/
































































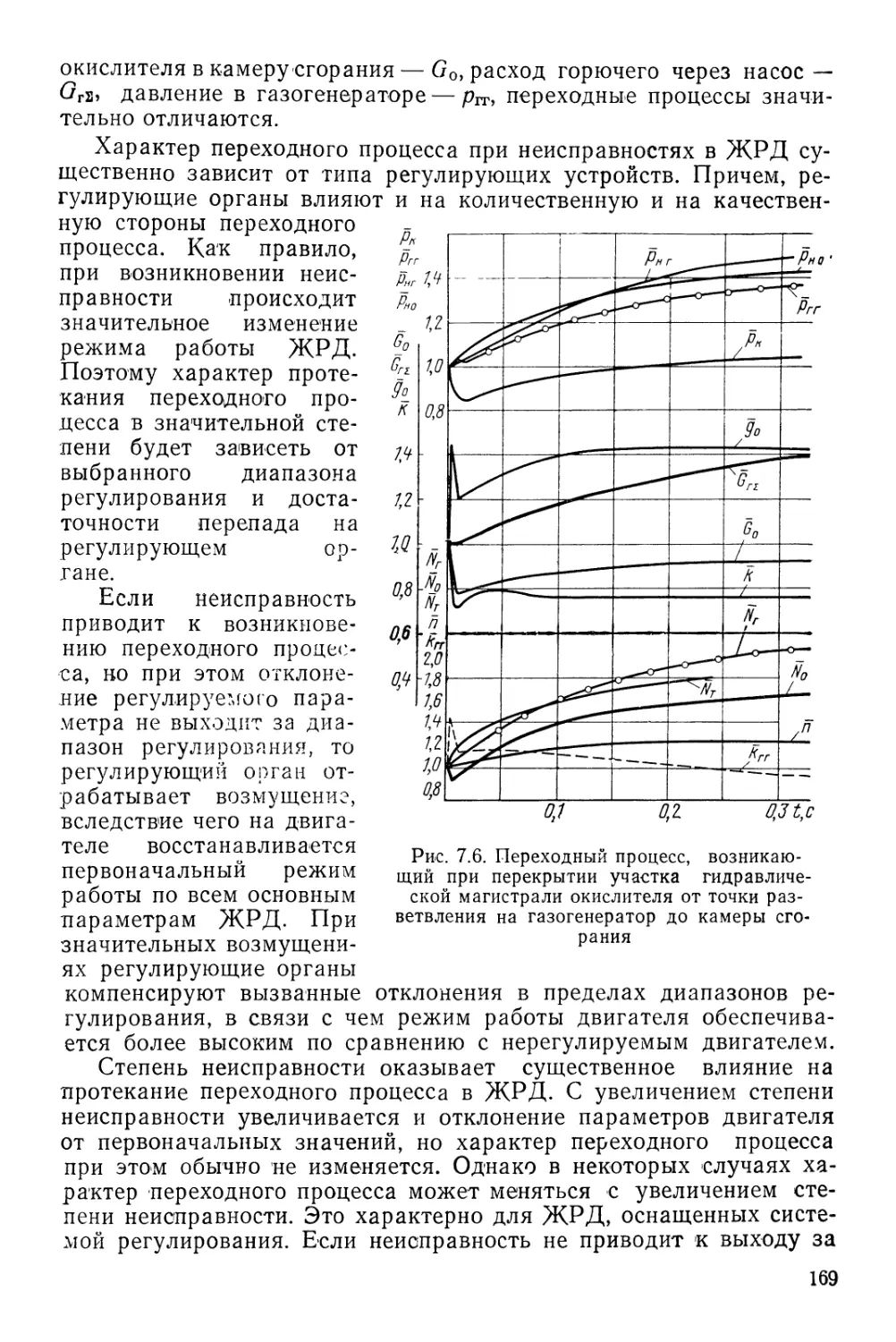



















Текст
К. А. ЛУАРСАБОВ, Л. В. ПРОНЬ, А. В. СЕРДЮК
ЛЕТНЫЕ ИСПЫТАНИЯ
ЖИДКОСТНЫХ РАКЕТНЫХ
ДВИГАТЕЛЕЙ
Москва
«МАШИНОСТРОЕНИЕ»
1977
УДК 629.7.036.54.063.6
Рецензент д-р техн. наук В. А. Махин
Луарсабов К. А., Пронь Л. В., Сердюк А. В. Летные испытания
жидкостных ракетных двигателей. М., «Машиностроение», 1977. 192 с.
В книге рассмотрены вопросы планирования, подготовки, проведения
и анализа результатов летных испытаний жидкостных ракетных
двигателей. Излагаются методы обоснования обьема измерений при летных
испытаниях, необходимого для установления технического состояния
двигателя, выяснения причин неисправностей и оценки достаточности имитации
летных условий при стендовой отработке ЖРД. Приведены основные
сведения о телеметрических средствах, метоцах измерений и обработки
информации. Освещены вопросы имитации летных условий при стендовой
отработке ЖРД, критерии достаточности имитации. Для определения
причин ненормальных исходов испытаний описаны модели отказов с
использованием уравнений динамики рабочих процессов в агрегатах ЖРД.
Кратко изложены методы структурно-функционального анализа
надежности с учетом результатов летных испытаний.
Книга предназначена для специалистов, работающих в области
ракетной техники, а также может быть полезна преподавателям, аспирантам и
студентам старших курсов ВУЗов.
о|ОАО |QA
Л '- 190-77 © Издательство «Машиностроение», 1977 г.
038(01)-77
ПРЕДИСЛОВИЕ
Летные испытания жидкостных ракетных двигателей (ЖРД)
являются одним из наиболее ответственных этапов в длительном
процессе создания двигателя.
Высокая стоимость проведения летных испытаний, жесткие
ограничения количества телеметрических каналов для передачи
информации, массо-габаритных характеристик передающей и
регистрирующей аппаратуры и другие особенности обуславливают
высокие требования к методам планирования, организации и
анализа результатов летных испытаний.
В отечественной и зарубежной литературе пока еще мало
работ, посвященных непосредственно летным испытаниям ЖРД.
Разобщенность сведений, а в некоторых случаях и их
противоречивость, затрудняют освоение этого материала и использование
накопленного опыта.
В предлагаемой книге обобщены и систематизированы
зарубежные и отечественные материалы по летным испытаниям,
появившиеся в печати в последние. 10—15 лет, а также опыт планирования
и анализ результатов летных испытаний.
Вследствие недостаточной изученности многие из .затронутых
вопросов еще далеки от полного разрешения. Однако авторы сочли
необходимым упомянуть о них, чтобы подчеркнуть важность и
актуальность их дальнейшего изучения.
Вопросы планирования, организации и анализа результатов
летных испытаний нельзя рассматривать изолированно, они тесно
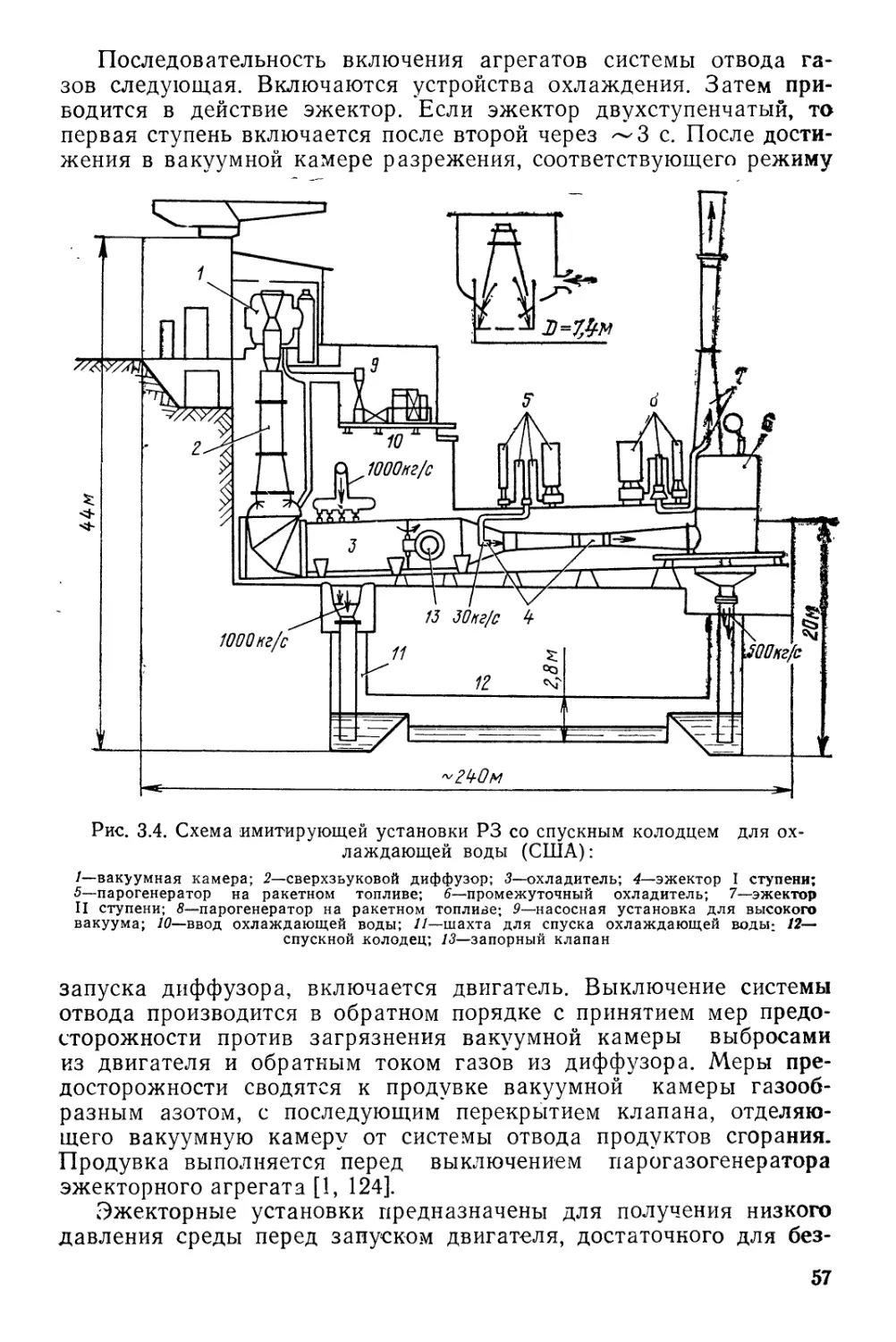
связаны с общими задачами отработки ЖРД, с методами анализа
и результатами стендовых испытаний. Это вызвало необходимость
наряду с изложением материала, непосредственно связанного с
летными испытаниями (планирование объема информации при
проведении летных испытаний, анализ результатов летных
испытаний, выяснение причин ненормальностей в работе двигателя
2227 3
и т. п.), рассмотреть смежные вопросы такие, как имитация летных
условий при стендовой отработке ЖРД, методы контроля
двигателя при подготовке к проведению летных испытаний и некоторые
Другие.
Улучшение качества и эффективности ЖРД в значительной
степени определяется уровнем подготовки и квалификации
инженерных и научных кадров.
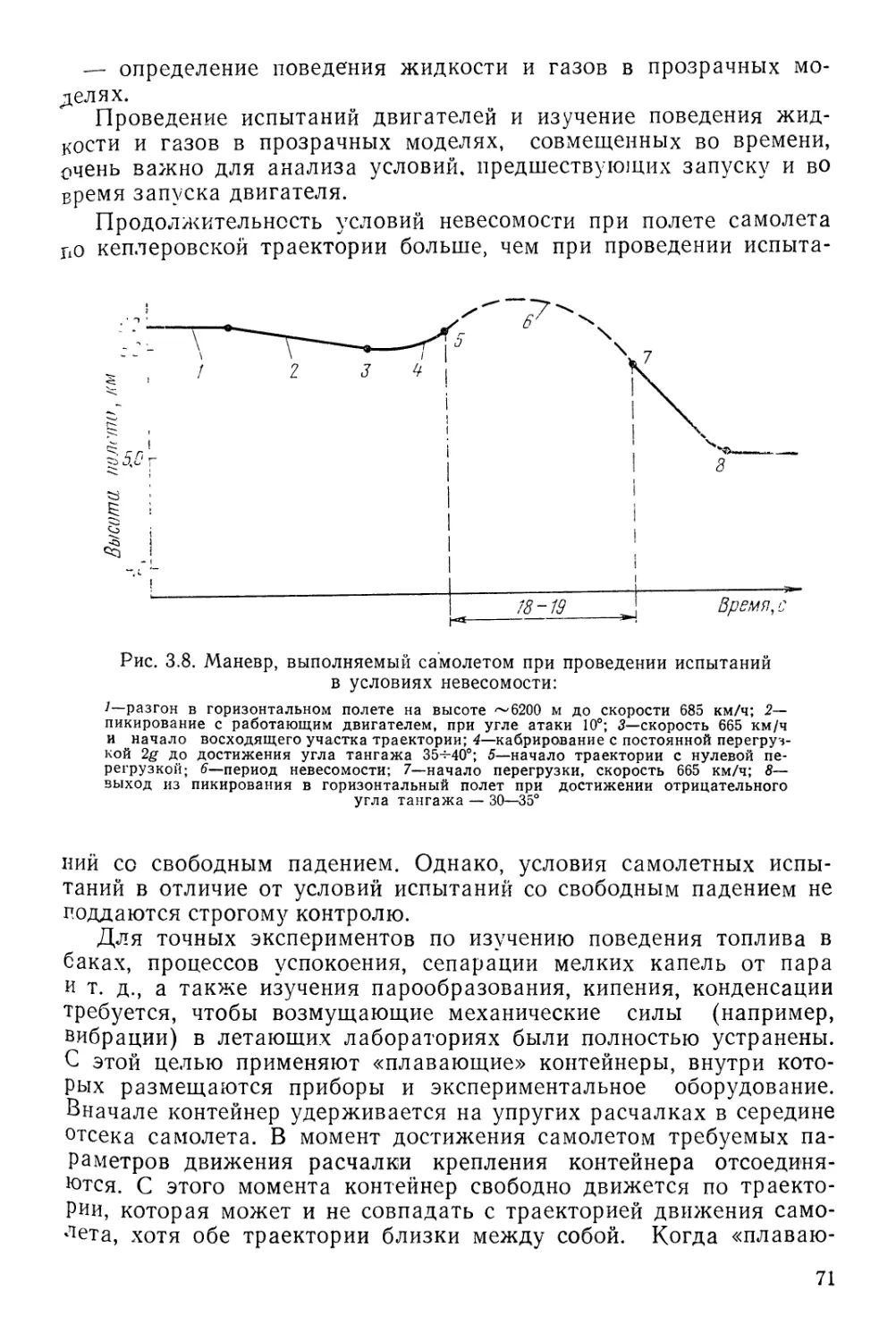
Авторы будут считать свою задачу выполненной, если данная
книга поможет повысить квалификацию специалистов-двигателе-
строителей.
Пожелания и критические замечания просьба направлять по
адресу: Москва, Б-78, 1-й Басманный пер., 3, издательство
«Машиностроение».
ГЛАВА 1
ЖРД КАК ОБЪЕКТ ЛЕТНЫХ ИСПЫТАНИЙ
1.1. ОСНОВНЫЕ СВЕДЕНИЯ
ЖРД относится к классу ракетных двигателей, используемых
на космических летательных аппаратах, ракетах-носителях,
спутниках и др.
Ракетный двигатель является единственным типом двигателей,
которые могут работать не только в атмосферных условиях, но
также в вакууме и жидкой среде. Это обусловлено наличием
запасов рабочего тела непосредственно на борту летательного
аппарата.
В качестве рабочего тела в ЖРД используются жидкие
компоненты топлива, состоящие из окислителя и горючего.
Жидкостный ракетный двигатель представляет собой
совокупность разнообразных систем и агрегатов, многие из которых
отличаются друг от друга принципом работы.
По назначению ЖРД можно разделить на следующие типы.
1. Основные (маршевые) двигатели, обеспечивающие разгон
аппарата на активном участке полета и сообщающие ему
требуемый суммарный импульс.
2. Вспомогательные двигатели, к которым относятся рулевые
двигатели, служащие для управления траекторией движения,
корректирующие, включаемые в космическом полете для коррекции
траектории космического аппарата при его полете с выключенным
маршевым двигателем, тормозные, применяемые для посадки и
схода с орбиты искусственного спутника, а также для торможения
отдельных ступеней многоступенчатых ракет при их разделении.
К вспомогательным относятся также двигатели системы
ориентации, осуществляющие разворот космического аппарата
относительно той или иной оси, необходимый для его ориентации в
космическом пространстве перед включением тормозного или
корректирующего двигателя, для ориентации антенны космического
аппарата на Землю или панелей солнечных батарей на Солнце, для
стыковки двух космических аппаратов на орбите и др., а также
двигатели системы стабилизации, предотвращающие вращение
или угловые колебания космического аппарата относительно той
или иной его оси [24, 23].
Современный ракетный двигатель в зависимости от его
назначения выполняет различные функции. Действительно, двигатель —
это энергетическая установка, сочетающая в себе тепловую
машину и движитель, в котором выделившаяся тепловая энергия
затрачивается непосредственно на увеличение энергии струи газов,
создающей реактивную силу тяги. Применяемые химические
ракетные топлива являются одновременно и источниками энергии и
источниками рабочего тела. Поэтому двигатель, кроме создания
реактивной тяги, может выполнять функции исполнительного органа
различных систем:
— регулирования вектора тяги;
— регулирования скорости полета;
— стабилизации полета ракеты;
— программного расходования топлива (оптимальной
выработки) ;
— литания топливом (вырабатывание рабочего тела наддува);
— обеспечения работы бортовых приводов, узлов автоматики
(как источник мощности).
1.2. ПРИНЦИПИАЛЬНЫЕ СХЕМЫ ЖРД
Основным агрегатом ЖРД является камера сгорания. В ней
происходит процесс сгорания топлива и образование газа, в
результате силового воздействия которого на корпус камеры
создается тяга — основной выходной параметр камеры.
Работа камеры двигателя обеспечивается комплексом систем
и агрегатов, назначением которых является подача топлива в
заданном количестве и под заданным давлением, обеспечение
заданной программы изменения величины тяги в полете, а также
осуществление запуска и отключения двигателя. К системам,
обеспечивающим работу камеры, прежде всего относятся система
питания, система наддува, а также система регулирования, запуска
и выключения двигателя.
Количество агрегатов, их состав, структура связей между ними,
а также параметры агрегатов и систем зависят от принятой схемы,
двигателя. Выбор принципиальной схемы проектируемого ЖРД
зависит от различных факторов, таких как назначение двигателя,
величина тяги, продолжительность и условия работы, его
энергетические показатели, массовые характеристики, надежность
работы и стоимость изготовления. Это приводит к большому
разнообразию схем двигательных установок в целом.
Схемы ЖРД отличаются в первую очередь системой подачи
компонентов топлива из баков.
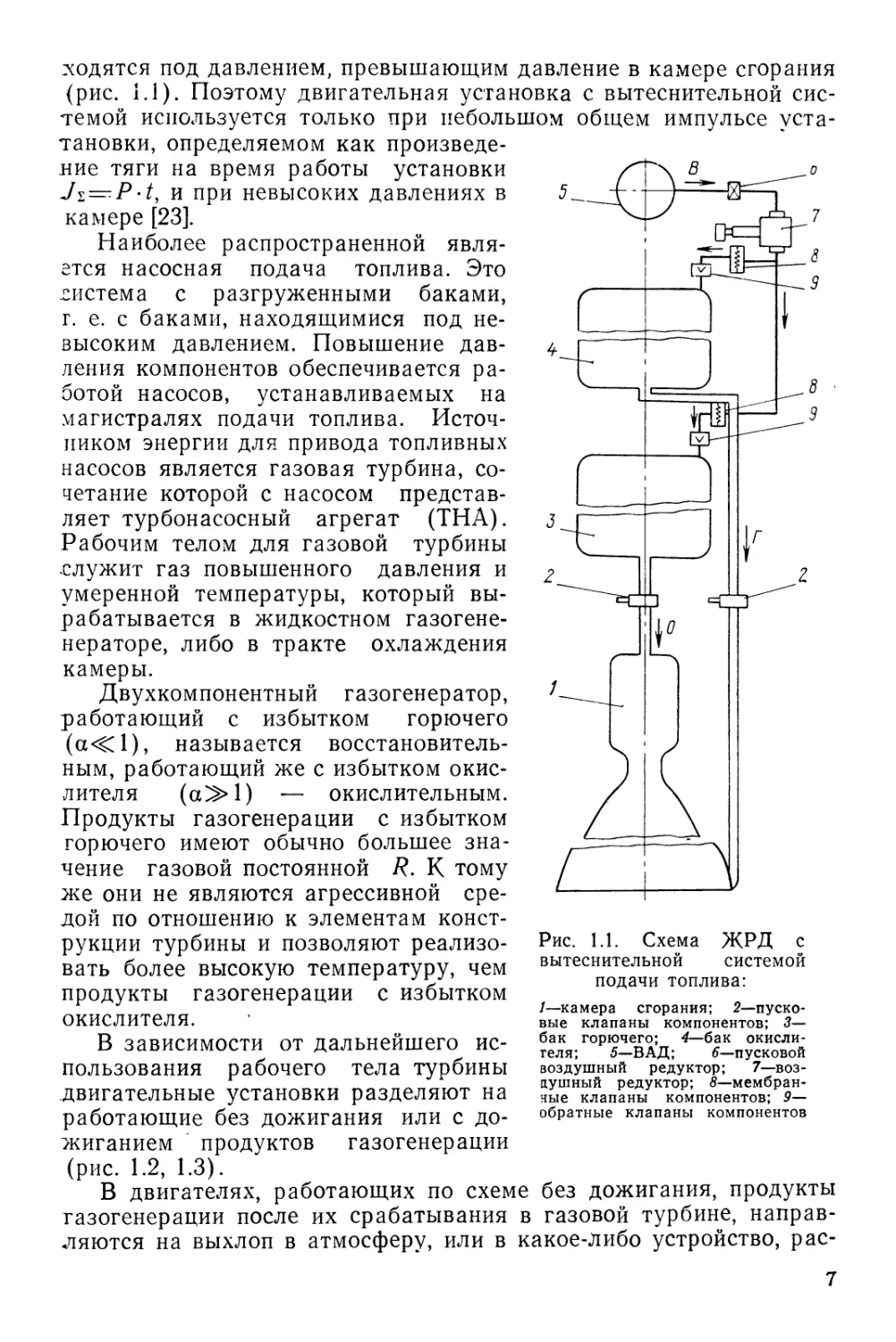
Системы подачи компонентов топлива разделяются на вытес-
нительпые и насосные. При вытеснительной системе подачи
топлива топливные баки во время работы двигателя постоянно на-
годятся под давлением, превышающим давление в кахмере сгорания
(рис. 1.1). ПоэтОхМу двигательная установка с вытеснительной
системой используется только при небольшом общем импульсе уста-
тановки, определяемом как
произведение тяги на время работы установки
Js = P-t, и при невысоких давлениях в
камере [23].
Наиболее распространенной
является насосная подача топлива. Это
система с разгруженными баками,
г. е. с баками, находящимися под
невысоким давлением. Повышение
давления компонентов обеспечивается
работой насосов, устанавливаемых на
магистралях подачи топлива.
Источником энергии для привода топливных
насосов является газовая турбина,
сочетание которой с насосом
представляет турбонасосный агрегат (ТНА).
Рабочим телом для газовой турбины
служит газ повышенного давления и
умеренной температуры, который
вырабатывается в жидкостном газогене-
нераторе, либо в тракте охлаждения
камеры.
Двухкомпонентный газогенератор,
работающий с избытком горючего
(а<С1), называется
восстановительным, работающий же с избытком
окислителя (а^1) — окислительным.
Продукты газогенерации с избытком
горючего имеют обычно большее
значение газовой постоянной R. К тому
же они не являются агрессивной
средой по отношению к элементам
конструкции турбины и позволяют
реализовать более высокую температуру, чем
продукты газогенерации с избытком
окислителя.
В зависимости от дальнейшего
использования рабочего тела турбины
двигательные установки разделяют на
работающие без дожигания или с
дожиганием продуктов газогенерации
(рис. 1.2, 1.3).
В двигателях, работающих по схеме без дожигания, продукты
тазогенерации после их срабатывания в газовой турбине,
направляются на выхлоп в атмосферу, или в какое-либо устройство, рас-
Рис. 1.1. Схема ЖРД с
вытеснительной системой
подачи топлива:
/—камера сгорания;
2—пусковые клапаны компонентов; 3—
бак горючего; 4—бак
окислителя; 5—ВАД; 6—пусковой
воздушный редуктор;
7—воздушный редуктор;
8—мембранные клапаны компонентов; 9—
обратные клапаны компонентов
положенное вне камеры сгорания и предназначенное для
использования запаса энергии, заключенного в газе (рулевые сопла, в
топливные баки для создания некоторого давления и др.).
17 18
16.
Рис. 1.2. Схема ЖРД с турбонасосным
агрегатом без дожигания продуктов
газогенерации:
/—газовый аккумулятор давления; 2, 8, 16—
электропневмоклапаны; 3—пневмоклапаны;
4—бак окислителя; 5—насосы окислителя и
горючего; 6—турбина; 7—главный клапан
окислителя; 9—аккумулятор низкого
давления; 10—жиклер; //—камера сгорания; 12—
главный клапан горючего; 13—пиростартер;
14—жидкостный газогенератор; /5—клапан;
/7—бак горючего; 18—мембраны; 19—газовый
редуктор давления
Рис.
нием
1.3. Схема
продуктов
ЖРД с дожига-
газогенерации:
/, 2—газогенераторы наддува баков;
3—мембраны; 4—бак окислителя; 5—
жиклер; 6—пиростартер; 7—насос
окислителя; 8, 11—клапан; 9, 12—главные
клапаны окислителя и горючего; 10,
14—дроссельные шайбы; 13—камера
сгорания; /5—турбина; 16—насос
горючего; /7—регулятор; 18—газогенератор;
19—бак горючего
Продукты газогенерации обладают определенным запасом
энергии. При выбросе этого газа имеют место существенные потери
энергии из-за нестехиометрического сжигания топлива. С ростом
давления в камере сгорания растут и относительные потери
энергии с газами после турбины, поскольку возрастает необходимое
давление подачи, необходимая мощность ТНА и расход рабочего
тела для привода турбины.
В двигателях, работающих по схеме с дожиганием, продукты
8
газогенерации после их срабатывания в газовой турбине ТНА
поступают в камеру сгорания, где происходит их догорание при
оптимальном соотношении горючих и окислительных элементов. При
этом все гидравлические и механические потери на турбине и
насосах ТНА в конечном счете превращаются в тепловую энергию,
передаваемую в камеру сгорания и полезно реализуемую в ней,
т. е. в этом случае отсутствуют характерные для двигательных
установок без дожигания потери тяги за счет нерационального
расходования компонентов на привод турбины.
В зависимости от состояния, в котором компоненты подаются
в камеру сгорания, различают два типа схем с дожиганием
генераторного газа: «газ — жидкость» и «газ — газ». При
использовании схемы «газ — жидкость» один из компонентов, окислитель или
горючее, полностью поступает в ЖГГ, где сгорает с частью
второго компонента, необходимой для осуществления заданной
температуры горения (соответственно при a-Cl или а^>1).
Образовавшиеся газообразные продукты сгорания с большим избытком
окислительных или горючих элементов идут на привод турбины
ТНА и затем по газоводу поступают в камеру сгорания. Второй
компонент поступает в камеру сгорания в жидком виде (рис. 1.3).
Логическим развитием схемы с дожиганием является схема с
использованием всего расхода компонентов топлива для генерации
рабочего тела, схема «газ — газ». Это схема с двумя
газогенераторами, один из которых с избытком горючего a<Cl, второй с
избытком окислителя (а>1) и соответственно с двумя турбинами.
Камера сгорания двигателей такой схемы работает на полностью
газифицированных компонентах.
Эта схема позволяет достигнуть максимальных значений
давления в камере сгорания, или при заданном уровне давления в
камере предельно уменьшить давление в газогенераторе, а
следовательно, потребные напоры насосов.
1.3. СТРУКТУРНЫЕ СХЕМЫ ЖРД
При анализе результатов измерения параметров двигателей в
ходе летных испытаний ракет, выяснении особенностей работы
ЖРД, а также аварийных исходов испытаний, вызванных работой
двигателя, используются не только принципиальные, но и
структурные схемы ЖРД.
Структурная схема ЖРД отображает специфику связей между
агрегатами. Она строится исходя из логических представлений
о работе агрегатов и их взаимосвязи. При необходимости
структурная схема может быть уточнена на основании системы уравнений.
Таким образом, структурная схема отображает как
принципиальную схему двигателя, так и те специфические особенности
процессов в агрегатах, которые учитываются в математической модели
двигателя.
Если принципиальная схема >КРД является однозначной для
двигателя, то структурная схема этого же двигателя может быть
представлена несколькими вариантами в зависимости от способа
разделения двигателя на звенья, выбранной системы переменных,,
описывающих процессы в звеньях, и необходимой подробности
описания процессов, протекающих в элементах агрегата.
Структурная схема зависит от типа принципиальной схемы,
но в ней фигурируют не агрегаты двигателя, а динамические
звенья, вместо трактов, связывающих агрегаты, на ней
изображаются связи между динамическими звеньями.
Под динамическим звеном будем понимать агрегат или
отдельный элемент этого агрегата, характеризуемый протеканием
процесса любой физической природы, работа которого описывается
одним уравнением или системой дифференциальных уравнений.
На структурной схеме динамические звенья изображаются в
виде прямоугольников, а существующие между ними связи —
стрелками, соответствующими направлению прохождения сигнала.
В зависимости от характера взаимодействия звенья могут быть
связаны между собой различными способами. Основными типами
соединений звеньев в сложных системах является
последовательное и параллельное соединение и обратная связь [57, 70].
Последовательным соединением называется такое соединение,
при котором выходной сигнал каждого элемента служит входным
для следующего элемента. При этом предполагается, что
соединяемые элементы обладают направленным действием.
При параллельном соединении входной сигнал подается
одновременно на несколько элементов, а выходные сигналы этих
элементов суммируются.
Обратной связью называется воздействие выхода элемента на
его вход. Если выходной сигнал элемента непосредственно подается
на его вход без какого-либо преобразования, то обратная связь
называется жесткой. Обратная связь может быть положительной
или отрицательной в зависимости от того, суммируется выходной
сигнал элемента с входным, или вычитается. Если в цепь обратной
связи включен некоторый элемент (система), преобразующий
выходной сигнал основного элемента, то такая обратная связь
называется гибкой.
Многочисленные параметры двигателя связаны между собой
как прямыми, так и обратными связями.
Рассмотрим структурные схемы различных типов ЖРД. При
составлении структурных схем и выводе уравнений динамики в
дальнейшем в качестве переменных будем использовать
следующие параметры двигателя: давление и температуру в газовых
емкостях (газогенераторе, камере сгорания, газоводе), расходы
компонентов по гидравлическим магистралям двигателя, частоту
вращения ротора ТНА, площадь проходного сечения регулирующих
органов, давление на входах в насосы ТНА и давление в баках
ракеты [22].
10
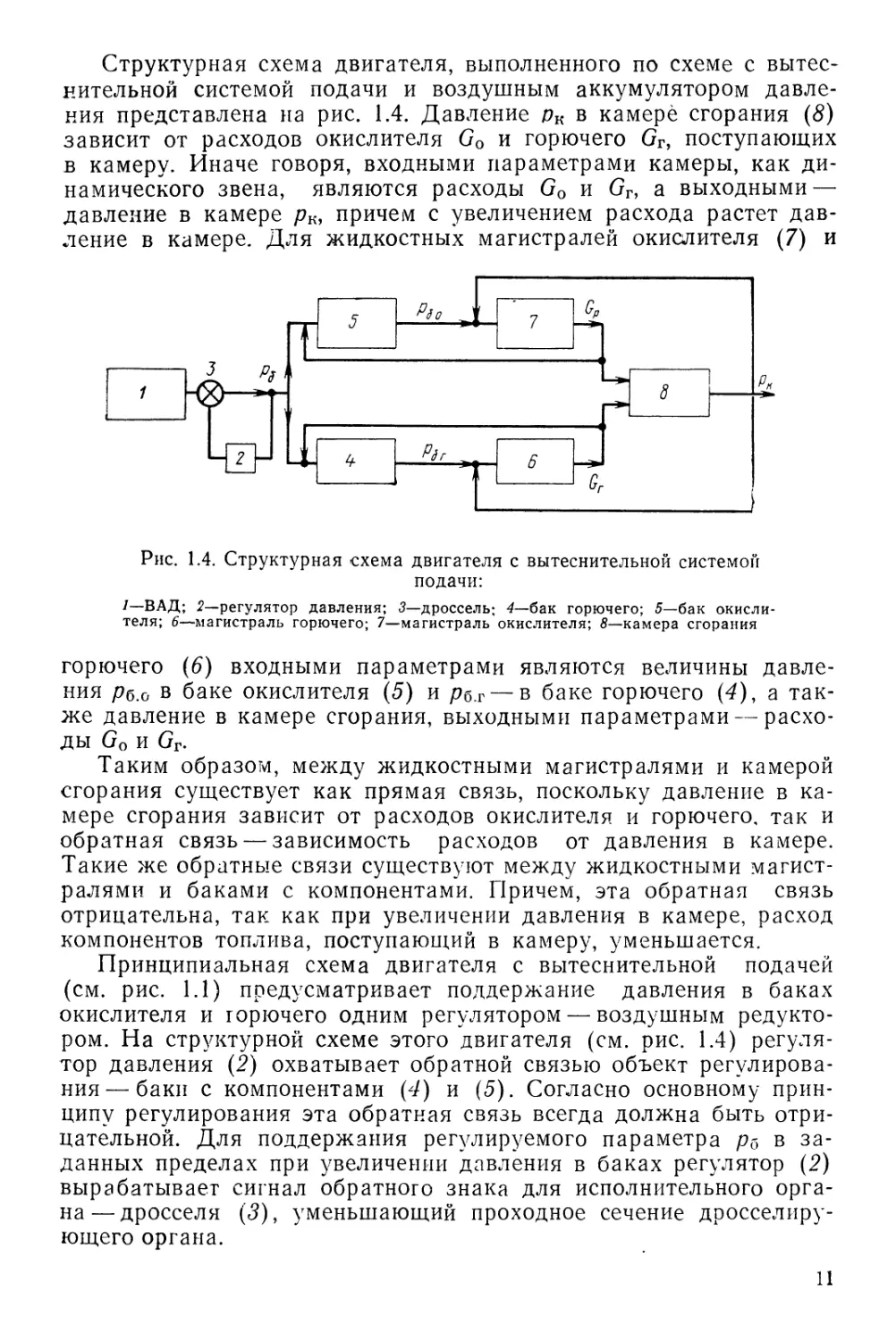
Структурная схема двигателя, выполненного по схеме с вытес-
нительной системой подачи и воздушным аккумулятором
давления представлена на рис. 1.4. Давление рк в камере сгорания (8)
зависит от расходов окислителя Go и горючего Gr, поступающих
в камеру. Иначе говоря, входными параметрами камеры, как
динамического звена, являются расходы Go и Gr, а выходными —
давление в камере рк, причем с увеличением расхода растет
давление в камере. Для жидкостных магистралей окислителя (7) и
гГ
Рис. 1.4. Структурная схема двигателя с вытеснительной системой
подачи:
/—ВАД; 2—регулятор давления; 3—дроссель; 4—бак горючего; 5—бак
окислителя; 6—магистраль горючего; 7—магистраль окислителя; 8—камера сгорания
горючего (6) входными параметрами являются величины
давления /?б.о в баке окислителя (5) и /?б.г— в баке горючего (4), а
также давление в камере сгорания, выходными параметрами —
расходы Go и Gr.
Таким образом, между жидкостными магистралями и камерой
сгорания существует как прямая связь, поскольку давление в
камере сгорания зависит от расходов окислителя и горючего, так и
обратная связь — зависимость расходов от давления в камере.
Такие же обратные связи существуют между жидкостными
магистралями и баками с компонентами. Причем, эта обратная связь
отрицательна, так как при увеличении давления в камере, расход
компонентов топлива, поступающий в камеру, уменьшается.
Принципиальная схема двигателя с вытеснительной подачей
(см. рис. 1.1) предусматривает поддержание давления в баках
окислителя и горючего одним регулятором — воздушным
редуктором. На структурной схеме этого двигателя (см. рис. 1.4)
регулятор давления (2) охватывает обратной связью объект
регулирования— баки с компонентами (4) и (5). Согласно основному
принципу регулирования эта обратная связь всегда должна быть
отрицательной. Для поддержания регулируемого параметра р& в
заданных пределах при увеличении давления в баках регулятор (2)
вырабатывает сигнал обратного знака для исполнительного
органа— дросселя (3), уменьшающий проходное сечение
дросселирующего органа.
11
Структурная схема двигателя с насосной системой подачи с
двухкомпонентным газогенератором без дожигания продуктов
газогенерации0 после турбины приведена на рис. 1.5. Схема
характеризуется большим количеством обратных и перекрестных связей.
Питающие гидравлические магистрали, подводящие компоненты
от баков к насосам, оказывают влияние на двигатель путем
изменения давления на входах в насосы ТНА. Двигатель имеет две
Рис. 1.5. Структурная схема ЖРД с насосной системой подачи без
дожигания продуктов газогенерации:
У—камера сгорания; 2—гидравлическая магистраль окислителя в камеру
сгорания; 3—гидравлическая магистраль горючего в камеру сгорания;
4—турбина; 5—насос окислителя; 6—насос горючего; 7—газогенератор; 8—
магистраль окислителя газогенератора; 9—магистраль горючего газогенератора; 10—
питающая магистраль окислителя; //—питающая магистраль горючего
гидравлические магистрали (2), (3), подающие компоненты из
насосов ТНА в камеру сгорания (1) и две (S), (9), подводящие
компоненты от насосов в газогенератор (7). Расходы в камере
сгорания зависят от давления на выходе из насосов, которое
определяется, главным образом, частотой вращения ТНА, и давлением
в камере сгорания рк, расходы в газогенератор также зависят от
давления на выходе из насосов и давления в газогенераторе рТт-
В свою очередь величины расходов по каждой из четырех
магистралей влияют на частоту вращения ТНА, зависящую от давления в
газогенераторе ргг и температуры продуктов газогенерации перед
турбиной ртт.
Практически все связи в высоконапорной системе подачи
компонентов замыкаются на турбонасосном агрегате. Воздействие на
камеру сгорания осуществляется путем изменения частоты
вращения ТНА. Между расходами компонентов в камеру сгорания и
12
газогенератор также существует определенная зависимость. Эта
зависимость определяется напорной характеристикой насоса.
Поскольку наклон этой характеристики у насосов ЖРД невелик,
зависимость между расходами в камеру и газогенератор оказывается
обычно относительно слабой.
На каждой из четырех магистралей могут быть установлены
дроссельные регулирующие устройства, изменением плрщади
проходного сечения магистралей создающие управляющее
воздействие.
Jo
-5
—*.
Pdr
h
9
10
7
11
a
Trr
Ргг Г"
Gn Pfor
\
1
r1
n
V
i—H
0
_J Pp
1 /
i
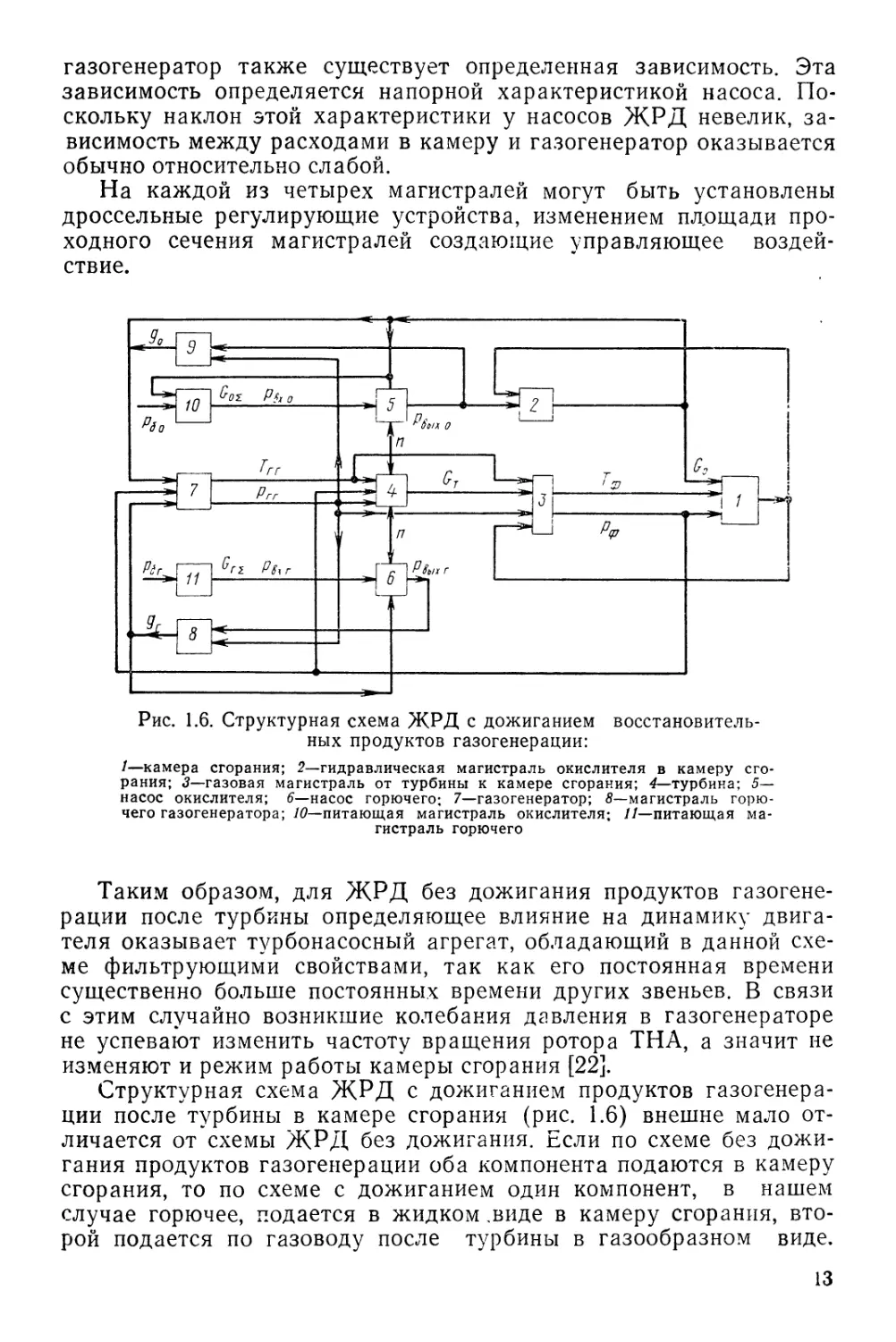
Рис. 1.6. Структурная схема ЖРД с дожиганием
восстановительных продуктов газогенерации:
/—камера сгорания; 2—гидравлическая магистраль окислителя в камеру
сгорания; 3—газовая магистраль от турбины к камере сгорания; 4—турбина; 5—
насос окислителя; 6—насос горючего; 7—газогенератор; 8—магистраль
горючего газогенератора; 10—питающая магистраль окислителя; 11—питающая
магистраль горючего
Таким образом, для ЖРД без дожигания продуктов
газогенерации после турбины определяющее влияние на динамику
двигателя оказывает турбонасосный агрегат, обладающий в данной
схеме фильтрующими свойствами, так как его постоянная времени
существенно больше постоянных времени других звеньев. В связи
с этим случайно возникшие колебания давления в газогенераторе
не успевают изменить частоту вращения ротора ТНА, а значит не
изменяют и режим работы камеры сгорания [22].
Структурная схема ЖРД с дожиганием продуктов
газогенерации после турбины в камере сгорания (рис. 1.6) внешне мало
отличается от схемы ЖРД без дожигания. Если по схеме без
дожигания продуктов газогенерации оба компонента подаются в камеру
сгорания, то по схеме с дожиганием один компонент, в нашем
случае горючее, подается в жидком,виде в камеру сгорания,
второй подается по газоводу после турбины в газообразном виде.
13
Однако, именно это отличие оказывает определяющее влияние
на динамику ЖРД и вносит целый ряд новых связей, не
свойственных двигателям без дожигания продуктов газогенерации.
Параметры газа в газовой магистрали, определяющие расход
газообразных компонентов в камеру, зависят от давления в
газогенераторе /?гг и температуры Ггг и очень слабо от частоты вращения
ТНА— п, в то время как расход жидкого компонента,
подающегося в камеру, так же как и в двигателях без дожигания, зависит,
главным образом, от частоты вращения п и давления в камере
сгорания. Следовательно, в схеме с дожиганием имеется прямая
связь между газогенератором и камерой сгорания через газовод,
не имеющий фильтрующих свойств, подобных ТНА.
В этом заключается основное отличие структурной схемы
двигателя с дожиганием от схемы двигателя без дожигания
продуктов газогенерации.
Управление двигателем можно обеспечить так же как и в
схеме без дожигания продуктов газогенерации постановкой
дросселирующих элементов на жидкостных магистралях двигателя.
Возможен также и другой способ — осуществить перепуск газа, минуя
турбину. Но в этом случае структурная схема становится более
сложной, поскольку в принципиальной схеме появляются
дополнительные элементы — тракты перепуска.
1.4. РЕЖИМЫ РАБОТЫ ЖРД
* Режим работы ЖРД характеризуется целым рядом
параметров, основными из которых являются тяга Р, удельный импульс
/у, давление в камере сгорания /?к, секундные расходы
компонентов топлива Go, Gr, частота вращения ТНА и др.
В эксплуатации, при стендовых и летных испытаниях
двигатель работает на различных режимах установившихся и
неустановившихся.
При работе на установившихся режимах параметры двигателя
остаются практически неизменными во времени. Имеющиеся
отклонения параметров от установившихся значений незначительны
и ими можно пренебречь. К установившимся можно отнести
режим главной, предварительной, конечной ступени.
Режим главной ступени, на котором двигатель работает
наиболее продолжительное время, является основным режимом.
Применительно к нему выбираются основные проектные параметры
двигателя.
Предварительная ступень предусматривается для обеспечения
более высокой надежности работы ЖРД, для уменьшения
скорости нарастания расхода компонентов топлива в камеру и более
плавного выхода двигателя на режим главной ступени и др.
В ЖРД, работающих на несамовоспламеняющихся компонентах
топлива, введение предварительной ступени обеспечивает прогрев
камеры и образование надежного факела. Предварительная сту-
14
пень обеспечивается установкой в гидравлической магистрали
двухпозиционного клапана, который сначала открывается
неполностью, а по достижении после насосов заданного давления
открывается полностью, что соответствует главной ступени.
Режим конечной ступени применяется для уменьшения осевой
перегрузки ракеты в конце активного участка, уменьшения
величины и разброса импульса последействия тяги. Кроме того, для
правильного определения момента выключения двигателя
необходимо с большой точностью выдержать заданную скорость
летательного аппарата и координаты конца активного участка
траектории, что легче достигается при меньшем ускорении, а
следовательно, меньшей тяге.
Если параметры двигательной установки изменяются во
времени, то режим работы неустановившийся или переходный. Следует
отметить, что к переходным следует относить процессы, в течение
которых происходит значительное (в несколько раз) изменение во
времени основных параметров ЖРД. На переходных режимах
ЖРД работают при запуске, переключении ступеней, выключении,
автоматическом регулировании.
Запуск ЖРД является одним из наиболее сложных физических
управляемых процессов, при котором за короткий промежуток
времени происходит изменение всех основных параметров в широких
пределах от нулевых до номинальных значений, преобразование
и установление мощных потоков различных видов энергии с
высокими параметрами. При запуске обеспечивается раскрутка
ротора ТНА от начального неподвижного состояния до требуемой
скорости вращения, подача компонентов топлива в камеру
сгорания и газогенератор, воспламенение, сгорание топлива в таком
состоянии, при котором возможно устойчивое протекание рабочего
процесса [22].
Система запуска должна обеспечивать достаточно быстрый, но
мягкий — без больших колебаний давления в камере сгорания, и
надежный выход двигателя на номинальный режим работы.
Различают два способа запуска ЖРД' одноступенчатый и
двухступенчатый.
Применение одноступенчатого запуска упрощает схему и
конструкцию двигателя, сводит к минимуму непроизводительную
трату компонентов топлива и задержку старта ракеты. Такой тип
запуска чаще используется для двигателей малых и средних тяг
как с вытеснительной, так и с насосной системой подачи.
При двухступенчатом запуске двигатель сначала выводится на
режим предварительной ступени, составляющей незначительную
долю от общего времени работы двигателя (1—2,5 с), а затем —
на главную.
Характер изменения во времени основных параметров
двигательной установки P(t), pK(t), G(t), n(t) и т. д. и
продолжительность переходного процесса запуска в основном определяются:
принципиальной схемой двигательной установки, принятой цикло-
15
граммой, инерционностью таких основных агрегатов, как ТНА и
гидравлические магистрали компонентов топлива, динамическими
характеристиками регулирующих устройств.
Воздействуя на двигатель по соответствующим каналам,
можно как форсировать переходный процесс, так и, наоборот,
увеличивать его продолжительность. Для двигателя выбранной
конструкции, изменяя циклограмму запуска, можно обеспечивать как
Р,кН
д4
45
36
27
18
3
-
-
2
/
/
3
1
/ \
/
1
5
1 .
V
\ 7
—^ -_
О 100 0 100 200 300 400 500 600 700 t,с
Рис. 1.7. Программа изменения тяги двигателя
посадочной ступени .космического корабля «Аполлон»:
/—запуск двигателя и стабилизация корабля;" 2—выход на
окололунную орбиту; 3—полет по инерции в течение 1 ч;
4—спуск; 5—планирование; 6—висение; 7—мягкая посадка
«жесткий», так и «вялый» запуск. Жесткость запуска
характеризуется величиной скорости нарастания давления в камере
сгорания — и заброса давления в момент воспламенения. Чем боль-
dt
ше эти величины, тем более «жестким» является запуск,
продолжительность запуска в этом случае уменьшается. Стремление
сократить время запуска ограничивается ростом —— и забросом
давления в камере сгорания, поскольку при этом возникает
опасность разрушения и даже взрыва камеры как вследствие потери
ее прочности, так и в результате возникновения детонационного
горения топлива.
Для обеспечения разгона ракет, торможения, спуска, взлета с
планет, для точного вывода космического корабля на орбиту и
других задач необходимо регулировать тягу ЖРД в широких
пределах, изменяя ее иногда'в десятки раз. В качестве примера на рис.
1.7 приведена программа изменения тяги двигателя посадочной
ступени космического корабля «Аполлон» [89].
" Глубокое регулирование тяги двигательной установки
осуществляется: в многокамерной двигательной установке путем отключе-
16
ния отдельных двигателей, или путем изменения в широких
пределах тяги однокамерной двигательной установки. При этом способ
дросселирования многокамерных двигательных установок имеет
ряд преимуществ, поскольку такой способ не связан с ухудшением
рабочего процесса, а главное, дает возможность обеспечить очень
малую тягу [8, 22].
При выключении двигательной установки возникает
переходный процесс, в течение которого все параметры изменяются во
времени от номинальных значений (или значений конечной ступени)
до нуля.
Выключение двигательной установки может производиться с
основного режима и с режима конечной ступени. Двигательные
установки могут выключаться с основного режима в одну или две
ступени. При выключении двигательной установки в одну ступень
подается команда на закрытие топливных клапанов, прекращается
подача компонентов топлива в камеру сгорания, и тяга падает от
номинальной величины до нуля. В случае выключения в две
ступени прекращается подача компонентов в газогенератор,
уменьшается число оборотов ротора ТНА, понижается режим работы
двигателя. По достижении определенного давления в камере сгорания
подается команда на перекрытие магистралей питания камеры
сгорания. После подачи команды на выключение двигателя его
тяга уменьшается до нуля не сразу, а в течение некоторого
времени, когда двигатель еще может оказывать силовое воздействие на
ракету. Это воздействие оценивается как импульс последействия
тяги [55].
Кроме нормального выключения, предусмотренного
программой системы управления, может производиться аварийное
выключение, двигателя (АВД) при обнаружении каких-либо ненормаль-
ностей в процессе его запуска и работы. В состав двигателя
включается специальная система обнаружения аварийной ситуации.
Датчики этой системы измеряют ряд параметров, отклонение
которых от расчетных или программных значений и характеризуют
появление аварийной ситуации. Система АВД позволяет
обеспечить сохранность материальной части двигателя путем его
выключения до возникновения разрушительных вибраций, пульсаций
и т. д.
1.5. ОСОБЕННОСТИ РАБОТЫ ЖРД В УСЛОВИЯХ ЭКСПЛУАТАЦИИ
Особенности работы ЖРД в условиях эксплуатации
рассмотрим на примере космических двигательных установок
многократного запуска, поскольку работа этих двигателей протекает в более
разнообразных условиях эксплуатации, чем двигателей I и II
ступеней.
Работа космических ЖРД протекает в специфических условиях
окружающей среды межпланетного пространства. Как будет
показано ниже, физические условия космического пространства ха-
17
рактеризуются целым рядом особенностей: низкой концентрацией
частиц (давлением), неограниченной тепловой поглощающей
способностью, невесомостью, электромагнитным и корпускулярным
космическим излучением, потоками микрометеоритов. Наиболее
существенное влияние на работу двигательной установки с ЖРД
и физические процессы, протекающие в отдельных его агрегатах
при повторных включениях и выключениях, оказывают низкие
давления, невесомость, практически неограниченная тепловая
поглощающая способность окружающей среды.
Применяемые в ЖРД топливные пары при низких давлениях
космической среды порядка 10~13—10~16 торр могут находиться
только в твердом или газообразном состоянии. Поэтому, при
контакте с окружающей средой жидкости оказываются, практически,
мгновенно перегретыми, интенсивно вскипают, испаряются и за
счет большого отвода тепла кристаллизуются. Это приводит к
тому, что первые порции компонента могут поступать в объем
камеры сгорания при запуске в виде газа и твердых частиц. В ряде
случаев может происходить закупорка устьев каналов, отложение
образований твердой фазы в трубопроводах, замораживание
дренажных отверстий [10, 111]. Повторные включения ЖРД могут
носить «жесткий» характер со значительной начальной перегрузкой
камеры сгорания.
Изменение температуры и давления компонентов топлива в
магистралях, в камере сгорания и дренажных трубопроводах в
моменты включений и выключений в значительной мере
определяются скоростью фазовых превращений первого рода жидких топлив,
подаваемых через форсунки в камеру сгорания и дренажные
трубопроводы в окружающую среду.
В связи с этим процессы заполнения топливных магистралей
двигателя при включении и процессы опорожнения их после
выключения ЖРД в условиях космоса связаны с возникновением и
развитием нестационарных двухфазных потоков из-за вскипания
топлива в вакууме. При этом выброс топлива при опорожнении
гидравлических магистралей носит нерегулярный пульсирующий
характер с низкой затухающей частотой.
Отсутствие воздушной среды в космическом пространстве и
повышенная температура материальной части может приводить к
холодной сварке контактирующих металлических соединений.
Неограниченная тепловая поглощающая способность
космического пространства приводит к тому, что части двигателя, не
подвергающиеся термостатированию в блоке, могут остывать до очень
низких температур, если они не подвержены воздействию
солнечных и космических лучей, а если подвержены такому воздействию—*
то нагреваться до значительных температур. Пониженная
температура части сопла, выступающей из блока и подверженной
температурному воздействию окружающего пространства, может
привести при запуске к замораживанию каналов зарубашечного
пространства камеры сгорания, а повышенная — к интенсификации
18
испарения первых порций компонента. Это оказывает
существенное влияние на процесс запуска двигателя.
Поведение жидкости в условиях невесомости отличается от
поведения жидкости в нормальном гравитационном поле из-за
проявления межмолекулярных сил, таких, как адгезия
(межмолекулярное сцепление между частицами разнородных фаз на
поверхности раздела), когезия (межмолекулярное сцепление между
частицами одной и той же фазы) и поверхностное натяжение, присущее
всем жидкостям. Эти силы чрезвычайно малы, и при эксплуатации
ЖРД в условиях воздействия значительно больших сил, например,
силы тяжести, в конструкции топливных систем не учитываются.
Однако, в условиях невесомости межмолекулярные силы могут
быть преобладающими и определять поведение жидкости [12, 27],
которое зависит от ее характеристик (плотности, вязкости,
температуры, растекаемости, связанной с величиной адгезии и когезии
и др.), конфигурации и размеров баков, конструкционного
материала, степени заполнения топливом, состава газа для наддува и
величин давления. Кроме того, неравномерность нагрева
внутренней поверхности бака влияет на формирование парового пузыря.
С повышением температуры поверхностное натяжение жидкости
уменьшается, паровой пузырь перемещается к наиболее нагретой
поверхности и прилипает. Это явление важно для решения вопроса
об ориентации баков, поскольку в том случае, когда наиболее
нагретая поверхность бака располагается вблизи заборного
устройства, пары концентрируются именно в этом районе.
Периодически при запусках основных двигателей и тепловых
закрутках компоненты очищаются от газовых включений, однако
при последующих эволюциях в состоянии невесомости вновь
перемешиваются.
Для успокоения волн жидкости и сепарации из нее газовых
включений перед запуском основного двигателя требуется
определенное время действия начальной перегрузки порядка 10~2—10~4 g,
создаваемой двигателем системы обеспечения запуска.
В расходных баках маршевой двигательной установки
космического корабля «Аполлон» имеются заборные устройства с
внутренним и наружным сетчатыми экранами; они предназначены для
предотвращения попадания пузырей гелия в топливные
магистрали, особенно в период запуска двигателя, когда возможны
значительные колебания уровня компонентов [36].
Космические условия, такие как вакуум, неограниченная
тепловая поглощающая способность, невесомость, оказывают
существенное влияние на протекание переходных процессов запуска,
останова и др. Так, отсутствие противодавления в полостях
двигателя оказывает влияние на скорость заполнения магистралей,
процессы истечения в камеру первых порций топлива, агрегатное
состояние первых порций топлива и воспламенение. Это оказывает
влияние на устойчивость рабочего процесса, величины
максимальных забросов давления в камере и газогенераторе, скорости выхода
19
на номинальный режим, на продолжительность и величину
импульса последействия тяги (ИПТ).
При выходе двигателя на режим и установлении
сверхкритического истечения потока через сопло давление и температура
окружающей среды уже не будут оказывать влияние на внутрикамер-
ные процессы, хотя внешний тепломассообмен до определенных
пределов будет зависеть от характеристик двигателя и
окружающей среды.
При длительных орбитальных полетах космических аппаратов-
на расстояниях 150—500 км их внешняя поверхность активно
взаимодействует с молекулами, атомами и ионами остаточных газов
атмосферы Земли. Так как энергия налетающих частиц лежит в-
диапазоне нескольких электронвольт, что превышает энергию
активации большинства химических реакций, то на поверхности могут
активно протекать такие физико-химические процессы, которые
отсутствуют при контакте поверхности с газами в обычных
условиях.
Разреженность космической среды вызывает ускоренную
сублимацию (испарение) поверхностных слоев материалов
конструкций космических аппаратов [46, 109]. Сублимация приводит к
нарушению поверхностных свойств. Состояние поверхности может
изменять скорость сублимации. Одновременно с вакуумом
действуют, также, электромагнитные и корпускулярные излучения,
которые, в свою очередь, могут усиливать эффект сублимации, так как
энергия связи атомов (молекул) в материале может быть более
низкой, чем энергия соответствующих видов излучений (квантов,
или частиц).
В вакууме практически отсутствует конвективный теплообмен
и теплопроводность среды, а передача тепла извне происходит
только путем лучистого обмена. Кроме того, в вакууме затруднена
теплопередача через статически соприкасающиеся между собой
узлы ввиду наличия микронеровностей поверхности и вакуумных
промежутков между ними.
Теплопередача в космическом вакууме при условии, что поток
молекул к поверхности мал, происходит практически полностью
благодаря излучению.
При длительном пребывании материалов в космическом
вакууме в результате газоотделения и потерь легколетучих компонентов,
могут изменяться свойства их, связанные с теплофизическими и
диэлектрическими характеристиками (теплопроводность,
электропроводность и т. п.). Могут изменяться механические свойства
материалов за счет нарушения поверхности. Это может быть
следствием возникновения либо микроскопических поверхностных
трещин, либо интеркристаллитной коррозии. Отсутствие окисных и
других поверхностных защитных пленок может оказывать
ощутимое воздействие на механические свойства материалов.
Сложность, тесная взаимосвязь физико-химических процессов,
происходящих в различных элементах двигательной установки^
20
особенности взаимодействия двигателя с реальной окружающей
средой приводят к тому, что создание и использование
экономичных и надежных ДУ возможно только при глубоком изучении:
природы указанных процессов, путем тщательной отработки и
исследования двигателей и отдельных их элементов в космическом
пространстве.
Осуществление данных исследований и отработка
двигательных установок на Земле становится возможной только при
обеспечении имитации условий космического пространства.
ГЛАВА 2
ОБЩИЕ ПОЛОЖЕНИЯ ПО ПРОВЕДЕНИЮ
ЛЕТНЫХ ИСПЫТАНИИ ЖРД
2.1. ПОНЯТИЕ О ЛЕТНЫХ ИСПЫТАНИЯХ ЖРД И УСЛОВИЯХ
ЭКСПЛУАТАЦИИ
Понятие летные испытания ракет включает комплекс вопросов
по организации, подготовке, проведению, обработке, анализу,
обобщению, оценке результатов испытаний и т. д. Эти же вопросы
являются определяющими при испытании ЖРД как одной из
систем ракеты.
Период проведения летных испытаний зависит от степени
совершенства всех систем комплекса.
Обычно, говоря о летных испытаниях ЖРД, подразумевают его
работу в составе ракеты-носителя или космического аппарата в
полете. В такой постановке летные испытания ЖРД — это
испытания в условиях эксплуатации.
Условия эксплуатации — это совокупность факторов,
воздействующих на двигатель за все время его работы, включая время
выработки ресурса. Под эксплуатационной выработкой ресурса
двигателя понимается та часть общего ресурса, которая может
быть выработана в течение установленных гарантийных сроков.
Например, эксплуатационную выработку характеризуют:
определенное количество срабатываний элементов автоматики
многократного срабатывания, количество перекладок подвижных частей
элементов регулирующих органов приводами, количество
срабатываний электропневмоклапанов, количество температурных на-
гружений от окружающей среды в допустимых крайних условиях
и др. В эксплуатационную выработку ресурса входит также работа
двигателя в составе ракеты-носителя или КА в полете. Иными
словами, за время эксплуатации в составе ракеты или КА двигатель
находится в различных условиях в зависимости от этапа
эксплуатации:
— хранение, нахождение на технической позиции или
стартовой площадке, транспортирование, заправка топливом и др.;
— пассивный полет после выведения на орбиту;
2L
— транспортирование ракетой-носителем (для двигателей,
установленных на второй и последующих ступенях) в полете;
— работа двигателя, включая участки запуска и выключения;
— пассивный полет после первого и последующих включений
двигателя (для двигателя многократного включения);
— длительное нахождение в условиях космического
пространства до первого включения.
Перечисленные этапы предопределяют условия эксплуатации,
■а следовательно и необходимость их проверки при отработке [26,
30, 57].
Условия эксплуатации двигателя в составе ракеты-носителя
или космического аппарата можно разделить на три вида:
наземную эксплуатацию, пассивный полет и период работы двигателя.
Первый вид объединяет условия эксплуатации,
характеризующие окружающую среду, параметры примененных компонентов
топлива, сжатые газы, пороховые заряды, способ крепления и
размещения двигателя в двигательной установке и т. п. К их числу
можно отнести:
— давление, температуру, влажность окружающей среды;
— температуру, плотность, давление и газонасыщенность
компонентов топлива;
— температуру, давление сжатых газов (используемые для
управления работой автоматики двигателя);
— температуру конструкции;
— степень разреженности окружающей среды (вакуум);
— состояние невесомости;
— степень электромагнитного излучения;
— степень корпускулярного излучения и др.
Второй вид объединяет условия эксплуатации, вызванные
влиянием систем ракеты на работу и работоспособность двигателя.
К числу таких систем можно отнести:
— системы питания двигателя компонентами топлива и
сжатыми газами;
— системы наддува топливных баков, использующих
компоненты топлива (за счет отбора компонентов топлива высокого
давления после насосов двигателя);
— системы наддува топливных баков, использующих продукты
неполного сгорания компонентов топлива (за счет отбора
продуктов газогенерации от двигателя).
Кроме того, на работу двигателя оказывают влияние:
— отбор компонентов топлива высокого давления на
автоматику топливных баков, гидроусилители, приводы и т. д.;
— гидродинамические характеристики подводящих расходных
магистралей;
— гидроудары и провалы давлений, вызванные включением и
выключением других (смежных) двигателей;
— газожидкостный состав компонентов топлива при
выработке кз баков последних порций;
— колебание давлений на входе в двигатель, вызванное
работой системы наддува баков;
— вибронагрузки за счет работающих смежных двигателей.
Третий вид объединяет условия эксплуатации, обусловленные
эволюциями ракеты в полете, в соответствии с требованиями, фор-
мирующимися в процессе полета или заложенными в систему
управления, и связанные с ними изменения режимов работы
двигателя. К таким условиям можно отнести:
— перегрузки относительно осей стабилизации ракеты;
— нагрев элементов конструкции, вызванный
аэродинамическим влиянием;
— акустические колебания давления;
— донное давление;
— колебания компонентов топлива, вызванные приложением
управляющих сил относительно центра масс;
— плавное дросселирование или форсирование, ступенчатые
перекладки с режима на режим, многократные включения,
обеспечивающие программную скорость полета;
— изменение режимов работы двигателя из-за изменения
соотношения компонентов топлива, для обеспечения программной
выработки компонентов топлива из баков;
— качания рулевых камер, маршевого двигателя, выхлопных
сопел, перепуск продуктов газогенерации в выхлопные сопла, вдув-
продуктов сгорания в закритическую часть сопла камеры для
обеспечения управляемого полета и стабилизации ракеты и др.
2.2. ЭТАП РАЗРАБОТКИ ПРОГРАММЫ ЛЕТНЫХ ИСПЫТАНИЙ.
ПРОГРАММА ЛЕТНЫХ ИСПЫТАНИЙ ЖРД
Программа летных испытаний двигателей является составной
частью программы летных испытаний ракеты и ракетного
комплекса [24].
Программа летных испытаний двигателей разрабатывается
заблаговременно для включения в общую программу по испытаниям
ракеты. До начала летных испытаний некоторые пункты
программы могут уточняться и изменяться, но для разработки программы
необходимы уточненные и проверенные сведения, а состояние
проработок и технические решения должны быть окончательно
сформулированы [45].
Перед разработкой программы летных испытаний двигателей
необходимо:
— сформулировать и согласовать требования технического
задания;
— выбрать окончательный вариант схемы двигателя;
— выбрать схему двигательной установки;
— определить основные принципиальные решения;
— уточнить характер и степень влияния вспомогательных
систем на работу двигателя;
2$
— выбрать стендовую базу, определить условия эксплуатации,
которые будут имитироваться в процессе стендовой отработки;
— обосновать объем информации, нужной для проведения
наземной отработки;
— выбрать средства и способы обработки результатов
измерений при стендовых испытаниях;
— сформулировать вопросы, подлежащие экспериментальной
проверке при летных испытаниях;
— разработать методический план отработки двигателя;
— разработать методический план обеспечения надежности;
— провести предварительное обоснование объема информации
ери летных испытаниях;
— провести предварительные проработки по применяемым
средствам телеметрических измерений;
— провести проработки по номенклатуре методик для
обработки и анализа результатов измерений.
Используя результаты основных проработок, можно
разработать программу летных испытаний двигателей и сформулировать
основные цели и задачи испытаний. С учетом изложенных
предпосылок, изменения, вносимые в программу, не будут носить
принципиального характера, а будут лишь уточнять затронутые
вопросы [29].
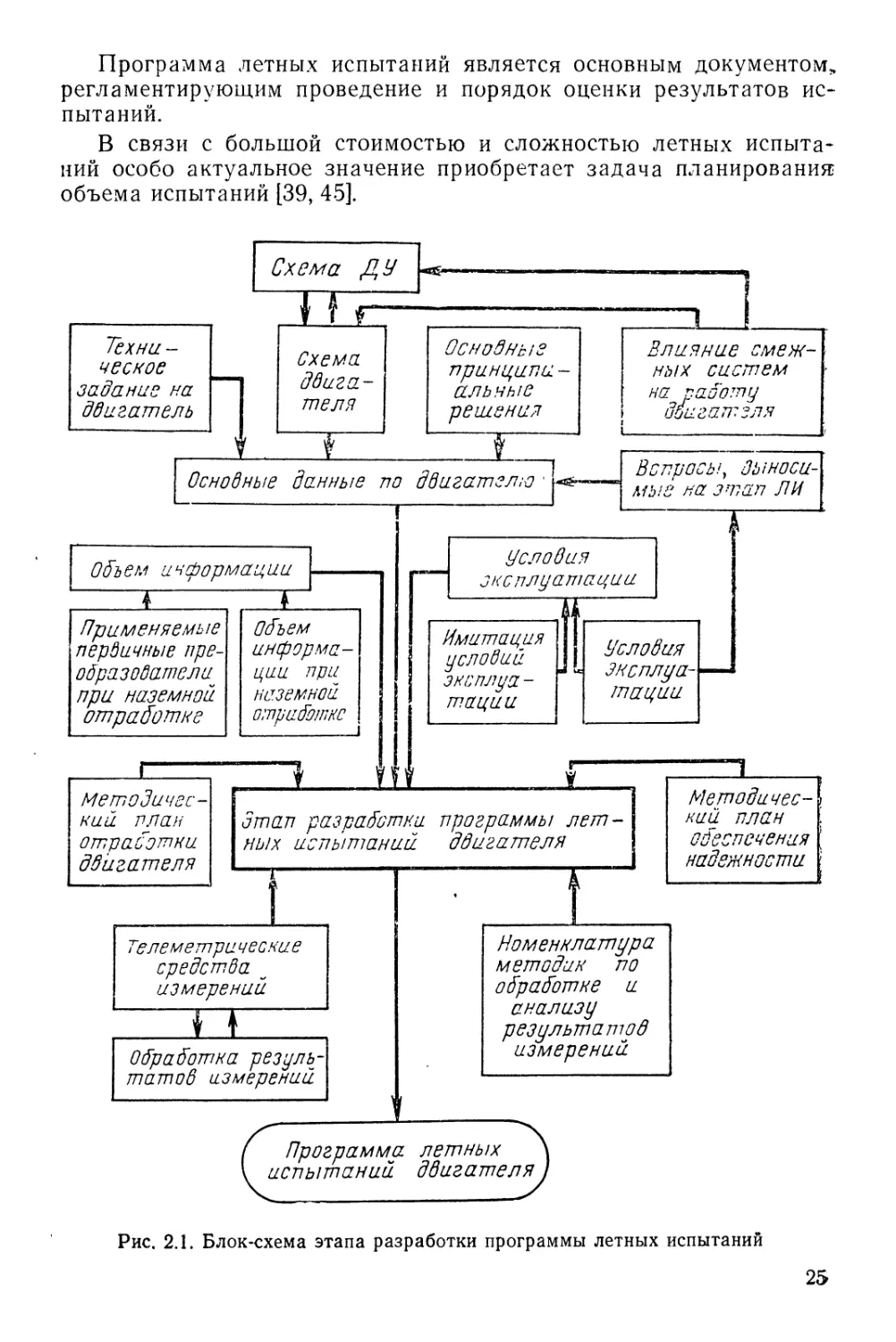
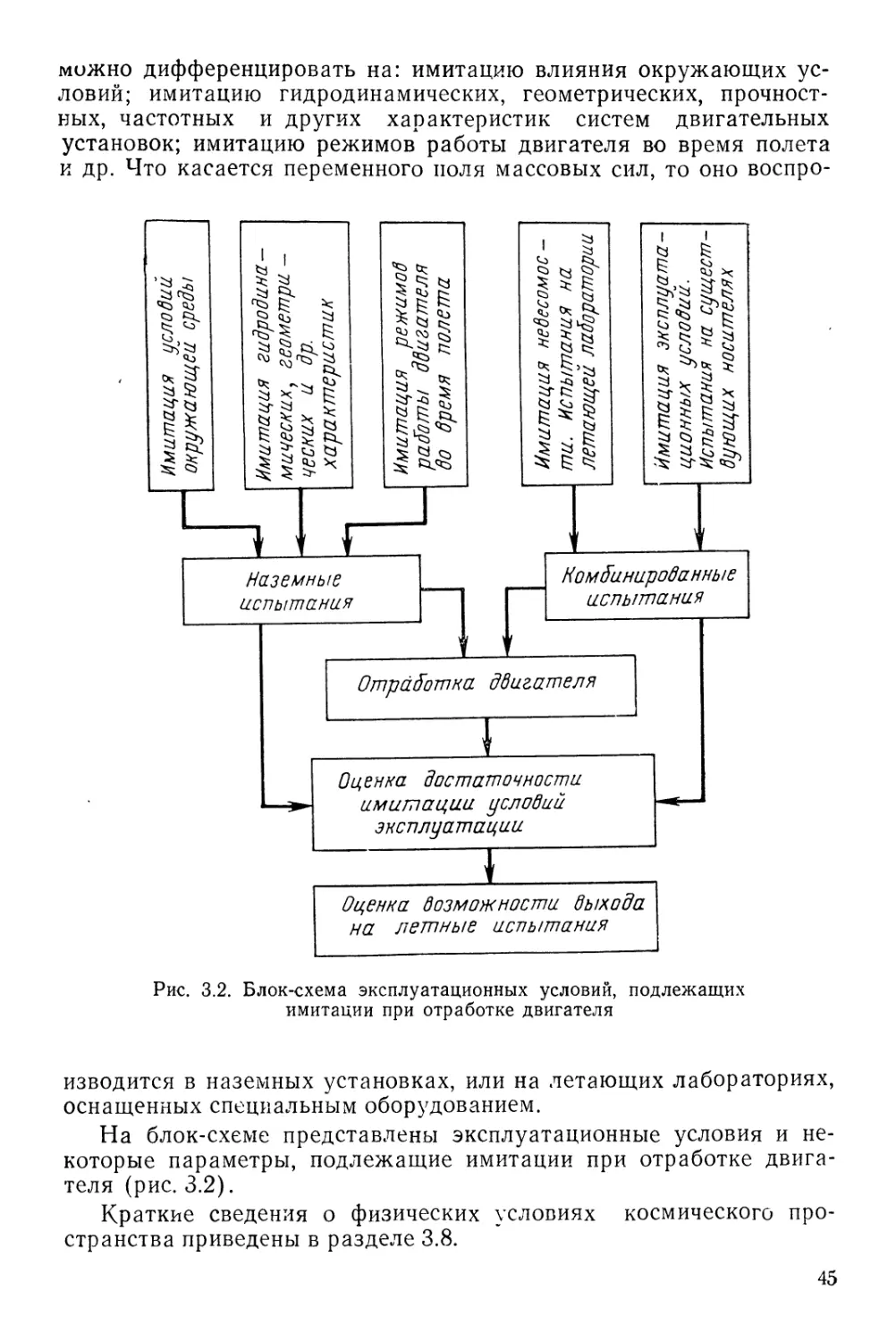
На рис. 2.1 представлена блок-схема этапа разработки
программы летных испытаний двигателя.
Исходными материалами для разработки программы летных
испытаний двигателей являются:
— основные требования на характеристики двигателя;
— условия эксплуатации двигателя:
— степень приближения стендовых условий (с учетом
имитации) к требованиям технического задания на разработку;
— влияния различных систем на работу двигателя: системы
регулирования тяги (скорости); системы расходования
компонентов топлива;
— вопросы, выносимые на этап летных испытаний, которые по
техническим и экономическим соображениям не могут
имитироваться при наземных испытаниях;
— заложенные принципиально новые технические решения в
конструкции и схеме двигателя;
— принципиально новые технические решения, внедряемые на
ракете и влияющие на работу двигателя;
— предполагаемый объем телеметрических измерений и
применяемые средства измерений;
— планируемый объем летных испытаний на основании
результатов стендовой отработки;
— априорная информация по ранее отработанным системам-
аналогам.
24
Программа летных испытаний является основным документом,,
регламентирующим проведение и порядок оценки результатов
испытаний.
В связи с большой стоимостью и сложностью летных
испытаний особо актуальное значение приобретает задача планирования?
объема испытаний [39, 45].
Схема ДУ
Техническое
задание на
двигатель
Основные
принципа -
альные
решения
Влияние
смежных систем
на рао от у
двигателя
Основные данные ло двигателю
Вопросы,
выносимые на этап ЛИ
Объем информации
Применяемые
лердичные
преобразователи
при наземной,
отработке
А.
Объем
информации при
наземной
отработке
Методический план
отработки
двигателя
Условия
эксплуатации
Имитация
условий
эксплуатации
Условия
эксплуа
тации
Этап разработки программы
летных испытаний двигателя
Телеметра чес кие
ере дет да м
измерений
±±
Обработка
результатов измерений.
Методический план
обеспечения
надежности
Номенклатура
методик по
обработке и
анализу
результатов
измерений.
( Программа летных \
\ испытаний двигателяJ
Рис. 2.1. Блок-схема этапа разработки программы летных испытаний
Программа составляется задолго до начала летных испытаний
и по мере отработки систем ракеты и двигателя, а также
обеспечения испытаний техническими средствами подвергается
корректировке.
Программа летных испытаний должна включать следующие
основные вопросы:
— цель и задачи испытаний;
— объект испытаний;
— методический план, включающий виды, порядок и
требования к испытаниям;
— номенклатуру методик и программ обработки и анализа
результатов измерений;
— подтверждение требований к надежности;
— подтверждение эксплуатационных характеристик в составе
ракеты;
— объем необходимой технической документации;
— отчетность по проводимым испытаниям.
Такие вопросы, как материально-техническое обеспечение,
наземные средства измерений, организация проведения работ на
всех этапах подготовки к пуску ракеты-носителя здесь не
рассматриваются.
2.3. ЦЕЛИ И ЗАДАЧИ ЛЕТНЫХ ИСПЫТАНИЙ ЖРД
В зависимости от назначения двигателя и выполняемых им
функций, конструктивных решений, размещения в двигательной
установке, полноты наземной проверки в условиях, близких к
эксплуатационным, изученности физических характеристик
окружающей среды, новизны схемных и конструктивных решений ракеты,
предъявляемых требований и др., определяются цели и задачи
летных испытаний двигателя в составе ракеты-носителя или
космического аппарата [54, 71, 88].
Целью летных испытаний является:
— проверка работы двигателя в условиях эксплуатации и
выполнения всех функций в соответствии с назначением;
— проверка совместимости двигателя со смежными системами
носителя в условиях штатной эксплуатации;
— проверка достаточности и эффективности наземной
отработки;
— уточнение и выявление физических процессов и явлений,
т. е. условий эксплуатации;
— отработка отдельных вопросов, выносимых на этап летных
испытаний;
— всесторонняя проверка и подтверждение характеристик
двигателя, оговоренных техническим заданием на разработку, в
условиях эксплуатации;
26
— подтверждение выполнения заданных эксплуатационных
характеристик двигателем;
— подтверждение выполнения требований к надежности и
правомерности распространения показателей надежности,
полученных при стендовой отработке, на условия эксплуатации.
В ходе летных испытаний возможны аномалии в работе
двигателя, зависящие от самого двигателя или от влияния смежных
систем. Иногда для принятия оптимальных решений (в целом па
ракете) приходится вносить некоторые изменения в конструкцию»
двигателя или смежной системы. Следовательно, на этапе летных
испытаний проводятся мероприятия по повышению надежности
комплекса в целом. Поэтому проверка вносимых изменений
является, также, целью летных испытаний [10, 47].
Задачи летных испытаний двигателей могут быть весьма
различными в зависимости от многих факторов, упомянутых выше.
Они определяются на этапе разработки программы. В ходе летных
испытаний возникают дополнительные задачи, которые
необходимо решать наравне с запланированными.
Если цели летных испытаний одинаковы практически для всех
ЖРД, то задачи существенно различаются.
Задачи летных испытаний двигателей продиктованы реальными
условиями эксплуатации, собственно двигательными процессами
и влияниями смежных систем. В общем случае задачами летных
испытаний двигателей являются:
— определение фактических характеристик двигателей и их
разброс относительно номинальных значений;
— оценка и определение параметров, недостаточно изученных
при стендовых испытаниях (предусмотрено планом отработки);
— оценка действия перегрузок относительно осей
стабилизации ракеты;
— оценка действия на двигатель пассажирских
виброперегрузок;
— оценка фактических вибронагрузок, действующих на
двигатель;
— проверка запуска двигателя в условиях кратковременной
невесомости;
— оценка повторных включений и выключений двигателя;
— определение теплового режима работы двигателя при
многократных включениях;
— определение влияния смежных двигателей на температуру
элементов конструкции двигателя;
— определение характеристик дренажей, обеспечивающих
требуемый теплосъем и минимальное время опорожнения полостей
двигателя без образования отложений твердой фазы;
— оценка работы двигателя на режимах форсирования и
дросселирования (как исполнительного органа регулирования
скорости полета);
27
— оценка работы двигателя при работе с различным
отношением массовых расходов компонентов топлива (как
исполнительного органа системы выработки компонентов топлива из баков);
— оценка управляющих усилий, создаваемых двигателем,
относительно осей стабилизации ракеты (как исполнительного
органа автомата стабилизации);
— оценка гидравлических ударов в магистралях двигателей
ори запуске и выключении;
— определение характеристик двигателей при выключении;
— определение импульса последействия тяги двигателя;
— оценка возмущающих усилий, создаваемых двигателем при
выключении;
— оценка взаимосвязи между параметрами двигателя и
действующими факторами;
— оценка работы двигателя при провалах давлений на входах
в насосы, вызванных включением смежных двигателей;
— оценка взаимного влияния двигателей в процессе их запуска;
— определение параметров двигательной установки по
баллистическим характеристикам;
— определение фактических потерь удельной тяги двигательной
установки из-за влияния ряда факторов;
— определение влияния смежных систем на работу двигателя
и его выходные характеристики;
— оценка взаимодействия потоков продуктов сгорания,
истекающих из сопел двигателей, определение этого влияния на работу
двигателей, обтекаемых продуктами сгорания;
— оценка воздействия факела двигателя на обшивку и
отдельные агрегаты;
— оценка работы двигателя при выработке из баков
последних порций компонентов топлива (газо-жидкостный состав);
— определение комплексного воздействия основных
параметров космического пространства на двигатель;
— оценка акустических и вибрационных нагрузок, вызываемых
работой двигателей, а также аэродинамической турбулентностью
и ударными волнами в окружающей среде;
— оценка донного давления;
— определение фактических параметров физических процессов
и воздействий условий эксплуатации;
— проверка влияния транспортирования ракеты на
работоспособность двигателя;
— проверка температурных и влажностных режимов в
условиях штатной эксплуатации;
— предварительная оценка эксплуатационных характеристик
двигателя;
— проверка сходимости характеристик двигателя, полученных
при стендовых испытаниях, с летными.
28
2.4. ТРЕБОВАНИЯ К ДВИГАТЕЛЯМ, ПОСТАВЛЯЕМЫМ
НА ЛЕТНЫЕ ИСПЫТАНИЯ
2.4.1. Требования к комплектации двигателей
Двигатели, поставляемые на летные испытания (прошедшие
тщательную стендовую отработку), должны быть последней
модификации, в которую внесены все изменения, потребовавшиеся в
процессе отработки. Эти двигатели не должны иметь различий
между собой. Отличия в элементах или в циклограмме запуска
двигателей должны быть сведены к минимуму, а еще лучше
полностью исключены, в противном случае снижается ценность
проведенных испытаний [7, 10, 28].
Изменения, вносимые в конструкцию двигателя, могут быть
результатом конструкторской доработки, необходимость которой
следует из анализа результатов летных испытаний.
В процессе автономной отработки узлов и комплексной
отработки двигателя испытания проводятся в широком диапазоне
изменения параметров с имитацией большого количества влияний
всевозможных возмущений. Диапазон этих изменений как по
отклонениям от номинальных факторов, так и по совокупности и
характеру влияющих факторов таковы, что не могут реализоваться
на двигателе при летных испытаниях ракеты. Режимы работы
двигателя со всевозможными комбинациями как внешних, так и
внутренних факторов необходимы, чтобы выявить слабые места,
степень влияния одной системы на другую и провести всестороннюю
проверку в наземных условиях [29, 58].
Например, при отработке двигателя F-1 автономные испытания
агрегатов завершались проверкой на соответствие требованиям
технических условий, включая надежность; испытания узлов,
агрегатов и двигателя на долговечность проводились при различных
режимах работы (номинальном, форсированном) [88].
В соответствии с требованием технического задания
«.квалификационное время» (время безотказной гарантийной работы
двигателя) превышало время работы в полете почти в 14 раз;
многократные пуски без снятия со стенда на номинальном и
форсированных режимах имело место и при отработке запуска и останова
относительно предусмотренного количества включений двигателя.
Запасы по включениям большие, и «квалификационное»
количество безотказных пусков в 20 раз превышало количество пусков в
полете.
Доводочные испытания двигателя проводились, в основном, на
долговечность. Причем, пуски каждого экземпляра двигателя на
конечных стадиях отработки проводились при последовательно
изменяющихся различных факторах, что позволило проверить
работоспособность двигателя не только в условиях, требуемых
техническим заданием, но и в различных аварийных ситуациях. Это
позволило многофакторные задачи проверить при малом коли-
29
честве испытуемых двигателей. Например, при испытаниях
двигателя F-1 на нескольких экземплярах проверялось влияние на
работоспособность 12 видов вносимых заранее возможных
неисправностей и 31 крайнего сочетания параметров двигателя. В ряде
случаев крайние значения превышали требования ТЗ. Так,
температура окружающей среды доводилась до +82° (с выдержкой
двигателя в течение 16 ч) по сравнению с максимальной температурой
окружающей среды +30°С по техническому заданию.
Суммарная наработка двигателя в стендовых условиях
превысила более чем в 10 раз наработку в полете. Суммарная
наработка в составе ступени ракеты в 3—4 раза превысила наработку в
полете. Это позволило выявить недостатки конструктивных решений
или технологии производства двигателя в процессе стендовых
испытаний.
При летных испытаниях двигателей F-1, J-2, отмечались лишь
дефекты, связанные с неудовлетворительным взаимодействием
двигателей с системами ракеты. По двигателю RL-10 дефекты во-
обше не отмечались в ходе летных испытаний [72, 88].
2.4.2. Контроль технического состояния ЖРД,
поставляемых на летные испытания
При подготовке к проведению летных испытаний во избежание
высоких затрат наряду с тщательной отработкой конструкции и
технологии изготовления необходима организация рациональной
системы контроля технического состояния ЖРД. Анализ
результатов летных испытаний позволяет оценить эффективность принятой
системы контроля технического состояния.
Помимо различного рода проверок в цехе-изготовителе
(контроль герметичности, прозвонка электрических цепей и т. д.)
каждый ЖРД подвергается различного вида стендовым контрольно-
технологическим испытаниям (КТИ), а партии двигателей —
контрольно-выборочным испытаниям (КВИ).
Совокупность сведений, регламентирующих порядок и
программы проведения контрольно-технологических и
контрольно-выборочных испытаний, номенклатуру и допустимые значения
диагностических параметров и признаков, и средства их измерения, а
также план контроля — данные об объеме партии, контрольных
нормативах и решающих правилах — определяет систему
контроля технического состояния ЖРД.
Основные положения методики выбора диагностических
параметров и признаков, изложенной в гл. 4 применительно к задачам
технической диагностики при летных испытаниях ЖРД, остаются
в силе и для стендовых контрольных испытаний. Различие состоит
в том, что в данном случае не столь остро ставится вопрос
оперативности диагноза и ограничений на весо-габаритные
характеристики средств контроля, что позволяет расширить номенклатуру
диагностических параметров и признаков.
30
Допустимые значения диагностических параметров и
признаков оговариваются в документации на контрольные испытания.
Для параметров, обеспечение которых регламентировано
техническим заданием на разработку двигателя в виде количественных
показателей, допустимые значения указываются в единицах,
измерения, оговоренных в техническом задании. Параметры и
признаки, обеспечение которых непосредственно не упоминается в
техническом задании, могут оцениваться как в физических единицах,
так и на основе применения показателей, характеризуемых в
условных единицах.
Дадим краткую характеристику контрольно-технологических и
контрольно-выборочных испытаний ЖРД-
Огневые контрольно-технологические испытания (ОКТИ) с последующей
переборкой
Характерной особенностью этого метода контроля является
переборка после испытания с целью уточнения технического
диагноза путем дефектоскопии и других методов неразрушающего
контроля узлов и агрегатов двигателя (ультразвуковой,
магнитный, вихревых токов и др.) [121].
Помимо проверки исправности основных узлов и агрегатов по
условиям и времени работы, близким к эксплуатационным, этот
метод позволяет оценить соответствие выходных параметров
установленным требованиям и, при необходимости, уточнить
настройку двигателя.
Серьезный недостаток этого метода контроля состоит в том,
что при повторной сборке возможна неправильная установка
отдельных деталей, нанесение повреждений, засорение трактов
двигателя и т. п.
Огневые контрольно-технологические испытания без последующей переборки
В отличие от рассмотренного выше метода после проведения
огневого испытания по специальной технологии удаляются
остатки компонентов топлива из трактов и полостей двигателя, и он
становится без переборки пригодным для летных испытаний.
К достоинствам данного метода контроля можно отнести
возможность:
— проверки исправности всех агрегатов и узлов двигателя при
заданных условиях и продолжительности работы, близких к
эксплуатационным;
— проверки правильности сборки двигателя и отсутствия
засорений и инородных предметов в его трактах;
— оценки соответствия настройки двигателя и выходных
характеристик установленным требованиям.
Вместе с тем этот метод контроля не лишен определенных
недостатков:
31
— необходимо отрабатывать сложную технологию удаления
остатков компонентов топлива из магистралей и полостей
двигателя;
— усложняется конструкция двигателя ввиду необходимости
исключения тупиковых полостей, применения специальных видов
уплотнений и т. п.;
— отсутствие переборки двигателя затрудняет обнаружение
скрытых дефектов узлов и агрегатов, вследствие чего
предъявляются повышенные требования к методам и средствам технической
диагностики при проведении испытания.
Разновидностью описанного метода контроля являются огне-;
вые предстартовые испытания (ОПИ) двигателя в составе
ступени или блока ракеты. Эти испытания проводятся на стендах,
расположенных недалеко от стартовых позиций, что позволяет
сократить промежуток времени между стендовыми и летными
испытаниями и, тем самым, предотвратить последствия, связанные
с воздействием остатков компонентов топлива на конструкционные
глатериалы двигателя при длительном хранении.
Такой метод контроля применялся для двигателей космических
кораблей «Аполлон». Например, перед первым пилотируемым
полетом корабля «Аполлон-7», его маршевый двигатель прошел
предполетные испытания по программе: 3 включения
продолжительностью 10; 60 и 60 с с 4-х часовыми перерывами между
включениями [88].
Естественно, что как метод контроля двигателя ОКТИ без
переборки, так и метод ОПИ в составе ступени или блока требуют
построения принципиальной схемы двигателя по принципу
многократного срабатывания также и в тех случаях, когда по условиям
применения он должен срабатывать один раз.
«Холодные» контрольно-технологические испытания (ХКТИ) без последующей
переборки
ХКТИ основаны на принципе физического моделирования
гидравлических характеристик агрегатов и узлов двигателя путем
применения жидкостей и газов, имитирующих компоненты
топлива и рабочее тело турбины. Модельные жидкости и газы не
должны взаимодействовать с конструкционными материалами и
должны легко удаляться из магистралей двигателя после
испытания. Кроме того, модельные жидкости и газы должны
удовлетворять соответствующим критериям подобия. Примерами таких
жидкостей и газов могут служить вода и спирт как имитаторы
горючего, фреон как имитатор окислителя, подогретый воздух,
либо инертные газы — как имитаторы рабочего тела турбины. При
проведении холодных проливок посадочного двигателя лунной
кабины корабля «Аполлон» в качестве рабочей жидкости
применялась вода.
После проведения ХКТИ и удаления остатков модельных
жидкостей путем продувки, осушки и вакуумирования внутренних по-
32
лостей двигатель без переборки пригоден для летных испытаний.
Проведение ХКТИ позволяет:
— проверять правильность сборки двигателя и отсутствие
засорений и инородных тел в магистралях двигателя;
— осуществить контроль функционирования и оценить
характеристики насосов, турбины, клапанов и регулирующих органов;
— проверить правильность настройки двигателя по массовому
соотношению компонентов топлива.
Согласно опубликованным данным эффективность ХКТИ для
решения указанных задач подтверждена экспериментально при
контроле двигателя посадочной ступени корабля «Аполлон»,
поскольку в процессе отработки были обнаружены засоренные
каналы, недоразмеренные узлы и агрегаты, несоосность клапанов
управления расходами, заедание клапанов или форсуночных
головок, поврежденное оборудование и т. д. [96].
Существенный недостаток ХКТИ заключается в отсутствии
контроля технического состояния двигателя при работе в
условиях, близких к летным. О важности огневых испытаний для
выявления дефектов свидетельствует, например, факт двукратной
замены взлетной ступени первой пилотируемой лунной кабины корабля
«Аполлон» из-за образования трещин в сварном шве форсуночной
головки, которые были обнаружены при осмотре двигателей,
прошедших ОПИ.
Логический и статистический анализ эффективности
рассмотренных методов контроля свидетельствует о том, что ни один из
этих методов, являясь по форме сплошным, по-существу не
позволяет гарантировать выявление всех возникающих неисправностей.
При особо ответственном назначении ЖРД можно комбинировать
различные методы КТИ таким образом, чтобы их преимущества
взаимно дополнялись, повышая эффективность системы контроля.
Проведение любых видов КТИ и их комбинаций не исключает
необходимости проведения контрольных испытаний выборки от
партии двигателей, предназначенных для летных испытаний.
Контрольно-выборочные испытания
КВИ подвергается один или несколько двигателей из партии.
Положительные результаты КВИ служат основанием для
использования двигателей партии по назначению.
Время непрерывной работы, число включений и режимы
работы при проведении КВИ назначаются в гарантийных пределах,
превышающих эксплуатационные.
Двигатели, прошедшие КВИ, разбираются, подвергаются
визуальному осмотру, металлографическим исследованиям и другим
видам анализа, позволяющим установить их техническое
состояние. Методика выбора системы контроля с учетом экономических
факторов и надежности для технических устройств типа ЖРД
приведена в работе [75].
2 2227 33
2.4.3. Критерий принятия решения о возможности перехода
к этапу летных испытаний
Качественный анализ результатов стендовой отработки, каким
бы тщательным и всесторонним он не был, не может служить
достаточно объективной и доказательной основой для принятия
решения о возможности перехода к этапу летных испытаний.
Объясняется это сложностью однозначной трактовки состояния
отработки из-за многообразия видов информации, ее разнородности и
ограниченного объема. Для того, чтобы решение о возможности
перехода к этапу летных испытаний было доказательным и носило
несубъективный характер, необходима формализованная основа
для его принятия. Такой формализованной основой, позволяющей
использовать разнообразный и разнородный статистический
материал является количественный анализ надежности ЖР I. При
этом положительное решение о переходе к этапу летных испытаний
принимается в случае соблюдения условий:
р=\ (требование отсутствия зачетных отказов) и Рн.с.и^Ртр при
где Р — частость безотказной работы;
Рн.си — нижняя граница одностороннего доверительного
интервала вероятности безотказной работы двигателя
при стендовых испытаниях;
-Ртр — требуемое для допуска ЖРД к летным испытаниям
значение вероятности безотказной работы;
У, Утр — соответственно принятое для расчета показателя
-Рн.с.и и требуемое значения доверительной
вероятности.
Таким образом, соответствие достигнутых показателей
надежности требуемым значениям рассматривается как критерий принятия
решения о завершенности этапа стендовой отработки и возможности
перехода к этапу летных испытаний.
2.5. ОБОСНОВАНИЕ ТРЕБОВАНИЙ К НАСТРОЙКЕ ДВИГАТЕЛЯ
При наземной отработке двигателя проводятся
многофакторные испытания на различных режимах с воспроизводством
влияний внешних и внутренних факторов. Отклонения параметров
двигателя, вызванные влиянием этих факторов, по абсолютным
значениям превышают возможные в условиях эксплуатации. Виды
факторов и их сочетания при испытаниях определенных сборок
двигателей подбираются с таким расчетом, чтобы проверить
работоспособность конструкции и по существу выявить заложенные
резервы. Очевидно, что эти сочетания невозможны в полете, а
влияние факторов весьма умеренно, но тем не менее такая отработка
в стендовых условиях проводится с целью выявления слабых мест.
По результатам таких испытаний принимаются конкретные
технические решения, вводятся конструктивные изменения, уточняются
технологические процессы и т. д. Если стендовую отработку про-
34
водить для номинальных условий (с учетом допусков), то этого
будет недостаточно для создания высоконадежного двигателя со
стабильными характеристиками. Поэтому стендовые испытания
изобилуют большой номенклатурой программ. Отработанный
двигатель, на котором учтены все возможные факторы,
проявляющиеся при полете ракеты, должен иметь резерв по добротности
конструкции, иметь стабильные характеристики и определенные
запасы, которые характеризуют, в конечном итоге, его надежность.
К летным испытаниям подходят с отработанным двигателем
окончательного (штатного) варианта.
Следует иметь з виду, что определение фактических законов
изменения и значений параметров двигателей проводится на
основании накопленных статистических данных об испытаниях
двигателей со штатной комплектацией и номинальной настройкой в
условиях эксплуатации.
Высказываются мнения, что при летных испытаниях
необходимы повторения (аналогично стендовым программам) с учетом
фактических условий и влияний, а также рекомендации
«ужесточить» условия эксплуатации в полете, чтобы в случае каких-либо
неисправностей, не связанных с работой двигателя, можно было
прогнозировать выполнение программы полета за счет резервов
двигателя. В связи с этим рассмотрим различные комбинации
внешних и внутренних факторов, приводящих к искусственному
утяжелению условий работы двигателя и покажем, к какому
результату это может привести.
Влияние внутренних факторов
Усиление воздействия внутренних факторов двигателя (за счет
конструктивных изменений) приводит к изменению режима
работы двигателя и нарушает динамические связи между отдельными
системами с учетом влияния условий эксплуатации. При этом
возникают трудности, связанные с разделением влияний
конструктивных изменений и условий эксплуатации (в силу ограниченного
числа этих испытаний). В то же время указанные изменения
искажают картину протекания процессов и взаимовлияний систем по
сравнению со штатными. Возможные отличия, вызываемые
работой двигателя в составе двигательной установки, могут быть неза-
мечены или искажены i[22, 54].
Учитывая тот факт, что не резко выраженное отклонение
размеров отдельных элементов двигателя для предполагаемого
штатного варианта может проявиться не сразу, становится ценным
накопление статистических данных, начиная с испытаний первых
экземпляров двигателей.
Повторяемость процессов и влияний дает основание с большим
доверием относиться к результатам измерений и быстрее
замечать незначительные аномалии, которые могут быть вызваны
причинами, не связанными с конструктивными решениями, а внесены
2* 35
при сборке или вызваны условиями эксплуатации. Каждое летное
испытание (особенно в начале реализации программы)
представляет большую ценность само по себе, а с учетом идентичности
результатов ценность возрастает, тем более, когда выявляются
аномалии. Действительно, повторяемость результатов может
служить критерием эффективности мероприятий, проведенных с целью
устранения выявленных неисправностей. А испытания с
искусственно повышенным влиянием внутренних факторов приводят к
накоплению разнотипных статистических данных, которые не могут быть
использованы в полном объеме. Поэтому для оценки надежности
двигателя могут потребоваться дополнительные испытания.
Следовательно, проводить летные испытания с заведомо повышенным
влиянием внутренних факторов нерационально.
Влияние внешних факторов
Внешние факторы — это совокупность условий эксплуатации:
окружающей среды, воздействий смежных систем, условий
размещения двигателя; эволюции ракеты, воздействий систем
стабилизации полета, систем расходования компонентов топлива и др.
[22].
При стендовых испытаниях внешние факторы имитируются в
зависимости от полноты нашего представления, совокупности их
воздействия и технических возможностей. Имитация всех
факторов на стенде проводится не одновременно, а в определенной
последовательности. Практически невозможно во время одного
испытания имитировать все внешние факторы, особенно такие, как
донное давление, акустические колебания, виброрежимы,
воздействие одного двигателя на другой, запуск в невесомости и т. д. Но
ряд факторов, которые технически можно осуществить,
воспроизводятся. Например, температура топлива доводится до +70°С
при заданном максимальном значении +30° С. Входные давления
меняются в широких диапазонах, превышающих в 2—3 раза
заданные. Температура конструкции также доводится до высоких
значений или снижается. Регулирование тяги или соотношения
компонентов топлива осуществляется в широких диапазонах,
значительно превышающих заданный и т. д. Продолжительность
воздействий указанных факторов (время непрерывной работы,
количество включений) также превышают заданные. При всех указанных
факторах добиваются высоких величин параметров и
работоспособности узлов и агрегатов двигателя.
Проверяя работоспособность и добротность при влиянии
многих факторов, не лимитировали основные выходные параметры,
т. е. количественное изменение их. Поэтому, одним из
ограничений по допустимым внешним возмущениям могут быть величины
отклонений основных выходных параметров от заданных в
техническом задании.
36
Выдерживание граничных условий эксплуатации,
характеризующих внешние факторы при летных испытаниях, желательно для
полноты охвата эксплуатационных условий. Этими испытаниями
проверяется совокупность всех взаимовлияющих факторов в
пределах, оговоренных требованиями эксплуатации. Проверять
работу двигателя с превышением граничных условий эксплуатации, как
иногда рекомендуют, нет необходимости, так как при этом:
— нарушается картина поведения параметров;
— искажается взаимовлияние систем;
— предъявляются дополнительные требования к смежным
системам, которые для этих испытаний должны дорабатываться,
перенастраиваться и т. д. (для обеспечения этих факторов);
— возникают дополнительные возмущения в смежных
системах и др.
Даже в случае реализаций этих условий полученные
результаты не повышают значимости такого испытания, так как была
нарушена «штатность». А в случае проявления значительных
отклонений от среднеопытных теряем в наборе статистических
данных.
Следует отметить, что граничные условия эксплуатации,
назначаемые в техническом задании на разработку двигателя, задаются
исходя из гипотетического предположения о сочетании факторов,
действующих в одну сторону, т. е. с некоторым расширением
возможного диапазона эксплуатационных условий. Поэтому, такие
внешние факторы, как температура топлива, давления на входах
в насосы, степень газонасыщения топлива, диапазоны
регулирования работы двигателя по давлению в камере сгорания и
соотношению компонентов топлива могут назначаться предельными при ряде
испытаний. При этом, двигатель, должен иметь «штатную»
комплектацию [54].
Сочетание указанных условий при «штатной» комплектации
и настройке двигателя на номинальный режим позволяет изучить
влияние внешних факторов и совокупность их воздействий не
только на двигатель, но и на смежные системы ракеты [2].
Влияние внутренних факторов в сочетании с внешними
Усиление воздействия внешних факторов в сочетании с
заведомо измененными внутренними факторами при нормальном
исходе испытания не несет какой-либо ценной информации.
Техническим заданием на разработку двигателя определяются
допуски на параметры и диапазоны изменения эксплуатационных
условий. Заданный диапазон условий должен соблюдаться при
летных испытаниях, например, по температуре компонентов
топлива, по конструкции, давлению на входах в насосы и др. перед
запуском двигателя, при этом параметры окружающей среды
(давление, температура и т. д.) считаются стабильными.
37
Изменение условий нарушает повторяемость и идентичность,
результатов измерений. Этот факт в значительной степени
обесценивает проведенное испытание. Кроме того, нарушается характер
влияния параметров двигателя на смежные системы, которые в
свою очередь могут исказить фактические характеристики. В
случае ненормальной работы двигателя труднее будет найти причину
его неисправности.
Таким образом, испытания с усиленным воздействием за счет
внешних, либо внутренних факторов или их сочетаний
подтверждают работоспособность двигателя. Но тем не менее они не
обогащают познания о протекающих процессах, взаимных влияниях,
обедняют статистику для установления закономерностей и т. д.
по сравнению с летными испытаниями, проводимыми в условиях
эксплуатации двигателей, собранных в штатной комплектации и
настроенных на номинальный режим.
2.6. ДОКУМЕНТАЦИЯ ДЛЯ ПРОВЕДЕНИЯ ЛЕТНЫХ ИСПЫТАНИЙ ЖРД.
НЕОБХОДИМЫЕ СВЕДЕНИЯ
Для обеспечения проведения летных испытаний
заблаговременно разрабатываются как эксплуатационная документация,
охватывающая процедуру работ с двигателем при проверках на
технической и стартовой позициях, так и документация для проведения
послеполетного анализа [6, 8, 50].
Эксплуатационная документация включает:
— инструкции по проведению работ на технической позиции;
— инструкции по проведению работ на стартовой позиции;
— инструкции по анализу компонентов топлива, заправке и
др.;
— частные инструкции и технические указания по проведению-
работ на технической позиции.
Для проведения послеполетного анализа и расчета основных
характеристик работы двигателя разрабатываются различные
программы и методики, используется техническая документация,
справочные материалы и т. д. В состав документации входят:
— расчетно-техническая документация;
— материалы по стендовой отработке;
— материалы к летным испытаниям;
— документация по средствам телеметрических измерений,
регистрации, обработке и т. д.;
— программа телеметрических измерений;
— техническая документация на телеметрические средства;
— методики и программы первичной обработки полученной,
информации (медленноменяющейся, быстроменяющейся);
— методики и программы по вторичной обработке результатов
измерений,
— методики по редактированию телеметрических измерений.;.
— методики по сглаживанию телеметрических измерений;
38
Эксплуатаци онная
документация
л
1
Обеспечение
проведения
летных
испытаний ЖРД
документацией
Инструкции по
проведению
работ
на ТП
L
я
Инструкции
по заправке,
анализам
компонентов,
газонасыщению
и др.
1
Инструкции по
проведению
работ
на СП
Частные инструкции и
технические указания на
проведение специальных работ
на ТП
Расчет но -
-техническая
документация
Материалы
по стендовой,
отработке ЖРД
Материалы
к летным
испытаниям ЖРД
(справочные
материалы)
1
Документация на средства и
телеметрических измерений,
регистрации, обработке и др.
Ч
L
Программа
телеметрических
измерений
Методики и
программы пп
первичной
обработке
телеизмерений
Основные из -
мереная для
оперативного
анализа
работы ЖРД
Методика
обработки
медленно
меняющихся
параметров
Методика ре-
дактирова -
ния
телеметрических
измерений
Методика
обработки
быстроменяющихся
параметров
Методики и про-*
граммы по
вторичной
обработке результатов
измерена!
Программы
расчета параметров
и временных
характеристик с
применением ЭВМ
Методика
сглаживания
телеметрических
измерений
Методика
определения
массовых
расходов
топлива
Методика
обработки
основных
параметров
движения
центра масс
ракеты
Техническая
документация
на
датчики и
средства
измерении
Рис. 2.2. Схема обеспечения документацией при проведении летных испытаний
ЖРД
39
— программы расчета параметров и временных характеристик
с применением ЭВМ и т. д.
На рис. 2.2 представлена схема обеспечения документацией
при проведении летных испытаний двигателей.
Для выхода на летные испытания представляются необходимые
сведения, отражающие как состояние отработки в целом, так п
Паспорт и дело
завода
-изготовителя на
двигатель
Необходимые
сведения о
двигателе
Материалы по
стендовой отработке
±
Отчеты, заключения,
исследования, анты
и др. по автономной
ompadbmxe узлов
двигателя
Материалы по
достигнутой
надежности работы узлов
и двигателя
Отчеты
по оценке
параметрической
надежности
Отчеты по
надежности
работы узлов
и двигателя
при стендовой
отработке
Заключение о допуске
двигателя к
летным испытаниям
в составе ракеты
Оценка вьтолнения комплексного
плана отрад~отни двигателя
Перечень
незавершенных
вопросов, не
влияющих на
начало
летных испытаний
к
Перечень
вопросов,
подлежащих
решению при
летных
испытаниях
Вопросы, находящиеся
в стадии завершения
или окончательного
оформления
Заключение о возможности
установки двигателя в
данной комплектации на
носитель
Некоторые
конструктивные
отличия узлов
от
окончательного варианта
Отступления,
долуценные
при
изготовлении и сборке
двигателя
Расчет но- техническая и
эксплуатационная документация
Рис. 2.3. Блок-схема необходимых сведений о двигателе для выхода на летные
испытания
40
'частные вопросы по конкретным экземплярам. К их числу можно
отнести:
— заключение о допуске двигателя к летным испытаниям в
составе ракеты;
— материалы по стендовой отработке (отчеты, заключения,
исследования и т. д.);
— материалы по оценке выполнения комплексного плана
отработки двигателя (незавершенные вопросы, не влияющие на начало
летных испытаний; вопросы, выносимые на этап летных
испытаний) ;
— заключение о пригодности двигателя в данной комплектации
(конструктивные отличия, отступления, допущенные при
изготовлении) ,
— материалы по оценке достигнутой надежности работы узлов
и двигателя;
— расчетно-техническая и эксплуатационная документация;
— паспорт и дело завода-изготовителя на двигатель и др.
На рис. 2.3 представлена блок-схема необходимых сведений о
двигателе для выхода на летные испытания.
ГЛАВА 3
ИМИТАЦИЯ УСЛОВИЙ ЭКСПЛУАТАЦИИ
ПРИ СТЕНДОВОЙ ОТРАБОТКЕ ЖРД
3.1. ЦЕЛИ И ЗАДАЧИ ИМИТАЦИИ УСЛОВИЙ ЭКСПЛУАТАЦИИ
Техническим заданием на разработку ЖРД оговариваются
требования к условиям эксплуатации в составе ракеты-носителя
или космического аппарата. Для двигателей различного
назначения условия эксплуатации могут существенно отличаться. Так,
для двигателя I ступени с однократным запуском требования к
условиям эксплуатации минимальны, по сравнению с
требованиями к двигателю, функционирующему в условиях космоса с
многократным включением через различные промежутки времени,
регулированием режима работы в широком диапазоне и т. п. Поэтому
требования всесторонней и тщательной отработки космических
ЖРД особенно актуальны. Для выполнения этих требований
необходимы специальные стенды, позволяющие с приемлемой
полнотой воспроизводить условия эксплуатации.
Высокая стоимость ракет и значительное время на подготовку
и проведение запусков ограничивают возможности испытаний
двигателей в натурных условиях и вызывают необходимость
добиваться предельной эффективности наземной отработки. Очевидно, что
эффективность наземной отработки может быть достигнута
воспроизведением достоверных действующих факторов,
характеризующих условия эксплуатации, т. е. имитацией их [29, 35, 54]. Основ-
41
ной задачей имитации является выявление протекающих
процессов в двигателях при работе в условиях эксплуатации.
В связи с этим, например, в США был принят принцип
отработки космической техники, состоящий в том, что все бортовые и
наземные системы должны быть самым тщательным образом
испытаны и отлажены на Земле, а в полете отрабатываются лишь
те из них. которые при современном уровне техники нельзя
проверить на Земле. Такой подход полностью оправдан. Относительное
число аварийных запусков стало уменьшаться (рис. 3.1).
100 г W00 г —^ 1 /000.0ОQ
900 \ _^~-о--<>----<^^
800 \ f~* - 100.000
600 • \— A /Vz jy ю-ооо
SO \ SO0 - \j* I N r^^
400 - ^]( У^^ ' l00°
200 - rT \xf?P^ ~ 10Q
1957 1960 1965 1910 годы
Рис. 3.1. Изменение числа запущенных КА (N), процента
аварийных запусков (Л), суммарного объема вакуумных камер
моделирующих установок (Fs) в США по годам
Указанный подход потребовал больших капиталовложений в
строительство испытательных центров. Ассигнования на эти цели
непрерывно возрастали из года в год. В 1963 году вложения в
создание новых моделирующих установок превысили 800 млн. долл.
Стоимость сооружения экспериментальной базы для отработки
системы «Сатурн» —«Аполлон» оценивается в 3—4 млрд. долл.
Всего по этой программе на наземную отработку систем было
израсходовано 16 млрд. долл. из общей суммы затрат 24 млрд. долл.
В последующих космических программах планируют еще более
увеличить долю затрат на наземную отработку систем, научные
исследования и строительство экспериментальных установок.
С 1958 по 1968 гг. в США введено более 400 различных
моделирующих установок, суммарный объем которых превысил 350 000 м3
[39, 40].
В настоящее время очевидно, что благодаря возможности
наземных испытаний с имитацией условий эксплуатации достигнута
высокая надежность, сокращены сроки, а следовательно и
стоимость разработки двигателей и КА «Аполлон», «Джемини», «Ма-
42
ринер» и др. [7, 15]. При осуществлении космических программ
нельзя дать уверенную оценку надежности работы систем КА в
активных и пассивных циклах полета без проверки в условиях,
близких к космическим. Невозможность предусмотреть все типы
проблем, которые могут возникнуть з полете, подтверждена
результатами летных испытаний двигателей 1-2 в составе
ракет-носителей КА «Аджены» и «Аполлона». Например, проблема
повторного запуска двигателя 7-2. Благодаря тщательным
исследованиям на высотном испытательном стенде была обнаружена
возможность повреждения турбины насоса горючего, хотя ранее из-за
недостаточного моделирования условий полета получаемые при
испытаниях результаты настолько вводили в заблуждение, что
расценивались как бесполезные и даже вредные.
Имитация оправдывает себя даже при значительных затратах,
необходимых для получения данных с высокой степенью
достоверности. Так, модернизация испытательного стенда 7-4 (для
доводки двигателя /-2), начатая в конце 1965 г. обошлась 4,7 млн. долл.
Стоимость же испытания, включая стоимость двигателя и
обслуживание, составила 8 млн. долл. Трехлетняя программа испытаний
на этом стенде оценивается в 29—34 млн. долл. Хотя затраты
велики, но по сравнению со стоимостью неудачного запуска 500 млн.
долл. менее существенны.
Принимая во внимание эти факты, ведущие организации США
в области космических исследований придают большое значение
исследованиям в имитированных условиях [40].
В частности, была интенсифицирована программа наземных
испытаний ракеты-носителя «Сатурн-5», а программа летных
испытаний сокращена с пяти запусков до двух [47]. Ход выполнения
программы «Аполлон» и других программ NASA показывает, что
их успех во многом был определен всесторонней отработкой
отдельных элементов, узлов, блоков, двигателей и ДУ в условиях,
воспроизводящих основные условия реальной среды и влияния
систем космического аппарата.
Ввиду того, что основной целью имитации является
воспроизведение не самой окружающей среды, а ее воздействия на системы
космического корабля, нет необходимости в больших затратах,
связанных со слишком тщательной имитацией без
соответствующего увеличения полезного эффекта и точности получаемых данных.
Тщательная имитация оправдана при испытаниях в
крупногабаритных камерах, предназначенных для исследования летательных
аппаратов в целом или их отдельных сложных систем. Таким
испытаниям уделяется значительное внимание, поскольку они
позволяют получить большое количество статистических данных
о работе систем в условиях, близких к натурным [29, 35].
При имитации натурных условий необходимо исходить из
инженерных и технологических проблем и предусматривать
максимальную эффективность использования вкладываемых средств.
43
&} &£& создании средств моделирования условий
эксплуатации кроме решения вопроса о практической возможности
имитации необходимо выяснить, какие условия могут оказать
решающее воздействие на элементы двигателя и с какой точностью
необходимо моделировать эти условия. Иногда более совершенное
моделирование условий эксплуатации требует таких высоких
затрат, которые могут оказаться неоправданными, если принять во
внимание величину получаемого дополнительного уточнения. В
связи с этим при проектировании наземных установок,
моделирующих условия эксплуатации, всегда возникает вопрос о
максимально допустимой погрешности воспроизведения этих условий.
Требования к всесторонней тщательной наземной отработке
в настоящее время еще более возрастают в связи с разработкой
ЖРД нового целевого назначения. Так, в США большое внимание
уделяется разработке космического транспортного корабля с
применением ЖРД многоразового использования для возвращаемых
на Землю ступеней космических ракет-носителей и аппаратов.
Гарантийный ресурс таких двигателей по числу включений и
продолжительности работы на два порядка выше, чем у
применявшихся ранее. Например, разрабатываемый фирмой Аэроджет-Джене-
рал кислородно-водородный двигатель с тягой 230 т (2250 кН)
рассчитывается на многократное использование при числе
включений не менее 500 и суммарной продолжительностью работы на
маршевом режиме порядка 10 ч. При этом предусматривается
возможность многократных повторных заправок ступени
компонентами топлива [71].
Отработка многоцелевых двигателей для подобного применения
потребует разработки новых методов и видов испытаний.
Требования, которые предъявляют к работе двигателей, обширны и
имеют свои особенности, например:
— циклический режим работы двигателя в земных условиях
и невесомости;
— действие положительных и отрицательных осевых
перегрузок, вызванных разгоном и торможением ступеней при
возвращении на Землю;
— действие ударных нагрузок, возможных при посадке;
— цикличность температурных нагрузок на элементы
конструкции (при работе и исходном состоянии):
— циклический характер нагружения двигателя, вызванный
многократными включениями и выключениями;
— влияние режима запуска и периодичности включений на
общий технический ресурс.
В настоящее время не все условия космической среды можно
воспроизвести в наземных испытательных условиях, имитация же
некоторых может быть настолько дорогостоящей, что окажется
более выгодным проведение испытаний непосредственно в космосе.
Имитируемые условия эксплуатации при стендовой отработке.
44
можно дифференцировать на: имитацию влияния окружающих
условий; имитацию гидродинамических, геометрических,
прочностных, частотных и других характеристик систем двигательных
установок; имитацию режимов работы двигателя во время полета
к др. Что касается переменного ноля массовых сил, то оно воспро-
it
5Ц
3 ^
M.I
ij ч -з g
►с to ч. ^J
^ ^ g J^
j^ 3 ^> ч
Наземные
испытания
< Hj N
PS
ж
ж
Ком5инированные
испытания
Отработка двигателя
J
Оценка достаточности
имитации условий
эксплуатации
Оценка возможности выхода
на летные испытания
Рис. 3.2. Блок-схема эксплуатационных условий, подлежащих
имитации при отработке двигателя
изводится в наземных установках, или на летающих лабораториях,
оснащенных специальным оборудованием.
На блок-схеме представлены эксплуатационные условия и
некоторые параметры, подлежащие имитации при отработке
двигателя (рис. 3.2).
Краткие сведения о физических условиях космического
пространства приведены в разделе 3.8.
45
3.2. ТРЕБОВАНИЯ К ПРОВЕДЕНИЮ ИСПЫТАНИЙ
Испытания являются естественным дополнением к проектным
и исследовательским работам, особенно на первых этапах
отработки, и их продолжением на более поздних этапах создания
двигателя. Работоспособность двигателя оценивается только на
основании результатов испытаний.
При планировании экспериментальных работ и разработке
программ стендовых испытаний делают упор на выявление
потенциальных возможностей и слабых мест проекта. Знание
потенциальных возможностей двигателя, уже на ранних этапах
отработки, позволяет прогнозировать пути совершенствования
конструкции, т. е. решать глобальную задачу создания высоконадежной
двигательной установки. Задача эта весьма сложна, она требует
принятия рациональных программ проведения испытаний и
решения конкретных проблем, которые возникают в результате
исследования влияния на двигатель множества различных факторов:
технологических; производственных; конструктивных; комплексной
увязки; условий проведения испытаний; влияния стендовых систем
и измерительных средств и др.
Программы и виды испытаний должны максимально учитывать
физические и конструктивные особенности отдельных систем и
узлов двигателя. План проведения испытаний составляется на
основании задач, сформулированных в техническом задании на
разработку двигателя, отражает цели,. задачи и планируемый
объем сборок, количество испытаний на одной и той же сборке
и др. На практике как правило возникает необходимость
конкретизировать' программу испытаний, делать отступления от плана
для разрешения возникающих проблем. По существу, выполнение
плана равноценно завершению отработки.
Типичная экспериментальная программа обычно включает:
— цель, задачи, особенности данного испытания;
— объект испытаний (особенности комплектации —
постановка одного или нескольких узлов с характеристиками,
отличающимися от проверенных ранее);
— условия проведения испытаний (внешние воздействующие
факторы и диапазон их варьирования);
— особенности настройки, диапазон варьирования факторов,
определяющих изменение процессов и режимов работы;
— необходимые измерительные средства, их расстановка;
— характер, способ регистрации, вид выходной информации;
— содержание вторичной обработки и расчет параметров;
— требования дефектоскопии двигателей после испытаний;
— вид отчетной документации и сроки выполнения программы
и т. п.
Кроме того, в программе указывается ответственный
исполнитель работ. Из типового плана видно, что при подготовке
испытаний решаются технические и организационные вопросы для обес-
46
печения высокого качества отработки. При этом анализ
результатов испытаний должен давать однозначный ответ на качественную
или количественную оценку процесса, явления. Принимаемые
решения должны быть оптимальными.
Ужесточение возможных режимов работы двигателей и
условий эксплуатации при испытаниях, использование материальной
части многократно, способствуют созданию высоконадежных
двигательных установок с меньшими затратами средств и времени.
Требования по ужесточению условий и режимов работы
(превышающих заданные технической документацией и предельные)
являются нормой наземной отработки и превалируют над
требованиями при испытаниях, проводимых в условиях и на режимах,
близких к номинальным [58].
В процессе наземной отработки конструкция деталей
отдельных узлов, агрегатов совершенствуется, проводятся испытания
различных вариантов конструкций и их модификаций. Результаты
испытаний дают возможность выявить положительные стороны
разработанной конструкции, преимущества и слабые места;
уточнить сочетания действующих на работу двигателя факторов и их
распределение и по этим результатам разработать штатную
конструкцию с последующей всесторонней проверкой на условиях
эксплуатации.
Экспериментальные данные должны обеспечивать получение
максимума информации о надежности как по отдельному узлу,
так и по двигателю в целом.
Таким образом, можно сформулировать основные требования
к программам испытаний.
1. Наземное испытательное оборудование должно
максимально приближать условия проведения испытания к условиям
эксплуатации.
2. Необходимо предусматривать широкий диапазон изменений
внутренних факторов в сочетании с предельными факторами
условий эксплуатации. В процессе проведения одного испытания
факторы могут меняться в различных сочетаниях.
3. Измерения параметров необходимо проводить в достаточном
объеме с требуемой точностью.
4. Объем испытаний на запланированной материальной части
должен позволять проводить полный анализ результатов
испытаний, расчет основных параметров и количественную оценку
надежности.
5. Организационная структура проведения испытаний должна
предусматривать:
— оперативность обработки и анализа результатов испытаний;
— оперативность дефектоскопии конструкции и др.
6. Стендовая система управления испытанием должна быть
оснащена средствами проведения диагностики состояния
материальной части при испытании.
47
7. Двигатели должны оснащаться необходимым количеством
специальных датчиков (включая и обычные датчики) с целью
получения информации для диагностирования в процессе огневого
испытания.
8. По мере накопления информации и анализа результатов
испытаний необходимо совершенствовать математическую модель
в соответствии с фактическими взаимосвязями двигательных
процессов.
Успешная реализация программы позволит перейти к
завершающему этапу отработки — подтверждению принятых и
проверенных условий на стенде летными испытаниями.
3.3. ОБЕСПЕЧЕНИЕ ИМИТАЦИИ УСЛОВИЙ ЭКСПЛУАТАЦИИ.
ТРЕБОВАНИЯ К СТЕНДОВОМУ ОБОРУДОВАНИЮ
Многообразие задач, выдвигаемых программами наземной
экспериментальной отработки, повышенные требования к
параметрам и надежности работы двигателей и двигательных установок
вызывают необходимость в сложном стендовом оборудовании.
Полноразмерные испытания высотных двигателей больших тяг в
имитируемых условиях с отработкой запуска, работы на режиме
и выключения требуют создания мощных и огромных
имитационных установок. Стендовое оборудование должно позволять
воспроизводить с необходимой точностью проверяемые условия
эксплуатации. Исходя из этого сформулируем общие требования к
стендовому оборудованию [54].
Стендовое оборудование должно обеспечивать:
1. Необходимые давления компонентов топлива на входах в
насосы двигателя при запуске, работе на режиме и выключении
(для этого должны быть идентичными со штатными
гидравлические, инерционные и волновые характеристики питающих
магистралей для всех участков работы двигателя); воспроизводить
изменения входных давлений в результате изменения полетной осевой
перегрузки и возмущений в гидравлических трактах;
воспроизводить изменения входных давлений в результате разновременности
запуска смежных двигателей двигательной установки, имеющих
гидравлическую связь по входным подводящим магистралям;
применение штатных демпфирующих устройств.
2. Непрерывную работу двигателей в течение времени не
менее полетного.
3. Необходимые характеристики компонентов топлива на
входах в насосы двигателей в течение работы двигателя.
Обеспечивается термостатирсванием компонентов топлива во всем диапазоне
требований технического задания. Определенное содержание газов
в компонентах топлива достигается с помощью специальных
устройств для ввода и равномерного смешения одним или
несколькими газами в заданных количествах или же полного удаления их.
48
4. Возможность вдува газов, имеющих различную температуру,
в компоненты топлива на входе в двигатель при его работе в
широком диапазоне относительного объема газосодержания потока;
плавное изменение вдуваемого газа в процессе испытания.
5. Необходимые начальные температуры конструкции
двигателя непосредственно перед запуском в диапазоне, заданном
техническим заданием. Применяются специальные системы термоста-
тированкя для достижения отрицательных и положительных
температур с использованием жидких газов и нагретого воздуха.
6. Воспроизведение натурных виброперегрузок при работе и
изменение тяги при запуске; ориентацию двигателя в различных
положениях относительно гравитационных сил; качание
двигателей, сопел, поворотных камер сгорания на углы в заданном
диапазоне.
7. Воспроизведение высотных условий для двигателей II и
последующих ступеней, обеспечивающих течение газов в сопле без
скачков уплотнения. Достигается применением диффузоров с
эжектирующими установками, что позволяет, также, производить
запуск в этих же условиях.
Воспроизведение условий для двигателей I ступеней при старте
из различных пусковых сооружений.
8. Проверку работоспособности двигателя в составе ступени
или КА при реализации полной программы полета с
задействованием всех систем (с регулированием расходов, качанием камер
или поворотом двигателя и др.)- Обеспечивается работой
имитационных установок на различных режимах, приближающихся к
условиям эксплуатации.
9. Исследование тепловых режимов двигателя и ДУ,
соответствующих работе их на различных стадиях активного и пассивного
полета. Обеспечивается работой имитационных установок с
дополнительным введением в действие имитаторов солнечной
радиации.
10. Отработку повторных включений и выключений двигателей
б составе ДУ или КА с имитацией теплового режима; отработку
дренажных систем двигателей и топливных баков. Обеспечивается
работой имитационных установок с выдерживанием требуемых
величин разрежения.
11. Автономную отработку агрегатов; исследование
применяемых материалов в условиях комплексного воздействия
низкотемпературной и разреженной среды, переменного поля массовых сил,
электромагнитных и корпускулярных излучений и др.
12. Исследование комплексного воздействия основных
факторов космического пространства на двигатель ДУ и другие системы,
при заданном функционировании всех двигателей.
13. Исследование запуска двигателя в условиях невесомости.
14. Исследование возможных аварийных ситуаций с
двигателем в составе двигательной установки.
49
Остановимся далее на требованиях к обеспечению некоторых
условий имитации более подробно.
Имитация гидродинамических характеристик системы питания
Гидродинамические характеристики питающих магистралей
оказывают существенное влияние на устойчивость двигателя по
отношению к кавитационным колебаниям и устойчивость камеры
сгорания по отношению к низкочастотным и высокочастотным
колебаниям. При этом необходимо иметь в виду, что гидравлические
магистрали испытательных стендов в соответствии с условиями
эксплуатации и необходимостью обеспечения безопасности имеют
значительно большую протяженность и большие значения
гидравлических сопротивлений, чем питающие магистрали ракет.
Для приближения характеристик гидродинамических процессов
стенда к ракетным используются специальные системы питания с
трубопроводами, моделирующими штатные ракетные. С этой
целью на стендах применяются пусковые баки или ресиверы,
которые устанавливаются в гидравлической магистрали стенда
примерно на таком же расстоянии от двигателя, как и баки на ракете
[22, 41].
Исходными данными для определения размеров стендовых
трубопроводов, пускового бака или ресивера служат
соответствующие размеры ракетных магистралей и топливных баков.
Моделирование на стенде ракетной системы питания
производится при соблюдении условий, обеспечивающих:
— воспроизведение характеристик переходных процессов при
запуске, выключении или изменении режима работы двигателя;
— воспроизведение характеристик колебательных процессов
в системе питания.
Для обеспечения соответствия характеристик переходных
процессов для однофазных потоков необходимо выполнение следующих
условий [22, 55]
= УЫ Раке™; гз.1)
стенда = V (А/?)/ ракеты, (3,2)
где /, Т7— длина и площадь поперечного сечения участка
гидромагистрали; п-—число участков; Ар — гидравлические потери
соответствующих участков магистрали.
Для обеспечения соответствия параметров течения двухфазных
потоков, необходимо выдерживать равенство скоростей потока, а
следовательно F стенда = F ракеты.
50
Давление перед запуском в газовой «подушке» пускового бака
или ресивера назначается таким, чтобы
(А*.двиг) стенда = (/7вг#ЛВИГ) ракеты;
Об + Сё^) стенда = {p6-{-QgnxH) ракеты, (3.3)
где Н — пьезометрический напор; q — плотность компонентов
топлива; пх — осевая перегрузка в полете.
Для воспроизведения на стенде колебательных процессов,
обусловленных сжимаемостью жидкости с теми же параметрами, что
и на ракете, наряду с указанными условиями моделирования (3.1),
(3.2), (3.3), необходимо обеспечивать равенство частот первых
тонов собственных колебаний топлива во входных (до насоса)
магистралях питания стенда и ракеты:
v стенда=v ракеты. (3.4)
Имитация действующих на ракету перегрузок
При стендовых огневых испытаниях воздействие перегрузок на
изменение пьезометрического напора на входе в двигатель
имитируется изменениями наддува баков так, чтобы на входе в насосы
-соблюдалось соотношение:
(рвх) стенда= (/?ьх) ракеты
или (pQ + QgH) стенда = (p6 + QgnxH) ракеты.
Имитация частотных возмущений
Колебания давлений компонентов топлива, обусловленные
упругостью топливных баков в случае резкого изменения перегрузок,
имеющих место при специальных типах старта, имитируются на
стенде с помощью гидропульсаторов или других устройств [39].
Характеристики гидропульсаторов и режим их работы назначаются
на основании результатов расчета амплитуд А и частот колебаний
у в лолете так, чтобы А стенда = Л ракеты; v стенда=г ракеты.
Имитация газонасыщения компонентов топлива
Насыщение компонентов топлива газами наддува проводится
методом барботирования в топливном баке, а также
распиливанием компонентов в газовой подушке бака [27, 30, 51].
При барботировании газ наддува пропускается через
компонент, в результате чего происходит его насыщение. Кроме этого
метода для газонасыщения может использоваться также метод вдува
газа в заправочные емкости.
Удаление газов, растворенных в компонентах топлива,
обеспечивается вакуумированием.
51
Имитация разреженной среды при испытаниях ЖРД
Для определения удельного импульса при стендовых
испытаниях двигателя с камерами сгорания, сопла которых имеют низкие
давления на срезе, применяются системы, обеспечивающие
безотрывное истечение из сопла — диффузоры или газодинамические
установки [53].
Начало режима подобия, при котором скачок уплотнения еще
находится на срезе сопла, определяется соотношением
противодавления (/?а) и давления в потоке газа на внутренней стенке
сопла (рв).
Для проведения точной оценки удельного импульса ЖРД
целесообразно использовать газодинамические установки в том случае,
когда
Рв \ Рв /крит.
Имитация условий окружающего пространства при испытаниях с истечением
компонентос топлива
При испытаниях, связанных с истечением в окружающую среду
компонентов топлива или газов, характеристики имитирующих
устройств выбираются из условия обеспечения реальной скорости
фазовых переходов.
Необходимыми и достаточными условиями, при которых
характер и скорость физических процессов в ЖРД и двигательной
установке, их агрегатах и системах в имитаторе будут идентичными
эксплуатационным, являются:
— величина разрежения в имитаторе, которая должна
определяться следующим неравенством: Рим = 0,01рраб;
— тепловая поглощающая способность среды в имитаторе,
которая должна быть равна эксплуатационной СИм = Сэкспл;
— скорость откачки паров и газов, которая должна превышать
скорость их образования GOtk=GO6p.
3.4. ТРЕБОВАНИЯ ПО ПРИБЛИЖЕНИЮ К УСЛОВИЯМ ЭКСПЛУАТАЦИИ
(ВЫБОР ГРАНИЦ)
При подготовке или выборе стендовой базы, а также при
планировании программы наземных испытаний возникает вопрос о
выборе достаточной степени имитации, позволяющей
воспроизвести основные факторы космической среды — условия
эксплуатации. Степень имитации должна надежно обеспечивать
воспроизведение влияний на двигатель заданных эксплуатационных условий.
Чем выше предельные параметры, на которые рассчитана
имитирующая установка, тем сложнее и дороже ее сооружение и
эксплуатация. Поэтому при назначении величин и границ имитации
условий эксплуатации в каждом случае необходимо исходить из назна-
52
чения двигателей и КА. Ниже приведены рекомендации по выбору
давлений, необходимых для изучения различных физических
явлений при имитации воздействия космического вакуума [35].
Давления, необходимые для имитации различпоьх
физических явлений в косчосе, торр
Изучение механической прочности и герметичности
корпусов КА при воздействии перепада давления . . . <10
Исключение воздушного демпфирования и вибраций <10~3
Теплопередача только излучением <10~4
Диэлектрические силы и разряды <10~5
Изучение физических свойств материалов,
конструктивной прочности, ползучести, внутреннего демпфирования . . <Ю~6
Холодная сварка <С10~7
Изучение сухого трения 10~7—10~5
Рассмотрим несколько примеров, иллюстрирующих выбор
границ имитации.
При запуске двигателя в глубоком вакууме протекающие
процессы чрезвычайно сложны и не поддаются надежному расчету.
На маломасштабных моделях в наземных условиях трудно
прогнозировать динамику формирования предпламенных процессов в
вакууме [12, 84]. Проанализируем факторы, действующие на
протекание процесса воспламенения при запуске. Для исходных
топливных пар (например, для низкокипящего окислителя) основное
влияние на процесс запуска могут оказать окружающее давление,
замерзание поверхностей каналов форсуночной головки, стенки
камеры сгорания, температура поверхностей конструкции,
опережение подачи окислителя, быстродействие заполнения топливных
магистралей. Поэтому для обеспечения имитации и отработки
предпламенных взаимодействий топливных пар достаточно, чтобы
давление среды было ниже давления насыщенных паров в
граничной точке до момента воспламенения в камере сгорания.
Для отработки теплового режима двигателя и двигательной
установки в различных случаях (после нахождения в течение
длительного времени в космосе, после первого выключения двигателя
и др.), в особенности при отработке радиационного охлаждения
конструкции, необходимо поддерживать глубину вакуума на таком
уровне, когда конвективная составляющая внешней теплопередачи
практически не влияет на установившийся тепловой режим
объекта. При этом глубина вакуума должка составлять 10~4—
10~5 торр.
Компоновка двигателей ДУ I ступени, т. е. размещение сопел
друг относительно друга и выступание их относительно донной
защиты, влияет на величину потерь удельного импульса и на
тепловое состояние поверхности элементов конструкции (за счет
истекающих выхлопных газов) [61]. Для многокамерных двигателей
или связки блоков двигателей необходимо исследовать взаимное
влияние выхлопных струй, приводящих к существенному измене-
53
кию их термодинамических характеристик. Взаимовлияние
выхлопных струй зависит от давления окружающей среды, размеров
сопел, расчетного значения давления на срезе сопел, режимов работы
двигателей, размещения и ориентации сопел друг относительно
друга и донной защиты. В зависимости от изменения окружающего
давления изменяется донное давление.
На двигатели I ступени существенное влияние оказывают
условия полета в плотных слоях, поэтому представляет значительный
интерес знание донного давления по времени полета. Сила донного
давления возникает вследствие воздействия на днище ракеты
истекающих газов и давления окружающей среды. Величина и
характер распределения давления зависят от давления на срезе сопла
двигателя, аэродинамических характеристик ракеты и условий
полета. Поэтому на начальном участке полета в плотных слоях
атмосферы сила донного давления отрицательна, а затем, когда
атмосферное давление становится меньше, чем давление на днище
ракеты, создается положительный эффект [83]. В связи с тем, что
большая часть времени полета I ступени происходит в условиях
разреженной среды, целесообразно моделировать такие высоты
(давления), при которых дальнейшее увеличение высоты не
отражается на величине донного давления и баллистических
характеристик. Для этого целесообразно моделировать высоты, при
которых давление среды составляет менее 1 торр.
Исследование влияния выхлопных струй от рулевых и марше-
еых двигателей на обшивку, конструктивные элементы и т. д.
необходимо проводить в условиях, при которых выхлопные газы
оказывают максимальное воздействие на конструкцию. Предельную
величину давления окружающей среды, необходимую для
исследования влияния факела на конструкцию, установить трудно. Это
объясняется тем, что минимальное давление зависит от
размещения двигателя по отношению к смежной конструкции, от его
размеров и режимов работы. Желательно, чтобы такие испытания
проводились в условиях, близких к натурным, а продолжительность
работы двигателей была не меньше предусмотренной в полете
[68, 76].
3 5. ТИПЫ ИМИТИРУЮЩИХ УСТАНОВОК, ОСНОВНЫЕ АГРЕГАТЫ
И ОБОРУДОВАНИЕ
В зависимости от целей и программ испытаний, которые носят
многоплановый характер, предопределяется разнотипность
имитирующих установок. На выбор принципиальных схем стендов и
их количества оказывают влияние размеры испытываемых
объектов, тяга двигателей, высотность, объем испытаний,
продолжительность работы двигателей, цикличность работ и т. д.
Наиболее распространенными установками для испытания
являются стенды, на которых двигатели работают в условиях
окружающей среды. На таких стендах отрабатываются двигатели и
54
ДУ I ступеней ракет. Запуск происходит в условиях эксплуатации,
поэтому не требуются специальные устройства. Работа на рабочем
режиме, учитывая, что высотность сопел составляет ОД—
0,7 кгс/см2, также не требует специальных установок, несмотря на
то, что давление окружающей среды в полете изменяется от
1 кгс/см2 до 0. Определенный интерес представляет изучение
процесса выключения (характер и продолжительность импульса
последействия тяги двигателя). Как правило, продолжительность и
характер импульса последействия тяги определяется расчетным
путем и уточняется в процессе летных испытаний, однако этот
параметр можно определять и при установке двигателя е
имитационной установке.
Испытания двигателей II и последующих ступеней проводятся
на специальных установках. В зависимости от назначения
двигателей и конкретных технических требований к ним выбирают типы
установок.
Применяют стендовые установки для:
— испытаний двигателей и ДУ в условиях окружающей среды
(у Земли);
— испытаний двигателей и ДУ с имитацией разреженности
окружающей среды при запуске;
— испытаний двигателей или ДУ с имитацией высотных
условий на рабочем режиме, не обеспечивающих имитации высотных
условий при запуске и выключении;
— испытаний с имитацией разреженности окружающей среды
и близких к реальным условиях внешнего теплообмена при запуске
и на рабочем режиме;
— испытаний с имитацией высотных условий при запуске и на
рабочем режиме;
— испытаний с имитацией воздействия разреженной среды и
близких к реальным условиям внешнего тепло- и массообмена при
запуске, на рабочем режиме и выключении;
— испытаний с имитацией разреженной среды и
кратковременного состояния невесомости при запуске и выключении или на
рабочем режиме;
— моделирования поглощения излучения космического
аппарата космосом и осуществления в установках криогенной
вакуумной откачки;
— моделирования тепловых режимов космических аппаратов
с имитаторами лучистых потоков от Солнца и планет.
Основным назначением имитирующих установок является
создание и поддержание необходимого уровня вакуума, которое в
ограниченном объеме возможно только в том случае, если приход
газа не будет превышать его расхода через откачивающие
устройства.
Среди агрегатов, применяемых для создания и поддержания
вакуума, есть такие, которые обладают высокой
производительностью откачки, но не позволяют получить высокий вакуум. Такие
55
агрегаты используются в тех случаях, когда требуется проводить
испытания крупноразмерных двигателей в течение длительного
периода работы с имитацией сравнительно небольших высот
полета. Эта группа агрегатов и устройств составляет систему отвода
продуктов сгорания.
Существует другая группа агрегатов, способных поддерживать
высокий вакуум, но не обладающих большой
производительностью. Эта группа называется системой вакуумирования.
3.5.1. Система отвода продуктов сгорания
В общем случае система отвода продуктов сгорания может
состоять из следующих агрегатов или устройств: сверхзвукового
диффузора, охладителей, теплообменников, эжекторов,
парогенератора, компрессоров, поворотных колен, фильтров, запорной
арматуры и др.
L /
\\\
М I
I I ■
I 11
111
III
I И
I И
Рис. 3.3. Схема системы отвода продуктов сгорания в центре
им. Арнольда (массовый расход продуктов сгорания 5,45 кгс/с):
1—вакуумная камера; 2—паровой эжектор; 3—впрыск 26,5 м3/мин воды для
охлаждения продуктов сгорания; 4—впрыск 5,7 м3/мин воды для охлаждения
стенок трубы; 5—впрыск 80 м3/мин воды для охлаждения продуктов сгора-
пия; 6—теплообменники; 7—эксгаустеры; 8—фильтр из сухой бумаги;
9—отводная труба; 10—окружающая среда
Существуют различные схемы отвода продуктов сгорания
имитирующих установок для испытаний ЖРД. На рис. 3.3 изображена
схема установки в центре им. Арнольда с использованием
компрессоров (эксгаустеров) для окончательного сжатия газов, а также
рассредоточения системы охлаждения продуктов сгорания и стенок
агрегатов. Для очистки газов перед выбрасыванием их в атмосферу
используются бумажные фильтры [95. 97].
На рис. 3.4 изображена схема установки РЗ и приведен баланс
массы. Составляющие баланса — 8 кг продуктов сгорания ЖРД,
60 кг парогаза и 1510 кг охлаждающей воды в секунду. Расход
состоит из 1530 кг конденсата и 48 кг потерь через отводящую
выхлопную трубу.
56
Последовательность включения агрегатов системы отвода
газов следующая. Включаются устройства охлаждения. Затем
приводится в действие эжектор. Если эжектор двухступенчатый, то
первая ступень включается после второй через ^Зс. После
достижения в вакуумной камере разрежения, соответствующего режиму
Рис. 3.4. Схема имитирующей установки РЗ со спускным колодцем для
охлаждающей воды (США):
/—вакуумная камера; 2—сверхзвуковой диффузор; 3—охладитель; 4—эжектор I ступени;
5—парогенератор на ракетном топливе; 6—промежуточный охладитель; 7—эжектор
II ступени; 8—парогенератор на ракетном топливе; 9—насосная установка для высокого
вакуума; 10—ввод охлаждающей воды; //—шахта для спуска охлаждающей воды: 12—
спускной колодец; 13—запорный клапан
запуска диффузора, включается двигатель. Выключение системы
отвода производится в обратном порядке с принятием мер
предосторожности против загрязнения вакуумной камеры выбросами
из двигателя и обратным током газов из диффузора. Меры
предосторожности сводятся к продувке вакуумной камеры
газообразным азотом, с последующим перекрытием клапана,
отделяющего вакуумную камеру от системы отвода продуктов сгорания.
Продувка выполняется перед выключением парогазогенератора
эжекторного агрегата [1, 124].
Эжекторные установки предназначены для получения низкого
давления среды перед запуском двигателя, достаточного для без-
57
црз
О
8 16
31
Время, с
а)
р \
GJ05'
орч
0,03
0Д2
0,01
\
;
1
3
отрывного течения продуктов сгорания в сопле, и при выключении
двигателя. Для этих целей эжекторы включаются кратковременно
перед запуском и перед остановом двигателя. С помощью
эжектора может быть достигнуто разрежение порядка нескольких торр
(рис. 3.5).
Эжекторы могут быть одноступенчатые и многоступенчатые.
Рабочим телом служит сжатый воздух или парогаз, получаемый в
специальных установках
J \( ^ в зависимости от
применяемых компонентов (в
специальных котельных
или парогенераторах).
На базе им. Эдвардса
ВВС в США
используется эжектор, работающий
от парогенератора. Для
получения парогаза
используется маловодная
перекись водорода,
поступающая в
парогенератор, разлагающаяся на
катализаторе с
образованием перегретого
водяного пара и кислорода с
температурой ~750° С.
В полученную смесь
вводится водород, кото-
рый самовоспламеняется
и сгорает.
Образовавшийся сильно перегретый
водяной пар ( — 2500° С)
охлаждается до рабочей
температуры путем
впрыска ~ 70 %
холодной воды. Время для
выхода холодной установки на установившийся режим' составляет
всего 15 с.
Автоматический останов осуществляется за 0,5 с [108].
В современных имитирующих установках эжекторы
используются также как один из агрегатов системы отвода продуктов
сгорания. Чаще всего они присоединяются за диффузором. Эжекторы
являются одним из наиболее выгодных средств для быстрого
создания начального разрежения, необходимого при запуске
диффузора. Работающий эжектор компенсирует недостатки диффузора
при запуске (затраты времени на формирование потока в
диффузоре) и при останове (повышение давления в результате выбросов).
В период установившейся работы выполняет функции по
дальнейшему сжатию продуктов сгорания, выходящих из диффузора.
О 8 16 24 31 W Время,с
Рис. 3.5. Изменение давления (кгс/см2) в
вакуумной камере во время испытания
двигателя без вспомогательного эжектора
(а) и со вспомогательным эжектором (б):
!—диффузор; 2—начало горения; 3—прекращение
горения; 4—вспомогательной паровой эжектор
58
Сочетание эжекторов и диффузоров является наиболее
эффективным. При испытании второй ступени ракеты «Сатурн-5»,
состоящей из пяти двигателей /-2 с суммарной тягой 450 т, с
имитацией давления соответствующего высоте 18 км использовалась
установка из сверхзвукового диффузора и встроенного кольцевого
парового эжектора. Длина диффузора составляла 22,8 м, а
диаметр выходного сечения 4,2 м. Эжектор включался только перед
запуском и перед остановом двигателей. Расход пара через
эжектор составлял 407 кгс/с [98].
Сверхзвуковые диффузоры предназначены для создания
разрежения на срезе двигателей после запуска, при этом
используется кинетическая энергия струи испытываемого двигателя.
Благодаря эжектирующему действию струи ракетного двигателя
работающий диффузор обеспечивает разрежение в вакуумной
камере в пределах, достаточных для безотрывного течения в сопле
высотного ракетного двигателя. В диффузоре осуществляется
частичное сжатие продуктов сгорания с переходом к дозвуковой
скорости [53].
Компрессоры (эксгаустеры) предназначены для окончательного
сжатия продуктов сгорания перед выбросом их в атмосферу.
В имитирующих установках компрессоры играют роль «последней
ступени» системы отвода продуктов сгорания. Агрегат чз
нескольких компрессоров присоединяется к выходному сечению эжектора
(см. рис. 3.3).
Охлаждающие устройства системы отвода продуктов сгорания
предназначены для защиты агрегатов от перегрева и сжатия газов
за счет их охлаждения. Из агрегатов системы отвода газов в
защите от перегрева нуждаются в первую очередь диффузор, а
также поворотное колено, устанавливаемое за диффузором при
вертикальном расположении. Для этой цели используется как
наружное охлаждение через поверхности теплообмена, так и внутреннее
охлаждение. Для внутреннего охлаждения применяется впрыск
охлаждающей жидкости или создание поясов завесы, вытекающей
через кольцевые щели в охлаждаемой поверхности (97, 98]. Во
всех случаях в качестве охлаждающей жидкости применяется
вода.
3. 5.2. Система вакуумирования
Система вакуумирования представляет собой сложный
комплекс устройств, сооружений, агрегатов, она предназначена для
создания и поддержания высокого вакуума, который не может
быть достигнут с помощью агрегатов системы отвода п[одуктов
сгорания. Широко применяются вакуумные камеры, механические
вакуумные и диффузионные насосы. В наиболее совершенных
установках используются средства криогенной откачки.
Наибольшее разрежение, приближающееся к 10~6 торр, можно
получить с помощью диффузионных насосов.
59
Для того, чтобы достигнуть еще более высокого вакуума и по
возможности сократить время вакуумирования, на некоторых
имитирующих установках прибегают к средствам криогенной
откачки.
Использование криогенных поверхностей наиболее близко
имитирует условия пребывания космического аппарата в космическом
пространстве. Только при помощи криогенных насосов возможно
получение экстремально высокого вакуума (~10~15 торр), а
также создание такого химического состава остаточных газов,
который приближается к составу в космосе.
Основу работы крионасосов составляет процесс криооткачки,
который объединяет три родственных процесса: криоконденсацию,
криосорбцию и криозахват.
Явление криоконденсации связано с понижением упругости
насыщенных паров и парциального давления газов в
откачиваемом объеме в зависимости от температур соответствующих
конденсационных поверхностей.
Явление криосорбции заключается в способности ряда
материалов (сорбентов) к сорбированию газов при криогенных
температурах, в частности, некоторых металлов, используемых в
конструкциях крионасосов (например, медь, сталь нержавеющая) и
т. п. [26]. Одной из отличительных черт криосорбции является ее
обратимый характер. Сорбированный газ можно десорбировать в
вакууме путем прогрева сорбента.
Сущность явления криозахвата заключается в том, что на
охлаждаемых жидким азотом поверхностях неконденсируемые газы
могут быть захвачены и «замурованы» осаждающимися
конденсируемыми парами [87].
Комбинация криозахвата с криогенной и струйной откачками
является весьма перспективным методом для использования в
сверхвысоковакуумных откачных системах космических
имитационных камер. Путем создания системы отверстий, через которые в
камеру будет впускаться полностью конденсирующийся пар
(водяной), можно осуществить откачку, захват и «замуровывание» на
конденсационных поверхностях, охлажденных до криогенных
температур, также и неконденсирующихся газов. Подобное устройство
позволяет создать наиболее стерильный вакуум, свободный от
паров рабочей жидкости диффузионных насосов, уменьшает
излишнюю конденсацию газов на поверхностях, охлаждаемых
гелием [108].
В имитирующих установках США в основном применяются
жидкий азот и газообразный гелий, позволяющие довести
температуру криогенных панелей до 77 К и 20 К соответственно.
Охлаждение панелей жидким азотом обеспечивает вымораживание
многих газов, входящих в состав продуктов сгорания. Для
вымораживания кислорода и азота температуры 77 К недостаточно.
Водород также не вымораживается на криогенных панелях,
охлаждаемых до 20 К.
Криогенная жидкость используется не только для вакуумиро-
вания рабочего пространства имитирующих установок, но и для
терморегулирования — имитации космического теплового «фона»,
в котором находятся двигатели в реальных условиях. Для этой
цели внутренние поверхности вакуумной камеры, обращенные к
двигателю, охлаждаются до весьма низких температур с помощью
циркуляции криогенной жидкости.
В некоторых установках применяются криогенные панели,
располагаемые с внутренней стороны обшивки вакуумной камеры, в
зоне, воспринимающей прямое излучение испытываемого двигателя.
Для имитации космического теплового «фона» достаточно
охлаждение жидким азотом.
Последовательность подготовки имитирующей установки в
части вакуумирования и охлаждения проследим на примере
подготовки и проведения испытания двигателя с тягой 7,2 т (70,6 кН) на
установке /-2А [124]. Цикл испытания включает:
— период приведения двигателя к условиям температуры и
давления на рабочей высоте;
— запуск и период работы более 3 мин;
— выключение и продолжительный период пассивного полета;
— повторный запуск двигателя.
Запуск производится после соответствующей подготовки
вакуумной камеры при непрекращающейся работе систем
вакуумирования и охлаждения, поддерживающих температуру и давление
на достигнутом уровне в вакуумной камере и в диффузоре,
перекрытом клапаном диаметром 1,8 м. Затем пускаются эксгаустеры,
которые поддерживают в выхлопной системе за диффузором
давление ~25 торр; перекрывается клапан повторного запуска
(с разрывным диском) и открывается клапан диффузора.
Непосредственно перед зажиганием включается автономная система
охлаждения диффузора жидким азотом и работает с небольшим
перекрытием по времени после выключения двигателя. Подается
команда на запуск двигателя, и сразу же после зажигания производится
подрыв диска клапана повторного запуска, обеспечивающего
свободный выход продуктов сгорания из диффузора. Клапан
рассчитан на небольшое-избыточное давление ~150 торр и может
сработать под напором продуктов сгорания. С этого момента начинает
работать система отвода продуктов сгорания. В течение первой
минуты работы двигателя на номинальном режиме давление в
вакуумной камере постепенно повышается от 10~5 до КН торр и
поддерживается на этом уровне в течение огневого испытания
двигателя.
Диффузионные и механические насосы отключаются после
выхода диффузора на установившийся режим. Система
охлаждения вакуумной камеры работает на протяжении всего испытания.
При выключении двигателя перекрывается клапан диффузора
и работа системы отвода продуктов сгорания приостанавливается.
Кратковременно, за время перекрытия клапана, давление в ваку-
61
умной камере повышается примерно до 1 торр за счет прорыва
газов с давлением около 25 торр из диффузора. При этом давление
в диффузоре уравнивается с давлением в вакуумной камере.
Горизонтальная имитирующая установка /-2А
Установка предназначена для испытания полноразмерных
ракетных двигателей на жидком и твердом топливе в условиях,
близких к космическим по давлениям и температурам [1, 106, 124].
Имитирующая установка /-2А обеспечивает вакуум
1,4 -10—5 торр (высота — 120 км) при имитации орбитального
полета до запуска двигателя; 0,17 торр (высота 60 км) при
кратковременной работе управляющего двигателя и 1 торр (высота
46 км) при работе двигателей с тягой до 9 т (88,3 кН).
Основная испытательная камера диаметром 5,4 м и длиной 9 м
охлаждается жидким азотом и помещена в трубе из мягкой
стали диаметром 6 м. Диффузор, охлаждаемый жидким азотом,
соединен с испытательной камерой и имеет два клапана: клапан
диффузора и клапан повторного запуска, позволяющие проводить
испытания двигателя в определенной последовательности.
Вакуумное уплотнение между соплом двигателя и диффузором
предохраняет испытательную камеру от обратного тока газов и диффузора.
Система охлаждения испытательной камеры жидким азотом:
рассчитана на тепловую нагрузку ~15 кВт в установившемся
режиме работы и ~500 кВт при обратном токе газов при отсечке
двигателя. Это двухфазная система с открытым циклом, в ней
используется насыщенный жидкий азот (Г=77 К). Пары азота
выводятся в атмосферу.
Охлаждение диффузора жидким азотом позволяет
конденсировать опережающий компонент до воспламенения в двигателе и
обратный поток газов при отсечке двигателя.
Двигатель и аппаратура устанавливаются внутри
испытательной камеры и соединяются с топливными емкостями и
источниками электрического тока специальными разъемами с
высоковакуумными уплотнениями в цилиндрическом входном шлюзе, в
котором поддерживается температура 20 К для снижения тепловых
напряжений.
В систему вакуумирования установки входят:
— поверхности испытательной камеры и диффузора,
охлаждаемые жидким азотом, которые используются для удаления
(вымораживания) газов, конденсирующихся при Г=77 К, например,.
водяных паров и двуокиси углерода;
— шесть криогенных пластин площадью 1,49 м2 каждая,
установленных радиально внутри испытательной камеры. Эти
пластины, по охлаждающим каналам которых циркулирует охлажденный
газообразный гелий (Г=20 К), обеспечивают вымораживание
кислорода и азота. Гелий подается с помощью насоса мощностью
1 кВт;
62
— вакуумные механические насосы производительностью
14,16 м3/мин и мощностью 25 л. с. (17387 Вт) с насосами Рутса
мощностью 40 л. с. (29420 Вт), обеспечивающие создание вакуума
до 10~3 торр;
— два масляных диффузионных насоса (d=0,508 м), которые
удаляют неконденсирующиеся (при Г=20 К) газы (гелий и
водород) и обеспечивают вакуум до 1,4 • 10~5 торр.
В испытательной камере предусмотрен тепловой экран,
охлаждаемый жидким азотом (Г=77 К), защищающий криогенные
пластины от прямого воздействия горячих газов и излучения.
Экран предохраняет от перегрузки гелиевый криогенный насос,
так как без него потребная мощность гелиевого насоса в 2,5 раза
была бы больше.
Имитация солнечного излучения осуществляется с помощью
ламп, расположенных вокруг двигателя.
Вертикальная имитирующая установка /-4
Установка предназначена для высотных испытаний мощных
ракетных двигателей и ступеней. В установке могут испытываться
ЖРД с тягой до 227 т (2200 кН) в условиях, соответствующих
высотам 80—120 км [93].
Установка монтируется в бетонную трубу—шахту диаметром
30,5 м и глубиной 80 м [109] со стенками толщиной 0,915 м в
нижней и 1,37 м в верхней частях. Колодец для шахты вырублен в
55-м толще известняка и опирается на плиту толщиной 1,83 м.
Нижняя часть шахты углублена в землю на 48,8 м. На расстоянии
по вертикали через 15,2 м расположены консольные кольцевые
перекрытия. Крепление установки осуществляется с помощью
радиальных стальных ферм, крепящихся болтами к закладным
элементам в шахте. Испытательная камера диаметром 14,5 м (может
быть увеличена до 30 м) расположена на уровне земли. Продукты
сгорания попадают в диффузор с охлаждаемой поверхностью.
В верхней части диффузора устанавливается эжектор. Продукты
сгорания, ударяясь об отражатель, отклоняются на 180° вверх.
При подъеме газы охлаждаются впрыскиваемой водой, которая
стекает на дно шахты и через кольцевой трубопровод
отсасывается с помощью механических насосов. Установка крупного
оборудования в испытательную камеру осуществляется после подъема
испытательной капсулы. В установке для имитации
низкотемпературных условий используются панели, охлаждаемые жидким
азотом.
В установке проводились испытания третьей-ступени ракеты-
носителя «Сатурн-5». Программа испытаний предусматривала
подготовку к запуску, первый запуск двигателя, свободный полет и
второй запуск.
63
Установка может быть приспособлена для испытаний ЖРД с
тягой до 680 т (6700 кН) [951.
Имитирующие установки для испытаний ЖРД на режиме запуска и рабочем
режиме
Установки с моделированием высотных условий при запуске
характеризуются непродолжительным циклом работы до ~3 с.
Для получения требуемого вакуума установки оборудуются
высокопроизводительными вакуумными насосами в сочетании с
конденсационными системами откачки. На установках этого типа
проводится отработка
запуска двигателя, изучение
процесса воспламенения
различных топливных
пар, отработка пусковых
устройств в высотных
условиях.
Установки С-3 и £-5
предназначены для
испытаний ЖРД с имитацией
высотных условий толькс
при запуске. На
установке £-5 были проведены
испытания полусборкг.
жидкостных двигателе!;
второй ступени ракеть
«Титан-3».
Имитирующие
установки Я-10, Я-3, С-2, С-6
предназначены для
имитации высотных условий
на рабочем режиме,
Необходимым условием1
при работе высотногс
двигателя на режиме яв]
ляется поддержание
давления окружающей среды
ниже расчетного
давления на срезе сопла. Есле
достигаемое в термобаро-!
камере разрежение на порядок ниже давления на срезе в расчет]
ном режиме, то этого достаточно для нормальной работы на
режиме ,и при некотором дросселировании. Для создания
необходимого разрежения применяются диффузоры (газодинамические
трубы) иногда в сочетании с эжекторными установками [531.
Для сглаживания скачков давления в термобарокамере на nei
реходных режимах работы двигателя и для повышения произво
64
Рис. 3.6. Схематическое устройство
имитатора фирмы «Дженерал электрик»:
/—внешняя стенка барокамеры; 2—испытываемый
объект; 3—криостаты мощностью 3—5 кВт; 4—
насосы' для предварительной откачки:
5—механические насосы, обеспечивающие откачку до
давления - 10-3 торр; 6—паромасляные
диффузионные насосы, обеспечивающие откачку до Ю-7
торр; 7—панели, охлаждаемые гелием;
8—комплект ртутно-ксеноновых ламп; 9—вход для
обслуживающего персонала; /0—панели,
охлаждаемые жидким азотом
дительности системы отвода продуктов сгорания, к выходу
диффузора иногда подключают эжекторы.
Криогенные системы
Криогенная система играет важную роль в конструкции
космических имитационных камер, используется для высоковакуумной
откачки, охлаждения ловушек, создания защитных экранов, а
также имитации поглощения космическим пространством лучистой
энергии испытуемого летательного аппарата.
Криогенные системы включают установки для получения
жидкого азота, жидкого водорода и жидкого или газообразного гелия:
криостаты: насосы для перекачки жидкого азота; емкости для
хранения больших количеств жидкого азота и систему
трубопроводов.
Рассмотрим вкратце устройство крупногабаритного имитатора
космических условий фирмы «Дженерал электрик» (рис. 3.6) [35].
В вакуумных камерах создается предельный вакуум 10~10 торр,
а с помощью одних только диффузионных паромасляных насосов
10~7 торр. Скорость откачки составляет 106 л/с при давлении
10~6 торр. Стенки камеры в верхней части выложены изнутри
зачерненными алюминиевыми пластинами, через которые
прокачивается жидкий азот. Для удаления молекул остаточных газов из
камеры методом вымораживания служит другая группа пластин
в нижней части камеры. Охлаждение этих пластин
обеспечивается газообразным гелием.
В камере осуществляется имитация солнечного излучения
интенсивностью ~ 1400 Вт/м2.
Некоторые характеристики вакуумной и криогенной систем
фирмы «Дженерал электрик» приведены ниже.
Полезный объем, м3 ~850
Предельный вакуум, торр 5-Ю-10
Скорость откачки при давлении 10~6 торр азота, л/с . . . 3,4-106
паров Н2О 42-Ю6
неконденсируемых газов 1,5-104
Максимальная тепловая нагрузка в камере от объекта, кВт 150
Скорость циркуляции криогенных хладоагентов в системах
охлаждения имитатора:
жидкого азота, м3/мин ~5
газообразного гелия (20 К), кг/ч 320
Хладопроизводительность вспомогательных установок, кВт:
азотной установки 300
гелиевой установки 1
3.6. КОМПЛЕКСНЫЕ ИМИТИРУЮЩИЕ УСТАНОВКИ
В настоящее время созданы установки, имитирующие
различные условия эксплуатации при испытаниях.
Рассмотрим некоторые из них.
3 2227 65
Установки для моделирования тепловых режимов
Важным условием обеспечения работоспособности двигателя
и космического корабля является обеспечение теплового режима.
Эту задачу можно условно разделить на «внешнюю» и
«внутреннюю». Под «внутренней» задачей понимается поддержание
температуры в отсеках корабля в заданных пределах, а также отвод
выделяемого двигателем и
оборудованием тепла. Под «внешней» задачей
понимается поддержание в заданных
пределах температуры наружных
поверхностей элементов космического аппарата.
Величина этой температуры зависит от
подводимого из отсеков корабля
внутреннего тепла, от внешних источников
5 тепла и от количества тепла, теряемого
поверхностью.
Моделирование «внутренней» и
«внешней» тепловых задач представляет
определенные трудности. В настоящее
9 время наибольшее распространение
получило моделирование внешних
источников тепла. Этими источниками тепла для
космического аппарата являются прямое
излучение Солнца, отраженное от Земли
солнечное излучение, собственное
излучение Земли, кинетическая энергия
молекул остаточной атмосферы Земли (на
Рис. 3.7. Схема имитацион- высотах до 300 км), кинетическая энер-
ной установки лаборатории гия метеоритных частиц, движущихся с
Рл?^оИлВН0Г0 движения большой скоростью. Солнечное излуче-
роГсТнца^"7"'0' ние характеризуется суммарной
интенсивностью, спектральным
распределением, однородностью или углом
коллимации облучения.
Имитация всех энергетических
воздействий является очень1 трудной
задачей. В связи с этим в зарубежных
имитационных установках
моделируются, в основном, прямое солнечное
излучение и условия космоса, включающие вакуум и наличие
абсолютно черного холодного тела, поглощающего все собственное
излучение космического аппарата.
Моделирование внешних источников тепла проводится в
барокамере, оборудованной имитаторами различных видов- излучений.
В барокамере поддерживается вакуум, а ее внутренние стенки
являются с точки зрения поглощения тепловой энергии имитаторами
космического пространства. Для чисто тепловых задач давление
1—ртутно-ксеноновые лампы;
2—параболоидное зеркало; 3—
гиперболоидное зеркало; 4—
линза диаметром 0,9 м; 5—
многогранный отражатель, 6—
главное коллимирующее
параболоидное зеркало; 7—рабочая
зона с испытуемым КА; 3—
криогенные, экраны;
9—диффузионные насосы
66
в барокамере должно составлять примерно Ю-5-—10~5 торр. В этом
случае энергия, переносимая молекулами, по сравнению с
энергией, излучаемой телом, не превышает 1 %.
Для имитации космического пространства стенки барокамеры
должны иметь близкое к единице значение степени черноты г, по
отношению к излучению поверхности испытуемого объекта, и
низкую температуру. Имитация температуры космического
пространства ^9 К формально может быть осуществлена при помощи
панелей, охлажденных гелием.
В качестве примера рассмотрим устройство солнечного
имитатора системы Кассегрена, выполненного по осевой схеме в одной
из моделирующих установок лаборатории реактивного движения
NASA [40].
Установка представляет собой вертикальный цилиндр
диаметром 8,2 м и высотой 14,3 м (рис. 3.7). Солнечный имитатор
расположен в десятиметровой надстройке над камерой и дает
вертикальный осевой поток лучей, максимальная интенсивность
которого достигает 2700 Вт/м2.
В этой схеме источником лучистой энергии служат ртутно-ксе-
ноновые лампы мощностью по 2,5 кВт, расположенные вне
камеры на плоском или вогнутом щите /. Лучи от 131 лампы
собираются параболоидным зеркалом 2 и концентрируются на псевдоги-
перболоидном выпуклом зеркале 3, состоящем из 19
шестигранников диаметром 0,165 м, изготовленных из нержавеющей стали;
далее пучок лучей проходит через линзу 4, выполняющую
одновременно роль окна, и попадает на многогранный отражатель 5,
посылающий лучи на главное параболоидное зеркало 6, которое
формирует коллимированный поток в рабочей зоне 7.
Облучаемая площадь представляет собой шестиугольни-к со
стороной 3,35 м (хмаксимальный диаметр вписанной окружности
~6 м). Неоднородность поля колеблется от ±10 до ±15%.
В табл. 3.1 приведены основные данные о зарубежных
установках для испытаний ракетных двигателей с имитацией
эксплуатационных условий [40].
3.7. ИСПЫТАНИЯ В УСЛОВИЯХ НЕВЕСОМОСТИ
Отработка запуска двигателей в условиях невесомости может
проводиться разными способами: на существующих ракетах, на
летающих лабораториях — специально оборудованных самолетах.
Изучение явлений, происходящих в условиях невесомости (без
запуска двигателя) в основном проводится в башнях «невеожос-
ти». Испытательный контейнер с аппаратурой для проведения
экспериментов обычно подвешивается в верхней части капсулы,
которая, в свою очередь, подвешивается в верхней части башни.
После сбрасывания капсулы и освобождения контейнера
аэродинамическое сопротивление тормозит капсулу. Специальные устрой-
3* 67
Таблица 3.1
Основные данные о зарубежных установках для испытаний ракетных двигателей
с имитацией эксплуатационных условий
Наименование
установки,
год ввода
в эксплуатацию
Горизонтальная
установка 1-2
(1961)1
Горизонтальная
установка /-2А,
(1962)
Вертикальная
установка /-3
(1963)2
Вертикальная
установка /-4
Тяга двигателя
т(кН)
27,2 (266,6)
до 9 (88,3)
(управляющие
двигатели, а также
РД)
до 45 (441,5)
(размеры камерь
достаточны для
ЖРД с тягой
680 т)
до 227 (2225)
(можно приспо
Размеры
испытательной
камеры, объем
Диаметр 6,1 м
Длина 18,3 м
Объем 537 мз
Диаметр 5,4 м
Длина 9,0 м
Объем 206 iM3
Диаметр 5,5 м
Высота 12,2 м
Объем 290 мз
Диаметр 14,5 м
(может быть
увеличен до 30 м)
Имитируемые
характеристики
Зысота,
км
41
46—120
45
30—120
—84
Излучение
Солнца, низкие
температуры
низкие
температуры
низкие
температуры
Оборудование
Механические
насосы,
диффузор, 2 воздушных
эжектора, паровой
эжектор
Гелиевый насос
мощностью 1 кВт,
диффузор,
механические и
масляные насосы, 6
криогенных пластин.
излучающие
лампы,
диффузионные насосы,
гелиевый
рефрижератор
Две съемные
испытательные
капсулы, панели с
низким азотом
Диффузор,
эжектор, механи
Назначение
Испытание
эДТТ: основные
характеристики,
зремя работы,
надежность,
характеристики
воспламенения и т. д.
Испытания
полномасштабных
РДТТ и ЖРД на
запуске и рабочем
режиме
Испытания
полноразмерных
РДТТ и ЖРД,
а также КА
Испытания
мощных РД и ступеней
в целом
Вертикальная
установка /-5
Установка С-3
(1957)
Установка £"-5
(1963)4
Установка С-2 5
Установки
С-6, Я-3
Установка Я-10
Примечая
собить для ЖРД
с тягой 680 т)
до 900 (8829)
45 (441,5)
113 (1108,5)
45 (441,5)
45 (441,5)
5,5 (54)
Объем 65 м3
Диаметр 3,35 м
Объем 130,5 мз
35
48,8 •
21,3
21,3
16,8
ческис насосы,
панели с низким
азотом
Оборудование,
аналогичное
установке £-5, но
меньших размеров
Вакуумные
насосы; 2
поршневых и 4 насоса
Рутса. Ливневая
система, система
продувки азота
Прямотрубный
диффузор, система
продувки гзотом
Диффузор
Диффузор
и е. Испытьивались:
1. Натурные РДТТ второй и третьей ступеней «Минитмен» и др.
2. ЖРД КА «Аполлон», РД промежуточной ступени «Титан-3».
3. Третья ступень «Сатурн-5».
4. Полусборка ЖРД второй ступени «Титан-3».
5. ЖРД «Титан-2».
\
Испытания
мощных РДТТ
Испытания
ЖРД на запуске
Испытания
ЖРД на запуске
в течение 3 с
Испытания
высотных двигателей
«Титан-3» на
рабочем режиме
Испытания ЖРД
на рабочем
режиме
Испытания ЖРД
на рабочем
режиме
ства тормозят и гасят кинетическую энергию сбрасываемой
системы.
Для моделирования невесомости установка подобного типа
применяется в научно-исследовательском центре NASA [12].
Установка состоит из шахты диаметром 8,5 м, заглубленной на 155,4 м
от поверхности земли. Внутри шахты размещена стальная
вакуумная камера диаметром 6 м. Перед испытанием достигается
вакуум порядка 10"2 торр, благодаря чему действие
аэродинамического сопротивления сводится к нулю. Состояние невесомости
длится 5 с.
В качестве тормозного устройства используется тележка,
заполненная шариками пенополистирола. Высота тележки 5,7 м,
диаметр 3,6 м и масса более 22 т. Такая конструкция обеспечивает
торможение контейнера при ускорениях до 30 g.
Основное назначение сооружения состоит в изучении поведения
жидкостей в условиях переменного поля массовых сил.
Прозрачные стенки бака позволяют регистрировать высокоскоростными
кинокамерами поведение жидкости.
Непродолжительное состояние невесомости может быть
достигнуто также с помощью специально оборудованного самолета,
выполняющего маневр по кеплеровской траектории.
В самолете устанавливаются пульты с приборами,
позволяющие производить экспериментатору визуальный контроль за
работой самолетных систем, за выполнением режимов невесомости и
достижением заданных перегрузок в плоскостях стабилизации
самолета; пульты управления работой двигательной установки,
управления аварийными системами и т. д. Двигательная установка
монтируется в контейнер, устанавливаемый в фюзеляж самолета.
В зависимости от типа самолета и траектории можно создавать
условия невесомости различной продолжительности. Одна из таких
траекторий, позволяющих достигать полной невесомости в течение
18—19 с, показана на рис. 3.8. Длительность периода невесомости
можно увеличить, повышая скорость самолета в начале
маневрирования по траектории. Так, на самолетах С-131, КС-135
продолжительность невесомости составляет 12—15 с при скорости
463 км/ч. А на сверхзвуковом самолете Х-15 продолжительность
невесомости может достичь 4 мин [40].
Запуск двигателя должен производиться через некоторое
время после установления условий невесомости, чтобы компоненты
топлива приняли свое исходное состояние такое же, как в условиях
эксплуатации.
Основные цели при проведении исследований на летающей
лаборатории:
— оценка запуска двигателя в условиях невесомости;
— оценка эффективности топливозаборных устройств, а также
внутрибаковых устройств для успокоения и сепарации из жидкости
газовых включений;
70
— определение поведения жидкости и газов в прозрачных
моделях.
Проведение испытаний двигателей и изучение поведения
жидкости и газов в прозрачных моделях, совмещенных во времени,
очень важно для анализа условий, предшествующих запуску и во
время запуска двигателя.
Продолжительность условий невесомости при полете самолета
по кеплеровской траектории больше, чем при проведении испыта-
Время,.
Рис. 3.8. Маневр, выполняемый самолетом при проведении испытаний
в условиях невесомости:
1—разгон в горизонтальном полете на высоте ~6200 м до скорости 685 км/ч; 2—
пикирование с работающим двигателем, при угле атаки 10°; 3—скорость 665 км/ч
и начало восходящего участка траектории; 4—кабрирование с постоянной перегруч-
кой 2g до достижения угла тангажа 35^-40°; 5—начало траектории с нулевой
перегрузкой; 6—период невесомости; 7—начало перегрузки, скорость 665 км/ч; 8—
выход из пикирования в горизонтальный полет при достижении отрицательного
угла тангажа — 30—35°
ний со свободным падением. Однако, условия самолетных
испытаний в отличие от условий испытаний со свободным падением не
поддаются строгому контролю.
Для точных экспериментов по изучению поведения топлива в
баках, процессов успокоения, сепарации мелких капель от пара
и т. д., а также изучения парообразования, кипения, конденсации
требуется, чтобы возмущающие механические силы (например,
вибрации) в летающих лабораториях были полностью устранены.
С этой целью применяют «плавающие» контейнеры, внутри
которых размещаются приборы и экспериментальное оборудование.
Вначале контейнер удерживается на упругих расчалках в середине
отсека самолета. В момент достижения самолетом требуемых
параметров движения расчалки крепления контейнера
отсоединяется. С этого момента контейнер свободно движется по
траектории, которая может и не совпадать с траекторией движения
самолета, хотя обе траектории близки между собой. Когда «плаваю-
71
щий» в отсеке контейнер упирается в стенку отсека, траектории
движения совпадают. При этом время «невозмущенной»
невесомости практически всегда оказывается на много меньше времени
движения самолета по баллистической кривой [27].
Максимальное приближение к условиям эксплуатации для
двигателей второй и последующей ступеней достигается с помощью
существующих носителей, которые выводят отрабатываемую
двигательную установку на орбиту или другую траекторию, подобные
требуемым. После выведения двигательной установки
осуществляется запуск двигателя, работа на режиме и выключение.
Например, двигатель RL-10 испытывался на ракете-носителе «Атлас-
центавр», а потом на ракете-носителе «Сатурн-1», а двигатель /-2
на «Сатурн-1» и «Сатурн-5». Такое использование существующих
ракет-носителей позволило снизить затраты при летных
испытаниях двигателей.
3.8. КРАТКИЕ СВЕДЕНИЯ О ФИЗИЧЕСКИХ УСЛОВИЯХ
КОСМИЧЕСКОГО ПРОСТРАНСТВА
Физические условия космического пространства в основном
характеризуются следующими параметрами:
— низкой концентрацией частиц (вакуум);
— низкой средней температурой;
— отсутствием поля массовых сил (невесомостью);
— электромагнитным и космическим корпускулярным
излучениями;
— потоками микрометеоритов.
Рассмотрим каждый из приведенных факторов космической
среды.
Космический вакуум
Космический вакуум может характеризоваться в зависимости
от расстояния до поверхности Земли как низкий, средний,
высокий, сверхвысокий или экстремально высокий.
При удалении от поверхности Земли на 100—150 км длина
среднего свободного пробега частиц остаточного газа становится
соизмеримой с линейными размерами космического аппарата. Эти
условия характеризуют условия высокого вакуума в соответствии
с принятой классификацией [33].
Атмосфера Земли не является однородной. На расстояниях,
превышающих 100 км от поверхности Земли, состав газа различен
как в химическом отношении, так и по физическому состоянию
частиц (молекулы, атомы, ионы). На расстояниях до 100 км
атмосфера химически почти однородна (исключение — озон и водяной
пар). На расстояниях до 60 км газ находится практически только
в виде нейтральных молекул; начиная с расстояний, превышающих
60 км, возрастает концентрация электронов и ионов, а на
расстояниях более 700— 800 км газ существует преимущественно в виде
72
атомов. На расстоянии нескольких тысяч километров газовые
частицы обнаруживаются преимущественно в ионизированном
состоянии.
Вакуум космического пространства, воздействуя на материалы
и элементы конструкций космических летательных аппаратов,
может вызвать ряд нежелательных явлений [117]:
— потерю материалов вследствие их испарения или
сублимации;
— ухудшение процессов трения и пноса;
— ухудшение теплопередачи;
— изменение поверхности и объемных свойств материалов
и др.
Все это делает необходимой имитацию вакуума космического
пространства на Земле с целью подробного экспериментального
исследования физических явлений, происходящих в космическом
пространстве, а также проведения поверочных испытаний узлов
и конструкций космических летательных аппаратов.
Космические корпускулярные излучения
Межпланетное пространство пронизывается корпускулярным
и электромагнитным излучениями, генерируемыми на Солнце,
галактическими космическими лучами. Поток корпускул движется
с гиперзвуковым!И скоростями
~300 км/с. Интенсивность
этих потоков зависит от
солнечной активности. Плотность
потоков кррпускулярного
излучения Солнца, именуемого
солнечным ветром, в периоды
малой активности составляет
в среднем 10 частиц на 1 см3.
В периоды солнечных вспышек
плотность потока возрастает
на несколько порядков с
соответствующим повышением их
энергетического уровня [12
113, 122].
На рис. 3.9 показано
сечение радиационных поясов,
образующих вокруг Земли тороидальные области заряженных
частиц, захваченных магнитосферой Зехмли. Затемненные зоны
представляют собой так называемые радиационные пояса. Внутренний
радиационный пояс образован протонами с энергией до
нескольких сот мегаэлектронвольт. Интенсивность потоков протонов с
энергией больше 40 МэВ равна в центре внутренней зоны
радиационного пояса ~104 протон/см2-с, плотность потоков протонов в
диапазоне 0,1—4 МэВ составляет ~ 108 протон/см2-с.
73
Рис. 3.9. Сечение радиационных поясов
Земли:
/—внутренний радиационный пояс (протоны
высокой энергии); 2—внешний радиационный
пояс (электроны высокой энергии);
3—захваченные магнитосферой Земли протоны и
электроны низкой энергии; 4—Земля;
5—«солнечный ветер»
Внешний радиационный пояс образован, преимущественно,
электронами с максимальной энергией до ~7 МэВ. В центре
радиационного пояса интенсивность электронных потоков с энергией
^1,6 МэВ составляет 104 эл/см2-с, а с энергией 5^40 кэВ —
108 эл/см2-с.
Центральная область внутреннего радиационного пояса
расположена на расстоянии примерно 3500 км от поверхности Земли в
плотности геомагнитного экватора. Центральная область
внешнего радиационного пояса заполнена электронами с энергией от
долей до нескольких мегаэлектронвольт и находится на расстоянии
15 000—20 000 км от поверхности Земли в плоскости
геомагнитного экватора Земли [79].
Помимо четко выраженных радиационных поясов, заполненных
частицами высоких энергий, область магнитосферы в
экваториальной плоскости от нескольких сот до десятков тысяч километров
от поверхности Земли заполнена прототда?ли и электронами низких
энергий, образующими вокруг Земли протоносферу и электроно-
сферу. Асимметрия протоносферы и электроносферы вызывается
деформацией магнитосферы Земли «солнечным ветром».
Максимальные значения стационарных потоков частиц в этих областях
лежат в диапазоне 108—109 частиц/см2-с.
Микрометеоритные частицы
В околоземном и межпланетном пространстве наряду с
наличием элементарных частиц существуют микрометеоритные
частицы и частицы планетного происхождения с массой от 10~14 до
Ю-8 г.
Микрометеоритные частицы могут состоять из каменных
пород и железоникелевых соединений с плотностью соответственно
3 и 7,8 г/см3. Встречаются рыхлые микрометеоритные частицы из
слипшихся пылинок с плотностью ~0,5 г/см3. Скорости
микрометеоритных частиц относительно Земли лежат в диапазоне 12—
72 км/с. Взаимодействие с частицами планетного происхождения
определяется скоростью космического аппарата и концентрацией
частиц [42].
Экспериментальные данные, полученные в результате полетов
автоматических станций к Луне, Марсу и Венере, показали спад
плотности микрометеоритных потоков по мере удаления от
поверхности Земли [120].
Электромагнитные излучения
В пределах солнечной системы на космические двигательные
установки и аппарат действует прямое излучение Солнца,
отраженное от планет солнечное излучение, собственное излучение
планет, вызывая изменение температурного режима.
При движении космического корабля по гелиоцентрической
орбите на большом расстоянии от планет можно пренебречь всеми
74
источниками тепловой энергии, кроме Солнца. При движении
искусственного спутника Земли на него воздействуют все
перечисленные выше факторы.
На расстоянии 150 000 000 (км (т. е. на орбите Земли)
плотность лучистого потока равна 1396 Вт/м2. В расчетах тепловых
режимов КА обычно принимают, что средняя энергетическая
яркость Солнца равна 2020 Вт/см2 стер, а его радиационная
температура (т. е. температура абсолютно черного тела, которое, имея
угловой размер Солнца, создает в вакууме на поверхности,
перпендикулярной к падающим лучам, энергетическую освещенность,
равную солнечной) составляет 5785 К.
При движении двигательной установки со скоростью 8 км/с
на орбите спутника Земли на расстоянии от ее поверхности менее
300 км двигатель получает тепло за счет ударов о его поверхность
молекул и атомов остаточного газа. На высоте 175 км количество
тепла от аэродинамического нагрева становится сравнимым с
нагревом от остальных источников тепла.
Количество лучистой энергии, поглощаемой поверхностью
летательного аппарата, существенно зависит от оптических свойств
поверхности и спектрального состава падающего излучения.
Основной вклад в тепловой баланс космических аппаратов
вносит длинноволновая область спектра — от 0,3 до 3 мк, где
сосредоточено 92% всей лучистой энергии Солнца. На область длин
волн от 0,3 до 0,38 мк приходится около 6% энергии Солнца, а на
область 0,2 до 0,3 мк — примерно 1,4%.
И тем не менее эта коротковолновая часть спектра заслуживает
особого внимания, так как ультрафиолетовая радиация является
одной из причин, вызывающих изменение коэффициентов
лучеиспускания внешних поверхностей космических аппаратов,
определяющих их тепловой режим. Металлы, как правило, значительное
количество энергии поглощают в видимой части спектра и
незначительное количество поглощают (а следовательно, и излучают)
в инфракрасной части спектра. Вследствие этого температура
металлических поверхностей двигательной установки, обращенных
к Солнцу, на пассивных участках траектории может достигать
500—600 К. Для того, чтобы обеспечить температуру поверхности
~300 К при ориентации объекта на Солнце, применяются
специальные покрытия, имеющие малую поглощающую способность в
видимой части спектра и большую в инфракрасной.
Ультрафиолетовое излучение Солнца, не давая существенного
вклада в тепловой баланс космического объекта, тем не менее,
может оказывать значительное влияние на оптические и прочностные
характеристики материалов поверхности этого объекта.
Невесомость
При полете в космосе, если воздействие силы тяжести на тело
(космический аппарат) отсутствует, тело находится в состоянии
невесомости. Такое состояние может быть, если на космическом
75
аппарате не задействованы энергетические системы, сообщающие
ему ускорение относительно центра масс (осей стабилизации).
В данном случае, употребляя термин «космос», мы подчеркиваем
факт длительного нахождения в условиях невесомости и «степень»
невесомости.
Термин невесомость широко используется при описании
условий орбитального полета, когда отсутствует воздействие
гравитации, которое можно объяснить по-разному. Одно из объяснений
состоит в следующем: совокупность сил, приложенных к телу в
системе координат, связанной с этим телом, находится в
равновесии (тело не испытывает ускорения). Равновесие наступает в
результате приложения силы инерции, равной по величине и
противоположной по направлению вектору местной силы тяжести.
Следовательно, каждое тело при таких условиях является
невесомым. Эти условия орбитального космического полета, разумеется,
являются упрощенными, поскольку принимается, что единственной
реальной силой, приложенной к летательному аппарату, является
сила тяготения. Несомненно, существуют другие внешние и
внутренние силы, которые необходимо учитывать.
Внешние силы могут быть вызваны:
— притяжением Луны, Солнца и планет;
— торможением, обусловленным аэродинамическим
сопротивлением;
— торможением, обусловленным электрическим
сопротивлением при солнечных вспышках и при прохождении радиационных
поясов Земли;
— ускорением в результате взаимодействия
электростатического заряда летательного аппарата с геомагнитным полем;
— ускорением под действием солнечного светового давления.
Ускорения возникают не только в результате возмущающего
воздействия внешних сил на отдельные элементы летательного
аппарата, но и в результате вращательного движения аппарата
вокруг его центра масс. Кроме того, ускорения возникают из-за
Таблица 3. 2
Ускорения в космосе (относительно силы тяжести g = 9,80665 м/с2)
Причина
Аэродинамического происхождения (максимум
солнечной активности)
Геомагнетизм
Световое давление
Внутренняя гравитация
Управление ориентацией в полете
Гр авитационный потенциал
Высота круговой орбиты,
км
240
7,0-Ю-6
9,5-Ю-12
3,1-10"9
3,3-Ю-8
4,3 -К)"7
4,3-Ю-7
1610
4,6-10"12
5;Ы0-13
3,1 -Ю-9
з,з-ю-8
2,4-10-7
2,4-Ю-7
76
градиента гравитации и внутренней гравитации в элементах
летательного аппарата.
В табл. 3.2 приведены результаты сравнительной оценки
ускорений, возникающих под действием тех или иных внешних и
внутренних сил на летательный аппарат [27].
Этот краткий анализ показывает, что вероятность отсутствия
ускорения космического летательного аппарата мала, если не
исключена совершенно. Наиболее вероятно, что для условий
невесомости характерны чрезвычайно малые ускорения, имеющие
величину порядка 10~6 g и менее.
Тепловое состояние космической среды
Рассмотренные выше различные виды излучений в
космическом пространстве могут прямо или косвенно привести к изменению
теплового состояния космического аппарата.
В условиях космического вакуума атомы и молекулы
сталкиваются очень редко и обычные уравнения гидродинамики и
теплообмена сплошной среды оказываются неприемлемыми. Главную роль
в процессах внешнего теплообмена занимает излучение.
Если не рассматривать излучение Солнца и ближайших
планет, то величина фоновой радиации в сумме невелика. Плотность
этой энергии оценивается примерно в 10~5 Вт/м2 по любому
направлению. Такую энергию излучает черное тело при температуре
около 4 К. Иными словами, это равновесная температура
пассивного тела, находящегося в космосе. Разумеется эта величина ни
в какой мере не характеризует кинетическую температуру частиц
межзвездной или межпланетной среды.
Температура, которую примет пассивное тело (без внутренних
источников тепла), в условиях космоса, зависит от его
лучеиспускательной способности (степени черноты) и способности к
поглощению падающей радиации. Теоретически, равновесная
температура тела может стать очень близкой к кинетической температуре
сильно разреженной среды, если отношение коэффициентов
излучения и поглощения сделать достаточно малым. Общепринятое
понятие температуры для космоса не имеет смысла, так как
пронизывающие его по всевозможным направлениям частицы не
находятся в термодинамическом равновесии.
Другой важной для лучистого обмена характеристикой
космического пространства является его «чернота». Размеры летящих
в космосе космических аппаратов слишком малы, а расстояния до
планет и звезд слишком велики, чтобы учитывать отражение и
возврат лучей, которые испускаются поверхностью космических
аппаратов. Так как тело излучает энергию (согласно закону
Стефана— Больцмана) пропорционально степени черноты и разности
четвертых степеней абсолютных температур его поверхности и
окружающей среды, то с очень большой точностью можно считать,
что космос поглощает все излучение, уходящее с поверхности кос-
77
мичеекого аппарата, как идеальное черное тело. Следовательно,
космос представляет собой неограниченную тепловую и массовую
емкость относительно космических двигательных установок и
аппаратов [12, 40].
ГЛАВА 4
ТЕХНИЧЕСКАЯ ДИАГНОСТИКА ЖРД.
ПЛАНИРОВАНИЕ ИНФОРМАЦИИ
ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ ЖРД
4.1. ОСНОВНЫЕ ЗАДАЧИ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ
Успешное решение проблем обеспечения высокой надежности
сложных технических систем и, в частности, систем ракетной и
космической техники при ограниченных объемах и сроках
отработки в последние годы многие специалисты связывают с развитием
идей и методов технической диагностики — отрасли знаний,
исследующей технические состояния объектов диагностирования.
Так, например, серьезное внимание вопросам диагностики
аварийных состояний ракетно-космических систем уделяется в США.
Разработаны системы, которые позволяют моделировать
различные состояния двигательных установок, выполнять диагностику и
управление при стендовых испытаниях ступеней, а также бортовую
диагностику [8, 90, 94, 110]. В составе разрабатываемых
транспортных кораблей многократного использования предусматривается
применение бортовых систем обнаружения неисправностей [29].
Различают два вида технического диагностирования:
функциональное и тестовое. В первом случае на объект в процессе его
функционирования поступают только рабочие воздействия. Во
втором случае на объект подаются тестовые воздействия. Диагностика
технического состояния ЖРД при летных испытаниях является,
как правило, функциональной. Тестовое диагностирование наряду
с функциональным применяется при стендовой отработке. Так,
проверка устойчивости рабочего процесса в камере сгорания ЖРД
к жесткому возбуждению высокочастотных колебаний путем
подачи ударных импульсов пиропатронами является примером
тестового диагностирования ЖРД [73].
Техническая диагностика ЖРД тесно связана с рядом других
задач повышения его надежности [67].
К первому типу можно отнести задачи по контролю
технического состояния, т. е. по определению вида технического состояния
ЖРД (исправен — неисправен, работоспособен —
неработоспособен).
Поскольку для контроля исправности или работоспособности
ЖРД необходимо знание его фактического технического состояния,
техническое диагностирование можно рассматривать как часть
процесса при контроле. Правда, в полной мере такое сопоставление
78
относится только к функциональной диагностике. Что касается
тестового диагностирования, то его следует скорее рассматривать как
специфическую систему управления объектом по определенной
программе.
Ко второму типу относятся задачи по определению технического
состояния ЖРД в будущем — техническая прогностика. Задачи
технической прогностики возникают, например, при определении
остаточного ресурса ЖРД, осуществляющего коррекцию орбиты
космического объекта, для правильного планирования операций по
подготовке и запуску очередных объектов, а также при периодических
профилактических проверках и ремонте ЖРД многоразового
использования.
Третьим типом являются задачи по определению технического
состояния, в котором двигатель находился в прошлом, —
техническая генетика. Задачи технической генетики возникают в связи с
расследованием причин отказов ЖРД. В итоге определяются
вероятные первичные неисправности, которые могли привести ЖРД в'
настоящее техническое состояние.
К четвертому типу задач, при решении которых также
непосредственно используются результаты технического диагностирования,
относятся задачи определения и контроля надежности, а также
управления качеством изготовления ЖРД. Определенная
специфичность этих задач состоит лишь в том, что, являясь статистическими,
они требуют для своего решения установления технического
состояния не единичного двигателя, а выборочной совокупности
двигателей. Связь технической диагностики с рассмотренными задачами
показана на рис. 4.1.
Реализация диагностических процедур осуществляется с
помощью систем технической диагностики (СТД). В зависимости от
целевого назначения можно различать'следующие виды СТД ЖРД:
стендовые, полетные и междуполетные. Стендовые СТД
предназначены для диагностирования ЖРД при его экспериментальной
отработке и товарных поставках. Полетные СТД предназначены для
выполнения диагностических процедур при подготовке к полету и
полете ракеты или жосмическего объекта. Междуполетные СТД
предназначены для проверки технического состояния ЖРД
многократного использования в период между полетами.
Система технической диагностики представляет собой единую
информационную систему, включающую объект и средства
диагностирования, а также устройства их сопряжения. Это требует
придания таких качеств конструкции двигателя, которые обеспечивали
бы его контролепригодность, а для двигателей многоразового
использования и ремонтопригодность. Очевидно поэтому, что
оптимизация диагностических процедур и их успешная реализация
возможны лишь при совместной разработке двигателя и средств
диагностирования.
На рис. 4 2 показан порядок проведения работ по технической
диагностике ЖРД и последующего использования ее результатов.
79
Первоначальной задачей в совокупности работ по техническому
диагностированию является определение параметров и признаков,
характеризующих техническое состояние ЖРД. От выбранных
диагностических параметров и признаков в большой мере зависит
эффективность, принципы построения, весогабаритные характеристики,
сложность системы диагностики. Техническое состояние ЖРД
характеризуется совокупностью параметров и признаков. В процессе
работы двигателя параметры непрерывно изменяют свои значения,
Техническая
диагностика
конгпиоль
технического
состояния
техническая
прогностика
техни -
ческая
генетика
определение
и
контроль
надежности
Р:ис. 4.1. Связь технической диагностики с задачами надежности
следовательно, возникает бесчисленное множество состояний.
Целесообразно для упрощения задачи разбить множество состояний
двигателя на конечное число классов. Основная задача диагностики
состоит в определении класса состояний. Совокупность свойств,
которые позволяют отнести ряд конкретных состояний к тому или
иному классу, составляет образ двигателя. Поэтому задача
классификации формулируется как задача распознавания образов [4]. В
общем случае двигатель может находиться в одном из трех
последовательных классов состояний: исправном, неисправном, но
работоспособном, и неработоспособном (рис. 4.3). Термин «исправное
состояние» означает такое состояние двигателя, при котором он
соответствует всем требованиям технической документации.
Неисправное состояние — это переходное состояние, которое
характеризуется изменением характеристик в сторону предельно допустимых
значений хпр, при этом двигатель еще обладает необходимой
работоспособностью. За неисправным состоянием следует полная
потеря работоспособности, т. е. отказ. В свою очередь, все неисправные
состояния и отказы можно классифицировать, отнеся к
определенному классу неисправности (отказы) по следующим общим
признакам: виду, месту появления и степени неисправности (отказа).
Узловым моментом распознавания указанных состояний
является определение параметров и признаков, которые содержат
основные сведения о различаемых классах. Принципы определения диаг-
80
ВьнГор объекта
диагиостирова -
нии (двигателя
или его состад-
тавные части)
Обоснование
диагностичсс -
них признаков
и (или)
параметров
Составление
программ
технического
диагностирования
Выбор
(разработка) средств
технического
диагностирования
Синтез
объекта
диагностирования
и СТА
Реализация
программ
технического диагно -
оптирования
Установление
технического
состояния
±
определение
и контроль
надежности
Установление
вида
технического
состояния
управление
качеством
изготовления
Исправное
состояние
Неисправное
состояние
Отказ
Прогнозирование
технического
состояния
(техническая
диагностика)
Установление
причин
(техническая
генетика)
Реализация
мероприятий
по
устранению
причин
Рис. 4.12. Порядок проведения работ ню технической диагностике
\
1
c:
1
ностических параметров и признаков на основе изучения моделей
неисправностей изложены в гл. 7.
Диагностические параметры и признаки определяют состав
средств технического диагностирования. На рис. 4.4 приведена
классификация средств технического диагностирования. К
аппаратурным средствам диагностирования относят датчики, приборы,
специальные вычислительные машины и т. д. Аппаратурные
средства диагностирования подразделяются, в свою очередь, на
встроенные и внешние. Встроенные
средства диагностирования
выполняются в общей конструкции с
двигателем, в то время как внешние
средства выполняются отдельно.
Технические средства
реализации аппаратурного способа
проверки можно делить на
автоматические, автоматизированные и
ручные, в зависимости от степени
участия человека в процессе
проверки. Для диагностики ЖРД в
полете и, в ряде случаев, для
z° Zf " междуполетной диагностики оп-
~ л о п . .--птт ределяющим может явиться тре-
Рис. 4.3. Схема состоянии ЖРД %овгте оперативности диагноза
в реальном масштабе времени с
выдачей управляющих команд без участия человека. В таком
случае технические средства реализации диагностики
выполняются в автоматическом варианте. Автоматическая СТД ЖРД
представляет собой аппаратурный вычислительный комплекс,
назначением которого являются:
— диагноз технического состояния двигателя;
— выявление неисправностей на стадии их возникновения;
— локализация обнаруженных неисправностей;
— прогнозирование остаточного ресурса;
— выполнение запрограммированных действий по предотвращению отказов
и восстановлению работоспособности (выключение двигателей, перевод их на
облегченный режим, включение резервных двигателей или узлов).
Принципиально возможно выполнение автоматических
диагностических систем в бортовом и наземном вариантах. В последнем
случае диагностическая процедура осуществляется путем ввода
телеметрической информации, поступающей с борта ракеты или
космического объекта, в наземную диагностическую систему.
В автоматической СТД можно выделить следующие основные
подсистемы:
А — подсистема анализа диагностических параметров и
признаков, определения класса состояний двигателя и прогнозирования
технического состояния;
82
Б — подсистема, реализующая запрограммированные действия
в соответствии с результатами диагноза и прогноза, выданными
подсистемой А;
В — подсистема функциональной самопроверки системы
технической диагностики.
Автоматические средства бортовой технической диагностики,
представляющие собой сложный логический и вычислительный
Средства
технического
диагностиробания
автомагпи
зироваипые
Рис. 4.4. Классификация средств технического диагностирования
комплекс, наряду с ЖРД становятся важным объектом летных
испытаний.
Программные средства диагностирования представляют собой
рабочие программы, либо тест-программы, записанные, например,
на перфоленте. Примером объекта, диагностируемого
программными средствами, является сама СТД.
Следующим этапом работ по технической диагностике является
составление программ диагностирования.
В общем случае программа технического диагностирования
устанавливает состав и порядок рабочих или тестовых воздействий,
поступающих или, соответственно, подаваемых на ЖРД, а также
состав признаков и параметров, образующих отклик ЖРД на
соответствующие воздействия. Что касается программ технического
диагностирования ЖРД при летных испытаниях, то на них накла-
83
дываются существенные ограничения, в связи с необходимостью
реализации комплексных программ испытаний ракет или
космических объектов. Это обстоятельство исключает возможность подачи
на ЖРД при летных испытаниях не только тестовых, но и
упорядоченных активных рабочих воздействий. Летные испытания ЖРД
являются типичным примером пассивного эксперимента.
В гаких программах можно выделить лишь характерные
периоды проверки двигателя: контроль предстартового состояния,
подготовки к запуску, запуска, работы на режиме, перехода с режима
на режим и выключения. Конкретные значения условий и режимов
работы двигателя не могут быть запрограммированы в связи с тем,
что они зависят от непредвиденных случайных воздействий внешней
среды и внутренних факторов на полет ракеты или космического
объекта. Это затрудняет диагностическую процедуру. Поэтому
разработка эффективных методов классификации состояний ЖРД при
летных испытаниях представляет собой важную диагностическую
проблему.
Последующие этапы работ связаны с непосредственной
реализацией диагностических процедур, таких как: установление
фактического состояния ЖРД и вида этого состояния, выполнение
технического прогноза, установление места и причин неисправностей
и отказов, а также разработка и реализация мероприятий по их
предотвращению.
4.2. ОПРЕДЕЛЕНИЕ ЦЕЛЕЙ ЭТАПА ЛЕТНЫХ ИСПЫТАНИЙ
ПРИМЕНИТЕЛЬНО К ЗАДАЧЕ ПЛАНИРОВАНИЯ ОБЪЕМА
ИНФОРМАЦИИ
Эффективность экспериментальной отработки ЖРД
характеризуется достигнутым уровнем надежности, а также затратами
средств и времени на отработку. Соответственно общий критерий
оптимизации экспериментальной отработки можно
сформулировать как достижение заданного уровня надежности при
минимальных затратах средств и времени. Такой критерий позволяет
сформировать необходимые этапы отработки, их рациональную
последовательность, определить необходимый состав и объем
информации для оценки и подтверждения показателей надежности на всех
этапах отработки, в том числе и на этапе летных испытаний.
Вместе с тем, летные испытания являются специфическим
этапом отработки ЖРД по следующим основным причинам:
— проверка работоспособности и правильности функционирования ЖРД
осуществляется в условиях, максимально приближенных к эксплуатационным;
■— задачи летных испытаний подчинены не только интересам его создателей;
на программы летных испытаний ЖРД накладываются ограничения, связанные
с выполнением комплексных программ испытаний ракет и космических объектов;
— количество летных испытаний ЖРД ограничено в связи с большой
стоимостью пусков ракет и космических объектов;
— ущерб в случае отказа ЖРД при летных испытаниях несоизмерим с
ущербом, который может причинить отказ при стендовых испытаниях;
84
— накладываются значительные ограничения на весогабаритные
характеристики регистрирующей и передающей информацию с борта ракеты или объекта
аппаратуры.
Чтобы конкретизировать цели этапа летных испытаний с
учетом указанных особенностей, проанализируем оптимальное
распределение ресурсов между стендовой отработкой и летными
испытаниями, приняв в качестве критерия оптимизации выполнение
требований к надежности при минимальных экономических
потерях. Будем исходить из следующим предпосылок:
— условия подтверждения надежности сформулированы в виде
Р = 1, Рн > Рн.з при y > Y3»
где Р — частость безотказной работы;
Ль РпЗ —соответственно расчетное и заданное значения нижней границы
одностороннего доверительного интервала вероятностей
безотказной работы;
Yt Y3 —соответственно принятое для расчета Рп и заданное значения
доверительной вероятности.
Этапы стендовых доводочных и летных испытаний можно представить в виде
последовательности испытаний ЖРД штатной конструкции, классифицированных:
как успешные.
Представим доверительную вероятность Y3 в виде
Y3 == Yhm 'Уn■>
где Yhm — доверительная вероятность, связанная с полнотой и достоверностью
имитации летных условий;
yN—доверительная вероятность, обусловленная ограниченностью объема
выборки.
Тогда, используя известное соотношение [16]
In (1 — Yw)
получим следующие зависимости для определения требуемых объемов
безотказных стендовых и летных испытаний для подтверждения Яп.з2
-. (4-2)
поскольку iB последнем случае Y"m=i1. Очевидно1, что Nc и^Л^л.и, т. е.
допускаем, что увеличением объема стендовых испытаний можно компенсировать
определенную неуверенность в достоверности имитации летных условий, если при
этом Yhm>Y3- Из соотношений (4.1), (4.2) следует, что эквивалент летного и
стендового испытаний равен
1п(1-уз)
э=
In (1 — Y3/Yhm)
Следовательно, если проведено Nc и стендовых и Nn п летных испытаний, го
эквивалентное, т. е. приведенное к летным условиям, число испытаний запишется
в виде
In (1 —
85
При учете ограничения на эквивалентный объем испытаний из условия
подтверждения требований к надежности соотношение (4. 3) примет вид
„.з
(4- 4)
Из этого выражения легко получить зависимость (4. 1) и (4.2), полагая
соответственно Nn И='О» и Nc.ii=0i
С учетом соотношения (4.4) требуемый фактический суммарный объем
испытаний определяется зависимостью
хг хт , хг хт . Г In (1 - уз) Л7 11п(1 —Уз'/Уим)
S .1.и "Геи л.и "Г |^ ^ рн з л-hJ 1п (1 __ уз)
Поэтому относительное увеличение суммарного объема испытаний из-за
определенной неуверенности в достоверности имитации летных условий может быть
представлено выражением
^ in(iY) ] in(iY) (4.о)
где ЪМАИ = Nflu ———относительный объем летных испытаний.
' In (1— уз)
Соотношение (4.5) представлено на графиках рис. 4.5 для уз=0,95.
видно из графиков, начиная со значений уцМ = 0,96о и менее происходит резкое
увеличение относительного объема испытаний. Рассмотрим теперь функцию
суммарных экономических затрат в виде
£а = (I/ + со) Л^с.и + VNaM + С,
где и, со — соответственно стоимость стендового испытания и изготовления
двигателя;
V— стоимость испытаний двигателя в составе ракеты;
С — капиталовложения на имитацию летных условий.
Деля почленно функцию затрат на стоимость отработки двигателя только в
летных условиях, будем иметь
1п(1-уз)
In Рн.з
с учетом соотношений (4.4), получим следующее выражение для относительных
суммарных экономических затрат
ЬС, (4.0)
где &С= —^—-—^2— — относительные капиталовложения на имитацию летных
V ln(l—Y3)
условий.
Очевидно, что подтверждение надежности совокупностью стендовых и летных
испытаний экономически еще оправдано, если ЬЕ% < 1, что согласно (4.6),
эквивалентно' выполнению условия
^ j (4.7)
86
На рис. 4.6 приведены графики, построенные с использованием
соотношения" (4.7) для у3 =0,95 и
V
= 0,1. Участки,
расположенные под кривыми — области, в которых подтверждение
надежности совокупностью стендовых и летных испытаний экономически
оправдано. Как видно из графиков, допустимые капиталовложения
возрастают при уменьшении относительного объема летных
испытаний и увеличении
достоверности имитации летных
условий и достигают
максимального значения при условии, что
6Л/л.и. = 0 и уим=1. Поэтому
максимально допустимые
капиталовложения на имитацию
летных условий, согласно
соотношению (4.7), обратно
пропорциональны относительной
стоимости изготовления и
испытаний ЖРД.
Анализируя соотношение
(4.6), можио убедиться в том,
что если капиталовложения на
имитацию летных условий на-
ходяФся в области допустимых
значений, показанной на
графике рис. 4.6, наибольший
экономический эффект (6£d =
= 6£12min) достигается при
6Агл.и. = 0, т. е. при
подтверждении надежности только
результатами стендовых испытаний.
Поскольку стоимость изготовления и (пуска современных
космических объектов во много раз (превышает стоимости
изготовления и стендового испытания ЖРД, становится очевидным, что
даже значительные затраты на имитацию летных условий в
подавляющем большинстве случаев оправданы. Таким образом, можно
сделать вывод о необходимости обеспечения и подтверждения
надежности ЖРД при стендовой отработке с реализацией
необходимых затрат на имитацию летных условий.
Полученный результат, несмотря на принятую упрощенную
модель экспериментальной отработки, носит, тем не менее,
достаточно общий характер, поскольку рассмотрение более реальной
модели приведет к усилению принципиального вывода.
Так, при изучении моделей экспериментальной отработки с
отказами и доработками (модели роста надежности) необходимо
ввести в функцию суммарных затрат экономический ущерб из-за
отказов ЖРД. А это приведет лишь к усилению полученного
вывода, поскольку ущерб из-за отказов ЖРД в составе ракет несоиз-
0,99 у,
Рис. 4.5. Относительный объем
испытаний как функция достоверности
имитации летчых условий
87
меримо выше, чем при отказах ЖРД в стендовых условиях.
Именно серьезные последствия аварийных исходов при летных
испытаниях ЖРД в свое время вызвали широкую пропаганду новых
направлений экспериментальной отработки, в числе которых как
одно из основных — смещение центра тяжести экспериментальной
отработки в сторону стендовой отработки.
Следует также учитывать, что специальное стендовое
оборудование для имитации летных условий (барокамеры, центрифуги,
камеры для имитации
космического излучения и др.)
создается для отработки не
одного типа двигателя, а в
отдельных случаях и не для одного
поколения двигателей, в связи
с чем фактические
капиталовложения на имитацию летных
условий, (приходящиеся на
один тип двигателя,
существенно снижаются.
В последние годы в
практику внедряются структурно-
функциональные
физико-статистические методы анализа
0,99 yt
им
Рис.
4.6. Области оптимальности
стендовой отработки
надежности (см. гл. 8),
являющиеся эффективным
инструментом управления
экспериментальной отработкой. Эти
методы основаны на
проведении активных экспериментов,
что создает предпосылки для ускорения отработки,
сокращения объема испытаний для достижения и подтверждения требуе-
мой надежности по сравнению с традиционными 'методами. В тоже
время возможности осуществления такого анализа надежности по
результатам летных испытаний в значительной мере ограничены.
Это объясняется двумя причинами. Во-первых, в связи с тем, что
программа испытаний ЖРД подчинена общей полетной
программе ракеты, невозможно получить информацию о работоспособности
двигателя при условии и в течение времени функционирования,
превышающих эксплуатационные диапазоны, тем более измерить
критические значения нагрузок (прочность). Во-вторых,
возможности получения параметрической информации значительно
понижены в связи с ограниченным количеством телеметрических
каналов и жесткими ограничениями на весогабаритные характеристики
регистрирующей и передающей информацию аппаратуры.
Указанные обстоятельства также стимулируют стендовую
отработку. Исключение могут составлять какие-либо специфичные
малоизученные условия работы, имитация которых в стендовых
условиях трудно осуществима, либо экономически неоправдана.
88
Например, имитация запуска двигательной установки в условиях
невесомости, имитация сверхвысоких перегрузок и т. д. Однако и в
этих случаях отработка ведется не на штатных носителях и
объектах, а на летающих стендах — лабораториях, технологических
объектах, серийных носителях.
Итак, изложенные выше обстоятельства диктуют
необходимость сосредоточения затрат на доводку двигателя и
подтверждение требуемой надежности 'на этапе стендовой отработки.
Поэтому в общем виде цель летных испытаний можно
формулировать как проверку возможности распространения показателей
надежности, определенных по результатам стендовой отработки,
на летные условия. В свою очередь, это правомерно при
выполнении следующих условий:
— путем сопоставления информации об имитируемых на стенде и летных
условиях функционирования ЖРД показана достаточная полнота и
достоверность имитации при стендовых испытаниях;
— определены и устранены причины отказов двигателя при стендовых и
летных испытаниях, т. е. выполнено основное требование подтверждения
надежности об отсутствии зачетных отказов. Реализация первого условия связана с
проверкой выполнения следующего соотношения:
где[уим — фактическая достоверность имитации летных условий;
Yum — достоверность имитации, которая принята при оценке нижней
границы вероятности безотказной работы двигателя.
Методика проверки выполнения данного соотношения
приведена в гл. 6.
Реализация второго условия основывается на методах и
средствах технической диагностики и технической генетики.
Необходимой для решения указанных задач информацией желательно
располагать уже на ранних стадиях экспериментальной отработки
ЖРД для своевременного внесения, в случае необходимости,
корректив в методологию и техническую оснащенность стендовой
отработки. Вместе с тем проведение летных испытаний ЖРД на
завершающем этапе стендовой отработки уменьшает вероятность
аварийных испытаний ракет. По-видимому, при решении вопроса
о начале летных испытаний ЖРД необходимо учитывать эти оба
обстоятельства.
4.3. МЕТОДИКА ПЛАНИРОВАНИЯ ИНФОРМАЦИИ ПРИ ЛЕТНЫХ
ИСПЫТАНИЯХ ЖРД
Поскольку обоснование правомерности распространения
показателей надежности, рассчитанных по результатам стендовой
отработки, на летные условия, основывается на сопоставлении
условий функционирования ЖРД при стендовых и летных испытаниях,
первая группа замеряемых при летных испытаниях параметров
должна характеризовать непосредственно либо косвенно условия
эксплуатации ЖРД. Состав этих параметров зависит от целевого
назначения, принципиальной схемы, компонентов топлива и
условий применения ЖРД. Он определяется при анализе технического
задания на разработку двигателя.
Типовой перечень условий эксплуатации 'приведен в гл. 2.
Вторая группа измеряемых параметров определяется
необходимостью установления технического состояния и причин
неисправностей и отказов при летных испытаниях. Техническое
состояние ЖРД характеризуется множеством параметров и признаков.
К их числу можно отнести параметры рабочих процессов
(давления, расходы, температуры, перепады давлений и т. д.), выходные
параметры (сила тяги, удельный импульс, массовое соотношение
компонентов топлива и т. д.), а также параметры и признаки,
характеризующие сопутствующие работе двигателя явления
(амплитуды пульсаций давления жидкости и газа, амплитуды вибраций
конструкции, наличие паров металла в продуктах сгорания
компонентов топлива и т. д.). В качестве исходного перечня
параметров, характеризующих техническое состояние ЖРД, может
рассматриваться совокупность параметров, принятых для структурно-
функционального анализа надежности ЖРД (см. гл. 8).
В соответствии с целевым назначением и уровнем развития методов
анализа надежности в число этих параметров как обязательные
включаются лишь выходные характеристики ЖРД. Параметры
рабочих процессов и параметры, характеризующие сопутствующие
явления, включаются в небольшом объеме. Поэтому результаты
измерений параметров, принятых для расчета надежности, позволяют
уверенно установить сам факт пребывания двигателя в том или
ином состоянии, но не всегда позволяют установить место и
причину неисправности. Для обеспечения необходимой глубины поиска
неисправностей и породивших их причин может потребоваться
измерение дополнительных диагностических параметров и признаков,
Такие параметры можно определить экспериментально, либо
путем математического моделирования 'реакций двигателя на
возникновение различных неисправностей. Сравнивая образы изменения
диагностических параметров при исправном и неисправном
состояниях ЖРД, можно установить не только сам факт неисправности,
но и причину его возникновения.
С одной стороны, увеличение числа контролируемых
параметров приводит к росту объема информации о состоянии двигателя.
С другой стороны, это приводит к увеличению объема и
усложнению контролирующей аппаратуры и. следовательно, к снижению
ее надежности, к увеличению веса и стоимости. Кроме того, как
уже отмечалось, возможность получения параметрической
информации при летных испытаниях ЖРД понижена в связи с
ограниченным количеством телеметрических каналов и жесткими
ограничениями на вес и габариты регистрирующей и передающей
информацию аппаратуры. Поэтому из исходного перечня параметров,
характеризующих состояние двигателя, необходимо выбрать
минимально необходимую совокупность. Основные требования к па-
90
раметрам и средствам их измерения можно сформулировать
следующим образом:
1. Совокупность параметров не должна быть избыточной.
Избыточность возникает в том случае, когда в числе выбранных
параметров имеются функционально зависимые, в связи с чем по
поведению одного параметра можно однозначно предсказать
поведение другого. Например, функционально связаны расходы и
перепады давлений в жидкостных магистралях. Избыточность
возникает и в том случае, когда в
совокупность параметров включаются ста- х
тистически зависимые параметры. Для у
^ r r ^ *тах
исключения такой избыточности
необходимо установить корреляционные
связи между параметрами, например,
между параметрами пульсаций и
вибраций.
2. Параметры должны быть
достаточно чувствительны к
неисправностям.
В работе {17] в качестве
характеристик чувствительности предложены
(рис. 4.7):
Ti — время запаздывания начала
изменения параметра относительно
момента проявления первичной
неисправности;
Т2 — время достижения параметром максимальной величины
при определенном значении характеристики ^первичной
неисправности;
Рис. 4.7. Характеристика переход
ного процесса
а — '■
т2 —
— градиент изменения параметра.
2
Более (предпочтительными для целей диагностики считаются те
параметры, которые имеют (меньшие значения х\ и т2 и большие
градиенты изменения.
Традиционные методы контроля технического состояния ЖРД
основаны на измерении медленноменяющихся параметров рабочих
процессов — давлений, расходов, температур и т. д., обладающих
сравнительно невысокими показателями чувствительности к ряду
первичных неисправностей. Например, практически невозможно по
параметрам рабочих процессов своевременно обнаружить
возникшую негерметичность жидкостных и газовых трактов, прогар теп-
лонапряженных узлов, износ подшипников ТНА.
Современные направления технической диагностики
ориентированы на дополнительное измерение высокочувствительных
параметров, таких как параметры пульсаций, вибраций, а также
признаков, например, появления линий металлов в спектре факела
двигателя.
3. Совокупность параметров должна охватывать лишь наибо-
91
лее вероятные неисправности, которые можно установить путем
анализа результатов отработки и эксплуатации
двигателей-прототипов и данного двигателя.
4. Измерительные средства и аппаратура должны обладать
достаточной чувствительностью и быстродействием, чтобы
выполнить диагностическую процедуру — обнаружение неисправности
с последующим выключением двигателя, либо его переведением
на безопасный режим работы в возможно короткий промежуток
времени, не превышающий интервала времени между моментом
возникновения неисправности и моментом отказа.
5. Измерение параметра должно быть технически осуществимо.
Установка измерительных средств не должна влиять на
протекание рабочих процессов и работоспособность двигателя.
С целью упорядочения процедуры аттестации параметров
исходного перечня с точки зрения целесообразности их измерения
при летных испытаниях ЖРД с учетом сформулированных и
некоторых других требований можно воспользоваться перечнем
анализируемых сведений, приведенным в табл. 4.1.
Таблица 4.1
Перечень анализируемых сведений для оценки целесообразности
измерения параметра
по
пор.
1
2
3
4
5
Содержание сведения
О параметрах
Стендовые условия испытаний,
характеризуемые данным
параметром, по сравнению с летными
условиями (по имеющейся
информации) :
— менее жесткие,
— не установлено с приемлемой
достоверностью
— (более жесткие)
— идентичные
Измерение параметра для
официального подтверждения
достаточности имитации при стендовых
испытаниях необходимо (не.
обязательно)
Характеристики
чувствительности параметра к первичным
неисправностям приемлемы
(неприемлемы)
Параметр функционально или
статистически независим
(зависим) от других измеряемых
параметров
Использование косвенных
параметров невозможно (возможно)
Примеры обоснования решения
об измерениях
Не установлена достоверность
имитации изменения давления в камере
двигателя при израсходовании
одного из компонентов топлива
Необходимо измерение провала
давления на входе в рулевой
двигатель при запуске маршевого
двигателя
Неприемлемы характеристики
чувствительности давления за насосом
к незначительной негерметичности
магистрали
Зависимы расходы и перепады
давления, давление в камере сгорания и
в форсуночной полости
Возможен расчет импульса
последействия тяги по результату
измерения перегрузок, действующих на
ступень ракеты
Продолжение
по
пор.
Содержание сведения
Примеры обоснования решения-
об измерениях
9
10
11
12
13
14
15
16
Измерение параметра для
расчета основных характеристик
двигателя необходимо (не обязательно)
Измерение параметра при
летных испытаниях требованиями
технического задания обусловлено
(не обусловлено)
Измерение параметра для
исследования недостаточно изученных
при наземной отработке процессов
и явлений необходимо (не
обязательно)
Условия проведения летных
испытаний измерить параметр
позволяют (не позволяют)
Измерение параметра для
уточнения показателей надежности
требуется (не требуется)
Измерение параметра для
расчета характеристик других систем
ракеты требуется (не требуется)
О средствах измерений
Измерение параметра с точки
зрения технических возможностей
измерительных средств
осуществимо (неосуществимо)
Чувствительность, точность и
быстродействие средств измерения
параметра приемлемы
(неприемлемы)
Установка средств измерения
параметра на работоспособность
двигателя не влияет (влияет)
Установка средств измерения
параметра на протекание рабочих
процессов не влияет (влияет)
Установка средств измерения
параметра с трудностями
конструктивного характера
несопряжена (сопряжена)
Необходим замер давления в поло
сти форсуночной головки
Обусловлено измерение давления в
камере сгорания при выключении
двигателя на участке выпаривания
компонентов топлива
Необходимо измерение пульсаций
давления компонентов топлива на
входе в насосы при полете
Нельзя измерить
работы насоса
давление срыва
Требуется измерение давления в
месте отбора газа на наддув бака
Прогар штуцера для измерения
давления газов в камере сгорания
снижает ее работоспособность
Измерение давления перед
форсунками газогенератора с отбором
компонента длинной трубкой влияет на
момент воспламенения топлива в
газогенераторе
Измерение давления газов в
малорасходном газогенераторе сопряжено
с конструктивными трудностями
Ответы на вопросы в перечне, не заключенные в скобки,
соответствуют необходимости измерения параметра, в то время как
заключенные в скобки — против измерения.
Результаты аттестации параметров по табл. 4.1. и решение о
93
целесообразности их замера при летных испытаниях ЖРД
сводятся в табл. 4.2.
Таблица 4. 2
Результаты аттестации параметров и решение о целесообразности
их измерения при летных испытаниях ЖРД
Пункты перечня,
(табл. 4.1)
1
2
3
16
Решение о
замере
Оценка целесообразности замера по признакам"
+
+
+
+
+
—
+ ill
—
•
•
•
•
•
•
•
•
•
•
+
+
Заранее ранжировать ответы на вопросы «Перечня...» по
степени их влияния на решение об измерении параметра не
представляется возможным. Решение о целесообразности измерения
того или иного параметра принимается в каждом конкретном
случае с учетом всех анализируемых аспектов.
Далее для каждого параметра в зависимости от требований к
точности измерений, к характеру регистрации (непрерывное,
дискретное и другие измерения) выбирается тип рекомендованных
для летных испытаний измерительных средств, либо
разрабатываются специальные измерительные средства.
Таблица 4. 3
Перечень измеряемых параметров, вид и средства измерения
Параметры
обозначение
Х2
хт
диапазон
изменения
допустимая по-
i реш-
ность
измерения
Тип
средства
измерения
Характер регистрации
непрерывный
дискретный
сигнальный
Частота
опроса
жительность
измерения
94
Комплекс сведений об измеряемых параметрах, характере
регистрации и измерительных средствах обобщает таблица вида 4.3.
На рис. 4.8 приведена блок-схема планирования объема
информации при летных испытаниях ЖРД.
Требования
технического
задания
±
принципиальная
схема
двигателя
структурно -
функциональная
схема
двигателя
перечень
имитируемых
условий
эксплуатации
априорная информация
о неисправностях
двигателей- прототипов^
мат ем am и ческая мо -
дель функционирова -
ния двигателя
параметры,
характеризующие
раоото-
слссоб'ность
параметры,
характеризующие
условия
эксплуатации
параметры
для анализа
причин
неисправностей
аттестация параметров для
оценки целесообразности их
измерения
выоор характера
регистрации и средств
телеизмерении
перечень
измеряемых
параметрод
Рис. 4.8. Блок-схема планирования информации при летных испытаниях
ЖРД
4.4. ЭФФЕКТИВНОСТЬ БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОЙ
ДИАГНОСТИКИ ЖРД
Применение бортовых систем технической диагностики
приводит к снижению потерь, вызываемых отказами ЖРД, поскольку
СТД позволяют:
95
— сохранить ступень ракеты или космический объект и тем
самым обеспечить возможность их повторного использования
после замены или ремонта неисправного двигателя;
— повысить надежность выполнения задачи путем ввода' в
действие резервных двигателей вместо неисправных.
Вместе с тем, снижение потерь ввиду отказов ЖРД отнюдь
не достигается без затрат. Кроме стоимости разработки и
изготовления самой СТД и резервных двигателей необходимо
учитывать дополнительные потери в связи с ухудшением весовых
характеристик ракеты или космического объекта.
Очевидно, что создание бортовой СТД может быть признано
целесообразным, если ожидаемые суммарные экономические
потери в случае ее применения будут меньше потерь при отсутствии
СТД, т.е."
Е*стл<Еъ. (4.8)
Исследуем условия выполнения критерия (4.8) в случае, когда
действие, выполняемое СТД, состоит в выключении неисправного
основного двигателя и в запуске резервного двигателя (систему,
выполняющую такие функции, именуют также системой
аварийной защиты — САЗ [17]).
При отсутствии СТД ожидаемые потери составят
£* = (1-Я)Кр| (4.9)
где Р — вероятность безотказной работы ЖРД;
Ур — ущерб из-за невыполнения задачи ракетой или
космическим объектом при возникновении отказа ЖРД (в
наихудшем случае равен стоимости реализации программы
пуска).
Для оценки ожидаемых потерь при использовании СТД
необходимо рассмотреть возможные гипотезы о состоянии и взаимодействии
двигателя и бортовой СТД, вероятность каждой гипотезы и
условные потери в случае их реализации. Такие сведения приведены в
табл. 4.4, при этом приняты следующие обозначения:
Р — вероятность безотказной работы основного и резервного
ЖРД (считаются равными);
/?л — вероятность ложного выключения СТД основного
двигателя и включения резервного двигателя;
i/?H — вероятность невыключения СТД неисправного основного
двигателя и (или) невключения резервного двигателя;
Сстд— стоимость СТД;
Ср.д — стоимость резервного двигателя;
Q>(o) —величина потерь, обусловленных ухудшением весовых
характеристик ракеты или космического объекта.
Математическое ожидание суммарных потерь определяется как
сумма парных произведений вероятностей гипотез, составляющих
96 i
полную группу, и потерь при условии реализации гипотез и равно
(4.10
Таблица 4. 4
по
пор.
Гипотезы
Вероятности гипотез
Стоимости потерь
Основной двигатель
исправен. СТД
исправна, ложного выключения
двигателя не произошло
Основной двигатель
исправен. СТД
неисправна, произошло ложное
выключение основного
двигателя и включение
резервного. Резервный
двигатель не отказал
Основной двигатель
исправен. СТД
неисправна, произошло ложное
выключение основного и
включение резервного
двигателя. Резервный
двигатель отказал
Основной двигатель
неисправен. СТД
исправна, выключен основной
двигатель и включен
резервный. Резервный
двигатель не отказал
Основной двигатель
неисправен. СТД
исправна, выключен основной
двигатель и включен
резервный. Резервный
двигатель отказал
Основной двигатель
неисправен. СТД
неисправна, не выключен
основной двигатель и (или)
не включен резервный
+vP
(1—/>)2(1—
СстдЧ-Ср#/
+vP
сстд+сР> д+сР(0)
С учетом соотношений (4.9), (4.10) критерий эффективности (4.8)
преобразуется к виду
'СТД
'Р(О)
— (4.11)
• F y P
Выражение в левой части неравенства представляет собой
относительную меру выигрыша от применения СТД в результате повы-
2227
97
шения надежности выполнения задачи, а выражение в правой
части неравенства — относительную меру экономических затрат,
связанных с применением СТД.
На основании неравенства (4.11) в предположении, что #л =
= %H=#f построены графики (рис. 4.9), разграничивающие
области, в которых создание СТД целесообразно (области под кри-
еыми, обозначены штриховыми линиями), и нецелесообразно
(области над кривыми).
Из графиков следует, что применение СТД тем эффективней,
чем ниже надежность
двигателей (в диапазоне реальных
значений), выше надежность
СТД, меньше затраты,
вызываемые применением СТД, и
больше ущерб при возникнове-'
вии отказа ЖРД. Применение
СТД безусловно
нецелесообразно, если вероятности /?л,
/?„, характеризующие
ненадежность СТД, превосходят
значение /?л, /?ц>0,5. Вместе с тем,
требование более высокой, чем
надежность ЖРД, надежности
СТД не является
обязательным, хотя эффективность ее
применения при этом
снижается.
Рассмотрим некоторые пу-
0,9
Рис. 4.9. Области целесообразности
применения СТД
ти повышения надежности СТД. Для этого вероятности Яя и /?л
представим в таком структурном виде:
п 1 Р Р Р •
Дн— 1 'кл'охв1 со'
П 1 р р
1\ п * ■* к л С КЗ'
где Рут — вероятность безошибочной классификации СТД
состояний ЖРД,
Яохв — вероятность того, что возможные неисправности
охвачены диагностическими параметрами и признаками
СТД,
рс0 вероятность отсутствия отказов типа «обрыв» средств
диагностирования,
рскз вероятность отсутствия отказов типа «короткое
замыкание» средств диагностирования.
Повышение величины Ркл связано, в первую очередь, с
развитием методов идентификации узлов и агрегатов ЖРД, их
математическими моделями как в условиях нормального
функционирования, так и при неисправностях и отказах. Это требует
целенаправленной систематизации и анализа априорной информации, поста-
98
новки специальных экспериментов с провоцированием
неисправностей.
Повышение величины РОхв возможно путем рационального
увеличения номенклатуры контролируемых параметров и признаков
и выязления обобщающих параметров, наиболее полно
характеризующих состояние двигателя. Для увеличения номенклатуры
контролируемых параметров особое значение имеет миниатюризация
средств измерения, в особенности для двигателей (малых тяг и
микродвигателей.
Вероятности Рс.о и Рс.кз могут быть увеличены за счет
повышения точности, структурной надежности датчиков и аппаратуры,
а также за счет применения методов резервирования.
ГЛАВА 5
ИЗМЕРЕНИЯ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ
Летные испытания ракеты рассчитаны на выполнение
следующих задач:
1. Получение информации, которая будет полезна, для
внесения поправок и усовершенствования конструкции узлов ракеты;
2. Получение информации, которая может иметь ценность при
проектировании ракет вообще, и может относиться не только к
конкретному объекту;
При большинстве пусков ракет выполняются почти все
указанные задачи.
Программа летных испытаний не может быть успешно
реализована, если она не рассчитана на выполнение подробного и
конкретного перечня задач.
При определении задач испытаний и методик для их
выполнения часто упускают из вида первостепенную важность обработки
данных. В результате этого после проведения испытания и
представления информации для окончательной обработки часто
оказывается, что необходимую информацию извлечь невозможно, так
как собранные данные или используемые методы не могут
обеспечить получение необходимых результатов.
Планирование летных испытаний, при которых с самого
начала не учитываются в полной мере методы обработки данных,
даже при определении целей испытаний может привести к
неудаче. Примерами такого недосмотра могут быть: измерения
переключаемого давления с неподходящей частотой дискретизации;
определение требований к телеметрической системе без учета того,
что из собранных данных даже теоретически невозможно получить
необходимую информацию; невозможность выполнения основных
целей серии летных испытаний вследствие неправильного метода
вычислений и т. д.
4* 99
Таким образом, после определения главных задач необходимо
решить вопросы измерений и аппаратурной реализации
измерений, обработки выходных сигналов датчиков (непрерывный или
коммутируемый канал, частота сигнала, ширина полосы, частота
дискретизации), определить форму представления результатов,
точные методы преобразования принятых сигналов в сигналы для
отображения и т. д. [78].
5.1. ТРЕБОВАНИЯ К ДАТЧИКАМ, ПРИМЕНЯЕМЫМ ПРИ ЛЕТНЫХ
ИСПЫТАНИЯХ. ИЗМЕРЯЕМЫЕ ПАРАМЕТРЫ
В настоящее время резко повысились требования к точности
измерений, значительно увеличилось количество измеряемых
величин и расширились диапазоны их измерени.ч, возникла
необходимость измерять быстроизменяющиеся величины. Значительно
усложнились и условия измерений — высокую точность необходимо
обеспечить в условиях различных внешних воздействий: высоких
температур, вибраций, линейных и ударных ускорений и т. д.
Все эти факторы сделали проблему обеспечения достоверности,
сопоставимости и единства измерения одной из важнейших при
создании новых объектов.
Надежное получение результатов измерений возможно лишь
при учете ряда условий, определяемых двигателем и
особенностями, и характеристиками применяемых датчиков.
При назначении измерений известны:
— ожидаемые пределы изменения физической величины;
— характер изменения величины параметра;
— вероятный частотный диапазон параметра.
Ориентировочно оцениваются и дестабилизирующие факторы,
влияющие на работу датчика, которые могут повлиять на
результат измерения: понизить точность измерения, дать ложное
измерение, разрушить датчик в случае, если замеряемое значение
превышает выбранный амплитудный или частотный диапазон.
К числу дестабилизирующих факторов относятся: вибрации,
акустические давления, линейные перегрузки, температурные
воздействия, изменения внешнего давления, влажность," влияние
паров агрессивных жидкостей. В летных условиях большинство
дестабилизирующих факторов воздействуют одновременно.
Существенное значение имеет совокупность воздействий на
датчик, связанных со спецификой работы двигателя сроками
годности датчика, сроками стабильности градуировочных
характеристик датчика.
Выбор датчика определяется следующими факторами:
измеряемым параметром, необходимыми амплитудами и частотным
диапазоном измеряемого процесса, гарантиями работоспособности и
точности с учетом всех эксплуатационных особенностей, зависящих
от объекта испытаний.
100
До летных испытаний датчики проходят проверку при
стендовых испытаниях в составе двигателя с воспроизведением
комплекса условий, наиболее приближающихся к натурным.
Таким образом, при летных испытаниях неизвестным должен
быть только контролируемый параметр двигателя. Средства же
измерений не должны вызывать сомнения в выдаваемом ими
результате измерений.
Расчет точности измерительных средств
Для выбора и расчета точности измерительных средств,
входящих в состав ракеты, необходимы исходные данные: параметры,
подлежащие измерениям, допустимые отклонения измеряемых
параметров, условия, в которых будут проводиться измерения и при
которых отклонения не должны превышать допустимых значений
[47, 86].
Приближенный расчет максимально допустимой основной
абсолютной погрешности измерительного прибора б проводится по
формуле
где бПр—максимальная допустимая погрешность измеряемого
параметра;
А — коэффициент, который принимается для точных
измерений равным 0,3 (для менее точных — 0,4);
бь бг,... бЛ — дополнительные погрешности измерительного
прибора, приспособления, кабеля, линии и т. д.
(предварительно принимаются равными нулю).
Приближенно необходимый класс точности измерительного
прибора определяется по формуле
• 100
К =
N
где N—максимальное значение показания прибора.
При летных испытаниях проводятся различные измерения
параметров двигателя. Одни из них могут рассматриваться как
обязательные, другие — как факультативные, в зависимости от
назначения двигателя, расчетных зависимостей, используемых для
определения характеристик, степени изученности и т. п.
Выбранный комплекс измеряемых параметров позволяет ответить на
вопросы, сформулированные в задачах испытаний, и в случае
появления неисправности или аварийных ситуаций использовать для
анализа причин аварийного процесса.
Измеряемые параметры
Параметры, подлежащие измерению при летных испытаниях
двигателей, можно подразделить следующим образом [78].
1. Параметры, характеризующие условия эксплуатации:
101
— давление окружающей среды;
— температура окружающей среды;
— температура компонентов топлива;
— плотность;
— давление наддува баков и др.
2. Основные параметры:
— давления компонентов топлива на входе в насосы;
— давления в камерах сгорания или перед форсунками газа, окислителя,
горючего;
— расходы компонентов топлива через двигатель и др.
3. Параметры, характеризующие добротность:
— давления компонентов топлива после насосов;
— давления генераторного газа (на входе в турбину, выходе, в
газогенераторе магистрали наддува баков);
— давления в пиростартере, пневмостартере;
— давления компонентов топлива в местах отбора на рулевые машины,
приводы, смесители, газогенераторы наддува и т. д.;
— давления продувки камер сгорания;
— перепад давления на регулирующих органах;
— давления газов вдува;
— пульсации давления компонентов топлива на входах в насосы, перед
форсунками камер сгорания и газогенератора;
—■ виброперегрузки на узлах (камер сгорания, газогенератора, турбона-
сосного агрегата, рамы двигателя и др.);
— температура газов наддува баков, узлов автоматики, элементов
конструкции, теплозащитных чехлов и т. д.;
— частота вращения ротора турбины;
— углы поворота камер сгорания;
— углы поворота приводов систем регулирования (РКС, СОБ и др.);
— сплошность потоков компонентов топлива на входе в насосы;
— время работы и др.
5.2. СИСТЕМА ТЕЛЕИЗМЕРЕНИЙ
С помошыо телеметрических систем * проводится отбор и
обработка информации, контролируется выполнение программ
полета, выявляются аномальные процессы и аварийные ситуации,
возникающие при подготовке к полете ракеты. Неотъемлемой частью
телеметрических комплексов являются средства обработки и
представления телеметрической информации. В современной
телеметрии средства обработки информации используют универсальные и
специализированные вычислительные машины, которые
применяются не только в наземных средствах, но и на борту
контролируемых объектов.
Наибольшего успеха в настоящее время достигла
радиотелеметрия. Разработана теория передачи измерительной информации
б аналоговой и цифровой форме, достаточно глубоко исследованы
Бопросы кодирования, частотного и временного разделения
сигналов, теории синхронизации и т. д. Широко используются
аналоговые многоканальные системы с частотным и временным
разделением сигналов. Успешные результаты достигнуты в области циф-
* Этим термином обозначают совокупность аппаратуры, обеспечивающей
выполнение задачи исследования различных процессов, происходящих на теле-
метрируемых объектах.
102
ровой телеметрии, многоступенчатой коммутации каналов,
передачи данных телеизмерений на большие расстояния [46]). Измерения,
проводимые на борту ракеты, подлежат регистрации в течение
всего эксперимента. Регистрация измерений может проводиться:
— на борту ракеты с последующим спасением результатов
записи;
— наземными радиотелеметричесюши 'Средствами;
— на борту ракеты с последующей передачей информации по
радиолинии.
Каждый из видов регистрации имеет как положительные, так
и отрицательные стороны. Основными достоинствами бортовой
регистрации с последующим спасением результатов измерений
являются независимость от условий радиосвязи и принципиальная
возможность получения большей точности измерения, основным
недостатком — возможность потери информации при неудачном
спасении устройств с носителем информации.
Наиболее широко при испытаниях ракет применяется метод
регистрации наземными радиотелеметрическими средствами.
Основным преимуществом этого способа является большая
вероятность сохранения результатов измерений при аварии ракеты.
Недостатки этого метода — ограничения, накладываемые условиями
распространения радиоволи, потеря информации при нарушении
радиосвязи, дополнительные погрешности измерений, вносимые в
процессе преобразования информации в радиотракте.
Радиотелеметрическая регистрация применяется во всех
случаях, когда обеспечивается надежная и непрерывная радиосвязь.
Регистрация на борту ракеты с последующей передачей
информации по радиолиниям применяется при работе двигателей и
других систем ракеты над территорией, необорудованной приемными
станциями, когда непосредственная передача измеряемых
параметров по радиоканалу затруднена или невозможна. Воспроизведение
накопленной информации через радиоканал осуществляется в
благоприятное для передачи или регистрации время.
Смешанные системы регистрации применяются для
гарантированного получения информации, особенно на наиболее
интенсивных участках сбоев радиолинии, связанных с ионизацией и
образованием плазмы вокруг передающих антенн в момент запуска
двигателей. В этом случае состав датчиков, согласующих устройств,
коммутаторов и генераторов поднесущей частоты является общим
Для бортовой измерительно-регистрирующей и для бортовой
радиотелеметрической систем. При этом на борту ракеты размещают
регистрирующую и передающую аппаратуру. При летных
испытаниях двигательных установок на ракетах, как правило, применяют
оба вида систем. Бортовую измерительно-регистрирующую
аппаратуру можно рассматривать как частный случай бортовой
радиотелеметрической аппаратуры, в которой передающее устройство
заменено регистрирующим. На рис. 5.1 изображена структурная
схема радиотелеметрической системы.
103
Измеряемая датчиком физическая величина преобразуется в
электрический сигнал. Электрические сигналы с датчиков
поступают в схему объединения каналов, в которой формируется общий
Г
Приемно -регистрирующая
аппаратура и аппаратура
обработки результатод
измерений
Приемное
устроистбо
Индикаторное
устроистдо
Hf If
Элементь/ схемы
разделения каналод
Регистрирующее
устроистбо
Графики для
экспресс - анализа
Носитель
инсрормации
Аппаратура обработки
результатод измерения
Таблицы
Графики
5орто5ая
измерительно - передаю ш, а я
аппаратура
i i
Измеряемые беличины
-___^ПГ^_ 'J
Рис. 5.1. Структурная схема радиотелеметрической
батывающей) системы
г
Элементы
сбязи
1
\
I/
г
Электрич
г <
'еские
соединения
\ ,
Элементы схемы
объединения
на налоб
[
с1по /
Передающее
устроистбо
Передающая антенна
j
(измерительной и обра-
суммарный сигнал. Сигнал с каждого датчика наделяется своим,
присущим только ему, признаком. По этому признаку в наземном
устройстве можно снова выделить сигнал каждого датчика.
Суммарный сигнал поступает в передающее устройство и излучается
передающей антенной. Приемная антенна принимает этот сигнал
и передает его в приемное устройство. Таким путем по одному
радиоканалу осуществляется передача большого числа измерений.
104
На выходе приемного устройства выделяется суммарный сигнал,
подобный суммарному сигналу на выходе схемы объединения
каналов, который поступает на индикаторное устройство и на схему
разделения каналов.
В схеме разделения каналов осуществляется выделение
сигнала каждого датчика для раздельной, поканальной записи в
регистрирующем устройстве. Выделение сигнала каждого датчика
из суммарного сигнала возможно по признаку, которым наделен
сигнал каждого датчика в 'бортовой аппаратуре.
В системах с разделением каналов по времени в передающем
устройстве выполняется поочередное подключение сигналов с
датчиков к общему тракту, а в приемном устройстве — распределение
сигналов с датчиков по каналам для раздельной регистрации.
Таким образом, признаком, которым наделяется сигнал каждого
датчика, является момент подключения этого датчика. В таких
системах схемы объединения и разделения каналов должны работать
синхронно и синфазно.
В системах с разделением каналов по частоте в передающем
устройстве сигнал каждого датчика модулирует сигнал
«приписанного» к нему генератора поднесущей частоты. Частоты
генераторов поднесущей частоты разнесены таким образом, чтобы при
смешении сигналов с генераторов в схеме объединения каналов че
произошло наложения спектров частот. В приемном устройстве в
схеме разделения каналов имеются фильтры поднесущей частоты
(по числу датчиков), каждый.из которых настроен на частоту
соответствующего генератора поднесущей частоты и выделяет
сигнал соответствующего ему датчика. Таким образом, признаком,
которым наделяется сигнал каждого датчика, является значение
частоты генератора поднесущей частоты, модуляция которого
осуществляется сигналом с датчика. Выделенные из общего потока
информации сигналы по каждому датчику записываются на
специальные носители информации (магнитные ленты, перфоленты
и т. п.). Далее накопленная информация подвергается обработке с
использованием специализированных и универсальных ЭВМ.
Результаты обработки представляются в виде графиков и таблиц
[78].
При испытаниях ракет применяются аналоговые и цифровые
методы измерений. Основным преимуществом аналоговых методов
в радиотелеметрических и бортовых системах является их
относительная простота, основными недостатками — дополнительная
погрешность измерений, накладываемая трактом передачи и
регистрации информации, и невозможность непосредственной (без
предварительной перекодировки) автоматизации результатов измерений
с использованием цифровых вычислительных машин.
Преимуществами цифровых методов изхмерений являются: отсутствие
дополнительной погрешности тракта передачи и регистрации
информации, возможность автоматизации обработки результатов
измерений. В настоящее время автоматизация обработки результатов
105
измерений приобрела актуальность, особенно в связи с
необходимостью диагностики и прогнозирования функционирования
сложных объектов в реальном масштабе времени.
5.3. КРАТКИЕ СВЕДЕНИЯ О МЕТОДАХ ИЗМЕРЕНИЙ
На борту ракеты применяются разнообразные датчики
(первичные преобразователи). Датчики выдают высокие и низкие
напряжения переменного и постоянного тока и имеют как
большое, так и малое внутреннее сопротивление. Некоторые датчики,
например, термопары, генерируют собственное напряжение, в то
время как, например, тензометрические мосты требуют питания
от внешнего источника. Некоторые датчики изменяют активное
сопротивление пропорционально измеряемой величине, у других
меняется магнитное сопротивление.
Многие величины, такие, как температура, давление,
положение вала привода, вибрация и ускорение различными способами
преобразуются в напряжение для передачи по телеметрической
системе.
Датчики телеметрической системы по уровню их напряжения
к полному сопротивлению принято группировать и объединять их
сигналы для передачи по общему каналу.
В зависимости от измеряемого параметра частота выборки —
опроса может быть малой и высокой. При измерении температур,
которые меняются довольно медленно, делается несколько
выборок в секунду или одна выборка в несколько секунд. При
измерении вибраций и пульсаций может потребоваться от сотен до
нескольких тысяч выборок в секунду для получения сведений об
амплитуде, частоте и фазе.
Сигналы от датчиков с помощью соединительных проводов
передаются в один передающий центр бортового телеметрического
устройства. В многоступенчатых ракетах каналы телеметрической
системы, выделенные для первой ступени, могут быть
использованы для передачи данных второй ступени после отделения первой.
На борту ракеты имеется разнообразная аппаратура,
генерирующая посторонние сигналы и шумы, которые могут вызвать
наводки в соединительных проводах. При монтаже телеметрических
кабелей необходимо это учитывать, экранировать их, заземлять и
т. д. [78].
На выходной сигнал датчиков определенное влияние могут
оказывать активное сопротивление и емкость монтажа, поэтому они
должны быть сбалансированы или скомпенсированы каким-либо
способом и откалпброваны.
В полете ракета подвергается различного вида воздействиям.
Температура может повышаться или понижаться на несколько сот
градусов. Ускорения могут изменяться на порядок, могут возникать
многие виды вибраций и в различных сочетаниях. Для уменьшения
106
погрешностей эти влияния необходимо учитывать при отработке
телеметрических систем.
Измеряемые физические параметры преобразуются с помощью
датчика в электрические сигналы. Эти сигналы дискретизируются,
квантуются, кодируются и передаются по каналу связи. На
приемной станции информация, представляющая собой определенную
форму изменяющегося напряжения, обычно записывается на
магнитную ленту. Основное назначение последующей обработки
данных заключается в обратном преобразовании этих изменяющихся
напряжений в значения функции, которая как можно ближе
соответствует изменениям данного физического параметра. В
последующем, для перевода напряжений в физическую величину
параметра используются результаты масштабирования по каждому
датчику.
В практике используются два метода масштабирования:
1. Индивидуальная градуировка каждого датчика и построение
градуировочных (тарировочных) кривых.
2. Подача на входы каналов напряжений, имитирующих
выходные сигналы датчиков, сравнение полученных выходных
сигналов системы с известными входными сигналами, в результате
чего и обеспечивается калибровка информационного канала.
Результаты, полученные с помощью этих двух методов,
обеспечивают в сумме полную калибровку от входа датчика до выхода
системы.
При испытаниях ракет калибровочную информацию получают:
— перед пуском ракеты в систему вводятся известные
электрические аналоги датчиков (тарированные напряжения). Результаты
калибровок записываются на магнитной ленте, чем обеспечивается
общий контроль бортовой телеметрической аппаратуры без
датчиков (предполетная калибровка);
— калибровкой во время полета, при которой в систему также
вводятся эталонные напряжения. При одновременной калибровке
системы передачи информации прерываются на короткие
промежутки времени, определяемые длительностью калибровочных
сигналов, либо по отдельным каналам регистрируются постоянные
величины напряжений калибровочных сигналов. Такая калибровка
обеспечивает контроль бортовой аппаратуры, особенно для
коррекции дрейфа напряжений бортовых источников питания во время
полета ракеты;
— использованием фактических летных данных,
обусловленных физической сущностью того или иного процесса. Так,
например, при нахождении ракеты на пусковой установке результаты
измерения давления и температуры должны соответствовать
окружающему давлению и температуре в данный момент времени; на
больших высотах давление равно нулю; при свободном полете
датчики ускорений должны давать нулевое показание и т. д.
Указанные данные применяются для устранения
систематических погрешностей в результатах измерений.
107
Частота опроса должна быть такой, чтобы не загромождать
информацию. Излишне высокая частота опроса каналов может
привести к получению большего числа данных, чем это требуется
для анализа или представления. Их можно «сжать» с помощью
регистратора, работающего на пониженной скорости, или метода
выборки, при котором из большого числа записанных данных
отбираются только те, которые соответствуют характерным точкам.
Для сокращения количества данных для анализа применяется
сглаживание. При этом усреднение большого числа выборок не
только уменьшает количество данных, которые необходимо
анализировать, но также повышает точность сглаженных данных.
Одним из важных условий для анализа результатов измерений
является требование, чтобы устройство отображения (например
графопостроителя) могло наносить данные на графики с
постоянной точностью. Это достигается путем одновременного нанесения
на бумагу координатной сетки и функции. В этом случае при
сужении или растяжении бумаги под влиянием влаги и температуры
масштаб изменяется, однако данные можно считывать с
первоначальной точностью.
При летных испытаниях ракет для приема информации в
течение всего полета одной приемной станции обычно недостаточно.
Поэтому на трассе полета устанавливаются дополнительные
приемные станции. Информация, принятая этими станциями
представляется в форме, удобной для ее передачи в центр обработки
данных, для получения полной информации на всем участке полета.
Доставка данных, записанных на магнитную ленту, в главный
центр обработки осуществляется самолетами, судами и др. В
ближайшем будущем эти данные будут передаваться с помощью
телевизионных и тональных каналов связи.
Говоря о телеизмерениях, необходимо остановиться на
вопросах частоты измерений значений параметров в зависимости от
точности измерения. Дискретные измерения (или выборки данных)
теоретически могут проводиться с такой частотой, которая
достаточна для воспроизведения любого физического явления с
требуемой точностью. Очевидно, что непрерывный канал не может
передавать информацию о процессах, происходящих со скоростью,
которая лежит за пределами ширины полосы пропускания канала.
Таким образом, пропускную способность дискретного или
непрерывного канала можно выразить через точность и частоту опроса.
Зависимость между частотой опроса и шириной полосы
исходного сигнала (или максимальной скоростью измерения параметра
при сохранении заданной точности передачи информации) можно
выразить уравнением
n = q-Bi,
где п — частота опроса;
BL — ширина полосы сигнала;
q — произвольная константа.
108
Как правило, на практике принимают q = 5. Это означает, что при
максимальной скорости изменения параметра на участке
наибольшего изменения величины параметра осуществляется 5 выборок.
В тех случаях, когда необходимо обеспечить повышенную точность,
выбирают q^l2. В реальных условиях максимальная скорость
изменения параметра редко имеет большую длительность.
Поэтому приемлемой величиной является q—b.
При назначении количества передаваемой информации,
особенно для широкого диапазона скоростей передачи информации,
необходимо понимание физических явлений и критической оценки
того, что в действительности ожидается или, что необходимо
получить от эксперимента.
В телеметрии применяются два основных вида временной
дискретизации: мгновенная и интервальная.
Мгновенной дискретизацией называется процесс, при котором
берутся относительно короткие выборки сигнала, для
последующего использования — восстановления первоначальной его формы.
При этом получается последовательность импульсов,
модулированных по амплитуде.
Интервальная дискретизация, называемая также кадровой,
представляет собой процесс выборки сигнала в течение
значительного промежутка времени.
Мгновенные выборки имеют весьма малую длительность по
сравнению с периодом, соответствующим наиболее
высокочастотной составляющей сигнала, подвергаемого временной
дискретизации. Интервальные выборки имеют значительно большую
длительность, чем наибольший представляющий интерес период изменения
сигнала. Первый вид дискретизации наиболее часто используется
для передачи низкочастотной информации в многоканальных
системах с временным разделением каналов. Второй вид
дискретизации применяется для периодического наблюдения за каналами, по
которым передается высокочастотная информация.
Для точного восстановления сигнала при мгновенной
дискретизации требуется более двух выборок на один период колебаний.
Или же, если сигнал не содержит частотных составляющих выше
заданной величины, то он однозначно определяется дискретными
значениями, езятыми через интервалы времени, равными
половине периода, соответствующего этой граничной частоте.
При ограничении частотных составляющих, содержащихся в
сигнале, подвергаемом дискретизации, следует проявлять
осторожность, так как в противном случае погрешности могут быть
относительно большими, а результаты потеряют смысл, т. е. может
возникнуть неоднозначность при коммутации. Например, в
крайних случаях, когда частота параметра равна или кратна частоте
дискретизации, выходной сигнал системы имеет вид напряжения
постоянного тока £/0. Если частота сильно отличается от кратной
частоты дискретизации, результирующий сигнал приобретает вид,
соответствующий случаю дискретизации более низкочастотного
109
параметра. Кажущийся сигнал будет иметь частоту, равную
разности частот параметра и дискретизации (опроса). Это явление
кажущегося смещения спектра в сторону более низких частот
носит название эффекта сдвига. На рис. 5.2 приведен характерный
Рис. 5.2. Зависимость выходного сигнала от соотношения частот
параметра и дискретизации:
а—мгновенная дискретизация сигналов постоянного тока и сигналов,
имеющих частоту, кратную частоте опроса каналов; б—группа мгновенных
выборок, представляющих несколько сигналов
пример, когда одна группа мгновенных выборок может
представлять два и более видов сигналов. На этом рисунке показаны три
синусоидальных сигнала, два из которых являются нечетными
гармониками (третьей и пятой) первого. Здесь частота опроса
сигналов равна учетверенному значению частоты первого сигнала.
Аналогичные результаты получаются для других нечетных гармоник
основного сигнала.
5.4. ОБРАБОТКА ИНФОРМАЦИИ
Для обеспечения экспериментатора или испытателя полезной,
в необходимом объеме и виде информацией, проводится ряд работ
в следующей последовательности: прием информации, обработка
и преобразование информации. При этом содержание работ
постоянно уточняется (по результата!м летных испытаний (13, 78].
Как показывает опыт, в процессе летных испытаний по
результатам первых пусков уточняются объемы информации,
подлежащей обработке, корректируются требования к точности измерения
параметров; диапазоны измерения по частотам и амплитудам;
вносятся изменения в методики и инструкции обработки и анализа,
определяется время, необходимое на выполнение в требуемые
сроки обработки и анализа, с целью своевременного устранения
выявленных замечаний.
Обработка и преобразование информации
Информацию, полученную в процессе полета, редко можно
использовать непосредственно. Без преобразующих устройств
невозможно считывать информацию с магнитных лент, перфолент и
даже с фотографий. Обработка и преобразование информации
ПО
представляют собой • операции, осуществляемые предварительно
над необработанными данными. Эти операции осуществляются с
помощью аппаратуры полуавтоматического и автоматического
преобразования, а также с использованием аналоговых или
цифровых вычислительных машин.
Окончательным результатом преобразований информации
являются таблицы и графики в виде, удобном для восприятия и
последующего анализа. Этот процесс является основным при
обработке информации. Заданная точность и выделяемое для этой
операции время определяют метод или комбинацию методов, которые
должны использоваться для преобразования информации. В
основном применяются три вида преобразования информации: аналого-
аналоговое, аналого-цифровое и цифро-аналоговое.
Аналого-аналоговое преобразование
Этот тип преобразования информации представляет собой
преобразование аналоговых данных из одной формы в другую
аналоговую форму для повышения возможности восприятия информации
человеком, например, путем отображения данных в реальном
масштабе времени на устройствах графической регистрации. На исцы-
тательных полигонах такой метод используется для отображения
в темпе приема некоторого количества наиболее важных
телеметрических параметров, характеризующих поведение ракеты и
работу основных узлов. К точности отображения на этом этапе
предъявляются сравнительно невысокие требования, однако результаты
корректируются в процессе полной обработки, после чего
используются для уточняющих расчетов.
Аналого-цифровое преобразование
Аналого-цифровое преобразование представляет собой процесс
преобразования информации из аналоговой формы в цифровую
с помощью полуавтоматической или автоматической аппаратуры.
Данные, которые должны быть преобразованы, могут поступать в
виде записей на магнитной ленте, осциллограмме и др., а
преобразованная информация 'выдается в виде перфокарт, перфолент,
магнитных лент для вычислительных машин. Для преобразования
телеметрической информации удобен метод преобразования с
применением автоматической аппаратуры, которая обеспечивает
высокую скорость, большую точность и облегчает процесс
обработки; однако, наряду с этим необходимо предусматривать
полуавтоматические методы обработки той части информации, которая
неприемлема для автоматического преобразования в цифровую
форму, например, вследствие сильных помех или плохих
показаний. В тех случаях, когда в цифровую форму преобразуется
относительно небольшое количество информации или время не играет
существенной роли, также могут оказаться достаточными
полуавтоматические и ручные методы.
ill
Цель преобразования аналоговых данных в цифровые
заключается в следующем.
1. Для числовых расчетов более удобными являются цифровые
данные.
2. При использовании числовых данных представляется
возможность с помощью ЭВМ проводить отбраковку отдельных
отсчетов, усреднение и сжатие сообщений, восстановление сбойных
значений и т. п.
Цифро-аналоговое преобразование
Цифро-аналоговые преобразования заключаются в том, что
цифровые данные представляются в аналоговой, обычно
графической форме. Хотя графическое отображение цифровой информации
не увеличивает точности данных, однако хорошо воспринимается,
поскольку обладает наглядностью.
Обработка данных на вычислительных машинах
Все возрастающие требования к уровню надежности ракет,
колоссальное увеличение объемов телеметрической информации при
их испытаниях и сжатые сроки обработки информации требуют
применения ЭВМ.
Как известно, цифровая вычислительная машина позволяет
автоматически обрабатывать значительное количество данных за
короткое время с высокой точностью. Однако эффективность
использования ЭВМ зависит не только от ее возможностей, но
также от опыта и искусства разработчиков системы обработки данных
и лиц, осуществляющих выбор числовых методов для выполнения
расчетов.
Информация, получаемая в процессе предварительной
обработки и преобразования, является исходной для выполнения расчетов
на ЭВМ. Однако процесс обработки на этом не заканчивается.
Полная последующая обработка информации на вычислительной
машине позволяет решать более сложные задачи, заключающиеся
в определении обобщенных характеристик отдельных параметров
двигателей или их групп, увязанных определенным алгоритмом,
или характеристик окружающей среды, непосредственное
измерение которых технически невозможно.
Наряду с решением указанных выше специальных задач ЭВМ
используются для оценки достоверности результатов измерений,
получения статистических характеристик параметров,
сглаживания результатов измерений и т. п.
Оценка достоверности относится к наиболее важным этапам
обработки информации. Этапы оценки достоверности и
сглаживания данных необходимы петому, что при обработке информации
приходится иметь дело с пропусками, вызванными различными
отказами, сбоями в канале связи, переходными искажениями и
всеми видами помех, разрывами непрерывностей в системах с диск-
112
ретизацией и т. д. Оценка достоверности заключается в
систематической проверке поступающей информации, удалении ложных и
излишних данных и замене недостоверных точек более
подходящими значениями.
Исключение влияния помех представляет одну из центральных
проблем обработки данных телеизмерений. Методы, дающие
удовлетворительные результаты при идеальных данных, могут при
высоком уровне помех давать бессмысленные результаты.
Из изложенного можно сделать вывод, что для обработки
данных с помощью ЭВМ необходимо в первую очередь разработать
численные методы оценки достоверности телеметрической
информации и устранения помех.
Различные методы обработки с применением вычислительной
техники могут быть точно описаны. Преимущества использования
вычислительной техники для операций сглаживания и оценки
достоверности заключаются в том, что ошибки, вносимые этими
методами, являются известными и их можно определить. Некоторые
из вопросов рассмотрим более подробно.
Оценка достоверности
Информация, получаемая с борта ракеты, является
дискретной. Иногда некоторые отсчеты (точки) оказываются утраченными
или их значения отличаются от правильных на недопустимую
величину. Такие точки являются аномальными или недостоверными.
Цель оценки на достоверность заключается в устранении таких
отсчетов и замене их отсчетами, не отличающимися от правильных
значений.
Вопрос оценки достоверности информации весьма сложен. Для
оценки достоверности вначале необходимо сделать допущение
относительно вида функции, которую представляет
последовательность измерений, затем оценить отклонение от истинных
значений функции для каждого отсчета. Это приводит « нелинейной
операции над величинами отсчетов, что трудно осуществить даже на
вычислительной машине из-за большого числа измеряемых
параметров. Если функция меняется весьма медленно, то можно легко
обнаружить и заменить аномальные отсчеты, например,
интерполированным значением, определенным по двум ближайшим
нормальным точкам. Такой процесс можно запрограммировать для
вычислительной машины. Трудности создают отсчеты функций,
характеризующих, например, колебательные процессы. В этих
случаях при просмотре таблиц трудно или даже невозможно отличить
достоверные отсчеты от недостоверных.
Сглаживание и подбор соответствующей кривой
Практически операция сглаживания заключается в отфильтра-
ции частот, значительно превышающих возможную граничную
частоту. Цель сглаживания по группе отсчетов — это замена каждого
113
отсчета другим отсчетом, лежащим на сглаженной функции,
проведенной через необработанные точки, или нахождение значений
параметров, определяющих сглаженную функцию. Сглаживание с
предварительной оценкой достоверности является важной и
ответственной операцией обработки данных, так как все последующие
операции обработки проводятся со сглаженными данными.
.Существует много способов сглаживания информации:
полиномиальное, цифровыми фильтрами к т. п.
Сглаживание посредством полиномов — это совмещение,
обычно по методу наименьших квадратов, полинома выбранной
степени с определенным числом последовательных отсчетов
параметров. Чтобы число точек перегиба не было большим, степень
полинома должна быть невысокой, однако, она должна быть
достаточно большой, чтобы полином как можно полнее отображал
изменение данных. Степень соответствия полинома характеру изменения
параметров можно оценить, например, с помощью
среднеквадратичной величины остатков между отсчетами параметров и
вычисленными значениями.
Интерполяция и экстраполяция
При обработке широко применяются методы интерполяции.
Линейная интерполяция обычно используется при просмотре
таблиц, а также для получения значений функции для моментов
времени, находящихся между исходными точками первоначальных
данных. Применение линейной интерполяции обусловлено
легкостью программирования на вычислительной машине, быстротой
интерполяции и возможностью обеспечения хорошего соответствия
любой форме функции, представляемой отсчетами. Однако,
применение линейной интерполяции оправдано в том случае, когда
частота дискретизации выбрана правильно, т. е. линейной
интерполяции должны подвергаться сглаженные, а не необработанные
данные. Интерполяция только по двум последовательным точкам
(в зависимости от временного интервала между точками), не
обязательно должна быть линейной.
По сравнению с интерполяцией экстраполяция является более
неопределенной операцией. Однако при обработке данных часто
необходимо именно экстраполяция, так как она является
единственным средством расчета значений некоторых функций.
Системы и методы программирования
С помощью телеметрической аппаратуры при летных
испытаниях получают большое количество сведений о различных
факторах, действующих на объект в полете. Основная цель испытаний
заключается в проверке сделанных допущений и аналитических
методов, использованных при разработке данного объекта, и
внесения дополнительных уточнений в теорию, если сделанные
допущения были правильными. В свою очередь, для подтверждения
114
допущений и проверки правильности выбранных методов
результаты измерений должны быть тщательно проанализированы.
Анализ позволяет выявить: верны ли предположения об окружающих
условиях и воздействиях, как совпало предполагаемое влияние
этих условий на рабочие характеристики системы с фактическим
влиянием и т. д. Зачастую многие методы анализа являются
такими же новыми, как и испытываемый объект, и любое ошибочное
допущение может вызвать серьезное расхождение между
наблюдаемыми и прогнозируемыми результатами. Все это говорит о
важности этапа анализа, который обычно связан с большим объемом
вычислений
Для анализа полученной информации, как правило, отводится
ограниченное время. Поэтому программы для вычислительных
машин, предназначенные для выполнения такого анализа,
составляются задолго до проведения испытаний. Эти программы должны
быть достаточно гибкими, должны позволять вносить необходимые
изменения, чтобы в большей степени соответствовать
определенным результатам, полученным во время испытания.
Ограниченность времени требует, чтобы ни в одну из основных
аналитических программ не вносились крупные изменения. Поэтому
подготавливаются стандартные подпрограммы, которые хранятся во
внешнем запоминающемся устройстве на одной из магнитных лент.
Программы, необходимые для обработки данных, подразделяются
на две группы:
— программы общего математического обеспечения (численное
дифференцирование, интегрирование, решение систем уравнений,
матричная алгебра, интерполирование, экстраполирование и т. д);
— программы специального математического обеспечения
(дешифровка информации различного типа датчиков — потенциомет-
рических, индуктивных, емкостных и др., предназначенных для
измерения давлений, температур, расходов и остатков
компонентов топлива, вибраций конструкций, пульсаций давлений и т. д.),
и решения специальных для ракетных двигателей задач с
использованием информации, полученной при летных испытаниях.
ГЛАВА 6
ОРГАНИЗАЦИЯ ПРОВЕДЕНИЯ ЛЕТНЫХ ИСПЫТАНИЙ.
ОЦЕНКА ВЫПОЛНЕНИЯ ПРОГРАММЫ
6.1. ОРГАНИЗАЦИЯ ПРОВЕДЕНИЯ ЛЕТНЫХ ИСПЫТАНИЙ
Для проведения летных испытаний назначается комиссия, в
которую входят представители всех заинтересованных
организаций — разработчиков систем и испытательного полигона. К работе
привлекается инженерно-технический и обслуживающий персонал
как испытательного полигона, так и заинтересованных организа-
115
Цели,зада-\
чи,обеспече-
ние, от
четность? орг.
вопросы
Задачи
испытаний по
каждому экземпляру
ракеты-носителя
Программа
проведения
летных
испытании
Комиссия по
проведению
летных „
испытании
Методический \
план проведения]
летных „
испытании
Обеспечение
проведения^ летных
испытании необходимой
документацией
Заключение о
готовности
служб'испытательного
полигона к
проведению летных
испытаний
Объект
испытания ШРД в
составе
ракеты-носителя
Частные зак-\
л ючен и. я по бор- -
то дым
системам, комплексу
ракеты-носителя
Решение
комиссии и продедении
летных
испытаний ЖРД a dp
.систем В составе
ракет ы-носи теля
Проведение
летных
и, с п ы т ании
Анализ результатов
летных испытаний
Реализация мероприятии
по замечаниям, выявленным
6 ходе летных испытаний^
отработка
эксплуатационно й документации и др.
ТЗ на разработку
ракеты и
комплекса и другие
требования
Приведение работ на
технической и стартовой
позициях
Обеспечение проведения
летных испытаний
техническими средствами и
инженерно - техни чески м
персоналом
Обработка информации,
получаемой при летных
испытаниях
Завершение решения частных
вопросов на этапе летнь/х
испытаний по системам
Проведение дополнительных
работ и проверок, требующих
длительного 'времени Т уело -
виях эксплуатации.
Оценка выполнения
программы летных
испытаний
ТЗ на разработки Н\РД
и других систем ракеты-
-носителя и комплекса
Решение комиссии о
завершении летных
испытаний
Огпчгт комиссии по
летным
испытаниям^ процедурные,
допросы
Рис. 6.1. Укрупненная схема организации проведения летных испытаний
116
ций. Общее руководство летными испытаниями осуществляет
комиссия [25, 78].
Укрупненная схема организации проведения летных испытаний
приведена на рис. 6.1. На основании частных заключений по
системам борта и комплекса ракеты-носителя, а также заключения о
готовности служб испытательного полигона, комиссией
принимается решение о начале проведения летных испытаний.
Летные испытания проводятся по программе, согласованной со
всеми заинтересованными организациями [92]. Методический план
проведения летных испытаний регламентирует цели и задачи по
каждому испытанию.
Испытательный полигон заблаговременно обеспечивается
необходимой документацией: эксплуатационной, частными
программами, методиками определения и оценки основных характеристик,
методиками подготовки испытаний и др.
Оснащенность полигона техническими средствами
(испытательно-проверочным, заправочным, пусковым,
информационно-измерительным и др. оборудованием) и 'подготовленным
инженерно-техническим персоналом обеспечивает проведение всех
предусмотренных технологией пуска ракеты работ на технической и стартовой
позициях.
После проведения испытания производится обработка и анализ
полученной телеметрической информации вычислительным
центром, анализируются результаты испытаний и дается оценка
выполнения поставленных задач. Выявляются отличия от
предполагаемых результатов для первых испытаний, а в ходе набора
статистики от опытных значений.
При необходимости вносятся изменения в техническую и
эксплуатационную документацию, проводятся доработки в наземном
проверочно-испытательном оборудовании или доработка на
ракете. Вносятся изменения в методики, в частные программы.
Нередко возникает необходимость моделирования процессов и условий
эксплуатации, проведения дополнительных лабораторных и
стендовых испытаний и т. п. [48].
6.1.1. Работы, проводимые с двигателями на технической
площадке и стартовом комплексе
Двигатели в составе ступеней носителя или объекта
поступают на испытательный полигон, представляющий собой комплекс
специальных сооружений и оборудования. На нем осуществляется
сборка, подготовка к пуску и пуск ракеты-носителя.
Основными объектами испытательного полигона являются
техническая площадка, стартовый и командно-измерительный
комплексы. Оборудование полигона, как правило, состоит из
специального технологического и общетехнического [43, 60].
Технологическое оборудование объединяет разнообразные и
многочисленные средства транспортировки, перегрузки, сборки, ис-
пг
лытаний, установки ракет-носителей на пусковую систему,
заправки компонентами топлива и сжатыми газами, подготовки к пуску,
луска и управления, и др.
Общетехническое оборудование включает электросиловое,
газоснабжения, термостатирования, осветительное, отопительное,
лриточно-вытяжной вентиляции, пожаротушения, связи,
дистанционного и автоматического управления и др.
На полигоне размещаются также вспомогательные и
обслуживающие объекты и системы, к которым относятся хранилища
транспортных средств и агрегатов обслуживания, хранилища
компонентов топлива, системы энергоснабжения, жилой комплекс и
другие объекты.
Техническая площадка (ТП) представляет собой комплекс
инженерных сооружений со специальные технологическим и
общетехническим оборудованием, 'подъездными .путями и др.,
обеспечивающими прием, хранение, сборку ступеней-носителей и КА,
испытания с применением испытательно-проверочного оборудования
и т. п. На технической позиции располагаются монтаж'но-испыта-
тельный 'кор'пус сборки и испытаний ракеты-носителя, монтажно-
испытательный корпус КА и другие 'служебные 'помещения.
В монтажно-испытательном корпусе имеется необходимая
контрольно-проверочная аппаратура, сосредоточенная в специальных
помещениях.
Двигатели в составе ступеней носителя или объекта проходят
лроверки как на технической, так и на стартовой позициях.
Обеспечение повышенных требований надежности
двигателями определяет объем проверок при подготовке к испытаниям.
Объем проверок может отличаться в зависимости от конструктивного
выполнения и назначения двигателя. Современные двигатели, как
правило, не требуют проверок соединений на герметичность,
точности настройки, и др. Проверки сводятся к дистанционному
контролю электроцепей пироклапанов, электропневмоклапанов,
сигнализаторов, датчиков, приводов и т. д. Проводится
функционирование узлов автоматики с включением приводов.
Функционирование проводится выдачей сигналов на приводы по тестовым
программам проверочной аппаратуры [25].
При проведении комплексных испытаний с помощью бортовых
телеметрических систем проводится контроль параметров
двигателей и бортовых систем (в основном исходное состояние
первичных преобразователей) с записью на магнитную ленту,
фотопленку наземными регистраторами. По результатам просмотра
телеметрических записей делается вывод о состоянии систем.
Если при проверках отстыковывались кабели двигателя,
снимались крепежные и защитные элементы и т. д., необходимо
выполнить операции по приведению в исходное состояние.
При положительных результатах испытаний ракета
перекладывается на транспортно-установочный агрегат или транспортно-ус-
118
тановочную тележку и транспортируется на стартовую площадку
стартового комплекса.
Стартовый комплекс представляет собой совокупность
специального технологического оборудования, сооружений с общетехни-
чески!м оборудованием, подъездными путями. Стартовый комплекс
(СП) предназначен для установки, подготовки и проведения пуска
носителей, а также для размещения наземного оборудования
и контрольно-испытательной аппаратуры.
Основным агрегатом стартового комплекса считается пусковая
система, обеспечивающая прием ракеты-носителя, подвод к ней
электрических, заправочных, пневматических, дренажных и других
коммуникаций.
Пусковая система обычно размещается в специальном
пусковом сооружении, в котором также располагается часть
проверочно-пускового и испытательного оборудования, элементы
заправочных систем, источников электропитания и т. п.
После установки ракеты-носителя на пусковой стол, наведения
и подключения к ней всех наземных коммуникаций проводятся
автономные и комплексные испытания с помощью
проверочно-пускового оборудования и наземных систем. Контролируемые
параметры фиксируются телеметрическими системами с записью
наземными регистраторами.
После анализа результатов испытаний проводится заправка
баков носителей компонентами топлива в определенной
последовательности. Химический состав компонентов топлива,
содержание механических примесей должны строго соответствовать
предъявляемым требованиям. Проверки бортовой измерительной
аппаратуры проводятся измерительными средствами, установленными
на технической и стартовой позициях.
Аппаратура командно-измерительного комплекса включает ра-
дпотелеметрические станции, радиопередающие и радиоприемные
устройства, антенные установки, телевизионные установки, линии
автоматической обработки полученных данных, вычислительные
машины, аппаратуру службы единого времени, средства связи,
источники питания и другое оборудование [78]. Измерительные
пункты обычно располагаются на значительных расстояниях друг от
Друга для обеспечения гарантированной связи по траектории
полета. Все пункты имеют общую службу единого времени.
6.2. АНАЛИЗ РЕЗУЛЬТАТОВ ЛЕТНЫХ ИСПЫТАНИЙ
Анализ результатов летных испытаний является сложной и
трудоемкой задачей. Трудности проведения анализа связаны со
сложностью внутридвигательных процессов и сложностью связей
двигателя с системами управления, регулирования, стабилизации,
системы литания двигателя [54].
Трудоемкость анализа определяется большими потоками
информации, сложностью математической модели процессов, а также
119
необходимостью выделения полезной информации на фоне шумов,
вызванных работой телеметрических систем измерений и других
систем.
Приступая к анализу, следует иметь в виду:
— телеметрическая информация — основной источник
информации;
— материальная часть практически мало пригодна для
анализа или отсутствует.
Основная задача анализа — всесторонняя оценка работы дви-
тателя и его характеристик в полете. Задачи и методы анализа
работы двигателя могут изменяться в зависимости от результатов,
полученных при испытании.
Для всесторонней оценки работы двигателя проводится
большой объем телеметрических и траекторных измерений. Однако
даже при совершенных средствах измерительной техники
большинство основных параметров двигателя непосредственно не
измеряется. К таким параметрам относятся тяга, удельная тяга и
другие характеристики. В связи с этим при летных испытаниях
проводится сложный математический анализ измерительной
информации с целью косвенной оценки параметров двигателя.
Для всестороннего анализа результатов летных испытаний
двигателей кроме информации, полученной в ходе летных испытаний,
используется разнообразная дополнительная информация.
Необходимость в такой информации возрастает при анализе
каких-либо ненормальностей работы и отличий в поведении параметров
двигателя от опытных значений. В этом случае очень ценна
информация по различным дефектам, авариям, неисправностям,
проявлявшимся в работе двигателей при стендовых испытаниях и
связанных с различными причинами (конструктивными, схемными,
производственными, технологическими, условиями проведения
испытания, неудовлетворительного состояния измерительных средств
и т. п.). Очень полезна также априорная информация по
неисправностям, имевшим место при стендовых и летных испытаниях
прототипов двигателей.
При оценке и анализе результатов летных испытаний
двигателей кроме информации собственно по двигателям, необходимо
привлекать обширную информацию по смежным системам ракеты.
Для объективной оценки возникающих вопросов по работе
двигателя, или же для исключения его из рассмотрения, приходится
обращаться к смежным областям техники [6, 8].
На рис. 6.2 приведена блок-схема результатов летных
испытаний, в которой иллюстрируется примерный объем информации,
необходимый для проведения анализа:
— общие сведения по двигателю (рис. 2. 3);
— априорная информация по двигателям-прототипам;
— информация по двигателю и носителю, полученная в ходе подготовки к
испытаниям на технической и стартовой позициях (рис. 6. 2);
— информация по полной обработке результатов испытаний двигателя;
120
Общие
сведения
о двигателе
Информация по системам
ракеты7 полученная в
ходе подготовки и
испытаниям на ТП и СП
Полная обработка
телеметрической
информации, полученной при
летных испъ /таниях
Информация л о
системам ранеты,
полученная в ходе
летных испытаний
Априорная информация по
двигателям-прототипам
и неисправностям,
выявленным при стендовых
испытаниях
Информация, имеющаяся а полученная
при летных испытаниях
Причины неисправностей 6ыявленнь1х в
работе двигателя при летных испытаниях
отступление
от
технологического
процесса при
изготовлении
и др.
не
зависящие
от
работы
двигателя
зависящие
от
руктивного
выполнения
Неполное
представление о
фактических
условиях и
возмущениях,
действующих в полете
Выход из строя
или
ненормальная работа
смежной
системь!
недостоверная
информа -
ция
телеизмерений
Неисправность
ff покупном
узле или
устройстве,
установленном*
на двигатель
Анализ результатов^
летных испытаний
Анализ аварийных
испытаний
Материалы по исследованиям
и анализу, подтверждающие
правильность вь>fводов о при-
чи н ах неисправностей
Рис. 6.2. Блок-схема объема информации, необходимой для анализа
результатов летных испытаний
121
— информация по системам ракеты, полученная в ходе летных испытаний;
— замечания, выявленные в ходе летных испытаний (по технологическим,
производственным, конструктивным и др. причинам);
— замечания по работе двигателя, вызванные причинами, не зависящими от
<его работы (недостаточное знание фактических условий и возмущений,
действующих в полете; ненормальная работа или выход из строя смежной системы;
ненормальность в покупном узле или устройстве, установленном на двигателе
я др.);
— замечания, связанные с недостоверной телемефической информацией;
— анализ аварийных испытаний и др.
Процедуру анализа результатов летных испытании можно разбить на два
этапа:
— оперативный анализ (послеполетный);
— полный анализ (детальный).
6.2.1. Оперативный анализ работы двигателя
при летных испытаниях
При летных испытаниях для оперативного планирования
работы вычислительного центра, а также оценки работы ЖРД
проводится послеполетный или оперативный анализ [6, 26].
При оперативном анализе результатов испытаний необходимо
выяснить:
— нормально ли функционировал двигатель;
— какие заметные аномалии сопутствовали его работе.
Применительно ко всем системам оперативный анализ дает
ответ как на общий вопрос — оценка испытания, так и на
направление сосредоточения усилий поиска возможных аномалий той или
иной системы.
Для оперативного анализа выбираются параметры,
характеризующие наиболее полно работу двигателя, т. е. выходные
параметры. Объем параметров должен быть по возможности небольшим.
Как правило, оперативный анализ сводится к просмотру
графического материала и оценке характерных моментов времени
циклограмм работы двигателя. Анализ проводится с
использованием общей оценки выполнения поставленной задачи. Оперативный
анализ проводится часто без рассмотрения абсолютных значений
замеренных параметров в относительных величинах. Конечно,
такой способ оперативного анализа не лишен субъективизма, в то
же время на оценку работы влияют такие факторы, как скорость
протяжки, масштаб и т. д. Из рассмотрения графиков можно
определить явно выраженные аномалии, а незначительные отличия
трудно уловить.
Для двигателей космических аппаратов оперативный анализ
проводится по ограниченному числу замеряемых параметров
методом опроса «параметр в норме — не норме». Для этого
определяются границы, в которых может изменяться параметр от влияния
внешних и внутренних факторов. Вот эти границы и
закладываются для быстрой оценки работы двигателя.
122
Для предварительной оценки эти способы приемлемы, однако
не позволяют сделать окончательного вывода о поведении
параметров и влияниях различных систем на работу двигателя.
Для объективности и быстроты анализа все большую
актуальность приобретает автоматизация обработки и анализа
телеметрической информации с широким применением электронно-вычис-
тительных машин на этапе оперативного анализа. Современные
устройства позволяют осуществить непосредственный ввод
информации с магнитных лент телеметрических систем в вычислительную
машину в реальном масштабе времени.
Автоматизация оценки работы двигателя при оперативном
анализе исключает субъективизм, зависящий от многих факторов как
от степени подготовленности испытателя, так и от качества
телеметрической информации.
Для проведения оперативного анализа привлекаются опытные
специалисты-испытатели, хорошо разбирающиеся в специфике
телеметрических измерений. Рассмотрим более подробно метод
оценки работы двигателя.
Выходные параметры двигателя (давление в камере сгорания,
перед форсунками и др.) отслеживают влияние внешних факторов
(давления на входах в насосы, температуру компонентов топлива^
регулирование по тяге и соотношению компонентов, отбор
генераторного газа или компонентов топлива на смежные системы и др.).
В свою очередь, как правило, режим работы двигателя по времени
изменяется за счет изменения влияния внутренних факторов
(к. п. д. турбонасосной группы, удельной мощности турбины,
потери давления в газовых и гидравлических трактах).
Если исключить влияние всех внешних факторов на работу
двигателя (включая и регулирование), т. е. получить
нерегулируемый двигатель, работающий в номинальных условиях, то по
времени работы режим его может возрастать, снижаться или
оставаться постоянным. Для каждого типа двигателя закон
изменения режима различен и по существу может рассматриваться как
номинальный.
При оперативном анализе целесообразно оценку работы
двигателя проводить с использованием факторов, наиболее влияющих
на работу двигателя, таких как:
— угол поворота вала привода системы регулирования тяги;
— угол поворота вала привода системы опорожнения баков;
— давление компонентов топлива на входе в двигатель;
— температура (или удельный вес) компонентов топлива на
входе в двигатель;
— расходование компонентов топлива и генераторного газа на
смежные или вспомогательные системы; и др.
При оценке работы двигателя следует приводить внешние
факторы к номинальным условиям, для получения фактического
закона изменения режима работы двигателя по времени. Искажения в
123
поведении фактического режима в этом случае будут
свидетельствовать о ненормальностях в работе двигателя [6].
В общем виде формулу приведения давления газов в камере
сгорания к номинальным условиям можно представить:
Ла+
да дрв
^вхо О* вх.г
Здесь учет влияния внешних факторов производится через
коэффициенты влияния, определяемые расчетными и
экспериментальными методами в процессе стендовой отработки двигателя.
Учитывая, что влияние некоторых факторов незначительно и стабильно,
их можно сгруппировать и рассматривать как постоянно
действующие, влиянием других факторов можно пренебречь.
Приведенный к номинальным условиям параметр рк.Пр
характеризует состояние двигателя, поскольку его изменение в этом
случае обусловлено только внутридвигательными процессами.
При летных испытаниях не исключены случаи аномалии в
работе телеметрических средств измерений. Поэтому, если в
процессе испытания зафиксировано определенное изменение одного из
параметров, необходимо проверить, является ли данное
отклонение параметра результатом сбоя системы измерения, или причину
нужно искать в двигателе: в появлении неисправности или в
воздействии на двигатель другой системы. С этой целью следует
провести увязку параметров, т. е. проанализировать, влечет ли
данное отклонение закономерное изменение остальных параметров
16, 78].
Если же отклонение одного из параметров не вызвало
отклонения других, или поведение других параметров нельзя объяснить
наличием каких бы то ни было неисправностей, то следует
признать, что замер данного параметра не является достоверным.
Проведем качественный анализ изменения параметров при
различных возмущениях в нерегулируемых двигателях с дожиганием
и без дожигания продуктов газогенерации.
Уменьшение расхода окислителя за насосом вызовет
уменьшение этого расхода через камеру сгорания и газогенератор. Это
приведет к понижению соотношения компонентов топлива по камере
сгора'ния и газогенератору (k и £гг). Причем, поскольку
газогенератор работает на участке резкой зависимости работоспособности
от соотношения компонентов, а камера сгорания — на пологой ча-
d(RT)rr . dRT
сти характеристики —-—-1— j> , первоначальное снижение
давления в восстановительном газогенераторе будет (больше [57].
Из-за уменьшения расхода продуктов газогенерации через
турбину и уменьшения степени расширения газа на турбине (особен-
124
но значительного в двигателях с дожиганием) снижается
располагаемая мощность турбины NT.
)A 1-(-Щ Хгг""1
L \ Ргг 1 хгг
где GT — расход газа через турбину;
г|т — к. л. д. турбины;
(RT)T — работоспособность продуктов газогенеоации;
ртт — давление в газогенераторе («перед турбиной);
Рг.м — давление в газовой магистрали (после турбины);
хГг — коэффициент «процесса расширения в проточной
части турбины.
Снижение располагаемой мощности турбины .приводит к
уменьшению частоты вращения турбонасосного агрегата. В результате
этого уменьшаются напоры, создаваемые насосами, а также
расходы компонентов топлива.
Если изменение одного из параметров приводит к изменению
других, причем это изменение подтверждается логическим
анализом, то в этом случае следует провести более тщательное
исследование с целью однозначного установления причины появившейся
неисправности.
Если в процессе испытания зафиксировано уменьшение
расхода горючего по магистрали за насосом Grs, это должно вызвать
рост соотношения компонентов в камере и газогенераторе. При
наличии восстановительного газогенератора это приведет к
повышению работоспособности газа в нем, так же как и в камере
сгорания. При этом возникает опасность прогаров газовых магистралей.
Однако снижение суммарного расхода, как правило, оказывает
большее влияние, чем повышение работоспособности продуктов
газогенерации и вызывает понижение давления в газогенераторе,
так же как и в камере сгорания.
Уменьшение расхода продуктов газогенерации через турбину и
степени расширения газа на турбине вызывает резкое понижение
располагаемой мощности турбины NT и уменьшение частоты
вращения ТНА. Это, в свою очередь, приведет к уменьшению расхода
окислителя в газогенератор, напоров насосов, а следовательно, и
давления в камере сгорания.
Переходный процесс при уменьшении расхода через насос
может сопровождаться и форсированием работы двигателя, если
двигатель выполнен по схеме с дожиганием продуктов газогенера-
Ции. Это связано со специфическими особенностями схемы, в
которой камера сгорания является противодавлением для турбины,
Например, если прошла перекладка дросселя СОБ или РКС,
стоящих на линии питания компонентом камеры сгорания, и
возрос перепад, срабатываемый на них, расход компонента в камеру
сгорания резко уменьшается, вследствие чего расход в
газогенератор возрастает. Это приводит к снижению давления в камере
сгорания и повышению давления в газогенераторе, тем более, что
125
изменение соотношения компонентов топлива kTV вызывает рост
работоспособности продуктов газогенерации (RT)Tr, как
окислительных, так и восстановительных схем.
Поскольку давление в камере сгорания является
противодавлением для турбины, понижение его вызывает увеличение степени
расширения газа на турбине ят и связанной со степенью
расширения располагаемой мощности турбины NT.
Увеличение NT, а также снижение потребляемой мощности
насоса из-за уменьшения расхода компонента при перекладке
дросселя, приводят к увеличению частоты вращения ТНА. Следствием
этого является рост параметров двигателя: напоров насосов,
давления в газогенераторе, расходов компонентов в газогенератор.
После первоначального резкого уменьшения расход компонента в
камеру сгорания начинает возрастать, а это приводит к росту
давления в камере сгорания.
Анализ показывает, что в двигателях с дожиганием продуктов
газогенерации форсирование режима работы двигателя по всем
основным параметрам наблюдается также и при отборе газа из
газовода для обеспечения работы других систем.
Отбор газа за турбиной уменьшает давление в газоводе. Так
как это давление является противодавлением для турбины,
степень расширения газа на турбине лт увеличивается. Возрастает и
располагаемая мощность турбины, а это, в свою очередь, приводит
к увеличению частоты вращения ТНА, напоров насосов, расходов
компонентов топлива и давлений в камере сгорания в
газогенераторе.
Если в процессе работы двигателя понижается к. п. д. одного
из насосов, потребляемая им мощность возрастает. Вследствие
чего понижаются частота вращения ротора ТНА, напоры,
создаваемые насосами, расходы компонентов топлива и давления в камере
сгорания и газогенераторе.
Характерной чертой переходного процесса при снижении к. п. д.
насосов является более резкое снижение частоты вращения ТНА в
начале переходного процесса то сравнению со скоростью спада
давления в газогенераторе.
В случае травления компонентов через разъемные соединения
или утечки компонентов через образовавшиеся отверстия, в
некоторых случаях понижение режима работы двигателя может и не
наблюдаться. Однако, температурные датчики, установленные в
хвостовом отсеке и регистрирующие температуру окружающей
среды, или температуру элементов конструкции, могут
зафиксировать повышение температуры в случае воздействия на них
продуктов сгорания, или понижение при воздействии компонентов
топлива. В зависимости от давления окружающей среды, степени
негерметичности и применяемых компонентов топлива температура
может достигать отрицательных значений.
Нужно иметь в виду, что при появлении негерметичности по
магистралям газогенератора режим работы двигателя резко сни-
126
жается. При этом утечка компонента, избыточного по отношению
к стехиометрическому составу в газогенераторе, может приводить
к прогарам газогенератора и проточной части турбины.
Так, например, появление негерметичности магистрали
горючего газогенератора двигателя с дожиганием восстановительного
генераторного газа приводит к росту соотношения компонентов и
работоспособности газа. Однако, снижение расхода компонента в
газогенератор настолько значительно, что давление в
газогенераторе понижается.
Относительное изменение суммарного расхода по камере
сгорания меньше, чем по газогенератору, в связи с чем снижение
давления в камере сгорания менее значительно. Степень расширения
газа в соплах турбины пт уменьшается, что совместно с
уменьшением расхода газа через турбину вызывает резкое понижение
располагаемой мощности турбины.
Появление негерметичности приводит к возрастанию расхода
через насос горючего GrS, а следовательно, к увеличению
потребляемой мощности насоса.
Таким образом, если при перекрытии магистрали уменьшение
располагаемой мощности турбины несколько компенсировалось
уменьшением потребляемой мощности одного из насосов, то при
негерметичности изменение и одного и другого параметра
направлено в сторону понижения частоты вращения ТНА. В связи с этим
скорость изменения частоты вращения ТНА при негерметичности
.больше, чем при перекрытии магистрали. Двигатель выходит на
режим, характеризующийся пониженными значениями
параметров, по сравнению с предшествующим неисправности.
При негерметичности гидравлической магистрали камеры
сгорания двигателей с дожиганием продуктов газогенерации из-за
утечки расход этого компонента в камеру сгорания резко
уменьшается. Уменьшается при этом и его расход в газогенератор, но
менее значительно. Степень расширения газа в соплах турбины
возрастает. Несмотря на некоторое уменьшение суммарного
расхода в газогенератор, вследствие роста пт возрастает
располагаемая мощность турбины. Это вызывает рост числа оборотов ТНА,
напоров насосов, расходов компонентов через насос. Вследствие
этого повышается давление в камере сгорания и газогенераторе.
Но если давление в газогенераторе может превысить
первоначальное значение, то давление в камере сгорания, как показывают
расчеты, остается ниже значения, предшествующего появлению
неисправности. Следовательно, в этом случае происходит
форсирование режима работы по параметрам турбонасосного агрегата.
Если в процессе испытания будет зарегистрировано резкое
понижение давления на входе в один из насосов, например,
окислителя, до критического, насос начнет кавитировать. При этом
падает напор, создаваемый насосом.
Отличительная черта переходного процесса в этом случае —
первоначальное увеличение частоты вращения ТНА, напора нека-
127
витирующего насоса горючего и его расхода, вследствие
уменьшения мощности, потребляемой насосом окислителя.
В том случае, когда понижение входного давления связано с
уменьшением давления наддува бака или перекрытием питающей
магистрали от бака до входа в 'насос, на двигателе
устанавливается режим, пониженный по сравнению с первоначальным.
Уменьшение расхода окислителя через насос приводит к
уменьшению его расхода как в камеру, так и в газогенератор.
Коэффициент соотношения компонентов в газогенераторе понижается, а
следовательно, снижается работоспособность газа, причем
снижение это значительно. Поэтому, несмотря на первоначальное
увеличение расхода горючего, давление в газогенераторе падает.
Давление в камере сгорания также уменьшается, но менее
существенно, поскольку зависимость RT=f(k) на участке работы камеры
сгорания очень пологая и работоспособность газа изменяется
слабо. Уменьшается степень расширения газа в турбине. Снижается
частота вращения ТНА, напор насоса горючего, происходит
дальнейшее уменьшение напора, создаваемого насосом окислителя.
Режим работы двигателя понижается.
Если кавитационный срыв насоса вызван негерметичностью
питающей магистрали, первоначальное снижение режима более
значительно, поскольку оно связано не только с уменьшением напора
из-за кавитации при снижении входного давления ниже
критического, но и с уменьшением расхода через насос вследствие
негерметичности перед насосом.
Резкое уменьшение напора и расхода кавитирующего насоса
приводит к снижению потребляемой им мощности. Вследствие
этого в начале переходного процесса увеличивается частота
вращения ТНА, напор, создаваемый некавитирующим насосом, и его
расход.
Уменьшение суммарного расхода компонентов в газогенератор
и понижение соотношения компонентов в нем, а также
работоспособности продуктов газогенерации при негерметичности
магистрали окислителя вызывает спад давления в газогенераторе,
снижение частоты вращения ТНА, напоров насосов и давления в камере
сгорания.
Понижение давления на входе в насос из-за негерметичности
приводит к увеличению перепада давления по питающей
магистрали от бака до входа в насос и увеличению расхода из бака.
Но если при негерметичности магистрали за насосом вслед за
первоначальным резким увеличением расхода утечки
происходило его уменьшение, то при появлении негерметичности питающей
магистрали происходит рост этого расхода до определенной
величины на протяжении всего переходного процесса. Аналогично
изменяется и суммарный расход из бака.
Уменьшение расхода за насосом приводит к повышению
давления на входе в насос окислителя. Это вызывает рост напора, по
скольку насос переходит на участок кавитационной характеристи-
128
ки, на котором наблюдается очень слабая зависимость напора от
давления на входе. Рост напора и расхода через насос окислителя
приводит к увеличению расхода и давления в камере сгорания и
газогенераторе, повышению частоты вращения ТНА. В
результате этого увеличивается располагаемая мощность турбины, растут
напоры насосов. При небольшом гидравлическом сопротивлении
участка питающей магистрали, новый установившийся режим
работы двигателя достигает первоначальных значений и остается
равным ему, поскольку при увеличении суммарного расхода из
бака гидравлические потери на участке до места разрушения
питающей магистрали остаются сравнительно небольшими.
6.2.2. Полная обработка телеметрической информации
Полная обработка информации, полученной в ходе летных
испытаний, проводится вычислительным центром. Основные
требования к обработке приведены в гл. 5, из которой следует, что
телеметрическая информация после дешифровки, оценки
достоверности, сглаживания и т. д. может служить официальным материалом
и использоваться при расчетах, анализе и оценке параметров
двигателей.
В зависимости от «потребителя» информации и качества
полученной информации проводится тот или иной объем обработки.
Объем обрабатываемой информации регламентируется единым
методическим подходОхМ для всех испытаний, а результаты
систематизируются для последующей статистической обработки. Однако
метод анализа может меняться в зависимости от специфики
конкретного испытания и его исхода [8, 15].
В зависимости от выполняемых функций и назначения
двигателя объем обработки может существенно отличаться по
номенклатуре. На рис. 6.3 представлена блок-схема полной обработки
информации по двигателю.
Примерный объем полной обработки включает:
— определение временных характеристик запуска,
выключения и т. д.;
— расчет основных характеристик двигателя;
— расчет удельной тяги двигателя с использованием бортовых
и траекторных измерений;
— расчет переходных процессов;
— расчет характеристик систем двигателя;
— оценка виброперегрузок элементов двигателя;
— оценка пульсаций давления компонентов топлива в трактах
двигателя;
— оценка параметров двигателя в местах отбора на смежные
системы (наддува баков, гидроприводы, гидроусилители и др.)',
— оценка приведенных к нормальным условиям параметров
Двигателя;
— оценка настройки двигателя на режим;
5 2227 129
Полная обработка и анализ информации,
полученной при летных испытаниях
полученной при летных
^ Расчет параметров
двигательной установки
Определение
временных
характеристик
двигателя
Расчет
основных
характеристик
двигателя
Определение
характеристик
переходных
процессов
двигателя
L1
Расчет
характеристик
отдельных
систем двигателя
Расчет
основных
характеристик
двигателя с
использованием
бортовых
и
траекторных
измерений.
1
Статистическая
обработка результатов
испытаний
Определение
вибронагрузок
на элементы
двигателя
Определение
величин
пульсаций
давления
компонентов
топлива
на входах
в насосы
Анализ ядле-
HuujHe
сматриваемых ранее
Анализ
изменения
режима
по бремени
Анализ
работы
телеметрических
средств
Анализ
информации
бортовых систем
L
Анализ результатов
испытаний
Анализ параметров
нерегулируемого
двигателя
Анализ настройки
двигателя
Анализ работы
исполнительного органа
системы регулирования
режима
Анализ работы
двигателя, как
исполнительного органа системы
-расходования топлива
Анализ работы смежных
систем, связанных с
двигателем
Анализ влияния смежных
систем на работу
двигателя, имеющих
непосредственную связь с ним
Анализ влияния смежных
систем на работу
двигателя, не имеющих
непосредственной связи с
двигателем
Анализ влияния
внешних условий на
работу двигателя
Анализ
температурного поля при различных
циклограммах работы
двагагпеля
Рис. 6.3. Блок-схема полной обработки информации и анализа результатов
испытаний
130
— оценка диапазона регулирования режима при испытании;
— оценка диапазона регулирования расходов компонентов
топлива;
— определение законов изменения параметров нерегулируемого
двигателя;
— оценка параметров импульса последействия тяги;
— оценка температурного поля элементов конструкции при
различных циклограммах работы двигателя;
— оценка работы систем, сопряженных с двигателем;
— оценка влияния сопряженных систем на работу двигателя;
— оценка влияния смежных систем (не связанных с
двигателем) на работу двигателя;
— оценка влияния внешних факторов (условий эксплуатации)
на работу двигателя;
— анализ неизвестных явлений и процессов, проявившихся при
летных испытаниях;
— анализ работы телеметрических средств (первичных
преобразователей) установленных на двигателе и др.
6.2.3. Определение параметров двигателя
Все параметры, определяемые при летных испытаниях
двигателей с использованием полученной информации можно разделить
на две группы:
— параметры, характеризующие работу двигателя в целом, как
единую систему. Это — удельный импульс двигателя;
секундные расходы компонентов топлива, соотношение секундных
расходов и др. Эти параметры именуются основными,
поскольку отклонение их значений от расчетных приводит к
появлению одной из основных причин отклонения
возмущенного движения носителя от требуемого;
— параметры, характеризующие работу отдельных узлов или
элементов двигателя. К ним можно отнести температуры и
давления в магистралях подачи топлива к камере сгорания
и газогенерации, температуру элементов конструкции,
обороты ротора ТНА и т. д. Определение этих параметров не
представляет особых затруднений, так как они могут быть
получены непосредственно по результатам обработки
телеметрических измерений — /показаний первичных
преобразователей.
Для определения основных параметров двигателя помимо
результатов телеметрических и траекторных измерений приходится
использовать уравнения движения ракеты как уравнения связи
искомого параметра с измеряемыми величинами 1[6].
При летных испытаниях измерение тяги не проводится,
поэтому оценка режима работы двигателя осуществляется косвенным
путем с использованием баллистических характеристик или
замеров выходных параметров двигателя.
5* 131
Каждый способ имеет положительные и отрицательные
стороны. Тяга, определенная с использованием траекторных, внешне-
траекторных измерений характеризует результирующую или
эффективную тягу двигательной установки в целом. Действующие
факторы, такие как аэродинамическое сопротивление, донное
давление, отклонение вектора тяги относительно продольной оси,
погрешности определения доз заправки и т. п., определяются с
большим разбросом и затрудняют оценку величины тяги
двигателя в полете. При оценке величины тяги по выходным параметрам
двигателя используются замеры давления газов в камере или
перед форсунками окислителя (горючего). Для этого используется
дроссельная характеристика, устанавливающая зависимость
между тягой двигателя Р и давлением в камере сгорания рк:
где А, В — постоянные коэффициенты, определяемые по
результатам стендовых испытаний.
В силу индивидуальных отличий и особенностей каждого
экземпляра двигателя при номинальных условиях и номинальном
значении давления в камере сгорания тяга может отличаться до
~1,5% от расчетного значения за счет разброса площади
критического сечения, коэффициента потерь в сопле и др. Этот фактор
не может быть учтен при определении тяги двигателя по
дроссельной характеристике.
Для двигательных установок, на которых устанавливается
несколько двигателей, с отличающимися энергетическими
характеристиками, например, рулевой двигатель и маршевые блоки,
определение тяги каждого двигателя с использованием траекторных
измерений затруднено.
Определенный интерес представляет оценка изменения режима
работы двигателя в полете, вызванная влиянием внешних и
внутренних факторов. Так, для двигателей, режим работы которых
изменяется для поддержания определенных баллистических
параметров полета или для двигателей с поддержанием собственного
режима в заданном интервале, влияние внешних и внутренних
факторов частично или полностью компенсируется
регулированием режима. Для двигателей без регулирования режим работы
изменяется по-разному. Давление в камере сгорания отслеживает
изменение режима работы и по нему можно оценивать степень
влияния различных факторов.
Для определения фактического закона изменения режима
работы двигателя текущие замеренные давления в камере сгорания
приводятся к номинальным условиям. Приведенное давление в
камере сгорания характеризует фактическое изменение режима
работы двигателя, так как это изменение вызвано внутренними
факторами. Закон изменения режима работы двигателя окончательно
определяется после набора необходимой статистики.
132
Для оценки результатов испытаний двигателей необходимо
предварительно определить фактические значения параметров.
На поведение и величину некоторых замеряемых параметров
влияют внешние факторы. Учет влияния внешних факторов
относительно заданных их (номинальных) значений называется
приведением параметра к номиналь-
Р*
ным условиям. Приведенный
параметр характеризует
состояние двигателя, поскольку его
изменение в этом случае
обусловлено только внутридвига-
гельными процессами. По
величине и характеру изменения
приведенного параметра за
счет внутренних факторов
можно судить о работе двигателя.
Для различных
параметров формулы приведения
зависят от схемных и
конструктивных решений и поэтому для
различных типов двигателей
отличаются. В общем виде
формула приведения имеет
вид:
к'
/
/
Pi
At
^^
Pz
t
Рис. 6.4. Нарастание давления в
камере сгорания при запуске
двигателя:
/—команда на запуск двигателя
■■■+%*■•
где х3-—среднее значение приводимого к номинальным условиям
замеренного параметра;
A6i, Аб2... Абг — отклонение от номинального значения
параметра, оказывающего влияние как внешний фактор.
Средние значения параметров х за оцениваемый период
времени, например, после выхода двигателя на установившийся режим,
определяются по формуле:
где Xi — текущее значение параметра;
п — число значений параметров, взятых через определенный
интервал.
Примерный объем обрабатываемой информации, приведенный
в разд. 6.2.2, весьма обширен. Здесь же рассмотрим определение
некоторых характеристик. Например, на рис. 6.4 изображена
кривая нарастания давления в камере сгорания при запуске двигате-
теля. Давление ри равное 5% от величины давления на режиме
соответствует моменту начала выхода двигателя на режим (или
момент воспламенения) от первой 'команды на запуск. Это время t3
Ш
характеризует срабатывание элементов автоматики, заполнение
систем двигателя компонентами, опережение одним компонентом
и др.
Давление рг, равное 90% от величины давления на режиме,
соответствует моменту выхода двигателя на режим. Это время
*выХ характеризует время выхода на режим.
Время Д/ = /вых—*з характеризует приемистость двигателя.
Величины давлений р± и р2 принимаются различными в зависимости
от типов двигателей.
Определение удельного импульса
Одной из актуальных задач при летных испытаниях является
определение опытных значений удельного импульса двигателя.
Удельный импульс, реализуемый на ракете в условиях
эксплуатации, может отличаться от значений, используемых в расчетной
документации, так как зависит от фактической величины
удельного импульса двигателя и от факторов, которые имеют место при
работе разных систем в полете.
Удельный импульс двигателя, реализуемый на ракете в
условиях эксплуатации, будем называть эффективным удельным
импульсом, так как он представляет отношение тяги, приложенной в
направлении продольной оси ракеты к секундному расходу массы
ракеты. Для того, чтобы определить удельный импульс
двигателя, необходимо полученный эффективный удельный импульс
привести к номинальным условиям.
Остановимся более подробно на расчетной зависимости
удельного импульса. Проанализируем составляющие, входящие в
выражение, по которым необходимо получить информацию в ходе
испытаний.
Удельный импульс равен отношению тяги к суммарному
секундному расходу топлива, израсходованного для получения этой
тяги
Однако, тяга не может быть замерена при летных испытаниях,
поэтому определение удельного импульса следует проводить на
основании измерений других параметров.
Опыт показывает, что наиболее точная оценка летных
характеристик обеспечивается 'методами, основанными на
использовании данных по ускорению, измеряемому бортовой инерциальной
системой наведения или внешнетраекторными измерениями.
Величина тяги, определенная как произведение массы не ускорение
Р = та, может быть на порядок более точной, чем величина тяги,
определенная на основании измеренного давления в камере
сгорания [6].
134
Воспользуемся для определения удельного импульса выражением для
проекции вектора ускорения на продольную ось ракеты.
К= Р~~Х -£.sin8, (6.2)
т
где т — масса ракеты;
X — осевая сила аэродинамического сопротивления;
9 — угол между продольной осью ракеты и местным горизонтом.
Тяга двигателя
P=Pn-Sa.pH, (6.3)
где Ра — тяга в пустоте;
рн — атмосферное давление;
G — секундный расход компонентов топлива.
Подставим выражение (6.3) с учетом (6.1) в уравнение (6.2), получим
V = — (ГО - SaP ) - — - g sin 6, (6.4)
т J n m
где
qV2 R2
Z {i\ -
V — скорость ракеты;
q — плотность воздуха;
Su — площадь миделя ракеты;
Сх — аэродинамический коэффициент осевой силы;
Н — высота полета над поверхностью Земли;
go — ускорение силы тяжести у поверхности Земли.
Определение удельного импульса по уравнению (6.4) требует большого
количества измерений и необходимости зондирования атмосферы. Траекторные
измерения дают возможность получить скорость движения центра масс, а не
ускорение.
Перейдем в уравнении (6.4) от действительного к кажущемуся ускорению
Примем G= —,; /у = const; рн = Ро'Л(Н). Тогда уравнение (6.5) примет вид
JaPQ
3 т т т
Проинтегрируем выражение (6.6) от t=ti до t=t2\
m
L (б.6)
ap\
т2 J m J m
Обозначим и введем функции
ЛИ7 = W(h) - W(ti); FH = SaPo \
\
J m
о
t
X
г* X
Fх = \ — dt получим
J т
(6.7)
о
У
135
где
Начало отсчета времени необходимо брать на участке после гарантированного
набора двигателем номинальной тяги. Конечный момент времени выбирается
с таким расчетом, чтобы иметь показания остатков компонентов топлива.
Решая уравнение (6. 7) относительно /" имеем
у In т]т
Полученная зависимость более удобна для определения удельного импульса.
Приращение проекции кажущейся скорости на продольную ось AW за время At
может быть найдено по телеметрическим измерениям. Масса тА и т2
определяется по результатам измерения суммарных остатков компонентов топлива;
mTb mT2 в эти же моменты времени, при этом
т\ = /як-он -f- /wTi;
т2 = ткон + тТ2-
Масса ракеты может быть определена с учетом результатов измерений
секундных расходов компонентов топлива по формулам
т2 = т0 ~~ ^s^2»
где т0 — начальная масса ракеты в момент t=to\
тКон — масса конструкции ракеты.
Для определения секундных расходов компонентов топлива используются-
специальные датчики расходов, устанавливаемые в подводящих к двигателю
расходных магистралях.
r> Qo ^ Qr
0 а7 ;г = Vr U; здесь
v0, vr — о-бъемы окислителя и горючего, израсходованные за время At;
Qo, Qr — средние плотности окислителя и горючего за 1время At.
При использовании показаний датчиков остатков или срабатываний
дискретных датчиков уровней (когда уровень топлива в баке достигает места
установки его чувствительного элемента) масса окислителя и горючего определяются
по формулам:
mo(t) = vo(t)$o> rnr{t) = vr(/)0r.
плотности определяются по зависимостям
Qo = Qo + Ро (То - К), Qr = Q* + рг (ТТ - 7^. "
Qo*, Qr* и Го*, Tv* — плотности и температуры окислителя и горючего при
заправке баков;
Го. Тт — температуры окислителя и горючего, замеренные
датчиками в момент времени /.
Секундные расходы компонентов топлива определяются
t \ — fJZ-
В уравнении (6.8) не учитывается возможное отклонение камеры
двигателя от направления, параллельного продольной оси ракеты (при стабилизации
136
ракеты и управлении полетом путем поворота камеры двигателя). Если это
отклонение имеет место, то значение удельного импульса двигателя
Г
/п __ 'у
у cos a
где 6 — угол отклонения камеры двигателя на участке At.
2 cos a,
(cos5)cp=
Для условий полета ракеты, при которых влияние окружающей среды
ничтожно, или практически отсутствует, поправка AF и и AFx можно принять равными
«улю. В этом случае выражение (6.8) упрощается
У In ГП1/ГП2
Данные о точности измерения параметров, используемых в
качестве исходных данных при определении удельного импульса,
приведены ниже.
Ускорение силы тяги, измеренное инерциаль-
еой системой, м/с2 от ±0,006 до ±0,012
(обычно ±0,1% или менее)
Дискретные объемы топлива:
датчики уровня, м3 от ±0,0085 до ±0,0285
другие данные по телеметрическим
измерениям, м3 . от ±0,0028 до 0,057
Температура топлива по телеметрическим
измерениям, °С ±1,1
Давления и другие телеметрические данные, % ±2
Достартовые весовые характеристики, % . .от ±0,03 до ±0,5
Температура топлива при наземных
измерениях, °С ±1,1
При летных испытаниях удельный импульс двигательной
установки может отличаться от удельного импульса двигателя за счет
различных факторов, которые вызваны:
1. Отличием температур и коэффициента соотношения
компонентов топлива через двигатель от расчетных;
2. Непроизводительными потерями компонентов топлива
вследствие стравливания газов наддува, дренажа компонентов
топлива, выброса генераторного газа и т. п.;
3. Отклонением вектора тяги от продольной оси из-за
погрешности установки двигателя, отклонением камер двигателя для
создания управляющих усилий и т п.
Определение удельного импульса сопровождается ошибками
измерения следующих величин.
1. Приращения кажущейся скорости полета ракеты;
2. Начальной массы ракеты, зависящей от массы
заправленных компонентов топлива, массы конструкции, количества
израсходованного топлива на момент определения;
137
3. Текущей массы ракеты, зависящей от текущих объемов
компонентов топлива, определенных по датчикам остатков или
дискретным датчикам, фактических температур и плотностей
компонентов топлива;
4. Силы лобового сопротивления;
5. Давления окружающей среды.
При определении удельного импульса двигателя необходимо
учитывать все указанные факторы. Оценка удельного импульса
двигателя на соответствие заданным в ТЗ требованиям
проводится после приведения и учета всех указанных факторов.
Определение разнотяговости камер сгорания многокамерного двигателя
Максимальная разность тяг любых двух камер сгорания на
установившемся режиме в текущий момент времени определяется
по формуле
где К — коэффициент тяги двигателя в пустоте:
Pm, puj — давление в двух камерах сгорания соответственно.
Определение ошибки настройки двигателя
Ошибка настройки двигателя по давлению в камере сгорания
производится в интервале времени после выхода двигателя на
установившийся режим по формуле
Рпр
looo/oi
где рПр, Рном — приведенное и номинальное давления в камере
сгорания.
Ошибка настройки двигателя по суммарному секундному
расходу компонентов топлива производится по формуле
где GSnp, GI10M — приведенный и номинальный суммарный
секундный расход компонентов топлива через
двигатель.
Определение параметров при переходе на режим конечной ступени и выключении
В зависимости от назначения двигателя и выполняемых им
задач, применяемых компонентов топлива и т. д., определяется
порядок перевода на режим конечной ступени. Выключение
двигателя также может быть различным: в одну ступень, либо в две
ступени. По команде на выключение могут отсекаться либо оба
компонента, либо один и т. д. [55].
138
К двигателю предъявляются определенные требования по
обеспечению параметров перехода с режима на режим и выключения.
При летных испытаниях подтверждаются и определяются
характерные параметры, которые трудно проверить при стендовой
отработке.
Рн
Ррет
Рреж
/
\
\
-с t ^
3
\
1
tnep
i
1
\
t'
Рзад
Ь
Рис. 6.5. Изменение давления в камере сгорания при выключении:
1—команда на выключение; 2—исполнение команды на выключение; 3—команда на переход
с основного режима на режим конечной ступени; 4—команда на выключение
Для случая выключения двигателя в одну ступень (рис. 6.5)
определяется время t спада давления в камере сгорания до
определенного заданного значения, считая от команды на выключение.
Для двигателя, выключаемого в две ступени (рис. 6.5),
определяются: время перехода на пониженный режим, соответствующее
моменту достижения 1.1 ркон и другие взаимосвязанные
параметры давление — время.
Определение импульса последействия тяги
Требования к величине импульса последействия тяги и его
разбросу зависят от сопутствующих выключению процессов
(отделение ступени, объекта и др.).
Для определения импульса последействия используются
косвенные измерения: осевой перегрузки пх, кажущейся скорости W,
давления в камере сгорания рк в зависимости от имеющейся
информации. Расчет проводится по следующим зависимостям,
соответственно:
t\ I=mbW\ I =
h
139
В качестве окончательной оценки импульса последействия тяге
принимается средневзвешенное значение [16]
\ + h/4 + ;3/q3
I/a2 + 1/4 + l/a|
где /ь /2, /3 — значения импульса последействия тяги,
определенные по разным методам;
ог±2, СГ22, аз2 — значения дисперсии.
Учет запаздывания показаний датчиков давления
При оценке результатов измерений параметров двигателя при
запуске, переходах с режима на режим, выключении следует
учитывать, что при больших градиантах изменения давления датчики
давления запаздывают. Этот факт усугубляется в случае
установки в датчики демпфирующих устройств.
Величина запаздывания зависит от многих факторов: от типа
датчика, типа демпфера, диаметра и длины соединяющих
трубопроводов и характеристик среды (газ, жидкость и т. д.).
Искажения могут быть существенными и достигать 30—40%.
Поэтому при оценке временных характеристик и импульса
последействия тяги по показаниям датчиков давления необходимо это
учитывать и вводить соответствующие поправки на запаздывание
показаний датчика.
Для определения поправки воспользуемся уравнением
датчика, как инерционного звена первого порядка.
где Т — постоянная времени датчика давления;
рд — давление, замеренное датчиком;
/Сд — коэффициент усиления датчика;
Рф — физическое давление.
Введение поправки сводится к построению кривой рф = /1 (^) по
кривой p = f2(t). При этом величина производной
определяется численным дифференцированием. Полученная поправка At на
запаздывание вводится в показания датчиков данного типа (см.
рис. 6.6). По показаниям датчика определяется время £д;
фактическое время определяется t^ = t^—At.
Особое место при летных испытаниях занимает оценка
основных параметров двигательной установки и двигателя: удельной
тяги, тяги, секундных расходов компонентов топлива. И не
случайно к величинам этих параметров предъявляются жесткие
требования. Информация (бортовая и внешнетраекторная),
используемая в расчетах, должна быть весьма достоверной, а применяемые
методы не должны вносить заметных погрешностей в
определяемые величины параметров [25].
140
При летных испытаниях ракеты удельная тяга двигательной
установки может отличаться от удельной тяги двигателя или
связки двигателей на величину суммарных потерь, вызванных
спецификой функций, выполняемых двигателем в полете, окружаю-
Рн
р'*
)
/
_ ■
At
<<s^~ *
^— ~~~~
1
2
— ■ -_
Рис. 6.6. Запаздывание показания датчика при запуске и
выключении двигателя:
1—фактическое давление; 2—давление, регистрируемое датчиком
щих условий и т. д. Поэтому все факторы, вызывающие потери
удельной тяги, должны быть выявлены и оценены.
К числу таких факторов можно отнести отклонение вектора
тяги двигателя относительно продольной оси ступени (при
стабилизации, управлении полетом и др.); выброс топлива и газов
наддува через дренажные устройства; нерасчетные температуры
компонентов топлива и др. При определении удельной тяги двигателя
I ступени необходимо дополнительно оценить изменение донного
давления по времени полета [83].
6.3. ОЦЕНКА СООТВЕТСТВИЯ ПАРАМЕТРОВ ЗАДАННЫМ ЗНАЧЕНИЯМ
Оценка выполнения требований к параметрам проводится как
по каждому летному испытанию, так и по всей их совокупности.
Оценка параметров по отдельному испытанию проводится после
приведения их >к номинальным условиям работы. При этом
анализируется как средняя за время работы двигателя величина
параметра, так и значение параметра в характерные текущие моменты
времени.
Сравнение опытного значения параметра с заданным значением
обычно приводят с учетом погрешностей измерений. Для этого
заданный допуск на параметр Да: расширяется по правилу «трех
сигм»:
где
— среднекйадратическая погрешность измерений.
141
Требование к параметру считается выполненным, если
значение параметра при летном испытании находилось в пределах
допуска кх'. При оценке выполнения требований к параметрам по
совокупности летных испытаний необходимо учитывать, что в
техническом задании на разработку двигателя обычно
сформулированы требования к номинальному значению и полю допуска на
параметр.
Задача оценки выполнения требований к номинальному
значению параметра в терминах математической статистики
формулируется как проверка гипотезы о равенстве математического
ожидания параметра X его номинальному значению, т. е. проверяется
гипотеза Яо : тх = хиом. В случае нормального распределения
параметра X метод проверки, известный в литературе под названием
«t — критерия», сводится к следующему.
Вначале вычисляют оценки математического ожидания и
дисперсии параметра X по результатам летных испытаний
N N
2 5'
Затем рассчитывают значение выборочной функции
Далее для заданной вероятности ошибки а и числа степеней
свободы m = N—1 находят предел выборочной функции ta,m из
таблицы [32]. Тогда 'критерий формируется следующим образом: при
Kl^^a,m гипотеза о равенстве математического ожидания
номинальному значению параметра отвергается со статистической
достоверностью у=1—а, а при \t\<ct*,m гипотеза принимается.
Для оценки выполнения требований к полю допуска на
параметр необходимо найти такие пределы (нижний и верхний
соответственно) Un=x—kSx и UB = x + kSx, что с заданной
вероятностью 7 можно гарантировать попадание в них доли совокупности,
не меньшей заданного значения Р. Эти пределы называются
допустимыми (толерантными). Зависимости для определения
множителя k в случае построения односторонних и двусторонних
толерантных пределов приведены, например, в книге [32]. Чем больше
количество испытаний, тем уже, при фиксированных значениях у и
Pf толерантный интервал, т. е. тем выше точность утверждения.
Требования к полю допуска на параметр считаются
выполненными, если найденный таким способом толерантный интервал
укладывается в заданное поле допуска.
Необходимо отметить, что окончательный вывод о выполнении
требований к параметрам, а, следовательно, к параметрической
надежности двигателя, может быть сделан только на основании
совместного анализа результатов летных и стендовых испытаний
(см. гл. 8).
142
6.4. ОЦЕНКА ВЫПОЛНЕНИЯ ПРОГРАММЫ ЛЕТНЫХ ИСПЫТАНИЙ
Оценка выполнения задач испытания проводится по каждому
пуску, при этом акцентируется внимание на замечаниях,
особенностях, отличиях и причинах, обусловивших их появление.
Уточнения расчетов, доработки, проводимые на двигателе
берутся под контроль и расцениваются как дополнительные задачи
для последующего испытания.
Окончательная оценка выполнения задач и программы летных
испытаний проводится по завершению запланированного объема
летных испытаний. К этому моменту должна быть получена
достаточная статистика по минимально необходимой информации, на
основании которой можно делать объективные выводы и оценки
[6, 8, 10].
На рис. 6.7 приведена блок-схема оценки выполнения задач и
программы натурных испытаний. Основными критериями
выполнения задач летных испытаний двигателей могут служить:
— достаточность имитации летных условий при стендовой
отработке;
— соответствие полученных параметров и характеристик
двигателей требуемым техническим заданием;
— подтверждение эксплуатационных характеристик;
— подтверждение и уточнение достигнутого уровня надежности.
Достаточность приближения летных условий при стендовой
отработке является важным показателем, характеризующим
отработанность двигателя. Поэтому в ходе летных испытаний
двигателей такая оценка проводится. Очевидно, что оценка достаточности
приближения условий запуска двигателей на стенде к летным
имеет первостепенное значение.
До завершения программы летных испытаний проводится
предварительная оценка достаточности приближения номинального
запуска при стендовых испытаниях к летным. Для сравнения
используются временные характеристики запуска, а также графики
изменения давлений компонентов топлива на входе в насосы,
зарегистрированные телеметрическими датчиками, такими же, как и
при летных испытаниях.
Сравнивается время поступления компонентов на форсунки
камеры сгорания и в газогенератор, моменты воспламенения в
газогенераторе и камере сгорания, время набора двигателем 90%
тяги, считая от команды на запуск и от момента воспламенения в
камере сгорания при испытаниях двигателя на стенде и в составе
носителя. Удовлетворительное совпадение сравниваемых
моментов времени должно свидетельствовать, что имеющиеся отличия
стендовых условий испытания по сравнению с летными
практически не влияют на временные характеристики запуска, и
приближение условий является достаточным. Тем самым на
существующие условия стендовых испытаний не накладываются
дополнительные требования.
143
На этапе летных испытаний проверяются эксплуатационные
характеристики двигателя. Проводится транспортирование в
составе ступеней носителя или в составе объекта в штатных
транспортных средствах по железной и автомобильной дорогам при
различных температурно-влажностных режимах и продолжитель-
ностях и т. д.
О цен на дыполнения задач
программы летных испытаний по двигателю
Оценка
достаточности
приближения
стендовых условий
к
эксплуатационным (летным)
Подтдержде -
ние
соответствия
полученных
параметров
заданным в ТЗ
Оценка
тационных
характеристик
Решение
вопросов, завершение
которых
запланировано на
этап летных
испытаний
Материалы исследований
и анализа,
подтверждающие правильность вы -
водов по замечаниям
Выводы
Греоцется
проведение
"дополнительных
испытаний
Программа летных
испытаний выполнена
Объем
испытаний
достаточен
Провести работы для
осрициаль ног о решения
вопросов по летным
испытаниям
{Продолжение
летных испытаний
Рис. 6.7. Блок-схема оценки выполнения программы летных испытаний
144
После проведения предусмотренных работ по наземной
эксплуатации производятся проверки и последующее летное испытание
двигателя. Результаты нормальной работы двигателя могут
служить одним из критериев оценки эксплуатационных
характеристик.
Успешными летными испытаниями двигателей подтверждаются
и уточняются достигнутые уровни надежности и их соответствие
заданным.
При оценке выполнения программы испытаний не последнее
место занимает завершенность работ, выносимых на этап летных
испытаний, а также состояние по проводимым работам,
рассчитанным на длительный срок.
Таким образом, из анализа совокупности упомянутых
вопросов вытекает объективная оценка выполнения программы летных
испытаний.
Оценка достаточности имитации летных условий при стендовой отработке ЖРД
Задачу оценки достаточности имитации летных условий при
стендовой отработке ЖРД рассмотрим в предположении, что
параметры, непосредственно или косвенно характеризующие летные
условия, независимы, в связи с чем оценка может проводиться по
каждому условию в отдельности.
Как показано выше, конечная цель оценки достаточности
имитации летных условий состоит в доказательстве правомерности
распространения показателей надежности, полученных на
основании анализа результатов стендовой отработки, на летные условия
испытаний.
Поскольку, как правило, нежелателен риск того, что
показатели надежности окажутся завышенными, критерий доказательства
можно представить б виде:
^ л.и^*с.и>
где Рли, РСЛ1 — соответственно вероятность безотказной работы
ЖРД при условиях летных и стендовых испытаний.
Используя теорему о полной вероятности события для
непрерывных случайных величин, вероятность безотказной работы
можно представить выражением
оо
Р= f P (x)/{x) dx,
— оо
где Р(х)—вероятность безотказной работы ЖРД при условии,
что параметр, характеризующий условия
эксплуатации, принял значение х (функция надежности),
f(x) — плотность распределения параметра X.
145
Соответственно исходный критерий преобразуется к виду:
оо
J P (*) /л.и
P
(6.9)
Р(х)
7
чении
Функция надежности Р(х) по своему смыслу одинакова как для
стендовых, так и летных испытаний, различие в вероятностях
безотказной работы при стендовых и летных испытаниях может быть
обусловлено различием
плотностей распределения
/л.и(*) И fc.n(x).
Предположим, что при
стендовых испытаниях
работоспособность двигателя
проверена в диапазоне зна-
параметра
, ^с.и max, !ПрИ ЭТОМ
новлен вид функции
надежности Р(х) в этом
диапазоне, описываемый одной из
кривых рис. 6.8. Поскольку
нет оснований для
оптимальных прогнозов
надежности при значениях пара-
*с.итах * метра X за /пределами
проверенного диапазона значе-
Рис. 6.8. Функция надежности и плот- ний, необходимо принять, что
ности распределения PW^O ПОИ *<Xc.iimin И
(6.10)
Тогда условие (6.9) можно записать так:
"^с.и max "*с.и max
j P{x)faM{*)dx> j P{x)fCM(x)dx.
с.н mln
"^с.и min
Очевидно, что для выполнения этого условия необходимо, в
первую очередь, чтобы диапазон изменения параметра X при
стендовых испытаниях «накрывал» диапазон изменения этого
параметра при летных испытаниях, т. е. необходимо, чтобы
л.и mln
/ -
В противном случае интервал интегрирования левой части
соотношения (6.10) расширится в область значений параметра, где
функция надежности равна нулю, в связи с чем условие (6.9)
нарушается.
Поскольку такая проверка основывается на ограниченном
числе летных испытаний, суждение о достаточной величине
диапазона имитации сопряжено с определенным риском, равным оценке
146
вероятности выхода параметра X при эксплуатации ЖРД за
диапазон проверенных значений, т. е.
си шах
~ J /л.„ (
На графике рис. 6.8 этой вероятности соответствуют
заштрихованные площадки под кривой плотности !л.и(х). Соответственно
величина Y*M=1— ct*M представляет собой вероятность
достоверной имитации.
Очевидно, что величина риска <х*м тем меньше, чем шире
диапазон изменения параметра при стендовой отработке. Поэтому
отработка ЖРД проводится в гарантированных пределах,
превышающих ожидаемый при эксплуатации диапазон значений внешних
условий на 10-=-20%. Следующее условие, создающее предпосылки
для выполнения критерия (6.9), состоит в требовании
идентичности плотностей распределений /л.и(*) и /с.и(#). Установление
идентичности осуществляется методами проверки статистических
гипотез о виде распределения [32]. Неидентичность допустима
лишь в том случае, если плотность распределения параметра при
стендовых испытаниях смещена относительно плотности fRM(x) в
направлении утяжеленных условий. Так, например, если функция
надежности имеет вид, соответствующий кривым: убывающей или
с выраженным оптимумом (рис. 6.8), то допустимо смещение
плотности распределения fc.n{x) к правой границе проверенного
диапазона; если функция надежности может быть описана 'кривой
с возрастанием, то допустимо смещение (плотности распределения
/си (*) 'К левой границе диапазона.
Если условия испытаний при отработке изменяются
преднамеренно, в связи с чем характеризующие их параметры нельзя
описать законами распределения случайных величин, необходимо
потребовать, по крайней мере, чтобы центр группирования значений
параметра X при стендовых испытаниях (среднее значение х) не
был смещен в направлении облегченных условий.
ГЛАВА 7
АНАЛИЗ НЕИСПРАВНОСТЕЙ
ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ ЖРД
7.1. ОСНОВНЫЕ ВИДЫ НЕИСПРАВНОСТЕЙ ЖРД
Работа двигателя зависит от большого числа самых
различных и взаимодействующих факторов, включая тяжелые условия
работы агрегатов, тепловые напряжения, высокие давления,
виброперегрузки и т. п. В связи с этим в процессе экспериментальной
отработки двигателя не исключено появление различного рода
неисправностей [7, 10, 52].
147
Однако, следует отметить, что хотя неисправности агрегатов
встречаются на различных этапах отработки, их характер и
частота проявления изменяются по мере доводки двигателей.
Если на начальном этапе отработки большое количество
неисправностей объясняется новизной конструкции, недостаточной
обоснованностью схемных решений, недостаточной изученностью
некоторых процессов, то отказы на последних этапах отработки
двигателя в основном связаны со случайными производственными
дефектами, или нарушениями условий подготовки и проведения
испытаний [7, 54, 119].
Кроме того, возможно возникновение при первых летно-конст-
рукторских испытаниях новых видов отказов, вызванных иными
условиями работы двигателя: влиянием системы питания или
воздействием на него других ракетных двигателей и систем,
вследствие недостаточной имитации условий эксплуатации при
стендовой отработке.
Каждый разрабатываемый двигатель имеет свои схемные,
конструктивные и другие особенности, в силу которых определенные
факторы, вызывающие отказы, на одном двигателе могут не
проявиться, а на другом — привести к повышенному количеству
соответствующих отказов. Не исключены случаи, когда на начальной
стадии экспериментальной отработки выявляются такие
особенности, что наиболее кардинальной мерой является проектирование
нового узла.
Так, например, общей проблемой при разработке двигательной
установки космического корабля «Аполлон» было достижение
приемлемых характеристик при обеспечении устойчивости горения
и совместимости форсуночной головки с камерой сгорания. За
исключением посадочного двигателя, устойчивость горения в других
двигателях достигалась с трудом. При разработке двигателя
взлетной ступени и маршевой двигательной установки возникали
самопроизвольные срывы процесса горения. В конструкцию
форсуночных головок обоих двигателей были введены дефлекторы, и
путем последовательных модификаций головок удалось
постепенно решить проблему неустойчивости горения.
Однако, даже при введении дефлекторов и других
конструктивных усовершенствований устойчивость работы двигателей
взлетной ступени обеспечить не удалось, поэтому была поручена
другой фирме параллельная разработка новой камеры сгорания.
Испытания на устойчивость новой камеры сгорания
подтвердили {пригодность двигателя взлетной ступени [7, 36].
Анализ результатов испытаний двигателей позволяет выделить
несколько типов неисправностей, вызванных производственными,
технологическими, схемными, конструктивными причинами и
условиями эксплуатации:
— перекрытие гидравлических магистралей;
— негерметичность гидравлических магистралей;
— негерметичность газовых магистралей;
148
— неисправности по насосам;
— неисправности по турбинам.
Перекрытие гидравлических магистралей может вызываться?
изменением гидравлических характеристик магистралей,
элементов автоматики, связанным с ошибками настройки двигателя,
превышающими предусмотренный диапазон, преждевременным
срабатыванием клапанов, зависанием подвижных элементов
клапанов, отрывом трубок отбора давления на регулирующие органы,,
засорением регуляторов, а также случайным попаданием
посторонних предметов в гидравлические магистрали, засорением
форсунок, жиклеров и трубопроводов малого диаметра или их
замерзанием в космических условиях.
Так, например, при летно-конструкторских испытаниях
двигательных установок в пилотируемом полете лунного
экспедиционного отсека космического корабля «Аполлон-9» имела место
закупорка гелиевой линии наддува двигательной установки
посадочной ступени и засорение регулятора двигательной установки
взлетной ступени [10, 111]. При отработке двигателей системы
управления корабля «Меркурий» имели место неоднократные засорения
форсуночных отверстий [7].
Дренаж гелиевого бачка одновременно с дренажом топливных:
баков двигательной установки посадочной ступени Лунного
экспедиционного отсека космического корабля «Аполлон-11» привел
к замораживанию горючего во внешнем теплообменнике.
Термическое расширение горючего в замкнутом объеме между
замерзшим теплообменником и отсечными клапанами за счет теплопод-
вода от камеры сгорания вызвало неожиданно высокий рост
давления горючего на входе в двигатель [10, 111].
Наиболее вероятной причиной выхода из строя двигателей
управления курсом кораблей «Джемини-5» и «Джемини-7» было>
временное замерзание трубопроводов окислителя (так как эти
корабли не возвратились на Землю однозначно установить причину
не удалось). В водородо-кислородных топливных элементах
корабля «Джемини» встречались трудности, связанные с подачей
реагентов и засорением топливных элементов [7].
Следует отметить особо аварии, обусловленные изменением
качества смесеобразования в камере сгорания или газогенераторе,
вызванным оплавлениями форсунок, установкой на данном
двигателе головки с низким качеством распыла [7].
Негерметичность гидравлических магистралей имеет место
при травлении компонентов через разъемные соединения,
разрушении гидравлических магистралей, преждевременном
срабатывании дренажных клапанов, негерметичности дренажных клапанов,,
а также при прогаре внутренней стенки камеры сгорания или
охлаждаемого газогенератора.
Например, при отработке маршевых двигателей космического
корабля «Аполлон» неоднократно возникали прогары камеры
сгорания [7].
При летных испытаниях двигательных установок лунного
экспедиционного отсека космического корабля «Аполлон-9» была
обнаружена негерметичность в двигательной установке посадочной
ступени [10, 111].
Негерметичность газовых магистралей вызывается прогарами,
отрывом штуцеров замеров давления в камере или газогенераторе
трещинами и разрушением, и др.
Так, при летных испытаниях двигательных установок
космического корабля «Аполлон-9» утечка в двигательной установке
посадочной ступени была вызвана трещиной в припое гелиевого пиро-
клапана, возникшей во время срабатывания пирозапала и
повышения давления в системе [11].
Причиной выхода из строя ракеты-носителя «Дельта-73»
явилась вибрация предохранительного клапана, вызвавшая утечку и
падение давления в системе [67, 91, 119].
Неисправности по насосам могут вызываться либо кавитацион-
ным срывом работы насоса, либо внутренними дефектами самого
насоса: неправильной установкой или поломками крыльчаток,
шнеков затиранием плавающих колец, неправильной установкой
упорных колец, поломками подшипников.
Неисправности, связанные с поломками шнеков, крыльчаток
насосов, приводят к изменению геометрии проточной части насоса,
а следовательно, к изменению напорной характеристики насоса.
Неисправности, связанные с поломками подшипников насосов,
затиранием плавающих колец приводят к увеличению момента
сопротивления насоса.
Кавитационный режим работы насоса обусловлен снижением
давления на входе в насос до значений, соответствующих
понижению напора насоса по кавитационной характеристике.
Это снижение входного давления может быть вызвано
различными причинами: появившейся негерметичностью питающей
магистрали, перекрытием питающей магистрали, неисправностями
системы наддува, повышением оборотов ТНА, загазованностью
компонентов, нарушением нормального подвода компонентов к
насосу, приводящим к неравномерности поля скоростей при входе
б рабочее колесо насоса, пульсациями жидкости в трубопроводах
' топливной системы в случае продольной неустойчивости ракеты.
Так, при запуске космического корабля «Аполлон-13»
вследствие резонанса продольных колебаний и пульсаций жидкости
давление в трубопроводах топливной системы падало ниже
допустимого уровня. Это привело к кавитации насоса жидкого кислорода,
снижению тяги, и преждевременному выключению центрального
ЖРД /-2 второй ступени ракеты «Сатурн-5» [65, 92].
Перекрытие питающей магистрали может возникнуть
вследствие неполного раскрытия мембран или мембранного клапана,
отрыва мембраны и попадания ее в рабочее колесо насоса,
случайного попадания постороннего предмета на вход в насос. В
системах, имеющих общий участок питающего трубопровода к марше-
150
вому и рулевому двигателям с разновременными командами на
запуск, в работе двигателей наблюдается явление, аналогичное
кратковременному появлению негерметичности. Это явление
наблюдается на двигателе, который запускается первым. Резкое
возрастание расхода по второму двигателю при запуске вызывает
снижение расхода по уже работающему двигателю, «провал»
давления на входе в насос этого двигателя и работу насоса в режиме
частичной кавитации, в связи с чем возникает кратковременное
понижение всех основных параметров работающего двигателя.
Неисправности турбины могут иметь место при прогарах
ротора, оглавлении соплового аппарата, при разрушении бандажа ро~
тора турбины и др.
Следует отметить, что появление неисправности одного вида
может повлечь за собой возникновение неисправности другого
вида. Так, например, негерметичность или перекрытие
гидравлических магистралей горючего двигателей с восстановительным
газогенератором может приводить к резкому возрастанию
температуры и прогару газовых трактов двигателя, оплавлениям
соплового аппарата турбины. Повышенная температура среды в
хвостовом отсеке может привести к преждевременному срабатыванию*
пироклапана отсечки компонента, а это в свою очередь вызвать
гидроудар и разрушение гидравлической магистрали.
Приведенные виды неисправностей не являются
всеобъемлющими, а рассматриваются как наиболее типичные.
7.2. ВЫЯСНЕНИЕ ПРИЧИН НЕИСПРАВНОСТЕЙ В РАБОТЕ ЖРД
Опыт отработки и эксплуатации ЖРД показывает, что
установление причины ненормальностей или аварийных исходов
испытаний в каждом конкретном случае требует индивидуального
подхода [7, 10,54].
При выяснении причины неисправности в работе двигателя
основными источниками информации являются результаты
телеметрических измерений по двигателю и смежным системам, внешне-
траекторные измерения, используют также материалы по работам
с ракетой, проводимым на технической и стартовой позициях, в
отдельных случаях привлекают кинодокументы пуска ракеты.
Наличие материальной части облегчает поиск, выяснение
причины неисправности, подсказывает пути проводимых работ.
Для установления причины неисправности или аварийного
исхода испытания ^проводится целая серия работ [7, 10, 64].
— анализ результатов измерений;
— осмотр и дефектоскопия материальной части;
— проверка технологических процессов узла и агрегатов топ>
же периода изготовления, что и прошедший испытания
экземпляр;
— анализ стендовых и летных испытаний, предшествующих
данному;
15L
— автономные испытания отдельных узлов и агрегатов;
— расчетные работы и моделирование процессов;
— имитация предполагаемых неисправностей на стенде.
Осмотр материальной части некоторых двигателей I ступеней
ракет дает возможность обнаруживать: прогары огневой стенки
камеры сгорания, газогенератора и других элементов двигателя,
оплавления, эрозию металла на входных патрубках насосов,
неправильное раскрытие мембран, разрушение отдельных узлов
двигателя, которые произошли до падения ступени. Кроме того,
осмотр позволяет по определенным признакам, таким как наклеп в
местах крепления к раме двигателя, наклеп в отсечных пирокла-
панах, отрыв подвижных элементов пироклапанов, раскрытие
цилиндрической части камеры сгорания и др., делать вывод о
наличии высокочастотных пульсаций в камере сгорания или
газогенераторе. По совокупности характерных признаков материальной
части могут быть сделаны важные выводы о имевшей место
неисправности.
В ходе выяснения причины аварийного исхода летного
испытания проводят экспериментальные работы, включающие в себя
дефектоскопию узлов, доставленных с места падения ракеты,
исследования в лабораториях химического состава металла,
автономные испытания узлов и агрегатов, гидро- и пневмоиспытания
сборок узлов двигателя того же периода изготовления, определяется
возможность разрушения отдельных узлов при статическом
подводе давления и лри имитации динамики заполнения трубопроводов,
проверяется прочность сильфонов, насосов, качество узлов
уплотнений и покрытий.
При выяснении причины неисправности анализируют и
материалы стендовых огневых испытаний, что позволяет в отдельных
случаях установить причину аварийного исхода в полете. Для
этого отбирают и анализируют те стендовые испытания, при
которых была зарегистрирована аналогичная картина протекания
процессов, что и при летном испытании [7, 10, 54].
Важным звеном при выяснении причины аварийного исхода
испытания являются расчеты. Они предполагают увязку основных
параметров ЖРД с целью подтверждения правильности
результатов измерений и аналитические исследования переходных
процессов и параметров установившегося режима работы двигателя в
предположении определенной неисправности.
Методически правильно проведенное аналитическое
исследование облегчает работу и позволяет сузить круг поиска возможных
причин аварий, отбросить некоторые версии как несостоятельные
и остановиться на наиболее вероятной, а в отдельных случаях (при
.достаточном объеме телеметрической информации) однозначно
установить причину [8, 48, 54].
Если характер переходного процесса и параметры нового
установившегося режима, зафиксированные при испытании,
соответствуют параметрам и характеру переходного процесса, полученным
152
расчетным путем в предположении определенной неисправности^
делается вывод о том, что эта неисправность явилась причиной
аварийного исхода летного испытания.
Воспроизведение в стендовых условиях характера
переходного процесса, возникшего в работе двигателя при летных
испытаниях (имитация), является завершающим этапом установления
причин аварийного исхода
испытания. Если при имитации
неисправности на стенде характер
переходного процесса и
параметры его установившегося
режима соответствуют
зафиксированным при летном
испытании, или близки к ним, то
делается вывод о причине
неисправности при летном
испытании (7, 54].
Имитация в стендовых ус-
условиях различных типов
неисправностей требует
проведения испытаний по
специальным программам и в отдельных
случаях серьезных доработок
экспериментального двигате-.
ля, которые бы позволили
воспроизвести неисправность.
Негерметичность магистра-
568,9
5291
430,5
157,0 ■
737,3
Щ7'
1
*~ ' J
4 7 '
1
!
78,5 г-
СП Q
О о,я
39,2
19,6
О
1
/
\ р
и
i
20 W
во
80 Время
Рис. 7.1. Давления в двигательной
установке посадочной ступени
ЛЭО-3 (начало работы):
/—гелий в бачке; 2—гелий на выходе из
блока регуляторов; 3—горючее на входе
в двигатель; 4—камера сгорания
ли можно имитировать
установкой на трубопроводе, где
предполагается
негерметичность, дополнительных пиро-
клапанов. Срабатыванием
этих пироклапанов в
определенные моменты работы
двигателя имитируют
негерметичность магистрали.
Перекрытие магистрали можно имитировать путем установки
дросселя или дополнительного жиклера в магистраль, в которой
предполагается неисправность. Имитацию полного перекрытия
можно обеспечить срабатыванием пироклапана отсечки
компонента.
Более сложным является воспроизведение неисправностей
насосов, агрегатов автоматики и турбин. Оно требует
конструктивных доработок этих агрегатов.
В некоторых случаях имитация в стендовых условиях является
единственным способом установления причины аварийного исхода
летного испытания ЖРД.
153
Приведем несколько примеров из практики по выяснению
причин неисправностей, имевших место в работе ЖРД.
По результатам измерений было установлено, что при летно-
конструкторских испытаниях двигательных установок лунного
экспедиционного отсека (ЛЭО-3) космического корабля «Аполлон-9»
с начала первого запуска двигательной установки посадочной сту-
лени отсутствовал наддув топливных баков вследствие закупорки
гелиевой магистрали (рис. 7.1). Это привело к нарушению
нормальной работы системы подачи вследствие снижения давления в
системе. Закупорка гелиевой линии устранилась лишь по истечении
5 с работы на режиме полной тяги, после чего давления в
двигательной установке поднялись до их нормальных уровней [10, 101,
111].
Температурные датчики гелиевой системы показали, что
приблизительно на 35-й секунде резко понизилась температура на
входе в регулятор, а также температура на входе и выходе
внутреннего (гелий—гелиевого) теплообменника (рис. 7.1). Этот
внезапный приток холодного гелия указал на устранение закупорки
гелиевой линии. Затем температура повысилась до нормального
уровня.
Последующее изучение причин неисправности двигательной
установки, проводимое в космическом центре Кеннеди, в частности,
проверка технологии обслуживания бачка с гелием, показало, что
давление в гелиевой линии может снизиться в некоторых случаях
до нуля, а это может привести к натеканию в магистраль воздуха
из окружающей среды.
Воспроизведение неисправности на экспериментальном
образце лунного экспедиционного отсека при испытаниях на стенде
показало, что наличие вакуума в гелиевой линии в течение
примерно 20 мин достаточно для того, чтобы заморозить и закупорить
теплообменник. На рис. 7.2 приведено сравнение результатов
летных испытаний ЛЭО-3 и стендовых испытаний
экспериментального образца [10, 101].
Во время второго запуска двигательной установки экипаж
космического корабля «Аполлон-9» отметил нестабильную работу
двигателя на уровне 27% тяги, которая длилась несколько секунд.
При выяснении причины неисправности (проводилась имитация
в стендовых условиях. Воспроизведение характера неисправности
проводилось с преднамеренной подачей гелия в
экспериментальный двигатель.
Сравнение переходных процессов, происходивших при полете,
и стендовых испытаниях с подачей гелия подтверждает
правильность установленной причины «неисправности (рис. 7.3).
Рост давлений в магистралях был обусловлен работой
стабилизаторов расхода в кавитационном режиме. Вследствие большого
освободившегося объема в топливных баках (60%), а также
поперечных и угловых ускорений космического корабля гелий,
по-видимому, попал в заборные устройства, а затем — в двигатель. Стен-
154
довые испытания показали, что попадание гелия в двигатель не
вызывает каких-либо дополнительных неполадок [10].-
В последние годы интенсивно ведутся работы, посвященные
исследованию аварийных состояний отдельных систем ракеты, r
том числе и двигателей и разработке систем автоматического
распознавания видов аварий при стендовых и летных испытаниях:
[98, 100, 112, 116].
Рис. 7.2. Результаты имитации:
О—ЛЭО-3; &—экспериментальный образец ЛЭО; режимы эксперимента
В докладах [94, 100] указывается, что одной из основных задач
ракетной техники, связанных с дальнейшим развитием
космических полетов, является создание диагностических систем с
автоматическим распознаванием неисправностей и предотвращением
аварий в полете. Разработано несколько экспериментальных
комплексов, состоящих из математических моделей отдельных систем^
находящихся в стадии экспериментальной отработки.
Действующая в настоящее время система «Марк 7А»
предназначена для прогнозирования и для моделирования различных
полетных состояний и характеристик двигательной установки I
ступени ракеты-носителя «Сатурн-5». Система позволяет
моделировать отказы [8, 116].
По существу математическая модель «Марк 7А» описывает
установившийся режим работы двигательной установки с
нормализованными величинами для переходных процессов. В модели
используются коэффициенты влияния. С их помощью вычисляют-
155
<ся характеристики двигателя на нерасчетных режимах. В модель
включены соответствующие модели всех систем, оказывающих
влияние на входные параметры двигателя. По программе вычисля-
* is?,o
<§ 117, 7
I Щ5
I 33,2
л
г з о
Время7 с
а)
Рис. 7.3. Нестабильность работы двигателя посадочной ступени:
«а—давление окислителя на входе в форсуночную головку; б—давление горючего на
входе в форсуночную головку; в—давление в камере; ЛЭО-3; наземные
испытания с подачей гелия
ется тяга, секундные расходы компонентов топлива, давления,
уровни компонентов в баках, время отсечки двигателя и т. д.
Математические модели системы «Марк 7А» основаны на
данных приемочных испытаний двигателей, 15 испытаний опытной
ступени 5—1с, огневых испытаний двигателей в составе ступени
и на данных летных испытаний.
7.3. ДИНАМИЧЕСКАЯ МОДЕЛЬ ДВИГАТЕЛЬНОЙ УСТАНОВКИ
Для анализа динамики процессов, возникающих в ЖРД при
появлении неисправности, и выяснения первопричины, вызвавшей
эту неисправность проводятся аналитические исследования
переходных процессов и параметров установившихся режимов работы
двигателя до и после появления неисправности.
При теоретических исследованиях динамических характеристик
двигательная установка рассматривается в виде математической
модели, представленной системой дифференциальных уравнений,
описывающих динамические процессы в отдельных агрегатах
двигательной установки.
Поскольку при появлении неисправности наблюдаются
значительные отклонения параметров от расчетного значения, при
расчетах переходных процессов необходимо использовать нелинейные
дифференциальные уравнения. В случае, если наблюдаются
малые отклонения параметров, нелинейные уравнения агрегатов
можно использовать в линеаризованном виде [22].
Система нелинейных дифференциальных уравнений,
описывающих динамические процессы в отдельных агрегатах ЖРД, пред-
156
ставляет собой динамическую модель двигателя. Вывод
уравнений, описывающих работу отдельных агрегатов при переходных
процессах, приводить не будем, поскольку они достаточно полно
рассмотрены в имеющейся литературе [22, 54, 55].
1. Уравнение камеры сгорания
Ук dpK pKvK d (RT)K
(RT)K dt (RT)2K dt
= G0(t- unp) + Gr (t - tIip) - AK -7== . (7.
У (a/ ;k
где pK —давление в камере сгорания,
vl{ — объем огневого пространства камеры,
(RT)K— работоспособность газа в камере,
G0Gr — расход окислителя и горючего в камеру сгорания,
Рк ^ко
Ак — — секундный расход продуктов сгорания из камеры.
х + 1
X—1
х — показатель процесса расширения газа в камере.
Работоспособность газа в камере (RT)K и показатель процесса расширения
х — сложные функции для данного рода топлива, зависящие от соотношения
компонентов топлива k и давления в камере сгорания рк, (RT)v=(RT)K(k, /?к),
х = к(&, лк), причем определяющее влияние оказывает коэффициент соотноше-
яия компонентов топлива k= -7—. Производная работоспособности газа опреде-
ляется следующим образом:
d(RT)K d(RT)K d^ d(RT)K dpK
dt dk dt dpK dt
dk
Локальная производная — характеризует изменение соотношения ком-
dt
понентов во времени и определяется режимом работы системы подачи:
dG0 dGr
Gr — Go
dk _ dt dt
dt 0%
г
В двигателях с дожиганием продуктов газогенерации уравнение динамики
камеры сгорания сохраняет вид уравнения (7.1), с введением в его правую
часть нового члена
Ук dpK pKvK d(RT)K
(RT)K dt ~(RTfK dt -C'°('-*IIp) +
(7.2)
п.. F..~
+ GT(t — тпр) + G& — AK -
где йф — расход продуктов газогенерации, поступающий через газовые
форсунки камеры сгорания
157
(7.3)
где \i — коэффициент расхода форсунки,
Хгг — показатель процесса расширения в газогенераторе,
Fj, ф — суммарная площадь проходных сечений форсунок,
ргм — давление в газовой магистрали,
(RT)Tm — работоспособность продуктов газогенерации в газовой магистрали.
Для двигателей с дожиганием, выполненным по предельной схеме, в
уравнении 7.2 будет отсутствовать один из членов, отражающих приход в камеру
соответствующего компонента. Для двигателей с дожиганием восстановительных
продуктов газогенерации—GT(t — тпр), с дожиганием окислительных продуктов
газогенерации G0(t — тпр).
2. Уравнение газовой магистрали
(7.4)
где vTM — объем газовой магистрали.
Работоспособность продуктов газогенерации в газовой магистрали
определяется следующей зависимостью через работоспособность газа в турбине (RT)t.
5lZl ф. ,,„ (7.5)
где т]т — коэффициент полезного действия турбины,
Сад — адиабатическая скорость истечения газа из сопел турбины
(= ]/ 2_^!_ iRT)r !-(£*-) "" , (7.6)
где ргт — давление в газогенераторе.
Приход газа в газовую магистраль определяется расходом газа через
турбину GT, величина которого зависит от вида истечения
для (док|ритическото истечения
/2 [" 1- УГ+1 I
2_^I_ J^ /A_MN «„ _ /£гм \"VT ; (7.7)
*гг-1 («Пт LUr/ \Ргг) J
для сверхкритического истечения
(7.8)
Для схемы без дожигания продуктов газогенерации /?гм определяется
давлением окружающей среды p0KV.
3. Уравнение газогенератора
^гг d(RT)rr _ рггугг d (RT)rr _
(RT)rr dt (RT)2rr dt
= go(t- rnp) + gr(t- vnv) - GT, (7.9)
где иГг— объем огневого пространста газогенератора,
158
(RT)rr — работоспособность продуктов газогенерацик,
go, gr — секундный расход окислителя и горючего в газогенератор.
d(RT)rr = d(RT)rr dkrr д (RT)rr dprr
dt ~~ dkrr dt дргг dt '
dgo _ dgT
dkTT gr dt go dt
dt g\
где Ti — время пребывания в газогенераторе,
(RT)TV(t — ti)—работоспособность газа у головки газогенератора.
4. Уравнение насосов
Рвъш - Рвх i = At"2 - BinG^ - CtGiv (7. 10)
рвых и Овх i — давление на выходе и входе в насос;
п— частота вращения ротора ТНЛ;
Лг-, В,, Ci — коэффициенты, соответственно характеризующие влияние на
напор насоса размеров рабочего колеса, геометрии проточной
части, гидравлических потерь и входного и выходного
патрубков.
G,s — расход i-того компонента через насос.
Рн = (Рвых i — Рвх i) ек>
где 8К — коэффициент, характеризующий глубину кавитации
d4 _ £кТ ~ е* (7Л1)
dt тн
где тн — время пребывания жидкости в насосе:
Массовый объем жидкости в насосе определяется через объем насоса
QH = vhq.
Статическая глубина кавитации определяется из экспериментальной кавита-
ционной характеристики
1 при рвк>Ркр
<р — ^вх)2
^"ПРИ Рк?>Рвх>Рс-
(Ркр — Рс)2
Значение давления на входе в насос, при котором насос начинает кавити-
ровать /?кр, зависит от числа оборотов ТНА и расхода компонента
Ркр = / (л, G£),
vc — давление, соответствующее срыву работы насоса.
159
5. Уравнение турбонасосного агрегата
где / — момент инерции ротора ТНА.
6. Уравнение мощности турбины и насосов
NT= GTLTy\T или NT— GTNyл; (7. 13)
,т=От1т-**-(*Г)т 1- £™ »гр • (7.14)
*гг ~ * L \ Ргг/ J
Коэффициент полезного действия турбины является функцией отношения —.
() (7.15)
Мощность, потребляемая насосом
NHi= ^^-^ , (7.16)
где т]н г — коэффициент полезного действия насоса
зг — константы;
7. Уравнения гидравлических магистралей
Без учета сжимаемости жидкости уравнение гидравлической магистрали
имеет вид [57]
dG
Pi-P2= a®2 + Ь — - Put. (7. 17)
где pit p2 — давления на входе и выходе из гидравлической магистрали;
рм i — давление массовых сил столба жидкости;
а — коэффициент гидравлического сопротивления.
где g — коэффициент потерь,
Fi, F2 — площадь гидравлической магистрали на входе и выходе,
Ъ — коэффициент инерционных потерь
Ь (7.19)
Для гидравлической магистрали с регулирующими органами уравнение
динамики гидравлической магистрали запишется следующим образом:
—
В этом случае коэффициент гидравлического сопротивления величина
переменная, зависящая от перемещения регулирующего органа х.
160
8. Уравнение регулирующего органа
Уравнение движения любой механической системы записывается на
основании принципа Д'Аламбера:
pi — сумма сил, действующая на подвижную систему.
Уравнение движения регулирующего органа представляет собой
дифференциальное уравнение, связывающее перемещение регулирующего органа,
параметры гидравлической магистрали и автоматического устройства, обеспечивающего
это перемещение [57].
т — + /т— = АЛ.эф + Рсо —СХ — Р2 (/^.эф - ^шт) — P\Fx>
где т— приведенная масса движущихся частей регулятора;
х— перемещение регулирующего органа;
ри — давление настройки регулятора;
Ри р2 — входное и выходное давление гидравлической магистрали;
Fc. эф — эффективная площадь сильфона;
^шт — площадь штока регулирующего органа;
Fx — текущая площадь иглы регулирующего органа;
Рсо — суммарное начальное поджатие пружины и сильфона при л = 0;
с — суммарная жесткость пружины и сильфона.
Пр,и моделировании различных типов переходных процессов
необходимо учитывать специфические особенности их протекания
в двигателе. Эти особенности должны учитываться в общей
системе нелинейных дифференциальных уравнений, составляющих
динамическую модель двигателя.
При расчете переходных процессов при аварийных ситуациях
динамическая модель нормально работающего двигателя должна
быть дополнена моделями основных неисправностей.
7.4. МОДЕЛИ НЕИСПРАВНОСТЕЙ ЖРД И МЕТОДИКА РАСЧЕТА
ПЕРЕХОДНЫХ ПРОЦЕССОВ
Модели неисправностей ЖРД составим на основе
определенных представлений о физической картине и количественных
изменениях, происходящих в каждом отдельном элементе двигателя
при появлении неисправности [54].
Полное или частичное перекрытие гидравлической магистрали
моделируется увеличением коэффициента гидравлического
сопротивления определенного участка магистрали, соответствующим
возрастанию перепада давления на данном участке вследствие
уменьшения его проходного сечения. При постепенном перекрытии
магистрали задается закон нарастания по времени коэффициента
гидравлического сопротивления определенного участка
магистрали.
При возникновении негерметичности газовых магистралей
вследствие разрушения или прогара через образовавшееся
отверстие газ начинает истекать в окружающую среду. Моделирование
отказа этого типа предусматривает видоизменение уравнения га-
6 2227 161
зовой магистрали, выражающееся в появлении нового члена,
отражающего утечку газа. Давление окружающей среды при
стендовых и летных испытаниях ра<98,0665 кН/м2 (ра=^1 кгс/см2),
поэтому практически всегда будет реализоваться
сверхкритическое истечение газа -из образовавшегося в емкости отверстия:
Q =^^уЦ_1\^~ (7.22)
где .Ротв — площадь образовавшегося в емкости отверстия;
\х — коэффициент расхода газа при истечении из отверстия;
Gy — расход утекающего из емкости газа;
р — давление в соответствующей емкости;
RT — работоспособность газа в емкости.
В связи с этим, например, в случае прогара и утечки газа из
газогенератора уравнение газогенератора запишется в виде
Ргг dPrr __ РГГ/7ГГ d (RTJrr __
(RT?rr dt
^>. (7.23)
Аналогично записываются и уравнения других газовых
емкостей при возникновении негерметичности.
При авариях, обусловленных изменением качества
смесеобразования, уменьшается действительное значение расходного комп- #
лекса, вследствие уменьшения ¥к=~^ коэффициента камеры,
где р* — теоретический расходный комплекс. В этом случае
необходимо пересчитать зависимость р=/(&) или RT=f(k) с учетом
снижения значения коэффициента камеры.
Проводить теоретическое исследование, связанное с кавитаци-
онным срывом работы насоса, можно, если в общей системе
уравнений динамики двигателя учтены питающие магистрали от бака
до входа в насос, а также динамика кавитационных явление.
Причем, приближенный учет кавитации в этом случае дает только
качественную картину. Чтобы получить количественное
совпадение с экспериментом, необходимо учитывать размеры казитацион-
ных каверн, зависимость объемов кавитационных каверн от числа
кавитации (давления на входе в насос) [20].
Если кавитационному срыву предшествует какая-то другая
неисправность: перекрытие питающей магистрали или
негерметичность и, как следствие, понижение давления на входе в насос и
напора, создаваемого насосом, то в системе уравнений динамики
двигателя должны найти отражение эти первопричины:
необходимо или увеличить значение коэффициента гидравлического
сопротивления питающей магистрали, или ввести дополнительное урав-
162
нение гидравлической магистрали утечки, появившейся вследствие
разрушения питающей магистрали.
Поломки подшипников насосов, затирание плавающих колец
приводят к увеличению момента сопротивления насоса, которое
может быть получено за счет снижения к. п. д. насоса. Этот вид
неисправностей можно имитировать -понижением к. п. д. насоса,
яадавая т]н=0,8 г)н* (где т]н* — номинальное значение к. п. д.
данного насоса).
Неисправности, связанные с дефектами самого насоса —
поломка крыльчаток, шнеков, приводят к изменению геометрии
проточной части насоса, а следовательно, к изменению напорной
характеристики насоса.
Неисправности турбины (оплавление лопаток турбины, прогар
ротора турбины) вызывают изменение геометрических размеров
каналов сопел, изменяют условия газодинамического течения
в соплах турбины, что приводит к изменению скорости истечения
газов из сопел турбины и в конечном итоге вызывает понижение
к. п. д. и уменьшение располагаемой мощности турбины. При
математическом описании неисправностей подобного типа можно
задавать изменение суммарной площади сопел турбины (iiFT)y
или уменьшение к. п. д. турбины. Разрушение бандажа ротора
турбины вызывает резкое торможение ротора ТНА вследствие
увеличения момента трения на валу турбины и снижения т)т из-за
появления дополнительных концевых потерь и увеличения потерь на
перетекание через увеличенный при отрыве бандажа зазор. Этот
вид неисправностей можно учитывать понижением к. п. д.
турбины или введением дополнительного члена в уравнение ТНА:
A^=NT-No-Nr-NTP A=/-|L. (7.24)
При поломке рессоры работу ТНА можно описать двумя
уравнениями:
^=NT-N0; (7.25)
^ = -Nt. (7.26)
at
В начальный момент щ=п2 и соответствуют значению частоты
вращения вала ТНА до возникновения неисправности.
При разрушении гидравлической магистрали или при
возникновении негерметичности появляется новый расход—утечка,
являющийся переменной во времени величиной и определяющийся
размером отверстия, через которое происходит утечка компонента, и
перепадом давления, обеспечивающим истечение. При разрушении
гидравлической магистрали истечение происходит в окружающую
среду с давлением ра, являющимся в общем случае величиной
переменной, зависящей от высоты подъема изделия ра = /(#).
Будем рассматривать место разрушения как новый узел в
гидравлической системе двигателя.
6* 163
Для определения величины утекающего из магистрали
расхода Gy=f(t) к уравнениям магистралей нормально работающего
двигателя нужно добавить еще одно уравнение, отражающее как
бы появление новой гидравлической магистрали (бак — место
разрушения).
При составлении этого уравнения,
кроме гидравлического сопротивления
тракта двигателя до места
разрушения, необходимо учитывать
сопротивление жидкости при истечении из
отверстия. Коэффициент
гидравлического сопротивления в этом случае
определится как
(7.27)
где F0TB — площадь отверстия,
образовавшегося при
разрушении;
\х — коэффициент расход при
истечении жидкости из
отверстия.
В уравнении гидравлической
магистрали, в которой произошло
разрушение, потери на участке от бака до
места разрушения, необходимо
определять с учетом расхода утечки, так
как до места разрушения идет
суммарный расход G = G0+Gy, включающий
в себя как расход утечки, так и расход
по магистрали двигателя после места
разрушения. Поскольку
гидравлические магистрали двигателя
представляют собой многоузловую
разветвленную систему трубопроводов, то
утекающий из магистрали расход должен
учитываться также в уравнениях тех
магистралей двигателя, которые имеют
общий участок трубопроводов с
магистралью, в которой произошло разру*
шение, что соответствует дополнительным потерям давления на
этих участках, а также в уравнениях мощности и напора насоса.
Поясним сказанное на простейшем примере. Допустим, произошло
разрушение магистрали на участке от места отбора на газогенератор до камеры
сгорания (|рис. 7.4). Через камеру идет расход Go, через газогенератор g0, в М'омент
разрушения через образовавшееся отверстие начинает утекать расход GY.
Гидромагистраль от бака до камеры сгорания состоит из ряда участков:
— от бака до входа в насос с расходом (Go+go + GY) и коэффициентами
гидросопротивления и инерционных потерь а0, Ьо\
164
Рис. 7.4. Простейшая схема
гидравлических
магистралей
— от насоса до места отбора на газогенератор с расходом (G0-rg0 + GY) и
коэффициентами гидросопротивления и инерционных потерь аг, Ь\\
— от места отбора на газогенератор до места разрушения с расходом
Go + Gy и коэффициентом гидросопротивления и инерционных потерь аг, &г;
— от места разрушения до камеры сгорания с расходом Go и
коэффициентами гидросопротивления и инерционных потерь аз, #з.
В связи с чем уравнение гидравлической магистрали камеры сгорания
будет иметь вид:
Рб + ShQ - (oq + аг) (Go + go
- а2 (Go + Gy)2 - b2 (^2- + ^L j _ азО2 _
(7.28)
Гидравлическая магистраль от бака до газогенератора также состоит из
ряда участков, причем от бака до входа в насос и от насоса до точки
разветвления на камеру и газогенератор. Эта гидромагистраль имеет общие участки
с гидромагистралью камеры сгорания и характеризуется теми же расходами и
коэффициентами. Участок от точки разветвления до газогенератора
характеризуется расходом go и коэффициентами гидросопротивления и инерционных
потерь а4, bk.
Уравнение гидр о магистр а ли от бака до газогенератора
Рб + gbQ - (я0 + *i) (Go + go + Gy)2 -
+ />н.о - a4gl -Ь4-^--ргт = 0. (7.29)
Дополнительно к этим уравнениям следует записать уравнение новой
гидравлической магистрали от бака до места разрушения.
Обозначим давление окружающей среды, куда происходит утечка
компонента— ра, коэффициент гидравлического сопротивления при истечении
компонента из образовавшегося отверстия ау.
С учетом этого, уравнение новой гидравлической магистрали утечки
запишется как
Рб + Qgh - (а0 + а{) (Go + go + Gy)2 - (*о + *i) X
dt dt ) y dt
Коэффициент гидравлического сопротивления при истечении компонента
через образовавшееся отверстие
Коэффициент расхода \х зависит от ряда факторов: формы отверстия,
состояния входных кромок, совершенства сжатия, числа Рейнольдса, напора,
диаметра отверстия, противодавления окружающей среды и т. д.
165
Методика расчета переходных процессов при неисправностях
основывается на решении системы нелинейных дифференциальных
уравнений, описывающих динамику двигателя с учетом моделей
неисправностей. Система уравнений решается численным
интегрированием по методу Эйлера или Рунге—Кутта на ЭВЦМ.
Из опыта стендовых и летных испытаний ЖРД известно, что
маловероятно одновременное возникновение двух независимых
отказов двигателя. Однако, систему уравнений и программу на
ЭВЦМ целесообразно составлять для одновременной реализации
всех видов неисправностей. В такой постановке каждый
конкретный вариант получается из общей системы путем задания
определенных логических коэффициентов и исключает необходимость
переделок программы в каждом конкретном случае.
Начальными условиями при расчете переходных процессов,
являются параметры установившегося режима, который
предшествовал появлению неисправности, и конкретные условия аварийной
ситуации: величина снижения к. п. д., размер образовавшегося
отверстия [л^отв, коэффициент гидравлического сопротивления
и т. д.
Перекрытие магистрали, происходящее по ступенчатому
закону, задается увеличенным по сравнению с номинальным
значением коэффициентом гидравлического сопротивления
определенного участка магистрали. При постепенном перекрытии магистрали
задается закон нарастания во времени коэффициента
гидравлического сопротивления определенного участка магистрали.
Поскольку гидравлические магистрали двигателя обычно
представляют собой многоузловую разветвленную систему
трубопроводов, изменение места разрушения гидравлического тракта
двигателя, связанное с перенесением через узел (точку отбора какого-
нибудь расхода на определенный агрегат двигателя), обязательно
потребует внесения изменений в программу. Чтобы избежать
этого, в программе нужно предусмотреть места разрушения после
каждого узла гидравлической системы. Это приводит к тому, что
расчетная схема получается более разветвленной, чем
действительная гидравлическая схема двигателя, так как добавляются
новые ответвления в местах возможных разрушений. Причем,
систему уравнений, описывающих динамику гидравлических
магистралей, приходится решать совместно, чтобы найти в явном виде
значения производных по расходу.
7.5. АНАЛИЗ НЕИСПРАВНОСТЕЙ В РАБОТЕ ДВИГАТЕЛЕЙ
Появление любой неисправности в двигателе вызывает
переходный процесс и изменение параметров, характеризующих его
работу. Отклонения параметров от расчетных значений могут быть
различными в зависимости от степени неисправности.
Неисправности в работе двигателя могут:
166
— не оказывать существенного влияния на работу смежных
систем и полет ракеты в целом;
— приводить смежные системы к предельным режимам работы
и к частичному выполнению программы полета;
— вызывать ненормальные условия работы, повреждения,
разрушения и, как следствие, невыполнение полетной программы.
В качестве признаков состояния ЖРД будем рассматривать
измеряемые параметры двигателя.
Характер протекания переходного процесса при появлении
неисправности зависит от схемных, конструктивных особенностей
двигателя, от типа неисправности и места ее возникновения.
Появление одной и той же неисправности в двигателях с
дожиганием и без дожигания продуктов газогенерации в отдельных
случаях может приводить к совершенно различному протеканию
переходного процесса. Так, например, при возникновении пере-
. крытия или негерметичности магистралей окислителя или
горючего камеры сгорания (после точки отбора на газогенератор) в
ЖРД без дожигания продуктов газогенерации происходит
снижение всех режимных параметров, особенно значительное при
негерметичности магистрали. При возникновении негерметичности
магистрали окислителя камеры сгорания в двигателях с дожиганием
восстановительных продуктов газогенерации илчи магистрали
горючего в двигателях с дожиганием окислительного газа проявляются
специфические свойства, присущие этим схемам, связанные с
непосредственным влиянием камеры сгорания, как противодавления
турбины.
Увеличение степени расширения газа на турбине и связанной с
ней располагаемой мощности турбины приводит к форсированию
режима работы двигателя. Ограничением для форсирования
режима работы двигателя является переход насосов на режим
частичной кавитации, а также понижение kTV до значений, соответствую-
ющих резкому снижению работоспособности продуктов
газогенерации.
При возникновении неисправностей различных типов
переходные процессы существенно отличаются друг от друга. Тем не
менее различные типы неисправностей могут привести к одинаковым
значениям параметров нового установившегося режима. Но даже
в тех случаях, когда параметры установившегося режима работы
при различных неисправностях практически не отличаются,
переходные процессы отличаются значительно. На рис. 7.5 приведены
совмещенные графики переходных процессов по основным
параметрам двигателя с дожиганием восстановительных продуктов
газогенерации для следующих неисправностей: перекрытия
гидравлической магистрали окислителя за насосом, негерметичности
этой же магистрали и понижения коэффициента полезного
действия насоса окислителя. Эти неисправности приводят к
установлению на двигателе практически одинаковых параметров
установившегося режима работы. В то же время по параметрам расход
167
W
0,9
0,85
\
V
V
о
^^
•——.
—o—
/2
V
——.
—^
—o—
Prr
1,0
0,9
0,8
0,01 0,01 0,03 0,04 0,05 0,06 0,07 0,08 0,091,С
a)
0,01 0,01 0,03 0,04- 0,05 0,06 0,07 0,08 0,09 0,1 t,c
S)
V
J^^—-
,1
1
-^—^
■—■
0,01 0,01 0,03 0,04 0,05 0,06 0,07 0,08 009 0,11с
в)
Рис. 7.5. Сравнение переходных процессов, возникающих при
различных неисправностях:
/—перекрытие гидравлической магистрали «О»; 2—негерметичность
гидравлической магистрали «О»; 3—уменьшение к. п. д. насоса «О»
168
окислителя в камеру сгорания — Go, расход горючего через насос —
Gr2, давление в газогенераторе — ргг, переходные процессы
значительно отличаются.
Характер переходного процесса при неисправностях в ЖРД
существенно зависит от типа регулирующих устройств. Причем,
регулирующие органы влияют и на количественную и на
качественную стороны переходного
процесса. Как правило,
при возникновении
неисправности происходит
значительное изменение
режима работы ЖРД.
Поэтому характер
протекания переходного
процесса в значительной
степени будет зависеть от
выбранного диапазона
регулирования и
достаточности перепада на
регулирующем
органе.
Если неисправность
приводит к
возникновению переходного
процесса, но при этом
отклонение регулируемого
параметра не выходит за
диапазон регулирования, то
регулирующий орган
отрабатывает возмущение,
вследствие чего на
двигателе восстанавливается
Qt3t,c
Рис. 7.6. Переходный процесс,
возникающий при перекрытии участка
гидравлической магистрали окислителя от точки
разветвления на газогенератор до камеры
сгорания
первоначальный режим
работы по всем основным
параметрам ЖРД. При
значительных
возмущениях регулирующие органы
компенсируют вызванные отклонения в пределах диапазонов
регулирования, в связи с чем режим работы двигателя
обеспечивается более высоким по сравнению с нерегулируемым двигателем.
Степень неисправности оказывает существенное влияние на
протекание переходного процесса в ЖРД. С увеличением степени
неисправности увеличивается и отклонение параметров двигателя
от первоначальных значений, но характер переходного процесса
при этом обычно не изменяется. Однако в некоторых случаях
характер переходного процесса может меняться с увеличением
степени неисправности. Это характерно для ЖРД, оснащенных
системой регулирования. Если неисправность не приводит к выходу за
169
диапазон регулирования, имеет место определенный характер
переходного процесса. При выходе за диапазон регулирования —
характер /переходного процесса меняется.
Изменение места возникновения неисправности в
гидравлических магистралях двигателя в некоторых случаях может
приводить к совершенно иному характеру переходного процесса.
Например, перекрытие участка магистрали горючего от насоса до
точки отбора на газогенератор в схеме с дожиганием
окислительных продуктов газогенерации приводит к дросселированию
режима работы, в то время, как возникновение перекрытия этой же
магистрали после точки отбора на газогенератор вызывает
форсирование режима работы двигателя (до определенной величины).
В регулируемых двигателях принципиальное значение имеет
место возникновения неисправности: до или после точек отбора на
регулирующие органы (до или после регулирующих органов).
Если неисправность возникает до точки отбора на регулирующий
орган, регулирующее устройство в состоянии отработать возмущение.
Если же неисправность возникает после точек отбора на
регулирующий орган, работа регулирующих устройств усугубляет
неисправность.
Таковы некоторые общие закономерности в протекании
процессов при возникновении неисправностей различных типов в
различных местах двигателей разных схем.
Для каждого типа двигателей характерны свои особенности в
протекании переходных процессов при различных неисправностях.
Так например для двигателя с дожиганием восстановительных
продуктов газогенерации при возникновении перекрытия данного
участка магистрали окислителя резко уменьшается расход
в камеру сгорания — Go и возрастает расход в газогенератор —
g0. Давление в камере сгорания рк понижается. Давление в
газогенераторе возрастает как за счет увеличения расхода, так и за счет
увеличения соотношения компонентов топлива £гг—, приводящего
g
к росту работоспособности продуктов газогенерации
Поскольку давление в камере является противодавлением для
турбины, его понижение при возрастании давления в
газогенераторе вызывает резкое увеличение степени расширения газа на
турбине ят=г —±г и связанной с ней располагаемой мощности тур-
Рк
бины NT.
Увеличение NTj а также снижение потребляемой мощности
насоса окислителя No вследствие уменьшения расхода окислителя
Go, приводят к увеличению частоты вращения ТНА. Увеличение
частоты вращения ротора ТНА вызывает рост напоров насосов,
расходов компонентов топлива Gos и GrS, давления в
газогенераторе и камере сгорания. Двигатель выходит на режим,
форсированный по отношению к предшествующему неисправности (рис.
7.6).
170
Более подробно исследование переходных процессов в
регулируемых и нерегулируемых ЖРД при возникновении различных
неисправностей приведено в работе [54].
ГЛАВА 8
АНАЛИЗ НАДЕЖНОСТИ ЖРД С УЧЕТОМ
РЕЗУЛЬТАТОВ ЛЕТНЫХ ИСПЫТАНИЙ
8.1. ОБЩИЕ ПОЛОЖЕНИЯ. ПРИНЦИПЫ ПОСТРОЕНИЯ СТРУКТУРНО-
ФУНКЦИОНАЛЬНОЙ СХЕМЫ АНАЛИЗА НАДЕЖНОСТИ ЖРД
Под надежностью двигателя понимается его свойство
выполнять заданные функции, сохраняя свои эксплуатационные
показатели в заданных пределах в течение требуемого промежутка
времени или требуемой .наработки [62]. Надежность двигателей
однократного применения обусловливается их безотказностью и
сохраняемостью, а двигателей многократного применения — также
долговечностью и ремонтопригодностью.
В большинстве случаев ЖРД представляют собой невосстанав-
ливаемые системы однократного применения. Как известно,
наиболее важной характеристикой надежности систем такого класса
является их безотказность, т. е. свойство выполнять заданные
функции с выходными параметрами, установленными требованиями
технической документации. Соответственно под отказом
понимается такое явление, при котором вследствие разрушения
конструкции или недопустимого отклонения характеристик рабочих
процессов двигатель не выполняет возложенные на него функции.
Математический аппарат теории надежности базируется,
главным образом, на вероятностно-статистических методах,
поскольку сам процесс появления отказов технических систем по
своей физической природе носит вероятностный характер.
Поэтому основным критерием надежности ЖРД является вероятность
безотказной работы в течение заданной циклограммы работы.
Проблема исследования надежности ЖРД носит комплексный
многоплановый характер. Она включает в себя как вопросы
методического обеспечения, так и вопросы организации работ на
всех этапах создания ЖРД (проектирование, отработка,
производство) и его эксплуатации (хранение, транспортировка, подготовка
к работе и т. д.).
Комплекс методических и организационных мероприятий,
направленных на создание конструкции с требуемым уровнем
надежности регламентируется специальными программами обеспечения
надежности [77]. Задачи надежности на различных стадиях
создания ЖРД отличаются друг от друга, однако непременным
условием их успешного решения является воззрение на количественные
показатели надежности как на основной критерий для принятия
171
решений о направлении дальнейших работ и о возможности
перехода к очередным этапам создания двигателя.
Чтобы показатели надежности служили доказательной и
объективной основой для принятия указанных решений необходимо
выполнение как минимум двух условий:
— должны предъявляться количественные требования к
надежности ЖРД;
— методы анализа надежности должны обладать необходимой
точностью и достоверностью.
В данном случае показатели надежности нас интересуют как
критерий принятия решения о возможности перехода к этапу
летных испытаний, а затем, после реализации программы летных
испытаний — к этапу серийного производства двигателя. В связи
с этим рассмотрим методы определения надежности по
результатам стендовой отработки и их последующего уточнения с
использованием информации этапа летных испытаний.
На первых этапах развития теории надежности, ее методы, по
сути дела, базировались на представлении сложной системы в
виде символической модели «черного ящика». Такая модель не
учитывает внутреннее содержание системы, и описание ее поведения
связывается только с двумя группами функций и
характеризующих эти функции параметров — «входа» (внешние воздействия,
или условия функционирования) и «выхода» (исполнительные
реакции системы, или выходные функции). «Выход»
рассматривается как функция «входа». Условие функционирования ЖРД
характеризуется давлениями и температурами компонентов топлива на
входах в насосы, спектром вибраций конструкции, давлением
окружающей среды, степенью газонасыщения компонентов топлива
и т. д. К числу наиболее важных выходных параметров относятся
тяга, удельный импульс, массовое соотношение компонентов
топлива, временные характеристики запуска, переходных режимов,
выключения, импульс последействия тяги и т. д.
Задача исследования надежности в этом случае состоит в
определении методами математической статистики вероятности
пребывания многомерного вектора «выхода» Xх <в заданных пределах
х* в течение заданного времени тз при условии, что и вектор
внешних воздействий Е находится в заданных пределах е*.
Для определенности в дальнейшем будем полагать, что на
параметры накладывается лишь одностороннее ограничение по
нижнему пределу. Поэтому условие поставленной задачи можно
записать в виде
или Р= Вер (!>>/£> Г*)
1 Случайные векторы (величины) принято обозначать строчными буквами
латинского алфавита, а их конкретные значения соответствующими
прописными буквами.
172
где U=X—х*— запас работоспособности двигателя по вектору
«выхода». Наиболее просто такая задача решается путем
качественной классификации результатов испытаний на успешные и
отказы. Под успешным испытанием понимается пребывание
многомерного вектора «выхода» в заданных пределах, соответственно
под отказом — выход любой из составляющих вектора за
установленные пределы.
Вместе с тем, этот метод обладает тем существенным
недостатком, что требует большого объема испытаний штатных
двигателей для подтверждения требуемых уровней надежности. Так,
для подтверждения нижней границы вероятности безотказной
работы Рн^0,99 при доверительной вероятности у = 0,95 необходима
провести iV«300 безотказных испытаний систем. Как правило, к
моменту завершения отработки ЖРД таким объемом испытаний
не располагают. Кроме того, неперспективность конструкции в
этом случае обнаруживается только при появлении отказов, что
снижает оперативность принятия мер по обеспечению
надежности. Поэтому дальнейшее развитие методов анализа надежности
происходило в направлении использования количественной
информации о параметрах.
Без существенного нарушения общности будем далее
проводить рассуждения для одного параметра «выхода», например, для
силы тяги.
Параметр «выхода» в фиксированные моменты времени
является случайной величиной, непрерывная совокупность которых
формирует случайный процесс изменения вектора во времени.
Использование количественной инфорамции о случайном
процессе позволяет оценить искомую вероятность пребывания
вектора «выхода» в установленных пределах в течение заданного
времени, например, путем применения моделей расчета типа
«нагрузка—'прочность», «нагрузка—прочность—время» и др. [58].
Основное преимущество этих методов заключается в сокращении
требуемого объема испытаний штатных систем до 25—30 экспериментов
и менее. Вместе с тем эффективность их применения в большой
степени зависит от точности и достоверности установления вида
законов распределения выходных параметров и их числовых
характеристик. Однако решение этой задачи, как правило,
сопряжено со значительными трудностями, поскольку закон распределения
выходных параметров представляет собой суперпозицию
распределений, обусловленных действием негрубых и грубых факторов
[11]. Если факторы первой категории формируют статистически
устойчивую компоненту финального закона распределения,
поддающуюся аппроксимации теоретическим распределением, то
действие факторов второй категории создает статистически
неустойчивую, неупорядоченную, трудно поддающуюся аппроксимации
компоненту (рис. 8.1). Прогноз надежности, основанный на
статистически неустойчивых законах распределения может оказаться
173
слишком грубым. Выход из такой ситуации находят в том, что
составляющие надежности, обусловленные действием указанных
двух категорий факторов, вначале исследуют отдельно, а затем
полученные оценки вероятностей безотказной работы определенным
образом объединяют. Составляющую надежности, связанную с
факторами первой категории, принято называть параметрической,
а с факторами второй категории — функциональной (наряду с
термином «функциональная надежность» употребляется также
термин «добротность»).
Рис. 8.1. Пример гистограммы распределения выходного параметра с учетом
влияния грубых факторов
Однако, такой подход не решает проблему полностью. Дело в
том, что раздельное исследование указанных составляющих
позволяет сохранить преимущества методов, основанных на
использовании количественной информации о поведении выходных
функций, лишь в отношении параметрической составляющей
надежности. Что касается добротности, то в рамках модели «черного
ящика» вынуждены вновь вернуться к ее определению на основе
качественной информации вида «успех—отказ», и, как следствие, идти
на резкое увеличение объема испытаний штатных систем. Это
обстоятельство, в свою очередь, стимулирует поиск дополнительной
количественной информации для оценки добротности двигателя.
Такая информация может быть получена при изучении
промежуточных физических процессов и свойств, влияющих на обеспечение
выходных функций. Образно говоря, необходимо заглянуть
вовнутрь «черного ящика». Инструментом решения такой задачи
является структурно-функциональный анализ надежности двигателя,
в процессе которого выделяются структурные элементы и функ-
174
ции, для выполнения которых предназначены эти элементы.
Естественно, что составленный для этих целей перечень функций
теперь уже содержит не только выходные, но и промежуточные
функции.
Соответственно двум рассмотренным составляющим
надежности можно различать и две категории промежуточных функций.
Первая категория — функции, влияющие на точность
поддержания выходных характеристик. К ним относятся: обеспечение
к. п. д. турбины и насосов, характеристик полноты сгорания
топлива, напоров, перепадов давления и т. д.; параметры,
характеризующие эти функции, как раз и формируют вполне определенную
устойчивую компоненту закона распределения выходных
параметров (см. рис. 8.1).
Вторая категория промежуточных функций — функции,
определяющие добротность ЖРД в указанном выше смысле. К их числу
относятся, например, обеспечение механической прочности к
статическим, вибрационным, циклическим нагрузкам; обеспечение
жаростойкости теплонапряженных элементов (камеры двигателя,
газогенератора, турбины и т. д.); обеспечение устойчивости
процессов; обеспечение срабатывания элементов автоматики и т. д. Для
этих функций характерно то, что их нарушение приводит к
существенному отклонению выходных характеристик от
установленных пределов (см. рис. 8.1). Закон распределения выходных
параметров при нарушении этих функций установить весьма сложно,
поскольку он носит неупорядоченный, статистически неустойчивый
характер.
Обозначим У— случайную величину параметра, который
принят как характеристика промежуточной функции, У* —
критическое значение параметра, т. е. значение, выход за пределы
которого означает нарушение рассматриваемой функции (прочность),
Z=Y—У* — запас работоспособности (прочности) по данной
функции.
В общем случае У и У*, следовательно, и Z являются
случайными функциями (например, давление в узле в процессе
испытания и давление, при котором происходит разрушение узла;
давление на входе в насос и давление, при котором происходит срыв
работы насоса; температура газов в газогенераторе и температура,
при которой происходит прогар газогенератора и т. д.). В частном
случае в качестве характеристики У* могут быть приняты, как и
для выходных параметров, установленные допуски на параметры
промежуточных функций, т. е. У* = у*.
Выясним принципы использования количественной
информации о параметрах У, У*, Z для определения вероятности
безотказной работы двигателя. Для этого введем понятие функции
эффективности (промежуточного параметра системы [34]. Под функцией
эффективности будем понимать вероятность выполнения
требований к выходным параметрам в зависимости от величины
промежуточного параметра, либо, что не меняет сути дела, от величины за-
175
пасов работоспособности по промежуточному параметру. Соот*
ветственно функции эффективности будем обозначить Е(у) и E{z)VA
Зная функцию эффективности, вероятность выполнения треба-*
ваний к выходным параметрам, для фиксированного интервала
времени работы, можно представить, используя теорему о полной
вероятности события для непрерывных распределений, в виде
= ] E(z)f(z)dz,
(8.1)
либо
/>= ] E(y)g(y)dy, (8.2)
'•Рис. 8.2. Функция эффективности и
плотности
—плотность распреда-,
ления
промежуточного параметра;
f(z)—плотность
распределения запаса
работоспособности по
промежуточному
параметру.
Примерный вид взаимного
расположения графиков
функции эффективности и
плотности распределения запаса работоспособности параметра показан
на рис. 8.2.
Если 2^0, то вероятность пребывания выходной
характеристики в установленных пределах близка к 1, а в зоне отрицательных'1
значений z вероятность снижается, асимптотически приближаясь
к нулю. Представим соотношение (8.1) как сумму двух интегралов,
которые выражают вероятность выполнения требований к
выходному параметру при условии пребывания z в указанных
характерных зонах:
Р= ]E{z)f{z)dz+]E{z)f{z)dz,
6
или, учитывая, что в области
р=
функция E{z)
6
Второй интеграл в последнем выражении представляет собой
вероятность того, что запас работоспособности по промежуточной
функции будет неотрицательным (на рис. 8.2 этой вероятности
соответствует заштрихованная площадь под кривой f(z)).
Установить функцию эффективности промежуточных
параметров в области отрицательных запасов работоспособности второй-
176
категории сложно, поскольку ее вид зависит не только от самой
величины z, но и от трудно прогнозируемого характера развития,
а, следовательно, и последствий отказа.
Однако анализ последствий функциональных отказов ЖРД
свидетельствует о том, что при их возникновении, как правило,
происходит в конечном счете настолько существенное отклонение
выходных параметров за установленные пределы, что можно
говорить о полной утрате работоспособности дзигателя.
Иными словами, можно считать, что функция эффективности
параметров второй категории на интервале — oo^z<0 равна нулю
(правая ветвь графика рис. 8.2) и, следовательно, приравнять
искомую вероятность Р вероятности того, что запас
работоспособности по промежуточной функции будет неотрицательным, т. е.
P=]f{z)dz. (8.3)
о
Такая модель расчета приводит к гарантированной оценке
надежности, если, конечно, не вводятся упрощающие предположения
противоположного характера при решении соотношения (8.3). Тем
самым идем на некоторый риск забракования вполне нормальной
конструкции той или иной системы, однако существенно
выигрываем в среднем объеме испытаний для подтверждения требуемых
показателей надежности (этот объем не превышает 25-^-30
испытаний штатных систем [61]). В связи с этим, методы испытаний
двигателей, позволяющие получить необходимую информацию для
решения соотношения типа (8.3) принято называть ускоренными
[74].
Решение уравнения (8.3) в связи с ограниченным объемом
испытаний для определения фактических и критических значений
параметров получают в виде нижней границы одностороннего
•доверительного интервала. Методы нахождения такой оценки
надежности по результатам ускоренных испытаний для различных
распределений фактических и критических значений параметров
рассмотрены в работах [3, 58].
Что касается промежуточных параметров 1-й категории, то
их функция эффективности в области отрицательных значений
имеет пологий характер (левая ветвь графика рис. 8.2).
Объясняется это сложностью внутренней структуры ЖРД — обратными
связями, различного рода избыточностями, в связи с чем лишь при
неблагоприятном сочетании нескольких промежуточных
параметров такого рода, что маловероятно, можно ожидать отклонения
выходных параметров за установленные пределы.
Рассмотрим вопрос учета информации о значениях промежуточных
параметров для оценки вероятности Р. Для этого удобнее воспользоваться исход-
дым соотношением в виде (8. 2).
177
Очевидно, функцию эффективности промежуточного параметра можно
определить как
оо
X*
где ф(-)—плотность распределения выходного параметра X при условии, что
промежуточный параметр принял значение у.
Соответственно выражение для вероятности Р преобразуется к виду
оо оо
Я= f \<?(x!y)g(y)dxdy. (8.4)
-оо X*
Поскольку условное математическое ожидание выходного параметра х
функционально связано со значением промежуточного параметра
вместо выражения (8.4) можно рассматривать эквивалентную ему зависимость
оо оо
р= J J r(x!x)g'(x)dxdx.
~оо X*
Найдем решение этого уравнения для случая нормальной плотности
распределения величин X и х: _
— о» X*
(х-х)* (х-хУ
или Р= \ \ е х~~х х dxdxt
где х—^ безусловное математическое ожидание величины выходного парамет-
oj — среднеквадратическое отклонение условного математического
ожидания х;
Ojp/J— средиеквадрэтическое отклонение выходного параметра при условии,
что промежуточный параметр принял фиксированное значение.
Преобразуем выражение в показателе степени к виду
2 2
7х- + °х,х- X X Л Х2
2 2а1а2 - ' 2ai 2a2 - ' 2alL 2a2 -
x x/x x x/x x x/x
Можно показать [16], что выражение
2ла _a_
x/x x ~
— oo
представляет собой нормальную плотность вероятности с центром рассеивания ~х
и среднеквадратическим отклонением
с2. + 2/*о-а _ ,
Х/Х X Х/Х
178
где г — коэффициент корреляции величин X и х.
Таким образом _
•о _ -f- 2ra_a —
x/x x x/x
(8.5)
где fo(-)—нормированная функция нормального распределения, значение
которой находится из таблиц [32].
Для того, чтобы учесть влияние каждого из воздействующих промежуточных
факторов в отдельности на вероятность пребывания выходного параметра" в
установленных пределах, можно воспользоваться более общей, чем (8.5)
зависимостью [16]
(8.6)
где Гц — коэффициент корреляции величин xu Xj, а £уммирование
распространяется на все различные попарные комбинации величин xiy х2,..., хп-
Если установлено уравнение регрессии выходного X и промежуточных
параметров Yu например, в линейном виде
то зависимость (8.6) может быть преобразована к виду
п
= ro i
1/
аУу1
1
(8.7)
где г/, Oyi — соответственно математическое ожидание и среднеквадратическое
отклонение промежуточного параметра Yu
Гц — коэффициент корреляции величин Yu Yj.
Из выражений (8.5), (8.6), (8.7) следует, что определение вероятности
пребывания выходного параметра X в заданных пределах в отличие от предыдущего
случая, уже нельзя свести к определению вероятности нахождения
промежуточного параметра в назначенных пределах. Необходимо учитывать также и вклад
в дисперсию выходного параметра всех других воздействующих факторов, что
является следствием внутренней избыточности.
Отметим, что аналогичные суждения можно провести по
отношению к промежуточным параметрам второй категории и
воздействующих на них промежуточных параметров более низкой
иерархической структуры. Возьмем, например, такой
промежуточный параметр, характеризующий добротность, как температура
компонента на выходе из охлаждающего тракта камеры
двигателя. Значение этого параметра зависит от ряда других случайных
параметров более низкой, по отношению к нему, иерархической
структуры: температуры стенок камеры, давления, скорости и
характера движения компонента и т. д. Эти параметры обладают из-
179
быточностью по отношению друг к другу, а поэтому функция
эффективности этих параметров за пределами допуска имеет
пологий характер.
Таким образом, вид структурно-функциональной схемы
анализа надежности ЖРД непосредственно зависит от характера
располагаемой информации о значениях параметров и функциональных
связях между ними. При этом, чем выше уровень развития теории,
тем в большем объеме учитывается информация о параметрах,
характеризующих более низкие уровни иерархической структуры и
функций ЖРД. Однако, минимально-необходимый перечень
параметров, непосредственно учитываемых при анализе надежности»
должен включать в себя все выходные параметры и все параметры
второй категории, характеризующие добротность ЖРД. Типовая
структурно-функциональная схема анализа надежности ЖРД с
минимально-необходимым уровнем детализации приведена в
работе [58].
В отношении указанных параметров часто допустимо
предположение об их статистической независимости, в связи с чем нижняя
граница вероятности безотказной работы двигателя при
доверительной вероятности у может быть определена из простого
соотношения Л|=|1 Pi (~~^) ПРИ условии, что Yi = Y> *'= 1, К
1тЛ \ pi /mm
где k — число выделенных структурно-функциональных эле-
_ ментов;
Pi— точечная оценка (частость) вероятности безотказной
работы 1-го элемента;
Ризу Pj — соответственно нижняя граница одностороннего
доверительного интервала и точечная оценка вероятности
безотказной работы /-го структурно-функционального
элемента, для которого их отношение минимально.
При отсутствии неустраненных отказов, чего добиваются
конструкторы к началу серийного изготовления ЖРД, т. е. при Л-=1>
1=1, k формула преобразуется к виду
Я„=Ян;-т1п, (8.8)
т. е. нижняя граница одностороннего доверительного интервала
вероятности безотказной работы ЖРД совпадает с аналогичным
показателем наименее надежного структурно-функционального
элемента.
8.2. УТОЧНЕНИЕ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ ЖРД ПО
РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ
При положительных результатах оценки достаточности
имитации эксплуатационных условий при стендовой отработке показа-
180
тели надежности ЖРД должны быть уточнены с привлечением
результатов летных испытаний.
Объединение результатов стендовых и летных испытаний
может осуществляться как на основе качественной (вида «успех—
отказ»), так и количественной информации о надежности.
В первом случае при отсутствии зачетных отказов расчет проводится в
такой последовательности: определяется
— эквивалентное число успешных испытаний N9 си, соответствующее
полученному по результатам стендовой отработки показателю надежности в виде
нижней границы одностороннего доверительного интервала вероятности
безотказной работы Рн. си при доверительной вероятности у, по формуле
где /?о — коэффициент, зависящий от доверительной вероятности у и объема
испытаний NB с. и, находится из таблицы [89]. Например, значению Рн. с. и325
= 0,98 при доверительной вероятности у==0,95 соответствует число
эквивалентных успешных испытаний NB. с. и= 148.
— суммарное количество эквивалентных стендовых и летных испытаний
— уточненное значение нижней границы одностороннего доверительного
интервала вероятности безотказной работы согласно выражению*
Например, если проведено Лгл.и = 30 успешных летных испытаний и,
следовательно, N= 148 + 30= 178 испытаний, то уточненный показатель надежности
равен
2,97
Ян = 1 - -^~ = 0,983 при у = 0,95.
При уточнении показателей надежности ЖРД на основе количественной
информации схема вычислений следующая:
— группируется статистика стендовых и летных испытаний по однотипным
параметрам, которые определены структурно-функциональной схемой анализа
надежности;
— определяются оценки математического ожидания и среднего
квадратичного отклонения параметров по результатам летных испытаний
'1
—2vJ
Л.И у Jy I >
— определяются уточненные оценки математического ожидания и среднего
квадратического отклонения по зависимости [62]
181
V-
i—2
— определяется нижняя граница одностороннего доверительного интервала
вероятности безотказной работы при заданной доверительной вероятности у
структурно-функциональных элементов по соотношениям, приведенным,
например, в работе [58];
— осуществляется оценка уточненного показателя надежности ЖРД
согласно выражению (8.8).
СПИСОК ЛИТЕРАТУРЫ
1. Авиационные и ракетные двигатели. Реферативный журнал. М., ВИНИТИ,
1966, № 2, 16 с.
2. Африкано, Логсдон. Оптимизация характеристик рякеты «Сатурн-5». ВРТ,
1970, № 2, с. 12—34.
3. Бабич А. Т., Сердюк А. В. Определение нижней границы вероятности
безотказной работы методом нагрузка — прочность, в кн. «Надежность и
долговечность технических систем», Киев, «Наукова думка», 1975, с. 68—76.
4. Барабаш Ю. Л., Барский Б. В. Вопросы статистической теории
распознавания. М., «Советское радио», 1967, 260 с.
5. Башта Т. М., Руднев С. С, Некрасов Б. Б. и др. Гидравлика,
гидравлические машины и гидравлические приводы. М., «Машиностроение», 1970, 504 с.
6. Бек. Оценка характеристик двигательных установок ракеты-носителя «Ти-
тан-3» по результатам летных испытаний. ВРТ, 1969, N° 9, с. 11.
7. Бойнтон, Клейнкнехт. Итоги трех программ разработки пилотируемых
космических кораблей, ВРТ, 1970, № 10, с. 16—33.
8. Болл Л. Оценка характеристик двигательной установки первой ступени
ракеты-носителя «Сатурн-5», ВТ, 1970, № 3, с. 31—39.
9. Большее Л. Н., Смирнов Н. В. Таблицы математической статистики. М.,
«Наука», 1965, 464 с.
10. Ботвин Р. Летные испытания двигательных установок лунного
экспедиционного отсека КК «Аполлон», ВРТ, № 5, 1971, с. 31—55.
'11. Бруевич Н. Г., Сергеев В. И. Некоторые общие вопросы точности и
надежности устройств, в кн. «О точности и надежности в автоматизированном
машиностроении». М., «Наука», 1965, с. 17—35.
12. Бурдаков В. П., Зигель Ф. Ю. Физические основы космонавтики. М.,
Атомиздат, 1975, 231 с.
13. Вальтер. Принципы обработки телеметрической информации,
поступающей с КЛА. ВРТ, ,1974, № 4, с. 10—32.
14. Васильев А. П., Кудрявцев В. И. и др. Основы теории и расчета ЖРД,
«Высшая школа». М., 1967, с. 675.
15. Вендетти, Сайнис. Анализ надежности комплекса «Сатурн-5», ВРТ, 1970,
№ 6, с. 3—8.
16. Вентцель Е. С. Теория вероятностей. М., «Наука», 1969, 576 с.
17. Волков Е. Б., Судаков Р. С, Сырицын Т. А. Основы теории надежности
ракетных двигателей. М., «Машиностроение», 1974, 400 с.
18. Володин В. А. Конструкция и проектирование ракетных двигателей. М.,
«Машиностроение», 1971, 336 с.
19. Вспомогательные системы ракетно-космической техники. Перевод с англ.
под ред. Тишунина И. В., М., «Мир», 1970, 400 с.
20. Высокооборотные лопаточные насосы. Под ред. Овсянникова Б. В. и Че-
баевского В. Ф. М., «Машиностроение», 1975, 336 с.
21. Гиршфельдер Д., Кортисс Ч., Берд Р. Молекулярная теория газов и
жидкостей. М., ИЛ, 1961, 929 с.
22. Гликман Б. Ф. Автоматическое регулирование ЖРД. М.,
«Машиностроение», 1974, 396 с.
23. Глушко В. П. Основные проблемы ЖРД. — «Авиация и космонавтика»,
1973, № 6, с. 32—43.
24. Глушко В. П. Развитие ракетостроения и космонавтики в СССР. М.,
изд-во АПН, 1973, 55 с.
25. Гнедов Г. М., Росенбаули О. Б., Шумов Ю. А. Проектирование систем
контроля ракет. М., «Машиностроение», 1975, 224 с.
26. Грошковский Я. Техника высокого вакуума. Перевод с польского. М.,
«Мир», 1975, 622 с.
183
27. Двигательные установки ракет на жидком топливе. Под ред. Э. Ринг.
М., «Мир», 1966, 40)4 с.
28. Дей. Разработка транспортных космических аппаратов многократного
применения. ВРТ, 1971, № 1, с. 3—11.
29. Джиндорф, Деврие. Роль испытаний при разработке КА «Маринер», ВРТ,
1971, № ю, с. 3-12.
30. Джуран, Цвик. Моффет. Влияние содержания газа в компонентах
топлива на характеристики двигателей. ВРТ, 1970, № 4, с. 34—44.
31. Добровольский М. В. Жидкостные ракетные двигатели. М.,
«Машиностроение», 1968, 396 с.
32. Дунин-Барковский И. В., Смирнов Н. В. Теория вероятностей и
математическая статистика в технике. М., Гостехиздат, 1955, 511 с.
33. Дэшман С. Научные основы вакуумной техники. М., «Мир», 1964, 715 с.
34. Епифанов А. Д. Надежность автоматических систем. М.,
«Машиностроение», 1964, 336 с.
35. Имитация космических условий при испытаниях непилотируемых
летательных аппаратов. ВРТ, 1966, № 10, с. 11—21, № 11, с. 15—35.
36. Иодис. Двигательные установки космического корабля «Аполлон», ВРТ,
1969, № 12, с. 17—29.
37. Кана, Додж. Поведение пузырей газа в баках с жидкостью,
подвергающихся продольным вибрациям. ВРТ, 1966, № 11, с. 36—41*
38. Качадурян, Чомп. Измерение вибраций элементов летательного
аппарата. — ВРТ, 1971, № 1, с. 84—91.
39. Келле. Модели стоимости в ракетно-космической технике. ВРТ, 1972,
JSfc 12, с. 3—63.
40. Козлов Л. В., Нусинов М. Д. и др. Моделирование тепловых режимов
космического аппарата и окружающей его среды. М., «Машиностроение», 1971,
380 с.
41. Колесников К. С, Самойлов Е. Н., Рыбак С. А. Динамика топливных
систем ЖРД. М., «Машиностроение», 1975, 171с.
42. Космическая физика. Под ред. Гэлли Д. П. и Розена А. Перевод с англ.
1966. М., «Мир», 739 с.
43. Космонавтика. Маленькая энциклопедия. М., «Советская энциклопедия»,
1970,591 с.
44. Кошевой А. А. Телеметрические комплексы летательных аппаратов. М.,
«Машиностроение», 1975, 312 с.
45. Кринецкий Е. И., Александровская Л. Н. Летные испытания систем
управления летательными аппаратами. М., «Машиностроение», 1975, 192 с.
46. Крошкин М. Г. Физико-технические основы космических исследований.
М., «Машиностроение», 1969, 2$8 с.
47. Кэмпбелл. Методы повышения надежности ракет-носителей космических
аппаратов. ВРТ, 1966, № 10, с. 21—28.
48. Линд. Математическая модель процесса испытания изделия. ВРТ, 1970,
ЛЬ 12, с. 3—^14.
49. Ллойд Д., Липов М. Надежность. М., «Советское радио», 1964, 686 с.
50. Майэширо, Пастер, Френг. Разработка двигательной установки для КА
«Маринер-71», ВРТ, 1971, № 9, с. 28—44.
51. Макдермот, Брешерс, Маккафферти. Анализ работы ЖРД на насыщенных
компонентах топлива. ВРТ, 1967, № 10, с. 28—41.
52. Макмунн, Коллинз, Браун. Модель опасных ситуаций при взрыве
твердотопливных ракет. ВРТ, 1970, № 3, с. 12:—30.
53. Массье, Рошке. Применение диффузоров для испытания ракетных
двигателей. ВРТ, 1963, № 5, с. 77—101.
54. Махин В. А., Миленко Н. П., Пронь Л. В. Теоретические основы
экспериментальной отработки ЖРД. М., «Машиностроение», 1973, 282 с.
55. Махин В. А., Присняков В. Ф., Велик Н. П. Динамика ЖРД, М.,
«Машиностроение», 1969, с. 384.
184
56. Мелькумов Т. М., Мелик-Пашаев Н. И., Чистяков П. Г., Шиуков А. Г.
Ракетные двигатели. М., «Машиностроение», 1968, с. 511.
57. Мельников В.. И., Сурков А. Н. Теория автоматического регулирования и
системы автоматики. М, «Машиностроение», 1972, 352 с.
V 58. Миленко Н. П., Сердюк А. В. Моделирование испытаний ЖРД. М.,
«Машиностроение», 1975, 183 с.
59. Митропольский А. К. Техника статистических вычислений. М., «Наука»,
1971, 576 с.
60. Морозов К. В. Ракеты-носители космических аппаратов. М.,
«Машиностроение», 1975, 118 с.
61. Муллен. Бендер. Тепловые нагрузки в донной части первой ступени
ракеты «Сатурн-5». ВРТ, 1970, № 1, с. 3—16.
62. Надежность в технике. Термины, ГОСТ 13377—67.
63. Новости ракетной техники. ВРТ, 1972, № 6, с. 89.
64. Новости ракетной техники. ВРТ, 1970, № 5, с. 91.
65. Новости ракетной техники. ВРТ, 1970, № 9, с. 106.
66. Новости ракетной техники. ВРТ, 1971, № 5, с. 85.
67. Пархоменко П. П. Основные задачи технической диагностики. Труды
I Всесоюзного совещания по технической диагностике. М., «Наука», 1972, с. 7—22.
68. Песик, Коппанг, Симкин. Воздействие факела реактивного двигателя на
обшивку космического аппарата в вакууме. ВРТ, 1966, № 12, с. 3—23.
69. Продольные колебания ракет на жидком топливе. Обзор, ВРТ, 1971, № II,
с. 3—23, № 12, с. 12—34.
70 Пугачев В. С. Основы автоматического управления. М., «Наука», 1968,
679 с.
71. Разработка космической транспортной системы в США. Под ред.
Дж. Лейтона и Дж. Грэя. ВРТ, 1974, № 1, с. 3—113.
72. Райан, Кифлинг, Бьюкенен. Анализ продольных колебаний ступени S-2
ракеты-носителя «Сатурн-5». ВРТ, 1971, № 4, с. 3—15.
73. Рирдон. Характеристики устойчивости горения водородно-кислородных
ЖРД при высоких давлениях в КС. ВРТ, 1966, № 6, с. 19—36.
74. Сердюк А. В. Ускоренные испытания технических устройств, в кн.
«Надежность и долговечность технических систем», Киев, «Наукова думка», 1975,
с. 76—88.
75. Сердюк А. В., Мымриков А. К. Методика приемочного контроля сложных
технических устройств. Киев, «Наукова думка», 1976, с. 52—62.
76. Смут, Симонсен, Вильяме. Модель выхлопной струи сверхзвуковых ракет
на малых высотах. ВРТ, 1973, № 11, с. 29—42.
77. Справочник по надежности. Том III. M., «Мир», 1970, 376 с.
78. Справочник по телеметрии (перев. с англ.). Под ред. Грюнберга Э. Л.
М., «Машиностроение», 1971, 482 с.
79 Тверской В. А. Динамика радиационных поясов Земли. М., «Наука», 1968,
224 с.
80. Тененбаум, Кларк. Ввод в эксплуатацию и предварительные данные о
работе 'стенда для испытаний камеры сгорания мощных ЖРД. ВРТ, 1968, № 6,
с. 50—64.
81. Уонг. Применение методов теории решений прч испытаниях больших
систем. ВРТ, 1972, № 1, с. 24—31.
82. Фремке А. В. Телеизмерения. М., «Высшая школа», 1975, 244 с.
83. Хонг. Анализ течения в донной области ракет с одним двигателем. ВРТ,
1972, № 6, с. 3—18.
84. Чаффи, Уили. Запуск в вакууме двигателей многоразового включения на
самовоспламеняющемся топливе. ВРТ, 1968, № 6, с. 36—49.
85. Шор Я. Б., Кузьмин Ф. И. Таблицы для анализа и контроля
надежности. М., «Советское радио», 1968, 284 с.
86. Шторм Р. Теория вероятностей, математическая статистика,
статистический контроль качества. М., «Мир», 1970, 368 с.
87. Шумский К. П. Вакуумные аппараты и приборы химического
машиностроения. Машгиз, 1963, 328 с.
88. Шунейко И. И. Пилотируемые полеты на Луну, конструкция и характе-
185
ристики Saturn V. «Apollo». M., ВИНИТИ, серия «Ракетостроение», 1973, том 3,
323 с.
89. Элверум Г., Стодхаммер П. и др. Двигатель торможения и мягкой
посадки космического корабля «Аполлон». ВРТ, 1968, № 9, с. 31—49.
90. Aerospace Daily, 1969, 9/IX, vol. 39, N 6, p. 39.
91. Air et cosmos, N 322, p. 21 (1969).
92. Air et cosmos, N 343, p. 17 (1970).
93. Air Force/Space Digest International, 1966, HI, N 3.
94. Arthur G. Olsson. The impact of spacecraft OCS on the design of ground-
support equipment and software. AIAApaper No 69—307, 1969.
95. Aviation week, 1963, 17/VI, vol. 78, N 24, p. 75.
96. R. D. Baker «Inert calibration of deep-throttling bipropellant rocket
engines». I. Spacecraft and Rockets, 1968, vol. 5, N 5, p. 578—583.
97. Barth H. Die Hohenprufstande des Raketenversuchsfeldes der DVL in
Lempoldshausen. Jahrbuch Wissensehaftliche Gesellschaft fur Luft — und Raum-
fahrt. E. V. (WGLR), 1965, SS. 506—515.
98. Raum W., Seidel A. Prufatandtechnik fur Raketentrebwerke, VDL-Leltung,
1967, v. 107.
99. Benedikt E. T. Seale of Separation Phenomen in Liquids under Conditions
of Nearly Free Fall, ARS Journ (Feb. 1959).
100. Bier R. Z., Rrolly S. D. Development of computerbasel on lourd check— .
out system simulator utilizing an alphanumerical display, AJAA 4-th annual
melting and technical Display Anaheim, 1967.
101. Botwin R. AJAA 6-th Propulsion Join Specialist conf. June 15—19, 1970,
AJAA Paper No 70—673.
102. Cospar International Reference Atmosphere (CIRA-64, CIRA-65), 1964,
1965.
103. Carwin E. L., Cryogenic Technology, Cryogenic Pumping and Space
Simulation, N 4, 1964.
104. Deane J. G., Sargent D. H. The Lunar Modul propulsion systems testing
at WSTE. «AIAA Paper», N 67—258.
105. «Engineering News Records, 1963, vol. 170, N 1.
106. FHgth, 1963, 19/IX, vol. 84, N 2845, p. 522—524.
107. Franciss Johnson. Structure of the Upper Atmosphere, Satellite environm,
handb. Stanford, Calif. Univ., Press, 1965.
108. Hyprok to cut altitude chamber cost Missiles and Rockets, 1963, April 22,
vol. 12, N 16, p. 27.
109. Jaffel L. D., Rittenhouse J. B. Behaviour of materials in space, ARS, J.,
1962, vol. 32, N 3.
110. John J. Kennedy. The evolution of launch vehicle automatic checkout
methods. AIAA Paper No 70—393, 1970.
111. Kelly T. J. Flihgt Experience with the Apollo Lunar Module, AIAA Paper,
No 68—1005.
112. Moon Warren D. Predicting, system she kount error. Ellectro-Technol.,
1969, vol. 73, No. 1.
113. Outman V. and Nand E. Simulation testing in Space environment-an
assessment. Journal of Spacecraft and Rockets, vol. 3, N 12, p. 1697 (Desember), 1966.
114. Petrash D. A., Zappa R. F., Otto E. W., Experimental study of the Effects
of Weightless on the Configuration of Mercury and Alcohol in Spherical Tanks,
NASA TND-1197. Apr. 1962.
115. Report Commitee on Space Research Established by the International
Council of Scientific Unions, Los Angeles, Calif., April 7, 1961.
116. S-lc. Propulsion system performance evolution, Lurry C. Ball, stage
Technology, the Boeing Company, Mechound, Louisiana, 1969.
186
117. Simons J. С, Jr., Simulation of Environmental Conditions in Near Space,
14th Annual Meeting of ARS, 1959.
118. Sivo J. W., Meyer C. L., Peters D. J. Experimental evaluation of rocket
exhaust diffusers for altitude simulation. NASA Technical Note D-298. Lewis
Research Center, I960, p 43.
119. Space Propulsion, 7, N 17, p. 205 (1969).
120. Space Research, COSPAR, London, 1967, vol. VIII, Ed, Mitra
North-Holland Publ, Amsterdam, 1968.
121. Thatcher A. G., Barton H. A., Rocket Engine Reliability Ordnance, jan-
febr, 1957, p 722—726.
122. The Dynamic Vacuum Facility for Space Simulation tests of rockets and
satellites, July, 1968.
123. The journal of the Environmental Sciences, vol. 10, N 1, p. 29, 1968.
1Я4. Williams R. В., Fergus J. L. Performance and operating experience of a
space simulation chamber used for propulsion testing, The Journal of
Environmental Sciences, 1965, v. 8, N 3, pp. 38—44.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Глава 1. ЖРД как объект летных испытаний 5
1. 1. Основные сведения 5
1.2. Принципиальные схемы ЖРД 6
1.3. Структурные схемы ЖРД 9
1.4. Режимы работы ЖРД 14
1.5. Особенности работы ЖРД в условиях эксплуатации .... 17
Глава 2. Общие положения по проведению летных испытаний ЖРД • • 21
2. 1. Понятие о летных испытаниях ЖРД к условиях эксплуатации . 21
2.2. Этап разработки программы летных испытаний. Программа
летных испытаний ЖРД 23
2.3v Цели и задачи летных испытаний ЖРД 26
2.4. Требования к двигателям, поставляемым на летные испытания . 29
2.5. Обоснование требований к настройке двигателя 34
2.6. Документация для проведения летных испытаний ЖРД.
Необходимые сведения 38
Глава 3. Имитация условий эксплуатации при стендовой отработке ЖРД 41
3.1. Цели и задачи имитации условий эксплуатации 41
3.2. Требования к проведению испытаний 4,6
3.3. Обеспечение имитации условий эксплуатации. Требования к
стендовому оборудованию 48
3.4. Требования по приближению к условиям эксплуатации (выбор
границ) 52
3.5. Типы имитирующих установок, основные агрегаты и оборудование 54
3.6. Комплексные имитирующие установки 65
3.7. Испытания в условиях невесомости 67
3.8. Краткие сведения о физических условиях космического
пространства 72
Глава 4. Техническая диагностика ЖРД. Планирование информации при
летных испытаниях ЖРД 78
4.1. Основные задачи технической диагностики 78
4. 2. Определение целей этапа летных испытаний применительно к
задаче планирования объема информации 84
4.3. Методика планирования информации при летных испытаниях ЖРД 89
4.4. Эффективность бортовых систем технической диагностики ЖРД 95
Глава 5. Измерения при летных испытаниях 99
5. 1. Требования к датчикам, применяемым при летных испытаниях.
Измеряемые параметры 100
5.2. Система телеизмерений 102
188
Стр.
5. 3. Краткие сведения о методах измерений 106
5.4. Обработка информации 110
Глава 6. Организация проведения летных испытаний. Оценка выполнения
программы 115
6. 1. Организация проведения летных испытаний 115
6.2. Анализ результатов летных испытаний 119
6.3. Оценка соответс!вия параметров заданным значениям .... 141
6. 4. Оценка выполнения программы летных испытаний 143
Глава 7. Анализ неисправностей при летных испытаниях ЖРД .... 147
7. 1. Основные виды неисправностей ЖРД 147
7. 2. Выяснение причин неисправностей в работе ЖРД 151
7. 3. Динамическая модель двигательной установки 156
7. 4. Модели неисправностей ЖРД и методика расчета переходных
процессов 161
7. 5. Анализ неисправностей в работе двигателей 166
Глава 8. Анализ надежности ЖРД с учетом результатов летных испытаний 171
8. 1. Общие положения. Принципы построения
структурно-функциональной схемы анализа надежности ЖРД 171
8. 2. Уточнение показателей надежности ЖРД по результатам летных
испытаний 180
Список литера!уры . . . . « , 183
ИБ 1158
Константин Александрович Луарсабов,
Людмила Владимировна Пронь,
Александр Владимирович Сердюк
ЛЕТНЫЕ ИСПЫТАНИЯ ЖИДКОСТНЫХ РАКЕТНЫХ ДВИГАТЕЛЕЙ
Редактор издательства Л. Г. Ш у мекая Художник А. Я. Михайлов
Технический редактор Н. Н. Скотникова Корректор А. И. Карамышкина
Сдано в набор 22/11 1977 г. Подписано к печати
Формат 60X90Vie Бумага № 2 Печ. л.
Цена 70 коп. Тираж 2800 экз.
Издательство «Машиностроение», 107885, Москва, Б-78, 1-й Басманный пер., 3.
Московская типография № 8 Союзполиграфпрома
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли.
Хохловский пер., 7. Тип. зак. 2227
18/V
12,0
1977
г.
Уч
.-изд.
Изд.
Т-09809
л. 13,45
зак. 626
ИЗДАТЕЛЬСТВО «МАШИНОСГРОЕНИЕ>
НОВЫЕ КНИГИ
ПО АВИАЦИОННОЙ ТЕХНИКЕ
Выпуск 1978 г.
Волков Е. Б., Сырицын Т. А., Мазинг Г. Ю. Статика и
динамика ракетных двигательных установок. В 2-х частях. Часть I
Статика, М., «Машиностроение», 1978 (III кв.), 16 л., 5000 экз.,
1 р. 40 к.
В первой части книги рассмотрены статические
характеристики ракетных двигательных установок, работающих на жидком,
твердом и твердо-жидком топливе. Изложены методы анализа
статических характеристик двигательных установок и их
агрегатов; дан анализ возмущающих факторов.
Волков Е. Б., Сырицын Т. А., Мазинг Г. Ю. Статика и
динамика ракетных двигательных установок. В 2-х частях. Часть II
Динамика, М., «Машиностроение», 1978 (IV кв.), 25 л., 5000 экз.,
1 р. 90 к.
Во второй части книги рассмотрены неустановившиеся режимы
работы двигательных установок на жидком, твердом и твердо-
жидком топливе. Изложены методы анализа динамических
характеристик ракетных двигательных установок и их агрегатов
(камера сгорания, турбонасосный агрегат, автоматика, газовые
магистрали). Дан анализ и приведены методы расчета установки
у границ работоспособности, запуска и выключения двигательных
установок.
Мальков В. А., Фаворский О. Н., Леонтьев В. Н. Контактный
теплообмен в газотурбинных двигателях и энергоустановках. M.t
«Машиностроение», 1978 (IV кв,), 11 л., 5000 экз. 70 к.
В книге изложены результаты теоретических и
экспериментальных исследований контактного теплообмена в авиационных
двигателях (лопатка — диск, подшипники и др.), даны
рекомендации по выбору расчетных зависимостей с учетом специфики
контактов. Приведены результаты исследований контактного
теплообмена при повышенных температурах в вакууме и газовых
средах применительно к энергоустановкам. Дан анализ термического
сопротивления газовой прослойки между контактирующими
поверхностями.
Основы теории автоматического управления ракетными
двигательными установками. Учебник для вузов ло специальности
«Двигатели летательных аппаратов». М., «Машиностроение», 1978
(III кв.), 26 л., 8000 экз.. 1 р. 20 к. Авт.: А. И. Бабкин, С. В.
Белов, Н. Б. Рутовский, Е. В. Соловьев.
В учебнике рассмотрена теория автоматического управления
двигательными установками с ракетными двигателями,
работающими на жидком, твердом и ядерном топливах, описаны системы
автоматического регулирования таких двигателей, изложены
методы расчета статических и динамических характеристик систем
автоматического управления РД и дан анализ динамических
характеристик отдельных звеньев систем.
Теория автоматического управления ракетными двигателями.
М., «Машиностроение», 1978 (III кв.), 21 л., 6000 экз. 1 р. 70 к.
Авт.: А. А. Шевяков, В. М. Калнин, Н. В. Науменкова, В. В.
Дятлов.
В книге изложены методы исследования динамических
процессов управления линейных и нелинейных систем, принципы
построения систем регулирования и даны рекомендации по их
проектированию. Рассмотрены системы регулирования тяги,
соотношения компонентов, точность и быстродействие таких систем.
Приведены схемы и программы управления запуском и остановом
ракетных двигателей. Основное взимание уделено методам
численного решения задач для нелинейных систем с похмощью ЭВМ.
Пневмогидравлические системы двигательных установок с
жидкостными ракетными двигателями. М., «Машиностроение», 1978
(I кв.), 18 л., 5000 экз. 1 р. 30 к. Авт.: Д. А. Полухин, Н. Н. Мир-
кин, В. М. Орещенко, Г. Л. Усов.
В (книге изложены основы проектирования, выбор параметров
и методы расчета пневмогидравличеоких систем (ПГС)
космических аппаратов. Дана классификация ПГС, рассмотрены
используемые материалы и их характеристики. Большое внимание
уделено внутрибаковым процессам и динамике работы ПГС.
Приобретайте книги издательства «Машиностроение» в
магазинах, распространяющих техническую литературу.
Помните, что предварительный заказ — единственный способ
приобретения книг, так как >с 1977 г. узкопрофильные
специальные издания распространяются только по твердым,
гарантированным заказам покупателей.