । °стаб> о — °*
°стаб
Тогда:
3Стаб = -%5- = —g33 = 0,0592 м2 = 5,92 дм2,
5КР=8 • SCTa6=8 • 0,0592 = 0,474м2=47,4 дм2.
88
Vy
О 0,05 0,1 0,15 к
Рис. 58. График для определения скорости снижения модели vv на выбранном
режиме полета
3. Задаемся величиной удлинения %кр= 16 и определяем раз-
/2
мах крыла /кр и САХ; %КР = — = 16;
^КР
I =, = V16 • 0,474 = /7^84 = 2,754 м.
САХ = -^= 9^й-- = 0,172 м.
I 2,754 ’
4. Задаемся значением удлинения и выбираем ХОТаб=5,5,
а затем определяем размах стабилизатора /0Таб и среднюю аэро-
динамическую хорду стабилизатора САХСТаб:
89
/стаб V*^стаб^стаб — 1^3,5 • 0,0592 — 0,571 м — 571 мм,
САХстаб = -г2225" = T&W = 0,104 м = 104 мм.
‘стаб U.O/1
5. Выбираем величину сужения крыла и стабилизатора рав-
ной 0,75, определяем размеры корневой и концевой хорд крыла и
стабилизатора:
-^-=0,75; Ьконп = 0,75 • 6К0РВ;
^корп
^КОРН.СТ 4“ ^КОНЦ.СТ ^КОРН.СТ 4" 0,75 • &КОРН.СТ 1,75 • &КОРЯ.СТ
~ 2 • САХ ст = 208 мм;
208
&КОРН.СТ = "75“ = 119 мм, принимаем 6КОРН.СТ == 120 мм;
^конц.ст 0,75 • &КОВЦ.СТ = 0,75 • 120 == 90 мм;
^корн.кр 4“ &К0НЦ.КР “ ^КОРН.КР 4- 0,756 КОНЦ.КР 1,75 • 6КОРЯ>КР =
~ 2 • САХкр — 344 мм;
344
6К0РН.кр = 1 7г == 196,6 мм, принимаем 6КОрн.кр = 197 мм;
1,/о
&КОНЦ.КР = 0,75 ' &КОРП.КР = 0,75.197 = 147,4 мм =» 147 мм.
6. Задаемся значением коэффициента статической устойчиво-
сти А=0,60 и определяем плечо горизонтального оперения Lr o.
Л - SS“uZ
£г.о = А . САХкр- = 0,60 • 0,172 • 8 = 0,826 м.
^г.о
Располагая основными конструктивными параметрами, конст-
руируем в первом приближении модель (рис. 59).
7. Определяем положение центра тяжести модели в долях
средней аэродинамической хорды:
хт=0,12+0,36 Аг.о =0,12+0,36-0,6=0,336 САХ.
Расстояние центра тяжести от передней кромки крыла состав-
ляет: САХКр • хт — 0,336 • 172 « 58 мм.
8. Проводим проверочный расчет боковой устойчивости
модели:
г.о ^г.о
S *^ХВ * к о.
у С . / О о,
& °нос чтос
S^xb * ^хв _ 33 * 03 _ оо
25Н0С./Н0С - 4,80 “D’Q6‘
Полученное соотношение удовлетворяет условию и, следова-
тельно, боковая и поперечная устойчивость модели будет обе-
спечена.
90
Lr.o=82S
757
120
6 = 1,600кГ= 16,178
8мод=53,3 дмг =0,533м2
5кр=47,4дм2= 0,474м2
5ст=5,92дМ2
Хкр=16
Хст=5,5
/{го =0.6
1г о =826мм
Прогриль', крыла - Е 211
оперения -NACA- 009
Рис. 59. Компоновочный чертеж рассчитанной радиоуправляемой модели планера
91
Аэродинамический расчет модели.
Аэродинамический расчет модели ведем по схеме рис. 53 и
графикам рис. 54, 55, 56, 57, 58. Результаты расчетов заносим
в табл. 3.
Таблица 3
СУ 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
V 12,9 11,1 9,8 9,0 8,3 7,7 7,3 6,9
Re 12,2-104 13,3-104 11,7.104 10,7-104 9,9-104 9,2-104 8,7.104 8,2. 104
% 0,0130 0,0135 0,0141 0,0147 0,0153 0,0161 0,0170 0,0190
C*i 0,0018 0,0032 0,0051 0,0072 0,0097 0,0127 0,0163 0,0198
Сх 0,0064 0,0064 0,0064 0,0064 0,0064 0,0064 0,0064 0,0064
вр
Сх 0,0212 0,0231 0,0256 0,0283 0,0314 0,0352 0,0397 0,0452
к 0,125 0,092 0,072 0,062 0,054 0,049 0,047 0,043
0,87 0,63 0,50 0,43 0,37 0,34 0,32 0,30
Расчет вредного сопротивления модели СЖвр производим в со-
ответствии с данными табл. 1.
Фюзеляж модели представляет собой хорошо обтекаемое тело
большого удлинения с гладкой поверхностью овального сечения.
Коэффициент сопротивления такого тела СЖф (см. табл. 1)
равен 0,12. Площадь поперечного сечения фюзеляжа составляет
8ф = 0,83 • 0,11 • 0,06=0,0055 м2.
Оперение модели работает на углах атаки, близких к 0°; оно
имеет симметричный профиль типа NACA 009 и для него СЖоп =
= 0,02. Полная площадь оперения составляет:
s--t^ = 0’0592'0^0- = 0’М46”’-
Из других элементов, находящихся в воздушном потоке, сле-
дует отметить буксировочный крючок, карабины и качалки систе-
мы управления оперением, общая площадь которых составит при-
близительно 0,0004 м2. Коэффициент сопротивления этих элемен-
тов конструкции СЖкоя можно принять равным 0,74.
Расчеты вредного сопротивления модели удобно свести в
табл. 4.
92
Рис. 60. Скоростная поляра рассчитанной модели планера
Вредное сопротивление модели СХвр, приведенное по пло-
щади крыла, для данной модели составит:
СХвр = = -°П4^ = 0.00558.
в₽ SKP 0,474
Таблица 4
Элементы модели sn сх хп е со Зп‘Схп
skp
Фюзеляж 0,0055 0,12 0,00066 0,00139
Оперение 0,0846 0,02 0,00169 0,00358
Прочие элементы конструкции 0,0004 0,74 0,00029 0,00061
Итого: 0,00264 0,00558
Для учета интерференции СХвр увеличением на 15%:
Сх = 0,00558 -1,15 = 0,00642.
*ВР
93
Затем определяем полное сопротивление модели СХвр сум-
мированием СХр, CXi, СХвр для всех значений Си. Результаты
вычислений заносим в табл. 3.
По графику (см. рис. 58) определяем значение скорости сни-
жения модели vy.
По результатам вычислений строим скоростную поляру моде-
ли (рис. 60).
В данном примере приведен расчет для удельной нагрузки
pi = 30 г/дм2 (29,4 Н/м2). Желательно провести расчеты для двух-
трех вариантов удельной нагрузки, например pi=40 г/дм2
(39,2 Н/м2); р2=50 г/дм2 (49 Н/м2); р3=60 г/дм2(58,8 Н/м2).
Результаты вычислений следует нанести на график (рис. 60),
который позволит быстро и безошибочно выбирать необходимые
тактические решения в условиях соревнований при различных
погодных условиях.
КОНСТРУИРОВАНИЕ
Предыдущая глава позволила рассчитать компоновочную
схему и определить полетные характеристики модели.
Практическая реализация расчетных параметров модели и ее
успешная эксплуатация в условиях спортивных соревнований воз-
можна лишь при тщательной конструктивной и технологической
разработке проекта модели.
Выбор тех или иных конструктивных и технологических ре-
шений во многом определяется наличием материалов, оборудова-
ния, инструмента и, главное, опытом и подготовленностью моде-
листа.
Проектируя и конструируя модель, моделист решает множест-
во задач, которые в конечном счете являются ответом на вопрос
«что делать?». На пути практической реализации этих конструк-
тивных решений непременно встают новые задачи, которые можно
объединить вопросом «как сделать?»
Моделисты обычно не могут долго заниматься эксперимен-
тальными работами и всесторонними испытаниями новых идей и
конструктивных схем, новых материалов и технологических при-
емов, так как этому препятствует большая трудоемкость изготов-
ления летающей, особенно спортивной, радиоуправляемой модели
Ведь применение нового конструктивного решения или непроверен-
ного материала может привести к аварии модели, а это на долгое
время лишает спортсмена-моделиста возможности участвовать в
соревнованиях.
Поэтому конструирование новой радиоуправляемой модели, как
правило, ведется с учетом опыта конструирования предыдущей
модели, изучения конструктивных решений и схем, хорошо себя
зарекомендовавших, проверенных в самых разнообразных усло-
виях.
Поиск оптимальных решений при проектировании и конструи-
ровании модели является тем творческим процессом, который
позволяет спортсмену-моделисту построить модель, с лучшими па-
раметрами и реализовать эти преимущества в самый высокий
спортивный результат.
Спортивная радиоуправляемая модель планера, так же как
и любая другая конструкция, состоит из отдельных элементов:
фюзеляжа, крыла, оперения, системы управления и т. д. Эти
элементы можно рассматривать как узлы и детали.
Специфика летающей модели, особенно спортивной, диктует
95
основные требования, которым подчинен весь процесс проектиро-
вания и конструирования модели.
Радиоуправляемая модель планера должна быть простой и
надежной, не иметь ничего лишнего. Это правило относится как
к отдельной детали, так и к узлам модели.
Детали должны быть технологичны, чтобы их можно было
изготовить из недефицитного материала на простом оборудовании
с помощью простого инструмента.
Конструкция деталей и узла должна быть такой, чтобы их
можно было надежно и точно повторить.
Разъемные соединения должны состоять из плоскостной или
цилиндрической поверхностей и не требовать дополнительных
подгоночных работ.
Как известно, полет любого летательного аппарата осуществ-
ляется за счет сил, возникающих в результате взаимодействия
тел определенной формы с воздушной средой. Величина и направ-
ление этих сил определяются формой и состоянием поверхности
тела, а также и скоростью его движения. Следовательно, для по-
лучения стабильных полетных характеристик на различных режи-
мах полета конструкция модели должна быть достаточно жесткой,
чтобы форма модели не изменялась под действием аэродинами-
ческих сил.
Величина аэродинамических сил различна на различных эле-
ментах. Чтобы модель могла выдерживать, не разрушаясь, воз-
действия аэродинамических сил, которые при некоторых маневрах
модели могут достигать достаточно больших значений, она должна
быть достаточно прочной.
Маневренность и управляемость модели в значительной мере
определяются ее инерционными характеристиками. Чем меньше
моменты инерции модели относительно всех осей перемещения,
тем быстрее модель изменяет свое положение в пространстве
вследствие действия аэродинамических сил на элементы управ-
ления. Моменты инерции модели определяются в основном весом
элементов модели и удаленностью этих элементов от центра тя-
жести модели, относительно которого совершаются все вращения
и перемещения модели.
Геометрические размеры модели, как правило, определяются
конструктивными соображениями, габаритами и массой оборудо-
вания модели, а также правилами соревнований, поэтому при кон-
струировании модели необходимо стремиться уменьшить массу
элементов и расположить оборудование как можно ближе к цент-
ру тяжести модели.
Итак, основными требованиями, которыми следует руковод-
ствоваться при проектировании и конструировании летающей мо-
дели, являются минимальная масса, максимальная жесткость и
достаточная прочность.
Крыло и оперение. Важнейшими элементами любой летающей
модели являются крыло и оперение, конструктивно очень похожие.
96
Существует несколько конструктивных схем крыла:
наборная каркасная конструкция с мягкой обшивкой;
то же с жесткой обшивкой;
бескаркасная конструкция с наполнителем.
Выбор той или иной конструктивной схемы крыла определя-
ется обычно назначением модели, наличием конструктивных ма-
териалов, технологическими возможностями и, наконец, вкусом
моделиста.
Наборная каркасная конструкция с мягкой обшивкой приме-
няется довольно широко. Основой конструкции является каркас,
состоящий из силовых и поддерживающих обшивку деталей. Си-
ловыми элементами такой конструкции являются лонжероны. Раз-
личают одно-, двух- и многолонжеронную схемы каркаса крыла.
Поддерживающими деталями каркаса являются нервюры, перед-
ние и задние кромки каркаса.
Существует много вариантов такой конструктивной схемы
крыла модели, определяемых наличием конструкционного мате-
риала (рис. 61). Полки лонжеронов обычно выполняют из сосны,
стенку лонжерона можно изготовить из бальзы, липы или фанеры
толщиной 0,8—1,5 мм. Передние и задние кромки крыла можно
изготовить из липового или осинового шпона толщиной 1,5—
2,5 мм, фанеры такой же толщины, бальзы толщиной 2,5—3,5 мм,
а также из пластин пенополистирола. Для уменьшения массы в
нервюрах из липы делают фигурные вырезы или круглые отвер-
стия.
Полки лонжеронов при однолонжеронной конструкции следует
располагать в местах максимальной толщины профиля крыла. Се-
чение полок лонжерона для моделей планера, обычно не предна-
значенных для перевернутого полета, бывает различным. Сечение
верхней полки лонжерона, испытывающей сжимающие нагрузки,
обычно в 1,5—2 раза больше, чем нижней.
Для обшивки крыла каркасной конструкции обычно применя-
ют волокнистую (микалентную) бумагу с последующей пропиткой
аэролаком (эмалит) и отделкой защитными лаками или эмалями.
Недостатками конструкции крыла с мягкой обшивкой явля-
ются большая трудоемкость изготовления, недостаточная жест-
кость конструкции и невозможность точного профилирования аэро-
динамических поверхностей, так как неизбежное провисание об-
шивки между соседними нервюрами вызывает искажение
профиля крыла.
Несколько лучшими характеристиками обладает крыло с ча-
стично жесткой поверхностью. Здесь передняя часть профиля
закрыта жесткой обшивкой. Обычно закрывают около 30 % длины
хорды профиля по верхней и нижней поверхностям. Остальная
часть поверхности выполняется так же, как и в описанной выше
конструкции. Жесткую часть обшивки толщиной 1,5—2 мм дела-
ют из бальзы.
Конструкция крыла, состоящая из каркаса и жесткой обшив-
ки (рис. 62), в отличие от только что рассмотренных обладает
4 Зак. 796
97
Рис. 61. Конструкции наборного крыла с мягкой обшивкой:
а — многолонжеронная; б — однолонжеронная; в — однолонжеронная с частичной жест-
кой обшивкой
98
Рис. 62. Конструктивные схе-
мы с жесткой обшивкой:
а — обшивка из бальзы; б — кры-
ло с профилем «Едельски»
Рис. 63. Конструктивная схема
крыла с ядром и жесткой об-
шивкой:
1 — бальза; 2 — пенополистирол;
3 — стеклоткань
значительной жесткостью и прочностью, позволяет точнее выдер-
жать профиль, получить более гладкую и чистую аэродинамиче-
скую поверхность. В качестве силовых элементов здесь иногда
применяют сосновый лонжерон. Но можно обойтись, применив
бальзовый лонжерон большего сечения; в этом случае вся обшив-
ка воспринимает нагрузки.
Основным материалом здесь обычно является бальза. После
тщательной шлифовки поверхности ее покрывают слоем волокни-
стой бумаги или шелка и наносят несколько слоев лака. Послед-
ний полируют до получения нужной чистоты. Однако эта конст-
рукция не без недостатков: она трудоемка, а конструкционный
материал дефицитен.
Представляет некоторый интерес простая конструкция крыла
с жесткой обшивкой, имеющая профиль «Едельски». Такое крыло
(рис. 62, б) может быть использовано на моделях первоначаль-
ного обучения. Простота конструкции и ее технологичность привле-
кательны, но такое крыло мало пригодно для спортивных мо-
делей.
4»
99
Новые конструкционные материалы и технологические приемы
позволили снизить трудоемкость изготовления моделей и основ-
ного их элемента — крыла. Обычно такая конструкция представ-
ляет собой ядро, изготовленное из пенополистирола и покрытое
каким-либо пластиком (рис. 63). Здесь возможны различные вари-
анты конструктивных решений. Преимуществом такой конструк-
ции крыла является его ремонтоспособность.
Иногда возможны комбинации перечисленных конструктивных
схем. Например, механизированное крыло с закрылками и элеро-
нами можно выполнить из пенопласта, а сами закрылки и элеро-
ны из дерева каркасной конструкции с мягкой обшивкой и т. п.
На простых моделях оперение иногда изготовляют с профи-
лем «плоская пластина». В этом случае стабилизатор и киль мо-
дели могут быть изготовлены из сплошной бальзовой пластины
(рис. 64, а) или в виде плоской фермы из реек бальзы или липы
с последующим покрытием мягкой обшивкой (рис. 64, б).
Размах крыла современной радиоуправляемой модели пла-
нера может достигать 3,5—4 метров. Поэтому чаще всего крыло
делается разъемным, по оси симметрии модели или по одной из
нервюр центропланной части фюзеляжа (рис. 65).
Узлы соединения половин крыла между собой и крыла с фю-
зеляжем являются наиболее нагруженными, так как подъемная
сила крыла передается на фюзеляж именно через этот узел.
И прорабатывая этот узел, следует относится к нему с особым
вниманием.
Практика выделила несколько вариантов конструктивных схем
этого узла.
Так, соединение половин крыльев может осуществляться с
помощью плоских или круглых штырей, вставляемых в специаль-
ные гнезда в их половинах (рис. 66). Обычно применяется 2—
3 штыря, изготовленных из стальной пружинной проволоки диа-
метром 4—6 мм или из пластин алюминия толщиной 1,5—3 мм.
Гнездо в консоли крыла изготавливают из обрезков латунной,
стальной или титановой трубки, подобранной по диаметру штыря.
Если применяют плоские штыри, то гнездо может быть изготов-
лено из жести, согнутой по форме штыря, с последующей пропай-
кой. Устанавливают гнездо обычно в нервюрах, усиленных фанер-
ными накладками и планками, которые соединяются с силовым
набором каркаса. Возможна и жесткая установка плоских шты-
рей в торце крыла. В таком случае соединение последнего с фю-
зеляжем осуществляется через гнездо, смонтированное в фюзеляже
(рис. 67, а). Для больших моделей можно применять узел, изоб-
раженный на рис. 67, б.
На простых моделях соединение крыла с фюзеляжем обычно
выполняют резиновыми лентами (см. рис. 65, а).
На рис. 66 показана наиболее распространенная конструкция
узла соединения крыла с фюзеляжем. Здесь оно выполнено с по-
мощью цилиндрических стальных штырей, имеющих изгиб крыла
на величину угла V. Через закрепленный на торцевой нервюре
100
Рис. 65. Разъемы крыла и фюзеляжа:
а — крепление резиновой лентой; б — шты-
ревое соединение
Рис. 64. Конструктивная схема опе-
рения:
а — сплошная пластина; б — плоская фер-
ма
Рис. 66. Конструкция штыревого соединения крыла и фюзеляжа:
1 — штырь; 2 — трубка; 3 — резиновый жгут; 4 — сосновый брусок
101
Рис. 67. Узел соединения с плоскими штырями:
а — штыри в крыле; б — штыри в фюзеляже; 1 — полка лонжерона; 2 — стенка лонжерона;
3 — штырь; 4 — винты; 5 — гайка; 6 — шпангоут; 7 — накладка; 8 — заклепки; 9 — гнездо
крючок с помощью пружины или резинового кольца крылья при-
жимаются к центроплану фюзеляжа. Конструкция узла достаточ-
но проста и надежна. Для модели планера с размахом крыла до
2,5—2,7 м и нагрузкой р = 30—50 г/дм2 достаточно двух штырей
диаметром 5 мм, выполненных из пружинной стальной проволоки.
Штыри не должны иметь следов коррозии и подсечек.
При постройке радиоуправляемых моделей — копий планеров
102
старых типов с подкосным крылом возможно конструктивное ре-
шение узла стыковки с фюзеляжем, изображенное на рис. 68.
Иногда встречается конструкция соединения крыла с фюзеля-
жем, представляющая собой металлический «язык», устанавливае-
мый в специальную коробку, которая монтируется в торцевой
части крыла (рис. 69).
Оперение модели обычно выполняется как конструктивное це-
лое с фюзеляжем модели, но, в случае необходимости, его можно
выполнить съемным. Узлы стыковки горизонтального оперения с
фюзеляжем подобны крыльевым узлам. Здесь важно выполнить
требование жесткого и точного соединения оперения с фюзеля-
жем, так как даже небольшие неточности в виде перекосов могут
заметно изменить характер полета модели.
Конструктивные схемы систем управления аэродинамическими
рулями модели будут рассмотрены в главе «Системы управления
моделями».
Изготовление крыльев, стабилизатора и киля. Изготовление
и сборка крыла, а также оперения обычно занимают много вре-
мени. И поэтому важно тщательно готовиться к этому: вниматель-
но проработать чертежи конструкции крыла (оперения), отдель-
ных деталей и процесс сборки.
Поскольку изготовление крыла каркасной конструкции много-
кратно описано в авиамодельной литературе, остановимся на нем
лишь кратко. Обычно начинают с изготовления деталей каркаса.
Продольные силовые элементы конструкции крыла — лонже-
роны изготовляют, как правило, из прямослойной сосны или из
ее переклейки. Наиболее распространенным способом обработки
является выстругивание с помощью рубанка или протягивание
(калибровка) после распиловки на циркулярной пиле. При изго-
товлении лонжеронов необходимо следить, чтобы детали не имели
заметных изгибов и круток, что гарантирует сборку каркаса без
напряжений.
Нервюры являются поперечными поддерживающими элемента-
ми, они определяют профиль крыла и соединяют все элементы
крыла в единую конструкцию. При их изготовлении, если крыло
имеет в плане форму, образованную прямыми линиями, использу-
ют пакетный способ изготовления (рис. 70).
Заготовки нервюр, вырезанные с некоторым запасом по кон-
туру, просверливают в заранее намеченных местах сверлом диа-
метром, равным диаметру технологической шпильки. Затем заго-
товки нервюр собирают в пакет, на обе стороны пакета наклады-
вают стальные шаблоны, и весь пакет стягивают шпильками.
Заготовки нервюр обрабатывают по контуру напильниками
и шкуркой, при этом надо следить за тем, чтобы образующие
контура между шаблонами в одноименных (по хорде профиля)
точках составляли прямые линии. После окончательной обработки
профиля и пазов для продольных силовых элементов пакет разъ-
единяют, нервюру нумеруют.
юз
Рис. 68. Узел соединения подкосного крыла:
1 — штырь; 2 — гнездо; 3 — подкос; 4 — крючок подкоса; 5 — петля
Рис. 70. Пакетный метод изготовле-
ния нервюр:
1 — шаблон; 2 — нервюры; 3 — шпильки
Рис. 69. Узел соединения типа «язык»:
1 — фюзеляж; 2 — «язык»; 3 — карман
104
Если форма крыла в плане образована кривыми линиями,
то приходится каждую нервюру размечать и обрабатывать отдель-
но или попарно для левой и правой консолей крыла. Передние и
задние кромки крыла, как правило, изготавливают в виде полу-
Рис. 71. Приспособление для
калибровки заготовок по
толщине:
1 — заготовка; 2 — шкурка; 3 —
фанерный диск; 4 — хвостовик;
5 — подкладка
Рис. 72. Изготовление ядра
крыла:
а — заготовка ядра; б *— шаблон
фабрикатов, которые окончательно обрабатывают после сборки
каркаса для образования точного профиля. Последний контроли-
руют с помощью специальных шаблонов.
Если крыло изготавливают с частичной или полной жесткой
обшивкой, то надо заготовить детали обшивок и откалибровать
их в заданный размер с помощью приспособления, представляю-
щего собой вращающийся фанерный диск с наклеенной на него
шкуркой (рис. 71). Калибровка ведется на сверлильном станке.
Заготовки обшивок в некоторых случаях склеивают по ширине,
размечают и обрезают по контуру.
Сборку каркаса крыла (оперения) обычно производят на ста-
пеле. В простейшем случае стапелем может служить ровная глад-
105
кая доска, например чертежная. Для сборки крыла с двойным
поперечным V обычно изготовляют специальные стапели для пра-
вой и левой половин крыла (рис. 72). На стапеле наносят размет-
ку мест установки, деталей каркаса крыла и тщательно выверя-
ют точность изготовления стапеля в характерных точках.
Сборку каркаса крыла обычно производят по следующей
схеме:
устанавливают и фиксируют зажимами или булавками ниж-
нюю полку лонжерона;
на полку устанавливают нервюры, соблюдая нумерацию, сма-
зывая клеем места соединения и контролируя по высоте точность
положения передней части и хвостиков нервюр;
устанавливают стенку и верхнюю полку лонжерона;
монтируют заднюю кромку;
вклеивают переднюю кромку;
после высыхания клея каркас можно снять со стапеля для
зачистки мест склеивания и монтажа деталей и узлов механиза-
ции, системы управления узлов стыковки и т. д.;
каркас устанавливают на стапель и фиксируют его, наклеива-
ют жесткую обшивку.
Следует иметь в виду, что удобнее использовать клей, приго-
товленный на основе эпоксидных смол. Следует только обеспе-
чить хорошую вентиляцию помещения.
После высыхания (полимеризации) клея каркас крыла извле-
кают из стапеля, производят чистку мест склеивания, обработку
передних и задних кромок и проверку профиля в контрольных
сечениях. Затем производят весовую балансировку и подготовку
каркаса к обтяжке бумагой и отделочным операциям.
Конструкция крыла бескаркасного типа с наполнителем полу-
чает все большее распространение. Этому способствует ряд факто-
ров, делающих данную конструкцию предпочтительной перед тра-
диционными каркасными. Высокая прочность и жесткость, отлич-
ная чистота поверхности, точность воспроизведения заданного
профиля, относительно низкая трудоемкость изготовления и хоро-
шая повторяемость на технологической оснастке — основные ее
преимущества. Ее недостаток — повышенный вес (на 15—20 %)
по сравнению с каркасными конструкциями с бальзовым покры-
тием.
После выбора конструктивного варианта крыла производится
подбор необходимых материалов и технологическая подготовка
процесса. Для изготовления ядра крыла используют пенополисти-
рол марки ПС-4 с удельной плотностью 0,03—0,05 г/см3. Этот ма-
териал обладает достаточной прочностью, равномерной структурой
и хорошими технологическими свойствами. Чаще всего встреча-
ются плиты размером 800X800 мм, и поэтому крыло большего
полуразмаха приходится изготавливать из двух-трех частей с по-
следующим их соединением.
В качестве силовых несущих элементов можно использовать
сосновые лонжероны, представляющие собой рейки постоянного
106
или переменного сечения размером 3X10 мм в корневой части и
2x5 мм в концевой части крыла. В качестве силовых элементов
могут быть использованы также жгуты из проклеенного стеклово-
локна, расположенного между обшивкой и ядром.
Для обшивок может использоваться стеклоткань толщиной
от 0,02 мм до 0,1 мм. В случае непосредственного покрытия ядра
стеклотканью используются более толстые стеклоткани, а если
используется подслой из древесины, следует пользоваться более
тонкими стеклотканями.
В качестве клеющего состава для соединения элементов кон-
струкции и проклейки обшивок следует использовать эпоксидный
компаунд К-153, обладающий относительно невысокой вязкостью
и хорошей прочностью и эластичностью. Следует отметить, что
использование растворителей на основе ацетона для уменьшения
вязкости компаунда категорически запрещается, так как эти раст-
ворители разрушают пенополистирол.
Для вырезания деталей конструкции из пенополистирола ис-
пользуют специальный резак, в качестве которого используют
нагреваемую электротоком струну из провода высокого сопротив-
ления (проволока из нихрома толщиной 0,35—0,8 мм).
Конструкция резака приведена на рис. 73, а. Его рама напо-
минает станок лучковой пилы, служит для натяжения «режущего»
инструмента — струны и обеспечивает ее натяжение при тепло-
вом расширении. В качестве упругого элемента используется ре-
зиновый жгут. Силу натяжения жгута регулируют перестановкой
одного из концов его в то или иное отверстие в раме. Для подвода
электротока к концам струны используют медные многожильные
провода сечением жил не менее 0,5 мм2 с хорошей изоляцией.
Источник тока должен обеспечивать регулировку напряжения в
пределах от 0 до 24 В при токе до 10 А.
Если в качестве источника тока используются батареи авто-
мобильных аккумуляторов, регулировка напряжения осуществля-
ется подключением большего или меньшего числа ее элементов.
Хорошие результаты при резании пенополистирола марки ПС4
получаются при нагревании струны до темно-вишневого цвета.
Из плиты пенополистирола вырезается блок по размерам пла-
новой проекции крыла или части его с припуском 15 мм по пе-
редней и задней кромкам (см. рис. 72, а), и на ровной плите про-
изводится разметка положения хорд корневого и концевого
сечения. При этом следует обратить внимание на плоскости вы-
резанного блока и их прилегание к поверхности плиты. В случае
необходимости поверхность обрабатывается рубанком до полного
прилегания (в свободном состоянии).
Из дюралюминия толщиной 1—2 мм надо вырезать шаблоны
корневого и концевого сечений крыла с учетом толщины обшив-
ки, разметить одноименные процентные линии по длине хорды
профиля в 10—12 точках. На задней кромке профиля следует из-
готовить технологические расширения, которые позволят обеспе-
чить правильный подход режущего элемента к одноименным точ-
107
Рис. 73. Оснастка для изготовления ядра:
а —обычный резак; б — специальный резак; в —шаблон; / — струна (нихром); 2 — резино*
вый жгут; 3 — пенополистирол; 4 — ядро; 5 — шаблон; 6 — основание (текстолит)
108
кам шаблона (см. рис. 72, б). Разметку процентных точек реко-
мендуется сделать с обеих сторон шаблона, что необходимо при
изготовлении трапециевидного крыла в плане. На хорде шаблона
сверлятся два отверстия диаметром 4 мм. Рабочие поверхности
шаблона тщательно зачищают и заполировывают шкуркой для
беспрепятственного движения по ним разогретой струны. Готовые
шаблоны укрепляют на блоке пенополистирола с помощью шуру-
пов так, чтобы разметка линий хорд заготовки и шаблона совпа-
дали.
Из фанеры толщиной 6—8 мм вырезают доску для прижима
блока пенополистирола к рабочей плите, а по форме заготовки
готовят 5—6 грузов общей массой 15—20 кг. Затем блок уклады-
вают на рабочую плиту, накрывают доской и прижимают груза-
ми. После этого включают электропитание резака и регулируют
напряжение до заданной температуры нагрева струны.
Ядро вырезают вдвоем с помощником. Сначала струну под-
водят к расширенной части шаблона и врезают ее в пенополисти-
рол. При этом струну подводят одновременно к одноименным точ-
кам (на шаблонах), перемещая струну от одной процентной
точки к другой и прижимая ее к рабочим поверхностям шабло-
нов. Скорость резания должна быть в пределах 10—15 мм/с. Дви-
жение начинается с верхней хвостовой части профиля, затем пере-
ходит на носик профиля и далее вырезается нижняя часть про-
филя. После выведения струны из блока пенополистирола электро-
питание отключается и заготовке дается время остыть в течение
5—10 минут. Затем ядро извлекают из заготовки. Внешнюю, не-
гативную часть заготовки с помощью резака разрезают по хорде
в носовой части и в дальнейшем используют как стапель при вы-
клеивании обшивок из стеклопластика. При необходимости торце-
вые сечения ядра могут быть обрезаны под заданные углы по
шаблонам для обеспечения угла V крыла (рис. 73, в).
Для вырезания в пенополистироле различных углублений, ка-
навок и т. п. можно изготовить простое приспособление (рис.
73, б). Соединение отдельных частей крыла осуществляют с по-
мощью вкладышей из фанеры толщиной 4—5 мм. Для этого в
торцевых частях заготовок ядра делают вырезы по форме вкла-
дышей. Расположение этих вкладышей обычно совпадает с распо-
ложением силовых элементов (рис. 74, а). Вкладыш вклеивается
заранее в одну из соединяемых частей крыла эпоксидной смолой.
Причем излишки клея тщательно удаляют.
В корневой части крыла производится монтаж узла стыковки
крыла с фюзеляжем. Варианты конструктивных решений могут
быть различными. Следует лишь помнить, что для закрепления
узлов, несущих какие-либо нагрузки, надо увеличивать поверхно-
сти склейки и опор этих узлов с помощью накладок и окантовок
из фанеры или из пластин бальзы (рис. 74, б). Готовое ядро кры-
ла зачищают шкуркой. Затем приступают к изготовлению обшив-
ки, суть которого состоит в том, что ядро проклеивают одним-дву-
мя слоями стеклоткани, пропитанной компаундом. Этот процесс
109
строят таким образом, чтобы после отвердения компаунда была
обеспечена целостность обшивки, ядра и несущих элементов, что-
бы была обеспечена чистота и гладкость поверхности без после-
дующей обработки.
Для изготовления обшивки надо подготовить ровную гладкую
доску или кусок органического стекла по размерам, несколько
превышающим развертку обшивки. Из рулонной полиэтиленовой
пленки толщиной 0,1—0,15 мм вырезают подкладку обшивки с
припуском около 50 мм на каждую сторону. Пленка не должна
иметь царапин, перегибов и вытяжек и должна свободно лежать
на рабочей плите, без волны и хлопунов.
Рис. 74. Стыковка и окантовка частей крыла:
а — соединение консолей крыла; б — окантовка крыла; 1 — вкладыш, 2 — накладки; 3 —
лонжерон; 4 —- ядро
Поверх подкладки ставят внешнюю обшивку из стеклоткани,
вырезанную с припуском около 50 мм на разворот по задней
кромке крыла. Заготавливают также жгут из стекловолокна диа-
метром 2,5—3 мм (для армирования задней кромки с припуском
по длине 50—60 мм).
Стеклоткань и жгут пропитывают компаундом К-153, который
лучше всего держать в полиэтиленовой мисочке. Количество ком-
паунда ориентировочно должно составлять 1,5—1,7 веса стекло-
ткани и жгута. Чтобы уменьшить вязкость компаунда, обычно в
него вводят небольшое количество метанола, а для контроля рав-
номерности его нанесения на стеклоткань и жгут добавляют
небольшое количество красителя (например, пасты из стержня
шариковой авторучки).
Вся эта смесь приготавливается в таком порядке: отвешива-
ют нужное количество компаунда и отвердителя и тщательно пе-
ремешивают в течение 8—10 минут. Затем в смесь небольшими
порциями вводят метанол, постоянно перемешивая, добиваясь не-
обходимой вязкости. Затем в смесь вводят небольшое количество
пасты и тоже перемешивают.
Приготовленную смесь разливают по поверхности заготовлен-
ной обшивки и равномерно распределяют по ней с помощью ре-
110
зинового валика или шпателя. При этом надо следить за тем,
чтобы пропитка обшивки была равномерной, чтобы не образовыва-
лись воздушные пузыри. Излишки пропитки следует удалить.
Подготовленную таким образом обшивку выдерживают в те-
чение 40—50 минут. Все работы с эпоксидными смолами следует
вести в помещении, оборудованном вытяжной вентиляцией, при
Рис. 75. Выклеивание обшивки из стеклоткани:
/—ядро; 2 —негативная форма; 3 — стеклоткань; 4 — полиэтиленовая пленка; 5 — скобы;
6 — армирование кромок крыла (стекловолокно)
температуре воздуха 20—24’ С и относительной влажности воз-
духа не более 50—60 %. До начала пропитки стеклоткань жела-
тельно просушить на листе металла, нагреваемом на электро-
плитке.
Обшивку вместе с листом полиэтилена переносят на негатив-
ную форму нижней поверхности крыла так, чтобы ее край высту-
пал за заднюю кромку ядра крыла на 20—25 мм. На обшивку
укладывают ядро, прижимая его к обшивке. С торцов ядро сое-
диняют с негативной формой с помощью металлических скоб, из-
готовленных из листовой стали толщиной 0,8—1,0 мм или из про-
волоки диаметром 1,5—2,0 мм (рис. 75). Затем укладывают жгут
армирования задней кромки крыла, предварительно пропитанный
той же смесью. Все это накрывают верхней обшивкой, натянув
полиэтиленовую подложку и закрепив ее липкой лентой. Пригла-
Ш
живая верхнюю обшивку до полного прилегания ее к ядру, сгоня-
ют образовавшиеся воздушные пузыри в сторону задней кромки.
Затем всю эту конструкцию накрывают верхней негативной фор-
мой, поверх которой кладут доску, а на нее груз. Ножницами об-
резают выступающие с торцов обшивку и подкладку.
После отвердения компаунда части крыла извлекают из фор-
мы. Полиэтиленовую пленку отделяют от поверхности.
Изготовленные части крыла соединяют по стыковочным по-
верхностям с помощью вкладышей. Места стыков обшивки тща-
Рис. 76. Варианты облегчения ядра:
а — метод высверливания; б — метод вы-
резания
Рис. 77. Сварка вакуумного мешка
тельно протирают бензином и высушивают. Затем места стыков
проклеивают лентой из стеклоткани шириной 30—35 мм и туго
обертывают полоской полиэтилена шириной 100—120 мм и закре-
пляют липкой лентой. После отвердения компаунда места стыков
освобождают от полиэтилена и зачищают с помощью шкурки.
Несколько лучшими эксплуатационными качествами обладает
крыло, в котором ядро имеет обшивку из шпона бальзы толщи-
ной 1,2—1,8 мм и стеклоткани толщиной 0,02—0,05 мм. Здесь,
как правило, отсутствуют силовые элементы и их роль выполня-
ет сама обшивка. Технологически такое крыло выполняется ана-
логично описанному. Для усиления центропланной части крыла
нередко делают двойную обшивку из стеклоткани. Здесь первый
слой наклеивают между ядром и деревянной обшивкой на ширину
300—350 мм плоскости разъема.
Для уменьшения веса крыла с пенополистироловым ядром и
деревянной обшивкой их можно облегчить, просверлив насквозь
отверстия диаметром 12—15 мм по всей площади ядра (рис. 76, а).
Если на крыле используется профиль с относительной толщи-
ной более 10 %, то возможно облегчить ядро, вырезав его внут-
112
реннюю полость с помощью разогретой струны, как показано на
рис. 76, б.
Значительного улучшения качества склеивания ядра и обшив-
ки можно достигнуть при использовании вакуумного мешка. Прин-
цип данного способа заключается в следующем: подготовленное
ядро с обшивками помещают в герметичный полиэтиленовый или
резиновый мешок и из него откачивают воздух с помощью вакуум-
ного насоса до разряжения 0,1—0,3 атмосферы. В этом случае
стенки мешка равномерно и плотно прижимают обшивку к ядру.
Вакуумный мешок нетрудно изготовить в домашних условиях из
полиэтиленовой пленки толщиной 0,1—0,2 мм, проклеив швы лип-
кой лентой или сваркой пламенем свечи (рис. 77). Для соедине-
ния с вакуумным насосом используют резиновую трубку с вве-
денной в нее стальной спиралью подходящего диаметра. В качест-
ве вакуумного насоса может быть использован топливный насос
мембранного типа от автомобильного двигателя с приводом от
электромотора мощностью 15—20 ватт.
Анализ различных конструктивных схем крыла показывает,
что масса 1 дм2 площади крыла в среднем составляет:
для наборной каркасной конструкции с мягкой обшивкой —
10 г;
для наборной каркасной конструкции с жесткой обшивкой —
10—11 г;
для пенополистиролового крыла с обшивкой из стеклопласти-
ка — 13—14 г;
для пенополистиролового крыла с обшивкой из бальзы —
11—12 г.
Фюзеляж. Фюзеляж — часть планера, на которой монтируют-
ся крыло и оперение, где размещаются аппаратура управления,
источники электропитания, двигательная установка в случае мото-
планера.
Конструируя фюзеляж, стремятся получить минимальную по-
верхность при достаточном внутреннем объеме. Силовые и конст-
руктивные схемы фюзеляжей обычно бывают балочные и фер-
менные.
В ферменной схеме роль главного силового элемента выпол-
няет пространственная ферма, а мягкая обшивка служит лишь
для придания фюзеляжу обтекаемой формы (рис. 78). Этот тип
конструктивной схемы фюзеляжа до последнего времени был ши-
роко распространен при постройке радиоуправляемых моделей
планеров, так как обладает рядом положительных качеств: мини-
мальный вес, достаточно прост, технологичен. Однако такой фю-
зеляж мало живуч, трудоемок в изготовлении, с неудовлетвори-
тельной аэродинамикой Поэтому в последнее время этот фюзе-
ляж применяют лишь при постройке учебно-тренировочных моде-
лей и моделей-копий старых типов планеров.
Конструктивно ферменный фюзеляж состоит из продольных
и поперечных силовых элементов (стрингеры, шпангоуты, раско-
113
Рис. 78. Форменная конструктивная схема фюзеляжа:
1 — шпангоуты; 2 — стрингеры; 3 — лонжерон; 4 — раскосы; 5 — косынки
Рис. 79. Балочная конструктивная схема фюзеляжа:
а — полумонокок; б — монокок
114
сы), изготовляемых, как правило, из сосновых реек, авиафанеры,
липы. Обшивки обычно делают из длинноволокнистой или кабель-
ной бумаги, а иногда из шелка.
Балочная конструктивная и силовая схема фюзеляжа являет-
ся наиболее распространенной при постройке современных спор-
тивных радиоуправляемых моделей планеров и мотопланеров. Эта
схема обеспечивает наилучшую аэродинамическую форму, наи-
большие живучесть и внутренние объемы. Здесь работу на изгиб
и кручение выполняет обшивка с элементами каркаса или только
одна обшивка.
Балочная схема фюзеляжа подразделяется на балочную типа
полумонокок и балочную типа монокок. Первая, типа полумоно-
кок, представляет собой работающую обшивку с продольным и
поперечным набором (рис. 79, а) и чаще всего используется при
изготовлении фюзеляжа из дерева (бальза, сосна, авиафанера);
вторая, типа монокок (скорлупа), представляет собой работающую
обшивку, полностью воспринимающую всю нагрузку на изгиб и
кручение, и не имеет силового набора. Эта конструктивная схема
фюзеляжа (рис. 79, б) получила наибольшее распространение при
конструировании радиоуправляемых спортивных моделей плане-
ров благодаря высоким качествам: чистоты и точности воспроизве-
дения аэродинамических поверхностей, достаточной прочности, ма-
лой трудоемкости при изготовлении.
Такая конструкция практически выполняется из стеклопла-
стиков с проклейкой полиамидными или эпоксидными смолами.
Добавка углеволокон при выклеивании такой конструкции позво-
ляет значительно увеличить ее жесткость и прочность.
Изготовление фюзеляжа. Изготовление деталей фюзеляжа
модели ферменной конструкции обычно не вызывает затруднений.
Продольные силовые элементы фермы, как правило, делают из
прямослойной сосны и обрабатывают методом протягивания в за-
данные размеры с последующим вышкуриванием. Поперечные си-
ловые элементы могут быть выполнены из авиационной фанеры
толщиной 1,5—3 мм с последующей точной пригонкой по чертежу
и прорезанием пазов для продольных элементов. Иногда шпан-
гоуты выполняют сборными из липовых или бальзовых пластин
с дальнейшей точной обработкой по чертежу. При обработке мест
соединения шпангоута со стрингерами необходимо обеспечить
плотную, но без каких-либо напряжений посадку стрингера в пазы
шпангоутов. Такие же требования надо соблюдать при изготовле-
нии раскосов, так как более плотная посадка вызовет нежелатель-
ные напряжения конструкции и деформацию ее в процессе экс-
плуатации.
Сборку фюзеляжа ферменной конструкции ведут обычно на
стапеле. В простейшем случае, когда форма фюзеляжа образована
плоскими фермами, стапелем может служить ровная доска, на
которой наносится разметка положения шпангоутов и раскосов
(рис. 80, а).
115
Рис. 80. Стапель для сборки фюзеляжа ферменной схемы:
а — с плоскими фермами; б — сложной формы
Шпангоуты закрепляют с помощью технологических прижи-
мов или булавок по разметке. В нужных местах устанавливают
стрингеры и проклеивают. Собранная ферма должна оставаться в
стапеле до полного высыхания клея. После извлечения фермы из
стапеля зачищают места склейки от излишков клея и устанавли-
вают элементы крепления радиооборудования, осуществляют пол-
ный или частичный монтаж узлов системы управления, узлов
крепления крыла, оперения фонаря и т. д. Затем устанавливают
жесткие обивки и элементы усиления фермы. По окончании всех
116
монтажных работ тщательно зачищают все наружные поверхно-
сти и подгоняют съемные части фюзеляжа (фонарь, лючки
и т. п.).
Сборку фюзеляжа ферменной конструкции выполняют на спе-
циальном стапеле. Им может служить металлическая трубка диа-
метром 8—10 мм или деревянная рейка сечением 10X15 мм.
В этом случае при изготовлении шпангоутов должны быть запла-
нированы специальные технологические места для установки
шпангоутов на стапеле (рис. 80, б). Они могут быть удалены пос-
ле проклейки фермы.
Фюзеляжи балочной схемы типа полумонокок обычно выпол-
няют с полной обшивкой из бальзы толщиной 1,5—3 мм; продоль-
ные и поперечные силовые элементы — из бальзы или комбинации
бальзы, сосны и липы. Сборка каркаса ведется в той же после-
довательности, что и фюзеляжа ферменной конструкции. Жест-
кая его обшивка может быть выполнена двумя способами.
Первый способ заключается в том, что поверхность каркаса
оклеивают узкими пластинами из бальзы с последовательной
подгонкой каждой пластины по ширине (рис. 81, а). После высы-
хания клея поверхность фюзеляжа тщательно обрабатывают
шкуркой, применяя контрольные шаблоны поперечных и продоль-
ных сечений фюзеляжа. Затем щепой бальзы или шпаклевкой за-
делывают неточности в стыках, зачищают и готовят фюзеляж к
окончательной отделке.
Второй способ изготовления жесткой обшивки заключается в
том, что из пластины бальзы толщиной 2—3 мм на болванке из
липы или пенополистирола формуют часть обшивки одинарной
или двойной кривизны. Для изготовления такой обшивки пластину
предварительно распаривают в горячей воде в течение 15—20 ми-
нут и крепят к болванке хлопчатобумажным марлевым или эла-
стичным бинтом. После подгонки обшивки к каркасу она может
быть приклеена (рис. 81, б).
Отдельные части фюзеляжа, изготовляемого из дерева, могут
быть выполнены по схеме монокок без специальных силовых эле-
ментов из авиафанеры, бальзы, липы. Так, хвостовую балку
фюзеляжа иногда выклеивают на деревянной или металлической
болванке из пластины бальзы или авиафанеры. Болванку изготав-
ливают с учетом толщины стенки элемента фюзеляжа. Металличе-
скую болванку полируют, деревянную после вышкуривания и
полировки покрывают двумя-тремя слоями аэролака и снова поли-
руют.
Развертку детали распаривают в кипятке, изгибают по бол-
ванке и прибинтовывают (рис. 82, а). Изготовленную таким об-
разом коническую или цилиндрическую трубу высушивают, под-
гоняют шов и склеивают. Затем заготовку тщательно обрабаты-
вают снаружи и оклеивают волокнистой бумагой, шелком или
стеклотканью. При оклеивании обычно используют эмалит, а для
оклеивания стеклотканью — двухкомпонентный паркетный лак.
Если монококовые детали фюзеляжа двойной кривизны дела-
117
Проклеить надрезы,
стянуть резиновой
лентой, просушить
д
Рис. 81. Способы изготовления обшивок типа полумонокок:
а —- последовательность выклеивания обшивки на каркасе; б — последовательность выклей-*
вания на болванке
ют из дерева, то обычно используют бальзовые пластины шири-
ной 10—15 мм с подгонкой мест стыка. Чтобы предотвратить
приклеивание выклейки к болванке, необходимо предусматривать
разделительный слой из тонкой бумаги, который наносят в мок-
ром виде, приглаживают и просушивают.
118
Изготовление фюзеляжей балочной схемы типа монокок из
стеклопластиков требует тщательной технологической подготовки.
Производят расчет необходимого количества слоев стеклоткани.
Это делается для того, чтобы получить заданную толщину стенок
фюзеляжа в каждом сечении:
f=[(Si’ni)-|-(S2,fi2)”l“- • .4*(5п,пп)]*7<С,
где St,Sn — толщина используемой стеклоткани;
tii,..., пп — количество слоев стеклоткани;
К — опытный коэффициент увеличения толщины слоя; обычно
он составляет 1,1—1,2.
Механическая прочность и жесткость выклейки растет с уве-
личением количества слоев стеклоткани, поэтому стремятся ис-
пользовать более тонкую ткань, но увеличивать количество слоев.
Пропитки должно быть лишь такое количество, чтобы надежно
смочить ткань. Идеальным случаем является, когда вес компаунда
составляет 60—70 % веса ткани. Толщину стенок фюзеляжа
современной модели планера средних размеров обычно выбирают
в передней и центральной частях фюзеляжа в пределах 0,8—
1,2 мм и в хвостовой части 0,5—0,6 мм.
В практике моделизма получили распространение два спосо-
ба изготовления фюзеляжей из стеклопластика. Первый способ —
по позитивной болванке — обычно используют при единичном, не
рассчитанном на последующее повторение конструкции. Позитив-
ную болванку готовят по размерам чертежа с учетом толщины
стенок фюзеляжа из пенополистирола и оклеивают слоем бумаги
на казеиновом клее или клее «88». В торцовые части болванки
устанавливают металлические штыри диаметром 5—6 мм с вы-
летом 80—100 мм (чтобы можно было вращать болванку на спе-
циальном ложементе, рис. 82, б).
Болванку покрывают слоем компаунда, способ приготовления
которого описан в предыдущих разделах, и на него накладывают
слой за слоем стеклоткань до получения необходимой толщины
стенок фюзеляжа с постоянным приглаживанием резиновым
шпателем до полного прилегания каждого последующего слоя.
При этом необходимо следить, чтобы между слоями ткани не об-
разовались воздушные пузыри и так называемые непроклеи. Пос-
ледним наносят наиболее тонкий слой стеклоткани и всю поверх-
ность фюзеляжа покрывают дополнительно тонким слоем ком-
паунда. Перед окончательным затвердением компаунда произво-
дят разметку необходимых вырезов и прорезают их острым ножом.
Не снимая вырезанных частей с болванки, ожидают полного от-
вердения компаунда.
Удаляют болванку из полученной выклейки с помощью аце-
тона или другого нитрорастворителя пенополистирола. Заготовку
фюзеляжа обрабатывают снаружи шкуркой до получения необхо-
димой чистоты поверхности.
При изготовлении двух и более одинаковых фюзеляжей целе-
119
сообразно применять второй способ выклеивания — по негативной
форме.
Здесь также для изготовления негативной формы делают бол-
ванку из переклея сосны или липы, точно соответствующую на-
ружным обводам будущего фюзеляжа. Поверхность болванки
тщательно обрабатывают, покрывают несколькими слоями лака,
полируют. Болванка должна иметь разъем по плоскости сим-
метрии.
Рис. 82. Способы изготовления обши-
вок типа монокок на позитивной бол-
ванке:
а — из древесины; б — из стеклопластика
Рис. 83. Изготовление фюзеляжа ти-
па монокок в негативной форме:
а — негативная форма; б — выклеивание
под давлением; 1 — форма; 2 — обшивка;
3 —резиновая диафрагма; 4 — плита; 5 —
уплотнение; 6 — штуцер с ниппелем
Из досок толщиной 15—20 мм делают рамку с припуском
15—20 мм от габаритных размеров фюзеляжа. Болванку уклады-
вают по плоскости разъема на стекло, смазывают разделительной
пастой и на нее наклеивают предварительно пропитанную ком-
паундом стеклоткань средней толщины и тщательно притирают к
поверхности болванки и стекла. Таким образом накладывают
два-три слоя стеклоткани. После отвердения компаунда болванку
накрывают рамкой, а свободное пространство в рамке заливают
гипсом с использованием наполнителя (обрезками древесины, пе-
ревязанными мягкой проволокой).
После отвердения гипса форму отделяют от стекла и дере-
вянную модель извлекают из формы. Дефекты поверхности на
форме заделывают с помощью густого компаунда с последующей
местной полировкой.
В негативной форме фюзеляж выклеивают (рис. 83, а) в сле-
120
a
Рис. 84. Сборка фюзеляжа типа монокок:
а — способы соединения полуформ; б — способы усиления фюзеляжа и крепления различных
узлов и элементов конструкции; 1 — соединение встык; 2 — накладки из стеклоткани; 3 —
деревянные накладки; 4 — фанерные детали; 5 — металлические детали; 6 — тяга управле-
ния; 7 — металлическая трубка; 8 — штырь
121
дующем порядке: поверхность формы покрывают разделительной
пастой; в форму закладывают первый, самый тонкий, слой стекло-
ткани, пропитанной компаундом. Затем закладывают последующие
слои. Причем последним укладывают слой самой толстой стекло-
ткани. В местах местного усиления вклеивают накладки из стекло-
ткани и металлические детали окантовок, усилений и другие кре-
пежные элементы. После частичного отвердения компаунда можно
срезать излишки стеклоткани.
После полного отвердения компаунда деталь извлекают из
формы и подгоняют места стыка правой и левой половин фюзе-
ляжа. Склеивание этих половин может быть произведено встык
с помощью полос стеклоткани или деревянных накладок из сосны
или бальзы (рис. 84, а). Деревянные элементы для соединения
половин фюзеляжа могут быть вклеены, когда деталь еще нахо-
дится в форме.
Места стыков очищают от излишков клея.
Способы вклеивания элементов усиления и посадочных мест
показаны на рис. 84, б.
При изготовлении фюзеляжа больших размеров (размах 4—
5 м) между слоями стеклоткани закладывают предварительно от-
формованные пластины из бальзы толщиной 3—4 мм.
Чтобы полнее использовать положительные качества конст-
рукций из стеклопластиков (получить минимальный вес, большую
жесткость и точность повторения наружного обвода деталей), про-
цесс формования следует вести под давлением.
Этот процесс может быть осуществлен на простейшей уста-
новке, где давление создается резиновой диафрагмой (рис. 83, б).
В этом случае негативную форму с выклейкой накрывают рези-
новой полосой толщиной 0,8—1,0 мм. Поверх резиновой диафраг-
мы накладывают плиту из органического стекла, гетинакса, тек-
столита или дюралюминия толщиной 5—8 мм. Пакет стягивают
с формой шурупами на расстоянии 50—70 мм по периметру.
Для улучшения герметизации по краю деревянной рамки про-
кладывают жгут из проволоки диаметром 2—3 мм. В плиту ввер-
тывают штуцер с велосипедным ниппелем. В пространство между
плитой и диафрагмой закачивают воздух с помощью велосипед-
ного или автомобильного насоса. Резиновая диафрагма плотно
обжимает выклейку по форме, создавая давление и вытесняя воз-
можные воздушные пузыри, которые могут оказаться между слоя-
ми стеклоткани. Чтобы выходил воздух из формы, в ее корпусе
просверливают несколько дренажных отверстий. Масса такой кон-
струкции составляет 11—13 г/дм2.
Системы управления. В зависимости от назначения (развле-
кательная, учебно-тренировочная, модель-копия, спортивная, ре-
кордная и т. п.) радиоуправляемая модель планера может иметь
различные системы управления, отличающиеся количеством кана-
лов управления и элементов, на которые воздействует оператор,
подавая радиокоманды.
122
В общем виде система управления летающей радиоуправля-
емой модели состоит из следующих трех элементов:
передающее устройство с шифратором команд, преобразую-
щее манипуляции оператора с элементами управления на пульте
в высокочастотные электромагнитные волны, модулированные осо-
бым образом и несущие информацию о необходимых перемеще-
ниях рулей или механизмов, находящихся на модели;
приемное устройство с дешифратором команд, которое долж-
но принятый сигнал преобразовать таким образом, чтобы нужная
информация была своевременно и точно направлена к соответст-
вующему исполнительному механизму;
аэродинамические рули и другие механизмы, которые приво-
дятся в действие посредством исполнительных механизмов для
изменения траектории или режима полета или каких-либо других
действий с элементами передачи механических усилий от испол-
нительного механизма к рулям.
Схема работы системы управления летающей радиоуправля-
емой моделью планера приведена на рис. 85.
Как видно из схемы, принятый антенной и преобразованный
в приемнике радиосигнал преобразуется в дешифраторе в элект-
рический сигнал достаточной мощности и направляется к испол-
нительному механизму, воздействующему на аэродинамический
руль, в данном случае на руль управления. Усилие от испол-
нительного механизма передается на руль посредством тяги через
специальную качалку. Тяга управления соединяется с качалкой и
исполнительным механизмом (рулевой машиной) с помощью спе-
циальных карабинов, позволяющих в небольших пределах регу-
лировать длину тяги.
Большое конструктивное разнообразие элементов систем
управления позволяет моделисту выбрать такой вариант конст-
рукции, который полнее удовлетворит поставленную задачу.
Наиболее простым и распространенным исполнительным меха-
низмом в недалеком прошлом был механизм электромагнитного
типа (обычный соленоид — рис. 86, а или электромагнит —
рис. 86, б).
Исполнительные механизмы подобного типа могут быть изго-
товлены самостоятельно или переделаны из промышленных реле
подходящих размеров. Здесь, как правило, приходится перематы-
вать обмотку реле, чтобы получить необходимый ток и достаточ-
ное усилие на конце рычага. Но такие исполнительные меха-
низмы позволяют получить лишь очень небольшие отклонения
рулей. Кроме того, у них значительная масса, и они расходуют
много электроэнергии. Однако из-за простоты и надежности эти
механизмы все еще встречаются в системах управления.
Некоторое распространение имеют простые исполнительные
механизмы в системе дискретного управления по одному каналу
типа «вертушки». «Вертушка» (рис. 87, а) состоит из электро-
магнита, звездочки и стопорного якоря. В качестве привода для
вращения звездочки может быть использован закрученный рези-
123
2
Рис. 85. Схема системы управления радиоуправляемой моделью планера:
1 — передатчик с шифратором команд; 2 — антенна передатчика; 3 — антенна приемни-
ка; 4 — источник электрического тока; 5 — приемник с дешифратором; 6 — исполнитель-
ный механизм; 7 — тяга управления; 8 — руль
Рис. 86. Исполнительные механизмы электромагнитного типа:
а — соленоид; б — двухпозиционный электромагнит; 1 — ярмо; 2 — обмотка; 3 — якорь;
4 — крышка; 5 — латунная втулка; 6 — сердечник; 7 — тяга
124
Рис. 87. Электромагнитный исполнительный механизм типа вертушки:
а —схема работы и устройство; б — вертушка в системе управления; / — звездочка; 2 —
якорь; 3 — электромагнит; 4 — пружина; 5 —вертушка; 6 — резиновый жгут (пружина); 7 —
выходной рычаг; 8 — руль
новый жгут или часовая пружина. Один из концов звездочки с
помощью рычага связан с рулем. Вращение звездочки ограничи-
вается стопорным якорем. Подача командного сигнала в обмотку
электромагнита вызывает притяжение якоря. Звездочка освобож-
дается и начинает вращаться. Повернувшись на угол 90°, она сто-
порится верхней защелкой якоря. После окончания командного
импульса стопорный якорь возвращается в исходное положение
силой натяжения небольшой пружины, и звездочка поворачивается
еще на 90° и т. д.
Для ограничения расхода электроэнергии при подаче команд-
ного сигнала в цепь питания электромагнита вертушки включа-
ется резистор, подобранный по величине так, чтобы ток после
притяжения стопорного якоря уменьшался в 8—10 раз и оказы-
вался достаточным только для удержания якоря в притянутом
положении. При нейтральном положении звездочки резистор
замкнут контактами.
Существуют разновидности механизмов типа вертушки с раз-
личным количеством зубьев звездочки, однако принцип действия
их сходен. Схема работы вертушки в системе управления на мо-
дели изображена на рис. 87, б.
125
Значительным недостатком исполнительных механизмов типа
вертушки является то, что возможны ситуации, когда для подачи
команды нужного направления приходится поочередно проходить
дополнительные команды «нейтраль» — противоположное направ-
ление — «нейтраль». Эти недостатки ограничивают применение
упомянутых выше исполнительных механизмов простейшими раз-
влекательными и учебно-тренировочными моделями.
Из простейших исполнительных механизмов, получивших рас-
пространение в последние годы на развлекательных и учебно-тре-
нировочных моделях, следует отметить механизм (рис. 88, а),
состоящий из микроэлектродвигателя и гибкой тяги, которая не-
посредственно наматывается на вал или небольшой ролик. От-
клонение руля происходит за счет сокращения длины тяги. Угол
отклонения руля поворота ограничивается специальным ограни-
чителем с контактным устройством и резистором для сокращения
потребляемого тока микроэлектродвигателем в момент тормо-
жения.
Возврат руля поворота в исходное положение происходит под
действием натяжения небольшой пружины или резиновой ленточ-
ки. Способ управления моделью с таким исполнительным меха-
низмом, как и с электромагнитным, состоит в том, что модель
настраивается на полет с виражом в одну сторону, а развороты
в противоположную сторону осуществляются при отклонении руля
направления. Полет по прямой линии осуществляется периодиче-
скими посылками команд определенной длительности с выбранными
паузами. Навык управления такой моделью приобретается очень
быстро.
На описанном принципе может быть выполнен простейший ис-
полнительный механизм как законченная конструкция (рис. 88, б).
Для работы в системе многокомандного управления моделью
наиболее распространены исполнительные механизмы промышлен-
ного и любительского изготовления, где в качестве привода ис-
пользуются микроэлектродвигатели постоянного тока с постоян-
ным магнитом. Микроэлектродвигатель, развивающий небольшой
вращающий момент, вращает через редуктор с передаточным от-
ношением 1 : 80—1 : 200 выходной вал исполнительного механиз-
ма. На выходном валу закреплена специальная качалка или диск
для присоединения тяги управления рулями.
Такой исполнительный механизм обладает значительным вра-
щающим моментом, экономичен и надежен в работе.
На многих промышленных конструкциях исполнительных ме-
ханизмов для съема усилий с выходного вала редуктора исполь-
зуется реечный механизм, обеспечивающий параллельное пере-
мещение тяги управления.
Такие механизмы, работающие в системе многокомандного
управления дискретного типа, оснащаются обычно специальным
устройством для возвращения руля в нейтральное положение пос-
ле прекращения командного сигнала и концевыми выключателями
в крайних положениях.
126
Рис. 88. Исполнительный механизм с электродвигателем и гибкой тягой:
а — одноканальный; б — двухканальный
127
Механизмы, работающие в системе пропорционального управ-
ления, по конструкции основных узлов подобны описанным выше,
но позволяют отклонять рули на любой заданный угол по жела-
нию оператора. Внешний вид таких механизмов показан на
рис. 89.
Элементом системы управления, передающим механическое
усилие от исполнительного механизма к рулям или узлам механи-
зации, является тяга с узлами крепления и регулирования кара-
бинами.
В конструкции моделей планеров чаще всего встречаются раз-
новидности тяг, приведенные на рис. 90. Здесь же показаны наи-
более типичные конструктивные схемы отдельных узлов системы
управления.
В конструкции системы управления аэродинамическим рулем
посредством мягкой тяги тросового типа (рис. 90, а) одна из тро-
совых проводок связана непосредственно с двуплечной качалкой
руля через карабин. Другая тяга соединяется с качалкой через
эластичный упругий элемент или пружину. Для точного согласо-
вания нейтрального положения исполнительного механизма и руля
один из карабинов первой тяги имеет узел регулирования длины
128
Рис. 90. Конструкция узлов передачи усилия от исполнительного механизма к
рулям:
а — гибкая тяга; б — жесткая тяга; в — боуден; г» д — качалки управления; 1 — руль
направления; 2 — руль высоты; 3 — элерон
5 Зак. 796
129
тяги. Последнее обычно производится при настройке модели. Пре-
имущество такой системы — это отсутствие люфтов, которые вы-
бираются за счет натяжения пружины. Недостаток — конструктив-
ная сложность и малая живучесть системы при грубых посадках
и авариях модели. Применяется же она чаще на моделях-копиях
планеров. В качестве тросов применяется обычно стальной пле-
теный канатик диаметром 0,2—0,4 мм.
Более распространенной и простой конструкцией, обеспечи-
вающей передачу усилия от исполнительного механизма к рулю,
является конструкция, которая состоит из жесткой деревянной
тяги круглого или квадратного сечения с законцовками, выполнен-
ными из стальной проволоки и имеющей на концах карабины.
С помощью их осуществляется соединение с качалками исполни-
тельного механизма и аэродинамического руля. Один из караби-
нов является, как правило, регулируемым по длине тяги (рис.
90, б).
На рис. 90, в показана конструкция соединения исполнитель-
ного механизма с рулем посредством гибкой тяги в оболочке и
называется «боуден». Такая передача используется тогда, когда
трудно или невозможно соединить исполнительный механизм с
рулем жесткой тягой без переходных качалок или рычагов. Слу-
чаи эти бывают при некоторых компоновочных особенностях мо-
дели, например при Т-образном расположении стабилизатора или
большой тесноте внутри хвостовой балки фюзеляжа. Для обеспе-
чения точной работы конструкции необходимо надежно закрепить
внешнюю оболочку тяги, образуя наибольшие радиусы изгиба ее
при монтаже. Если же радиус изгиба мал, потери на трение ста-
новятся слишком большими, при этом может нарушиться работа
исполнительного механизма из-за перегрузки. Внешняя оболочка
обычно выполняется из спиральной стальной пружины с плотной
намоткой. Внешний диаметр оболочки должен быть 2,5—3,5 мм.
Центральная тяга делается из жесткого стального тросика диа-
метром 0,8—1,0 мм. Изготовление такой проводки возможно из
жесткой пластиковой трубки подходящего диаметра и централь-
ной жилы диаметром 1,8—2,0 мм из полиамидной смолы. Несмот-
ря на все недостатки, присущие такой системе проводки, она на-
ходит применение при конструировании оригинальных моделей и
моделей-копий.
В случае необходимости для изменения направления усилия,
например при управлении двумя или более рулями от одного ис-
полнительного механизма, применяют разного рода двуплечие,
многоплечие рычаги и качалки (рис. 90, г, д). Главным требова-
нием к таким передачам является: по возможности малый люфт
в подвижных соединениях, легкость перемещения. Разумеется, все
это обеспечивается высокой точностью изготовления механизмов.
В узлах поворотных качалок желательно применять прибор-
ные шарикоподшипники. Однако не следует забывать и о мини-
мальном весе конструкции. Короткие тяги в таких механизмах
обычно делают из стальной пружинной проволоки диаметром
130
a
Рис. 91. Конструкции качалок:
а — промежуточная; б — качалка руля; в — регулируемая
1,5—2,0 мм. Рычаги и качалки могут выполняться из листового
пластика с металлическими точеными втулками или целиком из
металла с последующим облегчением (сверление или фрезерова-
ние). Возможно применение и качалок промышленного изготовле-
ния из различных пластиков.
При конструировании систем передачи усилий к рулям соблю-
дают правило: ограничить ход или угол поворота руля можно
только за счет использования предельных положений исполни-
тельного механизма или изменения действующей длины качалки.
Нельзя ограничивать ход исполнительного механизма за счет ка-
ких-либо упоров и ограничителей, ибо последние вызывают лиш-
ние нагрузки или полное затормаживание двигателя исполнитель-
ного механизма. Это вызывает излишний расход электроэнергии
бортового источника и может стать причиной выхода из строя
аппаратуры управления.
В процессе регулировок модели возникает необходимость из-
менить угол отклонения рулей при предельном положении качалки
исполнительного механизма. В этом случае регулировка может
быть осуществлена путем изменения длины рычага качалки соот-
ветствующего руля. Для этого на качалках обычно делают не-
сколько отверстий, с помощью которых можно присоединить ка-
рабин на различных расстояниях от оси вращения руля (рис. 91,
а, б). Более тонкая регулировка может быть осуществлена с ис-
пользованием качалки, изображенной на рис. 91, в. Здесь регули-
ровка осуществляется перемещением промежуточной серьги по
резьбовому концу рычага качалки. Серьга может быть сделана
из металла или пластика.
5*
131
Для соединения тяги с рычагами исполнительных механизмов
и с качалками рулей или промежуточных механизмов использу-
ются специальные карабины. Часто эти узлы выполняют регули-
руемыми, с тем чтобы получить заданное положение рулей. Иног-
да к таким узлам предъявляются требования быстрого и надеж-
ного отсоединения при нагрузках, превышающих расчетные.
Простейший карабин, применяемый для систем управления
элементами, находящимися в параллельных плоскостях с плос-
костью вращения рычагов, можно выполнить из стальной прово-
локи (рис. 92, а) диаметром 1,5 мм. Устройство его понятно из ри-
сунка. Здесь Z-образный изгиб служит для регулировки длины
тяги, а припаянная петля из стальной проволоки диаметром 0,6—
0,8 мм фиксирует тягу от самопроизвольного отсоединения от ка-
чалки.
Для более тонкой регулировки длины тяги карабин можно
изготовить из велосипедной спицы и натяжной втулки (рис. 92, б).
Карабин, изображенный на рис. 92, в, служит для соединения эле-
ментов, имеющих непараллельные плоскости вращения, например
рули V-образного стабилизатора. Кроме того, такой карабин мо-
жет отсоединяться при нагрузках, превышающих расчетные, и хо-
рошо защищает систему управления при аварийных посадках.
Вилку такого карабина обычно выполняют из пружинной стали.
С тягой управления вилку соединяют резьбой и контролируют
контргайкой.
Очень удобны для эксплуатации карабины, изготовленные из
различных пластиков, выпускаемые промышленностью (рис. 92, г).
Простое устройство для регулирования системы управления
рулями может быть сконструировано, применяя так называемые
реечные исполнительные механизмы (Супранар-82, Супранар-83).
В них проволочная скоба (рис. 93) закрепляется в отверстиях вы-
ходного устройства через резиновую трубку. Тяга руля соединяется
со скобой с помощью зажима, изготовленного из алюминиевого
сплава, посредством накладки и винтов. Простота и удобство мон-
тажа такого устройства, широкий диапазон регулировок, хорошая
защита исполнительного механизма от перегрузок при авариях и
грубых посадках позволяют рекомендовать его для оборудования
моделей.
Важным элементом в системе управления модели является
узел навески рулей. К этому узлу предъявляются требования: хо-
рошая подвижность руля, минимальные потери на трение и не-
большие люфты.
В этих целях используют малогабаритные петли из металла и
капрона — как самодельные, так и промышленного производства
(рис. 94, а). Широко используются также узлы навески, выполнен-
ные из синтетической ткани или крученой капроновой нити. Узел,
изображенный на рис. 94, б, выполняют из полоски ткани, наклеи-
ваемой одним концом на верхнюю поверхность киля, а другим —
на нижнюю поверхность руля. Другая полоска наклеивается в об-
ратном порядке и т. д.
132
Рис. 93. Узел регулировки системы
управления:
1 — резиновая трубка; 2 — скоба; 3 — тяга
Рис. 94. Способы навески рулей:
а — петля; б — тканевая лента; в — нитя-
ная восьмерка; г, д, е — тканевые шар-
ниры
133
Узел навески с помощью капроновой крученой нити
(рис. 94, в) очень прост и дает хорошие результаты. Через предва-
рительно просверленные отверстия руль «пришивается» к килю
(стабилизатору). Нить при этом образует восьмерку. После при-
шивания конец нити закрепляют каплей клея.
Простой и хороший узел навески можно изготовить из двух
полосок капроновой ткани шириной 30—40 мм, сложенной в два
слоя и простроченной посередине по всей длине (рис. 94, г). За-
тем склеивают.
Неплохо работает узел подвески, изображенный на рис. 94, д.
Здесь он образован полоской ткани, вклеенной между рейками,
образующими кромки руля и киля (стабилизатора). Узел подвес-
ки (рис. 94, е) руля (элерона) за верхнюю поверхность, позво-
ляющий получить аэродинамически чистую поверхность, широко
применяют на спортивных моделях.
Во время проклеивания ткани и нитей надо следить за тем,
чтобы клей не попадал на участки ткани, подвергающиеся изгибу.
Это же требование выполняют и при лакировке модели.
В ходе конструирования системы управления простой модели
с исполнительным механизмом электромагнитного типа (электро-
магнит, соленоид, вертушка) возникают некоторые сложности, свя-
занные с малыми усилиями, которые развивает исполнительный
механизм. И чтобы уменьшить влияние веса тяги на работу меха-
низма, можно рекомендовать конструкцию, изображенную на
рис. 95. Здесь усилие механизма передается рулю посредством вра-
щения тяги.
Конструирование очень легких моделей осложняется тем, что
необходимо предельно облегчить все оборудование модели, осо-
бенно исполнительного механизма. Использование малогабаритных
электромагнитов в качестве исполнительного механизма здесь
оправдано благодаря их малым размерам и простоте конструкции.
Однако чрезвычайно малые усилия такого механизма вынуждают
искать иные решения. Один из вариантов — это новая конструкция
руля направления, предложенная чехословацкими моделистами.
Чтобы получить должную маневренность модели при класси-
ческом решении руля направления (рис. 96, первый вариант), для
отклонения руля в заданном диапазоне углов требуется переме-
стить рычаг исполнительного механизма на расстояние L. Руль на-
правления во втором варианте для получения того же эффекта
требует в два раза меньшего угла отклонения, а следовательно,
и меньшего перемещения рычага. Эта находка позволяет значи-
тельно повысить надежность и экономичность работы электро-
магнита.
Улучшение управляемости и маневренности модели планера
при малом числе исполнительных механизмов может быть достиг-
нуто сопряжением одновременного действия двух и более аэроди-
намических рулей от одного исполнительного механизма. На
рис. 97, а изображен узел, позволяющий осуществить одновремен-
ное управление рулем направления и элеронами от одного испол-
134
Вариант 1
Рис. 96. Варианты конструкции руля
направления
а — элероны — руль направления; б —
руль направления — руль высоты
Рис. 98. Сопряженное действие за-
крылка и интерцептора:
а, б, в — схемы работы; г — конструкция
качалки; д — конструкция тяги управле-
ния
135
нительного механизма. Здесь в фюзеляже модели смонтирована
специальная трехплечая качалка, которая поворачивается испол-
нительным механизмом руля направления. Два других плеча ка-
чалки соединены карабинами с шаровым зацеплением с тягами
управления элеронами. Выбором угла между плечами качалки
можно обеспечить дифференциальное управление работой элеро-
нов: угол отклонения элерона вверх больше, чем вниз. Шары диа-
метром 4 мм закреплены в отверстиях качалки посредством кер-
нения кромок отверстия в трех — пяти точках с обеих сторон.
Такая конструкция узла удобна в эксплуатации, хорошо регу-
лируется и защищает исполнительный механизм при грубых по-
садках и авариях.
На модели, управляемой только одним рулем направления,
для улучшения маневренности и уменьшения потерь высоты при
отклонении руля направления можно использовать простое устрой-
ство (рис. 97, б), позволяющее отклонять руль высоты вверх на
небольшой угол при отклонении руля в любую сторону. Здесь де-
тали изготовлены из проволоки диаметром 1,0—1,2 мм. Эффектив-
ность действия такого устройства зависит от площади дополни-
тельного руля высоты и угла его отклонения. Последний определя-
ется экспериментально и обычно не превышает 5—7° при отклоне-
нии руля направления на 15—20°. Величина отклонения руля
высоты и характер зависимости от угла отклонения руля направле-
ния определяются кривизной направляющих, которые расположе-
ны на руле высоты.
Сопряжение действия рулей и механизмов на моделях связа-
но не только с тем, что применяются простые системы управления
с ограниченным числом каналов управления и исполнительных
механизмов, но и с многоканальными системами с целью умень-
шения полетного веса и габаритов фюзеляжа, а следовательно,
уменьшения аэродинамического сопротивления.
Если используются отклоняемые закрылки на крыле модели,
возникает возможность реализовать их при больших углах откло-
нения (до 90°) и в качестве тормозных щитков. Но, как показыва-
ет практика, такое решение не всегда обеспечивает маневрирова-
ние моделью при посадке. Если модель не долетает до заданной
точки приземления с отклоненным тормозным щитком, то пробле-
матично также продолжение планирования при возвращении щит-
ка в нормальное положение, ибо модель тут же «просаживается» —
теряет высоту.
Другим неприятным моментом является значительное ухудше-
ние путевой управляемости при полном отклонении тормозного
щитка. В определенной мере эту неприятность можно устранить
значительным уменьшением (до 30 % размаха крыла) размаха
тормозного щитка. Однако это уменьшение снизит его эффектив-
ность, когда он используется в качестве закрылка.
Данную проблему удалось успешно решить чехословацким
моделистам, которые расположили специальный тормозной щиток
(интерцептор) на верхней поверхности крыла. Посадочный маневр
136
с применением тормозного щитка значительно упростился, сохра-
нилась и хорошая управляемость модели.
У модели с размахом около 3 метров размеры интерцептора
составили 250X30 мм. По размаху крыла интерцепторы располо-
жены таким образом, что при их отклонении вихревая зона не
охватывает хвостовое оперение. При выборе места расположения
интерцепторов следует иметь в виду, что вихревая зона расширя-
ется в сторону оперения модели. Если используется V-образное
оперение, расстояние от интерцепторов до фюзеляжа можно вы-
брать несколько меньшим, чем при традиционном оперении. Откло-
няемый закрылок в этом механизме (рис. 98) может быть отклонен
вверх до 5° (для увеличения скорости полета при выполнении
упражнения «скорость на базе», рис. 98, а). Для выполнения
упражнения «дальность полета» угол отклонения равен 0°
(рис. 98, б, в) и при угле отклонения 10° вниз модель может вы-
полнять планирование в упражнении «продолжительность полета».
Приведенные выше углы отклонения закрылка являются ориенти-
ровочными и зависят от выбранного профиля и других факторов.
Конструкция механизма позволяет управлять обоими элемен-
тами механизации крыла одним исполнительным механизмом про-
порционального действия. Конструкция механизма и принцип его
действия понятны из рис. 98, г. Внутри крыла расположен вращаю-
щийся шток управления механизмом (рис. 98, д), изготовленный
из дюралевой проволоки диаметром 4 мм. Конец штока со стороны
корневой нервюры отогнут и расклепан. На другом конце штока
опилен четырехгранник размером 3X3 мм и нарезана резьба М3.
На четырехгранник устанавливают специальный сегмент
(рис. 98, г) из металла или пластика толщиной 1,5—2 мм и затя-
нут гайкой М3. Основные размеры и взаимное расположение сег-
мента и качалки управления показаны на рисунке. Для правильной
работы механизма необходимо выдержать углы и размеры между
осями отверстий сегмента. Тяги от сегмента к аэродинамическим
элементам удобно изготовить из спиц от велосипедного колеса
диаметром 1,8—2,0 мм. Головка спицы соединена с сегментом,
на другом конце используют регулируемый карабин.
Канавка на кронштейне интерцептора позволяет работать за-
крылку в диапазоне углов от —5 до +10° без отклонения интер-
цептора; интерцептор начинает отклоняться лишь при дальнейшем
отклонении закрылка вниз. Собственно, сам интерцептор изготав-
ливают из фанеры и обрабатывают по профилю крыла. В закры-
том положении интерцептор удерживается резиной (чтобы он не
открылся при большой скорости полета и при взлете).
В ходе решения некоторых конструктивных задач возникает
необходимость осуществить управление одним аэродинамическим
рулем двумя независимыми исполнительными механизмами. Так,
управление элеронами на моделях-бесхвостках, управление руля-
ми высоты и направления при V-образном оперении, управление
механизмом изменения кривизны профиля и элеронами и т. п.
осуществляется с использованием смесителей или миксеров.
137
Рис. 99. Смеситель с перемещением одного из
исполнительных механизмов
Рис. 100. Варианты конструкций смесителей:
а, б — с промежуточными качалками; в — для исполнительных механизмов с плоско-
параллельным перемещением рычагов
138
Наиболее распространенным устройством для управления эле-
ронами или V-образным оперением до последнего времени был
смеситель, изображенный на рис. 99. Здесь разноименное пере-
мещение рулей осуществляется подвижным исполнительным ме-
ханизмом, установленным на специальные направляющие. Соглас-
ное перемещение рулей реализуется движением первого исполни-
тельного механизма вместе с рулями по направляющим второго
исполнительного механизма, закрепленного неподвижно относитель-
но фюзеляжа модели.
Конструктивно такой смеситель обычно выполняется в виде от-
дельного съемного блока. Недостатком его является увеличенная
нагрузка на один из исполнительных механизмов в связи с необ-
ходимостью перемещения другого.
Некоторое неудобство при эксплуатации модели со смесите-
лем, изображенным на рис. 99, может быть устранено, если ис-
пользовать смеситель, показанный на рис. 100, а. Здесь оба ис-
полнительных механизма неподвижно закреплены в фюзеляже
(крыле), а все необходимые соединения осуществляются через
промежуточные качалки. Согласное перемещение рулей здесь осу-
ществляется правым (по рисунку) исполнительным механизмом.
Разноименное перемещение рулей осуществляется другим исполни-
тельным механизмом. Необходимые углы отклонения рулей от
каждого механизма могут быть выбраны изменением расстояния
от оси вращения промежуточных качалок до точек присоединения
тяг управления рулями и промежуточных.
Одним из вариантов подобного типа является смеситель, изо-
браженный на рис. 100, б. Принцип его работы аналогичен опи-
санному и понятен из рис. 100, в.
Прост по устройству и очень компактен миксер, изображен-
ный на рис. 101. Как видно из рисунка, на общей оси закреплены
три рычага с регулируемым расстоянием от оси вращения. Весь
узел смонтирован на выходном диске исполнительного механизма.
Рычаги устройства соединены с тягами посредством шаровых кара-
бинов или двухосевых шарниров.
В случае использования исполнительных механизмов с плоско-
параллельным перемещением выходных рычагов могут быть ис-
пользованы смесители рычажного типа, которые монтируются пря-
мо на выходных рычагах.
Смеситель, который может быть смонтирован отдельно от ис-
полнительных механизмов в фюзеляже, изображен на рис. 102, а.
Узел изображен схематично. Принцип его работы прост и поня-
тен из рисунка.
Если исполнительные механизмы размещены в крыле модели,
для управления элеронами может быть использован смеситель,
изображенный на рис. 102, б. Один из вариантов такого механиз-
ма, изображенный на рис. 103, позволяет реализовать крыло с раз-
витой механизацией. Здесь исполнительный механизм, управляю-
щий закрылком, отклоняет секцию крыла, на котором расположен
элерон. При этом элерон отклоняется на угол, больший чем сек-
139
Рис. 101. Компактный
смеситель, монтируемый
на исполнительном меха-
низме
Рис. 102. Кинематическая
схема смесителя:
а — монтируемого в фюзеля-
же; б — монтируемого в
крыле
ция закрылка. Такое конструктивное решение механизации крыла
позволяет менять кривизну профиля крыла в широких пределах
при независимом управлении элеронами. Величины углов отклоне-
ния элерона и секции закрылка определяются размерами х и у
плечей основной качалки. При симметричном исходном профиле
крыла можно получить отличные результаты в упражнении «ско-
рость на базе».
140
Рис. 103. Смеситель для управления
развитой механизацией крыла
Рис. 104. Узел системы управления
механизацией крыла от исполнитель-
ных механизмов, монтируемых в фю-
зеляже
Рис. 105. Вариант системы управления механизацией крыла с качалками вилоч-
ного типа
141
Увеличение кривизны профиля дает возможность получить до-
статочно высокий Су крыла при выполнении упражнения «продол-
жительность полета».
При конструировании всех типов смесителей следует стремить-
ся получить наименьшие люфты во всех подвижных соединениях и
шарнирах. Однако следует стремиться также и к получению мини-
мальных потерь на трение в узлах.
Крыло современной радиоуправляемой модели планера доста-
точно тонкое, и размещение исполнительных механизмов в крыле
затруднено. Чаще всего исполнительные механизмы монтируются
в фюзеляже модели, и передача усилий к элеронам, закрылкам,
интерцепторам осуществляется через специальные узлы. Высокие
требования к точности и надежности работы этих узлов заставля-
ют уделять особое внимание их конструктивной отработке. Прак-
тика позволила выделить несколько таких конструкций.
На рис. 104 изображен узел управления элеронами (закрылка-
ми, элевонами), хорошо зарекомендовавший себя на практике.
Конструкция достаточно проста, надежна и понятна из рисунка.
Часто применяется конструкция узла передачи усилий от ис-
полнительных механизмов к элеронам, закрылкам, интерцепторам
вилочного типа, изображенная на рис. 105. При конструировании
таких узлов всегда следует стремиться к получению разъемных
соединений с минимальными люфтами для предотвращения воз-
можных вибраций при больших (35—40 м/с) скоростях полетов.
Конструкции узлов системы управления интерцепторами отли-
чаются разнообразием. Несколько конструктивных схем приведены
на рис. 106, а, б, в, г, д, е. Основным требованием при изготовле-
нии таких узлов является обеспечение аэродинамической чистоты
поверхности участка крыла, на котором размещен интерцептор.
В качестве аэродинамических тормозов на модели иногда ис-
пользуются отдельные элементы фюзеляжа, горизонтального опе-
рения и т. д. Узел управления аэродинамическим тормозом, в ка-
честве которого используется фонарь кабины, конструктивно прост
и легко реализуется с исполнительным механизмом, у которого
есть силовой выход поворотного типа. На диск или качалку ис-
полнительного механизма винтами М2 прикрепляется удлиняю-
щий рычаг, соединенный с фонарем модели (рис. 107, а).
В качестве аэродинамического тормоза может быть использо-
ван также руль направления, который в этом случае сделан из
двух частей (рис. 107, б) с плоскостью разъема, совпадающей
с осью симметрии. Каждая часть руля направления может пово-
рачиваться около общей оси вращения. Здесь для включения
аэродинамического тормоза в работу руль направления расщепля-
ется, и половинки руля встают поперек потока. Характерно, что
функции руля направления сохраняются и при раскрытом тормо-
зе. Управление таким узлом осуществляется с помощью какого-
либо смесителя двумя исполнительными механизмами.
Технические возможности современной радиоаппаратуры
управления моделями позволили значительно поднять общий уро-
142
Рис. 106. Узлы системы управления интерцептором:
а, в, г — поворотным; б, д — выдвижным; е — выдвижным для модели-копии
вень всех радиоуправляемых классов моделей. Современные пра-
вила соревнований требуют от моделей высокого аэродинамиче-
ского качества, малого сопротивления и широкого диапазона ско-
ростей полета. Полетные характеристики моделей в значительной
мере зависят от аэродинамической чистоты конструкции. Одним
из путей улучшения этой чистоты модели является стремление
убрать из потока обтекания все излишние элементы: качалки, ка-
рабины, отверстия и т. п.
Традиционная конструктивная схема системы управления
аэродинамическими рулями, состоящая из качалки, карабина,
тяги управления, выходящей из фюзеляжа через отверстие, в зна-
Рис. 107. Аэродинамические тормоза:
а — фонарь; б — руль направления
чительной мере повышает вредное сопротивление модели. Тяга,
как правило, изогнутая способствует возникновению нежелатель-
ных вибраций рулей, что также повышает сопротивление модели.
Отверстия в фюзеляже или в обшивке крыла для выхода тяг
управления являются концентраторами напряжений и могут слу-
жить причиной преждевременного разрушения конструкции.
Чехословацкие моделисты предложили новую конструктивную
схему управления рулями, которая в значительной мере свободна
от перечисленных недостатков. Ее кинематическая схема приве-
дена на рис. 108, а. Здесь тяга /, жестко соединенная с роликом 2,
вторым своим концом может перемещаться в направляющем пазу
кулисы 3. Ролик 2 может вращаться в подшипниках 4, соединен-
ных с рулем. При перемещении тяги 1 в направляющем пазу ро-
лик будет поворачивать руль. В исходном положении ролик уста-
навливается под углом 0 к плоскости, лежащей на оси вращения
руля; изменение угла 0 дает возможность изменять передаточное
отношение между углами а и у. При 0 = 45° углы а и у равны.
Уменьшение угла 0 увеличивает угол у по сравнению с углом а,
и наоборот.
Один из вариантов конструктивного исполнения описанного
узла изображен на рис. 108, б.
144
Рис. 108. Механизм управления рулями:
а — схема работы устройства; б — конструкция узла; в — механизм в крыле; / тяга; 2 ~ ролик,
3 — направляющая кулиса; 4 — подшипник; 5 — накладка; 6 — основание; 7 — ползун
2
Рис. 109.
Механизм
отцепки леера:
а — неподвижный
крючок с фикса-
тором; б, в —
поворотный
крючок;
г — кассета
с несколькими
крючками;
/ — корпус;
2 — качалка;
3 — фиксатор;
4 — фюзеляж;
5 — резиновое
кольцо;
6 — тяга;
7 — крючок;
8 — шпангоут;
9 — балка
Рис. ПО. Буксировка модели планера моделью самолета-буксировщика:
А — устройство замка буксировщика; Б — устройство замка планера; 1 — замок; 2 — латун-
ная трубка диаметром 3 мм с вырезом; 3 — леер; 4 — замок планера
Такой механизм удобен в системе управления элеронами со-
временной спортивной модели планера, где, как правило, крыло
имеет очень тонкий профиль. Схема расположения механизма
управления элероном в крыле приведена на рис. 108, в.
Практика показывает необходимость быстрого вмешательст-
ва оператора в процесс буксировки модели планера на леере. От-
цепка леера в нужный момент может быть произведена операто-
ром с помощью специального устройства. Как правило, для приво-
да механизма отцепки леера самостоятельного исполнительного
механизма не устанавливают, а используют исполнительный ме-
ханизм руля высоты. Такой механизм срабатывает при предель-
ном отклонении руля высоты вверх на очень короткий промежуток
времени. Модель не успевает среагировать на резкую дачу руля,
и траектория полета практически не меняется.
Конструкции узлов отцепки просты, они представляют собой
законченный механизм, монтируемый на фюзеляже. На рис. 109,
а, б, в, г изображены конструкции таких узлов. В качестве мате-
риала чаще всего используется металл.
Для реализации взлета модели-копии планера или развлека-
тельной модели путем буксировки ее моделью самолета-буксиров-
щика могут быть использованы простейшие приспособления. Для
приведения в действие их не требуется специальных исполнитель-
ных механизмов. Конструкции таких приспособлений приведены
на рис. ПО. Для отцепления буксировочного леера используют
исполнительный механизм руля направления. Отцепка происходит
при полном отклонении руля направления в какое-либо крайнее
147
положение на короткий промежуток времени. Для облегчения раз-
гона модели при взлете следует использовать легкую тележку,
отдаляющуюся при отрыве модели от земли.
Мотопланеры с микродвигателями внутреннего сгорания. Ра-
диоуправляемая модель планера, оснащенная двигательной уста-
новкой для осуществления взлета, называется мотопланером. Пос-
ле окончания работы двигательной установки мотопланер совер-
шает планирующий полет точно так же, как и обычная радио-
управляемая модель планера. Мотопланер обладает рядом
положительных свойств, которые способствуют все большему их
распространению. Одним из главных преимуществ модели мото-
планера перед обычным планером является возможность запуска
его без помощников, что способствует значительной интенсифи-
кации тренировочного процесса. Меньшие аэродинамические на-
грузки в процессе взлета модели мотопланера по сравнению с мо-
делью планера уменьшают вероятность поломок, которые возмож-
ны при использовании случайных помощников. Мотопланер явля-
ется практически идеальной моделью для обучения навыкам
пилотирования радиоуправляемой летающей моделью.
Специально спроектированная модель мотопланера обычно
по своей компоновочной схеме подобна самолету и имеет двига-
тельную установку, смонтированную на фюзеляже непосредствен-
но. Здесь возможны различные варианты расположения микро-
двигателя (рис. 111, а, б, в, г). Каждая из этих схем обладает
своими особенностями и выбирается исходя из вкуса моделиста
с учетом эксплуатационных условий модели.
Схема расположения моторной установки, изображенная на
рис. 111, б, позволяет легко обеспечить необходимую центровку
модели, хорошее капотирование двигателя, но требует установки
специального приспособления для защиты воздушного винта от
поломок при посадке модели.
Схема, показанная на рис. 111, а, очень удобна в эксплуата-
ции, так как позволяет моделисту свободно работать при запуске
микродвигателя двумя руками, когда модель лежит на земле,
протереть руки после запуска микродвигателя, взять в руки пере-
датчик и затем произвести запуск модели.
При переоборудовании модели планера для полетов с микро-
двигателем внутреннего сгорания чаще всего используют схемы,
изображенные на рис. 111, а, г. Здесь микродвигатель, располо-
женный на специальном пилоне, может быть легко установлен
или снят с модели. Для этого на фюзеляже модели монтируются
специальные узлы крепления моторной установки. При конструи-
ровании таких узлов следует обращать внимание на жесткость и
прочность конструкции, так как при работе микродвигателя, рас-
положенного на пилоне, наблюдаются значительные вибрации
узла. Следует обратить внимание также на правильное ориенти-
рование оси вращения вала двигателя относительно оси модели.
Желательно капотирование микродвигателя и системы топливо-
148
Рис. 111. Варианты компоновки моторной установки мотопланера:
а — пилон на фюзеляже; б — тянущий винт; в — толкающий винт; г — пилон на крыле
питания с механизмом выключения. Некоторые конструктивные
варианты решений данного узла приведены на рис. 112, а, б, в.
Правила проведения соревнований по авиамодельному спор-
ту допускают использование микродвигателей на моделях мото-
планеров с рабочим объемом не более 2 см3. При этом на 1 см3
объема микродвигателя должно приходиться не менее 1000 г по-
летного веса модели. Это означает, что если полетный вес модели
составляет 1600 г, то рабочий объем микродвигателя не должен
превышать 1,6 см3. Время моторного полета не должно быть бо-
лее 45 с.
149
При выборе микродвигателя для модели мотопланера следу-
ет отдать предпочтение наиболее мощному и легкому микродви-
гателю, обращая основное внимание на надежность и хорошие
пусковые качества его. Если зажигание калильное, модель надо
покрыть специальным покрытием против воздействия метанола.
Подготовка микродвигателя к установке на модель заключа-
ется в тщательной его промывке и очистке всех деталей от по-
сторонних частиц. Для этого микродвигатель полностью разби-
рают, осматривают, каждую деталь тщательно промывают в бен-
зине с помощью жесткой волосяной щетки. В случае обнаружения
заусенцев или окалины последние осторожно удаляют тонким ша-
бером и шкуркой и снова промывают. Затем микродвигатель соби-
рают и все трущиеся детали смазывают жидким минеральным
маслом.
При эксплуатации микродвигателя всегда следует следить за
чистотой, не допускать попадания пыли, песка, грязи во всасы-
вающий воздушный канал и выхлопные окна. После окончания ра-
боты с микродвигателем необходимо его обязательно закрыть чи-
стой тряпкой и надеть на него специальный чехол. Эти меры по-
зволят обеспечить долгую работу моторной установки модели.
Для реализации всех возможностей микродвигателя на моде-
ли необходимо тщательно подобрать воздушный винт. В инструк-
ции по эксплуатации микродвигателя обычно рекомендуются па-
раметры воздушных винтов, которые подходят для него. Однако
чаще всего воздушный винт подбирают для микродвигателя и мо-
дели эмпирически, производя запуск модели и изменяя в неболь-
ших пределах диаметр воздушного винта или его шаг. Чтобы
уменьшить сопротивление, можно использовать складной воздуш-
ный винт, подобный тому, который применяют советские спортсме-
ны на «таймерных» моделях. Конструкция такого воздушного
винта приведена на рис. 113, а. Лопасти 1 такого винта обычно
изготавливают из стеклопластика (стекловолокно+эпоксидный
компаунд К-153). Втулку 2 винта изготавливают из дюралюминия
и закладывают при формовке лопасти. Ступицу 3 изготовляют из
дюралюминия Д16А-Т. В качестве оси вращения лопасти 4 ис-
пользуют стальной винт с гладкой цилиндрической частью диаме-
тром 3 мм.
В случае использования современных мощных высокооборот-
ных микродвигателей диаметр оптимального воздушного винта
становится чрезвычайно малым, и его коэффициент действия зна-
чительно падает. Здесь может оказаться полезным использование
однолопастного воздушного винта, который также может быть
складным (рис. 113, б). Здесь лопасть 1 изготовлена подобно
складывающемуся двухлопастному винту, описанному ранее.
Планшайбу вытачивают и фрезеруют из титанного сплава. Про-
тивовес изготавливают из тяжелого сплава на основе вольфра-
ма или из латуни ЛС-59-1. Балансировка воздушного винта про-
изводится изменением массы противовеса путем высверливания.
Весь узел закрывается обтекателем (коком) обычной конструкции.
150
Рис. 112. Конструкция пилонов моторной установки:
а — пилон из фанеры; б, в — пилон из металла
Рис. 113. Складывающиеся воздушные винты:
а — двухлопастный; б — однолопастный; 1 — лопасть; 2 — втулка; 3 — ступица; 4 — ось;
5 —- планшайба; 6 — противовес
151
При проектировании и изготовлении этого винта следует обращать
особое внимание на прочность крепления лопасти и противовеса.
После любого изменения форм или размеров лопасти следует
проверить балансировку воздушного винта.
Работа моторной установки в значительной мере определяет-
ся конструкцией системы топливопитания микродвигателя, кото-
рая состоит из топливного бака, трубопроводов и устройства оста-
новки микродвигателя.
Топливные баки обычно используют простые, из которых топ-
ливо поступает в двигатель самотеком. Есть и сложные баки, из
которых топливо подается под некоторым давлением, создавае-
мым за счет наддува из картера или глушителя шума. В случае
применения резонансных устройств на выхлопе давление в бак
может отбираться из резонансной трубы в зоне ее максимального
диаметра. Топливный бак делают из белой жести или луженой
латуни толщиной 0,25—0,4 мм с пропайкой внахлест. Трубки для
соединения бака с микродвигателем тщательно впаивают до
установки дна бака. Обычно используют медные или латунные
трубки диаметром 3 мм, а также резиновые трубки с внутренним
диаметром 2 мм. Последняя должна быть изготовлена из бензо-
маслостойкой резины и быть достаточно эластичной. Остановку
двигателя обычно осуществляют путем прекращения подачи топ-
лива (например, путем пережатия трубки. Один из возможных
вариантов устройства приведен на рис. 114. Привод этого устрой-
ства осуществляется от одного исполнительного механизма си-
стемы управления. Работа устройства происходит следующим об-
разом: нажатием на рычаг 1 механизм взводится в рабочее по-
ложение (трубопровод открыт); профилированный кулачок 2 от-
жимает прижим и сжимает пружину 3; при подаче команды на
остановку двигателя тяга 6 перемещается и упором 7 нажимает
на рычаг Г, кулачок освобождает прижим 2, и он под действием
пружины 3 пережимает топливопровод, прижимая его к су-
харю 4.
Устройство может быть приведено в действие также от часо-
вого механизма, который включается в момент выпускания моде-
ли и подает команду на остановку микродвигателя через задан-
ное время.
Мотопланеры с электродвигателем. В последние годы авиамо-
делисты во многих странах проявляют интерес к радиоуправляе-
мым моделям планеров с моторной установкой, где используются
электродвигатели. Такие модели интересны тем, что отсутствуют
шум во время работы двигателя и загрязнение окружающей сре-
ды. Запуск электродвигателя осуществляют простым включением
контактов посредством радиокоманды. Интересно, что во время
полета модели можно многократно включать и выключать элек-
тродвигатель. Режим работы электродвигателя легко регулирует-
ся переключением напряжения питания. Однако из-за несовершен-
ства источников электроэнергии удельная весовая мощность такой
152
двигательной установки значительно уступает микродвигателям
внутреннего сгорания.
Чтобы уменьшить вес двигательной установки, выбирают
электродвигатель с постоянным магнитом на рабочее напряже-
ние 6—12 В. Современные электродвигатели с мощностью 25—
40 Вт, как правило, очень быстроходны. Частота вращения вала
такого двигателя при оптимальной нагрузке составляет 10—15 ты-
Рис. 114. Устройство для остановки
микродвигателя на модели мотопла-
нера:
/ — рычаг; 2 — кулачок; 3 — пружина; 4 —
сухарь; 5 — топливопровод; 6 — тяга уп-
равления; 7 —упор
Рис. 115. Силовая установка с
электродвигателем:
1 — электродвигатель; 2 — шестерни; 3 —
корпус; 4 — крышка; 5 — лопасть
сяч оборотов в минуту. При скорости полета модели 5—8 м/с для
такого электродвигателя потребуется воздушный винт очень ма-
лого диаметра с малым шагом. Следовательно, коэффициент по-
лезного действия его будет невысок. Поэтому для оптимизации
режима работы воздушного винта снижают обороты с помощью
редуктора с передаточным отношением 1 : 2—1 : 5. Воздушный
винт рассчитывают на необходимый режим полета модели. Обыч-
но в таком случае воздушный винт получается диаметром 280—
360 мм с шагом 200—300 мм. Его выполняют примерно таким,
как винт резиномоторной модели, со складывающимися лопастя-
ми. Один из вариантов конструкции двигательной установки с
электродвигателем, редуктором и воздушным винтом показан на
рис. 115.
Для питания электродвигателя используют аккумуляторную
батарею напряжением 6—12 В, емкостью 0,5—1,5 А. ч. Емкость
источника тока выбирают такой, чтобы обеспечить работу элек-
тродвигателя в течение 8—10 мин. Обычно это никель-кадмиевые
или серебряно-цинковые аккумуляторы, обладающие хорошими
153
эксплуатационными свойствами. Некоторые типы таких аккуму-
ляторов позволяют осуществлять их зарядку от аккумуляторов
автомобиля или мотоцикла. Специальное же зарядное устройство
обеспечивает форсированный режим зарядки. Причем 80 % энер-
гии батарея получает за 15—20 мин, остальную часть в течение
часа.
Если используется коллекторный двигатель постоянного тока,
следует иметь в виду, что его коллекторно-щеточный узел излу-
чает радиопомехи, которые создают помеху радиоканалу системы
управления моделью. Для снижения уровня помех в цепь питания
электродвигателя включают специальные высокочастотные филь-
тры, состоящие из дросселей 20—30 витков провода диаметром
0,5 мм, на каркасе диаметром 5 мм, конденсатора постоянной ем-
кости 50—100 НХЗО В. Электродвигатель и провода экранируют.
Для защиты аккумуляторов от глубокого разряда в цепь пи-
тания иногда включают электронное устройство, отключающее
аккумулятор при достижении напряжения, предельного для дан-
ного типа аккумуляторов.
С целью кратковременного увеличения мощности установки
можно увеличивать напряжение питания на 30—40 % против но-
минального. При этом следует обеспечить интенсивное охлажде-
ние электродвигателя, надевая на его корпус специальный радиа-
тор из алюминия или латуни.
РЕГУЛИРОВКА И ЗАПУСК МОДЕЛЕЙ
Контроль геометрических параметров. Достижение высоких
спортивных результатов в значительной мере зависит от аэроди-
намических параметров модели. Использование современных ла-
минарных профилей крыла, оперения и сложных по форме фю-
зеляжей требует тщательного контроля формы всех аэродинами-
ческих поверхностей, точного и симметричного распределения по-
лукрыльев и оперения относительно плоскости симметрии модели.
Для достижения хорошей управляемости необходимо правильно
настроить систему управления.
Контроль за точностью формы поверхностей, находящихся
в воздушном потоке, должен вестись еще на этапе изготовления
деталей конструкции и полуфабрикатов. Такой контроль обычно
ведется с помощью шаблонов, которые могут быть изготовлены из
листового дюралюминия толщиной 0,8—1,0 мм.
Технологические и контрольные шаблоны для обводов кры-
ла и оперения делают обычно из листовой стали. В первую оче-
редь это относится к шаблонам, по которым производится обра-
ботка нервюр крыла и оперения и обработка обшивок готового
крыла. Точность изготовления таких шаблонов должна быть весь-
ма высокой, не ниже ±0,05 мм.
Для изготовления и контроля фюзеляжей обычно делают
продольные и поперечные шаблоны (рис. 117, а). Продольные
Рис. 117. Шаблоны для контроля частей модели:
а — фюзеляжа; б — крыла; в — углов отклонения рулей
155
шаблоны бывают двух видов: для контроля формы в плоскости
симметрии и для контроля формы по линии максимальной ши-
рины фюзеляжа. Поперечные шаблоны делают для нескольких
поперечных сечений фюзеляжа в характерных точках его. И те и
другие шаблоны должны быть взаимно увязаны между собой. На
готовых шаблонах наносятся полная информация о назначении
шаблона, разметка осей и их наименование, характерные точки,
места контрольных сечений и т д. Для использования контроль-
ных шаблонов при сборке моделей и определения взаимного рас-
положения элементов модели полезно на шаблонах наносить раз-
метку или делать площадки на некотором расстоянии от осей мо-
дели.
При изготовлении крыла (рис. 117, б) обычно делают шабло-
ны на нервюры для контроля плоскостей разъема крыла и фюзе-
ляжа, а также контршаблоны для контроля наружных обводов
Рис. 118. Контроль точности сборки модели (ht=h'i)
профиля крыла в соответствующих сечениях. На шаблонах крыла
наносится информация: наименование профиля, размер хорды,
толщина обшивок, размер силовых элементов, другие конструк-
тивные размеры. На контршаблонах делают контрольные пло-
щадки по хорде профиля, размечают места установки силовых
элементов и наносят информацию о процентном делении хорды
(для контроля продольных обводов крыла).
Для настройки системы управления можно изготовить специ-
альные шаблоны: для измерения углов отклонения рулей, элеро-
нов и т. п. (рис. 117, в).
Ответственной операцией является сборка узлов и модели
в целом. От правильности установки крыла и оперения относи-
тельно друг друга в значительной мере зависят летные характе-
ристики модели. Изготовление специальной оснастки и приспо-
соблений для сборки вполне окупается экономией времени при
сборке модели и высокой точностью.
Контроль точности взаимного расположения элементов моде-
ли осуществляют на разметочной плите или на ровной чертежной
доске подходящих размеров (рис. 118). При этом следует доби-
ваться симметрии крыльев, оперения и точности установки углов
крыла, оперения и двигательной установки. Для этого модель за-
крепляют на ложементах и с помощью рейсмаса производят заме-
ры в характерных точках и вычисляют установочные углы, устра-
няют перекосы и неточности.
156
Способы буксировки модели на высоту. До недавнего времени
традиционный способ буксировки радиоуправляемой модели пла-
нера на высоту с помощью простого леера был едва ли не един-
ственным Для выполнения его требовался помощник, который
затрачивал много энергии при старте. От помощника требовались
определенная физическая подготовка и некоторые знания. Этот
способ многократно описан в различных авиамодельных книгах.
Современные модели имеют достаточно большую нагрузку на
крыло, и, следовательно, скорость планирования их высока. Если
к тому же ветер отсутствует или очень слаб, то обеспечить нуж-
ную скорость буксировки нелегко. Тогда часто используют букси-
ровку с помощью блока, который позволяет увеличить скорость
буксирования в два раза. При этом один конец леера закрепляют
неподвижно на специальном колышке (рис. 119, а). Помощник,
двигаясь с блоком в руках в направлении взлета, натягивает леер
и буксирует модель.
Использование двух блоков позволяет увеличить скорость бук-
сировки в четыре раза. Схема расположения блоков и движения
буксировщика приведена на рис. 119, б, в. Здесь возможны два
равноценных варианта. Отметим, что достижимая высота при ис-
пользовании блоков меньше полной длины леера приблизительно
на 30—35 %. В качестве леера обычно используют капроновую
или нейлоновую рыболовную леску диаметром 0,8—1,0 мм. Леер
должен выдерживать на разрыв усилие в 35—40 кг.
Чтобы точно фиксировать момент отделения леера от модели,
на нем обычно закрепляют яркий флажок размерами 300x300 мм
на расстоянии 200—500 мм от кольца, которым леер закрепляется
на буксировочном крючке (рис. 120, а). Иногда, чтобы уменьшить
скорость падения и предотвратить его запутывание, после отде-
ления от модели вместо флажка используют небольшой парашют
с диаметром купола 300—400 мм. При натяжении леера парашют
вытягивается в линию и не оказывает вредного влияния на режим
буксирования. А когда натяжение леера ослабнет или оператор
откроет буксировочный крючок, парашют раскрывается и срывает
леер с крючка. Леер с парашютом плавно опускается на землю
(рис. 120, б).
Интересен способ запуска модели планера с резиновой ката-
пульты. Этот способ позволяет запускать модель без помощника.
Схема такого способа старта показана на рис. 121, а. Общая дли-
на катапульты с резиновым амортизатором составляет 150 метров.
В качестве резинового амортизатора используется резиновый
жгут сплошного сечения или составленный из отдельных нитей
(лучше круглого сечения) с площадью сечения около 20—25 мм2.
Длина резинового амортизатора должна составлять 15—20 % об-
щей длины катапульты. Перегрузка, достигаемая при таком стар-
те, может достигать 4—4,5 g в зависимости от вытяжки аморти-
затора и веса модели.
В последние годы большое распространение получил способ
буксировки радиоуправляемых моделей планера с помощью элек-
157
Рис. 119. Буксировка модели с помощью блоков:
а — одним блоком; б, в — двумя блоками
Рис. 120. Леер:
а — с сигнальным флажком; б — с
парашютом
158
Ветер
Рис. 121. Буксировка модели:
а — леером с резиновой катапультой; б — лебедкой
трической или механической лебедки. Схематически этот вид стар-
та изображен на рис. 121, б. Здесь также модель запускают без
помощника. Конструкция лебедки проста и понятна из рис. 122, а.
Схема электрических соединений изображена на рис. 122, б.
Управление лебедкой осуществляется с помощью ножной педали
(рис. 123), а управление двигателем лебедки — через мощное ре-
ле. В качестве двигателя лебедки использован автомобильный
стартерный электродвигатель. Питание его осуществляется от ав-
томобильного аккумулятора. Непосредственно на валу электро-
двигателя закреплена специальная катушка, конструкция которой
понятна из рис. 124. Обводной ролик имеет направляющие (для
пропускания леера). Причем одна из направляющих подвижна и
поворачивается около оси ролика. Все детали обводного ролика
(рис. 125) изготовлены из стали и соединены электросваркой.
159
Рис. 122. Электролебедка:
а — конструкция; б — схема электрических
соединений; 1 — электродвигатель; 2 — ка-
тушка; 3 — аккумулятор; 4 — реле; 5 — на-
правляющее кольцо
Рис. 124. Конструкция катушки
электролебедки:
1 — щека (текстолит); 2 — втулка (Д16);
3 — втулка (сталь); 4 — накладка (сталь);
5 — винт М4Х30
Рис. 123. Конструкция педали управ-
ления:
1 — основание; 2 — нажимная площадка;
3 — шарнир; 4 — кнопка; 5 — ограничитель
Рис. 125. Конструкция обводного ро-
лика:
/ — обводной ролик (сталь); 2 — поворот-
ная направляющая (сталь); 3 — ограничи-
тель поворота направляющей до вертика-
ли; 4 — щека (сталь); 5 — болт М14; 6 —
направляющая
60 к.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ .............................. 3
НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ АЭРОДИНАМИКИ ... 6
АЭРОДИНАМИЧЕСКИЙ РАСЧЕТ................66
КОНСТРУИРОВАНИЕ........................95
РЕГУЛИРОВКА И ЗАПУСК МОДЕЛЕЙ..........155