


















Автор: Аншаков Г.П. Голяков А.Д. Петрищев В.Ф. Фурсов В.А.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) космонавтика навигация
ISBN: 978-5-93424-554-3
Год: 2011




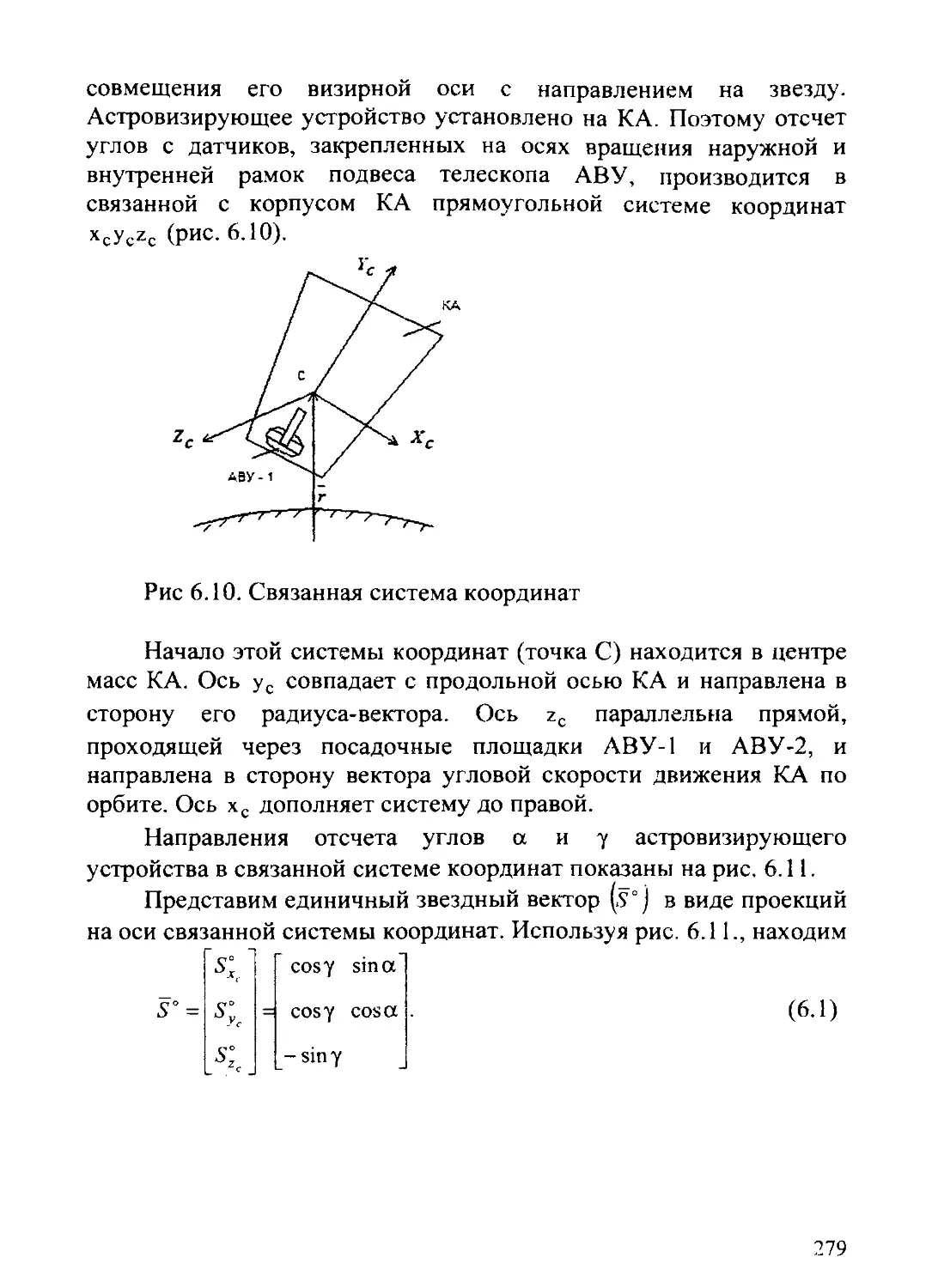
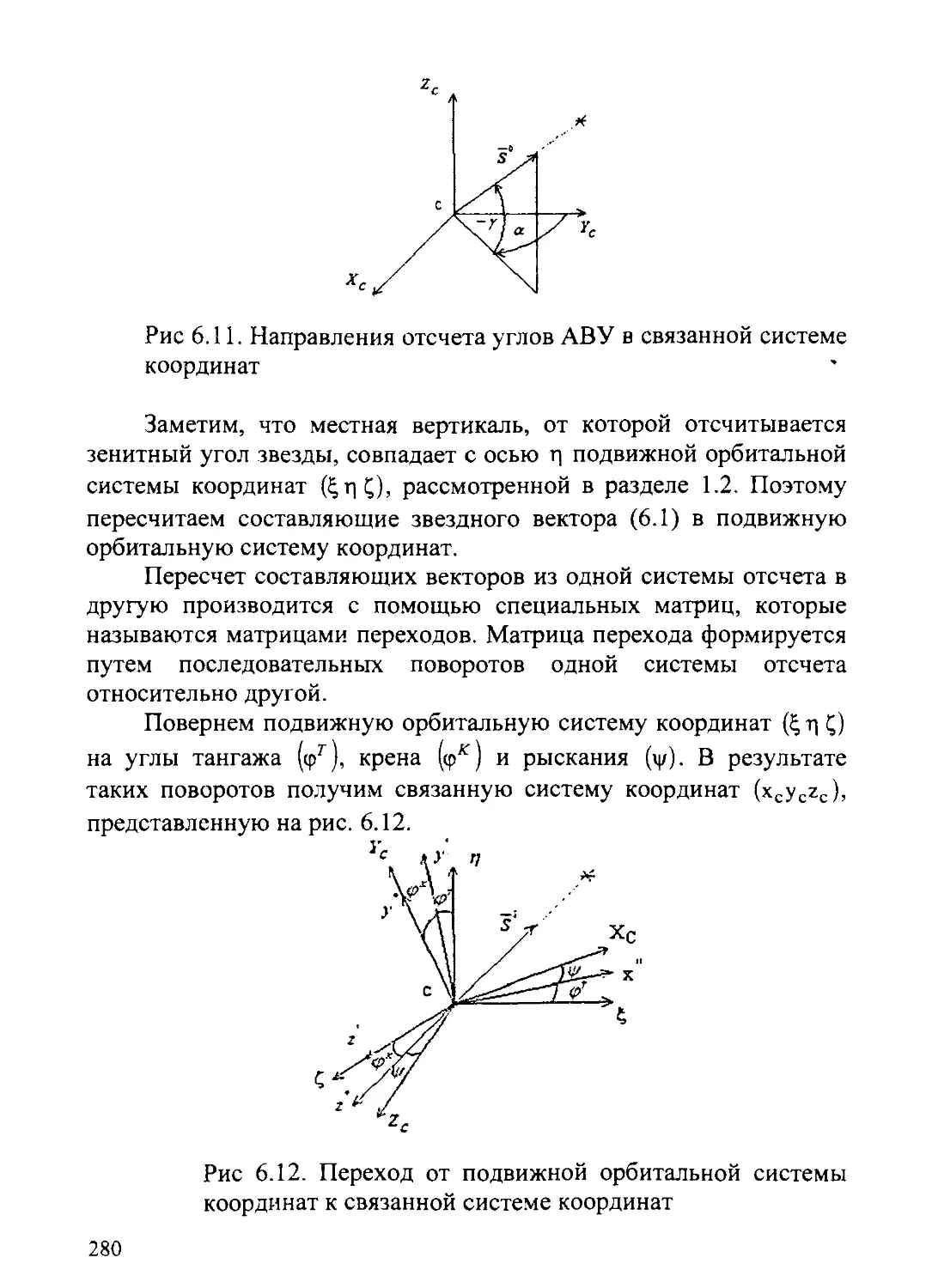
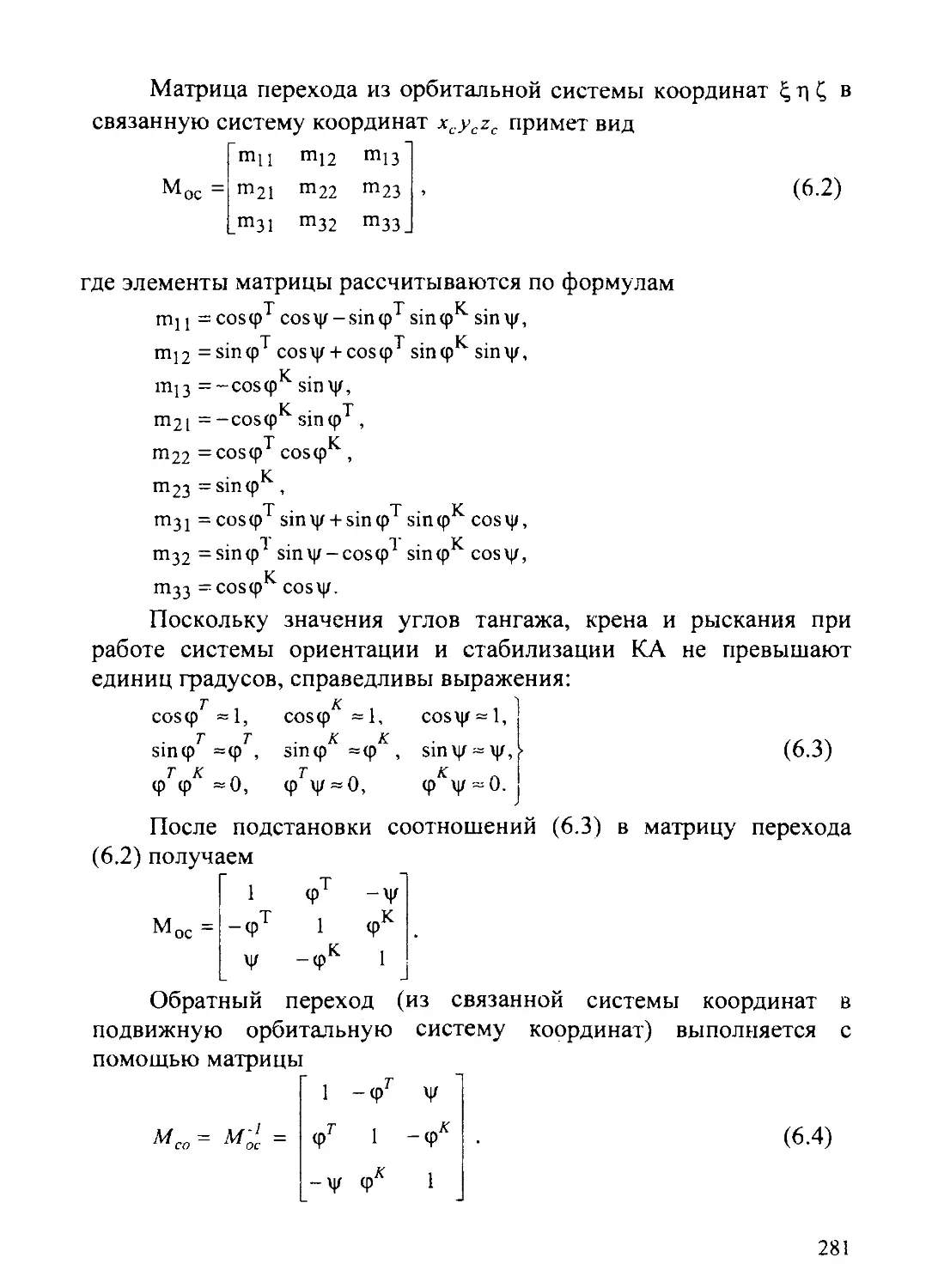
Автономная навигация
ОСМИЧЕСКИХ АППАРАТОВ
ГНПРКЦ «11СКБ-ПРОГРЕСС»’
2011 Е
70 - летию ГНП РКЦ «ЦСКБ -
Прогресс» на Самарской земле
посвящается
Г.П.Аншаков
А.Д.Голяков
В.Ф.Петрищев
В.А.Фурсов
АВТОНОМНАЯ НАВИГАЦИЯ
КОСМИЧЕСКИХ АППАРАТОВ
Под общей редакцией доктора технических наук,
профессора А.Н.КИРИЛИНА
Государственный научно - производственный
ракетно - космический центр «ЦСКБ - Прогресс»
Самара 2011
УДК 629.7
ББК 39.62
К43
Рецензенты: доктор технических наук, профессор В.Л. Балакин,
доктор технических наук, профессор И.В. Белоконов.
Г.П.Аншаков и др.
К43 Автономная навигация космических аппаратов
/ Г.П.Аншаков, А.Д.Голяков, В.Ф.Петрищев, В.А.Фурсов.
Под общей редакцией А.Н.Кирилина -
Самара: Государственный научно - производственный
ракетно - космический центр «ЦСКБ - Прогресс», 2011. - 486 с.:
илл.
ISBN 978 - 5 - 93424 - 554 - 3
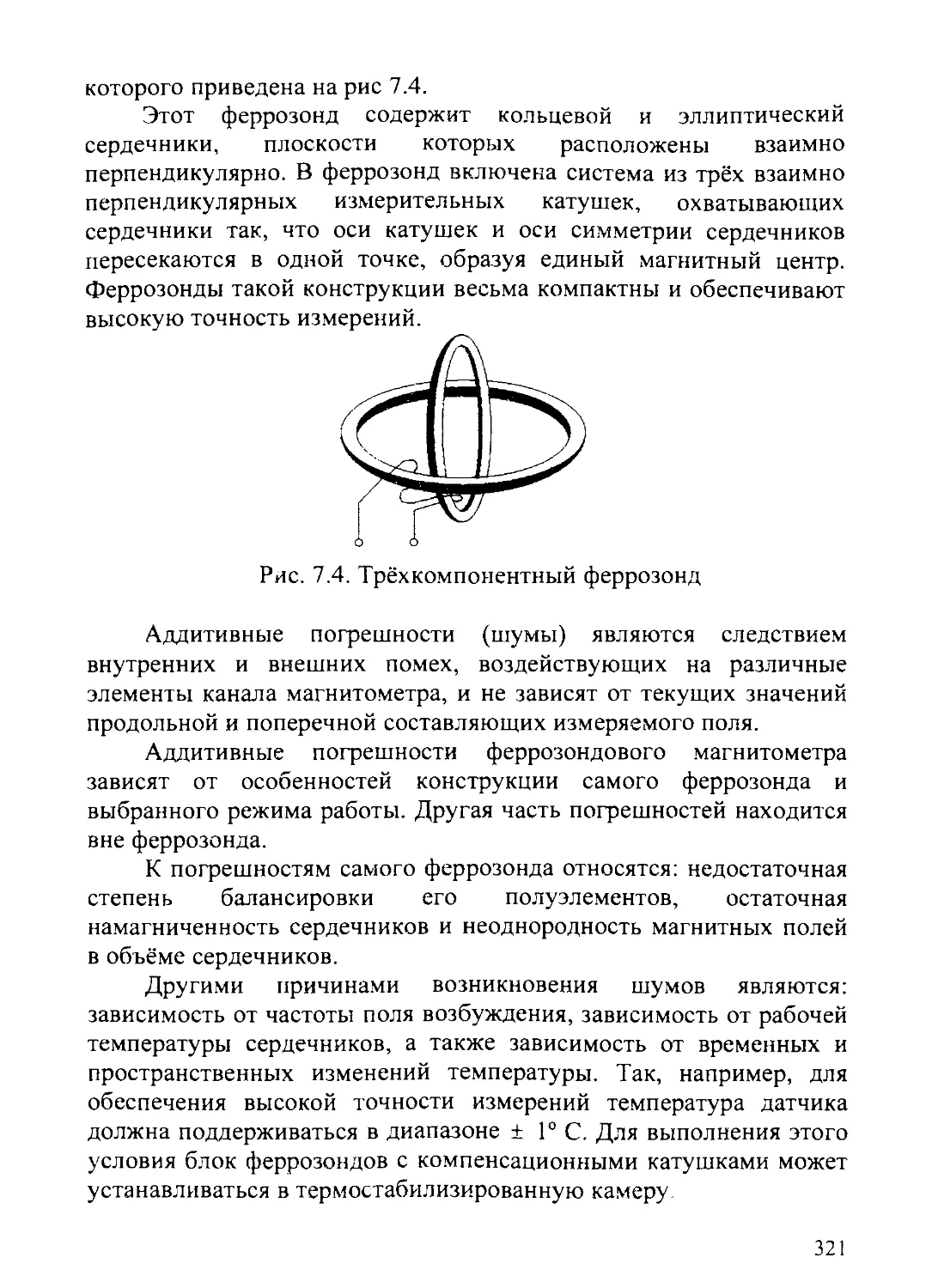
В книге изложены теоретические основы построения и
проведен анализ технических характеристик систем автономной
навигации космических аппаратов дистанционного зондирования
Земли. Рассмотрены системы, созданные или исследованные в
эпоху, предшествующую вводу в строй спутниковых
радионавигационных систем (СРНС) ГЛОНАСС и GPS, а также
перспективная прецизионная интегрированная система с
использованием протяжённых наземных ориентиров, которая
может быть создана на базе современных информационных
технологий в качестве резервной для систем с использованием
аппаратуры потребителей СРНС. В рамках исследования резервной
системы разработаны основы теории оптимального сканирования
поверхности Земли.
Впервые в одной книге изложены результаты исследований и
практических разработок авторов, опубликованные ранее лишь в
журнальных статьях и учебных пособиях.
Книга адресована научным работникам, преподавателям и
студентам вузов аэрокосмической отрасли, специализирующимся в
области космической навигации, а также соискателям учёных
степеней.
ISBN 978-5-93424-554-3 ББК 39.62
© Г.П.Аншаков, А.Д.Голяков, В.Ф.Петрищев, В.А.Фурсов,
2011
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ............................................12
Часть I
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ АВТОНОМНОЙ
НАВИГАЦИИ КОСМИЧЕСКИХ АППАРАТОВ
Глава 1. Методы автономной навигации КА.................15
1.1. Задача автономной навигации КА и методы её
решения.........................................15
1.2. Системы отсчета, применяемые в космической
навигации.......................................16
1.2.1. Сферические и специальная системы отсчёта.16
1.2.2. Прямоугольные системы отсчёта.............20
1.3. Законы движения центра масс КА.................22
1.3.1. Уравнения невозмущенного движения.........23
1.3.2. Уравнения возмущенного движения...........24
1.4. Влияние начальных отклонений на параметры
дальнейшего движения КА. Матрицы баллистических
производных.....................................29
1.5. Первичные навигационные параметры..............34
1.5.1. Угловые первичные навигационные параметры.35
1.5.2. Линейные первичные навигационные параметры..41
1.6. Методы автономного определения параметров орбит.. 44
1.7. Метод опорной орбиты...........................46
Глава 2. Методы обработки навигационной информации......53
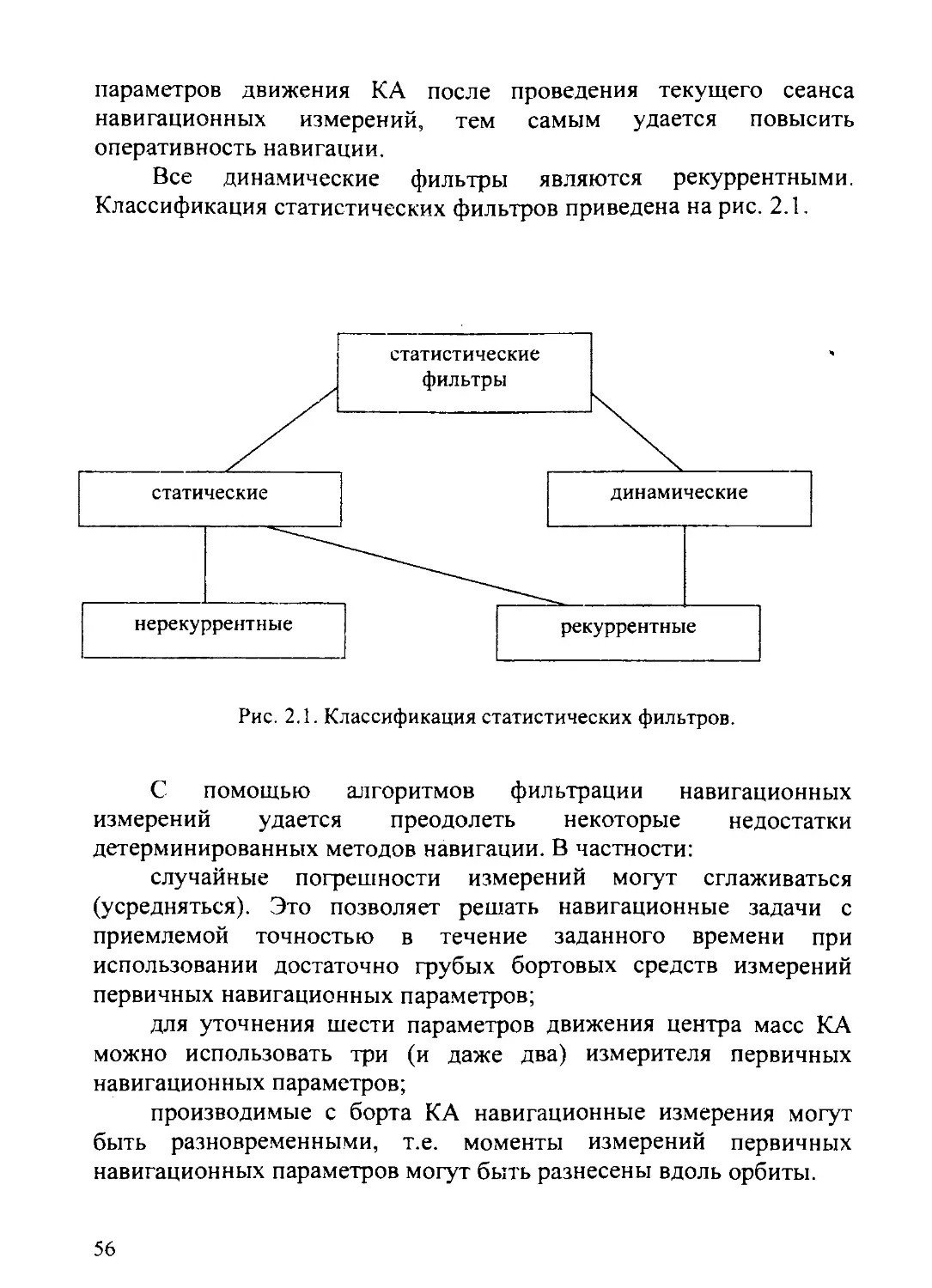
2.1. Основы статистической фильтрации...............53
2.2. Методы нерекуррентной фильтрации...............57
2.2.1. Метод наименьших квадратов................60
2.2.2. Метод максимального правдоподобия.........65
2.2.3. Метод максимума апостериорной вероятности.69
2.3. Статические рекуррентные методы навигации......76
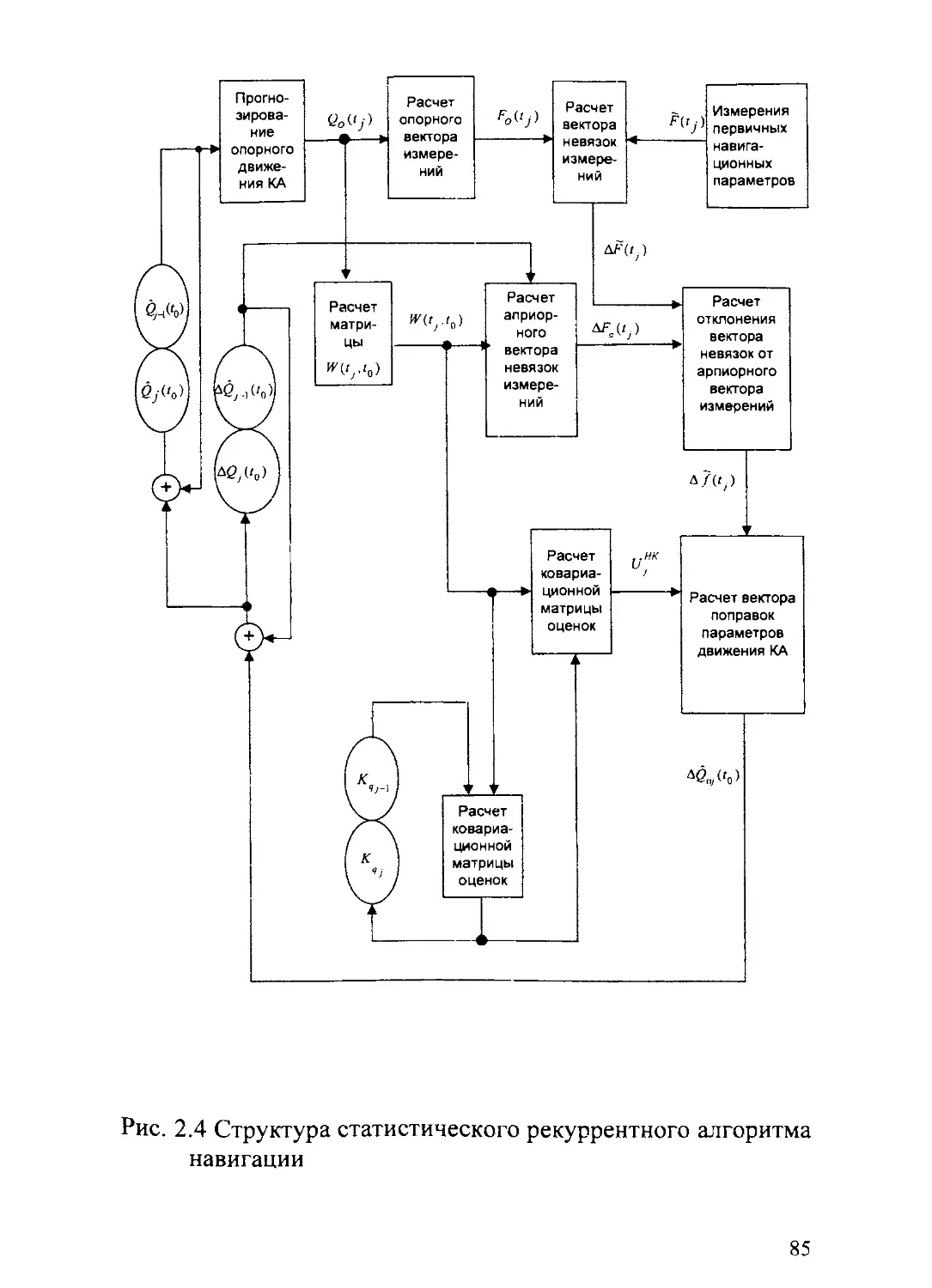
2.4. Динамический фильтр.......................... 84
Глава 3. Методы оценивания точности систем автономной
навигации КА........................................93
3.1. Классификация способов аналитического оценивания
точности........................................93
3.2. Детерминированный способ......................95
3.3. Стохастический способ текущего оценивания......97
3.4. Стохастический способ начального оценивания....99
3
3.5. Аналитическое оценивание точности навигации КА по
измерения высоты полёта...........................102
3.6. Аналитическое оценивание точности навигации КА по
измерениям углов «звезда-вертикаль»...............108
3.7. Аналитическое оценивание точности навигации КА
по совместным измерениям высоты полета и углов
«звезда-вертикаль»................................111
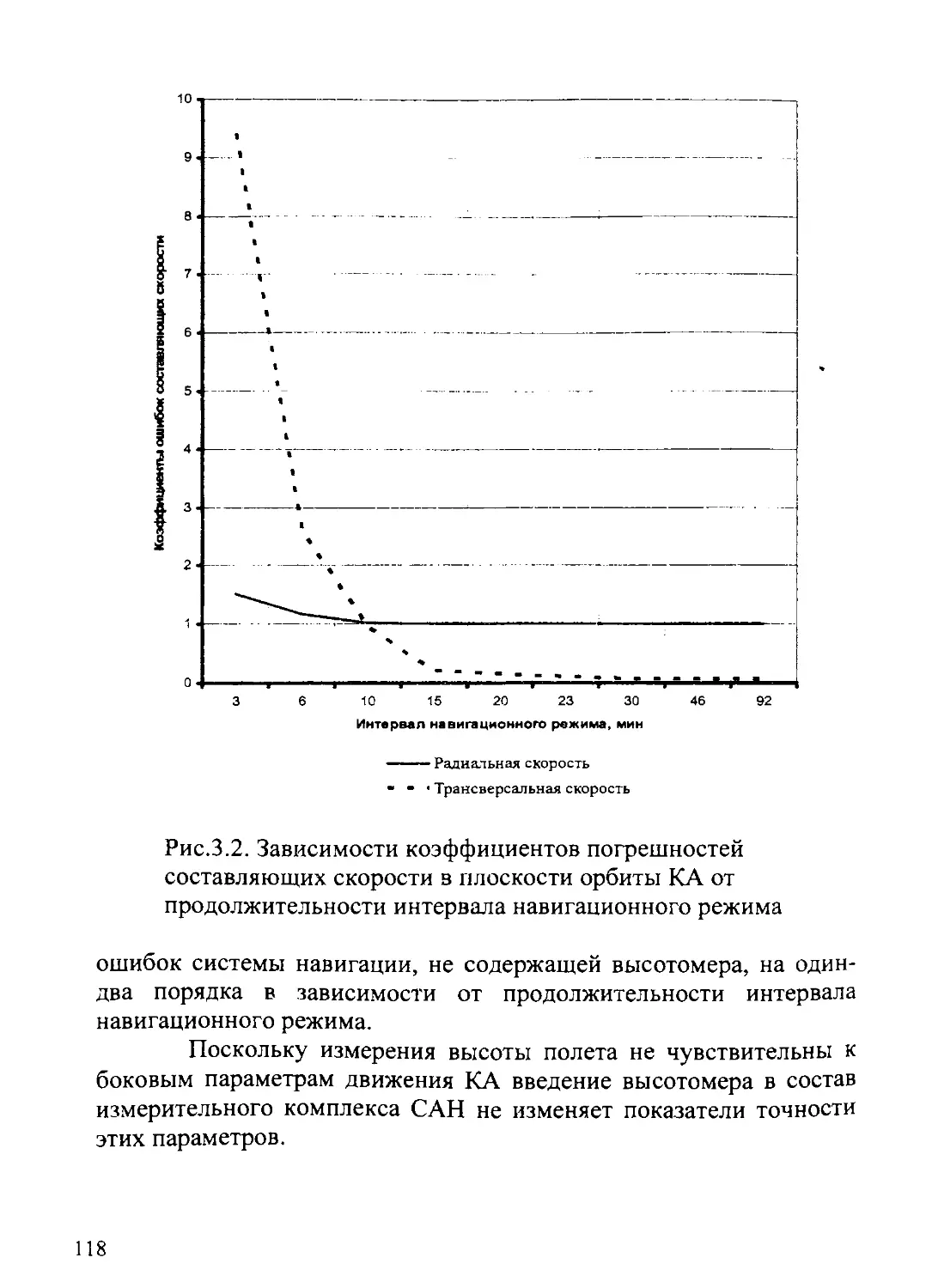
3.8. Компьютерные методы оценивания точности навигации
КА................................................119
Глава 4. Задачи и методы повышения качества изображений
на борту КА ДЗЗ........................................122
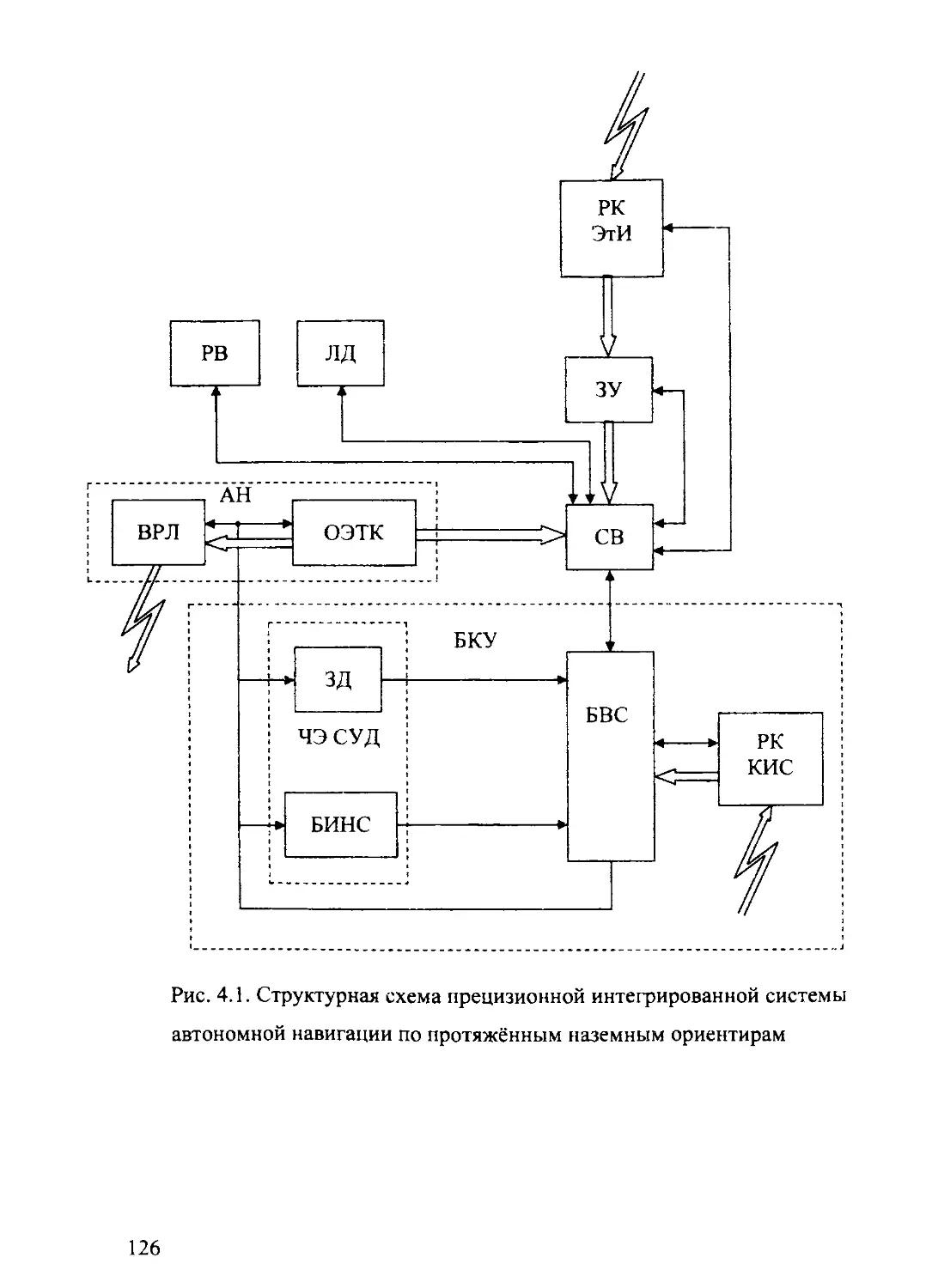
4.1. Концепция построения прецизионной интегрированной
системы автономной навигации КА ДЗЗ по протяжённым
наземным ориентирам...............................122
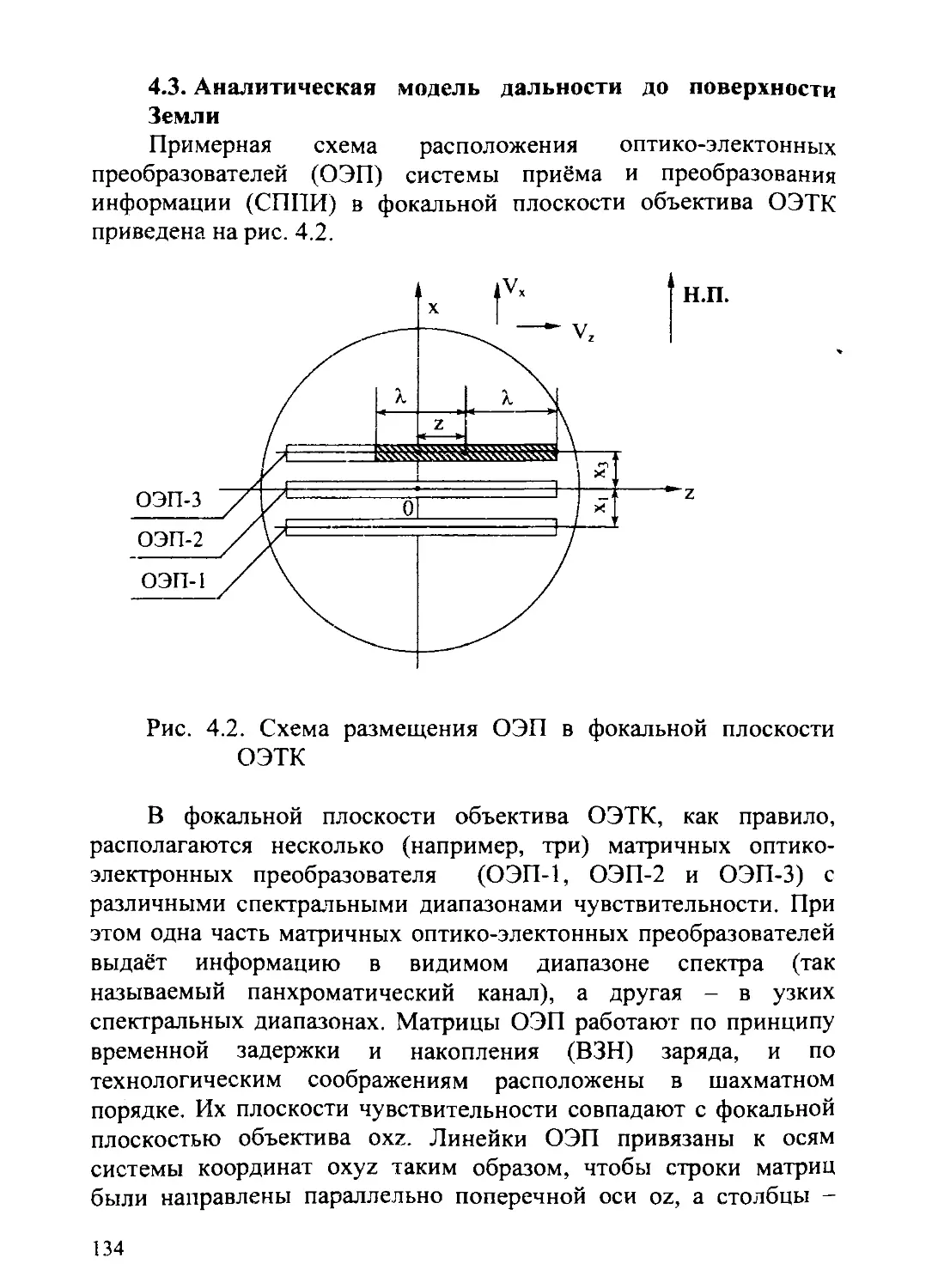
4.2. Задачи повышения качества изображений.......128
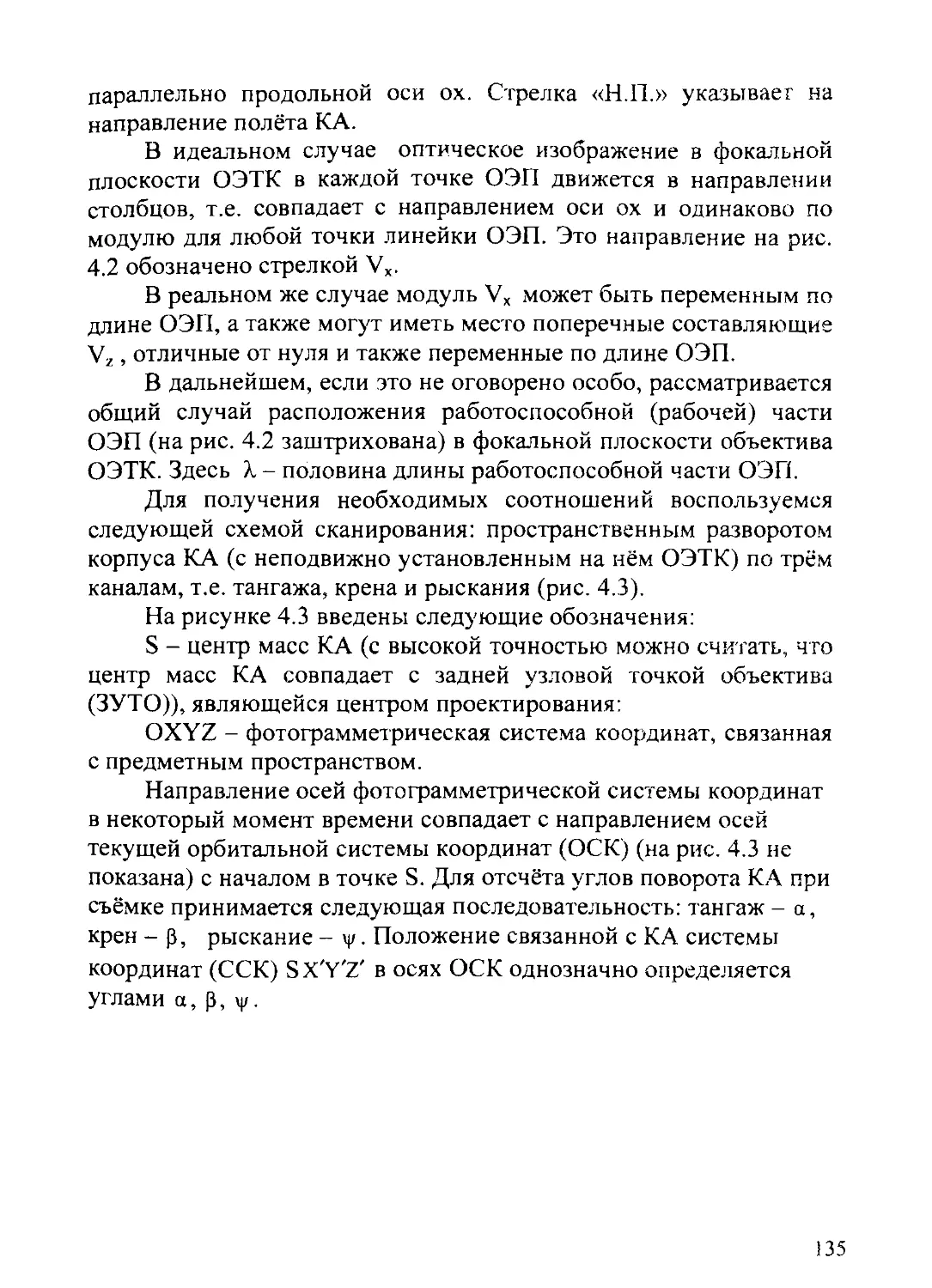
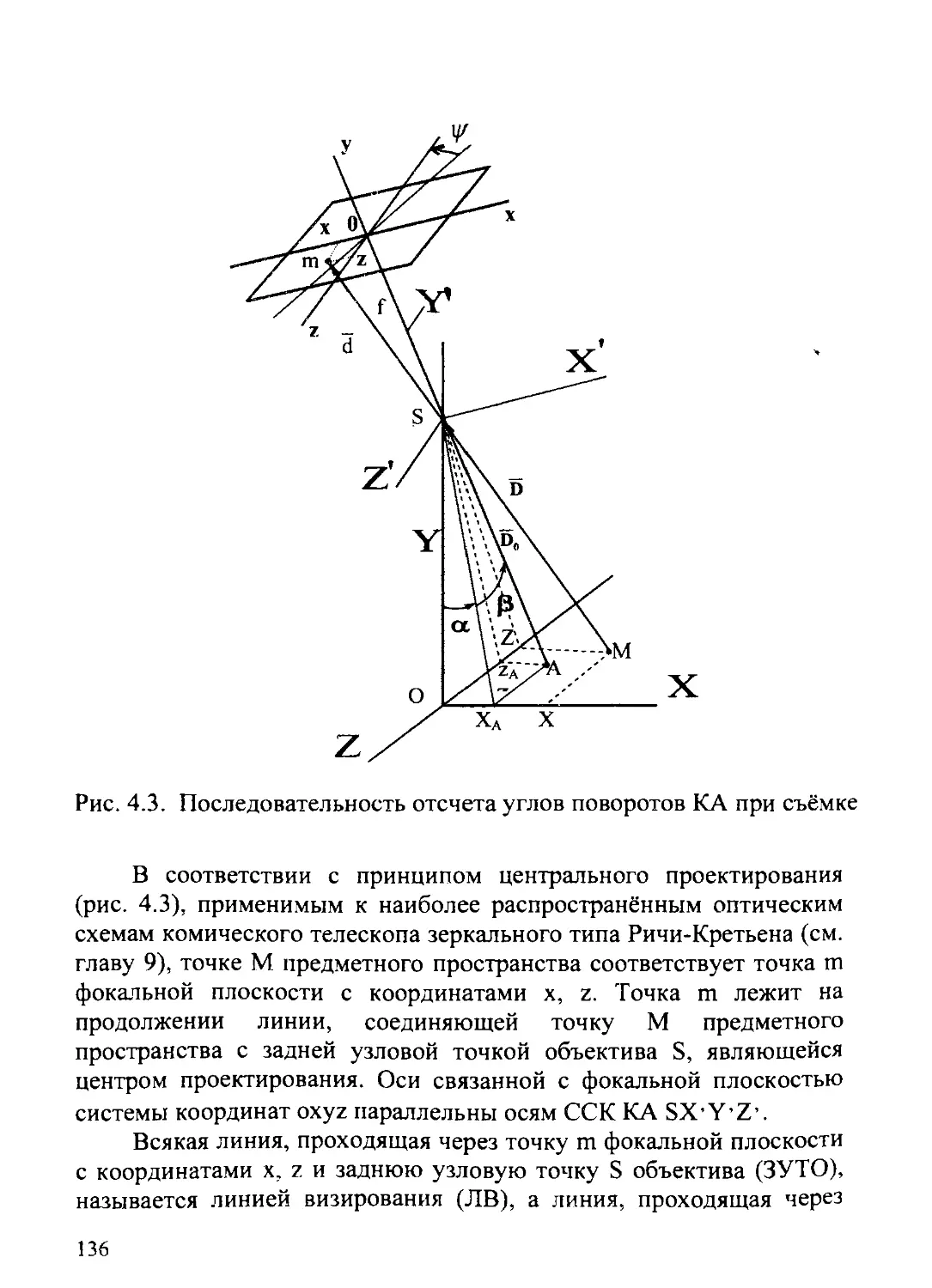
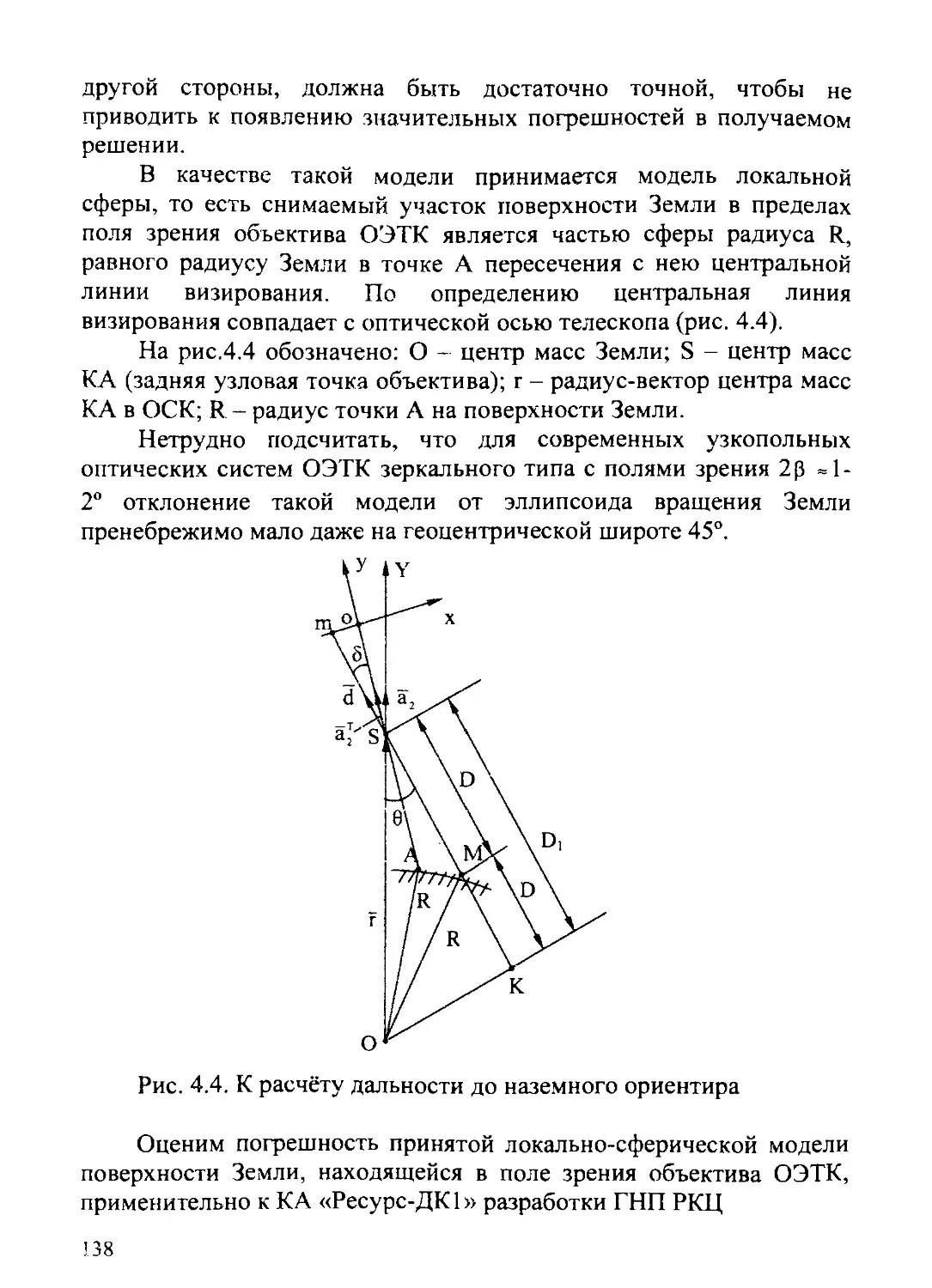
4.3. Аналитическая модель дальности до поверхности
Земли.............................................134
4.4. Аналитическая модель движения оптического
изображения в фокальной плоскости объектива...143
4.5. Интегральные кривые движения точек подстилающей
поверхности Земли для случая круговой орбиты
КА................................................150
4.6. Теоретические основы оптимального сканирования
космическим аппаратом поверхности Земли...........155
4.6.1. Постановка задачи оптимального сканирования ..155
4.6.2. Определение оптимальных составляющих вектора
скорости углового движения КА при
сканировании...................................164
4.6.3. Определение оптимального угла рыскания КА на
заданный момент сканирования...................172
4.7. Основные характеристики оптимальной программы
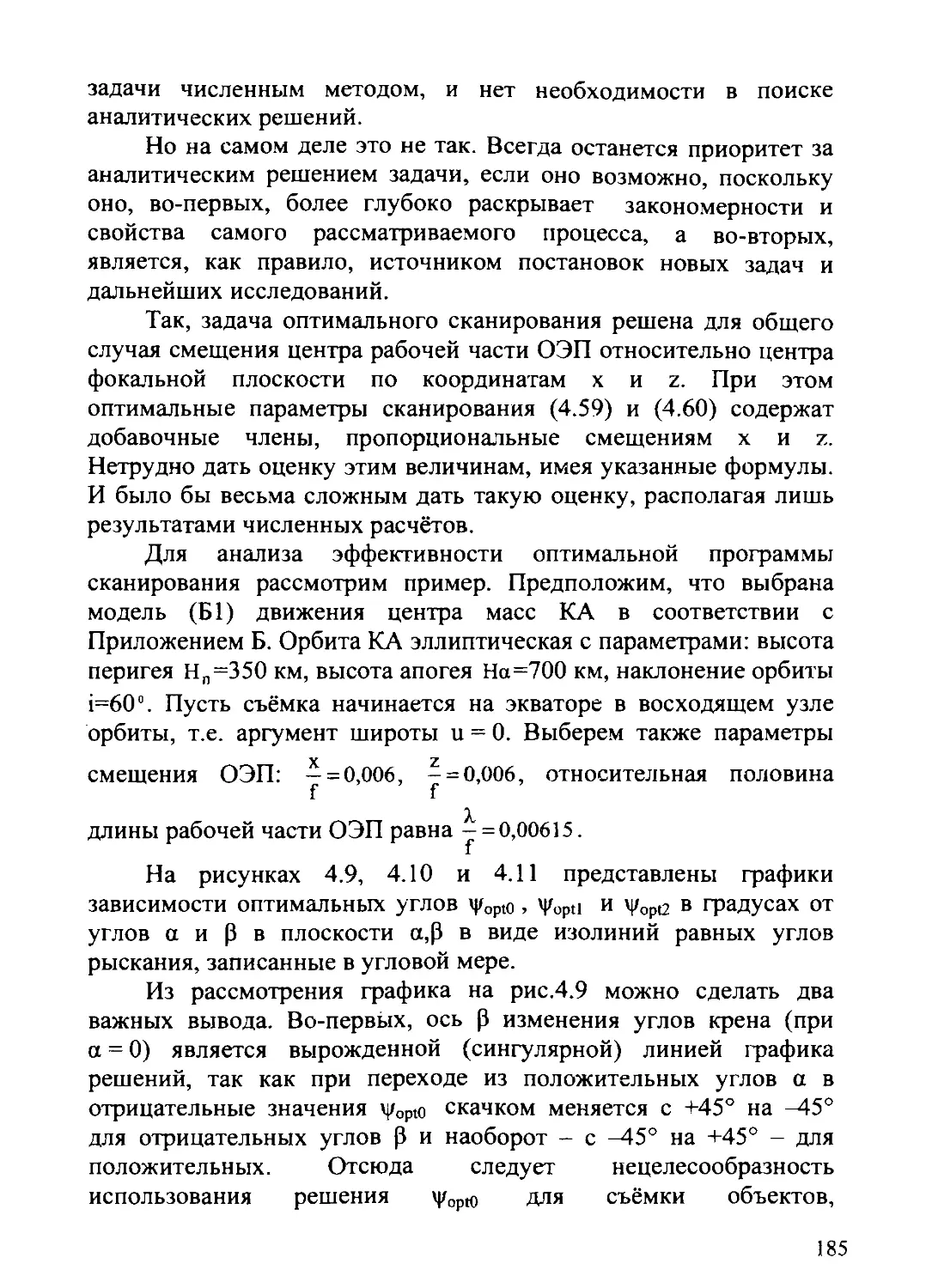
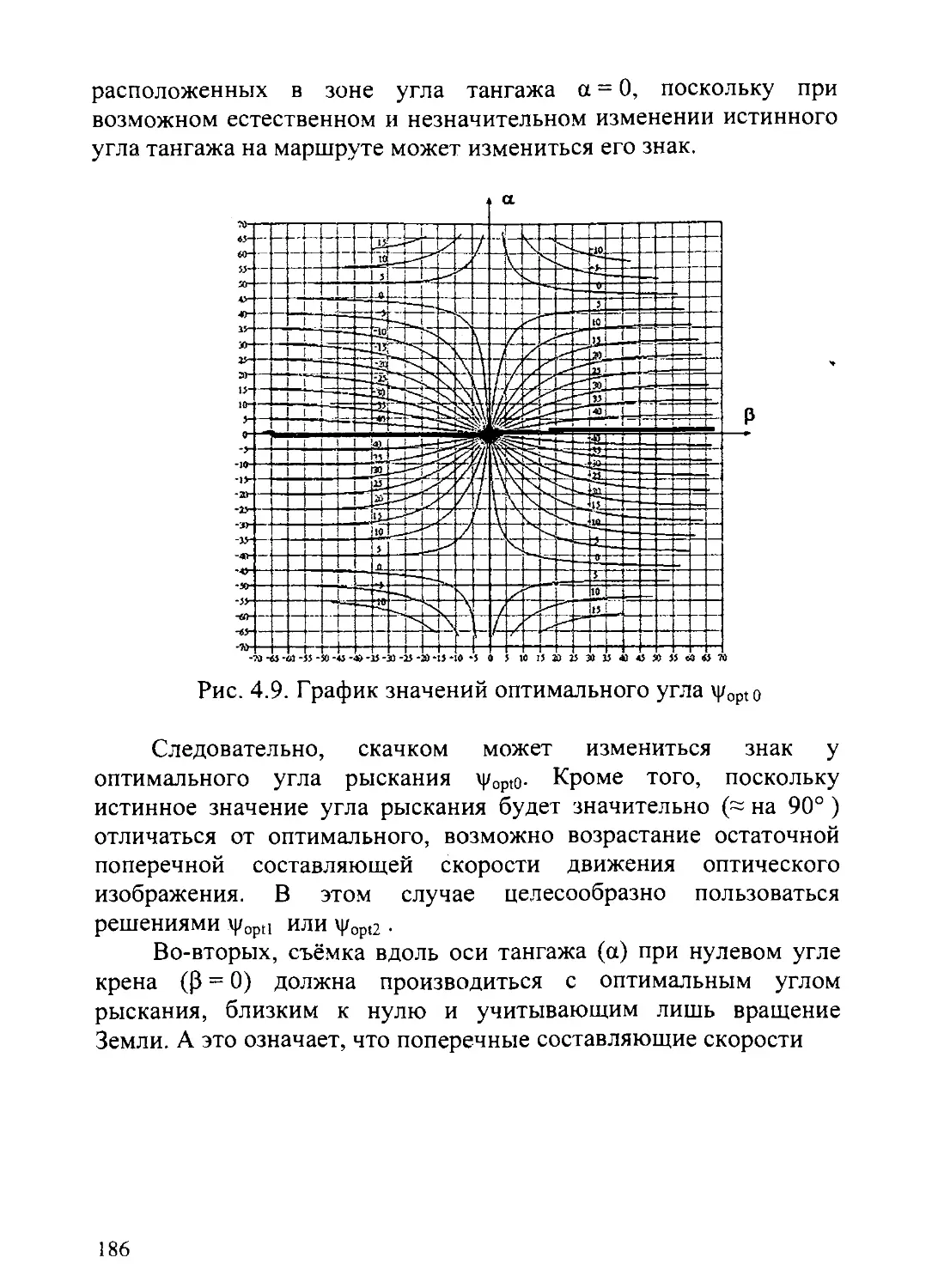
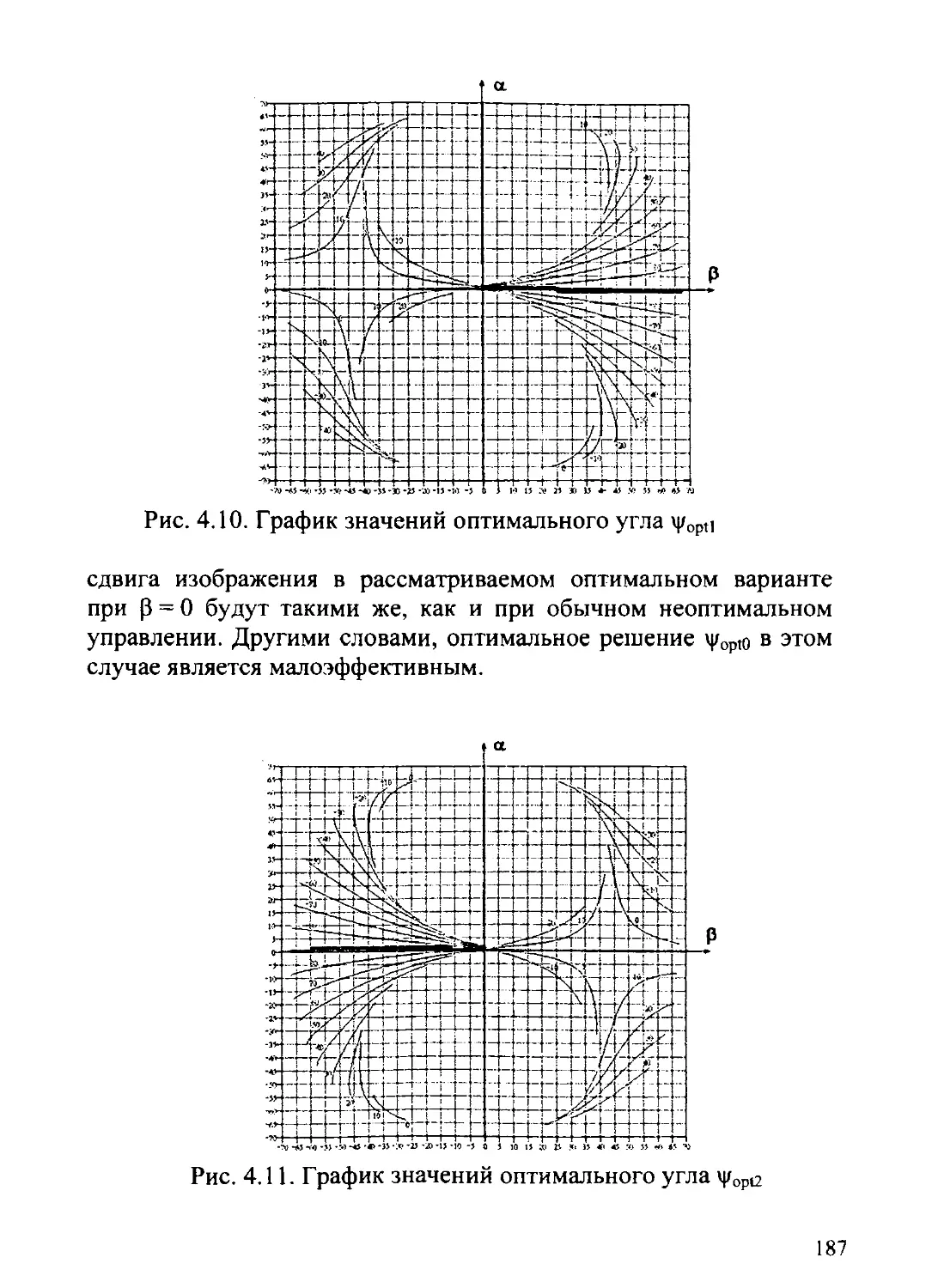
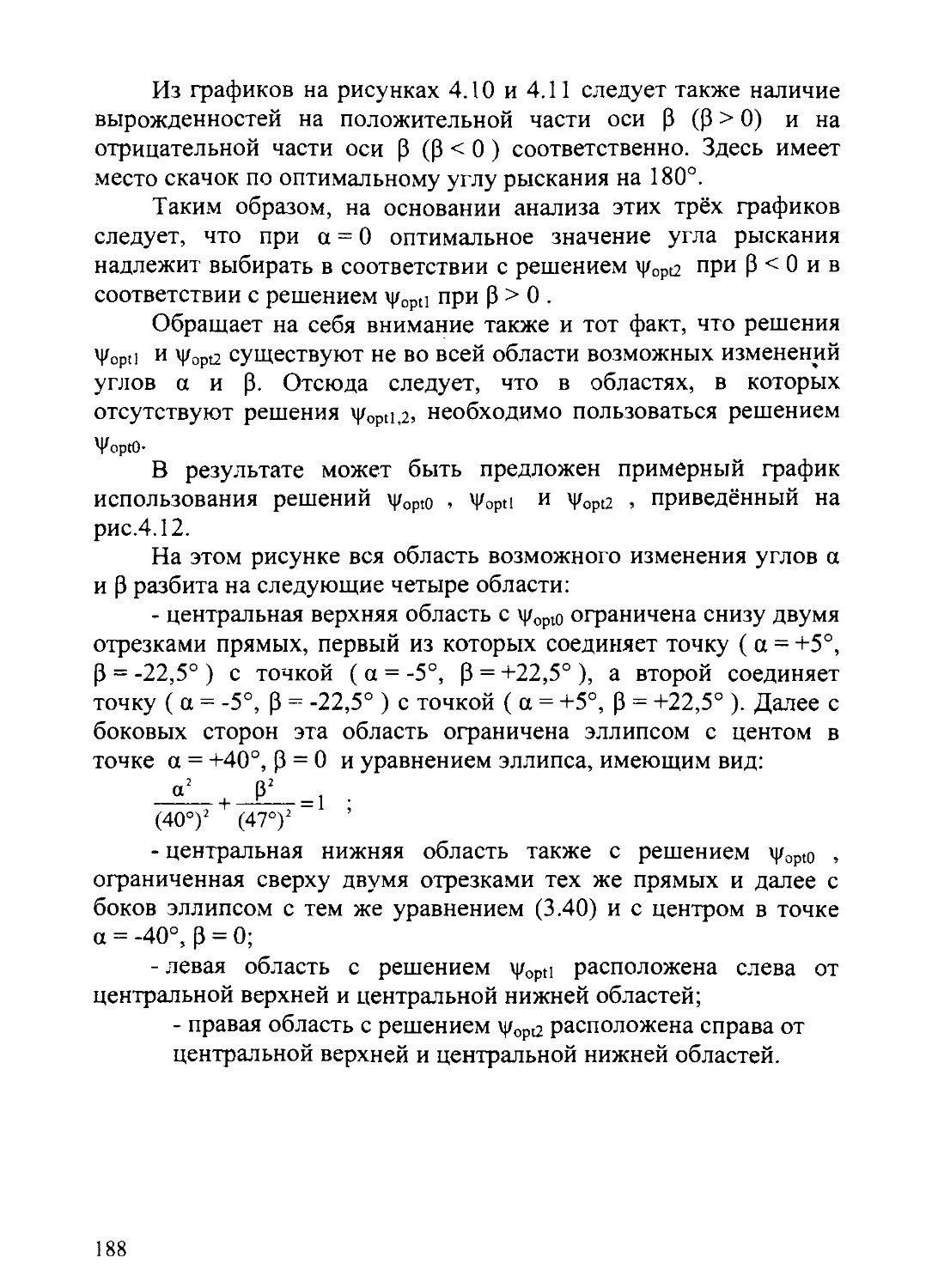
сканирования......................................184
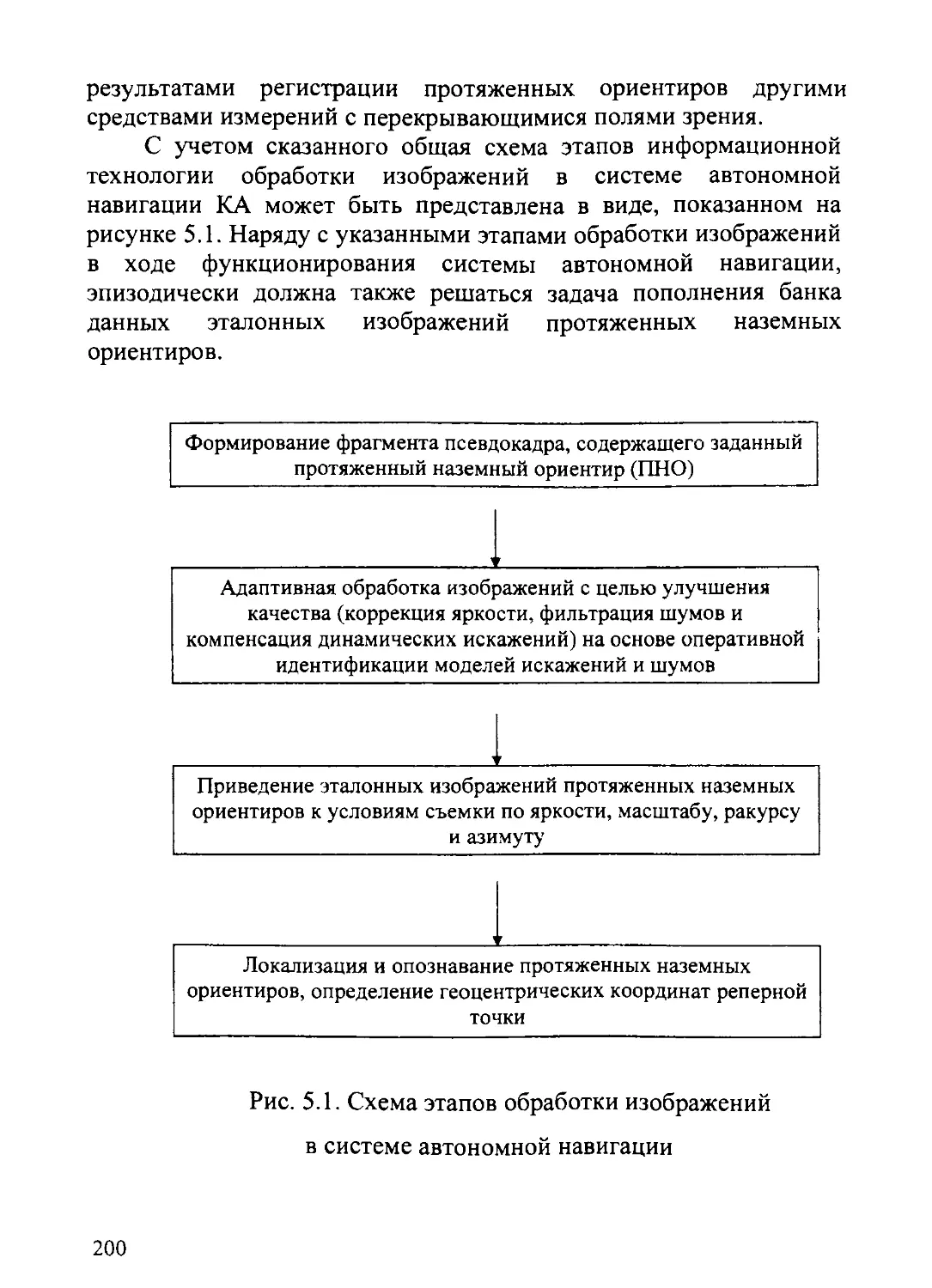
Глава 5. Методы обработки изображений на борту КА....193
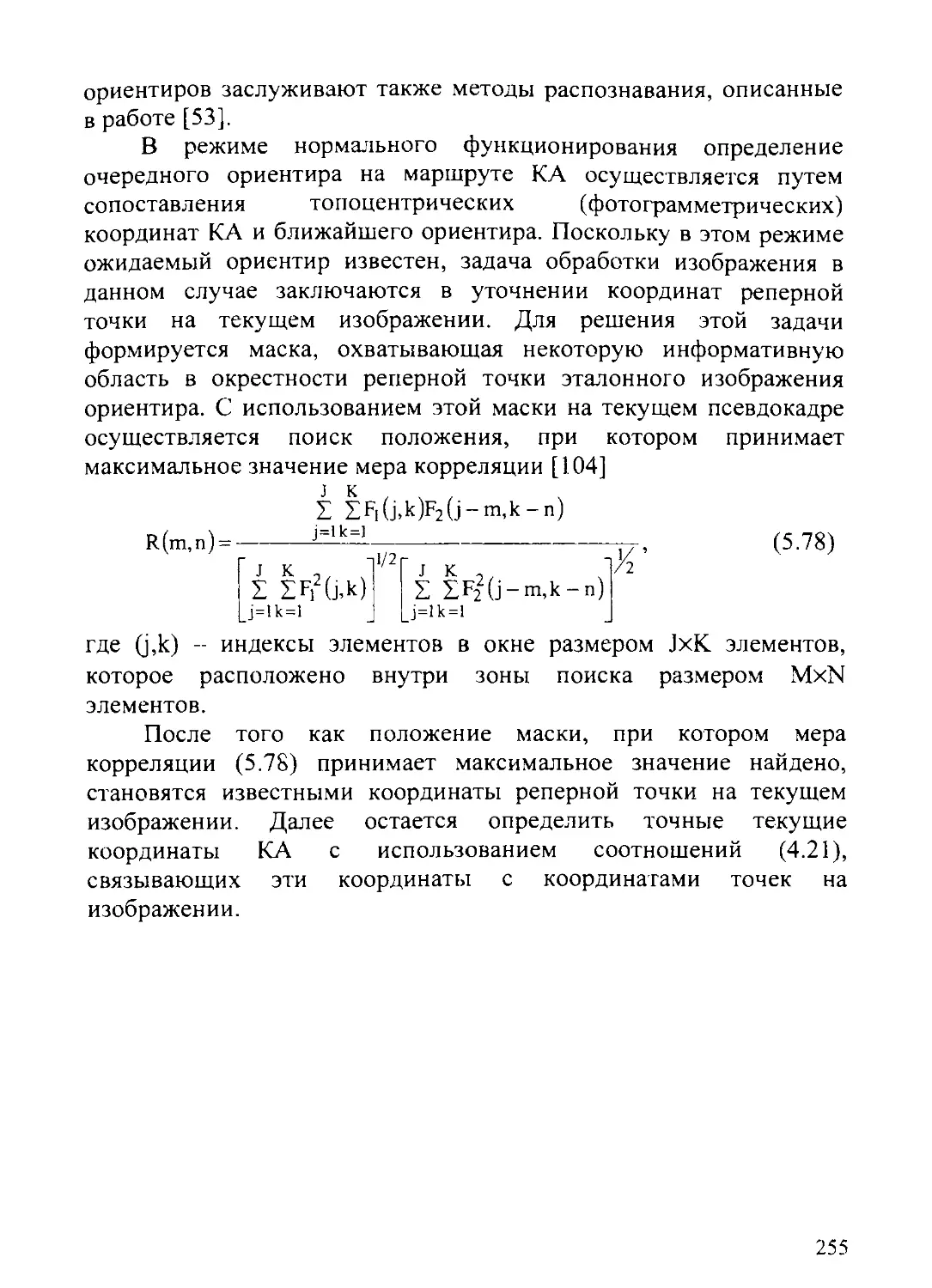
5.1. Формулировка задач обработки изображений
в системах автономной навигации КА................193
5.2. Выделение фрагментов, содержащих протяжённые
наземные ориентиры................................201
4
5.3. Предварительная обработка изображений в системах
автономной навигации КА..................211
5.4. Формирование банка эталонных изображений
протяженных наземных ориентиров..........224
5.5. Приведение эталонных изображений протяжённых
наземных ориентиров к текущим условиям съёмки... 237
5.6. Обнаружение и опознавание текущих протяжённых
ориентиров..............................245
Часть II
СИСТЕМЫ АВТОНОМНОЙ НАВИГАЦИИ
КОСМИЧЕСКИХ АППАРАТОВ ДИСТАНЦИОННОГО
ЗОНДИРОВАНИЯ ЗЕМЛИ
Глава 6. Астрорадиотехническая система автономной
навигации КА...........................................256
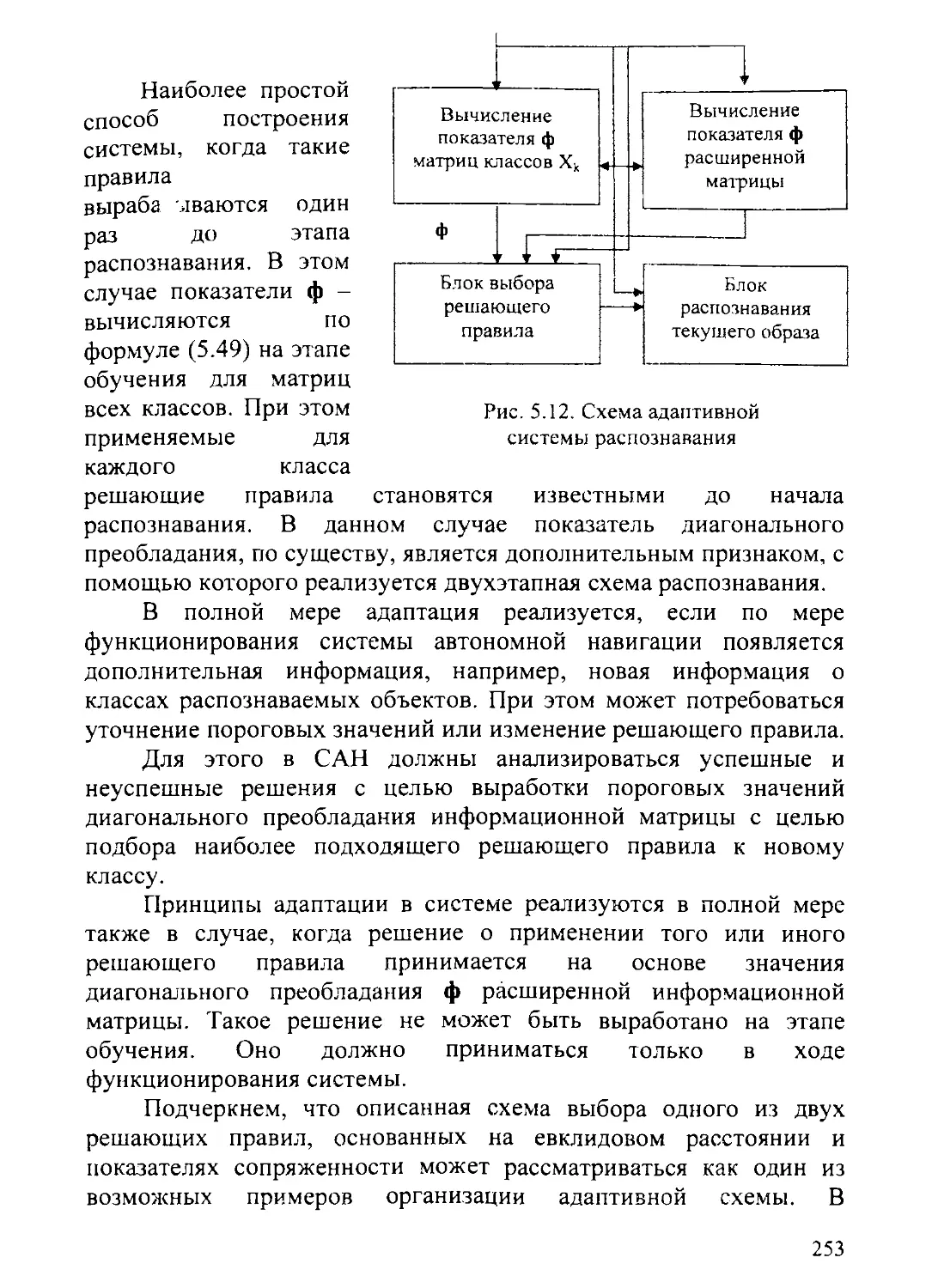
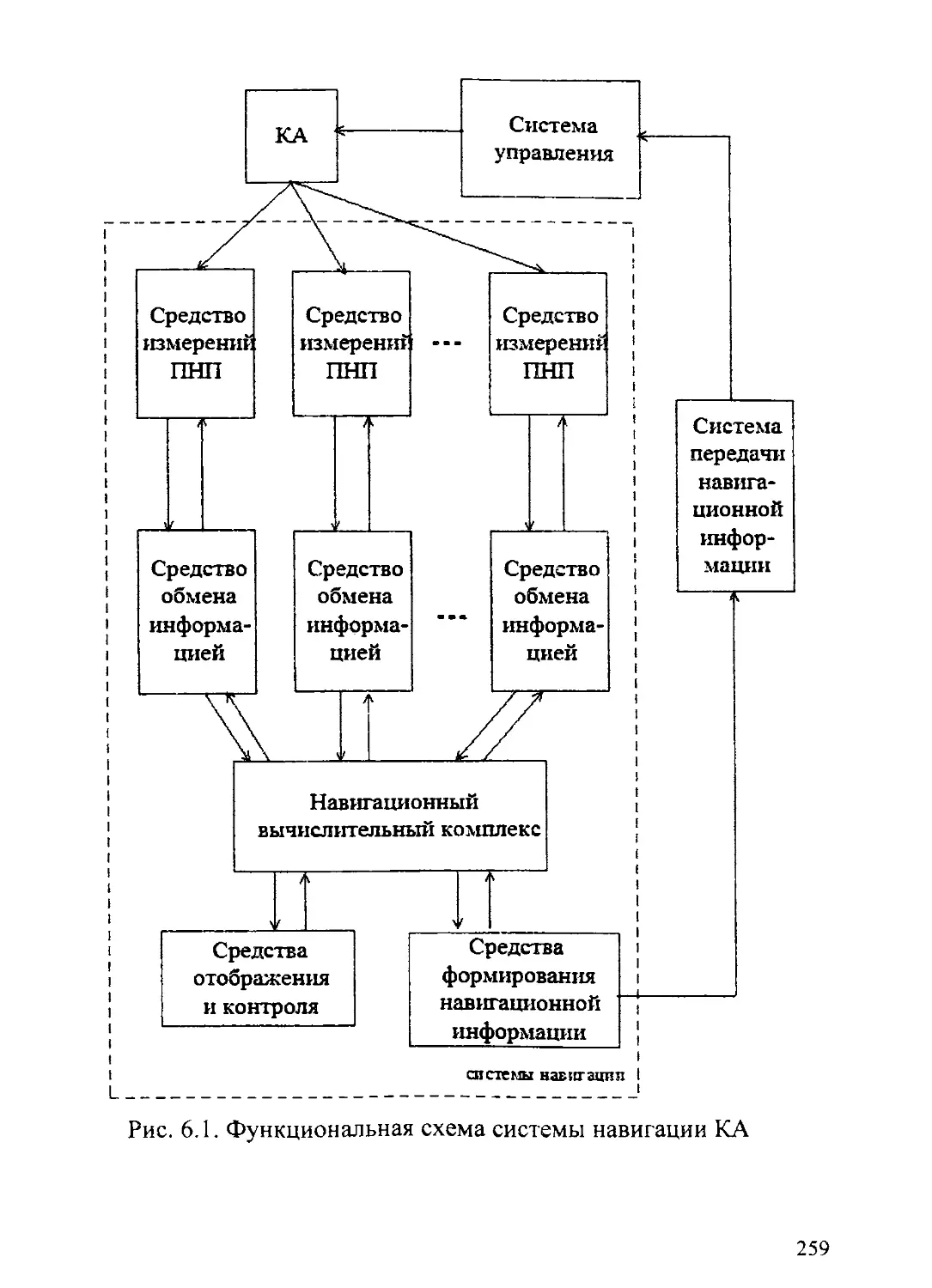
6.1. Функциональная схема системы навигации КА...256
6.2. Структура и функциональные показатели
астрорадиотехнической системы автономной навигации
КА..........................................260
6.3. Основные характеристики БЦВК................262
6.4. Астровизирующее устройство..................262
6.5. Радиовертикаль-высотомер....................269
6.6. Структура программного обеспечения..........274
6.7. Математическое обеспечение..................276
6.7.1. Математическая модель зенитного утла звезды... 278
6.7.2. Декомпозиция астрорадиотехнической системы. 283
6.7.3. Модифицированный динамический фильтр....289
6.8. Основные алгоритмы САН......................294
6.8.1. Алгоритм съёма информации с АВУ........295
6.8.2. Алгоритм съёма информации с РВВ........295
6.8.3. Алгоритм выбора астроориентиров........296
6.8.4. Алгоритм наведения АВУ.................298
6.8.5. Алгоритм прогнозирования параметров движения
КА......................................298
6.8.6. Алгоритм орбитальной навигации.........299
6.8.7. Алгоритм навигационного режима.........299
6.9. Планирование и режим работы САН............300
6.10. Особенности организации лётной эксплуатации
САН.........................................304
5
Глава?. Система автономной навигации КА по магнитному
полю Земли..........................................310
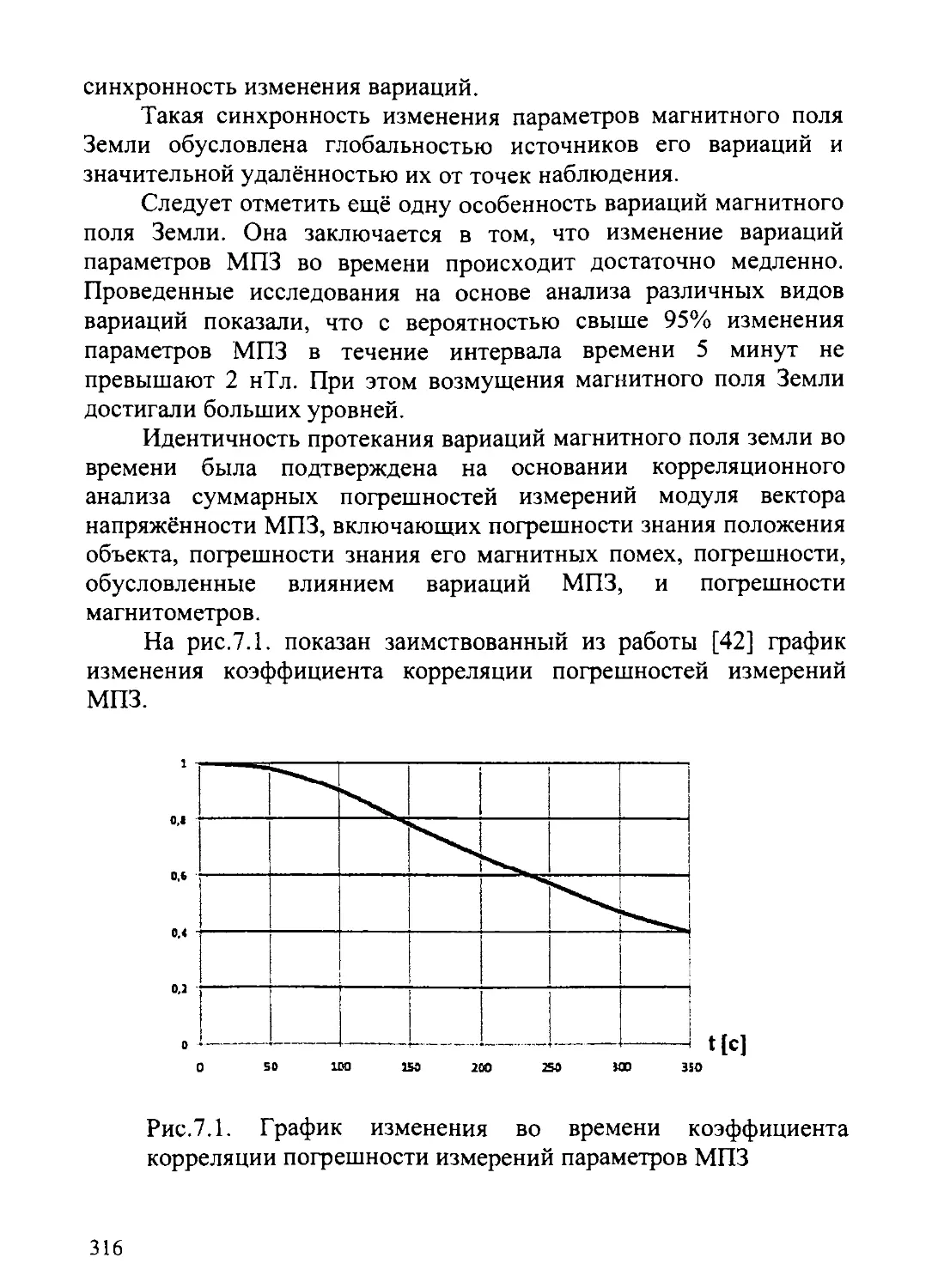
7.1. Проблемы построения системы автономной навигации
КА с использованием магнитного поля Земли.......310
7.2. Магнитное поле Земли.........................313
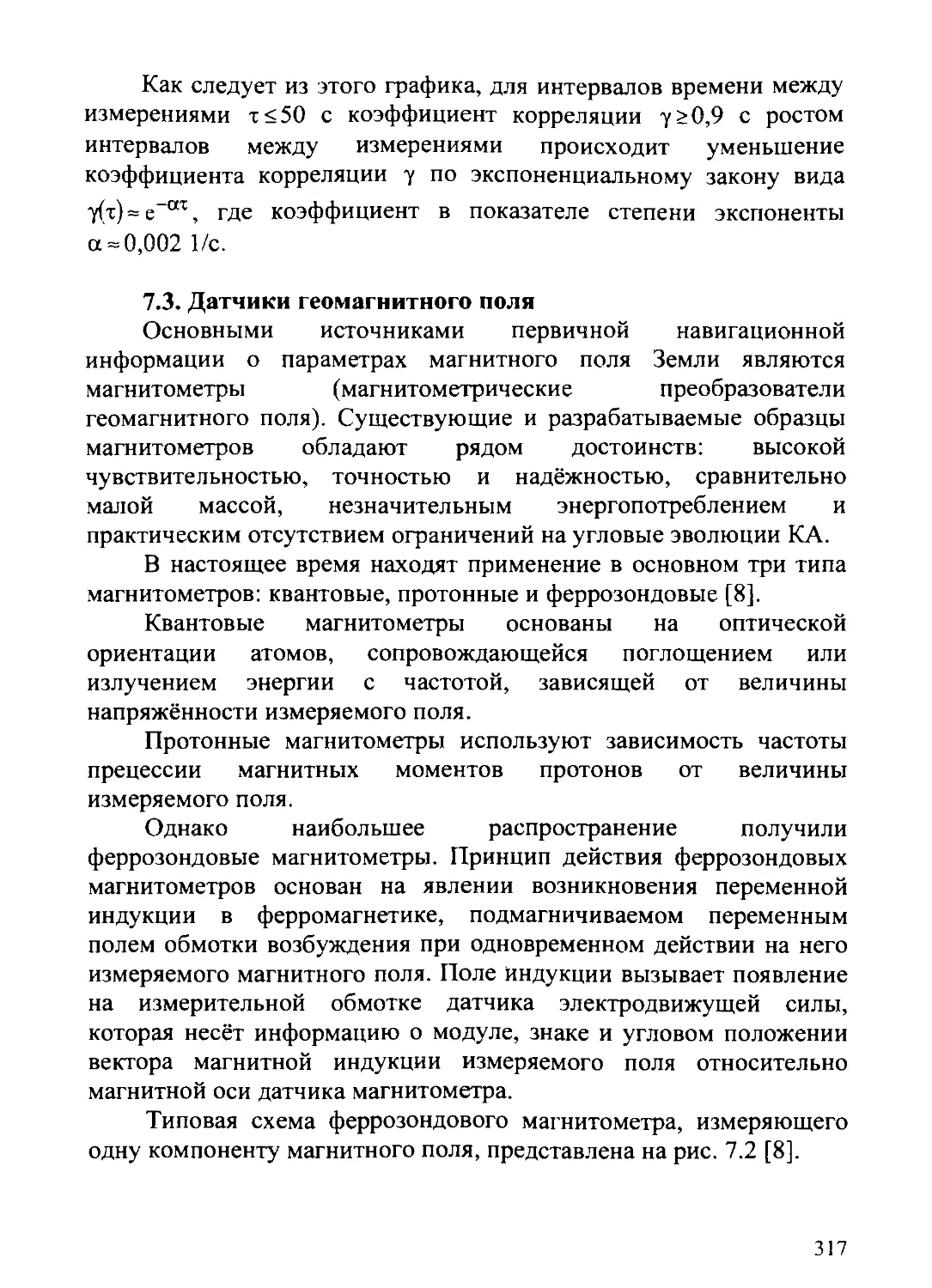
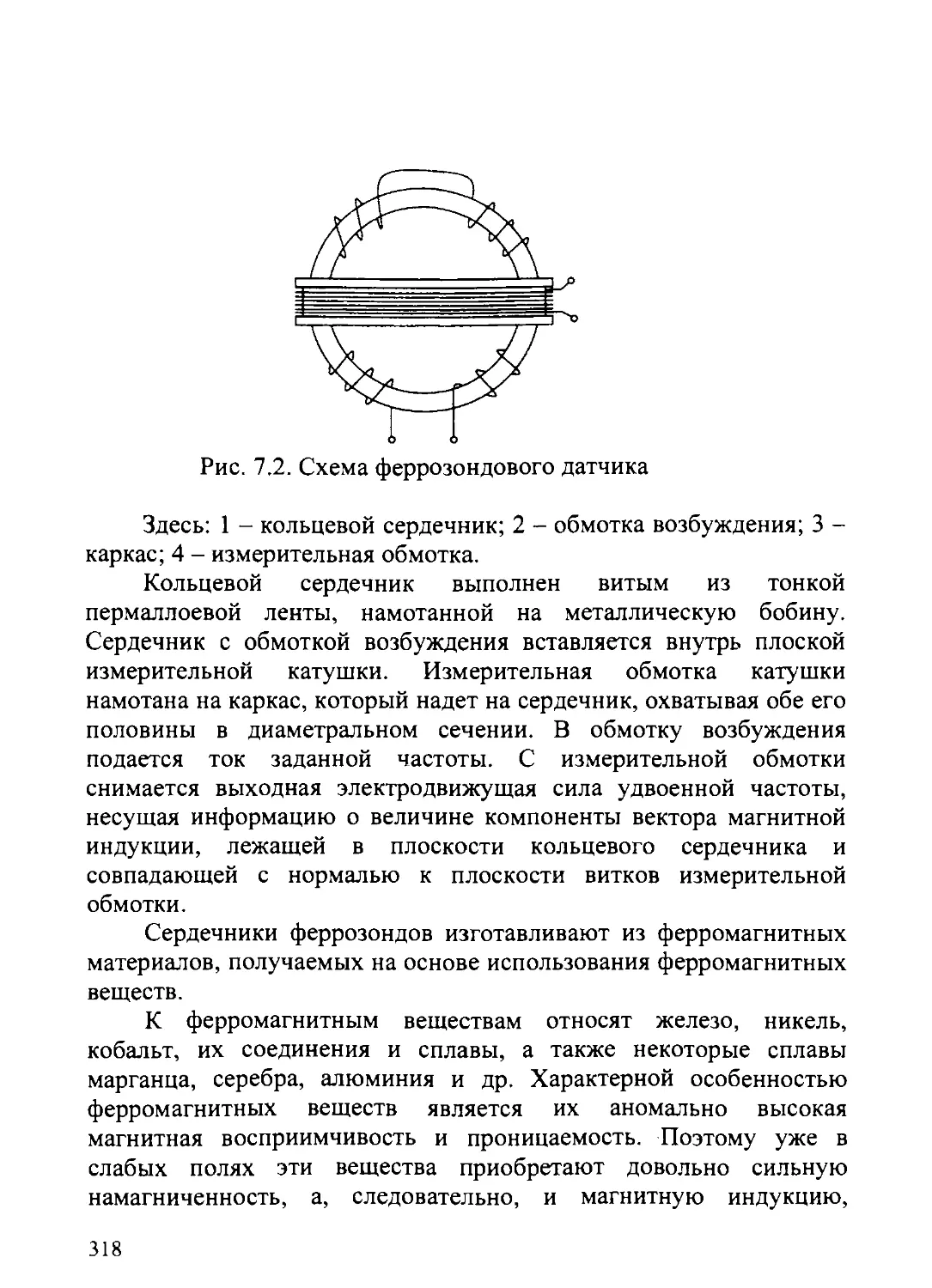
7.3. Датчики геомагнитного поля...................317
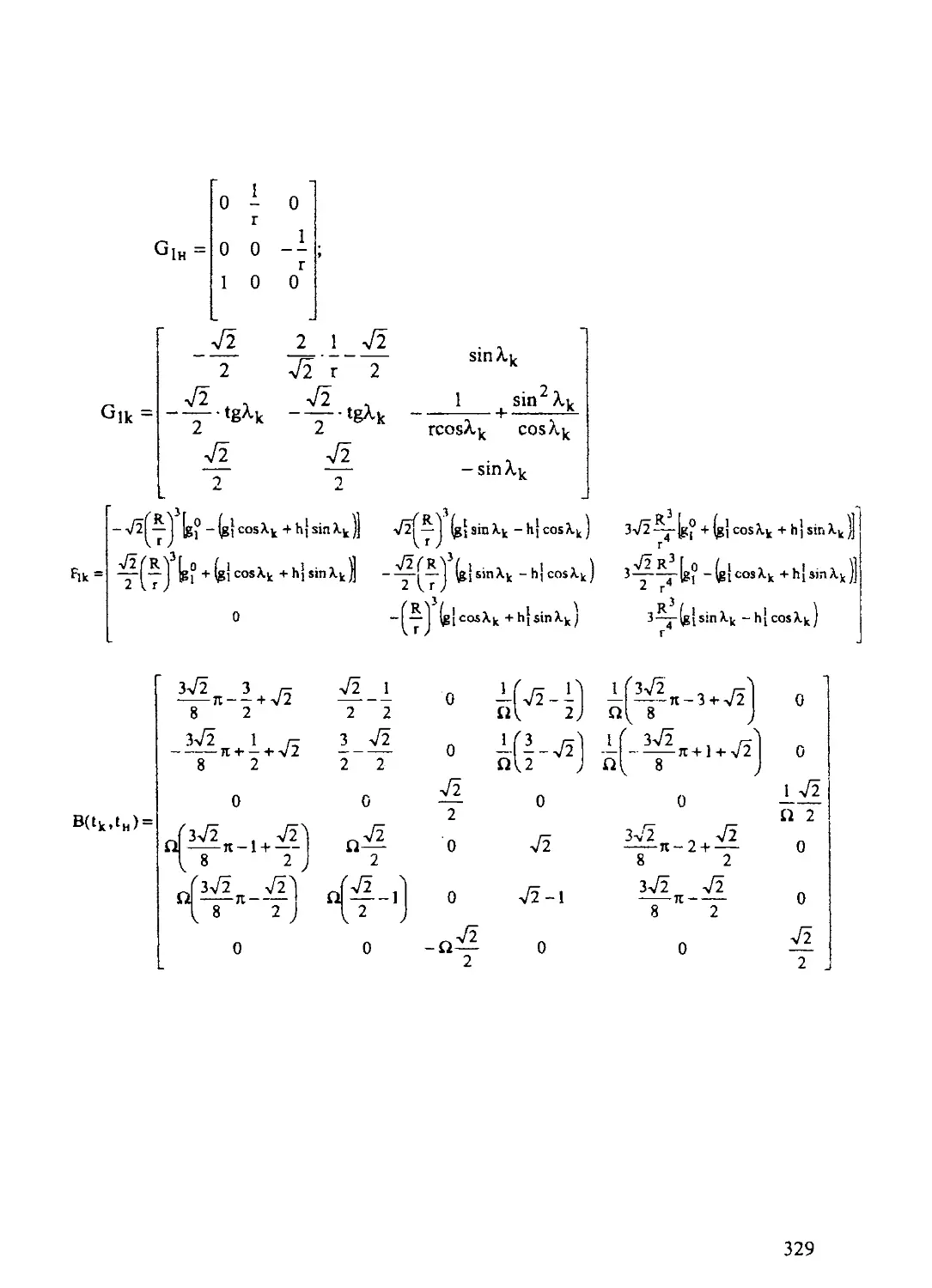
7.4. Дифференциально - корреляционный метод обработки
магнитометрической информации...................322
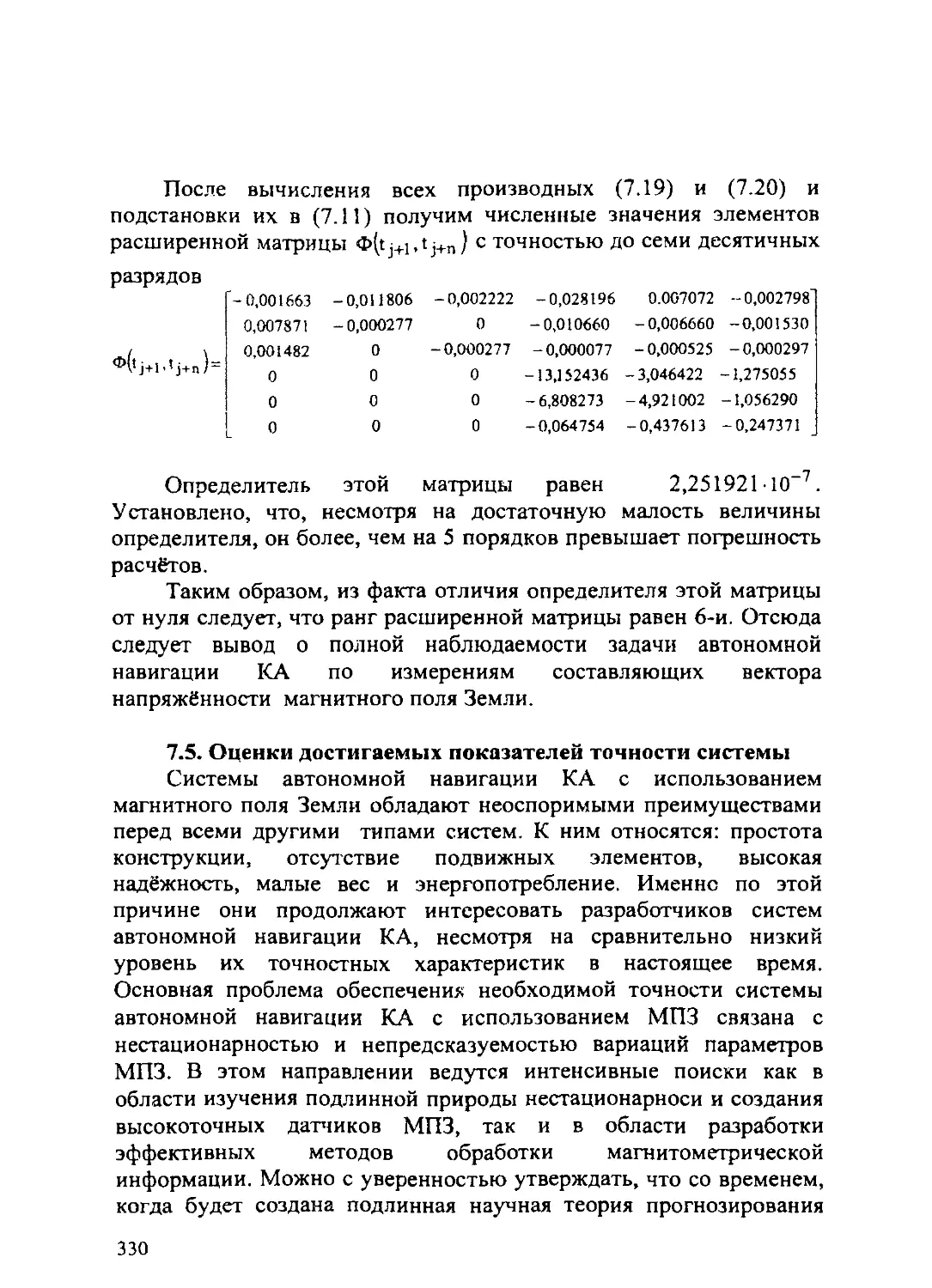
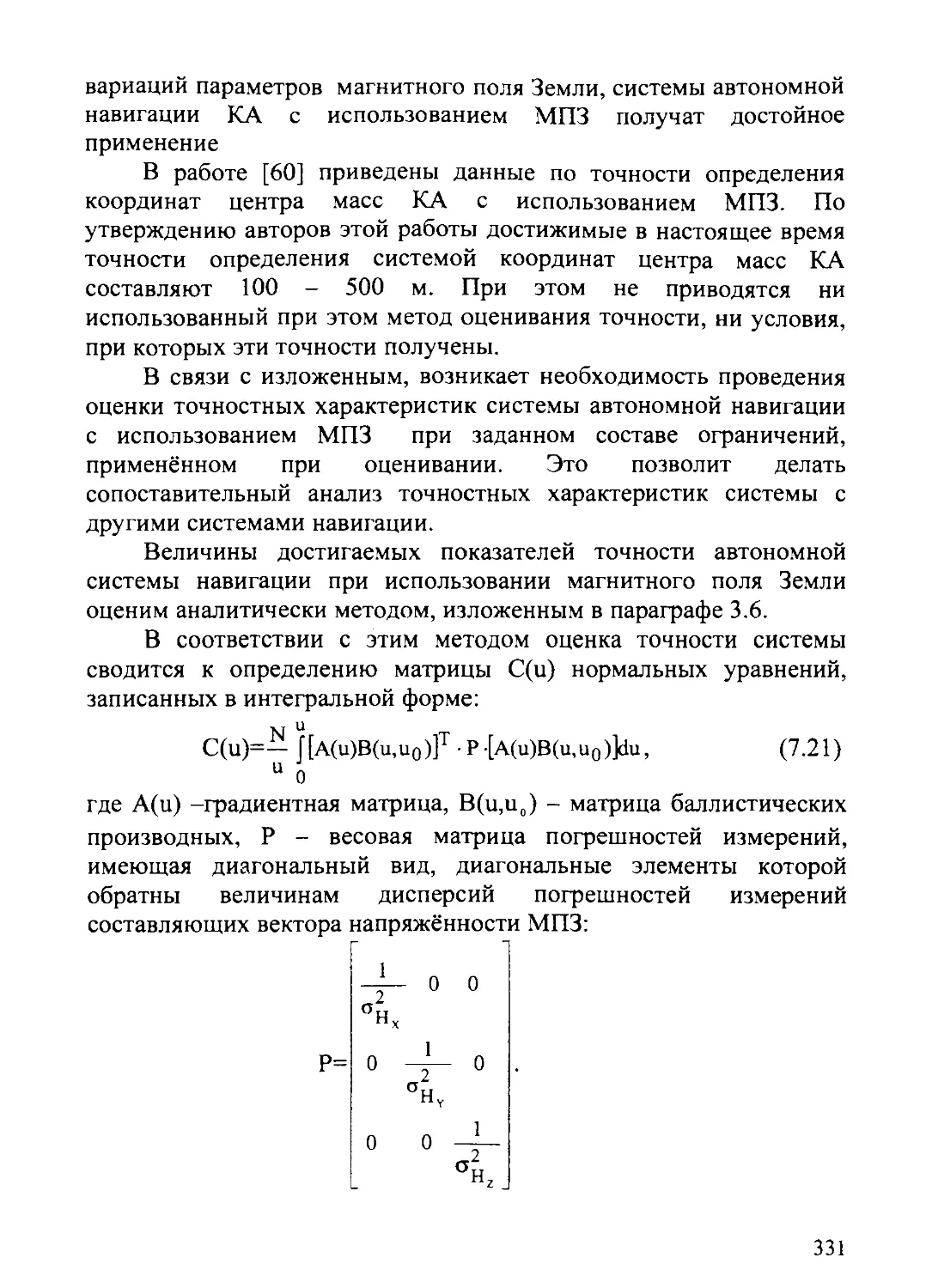
7.5. Оценки достигаемых показателей точности
системы........................................330-
Глава 8. Система автономной навигации КА с использованием
орбитальных ориентиров..............................334
8.1. Основы построения системы....................334
8.2. Условия наблюдаемости в задаче автономной навигации
КА при использовании орбитальных ориентиров..336
8.2.1. Критерий наблюдаемости..................336
8.2.2. Математическая модель движения КА и орбитальных
ориентиров....................................338
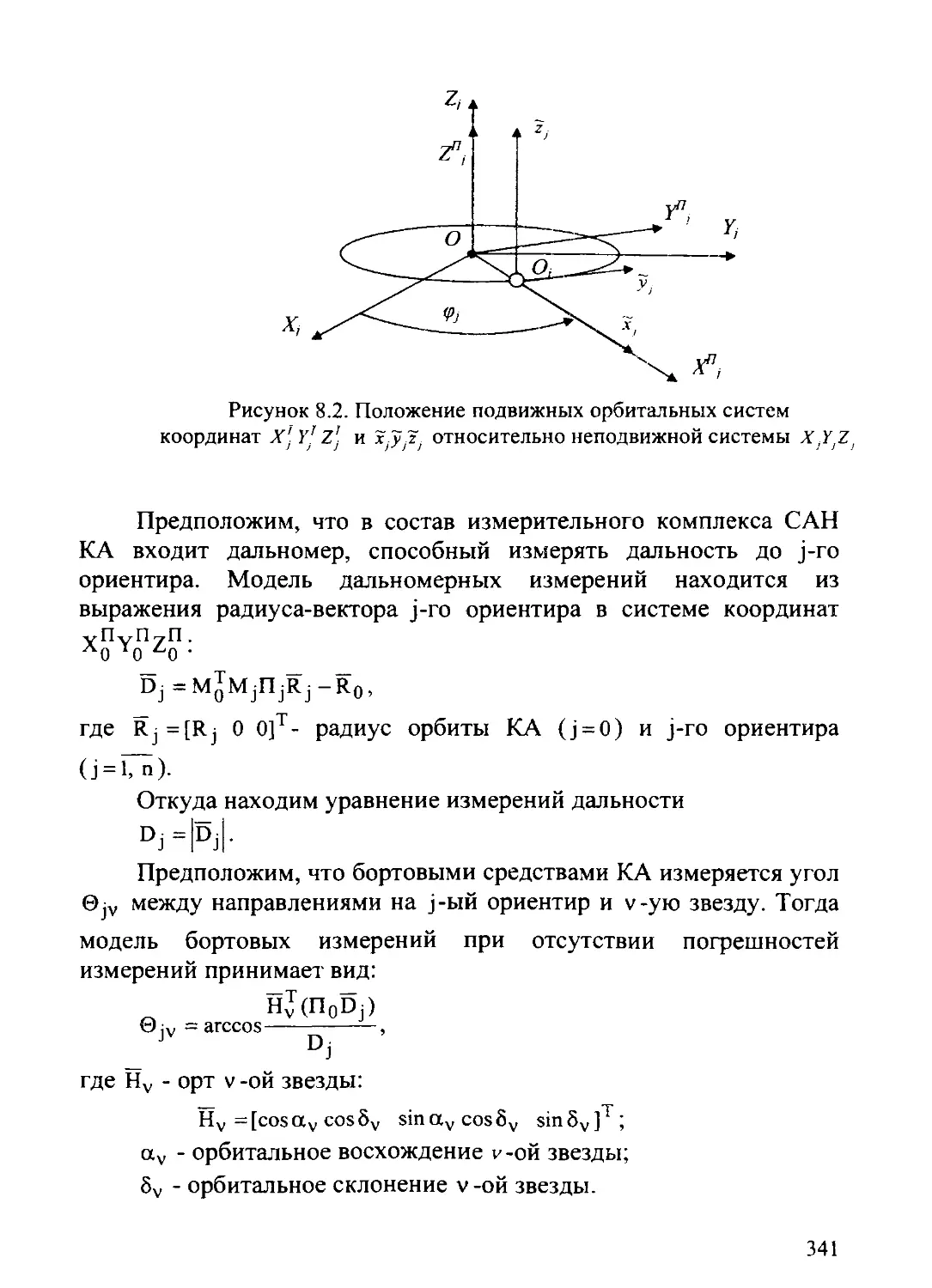
8.2.3. Модель бортовых навигационных измерений.338
8.2.4. Исследование наблюдаемости по бортовым
астрономическим измерениям....................342
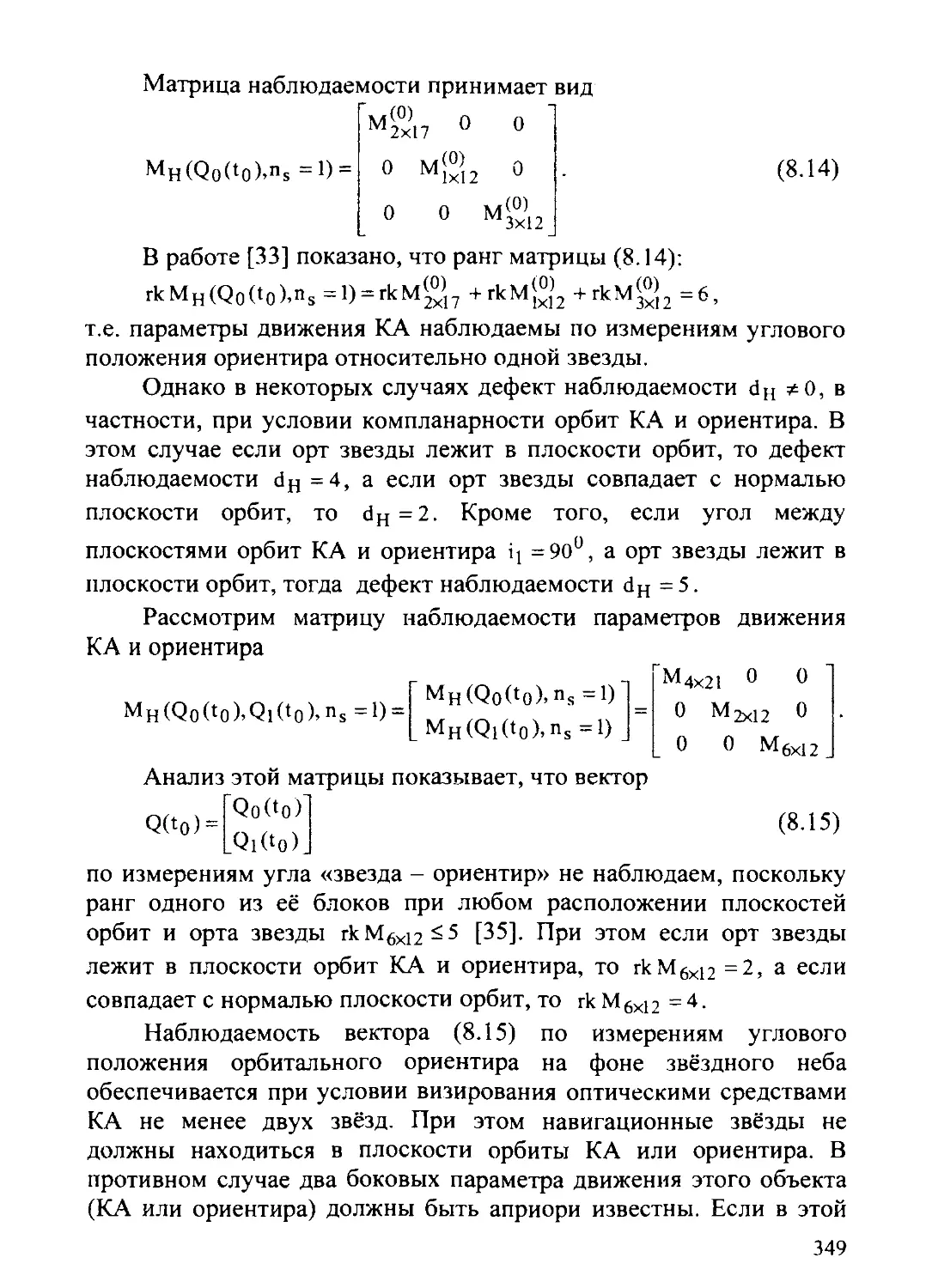
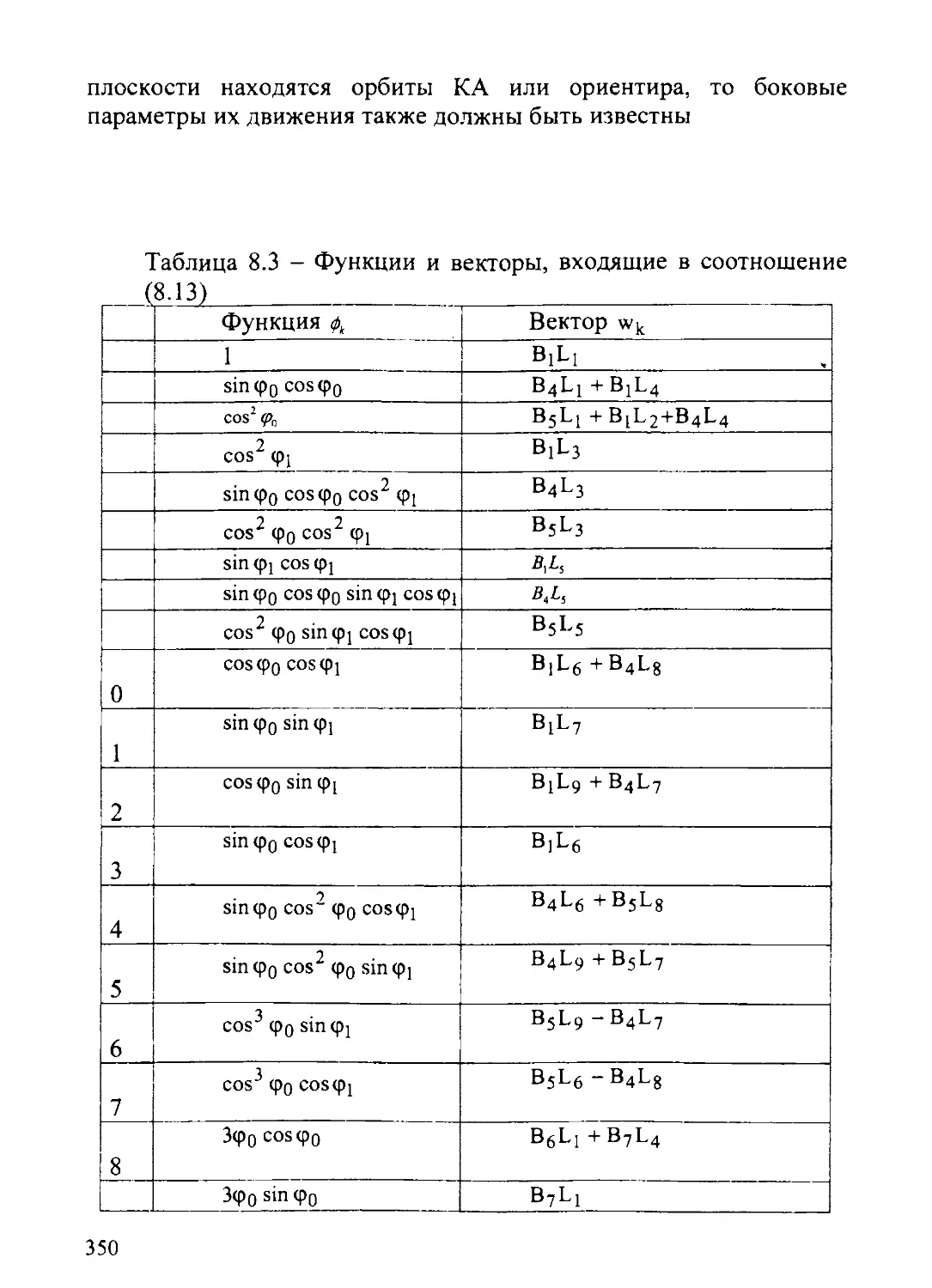
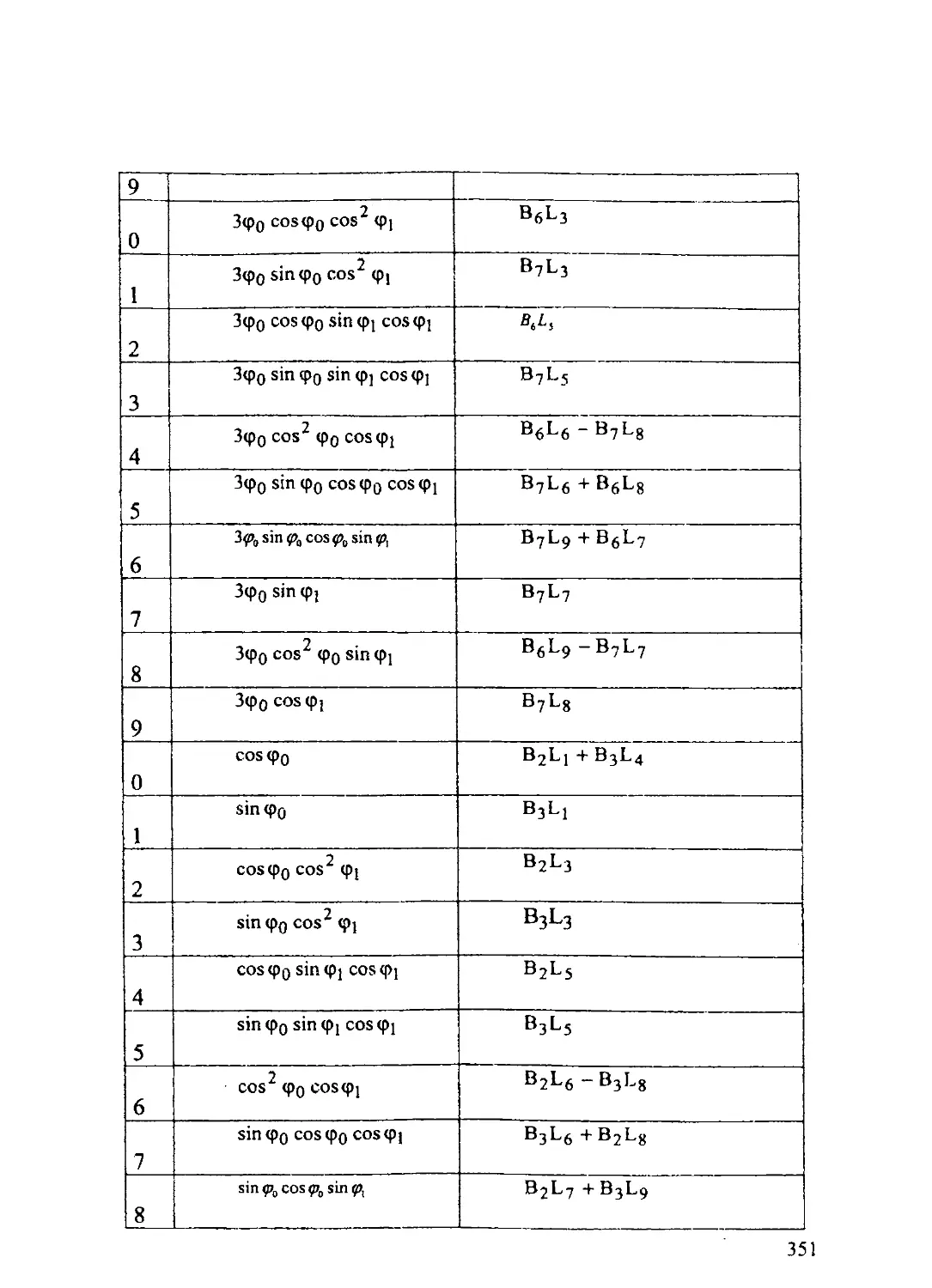
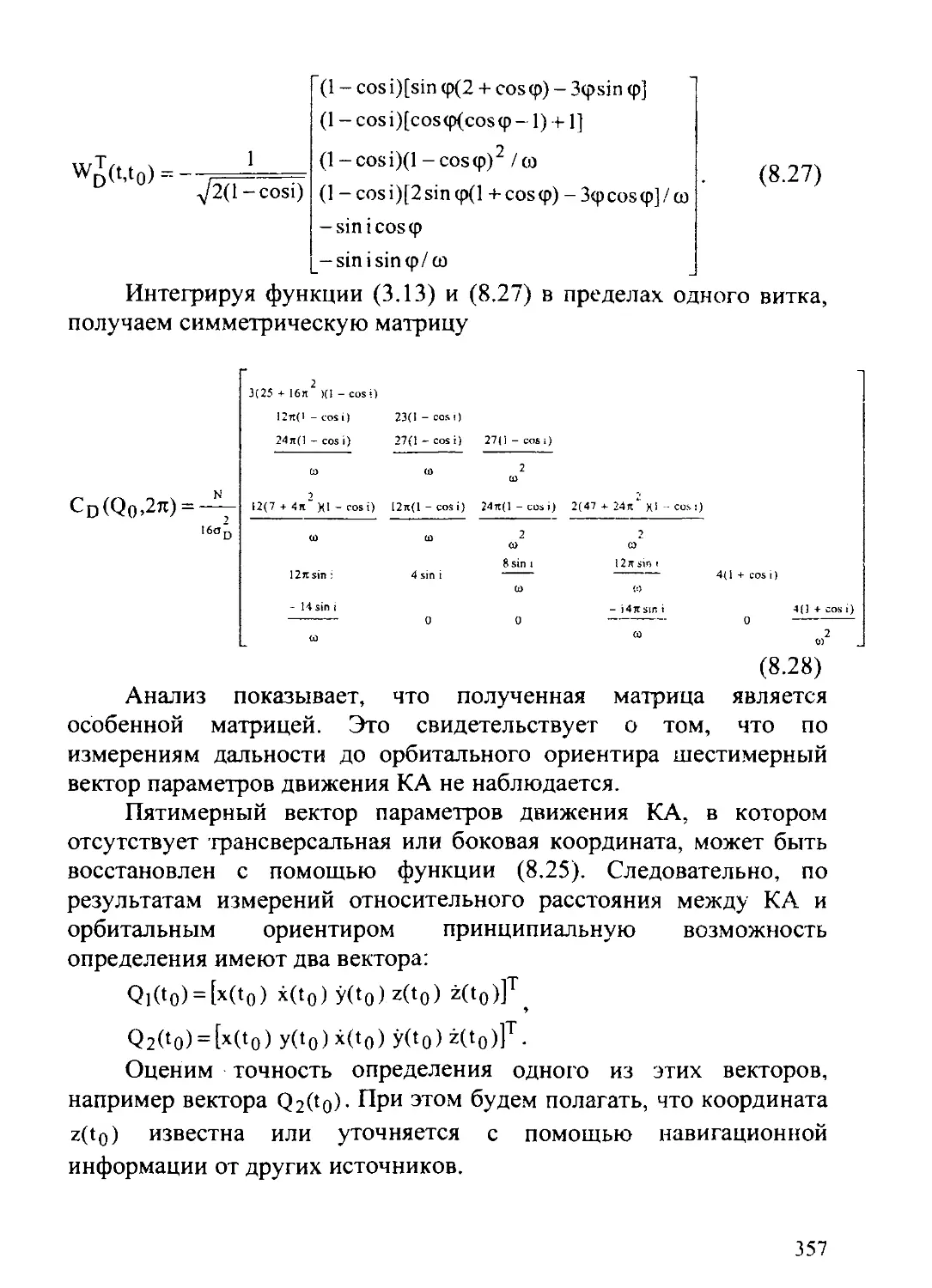
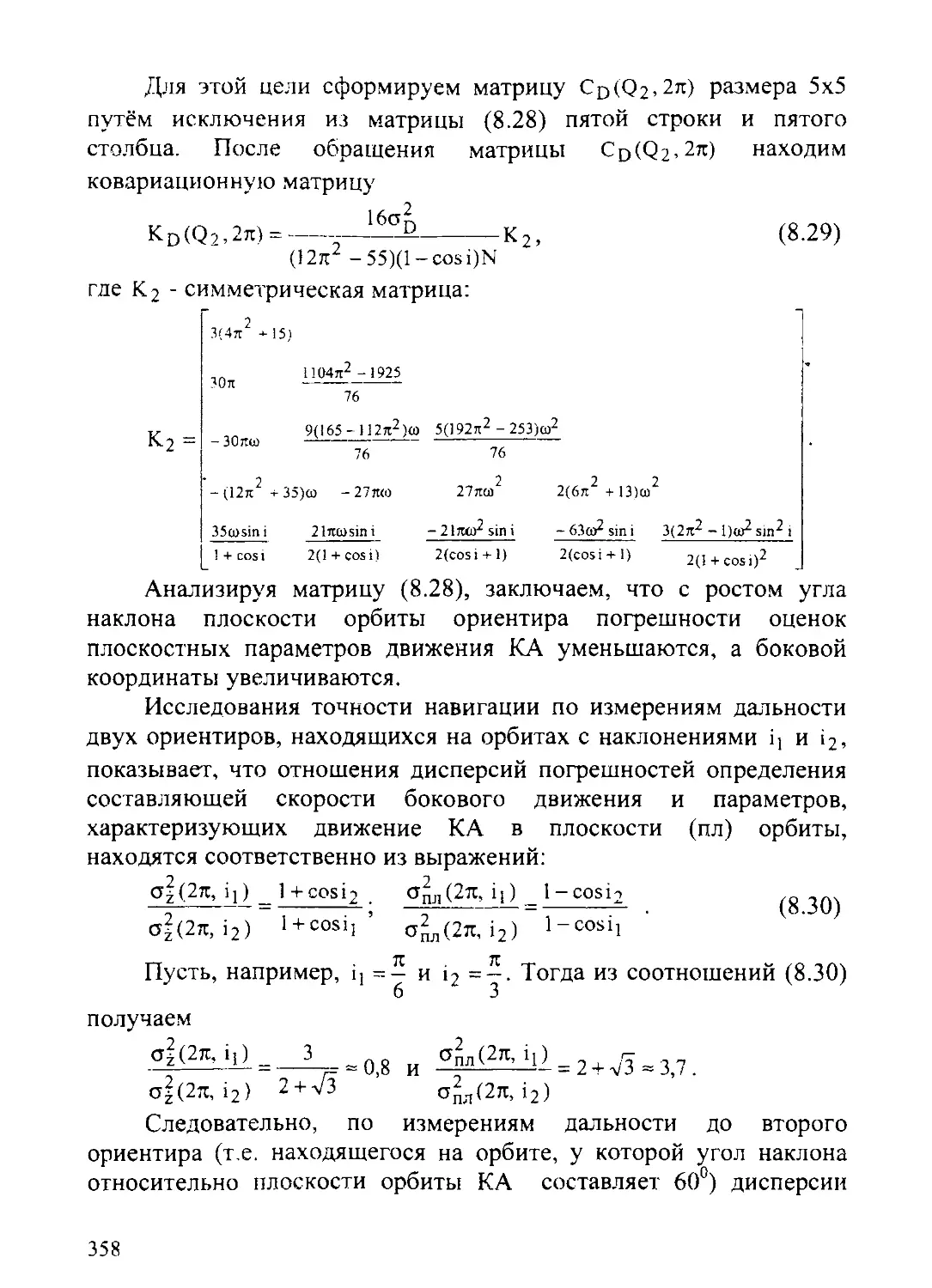
8.3. Оценивание точности решения задачи навигации КА352
8.3.1. Постановка задачи.......................352
8.3.2. Измерения углов «звезда - ориентир».....353
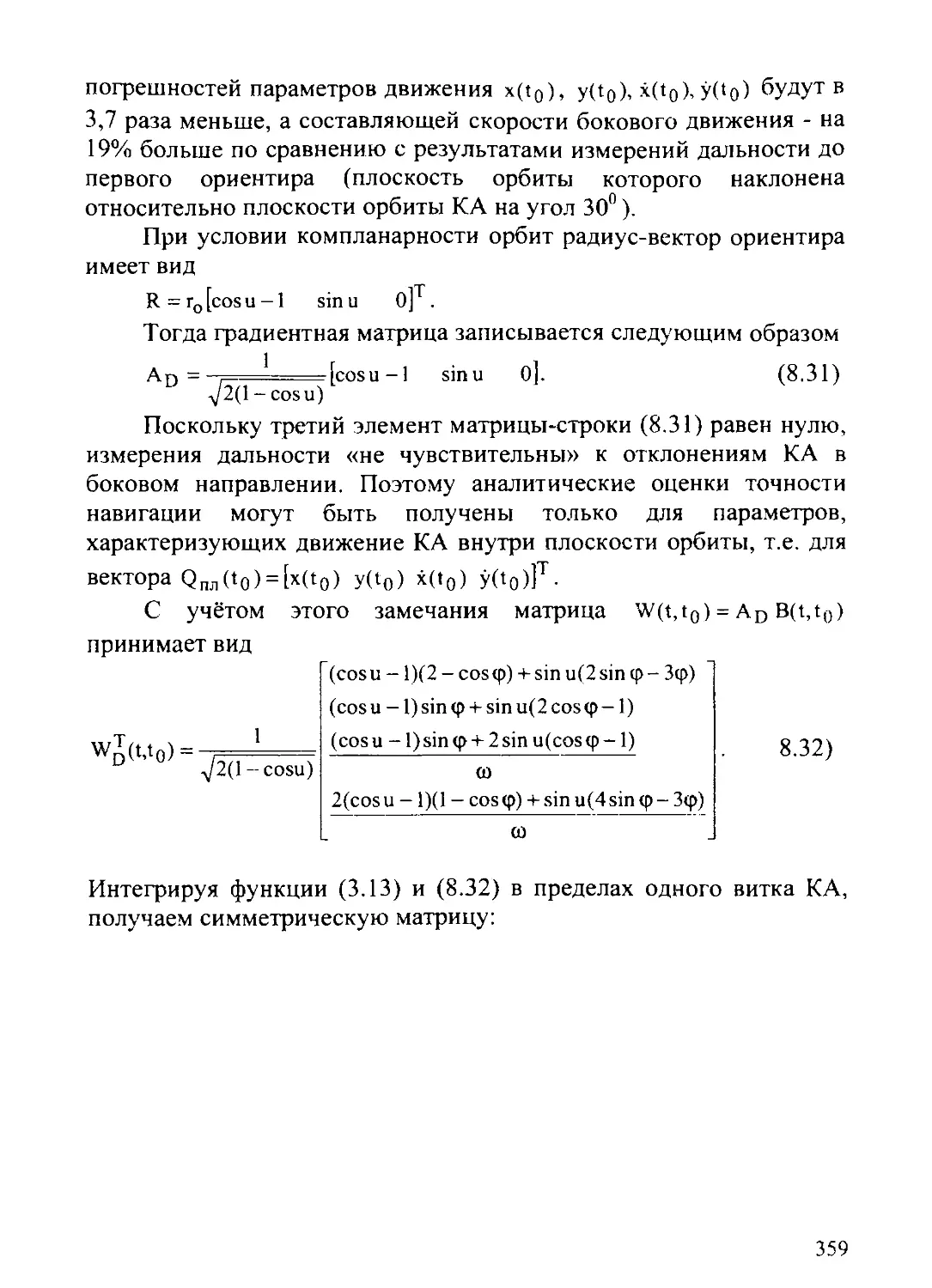
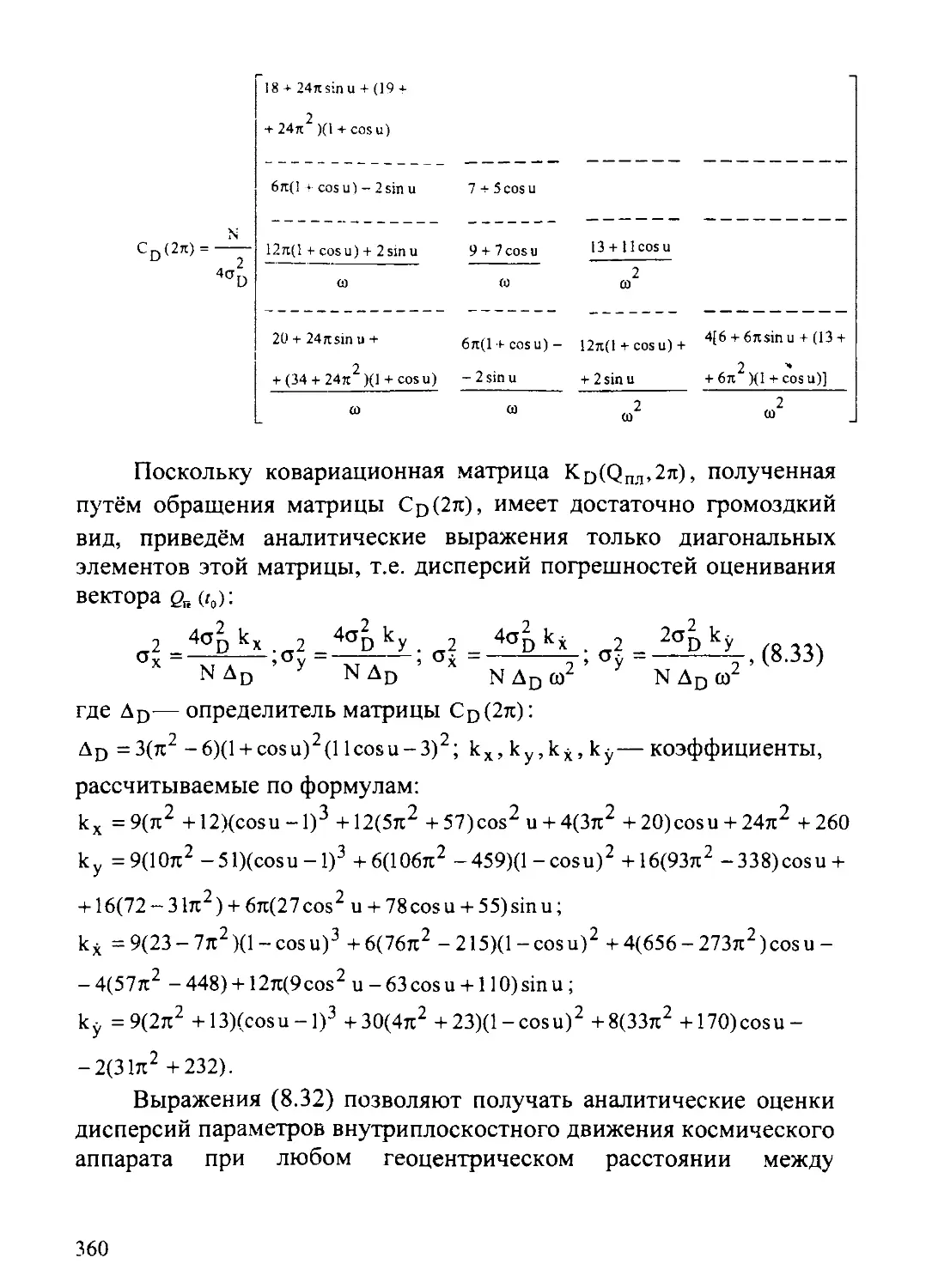
8.3.3. Измерения дальности до ориентира........356
8.3.4. Совместные измерения дальности до ориентира и
углов «звезда - ориентир».....................361
8.4. Структура и состав системы навигации.........365
8.5. Особенности астрозондовой навигации КА.......368
Глава 9. Система автономной навигации КА ДЗЗ с
использованием протяжённых наземных
ориентиров...................................373
9.1. Состав программного обеспечения и особенности
функционирования системы........................373
9.1.1. Программный комплекс планирования.......375
9.1.2. Программный комплекс управления системой
автономной навигации..........................376
6
9.1.3. Программный комплекс получения и регистрации
необходимых массивов измерительной
информации.....................................377
9.1.4. Программный комплекс обработки полученной
информации.....................................377
9.1.5. Программный комплекс обработки первичных
навигационных параметров.......................379
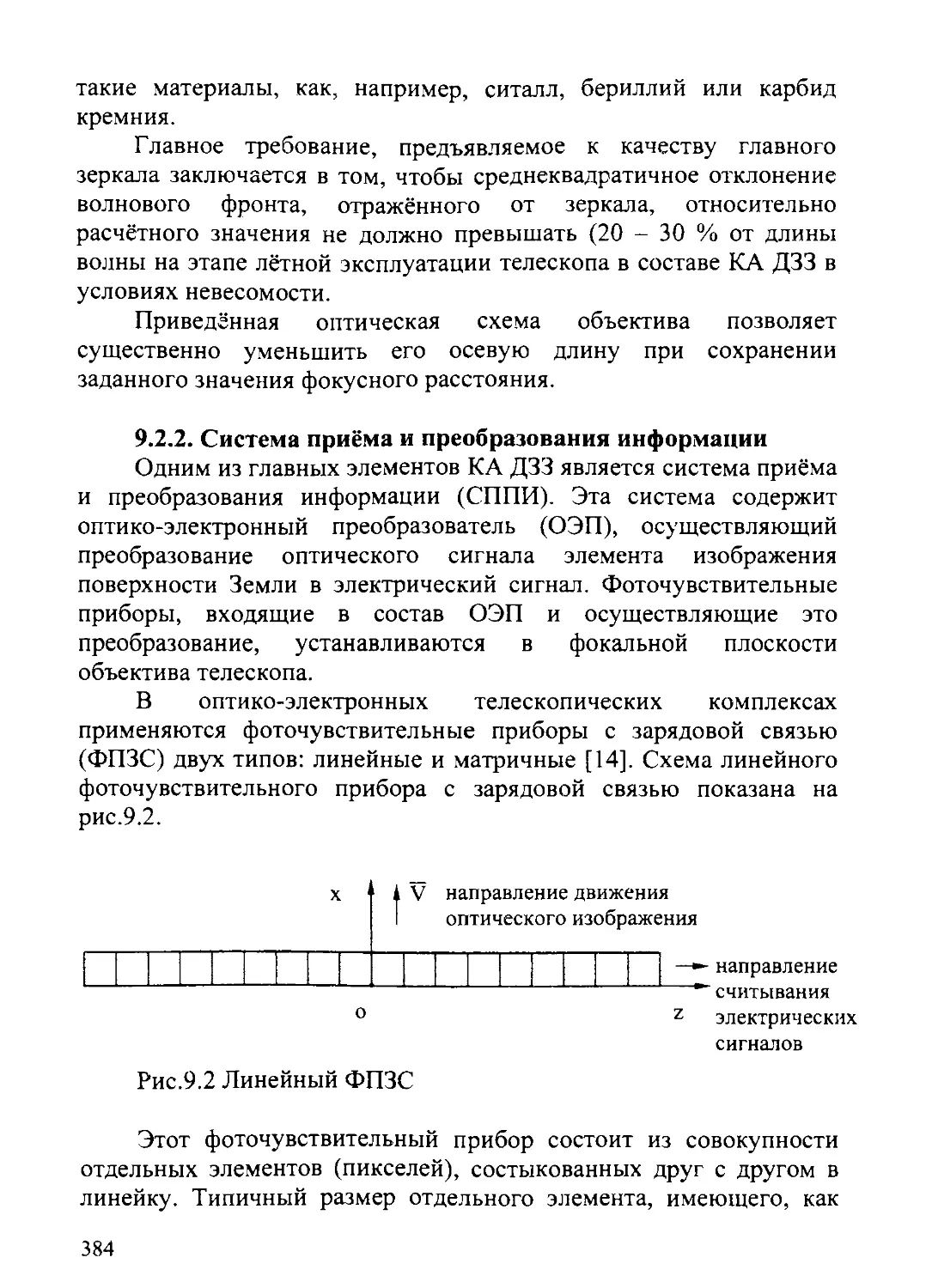
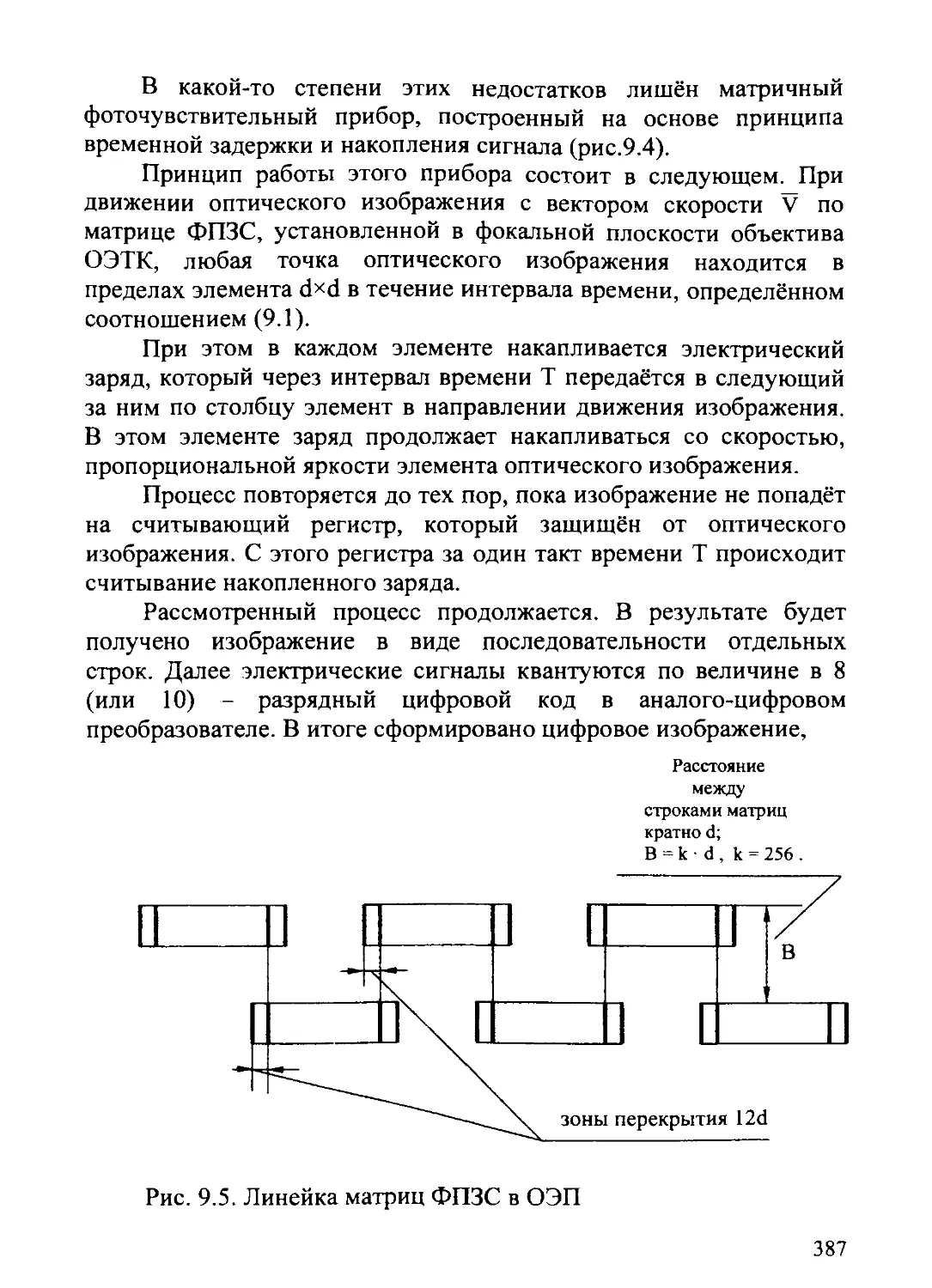
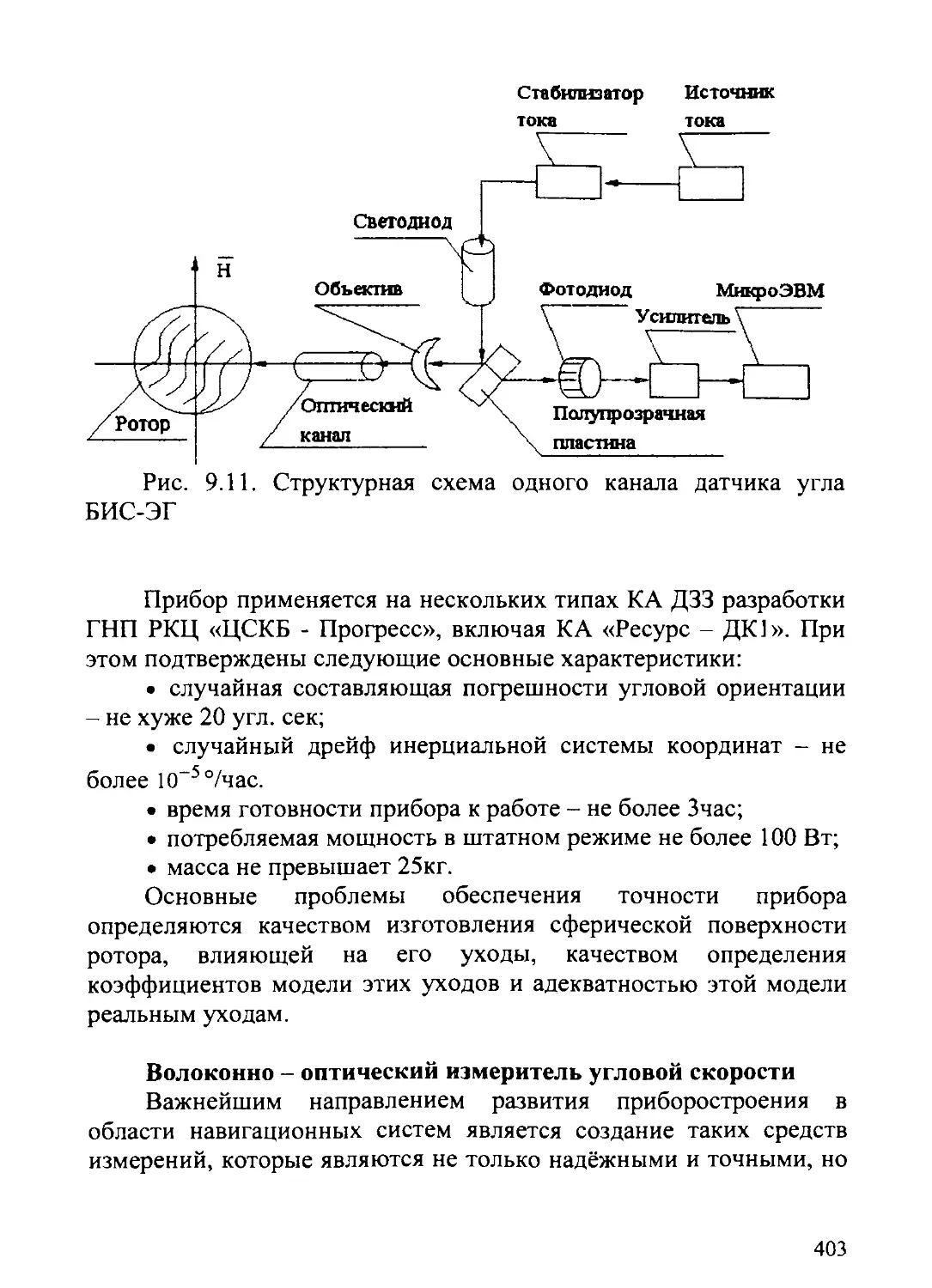
9.2. Оптико-электронный телескопический комплекс
дистанционного зондирования Земли и система приёма и
преобразования информации........................379
9.2.1. Принципы построения и функционирования
ОЭТК...........................................379
9.2.2. Система приёма и преобразования
информации.....................................384
9.3. Средства определения параметров углового движения
КА в инерциальном пространстве в процессе
съёмки...........................................389
9.3.1. Звёздные датчики. Характеристики. Принципы
построения и функционирования..................389
9.3.2. Гироскопические средства измерения углового
положения КА в инерциальном пространстве... 395
Глава 10. Исследования точности системы автономной
навигации КА ДЗЗ с использованием протяжённых
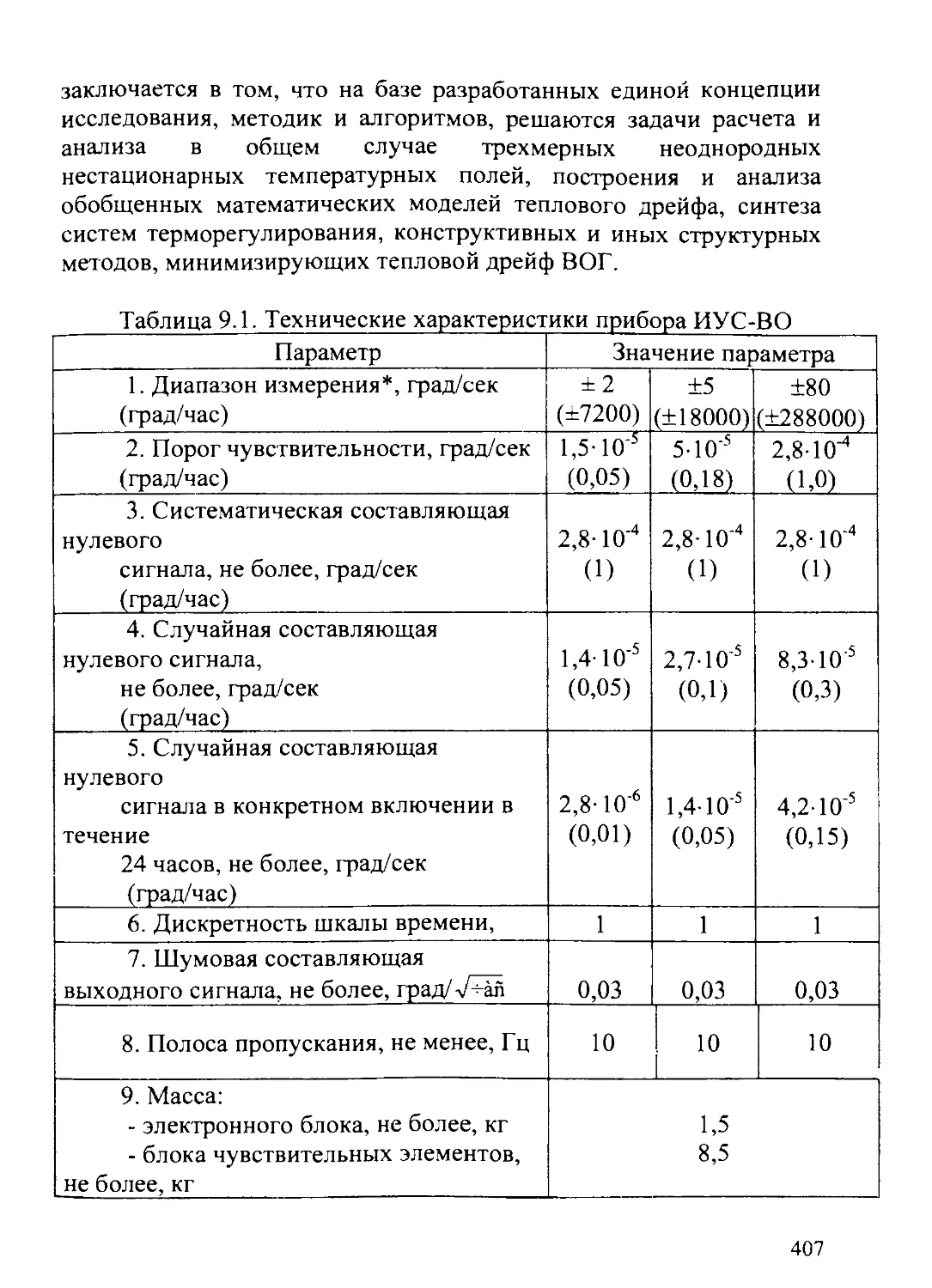
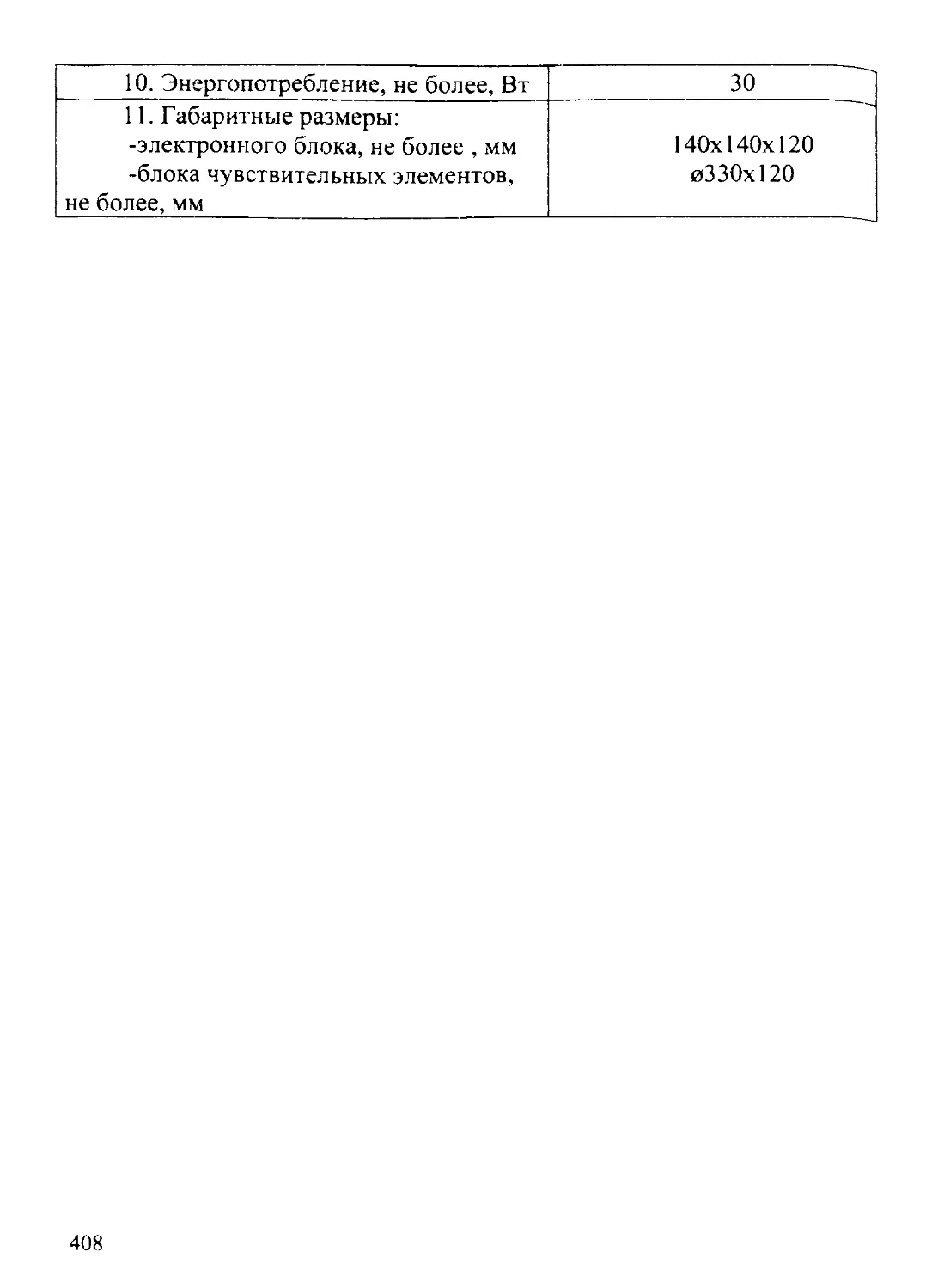
наземных ориентиров.....................................409
10.1. Методы повышения точности определения параметров
углового движения КА в процессе съёмки поверхности
Земли............................................409
10.1.1. Метод повышения точности звёздного датчика при
движении КА с большими угловыми
скоростями.....................................409
10.1.2. Метод полётного калибрования гироскопических
средств........................................412
10.2. Методы и средства высокоточной ориентации линии
визирования наземного ориентира..................419
10.2.1. Метод полётного фотограмметрического
калибрования оптико-злектронного телескопичес-
кого комплекса.................................419
10.2.2. Привязка осей звёздного датчика к осям визирной
системы координат ОЭТК.........................428
7
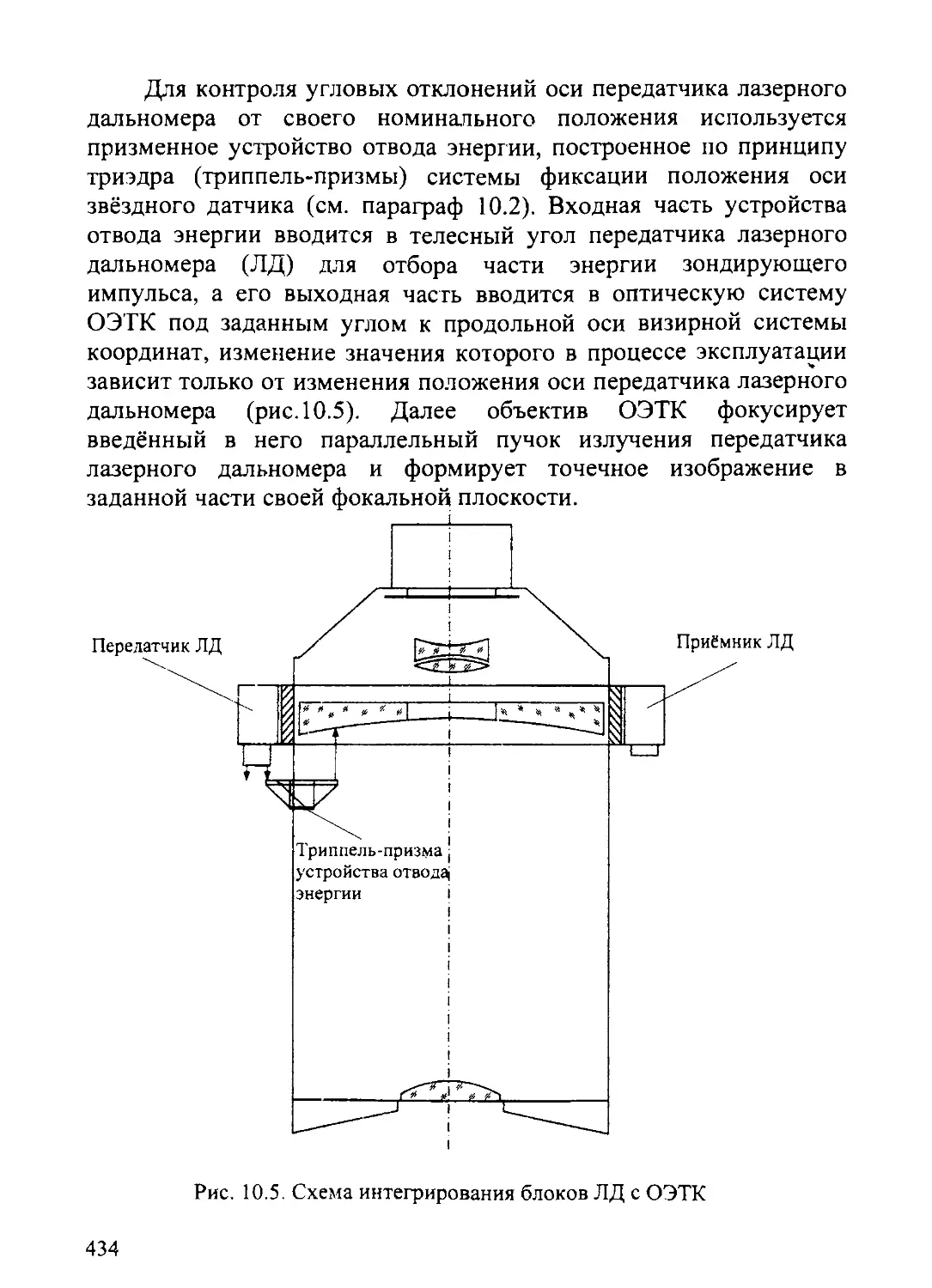
10.2.3. Привязка осей передатчика лазерного дальномера к
осям визирной системы координат ОЭТК.........433
10.3. Аналитическое оценивание показателей точности
системы........................................436
10.3.1. Декомпозиция системы навигации с
использованием протяжённых наземных
ориентиров...................................438
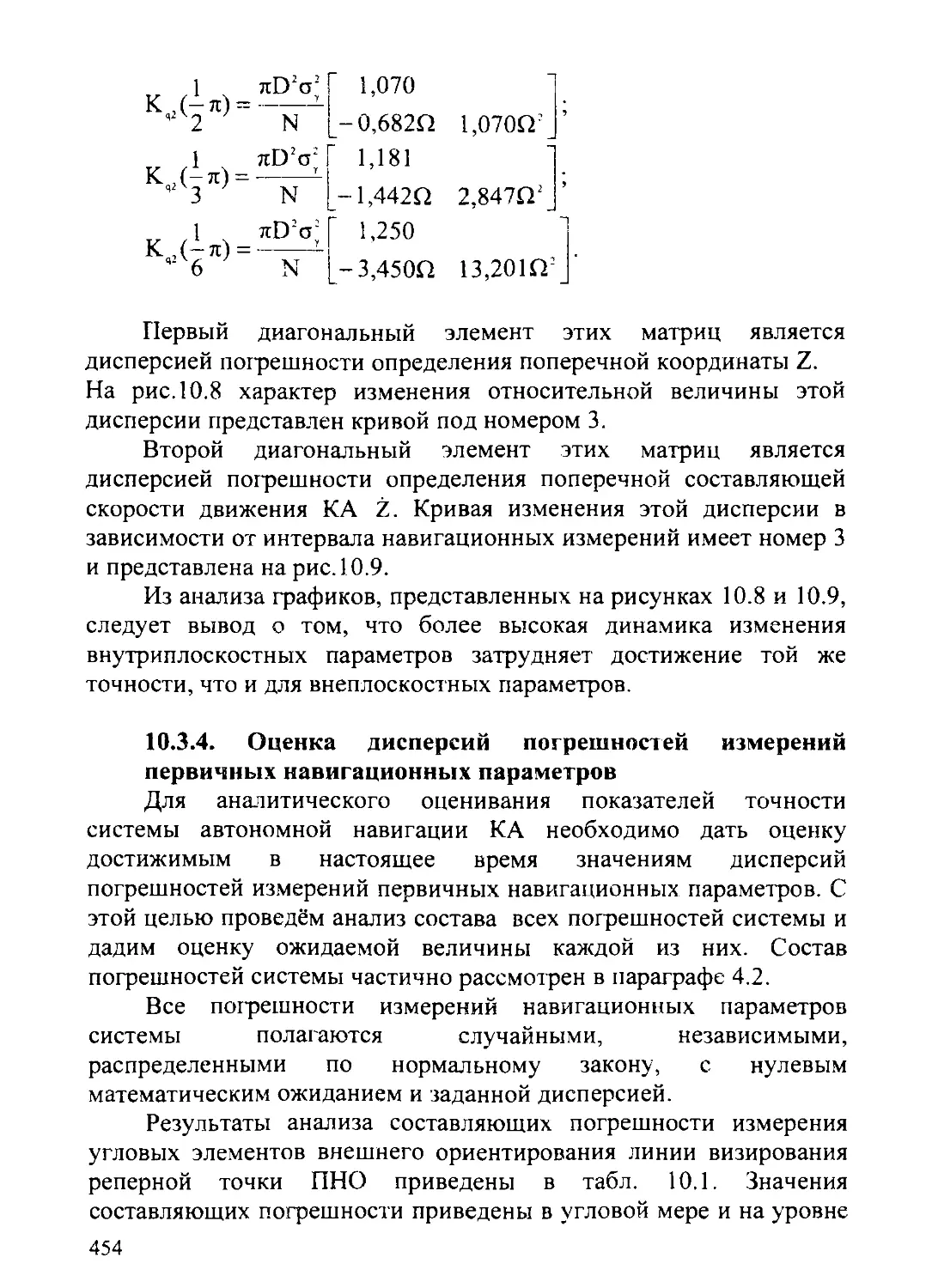
10.3.2. Аналитическая оценка точности определения
внутри - плоскостных параметров движения центра
масс КА......................................446
10.3.3. Аналитическая оценка точности определения
внеплоскостных параметров движения центра масс
КА...........................................450
10.3.4. Оценка дисперсий погрешностей измерений
первичных навигационных параметров...........454
10.3.5. Аналитическая оценка достигаемых показателей
точности прецизионной интегрированной САН КА
ДЗЗ....................................462
ЛИТЕРАТУРА.....................................465
ПРИЛОЖЕНИЕ А. Расчёт некоторых функций
дальности.......................................478
ПРИЛОЖЕНИЕ Б. Интегральные кривые движения точек
поверхности Земли для случая эллиптической орбиты КАи
сферической вращающейся Земли...................482
8
ПРИНЯТЫЕ СОКРАЩЕНИЯ
АВУ АКСО АН АЦП ВВС БИНС - астровизирующее устройство - астроконтроль согласования осей - аппаратура наблюдения - аналого-цифровой преобразователь - бортовая вычислительная система - бесплатформенная инерциальная навигационная — - система
БИХ БКУ БОКЗ-М БЦВК БШВ ВЗН ВОГ ВРЛ ГИВУС - бесконечная импульсная характеристика - бортовой комплекс управления - бортовой определитель координат звёзд - бортовой цифровой вычислительный комплекс - бортовая шкала времени - временная задержка и накопление - волоконно-оптический гироскоп - высокоскоростная радиолиния - гироскопический измеритель вектора угловой - скорости
ГЛОНАСС ГТИ ДЗЗ ДУС ДФ ЕЭС зд зпс ЗУ ЗУТО ИУС КА КИС ких кт лд мкс МНК МПЗ НКИК НКУ - глобальная навигационная спутниковая система - главная точка изображения - дистанционное зондирование Земли - датчик угловой скорости - динамический фильтр - европейское экономическое сообщество - звёздный датчик - зеркало перенацеливания и сканирования - запоминающее устройство - задняя узловая точка объектива - измеритель угловой скорости - космический аппарат - командно-измерительная система - конечная импульсная характеристика - космический телескоп - лазерный дальномер - международная космическая станция - метод наименьших квадратов - магнитное поле Земли - наземный командно-измерительный комплекс - наземный комплекс управления
9
нппи - наземный пункт приёма информации
нтд - нормативно-техническая документация
оск - орбитальная система координат
оэп - оптико-электронный преобразователь
ОЭС - оптико-электронная система
ОЭТК - оптико-электронный телескопический комплекс
ПВО - параметры внутреннего ориентирования
пдцм - параметры движения центра масс
ПЗС - прибор с зарядовой связью
пно - протяжённый наземный ориентир
пнп - первичные навигационные параметры
РАН - российская академия наук
РВ - радиовысотомер
РВВ- - радиовертикаль-высотомер
РК - радиоканал
РЛС - радиолокационная система
РП - рабочая программа
СА - спускаемый аппарат
САН - система автономной навигации
св -спецвычислитель
сди - скорость движения изображения
СК - спускаемая капсула
ско - среднеквадратичное отклонение
сппи - система приёма и преобразования информации
СР - спутник-ретранслятор
СРНС - спутниковая радионавигационная система
СУД - система управления движением
СФПО - система фиксации положения оси
УРНИ - устройство регистрации направления излучения
ФП - фокальная плоскость
ФПУ - фотоприёмное устройство
ФПЗС - фотоприбор с зарядовой связью
ФСК - фотограмметрическая система координат
ЦВМ - цифровая вычислительная машина
цлв - центральная линия визирования
ЦУП- - центр управления полётами
эвм - электронно-вычислительная машина
ЭтИ - эталонная информация
10
Уважаемые читатели!
Навигация - одна из древнейших областей человеческих
знаний. Поэтому неудивительно, что ряд известных научно -
прикладных школ уделяли и продолжают уделять этому
направлению исследований большое внимание. Естественно, что
специалистам Государственного научно-производственного
ракетно-космического Центра «ЦСКБ-Прогресс» - головного в
России предприятия по космическим аппаратам дистанционного
зондирования Земли - пришлось многое сделать в разработке
теоретических положений и новых подходов к определению,
расчёту и оценке навигацйонных данных в процессе полётов
многочисленных КА разработки Центра.
В результате была создана и эксплуатировалась более 30 лет в
разных модификациях астрорадиотехническая система на базе двух
астровизирующих устройств и радиовертикали-высотомера. В
настоящее время разработаны и успешно эксплуатируются
аппараты на базе спутниковых радионавигационных систем
(СРНС) ГЛОНАСС и GPS. Вместе с тем, в заделе у разработчиков
находится перспективная интегрированная система с
использованием протяжённых наземных ориентиров, позволяющая
на базе современных информационных технологий достичь
показателей точности, сравнимых с системами на базе СРНС.
При разработке этой системы решены важные вопросы
обнаружения и опознания наземных ориентиров бортовыми
средствами, разработаны основы теории оптимального
сканирования поверхности Земли с целью получения изображений
высокого качества.
Настоящая монография отражает вклад авторов -
специалистов Центра «ЦСКБ-Прогрес|с» и смежных организаций -
в теорию и практику создания систем автономной навигации
космических аппаратов. По широте охвата материала и глубине
теоретических исследований настоящая монография представляет
собой малую энциклопедию по системам автономной навигации
космических аппаратов.
Президент Самарского Государственного
аэрокосмического университета, член-корреспондент РАН,
доктор технических наук, профессор J В.А Сойфер
11
ВВЕДЕНИЕ
Системы автономной навигации космических аппаратов
(КА) призваны решать одну из важных задач бортового
комплекса управления, а именно, задачу постоянного снабжения
этого комплекса высокоточными параметрами движения центра
масс (ПДЦМ) КА с целью обеспечения автономного выполнения
поставленных перед ним задач.
Решение на борту КА задач планирования и проведения
навигационных измерений специальными средствами, задач
обработки результатов этих измерений вычислительными
средствами КА позволяет разгрузить персонал центров
управления полетами (ЦУП) КА от длительной и непрерывной
работы по планированию режимов эксплуатации измерительных
средств наземного комплекса управления (НКУ) и по обработке
результатов траекторных измерений, а также высвободить эти
средства на проведение работ по управлению другими КА.
Кроме того, только применение систем автономной
навигации может обеспечить точность определения и
прогнозирования ПДЦМ КА на любой заданный момент времени,
недостижимую при использовании наземного контрольно-
измерительного комплекса.
За время, прошедшее с момента запуска первого
искусственного спутника Земли, в нашей стране созданы и
успешно эксплуатировались лишь две системы автономной
навигации КА. Одна из них, получившая название «Дельта»,
создана в Ракетно-Космической Корпорации «Энергия»
(г. Королев) применительно к пилотируемым КА. В ее основу
положены измерения, выполняемые с участием космонавта.
Система «Дельта» успешно эксплуатировалась на
пилотируемых орбитальных станциях «Салют» и «Мир»
[13,30,36].
Первая беспилотная астрорадиотехническая система
автономной навигации КА создана кооперацией во главе с
Центральным Специализированным Конструкторским Бюро
(ныне ГНП РКЦ «ЦСКБ-Прогресс», г. Самара). Теоретические
основы создания этой системы разработаны коллективом ученых
Военно-космической академии им. А.Ф. Можайского (г. Санкт-
Петербург) во главе с профессором, д.т.н. Л.Ф. Порфирьевым.
Система успешно эксплуатировалась на нескольких типах КА
12
дистанционного зондирования Земли (ДЗЗ) вплоть до 2004г.
С момента создания сетевых спутниковых
радионавигационных систем (СРНС) ГЛОНАСС в России [31] и
GPS в США [112] и в связи с изменением политической
обстановки в мире все потребители навигационной информации,
включая разработчиков КА, сделали ставку на использование
исключительно этих систем для решения задач навигационного
обеспечения. Приемлемые массогабаритные характеристики и
сравнительно малое энергопотребление аппаратуры потребителя
навигационной информации, постоянная готовность к работе и
высокая точность определения параметров движения центра масс
(предельная погрешность по координатам 10м и менее) быстро
поставили эти системы вне конкуренции по сравнению со всеми
другими системами навигации. Тем самым, создание аппаратуры
потребителя информации СРНС ознаменовало начало второго
этапа развития бортовых систем автономной навигации КА.
Но следует иметь ввиду, что сигналы с навигационных
спутников могут быть подвергнуты случайному или
преднамеренному отключению, а радиоканалы передачи данных
могут быть уязвимы к воздействию помех (особенно специально
организованных). Эти соображения в некоторых исключительных
случаях могут оказаться определяющими при принятии решения
о разработке резервной высокоточной системы автономной
навигации КА.
Применительно к КА ДЗЗ существует группа потребителей
информации, которая не может допустить даже
кратковременного отсутствия навигационных сигналов,
передаваемых бортовыми средствами КА СРНС. Можно
предположить, что состав этой группы со временем может
расшириться, если будет создана резервная система навигации,
которая обеспечит необходимое качество навигационных
определений при возникновении отказов по внутренним или
внешним причинам бортовых приёмников или другой
аппаратуры СРНС. Таким образом, задача создания
прецизионной САН КА ДЗЗ с точностью, сопоставимой с
точностью систем на основе СРНС, является актуальной и
определяет, по мнению авторов, начало нового, третьего этапа в
развитии систем автономной навигации КА.
Цель публикации настоящей монографии авторы видят в
13
том, чтобы, во-первых, показать специалистам по бортовым
системам навигации КА, сформировавшимся в период второго
этапа их развития, т е. в эпоху практического применения СРНС,
достижения предыдущего первого этапа, в течение которого
получила развитие система автономной навигации КА и, во-
вторых, рассмотреть возможности создания систем третьего
этапа развития. В качестве такой системы, в частности, может
выступать перспективная система автономной навигации КА ДЗЗ
по протяжённым наземным ориентирам, способная, по мнению
авторов, играть роль резерва для уже существующих систем КА
ДЗЗ, построенных на основе СРНС.
Монография состоит из двух частей и содержит десять
глав. В первой части (главы 1-5), изложены методы автономной
навигации КА, методы обработки навигационной информации,
методы оценивания точности систем навигации КА, а также
методы повышения качества снимков поверхности Земли и
методы их обработки в системах автономной навигации по
протяжённым наземным ориентирам.
Здесь необходимо отметить, что для улучшения условий
обнаружения и опознавания протяжённых наземных ориентиров
в четвёртой главе разработаны основы теории оптимального
сканирования поверхности Земли, позволяющие обеспечить
одинаково высокое качество снимка во всех его частях (в центре
и на краю оптико-электронного преобразователя).
Во второй части (главы 6-10) описаны принципы
построения и функционирования автономных систем
космической навигации (астрорадиотехнической, с
использованием магнитного поля Земли, орбитальных
ориентиров, а также протяжённых наземных ориентиров),
приводятся аналитические оценки точностных характеристик
этих систем.
Введение и главы 1 и 6 написаны Г.П.Аншаковым, главы
2, 3 и 8 написаны А.Д.Голяковым, главы 4, 7, 9, 10 и параграф 5.2
- В.Ф.Петрищевым, глава 5 - В.А.Фурсовым.
Авторы выражают надежду, что монография может быть
полезна разработчикам систем автономной навигации КА,
специалистам по их эксплуатации, а также студентам старших
курсов университетов аэрокосмических специальностей и
соискателям учёных степеней.
14
Часть I
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ АВТОНОМНОЙ
НАВИГАЦИИ КОСМИЧЕСКИХ АППАРАТОВ
Глава 1. МЕТОДЫ АВТОНОМНОЙ НАВИГАЦИИ КА
1.1. Задача автономной навигации КА и методы её
решения
Для управления полётом КА с целью практической
реализации заданных в соответствии с программой полёта функций
необходимо располагать информацией о параметрах движения его
центра масс и параметрах движения относительно центра масс.
Задача, которая заключается в определении параметров движения
центра масс космического аппарата в установленный момент
времени, получила название задачи навигации КА.
Задача космической навигации имеет свои характерные
особенности. Во-первых, она является многомерной задачей,
поскольку определению подлежат, в общем случае, шесть
параметров движения КА, например, три координаты и три
составляющие вектора скорости КА, т.е. шестимерный вектор
Q(t) = (x(t) y(t) z(t) x(t) y(t) z(t)]T.
Во-вторых, искомые параметры не поддаются прямым
измерениям. В связи с этим находят применение косвенные методы
измерений, т.е. измеряются такие параметры, которые
функционально связаны с параметрами движения центра масс КА.
В-третьих, количество измеряемых параметров, как правило,
меньше количества искомых параметров. Поэтому возникает
проблема, которая заключается в определении принципиальной
возможности решения задачи космической навигации, так
называемая «проблема наблюдаемости» (см. п. 8.2.1).
В-четвертых, навигационные измерения имеют
стохастический характер. При этом даже незначительные
погрешности измерений вносят существенный вклад в ошибки
навигации. С целью борьбы с неизбежными случайными
погрешностями измерений применяются методы статистической
обработки измерительной информации (см. главу 2).
Таким образом, процесс решения навигационной задачи
состоит в измерении физических величин, имеющих
функциональную связь с искомыми параметрами, проведении
15
обработки результатов измерений с помощью выбранных
алгоритмов и формировании вектора параметров движения центра
масс КА в той системе координат, которая необходима
потребителю навигационной информации.
1.2. Системы отсчета, применяемые в космической
навигации
При решении задач космической навигации используются
сферические, прямоугольные и специальные системы отсчёта. Из
сферических систем наибольшее распространение получили
экваториальная и орбитальная системы координат, а из-
прямоугольных систем - геоцентрическая экваториальная
(“абсолютная”), неподвижная и подвижная орбитальные системы
координат. К специальным системам отсчета относится, в
частности, система шести Кеплеровых элементов орбиты.
1.2.1. Сферические и специальная системы отсчёта
В основу сферических систем координат положено понятие
небесной сферы. Под небесной сферой понимается сфера
произвольного радиуса с центром в некоторой точке пространства,
на которую проецируются небесные светила и орбитальные
объекты, в том числе космические аппараты дистанционного
зондирования Земли. Центр небесной сферы принят за начало
координат. Например, центр геоцентрической небесной сферы
совмещается с центром Земли. Радиус небесной сферы обычно
полагают равным единице.
В каждой сферической системе выбираются основная
плоскость и основное направление.
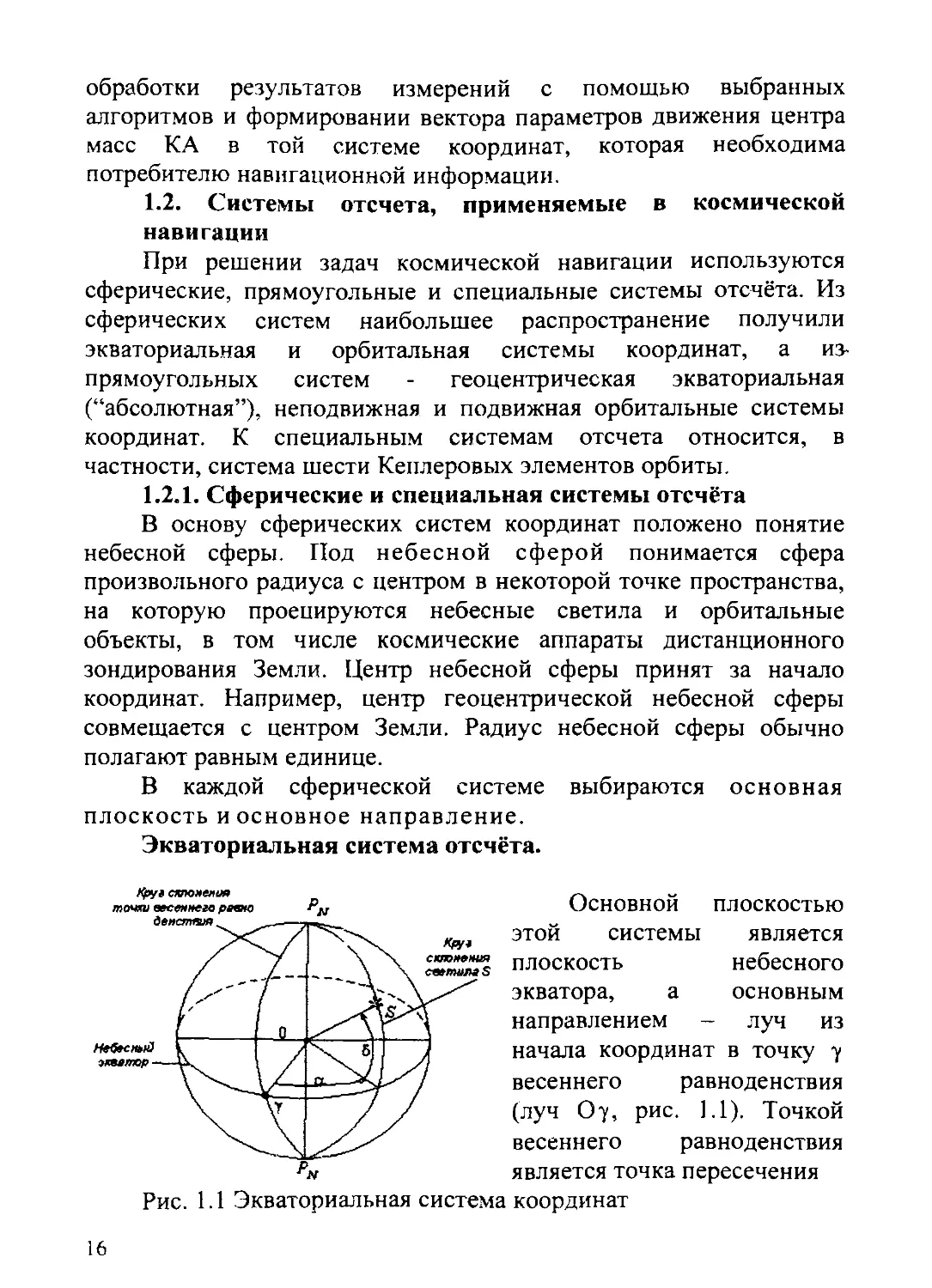
Экваториальная система отсчёта.
Основной плоскостью
этой системы является
плоскость небесного
экватора, а основным
направлением - луч из
начала координат в точку у
весеннего равноденствия
(луч Оу, рис. 1.1). Точкой
весеннего равноденствия
pn является точка пересечения
Рис. 1.1 Экваториальная система координат
16
плоскости эклиптики с небесным экватором при движении Солнца
из южного полушария в северное.
Плоскость небесного экватора расположена в пространстве
таким образом, что, во-первых, она проходит через центр небесной
сферы и, во-вторых, перпендикулярна оси мира, т.е. того
направления, вокруг которого происходит видимое вращение
небесной сферы. Поскольку ось мира пересекает небесную сферу в
точках северного (PN) и южного (Ps) полюсов мира, она имеет
второе название «ось полюсов».
Плоскости, проходящие через ось полюсов PNPS, пересекают
небесную сферу и образуют круги, которые получили название
«круги склонений». В частности на рис изображены круг склонения
точки весеннего равноденствия (у) и круг склонения некоторого
светила S.
Двугранный угол между кругом склонения точки весеннего
равноденствия (у) и кругом склонения рассматриваемого светила
(S) называется прямым восхождением светила. Прямое
восхождение (а) отсчитывается по дуге небесного экватора от
точки весеннего равноденствия (у) до круга склонения светила
против часовой стрелки, если смотреть с северного полюса (PN).
Особенность прямого восхождения состоит в том, что его
измерения могут производиться как в угловой мере (от 0е до 360°),
так и в часовой мере (от 0 до 24 часов).
Иногда в космической навигации вместо прямого
восхождения светила используют её часовой угол (t). Часовой угол
является двугранным углом между плоскостью, которой
принадлежит круг склонения светила, и плоскостью небесного
меридиана, совпадающего с плоскостью географического
меридиана наблюдателя. Часовой угол отсчитывается по дуге
экватора от южной стороны небесного меридиана до круга
склонения светила в направлении видимого суточного вращения
небесной сферы. Угол t измеряется, как правило, в часовой мере в
диапазоне от 0 до 24 часов.
Склонение - это угловое расстояние светила S от плоскости
небесного экватора. Склонение (5) отсчитывается по дуге круга
склонения от экватора до светила. В северном полушарии небесной
сферы склонение имеет положительное значение, а в южном -
17
отрицательное значение. Склонение изменяется в пределах от -90°
до +90°.
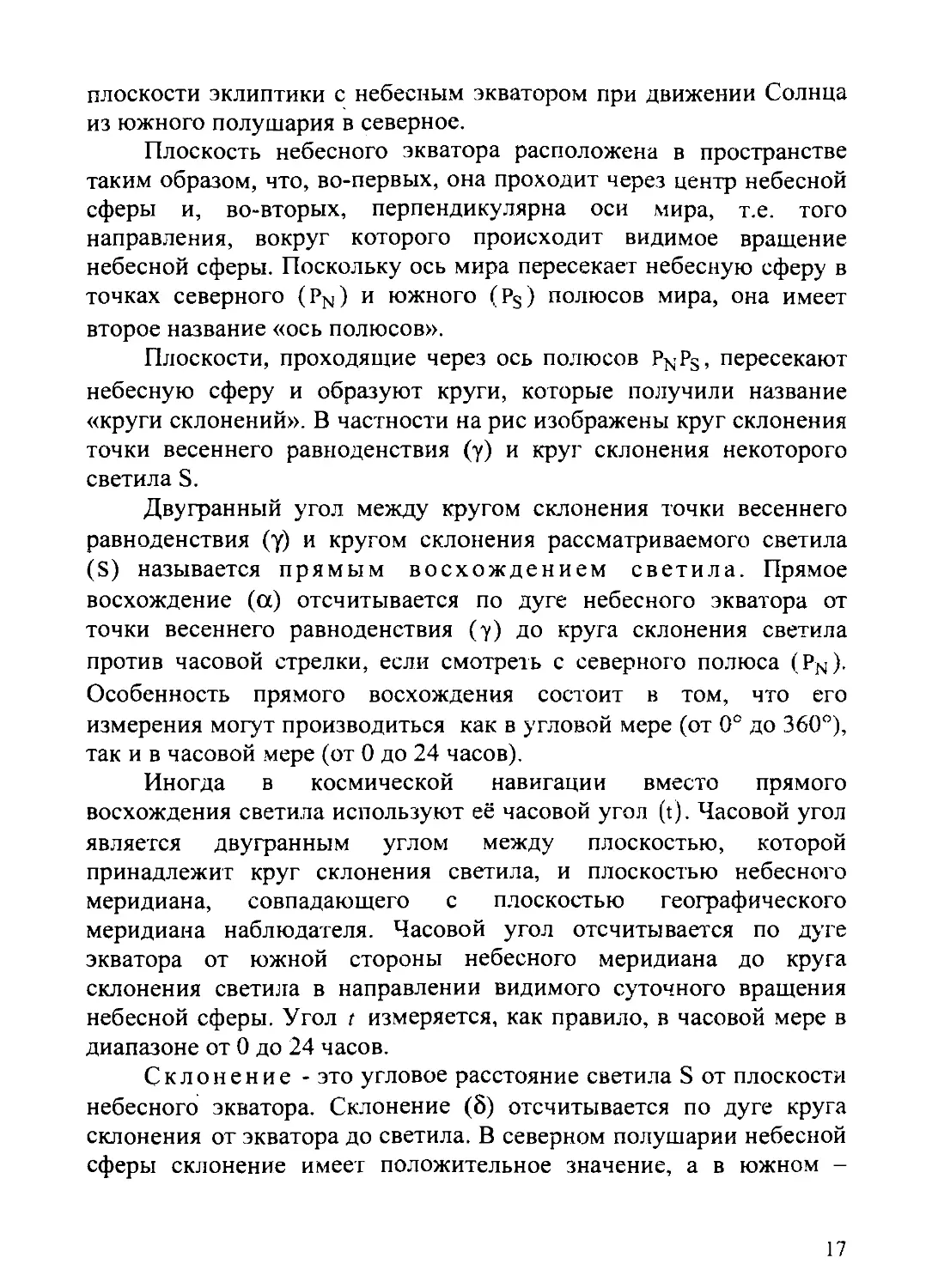
Орбитальная сферическая система отсчёта.
Основной плоскостью этой системы
отсчёта является плоскость орбиты КА, а
основным направлением - направление из
начала координат в восходящий узел
орбиты (В) орбиты. Это направление
находится на линии узлов BN (рис. 1.2), где
N- нисходящий узел орбиты.
Линия узлов находится на пересечении
двух плоскостей : плоскости орбиты КА и
плоскости небесного экватора.
Рис. 1.2 Сферическая орбитальная система координат
Полюсами орбиты называются точки Ро и ₽о пересечения
небесной сферы и прямой линии, которая перпендикулярна
плоскости орбиты и проходит через начало координат.
Положение светила (S) в орбитальной системе координат
определяется его орбитальным восхождением и орбитальным
склонением.
Орбитальное восхождение («о) является аналогом прямого
восхождения, т. е это двугранный угол между кругом орбитального
склонения восходящего узла орбиты (В) и кругом орбитального
склонения светила S. Орбитальное восхождение отсчитывается в
плоскости орбиты от её восходящего узла в направлении движения
КА и изменяется в пределах от 0 до 360°.
Орбитальное склонение (50) - это угол между плоскостью
орбиты КА и направлением из центра небесной сферы на светило.
Орбитальное склонение отсчитывается по дуге круга орбитального
склонения от плоскости орбиты до светила и изменяется в
диапазоне от -90° до +90°). Светила, располагающиеся слева от
орбиты КА, если смотреть в сторону его движения, имеют
положительные склонения, а справа - отрицательные.
Специальная (оскулируюшая) система координат.
Эта система содержит шесть элементов, которые получили
название элементов Кеплера. Достоинство Кеплеровых элементов
18
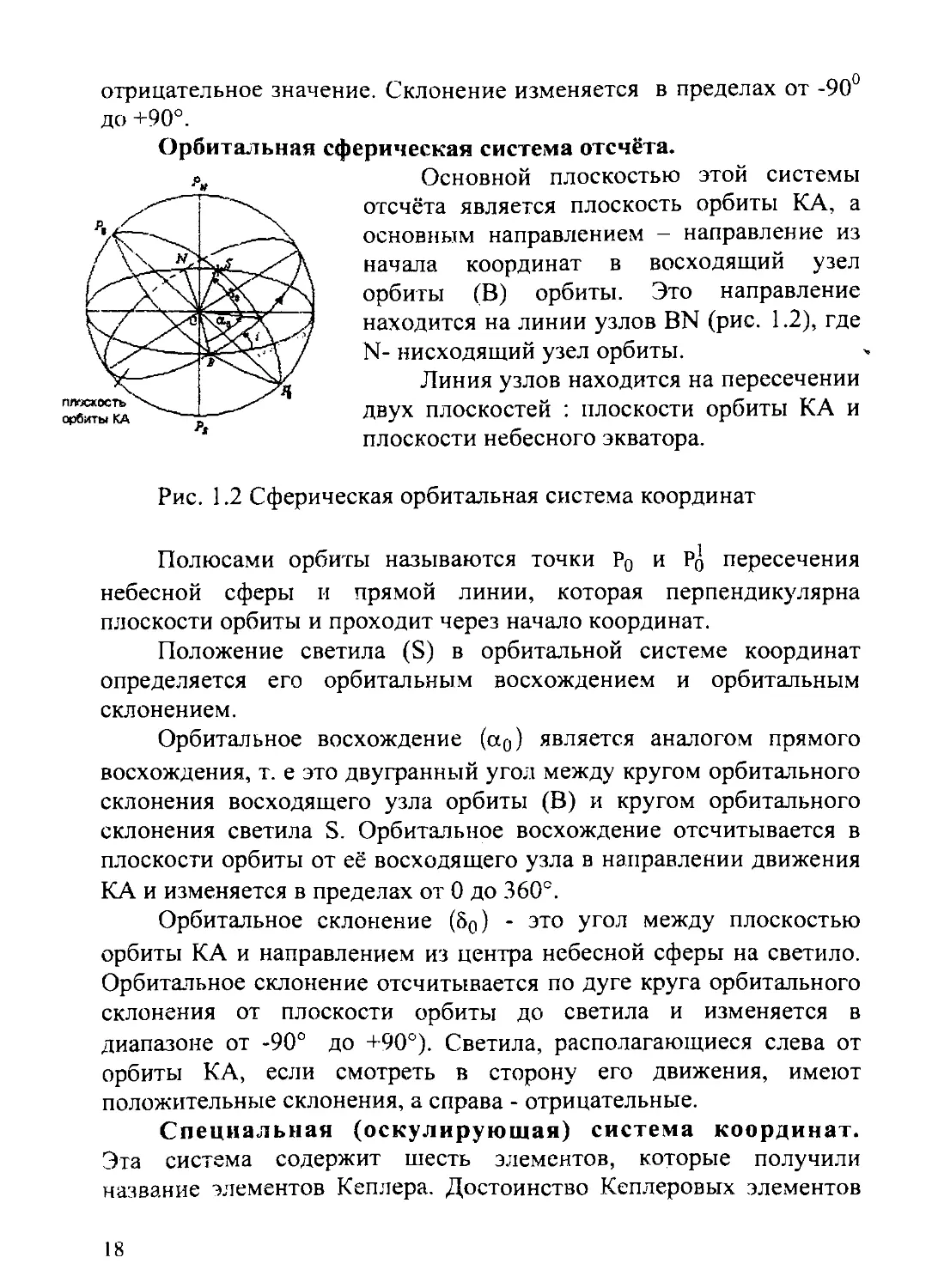
состоит в том, что они позволяют достаточно наглядно отобразить
положение не только КА, но плоскости его орбиты в пространстве.
В состав элементов Кеплера
входят (рис. 1.3):
а) два угла, определяющие
положение плоскости орбиты КА
в пространстве: прямое
восхождение восходящего узла
(Q) и наклонение плоскости
орбиты (i);
б) угол, характеризующий
положение перицентра (перигея)
в плоскости орбиты - аргумент
перицентра (со);
в) два элемента, которые
однозначно устанавливают форму
орбиты КА: большая полуось (а)
и эксцентриситет (е);
Рис. 1.3 Элементы орбиты КА
г) элемент, с помощью которого определяется текущее
положение КА относительно перицентра - момент времени
прохождения перицентра (г).
Иногда вместо элемента т используют момент начала витка
(гп)(как правило, полагают, что виток начинается на экваторе в
восходящем узле орбиты), начальное значение истинной аномалии
(i30) или начальное значение аргумента широты (и0 = ы + б0).
Под истинной аномалией (О) понимается угол между
направлениями на перицентр орбиты и на КА (рис. 1.3).
При необходимости орбитальные координаты светил (а0 и
8о) можно получить по значениям их экваториальных координат
(а и 8) и элементам, определяющим положение плоскости орбиты
в пространстве (Q и i). Для решения этой задачи используются
следующие формулы:
19
sin5p = cosi sinS-sinicosSsin(a-Q);
cosSq sinao = sini sin5 +cosi cos5sin (a-Q);
cosSg cosao = cos6cos(a-Q);
tgag = sini tg<Ssec(a-Q)+ cosi tg (a-Q).
1.2.2. Прямоугольные системы отсчёта
Прямоугольные системы отсчёта, применяемые в околоземной
навигации КА, можно объединить в группы. Эти группы
различаются расположением начала систем отсчёта, например,^
начало геоцентрических систем находится в центре масс Земли, а
начало топоцентрических систем - в точке на поверхности Земли.
В группу прямоугольных геоцентрических систем координат
входят в частности, экваториальная система, неподвижная и
подвижная орбитальные системы.
Прямоугольная геоцентрическая
экваториальная система координат XYZ.
Экваториальной эта система является потому, что основной её
плоскостью является плоскость Земного экватора. Ось
X геоцентрической экваториальной системы отсчёта направляется
в точку весеннего равноденствия (у), ось Z - в северный полюс
мира, а ось Y дополняет систему до правой. Система XYZ не
участвует во вращении Земли. Геоцентрическую экваториальную
систему отсчёта называют также звёздной или абсолютной.
Неподвижная геоцентрическая орбитальная
система координат xyz. Основная её плоскость - это
плоскость орбиты КА. Ось х направляется в какую-либо
характерную точку орбиты, например, ее перигей или точку
восходящего узла, ось z - по нормали к плоскости орбиты КА в
сторону вектора орбитальной угловой скорости движения, ось у
дополняет систему до правой.
В зависимости от того, в какую точку направлена ось х,
различают перигейную и узловую неподвижные орбитальные
системы координат.
При решении навигационных задач возникает необходимость
пересчёта параметров, характеризующих движение центра масс
КА, из одной прямоугольной системы отсчёта в другую систему.
Например, переход от орбитальных координат х, у, z и компонент
20
вектора скорости х, у, z произвольной точки (необязательно
лежащей в плоскости орбиты КА) к её координатам X,Y,Z и
компонентам скорости X,Y,Z в абсолютной системе
осуществляется с помощью матрицы м , содержащей три строки и
три столбца:
nx тх €х'
М= п у т у у
nz mz
Для такого преобразования параметров движения КА
используются матричные выражения вида
X X X X
Y = м- У Y = м- У (1.2)
Z z j Z Z
Элементы матрицы М представляют собой, так называемые,
направляющие косинусы осей неподвижной орбитальной системы
координат (xyz) относительно соответствующих осей абсолютной
системы координат (X Y Z) .
Для перигейной системы (ось х направлена в точку перигея
орбиты КА) эти элементы задаются соотношениями [79]:
пх = cos £2 cos (О - sin £2 sin (О cos i,
Пу = sin £2 coscc + cos £2 sin co cos i, (1.3)
n^ = sini sin co, mx = - cos £2 sin co - sin £2 cos co cos i, my = - sin £2 sin co + cos £2 cos co cos i, (1-4)
mz = sin i cosco , lx =sin£2 sini, 1 = - cos£2 sini, lz = cosi. Если перейти к векторной форме записи и обозначить (1.5)
п = nx mx ny , m = my , (1.6)
то радиус-вектор (f . nZ _ . ) KA определяется из выражения
r=xn + ym . (1-7)
В космической навигации используется также подвижная
геоцентрическая орбитальная система отсчёта, которая в отличие от
21
неподвижной геоцентрической орбитальной системы отсчёта
вращается относительно перпендикуляра к плоскости орбиты КА,
повторяя его движение.
Для решения навигационной задачи по результатам бортовых
измерений широкое применение находят прямоугольные системы
отсчёта, начало которых находится в центре масс КА или
совмещено с чувствительным элементом средства измерений.
Примером таких систем является подвижная орбитальная
система координат
Начало этой системы располагается в центре масс КА. Оси
системы отсчёта направляются в пространстве таким образом,
что ось совмещается с радиусом-вектором КА, ось - по
бинормали к плоскости орбиты КА коллинеарно вектору его
угловой скорости движения по орбите (боковая ось), ось
дополняет систему до правой. Подвижная орбитальная система
координат вращается вокруг оси
Описание других систем координат приведено в
соответствующих разделах монографии.
1.3. Законы движения центра масс КА
Методы прогнозирования движения
Для определения параметров движения центра масс КА,
предназначенных для решения задач в околоземном пространстве,
используется векторное уравнение
^ = g(r) + a(r) + p, (1.8)
at
где г - вектор, определяющий положение центра масс КА в
выбранной системе отсчёта;
g(r) - вектор гравитационного ускорения;
а(г)- вектор ускорения, обусловленный действием сил
аэродинамического сопротивления;
р - вектор ускорения, возникающий при работе
корректирующих двигателей КА.
Для расчёта векторов g(r) и а(г) применяются различные
модели гравитационного поля Земли и её атмосферы, которые
различаются степенью адекватности и, как следствие, приводят к
различным значениям погрешностей прогноза.
22
Движение КА в поле действия единственной силы тяготения,
направленной точно к центру Земли (движение в центральном
гравитационном поле), принято называть невозмущенным
движением.
1.3.1. Уравнения невозмущенного движения
Дифференциальное уравнение невозмущенного движения КА
в векторной форме выражается зависимостью
г=~г, (1.9)
где ц- гравитационный параметр Земли, равный произведению
гравитационной постоянной на массу Земли (ц= 3,98602 • 105
км3/с2).
Результатом проектирования уравнения (1.9) на оси
геоцентрической экваториальной системы координат XYZ является
система трех скалярных дифференциальных уравнений второго
порядка:
X = - 4х’
y = -4-y, (1-10)
2--pz-
Особенность невозмущенного движения КА заключается в
том, что из шести элементов Кеплера (i,Q,a,e,(o,6) только истинная
аномалия (О) изменяется с течением времени (z). Однако
зависимость истинной аномалии от времени является сугубо
нелинейной.
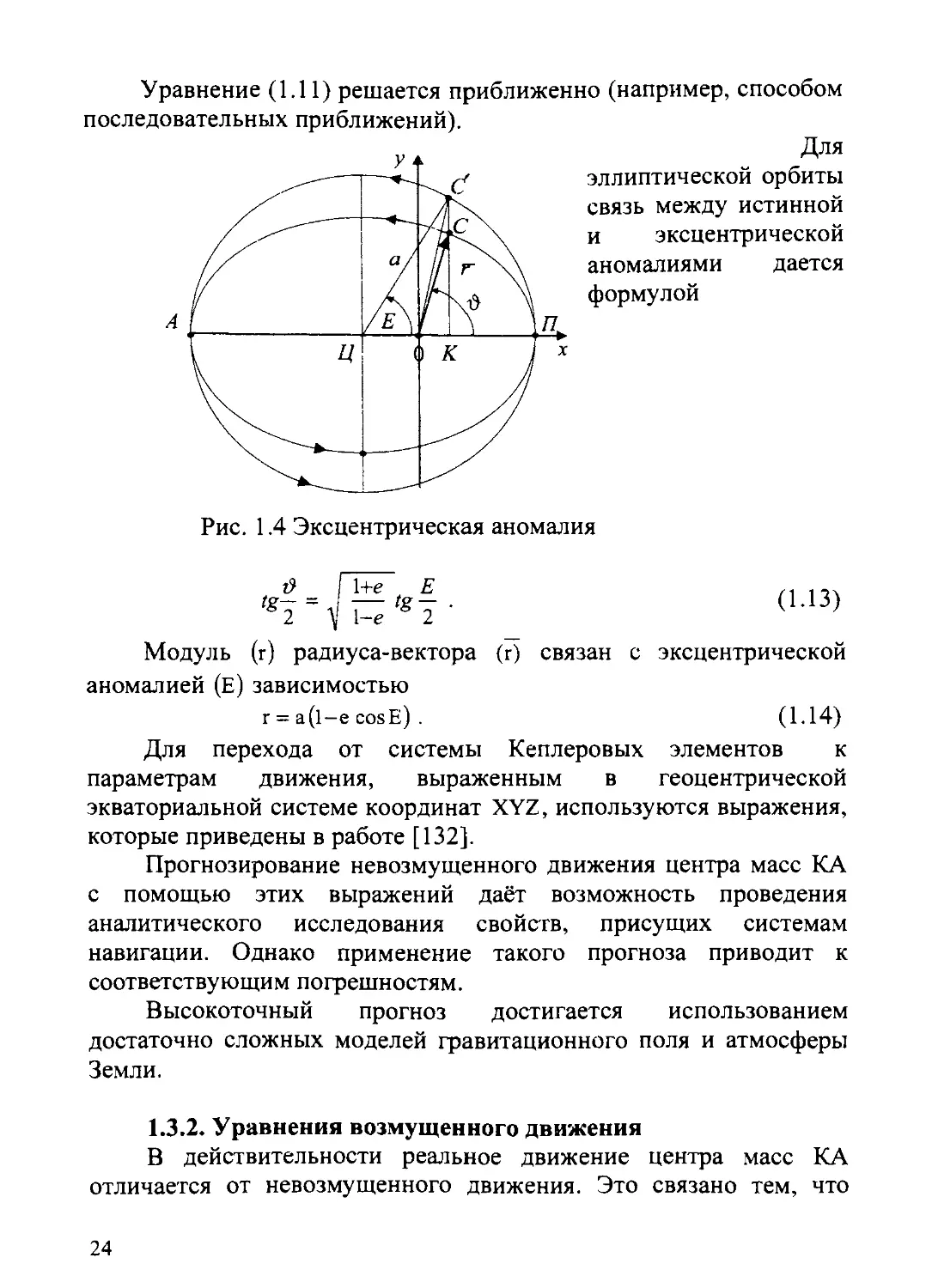
Для устранения этой проблемы введён специальный параметр,
называемый эксцентрической аномалией Е (рис. 1.4). Благодаря
этому задача определения положения КА в плоскости его орбиты
(г и О) по заданному моменту времени (t) сводится к вычислению
эксцентрической аномалии Е (рис. 1.4) путем решения уравнения
Кеплера
E-esinE = M, (1-11)
где М - средняя аномалия, вычисляемая по формуле
M = 2j£(t-T). (1.12)
23
Уравнение (1.11) решается приближенно (например, способом
последовательных приближений).
Для
эллиптической орбиты
связь между истинной
и эксцентрической
аномалиями дается
формулой
Рис. 1.4 Эксцентрическая аномалия
Модуль (г) радиуса-вектора (г) связан с эксцентрической
аномалией (Е) зависимостью
г = а (1-е cosE) . (1.14)
Для перехода от системы Кеплеровых элементов к
параметрам движения, выраженным в геоцентрической
экваториальной системе координат XYZ, используются выражения,
которые приведены в работе [132].
Прогнозирование невозмущенного движения центра масс КА
с помощью этих выражений даёт возможность проведения
аналитического исследования свойств, присущих системам
навигации. Однако применение такого прогноза приводит к
соответствующим погрешностям.
Высокоточный прогноз достигается использованием
достаточно сложных моделей гравитационного поля и атмосферы
Земли.
1.3.2. Уравнения возмущенного движения
В действительности реальное движение центра масс КА
отличается от невозмущенного движения. Это связано тем, что
24
наряду с центральной гравитационной силой, на КА оказывают
воздействия, так называемые, возмущающие силы, которые
обусловлены тем, что гравитационное поле Земли не является
центральным, силы притяжения других планет, а также
аэродинамическая сила не равны нулю и т.п.
Вид уравнений возмущенного движения КА определяется
высотой его полета и выбранной системой отсчета. В частности,
уравнения движения КА, высота орбиты которого не превышает
500 км, можно записать в гринвичской системе отсчета хруггг,
которая вращается вместе с Землёй относительно инерциального
пространства. Начало этой системы находится в центре масс Земли.
Ось Охр направлена в точку пересечения плоскости экватора
Земли и гринвичского меридиана, ось Ozr совмещена с вектором
угловой скорости вращения Земли, а ось Оуг находится в
плоскости экватора Земли и дополняет систему отсчёта до правой.
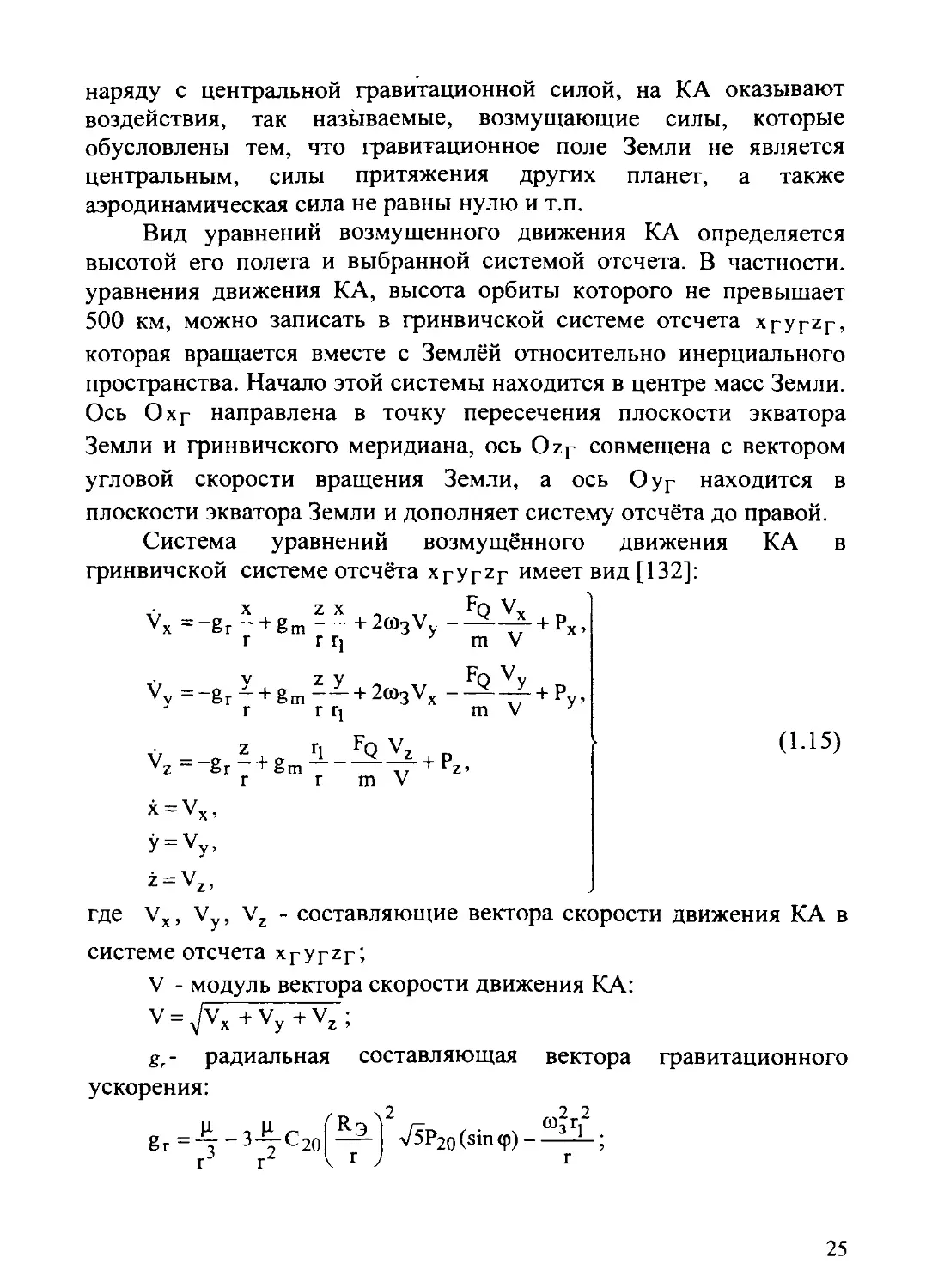
Система уравнений возмущённого движения
гринвичской системе отсчёта xryrzr имеет вид [132]:
Vx =-gr- + gm-- + 2co3vy -ИУ5- + Р
г г Г] 7 m V
Vy=-gr^ + gm-^ + 2со3 Vx -+ Р
J г г ij tn V 7
H-^+Pz,
г m V
КА в
(1-15)
V =-g - + g —-
vz or
г
x = Vx,
y = Vy,
z = Vz,
где vx, vy, vz
системе отсчета
V - модуль вектора скорости движения КА:
- составляющие вектора скорости движения КА в
хгУг2Г’
' _^’х ’ут *Z’
gr- радиальная составляющая вектора гравитационного
ускорения:
ZD Л2 „2Г2
gr=-j-3-yC2o[—] V5P20(sin<p)-^J-;
г3 г2 I г ) г
25
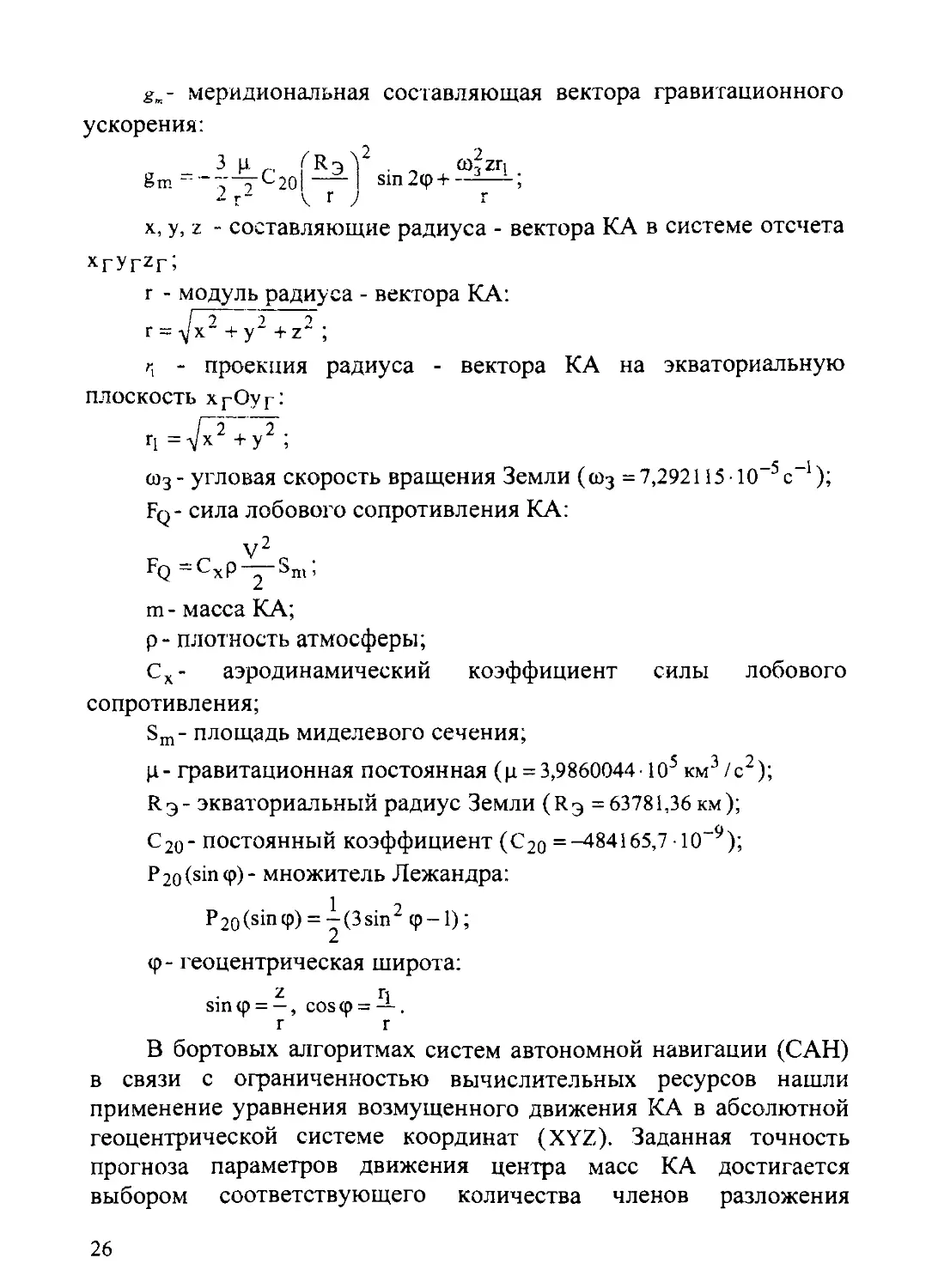
g„- меридиональная составляющая вектора гравитационного
ускорения:
3 р. (R3 V . „ <a?zn
gm ^“-'—<-201 —I sm2<p + —;
x, у, z - составляющие радиуса - вектора КА в системе отсчета
xryrzr;
г - модуль радиуса - вектора КА:
ГЗ Ъ т"
г - т/х- + у“ +z ;
i\ - проекция радиуса - вектора КА на экваториальную
плоскость хгОуг:
Г1 =7x2 +у2;
d>3 - угловая скорость вращения Земли (а>3 = 7,2921 15-10-5 с-1);
Fq- сила лобового сопротивления КА:
V2 _
Fq — схр-у лт,
т- масса КА;
р- плотность атмосферы;
Сх- аэродинамический коэффициент силы лобового
сопротивления;
Sm- площадь миделевого сечения;
|1- гравитационная постоянная (ц = 3,9860044 105 км3/с2);
R3- экваториальный радиус Земли (R3 =63781,36 км);
С20- постоянный коэффициент (С2о =-484165,7 10-9);
P2o(sin<p)- множитель Лежандра:
1 Э
p20(sinq>) = -(Змп ф-1);
<р- геоцентрическая широта:
Z Г]
sin<p = —, cos<p = —.
г г
В бортовых алгоритмах систем автономной навигации (САН)
в связи с ограниченностью вычислительных ресурсов нашли
применение уравнения возмущенного движения КА в абсолютной
геоцентрической системе координат (XYZ). Заданная точность
прогноза параметров движения центра масс КА достигается
выбором соответствующего количества членов разложения
26
потенциала гравитационного поля, а также выбором модели
атмосферы Земли.
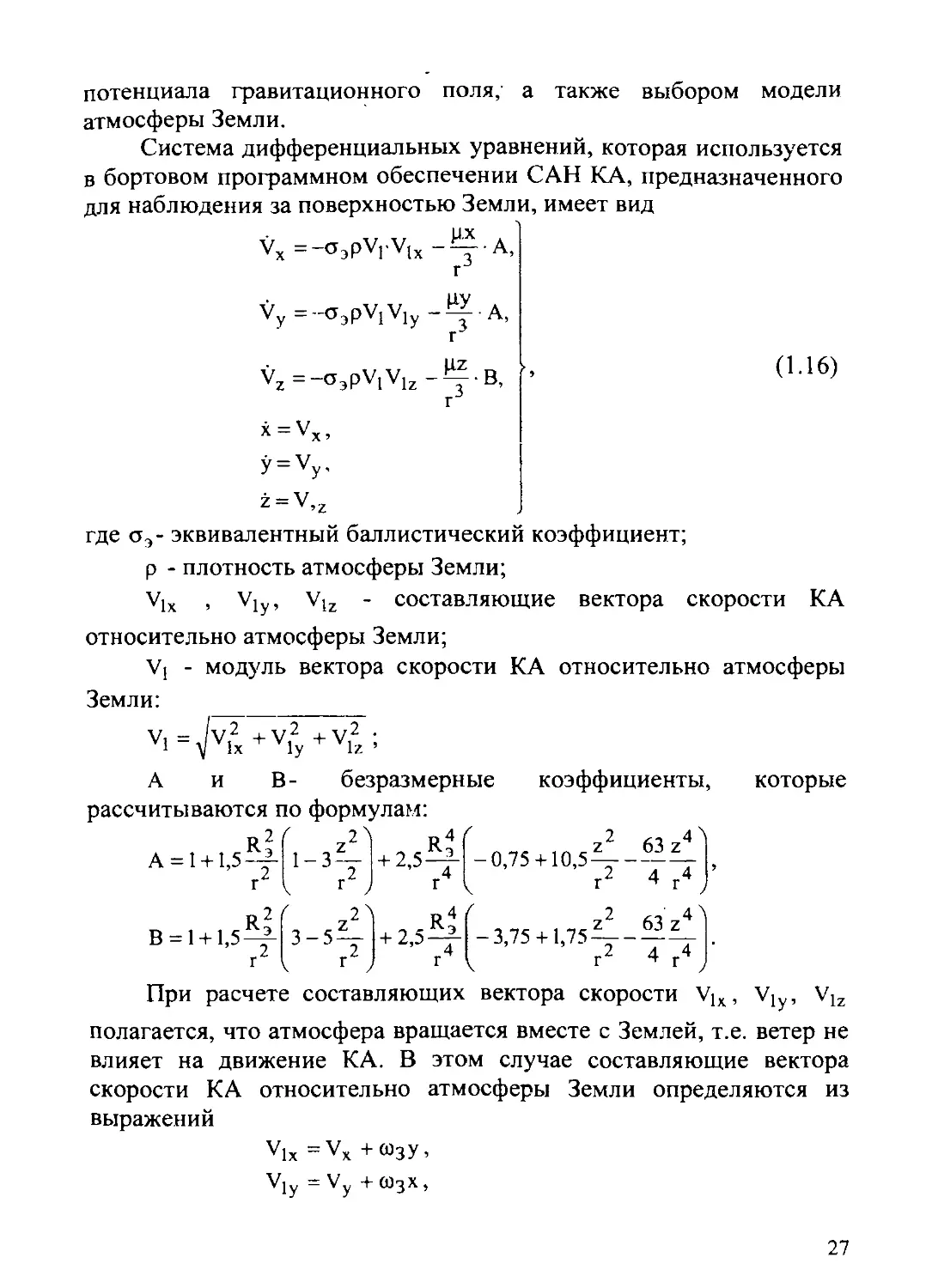
Система дифференциальных уравнений, которая используется
в бортовом программном обеспечении САН КА, предназначенного
для наблюдения за поверхностью Земли, имеет вид
Vx =-<bpVrVlx -^-А,
Vy=--a3pV1Vly-^A,
Vz=-a3pViVlz-^B,
(1.16)
х = Vx,
z = V,z
где о3- эквивалентный баллистический коэффициент;
р - плотность атмосферы Земли;
Vlx , Vly, Vlz - составляющие вектора скорости КА
относительно атмосферы Земли;
V[ - модуль вектора скорости КА относительно атмосферы
Земли:
V. = J V 2 + V,2 + V 2 ;
1 у lx ly 1Z ’
А и В- безразмерные коэффициенты, которые
рассчитываются по формулам:
o2( _2) n 4 ( ~2 A3-/4 4
A = 1 + 1,5-t- 1-3^- +2,5—3- -0,75 + 10,5 — --—^— ,
2 2 4 2 4 4
.....'",-4
-2 .2 „4 ’ r2 4 r4j
г
г
г
г
г2
г
’ г2
При расчете составляющих вектора скорости Vlx, Vly, Vlz
полагается, что атмосфера вращается вместе с Землей, т.е. ветер не
влияет на движение КА. В этом случае составляющие вектора
скорости КА относительно атмосферы Земли определяются из
выражений
Vlx =VX +со3у,
vly = V у + w3x,
27
Vi = V
vlz vz •
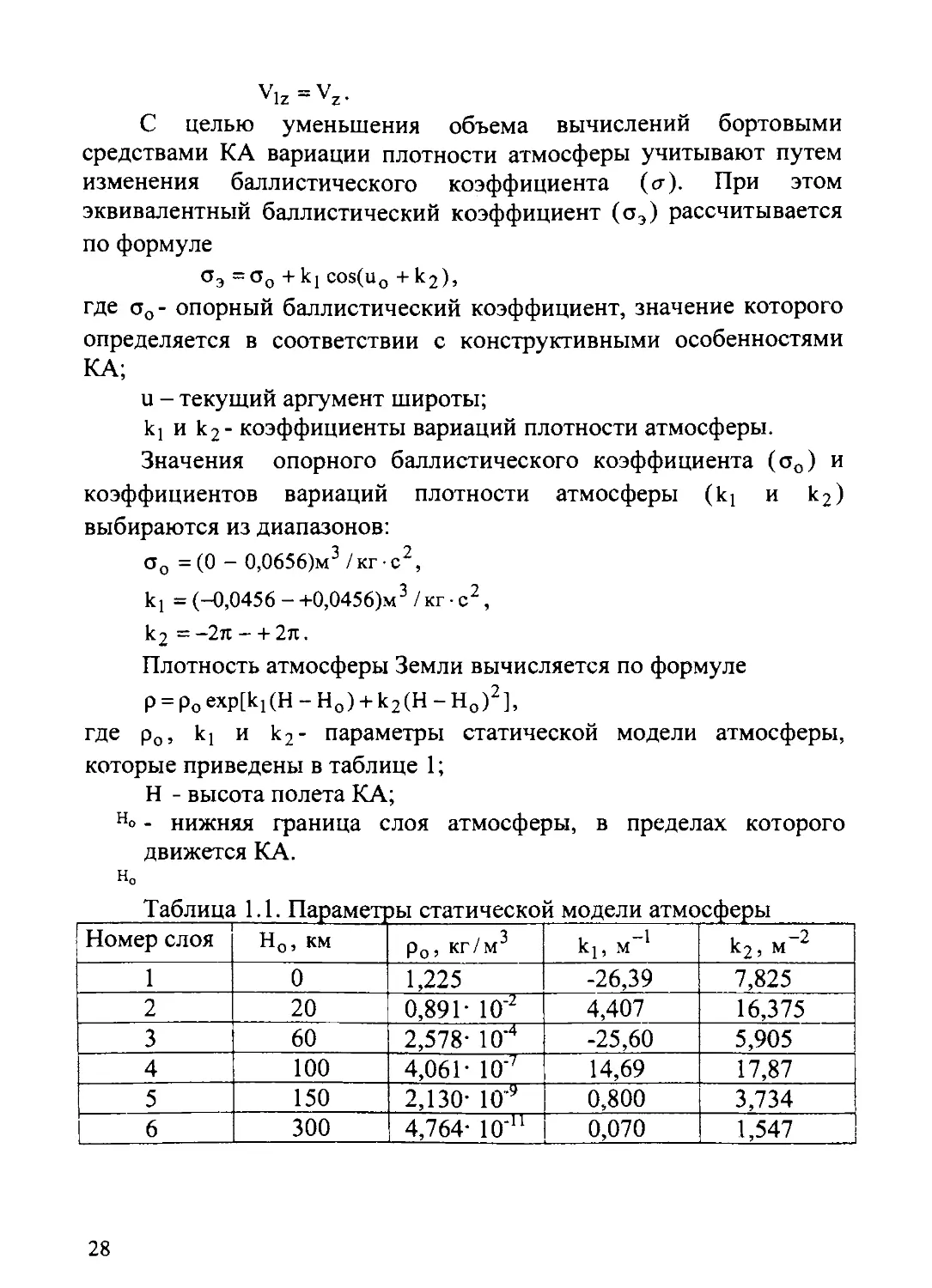
С целью уменьшения объема вычислений бортовыми
средствами КА вариации плотности атмосферы учитывают путем
изменения баллистического коэффициента (<т). При этом
эквивалентный баллистический коэффициент (оэ) рассчитывается
по формуле
оэ =°о +ki cos(uo + к2),
где оо- опорный баллистический коэффициент, значение которого
определяется в соответствии с конструктивными особенностями
КА;
и - текущий аргумент широты;
к! и к2- коэффициенты вариаций плотности атмосферы.
Значения опорного баллистического коэффициента (оо) и
коэффициентов вариаций плотности атмосферы (к] и к2)
выбираются из диапазонов:
оо = (О - 0,0656)м3 /кг с2,
ki = (-0,0456 -+0,0456)м3/кг с2,
к2 = -2л - + 2л.
Плотность атмосферы Земли вычисляется по формуле
р = р0 ехр[к1(Н - Но) + к2(Н - Но)2],
где р0, к! и к2- параметры статической модели атмосферы,
которые приведены в таблице 1;
Н - высота полета КА;
н« - нижняя граница слоя атмосферы, в пределах которого
движется КА.
н0
Таблица 1.1. Параметры статической модели атмосферы
Номер слоя Но, км р0, кг/м3 к], м 1 к2, м 2
1 0 1,225 -26,39 7,825
2 20 0,891- 10’2 4,407 16,375
3 60 2,578- W4 -25,60 5,905
4 100 4,061- 10’7 14,69 17,87
5 150 2,130- 10 9 0,800 3,734
6 300 4,764- 1О'П 0,070 1,547
28
Для прогнозирования параметров движения КА задаются
начальные условия, которые соответствуют моменту времени г0.
Шаг интегрирования выбирается, как правило, из диапазона от 2 до
30 секунд.
1.4. Влияние начальных отклонений на параметры
дальнейшего движения КА. Матрицы баллистических
производных
К числу возмущающих факторов, вызывающих отклонения
истинных (фактических) параметров движения КА
Q(t) = [х( t) y(t) z(t) x(t) y(t) z(t)]T
от их опорных (расчетных) значений
Qo (0 = [х о (t) У О (0 zo (0 X о (0 У о (0 zo (t)]T,
относятся отклонения начальных условий движения, которые
соответствуют начальному моменту времени t0, т.е. вектор
отклонений
AQ(to) = Q(to)--Qo(to) = [Ax(to) Ay(to) Az(to) Ax(t0) Ay(t0) Az(t0)]T.
На практике отклонения начальных условий движения КА
всегда имеют место, например, за счет ошибок выведения или
погрешностей навигации на предшествующем этапе.
В результате истинное движение КА отличается от его
расчетного движения. Причем текущие отклонения
AQ(t) = [Ax(t) Ay(t) Az(t) Ax(t) Ay(t) Az(t)]T
непосредственно определяются начальными отклонениями AQ(t0).
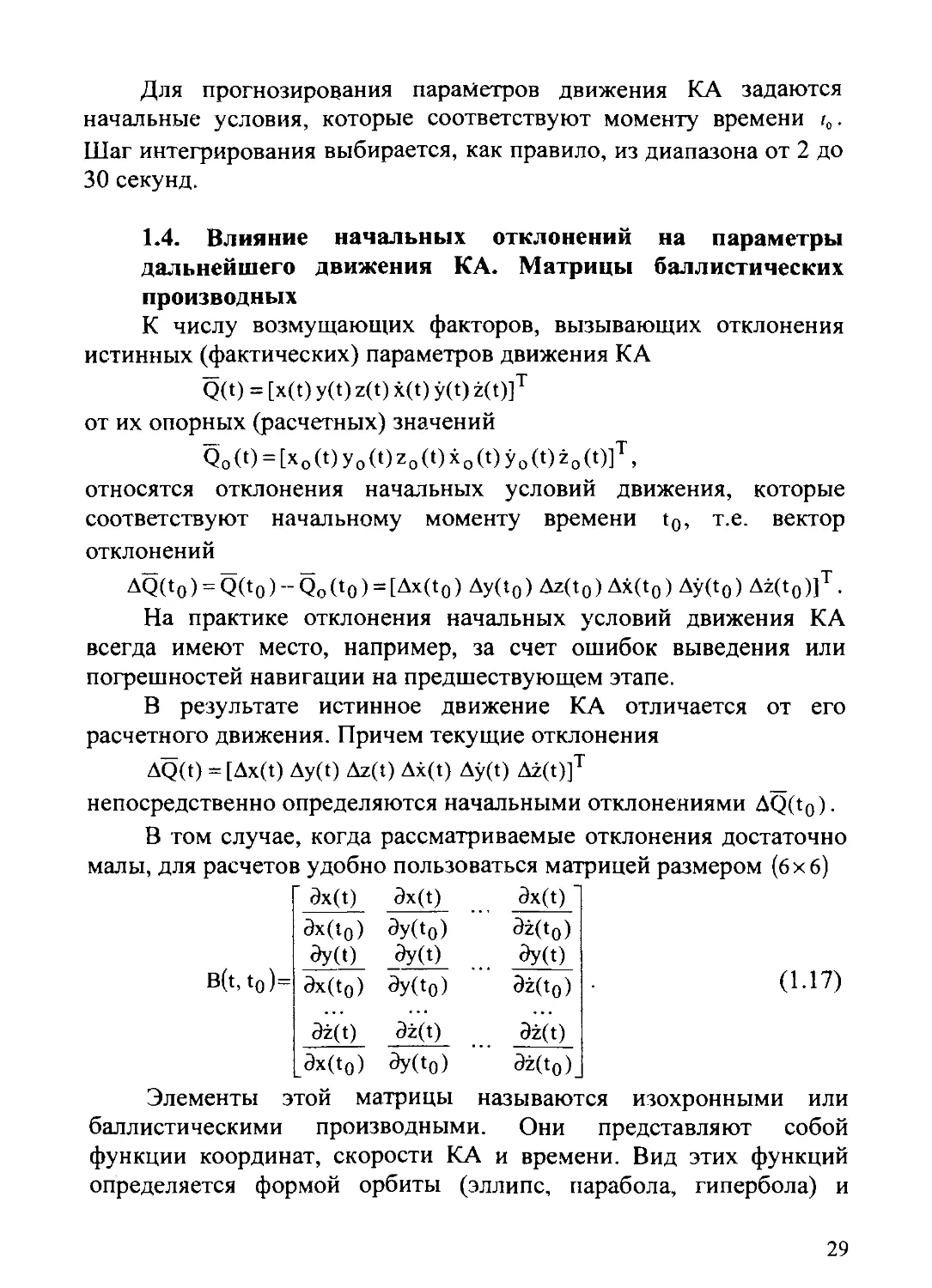
В том случае, когда рассматриваемые отклонения достаточно
малы, для расчетов удобно пользоваться матрицей размером (бхб)
3x(t) 3x(t) 3x(t) ’
3x(t0) dy(t0) 3z(t0)
dy(t) dy(t) dy(t)
B(t,t0)= dx(t0) dy(t0) 3z(t0) (1-17)
3z(t) 3z(t) 3z(t)
_3x(t0) 3y(t0) 3z(t0)_
Элементы этой матрицы называются изохронными или
баллистическими производными. Они представляют собой
функции координат, скорости КА и времени. Вид этих функций
определяется формой орбиты (эллипс, парабола, гипербола) и
29
системой отсчёта, в которой описывается движение КА. При t = t0
матрица (1.17) является единичной.
Баллистические производные могут вычисляться численными
и аналитическими методами. Из численных методов наибольшее
распространение получили метод конечных разностей и метод
вариаций. Численные методы отличаются высокой точностью, так
как позволяют учитывать возмущения, действующие на КА в
процессе его полета вокруг Земли, как, например, несферичность
Земли, неравномерность её вращения, влияние атмосферы и т.п.
Аналитические методы расчета баллистических производных
- по конечным формулам - не обладают высокой точностью. Они
учитывают лишь воздействие на КА сил центрального
гравитационного поля Земли. Поэтому аналитические методы
расчёта баллистических производных отличаются простотой и
наглядностью.
Кроме того, как показывает практика решения задач
автономной навигации КА, погрешности вычисления
баллистических производных не оказывают заметного влияния на
точность определения фактических параметров движения КА. Эти
погрешности влияют только на скорость сходимости процесса
решения. Поэтому в целях упрощения навигационных алгоритмов
полные аналитические выражения баллистических производных
иногда заменяют их разложениями в ряд Тейлора и ограничиваются
учетом нескольких членов ряда.
Если известны отклонения параметров движения КА от
опорной орбиты в начальный момент времени t0, т.е. вектор
AQ(t0), то обусловленные ими текущие отклонения AQ(t) находятся
по формуле
AQ(t) = B(t, to)AQ(to). (1.18)
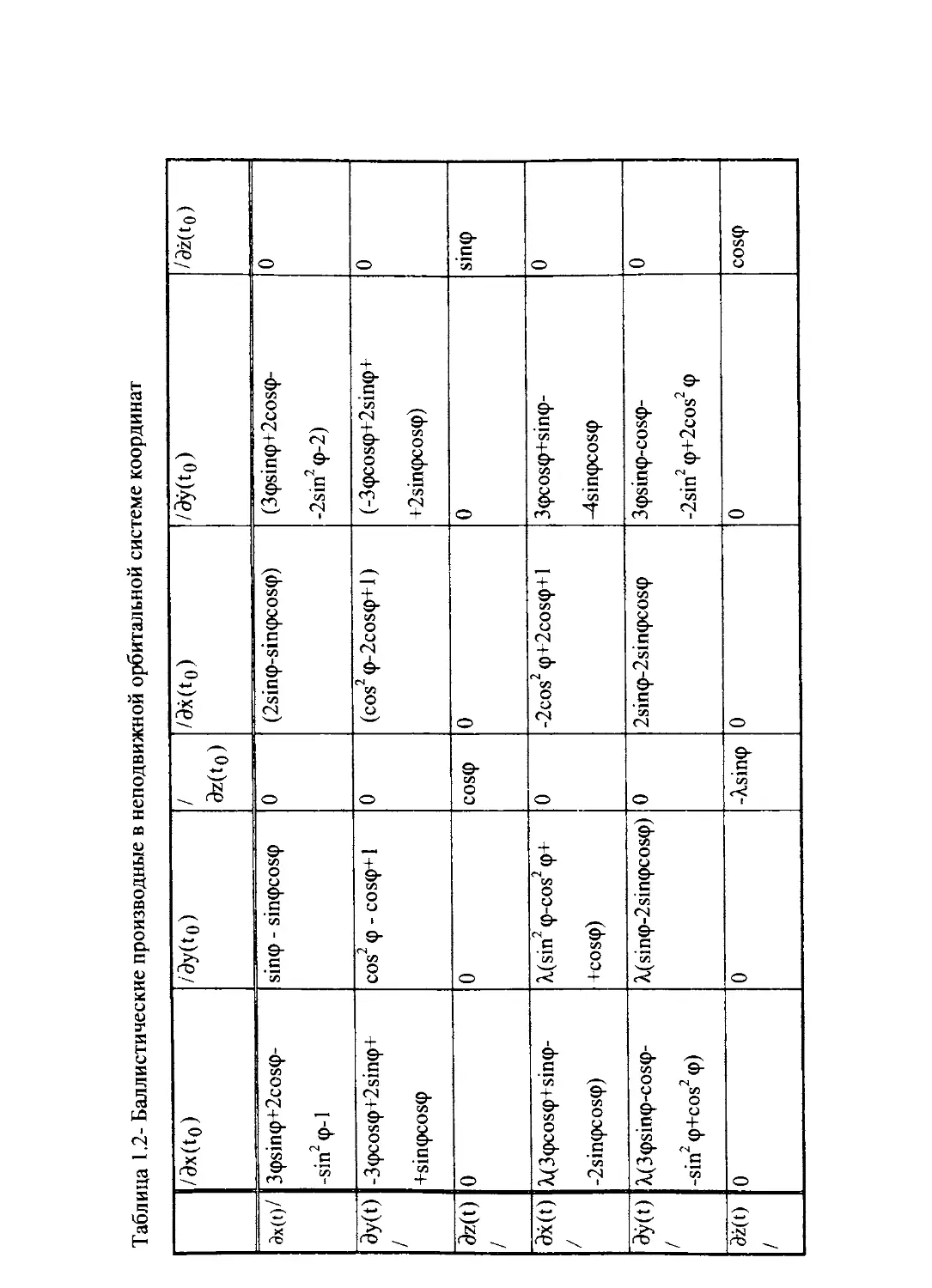
Наиболее простой вид элементы матрицы (1.17) принимают в
том случае, когда “расчетный” спутник движется по круговой
экваториальной орбите радиуса г0 в центральном поле сил. При
этом в качестве системы отсчёта выбрана прямоугольная
геоцентрическая неподвижная орбитальная система координат xyz.
Если за начало отсчета времени принят момент (t0)
прохождения спутника через ось х, от которой отсчитывается его
угловое положение (<р), тогда элементы матрицы баллистических
производных принимают вид, представленный в табл. 1.2.
30
В табл. 1.2 обозначено: - орбитальная угловая
скорость движения КА по расчетной (опорной) круговой орбите, V
- расчётная скорость полета, <p = k0(t-t0) - полярный угол,
определяющий положение КА в невозмущенном движении.
Из анализа соотношений, приведенных в табл. 1.2, видно, что
текущие возмущения параметров движения КА содержат два типа
составляющих. Во-первых, это вековые составляющие, которые
пропорциональны углу ф, и, во-вторых, периодические
составляющие, которые зависят лишь от тригонометрических
функций угла ф, т.е. функций sincp и coscp. В частности,
возмущения боковых параметров бокового движения КА z(t) и z(t)
относятся к периодическому типу составляющих, поскольку их
значения повторяются через каждый виток КА, т.е. через ф = 2лк,
где к=1,2,...
В некоторых случаях для описания движения КА в плоскости
его орбиты более удобны траекторные параметры в координатах
подвижной орбитальной системы отсчета Начало этой
системы совмещается с центром масс КА, ось направлена по
трансверсали (перпендикулярно радиусу-вектору в плоскости
орбиты вперед по движению), ось Т| - вдоль радиуса-вектора, ось £ -
перпендикулярна плоскости орбиты и дополняет систему до
правой.
Для упрощения процедуры последующего анализа вектор
параметров движения центра масс КА записывается в виде
Q(t) = £(t) n(t) £(t) fi(t) £(t) C(t)]T • (1.19)
Тогда матрица баллистических производных B(t, t0)
становится квазидиагональной:
Bj(t, tg) О
B(t,t0) =
0 L ° B2(t,t0) J’
где матрицы ВДМд) и B2(t,t0) имеют размеры (4 х 4) и (2 х 2)
соответственно.
Q-нулевые прямоугольные матрицы размером (4 х 2) и (2 х 4).
Представим вектор (1.19) в следующем виде
rQi(t)l
.Q2(t)J’
Q(t) =
31
Таблица 1.2- Баллистические производные в неподвижной орбитальной системе координат
/dx(t0) /ay(t0) / 3z(t0) /dx(t0) /3y(t0) /dz(t0)
3x(t)/ 3<psin<p+2cos<p- -sin2 <p-1 sintp - sinipcostp 0 (2sin<p-sin<pcos<p) (3ipsin<p+2cos<p- -2sin2 <p-2) 0
dy(t) / -3<pcos<p+2sin<p+ +sin<pcos<p cos2 <p - cos<p+1 0 (cos2<p-2cos<p+l) (-3<pcos<p+2sin<p+ +2sin<pcos<p) 0
dz(t) / 0 0 coscp 0 0 sintp
9x(t) / X(3<pcos<p+sin<p- -2sin<pcos<p) X.(sin2 (p-cos2 <p+ +cos<p) 0 -2cos2 <p+2cos<p+l 3(pcos<p+sin<p- -4sin<pcos<p 0
dy(t) / Z(3<psin<p-cos<p- -sinz <p+cos2 <p) A,(sin<p-2sin<pcos<p) 0 2sin<p-2sin<pcos<p 3<psin<p-cos<p- -2sin2 <p+2cos2 <p 0
dz(t) / 0 0 -Xsintp 0 0 coscp
где вектор Q] (t) = [^(t) rtft) 4(0 rtf t)]T характеризует движение KA в
плоскости орбиты, а вектор Q2(t) = К(0 £(0]Т - движение КА по
нормали к плоскости его орбиты.
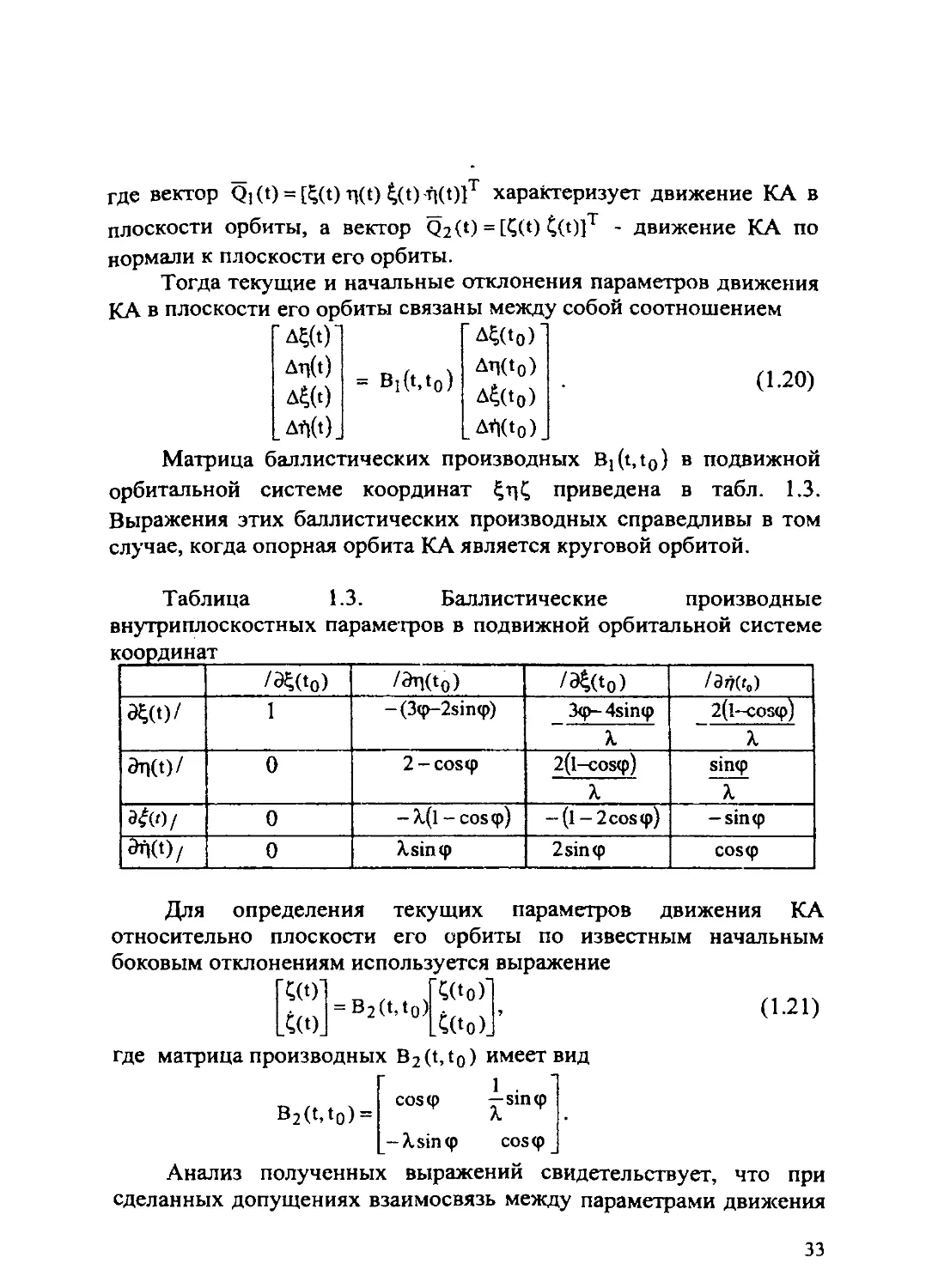
Тогда текущие и начальные отклонения параметров движения
КА в плоскости его орбиты связаны между собой соотношением
A^(t)1 Г Д£(‘О)
Ail(t)
A^(t)
ДП(‘о)
Д£(‘о)
(1.20)
= вНгдо)
Afl(t),
AtKto)
Матрица баллистических производных Bjt, t0) в подвижной
орбитальной системе координат приведена в табл. 1.3.
Выражения этих баллистических производных справедливы в том
случае, когда опорная орбита КА является круговой орбитой.
Таблица 1.3. Баллистические производные
внутриплоскостных параметров в подвижной орбитальной системе
координат_________________________________________________
/^(t0) /artft0) /a4(t0) /Эт7(г0)
d£(t)/ 1 - (3<p—2sin<p) 3<p- 4sincp X 2(l-cos<p) X
drtfO/ 0 2 - costp 2(l-cos<p) X sirup “T”
3^(0/ 0 -X(l-cos<p) -(l-2cos(p) -sincp
9t»(t)/ 0 Xsincp 2sin<p coscp
Для определения текущих параметров движения КА
относительно плоскости его орбиты по известным начальным
боковым отклонениям используется выражение
4(0‘
4(0.
ВгООо)
СОо)
C(t0)
(1-21)
где матрица производных B2(t,t0)
в2 (t, to) =
coscp
- Xsin <p
имеет вид
1 .
—sin<p
X .
cos<p
Анализ полученных выражений свидетельствует, что при
сделанных допущениях взаимосвязь между параметрами движения
33
КА внутри плоскости его орбиты и относительно этой плоскости
отсутствует.
1.5. Первичные навигационные параметры.
Навигационные производные
Параметры движения центра масс КА (три координаты и три
составляющие вектора скорости в выбранной системе отсчёта либо
шестерка Кеплеровых элементов орбиты) непосредственным
измерениям, как правило, не поддаются. Поэтому, для решения
задачи навигации измеряются другие параметры, которые, во-
первых, поддаются непосредственным измерениям с помощью
технических средств и, во-вторых, чувствительны к перемещению
космического аппарата в пространстве. Эти параметры называются
первичными навигационными параметрами.
Таким образом, первичный навигационный параметр
- это физическая величина, поддающаяся непосредственному
измерению и зависящая от искомых параметров движения центра
масс КА, т.е. являющаяся их функцией
Каждому первичному навигационному параметру
соответствует некоторая поверхность, в одной из точек которой
находится КА. Форма поверхности определяется видом
измеряемого первичного навигационного параметра, а конкретные
ее характеристики - числовым результатом измерения. Все точки
этой поверхности отвечают постоянному значению первичного
навигационного параметра, которое равно результату измерения.
Такую поверхность называют поверхностью положения, или
изоповерхностью [112].
Используемые на практике первичные навигационные
параметры, как правило, являются функциями положения КА в
пространстве и зависят только от координат КА (X(t),Y(t) nZ(t)),
т.е. первичный навигационный параметр - это функция вида:
F(t) = f(X(t),Y(t),Z(t)). (1.22)
Разложив функцию (1.22) в ряд Тейлора в окрестности
некоторой номинальной (опорной) точки (X0(t), Y0(t), Z0(t))
положения КА и ограничившись линейными слагаемыми, получим1
1 В дальнейшем с целью упрощения выражений время t опустим.
34
AF = —— AX + AY + — AZ . (1.23)
ax Sy az v ’
где AF = F(X,Y,Z)-F(X0,Y0,Z0), AX = X -Xo , AY = Y - Yo
AZ = Z-Z0 - отклонения соответствующих параметров от своих
номинальных значений.
Анализ выражения (1.23) свидетельствует о том, что чем
больше частные производные, тем больше отклик (приращение AF)
первичного навигационного параметра (F) на отклонения
(AX, AY, AZ) координат КА. Если окажется, например, что
производная SF/SZ=O, то, следовательно, первичный параметр (F)
“не чувствует” перемещения по направлению Z. Если все три
производные равны нулю, то параметр F вообще не откликается на
перемещение КА в пространстве, и измерения этого параметра для
навигации бесполезны. Примером такого параметра является угол
между направлениями на нерефрактирующие звезды [36].
Первичные навигационные параметры можно условно
разделить на две группы - угловые и линейные параметры.
1.5.1. Угловые первичные навигационные параметры
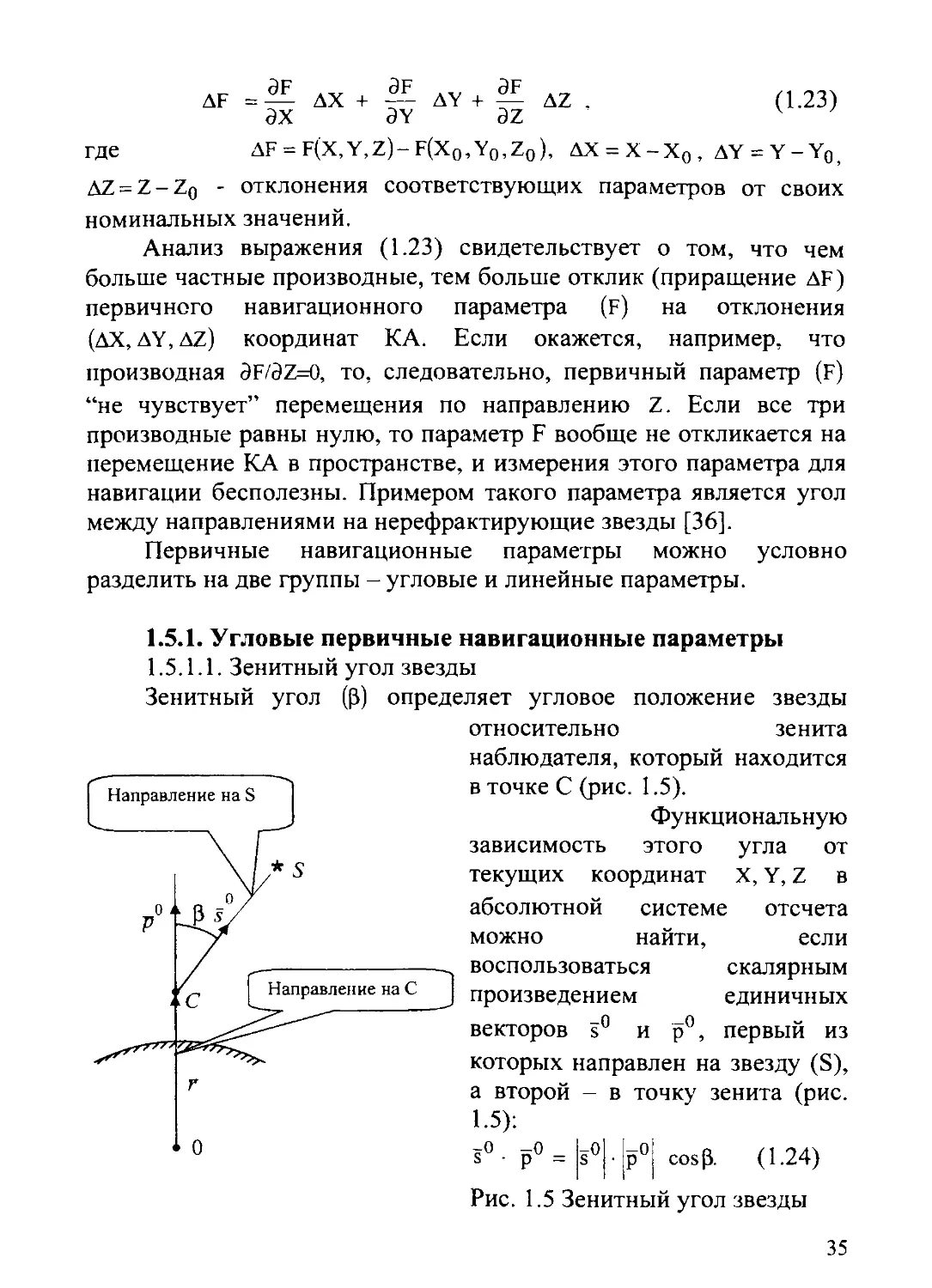
1.5.1.1. Зенитный угол звезды
Зенитный угол (|3) определяет угловое положение звезды
относительно
зенита
наблюдателя, который находится
в точке С (рис. 1.5).
Функциональную
зависимость этого угла от
текущих координат X, Y, Z в
абсолютной системе отсчета
можно найти, если
воспользоваться скалярным
произведением единичных
векторов s° и р°, первый из
которых направлен на звезду (S),
а второй - в точку зенита (рис.
1.5):
s° . Р° = |s°|-|p°| cos₽. (1.24)
Рис. 1.5 Зенитный угол звезды
35
Поскольку радиус-вектор (г) точки С и вектор р°
коллинеарные, имеет место равенство
(1.25)
где |г|=г - модуль радиуса-вектора точки С, в которой находится
КА.
На основании соотношений (1.24) и (1.25) получаем
ч°г
cos р = — . (1.26)
г
Если КА имеет координаты X,Y, Z в абсолютной системе
отсчета, то справедливо равенство
г = д/х2+ Y2+ Z2 . (1.27)
Обозначим а°,Ь°,с° проекции единичного звездного вектора
s° на оси абсолютной системы отсчёта. Тогда, заменяя скалярное
произведение векторов в числителе (1.26) суммой произведений
соответствующих их проекций и учитывая (1.27), получим
уравнение связи зенитного угла (р) звезды с координатами X, Y, Z
местоположения КА:
а°Х + b°Y + c°Z
7x2+Y2+ z2
(1-28)
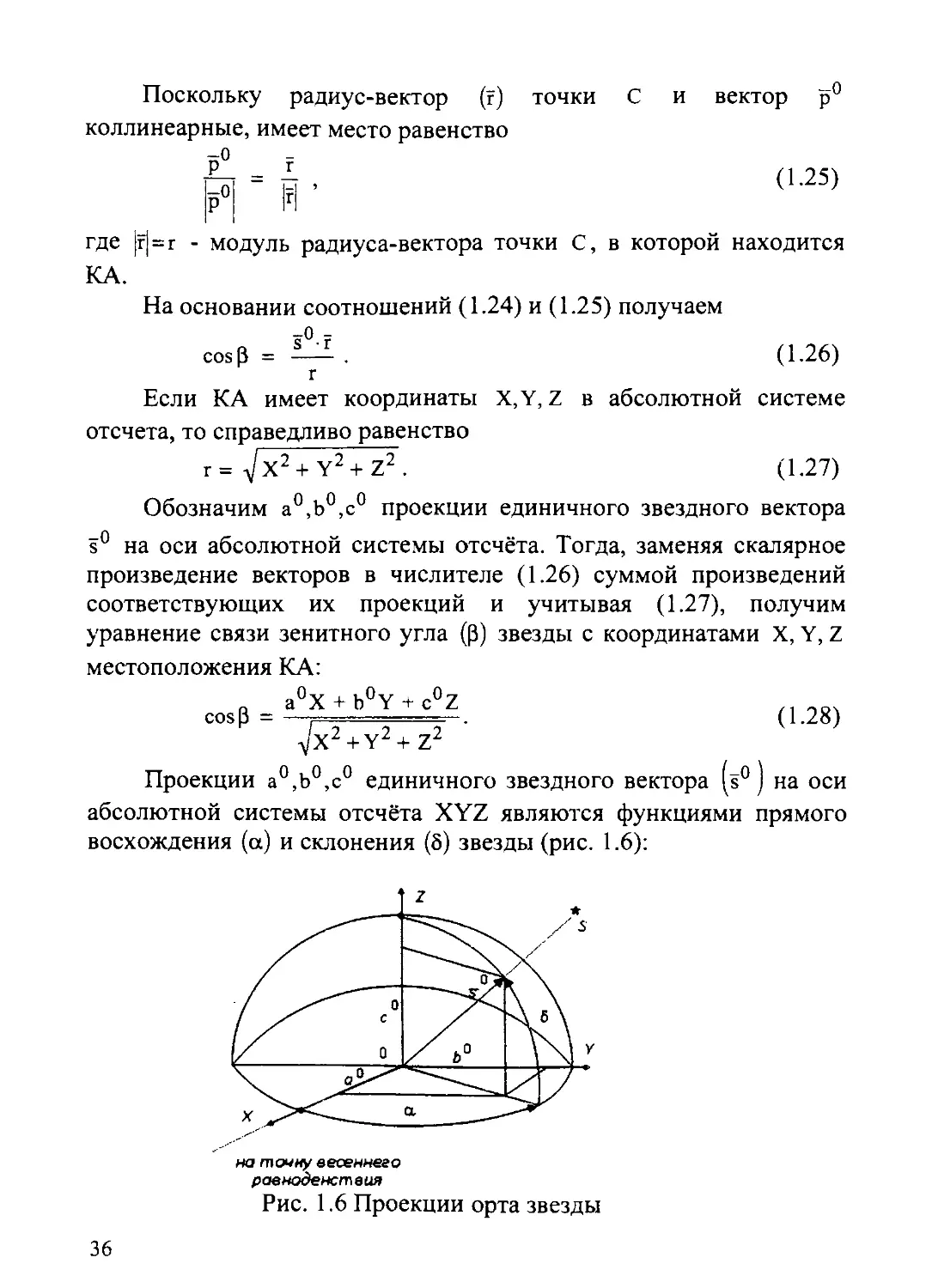
Проекции a°,b°,c° единичного звездного вектора
(s°) на оси
абсолютной системы отсчёта XYZ являются функциями прямого
восхождения (а) и склонения (8) звезды (рис. 1.6):
на точку весеннего
равноденствия
Рис. 1.6 Проекции орта звезды
36
О с
a =cosa coso,
b° =sina cos <5,
0 • к
c =sino.
(1-29)
Найдем навигационные производные по осям
Дифференцируя уравнение
f „0v . kOv
a X + b Y+c Z
arccos
(1-30)
находим:
ЭР
ax
эр
3Y
X
— • cos P - a
• cos p — b°
(131)
P =
r
ap
az
1
г sinP
---1-_______
г sin Р (. г
-----__ Г— cos Р - с°
г sin р г
Анализ полученных выражений позволяет сделать ряд
выводов. Во-первых, измерения зенитного угла звезды,
направление на которую лежит в плоскости орбиты, дают
информацию о перемещении КА только в этой плоскости. Во-
вторых, измерения зенитного утла звезды, направление на которую
перпендикулярно плоскости орбиты, “откликаются” лишь на
перемещение КА по бинормали к плоскости его орбиты. В-третьих,
информативность измерений зенитного угла снижается по мере
удаления КА от Земли.
Для реализации измерений угла р на борту КА, как правило,
совместно используются два средства навигационных измерений:
астровизирующее устройство (см. параграф 6.4) и построитель
текущей (местной) вертикали (см. параграф 6.5).
1.5.1.2. Угловой диаметр Земли
Видимый из точки местоположения космического аппарата
угловой диаметр Земли содержит информацию об удаленности КА
от её поверхности.
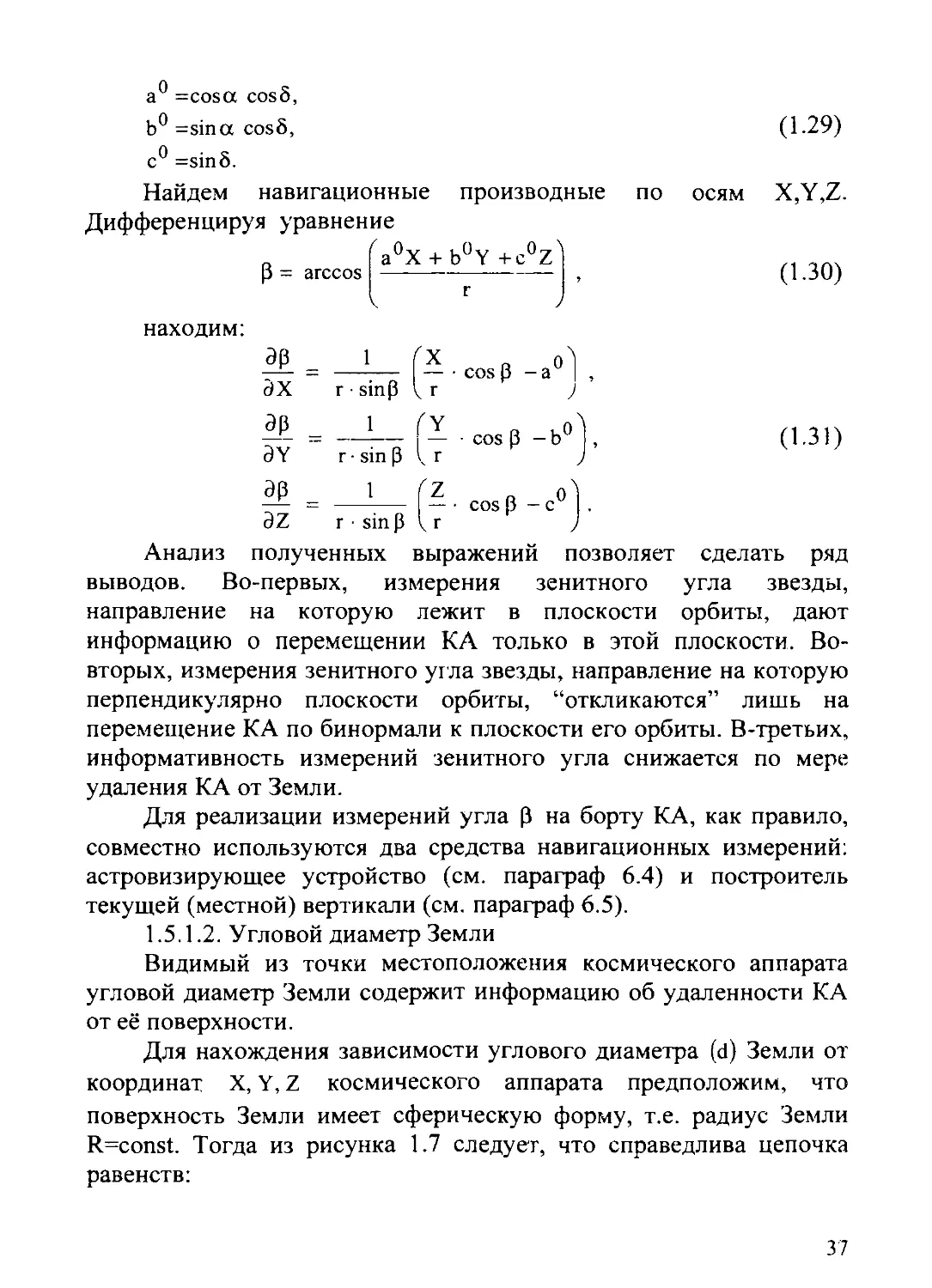
Для нахождения зависимости углового диаметра (d) Земли от
координат X, Y, Z космического аппарата предположим, что
поверхность Земли имеет сферическую форму, т.е. радиус Земли
R=const. Тогда из рисунка 1.7 следует, что справедлива цепочка
равенств:
37
2 r ^x2+y2+z2
(1-32)
Откуда угловой диаметр Земли
d = 2 arcsin
R
7x2+Y2+Z2
определяется из выражения
(1-33)
Дифференцируя отношения (1.32) или (1.33) по координатам
X, Y, Z, найдём исомые
производные по осям
абсолютной системы
отсчёта XYZ:
3d 2Х d
ЭХ ~ r2 ' tg 2 ’
3d 2Y d
(1-34)
3d 2Z d
dZ~ r2 tg 2
Рис. 1.7. Угловой диаметр Земли
Для измерения видимого углового диаметра Земли на борту
КА используются приборы, которые получили название
стадиметров. Впервые стадиметры применялись при межпланетных
перелетах на участке подлета к планете назначения.
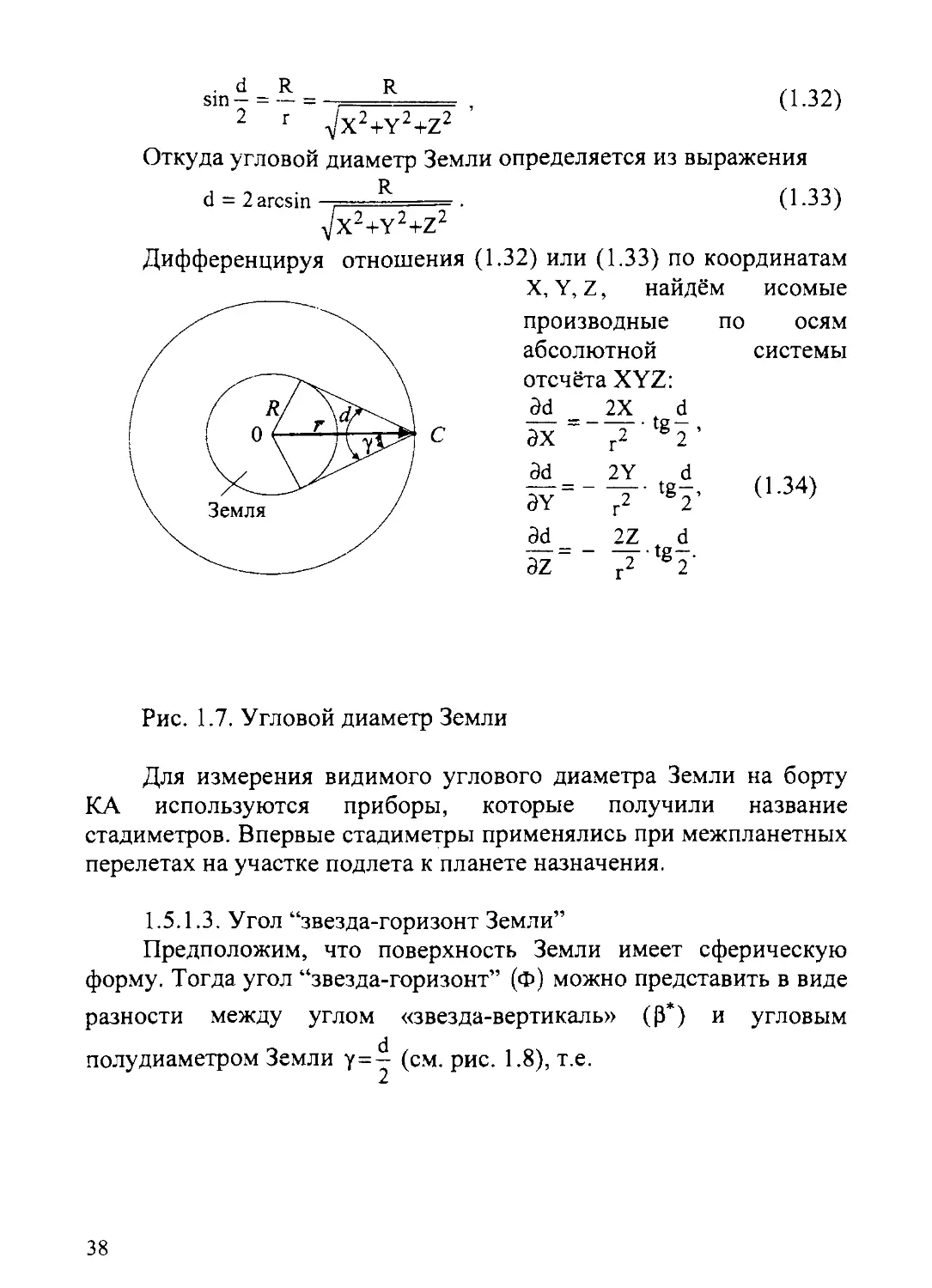
1.5.1.3. Угол “звезда-горизонт Земли”
Предположим, что поверхность Земли имеет сферическую
форму. Тогда угол “звезда-горизонт” (Ф) можно представить в виде
разности между углом «звезда-вертикаль» (Р*) и угловым
полудиаметром Земли у= — (см. рис. 1.8), т.е.
38
Рис. 1.8. Угол “звезда-горизонт”
a°O+b0Y+c°Z
7x2+Y2+Z2
(135)
Функциональная
связь угла “звезда-
горизонт” с
координатами X, Y, Z
космического аппарата в
абсолютной системе
отсчёта устанавливается с
помощью очевидных
соотношений (1.30),
(1.33) и (1.35):
О = arccos
- arcsin
J
л
R
7x2+Y2+Z2 ,
(1.36)
Навигационные производные угла “звезда-горизонт” в
соответствии с (1.31), (1.34) и (1.36) имеют вид:
дб эх ' эд 3Y эд эг 1 (х о(Лх = . D cosp а + tgy , г • Sin Р \ г J г2 = . „ f cosp b0>| + - • tgy , (1-37) г • sm р \ г J г2 1 (Z Q o^l z = cosp с + • tgy . Г • Sin Р г ) г2
Анализ выражений (1.30) и (1.34) показывает, что измерения
угла (Ф) “звезда-горизонт” дают более высокую информативность
по сравнению с измерениями зенитного угла (р). Это объясняется
тем, что они содержат информацию об удаленности КА от Земли, в
то время как измерения зенитного угла такой информации не
содержат. Нетрудно показать, что при перемещении КА вдоль его
радиуса-вектора зенитный угол, измеряемый с борта этого КА, не
изменяется.
1.5.1.4. Угол “звезда-ориентир”
Ориентирами в космической навигации являются любые
материальные объекты, координаты которых в какой-либо системе
39
отсчёта известны. Ориентиры могут находиться как на поверхности
Земли, так и в космическом пространстве. Поэтому они получили
названия наземные и орбитальные ориентиры.
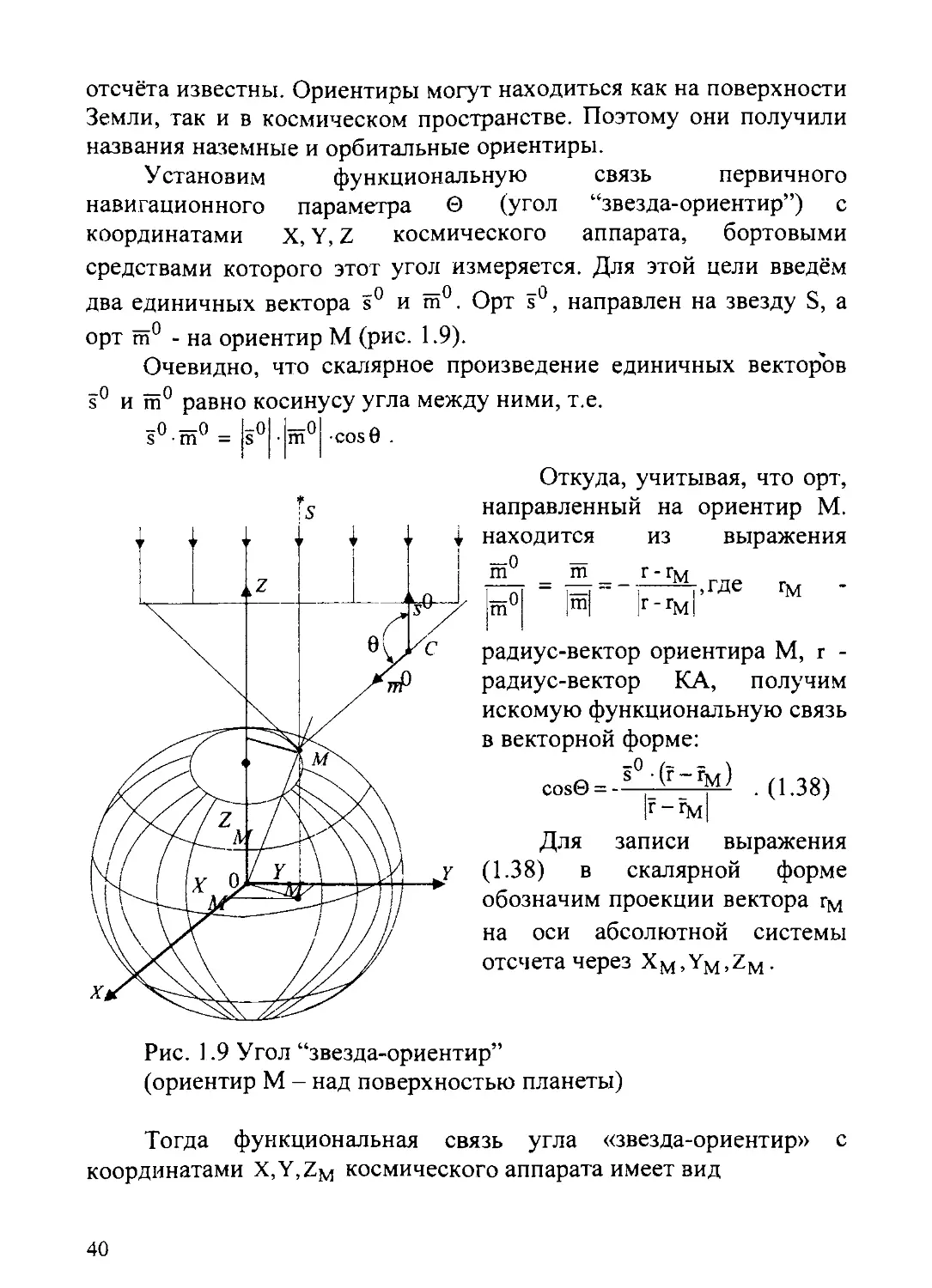
Установим функциональную связь первичного
навигационного параметра 0 (угол “звезда-ориентир”) с
координатами X, Y, Z космического аппарата, бортовыми
средствами которого этот угол измеряется. Для этой цели введём
два единичных вектора s° и т°. Орт s°, направлен на звезду S, а
орт т° - на ориентир М (рис. 1.9).
Очевидно, что скалярное произведение единичных векторов
s° и т° равно косинусу угла между ними, т.е.
s°m° = |s°| -|ш0| -COS0 .
Откуда, учитывая, что орт,
направленный на ориентир М.
находится из выражения
т° т г - гм
г-ти = Fi = -|—^>где гм -
т° М 1г-гм|
радиус-вектор ориентира М, г -
радиус-вектор КА, получим
искомую функциональную связь
в векторной форме:
cos© = -s°-(r~rM) . (1.38)
k-nvil
Для записи выражения
(1.38) в скалярной форме
обозначим проекции вектора гм
на оси абсолютной системы
отсчета через XM,YM,ZM.
Рис. 1.9 Угол “звезда-ориентир”
(ориентир М - над поверхностью планеты)
Тогда функциональная связь угла «звезда-ориентир» с
координатами X,Y,Zm космического аппарата имеет вид
40
а°(Х —Хм) + b°(Y-YM) + c°(Z-ZM)
cos0 =----, • " '---. 1.1. J У 7
7(X-XM)2 +(Y-YM)2 +(Z-ZM)2
Если ориентир находится на поверхности сферической Земли
с радиусом R и имеет географические координаты - широту фМ и
долготу А,м, то его абсолютные прямоугольные координаты
вычисляются следующим образом [79]
хм XG
YM = MGa yg (1.40)
_ZM. _ZG.
где XG, YG,ZG - координаты наземного ориентира в гринвичской
прямоугольной системе отсчета,
MGa - матрица перехода от гринвичской к абсолютной
системе координат.
Матрица перехода MGa определяется с помощью часового
угла точки весеннего равноденствия на нулевом меридиане
(меридиане Гринвича), т. е. по звездному времени SG гринвичского
меридиана
MGa~
cosSG
sinSG
О
-sinSG О
cosSG О
О 1
(1-41)
Для расчёта прямоугольных координат XG, YG, ZG наземного
ориентира, входящих в соотношение (1.40), используются формулы
XG = R совфм cosZM ,
YG = R • cosQm sinA,M, (1-42)
ZG = R sinq>M.
1.5.2. Линейные первичные навигационные параметры
В качестве линейных первичных навигационных параметров
наибольшее распространение в автономной навигации получили
высота полёта КА и дальность до ориентира с известными
координатами. Линейные первичные навигационные параметры
являются функциями только координат КА и не зависят от
составляющих скорости его движения.
1.5.2.1. Высота полёта КА
Высота полёта КА (н) равна разности модуля радиуса-вектора
(г) КА и радиуса (R) Земли в подспутниковой точке, т.е.
41
H = r-R = уХ2 + Y2 + Z2 - R . (1.43)
Характеристикой чувствительности измерений высоты полёта
КА к его координатам являются частные производные:
анх. эн_у. эн_г
ах-г’ эу г’ az г 2
Если производные (1.44) отличны от нуля, то смещения
центра масс КА относительно расчётного положения по осям
прямоугольной системы отсчёта (Дх, Ду, Az ) приводят к появлению
отклонения результата измерения высоты полёта:
ан ан ан z. .
ДН = Дх + — Ду + — • Дг . (1.45)
Эх Эу дг
Из соотношений (1.44) и (1,45)следует, что чувствительность
измерений высоты полёта КА, во-первых, уменьшается с ростом
радиуса его орбиты и, во-вторых, зависит от выбранной системы
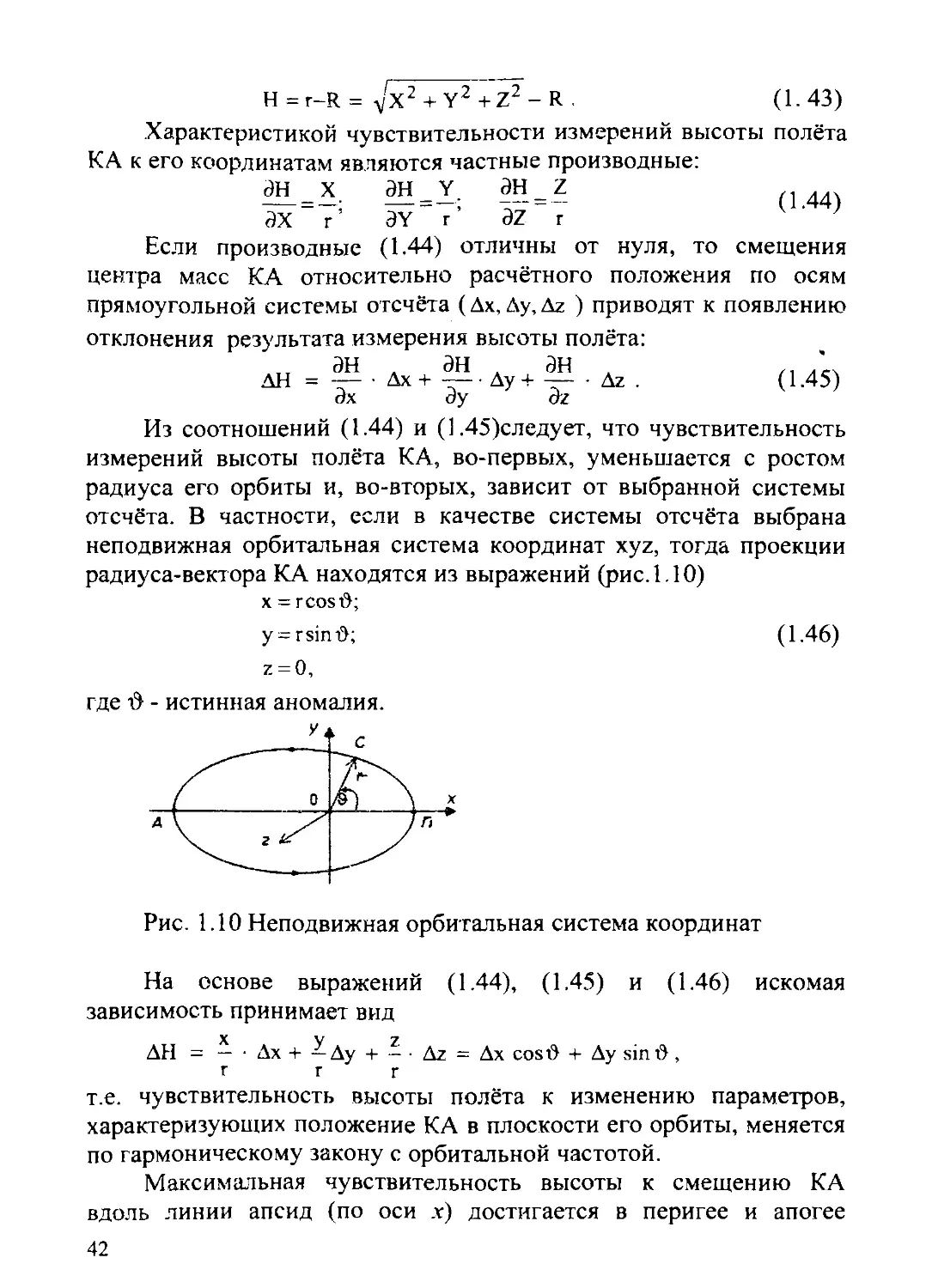
отсчёта. В частности, если в качестве системы отсчёта выбрана
неподвижная орбитальная система координат xyz, тогда проекции
радиуса-вектора КА находятся из выражений (рис. 1.10)
х = г cos О;
y = rsint>; (1-46)
z = 0,
где О - истинная аномалия.
Рис. 1.10 Неподвижная орбитальная система координат
На основе выражений (1.44), (1.45) и (1.46) искомая
зависимость принимает вид
X у 2.
ДН = — Дх + — Ду + — • Дг = Дх cost? + Ду sin О ,
г г г
т.е. чувствительность высоты полёта к изменению параметров,
характеризующих положение КА в плоскости его орбиты, меняется
по гармоническому закону с орбитальной частотой.
Максимальная чувствительность высоты к смещению КА
вдоль линии апсид (по оси .г) достигается в перигее и апогее
42
орбиты, т.е. при г) = 0, л, 2л, а к смещению вдоль нормали к линии
апсид (по оси у ') - при д = В том с;1Учае> когда КА
смещается по бинормали к орбите (по оси z) значения результатов
измерений высоты полёта не изменяются, т.е. этот параметр
является инвариантным.
При описании движения КА в подвижной орбитальной
системе координат (см. п. 1.2.2) измерения высоты полёта
реагируют только на смещение КА по вертикали, причем
коэффициент чувствительности максимален и равен единице.
В ряде случаев в модели Земли учитывается её полярное
сжатие. При этом высота полета КА в абсолютной системе отчёта
рассчитывается по формуле
(1.47)
где R3 - экваториальный радиус Земли (большая полуось
эллипсоида Красовского, равная 6 378 245 м),
а - коэффициент, характеризующий сжатие Земли
относительно полюсов,
Z - координата КА вдоль направления на северный полюс
Мира.
С учётом (1.47) частные производные высоты полета КА по
его координатам принимают вид
ЭН
ЭХ
ЭН
ЭУ
ЭН
эг
(1.48)
1.5.2.2. Дальность до известного ориентира
Предположим, что положение КА и ориентира М
определяются в абсолютной системе отсчета. Тогда дальность “КА
- ориентир” находится из соотношения
D 7(Х~ХМ)2 + (Y-YM)2 + (Z-ZM)2 . (1.49)
43
Частные производные от дальности по координатам КА
рассчитываются по формулам:
ЭР .. Х-Хм ЭР _ Y-YM ЭР Z-ZM
эх р ’’ эу р ’ эг р 1 ‘ }
Анализ выражений (1.50) показывает, что с ростом дальности
чувствительность этого навигационного параметра снижается.
1.6. Методы автономного определения параметров орбит
Для определения параметров движения центра масс КА
применяется большой арсенал методов навигации, которые можно
разделить на две группы. В первую группу входят методы, с
помощью которых навигационная задача может быть решена
только бортовыми аппаратно-программными средствами КА без
привлечения средств наземного комплекса управления (НКУ).
Методы этой группы получили название автономных методов
навигации КА, поскольку они обладают свойством автономности.
Под автономностью понимается такое свойство метода
определения орбит КА, которое характеризует его способность
решать навигационную задачу бортовыми аппаратно-
программными средствами космического аппарата без привлечения
средств НКУ.
Очевидно, что те методы навигации, которые не обладают
свойством автономности, входят в группу неавтономных методов.
К таким методам, в частности, относятся методы, которые
основаны на измерениях, производимых наземными средствами,
или используют баллистическую информацию, формируемую
средствами НКУ.
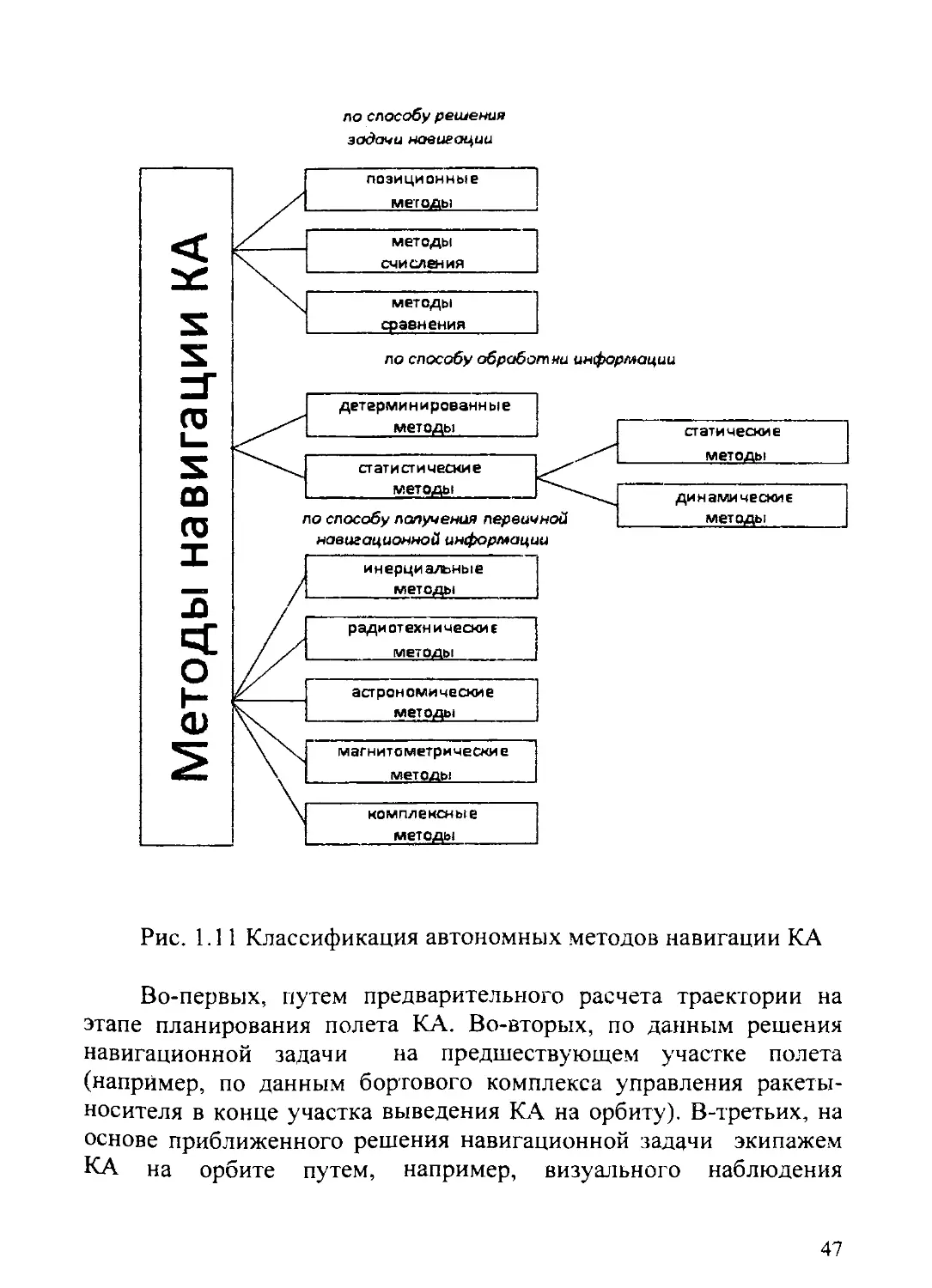
Большое разнообразие существующих и разрабатываемых
методов космической навигации классифицируется по трём
основным признакам (рис. 1.11):
способ решения задачи навигации;
способ математической обработки навигационной
информации;
способ получения первичной навигационной информации.
По первому признаку классификации исторически выделилось
три группы методов: позиционные, методы счисления пути и
методы сравнения.
44
Позиционные методы основаны, на измерениях физических
величин - первичных навигационных параметров, функционально
связанных с координатами КА, характеризующих его положение
(позицию) в заданной системе отсчёта.
Искомое положение КА в пространстве определяется путём
решения трёх уравнений независимых навигационных измерений
[36]
F,= F,(X,Y,Z),
F2 = F2(X,Y,Z) , (1.51)
F3 = F3(X,Y,Z) ,
а привязка точек местоположения ко времени позволяет установить
составляющие вектора скорости КА.
Методы счисления основаны на математическом или
физическом моделировании движения КА по орбите. На активных
участках полета (при работающих реактивных двигателях)
счисление сводится к измерению и интегрированию во времени
составляющих вектора ускорения движения центра масс КА.
Первое интегрирование дает составляющие вектора скорости,
второе интегрирование - пройденный путь, и, следовательно, на
основании знания исходных параметров движения, текущие
координаты КА.
На орбитальном участке полета (при выключенных
двигателях) используются методы физического моделирования
движения. Например, в применяемом на пилотируемых
космических аппаратах навигационном индикаторе движение КА
относительно Земли моделируется с помощью вращающегося под
неподвижным перекрестием глобуса, причем счетно- решающее
устройство обеспечивает необходимое направление и скорость его
вращения [34].
Методы сравнения основаны на фиксации путем наблюдений
или измерений каких-либо характеристик среды, в которой
происходит полет КА, и сравнении этих характеристик с априорно
известными. В частности, к этим методам относятся метод опорной
орбиты (см. параграф 1.7) и обзорно-сравнительные методы
навигации, основанные на визуальном наблюдении с борта КА
земной поверхности и сравнении её с географической картой. Для
наблюдения кроме видимого могут использоваться и другие
участки спектра электромагнитного излучения.
45
По способу получения первичной навигационной информации
в зависимости от используемых технических средств измерений
различают радиотехнические, астрономические, инерциальные,
магнитные и комплексные методы навигации.
По способу математической обработки поступающей
навигационной информации методы навигации разделяются на
детерминированные и статистические. Последние, в свою очередь,
делятся на методы обработки полной выборки измерений
(статические) и методы обработки выборки нарастающего объема
(динамические методы).
Для детерминированных методов навигации характерно
равенство количества искомых и измеряемых в процессе полёта КА
параметров. При этом все измерения должны проводиться в один и
тот же момент времени.
Примером реализации этого метода является задача
определения трех координат точки местоположения КА в
пространстве, требующая одновременного измерения трех
независимых первичных навигационных параметров. Другая
разновидность детерминированных методов применяется для
определения всех шести элементов орбиты по двум
фиксированным в различные моменты времени точкам орбиты.
Главный недостаток детерминированных методов навигации
заключается в их относительно низкой точности, поскольку
неизбежные случайные погрешности измерений приводят к
соизмеримым ошибкам определения параметров движения КА.
Статистические методы предполагают обработку
существенного избытка результатов навигационных измерений, как
правило, по критерию минимума погрешностей навигации. При
этом удается в значительной степени усреднить случайную
составляющую и в некоторых случаях «отфильтровать» отдельные
систематические компоненты погрешностей измерений.
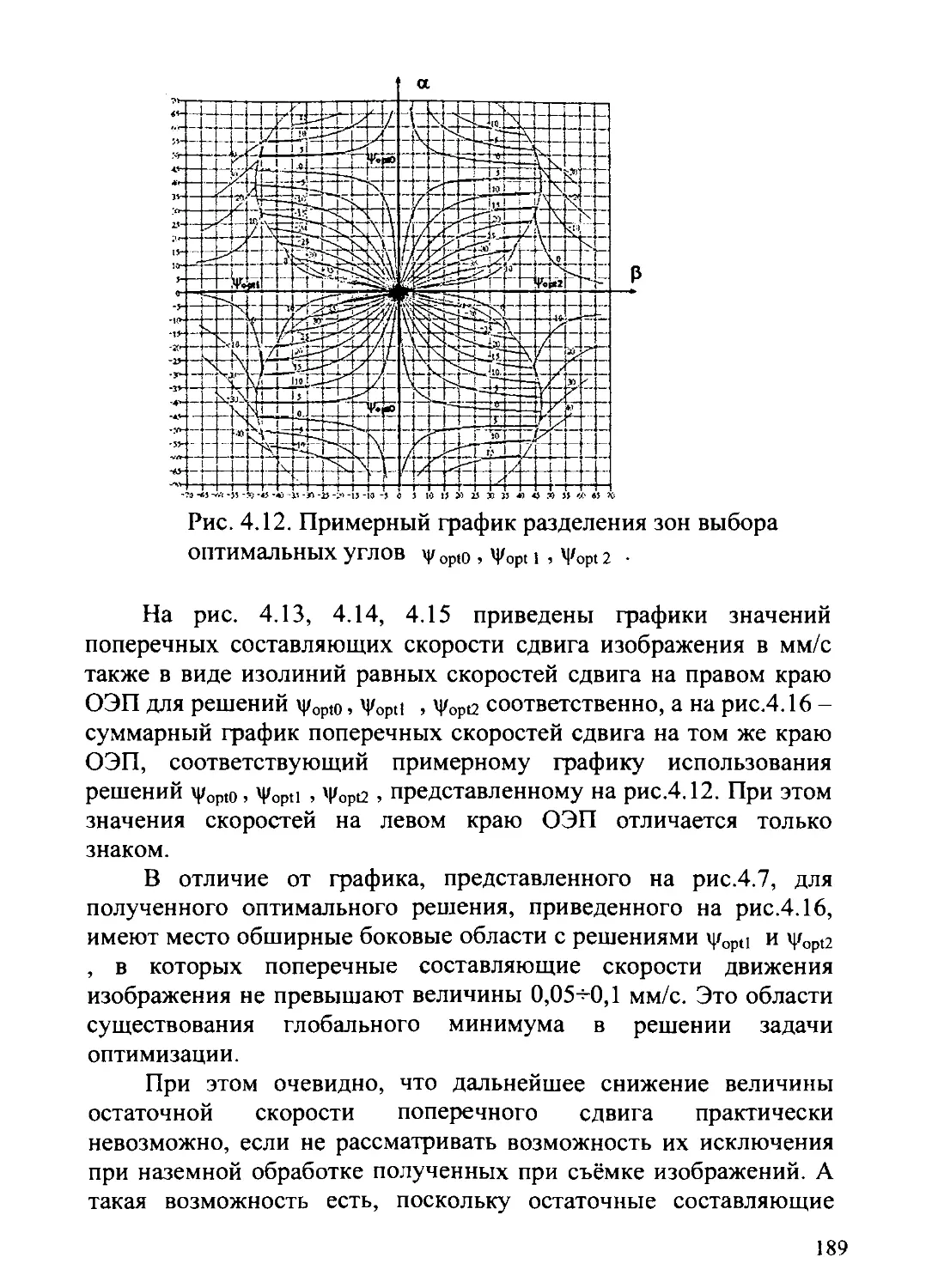
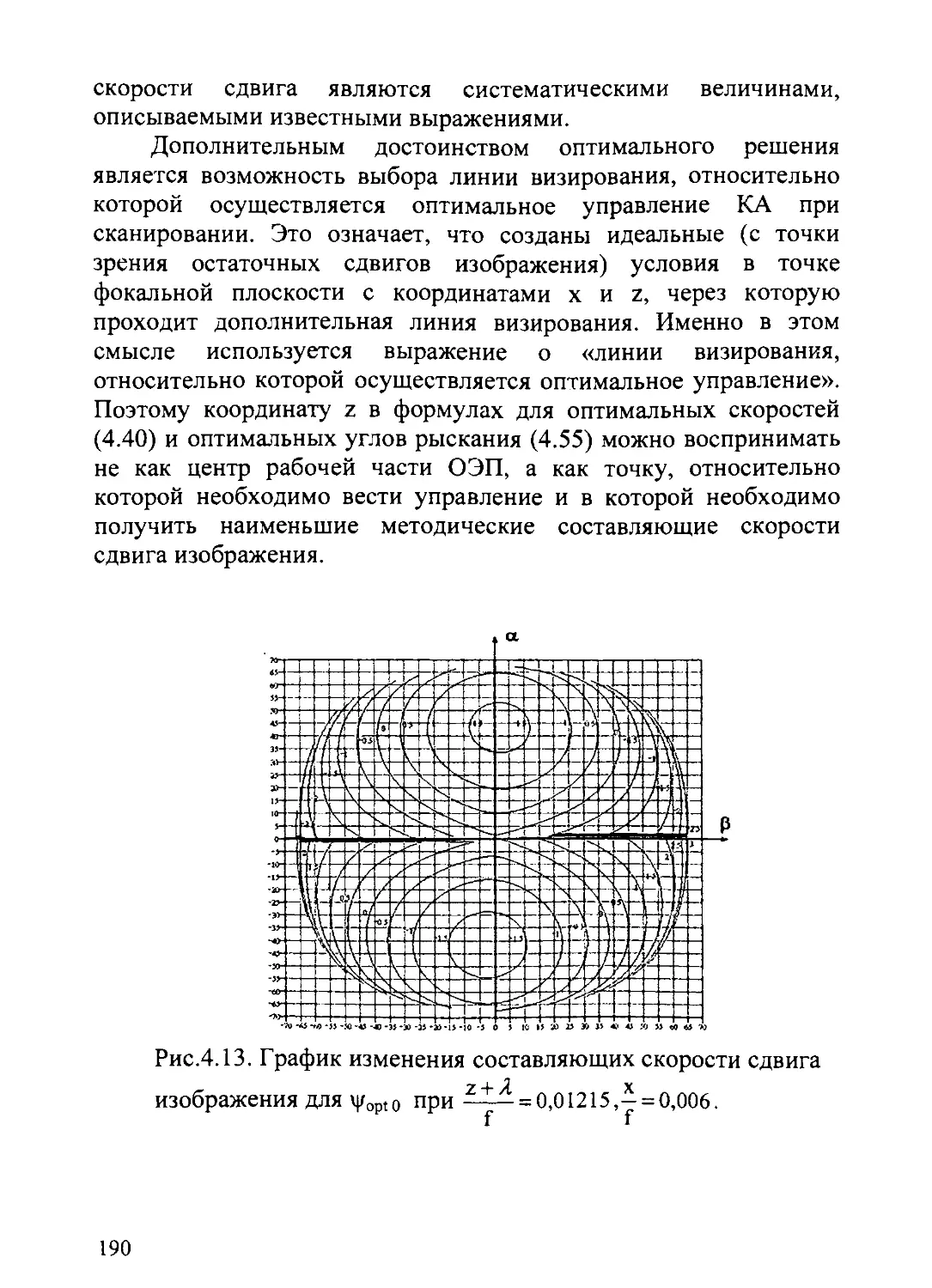
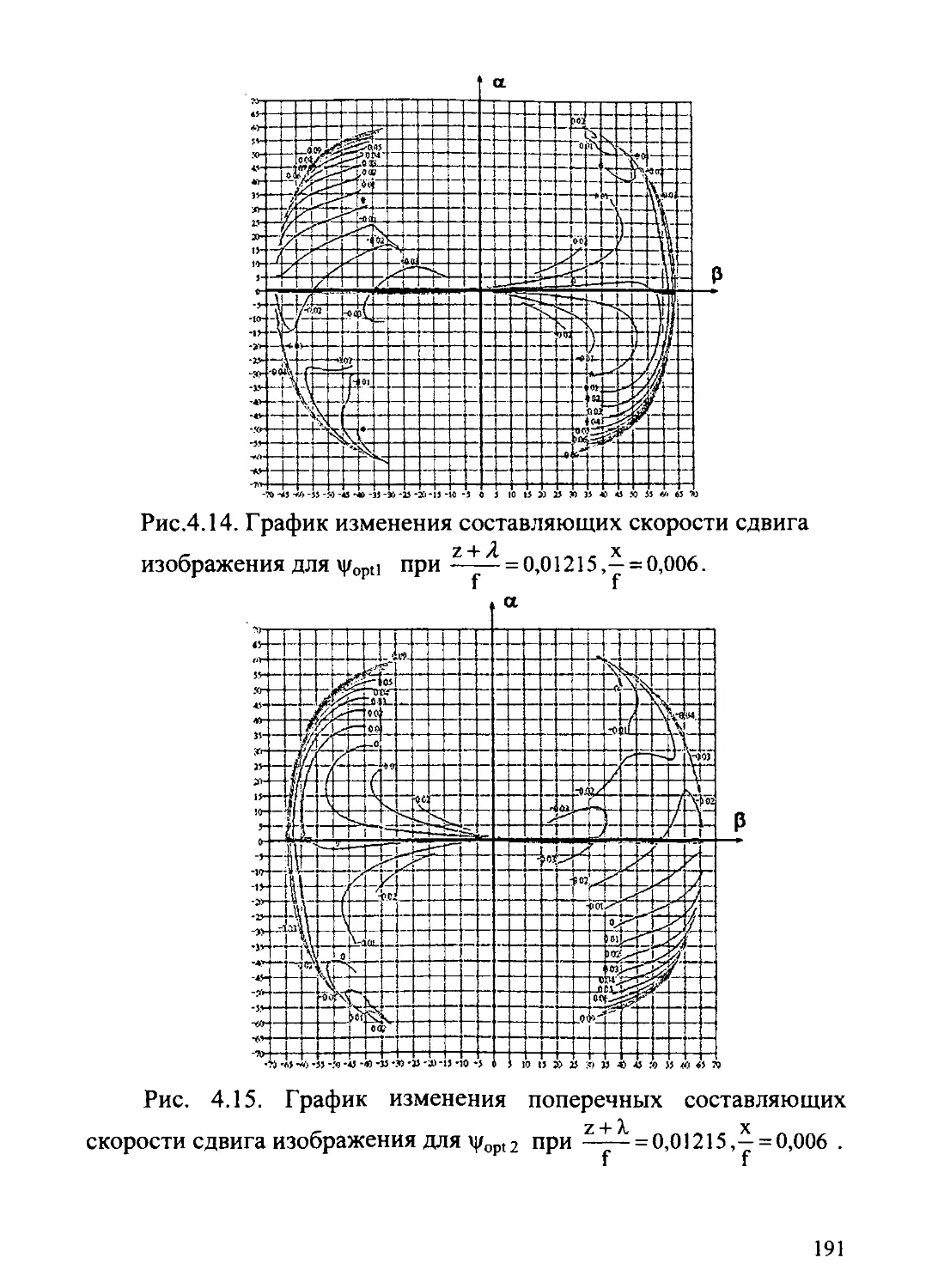
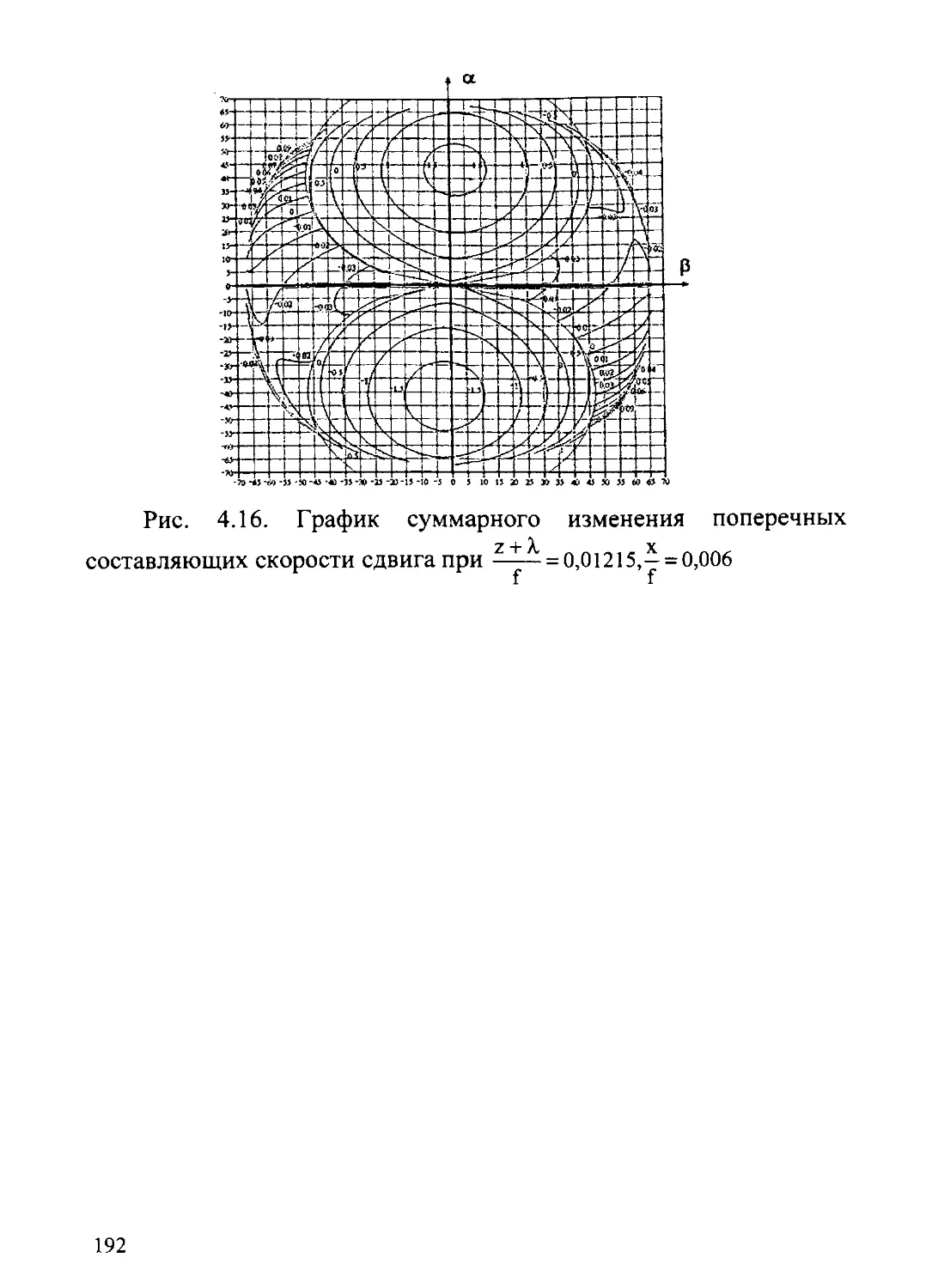
1.7. Метод опорной орбиты
На практике нет необходимости решать нелинейные
уравнения вида (1.51.), т.к. реально всегда имеется априорная,
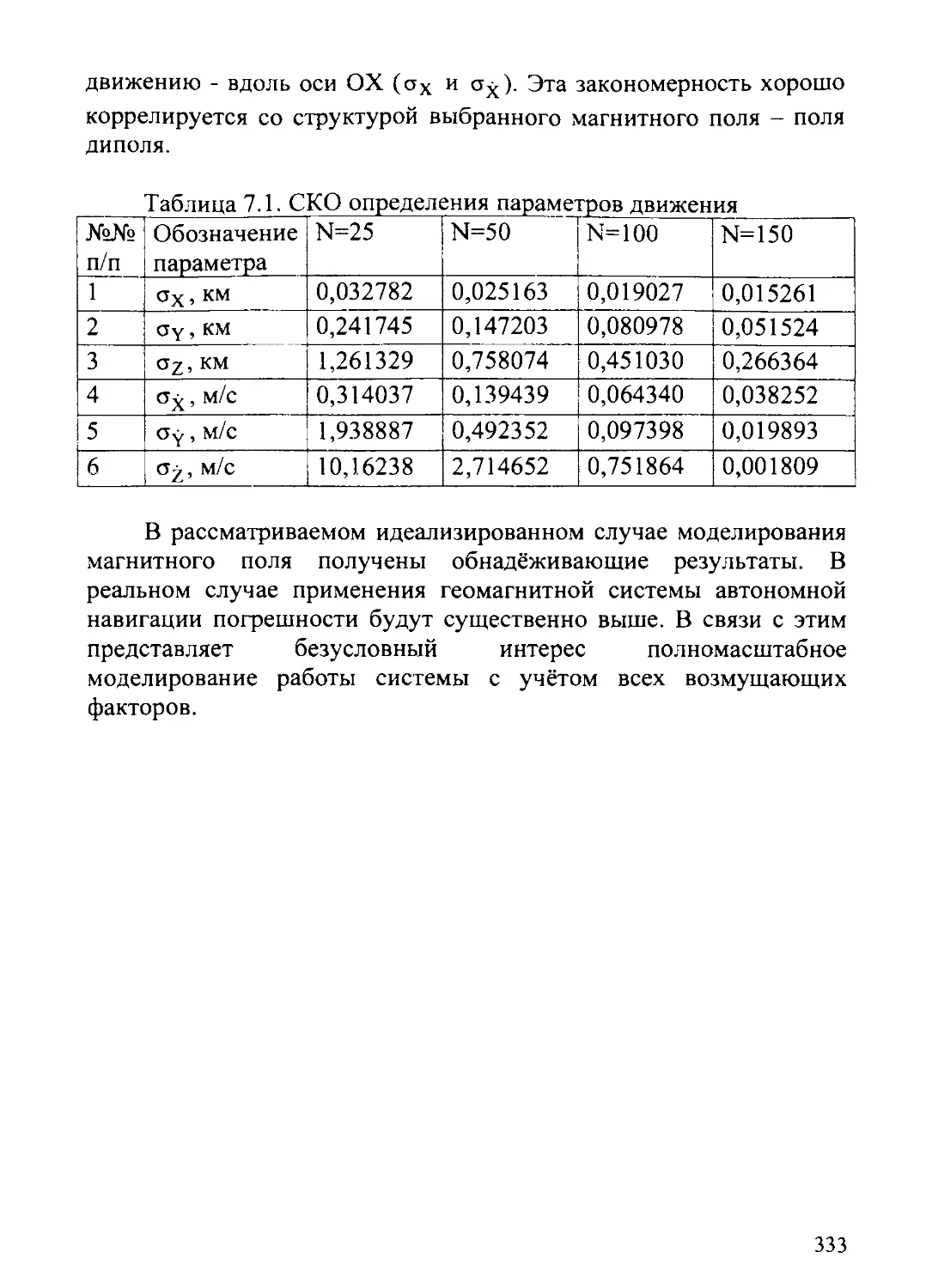
пусть даже достаточно грубая, информация о местоположении КА.
Такая информация может быть получена, например, одним из трех
следующих способов.
46
до способу решения
задачи навигации
Рис. 1.11 Классификация автономных методов навигации КА
Во-первых, путем предварительного расчета траектории на
этапе планирования полета КА. Во-вторых, по данным решения
навигационной задачи на предшествующем участке полета
(например, по данным бортового комплекса управления ракеты-
носителя в конце участка выведения КА на орбиту). В-третьих, на
основе приближенного решения навигационной задачи экипажем
КА на орбите путем, например, визуального наблюдения
47
подстилающей поверхности и прослеживания ее по карте и
бортовым часам.
Полученную по таким приближенным данным траекторию
движения КА называют опорной (номинальной или расчетной).
Наличие априорной информации позволяет линеаризовать
уравнения системы (1.51) в окрестности опорной точки,
координаты которой обозначим X0,Y0,Z0. Линеаризация этой
системы уравнений в окрестности составляющих вектора скорости
Xo’Y0,Z0, как правило, не проводится в связи с позиционным
характером используемых в автономной навигации первичнйх
навигационных измерений.
Процесс решения навигационной задачи сводится к
отысканию отклонений фактических (истинных) координат
КА от опорной точки, т.е. к отысканию поправок, уточняющих
приближенно известную опорную точку местоположения КА.
Введем вектор Дг отклонений истинных координат от его
опорных значений:
Дг =
ДХ
ДУ
Х-Х0
Y-Y0
Z-Zo
= ?-го>
(1-52)
где f = [х YZ]T - вектор истинных координат КА,
r0 =txo Y0 Z0]T - вектор опорных координат КА.
Очевидно, что фактическим координатам (X, Y, Z) КА
соответствуют истинные значения первичных навигационных
параметров (Fj.F^Fj), т.е. те значения, которые определяются с
помощью приборов, находящихся на борту КА. Причём, эти
приборы являются «идеальными» бортовыми средствами
навигационных измерений КА, т.е. таких измерительными
приборами, у которых отсутствуют инструментальные и
методические погрешности.
В то же время опорным координатам Xo,Yo,Zo соответствуют
номинальные значения первичных навигационных параметров. Эти
параметры могут быть вычислены на основе априорной
информации, т.е. по известным значениям опорных координат КА.
Обозначим номинальные первичные навигационные
параметры как функции Fl(X0,Y0,Z0'), F2(X0,Y0,Z0), F3(X0,Y0,Zo).
48
Тогда вектор AF отклонений истинных первичных навигационных
параметров относительно их опорных значений принимает вид
AF; AF = AF3 AF3 ”Fj(X,Y,Z) — F](X0, Y0,Z0) ~ = F2(X,Y,Z)-F2(Xo,Yo,Zo) . (1.53) _F3(X, Y,Z) —F3(X0, Y0,Z0)_
Предположим, что отклонения (1.52) и (1.53) достаточно
малы, т.е. их произведениями, квадратами, кубами и т.д. можно
пренебречь по сравнению с первой степенью (например,
AX-AY«AX, AF]2«AF и т.д.). Тогда, раскладывая уравнения
(1.51) в ряд Тейлора в окрестности опорной точки и оставляя
только линейные слагаемые, получим систему линеаризованных
уравнений:
являющиеся коэффициентами этих уравнений, также представляет
собой функции от координат КА. Они вычисляются по тем
значениям координат КА, которые априорно известны, т.е. по
номинальным значениям координат (Xo,Yo,Zo).
Представим систему уравнений (1.54) в матричном виде.
Учитывая соотношения (1.52) и (1.53), получим:
AF = AAr, (1.55)
где А - матрица частных производных первичных
навигационных параметров по координатам КА.
Эта матрица называется матрицей навигационных
производных или градиентной матрицей. Она содержит три строки
и три столбца:
49
3Fj 3F; 3F]
эх ay az
3F2 3Ft 3F,
A = -----------i-
ax ay az
3F3 8F3 8F3
Lax ay azL,
0
используются параметры опорной точки,
координаты (X0,Y0,Z0).
(1.56)
которая имеет
В левых частях уравнений (1.54) или (1.55) в качестве
фактических значений первичных навигационных параметров (Fj)
При расчёте значений элементов градиентной матрицы (1.56)
находятся результаты их измерений (fJ. Измеренные параметры
отличаются от фактических значений в связи с наличием
неизбежных погрешностей измерений. Поэтому строки вектора Д/7
в отличие от соотношения (1.53 ) формируют следующим
образом:
ДР, = Fj —Г(Хд, Y0,Z0), i = l,2,3. (1.57)
Предположим, что измеряемые параметры, составляющие
засечку положения КА, взаимно независимы. Градиентная матрица
(А) в этом случае является неособенной (т.е. ее определитель (ДА)
отличен от нуля, ДА *0), и система (1.55) имеет решение:
Дг = А-1 ДЁ (1.58)
Найденные отклонения Дг в качестве поправок алгебраически
суммируются с опорными координатами (X0,Y0,Z0) и, тем самым,
уточняют их:
Г = гд+Дг. (1-59)
Рассмотренный метод решения навигационной задачи на
основе данных о параметрах опорной орбиты относится к
детерминированным методам сравнения. Это обусловлено тем, что,
во-первых, в этом способе не ведётся борьба с погрешностями
измерений и, во-вторых, результаты измерений сравниваются с
рассчитанными по известным формулам значениями опорных
первичных навигационных параметров.
На практике точка, характеризующая опорное положение КА,
может быть известна весьма приблизительно, даже грубо. Поэтому
реальные отклонения от нее вследствие влияния имеющихся
нелинейностей могут быть сравнительно велики.
50
Для устранения влияния нелинейностей решение используется
способ последовательных сближений (итераций). В этом способе
результаты предшествующей итерации принимаются в качестве
исходных данных для следующего цикла. Причем на каждом цикле
решения используются одни и те же измеренные значения ^,F2,F3
первичных навигационных параметров.
Итерационный процесс может оказаться расходящимся. В
этом случае следует получить и использовать более точные
опорные значения координат X0,Y0,Z0.
Алгоритм детерминированного метода решения
навигационной задачи в линейной постановке включает ряд этапов
(рис. 1.12).
1. По исходном данным - приближенным координатам
Xo,Yo,zo опорной точки местоположения КА - рассчитывают
номинальные («счислимые») значения первичных навигационных
параметров Fj(X0,Yo,Z0), г= 1,2,3.
2. По этим же исходным данным вычисляют частные
производные < —L1 и составляют градиентную матрицу А.
I Эг .1 о
3. Вычисляют обратную матрицу А-1.
Рис. 1.12 Общая структура алгоритма уточнения
местоположения КА методом опорной орбиты
4. Фиксируются результаты измерений ^,F2,F3 и вычисляются
разности AFj = F; - Fj(X0, Yo, Zo), i=l,2,3. Все вычисления и
51
измерения соответствуют моменту времени, для которого известны
координаты (X0,Y0,Z0) опорной точки.
5. В соответствии с уравнением (1.41) методом итераций
вычисляют уточняющие поправки AX,AY,AZ.
6. Эти поправки добавляют к опорным значениям координат и
определяют действительные координаты КА (X,Y,Z).
В заключение отметим наиболее характерные особенности
рассматриваемого метода решения задачи определения координат КА.
1. Метод достаточно прост, для обработки информации не
требует использования сложных вычислительных средств, может
быть реализован с помощью простых штурманских линеек,
шаблонов или даже таблиц и относится к «ручным»
высоконадежным методам.
2. Метод основан на использовании минимально необходимой
измерительной информации, когда количество измеряемых и
определяемых параметров одинаково.
3. Метод требует одновременного измерения нескольких
первичных навигационных параметров, составляющих засечку
положения, что не всегда легко выполнить.
4. Искомые параметры движения КА определяются на тот же
момент времени, когда произведена засечка положения.
5. Метод работоспособен, если все участвующие в засечке
измеряемые параметры являются взаимно независимыми
величинами. В противном случае градиентная матрица становится
особенной (с нулевым определителем), и операция ее обращения
невыполнима.
6. Метод не сглаживает случайные погрешности измерений,
поэтому точность определения фактических координат КА при
использовании существующих измерителей зачастую не приемлема
для многих реальных задач.
Первая из указанных особенностей является достоинством
детерминированного метода навигации, а остальные - его
недостатками. В значительной степени недостатки метода могут быть
преодолены за счет использования статистической обработки избытка
навигационных измерений, производимых на протяженных мерных
участках орбиты.
52
Глава 2. МЕТОДЫ ОБРАБОТКИ НАВИГАЦИОННОЙ
ИНФОРМАЦИИ
2.1. Основы статистической фильтрации
К числу недостатков детерминированных методов навигации
КА относится необходимость проведения высокоточных измерений
первичных навигационных параметров. Это обусловлено тем
обстоятельством, что в детерминированных методах используется
минимально необходимое число измерений. При этом борьба со
случайными погрешностями измерений не ведется.
При использовании бортовых средств измерений первичных
навигационных параметров точность решения навигационной
задачи детерминированными методами во многих случаях не
приемлема для выполнения стоящих перед КА функций.
Одним из путей повышения точности навигации КА является
применение статистических способов обработки избыточных
навигационных измерений, т. е. реализация в бортовых комплексах
управления КА статистических методов навигации.
Сущность этих методов заключается в следующем.
Предположим, что требуется определить вектор параметров
движения центра масс КА Q(tj), соответствующий некоторому
моменту времени t. Для определения вектора Q(tj) проводятся
измерения первичных навигационных параметров FK(t), количество
которых равно m , т.е. к = 1,т.
Первичные навигационные параметры подвергаются
измерениям в моменты времени tj , где j = l,n. Таким образом, в
каждый момент времени tj измеряется т- мерный вектор
F(tj)=[F1(tj) F2(tj)... FK(tj) ...Frn(t j)]T .
Компонентами вектора F (tj) являются первичные
навигационные параметры, которые, как известно, зависят от
параметров движения центра масс КА. Следовательно, между
векторами F (tj) и Q(tj) существует функциональная зависимость
вида
. F (tj)=F(Q(tj)). (2.1)
Однако в действительности измеренные значения вектора
F (tj) содержат неизбежные погрешности, которые могут носить
53
инструментальный и методический характер. Обозначим F(tj) -
вектор измеренных значений первичных навигационных
параметров в момент времени tj. Тогда вектор F (tj) связан с
вектором F (tj) истинных значений измеряемых параметров
соотношением
F (tj) = F(tj) + 4(tj), (2.2)
где £ (tj) - вектор погрешностей измерений.
В ходе решения навигационных задач значения вектора (tj)
остаются неизвестными. Их обычно рассматривают как случайные
векторы с известными законами распределения. При этом
полагают, что случайные погрешности не зависят от времени, а их
математические ожидания равны нулю.
Предположим, что движение КА происходит в известном поле
сил. Тогда существует функциональная зависимость
Q (tj) = f(Q(t),tj), (2.3)
которая позволяет однозначно определить параметры движения
центра масс КА в момент tj по известному значению вектора Q(tj)
в момент времени t.
Заметим, что зависимость (2.3) является взаимно однозначной,
так как выбор момента t произволен и времена t и tj можно
поменять местами.
С учетом (2.2) и (2.3) матричное уравнение (2.1) перепишем
следующим образом
F(f(Q(t), tj))=F(tj), j = U. (2.4)
Выражение (2.4) представляет собой систему из n-m
уравнений, которые являются неточными. С помощью этой
системы уравнений нельзя получить истинное значение вектора
Q(t) искомых параметров движения КА. Однако, можно найти
оценку этого вектора, которую обозначим через Q(t). Оценка Q(t)
должна по возможности мало отличаться от вектора Q(t).
Таким образом, задача свелась к поиску алгоритма вида
Q(t)=O(F(tj)), (2.5)
позволяющего находить оценку вектора параметров движения
центра масс КА в момент времени t по измеренным значениям
F(tj) первичных навигационных параметров.
54
Основная задача алгоритма (2.5) статистической отработки
навигационных измерений заключается в том, чтобы существенно
снизить роль случайных погрешностей или, как говорят,
отфильтровать их. В связи с этим, алгоритмы статистической
отработки измерений часто называют статистическими фильтрами,
а процесс статистической отработки измерений - статистической
фильтрацией.
В зависимости от принадлежности оцениваемого вектора
параметров движения КА к начальному (t0) или текущему (t)
моментам времени различают статические и динамические
фильтры. Статические фильтры применяются в тех случаях, когда
необходимо оценить, например, координаты и скорость КА в
момент, соответствующий началу первого сеанса навигационных
измерений. При необходимости получения таких оценок в текущем
сеансе измерений, т.е. в момент времени tj, используются
динамические фильтры.
В теории космической навигации достаточно часто
встречаются такие понятия как статическая и динамическая
фильтрации. Раскроем их содержание.
Статистической фильтрацией называется процесс определения
оценки Q(t0) вектора начальных параметров движения Q(t0) по
результатам статистической обработки измерений первичных
навигационных параметров. Процесс определения оценки
Q(t)текущих параметров движения КА называется динамической
фильтрацией.
В ряде случаем оказывается полезным находить оценку
параметров движения КА по имеющейся в данный момент tj
информации, последовательно уточняя ее по мере поступления
новых данных. Процесс получения последовательно уточняемых
оценок параметров движения центра масс КА называется
рекуррентной фильтрацией.
Нерекуррентной фильтрацией называется процесс
определения оценок параметров движения центра масс КА,
основанный на совместной статистической обработке всей
навигационной измерительной информации.
В соответствии с этими определениями различают
рекуррентные и нерекуррентные фильтры. Применение
рекуррентных фильтров позволяет получать оценки искомых
55
параметров движения КА после проведения текущего сеанса
навигационных измерений, тем самым удается повысить
оперативность навигации.
Все динамические фильтры являются рекуррентными.
Классификация статистических фильтров приведена на рис. 2.1.
Рис. 2.1. Классификация статистических фильтров.
С помощью алгоритмов фильтрации навигационных
измерений удается преодолеть некоторые недостатки
детерминированных методов навигации. В частности:
случайные погрешности измерений могут сглаживаться
(усредняться). Это позволяет решать навигационные задачи с
приемлемой точностью в течение заданного времени при
использовании достаточно грубых бортовых средств измерений
первичных навигационных параметров;
для уточнения шести параметров движения центра масс КА
можно использовать три (и даже два) измерителя первичных
навигационных параметров;
производимые с борта КА навигационные измерения могут
быть разновременными, т.е. моменты измерений первичных
навигационных параметров могут быть разнесены вдоль орбиты.
56
В настоящее время разработан достаточно обширный арсенал
алгоритмов фильтрации. Они позволяют найти такие оценки Q
вектора Q , которые были бы оптимальным в соответствии с
выбранным критерием. В качестве критерия оптимальности при
решении навигационных задач наибольшее распространение
получил критерий минимума погрешностей навигации.
2.2. Методы нерекуррентной фильтрации
В соответствии с принятой в настоящее время
классификацией методов статистической обработки измерений в
данную группу входят такие методы, с помощью которых оценка
параметров движения центра масс КА находится после проведения
всех заранее запланированных сеансов навигационных измерений.
Причем эта оценка относится к некоторому моменту времени г0, в
качестве которого, как правило, выбирается момент проведения
первого сеанса измерений первичных навигационных параметров
или предшествующий ему момент времени.
Рассмотрим сущность этих методов. Пусть требуется
определить вектор параметров движения КА следующего вида
г тТ
Q(t0) = [х(10) У(1о) z(to) x(t0) y(t0) z(t0)J ,
где x(t0),y(t0),z(t0) - координаты, a x(t0),y(t0),z(t0) - составляющие
вектора скорости KA в выбранной системе отсчета.
Для определения вектора Q(t0) в моменты времени tj, j = l,n
проводятся сеансы навигационных измерений. В каждом сеансе
измеряются m первичных навигационных параметров, т.е.
подвергаемый измерениям вектор F(tj) является m - мерным.
Заметим, что вектор F(tj) первичных навигационных
параметров по определению связан функциональной зависимостью
(2.1) с вектором Q(tj), который характеризует положение и
скорость КА в момент j- го сеанса навигационных измерений.
Из теории полета космических аппаратов известно, что
текущие параметры движения центра масс КА зависят от тех
значений, которые имели эти параметры в начальный момент
времени t0. Если предположить, что все силы, действующие на КА
в процессе его орбитального полета, известны, то можно записать
матричное уравнение
57
Q(tj) = f(Q(t0),tj). (2.6)
Следовательно, вектор первичных навигационных параметров,
измеряемый в j-ом сеансе, зависит от искомых параметров
движения КА в начальный момент времени, т.е. справедлива
система, содержащая п уравнений:___
F(tj) = F(f(Q(t0),tp) , j = U- (2.7)
Для определения вектора Q(t0) параметров движения КА
воспользуемся методом сравнения (раздел 1.7). Согласно этому
методу задача навигации решается путем определения поправки
AQ(t0) к известному опорному вектору Qo(t0), т.е. вектор
истинных параметров движения КА находится с помощью
соотношения
Q(t0) = Qo(to) + AQ(to)- (2-8)
Вектор Qo(t0) характеризует, так называемую, опорную
орбиту КА в момент t0. Компоненты этого вектора известны. Их
значения находятся в памяти бортовой ЦВМ, в которую они
вводятся перед запуском КА или по результатам наземных
траекторных измерений в момент отделения КА от ракеты-
носителя.
Опорный вектор параметров движения может быть также
сформирован автономным методом путем проведения
предыдущего навигационного режима. Навигационная задача
решается на основании сравнения первичных навигационных
параметров, полученных на истинной и опорной орбитах. На
истинной орбите навигационные параметры измеряются, а на
опорной - рассчитываются.
Предположим, что истинная орбита КА достаточно близка к
опорной. Тогда после разложения выражения (2.7) в ряд Тейлора
относительно параметров опорной орбиты можно ограничиться
только линейными членами разложения. В результате получаем
F(t j) = FoCT j) + w(tj,t0) AQ(t0), j = l,n, (2.9)
где Fo(tj) - вектор первичных навигационных параметров, который
соответствует моменту j-ro сеанса измерений при условии, что КА
находится на опорной орбите;
W(tj, t0) - матрица размера тхб, компонентами которой
являются частные производные от измеряемых в момент tj
58
первичных навигационных параметров по определяемым в момент
t0 параметрам движения центра масс KA:
3Fi(tj) SFHtj) SFi(tj) aFjdj)'
3x(t0) 3 y(t0) Bz(t0) 3z(t0)
Г BF(tj) ] aF2(tj) 3F2(tj) 3F2(tj) 3F2(tj)
Wi',° , = Uo>JQ = dx(t0) Э y(t0) 3z(t0) 3z(t0)
^Fm(tj) 3Fm(t,) ^Fm(tj) dFm (t j)
3x(t0) 9 y(t0) 3z(t0) dz(t0) _ Q„
Матрицу частных производных W(tj,t0) можно переписать в
виде произведения двух матриц:
W(trt0)
[ 3F(tj)]
PQ(t0)jQ
'dF(tp]
3<wJQ.
3Q(t )'
i------- r
3Q(t0)
к
Qo
= A(tj)-B(tj,t0).
Тогда система уравнений (2.9) принимает вид
AF(tj) = A(tj).B(tj,to) AQ(to), j = U, (2-Ю)
где AF(tj) - m-мерный вектор, компонентами которого являются
разности между истинным и опорным значениями первичных
навигационных параметров в момент времени tj, т.е.
AF(tj) = F(tj)-F0(tj).
Заметим, что системы (2.9) и (2.10) включают в себя шп
уравнений. Из них, как правило, можно найти такие шесть
уравнений, которые позволяют получить шесть поправок AQk(t0),
где к = 1,6 к опорному вектору Qo(t0) параметров движения КА.
Однако, в системе уравнений (2.9) не учтены неизбежные
погрешности, которые возникают при проведении измерений
вектора первичных навигационных параметров F(t j).
Вектор измеренных значений F(tj) первичных навигационных
параметров представим в виде
F(tj) = F(tj) + ^(tj),
где £(tj) - конкретная реализация случайного вектора
погрешностей £, которая получена в j-ом сеансе измерений.
Таким образом, в результат сравнения компонент измеренного
вектора первичных навигационных параметров с их опорными
59
значениями будут входить конкретные реализации случайных
величин. Действительно
AF(tj)-F(tj)-F0(tj) = F(tj) + ^(tj)-F0(tj) =
= F0(t j) + W(tj,t0)AQ(t0) + ^(tj) - F0(tj),
где AF(tj) - m - мерный вектор, который получил название
вектора невязок измерений.
Откуда следует, что вектор невязок, сформированный в
процессе j-ro сеанса измерений, находится с помощью выражения
AF(tj) = W(tj,to)AQ(to) + ^(tj), j = U (2.11) >
В основу методов статической нерекуррентной фильтрации
положена идея таким образом найти оценку AQ(t0) вектора AQ(t0),
чтобы при подстановке ее в систему уравнений (2.11) значения
вектора невязок были минимальны. Отличительная особенность
каждого из методов этой группы заключается в выбранном
критерии, с помощью которого определяются минимальные
погрешности навигации
2.2.1. Метод наименьших квадратов
Предположим, что погрешности измерений первичных
навигационных
параметров распределены по нормальному закону и являются
независимыми друг от друга. Следовательно, ковариационная
матрица вектора погрешностей измерений имеет диагональный
вид
. 0 ’ш.
2
где ст - дисперсия погрешности измерения 1- го первичного
навигационного параметра.
Метод наименьших квадратов требует так определить вектор
оценок AQ(t0) в (2.11), чтобы невязки AF(tj)-W(tj,t0)-AQ(t0)
минимизировали заданный функционал качества.
В тех случаях, когда в состав первичных навигационных
параметров входят различные физические величины (например,
углы «звезда-вертикаль» и высота полета КА), невязки измерений
60
приводят к безразмерному виду. В этом случае необходимо
мини визировать не — 0 <*1 1 о2 вязки: • [AF(tj) - W(tj;t0)' ^Q(t0)] • (2.12)
0 1
Введём матрицу накапливаемых производных
rw(tbt0)l
W(t2,t0)
Lw(tn,t0)
размер которой (m n)x6, (m n) - мерный вектор накапливаемых
измерений
AF =
4F(t])
AF(t2)
AF(‘n)
и (m n)x(m n)-мерная накапливаемая квадратная диагональная
ковариационная матрица
К^1 О
= к?
О к^1
Критерием качества по методу наименьших квадратов
выбирается функционал в виде суммы квадратов безразмерных
невязок (2.12)
S = [AF-W AQ(t0)]r K^-[AF-W AQ(t0)]=min. (2.13)
Для минимизации функционала 3 необходимо найти и
приравнять нулю частные производные от него по искомому
вектору AQ(t0), т.е. необходимо получить и решить уравнение в
матричной форме
61
-Э3 =0.
a<AQ(t0))
После дифференцирования функционала по вектору AQ(t0)
[108] и деления на 2 получим
- WT • д₽ + |\VT • • wj- AQ(t0) = 0.
Это матричное уравнение можно представить в виде
CAQ(t0) = d, (2.14)
где С - матрица коэффициентов размера 6x6,
d - шестимерный вектор, учитывающий результаты
измерений и поэтому называемый вектором взвешенных
измерений.
Система (2.14) называется системой нормальных уравнений.
Элементы матрицы С и вектора d накапливаются от одного сеанса
измерений к другому в соответствии с формулами
С = WT • W,
d = WT • • Д₽.
Здесь обратная матрица рассчитывается на основе
обратной ковариационной матрицы погрешностей измерений:
(2.15)
О12
О22
О
(2.16)
°m2J
уравнений (2.14) можно записать в
0
Систему нормальных
развёрнутом виде следующим образом
(WT • • W) • AQ(t0) = WT • • Д₽. (2.17)
Решение системы нормальных уравнений (2.17) имеет вид
AQ(t0) = (WT W)-1 • WT ДЕ (2.18)
Искомые параметры движения центра масс КА определяются
путем алгебраического сложения опорных параметров движения
КА с полученными поправками, т.е.
QGo)= Qo Оо) + AQGo )• (2.19)
Заметим, что поскольку расчёт вектора AQ(t0)производится по
формуле (2.18), в которую входят погрешности измерений,
получаемые значения поправок к параметрам движения КА
являются случайными.
62
Ковариационная матрица, которая характеризует точность
оценивания параметров движения КА, находится с помощью
выражения
Kq =(WTK^W)->. (2.20)
Алгоритм автономной навигации КА по методу наименьших
квадратов можно представить следующим образом (рис. 2.2):
l. Ha основании находящихся в памяти бортовой ЦВМ данных
о параметрах опорной орбиты КА, соответствующих начальному
моменту времени t0, прогнозируют движение КА на заранее
выбранный временной интервал At и находят вектор Q0(tp, где
tj = t0 + At. В дальнейшем (j * 1) прогнозирование движения КА
проводят относительно вектора Q0(tj), который принимают в
качестве начального;
2. Рассчитывают опорный вектор первичных навигационных
параметров F0(tj) , который соответствует нахождению КА на
опорной орбите, характеризуемой вектором Q0(tj);
3. Проводят измерения первичных навигационных параметров
F(tj);
4. Находят вектор невязок измерений AF(tj) = F(tj)-F0(tj);
5. Рассчитывают матрицу W(tj,t0);
6. Формируют квадратную матрицу:
C(tj) = WT(tj,t0) K^ W(tj,t0);
7. Накапливают матрицу коэффициентов:
c/tj^Xcetj).
j=i
8. Формируют шестимерный вектор взвешенных измерений:
d(tj) = WT(tj,t0)K^1AF(tj)
9. Накапливают вектор взвешенных измерений:
dj = f d(tj).
j=i
Заметим, что после первого сеанса измерений (j = l)
матрица Cj и вектор dj только запоминаются.
63
10. Проверяют условие (j = n), где п - заранее установленное
количество сеансов навигационных измерений. Если это условие не
выполняется, то переходят к п. 1, а в противном случае - к п. 11;
11 .Находят обратную матрицу коэффициентов (С-1);
12. Рассчитывают вектор поправок к опорному вектору
параметров движения КА, т.е. AQ(10) = С-1 d;
13. Уточняют опорные параметры движения КА,
соответствующие начальному моменту времени, т.е. находят вектор
QGo) = Qo + AQ(lo)
Разработанный Гауссом метод наименьших квадратов (МНК)
является одним из самых простых и надежных методов обработки
измерений. Он достаточно подробно исследован и широко
используется. Достоинство МНК показано в теореме Гаусса-
Маркова. Смысл её применительно к задачам навигации
заключается в следующем. Пусть для уточнения параметров
движения КА используются одинаковые (равноточные) средства
измерений. Тогда МНК обеспечивает минимум дисперсий всех
поправок к опорной орбите КА.
Решение системы нормальных уравнений (2.14) без
применения ЭВМ приводит подчас к довольно трудоемкому
процессу. Так, производя топосъемку Ганновера, Гаусс составил и
решил систему из 300 уравнений с 55 неизвестными. Это заняло у
него около трех месяцев непрерывной работы.
Появление ЭВМ позволило устранить вычислительные
проблемы метода наименьших квадратов. Однако другие
недостатки метода наименьших квадратов сохранились. В
частности:
обработка навигационных измерений, содержащих
погрешности, которые не подчиняются нормальному закону
распределения, приводит к тому, что полученные оценки
параметров движения КА обладают меньшей точностью;
- уточнению подлежит вектор параметров движения центра
масс КА, отнесенный к начальному моменту времени. Для
определения текущих параметров необходимо производить
прогнозирование движения КА, что естественно приводит к
дополнительным погрешностям;
- для решения навигационной задачи с требуемой точностью
необходим достаточно большой интервал времени. В частности,
64
доказано, что минимальные погрешности навигации при
использовании метода наименьших квадратов достигаются при
мерном интервале, кратном одному витку КА.
Одним из способов повышения точности навигации КА
является реализация итерационной процедуры метода
наименьших квадратов, сущность которой заключается в
следующем. Полученная на первой итерации оценка вектора
параметров движения КА принимается в качестве опорной и
алгоритм навигации повторяется. При этом результаты
измерений остаются прежними. Количество итераций задается
заранее или устанавливается из условия завершения
итерационного процесса, например, при достижении таких
поправок по координатам и составляющим скорости КА, которые
не превышают заданных значений.
Применение итерационной процедуры метода наименьших
квадратов может привести к проблеме сходимости процесса
уточнения параметров движения КА. Область сходимости
зависит, как правило, от того, насколько далека опорная орбита
КА от истинной. Однако в большинстве случает итерационный
метод наименьших квадратов позволяет получать сходящийся
процесс оценивания параметров движения КА уже после 3-5
итераций.
2.2.2. Метод максимального правдоподобия
Рассмотрим вектор AF невязок измерений. Этот вектор
включает в себя все невязки, которые получены в течение п
сеансов измерений m первичных навигационных параметров.
Следовательно, он имеет размерность mxn.
Вектор AF можно полагать случайным. Закон его
распределения зависит от того, насколько истинная орбита КА
отличается от опорной в начальный момент времени, т.е. от
вектора AQ(t0). Действительно, при совпадении истинной и
опорной орбит закон распределения AF определяется только
точностными характеристиками средств измерений первичных
навигационных параметров.
65
Рис. 2.2 Структура алгоритма навигации по методу
наименьших квадратов
66
Обозначим через f(AF/AQ(t0)) плотность распределения
случайного вектора AF при условии, что вектор отклонений
истинных параметров движения КА от опорных в начальный
момент времени равен AQ(t0). Подставим в выражение для этой
плотности конкретные результаты измерений, полученные в
процессе всех проведенных навигационных сеансов, и найдем
вероятность появления этой реализации. Искомая вероятность
приблизительно равна элементу вероятности случайного вектора
AF, т.е.
P(AF/AQ(t0)) = f(AF/AQ(t0))d(AF), (2.21)
где d(AF) - элементарный вектор, примыкающий к вектору AF.
Метод максимального правдоподобия утверждает, что при
данной реализации вектора измерений AF наиболее
правдоподобным (т.е. наиболее близким к истинному) является то
значение оценки AQ(t0) вектора AQ(t0), при котором вероятность
(2.21) максимальна.
Очевидно, что максимум этой вероятности достигается
тогда, когда максимальна плотность f(AF/AQ(t0)), в выражении
для которой уже подставлены конкретные результаты измерений
первичных навигационных параметров. Заметим, что эта функция
теперь зависит только от оцениваемого вектора AQ(t0)
отклонений истинных параметров движения КА относительно
опорных значений. Она получила название функции
правдоподобия.
Следовательно, для определения наиболее правдоподобных
значений составляющих вектора AQ(t0) необходимо найти такую
оценку AQ(t0), которая доставляет экстремум функции
правдоподобия.
Обозначим функцию правдоподобия через 3(AQ(t0)), т.е.
3(AQ(t0)) = f(AF/AQ(t0)) . (2.22)
Поиск экстремума функции правдоподобия сводится к
нахождению корней системы уравнений
33(AQ(t0))_n ._Г7
0AQk (t0)
Уравнение (2.23) называется уравнением правдоподобия.
Решением этого уравнения является оценка AQ(t0)BeKTopaAQ(t0),
которая называется максимально правдоподобной оценкой.
(2.23)
67
Для нахождения максимально правдоподобной оценки
необходимо в первую очередь определить функцию
правдоподобия. Для этого воспользуемся зависимостью
AF = W4Q(t0) + £, (2.24)
где W - матрица частных производных размера (т • п)х 6;
£ - (т п)- мерный вектор погрешностей измерений первичных
навигационных параметров.
Обозначим плотность распределения вероятности случайного
вектора £ через f(£). Тогда из зависимостей (2.22) и (2.24)
непосредственно следует, что функция правдоподобия
S(AQ(t0)) = f(AF-WAQ(t0)). (2.25)
Таким образом, для практического нахождения максимально
правдоподобной оценки вектора параметров движения КА
необходимо знать закон распределения погрешностей
навигационных измерений. От вида этого закона зависит структура
соответствующего алгоритма навигации КА.
Предположим, что вектор погрешностей измерений
первичных навигационных параметров распределен по
нормальному закону. В этом случае плотность распределения
вероятности вектора £ имеет вид
f£)=- 1 , ехр|-^ТкМ
A/(27t)m-n|K€| I 2 J
где К^- ковариационная матрица погрешностей навигационных
измерений размером (т • п) х (т п).
Тогда выражение для функции правдоподобия (2.25)
принимает вид
S(AQ(t0)) = —expMfaF- WAQ(t0)f КГ1 [д₽- WAQ(t0)]l. (2.26)
Очевидно, что функция правдоподобия (2.26) достигает своего
максимума, когда показатель экспоненты будет минимальным.
Продифференцируем показатель экспоненты в выражении (2.26):
J [AF - WAQ(t0)]T К^1 [д?- WAQ(t0)]l =
dAQ(t0) [ ъ J
= 2 • WT • К^1 • [д? - WAQ(t0)].
68
В результате этого уравнение правдоподобия (2.23)
приводится к виду
WTK^ (Д₽ - WAQ(t0)) = 0.
После очевидных преобразований находим
WTK^4F = WTK^W4Q(t0).
Откуда получаем максимально правдоподобную оценку
AQ(t0) = (WTK^W)-1 WTK^AF. (2.27)
Погрешность оценки (2.27) находится с помощью
соотношения
Kq =(WTK^W)-1.
Заметим, что в случае некоррелированных погрешностей
измерений первичных навигационных параметров выражение
(2.27) полностью совпадает с формулой (2.18) расчета оценок
параметров движения КА по методу наименьших квадратов.
Следовательно, метод наименьших квадратов является
частным случаем метода максимального правдоподобия.
Поэтому, при отсутствии корреляционных связей между
погрешностями измерений максимально правдоподобные оценки
совпадают с оценками по методу наименьших квадратов.
Структура алгоритма навигации по методу максимального
правдоподобия аналогична структуре, приведенной на рис. 2.2.
Метод максимального правдоподобия находит достаточно
широкое применение, в частности, при сглаживании случайных
погрешностей на этапе первичной обработки навигационных
измерений.
2.2.3. Метод максимума апостериорной вероятности
В методах наименьших квадратов и максимального
правдоподобия полагается, что какая-либо априорная (т.е. до
начала навигационного режима) информация о векторе искомых
параметров движения центра масс КА отсутствует. Однако, в
ряде случаев статистические характеристики вектора априорных
оценок AQa(to) могут быть известны, например, по результатам
предыдущего навигационного режима получена ковариационная
матрица погрешностей оценок параметров движения КА.
Использование дополнительной информации о векторе искомых
параметров приводит, как правило, к повышению точности
69
навигации КА. В основу метода максимума апостериорной
вероятности положено предположение о существовании априорной
информации о параметрах движения КА.
Сущность этого метода заключается в следующем.
Предположим, что известно априорное распределение вероятности
вектора AQ(t0) . Оно задано плотностью распределения fa (AQ(t0)).
Тогда согласно теореме Байеса апостериорная (т.е. после
проведения навигационного режима) плотность распределения
вероятностей вектора AQ(t0) определяется из выражения
fjAQ(t0)/AF)= f ,
Jfa(AQ(t0) -f(AF/AQ(t0)) d(AQ(t0))
Mq
где f(A₽/AQ(t0)) - функция правдоподобия,
Mq - область возможных значений вектора AQ(t0).
Метод максимума апостериорной вероятности утверждает, что
наиболее вероятным является то значение вектора AQ(t0), при
котором условная плотность распределения вероятностей
fn(AQ(t0)/AF) максимальна. Таким образом, искомая оценка AQ(t0)
вектора отклонений истинных параметров движения КА
относительно опорных по методу максимума апостериорной
вероятности определяется с помощью решения системы уравнений
k=i76
dAQk(to)
Вывод формулы для расчета оценки AQ(t0)Ha основе решения
этой системы уравнений достаточно громоздкий. В связи с этим
воспользуемся следующим оригинальным приемом.
Разобьем вектор (д?) навязок измерений на два
некоррелированных подвектора AFj и Д₽2, т.е.
лг
ДР = ~ .
др2_
Поскольку корреляционная связь между подвекторами Д₽г и
д₽2 отсутствует, ковариационная матрица принимает
квазидиагональный вид
70
где Ki и К2- ковариационные матрицы соответственно векторов AF]
И Д₽2 •
Матрицу производных (W) представим в виде двух блоков W]
и W2, т.е.
W,
W= 1
w2
Воспользуемся формулой для вычисления оценок по методу
максимального правдоподобия (2.27). С учетом сделанных
допущений выполним следующие преобразования
О
K2'JLaF2
AQ(t0) = C_1WTK^AF = C
[WjT; W2‘
т] к2' А?2
2 J _1 ~
V~l АГ.
[wjT w2T
_К2’ ДР2
Матрицу С можно представить в виде
с = WTK^’w = [w]TW2 ]
’д?!
(2.28)
= C-1(w1TKf1AFi + wJk2’aF2).
Kf1
о
о 1Г Wj
К2‘ LW2_
[ т т1к1 wi
= Kw2Tl 1
[К2 -w2_
Пусть подвектор Д?) представляет собой априорную
= W^Kf’W] +wJk2’w2 .
(2.29)
оценку
отклонений определяемых параметров движения КА, которая
= с
О
получена, например, путем проведения наземных траекторных
измерений, т.е. Др) =AQa(t0), а подвектор ДР2- разность между
измеренными бортовыми средствами КА и опорными значениями
первичных навигационных параметров.
В этом случае очевидно, что, во-первых, матрица Wj является
единичной, т.е. Wj = Е и, во-вторых, матрица К] представляет
собой ковариационную матрицу априорной оценки AQa(t0)
искомого вектора AQ(t0) , т.е. К] = Kqj.
С учетом сделанных предположений выражения (2.28) и (2.29)
можно записать следующим образом
AQ(to) = C-,K-’AQa(t0) + C-1W2TK-1AF2 , (2.30)
С = К“’+wJk2'w2 . (2.31)
Из соотношения (2.31) находим
71
к-1 =c-w.tk;1w2.
qa 2 2 2
Тогда первое слагаемое в выражении (2.30) принимает вид
СЧК AQa(t0) = C-1(C-wjK21W2)AQa(t0) =
Ча 1 х. х.
= (Е - С-1 wjK2' W2 )Дфа (t0 ) = AQa (t0 ) — С-1 wjK21 W2AQa (t0 ) .
В результате получаем искомую формулу для расчета оценки
вектора AQ(t0) по методу максимума апостериорной вероятности:
AQ(to)-AQa(to)-C_1WTK71WAQa(t0) + C-IWTK71AF =
q s (2.32)
= AQa(to) + C~1WTK^(AF-WAQa(to)),
где C = K-1+WTK71W ,
Ча Ч
W = W2 ,
к^ = к2,
ДР = ДР2 .
Выражение (2.32) позволяет наглядно выявить отличие оценок
параметров движения КА по методу максимума апостериорной
вероятности от оценок, полученных по методу максимального
правдоподобия.
Действительно, предположим, что до начала навигационного
режима априорные сведения о параметрах движения КА
отсутствуют, т.е. AQa(t0) = 0, а ковариационная матрица, которая
характеризует точность этого вектора, имеет в своей главной
диагонали бесконечно большие дисперсии. Следовательно,
обратная ковариационная матрица К”1 = 0.
Тогда выражение (2.32) принимает вид
AQ(t0) = (WTK^1W)“1WTK^1AF,
которое полностью соответствует формуле (2.27) для вычисления
оценок по методу максимального правдоподобия.
Таким образом, при наличии априорных статистических
сведений о параметрах движения КА уточнение искомых оценок
после проведения навигационного режима производится путем
расчета поправки AQn(t0), с помощью которой корректируется
априорный вектор AQa(t0), т.е.
AQ(t0) = AQa(t0) + AQn(t0) .
72
Учитывая соотношения (2.32), вектор поправок определяется
из выражения
дОп(‘о) = с“^тк^(др-дра),
где AFa=WAQa(t0) - априорный вектор невязок измерений,
рассчитанный с помощью априорного вектора оценок параметров
движения КА.
В основу алгоритма навигации КА по методу максимума
апостериорной вероятности положено сравнение вектора невязок
измерений, проведенных в течение навигационного режима, с
априорным вектором невязок. Очевидно, что при равенстве этих
векторов априорный вектор параметров движения КА не
корректируется. Такое событие может произойти при отсутствии
ошибок расчета априорного вектора невязок, а также погрешностей
измерений первичных навигационных параметров.
Ковариационная матрица погрешностей оценок параметров
движения КА по методу максимума апостериорной вероятности
находится с помощью соотношения
Ка =С-1 =Гк~’ +WTK71W>] 1 .
q I q. q J
В отличии от метода максимального правдоподобия в этой
формуле появилась априорная ковариационная матрица
погрешностей оценок параметров движения КА. Это привело к
тому, что дисперсии оценок по методу максимума апостериорной
вероятности оказываются меньше дисперсий соответствующих
оценок по методу максимального правдоподобия, поскольку с
использованием формулы обращения двучленной матрицы [133]
матрица Kq может быть представлена в виде разности
к, = к,. - к,. WT.K, + WKq. wT)-' WK,..
Очевидно, что справедливо неравенство: Kq < Kqa.
Следовательно, система навигации, в которой реализован алгоритм
метода максимума апостериорной вероятности, обладает
повышенной точностью.
Анализ выражения (2.32) показывает, что для нахождения
оценок параметров движения КА по методу максимума
апостериорной вероятности необходимо обращать матрицы размера
6x6, что в отдельных случаях приводит к определенным
73
трудностям, которые обусловлены особенностями бортовых
вычислительных средств.
С целью уменьшения размерности обращаемой матрицы
используется следующая формула расчета оценок параметров
движения КА
4Q(t0) = 4Qa(t0) + UAB(4F-AFa), (2.33)
где UAB - матрица размера 6х(ш п) вида
UАВ = 4 wt(k4 + wk4i wTJr’,
которая называется матричным коэффициентом усиления по
методу максимума апостериорной вероятности.
Ковариационная матрица погрешностей оценок
рассчитывается в этом случае следующим образом
Kq=(E-UABW)Kqa , (2.34)
где Е - единичная матрица размера 6x6.
Покажем, что при использовании соотношения (2.33)
требуется обращать матрицы размера mxm, где m - количество
измеряемых первичных навигационных параметров. С этой целью
представим вектор поправок AQn(t0) к априорному вектору
4Qa(to)в таком виде
AQn(to) = UAB(aF-AFa) = K4i WT(k4 + WKq> WT)Г1(д₽-WAQa(t0))=
= KqaV(t0),
где v(t0) = Wt(k^ + WKq WT) *(aF-WAQa(t0)) - шестимерный
вспомогательный вектор.
Заметим, что при расчете ковариационной матрицы
погрешностей навигации (2.34) необходимо обращать матрицу,
входящую в коэффициент усиления UAB. Перепишем выражение
(2.34) следующим образом
Kq+(E-UABW)Kqa =(E-KqaM)Kqa ,
где М = Wt(k₽ + WKqa wTjr1 w - вспомогательная матрица размера
6x6.
Как известно, матрица имеет квазидиагональный вид.
Причем блоки, стоящие на главной диагонали этой матрицы,
представляют собой ковариационную матрицу К размера mxm
погрешностей измерений первичных навигационных параметров.
74
В связи с этим, выражения для расчета вектора v(t0) и
матрицы М представим в виде
П п Г т 1-1
v(t0) = Zv(tJ,t0) = SWT(tj,t0)[K + W(tj,t0)Kqi WT(tj;t0)J •
j=i j=i (2.35)
(AF(tj) — W(tj ,tQ)AQa(t0))’
M = f M(t j) =£ WT(tj, to )[k^ + W(tj ,t0)Kqi WT(tj ,t0)]~’ W(t j,to) .(2.36)
j=l j=l
Из полученных выражений видно, что после проведения
каждого j- го измерения m первичных навигационных
параметров требуется производство обращения матрицы
+ W(tj,t0)Kq WT(tj,t0), которая имеет размер mxm.
Таким образом, параметры движения КА и ковариационная
матрица навигационных погрешностей при использовании метода
максимума апостериорной вероятности рассчитываются с
помощью следующих соотношений
Q(to) = Qo(lo) + AQa(to) + AQnOo)’
AQn(t0) = Kqav(t0), (2.37)
Kq=(E-KqaM)Kqi ,
где вектор v(t0) и матрица М находятся по формулам (2.35) и
(2.36) соответственно.
Алгоритм навигации по методу максимума апостериорной
вероятности выглядит следующим образом:
1. На основании находящихся в памяти бортовой ЦВМ
данных о параметрах опорной орбиты КА, соответствующих
начальному моменту времени t0, прогнозируют движение КА на
заранее выбранный временной интервал At и находят вектор
Q0(tj), где tj --10 + At. В дальнейшем(j * 1)прогнозирование
движения КА проводят относительно вектора Q0(tj), который
принимают в качестве начального;
2. Рассчитывают опорный вектор первичных
навигационных параметров F0(tj), который соответствует
нахождению КА на опорной орбите, характеризующейся
вектором Q0(tj);
75
3. Проводят измерения первичных навигационных
параметров и формируют вектор F(tj) ;
4. Находят вектор невязок измерений;
5. Рассчитывают матрицу W(tj,t0) J
6. Рассчитывают априорный вектор навязок измерений
первичных навигационных параметров AFa(tj) = W(tj,to) AQa(ro),
7. Формируют вектор отклонений невязок измерений
первичных навигационных параметров относительно их априорных
значений Д? (tj) = AF(t j) - AFa (t j);
8. Рассчитывают вспомогательную матрицу
M(tj) = wT(tj,to)[^ + w(tj>to)KqaWT(tj,to)f1w(tj,to);
9. Накапливают вспомогательную матрицу М = ^M(tj);
j=i
10. Рассчитывают вспомогательный вектор
v(tj,t0) = WT(tj,t0) [K^ + W(tj,t0)Kqi WT(tj,t0)]~1Af(tj);
n
11. Накапливают вспомогательный вектор v(t0) = £v(tj,t0);
j=i
12. Проверяют условие (j = п), где n - заранее установленное
количество сеансов навигационных измерений. Если это условие не
выполняется, то переходят к п. 1, а в противном случае - к п. 14;
13. Рассчитывают вектор поправок параметров движения КА:
AQn(to) = Kq, • v(t0);
14. Уточняют априорный вектор параметров движения КА:
AQ(to ) = AQa (to ) + AQn (to) 5
15. Рассчитывают ковариационную матрицу оценок
параметров движения КА: Ка = (е - Ка М)ка ;
16. Уточняют опорные параметры движения КА,
соответствующие начальному моменту времени t0, т.е.
Q(to) = Qo(to) + AQ(to)-
Упрощенная структура этого алгоритма приведена на рис. 2.3.
2.3. Статические рекуррентные методы навигации
В основе статических рекуррентных методов навигации
лежит принцип последовательного уточнения оценок параметров
76
движения КА, соответствующих начальному моменту времени
t0. В отличие от изложенных в разделе 2.2 методов статической
обработки навигационных измерений по полной выборке в
рекуррентных методах искомые оценки формируются после
каждого навигационного сеанса.
Рассмотрим методику построения рекуррентного
статического фильтра на примере метода наименьших квадратов.
Предположим, что к моменту времени tj произведено j
измерений ш- мерного вектора F(t) первичных навигационных
параметров и рассчитаны векторы невязок измерений
AF(t1),AF(t2),...,AF(tj).
Запишем систему нормальных уравнений метода
наименьших квадратов
CjAQj(t0) = dq.,
(2.38)
где AQj(t0) - оценка вектора AQ(t0), полученная по результатам
измерений первичных навигационных параметров в моменты
времени t1,t2,...,tj.
В системе уравнений (2.38) матрица коэффициентов Cj и
вектор взвешенных измерений dq. имеют вид
Cj=WjrPjWj, dq. =WjTPjAFj,
(2.39)
W(t!,t0)
W(t2,to)
где
- матрица размера (m j) x 6;
W(tj,t0)
Pi =
весовая матрица диагонального вида
размера (m j)x(m j), в которой стоящие на главной диагонали
блоки Р; =р2 =...Pj =Р = К^ имеют размер mxm;
77
AFj =
д₽(Ч)'
AF(t2)
- (m-j) - мерный вектор невязок измерений.
AF(tj)
Выражения (2.39) запишем следующим образом
О’
Cj=WjT
'W(ti.to)’
W(t2,to)
= WT
J
PW(t1,t0)
PW(t2,t0)
PW(tj,t0)_
pw(tbtor
(ЦЗо)
т т 1 PW(t2,t0)
WT (t2, t0)... WT (t j, t0) J' ...
PW(tj,t0)
Р
Р
о
р
’PAF(ti)’
= [wT(tbto)WT(t2,to)-WT(tj>to)]- PAF(t2) =
PAF(tj)
= fwT(tI,t0)PAF(ti).
(2.40)
После таких преобразований выражения (2.39) можно
представить в виде рекуррентных зависимостей
Cj=Cj_1 + WT(tJ,to)PW(tj,to)5
Ч =3qj-i +wT(tj,t0)PWj),
где Cj_i = Wj^_1Pj_1Wj_i - матрица коэффициентов размера 6x6;
dq - 6-мерный вектор взвешенных измерений.
78
Рис. 2.3 Структура алгоритма навигации по методу
максимума апостериорной вероятности.
79
Заметим, что элементы матрицы Cj_i и вектора dq
накапливались в течение j-1 навигационных сеансов измерений.
Воспользуемся очевидными равенствами
Cj_1AQj_1(t0) = dq._1, Сн=К-1_1;
где AQj-i(t0) - оценка вектора AQ(t0), полученная по результатам
измерений навигационных параметров в моменты времени
Kq - ковариационная матрица погрешностей оценки
AQj-lGo)-
Тогда выражения (2.40) перепишем следующим образом
с.=к-‘ + WT(tj,t0)PW(tj,t0),
~ т ~ (2.41)
dq = К~ AQj_1(t0) + WT(tJ,t0)PAF(tj).
” J Ч j-i J J J
Найдем рекуррентную формулу для расчета оценки AQj(t0).
Используя соотношения (2.38) и (2.41), имеем
AQj(to) = C'1d =С-1ГК-' AQj_](t0) + WT(tj,t0)PAF(tj) =
J J ~i J 4j-i J J J
= C-1K"1_ AQJ_1(t0) + C-1WT(tj,t0)PAF(tj).
Введем матрицу Uj размера 6xm:
Uj = CJ1 WT(tj,t0)P.
Тогда последнее равенство принимает вид
AQj(t0) = C-1K-1 AQj-Ktoj + UjAFBj). (2.42)
J J 4j-i J J J
С учетом первого выражения в (2.41) запишем очевидное
равенство
К-1 =с -wT(tj,t0)PW(tJ,t0).
Чj-1 J J J
Первое слагаемое в (2.42) перепишем следующим образом
С^К"1 AQj-lOol^C-^Cj -WT(tj;t0)PW(tj,t0)jAQj_i(t0) =
= C71CjAQj_1(to)-C71WT(tj,to)PW(tj,to)AQj_1(to) =
= AQJ(to)-UjW(tj,to)AQj_i(to).
80
В результате получаем рекуррентную формулу расчета
оценки AQj(t0) по методу наименьших квадратов
AQj(t0) = AQj-l(to) + U?K[ AF(tj) - W(tj,to)AQj-i(to) L (2-43)
где U«K = к;1 +WT(tj,t0)PW(tj,t0)
J 4j-i
WT(tj,t0)P
матричный
коэффициент усиления статического рекуррентного фильтра.
Из выражения (2.43) следует, что после проведения
очередного навигационного сеанса измерений искомая оценка
параметров движения КА формируется путем сложения
предыдущей оценки с некоторой поправкой. Для расчета вектора
поправок необходимо знать не только предыдущую оценку, но и
её ковариационную матрицу. Для определения этой матрицы
используется выражение
-1
к = к;1 +wT(tj,t0)PW(tj,t0)
L 4j_i j j
(2.44)
Сравнивая соотношения (2.43) и (2.44) с формулами (2.33) и
(2.34) , которые используются при нерекуррентной фильтрации
по методу максимума апостериорной вероятности, видим, что
они имеют много общего. Действительно, оценка AQj_i(t0) ,
полученная на предыдущем шаге, по своей сути является
априорной оценкой по отношению к j-му навигационному сеансу,
т.е. AQj_1(t0) = AQa(t0). Этот вывод правомерен и к
соответствующим ковариационным матрицам, т.е. Kq., =Kq .
Следовательно, рекуррентные формулы для расчета оценок
параметров движения КА по методу максимума апостериорной
вероятности имеют вид
AQj(t0) = AQJ_1(t0)+U^B[AF(tJ)-AFa(tj)] ,
Г АВ t (2’45)
Kq, = [Е - Uj W(tj,t0)Xq^l ,
где UAB - коэффициент усиления рекуррентного фильтра,
основанного на методе максимума апостериорной вероятности:
UjAB = Kqj iWT(tJ,t0)[K4 + W(tj,t0)Kqr WT(tj,t0)] ;
AFa(tj) - априорный вектор невязок измерений первичных
навигационных параметров:
81
AFa(tj) = W(tj,t0)AQj_j (to) •
Рекуррентные зависимости (2.45) представляют собой
статический рекуррентный фильтр, основанный на методе
максимума апостериорной вероятности. Этот фильтр позволяет по
мере поступления результатов измерений первичных
навигационных параметров в j-м сеансе находить оценки
параметров движения КА, соответствующих начальному моменту
времени. Заметим, что оценка AQj(t0) получается путем
добавления к предыдущей оценке AQj_](t0) некоторой поправки.
Эта поправка связана линейной зависимостью с вектором
AF(tj)-AFa(tj) , который представляет собой разность между
измеренным вектором невязок первичных навигационных
параметров и априорным значением этого вектора.
Алгоритм статического рекуррентного фильтра имеет
следующий вид:
1. На основании данных, находящихся в памяти бортовой ЦВМ
о параметрах опорной орбиты КА, соответствующих начальному
моменту времени г0, прогнозируют движение КА на заранее
выбранный временной интервал At и находят вектор Q0(tj), где
tj=t0 + At. В дальнейшем (j*l) прогнозирование движения КА
проводят относительно вектора Qo(tj), который принимают в
качестве начального;
2. Рассчитывают опорный вектор первичных навигационных
параметров Fo(tj), который соответствует нахождению КА на
опорной орбите, характеризуемой вектором Qo(tj);
3. Проводят измерения первичных навигационных параметров
F(tj);
4. Находят вектор невязок измерений AF(tj) = F(tj) - Fo(tj);
5. Рассчитывают матрицу W(tj,t0);
6. Рассчитывают априорный вектор навязок измерений
первичных навигационных параметров: AFa(tj) = W(tj,t0)- AQa(t0);
7. Формируют вектор отклонений невязок измерений
первичных навигационных параметров относительно их априорных
значений: Af(tj) = AF(tj)-AFa(tj);
82
8. Рассчитывают ковариационную матрицу оценок параметров
движения КА
-I
кЧ) = К-’ +wT(tj,t0)PW(tJ>t0) ;
9. Рассчитывают коэффициент усиления рекуррентного
фильтра:
uJIK=Kq.WT(tj,to)P;
10. Формируют вектор поправок параметров движения центра
масс КА:
AQnj(to) = ufK4f(tj) ;
11. Уточняют полученный на предыдущем шаге вектор
отклонений параметров движения КА относительно опорных
значений:
AQj(to) = j-1 (to)+д<2nj(to) ;
12. Уточняют опорные параметры движения КА
Qj(to) - Qj-i(to) + aq j (t0)
Структура статического рекуррентного алгоритма навигации
по методу наименьших квадратов приведена на рис 2.4.
До начала работы рекуррентного статического фильтра
необходимо установить значения элементов вектора AQ(t0) и
ковариационной матрицы K.q, соответствующие моменту
времени t0. Начальный вектор AQ(t0) полагают, как правило,
нулевым, поскольку информация об отклонении реального
движения КА относительно опорного отсутствует. Начальную
ковариационную матрицу Kq формируют на основании
результатов аналитических исследований точности навигации,
моделирования процесса решения навигационной задачи на ЭВМ
или результатов предыдущего навигационного режима.
Навигационная задача может быть также решена путем
последовательного использования двух статических фильтров.
Навигационный режим при этом разбивается на два этапа.
На первом этапе в течение заранее установленного интервала
времени навигационные измерения обрабатываются с помощью
нерекуррентного фильтра. В результате этого определяется
оценка Q(t0) и ковариационная матрица Kq. На втором этапе
83
используется рекуррентный фильтр, для которого полученные на
первом этапе данные являются начальными.
Критерием завершения работы рекуррентных фильтров может
выступать условие достижения заданного количества сеансов
навигационных измерений или повторяемость (с установленной
степенью точности) формируемых оценок параметров движения
КА.
2.4. Динамический фильтр
Ранее рассмотренные статические методы и алгоритмы
навигации позволяют уточнять только такие параметры движения
центра масс КА, которые он имел до начала навигационного
режима, т.е. параметры движения в момент времени t0. Для
определения текущих координат и составляющих вектора скорости
КА после проведения навигационного режима необходимо
прогнозировать движение КА с помощью известных алгоритмов,
изложенных в параграфе 1.3.
Алгоритмы прогнозирования не являются абсолютно
точными. Они содержат методические погрешности, которые
увеличиваются с ростом прогнозируемого временного интервала.
Это в наибольшей степени проявляется при прогнозировании
параметров движения КА с помощью бортовой ЦВМ.
Поэтому в автономных системах навигации КА нашли
применение статистические алгоритмы, которые представляют
собой динамические фильтры. Эти алгоритмы позволяют уточнять
текущие параметры движения КА после каждого сеанса
навигационных измерений.
Построим простейший динамический фильтр. Пусть в
некоторый момент времени tj_] известна оценка AQ(tj_t) вектора
AQ(tj_j) отклонений истинных параметров движения центра масс
КА относительно опорных значений. Эта оценка получена путем
статистической обработки измерений первичных навигационных
параметров, произведенных до текущего момента времени tj.
Будем также полагать, что в момент времени tj измерены
первичные навигационные параметры и сформирован вектор
невязок измерений
AF(tj) = F(tj)-F0(tj).
84
Рис. 2.4 Структура статистического рекуррентного алгоритма
навигации
85
Предположим, что известны ковариационные матрицы
погрешностей измерений и оценок параметров движения КА
Заметим, что матрица Kq(tj_!) является
ковариационной матрицей вектора оценок параметров движения,
соответствующих моменту времени tj_b т.е. вектора AQ(tj..]). В
статических рекуррентных фильтрах используется
ковариационная матрица Kq (t0) вектора оценок параметров
движения, которые соответствуют начальному моменту времени
to, т.е. вектора AQ-_,(t0). Следовательно, ковариационные
матрицы Kq(tj_i) и Kq (t0) характеризуют точность оценивания
различных векторов по результатам обработки измерений
первичных навигационных параметров, выполненных на одном
интервале времени [tptj-iJ.
Предположим также, что известна матрица перехода
, которая связывает векторы AQ(tj) и AQ(tj_!) линейной
зависимостью:
AQ(tj) = B(tj,tj_1)AQ(tj_1).
Тогда до начала сеанса навигационных измерений в
текущий момент времени tj можно найти априорную оценку
отклонений параметров движения
AQa(tj) = B(t j, t j-i) AQ(t j-j). (2.46)
Один из основателей теории систем профессор Р.Е.Калман
предложил искать текущую оценку AQ(tj) отклонений
параметров движения КА по результатам измерений первичных
навигационных параметров на интервале времени [t;,tjj в виде
следующего рекуррентного соотношения:
AQ(tj)=AQa(tj) + U’^<I’(tj)-[AF(tj)-AFa(tj)] , (2.47)
где AFa (tj) - априорный вектор невязок измерений;
U^(tj) - матричный коэффициент усиления динамического
фильтра.
Априорный вектор невязок измерений можно получить с
помощью градиентной матрицы A(t) и матрицы баллистических
86
производных B(tj,tj—i), образующих матрицу
W(tj,tj_i) = A(tj)B(tJ,tj_1):
AFa(tj) = A(tj)AQa (tj) = A(tj)B(tj,t j_i )AQ(tj_i) = W(tj,tj_1)AQ(tj_1) (2.48)
Заметим, что истинный вектор AF(tj), т.е. вектор отклонений
первичных навигационных параметров на истинной орбите КА от
первичных навигационных параметров на опорной орбите,
определяется с помощью соотношения:
AF(tj) = A(tj)AQ(tj) = A(tj)B(tj,tj_1)AQ(tj_i) = W(tj,tj_1)AQ(tj_1).
Найдем коэффициент усиления иДФ(^) динамического
фильтра. Для решения этой задачи введём определение
погрешности оценивания параметров движения КА в j - й момент
времен в виде разности оценки отклонения и истинного значения
этого отклонения от опорного движения, т. е. погрешность
оценивания находится из выражения:
e(tj) = AQ(tj)-AQ(tj) =
= B(t j, t j-i) • AQ(tj-i) + иДФ (tj)[AF(tj) - AFa (t j)]- AQ(tj) = (2.49)
= [e - иДф(tj) • A(tj)]• B(tj,tj_!) • e(tj_i) + иДФ (tj) £(tj)
Матричный коэффициент усиления идф(1 j) динамического
фильтра найдём из условия минимума среднего квадрата
погрешности оценивания параметров истинного движения в j - й
момент времени, представляющего собой след ковариационной
матрицы
Kq(tj) = M[e(tj) • e(tj)T],
где М - знак математического ожидания.
Предположим далее, что погрешности измерений и
погрешности оценивания не коррелированы между собой, т.е. для
них выполняются соотношения:
M[e(t j) - £( t j )т ] = M£(t j) • e(t j )T ] = 0.
Тогда выражение для ковариационной матрицы погрешностей
оценивания параметров движения центра масс КА принимает вид:
Kq(tj) = [E-U^(tj)-A(t j)]-K.qa(t j) - [в — UДф(tj) - A(tj)]r +. (
+ иДФ(9 K^[U^(tj)]T
87
где Kqa(tj) - априорная ковариационная матрица погрешностей
навигации в момент времени t j.
Ковариационную матрицу Kqa(tj) можно найти путём
матричного преобразования соответствующей ковариационной
матрицы Kq(tj_[), которая была получена в предыдущий момент
времени:
Kqa(tj) = B(tj,tj_1)Kq(tj_])BT(tj,tH). (2.51)
Оптимальное значение матричного коэффициента усиления
иДФ(1 j) динамического фильтра находится из решения уравнения
3{Sp[K (tj)]}
----=£—-— = min .
а[иДфор]
Для удобства дифференцирования раскроем скобки в
выражении для ковариационной матрицы Kq(tj) (2.50). В
результате имеем
Kq(tj) = КЦа (tj) - Kqi (tj) • Ат(tj) -[UДф(tj)]т - иДФ(ф• A(tj) Kqa (tj)
+ иДФ(1р [A(tj) • КЧа (tj) • AT(tj) + 1Ц}- [UДф(tj)]T •
Воспользовавшись правилами дифференцирования следа матрицы
по матрице [108], после сокращения на 2 получим выражение
- Kqa (t j) • АТ (t j) + UДф (t j) [A(t j) Kqa (t j) • AT (tj!) + КЦ ] ~ 0.
Отсюда следует
иД%) = Kqa (tj)AT(t j) • [A(tj)Kqa (tj)AT(tj) + K^1. (2.52)
Очевидно, что после каждого сеанса навигационных
измерений необходимо рассчитывать ковариационную матрицу
Kq(tj). Для решения этой задачи необходимо подставить
выражение для полученного оптимального матричного
коэффициента усиления (2.52) в выражение для ковариационной
матрицы Kq(tj):
Kq(tj) = Kqa (tj)-Kqi(tj).AT(tJ).[U^(tj)]T -
- иД%) A(tj) Kq> (tj) + Kq> (tj) AT(tj) [UДф(tj)]T ‘
В итоге будем иметь
Kq(tj) = [E-U^(tj)A(tj)]Kqa (tj). (2.53)
88
Система уравнений (2.46) - (2.53) представляет собой
соотношения динамического фильтра. Эти формулы расчета оценок
параметров движения КА весьма удобны с вычислительной точки
зрения. Действительно, на основе известной оценки AQ(tH),
полученной в ходе предыдущего навигационного сеанса, и
результатов измерений первичных навигационных параметров в
текущий момент времени tj формируется оценка AQ(tj), которая
характеризует отклонение истинной орбиты КА относительно
опорной. Навигационный алгоритм, реализующий метод
динамической фильтрации, имеет вид:
1. На основании находящихся в памяти бортовой ЦВМ
данных о параметрах опорной орбиты КА, соответствующих
моменту времени tj_] предыдущего навигационного сеанса
измерений, прогнозируют движение КА на заранее выбранный
временной интервал At и находят вектор Qo(tj), где tj =tj_i +At;
2. Рассчитывают опорный вектор измерений Fo(tj), который
соответствует нахождению КА на опорной орбите с параметрами
Qo(tj);
3. Проводят измерения первичных навигационных параметров
₽(tj);
4. Находят вектор невязок измерений AF(tj) = F(tj) - Fo(tj);
5. Рассчитывают переходную матрицу B(tj,tj_j) и
градиентную матрицу A(tj);
6. Формируют матрицу W(tj,tj—1) путем перемножения
градиентной и переходной матриц: W(tj,tj_i) = A(tj)B(tj,tj_1);
7. Рассчитывают априорный вектор невязок измерений
первичных навигационных параметров:
AFa(tj) = W(tj,tj_1)AQ(tj_1);
8. Формируют вектор отклонений невязок измерений
первичных навигационных параметров относительно их априорных
значений: Af(tД = AF(tj) -AFa(t f);
9. Находят априорную ковариационную матрицу
погрешностей оценок параметров движения КА:
КЧа (tj) = B(tj>tj_[)Kq(tj_1)BT(tj,tj_1);
89
10. Рассчитывают матричный коэффициент усиления
динамического фильтра
иДФ(ф = КЧ1 (tj)АТ(tj)[к^ + A(tj)Kqi (tj)AT(tj)] ;
11. Формируют вектор поправок параметров движения центра
масс КА:
AQn(tj) = Ufl<1’(tj)Af(tj);
12. Находят априорную оценку вектора отклонений истинных
параметров движения КА относительно опорных значений в
текущий момент времени AQa(tj) = B(tj,tj_1)AQ(tj_r) ;
13. Корректируют априорный вектор оценок
AQ(tj) = AQa(tj) + AQn(tj);
14. Рассчитывают ковариационную матрицу оценок
параметров движения КА, соответствующих текущему моменту
времени
Kq(tJ) = [E-Uw(tj)A(tj)tcqa (tj);
15. Уточняют опорные параметры движения цента масс КА:
Q(tj) = Q0(tj) + AQ(tj).
Структура навигационного алгоритма по методу
динамической фильтрации приведена на рис. 2.5.
Для реализации этого алгоритма необходимы начальные
значения вектора AQ(t0) и матрицы Kq(t0). Способы выбора
начальных условий не отличаются от рассмотренных в параграфе
2.3.
Динамический фильтр впервые был представлен профессором
Р. Е. Калманом в 1961 году на первом конгрессе ИФАК. Поэтому
его часто называют фильтром Калмана.
Достоинствами динамического фильтра являются:
простота его реализации на ЭВМ в связи с рекуррентным
процессом обработки измерений первичных навигационных
параметров;
оценка параметров движения КА формируется в темпе
поступления измерительной информации во время навигационного
сеанса;
достаточная простота его модификации.
Необходимость модификации динамического фильтра
обусловлена следующими причинами. Во-первых, алгоритм
90
Рис. 2.5 Структура навигационного алгоритма на базе
динамического фильтра
91
динамической фильтрации содержит операцию обращения
матрицы. Элементы этой матрицы с течением времени
уменьшаются и становятся соизмеримыми с ошибками счета ЦВМ.
Во-вторых, в основе построения динамического фильтра положено
предположение о том, что уравнения движения и измерений
являются линейными. В действительности допущение о
линейности уравнений справедливо тогда, когда истинная орбита
незначительно отличается от опорной.
92
Глава 3. МЕТОДЫ ОЦЕНИВАНИЯ ТОЧНОСТИ
СИСТЕМ АВТОНОМНОЙ НАВИГАЦИИ КА
3.1. Классификация способов аналитического оценивания
точности
Для нахождения оценок показателей точности САН
применяются методы математического и физического
моделирования, а также экспериментальные методы. Одним из
видов математического моделирования САН КА является
аналитические способы оценивания её точности.
Сущность аналитических способов оценивания точности
систем навигации заключаются в том, чтобы найти аналитическим
путём такие соотношения, с помощью которых возможен расчёт
показателей точности навигации. Полученные аналитические
выражения позволяют провести теоретические исследования
одного из важнейших свойств системы автономной навигации - её
точности (см. главу 6).
Кроме того, с помощью аналитических соотношений удаётся
получить такие оценки, которые характеризуют потенциальную
точность решения задачи автономной навигации КА. Под
потенциальной точностью навигации понимается предельно
достижимая в смысле выбранного критерия точность оценки
вектора параметров движения центра масс КА.
Исследования потенциальной точности позволяют выявить
общие закономерности навигационного процесса и установить
предельные возможности подвергаемой анализу системы
навигации. Полученные при этом количественные оценки
показателей точности имеют оптимистический характер. Они могут
служить своеобразным эталоном или первым приближением, с
которым следует сравнивать результаты решения навигационной
задачи, полученные численным способом.
В зависимости от принятой модели измерений первичных
навигационных параметров способы аналитического оценивания
точности навигации подразделяются на две группы -
Детерминированные и стохастические способы.
В основе детерминированных способов лежит предположение
о том, что погрешности измерений первичных навигационных
параметров являются известными величинами. Причём значения
93
этих погрешностей либо не зависят от времени и остаются
постоянными в течение навигационного сеанса, либо изменяются
по известному закону.
Стохастические способы основаны на утверждении о
случайном характере погрешностей навигационных измерений.
Однако при этом полагается, что закон распределения этих
погрешностей, а также параметры этого закона известны.
В зависимости от того, в какой момент времени определяется
вектор параметров движения центра масс КА (в текущий момент t
или начальный момент to), способы аналитического оценивания
точности навигации подразделяются на способы текущего и
начального оценивания.
При текущем оценивании линеаризованное уравнение
измерений первичных навигационных параметров относительно
опорной орбиты имеет вид
F(t)-F0(t) = AF(t) = A(t) AQ(t). (3.1)
Предположим, что погрешности измерений обладают
свойством аддитивности, т.е.
F(t) = FH(t) + 8(t),
где FH(t)- истинное значение вектора первичных навигационных
параметров в момент времени t;
8(t) - вектор погрешностей измерений в момент времени t.
Тогда из уравнения (3.1) получаем
AF(t) = AFH (t) + 8(t) = A(t) AQ и (t) + A(t) • Aq(t),
где AQ„(t)- вектор отклонений параметров движения КА,
находящегося на истинной (фактической) орбите, относительно его
опорных параметров движения;
Aq(t)- вектор погрешности решения навигационной задачи.
Следовательно, вектор погрешностей измерений
8(t) = A(t)Aq(t). (3.2)
Очевидно, что решение уравнения (3.2) возможно в том
случае, когда определитель матрицы A(t) отличен от нуля, т.е. при
выполнении условия det A(t) * 0 справедливо равенство
Aq(t) = [A(t)]-15(t), (3.3)
где [A(t)]-1 - матрица, обратная матрице A(t).
94
В связи с тем, что первичные навигационные параметры,
измеряемые бортовыми средствами, зависят, как правило, только от
координат КА, уравнение (3.3) принимает вид
Ar(t) = [Ar(t)J-18r(t), (3.4)
где &r(t)- вектор погрешностей определения координат КА;
Ar(t) - матрица производных размера 3x3, имеющая вид
(1.39);
Sr(t)- трёхмерный вектор погрешностей позиционных
измерений.
3.2. Детерминированный способ
В случае применения детерминированного способа, как
правило, полагают, что погрешности измерений являются
постоянными величинами.
Тогда на основании соотношения (3.4) получаем
AX(t)
AY(t)
AZ(t)
Д1
= [Ar(t)]-1 Д2
(3.5)
д3
где
Д{ (i = l, 2,3) - погрешность измерений i-ro первичного
навигационного параметра.
Пример 1. Предположим, что КА совершает полёт по
околокруговой орбите. Параметры движения центра масс КА в
абсолютной системе отсчёта XYZ в некоторый момент времени t„
на опорной орбите определяются вектором
Qo(t0)-[ro000Vo0]T,
т.е. опорное движение КА происходит по экваториальной орбите, а
его центр масс находится на оси X.
Для определения координат КА в момент времени /0
бортовыми средствами измеряются два угла «звезда-вертикаль»
(РьР2) и высота полёта (Н).
Результаты измерений имеют погрешности Дрь Др2 и ДН.
Орты навигационных звёзд в системе отсчёта XYZ
соответственно равны ё] = [001]ти ё2 =[010]т, т.е. направление на
первую звезду совпадает с направлением оси Z, а направление на
вторую звезду - с направлением оси Y.
Тогда на основании выражения (3.5) получаем
95
AX(t0)
AY(tp)
AZ(t0)
= [Ar(t0)]-’
AP1
др2
ДН
где Ar(t0) навигационная (градиентная) матрица вида
Ar(tg)
ЭР1 30! Эр!
ЭХ ЭУ 3Z
дР2 др2 Эр2
ЭХ ЭУ 3Z
ЭН ЭН ЭН
эх эу эг
С учётом выражений (1.14) и (1.27) находим
Ar(t0) =
го
— О
го
О О
Обратив матрицу Ar(t0), получаем
[Ar(t0)]
Таким образом,
принимает вид
гдх(1о)_
AY(t0)
_AZ(t0).
L~ro
искомый
-го
-го О
О О
о -г0
О
вектор погрешностей навигации
‘дрГ
др 2
ДН
ДН
- Го АРг
.-Го -АР1.
О
О
О
О
1
о
о
1
о
о
Из полученного выражения следует, что при выбранном
составе первичных навигационных параметров погрешность
навигации по координате X (т.е. ДХ(10)) определяется только
погрешностью высотомера ДН.
Погрешности по координатам У и Z зависят от двух
факторов. Во-первых, от погрешностей средств измерений углов
Р] и р2 и, во-вторых, от радиуса орбиты КА. Причём с ростом
радиуса погрешности ДР! и др2 увеличиваются по линейному
закону.
96
Заметим, что если центр,масс КА переместить на ось Y, а в
качестве второй звезды выбрать точку, расположенную по
направлению оси X, тогда
вектор параметров движения КА и орт второй звезды равны
соответственно
Qo(to)=[o го ° v0 о 0]т и ё2 = [1 0 0]т
Навигационнг 1я матрица при 0 0 - — го нимает вид
Ar(t0) = 0 г0 0 1 0 0
Вектор погрешностей навигации определяется из выражения
AX(t0)l ДР1 о -r0 O’ АРГ - r0 • AP2
AY(t0) = AI71(t0)- A02 = 0 0 1 A02 = AH
_AZ(t0)_ AH _-r0 0 0 AH _-r0 ДР1 .
Анализ этого выражения показывает, что погрешность
высотомера АН влияет только на точность определения
координаты Y. При этом погрешность AX(t0) связана линейной
зависимостью с радиусом орбиты КА и погрешностью второго
измерителя угла «звезда-вертикаль».
3.3. Стохастический способ текущего оценивания
При стохастическом способе текущего оценивания точности
навигации КА используется стохастическая модель измерений
первичных навигационных параметров. В этом случае вектор
погрешностей 5(t) является случайным. При аддитивном характере
погрешностей уравнение измерений принимает вид
F(t) = FH(t) + £, (3.6)
где £ - случайный вектор погрешностей измерений первичных
навигационных параметров.
Очевидно, случайным является также и вектор Ar(t). Поэтому
точность навигации КА характеризуется ковариационной матрицей
Kr (t)=[A? (t) к^1 • Ar (t)]-1 = a;1 (t) • • [A;1 (t)]T,
97
где К₽- ковариационная матрица погрешностей измерений размера
3x3.
На практике для проведения исследований точности
навигации КА используют диагональные элементы матрицы Kr(t),
которые являются дисперсиями оценок, а также средние
квадратические отклонения погрешностей навигации.
В качестве интегральной оценки точности может служить,
например, след матрицы Kr(t), т.е.
Sp Kr (t) = о* (t) + Оу (t) + о2 (t),
где o^(t), Oy(t), - дисперсии погрешностей оценок координат
КА в момент проведения навигационной засечки положения КА.
Пример 2. В условиях примера 1 требуется найти
ковариационную матрицу погрешностей навигации Kr(t), полагая,
что погрешности измерений первичных навигационных параметров
распределены по нормальному закону с нулевыми
математическими ожиданиями, т.е. систематические погрешности
измерений отсутствуют. Предположим также, что измерения
являются независимыми, т.е. ковариационная
матрица
погрешностей измерений имеет диагональный вид
Из выражения (3.7) получаем
Kr(t) = Ar1(t) K4 [A;’(t)]T = 0-г0
-г0 О
о2 О О
О о2 О
Рз
О О
О 0 -г0
О -г0 О
1 О О
О О
1
О
О
После очевидных преобразований находим искомую матрицу
Ох 0 0 Он 0 0
Kr(t) = 0 оу 0 = о г2о^ 0
0 0 о| 0 0 г2о2(
След этой матрицы определяется выражением
98
SpKr(t) = o2 (t) + 02r(t) + 02 (t) = a2 +r02(a^ + o2 ).
Можно показать, что если центр масс КА переместить на ось
Y, а в качестве второй звезды выбрать точку, расположенную по
направлению оси X, тогда ковариационная матрица погрешностей
навигации принимает вид
Kr(t)= О
Оу О
О о^
ro2o^ О О
О Он о
0 0
О О
О
При этом след матрицы Kr(t) не изменяет своего значения.
Сравнительный анализ результатов, полученных в примерах 1
и 2, свидетельствует о полном совпадении основных выводов.
3.4. Стохастический способ начального оценивания
В случае применения стохастического способа начального
оценивания показателей точности навигации КА линеаризованное
уравнение измерений первичных навигационных параметров
принимает вид
AF(t) = [A(t) B(t, 10)] • AQ(t0) = W(t, 10) AQ(t0).
Введём допущение об аддитивности погрешностей измерений.
Тогда можно показать, что вектор погрешностей измерений
8(t) = W(t,t0)-Aq(t0). (3.7)
Если матрица W(t,t0) не является особенной, тогда вектор
погрешности навигации в момент времени t0, обусловленный
погрешностями измерений первичных навигационных параметров,
находится из выражения
Aq(t0) = [W(t,t0)]-18(t). (3.8)
При необходимости определения ковариационной матрицы
Kq(t,t0) вектора Aq(t0) применяется выражение
KQ(t,to) = [WT(t,to) K^ W(t,t0)]-1. (3.9)
Если погрешности измерений статистически независимы
между собой, тогда точность оценки вектора Aq(t0)
характеризуется матрицей
Kq (t, t о) = [WT Ct, 10 ) • P • W(t, t о)]-', (3.10)
где P - весовая матрица:
99
Pf =
Р] о о ... о
О Р2 о ... о
О О О ... Рт
О?
- дисперсия погрешности
i-ro измерителя первичного
навигационного параметра;
ш - количество первичных навигационных параметров.
Введём матрицу
Cq(t, t0) = WT(t, t0) P W(t, t0), (3.11)
которая является обратной матрицы Kq(t,t0).
Предположим, что измерения первичных навигационных
параметров проводятся в моменты времени tj (j = l, N) в течение
навигационного сеанса продолжительностью x = tN-t0. Тогда
элементы матрицы Cq(tN,t0) рассчитываются по формуле
(параграф 2.2)
m N
Cq(tN,to) = XPiZWiT(tjTo)Wi(tj,to), (3.12)
i=l j=l
где Wj(tj,t0)- i-ая строка матрицы производных W(t,t0),
соответствующая моменту времени tj.
При достаточно малом промежутке времени между
измерениями At = — операцию суммирования в соотношении (3.12)
N
можно заменить операцией интегрирования [102]
N JS, totT т
cq(t0+T,t0) = -£Pi J w^toTWiCMoXit. (3.13)
т 1=1 t0
Как показали исследования, проведенные в работе [102], для
решения задач автономной навигации отклонения сумм от
интегралов не превышает 1% при количестве измерений N > 50.
Выражение (3.13) получено с учётом допущений, согласно
которым, во-первых, первичные навигационные параметры
измеряются с одинаковой и постоянной частотой в течение всего
навигационного сеанса (т.е. количество измерений i-ro параметра
Nj=N = const, где i = l,rn) и, во-вторых, погрешности измерений
100
имеют нормальное распределение с нулевыми математическими
ожиданиями и постоянными дисперсиями.
В тех случаях, когда измерения компонент вектора первичных
навигационных параметров проводятся с различной частотой, в
выражение (3.13) вводится коэффициент
N-
Kn, = Tj , где Nmax = max(Nj, N2,...Nj,...Nm).
N max
В результате выражение для расчёта компонент матрицы
Cq(tN,t0) принимает вид
N m t(,tT т
Cq(t0+T,t0) = --™^^KNPi f w/(t,to)-Wi(t,t0)dt. (3.14)
T i=l t0
Исследования, проведённые в работе [102], показали, что при
анализе точности решения навигационных задач ковариационную
матрицу Kq(t,t0) удобно представлять в виде произведения:
Kq(t,t0) = Kq(t,t0)kH, (3.15)
где Kq(t,t0) - матрица «ошибок навигации»;
кн - коэффициент нормирования.
Элементы матрицы Kq(t,t0) определяются
продолжительностью (т) сеанса навигационных измерений,
координатами навигационных звезд и другими факторами,
которые применяются при проведении исследований точности
навигации КА.
Коэффициент нормирования является функцией погрешностей
бортовых измерителей, параметров опорной орбиты в начальный
момент времени и количества измерений первичных
навигационных параметров, т.е.
kH =f(K^,Qo(t0),N).
В процессе аналитического исследования точности
автономной навигации КА аргументы этой функции полагаются
постоянными и не влияют на результаты анализа.
Поэтому показатели точности навигации весьма полно
определяются безразмерными элементами матрицы Kq(t,t0). Кроме
101
того, при заданной продолжительности мерного участка элементы
этой матрицы являются постоянными величинами.
Диагональные элементы матрицы Kq(t,t0)no своей сущности
представляют собой приведённые к некоторым обшим условиям
ошибки решения навигационной задачи. Поэтому они называются
коэффициентами ошибок навигации.
Для оценивания точности навигационных задач используется
также метод максимума апостериорной вероятности (п. 2.2.3). Этот
метод позволяет учесть априорную информацию, однако приводит
к достаточно громоздким выкладкам при определений
ковариационных матриц погрешностей навигации.
Сравнительный анализ способов аналитического оценивания
точности навигации показывает, что способ оценивания начального
вектора Aq(t0) является более трудоёмким по сравнению со
способом оценивания текущего вектора Aq(t).
Однако область применения этого способа не ограничивается
необходимостью одновременного измерения шести независимых
первичных навигационных параметров, которые имеют
функциональные связи не только с координатами КА, но и с
составляющими его вектора скорости.
3.5. Аналитическое оценивание точности навигации КА
по измерениям высоты полёта
Предположим, что КА совершает полёт по околокруговой
экваториальной орбите. Параметры движения центра масс КА в
абсолютной системе отсчёта XYZ в некоторый момент времени t0
на опорной орбите определяются вектором
Qo(to) = [xo(to) Yo(t0) Xo(t0) Yo(t0) Zo(t0) Zo(t0)]r=[ro 0 0 Vo 0 0]T
где модуль скорости Vo полета KA связан с радиусом его
орбиты г, известным соотношением
Vo=k°r°=]l-
Для определения координат КА в течение одного витка
бортовыми средствами измеряется высота полёта (Н). Измерения
проводятся с постоянной частотой. Количество измерений равно
N. Погрешность измерений характеризуется постоянной
102
дисперсией о^- Систематические погрешности измерений
отсутствуют.
Требуется определить ковариационную матрицу KH(Q(t0),2n:)
погрешностей навигации КА.
В этом случае векторное уравнение (3.6) принимает
скалярный вид
SH(t) = WH(t, to) • Aq(t0),
где 8H(t)- погрешность высотомера;
WH(t,t0) - матрица (вектор-строка размера 1хб), которая
определяется из выражения
WH(t,to) = AH(t)B'(t)to);
Ан (t) - навигационная матрица (вектор-строка размера 1x3):
AH(t) =
dH(t) 3H(t) dH(t)
dx(t) dy(t) dz(t)
-[10 0];
B'(t,t0) - блок матрицы баллистических производных размера
3x6:
3x(t) dx(t) dx(t) 3x(t) dx(t) dx(t)
dx(t0) dy(t0) dx(t0) dy(t0) 3z(t0) 3z(t0)
B'(t,t0) = dy(t) dx(t0) dy(t) dy(t0) dy(t) dx(t0) 3y(t) 3y(t0) tfy(t) 3z(t0) dy(t) 3z(t0)
3z(t) 3z(t) 3z(t) 3z(t) 3z(t) dz(t)
dx(t0) 3y(t0) 3x(t0) 3y(t0) az(t0) 3z(to)J0
С учётом матрицы баллистических производных, приведённой
в параграфе 1.4, получаем, что
2 — cos(p sin(p sin(p V 2(1-cos (p) 0 0
B'(t,t0) = 2sin(p-3(p 0 2cos(p-l 0 2(cos<p-l) 0 4sin(p~3<p к n Sin(P 0 cos(p ——L ^0
Таким образом, матрица WH(t,t0) принимает вид
sin (p WH(t,t0)= 2-cos(p sincp —— L 2(1-cos tp) К
103
Заметим, что частные производные от высоты полёта по
параметрам движения относительно плоскости орбиты (боковым
параметрам) КА (функции чувствительности высоты полёта от
боковых параметров движения) равны нулю. Поскольку боковые
параметры Z(t0) и Z(t0) движения КА оценить по измерениям
высоты полёта не удаётся, ограничимся оцениванием точности
параметров движения КА в плоскости орбиты, т.е. вектора
Ql(t0) = [X(t0) Y(t0)X(t0) Y(t0)]T.
Интегрируя функции (3.13) в пределах одного витка, получаем
матрицу
9 0 0 10 ’ к
0 1 1 0
— N
CH(Qi(t0),2n:) = — 1
2он 0 0
10 п п 12
/о и и
(3.16)
Заметим, что второй и третий столбцы (а также вторая и
третья строка) матрицы (3.16) связаны между собой линейной
зависимостью. Поэтому эта матрица является особенной матрицей.
Действительно, найдём определитель матрицы (3.16):
CH(Qi(t0),2n)| = 9- 1 — 0 К
1 1 Х20 0
0 0 12
10 к 0 1 — к 0 i i i » ° = 0
Поскольку определитель матрицы (3.16) равен нулю, вектор
параметров движения центра масс КА в плоскости его орбиты
Qi(t0) = [X(t0) Y(t0) X(t0) Y(t0)]Tno результатам измерений высоты
его полёта не поддаётся оцениванию.
В связи с этим рассмотрим трёхмерный вектор параметров
движения в плоскости орбиты КА, например, вектор
Qi(t0) = [X(t0) Y(t0)X(t0)]T.
104
Матрица (3.16) принимает вид
9 0 0
N 1
CH(Qi(t0),2n) = —- 0 1——.
Ч К
о -L -L
^•° хо J
Очевидно, что определитель этой матрицы |с'н (Ql(to),2n)| = O.
Не трудно убедиться в том, что по измерениям высоты полёта
трёхмерные векторы, содержащие трансверсальную координату и
радиальную составляющую вектора скорости, т.е. векторы
Qi(to)=[X(to) Y(t0) X(t0)]T и Q2(to) = [ Y(t0) X(t0) Y(t0)]T, а также
двумерный вектор Q((t0) = [Y(t0) X(t0)]T не поддаются оцениванию.
При этом принципиальная возможность уточнения существует
у трехмерных векторов Q3 (tо) = [X(t0) Y(t0) Y(t0 )]т и
Шо) = [Х(1о) X(t0) Y(t0)]T и двумерных векторов
Q2(t0) = [X(t0) Y(t0)]т,Q5(t0) = [X(t0) Y(t0)]Tn Q4(t0) = [X(t0) Y(t0)]T.
С целью проверки этого положения найдём ковариационную
матрицу трёхмерного вектора параметров движения КА в
плоскости орбиты, в котором отсутствует радиальная
составляющая скорости X(t0), т.е. вектора
Q3(t0)=[X(t0) Y(t0)Y(t0)]T.
Путём удаления из матрицы (3.16) третьего столбца и третьей
строки получаем
Q Л 10
—, N Сн(Рз(1о)>2п) - —у 2о2н 7 U 0 1 12. 0 к 0 12
/о л2 Ло J
Искомая ковариационная матрица принимает вид
_, с* KH(Q3(t0),2n) = ^- 12 0 0 8 -10Хо 0
-10Хо 0 9Х2
105
Анализ полученной матрицы показывает, что, во-первых,
дисперсия погрешности уточнения радиальной координаты
превышает дисперсию погрешности трансверсальной координаты.
Во-вторых, погрешности уточнения координат X(t0) и Y(t0) не
зависят от радиуса орбиты КА. В-третьих, корреляционная
зависимость существует только между радиальной координатой и
трансверсальной составляющей скорости. В-четвёртых, дисперсия
погрешности определения трансверсальной координаты
уменьшается с ростом радиуса орбиты.
Проведя аналогичные преобразования, можно получить
ковариационную матрицу погрешностей определения вектора
Q4(t0) = [X(t0)X(t0) Y(t0)]T:
Г 12 О -ЮХ0'
KH(Q4(t0),2Jt) = 0 8Z2 0 .
4N
_-10ко О 9Х2
Найдём ковариационную матрицу вектора координат КА в
плоскости орбиты, т.е. вектора Q2G0)= [X(t0) Y(t0)]T.
Можно показать, что после удаления третьего и четвёртого
столбцов и третьей и четвёртой строк в матрице (3.16), получаем
матрицу
N Г9 0"|
CH(Q2(t0),27t) = — •
2а2н L« 1 J
Ковариационная матрица погрешностей вектора Q2(t0) имеет
вид
1 О
— 2о2
хн(02(1о)>2л) = —-р- 9
N
Ох (2л)
О
О
Оу (2 л)
измерениям высоты
радиальная и
О 1
Анализ этой матрицы показывает, что по
полёта могут одновременно уточняться
трансверсальная координаты КА. При этом средняя квадратическая
погрешность радиальной координаты в три раза меньше средней
квадратической погрешности трансверсальной координаты:
ау(<22Со).2я) 3
т.е. результаты измерений высоты полёта КА основной вклад
вносят в точность навигации радиальной координаты.
106
Предположим, что необходимо найти ковариационную
матрицу вектора погрешностей, содержащего радиальную
координату и трансверсальную составляющую скорости, т.е.
вектора Q3(t0) = [X(t0) Y(t0)]T.
После удаления второго и третьего столбцов, а также второй и
третьей строк в матрице (3.16) получаем
Q 10 '
N У к
Сн(9з(1о),2^) = —у 2°н 10 /о 12 >2
В результате обращения этой матрицы искомая
ковариационная матрица принимает вид
KH(Q3(to).2*) = -g- 4N 12 -10Хо' -10Хо 9Х2О = ох(2л) оху(2л)П о v (2л) о2 (2л) . ЛI I _ 5
где °Ху(2я)" ковариация случайных погрешностей оценивания
вектора Q3 (t0).
Сравнительный анализ матриц Кн (Q2 (t0 ),2л) и Кн (Q3 (t0),2jt)
позволяет сделать следующие выводы. Во-первых, в матрице
Кн(<2з(1о),2л) появились ковариации, которые имеют
отрицательные значения. Это свидетельствует о наличии обратной
корреляционной зависимости между составляющими X(t0) и Y(t0)
вектора Q3 (t0). Коэффициент корреляции
Pxy(2k) = -|^ = -X0,
связан линейной зависимостью с угловой скоростью вращения КА
по опорной орбите, т.е. с ростом радиуса орбита КА коэффициент
корреляции между составляющими X(t0) и Y(t0) уменьшается.
Во-вторых, дисперсия погрешности определения координаты
X(t0) при оценивании вектора Q3(to) = [X(t0) Y(t0)]т на порядок
превышает соответствующую дисперсию при оценивании вектора
Q2(to) = [X(to) Y(t0)]T.
Легко убедиться в том, что ковариационная матрица вектора
Q4(t0) = [X(t0) Y(t0)]T имеет вид
107
KH(Q4(to),2^) = -^L^o'
О
1
12
о^(2л) О
Л
о о^(2л)
Приведённые оценки точности показывают, что погрешности
определения координат КА зависят как от количества и качества
измерений высоты полёта КА, так и от состава уточняемых
параметров. При этом существуют такие составы параметров
оценивания, в которых средние квадратические погрешности
имеют наименьшее значение.
В частности наиболее предпочтительным (в смысле точности
навигации) оцениванием радиальной координаты КА является
состав параметров, который входит в вектор Q2(to) = [x(to) Y(t0)]T.
В этом случае средняя квадратическая погрешность радиальной
координаты находится из выражения
_, J2
o(Q3(t0),2n) = — он.
Очевидно, что средние квадратические погрешности
радиальной координаты при других составах определяемых
зТз л
параметров в -j=- = 4 раза превышают это значение.
В связи с отсутствием принципиальной возможности
определения вектора
Q(t0) = [x(t0) Y(t0) X(t0) Y(t0) Z(t0) Z(to)]1 по измерениям высоты
полёта в системах автономной навигации КА этот первичный
навигационный параметр не применяется в качестве единственного
источника навигационной информации. Для решения шестимерной
навигационной задачи измерения высоты полёта КА
комплексируются с другими первичными навигационными
параметрами, например, с измерениями углов «звезда-вертикаль».
3.6. Аналитическое оценивание точности навигации КА
по измерениям углов «звезда-вертикаль»
В состав первичных навигационных параметров, измеряемых
бортовыми средствами КА, входят зенитные утлы [3, т.е. утлы
между направлениями на зенит и звезды, координаты которых
известны.
108
Угол «звезда-вертикаль» р , т.е. угол между направлениями на
звезду и центр Земли, связан с зенитным углом р очевидной
зависимостью
Р = л - Р = л - arccos
а°Х + b°Y + c°Z?
. r
Составляющие градиентной матрицы принимают вид
cos Р - а ° | ,
ар* 1 f X
ах r sinP (. Г
ар* 1 (Y
ау г - sin Р л
ар* 1 <z
az г - sin Р \ г
cos р — b°
• COS Р - с°
Предположим, что бортовыми средствами КА измеряются два
угла Р* между направлениями на i-ую звезду (i = l, 2) и центр
Земли, т.е. два угла «звезда-вертикаль». Погрешности измерений
имеют нормальные распределения с нулевыми математическими
2 2
ожиданиями и дисперсиями о:,, и сс..
Pi Рг
Положение звезд относительно плоскости орбиты КА выбрано
таким образом, чтобы первая звезда находится в плоскости орбиты
(по направлению оси OY), а вторая - в её полюсе, т.е.
О__л Л ___। 0 _г»
3| — 0, Oj — 1, С| ~
О _л ,0 __л 0 ___-1
а -% — и, о ~~ с 2 ~ 1"
Полагая справедливыми допущения, приведенные в
подразделе 3.6, можно показать, что матрица Ср- (Q(t0),2n), которая
получена по результатам измерений двух углов р* и Р2, имеет
диагональный вид [102]
Гср; (Qi(t0)>2n) о4х2
°2х4 Cp-(Q2(t0)
где Ср-(Q|(t0),2л) - матрица размера 4x4, которая получена по
результатам измерений угла р]:
(3-17)
Cp-2(Q(t0),2rt) =
109
12л2+14 Зл
^0
6л
12л2 +22
4 Зл
N ^0 ^0
Ср- (Qi(t0),2n) = —— 6л 4 6 6л
Г°Ор- к К X2 X2
12л2 +22 Зл 6л 12л2 +32
V К к2 ло к2
Ср-(Q2(lo),2n) - матрица размера 2x2, которая получена по
результатам измерений угла р2:
Ср- (С?2(1о)>2л) -
1
о
о
1
>2
N
°4х2 и °2х4 ' прямоугольные нулевые матрицы, имеющие
соответствующие размеры 4x2 и 2x4.
Результатом обращения матрицы Ср- (Q(t0),2n) является
искомая ковариационная матрица погрешностей навигации КА по
измерения двух углов «звезда-вертикаль»
ГКр-(Qi(t0),2л) 04х2
Кр- (Q(t0),2n) =
Р''2 °2х4 Kp-(Q2(t0)
где Кр-(Q1(t0),2n) - ковариационная матрица погрешностей
навигации параметров в плоскости движения КА:
Kp;(Q1(t0),2n) =
(3.18)
2„2 Зл2 + 32 30л 30л -30лХо -(Зл2+22)ХО
36(л2-3) - 6(5л2 - 12)Х0 -24лХ0
6(л2 -6)N -30лХо - 6(5л2 - 12)Х0 27(л2-2)Х2 24лХ2
_-(Зл2 +22)Х 0 - 24лк0 24лХ2 (Зл2 + 14)Х2_
Kp;(Q2 (t0),2л) - ковариационная матрица погрешностей
навигации боковых параметров движения КА:
Kp;(Q2(to)-2H) =
1 О
О х2
110
3.7. Аналитическое оценивание точности навигации КА по
совместным измерениям высоты полета и углов «звезда-
вертикаль»
При обосновании состава средств измерений первичных
навигационных параметров САН КА возникает необходимость
анализа вклада каждого измеряемого параметра в точность
навигации. Эффективным средством проведения такого анализа
является аппарат аналитического оценивания.
Рассмотрим состав бортовых навигационных измерителей,
который содержит высотомер, построитель местной вертикали и
два астроприбора. Предположим, что дисперсия погрешности
измерения каждого угла «звезда-вертикаль», т.е. интегральная
дисперсия погрешностей построителя местной вертикали и
астроприбора, равна ор.
Будем также полагать, что проводимые измерения являются
некоррелированными, т.е. весовая матрица имеет диагональный
вид
Тогда с учетом допущений, которые приняты в подразделах
3.5 и 3.6, находим сумму матриц
сн.р; 2 (Q(t0),2л) = СН (Q(to),2л) + Ср-2 (Q(t0 ),2л) =
Сц^р' (Qi (to )»2тт) 0дх2
02х4 Ср- (Q2 (t0),2л)
(3.19)
где CHp-(Q1(to),2n) - матрица размера 4x4, которая получена по
результатам измерений высоты полета Н и угла 0*:
111
9 0 0 ^0
N снв: (Qi(t0),2O = -—- 2оН 0 1 0 — — 0 ^0 0 +
12л2+14 Зл Зл 3 N + 2„2 6л 4 К Г» 'о 6л ^7 4 *0 6 д. 12л2 +22 К Зл К 6л
К к ''•о X2
12л2 +22 Зл ^•о ^-о 6л "а2” 12 л2 +32 А2
Ср-(Q2 (to),2л) - матрица (3.17), которая
получена по
результатам измерений угла Р2 •
Введем отношение дисперсий г] = 2„2 Г°ар- Тогда матрица
°н
Сн р- (Qi(t0),2n) принимает вид
12л2 + 14 + -— Зл 6л 12л2 +22 + 5Т]
2 К
Зл з + И 8 + Т] Зл
N 2 2Х0 К
сн,р- (Qi(t0),2n) = —— 6л 8 +Т| 12 + П 6л
0 Pi 2Х0 2Х2 ^0
12л2 +22 + 5Т] Зл 6л 12л2 +32 + 6Т|
К А2 X2 J
Ковариационная матрица погрешностей навигации КА по
измерениям высоты полета и двух углов «звезда-вертикаль»
определяется из выражения
112
kh>p-2 (Q(t° )’271) = [Сн,р;, (Q(to).2n)]
(Qi^o)’271) ®4x2
°2x4 K.p-(Q2(to),2n)
(3.20)
где KH p-(Q[(t0),2H) - ковариационная матрица погрешностей
определения вектора параметров движения в плоскости орбиты КА
по измерениям высоты полета и угла «звезда-вертикаль», которые
проводились в течение одного витка
KH,p;(Qi<to)>2n)=
D(x(t0),2n)
cov(x(t0),y(t0),2n) D(y(t0),2n) ;
cov(x(t0),x(t0),27t) cov(y(t0),x(t0),2n) D(x(t0),2n)
cov(x(t0),y(t0),2n) cov(y(t0),y(t0),2jt) cov(x(t0),y(t0),2jt D(y(t0),2rt)
Kp- (Q2(to),2n) - ковариационная матрица погрешностей
навигации боковых параметров движения КА по измерениям угла
«звезда-вертикаль», которые проводились в течение одного витка.
Матрица Kp-(Q2(t0),2n) имеет диагональный вид (см. раздел
3.6) и не зависит от информации, получаемой от высотомера.
Ковариационную матрицу Кн р-(Qi (to )’2к) запишем по
элементам [102]:
_2_2
Г°°Р’ 2 2 2
D(x(t0),2n) =----[8(3тг2 + 32) + 2(3л2 +56)ц +!2ц2];
NAH,p-
2 2
r°°R'
D(y(t0),2n) =-------—[288(л2 -3) + 120(л2 + 1)т| + 4(3л2 + 16)т|2 + 4п3 ];
NAH,p-
О э
VOCTR-
D(x(t0),2n) =----— [216(л2 - 2) + 2(51тг2 +12)г] + 4(3л2 +10)т|2 +4т|3];
NAH,p-
V2o2.
D(y(t0),2n)= ° Р [8(3л2 +14) + 2(Зл2 + 32)т] + 9г|2];
NAH,p-
6 2
cov(x(t0),y(t0),27t)= ° -(4О + 14Т| + Г|2);
NAH,p-
из
cov(x(t 0 ), x(t 0 ),2ге) = - |^°V° (40 + 14r] + Г]2);
NAhjT
cov(x(t0), y(t0 ),2л) = —--V° [8(3 re 2 + 22) + 6(re2 + 14)r] +1 Or]3);
NAH.p-
cov(y(t0),x(t0),2re) = - Г°V° [48(5n2 -12) + 4(27re2 + 14)TJ + 12(re2 +4)r]2 +4r|3)
NAH,P’
cov(y(t0), у(tо ),27Г) = V° (64 + 20Г] + n2);
NAH,p-
3reV2 2
cov(x( 10), y(t 0 ),2 Л) = —-2- (04 + 20r| + T|2),
NAH,p-
где Днр- - определитель матрицы Сн р« (Q1(t0),2n):
Дн р' = 48(ге2 - 6) + 8(3л2 - 1)Т| + (Зге2 + 32)Г|2 + 4г]3.
Полученные выражения характеризуют вклад, который вносят
результаты измерений высотомера в точность оценивания вектора
параметров движения КА в плоскости его орбиты.
При отсутствии высотомера в составе средств навигационных
измерений выполняется условие г| = 0. В этом случае достигается
равенство ковариационных матриц (3.18) и (3.20).
Применение высотомера, обладающего достаточно высокими
прецизионными характеристиками, приводит к тому, что весовой
коэффициент
2-2
ГО
ц = —/-»1. (3.21)
Он
С учетом неравенства (3.21) ковариационная матрица
Кн р-(Qi(to),2re) погрешностей параметров движения КА в
плоскости его орбиты принимает вид
114
3 Зл Зл
и 2т) ~ 2т] 0 2т]
9 7 Зл 1 1 Зл.
г0°р- KH,p;(Qi(to)»2’t)- N' 2Л 2т] 1 Л,о -К ~ "о 4т] Зл.2 4т]
-Ах Ьп ° Зл. Зл-2 4т] J
Анализ этой матрицы позволяет сделать следующие выводы [102]:
— при совместной обработке информации построителя
местной вертикали, двух астроприборов и высотомера, показатели
точности которых удовлетворяют условию (3.21), дисперсии
погрешностей трансверсальной координаты и радиальной скорости
(y(t0) и x(tg)) снижаются примерно на порядок, а дисперсии
радиальной координаты и трансверсальной скорости (x(t0) и y(t0))
— на несколько порядков по сравнению с соответствующими
характеристиками точности навигации при составе измерений р*,
Р2 , который рассмотрен в разделе 3.6;
— погрешности астрорадиотехнической системы навигации,
построенной на основе измерений двух углов «звезда-вертикаль» и
высоты полета КА, практически являются взаимно независимыми,
поскольку корреляционные моменты матрицы КНр-(ф1(10),2л)
пренебрежимо малы по сравнению с соответствующими
моментами матрицы Кр- (Qj (t0 ),2л);
— исключением при этом является взаимная зависимость
погрешностей трансверсальной координаты и радиальной
составляющей скорости КА (y(to) и *(t0)), которая тоже примерно
на порядок слабее в этой системе навигации.
Исследования зависимости точности астро-радиотехнической
системы навигации КА от продолжительности интервала
навигационного режима (т), приведенные в работе [110], показали,
что операция обращения матриц Сн р- (Qi(to),T) системы
нормальных уравнений при т*2л представляет собой достаточно
трудоемкую задачу. Поэтому эта операция выполнена численным
методом с использованием ЭВМ.
115
Результаты исследований (см. таблицу 3.1) представлены
коэффициентами ошибок навигации (см. параграф 3.4), т.е.
диагональными элементами матрицы Kq(T). Значения
продолжительности интервала навигационного режима (т)
выбраны из ряда т = 3, 6, 10, 15, 20, 23, 30, 46, 92 мин, где интервал
навигационного режима равный периоду обращения КА
т = То =92 мин. При проведении вычислений полагалось, что
интервал времени между измерениями первичных навигационных
параметров At = 60 с.
Зависимости коэффициентов ошибок координат и
составляющих скорости в плоскости орбиты КА от
продолжительности интервала навигационного режима приведены
на рисунках 3.1 и 3.2.
Анализ этих данных свидетельствует о том, что применение
высокоточного высотомера приводит к двум эффектам [102].
Первый сводится к весьма существенному ослаблению зависимости
ошибок навигации от продолжительности интервала
навигационного режима. В наибольшей степени это относится к
коэффициентам ошибок координат.
В рассматриваемом диапазоне значений г коэффициент
Кх(т), который характеризует погрешность положения КА вдоль
радиуса его орбиты, является постоянной величиной. Наиболее
зависим от продолжительности интервала навигационного режима
коэффициент ошибок трансверсальной составляющей скорости
Ку(т). Значения этого коэффициента в диапазоне интервала
навигационного режима т = Т01
_1_
6
изменяется на порядок, а при
Т
условии < т < То
остается практически постоянным.
Второй эффект при включении высокоточного высотомера в
состав измерительного комплекса САН состоит в существенном
повышении точности определения параметров x(t0) и y(t0) в
плоскости орбиты КА. Коэффициенты ошибок этих параметров
уменьшаются по сравнению с соответствующими коэффициентами
116
Таблица 3.1. Коэффициенты погрешностей навигации
Продолжительности интервала навигационного режима Коэффициенты погрешностей навигации
-С, мин ит,рад x(t0) y(t0) x(t0) y(to)
3 0,1987 0,10 1,4 1,52 9,42
6 0,3973 0,10 1,14 1,17 2,6
10 0,691 0,08 1,05 1,02 0,96
15 1,036 0,08 1,01 1,01 0,2
20 1,382 0,09 1,01 1,01 0,15
23 1,589 0,09 1,01 1,01 0,11
30 2,073 0,09 1,01 1,01 0,07 '
46 3,179 0,09 1,01 1,01 0,06
92 6,357 0,07 1,01 1,01 0,06
3 6 10 15 20 23 30 46 92
Интервал навигационного режима, мин
———— Радиальная координата
- - " Трансверсальная координата
Рис. 3.1. Зависимости коэффициентов погрешностей
координат в плоскости орбиты КА от продолжительности
интервала навигационного режима
117
10
—— Радиальная скорость
• • • Трансверсальная скорость
Рис.3.2. Зависимости коэффициентов погрешностей
составляющих скорости в плоскости орбиты КА от
продолжительности интервала навигационного режима
ошибок системы навигации, не содержащей высотомера, на один-
два порядка в зависимости от продолжительности интервала
навигационного режима.
Поскольку измерения высоты полета не чувствительны к
боковым параметрам движения КА введение высотомера в состав
измерительного комплекса САН не изменяет показатели точности
этих параметров.
118
3.8. Компьютерные методы оценивания точности навигации
КА
Аналитическое оценивание точности САН КА, проведенное в
подразделах 3.1 - 3.7, является одним из видов математического
моделирования, которое получило название аналитического
моделирования2. Особенность этого вида моделирования заключается
в том, что используемая математическая модель имеет
аналитическую форму записи, которое представляет собой явные
выражения показателей точности САН КА (выходных параметров)
как функции некоторых переменных (входных параметров).
Входными параметрами при этом являются размеры орбиты и её
положение в инерциальном пространстве, состав измеряемых
первичных навигационных параметров и характеристики
погрешностей средств измерений, количество измерений и
продолжительность навигационного режима. В тех случаях, когда
при аналитическом оценивании не удается получить в общем виде
искомые зависимости прибегают к численным расчетам, например, к
численному обращению матрицы (см. параграф 3.7).
Математические модели, построенные в результате
формализации процесса решения навигационной задачи для
получения аналитических оценок точности, имеют некоторую
степень приближения. Поэтому количественные значения
показателей точности навигации носят, как правило,
оптимистический характер.
Более высокую достоверность имеют результаты компьютерного
моделирования. Под компьютерным моделированием понимается
математическое моделирование с использованием средств
вычислительной техники (компьютеров). Преимущество
компьютерного моделирования состоит в том, что используемые при
компьютерном моделировании математические модели измерений
первичных навигационных параметров и движения центра масс КА
обладают более высокой степенью адекватности.
В ходе компьютерного моделирования процесс исследования
свойства точности САН КА реализуется в виде серии
вычислительных экспериментов на компьютере с использованием
Наряду с математическим моделированием на практике находит применение физическое моделирование. Под
физическим моделированием СЛН КА понимается исследование её точности на физических моделях, когда
навшиционпыП процесс воспроизводят с сохранением его физической природы. Одним из видов физического
м°Делирования является имитационное (натурное) моделирование, в ходе которого используются, например.
Р^ьные бортовые измерители и имшаторы звезд [34].
119
математической модели, которая лишена отдельных допущений
Однако для нахождения общих закономерностей навигационного
процесса необходим достаточно большой объем вычислительных
экспериментов.
При компьютерном моделировании исследования точности
навигации КА выполняется путем расчёта оценок математических
ожиданий и средних квадратических отклонений погрешностей
определения параметров движения КА. Для решения этой задачи
используются хорошо известные инструменты статистического
моделирования, которые базируются, как правило, на методе
Монте-Карло. В основе этих методов лежат процедуры
воспроизведения случайных факторов, событий, величин и
процессов.
Компьютерное моделирование САН КА имеет следующие
особенности. Во-первых, при моделировании истинной орбиты
характеристики модели поля сил, действующего на КА, выбираются
таким образом, чтобы погрешности прогнозирования параметров
движения космического аппарата в течение навигационного режима
не превышали нескольких процентов предполагаемой погрешности
системы навигации. При этом выбранные характеристики имеют
детерминированный вид.
Во-вторых, в моделях измерителей первичных навигационных
параметров вводятся различного рода стохастические шумы и
случайные события. Законы распределения погрешностей измерений
устанавливаются на основании статистических исследований
бортовой аппаратуры или полагается нормальное распределение.
Характеристики распределения (математическое ожидание и
стандартное отклонение) выбираются из заданных интервалов.
Полученные в результате статистического моделирования САН
КА погрешности навигации обрабатываются по правилам
математической статистики. В частности, оценки математических
ожиданий и стандартных отклонений погрешности навигации КА
по координате x(t) находятся по формулам
1 п
x(t) = -£xj(t),
sx(t)= ,
120
где
n - количество экспериментов при компьютерном моделировании
процесса решения навигационной задачи;
xj(t) - погрешность навигации по координате x(t) при
проведении j-ro эксперимента.
Рассчитанные в результате компьютерного эксперимента
погрешности параметров движения КА представляют собой частный
случай решения навигационной задачи, который соответствует
заданным начальным условиям. При этом повторить полученный
результат можно только при условии перевода датчика
псевдослучайных чисел в исходное состояние.
Таким образом, задачу выявления общих теоретических
закономерностей навигационного процесса целесообразно решать
аналитическим способом, а проверку и подтверждение правильности
выявленных закономерностей путем компьютерного моделирования.
121
Глава 4. ЗАДАЧИ И МЕТОДЫ ПОВЫШЕНИЯ
КАЧЕСТВА ИЗОБРАЖЕНИЙ НА БОРТУ КА ДЗЗ
4.1. Концепция построения прецизионной
интегрированной САН КА ДЗЗ по протяжённым
наземным ориентирам
Прецизионная интегрированная система автономной
навигации КА ДЗЗ с использованием протяжённых наземных
ориентиров позиционируется в качестве резерва для
существующих систем навигации на базе аппаратуры потребителя
спутниковых радионавигационных систем (СРНС). Поэтому
показатели точности этой системы и другие её характеристики
должны приближаться к характеристикам таких навигационных
систем, как ГЛОНАСС (Россия) и GPS (США).
Для решения этой задачи САН КА должна строится на
следующих принципах:
- глобальности распределения источников навигационной
информации в пространстве;
- высокой стабильности их пространственного положения и
характеристик;
- прецизионной точности знания их координат, высокой
информативности навигационных измерений по этим источникам;
- возможности создания прецизионной навигационной
аппаратуры для измерения первичных навигационных
параметров;
- возможности глубокого интегрирования навигационной
аппаратуры с существующими бортовыми системами КА.
Наибольшую степень соответствия этим принципам имеет
система автономной навигации КА ДЗЗ по протяжённым
наземным ориентирам (ПНО). Это обусловлено существующей в
настоящее время возможностью введения в бортовое
запоминающее устройство КА ДЗЗ каталога протяжённых
наземных ориентиров, достаточно равномерно распределённых по
континентам, наличием прецизионной целевой аппаратуры,
высокоточных измерителей высоты и дальности, а также
спецвычислителем, обладающим высокой производительностью,
и другими современными бортовыми устройствами.
В основу построения прецизионной интегрированной системы
122
автономной навигации положен известный состав наиболее
информативных первичных навигационных параметров:
угол «звезда - наземный ориентир»;
дальность до реперной точки этого ориентира [88];
высота полёта над акваторией Мирового Океана [92,94].
Для определения трех угловых координат положения КА в
инерциальном пространстве в любой момент времени необходимо
использовать две звезды, по которым в итоге может быть
определено направление на наземный ориентир в инерциальном
пространстве.
Таким образом, по принципу построения резервная система
относится к классу систем, решающих задачу автономной навигации
позиционным способом.
Реализовать систему автономной навигации КА ДЗЗ с таким
составом измерений стало возможным благодаря значительным
успехам в различных областях космических деятельности,
достигнутым к настоящему времени. Наиболее важные из них
являются:
- успехи в создании высокоточных крупномасштабных
цифровых карт. К примеру, при масштабе 1:25000 они могут
обеспечить определение истинных координат наземных ориентиров
с предельной погрешностью в несколько метров по всем трём
геоцентрическим координатам (в плане и по высоте);
- достигнутый уровень создания современных средств
наблюдения КА ДЗЗ. В отличие от фотографических средств
наблюдения КА ДЗЗ, длительность функционирования которых на
орбите ограничена невосполняемым запасом на борту КА
фотопленки, современные средства наблюдения, такие как оптико-
электронные телескопические комплексы (ОЭТК) и
высокоскоростная радиолиния (ВРЛ), обеспечивают получение и
передачу наземному потребителю цифровых снимков местности в
масштабе времени, близком к реальному, и обладают высокой
оперативностью, информационной производительностью и
Длительными сроками функционирования на орбите. Их отличает
также высокое разрешение на местности и высокие
фотограмметрические (измерительные) свойства получаемых
снимков.
К настоящему времени достигнут высокий уровень точностных
характеристик звёздных датчиков, входящих в состав
123
прецизионных бортовых систем управления движением КА.
Безусловными лидерами здесь являются звёздные датчики
разработки Института космических исследований РАН,
называемые бортовыми определителями координат звёзд (БОКЗ).
При отсутствии углового движения КА в инерциальном
пространстве погрешность определения положения оптической
оси одного из них (БОКЗ-М) не превышает 2", а погрешность
определения углового положения относительно оптической оси -
20" [24]. Однако с ростом угловой скорости вращения КА в
пространстве погрешности измерений быстро увеличиваются. Так,
при скорости около 0,1 град/с погрешность определения
положения оптической оси составляет уже около 10". Отсюда
следует возможность использования звёздных датчиков для
высокоточной коррекции показаний гироскопических датчиков
ориентации лишь при положении КА в пространстве, близком к
неподвижному (инерциальный режим ориентации).
В составе высокоточных систем управления движением
(СУД) КА входят гироскопические датчики ориентации КА в
пространстве. Как правило, это датчики угла и/или угловой
скорости [58, 106]. Однако в последнее время все чаще применяют
гироскопические датчики измерения вектора угловой скорости,
однократное интегрирование сигналов с которых дает также
значение угла, если в качестве начальных значений
интегрирования использовать показания звёздных датчиков.
Перспективными для этих целей являются так называемые
бесплатформенные инерциальные навигационные системы
(БИНС).
В настоящее время наибольшее применение как в нашей
стране, так и за рубежом в качестве БИНС находят
бесплатформенные инерциальные блоки. Наилучшие из них
разработаны в НИИ прикладной механики имени акад. В.И.
Кузнецова (г. Москва). Они получили название гироскопических
измерителей вектора угловой скорости (ГИВУС) и
устанавливаются на различных типах отечественных и
зарубежных КА, включая российский сегмент Международной
космической станции (МКС) «Альфа». Ключевым элементом
бесплатформенного инерциального блока является двухстепенный
поплавковый интегрирующий гироблок с газодинамической
опорой подвеса ротора [29].
124
Рассмотренный комплекс оптико-электронных, астро - и
гиросредств совместно с комплексом высокоточных и
высокопроизводительных бортовых вычислительных средств [120]
являются основой построения прецизионной_ интегрированной
системы автономной навигации КА ДЗЗ.
Структурная схема этой системы автономной навигации КА
ДЗЗ представлена на рис.4.1. Кроме функционально входящих в
состав системы элементов аппаратуры наблюдения (АН) - оптико-
электронного телескопического комплекса (ОЭТК) и элементов
бортового комплекса управления (БКУ) - чувствительных
элементов системы управления движением (СУД) и бортовой
вычислительной системы (БВС) - она содержит: запоминающее
устройство (ЗУ) САН с радиоканалом (РК) закладки на борт КА
каталога эталонных изображений ПНО, спецвычислитель (СВ),
радиовысотомер (РВ) и лазерный дальномер (ЯД).
Управление системой осуществляется по командам
спецвычислителя, цикл управления запускается БВС.
Для предотвращения несанкционированного доступа в
радиоканал закладки каталога ПНО используются соответствующие
средства защиты.
Центральным звеном системы навигации является
спецвычислитель. Он
анализирует программу работы ОЭТК на очередной виток
полета КА для определения количества заданных в каталоге
ориентиров, изображения которых будут получены на этом витке. В
случае недостаточности этого количества он выдает в БВС
рекомендации о съёмке дополнительных объектов наблюдения
(маршрутов).
В процессе съёмки спецвычислитель решает следующие
задачи:
- определяет фрагмент псевдокадра, содержащий заданный
ориентир;
- запрашивает этот фрагмент псевдокадра по интерфейсу;
- получает необходимый фрагмент псевдокадра из ОЭТК;
- осуществляет обработку этого фрагмента.
Обработка фрагмента псевдокадра производится путем
сопоставления с эталонным изображением ориентира с целью
обнаружения, опознавания и определения координат его реперной
125
Рис. 4.1. Структурная схема прецизионной интегрированной системы
автономной навигации по протяжённым наземным ориентирам
126
точки в системе координат псевдокадра (при этом продольная
координата определяется по времени от начала сканирования).
Информация о каждом протяжённом наземном ориентире
(ПНО) содержит тип ПНО, геоцентрические координаты его
реперной точки, включая высоту над поверхностью общеземного
эллипсоида, характерный размер, привязку по азимуту,
структурное описание изображения.
Совокупная информация о всех ПНО, находящихся в
запоминающем устройстве САН, приведенная к некоторым
номинальным условиям съемки (фиксированная высота съёмки
(масштаб), изображение в плане без ракурсных искажений,
фиксированная высота Солнца над горизонтом ориентира, в
соответствии с которой определена и задается его яркость),
называется эталонной информацией (ЭтИ).
Адаптация эталонной информации к реальным условиям
съёмки (яркость, масштаб, ракурс и азимут) осуществляется в
спецвычислителе САН непосредственно перед началом процесса
обнаружения и опознавания ПНО на фрагменте псевдокадра.
Для получения первичной навигационной информации
рассматриваемой системы навигации КА измеряются:
- координаты реперной точки заданного ориентира на
фрагменте, а затем и на псевдокадре на момент её регистрации;
- наклонная дальность до ориентира (с помощью лазерного
дальномера);
- положения в инерциальном пространстве оптических осей
звёздных датчиков;
отклонения оптических осей звёздных датчиков
относительно соответствующих нормалей к базовым плоскостям
КА;
- ориентация осей КА в инерциальном пространстве (с
помощью гироскопических приборов СУД).
Кроме того, при полёте над акваторией Мирового Океана
измеряется высота полета КА.
Все измерения (кроме высоты полёта) привязываются к одному
моменту времени - моменту регистрации на псевдокадре
реперной точки ПНО. Как правило, это условие невыполнимо для
многих параметров. Поэтому значения этих параметров на
указанный момент регистрации реперной точки определяются
путём интерполяции двух измерений этих параметров,
127
выполненных до и после регистрации.
По результатам выполненных измерений рассчитываются
первичные навигационные параметры:
- угловые элементы внешнего ориентирования линии
визирования ПНО в осях ИСК. В физической интерпретации это
два угла между линией визирования ПНО и оптическими осями
двух звёздных датчиков;
- наклонные дальности до ПНО.
Начальные значения параметров движения центра масс КА
поступают в БВС от системы, построенной на основе СРНС. или
от средств НКУ по радиоканалу командно-измерительной
системы (КИС).
4.2. Задачи повышения качества изображений
Система автономной навигации КА ДЗЗ с прецизионными
точностными характеристиками, позволяющими использовать её
при отказе основной системы, построенной на основе СРНС,
должна в каждом своём элементе формировать информацию
соответствующего качества. При этом здесь под информацией
следует понимать не только измерительную навигационную
информацию в классическом понимании этого термина, но и
целевую информацию КА ДЗЗ, используемую для получения на её
основе навигационной информации. В рассматриваемой системе к
такой информации следует отнести псевдокадры, содержащие
изображения ПНО, являющиеся источником наиболее важной
навигационной информации о координатах ПНО. Таким образом,
для получения высокоточной навигационной информации о
координатах ПНО необходимо обеспечить получение ОЭТК
целевой информации высокого качества.
Известно, что высокое качество получаемых снимков
поверхности Земли, в том числе линейное разрешение на
местности, обеспечивается:
оптико-электронным телескопическим комплексом
(ОЭТК);
- системой приёма и преобразования информации (СППИ);
- высокоскоростной радиолинией (ВРЛ), предназначенной
для передачи информации с борта КА на наземный пункт приёма.
Однако создание высококачественных систем получения и
128
передачи изображений является лишь необходимым, но не
достаточным условием получения качественных снимков. Для
получения снимков высокого качества необходимо также иметь
высокоточные бортовые системы управления движением и
автономной навигации КА. Именно, при высоком качестве
управления КА могут быть уменьшены не только случайные
инструментальные сдвиги изображения, но и методические
составляющие этих сдвигов.
С целью обоснования перечня задач повышения качества
получаемых изображений элементы системы автономной
навигации КА традиционно разделяются на две большие группы.
К первой группе относятся штатные элементы бортового
комплекса управления (БКУ) и оптико-электронного
телескопического комплекса КА, функционально входящие в
систему навигации. Вторая группа содержит элементы,
непосредственно входящие в состав системы автономной
навигации и выполняющие лишь её функции.
Для создания системы автономной навигации, обладающей
высокой точностью должны быть решены следующие задачи,
которые относятся к первой группе элементов САН, т.е. к
обеспечивающей аппаратуре КА ДЗЗ.
1. Разработать метод определения суммарного сдвига
оптического изображения, обусловленного случайными
погрешностями работы БКУ и ОЭТК. Решение задачи
достоверного обнаружения и опознавания на псевдокадре
протяженного наземного ориентира очевидным образом зависит
от одного из важнейших параметров, характеризующих качество
изображения на псевдокадре, а именно, от линейного разрешения
на местности получаемого изображения. От этого параметра
зависит также и величина погрешности определения координат
ПНО на псевдокадре.
Линейное разрешение на местности определяется
разрешающей способностью самого ОЭТК и качеством работы
обеспечивающих систем БКУ. Погрешности работы этих систем
по угловым и линейным координатам, а также скоростям
поступательного и углового движений КА приводят к появлению
сдвигов оптического изображения и, как следствие, к снижению
разрешающей способности экспонируемого изображения. В связи
с этим необходимо разработать метод аналитической оценки
129
величины суммарной дисперсии составляющих сдвига
оптического изображения, вызванного погрешностями работы
БКУ и ОЭТК для достоверного учёта вклада погрешностей СУД
и БКУ в величину линейного разрешения на местности и оценки
погрешности определения координат ПНО на псевдокадре.
2. Разработать программу сканирования земной поверхности,
минимизирующую продольные и поперечные методические
составляющие скорости сдвига оптического изображения на краях
линейки ОЭП. Очевидно, что решение задачи достоверного
обнаружения и опознания на псевдокадре протяжённого
наземного ориентира зависит от значений методических
(остаточных) продольных и поперечных составляющих скорости
сдвига оптического изображения в каждой точке
информационного поля оптико-электронного преобразователя
(ОЭП) ОЭТК, приводящих к ухудшению качества оптического
изображения. Эти составляющие определяются главным образом
принятой программой сканирования поверхности Земли.
В настоящее время известна и используется на практике
эвристическая программа сканирования, минимизирующая лишь
продольные составляющие методического сдвига изображения
[20]. При этом значения поперечных методических составляющих
скорости сдвига на краях линейки ОЭП могут достигать 3 мм/с и
уменьшаться подбором необходимого начального угла рыскания.
Протяжённый наземный ориентир может находиться в любой
части псевдокадра, в том числе и на его краю. Поэтому для
обеспечения условий его достоверного обнаружения и
опознавания должна быть разработана оптимальная программа
сканирования земной поверхности, с помощью которой
минимизируются значения продольных и поперечных
методических составляющих скорости сдвига оптического
изображения на краях линейки ОЭП.
3. Разработать метод эффективной полётной
фотограмметрической калибровки ОЭТК. Прецизионное
определение координат ПНО на псевдокаре возможно, если
экспонированный псевдокадр обладает высокими
фотограмметрическими (измерительными) свойствами, то есть
линейное расстояние между изображениями объектов адекватно
угловому расстоянию между истинными объектами. При этом
требование по точности определения координат сопоставимо с
130
требованием к значению линейного разрешения снимка (в угловой
мере это единицы и даже доли угловых секунд).
На точность определения координат ПНО на псевдокадре
влияют параметры внутреннего ориентирования (ПВО) ОЭТК,
основными из которых являются:
- несовпадение положения реперной точки ПНО с началом
визирной системы координат;
- отклонение истинного значения фокусного расстояния
объектива ОЭТК от его расчётного значения;
- оптическая дисторсия объектива ОЭТК;
- смещение и поворот матрицы ФПЗС ОЭП в фокальной
плоскости объектива ОЭТК.
Задача определения параметров внутреннего ориентирования
ОЭТК частично решается при наземной калибровке телескопа.
Однако представляется целесообразным решать эту задачу после
выведения КА на орбиту в условиях отсутствия поля сил тяжести,
действующих на оптические элементы на Земле, и с учётом
фактически установившегося поля температур на оптических
элементах ОЭТК. Эта задача, называемая задачей полётной
фотограмметрической калибровкой ОЭТК, может быть решена по
результатам .обработки снимка звёздного неба [1, 15, 61, 91].
Необходимо рассмотреть решение этой задачи и дать оценку
точности этого решения.
4. Разработать схему высокоточной привязки осей звёздного
датчика к осям визирной системы координат ОЭТК. Для решения
этой задачи необходимо произвести анализ вариантов возможных
схем высокоточной привязки осей звёздного датчика к осям
визирной системы координат ОЭТК. При этом необходимо
учитывать, что погрешность определения положения в
инерциальном пространстве осей визирной системы координат
ОЭТК в режиме инерциальной ориентации КА складывается из
двух составляющих: инструментальной погрешности звёздного
датчика по определению ориентации его осей в инерциальном
пространстве и погрешности привязки осей звёздного датчика к
осям визирной системы координат.
5. Разработать методологию полётного калибрования
гироскопических средств, входящих в состав бортового комплекса
Управления КА. Необходимость решения этой задачи обусловлена
следующими обстоятельствами. Современные ОЭТК
131
обеспечивают съёмку поверхности Земли, как правило, с высоким
и сверхвысоким линейным разрешением на местности, для чего их
объективы имеют большие фокусные расстояния.
При больших фокусных расстояниях объективов скорости
движения изображения при неподвижном положении КА в осях
текущей орбитальной системы координат превышакт пределы
возможности технической реализации системы приема и
преобразования информации. Уменьшение скорости движения
изображения до приемлемого уровня обеспечивается
компенсационным движением самого КА. При этом значения
угловых скоростей движения КА главным образом по каналу
тангажа могут достигать 1-2 град./с. При сканировании с такими
угловыми скоростями отсутствует возможность применения
звёздных датчиков для определения положения визирной системы
координат в инерциальном пространстве.
Современные бортовые звёздные датчики имеют достаточно
высокую точность определения ориентации своих оптической
осей в инерциальном пространстве (например, погрешность
определения ориентации бортового определителя координат звёзд
БОКЗ-М составляет около 2"). Однако эти характеристики
достигаются только в режиме инерциальной ориентации КА, т.е. в
том случае, когда КА неподвижен в инерциальном пространстве.
Следовательно, в процессе сканирования задача определения
ориентации КА, а также визирных осей ОЭТК, может быть
решена при условии использования гироскопических средств типа
БИНС, которые способны измерить и передать в систему
управления движением КА по её запросу значения угловых
скоростей вращения КА по соответствующим каналам.
В то же время известно, что БИНС имеют значительные
погрешности измерения угловых скоростей, которые приводят к
достаточно быстрому нарастанию во времени погрешностей
определения ориентации в пространстве при интегрировании
угловых скоростей [48 - 50].
Высокая точность определения угловых элементов внешнего
ориентирования визирных осей ОЭТК в этих обстоятельствах
может быть достигнута двумя способами. Первый из них связан с
сокращением интервала времени сканирования с использованием
БИНС. Перед началом этого интервала ориентация
осуществляется с помощью звёздных датчиков.
132
Такие определения ориентации называются
астроопределениями или астрозасечками и реализуются в режиме
инерциальной ориентации КА.
Однако первый способ малоэффективен, так как интервал
сканирования весьма ограничен. Это связано с тем, что в интервал
сканирования входят затраты времени как на разгон КА до
необходимых для сканирования угловых скоростей из
неподвижного в пространстве состояния, так и на последующее
торможение.
Второй способ достижения высокой точности определения
угловых элементов внешнего ориентирования визирных осей
ОЭТК основан на проведении полётного калибрования БИНС, под
которым понимается решение задачи определения
систематических погрешностей измерений БИНС по информации,
поступающей от звёздных датчиков. Этот второй способ является
пока единственным, способным обеспечить решение
поставленной задачи.
Все современные высокоточные БИНС построены, как
правило, на основе двухстепенных гироскопов и выдают
потребителю по его запросу текущие значения составляющих
вектора угловой скорости КА. Одними из лучших двухстепенных
гироскопов в настоящее время является ряд приборов типа
гироскопических измерителей вектора угловой скорости (ГИВУС)
разработки НИИ прикладной механики им акад. В.И. Кузнецова
(г. Москва) [29].
Не менее важными являются задачи повышения качества
второй группы элементов системы автономной навигации.
Перечень таких задач продиктован составом тех элементов,
которые входят в систему автономной навигации КА.
6. Одной из таких задач является разработка метода
высокоточной привязки зондирующего луча передатчика
лазерного дальномера к осям визирной системы координат ОЭТК.
Для уменьшения погрешности измерения дальности лазерным
дальномером, вызванной отклонением его зондирующего луча от
расчётного положения, необходимо предложить схему
высокоточной привязки этого луча к осям визирной системы
координат ОЭТК. Как показали результаты анализа,
существующие в настоящее время схемы такой привязки
Достаточно сложны.
133
4.3. Аналитическая модель дальности до поверхности
Земли
Примерная схема расположения оптико-электонных
преобразователей (ОЭП) системы приёма и преобразования
информации (СППИ) в фокальной плоскости объектива ОЭТК
приведена на рис. 4.2.
Рис. 4.2. Схема размещения ОЭП в фокальной плоскости
ОЭТК
В фокальной плоскости объектива ОЭТК, как правило,
располагаются несколько (например, три) матричных оптико-
электронных преобразователя (ОЭП-1, ОЭП-2 и ОЭП-3) с
различными спектральными диапазонами чувствительности. При
этом одна часть матричных оптико-электонных преобразователей
выдаёт информацию в видимом диапазоне спектра (так
называемый панхроматический канал), а другая - в узких
спектральных диапазонах. Матрицы ОЭП работают по принципу
временной задержки и накопления (ВЗН) заряда, и по
технологическим соображениям расположены в шахматном
порядке. Их плоскости чувствительности совпадают с фокальной
плоскостью объектива oxz. Линейки ОЭП привязаны к осям
системы координат oxyz таким образом, чтобы строки матриц
были направлены параллельно поперечной оси oz, а столбцы -
134
параллельно продольной оси ох. Стрелка «Н.П.» указывает на
направление полёта КА.
В идеальном случае оптическое изображение в фокальной
плоскости ОЭТК в каждой точке ОЭП движется в направлении
столбцов, т.е. совпадает с направлением оси ох и одинаково по
модулю для любой точки линейки ОЭП. Это направление на рис.
4.2 обозначено стрелкой Vx.
В реальном же случае модуль Vx может быть переменным по
длине ОЭП, а также могут иметь место поперечные составляющие
Vz, отличные от нуля и также переменные по длине ОЭП.
В дальнейшем, если это не оговорено особо, рассматривается
общий случай расположения работоспособной (рабочей) части
ОЭП (на рис. 4.2 заштрихована) в фокальной плоскости объектива
ОЭТК. Здесь X - половина длины работоспособной части ОЭП.
Для получения необходимых соотношений воспользуемся
следующей схемой сканирования: пространственным разворотом
корпуса КА (с неподвижно установленным на нём ОЭТК) по трём
каналам, т.е. тангажа, крена и рыскания (рис. 4.3).
На рисунке 4.3 введены следующие обозначения:
S - центр масс КА (с высокой точностью можно считать, что
центр масс КА совпадает с задней узловой точкой объектива
(ЗУТО)), являющейся центром проектирования:
OXYZ - фотограмметрическая система координат, связанная
с предметным пространством.
Направление осей фотограмметрической системы координат
в некоторый момент времени совпадает с направлением осей
текущей орбитальной системы координат (ОСК) (на рис. 4.3 не
показана) с началом в точке S. Для отсчёта углов поворота КА при
съёмке принимается следующая последовательность: тангаж - а,
крен - 0, рыскание - у. Положение связанной с КА системы
координат (ССК) SX'Y'Z' в осях ОСК однозначно определяется
углами а, 0, у.
135
Рис. 4.3. Последовательность отсчета углов поворотов КА при съёмке
В соответствии с принципом центрального проектирования
(рис. 4.3), применимым к наиболее распространённым оптическим
схемам комического телескопа зеркального типа Ричи-Кретьена (см.
главу 9), точке М предметного пространства соответствует точка m
фокальной плоскости с координатами х, z. Точка m лежит на
продолжении линии, соединяющей точку М предметного
пространства с задней узловой точкой объектива S, являющейся
центром проектирования. Оси связанной с фокальной плоскостью
системы координат oxyz параллельны осям ССК КА SX Y Z’.
Всякая линия, проходящая через точку m фокальной плоскости
с координатами х, z и заднюю узловую точку S объектива (ЗУТО),
называется линией визирования (ЛВ), а линия, проходящая через
136
начало координат фокальной плоскости (х-0, z=0) и ЗУТО,
называется центральной линией визирования (ЦЛВ).
Кратчайшее расстояние oS между фокальной плоскостью и
ЗУТО называется фокусным расстоянием объектива и обозначается
через f.
Пусть поворотам КА на углы тангажа а, крена [3 и рыскания у
соответствуют матрицы поворотов Аа , Ар, Av . Обозначим матрицу
суммарного поворота через Ат:
а.
а
а
Аг — Av Ар Ап —
а„ а
а12 а
а„ а
а,
а
а
(4.1)
Из выражения (4.1) следует, что А есть матрица поворота КА
от орбитальной системы координат SXYZ к связанной с ФП системе
координат oxyz, а матрица А определяет обратный поворот - от
связанной к орбитальной системе координат.
Нетрудно показать, что элементы матрицы А равны:
ац = cosacosy-sinasinpsiny;
а[2 =-sinacos0;
aj3 = cosasiny + sinasinpcosy;
а2] = sin a cosy + cos a sin P sin у ;
а 22 = cosacosP;
а2з =sinasiny-cosasinpcosy;
api =-cospsiny;
(4.2)
a32 =sinp;
азз = cospcosy.
Известны формулы для расчёта дальности от центра масс КА
до точки на поверхности Земли [117]. Найдём выражение, которое
описывает дальность до произвольно заданной точке М на
поверхности Земли, находящейся в поле зрения объектива
телескопа, в функции координат её изображения m в фокальной
плоскости.
Для получения искомой модели дальности необходимо иметь
математическую модель поверхности Земли, которая позволяет
вычислить дальность от центра масс КА (S) до любого ориентира
(М) на поверхности Земли, попадающего в поле зрения объектива.
Эта модель, с одной стороны, должна быть достаточно простой,
чтобы позволять аналитически решать поставленную задачу, а с
137
другой стороны, должна быть достаточно точной, чтобы не
приводить к появлению значительных погрешностей в получаемом
решении.
В качестве такой модели принимается модель локальной
сферы, то есть снимаемый участок поверхности Земли в пределах
поля зрения объектива ОЭТК является частью сферы радиуса R,
равного радиусу Земли в точке А пересечения с нею центральной
линии визирования. По определению центральная линия
визирования совпадает с оптической осью телескопа (рис. 4.4).
На рис.4.4 обозначено: О - центр масс Земли; S - центр масс
КА (задняя узловая точка объектива); г - радиус-вектор центра масс
КА в ОСК; R - радиус точки А на поверхности Земли.
Нетрудно подсчитать, что для современных узкопольных
оптических систем ОЭТК зеркального типа с полями зрения 2р =1-
2° отклонение такой модели от эллипсоида вращения Земли
пренебрежимо мало даже на геоцентрической широте 45°.
Рис. 4.4. К расчёту дальности до наземного ориентира
Оценим погрешность принятой локально-сферической модели
поверхности Земли, находящейся в поле зрения объектива ОЭТК,
применительно к КА «Ресурс-ДК1» разработки ГНП РКЦ
138
«ЦСКБ-Прогресс» (г. Самара), выведенному на орбиту 15.06.2006г.,
у которого:
- максимальная высота полёта по орбите Н=650 км;
- фокусное расстояние объектива телескопа f=4000 мм;
- суммарное количество пикселей в строке ОЭП N=36000
пикселей;
- размер пикселя ОЭП — квадрат бхб=9х9мкм.
В качестве реальной поверхности Земли примем поверхность
общеземного эллипсоида, радиус которого в заданной точке
определяется выражением:
о
Rq, =а< (1 - a - sin" ср),
где а, - большая полуось общеземного эллипсоида: а.=6378,16
км;
а - сжатие эллипсоида: «=1:298,2;
ср - геоцентрическая широта заданной точки (угол между
геоцентрической вертикалью, проходящей через центр масс Земли,
и плоскостью Земного экватора).
Известно, что угловое расстояние между геоцентрической
вертикалью и местной вертикалью (нормалью к поверхности
общеземного эллипсоида) приближённо определяется по формуле
[79]:
Дер = а • sin 2ср.
На геоцентрической широте <р=45" угол Дер достигает
максимального значения, равного 11,5 угловых минут, а радиус
общеземного эллипсоида равен
Яф=6367,465 км.
При съёмке в надир с высоты Н проекция L пикселя на
поверхность Земли составит
L=H-=1,4625 м.
f
При этом радиус участка на поверхности Земли, находящегося
в поле зрения объектива телескопа, равный половине ширины
полосы захвата телескопа, составит
N
В=—L =26,325 км.
2
Край этого участка в плоскости меридиана на широте
<р =45 ° отстоит от его центра по широте на угол
139
5<p = — =0,2632°.
Кф
В результате радиус общеземного эллипсоида для края участка
поверхности Земли, находящегося в поле зрения объектива
телескопа на широте <р =45°, определяется по формуле:
R<p+5<p = a] • [1 - a-sin2(45° + &р)]=6367,367 км.
Для локально-сферической модели поверхности Земли,
находящейся в поле зрения объектива телескопа, радиус Земли на
краю полосы захвата телескопа является постоянной величиной Кф
в пределах всей полосы захвата.
Таким образом, максимальная величина погрешности принятой
локально-сферической модели поверхности Земли для КА «Ресурс -
ДК1» равна
AR = Rф — Кф+8ф =98 м,
что вполне допустимо, поскольку это приводит к относительной
погрешности Кф на краю полосы захвата телескопа, равной 0,015%.
Действительно, в соответствии с формулой (4.18) изменение
скорости движения оптического изображения Vx, вызванное
изменением дальности D при съёмке в надир, составит
пренебрежимо малую величину
A V х -—100 = 0,015%.
Л Н 650000
Нетрудно показать, что на других широтах эта погрешность
становиться ещё меньше, а на экваторе и полюсах она равна нулю.
При смещении оптической оси телескопа от направления в
надир отклонение AR возрастает. Однако вместе с ним
пропорционально отклонению увеличивается и проекция пикселя на
поверхность Земли. В результате относительная величина
погрешности локально-сферической поверхности Земли остаётся на
допустимом уровне.
Как следует из рис. 4.4, точка М, находящаяся в поле зрения
объектива ОЭТК одновременно с точкой А, в силу принятой модели
сферичности также имеет радиус R.
Поскольку параметры движения центра масс КА и его угловое
положение в пространстве в каждый момент времени известны с
высокой точностью, можно считать, что также с высокой точностью
может быть определено направление на точку А, а по нему - и
140
радиус R точки А, принадлежащей поверхности общеземного
эллипсоида (с заданным превышением h).
Этот радиус может быть принят за радиус R локального
участка сферической поверхности Земли.
Здесь важно подчеркнуть, что в каждый момент времени
рассматривается и используется именно локальный участок
сферической поверхности Земли радиуса R . При смещении точки А
пересечения ЦЛВ с поверхностью Земли по поверхности Земли
вновь должно вычисляться новое значение радиуса R. Поэтому
радиус R есть не константа, а функция времени: R(t).
Вместе с тем, представление о сферичности поверхности
Земли, участок которой оказался в некоторый момент времени в
поле зрения объектива ОЭТК, позволяет получить простую формулу
для расчёта дальности до любой точки поверхности Земли М,
находящейся в поле зрения объектива ОЭТК.
Введём два вектора d и а2 в ССК. Вектор d (рис. 4.2)
определяется координатами точки т, лежащей в фокальной
плоскости объектива ОЭТК и являющейся, в свою очередь,
центральной проекцией точки М поверхности Земли на фокальную
плоскость:
d = (x2 + f2 + z2)lz2
(4-3)
Единичный вектор а2 (рис.4.4) направлен по оси SY
орбитальной системы координат. В соответствии с выражением (4.1)
а
он равен:
а21‘
а 22
а 23 .
, а2 = (а2, + а22 + а23)'2 = 1
(4.4)
Здесь (рис.4.3) он представлен своими проекциями в связанной
системе координат КА.
Найдём скалярное произведение векторов d и а2:
а2 • d =a; dcosQ = dcos0, (4.5)
где 0 - угол между осью SY ОСК и линией визирования,
проходящей через точку m фокальной плоскости.
С другой стороны, для скалярного произведения справедливо
соотношение:
а2 d = а2| х + а,2 f + а23 z .
(4.6)
141
Из сравнения (4.5) и (4.6) с учётом (4.3) имеем
Разделив числитель и знаменатель дроби в правой части
полученного выражения на f, будем иметь
COS0 =
X Z
а22 +а21 J + a23
7~\2
1 +i +И ',2
Здесь важно принять ещё одно важное положение,
необходимое для обеспечения высокой точности в получаемых в
дальнейшем аналитических выражениях. А именно, при выводе
формул пренебрежём членами второго порядка малости для
относительных координат у, |. Справедливость этого допущения
для современных длиннофокусных космических телескопов
устанавливается непосредственно. Допускаемая при этом
погрешность, как правило, не превышает сотых долей процента.
Пренебрегая в последнем выражении членами второго порядка
малости относительно — , будем иметь:
cos0 = а
х z
у + а^ • (4-7)
В соответствии с рис.4.3 далее нетрудно получить формулу для
расчёта дальности D, если принять, что треугольник OSK -
прямоугольный с прямым углом при вершине К:
D=D, -D2,
где
D] = COS0T = а„ +а„ — + а„- г.
( - 21 f 2- f J
Из прямоугольного треугольника OSK также следует
ОК2 = г2 — D2.
В свою очередь, из прямоугольного треугольника ОМК.
следует
D2 =(0М2 -OK2)1'2 =[R2 - (г2 -D2)]12 =(D2 +R2 -г2)1'2.
Итак, окончательно получаем искомую аналитическую модель
дальности:
142
D = Df -D2
X Z ]
— aji 4—а?3 'Г'
f 21 f 231
(4.8)
По этим простым соотношениям может быть определена
дальность до любой точки М участка поверхности Земли в поле
зрения объектива ОЭТК, проектирующейся в точку m на фокальной
плоскости с координатами х и z.
Вывод на основе полученной модели некоторых параметров,
являющихся функциями дальности, выражения для которых
потребуются в дальнейшем, приведены в Приложении А.
4.4. Аналитическая модель движения оптического
изображения в фокальной плоскости объектива
В общем случае движение оптического изображения в
фокальной плоскости объектива ОЭТК определяется параметрами
поступательного движения КА, как материальной точки,
параметрами углового движения КА в инерциальном пространстве,
а также параметрами вращательного движения точки М наблюдения
вместе с Землёй. Отсюда следует, что скорость движения
оптического изображения в каждой точке фокальной плоскости
определяется не более, чем 18-ю параметрами: шестью параметрами
поступательного движения центра масс КА в инерциальном
пространстве, шестью параметрами углового движения вокруг
центра масс КА в инерциальном пространстве и шестью
параметрами движения в инерциальном пространстве точки М
пересечения линии визирования с поверхностью Земли.
Впервые наиболее полные уравнения движения оптического
изображения в фокальной плоскости объектива ОЭТК, однако, без
использования понятия угловой скорости КА, получены в работах
[17, 18]. При этом способ получения уравнений в этих работах
путём последовательного преобразования предметного пространства
к пространству изображений и последующего дифференцирования
координат применён также в работе [73].
В настоящей работе получены приближённые уравнения
движения оптического изображения с привлечением понятия
угловой скорости КА, и получены они благодаря использованию
связей между основными кинематическими параметрами,
143
определяющими процесс съёмки [90].
Из принципа центрального проектирования (рис.4.3) при
высоком качестве объектива ОЭТК имеет место соответствие
между координатами X, Y, Z точки М предметного пространства и
координатами х, z ее проекции m в пространстве изображений (в
фокальной плоскости объектива ОЭТК):
x-xs
xs-x
d= 0 —ys =kAT Ys-Y =kATD,
_z-zsJ |_ZS-Z_
zs-z
(4.9)
где:
d - вектор пространства изображений, являющийся
продолжением вектора дальности D предметного пространства,
направленного от точки М к центру масс КА;
к - неизвестный коэффициент пропорциональности;
D - вектор дальности до рассматриваемой точки М
предметного пространства с координатами X, Y, Z в ФСК,
направленный от точки М;
х, , у s , z5 - координаты центра проектирования S в системе
координат oxyz;
Xs, Ys, Zs - координаты центра проектирования S в системе
координат OXYZ.
Для принятого на рис.4.3 положения центра проектирования
S в системе координат oxyz справедливы равенства:
х5 = 0; ys = - f; zs = 0,
где f - фокусное расстояние объектива ОЭТК.
Следовательно, вектор пространства изображений d
определяется из выражения (4.3).
Из (4.9) с учётом (4.1) нетрудно определить соотношение для
второго элемента вектора d, являющегося фокусным расстоянием
объектива ОЭТК:
f = k(a] D) .
Здесь в правой части имеем скалярное произведение
векторов а] и D. Отсюда нетрудно найти коэффициент
пропорциональности к:
С учётом этого выражения соотношение (4.9) можно
записать в следующем виде:
144
Соотношение (4.10) получено также и в работах [16, 17]. Оно
является основным для определения скорости движения
оптического изображения в фокальной плоскости объектива ОЭТК.
В отличие от работ [17, 18] при дифференцировании (4.10)
воспользуемся известными кинематическими параметрами
вращения твёрдого тела и некоторыми допущениями.
Продифференцируем обе части (4.10) по времени.
Производную по времени будем в дальнейшем обозначать точкой
сверху. Дифференцируя правую часть (4.10) как сложную функцию,
получим
(аТ D + АТ D)-(aJ D + aJ d)(A 3
(aJ • D) (a J • D,
Коэффициент у второго члена в правой части полученного
выражения является скаляром, поэтому его можно переставить с
вектором (ат Г>).
(ат • d)
Подставляя в соответствии с (4.10) вместо дроби дробь
- в правую часть и приводя подобные в правой части, будем иметь
Ат • D-у(а2г d)
(4.Н)
Заметим, что из теории вращения твёрдого тела [65] известно,
что производная от матрицы поворота может быть представлена в
виде
АТ =-£1АТ ,
(4.12)
где Q - квадратная матрица
0
Q = а>з
— СО3
0
-О>2
О>2
-СО!
0
“1
Здесь СО] , <л»2 , - составляющие вектора мгновенной угловой
скорости КА в инерциальном пространстве по осям ох, оу, oz
соответственно системы координат, связанной с фокальной
плоскостью. Для удобства использования в дальнейшем в
соответствии с принятыми названиями углов переобозначим
составляющие угловых скоростей следующим образом
145
CO] — О)к , ©2 - ®р 5 ®з = (0T ,
где т, к, р - индексы обозначения осей соответственно тангажа,
крена и рыскания.
Кроме того, умножая (4.10) слева на матрицу А и учитывая,
что произведение ААТ=Е есть единичная матрица, можно
записать
Раскрывая фигурные скобки в правой части (4.11) и учитывая
равенства (4.12) и (4.13), получим
-Qd-|(S( Ad) . (4.14)
Выпишем далее выражение для второй строки равенства
(4.12):
а' = -[©т; 0; — сок ]ат .
Нетрудно заметить, что производная по времени от вектора
дальности D в силу определения (4.9) есть вектор скорости
поступательного движения КА относительно поверхности Земли в
точке пересечения линии визирования (вектора D) с этой
поверхностью.
Обозначим
xs-x
YS-Y
zs-z
Wy
wz
Здесь Wx , Wy , W2 - проекции упомянутого вектора
скорости на оси орбитальной системы координат.
Заметим также, что скалярное произведение (а2г D)
единичного вектора aj, направленного по оси оу на вектор
дальности D точки М, равно (рис.4.3):
(aj • d) - D cos 5 ,
где 5 - угол между ЛВ (D) и осью оу.
С учётом введённых обозначений и после подстановки всех
полученных выражений соотношение (4.14) в координатной
форме приобретает матрично - векторный вид:
146
X
d = О
z
(4.15)
(wx an + Wy a21 + Wz a31)-y (wx a12 + Wy a22 + Wz a32)j
Отсюда, выписывая построчно (4.15) для первой и третьей
строк, получим искомые соотношения для продольной и
поперечной составляющих скорости движения оптического
изображения в точке ш фокальной плоскости ОЭТК:
Vx=x = —"
Dcoso
f Х^ I X z
+ f+Ti T~z0)p—r05*
(4.16)
(wxa13 + Wya23 + Wza33)-y (wxa12 + Wy a22 + Wz a32)J -
vz=z=—5—
DcosS
-ff + —
f
x z
V
(4.17)
Вторые члены в круглых скобках в правых частях этих
уравнений имеют второй порядок малости. В соответствии с
принятым в параграфе 4.1 положением ими можно пренебречь.
Можно также пренебречь и последними членами в правых частях
уравнений (4.16) и (4.17) в силу того, что коэффициент имеет
второй порядок малости по отношению к другим членам. Кроме
того, при малых значениях угла 8 (8<Г), что справедливо при
условии использования узкопольного объектива, выражение cos8
можно заменить единицей. Однако в общем случае это выражение
должно быть сохранено. Вопрос о его практическом
использовании в каждом конкретном случае должен
рассматриваться отдельно.
Таким образом, в итоге искомые уравнения движения
оптического изображения имеют вид:
147
x DcosS
(wx Эц + Wy а21 + Wz a31)-y (wx a12 + Wy a22 + Wza32)
+ f C0T - ZCOp
Vz= —Г
DcosS
(wxat3 + Wya23 + Wza33)-|(wxai2 + Wya22 + Wza32)
(4.18)
’(4.19)
- f ©„ + X(Dn
к p
Необходимо ещё раз подчеркнуть, что в полученных
уравнениях:
D - дальность вдоль линии визирования точки М на
поверхности Земли с координатами X, Y, Z в фотограмметрической
системе координат, изображение (центральная проекция) которой
(точка ш) на фокальную плоскость имеет координаты х, z (рис.2.1);
ay (i, j =1,2,3) - направляющие косинусы матрицы А поворота
от связанной к орбитальной системе координат;
Wx , Wy , Wz - проекции вектора скорости поступательного
движения центра масс КА относительно точки М на оси ОСК;
сот, сок, (Ор - составляющие вектора угловой скорости вращения
КА в инерциальном пространстве в проекциях на связанные с КА
оси тангажа, крена и рыскания соответственно. При этом оси
фотограмметрической системы координат, в которой задана точка
М, по направлению совпадают с осями орбитальной системы
координат.
Полученные уравнения являются приближёнными, поскольку
при их выводе использованы допущения о локальной сферичности
Земли и малости параметров у и |.
Для удобства записи уравнения (4.18) и (4.19) можно
представить в другой более компактной форме. Нетрудно заметить,
что в этих уравнениях составляющие скорости движении
изображения (СДИ) выражены через составляющие вектора
относительной скорости Wx , Wy, Wz в осях ОСК, который скалярно
умножается на единичные векторы, направленные по осям ОСК и
представленные проекциями на оси ССК. Следовательно, эти
скалярные произведения представляют собой проекции вектора
относительной скорости на оси программной системы координат
(ПСК или ССК, поскольку в рамках рассматриваемой задачи
различие между ними не делается), которые обозначим с
использованием буквы "с":
148
Wxc=(Wa?') = Wxa11+Wya21 + Wza31;
Wyc =(W a2 ) = Wxai2 +Wy a22 + Wza32; (4.20)
wzc = (WaJ) = Wxa13+Wya23 + Wza33;
В итоге уравнения для составляющих скорости движения
изображения приобретают наиболее компактный вид:
Г ( X А
Vx =---- Wxc — Wvc + f сот - zcon ;
* Dcos5l f y J p
(4.21)
f f 7 A
Vz =----- wzc - - Wvc - f (OK + x coD
z DcosSv zc f ycJ K P
Полученные уравнения составляют содержание
приближённой аналитической модели движения оптического
изображения в фокальной плоскости объектива ОЭТК [90]. В
дальнейшем она использована при разработке аналитических
моделей сдвига оптического изображения, отклонений в
координатах точек псевдокадра, при разработке основ теории
оптимального сканирования.
Необходимо отметить, что уравнения (4.21) остаются
справедливыми при произвольно заданной последовательности
углов поворотов КА, которая определяет значения элементов ay (i,
j =1,2,3) матрицы А.
С практической точки зрения полученная приближённая
модель движения оптического изображения в фокальной
плоскости объектива телескопа в форме (4.21) позволила
повысить точность расчёта и выдачи в систему приёма и
преобразования информации скорости движения оптического
изображения на КА нового поколения.. Традиционно на КА
предыдущих поколений для расчёта продольной скорости
движения оптического изображения для выдачи е СППИ с целью
формирования скорости передачи зарядовых пакетов вдоль
столбцов матриц ФПЗС использовалась формула, которая в
рамках принятых выше обозначений имела вид:
f
Vx = — Wxc + f шт — z<Op,
то есть не учитывала наличие члена (- — Wyc).
Эта традиция связана с отсутствием у КА предыдущих
поколений угловых отклонений по каналу тангажа в процессе
149
проведения съёмки. При этом съёмка проводилась в надир, либо с
отклонением от текущей орбитальной системы координат лишь по
каналу крена (если не учитывать необходимый поворот по каналу
рыскания для компенсации вращения Земли).
В целях повышения производительности КА нового поколения
отклоняются не только по крену, но и по тангажу, что приводит к
появлению
составляющей
(“wyc) для ОЭП,
смещённого в
продольном направлении на величину х * 0 (рис.4.2).
Так, например, отсутствие этого члена в формуле для расчёта
V, при угле отклонения КА по тангажу 60’ и при расстояниями
между ОЭП, равным 90 мм, приводит для смещённого относительно
центра ОЭП к погрешности в формировании vx, равной 0,5 мм/с.
При скорости движения изображения vx=32 мм/с и количестве строк
накопления зарядов в матрицах ФПЗС, равном 128, эта погрешность
на интервале времени накопления заряда приведёт к сдвигу
оптического изображения, равному двум пикселям, что
недопустимо.
Применительно к космическим телескопам с нецентральным
проектированием, с оптическими схемами зеркального типа Кука
имеют место те же соотношения (4.21). Однако, в этом случае
значение х в члене (-—Wyc) существенно больше, чем расстояние
между ОЭП в схеме Ричи-Кретьена [86, 87].
4.5. Интегральные кривые движения точек подстилающей
поверхности Земли для случая круговой орбиты КА
Сдвиг оптического изображения и соответствующее ему
увеличение погрешностей определения координат ПНО в плоскости
псевдокадра могут быть вызваны не только влиянием
инструментальных погрешностей в работе БКУ и ОЭТК, но и
методическими составляющими скоростей сдвига изображения.
Последние погрешности имеют место даже при отсутствии
инструментальных погрешностей в работе бортовых систем.
Методические погрешности возникают вследствие различия в
движении отдельных точек поверхности Земли в пространстве
предметов объектива ОЭТК, вызванного поступательным и
вращательным движениями КА и вращением Земли. Движение
оптического изображения в заданной точке фокальной плоскости с
150
координатами x,z полностью описывается уравнениями (4.21),
полученными в предыдущем параграфе.
Рассмотрим физическую сущность процесса возникновения
методических составляющих, описываемого этими уравнениями.
Для этой цели поставим задачу нахождения траектории движения
произвольно выбранной точки на поверхности Земли при заданных
в начальный момент времени t0 углах тангажа а0 и крена р0
направления на нее линии визирования КА при следующих
упрощающих предположениях: орбита КА круговая, Земля не
вращается. В этом случае можно принять:
Wx=Wn, WY =0, wz=o.
Для нахождения траектории движения произвольно выбранной
точки в плоскости углов тангажа а и крена р отвлечёмся на время от
задачи съёмки, и будем полагать, что изображение точки М
непрерывно удерживается в центре фокальной плоскости ОЭТК по
направлению центральной линии визирования, то есть тождественно
выполняются соотношения:
х = 0, z = 0, s 0, = 0, V, = 0, Vz s 0.
Здесь, как и ранее, точка над параметром ф означает первую
производную по времени. При этих условиях соотношения (4.18) и
(4.19) принимают вид:
W
f—^а.. +fco = 0;
D (4.22)
w
f—-a., — fcox =0,
D
а выражения для направляющих косинусов аи, а13 из (4.2),
соответственно, вид:
ац =cosa; aj3 = sin а. • sin (3.
Воспользуемся кинематическими уравнениями Пуассона
углового движения КА, связывающими угловые скорости а>г, о>к, соР
с углами а, р, ф и их производными по времени. Для принятой
(рис.4.3) последовательности отсчёта углов - тангаж (а), крен (р),
рыскание (ф) - эти уравнения имеют вид:
гот =acos Pcosy + Psiny;
сок = Pcosvy - acos psimy; (4.23)
a>p = asinp + у .
151
При сделанных предположениях кинематические уравнения
приводятся к более простому виду:
coT=acosP; сок = Р; cop=asinp. (4.24)
Подставляя эти выражения для угловых скоростей в (4.18) и
(4.19), будем иметь
W W
—-cosa + acosB = 0; —-sinasinB-B = O.
D D
Из последних равенств нетрудно получить
дифференциальное уравнение первого порядка с разделяющимися
переменными
Р
-------- - a tga,
sin Р cos Р
интегрирование которого на интервале времени от t0 до t с
начальными значениями углов а0 и р0 дает интегральные кривые
вида
tgP = kcosa, (4.25)
где константа к определяется начальными условиями: к = .
cosa0
Графики полученных интегральных кривых в функции углов
тангажа и крена представлены на рис.4.5 для различных значений
параметра к. Напомним, что вектор скорости движения точек
наблюдения вдоль интегральных кривых направлен по
касательной к интегральной кривой в рассматриваемой точке.
Расчет интегральных кривых проведен на произвольный
момент съемки маршрута, когда оси фотограмметрической
системы координат OXYZ параллельны осям текущей
орбитальной системы координат (рис.4.3), а именно: ось OY
направлена по местной вертикали, ось ОХ совпадает с плоскостью
орбиты. Поэтому на рис.4.5 интегральные кривые построены
фактически в осях текущей орбитальной системы координат, что
необходимо иметь в виду, пользуясь этими кривыми.
152
Рис.4.5. Интегральные кривые движения точек наблюдения
Рис.4.5 дает наглядное представление о распределении
скоростей движения точек подстилающей поверхности Земли по
всему полю обзора в координатах а и 0, в том числе вдоль строки
матрицы ФПЗС. Действительно, предположим, что линейка ОЭП
(строки матрицы ФПЗС) находится в положении 1, как показано
на рис.4.5.При этом центр линейки совместится с некоторой
точкой А наблюдения, для которой построена интегральная
кривая, а направление линейки ОЭП будет строго
перпендикулярно касательной к интегральной кривой,
проходящей через точку А. В этом случае скорости движения в
других точках линейки, в особенности по ее краям (точка Л у
левого края и точка II у правого), будут отличаться как по
величине, так и по направлению от скорости в точке А.
Очевидно, что это отличие тем значительнее, чем больше
угол зрения объектива ОЭТК и длина линейки ОЭП. Причем,
скорость в точке Л, расположенной ближе к началу системы
153
координат осф, будет больше по модулю скорости в точке А и
иметь поперечную составляющую (вдоль линейки ОЭП),
направленную в отрицательном направлении оси oz. И наоборот,
скорость в точке П, расположенной дальше точки А от начала
координат, будет меньше по модулю скорости в точке А и иметь
поперечную составляющую, направленную в положительном
направлении оси oz.
Отметим, что для обеспечения перпендикулярности в точке
А касательной к интегральной кривой и линейки ОЭП последнюю
вместе с КА необходимо развернуть по каналу рыскания.
Значение угла разворота может быть определено из уравнения
(4.19) при условии Vz=0, которое при х=0, z=0 и при отсутствии
вращения КА в инерциальном пространстве, то есть при й>г=0,
сок=0, (Ор=0 дает: ai3=0. С учетом (4.2) из этого равенства
находится искомый угол разворота по рысканию:
tg\|/ = -sin|3tga . (4.26)
Из рис.4.5 также следует: при отклонении линейки ОЭП
только по тангажу в положения 2 или 3 поперечные составляющие
вектора скорости движения изображения на краях линейки ОЭП
равны по модулю и направлены в противоположные стороны.
Наконец, при отклонении только по крену в положение 4
поперечные составляющие равны нулю в любой точке линейки
ОЭП.
В силу особенностей работы матриц ФПЗС, не имеющих
поперечного переноса зарядовых пакетов (от столбца к столбцу),
наличие поперечных составляющих и различие в продольных
составляющих скорости движения вдоль линейки ОЭП приводит к
методическому сдвигу изображения.
Полученные интегральные кривые, с одной стороны,
характеризуют направление движения точек наблюдения в
плоскости углов отклонения линии визирования по тангажу и
крену. С другой стороны, они позволяют лучше понять причину
возникновения методических (остаточных) составляющих
скорости сдвига оптического изображения, а именно:
методические погрешности возникают вследствие того, что
различные точки предметного пространства объектива ОЭТК и,
следовательно, их изображения в фокальной плоскости объектива
в пределах одной линейки ОЭП движутся по разным траекториям,
то есть имеют относительное движение [90].
154
Сделанный вывод мало меняется и в общем случае
эллиптической орбиты КА и вращающейся Земли (Приложение
Б). При этом интегральные кривые лишь несколько
деформируются. Соответствующее исследование проведено в
работе [89].
Далее в этой главе установлена зависимость методических
составляющих скорости сдвига изображения от закона управления
угловым движением КА и найден закон управления,
минимизирующий методические составляющие скорости сдвига
изображения и, тем самым, повышающий качество снимка и
точность определения координат ПНО в плоскости псевдокадра.
4.6. Теоретические основы оптимального сканирования
космическим аппаратом поверхности Земли
4.6.1. Постановка задачи оптимального сканирования
Современные методы космической оптико - электронной
съемки поверхности Земли развились на базе традиционных
методов, использованных еще на самых первых КА
дистанционного зондирования Земли отечественного
производства. Ретроспективный анализ этих методов [20]
показывает: для того, чтобы сформировать программу
сканирования с трехосным управлением КА, необходимо
составить три уравнения связи.
С помощью этих уравнений однозначно могут быть
получены функциональные зависимости трёх составляющих
вектора угловой скорости от времени. В результате
интегрирования составляющих вектора угловой скорости
определяются углы, а после дифференцирования - угловые
ускорения вращения КА.
В частности, для съемки с отклонением линии визирования
только по крену на фиксированный угол два уравнения связи
имеют следующую форму: 1) а=0 и 2) p=Const. Третье уравнение
связи для традиционной съёмки представляет собой условие
компенсации поперечной составляющей скорости движения
изображения (СДИ) в центре фотоприёмной структуры:
3) Vz(x = 0, z = 0) = 0, которое выполняется, как показано в параграфе
4.5, путем разворота съёмочной аппаратуры на определенный
компенсационный угол по рысканию.
155
Для ОЭТК нового поколения, по мнению авторов работы
[20], целесообразно сохранить требование компенсации
поперечной составляющей скорости движения оптического
изображения в центре фотоприёмной структуры (ОЭП).
Откуда следует первое уравнение связи: V2(x = 0,z = 0) = 0.
Второе уравнение связи для системы с регулировкой
скорости движения изображения определяет требование к
продольной составляющей скорости движения в центре
фотоприёмной структуры:
v(x = o,z = o)=v =vx,
где Vx зад - заданное значение продольной составляющей СДИ.
Третье уравнение связи может быть получено из условия
обеспечения постоянства продольной составляющей скорости
движения изображения по всей длине линейки ОЭП. Третье
уравнение связи может быть выражено в дифференциальной
форме:
dz
при х=0, z=0 (условие выравнивания продольной составляющей
СДИ по длине линейки ОЭП). Это означает равенство нулю угла
наклона касательной к годографу продольной скорости в центре 0
линейки ОЭП.
Метод формирования программы углового движения КА при
сканировании, основанный на приведенных выше условиях связи,
назовём эвристическим. Это обусловлено тем, что этот метод
базируется на основе простых инженерных соображений и
является результатом удачных находок и соответствующих им
решений.
К настоящему времени известно и используется в практике
оптико-тронного сканирования несколько вариантов
эвристического метода формирования программы углового
движения КА. В частности, к таким вариантам эвристического
метода можно отнести:
- сканирование с нулевым углом тангажа и постоянным
заданным углом крена;
- сканирование с постоянными заданными углами тангажа и
крена;
- управление с тангажным замедлением движения
подстилающей поверхности Земли;
156
- сканирование с произвольно заданным начальным
азимутом средней линии маршрута;
- сканирование с произвольно заданным постоянным
азимутом средней линии маршрута;
- сканирование с выравниванием продольной составляющей
скорости движения изображения по длине линейки ОЭП.
В качестве примера может быть рассмотрен последний из
перечисленных вариантов формирования программы углового
движения КА при сканировании, являющийся вершиной
достижений эвристического метода. В дальнейшем в связи с
разработкой основ теории оптимального сканирования будут
определены место и значение эвристического метода в теории
оптимального сканирования.
Итак, для выравнивания продольной составляющей скорости
движения изображения по длине линейки ОЭП эвристический
метод предлагает использовать следующие три уравнения связи;
V(x = 0,z = 0)=0 ;
V (x = 0,z = 0)=V; ; (4.27)
— —-^-(х = 0, z = 0)= О
dz
Последнее из этих условий определяет равенство нулю угла
наклона касательной к годографу продольной составляющей
скорости движения изображения в центре линейки ОЭП.
Здесь необходимо отметить, что объективы современных
ОЭТК для получения необходимого разрешения выполняют, как
правило, длиннофокусными, так что их угол зрения 25 не
превышает нескольких угловых градусов. При таких малых углах
любая нелинейная при больших углах функция пренебрежимо
мало отличается от линейной функции.
Учитывая линейный характер изменения продольной
составляющей скорости движения изображения вдоль линейки
ОЭП, переформулируем два последних условия в виде равенства
продольных составляющих СДИ на левом и правом краях линейки
ОЭП заданной величине V'. В этом случае условия связи примут
вид:
V (х =0,z = 0)=0 ;
VM(x=0,z = zJ=v; ; (4.28)
Vn(x = 0,z = z„) = V; .
Подставим выражения для скоростей движения изображения
157
(4.18) и (4.19) в условия (4.28). Принимая (рис.4.2), что на левом
краю центрального ОЭП гл=-Х, а на правом zn =+Х, и х = 0,
получим (после перестановки уравнений):
—(W а,, + W а + WaJ+fia +Хсор - V
^-(Wxa„ + Wya„ +Wza„)+fcoT-Xcop=V/; (4.29)
^-(WxaI3 + Wya33 + Wza33)~ fcoK =0.
Здесь параметр Do в третьем уравнении есть дальность вдоль ’
центральной линии визирования, параметры Dn и Dn -- дальности
до точек наблюдения, проектирующихся на левый и правый края
линейки ОЭП соответственно.
Полученная система уравнений (4.29) полностью определяет
угловые скорости 0^, GX, (Op КА при сканировании.
Для определения составляющей оу сложим первые два
уравнения (4.29), для вычисления составляющей (Пр вычтем первое
из уравнений (4.29) из второго, а из третьего непосредственно
определяется составляющая (0к.
В итоге получим:
со = —| —I (w а.. + W а„ + W а„) ;
f 2^Dn DJ * ”7
и =—(wa„ + Wa„ + Wa„) ;
к y-v \ x 13 у 23 z 33 / ’
L'o
co = — f—---—l(w a..+W a,.+Wa3.) .
p DjV ‘ " y 21 z 317
Используя полученные ранее и приведенные в Приложении
А результаты расчётов некоторых вспомогательных параметров
дальности, а именно, (А. 13) и (А. 14) при х=0, z=0, окончательно
будем иметь искомую для рассматриваемого варианта
эвристического метода программу формирования управления при
сканировании:
158
®, (w а„ + W а„ + W а„) ;
1 г гл ' ' 11 > 21 г
’ f Do ' " > '
со, =-—(Wxa,3 + Wya,, + Wza„) ;
(4.30)
0
В итоге получена программа углового движением
космического аппарата при сканировании поверхности Земли на
любой момент времени сканирования [97]. Ниже будет показано,
что она обеспечивает выравнивание продольной составляющей
скорости движения изображения по длине линейки ОЭП.
В следующих разделах при разработке основ теории
оптимального сканирования будет также показано, что этот
вариант эвристического метода формирования программы
управления при сканировании является оптимальным при
некоторых частных предположениях о положении рабочей части
ОЭП в фокальной плоскости объектива ОЭТК.
Для получения представления о значениях остаточных
составляющих скорости сдвига изображения при сканировании
произведены расчеты для этого варианта сканирования для случая
круговой орбите КА с высотой Н=350 км. На рис. 4.6 и 4.7
представлены результаты этих расчетов для диапазона углов аир
отклонения линии визирования ±70 град, для центральной
линейки ОЭП (х=0, z=0) и для правой крайней точки линейки
ОЭП с относительной координатой у = 0,01215. (Для левой
крайней точки ОЭП результаты получаются аналогичными, но с
другим знаком). Графики представлены в виде изолиний равных
остаточных составляющих скорости движения изображения в
мм/с.
Из рис. 4.6 следует, что продольные составляющие скорости
движения изображения действительно хорошо скомпенсированы
и их остаточные значения AVX не превышают 0,05 ммс. В то же
время из рис. 4.7 следует, что
поперечные составляющие AVZ компенсируются не столь
хорошо и их
остаточные значения достигают 3 мм/с.
Рис. 4.6. График изменения остаточных продольных составляющих
скорости сдвига изображения при
— = 0,01215
f
Из практики применения эвристического метода
формирования программы управления угловым движением КА
при сканировании известно, что поперечные составляющие
скорости движения изображения могут быть в какой-то степени
160
уменьшены выбором начального азимута сканирования (угла
разворота КА по рысканию).
Рис. 4.7. График изменения остаточных поперечных составляющих
скорости сдвига изображения при — = 0,01215
Причем, если в интересах решения задачи получения
высокого
разрешения необходимо ограничиться величиной остаточной
поперечной составляющей сдвига, равной, например, 0,1 мм/', то
необходимо съемку проводить в ограниченной полосе углов а и [3,
примыкающей к изолинии «0».
В связи с изложенным возникает вопрос о возможности
дальнейшего улучшения программы углового движения КА при
161
сканировании.
Чтобы ответить на этот вопрос, необходимо поставить и
решить задачу определения оптимальной программы управления.
Для этого необходимо показать, что возможна адекватная и
математически строгая постановка задачи формирования
программы управления угловым движением КА в форме задачи
минимизации некоторого функционала качества. В результате
минимизации этого функционала определялись бы параметры
оптимальной программы сканирования. Этот подход можно
назвать формированием оптимальной программы сканирования.
Постановка новой задачи оптимизации может состоять в
следующем. При заданных углах отклонения центральной линии
визирования по тангажу а и крену 0 требуется найти такие
значения составляющих вектора угловой скорости КА 0^, (Ок, (Ор и
угол поворота по рысканию \у, которые минимизируют
квадратичный функционал качества:
3 = AV^ + AV^ + AV^ + AV^,, (4.31)
где AVv, AVxn, AVM, AVzn - остаточные продольные и
поперечные составляющие СДИ на левом и правом краях рабочей
части линейки ОЭП.
духл=4- (Wxau +
-
Wya21 + Wza31)-y(wxa12 + Wya22 + Wza32)l +
P
+ ftoT - Zj, co
AVxn = -Ц (Wxat! + Wya21 + Wza3,)- ^(wxa12 + Wya22 + Wza32)
L *
4- fcoT zn (Op ~ Vx;
^Vzn='jT— (Wxa13 + Wya23 + Wza33)-"7L(Wxa12 + Wya22 + Wza31) ~
^л L t
л L
- fcoK + xcop;
AVzn =-£- (Wxa13 + Wya23 + Wza33)- ^(wxa12 + Wya22 + Wza32)
L *
(4.32)
- f(0K + XCOp
Здесь Vx* - заданное значение продольной составляющей СДИ,
которое должно выдерживаться при сканировании. Оно
определяется светотехническими характеристиками объекта
162
наблюдения и матриц ОЭП. Выражения для остаточных
составляющих скорости движения изображения соответствуют
уравнениям (4.18) и (4.19), описывающим истинные
составляющие СДИ с точностью до членов второго порядка
малости относительно р у - Индексы "л" и "п" относятся к левому
и правому краям рабочей части линейки ОЭП соответственно; для
них выполняется: z„=z-X, zn=z + X (рис.4.2). Здесь х и z -
координаты центра рабочей части ОЭП.
Адекватность такой математической постановки задачи
оптимизации истиной задаче минимизации продольных и
поперечных остаточных составляющих СДИ обосновывается
следующими утверждениями.
Во-первых, как уже упоминалось, для узкопольных систем
наблюдения графики остаточных продольных и поперечных
составляющих скорости сдвига изображения с высокой степенью
точности являются линейными. Поэтому минимизация квадратов
остаточных скоростей сдвига изображения на левом и правом
краях линейки ОЭП автоматически минимизирует и квадраты
остаточных скоростей сдвига изображения в центральной точке
линейки ОЭП.
Во-вторых, в отличие от всех рассмотренных выше
вариантов эвристического метода в данной формулировке
постановки задачи впервые ставится вопрос о минимизации
квадратов поперечных составляющих скорости сдвига
изображения.
Поскольку в эвристическом варианте сканирования с
выравниванием продольной составляющей по длине линейки
ОЭП все три составляющие вектора угловой скорости КА со
определялись для обеспечения обнуления лишь остаточных
продольных составляющих скорости сдвига изображения, для
состоятельности новой задачи оптимизации целесообразно
положить оптимизирующим параметром угол рыскания у наряду
с составляющими вектора со.
В-третьих, поставленная задача сформулирована в самом
общем виде, настолько общем, насколько это вообще возможно.
Поэтому можно ожидать, что полученное решение этой задачи
будет содержать все основные достижения эвристического
подхода, приведенные выше.
163
4.6.2. Определение оптимальных составляющих вектора
скорости углового движения КА при сканировании
Перейдем к решению задачи, сформулированной в
предыдущем параграфе. Её решение приведено в работах [89, 90,
97]. При этом в общем случае будем полагать, что линейка ОЭП
является нецентральной, то есть она смещена вдоль оси ох (рис.
4.1), причем таким образом, что координаты х, z центра рабочей
части линейки ОЭП не равны нулю: х*0, z*0. Тогда z4=z- X,
zn= z + X и уравнения (4.32) запишутся в виде:
+ fcoT -(z-Х)о)р - V*;
AVxn (Wxal 1 + Wya21 + Wza31)“ 4(Wxa12 + Wya22 + Wza32)
L *
(4.33)
+ ftoT - (z + X)cOp - V*;
AVzji (Wxa13 + Wya23 + Wza33)~ ' f^(Wxa12 + Wya22 + Wza32)
- fcoK + xcop;
AVzn =— (Wxa13 + Wya23 + Wza33)-~~(Wxa12 + Wya22 + Wza32)
un L T
- f(Ot, + X(On.
к p
Подставим эти уравнения в функционал (4.31). В
соответствии с методами вариационного исчисления для
нахождения оптимальных значений угловых скоростей
сканирования необходимо приравнять нулю частные производные
от полученного выражения для функционала по угловым
скоростям тангажа (со,.), крена (сок) и рыскания (Wp), а для
нахождения оптимального значения угла рыскания -
соответственно приравнять нулю производную по этому углу.
Подстановка составляющих (4.33) с использованием
компактной формы записи (4.21) для составляющих
относительной скорости движения центра масс, представленных в
проекциях на оси связанной (программной) системы координат, в
функционал (4.31) с точностью до членов второго порядка
малости даёт выражение для функционала:
164
f ( XI I
3=<----- Wxc- —Wvc 4-f coT — (z — X)con — Vx > +
Г> I *'' £ j 1 ' 7 p XI
\ 1 / J
r f 7 X (2
+ Wxc_TWyc +f“T-(z + ^)wp-Vx 4-
I U-\ * / j
x2 (4.34)
I f f 'I c I
+ I Г» Wzc - WyC fcOK +XCOp ? +
lил v I ) J
Г Г / 1 \ I2
If ... z + A„. ) _
+ 5-- W,(.----wv„ -tco„4-xco->
I rx I p ус I к p
1ип v 1 / J
Вычислим и приравняем нулю первую производную от
функционала (4.34) по угловой скорости КА по тангажу: -^_ = 0.
йсот
Имеем:
С f X * 1
2---- Wxc--Wvc +fcoT-(z-k)con-Vx И +
ТА I АС С У'*' * ' ' Р А
1иЛ V 1 7 J
f f* / х А * 1
+ 25-- Wxc - —Wvc + fcoT -(z + X)co„ - Vx >f = 0
l^n \ 1 7 J
После деления этого соотношения на 4f2 и приведения
подобных членов получим:
z V' 1 ( 1 1 V,,, х ,,, ")
со — со = —-----— н---- W — W . (4.35)
f р f 2(D„ f ’J
Вычислим также и приравняем нулю первую производную
от функционала по угловой скорости КА по крену: -— = 0. В
йсо,
результате получим:
2(— | Wzc—Wvc |-fcoK 4-хсо- ) (-f) +
I у") У*' J Р | ' *
4-2(— I W7C-^-^wvc |-fwK 4-хсо— M-f)=0 .
[Un\ 1 7 J
После деления этого соотношения на 4f2, приведения
подобных членов и с учётом равенства (А. 14) из Приложения А с
точностью до членов второго порядка малости будем иметь:
ш -Аш =1| J_ + J_¥w £w (4.36)
’ f ₽ 2^D„ Djl f ycJ
165
Наконец, вычислим и приравняем нулю первую
производную от функционала по угловой скорости КА по
ЭЗ _ п „
рысканию: ---= 0. Результатом этих действии является
Эсор
уравнение:
2 Wwxc-^Wyc\f(oT-(z-X)cop-Vx*l(-z + X) +
\ I ) J
f f X 1s
+ 2 <—— Wxc - — Wyc + f coT -(z + X)cop -Vx >(-z-X)+
l^nX / J
+ 2 < —— | W7C - -—- Wvc | - f co„ + x con > x +
[оД f у J PJ
[ f f z + X 1
+ 2<.- W7C-----Wvr - f cox + xcon > x = 0 .
[DnV f У ) PJ
После деления на 2f, раскрытия круглых скобок в первых
двух членах и приведения подобных с точностью до членов
второго порядка малости получим:
—— + —5— j (- WXP z + W7„ • х) +1 —-— I Wxr - A, — 2 z 1 coT - — con |
n n ' XL zc ' n n xc 1 f P
un J \иЛ иП 7 k 1 7
- 2x coK
x 2-2
---con 4— A,
f PJ f
z *
con + 2—Vx =0
P f x
После подстановки в это соотношение выражений (4.35) и
(4.36) имеем:
' z + Wzc х)+| —--------— I Wxc • X-
' I у'ч p* I AV
\ил ип/
-2z
—--Ц- + —j| wxc--Wyc
f 2^Dn DnJ\ xc f yc
2 э z *
+ -Х2 con+2-Vx =0
f Р f х
-2x
- —+— |fwzc-- wvc
[_2^ОЛ Djl f Ус
После приведения подобных членов обнаруживается, что все
fi О
члены с сомножителями------н — и V взаимно уничтожаются
DnJ
так, что в результате с точностью до членов второго порядка
малости получим:
166
1
D.,,
11 2 7
— . Wxc A + -V wn =0 ,
DnJ f P
откуда
1 f f 1 И W
Р DnJ
Используя соотношение (А. 14) из Приложения А для
разности обратных величин для Dn и Dn, получим окончательное
выражение, определяющее оптимальную скорость КА по каналу
рыскания;
ЫР opt ~а23 n п Wxc.
Dq и20
Подставляя это выражение в (4.35) и (4.36), с учётом (А. 13)
из Приложения А, будем иметь:
z г
шт - Ja23
(4.37)
шк ~^а23
( X Z
1 + 1 уа21 + Ja23
хс - - Wvc
Av £ У''
•Wxc =
D0D20
f 2 D0
---~ ' wxc =
Do D20
_ 1 2
"2 Do
1 Iх z I r
1+ 7a21 +7a23 ——
M I J D2o
7
V/ - — W
'' ZC £ ус
Подводя в этих выражениях подобные члены, с точностью до
членов второго порядка малости будем иметь окончательные
выражения для оптимальных значений угловых скоростей по
каналам тангажа и крена:
f D
Штор1
Шкор1
. х Г
1 + — а2. —
f D
X г
= -а,, -
f -’d0d20
w-
20 J 1
1
—--W +— 1+ -а
_ _ - - । f
Z ) г
—а,, ----
f ) d20J
(4.38)
Wz. - — W (4.39)
* f Dn ус 7
D
Выражения (4.37), (4.38), (4.39) представляют собою
искомую программу оптимального сканирования. В эти
выражения входят составляющие скорости движения центра масс
КА относительно точки наблюдения, представленные в связанной
(программной) системе координат.
С использованием соотношений (4.20) выражения (4.37),
(4.38), (4.39) могут быть представлены составляющими скорости
167
движения центра масс КА относительно точки наблюдения в
орбитальной системе координат:
ы . = —---— I l + a2I~— (w а,, + W а,. + Wa„)+
ropt г рч I 2 Г Г> ' 1(11 у 21 ZJI/
1 ^0 \ 1 ^20 )
fD
“кор.
1
+ D0
Х (w,a,2 + Wya2
х г
= а,,--------
f D • D
, (х z
• 1 + — а„ + -а
Iff ! >
|_ \ 1 1 7 20
(Wxa„ +Wya2l +Wza3I) +
23ГгГ '(W’aB+Wya23
J D?n
(4.40)
I ’
“p opt = a23 —-“--(Wxall + Wya21 + Wza31)
u0 u20
Рассмотрим частный случай этой программы применительно
к центральному несмещенному симметрично расположенному в
фокальной плоскости оптико-электронному преобразователю,
обозначенному на рис. 4.2 через ОЭП-2.
Очевидно, что справедливы следующие равенства: х=0, z=0.
Подставляя эти равенства в выражения (4.40),
соответственно получим:
ЮТopt = ~ ~ (wxat 1 + Wya21 + wza31}
I Dq
®Kopt=H-(wxa13+Wya23 + W2a33)t (4.41)
uo
и , = a„-------(w a,, + W a„ + WaJ.
p vpt 23 рч p. \ x II f 2i z 31 /
L'O ’ ^20
Представляет интерес сравнить это частное решение для
центрального ОЭП с решением (4.30) для эвристической
программы сканирования с выравниванием продольной
составляющей СДИ по длине линейки ОЭП. Факт полного
совпадения этих решений объясняет успех применения
эвристической программы сканирования для случая центрального
расположения ОЭП в фокальной плоскости объектива ОЭТК.
Нетрудно вычислить, что после подстановки оптимальных
значений угловых скоростей КА (4.37), (4.38), (4.39) в
функционал (4.30) сумма квадратов остаточных продольных
168
составляющих скорости сдвига изображения
3, =AV^ + ДУХП.становится тождественно равной нулю, а сам
функционал 3 = в этом случае приобретают остаточный
вид:
3=32=ДУ^+ДУ,„. (4.42)
Для доказательства этого утверждения запишем цепочку
равенств:
31 = AVXJI + ДУХП =
. 12
Wxc - у Wyc j + f <от - (z - XJcOp - V* +
[ f ( x A
+ \-- Wxc----Wvc + f _ (Z + ^-)^D ~ Vx
I AC jfU j ’ ' ' i
В полученные соотношения подставим выражения
оптимальных угловых скоростей КА (4.37), (4.38), (4.39). С учётом
выражений (А.11) и (А. 12), приведенных в Приложении А,
получим:
/х 1 (, X Г |( ... X
Г-БД + ?а21 Б^дхс ~ fWyc
Приводя подобные члены с составляющими \VX(. и Wyc, с
точностью до членов второго порядка малости будем иметь:
г, [ X ( X Z - X ) г ... ]
3П"'БД7а2, + Д_а23.Г5^'М +
х ( х z + X
— —а о । ч---а эд
D0(f 21 f
Л 2
--“Wyc
D20 У J
С точностью до членов второго порядка малости выражения
169
в фигурных скобках равны нулю. Таким образом, доказано, что
3, =0.
Отсюда следует важный вывод о том, что оптимизация
суммы квадратов остаточных продольных составляющих скорости
движения изображения на левом и правом краях линейки ОЭП
обеспечивается выбором одних лишь значений составляющих
вектора угловой скорости КА в инерциальном пространстве.
Следовательно, вторая часть функционала (4.42) оптимизируется
одним оставшимся параметром - углом разворота КА по
рысканию.
В результате задача оптимизации оказалась
декомпозированной на две независимые подзадачи: подзадачу
оптимизации угловых скоростей и подзадачу оптимизации угла
рыскания. Этот важный вывод объясняет успех применения
эвристического метода формирования программы углового
движения КА при сканировании при отсутствии теоретического
обоснования этого метода.
Найдём значение второй части (4.42) функционала качества:
32 =ду2п +ду2п =
f ( z - к 12
--- W7r-------Wvr - f coK + x con >
DA f y J p
f f f,,. z + X. __, „ 1
4- <-- W,r-------Wvr - f (О., + X C0n >
[da f у J PJ
Для его определения подставим в полученное выражение
формулы (4.37), (4.38) и (4.39) для расчёта оптимальных угловых
скоростей КА (i\ opt, <А opt, (Op opt.
В результате получим:
3, A^fw7r -^wyc
-а оз—-—Wxc
tf D0D20
ZC
z
X
1
1 . X z r
+ — 1+ —a?i + — а оз ---
D0 L H f JD20J
DoL
f
Wzc p Wyc jу + *a23 Wxc } +
t 7/ dod2o
I_fw - z + ^w
I VV 7Г. f VT yc
D 1 zc
x r w
tf a23 d0d20 xc
z
1 , ( x . ~ i -
ч---1 + —a2i + ~a23 A—
D0[ If f 23Jd20J
f
Wzc — Wv I) + x a 23--Wxc p
f У J/ D0D20 !
170
Используя соотношения (А.11) и (А.12) из Приложения А и
приводя подобные члены, можно записать:
32=-{ — 1 + f—а21+-—~а2з'1~~— fWzc -- Wv,.'I-
2 [DqL <f f JD2oJ< f y J
I X z
1 + l Ja21 + Ja23
r
D20_
___.
D0.
[ f , , ~
[Do|_ <f 21 f 23
x z + X
f f
f (х 7
----1+ —а21 +—а23
DqL If f
32 =
z M2
wzc--wycl
r
D20_
wzc -~^Wyc
>2
7. 1
w -—w >
vv ZC f УС ) I
X Z I Г i
f-zi
После выделения членов, содержащих параметр X, находим:
7 1
W W + — W
** zc f УС J f УС
X Z ) г
Ja21 + Ja23
f ( X 7
---- 1+ ~a21 +~a23
DqL If f
X z
f f
X г \ (
d20j fa23D20/Ll
4 2
Wzc — — Wyc j > •
r
D20.
f
X r \ (
7a21+7a23 It— + ya23 ——)
и20/1Д
Ч 2
Wzc --Wvc H
f / I
X z
f f
r
D20 J f
z X.
Wzc--Wvc —Wvc
I , f X Z ] r
DqL If f 3Jd20J
После раскрытия скобок, приведения подобных членов и
X „
исключения — * 0 с точностью до членов второго порядка
малости будем иметь:
Гх 2z ) г
7а21+таи,М
32 =
Wyc - a23 -L- wzc
u20
-7a23— Wyc
f 23d20 ycj
X r 'I2
3—a 23--Wvc >
f d20 ycJ
,1х 2z ] r ...
+ ) 1+ 7a21 +“7a23 k;— W’
[LU I 7d20.
Отсюда с точностью до членов второго порядка малости после
перестановки членов окончательно имеем:
х 2z ) г
yc a23 n Wzc
u20
2
^2 -)a23 7~Wzc
I u20
1 + Ta21+— a23 кт— Wyc
f •"* ' f ~"Jd20
171
Полученное выражение представляет собой соотношение
(4.42) в компактной форме записи. В развернутой форме оно
имеет вид:
а23~" (Wxa13 + Wya23 + Wza33 )~
^20
(Wxa12 + Wya22 + Wza32 ).
(4.43)
,1х , ->z r
1+ 7a2i +27a23 7;—
v t 7U2o
Повторим, что из полученных результатов следует важный
вывод о том, что оптимизация суммы квадратов остаточных
продольных составляющих скоростей сдвига изображения на
левом и правом краях линейки ОЭП обеспечивается выбором
одних значений составляющих вектора угловой скорости КА в
инерциальном пространстве. При этом оставшийся функционал
(4.43) минимизируется углом разворота КА по рысканию. В
результате задача оптимизации оказалась декомпозированной на
две подзадачи: подзадачу оптимизации угловых скоростей и
подзадачу оптимизации угла рыскания.
Этот вывод важен не только с теоретической, но и с
практической точки зрения. Благодаря этому выводу на борту КА
или на наземном специальном комплексе (ИСК) можно решать
задачу определения начального значения оптимального угла
рыскания (или оптимального азимута) на момент начала
маршрута для формирования программы работы КА. Далее в
случае решения этой задачи на ИСК полученное значение в форме
начального азимута маршрута можно закладывать на борт КА в
составе рабочей программы (РП). В этом случае в БКУ КА можно
решать лишь задачу формирования оптимальной программы
управления угловым движением КА с использованием
соотношений (4.37), (4.38) и (4.39).
Установленный факт объясняет также успех применения
эвристического метода сканирования, в котором минимизируются
(сводятся к нулю), как теперь становится ясно, лишь продольные
методические составляющие скорости сдвига изображения.
4.6.3. Определение оптимального угла рыскания КА на
заданный момент сканирования
Для определения оптимального угла рыскания вычислим
172
первую производную по этому углу от функционала (4.43) и
приравняем полученную производную нулю. Заметим , что в
функционале (4.43) только элементы ау (i,j=1,2,3) матрицы А,
определяемые соотношениями (4.2), являются функциями угла у.
При этом необходимо учесть, что в соответствии с (4.2)
имеют место равенства для производных по времени от
направляющих За13 . Эу косинусов: да 23 . -х “а21> ду дазз . ду 31 ’
^1 = 0; Эхр д^22 0. Эу ^31 = О; Эц/ (4.44)
^и=-я Эх|/ 13 да2! _ ’ “ а23 ду Эаз1 - л ’ Эж 33 ‘
Дифференцируя полученное выражение для функционала по
Wza3s)- 1 + ( 7а21 + 2|а23 х
углу и приравнивая производную нулю, с использованием
значений (4.44), получим:
]а23 7~(Wxa13 + Wya23 + '
I и20
x(Wxa12 + Wya22 + Wza32 )}:
x)a217^—(Wxa13 + Wya23 + Wza33)+a23 7;—(Wxal 1 + Wya21 +
I D20 D20
+ Р|а23 ~27a21^77—(Wxa12 + Wya22 + Wza32)}~°-
V I >u20
D2oj (4.45)
Отсюда следует, что оптимальное значение угла рыскания у
определяется двумя уравнениями в фигурных скобках,
записанными в симметричном относительно у, в виде:
a23(Wxa13 + Wya23 + wza33 )~ (Wxa12 + Wya22 + Wza32)—“
1 2z ' (4Л6)
~y[a21(Wxa12 + Wya22 + Wza32)]--ya23(Wxa12 + Wya22 + Wza32)=° >
a21(Wxa13 + Wya23 + Wza33 a23 (WxaI 1 + Wya21 +Wza31j +
x r / Yl 2z / \ (4-47)
+ y[a23(wxa12 +Wya22 + Wza32)j-yra21(Wxa12 +Wya22 +Wza32)=0 •
В соответствии с теорией квадратичных форм первое из этих
уравнений определяет наличие глобального минимума в решении
173
задачи, если это уравнение имеет действительные корни,
поскольку определяется членом в фигурных скобках (4.43),
возводимым в квадрат. Если же (4.46) не имеет действительных
корней, то второе из этих уравнений (4.47) определяет наличие
локального экстремума в решении задачи.
Если ввести обозначение 32 = [ф(у)]2 для квадратичной
целевой функции качества, то оптимальное значение у
определяется из равенства
Э\|/ о\|/
Очевидно, что существуют два возможных решения: <р(\|/) = О
или — = 0. В этом случае действует исключающее «или»: либо
Эу
имеет место одно решение, либо другое.
Если уравнение <р(\|л) = О имеет действительные корни, то
существуют глобальные минимумы, равные нулю. Если
уравнение <р(у) = 0 не имеет действительных корней, то решение
Эф «
имеет лишь экстремумы, определяемые из равенства —- = 0, из
которых необходимо выделить локальные минимумы и локальные
максимумы и сделать выбор между ними.
Примерное расположение корней этих уравнений приведено на
рис.4.7 и рис.4.8 соответственно.
Рис. 4.7. График зависимости поперечной скорости сдвига
изображения на краю ОЭП от угла рыскания при наличии
глобальных минимумов
174
Рис. 4.8. График зависимости поперечной скорости сдвига
изображения на краю ОЭП от угла рыскания при наличии
лишь локальных экстремумов
Для проведения дальнейших преобразований введем
следующие обозначения для некоторых параметров, которые
являются функциями составляющих вектора относительной
скорости центра масс КА и углов отклонения КА по каналам
крена и тангажа:
b] = Wx sin2a + Wy 2sin2a ;
Ьг = Wx sina cosp - Wy cosa cosp - W2 sinp ;
Ьз - Wx cos2a sinp + Wy sin2a sinp - Wz sinacosp ;
b4 = Wx sin2a sin2p - 2Wy cos2a sin2p + Wz cosa sin2p ;
t>5 ~ Wx sinacosa sinpcosP - Wy cos2 a sinp cosP- Wz cosa sin2 P ;(4.48)
t>6 = Wx sin2 a cosp- Wy sina cosa cosP - Wz sinasinp;
by = Wx sin2a(l + sin2p)+ Wy2(sin2a-cos2asin2p)+ Wzcosasin2p
Благодаря этим обозначениям последующие соотношения
примут более компактный вид.
Расчет оптимального угла рыскания КА начнем с первого
уравнения (4.46), то есть с поиска глобального минимума в
решении задачи.
Подставим в него значения элементов ау (i, j = 1,2,3) из (4.2),
разделим на cos хр, учтём равенство -----= ^/1 + tg2vp и приведём
cosvp
подобные члены. В результате после умножения на 2 получим:
175
2(sinatgy-cosasinp)|wx (cosatgy + sinasinp) + Wy (sinatgy-cosasinp) + Wz cosp]-
- 2[wx (- sinacosp) + Wy cosacosp + Wz sin p] (1 + tg2y -
-21 (sin a + cos a sin Ptgy)[wx (- sin a cos p) + Wy cos a cos P + Wz sin р]д/1 + tg2y -
-2^(sinatgy-cosasinp)[wx (-sinacosp)+ Wy cosacosP + Wz sinp]-Jl + tg2V = 0
Приведём подобные члены. При этом приведение подобных
членов произведём отдельно для основных членов и малых
членов, содержащих у, у.
В результате получим:
tg2y (wx 2sinacosa+ 2Wy sin2a)+ 2(wxsinacosp~ Wycosacosp- Wzsin p)——
+ 2tgy [wx (sin2asin p-cos2 asinp)-Wy (sinacosasin p + sinacosasin p)+
+ Wz sinacosp]-2(wx sinacosasin2p- Wy cos2 asin2 p + Wz cosasinpcosp)+
+ 2 (wx sina cosp - Wy cos a cos P - Wzsin p )-^2. +
+ y>/> + tg2 y{tgy[(Wx2sinacosasinPcosP - Wy2cos2asinpcosP-H/) 2 cos (Z sin2 /?)]
+ [(Wx2sin2a cosP - Wy2sinacosacosP - Wz2sinasinp)]} +
+ •^A/l-i-tg2y{tgy(Wx2sin2acosP-Wy2sinacosacosP - Wz2sinasinP) -
- (wx2sinacosasinpcosp - Wy2cos2asinPcosP - Wz2cosasin2p)} =0
Используя введенные обозначения (4.48), полученное
выражение в итоге можно записать в более компактном виде:
tg2y(b) + 2Ьз —— ]-2tgу b3 -[ Ьд -2Ь3—— j +
Г J J (4.49)
+ у71 + lg2V ’ (tgV • 2b5 + 2b6) + у 71 + ' 2 OgV' 2b6 - 2b5) = 0
Приведенное квадратное уравнение относительно tgy имеет
четыре корня. В последующих материалах настоящей монографии
будет показано, что если оно имеет действительные корни, то они
попарно определяют положение четырёх глобальных минимумов,
равных нулю.
176
Аналогично найдём оптимальный угол рыскания для второго
уравнения (4.47), то есть определение локального экстремума в
решении задачи.
Подставим в это уравнение значения элементов a,j (ij = 1,2,3)
в соответствии с (4.2) и разделим его на cos2\j/. В результате
получим:
(sina + cosasinPtgv)[Wx(cosatgv + sinasinp) +
+ Wy(sinatgy - cosasinp) + WzcosP ] +
+ (sinatgvg - cosasinP)[Wx(cosa - sinasinptgy) +
+ Wy(sina + cosasinptgy) - Wzcosptgvg ] +
x
7
(sinatgvg - cosasinp)[-WxsinacosP + Wycosacosp +
+ Wzsinp X/1 + tg2\g } -
- -^(sina + cosasinptgv)[-WxsinacosP +
+ Wycosacosp + WzsinP У1 + tg2vg = 0
После приведения подобных членов отдельно для основных
членов и для малых членов, содержащих | и|, будем иметь:
tg2^[wxcos2asinp + WySinacosasinp - Wxsin2asinp +
+ WySinacosasinP - Wzsinacosp] + tgy [2Wxsinacosa +
+ 2WySin2a + 2Wxsinacosasin2p -2WyCos2asin2p + 2WzcosasinPcosP ] +
+ [wxsin2asinP - Wysinacosasinp + WzsinacosP - Wxcos2asinp -
P ] + yV’ + tgV
- WySinacosasin
tgv
Wxsin2acosp + WySinacosacosp +
+ Wzsinasinp) ]+ (WxsinacosasinPcosp - WyCOs2asinPcosp - Wzcosasin
+ “--^1 + tg2y[tgy(\Vxsinacosasinpcosp - WyCOs2asinPcosp -
- Wzcosasin2p) + (wxsin2acosP - Wysinacosacosp - Wzsinasinpj] =0
Используя введенные обозначения (4.48), полученное
выражение в итоге можно записать также в более компактном
177
виде:
tg2v|/b3 + tg\|/b7 -b3 -i-Jl + tg2v (tgv b6 -b5)+
___________ f (4.50)
+|VI + tg2'i'(tgvb5 +ь6)=о .
В результате получено ещё одно квадратное уравнение
относительно tgy, которое также имеет четыре корня. В
последующих материалах настоящей монографии будет показано,
что если оно имеет действительные корни, то они попарно
определяют положение двух локальных минимумов и двух
локальных максимумов.
Соотношения (4.49) и (4.50) для получения решения в
случаях наличия глобального минимума или локального
экстремума соответственно являются, во-первых, нелинейными
уравнениями относительно tgy и, во-вторых, содержат члены с
X Z
малыми коэффициентами у, Поэтому точное решение этих
уравнений невозможно, однако возможно их приближенное
решение.
Для поиска приближённого решения рассмотрим решение
этих уравнениий при условии отсутствия малых членов, то есть
при х = 0 и z = 0. Это соответствует случаю центрального
расположения ОЭП в фокальной плоскости объектива. В этом
частном случае уравнения (4.49) и (4.50) соответственно имеют
вид:
tg2\|/^b] +2b2~—^-2tgyb3 -^b4 -2b2^-^j = 0; (4.51)
tg2v = 2b_. (4.52)
b7
Первое из этих уравнений является квадратным уравнением
и имеет два корня относительно tgy, а второе, полученное также
из квадратного уравнения, имеет два кратных корня относительно
tg2y.
С учетом очевидного равенства b,=b7-b4 корни этих
упрощённых уравнений (обозначим их чертой сверху)
определяются из соотношений:
178
b3 ± Jbj + [b4 -2b2 °2-0- jb7 -fb4-2b2 ^"1
tgVi,2‘=---’----------7— 7 n\-----------, (4.53)
b7 - b4 - 2b2 —— |
\ r J
tg2w0=2^ (4.54)
b7
Здесь черта сверху у углов у указывает на принадлежность
этого решения случаю центрального расположения ОЭП, а
нижние индексы у углов у определяют вариант получаемого
решения: 0-два кратных корня локального экстремума, 1,2-два
различных корня глобального минимума.
По найденным действительным значениям тангенсов
находятся все значения угла рыскания.
Таким образом, в случае центрального расположения ОЭП в
фокальной плоскости объектива ОЭТК удается получить точное
аналитическое решение задачи определения оптимального
значения угла рыскания КА.
В отличие от этого частного случая в общем случае
нецентрального ОЭП точно разрешить уравнения (4.49) и (4.50)
относительно tgvp не удаётся. Причина состоит в нелинейности
этих уравнений. Однако в этом случае можно получить
приближённое оптимальное решение задачи, если
воспользоваться методом вариаций. Приведём следующее
обоснование применения этого метода.
Структура левых частей уравнений (4.49) и (4.50) такова,
что к одной части входящих в неё членов прибавляется другая с
малыми коэффициентами
. Это указывает на то, что
решения этих уравнений относительно tg\p формируют в основном
члены, не содержащие малых коэффициентов и ~ , а члены,
содержащие эти коэффициенты, лишь незначительно меняют это
решение.
Таким образом, представляется целесообразным каждое из
оптимальных решений уравнений (4.49) и (4.50) искать в виде
суммы неоптимального решения, полученного для случая
центрального ОЭП, и некоторой его малой вариации:
Voptl.2 — V1.2 ^1.2 ’ VPptO ~ Vo + ^0 (4.55)
179
Здесь Vi.2 * решение уравнения (4.53), у0 - решение
уравнения (4.54), а Д12, До - искомые малые поправки (вариации),
для которых выполняются условия:
tgAi,2=Ai,2; tg40=40. (4.56)
Проварьируем в (4.49) и (4.50) параметры, содержащие tg\|/.
С использованием формулы для бинома Ньютона (А.4) из
Приложения А с точностью до членов второго порядка малости
относительно Д1>2 и До получим:
-Для voptl,2:
tgVopu.2 = tg(v,.2 +A,.2)=tgv,.2 + (1 + tg2^, 2)д,
tg^u =tg’’('l',,2 + A,.2)=tg2v,.2 +2tgv,.2(l + tg2v,.2)A,.2;
71 + tg2V„p,L2 = +A12) = 71 + tg2 V,.2 (1 + tgVi 2д,.2} (4-57)
71 + ^Хи,2 -tgVop,^ =7i + tg2(v,.2 + Д, ,)• tg(\y, 2 + Д, 2)=
= A/l + tg2v,.: '[tgV1, +(l + 2tg2v,.,)AI.2] ,
-Для Vop,0:
tgVop.0 = tg(vo + Ao)=tgVo + (1 + tg2Vo)Ao;
tgVp.o = tg2(v0 + Ao)=tg2Vo + 2tgv0(1 + tg2Vo)Ao;
71 + tg2Vopto = 71 + tS2(vo +до) = 71 + tg2N'o(l + tgVoAo); (4-58)
V1 + tgVP<0 tgVop.o = 71 + tg2(vo +До)• tg(vo + Ao) =
= 71 + tg4 -[tgVo + (1 + 2tg2 Vo )д0 ]
Подставляя полученные выражения (4.57) и (4.58) в
соотношения (4.49) и (4.50) соответственно и приводя подобные
члены с Д1>2 и До, с учетом частных решений (4.51) и (4.52)
получим каждую из искомых вариаций Д!2 и До с точностью до
X
членов второго порядка малости относительно -,
вариаций в виде дробей:
= A(a,p,^ ) _С(а,р,у0)
в(а,0,у12) ’ 0 D(a,p,V0)
z
- и самих
f
(4.59)
где выражения, стоящие в числителях и знаменателях этих
дробей, имеют следующий вид:
180
л(а,Р, V] 2)=-y71 + t82'i'l,2 [‘gVl,2 -2b5 +2b6]~
- — д/1 + *g2Vl,2 (lg Vl ,2 ' 2b6 “ 2b5) ;
B(a,P,Vi,2)=2tgVi,2(1 + tg2Vi,2^b]+2b2——^-2(l + tg2\j7li2)b3 ; (
c(a,p, vo) = j71 + tg2Vo(tgvo b6 -b5)-|yl + tg2Vo(tgvo -b5 + b6) ;
D(a, P, Vo) = 2 tgVo (1 + tg2 Vo )b3 + (1 + tg2 Vo )b7
4.60)
Докажем справедливость полученных равенств.
Доказательство начнём с уравнения (4.49).
Подставим в уравнение (4.49) вместо параметра yopt 1>2 его
выражение через приближённое значение v12 и поправку
(вариацию) Д1>2 (4.56). С учётом выражений (4.57) для функций tg
Vopt i,2 получим:
[tg2Vl,2 + 2tgVi,2 (• + tg2Vl,2)д1,2]^b] + 2b2—yj -
’ 2[tgVl,2 + (1 + tg2 Vl,2)Д1,2] b*3 ~ ^b4 - 2b5—y-j +
+ J^71 + tg2Vi,2 {tgVi,2 + (1 + 2tg2Vi,2)^i,2]-2b5 +
+ (l + tgv1>2 Al,2)'2b6}) + у ^+tg2Vl,2{ [tgVl,2 + (1 + 2tg2Vl,2 ^1,21 2b6 -
- (1 + tg4q>2 Aii2)-2b5}} =0
Учтём далее, что здесь v>, есть решение уравнения (4.51).
Поэтому после раскрытия скобок в полученном выражении и
вычитания из него выражения (4.51) будем иметь:
181
2tg4'l,2(l + tg2Vl,2)^l,2^b1 +2b2—^2-^-2 (1 + tg2 Vl,2 )Д1,2 b3 +
+ yj-^/1 + tg2V1.2 [tgV1.2 '2b5 +2b6| +
+ |-\/l + tg2Vl,2 [(1 + 2tg2Vl,2 )Д1,2 ’ 2b5 + tgVl,2 Д1,2'2b6 Jj“ +
+ у p1+tg2V1.2 [tgVl,2'2b6 - 2b5 ]} +
2z f f о [Z 7__________ __ Tl
+ y|71 + tg Vl,2lV + 2tg V1.2 УА1,2'2b6 - tgVl,2 ,2 2b5 Jp = 0
Приводя подобные члены с Д1>2 и оставляя их в левой части
уравнения и перенося члены, не содержащие Д1>2, в правую часть,
получим
/2tg\pi (1 + tg2Vi,2 jfb] + 2b2 ——'j - 2(1 + tg2xpi 2 )ьз +
+ У Р1^2^!-2 [(1 + 2tg2,2 )• 2b5 + tgV1,2 2Ь61 +
+ -y-|^1 + tg*'Vl,2 К1 + 2tg244,2 )' 2b6 -tgVl,2’2b5]j^Al,2 ~
= ~yp1 + tg2'i'1,2 [tgVl,2 2b5 + 2Ьб]} -
-y-p/h+tg2^ (lgVl,2 • 2b6 — 2Ь5)|
Отсюда находится искомая поправка Д)>2:
д = АкР. 4/1.2)
1,2
где выражения, стоящие в числителе и знаменателе этой дроби,
имеют следующий вид:
А(а,Р, \j7i,2)=-y71 + tg2'i'l>2 [tgVl^ • 2Ь5 + 2Ьб]~
-у^7ь^2'*'1,2 (tgVi,2 -2b6— 2bs) ;
в(а, ₽, У1;2) = 2 tg\j/1>2 (1 + tg2V] д ^b! + 2b2 -2(1 + tg2xpj 2 )• b3
Здесь при выборе выражения для параметра B(a,p,V12)
исключены члены, содержащие малые коэффициенты j и |,
ввиду малости самой искомой поправки Д!>2 (параметр A(a,p,vj/12)
182
содержит только члены с малыми коэффициентами - и -).
f f
Расчёт поправки До проведём аналогично расчёту поправки
Д|,2 •
Представим уорю в форме (4.55). С учётом выражений (4.56)
и (4.58) уравнение (4.50) представим в виде:
[’g2Фо + 2 (1+‘g2Фо Ко ]ьз + Кфо + (1 + tg2 vo Ко |ь7 - ь3 -
- у ^/1 + ‘е2Фо {кфо + (> + 2‘g 2Фо Ко К ~ 0+tgФо Д о )bs})+
+j^71 + t82vo {[tgvo + (*+ 2^2ФоКо Ks + 0 + Ч»Фо До)ьб= °
Учитывая, что есть решение уравнения (4.52), раскроем
скобки в полученном выражении и вычтем из него (4.52). В
результате получим:
ZtgVo^+tg^oKobs + (1+^2Фо)дО Ь7 -
- у з/1+^2Фо ЬёФо Ь6 - ь5]-уз/1+,ё2Фо К1 + 2 ^2Фо )Д0 Ь6 - tgvo Д0 Ьб]+
+ у71 +162Фо [tgV0b5 + Ьб] + уз/1 +tg2Vo К + 2 tg2Vo )д0 ь5 + ,ёФоДО Ьб]= О
После приведения подобных членов с д0 имеем:
К tg Фо (1 + tg2 Фо )b3 +(1 + tg 2 Фо К? -уз/1 +‘В2 Фо [(1 + 2tg 2 Фо Ke - tg Фо Ь5 ]+
+ у з/1 + ‘в2Фо К1 + 2tg2 ФоКз + ‘ВФо Ь6 ]}д0 =
= уз/1 + 182Фо(‘8Фо Ьб ~ь5 )~уз/1+‘В2Фо (tgФО ь5 + ь6) •
Откуда находится искомая поправка До :
д С(а,р,ф„)
О(а,Р,ф„)
где выражения, стоящие в числителе и знаменателе этой дроби,
имеют следующий вид:
С(а,Р,Фо) = уз/1+^2Фо^Фо 'Ь6 -b5)-|#^toob5+b6) ;
D(a, Р, фо) = 2 tg V0 (1 + tg 2 Фо )b3 + (i + tg2Vo)' b7 •
Таким образом, оптимальным решением задачи является одно
из решений (4.55), находящееся в поле действительных (не
мнимых) чисел, если иметь в виду возможность получения в (4.53)
отрицательного значения подкоренного выражения.
183
4.7. Основные характеристики оптимальной программы
сканирования
Разработка и применение на практике вариантов
эвристического метода формирования программы управления при
сканировании обеспечили создание высокоэффективных систем
дистанционного зондирования Земли. Однако при этом с
неизбежностью возникал вопрос о том, нельзя ли эти варианты
улучшить? Последним таким улучшением явился вариант с
выравниванием продольной составляющей скорости движения
изображения (п. 4.6.1).
В процессе получения оптимальной программы управления
было обнаружено, что задача получения оптимального решения
является декомпозированной на две подзадачи: подзадачу
оптимизации продольных составляющих скорости движения
изображения и подзадачу оптимизации поперечных её
составляющих. Именно этот теоретический результат позволяет
объяснить успех применения эвристических программ
управления.
При этом показано, что оптимальные значения угловых
скоростей минимизируют лишь продольные составляющие
скорости движения изображения по длине линейки ОЭП.
Минимизация поперечных составляющих скорости движения
изображения обеспечивается однократным выбором оптимального
угла рыскания, который возможен на любой момент времени
сканирования маршрута. При малых продолжительностях
сканирования оптимальный угол рыскания можно выбирать на
начало сканирования, при больших продолжительностях - на
середину интервала сканирования, а для определения начального
угла рыскания в этом последнем случае необходимо
интегрирование уравнений движения осуществлять с середины
интервала в его начало в обратном времени.
Постановка и решение задачи формирования оптимальной
программы управления КА при сканировании позволили получить
аналитические выражения для оптимальных параметров
управления - угловых скоростей по трём каналам (тангажу, крену
и рысканию) и оптимальному углу рыскания.
Важность получения аналитических выражений нельзя
переоценить. Казалось бы, в наш век всеобъемлющего
применения компьютеров в принципе возможно решение любой
184
задачи численным методом, и нет необходимости в поиске
аналитических решений.
Но на самом деле это не так. Всегда останется приоритет за
аналитическим решением задачи, если оно возможно, поскольку
оно, во-первых, более глубоко раскрывает закономерности и
свойства самого рассматриваемого процесса, а во-вторых,
является, как правило, источником постановок новых задач и
дальнейших исследований.
Так, задача оптимального сканирования решена для общего
случая смещения центра рабочей части ОЭП относительно центра
фокальной плоскости по координатам х и z. При этом
оптимальные параметры сканирования (4.59) и (4.60) содержат
добавочные члены, пропорциональные смещениям х и z.
Нетрудно дать оценку этим величинам, имея указанные формулы.
И было бы весьма сложным дать такую оценку, располагая лишь
результатами численных расчётов.
Для анализа эффективности оптимальной программы
сканирования рассмотрим пример. Предположим, что выбрана
модель (Б1) движения центра масс КА в соответствии с
Приложением Б. Орбита КА эллиптическая с параметрами: высота
перигея Нп=350 км, высота апогея На=700 км, наклонение орбиты
i=60°. Пусть съёмка начинается на экваторе в восходящем узле
орбиты, т.е. аргумент широты и = 0. Выберем также параметры
смещения ОЭП:
- = 0,006,
f
— = 0,006, относительная
половина
длины рабочей части ОЭП равна у = 0,00615.
На рисунках 4.9, 4.10 и 4.11 представлены графики
зависимости оптимальных углов уорю, Vopti и \|/opt2 в градусах от
углов а и Р в плоскости а,р в виде изолиний равных углов
рыскания, записанные в угловой мере.
Из рассмотрения графика на рис.4.9 можно сделать два
важных вывода. Во-первых, ось р изменения углов крена (при
а = 0) является вырожденной (сингулярной) линией графика
решений, так как при переходе из положительных углов а в
отрицательные значения VoPto скачком меняется с +45° на -45°
для отрицательных углов р и наоборот - с -45° на +45° - для
положительных. Отсюда следует нецелесообразность
использования решения \|/opt0 для съёмки объектов,
185
расположенных в зоне угла тангажа а = 0, поскольку при
возможном естественном и незначительном изменении истинного
угла тангажа на маршруте может измениться его знак.
Рис. 4.9. График значений оптимального угла \|/opt0
Следовательно, скачком может измениться знак у
оптимального угла рыскания \|/opt0. Кроме того, поскольку
истинное значение угла рыскания будет значительно (~ на 90° )
отличаться от оптимального, возможно возрастание остаточной
поперечной составляющей скорости движения оптического
изображения. В этом случае целесообразно пользоваться
решениями x|/optI или \|/oPt2 •
Во-вторых, съёмка вдоль оси тангажа (а) при нулевом угле
крена (Р = 0) должна производиться с оптимальным углом
рыскания, близким к нулю и учитывающим лишь вращение
Земли. А это означает, что поперечные составляющие скорости
186
Рис. 4.10. График значений оптимального угла x|/optj
сдвига изображения в рассматриваемом оптимальном варианте
при р = 0 будут такими же, как и при обычном неоптимальном
управлении. Другими словами, оптимальное решение xj/opto в этом
случае является малоэффективным.
Рис. 4.11. График значений оптимального угла уор12
187
Из графиков на рисунках 4.10 и 4.11 следует также наличие
вырожденностей на положительной части оси р (Р > 0) и на
отрицательной части оси р (р < 0 ) соответственно. Здесь имеет
место скачок по оптимальному углу рыскания на 180°.
Таким образом, на основании анализа этих трёх графиков
следует, что при а = 0 оптимальное значение угла рыскания
надлежит выбирать в соответствии с решением yopt2 при р < 0 и в
соответствии с решением уорц при р > 0 .
Обращает на себя внимание также и тот факт, что решения
Vopti и \|/opt2 существуют не во всей области возможных изменений
углов аир. Отсюда следует, что в областях, в которых
отсутствуют решения уОрп,2> необходимо пользоваться решением
VoptO-
В результате может быть предложен примерный график
использования решений y0pto , Vopti и VoPt2 , приведённый на
рис.4.12.
На этом рисунке вся область возможного изменения углов а
и Р разбита на следующие четыре области:
- центральная верхняя область с уОрЮ ограничена снизу двумя
отрезками прямых, первый из которых соединяет точку (а- +5°,
Р = -22,5° ) с точкой ( а = -5°, Р = +22,5° ), а второй соединяет
точку ( а = -5°, р = -22,5° ) с точкой ( а = +5°, р = +22,5° ). Далее с
боковых сторон эта область ограничена эллипсом с центом в
точке а = +40°, Р = 0 и уравнением эллипса, имеющим вид:
(40°) (47°)
- центральная нижняя область также с решением \|/opt0 ,
ограниченная сверху двумя отрезками тех же прямых и далее с
боков эллипсом с тем же уравнением (3.40) и с центром в точке
а = -40°, р = 0;
- левая область с решением Vopti расположена слева от
центральной верхней и центральной нижней областей;
- правая область с решением \popt2 расположена справа от
центральной верхней и центральной нижней областей.
188
Рис. 4.12. Примерный график разделения зон выбора
оптимальных углов уорЮ , Vopt 1 , Vopt 2 •
На рис. 4.13, 4.14, 4.15 приведены графики значений
поперечных составляющих скорости сдвига изображения в мм/с
также в виде изолиний равных скоростей сдвига на правом краю
ОЭП для решений Vopto > Vopti > VoPt2 соответственно, а на рис.4.16 -
суммарный график поперечных скоростей сдвига на том же краю
ОЭП, соответствующий примерному графику использования
решений vpopto, vpopti > xVopt2 , представленному на рис.4.12. При этом
значения скоростей на левом краю ОЭП отличается только
знаком.
В отличие от графика, представленного на рис.4.7, для
полученного оптимального решения, приведенного на рис.4.16,
имеют место обширные боковые области с решениями уори и yopt2
, в которых поперечные составляющие скорости движения
изображения не превышают величины 0,05-4), 1 мм/с. Это области
существования глобального минимума в решении задачи
оптимизации.
При этом очевидно, что дальнейшее снижение величины
остаточной скорости поперечного сдвига практически
невозможно, если не рассматривать возможность их исключения
при наземной обработке полученных при съёмке изображений. А
такая возможность есть, поскольку остаточные составляющие
189
скорости сдвига являются систематическими величинами,
описываемыми известными выражениями.
Дополнительным достоинством оптимального решения
является возможность выбора линии визирования, относительно
которой осуществляется оптимальное управление КА при
сканировании. Это означает, что созданы идеальные (с точки
зрения остаточных сдвигов изображения) условия в точке
фокальной плоскости с координатами х и z, через которую
проходит дополнительная линия визирования. Именно в этом
смысле используется выражение о «линии визирования,
относительно которой осуществляется оптимальное управление».
Поэтому координату z в формулах для оптимальных скоростей
(4.40) и оптимальных углов рыскания (4.55) можно воспринимать
не как центр рабочей части ОЭП, а как точку, относительно
которой необходимо вести управление и в которой необходимо
получить наименьшие методические составляющие скорости
сдвига изображения.
а
Рис.4.13. График изменения составляющих скорости сдвига
изображения для vopt0 при —j— = 0,01215,— = 0,006.
190
Ct
Рис.4.14. График изменения составляющих скорости сдвига
Рис. 4.15. График изменения поперечных составляющих
скорости сдвига изображения для 7opt2 при ^-^ = 0,01215,^ = 0,006 .
191
Рис. 4.16. График суммарного изменения поперечных
^^ = 0,01215,— = 0,006
f f
составляющих скорости сдвига при
192
Глава 5. МЕТОДЫ ОБРАБОТКИ ИЗОБРАЖЕНИЙ НА
БОРТУ КА
5.1. Формулировка задач обработки изображений
в системах автономной навигации КА
В современных системах навигации КА используются
различные средства измерений первичных навигационных
параметров, которые можно объединить в следующие группы:
- геотехнические средства, основанные на измерениях
параметров естественных геофизических полей Земли, в том числе
на измерениях таких физических полей как:
а) магнитного поля (магнитный компас);
б) поля атмосферы (барометрический высотомер);
в) поля оптического контраста (оптический визир);
г) гравитационного поля (гравиметр);
д) поля рельефа;
е) поля инфракрасного контраста и др.;
- радиотехнические средства, основанные на измерениях
параметров искусственных электромагнитных полей
(радиолокаторы, спутниковые системы);
- астрономические средства, основанные на пеленгации
небесных светил, координаты которых известны или могут быть
определены (рассчитаны) с высокой точностью;
- светотехнические средства, основанные на визировании
бортовых или наземных источников света (искусственных маяков).
Выходные сигналы большинства из перечисленных
измерительных подсистем представляются в виде цифровых
изображений, формируемых на некоторой сенсорной плоскости в
виде двумерных распределений измеряемых физических величин.
В частности, в монокулярных телевизионных системах двумерное
распределение (поле) формируется путем пространственно-
временной дискретизации первичных сигналов, в системах
видеонаблюдения используются специализированные аналоговые
интегральные микросхемы, состоящие из светочувствительных
элементов, использующих технологию приборов с зарядовой
связью (ПЗС).
С точки зрения задач автономной навигации КА по
протяженным наземным ориентирам способ получения
193
двумерных распределений не имеет существенного значения.
Поэтому в дальнейшем проблемы формирования соответствующих
полей в различных каналах не рассматриваются.
Как правило, в подобных системах рассматриваются
алгоритмы и информационные технологии обработки изображений
протяженных наземных ориентиров, получаемых с помощью
оптико-электронного телескопического комплекса (ОЭТК). Однако
эти методы, алгоритмы и технологии являются достаточно
универсальными и могут без каких-либо существенных изменений
использоваться для обработки полей, сформированных с
использованием измерительных подсистем других типов. Эти поля
можно считать изображениями. В связи с этим в настоящей главе
не рассматривается вопрос, с помощью какого средства измерения
получено соответствующее поле.
В процессе исследования будем полагать, что независимо от
способа регистрации двумерное распределение может быть
представлено в виде цифрового изображения. При этом детальному
анализу будут подвергнуты вопросы обработки и анализа
цифровых изображений, представленных в растровой форме [3].
Формируемые одним из способов цифровые изображения
могут, либо дублировать, либо дополнять друг друга. В частности,
при изменениях параметров, характеризующих условия
функционирования системы, может осуществляться переключение
измерительных каналов с целью выбора наиболее качественного
сигнала (изображения). Для реализации таких схем управления
идут по пути создания комплексных информационно-управляющих
систем, обеспечивающих повышение точности, надежности,
контролеспособности и степени автоматизации навигационных
систем за счет использования информации от средств
формирования многозональных изображений и их комплексной
обработки в темпе реального времени.
Получаемые от различных измерительных подсистем или
специальным образом формируемые изображения могут иметь
существенно различающиеся геометрические и яркостные
характеристики в описании одного того же фрагмента
подстилающей поверхности Земли. Связано это с временным
рассогласованием данных, различиями масштаба, ракурса,
особенностями формирования поля яркости и других
характеристик регистрирующих подсистем. Поэтому
194
необходимыми этапами информационной технологии являются
коррекция полученных двумерных функций распределения с целью
взаимного согласования текущих изображений с заданными
(эталонными) изображениями ориентиров и их геометрическая
привязка к заданной геоцентрической системе координат.
Этапы предварительной обработки и анализа изображений с
целью их привязки, а также обнаружения и распознавания объектов
на изображениях являются типичными для систем различного
назначения. Большое число методов и алгоритмов, реализующих
указанные этапы можно найти в книге [74], в которой выполнен
фундаментальный анализ проблем компьютерной обработки
изображений. При реализации этих методов в системах автономной
навигации КА по протяженным наземным ориентирам должны
выполняться специфические требования, связанные с
особенностями систем рассматриваемого класса. К этим
требованиям относятся:
- необходимость эпизодической перенастройки с целью
уточнения текущих характеристик системы, а также внесения
изменений в описания и изображения эталонов ориентиров,
связанная с изменением условий съемки и функционирования
системы в целом;
высокое быстродействие системы, обусловленное
необходимостью обработки изображений в реальном масштабе
времени;
- высокая достоверность принимаемых решений.
Поэтому задачу опознавания протяжённых наземных
ориентиров и связанные с ней задачи обработки изображений
будем рассматривать под углом зрения сформулированных выше
требований.
Предварительная обработка изображений является
непременным этапом многих информационных технологий. К
основным составляющим процесса предварительной обработки
относятся: коррекция яркости, компенсация динамических
искажений, фильтрация и восстановление изображений. При
необходимости преобразования изображения к виду, более
удобному для дальнейшего анализа может осуществляться также
препарирование изображений.
Предварительная обработка изображений осуществляется с
целью коррекции искажений, внесенных в оптический сигнал при
195
его формировании. В частности, решаются задачи устранения
влияния движения системы измерений (смаза), подавления шумов,
устранения искажений типа дефокусировки, а также задачи
яркостной нормализации изображения: устранение случайных
вариаций условий наблюдения поверхности (общее и локальное
выравнивание контраста) и т.п.
Основная проблема при решении задач восстановления
изображений на этапе предварительной обработки состоит в том,
что, как правило, отсутствует априорная информация о
характеристиках искажающего оператора системы регистрации.
Связано это, как с изменением погодно-климатических условий,
так и условий наблюдения (ориентации КА) на интервале
регистрации изображений. Более того, характер искажений
(например, смаз) из-за колебаний КА в плоскости, содержащей
регистрирующую ПЗС-линейку, и перпендикулярной направлению
его движения, может быть различным в разных частях
изображения, полученного в одном эпизоде съемки. Поэтому в
данном случае использование процедур синтеза
восстанавливающих (например, Винеровских) фильтров с
использованием априорных частотных характеристик искажающей
системы и помех не всегда возможно и оправдано.
В системах рассматриваемого класса более предпочтительным
является адаптивный подход, предусматривающий возможность
эпизодической перестройки восстанавливающих фильтров по
текущей информации об искажениях и помехах. Общие принципы
построения адаптивных систем с эпизодической идентификацией и
адаптацией подробно рассматривались, например, в монографии
[119]. В системах указанного класса функционально необходимыми
элементами являются блоки алгоритмов идентификации и
адаптации. В данном случае одной из задач блока идентификации
будет уточнение характеристик восстанавливающих фильтров.
Однако задачи определения характеристик (идентификации)
моделей по текущим измерительным данным часто возникают
также в ряде других подсистем КА. В частности, в системах
навигации и управления КА необходимо решать также задачи
идентификации динамических моделей КА и определения
параметров движения (вектора состояния) системы.
Несмотря на различную физическую природу явлений,
лежащих в основе описания указанных моделей, проблемы их
196
идентификации имеют общие закономерности. Опираясь на эти
общие свойства алгоритмов в работе [125] предложена
унифицированная схема построения системы, в которой алгоритм
идентификации одновременно используется как для определения
параметров модели ЛА, так и для оценки характеристик
восстанавливающего фильтра. Информационная технология
улучшения качества изображений, включающая алгоритмы
параметрической идентификации восстанавливающих фильтров,
будет рассмотрена в параграфе 5.3.
Другая серьезная проблема состоит в том, что
предварительная обработка изображений должна осуществляться в
реальном масштабе времени, т.е. в темпе проведения
видеоизмерений. В настоящее время повышение быстродействия
вычислительных систем за счет совершенствования характеристик
элементной базы достигло физических пределов, а дальнейшее
повышение производительность достигается, в основном, за счет
распараллеливания вычислений.
В рамках сложившейся парадигмы задача построения
алгоритмов предварительной обработки изображений, обладающих
высокой степенью внутреннего параллелизма, имеет важное
самостоятельное значение. Поэтому в последующих параграфах
описания некоторых рекомендуемых алгоритмов восстановления
изображений и опознавания ориентиров будут сопровождаются
анализом структуры алгоритмов с точки зрения возможности их
распараллеливания. В частности, в параграфе 5.3 этот вопрос
подробно рассмотрен в связи с проблемой построения физически
реализуемых БИХ-фильтров.
Наряду с улучшением качества изображений осуществляется
их калибровка для приведения изображений к некоторым
стандартным условиям, при которых возможно сопоставление
двумерных функций распределения с целью выявления на них
одного и того же протяженного ориентира. Эта задача существенно
усложняется, когда эталонный ориентир, с которым должно
проводиться сравнение, неизвестен. Для выбора из базы данных
ожидаемого эталона ориентира используются прогностические
расчеты, данные навигационной информации, полученные от
других подсистем, а также данные измерений текущих параметров
движения КА. При значительном временном рассогласовании
данных различных подсистем наряду с выбором изображений, с
197
наиболее близкими моментами их регистрации, может проводиться
интерполяция изображений последовательно регистрируемых
кадров.
Опознавание протяженных наземных ориентиров
осуществляется путем сравнения текущих фрагментов
регистрируемых изображений с эталонными изображениями,
хранящимися в бортовой базе данных. Если бы в базе данных
хранилось изображение всей земной поверхности, это позволило
бы проводить навигацию непрерывно на протяжении всего полета
КА. Однако объем таких, даже сжатых с высокой степенью,
изображений слишком велик для их хранения на борту КА. Кроме
того, не всякий участок земной поверхности можно использовать в
качестве наземного ориентира. Это должны быть наиболее
информативные фрагменты изображения. Тем не менее, для
повышения точности и оперативности автономной навигации
необходимо, чтобы база данных эталонных ориентиров содержала,
по-возможности, большее число таких изображений. Это возможно
лишь при условии высокой степени их сжатия. Таким образом, в
качестве самостоятельных следует выделить задачи построения
процедур отбора информативных фрагментов изображения,
наиболее подходящих для формирования протяженных наземных
ориентиров, а также их препарирования и сжатия.
Применяемые методы сжатия должны допускать быстрый
доступ к необходимой информации и обеспечивать высокую
точность и достоверность сопоставления изображений ориентиров
с эталонами. Указанные требования в значительной степени
противоречивы. С точки зрения экономии памяти целесообразно
подвергать изображения высокой степени сжатия. Однако при этом
исходное растровое изображение может быть восстановлено с
большими потерями, что может привести к ошибкам сопоставления
и геометрической привязки ориентиров.
Этих проблем можно избежать, если сопоставление эталонов
и геометрическую привязку ориентиров осуществлять в
пространстве признаков. В этом случае на завершающем этапе
предварительной обработки текущее изображение подвергается
процедуре препарирования с целью представления его в принятой
системе признаков, а сформированное поле признаков сохраняется
в базе данных для последующего использования в качестве
исходного набора данных для опознавания ориентира. При этом
198
необходимо обеспечить требуемую точность воспроизведения
образов эталонов и текущих изображений в пространстве
признаков. Это может достигаться калибровкой текущих
изображений к принятым стандартным условиям регистрации, а
также применением систем признаков и методов сжатия,
обеспечивающих сохранение информации, важной для
геометрической привязки и сопоставления ориентиров.
Методы сжатия, кроме прочего, должны строиться с учетом
возможности пополнения банка протяженных наземных
ориентиров в ходе функционирования системы. С другой стороны,
процедуры пополнения такого банка протяженных ориентиров
должны допускать автоматизацию этого процесса.
Для решения этой задачи целесообразно использовать
формальные критерии определения наиболее информативных
областей на изображении, а также строить процедуры выбора среди
них фрагмента, который отличается высоким значением порога
функции корреляции, характеризующего различия в распределении
функции яркости на фрагменте. Весь комплекс задач, связанных с
пополнением банка данных протяженных наземных ориентиров,
включая их сжатие, будет рассмотрен в параграфе 5.4.
Обнаружение и опознание текущего протяженного ориентира
вне зависимости от способа его представления (в виде исходного
растрового изображения или набора признаков) является
самостоятельной проблемой. По существу это проблема построения
алгоритмов локализации и распознавания объектов на
изображениях при наблюдении из космоса. Такая задача
рассматривалась, например, в работе [9]. В параграфе 5.6
предложены основные подходы к решению задачи определения
положения протяженного ориентира на текущем изображении.
При выборе конкретного метода локализации и опознавания
ориентира следует иметь в виду, что алгоритмы принятия решений
в данном случае должны функционировать в условиях априорной
неопределенности относительно возмущений и помех. Поэтому
также как и алгоритмы предварительной обработки изображений,
они должны строиться на принципах адаптации. В случае
использования многозональных изображений и информации от
других подсистем необходимым этапом является также
геометрическое согласование изображений и их интеграция с
199
результатами регистрации протяженных ориентиров другими
средствами измерений с перекрывающимися полями зрения.
С учетом сказанного общая схема этапов информационной
технологии обработки изображений в системе автономной
навигации КА может быть представлена в виде, показанном на
рисунке 5.1. Наряду с указанными этапами обработки изображений
в ходе функционирования системы автономной навигации,
эпизодически должна также решаться задача пополнения банка
данных эталонных изображений протяженных наземных
ориентиров.
Рис. 5.1. Схема этапов обработки изображений
в системе автономной навигации
200
В последующих параграфах указанные задачи и этапы
информационной технологии обработки и анализа изображений
рассматриваются более детально с учётом той последовательности
этапов, которая указана в схеме. При этом описываемые методы не
следует рассматривать как единственно возможные для реализации
соответствующих этапор обработки изображений в системах
автономной навигации. Авторы считали более важным
акцентировать внимание на обсуждении особенностей и
специфических требований к алгоритмам в системах
рассматриваемого класса, а описываемые методы являются скорее
лишь иллюстрацией возможных вариантов реализации,
построенных с учетом этих специфических особенностей. При их
отборе авторы руководствовались личным опытом и отдавали
предпочтение, по их мнению, наиболее работоспособным и
эффективным методам.
5.2. Выделение фрагментов, содержащих протяжённые
наземные ориентиры
Несмотря на впечатляющие успехи как в области теории
обработки изображений и распознавания образов [74], так и в
области создания быстродействующих многопроцессорных
вычислительных средств [120], сегодня решить задачу
обнаружения и опознавания заданного ПНО в масштабе времени,
близком к реальному, имея в качестве основы весь псевдокадр, все
еще не представляется возможным. Слишком велико при этом
количество вычислительных операций. Так, применительно к
псевдокадру, получаемому с КА ДЗЗ «Ресурс-ДК1», в форме
квадрата со стороной 36 тыс. пикселей и скользящему по
псевдокадру квадратному окну со стороной минимального размера
20 пикселей количество только операций умножения для расчёта
корреляционной функции превысит 500 млрд, операций.
В связи с этим необходимо разработать метод расчета
параметров фрагмента псевдокадра, содержащего заданный
протяжённый наземный ориентир и имеющий минимально
избыточные размеры. Для этого на псевдокадре необходимо
симметрично относительно расчетного положения ориентира
описать прямоугольник. Стороны этого прямоугольника равны
удвоенным значениям суммарных отклонений в продольном и
поперечном направлениях псевдокадра, которые вызваны
201
noi-решностями в параметрах линейного и углового движений КА
ДЗЗ. Таким образом, рассматриваемая задача ожжет быть решена,
если будет разработан метод, в соответствии с которым построена
математическая модель для расчета отклонений в координатах
точек псевдокадра, получаемого при сканерной съёмке.
Отклонения в координатах точек псевдокадра возникают
вследствие влияния двух групп погрешностей в параметрах
линейного и углового движений КА ДЗЗ: случайных и
систематических. Влияние этих групп погрешностей различно.
Случайные погрешности на интервале времени съёмки
усредняются и приводят к фиксированному отклонению координат
псевдокадра в любой момент съёмки. Систематические
погрешности ведут к нарастанию отклонений в координатах
псевдокадра и в целом зависят от продолжительности съёмки.
Получим модели этих отклонений в координатах псевдокадра.
Начнём с анализа влияния случайных погрешностей.
Уравнения движения оптического изображения в форме (4.21)
в принципе позволяют проследить влияние различных
погрешностей в параметрах поступательного и вращательного
движений КА на скорость движения изображения, если построить
математические соотношения для оценки влияния погрешностей
(вариаций) параметров на скорость движения оптического
изображения. Очевидно, что оценка влияния на скорость движения
изображения случайных составляющих должна производиться
статистическими методами. При этом оценить влияние этих
параметров можно лишь в среднем.
Статистический метод расчёта сдвигов изображения,
вызванных случайными погрешностями БКУ и ОЭТК,
применительно к полной модели движения оптического
изображения в фокальной плоскости рассмотрен в [93].
Для последующего изложения материала монографии введём
термины «время экспонирования» и «скорость сдвига оптического
изображения». Временем экспонирования называется время
движения зарядовых пакетов матрицы ФПЗС до считывающего
регистра. Время экспонирования обозначим буквой «Т».
Скоростью сдвига оптического изображения называется
отклонение скорости движения оптического изображения от
заданной скорости движения зарядовых пакетов матрицы ФПЗС
вдоль столбцов матрицы в течение времени сканирования.
202
Скорость сдвига на интервале Т приводит к смазу изображения, то
есть к ухудшению его качества (линейного разрешения на
местности).
Если в уравнениях (4.21) учесть заданную компенсационную
скорость движения зарядовых пакетов, обозначаемую через V’, то
можно получить уравнения для составляющих вектора скорости
сдвига оптического изображения в фокальной плоскости объектива
ОЭТК в форме (4.32);
ДУХ=— (wxan + Wya2] + Wza31)-
--(wx а12 + Wy а22 + wza32)
(5-1)
+ f сот - z top - Vx
AVz =— (wxai3 + Wya23 + Wza33)--(wxaJ2 + Wy
- f co„ + xcon
к p
При этом AVz = Vz ввиду отсутствия передачи зарядовых пакетов
вдоль строк матрицы ФПЗС.
Для расчета скоростей сдвига изображения, вызываемых
погрешностями бортового комплекса управления КА и ОЭТК,
воспользуемся методом теории ошибок. Согласно этому методу
вариация скорости сдвига изображения, вызванная вариацией
одного из параметров, равна произведению частной производной от
отклонений (5.1) в скорости движения изображения по этому
параметру на соответствующую вариацию самого параметра:
5[V4(5pra)]= ^-3Pm; 8[Vz(5Pm)] = ^5Pm, (5.2)
5pm Эрт
где Pm - один из тринадцати параметров углового, поступательного
движения КА или движения зарядовых пакетов, имеющий
вариацию 5Рт:
Рт = {a,p,v,ioT>wK,o>p.Xs,Ys,Zs,Wsx,WSY,Wsz,v; } , (5.3)
т = 1,2,..., 13.
Предположим, что изменения вариаций параметров движения
за время полёта КА являются случайными величинами, которые
имеют нормальное распределение с нулевым математическим
ожиданием. Тогда в качестве значений вариаций 5Рт надлежит
брать их среднеквадратические отклонения (СКО) п(рга).
С учётом линейности соотношений (5.2) в этом случае
203
получаем CKO отдельных составляющих в продольной и
поперечной скоростях сдвига изображения: s[Vx(6pm)], a[VT(5pra)].
Суммирование дисперсий этих составляющих по всем m
параметрам даёт искомые дисперсии продольной и поперечной
скоростей сдвига изображения:
13 г) ДА/ 11 г) ДУ
o2(Vx)= D^Mpjr; <C(V2)= (5-4)
m=l dPm m=l OPm
Отсюда CKO линейных сдвигов изображения в продольном и
поперечном направлениях, накапливаемые за время
экспонирования Т, определяются соотношениями:
a(Sx) = o(V )Т; o(SJ = o(V7)T. (5.5)
Найдём оценки систематических отклонений. Для решения
этой задачи свяжем систему координат oiiv с псевдокадром таким
образом, что ось ov направлена, подобно оси ох фокальной
плоскости, по нормали к строкам матриц ФПЗС, вытянутых в
линейку по направлению оси oz (рис.4.1). Ось оц направлена вдоль
строк матриц, подобно оси oz. Пусть начало координат совпадает с
центром первой строки, at, - расчётный момент времени
регистрации протяжённого наземного ориентира.
Пусть также интервал времени малой длины At = tk-tk_, есть
период дискретизации работы каналов ориентации и стабилизации
системы управления движением и системы автономной навигации
КА. Он, как правило, выбирается в диапазоне от 0,1 до 0,5 с, а
начало и конец интервала сканирования совпадают с узлами
дискретизации. Тогда систематические отклонения координат
точек n-ой строки псевдокадра от их расчётных значений
приближённо можно представить в следующей линейной
дискретной форме [57-59]:
дц„ =Дно+ Ёдгд(Ч)к; д^„ =ду0 + Ёдгд(ух)к, (5.6)
к=0 к-0
где Дц0,Ду0 - начальные отклонения в координатах, вызванные
начальными погрешностями ориентации и навигации КА,
д(У7)к,Д(Ух)к - суммарные систематические (включая и
методические) отклонения в скоростях сдвига оптического
изображения на момент tk, определяемые по аналогии с (5.5.2) по
формулам:
204
= = • (5.7)
™=А oqm ,!1И< dqm )к
„ ЭДУХ <JAVz
Здесь: —----, —— - частные производные составляющих
3qra 3qm
скорости сдвига оптического изображения (5.1) по параметрам q ,
определяющим процесс сканирования в момент времени tk; aq -
систематическая погрешность параметра qm. В силу наличия только
таких погрешностей в (5.7) производится алгебраическое
суммирование.
Как было установлено в предыдущей главе, процессу
сканирования сопутствуют методические продольные и
поперечные составляющие скорости сдвига оптического
изображения, достигающие в некоторых случаях значительных
величин. Эти составляющие носят также систематический
характер. Их влияние аналогично влиянию систематических
погрешностей в угловых скоростях КА. Поэтому, чтобы не
увеличивать количество параметров q,, аналогичных параметрам
рга в (5.3), примем, что эти методические составляющие с верхним
индексом «м» входят в систематические составляющие
погрешностей угловых скоростей КА по каналам тангажа и крена,
обозначаемые верхним индексом «с». Кроме того, учитывая
характер влияния погрешности отработки ОЭТК параметра V, в
(5.1) на процесс сканирования, можно считать, что эта погрешность
вызвана некоторой дополнительной систематической
погрешностью Дю^ в угловой скорости КА по каналу тангажа. В
результате будем иметь:
Дют =Д(От + Да)”+До)у ; Дсок =Дк>к + Д(Ок ; Дсор=ДШр (5.8)
В этом случае количество параметров qm, влияющих на
процесс сканирования, сокращается до двенадцати.
Введём следующий 12-и мерный вектор состояния,
называемый вектором элементов внешнего ориентирования ОЭТК:
qk= [a,|3,v|/,coT,coK,(op,Xs,Ys,Zs,Wsx,Wsy,Wsz]kr. (5.9)
Представим отклонения расчётных значений элементов
внешнего ориентирования ОЭТК от их истинных значений в виде
вектора отклонений:
Aqk =qk„„ -qkpac, = h^w,Afs,AwJ, (5.10)
где
205
Дфк, Дык, Дг$к, AWsk - векторы отклонений в угловом
положении КА по трём каналам, угловых скоростях вращения (в
частности, их остаточных значениях после проведения полётной
калибровки БИНС и учёта результатов этой калибровки),
координатах местоположения центра масс КА и скоростях
движения центра масс КА по каждой из координг ных осей:
Дрк =[Да,ДР,Д1|/]к, Дйк =[дсот,Дсок,Дс1)Р]к,
Дг5к =[AXs,AYs,ASst AWSk = [AWSX,ДWSY,ДWsz£ (5.11)
Представим для краткости записи соотношения (5.2) с учетом*
введённых обозначений (5.10) в векторной форме:
д(уД=Ц-Ацк; A(V)t = М[ Aqk, (5.12)
где Lk и Мк также 12-и мерные векторы частных производных
от составляющих скорости сдвига оптического изображения (5.1)
по элементам внешнего ориентирования ОЭТК:
Lk -[Lff’L/i>L^’Lsj7>L<jK,LQ#,Lx,LY.Lz,LWx,LWY,Lwz]^. (5.13)
С учётом введённых обозначений соотношения (5.6) для
отклонений в координатах точек n-ой строки псевдокадра
записываются в виде:
=ДНо +^'Ё(Ц = Av0 +At-£(MkT AqJ (5.14)
к-0 к=0
В общем случае процесс изменения во времени вектора
отклонений в элементах внешнего ориентирования ОЭТК Aqk,
0<к<п-1 в рамках теории линейных дискретных систем может
быть представлен в форме линейного дискретного процесса
рекуррентного вида [55]:
Aqk =ФМ-1-Ачк... (5-15)
где Фк к, - фундаментальная (переходная) матрица этого
процесса.
Основанием для такого представления является малый
интервал времени At = tk - tk, и линейность изменения на этом
малом интервале всякого малого отклонения Aqk от произвольного
исходного нелинейного процесса qk. Переходная матрица
определяется принятыми моделями углового и поступательного
движений КА. Нетрудно показать, как может быть определена
переходная матрица Фкк, линейного дискретного процесса (5.15),
206
если имеется (в общем случае нелинейная) модель непрерывного
процесса q(t):
^- = F[q(t)]. (5.16)
at
Представим q(t) в функции некоторого опорного
(программного) значения q0(t), отличающегося от истинного
значения q(t) на малую величину Aq(t):
q(t) = q0(t) + Aq(t).
Разложив правую часть (5.16) в ряд Тейлора в окрестности
опорного значения q0(t) и ограничившись лишь линейным членом
для малого отклонения Aq(t) от этого опорного значения получим
^“ = -^к(.ниТдч(1) = с[Яо(1)]-М1)> (5.17)
где G[ q0(t) ] - матрица частных производных.
Отсюда, ограничившись первыми двумя производными, в
силу малости tk -tk I = At можно записать
Aq(tk) = Aq(tk.l) + —1,=,./At + | , 'At2. (5.18)
Дифференцируя по времени (5.17) и подставляя полученный
результат для второй производной и выражение для первой
производной в (5.18),
имеем:
Aq(tk) = Aq(tk.J) + G[q0(tk_1 )]• Aq(tk4)-At +
+ “ fc[q0 (t k-i)]' Aq(t k.i)+ G2 [q0(tk_,)] • Aq(tk4 )]• At2 =
/ 1 Г- , \ <5'19)
= (E + G[q0(tk.I)]-At + -(G[q0(tk.l)] + G-[q0(tk.I)]}• At2 Uq(tk4) =
= ФОк - tk-!) • Aq(tk_;),
что соответствует более привычной записи (5.17) для дискретных
систем. Здесь Е- единичная матрица, G[q0(tk,)] -- производная по
времени матрицы G[q0(tkl)]. Вторую производную в (5.18) следует
использовать при большом значении шага дискретизации по
времени At или при возрастании длительности процесса съёмки.
Для ориентации КА в настоящее время все реже применяются
гироскопические средства типа гироорбиты, корректируемой от
инфракрасного построителя местной вертикали [106, 96]. Для этой
цели, как правило, применяются бесплатформенные инерциальные
207
навигационные системы (БИНС). Кроме того, на КА ДЗЗ
разработки ГНП РКЦ «ЦСКБ-Прогресс» началось практическое
применение бесплатформенных инерциальных систем с
электостатическим подвесом гироскопа (БИС - ЭГ) разработки
ЦНИИ «Электроприбор» (г. Санкт - Петербург) [66].
Рассмотрим пример исполнения БИНС на базе блока трёх
датчиков угловой скорости с взаимно ортогональными осями
чувствительности, совпадающими по направлению с осями
системы координат, которая связана с корпусом КА.
Воспользуемся кинематическими уравнениями Пуассона углового»
движения КА, связывающими угловые скорости о>г, (Ок, Юр с углами
а, Р, ф и их производными по времени. Для принятой (рис.4.3)
последовательности поворотов - тангаж (а), крен (Р), рыскание (\g)
эти уравнения имеют вид:
сот =acos|3cosv|/ + psinw;
<вк = р cos — a cospsin хр; (5.20)
сор =asinP + у.
Разрешение уравнений (5.20) относительно производных от
углов ориентации по времени даёт:
1 ,
а -----(coTcos ц/ - coKsin у);
cosp
Р =coTsiny + coKcosy; (5.21)
ф = соР - tgP(coTcos - coKsinу).
Предположим, что датчики угловых скоростей имеют
отличные от нуля аддитивные систематические погрешности
измерений скорости Дшт, Дсок, и ДсоР. Тогда дифференциальные
уравнения для отклонений производных по времени от углов Да,
др, Дф относительно истинных значений из (5.21) принимают вид:
Да = —-—(AcoTcosy - Дсок51п ху);
cosp
Др = Дшг31пх|/ + Дй)ксо8Х|/; (5.22)
Ду = Дсор - tgP(AcoTcosxp - Дсок8ту).
Отсюда в предположении малости периода дискретизации по
времени At и при использовании в (5.18) только первой
производной по времени для вектора отклонений параметров
углового движения получаем соотношение (5.15), содержащее
208
переходную матрицу, в виде:
Да др Ду Дау Дау Дсц, к 1 0 0 0 0 0 0 1 0 0 0 0 0 0 1 -tg 0 0 0 С-°—At cosp siny • Д1 IcosyAt 1 0 0 S'nV Л -At 0 cosp cosy At 0 tgpsinyAt At 0 0 1 0 0 к-! Да др Ду Дау Дау ,.М.. (5.23) ..
Аналогично может быть получено соотношение дли
отклонений в параметрах поступательного движения Ка
Переходная матрица Ф^., (5.15) в этом случае носит название
матрицы баллистических производных. При малом времени съёмю
движение центра масс КА можно рассматривать происходящим в
центральном поле сил:
^L = WXS; ^ = Wy<;
dt xs dt Yj
dWxs ^ p-X dWYS_ P-YS;
dt r3 ’ dt r!
dZs u
dt
dWzs ц Zs
dt r3
(5.24)
где ц - гравитационный параметр Земли (ц=3,986-К)-' км/с2); г -
модуль радиуса - вектора центра масс КА.
Разлагая уравнения (5.23) в ряд Тейлора в окрестности
некоторой опорной орбиты, которая мало отличается от истинной,
и используем в выражении (5.18) только первую производную го
времени. В результате соотношение для вектора отклонений г
функции параметров поступательного движения КА по опорно;
орбите принимает вид:
1 0 0 1 0 0 дт 0 0 дт 0 " 0
дх5 0 0 1 0 0 дт AXS
AYs AZS Зц(х2 1 4 г2 "3 J г3 г At г3 г2 1 0 0 AYS AZS (5.2
AWXS 3±y^t 3 2 ~ / 7 а, AWXS
awys Зн У__1 г21г2 \ 0 1 0 AWys
AWZS. к г г Г г AW^s k-1
^At ^Д1 0 0 1
г3 г2 ,3 г2 г3 ( г2 3 I
1 I Г г к-1
Соответствующая матрица баллистических производных дл;
2G '
случая использования в (5.18) второй производной по времени
приведена в параграфе 1.3.
Начальные отклонения Ди„ и Ду(, в координатах (5.6)
заданных точек псевдокадра, вызванные наличием начальных
погрешностей в угловых Д<я и в линейных Дг0 координатах КА,
определяются из соотношения (4.3). Варьирование правой части
(4.3) по параметрам Д^,, и д?„ даёт вариацию в искомых
координатах х
вектора d:
Ad = --Д-=-
(а' D)
(соответственно ц„) и z (соответственно и0)
Ат D + ДАТ D + А1 AD , (5.26)
Да; Р-а2 ДР
(а:-Р)
где ДА1 - квадратная матрица вида:
Да,, Да,, Да,,
ДАТ = Да и Да,, Ла,,
Да,, Да,, Да „
Откуда следует, что вариация Да] есть вторая строка матрицы
ДАГ.
Вариации направляющих косинусов (4.2) матрицы Атпри
известных углах ориентации КА на момент начала сканирования
определяются в соответствии со следующими соотношениями:
Да। j = -а2| Да - sin а cos р sin у др - а^Ду;
Да,, = -cosa cos Р Да + sin a sin Р ДР;
Да,3 = -а,,Да + sina cos Р cosy Др + а,,Ду;
Да,, = а,,Да + cosa cos Р sin у - а,, Ду;
Да,, = -sin a cos р Да - cos a sin р ДР;
Да2з = а^Да- cosa cos Р cosyAP + а21Ду;
Да3| = sinр sin у ДР - cos Р cosy Ду;
Да,, = cos Р Др;
Дазз = -sin р cosy Др - cos р sin у Ду.
Входящая в соотношение (5.26) дважды вариация AD в
соответствии с определением (4.9) вектора дальности
характеризуется начальным отклонением в линейных координатах
центра масс КА Дг„ на момент начала сканирования.
Подстановка полученных выражений для элементов вектора
Ad и для переходных матриц в (5.26) применительно к конкретной
программе углового и поступательного движений КА позволяет
произвести расчёт отклонений в координатах любой заданной
точки псевдокадра с координатами x,z на момент регистрации этой
точки на псевдокадре.
Полученная модель отклонений, содержащая случайные
(5.5), систематические начальные Дц0 и 4v0 - (5.26),
систематические угловые - (5.23) и систематические линейные -
(5.25) отклонения, позволяет произвести расчёт максимальных
суммарных значений этих отклонений:
Az=3o(Sz) + |Voi+^ + ^ (5.27)
I п
Здесь j»| - модули соответствующих величин, f - фокусное
расстояние объектива телескопа, а Н - высота полёта КА в процессе
съёмки.
Приведенные выражения получены в предположении малости
отклонений по углу рыскания Дф и по линейной координате AYS
КА за время от начала процесса съёмки до момента съёмки
протяжённого ориентира (его реперной точки).
Выражения (5.27) позволяют выделить на псевдокадре
фрагмент, содержащий наземный ориентир, с целью дальнейшего
его обнаружения и опознания. Этот фрагмент представляет собой
прямоугольник со сторонами, равными 2ДХ и 2AZ, в центре
которого по предположению находится реперная точка
протяжённого наземного ориентира.
В действительности реперная точка может оказаться в любой
другой точке прямоугольника, однако выбор его размеров в
соответствии с описанной методикой гарантирует ее нахождение
внутри прямоугольника.
5.3. Предварительная обработка изображений в системах
автономной навигации КА
Предварительная обработка изображений осуществляется с
целью повышения их качества. Методы и алгоритмы
предварительной обработки условно можно разделить на две
большие группы [74, 104]:
1. Преобразование яркости изображений;
2. Фильтрация и восстановление изображений.
Методы первой группы - это в большинстве своем
211
эмпирические процедуры, направленные на решение конкретной
задачи, например, повышение резкости изображений без учета
помех. В задачах линейной и нелинейной фильтрации строится
оптимальная в каком-либо смысле процедура восстановления с
учетом моделей помех. Обычно искажение изображений
сопровождается их размытием. При этом восстановление
изображений также приводит к повышению резкости.
Особую группу методов предварительной обработки
изображений составляют методы выделения контуров. Эти методы
и алгоритмы включаются в сквозную информационную’
технологию в том случае, когда на ее последующих этапах
контурные изображения используются для распознавания объектов.
В системах автономной навигации рассматриваемого класса такие
изображения (изгиб береговой линии, пересечение дорог, группа
зданий и др.) действительно являются наиболее информативными.
Кроме того, использование контурных изображений протяженных
ориентиров в САН целесообразно с точки зрения экономии памяти
для хранения эталонов.
Следуя указанной укрупненной классификации, приведем
краткий обзор методов и алгоритмов преобразования яркости. Одна
из наиболее востребованных в САН процедур - коррекция
амплитудных характеристик. Она осуществляется с целью
компенсации нелинейных искажений, возникающих при
регистрации изображений. Если на входе видеодатчика
наблюдается сигнал - х, а нелинейная функция преобразования
видеодатчика - U, то видеосигнал на выходе
y = U(x). (5.28)
Искажения, вносимые видеодатчиком с указанной
амплитудной характеристикой, можно в значительной степени
компенсировать путем поэлементного преобразования изображения
с использованием так называемой обратной функции
преобразования [74]:
x = U-1(y) (5.29)
обеспечивающей близость в каком-либо смысле восстановленного
сигнала х к заданному сигналу х.
Обычно функцию преобразования U~’(y) определяют
опытным путем, используя тестовые изображения с известным
уровнем видеосигнала. Эта операция называется калибровкой.
212
Качество калибровки изображений оказывает большое влияние на
надежность решения задачи опознавания и геометрической
привязки изображений протяженных ориентиров.
Другая часто используемая процедура предварительной
обработки в системах автономной навигации КА -
контрастирование изображений. Изображения одного и того же
участка поверхности Земли, полученные в разное время суток,
могут иметь существенно отличающийся диапазон яркостей. Для
их сопоставления в САН необходимо предварительное приведение
исходного поля яркости к некоторому стандартному
динамическому диапазону. Эта задача решается также путем
поэлементного преобразования отсчетов f(nbn2) исходного
изображения с использованием соотношения вида
g(n1,n2)=af(n1,n2)+b. (5.30)
Здесь а, b - параметры, определяемые как в работе [74]
_ Smax ~ ёппп _ ^maxgmin ~ ^minSmax
~ f -f • ’ f -f ’
Xmax 1mm Xmax 1min
где fmax, fmin, gmax, gmin - максимальные и минимальные значения
яркостей исходного и преобразованного изображений
соответственно. Иногда целью контрастирования является
приведение среднего значения и дисперсии поля яркости к
заданным величинам.
Наконец, еще одна процедура, часто используемая при
обработке изображений ориентиров - пороговая обработка.
Пороговая обработка осуществляется с целью преобразования
полутонового изображения в бинарное. Такая операция
обеспечивает значительное сокращение избыточности изображения
и по существу является процедурой сжатия без потери информации
об очертаниях протяженных ориентиров. Пороговая обработка
(5.31)
выполняется по правилу:
[1 при f(n1,n2)>f0,
g(nbn2M .
[0 при Т (п 1, П 2 ) > 10 ,
где f0 - пороговое значение яркости.
Ясно, что полученные в результате пороговой обработки
разных изображений одного и того же ориентира очертания могут
существенно различаться даже при одинаковых порогах, если они
до этого подверглись различным нелинейным и динамическим
искажениям. Поэтому пороговой обработке изображений в
213
системах автономной навигации КА обычно предшествуют
описанные выше операции компенсации нелинейных искажений
(калибровки) в соответствии с (5.29) и приведения его
динамического диапазона к заданному стандартному значению с
использованием соотношения (5.30).
Следующая группа методов предварительной обработки
изображений - фильтрация и восстановление. Целью этого этапа
информационной технологии также является улучшение качества
(например, резкости) изображений. Для этой цели обычно
используются либо фильтры с конечной импульсной
характеристикой (КИХ-фильтры), либо фильтры с бесконечной
импульсной характеристикой (БИХ-фильтры). Так называемый
нерекурсивный КИХ-фильтр - это фильтр, импульсный отклик
которого содержит конечное число отсчетов:
m m
y(ni,n2)= '£ £h(kbk2)x(ni-kbn2-k2). (5.32)
k, =0k;=0
Здесь x(nj — k।,n2 — k2), y(nbn2) - отсчеты на входном и
выходном изображениях соответственно, a h(kbk2) - значения
импульсной характеристики. КИХ-фильтры всегда физически
реализуемы и устойчивы. Однако при значительных динамических
искажениях требуется опорная область больших размеров, что
приводит к существенному возрастанию вычислительной
сложности. Попытка снизить вычислительную сложность путем
«усечения» опорной области приводит к серьезным ограничениям
возможностей улучшения качества изображений с помощью КИХ-
фильтров.
Входной х(г],г2) и выходной у(пьп2) сигналы рекурсивного
БИХ-фильтра удовлетворяют разностному уравнению конечного
порядка:
y(nj,n2)=:SLa(ni -гьп2 — г2 )х(г] ,г2 ) —
г‘Г2 (5 зз)
- I Zb(nt-kbn2-k2)y(kbk2).
1ч kj
k। k2 *ni,n2
Области, содержащие совокупность отсчетов, по которым
вычисляются суммы в правой части (5.32) и (5.33) называют
опорной областью или маской. С использованием БИХ-фильтра
можно обеспечить компенсацию сильных искажений на базе
214
опорной области небольших размеров. Однако эти фильтры для
некоторых форм опорной области физически нереализуемы. Кроме
того, они могут оказаться неустойчивыми. Связано это с тем, что
при определенных искажениях, например, обладающих радиальной
симметрией, для определения выходного отсчета используются
окружающие его отсчеты опорной области, некоторые из которых
еще не вычислены.
На рис. 5.2, а приведен пример опорной маски 5x5, для
которой требование рекурсивной вычислимости не выполняется
(вычисляемый выходной отсчет обозначен кружком в центре
опорной области). Указанные проблемы рассматривались,
например, в обстоятельной монографии [43], где в качестве одного
из возможных способов преодоления указанной трудности
рассматривалась итерационная схема реализации. К сожалению, эта
схема по вычислительной сложности оказывается сравнимой с
реализацией КИХ-фильтра. Тем не менее, по ряду причин, о
которых будет сказано в последующих параграфах, применение
БИХ-фильтров более целесообразно.
Рассмотрим существенно более экономичную в
вычислительном отношении технологию обработки изображений с
использованием физически реализуемых БИХ-фильтров,
предложенную в работе [80].
Предполагается, что в рассматриваемой области
крупноформатного изображения характеристики искажающей
системы допускают построение восстанавливающих фильтров в
классе линейных инвариантных к сдвигу систем.
а) б) В) г) д)
« • ♦ ♦ ♦ • • • • ♦ 1 1’ ' 1 * * *-ь-
. . О ♦ ♦ * * ♦ ♦ ' • ♦ * * • ?о • 4 * » « [•
Рис. 5.2. Исходная маска и соответствующие ей маски и
допустимые направления рекурсии: а) - исходная маска 5x5; б) -
маска для 1-го квадранта; в) - для 2-гс квадранта; г)- для 3-го
квадранта; д) - для 4-го квадранта
215
Известно, что для этого класса систем имеют место
ассоциативные и дистрибутивные свойства, обеспечивающие
возможность последовательного и параллельного соединения
подсистем. В частности, применяя правило дистрибутивности для
нахождения общего импульсного отклика для двух параллельно
соединенных систем, имеем:
у = (х * *h) + (х * *g) = х * *(h + g),
(5.34)
где х - общий входной сигнал;
у - общий выходной сигнал;
h, g - импульсные отклики систем;
- операция двумерной свертки.
Опираясь на свойство (5.34) двумерный фильтр (5.33) можно
представить в виде параллельного соединения физически
реализуемых БИХ-фильтров. В частности, построим фильтр в виде
параллельного соединения физически реализуемых БИХ-фильтров
с опорными областями в форме квадрантов.
Известно [43], что
импульсный отклик
симметричного БИХ-
фильтра с опорной
областью на всей (nj,n2)-
плоскости можно разбить
на четыре отдельных
импульсных отклика, по
одному на каждый
квадрант. На рис. 5.2,
б - д приведены
соответственно маски 1 -
го, 2-го, 3-го и 4-го
квадрантов и направления
рекурсии для них.
С использованием
Рис. 5.3. Параллельное соединение 4-х
фильтров одного квадранта, реализующее
БИХ-фильтр на (п,,и2 [-плоскости
указанного разбиения можно построить фильтры, соответствующие
этим квадрантам, и соединив их параллельно, получить общий
импульсный отклик двумерного БИХ-фильтра. На рисунке 5.3
приведена общая схема параллельного соединения БИХ-фильтров
одного квадранта, реализующая двумерный БИХ-фильтр на
(П[,П2 [-плоскости.
Предположим, что БИХ-фильтры, построенные на каждом z-m
216
(z--l,2,3,4) квадранте, описываются передаточными функциями
вида
H^(z„z2)=A^Z1’z^. (5.35)
B^(zbz2)
В соответствии со схемой (рис. 5.3) составленную из них
общую передаточную функцию двумерного БИХ-фильтра на
(пьп2)-плоскости можно записать в виде:
D/ . ХПА(Льг2)вЙг1,22)
H^z,,z2) = ^Zi^ = l=-^^----------------. (5.36)
Bz(zbz2)
i=l
Нетрудно заметить, что знаменатель общей передаточной
функции является произведением знаменателей БИХ-фильтров на
квадрантах.
Реализация таких алгоритмов в многопроцессорной
вычислительной системе позволяет использовать декомпозицию
задачи на двух уровнях. Первый уровень - декомпозиция по
данным: разбиение изображения на фрагменты и распределение их
по узлам вычислительной системы, второй уровень
функциональная декомпозиция потоков, соответствующих
реализации отдельных БИХ-фильтров, каждый из которых
реализован в «своем» квадранте опорной области. Высокая степень
внутреннего параллелизма описанного алгоритма является
предпосылкой для достижения высокого качества восстановления
изображений в реальном времени, что является еще одним доводом
в пользу применения описанной технологии обр ..ботки
изображений в системах автономной навигации КА.
Основная проблема при построении восстанавливающих
фильтров заключается в определении их параметров. В
большинстве известных методов синтеза фильтров предполагается,
что модели оператора искажающей системы и шумов известны. В
действительности эти модели, как правило, известны, весьма,
приблизительно или совершенно неизвестны. Сказанное в полной
мере относится к задаче определения параметров простых БИХ-
фильтров на квадрантах. В условиях априорной неопределенности
моделей искажающей системы и помех представляется
целесообразной изложенная в работе [80] технология построения
217
БИХ-фильтров на квадрантах путем идентификации их
характеристик по тестовым изображениям. Рассмотрим эту
технологию подробно.
Основная проблема в данном случае заключается в
формировании тестовых изображений. Ясно, что получить реальное
образцовое изображение на «рабочем» маршруте КА путем его
регистрации в ходе нормального функционирования системы
автономной навигации невозможно. Тем не менее, можно
сформировать «неискаженный» тестовый образец на фрагменте
текущего искаженного изображения, используя априорные сведения«
о геометрической форме зарегистрированного объекта. Этот подход
опирается на методику, используемую в фотометрии для
определения разрешающей способности видеотракта.
В соответствии с методикой для формирования тестовых
изображений на исходном изображении отыскиваются участки, на
которых предположительно должен быть резкий перепад яркости.
Такие участки обычно имеются, например, на границе освещенной
крыши здания и отбрасываемой им тени.
Используя некоторые дополнительные сведения относительно
характера искажений (смаза и/или дефокусировки), можно
сформировать желаемый вид функции яркости на этой границе.
Способ автоматизированного формирования тестовых фрагментов
(компьютерное ретуширование) по этой методике предложен в
работе [115].
В последующих работах [101, 55] этот способ неоднократно
использовался в технологиях обработки крупноформатных
изображений. Существо метода сводится к отысканию на исходном
изображении фрагментов заданных размеров, имеющих
значительный контраст, а отклонение значений яркости от их
среднего значения на участках по обе стороны от линии перепада
яркости незначительно. Вид функции распределения яркости на
фрагменте, которая удовлетворяет указанным требованиям, а также
вид соответствующей желаемой функции яркости для этого
фрагмента приведены на рис. 5.4 а), б).
Рассмотрим теперь более детально решение собственно задачи
идентификации параметров восстанавливающих фильтров на
квадрантах по тестовым фрагментам. Предположим, что пара
тестовых фрагментов (искаженный и желаемый), сформирована. В
качестве примера такая пара изображена на рис. 5.4, а), б).
218
Для N положений опорных масок на этих фрагментах в
соответствии с (5.32) и (5.33) можно записать систему N линейных
уравнений вида [124]
у = Хс + ^, (5.37)
где у, 5 - Nxl - мерные векторы, которые определены как
^г(п1>п2)
^N(ni,n2).
У1(П1’П2)
У2 (ni,n2)
,Ум(п1>п2).
Рис. 5.4. Функция яркости: на исходном фрагменте (а); на том
же фрагменте после «компьютерного ретуширования (б)
Матрица X в случае идентификации модели КИХ-фильтра
формируется по входным отсчетам х(п] -kbn2 -k2):
Хких -
xi(nbn2)
Х2(П1,П2)
xN(nj,n2)
x^nj -m,n2 -m)
х2(п] -m,n2 -m)
x^j(ri| — m,n2 — m)
(5.38)
а в случае БИХ-фильтра - как по входным так и по выходным:
ХБИХ -
xl(rbr2)
Х2(Г1Д2)
У1(к],к2)
у2(к[,к2) -
УмОЧ’^г)
(5.39)
Здесь и далее для унификации записей будем полагать, что
219
всегда X - это NxM-матрица (N34), а искомый Мх 1-вектор
параметров в случае КИХ-фильтра имеет вид
c = [h(O,O), •••, h(m1,m2)]T, (5.40)
а в случае БИХ-фильтра - соответственно
с = [a(ri] -Г],п2 -г2), •••, Ь(п1 -kj,n2-k2)]T. (5.41)
Неизвестный ДМ-вектор ошибок связан с погрешностями
измерений, неточностью задания модели и другими факторами.
Заметим, что компоненты этого вектора в указанных случаях -
(5.40), (5.41) формируются различным образом. В частности, для
модели КИХ-фильтра £[k + j]=e[k + j], а в случае БИХ-фильтра
компоненты вектора ошибок формируются по соотношению
£[k + j] = е[к + j]- £а;е[к-i + j], (5.42)
i=l
где е[к + j] - аддитивные ошибки измерения, порядка модели и др.
Описанная формулировка задачи идентификации с точностью
до обозначений остается справедливой как в случае определения
характеристик искажающей системы, так и для оценки параметров
восстанавливающего фильтра. Ясно, что в указанных вариантах
входное и выходное изображения и соответствующие им
обозначения «меняются местами». При этом схема вычисления
оценок остается прежней.
Наиболее широко известным и часто используемым способом
вычисления оценок является метод наименьших квадратов (МНК):
с = [хтх]~'хту. (5.43)
Известно, что этот метод оптимален в случае, когда случайные
погрешности имеют нормальное распределение. Если данные
содержат грубые ошибки типа сбоев, МНК оказывается
неработоспособным. Существует простой способ улучшения МНК-
оценок с использованием так называемого итерационного МНК:
с = [xTGkx]’1XTGky, к-1,2,..., (5.44)
где Gk - диагональная весовая матрица. Элементы этой
матрицы на каждом шаге итерационного процесса определяются
как
gj.n=~bH’ n = W j=^’ <5-45)
где п - n-я компонента вектора
220
t = Xc-y,
g0 - нормирующий коэффициент, удовлетворяющий условию
N __
£gj,n=N, j = l,3,
n=l
а Е — число, заведомо меньшее самого малого значения
вводится для того, чтобы исключить возможность деления на нуль
в (5.45).
В работе [45] показано, что получающиеся в результате
указанной итерационной схемы оценки, устойчивы к
выделяющимся ошибкам в наблюдениях. Обычно для получения
«хороших» оценок после вычисления МНК-оценок (5.43)
достаточно одной или двух дополнительных итераций (5.44).
Остановимся на некоторых особенностях описанной
технологии. Во-первых, тестовые изображения должны быть
небольшими, а фигурирующие на них фрагменты регистрируемых
объектов - иметь простую форму. Это требование связано с
трудностями формирования желаемой функции яркости на
фрагменте больших размеров для объектов сложной формы.
Наиболее простыми для формирования тестовых образцов
являются фрагменты изображений, распределения яркости на
которых содержат перепады вдоль прямой линии. Пример такого
распределения яркости приведен на рисунке 5.4, а.
Однако при попытке идентификации параметров фильтра
более высокого, чем первый, порядка, по соответствующему
тестовому фрагменту, показанному на рисунке 5.4, б, матрица X
будет содержать линейно-зависимые столбцы.
В общем случае для построения фильтра, восстанавливающего
двумерный сигнал с несимметричным импульсным откликом, поле
яркости тестовых изображений должно содержать информацию об
импульсном отклике во всех направлениях. Для идентификации
параметров такого восстанавливающего фильтра по простым
тестовым фрагментам, в работе [80] предложена методика,
позволяющая избежать плохой обусловленности задачи.
Суть этой методики состоит в том, что для определения
параметров фильтра используется множество простых фрагментов,
на каждом из которых функция яркости изменяется в одном
направлении, но эти направления для разных фрагментов различны.
Формируемая по этим фрагментам матрица X является блочной, а
221
каждый блок соответствует одному из фрагментов с простой
функцией яркости.
Идентификация восстанавливающего фильтра в классе БИХ-
фильтров (5.33), (5.35) по соотношениям (5.43) - (5.45) в
вычислительном отношении, обычно, существенно выгоднее по
сравнению с использованием для этой цели КИХ-фильтров. Во-
первых, с помощью БИХ-фильтра может быть воспроизведена
протяженная импульсная реакция при малых размерах опорных
областей.
Во-вторых, малые размеры опорной области позволяют
использовать для идентификации тестовые фрагменты малых
размеров. Это очень важно, поскольку формирование тестовых
фрагментов больших размеров крайне трудная задача.
Кроме того, как уже указывалось, описанные алгоритмы
обладают высокой степенью внутреннего параллелизма, что
открывает широкие возможности для их параллельной реализации
с использованием многоядерных вычислительных систем. Этот
факт приобретает особую актуальность при построении САН,
которая должна обладать возможностью реализации этих
алгоритмов в реальном масштабе времени [101].
На рисунках 5.5 а) и б) приведен пример реализации
описанной технологии к обработке черно-белых аэрокосмических
снимков. При этом использовались четыре параллельно
соединенных БИХ-фильтра одного квадранта с опорными
областями, показанными на рисунках 5.2 б) - д). Для
идентификации параметров фильтров одного квадранта
применялись тестовые фрагменты малых размеров, показанные на
рисунках 5.6 а) - h), с изменением функции яркости в одном из
восьми направлений.
Соответствующие им «неискаженные» фрагменты,
сформированные путем компьютерного ретуширования, показаны
на рисунках 5.6 i) - р). В соответствии с количеством пар тестовых
фрагментов сформировано 8 матричных блоков размерности 30x17,
из которых составлена матрица X размером 240x17.
В заключение заметим, что наряду с определением
характеристик систем формирования изображений, описанный
алгоритм идентификации может эффективно использоваться в
системах управления КА для решения ряда других задач.
222
Рис. 5.5. Спутниковые черно-белые изображения:
а) - исходное, б) - восстановленное
a b cdef gh
i j k 1 m n о p
Рис. 5.6. Тестовые фрагменты: (a - h) - на исходном изображении,
(i - р) - те же фрагменты после компьютерного ретуширования
В частности, обычно требуется эпизодическое определение
параметров моделей управления и параметров движения
(состояния) КА в подсистемах технической диагностики, контроля
траектории и др.
223
Принципы построения систем с поэтапной адаптацией и
параллельной эпизодической идентификацией рассмотрены в
работе [119]. Идея применения унифицированных алгоритмов
идентификации, «включаемых» по запросам различных подсистем
(в том числе, управления и стабилизации КА в основном контуре
управления) в некоторой последовательности, определяемой их
запросами и приоритетами, обсуждалась в работе [125].
В работах [74,124] приведены примеры реализации
алгоритмов идентификации в информационных технологиях
совмещения изображений и оценки разрешающей способности
витдеотракта. Возможны и другие применения описанных методов
идентификации на этапе предварительной обработки изображений,
в частности, для определения контуров на изображениях. Хотя
методы выделения контуров обычно также относят к
предварительной обработке изображений, они рассмотрены в
следующем параграфе, посвященном формированию базы эталонов
для опознавания ориентиров. Связано это с тем, что выделение
контуров, по существу, является одним из способов сжатия
изображений без существенной потери их информативности.
Большинство исследователей признают, что очертания
наблюдаемых объектов действительно содержат наиболее
полезную информацию для их распознавания, в том числе для
опознавания протяженных наземных ориентиров.
5.4 Формирование банка эталонных изображений
протяжённых наземных ориентиров
В общей задаче формирования базы данных эталонов
протяженных наземных ориентиров можно выделить, по крайней
мере, три этапа:
1. Нахождение фрагментов изображений подстилающей
поверхности Земли, наиболее подходящих на роль протяженных
ориентиров;
2. Приведение выбранных фрагментов (протяженных
наземных ориентиров) к виду удобному для последующего
хранения в базе данных и опознавания;
3. Анализ и прогноз эффективности применения эталонов
протяженных ориентиров с целью «прореживания» и пополнения
базы.
224
При реализации указанных этапов в системах автономной
навигации КА следует учитывать требования, предъявляемые к
базе данных, и требования к хранящимся в ней протяженным
наземным ориентирам:
- изображения протяженных наземных ориентиров должны
быть информативными, в том смысле, что каждый ориентир
должен обладать уникальным набором признаков, отличающим его
от других и обеспечивающим возможность его уверенного
опознавания;
- свойство информативности должно обладать устойчивостью
к сезонным и погодным колебаниям условий регистрации;
- количество ориентиров, хранящихся в базе данных (банке
ориентиров) должно быть достаточным для обеспечения текущего
определения параметров траектории с требуемой точностью;
- общий объем банка ориентиров должен быть, не-
возможности, ограничен, вследствие жестких требований к
габаритно-весовым характеристикам бортового оборудования КА.
Рассмотрим перечисленные выше этапы формирования базы
данных эталонов протяженных наземных ориентиров с учетом
указанных требований.
На первом этапе - осуществляется поиск фрагментов
изображений подстилающей поверхности Земли, наиболее
подходящих на роль протяженных ориентиров, т.е. выявляются
изображения-претенденты, которые после анализа эффективности
их применения на третьем этапе могут быть либо закреплены в базе
данных, либо исключены из нее. Такие изображения (по крайней
мере на начальном этапе) могут быть отобраны на основе
визуального анализа изображений различных участков земной
поверхности, что потребует значительных затрат времени.
Поэтому представляет интерес задача построения
автоматизированной технологии формирования таких изображений
в процессе функционирования системы автономной навигации.
Ключевым для построения такой технологии на данном этапе
является требование информативности фрагментов изображений.
Для определения информативности фрагментов могут
использоваться детекторы, в которых используются сравнительные
оценки интенсивности отсчетов изображения. Рассмотрим
некоторые, наиболее широко известные детекторы.
225
В качестве детектора углов часто используется один из самых
простых - детектор Моравека [78]. Этот алгоритм поиска углов
реализуется следующим образом. Для каждого положения
скользящего окна определяется изменение интенсивности как
сумма квадратов разности интенсивностей в текущем окне и его
смещении на (х,у):
E(x,y) = ^w(u,v)(l(x + u,y + v)-I(u,v))2, (5.46)
u.v
где
l(x + и, у + v))> l(u’ У)) " функции яркости в точках (х + и, у + v) и
(u.v);
w(u,v) - коэффициенты, которые задают прямоугольное окно
(равны единице, если отсчет принадлежит заданному
прямоугольному окну, и нулю - в противном случае).
Смещение окна происходит во всех направлениях. На рис. 5.7
приведены различные случаи взаимного положения угла и
скользящего окна. Легко понять, что при смещении окна во всех
направлениях значение критерия (5.46) будет больше в случае,
показанном на рис. 5.7 в). Недостатком детектора Моравека
является то, что он не инвариантен к повороту изображения.
Рисунок 5.7.
скользящего окна
Примеры взаимного
положения углов и
Другим известным детектором углов является детектор
Харриса [126]. В данном случае фигурирующая в (5.46) функция
яркости l(x + и, у + v)) разлагается в ряд Тейлора:
I(x + u,y + v) = I(u,v) + Ix(u,v)x + Iy(u,v)y + O(x2,y2).
226
С учетом малых смещений (,т,у) величина Е(х,у),
характеризующая локальное изменение интенсивности, может быть
записана как
Е(х>у) = 2ХМ(ММх + (Му)
U,v
или в матричной форме
Е(х,у) = [х у]М ,
где М - матрица вида
М = ^w(u,v)
I* Ц
i,L и
(5.47)
В отличие от детектора Моравека в дегекторе Харриса
функция w(u,v) задается круговое окно в виде гауссиана:
w(u,v) = e 2о‘ .
При этом евклидово расстояние от центрального отсчета окна
до границы окна одинаково во всех направлениях.
Для определения углов на основе соотношения (5.47) может
использоваться информация о собственных значениях матрицы М.
В частности, о наличии угла свидетельствую! два больших по
величине собственных значения. В качестве признака угла могут
использоваться также либо мера отклика по Харрису:
A-det(M)-Jl(zr(M))2,
где к - заданная константа, либо мера отклика по Ферсзнеру:
n_det(M)
fr(M) ’
Реализация алгоритма Харриса заключается в вычисление
величины R для всех точек изображения. Затем находятся
локальные максимумы R, превосходящие некоторый порог.
Недостатком детектора углов Харриса является то, что на одном
изображении, представленном в разных масштабах, могут быть
определены разные характеристические точки. Примером
инвариантного к масштабу детектора углов является детектор
Харриса-Лапласа.
227
Для выделения характе-
ристических точек и областей
на изображении
используются также
детекторы, основанные на
применении
дифференциального фильтра
второго порядка,
полученного применением
оператора Лапласа к функции
Гаусса (LoG - Laplacian of
Gaussian) [130].
Известно, что LoG -
Рис. 5.8. Импульсная характеристика
LoG-
фильтр совмещает в себе фильтрующие и дифференцирующие
свойства и дает значительный отклик для разностей
интенсивностей двух типов - для небольших пятен, центр которых
совпадает с центром маски фильтра, и для широких ступенчатых
краев, расположенных близко от центра маски [130]. LoG - фильтр
имеет следующий вид (рисунок 5.8)
V=g IX. у) = + = _ _L [, _ кДД ] Л;-,
5х 5у тот4 2о
7 к 7
1 --—
где g(x,y) =--5-е 21,1 - гауссиан со значением СКО а.
2ло
LoG фильтр может быть аппроксимирован функцией,
являющейся разностью двух гауссианов с разными значениями
СКО [130]. Такая аппроксимация называется DoG фильтром
(Difference of Gaussians). Алгоритм на основе DoG фильтра также
используется в различных методах, в частности в технологии SIFT
[68] для определения характеристических точек на изображениях.
Рассмотренные методы определения характеристических
точек на изображениях достаточно просты в вычислительном
отношении. Однако они ориентированы на поиск объектов
определенной геометрической формы и, к сожалению,
непосредственно не связаны с характеристиками достоверности
опознавания ориентиров. Более полной характеристикой
информативности фрагментов являются так называемые меры
мультиколлинеарности. Рассмотрим их построение.
228
Составим NxM-матрицу X (К>М)из отсчетов (значений
яркости) изображения в прямоугольном фрагменте изображения
размерами NxM. Интуитивно ясно, что наиболее информативными
являются те фрагменты изображения, в которых содержится
значительное количество существенных перепадов функции
яркости, в различных направлениях. Обычно это приводит к тому,
что векторы-столбцы матрицы X обладают слабой
мультиколлинеарностью (сопряженностью). Для выявления
степени мультиколлинеарности векторов используется так
называемая информационная МхМ-матрица:
А = ХГХ. (5.48)
Для оценки информативности фрагмента, представляемого
матрицей А могут использоваться следующие меры
мультиколлинеарности:
• Определитель информационной матрицы - det (А).
Минимальное собственно число - Хт1П (А).
Число обусловленности - К(А) = Xmax/Xmin .
Показатель диагонального преобладания
tr2A
trA2
(5.49)
Наиболее простой в вычислительном отношении мерой
мультиколлинеарности является показатель диагонального
преобладания (5.49). Этот показатель использовался в задаче
идентификации динамического объекта в адаптивной системе
управления летатель-
ного аппарата [119], а
также предлагался в
работе [125], для
оценки информатив-
ности данных унифи-
цированных алгорит-
мов идентификации,
решающих задачи как
оценки динамических
характеристик ЛА,
так и параметров
а) б)
Рис.5.9. Поле информативности (б) изображения
(а), полученное с использованием показателя ф
229
фильтров для улучшения качества изображений. Показатель (5.49)
не зависит от геометрической формы и ориентации объектов и, как
будет показано в разделе 5.6, непосредственно связан с
достоверностью распознавания.
На рис. 5.9 приведены бинарные изображения исходного поля
яркости и соответствующего поля информативности, полученного с
использованием показателя диагонального преобладания.
Областям, соответствующим наибольшим значениям этого
показателя присвоены соответственно большие значения яркости.
Поэтому они выглядят как более светлые. Как и следовало ожидать,
области фона, оказались наиболее темными, что соответствует
представлениям об их малой информативности.
Приведем предложенный в работе [62] алгоритм отбора
наиболее информативных фрагментов изображений с
использованием показателя диагонального преобладания.
Предположим, что анализируемая область изображения имеет
размеры NxM (N>M). Задача отбора информативных фрагментов
изображения в этой области состоит в выделении фрагмента
заданных (меньших, чем NxM) размеров, для которого значение
показателя (5.49) по сравнению с другими участками
анализируемой области принимает более высокие значения.
Алгоритм реализуется в виде итерационной схемы.
При А = 1 переменным nk и mk присваиваются начальные
значения: nk=n1 = N1, mk=m1 = N, K. = nkxmk и задается допустимое
количество пикселей М на искомом фрагменте Далее выполняется
следующая последовательность шагов.
Шаг 1. Проверяется условие К > М. Если это условие
выполняется, то значение умножается на два и осуществляется
переход к следующему шагу, если нет - к шагу 5.
Шаг 2. Путём деления каждой строки на к частей
изображения разбиваются на к2 прямоугольных фрагментов и
вычисляется размерность получающихся на данном шаге
фрагментов: K = ntxmk где nk=nk_t/k, mk=ml_l/k. Результат
округляется до ближайшего целого.
Шаг 3. Для каждого, например, q -го фрагмента изображения,
сформированного на шаге 2, составляется nk xmk-матрица X k, с
использованием которой формируется соответствующая
информационная mk xmk-матрица А* =Х] Xtiy.
230
Шаг 4. С помощью информационной матрице вычисляется
показатель диагонального преобладания (или другая мера
мультиколлинеарности). Полученное значение меры
мультиколлинеарности суммируется со значением меры,
достигнутой в каждом пикселе этого фрагмента на предыдущих
шагах алгоритма.
Шаг 5. Анализируются достигнутые значения мер
мультиколлинеарности на всех фрагментах размерности nkxmk и
отбирается тот, для которого эта мера соответствует наибольшей
информативности. В частности, в случае использования в качестве
меры мультиколлинеарности показателя диагонального
преобладания, наиболее информативным считается фрагмент, для
которого достигнуто наибольшее значение этого показателя.
Подчеркнем, что несмотря на, возможно, более высокую
вычислительную сложность определения информативных
фрагментов по показателю диагонального преобладания по
сравнению с рассмотренными выше алгоритмами Харриса, Мореля
и др., в сквозной информационной технологии, включающей
алгоритмы адаптивного распознавания, он может оказаться более
выгодным.
Это обстоятельство обусловлено тем, что при этом
одновременно может вырабатываться признак наиболее
предпочтительного решающего правила, который может
непосредственно (без пересчета) использоваться на этапе
распознавания. Этот вопрос более детально рассмотрен в параграфе
5.6.
Описанный метод в какой-то степени близок к описанному в
работе [68] методу определения информативных фрагментов путём
вычисления локальных дисперсий. Это сходство основано на том,
что элементы информационной матрицы А являются скалярными
произведениями векторов, из которых составлено анализируемое
изображение, поэтому они, как и дисперсии, характеризуют
степень неоднородности функции яркости. Однако в описанном
выше алгоритме не требуется проводить статистический анализ на
каждом фрагменте. В данном случае всё исходное изображение при
переходе к каждой следующей итерации разбивается на всё более
мелкие области, при этом информативные участки постепенно сами
«проявляются» на поле исходного изображения.
231
На втором этапе формирования базы данных решается задача,
которая заключается в приведении выбранных фрагментов
(протяженных ориентиров) к виду, удобному для последующего
хранения в базе данных и оперативного их опознавания. Решение
этой задачи обеспечивает выполнение сформулированных
требований: количество ориентиров, хранящихся в банке, с одной
стороны, должно быть достаточным для текущего контроля
траектории с требуемой точностью, с другой стороны, общий
объем банка ориентиров должен быть, по-возможности, ограничен.
Указанные требования являются в значительной степени
противоречивыми. Компромисс достигается путем применения
алгоритмов сжатия изображений.
Наиболее популярным и являющимся по существу стандартом
в области сжатия информации, является семейство алгоритмов
JPEG. Метод компрессии изображений JPEG основан на
дискретном косинусном преобразовании. Модификация этого
формата - JPEG 2000 использует технологию вейвлет-
преобразования. Благодаря этой технологии, изображение
получается более гладким и чётким, а размер файла по сравнению с
JPEG, при одинаковом качестве, уменьшается на 30 %.
Другая модификация -JPEG-LS основана на формате LOCO-I.
Она обеспечивает реализацию алгоритма сжатия без потерь, а
также режим сжатия с заданными ограниченными потерями.
Формат JPEG 2000 также содержит режим сжатия без потерь,
однако он работает медленнее и дает меньшее сжатие по
сравнению с JPEG-LS.
Другим интересным подходом, реализующим идею сжатия без
потерь, является метод иерархической сеточной интерполяции
(hierarchical grid interpolation - HGI) [31]. Существо метода сводится
к следующему. Изображение представляется как объединение
непересекающихся отсчетов, принадлежащих различным
иерархическим уровням.
Процедура сжатия строится следующим образом. На каждом
уровне отсчеты, восстановленные на верхних уровнях иерархии,
интерполируются. Затем вычисляются разности между исходными
и интерполированными значениями отсчетов на текущем уровне.
Полученные разности квантуются, так чтобы ошибка квантования
не превышала допустимой погрешности (чем и обеспечивается
заданная точность восстановления). По полученным квантованным
232
интерполяционным разностям строятся восстановленные значения
отсчетов, с использованием которых описанная процедура
повторяется на следующем (ниже) иерархическом уровне.
Подробное изложение метода содержится в работе [31], в которой,
в частности, показано, что HGI-метод обладает низкой
вычислительной сложностью, возможностью контроля качества
восстановления изображений с высоким коэффициентом
компрессии и небольшими погрешностями.
При выборе конкретного метода сжатия изображений
ориентиров в системах автономной навигации КА необходимо
четко представлять их особенности и свойства, а также увязывать
их с характеристиками других алгоритмов, применяемых в САН.
Одной из важнейших характеристик методов компрессии является
закон распределения ошибок, возникающих вследствие сжатия
изображений. В частности, если изображение после декомпрессии
подвергается обработке с использованием нелинейных фильтров,
наличие небольшого числа выделяющихся ошибок, скорее всего, не
окажет существенного влияния на качество работы системы в
целом. Если же изображение подвергается последующей обработке
с использованием алгоритмов, основанных на методе наименьших
квадратов, наличие даже незначительного количества грубых
ошибок может привести к нарушению его работоспособности. В
этом случае целесообразно использовать методы сжатия с
ограниченной гарантированной погрешностью.
Важнейшим требованием к алгоритмам компрессии
изображений в системах автономной навигации КА является
сохранение в сжатом изображении информации, позволяющей
осуществлять распознавание ориентиров. Для большинства типов
протяженных наземных ориентиров (пересечения дорог, излучины
рек, здания, сооружения и др.) наиболее информативными
являются характеристики границ элементов изображения. Контура
обычно оказываются наиболее устойчивыми к суточным, погодным
и сезонным изменениям.
Поэтому переход от исходного изображения к его контурному
представлению является одним из наиболее целесообразных
способов представления изображений в системах автономной
навигации КА, обеспечивающих их сжатие без существенной
потери информативности. Для решения задачи контурного
представления изображений в САН наибольший интерес, на наш
233
взгляд, представляет метод активных контуров, предложенный в
работе [129] и получивший развитие в последние годы.
Метод активных контуров в данном случае применяется после
того как реализованы предшествующие этапы информационной
технологии (геометрическая привязка и предварительная обработка
изображений ориентиров). Работа алгоритма начинается с
построения начального (в оригинале затравочного) контура [129].
Для получения начального контура используется пороговая
обработка, в результате которой составляется функция ф0(х,у). Эта
функция внутри контура имеет положительные значения (ф0 >о), а
снаружи контура - отрицательные значения (фо<о). Эволюцию
начального контура определяет следующее уравнение:
^ = §Е(ф) ц-divf-
at L V
ф(0,х,у) = ф0(х,у),
где
и0(х,у) - функция яркости исходного изображения;
h,v,A.i,A.2 - параметры активного контура,
J Cj (ф) = average(u0)„mw^ > 0},
[с2(ф) = average(u0),ana{p < 0}.
Уравнение эволюции контура решатся численным методом по
следующей схеме:
СдФы
At
— V—С]) + k2(UQ с2)
= 0,
(5.50)
(5.51)
= W.j)
п
Д*Фц'
/(Ь2) + (ф"н-Ф“н)2/(2h2)
+4ду
h2 "
+ (ФГ+и -ФР-ц)2 /(2h2)
(5.52)
-v - kt (иодj - Cj (ФП ))2 + k2 (u0>iJ - c2 (фп ))2 ].
Здесь i, j служат для обозначения координат точек на
изображении, ah- шаг по этим координатам. Искомое решение
итерационным методом. В работе [22] показано, что применение
описанного метода позволяет точно обозначить контуры соседних
элементов даже в случаях касания, что не всегда возможно при
использовании широко известных градиентных методов выделения
контура.
234
В указанной работе приведен пример решения близкой по
постановке задачи - определение контура протяженного блика. В
этой задаче параметры Х]Л2, характеризующие действие
внутренних и внешних сил на контур, определены как ^=1, Х2 = 35.
При этом действие внешних сил оказывается достаточным, чтобы
отделить контуры, отстоящие друг от друга на 1-2 пикселя.
В качестве протяженного наземного ориентира может
использоваться информация о характере кривой, разделяющей на
его изображении области с разными (но однородными внутри
областей) текстурами и уровнями яркости (например, береговая
линия). Тогда для определения этой кривой (контура) можно
применить более простой в вычислительном отношении метод,
основанный на, так называемой, функции контраста. Этот метод
использовался в работе [23] для определения границ тени.
Идея восходит к предложенному в работе [109] методу
Розенфельда и состоит в следующем. Для определения точки s',
принадлежащей контуру, вводится в рассмотрение, так
называемый, показатель контраста:
f(s) = CR-CL, (5.53)
где
1 N
CR=N^ri,Lk(x,)’
-CR и CL - оценки среднего значения функции яркости на
интервалах [s* + 1,n] и [l.s'J соответственно,
У - количество отсчетов на исследуемом участке
изображения в заданном направлении.
Указанная точка s* определяется как точка, в которой
показатель контраста (5.53) максимален:
f(s’) = maxf(s). (5.54)
Направление, для которого вычисляется показатель контраста,
не обязательно должно быть перпендикулярным контуру в данной
точке. Это направление может варьироваться в значительных
пределах. Поэтому совокупность, точек, принадлежащих контуру,
может быть определена лишь для нескольких, например, четырёх
взаимно-перпендикулярных направлений (вертикальное,
235
горизонтальное и два направления под углом 45° к этим осям), а
затем данные объединены. Применение этого метода, в отличие от
метода Розенфельда [109], позволяет избежать появления
множества соответствующих локальным хребтам функции яркости
контуров, вводящих в заблуждение систему опознавания
ориентиров.
Если эталоны протяженных ориентиров хранятся в базе
данных в виде контурных изображений, то регистрируемые на
маршруте (текущие) ориентиры, подлежащие распознаванию,
также целесообразно представлять в виде контурных изображений.
При этом должны применяться также и методы опознавания,
чувствительные к формам контуров. В параграфе 5.6 даны ссылки
на методы, применение которых эффективно в этом случае.
Наконец, задача третьего этапа формирования базы данных
эталонов протяжённых наземных ориентиров состоит в
поддержании объема и качественных характеристик банка
эталонных ориентиров на требуемом уровне. Это может
достигаться путем замены эталонов протяженных ориентиров с
низкими характеристиками опознаваемости новыми с более
высокими характеристиками. Низкие характеристики
опознаваемости могут иметь место вследствие их высокой
чувствительности к сезонным и погодным колебаниям, малой
информативности, а также при заметной корреляции изображений
эталонов, являющихся ориентирами сравнительно близких точек
подстилающей поверхности Земли.
При подборе фрагментов изображений подстилающей
поверхности Земли, наиболее подходящих на роль протяженных
ориентиров для замены ориентиров с низкими характеристиками
опознаваемости необходимо выполнить следующие требования:
1. Высокая информативность изображений.
2. Устойчивость изображений к изменениям условий
регистрации.
3. Некоррелированность (непохожесть) изображений.
Процедуры поиска информативных фрагментов изображений
для формирования претендентов на замену эталонов в данном
случае могут использоваться те же, что и на первом этапе
формирования банка данных эталонных изображений.
Проверку некоррелированности очередного претендента с
другими изображениями из уже созданного банка данных можно
236
осуществлять непосредственно перед его размещением в банке
ориентиров. С целью контроля устойчивости к изменениям
текущих условий регистрации изображений необходимо выполнять
соответствующие проверки в течение некоторого интервала
времени функционирования системы. Для этого необходимо
накапливать сравнительные данные о результатах опознавания
имеющихся и вводимых в базу данных ориентиров и затем
проводить статистическую обработку этих данных.
По результатам этой статистической обработки может
оказаться, что заменяемый эталон по своим характеристикам
предпочтительнее изображения претендента. В этом случае
необходимо выполнить обратную замену. Поэтому база данных
эталонных ориентиров в САН должна иметь некоторую буферную
область, в которой исключаемые ориентиры и претенденты на их
замену в течение некоторого времени «ожидают» окончательного
решения.
Таким образом, схема автоматического пополнения банка
протяженных ориентиров может строиться в виде следующих
этапов:
1. Определение на подстилающей поверхности Земли
наиболее информативных фрагментов изображений-претендентов
на включение в банк протяженных ориентиров и их
геометрическая привязка.
2. Сжатие выделенного фрагмента изображения принятым в
системе способом и внесение во временный банк данных вместе с
опознавательной информацией в виде топоцентрических
координат.
3. При каждом очередном «прохождении» этого ориентира
вычисление и анализ устойчивости его характеристик (формы,
распределения функции яркости, цветовой палитры, текстуры и
др.). Если характеристики ориентира и качество опознавания в
нескольких последовательных эпизодах наблюдения изменяются
незначительно, осуществляется его «перенос» в постоянную базу
данных, используемую для навигации КА.
5.5. Приведение эталонных изображений протяжённых
наземных ориентиров к текущим условиям съемки
Приведение эталонного изображения ориентира к текущим
условиям съемки заключается в его геометрическом
237
преобразовании, обеспечивающем возможность сопоставления с
текущим изображением этого же ориентира. Для сопоставления
изображений, строго говоря, необходимо чтобы для каждой точки
преобразованного изображения нашлась соответственная точка на
текущем изображении. Под соответственными точками
понимаются пиксели двух изображений, соответствующие
проекциям одной и той же точки подстилающей поверхности.
Ясно, что в действительности строгое соответствие может
достигаться в исключительно редких случаях, а речь может идти
лишь о близости изображений в каком либо смысле.
Для решения этой задачи необходимо построить алгоритм
преобразования изображений с использованием измерений
параметров движения КА. Формирование исходного банка
изображений эталонов рекомендуется проводить для некоторых
номинальных значений параметров движения КА. Однако это не
всегда возможно, в особенности при пополнении банка эталонов в
процессе нормального функционирования САН. Поэтому для
построения трансформаций изображений должны использоваться
параметры движения КА, имевшие место как при регистрации
текущего, так и эталонного изображений ориентира, притом не
сами параметры движения КА, а их относительные значения.
При определении относительных значений параметров
движения будем полагать, что в обоих эпизодах регистрации
(текущем и при формировании эталона) центральная линия
визирования, проходящая через начало связанной системы
координат фокальной плоскости и заднюю узловую точку
объектива, пересекает также опорную точку ориентира. Параметры
движения центра масс и углового положения КА известны точно.
Поэтому в опорной точке ориентира можно полагать также
известными углы азимута, углы места и наклонные дальности в
обоих эпизодах регистрации. Для определенности введем
следующие обозначения:
Аэ, 0Э> D3 - угол азимута, угол места и наклонная дальность в
момент регистрации эталонного изображения протяженного
наземного ориентира;
А, 0, D - угол азимута, угол места и наклонная дальность в
момент регистрации текущего изображения.
Задача заключается в приведении эталонного изображения
протяженного наземного ориентира с использованием указанных
238
параметров к текущим условиям съемки. Рассмотрим вначале
приведение эталонных изображений по азимуту.
Введем относительный угол азимута:
ДА = А-АЭ. (5.55)
Для привязки изображений по азимуту необходимо
осуществлять преобразование поворота. В данном случае для
приведения к текущим условиям съемки эталонное изображение
ориентира необходимо повернуть на угол ДА. Поворот
изображения является плоским преобразованием и осуществляется
относительно опорной точки ориентира. Это преобразование
описывается как
v = Rv3, (5.56)
где v = [x, z]1, v3=[x3,z3]T - векторы, составленные из координат
пикселей преобразованного и эталонного изображений
соответственно,
R- ортонормальная матрица поворота:
ГСоб(ДА) -Sin(AA)l
|_Sin(AA) Cos(AA)J’ 1 °
которая обладает следующими свойствами:
RR1 =1 и |R| = 1.
Иногда представляется более целесообразным использовать
нормализованные координаты, предложенные в работе [118]. Для
изображения с шириной W и высотой Н равенства, определяющие
переход от целочисленных координат пикселей v = (x,z) в
нормализованные координаты, имеют вид
2x-W 2z-H TIx
х =----- и z =------, где S = max(W,H).
S S
Переход к нормализованным координатам используется для
удобства работы с изображениями при различном разрешении.
Если на этапах формирования базы протяженных ориентиров и
нормального функционирования системы автономной навигации
используются одни и те же регистрирующие устройства, переход к
нормализованным координатам не обязателен.
Операции приведения изображений ориентиров по азимуту и
масштабу могут выполняться совместно путем трансформации
поворота с изменением масштаба. Это преобразование известно как
преобразование подобия и может быть описано как
239
v = [(S-R)]v3
a -b
(5.58)
где S - заданный параметр масштаба (скаляр). В данном случае не
требуется выполнения условия а2 +Ь2 =1. Преобразование подобия
сохраняет углы между линиями.
Преобразование масштабирования в виде преобразования
подобия (5.58) или в виде отдельного этапа выполняется, если
текущая наклонная дальность от центра масс КА до опорной точки
ориентира при регистрации текущего изображения отличается от
той, которая имела место при регистрации эталона. Формулы
масштабирования в общем случае имеют вид
х = Sx • хэ,
z Sz z3,
где Sx, Sz - масштабные коэффициенты по осям ох и oz.
Обычно эти коэффициенты имеют равные значения, а
масштабирование осуществляется относительно точки
изображения, являющейся опорной точкой протяженного
ориентира. Масштабные коэффициенты определяются как
Sx =SZ =S = D3/D, (5.59)
где D3, D - наклонные дальности,
имевшие место при регистрации
эталонного и текущего изображений
соответственно.
На рисунке 5.10 приведена
геометрическая схема, объясняющая
соотношения (5.59), которые
используются для вычисления
масштабных коэффициентов. В
частности, показана схема для
расчёта масштабного коэффициента
Sz (в направлении оси oz связанной
системы координат), Соотношение
(5.59) в данном случае вытекает из
подобия треугольников KMF.ozF и
KMF,,o,z3F,. Масштабный
коэффициент Sx в общем случае,
когда для регистрации изображения
Рисунок 5.10. К вопросу
определения масштабных
коэффициентов
240
используется ПЗС-матрица, зависит от координаты точки по оси ох.
Связано это с тем, что при этом регистрируемый отрезок КМ не
будет перпендикулярным к центральным линиям визирования в
обоих эпизодах регистрации изображений.
В данном случае регистрация изображения осуществляется
построчно. Поэтому соотношения (5.59) остаются справедливыми и
для масштабного коэффициента Sx в направлении оси ох.
Для привязки изображения по ракурсу (углу места)
необходимо осуществить пространственный поворот относительно
оси OZ фотограмметрической (топоцентрической) системы
координат в точке пересечения центральной линии визирования с
поверхностью геоида Земли. При этом изменятся значения
координат соответственных точек в фокальной плоскости (на
изображении). Построим соотношения для пересчета координат для
случая, когда предварительно выполнены этапы приведения по
азимуту и масштабу. На рисунке 5.11 показана схема регистрации
одного и того же отрезка длиной L, направление которого
совпадает с направлением оси ОХ фотограмметрической системы
координат в двух эпизодах регистрации, соответствующих
получению эталонного и текущего изображений.
Из треугольника КМЕ, (рис.54.11) по теоремам косинусов и
синусов соответственно получаем:
KF2 = L2 + D2 - 2 • LDCos©3
L-Sin©
Siny3= — • (5.60)
По теореме синусов для треугольника oF3xi3 с учётом
равенства углов ZKF,M и ZoF3xi3 можно записать
охь • KF, ^/1-Sin2y3 = f • L • Sin©3.
Осуществляя замену Siny3 в соответствии с (5.60) и возводя в
квадрат, последнее выражение, имеем
ox23-KF2 = L2[ox2 Sin2©3 + f2Sin2©3]. (5.61)
Аналогичное соотношение можно получить применительно к
треугольникам KFM и oFx_:
ox2 KF2 =L2[ox2-Sin20 + f2Sin2©]. (5.62)
Исключая L2 из соотношений (5.61) и (5.62), после
соответствующих преобразований находим соотношение для
241
вычисления координат х,, i = 1,2,... текущего изображения по
координате соответственной точки и фокусному расстоянию на
эталонном изображении:
= I f2
i = 1.2,.... ,
(5.63)
где g - коэффициент, который определяется из выражения:
(р2 + L2 - 2DLCOS0)2Sin203
(р2 + L2 - 2PLCOS0.,)2Sin2©
Рис. 5.11. К выводу формулы для расчёта
координат изображений
Здесь D - наклонная дальность (одинаковая в обоих эпизодах
регистрации, т.к. изображения приведены по масштабу), а 0, 0Э -
ракурсы (углы места) при регистрации текущего и эталонного
изображений соответственно. Поскольку отношение L/D
значительно меньше единицы, то в выражении (5.63) можно
полагать, что
242
Sin203
g =—г-2--
Sin2©
В соответствии с (5.63) осуществляется пересчет координат
только в направлении оси ох связанной системы координат
(фокальной плоскости). Координаты в направлении оси oz
остаются теми же, поскольку предполагается, что приведение по
ракурсу и масштабу уже выполнено.
Мы рассмотрели вопросы приведения эталонных изображений
к текущим условиям съемки на основе простейших трансформаций
поворота и масштабирования. Такое упрощение в данном случае
допустимо, т.к. изображение формируется путем
последовательного «припасовывания» строк, регистрируемых ПЗС-
линейкой. Поскольку поперечный (в направлении оси ох) размер
части изображения, соответствующей одной строке, сравнительно
невелик, в целом на изображении искажения перспективы при
больших углах места также малы. Трансформациями перспективы
можно также пренебречь в случае, когда регистрация
осуществляется на большом удалении от подстилающей
поверхности Земли, а отклонения топоцентрических координат
центра масс КА от координат ориентира невелики.
При малых углах места, возможно, лучший результат будет
достигаться путем проективного преобразования, известного как
преобразование перспективы:
v = Hv3, (5.64)
где Н - ЗхЗ-матрица проективного преобразования;
v - [х, zJ1, v3 = [хэ, 2Э7 - векторы, составленные из так называемых
однородных координат.
Для приведения результатов к неоднородным координатам
полученные однородные координаты должны быть нормализованы.
Для решения этой задачи используются следующие соотношения:
х,_ hoox + h01y+h02
h20x + h21y + h22
hi0x + hiiz + hi2
h20x + h2]z + h22
Построение матрицы проективного преобразования по
текущим параметрам движения может быть нецелесообразным
также по соображениям вычислительного характера.
Кроме описанных геометрических преобразований, из-за
243
различий по дальности и изменения погодных условий текущие
изображения могут также заметно отличаться от хранящихся в базе
данных эталонных изображений по яркости. Для того чтобы
скорректировать искажения яркости регистрируемого изображения
обычно используют оценки среднего и дисперсии, рассчитанные
для изображений ориентиров, хранящихся в базе данных: цг(п,,п2),
Of(nt,n2). С помощью этих оценок рассчитываются коэффициенты
преобразования, обеспечивающие требуемые значения
Hg(ni,n2), Og(n],n2) [74]:
a(n1;n2)=:—(5.65)
of(n„n,)
b(n1,n2) = pg-pf(n1,n2)——-. (5.66)
Of (П|,П2 )
Заметим, что приведение среднего значения яркости текущего
изображения к заданному значению pg не гарантирует совпадение
значений яркости в соответственных точках текущего и эталонного
изображений. Связано это с тем, что эталонное изображение,
хранящееся в базе ориентиров, является фрагментом текущего
зарегистрированного изображения. Поэтому ошибка привязки по
яркости будет зависеть от диапазона яркостей в областях, которые
прилегают к фрагменту, являющемуся эталоном.
При выполнении описанных преобразований алгоритм должен
строиться таким образом, чтобы исключить появление
необработанных точек на выходном изображении (например при
масштабировании с увеличением размеров выходного
изображения). Обычный прием, позволяющий избежать этого,
состоит в том, что для каждой точки на выходном изображении
выполняется преобразование наиболее близких соответствующих
точек входного изображения. При этом более точное соответствие
выходного и входного изображений достигается путем
интерполяции обработанных точек в окрестности точки, которая
оказалась незаполненной.
В заключение напомним, что для уточнения координат КА
необходимо определить отклонения координат точек, принятых в
качестве опорных (реперных), на текущем и эталонном
изображениях. Как правило, это характерные легко определяемые
на изображении изгибы, пересечения, точечные естественные или
244
техногенные объекты и др. Для того чтобы определить эти
отклонения необходимо совместить реперные точки эталонного и
текущего изображений.
К сожалению, вследствие неизбежных погрешностей в
системе управления КА и системе регистрам, и ю-к; пересечения
центральной линии визирования в момент регистрации текущего
изображения может не совпадать с реперной точла. Описанные
выше преобразования эталонных изображений протяженных
наземных ориентиров, осуществляемые по гекутл-и значениям
параметров движения КА, необходимы для то’ о. чтобь'. «сузить»
размеры зоны поиска реперной точки ожидавтого .•риечтира.
5.6. Обнаружение и опознавание текущих протяженных
ориентиров
Задача опознавания ориентира решается САН после
выполнения описанных в предыдущем параграфе этапов
предварительной обработки и преобразования изображений, в ходе
которых улучшено качество изображений и выполнено их
приведение к условиям съемки по яркости. ракурсу, азимуту и
масштабу.
Следует различать два режима опознав-;пня ориентира: режим
нормального функционирования и режим потока ориентиров в
условиях неопределенности.
В режиме нормального функционирования процесс
определения очередного орг. штира на маршруте КА
осуществляется путем сопоставления топопентрических
(фотограмметрических) координат КА и блия:нищего ориентира. В
этом режиме по текущим параметрам движения КА (координаты
центра масс, модуль и направление вектора скорости) может быть
вычислен подходящий момент временя д-р. формирования
псевдокадра, когда КА находится на минимальном расстоянии от
очередного ориентира на маршруте. Дли зюго используются
соотношения, связывающие координаты реперной точки
ожидаемого протяженного ориентира с координатами КА,
приведенные в параграфе 4.4.
В указанном режиме ожидаемый орле л ир известен до
формирования псевдокадра, т.е. задача .< конавзния ориентира
фактически решена до его регистрации. i: ..•этому задачи обработки
изображения в данном случае заключаю: тт. ;• одной стороны, в
245
выработке сигнала подтверждения, что это именно тот ориентир,
который ожидался в данной точке, с другой стороны, в уточнении
координат центра ориентира на изображении и соответственно
текущих координат КА в силу соотношений, связывающих эти
координаты. Для решения указанных задач обычно применяются
методы корреляционного анализа изображений.
Режим поиска ориентиров в условиях неопределенности
реализуется в ситуации, когда, по каким-либо причинам,
достаточно точный прогноз отсутствует, а известна лишь область, в
которой предположительно может находиться несколько
ориентиров. В этом случае задача опознавания ориентиров, по
существу, является задачей распознавания изображений и
формулируется как типичная задача классификации на множестве
признаков, вычисляемых по изображению текущего ориентира.
Известно много подходов и методов решения задачи
распознавания объектов на изображениях. Даже краткий обзор
методов и алгоритмов распознавания, которые могли бы быть
применены для опознавания ориентиров в описанной ситуации, в
рамках данной монографии не представляется возможным, укажем
лишь на два «классических» источника [47,121].
В данном случае основное внимание будет сосредоточено на
рассмотрении специфических особенностей решения задач
распознавания в САН, которые могут оказать влияние на выбор
конкретного метода. Основные идеи будут иллюстрироваться
описанием лишь немногочисленных методов и алгоритмов,
которые в разное время предлагались авторами для решения
подобных задач.
Важнейшей специфической особенностью опознавания
ориентира в режиме неопределенности является то, что
неизвестными являются не только координаты центров ориентиров
на изображениях, но и то, какой конкретно протяженный ориентир
зарегистрирован в данной области изображения. Поэтому в данном
случае сначала на псевдокадре должны быть определены
фрагменты, «подозрительные» на наличие в них изображений
ориентиров, а затем решаться задача сопоставления этих областей с
хранящимися в базе данных эталонами. При этом для определения
единственного ориентира должны сопоставляться множества
фрагментов-претендентов и предполагаемых эталонов из базы
данных. Количество сопоставляемых изображений в каждом
246
конкретном случае зависит от степени неопределенности
положения КА.
Задача опознавания в указанных условиях может решаться
путем последовательного «просмотра» фрагментов претендентов с
выбором наилучшего соответствия на каждом шаге процедуры
опознавания. Окончательный выбор осуществляется в результате
отбора ориентира с наилучшими показателями соответствия и
проверки достижения пороговых значений этих показателей.
Методы и алгоритмы, используемые на этапе определения
изображений претендентов, рассмотрены в параграфе 5.4.
Решаемая на каждом этапе задача определения наилучшего
соответствия эталона одному из изображений-претендентов в
условиях априорной неопределенности является типичной задачей
классификации. Как всякая задача распознавания, она включает два
этапа: формирование системы признаков и собственно
классификация.
Процедура формирования набора признаков является
самостоятельной, трудно формализуемой проблемой. В настоящее
время известно большое количество различных систем признаков
(геометрические, топологические, вероятностные, спектральные и
др.), которые могут с успехом использоваться в системах
автономной навигации КА.
При распознавании ориентиров на многозональных
изображениях, наибольший эффект будет достигаться при
использовании нескольких систем признаков одновременно. Выбор
конкретной системы признаков тесно связан также со способом
представления (сжатия) изображений протяженных ориентиров в
базе данных (см. параграф 5.4).
Предположим, что задача формирования пространства
признаков решена. Тогда приведем постановку задачи опознавания
ориентиров в терминах общей проблемы распознавания.
Пусть имеется М изображений каждого из К ориентиров.
Каждое изображение представляется вектором x = [x!,x,,...,xN]T
размерности А, где ХрХ^.-.Хл - признаки.
Векторы, соответствующие изображениям одного ориентира,
составляют класс. Совокупность векторов признаков всех классов
образует обучающую выборку. Решение задачи распознавания
состоит в конструировании решающей функции f :RN i->{0,l,2,...,K},
247
которая каждому вектору х ставит в соответствие некоторый класс.
Для исключения неправильных классификаций вводится также
класс с номером 0, соответствующий отказу в распознавании (при
этом решение о местонахождении КА должно вырабатываться с
использованием других источников информации).
Из множества {х1,х2,...,х.и} векторов каждого класса
(различных изображений одного ориентира) составляется NxM -
матрица
X = [x„x2,...,xw]. (5.67)
Этой матрице ставятся в соответствие так называемая
информационная МхМ- матрица:
А = ХГХ (5.68)
и ковариационная Л'х/У-матрица
В = ХХГ. (5.69)
Предполагается, что гапкА = М. Сформулированная задача
имеет строгое математическое решение.
Одним из наиболее популярных [121] является способ
классификации, основанный на извлечении из изображения
признаков и последующем вычислении мер близости между ними.
Наиболее распространенное решающее правило для установления
близости вектора признаков х - к-му классу заключается в
вычислении евклидова расстояния между этим вектором х и
вектором xt, являющимся эталоном, представляющим к-й класс:
D = ||х - хк|| = д/(х - хк)т(х - хк) . (5.70)
Вектор хк может определяться, например, как выборочное
среднее значение для множества хк образов, принадлежащих к-му
классу:
хк =-^~ Ух ,
к Nk %
к хеХк
где Nk - количество образов (векторов), входящих во множество
Xt.
Часто методы распознавания реализуются в пространстве
признаков, где в качестве значений признаков используются сами
значения яркостей отсчетов цифрового изображения. Недостаток
этого подхода - большая размерность пространства признаков.
Известным способом преодоления этой трудности является
отбор наиболее информативных признаков, путем использования
248
матрицы весов или перехода к системе признаков меньшей
размерности, например, с помощью разложения Карунена-Лоэва
(Principal Component Analysis - РСА). Описания некоторых
эффективных способов отбора информативных признаков можно
найти в работах [9,62].
В рамках этого направления наряду с евклидовым
расстоянием известны и широко используются в качестве меры
близости манхэттенская метрика, расстояние Махаланобиса и др.
Следует иметь в виду, что выбор той или иной меры близости
определяется доступной априорной информацией. В зависимости
от объема и характера априорной информации возможны два
подхода: детерминистский и вероятностный.
В рамках вероятностного подхода предполагаются
известными вероятностные характеристики, а качество
классификации характеризуется условным средним риском или
общим риском.
Условный средний риск характеризует потери, связанные с
решением об отнесении вектора признаков у к k-му классу:
Rk(y) = -^SIclkP(W1)p(y/Wi), (5.71)
Р1У)1=о
где Р(А[) - априорная вероятность появления объектов из класса
Q]; р(уАУ) _ условная плотность распределения вероятностей
случайного вектора признаков Y при условии, что он является
объектом класса \\ (функция правдоподобия);
р(у) - безусловная плотность распределения вероятностей
случайного вектора Y;
clt - потери, обусловленные принятием решения об отнесении
вектора признаков к А-му классу, в то время как объект
принадлежит классу \\.
Общий риск определяется как математическое ожидание
потерь. Для построения решающих правил необходимы
статистические, данные о характере распределения признаков. Эти
данные могут быть получены путем наблюдения ориентиров в
течение достаточно длительного времени при различных условиях
регистрации.
Следует иметь в виду, что статистические характеристики
одного и того же ориентира в разное время года могут существенно
различаться. Поэтому целесообразно формировать несколько
249
«комплектов» исходных вероятностных моделей, применяемых в
различных условиях функционирования. Если в результате такого
изучения сформированы достаточно достоверные априорные
вероятностные модели, могут применяться оптимальные стратегии
статистической классификации: байесова, минимаксная или
стратегия Неймана-Пирсона. Описание этих методов можно найти
в книгах [74, 47, 121].
Если объем предварительных исследований невелик, то
априорные статистические характеристики часто оказываются
недостоверными или отсутствуют вовсе. При этом количество
изображений каждого ориентира, по которым должно приниматься
решение о принадлежности к данному классу, невелико. Априорная
неопределенность может иметь место даже при длительном
наблюдении ориентиров вследствие, как уже указывалось выше,
значительных сезонных или погодных изменений их
характеристик. В указанных случаях вероятностные методы
оказываются не вполне обоснованными, а методы и алгоритмы
опознавания ориентиров целесообразно строить на основе
принципов адаптации
В адаптивных методах распознавания решающие правила
перестраиваются с учетом текущей информации, поступающей по
мере функционирования системы. При этом могут учитываться
также некоторые специфические особенности задачи (характер
искажений, взаимное расположение векторов образов в классе и
др-)-
Далее в качестве иллюстрации приведем один пример
построения процедур принятия решений на основе принципов
адаптации. Для этого наряду с решающим правилом, основанным
на вычислении евклидова расстояния между распознаваемым
вектором и вектором, являющимся представителем к-го класса,
введем в рассмотрение правило принятия решений на основе меры
близости к подпространству, натянутому на векторы из к-го класса.
Для этого используется одна из следующих Ах А-матриц Q(>)
[62]:
Q^X^xJ" *1(5.72)
или Q*.s=T*T*\ (5.73)
250
где Tt- матрица, составленная из собственных векторов,
соответствующих нулевым собственным значением матрицы
в,=хХ;
Xt- N х М -матрица, та же, что и в (5.6'7).
Решающая функция /(х) строится шг-?дукч>- -м обпазом.
Вектор х принадлежит т -му классу, то есть , ; х) - г. 1.7. ...аг .
xnQ. ах
если R =maxR... где R t - —— ’ , ;5.74)
k (х‘х) ’
xTQt ,х
либо S_ =minSk, где S. -—74-. рх /5)
k ' (*‘х)
При использовании порогового значения т , решающая
функция дополняется правилом
f(x) = O, если Rm <1-Tq или Sm >Т.,. (5.76)
Показатели R и S в выражениях (5.74) и <5.75 > связаны между
собой соотношением
R; —1—Sj.
Поэтому применение одного из них в каждой конкретной
ситуации может определяться только объем, -м вычислительных
затрат. В частности, правило (5.75) целесоо6рхз»:е применять в
ситуации, когда отношение количества чзблкщеш-ш к количеству
признаков сравнительно невелико, например, находится в
диапазоне (2-2,5) [62].
Указанные решающие правила в ряде сглчаев сказывается
более эффективными по сравнению с вычислением евклидовых
расстояний и некоторых других мер блиюсл-., т к. учитывают
характер взаимной ориентации всех векторов признаков класса в
целом. В работе [63] приведены примеры, иллюстрирующие более
высокое качество распознавания при применении л качестве мер
близости показателей сопряженности. В частности, замечено, что
эти преимущества проявляются в ситуации, г э; дэ векторы
признаков в классе не сгруппированы тесно ч симметрично
относительно некоторого «центрах- класса, а образуют
подпространства со специфической взаимной ориентацией.
Указанная особенность можг>- уощхг.у. :»«». лдоваться для
повышения степени адаптации системы < изменениям условий
функционирования. Для этого необходим толо.тзитгльный
признак, характеризующий особенност;.- ориентации и
близости векторов признаков внутри каждого класса.
Количественными характеристиками особенностей ориентации и
тесноты группирования векторов признаков в классе являются так
называемые показатели мультиколлинеарности: определитель, след
и минимальное собственное значение информационной матрицы А.
Наиболее полной (среди указанных) характеристикой взаимной
ориентации векторов признаков является минимальное собственное
значение матрицы информативности.
В работах [125, 62] показана возможность применения для
анализа мультиколлинеарности с целью адаптации систем
показателя диагонального преобладания (5.49) информационной
матрицы (5.68). Для этого наряду с указанными выше матрицами А
и В рассматривались также расширенные информационная и
ковариационная матрицы размерности (М+1)х(М+1) и (N+l)x(N+l)
соответственно. Эти матрицы строятся с путем присоединения к
исходной матрице признаков X = [x1,x2,...,xw] предъявленного на
распознавание вектора признаков х = [x,,x2,...,xN]T. Идея адаптации
состоит в том, чтобы в зависимости от величины показателя
диагонального преобладания информационной матрицы или
расширенной информационной матрицы применять различные
решающие правила.
Адаптивная система распознавания, в которой показатель
диагонального преобладания ф, определяемый с помощью
выражения (5.49), используется для выбора одного из решающих
правил: евклидово расстояние - (5.70) или показатель
сопряженности - (5.74), (5.75) может быть построена, например, в
виде схемы, показанной на рисунке 5.12.
В данном случае в блоке выбора решающего правила
вырабатывается решение о применении мер близости (5.70) или
(5.74), (5.75). Блок распознавания текущего образа реализует
обычную процедуру распознавания по установленному
решающему правилу. Алгоритмы блока выбора решающего
правила могут решать эту задачу на любом этапе ее
функционирования по мере появления также и другой
дополнительной информации.
252
Наиболее простой
способ построения
системы, когда такие
правила
выраба лваются один
раз до этапа
распознавания. В этом
случае показатели ф -
вычисляются по
формуле (5.49) на этапе
обучения для матриц
всех классов. При этом
применяемые для
каждого класса
Рис. 5.12. Схема адаптивной
системы распознавания
решающие правила становятся известными до начала
распознавания. В данном случае показатель диагонального
преобладания, по существу, является дополнительным признаком, с
помощью которого реализуется двухэтапная схема распознавания.
В полной мере адаптация реализуется, если по мере
функционирования системы автономной навигации появляется
дополнительная информация, например, новая информация о
классах распознаваемых объектов. При этом может потребоваться
уточнение пороговых значений или изменение решающего правила.
Для этого в САН должны анализироваться успешные и
неуспешные решения с целью выработки пороговых значений
диагонального преобладания информационной матрицы с целью
подбора наиболее подходящего решающего правила к новому
классу.
Принципы адаптации в системе реализуются в полной мере
также в случае, когда решение о применении того или иного
решающего правила принимается на основе значения
диагонального преобладания ф расширенной информационной
матрицы. Такое решение не может быть выработано на этапе
обучения. Оно должно приниматься только в ходе
функционирования системы.
Подчеркнем, что описанная схема выбора одного из двух
решающих правил, основанных на евклидовом расстоянии и
показателях сопряженности может рассматриваться как один из
возможных примеров организации адаптивной схемы. В
253
действительности, в рамках этого подхода могут использоваться
различные меры близости. Конкретные решающие правила
применяемые в системе, кроме прочего, определяются также
способом представления изображений ориентиров. В частности,
если протяженные наземные ориентиры хранятся в виде контурных
изображений, для их опознавания целесообразно использовать,
методы, основанные на вычислении меры Хаусдорфа.
Направленная мера Хаусдорфа от М к I, где М и I -
множества точек, определяется как
= (5.77)
me М iе I
где ||»| - некоторая норма.
Мера (5.77) задает максимальное расстояние точек множества
М от ближайших точек из множества I.
В приложении к задаче распознавания ориентиров мера
Хаусдорфа может использоваться в качестве количественной
оценки близости между ориентирами и эталонами, задаваемыми в
виде множеств точек (пикселей), принадлежащих их контурам на
изображениях. В работе [128] приводится пример эффективного
использования различных, построенных на основе этой меры,
модификаций решающих правил и алгоритмов к распознаванию
контурных изображений цифр на движущихся объектах.
По мере функционирования адаптивной системы опознавания
ориентиров в САН накапливается объем статистических данных о
применяемых моделях принятия решений. При этом возрастает
достоверность вероятностных моделей и статистические методы
распознавания могут оказаться более предпочтительными.
Для принятия соответствующих решений в системах
автономной навигации КА могут использоваться как эмпирические
правила, основанные на непосредственном подсчете и сравнении
числа успешных решений различными методами, так и построении
доверительных областей. Статистические процедуры
распознавания, обычно, реализуются в виде различных
модификаций байесовского решающего правила, применение
которых зависит от уровня доступной априорной информации.
Применение байесовских процедур распознавания объектов на
изображениях при наблюдении из космоса рассматривалось в
работе [9]. Особого внимания с точки зрения опознавания
254
ориентиров заслуживают также методы распознавания, описанные
в работе [53].
В режиме нормального функционирования определение
очередного ориентира на маршруте КА осуществляется путем
сопоставления топоцентрических (фотограмметрических)
координаз' КА и ближайшего ориентира. Поскольку в этом режиме
ожидаемый ориентир известен, задача обработки изображения в
данном случае заключаются в уточнении координат реперной
точки на текущем изображении. Для решения этой задачи
формируется маска, охватывающая некоторую информативную
область в окрестности реперной точки эталонного изображения
ориентира. С использованием этой маски на текущем псевдокадре
осуществляется поиск положения, при котором принимает
максимальное значение мера корреляции [104]
Z ZF1(j,k)F2(j-m,k-n)
R(m,n) =-------------------------------(5.78)
’ J К 2 11/2Г J К 2 1/2
Z ZFj2(j,k) Е EF22(j-m,k-n)
J=lk=l J |_j=ik=l
где (j,k) - индексы элементов в окне размером JxK элементов,
которое расположено внутри зоны поиска размером MxN
элементов.
После того как положение маски, при котором мера
корреляции (5.78) принимает максимальное значение найдено,
становятся известными координаты реперной точки на текущем
изображении. Далее остается определить точные текущие
координаты КА с использованием соотношений (4.21),
связывающих эти координаты с координатами точек на
изображении.
255
Часть И
СИСТЕМЫ АВТОНОМНОЙ НАВИГАЦИИ
КОСМИЧЕСКИХ АППАРАТОВ ДИСТАНЦИОННОГО
ЗОНДИРОВАНИЯ ЗЕМЛИ
Глава 6. АСТРОРАДИОТЕХНИЧЕСКАЯ СИСТЕМА
АВТОНОМНОЙ НАВИГАЦИИ КА
6.1, Функциональная схема системы навигации КА
Процесс навигации космического аппарата, включает в себя
измерения первичных навигационных параметров и последующие
вычисления параметров движения его центра масс. Реализация этих
функций осуществляется с помощью системы навигации.
Под системой навигации К А понимается совокупность
технических и программных средств, обеспечивающих проведение
измерений первичных навигационных параметров, вычисление
параметров движения центра масс КА и формирование
необходимой информации для функционирования системы
управления движением КА и его целевой аппаратуры.
В зависимости от места своего расположения системы
космической навигации разделяются на бортовые и наземные.
К наземным системам навигации КА относятся такие системы,
в которых измерения первичных навигационных параметров и все
необходимые вычисления производятся с помощью технических
средств, входящих в состав наземного комплекса управления
(НКУ). Для передачи в бортовую систему управления КА сведений
о параметрах движения его центра масс, которые соответствуют
заданным моментам времени, используются системы передачи
навигационной (эфемеридной) информации. Эфемериды могут
передаваться как непосредственно на приёмник КА по каналу
«НКУ - КА», так и с помощью КА - ретрансляторов.
В бортовых системах навигации реализация навигационного
процесса осуществляется бортовыми устройствами КА.
На первом этапе развития космической техники все системы
навигации
КА были наземными. В дальнейшем в связи с появлением
малогабаритных средств измерений первичных навигационных
параметров и созданием быстродействующих бортовых цифровых
вычислительных комплексов распространение получили бортовые
256
системы навигации КА. Наземные навигационные комплексы
сохранили при этом функцию контроля технического состояния
бортовых систем, а при необходимости выполняют функцию
коррекции формируемых бортовой системой параметров движения
центра масс КА. Выбор вида системы навигации во многом
определяется принципом управления, который используется при
летной эксплуатации КА.
В настоящее время нашли применение два принципа
управления КА, а именно: программно-временной и координатный.
Согласно программно-временному принципу управление КА
осуществляется путем передачи на его борт временной программы.
Эта программа представляет собой последовательность моментов
времени выдачи команд для включения или выключения
соответствующей бортовой аппаратуры. Расчет временной
программы производится на наземном комплексе управления
(НКУ) и является достаточно сложным и трудоемким процессом.
Сущность координатного принципа управления заключается в
следующем. Зная в любой момент времени текущие координаты и
составляющие вектора скорости КА, можно с помощью бортовых
средств решать поставленные перед КА задачи (например,
наблюдения заданного района земной поверхности) без расчета на
НКУ временной программы. В результате этого загруженность
НКУ снижается, а помехозащищенность КА увеличивается.
В общем случае в состав системы навигации КА входят (рис.
6.1):
- средства измерений первичных навигационных параметров
(ПНП);
- средства обмена информацией;
- навигационный вычислительный комплекс;
- средства отображения и контроля;
- средства формирования навигационной информации.
Первичные навигационные параметры измеряются с помощью
средств, построенных на различных физических принципах. К
числу их относятся радиотехнические системы, оптико-
электронные приборы, магнитометры и т.д. Широкое
распространение в системах космической навигации получили
оптические и радиотехнические измерители. Оптические приборы
обеспечивают определение направлений на звезды, наземные
ориентиры, центры видимых дисков или горизонты Земли, Луны,
257
Солнца, а также моментов времени затмения Солнца или других
звезд Землей. С помощью радиотехнических систем измеряются
расстояния и радиальные скорости движения КА. Для навигации
КА используются измерения расстояний до поверхности Земли и
наземных радионавигационных точек.
Средства обмена информацией предназначены для
преобразования сигналов измерителей первичных навигационных
параметров в форму, удобную для работы устройств ввода-вывода
навигационного вычислительного комплекса. Кроме того, с
помощью средств обмена информацией преобразуются команды
управления, поступающие из навигационного вычислительного
комплекса в измерители. В современных бортовых системах
навигации эти средства встраиваются в измерительные приборы.
Навигационный вычислительный комплекс представляет
собой ЭВМ с необходимым для проведения навигационных
вычислений программным обеспечением. Наземные системы
навигации КА снабжаются, как правило, универсальными ЭВМ, а
бортовые - специализированными.
На пилотируемых космических кораблях (ПКК) в состав
системы навигации входят средства отображения информации о
параметрах движения центра масс ПКК. Эти средства могут быть
связаны с навигационным вычислительным комплексом или
функционировать независимо от него, т.е. выполнять свои функции
автономно после ввода космонавтом соответствующих исходных
данных.
Одним из таких средств является навигационный индикатор,
который позволяет определять не только широту и долготу района,
над которым пролетает ПКК, но и географические координаты
места его посадки при включении в данный момент тормозной
двигательной установки [36].
Для определения технического состояния, парирования сбоев,
устранения отказов и повреждений системы навигации
используются средства контроля. В качестве такого средства может
выступать соответствующая программа, например, программа
режима управления при нештатных ситуациях.
С помощью средств формирования навигационной
информации создается навигационное сообщение, которое,
благодаря системе передачи навигационной информации,
поступает в систему управления КА.
258
системы навигации
L
Рис. 6.1. Функциональная схема системы навигации КА
259
6.2. Структура и функциональные показатели
астрорадиотехнической системы автономной навигации
КА
Выбор структуры системы навигации КА о< новывается на
целевом назначении КА, предъявляемых к нему требованиях и
достигнутом уровне развития техники. В зависимости от целевого
назначения различают связные, навигационные, метеорологические
и геодезические КА, а также КА дистанционного зондирования
Земли.
К системам навигации КА предъявляются следующие
требования:
- рациональное распределение функций между наземным и
бортовым комплексами управления КА;
- возможность комплексного использования измерителей
первичных навигационных параметров в интересах других
бортовых систем;
- совместимость во времени работы системы навигации с
другими бортовыми системами;
- минимизация массы, габаритов и потребляемой энергии.
С учетом этих требований в 60-х годах прошлого столетия
было принято решение установить на отечественном беспилотном
КА дистанционного зондирования Земли систему автономной
навигации. Эта система основана на измерениях высоты полета КА
и двух углов «звезда-вертикаль». Проводимые бортовыми
средствами измерения подвергаются статистической обработке с
использованием метода динамической фильтрации Калмана (см.
п.2.4).
Для статистической обработки измерений первичных
навигационных параметров использован бортовой цифровой
вычислительный комплекс (БЦВК). Очевидно, что техническая
реализация такой структуры системы навигации возможна при
размещении на борту КА высотомера, построителя вертикали и
двух оптико-электронных приборов, визирующих звезды [6].
В связи с этим в состав системы автономной навигации (САН)
беспилотного КА дистанционного зондирования Земли входят
БЦВК и навигационный измерительный комплекс (рис. 6.2).
Измерительный комплекс САН включает в себя радиовертикаль -
высотомер (РВВ) и два астровизирующих устройств (АВУ-1 и
АВУ-2).
260
Рис. 6.2. Аппаратурный состав астрорадиотехнической САН
Система автономной навигации КА дистанционного
зондирования Земли построена таким образом, что ее
систематические погрешности, т.е. средние значения погрешностей
параметров движения центра масс КА, должны быть равны нулю.
Появление систематических погрешностей фиксируется средствами
НКУ. Параметры движения, определяемые САН и содержащие
систематические погрешности, корректируются путём введения
соответствующих поправок к их значениям.
Поэтому точность САН оценивается предельными
погрешностями, которые равны 3oq , где Oq - среднее
квадратическое отклонение бк~го параметра движения центра масс
КА.
Предельные погрешности первой отечественной САН
беспилотного КА наблюдения за поверхностью Земли достигают
следующих значений [6]:
- по высоте полета -0,15 км;
- по трансверсали (вдоль орбиты КА) - 6,0 км;
- по боковой координате (по нормали к плоскости орбиты КА)
- 1,5 км;
- по радиальной составляющей скорости - 7,0 м/с;
- по продольной составляющей скорости - 0,22 м/с;
- по боковой составляющей скорости - 1,88 м/с.
Среднее время навигационного режима, в ходе которого
достигаются указанные показатели точности САН, составляет (1,2 -
2,0) витка вокруг Земли. При этом интервал времени между
засечками первичных навигационных параметров равен 10 с.
В промежутках между навигационными режимами САН
способна прогнозировать движение КА. Предельные погрешности
261
прогноза по координатам в течение 8 витков не превышают: по
высоте - 0,5 км, по трансверсали - 32,7 км, по боковой координате
- 4,4 км. При этом погрешности навигационного режима САН в
момент начала прогноза полагаются нулевыми.
6.3. Основные характеристики БЦВК
Для обеспечения требований по надёжности БЦВК содержит
три БЦВМ, которые соединены по схеме голосования «два из
трёх». Арифметические операции в БЦВК выполняются с
фиксированной запятой. Для высокоточных вычислений применена
специальная программа счёта с плавающей запятой. Формат
представления чисел является 16-разрядным или 32-разрядным при
операциях с удвоенной точностью.
Быстродействие БЦВК при операциях с 32-разрядным
форматом слова составляет:
- сложение - 105 тыс. опер/с;
- умножение - 8,5 тыс. опер/с;
- деление - 4,4 тыс. опер/с.
Ёмкость оперативной и постоянной памяти соответственно
равна 3072 и 32768 16-разрядных слов. Возможно расширение
оперативной памяти до 4096. а постоянной памяти до 49152 16-
разрядных слов.
6.4. Астровизирующее устройство
Астровизирующее устройство (АВУ) предназначено для
поиска, захвата и слежения за звездами с целью определения их
углового положения в связанной с корпусом КА системе
координат.
По своему принципу построения АВУ представляет собой
телескоп, установленный в двухстепенном кардановом подвесе.
Благодаря следящей системе, визирная ось телескопа направлена на
заранее выбранную навигационную звезду. Положение телескопа
относительно корпуса КА определяется с помощью двух датчиков
углов. Они установлены на осях вращения рамок карданового
подвеса.
В качестве угловых координат звезд в связанной с корпусом
КА системе отсчета используются углы а и у. Угол а
отсчитывается в плоскости орбиты от продольной оси КА до
проекции на эту плоскость направления на звезду (рис. 6.3, а), а
262
угол у - от плоскости орбиты до направления на звезду (рис. 6.3, б).
Углы а и у определяются поворотами соответственно наружной и
внутренней рамок карданового подвеса АВУ относительно
исходного положения.
Астровизирующее устройство состоит из двух блоков: оптико-
механического и электронного (рис. 6.4). Оптико-механический
блок (ОМБ) содержит:
- основную оптическую систему с объективом, блендой,
пылезащитной крышкой (ПЗК) и тремя плоскими зеркалами, одно
из которых имеет отверстие;
- эталонный источник света (ЭТ);
- фотоприемник (ФП);
- датчик Солнца (ДС) с приводом (Пр) и затвором;
- подвижное основание, которое является внутренней рамкой
карданового подвеса и включает в себя шаговый двигатель (ШДУ) с
редуктором и датчик угла у (ДУу);
а)
Рис 6.3. Направления отсчета углов «(а) и у(б) АВУ
- неподвижное основание, которое является наружной рамкой
карданового подвеса и включает в себя шаговый двигатель (ШДа) с
редуктором и датчик угла а (ДУа);
263
- преобразователь кодов и сигналов (ПКС) для обмена
информацией с БЦВК.
В электронный блок (ЭБ) входят устройства обработки
сигнала и управления, блок питания и т.п.
Пылезащитная крышка (ПЗК) предназначена для защиты от
пыли и других посторонних частиц входного зрачка бленды на
время предстартовой подготовки, пуска и выведения КА на
заданную орбиту. Открытие крышки осуществляется с помощью
электроспуска после отделения КА от PH.
Бленда представляет собой тонкостенную трубу с набором
диафрагм. Она служит защитой фотоприемника от боковых
засветок Солнца, Луны и элементов конструкции КА. Для
предотвращения возможной засветки фотоприемника прямыми
солнечными лучами используется специальный
Рисунок 6.4. Функциональная схема АВУ
затвор, который управляется приводом по сигналам датчика
Солнца
Датчик Солнца (ДС) формирует выходной сигнал в том
случае, когда солнечные лучи падают на бленду под углом менее
40° к оптической оси телеблока. Этот сигнал поступает на привод
264
затвора, который перекрывает входной зрачок объектива,
обеспечивая защиту фотокатода диссектора от солнечных засветок.
Эталонный источник света (ЭТ) содержит лампочку эталона и
оптическую систему. Он предназначен для геометрической и
энергетической юстировки АВУ. Лампочка эталона способна
определить на фотоприемнике изображение его геометрии' 'кого
центра. Кроме того, с ее помощью калибруется коэффициент
усиления электронного блока для идентификации звезды по
яркости.
В качестве фотоприёмника (ФП) используется диссектор с
отклоняющими электромагнитами, которые расположены в
перпендикулярных плоскостях.
Электронный блок (ЭБ) включает в себя:
- блок обработки видеосигнала, в котором выделяется сигнал
звезды, опознавание её и формирование сигналов управления
шаговыми двигателями ШДа и ШДу в режиме слежения за
звездой;
- блок управления развёрткой с усилителями по каналам а и
у, которые формируют сигналы для отклоняющих электромагнитов
диссектора;
- блок управления и коммутации, определяющий алгоритм
работы АВУ и формирующий сигналы управления на шаговые
двигатели ШДа и ШДу;
блок обмена информацией , обеспечивающий
информационную связь датчиков углов а и у с БЦВК.
Работа АВУ происходит следующим образом. В исходном
состоянии АВУ выставлен по направлению продольной оси КА и
находится под светозащитной крышкой («в укрытии»).
Светозащитная крышка защищает поле зрения прибора оз
паразитных засветок. На бленде АВУ в начале полёта КА крепится
пылезащитная крышка.
После подачи команды «Включение АВУ» в течение 8с
прибор функционирует в режиме геометрического и
энергетического эталонирования (статическое состояние АВУ) по
встроенному в прибор эталонному источнику света (рис.6.4).
В этом режиме включается лампочка эталона (ЭТ) и на
фотокатоде диссектора высвечивается изображение точки
геометрического центра АВУ. При этом луч света от этого
источника, пройдя через отверстие в зеркале, попадает в центр
265
фотокатода диссектора. Блок управления развёрткой формирует
растр в форме прямоугольной сходящейся спирали (рис. 6.5,а).
Если центр развёртки не совпадает с геометрическим центром
изображения эталона, то с помощью блока управления развёрткой
производится подстройка нулей развёртки под положение
изображения эталона на фотокатоде в центре диссектора.
Одновременно в блоке обработки видеосигнала производится
подстройка пороговых устройств видеотракта, т. е. производится
энергетическое эталонирование по яркости изображения эталона.
Таким образом, в процессе эталонирования центр развёртки
диссектора совмещается с оптической осью телеблока и уточняется
чувствительность блока обработки видеосигнала. После окончания
эталонирования в БЦВК выдаётся сигнал «Готов».
В течение следующего интервала времени БЦВК формирует
команды наведения АВУ на заданную звезду. На шаговые
двигатели ШДа и ШДу поступают импульсы управления с
частотой 400 Гц. При этом поворот рамок двухосного карданового
подвеса за один импульс составляет 30 угл. сек., что обеспечивает
прокачку АВУ на 90° в течение интервала времени, не
превышающего 30 с.
При первом включении АВУ (после выведения КА) из БЦВК
подаётся команда «Электроспуск». Эта команда поступает на
пиропатрон пылезащитной крышки. В результате срабатывания
пиропатрона пылезащитная крышка отстреливается.
По сигналам запроса БЦВК информация об углах поворота
рамок карданового подвеса снимается с датчиков углов ДУ а и
ДУ у. Наведение АВУ на звезду осуществляется до совпадения
кодов наведения БЦВК с кодами, снимаемыми с датчиков углов.
Затем БЦВК формирует команды «Диапазон» и «Поиск».
По команде «Диапазон» переключается чувствительность
АВУ в соответствии с яркостью выбранной звезды, предусмотрено
четыре команды переключения чувствительности АВУ,
обеспечивающие шесть диапазонов значений коэффициента
усиления блока обработки сигнала при следующих интервалах
яркостей звёзд:
- от 3,7 m до 2,25 m -- без диапазона;
- от 2,25 m до 1,5 m - I диапазон;
- от 1,5 m до 0,75 m - II диапазон;
- от 0,75 m до 0 m - III диапазон;
266
- от 0 m до - 0,75 m - IV диапазон;
- от - 0,75 m до - 1,5 m - I и IV диапазоны.
Отсутствие команды «Диапазон»
максимальному коэффициенту усиления.
соответствует
Начало и>им
а) Поисковая? аз вертка
б) Следящая развёртка
Рис.6.5. Поисковая (а) и следящая (б) развёртки АВУ
По команде «Поиск» осуществляется запуск поисковой
развёртки (рис.6.5, а). Одновременно начинается «часовое ведение»
АВУ вокруг оси наружной рамки в направлении +а или - а в
зависимости от направления вектора орбитальной угловой скорости
(ыорб) КА относительно осей АВУ. «Часовое ведение» заключается
в развороте внешней рамки подвеса телеблока со скоростью
а - (оорб. В результате уменьшается скорость ухода звезды из поля
зрения АВУ за счёт компенсации угловой скорости орбитального
движения КА. При этом частота управляющих сигналов,
поступающих на ШДа, равна 8 Гц.
Просмотр поля зрения происходит по принципу обнаружения
и приведения в центр поля зрения наиболее яркой звезды. Звезда
считается более яркой, если её звёздная величина не менее чем на
единицу превосходит яркость другой звезды в спектральном классе
АВУ.
В режиме поиска развёртка имеет вид сходящихся квадратов.
Если на траектории развёртки возникает видеосигнал, уровень
которого превышает заданное командой «Диапазон» пороговое
значение, то поисковая развёртка останавливается и формируется
малый растр (следящий растр - рис. 6.5, - б).
Малый растр - это развёртка, имеющая вид двух
пересекающихся крестов, в точке пересечения которых находится
изображение звезды. Шаговые двигатели ШДа и ШДу
267
разворачивают телеблок так, чтобы совместить изображение
найденной звезды с центром его поля зрения, для чего
используются координаты центра малого растра.
Продолжительность поиска составляет 60 с. В случае отсутствия
звезды в поле зрения АВУ в БЦВК выдаётся сигнал «Кадр», по
которому производится перенаведение АВУ на другую звезду.
После окончания поиска навигационной звезды измеряются
отклонения Да и Ду, по которым формируются управляющие
импульсы на шаговые двигатели ШДа и ШДу таким образом,
чтобы при развороте АВУ звезда оказалась в центре поля зрения
телеблока.
Таким образом, после окончания режима поиска и приведения
выбранная звезда находится в центре поля зрения телеблока. АВУ
переходит в режим слежения. При этом выключается «часовое
ведение» и формируется сигнал «Готовность».
В дальнейшем АВУ обеспечивает слежение за выбранной
звездой. Параметры движения звезды в поле зрения АВУ в режиме
слежения принимают следующие значения: угловая скорость не
более 0,2 град/с, угловое ускорение не более 0,6 град/с2. В режиме
слежения малый растр удерживается в энергетическом центре
звезды. Разность координат этого центра и геометрического центра
поля зрения (оптическая ось телеблока) поступает из блока
обработки на ШДа и ШДу. Двигатели разворачивают телеблок
так, чтобы оптическая ось прибора всё время была направлена на
найденную звезду.
После выдачи сигнала «Готовность» по запросам с БЦВК
производится съём измерительной информации с датчиков углов
ДУ а и ДУ у. Углы а и у направления на звезду измеряются с
погрешностями, предельные значения которых (на уровне 3 о)
составляют3 о7<5 угл. мин., 3 оа< (2- 3)угл. мин.
Поскольку сильная засветка фотокатода диссектора приводит
к его разрушению, в АВУ предусмотрена защита фотокатода от
солнечных лучей затвором многоразового действия. При
превышении световым потоком допустимого уровня затвор по
команде датчика Солнца закрывается. Открытие затвора
происходит при уменьшении светового потока до безопасного
уровня при включённом АВУ.
268
По окончании работы АВУ уводится в укрытие (под
светозащитную крышку) и выключается. Энергопотребление АВУ
не превышает 100 Вт. Работоспособность АВУ обеспечивается при
вибрации в диапазоне частот 10 - 2500 Гц с перегрузкой 1-10 ед.
6.5. Радиовертикаль - высотомер
Радиовертикаль - высотомер (РВВ) предназначен для
измерения высоты полета КА над поверхностью Земли и углов
отклонения продольной оси КА от местной вертикали в плоскостях
крена и тангажа. Под местной вертикалью, определяемой РВВ,
принимается «радиолокационный перпендикуляр» к подстилающей
поверхности Земли, направленный по кратчайшему пути при
идеальной работе системы ориентации КА.
Угловые отклонения продольной оси КА от положения
местной вертикали измеряются радиовертикалью - высотомером с
использованием дальномерно - разностного метода. Сущность
этого метода заключается в следующем.
Радиовертикаль - высотомер измеряет расстояния до
поверхности Земли по направлениям четырех наклонных лучей Ль
Л2, Л3 и Л4 (рис. 6.6). Два луча Л] и Л2 расположены в плоскости
тангажа, т.е. в плоскости орбиты КА, а два других луча Л3 и Л4 - в
плоскости крена, т.е. в плоскости, перпендикулярной плоскости
орбиты КА.
Рис 6.6. Электрические оси лучей диаграммы направленности
антенной системы РВВ
269
Расстояние от центра Земли до её поверхности в форме
эллипсоида
можно рассчитать по формуле
R = а; (1 - ос sin" ф),
где aj - большая полуось земного эллипсоида (aj =6378,16 км)-
а - сжатие земного эллипсоида (а=1:298,2).
Углы, образованные лучами, известны с высокой точностью.
В течение орбитального полета КА углы между этими лучами
остаются равными 2[За=9°. Биссектрисы этих углов совпадают с
продольной осью КА. Очевидно, что в случае равенства расстоянии
до поверхности Земли по направлениям четырех наклонных лучей
биссектрисы углов совпадут с местной вертикалью, а углы тангажа
и крена примут нулевые значения.
Найдем зависимость между расстояниями Db D2 по
направлениям наклонных лучей соответственно Ль Л2 и углом
тангажа (фг). Без учета, несферичности Земли из треугольников
Рис 6.7. К расчету углов тангажа (а) и крена (б) РВВ
где Н - высота полета КА,
Ра=4.5°.
Разность расстояний до земной поверхности
AD' = D2 - D1 = HC0S^-<Pj-c^a^ J
cos(pa -(p1 Jcos^Pa +<pT )
позволяет найти искомый угол тангажа <рт. Действительно, после
преобразований числителя в последнем выражении
cos(pa -фг)- cos(pa + <рг)= cos/?o cos(pr + sinPasin<pr -
- cosfta cos<pr+sinpa sin(pr = 2sinpa sin(pr
получаем
AD' = H —ZsinP.sirnp1'
cosfpa _фТ
Откуда
Т AD' coslp
81Пф =------
2Н
Ia -<pT)cos{pa +<pT)
sin Pa
Поскольку при проведении сеанса навигационных измерений
угол тангажа достаточно мал (|<рг| < 5°40'), то, принимая
cos<pT=l, sin<рт »<рт, sin2<рт = 0, получаем
т ДР' cos2 Ра
2 Н sin ра
Полагая, что Н = DcosPa, где Р = ^ (Di + Р2), окончательно
имеем
Т D? — Di о
Ф = 2 г, CtgPa-
U] + и2
Аналогичным путем можно получить зависимость для расчета
угла крена (рис. 6.7, б):
к D4 — D3 п
Ф =———— cfgpa .
Uj 4- U4
Таким образом, для технической реализации
дальномерного метода измерения углов тангажа и
должен включать в себя четыре облучателя. Два
формируют диаграммы направленности в плоскости
(канал тангажа), а два других облучателя - в
перпендикулярной плоскости орбита КА (канал крена).
Высота полета КА измеряется РВВ с помощью пятого
облучателя. Электрическая ось диаграммы направленности этого
разностно-
крена РВВ
облучателя
орбиты КА
плоскости,,
271
облучателя совмещена с продольной осью КА и, в общем случае, не
совпадает с местной вертикалью.
При измерении расстояний предполагается, что скорость
распространения радиоволн имеет постоянное значение. Поэтому
измеряемое расстояние прямо - пропорционально временной
задержке сигнала, отраженного от земной поверхности,
относительно зондирующего импульса передающего устройства
РВВ.
Радиовертикаль - высотомер, функциональная схема которого
изображена на (рис. 6.8), состоит из следующих блоков:
- антенного устройства (АУ);
- антенного коммутатора (АК);
- волнового тракта (В);
- передатчика (ПРД);
- приемника (ПРМ);
- блока управления антенным коммутатором (БУ АК);
- командно-распределительного устройства (КРУ);
- блока дальномерного устройства (БДУ);
- блока обработки информации (БОИ);
- блока питания (БП).
Радиовертикаль - высотомер имеет одну приемопередающую
антенну (АН) с пятью облучателями. Первый и второй облучатели
предназначены для измерения угла тангажа (Т), третий и четвертый
- для измерения угла крена (К), а пятый облучатель используется
при измерениях высоты (Н) полета КА.
Рис 6.8. Функциональная схема РВВ
272
Часть устройств РВВ дублирована и носит название
полукомплектов. Например, в полукомплект П1 (П2) входят БДУ и
БОИ, а в полукомплект Т1 (Т2) - БУАК, ПРМ, БП и ПРД.
Возможны разные сочетания полукомплектов. Основным является
сочетание П1 и Т1. Переключение на другие полукомплекты
производится по радиокомандам от НКУ.
Измерения высоты и углов тангажа и крена начинаются после
проведения анализа технического состояния РВВ, который
начинается по команде «Контроль», поступающей из БЦВК. При
условии работоспособности РВВ формируется команда
«Измерение». По этой команде высокое напряжение подается на
модулятор передатчика (ПРД). Радиоимпульсы поступают в
антенный коммутатор (АК) и приемник (ПРМ).
По команде БЦВК «Запрос Н» с помощью антенного
коммутатора поочередно подключаются выход передатчика и вход
приемника к пятому облучателю, который формирует
вертикальный луч диаграммы направленности антенного
устройства. По разности между моментами прихода
соответствующих импульсов в блоке дальномерного устройства
(БДУ) формируется код, который соответствует измеренному
значению высоты полета КА.
По команде БЦВК «Запрос Т» антенный коммутатор
поочередно подключает выход передатчика и вход приемника к
первому и второму облучателям, которые расположены в
плоскости тангажа. Передний луч диаграммы направленности
формируется вторым облучателем, а задний - первым облучателем.
Отраженные сигналы, принятые облучателями, через антенный
коммутатор поступают на вход приемника.
После усиления, детектирования и нормирования по уровню
сигналы с выхода приемника проходят через командно-
распределительное устройство (КРУ) на вход блока дальномерного
устройства. Этот блок состоит из двух дальномеров. Импульсы,
принятые облучателем 1, поступают на первый дальномер, а
импульсы, принятые облучателем 2, - на второй дальномер.
Информация о значениях измеренных расстояний поступает в
блок обработки информации (БОИ). Этот блок формирует код,
соответствующий углу тангажа, который выдается через командно-
распределительное устройство в БЦВК.
273
По команде БЦВК «Запрос К» работа РВВ происходит
аналогичным образом, за исключением того, что антенный
коммутатор поочередно подключает передатчик и приемник к
третьему и четвертому облучателям, распложенным в плоскости
крена.
Точность проводимых РВВ измерений зависит, в основном, от
дальномерных погрешностей и ошибок системы угловой
стабилизации КА при ее работе в навигационном режиме. Кроме
того, РВВ свойственна методическая погрешность, обусловленная
несферичностью Земли и неровностями её поверхности. Поэтому
измерительная информация снимается с РВВ только над водной
поверхностью Земли. Погрешности, обусловленные
несферичностью Земли, частично компенсируются в
математическом обеспечении системы автономной навигации
путем расчета поправок к измеренным РВВ значениям углов
тангажа и крена (п.6.7.1).
Предельные погрешности угловых измерений не превышают
(10 + 30) угл. мин., а измерений высоты полета КА над водной
поверхностью Земли - (50 250) м.
Мощность, потребляемая РВВ от бортовой сети 27 В во всех
режимах не превышает 75 Вт. Масса РВВ составляет 65 ± 1 кг.
6.6. Структура программного обеспечения
Программное обеспечение системы автономной навигации КА
дистанционного зондирования Земли включает в себя программы,
которые разбиты на три основные группы:
1. Программы специального математического обеспечения;
2. Программы контроля и восстановления работоспособности;
3. Программы обслуживания БЦВК.
К программам специального математического обеспечения
относятся:
- планирующие программы;
- программы режимов;
- рабочие программы;
- стандартные программы.
Планирующие программы организуют определенную
последовательность включения программ режимов и рабочих
программ с целью решения задач, возложенных на систему
автономной навигации. Исходные данные для работы
274
планирующих программ поступают с НКУ или формируются
другими программами.
Программы режимов предназначены для решения
конкретных задач, таких как, например, уточнение параметров
движения центра масс КА, управление бортовой аппаратурой при
возникновении отказов или аварийных ситуаций. Кроме того,
программы режимов обеспечивают включение и выключение
бортовых приборов в тех случаях, когда отсутствует рабочая
программа, управляющая данным прибором. Программы режимов
работают по исходным данным, которые формируются
планирующими программами или задаются непосредственно с
НКУ.
Рабочие программы предназначены для решения
некоторых частных задач в процессе реализации программ
режимов. По характеру выполняемых действий рабочие программы
делятся на два вида: управляющие и вычислительные.
Рабочие управляющие программы предназначены для
управления бортовыми приборами. К этому виду относится,
например, программа наведения астровизирующего устройства на
звезду. Исходные данные для рабочих управляющих программ
задаются, в основном, программами режимов и рабочими
вычислительными программами.
С помощью рабочих программ рассчитываются различные
параметры, необходимые для работы других программ, например,
экваториальные координаты звезд, на которые будут наводиться
астровизирующие устройства, прогнозируемые параметры
движения центра масс КА, а также результаты решения
навигационной задачи.
Стандартные программы представляют собой типовые
программы, которые являются общими для многих программ,
относящихся к программному обеспечению, как системы
автономной навигации, так и других бортовых систем КА,
например, системы ориентации. Стандартные программы делятся
на два вида: информационные и расчетные.
Информационные стандартные программы организуют обмен
информацией между БЦВК и приборами бортовой аппаратуры КА.
К информационным относятся, например, программы съема
информации с астровизирующего устройства и радиовертикали -
высотомера.
275
Расчетные стандартные программы производят расчет
значений элементарных функций таких как: синус, косинус и т.п.
Исходные данные для работы стандартных программ задаются при
обращении к ним.
Вторая группа программ (программы контроля и
восстановления работоспособности) предназначена для управления
бортовой аппаратурой КА в аварийных ситуациях и для
формирования массива телеметрической информации с целью
анализа этих ситуаций специалистами по системе автономной
навигации и других бортовых систем.
Программы третьей группы (программы обслуживания БЦВК)
предназначены для организации работы БЦВК в
мультипрограммном режиме в реальном масштабе времени. Эти
программы делятся на две подгруппы:
- диспетчерские программы;
- программы обслуживания устройства отсчета времени
(УОВ).
Диспетчерские программы организуют работу БЦВК в
мультипрограммном режиме. С помощью программы
обслуживания УОВ осуществляется работа БЦВК в реальном
масштабе времени.
В связи с ограниченным объемом памяти первых
отечественных БЦВК такие задачи как выбор звезд и расчет
временных интервалов полета КА над водной поверхностью
решались с помощью вычислительных средств НКУ. Полученные
результаты передавались на КА во время сеанса управления.
Поэтому программное обеспечение САН в то время состояло из
двух частей: наземного и бортового. На последующих
модификациях САН КА дистанционного зондирования Земли
перечисленное программное обеспечение находилось уже на борту
КА.
6.7. Математическое обеспечение
К математическому обеспечению системы автономной
навигации КА относятся математические методы и модели, с
помощью которых решается навигационная задача. Степень
адекватности применяемых моделей определяется, в основном,
276
Рис 6.9. Структура программного обеспечения САН КА
техническими возможностями бортового вычислителя, который
установлен на КА, а также необходимостью его использования для
решения других (не навигационных) задач.
Основными моделями математического обеспечения системы
автономной навигации являются:
- модели первичных навигационных параметров;
- модели гравитационного поля и атмосферы Земли;
- модель формы Земли;
- модель движения центра масс КА;
- модель трассы КА;
- модель границы «суша-море» на поверхности Земли и
другие.
В математическом обеспечении САН используется большая
группа методов, в которую входят:
- прямой численный метод Рунге-Кутта четвертого порядка,
предназначенный для решения дифференциальных уравнений при
прогнозировании движения КА;
- метод динамической фильтрации Калмана, с помощью
которого производится статистическая обработка навигационных
измерений;
277
- метод разложения функций в ряд Тейлора, позволяющий
найти значения (например, тригонометрических) функций по
заданному аргументу и т.п.
Модели и методы, входящие в математическое обеспечение
САН, рассмотрены в предыдущих главах монографии. В частности,
в первой главе - модель движения КА (параграф 1.3), модели
первичных навигационных параметров: зенитного угла (п. 1.5.1) и
высоты полета КА (п. 1.5.2), во второй главе - метод динамической
фильтрации (параграф 2.4).
В данном подразделе рассмотрим две особенности
математического обеспечения астрорадиотехнической САН КА
дистанционного зондирования Земли. Во-первых, в его составе
находится математическая модель зенитного угла звезды,
измеряемого с помощью двух бортовых приборов (АВУ и РВВ).
Во-вторых, в математическом обеспечении САН используется
модифицированный метод динамической фильтрации, который
позволяет исключить из программного обеспечения стандартную
программу обращения матриц.
6.7.1. Математическая модель зенитного угла звезды
В процессе орбитального полета КА, как правило, отсутствует
возможность проведения высокоточных измерений зенитного угла
звезды одним оптико-электронным бортовым прибором, например,
астровизирующим устройством. Действительно, при отсутствии
погрешностей системы ориентации, которая удерживает
продольную ось КА по направлению местной вертикали, для
измерения зенитного угла звезды достаточно только снять
показания с датчиков углов астровизирующего устройства. Однако,
в связи с наличием неизбежных ошибок по каналам тангажа и
крена, такие измерения зенитного угла приведут к значительным
погрешностям.
Поэтому в математическом обеспечении системы автономной
навигации КА при формировании истинных значений зенитных
углов звезд учитываются, наряду с показаниями датчиков углов
астровизирующего устройства, результаты измерений углов
тангажа (<рг) и крена (<р*) радиовертикалью - высотомером.
Найдем выражение для расчета истинных значений зенитных
углов звезд. Известно (подраздел 6.4), что угловое положение
звезды фиксируется астровизирующим устройством путем
278
совмещения его визирной оси с направлением на звезду.
Астровизирующее устройство установлено на КА. Поэтому отсчет
углов с датчиков, закрепленных на осях вращения наружной и
внутренней рамок подвеса телескопа АВУ, производится в
связанной с корпусом КА прямоугольной системе координат
xcyczc (рис. 6.10).
Рис 6.10. Связанная система координат
Начало этой системы координат (точка С) находится в центре
масс КА. Ось ус совпадает с продольной осью КА и направлена в
сторону его радиуса-вектора. Ось zc параллельна прямой,
проходящей через посадочные площадки АВУ-1 и АВУ-2, и
направлена в сторону вектора угловой скорости движения КА по
орбите. Ось хс дополняет систему до правой.
Направления отсчета углов а и у астровизирующего
устройства в связанной системе координат показаны на рис. 6.11.
Представим единичный звездный вектор (<S° j в виде проекций
на оси связанной системы координат. Используя рис. 6.11., находим
cosy sin а
cosy cosа
-sin у
(6.1)
279
Рис 6.11. Направления отсчета углов АВУ в связанной системе
координат
Заметим, что местная вертикаль, от которой отсчитывается
зенитный угол звезды, совпадает с осью т| подвижной орбитальной
системы координат (£г|£), рассмотренной в разделе 1.2. Поэтому
пересчитаем составляющие звездного вектора (6.1) в подвижную
орбитальную систему координат.
Пересчет составляющих векторов из одной системы отсчета в
другую производится с помощью специальных матриц, которые
называются матрицами переходов. Матрица перехода формируется
путем последовательных поворотов одной системы отсчета
относительно другой.
Повернем подвижную орбитальную систему координат (£ ц £)
на углы тангажа (фг), крена (ф*) и рыскания (ф). В результате
таких поворотов получим связанную систему координат (xcyczc),
представленную на рис. 6.12.
Рис 6.12. Переход от подвижной орбитальной системы
координат к связанной системе координат
280
Матрица перехода из орбитальной системы координат £, т| £ в
связанную систему координат xcyczc примет вид
гпц m12 mi3
Мос = т21 т22 т23 ,
(6.2)
т3] т32 т33
где элементы матрицы рассчитываются по формулам
т т к
mu=cos(p cosy-sincp sincp siny,
т т к
mi2 = sm (р cosV + cosФ sm Ф sin о
H113=-COS(p siny,
к T
m21 =“Cos(p sincp ,
т к
m22“C0S(P COS(p ,
IZ
ГП23 = sincp ,
т т к
tT131=COS(p siny + sin(p sincp cosy,
T т к
ni32=Sin(p sin у - cos (p sin (p cosy,
iz
ni33=COS(p cosy.
Поскольку значения углов тангажа, крена и рыскания при
работе системы ориентации и стабилизации КА не превышают
единиц градусов, справедливы выражения:
Т . coscp =1, COS (р ~ 1, COS\|Z = 1,
т т sincp =(р , к к sin ср «ср , sin<|/ ~ ф, (6.3)
т к т к
ср ср ~0, (р у~0, ф ф = 0.
После подстановки соотношений (6.3) в матрицу перехода
(6.2) получаем
1
т
-Ф
Мос —
т
Ф
1
~ФК
-V
фК
1
Обратный переход (из связанной системы координат в
подвижную орбитальную систему координат) выполняется с
помощью матрицы
Г 1 -фг ф
мсо = м-0‘с
фг 1 -фх
-V Ф* 1
(6.4)
281
Используя матрицу перехода (6.4), пересчитаем составляющие
звездного вектора (6.1) в подвижную орбитальную систему отсчета:
S? 1 т -Ф cosy sina
сл| О о II s° ЭТ| = Mcos° = т ф 1 9- 1 cosy cosa (6.5)
Л -ф Фк 1 -siny
О
1
о
\) Ро —
S°
Вспомним, что единичный вектор р°, введенный в разделе 1.5,
направлен "вдоль вертикали от центра Земли. Его проекции на оси
подвижной орбитальной системы отсчета (£т|£) представимте
векторной форме
Ро = |р| Рт] Р^Т= [° 1 0]т.
Найдем скалярное произведение векторов S° и р°:
= s°. (6.6)
Из выражения (6.5) не трудно получить, что
= фТ cosy sina + cosy cosa+ фК siny. (6.7)
Поскольку скалярное произведение двух ортов S° и р° равно
косинусу угла (р) между ними, т.е. S° • р° = cosp, из соотношений
(6.6) и (6.7) находим
cosp - <рт cosy sina + cosy cosa + фК sin у . (6.8)
В силу малости углов <рг и <рА можно произвести замену:
<рг = sin <рг, ф* = sin ф*, 1 = со5фг.
С учетом такой замены выражение (6.8) переписываем
следующим образом
cosP = созу^тф7” sma + совф7 cosa)+ втф* siny =
= cosy cos (а-фГ)+в1пфА siny .
Окончательная формула для расчета истинного значения
зенитного угла звезды принимает вид
Р = arccos |cosycos(a - фг)+ sin ф* sin у]. (6.9)
В основу принципа измерений углов тангажа и крена, который
используется в РВВ, положено предположение, что Земля имеет
сферическую форму. Для учета несферичности Земли к
282
результатам измерений углов тангажа и крена (<рг и ф*)
добавляют поправки А<рг и Аф*, т.е.
фТ= фт+ АфТ= фт-Аф sinisin2u, ....
V __v v v
ф _ ф + Аф = ф - Аф • sin u sin 2i,
где Аф - отклонение местной вертикали относительно
геоцентрический вертикали (максимальное значение Аф=11,5
угл. мин.)
В соотношениях (6.10) используются опорные значения угла
наклона орбиты (i) и аргумента широты (и ).
6.7.2 Декомпозиция астрорадиотехнической системы
Как известно, задача автономной навигации КА состоит в
определении шести элементов начального (или текущего) вектора
состояния по результатам бортовых измерений навигационных
параметров. В состав этих параметров входят: три элемента -
составляющие радиуса-вектора и три элемента - составляющие
вектора скорости центра масс КА.
Движение КА рассматривается в инерциальной
геоцентрической системе координат OXYZ (рис.6.11), точка О
которой совмещена с центром масс Земли, ось ОХ направлена в
точку Весны, ось OZ совпадает с осью Мира, а ось OY дополняет
систему координат до правоориентированной. В этом случае задача
системы автономной навигации состоит в определении по
результатам обработки бортовых измерений параметров
шестимерного вектора состояния КА:
q0 =[х YZX YZ]J. (6.11)
Здесь обозначено: точкой сверху - значение первой
производной по времени от соответствующего параметра, индексом
нуль - начальные значения параметров.
При рассмотрении методов обработки навигационных
измерений в предыдущих параграфах было показано, что для
получения оценок параметров движения центра масс КА
необходимо обращать квадратную матрицу, имеющую
размерность, равную размерности пространства состояния, а
именно, равную шести при отсутствии расширения этого
пространства. Даже для современных высокопроизводительных
бортовых вычислительных средств обращение подобной матрицы
283
всё ещё представляет достаточно сложную техническую проблему.
С целью исключения этой операции привлекают методы
декомпозиции задачи навигации, позволяющие свести исходную
задачу навигации, как правило, к двум практически независимым
задачам меньшей размерности.
При этом в силу особенностей закона движения центра масс
КА, изложенных в п. 1.6 (движение в центральном поле сил при
наличии малых гармонических возмущений) шестимерное
пространство состояний задачи навигации может быть
декомпозировано на следующие два пространства: пространство
четырёх внутриплоскостных составляющих движения в условиях
практического отсутствия зависимости этого движения от
остальных двух параметров и пространство двух внеплоскостных
параметров также в условиях практического отсутствия их
зависимости от внутриплоскостных параметров.
В таком случае исходное шестимерное пространство
начального состояния системы декомпозируется на четырехмерное
пространство начальных значений внутриплоскостных параметров
q10=[xYXY]J (6.12)
и двухмерное пространство начальных значений внеплоскостных
параметров
q20=[zz]J (6.13)
истинной орбиты.
Задачу декомпозиции можно было бы считать решённой, если
бы удалось также просто, как пространство состояний,
декомпозировать пространство измерений на два подпространства:
подпространство измерений для оценивания внутриплоскостных
параметров и подпространство измерений для оценивания
внеплоскостных параметров, не потеряв при этом в точности
решения навигационной задачи. К сожалению, каждый измеряемый
навигационный параметр, как правило, является функцией
некоторой совокупности внутри - и внеплоскостных параметров.
Тем не менее, выход из этой ситуации был найден [83]. Он связан с
переходом от истинных навигационных измерений к так
называемым псевдоизмерениям. При этом одни псевдоизмерения
оказываются зависимыми только от внутриплоскостных
параметров движения и поэтому носят название
внутриплоскостных измерений, другие - только от внеплоскостных
284
параметров движения и поэтому называются внеплоскостными
измерениями.
Важнейшим условием перехода от истинных навигационных
измерений к псевдоизмерениям является недопущение потери
точности этих измерений, благодаря чему обеспечивается
адекватность решения декомпозированной задачи навигации
решению исходной задачи.
В качестве демонстрации метода декомпозиции системы
вначале производится декомпозиция пространства измерений
астрорадиотехнической системы автономной навигации,
содержащей радиовертикаль - высотомер и два астровизирующих
устройства. Далее этот метод применяется также для системы
автономной навигации с использованием протяжённых наземных
ориентиров.
Астрорадиотехническая система позволяет измерять в
заданные моменты времени t; (1=1,2,...,и) высоту полёта Н над
акваторией Мирового океана и два зенитных угла р и Р2. Таким
образом, истинный вектор измерений этой системы представляет
собой трёхмерный вектор
§>=[НР1Р2Г, i=l,2,...,n. (6.14)
Приведенный ниже метод декомпозиции изложен в [83].
По результатам измерений высоты полёта КА (Н) можно
оценивать только внутриплоскостные параметры (6.12). Поэтому
компонента Н вектора (6.14) должна входить в состав первого
измеряемого вектора, по которому должны оцениваться
внутриплоскостные параметры.
В соответствии с методом астрономических засечек,
используемым в астронавигации, измеренные значения зенитных
углов ft и р2 определяют в системе координат OXYZ (рис. 6.13)
одну из линий пересечения двух конусов с вершинами вначале
координат, с осями, направленными на визируемые звёзды, и с
углами при вершинах, равными 2 Pi и 2р2 соответственно.
Линия пересечения рассматриваемых конусов со сферой
единичного радиуса даёт проекцию точки, определяющей
местоположение КА на этой сфере. В результате пересечения
конусов со сферой имеются две окружности радиуса ft и р2 с
центрами-звёздами, лежащими на концах единичных векторов S] и
285
Рис. 6.13. Схема астрономических засечек
s2 соответственно. Пересечение этих окружностей даёт две точки,
одна из которых (^) определяет измеренное положение КА. Для
неё выполняются соотношения
S]T-^=cosPi, sj-^=cosp2, feT X ~ 1 • (6.15)
Последнее из этих соотношений приближённое и определяет
условие близости измеренного положения КА (^) к априорно
известному положению (ге).
Записывая (6.15) в матричной форме А^=В, нетрудно
получить измеренное положение КА на единичной сфере в форме
^=А’1В:
-Т
S]
-Т
s2
fT
‘e
Обратная
Ъ =
COS Pl
COSp2
1
(6.16)
матрица в правой части (6.16) существует, если
априорно известное положение КА не лежит (рис.6.13) на
ортодромии, проходящей через концы векторов S[ и §2.
Известное измеренное положение КА в форме (6.16)
позволяет завершить процедуру декомпозиции пространства
286
измерений системы. Для этого необходимо ввести понятия
псевдоориентиров. Этим термином обозначаются некоторые точки
небесной сферы, связанные с параметрами априорно известной
(опорной) орбиты и определяемые соотношениями (рис.6.14):
г X V S-, х г
s2p=^, (6.17)
Р |rxv| |s2pxr|
где slp и s2p - единичные векторы направлений на псевдозвёзды, v
- вектор скорости центра масс КА на априорной орбите.
Из соотношений (6.17) следует, что первая псевдозвезда лежит
в плоскости априорно известной орбиты КА по трансверсали к
текущему радиусу-вектору КА в направлении его полёта, а вторая -
по бинормали к плоскости априорно известной орбиты КА слева по
полёту. Положение псевдозвёзд в каждый момент времени
известно, поскольку известны параметры опорной орбиты КА.
Z
Рис. 6.14. Схема измерений зенитных расстояний псевдозвёзд
287
Используя введённые понятия псевдозвёзд, можно перейти от
истинных измерений зенитных углов Р; и р2 к псевдоизмерениям -
измерениям зенитных расстояний псевдозвёзд Р1р и р2р • Поскольку
в соответствии с (6.16) по результатам реальных измерений Р] и р2
найдено измеренное положение КА на единичной сфере (вектор ^),
можно полагать (рис.6.14), что оно получено в результате
измерений зенитных расстояний псевдозвёзд, для которых в этом
случае должны выполняться соотношения:
cosPlp=s^ %, cosP2p =s2p %. (6.18)
Отсюда следует, что измеренные значения зенитных
расстояний псевдозвёзд близки к 90°. Их априорные значения
строго равны 90°, поскольку для них выполняются соотношения:
cosPlp =s£ re=0, cosP2p = s2Tp re=0.
Нетрудно заметить, что выбор псевдозвёзд произведён таким
образом, что внутриплоскостные параметры движения (6.12)
зависят от результатов измерения р1р и с точностью до членов
второго порядка малости не зависят от измерений Р2р и. напротив,
внеплоскостные параметры движения (6.13) зависят от измерений
Р2р и с точностью до членов второго порядка малости не зависят от
измерений Р!р.
Таким образом, двумерный вектор измерений
§H=[HPip[ (6.19)
надлежит использовать для оценивания внутриплоскостных
параметров (6.11), а измерения скалярной величины
©2Р. = Pip, (6.20)
- для оценивания внеплоскостных параметров (6.12).
В результате завершена декомпозиция рассматриваемой
задачи навигации на две: в первой из них внутриплоскостные
параметры движения центра масс КА (6.11) определяются по
измерениям двумерного вектора (6.19), во второй - внеплоскостные
параметры движения (6.12) определяются по измерениям
скалярной величины (6.20).
288
6.7.3. Модифицированный динамический фильтр
Выбор метода динамической фильтрации для статистической
обработки результатов бортовых навигационных измерений
обусловлен несомненными его достоинствами, которые показаны в
параграфе 2.4. Однако реализация этого метода в математическом
обеспечении системы автономной навигации КА связана с
необходимостью обращения матрицы + A(tj )tcqa (tj )ат(tj) при
расчете коэффициента усиления фильтра по формуле (2.52).
В бортовом БЦВК с ограниченной разрядностью чисел при
выполнении операции обращения матрицы возникают неизбежные
ошибки. Эти ошибки могут привести к расходимости формируемых
динамическим фильтром оценок параметров движения КА. Кроме
того, в силу ряда объективных причин, связанных, например, с
жесткими массово - габаритными требованиями к БЦВК, в
бортовом программном обеспечении может отсутствовать
стандартная программа обращения матрицы.
Поэтому в математическом обеспечении
астрорадиотехнической системы автономной навигации КА
дистанционного зондирования Земли использован
модифицированный динамический фильтр, в котором операция
обращения матрицы отсутствует.
Сущность модификации динамического фильтра заключается
в последовательной обработке результатов измерений первичных
навигационных параметров в каждом навигационном сеансе, т.е.
каждый шаг уточнения координат и составляющих скорости КА
состоит из нескольких этапов, число которых равно размерности
вектора измеряемых параметров. Например, если вектор
навигационных измерений является трехмерным, то каждый шаг
оценивания параметров движения КА представляет собой три
последовательных этапа. На первом этапе обрабатывается первая
компонента вектора измеряемых параметров. Получаемая при этом
оценка параметров движения КА уточняется на втором шаге и т.д.
Рассмотрим модифицированный динамический фильтр,
реализованный в математическом обеспечении
строрадиотехнической системы автономной навигации КА
дистанционного зондирования Земли.
Вектор параметров движения, который уточняется при
проведении навигационного режима, включает три координаты и
три составляющие вектора скорости КА в абсолютной
289
геоцентрической экваториальной системе отсчета, т.е.
Q(t) = [x(t) Y(t) Z(t) Vx(t) Vy(t) Vz(t)]T. (6.21)
Первичными навигационными параметрами являются высота
полета и зенитные углы двух звезд, т.е. вектор измеряемых
навигационных параметров
F(t) = [H(t) P^t) p2(t)]T.
Ковариационная матрица погрешностей измерений имеет
диагональный вид
°н 0
0
о о
о
где он - средняя квадратическая погрешность высотомера ;
ор - средняя квадратическая погрешность измерения
зенитного угла звезды.
Начальная ковариационная матрица погрешностей оценок
параметров движения КА является диагональной, т.е.
°Х (to. 0 0 0 0 0
0 о y (t0, 0 0 0 0
0 0 Oz(t0) 0 0 0
КЧ, (t0) 0 0 0 °V (fo) 0 0
0 0 0 0 (to) У 0
0 0 0 0 0 °V (to)
где 0x(to),0y (to )’OZ (to) - априорные средние квадратические
погрешности оценок координат КА;
Ох(1о),Оу(1о).Ог(‘о) ' априорные средние квадратические
погрешности оценок составляющих вектора скорости КА.
Значения ои и стр, а также априорные средние квадратические
погрешности оценок координат и составляющих вектора скорости
полагаются постоянными в течение всего орбитального полета КА
и соответственно равными ан=30 м, ор= 4 угл. мин.,
0x(to)=0y(to)=07.(to)= 20 км, 30 м/с.
290
Начальный вектор отклонений истинных параметров
движения КА относительно опорных значений выбран нулевым,
т.е. AQ(to) = 0, а интервал времени между сеансами навигационных
измерений At = 10 с.
Алгоритм работы модифицированного фильтра совпадает с
рассмотренным в параграфе 2.4 алгоритмом метода динамической
фильтрации Калмана до момента формирования коэффициента
усиления U^(tj).
К этому моменту времени выполнены следующие операции:
- проведено интегрирование системы дифференциальных
уравнений (1.15) методом Рунге-Кутта четвертого порядка с
постоянным шагом 10 с, т.е. путем прогнозирования уточненных по
результатам предыдущего сеанса навигационных измерений
параметров движения КА получен опорный вектор Q0(tj );
- в соответствии с выражениями (1.30) и (1.43) сформирован
опорный вектор измерений, который соответствует моменту
времени tj;
- проведены измерения высоты полета КА, углов тангажа и
крена, а также углов поворота наружной и внутренней рамок
кардановых подвесов телескопов астровизирующих устройств,
визирные оси которых совпадают с направлениями на выбранные
навигационные звезды;
- для учета несферичности Земли к измеренным с помощью
РВВ значениям углов тангажа и крена введены поправки (6.10);
- по формуле (6.9) определены измеренные значения зенитных
углов двух звезд;
- рассчитаны матрица баллистических производных и
априорная ковариационная матрица погрешностей оценок
параметров движения КА;
- получена априорная оценка вектора отклонений истинных
параметров движения КА относительно опорных значений, т.е.
вектор AQa(tj);
- сформирована градиентная матрица
291
где AH(tj) - вектор - строка частных производных от высоты полета
по составляющим вектора (6.11), элементы которой рассчитаны по
формулам (1.48);
- Apj(t) - вектор-строки частных производных от зенитного
угла г- ой звезды (i - 1, 2) по составляющим векторов (6.11) и
(6.12) соответственно, элементы которых рассчитаны по формуле
(1.31);
- получено априорное значение корреляционной матрицы
погрешностей оценок параметров движения на момент времени (tj)
с использованием переходной матрицы B(tj,tj_[) по известному
значению корреляционной матрицы на момент времени (tj.}):
Kqa(t j) = B(tj,tJ-!) • Kq(tj-l) • BT(tj,t j_]).
Последовательная обработка навигационных параметров
алгоритмом модифицированного метода динамической фильтрации
выглядит следующим образом.
1. Находят вектор AQn(tj) поправок, появление которого
обусловлено результатами измерений высоты полета КА, т.е.
AQn(tj)- u«o(tj) [н(tj) - H0(tj)],
где U^(tj) - векторный коэффициент усиления динамического
фильтра, который характеризует чувствительность поправок
параметров движения КА к изменению высоты полета:
KgaGjMCj) ________
АН (t j)'Kqa (t j)' AnOj) +Oh
где AH(tj) -градиентная вектор - стока производных от высоты
полёта.
Заметим, что, во-первых, в целях упрощения бортовых
вычислений произведена замена разности невязок измерений
высоты AH(tj)-AHa(tj) на разность высот H(tj)-H0(tj) и, во-вторых,
выражение, стоящее в знаменателе формулы расчета коэффициента
усиления фильтра, является скалярной величиной.
2. Находят корреляционную матрицу погрешностей оценок
параметров движния по результатам обработки высоты полёта:
Kq[;(tJ)^Kqa(t,)-Ufl<I>(tJ).AH(tJ).Kqa(tJ).
У
292
3. Находят вектор AQp (tj) поправок, появление которого
обусловлено результатами измерений зенитного угла первой
звезды, т.е.
А<2пУ= и?фЫ & Ы- PioWL
где U(t j)-векторный коэффициент, который рассчитывается по
Pl J
формуле:
, х Ко (ti)-Al (tj)
UiT =-----------’ /т -------------г
Pl AM'j) K4.(tj) AJl<'P+^
4. Уточняют значение корреляционной матрицы
погрешностей оценок параметров движения по результатам
измерения зенитного угла первой звезды:
Ч,
5. Наконец, находят последний вектор AQ^2 (tj) поправок,
появление которого обусловлено результатами измерений
зенитного угла второй звезды, т.е.
AQri(tj)= ирФМ (tj) - P2o(‘j)]’
где и^ф(10-- векторный коэффициент, рассчитываемый по
формуле:
иДф (t.)= Ч.(^) Ap2(tJ} ____
АР2 (Ij) ' Kqp, (tj)'Ар2 (tj) +
6. Получают итоговое на момент времени (tj) уточнённое
значение корреляционной матрицы погрешностей оценок
параметров движения
Kq(tj)“4, (tj) = Kq(jj (tj) - Uj^ (tj) • Ajy(tj) (tj).
Далее по этому значению находят априорное значение
матрицы на момент времени (tj+i) для последующей обработки
результатов измерений, полученных на этот момент времени.
7. Корректируют априорный вектор отклонений истинных
параметров движения КА относительно опорных значений:
AQ(tj) = AQa(tj) + AQ}](tj) + AQ?i (t,) + AQ^ (tj) .
293
В дальнейшем работа фильтра происходит в соответствии с
алгоритмом метода динамической фильтрации Калмана. Один из
вариантов зависимостей погрешностей оценок параметров
движения КА в подвижной орбитальной системе координат от
количества проводимых сеансов навигационных измерений высоты
полета и зенитных углов двух звезд приведен на рис. 6.15 [6].
Таким образом, используемый в математическом обеспечении
САН алгоритм статистической обработки навигационных
измерений, сохраняя достоинства фильтра Калмана, не содержит
операцию обращения матриц.
6.8. Основные алгоритмы САН
Для обслуживания астрорадиотехнической САН на борту КА
используются следующие алгоритмы:
ИЗ - съёма информации с АВУ;
И4 - съёма информации с РВВ;
В 7 - выбора астроориентиров;
А12 - наведения АВУ;
В2 - прогнозирования движения КА;
В9 - орбитальной навигации;
Р7 - навигационного режима.
Алгоритмы работы САН взаимодействуют с другими
программами бортового программного обеспечения, основными из
которых являются:
Ш - общий алгоритм планирования;
Д2 - общий диспетчер;
Р6 - программа режима орбитальной ориентации;
Р8 - программа режима управления при работе аппаратуры
дистанционного зондирования Земли;
Р11 - программа режима управления при нештатных
ситуациях;
А4 - программа построения плоскости орбиты;
А8 - программа сброса кинетического момента;
А34 - программа выдачи телеметрической информации;
В5 - программа расчёта манёвра поддержания заданной
трассы;
В8 - программа астрокоррекции комплекса командных
приборов;
294
В12 - программа съёма информации обратного канала
командной радиолинии.
6.8.1. Алгоритм съёма информации с АВУ
Алгоритм съёма информации с АВУ (ИЗ) предназначен для
съёма и преобразования измерительной информации, поступающей
с оптико-электронных приборов АВУ1 и АВУ2. С помощью
каждого АВУ измеряются углы а и у разворота внешней и
внутренней рамок подвеса астроблока, направленного на
соответствующую навигационную звезду.
Алгоритм ИЗ имеет два режима работы:
- режим наведения;
- режим слежения.
В режиме наведения от каждого АВУ, номер которого указан
в обращении к алгоритму, производится однократный съём
информации с последующим её преобразованием. При этом
состояние индикатора «Готов» соответствует слежению за звездой
с требуемой точностью.
В режиме слежения съём информации может производиться
как с каждого АВУ отдельно, так и с двух приборов одновременно
с привязкой и без привязки ко времени полученных данных. Перед
съёмом измерительной информации опрашивается состояние
индикатора «Готов».
При наличии сигнала «Готов» с прибора осуществляется
двукратный съём информации с интервалом времени 0,05 с (см.
параграф 6.9). При отсутствии сигнала «Готов» формируется
соответствующий признак. Если в течение интервала времени
более 1 мин сигнал «Готов» отсутствует, то осуществляется выход
в алгоритм режима Р11 (режим управления при нештатных
ситуациях).
При съёме значений углов as, у; (1=1,2) с привязкой ко
времени в алгоритме ИЗ фиксируется текущее время, которое
соответствует первому из двух обращений к АВУ.
6.8.2.А лгоритм съёма информации с РВВ
Алгоритм съёма информации с РВВ (И4) предназначен для
организации съёма информации с радиовертикали-высотомера и
преобразования этой информации к виду, необходимому для
функционированию алгоритма В9 - орбитальная навигация.
295
Алгоритм И4 выполняет следующую последовательность
операций:
1. Производится опрос индикатора «Готовность РВВ»;
2. При наличии готовности РВВ осуществляется опрос
признака обращающегося алгоритма для формирования и
запоминания адреса возврата;
3. Формируется сигнал «Запрос Я»;
4. Производится привязка информации о высоте полёта КА
ко времени с выдачей сигнала «Середина измерения» (СИ);
5. По сигналу «КП» (конец преобразования) с выходного
регистра РВВ осуществляется съём кода, соответствующего высоте
полёта КА;
6. Производится трёхкратный съём значений углов тангажа и
крена;
7. Результаты измерений углов тангажа и крена
усредняются и, при необходимости, отбраковываются;
8. Рассчитываются методические погрешности измерений
углов тангажа и крена, обусловленные несферичностью Земли;
9. Уточняется информация об углах тангажа и крена;
10. При отсутствии сигнала «Готовность РВВ»
осуществляется передача управления в диспетчерскую программу
Д2;
11. При наличии сиг налов «СИ» или «КП» без формирования
сигнала «Запрос Н» производится уход в программу Pl 1.
6.8.3. Алгоритм выбора астроориентиров
Для проведения измерений первичных навигационных
параметров производится выбор опорных звёзд. Решение этой
задачи возложено на программу «Выбор астроориентиров» (В7),
которая в первой отечественной САН КА содержала наземную и
бортовую части.
Наземная часть алгоритма предназначена для расчёта
координат навигационных звёзд (астроориентиров). Результатами
работы наземной части программы являются экваториальные
координаты шести звёзд с указанием величин их яркостей и
орбитальные координаты Солнца. Эти параметры передаются на
борт КА в составе рабочей программы (РП) и представляют собой
исходные данные для бортовой части программы «Выбор
астроориентиров», которая в силу ограничений объёма памяти и
296
производительности БЦВК не могла реализовать наземную часть
алгоритма.
Рис 6.15. Зависимости погрешностей оценок параметров
движения КА от количества измерений: а) вдоль орбиты; б) по
радиусу-вектору КА; в) по бинормали к орбите
297
Бортовой алгоритм В7 «Выбор астроориентиров»
предназначен для:
- определения последовательности смены звёзд и расчёта
момента времени их смены для каждого АВУ в течение двух
витков движения КА вокруг Земли;
- уточнения орбитальных координат звёзд и расчёта
траектории наведения АВУ на выбранную навигационную звезду.
Программа В7 работает в двух режимах.
Режим 1 предназначен для определения последовательности и
моментов времени смены звёзд. В этом режиме алгоритм В7
работает перед включением программы А12 - «Наведение АВУ».
Режим 2 предназначен для уточнения орбитальных координат
звёзд и определения траектории наведения АВУ. Работа этого
режима осуществляется перед наведением на очередную звезду.
Траектории наведения АВУ и типовые траектории обхода зоны
засветки Солнцем приведены в параграфе 6.9.
Разворот астроблока АВУ при штатном наведении происходит
одновременно по осям наружной и внутренней рамок подвеса. При
совпадении одного из углов сц и 7, с одним из заданных значений
астроблок разворачивается только по одной из осей подвеса.
6.8.4. Алгоритм наведения АВУ
Алгоритм наведения АВУ (А 12) предназначен для решения
ряда задач, основными из которых являются:
- выведение по командам из БЦВК визирных осей астроблоков
АВУ1 и АВУ2 в районы заданных навигационных звёзд;
- организация поиска , слежения и смены навигационных
звёзд;
- организация возврата астроблоков АВУ в укрытие;
- выключение АВУ-1 и АВУ-2 после окончания работы;
- организация выключения АВУ при появлении отказов.
6.8.5. Алгоритм прогнозирования параметров движения
КА
Алгоритм прогнозирования параметров движения КА (В2)
предназначен для расчёта на заданный момент времени параметров
движения центра масс КА с установленной точностью.
Задача прогнозирования решается путём интегрирования
системы дифференциальных уравнений движения КА методом
298
Рунге-Кутта четвёртого порядка с постоянным шагом
интегрирования. Алгоритм В2 может работать в четырёх режимах.
Выбор режима работы алгоритма В2 осуществляется с помощью
алгоритмов планирования БЦВК.
6.8.6. Алгоритм орбитальной навигации
Алгоритм орбитальной навигации (В9) предназначен для
выполнения ряда задач, основными из которых являются:
- анализ готовности к проведению измерений бортовыми
приборами АВУ-1, АВУ-2 и РВВ;
- организация съёма информации с измерителей первичных
навигационных параметров;
- анализ результатов измерений;
- проведение статистической обработки измерительной
информации с помощью метода динамической фильтрации и
уточнение параметров движения центра масс КА.
6.8.7. Алгоритм навигационного режима
Алгоритм навигационного режима (Р7) предназначен для
организации взаимосвязанной работы бортовой аппаратуры и
рабочих программ при уточнении параметров движения центра
масс КА. Поэтому основной задачей алгоритма Р7 является
организация навигационных измерений с целью уточнения
координат и составляющих вектора скорости КА.
Управление этим режимом осуществляется программой Р7,
которая функционирует на основе исходных данных, рассчитанных
в наземном комплексе управления .
Для достижения требуемой точности определения параметров
движения центра масс КА навигационные измерения проводятся
только над морской поверхностью. Поэтому мерный интервал
состоит из участков измерений над морем, разделённых участками
суши. Длительность мерного интервала и режима составляет (1,2-
2,0) То, где То - период обращения КА.
В процессе работы системы управления движением КА
программа Р7 обеспечивает:
- ориентацию и стабилизацию КА с требуемой точностью;
- выбор навигационных звёзд (астроориентиров), наведение
АВУ и включение РВВ;
299
- уточнение параметров движения центра масс КА на участках
навигационных измерений и передачу их в программу общего
алгоритма планирования Шив программы алгоритмов системы
управления движением;
- формирование информации для обратного канала командно-
программной траекторной радиолинии и информации для системы
телеконтроля.
Для обеспечения необходимой точности навигационных
измерений до их начала проводится коррекция командных
приборов от инфракрасного построителя вертикали КА.
6.9. Планирование и режим работы САН
Задачи планирования режимов работы бортовой аппаратуры
КА решаются с помощью средств НКУ, При этом планированию
подлежат также сеансы управления КА с наземных измерительных
пунктов Центром управления полётом.
При планировании работы астрорадиотехнической САН КА
дистанционного зондирования Земли учитываются следующие
особенности его орбитального движения и процесса решения
навигационной задачи:
1) Полёт КА происходит по орбитам с параметрами:
- высота над поверхностью Земли 140-500 км;
- наклонение плоскости орбиты к плоскости земного экватора
51-81 град.
За сутки КА совершает около 16 витков вокруг Земли,
причём часть суточных витков является невидимой с территории
РФ.
2) Недостаточно высокая точность решения
навигационной задачи и значительные погрешности
прогнозирования параметров движения центра масс КА
бортовыми средствами приводит к необходимости
ежесуточного уточнения этих параметров с помощью
средств НКУ.
На первых двух-трёх витках, видимых с территории РФ,
планируется проведение траекторных измерений. По результатам
этих измерений определяются параметры движения центра масс
КА. Это позволяет повысить точность проведения последующего
прогноза параметров движения центра масс КА. В значении
баллистического коэффициента учитывается изменение
300
аэродинамических характеристик КА при развороте панелей
солнечных батарей.
Полученные данные траекторных измерений
используются для:
- планирования в Центре управления полётом (ЦУП)
работы бортовых и наземных средств на последующих витках
полёта;
- закладки в ближайшем сеансе управления на борт КА
начальных условий орбитального движения, а также исходных
данных для суточной автономной работы бортовой аппаратуры КА.
Исходными данными для работы САН являются
координаты трёх пар звёзд, обеспечивающих работу АВУ-1 и АВУ-
2 в течение каждого витка, и временные характеристики
интервалов проведения навигационных измерений. Необходимость
передачи на борт КА этих исходных данных связана с
ограниченными возможностями БЦВК, используемого в первой
отечественной САН.
В силу специфики построения измерительного комплекса
САН:
- навигационные измерения РВВ с требуемой точностью
проводятся только над акваторией Мирового океана;
- работа АВУ осуществляется только по навигационным
звёздам, удовлетворяющим заданным требованиям к яркости,
времени сопровождения и т.д.
По начальным условиям в БЦВК производится
прогнозирование параметров движения в центре масс КА на
текущий момент времени и формирование управляющих
воздействий на бортовые системы в соответствии с программно-
координатным принципом управления. Однако при необходимости
прогнозирования параметров движения КА на сутки (16 витков)
возникают значительные погрешности (например, погрешности
прогноза дальности) могут достигать 100 км). Поэтому через 4-6
витков после закладки начальных условий на борт КА необходимо
включать навигационный режим КА для уточнения его параметров
движения центра масс.
Для проведения навигационного режима корпус КА
ориентируется в пространстве таким образом, что его продольная
ось направлена по местной вертикали, а вертикальная плоскость, в
которой располагаются астровизирующие устройства,
301
перпендикулярна плоскости орбиты КА. Точность ориентации КА
определяется, в основном, динамическими ошибками его системы
управления угловым движением, т.е. системой ориентации.
Функционирование САН осуществляется по командам,
которые поступают из БЦВК. До начала навигационного режима
происходит прогрев электронной аппаратуры измерительного
комплекса САН и последующий анализ работоспособности АВУ-1,
АВУ-2 и РВВ.
Каждое АВУ наводится на искусственное светило эталона
(имитатор звезды), находящееся в оптико-электронном блоке
астровизирующего устройства. После захвата имитатора звезды
производится юстировка и эталонирование АВУ.
Работоспособность РВВ проверяется путем выдачи из РВВ в
БЦВК контрольного кода, который соответствует заданному
значению высоты и свидетельствует о готовности РВВ к
проведению измерений.
Наведение АВУ-1 и АВУ-2 осуществляется на заранее
выбранную пару навигационных звезд. При выборе звезд
учитывается, что точность астронавигации зависит от
геометрического расположения звезд относительно друг друга.
Поэтому одна звезда выбирается, например, вблизи плоскости
орбиты КА, а другая - по нормали этой плоскости.
Для предотвращения возможной засветки фотоприемника
АВУ солнечными лучами рассчитывается траектория его
наведения. Типовые траектории наведения и обхода зоны засветки
Солнцем показаны на рис. 6.16.
В силу специфичности построения РВВ высота полета КА и
углы тангажа и крена измеряются только над акваторией Мирового
океана. Поэтому для определения начала и конца каждого сеанса
навигационных измерений проводится расчет трассы КА, т.е.
проекции орбиты КА на поверхность вращающейся Земли.
По известным географическим координатам суши и
прогнозируемым параметрам движения центра масс КА
определяются моменты времени перехода трассы с суши на море и
с моря на сушу. Ошибки проводимых вычислений зависят, в
основном, от погрешностей, возникающих при прогнозе
параметров движения центра масс КА.
Результатом расчета являются временные интервалы, в
которых измеряются высота полета КА и углы тангажа и крена.
302
Поскольку на трассе может быть достаточно много участков суши,
продолжительность навигационного режима в ряде случаев
достигает двух витков КА вокруг Земли.
Особенность первой отечественной САН КА состоит в том,
что в связи с ограниченным объемом памяти применяемого БЦВК
задачи выбора звезд и расчета участков «суша-море» решались в
НКУ. Полученные данные передавались на борт КА при помощи,
так называемой, рабочей программы во время сеанса управления.
Рабочая программа составлялась на планируемые сутки. В её состав
входили:
- координаты трех пар звезд, их звездные величины, а
экваториальные также орбитальные координаты Солнца;
- номер витка реализации навигационного режима, время
начала первого участка моря и длительности выбранных участков
морей и суш, а также другие параметры, необходимые для работы
САН.
На последующих модификациях САН навигационные звезды,
моменты начала и конца сеансов навигационных измерений
определяются с помощью математического и программного
обеспечения БЦВК, для чего на борт КА закладывался альманах
рабочих звёзд, содержащий около 140 самых ярких звёзд, и
географическая карта «суша - море» в проекции Меркатора.
После наведения, захвата и перевода в автоматическое
сопровождение звезд при нахождении КА над водной
поверхностью по запросам БЦВК измерительная информация
снималась с РВВ и АВУ. Эта информация подвергалась первичной
обработке.
В частности, с помощью РВВ в течение заданного временного
интервала многократно измеряется высота полета КА. Результаты
измерений усредняются и привязываются к середине этого
интервала времени. Затем среднее значение высоты сравнивается с
высотой опорной орбиты КА. Если разность между средней и
опорной высотами не превышает по модулю допустимое значение,
равное 10 км, то проводится вторичная обработка этого измерения
методом динамической фильтрации. В противном случае результат
измерения отбраковывается и производится повторный съем
информации о высоте полета КА.
Для повышения достоверности измерений углов поворотов
наружной и внутренней рамок карданового подвеса АВУ
303
осуществляется двухкратный съем информации через короткий
промежуток времени и последующее сравнение результатов
измерений. При совпадении значений одноименных углов с
погрешностью не более 5 угл. мин первый результат измерения
используется для решения навигационной задачи.
При отсутствии такого совпадения формируется признак сбоя
информации, а результат измерения не подвергается вторичной
обработке.
Каждый случай неудовлетворения принятых критериев
оценивания качества измерительной информации учитывается
путем из суммирования в так называемых счетчиках сбоев. Если
после ряда сбоев соответствующий оценивающий параметр
приходит в норму, то счетчик его сбоев обнуляется. При значении
счетчика сбоев, равном 15, происходит аварийное прекращение
работы САН. Космический аппарат при этом переводится в режим
управления при возникновении нештатных ситуаций. Решение о
продолжении работы САН принимается на НКУ после
обнаружения и устранения причины отказа.
Навигационный режим завершается приведением РВВ, АВУ-1
и
АВУ-2 в исходное состояние и формированием вектора
уточненных параметров движения центра масс КА. Эти параметры
в дальнейшем прогнозируются и используются для решения
целевых задач. При необходимости уменьшения ошибок прогноза
по команде БЦВК назначается следующий навигационный режим,
и работа САН повторяется.
С течением времени под влиянием ряда причин возникают
систематические погрешности САН. Компенсация этих
погрешностей осуществляется с помощью наземного комплекса
управления путем сравнения по модулю соответствующих
параметров движения центра масс КА, полученных САН и
средствами НКУ (см. параграф 6.10).
6.10. Особенности организации лётной эксплуатации САН
Под эксплуатацией понимается такая стадия жизненного
цикла САН, на которой реализуется, поддерживается и
восстанавливается её качество. На практике различают наземную и
летную эксплуатации. При наземной эксплуатации специалисты
полигона запуска проводят сборку бортовой аппаратуры САН и
304
Рис 6.16. Типовые траектории наведения (перенаведения) (а, б,
в) и обхода зоны засветки Солнцем (г, д, е)
проверяют её техническое состояние по результатам автономных и
комплексных испытаний.
Летная эксплуатация начинается после отделения КА от
ракеты-носителя, предварительного расчета параметров орбиты КА
средствами наземного комплекса управления и проведения полного
305
цикла проверок всех бортовых систем КА. Летную эксплуатацию
САН осуществляют специалисты НКУ. Для координации их
деятельности создана целая система управления эксплуатацией, в
которую входят средства эксплуатации.
К средствам летной эксплуатации относятся:
наземная радиопередающая и приемная аппаратура
командно-измерительных комплексов (КИК);
средства обработки и передачи телеметрической и
траекторной информации;
- оборудование для приема, обработки и отображения
полученной информации.
С помощью этих средств специалистами отдела анализа
центра управления полетом КА контролируется техническое
состояние системы автономной навигации.
Контроль технического состояния бортовой аппаратуры и
программного обеспечения САН в процессе лётной эксплуатации
подразделяется на три вида:
- экспресс-оценка;
- оперативная оценка;
- полный контроль.
Экспресс - оценка технического состояния САН
осуществляется во время сеанса управления КА. При этом
определяется перечень наиболее важных параметров, с помощью
которых оценивается техническое состояние отдельных бортовых
систем. Эти параметры группируются в формуляры (страницы) и в
течение нескольких минут отображаются на экранах мониторов
дежурной смены группы анализа.
Каждый формуляр содержит условное обозначение
телеметрируемого параметра, его числовое значение и
размерность, а также время его съема. Например, о готовности
АВУ к работе свидетельствует параметр, который имеет условное
обозначение «Г-АВУ», а о работоспособности РВВ - параметр
«СРВВ».
Оперативная оценка технического состояния системы
автономной навигации производится путем анализа приборной
телеметрической информации процессов, происходящих в
бортовом комплексе управления и в бортовой аппаратуре САН в
течение интервала времени от момента предыдущего сеанса
306
управления. Кроме того, при оперативной оценке анализируется
правильность отработки запланированных режимов и алгоритмов.
При полном контроле САН проверка её технического
состояния проводится путем анализа всех телеметрируемых
параметров на соответствие заданным требованиям. В связи с
достаточно высокой трудоемкостью, этот вид контроля
используется с периодичностью, установленной в
эксплуатационной документации, а также в следующих случаях:
- после выведения КА на орбиту;
- при возникновении аварийной ситуации;
- при обнаружении отказов в бортовой аппаратуре КА;
- по истечении гарантийного срока активного существования
КА.
Наряду с контролем технического состояния САН
оцениваются её систематические погрешности. Появление этих
погрешностей обусловлено следующими причинами:
- наличием систематических погрешностей измерений высоты
и углов бортовыми приборами (РВВ и АВУ);
- неизбежными погрешностями установки на борт КА средств
навигационных измерений;
- деформациями корпуса КА вследствие температурных
колебаний;
конструктивными и технологическими особенностями
измерительных средств и условиями их работы.
Оценивание систематических погрешностей системы
автономной навигации осуществляется через 3-7 суток полета КА
с помощью, как правило, двух командно-измерительных
комплексов (КИК). При этом полагается, что полученные
средствами НКУ параметры (QHKy) движения КА не содержат
систематических ошибок.
Планирование работы бортового и наземного комплексов
управления КА для расчета систематических погрешностей
системы автономной навигации производится таким образом,
чтобы момент конца навигационного режима САН совпадал с
моментом проведения сеанса наземных траекторных измерений.
Результаты работы средств НКУ сравниваются с
телеметрируемыми с борта КА параметрами движения {QcahY
которые получены системой автономной навигации, т.е.
рассчитывается вектор погрешностей
307
aQ = Qhky -Qcah-
В связи с тем, что требования к точности работы САН заданы
в подвижной орбитальной системе координат, составляющие
вектора &Q переводятся из абсолютной экваториальной
геоцентрической системы отсчета в систему Для этого
перевода используется следующие формулы:
X’ дх‘
Дц - МЭО ДУ 5
Л. дг
’да’ ДА'
Дт; = ЭО ДУ + МЭО ДУ 5
X А7 дг
где VI эо - матрица перехода от экваториальных координат к
орбитальным:
С1УНКУ ~С2ХНКУ сз 2НКУ
с гнку с ГНКУ
м _ C2ZHKy ~С3УНКУ С1 ХНКУ
ЭО СгНКУ С ГНКУ
С3ХНКУ ~ClZHKy С2 УНКУ
Сгнку с гнку .
С,С1;С2,Сз - модуль векторной константы интеграла площадей
и её составляющие на оси системы координат, которые
определяются выражениями :
гнку =у'хнку + унку+2нку ‘ М°ДУЛЬ радиуса - вектора КА,
полученный по данным НКУ;
Мш - матрица угловых скоростей:
(£>у ~(£>х О
О (£>z — C0v
- О>2 О CDX
сох,а>7,о>- - проекции на оси абсолютной экваториальной
геоцентрической системы координат вектора угловой скорости
вращения системы относительно системы XYZ:
С; С2 Сз
®z=^-,
гнку гнку гнку
308
где интегралы площадей СрСг.Сз рассчитываются с помощью
известных соотношений
С] = YZ-ZY;
С2 = ZX - XZ;
С3 = XY —YX.
Значения систематических погрешностей системы автономной
навигации КА определяются путем осреднения компонент вектора
AQ = [а£ Ат) А£ А4 Af) а£]Т ,
полученного по результатам трех последовательно
проведенных сеансов траекторных измерений НКУ и
навигационных режимов САН, т.е.
1 з
AQc Е A4i-
3 i=l
Компоненты вектора AQC передаются на борт КА и
используются в качестве поправок к параметрам движения,
которые формируются динамическим фильтром системы
автономной навигации.
В процессе лётной эксплуатации КА возможно проведение
корректирующего технического обслуживания отдельных
элементов системы автономной навигации. В основе этого вида
обслуживания лежит отключение отказавшего блока и
подключение исправного (резервного). Например, переключение
электронной аппаратуры РВВ с одного полукомплекта на другой.
В ряде случаев применяются и другие способы
корректирующего технического обслуживания. Например, при
непрохождении команды на отстрел крышки АВУ выдается
повторная команда, при заклинивании привода наружной или
внутренней рамки карданового подвеса АВУ предпринимается
попытка возврата астровизирующего устройства в исходное
состояние с последующем его наведением на заданную
навигационную звезду.
309
Глава?. СИСТЕМА АВТОНОМНОЙ НАВИГАЦИИ КА
ПО МАГНИТНОМУ ПОЛЮ ЗЕМЛИ
7.1. Проблемы построения системы автономной
навигации КА с использованием магнитного поля Земли
Исторически магнитное поле Земли стало вторым после
звёздного неба источником информации, использованным
человечество!^ на протяжении многих веков для решения задач
навигации морских судов, а в двадцатом веке и в авиации.
С началом космической эры получили дальнейшее развитие
методы и средства ориентации и навигации КА с использованием
бортовых измерений параметров магнитного поля Земли (МПЗ).
При этом с самого начала наибольшие надежды возлагались на
успешное решение задач ориентации, в том числе как для
построения чувствительных элементов, так и исполнительных
органов ориентации. В ходе развития космической отрасли и
быстрого роста требований к чувствительным элементам задача
создания систем ориентации с использованием датчиков МПЗ
быстро потеряла свою актуальность. И наоборот, нашли
применение и в настоящее время получили широкое
распространение методы и средства использования МПЗ для
разгрузки исполнительных органов систем ориентации
гироскопического типа, то есть для так называемого сброса
кинетического момента, накопленного силовыми гироскопами.
Глубокой проработке подверглась задача создания системы
автономной навигации КА с использованием измерений элементов
вектора магнитной индукции МПЗ. Привлекательность этой задачи
обусловлена следующими важными факторами: глобальностью
распространения МПЗ и, в связи с этим, постоянной готовностью
системы к работе, малыми весом и энергопоз'реблением системы, её
полной автономностью и высокой надёжностью.
Основная трудность создания системы автономной навигации
КА на основе измерений параметров магнитного поля Земли
заключается в нестационарности параметров магнитного поля, а
именно, в наличии непредсказуемых возмущений магнитосферы,
вызываемых активностью Солнца и называемых вариациями МПЗ.
Тем не менее, учитывая относительно малый уровень вариаций
параметров МПЗ, характер их пространственно-временного
310
распределения, с одной стороны, и важность проблемы создания
эффективной системы автономной навигации, с другой,
представляется целесообразным показать успехи, достигнутые в
области создания системы автономной навигации КА с
использованием магнитного поля Земли.
Для построения системы автономной навигации по
измерениям параметров магнитного поля на борту КА должна быть
модель МПЗ, адекватная реальному магнитному полю Земли.
Реальное магнитное поле Земли традиционно рассматривается
состоящим из главного и переменного полей [135, 136]. В свою
очередь, главное магнитное поле складывается из поля однородно
заряженного Земного шара - так называемого поля диполя - и
недипольного поля, обусловленного намагниченностью верхних
частей земной коры. Переменное поле складывается из
периодических составляющих (суточных, лунносуточных и
годовых) и непериодических магнитных возмущений. При большой
интенсивности непериодических магнитных возмущений они
получили название магнитных бурь.
Магнитный потенциал главного магнитного поля имеет
аналитическое представление в виде сферического гармонического
ряда (ряда Гаусса) в функции магнитных координат (долготы,
дополнения широты) и радиус-вектора точки пространства. Этот
ряд может быть использован в качестве бортовой модели МПЗ. К
сожалению, в связи с утратой за последние десятилетия
значительной части сети магнитных обсерваторий в нашей стране
можно предположить, что коэффициенты гармонического ряда
Гаусса подлежат уточнению.
Система автономной навигации КА может быть построена на
основе сравнения трёх измеряемых специальными датчиками
ортогональных компонент вектора напряжённости магнитного поля
Земли, являющихся частными производными от его потенциала по
измеряемым направлениям, с опорными значениями этих
компонент, которые вычислены с помощью бортовой модели МПЗ.
При вычислении этих компонент исходят из условия точного
знания ориентации датчиков в абсолютном пространстве. Способы
обеспечения выполнения этого условия приводятся в параграфе 9.3.
При этом условии несовпадение результатов измерений с
результатами расчётов свидетельствует о несовпадении расчётных
координат в пространстве точки расположения датчиков и,
311
следовательно, расчётных координат центра масс КА, с истинными
координатами, то есть, с той точкой пространства, в которой
измеренные значения совпадали бы с расчётными значениями.
Использование различных процедур обработки полученных
разностей (несовпадений) позволяет сформировать поправки к
расчётным координатам, учёт которых переводит КА из исходного
опорного положения в уточнённое расчётное положение,
расположенное ближе к точке, в которой измеренные значения
должны совпадать с расчётными значениями. При этом в общем
случае наряду с уточнением координат производится также
уточнение составляющих вектора скорости центра масс КА.
При такой схеме решения навигационной задачи необходимо
подтвердить выполнение такого важного свойства системы, как её
полная наблюдаемость, под которой понимается возможность
однозначного определения трёх координат положения центра масс
КА и трёх составляющих его вектора скорости по серии измерений
трёх ортогональных составляющих вектора напряжённости МПЗ
[60].
Кроме того, существенную роль играют частные производные
от измеряемых величин по текущим параметрам движения центра
масс КА. Значения этих производных характеризуют
информационные свойства системы, которые, в конечном счёте,
влияют на показатели точности системы автономной навигации
КА.
Однако важнейшей проблемой при решении задачи навигации
на основе измерений параметров магнитного поля Земли является
выбор метода их обработки в условиях наличия вариаций
параметров МПЗ с целью обеспечения высокой точности
функционирования системы навигации КА. Здесь необходимо
отметить, что благодаря усилиям ряда российских и зарубежных
учёных такой метод был разработан. Он получил название
дифференциально-корреляционного метода.
Несомненную актуальность имеет анализ вариантов
возможных схем построения датчиков, измеряющих проекции
вектора напряжённости МПЗ. От выбора схемы построения датчика
зависят такие его основные характеристики, как уровень нулевого
сигнала, отклонение в крутизне выходного сигнала, случайный
шум датчика и другие.
В последующих параграфах этой главы перечисленные
312
вопросы рассмотрены с той степенью детализации, которая
позволяет понять суть предлагаемых по ним решений.
7.2. Магнитное поле Земли
При описании магнитного поля Земли мы будем полностью
опираться на классический труд [136].
Принято считать магнитное поле земли стационарным полем,
так как изменение его во времени составляет малую часть по
отношению ко всему полю. Достаточно заметить, что амплитуда
спокойных суточных вариаций не превосходит несколько десятков
наноТесла (нТл). Кроме того, частота вариаций исчисляется от 1СГ4
до 10“' Гц, что незначительно сказывается на величине
индуцированного электрического поля при рассмотрении многих
явлений земного магнетизма. Поэтому в большинстве случаев при
изучении земного магнетизма приходится пользоваться законами
стационарного поля.
Характеристикой магнитного поля Земли, как и всякого
магнитного поля, служит вектор напряжённости Н и его
составляющие: Нх - вдоль географического меридиана на север, Ну
- по направлению географической параллели на восток, Hz - в
вертикальном направлении к центру Земли. Эти элементы носят
название элементов земного магнетизма.
Наблюдения за составляющими напряжённости магнитного
поля Земли показывают, что ни один из них не остаётся
постоянным во времени, а каждый непрерывно меняет своё
значение. Такие изменения получили название вариаций элементов
земного магнетизма.
Если наблюдать за этими вариациями в течение короткого
промежутка времени, например, в течение суток, то можно
заметить, что они имеют периодический характер. Однако
периоды, амплитуды и фазы их чрезвычайно разнообразны.
Если наблюдения вести в течение продолжительного
интервала времени, например, в течение нескольких лет, определяя
каждый год среднегодовые значения элементов, то можно легко
установить, что среднегодовые значения вариаций элементов
земного магнетизма также меняются, но имеют уже монотонный
характер изменения. Периодичность их выявляется за очень
большой период наблюдения, порядка нескольких сотен лет.
313
Таким образом, по характеру самих вариаций их можно
классифицировать на два типа: быстротечных вариаций
периодического характера и медленных вариаций, получивших
название вековых. Исследования обоих типов вариаций показали,
что они отличаются не только по своему характеру, но и по
происхождению. Быстротечные вариации имеют своим источником
электрические токи в высоких слоях атмосферы, называемых
ионосферой, тогда как вековые вариации связаны с источниками,
лежащими внутри земного шара, и, по всей вероятности,
одинакового происхождения с магнитным полем Земли.
Поэтому принято делить наблюдаемое магнитное поле на две
части: главное магнитное поле и его вековые вариации, имеющие
своим источником внутренние причины, и переменное магнитное
поле, имеющее внешнее происхождение.
Существует аналитическое представление потенциала U
главного магнитного поля Земли в форме разложения в
гармонический ряд (ряд Гаусса) по сферическим функциям [136]:
~ \n+1 п Г 1
U=R^2 — cosmX + h™ sinm%] P™(cos0), (7.1)
n=I Г m=0
где R - средний радиус Земли;
г - модуль радиуса - вектора точки наблюдения;
к - географическая долгота точки наблюдения;
0 - дополнение до 90° к широте точки наблюдения: 0 = 90°-<р;
g„ и h™ - постоянные коэффициенты Гаусса - Шмидта;
P^XcosO) - полином Лежандра первого рода, равный
Рп+1 (cos 6)=----+ 1 cos Q. р™ (cos 0) -
[(n + m + l\n - m + l)]j
1
_(n + m + lXn-m + l)
Ряд, соответствующий выражению (71), является
сходящимся. Коэффициенты этого ряда g„, h„ определяются
сетью отечественных и мировых геомагнитных обсерваторий.
Модуль вектора напряжённости МПЗ на поверхности Земли
вблизи её экватора составляет =30 мкТл, а на полюсе Земли - =60
мкТл.
314
Составляющие вектора напряжённости магнитного поля
Земли по текущим осям х (на север), у (на восток) и z (к центру
Земли) определяются из выражений:
„ __!.<*!• н =_______— н
х г 30 ’ у rsin0 ЗА.’ z Зг
(7-2)
Выполнив дифференцирование соотношений (7.2), получим:
_ п+2
Х'1 ( m л ,m i)dP™(cos0)
(gn cosmA. + hn sinnA)-(7.3)
Г J oH
n=l m=0
n n+2
X^ (R) ( m i , m -i) Pnm(cos6) /т л \
Ну=У-У — (gn sinA.-hn cosml/m- n — ; (7.4)
J I г J sm 0
n=l m=04
=o n n+2
hz = ZZ
n=l m=0
(g[]1cosmA. + h[ysinmA.)-(n + l)P^n(cos0) , (7.5)
где частная производная от полинома Лежандра первого рода по
дополнению к широте до 90° к широте точки наблюдения имеет
вид:
3P"m(cOse) = + .Р-,(0080)-(n + l)ctge Р™ (cos 9). (7.6)
30 sin 0
Соотношения (7.4) - (7.6) удобны для определения вектора
напряжённости главной части МПЗ на борту КА в любой точке
инерциального пространства в функции координат 0, X, г.
Переменная часть МПЗ представляет собой сложное явление,
зависящее от большого количества различных факторов. Вариации
могут существенным образом изменять структуру главного
магнитного поля Земли, а, следовательно, и влиять на точность
измерения параметров МПЗ.
Вариации магнитного поля Земли охватывают большой
диапазон частот от короткопериодических колебаний с периодом
от нескольких секунд до вековых с периодом в несколько десятков
лет и более. Амплитуда этих колебаний изменяется от нескольких
сотен до тысяч нТл [42].
Одной из особенностей вариаций МПЗ является достаточно
высокая синхронность изменения его параметров в наземных
пунктах наблюдения, расположенных даже на больших
расстояниях друг относительно друга (от нескольких десятков до
сотен км). Проведенные одновременные записи во время сильных
возмущений магнитного поля Земли также подтвердили
315
синхронность изменения вариаций.
Такая синхронность изменения параметров магнитного поля
Земли обусловлена глобальностью источников его вариаций и
значительной удалённостью их от точек наблюдения.
Следует отметить ещё одну особенность вариаций магнитного
поля Земли. Она заключается в том, что изменение вариаций
параметров МПЗ во времени происходит достаточно медленно.
Проведенные исследования на основе анализа различных видов
вариаций показали, что с вероятностью свыше 95% изменения
параметров МПЗ в течение интервала времени 5 минут не
превышают 2 нТл. При этом возмущения магнитного поля Земли
достигали больших уровней.
Идентичность протекания вариаций магнитного поля земли во
времени была подтверждена на основании корреляционного
анализа суммарных погрешностей измерений модуля вектора
напряжённости МПЗ, включающих погрешности знания положения
объекта, погрешности знания его магнитных помех, погрешности,
обусловленные влиянием вариаций МПЗ, и погрешности
магнитометров.
На рис.7.1, показан заимствованный из работы [42] график
изменения коэффициента корреляции погрешностей измерений
МПЗ.
Рис.7.1. График изменения во времени коэффициента
корреляции погрешности измерений параметров МПЗ
316
Как следует из этого графика, для интервалов времени между
измерениями т<50 с коэффициент корреляции у >0,9 с ростом
интервалов между измерениями происходит уменьшение
коэффициента корреляции у по экспоненциальному закону вида
у(т) = е-ах, где коэффициент в показателе степени экспоненты
а = 0,002 1/с.
7.3. Датчики геомагнитного поля
Основными источниками первичной навигационной
информации о параметрах магнитного поля Земли являются
магнитометры (магнитометрические преобразователи
геомагнитного поля). Существующие и разрабатываемые образцы
магнитометров обладают рядом достоинств: высокой
чувствительностью, точностью и надёжностью, сравнительно
малой массой, незначительным энергопотреблением и
практическим отсутствием ограничений на угловые эволюции КА.
В настоящее время находят применение в основном три типа
магнитометров: квантовые, протонные и феррозондовые [8].
Квантовые магнитометры основаны на оптической
ориентации атомов, сопровождающейся поглощением или
излучением энергии с частотой, зависящей от величины
напряжённости измеряемого поля.
Протонные магнитометры используют зависимость частоты
прецессии магнитных моментов протонов от величины
измеряемого поля.
Однако наибольшее распространение получили
феррозондовые магнитометры. Принцип действия феррозондовых
магнитометров основан на явлении возникновения переменной
индукции в ферромагнетике, подмагничиваемом переменным
полем обмотки возбуждения при одновременном действии на него
измеряемого магнитного поля. Поле индукции вызывает появление
на измерительной обмотке датчика электродвижущей силы,
которая несёт информацию о модуле, знаке и угловом положении
вектора магнитной индукции измеряемого поля относительно
магнитной оси датчика магнитометра.
Типовая схема феррозондового магнитометра, измеряющего
одну компоненту магнитного поля, представлена на рис. 7.2 [8].
317
Рис. 7.2. Схема феррозондового датчика
Здесь: 1 - кольцевой сердечник; 2 - обмотка возбуждения; 3 -
каркас; 4 - измерительная обмотка.
Кольцевой сердечник выполнен витым из тонкой
пермаллоевой ленты, намотанной на металлическую бобину.
Сердечник с обмоткой возбуждения вставляется внутрь плоской
измерительной катушки. Измерительная обмотка катушки
намотана на каркас, который надет на сердечник, охватывая обе его
половины в диаметральном сечении. В обмотку возбуждения
подается ток заданной частоты. С измерительной обмотки
снимается выходная электродвижущая сила удвоенной частоты,
несущая информацию о величине компоненты вектора магнитной
индукции, лежащей в плоскости кольцевого сердечника и
совпадающей с нормалью к плоскости витков измерительной
обмотки.
Сердечники феррозондов изготавливают из ферромагнитных
материалов, получаемых на основе использования ферромагнитных
веществ.
К ферромагнитным веществам относят железо, никель,
кобальт, их соединения и сплавы, а также некоторые сплавы
марганца, серебра, алюминия и др. Характерной особенностью
ферромагнитных веществ является их аномально высокая
магнитная восприимчивость и проницаемость. Поэтому уже в
слабых полях эти вещества приобретают довольно сильную
намагниченность, а, следовательно, и магнитную индукцию,
318
обеспечивая, тем самым, высокую степень концентрации
магнитной энергии.
Феррозонды с замкнутыми сердечниками (в том числе
кольцевые феррозонды) получили наибольшее распространение по
сравнению со стержневыми ввиду их несомненных преимуществ. К
этим преимуществам относятся:
• низкий уровень шума и более высокая стабильность
нулевого сигнала;
• низкий уровень полей рассеяния и, как следствие, меньший
уровень электродвижущей силы небаланса;
• малая потребляемая мощность за счёт меньшего объёма
сердечника, выполняемого обычно из тонкой пермаллоевой ленты,
а также за счёт возможности использования феррорезонансного
режима возбуждения;
• возможность простой балансировки феррозонда - при
наличии кольцевого сердечника - за счёт поворота сердечника
относительно неподвижной измерительной катушки, центр которой
совмещён с центром кольца;
• возможность одновременного измерения двух
составляющих магнитного поля при наличии одного сердечника и
трёх составляющих при наличии двух сердечников.
Однако феррозондовый датчик, например, датчик,
представленный на рис.7.2, обладает большой мультипликативной
погрешностью измерений составляющей магнитного поля
(нелинейностью выходной характеристики). Эта погрешность
пропорциональна величине поперечной оставляющей поля, не
измеряемой датчиком. Для устранения мультипликативной
погрешности в датчике устанавливают дополнительную, третью,
так называемую компенсационную, катушку, которую наматывают
на сердечник так же, как катушку возбуждения. Компенсационная
катушка обеспечивает компенсацию измеряемой составляющей
вектора магнитной индукции В,. Это превращает феррозондовый
датчик в нуль - индикатор, а сам магнитометр - в прибор
компенсационного типа.
Однако, если ось катушки компенсации оказывается
непараллельной магнитной оси феррозонда, то возникают ещё и
дополнительные поперечные составляющие поля, воздействующие
в трёхкомпонентных магнитометрах на соседние феррозонды и,
следовательно, приводящие ещё к одному виду мультипликативной
319
погрешности.
Для полной компенсации мультипликативных погрешностей,
включая погрешности, обусловленные нестабильностью
пространственного положения магнитных осей феррозонда,
предложена следующая схема трёхкомпонентного магнитометра.
Рис. 7.3. Функциональная схема трёхкомпонентного
магнитометра с полной компенсацией поля
На рис. 7.3 введены следующие обозначения: БФЗ - блок
феррозондов; СК - трёхкомпонентная система катушек на каркасе в
форме куба; ИУ - избирательный усилитель; СД - УИ -
синхронный детектор с усилителем - интегратором; ГВ - генератор
возбуждения.
Феррозондовый блок, содержащий три однокомпонентных
феррозонда, установлен внутри куба, являющегося каркасом для
трёхкомпонентной системы катушек компенсации.
Вырабатываемые феррозондовым блоком сигналы второй
гармоники поступают на входы соответствующих электронных
каналов, с выхода которых токи автокомпенсации проходят в
соответствующие катушки компенсации.
В результате обеспечивается полная компенсация поля в
объёме феррозондового блока.
Кроме того, вместо трёх однокомпонентных феррозондов
можно применять один трёхкомпонентный феррозонд, схема
320
которого приведена на рис 7.4.
Этот феррозонд содержит кольцевой и эллиптический
сердечники, плоскости которых расположены взаимно
перпендикулярно. В феррозонд включена система из трёх взаимно
перпендикулярных измерительных катушек, охватывающих
сердечники так, что оси катушек и оси симметрии сердечников
пересекаются в одной точке, образуя единый магнитный центр.
Феррозонды такой конструкции весьма компактны и обеспечивают
высокую точность измерений.
Рис. 7.4. Трёхкомпонентный феррозонд
Аддитивные погрешности (шумы) являются следствием
внутренних и внешних помех, воздействующих на различные
элементы канала магнитометра, и не зависят от текущих значений
продольной и поперечной составляющих измеряемого поля.
Аддитивные погрешности феррозондового магнитометра
зависят от особенностей конструкции самого феррозонда и
выбранного режима работы. Другая часть погрешностей находится
вне феррозонда.
К погрешностям самого феррозонда относятся: недостаточная
степень балансировки его полуэлементов, остаточная
намагниченность сердечников и неоднородность магнитных полей
в объёме сердечников.
Другими причинами возникновения шумов являются:
зависимость от частоты поля возбуждения, зависимость от рабочей
температуры сердечников, а также зависимость от временных и
пространственных изменений температуры. Так, например, для
обеспечения высокой точности измерений температура датчика
должна поддерживаться в диапазоне ± 1° С. Для выполнения этого
условия блок феррозондов с компенсационными катушками может
устанавливаться в термостабилизированную камеру
321
Впечатляющие успехи, достигнутые к настоящему времени в
области создания феррозондовых магнитометров, а также и в
области электроники и вычислительной техники позволяют
надеяться на возможность создания магнитометра с цифровым
выходом со следующими техническими характеристиками:
• диапазон измеряемых значений - ±6104 нТл;
• нестабильность крутизны выходной характеристики - 0,01%;
• порог чувствительности (минимальный сигнал) - 2 нТл;
• уровень случайного сигнала (шума) - 5 нТл;
• потребляемая мощность - 2... 3 Вт;
• масса - 3...4 кг.
7.4. Дифференциально-корреляционный метод обработки
магнитометрической информации
Анализ основных факторов, влияющих на точность
магнитометрической системы автономной навигации КА,
показывает, что на последовательные измерения параметров МПЗ
большое влияние оказывают сильно коррелированные и
постоянные систематические погрешности измерений. Не учёт этих
погрешностей ведёт к значительному ухудшению точностных
характеристик системы.
В настоящее время разработаны статистические методы,
изложенные в главе 2, позволяющие осуществлять учёт корреляции
погрешностей последовательных измерений. К этим методам
относятся метод апостериорной вероятности и метод максимума
правдоподобия, которые основаны на использовании полной
выборки измерений. Применение этих методов на
продолжительных мерных интервалах и при большой размерности
вектора состояния системы требует значительного объёма
вычислений на борту КА.
Известен метод расширения вектора состояния системы,
который учитывает корреляцию погрешностей последовательных
измерений путём включения их в вектор оцениваемых параметров.
Однако, включение вектора погрешностей характеристик
магнитного поля Земли в вектор оцениваемых параметров
приводит к тому, что с течением времени процесса уточнения будет
увеличиваться отличие между действительными значениями
погрешностей измерений и их априорной моделью, которая
задаётся корреляционной матрицей. Это приводит к ухудшению
322
характеристик процесса оценивания.
Для уменьшения влияния коррелированных и
систематических погрешностей в последовательных измерениях на
точность решения задачи оценивания вектора состояния можно
использовать дифференциально - корреляционные методы
статистического оценивания, основанные на применении разностей
последовательных измерений [42].
Для повышения эффективности магнитометрической системы
навигации в условиях действия сильно коррелированных
возмущений больших уровней целесообразно формировать вектор
измерений составляющих вектора напряжённости МПЗ в виде
разности измерений (представленных в виде отклонений от
опорных значений), разнесённых на величину интервала
дискретности измерений во времени:
Af(tj)= AT(tj^j) - у • AF(tj). (7.7)
При этом предполагается, что погрешности измерений
представляют собой марковский случайный процесс
5F(tj+1)=75F(tj)+?(tj). (7.8)
Можно показать, что при использовании сведений о
коэффициенте корреляции у устраняется влияние
коррелированных и систематических погрешностей измерений на
оцениваемые параметры движения центра масс КА. В самом деле,
имеем:
Af (t j) = AF(t j+1) - yA?(t j) = A(t j+t )B(t j+1 4j)AQ(tj)+8F(tJ+!)-
-yMtJ)AQ(tj)+5F(tj)]=[A(tj+1)B(tj+1,j)-YA(tj)]AQ(tj)+ (7.9)
+ [w(t J)+ 5(t j)- Y8F(t j)]= A*(tj )AQ(tj )+ 5(tj)
Из выражения (7.9) следует, что влияние коррелированных
погрешностей измерений параметров МПЗ на формирование
параметров A?(tj) устраняется.
Воспользовавшись результатами главы 2, для оценивания
параметров движения КА можно применить один из известных
методов статистической рекуррентной фильтрации. Однако более
предпочтительным в данном случае является метод динамической
фильтрации.
Используя выражение (7.9) и алгоритм метода динамической
фильтрации (2.47) - (2.51), можно записать рекуррентный алгоритм
323
оценивания шести мерного вектора состояния AQ(tj+1) на j+1 шаге в
следующем виде:
a$(tj+])= B(tj+btj) AQ(tj)+ Ua6 (tj+1)[A?(tj+1)- A*(tj+1 )B(tj+1,tj)a$(tj)] ;
Ufl<^(tj+1 )= Kqa(tj+1) AT(tj+1) [k^ + w(tj+btj) Kqa(tj) WT(tj+btj)P ;
A?(tj+1)=AF(tJ+2)-yA?(tj+!) ; A’(tj+1)=A(tj+2)B(tj+2,tj+1)-yA(tj+I) ;
4?(tj+i)=A(tj+1) B(tj+btj)A^(tj)+5(tj+1)= w(tj+btj) AQ(tj)+5(tj+1) ;
Kqa Gj+1 )= B(t j+i, tj) Kq (t j)BT (t j+b tj) J
Kq (t j+1) = [e - и(t J+1) A(t j+1)]Kqa (t J+1) . (7.10)
Приведенный алгоритм при наличии сведений о корреляции
погрешностей геомагнитных измерений у позволяет проводить
оценивание вектора состояния, устраняя влияние систематических
и долгопериодических погрешностей измерений параметров МПЗ,
которые существенно ухудшают точностные характеристики
магнитометрической системы автономной навигации КА.
При планировании стратегии измерений в первую очередь
должны быть проведены исследования, направленные на
определение возможности решения задачи навигации с
использованием параметров МПЗ. Эти исследования проводятся с
позиций теории наблюдаемости.
Известно, что под наблюдаемостью системы понимается
возможность однозначного определения состояния системы по
измерительной информации, которая содержится в её выходном
сигнале.
Рассмотрим дискретную систему вида
^Q(tj+l)=B(tj+btj)AQ(tj) ;
4F(tj+1)=A(tj+1)4Q(tj+1) ,
Такая система является полностью наблюдаемой тогда и
только тогда, когда расширенная матрица системы размерности
пхпш
ф(‘j+1 <tj+n )= |ат (tj+1); Вт (tj+2, tj+1 )дт (tj+2 );• • BT (tj+n, t j+1)AT(tj+n ) ],(7.1 1)
имеет ранг n.
Здесь введено обозначение матрицы
В (tj+n’tj+i)= В (tj+n,tj+(n_jj)B (tj+(n_|j,tj+(n_2j)--• В (tj+2,tj+]) (7.12)
324
Для подтверждения наблюдаемости задачи навигации КА по
измерениям параметров МПЗ определим ранг матрицы (7.11)
расчётным способом. Для простоты решения этой задачи
воспользуемся несколькими важными упрощениями.
Во-первых, примем в качестве модели магнитного поля Земли
поле диполя, то есть однородно намагниченного шара. Поле диполя
является главной, определяющей по величине составляющей МПЗ.
Поэтому, если при использовании поля диполя задача автономной
навигации не будет обладать свойством полной наблюдаемости, то
трудно надеяться на то, что она, тем не менее, будет полностью
наблюдаемой по полному магнитному полю Земли.
В этом случае потенциал магнитного поля Земли (7.1) при п=1
и е=90°-ср приобретает простейший вид [136]:
U = —— [g® sincp+ (gj cosX + h} sinxjcoscp] . (7.13)
Коэффициенты этого ряда известны [141]: gP=-30,6678 мкТл;
g}=-2,1603 мкТл; h}=5,7735 мкТл, <р и X - широта и долгота точки
измерений.
Во - вторых, примем также для простоты расчётов, что
опорная орбита КА круговая и невозмущённая, Орбита имеет
радиус г ~ 6700км и наклонение 90° (полярная орбита). Очевидно,
что плоскость орбиты совпадает с плоскостью OXZ инерциальной
геоцентрической системы координат. Кроме того, начальное
положение центра масс КА совпадает с восходящим узлом орбиты.
В качестве оцениваемого вектора состояния задачи навигации
можно принять шести мерный вектор состояния в инерциальной
геоцентрической системе координат:
Q = [x Y Z X Y zf , (7.14)
ось X которой направлена по радиусу-вектору начального
положения центра масс КА, ось Y лежит в плоскости орбиты в
направлении полёта, а ось Z ортогональна плоскости орбиты.
Составляющие вектора напряжённости магнитного поля
Земли для рассматриваемого случая применения системы
координат (7.14) определяются соотношениями:
Нх=~; Ну=--^; Hz=-L_.|bL; (7.15)
dr 3 г dtp rcostp dz.
После дифференцирования соотношений (7.15) получим
систему уравнений
325
Нх =-2^—J [gp sin ср ч- (g| cosX ч- h| sin xjcoscp]
Hy=-(—[gO coscp ~(g| cosX + h}sinx)sin(p] ; (7.16)
/' n \
Hz——j [g'sinX-hjcosX] ;
Для определения градиентной матрицы производных от
измеряемых параметров по элементам текущего вектора состояния
системы
ЭНХ ЭНХ ЭНХ ЭНХ ЭНХ ЭНХ
ЭХ dY Эг ЭХ 3Y 3Z
ЭНу ЭНу ЭНу ЭНу ЭНу ЭНу
А = ~дх FF Hz IF IF IF
ЭН, ЭН, ЭН, ЭН2 3HZ 3HZ
la л-. L*
IF IF "эГ IF эу эг
l_ -J
воспользуемся известной связью между сферическими и
геоцентрическими координатами:
1
sinq> = -; sinX = -—; r = (x2 + Y2 + Z2P . (7.17)
г г
Здесь ф и X - широта и долгота на заданный момент времени.
С учётом независимости измерений параметров магнитного
поля Земли от составляющих вектора скорости движения КА
градиентную матрицу можно представить в виде блочной матрицы
А = [Л! А2], содержащей две матрицы размерности 3x3 каждая:
матрицу А[ частных производных по координатам и матрицу А2
частных производных по составляющим вектора скорости. В силу
позиционности измерений имеем: а2=0.
Тогда можно записать
ЭНХ ЭНХ ЭНХ ' Эф Эф Эф
Эф ЭХ Эг Эх эу эг
ЭНу ЭНу ЭНу эх эх эх
А1 - (7.18)
1 Эф ЭХ Эг эх эу эг
ЭН2 ЭНг ЭНг Эг Эг Эг
Эф ЭХ Эг дх sy эг.
Вначале продифференцируем соотношения (7.16) по
сферическим координатам.
326
В результате дифференцирования получим
^^- = -2^—[g? costp — (gj cos А,-ь h} sin A.)sin ф]
Эф < г) 1 '
dHx R ) / i . . 1 ,
—— = 2 — (gi sinX - hi созХусозф ;
ЭХ у r J
ЭНХ , r3[о • fi , i . , 1
—-^ = 6—[gt sinф + fgj cosX + hj sinAjcosip
r)r w4*
[gO 51пф + (g{ COSX + h] 51пХ)СО8ф
(7.19)
ЭН y (
Эф у
ЭН.,
ЗНу R3 Г о / ^- = 3^4’1.ё1 СОБф-^ ^ = 0 ; Эф ;} cos А-4-h j sin A.)sin ф] ;
ЭН7 / 1 , 1 )
-т-^ = 3—-lg{ sin X-h{ cosX) ;
Эг г4
Найдём производные от сферических координат (7.17) по
декартовым инерциальным координатам:
Эф _ эх- X —2 ^ф; Эф ЭУ _ costp. г Эф _ эг~ 1 . , ^ф- sinX; г
эх _ х эх 1 , эх cosX
эх ~ —2 ЭУ = —sm<p-tgA; г эг" Г
Эг X Эг Эг
ZT — = sin ср; *~~ -sinX.
эх г ЭУ эг
В качестве ещё одного, третьего, допущения будем полагать,
что параметры магнитного поля Земли измеряются два раза. Первое
измерение производится в начальном положении центра масс КА.
т.е. в момент времени, при котором угловые координаты КА равны
Фн =0 и X; =0. Второе измерение выполняется в конечном
положении КА, т.е. - в момент времени, при котором угловые
координаты КА равны <РК=“ и Хк =-2,8125°. При этом времени
движения КА из начального в конечное положение равно 675 с.
327
Выбор только двух моментов времени означает стремление
ограничиться двумя матрицами в расширенной матрице (7.11) при
определении ранга последней. Основанием для этого является
размерность вектора измерений параметров магнитного поля
Земли, равная трём. При такой размерности для определения
шестимерного вектора состояния КА принципиально достаточно
измерить трёхмерный вектор напряжённости магнитного поля
Земли в двух точках орбиты КА.
Значения векторов состояния в этих положениях будут
соответственно иметь вид:
QH = [г 0 0 0 rQ 0]т;
— г —г 0 rQ —rQ 0 .
2 2 2 2
Qk =
Здесь Q= 0,0012с 1 - угловая скорость орбитального движения
КА.
Положим также, что опорная орбита мало отличается от
истинной. Поэтому вектор начальных отклонений параметров
опорной орбиты от истинной орбиты может быть представлен в
виде малых отклонений:
AQ0 = [АХ AY AZ АХ AY Azf.
Матрицу баллистических производных B(tk,tH) в выбранной
неподвижной системе координат при перемещении центра масс КА
Л г
из начального положения в конечное на угол <р = — будем
4
определять в соответствии с таблицей 1.1 параграфа 1.4.
Представим матицу А1; определяемую выражением (7.18), в
виде произведения матриц Fj и G], При выбранных начальных и
конечных условиях начальные и конечные значения матриц F] и Gj
принимают вид:
,R3 1
6~Тё1
3—g°
J 4 gl
Г
,R\1
-3—hi
328
о
Gih =
О
1
г
О
г
О
О
sinA-k
1 sin2Xv
—------ч--------
rCOsXfc COsXfc
-sinXfc
hk = -т/2^—} [g° ~(gjcosXk +h{sinXk)] t?+(glcosXk+b{sinkk^ •?2^—J (gjsinXk -h!cosA.k) ~ (&lsinXk -h}cosA.k) 3i/2 “-[gO + (g) coskk + hj sink 3-y-^-[g? -(BlcosXk +h|sinA.
0 ~CrO (glcosXk+hisinXk) ,,R31 1 •> ul , 1 3—^-^smA.fc -htcosAfc) г
О
О
_1_Л
П 2
О
О
Ji
2
329
После вычисления всех производных (7.19) и (7.20) и
подстановки их в (7.11) получим численные значения элементов
расширенной матрицы <I>(tj+1,tj+n) с точностью до семи десятичных
разрядов
4j+b’j+n) = -0,001663 0,007871 0,001482 -0,011806 - 0,000277 0 -0,002222 0 -0,000277 -0,028196 -0,010660 -0,000077 0.007072 -0,002798 -0,006660 -0,001530 -0,000525 -0,000297
0 0 0 -13,152436 -3,046422 -1,275055
0 0 0 -6,808273 -4,921002 -1,056290
0 0 0 -0,064754 -0,437613 -0,247371
Определитель ЭТОЙ матрицы равен 2,251921 10“7.
Установлено, что, несмотря на достаточную малость величины
определителя, он более, чем на 5 порядков превышает погрешность
расчётов.
Таким образом, из факта отличия определителя этой матрицы
от нуля следует, что ранг расширенной матрицы равен 6-и. Отсюда
следует вывод о полной наблюдаемости задачи автономной
навигации 1<А по измерениям составляющих вектора
напряжённости магнитного поля Земли.
7.5. Оценки достигаемых показателей точности системы
Системы автономной навигации КА с использованием
магнитного поля Земли обладают неоспоримыми преимуществами
перед всеми другими типами систем. К ним относятся: простота
конструкции, отсутствие подвижных элементов, высокая
надёжность, малые вес и энергопотребление. Именно по этой
причине они продолжают интересовать разработчиков систем
автономной навигации КА, несмотря на сравнительно низкий
уровень их точностных характеристик в настоящее время.
Основная проблема обеспечения необходимой точности системы
автономной навигации КА с использованием МПЗ связана с
нестационарностью и непредсказуемостью вариаций параметров
МПЗ. В этом направлении ведутся интенсивные поиски как в
области изучения подлинной природы нестационарноси и создания
высокоточных датчиков МПЗ, так и в области разработки
эффективных методов обработки магнитометрической
информации. Можно с уверенностью утверждать, что со временем,
когда будет создана подлинная научная теория прогнозирования
330
вариаций параметров магнитного поля Земли, системы автономной
навигации КА с использованием МПЗ получат достойное
применение
В работе [60] приведены данные по точности определения
координат центра масс КА с использованием МПЗ. По
утверждению авторов этой работы достижимые в настоящее время
точности определения системой координат центра масс КА
составляют 100 — 500 м. При этом не приводятся ни
использованный при этом метод оценивания точности, ни условия,
при которых эти точности получены.
В связи с изложенным, возникает необходимость проведения
оценки точностных характеристик системы автономной навигации
с использованием МПЗ при заданном составе ограничений,
применённом при оценивании. Это позволит делать
сопоставительный анализ точностных характеристик системы с
другими системами навигации.
Величины достигаемых показателей точности автономной
системы навигации при использовании магнитного поля Земли
оценим аналитически методом, изложенным в параграфе 3.6.
В соответствии с этим методом оценка точности системы
сводится к определению матрицы С(и) нормальных уравнений,
записанных в интегральной форме:
C(u)=N f [a(u)B(u,u0)]T P-[A(u)B(u,u0)]du, (7.21)
где A(u) -градиентная матрица, B(u,u0) - матрица баллистических
производных, Р - весовая матрица погрешностей измерений,
имеющая диагональный вид, диагональные элементы которой
обратны величинам дисперсий погрешностей измерений
составляющих вектора напряжённости МПЗ:
331
В результате аналитического обращения матрицы С(и)
находится корреляционная матрица погрешностей оценок
K.(u)=C-(u), (7.22)
диагональные элементы которой являются искомыми дисперсиями
погрешностей оценивания параметров движения центра масс КА.
Для простоты решения задачи будем использовать
предположения, применённые в предыдущем параграфе: орбита КА
круговая невозмущённая заданной высоты (г=6700 км) и заданного
наклонения 90°; плоскость орбиты совпадает с плоскостью OXZ
инерциальной геоцентрической системы координат; начальная
точка движения совпадает с восходящим узлом орбиты (ио=О),
магнитное поле Земли представлено полем диполя.
Оценку точностных характеристик системы произведём на
интервале работы системы и движения КА от начальных углов
Uj=(pi=O до конечных углов иё=срё
При этом полагаем
анх =ану =aHz =ан в силу использования однотипных
магнитометров в измерительных каналах системы. Тогда Р=-^- Е,
°н
где Е - единичная матрица размерности 3x3.
Результаты расчётов среднеквадратичных отклонений
погрешностей определения параметров движения центра масс КА
представлены в таблице 7.1. При этом расчёты проведены для
четырёх интервалов протяжённости навигационных измерений:
ц=л/12,и=л/6, и=л/3, и=л/2. Этим интервалам соответствуют
количество измерений на каждом из этих интервалов: N=25, N=50,
N=100 и N=150. Среднеквадратичная величина погрешности
измерений составляющих вектора напряжённости магнитного поля
Земли принята равной он=0,03 мкТл. Примем также, что
навигационные измерения проводятся с равными интервалами
u/N=0,01 рад, так что Vu/N • он =0,003 мкТл.
Из таблицы 7.1 может быть выявлена следующая
закономерность. Для выбранной полярной орбиты с наибольшей
погрешностью определяются координата и составляющая скорости
бокового движения (параметры oz и oz достигают 1,26 км и
свыше 10 м/с соответственно), а с наибольшей точностью
определяются параметры, соответствующие радиальному
332
движению - вдоль оси ОХ (ах и ох)- Эта закономерность хорошо
коррелируется со структурой выбранного магнитного поля - поля
диполя.
Таблица 7.1. СКО определения параметров движения
№№ п/п Обозначение параметра N=25 N=50 N=100 N=150
1 стх > КМ 0,032782 0,025163 0,019027 0,015261
2 gy , км 0,241745 0,147203 0,080978 0,051524
3 oz, км 1,261329 0,758074 0,451030 0,266364
4 стх, м/с 0,314037 0,139439 0,064340 0,038252
5 оу, м/с 1,9.38887 0,492352 0,097398 0,019893
6 м/с 10,16238 2,714652 0,751864 0,001809
В рассматриваемом идеализированном случае моделирования
магнитного поля получены обнадёживающие результаты. В
реальном случае применения геомагнитной системы автономной
навигации погрешности будут существенно выше. В связи с этим
представляет безусловный интерес полномасштабное
моделирование работы системы с учётом всех возмущающих
факторов.
333
Глава 8. СИСТЕМА АВТОНОМНОЙ НАВИГАЦИИ КА С
ИСПОЛЬЗОВАНИЕМ ОРБИТАЛЬНЫХ ОРИЕНТИРОВ
8.1. Основы построения системы
Навигационные задачи, которые решаются бортовыми
средствами космических аппаратов, совершающими полёт в
околоземном пространстве, связаны, как правило, с
необходимостью наблюдения за поверхностью Земли или её
горизонта с целью построения на борту КА местной вертикали. При
этом появляются неизбежные методические погрешности,
которыми обладает построитель местной вертикали. Наличие
методических погрешностей обусловлено несферичностью Земли,
«размытостью» её горизонта, суточной и сезонной подвижностью
атмосферы и другими факторами.
Одним из способов борьбы с погрешностями, которые
возникают в процессе построения вертикали, является
использование методов автономной навигации, основанных на
измерениях таких первичных навигационных параметров, в
которых отсутствует направление радиуса-вектора КА.
В группу таких параметров входят угловые и линейные
параметры движения орбитальных ориентиров. Линейными
параметрами являются дальности до орбитальных ориентиров и
скорости их движения относительно КА. К угловым параметрам
относятся углы между линиями визирования орбитальных
ориентиров и навигационных звезд, а также угловые скорости
линий визирования.
В качестве орбитальных ориентиров могут использоваться
специально запускаемые для навигации или для решения других
задач космические аппараты, пилотируемые орбитальные станции,
последние ступени ракет-носителей, разгонные блоки,
навигационные зонды и т.п.
Орбитальные ориентиры, которые могут быть использованы
для целей навигации КА, по наличию информации о параметрах их
движения подразделяются на три группы. В первую группу входят
ориентиры, истинные параметры движения которых неизвестны.
При этом опорные элементы их орбит находятся в памяти
бортового вычислительного комплекса. Очевидно, что в вектор
уточняемых параметров, наряду с шестью параметрами движения
334
КА, входят параметры движения наблюдаемых орбитальных
ориентиров.
В результате искомый вектор имеет размерность не менее
двенадцати. В качестве ориентиров первой группы могут
использоваться КА, предназначенные для решения задач, не
связанных с навигацией, а также навигационные КА, которые не
способы (по тем или иным причинам) сообщать потребителям
параметры своих орбит.
Во вторую группу входят ориентиры, которые отделяются от
КА в известные моменты времени, Причем скорость их отделения
известна с некоторой точностью. В эту группу входят специально
запускаемые навигационные зонды, а также последние ступени
ракет-носителей или разгонные блоки.
В вектор уточняемых параметров в этом случае включается
вектор скорости запуска орбитального ориентира, т.е. размерность
этого вектор становится равной девяти. При этом алгоритм
навигации может быть построен таким образом, что после
уточнения вектора скорости запуска ориентира осуществляется
переход на процедуру оценивания только параметров движения
КА.
Особенность орбитальных ориентиров третьей группы
состоит в том, параметры их движения известны в любой момент
времени. К этой группе относятся навигационные КА, эфемериды
которых передаются потребителям. Кроме того в эту группу входят
навигационные КА, которые запускаются на орбиты, имеющие
незначительную прецессию. При этом их массогабаритные
характеристики выбираются таким образом, чтобы обеспечить
незначительное смещение орбиты под действием атмосферы Земли.
Такие КА получили название «навигационных якорей» [111] .
«Навигационные якоря» представляют собой пассивные
ориентиры, на которых отсутствует система управления, а также
приемная и передающая аппаратура. Поэтому они не передают
информацию о значениях элементов своих орбит. Эта информация
находится в бортовом вычислителе КА, в котором с заданной
периодичностью производится прогнозирование движения
«навигационного якоря».
Орбитальные ориентиры третьей группы обеспечивают
необходимой информацией систему навигации, которая решает
задачу оценивания шести параметров движения центра масс КА
335
Системам автономной навигации, которые базируется на
средствах измерений параметров движения орбитальных
ориентиров, удается обойти целый ряд «атмосферных» проблем.
Однако в этих системах вектор искомых параметров может иметь
достаточно большую размерность, что усложняет навигационный
алгоритм и приводит к необходимости детального исследования
проблем наблюдаемости (см. параграф 8.2) и потенциальной
точности решения навигационной задачи (см. параграф 8.3).
Основой построения системы автономной навигации по
орбитальным ориентирам является метод, который базируется на
достоверной информации о характеристиках гравитационного поля
Земли и координатах визируемых звёзд. Поэтому неадекватность
модели гравитационного поля, которая используется в
программном обеспечении бортового вычислителя, а также
ошибки, допускаемые при идентификации звёзд, приводят к
снижению точности определяемых этим методом параметров
движения центра масс КА
8.2. Условия наблюдаемости в задаче автономной
навигации КА при использовании орбитальных
ориентиров
8.2.1. Критерий наблюдаемости
Понятие наблюдаемости, введенное впервые Р.Е.Калманом
[59], является одним из основных в теории систем. Под
наблюдаемостью в задачах навигации понимается способность её
решения при выбранном составе первичных навигационных
параметров.
Исследования наблюдаемости в некоторой (достаточно малой)
окрестности относительно опорного вектора параметров движения
центра масс КА проводятся с помощью критериев локальной
наблюдаемости [25]. Рассмотрим один из таких критериев, который
приведен в работе [35].
Предположим, что существует зависимость между j-ым
первичным навигационным параметром и вектором Q(t0)
параметров движения центра масс КА в некоторый начальный
момент времени t0:
AFj(t) = Wj(t,t0) AQ(t0) • (8.1)
336
где AFj(t) = Fj(t)-FjQ(t) - отклонение j-го истинного первичного
навигационного параметра относительно опорного значения в
момент времени t;
AQ(to) = Q(to)-Qo(to) вектор отклонений истинных
параметров движения центра масс КА относительно опорного
вектора в момент времени t0;
Wj(t,t0)- вектор-строка частных производных от j-ro
первичного навигационного параметра по параметрам движения
КА.
Представим вектор-строку Wj(t,t0) в виде
р.
WJT(t,t0)=£wjv4'JV(t), (8.2)
V=1
где WjV- вектор коэффициентов, не зависящих от времени /;
4/jV(t) - линейно независимые на отрезке времени [t0,t]
функции.
Тогда вектор AQ(t0) наблюдаем по измерениям j-ro
первичного навигационного параметра, если ранг матрицы
Мн =[wj] Wj2 ... Wjp ] равен количеству Nq составляющих вектора
искомых параметров, например, Nq=6, т.е. гкМц =6. Матрица
Мн получила название матрицы наблюдаемости по измерениям j-
го первичного навигационного параметра
Если количество измеряемых параметров равно т, тогда
исследование наблюдаемости сводится к поиску ранга матрицы
Мн =[МН1 мН; ... MHJ.
Критерий наблюдаемости формулируется следующим
образом: вектор AQ(t0) наблюдаем по измерениям m первичных
навигационных параметров, если ранг матрицы
Мн =[МН Мн, ... Мн ] равен количеству составляющих вектора
искомых параметров, т.е.
rkMЦ = гк[М}^ ... M[_j^] = Nq. (8.3)
Для количественной оценки наблюдаемости используется
показатель
dH = nq ~rkMH,
который называется дефектом наблюдаемости.
337
8.2.2. Математическая модель движения КА и
орбитальных ориентиров
Исследование наблюдаемости системы, состоящей из КА и п
орбитальных ориентиров, по бортовым измерениям параметров их
относительного движения представляет собой сложную задачу.
Решение этой задачи при отсутствии в математической модели
движения разумных допущений ведет к достаточно громоздким
выкладкам, которые затрудняют проведение последующего анализа
полученных результатов. В связи с этим будем полагать, что КА и
орбитальные ориентиры движутся в центральном поле сил. При
этом их истинные орбиты являются околокруговыми, а опорные
орбиты - круговыми.
При сделанных допущениях математическая модель движения
системы, содержащей КА и п орбитальных ориентиров, имеет вид:
AQn+i (О= Bn+1 (t, to) • AQn+i (т о) > (8-4)
где AQn+I(t) и AQn+1(t0) - 6(п + 1)-мерные векторы параметров
движения системы в моменты времени t и tg соответственно;
Bn+i(t,to) - матрица баллистических производных системы,
содержащей КА и п орбитальных ориентиров, размера
6(п + 1)хб(п + 1).
Если предположить, что движения КА и п орбитальных
ориентиров независимые, то матрица Bn+1(t,t0) имеет
квазидиагональный вид:
~B0(t,t0) 0 0 0
о Bi(t,to) 0 0
Bn + l(t,to) = 0 0 B2(t,t0) 0
О 0 Bn(t,t0)
8.2.3. Модель бортовых навигационных измерений
Для построения модели бортовых навигационных измерений,
которая необходима при проведении исследований наблюдаемости
системы из КА и п орбитальных ориентиров, введем неподвижные
и подвижные геоцентрические системы координат.
В неподвижных геоцентрических системах координат X jYjZj,
где j = 0, п, оси OXj совпадают с направлением радиуса-вектора
соответствующего орбитального объекта в начальный момент
338
времени t0. Оси OZj совмещены с бинормалями плоскостей
соответствующих орбит, а оси OYj дополняют соответствующие
системы координат до правых.
Для перехода из системы координат XjYjZj, где j = 1, п в
систему координат X0Y0Z0 используется матрица
Mj=[PjGjNj], (8.5)
где Pj - орт, направление которого совпадает с направлением
радиуса-вектора КА в начальный момент времени t0:
cosQj cosu j - sin Qj sin u j cosij
cosQj sin Uj cosij+sinQj cosuj ;
sin u j sin ij
Gj- орт, лежащий в плоскости орбиты КА и
перпендикулярный орту Pj:
- cosQj sin u j - sin Qj cosuj cosij
cosQj cosuj cosij-sinQj sinuj ;
cosuj sin ij
Nj - орт, перпендикулярный плоскости орбиты КА:
pj =
gj =
NJ =
sinQj sinij
-cosQj sinij
cos i j
Qj - угол между осью OX0 и линией пересечения плоскостей
орбит КА и j-ro орбитального ориентира, отсчитываемый от оси
ОХ0;
ij - угол между плоскостями орбит КА и j-ro орбитального
ориентира;
Uj - угол между линией пересечения плоскостей орбит КА и j-
го орбитального ориентира и осью OXj (см. рис. 8.1).
339
Рисунок 8.1. Угловое положение орбитального ориентира
относительно КА в геоцентрической системе координат
В подвижной геоцентрической системе координат
ось oxj1 совпадает с направлением текущего радиуса-вектора j-ro
ориентира, ось OyJ1 лежит в плоскости орбиты j-ro ориентира и
перпендикулярна оси ОХ^, ось OZ^ совпадает с осью OZj.
Для перехода из системы координат X^Y^zp в систему
XjYjZj используется матрица
nj =
COS<Pj
sin <Pj
О
— sin <pj О
cos<pj О
О 1
(8-6)
где cpj =A.j(t-t0) - угол поворота радиуса-вектора j-ro ориентира
относительно начальной точки (см. рисунок 8.2);
A,j - угловая скорость движения j-ro ориентира.
340
Рисунок 8.2. Положение подвижных орбитальных систем
координат Д''}'/ z't и xjy^t относительно неподвижной системы X,Y)ZI
Предположим, что в состав измерительного комплекса САН
КА входит дальномер, способный измерять дальность до j-ro
ориентира. Модель дальномерных измерений находится из
выражения радиуса-вектора j-ro ориентира в системе координат
упvП уП .
Л0 т0 ^0
Dj=MjMjnjRj-R0,
где Rj=[Rj 0 0]т- радиус орбиты КА (j = 0) и j-ro ориентира
(J = 1, п).
Откуда находим уравнение измерений дальности
DJ=|Dj|.
Предположим, что бортовыми средствами КА измеряется угол
0jV между направлениями на j-ый ориентир и v-ую звезду. Тогда
модель бортовых измерений при отсутствии погрешностей
измерений принимает вид:
Hj(n0Dj)
€);v = arccos-----,
_ Dj
где Hv - орт v-ой звезды:
Hv =[cosav cos5v sinavcos8v sin8v]T;
av - орбитальное восхождение v-ой звезды;
8V - орбитальное склонение v-ой звезды.
341
8.2.4. Исследование наблюдаемости по бортовым
астрономическим измерениям
При исследовании наблюдаемости параметров движения
системы, содержащей КА и п орбитальных ориентиров, по
измерениям углового положения ориентиров относительно
навигационных звезд будем полагать, что измерения проводятся в
течение одного витка КА, а первичными навигационными
параметрами являются косинусы углов ©jV, т.е.
0c(t) = HTd(t), (8.7)
где 0c(t) - п-мерный вектор;
d(t) - Зп-мерный вектор: dT(t) = [djr d2 ... d„];
dj - орт вектора Dj;
Нт - квазидиагональная матрица размера пхЗп:
Hj(ns) 0 0 К]
нт = 0 Hj(ns) 0 ; Hj(ns) = hJ
0 0 Hj(ns) нт ns
Переход от угла к его косинусу не влияет на результаты
исследования наблюдаемости, поскольку функция 0 = arccos(0c)
монотонна, непрерывна и дифференцируема в области 0 < 0 < л.
Градиентную матрицу запишем следующим образом
Ac(t) = HTfl(t)M(t) = LT(t)M(t), (8.8)
где Д(Ч) - квазидиагональная матрица размера Зп х Зп :
M(t) - переходная матрица размера Зп х 3(п +1):
-По Mj(t)n 0 0
M(t) = -По 0 M2(t)n2 0
-По 0 0 Mn(t)n
LT (t) = НтД(0 - матрица размера m х Зп:
342
L{(t) О
О L^(t)
О
О
О О L„(t)
Исследования, проведённые в работе [35], показали, что
наблюдаемость рассматриваемой системы определяется видом
области пространства, в которой находятся КА и орбитальные
ориентиры. В связи с этим рассмотрим два варианта возможных
областей.
Вариант 1. Система, содержащая КА и орбитальные
ориентиры находится на сфере радиуса г0.
Предположим, что бортовыми средствами КА измеряется
косинус угла между направлением на звезду и орбитальный
ориентир. Исследуем наблюдаемость движения КА с помощью
критерия, рассмотренного в п. 8.2.1.
Представим вектор-столбец WT(t,t0) в виде [4]:
Wjr(t,t0) = [B'(t,t0)]TL(t), (8.9)
где B'(t,t0) матрица производных, приведённая в параграфе 3.6.
Запишем матрицу B'(t,t0) следующим образом:
-г 7
[B'(t,t0)]T =^Bj(X0)Fj(t),
j=l
где Fj(t) - линейно независимые на отрезке времени То функции:
F](t) = l, F2(t) = cos<p0, F3(t) = sin<p0, F4(t) = sin<p0 cos<p0,
F5(t) = cos2 <Po» F6(t) = 3<p0cos<p0> MO = 3<Po sin Фо ;
To - период обращения KA вокруг Земли;
Bj(X)- матрицы размером 6x3 (индекс «О» опустим):
343
В1(Х) = '-2 0 0 _4 0 _ 0 0 -1 0 0' 1 0 1о к 0 0 0 0 0 0 , в2(Х) = 2 0 0 2 к 0 0 ’ 1 0 0 0 О' -1 0 - 0 к 0 0 0 1 0 °- , в3(Х) = 0 1 2 к 0 0 0 1 0 0 2 0 0 2 к 0 0 -1 0 0 0 0 0 0 0 j_ к. 'o’ 0 0
1 0 0 О' 0 0
0 1 О’ 0 0
В4(Х) = к 0 2 к 0 в5(к) = 2 к к 0 0 , В6(к) = 0 Л к Л 0 Л
0 0 0 0 0 0 и Л и и Л
_ 0 0 0 _ 0 0 0 0 0 0
1 0 0'
0 0 0
0 0 0
57(Я) = 1 А А
я и и
0 0 0
0 0 0
Вектор Dj представим в виде
D1 = rot(pl -Po)c°s<Po +(G1 -G0)sin<p0] = r0(APcos<p0 +AGsin<p0).
С учетом этого выражения после элементарных
преобразований получим
1 3 -
Ц0 = 7Г~7 ^к Yk ’
lDllk=l
где Lk - трёхмерные векторы:
Lj =(aGTAG-AGAGt^I1;
L2 =(лРТДР-ДРДРТ)Н1 - Lb
L3 = (дртдо + ДРДОТ + ДОТДР + ДОДРТ)н1;
Н] - единичный вектор направления на звезду;
344
ук - линейно независимые на отрезке времени Т функции:
71 (0 = 1, Y2 (С = cos2 фо, Тз (0 = cos фо sin ф0.
В результате выражение (8.9) принимает вид
I 13
WoT(t,to) = 7--TLwk(t>k(t), (8.10)
1и1| к=1
где шестимерные векторы wk и линейно независимые функции фк
приведены в таблице 8.1
Таблица 8.1 - Функции и векторы, входящие в соотношение
(8-Ю)
Функция фк Вектор wt
1 BjL!
sin фд cos фо B4L1 + BjLj
2 cos фо + BiLi+B^Ly
sin фо cos3 фо B4L2 + b51l3
4 cos фо b5Li - B4L3
Зфо cos Фо B6Li + B7L3
Зфо^пфо B7Li
Зф0 cos3 ф0 B5L2 - B7L3
Зф08ШфоС05 фо b5l3+ b7l2
0 СОвфо В 2 L1 +B3L3
1 sin фо B3L]
2 sin (ра cos2 (ра b3l2+ b2l3
3 cos3 фо b2l2 -B3L3
Следуя п. 8.2.1, составим матрицу наблюдаемости
MH(Q0(t0), ns =l) = [wi w2 ... w13].
Проведя несложные преобразования с полученной матрицей,
находим
345
MH(Qo(to),ns =1) =
M2x5 О О
О М1Х4 О
О о м3х4
где блоки Мр<к матрицы наблюдаемости:
М2х5 = Lly — 2Lix + L Lly -2L 3y 3x Ljy + L2y _L3x -L2x Ljx — 2L2x + L3y L2y + L3y + L3x
Mjx4 = - Ljy + L3x l-lx l-2y l-3x l-3y +L: ’x ];
Lly ~L3x ~ Llx l-3y — l-2x l-2y + L3x
М3х4 = 1-lz 0 L 3z L2z
L3z 1-lz l-2z — l-3z
L2y + L3x
L 2х — 1^3у
Lkx, Lky, Lkz - проекции вектора Lk на оси системы координат
X0Y0Z0.
Найдём ранг матрицы (8.11):
гкМн(Ро(‘о)> ns =1) = гкМ2х5 + гкМ1х4 +гкМ3х4 .
Пусть орбиты КА и ориентира компланарные, т.е.
Полагая, что Qj =0, получаем
Нх (1 - cosui) - Ну sinuj
Lj = (1 -cosuj) - Нх sinUj + Ну(1 + cosui)
2HZ
(8.11)
ij =0.
L2 =(l-cosuj)
L3 = (l-cosuj)
2HX cosU] + Hy sinUj
2(HX sinui + Hy cosuj) ,
0
-2(HX sinuj -Hy cosuj)
2(HX cosUj + Hy sinUj)
0
Заметим, что справедливы равенства: -L2x+L3y=0 и
L2y+L3x=0. Кроме того, в векторе-строке М1х4 третий и
четвёртый элементы равны нулю, в матрице М3х4 третий и
четвёртый столбцы являются нулевыми векторами и в матрице
М2х5 четвёртый и пятый столбцы также являются нулевыми
векторами.
346
Поэтому справедливо неравенство: rkMH(Q0(t0), ns =1)< 5, т.е.
движение КА не наблюдаемо по измерениям угла «звезда -
орбитальный ориентир» с дефектом наблюдаемости dH > 1.
Можно показать, что наблюдаемость движения орбитального
ориентира по угловым астрономическим измерениям его
положения бортовыми средствами КА также не наблюдается с
дефектом
dH = 6-rkMH(Q1(t0),ns = 1) > 1.
Рассмотрим систему, состоящую из КА и орбитального
ориентира. Матрица наблюдаемости принимает вид
MH(Qo(to)’Ql(to)>ns -!)-
MH(Qo(lo)’ns = 1)
Mh(Q1(1o)> ns =1).
Проведя аналогичные преобразования, получим
rkMH(Qo(to),Qi(to),ns =1)^Ю,
т.е. движение системы «КА - орбитальный ориентир» не
наблюдаемо по измерениям угла «звезда - орбитальный ориентир»
с дефектом наблюдаемости
dH=12-rkMH(Qo(to),Qi(to).ns=l)22.
Предположим, что бортовыми средствами КА визируются две
звезды. Матрицу наблюдаемости запишем в следующем виде
мн(Со(1о)>91(1о)>п5 = 2)= (мн,(Qo(1о),ns =1) мн,(Qi(lo)>ns =1)J,
где MHl(Qo(to),Qi(to).ns =0 и мн2(QoCtoXQiGo)»ns =D матрицы
наблюдаемости при визировании первой и второй звезды
соответственно.
В работе [35] доказана теорема, согласно которой в
рассматриваемой области пространства существуют подобласти,
где ранг матрицы наблюдаемости движения КА и орбитального
ориентира равен двенадцати, т.е. в общем случае
rkMH(Qo(to),Qi(to).ns=2)<12.
С позиций наблюдаемости наиболее неблагоприятной
является ситуация, при которой КА и ориентиры находятся в одной
плоскости (ij =о) на некотором угловом геоцентрическом
расстоянии U]*0 друг от друга. В этом случае дефект
наблюдаемости равен шести, т.е. наблюдаем либо вектор
параметров движения КА, либо вектор параметров движения
орбитального ориентира.
347
Вариант 2. Система, содержащая КА и орбитальный ориентир
находится на несоприкасающихся сферах радиуса, т.е. го * Г].
Предположим, что измеряется угол «звезда - орбитальный
ориентир».
Зададим опорное положение ориентира относительно КА
вектором
D] =r0[kr(P1 cos q>! +Gi sin ф[) ~ (Ро cos Фо + Gosn^o)],
где коэффициент kr = — * 1.
г0
После алгебраических преобразований получаем
! 9
L(t)~ZLkYk, (8-12)
|Di[3 k=l
где векторы Lk и линейно независимые функции ук приведены в
табл. 8.2.
Таблица 8.2 - Функции и векторы, входящие в
соотношение (8.12)
Функция ук Вектор Lk
1 [(k2+l)E-k2G!G^-GogJ]1
cos2 <ра (GoGj-PoPjlH!
cos2 Ф1 k2(G]G^ -Р^Щ
sin (fa cos^0 -(G0P0T +P0Gj)H!
sin Ф1 COS ф1 — kflGjP^ +P1G[)H1
COS0»O COS^j kr (P0Pj^ +P1P0T-2P0TP1E)H1
sin фо sin ф[ kr(G0G^ +G!GJ-2GqGjE)
sin фо СО5ф1 kr(GopT 4-PiGg -2gJP!E)H
cos фо sin Ф1 kJPoGf +G!PoT -2P(Jg,E)H
На основании соотношения (8.12) находим
1 41
WoT(t,to) = i=-rXwk(l)k(t), (8.13)
|Di| k=i
где шестимерные векторы wk и линейно независимые функции фк
приведены в табл. 8.3
348
Матрица наблюдаемости принимает вид
MH(Qo(to)>ns =1) =
^2x17 О О
0 С О
(8.14)
В работе [33] показано, что ранг матрицы (8.14):
rkMH(Q0(t0),ns =1) = гкМ(2°х)17 +гкМ<°)2 +гкМ^,2 =6,
т.е. параметры движения КА наблюдаемы по измерениям углового
положения ориентира относительно одной звезды.
Однако в некоторых случаях дефект наблюдаемости dH *0, в
частности, при условии компланарности орбит КА и ориентира. В
этом случае если орт звезды лежит в плоскости орбит, то дефект
наблюдаемости dH =4, а если орт звезды совпадает с нормалью
плоскости орбит, то dH=2. Кроме того, если угол между
плоскостями орбит КА и ориентира ij =90°, а орт звезды лежит в
плоскости орбит, тогда дефект наблюдаемости dH = 5.
Рассмотрим матрицу наблюдаемости параметров движения
КА и ориентира
MH(Qo(to),Qi(to), ns =1) =
MH(Qo(lo)>ns = 0
MH(Qi(to)> ns =1)
M4x21 0 °
0 0
° ° M6xl2
Анализ этой матрицы показывает, что вектор
Q(t0) =
QoOo)
Qi(t0)
(8.15)
по измерениям угла «звезда - ориентир» не наблюдаем, поскольку
ранг одного из её блоков при любом расположении плоскостей
орбит и орта звезды rkM6xl2<5 [35]. При этом если орт звезды
лежит в плоскости орбит КА и ориентира, то гкМ6х12 =2, а если
совпадает с нормалью плоскости орбит, то rk М6х12 = 4.
Наблюдаемость вектора (8.15) по измерениям углового
положения орбитального ориентира на фоне звёздного неба
обеспечивается при условии визирования оптическими средствами
КА не менее двух звёзд. При этом навигационные звёзды не
должны находиться в плоскости орбиты КА или ориентира. В
противном случае два боковых параметра движения этого объекта
(КА или ориентира) должны быть априори известны. Если в этой
349
плоскости находятся орбиты КА или ориентира, то боковые
параметры их движения также должны быть известны
Таблица 8.3 - Функции и векторы, входящие в соотношение
(8 13)______________________________________________
Функция фк Вектор wk
1 B1L1
sin фо cos фо Вд L1 +
cos2 <р„ B5L1 + В^Г^+ВдЬд
COS2 ф[ B1L3
7 Sin Фо COS Фо COS Ф1 B4L3
2 2 COS Фо COS ф| B5L3
81Пф1 COS Ф|
sin фо cos фо sin ф] cos ф) Д4£,
2 COS фо§1Пф|С08ф1 В5Ь5
0 COS Фо СО5Ф1 B]Lo+ B4L8
1 sin фо sin ф] B1L7
2 cos фо sin ф[ B[L-9 + B4L7
3 sin фо со5ф1 BiL6
4 7 Sin фо COS фо СО8ф1 b4l6 + b5l8
5 2 sin фо cos фо sin ф! B4L9 + B5 L7
6 cos3 Фо sin Ф1 B5L9 — B4L7
7 cos3 Фо СО5ф1 B5L6 - В4Ц
8 Зфо COS Фо BfiLi + B7L4
Зфо sin Фо B7L1
350
9
0 3<p0 cos<p0 cos2 <P] B6L3
1 3<po sin<po cos2 Ф1 b7l3
2 3фо cos Фо sin Ф1 cos Ф1
3 3<Pq s>n Фо sin Ф1 cos Ф1 B7L5
4 3<p0 cos2 Фо cos<pi B6L6 - B7L8
5 3<p0 sin <p0 cos фр cos <Pi b7l6 + b6l8
6 3p0 sin <pa cos p0 sin p, b7l9 + b6l7
7 Зфо sin Ф1 b7l7
8 2 3<p0 cos Фо sin<Pi B6L9 -b7l7
9 3<p0 cos Ф1 b7l8
0 COSCpo B2L1 + B3L4
1 sincpQ В3Ц
2 COS<Po с°82 Ф1 b2l3
3 sin «pg cos2 <p] B3L3
4 coscpo sin (pi cosq>i b2l5
5 sin (po sin9i cos9i b3l5
6 COS2 <Po COS<P1 b2l6 - b3l8
7 sin Фо COS Фо СО5Ф1 B3L6+ B2L8
8 sin <p0 cos sin <px BjL? +B3L9
351
9 COS1 (рс Sin^J, B2L9 — B3L7
0 sintpi B3L7
1 COS ф] BjLg
8.3. Оценивание точности решения задачи навигации КА
8.3.1. Постановка задачи
Успешное выполнение целевых задач, стоящих перед КА, во
многом зависит от точности определения его параметров движения.
Для изучения этого свойства системы навигации, основанной на
бортовых измерениях параметров движения ориентиров
относительно расположенных на небесной сфере навигационных
звёзд, воспользуемся теорией аналитического оценивания, которая
изложена в параграфе 3.6.
Согласно этой теории при выводе ковариационных матриц
погрешностей навигации требуется проводить операции обращения
матриц, размер которых определяется размерностью пространства
исследуемой системы. В частности при оценивании точности
навигации системы, состоящей из КА и орбитального ориентира,
параметры движения которого неизвестны, размерность
обращаемой матрицы равна [12x12].
Поскольку аналитический способ обращения матриц больших
размерностей приводит к громоздким выражениям, введем
следующие допущения.
Предположим, что движение КА и орбитального ориентира
происходит по околокруговым орбитам в центральном поле сил.
При этом опорные орбиты являются круговыми, находящимися на
одной сфере радиуса г0.
При выводе аналитических оценок точности навигации будем
полагать, что в моменты времени t с помощью бортовых средств
КА измеряется угол 0j(t) между орбитальным ориентиром и двумя
звездами (j = 1,2). В качестве первичного навигационного параметра
может использоваться также дальность D(t) до орбитального
ориентира.
352
Проводимые измерения углов 0j(t) и дальности D(t) имеют
аддитивные случайные погрешности, которые распределены по
нормальному закону с нулевыми систематическими
составляющими и дисперсиями oQ и Будем полагать, что
дисперсии в течение сеанса навигационных измерений сохраняют
свои значения.
8.3.2. Измерения углов «звезда - ориентир»
Предположим, что КА и ориентир совершают движение в
одной плоскости. Угол между опорными радиусами-векторами КА
и ориентира равен u = const.
Согласно проведенным в параграфе 8.2 исследованиям, при
этих условиях наблюдаются либо параметры движения КА, либо
параметры ориентира. Оценим точность навигации КА, полагая,
что параметры движения ориентира известны.
Уравнение измерений угла «звезда - ориентир» имеет вид
(Н; D)
0;(t) — arccos —p=j—, j = 1, 2, (8.16)
J |d|
где Hj и D - орт j-ой звезды и радиус-вектор ориентира в
подвижной орбитальной системе координат, связанной с КА.
Введем обозначения: c = l-cosu и s = sinu. Тогда радиус-
вектор ориентира
D = r0[-c s 0]т. (8.17)
Очевидно, что дальность до ориентира
D = r0V2c. (8.18)
Предположим, что первая звезда находится в плоскости
орбиты КА, а вторая звезда совпадает с бинормалью его орбиты.
Для определенности установим, что орт первой звезды совмещен с
осью ОХ неподвижной орбитальной системы координат.
Тогда орты звезд равны
H1(t) = [coscp - sin ср 0]Т и H2(t) = [O О 1]Т.
Градиентную матрицу запишем следующим образом
1 fs с о
А© = ——- _ • (8.19)
2гос|_0 0 л/2с
Умножив матрицу (8.19) на матрицу баллистических
производных, получаем
353
s(2 - cos ср) + с(2 sin ср - Зср)
s sin срн- с(2 cos ср — 1)
ssin(p + c-2cos(p
о
о
о
W©T(t,t0)=-^
2гос
со
s(2-2coscp) + c(4 sin ср - 3ср)
(8.20)
CD
О
О
О
со
Из выражения (8.20) следует, что векторы внутриплоскостных
и боковых параметров движения КА являются независимыми.
Предположим, что сеанс навигационных измерений
соответствует одному витку КА вокруг Земли.
Интегрируя функции (3.13) и (8.20) в пределах одного витка,
имеем
О
C©(Qq, 2л) =
С©! (Qq, 2л)
0 С©2 (Qo, 2л)
где C© (Qq, 2л) и C©2(Qo, 2л) - симметрические матрицы:
С©, (Qq, 2я) =
(8.21)
N
8сг2о©
18 - 24лз +19с + 24л2с
2(s + Зле)
2(6лс - s)
со
2 +5с
2 +7с
со
10- 12 лэ + (17 + 12л2)с
со
2s + блс
(О
2 +Ис
со2
12лс -25 4(6 - 6лз + 6Л2С + 13с)
со2
со2
С©, (Qo> 2л) -
N
1 7
4сго°©
1
о
0 ’
1
со2 _
Искомая ковариационная матрица имеет вид
ке, (Qon,2^)
К0((Эо,2л) =
(8.22)
0
L ° к0, (Qofi, 2л)
где K0i(Qon,2K) и К@2(р0Б,2л) - ковариационные матрицы
погрешностей оценок соответственно продольного и бокового
движения КА:
354
4ro°0
Ke, (Qon> 2 л) - —f 5— Kq (2lt),
’ 3(л2-6)(3c + 2)2N Чпл
K'm (ад =
2с[9с2(л2 +12) + 1 +6с(л2+6) + 8] 1 I 1
2[3лс(27с2 + 24с+ ] +4)-2л(81с2+ !^с2л2+4с(6л2 + +36с + 4)] i +25)+ 16-6^(4 + ! +27 с2 + 24с)] [
1 -2[9с2(8л2 -33) + 1 2(9с’(7л2-23)+ 1
2[45(27с2 +15с+ ' +12с2(7л2-2) + ] +6с2(13л2 -8)+ '
+2) - Злс(27с2 + | +4с(6л2 +19) +16 - I +4с(6л2+13)- 1
+24с + 4)]ю0 1 —3rcs(45c2 + 42с + 1-12л5(9с2 + 9с + 2) + 1
1 +8)]о>о 1 +1<’Ж i
2[4i(27c2 +15с + 1(25(135с2 + 48с + 4) - -|(Зл5(45с2 +36с + 4)-|с[9с2(2л2 +13) +
+2)-Злс(27с2 + ! -Зго(45с2 +36с + I -45(45с221с+ 1 +4 + 12с(я2-
+2 4с + 4)]а>0 1 +4)]а>о j +2)]О)2 ’ -1)]ш2
2 2 4г„ сап Г1 0 1
K0;(QOB,2n) = --^-2- 0 to2
Соотношение
орбиты г0, угла u
(8.22) позволяет оценить влияние радиуса
между радиусами-векторами КА и ориентира,
качества и объёма (Од и
N) проводимых измерений на точность
навигации КА.
Исследуем влияние угла и меду радиусами-векторами КА и
ориентира на точность определения параметров движения центра
масс КА.
Предположим, что и = л. Тогда
Зл2 +32
ке, (Qon>2л) -
,2„2
2го
3(л2 — 6)N
30л 36(л2-3)
-30л 6(12-5л2)<о
(-Зл2 - 22)<о - 24ла>
27(л2 -2)<о2
24л<о2 (Зл2+14)а>2
.(8.23)
Сравнительный анализ ковариационной матрицы (8.23) и
матрицы Кр(2л), приведённой в работе [102, с 132-133],
показывает, что справедливо равенство К0 (Qon> 2л) = 4К.р(2л), т.е.
зенитный метод навигации по существу является частным случаем
355
метода, основанного на астрономических измерениях положения
орбитального ориентира.
Можно показать, что с уменьшением угла и точность
навигации увеличивается. Однако при малых углах (и = 0) вторая и
третья строки в матрице (8.20) являются линейно зависимыми.
Следовательно, вектор параметров движения КА становится плохо
наблюдаемым. Причем дисперсии погрешностей трансверсальной
координаты и радиальной составляющей скорости возрастают.
Очевидно, что существует такое значение угла и, при котором
значения дисперсий трансверсальной координаты и радиальной
составляющей скорости принимают минимальные значения. В
работе [33] показано, что наименьшие погрешности навигации
имеют место при и ~ 30°.
8.3.3. Измерения дальности до ориентира
Исследования точности навигации КА по измерениям
дальности до ориентира выполним при допущениях, которые были
сделаны в п. 8.3.2.
При условии, что орбиты ориентира и КА являются
некомпланарными (i * 0) и в начальный момент времени
геоцентрическое расстояние между ними и = 0, радиус-вектор
ориентира в подвижной орбитальной системе координат
R = r0[sin2 (p(cosi -1) sin <pcos<p(cosi — 1) sincpsinij^. (8.24)
Уравнение измерений относительного расстояния в этом
случае определяется выражением
D - r0 sin <p72(l-cosi). (8.25)
Градиентная матрица по измерениям дальности ориентира
принимает вид
Ар = [sin<p(cosi-1) coscp(cosi-1) sini], (8.26)
y2(l -cosi)
Умножение матрицы-строки (8.26) на матрицу
баллистических производных В(щ0), приведённую в [102], даёт
следующий результат
356
(1 - cosi)[sin <p(2 + cos ср) - 3<psin <p]
(1 - cosi)[coscp(cos<p- 1) +1]
wT(t,to) = - j— (l-cosi)(l-Cos<p)2/co (827)
72(1 -cosi) (1 -cosi)[2sincp(l + cos<p) - 3<pcos<p] / co
-sini cos <p
-sini sin ср/co
Интегрируя функции (3.13) и (8.27) в пределах одного витка,
получаем симметрическую матрицу
3(25 + 16п )(1 - cos >)
23(1 - cost)
24rt( 1 - cos i)
CO
8 sin i
co
0
(8.28)
Анализ показывает,
что полученная матрица является
особенной матрицей. Это свидетельствует о том, что по
измерениям дальности до орбитального ориентира шестимерный
вектор параметров движения КА не наблюдается.
Пятимерный вектор параметров движения КА, в котором
отсутствует трансверсальная или боковая координата, может быть
восстановлен с помощью функции (8.25). Следовательно, по
результатам измерений относительного расстояния между КА и
орбитальным ориентиром принципиальную возможность
определения имеют два вектора:
Ql(to) = [х<Эо> x(t0) y(to) z(to) z(to)]T
Q2O0) = [x(to) У(‘о)*(1о) y(to) z(t0)]T -
Оценим точность определения одного из этих векторов,
например вектора Q2(to) • При этом будем полагать, что координата
z(t0) известна или уточняется с помощью навигационной
информации от других источников.
357
Для этой цели сформируем матрицу Cp(Q2,2n) размера 5x5
путём исключения из матрицы (8.28) пятой строки и пятого
столбца. После обращения матрицы Cd(Q2,2k) находим
ковариационную матрицу
]6 2
Kd(Q2,2tt) =-----------D------к2, (8.29)
(12л/ -55)(l-cosi)N
где К2 - симметрическая матрица:
3(4п2 * 151
1104тг - 1925
76
к2 = - ЗОло) 9(165-112тс2)а> 76
| -1 7 ТГ 2 4-
5(192п2 - 253)ю2
76
2 2 2
27лсо 2(6я + 13)со
35(osin i 2 Iwsin i - 21гсср2 sin i - бЗсо2 sin i 3(2tc2 - l)co^ sin2 t
1 + cosi 2(l + cosi) 2(cosi + l) 2(cosi + l) 2(l + cosi)2
Анализируя матрицу (8.28), заключаем, что с ростом угла
наклона плоскости орбиты ориентира погрешности оценок
плоскостных параметров движения КА уменьшаются, а боковой
координаты увеличиваются.
Исследования точности навигации по измерениям дальности
двух ориентиров, находящихся на орбитах с наклонениями ц и i2,
показывает, что отношения дисперсий погрешностей определения
составляющей скорости бокового движения и параметров,
характеризующих движение КА в плоскости (пл) орбиты,
находятся соответственно из выражений:
02<2^ Ч) = 1 + cosi2 . Опл(2^ И) = 1 — cosi2
о?(2яД2) 1 + cosi, ’ a^(2n.j2) 1-cosii
Пусть, например, ij =-
6
и i2 = у. Тогда из соотношений (8.30)
получаем
.7^1’= 0,8 и ^^ЕЧ).2^_з17
о^(2к, i2> 2 + 73 0^,(271,12)
Следовательно, по измерениям дальности до второго
ориентира (т.е. находящегося на орбите, у которой угол наклона
относительно плоскости орбиты КА составляет 60°) дисперсии
358
погрешностей параметров движения x(t0), y(t0), x(t0),y(t0) будут в
3,7 раза меньше, а составляющей скорости бокового движения - на
19% больше по сравнению с результатами измерений дальности до
первого ориентира (плоскость орбиты которого наклонена
относительно плоскости орбиты КА на угол 30°).
При условии компланарности орбит радиус-вектор ориентира
имеет вид
R = r0 [cos и -1 sin u 0]Т.
Тогда градиентная матрица записывается следующим образом
Ар = !— ' - - [cosu -1 sinu О]. (8.31)
->/2(1 - cosu)
Поскольку третий элемент матрицы-строки (8.31) равен нулю,
измерения дальности «не чувствительны» к отклонениям КА в
боковом направлении. Поэтому аналитические оценки точности
навигации могут быть получены только для параметров,
характеризующих движение КА внутри плоскости орбиты, т.е. для
вектора Qnjl(t0) = [x(t0) y(t0) x(t0) y(t0)]T-
С учётом этого замечания матрица W(t,t0) = Ар B(t,t0)
принимает вид
т 1 wA(Un) - - (cosu -1)(2 - cos<p) +sin u(2sin q>- 3(p) (cos u -1) sin <p + sin u(2 cos <p — 1) (cos u -1)sin <p + 2 sin u(cos<p — 1) 8.32)
72(1-cosu) (0 2(cosu -1)(1 - cos<p) -t-sin u(4sin<p- 3<p)
co
Интегрируя функции (3.13) и (8.32) в пределах одного витка КА,
получаем симметрическую матрицу:
359
18 24nsinu + (19 + + 24п^ )(I + cos и) 6я(1 4- cos и) - 2 sin и 7 + 5 cos и
CD(2n)- ’ 4cd 12л(1 + cosu) + 2sinu 9 + 7cosu 13 + 11 cos и 2 О) (0 СО 20 + 24rtsinu+ 6n(l + cosu)- 12тс(1 + cos и) + 4(6 + 67lsin u + 03 + 2 2 4 + (34 + 24л )(l + cosu) -2 sin и +2 sin и + 6л )(l + cosu)] “ “ <O2 <o2
Поскольку ковариационная матрица Кр(0пл,2л), полученная
путём обращения матрицы Ср(2л), имеет достаточно громоздкий
вид, приведём аналитические выражения только диагональных
элементов этой матрицы, т.е. дисперсий погрешностей оценивания
вектора £?„ (г0):
2 _4aD kx .—2 _4°D кУ . 2 _ 4oD k* . _2 _ 2°D кУ /о
°X “ XT A ’°y - XT A ’ ~ 2 ’ ~ 2 ’
NAd NAd NADft)2 NAd(i)2
где До— определитель матрицы Ср(2л):
Др = 3(л2 -6)(l + cosu)2(l lcosu-З)2; кх,ку,кх, ку— коэффициенты,
рассчитываемые по формулам:
кх = 9(л2 + 12)(cosu-l)3 + 12(5л2 +57)cos2 и + 4(3л2 + 20)cosu + 24л2 +260
к у = 9(10л 2 -51)(cosu -1)3 + 6(106л2 — 459)(1 - cos и)2 + 16(93л2 - 338) cos и +
+ 16(72 - 31л2) + 6л(27со52 и + 78cos и + 55) sin и;
кх = 9(23-7л2)(1-сози)3 +6(76л2 - 215)(1-cosu)2 + 4(656- 273л2)cosu -
-4(57л2 -448) + 12л(9соз2 и-63cosu +110) sin и ;
ку = 9(2л2 + 13)(cosu -1)3 +30(4л2 + 23)(1-cosu)2 + 8(33л2 +170) cosu -
-2(31л2 +232).
Выражения (8.32) позволяют получать аналитические оценки
дисперсий параметров внутриплоскостного движения космического
аппарата при любом геоцентрическом расстоянии между
360
орбитальным ориентиром и КА. Например, при и = 30°
соотношения (8.32) принимают вид:
2 8Ор[3(61л/3 + 106)л* 2 + 3376 + 1940УЗ
3(928л/3 + 1609)(л2 - 6)N
2 8ар[6(369л/з + 646)л2 +6(301+ 156л/3)л-11006-6485^3
У 3(928^3 +1609)(л2 -6)N
2 8Ор[3(555л/3 + 974)л2 +12(107 + 54>/3)л- 5510 -3281^3
3(928^3 +1609)(л2 - 6)N со2
2 _ 4ар[2(183л/3 + 318)л2 +2906 + 1675^3
У 3(928^3 + 1609)(л2 - 6)N со2
Как следует из анализа полученных результатов, с ростом
геоцентрического расстояния между КА и орбитальным
ориентиром точность решения навигационной задачи по
измерениям дальности снижается. Среди составляющих вектора
Qnj](t0) трансверсальная координата и радиальная составляющая
скорости определяются с наиболее низкой точностью. Зависимости
дисперсий погрешностей оценок x(t0) и y(t0)OT угла между
радиусами-векторами КА и ориентира имеют практически
линейный возрастающий характер.
При движении КА и орбитального ориентира на угловых
геоцентрических расстояниях и = 10°+ 30° дисперсии погрешностей
определения радиальной координаты (о^) и трансверсальной
составляющей скорости (ау) КА в 3-5 раз меньше дисперсий а2 и
8.3.4. Совместные измерения дальности до ориентира и
углов «звезда - ориентир»
Найдем аналитические оценки показателей точности
навигации КА, плоскость орбиты которого находится в плоскости
орбиты ориентира, при совместных измерениях дальности и углов
«звезда-ориентир». Поскольку по измерениям дальности параметры
бокового движения КА не наблюдаются, найдём ковариационную
матрицу погрешностей оценок вектора Qnj](t0).
361
Тогда, полагая, что навигационная звезда находится в
плоскости этих орбит, а проводимые в течение одного витка КА
измерения являются некоррелированными, получаем матрицу
C0D(Qnn- 2я) = C0(QnjI, 2л) + CD(QnJ1, 2л), (8.34)
где C0(QnjI,2n) - матрица размером 4x4, которая представляет
собой блок C0 (QO, 2л) матрицы (8.21);
CD(Qn,n,2n)— матрица размером 4x4, которая сформирована с
помощью матрицы С0(2я) путём исключения пятых и шестых
столбцов и строк.
Диагональные элементы искомой матрицы К0о(фпл,2л)
представим следующим образом
к.(2л) = —-ffjj(v)e3-vdv^, j - 1,2,3,4 , (8.35)
Д0О v=0
4
где Д0Е)— определитель матрицы (8.33): A0D = fA(v)04 vdv ;
v=0
0 и d — весовые коэффициенты, характеризующие объём и
Nr> Nn
качество измерений углов 0 и дальности D: Q = --~ и d = —у.;
ГоО0 Ор
fjj(v)— функциональные зависимости, представленные в табл.
8.4;fA(v)— функции вида:
f д (0) = 3(л2 - 6)(5 - 3 cos u)2 (1 - cos и);
fA(l) = 8 [-27(л2 - 6)(1 - cosu)4 + 36(л2 - 6)(1 - cosu)3 + 18(3я2 -13)(1 - cosu)2 +
+ 12(л2 + 1)(1 - cosu) + 16];
fA(2) = 8[81(n2 -6)(1-cosu)4 -324(л2 -6)(1 - cosu)3 +12(17л2 -132)0 - cosu)2
+ 240(л2 - 3)(1 - cosu) + 8(3л2 + 32)](1 - cosu);
fA(3) = 32 [-27(л2 -6)(1 -cosu)4 +180(л2 -6)(1 -cosu)3 -18(21л2 -13)(1 -cosu)2 +
+ 12(17л2 -139)(1 -cosu) + 32(3л2 -1)](1 -cosu)2;
Гд(4) = 48(л2 -6)(5 + 3 cos и)2 (1 + cosu)2(l - cosu)3;
ц — коэффициент, определяемый из выражения:
[0 при j = 1,2 ,
H = k
(2 при j = 3,4.
Соотношения (8.34) носят универсальный характер.
Действительно, полагая, например, 0 = 0 и d + О (т.е. в процессе
362
навигационного сеанса проводятся измерения только дальности), из
соотношений (8.34) следуют аналитические оценки (8.32), а при
0*0 и d = 0 находятся диагональные элементы ковариационной
матрицы (8.22) погрешностей определения вектора QnJ](t0) по
астрономическим измерениям.
Найдём дисперсии погрешностей оценивания вектора Qnn(t0)
по результатам совместных измерений дальности и углов «звезда-
ориентир» при условии равенства весовых коэффициентов (0 = d).
Это равенство справедливо, например, при следующих
характеристиках измерительной информации, используемой для
решения навигационной задачи:
— количество астрономических измерений в 100 раз
превышает количество измерений дальности, т.е. N@ = 100ND;
Таблица 8.4. Функциональные зависимости, используемые для
расчёта диагональных элементов ковариационной матрицы
к№(ае,2л-)_________________________________________
j V
1 0 8[9(л2 +12)(1 -cosu)2 + 6(л2 + 6)(1 - cos и) + 8](1 - cos и)
1 16[-27(л-2 +12)(1 - cosu)3 + 12(4л2 +51)(1 -cosu)2 + 8(3л-2 + 34)(1 - - cosu) + 48](1 - cosu)
2 32[27(л2 +12)(1 - cosu)3 — 6(19эг2 + 222)(1 - cosu)2 + 4(27л2 + 292)(1 - - cosu) + 8(3 д'2 + 56)](1 - cosu)2
3 64{-9(л2 +12)(1 - cosu)3 + 12(5л2 + 57)(1 -cosu)2 -4(33л2 + 362)(1- - cosu) + 32(3л2 + 32)](1 -cosu)3
2 0 8[9(10л2 - 51)(1 - cos и)3 + 96л2 (1 - cos и)2 + 4(6л2 + 25)(1 - cos и) +16] - - 48л(27(1 - cos и)2 + 24(1 - cos и) + 4]sin и
1 16{[-27(10л2 - 51)(cosu -1)3 + 6(74л2 — 459)(1 - cosu)2 - 8cosu(51л2 + + 14) + 8(57л2 + 46)] + 6л[81(1 - cosu)2 +84cosu - 136]sinu}(l-cocu)
2 32{[27(10л2 - 51)(cosu -1)3 - 12(98л2 -459)(1-cosu)2 + 4(264л2 - - 1405)(1 - cosu) + 480(л2 + 1)]-61л[81(1 - cosu)2 - 240(1 - cosu) + + 104]sinu}(l-cocu)2
3 64{[9(10л2 -51)(cosu -1)3 + 6(106л2 - 459)(1 - cos и)2 - !6(93л2 - -338)(1 - cosи) +1152(л2 -3)] + 6л[27(1 -cosu)2 - 132(1 -cosu) + + 160]sin и}(1 - соси)3
363
3 0 8{[9(7л? - 23)(cosu -1)’ + 6(1 Зл2 -8)(1 - cosu)2 + 4(6л2 +13)(1 - - cosu) + 16]-12л[9(1 - cosu)2 +9(1 - cosu) + 2]sin u}
1 16{[27(7л2 - 23)(cosu -1)3 + 6(50л2 -199)(1-cosu)2 + 16(21л2 -8)(1 - -cosu) + 16(3 л2 + 10)] + 12л[27(1 - cosu)2 + 27cosu -47]sin u}(1 - cosu)
2 32{[27(7л2 -23)(l-cosu)3 -6(139л2 -422)(1-cosu)2 + 1130л2 -2452- -4(183л2 -637)со5и]-12л[27(1-со5и)2 + 81 cosu -47]sin u}(l-cosu)2
3 64{[-9(7л2 -23)(cosu-l)3 + 6(76л2 -215)(l-cosu)2 -4(57л2 -224) + -4(273л2 - 656) cos u] + 12л[9(1 - cosu)2 + 45cosu +11]sin u](l - cosu)'
4 0 4[9(2л2 +13)(l-cosu)2 + 12(л2 -1)(1 -cosu) + 4](1 -cosu) »
1 8[-27(2л2 +13)(1-cosu)3 + 6(16л2 +119)(1 - cosu)2 + 4(12л2 + 49)(1- -cosu) + 72](1 - cosu)
2 16[27(2л2 +13)(1-cosu)3-12(19л2 +116)(1-cosu)2 +8(27л2 +145)(1 — -сови) + 16(3л2 +32)](l-cosu)2
3 32[-9(2л2 +13)(1-cosu)3 +30(4л2 + 23)(1-cosu)2 -8(33л2 + 170)(l- -сови) + 64(3л2 +14)](l-cosu)3
—радиусы опорных орбит КА и ориентира равны 10 тыс. км;
—средние квадратические отклонения погрешностей
измерителей углов и дальности составляют о@ =10-4рад и oD =0,1
км.
Выражения (8.34) в этом случае принимают вид
з
k jj (2*) = | = kjj (2я)а/ ±,
ZfA(v)
v=0
где kjj(2n) — коэффициенты ошибок навигации.
Результаты расчётов коэффициентов ошибок kjj(2n) в
зависимости от значения геоцентрического расстояния между КА и
орбитальным ориентиром представлены в табл. 8.5.
Полученные результаты оценивания точности навигации
свидетельствуют о том, что существуют такие орбитальные
положения КА относительно ориентира, при которых
погрешности определения оценок y(t0) и x(t0) являются
минимальными. Значения этих геоцентрических расстояний
определяются отношением коэффициентов d и 0, т.е. величиной
относительного весового коэффициента:
364
Таблица 8.5 - Результаты расчётов коэффициентов ошибок
навигации
Определяем Значение геоцентрического расстояния,град
ый параметр 1 2 5 10 15 20 30
X, км 0,001 0,004 0,025 Го,095 0,204 0,340 0,642
У, км 0,929 0,880 0,860 1,140 1,618 2,171 3,349
X, м/с 0,927 0,872 0,816 1,008 1,392 1,850 2,841
У, м/с 0,001 0,003 0,017 0,068 0,144 0,240 0,455
о •
d _ Np ор
9 N0 о2 °’
Исследования показали, что при % = 1 минимальные
погрешности определения трансверсальной координаты и
радиальной составляющей скорости КА достигаются в том случае,
когда геоцентрическое расстояние и = 5°. При этом наибольший
вклад в задачу повышения точности определения радиальной
координаты и трансверсальной компоненты скорости КА вносит
дальномерная информация. По сравнению с ошибками навигации
по измерениям углов «звезда-ориентир» при использовании
совместных измерений дисперсии указанных параметров
снижаются в 3 - 4 раза. Дисперсии погрешностей двух других
параметров движения КА (трансверсальной координаты и
радиальной составляющей скорости) уменьшаются в 1,5-2 раза.
При одинаковом количестве измерений углового положения
орбитального ориентира относительно звёзд и расстояний между
КА и ориентиром в течение навигационного сеанса с применением
существующих и перспективных бортовых измерителей
справедливо неравенство %»1. В этом случае основную роль в
процессе уточнения параметров, определяющих положение и
скорость КА в плоскости орбиты, играет дальномер, а параметров
бокового движения - оптико-электронный угломер.
8.4. Структура и состав системы навигации
В состав системы автономной навигации, основанной на
визировании на фоне звездного неба орбитальных ориентиров,
365
входит навигационный измерительный комплекс, бортовой
вычислитель и обеспечивающая аппаратура.
Анализ результатов исследований наблюдаемости движения
КА и точности определения параметров движения его центра масс
показывает, что измерительный комплекс должен обеспечивать
решение следующих задач:
— слежение за одним или несколькими орбитальными
ориентирами;
— обнаружение и опознавание навигационных звезд;
— измерения углового положения орбитального ориентира
относительно не менее двух звезд.
Измерительный комплекс, способный решить перечисленные
задачи, имеет два основных варианта исполнения.
Первый вариант характеризуется тем, что измерения двух
углов «звезда - ориентир» проводятся с помощью трех телескопов,
установленных в кардановых подвесах. Искомые первичные
навигационные параметры определяются по результатам измерений
углового положения телескопов относительно корпуса КА, т.е. по
выходным сигналам датчиков углов на осях вращения кардановых
подвесов телескопов.
При таком варианте построения измерительного комплекса
системы навигации функционирование телескопов происходит
независимо друг от друга. Область небесной сферы, используемая
для выбора навигационных звезд, имеет достаточно большие
размеры, поскольку не ограничивается полями зрения телескопов.
В связи с этим первый вариант построения измерительного
комплекса обеспечивает наиболее благоприятные условия для
высокоточной навигации КА. Кроме того, продолжительность
навигационного сеанса определяется главным образом углами
прокачки телескопов.
Однако при этом варианте построения измерительного
комплекса погрешности, которые возникают в процессе измерений
первичных навигационных параметров, имеют достаточно высокий
уровень, обусловленный низкой точностью средств измерений
углового положения рамок карданового подвеса. При этом жесткие
требования предъявляются к погрешностям взаимной юстировки
осей визирования телескопов. Кроме того, такой измерительный
комплекс отличается существенными массогабаритными
366
характеристиками и сравнительно высокими показателями
энергопотребления.
Второй вариант построения измерительного комплекса
базируется на использовании оптико-электронных средств (ОЭС),
которые неподвижно установлены на платформе, способной
совершать угловые повороты относительно двух осей. Управление
положением платформы осуществляется по командам, которые
поступают из ОЭС, предназначенного для визирования
орбитального ориентира.
Второе оптико-электронное средство располагается таким
образом, чтобы направление оси его визирования, во-первых,
обеспечивало необходимые условия наблюдаемости и, во-вторых,
соответствовало минимальным погрешностям навигации (см.
параграф 8.3).
Первичные навигационные параметры определяются по
информации, поступающей с чувствительных элементов
неподвижных относительно корпуса ОЭС. В качестве таких
чувствительных элементов могут применяться, например, приборы
с зарядовой связью.
Очевидно, что в связи с отсутствием подвижных частей в
измерительном канале навигационного комплекса, точность
измерения первичных навигационных параметров выше по
сравнению с первым вариантом. Кроме этого, уменьшаются
массогабаритные и энергетические характеристики системы.
В тоже время неподвижное размещение ОЭС приводит к
повышению частоты смены навигационных звезд, проведению
дополнительных операций по их идентификации и, как следствие, к
уменьшению объёма первичной навигационной информации и
росту требований к быстродействию бортового навигационного
вычислителя.
Использование широкоугольного объектива в ОЭС приводит,
с одной стороны, к росту габаритов системы навигации, а, с другой
стороны, к снижению точности определения координат
изображения ориентира и звезд в фокальной плоскости оптической
системы. Кроме того, возникают дополнительные трудности с
защитой ОЭС от фоновых засветок.
Сравнительный анализ вариантов исполнения измерительного
комплекса системы автономной навигации показывает, что
наиболее предпочтительным для навигации КА по орбитальным
367
ориентирам является второй вариант, которому присущи
случайные и систематические погрешности.
Источниками случайных погрешностей являются физические
процессы, возникающие при эксплуатации измерительного
комплекса. К источникам этих погрешностей относятся: шумы в
фотоприемниках и электронных схемах обработки сигналов,
нестабильность светового потока, поступающего на
чувствительные элементы, наличие фона звездного неба и т.п.
Для оценивания систематических погрешностей средств
измерений углов «звезда - ориентир» необходимо выполнять
периодический контроль их значений. В качестве бортового
алгоритма решения этой задачи может использоваться алгоритм,
предложенный в работе [33].
Согласно этому алгоритму задача контроля систематических
погрешностей ОЭС решается путем многократных измерений
координат навигационных звезд в прямоугольной системе отсчета,
которая расположена в фокальной плоскости контролируемой
оптической системы. По результатам этих измерений определяются
угловое расстояние между звездами. Измеренные значения этого
расстояния содержат случайные и систематические погрешности,
которые являются неизвестными.
Поскольку угловое расстояние между навигационными
звездами является, в общем случае, постоянной величиной
(01>2 = const), которое может быть вычислено по известным
орбитальным координатам, находятся оценки математических
ожиданий и средних квадратических отклонений измеренных
значений относительно вычисленного значения ©, 2.
Решение о введении корректирующей поправки в результаты
измерений принимается на основании критерия Стьюдента,
используя заданное значение показателя достоверности контроля.
В состав измерительного комплекса может входить также
средство измерений дальности до орбитального ориентира и другие
измерители первичных навигационных параметров.
8.5. Особенности астрозондовой навигации КА
Пот термином «астрозондовая навигация» понимается процесс
определения параметров движения материального тела, например,
космического аппарата, по измерениям положения на фоне
368
звездного неба специально зонда, который отделился от КА и
совершает полет по баллистической траектории.
К отличительным особенностям астрозондовой навигации КА
относится возможность применения высокоточных средств
измерений первичных навигационных параметров, т.е.
прецизионных оптико-электронных устройств на ПЗС матрицах и
лазерных дальномеров. Это обусловлено тем, что навигационный
зонд может обладать такими характеристиками, которые способны
обеспечить приемлемые метрологические показатели средств
измерений.
Точность астрозондовой навигации зависит не только от
погрешностей средств измерений, но от ошибок запуска зонда.
Поэтому в случае необходимости повышения точности навигации
КА осуществляются измерения составляющих вектора скорости
запуска зонда, либо ошибки запуска вводятся в вектор уточняемых
параметров.
Исследования процесса уточнения девятимерного вектора,
содержащего шесть параметров движения КА и три составляющие
вектора скорости запуска зонда, показали, что вначале этого
процесса уточняется трёхмерный вектор скорости запуска зонда, а
затем - шестимерный вектор параметров движения центра масс КА.
Поэтому алгоритм астрозондовой навигации разбивается на
два этапа. На первом этапе решается девятимерная задача, а на
втором этапе - шестимерная задача.
Система астрозондовой навигации, наряду с измерительным
комплексом и вычислителе, должна включать устройство запуска
зонда. Кроме того, в связи с ограниченностью интервала времени
использования зонда для целей навигации, в навигационную
систему КА длительного существования входит хранилище зондов.
Выбор направления запуска зонда представляет собой
достаточно сложную проблему. От направления вектора скорости
запуска зонда зависит наблюдаемость параметров движения КА,
продолжительность его визирования и точность решения
навигационной задачи.
В частности, при запуске зонда в направлении бинормали
орбиты КА по измерениям дальности до зонда и двух углов «зонд-
звезда» наблюдаются радиальная координата КА и боковые
составляющие его движения. При этом, во-первых, погрешности
оценивания боковых параметров движения КА не зависят от
369
модуля скорости запуска зонда и, во-вторых, минимальные
погрешности навигации достигаются при условии, когда разность
между орбитальными восхождениями звезд равна 90°.
Действительно, используя методику, приведенную в
параграфе 8.3, можно показать, что средние квадратические
отклонения погрешностей оценок радиальной координаты КА и
боковых составляющих его движения при одновитковом сеансе
навигационных измерений <рт=2л находятся с помощью
выражений:
. V2voaD (128л3 + 67л+ 192
ах (2л) = и
T3N?V3
128 л
ГО°0
ог(2л) = -===
VN©
_ VO°0
VN0
JH2 + Н2
V У, Уг
ну,нХ2-нУ2НХ| ’
Jh2 + н2
V X. X;
Hv Нх -Hv нх ’
J1 Л2 /2 А1
где v0- скорость полета КА по опорной орбите;
oD и gq - средние квадратические погрешности средства
измерения дальности до зонда и угла «зонд-звезда»;
Nd и Nq - количество измерений дальности до зонда и углов
«зонд-звезда»;
V3 - модуль вектора скорости запуска зонда,
Нх и Ну - проекции орта i-ой звезды (i = l, 2) на
соответствующие оси подвижной системы координат, связанной с
центром масс КА.
В случае запуска зонда под углом к плоскости орбиты КА
и уточнения трансверсальной координаты и боковых параметров
движения КА по измерениям в течение одного витка двух углов
«зонд-звезда» средние квадратические отклонения погрешностей
навигации приведены в таблице 8.6.
370
Таблица 8.6 - Средние квадратические отклонения
погрешностей навигации при запуске зонда под углом к
плоскости орбиты КА в зависимости от положения
навигационных звезд
Средние квадратические отклонения погрешностей навигации, км Координаты звезд
а! =0,8! =0, =0 ocj =0,8] =0, a2 =0, «1 ~ %’8! ~ °’ a2 =0, §2 =/2
°У 4Т2гоое TT1N0 4гоо© V5N0 4roo0 75N©
2V2roo0 7N© 4roO0 7?n0 8rogO 73 IN©
ai 4V10voOq 71 IN© 2V2voq0 T3N0 4voO© 75N0
Примечание - в таблице введены следующие обозначения:
ос; и 8; - орбитальное восхождение и орбитальное склонение
i-ой навигационной звезды
Анализ результатов исследований, приведенных в таблице 8.6,
показывает, что положение звезд относительно плоскости орбиты
КА влияет на точность астрозондовой навигации. В частности,
минимальные погрешности достигаются в том случае, когда орт
первой звезды совпадает с трансверсальной осью, а орт второй
звезды - с бинормалью орбиты КА.
Приведенные результаты оценивания точности получены
при условии, что запуск зонда проводится без погрешностей.
Грубые ошибки запуска могут привести к расходимости процесса
сходимости оценок. Расходящийся характер искомых оценок
навигации возникает, как правило, в тех случаях, когда в момент
отделения зонда истинные параметры движения центра масс КА
значительно отличаются от опорных значений.
При необходимости парирования таких явлений на первом
этапе решения навигационной задачи уточняется вектор скорости
запуска зонда. При этом экспериментально доказано, что
наибольший вклад в точность оценивания модуля скорости вносят
результаты измерений дальности, а в точность оценивания
371
параметров, характеризующих угловое положение вектора
скорости запуска, - результаты измерений углов «звезда-зонд».
Точность решения навигационной задачи астрозондовым
методом зависит от формы, размера и материала поверхности
зонда. При использовании оптико-электронных средств измерений
параметров движения зонда относительно КА наиболее
приемлемым является зонд, который имеет сферическую
поверхность, на которой размещены уголковые отражатели.
372
Глава 9. СИСТЕМА АВТОНОМНОЙ НАВИГАЦИИ КА
ДЗЗ С ИСПОЛЬЗОВАНИЕМ ПРОТЯЖЁННЫХ
НАЗЕМНЫХ ОРИЕНТИРОВ
9,1. Состав программного обеспечения и особенности
функционирования системы
Система автономной навигации КА по протяжённым
наземным ориентирам является прецизионной интегрированной
системой, структурная схема которой представлена на рис.4.1. Для
полного представления принципов функционирования этой
системы рассмотрим её программное обеспечение.
В состав программного обеспечения системы автономной
навигации КА по протяжённым наземным ориентирам входит
следующий комплекс программных средств:
• программный комплекс планирования работы элементов
(составных частей) системы, включая функционально входящие в
неё элементы;
• программный комплекс управления системой и организации
взаимодействия входящих в её состав элементов, в том числе,
организация взаимодействия с наземным сегментом системы.
• программный комплекс получения и регистрации
необходимых массивов измерительной информации;
• программный комплекс обработки полученной информации
с целью формирования первичных навигационных параметров;
• программный комплекс обработки первичных
навигационных параметров с целью уточнения текущих параметров
движения центра масс КА (элементов орбиты).
Учитывая, что позиционируемая система автономной
навигации КА ДЗЗ описывается впервые, представляет интерес
рассмотреть функции этих программных комплексов более
подробно.
Рассмотрим, какие задачи решает каждый из перечисленных
комплексов. Однако, прежде, чем рассматривать эти задачи,
необходимо отметить, что поскольку система автономной
навигации является резервной, она может работать в
ненагруженном режиме. Это означает, что на интервале времени
функционирования основной бортовой системы навигации, которая
построена на базе аппаратуры потребителя систем ГЛОНАСС или
373
GPS, электронные и механические блоки радиовысотомера (РВ) и,
возможно, лазерного дальномера (ЛД) могут не использоваться и
находиться в состоянии готовности к выполнению своих функций.
Относительно аппаратуры лазерного дальномера необходимо
сделать некоторую оговорку. Очевидно, что достаточно трудно
представить себе ситуацию, в которой разработчики КА
дистанционного зондирования Земли, пойдя на установку
резервной системы автономной навигации, содержащей лазерный
дальномер, отказались бы от заманчивой идеи использовать его
постоянно в режиме штатного функционирования КА ДЗЗ.
Заманчивость этой идеи состоит в том, что если лазерный
дальномер установлен на борт космического аппарата
дистанционного зондирования Земли, то его, безусловно,
необходимо использовать в режиме целевого функционирования
КА. Это обусловлено тем, что его применение существенно
повышает качество решения целевых задач, например, задач
топографической съёмки. Специфика решения этих задач выходит
за пределы настоящей работы. Поэтому в настоящей монографии
они не рассматриваются.
Таким образом, будет обоснованно полагать, что при
рассмотрении варианта непрерывно работающей системы
автономной навигации КА аппаратура лазерного дальномера также
включается и работает на протяжении каждого сеанса съёмки
поверхности Земли.
Использование постоянно работающей резервной системы
автономной навигации открывает новые возможности и придаёт
новые свойства самому КА ДЗЗ. Если даже не используется
радиовысотомер, предназначенный для поддержания необходимой
точности внутриплоскостных параметров движения центра масс
КА ДЗЗ при полёте над акваторией Мирового океана, то при полёте
над участками суши и проведении съёмок этих участков
точностные характеристики резервной системы навигации на этой
части витка будут соответствовать расчётным значениям.
Поскольку показатели точности резервной системы навигации
на этой части витка приближаются к точностным характеристикам
основной системы навигации, появляется возможность вести
взаимный контроль их способности решать навигационную задачу
с заданной точностью. И если в процессе непрерывной работы
резервной системы автономной навигации будут подтверждены её
374
точностные характеристики, то при возникновении резких отличий
в показаниях двух систем обоснованно может возникнуть вопрос о
каком-то сбое в работе основной системы навигации и
необходимости экстренного перехода на работу резервной системы
навигации. Таким образом, непрерывно работающая резервная
система автономной навигации КА ДЗЗ даже без использования
радиовысотомера может стать дополнительным индикатором сбоя
в работе штатной системы навигации.
Кроме того, при условии непрерывной работы резервной
системы автономной навигации и, например, при отсутствии
установленной комплектности орбитальной группировки СРНС
ГЛОНАСС или GPS, имеется возможность комплексного
использования результатов навигационных измерений основной и
резервной систем навигации для повышения точностных
характеристик бортового навигационного обеспечения КА ДЗЗ. Эта
тема представляет безусловный как научный , так и прикладной
интерес. Однако в настоящей работе она не рассматривается.
Рассмотрим основные задачи, которые решают программные
комплексы, входящие в программное обеспечение системы
навигации КА.
9.1.1. Программный комплекс планирования
По исходной рабочей программе (РП) проведения съёмок
поверхности Земли, закладываемой ежесуточно по каналу
радиосвязи на борт КА ДЗЗ в бортовой комплекс управления (БКУ)
и передаваемой в спецвычислитель (СВ) резервной системы
навигации, решается баллистико-навигационная задача. В
результате этой задачи производится:
расчёт суточных полос захвата участков поверхности Земли
при всех включениях аппаратуры съёмки;
определение номенклатуры всех протяжённых ориентиров,
попадающих в эти полосы из перечня, который находится на борту
в запоминающем устройстве (ЗУ) системы;
выбор из них по определённым критериям рабочих
ориентиров, по которым в дальнейшем будет решаться
навигационная задача;
формирование и передача в бортовой комплекс управления
координат фрагментов будущих изображений с целью получения
этих фрагментов после проведения съёмки участка местности,
375
называемого маршрутом и содержащего некоторые из рабочих
ориентиров.
Кроме того, после выбора рабочих ориентиров может быть
решена задача приведения изображений рабочих ориентиров к
условиям съёмки по яркости, масштабу, ракурсу и азимуту с
использованием полученных ранее результатов решения
баллистико-навигационной задачи. Решение последней задачи
связано с разработкой программы углового движения КА в
процессе съёмки маршрута с привязкой к реальному бортовому
времени и выполняется в соответствии с результатами главы 4.
В случае недостаточности количества протяжённых наземных
ориентиров для решения навигационной задачи (в силу, например,
малости запланированных в рабочей программе маршрутов съёмки)
может быть запланировано некоторое количество дополнительных
съёмок маршрутов, содержащих протяжённые ориентиры,
сформирована и передана в БКУ информация о дополнительной
программе работы БКУ. Мероприятия по реализации этой
программы собственно системой автономной навигации проводятся
аналогично изложенным выше операциям.
При использовании резервной системы автономной навигации
в качестве резерва основной системы необходимо также
планировать работу радиовысотомера на протяжённых участках
полёта над акваторией Мирового океана. Автономное
планирование работы радиовысотомера может быть осуществлено
с использованием карты морских побережий, как это изложено в
параграфе 6.9.
9.1.2. Программный комплекс управления системой
автономной навигации
Программный комплекс выполняет функции автономной
разработки и реализации в реальном масштабе времени
циклограммы функционирования средств системы. С помощью
этого программного комплекса организуется взаимодействие
системы навигации как с бортовым комплексом управления КА, так
и с наземным сегментом поддержки. При этом имеется
возможность включения и выключения системы от бортового
комплекса управления по указаниям центра управления полётом
КА ДЗЗ.
376
9.1.3. Программный комплекс получения и регистрации
необходимых массивов измерительной информации
Программный комплекс обеспечивает получение и
регистрацию информации, содержащую данные, из которых в
результате обработки могут быть получены первичные
навигационные параметры. Вся информация поступает с привязкой
к бортовой шкале времени.
Как следует из параграфа 4.1, в качестве первичных
навигационных параметров в системе автономной навигации
используются четыре параметра: высота полёта над акваторией
Мирового океана, дальность до заданного наземного ориентира и
два угла, определяющие на борту КА направление на наземный
ориентир в инерциальной системе координат.
Для вычисления первичных навигационных параметров
используются следующие массивы информации:
• фрагменты псевдокадра изображений снятого маршрута,
содержащие изображения протяжённых ориентиров с
фактическими координатами положения их реперных точек. При
этом к бортовой шкале времени привязывается каждая строка
изображения полученного в процессе съёмки псевдокадра;
• массивы измерений дальностей, полученных лазерным
дальномером с заданной частотой, с информацией о направлении
излучения передатчиком дальномера лазерного луча;
• массивы информации со звёздных датчиков (ЗД),
содержащие сведения об ориентации их осей в инерциальной
системе координат с заданной частотой, и информация о привязке
осей ЗД к осям визирной системы координат оптико-электронного
телескопического комплекса (ОЭТК);
♦ массивы измерений углового положения корпуса КА в
инерциальной системе координат, которые формируются с
помощью гироскопических измерительных средств. Назначение
этой информации и типы используемых для этой цели
гироскопических приборов излагается в параграфе 9.3;
• массивы измерений высоты полёта над акваторией
Мирового океана, полученные с заданными интервалами времени.
9.1.4. Программный комплекс обработки полученной
информации
Программный комплекс предназначен для формирования
377
первичных навигационных параметров путём проведения
обработки полученной измерительной информации. Кроме того, с
его помощью выполняется ряд функций. Содержащий следующие
операции.
Во-первых, операции по определению значений первичных
навигационных параметров и, прежде всего, по определению
координат на псевдокадре реперных точек наземных ориентиров и
в том числе их реперных точек в результате процедуры по
обнаружению и опознанию наземных ориентиров на выделенных
фрагментах;
Во-вторых, операции по привязке всех первичных
навигационных параметров к одному моменту времени бортовой
шкалы времени, а именно, к моменту съёмки строки изображения,
содержащей реперную точку наземного ориентира.
Методология привязки первичных навигационных параметров
к моменту съёмки строки изображения достаточно проста. Если
моменты измерений некоторого параметра не совпадают с
моментами съёмки реперной точки, то из массива измерений этого
параметра выбирается пара измерений, ближайших к моменту
съёмки реперной точки, одно из которых выполнено до съёмки
реперной точки, а другое - после её съёмки. Учитывая, что
интервал времени между этими измерениями является достаточно
малым, можно полагать линейным характер изменения
измеряемого параметра. Учитывая положение момента съёмки
реперной точки наземного ориентира на интервале между
моментами измерений параметра и линейный характер его
изменения между этими моментами измерений, можно легко
определить значение искомого параметра на момент съёмки
реперной точки наземного ориентира.
Рассмотрим некоторые особенности измерений дальности с
использованием лазерного дальномера. Лазерный дальномер, как
известно [71], производит измерения в строго фиксированном
направлении в визирной системе координат телескопа ОЭТК,
которое, в общем случае, не совпадает с направлением реперной
точки ориентира. В связи с эти возникает необходимость пересчёта
дальности с фиксированного направления в визирной системе
координат в направлении реперной точки ориентира. Используя
введённую в параграфе 4.3 аналитическую модель дальности до
любой точки поверхности Земли, находящейся в поле зрения
378
телескопа, нетрудно произвести такой пересчёт.
9.1.5. Программный комплекс обработки первичных
навигационных параметров
С помощью программного комплекса обработки первичных
навигационных параметров производится операция уточнения
текущих параметров орбиты. В связи с подробным изложением
содержания этой операции во второй и пятой главах настоящей
монографии дополнительных пояснений функционального
назначения этого программного комплекса не требуется. С точки
зрения выполнения им вычислительных операций можно отметить,
что последние достаточно подробно рассматриваются в параграфе
10.3.
9.2. Оптико-электронный телескопический комплекс
дистанционного зондирования Земли и система приёма и
преобразования информации
К важнейшим составным частям КА дистанционного
зондирования Земли, используемым для создания резервной
системы автономной навигации по протяжённым наземным
ориентирам, относятся оптико-электронный телескопический
комплекс (ОЭТК) с системой приёма и преобразования
информации (СППИ).
9.2.1. Принципы построения и функционирования ОЭТК
Современные оптико-электронные телескопические
комплексы космического базирования, решающие задачи
дистанционного зондирования Земли, обладают уникальными
техническими характеристиками, в частности:
высокими показателями оперативности доставки информации
наземному потребителю;
значительной шириной полосы захвата изображения
поверхности Земли;
пространственным разрешением и информационной
производительностью, показатели которых отвечают современным
требованиям;
достаточно большими назначенными сроками лётной
эксплуатации.
Оптико-электронные телескопические комплексы
379
существенно отличаются от фотографических комплексов такого
же назначения, в которых многие из перечисленных характеристик
определяются наличием не восполняемого запаса фотоплёнки на
борту КА ДЗЗ, возвращаемой после экспонирования на Землю в
спускаемых аппаратах или в спускаемых капсулах.
В современных ОЭТК такие процессы, как регистрация
информации при съёмке земной поверхности, её преобразование в
цифровой код и передача через бортовую радиолинию на наземный
пункт приёма информации выполняются в масштабе времени,
близком к реальному. Поэтому практические реализации этих
процессов ограничиваются только наличием наземного пункта
приёма информации или спутника-ретранслятора в поле зрения КА
дистанционного зондирования Земли в момент регистрации
информации. При увеличении полосы захвата и одновременном
повышении пространственного разрешения ОЭТК возрастает поток
цифровой информации (количество кодов, передаваемых в единицу
времени), который ограничивается реальной пропускной
способностью наземного пункта приёма информации применяемой
радиолинии. Срок эксплуатации КА ДЗЗ на орбите с
использованием современных ОЭТК достигает 5-7 лет.
В состав ОЭТК входят следующие системы [44]:
• космический телескоп (КТ);
• системы контроля и коррекции оптических параметров в
составе:
1) система автоматической фокусировки (САФ);
2) система автоматической юстировки (САЮ);
• система фотометрической калибровки (СФК);
• блок узкопольных светофильтров (УСФ);
• система управления телескопом.
Одним из основных элементов ОЭТК является космический
телескоп. Космический телескоп предназначен для формирования
непрерывно движущегося оптического изображения в фокальной
плоскости на светочувствительной поверхности оптико-
электронных преобразователей (ОЭП) системы приёма и
преобразования информации (СППИ),
С целью уменьшения массы КА ДЗЗ объективы современных
КТ выполняют, как правило, не линзовыми, а зеркальными (или
зеркально-линзовыми), несмотря на некоторое ухудшение качества
информации, получаемой с помощью последних.
380
Типовая схема космического телескопа приведена на рис.9.1
[97].
Оптическая схема его объектива выполнена по типу Ричи-
Кретьена [70]. В целях экономии массы космический телескоп
устанавливается на борт КА ДЗЗ, как правило, неподвижно.
В процессе съёмки световой поток от поверхности Земли при
открытой крышке светозащитного устройства (СЗУ) попадает на
зеркальную поверхность главного зеркала (ГЗ), отражается от неё,
после чего попадает на зеркальную поверхность вторичного
зеркала (ВЗ), отражается от последней и далее проходит через
центральное отверстие в ГЗ и линзовый корректор, с помощью
которого фокусируется на фокальной плоскости. Вторичное
зеркало удерживается крестовиной спайдеров. Сам узел вторичного
зеркала крепится к силовому шпангоуту телескопа с помощью
системы стержней. Силовой шпангоут служит одновременно для
стыковки телескопа с КА ДЗЗ.
Система автоматической фокусировки предназначена для
устранения расфокусировки, возникающей под действием
дестабилизирующих факторов в процессе эксплуатации. Система
автоматической фокусировки (САФ) осуществляет совмещение
плоскости наилучшего изображения телескопа с
фоточувствительной плоскостью блоков ОЭП при изменении
дальности до
наблюдаемого объекта. Для совмещения плоскости
наилучшего изображения с фоточувствительной плоскостью ОЭП
система автоматической фокусировки перемещает вторичное
зеркало по главной оптической оси телескопа от положения,
полученного при фокусировке «на бесконечность»
(°о), пропорционально дальности до наблюдаемого объекта.
Система автоматической юстировки предназначена для
устранения разъюстировок, возникающих под воздействием
дестабилизирующих факторов в процессе эксплуатации, с целью
получения изображения заданного качества по всей
фоточувствительной плоскости блоков ОЭП.
САЮ состоит из двух систем:
1) системы автоматической юстировки
линейной (САЮ-Л);
2) системы автоматической юстировки
угловой (САЮ-У).
381
Рис.9.1 Схема космического телескопа
САЮ-Л определяет линейные смещения вторичного зеркала
по осям визирной системы координат OYB и OZB и устраняет их.
САЮ-У определяет развороты вторичного зеркала вокруг
осей OYB и OZB относительно номинального положения и
устраняет их.
Система фотометрической калибровки предназначена для
обеспечения засветок солнечным излучением фоточувствительных
плоскостей блоков ОЭП в процессе натурных испытаний и штатной
эксплуатации.
С целью получения различных освещённостей осветительное
устройство снабжено переключающимися нейтральными
светофильтрами и светозащитной шторкой.
Оптико-электронный телескопический комплекс имеет три
382
режима функционирования:
1. Съёмка поверхности Земли;
2. Съёмка звёздного неба (полётная фотограмметрическая
калибровка);
3. Фотометрическая калибровка
Режим «съёмка звёздного неба» предназначен для создания
оптического изображения звёзд в фоточувствительной плоскости
оптико-электронного преобразователя. Этот режим проводится с
целью определения параметров, которые характеризуют
отклонения отображений снятых объектов от их истинного
положения в предметном пространстве. Источниками таких
отклонений являются параметры внутреннего ориентирования
ОЭТК, приводящие к неадекватному отображению истинного
предметного пространства к пространству изображений.
Появление этих отклонений обусловлено:
• погрешностями в координатах главной точки изображения
объектива;
• наличием оптической дисторсии объектива;
• неточностью знания фокусного расстояния объектива;
• линейными и угловыми смещениями матриц ФПЗС при их
установке в оптико-электронный преобразователь.
Блок узкопольных светофильтров предназначен для отработки
заданных спектральных диапазонов оптического изображения
мультиспектральных оптико-электронных преобразователей.
Система управления предназначена для управления и
контроля способности оптико-электронного телескопического
комплекса выполнять заданные функции.
Для уменьшения тепловых деформаций в элементах
конструкции объектива космического телескопа, приводящих к
ухудшению качества получаемой информации, корпус объектива
космического телескопа помещён в рубашку, обвитую с наружной
поверхности змеевиком системы обеспечения теплового режима
КА ДЗЗ. Прокачивая по змеевику жидкость заданной температуры,
эта система обеспечивает (при закрытой крышке светозащитного
устройства) термостабилизацию элементов конструкции объектива.
С целью уменьшения массы главного зеркала, которое в
основном и определяет массу всего телескопа, его изготавливают
путём спекания из нескольких элементов, содержащих пустоты. В
качестве материала главного зеркала могут быть использованы
383
такие материалы, как, например, ситалл, бериллий или карбид
кремния.
Главное требование, предъявляемое к качеству главного
зеркала заключается в том, чтобы среднеквадратичное отклонение
волнового фронта, отражённого от зеркала, относительно
расчётного значения не должно превышать (20 - 30 % от длины
волны на этапе лётной эксплуатации телескопа в составе КА ДЗЗ в
условиях невесомости.
Приведённая оптическая схема объектива позволяет
существенно уменьшить его осевую длину при сохранении
заданного значения фокусного расстояния.
9.2.2. Система приёма и преобразования информации
Одним из главных элементов КА ДЗЗ является система приёма
и преобразования информации (СППИ). Эта система содержит
оптико-электронный преобразователь (ОЭП), осуществляющий
преобразование оптического сигнала элемента изображения
поверхности Земли в электрический сигнал. Фоточувствительные
приборы, входящие в состав ОЭП и осуществляющие это
преобразование, устанавливаются в фокальной плоскости
объектива телескопа.
В оптико-электронных телескопических комплексах
применяются фоточувствительные приборы с зарядовой связью
(ФПЗС) двух типов: линейные и матричные [14]. Схема линейного
фоточувствительного прибора с зарядовой связью показана на
рис.9.2.
V направление движения
оптического изображения
—направление
считывания
электрических
сигналов
Рис.9.2 Линейный ФПЗС
Этот фоточувствительный прибор состоит из совокупности
отдельных элементов (пикселей), состыкованных друг с другом в
линейку. Типичный размер отдельного элемента, имеющего, как
384
правило, квадратное сечение, составляет 12х 12 мкм. Существуют
фоточувствительные приборы с размером элемента 9Х9 мкм и даже
6x6 мкм.
Работает прибор следующим образом. При скорости движения
изображения V и размере элемента dxd в течение интервала
времени
т=4 (9.1)
в каждом элементе фоточувствительного прибора происходит
накопление электрического заряда. Величина заряда
пропорциональна оптическому сигналу изображения
соответствующего элемента поверхности Земли, который
проецируется на данный элемент прибора. Затем происходит
быстрое последовательное считывание накопленных электрических
зарядов элементов в направлении линейки. В результате
запоминается строка изображения поверхности Земли. Далее
процесс накопления электрических зарядов в каждом элементе
прибора повторяется.
Особенностью применения линейного фоточувствительного
прибора является необходимость организации механического
сканирования поверхности Земли для получения скорости V либо
только за счёт поступательного движения КА ДЗЗ по орбите, либо
путём придания корпусу КА дополнительной угловой скорости
вращения в осях текущей орбитальной системы координат.
Достоинством прибора с зарядовой связью является
сравнительно невысокие требования к точности ориентации и
стабилизации системы управления движением (СУД) КА ДЗЗ.
Однако предъявляются высокие требования к чувствительности
Рис.9.3. Кадровый ФПЗС
385
самого преобразователя. Недостатком прибора является наличие
неравномерности чувствительности элементов по длине линейки,
что приводит к неизбежному искажению изображения.
Матричные фоточувствительные приборы с зарядовой связью,
в свою очередь, делятся на кадровые и работающие на основе
принципа временной задержки и накопления сигнала (Push broom).
Кадровый фоточувствительный прибор (рис.9.3) состоит из
mxn элементов (т строк и п столбцов матрицы) и может
накапливать электрический заряд в течение некоторого интервала
времени при условии отсутствия движения оптического
изображения по матрице, а затем быстро и независимо считывать
заряды каждой строки.
Недостатками кадрового (точнее, полнокадрового)
фоточувствительного прибора являются:
- необходимость прецизионного удержания оптического
изображения в неподвижном положении относительно матрицы
прибора. При этом должны выполняться весьма жёсткие
требования к системе управления движением КА, в частности, к
показателям точности стабилизации по угловой скорости при
сравнительно больших угловых скоростях движения КА
относительно снимаемого участка поверхности Земли;
- наличие неравномерной чувствительности в элементах
матрицы приводит к искажениям в полученном изображении по
сравнению с исходным оптическим изображением;
- при считывании сигнала светочувствительная область
остаётся под действием светового потока, что приводит к
искажениям выходного сигнала.
Рис.9.4. Схема матричного ФПЗС типа ВЗН
386
В какой-то степени этих недостатков лишён матричный
фоточувствительный прибор, построенный на основе принципа
временной задержки и накопления сигнала (рис.9.4).
Принцип работы этого прибора состоит в следующем. При
движении оптического изображения с вектором скорости V по
матрице ФПЗС, установленной в фокальной плоскости объектива
ОЭТК, любая точка оптического изображения находится в
пределах элемента d*d в течение интервала времени, определённом
соотношением (9.1).
При этом в каждом элементе накапливается электрический
заряд, который через интервал времени Т передаётся в следующий
за ним по столбцу элемент в направлении движения изображения.
В этом элементе заряд продолжает накапливаться со скоростью,
пропорциональной яркости элемента оптического изображения.
Процесс повторяется до тех пор, пока изображение не попадёт
на считывающий регистр, который защищён от оптического
изображения. С этого регистра за один такт времени Т происходит
считывание накопленного заряда.
Рассмотренный процесс продолжается. В результате будет
получено изображение в виде последовательности отдельных
строк. Далее электрические сигналы квантуются по величине в 8
(или 10) - разрядный цифровой код в аналого-цифровом
преобразователе. В итоге сформировано цифровое изображение,
Расстояние
между
строками матриц
кратно d;
B = k-d, k = 256.
Рис. 9.5. Линейка матриц ФПЗС в ОЭП
387
которое, например, после передачи на Землю можно вывести на
монитор компьютера или отпечатать фотографию.
В принципе возможно создание матрицы ФПЗС с
дополнительным боковым переносом зарядов (от столбца к
столбцу), кроме передачи по столбцам. Но эти схемы достаточно
сложны, чтобы их можно было использовать на практике.
Матрицы ФПЗС имеют различное число элементов. Наиболее
употребительны матрицы, содержащие 128x1024 элементов, где
128 строк и 1024 столбца. Имеется возможность использовать лишь
часть строк, примыкающих к считывающему регистру (64, 32, 16,
8) в зависимости от освещённости поверхности Земли (от типа
поверхности и от угла Солнца над местным - для снимаемого
участка поверхности - горизонтом Земли).
В настоящее время на КА ДЗЗ «Ресурс-ДК1» разработки
ГНПРКЦ «ЦСКБ-Прогресс», запущенном на орбиту 15.06.06 г. и
продолжающем функционировать к моменту написания этих строк,
используются матрицы ФПЗС 128x1024 элементов и с размерами
отдельного элемента (пикселя) 9x9 мкм. На планируемом к запуску
в 2012 году новом КА ДЗЗ «Ресурс-П» разработки той же
организации используются матрицы ФПЗС с размером элемента
6x6 мкм. Они освоены отечественной промышленностью [14]. За
рубежом уже имеются матрицы ФПЗС с размерами элемента
3,5x3,5 мкм.
Для обеспечения необходимой ширины полосы захвата из
матриц ФПЗС набирается ОЭП. По технологическим соображениям
эти матрицы устанавливаются не «в стык», а в «шахматном»
порядке (с перекрытием, для исключения потери информации на
стыках матриц), как показано на рис.9.5.
В матричном фоточувствительном приборе, который построен
на основе принципа временной задержки и накопления сигнала, за
время движения зарядовых пакетов вдоль столбца происходит
усреднение разбросов накапливаемых сигналов за счёт
неравномерности чувствительности отдельных элементов столбца.
В связи с этим значение получаемого электрического сигнала более
адекватно уровню оптического сигнала.
Вместе с тем при использовании такого прибора высокие
требования к функциональным характеристикам системы
управления движением КА сохраняются. В частности, к
основополагающим относятся следующие требования.:
388
- за время движения оптического изображения вдоль столбцов
матрицы ФПЗС, равное тТ, его смещение в поперечном
направлении (вдоль строк) должно быть не более (0,3-0,5) d;
- скорость передачи зарядовых пакетов от строки к строке
должна строго соответствовать заданной скорости V движения
изображения. Накопленное за время тТ отставание или
опережение в движении зарядовых пакетов по отношению к
движению оптического изображения также не должно превышать
0,3-0,5d;
- перечисленные условия должны выполняться для всех
столбцов всех матриц, входящих в оптико-электронный
преобразователь и образующих линейку ОЭП, включая крайние
столбцы крайних матриц оптико-электронного преобразователя.
9.3. Средства определения параметров углового движения
КА в инерциальном пространстве в процессе съёмки
Принцип решения задачи навигации в прецизионной
интегрированной системе автономной навигации по протяжённым
наземным ориентирам хорошо известен. Он основан на
возможности определения в инерциальном пространстве координат
центра масс КА по измерениям двух улов «звезда - известный
ориентир» и дальности до этого ориентира. Измерения двух углов
определяют в инерциальном пространстве направление на
заданный ориентир, проходящее через центр масс КА. Измерение
дальности до ориентира определяет на этом направлении точку, в
которой находится в данный момент центр масс КА.
9.3.1. Звёздные датчики. Характеристики. Принципы
построения и функционирования
Важнейшей задачей, которая требуют первоочередного
решения для создания системы автономной навигации, является
задача высокоточного определения угловых элементов внешнего
ориентирования линии визирования наземного ориентира в
инерциальном пространстве непосредственно в процессе
сканирования.
Одним из способов решения этой задачи является введение в
состав бортовых систем КА звёздного датчика. В первой
отечественной системе автономной навигации в качестве такого
датчика использовано астровизируюшее устройство с оптическим
389
блоком в двухстепенном карданом подвесе (см. параграф 6.4). При
этом алгоритм решения этой задачи имел следующий вид.
Оптический блок этого устройства наводился на заданную
область небесной сферы, в которой находится выбранная из
ограниченного бортового списка навигационная звезда. После
наведения оптического блока в заданную область небесной сферы
проводился автоматический поиск, идентификация и захват
навигационной звезды с последующим переходом в режим
слежения за звездой.
За прошедшие десятилетия достигнуты впечатляющие успехи
в разработке и создании принципиально новых звёздных датчиков.
Принципиальное отличие этих датчиков состоит в следующем:
• неподвижная установка оптического блока на корпус КА;
• использование кадровых матриц приборов с зарядовой
связью в фокальной плоскости оптической системы для
регистрации участка звёздного неба с необходимым количеством
звёзд с целью оперативного получения и обработки изображения
этого участка;
• наличие бортового каталога навигационных звёзд яркостью
до шестой и даже восьмой звёздной величины, позволяющего при
отсутствии априорной информации об ориентации осей датчика
автономно решать задачи обнаружения и опознания звёзд;
• большое поле зрения оптического блока, позволяющее
решать задачу определения трёхосной ориентации осей датчика в
инерциальном пространстве;
• прецизионная точность определения ориентации осей
датчика в инерциальном пространстве.
Безусловным лидером в этой области в нашей стране является
Институт Космических Исследований Российской Академии Наук.
Созданные им блоки определения координат звёзд (БОКЗ-М)
имеют заявленный срок эксплуатации в космосе 15 лет. Эти
звёздные датчики (звёздные координаторы) находят самое широкое
применение на различных типах КА, создаваемых в нашей стране
[24]: МКС, «Ямал - 100», «Ямал - 200», «Ресурс - ДК1» и другие.
В соответствии с техническим заданием на БОКЗ-М, он
способен функционировать на орбитах высотой =500 км в режиме
инерциальной и орбитальной ориентации космического аппарата
при угловых скоростях движения корпуса КА относительно звёзд
до 230 '7с.
390
Телевизионная камера этого звёздного координатора
регистрирует звёзды при условии, что Солнце, и освещённые
Солнцем Земля и элементы конструкции КА находятся
относительно оптической оси прибора на угловом расстоянии более
30°, Луна - на угловом расстоянии более 20°.
В настоящее время достигнуты следующие технические
характеристики звездных датчиков БОКЗ-М:
- угол поля изображения 2р ~ 8°;
- энергопотребление 10,2 Вт;
- масса 4,0 кг;
- цикл обновления информации Зс.
Показателями точности БОКЗ-М являются
среднеквадратические погрешности определения направления
оптической оси (с^) и среднеквадратические погрешности
определения направления вокруг оптической оси (о2)- Значения
этих показателей зависят от режима работы БОКЗ-М и имеют
следующие значения:
- в режиме инерциальной ориентации aj=l ",25, о2=25”. В
режиме орбитальной ориентации (при угловой скорости
относительно звёзд 230 "/с) Ст]=2",75 и а2=48”.
Рассмотрим состав прибора, характеристики и принцип
работы.
Прибор содержит телевизионную камеру и электронный блок,
которые установлены на одном жёстком основании. Электронный
блок состоит из модуля процессора с памятью и модуля вторичных
источников питания. Основание прибора обеспечивает его жёсткое
крепление к корпусу КА. В корпусе основания смонтирована плата
видеотракта.
Объектив телевизионной камеры системы «Цефей»
специально разработан для звёздных датчиков и включает в себя
пять линз. Номинальное значение фокусного расстояния объектива
при температуре 20° С и давлении 1 атм. составляет 60 мм.
Диаметр входного зрачка равен 24 мм. Угловое поле изображения
равно 8°, чему соответствует изображение диаметром 8мм.
Входной зрачок - апертурная диафрагма - расположен перед
поверхностью первой линзы объектива на расстоянии от неё 10 мм.
Оптическая схема телевизионной камеры БОКЗ - М
приведена на рис. 9.6. Объектив рассчитан на спектральный
391
диапазон (450 - 850) нм. Качество изображения объектива близко к
дифракционному. Фотограмметрическая дисторсия не превышает
±7 мкм.
Перед объективом под углом 4° установлен жёлтый
светофильтр, выполняющий одновременно функции защитного
стекла, Он представляет собой склейку из двух пластин.
Для автономных тестовых проверок БОКЗ - М снабжён двумя
имитаторами звёзд. Оптическая система каждого имитатора вместе
с объективом телевизионной камеры формирует параллельный
пучок света, отражаемый полупрозрачным зеркальным покрытием,
нанесённым в центре светофильтра. Отразившись от этого зеркала
и вторично пройдя объектив, световой поток от имитаторов
фокусируется на светочувствительной поверхности матрицы ПЗС,
имитируя изображения двух звёзд.
Защитная крышка закрывается при выключении прибора или
при съёмке со штатной пороговой отсечкой в 8 градаций аналогово
- цифрового преобразователя, т.е. при максимально возможном
уровне сигнала в видеотракте. Основное предназначение защитной
крышки состоит в защите оптики от загрязнения при наземных
испытаниях и особенно при штатной эксплуатации, в частности, от
пылинок из окружающего КА пространства.
Светозащитная бленда обеспечивает надёжную регистрацию
звёзд при заданных ограничениях углового расстояния между
оптической осью телевизионной камеры и направлениями на
Солнце и другие источники света.
В качестве чувствительного элемента в БОКЗ-М используется
кадровая ПЗС - матрица «Лев-2» производства ОАО ЦНИИ
«Электрон» с количеством элементов 512 х 512 размером (16 х 16)
мкм. Для охлаждения фотоприёмника осуществляется до
температуры минус 18° С используется встроенный
термоэлектрический микроохладитель на основе элемента Пельтье.
Для решения своих функциональных задач звёздный датчик
содержит каталог звезд яркостью до 7,5 звездной величины. Этот
каталог включает координаты 8500 звёзд и соответствующие им
звёздные величины. Каталог содержит 642 сектора, на которые
разбита вся небесная сфера. Максимальное количество звёзд в
секторе не превышает 65. Время просмотра всех секторов (при
отсутствии априорной информации об ориентации КА) около 30 с.
392
1
Рис. 9.6. Оптическая схема телевизионной камеры БОКЗ - М
Здесь 1 - светозащитная бленда, 2 - защитная крышка, 3 -
апертурная диафрагма, 4 - объектив ТВ - системы, 5 - имитатор
звёзд, 6 - светофильтр, 7 - матричный ПЗС с микроохладителем, 8
- основание прибора.
Зарегистрированные звёзды идентифицируются путём
сравнения измеренных и рассчитанных (каталожных) угловых
расстояний. С целью сокращения бортовых вычислительных
операций угловые расстояния между предварительно
упорядоченными по звёздным величинам звёздами в системе
координат бортового звёздного каталога вычисляются по
направляющим косинусам. В системе координат прибора угловые
расстояния между измеренными звёздами, упорядоченными по
возрастанию интегральных яркостей, вычисляются с помощью
измеренных координат изображений звёзд и фокусного расстояния
393
камеры.
Основным фактором, от которого зависит точность
определения ориентации по звёздам, является погрешность
определения направлений на звёзды во внутренней системе
координат оптико - электронного измерительного блока. Для
выполнения измерений с субэлементной точностью, т.е. для того,
чтобы погрешности измерений координат звёзд были бы
существенно меньше размера одного элемента ПЗС - матрицы
(пикселя), необходимо обеспечить покрытие оптическим
изображением звезды достаточного количества пикселей. При этом
центр изображения звезды находится как среднее взвешенное из
координат центров покрываемых звездой пикселей с весами,
равными сигналам в этих пикселях.
Для того, чтобы придать оптическому изображению звезды
нужные размеры, применяется дефокусировка объектива. По
результатам исследований установлено, что объектив звёздного
координатора должен быть расфокусирован так, чтобы
изображение звезды покрывало площадь, примерно равную 3x3
пикселя
При достаточном количестве изображений звёзд в кадре и
равномерном распределении их по всему полю матрицы ПЗС
одновременно с данными ориентации определяются и элементы
внутреннего ориентирования телевизионной камеры: положение
главной точки изображения, эквивалентное фокусное расстояние
объектива и две поправки фотограмметрической дисторсии.
Управление работой БОКЗ - М осуществляется по командам,
подаваемым от бортовой вычислительной системы (БВС)
бортового комплекса управления КА в соответствии с программой
полёта. Включение звёздного координатора осуществляется
подачей от системы энергоснабжения КА напряжения 27 ± ЗВ.
Через 5 минут, необходимых для проведения самотестирования,
прибор переходит в состояние готовности к выполнению заданных
функций.
При поступлении из бортовой вычислительной системы на
вход звёздного координатора периодических команд
«Синхронизация» на его выходе формируется совокупность данных
об ориентации КА.
Выходными данными прибора является кватернион
ориентации КА с привязкой к бортовой шкале времени. Эти данные
394
выдаются в бортовую вычислительную систем КА.
Для обеспечения временной привязки измерений звёздного
координатора к бортовой шкале времени перед подачей первой
команды «Синхронизация» в прибор передаётся соответствующее
значение бортового времени.
Кватернион ориентации привязывается к моменту времени,
имеющему строго фиксированную задержку после прохождения
команды «Синхронизация». Этот момент соответствует середине
интервала экспонирования, начинающегося с момента поступления
команды «Синхронизация».
Такая логика измерений и привязка их результатов ко времени
позволяет обеспечить одновременные измерения ориентации,
которые проводятся с помощью двух и более приборов БОКЗ - М,
привязанные к одному моменту времени. Это позволяет получить
равноточные по всем трём осям данные об угловой ориентации КА.
Для перехода от внутренней системы координат звёздного
координатора к системе координат КА на его основании размещён
оптический кубик, реализующий внешнюю (приборную) систему
координат БОКЗ - М. Эта система может реализовываться и другим
способом. Этот способ заключается в использовании базовых
посадочных и фиксирующих элементов (БПФЭ) - нормали (БПЭ) к
посадочной плоскости основания прибора и положении на ней
классных отверстий и классного паза (БФЭ). Связь внутренней и
внешней систем координат БОКЗ - М определяется при его
наземной калибровке.
9.3.2. Гироскопические средства измерения углового
положения КА в инерциальном пространстве
Сложность решения задачи прецизионного определения
ориентации линии визирования наземного ориентира в
инерциальном пространстве непосредственно в процессе его
сканирования обусловлена также следующими обстоятельствами.
Современные ОЭТК обеспечивают съёмку поверхности Земли, как
правило, с высоким линейным разрешением на местности. Поэтому
их объективы имеют большие фокусные расстояния. Однако при
больших фокусных расстояниях объективов скорости движения
изображения при неподвижном положении КА в осях текущей
орбитальной системы координат имеют такие значения, которые
превышают пределы возможности технической реализации
395
системы приёма и преобразования информации.
Уменьшение скорости движения изображения до приемлемого
уровня достигается компенсационным угловым движением корпуса
КА. При этом в зависимости от высоты орбиты КА значения этой
скорости могут достигать величин (1-2) град./с.
При сканировании с такими угловыми скоростями отсутствует
возможность применения звёздных датчиков БОКЗ - М, которые
способны определять положение визирной системы координат в
инерциальном пространстве. Это обусловлено тем, что звёздные
координаторы имеют высокую точность определения ориентации в
инерциальном пространстве только в режиме, близком к режиму
инерциальной ориентации, т.е. когда КА неподвижен в
инерциальном пространстве.
Следовательно, определение ориентации КА при
сканировании в этом случае возможно с использованием других
средств измерений, например, гироскопических датчиков. Эти
средства должны обладать способностью измерения составляющих
вектора угловой скорости вращения КА в инерциальном
пространстве и выдачи полученных результатов измерений в
систему управления движением КА по её запросу.
Современные высокоточные гироскопические датчики
построены, как правило, на основе двухстепенных гироскопов.
Одними из таких приборов в настоящее время является ряд
приборов типа блоков датчиков угловой скорости (БДУС)
разработки ПО «Корпус» (г. Саратов) и бесплатформенных
инерциальных блоков (БИБ) разработки НИИ прикладной
механики им. акад. В.И. Кузнецова. Эти гироскопические приборы
пришли на смену гироскопическим средствам предыдущего
поколения типа гиростабилизированных платформ. Огромные
трудности, которые при этом были преодолены, были направлены
на выполнение следующих требований:
• повышение сроков активного существования и,
соответственно, ресурса работы до 5-10 лет;
• повышение надёжности функционирования;
• обеспечение свободы угловой ориентации КА в
пространстве;
• повышение точности угловой ориентации до средних
квадратических погрешностей (3-10) угл. мин.;
• повышение точности измерений угловой скорости до
396
средних квадратических погрешностей (1 • 10-4 - 1 • 10-5) %.
Этого удалось достичь, в том числе благодаря применению
встроенных вычислительных средств, которые взяли на себя
функции рамок гиростабилизированной платформы и обеспечили
высокую точность определения угловой скорости по информации
от гироскопических чувствительных элементов, жёстко
устанавливаемых на борт КА. Использование встроенных
вычислительных средств дало возможность определять и
компенсировать систематические составляющие погрешностей
средств измерений.
Функциональная схема бесплатформенного инерциального
блока, демонстрирующая взаимосвязь подсистем прибора и его
связь с бортовыми системами, на примере прибора КИНД34-020,
представлена на рис. 9.7. Этот прибор установлен на КА «Ямал-
100», который функционирует на геостационарной орбите.
В состав бесплатформенного инерциального блока входят
следующие составные части:
• измерительный гироканал;
• система термостатирования;
• система электропитания, обеспечивающая необходимыми
видами напряжений гироблоки и электронные устройства;
• система магнитного центрирования поплавковых камер
гироблоков;
• коммутационный блок.
Измерительный канал содержит гироблок и контур обратной
связи. Этот канал обеспечивает на прецизионном уровне измерение
и преобразование сигналов гироблока в информацию об
измеряемой угловой скорости.
Ключевым элементом бесплатформенного инерциального
блока является чувствительный элемент - двухстепенный
поплавковый интегрирующий гироблок с газодинамической опорой
подвеса ротора.
Принципиальная схема конструкции гироблока представлена
на рис. 9.8.
Основными конструкционными особенностями поплавкового
397
Рис. 9.7. Функциональная схема бесплатформенного
инерциального блока
гироблока (ПГБ) являются:
• применение газодинамической опоры подвеса ротора
гироскопа;
• магнитное центрирование поплавковой камеры гироблока;
• полная симметрия конструкции.
Газодинамические опоры при скорости вращения ротора
ЗООООоб/мин, а также магнитное центрирование поплавковой
камеры обеспечивают полное отсутствие «сухого» контакта между
ротором и камерой, между камерой и корпусом гироблока.
Этим же обеспечивается высокая стабильность взаимного
положения элементов датчика момента. Тем самым достигается
наивысшая точность и практически неограниченный ресурс работы
гироблока [29].
398
Рис.9.8. Конструкция гироблока
Первоначально бесплатформенный инерциальный блок имел в
своём составе минимально необходимое количество измерителей
(три измерителя) с классической ортогональной схемой
расположения осей чувствительности гироблоков.
Естественным развитием бесплатформенного инерциального
блока с целью повышения отказоустойчивости минимальными
аппаратными затратами стало использование функциональной
избыточности. Так, введение четвёртого измерительного канала
позволило обеспечивать работоспособность бесплатформенного
инерциального блока при отказе одного из каналов.
Вариант построения кинематической схемы прибора с
четырьмя измерительными каналами представлен на рис 9.9.
Одна из последних модификаций бесплатформенного
инерциального блока - КИНД 34-020 -имеет следующие основные
технические характеристики:
• количество измерительных каналов (гироблоков) - 4;
• диапазон измерения угловой скорости - ± 0,45%;
• случайная составляющая смещения нуля (Зо) - 0,003°/час;
• масштабный коэффициент (дискрет информации) - 0,04 угл.
с/бит;
• погрешность масштабного коэффициента измерительного
канала- 0.01%;
399
Рис. 9.9. Кинематическая схема четырёхканального
бесплатформенного инерциального блока
• нестабильность положения осей чувствительности - 30 угл. с;
• масса - 12кг;
• энергопотребление прибора в установившемся тепловом
режиме - 70 Вт;
• ресурс непрерывной работы на орбите - Юлет;
• информационный обмен прибора с бортовой
вычислительной системой - в виде последовательности
однополярных импульсов.
Бесплатформенная инерциальная система - гироскоп с
электростатическим подвесом (БИС - ЭГ)
Рассмотрим ещё один вариант построения перспективной
гироскопической бескарданной инерциальной системы с
электростатическим подвесом ротора гироскопа (БИС - ЭГ).
Достоинство электростатического подвеса заключается в том, что
он не создаёт возмущающих моментов, действующих на идеально
сферический проводящий шар.
400
• охуд
Рис. 9.10. Схема прибора БИС - ЭГ
Практическая задача создания такого гироскопа сводится к
формированию электростатического подвеса, разработке и
изготовлению систем разгона ротора, демпфирования его
нутационных колебаний, стабилизации скорости вращения и съёма
информации об угловом положении ротора в корпусной системе
координат. Несмотря на кажущуюся простоту построения
гироскопического прибора (рис. 9.10), практическая реализация его
принципов требует привлечения многих технологий высокого
уровня.
Гироскоп имеет сплошной десятимиллиметровый
бериллиевый ротор, взвешенный в электрическом поле, которое
создаётся тремя парами ортогонально расположенных электродов.
Вращение ротора со скоростью 3000 об/с и демпфирование его
нутационных колебаний в любой из трёх ортогональных
ориентаций выполняется с помощью шести катушек. Для
обеспечения работы гироскопа в режиме «выбега» ротора
предусмотрен вакуумный насос, который создает в зазоре между
ротором и стенкой прибора вакуум порядка 10 6... 10-8 мм рт. ст. С
целью исключения влияния уводящих моментов магнитной
природы чувствительный элемент гироскопа помещён в
двухслойный магнитный экран.
Такой гироскоп выполняет функции свободного гироскопа в
трёхосном кардановом подвесе
401
Считывание информации об угловом положении ротора в
неограниченном диапазоне углов осуществляется с помощью
шестиканального оптического датчика угла по нанесённому на
роторе растровому рисунку. Схема одного канала датчика угла
приведена на рис. 9.11.
Световой поток, созданный светодиодом, отражается от
полупрозрачной пластины и фокусируется объективом на торец
оптического канала. Оптический канал направляет световой поток
на ротор. Отразившись от ротора и пройдя по тому же оптическому
каналу, световой поток попадает на фотодиод, преобразующий
световой поток в электрический сигнал, амплитуда которого
пропорциональна световому потоку.
Чередование тёмных и светлых полос на поверхности ротора
модулирует сигнал по амплитуде и частоте.
Микро-ЭВМ осуществляет алгоритмическую обработку
информации с датчиков углов с целью аналитического построения
инерциальной системы координат.
Три таких одновременно работающих чувствительных
элемента прибора БИС - ЭГ являются основой для построения
бескарданной инерциальной системы ориентации КА. При этом
аппаратная избыточность (для построения ортогональной
инерциальной системы координат достаточно двух чувствительных
элементов с неколлинеарными направлениями векторов
кинематических моментов роторов) используется как для
повышения надёжности (в случае коллинеарности двух векторов
или отказа одного из гироскопов), так и для повышения точности
прибора.
Достоинством прибора БИС - ЭГ является отсутствие
погрешностей интегрирования угловой скорости в связи с
непосредственным измерением угла по сравнению с поплавковыми
и лазерными гироскопами. Скорости уходов таких
гироскопических приборов не превышают 10-5о/час.
К недостаткам прибора следует отнести их относительно
малую стойкость к механическим перегрузкам и значительное
время, необходимое для приведения его в состояние готовности.
402
Стабилизатор Источник
тока тока
Рис. 9.11. Структурная схема одного канала датчика угла
БИС-ЭГ
Прибор применяется на нескольких типах КА ДЗЗ разработки
ГНП РКЦ «ЦСКБ - Прогресс», включая КА «Ресурс - ДК1». При
этом подтверждены следующие основные характеристики:
• случайная составляющая погрешности угловой ориентации
- не хуже 20 угл. сек;
• случайный дрейф инерциальной системы координат - не
более 10-5о/час.
• время готовности прибора к работе - не более Зчас;
• потребляемая мощность в штатном режиме не более 100 Вт;
• масса не превышает 25кг.
Основные проблемы обеспечения точности прибора
определяются качеством изготовления сферической поверхности
ротора, влияющей на его уходы, качеством определения
коэффициентов модели этих уходов и адекватностью этой модели
реальным уходам.
Волоконно - оптический измеритель угловой скорости
Важнейшим направлением развития приборостроения в
области навигационных систем является создание таких средств
измерений, которые являются не только надёжными и точными, но
403
и обладают минимальными габаритно - массовыми
характеристиками.
Одним из путей, реализующих это направление, является
создание измерителей угловой скорости (ИУС) на базе волоконно -
оптических гироскопов. Перспективность этого пути
подтверждается тем, что по нему идёт большинство авторитетных
производителей ракетно-космической техники, в частности, такие
фирмы, как Honeywell, McDonnell - Douglas, Thomson, Martin
Marietta, Alcatel и др. Достигнутые успехи позволили ряду фирм,
например Alcatel, наладить серийный выпуск волоконно-
оптических гироскопов и измерителей угловой скорости на их
основе. Приборы на основе волоконно-оптических гироскопов
эксплуатируются на аэробусах Boing 777 для обеспечения
ориентации при отказе основных средств навигации.
В нашей стране разработку измерителей угловой скорости
ведёт НПП «АНТАРЕС» (г. Саратов) на базе волоконно-оптических
гироскопов производства фирмы «Физоптика» (г. Москва). В
частности, им разработан прибор, который установлен и
эксплуатируется на КА ДЗЗ «Ресурс - ДК1», а также разработан
прибор для КА ДЗЗ «Ресурс - П» (рис. 9.12).
Оптический гироскоп относится к классу приборов, в которых
в замкнутом оптическом контуре распространяются встречно
бегущие световые лучи. Принцип действия оптического гироскопа
основан на «вихревом» эффекте Саньяка, открытым этим ученым в
1913 г. [72]. Сущность «вихревого» эффекта заключается в
следующем. Если в замкнутом оптическом контуре в
противоположных направлениях распространяются два световых
луча, то при неподвижном контуре фазовые набеги обоих лучей,
прошедших весь контур, будут одинаковыми. При вращении
контура вокруг оси, нормальной к плоскости контура, фазовые
набеги лучей неодинаковы, а разность фаз лучей пропорциональна
угловой скорости вращения контура.
При конструировании волоконных оптических гироскопов,
как правило, в качестве излучателей используют
полупроводниковые лазеры (лазерные диоды), светодиоды и
суперлюминесцентные диоды.
Весьма перспективными для реализации являются волоконно-
оптические гироскопы, создаваемые предприятием «Физоптика» (г.
Москва). На этом предприятии используется цельноволоконная
404
технология изготовления волоконно-оптических гироскопов, при
которой используется один световод. Вдоль этого световода
формируются все необходимые оптические компоненты.
При такой технологии отпадает необходимость в
использовании стыковки отдельных компонентов, что уменьшает
оптические потери, снижает уровень шумов, повышает надежность
изделия. Внедрение цельноволоконной технологии позволило
предприятию наладить серийный выпуск относительно дешевых
волоконно-оптических гироскопов (стоимостью менее 3000$),
которые в сочетании со структурными методами повышения
точности могут использоваться в качестве чувствительных
элементов при разработке достаточно точных измерителей угловой
скорости.
Блок чувствительных элементов содержит несколько
идентичных измерительных каналов (количество которых
уточняется на этапе рабочего проектирования). Каждый из каналов
содержит датчик угловой скорости (волоконно-оптический
гироскоп), аналого-цифровой преобразователь ь устройство
цифровой обработки сигнала .
Волоконно-оптический гироскоп предназначен для
преобразования скорости его вращения вокруг собственной оси
чувствительности в аналоговый сигнал (напряжение) для
дальнейшей цифровой обработки.
Аналого-цифровой преобразователь осуществляет
преобразование аналогового сигнала, поступающего с волоконно-
оптического гироскопа в цифровую форму.
Устройство цифровой обработки сигнала осуществляет
необходимые виды преобразования и цифровой обработки сигнала:
цифровую фильтрацию, необходимые процедуры коррекции и
восстановление сигнала.
Блок электроники предназначен для обеспечения нормального
функционирования блока чувствительных элементов. Блок
электроники содержит:
- источник питания, предназначенный для преобразования
бортового питания в ряд напряжений, необходимых для питания
электронных модулей, входящих в блок электроники и блок
чувствительных элементов;
- процессор, предназначенный для сбора и обработки
информации, которая поступает с каждого измерительного
405
канала блока чувствительных элементов, диагностики
неисправностей канала, выбора необходимой конфигурации
измерительных каналов, управления системой
терморегулирования и решения других задач;
- плата мультиплексного канала обмена предназначена для
обмена информацией с аппаратурой системы управления
движением более высокого иерархического уровня.
“заглушка” “заглушка”
Рис. 9.12. Функциональная схема волоконно-оптического
измерителя угловой скорости (ИУС - ВО)
Волоконно-оптический измеритель угловой скорости (ИУС-
ВО) состоит из блока чувствительных элементов, содержащего
шесть измерительных каналов (две ортогональные триады) и
дублированного блока электроники.
Значения технических характеристик прибора ИУС-ВО
приведены в табл. 9.1.
Одним из важнейших направлений развития современных
волоконно-оптических гироскопов является повышение их
точности. Как показывает накопленный опыт исследований,
решение этой проблемы представляется неразрывно связанным с
изучением влияния на точность волоконно-оптического гироскопа
среды его функционирования и в особенности температурных
воздействий. Большой объем работ по исследованию
температурных погрешностей волоконно-оптических гироскопов
выполнен Институтом проблем точной механики и управления
РАН (г. Саратов). Предлагаемый подход к решению этой проблемы
406
заключается в том, что на базе разработанных единой концепции
исследования, методик и алгоритмов, решаются задачи расчета и
анализа в общем случае трехмерных неоднородных
нестационарных температурных полей, построения и анализа
обобщенных математических моделей теплового дрейфа, синтеза
систем терморегулирования, конструктивных и иных структурных
методов, минимизирующих тепловой дрейф ВОГ.
Таблица 9.1. Технические характеристики прибора ИУС-ВО
Параметр Значение параметра
1. Диапазон измерения*, град/сек (град/час) ±2 (±7200) ±5 (±18000) ±80 (±288000)
2. Порог чувствительности, град/сек (град/час) 1,5-10‘5 (0,05) 510 s (0,18) 2,8-Ю-4 (1,0)
3. Систематическая составляющая нулевого сигнала, не более, град/сек (град/час) 2,8-10’4 (1) 2,8-10'4 (1) 2,8-10’4 (1)
4. Случайная составляющая нулевого сигнала, не более, град/сек (град/час) 1,4-10'5 (0,05) 2,7-10'5 (0,1) 8,3-10 5 (0,3)
5. Случайная составляющая нулевого сигнала в конкретном включении в течение 24 часов, не более, град/сек (град/час) 2,8-10'6 (0,01) 1,4-10'5 (0,05) 4,2-10’5 (0,15)
6. Дискретность шкалы времени, 1 1 1
7. Шумовая составляющая выходного сигнала, не более, град/У^йй 0,03 0,03 0,03
8. Полоса пропускания, не менее, Гц 10 10 10
9. Масса: - электронного блока, не более, кг - блока чувствительных элементов, не более, кг 1,5 8,5
407
10. Энергопотребление, не более, Вт 30 "
11. Габаритные размеры: -электронного блока, не более , мм -блока чувствительных элементов, не более, мм 140x140x120 0330x120
408
Глава 10. ИССЛЕДОВАНИЕ ТОЧНОСТИ СИСТЕМЫ
АВТОНОМНОЙ НАВИГАЦИИ КА С
ИСПОЛЬЗОВАНИЕМ ПРОТЯЖЁННЫХ НАЗЕМНЫХ
ОРИЕНТИРОВ
В настоящей главе проводится анализ и даётся оценка
точности системы автономной навигации КА с использованием
протяжённых наземных ориентиров. Описание этой системы
приведено в предыдущей главе.
10.1. Методы повышения точности определения
параметров углового движения КА в процессе съёмки
поверхности Земли
10.1.1. Метод повышения точности звёздного датчика
при движении КА с большими угловыми скоростями
Для обеспечения высокой точности определения ориентации
осей КА ДЗЗ в инерциальном пространстве на участках
непосредственной съёмки поверхности Земли с большими
угловыми скоростями наметились два встречных направления
развития.
Первое из этих направлений заключается в использовании
встроенных гироскопических датчиков угловой скорости, с
помощью которых достигается расширение динамического
диапазона угловых скоростей для высокоточного измерения
параметров ориентации и частоты этих измерений
(быстродействия) звёздными датчиками.
Второе направление представляет собой проведение полётной
калибровки гироскопических средств с целью оценки и учёта
систематических погрешностей измерений угловых скоростей.
В настоящее время на смену датчику БОКЗ-М (см. параграф
9.3) пришёл модернизированный звёздный датчик БОКЗ-М 60/1000,
где 60/1000-это условный индекс модификации. Первая цифра 60 в
этом индексе определяет значение фокусного расстояния объектива
в мм, вторая цифра 1000 - количество пикселей в строке (и
столбце) матрицы ПЗС.
Необходимость проведения модификации прибора БОКЗ-М
обусловлена следующим обстоятельством. Опыт эксплуатации
БОКЗ - М на борту космических аппаратов «Ямал - 200» и «Ресурс
409
- ДК1» показал его высокую надежность в непрерывном режиме
работы на орбите. Так, на КА «Ресурс - ДК1» в процессе его полёта
произведён переход от эпизодического решения задачи
астрокоррекции, к практически непрерывному её решению.
При этом система управления движением КА на 11-ти циклах
управления с периодом 0,25 с выполняет свои функции с помощью
информации о параметрах углового движения, получаемой от
гироскопических средств, а на 12-том шаге - по информации от
БОКЗ - М, получаемой с периодом 3 с. Одновременно на этом шаге
производится коррекция показаний гироскопических средств.
Эти возможности побудили разработчиков систем управления
КА и разработчиков прибора БОКЗ - М кардинально пересмотреть
идеологию применения и построения перспективного звёздного
датчика. Из астрокорректора гироскопических средств он должен
превратиться в прецизионный чувствительный элемент для
непрерывной астроориентации КА. Такой прибор создан и получил
обозначение БОКЗ-М 60/1000.
Самыми существенными отличиями нового звёздного датчика
от его предшественника являются:
• увеличение (примерно вдвое) с 2(3=8° до2(3 -16° угла поля
зрения прибора и увеличения в два раза размера матрицы ПЗС до
1000x1000 при сохранении размера пикселя 16x16 мкм и
сохранении значения фокусного расстояния объектива. Это
позволило сохранить угловое поле изображения отдельного
пикселя;
• увеличение (более чем в 1,5 раза) диаметра объектива
прибора;
• переход на работу с более яркими звёздами до шестой
звёздной величины вместо +7,5. В результате этого существенно
сократился объём звёздного каталога, и возросла скорость
процедуры поиска начальной ориентации;
• существенно уменьшен интервал измерений с 3 с до 0,25 с и
расширен динамический диапазон измерений ориентации до 5 7с
при сохранении точности измерений. Это достигнуто благодаря
применению встроенного датчика угловой скорости на базе
микромеханического гироскопа;
• повышена надёжности прибора в связи с отказом от
применения в его конструкции защитной крышки. Одновременно с
этим предложены мероприятия, обеспечивающие требуемую
410
чистоту оптических элементов после выведения КА на орбиту.
Одним их них является разработка и использование демонтируемой
перед стартом защитной крышки с встроенным в неё имитатором
звёзд, устанавливаемым на бленду и необходимым для автономных
тестовых проверок прибора;
• введение в состав прибора комбинированной бленды,
состоящей из двух частей. Принцип построения комбинированной
бленды заключается в том, что имеющийся в ней второй каскад
защищает первый до определённого заданного угла, например, 40
град. При дальнейшем уменьшении угла, солнечные лучи начинают
попадать в первый каскад бленды, постепенно увеличивая зону
засветки. В диапазоне углов «ось визирования - Солнце» от 40 до
30 град второй каскад продолжает частично защищать первый,
допуская, в конечном счете, засветку менее чем 50% его объёма.
Применение комбинированной бленды позволяет избежать
конструкторских проблем, связанных с габаритами бленды, и
обеспечивает высокую помехозащищённость прибора до 40 град к
Солнцу. При этом в диапазоне углов от 40 до 30 град условия
наблюдения постепенно ухудшаются, обеспечивая, однако,
меньший уровень фоновой засветки, чем при использовании
однокаскадной бленды.
Указанные и другие отличия привели к необходимости
кардинальной переработки конструкции и схемотехнических
решений прибора. При этом массово-габаритные и энергетические
характеристики остались практически прежними. В приборе
выбрана полнокадровая матрица разработки ОАО ЦНИИ
«Электрон» формата 1040x1160 элементов и размером элемента
16x16 мкм.
В качестве инерциального измерителя угловой скорости
применён микромеханический гироскоп фирмы BAE Sytems,
имеющий нестабильность нуля 3 град/ч и нестабильность
масштабного коэффициента 0,05%. Этот датчик угловой скорости
имеет аналоговый выходной сигнал, пропорциональный проекции
вектора угловой скорости на чувствительную ось датчика и сигнал
с выхода встроенного термодатчика. Для оцифровки этих сигналов
в приборе используется 24 - разрядный аналого-цифровой
преобразователь.
В интегрированном приборе информация, которая снимается с
датчика угловой скорости, используется в качестве «подсказки»
411
звёздному датчику при наличии большой угловой скорости КА или
при засветке поля зрения прибора Солнцем, Землёй или Луной.
Возможность повышения быстродействия датчика до 4-х Гц
обеспечивается тем, что в обработку берётся видеоинформация не
всего кадра, а лишь участки - «окна» вокруг звёзд размером 17x17
элементов ПЗС. Использование математического аппарата «окон»
позволяет сократить время расчёта параметров ориентации до 100
мс. Положение «окон» на каждом следующем кадре вычисляется на
основе показаний инерциального канала, погрешность которого
при времени интегрирования 250 мс (один такт измерений) не
превышает 1 угл. сек.
При работе прибора на каждом такте измерений производится
калибровка смещения нуля и масштабного коэффициента ,которые
изменяются, в том числе под действием ионизирующего излучения.
Исходной информацией для калибровки служат определённые по
оптическому и инерциальному каналам параметры поворота на
каждом такте измерений. Статистическая обработка этих
параметров, вычисленных на достаточно длительном интервале
времени, позволяет существенно повысить точность оценивания
показаний датчика угловой скорости.
Перспективы развития звёздных приборов семейства БОКЗ не
ограничиваются их интеграцией с инерциальными датчиками.
В планах разработчиков прибора включение в его состав
аппаратуры потребителей спутниковых радионавигационных
систем ГЛОНАСС и GPS, а также акселерометров. Это позволит
превратить прибор в универсальный измерительный элемент
систем управления движением КА.
10.1.2. Методика полётного калибрование
гироскопических средств
Бесплатформенные инерциальные гироскопические системы
(БИНС) имеют погрешности измерения угловых скоростей,
которые содержат систематические и случайные составляющие.
Систематические составляющие приводят к нарастанию во
времени погрешностей определения ориентации КА в пространстве
при интегрировании угловых скоростей. Наземное калибрование
позволяет частично определить и учесть в процессе лётной
эксплуатации значения систематических погрешностей, поскольку
условия космического полёта отличаются от наземных условий.
412
В этой связи возникает необходимость проведения полётного
калибрования БИНС, под которым понимается решение задачи
определения систематических погрешностей измерений
бесплатформенными инерциальными гироскопическими системами
по информации, получаемой от звёздных датчиков.
Методика полётной калибровки бесплатформенных
инерциальных навигационных систем к настоящему времени
разработана достаточно полно [48, 49, 50]. Учитывая важность
вопроса, кратко изложим суть этой методики.
Будем полагать, что при установке БИНС оси
чувствительности трёх гироскопов должны совпадать с
направлениями визирных осей ОЭТК. Однако на практике это
условие строго не выполняется. Поэтому кроме инструментальных
погрешностей измерений угловой скорости (главными из которых
являются уход нулевого сигнала и погрешность крутизны
выходной характеристики) необходимо учесть погрешности
установки гироскопов относительно визирных осей. Эти последние
могут быть вызваны также тепловыми деформациями конструкции
мест установки гироскопов на корпус КА.
Наличие таких погрешностей у отдельно взятого гироскопа
приводит к тому, что он кроме измерения угловой скорости в
направлении своей визирной оси ОЭТК в общем случае будет
измерять проекции угловых скоростей, имеющих место в
направлении двух других осей. Значения этих проекций
определяются малыми углами погрешностей, которые возникают
при установке гироскопа. Если же в процессе калибрования БИНС
ограничиться плоскими поворотами, то в силу нулевых угловых
скоростей по двум другим каналам в результатах измерений в
канале, относительно которого осуществляется вращение,
дополнительные погрешности будут отсутствовать
В случае пространственных поворотов модель измерений,
выполняемых каждым гироскопом в произвольный момент
времени, можно представить в виде:
йт = Д<от + (1 + Дкт) <от + Дтк wK + ДТР • <Ор + Пт;
гок = Д(лк + (1 + Дкк ) <ок + Дкр • <оР + Дкт • сот + Пк • (Ю-1)
<5р = Д(ор + (1 + Дкр) • Wp + Дрт • сот + Дрк • сок + пР •
Здесь:
wi - измеренное значение угловой скорости i-ro гироскопа (i
=т, к, р);
413
co, - истинное значение измеряемой угловой скорости i-ro
гироскопа;
д<о, - уход нулевого сигнала i-ro гироскопа;
Дк, - погрешность крутизны выходной характеристики i-ro
гироскопа;
Д,3 - угловое отклонение i-ro гироскопа от i-ой визирной оси
ОЭТК в плоскости осей ij;
t]j - случайная погрешность измерений i-ro гироскопа.
Полагаем также, что малые параметры До\, Д^ - постоянны
на достаточно длительном интервале времени, а случайная
погрешность измерений и, - имеет нормальный закон
распределения с нулевым математическим ожиданием и
дисперсией ст,2.
В результате калибрования каждого гироприбора должны
быть определяются четыре параметра: Дсо,, Дк,, Дя, Дй.
При плоском калибровочном повороте вокруг одной из
визирных осей ОЭТК угловые скорости вращения вокруг двух
других осей удерживаются системой управления движением на
уровне, близком к нулю.
Пренебрегая в этом случае членами второго порядка малости,
представим (10.1) в упрощённой форме:
ST = <вт + Дсот + Дктсот + т]т;
<ок =сок + Дсок + Дкксок+г]к; (Ю-2)
сор = шр + ДсОр + ДкрСОР + т]р.
В результате интегрирования этих показаний за время каждого
из плоских поворотов определяются углы поворотов КА по тангажу
5, крену р и рысканию ф. Вместе с тем, перед началом и после
окончания каждого из калибровочных поворотов проводятся
астроопределения ориентации КА с использованием звёздных
датчиков. Это позволяет определить истинные углы поворотов по
тем же каналам: тангажа а, крена р и рыскания у.
Астроопределения производятся при положении КА в
инерциальном пространстве, близком к неподвижному.
Концепция решения задачи калибрования состоит в том, что
по данным, полученным со звёздных датчиков, определяется
истинное движение КА в процессе калибровочного поворота. С
414
учётом данных, полученных в результате интегрирования
показаний бесплатформенных инерциальных навигационных
систем, определяется наблюдаемое движение КА. По разности этих
двух движений с помощью модели (10.2) определяются искомые
систематические погрешности измерений БИНС.
Итак, используем плоский калибровочный поворот КА, то
есть его вращение вокруг одной из визирных осей. При этом
заданные угловые скорости по этой оси отличны от нуля, а по двум
другим осям равны нулю. Управление угловым движением КА
осуществляется по показаниям БИНС. При этом показания
бесплатформенных инерциальных навигационных систем
удерживаются равными заданным с точностями системы
управления движением КА.
Теоретической базой для решения задачи являются
дифференциальные уравнения для производных по времени от
углов поворотов КА по каналам тангажа, крена и рыскания:
d = —-—(coTcosv-wK siny);
cos p
0 = (wT simy + coK cos у); (Ю-3)
ф = (ор -tg0(toT cos\|»-coK siny).
Эти уравнения следуют из кинематических уравнений
углового движения КА (4.23) при принятой последовательности
отсчёта углов поворотов (тангаж, крен, рыскание).
Всего необходимо осуществить шесть калибровочных
поворотов. Повороты представлены парами вокруг каждой из трёх
визирных осей. При этом первый поворот из пары осуществляется
в течение интервала времени Т с одним уровнем заданной угловой
скорости вокруг оси поворота, второй - также в течение интервала
времени Т с увеличенным в два раза уровнем той же угловой
скорости.
Рассмотрим пример плоского поворота по каналу тангажа
(рис. 10.1). При плоском повороте в течение интервала времени Т
вначале с одним уровнем постоянной угловой скорости с5т КА
повернётся на угол а, и далее за то же интервал времени Т с другим
- удвоенным уровнем - угловой скоростью 2с5т - на угол а2=2а, (но
не возврат в исходное положение). При этом углы а, и а2 получены
путем интегрирования показаний бесплатформенных
инерциальных гироскопических систем с нулевыми начальными
415
данными. Также путём интегрирования могут быть получены ещё
четыре малых утла: Р1; р2, у,, у2.
По показаниям звёздных датчиков можно получить шесть
углов поворота: а,, а2, (3,, р2, у, у2, последние четыре из которых
также малы.
Поскольку каждый поворот производится по результатам
измерений бесплатформенных инерциальных навигационных
систем, содержащим случайные ошибки измерений, он оказывается
не идеально плоским. Высокоточные показания звёздных датчиков
определяют истинную угловую скорость почти плоского вращения
КА (усреднённую по паре поворотов):
®т=-^(2а, + а2); сок =-i-(2₽,+|32); шр =^-(2у, + у2) (10.4)
4Т 4Т 41
Углы а, и а2 определены путём интегрирования результатов
измерений бесплатформенных инерциальных навигационных
систем. По этим углам на основе первого уравнения системы (10.2)
с использованием полученного значения сот в (10.4) могут быть
определены первые два параметра измерительного канала тангажа:
уход нулевого сигнала Дшт и погрешность крутизны выходной
характеристики Дкт. В самом деле, учитывая постоянство в
среднем скоростей плоского поворота и используя первое из
соотношений (10.2), можно записать:
а, = йтТ = <втТ + Д<втТ + ДктсотТ;
а2 = 2йтТ = 2<втТ + Д<втТ + Дкт2сотТ . (10.5)
Далее, умножая первое соотношение из (10.5) на 2 и вычитая
из него второе, будем иметь:
дсат=—С7а? . (10.6)
Совершая аналогичные повороты относительно других осей
можно получить также ещё четыре неизвестных погрешности
измерительных каналов: Дсок, Дкк, ДшР, Дкр.
416
......................... i
Рис. 10.1. Схема плоского поворота по каналу тангажа
По информации со звёздных датчиков определяются также
истинные углы отклонения оси чувствительности каждого
гироскопа от соответствующей оси визирной системы координат в
проекциях на координатные плоскости.
Для чего рассмотрим рис. 10.1. Здесь обозначено: ОХВ, OYB,
OZB - оси визирной системы координат; i, j, k - оси
чувствительности гироскопов БИНС. При повороте по тангажу
(вращение относительно оси OZB) с удержанием нулевыми
значений угловых скоростей по каналам крена и рыскания
фактическое вращение КА будет происходить вокруг вектора шт,
ортогонального плоскости осей чувствительности гироскопов i и j и
медленно изменяющего своё положение в пространстве в связи с
наличием погрешностей.
Принимая неизменным направление вектора шт в
пространстве, направим вдоль него вектор конечного поворота КА
0Т за время поворота по тангажу. Если по результатам измерений,
выполненных звёздными датчиками до и после поворота,
определить направление вектора конечного поворота Qr в осях
417
визирной системы координат, то, тем самым, будет определено в
координатных плоскостях этой системы отсчёта положение осей
чувствительности гироскопов j и к, ортогональных вектору QT.
Это означает, что по результатам плоского поворота по тангажу
определяются истинные значения в визирной системе координат
двух отклонений: Дкт, д^.
Аналогично при плоском повороте по крену определяются
отклонения Дтк, дРК, а при плоском повороте по рысканию -
отклонения Дтр, Д^.
Таким образом, по результатам трёх пар плоских поворотов
определяются все шесть неизвестных отклонений осей
чувствительности гироскопов от соответствующих осей визирной
системы координат.
Приведенные примеры калибровочных режимов не
претендуют на оптимальность. Они призваны показать полную
наблюдаемость шести неизвестных параметров бесплатформенной
инерциальной навигационной системы и шести отклонений осей
чувствительности гироскопов по показаниям БИНС и звёздных
датчиков.
Вместе с тем, с целью сокращения затрат времени на
проведение калибровочных плоских поворотов целесообразно
поставить задачу разработки метода определения рассмотренных
инструментальных погрешностей путём статистической обработки
избыточного объёма информации, которая циркулирует в контуре
управления угловым движением КА в процессе его целевого
применения.
На точность определения рассмотренных параметров влияют
процессы разгона до заданной угловой скорости и процессы
торможения движения КА. Для уменьшения влияния этих
процессов необходимо уменьшать их продолжительность и
увеличивать длительность интервала времени плоского вращения.
При этом наиболее эффективными являются плоские повороты на
углы, не кратные числу л.
В процессе эксплуатации КА разработки ГНП РКЦ «ЦСКБ-
Прогресс уже в течение многих лет успешно реализуются
необходимые калибровочные режимы.
418
10.2. Методы и средства высокоточной ориентации линии
визирования наземного ориентира
10.2.1. Метод полётного фотограмметрического
калибрования оптико-электронного телескопического
комплекса
Погрешности в определении координат точек псевдокадра,
формируемого при сканерной съёмке, возникают не только в связи
с наличием погрешностей функционирования бортового комплекса
управления КА и оптико-электронного телескопического
комплекса, что было предметом исследований в параграфе 5.2. Не
менее значительными по уровням являются погрешности,
связанные с отличием параметров реального объектива ОЭТК от
его проектных параметров и приводящие к неадекватному
отображению истинного предметного пространства к пространству
изображений. Эти параметры называются элементами внутреннего
ориентирования (ЭВНО) ОЭТК.
Элементы внутреннего ориентирования обусловлены
погрешностями изготовления, сборки и юстировки объектива
оптико-электронного телескопического комплекса, проводимых с
помощью наземного проверочно-испытательного оборудования, а
также возмущениями, возникающими на этапе выведения КА на
орбиту и последующего функционирования ОЭТК в условиях
космического пространства.
Важнейшими среди элементов внутреннего ориентирования
ОЭТК являются фотограмметрические параметры.
К фотограмметрическим параметрам относятся:
- отклонение главной точки изображения от центра фокальной
плоскости;
- дисторсия объектива;
- неточность знания фокусного расстояния объектива.
К элементам внутреннего ориентирования ОЭТК также
относятся линейное и угловое смещения каждой матрицы
фоточувствительных приборов с зарядовой связью в фокальной
плоскости объектива.
Дадим геометрическую интерпретацию этим параметрам. С
этой целью введем две системы координат.
Определим визирную систему координат OXBYBZB, связанную
с конструкцией объектива ОЭТК. Начало системы координат
419
(точка Ов) системы лежит на линии, проходящей через центры
базовых фиксирующих пальцев, используемых для установки
центрального оптико-электронного преобразователя (ОЭП), на
равном расстоянии от этих центров. Ось ОВХВ ортогональна задней
плоской стороне главного зеркала и направлена в сторону
вторичного зеркала объектива. Оси OBYB и OBZB образуют с осью
ОВХВ правую ортогональную систему координат, причём ось OBZB
направлена вдоль линии, проходящей через центры базовых
фиксирующих пальцев, а ось OBYB при съёмке «в надир»
направлена в сторону, противоположную направлению движения
оптического изображения.
Приборной системой координат, связанной с
фоточувствительными приборами оптико-электронного
преобразователя (ОЭП), назовём систему, центр которой лежит в
фокальной плоскости, а оси ох и оу должны быть параллельны
соответственно осям (-OBZB) и (-OBYB) визирной системы координат
телескопа.
Визирной осью телескопа называется прямая, которая
проходит через центр входного зрачка объектива и центр
изображения точечного источника излучения, расположенного в
пространстве предметов на оси ОВХВ визирной системы координат
и удаленного в бесконечность.
Пересечение визирной оси с фокальной плоскостью
называется главной точкой изображения. Обозначим её буквой А
(рис. 10.2).
Главная точка изображения является также проекцией задней
узловой точки объектива на фокальную плоскость. В общем случае
в силу ряда причин конструктивного характера главная точка
изображения А не совпадает с центром приборной системы
координат ОЭТК (точкой о).
Другим отличием параметров реального объектива от
проектных является наличие оптической дисторсии объектива, то
есть смещение точки изображения относительно ее расчётного
положения в меридианальном (относительно главной точки
изображения) и тангенциальном направлениях. Как показывают
результаты наземной фотограмметрической калибровки оптико-
электронного телескопического комплекса с оптической схемой
объектива, выполненной по типу Ричи - Кретьена, в таких оптико-
электронных приборах практически отсутствует тангенциальная
420
дисторсия. Однако такие приборы имеют значительные
меридианалные дисторсии, симметричные относительно главной
точки изображения.
Известно [15], что такая дисторсия достаточно точно
аппроксимируется полиномом нечетных степеней (с третьей по
седьмую включительно) радиальной координаты г,, отсчитываемой
от главной точки изображения:
P(ri)=a3r,3 +а5Г,5 +а7Г,7- (10-7)
Неточность знания фокусного расстояния объектива приводит
также к меридианальному смещению точки изображения,
пропорциональному первой степени радиальной координаты г/.
Дг^ад,. (10.8)
Вслед за авторами работы [15] перечисленные выше
параметры внутреннего ориентирования оптико-электронного
телескопического комплекса будем называть параметрами
обобщенной дисторсии.
С целью повышения точности определения элементов
внутреннего ориентирования необходимо дополнительно
оценивать и учитывать для каждой матрицы ФПЗС, входящей в
оптикоэлектронный преобразователь (ОЭП), её смещения от
заданного положения. Такими смещениями являются: две
координаты смещения её центра и угол поворота в фокальной
плоскости. Итого для каждой матрицы необходимо дополнительно
оценивать три параметра.
В работах [15, 61, 64, 91] доказана возможность
фотограмметрической калибровки фотокамер и оптико -
электронной аппаратуры наблюдения по результатам сканирования
звёздного неба. Звёздное небо представляет собой идеальную по
точности естественную систему калибрования оптических средств.
В цитируемых работах решается задача определения только
радиальной и тангенциальной дисторсии по результатам
сканирования телескопом ОЭТК звёздного неба. Задача решается с
привлечением информации об изменении ориентации осей КА,
получаемой от звёздных датчиков. При этом параметры
обобщенной дисторсии определяются в результате применения
процедуры статистической обработки невязок между фактическими
и расчетными координатами звёзд на псевдокадре.
В настоящей монографии решается задача определения
фотограмметрических параметров ОЭТК. содержащихся в
421
оптической схеме двухзеркального объектива типа Ричи-Кретьена,
а также параметров смещения матриц. Приводится геометрическая
интерпретация всех этих параметров. При этом предполагается, что
сканирование звёздного неба осуществляется вращением с
постоянной малой угловой скоростью вокруг поперечной оси (-
OBZ3) телескопа ОЭТК (рис. 10.2).
В качестве чувствительных элементов оптико-электронного
преобразователя световой энергии в электрическую энергию в
ОЭТК, как уже было отмечено, используется линейка матриц
фоточувствительных приборов с зарядовой связью (см. параграф
9.2). Матрицы работают в режиме временной задержки и
накопления. Они расположены в фокальной плоскости объектива
ОЭТК по технологическим соображениям в «шахматном» порядке
в два ряда и входят в состав оптико-электронного преобразователя
(ОЭП). В общем случае рассматривается нецентральный оптико-
электронный преобразователь, смещённый относительно начала
системы координат oxyz в продольном направлении оси ох. На рис.
10.2 матрицы фоточувствительных приборов с зарядовой связью
(ФПЗС) обозначены пунктиром, а их считывающие регистры - в
виде жирных отрезков.
За один такт работы матриц ФПЗС с выхода каждой из них (с
выходов считывающих регистров) снимается часть строки
изображения звёздного неба. Ширина этих строк равна размеру dy
пикселя по оси оу, длина каждой из них - размеру m dx, где m -
количество пикселей в строке матрицы, dx - размер пикселя по оси
ох. Как правило, справедливо равенство dx=dy.
Предполагается, что положение визирной системы координат
ОЭТК OXBYBZB в предметном (инерциальном) пространстве в
каждый момент времени известно с высокой точностью. Это
условие может быть выполнено при использовании
интегрированных с оптико-электронным телескопическим
комплексом высокоточных звёздных датчиков ориентации и
прошедших полётную калибровку гироскопических приборов в
сочетании с высокоточной системой управления движением КА.
Поставленная задача определения параметров внутреннего
ориентирования оптико-электронного телескопического комплекса
по результатам сканирования звёздного неба может быть решена
тремя последовательными шагами.
422
На первом шаге на полученном в результате сканирования
псевдокадре производится обнаружение и опознание реально
экспонированных звёзд (с учётом их яркости), определяются их
линейные координаты Xj, у,, а также, при необходимости,
производится отбраковка ложных звёзд. Фиксируются моменты
экспонирования звёзд. При этом координата х; определяются по
номеру матрицы ФПЗС, номеру столбца этой матрицы с
экспонированной i-й звездой, линейному размеру пикселя dx.
Координата yj определяется положением считывающего регистра
матрицы ФПЗС с экспонированной звездой в системе отсчёта oxyz
с учётом её смещения и разворота.
На втором шаге по результатам измерений гироскопических
приборов, звёздных датчиков и измеренных оптико-электронным
телескопическим комплексом координат опознанных звёзд
восстанавливаются конструктивные углы между оптическими
осями звёздных датчиков и осью ОВХВ ОЭТК. С учётом этих
данных определяется истинное угловое движение КА в
инерциальном (абсолютном) пространстве и в соответствии с этим
движением определяются расчётные (ожидаемые) линейные
координаты х,., у, экспонированных звёзд на моменты времени их
экспонирования.
На третьем шаге решается основная задача определения
параметров внутреннего ориентирования оптико-электронного
телескопического комплекса методом статистической обработки
разностей между измеренными и расчетными линейными
координатами экспонированных на псевдокадре звёзд.
Рассмотрим алгоритм решение этой задачи на третьем шаге
[91].
Пусть S, (i = 1,2,...,п) - i-тая экспонированная на каком-либо
такте съёма видеоинформации с ОЭП и опознанная звезда
(рис. 10.2). Тогда
Ч=Г~П - (10-9)
измеренный на псевдокадре вектор направления на неё из начала
координат oxyz. В соответствии с рис. 10.2 вектор можно
представить в виде следующей суммы векторов:
Дг0 +г, + Дгн +Afj2 +п; = q. (10.10)
423
фотограмметрических параметров системы приёма и
преобразования информации
Здесь:
(10.11)
- вектор
л-
ДГО=1 л-
1До0 J
определяет положение главной точки изображения (ГТИ) А
объектива ОЭТК;
- вектор
(10.12)
определяет расчётное положение относительно ГТИ i-ой
экспонированной звезды S; (в этой точке находилась бы i-ая
звезда, если бы все другие фотограмметрические параметры, за
исключением Дг0, были равны нулю);
- вектор Дгп есть сумма двух векторов, отсчитываемых в
меридианальном (по вектору rj) направлении:
Дги =a]fi +(a3rj2+a5r^+a7r^)ri (10.13)
424
Первый вектор в выражении (10.13) учитывает отклонение
фотограмметрического фокусного расстояния от его паспортного
значения f, а второй - меридианальную фотограмметрическую
дисторсию, которая аппроксимируется полиномом нечётных
степеней радиальной координаты г,, отсчитываемой от ГТИ
(аиа3,а5,а7 — неизвестные малые величины, г, - модуль вектора
Г,). При этом для оптической схемы ОЭТК типа Ричи - Кретьена
тангенциальная составляющая фотограмметрической дисторсии
принята равной нулю;
- вектор Дг12 учитывает наличие малых линейных смещений
Axj и Ду,, а также наличие малого угла поворота Ду, в
плоскости оху i-той матрицы ФПЗС. В силу малости параметров
для него справедливо приближённое представление:
ДЙ2 =
Ах;
Ду; + X, • Ду;
(10.14)
где X, - координата звезды вдоль считывающего регистра i-той
матрицы ФПЗС (оси ох), отсчитываемая относительно центра
матрицы;
-вектор д-вектор случайных ошибок измерений.
Рассмотрим задачу оценивания искомых параметров
применительно к КА «Ресурс-П», оптико-электронный
преобразователь которого содержит 36 матриц ФПЗС. Для этого
КА’ задача состоит в определении шести фотограмметрических
параметров Дх0, Ду0,а],аз,а5,а7 и ста восьми (36x3=108)
параметров смещения матриц. Таким образом, для этого КА оценке
подлежит расширенный вектор состояния, содержащий 114
параметров:
ДЧ = [Дхо,Дуо,а1,аз,а5,а7,Дх1,Ду1,Дч'1,...,Дх;,Ду1,Ду|,...,Дхзб,Дузб,Дузб1Г ,(Ю15)
где Т - операция транспонирования.
Применение метода наименьших квадратов в этом случае
сопряжено с большой длительностью вычислительного процесса,
связанного с необходимостью обращать матрицу нормальных
уравнений размерности 114x114.
В этом случае целесообразно воспользоваться
модифицированным алгоритмом фильтра Калмана (см. параграф
6.7).
Перенесём из левой части (10.10) в правую часть вектор г,
425
(1 0.12). Тогда в правой части получим невязку-разность между
измеренным и расчётным векторами направления на звезду S,:
Дг0 + Дг- j + ДТ|2 + T|j - д5|, (10.16)
Представим левую часть (10.16) приближённо в виде
линейной функции искомого вектора Дд:
ДО,
х;-х;
7i - У1
— Wj • Aq =
w,T
•Дч,
(10.17)
Ч
Здесь Wj - матрица размерности 2x114, wJh wj - матрицы -
строки размерности 1x114.
Из (10.17) следует, что невязка Д5, определяется значениями
параметров оцениваемого вектора Aq и при нулевых значениях
этих параметров равна нулю с точностью до случайных
погрешностей измерений.
Элементы сток матрицы производных Wj являются
функциями координат i - той звезды:
___'Р 7 4 А
W? = Юхгхг ХГ XW| W[ W[ ,...,W[ W[ W[ ,,..,W[ Wj W[ ,
i 1 2 3 i| i2 i3 36^ 36j
wJ = 01 у r^y r^y r^y w? W1 W1 W->. Wt. ,..,W2„, W-) W-)
2i |_ 4 2 3 ij S 213 236j 2362 2363
(10.18)
При этом в силу функциональной зависимости результатов
измерений координат звёзд от смещения матриц в общем случае
имеют место следующие соотношения:
wj ,=,...,= w>. =,...,= Wk, =l;wi =,..., = w. =,..., = W, =0;
4 *4 136] *2 *12 *362
W| =,...,= W|. =,...,= w. = 0; w2 ,=,...,= w2. =,...,= w2,, =0;
*3 *13 Ч63 Z1 z4 z36[
w2 =,...,= w2. =,...,= w2,, =1;
z2 xi2 z362
w23 = M;-;w2i3 =^-i;-;w2363 =^зб*
где
Xi (i = 1,2,...,3б)-координата звезды вдоль считывающего
регистра i - той матрицы ФПЗС, которая зарегистрировала звезду.
Координата отсчитывается относительно центра матрицы;
ri =(xi2 + yi2)2-
426
Модифицированный алгоритм метода Калмана сводится к
следующей последовательности вычислений на каждом j-том
(j=l,2,...,N) шаге:
Mk,j = Mk,j-l + ^к,j ’ (А®к,j - j • Aqk> j_j j
^k,j _ Kq j-1
J Wk^j' Kq>kj_] • Wkj + o2 ’
(10.19)
Kq,k,j — Kqjk,j-1 ' ^k,j Kq,k,j-1-
Здесь
Pkj -оптимальный весовой вектор;
Д0кj -скалярный элемент вектора A0k j -одно из отклонений
координат i - той звезды (при к=1 обрабатывается отклонение по
оси х, при к=2 - отклонение по оси у);
Wkj -соответствующая элементу A0k j строка матрицы Wkj;
Kq,k,j_ корреляционная матрица погрешностей оценок,
уточняемая на каждом шаге работы фильтра;
2 ~
ст -дисперсия погрешностей измерении невязок координат
звёзд на изображении звёздного неба.
Таким образом, на каждом шаге вычислений по приведенным
соотношениям расчёты производятся дважды: первый раз при
обработке координаты х звезды, второй раз - при обработке
координаты у. Благодаря тому, что обработке подвергается
скалярная величина, исключается необходимость применять
операцию обращения матрицы.
Общее число шагов равно суммарному количеству звёзд,
зарегистрированных матрицами ФПЗС (с учётом перекрытий
матриц).
Если звезда окажется на перекрытии соседней матрицы, то она
также обрабатывается с учётом необходимых уточнений элементов
Wj этой соседней матрицы).
Поскольку звезда может быть зарегистрирована какой-то
конкретной i - той матрицей ФПЗС, то при обработке результатов
измерений координат этой звезды необходимо обнулять элементы
матрицы W;, определяющие влияние смещений всех других матриц
на результаты измерений.
427
В качестве начального значения оцениваемого вектора
состояния Aq можно принимать нулевой вектор. Начальное
значение корреляционной матрицы погрешностей оценок
принимается в виде диагональной матрицы, диагональные
элементы которой равны дисперсиям погрешностей, с которыми
известны параметры вектора состояния Aq.
10.2.2. Привязка осей звёздного датчика к осям
визирной системы координат ОЭТК
Описанные в предыдущих параграфах этой главы звёздные
датчики типа БОКЗ обладают прецизионной точностью
определения ориентации их внутренних осей в инерциальной
системе координат. Вместе с тем для определения угловых
элементов внешнего ориентирования линии визирования наземного
ориентира необходимо измерить его угловое положение.
При изложении приведенного в предыдущем параграфе
материала предполагалось, что определение ориентации визирных
осей ОЭТК в инерциальном пространстве с использованием
звёздных датчиков выполняется весьма точно. К этому есть
определённые предпосылки. Как уже упоминалось в предыдущем
параграфе, звёздные датчики в режиме инерциальной ориентации
КА имеют высокую точность определения ориентации своих осей в
инерциальном пространстве (Зо=2") [1, 24]. Однако, определение
положения осей самого звёздного датчика по отношению к осям
визирной системы координат (так называемая привязка осей) с
целью определения угловых элементов внешнего ориентирования в
инерциальном пространстве оптической оси телескопа до
настоящего времени представляет собой всё ещё достаточно
трудную задачу, которую разработчики КА ДЗЗ решают совместно
с разработчиками звёздных датчиков.
Рассмотрим некоторые из этих решений.
Как известно (см. параграф 9.3), на основание корпуса
звёздного датчика типа БОКЗ устанавливают оптический кубик,
который позволяет определять положение приборной системы
координат датчика в системе координат ОЭТК. Однако
использовать эту возможность достаточно сложно, если учесть
пространственное размещение на КА самих звёздных датчиков.
Одним из содержательных способов обеспечения привязки
оптической оси звёздного датчика к осям визирной системы
428
координат является применение в составе звёздного датчика
системы фиксации положения оси звёздного датчика разработки
ЦКБ «Пеленг» г. Минск [46].
Эта система (рис. 10.3) состоит из источников излучения
(основного 1 и резервного 2), сопряженных с помощью
светоделительного кубика 3 и установленных вблизи фокальной
плоскости звёздного датчика. Фокусирующая линза 4 переносит
уменьшенное изображение включённого источника в фокальную
плоскость на ПЗС - матрицу звёздного датчика. Излучение
источника, сколлимированное объективом 5, отклоняется клиньями
6 параллельно оптической оси звёздного датчика. Триппель-
призмы 7 и 8, работающие по принципу триэдра, обладают
свойством отклонять падающий на них пучок лучей строго на 180°
и смещать его параллельно самому себе. Призма 7 используется для
выведения пучка света из объектива, а призма 8 - для введения в
объектив.
Светоделительная призма 9 представляет собою склейку двух
призм, одна из которых является ромбической. Плоскость склейки
является полупрозрачным зеркалом, делящим падающий пучок
света на проходящий и отражённый с равными интенсивностями.
Посредством триппель-призмы 7 пучок света, попадающий в
канал системы фиксации положения оси (СФПО), выводится за
край входного зрачка объектива и отклоняется в обратном
направлении параллельно оптической оси объектива. Далее пучок
проходит через ромбическую призму светоделительной призмы 9,
после двукратного отражения в которой без отклонения по
направлению попадает на отражательный (контрольный) элемент
10, установленный в прямой видимости позади объектива.
Отражательный элемент 10, установленный на
автоколлимацию, возвращает отражённый пучок света назад по
тому же направлению. При повороте отражательного элемента на
некоторый угол вокруг оси, перпендикулярной нормали к
плоскости зеркала, отражённый от зеркала пучок отклоняется на
удвоенный угол. При этом отражённый от зеркала пучок, несущий
информацию об угле отклонения зеркала, проходит без смещения
светоделительную призму 9 и вводится в объектив звёздного
датчика с помощью триппель - призмы 8. При этом пучок проходит
мимо преломляющих клиньев и фокусируется на
фоточувствительной поверхности матрицы ПЗС.
429
Рис. 10.3. Схема системы фиксации положения оси
Все элементы канала системы фиксации положения оси, кроме
отражательного элемента 10, при поворотах и смещениях не
меняют положения изображения пучка в фокальной плоскости.
Повороты отражательного элемента 10 вызывают удвоенное
смещение положения измерительной точки (за счёт
автоколлимации) относительно центра матрицы ПЗС.
На основе звёздных датчиков, снабжённых системой
фиксации положения оси, предложено и запатентовано два
варианта устройств для определения угловых элементов внешнего
ориентирования осей визирной системы координат ОЭТК [98, 99].
Схема одного из них разработана для случая применения
430
ОЭТК с зеркалом перенацеливания и сканирования и представлена
на рис. 10.4. Устройство содержит корпус 1, установленные на нём
три оптико-электронных звёздных датчика 2 с разнесёнными в
пространстве направлениями оптических осей, в состав которых
входит система фиксации положения оси 3, и зеркало
перенацеливания и сканирования 4 ОЭТК 5, зеркальная плоскость 6
которого взаимодействует с пучком света, направленного
параллельно оптическим осям измерительных каналов 7 системы
фиксации положения оси 3. При этом зеркало перенацеливания и
сканирования 4 установлено с возможностью вращения вокруг двух
своих осей в пределах углов взаимодействия.
Устройство работает следующим образом. Система фиксации
положения оси 3 каждого из звёздных датчиков 2 до начала режима
съёмки испускает пучок света по оптической оси измерительного
канала 7, параллельной оптической оси звёздного датчика 2. Пучок
света попадает на зеркальную плоскость 6 зеркала перенацеливания
и сканирования 4, повёрнутого в двухстепенном кардановом
подвесе в такое положение, чтобы последовательно во времени
обеспечить режим автоколлимации каждого звёздного датчика 2.
Пучок света, отражаясь от зеркала перенацеливания и
сканирования 4, возвращается в систему фиксации положения оси
3,обеспечивая поочерёдно для каждого звёздного датчика 2
измерение взаимного положения его оптической оси и нормали к
зеркальной плоскости 6 зеркала перенацеливания и сканирования 4,
а также измерение положения ЗПС 4 в режиме автоколлимации
относительно базовой плоскости, определяемой исходным
положением ЗПС. Положение базовой плоскости при этом
определяется в режиме автоколлимации по отношению к пучкам
света, испускаемым источниками, установленными в фокальной
плоскости ОЭТК.
Недостатком рассмотренных вариантов привязки является
наличие системы фиксации положения оси у звёздного датчика.
Это существенно усложняет схему звёздного датчика и требует
специальной световой защиты оптических каналов системы
фиксации положения оси от внешних источников света.
Наиболее эффективным методом привязки осей звёздного
датчика к визирным осям ОЭТК является реализация режима
работы звёздных датчиков одновременно со съёмкой звёздного
неба оптико - электронным телескопическим комплексом для
431
определения его параметров внутреннего ориентирования,
изложенного в предыдущем пункте. Этот режим получил название
режима астроконтроля согласования осей (АКСО).
Рис. 10.4. Схема устройства для определения угловых
элементов внешнего ориентирования осей визирной
системы координат ОЭТК при использовании зеркала
В результате реализации этого режима определяются не
только параметры внутреннего ориентирования оптико-
электронного телескопического комплекса, но и ориентация в
инерциальном пространстве его визирных осей и приборных осей
звёздных датчиков, связанных с их оптическими осями.
В результате статистической обработки всей совокупности
полученной информации определяется положение осей каждого
звёздного датчика в визирных осях оптико-электронного
телескопического комплекса. При этом, естественно, с большей
432
точностью определяется направление оптической оси звёздного
датчика.
Частота проведения режима астроконтроля согласования осей
определяется стабильностью конструкции КА, оптико-
электронного телескопического комплекса и звёздных датчиков,
зависящей от температурной стабильности названных элементов и
конструкции КА.
10.2.3. Привязка осей передатчика лазерного
дальномера к осям визирной системы координат ОЭТК
Ещё одной важной задачей обеспечения точности системы
навигации по протяжённым наземным ориентирам является анализ
возможных схем построения лазерного дальномера и разработка на
его основе принципов построения прибора, измеряющего с
высокой точностью дальность и угловые элементы внешнего
ориентирования направления излучения передатчика лазерного
дальномера при больших углах визирования и дальностях до 1,5
тыс. км и более.
Как известно [71], лазерные дальномеры находят широкое
применение в топографических оптико-электронных комплексах,
предназначенных для получения снимков земной поверхности с
целью создания топографических карт. Получаемые снимки при
наличии информации о параметрах движения центра масс КА, об
угловых элементах внешнего ориентирования линии визирования, а
также измеренных значений дальности лазерным дальномером
позволяют уточнять планово - высотную основу существующей
государственной геодезической сети.
Лазерный дальномер измеряет дальность до поверхности
Земли путём определения времени между зондирующим и
отражённым импульсами. Зондирующие импульсы имеют
наносекундную продолжительность.
Лазерный дальномер строится по принципу разнесения
передающей и приёмной частей [57].
Передатчик лазерного дальномера включает' передающую
оптическую систему, которая предназначена для коллимации
излучения твёрдотельного лазера. Приёмник лазерного дальномера
также содержит оптическую систему, которая предназначена для
приёма отражённого сигнала и передачи его на фотоприёмное
устройство с целью фиксации момента времени его поступления.
433
Для контроля угловых отклонений оси передатчика лазерного
дальномера от своего номинального положения используется
призменное устройство отвода энергии, построенное по принципу
триэдра (триппель-призмы) системы фиксации положения оси
звёздного датчика (см. параграф 10.2). Входная часть устройства
отвода энергии вводится в телесный угол передатчика лазерного
дальномера (ЛД) для отбора части энергии зондирующего
импульса, а его выходная часть вводится в оптическую систему
ОЭТК под заданным углом к продольной оси визирной системы
координат, изменение значения которого в процессе эксплуатации
зависит только от изменения положения оси передатчика лазерного
дальномера (рис. 10.5). Далее объектив ОЭТК фокусирует
введённый в него параллельный пучок излучения передатчика
лазерного дальномера и формирует точечное изображение в
заданной части своей фокальной плоскости.
Рис. 10.5. Схема интегрирования блоков ЛД с ОЭТК
434
Для приёма отведённой части энергии в заданной части
фокальной плоскости ОЭТК устанавливается устройство
регистрации направления излучения типа ПЗС - матрицы, которое
позволяет определять отклонение оси передатчика лазерного
дальномера от его номинального положения в визирной системе
координат. Отклонение оси передатчика лазерного дальномера
определяется по отклонению координат энергетического центра
точечного изображения, сформированного объективом ОЭТК от
его номинального положения, определённого при юстировке. В
результате этого достигается высокая точность регистрации
направления излучения лазерного дальномера (предельная
погрешность измерений составляет единицы угловых секунд).
Таким образом, система контроля угловых отклонений
направления излучения передатчика лазерного дальномера
относительно его номинального положения становится одной из
служебных систем ОЭТК.
Приёмник ЛД с фотоприёмным устройством устанавливается
также на силовом элементе ОЭТК на внешней стороне его корпуса
(рис. 10.5). Остальные блоки лазерного дальномера
устанавливаются в приборном отсеке ОЭТК.
Рассмотренная схема может найти применение и для решения
задачи автономной навигации. Однако в данном случае при
больших углах визирования и при больших дальностях до
ориентира пятно облучения на поверхности Земли от пересечения с
нею зондирующего лазерного луча оказывается вытянутым в
направлении плоскости визирования. Поэтому отражённый
импульс оказывается достаточно слабым по мощности и
растянутым во времени. В результате этого снижается точность
измерения дальности до наземного ориентира и ухудшается
энергетика приёмного канала бортового прибора.
На основании исследований, проведенных в работе [57],
предложен вариант дальнейшего интегрирования лазерного
дальномера с ОЭТК, а именно: предложено использовать
оптическую систему объектива ОЭТК в качестве приёмной
антенны приёмника лазерного дальномера. Для реализации этого
варианта предложено разместить в фокальной плоскости объектива
ОЭТК фотоприёмное устройство лазерного дальномера.
Оптимистические результаты проведенных исследований
показывают возможность измерения наклонной дальности с
435
использованием предложенной схемы построения лазерного
дальномера. Средняя квадратическая погрешность измерений при
этом составляет менее 10 м.
10.3. Аналитическое оценивание показателей точности
системы
В настоящей монографии основное предпочтение отдается
аналитическому методу исследования систем автономной
навигации космических аппаратов. Этот метод применён и при
анализе точности системы с использованием протяжённых
наземных ориентиров.
Как известно (см. главу 3), численные методы позволяют в
максимальной степени учесть все реальные возмущения, влияющие
на решение навигационной задачи. В этом их несомненное
достоинство.
Однако результат численного расчета справедлив для одного
конкретно рассматриваемого случая. Чтобы выявить общие
закономерности решения задачи, требуется произвести большое
количество вариантов расчета с последующим анализом
полученных результатов.
Аналитические оценки точности, о чем неоднократно
упоминается в основополагающей работе [102], «в результате
упрощающих допущений хотя и приводят реальную задачу к
некоторой идеализированной, однако позволяют получить первое
приближение решения в весьма наглядном виде и вскрыть общие
закономерности, которые ведут к подлинному пониманию природы
явлений».
Метод аналитического оценивания показателей точности
системы навигации, разработанный научной школой под
руководством профессора Л.Ф.Порфирьева и изложенный в разделе
3.6, привлекает внимание исследователей [37, 38] благодаря
возможности выявлять общие закономерности процесса
оценивания точности решения навигационной задачи, несмотря на
существенные упрощения, используемые при его применении.
Для применения метода аналитического оценивания точности
системы автономной навигации с использованием протяжённых
наземных ориентиров используется следующая упрощенная
постановка задачи исследования:
• движение КА происходит в центральном поле сил по
436
околокруговой орбите, с которой связана неподвижная система
координат OXYZ;
• оси ОХ и OY этой системы лежат в плоскости орбиты;
• началом отсчета времени является момент прохождения КА
оси ОХ;
• сеансы навигационных измерений происходят с постоянным
интервалом изменения орбитального угла и, отсчитываемого в
плоскости орбиты от начальной точки, и равным Дц=—, где N -
N
количество сеансов навигационных измерений, проводимых в
течение интервала времени, который соответствует углу поворота
и=л\ Принимается, что для съёмок доступна освещенная Солнцем
поверхность Земли на максимальном интервале, равном половине
витка. При уменьшении интервала навигационных измерений
количество сеансов N пропорционально уменьшается;
• сеансы навигационных измерений проводятся относительно
протяжённых наземных ориентиров, одинаковым образом
расположенным по отношению к КА в течение всего интервала
навигационных измерений: дальность D и угловое положение у
одинаковы для всех используемых наземных ориентиров;
• погрешности измерений дальности D и углового положения
у являются случайными некоррелированными между собой
величинами с нулевым математическим ожиданием и дисперсиями
a*, aj соответственно;
• измерениям дальности до протяжённого наземного
ориентира и его углового положения соответствует весовая
матрица Р погрешностей которая имеет диагональный вид, а её
диагональные элементы обратны дисперсиям погрешностей
измерений дальности и угла, т. е.
(10.20)
• задана постоянная угловая скорость орбитального движения
Q КА по орбите;
• показателями точности системы навигации являются
дисперсии погрешностей определения параметров движения центра
масс КА;
437
• для оценивания показателей точности системы навигации
используется метод наименьших квадратов.
В соответствии с этими положениями задача аналитического
оценивания точности системы автономной навигации сводится к
определению матрицы С(и) нормальных уравнений, записанных в
интегральной форме:
C(u)=— J[W(u,y)B(u,u0)]T P [W(u,Y)B(u,u0)]du, (10.21)
u J
где W(u,y) -градиентная матрица, B(u,u0) - матрица
баллистических производных. В результате аналитического
обращения матрицы С(и) находится корреляционная матрица
погрешностей оценок
K?(u)=C'(u), (10.22)
диагональные элементы которой являются искомыми
дисперсиями погрешностей оценивания параметров движения
центра масс КА.
1 0.3.1. Декомпозиция системы навигации с пользованием
протяжённых наземных ориентиров
Для решения задачи навигации по протяженным наземным
ориентирам в качестве первичных навигационных параметров,
подвергаемых обработке на борту КА, предлагается использовать
измеренные значения четырёх параметров: высоты полёта,
дальности до наземного ориентира и двух углов, определяющих
направление на этот ориентир с борта КА в инерциальном
пространстве. Каждый из этих параметров, в свою очередь,
определяется по результатам измерений ряда других параметров.
В такой постановке определение шести параметров движения
центра масс КА по результатам измерений четырёх первичных
навигационных параметров является достаточно сложной задачей
как для реализации алгоритма фильтра Калмана в бортовом
спецвычислителе, так и для решения задачи аналитической оценки
точности автономной системы.
Учитывая прецизионную точность системы, предложено
упростить алгоритм решения задачи и использовать подход,
который рассмотрен при декомпозиции астрорадиотехнической
системы автономной навигации (см. п. 6.7.2). В основе этого
подхода лежит процедура декомпозиции задачи навигации КА на
две подзадачи: подзадачу оценивания четырёх внутриплоскостных
438
параметров движения центра масс КА и подзадачу оценивания двух
внеплоскостных параметров.
Для декомпозиции задачи в пространстве измерений
предложено от измерений относительно реального наземного
ориентира перейти к измерениям по отношению к двум
псевдоориентирам, первый из которых является проекцией
истинного ориентира на плоскость опорной орбиты КА, второй -
на ортогональную к ней плоскость, проходящую через местную
вертикаль опорной орбиты.
Одновременно предложено перейти от измерений углов
между направлениями на псевдоориентиры и реальные звёзды к
измерениям углов между направлениями на псевдоориентиры и
псевдозвёзды. При этом первая псевдозвезда лежит по
направлению трансверсали опорной орбиты (в сторону полёта КА),
вторая - по направлению бинормали опорной орбиты.
В этом случае в состав первичных навигационных параметров
первой подзадачи входят, кроме высоты полёта, дальность до
первого псевдоориентира, лежащего в плоскости опорной орбиты,
и угловое положение этого псевдоориентира относительно первой
псевдозвезды. В состав первичных навигационных параметров
второй подзадачи входят дальность до второго псевдоориентира и
его угловое положение относительно второй псевдозвезды.
Задача обработки результатов измерений высоты полёта
решается отдельно, поскольку измерения высоты полёта КА над
морской поверхностью, как правило, не совпадают по времени с
другими навигационными измерениями.
В соответствии с принятыми допущениями, задача
автономной навигации КА по протяжённым наземным ориентирам
решается по результатам бортовых измерений и статистической
обработки в общем случае четырех параметров:
высоты полета Н над уровнем Мирового океана;
дальности D до протяжённого наземного ориентира;
двух углов е, и е2 между направлениями линий визирования
двух звёзд и протяжённого наземного ориентира.
При проведении аналитических исследований точности
движение КА целесообразно рассматривать (рис. 10.6) в
неподвижной системе координат OXYZ, оси ОХ и OY которой
совмещены с плоскостью опорной орбиты так, что ось ОХ
направлена по радиусу - вектору начального положения КА на
439
орбите (в перигее), ось OY направлена в сторону полета, а ось OZ
дополняет систему координат до правоориентированной. При этом
текущая орбитальная система координат обозначается Oxyz.
Рис. 10.6. Определение систем координат
Для решения задачи определения параметров (6.12) и (6.13),
характеризующих движение КА в плоскости его орбиты,
производится декомпозиция пространства измерений - вектора
навигационных измерений
§ = [н D Е] е2Г. (10.23)
В результате вектор (10.23) представляется в виде
совокупности двух векторов меньшей размерности.
Декомпозиция пространства измерений системы производится
аналогичным п. 6.7.2 способом. При этом параметр Н должен
входить в состав первого измеряемого вектора, поскольку по
результатам измерений высоты полёта оцениваются только
внутриплоскостные параметры движения КА (см. параграф 3.6).
Далее реперную точку протяжённого наземного ориентира,
координаты которой в текущей орбитальной системе координат
Oxyz, связанной с опорной орбитой, известны, обозначим через М.
Если априорно известный текущий радиус - вектор точки М из
центра масс Земли в координатах Oxyz имеет вид:
гм=[хм Ум zM]T, (10.24)
а текущий радиус - вектор центра масс КА в тех же координатах -
вид:
П<а=[хка ° (10.25)
то текущий вектор расчетной дальности в направлении от точки М
440
до центра масс КА будет равен
О = гкд-rM =[хКА-хм -ум - zM]т. (10.26)
Далее точа М (рис. 10.6) проектируется на плоскость опорной
орбиты и на плоскость, ортогональную плоскости опорной орбиты
и проходящую через местную вертикаль. Первая проекция
обозначается буквой М] и называется первым псевдоориентиром, а
вторая проекция - буквой М2 и называется вторым
псевдоориентиром.
Из (10.24), (10.25) и (10.26) следует, что с учетом близости
опорной и истинной орбит КА измеренная дальность до первого
псевдоориентира равна
DM1 = D -хм)2 + УМ J2 .., (j 0 27)
[(*ЁА - хм)2 +Ум +w
а измеренная дальность до второго псевдоориентира
соответственно равна
г J
I/* - \2 * Г
бМ2 = d- I>x^a~Xm) + ^Г f. (10.28)
[(хёА - хм )2 + УМ + 2м Г
Здесь D - измеренная лазерным дальномером дальность до
реперной точки протяжённого наземного ориентира.
Соответственно дальность до первого псевдоориентира DMI
включается в состав первого вектора навигационных измерений для
оценивания внутриплоскостных параметров движения (6.12), а
дальность до второго псевдоориентира DM2 - в состав второго
вектора для оценивания внеплоскостных параметров (6.13).
По предложенной методике выбираются псевдозведы и
производится переход от истинных измерений е,, е, углового
положения реперной точки протяжённого наземного ориентира
относительно визируемых звезд к псевдоизмерениям углов 71 и 72
между соответствующими направлениями на псевдоориентиры и
псевдозвезды.
Напомним, что по определению (6.17) первая псевдозвезда
расположена в плоскости опорной орбиты КА по оси Оу (в
направлении, близком к апексу орбиты), а вторая - по оси Oz (по
бинормали орбиты в направлении её полюса). Положение
441
псевдозвезд в каждый момент времени известно, поскольку
известны параметры опорной орбиты КА.
Используя введенные понятия псевдозвезд, нетрудно перейти
от истинных измерений е, и е, углового положения протяжённого
наземного ориентира к псевдоизмерениям - измерениям углового
положения псевдоориентира относительно двух псевдозвезд,
т.е. У] и у2 [92, 95].
Для этой цели вводится обозначение
$м~1*м Ум zm]t, (10.29)
измеренного единичного вектора (*м + Ум + -1),
направленного по линии «реперная точка М протяжённого
наземного ориентира - центр масс КА» от точки М к центру масс
КА в системе координат Oxyz. Для иллюстрации на рис. 10.7
приведены проекции истинных звезд S], S2 и псевдозвезд S1P,S2P на
единичную сферу, а также точка SM пересечения единичного
вектора % со сферой единичного радиуса.
Положение точки SM на единичной сфере определяется
измеренными углами е, и е2 по отношению к визируемым звездам
Si и S2 соответственно.
Компоненты единичного вектора определяются из трех
следующих очевидных равенств:
S/ • Sm =cos £р S? • SM = cose2; S„ • SM ~ 1. (10.30)
Последнее из этих равенств - приближенное и определяет
близость измеренного направления на реперную точку
протяжённого наземного ориентира и его расчетного направления
Sm, соответствующего опорной орбите. Записывая эти равенства в
матричной форме А 5^ = В, нетрудно получить выражение для
единичного вектора 5^ в форме SM = А 1 В:
sm =
хм
Ум
ZM
cose)
COSC2
1
(10.31)
Обратная матрица в правой части (10.31) существует, если
направление оптической оси объектива ОЭТК достаточно далеко
отстоит от плоскости, проходящей через оптические оси звёздных
442
датчиков, визирующих звезды, таким образом, что векторы
Si, S2, SM не лежат в одной плоскости.
После вычисления в соответствии с (10.31) вектора в явном
виде, можно найти его единичные проекции на плоскость опорной
орбиты
§М1 ~--------Г[Хм Ум 0]т (10.32)
(хм + Ум
и на плоскость, ортогональную плоскости опорной орбиты и
содержащую местную вертикаль опорной орбиты (ось Ох),
SM2 =--------f[xM 0 zM]T (10.33)
(хм+Ум)2
Проекции, определяемые выражениями (10.32) и (10.33),
назовём псевдоориентирами.
Рис 10.7. Схема угловых измерений системы на сфере единичного радиуса
В качестве новых навигационных измерений системы можно
принять углы у,, у2 между соответствующими направлениями на
псевдоориентиры и псевдозвезды, определяемые соотношениями:
cosy, = S1P; cosy2 = S^2-S2P; (10.34)
Первый из этих углов отсчитывается в плоскости опорной
443
орбиты, а второй - в ортогональной к ней плоскости, содержащей
местную вертикаль опорной орбиты.
В итоге искомые векторы измерений для оценивания
внутриплоскостных параметров движения КА принимают вид
§1=[н DM1 YiP, (10.35)
а для оценивания внеплоскостных параметров - следующий вид
©2=[бм2 ТгР- (10.36)
В результате исходная задача автономной навигации
(определения шести начальных параметров орбиты по дискретным
измерениям четырех величин) декомпозирована на две подзадачи:
определения четырех внутриплоскостных параметров орбиты (6.12)
по результатам измерений трех навигационных параметров (10.35)
и определения двух внеплоскостных параметров орбиты (6.13) по
результатам измерений двух навигационных параметров (10.36).
Градиентные матрицы при использовании
псевдоизмерений
Важными элементами, используемыми в процессе
статистической обработки навигационных измерений, являются
градиентные (называемые также навигационными) матрицы, то
есть матрицы частных производных от измеряемых величин по
текущим значениям уточняемых параметров движения КА.
Далее вычисляются элементы этих матриц, которые
обозначаются для декомпозированных задач соответственно через
W, и W2.
Применительно к астрорадиотехнической системе автономной
навигации матрица W( и скаляр W2 в системе координат OXYZ
полностью соответствуют матрицам, приведенным в параграфе 1.5.
Применительно к системе автономной навигации КА с
использованием протяжённых наземных ориентиров с учётом
результатов проведенной декомпозиции системы полученным двум
подзадачам в системе координат Oxyz соответствуют
навигационные матрицы:
444
(10.37)
(10.38)
где)- дискретный момент времени, которому соответствуют
значения всех используемых параметров.
В соответствии с [102] для простейшего случая сферической
Земли с радиусом R3 и оценивания внутриплоскостных параметров
можно считать, что для высоты Н имеет место соотношение:
Н = (х2 + у2)^ -Rc. (10.39)
На основании (10.39) с применением простых геометрических
построений следуют необходимые выражения для частных
производных - элементов матрицы W !:
ЭН _ х ЭН _ у
=sin> : ^2“- =-COST,; (10.40)
Эх Эу
Эу! _ cosYj Эу] _ sinyt
Эх DMI ’ Эу DMI '
Аналогичным образом определяются частные производные -
элементы матрицы W2:
^i = -cosy,; Эу1=51гту 2 (10.41)
Эг ' dz Dm2
При нахождении элементов градиентных матриц принималось
во внимание, что дифференциалы производных можно
приближенно заменить малыми приращениями соответствующих
функций. С учетом этого определялись значения приращений
(вариаций) измеряемых параметров при заданных малых значениях
вариаций координат, и далее осуществлялся предельный переход
445
при стремлении к нулю вариаций координат [92].
В силу позиционности состава измерений остальные
производные по скоростным составляющим тождественно равны нулю: — =о ; —- = о ; ЭРМ1 ^0 ; ЭРМ1 _0 . Эх ’ Эу Эх Эу отклонений
^- = 0 ; Эх = 0 ; ^М2=о ; ^1 = 0 Эу 3z dz (10.42)
Полученные соотношения позволяют провести аналитическую
оценку точности предлагаемого варианта системы автономной
навигации КА по протяженным наземным ориентирам при условии,
что характеристики погрешностей измерений измеряемых
параметров известны.
1 0.3.2. Аналитическая оценка точности определения
внутриплоскостных параметров движения центра масс КА
Исследования начинаются с оценки точности по результатам
проведения сеансов навигационных измерений дальности до
первого (внутриплоскостного) псевдоориентира и его углового
положения, определяемых при проектировании вектора дальности
до истинного ориентира на плоскость опорной орбиты, элементы
матрицы W,(u,y) в соответствии с (10.37), (10.38), (10.39) имеют
вид [99]:
3D, 3D, 3D, 3D,’
siny] -cosyi 9 0
W,(u,y)= ЭХ ЭУ ЭХ ЭУ Эу, Эу, Эу, Эу, = cosyi sinyj 0 0 Г), Di
L ЭХ ЭУ ЭХ ЭУ J L 171 j
Здесь у - угловое положение первого псевдоориентира
относительно трансверсали орбиты, D,- дальность до первого
псевдоориентира.
Матрица баллистических производных B(u,u0) соответствует
табл. 1.2 из параграфа 1.4.
В силу структуры подинтегрального выражения (10.21)
матрица С(и) является симметрической. Поэтому симметрической
является и корреляционная матрица Kq(u) (10.22). В связи с этим в
последующих материалах монографии корреляционных матрицах
приводятся только неповторяюшиеся элементы.
Для определения матрицы Ci(u)= С|(я") выполним
446
внутриплоскостному
интегрирование на интервале, равном половины витка, т.е. и=л.
Полагаем, что этот интервал интегрирования является максимально
возможным с учётом условия освещённости Земли Солнцем.
Полученные в результате интегрирования в пределах от и„=0
до и=л элементы матрицы С|(тг) имеют вид (для повышения
наглядности в дальнейшем индекс единицы у параметров у, и D,,
характеризующий принадлежность к
псевдоориентиру, опущен):
C„=y(-4sin2y - 29ncos2y + 6n2sin2y + 9л ч- 6n’cos2y) + -|л(6л2 -11);
С,, = —(13cos2y + 45 + 6cos2y + 20nsin2y + 12n2cos2y) + —3(8 + л2);
8 2
a , b
c,; ——(4sin2y + 5лcos' у + л) + — 7л;
a b
C3I=—(5cos2y + 37 - 10cos2y + 28nsin2y + 24n2cos2y) ч—(8 + Зл2);
8fl fl
a , b
c„ =— (6sm2y + 7лсоб‘у + л) + —9л;
2fl 2 fl
C”==^’(8sin2y +11лсо5Э+ + ^7137t; (10.43)
a b
c4I =—(-6sin2y-38ncos2y + 10л + 6л25ш2у + 6n’cos2y) + —Зл(л2 -3);
a b
c4, =—(5cos2y - 10cos2y + 10nsin2y + 67Tcos2y + 21) + —(16 + 3л2);
4 2Q
a b
c43 =—r(13 - 3cos2y - 26cos2y + 14nsin2y + 12K2cos2y) ч—-Зл2;
a b
C44 = —(3n2sin2y 4- 3n3cos2y ч- 6л - 4sin2y - 22лсо52у) ч- —^л(3л2 - 10).
Здесь приведены результаты интегрирования (10.21) без учета
N
постоянного коэффициента — и приняты следующие обозначения
л
221^21-
D2a>2 ’
Введем далее
(10.44)
Ь D2<
важное предположение о том, что
навигационные измерения углового положения ориентира и
дальности до него равновесны. Это означает, что дисперсия
погрешностей измерений угла связана с дисперсией погрешности
измерений дальности зависимостью:
D2<f=o2. (10.45)
447
При выполнении условия (10.45) о равновесности
используемых навигационных измерений имеем: а = 0, что
существенно упрощает дальнейшие исследования. В этом случае
матрица С(и) перестает зависеть от углового положения ориентира
у и остаётся зависимой только от интервала интегрирования и:
-^л(6л2 -11)
N f(8 + 7l?)
С,(л-)=^Ь ,2
Л ^(8 + Зтг2)
—Зл(л2 -3)
LO
После аналитического
корреляционную матрицу
7
— л
2
9л 13л ’
20 2О7
—(16 + Зл2) Д-л(Зл2 - 10)
20 О2 О2 J
обращения этой матрицы получаем
Кч(л) погрешностей определения
внутриплоскостных параметров движения центра масс КА. Если
через Д обозначить определитель матрицы С](л):
Д=75л6 -80л4 -12800л2 +65536,
г г Nv 4
а через i - выражение f =—b Д, то элементы корреляционной
л
матрицы Kql (л) можно записать в компактном виде:
к„=у(15л4 +280л2 -3328); к„=^у-(7л2 -64);
4тг 40
к22=у(Ю5л4 -1252л2 +2560); к31=—р(105 л4 -640л2 -2048);
к32=- ^у^(15л4-166л2 + 256); к„=^р-(165 л4 -1496л2 +512);
к41=- (5 л4 + 60л2 -896); к42 =- -“(135 л4 -800л2 -4096);
к„ = (45 л4 - 160л2 - 2048); к44=^у-(15 л4 + 130л2 -2368).
После вычисления полиномов степени числа л окончательно
имеем:
1,602
тл , , лЯ2с2 0,857 1,541
К,л =--------
q,v 7 N -2,1210 -1,6890 3,2510
-0,9820 - 0,6590 1,290О2 0,672О2
Как уже отмечалось, диагональные элементы этой матрицы
есть дисперсии погрешностей оценивания внутриплоскостных
448
параметров движения центра масс КА на полувитковом интервале
навигационных измерений.
Уменьшая интервал интегрирования с половины витка (и=л) и
сохраняя неизменным промежуток между сеансами навигационных
измерений, найдём элементы матриц С(ц) и К (и) для значений и,
5 2 1 1 1 г»
равных -тг, — 6 3 л, —л, - 2 3 л, —л. В результате получим: 6
2,036
(5 лЭ2о; 0,793 1,613
К.
N -2,7390 -1,6070 4,136О2
-1,0710 - 0,7090 1,426О2 0,754О2
2,535
<2 ) лО2а2 0,641 1,822
к — л —
ч' <3 J N -3,5400 -1,3940 5,433О2
-1,0510 - 0,9130 1,43 Ю2 0,997О2
3,174
(1 лЭ2а2 0,426 2,348
к — л —
qi u J N -4,8030 -1,0650 7,965О2
-0,8950 -1,6720 1,267О2 2,147O2
4,319
лЭ2с2 0,208 3,609
К -л
ч N -7,9090 -0,6840 16,504О2
-0,6280 -4,4640 0,9800’ 8.469O2
8,029
<1 7tD2a2 0,056 7,619
к -л
ч <6 ) N -24,6650 -0,3250 94,972О2
-0,3200 -21,0390 0,723О2 80,301О2_
По результатам проведенных исследований построены
графики зависимостей дисперсий погрешностей определения
координат (X и Y) и составляющих скорости (X и Y) от
продолжительности интервала измерений (кривые 1 и 2
соответственно на рис. 10.8 и рис. 10.9).
Графики на рис. 10.8 и 10.9 построены в относительных
величинах:
-2
о„ =о„/----
, лЭ2с2О2
о* ---------—
(10.46)
449
Из приведенных графиков следует, что дисперсии
погрешностей определения скоростных составляющих параметров
движения центра масс КА менее чувствительны к
продолжительности интервала навигационных измерений, чем
дисперсии погрешностей определения координат КА. Различия
между дисперсиями погрешностей определения координат X и Y и,
соответственно, составляющих скорости X и Y практически
отсутствуют.
Задача определения дисперсий погрешностей оценок
начальных значений внутриплоскостных параметров движения-
центра масс КА по результатам обработки измерений высоты
полета КА подробно исследована в параграфе 3.6.
Совместные измерения высоты полета, проводимые над
акваторией Мирового океана, и измерения с использованием
наземных ориентиров, проводимые при полете над сушей, как
правило, не могут быть практически реализованы. Поэтому
результаты совместной обработки этих измерений в настоящей
монографии не исследуются.
10.3.3. Аналитическая оценка точности определения
внеплоскостных параметров движения центра масс КА
Для оценивания показателей точности определения
внеплоскостных параметров движения КА найдём градиентную
матрицу из соотношения (10.38):
~ЭР2 2 - cosy2 0
W2(u,72) = 3Z ду2 az ау2 = S 0
_ az az . L u2 J
и матрицу баллистических производных в соответствии с табл. 1.2
главы 1:
' az az'
B2(u,u0)= az0 az az0 az = cosu sinu T
- Qsinu cosu
где
D2- дальность до второго наземного псевдоориентира,
лежащего в поперечной плоскости, содержащей местную вертикаль
и бинормаль опорной орбиты, и являющегося проекцией истинного
ориентира на эту плоскость;
450
у2 - угловое положение второго псевдоориентира по
отношению к бинормали опорной орбиты.
Подстановка этих соотношений в формулу (10.21) и
интегрирование в пределах от и„=0 до и с той же весовой матрицей
Р (10.20) позволяет получить матрицу С2(ц) нормальных уравнений
в виде:
u + —sin2u
^^(l-cos2u) —y(u - — sin2u)
(10.47)
где константа m принята равной
(10.48)
В результате аналитического обращения матрицы нормальных
(10.47) получаем корреляционную матрицу
уравнений
погрешностей оценивания внеплоскостных параметров
движения КА:
Nm(4u2 + 2cos2u - 2)
и —sin2u
2
---(1 —cos2u) Qz(u + —sin2u)
(10.49)
Аналогично задаче оценивания точности определения
внутриплоскостных параметров движения КА оценим дисперсии
погрешностей определения внеплоскостных параметров для тех же
5 2 1 11
интервалов навигационных измерении: л, -л, -л, - л, -л, -л.
6 3 2 3 6
При этом, как и ранее, полагаем неизменным и равным —
промежуток между сеансами навигационных измерений в пределах
любого из этих интервалов, где N - число сеансов на половине
витка.
При оценивании точности определения внеплоскостных
параметров будем также полагать, что дисперсия о2 погрешностей
измерения дальности до внеплоскостного псевдоориентира и
дисперсия oj погрешностей измерения его углового положения
подчиняются условию (10.45) равновесности измерений.
В этом случае коэффициент m (10.48) оказывается равным
коэффициенту b из (10.44).
В итоге имеем:
451
К» =
jtD'cr Г0,637
_____l_
N 0
0,637Q;
Рис. 10.8. Графики зависимостей дисперсий погрешностей
определения координат от интервала измерений: кривая 1
- по координате X; кривая 2 - по координате Y; кривая 3 -
по кооолинате Z.
452
Рис. 10.9. Графики зависимостей дисперсий погрешностей
определения составляющих скорости от интервала
измерений: кривая 1 - по составляющей X; кривая 2 - по
составляющей Y; кривая 3 - по составляющей Z.
5 7tD2O2 Г 0.770
К ,(-л) = У
чЛ6 N -0,063Q 0,55Ш2
,2 ч TrD2O2 Г 0,927 -
К ,(-л) =
q2 v 3 ' N -0,275Q 0,609Q2J
453
1 7tD2cr 1,070
У_ N -0,6820 1,0700? >
1 7tD2O: 1,181 1
N -1,4420 2,847O2 >
1 7lD2O; P 1,250
^7*) = О N -3,4500 13,201O2
Первый диагональный элемент этих матриц является
дисперсией погрешности определения поперечной координаты Z.
На рис. 10.8 характер изменения относительной величины этой
дисперсии представлен кривой под номером 3.
Второй диагональный элемент этих матриц является
дисперсией погрешности определения поперечной составляющей
скорости движения КА Z. Кривая изменения этой дисперсии в
зависимости от интервала навигационных измерений имеет номер 3
и представлена на рис. 10.9.
Из анализа графиков, представленных на рисунках 10.8 и 10.9,
следует вывод о том, что более высокая динамика изменения
внутриплоскостных параметров затрудняет достижение той же
точности, что и для внеплоскостных параметров.
10.3.4. Оценка дисперсий погрешностей измерений
первичных навигационных параметров
Для аналитического оценивания показателей точности
системы автономной навигации КА необходимо дать оценку
достижимым в настоящее время значениям дисперсий
погрешностей измерений первичных навигационных параметров. С
этой целью проведём анализ состава всех погрешностей системы и
дадим оценку ожидаемой величины каждой из них. Состав
погрешностей системы частично рассмотрен в параграфе 4.2.
Все погрешности измерений навигационных параметров
системы полагаются случайными, независимыми,
распределенными по нормальному закону, с нулевым
математическим ожиданием и заданной дисперсией.
Результаты анализа составляющих погрешности измерения
угловых элементов внешнего ориентирования линии визирования
реперной точки ПНО приведены в табл. 10.1. Значения
составляющих погрешности приведены в угловой мере и на уровне
454
среднеквадратических отклонений (CKO) а,.
Погрешности измерения угловых элементов внешнего
ориентирования линии визирования реперной точки условно можно
разбить на несколько групп. К первой группе можно отнести
погрешности с номерами 1-4 определения положения направления
на реперную точку протяжённого наземного ориентира в визирной
системе координат объектива ОЭТК.
Ко второй группе с номерами 5-8 относятся погрешности
определения в инерциальном пространстве положения оптической
оси звёздного датчика также в визирной системе координат.
Погрешности этих двух групп характеризуют часть суммарной
погрешности определения угловых элементов внешнего
ориентирования линии визирования реперной точки протяжённого
наземного ориентира на моменты времени астрокоррекций.
Третью группу с номерами 9 и 10 составляют погрешности,
обусловленные использованием информации, которая поступает от
бесплатформенной инерциальной навигационной системы.
Дадим экспертную оценку каждой из составляющих. При этом
в качестве дисперсии целесообразно принимать, по возможности,
её верхнюю оцениваемую границу.
В качестве примера примем высоту круговой орбиты КА,
равную 750 км. Будем полагать, что навигационные измерения
проводятся на средних дальностях до протяжённого ориентира, т.е.
на дальностях около 1000 км.
Анализ источников, которые приводят к появлению
погрешностей определения угловых элементов внешнего
ориентирования линии визирования реперной точки протяжённого
наземного ориентира, показывает наличие 11 составляющих
суммарной погрешности, которые приведены в таблице 10.1.
Появление перечисленных в таблице 10.1 составляющих
суммарной погрешности обусловлено следующими
обстоятельствами:
1. При использовании высокоточных карт можно принять
погрешность знания горизонтальных геоцентрических координат
реперной точки протяжённого наземного ориентира, равной 7,5 м.
В случае навигационных измерений «в надир» погрешность
знания горизонтальных геоцентрических координат реперной точки
ориентира принимает наибольшее значение, которое при высоте
750 км составляет 2".
455
2. Без проведения специальных исследований по
моделированию процесса обнаружения и опознания протяжённого
наземного ориентира трудно дать квалифицированную оценку
погрешности обнаружения. Однако, ясно, что координатные
погрешности детального описания эталонного изображения
протяжённого наземного ориентира, закладываемого на борт КА,
существенно меньше погрешности привязки элементов этого
изображения к карте. Поэтому можно принять, что эта погрешность
составляет одну треть погрешности привязки к карте, т.е. не
превышает значения 0,67".
Таблица 10.1. Погрешности измерений, влияющие на точность
определения угловых элементов внешнего ориентирования
линии визирования реперной точки протяжённого наземного
ориентира________________________________________
NN п/п Наименование погрешности СКО, у гл. сек.
1 Знание геоцентрических координат реперной точки протяжённого наземного ориентира 2
2 Обнаружение на псевдокадре реперной точки протяжённого наземного ориентира 0,67
3 Определение положения реперной точки протяжённого наземного ориентира в фокальной плоскости объектива ОЭТК 0,5
4 Полётная фотограмметрическая калибровка ОЭТК и учёт её результатов 1
5 Полётная юстировка положения вторичного зеркала ОЭТК в визирной системе координат 3
6 Паспортизация базовых посадочных и фиксирующих элементов звёздных датчиков на вторичном зеркале ОЭТК 0,5
456
7 Паспортизация положения приборных осей звёздных датчиков относительно их посадочных плоскостей 0,5
8 Измерение положения приборных осей, в том числе оптических осей звёздных датчиков в инерциальном пространстве 2
9 Полётная калибровка параметров бесплатформенной инерциальной навигационной системы по показаниям звёздных датчиков и учёт её результатов 2
10 Определение ориентации КА с использованием информации о приращении углов 1
11 Расчёт угловых элементов внешнего ориентирования линии визирования реперной точки протяжённого наземного ориентира 0,5
Суммарная погрешность определения угловых элементов внешнего ориентирования линии визирования реперной точки ПНО 5
3. Погрешности определения положения реперной точки
протяжённого наземного ориентира в фокальной плоскости
объектива ОЭТК при нулевых значениях параметров обобщённой
дисторсии определяются конструкцией его фокального узла и
расположенными на нём оптико-электронными преобразователями.
Эти погрешности не превышают 4-5 пикселей, т. е. можно полагать
равными 0,5".
4. Погрешности определения и учёта параметров обобщённой
дисторсии объектива оптико-электронного телескопического
комплекса в соответствии с результатами параграфа 10.1 могут
быть приняты не превышающими 8-10 пикселей, т. е. равными 1".
5. Погрешности полётной юстировки положения вторичного
зеркала оптико-электронного телескопического комплекса в
визирной системе координат определяются характеристиками
систем автоматической юстировки и, как правило, не превышают 2-
457
3". Поэтому в качестве опорной погрешности примем значение 3".
6-7. Погрешности паспортизация базовых посадочных и
фиксирующих элементов звёздных датчиков на вторичном зеркале
оптико-электронного телескопического комплекса и паспортизации
положения приборных осей звёздных датчиков относительно их
посадочных плоскостей достаточно малы и не превышают 0,5".
8. Погрешности измерения положения оптической оси
современных звёздных датчиков в инерциальном пространстве в
режиме инерциальной ориентации не превышает значения 2", в
отличие от погрешности измерения положения вокруг оптической
оси, которая на порядок больше и достигает 20". Применение
одновременно двух звёздных датчиков с разнесенными в
пространстве направлениями оптических осей на углы более 60”
позволяет определять положение в инерциальном пространстве
всех трёх приборных осей звёздных датчиков с погрешностью 2".
9. Погрешности полётной калибровки параметров
бесплатформенной инерциальной навигационной системы по
результатам измерений звёздных датчиков и учёта её результатов
исследованы в параграфе 10.1, в котором показано, что
погрешность оценивается величиной 2".
10. Методическая погрешность определения ориентации КА с
использованием информации о приращении углов также детально
исследована. Результат оценки этой погрешности составляет 1".
И. Оценить дисперсию вычислительной погрешности
проведения расчётов угловых элементов внешнего ориентирования
линии визирования реперной точки протяжённого наземного
ориентира крайне затруднительно, поскольку для этого требуется
проведение значительного объёма специальных исследований. В
связи с этим приведём экспертную оценку этой погрешности: 0,5".
Значения рассмотренных погрешностей имеют один порядок.
Среди них нет значительных по величине. При этом каждая из
рассмотренных погрешностей, в свою очередь, является, как
правило, суммой большого количества составляющих.
В соответствии центральной предельной теоремой теории
вероятностей [28] в этих условиях закон распределения
погрешностей можно принимать нормальным и
среднеквадратичное значение суммарной погрешности определять
как корень квадратный из суммы квадратов составляющих
погрешностей.
458
В итоге после сложения под корнем квадратным квадратов
всех приведенных выше значений получаем суммарное среднее
квадратическое отклонение погрешности определения угловых
элементов внешнего ориентирования линии визирования реперной
точки ПНО, равное 5".
Приведенные результаты анализа указывают на основные
направления дальнейшего снижения показателей точности системы
в части определения угловых элементов внешнего ориентирования
линии визирования реперной точки протяжённого наземного
ориентира. В состав этих направлений входят:
• повышение точности представления картографического
материала;
• повышение точности полётной юстировки вторичного
зеркала ОЭТК;
• повышение точности определения ориентации звёздными
датчиками;
• повышение точности полётной калибровки
бесплатформенной инерциальной навигационной системы.
Как показано в следующем параграфе, имеющиеся в
настоящее время технические средства обеспечивают возможность
создания системы автономной навигации КА по протяжённым
наземным ориентирам с достаточно высокими показателями
точности.
Результаты анализа составляющих погрешности измерения
дальности до реперной точки протяжённого наземного ориентира
приведены в табл. 10.2.
Лазерный дальномер в предложенной схеме размещения
передатчика измеряет дальность не по линии визирования реперной
точки протяжённого наземного ориентира, а по направлению
визирной оси ОХВ ОЭТК. Поэтому необходимо осуществлять
пересчёт результата измерений дальности в значение дальности
вдоль линии визирования реперной точки протяжённого наземного
ориентира.
459
Таблица 10.2. Погрешности измерений, влияющие на точность
определения дальности до реперной точки протяжённого
наземного ориентира___________________________________
NN п/п Наименование погрешности СКО, м
1 Измерение дальности вдоль оптической оси передатчика лазерного дальномера 20
2 Полётная юстировка положения вторичного зеркала ОЭТК в визирной системе координат 15
3 Паспортизация базовых посадочных и фиксирующих элементов (БПФЭ) передатчика лазерного дальномера на вторичном зеркале ОЭТК 2,5
4 Паспортизация положения приборных осей передатчика лазерного дальномера относительно их посадочных плоскостей 2,5
5 Вычисление дальности вдоль линии визирования реперной точки ПНО 2,5
Суммарная погрешность определения дальности до реперной точки ПНО 25
Для такого пересчёта необходима определённая модель
поверхности Земли. В этой главе использована модель поверхности
Земли, принятая в параграфе 4.3. Согласно этой модели в пределах
поля зрения ОЭТК поверхность Земли представляет собой
сферическую поверхность с радиусом, равным радиусу геоида
Земли в точке пересечения с ним визирной оси ОХВ ОЭТК, с
заданным превышением h.
Тогда в соответствии с принятой моделью поверхностью
Земли, измеренная лазерным дальномером дальность в
направлении визирной оси ОХВ ОЭТК может быть обозначена
через D10 = а22 • г. Отсюда при известном угловом положении КА по
всем трём каналам и при известном положении изображения
реперной точки в фокальной плоскости (координаты х и z
известны) можно определить дальность D по линии визирования
реперной точки протяжённого наземного ориентира:
460
р. _ ~ (х z ) D
Di - DK, + — а21 + -an —
If f ) a-
D, = D; +(R + h)2 -f^-
I
(10.50)
D = D, -D2.
Таблица 10.2 (п.5) учитывает погрешность этого пересчёта,
значения всех составляющих погрешностей приведены в линейной
мере и также на уровне среднеквадратических отклонений (СКО)
Аналогично изложенному в этом пункте подходу дадим
примерную оценку каждой из составляющих погрешности,
приведенных в этой таблице.
1. Погрешность измерения дальности лазерным дальномером
определяется его техническими характеристиками и, в первую
очередь, энергетикой канала, которая обусловлена диаметром
входного зрачка приёмника. Для предложенной схемы построения
прибора на дальностях функционирования около 1000 км среднее
квадратическое отклонение погрешности измерения дальности
принята равной 20 м.
2. Погрешность полётной юстировки положения вторичного
зеркала ОЭТК в визирной системе координат в угловой мере 3” на
дальности 1000 км дает среднее квадратическое отклонение
погрешности в линейной мере 15 м.
3- 4. Погрешности паспортизации базовых посадочных и
фиксирующих элементов передатчика лазерного дальномера на
вторичном зеркале ОЭТК и погрешности паспортизации положения
приборных осей передатчика лазерного дальномера относительно
их посадочных плоскостей в угловой мере соответствует 0,5", т.е.
на дальности 1000 км в линейной мере равны 2,5 м.
5. Инструментальная погрешность расчёта дальности вдоль
линии визирования реперной точки протяжённого наземного
ориентира с, в соответствии с (5.34), как и ранее, может быть
определена экспертным путём и принимается равной 2,5 м.
6. Таким образом, суммарная погрешность определения
дальности до реперной точки протяжённого наземного ориентира
составляет около 25 м.
Из табл. 10.2 следует, что основные направления повышения
461
точности системы автономной навигации в части определения
дальности до реперной точки протяжённого наземного ориентира
связаны с повышением частоты и точности измерения дальности
лазерным дальномером и с повышением точности полётной
юстировки вторичного зеркала ОЭТК.
10.3.5. Аналитическая оценка достигаемых показателей
точности прецизионной интегрированной САН КА ДЗЗ
Для оценки показателей точности системы автономной
навигации КА с использованием протяжённых наземных
ориентиров воспользуемся результатами предыдущего пункта. В
частности, предположим, что измерения углового положения
направления на наземный ориентир в инерциальном пространстве
проводятся со среднеквадратической погрешностью ат= 5", а
измерения дальности до него - со среднеквадратической
погрешностью а„=25 м при дальности в момент измерений D=1000
км. Измерения равновесны.
Как следует из материалов предыдущего пункта, на
современном этапе развития технических средств КА
дистанционного зондирования Земли эти характеристики точности
вполне достижимы.
Пусть для простоты расчетов будем полагать, что угловая
скорость орбитального движения КА 0,001с'1, а промежуток
между сеансами навигационных измерений определяется
соотношением
— =0,1
N
т. е. за половину витка полёта КА вокруг Земли выполняется около
30 сеансов навигационных измерений.
При этих значениях коэффициенты у относительных
дисперсий в (10.53) равны:
L=62,5 м ; -—=0,625 ^-.
N--------------------------N-с2
По известным знаниям этих коэффициентов можно вычислить
истинные значения дисперсий погрешностей определения
параметров движения по значениям относительных дисперсий.
Шкалы значений истинных дисперсий для рассматриваемого
примера представлены на рис. 10.8 и 10.9 справа.
462
Из рис. 10.8 следует, что точнее других определяется
координата Z. К тому же средняя квадратическая погрешность
определения этой координаты остается достаточно высокой (менее
10 м) даже при малом интервале навигационных измерений ц=-,
6
что соответствует всего пяти сеансам.
Несколько ниже точность определения координат X и Y. При
уменьшении интервала навигационных измерений с л до -л
6
средняя квадратическая погрешность определения этих координат
увеличивается более чем в 2 раза, т. е. с 10 м до 22 м.
Аналогичный вывод можно сделать и из рассмотрения
кривых, представленных на рис. 10.9. На точность определения
составляющих скорости продолжительность интервала
навигационных измерений оказывает более существенное влияние.
При уменьшении продолжительности интервала в 6 раз (т.е. с л до
1 .
-л) средняя квадратическая погрешность определения
6
“6- Л ГТ СМ -I 0-7 СМ
составляющей Z увеличивается с 0,63— до 2,87 —, т.е. примерно
с с
в 4,5 раза.
При этом другие составляющие погрешностей навигации
увеличиваются с ещё большей скоростью. Например, наибольшую
среднюю квадратичную погрешность имеет составляющая
скорости X. Причём её значение увеличивается в 5,5 раз (с 1,425 —
с
_ _ см.
до 7,7 —).
с
Средние квадратические погрешности определения координат и
составляющих вектора скорости движения КА остаются на достаточно
высоком уровне. Так, на интервале измерений в четверть витка при
количестве навигационных измерений около 15 средняя
квадратическая погрешность определения координат не хуже 15 м и
~ с см „
составляющих вектора скорости не хуже 2,5 —. Дополнительный
с
учет измерений высоты полета КА над акваторией Мирового океана,
без сомнения, позволяет повысить точность навигационных
определений внутриплоскостных параметров.
В результате проведенной оценки можно сделать вывод о том,
463
что показатели точности рассматриваемой системы автономной
навигации КА приближаются к точностным характеристикам
аппаратуры потребителя спутниковых радионавигационных
систем, т.е. автономная система навигации с использованием
протяжённых наземных ориентиров обладает большими
потенциальными возможностями.
464
ЛИТЕРАТУРА
1. Аванесов, Г.А. Динамические испытания систем
управления полётом искусственных спутников Земли. [Текст] /
Г.А.Аванесов, Я.Л.Зиман, А.А.Форш И Полёт. №9, 2005, - С. 28 -
32.
2. Алпатов, А.П. Динамика космических аппаратов с
магнитными системами управления. [Текст] / А.П. Алпатов,
В.И.Драновский, Ю.Д.Сатыков, В.С.Хорошилов // - М.:
Машиностроение, 1976. - 280с.
3. Алпатов, Б.А. Методы обработки и анализа
изображений в бортовых системах обнаружения и
сопровождения объектов [Текст] / Б.А.Алпатов, П.В.Бабаян //
Цифровая обработка сигналов. - 2006. - № 2. - С. 45-51
4. Анатольев, А.Ю. Оценка информационных
возможностей космических оптико - электронных систем
дистанционного зондирования. [Текст] / А.Ю. Анатольев, А.С.
Батраков, А.М.Федына // Оптический журнал. 2000. №7. - С. 12 -
18.
5. Анатольев, А.Ю. Математическое моделирование
космической оптико электронной съёмки с программным
сканированием. [Текст] / А.Ю. Анатольев, А.С.Батраков // Учебное
пособие. - С - Пб.: ВИКА им. А.Ф.Можайского. 1995. - 117с.
6. Антонов, Ю.Г. Математическое и программное
обеспечение системы автономной навигации КА. [Текст] / Ю.Г.
Антонов, Т.П. Аншаков, А.Д. Голяков, Я.А. Мостовой, В.Ф.
Петрищев // Учебное пособие. МО СССР, 1986. - 131с.
7. Анучин, О.Н. Бортовые системы навигации и
ориентации искусственных спутников Земли. [Текст] / О.Н.Анучин,
И. Э. Комарова, Л.Ф.Порфирьев И- СПб: ГНЦ РФ
«Электроприбор», 2004, -326с.
8. Афанасьев, Ю.В. Феррозондовые приборы. [Текст] /
Ю.В.Афанасьев // Энергоатомиздат, Ленинградское отделение,
1986.- 188с.
9. Бабаян, П.В. Распознавание объектов на
изображениях при наблюдении из космоса [Текст] /
П.В.Бабаян, А.Б.Фельдман // Вестник РГРТУ. 4 (выпуск 26).
Рязань, 2008.
465
10. Бажинов, U.K. Космическая навигация. [Текст] / И.К.
Бажинов, В.И. Алёшин, В.Н. Почукаев, В.С. Поляков // - М.:
Машиностроение. 1975. - 352с.
11. Бажинов, И.К. Оптимальное планирование
навигационных измерений в космическом полёте. [Текст] / И.К.
Бажинов, В.Н. Почукаев // - М.: Машиностроение. 1976. - 288с.
12. Бажинов, И.К. Навигация в совместном полёте
космических кораблей «Союз» и «Аполлон». [Текст] / И.К.
Бажинов, В.Д. Ястребов // - М.: Наука .1978. - 224с.
13. Бажинов, И.К. Навигационное обеспечение полёта
орбитального комплекса «Салют-6» - «Союз» - «Прогресс». [Текст]
/ И.К. Бажинов, В.П. Гаврилов, В.Д. Ястребов и др. // - М.: Наука,
1985.-376с.
14. Бакланов, А.И. Системы наблюдения и мониторинга.
[Текст] / А.И.Бакланов // Учебное пособие. М: Бином, 2009. - 239с.
15. Бакланов, А.И. Фотограмметрическая калибровка
оптико-электронной аппаратуры наблюдения Земли по звёздному
небу [Текст] / А.И. Бакланов, М.В. Клюшников // Труды
международной академии информатизации. Москва, Зеленоград,
2003. С.39 - 44.
16. Бакланов, А.И. Принцип построения системы
автономной навигации по наземным ориентирам. [Текст] / А.И.
Бакланов, С.А. Башкиров, М.В. Клюшников // Труды
международной академии информатизации. Москва, Зеленоград,
2003. С.59 - 62.
17. Батраков, А.С. Прогнозирование скорости сдвига
оптического изображения при съёмке земной поверхности. [Текст] /
А.С. Батраков // Исследование Земли из космоса. 1984. №1. -С. 79
-85.
18. Батраков, А.С. Общая модель для расчёта и анализа
скорости сдвига оптического изображения при съёмке земной
поверхности. [Текст] / А.С. Батраков // Исследование Земли из
космоса. 1989. №4. - С. 99 - 106.
19. Батраков, А.С. Распознавание трёхмерных объектов на
изображении местности. [Текст] / А.С.Батраков, В.П. Иванов //
Оптический журнал. 1993. №6. - С. 35 - 40.
20. Батраков, А.С. Математическая модель для
прогнозирования линейного разрешения космических оптико -
электронных систем дистанционного зондирования. [Текст] / А.С.
466
Батраков, А.Ю. Анатольев // Оптический журнал. 2000. №7. — С. 92
-99.
21. Бебенин, Г.Г. Системы управления полётом
космических аппаратов [Текст] / Г.Г. Бебенин, Б.С. Скребушевский,
Г.А. Соколов // - М.: Машиностроение, 1974. - 340с.
22. Бибиков, С.А. Цветовая коррекция бликов на цифровых
изображениях [Текст] / С.А. Бибиков, Е.Ю.Минаев, А.В.
Никоноров, В.А. Фурсов // Компьютерная оптика. - Самара-
Москва, 2010. - Т.34 №3. - С. 382-391.
23. Bibikov, S.A. Shadow Artifacts Correction on Fine Art
Reproductions [text] / S.A. Bibikov, V.A. Fursov, A.V. Nikonorov //
Roceedings of IMTA 2010 in conjuction with VISIGRAPP 2010,
Angers, France, 17-21 May 2010, pp. 3-12. ISBN: 978-989-674-030-6.
24. Блок определения координат звёзд [Текст] /
Техническое задание на составную часть опытно -
конструкторской работы // 14Ф137- 23 - 1404 - 2007. ГНП РКЦ
«ЦСКБ - Прогресс». - 61с.
25. Брандин, В.Н. Определение траекторий космических
аппаратов [Текст] / В.Н. Брандин, Г.Н. Разорёнов //- М.:
Машиностроение. 1978.-216с.
26. Брайсон, А. Прикладная теория оптимального
управления [Текст] / А. Брайсон, Хо Ю-Ши //.- М.: Мир. 1972. -
544с.
27. Бэттин, Р. Наведение в космосе. [Текст] / Р. Бэттин // -
М.: Машиностроение. 1966.-448с.
28. Вентцель, Е.С. Теория вероятностей [Текст] / Е.С.
Вентцель // - М.: Гос. изд. физматлитературы. 1962. - 564с.
29. Волынцев, А.А. Опыт создания высокоточных
поплавковых гироприборов, применяемых в системах угловой
ориентации и стабилизации космических аппаратов и станций
[Текст] / А.А. Волынцев, Л.А. Дудко, Б.А. Казаков, В.В. Козлов и
др. // Материалы X Санкт-Петербургской международной
конференции по интегрированным навигационным системам. С-Пб.
2003.-С. 67-76.
30. Гаушус, Э.В. Автономная навигация и управление
орбитальной станцией «Салют - 7» [Текст] / Э.В.Гаушус,
Ю.Н.Зыбин, В.П.Легостаев // Космические исследования, 1986, Т.
24. Вып. 6. - С. 844-865.
31. Гашников, М.В. Метод иерархической компрессии
467
космических изображений [Текст] / М.В.Гашников, Н.И.Глумов,
В.В.Сергеев // Автоматика и телемеханика. 2010. №3. -С. 147 - 156.
32. Глобальная спутниковая радионавигационная система
ГЛОНАСС [Текст] / Под ред. В.Н.Харисова, А.И.Петрова,
В.А.Болдина И - М.: ИПРЖР, 1999. - 400с.
33. Голяков, А.Д. Оценки систематических погрешностей
оптико-электронного измерительного комплекса системы
навигации [Текст] / А.Д.Голяков, В.В.Серогодский И Изв. ВУЗов.
Приборостроение, 1990, Т. 34, № 8, С. 37-41.
34. Голяков, А.Д. Испытания систем ракетно-космической
техники. [Текст] / А.Д.Голяков, В.И.Миронов, В.В.Смирнов //- СПб:
ВИКИ им. А.Ф.Можайского, 1992,- 398с.
35. Голяков, А.Д. Введение в теорию взаимной
астронавигации ИСЗ [Текст] / А.Д. Голяков // Учебное пособие. - С
- Пб.: ВИКА им. А.Ф. Можайского, 1992. - 142с.
36. Голяков, А.Д. Системы навигации космических
аппаратов. [Текст] / А.Д.Голяков, А.А.Лукашевский, В.В.Смирнов
//МОРФ, 2003.-267с.
37. Голяков, А.Д. Аналитическая оценка потенциальной
точности автономной астронавигации космического аппарата по
орбитальным ориентирам [Текст] / А.Д. Голяков // Изв. вузов.
Приборостроение. 2003. Т. 46, №4. - С. 51 - 57.
38. Голяков, А.Д. Аналитические оценки точности
автономной асронавигации малого космического аппарата по
орбитальным ориентирам [Текст] / А.Д.Голяков, П.В.Шевченко //
Изв. вузов. Приборостроение. 2004. Т. 49, №3. - С. 53 - 59.
39. Горбук, С.В. Космические системы дистанционного
зондирования Земли. [Текст] / С.В.Горбук, В.Е.Гершензон // - М.:
Наука. 1997.-296с.
40. Горелик, А. Л. Методы распознавания [Текст] /
А.Л.Горелик, В.А.Скрипкин // - М.: Высшая школа, 1989.
41. Гурьев, И.С. Метод последовательной декомпозиции
линейных задач оценивания. [Текст] / И.С.Гурьев // Изв. АН СССР.
Техническая кибернетика. 1979. №5. -С. 194- 198.
42. Гурьев, И.С. Дифференциально - корреляционный
принцип построения магнитометрических систем навигации и
ориентации [Текст] / И.С. Гурьев // -МО ССР. 1982. - 146с.
468
43. Даджион, Д. Цифровая обработка многомерных
сигналов [Текст] / Даджион Д., Мерсеро Р // Пер. с англ. - М.: Мир.
1988. - 488 с.
44. Данилов, В.А. Служебные системы космических
телескопов [Текст] / В.А.Данилов, А.И.Лысенко, Е.Р.Маламед,
М.Н.Сокольский // Оптический журнал. 2002. №9. - С 36 - 44.
45. Демиденко, Е.З. Линейная и нелинейная регрессии
[Текст] / Е.З.Демиденко // - М.: Финансы и статистика, 1981, - 302 с.
46. Дополнение к эскизному проекту СИУП,
комплексированного с ЭСТ и АГ - системы разработки НИИАП
[Текст] // ЦКБ «Пеленг», Минск, 1994. - 182с.
47. Дуда, Р. Распознавание образов и анализ сцен [Текст]
/ Р.Дуда, П.Харт // - М.: Мир, 1976. - 511 с.
48. Дюмин, А.Ф. Способ калибровки гироинерциальных
измерителей бесплатформенной инерциальной навигационной
системы ориентации космического аппарата [Текст] / А.Ф.Дюмин,
С.Н.Егоров, В.В.Корабельщиков, Д.М.Суринский // Патент РФ на
изобретение №2092402 от 10 октября 1997г.
49. Дюмин, А.Ф. Повышение точности астрокоррекции
бесплатформенной инерциальной системы ориентации на
электростатических гироскопах [Текст] / А.Ф.Дюмин,
В.В.Корабельщиков, С.Н.Платонов, Д.М.Суринский // Гироскопия
и навигация. 2005. №1(48). - С.76 -83.
50. Егоров, С.Н. Калибровка гироинерциальных
измерителей систем ориентации по информации от неподвижных
астровизиров [Текст] / С.Н.Егоров, В.В.Корабельщиков,
Д.М.Суринский // Механика твёрдого тела. 1991. №3. - С.7 -12.
51. Егоров, Е.А. Метод астрозондовой навигации
разгонного блока [Текст] / Е.А.Егоров, В.П.Белов // В
сб.:"Навигация и управление движением",2-я Научно-техническая
конференция молодых ученых. 28-30 марта 2000 г. в ГНЦ РФ-
ЦНИИ "Электроприбор".2000.
52. Жуковский, А.П. Теоретические основы
радиовысотометрии [Текст] / А.П.Жуковский, Е.И.Оноприенко,
В.И.Чижов // - М.: Советское радио. 1979. -- 320с.
53. Журавлев, Ю.И. Об алгебраических методах в задачах
распознавания и классификации [Текст] / Ю.И.Журавлев //
Распознавание, классификация, прогноз. 1988. Т. 1. — С. 9-16
54. Зиман, Я.Л. Определение фотограмметрических
469
параметров фотокамер по снимкам звёзд [Текст] / Я.Л.Зиман //
Астрономический журнал. Том 46. 1969.
55. Зимин, Д.И. Технология определения
восстанавливающего фильтра и обработки цветных изображений
[Текст] / Д.И.Зимин, В.А.Фурсов // Сб. Компьютерная оптика, №
27, 2005, с. 170-173.
56. Иванов, Н.М. Баллистика и навигация космических
аппаратов. [Текст] / Н.М.Иванов, Л.Н.Лысенко // - М.: Дрофа, 2004.
- 544с.
57. Исследование принципов построения и достижимых
характеристик лазерного дальномера для перспективных КА
[Текст] // Отчёт о НИР «Пролёт». НПП «Контакт» ОКБ «Рубин».
512/1102 -04. 2003. - 55с.
58. Кавинов, И.Д. Инерциальная навигация в околоземном
пространстве [Текст] / И.Д.Кавинов // - М.: Машиностроение,
1988,- 141с.
59. Калман, Р.Е. Об общей теории систем управления
[Текст] / Р.Е.Калман // Тр. 1-го международного конгресса ИФАК.
- М.: АН СССР, 1961, Т.2, С.521 - 546.
60. Керножицкий, В.А. Магнитные системы ориентации,
манёвра и навигации космических аппаратов [Текст] /
В.А.Керножицкий, С.В.Козлов, С.И.Марков // Учебное пособие.
Санкт-Петербург, 2007. - 39с.
61. Клюшников, М.В. Звёздный датчик и его
использование для полётной фотограмметрической калибровки
оптико - электронной аппаратуры дистанционного зондирования
Земли [Текст] / М.В.Клюшников // Канд. дисс. МФТИ, 2003, 116с.
62. Козин, Н.Е. Снижение размерности векторов признаков
по критериям мультиколлинеарности [Текст] / Н.Е.Козин,
В.А.Фурсов // Компьютерная оптика. - 2008. - Том 3, № 32. - С.
307-311.
63. Kozin, N. Building of classifiers based on conjugation
indices [text] / Kozin N., Kulagina I., Fursov V. // Optical Memory &
Neural Networks. - 2007. - Vol. 16, No. 3.-pp. 136-141.
64. Кондратьев, Ю.М. О методах калибровки спутниковой
аппаратуры в полёте. [Текст] / Ю.М.Кондратьев, В.Н.Стожкова,
Б.К.Фукс // Тр. ГосНИИ Центра изучения природных ресурсов.
1990. №7.-38 -48С.
65. Корн, Г. Справочник по математике для научных
470
работников и инженеров [Текст] / Г.Корн, Т.Корн // - М.: Наука,
1970.- 718с.
66. Ландау, Б.Е. Бескарданная система ориентации
космического аппарата на базе эектростатических гироскопов
[Текст] / Б.Е.Ландау, С.С.Гуревич, С.Л.Левин, С.Г.Романенко,
В.Н.Цветков // Вестник Российской академии космонавтики. Часть
1. Управление движением и навигация летательных аппаратов.
Самара. 2000. - С. 100 - 104.
67. Лобанов, А.Н. Фотограмметрия. [Текст] / А.Н. Лобанов
// - М.: Недра. 1984.
68. Lowe, D. Distinctive Image Features from Scale-Invariant
Keypoints [text] / D.Lowe // International Journal of Computer Vision,
60,2(2004), pp. 91-110.
69. Лоуден, Д.Ф. Оптимальные траектории для
космической навигации [Текст] / Д.Ф.Лоуден И - М.: Мир, 1966. -
152с.
70. Лысенко, А.И. Оптические схемы объективов
космических телескопов [Текст] / А.И.Лысенко, Е.Р.Маламед,
М.Н.Сокольский, Ю.Д.Пименов, И.Е.Путилов // Оптический
журнал. 2002, №9. - С. 21 - 25.
71. Малашин, М.С. Основы проектирования лазерных
локационных систем [Текст] / М.С.Малашин, Р.П. Каминский, Ю.Б.
Борисов II - М.: Высшая школа, 1983. - 207с.
72. Матвеев, В.В. Основы построения бесплатформенных
инерциальных навигационных систем [Текст] / В.В.Матвеев,
В.Я.Распопов // - Санкт-Петербург, 2009. - 278с.
73. Мельканович, А.Ф. Фотографические средства и их
эксплуатация [Текст] / А.Ф. Мельканович // - М.: МО СССР. 1984.
- 576с.
74. Методы компьютерной обработки изображений [Текст]
/ Под ред. В.А.Сойфера // - М. Физматлит. 2001. - 780с.
75. Мирошников, М.М. Теоретические основы оптико -
электронных приборов. [Текст] / М.М.Мирошников // - Л - д:
Машиностроение. 1983,- 696с.
76. Михлин, Б.З. Геомагнитная навигация [Текст] /
Б.З.Михлин, В.П.Селезнёв, А.В.Селезнёв // - М: Машиностроение.
1976.-280с.
77. Метод автоматизированной сегментации изображений
цитологических препаратов на основе модели активного контура
471
[Текст] / Д.М. Мурашов // ТРУДЫ МФТИ, 2009, Том 1, № 1, стр.
80-89.
78. Moravec, Н. Obstacle Avoidance and Navigation in the
Real World by a Seeing Robot R.over [text] / H.Moravec //
79. Навигация, наведение и стабилизация в космосе.
[Текст] / Под ред. Дж. Э. Миллера // - М.: Машиностроение. 1970.
-363с.
80. Никоноров, А.В. Параллельная реализация двумерных
БИХ-фильтров в распределенной системе обработки изображений
[Текст] / А.В.Никоноров, М.Г.Милюткин, В.А.Фурсов //
Вычислительные методы и программирование. - М. Московский
университет. 2010. 1, Т. 11. С. 92-98.
81. Основы теории полёта космических аппаратов [Текст] /
Под ред. Г.С.Нариманова и М.К.Тихонравова // - М.:
Машиностроение. 1972.-607с.
82. Охоцимский, Д.Е. Основы механики космического
полёта [Текст] / Д.Е.Охоцимский, Ю.Г.Сухарулидзе // - М: Наука.
1990. -448с.
83. Петрищев, В.Ф. Метод декомпозиции в задаче
припланетной астронавигации с использованием псевдозвёзд
[Текст] / В.Ф Петрищев // Космические исследования. 1989, №2, -
С.221-227.
84. Петрищев, В.Ф. О полной наблюдаемости отклонений в
элементах внешнего ориентирования съемочной камеры по
результатам обработки снимков земной поверхности [Текст] /
В.Ф.Петрищев // Исследование Земли из космоса. 1992, №5, - С.31-
37.
85. Петрищев, В.Ф. Аналитическая модель отклонений в
координатах точек псевдокадра, получаемого при сканерной съемке
земной поверхности, для случая круговой орбиты и сферической
невращаюшейся Земли [Текст] / В.Ф.Петрищев //' Исследование
Земли из космоса. 1993, №2, - С.48-55.
86. Петрищев, В.Ф. Скорость движения оптического
изображения при сканировании земной поверхности [Текст] /
В.Ф.Петрищев // Оптический журнал. 1995, №9, - С. 46-50.
87. Петрищев, В.Ф. Анализ процесса сканирования земной
поверхности с помощью зеркала [Текст] / В.Ф. Петрищев //
Оптический журнал. 1995, №12, - С. 47-51.
88. Петрищев, В.Ф. Система автономной навигации
472
космического аппарата по протяженным наземным ориентирам
[Текст] / В.Ф.Петрищев // Изв. вузов. Приборостроение. 2001, №4, -
С. 24-30.
89. Петрищев, В.Ф. Оптимальная программа сканирования
оптико-электронного комплекса дистанционного зондирования
Земли. Случай эллиптической орбиты и сферической вращающейся
Земли [Текст] / В.Ф.Петрищев // Тр. междунар. акад,
информатизации «Современные оптико-электронные комплексы и
системы дистанционного зондирования Земли». -М.: Зеленоград,
2003, - С. 101-122.
90. Петрищев, В.Ф. Оптимальная программа сканирования
оптико-электронного телескопического комплекса дистанционного
зондирования Земли для общего случая расположения оптико-
электронного преобразователя в фокальной плоскости объектива
[Текст] / В.Ф.Петрищев // Сб. тр. XI Всерос. науч. - техн, семинара
по управлению движением и навигации летательных аппаратов.
Самара, 2003, - С.149-156.
91. Петрищев, В.Ф. Полетная фотограмметрическая
калибровка оптико-электронной аппаратуры дистанционного
зондирования Земли по звездному небу [Текст] / В.Ф.Петрищев //
Полет. 2005, №7, - С.39-42.
92. Петрищев, В.Ф. Автономная навигация космического
аппарата дистанционного зондирования Земли по протяженным
наземным ориентирам [Текст] / В.Ф.Петрищев // Полет. 2005, №9, -
С. 17-22.
93. Петрищев, В.Ф. Общая модель для расчёта сдвига
оптического изображения, вызываемого погрешностями работы
бортового комплекса управления КА ДЗЗ [Текст] / В.Ф.Петрищев //
Сб. тр. XII Всероссийского науч.-техн, семинара по управлению
движением и навигации летательных аппаратов - Самара, 2006, -
С.101-113.
94. Петрищев, В.Ф. Прецизионная интегрированная
система автономной навигации космического аппарата
дистанционного зондирования Земли по протяжённым наземным
ориентирам [Текст] / В.Ф.Петрищев И Труды IV науч. - техн,
конференции “Системы наблюдения, мониторинга и
дистанционного зондирования Земли. - М.: МНТОРЭС им.
А.С.Попова, 2007. - С.68-74.
473
95. Петрищев, В.Ф. Оценивание точности системы
автономной навигации
космического аппарата [Текст] /
В.Ф.Петрищев // Полет. 2008, №4, -
С.21-27;
96. Петрищев, В.Ф. Элементы теории гироскопа и его
применение для управления космическими аппаратами [Текст] /
В.Ф.Петрищев // Учебное пособие. Самара, СГАУ, 2004. - 67с.
97. Петрищев, В.Ф. Оптимальное сканирование
космическим аппаратом поверхности Земли [Текст] /
В.Ф.Петрищев // Учебное пособие. Самара, СГАУ, 2007. - 92с.
98. Петрищев, В.Ф. Устройство для определения угловых
элементов внешнего ориентирования линии визирования
съемочной аппаратуры
[Текст] / В.Ф.Петрищев, В.С.Солунин,
Б.И.Стрельников // Патент РФ на
изобретение № 2145110 от 27января 2000 г.
99. Петрищев, В.Ф. Устройство для определения угловых
элементов внешнего ориентирования линии визирования
съемочной аппаратуры [Текст] / В.Ф.Петрищев, А.С.Рыцарев //
Патент РФ на изобретение № 2195009 от 20 декабря 2002 г.
100. Пешехонов, В.Г. Новые космические приборы [Текст] /
В.Г.Пешехонов// AEROSPASE JOURNAL. 1996. Июль - август. -
С.97.
101. Попов, С.Б. Кластерная технология формирования и
параллельной фильтрации больших изображений [Текст] /
С.Б.Попов, В.А.Сойфер, А.А.Тараканов, В.А.Фурсов //
Компьютерная оптика. № 23, 2002, С. 75-78.
102. Порфирьев, Л.Ф. Аналитические оценки точности
автономных методов определения орбит [Текст] / Л.Ф.Порфирьев,
В.В.Смирнов, В.И.Кузнецов // - М.: Машиностроение, 1987. - 280с.
103. Пресс, Ф.П. Фоточувствительные приборы с зарядовой
связью [Текст] / Ф.П.Пресс // - М.: Радио и связь. 1991. - 262с.
104. Прэтт, У. Цифровая обработка изображений [Текст] /
У.Прэтт // - М.: Мир, 1982. - Кн. 2 - 480 с.
105. Разоренов, Т.Н. Наблюдаемость в нелинейных задачах
навигации космических аппаратов [Текст] / Т.Н.Разоренов. //
Космич. исслед., 1975, Т.13, Вып. 2, С. 190 - 200.
106. Раушенбах, Б.В. Управление ориентацией космических
474
аппаратов [Текст] / Б.В.Раушенбах, Е.Н.Токарь // - М. Наука. 1974.
-598с.
107. Ривкин, С.С. Статистическая оптимизация
навигационных систем [Текст] / С.С.Ривкин, Р.И.Ивановский,
А.В.Костров // - Л-д: Машиностроение. 1976. - 280с.
108. Ройтенберг, Я.Н. Автоматическое управление [Текст] /
Я.Н.Ройтенберг// - М.: «Наука». 1978. - 552с.
109. Rosenfeld, A. Edge and Curve Detection for Visual Scene
Analysis [text] / A.Rosenfeld, M.Thurston // IEEE, Trans. Computers,
pp-20, 5, 562-569 (May 1971).
110. Романтеев, А.Ф. Астрономическая навигация
пилотируемых космических кораблей. [Текст] / А.Ф.Романтеев,
Е.В.Хрунов // -М.: Машиностроение. 1976. -232с.
111. Рязанов, С.Н. Методы и средства автономной
навигации космических аппаратов [Текст] / С.Н.Рязанов,
В.Ф.Фатеев // Зарубежная радиоэлектроника, №6, 1991, - С. 50-66.
112. Сетевые спутниковые радионавигационные системы
[Текст] / Под ред. В.С.Шебшаевича // - М.: Радио и связь. 1993. -
408с.
113. Смирнов, В.В. Аналитическая оценка точности
определения траекторий ИСЗ с космических станций. [Текст] /
В.В.Смирнов, А.Д.Голяков //.Космич. исслед., 1992, т.30, вып. 3,
с.418-420.
114. Смирнов, В.В. Оптимизация углового расстояния
между двумя ИСЗ на круговой орбите при уточнении положений по
взаимным астрономическим измерениям [Текст] / В.В.Смирнов,
А.Д.Голяков // Космич. исслед., 1992, т.30, вып.4.
115. Сергеев, В.В. Оценка разрешающей способности
видеотракта по фрагментам регистрируемых изображений [Текст] /
В.В.Сергеев, В.А.Фурсов, С.И.Парфенов // Автометрия, № 5, 2001.
-С. 25 -36.
116. Современные информационные технологии в задачах
навигации и наведения беспилотных маневренных летательных
аппаратов [Текст] / Под ред. М.Н.Красильщикова, Г.Г.Себрякова //
М.: ФИЗМАТЛИТ, 2009. - 556 с.
117. Соллогуб, А.В. Космические аппараты систем
зондирования поверхности Земли [Текст] / А.В. Соллогуб, Т.П.
Аншаков, В.В. Данилов. Под ред. Д.И.Козлова // - М.:
Машиностроение. 1993. - 367с.
475
118. Szeliski, R. Image Alignment and Stitching [Текст] / /
Richard Szeliski // A Tutorial Technical Report MSR-TR-2004-92,
2006, 68 c. http://www.research.microsoft.com (A shorter version of this
report appeared in Paragios, N. et al., editors, Handbook of
Mathematical Models in Computer Vision, pages 273-292, Springer,
2005)
119. Теряев, Е.Д. Цифровые системы и поэтапное
адаптивное управление [Текст] / Е.Д.Теряев, Б.М.Шамриков // - М.:
Наука, 1999
120. Тербер, К. Архитектура высокопроизводительных
вычислительных систем [Текст] / К. Дж. Тербер // - М.: Наука,
1985.-272с.
121. Ту, Дж. Принципы распознавания образов [Текст] /
Дж. Ту, Р.Гонсалес // - М.: Мир, 1978. 414.
122. Федосеев, В.И. Оптико-электронные приборы
ориентации и навигации космических аппаратов [Текст] /
В.И.Федосеев, М.П.Колосов // - М.:Логос. 2007. - 248 с.
123. Фу, К. Структурные методы в распознавании образов
[Текст] / К.Фу //-М.: Мир. 1977. - 319с.
124. Фурсов, В. А. Идентификация моделей систем
формирования изображений по малому числу наблюдений [Текст] /
В.А.Фурсов // - Самара ИПО СГАУ, 1998. - 128 с.
125. Fursov, V.A. Constructing unified identification algorithms
using a small number of observations for adaptive control and
navigation systems, [text] / V.A. Fursov //Journal: Proc. SPIE Vol. 3087,
p. 34-44, Scott A. Speigle; Ed., 1997.
126. Футнер, И. Galileo - это улучшенная GPS или нечто
большее?
Анализ характеристик с помощью программы NAV - SIM
[Текст] / И. Футнер // Доклады IX Санкт - Петербургской
международной конференции по интегрированным навигационным
системам. C-Пб. ЦНИИ «Электроприбор». 2001. - С.60 -70.
127. Harris, С. A. Combined Comer and Edge Detector, [text] /
C.A.Harris // Proceedings of the 4th Alvey Vision Conference, pp. 147—
151.
128. Хмелев, P.B. Совместное использование структурного
анализа и метрики Хаусдорфа при сравнении объекта и эталона
[Текст] / Р.В. Хмелев // Компьютерная оптика. - 2005. - Вып. 27. -
С. 174-176
476
129. Chan, T.F. Active contours without edges [text] / T.F.
Chan, L.A. Vese // Image Processing, IEEE Transactions on Vol. 10, Iss.
2, Date: Feb 2001, P. 266-277.
130. Шапиро, Л. Компьютерное зрение [Текст] / Л. Шапиро
// - М.: БИНОМ. Лаборатория знаний, 2006. - 752 с.
131. Шебшаевич, В.С. Введение в теорию космической
навигации [Текст] / В.С.Шебшаевич // - М.: Сов. Радио. 1971. -
295с.
132. Эльясберг, П.Е. Введение в теорию полёта
искусственных спутников Земли [Текст] / П.Е.Эльясберг // - М.:
Наука. 1965. -540с.
133. Эльясберг, П.Е. Определение движения по результатам
измерений [Текст] / П.Е.Эльясберг //- М.: Наука. 1976. - 415с.
134. Эскобал, П. Методы определения орбит [Текст] /
П.Эскобал // - М.: Мир. 1970.
135. Яновский, Б.М. Земной магнетизм [Текст] /
Б.М.Яновский // - М.: Гос. Изд-во техн-теорет. литературы. 1953. -
592с.
136. Яновский, Б.М. Земной магнетизм. Часть I [Текст] /
Б.М.Яновский // Изд- во Ленинградского университета. 1964. -
446с.
137. http://www.fas.org/spp/military/program/imint/kh-
12.htm.KH-12 IMPROVED CRYSTAL.
477
ПРИЛОЖЕНИЕ А
Расчёт некоторых функций дальности
Проведём детальный анализ изменения дальности до
произвольной точки визирования М при изменении координат х и z
её проекции ш , а также получим некоторые соотношения между
дальностями для различных точек фокальной плоскости. В первую
очередь представляет интерес влияние изменения координаты z.
А.1. Дальность вдоль ЦЛВ
Обозначим через Do дальность вдоль центральной линии
визирования, т.е. при х = 0, z = 0. Из (2.8) следует
Do = D|O-D2o, Di0 = а22 ' г , D20=(D;0 + R;-r2)'2 (А.1)
А.2. Отличие в дальности на левом краю ОЭП
Определим дальность до точки, проектирующейся на левый
край ОЭП с координатами х и z-X через параметры дальности Do:
Ол = О0 + ДОл,ДПл = ДГ>1л-ДО2л. (А.2)
Здесь ДП1л находится из D] (2.8) как разность между D, и Do:
AD„ =^а21+^у^а,,^-г . (А.З)
Заметим, что D2j1 (2.8) отличается от D2o (А.1) на величину,
обозначаемую ДО2л. Эта величина может быть определена
следующим образом. Представим левую и правую части третьего
из соотношений (2.8) в функции поправок к параметрам дальности
вдоль ЦЛВ:
DM + AD,, = [(D,„ + AD,,)' + R; - r‘] .
Здесь необходимо отметить, что параметр ДП[Л в правой части
полученного равенства значительно меньше параметра D10
.Поэтому, возводя двучлен в правой части в квадрат и удерживая
лишь член первого порядка
малости, получим
D,o + AD,, = [(D;„ + R2 - r) + 2D,0 AD,„ ]’ *’
Воспользуемся далее формулой для бинома Ньютона
разложения двучлена, удерживая в этой формуле лишь члены
первого порядка малости:
(а±Д)п = ап±п-ап'1-Д (А .4)
при а » Д [4].
С учётом равенства (А.1) для D2q применение формулы для
478
бинома Ньютона даёт:
D2o + AD2„=D2„ + -^-2Dl0AD„ ,
^^20
откуда
AD,n=AD1„-^ = f-a,,+^a22Yr^- . (А.5)
D,„ f ) D,o v
С учётом этого результата параметр ДО., (А.2) отличия
дальности вдоль линии визирования, проходящей через левый край
линейки ОЭП и вдоль ЦЛВ, оказывается равным
(х z-k 'l {D .I fx z-?, ) D ,.
' If f 23 J Id20 J If f -!J D20
поскольку в соответствии c(l.l) D|0- D20 = Do.
A.3. Отличие в дальности на правом краю ОЭП
Совершенно аналогично предыдущему пункту
устанавливается различие в дальности на правом краю ОЭП и
вдоль ЦЛВ.
Запишем
D„ = Do + ADn ; ADn = ДО)[; - AD2r,, (A.7)
где AD,n=^a21+^a2,] r . (A.8)
Разлагая в правой части (2.8) D, на сумму D10 и ADi„ ,
ограничиваясь членами первого порядка малости и
воспользовавшись формулой для бинома Ньютона (А.4) и разлагая
в правой части D2 на сумму D20 и AD2n , получим
AD, = (—а, + —-а2Дг-^ (А.9)
' I f f J D
К 1 1 / ‘-'20
и, соответственно,
AD = -—а,.+-----а,, -г---. (А.10)
If f J D20
А.4. Расчёт величины — + —
D„ D,
Используя (А.7) и применяя формулу для бинома Ньютона,
1
величину — представим в виде
= (D„ + AD )' --^AD,
D. ° D„ Di
D‘
479
Подставляя сюда AD„ в соответствии с (А.Ю), получим
J__ 1
D ~ D
X Z + к I r
— a„ +---a.. ---
f ' f Jd2J
. i
Аналогично — представим в виде
(A.11)
х z - к
— а„ +---------а
f 21 f
_i__
D, ~D,
В результате сложения (A.l 1) и (A.12) будем иметь
1 J_ = _2
D„ +D , ~D(
X z ) г
— аЭ1 + -а,, -----
f f -’Jdm
(A.12)
(A.13) ,
г
. _ „ 11
A.5. Расчет величины-----
D„ D,
Вычитая (A.l 1) из (A.12), получим
1 1 Л r
------= 2—a,.--- .
D„ D, f D0D,0
(A.14)
. , и 11
A.6. Расчет величины-
D„ D,
Представим в виде (A.l 1):
X Z 1 г
— а,, + —а,, —
f •' f ~ Ж(
_1__ 1
D„-D
В результате получим
J____[
D, D,
+ к 1 г
—а,, -
f MJ
X Z 1 Г
—а,. + -а„ —
f 3i f ‘3;d
А.
=—а,,
f d0d20
(A.15)
x
?
Г
A.7. Расчёт величины 7--L
D, D
z 1 г
-а„ -----
f ) D
1 ^20
X
7
По аналогии с предыдущим пунктом, воспользовавшись
формулой (А.Ю), будем иметь
fx Z ) г
If 21 f "JdJ
А.8. Расчёт величины -^- + —
D2 D,
По аналогии с п. А.4 можно записать
D, D,
X г
-----------
f D0D20
(A. 16)
480
D? D
-- = (Drj + ADn): =—-2-?AD„ .
D’ D; D’
Подставляя сюда ADn в соответствии с (А. 10), получим
1 Г, Лх z + /. ) г
—- 1 + 2 — а,, +--а,. --- .
< - f ‘>DJ
Аналогично — представим в виде
( X z - )-
1 + 2 — а„ 4--а
< f *' f
J__ 1
dTdJ
В результате имеем
1 1 2 Г,
--+ = -— 1 + 2 —;
D D D: if
Dj
, -a
z i г
------------
f J D
1 ' *"20
(А-17)
(А. 18)
(А.19)
А.9. Расчёт некоторых вспомогательных величин
Без доказательства (в силу его очевидности) приведём два
вспомогательных равенства, которые также используются в работе:
^71^- — = ---; = А (А.20)
Do Do D„ DB Do
481
ПРИЛОЖЕНИЕ Б
Интегральные кривые движения точек поверхности Земли
для случая эллиптической орбиты КА и сферической
вращающейся Земли
Для нахождения траектории движения произвольно
выбранной точки в плоскости углов тангажа и крена в общем
случае эллиптической орбиты КА и сферической вращающейся
Земли аналогично предыдущему пункту будем полагать:
xsO, zsO, ysO, ysO, Vx sO, Vz sO.
Для составляющих Wx , Wy , Wz вектора скорости в
рассматриваемом случае имеют место приближённые соотношения:
Wx = (l + ecosu)-R3Q3cosi;
;Р
W = esinu; (Б.1)
VP
Wz =-R3 Q3 sini cosu.
Здесь p = 3,986' 105 км3/с2 - гравитационный потенциал Земли,
Q3 = 7,292'10'5 с1 - угловая скорость вращения Земли, параметры
орбиты р, е, i, и, и - соответственно фокальный параметр,
эксцентриситет, наклонение плоскости орбиты к плоскости
экватора, текущий аргумент широты и истинная аномалия.
Тогда при Wy^O (орбита эллиптическая) и при Wz^0 (Земля
вращается) соотношения (4.18) и (4.19) принимают вид:
^(wxan+Wya21+Wza31)+coT=0;
7 (Б.2)
-(wxa]3+Wya23 + Wza33)-coK =0.
В рассматриваемом случае кинематические уравнения (4.23)
также имеют упрощенный вид (4.24). Подставляя их в (Б.2), после
вынесения в последних о>г и сок в правые части и последующего
деления этих уравнений друг на друга будем иметь:
W„au + W а,, + Wza„ а
— --------:----— =—cosB
WxaI3 + Wya23 + Wza33 p
Подставляя сюда выражения из (4.2) для направляющих
косинусов при V=0, получим:
482
Wxcosa+Wsina a „
WxsinasmP-Wycosasinp +Wzcos[J p
Для получения выражения для интегральных кривых,
описываемых этим дифференциальным уравнением, необходимо
последнее проинтегрировать. Результаты численного
интегрирования (Б.З) представлены на рис. БЛ, Б.2, Б.З. При этом
приняты следующие параметры орбиты: высота перигея Нп=350 км,
высота апогея На=700 км, наклонение орбиты i=60°. Рис. Б.1
приведен для восходящего узла орбиты (и=0), соответствующего
истинной аномалии \)=90°. Соответственно, рис. Б.2 приведен для
и=90°, \)=180°, а рис. Б.З - для и=180°, 1)=270°.
На этих рисунках наглядно видно, как влияет главным
образом вращение Земли на поведение интегральных кривых
движения точек наблюдения. Практическое совпадение кривых рис.
Б.2 с кривыми рис.4.5 подтверждает, что при коллинеарности
направления движения точки наблюдения с плоскостью орбиты (в
точке орбиты с аргументом широты и=+90°, а также в
непоказанной на рисунке точке с и=-90°) интегральные кривые
соответствуют случаю отсутствия вращения Земли. И наоборот, в
восходящем узле орбиты (ВУЗ) (рис.Б.1) и нисходящем (НУЗ)
(рис.Б.З)
483
-a
•W*W*®l*?3*W*«3‘«*33*K43*C*33*3tl*23*3tl*l3*l0 «3 О -3 -10-13-»-Л-ЗО-ЗЗ-в-С-Я-»-<0-О-Я^3-30-И-Я
Рис. Б. 1. Интегральные кривые движения точек наблюдения. и=0
интегральные кривые в целом незначительно деформируются,
причем, таким образом, что в каждой точке кривой, имеющей а=0 и
некоторый заданный угол р, интегральная кривая (касательная к
ней) уже перестает совпадать с направлением оси оа. Это говорит о
необходимости разворачивать КА на некоторый дополнительный
угол по рысканию даже при угле а=0 и произвольном угле р.
484
-a
Рис. Б.2. Интегральные кривые движения точек наблюдения.
и=90°
Рис. Б.З. Интегральные кривые движения точек наблюдения.
и=180°
485
Для нахождения угла разворота КА по рысканию для любой
заданной точки наблюдения с координатами а и Р воспользуемся
соотношением (4.19), которое при х=0, z=0, (Вк=0 и V7=0 даёт
Wxa13 + Wya23 + Wza33 = О,
откуда с учётом выражений (4.2) для a; j следует искомая
величина
W sin a sin р - Wv cos а sin р + W, cos р .
tg v =--------------------------------- (Б.4)
Wx cos а + W sin а
486
Научное издание
Аншаков Геннадий Петрович
Голяков Алексей Дмитриевич
Петрищев Владимир Федорович
Фурсов Владимир Алексеевич
«Автономная навигация
космических аппаратов»
Подписано в печать 28.11.2011
Формат 60 х 84/16
Гарнитура Times New Roman
Усл. печ. л. 28,5
Тираж 300 экз.
Заказ № 6510
Отпечатано в типографии ФГУП «ГНПРКЦ «ЦСКБ-Прогресс
Россия, Самара, ул. Земеца, 18