























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Автор: Рег Д.А. Сартори Г.Д.
Теги: электротехника компьютерные технологии электроника энциклопедия технологические процессы промышленная электроника переводная литература издательство дмк пресс
ISBN: 978-5-94074-936-3
Год: 2013




Y.ZJ;K
66K
621.38
32.973.26-108.2
P31
Per 1I
.
P31 3Hl(MKJIOrre)],Iul rrpOMblIlIJIeHHOM 3JIeKTpOHMKM.. M.: )J,MK ITpecc; 2013. - 1136
c.: MJI.
ISBN 978-5-94074-936-3
IIpell,MeTOM rrpOMblIlIJIeHHOM 3JIeKTpOHMKM 51BJI5IeTC5I 3JIeKTpOHMKa, MCrrOJIb3Y-
eMa51 rrpM BblIIOJIHeHMM TeXHOJIOrMqeCKMX rrpOl(eCCOB, Heo6xo)],MMblX )],JI5I rrpOM3-
BO)],CTBa pa3JIMqHbiX BM)],OB TOBapOB M YCJIYr.
B 3TOM KHMre paCCMOTpeHbl MHorMe 3JIeMeHTbi 3JIeKTpOHHbiX CMCTeM, rrpMqeM
aKl(eHT c)],eJIaH Ha TOM, KaK 3TM 3JIeMeHTbi BrrMCblBaIOTC5I B rrpOMblIlIJIeHHOe IIpM-
MeHeHMe. Yqe6HMK BblCTpoeH B COOTBeTCTBMM C Tpa)],Ml(MOHHbIMM KypCaJ\UI rrpo-
MblIlIJIeHHOM 3JIeKTpOHMKM, CYIIleCTBYIOIIlMMM B TeXHMqeCKMX YHMBepCMTeTax. B
HeM paCCMaTpMBaIOTC5I )],BMraTeJIM rrOCT05lHHOrO M rrepeMeHHoro TOKOB, BorrpOCbl
)],MCKpeTHoro M aHaJIOrOBOro yrrpaBJIeHM5I rrpOM3BO)],CTBeHHbIM rrpOl(eCCOM, KJIlOqM
M )],aTqMKM, a TaK)Ke CMCTeMbl yrrpaBJIeHM5I H aBTOMaTM3aL(MM rrpOM3BO)],CTBa. Kpo-
Me Toro, pa3)],eJIbl, rrOCB5IIIleHHble MexaHOTpOHMKe, B paBHOM CTerreHM rrOJIe3HbI M
)],JI5I M3yqalOIIlMX KYpC MexaHMKM, rrOCKOJIbKY 3HaKOM5IT C KOHl(errL(M5IMM 3JIeKTpO-
MexaHMKM, MCrrOJIb3YIOIIlMMMC5I B rrpOMbIIlIJIeHHbIX MaIlIMHax M aBTOMaTMKe.
113)],aHMe rrpe)],Ha3HaqeHO cTy)],eHTaJ\1 CTapIlIMX KypCOB pa)],MO- M 3JIeKTpOTex-
HMQeCKMX Crrel(MaJIbHOCTeM BY30B, o6YQaIOIIlMXC5I rro Crrel(MaJIbHOCTM
IIpOMbIIlI-
JIeHHa51 3JIeKTpOHMKa
, MH)KeHepaJ\l, a TaK)Ke 6y)],eT rrOJIe3HO BceM QMTaT, eJI5IM
MHTepecYIOIlIMMC5I COBpeMeHHOM 3JIeKTpOHMKOM.
Per )J,)KeMMC
3HLU.1KnOne.QLt151 npOMblwneHHoi1 3neKTpOHLt1KLt1
fJIaBHbIM pelJ,aKTOp MOBqaH II. A.
dm@dmk-press.ru
KoppeKTop CI1H5Iem f. 11.
BepcTKa ITapaHCKa5I H. B.
LJ,I13aMH 06JIQ)KKI1 MOBqaH A. r.
ITOlJ,III1CaHO B IIeqan 28.02.2013. cDopMaT 70x100 1/16.
fapHI1Typa
ITeTep6ypr
. ITeqan ocpceTHa5I.
YCJI. IIeq. JI. 106,5.
Web-caih I13lJ,aTeJIbCTBa: ww\\:dmk-press.ru
ISBN 0-13-206418-9 (aHrJI.)
ISBN 978-5-94074-936-3 (pyc.)
Copyright @ Pearson Education Inc.,
@ 113lJ,amle, ocpopMJIeHI1e LJ,MK ITpecc, 2013
3
ПРЕДИСЛОВИЕ ...................................................................................................... 12
ГЛАВА 1 ВВЕДЕНИЕ В ПРОМЫШЛЕННУЮ ЭЛЕКТРОНИКУ ......................... 19
Цель главы ............................................................................................. 19
Применение знаний в профессиональной деятельности ........................ 20
1.1 Введение ........................................................................................ 21
1.2 Краткая история развития промышленной электроники ............... 22
1.3 Типы промышленного производства .............................................. 25
1.4 Классификация устройств управляющей промышленной
электроники ................................................................................... 27
1.5 Пирамида и дерево технологий ...................................................... 29
1.6 Поиск и устранение неисправностей системы ............................... 33
1.7 Знания, необходимые для схемотехнического анализа .................. 47
1.8 Веб'сайты для данного раздела ..................................................... 48
Резюме ................................................................................................... 48
Вопросы .................................................................................................. 50
Проблемы поиска неисправностей ........................................................ 51
Задачи ..................................................................................................... 52
ГЛАВА 2 ВХОДНЫЕ И ВЫХОДНЫЕ ДИСКРЕТНЫЕ УСТРОЙСТВА
УПРАВЛЕНИЯ ....................................................................................... 54
Цель главы ............................................................................................. 54
Применение знаний в профессиональной деятельности ........................ 55
2.1 Введение в дискретное управление ............................................... 56
2.2 Классификация переключателей по механическим
и электрическим свойствам ........................................................... 56
2.3 Ручные переключатели для электронных схем .............................. 71
2.4 Механические переключатели электронных схем ......................... 78
2.5 Мощные ручные переключатели для промышленого
управления ..................................................................................... 81
2.6 Переключатели для промышленого управления
с механическим приводом .............................................................. 92
2.7 Переключатели, управляемые технологическим процессом ....... 100
2.8 Дискретные выходные устройства — приводы ........................... 106
2.9 Реле .............................................................................................. 109
2.10 Контакторы .................................................................................. 117
2.11 Клапаны ....................................................................................... 119
2.12 Нагреватели и сигнальные лампы ............................................... 128
2.13 Схемы управления ....................................................................... 129
ëÓ‰ÂʇÌËÂ
ëÓ‰ÂʇÌËÂ
4
2.14 Поиск неисправностей во входных и выходных устройствах ....... 140
2.15 Веб'сайты производителей входных и выходных устройств ........ 145
Краткий обзор главы 2 ......................................................................... 146
Вопросы ................................................................................................ 149
Вопросы по справочным данным .......................................................... 151
Проблемы поиска неисправностей ...................................................... 152
Задачи ................................................................................................... 152
ГЛАВА 3 ТВЕРДОТЕЛЬНЫЕ УСТРОЙСТВА В ПРОМЫШЛЕННОЙ
ЭЛЕКТРОНИКЕ ................................................................................... 155
Цель главы ........................................................................................... 155
Применение знаний в профессиональной деятельности ...................... 156
3.1 Введение в твердотельные устройства ......................................... 156
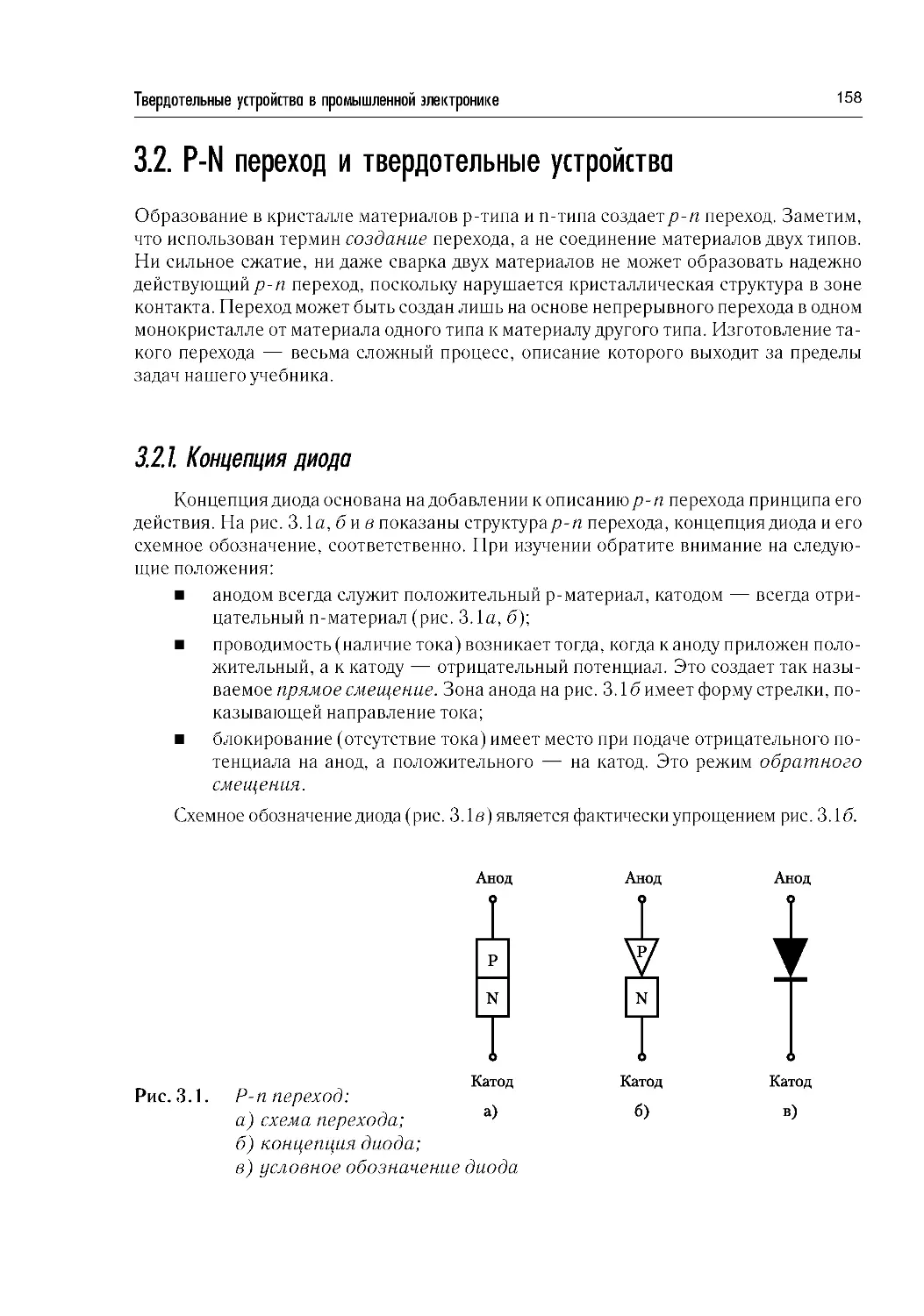
3.2 р'n переход и твердотельные устройства ..................................... 158
3.3 Биполярный транзистор ............................................................... 166
3.4 Транзисторные ключи .................................................................. 172
3.5 Твердотельные реле ..................................................................... 182
3.6 Цепи смещения транзисторных усилителей ................................ 185
3.7 Транзисторный усилитель с общим эмиттером ............................ 189
3.8 Транзисторный регулятор напряжения ........................................ 194
3.9 Транзисторный инвертор ............................................................. 197
3.10 Транзисторные преобразователи постоянного
напряжения .................................................................................. 203
3.11 Диагностирование схем с биполярными транзисторами ............. 211
3.12 Другие твердотельные устройства ............................................... 212
3.13 Веб'сайты о твердотельных устройствах ..................................... 221
Резюме ................................................................................................. 222
Вопросы ................................................................................................ 224
Вопросы по справочным данным .......................................................... 225
Задачи ................................................................................................... 226
ГЛАВА 4 ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ И ЛИНЕЙНЫЕ
ИНТЕГРАЛЬНЫЕ СХЕМЫ ................................................................. 229
Цель главы ........................................................................................... 229
Применение знаний в профессиональной деятельности ...................... 230
4.1 Операционные усилители. Краткий исторический очерк ............ 231
4.2 Введение в параметры операционных усилителей ....................... 232
4.3 Пояснение к справочным данным операционных усилителей ..... 233
4.4 Инвертирующие усилители ......................................................... 240
4.5 Неинвертирующие усилители ...................................................... 245
4.6 Суммирующие усилители ............................................................. 247
4.7 Дифференциальные усилители .................................................... 249
ëÓ‰ÂʇÌËÂ
5
4.8 Преобразователи напряжения в ток ............................................ 250
4.9 Преобразование тока в напряжение ............................................ 251
4.10 Интеграторы и дифференциаторы ............................................... 252
4.11 Компараторы и датчики окна ....................................................... 256
4.12 Схемы активных фильтров ........................................................... 262
4.13 Контрольно'измерительные усилители ....................................... 274
4.14 Усилители разностных токов ....................................................... 278
4.15 Поиск неисправностей в устройствах на базе ОУ ....................... 287
4.16 Веб'сайты по операционным усилителям .................................... 289
Резюме ................................................................................................. 290
Вопросы ................................................................................................ 292
Вопросы по справочным листам .......................................................... 294
Задачи ................................................................................................... 294
ГЛАВА 5 ПРИБОРЫ ИЗ СЕМЕЙСТВА ТИРИСТОРОВ ..................................... 297
Цель главы ........................................................................................... 297
Применение знаний в профессиональной деятельности ...................... 298
5.1 Введение в тиристоры .................................................................. 298
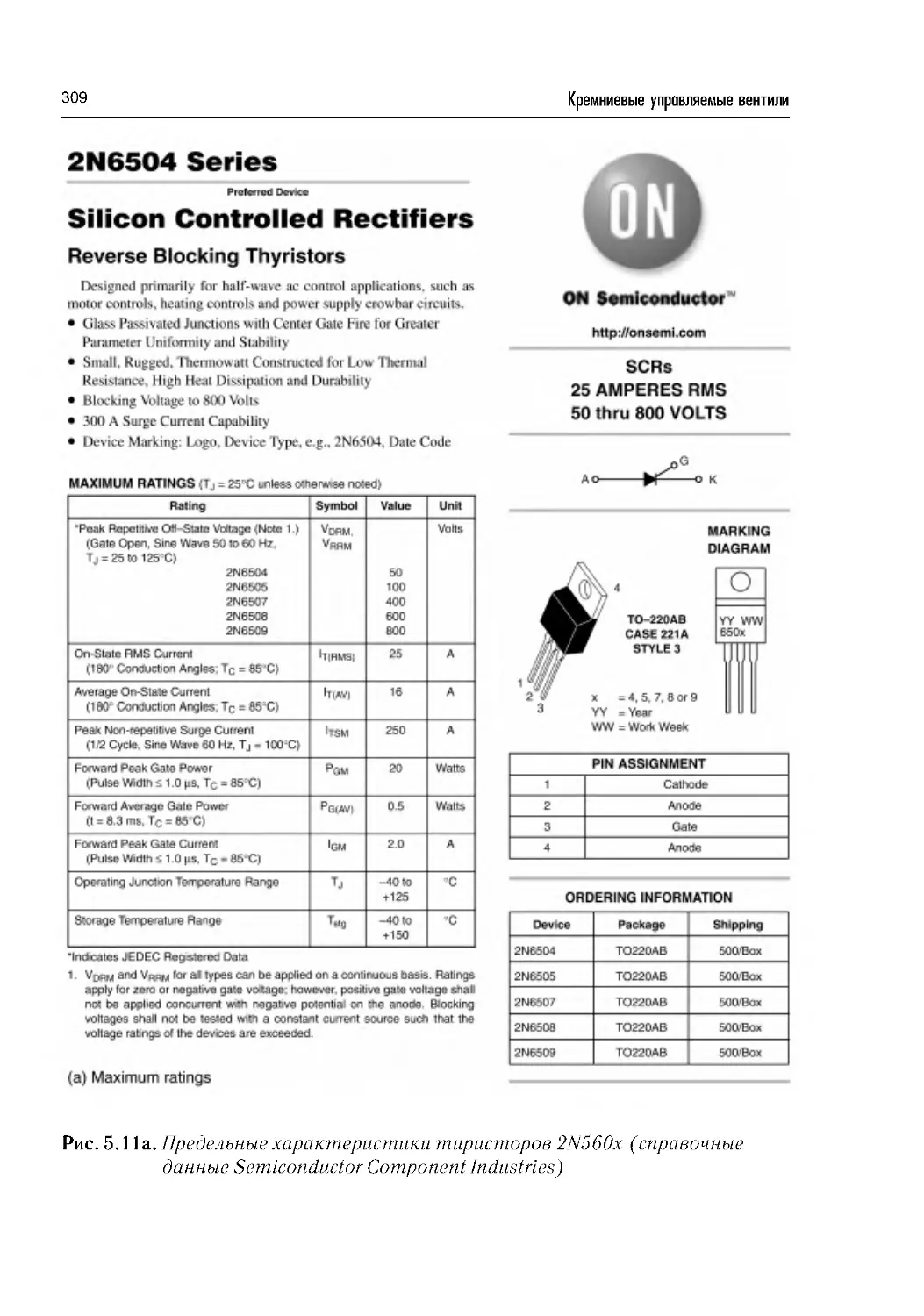
5.2 Кремниевые управляемые вентили .............................................. 300
5.3 Устройства переключения тиристора .......................................... 316
5.4 Применения тиристоров .............................................................. 327
5.5 Симисторы ................................................................................... 330
5.6 Применения симисторов .............................................................. 343
5.7 Управляемые переключатели ...................................................... 346
5.8 Поиск неисправностей тиристоров .............................................. 353
5.9 Веб'сайты о тиристорах ............................................................... 353
Резюме ................................................................................................. 354
Вопросы ................................................................................................ 355
Вопросы по справочным листам .......................................................... 357
Задачи ................................................................................................... 357
ГЛАВА 6 ДАТЧИКИ И УСТРОЙСТВА ДИСКРЕТНОЙ АВТОМАТИКИ ............. 361
Цели обучения ...................................................................................... 361
Применение знаний в профессиональной деятельности ...................... 362
6.1 Введение в электронные датчики ................................................. 363
6.2 Бесконтактные датчики приближения ......................................... 366
6.3 Бесконтактнные датчики фотоэлектрического типа .................... 383
6.4 Интерфейсы выходного устройства датчика ................................ 409
6.5 Аналоговые датчики для систем автоматизации .......................... 413
6.6 Выбор и применение датчиков ..................................................... 417
6.7 Подключение датчиков к цепям питания и управления ............... 429
6.8 Системы технического зрения ..................................................... 433
ëÓ‰ÂʇÌËÂ
6
6.9 Поиск неисправностей при применении дискретных
датчиков ....................................................................................... 445
6.10 Веб'сайты для дискретных датчиков автоматизации ................... 449
Резюме ................................................................................................. 450
Вопросы ................................................................................................ 453
Вопросы по справочным данным .......................................................... 455
Проблемы поиска неисправностей ...................................................... 456
Задачи ................................................................................................... 457
ГЛАВА 7 ДАТЧИКИ И ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
ДЛЯ УПРАВЛЕНИЯ АНАЛОГОВЫМИ ПРОЦЕССАМИ ................... 461
Цель главы ........................................................................................... 461
Применение знаний в профессиональной деятельности ...................... 462
7.1 Введение ...................................................................................... 463
7.2 Силовые приводы и выходные устройства ................................... 463
7.3 Управляющие клапаны ................................................................ 463
7.4 Электронагревательные элементы .............................................. 472
7.5 Обзор датчиков, усилителей и преобразователей для систем
управления ................................................................................... 475
7.6 Датчики температуры .................................................................. 478
7.7 Датчики давления ......................................................................... 489
7.8 Расходомеры ................................................................................ 499
7.9 Датчики уровня ............................................................................ 514
7.10 Датчики положения ..................................................................... 525
7.11 Другие датчики процесса ............................................................. 529
7.12 Устройства управления процессом поиска неисправностей
и датчики ...................................................................................... 531
7.13 Веб'сайты по устройствам управления процессом
и датчиков .................................................................................... 533
Резюме ................................................................................................. 534
Вопросы ................................................................................................ 538
Задачи ................................................................................................... 540
ГЛАВА 8 БЕЗОПАСНОСТЬ ................................................................................ 543
Цель главы ........................................................................................... 543
Применение знаний в профессиональной деятельности ...................... 543
8.1 Введение в технику безопасности ................................................ 545
8.2 Требования техники безопасности ............................................... 545
8.3 Безопасность обслуживащего персонала .................................... 547
8.4 Охрана труда на производственных участках ............................... 550
8.5 Датчики присутствия .................................................................... 551
8.6 Устройства электромеханической блокировки ............................ 557
ëÓ‰ÂʇÌËÂ
7
8.7 Разработка стратегии обеспечения безопасности ....................... 565
8.8 Рекомендации при проектировании ............................................. 573
8.9 Подсчет стоимости программы обеспечения безопасности ......... 573
8.10 Веб'сайты по технике безопасности ............................................ 574
Резюме ................................................................................................. 575
Вопросы ................................................................................................ 577
Задачи ................................................................................................... 578
ГЛАВА 9 ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА И ИХ СИСТЕМЫ
УПРАВЛЕНИЯ ..................................................................................... 581
Цель главы ........................................................................................... 581
Применение знаний в профессиональной деятельности ...................... 582
9.1 Введение ...................................................................................... 583
9.2 Теория магнетизма ....................................................................... 584
9.3 Возможности двигателя постоянного тока .................................. 587
9.4 Компоненты двигателя постоянного тока .................................... 590
9.5 Работа двигателей постоянного тока и их основные типы ........... 595
9.6 Электродвигатели постоянного тока с последовательным
возбуждением ............................................................................... 597
9.7 Электродвигатели постоянного тока с параллельным
возбуждением ............................................................................... 607
9.8 Двигатели постоянного тока со смешанным возбуждением ........ 615
9.9 Другие методы управления скоростью и направлением
вращения ...................................................................................... 621
9.10 Тяговые двигатели постоянного тока ........................................... 633
9.11 Методы торможения .................................................................... 635
9.12 Веб'сайты по двигателям постоянного тока и схемам
управления ................................................................................... 638
Резюме ................................................................................................. 640
Вопросы ................................................................................................ 641
Задачи ................................................................................................... 643
ГЛАВА 10 ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА И ПРИВОДЫ
С РЕГУЛИРОВАНИЕМ СКОРОСТИ .................................................. 645
Цель главы ........................................................................................... 645
Применение знаний в профессиональной деятельности ...................... 646
10.1 Введение ...................................................................................... 647
10.2 Основные принципы работы ........................................................ 647
10.3 Компоненты двигателя переменного тока ................................... 653
10.4 Однофазные асинхронные двигатели ........................................... 661
10.5 Трехфазные двигатели переменного тока .................................... 669
10.6 Управление трехфазными двигателями ....................................... 682
ëÓ‰ÂʇÌËÂ
8
10.7 Расшифровка данных, приведенных в табличке на двигателе ..... 689
10.8 Приводы двигателей переменного тока ....................................... 694
10.8 Веб'сайты по двигателям переменного тока и приводам
с регулированием скорости .......................................................... 699
Резюме ................................................................................................. 700
Вопросы ................................................................................................ 701
Задачи ................................................................................................... 702
ГЛАВА 11 СПЕЦИАЛЬНЫЕ ДВИГАТЕЛИ И ЦЕПИ УПРАВЛЕНИЯ .................. 705
Цель главы ........................................................................................... 705
Применение знаний в профессиональной деятельности ...................... 706
11.1 Введение в .................................................................................... 706
11.2 Двигатели постоянного тока с постоянными магнитами .............. 707
11.3 Бесщеточные двигатели постоянного тока .................................. 714
11.4 Шаговые двигатели ...................................................................... 719
11.5 Серводвигатели ............................................................................ 731
11.6 Оптические кодеры ...................................................................... 736
11.7 Резольверы .................................................................................. 746
11.8 Сравнение двигателей специального назначения ........................ 750
11.9 Веб'сайты по двигателям специального назначения
и устройствам управения ими ...................................................... 750
Резюме ................................................................................................. 751
Вопросы ................................................................................................ 753
Задачи ................................................................................................... 754
ГЛАВА 12 ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ ............... 757
Цель главы ........................................................................................... 757
Применение знаний в профессиональной деятельности ...................... 758
12.1 Введение .................................................................................... 759
12.2 Системы ПЛК и ее компоненты ................................................ 763
12.3 Типы ПЛК ................................................................................. 770
12.4 Стандартные языки IEC 61131'3 ... .... .... .... .... .... ... .... .... .... .... .... 773
12.5 Язык лестничных схем (LD) по стандарту IEC 61131'3 ... .... .... 775
12.6 Традиционное программирование логических лестничных схем ... 780
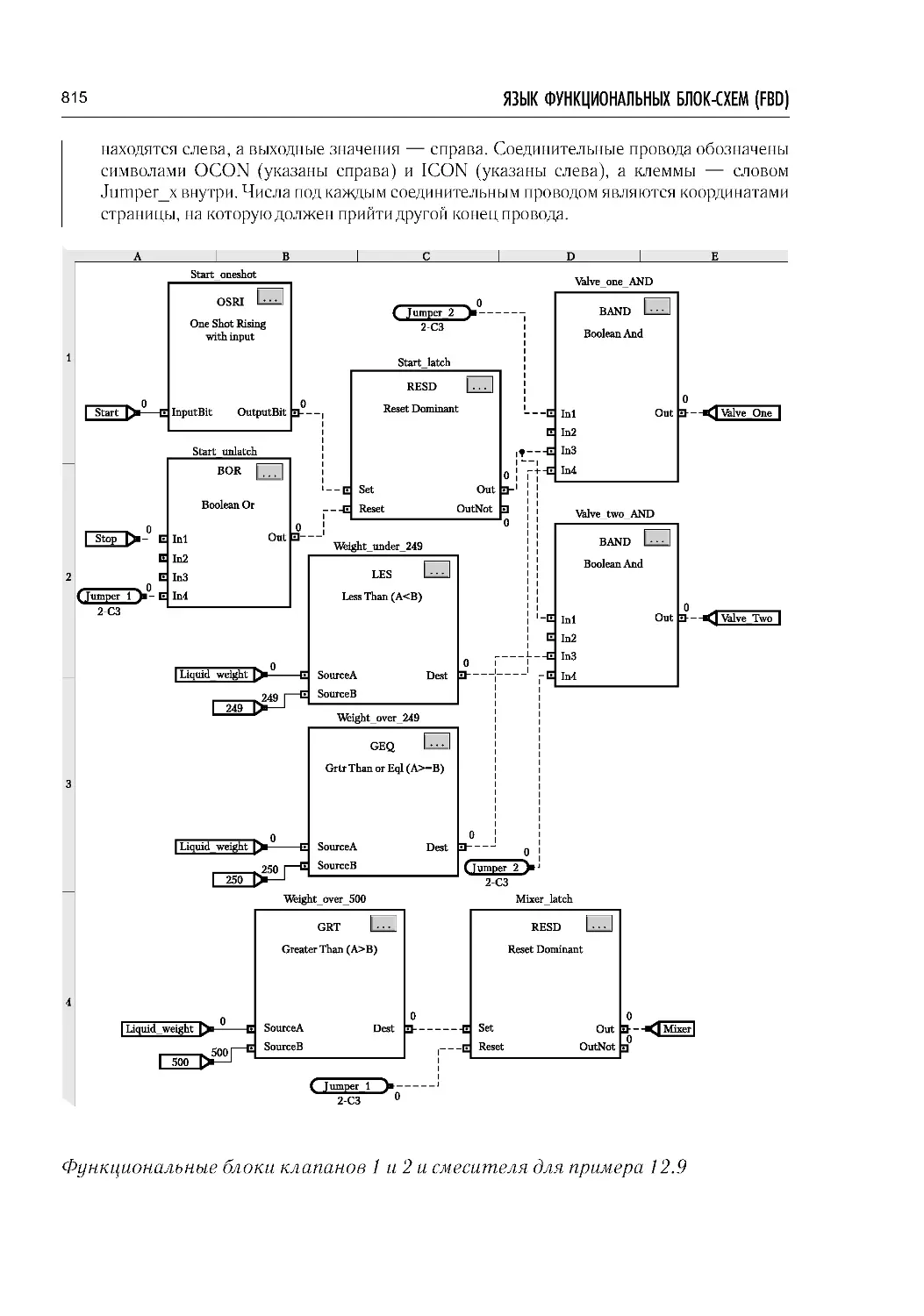
12.7 Язык функциональных блок'схем ............................................. 805
12.8 Язык структурированного текста (SТ) ...................................... 817
12.9 Последовательные функциональные диаграммы (SFC) ........... 828
12.10 Веб'сайты о программируемых логических контроллерах ....... 839
Резюме ................................................................................................. 843
Вопросы ................................................................................................ 846
Вопросы по справочным данным .......................................................... 848
Задачи ................................................................................................... 849
ëÓ‰ÂʇÌËÂ
9
ГЛАВА 13 ВСТРОЕННЫЕ МИКРОКОНТРОЛЛЕРЫ .......................................... 853
Цель главы ........................................................................................... 853
Применение знаний в профессиональной деятельности ...................... 853
13.1 Введение ...................................................................................... 854
13.2 Аппаратные средства микроконтроллеров .................................. 856
13.3 Справочные данные микроконтроллеров .................................... 858
13.4 Основы программирования микроконтроллеров ......................... 863
13.5 Применение встроенных микроконтроллеров ............................. 868
13.6 Веб'сайты с информацией о встроенных микроконтроллерах .... 871
Резюме ................................................................................................. 871
Вопросы ................................................................................................ 873
Задачи ................................................................................................... 875
ГЛАВА 14 УПРАВЛЕНИЕ НЕПРЕРЫВНЫМИ ПРОЦЕССАМИ ......................... 877
Цель главы ........................................................................................... 877
Применение знаний в профессиональной деятельности ...................... 878
14.1 Введение .................................................................................... 879
14.2 Реакция системы ....................................................................... 881
14.3 Разомкнутые и замкнутые системы управления ....................... 886
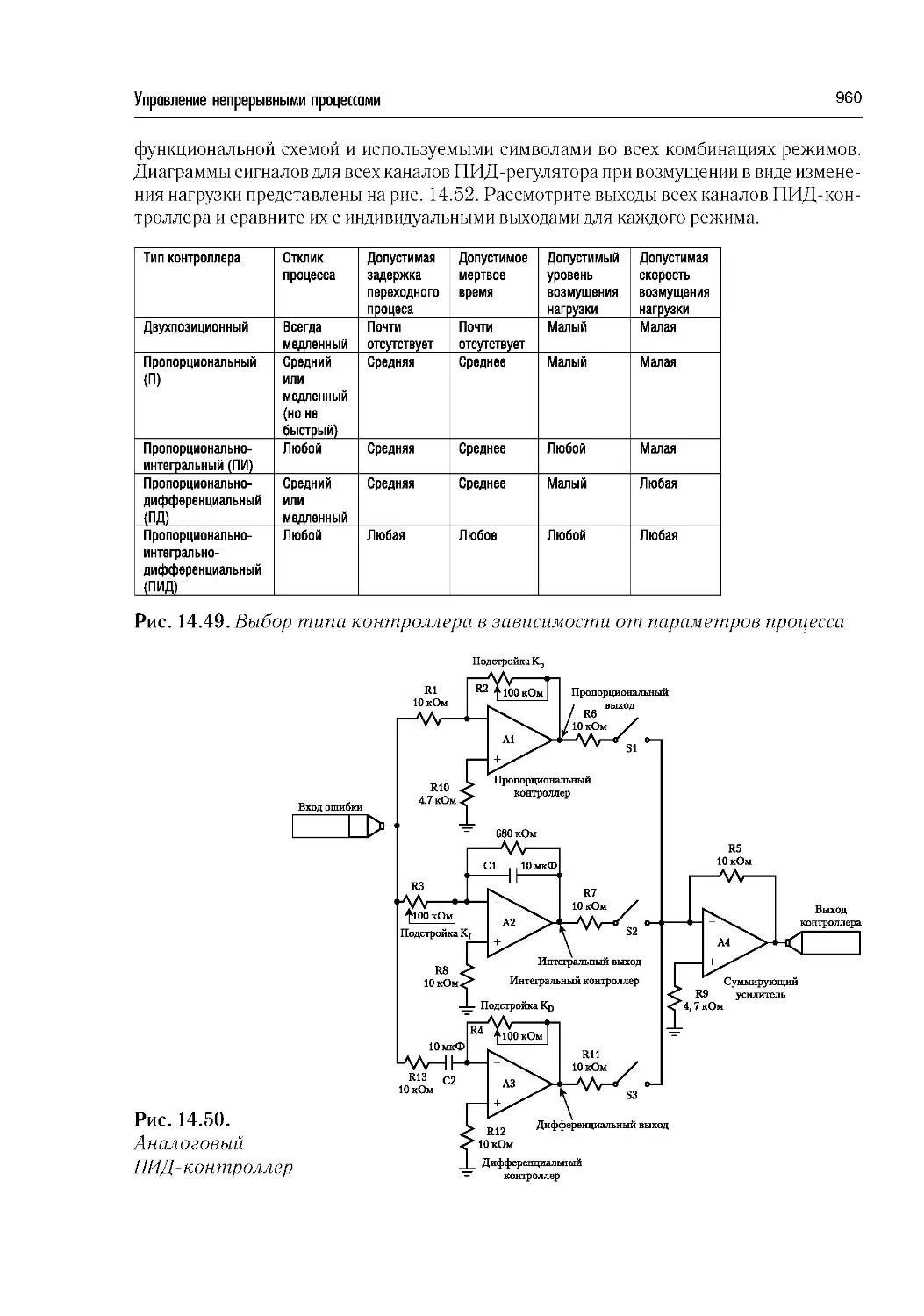
14.4 Показатели эффективности управляющих систем .................... 903
14.5 Процессы с опережением и запаздыванием ............................. 921
14.6 Контроллеры позиционных регуляторов ................................... 931
14.7 Контроллеры непрерывного действия с одной петлей
обратной связи .......................................................................... 944
14.8 Цифровое управление ............................................................... 962
14.9 Режим ручного управления и безударное переключение .......... 970
14.10 Контроллеры с нечетким управлением ..................................... 970
14.11 Процесс настройки управляющих систем ................................. 978
14.12 Система обозначений и стандартных символов ........................ 989
14.13 Веб'сайты по управлению непрерывными процессами ............ 997
Резюме ................................................................................................. 997
Вопросы .............................................................................................. 1001
Вопросы по справочным данным ........................................................ 1003
Задачи ................................................................................................. 1004
ГЛАВА 15 ПРИНЦИП ДЕЙСТВИЯ И ПРОГРАММИРОВАНИЕ
ПРОМЫШЛЕННЫХ РОБОТОВ ....................................................... 1007
Цель главы ......................................................................................... 1007
Применение знаний в профессиональной деятельности .................... 1008
15.1 Введение .................................................................................... 1008
15.2 Определение промышленных роботов ....................................... 1009
15.3 Основная система робота .......................................................... 1017
ëÓ‰ÂʇÌËÂ
10
15.4 Инструментальная оснастка ................................................... 1025
15.5 Контроллер робота .................................................................. 1038
15.6 Обучающие станции ................................................................ 1044
15.7 Основы программирования роботов ....................................... 1045
15.8 Программируемые сервороботы ............................................. 1052
15.9 Синтаксис языка программирования сервороботов ............... 1055
15.10 Программирование разомкнутых робототехнических
систем ...................................................................................... 1062
15.11 Безопасность робота ............................................................... 1066
15.12 Диагностирование робототехнических систем ........................ 1069
15.13 Веб'сайты о промышленных роботах ...................................... 1071
Резюме ............................................................................................... 1072
Вопросы .............................................................................................. 1075
Вопросы по справочным данным ........................................................ 1076
Проблемы безопасности .................................................................... 1077
Задачи ................................................................................................. 1077
ГЛАВА 16 ОБМЕН ДАННЫМИ МЕЖДУ ИНТЕЛЛЕКТУАЛЬНЫМИ
МАШИНАМИ .................................................................................... 1081
Цель главы ......................................................................................... 1081
Применение знаний в профессиональной деятельности .................... 1082
16.1 Введение .................................................................................... 1083
16.2 Классификация сетевых сред передачи данных ......................... 1088
16.3 Сети предприятий ...................................................................... 1098
16.4 Сеть предприятия ....................................................................... 1102
16.5 Сети Fieldbus ............................................................................. 1111
16.6 Поиск сетевых неисправностей ................................................. 1114
16.7 Веб'сайты о сетях передачи данных ........................................... 1119
Резюме ............................................................................................... 1119
Вопросы .............................................................................................. 1121
Задачи ................................................................................................. 1122
ГЛОССАРИЙ ........................................................................................................ 1123
Посвящается моему лучшему другу и любимой жене Мерси
и моим внукам – Исааку, Саманте, Амелии, Джейсон и Катерине
Джеймс Рег
Посвящается моей любимой жене Розанне
и памяти моих родителей, Джона и Анны,
которые привили мне любовь к писательскому творчеству
Гленн Сартори
è‰ËÒÎÓ‚ËÂ
è‰ËÒÎÓ‚ËÂ
ÇÇÖÑÖçàÖ
Предметом промышленной электроники является электроника, используемая в про9
мышленности, чтобы выполнять множество технологических процессов, необходи9
мых при производстве всех видов товаров и услуг. Чем такая электроника отличается
от электроники других типов, используемой в технике и технологии? Электроника,
применяемая в промышленности, использует концепции, рассматриваемые в разно9
образных электрических и электронных курсах, от цепей постоянного тока до систем
управления. В этом учебнике рассмотрена совокупность многих элементов электро9
ники, причем акцент сделан на том, как эти элементы вписываются в промышленные
применения. В результате, учебник выстроен в соответствии с традиционными кур9
сами промышленной электроники, существующими во многих двух9 и четырехлетних
программах обучения электротехнике в технологических университетах. В учебнике
также рассматриваются двигатели постоянного и переменного токов, вопросы диск9
ретного и аналогового управления производственным процессом, ключи и датчики,
а также системы управления и автоматизации производства. Кроме того, разделы,
посвященные мехатронике, в равной степени полезны и для курсов механики, по9
скольку они знакомят с концепциями электромеханики, использующимися в про9
мышленных машинах и автоматике.
óíé ÑÄÖí ìóÖÅçàä ëíìÑÖçíÄå
Поскольку технологические установки являются сложными системами с высокой
степенью автоматизации, для работы в сфере автоматизации производства требует9
ся большое число дипломированных специалистов: инженеров и технологов. Студен9
ты, которые будут иметь дело с производственными системами в промышленности
должны понимать теорию и принципы работы электронной техники. Наша главная
цель состояла в том, чтобы создать ясный и всесторонний учебник для изучения про9
мышленной электроники и систем управления. Материал изложен в логическом по9
рядке, концепции должны быть понятны для неподготовленного читателя и в учебни9
ке мы старались полностью осветить все области знаний, необходимые студентам.
Многие авторы используют для описания незнакомые студентам термины, без пред9
варительного их определения. В настоящем учебнике незнакомые термины и техни9
ческие выражения определяются при первом их упоминании.
Каждая глава начинается разделом с названием «Применение знаний в профес9
сии», в котором рассказывается, как рассматриваемая информация может исполь9
зоваться при работе в промышленности. В этом разделе описываются также виды
задач или области профессиональной деятельности, которыми могут заняться сту9
денты, если материал, изложенный в главе, покажется им интересным и захватыва9
ющим. В материал включены также многочисленные рисунки и примеры решения
задач, помогающие разъяснить представленные концепции. Чтобы сделать обучение
более наглядным и представить необходимые примеры, используются также много9
численные ресурсы, имеющиеся в сети Интернет. Вопросы и задачи в конце каждой
главы основаны на реальных ситуациях, встречающихся в промышленной практике.
Учебник создан для студентов технологических университетов с двух9 и четырехлет9
ними курсами обучения технологии. При изучении этого курса промышленной элек9
троники считается, что читатель имеет твердые знания в области схем постоянного и
переменного тока, а также уверенно владеет математическим аппаратом алгебры и
тригонометрии. Следовательно, текст может использоваться уже в третьем, либо
в четвертом семестре, поскольку вся теория полупроводниковых устройств включе9
на в первые главы учебника. Текст может также использоваться в двух9 и четырех9
летних программах подготовки инженеров9механиков с акцентом на разделах, посвя9
щенных мехатронике.
ëíêìäíìêÄ ìóÖÅçàäÄ
Главы данного учебника имеют одинаковую структуру, общими чертами для которой
являются следующие:
В начале каждой главы приводятся цели обучения.
Затем следует раздел «Применение знаний в профессии», в котором расска9
зывается, как рассматриваемые концепции используются в различных задачах
и в областях деятельности, которые студенты могут выбрать на основе рас9
смотренной в данной главе области технологии.
Широта круга рассматриваемых разделов промышленной электроники, равна
или превышает объемы, покрываемые имеющимися в продаже учебниками.
Применяется метод пирамиды обучения — от развития основных концепций
электроники и устройств в первых главах до промышленных машин и систем
в последующих. Такое построение глав обеспечивает логическую последова9
тельность изложения материала.
Включены главы, описывающие работу и методы программирования програм9
мируемых логических контроллеров с полным рассмотрением новых языков
программирования стандарта IEC 61131.
ëÚÛÍÚÛ‡ Û̃·ÌË͇
13
è‰ËÒÎÓ‚ËÂ
В большинстве глав приведены концепции поиска неисправностей, касающи9
еся материалов данной главы
В каждой главе рассматриваются примеры решения задач и приводятся пояс9
няющие материал рисунки.
Основные концепции и краткое содержание, приведенные в каждой главе по9
могают лучшему пониманию и запоминанию материала.
В конце главы приводятся вопросы и задачи практического плана, представ9
ляющие собой короткие эссе; вопросы, требующие поиска материалов в Ин9
тернет, проблемы поиска неисправностей и расчетные задачи различных
уровней трудности.
В каждой главе приведены полезные ресурсы Интернета и адреса сети.
Согласованное введение и рассмотрение материалов позволяет следовать при
обучении принятой в книге последовательности глав; однако, автономный ха9
рактер разделов каждой главы позволяет преподавателям корректировать
последовательность глав, чтобы приспособить ее к собственной программе
обучения.
Глоссарий облегчает ознакомление с терминами, используемыми в книге.
ëéÑÖêÜÄçàÖ ÉãÄÇ
Глава 1 содержит введение в предмет промышленной электроники и рассматривает
краткую историю промышленной электроник. Определена термин «промышленная
электроника», и классифицируются различные применения. Понятия представлены
в виде пирамиды обучения так, чтобы студенты могли понять какие базовые знания
необходимы для освоения каждой последующей области. Представлено также дере9
во технологий, чтобы студенты могли выявить связи между многочисленными ветвя9
ми промышленной электроники. Представлена также структура процесса поиска
неисправностей в любой электронная системе, с рассмотрением методов, которые
обеспечивают компетентный и эффективный процесс поиска неисправностей.
Глава 2 представляет устройства самого низкого уровня, используемые в индуст9
риальном управлении, а именно переключатели, приводы и индикаторы. Переключа9
тели классифицированы областям промышленного использования и по типу приве9
дения в действие: ручному, механическому или с помощью слежения за параметрами
производственного процесса. Всестороннее рассмотрены клапаны и сигнальные
лампы. Кроме того, описываются управляющие реле, реле времени, пускатели для
двигателей, стандартные схемы управления, включая двух9 и трехпроводные схемы
управления. Рассматриваются также релейные логические лестничные схемы с точ9
ки зрения их работы и достаточно сложного процесса разработки. Кроме того описы9
ваются коммутационные устройства, как бытовые, так и промышленные, которые
традиционно занимают большой объем в любом курсе промышленной электроники .
14
Глава 3 посвящена полупроводниковым устройствам, используемым в промыш9
ленном управлении, включая некоторые типы диодов, биполярных и полевых тран9
зисторов и тиристоров. В дополнение к исследованию работы устройств, описаны и
проанализированы многочисленные стандартные схемы, в которых эти устройства
используются. Примерами здесь являются бесконтактные реле, схемы смещения
усилителей, стабилизаторы напряжения, инверторы и ряд типов преобразователей
постоянного напряжения в постоянное (конвертеров).
В главе 4 всестороннее рассматриваются операционные усилители, обычно исполь9
зуемые в системах промышленного электронного управления. После краткой истории
развития этой области, рассмотрены все принципиальные схемы (инвертирующие
и неинвертирующие усилители, повторитель напряжения, суммирующий усилитель,
дифференциальный усилитель, компараторы и оконные детекторы, активные фильтры,
измерительные усилители, и усилители разности токов), а также многочисленные при9
менения этих схем. Глава заканчивается с поиском неисправностей в устройствах и схе9
мах на их основе.
Глава 5 обеспечивает законченный краткий обзор ключевых полупроводниковых
устройств, включая кремневые управляемые вентили (КУВ), симисторы и четыре
других устройства тиристорного типа (диод Шокли – динистор, двунаправленный
динистор – диак и два типа однопереходных транзисторов). Рассматривается работа
и характеристики каждого устройства, включая описание его работы устройства
в типовых схемах. Глава заканчивается обширным разделом поиска неисправностей,
помогающим студентам освоить эффективную методику их поиска и устранения.
Глава 6 обеспечивает всестороннее рассмотрение бесконтактных дискретных
датчиков и устройств автоматизации. Описываются три главные категории – датчики
приближения, фотоэлектрические датчики и системы технического зрения, с подкате9
гориями в каждой из этих областей. Рассмотрены как индуктивные, так и емкостные
датчики приближения, четыре типа фотоэлектрических датчиков (с проходящим, от9
раженным и отраженным поляризованным лучом и с диффузным отражением). Опи9
саны работа, параметры, и типичные применения для каждого датчика. Приводятся
условные обозначения, используемые в промышленности для каждого устройства.
Датчики разделены на контактные и бесконтактные, а затем для каждой группы опи9
саны работа и критерии выбора датчиков. Кроме того, обсуждаются общие методы
интерфейса между датчиками и промышленными контроллерами, также как и мон9
таж датчиков и схем управления. Исследованы два типа аналоговых датчиков рас9
стояния, наряду с системами системы технического зрения и требованиями к осве9
щению в этих системах. Глава 6 заканчивается поиском неисправностей в датчиках и
системах на их основе.
В главе 7 описываются аналоговые датчики и устройства управления процессом.
Они предназначены для контроля и управления главными параметрами процесса,
такими как температура, перемещения, давление, поток и уровень. Кроме того,
в главе рассмотрены типичные выходные устройства, такие как нагревательные эле9
менты и клапаны управления. Обсуждаются датчики и цепи передачи их сигналов,
ëÓ‰ÂʇÌË „·‚
15
è‰ËÒÎÓ‚ËÂ
различные типы сигналов управления, согласование и масштабирование сигналов и
их калибровка. Другие датчики рассмотренные в этой главе: датчики позиции, плотно9
сти, вязкости и влажности. Конец главы посвящен поиску неисправностей в аналого9
вых датчиках и системах на их основе.
Глава 8 посвящена всестороннему обсуждению проблем и стандартов безопаснос9
ти, рабочим участкам с защитой персонала, использующим датчики присутствия, на9
ряду с запорными устройствами. Освещены также вопросы разработки стратегии бе9
зопасности, проектирования систем безопасности и утверждения плана безопасности.
Глава 9 это первая из трех глав посвященных электродвигателям. Она касается
двигателей постоянного тока и системы управления ими и представляет магнитную
теорию и таким понятиям для двигателей постоянного тока, как вращающему момен9
ту, работа и мощность (в лошадиных силах). Описаны компоненты и следующие
типы двигателей постоянного тока: с последовательным, параллельным и смешан9
ным возбуждением и тяговые двигатели. Полностью рассмотрены работа, характе9
ристики, средства управления скоростью и направлением вращения, установка и по9
иск неисправностей для каждого типа двигателей. В заключение описаны методы
торможения.
Глава 10 посвящена двигателям переменного тока и приводам с регулировкогй
скорости, а также компонентам и конструкции двигателей. Обсуждаются однофазные
индукционные (с резистивным и емкостным запуском плюс неявновыраженный по9
люс) и трехфазные (с «беличьей клеткой», фазный ротором и синхронный) двигатели
переменного тока. Напряжение, скорость и управление направлением вращения (по9
рядком чередования фаз) трехфазных двигателей, наряду с расчетом типоразмеров
пускателя для двигателя и чтением табличек на его корпусе. Рассматривается пере9
менное напряжение, ШИМ, вектор потока и программируемые приводы двигателей.
Глава 11 описывает двигатели специального назначения и устройства управления,
используемые в промышленности, включая постоянные магниты и бесщеточные двига9
тели постоянного тока, шаговые двигатели, и сервомотора постоянного и переменного
тока. Приводятся рабочие характеристики для каждого типа двигателей, наряду с харак9
теристиками, которые делают двигатель уникальным. Глава заканчивается изучением
кодеров и решающих устройств. Они используются в датчики обратной связи, чтобы пе9
редать данные о скорости и направлении вращения (циклическом сдвиге) обратно в сис9
тему управления.
Глава 12 предлагает всестороннее обсуждение нового программируемого логи9
ческого контроллера (PLC, ПЛК), соответствующего стандарту IEC 61131 и пяти
языков, упомянутых в стандарте. Сравнивается стандарт на лестничные схемы с со9
временными лестничными схемами программируемой логики, применяемыми в Со9
единенных Штатах. Для студентов, пока не знакомых с классом устройств ПЛК, рас9
сказывается об основах программирования лестничных схем. Глава заканчивается
всесторонним описанием ПЛК и методов программирования, связанных с языками
функциональных блок9схем, структурированного текста и последовательных функ9
циональных диаграмм (Sequential Function Chart – SFC), представляющими собой
16
новые языки описания алгоритмов. Перечень команд пятого языка, который не полу9
чил пока широкого распространения, приведен в сокращенном виде.
В главе 13 рассказывается о встроенных микроконтроллерах. Сначала представ9
лены такие функциональные блоки аппаратных средств устройства, как централь9
ный процессор, память, схем ввода9вывода, логического управления, шины данных и
управления. Потом рассматриваются вопросы программировании контроллера и ме9
тодика работы с важной информацией, заключенной в справочных данных, а в конце
главы обсуждаются применения микроконтроллера.
В главе 14 описываются методы реализации обратной связи, включая характери9
стики процесса, типы контроллеров и управления, PID9регуляторы и методы на9
стройки. Управление процессом описывается нематематическим способом, легко
понятным каждому студенту. Математический аппарат и детальное рассмотрение
используются только тогда, когда они совершенно необходимы для ясного изложе9
ния, при этом пояснения хорошо документированы. В конце главы обсуждаются ме9
тоды настройки PID9регуляторов и логических контроллеров с нечеткой логикой.
Глава 15 посвящена роботам и автоматизированным производственным участкам,
на которых используются роботы, включая механизмы захвата, используемые для
транспортировки деталей; расчет подъемной силы механизма захвата; контроллер сер9
вомотора робота с обратной связью; и пневматические роботизированные устройства
с разомкнутой обратной связью. Роботы исследуются с точки зрения конфигурации
руки и используемых методов управления рабочей ячейкой: путем программирова9
ния или обучения. Процесс программирования освещен достаточно подробно, чтобы
студенты смогли разработать проекты программ для роботов с сервомоторами и без
них. В конце главы представлена система поиска неисправностей робота.
В главе 16 описывается передача данных между интеллектуальными машинами.
Представляется описание архитектуры сети предприятия и классификациия сетевых
средств связи. Поскольку этот учебник относится к промышленной электронике, ос9
тавшаяся часть главы посвящена цеховым сетям. Разделы включают цеховые сети типа
Ethernet, ControlNet, DeviceNet, а также программы управления участками SERCOS,
Profibus и FOUNDATION Fieldbus. Глава заканчивается рядом рекомендаций по по9
иску неисправностей в сетях.
Руководство для преподавателя имеет ответы и решения для вопросов и задач,
помещенных в конце каждой главы, что облегчает использование учебника для мно9
гочисленных вариантов построения курса, и, кроме того, обширный банк задач.
Мы хотели бы поблагодарить следующих профессоров, которые просмотрели
учебник и дали рекомендации по расстановке необходимых акцентов и изменениям:
Профессора Джона Андерсона
Университет Пурдуа
Профессора Али Ансари
Вирджиния Стате университи
Профессора Джеймса Финн
Колледж графства Миддлесекса
Профессора Джана Лугоуски
Университет Пурду
ëÓ‰ÂʇÌË „·‚
17
è‰ËÒÎÓ‚ËÂ
Профессора Дэн Лукаду
Новый Речной Семейства колледж
Профессора Билла Максвелла
Колледж Семейства Нашвилл Счета
Профессора Ченгганга Меи
Юго9восток Государственный университет
Mиссури
Профессор Дейва Сецера
Колледж Семейства графства Джонсона
Профессор Джеффри Е. Шорт, P.E. Юго9западный Государственный университет
Штата Оклахома
Профессор Ллойд Сталлкамп
Государственный университет
штата Монтана9северный
Профессор Джозеф П. Срода, PE Середина Состояния Технический колледж
Профессор ТаиКван Янг
Центральный Вашингтонский университет
Кроме того, мы высоко оцениваем всеобщую поддержку многочисленных изгото9
вителей компонентов, которые предоставили нам иллюстрации и изображения про9
мышленных электронных систем и компонентов и сделали свои богатые информаци9
ей вебсайты доступными для наших студентов. Благодарим Эрика Блэка за его обзор
и рецензию на содержание части, посвященной управлению процессом. Мы также
благодарим студентов, которые обеспечили превосходную обратную связь по мате9
риалам учебника, проверенным в классах колледжа и в многочисленных учреждени9
ях. В заключение, мы благодарим Чарльза Стюарта, Майду Боско, Элизабет Фар9
релл и Алекса Волфа из Prentice Hall и Kelly Mulligan из Carlisle Publishers Services
за их поддержку в создании этого учебника.
Джеймс А (james@rehg.org)
Glenn J. Sartori (rg492@ sbcglobal.net)
18
1
ǂ‰ÂÌËÂ
‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
ñÂÎ̧ „·‚̊
В главе 1 дан краткий обзор всех задач предмета промышленной
электроники и общая теория поиска неисправностей, а также
набор методов, используемых при поиске места неисправности в
технол огических установках и системах.
После изучения материала этой главы вы сможете:
1. Описать главные изобретения и события за последние 200 лет, вызвавшие пере
ход от ручного производства к автоматизированным средам, используемым в на
стоящее время.
2. Описать типы производственных систем, с которыми может быть связана работа
инженеров и техников, работающих в области промышленной электроники и тео
рии управления электронными системами.
3. Перечислить главные группы машин и систем, которые являются традиционными
компонентами в автоматизированном производстве.
4. Использовать пирамиду технологии, чтобы составить план своей подготовки к
практической работе в области промышленной электроники и автоматизации
производства.
5. Перечислить, какими качествами должен обладать умелый наладчик, и расска
зать об обычных заблуждениях, касающихся поиска неисправностей.
6. Создать блок
схему технологической системы.
7. Использовать блок
схему системы совместно с правилами потока сигнала и прави
лами заключения в скобки и информационной воронки, чтобы определить неисправ
ный компонент или модуль, являющийся причиной неправильной работы системы.
8. Описать последовательность поиска неисправностей в системах.
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
9. Описать процесс идентификации проблемы множественных дефектов со связан
ными или несвязанными признаками.
10. Проверить на примерах схемных задач свое знание основных законов схемотех
ники и теорем, необходимых для понимания концепций, изложенных в тексте.
èêàåÖçÖçàÖ áçÄçàâ
Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Каждая глава нашего учебника открывается разделом, в котором описываются профес
сиональные задачи, возникающие в связи с материалом, излагаемым в данной главе.
Решение этих задач составляет предмет профессиональной деятельности различных
специалистов, работающих в области промышленной электроники, и может определить
вашу собственную карьеру в той или иной компании, работающей в данной области. В
учебнике обсуждаются все специальности, встречающиеся в области промышленной
электроники и автоматизации производства. В данном разделе будет рассказано, как вы
могли бы выбрать себе специальность внутри этой широкой группы. Твердые знания в
выбранной вами области техники или технологии вместе с информацией, изложенной в
каждом из разделов нашего учебника, помогут вам занять высокое и прочное положение
в соответствующих областях профессиональной деятельности. Например, вы сможете
работать в сфере автоматизированного производства или в области проектирования
технологических систем, в области анализа, проверки и поиска неисправностей; уста
навливать и обслуживать технологические системы у заказчика или заниматься марке
тингом и техническими продажами.
Вы могли бы стать специалистом по отдельным компонентам, например датчи
кам, или в области систем автоматизации в целом, освоить работу продавца, который
компонует и устанавливает технологическую систему на площадях заказчика, прове
ряет ее и обучает правилам эксплуатации технический персонал фирмы
заказчика.
В каком бы государстве вы ни жили, к какой бы нации ни принадлежали, почти
всегда рядом с вашим домом найдется промышленное производство, и, обладая нуж
ной специальностью, вы сможете найти работу почти везде, где пожелаете. Промыш
ленная электроника открывает вам путь к решению захватывающих проблем и разно
образной полезной деятельности на протяжении всей вашей жизни. Этот раздел даст
вам обзор некоторых специальностей, связанных с промышленной электроникой.
Вот пример специфической задачи, которая может быть вам поручена, — введе
ние в строй и техническая поддержка системы управления технологическим процес
сом, недавно установленной у заказчика. Предположим, что вы молодой специалист,
работающий инженером по продаже техники в отделе Baumann фирмы Emerson, по
ставляющем изделия для управления процессом.
Как дипломированный специалист, только начинающий карьеру инженера по
техническим продажам, вы пройдете программу обучения на производственной линии,
выпускающей изделия, разработанные подразделением Baumann и другими отделами
фирмы Emerson.
20
Время обучения зависит от характера изделий, которые вы будете поддерживать,
и размера компании, и может длиться от месяца до года. В ходе обучения вы получите
возможность совместно с опытными инженерами по продаже техники ездить в коман
дировки на фирмы
заказчики. Вы увидите, как инженеры анализируют потребности
компании
заказчика в автоматизированных системах и затем создают план, позволя
ющий удовлетворить эту потребность с помощью аппаратных средств и программного
обеспечения, имеющихся в распоряжении вашей фирмы.
Ваше первое поручение от Baumann может заключаться, например, в том, чтобы
обеспечить техническую поддержку выпуска продукции на предприятии, где была не
давно установлена распределительная система управления (DCS) фирмы Emerson с
программным обеспечением Дельта V. Ваша задача будет заключаться в том, чтобы в
процессе работы помогать инженерам данного предприятия, если при эксплуатации
аппаратных средств или программ они столкнутся с проблемами, которые не смогут
решить. В начале эксплуатации системы вы можете по целой неделе в месяц тратить
на решение возникающих проблем непосредственно на объекте, но потом значитель
ную часть консультаций будете проводить уже по телефону.
Если же возникнет проблема, которую вы будете не в состоянии решить самосто
ятельно, вы сможете обратиться за помощью к опытным инженерам из Emerson, ко
торые поедут вместе с вами к заказчику. Это — поистине увлекательная деятельность,
которая позволит вам сделать блестящую карьеру, поскольку вы будете иметь воз
можность решать самые разнообразные проблемы управления во многих отраслях
промышленности.
1.1. ÇÇÖÑÖçàÖ
Как ясно из заголовка, этот учебник описывает электронные устройства, схемы и систе
мы, которые управляют промышленным производством. Термин промышленный имеет
широкое значение. Каждый продукт, предлагаемый потребителям, производится опре
деленной областью промышленности, название которой соответствует товару. Напри
мер, продовольствие производится пищевой промышленностью; автомобили, фургоны
и грузовики — автомобильной промышленностью; одежда — швейной промышленнос
тью, а крупные бытовые приборы и мебель — промышленностью товаров длительного
пользования. В каждой из этих отраслей производства используются технологические
установки и системы. Хотя изделия, производимые в различных отраслях, существенно
различаются, электронные устройства, схемы и системы, используемые для управления
различными технологическими установками, зачастую очень похожи. Поэтому было бы
неразумно писать учебник или создавать учебный курс для каждой из возможных техно
логических установок, используемых в промышленности. Целесообразнее изучить ос
новные концепции и технологии, применяемые при создании таких установок. Именно
это вы и можете сделать на базе данного учебника и соответствующего курса. Приве
денная далее краткая хронология разработок в промышленной электронике даст вам
представление об исторической перспективе развития этой области техники.
ÇÇÖÑÖçàÖ
21
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
1.2 . äêÄíäÄü àëíéêàü êÄáÇàíàü èêéåõòãÖççéâ
ùãÖäíêéçàäà
История промышленной электроники — это история промышленного развития. Начи
ная с разработки первой машины, люди пытались уменьшить бремя физических нагру
зок рабочего, используя энергию разнообразных машин. Уже тысячи лет назад при па
хоте использовались животные, при этом физические усилия частично заменялись
управлением. Эволюционное развитие привело в середине 18 века к промышленной
революции в Англии, когда для вращения и привода машин вместо энергии воды стала
использоваться энергия паровых двигателей. Изменение произошло именно в 18 веке,
поскольку к этому времени повышение производительности труда стало настоятельной
потребностью.
Мировыми лидерами часто являются страны с высокими производственными
возможностями. Благодаря изобилию своих природных ресурсов и постоянному появ
лению новых изобретений, Соединенные Штаты в середине 19 в. сменили Англию в
качестве государства, лидирующего в промышленном производстве,. и до настоящего
времени остаются наиболее мощным производителем. В начале двадцатого столетия
изобретение электродвигателей способствовало электрификации производства, ко
торая привела к замене энергии пара и воды электроэнергией и вывела производи
тельность труда на следующий уровень. Фабрики выросли в размерах, стали возмож
ны более жесткие технологические допуски при изготовлении продукции, а
применение сборочного конвейера для массового производства еще более увеличило
производительность труда.
Ручная обработка была заменена машинной, рабочие стали иметь все меньше
прямых контактов с производимыми товарами, и точность машины заменила умение
мастера.
1.2 .1 . ìÔ‡‚ÎÂÌËÂ Ò Ó·‡ÚÌÓÈ Ò‚flÁ̧̨
Управление с обратной связью — процесс, в котором технологическая установка ав
томатически измеряет параметры выходящей продукции и вносит исправления в про
цесс при неправильной работе, — было разработано после Первой мировой войны и
усовершенствовано в ходе Второй мировой войны. Формирование технологии управ
ления с обратной связью, разработанной для производства вооружений Второй миро
вой войны, привело к появлению нового термина — промышленное управление.
Промышленное управление определило производственную систему, которая автома
тически контролирует производство и совершает соответствующие корректирующие
действия, если производственная система отклоняется от требуемых параметров. В
следующем разделе приводится хронология значительных изобретений и событий в
развитии производства от ручного труда до полностью автоматизированных промыш
ленных систем.
22
1.2 .2. á̇̃ËÚÂÎ̧Ì̊ ÒÓ·̊ÚËfl
Рассмотрим хронологию главных событий и изобретений, которые позволили про
мышленности перейти от ручного труда и управляемых вручную машин к полностью
автоматизированным промышленным системам, используемым сегодня во всем мире.
Этот перечень вкратце ознакомит вас с историей развития современной технологии,
которая коренным образом изменила производство, что привело, в частности, и к со
зданию этой книги, рассказывающей о промышленной электронике.
1801 — Джозеф Джакквард (Joseph Jacquard) изобретает текстильную машину, ко
торая управляется перфорированными картами.
1834 — Чарльз Баббаг (Charles Babbage) изобретает цифровую машину, которая
позже становится механическим компьютером.
1890 — Никола Тесла (Nicola Tesla) демонстрирует дистанционное управление ко
раблем с использованием электронного управления.
1892 — В Соединенных Штатах Севард Баббит (Seward Babbitt) разрабатывает мо
торизованный подъемный кран с механизмом захвата для удаления слитков
из печи.
1904 — Сэр Джон Флеминг (John Fleming) демонстрирует вакуумный диод для пре
образования переменного тока в постоянный.
1907 — Ли де Форест (Lee de Forest) изобретает вакуумный триод — усилительную
электронную лампу.
1919 — За шестьдесят лет, с 1869 года, объем промышленного производства увели
чился в тридцать три раза при увеличении человеческих трудовых ресурсов
только в семь раз. Рабочих заменили промышленные машины.
1927 — В Калифорнии постороен первый автоматически управляемый нефтепровод
с электроприводом.
1928 — Электронные лампы используются для управления двигателями постоянного
тока.
1930 — Компания A.O. Smith Electrical Products Company запускает первое полнос
тью автоматизированное производство автомобильных рам, выпускающее
одну раму каждые шесть секунд.
1938 — Уолтер Шоттки (Walter Schottky), уроженец Германии, изобретает полупро
водниковый диод.
1941 — Появляется первый промышленный двигатель переменного тока с регулиру
емой скоростью вращения.
1945 — Разработан первый компьютер, получивший имя ENIAC.
1947 — Американские ученые Уильям Шокли (William Shockley), Уолтер Браттаин
(Walter Brattain) и Джон Бардин (John Bardeen) изобретают транзистор.
1948 — Норберт Винер (Norbert Wiener), профессор Массачусетского Технологи
ческого Института (MIT), выпускает книгу «Кибернетика».
1954 — Джордж К. Девол (George C. Devol) разрабатывает первый программируемый
робот и вводит термин универсальная автоматизация; Чепмен (Chappman),
äêÄíäÄü àëíéêàü êÄáÇàíàü èêéåõòãÖççéâ ùãÖäíêéçàäà
23
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
Фуллер (Fuller) и Пирсон (Pearson) из лабораторий Бэлла разрабатывают крем
ниевую фотогальваническую ячейку (фотоэлемент).
1956 — Джордж К. Девол и Джозеф Ф. Енгелбергер (Joseph F. Engelberger) создают
первый действующий промышленный робот под названием Unimation.
1957 — Появляется первый промышленный полупроводниковый привод двигателя с
регулируемой частотой вращения.
1958 — Керни (Kearney) и Трекер (Trecker) представляют станок, управляемый
встроенным компьютером.
1960 — Разработаны лазеры для связи и для обработки материалов.
1961 — Первый робот Unimate используется для вызгрузки кристаллов из установки
для резки.
1968 — Отделением Oldmobile фирмы «Дженерал моторс» разработан программи
руемый логический контроллер.
1969 — Фирма Molins Machine в Англии применяет компьютеры для управления
производственными процессами.
1970 — Фирма Franz Morat предлагает первую полностью автоматическую промыш
ленную вязальную машину, управляемую компьютером.
1971 — Тэд Хофф (Ted Hoff) из компании Intel изобретает первый микропроцессор.
1973 — Ричард Хон (Richard Hohn) из Cincinnati Milacron Corporation изобретает
первый коммерческий, управляемый компьютером промышленный робот,
названный инструментом будущего ( The Tommorow Tool — T3).
1977 — ASEA Brown Boveri Robotics (ABB) Inc., европейская компания по производ
ству роботов, предложила два типа промышленных роботов с микроконтрол
лерным управлением.
1978 — Компания Apple представляет Apple II, первый домашний микрокомпьютер
для широкого использования.
1980 — В Японии, США и Великобритании вводится понятие автоматизированного
интегрированного производства (CIM)
1984 — Корпорация Adept представляет руку робота с непосредственным приводом.
1994 — Компания Intel представляет 64
разрядный микропроцессор.
1998 — Программируемые логические контроллеры tag
based начинают приспосаб
ливать для промышленного применения.
2000 — Сети устройств, подобные DevicNet, ControlNet, Foundation Field bus, Profibus и
Ethernet/IP, широко применяются на производстве.
2001 — Все более широкое применение в автоматизации находят беспроводные
сети.
Обзор почти 200
летней истории изобретений, открытий и разработок позволяет
прийти к следующим важным выводам:
промышленное управление развивается уже не одну сотню лет;
достичь современного уровня развития промышленного управления и авто
матизации можно было только на основе изобретений и разработок в облас
ти электроники и компьютерной техники;
24
потребность в инженерах и техниках, обладающих знаниями в области про
мышленной электроники, существует уже в течение более чем пятидесяти
лет и будет существовать в обозримом будущем.
Это развитие и рост промышленного управления привели к разработке широкого
спектра производственных систем. В следующем разделе описываются различные
производственные системы, для которых необходимо примышленное управление раз
личных типов.
1.3. íàèõ èêéåõòãÖççéÉé èêéàáÇéÑëíÇÄ
Когда вся производственная деятельность ограничивалась надомным трудом ремес
ленников, не существовало большого разнообразия в методах производства. В насто
ящее же время производство имеет много различных форм, которые могут быть объе
динены в пять групп: проектное, цеховое, серийное, на производственных линиях и
непрерывное. При изучении промышленного управления полезно различать эти пять
типов, потому что некоторые промышленные методы управления наиболее часто ис
пользуются лишь для определенных групп производства. Например, роботы исполь
зуются в серийном производстве с тяжелыми условиями труда и на производственных
линиях, но вы почти никогда не найдете их в проектных производствах. Таким образом,
понимание особенностей производственных систем позволяет разработать основные
концепции использования промышленной электроники и промышленных средств уп
равления.
1.3.1. ä·ÒÒËÙË͇ˆËfl ÔÓËÁ‚Ó‰ÒÚ‚ÂÌÌ̊ı ÒËÒÚÂÏ
Невозможно избежать совместного применения различных типов производства (про
ектное, цеховое, повторное, на линиях и непрерывное), и большинство компаний ис
пользуют одновременно несколько типов производственных систем. Необходимо де
тальное изучение производственных операций, чтобы отнести производственную
систему к одному из рассматриваемых типов. Приведенные далее описания каждой
группы содержат основные характеристики, которые отличают одну группу от другой.
Проектное производство — изделия в этой категории сложны, имеют много ча
стей, и наиболее часто это производство изделий одного типа. Например, проектные
производственные системы используются, чтобы строить маслоочистительные заво
ды, большие офисные здания, круизные суда и большие самолеты. Производство и
сборочные работы связаны с большой долей ручного труда, хотя машины используют
ся при изготовлении компонентов проекта. Из
за размера и веса таких крупных изде
лий, как самолет или корабль, оборудование и компоненты перемещаются в помеще
ние сборки, а изделие остается на месте до окончания производства.
Цеховое производство — несложные изделия с немногими частями и неболь
шим объемом производства изготавливаются в цехах. По сравнению с компонентами
íàèõ èêéåõòãÖççéÉé èêéàáÇéÑëíÇÄ
25
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
проектного производства, размер и вес деталей в цеховом производстве очень мал.
Поэтому компоненты перемещаются между фиксированными промышленными рабо
чими участками и машинами для обработки материала. При производстве компонен
тов используется комбинация ручного труда и автоматизированной машинной обра
ботки. В большинстве случаев низкий объем выпуска изделий не позволяет
использовать промышленную автоматизацию и требует значительной доли ручного
труда. Пример типичной цеховой работы — производство подшипников нестандарт
ного размера для насосов.
Серийное производство — серийная производственная система имеет следую
щие характеристики: заказы на повторное изготовление приближаются к 100 процен
там, многолетние контракты на изделия здесь обычны, а объем производства хотя и
изменяется в относительно широких пределах, но остается обычно достаточно высо
ким. Поскольку заказы на изделия предсказуемы и распространяются на длительные
периоды времени, в группе серийного производства часто используются автоматизи
рованные процессы и специализированные приемы автоматизации. Некоторая доля
ручного труда присутствует, но она обычно намного меньше, чем автоматизированная
составляющая. Примеры изделий для этого типа производственной системы — такие
детали для автомобильной промышленности, как водяные насосы, генераторы пере
менного тока и трансмиссии.
Линии — производственные линии имеют ряд отличительных характеристик: (1)
требуемое время поставки заказчику часто короче, чем общее время производства из
делия, (2) изделие имеет множество модификаций или моделей и (3) перечень необхо
димых подсистем может легко варьироваться по желанию заказчика. Автомобильная
продукция является типичным примером применения производственных линий. За
конченный автомобиль собирается всего за несколько часов, поскольку большинство
деталей (то есть двигатель, сиденья и панель управления) собраны и готовы к разме
щению в автомобиле. Этот тип производственной системы может иметь большую
долю ручного труда, частичную автоматизацию при производстве одних компонентов и
полностью автоматизированный процесс без ручного труда при производстве других.
Непрерывное производство — под этим термином понимается производство,
при котором поток изделий на выходе производственной системы практически не пре
рывается. Примеры изделий, производимых системами такого типа, — это завтраки
из хлебных злаков, низкоалкогольные напитки, жидкости для полоскания рта и зубная
паста. В системах этого типа на вход подается сырье, а с выхода поступает непрерыв
ный поток готовых изделий. Система останавливается для переналадки на другое из
делие или для очистки, а затем перезапускается. Этим методом часто производятся
изделия постоянного спроса, которые потребители могут покупать, когда пожелают.
Во всех предыдущих типах производства время, в течение которого заказчик согласен
ждать заказа после его размещения, превышает время, необходимое для изготовле
ния изделия. Следовательно, перед началом изготовления продукции на нее должен
прийти надежный заказ. Для изделий, производимых в непрерывном процессе, ситуа
ция совершенно иная. Поэтому изделия, производимые по этому методу, должны
пользоваться устойчивым и предсказуемым спросом, быть готовы к продаже сразу
после производства, иметь высокий объем производства и ограниченное количество
вариантов. Производственные системы этого типа высоко автоматизированы при ма
лой доле ручного труда.
26
Понимание особенностей описанных выше производственных систем и обсужда
емых в следующем разделе систем управляющей промышленной электроники позво
ляет выделить области и системы производства, в которых для работы и управления
применяется промышленная электроника.
1.4 . äãÄëëàîàäÄñàü ìëíêéâëíÇ ìèêÄÇãüûôÖâ
èêéåõòãÖççéâ ùãÖäíêéçàäà
Чтобы лучше понять содержание предмета, названного промышленной электроникой,
вы должны уметь различать основные машины и подсистемы, используемые во всех
производственных системах, и изучить их функции. Эти машины и системы можно
разделить на следующие группы.
Машины с ручным управлением представляют собой большую группу машин,
эксплуатируемых в ручном режиме и позволяющих осуществлять каждую
операцию при производстве товара.
Программируемые машины— большая группа компьютерных машин с число
вым программным управлением (ЧПУ). Они выполняют ряд задач по обра
ботке материалов, таких, например, как обработка металлических деталей на
металлорежущих станках или формовка пластмассовых деталей в автомати
ческом режиме при программном управлении.
Роботы — промышленные машины, которые можно запрограммировать и снаб
дить необходимыми инструментами для выполнения большого количества
различных производственных задач, включая сварку, обработку материалов,
окраску и перемещение деталей.
Системы, перемещающие материалы, — широкий диапазон систем, которые
перемещают сырье и законченную продукцию в процессе производства, ис
пользуя ряд автоматизированных технологий, включая ленточные и цепочеч
ные конвейеры и автоматические управляемые транспортные средства.
Системы, следящие за материал ом, — технологические системы, предназна
ченные для идентификации и представленные широким диапазоном систем,
которые идентифицируют сырье и готовую продукцию в процессе производ
ства с использованием штриховых кодов и других технологий идентификации и
распознавания объектов.
Системы хранения и поиска материал ов — автоматизированные системы,
называемые автоматическими системами хранения и поиска (ASRS), сохраня
ют и отыскивают сырье, готовые детали и готовую продукцию. Размеры сис
тем варьируются от моделей, представляющих собой скамью с размещением
деталей сверху, имеющую менее 100 позиций хранения, до систем, которые
занимают все склады и имеют тысячи различных поддонов для хранения.
Гибкие производственные участки — группа связанных машин, которые выпол
няют специфический процесс или шаг в большом производственном процессе.
äãÄëëàîàäÄñàü ìëíêéâëíÇ ìèêÄÇãüûôÖâ èêéåõòãÖççéâ ùãÖäíêéçàäà
27
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
Типичная гибкая производственная ячейка (FMC) представляет собой машину с
ЧПУ, машину для какой
либо обработки материала и, возможно, робот.
Жесткие автоматизированные машины — большой класс специальных ма
шин автоматизации, разработанных для конкретного производства и превраща
ющих детали в готовые изделия с минимальным человеческим вмешательством.
Гибкие производственные системы — одна или несколько производственных
машин, интегрированных в автоматическую систему обработки материалов.
Работа управляется компьютером. Гибкой производственной системой (FMS)
могла бы быть комбинация ЧПУ с системой обработки материалов.
Системы с непрерывным процессом — управляемые компьютером промыш
ленные системы, используемые при производстве продовольствия и химичес
кой продукции, фармацевтики и бумажных изделий. Эти системы используют
ряд технологий управления процессом.
Компании используют машины и системы описанных категорий, чтобы создавать
серийные, линейные и непрерывные производственные системы, о которых мы гово
рили выше. Машины и системы в этих группах сформированы из сотен компонен
тов — от простых переключателей до сложных компьютеров. Чтобы устанавливать и
программировать эти машины и системы и находить в них неисправности, инженеры и
техники должны, прежде всего, понимать принцип работы используемых компонен
тов. Полное описание этих компонентов и является основной целью этого учебника.
1.4 .1 . èÓËÁ‚Ó‰ÒÚ‚ÂÌÌ̊ ÒËÒÚÂÏ̊ Ë ÔÓÏ̊̄ÎÂÌ̇fl
̋ÎÂÍÚÓÌË͇/‡‚ÚÓχÚËÁ‡ˆËfl
Производственные системы и категории промышленной автоматики объединены на
графике рис. 1.1. Прежде чем двинуться дальше, как следует его изучите. Обратите
внимание, что по горизонтальной оси отмечены типы машин и групп систем: от наиме
нее сложных (ручные машины) слева и до наиболее сложных (системы непрерывного
процесса) справа. Над горизонтальной осью во вертикали размещены названия про
изводственных систем, для того чтобы соотнести типы промышленных машин и типы
производства. Например, область повторного производства на графике начинается
слева от программируемых машин и простирается до гибких производственных сис
тем. Это показывает, что промышленные системы с повторным производством могли
бы использовать для своего формирования любую из технологий: от программируе
мых машин до гибких производственных систем.
Рассмотрите и другие производственные системы, чтобы узнать наиболее часто
используемые промышленные технологии.
На рис. 1.1 также показана степень автоматизации, присущая каждой представ
ленной производственной системе. Затененная область для каждого типа производ
ства показывает вероятную долю ручного труда. Например, при проектном производ
стве труд почти полностью ручной, в то время как непрерывное производство имеет
самую низкую долю ручного труда. Автоматизированные части производственных сис
тем используют аппаратные средства и программное обеспечение управляющих про
28
мышленных технологий, перечисленные в нижней части рисунка. Следовательно, об
ласть графика справа от пунктирной линии, делящей каждое поле, показывает спрос
на специалистов в промышленной электронике. Нетрудно видеть, что отрасли про
мышленности, использующие повторные и непрерывные производственные системы,
нуждаются в инженерах и техниках данного профиля. Технологии, представленные в
области справа от пунктирной линии, отражены и в пирамиде технологий, представ
ленной на рис. 1.2 .
Рис. 1.1. Производственные системы и управляющая промышленная
электроника
1.5 . èàêÄåàÑÄ à ÑÖêÖÇé íÖïçéãéÉàâ
Пирамида технологий на рис. 1.2 показывает набор областей знания, которыми долж
ны владеть инженеры и техники, чтобы разрабатывать, создавать, проверять, про
граммировать и экплуатировать автоматизированные промышленные системы.
Рассмотрим подробно рис. 1 .2, чтобы познакомиться с технологиями на каждом уровне
пирамиды. Трем нижним уровням соответствуют устройства, которые используются при со
здании блоков для автоматизации производства. Эти устройства многообразны — от самых
простых, таких как кнопка и переключатель, до таких сложных, как операционный усили
тель. Переключатели, транзисторы, операционные усилители и коммутационные устрой
ства переменного тока, показанные на первых трех уровнях, используются, чтобы создавать
дискретные и аналоговые датчики на следующем уровне. Безопасность занимает уровень
5 — вследствие своего высокого приоритета в промышленности, так как понимание прин
ципов обеспечения безопасности необходимо перед переходом к более высоким уровням.
Датчики и двигатели располагаются на уровнях 4 и 6, а полупроводниковые компоненты для
контроллеров на уровне 7. Уровень 8 выделен для процессов управления при разомкнутых и
замкнутых цепях обратной связи и роботов, используемых в автоматизированных производ
ствах, таких как компьютерные заводы с цифровым управлением и системы хранения рас
познавания и перемещения материалов и готовых изделий. Системы, расположенные на
èàêÄåàÑÄ à ÑÖêÖÇé íÖïçéãéÉàâ
29
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
уровне 8, создаются с использованием устройств и принципов, относящихся к семи нижним
уровням. Верхний уровень, названный сетями данных, описывает, как информация от раз
личных систем автоматизации производства передается между автоматизированными ма
шинами и системами. Пирамида представляет нам полную картину технологий, связанных с
управляющей промышленной электроникой, начиная с одиночных компонентов, подобных
переключателям, и кончая полностью функциональными системами автоматизации.
Пирамида показывает также порядок, в котором эти технологии должны изучаться,
начиная с нижнего уровня. Номера, заключенные в круглые скобки на каждом уровне,
соответствуют главам, в которых рассматриваются данные темы в настоящем учебнике.
Если изучать темы в указанном порядке, то вся информация, необходимая для освоения
более высоких уровней, будет уже получена на более низких уровнях. Пирамида дает
представление о карте и вехах пути, который необходимо пройти специалисту, начиная с
базового уровня знаний в электронике, чтобы получить квалификацию, необходимую
для работы с полностью автоматизированными системами, соответствующими верхней
части пирамиды. Темы каждого следующего уровня на дереве технологий, приведенном
на рис. 1.3, дают вам новый раздел знаний, необходимых для такой работы.
1.5 .1. ÑÖêÖÇé íÖïçéãéÉàâ
Дерево технологий (см. рис. 1.3) представляет собой иерархический список устройств
и программного обеспечения, которые используются в системах автоматизации, при
меняемых в различных отраслях промышленности. Дерево является своего рода крат
ким обзором разделов книги. Все упомянутые в нем элементы должны быть освоены
инженерами и техниками, работающими с соответствующими системами промышлен
ной электроники. Рассмотрим основные пункты на рис. 1.3 .
Дерево основано на концепциях промышленного управления, потому что это ос
новная функция промышленных электронных систем. Первые две основные ветви —
машины с ручным управлением и машины с электронным управлением. Термин элек
тронное управление применяется потому, что на самом низком уровне для управления
производственным процессом используются простые переключатели и схемы релей
ной логики. На самом же высоком уровне системы автоматизации управляются слож
ными компьютерными сетями. В материалах учебника мы рассматриваем многие из
элементов, включенных в ветвь дерева технологий, представляющую класс машин с
электронным управлением. В подветвях этой ветви (входные устройства, выходные
устройства, аппаратные средства контроллеров, программное обеспечение контрол
леров и сетевая инфраструктура) представлены аппаратные средства и программное
обеспечение, используемое для создания автоматизированных промышленных систем
с электронным управлением. Каждая из пяти подветвей содержит ряд устройств или
программных компонентов. Например, входные устройства, используемые в промыш
ленном управлении, делятся на два типа: контактные и бесконтактные. Эти две кате
гории делятся и далее; например, бесконтактные датчики включают в себя устройства
дискретной и аналоговой группы. Хотя некоторые из терминов на этом рисунке пока
вам незнакомы, они приведены заранее, чтобы вы могли видеть связь разделов учеб
ника с областями знаний, необходимыми для работы в промышленной электронике.
30
Изучите все ветви дерева, чтобы познакомиться с терминами. Дерево и пирамида тех
нологий связаны между собой, потому что все разделы, образующие ветви дерева, яв
ляются одновременно и элементами одного из уровней пирамиды.
Пирамида и дерево приведены здесь в качестве иллюстрации, чтобы дать вам об
щее представление о разделах промышленной электроники, рассматриваемых в сле
дующих главах. Рекомендуется по мере изучения материала возвращаться к рис. 1.2 и
1.3, чтобы лучше представить себе весь объем знаний, используемых в промышлен
ной электронике.
Рис. 1.2. Пирамида технологий
èàêÄåàÑÄ à ÑÖêÖÇé íÖïçéãéÉàâ
31
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
Р
и
с
.
1
.
3
.
Д
е
р
е
в
о
т
е
х
н
о
л
о
г
и
й
32
1.6 . èéàëä à ìëíêÄçÖçàÖ çÖàëèêÄÇçéëíÖâ ëàëíÖåõ
Техникам и инженерам любых специальностей необходимо решать те или иные про
фессиональные задачи. Большая часть задач связана с разработкой нового компонен
та либо с созданием машины или системы. Другой важной областью является поиск
неисправностей в неработающих системах или в машинах и системах, работающих с
отклонениями от нормального режима. В каждом случае от грамотного специалиста
требуется организованный подход к решению этих задач. В методах решения задач,
касающихся разработки нового оборудования и поиска неисправностей на действую
щем оборудовании, имеются как сходство, так и различия. Решение задач, связанных с
проектированием систем, содержится в материалах каждой главы. В каждую из глав
учебника включены также и методы поиска неисправностей. Существует, однако, об
щая методика, применимая к поиску неисправностей во всех типах промышленных
систем, которая и представлена в следующем разделе.
1.6 .1. ǂ‰ÂÌË ‚ ÔÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ
Отправной точкой для введения в любую тему является определение терминов.
Наладчик — квалифицированный специалист, нанимаемый, чтобы находить не
исправности и производить ремонт машин и технического оборудования.
Поиск неисправностей — комплексный процесс, необходимый для восстанов
ления работоспособности системы. Хотя этот процесс преимущественно ло
гический, часто необходимо использовать оборудование и манипулировать
механическими объектами.
Задача поиска неисправностей — ситуация, в которой ответ или решение сра
зу неочевидны, но могут быть найдены логическим путем, часто включающим
и интуитивный компонент.
Эти определения указывают на некоторые важные понятия, но не рассеивают
обычных заблуждений относительно способностей наладчиков к поиску неисправнос
тей. Это следующие заблуждения:
поиск неисправностей — это всего лишь простой процесс, состоящий
из множества шагов, который можно запомнить. Хотя имеются мето
ды, которые могут помочь в поиске неисправностей, но процесс решения так
же нестандартен, как и множество неисправностей, которые могут происхо
дить в машинах. Каждая новая задача нестандартна;
копирование методов, используемых другими наладчиками, — хоро+
ший способ освоить поиск неисправностей. Люди редко обладают одина
ковым стилем поиска неисправностей, поскольку у каждого своя методика
решения задач. Вы можете узнать некоторые стандартные решения для спе
циальных задач, работая с квалифицированным наладчиком, но каждый дол
жен открыть и разработать на практике собственные методы поиска неисп
равностей;
èéàëä à ìëíêÄçÖçàÖ çÖàëèêÄÇçéëíÖâ ëàëíÖåõ
33
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
хороший наладчик способен решить задачу или отыскать неисправ+
ность немедленно. Опытные наладчики, которым уже приходилось решать
большое количество задач,, знают, что решение приходит сразу после изуче
ния признаков неисправности только потому, что они решали подобную зада
чу ранее. Когда задача решается во второй раз, это — просто упражнение, а
не истинное решение задачи. Однако когда опытный наладчик или новичок
сталкиваются с задачей, никогда прежде не встречавшейся, они должны про
анализировать признаки и подключить свое логическое мышление, чтобы
понять причины проблемы. Опыт позволяет ускорить этот процесс, но не га
рантирует немедленного обнаружения дефекта;
хороший наладчик всегда в процессе поиска дефекта что+то измеря+
ет. Трудно сделать заключение более далекое от истины. Хорошие наладчи
ки тратят основное время на обдумывание и анализ данных системы, прежде
чем окунуться в активную деятельность. Длительное время, потраченное на
обдумывание, является признаком квалифицированного наладчика;
хорошие способности к поиску неисправностей являются врожденны+
ми, этому нельзя научиться. Все люди разные, и некоторые из них подхо
дят к решению задач более логично, чем другие. В результате некоторые ра
ботники приобретают навыки поиска неисправностей легче других. Однако
обучиться может любой, любой может совершенствовать свои способности
в наладке, изучив некоторые эффективные методы;
нередко несколько неисправностей в системе случается одновремен+
но. В большинстве случаев сбой системы является случайным событием.
Например, сбой может быть вызван такими внешними событиями, как замы
кание между троллеями и системой, подводящей питание, или перенапряже
ние из
за воздействия молнии. Другую группу причин сбоев составляет ухуд
шение качества компонентов из
за старения, нагрева, вибраций или из
за
электрического или механического напряжения. Какова бы ни была причи
на, это событие в большинстве случаев непредсказуемо. Поэтому маловеро
ятно, что два случайных, несвязанных события произойдут одновременно,
вызвав два сбоя в системе и первоначально принимается гипотеза об одном
сбое. Множественные сбои более трудны для поиска и будут обсуждаться
ниже в этом разделе.
Поиск неисправностей — необходимый навык для инженеров и техников, рабо
тающих с машинами и системами, так как что
то, в конечном счете, всегда выходит из
строя. В современном мире умелый наладчик — это очень ценный специалист.
1.6 .2 . 뇂ÌÂÌË ‡ÔÔ‡‡ÚÌ̊ı Ë ÔÓ„‡ÏÏÌ̊ı Ò‰ÒÚ‚ ÔÓËÒ͇ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ
Сегодня трудно найти машину или промышленную систему, которая не являлась бы
сочетанием электронных схем, механизмов и компьютерных контроллеров. Компью
тер часто выполняется в форме микропроцессора и микроконтроллера, размещенных
на одной плате или в форме программируемого логического контроллера. В любом
34
случае, присутствие компьютера показывает, что существует программа или машин
ный код как средство управления работой машины. Наличие программы приводит к
уникальному набору проблем, встающих перед наладчиком системы. Поиск неисправ
ностей в машинных программах обсуждается в следующих главах; однако некоторые
общие рекомендации для него целесообразно изложить сразу:
если программа работала вчера, то она должна работать и сегодня.
Эта инструкция подразумевает, что программы обычно не портятся, так что,
если программа управляла машиной правильно в прошлом, она должна про
должать корректно работать и сейчас. Если вчера машина работала, то за
сегодняшний сбой отвечает не компьютерная программа. Имеются, однако,
две ситуации, представляющие собой исключения их этого правила:
1. В программу часто вводятся исходные данные, чтобы обеспечить на
чальные уставки или условия работы. Если в программу введены непра
вильные данные, то после сбоя работа программы может прерваться.
2. Нередко в интерфейсе, связывающем технологическую установку с уп
равляющим компьютером, проходят сотни сигналов. Программист пы
тается предусмотреть все возможные комбинации сигналов при разра
ботке управляющей программы; однако в процессе работы может
появиться сочетание входных сигналов, не учтенное при написании про
граммы. Программа может функционировать правильно в течение не
скольких месяцев, прежде чем появится этот уникальный набор входных
условий. Сбой в этом случае особенно трудно найти, потому что работа
программы еще недавно представлялась вполне корректной;
необходимо некоторое знание языка программирования. Инженер или
техник, занимающийся поиском неисправностей в машине, должен уметь
читать, интерпретировать и анализировать программный код, используемый
для управления машиной;
хорошо документированный программный код является критичным услови
ем для успешного поиска неисправностей машины. Управляющие машиной
программы разработаны или компанией, поставляющей машину, или техни
ческим отделом компании, где машина установлена. В любом случае, деталь
ность и ясность документирования программы необходимы для поиска буду
щих неисправностей и аппаратных сбоев.
В настоящей главе мы акцентировали ваше внимание в основном на электронных и
механических аппаратных компонентах. Однако в последующих главах, посвященных
программированию, будет дополнительно рассмотрен и поиск ошибок в программах.
1.6 .3. åÂÚÓ‰̊ ÔÓËÒ͇ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ
Методы поиска неисправностей представляют собой проверенные на практике про
цедуры, которые образуют структуру процесса поиска неисправностей. Хотя и опыт
ный наладчик, и новичок используют одни и те же методы для установления дефектно
го компонента, этот факт не всегда очевиден, поскольку опытный наладчик часто
èéàëä à ìëíêÄçÖçàÖ çÖàëèêÄÇçéëíÖâ ëàëíÖåõ
35
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
производит многие действия и расчеты в уме. Новичку рекомендуется записывать все
предпринятые им шаги, пока он не освоит необходимые методы. Наиболее часто ис
пользуются блок
схемы вместе с методами заключения в скобки, протекания сигнала
и информационной воронки.
Блоксхемы. Блок
схема представляет собой набор условных обозначений для
описания всех частей системы. Блок
схема системы громкоговорящей связи (PA) пока
зана на рис. 1 .4 . На входах в смеситель включены два микрофона. Смеситель позволяет
регулировать громкость и тон для каждого микрофона отдельно. Усилитель малого сиг
нала, названный предусилителем, формирует объединенный сигнал на входе смесителя.
Усилитель мощности обеспечивает дополнительное усиление и подает сигнал на два
выходных динамика. Между предусилителем и усилителем мощности включен селек
торный переключатель, чтобы подключать микрофоны, CD
плеер или усилитель мощ
ности. В состав модуля CD
плеера входят собственные предусилитель и регулятор
громкости. Рассмотрите внимательно схему рис. 1 .4, чтобы понять ее работу.
Рис. 1 .4 . Блок+схема громкоговорящей связи
Этот пример иллюстрирует следующие свойства блок
схем:
сложные системы представляются рядом простых прямоугольников.
Такие сложные части системы громкоговорящей связи, как предусилитель и
усилитель мощности, представлены простым прямоугольником. В результа
те сложная система может уместиться на одной странице;
поток информации проходит слева направо. Обратите также внимание,
что поток информации входит слева (звук в микрофонах) и проходит направо,
где размещены прямоугольники, обозначающие динамики. Таким образом,
входы находятся слева, а выходы справа;
представлены системы и подсистемы. Решение о том какую часть систе
мы изобразить в виде прямоугольника, обычно основано на том, как выпол
36
няется ремонт. Если неисправный модуль может быть заменен запасным,
дабы возвратить работоспособность системе, то весь этот модуль должен
быть отражен на блок
схеме одним блоком. Однако если замене подлежат
компоненты этого модуля, необходимо нарисовать его блок
схему. Напри
мер, усилитель мощности на рис. 1 .4 имеет три внутренних модуля, которые
могут быть заменены. Система громкоговорящей связи имеет блок
схему,
показанную на рис. 1.4, а блок
схема подсистемы усилителя мощности пока
зана на рис. 1.5. Если поиск дефекта приводит к усилителю мощности, то
необходимо продолжить поиск неисправностей на уровне подсистемы бло
ков, размещенных внутри усилителя мощности (см. рис. 1.5).
Блок
схему можно получить двумя путями. В идеале продавец оборудования при
водит блок
схему системы в руководстве пользователя. При отсутствии блок
схемы
вы должны сами создать ее, исходя из собственной ситуации поиска неисправностей.
Блок
схема легко формируется следующим образом:
1. Перечислите все компоненты системы, которые могут быть заменены при появ
лении сбоя. Например, селекторный переключатель и микрофон — одиночные
компоненты в системе, представленной на рис. 1.4, которые при неисправности
будут заменены. Усилитель мощности имеет три схемные платы (см. рис. 1.5),
которые могут быть заменены индивидуально, если неисправность случилась в
усилителе. Однако, если неисправен предусилитель, который состоит многих
компонентов, он будет заменен как один модуль. Все модули, подобные предуси
лителю, заменяются на запасные, поскольку это самый быстрый способ восста
новления работоспособности системы. Решение о восстановлении неисправного
модуля основывается на стоимости ремонта — иногда дешевле купить новый мо
дуль. В других ситуациях модуль ремонтируют, и он становится запасным.
2. Составьте список компонентов, в начало которого поместите входные блоки сис
темы, а в конец — выходные, оставшиеся компоненты расположите между ними
в порядке прохождения сигнала через систему. Список для системы рис. 1 .4 будет
начинаться с микрофонов и заканчиваться динамиками. Смеситель должен быть
записан следующим пунктом под микрофонами, а предусилитель и CD
плеер за
писываются на одной строке, поскольку сигнал с обоих подается на селекторный
переключатель. Селекторный переключатель и усилитель мощности должны сто
ять в списке сразу перед динамиками.
3. Поместите все компоненты блок
схемы в прямоугольники и примените метод по
тока сигнала, связывая прямоугольники в схему. Основными методами работы с
Рис. 1.5. Блок+
схема
усилителя
мощности
èéàëä à ìëíêÄçÖçàÖ çÖàëèêÄÇçéëíÖâ ëàëíÖåõ
37
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
блок
схемами являются представление потока сигнала и анализ, который описан
в следующем разделе.
Для определения места дефекта используется блок
схема системы и методика
поиска неисправностей, называемая заключением в скобки.
Заключение в скобки. Это методика, которая использует внешние маркеры на
блок
схеме, чтобы идентифицировать часть блок
схемы, в которой имеется дефект.
Скобки помещают, прежде всего, в блок
схему системы, но они могли бы размещать
ся и на принципиальных схемах, когда дефект присутствует в одном блоке. Процесс
начального расположения для скобок можно разделить на три шага.
1. Записать и изучить все признаки системы. Перечислить все условия, которые от
личаются от нормальных условий работы.
2. Разместить точки на блок
схеме системы, где обнаружена аварийная работа. По
местить правую скобку (]) после каждого аварийного блока. Помните: поток сиг
нала на блок
схеме направлен слева (от входов) направо (к выходам). При этом
правые скобки, помещенные справа от блоков выхода, не имеют смысла.
3. Сдвигать левую скобку налево, если сигнал неверен, пока не обнаружится нор
мально работающий блок. Поместить левую скобку ([) справа от нормально рабо
тающего блока. Вообще, левая скобка первоначально размещается с применением
минимально детализированных испытаний или только легко выполнимых тестов.
Опытные наладчики могут представить весь процесс, связанный с движением
скобок, в уме. Однако начинающим рекомендуется рисовать скобки на реальной схе
ме, чтобы лучше освоить методику поиска неисправностей. Пример 1.1 иллюстрирует
этот процесс.
èËÏ 1.1
Система на рис. 1.4 предназначена для презентаций в зале заседаний. Система установ
лена техниками и проверяется на работоспособность. Техник обнаружил, что при про
верке с обоих микрофонов нет звука от любого динамика. Отыщите в системе место
неисправности. Считайте, что в этом примере на заключение в скобки усилитель мощ
ности исправен и регулятор громкости на смесителе находится в рабочем положении.
êÖòÖçàÖ
1. Запишем и проанализируем признаки. Отсутствует звук на обоих динамиках,
когда исправный входной сигнал прикладывается к системе.
2. Поместим правую скобку после каждого дефектного выхода. Правые скобки по
мещены справа от каждого блока динамика, как показано на рис. 1.6.
3. Поместим левую скобку направо от последнего, хорошего или нормального вы
хода. Признаки указывают, что входы на микрофонах исправны, но исправность
самих микрофонов не установлена. Следовательно, левая скобка размещается
слева от блоков микрофонов, как показано на рис. 1.6.
Пример 1.1 показывает, что начальные позиции скобок соответствуют признакам
проверяемой системы. Однако при этом мы не получаем никакой новой информации,
потому что скобки сообщают нам: этот дефект расположен где
то внутри системы.
38
Перед продолжением проверки системы важно познакомиться с понятиями, связан
ными с потоком сигнала в блок
схеме.
Поток сигнала. Поток сигнала в общем случае разделяется на две группы, назы
ваемые потоками мощности и информации. Поток мощности показывает, как мощ
ность проходит через все компоненты системы, а поток информации указывает, как
информация или данные проходят от источников к приемникам.
Имеется пять различных типов топологии путей для потока сигнала: линейный,
расходящийся, сходящийся, с обратной связью и переключаемый. Пользователь дол
жен уметь распознавать каждый тип пути, потому что с каждой из топологий связан
свой подход к поиску неисправностей. Приведем описание каждого типа.
Линейный — линейный путь сигнала реализуется при последовательном соеди
нении блоков, показанном на рис. 1.5 .
Расходящийся — расходящийся путь сигнала получается, когда один блок питает
два или большее количество блоков. Блок
схема потока мощности для системы защи
ты представлена на рис. 1.7 . Можете ли вы найти расходящийся путь сигнала на ри
сунке? Расходящийся путь сигнала на рис. 1.7 — это мощность, текущая от источника
питания к трем блокам системы.
Сходящийся — сходящийся путь сигнала получается, когда сигналы от двух или
более блоков подаются на один блок. Два микрофона, связанные со смесителем, на
рис. 1.4 представляют собой пример сходящегося пути сигнала. Второй пример пред
ставлен на рис. 1.7, где в системе защиты два источника мощности соединяются с вто
ричным источником питания.
Рис. 1.6. Блок+схема системы громкоговорящей связи со скобками
èéàëä à ìëíêÄçÖçàÖ çÖàëèêÄÇçéëíÖâ ëàëíÖåõ
39
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
Обратная связь — поток сигнала обратной связи создается, когда часть выход
ного сигнала ответвляется обратно на вход системы, складываясь с входным сигна
лом. Блок
схема системы регулирования температуры с обратной связью приведена
на рис. 1.8 . Температура процесса измеряется датчиком, и измеренный сигнал подает
ся обратно на вход, где он сравнивается с сигналом желательной температуры, назы
ваемым уставкой. Когда уставка выше фактической температуры, возникает положи
тельный сигнал рассогласования. Усиленный сигнал рассогласования заставляет
клапан смесителя увеличивать температуру жидкости в резервуаре. Если температура
процесса слишком велика, появляется отрицательный сигнал рассогласования и про
исходит снижение температуры.
Рис. 1 .7 . Блок+схема для потока
мощности в системе
безопасности
Рис. 1 .8 . Блок+схема системы с обратной связью для терморегулятора
40
Переключаемые пути — переключаемые пути потока сигнала включают линей
ные, расходящиеся или сходящиеся пути с переключателями, позволяющими изме
нить путь потока сигнала. Переключаемый путь имеется в системе на рис. 1.4, где CD
плеер и предусилитель подключены к усилителю мощности через селекторный
переключатель.
Каждая система имеет блок
схему потока сигнала, которая является комбинаци
ей из этих пяти топологий. Чтобы ускорить процесс поиска неисправностей, необхо
димо провести анализ топологии.
Анализ потока сигнала. Пять типов путей сигнала (линейный, расходящийся,
сходящийся, обратная связь и переключаемый), представленные в предыдущем раз
деле, имеют собственные правила, которые могут применяться для ускорения поиска
дефектного компонента системы. Ниже описаны правила движения скобок для каж
дой из топологий.
Правило для линейного пути — когда в скобки заключен линейный набор прове
ряемых блоков системы, первая точка проверки должна располагаться в середине об
ласти внутри скобок. Если сигнал дефектен, то правая скобка (]) передвигается к этой
отметке, поскольку дефектная область находится слева. Если сигнал правильный, то
левая скобка ([) перемещается к этой отметке, потому что дефект находится в блоках
справа от этой нее. Использование правила разделяй и властвуй исключает из рас
смотрения половину компонентов после такой проверки.
Правило для расходящегося пути — когда в скобки заключают блоки системы с
расходящимся путем, часть схемы перед развилкой является исправной, если любой
из расходящихся путей дает нормальный сигнал. Допустим, например, что в скобки ([])
заключены источник питания и все три выхода в блок
схеме потока мощности на
рис. 1 .7. Если при этом проверка показывает, что подводится питание к системе по
жарной тревоги, то источник питания исправен. В результате левая скобка ([) пере
мещается на сторону выхода источника питания.
Правило для сходящегося пути — когда в скобки заключают блоки системы со
сходящимся путем, то необходимо применять два правила. Правило 1: если для обес
печения нормального сигнала на выходе необходимы корректные сигналы на всех вхо
дах, то правильный сигнал на выходе показывает, что все входные пути исправны.
Правило 2: если только один из входных сигналов необходим для получения коррект
ного выходного сигнала, то следует проверить исправность всех входных путей. На
пример, для путей, сходящихся к источнику питания, на рис.1.7 следует использовать
правило 2, потому что любой первичный источник может обеспечивать энергию для
источника питания.
Правило для путей с обратной связью — когда в скобки заключают блоки систе
мы с путем обратной связи, используется изменение или модификация пути обратной
связи, чтобы показать ее нормальную работу. Блок
схема для такой топологии приве
дена на рис.1.8 .
Правило для переключаемых путей — если скобки содержат линейную, расхо
дящуюся, или сходящуюся топологию, которая изменяется с помощью переключате
ля, то необходимо проверить систему при другой позиции переключателя. Если ошиб
ка исчезает, то неисправен путь, который был включен до этого. Если проблема
сохраняется, то дефект находится на пути, общем для обеих позиций переключателя.
èéàëä à ìëíêÄçÖçàÖ çÖàëèêÄÇçéëíÖâ ëàëíÖåõ
41
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
Информационная воронка. Последняя общая концепция поиска неисправнос
тей называется информационной воронкой. Этот процесс изображен графически на
рис. 1.9. Рисунок показывает, что, когда расстояние между скобками на блок
схеме
велико, проверки, выбранные для идентификации дефекта, должны носить более об
щий характер. Например, проверки на уровне 1 могут включать:
проверку, подается ли питание на каждый модуль;
проверку выключателей, которые должны находиться в положении, необхо
димом для нормальной работы;
проверку правильности всех соединений;
проверку положения органов управления на лицевой панели;
изменение положения органов управления на лицевой панели или парамет
ров настройки, чтобы видеть, как это влияет на признаки неисправности.
Проверки на этом уровне могут выполняться быстро и обычно не требуют ника
кого измерительного оборудования или снятия крышек и могут исключить из числа
подозреваемых некоторые блоки, так что расстояние между скобками может быть
уменьшено. Как правило, вы должны исчерпать все возможные проверки на каждом
уровне, перемещая при этом скобки как можно ближе друг к другу. При понижении
уровня проверки становятся более специфическими.
На уровне 2 между скобками заключено меньшее количество подозреваемых
блоков, а для сближения скобок используется измерительное оборудование. Напри
мер, из модулей могут быть вынуты кабели, чтобы проверить, что присутствует нор
мальный входной или выходной сигнал. Работа на этом уровне обычно связана с рядом
измерений. При этом результат каждого измерения сужает расстояние между скобка
ми, изменяя положение левой или правой скобки. Применяемое испытательное обо
рудование чаще всего состоит из электроизмерительных приборов, осциллографов и
анализаторов данных.
Рис. 1 .9 . Информационная воронка
42
Испытания на уровне 3 информационной воронки обычно выполняются, когда
уже найден конкретный неисправный модуль. В некоторых случаях поиск неисправно
стей продолжается внутри модуля на подсистемных модулях или электронных платах,
с использованием более точных измерений. Однако не менее часто модуль просто за
меняется запасным.
На самом низком уровне 4 заменяют дефектные модули или компоненты подсис
темы на запасные и проверяют, восстанавливает ли замена работоспособность.
Методика заключения в скобки совместно с информационной воронкой помогает
устранить:
бессмысленные и излишние проверки системы — наладчик должен сосре
доточиться только на блоках внутри скобок;
избыточные проверки системы — если расстояние между скобками не
изменяется, а измерения не дают новой информации. Когда это происходит,
то это показывает, что дополнительные проверки на текущем уровне беспо
лезны
преждевременную детализацию проверки системы — детальная про
верка одного блока, когда расстояние между скобками достаточно велико,
дает точную картину для представленной ситуации. Информационная ворон
ка помогает сфокусировать внимание на наиболее подходящем типе прове
рок для такой ситуации.
èËÏ 1.2
Используется пример 1.1 и рис. 1.6, чтобы показать, как помещать скобки в систему,
имеющую признаки сбоя. Применяются методы информационной воронки, чтобы
найти дефектный модуль.
êÖòÖçàÖ
Уровень 1 информационной воронки работает следующим образом.
1. Проверка наличия питания, правильности положения переключателей и соот
ветствия кабельных связей показывают, что ни одно из этих условий не служит
причиной неисправности. Скобки не передвигаются.
2. Смеситель имеет регулятор громкости для каждого микрофона и общий регулятор
громкости. Поскольку каждый микрофон подключен на свой вход, проверяется,
что все три регулятора громкости установлены в рабочее положение. Если регуля
торы громкости находятся в рабочем положении, то скобки не передвигаются.
3. Как показано на блок
схеме системы (см. рис. 1.6), на второй вход усилителя
мощности подается сигнал от CD
плеера, и мы можем применить правило для пе
реключаемых путей. Установим нормальную громкость на плеере и изменим пози
цию переключателя. Если после этого появится звук на обоих динамиках, то уси
литель мощности и динамики нормально работают от CD
плеера. В результате
правая скобка помещается между переключателем и выходом предусилителя.
Маловероятно, чтобы оба микрофона одновременно вышли из строя (предполо
жение об отсутствии множественных сбоев), поэтому левая скобка помещается
между микрофонами и смесителем. Блок
схема системы с новым расположением
скобок приведена на рис. 1 .10. Благодаря использованию процедур уровня 1, об
èéàëä à ìëíêÄçÖçàÖ çÖàëèêÄÇçéëíÖâ ëàëíÖåõ
43
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
ласть расположения дефекта удалось сузить от восьми до двух модулей. Однако
никакой дополнительной информации при работе на этом уровне получить уже
невозможно, и проверка перемещается на уровень 2.
4. Из измененной блок
схемы на рис 1.10 можно видеть, что дефектным является
линейный путь, состоящий из смесителя и предусилителя. Применим стратегию
разделяй и властвуй и проверим с помощью осциллографа сигнал в средней точ
ке линейного пути между смесителем и предусилителем. Выходной сигнал сме
сителя оказывается правильным, поэтому левая скобка перемещается на его
выход и в скобках оказывается только один неисправный блок — предусили
тель. В использовании уровня 3 нет необходимости, поскольку предусилитель не
имеет никаких заменяемых компонентов. Если бы неисправным оказался усили
тель мощности, проверка была бы продолжена на уровне 4.
5. Предусилитель заменяется на запасной, после чего проверяется работоспособ
ность системы. Если проверка дает положительный результат, то система снова
готова к работе.
Пример 1.2 показывает, как использование блок
схемы системы в сочетании с
заключением в скобки, анализом потока сигнала и информационной воронкой помога
ет отыскать дефектный компонент в самые короткие сроки и с минимумом измерений.
1.6 .4 . èËÁ̇ÍË ÌÂËÒÔ‡‚ÌÓÒÚÂÈ Ë ËÒÔÓÎ̧ÁÓ‚‡ÌË ‰‡ÌÌ̊ı ÒËÒÚÂÏ̊
Опытный наладчик для решения проблемы использует комбинацию инструменталь
ных средств и методов. Наладчик подобен детективу, неисправность — преступле
Рис. 1 .10. Блок+схема системы громкоговорящей связи после применения
метода информационной воронки
44
нию, а признаки — уликам. Следующие общие рекомендации следует учитывать по
мере необходимости в процессе решения:
признаки представляют собой ясное и детальное описание того, что работает
правильно, а что — нет. Иногда определение исправных компонентов помо
гает более ясно представить себе, что же не работает. Воспользуйтесь следу
ющими рекомендациями:
1. Если возможно, проверьте все признаки лично. Если это невозможно,
положитесь на записи из журналов обслуживания и другие надежные
источники.
2. Перед записью и анализом признаков проверьте, что все органы управ
ления находятся в рабочем положении;
ведите точный и подробный журнал регистрации поиска неисправностей для
каждой системы. Он должен включать начальную ситуацию поиска неисп
равностей и изменения в системе, проводимые в процессе поиска;
чтобы распознать ошибочную работу, вы должны хорошо представлять себе
нормальный режим работы. Изучайте нормальную работу системы, пока
каждый из возможных режимов нормальной работы не станет вам абсолют
но ясен;
ненормальная работа имеет три причины:
1. Настройка — неправильная настройка средств управления на лицевой
панели или внутри модуля.
2. Калибровка — неверная калибровка, отличная от предусмотренных
стандартов.
3. Неисправность компонента или модуля — неисправность компонен
тов в какой
либо части системы. Всегда проводите внешний осмотр ком
понентов для определения значительного износа, следов подгорания,
чрезмерного перегрева или повреждения вследствие других воздействий.
1.6 .5. èÓÒΉӂ‡ÚÂÎ̧ÌÓÒÚ̧ ÔÓËÒ͇ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ
Для систематического и организованного поиска неисправностей рекомендуется сле
дующая последовательность шагов:
1. Определите проблему. Соберите все данные о признаках сбоя и информацию о
состоянии системы на момент повреждения.
2. Решите, что именно необходимо проверить. Заключайте в скобки (на бумаге
или мысленно) часть блок
схемы для ограничения области поиска той частью си
стемы, где была зафиксирована неисправная работа.
3. Решите, какая проверка должна быть выполнена. Примените критерии ин
формационной воронки, при которых начинают с изменения в пути потока сигна
ла и выполняют широкую проверку системы, чтобы устранить некоторые из подо
зреваемых модулей, находящихся между скобками. После сужения области
поиска для более точных проверок можно использовать измерительное оборудо
èéàëä à ìëíêÄçÖçàÖ çÖàëèêÄÇçéëíÖâ ëàëíÖåõ
45
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
вание. Если испытания не дадут необходимого результа, ищите любую новую ин
формацию относительно расположения дефекта, а затем переходите на следую
щий уровень к более точным испытаниям.
4. Устраните неисправность. После того как дефектный модуль или компонент
идентифицирован, устраните неисправность путем корректировки или замены
модуля или компонента.
5. Проверьте правильность работы. После того как неисправность устранена,
важно проверить всю систему, чтобы выявить ее полную работоспособность.
6. Определите причину сбоя. Возврат системы в рабочее состояние представляет
собой только половину задачи. Если возможно, определите причину неисправно
сти модуля или компонента и изменения в системе, которые предотвратили бы
подобный сбой в будущем.
Первые три шага повторяются по мере необходимости до тех пор, пока неисправ
ность не будет найдена. Изучаются признаки, вероятные дефектные модули в скобках,
и производятся наиболее простые изменения
в потоке сигнала, чтобы снять подозрения с некоторых модулей. По мере сближе
ния скобок проводятся все более точные испытания подозреваемых модулей с приме
нением необходимого оборудования. Анализ признаков продолжается в течение всего
процесса поиска. Анализ включает в себя размышление над проблемой: обработку
результатов предыдущих испытаний и обдумывание новых шагов.
1.6 .6 . åÌÓÊÂÒÚ‚ÂÌÌ̊ ҷÓË
Системы с множественными сбоями создают наибольшие трудности при поиске
неисправностей. Прежде всего, необходимо определить, произошел ли множествен
ный сбой. Если одиночный модуль или составляющая сбоя не могут вызвать наблюда
емые признаки, то следует принять гипотезу о множественных сбоях. Множественные
сбои могут характеризоваться двумя видами признаков: связанными и несвязанными.
В ситуации связанных признаков сбой любого модуля или компонента привел бы к
одному и тому же признаку. Рассмотрим, например, случай насоса с регулируемым
приводом, который работает от двигателя, управляемого схемой регулирования час
тоты вращения. Накачка прекращается, если неисправен либо двигатель, либо блок
управления. Таким образом, признаки для обоих компонентов связаны. Однако если
насос не качает, застревая из
за механических причин, а мотор не запускается из
за
короткого замыкания в системе, то получаются множественные сбои с несвязанными
признаками. Если модули и компоненты имеют связанные признаки и возникает гипо
теза множественных сбоев, то важно проверить каждый компонент перед тем, как за
фиксировать неисправность.
Присутствие несвязанных признаков указывает, что множественные сбои могли
иметь место в несвязанных модулях или компонентах. Хотя этот тип сбоя более редок,
процесс решения тот же самый. Примените методы поиска неисправностей к одному
из признаков, пока дефект не будет исправлен; затем повторите процесс для несвя
занных признаков, пока не установите второй дефект.
46
Инструментальные средства и процессы, рассмотренные в этом разделе, обеспе
чивают общий подход к задачам поиска неисправностей системы. Для конкретных
компонентов и машин в системе существуют специфические методы поиска неисправ
ностей. Чтобы устранять неисправности системы как можно быстрее, инженеры и
техники должны уметь использовать как общие, так и специфические методы.
1.7 . áçÄçàü, çÖéÅïéÑàåõÖ
Ñãü ëïÖåéíÖïçàóÖëäéÉé ÄçÄãàáÄ
Разделы промышленной электроники в данном учебнике выстроены таким образом,
чтобы с основной информацией, необходимой для восприятия новых понятий или разде
лов, познакомить вас заранее. Однако считается, что некоторыми базовыми знаниями в
электронике читатель уже обладает, и важно установить этот начальный уровень зна
ний. В учебнике подразумевается, что вы имеете начальные знания о постоянном и пе
ременном токе, законах, теоремах и анализе принципиальных схем. Вы должны уметь:
идентифицировать и использовать все три пассивных компонента (резисто
ры, конденсаторы и катушки индуктивности) в схемных решениях;
использовать законы Ома и рассчитывать мощности в схемных решениях;
использовать стандартные десятичные префиксы для физических единиц
(милли, микро, пико, кило и мега) при расчетах схем;
использовать законы Кирхгофа для токов и напряжений при расчетах схем;
использовать теорему Тевенина при расчетах схем;
идентифицировать и проводить вычисления для последовательных и парал
лельных схем;
использовать амперметры и вольтметры для измерения токов и напряжений
на компонентах;
использовать идеальные и реальные источники напряжения и тока при рас
четах схем;
рассчитывать напряжения и токи на компонентах схем с одним источником
питания и комбинациями последовательных и параллельных компонентов.
Важно, чтобы эти навыки вы могли использовать при расчетах схем с идеальными
источниками постоянного тока и резисторами и схем с источниками переменного тока и
пассивными компонентами всех трех типов. Перечисленные навыки представляют со
бой лишь малую часть из классического раздела электротехники, посвященного цепям
постоянного и переменного тока. Этот раздел преподается на втором курсе обучения по
любым электротехническим или технологическим специальностям. Однако эти навыки
являются основой, на которой строится вся теория промышленной электроники.
Если какая
то из упомянутых областей электротехники вам неизвестна, озна
комьтесь с понятиями постоянного и переменного тока в учебниках по схемотехничес
кому анализу. Практические задачи из всех областей приводятся в разделе задач в кон
áçÄçàü, çÖéÅïéÑàåõÖ Ñãü ëïÖåéíÖïçàóÖëäéÉé ÄçÄãàáÄ
47
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
це этой главы. Эти задачи охватывают весь круг понятий из области промышленной
электроники, которые будут использоваться нами в дальнейшем.
1.8 . ÇÖÅ -ëÄâíõ Ñãü ÑÄççéÉé êÄáÑÖãÄ
Поставщики систем и устройств, рассмотренных в каждой главе, имеют свои сай
ты в Интернете, идентифицированные универсальным кодом ресурса (URL). В каж
дой главе приведены ссылки на сайты соответствующих продавцов, так что вы можете
изучить дополнительные разделы или получить информацию о других аппаратных
средствах и системах интересующего вас поставщика через Интернет. Некоторые из
вопросов и задач в конце текста требуют использования указанных URL. Адреса сай
тов часто изменяются поставщиками, поэтому, если какая
либо из ссылок неактивна,
воспользуйтесь сетевым поиском, используя тип устройства как ключевое слово, что
бы найти интерактивный материал.
Сайт по промышленной электронике:
http://www.ewh.ieee.org/soc/ies/
Выпуски ИИЭРА по промышленной электронике:
http://www.trans+ie.uni+wuppertal.de/
Промышленная электроника, представляемая компанией (пример 1):
http://my.execpc.com / ~ indelect/
Промышленная электроника, представляемая компанией (пример 2):
http://www.wieinc.com/industelectronics.cfm
История автоматизации производства и компьютеров:
http://www.htservices.com/history_of_technolog y.htm
êÖáûåÖ
1.2 . Краткая история промышленной электроники
Промышленная электроника использует мощные машины для облегчения физи
ческих нагрузок рабочих.
Промышленное управление определяет систему производства, которое автома
тически контролирует процессы производства, и производит соответствующее
корректирующее действие, если продукция системы отклоняется от технических
требований на изделия.
1.3 . Классификация производств
Все промышленные операции делятся на пять групп: проектные, цеховые, серий
ные, осуществляемые на производственных линиях и непрерывные.
1.4 . Классификация устройств управляющей промышленной электроники
Машины делятся на машины с ручным управлением, программируемые, автома
тизированные, для перемещения материала, для слежения за материалами, их
48
хранения и поиска, для гибкого производства, с фиксированной автоматизацией и
для непрерывных процессов.
1.5 . Пирамида и дерево технологий
Пирамида технологий иллюстрирует уровни электронных технологий и порядок, в
котором они должны быть изучены.
Дерево технологий содержит иерархический список программного обеспечения и
устройств, которые используются в системах автоматизации для различных от
раслей промышленности.
1.6 . Поиск и устранение неисправностей системы
Наладчик — специалист, который занимается поиском неисправностей или про
изводит ремонт машин или технического оборудования.
Поиск неисправностей — комплексный процесс, позволяющий восстановить ра
ботоспособность технологической установки.
Хотя этот процесс преимущественно интеллектуальный, часто все же необходи
мо использовать оборудование и манипулировать механическими объектами.
Проблема поиска неисправностей — ситуация, в которой решение сразу не оче
видно, но может быть найдено логическими методами и частично с помощью ин
туиции.
Наличие программного обеспечения в системе создает специфический набор
проблем, описанных в трех рекомендациях.
1.6 .3 . Методы поиска неисправностей
Наиболее часто используемые методы — сочетание блок
схем с методами потока
сигнала, заключения в скобки и информационной воронки.
Анализ потока сигнала применяется к пяти топологиям (линейной, расходящейся,
сходящейся, с обратной связью и переключаемой), и используется набор правил,
позволяющий обеспечить быстрый поиск неисправного компонента системы.
Информационная воронка — методика для определения уровня детализации
проверок на различных стадиях процесса поиска неисправностей.
Наладчик при сборе признаков неисправности должен следовать приведенным
общим рекомендациям.
1.6 .5 . Последовательность поиска неисправностей
Определение неисправности: собирают все данные о признаках сбоя и информа
цию относительно состояния системы на момент сбоя.
Выбор того, что именно необходимо проверить; размещают скобки на блок
схеме
системы (на бумаге или мысленно) как можно ближе к месту дефекта, то есть к
той части системы, где ошибочная работа была обнаружена.
Принятие решения, какую проверку необходимо выполнить. Применяется крите
рий информационной воронки, согласно которому поиск начинается с изменения
сигнала на пути потока и с выполнения широких проверок системы, которая по
зволяет вывести некоторые из подозреваемых модулей за скобки. С уменьшением
расстояния между скобками тип выполняемого теста становится более точным и
проводится с использованием большего количества испытательного оборудова
ния. Когда тесты уже не будут давать никакой новой информации о местонахожде
нии дефекта, переходят на следующий, более точный уровень испытаний.
êÖáûåÖ
49
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
Устранение неисправности после определения дефектного модуля или компонен
та: проблема решается путем исправления или замены модуля или компонента.
Проверка правильности работы. После того как проблема исправлена, важно пол
ностью проверить всю систему и установить, что все проблемы системы устранены.
Определение причины сбоя. Возврат системы в рабочее состояние — только по
ловина решения. Если возможно, определите, что вызвало повреждение модуля
или компонента и порекомендуйте внести изменения в систему, которые предотв
ратили бы подобный сбой в будущем.
1.6 .6 . Множественные сбои
Множественные сбои бывают двух типов: связанные и несвязанные. При нали
чии связанных сбоев неисправность в любом блоке или компоненте дает признак
сбоя. Присутствие несвязанных признаков указывает, что множественные сбои
имеют место в несвязанных модулях или компонентах.
Çéèêéëõ
1. Что является причиной смены эволюционного развития в производстве револю
ционными изменениями?
2. Какая потребность явилась движущей силой всех изменений в производстве?
3. Какое изобретение вывело производительность труда к началу двадцатого столе
тия на новый уровень?
4. Что такое управление с обратной связью?
5. Опишите пять типов промышленных систем.
6. Назовите три промышленные системы, которые характеризуются самым высо
ким уровнем управления.
7. Чем отличаются роботы от программируемых машин общей категории?
8. Что делает ЧПУ в отличие от гибких производственных систем?
9. Что делает ЧПУ в отличие от фиксированных машин автоматизации?
10. Какая производственная система имеет самую большую долю ручного труда?
11. Для чего служат пирамида и дерево технологии?
12. Чем занимается наладчик?
13. Чем отличается поиск решения от упражнения?
14. Опишите две ситуации, в которых машинная программа может явиться причиной
сбоев системы.
15. Как создать блок
схему системы?
16. Каким образом устанавливаются скобки на блок
схеме в начале поиска неисп
равностей?
17. Что отличает поток мощности от потока сигнала?
18. Опишите пять различных типов потока сигнала.
19. В чем заключается правило разделяй и властвуй?
50
20. Чем различаются правила для сходящегося и для расходящегося пути?
21. В чем состоит правило для переключаемых путей?
22. Что означает термин информационная воронка?
23. Почему на уровне 2 информационной воронки надо потратить больше времени,
чем на любом другом уровне?
24. Почему время, потраченное на уровне 1 информационной воронки, так критично
для эффективного решения?
25. Как использовать журнал поиска неисправностей для совершенствования про
цесса поиска?
26. Почему полнота знаний о системе критична для успешной наладки?
27. Почему возврат работоспособности системы является только половиной реше
ния проблемы?
28. Каким образом связанные и несвязанные признаки изменяют процесс поиска не
исправностей при множественных сбоях?
29. Почему несвязанные множественные сбои нельзя рассматривать как обычные сбои?
èêéÅãÖåõ èéàëäÄ çÖàëèêÄÇçéëíÖâ
Систему громкоговорящей связи (PA) на рис. 1.4 используйте для решения следующих
задач. В любом случае, будем считать, что система уже налажена и что неисправность
произошла, когда питание было подано.
1. Определите, где должны быть помещены начальные скобки для следующих при
знаков:
a) нет звука из динамика No1 при начальной проверке системы;
b) нет ответа, когда проверяется микрофон No1, но оба динамика звучат при
проверке с микрофона No2;
c) не звучит динамик No2, но динамик No1 работает с обоими микрофонами.
2. Как может использоваться предположение об одиночном сбое на шаге 2 из при
мера 1.1, чтобы поместить правую скобку не после каждого динамика, а на выход
усилителя мощности?
3. Почему не может использоваться предположение об одиночном сбое на шаге 1 из
примера 1.1, чтобы поместить левую скобку не перед обоими микрофонами, а на
вход смесителя?
4. Определить, как переместились бы скобки на шаге 3 из примера 1.2, если бы
динамики не имели выходного сигнала, когда селекторный переключатель пере
водился бы в положение CD
плеера.
5. Описать последовательность испытаний, начинающуюся с шага 3 в примере 1.2,
если схема драйвера мощности (см. рис. 1.5) неисправна. Каково минимальное
количество испытаний, требуемых для нахождения неисправного компонента?
èêéÅãÖåõ èéàëäÄ çÖàëèêÄÇçéëíÖâ
51
ǂ‰ÂÌË ‚ ÔÓÏ̊̄ÎÂÌÌŲ̂ ̋ÎÂÍÚÓÌËÍÛ
áÄÑÄóà
Используйте стандартную запись тока при решении всех задач.
1. Используйте стандартный цветной код для угольных композитных резисторов (Bl =
черный, Br = коричневый, R = красный, Y = желтый, O = оранжевый, Gn = зеле
ный, Bu = синий, V = фиолетовый, Gr = серый, W = белый, G = золотой и S =
серебряный), записывайте значение каждого резистора в приведенной ниже таб
лице в омах, килоомах и мегаомах. В последней строке вычислите максимальные и
минимальные значения, основываясь на допуске.
Первая цветная полоса в таблице — около конца резистора.
Цветной код
R,Y,O Br,Вт, O,V, Gn,Gr,R V,Y,Bl,G
Bu,R, W,Y,O
Bl,G Gn,S
Bl, G
Омы
Килоомы
Мегаомы
Диапазон
допуска
2. Используя данные таблицы, вычислите два отсутствующих значения в каждом
столбце. (Префиксы: к — кило, м — милли, мк — микро, М — мега; единицы:
В — вольты, A — амперы, Вт — ватты; сокращенные обозначения: К — кило
омы, М — мегаомы.)
Сопротивление 15 К
0,4 М 120
30К
Напряжение
30В
50 мВ
500 мкВ
Ток
250 мкA 0,08A
100 мA
Мощность
48Вт 50мВт
0,5 Вт
0,1 кВт
3. Вычислите емкостное реактивное сопротивление для каждого значения емкости
(верхняя строка), использовав приведенные ниже частоты. Запишите ответ в кОм.
(Префиксы: мк — микро, п — пико; единицы емкости: Ф — фарады.)
Емкость
0,01 мкФ
0,001 Ф
0,005 мкФ
15 мкФ
10 пФ
Частота
400 Гц
2000 рад/с
4. Вычислите индуктивное сопротивление для каждого значения индуктивности (вер
хняя строка) в таблице при приведенных ниже частотах. Запишите ответ в кОм.
(Префиксы: мк — микро, м — милли; единицы индуктивности: Гн — генри.)
Емкость
10 мГн
0,5 Гн
500 мкГн
Частота
400 Гц
2000 рад/с
52
5. Вычислите ток и мощность источника на схемах рис. 1 .11a и б. Примените упро
щение цепи для последовательно и параллельно соединенных компонентов, что
бы уменьшить пассивные цепи до одного эквивалентного сопротивления на
рис. 1.11a и до эквивалентного полного сопротивления на рис. 1.11б.
6. Используйте результаты решения задачи 5 и теоремы теории цепей, чтобы вы
числить ток, текущий от точки а к точке b в схеме рис. 1.11a.
7. Используйте результаты решения задачи 5 и теоремы теории цепей, чтобы вы
числить ток, текущий от точки с к точке d на рис.1.11б.
8. Используйте теорему Тевенина, чтобы заменить цепь, расположенную слева от
зажимов а и b на рис 1.11a. Используйте теорему делителя напряжения, чтобы
вычислить напряжение на резисторе 10 кОм из схемы замещения Тевенина.
9. Используйте теорему Тевенина, чтобы заменить сеть слева от зажимов с и d на
рис. 1 .11б со схемой замещения Тевенина. Используйте теорему делителя напря
жения, чтобы вычислить напряжение на катушке индуктивности в 200мГн из тео
ремы Тевенина.
10. Преобразуйте источник напряжения по теореме Тевенина в задачах 8 и 9 в экви
валентный источник тока по теореме Нортона. Используйте теорему делителя то
ков и теорему Нортона для источника тока, чтобы соответственно вычислить ток,
текущий через резистор 10 кОм и резистор 200 МОм.
11. Используйте законы Кирхгофа для напряжений и токов и закон Ома, чтобы вы
числить следующие значения для схемы рис. 1.12:
a) напряжение на зажимах а и b;
b) сопротивление резистора R;
c) напряжение источника V.
Обратите внимание, что задан один ток ветви и напряжение на одном из резисторов.
Рис. 1.11 . Схема к задачам 5–10
I
a
b
30 кОм
20 кОм
10
кОм
5 кОм
500 Ом
7500 Ом
3 кОм
100 В
1 кОм
+
i(t)
120 sin 377t
100 Ом
500 мГн
200 мГн
50 мкФ
300Омc
d
200 Ом
15 мкФ
Рис. 1.12. Схема к задаче 11
1,3 А
50 Ом
5Ом
15 Ом
150 В
V
R
а
б
100 В
54,5 В
10 Ом
20 Ом
áÄÑÄóà
а)
б)
53
2
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊Â
‰ËÒÍÂÚÌ̊Â
ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
ñÂÎ̧ „·‚̊
Эта глава посвящена описанию и объяснению принципа работы ме
ханических и электрических входных и выходных коммутирующих
устройств дискретного управления, обычно используемых в элект
ронной аппаратуре и в системах промышленной электроники.
Изучив материал этой главы, вы сможете:
1. Описать переключатели различных типов, предназначенные для электронных
схем: перекидные, нажимные, кулисные, скользящие, поворотные, замковые,
двухрядные, с мгновенным переключением и ртутные, а также сделать выбор пе!
реключателя для конкретного применения.
2. Описать разъединители, кнопки, селекторные, барабанные, ножные и дисковые
управляемые вручную промышленные переключатели, а также сделать выбор та!
кого переключателя для конкретного применения.
3. Описать концевые переключатели с механическим приводом и такие устройства,
управляемые процессом, как переключатели потока, уровня жидкости, давления,
вакуума и температуры, а также сделать выбор такого переключателя для конк!
ретного применения.
4. Описать следующие выходные управляющие устройства: соленоиды, реле для
электронных схем, промышленные реле управления и реле времени, контакторы,
клапаны, управляемые соленоидами, пневматические клапаны прямого управле!
ния, нагреватели и сигнальные лампы, а также сделать выбор выходного устрой!
ства для конкретного применения.
5. Описать работу релейной логической лестничной схемы управления, представ!
ленной соответствующей схемой релейной логики.
6. Разработать схему релейной логической лестничной системы управления, позво!
ляющую обеспечить заданную последовательность управляющего процесса.
7. Отыскать и устранить неисправности в системах с входными и выходными уст!
ройствами, описанными в данной главе, используя схемы релейной лестничной
логики, которые отображают управление с помощью таких устройств.
èêàåÖçÖçàÖ áçÄçàâ
Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Любая машина и система, используемая на производстве, имеет переключатели для
ручного управления и приводы для управления внешними устройствами. Работа на
любой из этих машин или систем требует досконального знания дискретных уст!
ройств, включая понимание смысла данных, указываемых в справочных листах. Кроме
хорошего знания работы устройств и систем в нормальном режиме, необходимо уметь
находить для замены устройства, эквивалентные по электрическим и механическим
параметрам, понимать применяемые в схемах условные обозначения, правильно мон!
тировать устройства в схемах управления и использовать соответствующую термино!
логию при описании устройств и систем. Изучение сведений, изложенных в этой гла!
ве, обеспечит вам должный уровень понимания всех входных и выходных дискретных
устройств управления.
Инженеры и технологи в рассматриваемой области могут вести различные виды
профессиональной деятельности, которые обеспечат им карьерный рост, в том числе
работать в фирмах по изготовлению компонентов и заниматься как разработкой и ис!
следованием электрических параметров и показателей надежности изделий, так и тех!
ническими продажами и производством. Можно работать также с компаниями, исполь!
зующими рассматриваемые компоненты в процессе проектирования, испытаний и
производства устройств. В любой отрасли промышленности вы регулярно будете ис!
пользовать компоненты, описанные в этой главе. А понятия, с которыми вы здесь позна!
комитесь, подготовят вас к этой деятельности. Пример специфической задачи, решение
которой вам могут поручить: разработка оборудования для проверки переключателя.
Допустим, что вы работаете на фирме!изготовителе переключателей и вам поручена
разработка специального переключателя. Новый переключатель должен иметь очень
низкое значение сопротивления постоянному току, а вы должны разработать оборудова!
ние, которое измеряет сопротивление контактов каждого переключателя в процессе
производства. Ваш проект должен быть частью автоматизированной системы сборки,
разработанной для вашей компании фирмой, занимающейся системами автоматизации.
Используя информацию о сопротивлении контактов переключателей и дополнительно
èêàåÖçÖçàÖ áçÄçàâ Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
55
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
изучив системы автоматизированных измерений сопротивлений, вы выбираете систему
измерения от фирмы Agilent Technologies. Здесь критически важно то, что испытатель!
ная система должна быть встроена в высокоскоростную автоматизированную техноло!
гическую установку. Проверка образцов переключателей, посланных на фирму Agilent,
показала, что их система удовлетворяет всем требованиям. Вы делаете предваритель!
ный рисунок автоматизированной измерительной системы и, после нескольких поездок
к проектировщикам системы автоматизации, представляете свой проект администрато!
ру отдела производства. Проект одобрен, и вы посылаете его производителю системы
автоматизации. Работа над проектом займет два месяца, включая три недели, потрачен!
ные вами на проектирование и проверку оборудования вместе с производителем изме!
рительной системы.
2.1. ÇÇÖÑÖçàÖ Ç ÑàëäêÖíçéÖ ìèêÄÇãÖçàÖ
Термин дискретное управление подразумевает, что устройство может находиться в од!
ном из двух состояний, которые в электронике называются включенным и выключен!
ным. Эта глава описывает входные устройства с дискретными характеристиками, по!
добные перекидному переключателю, представленному на рис. 2 .1, поскольку такие
устройства наиболее широко используются в промышленности в качестве компонен!
тов управления. Механическое устройство для изменения состояния контактов пере!
ключателя называется приводом. Привод переводит переключатель в одно из двух по!
ложений: левое или правое, как показано на рис. 2.1 . Они соответствуют двум
электрическим состояниям: контакты разомкнуты (левое положение рычага) или зам!
кнуты (правое положение). С электрических переключателей, наиболее значимых
дискретных входных устройств, мы и начнем изучение промышленной электроники.
Вы должны научиться опознавать распространенные типы переключателей, описы!
вать их механическую и электрическую работу и разбираться в механических и элект!
рических характеристиках любого переключателя. Итак, приступим вначале к изуче!
нию механических и электрических характеристик, которые являются общими для
большинства переключателей.
2.2 . äãÄëëàîàäÄñàü èÖêÖäãûóÄíÖãÖâ
èé åÖïÄçàóÖëäàå à ùãÖäíêàóÖëäàå ëÇéâëíÇÄå
Классификация переключателей основана на следующих четырех признаках: приме!
нение, метод приведения в действие, тип и конфигурация контактов. Как группируют!
ся по первым трем признакам некоторые обычно применяемые переключатели, пока!
зано на рис. 2.2. Однако прежде чем познакомиться с каждым переключателем,
полезно получить общее представление о классификационных признаках.
56
2.2.1. ä·ÒÒËÙË͇ˆËfl ÔÓ ÔËÏÂÌÂÌĘ̈, ÚËÔÛ Ë ÏÂÚÓ‰‡Ï ÔÂÂÍĮ̂̃ÂÌËfl
Применение. Рассмотрим классификационные признаки, приведенные на рис. 2 .2 .
Промышленное применение многообразно и требует специальных переключателей; на!
пример, в термостатах для переносных электрических нагревателей используется пере!
ключатель температуры. Однако большинство переключателей может быть отнесено к
одной из двух областей широкого применения: электронным схемам и промышленному
управлению. В электронных схемах применяются маломощные переключатели элект!
ронного оборудования. При промышленном управлении применяются переключатели
для схем средней и большой мощности, включая схемы для пуска и торможения некото!
рых двигателей. Схема на рис. 2 .2 показывает, что переключатели некоторых типов, на!
пример нажимные, используются в обеих областях; другие же, такие как переключатели
скольжения, используются только для электронных схем.
Метод переключения. Приведены три метода переключения: ручной, механи!
ческий и используемый в ходе некоторого процесса.
При ручном методе механизм переключения перемещается физическим усилием
человека. Например, рычаг переключателя, изображенного на рис. 2.1, перекидывает
оператор.
Механическое переключение подразумевает, что механизм переключения приво!
дится в действие усилием, возникающим при движении машины. Концевые переклю!
чатели, изображенные на рис. 2.3, представляют собой типичный пример механичес!
кого переключения. Переключатель изменяет состояние после нажатия специальной
клавиши, изображенной на переднем плане, когда она утапливается в отверстие пере!
ключателя. Переключатель с клавишей используется, например, для гарантии, что
дверь в машину полностью закрыта.
Переключатели, управляемые процессом, имеют механизм переключения за счет
изменения параметров процесса. Например, переключатель потока приводится в дей!
ствие потоком жидкости через канал.
Тип . Категория типа состоит из различных переключателей, используемых в
электронных и промышленных применениях. Каждый из этих типов описан ниже в
данной главе.
Рис. 2.1 . Перекидные
переключатели
äãÄëëàîàäÄñàü èÖêÖäãûóÄíÖãÖâ èé åÖïÄçàóÖëäàå à ùãÖäíêàóÖëäàå ëÇéâëíÇÄå
57
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
И наконец, последний признак — конфигурация контактов — применяется ко
многим из типов переключателей, перечисленных на рис. 2 .2.
2.2 .2 . äÓÌÙË„Û‡ˆËfl ÍÓÌÚ‡ÍÚÓ‚ ÔÂÂÍĮ̂̃‡ÚÂÎfl
Следующие термины используются, чтобы описать конфигурацию контактов.
Полюс — термин относится к внутреннему проводнику в переключателе, который
перемещается механизмом переключения. На рис. 2 .1 рычаг переключателя заставляет
полюс двигаться, как показано на электрической схеме переключателя. Переключатели
могут иметь любое количество полюсов, но большинство переключателей, используе!
мых в электронике и промышленном управлении, имеют от одного до трех полюсов.
Рис. 2 .2. Классификация переключателей
Рис. 2 .3. Концевые
переключатели,
приводимые в
действие
механически
58
НЗ и НР — аббревиатура НЗ означает нормально замкнутый и относится к кон!
тактам переключателя, которые находятся в замкнутом состоянии, когда переключа!
тель выключен. НР означает нормально разомкнутый и относится к контактам пере!
ключателя, разомкнутым при выключенном переключателе. Термин обычно подразу!
мевает, что рычаг переключателя имеет номинальную начальную позицию. Переклю!
чатель на рис. 2.1 имеет два положениярычага: когда контакты переключателя разом!
кнуты (положение ВЫКЛ), и когда контакты замкнуты (положение ВКЛ). Аббревиа!
туры НЗ и НР для переключателя с рис. 2.4 относятся к выключенному состоянию,
когда рычаг находится в левом положении (рис. 2.4a).
Рассмотрим влияние положения рычага переключателя с рис. 2.4 на состояние
полюса и соответствующие изменения в электрической схеме переключателя.
Рис. 2.4. Конструкция и схема перекидного переключателя:
а) рычаг в левом положении;
б) рычаг в правом положении
äãÄëëàîàäÄñàü èÖêÖäãûóÄíÖãÖâ èé åÖïÄçàóÖëäàå à ùãÖäíêàóÖëäàå ëÇéâëíÇÄå
59
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Положение. Перекидные переключатели могут иметь одно или два положения.
Когда переключатель имеет и контакты НЗ и НР, он рассчитан на два положения, на!
пример переключатель на рис. 2.4. Если присутствует только НР!контакт, то пере!
ключатель имеет одно положение, как на рис. 2.1. Когда НЗ!контакт замкнут, а НР!
контакт разомкнут, переключатель на два положения находится в положении ВЫКЛ.
Следовательно, рычаг переключателя с двумя положениями на два направления
(2П2Н), показанный на рис. 2.4, будет в левом положении, когда переключатель вык!
лючен. Некоторые переключатели с двумя положениями имеют еще и центральное
положение, в котором разомкнуты оба полюса.
Спецификации положения и направления объединяются, чтобы описать конфигу!
рацию контактов переключателя. Некоторые из многих возможных комбинаций изоб!
ражены на рис. 2 .5. Изучите все представленные варианты. Обратите внимание, что
трехполюсный переключатель на два положения представляет собой три однополюсных
переключателя на два положения, размещенных в общем корпусе. Пунктирные линии,
соединяющие полюсы, свидетельствуют о том, что все они являются частью одного пе!
реключателя и положение всех полюсов изменяется одним рычагом. Конфигурация со
средним положением, описанная ранее, также приведена на рисунке. Пример 2.1 пока!
зывает, как требования управления диктуют выбор конфигурации переключателя.
Рис. 2 .5. Варианты
конфигурации
переключателей
60
èËÏ 2.1
Выберите конфигурацию переключателя и приведите решение для следующей задачи
управления. Одним переключателем необходимо запустить двигатель переменного
тока, рассчитанный на напряжение 110 В, и управлять двумя сигнальными лампами,
питающимися от напряжения 28 В постоянного тока. Свечение красной лампы долж!
но показывать, что двигатель отключен, а свечение зеленой — что на двигатель пода!
но питание.
êÖòÖçàÖ
Чтобы управлять двигателем переменного тока на 110 В и двумя сигнальными лампа!
ми постоянного тока на 28 В, достаточно одного переключателя на два положения и
два направления. Одно из направлений используется для включения двигателя, вто!
рое для переключения ламп. Только одна лампа должна гореть в любой момент, а в
положении, когда горит зеленая лампа, должно подаваться и питание на двигатель.
Необходимое управление обеспечивается схемой на рис. 2.6. Переключатель имеет
два полюса и два положения, а пунктирная линия между полюсами показывает, что
оба полюса управляются одним рычагом.
2.2.3. ÑÛ„Ë ÒÔˆËÙË͇ˆËË ÍÓÌÚ‡ÍÚÓ‚ ÔÂÂÍĮ̂̃‡ÚÂÎfl
Некоторые дополнительные свойства переключателей, часто используемых в элект!
ронных схемах и устройствах промышленного управления, характеризуются такими
терминами, как электронный режим работы, пилотный режим работы, размыкающие
Рис. 2.6 . Схема управления двигателем и сигнальными лампами
äãÄëëàîàäÄñàü èÖêÖäãûóÄíÖãÖâ èé åÖïÄçàóÖëäàå à ùãÖäíêàóÖëäàå ëÇéâëíÇÄå
61
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
контакты с двойным размыканием, перекидные контакты, контакты с возвратом и
фиксацией, номинальные величины коммутируемого напряжения/тока, срок службы,
запас по предельно допустимым величинам, степень защиты от воздействия условий
окружающей среды и др.. Ниже описан каждый из них.
Режим работы в электронных схемах. Электронный режим работы показыва!
ет, что контакты переключателя разработаны, чтобы переключать небольшие токи
менее 100 мА. Такая способность называется способностью контактов работать в су!
хих схемах. При низких значениях переключаемые токи не могут проходить через
окись, которая часто нарастает на поверхности контактов переключателя. Поэтому
переключатели в электронных схемах обеспечивают стирание окиси при переключе!
нии или создаются по технологии, при которой окись не возникает.
Пилотный режим работы. Переключатель для пилотного режима работы раз!
рабатывается на большие токи переключения, часто необходимые при промышлен!
ном управлении. Переключатели этой категории часто не имеют хороших показателей
для схем с сухими контактами и непригодны для переключения малых токов нагрузки.
Контакты с двойным размыканием. Один конец полюса переключателя 1П1Н
поддерживает постоянный контакт с выводом, в то время как другой конец полюса
замыкает и размыкает электрическую схему (см. рис. 2.1). В переключателях с двой!
ным размыканием контактов оба конца полюса движутся при переключении, образуя
двойное размыкание. На рис. 2.7 показана схема контактов 1П1Н и 1П2Н для пере!
ключателей с двойным размыканием. Обратите внимание, что к сокращению добавле!
ны буквы DB (double break), чтобы указать на двойное размыкание контакта. Следую!
щий пример иллюстрирует, как размыкающие контакты с двойным размыканием
используются в схеме управления.
Рис. 2 .7. Контакты
выключателей с
двойным размыканием
èËÏ 2.2
Создайте схему для решения следующей задачи управления, использовав переключа!
тели с двойным и без двойного размыкания. Питающие напряжения на двигатель пе!
ременного тока напряжением 110 В и на лампу постоянного тока напряжением 28 В
должны подаваться так, чтобы при включении переключателя работал двигатель, а
при выключении загоралась красная лампа.
êÖòÖçàÖ
Для этого применения используются контакты переключателя SPDTDB (2П1Н), по!
тому что каждое устройство должно питаться от собственного источника. Схема
рис. 2.8 удовлетворяет всем требованиям управления. Двойное размыкание контак!
тов позволяет включить каждую нагрузку на свой источник питания: одну через НЗ!,
вторую через НР!контакты. Если бы конфигурация DB не была доступна, то должен
62
был бы использоваться переключатель 2П2Н в схеме, подобной схеме на рис. 2 .6.
Использовать переключатель 2П1Н, как на рис. 2.4, было бы невозможно, потому
что в этом случае полюс имеет общую точку НЗ! и НР!контактов; в результате один
полюс не мог бы использоваться, чтобы включить два различных напряжения.
Рис. 2.8 . Пример схемы управления с помощью переключателя
с двойным размыканием
= 28В
Переключатель в положение “Выкл”
~ 110В
Красная лампа
+
K
Двигатель
М
Перекидные контакты. Изучение работы переключателя 2П1Н на рис. 2.4 по!
казывает, что НЗ!контакты размыкаются еще до того, как замыкаются НР!контакты. В
этом случае полюс не контактирует ни с НЗ!, ни с НР!контактами в течение нескольких
миллисекунд. Такая работа контакта наблюдается в большинстве случаев. В некоторых
схемах управления, однако, возникают проблемы, если включенное устройство не свя!
занно ни с каким потенциалом на интервале переключения. Перекидные контакты
(make!before!break) решат эту проблему. При этом типе передачи НР!контакты сбли!
жаются прежде, чем размыкается НЗ!контакт. Конфигурация перекидных контактов
часто используется в поворотных выключателях.
Возвратные переключатели. Переключатель, показанный на рис. 2 .4, являет!
ся переключателем с удержанием положения после переключения. Это означает, что
рычаг переключателя остается в левом или правом положении, пока не будет снова
переключен вручную. В возвратном переключателе есть позиция, которая не будет
поддерживаться при отпущенном рычаге. Допустим, например, что переключатель на
рис. 2.4 выполнен с возвратом рычага вправо. В этом случае переключатель остался
бы в положении, показанном на рис.2.4б, только на то время, в течение которого удер!
живается рычаг. После отпускания рычага он тут же вернулся бы вправо, в выключен!
ное положение. Такой возврат часто используется в кнопочных переключателях.
Номинальные токи и напряжения. Переключатель используется каждый раз,
когда надо управлять приложением напряжения и током в нагрузке или электрическом
устройстве. Следовательно, каждый переключатель имеет номинальное значение диа!
пазона или максимума напряжения и тока, который можно безопасно переключать. Ток
и номинальные напряжения для концевых переключателей D4MC фирмы Omron пока!
заны на рис. 2 .9. Обратите внимание, что номинальные токи изменяются в зависимости
äãÄëëàîàäÄñàü èÖêÖäãûóÄíÖãÖâ èé åÖïÄçàóÖëäàå à ùãÖäíêàóÖëäàå ëÇéâëíÇÄå
63
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
от входного напряжения, вида питания (постоянный или переменный ток) и типа нагруз
ки, неиндуктивной или индуктивной. Токи также различны для различного типа нагру
зок: резистивных, ламповых, индуктивных и двигательных. Примером резистивных на
грузок служат нагревательные элементы. Катушка соленоида, используемая, чтобы
управлять пневматическим клапаном, — пример индуктивной нагрузки. Ламповые на
грузки уникальны, поскольку сопротивление холодной нити мало по сравнению с сопро
тивлением горящей лампы, для двигателей указывается номинальный ток; однако для
некоторых переключателей нормируется мощность двигателя в л.с . и максимальное ра
бочее напряжение. Обратите внимание, что при некоторых нагрузках номинальный ток
не одинаков для НЗ и НРконтактов.
Рис. 2 .9 . Номинальные токи и напряжения при различных нагрузках
для концевых переключателей D4MC
èËÏ 2.3
Номинальный ток ламп, показанных на рис. 2 .6, составляет 2 А. Определите с помо
щью рис. 2 .9 переключатель D4MC, который мог бы использоваться в данном случае.
êÖòÖçàÖ
Лампы рассчитаны на 28 В постоянного тока, и на рис. 2.9 отсутствуют данные для
такого напряжения. В технике очень часто встречается ситуация, когда не имеется
точных данных о применяемом устройстве. Если это касается критического парамет
ра, то следует обратиться к изготовителю, чтобы получить дополнительные сведения
или использовать данные для устройств с наиболее близкими параметрами. В нашем
примере используются данные для переключателей, рассчитанных на 30 В постоян
ного тока, поскольку эта величина наиболее близка к значению переключаемого на
пряжения в 28 В. Столбец, относящийся к ламповой нагрузке, разделен на две части:
для НЗ и НРконтактов. При 30 В постоянного тока НЗконтакты могут переклю
чать ток в 3 А, а НРконтакты — ток в 1,5 А. По условиям применения контакты НЗ
и НР должны переключать ток в 2 А. Следовательно, эта модель переключателя не
может использоваться для схемы на рис. 2.6.
64
Срок службы переключателя. Каждое механическое устройство имеет номи!
нальный срок службы, выражаемый количеством включений или выполняемых цик!
лов. Для переключателей ожидаемый срок службы основан на механическом износе
механизма и ухудшении контактов из!за нагрева и искрения при прохождении тока.
Графики, иллюстрирующие влияние электрических параметров на электрический
срок службы для двух типов переключателей фирмы Omron, приведены на рис. 2.10.
Как показывает рисунок, электрический срок службы изменяется в зависимости от
коэффициента мощности. Коэффициент мощности (power factor PF), определяемый
как косинус фазового угла, равен 1 для чисто активной нагрузки, подобной электро!
нагревателю, и уменьшается, когда нагрузкой являются двигатели или катушки ин!
дуктивности. Механический срок службы — величина, фиксированная для конкрет!
ной модели переключателя. Например, рис. 2.11 показывает, что переключатель
D4MC имеет механический срок службы (over travel — OT) — не менее 10 000 000
операций при номинальном для переключателя режиме эксплуатации.
Запас по режиму работы переключателя. Смягчение режима работы уст!
ройств — общая стратегия, используемая в процессе проектирования, чтобы создать
более надежное решение. В процедуре смягчения режима параметры устройства
уменьшаются на 25–50 процентов от предельно допустимых, чтобы устройство ни!
когда не испытывало максимально допустимых нагрузок по любой из характеристик.
Например, токи переключателя уменьшаются на 50 процентов от предельного значе!
ния, указанного на рис. 2.9. Вообще, любое снижение нагрузок увеличивает электри!
ческий срок службы устройств.
Рис. 2.10. Электрический срок службы
Э
л
е
к
т
р
и
ч
е
с
к
и
й
с
р
о
к
с
л
у
ж
б
ы
(
х
1
0
6
о
п
е
р
а
ц
и
й
)
Э
л
е
к
т
р
и
ч
е
с
к
и
й
с
р
о
к
с
л
у
ж
б
ы
(
т
ы
с
я
ч
и
)
Рабочая частота : 20 операций/мин
125В(cosφ=1)
125В(cosφ=1)
125 В (cos φ= 0,4)
250В(cosφ=1)
250 В (cos φ= 0,4)
30 В пост. тока
L/R=0
а) D4MC
б) D4CC
Переключаемый ток, А
Переключаемый ток, А
100
70
50
30
10
7
5
3
1
0,7
0,5
0,3
0246810
12
10,000
1,000
500
200
5,000
012
èËÏ 2.4
Концевой переключатель D4CC, который переключается из включенного в выклю!
ченное состояние и обратно десять раз в минуту, используется в системе технического
зрения, чтобы включать лампу номинальной мощностью в 75 Вт на 125 В переменно!
го тока. Определите минимальное ожидаемое количество восьмичасовых смен, кото!
рое может отработать переключатель.
äãÄëëàîàäÄñàü èÖêÖäãûóÄíÖãÖâ èé åÖïÄçàóÖëäàå à ùãÖäíêàóÖëäàå ëÇéâëíÇÄå
65
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
êÖòÖçàÖ
Определим ток переключателя IS:
IS=P/U=75Вт/125В=0,6А.
Рабочие скорости
От 0,05 мм/с до 0,5 м/с (от 0,002 до 19,69
дюймов/с)
в варианте для монтажа на панели
Рабочая частота
Механическая
120 операций/мин
Электрическая
20 операций/мин
Сопротивление изоляции
Не менее 100 МОм (при 500 В постоянного тока)
Сопротивление контактов
15 мОм (начальное)
Электрическая прочность
1000 В переменного тока при частоте 50/60 Гц
между непостоянно подключенными выводами
2000 В переменного тока при частоте 50/60 Гц
между токопроводящими металлическими
деталям и корпусом и между каждым выводом
и непроводящими деталями
Вибрационное
Приводящее
От 10 до 55 Гц, размах 1,5 мм
сопротивление
к нарушению
работоспособности
Сопротивление ударам Разрушающее
1000 м/с2 (около 100g), или 3280 фут/с2
Приводящее
100 м/с2 (около 10g), или 328 фут/с2
к нарушению
работоспособности
Температура
Рабочая
От.10°Сдо80°С(от14°Фдо176°Ф)
окружающей среды
без охлаждения
Влажность
Рабочая
От 35% до 95%
окружающей среды
Ожидаемый
Механический
Не менее 10 000 000 операций
срок службы
(при номинальных условиях эксплуатации)
Электрический
См. технические данные
Вес
Приблизительно 60 г (2,17 фунта)
в варианте для монтажа на панели
Степень защиты
IP67
Рис. 2 .11. Другие характеристики концевого переключателя D4MC
Пользуясь кривой для 125 В на рис 2.10б и значением тока переключателя, опре!
делим минимальный электрический срок службы. Из графика для 0,6 А находим мини!
мальный срок службы, равный (2000+1000) операций, или приблизительно 2 милли!
она операций.
Определим количество циклов переключателя при восьмичасовой рабочей смене
и ожидаемое минимальное количество смен, которое переключатель прослужит без
выхода из строя:
66
Количество циклов за смену Nц.см
:
Nц.см
= 10 циклов/мин + 60 мин + 8 = 4800 циклов.
Количество смен безотказной работы Nсм определяем, поделив срок службы Nсл
на число циклов за смену Nц.см
:
Nсм
=N
сл
/ Nц.см
= 2000000/4800 = 417 смен.
Условия окружающей среды. Ряд условий окружающей среды определяет, на!
сколько хорошо будет работать переключатель. Характеристики переключателя D4MC,
приведенные на рис. 2.11, дают значения для некоторых из этих важных параметров: для
вибрации, ударного сопротивления, для температуры, влажности и степени защиты, обес!
печиваемой корпусом. Параметр температуры часто снижается в помещениях, где запре!
щен свободный поток воздуха. Согласно хорошему эмпирическому правилу, в этом случае
максимальная температура уменьшается на 20 °Ф. Например, для пускателя D4M темпе!
ратурой окружающей среды вместо 176 °Ф (согласно рис. 2.11) должна быть выбрана
температура 156°Ф. Оценка степени защиты корпуса также важна. Несколько организа!
ций, включая Underwriters Laboratory (UL), National Electrical Manufacturers Association
(NEMA) и International Electromechanical Commission (IEC), проверяют и устанавливают
стандарты корпуса. Прежде чем выбрать какой!либо корпус, вы должны ознакомиться со
стандартом NEMA Standards Publication 250–1997, Enclosures for Electrical Equipment
(1000 Volts Maximum). Краткий обзор этого стандарта приведен на рис. 2 .12a для безо!
пасных помещений и на рис. 2.12б для помещений с повышенной опасностью. Стандарт
указывает, что для всех групп обеспечивается защита персонала от случайного контакта с
включенным оборудованием. В табл. 2.1a, б и в согласовываются условия окружающей
среды с типом корпуса, соответствующим стандартам NEMA. Рассмотрите все условия
окружающей среды, представленные в табл. 2 .1a или 2.1б, и затем найдите столбцы, от!
меченные знаком +, для каждого из условий. Типы корпусов стандарта NEMA перечисле!
ны в заголовке. Если более чем один корпус удовлетворяет условиям, используйте корпус
с наименьшим номером. Если имеются опасные факторы, воспользуйтесь табл. 2.1в, что!
бы идентифицировать группу, раздел и класс. Определите условия окружающей среды,
чтобы согласно этим данным правильно выбрать на рис. 2.12б корпус NEMA.
èËÏ 2.5
От каких воздействий внешней среды защищает корпус переключателя D4MC?
êÖòÖçàÖ
Степень защиты корпуса переключателя D4MC согласно рис. 2.11 соотвествует
группе IP67 стандарта IEC. Рис. 2.12a показывает, что корпус переключателя обес!
печивает защиту персонала от случайного прикосновения к токоведущим частям и
защиту переключателя от падающей грязи, воды из брандспойта, длительного погру!
жения в воду на ограниченную глубину и внешнего обледенения.
äãÄëëàîàäÄñàü èÖêÖäãûóÄíÖãÖâ èé åÖïÄçàóÖëäàå à ùãÖäíêàóÖëäàå ëÇéâëíÇÄå
67
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Степень Степень Описание степени защиты
защиты защиты (при неопасных воздействиях)
по NEMA по IEC
1
IP10
Падающая грязь.
2
IP11
Падающая грязь, капли и небольшие брызги жидкостей.
3
IP54
Падающая грязь, дождь, дождь со снегом, снег, ветер, несущий пыль,
и внешнее обледенение.
3R
IP14
Падающая грязь, дождь, дождь со снегом, снег и внешнее обледенение.
3S
IP54
Падающая грязь, дождь, дождь со снегом, снег, ветер, несущий пыль,
и работа при обледенении.
4
IP56
Падающая грязь, дождь, дождь со снегом, снег, ветер, несущий пыль,
водяные брызги, вода из брандспойта и внешнее обледенение.
4X
IP56
Падающая грязь, дождь, дождь со снегом, снег, ветер, несущий пыль,
водяные брызги, вода из брандспойта, коррозия и внешнее обледенение.
5
IP52
Падающая грязь, оседающая пыль, хлопья, волокна и летящие частицы;
капли и небольшие брызги жидкостей.
6
IP67
Падающая пыль, вода из брандспойта, недолгое случайное погружение
в воду на малую глубину и внешнее обледенение.
6P
IP67
Падающая грязь, вода из брандспойта, вход воды в течение длительного
погружения в воду на малую глубину и внешнее обледенение.
12
IP62
Удары по корпусу отсутствуют. Падающая грязь, вихри пыли, хлопья,
волокна и летящие частицы; капли и небольшие брызги жидкостей.
12К
IP52
Имеются удары по корпусу. Падающая грязь, вихри пыли, хлопья, волокна
и летящие частицы; капли и небольшие брызги жидкостей.
13
IP54
Падающая грязь, вихри пыли, хлопья, волокна и летящие частицы;
капли, водяная пыль и потоки воды; масло и некоррозийные хладагенты.
Степень
Описание степени защиты
NEMA
(при опасных воздействиях)
защиты по
7
Внутреннее использование. Класс I, раздел 1, группы A, B, C или D
8
Внутреннее или наружное использование. Класс I, раздел 1, группы A, B, C или D
9
Внутреннее использование. Класс II, раздел 1, группы E, F или G
10
Департамент охраны труда и здоровья на шахтах министерства труда США
(а)
(б)
Рис. 2 .12. Стандарты NEMA для корпусов переключателей, применяемых
для неопасных (а) и опасных (б) сред
èËÏ 2.6
Концевой переключатель используется на машине, применяемой на мебельной фаб!
рике для окраски деревянных деталей водным раствором красителя. Переключатель
установлен в общем цеху фабрики, где деревянные детали вырезаются, обрабатыва!
ются и затем подвергаются окраске водным раствором красителя. Какой тип корпуса
по стандарту NEMA необходим для переключателя?
68
ТАБЛИЦА 2.1a. Сравнение степени защиты различных корпусов
переключателей, соответствующих стандарту NEMA
(Национальной электротехнической ассоциации
производителей)
СРАВНЕНИЕ СТЕПЕНИ ЗАЩИТЫ КОРПУСОВ ДЛЯ ВНУТРЕННИХ БЕЗОПАСНЫХ ПОМЕЩЕНИЙ
Обеспечивается защита
Тип корпуса по стандарту NEMA
от следующих воздействий
окружающей среды
1*2*4
4X5
6
6P1212K13
Случайный контакт
+
+
+
+
+
+
+
+
+
+
с включенным оборудованием
Падающая грязь
+
+
+
+
+
+
+
+
+
+
Падающая жидкость
+
+
+
+
+
+
+
+
+
и небольшие брызги
Вихри пыли, хлопьев,
+
+
+
+
+
+
+
волокон и летящих частиц**
Оседание хлопьев,
+
+
+
+
+
+
+
+
волокон и летящих частиц**
Вода из брандспойта
+
+
+
+
Утечка масла и хладагента
+
+
+
Распыление и брызги масла
+
и хладагента
Коррозийные агенты
+
+
Случаи временного
+
+
погружения в жидкость
Случаи долгого погружения
+
в жидкость
* Эти корпуса можно ох лаждать вентиляторами.
** Эти волокна и частицы из неопасных материалов и не рассматриваются, как в к лассе III горючие волокна или и частицы.
Для класса III, учитывающего защиту от горючих волокон и частиц, см. стандарт National Code, статью 500.
ТАБЛИЦА 2.1б.
СРАВНЕНИЕ СТЕПЕНИ ЗАЩИТЫ КОРПУСОВ ДЛЯ НАРУЖНОГО ПРИМЕНЕНИЯ В БЕЗОПАСНЫХ СРЕДАХ
Обеспечивается защита
Тип корпуса
от следующих воздействий
окружающей среды
33R*3S44X66P
Случайный контакт с включенным оборудованием
+
+
+
+
+
+
+
Дождь, снег и дождь со снегом**
+
+
+
+
+
+
+
Дождь со снегом***
+
Воздушные потоки с пылью, хлопьями,
+
+
+
+
+
+
волокнами и летящими частицами
Вода из брандспойта
+
+
+
+
Коррозийные агенты
+
+
Случаи временного погружения в жидкость
+
+
Случаи долгого погружения в жидкость
+
* Эти корпуса можно ох лаждать вентиляторами.
** Внешние механизмы не должны работать в условиях обледенения.
* ** Внешние механизмы должны работать в условиях обледенения.
äãÄëëàîàäÄñàü èÖêÖäãûóÄíÖãÖâ èé åÖïÄçàóÖëäàå à ùãÖäíêàóÖëäàå ëÇéâëíÇÄå
69
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
êÖòÖçàÖ
Переключатель используется в закрытом помещении, поэтому воспользуемся табл. 2.1а.
Переключатель подвергается воздействию вихревых пылевых потоков, осаждению пыли и
брызг водного раствора красителя, который может быть коррозийным. Этим условиям со!
ответствуют корпуса переключателей со степенями защиты 4X и 6P. Следует выбрать кор!
пус с защитой 4X по стандарту NEMA, поскольку его порядковый номер ниже, чем у 6P.
Другие характеристики. Другими важными характеристиками переключате!
лей, перечисленными на рис. 2 .11, являются быстродействие и частота переключе!
ний. Обратите внимание, что отношение механической и электрической действующих
частот равно 10. Другая полезная характеристика — сопротивление контактов, на!
чальная величина которого составляет 15 мОм, или 0,015 Ом.
ТАБЛИЦА 2.1в.
КЛАСС, РАЗДЕЛ И ГРУППА КЛАССИФИКАЦИИ NEMA ДЛЯ ОПАСНЫХ СРЕД
Класс
Раздел
Группа
I. Газ
1. Опасность может
А. Ацетилен.
существовать в атмосфере B. Водород и производственные
при нормальных
водородосодержащие газы.
условиях работы
C. Нефтехимические вещества (например, этилен).
D. Нефтехимические вещества (например, алкоголь).
2. Потенциальная опасность А. Ацетилен.
A. Может существовать
B. Водород и производственные
в атмосфере только
водородосодержащие газы.
при аварийных
C. Нефтехимические вещества (например, этилен).
обстоятельствах.
D. Нефтехимические вещества (например, алкоголь)
B. Помещения, относящиеся
к разделу 1 помещений
II. Пыль 1. Опасность может
E. Токопроводящая и горючая пыль
существовать в атмосфере (Удельное сопротивление < 105 Ом/см).
при нормальных
F. Угольная пыль
условиях работы
(Удельное сопротивление > 102 Ом/см).
G. Непроводящая горючая пыль
(Удельное сопротивление > = 105 Ом/см)
2. Потенциальная опасность G. Непроводящая горючая пыль
A. Может существовать
(Удельное сопротивление > = 105 Ом/см)
в атмосфере только
при аварийных
обстоятельствах
III. Волокна 1.Производственные
Легко воспламенимые волокна или частицы
помещения
2. Помещения для обработки Легко воспламенимые волокна или частицы
и хранения
Описанные выше характеристики переключателей относятся к большинству ти!
пов переключателей, приведенных на рис. 2 .2. Следующим шагом будет подробное
70
изучение характеристик конкретных типов переключателей, используемых в элект!
ронных схемах и промышленном управлении.
2.3. êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü ùãÖäíêéççõï ëïÖå
Переключатели на рис. 2 .2 были разделены на две большие группы: для электронных
схем и для промышленного управления. Переключатели, разработанные для исполь!
зования в бытовых устройствах, подобных стереосистемам или миксерам, или пред!
назначенные для монтажа на печатных платах и в электронном оборудовании, были
отнесены к категории приборов для электронных схем. Другие переключатели пред!
назначены для использования на промышленных машинах и панелях управления про!
цессом и относятся к группе промышленного управления. Для всех переключателей
используются характеристики, приведенные в предыдущем разделе; однако вид, раз!
мер и методы монтажа переключателей зачастую совсем не похожи. Кроме того, сим!
волы в монтажных схемах электрических соединений, используемые для электронных
схем и схем промышленного управления, также различны. Например, рис. 2 .13 иллю!
стрирует различие в условных обозначениях для некоторых устройств, применяемых и
в той и в другой области.
2.3.1 . èÂÂÍˉÌ̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
Перекидные переключатели уже были представлены на рис. 2.1 и 2.4, где они исполь!
зовались для описания основных характеристик коммутационных устройств. Имеется
множество типов перекидных переключателей, среди которых модели, представлен!
ные на рис. 2.14. Перекидные переключатели используются в качестве привычных
для нас настенных выключателей освещения в офисах, управляют небольшими при!
борами и многими другими бытовыми электронными устройствами. Конфигурации
контактов и схемы типичных перекидных переключателей показаны на рис. 2 .5. Про!
изводители поставляют перекидные переключатели почти всех типов, о которых упо!
миналось в предыдущем разделе. Исключение составляют переключатели с двойным
размыканием и перекидными контактами, которые обычно отсутствуют среди пере!
кидных переключателей.
èËÏ 2.7
Перекидной переключатель должен быть заменен компонентом, предназначенным
для ЧПУ из серии WT!переключателей NKK. Заменяемый переключатель имеет кон!
фигурацию контактов 2П2Н, все положения переключателя фиксируются, он имеет
среднее нейтральное положение и винтовое крепление проводов. Переключается на!
грузка с током 7 А при напряжении 120 В переменного тока. Загляните на веб!сайт
NKK, чтобы найти конкретную модель для замены переключателя и проверить, рас!
считана ли она на требуемый номинальный ток.
êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü ùãÖäíêéççõï ëïÖå
71
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Рис. 2 .13. Сравнение
символов,
применяемых в
электронных
схемах и в
промышленной
электронике
Рис. 2 .14. Перекидные
переключатели для
электронных цепей
êÖòÖçàÖ
После знакомства с информацией веб!сайта NKK (www.nkk.com) станет ясно, что мо!
дель WT23T является точной заменой. Цифра 2 в наименовании указывает на опцию
2П2Н, цифра 3 показывает, что положение переключателя фиксируется и имеет кон!
фигурацию вкл!выкл!вкл (среднее нейтральное положение), а символ T свидетель!
ствует, что выводы рассчитаны на винтовое крепление проводов. Новый переключа!
тель имеет переключаемый ток в 10 А при напряжении 120 В переменного тока, так что
требования по нагрузке контактов удовлетворяются даже с некоторым запасом.
72
2.3.2 . ç‡ÊËÏÌ̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
Следующим наиболее часто применяемым в электронных устройствах средством управ!
ления являются нажимные переключатели. Как и перекидные переключатели, они име!
ют множество различных конфигураций, представленных на рис. 2.15. Большинство
нажимных переключателей мгновенно осуществляет необходимое соединение контак!
тов и фиксирует его после однократного нажатия. При первом нажатии НР!контакты
замыкаются и фиксируются в этом положении, а при повторном снова размыкаются.
Варианты конфигурации контактов нажимных переключателей те же, что и для пере!
Рис. 2.15. Нажимные
переключатели для
электронных цепей
Рис. 2.16. Конструкция нажимных переключателей
êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü ùãÖäíêéççõï ëïÖå
73
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
кидных (см. рис. 2 .5). Наиболее часто в электронных схемах используются выключатели
с одним размыканием контактов, но некоторые производители поставляют и переклю!
чатели с двойным размыканием. Два типа конструкции нажимного переключателя пред!
ставлено на рис 2.16. На рис. 2 .16а показан переключатель, построенный на базе пере!
ключателя мгновенного действия или микропереключателя, включенного в состав
конструкции, чтобы создать необходимую конфигурацию контактов.
Два других типа переключателей, относящихся к категории нажимных, — так!
тильные и мембранные переключатели. Тактильные переключатели работают так же,
как обычные нажимные переключатели, но требуют минимальной силы воздействия.
Мембранные переключатели созданы с использованием слоев поликарбонатных или
полиэстерных изоляционных материалов и проводящих дорожек. В результате такие
переключатели могут быть интегрированы непосредственно на печатную плату пане!
ли управления машины или лицевой панели прибора.
2.3.3. äÛÎËÒÌ̊Â ÔÂÂÍĮ̂̃‡ÚÂÎË
Кулисные переключатели представляют собой разновидность перекидных переклю!
чателей. Рычажный привод в них заменен кулисным механизмом. Некоторые из кон!
струкций кулисных переключателей представлены на рис. 2.17. Здесь также показан
разрез типичного кулисного переключателя. Если не учитывать различий в механизме
привода, кулисные переключатели имеют те же самые конфигурации контактов и
электрические характеристики, что и перекидные.
Рис. 2 .17. Кулисные переключатели для электронных схем
2.3.4 . ëÍÓÎ̧Áfl̆Ë ÔÂÂÍĮ̂̃‡ÚÂÎË
Движок на скользящих переключателях перемещается параллельно плоскости, на
которой установлен переключатель. Несколько вариантов конфигурации переключа!
теля скольжения и разрез, из которого ясен принцип действия переключателя, пред!
ставлены на рис. 2.18. Как показано на разрезе, полюс прикреплен к среднему выводу
74
и при скольжении движка замыкает НР! или размыкает НЗ!контакт. Все конфигура!
ции контактов, отображенные на рис. 2.5, имеются и в скользящих переключателях.
Рис. 2.18. Скользящие переключатели для электронных схем
2.3.5 . èÓ‚ÓÓÚÌ̊Â ÔÂÂÍĮ̂̃‡ÚÂÎË
Движок в поворотном переключателе вращается, чтобы замкнуть или разомкнуть
контакты. Поворотные переключатели имеют различные размеры и конфигурацию
контактов и изготавливаются в открытом или закрытом вариантах. Поворотные пере!
ключатели закрытого вида, в которых контакты защищены внешним корпусом, пред!
ставлены на рис. 2.19. Переключатель на рис. 2 .20а открытого вида, так что вы може!
те видеть расположение контактов. Переключатель на рис. 2.20б имеет одну галету,
но поворотные переключатели могут иметь и несколько галет. Каждая галета может
иметь несколько полюсов и схемы с параллельно расположенными цепями. Внима!
тельно рассмотрите галету переключателя на рис. 2 .20б, и вы поймете, что лепестки
1, 5 и 9 находятся всегда в контакте со своими вращающимися полюсами. Обратите
также внимание на то, что в приведенном на рисунке положении полюса контактиру!
ют с лепестками 2, 6 и 10. Полюс, контактирующий с лепестком 2, шире остальных,
потому что он выполнен для работы с перекидным контактом (break!before!make) . В
этом случае при вращении полюса он вступит в контакт с лепестком 12 почти сразу
после размыкания контакта с лепестком 2. Другие два проводника обеспечивают раз!
мыкание перед контактом со следующим лепестком. В результате полюс связан с ка!
ким!либо лепестком не во все время операции переключения. Вал переключателя на
рис. 2.20 поворачивается с шагом 30° и имеет общий диапазон вращения 60° . Другие
общеупотребительные углы поворота на шаге составляют 15, 45 и 90°. Схема конфи!
гурации контактов для трехполюсного (на три направления) трехпозиционного пово!
ротного выключателя (3П3Н) приведена на рис. 2.20в.
êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü ùãÖäíêéççõï ëïÖå
75
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Рис. 2 .21. Электронная схема DIPпереключателей
а) вид сверху;
б) вид сбоку;
в) переключатели 1П1Н
12
(a)
34567
Open
(б)
(в)
1234567
Рис. 2 .20. Открытый поворотный переключатель
Галета
12
11
1
2
4
5
6
7
10
9
8
(a)
1
3
4
6
5
7
8
10
9
11
12
2
Полюс
с приближением
перед разрывом
Полюс
без приближения
перед разрывом
Поворотный
замыкатель
(б)
2
11
6
3
10
11
2
54
9
(в)
8
7
Рис. 2 .19. Поворотные
переключатели
для электронных
схем
76
Основное преимущество поворотных переключателей заключается в возможнос!
ти выстраивания сложной последовательности переключений в электрической цепи,
обусловленной сложными алгоритмами управления. Примерами здесь могут служить
выбор измерительного диапазона для комбинированных измерительных приборов и
переключение временных диапазонов в осциллографах.
2.3.6 . Ñ‚Ûıfl‰Ì̊ ԇÍÂÚÌ̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
Двухрядные пакетные переключатели (Dual!in!Line Package — DIP) используются
преимущественно в цифровых схемах на печатных платах для создания дискретных
входных сигналов логических схем. Вид сверху для блока из семи переключателей
представлен на рис. 2.21а, вид сбоку — на рис. 2 .21б. Переключатели имеют тот же
самый размер штырька и интервал между штырьками 0,300 дюйма, что и стандартные
интегральные схемы (ИС), поэтому могут быть впаяны в стандартные отверстия пе!
чатной платы или размещены на разъеме ИС. Три типа этих кулисных переключателей
применяются наиболее часто: на 4 корпуса (8 штырьков), 7 корпусов (14 штырьков) и
8 корпусов (16 штырьков). Обычно контакты переключателей выполняются в конфи!
гурации 1П1Н (рис. 2 .21в) и переключаются миниатюрным кулисным приводом (для
переключения неплохо подходит обычная шариковая ручка). Переключатели обычно
выставляются при сборке печатной платы (PC) и при наладке, но переключение про!
исходит нечасто.
2.3.7. á‡ÏÍÓ‚̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
Некоторые образцы замковых переключателей показаны на рис. 2 .22 . Можно заметить,
что они бывают с различными размерами пакета и степенями защиты. И хотя они рабо!
тают, как обычные поворотные переключатели, но конфигурации контактов обычно ог!
раничиваются схемами 1П1Н или 2П1Н. Как видно из рисунка, переключатели могут
устанавливаться на лицевой панели или запаиваться на печатную плату в зависимости
от конфигурации крепления. Несмотря на то что вручную управляемые переключатели,
Рис. 2.22 . Переключатели для
электронных схем с
приводом типа ключа
êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü ùãÖäíêéççõï ëïÖå
77
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
описанные в этом разделе, разработаны для управления электронными схемами, они
удовлетворяют требованиям 95 процентов всех электронных устройств.
2.4 . åÖïÄçàóÖëäàÖ èÖêÖäãûóÄíÖãà ùãÖäíêéççõï ëïÖå
Наиболее распространены два типа переключателей с механическим приводом: ртут!
ные переключатели и переключатели мгновенного действия (Sprungschalter — snap!
action switch). Оба типа устройства переключаются при движении какой!либо детали
прибора или технологической установки. Например, при открытии двери автомати!
ческой сушилки одежды освобождается переключатель мгновенного действия, вык!
лючающий сушилку. Или же механическое движение датчика температуры в системе
обогрева жилых помещений вызывает срабатывание ртутного переключателя, кото!
рый управляет нагревательным элементом.
2.4 .1. èÂÂÍĮ̂̃‡ÚÂÎË, ̃Û‚ÒÚ‚ËÚÂÎ̧Ì̊Â Í ÔÓÎÓÊÂÌĘ̈
Переключатели, чувствительные к положению (рис. 2 .23), используются в машинах,
чтобы считывать позицию механизма. Эти переключатели часто называются переклю!
чателями мгновенного действия, поскольку для их переключения достаточно незначи!
тельного усилия переключающего механизма, обычно в 100–200 г. Изучите вид меха!
низма переключения, показанного на рис 2.24, и обратите внимание, что полюс
свободно движется вверх или вниз в точке (A), где он подсоединен пружиной на общий
вывод. Правый конец пружины прикреплен к корпусу выше точки НЗ!контакта, поэто!
му, когда привод отжат, пружина перемещает конец полюса, расположенный около НЗ!
контакта, вверх. Когда привод смещает пружину вниз, она понижается ниже базовой
отметки, и пружина фиксирует полюс на НР!контакте. Это тип переключателя с мгно!
венным переключением, поскольку полюс замыкает НР!контакт практически сразу, как
только к коромыслу прикладывается усилие. Большинство производителей предлагает
переключатели только с конфигурацией контактов 2П1Н, но существуют и переключа!
тели с конфигурацией 2П2Н. Переключатели часто снабжаются выносным рычагом для
уменьшения переключающего механического усилия, как, например, два переключате!
ля на рис. 2 .23. Несколько типов механического привода, используемых для переключа!
телей мгновенного действия, показано на рис. 2 .25. Переключатели мгновенного дей!
ствия часто называются микропереключателями, поскольку первым производителем
таких переключателей стала основанная в 1937 году компания Micro Switch. Теперь она
превратилась в подразделение компании Honeywell.
2.4 .2. êÚÛÚÌ̊Â ÔÂÂÍĮ̂̃‡ÚÂÎË
Работа ртутных переключателей, называемых также наклонными и опрокидываемы!
ми стеклянными переключателями, наглядно проиллюстрирована на рис. 2 .26. Здесь
78
в каждом из переключателей небольшое количество ртути помещено внутрь отпаян!
ной стеклянной трубки, с проводниками, проходящими через стенку трубки. Ртуть пе!
ретекает к одному концу трубки, когда та отклоняется от горизонтального положения.
Металл замыкает контакты, запаянные в конце трубки, и высокая проводимость ртути
создает низкое сопротивление (меньше одной десятой ома) между двумя электричес!
кими контактами. Геометрия трубки задает угол отклонения, необходимый для пере!
ключения. Например, переключателю на рис. 2.26a необходим малый угол наклона
для переключения из одного состояния в другое, в то время как при геометрии, пока!
занной на рис 2.26в, этот угол должен составлять не менее 30°. Опрокидываемый (tip
over) переключатель на рис. 2 .26г включится, когда трубка будет повернута на угол
45° в любом направлении. Типичные параметры ртутного переключателя приведены
на рис. 2.26.
Рис. 2.23. Концевые переключатели
Рис. 2.24. Работа переключателей с мгновенным переключением
åÖïÄçàóÖëäàÖ èÖêÖäãûóÄíÖãà ùãÖäíêéççõï ëïÖå
79
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Рис. 2 .26. Ртутные переключатели: а) наклоняемый (tilt) переключатель
1Н, б) наклоняемый переключатель 2Н, в) наклоняемый
переключатель с большим углом наклона 1Н, г) опрокидываемый
(tip over) выключатель 2Н
Рис. 2 .25.
Приводы
переключателей
мгновенного действия
80
2.5 . åéôçõÖ êìóçõÖ èÖêÖäãûóÄíÖãà
Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü
Переключатели для промышленного управления (см. рис.2 .2) выполняют ту же самую
функцию, что и их аналоги, применяемые в электронных приборах, а именно замыка!
ют и размыкают электрические цепи. Однако переключатели для промышленного уп!
равления рассчитаны на работу в более жестких условиях промышленного производ!
ства и должны коммутировать большие токи и мощности. Кроме того, схемы и
символы устройств, используемых в маломощной и силовой электронике, часто отли!
чаются от тех, что используются в электронных схемах. Это различие в условных обо!
значениях частично было уже показано на рис. 2.13.
Переключатели для промышленного управления делятся на три группы: с ручным
приводом, с механическим приводом и активизируемые технологическим процессом.
Наше изучение переключателей для промышленного управления начнем с управляе!
мых вручную переключателей, которые включают разъединители, кнопки, селекторы,
барабанные, ножные и дисковые переключатели.
2.5.1. ê‡Á̇‰ËÌËÚÂÎË, ËÎË Á‡̆ËÚÌ̊ ‚̊ÍĮ̂̃‡ÚÂÎË
Разъединители — перекидные переключатели на большие токи и напряжения. Дру!
гое их название — защитные выключатели — указывает, что основной их функцией
является аварийное отсоединение промышленных электрических нагрузок от источ!
ника питания. Разъединители часто используются, чтобы отключить питание двигате!
ля, технологической установки машины или всего промышленного здания.
Типичные универсальные разъединители рассчитаны на 240 или 600 В перемен!
ного напряжения и на токи от 30 до 1200 А. Разъединители, подобные тем, что изобра!
жены на рис. 2.27, могут поставляться в различных корпусах по стандарту NEMA (см.
рис. 2 .12). Контакты переключателя размещены внутри корпуса, ручка включения
видна с правой стороны корпуса. Она может быть заблокирована в выключенном по!
ложении, как показано на рис. 2.27. Выбор модели разъединителя определяется зна!
чениями подключаемого напряжения и тока или мощностью подключаемого двигателя
в л.с. Типичные номинальные напряжения — 120, 240 и 600 В переменного напряже!
ния, а типичные номинальные токи выбираются из ряда 30, 60 100, 200, 400, 600, 800
и 1200 А. Полюса называются лезвиями, выключатели могут поставляться с одним,
двумя, тремя, четырьмя и шестью полюсами. В состав разъединителей могут входить и
предохранители. Внутри трехполюсного разъединителя с открытой крышкой, который
показан на рис. 2.28, видны полюса, или лезвия, и три плавких предохранителя. Ус!
ловные обозначения для разъединителей 1П2Н без предохранителей, 1П3Н с предох!
ранителями и 2П3Н без предохранителей приведены на рис. 2.29. Двухполюсные
разъединители обычно не имеют плавких предохранителей, поскольку нагрузка к ним
подключается через однополюсные разъединители со встроенными плавкими предох!
ранителями.
åéôçõÖ êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü
81
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Рис. 2 .27. Разъединители,
или защитные
выключатели
èËÏ 2.8
Найдите трехполюсные разъединители с плавкими предохранителями со следующими
характеристиками: корпус с защитой группы 3R по стандарту NEMA, ток 150 А, пере!
менное напряжение 240 В, заводская установка нейтрали. Используйте каталог защит!
ных переключателей фирмы Square D, имеющийся на сайте www.squared.com, чтобы
определить тип разъединителя с наиболее близкими характеристиками.
êÖòÖçàÖ
Интерактивный каталог Square D Enclosed Safety Switch указывает, что имеется
разъединитель с обозначением: D (общий режим работы), 3 (трехполюсный), 2 (240
В переменного напряжения), 4 (200 А при требуемом в задании максимальном токе
150 А), N (заводская установка нейтрали) и RB (NEMA тип, 3R корпус). Таким обра!
зом, требованиям задачи удовлетворяет модель D324NRB.
82
Рис. 2.29. Условные обозначения защитных выключателей
(разъединителей):
а) 1П2Н без предохранителей;
б) 1П3Н с предохранителями;
в) 2П3Н без предохранителей
Сеть
Нагрузка
(a)
Сеть
Нагрузка
Нагрузка
(в)
Сеть
Нагрузка
Предохранитель
(б)
Рис. 2.28. Устройство разъединителей
Разъединитель показан
с вынутыми предохранителями
Нижняя сборка держателей
Держатели предохранителей
Лезвия
Верхняя сборка держателей
åéôçõÖ êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü
83
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
2.5 .2. äÓÏÏÛÚ‡ˆËÓÌÌ̊ ÛÒÚÓÈÒÚ‚‡ ÔËÎÓÚÌÓ„Ó ÚËÔ‡
Переключатели пилотного типа, используемые в промышленном управлении, отлича!
ются от переключателей, описанных в разделе 2.3. Основным отличием является
больший номинальный ток и метод монтажа переключателя. Изучите различные кон!
струкции переключателей пилотного типа, изображенных на рис. 2.30, где показаны
два различных типа переключателей: командные кнопки (A, B, F, G, H и K) и селектор!
ные переключатели (D, E и J). Механизм привода кнопки предварительно был описан
при рассмотрении переключателей для электронных схем. В переключателях селек!
торного типа привод осуществляется ручкой, которая поворачивается по часовой
стрелке или в обратном направлении, чтобы изменить состояние контактов переклю!
чателя. Все стандартные конфигурации контактов типа 1П1Н, 1П2Н, 2П1Н и 2П2Н
применяются и в кнопочных, и в селекторных переключателях, причем используются
модификации с двойным размыканием.
Рис. 2 .30. Переключатели промышленного управления пилотного типа
Имеются командные кнопки пилотного типа четырех модификаций: без защиты го!
ловки, с полной защитой, с расширенной защитой и кнопка!грибок. В модификациях с
полной или расширенной защитой головка кнопки не выступает за пределы корпуса, как,
например, головка кнопки без защиты на рис. 2.31б. В кнопках с полной защитой плос!
кость головки находится на уровне корпуса (рис. 2.31a), а в случае с расширенной защи!
той головка утоплена в выступающий защитный цилиндр (рис.2.31в). И наконец, кнопка!
грибок имеет выступающую круглую головку грибовидной формы (рис. 2.31г, д, е, ж).
84
Возвратные командные кнопки (рис. 2.31а, б, в, д) обеспечивают контакт на время, пока
оператор удерживает их в нажатом состоянии, после чего пружина возвращает головку
наружу в нормальное положение. Командные кнопки с фиксацией положения контактов
имеют две конфигурации. Одна из них (конфигурация на рис.2 .31г) после нажатия фикси!
руется в нижнем положении и для возврата в исходное положение необходимо вытянуть
головку кнопки наружу. В таких моделях, как на рис. 2 .31д, грибок кнопки необходимо
перед возвратом повернуть. В модификации, представленной на рис. 2 .31е, возврат кноп!
ки в исходное положение обеспечивается повторным нажатием, и, наконец, в модифика!
ции, приведенной на рис. 2.31ж, имеются две кнопки со связанным механизмом переклю!
чения, когда при нажатии одной кнопки вторая возвращается в исходное положение.
Изготовители предлагают кнопки с подсветкой головки и без нее и различные конструк!
ции подключения проводов к выводам: от крепления под винт до распайки на печатную
плату. Чтобы идентифицировать кнопочные переключатели на схемах чаще всего исполь!
зуется обозначение PB. Если в схеме имеется несколько командных кнопок, они обознача!
ются как PB1, PB2, PB3, и так далее.
Селекторные переключатели обычно изготавливаются на два, три или четыре
положения. На рис. 2.32 приведены конструкции переключателей с ручками различ!
ной формы. Большая ручка в форме крыла предназначена для операторов, работаю!
щих в перчатках.
Рис. 2.32. Селекторные переключатели
Рис. 2.31. Конструкции головок командных кнопок
åéôçõÖ êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü
85
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Ручка может быть заменена ключом, при этом поворотный механизм выполняет!
ся в виде цилиндрического замкового блока (рис. 2.32г). Посетив сайты компаний
Rockwell Automation или Square D, вы найдете множество конфигураций контактов
для селекторных переключателей. Компании предлагают любую конфигурацию кон!
тактов для селекторных переключателей и множество конфигураций для возвратных
кнопок. Для обозначения селекторных переключателей наиболее часто используется
аббревиатура SS (selector switch). Если в схеме имеется несколько селекторных пере!
ключателей, они идентифицируются по номеру: SS1, SS2, SS3 и так далее.
Имеется еще два типа пилотных устройств для специальных условий переключе!
ния: перекидной переключатель на четыре направления и селекторный выключатель с
управлением от командных кнопок. Переключатель на четыре направления имеет
джойстик для переключения и четыре контактных блока. Джойстик перемещается
вверх, вниз, влево и вправо, и в каждом из четырех положений осуществляется раз!
личная конфигурация контактов. Селекторный выключатель с управлением от коман!
дной кнопки объединяет в себе двухпозиционный селекторный переключатель с уп!
равляющей командной кнопкой. Кнопка имеет два вида конфигурации контактов,
соответствующие различным положениям селекторного переключателя. Таким обра!
зом, конфигурация контактов изменяется, и действие командной кнопки определяется
состоянием селектора.
Стандартные условные обозначения для кнопок и селекторных переключателей
приведены на рис. 2.33. Обозначения на рис. 2.33a относятся как к возвратным кноп!
кам, так и к кнопкам с фиксацией положения. Обозначение для перекидного переклю!
чателя на четыре направления представляет переключатель с джойстиком, который
вызывает изменение в контактах, когда сдвигается вверх, вниз, влево и вправо. Ко!
мандная кнопка с подсветкой имеет встроенный источник света, подсвечивающий пе!
реднюю поверхность кнопки при включении.
èËÏ 2.9
Для промышленного управления необходима 30!миллиметровая кнопка пилотного
типа с одним НР! и одним НЗ!контактом. Найдите подходящий компонент в каталоге
кнопок, размещенном на сайте компании Rockwell Automation. Определите конфигу!
рацию контактов и группу защиты корпуса по стандарту NEMA.
êÖòÖçàÖ
Обзор интерактивного каталога дает следующую информацию для стандартных кон!
фигураций контактов 4 и 13 групппы защиты корпуса по станадарту NEMA.
Номинальные рабочие токи и мощности
Напряжения, В
Напряжения, В
НР.контакты
НЗ.контакты
До 600 В переменного тока
От 120 до 600
7200 ВА
720 ВА
От72до120
60А
720 ВА
От24до72
60А
10А
До 600 В постоянного тока
От28до600
138 ВА
138 ВА
От24до28
5А
5А
Примечание. Обратите внимание, что для некоторых контактов оценивается мощ!
ность переключения в ВА, а для других максимальный ток в А.
86
2.5.3. äÓÌÙË„ÛËÓ‚‡ÌË ÔÂÂÍĮ̂̃‡ÚÂÎÂÈ ÔÓÏ̊̄ÎÂÌÓ„Ó ÛÔ‡‚ÎÂÌËfl
Одно из главных преимуществ промышленых переключателей управления — метод
сборки переключателя из стандартных деталей. Как модуль переключателя собирает
ся из деталей, производимых компанией Square D, показано на рис. 2.34. Начнем со
стандартного хомута (обозначен цифрой 3 на рисунке), модуля подсветки (7) и контак
тных блоков (4 и 6), собираемах в линейку друг за другом. Устройство становится ко
мандной кнопкой или селекторным переключателем, в зависимости от типа привода
(14), который установливается в передней части хомута. Чтобы отобразить маркиров
ку переключателей, используются пластины для маркировки (13), а также гибкие
компьютерные диски (16). Благодаря использованию разных контактных блоков мо
жет быть обеспечено широкое разнообразие конфигураций контактов для переключа
теля. Устройства пилотного индикатора (описанного ниже в этой главе) могут соби
раться на том же хомуте при установке сзади модуля подсветки (15). Вид контактных
конфигураций определяется клеммной колодкой с креплением проводов под винт (4),
Рис. 2.33 . Обозначения для кнопок и селекторных переключателей
КНОПКИ
(a) Условные обозначения кнопок
ВОЗВРАТНЫЕ
ОДНО
НАПРАВЛЕНИЕ
ДВА
НАПРАВЛЕНИЯ
ГРИБОК
РЫЧАГ
СДВОЕННЫЕ
КОНТАКТЫ
СВЯЗАННЫЙ
МЕХАНИЗМ
НРИНЗ
НЗ
НР
С ФИКСАЦИЕЙ
ПОЛОЖЕНИЯ
ПОДСВЕТКА
R
(б) Условные обозначения селекторных переключателей
1НР – 1НЗ
1НР – 1НЗ
2НР – 2НЗ
2НР – 2НЗ
ВЫКЛ
ВАРИАНТ ОБОЗНАЧЕНИЯ
1НР – 1НЗ
ВКЛ
ВКЛ
ВЫКЛ
ВАРИАНТ ОБОЗНАЧЕНИЯ
1НР – 1НЗ
ЦЕНТР 5 ВЫКЛ
ВКЛ
åéôçõÖ êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü
87
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
сменными контактными сборками (6) и печатной платой (11) в задней части переклю!
чателя.
Рис. 2 .34. Конфигурация и сборка пилотного переключателя
2.5 .4 . ҇·‡ÌÌ̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
Другим типом переключателей для промышленного управления являются барабанные
переключатели, часто используемые в электроприводе. Барабанные переключатели с
ручным управлением зачастую используются для реверса двигателей постоянного и пере!
менного тока или для ступенчатой регулировки скорости в многоскоростных двигателях,
88
позволяя получить от двух до четырех уровней скорости. Барабанные переключатели, по!
добные изображенному на рис. 2.35а, обычно используются со следующими типами дви!
гателей: с двигателями переменного тока мощностью 5 л.с. на напряжение 200 и 300 В,
двигателями переменного тока мощностью 7,5 л.с. на напряжение от 460 до 575 В и двига!
телями постоянного тока мощностью 2 л.с . на напряжение от 115 до 230 В. Если применя!
ются более мощные двигатели, барабанный переключатель заменяется магнитным пуска!
телем. Изменение направления вращения двигателя используется для лифтов и дверей, а
регулирование частоты вращения двигателей применяется в вентиляторах, смесителях,
насосах, и специальных станках. Ручка переключателя на рис. 2.35a находится в положе!
нии ВЫКЛ, и все контакты переключателя, показанные на рис. 2 .35б, разомкнуты. Пово!
рот ручки влево создает конфигурацию контактов, соответствующую реверсу двигателя, а
поворот вправо — конфигурацию для вращения в прямом направлении. Для обозначения
барабанных переключателей на схемах чаще всего присутствует сочетание DS, а несколь!
ко переключателей в схеме обозначаются как DS1, DS2, DS3 и так далее.
Рис. 2.35 . Барабанный переключатель и его контакты
èËÏ 2.10
Для изменения направления вращения трехфазного двигателя (реверса) необходимо
поменять местами любые две из трех фаз подводимого питающего напряжения. По!
кажите, как можно использовать барабанный переключатель, чтобы реализовать ре!
версивный режим в трехфазном двигателе.
êÖòÖçàÖ
Трехфазный двигатель и источник входного напряжения подключены к переключате!
лю так, как показано на левом рисунке. Когда ручка переключается на движение впе!
ред, осуществляются связи, показанные на центральном рисунке: L1 соединяется с
T1, L2 — c T2, а L3 — c T3. Когда переключатель находится в позиции реверса (пра!
вый рисунок), L1 и L3 меняются местами так, что L1 соединяется с T3, а L3 — с T1.
åéôçõÖ êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü
89
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
2.5 .5. ÑÛ„Ë ÔÂÂÍĮ̂̃‡ÚÂÎË ‰Îfl ÔÓÏ̊̄ÎÂÌÌÓ„Ó ÛÔ‡‚ÎÂÌËfl
Двумя другими часто используемыми типами промышленных переключателей управле!
ния являются ножные и дисковые переключатели. Ножные переключатели применяют!
ся в производственных установках, чтобы позволить оператору запустить устройство, в
то время как его руки заняты выполнением других операций. Ножные переключатели
имеют обычную конфигурацию контактов и различные размеры. Чаще всего они пред!
ставляют собой возвратные кнопки и используются только для запуска процесса опера!
тором, обе руки которого должны быть свободны. Условные обозначения для ножных
переключателей приведены на рис. 2 .36 . На схемах они обозначаются как FTS, а при
наличии нескольких переключателей — в сочетании с порядковым номером (FTS1,
FTS2, FTS3 и так далее).
Рис. 2 .36. Условное обозначение для
ножного переключателя
Дисковые переключатели (thumbwheel) часто используются, чтобы ввести число!
вые значения и установки в машину или процесс. Четырехразрядный дисковый пере!
ключатель изображен на рис. 2 .37, где видны кнопка + и кнопка —, используемые для
поворота на один шаг. Нажимной переключатель (pushwheel) представляет собой но!
вую версию дискового переключателя thumbwheel, где цифры изменялись при враще!
нии зубчатого колесика. Каждой цифре на нажимном переключателе (см. рис. 2 .37) со!
ответствуют обычно четыре, восемь или десять 1П1Н!переключателей, соединенных
одним выводом с общей шиной. Таблицы выходных соединений на рис. 2 .38a, б показы!
вают десятипозиционный десятичный переключатель и переключатель с двоично!деся!
тичным кодом. Десять позиций имеют десять 1П1Н!переключателей, соответствующих
90
цифрам от 0 до 9. Например, когда переключатель имеет значение три, третий 1П1Н!
переключатель подключает общий терминал на выход третьего переключателя через
замкнутый контакт. Переключатели с двоично!десятичным кодом преобразует двоичное
значение на входе в состояние, соответствующее двоично!десятичному коду на выходе.
Существуют переключатели с различными законами кодирования, они могут также
группироваться в блоки, подобные блоку из четырех переключателей, показанному на
рис. 2 .37. Нажимные и шестеренчатые дисковые переключатели обычно переключают
постоянные напряжения с низкими значениями (от 5 до 24 В) и небольшие токи.
Рис. 2.38 . Десятипозиционные и
двоичнодесятичные
дисковые переключатели
Рис. 2.39 . Концевые
переключатели
Рис. 2.37. Дисковый
переключатель
åéôçõÖ êìóçõÖ èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü
91
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
2.6 . èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü
ë åÖïÄçàóÖëäàå èêàÇéÑéå
Типичным, широко используемым примером переключателя с механическим приводом
для промышленного управления является концевой переключатель. Контакты устройства
переключаются: (1) вращающимся рычагом, (2) нажимным короткозамыкающим порш!
нем или (3) отключающим поворотным рычагом. На рис. 2 .39 показаны пять различных
конфигураций концевых переключателей с приводом от: a) регулируемого рычага с роли!
ком; б) короткозамыкающего поршня; в) обычного рычага с роликом; г) колеблющегося
рычага; д) регулируемого стержневого рычага. Выбор и применение концевых переклю!
чателей требует понимания физических и электрических свойств устройств наряду с их
рабочими характеристиками. Физические свойства концевого переключателя определя!
ются четырьмя компонентами, показанными на рис. 2 .40: коробом, вкладышем переклю!
чателя, головкой привода и контактным устройством. Короб с помощью интерфейса обес!
печивает электрические контакты со схемой управления. В состав вкладыша входит
механический привод и контакты, кроме того, к нему крепится головка привода. Контак!
тирующее устройство, изображенное на рис. 2.40, представляет собой один из многочис!
ленных типов контактных устройств — рычаг с роликом. Семь типов контактных уст!
ройств для переключателя D4A!N фирмы Omron показаны на рис. 2 .41. Полный обзор
характеристик для всего ряда концевых переключателей D4A фирмы Omron приведен на
сайте компании www.omron.com.
Переключатели D4A!N фирмы Omron имеют два варианта приводов: боковой
поворотный и встроенный. Боковой поворотный вариант использует рычажный при!
вод, подобный изображенному на рис. 2 .41, для изменения состояния контактов.
Встроенный привод представляет собой либо короткозамыкающий плунжер, встро!
енный в головку переключателя, с плоской кромкой или роликом в верхней части,
Рис. 2 .40. Составные элементы концевого переключателя
92
Рис. 2.41 . Рычаги для концевых переключателей D4A
N фирмы Omron
с боковым вращением
èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü ë åÖïÄçàóÖëäàå èêàÇéÑéå
93
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
либо колеблющийся привод. В поворотном типе используется поворотный рычаг, для
привода переключателя, в то время как встроенные приводы используют линейное
движение короткозамыкающего поршня или отклонения колеблющегося рычага, что!
бы вызвать изменение состояния переключателя. Существуют конфигурации контак!
тов — 2П1Н и 2П2Н, чаще всего с двойным размыканием. Кроме того, возможна
последовательная работа и работа с нейтральным средним положением. При последо!
вательной работе переключение полюса 1 происходит до переключения полюса 2; при
работе со средним нейтральным положением переключение полюса 1 происходит при
вращении по часовой стрелке, а полюса 2 — при обратном вращении. Стандартные
условные обозначения для концевых переключателей показаны на рис. 2.42. Обозна!
чения на рис. 2.42a, б, в, г относятся к возвратным переключателям, а обозначение на
рис. 2.42д — к переключателю с фиксацией положения. Обозначения на рис. 2.42a, б
показывают НР! и НЗ!контакты в верхней части и удерживаемые НЗ! и НР!контакты
в нижней части. Состояния контактов на схеме обычно приводятся для начального со!
стояния при отключенной установке, таким образом, последние два символа исполь!
зуются, чтобы показать состояние контактов, когда работа еще не началась. Обозна!
чение на рис. 2.42в относится к среднему нейтральному положению контактов; на рис.
2.42г один контакт удерживается замкнутым. Чтобы показать состояние переключа!
теля, применяются индикаторы двух типов: светодиоды и неоновые лампы. Полное
описание работы переключателей и схемы индикаторов приводятся в справочных дан!
ных на сайте компании. Типичные электрические свойства для концевых переключа!
телей пилотного типа представлены на рис. 2.43. Нормируются три различных тока:
замыкания, размыкания и непрерывного режима работы для четырех различных пере!
ключаемых напряжений. Указанные значения токов являются нормальными условия!
ми для управления небольшими двигателями, пускателями двигателей, лампами и
другими мощными нагрузками. В концевых переключателях могут использоваться и
контакты для электронных режимов работы с низкими значениями напряжений (от 5
до30В)итоков(от0,2до100мА).
Рис. 2 .42. Условные обозначения для концевых переключателей
94
Рис. 2.43. Номинальные электрические параметры для контактов концевого
переключателя D4AN
NEMA A600 (UL/CSA)
Цепь
Номинальное
переменное
напряжение, В
Ток, А
Напряжение, В
замыкания размыкания непрерывный замыкания размыкания
2П1Н
120 В
60
6
10
7200
720
с двойным
240 В
30
3
10
7200
720
размыканием 480 В
15
1,5
10
7200
720
600 В
12
1,2
10
7200
720
Рабочие характеристики переключателей D4A!N включают все величины: от быс!
тродействия до веса устройства. Обзор характеристик, приведенных в справочных дан!
ных на сайте, демонстрирует превосходный срок службы для этих устройств. Определе!
ния различных движений переключателей и усилий, требуемых для их реализации,
также относятся к важным рабочим характеристикам, общим для всего ряда концевых
переключателей. Описание и рисунки типов движения и усилий для короткозамыкаю!
щего поршня и переключателя рычажного типа показаны на рис. 2 .44a, а на рис.2 .44б
приведены значения этих параметров для концевых переключателей рычажного типа
D4A!N. На схемах концевые переключатели чаще всего обозначаются буквами LS с
соответствующим порядковым номером при наличии на схеме нескольких компонен!
тов — LS1, LS2, LS3 и т.д.
Определение рабочих характеристик
Сила срабатывания (OF):
Сила, приложенная к приводу,
необходимая для срабатывания контактов
Сила освобождения (RF):
Сила, приложенная к приводу,
которая позволяет контактам освободиться
Свободное положение (FP):
Начальное положение привода
при отсутствии внешних сил
Рабочее положение (OP):
Положение привода, при котором
контакты переходят в рабочую позицию
Положение освобождения (RP):
Положение привода, при котором контакты
возвращаются из рабочего в свободное положение
Положение полного прохода (TTP):
Положение привода, при котором он достигает упора
Предварительный путь (PT):
Расстояние или угол, который проходит
привод от свободного до рабочего состояния
Путь перехода (OT):
Расстояние или угол, который проходит
привод от рабочего состояния
до положения упора
Разность расстояний (MD):
Расстояние или угол между рабочим
положением и положением освобождения
Полное расстояние (TT):
Сумма расстояний или углов
предварительного пути перехода
OF: Сила срабатывания
TTP: Положение полного прохода
RF: Сила освобождения
PT: Предварительный путь
FP: Свободное положение
OT: Путь перехода
OP: Рабочее положение
MD: Разность расстояний
RP: Положение освобждения
TT: Полное расстояние
Работа
Освобождение
TTP
OP
RP
PT
MD
MD
PT
OF
FP
RF
RP
OP
TT
TTP
FP
OF
PT
OP
OT
TTP
MD
RF
RP
TT
(а)
èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü ë åÖïÄçàóÖëäàå èêàÇéÑéå
95
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Рис. 2 .44. Определение рабочих характеристик переключателя:
а) параметры движения переключателя;
б) типовые значения усилия
Переключатели с боковым вращением
Тип
Описание
OF max
RF min
PTmax OTmin MDmax
OP
2П1Н 2П2Н
D4A.**01N Cтандартный
4 кг.см
0,5 кг.см
12±3° 70° 4±1° 5±2° —
(3,5
(0,4
фунто.дюйма) фунто.дюйма)
D4A.**02N Высокого давления 4 кг.см
0,5 кг.см
5±2° 75° 3±1° 4±1° —
(3,5
(0,4
фунто.дюйма) фунто.дюйма)
D4A.**03N Боковое вращение, 2 кг.см
—
12±3° 70° 4±1° 5±2° —
низкий момент
(1,7
фунто.дюйма)
D4A.**04N Боковое вращение, 2 кг.см
—
5±2° 75° 3±2° 4±2° —
высокая точность/ (1,7
низкий момент
фунто.дюйма)
D4A.**05N Боковое вращение, 4 кг.см
—
55±10° 20° 28±7° 28±7° —
удержание
(3,5
положения
фунто.дюйма)
D4A.**017N Боковое вращение, 4 кг.см
0,5 кг.см
1полюс 65° 4±2° 4±2° —
последов. работа (3,5
(0,4
7±3°
фунто.дюйма) фунто.дюйма) 2 полюс
15±3°
D4A.**018N Боковое вращение, 4 кг.см
0,2 кг.см
15±3° 65° 4±1° 4±1° —
центральное
(3,5
(0,2
положение
фунто.дюйма) фунто.дюйма)
нейтрально
Примечание: рабочее положение зависит от типа выбранного рычага
(б)
2.6 .1. ëÓ·‡̃ÍË ‰Îfl ÍÓ̈‚̊ı ÔÂÂÍĮ̂̃‡ÚÂÎÂÈ
Концевые переключатели часто используются, чтобы обнаружить движение деталей
или держателей на автоматизированных рабочих участках. Переключатель включается
специальной деталью, прикрепленной к движущемуся объекту, называемой собачкой.
Собачка используется, чтобы повернуть рычаг, переместить короткозамыкающий пор!
шень или вызвать колебание привода концевого механического переключателя. На
рис. 2 .45a показан концевой переключатель рычажного типа и собачка, закрепленная
на вращающейся детали установки. На рис. 2 .45б показаны два концевых переключате!
ля с короткозамыкающим поршнем и две собачки, установленные на поворотной плас!
тине. Скорость, с которой движется привод концевого переключателя, зависит от фор!
мы собачки, используемой для перемещения рычага. Типовые данные для расчета
96
концевых выключателей фирмы Omron Electronics приведены на рис. 2 .44б и 2.46. Эти
данные используются, чтобы определить три критических параметра: угол собачки (Φ),
угол рычага (θ) и высоту ролика относительно базы собачки в проектах собачек для ры!
чажных и плунжерных переключателей. Собачки рассчитываются так, чтобы миними!
зировать скорость рычага на переключателе, когда переключатель приводится в дей!
ствие деталью, передающей усилие.
Рассмотрите рис. 2 .46 и отметьте, что при увеличении скорости собачки угол рабо!
чей поверхности собачки (Φ) уменьшается, а угол рычага (θ) увеличивается. Использу!
ются два типа работы собачки: возвратный и невозвратный. При невозвратной работе
собачка сохраняет переключатель во взведенном состоянии, а при возвратной позволя!
ет ему возвратиться в исходное состояние после того, сама выйдет из механического
контакта с переключателем. Расчет собачек производится в следующем порядке:
1. Пользуясь механическими и электрическими характеристиками, указанными в
задании, выберите короб, вкладыш переключателя и рычажную либо плунжер!
ную конфигурацию.
2. Определите скорость собачки во время воздействия на рычаг или плунжер пере!
ключателя. Определите, будет ли операция возвратной или невозвратной.
3. Исходя из данных, полученных в пп. 1 и 2, выберите соответствующую таблицу из
таблиц скоростей, приводимых изготовителем (рис. 2.46).
Рис. 2.45. Применения систем с концевым переключателем и собачкой:
а) концевой переключатель с поворотным рычагом и собачкой в
виде полосы, закрепленной на вращающемся основании;
б) два переключателя с замыкающим поршнем и две собачки на
поворотной пластине
èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü ë åÖïÄçàóÖëäàå èêàÇéÑéå
97
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Рис. 2 .46. Данные для расчета собачек
4. Определите ближайшие значения скорости собачки из таблицы, которые меньше
и больше значения, вычисленного в п. 2. Используйте значения для φ и θ, соот
ветствующие большему из двух значений скоростей. Найдите уравнение для y в
этой таблице.
98
5. Определите невозвратное (PT) и возвратное (OT) значения (исходя из рис. 2 .44б
или из данных сайта), пользуясь данными таблицы рабочих характеристик для ко!
нечного переключателя, выбранного в п. 1.
6. Определите TT = (PT + OT) для выбранного переключателя. Для предельных
переключателей рычажного типа:
TT=радиусплеча+(1/cosTT)
Для плунжерного типа TT определяется из справочных данных.
7. Рассчитайте ширину собачки y, воспользовавшись значением TT из п. 6 и уравне!
нием из п. 4.
8. Начертите собачку и концевой переключатель на основе значений, полученных в
пп.5и7.
èËÏ 2.11
Требуется создать сигнал для сварочного робота, чтобы он начал сварочный цикл на
детали, помещенной на координатный стол. Разработайте собачку для края стола,
приводящую в действие концевой переключатель, когда стол достигнет крайнего по!
ложения. Скорость собачки — 0,5 фут/с; для применения выбран концевой пере!
ключатель D4A!1101 с рычагом D4A!A00. Необходим невозвратный режим работы.
êÖòÖçàÖ
1. Выберем переключатель D4A!1101 с рычагом D4A!A00. Это переключатель
конфигурации 1П2Н, вращательного типа со спецификациями для переключа!
теля и рычага, заданными на рис. 2.41 (для D4A!A00) и 2.44б ( для D4A!**01N).
2. Скорость: 0,5 фут/с.
3. Для этого применения необходим невозвратный режим работы.
4. Диапазон скорости из таблицы на рис. 2 .46 (от 0,82 фут/с (0,25 м/с) до 0,5 фут/с)
удовлетворяет требованиям, заданным в условиях задачи.
5. Скорость собачки 0,5 фут/с лежит между значениями 0,33 фут/с (0,1 м/с) и
0,82 фут/с (0,25 м/с) в табл. A на рис. 2.46. Поскольку применяются данные для
большего значения — 0,82 фут/с, то возьмем Φ = 45° из таблицы.
6. Имеется следующий набор значений: Φ = 45°, PT= 12° и OT =70° (значения PT
и OT из рис. 2.44б). Уравнение для y (из табл. A):
у = 0,8 × общее расстояние (в дюймах).
7. TT = PT+OT =12+70 = 82°.
8. TT =радиусплеча×(1–cosTT)=1,5дюйма(1–cos82°) =1,5×0,860 =1,29
дюйма.
9.
у=0,8×TT=0,8×1,29=1,03дюйма.
10. Собачка и предельная позиция переключателя, удовлетворяющие условиям за!
дачи, приведены на рис 2.47 с использованием полученных при расчете значе!
ний. Обратите внимание, что ширина собачки в 1,5 дюйма не обязательна, но
должна быть больше, чем 1,03 дюйма.
èÖêÖäãûóÄíÖãà Ñãü èêéåõòãÖçéÉé ìèêÄÇãÖçàü ë åÖïÄçàóÖëäàå èêàÇéÑéå
99
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
2.7 . èÖêÖäãûóÄíÖãà,
ìèêÄÇãüÖåõÖ íÖïçéãéÉàóÖëäàå èêéñÖëëéå
К последней из рассматриваемых здесь категорий входных устройств промышленного
управления относятся переключатели, следящие за параметрами технологического
процесса. Датчики параметров процесса всегда являются либо дискретными, либо не!
прерывными. Дискретное, или ключевое, устройство вызывает изменение состояния
контактов при некотором значении параметра процесса. Например, датчик уровня (по!
плавковый переключатель) в резервуаре изменяет состояние контактов, когда глубина
жидкости достигает определенного уровня (например, 20 футов). Напротив, непрерыв!
ное устройство, часто называемое аналоговым датчиком, производит непрерывно изме!
няющееся выходное напряжение или ток, который является пропорциональным вели!
чине изменяющегося параметра процесса. Например, непрерывный датчик уровня
создает выходной ток от 4 до 20 мА, пропорциональный уровню жидкости в резервуаре,
когда он изменяется от 1 до 20 футов. В этой главе рассказывается о дискретных комму!
тационных устройствах, а непрерывные, или аналоговые, датчики процесса рассматри!
ваются в главе 7. Наиболее широко используемые переключатели из этой группы диск!
ретных приборов — переключатели потока, уровня, давления, вакуума и температуры.
Дискретные переключатели процессов различных типов имеют сходные электри!
ческие свойства. Имеются переключатели со всеми конфигурациями контактов, одно!
полюсные и двухполюсные, на одно и на два положения. Большинство приборов явля!
ются пилотными, что означает: переключатели переменного напряжения от 120 до
600 В с диапазоном переключаемых токов от 6 до 2 А соответственно. Переключатели
могут управлять небольшими двигателями, подавать питание постоянного и перемен!
ного тока и включать резистивные и индуктивные нагрузки. Возможность использова!
ния переключателей в промышленной среде с жесткими условиями обеспечивается
корпусами с высоким уровнем защиты от воздействий окружающей среды и соответ!
ствующими стандартам NEMA.
Риc. 2 .47. Чертеж собачки
100
2.7.1 . èÂÂÍĮ̂̃‡ÚÂÎË ÔÓÚÓ͇
Переключатели потока используются, чтобы реагировать на изменение потока жид!
кости или газа в каналах или трубах. Переключатель, показанный на рис. 2.48a, изме!
няет состояние контактов, когда поток жидкости в канале становится достаточным,
чтобы отклонить рычаг, установленный в потоке. Существуют переключатели для
жидкостей с различными вязкостями, протекающих в трубах, и для фиксации воздуш!
ных или газовых потоков в соответствующих каналах. Условные обозначения, исполь!
зуемые для переключателей потока, показаны на рис. 2 .48б. На схемах переключате!
ли потока обозначены аббревиатурой FL, с добавлением порядковых номеров (FL1,
FL2, FL3 и т.д .), если на схеме несколько переключателей.
Риc. 2.48. Переключатель потока жидкости в трубе:
а) конструкция системы;
б) условные обозначения контактов
2.7.2 . èÂÂÍĮ̂̃‡ÚÂÎË ÛÓ‚Ìfl
Поплавковые переключатели, называемые также переключателями уровня, являют!
ся дискретными приборами, используемыми для управления уровнем жидкостей и
гранулированных материалов в резервуарах и лотках. Поплавковые переключатели,
подобные изображенным на рис. 2 .49, используют поплавок на поверхности жидко!
сти, чтобы вызвать изменение в контактах переключателя. Переключатель включает
быстродействующий спусковой механизм, который обеспечивает мгновенное замыка!
ние или размыкание контактов. Когда поплавок достигает установленного уровня,
спусковой механизм приводит в действие переключатель, но переключение происхо!
дит под действием мощных сил спускового механизма. Кроме того, на рис. 2.49 пока!
заны условные обозначения для поплавковых переключателей с НР и НЗ.
èÖêÖäãûóÄíÖãà, ìèêÄÇãüÖåõÖ íÖïçéãéÉàóÖëäàå èêéñÖëëéå
101
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Поплавковые переключатели поставляются в двух конфигурациях: для открытых
и закрытых резервуаров. Первые из этих моделей используются в неизолированных
резервуарах, открытых для атмосферы. Модели второго типа применяются в герме!
тичных резервуарах с изолированной средой. Модели для открытых резервуаров ис!
пользуют различные типы поплавков, показанные на рис. 2.49.
Рис. 2 .49. Переключатели уровня, приводимые в действие рычагом:
а) универсальный механизм для преращения потока и для слива,
б) поворотный механизм,
в) механизм с противовесом
102
2.7.3. èÂÂÍĮ̂̃‡ÚÂÎË ‰‡‚ÎÂÌËfl
Дискретные переключатели давления изменяют состояние электрических контактов
при изменении давления, оказываемого на устройство воздухом, водой, маслом или
какой!либо другой жидкостью. Обычным применением для переключателей давления
является регулирование воздушного давления в резервуаре путем включения двигате!
ля воздушного компрессора всякий раз, когда давление падает ниже заданного значе!
ния. Выпускаются переключатели как с фиксированным уровнем заданного давления,
так и с возможностью его подстройки.
Переключатели давления имеют два основных компонента: привод, который пе!
ремещается приложенным давлением жидкости или газа, и набор контактов мгновен!
ного действия. Давление жидкости или газа обычно прикладывается изнутри закрыто!
го сильфона или с одной стороны диафрагмы, имеющей форму сильфона, и стремится
развернуть мехи сильфона или сместить диафрагму. В переключателях другой конст!
рукции, чтобы обеспечить смещение от приложенного давления, используется пор!
шень. Электрические контакты механически связаны с приводом так, чтобы при опре!
деленном смещении контакты изменили состояние (с разомкнутого на замкнутое или
наоборот). Контакты при достижении заданного уровня давления мгновенно изменяют
свое состояние. Кроме этого, переключатели обладают также гистерезисом, позволя!
ющим избежать дребезга при приближении к давлению переключения.
Переключатель давления на рис. 2 .50a относится к переключателям дифференци!
ального типа, реагирующим на разность давлений, с нерегулируемым уровнем переклю!
чения. Максимальное давление для переключателя, приведенного на рисунке, лежит в
диапазоне от 100 до 2000 psi (эта величина соответствует давлению, производимому си!
лой в 1 фут на площадь в 1 квадратный дюйм. 1 psi и соответствует 6,89473 кПа. — П рим.
перев.) Контакты переключателя рассчитаны на переключение токов и напряжений в
широком диапазоне, как переменного, так и постоянного тока. Условное обозначение пе!
реключателей давления показано на рис. 2 .50б вместе с типичной конфигурацией контак!
тов. Изучите перечень доступных автоматически и вручную сбрасываемых конфигураций
контактов на рис. 2.51, которые используются при различных условиях управления.
Рис. 2.50 . Переключатель разности давлений:
а) внешний вид;
б) условные обозначения контактов
èÖêÖäãûóÄíÖãà, ìèêÄÇãüÖåõÖ íÖïçéãéÉàóÖëäàå èêéñÖëëéå
103
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Рис. 2 .51.
Условные
обозначения для
переключателей
давления и
температуры
104
2.7.4 . LJÍÛÛÏÌ̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
Любое давление в интервале от 0 до 14,7 psi (атмосферное давление на уровне моря)
называется вакуумом. Вакуумные переключатели работают в этом диапазоне точно
так же, как переключатели давления — при давлении выше атмосферного. Чаще все!
го применяются вакуумные переключатели с подстройкой установленного уровня дав!
ления, как, например, вакуумный переключатель на рис. 2.52a, который относится к
переключателям дифференциального типа с диапазоном регулирования уставки дав!
ления от 5 до 20 дюймов ртутного столба (28 дюймов рт. ст. приблизительно соответ!
ствуют атмосферному давлению). Условное обозначение для однополюсного вакуум!
ного переключателя с двойным размыканием приведено на рис. 2.52б.
2.7.5 . èÂÂÍĮ̂̃‡ÚÂÎË ÚÂÏÔ‡ÚÛ̊
Переключатели температуры, часто называемые термостатами, переключают элек!
трические контакты, изменяя их состояние при определенной температуре. Это из!
менение состояния контактов переключателя температуры вызвано расширением
жидкости внутри герметичной камеры. Прежде чем описать работу переключателя
температуры, изображенного на рис. 2.53, рассмотрим его конструкцию. На рисун!
ке представлена герметичная камера с внешним капиллярным шлангом и цилинд!
ром из нержавеющей стали с сильфоном внутри корпуса переключателя. Жидкость,
которая заполняет его камеру, имеет высокий положительный коэффициент темпе!
ратурного расширения. Когда цилиндр из нержавеющей стали нагревается, жид!
кость расширяется, увеличивая давление на внутреннюю поверхность герметичной
камеры. В результате сильфон расширяется, что при увеличении давления до задан!
ного предела вызывает изменение состояния электрических контактов. Различные
типы конфигурации контактов для имеющихся на рынке переключателей темпера!
туры приведены на рис. 2 .51.
Рис. 2.52. Вакуумный переключатель:
а) внешний вид;
б) условные обозначения контактов
èÖêÖäãûóÄíÖãà, ìèêÄÇãüÖåõÖ íÖïçéãéÉàóÖëäàå èêéñÖëëéå
105
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
2.8 . ÑàëäêÖíçõÖ ÇõïéÑçõÖ ìëíêéâëíÇÄ — èêàÇéÑõ
В первой части этой главы было рассмотрено множество различных типов переключа!
телей. Эти входные устройства управляют действием выходных устройств (исполни!
тельных механизмов или приводов), которые выполняют технологические операции. В
нашем учебнике рассматриваются многочисленные выходные устройства, используе!
мые в промышленных электронных системах, но в этой главе мы сосредоточим свое
внимание на следующих типах приводов: на устройствах, приводимых в действие соле!
ноидами (таких как реле, контакторы и клапаны), и на индикаторах и дисплеях. Прежде
чем описывать работу конкретных устройств, рассмотрим, как же действуют соленоиды.
2.8 .1 . ëÓÎÂÌÓˉ̊
Соленоид — одно из первых изобретений, относящихся к электромеханическим уст!
ройствам, — непосредственно преобразует электрическую энергию в линейное механи!
ческое движение. Расстояние перемещения, называемое ходом, относительно мало, что
ограничивает возможность применения соленоида. Обычный соленоид постоянного тока,
изображенный на рис. 2 .54, состоит из двух частей: катушки, намотанной проводом, и под!
вижного сердечника из электромагнитного материала. В отсутствие тока (рис. 2.54a)
единственная сила, действующая на сердечник — это сила пружины, выталкивающая его
из катушки. При замыкании ключа S, ток через катушку создает электромагнит, магнит!
ный поток которого течет от верхней части катушки (северного полюса) в нижнюю часть
(южный полюс). Это магнитное поле втягивает магнитный сердечник в катушку, посколь!
ку магнитная сила Fm превышает силу пружины Fs
. Ходом соленоида называется разность
координат сердечника при выключенном и включенном токе. Соленоиды, питаемые от ис!
точников переменного тока, чаще используются в промышленности и имеют третий ком!
Рис. 2 .53. Переключатель
температуры
106
понент, называемый магнитопроводом. Рассмотрим конструкцию соленоида переменного
тока, показанную на рис. 2 .55, чтобы познакомиться со всеми его частями. На рисунке
присутствует также условное обозначение соленоида. Магнитопровод, как и подвижный
сердечник (якорь), набран из большого количества пластин высококачественной кремни!
стой стали, а катушка намотана изолированным медным проводом. Пластинчатая конст!
рукция необходима для соленоидов переменного тока, чтобы уменьшить нагрев, вызывае!
мый вихревыми токами, протекающими в магнитопроводе и подвижном сердечнике.
Вихревые, или круговые, токи создаются в металле переменным магнитным полем, воз!
никающим при прохождении по обмотке переменного тока. Величина вихревых токов
уменьшается при пластинчатой конструкции. Положения соленоида для трех моментов
времени представлены на рис. 2 .55:
1. Сразу после включения тока.
2. После того как подвижная часть, называемая якорем, начнет притягиваться
к магнитопроводу.
3. В конечном состоянии, когда якорь притянут к магнитопроводу.
Для каждого из состояний указано типичное значение тока в катушке, чтобы пока!
зать, как изменяется ток в процессе притягивания якоря. Причина изменения тока ка!
тушки заключается в изменении магнитного контура (рис. 2 .55, вверху), создаваемого
якорем после срабатывания соленоида. Поток в магнитном контуре соответствует току
в электрической схеме, а сопротивление воздушного промежутка — высокоомному ре!
зистору. Чем больше воздушный промежуток, тем больше и энергия, требуемая для втя!
гивания якоря. В результате значение тока в катушке в начале движения якоря велико и
уменьшается в процессе движения.
2.8.2 . çÂÔÂ̊‚Ì̊È Ë ÔÓ‚ÚÓÌÓ-͇ÚÍÓ‚ÂÏÂÌÌ̊È ÂÊËÏ̊
Соленоиды с непрерывным режимом работы созданы для длительных периодов, когда
якорь полностью притянут. Устройствам для повторно!кратковременного режима не!
Рис. 2.54. Работа соленоида
ÑàëäêÖíçõÖ ÇõïéÑçõÖ ìëíêéâëíÇÄ — èêàÇéÑõ
107
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
обходимо некоторое время для охлаждения после притягивания якоря. Тепловые про!
блемы вызваны тем, что в переходном режиме требуется большее напряжение и ток,
чем в установившемся, а излишняя энергия превращается в тепло. Поэтому в повтор!
но!кратковременных режимах работы соленоиды должны рассеивать больше тепла.
Соленоиды применяются как исполнительные элементы в многочисленных выходных
устройствах, включая электромеханические реле и клапаны. Характеристики и работа
этих устройств будут рассмотрены ниже.
Рис. 2 .55. Соленоид
переменного
тока
108
2.9 . êÖãÖ
Реле — одно из самых старых устройств управления, которое, тем не менее, все еще
широко используется, — представляет собой переключатель с дистанционным управ!
лением. В нем электромагниты и соленоиды сочетаются с различными конфигурациями
контактных переключателей. Реле, показанные на рис. 2 .56, соответствуют четырем
методам управления движением контактов с помощью с соленоидов и электромагнитов.
В поворотных и звонковых типах электромагнит поворачивает якорь к катушке, и меха!
нический рычаг заставляет контакты замыкаться. Соленоиды вертикального и горизон!
тального типов действия используют соответствующее названию направление движе!
ния для замыкания контактов. Многочисленные модели реле способны удовлетворить
все многообразные требования управления. Рассмотрим различные категории реле, пе!
речисленные на рис. 2.57.
Рис. 2.56 . Конструкция контактов и якорей электромеханических реле:
а) поворотного типа;
б) с вертикальным движением;
в) звонкового типа;
г) с горизонтальным движением
êÖãÖ
109
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Две основные категории — это электромеханические реле, рассмотренные в
данной главе, и полупроводниковые, которые будут рассмотрены ниже в главе 3. Про!
мышленые электромеханические реле используются, прежде всего, промышленнос!
тью для управления средствами автоматизации, в то время как приборные реле ис!
пользуются в электронном оборудовании и приборах. Реле промышленного
управления показаны на рис. 2.58a, а приборные реле с замкнутыми и разомкнутыми
контактами — на рис. 2.58б. Язычковые и ртутные реле с электронными режимами
работы имеют низкое сопротивление контактов, которое необходимо для переключе!
ния малых токов. Реле выполняют две основные функции: (1) управляют большими
токами и/или напряжениями с помощью малого электрического сигнала и (2) изоли!
руют источники питания, используемые для управления, от переключаемого источни!
ка, оказывающего технологическое воздействие. Обычно токи катушки реле для элек!
троники значительно ниже 1 А, в то время как номинальные значения токов через
контакты промышленных реле составляют не менее 10 А. На практике реле действует
как двоичный переключающий усилитель (с положениями ВКЛ или ВЫКЛ). Это дво!
ичное действие переключающего усилителя иллюстрируется примером схемы управ!
ления на рис. 2.59. Здесь относительно маломощный переключатель на панели управ!
ления, размещенной на некотором расстоянии от реле, подает питание от источника
постоянного тока напряжением 24 В на катушку реле, размещенного вблизи нагрузки.
Когда включается катушка реле, контакты подключают большое напряжение и ток к
нагрузке. Исключить реле и использовать для такой работы переключатель на панели
управления невозможно из!за высокого напряжения и тока, который необходимо
было бы подать на панель. Вторая функция также проиллюстрирована рисунком. Уп!
равление осуществляется от источника постоянного тока, а переключается напряже!
ние переменного тока, и эти источники изолированы друг от друга. Обратите внима!
ние, что контакты изолированы от катушки и магнитопровода реле, как показано на
рис. 2 .56 . Изучите схему, чтобы понять принцип работы и преимущества реле.
Рис. 2 .57. Классификация реле
110
2.9.1. çÓÏË̇Î̧Ì̊ ̋ÎÂÍÚË̃ÂÒÍË ̇„ÛÁÍË ‰Îfl ÍÓÌÚ‡ÍÚÓ‚ ÂÎÂ
Номинальные значения величин, характеризующих электрические нагрузки для кон!
тактов реле, изменяются в широком диапазоне в зависимости от типа изучаемого
реле. Номинальные величины токов и напряжений для контактов реле промышленно!
го управления приведены на рис. 2.60. Обратите внимание на большое различие меж!
ду допустимыми величинами при постоянном и переменном токах и примерно одина!
ковом напряжении. Например, при 120 В переменного напряжения максимальный
размыкаемый ток составляет 6 А; а при таком же напряжении постоянного тока —
всего 0,55 А. Основная причина столь существенного различия — маленький воздуш!
ный промежуток между открытыми контактами, который недостаточен, чтобы разор!
вать длинную дугу постоянного тока при индуктивной нагрузке. Однако этот более
низкий предел вполне пригоден для построения логических схем управления, в кото!
рых обычно используются реле этого типа. Иногда требуемая нагрузка на контакты
Рис. 2.58 . Реле для промышленного
управления и реле для электронных
приборов
Рис. 2.59 . Релейная схема
управления
êÖãÖ
111
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
реле может быть несколько выше их номинального значения. Номинальное значение
тока можно увеличить при параллельном соединении контактов, а подавление дуги
улучшается при их последовательном соединении. Параллельные контакты должны
быть контактами одного и того же реле, чтобы моменты коммутации совпадали.
2.9 .2. äÓÌÙË„Û‡ˆËË ÍÓÌÚ‡ÍÚÓ‚ ÂÎÂ
Конфигурация и терминология для переключателей, рассмотренные в первой части гла!
вы, те же, что и для реле. Две первичные спецификации, которые относятся именно к
реле, — это число полюсов и тип контакта (обычно НЗ или НР). Ярмо реле может приво!
дить к изменению состояния нескольких наборов контактов; следовательно, как и пере!
ключатель, реле может быть многополюсным устройством. Реле обычно имеет от одного
до восьми полюсов. Контакты бывают НР или НЗ или используется их комбинация. Как и
для переключателей, нормальное состояние контактов реле соответствует выключенному
состоянию катушки, и изготовителем на корпусе реле приводится схема именно для этого
состояния. Состояние контактов реле при неподключенной катушке показано на рис. 2.59.
Условные обозначения катушек реле и их контактов, используемые в схемах, отличны для
принципиальных и монтажных схем. Кроме того, международный стандарт отличается от
американского. Условные обозначения для всех перечисленных стандартов показаны на
рис. 2 .61. В схеме реле на рис. 2.59 присутствуют обозначения для принципиальных схем.
Монтажные схемы обсуждаются в конце данной главы.
Рис. 2 .60. Номинальные нагрузки контактов реле
2.9 .3. êÂΠ‚ÂÏÂÌË
Реле времени (таймер) устанавливает постоянную или регулируемую задержку изме!
нения состояния контактов после момента подачи напряжения на катушку или снятия
питания с катушки или при любом из этих условий. Реле времени — важнейшее уст!
112
ройство автоматизированного производства, которое используется в релейных логи!
ческих лестничных схемах уже более пятидесяти лет. Таймеры необходимы, например,
при последовательной обработке или при определенной последовательности техноло!
гических операций, каждая из которых должна продолжаться в течение заданного вре!
менного промежутка. В релейных логических лестничных схемах реле времени назы!
ваются таймерами, поскольку изменение положения контактов в них связано с
функцией синхронизации. Изучение реле времени актуально и в настоящее время,
поскольку такие реле, реализующие лестничные логические схемы, продолжают ис!
пользовать для управления мощными переключателями. Условные обозначения для
реле времени показаны на рис. 2.61.
Рис. 2.61. Условные
обозначения
реле
êÖãÖ
113
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Классификация реле. Реле выпускаются в различных вариантах и размерах, но
все они могут быть сгруппированы в два больших класса пневматических и электрон!
ных реле. Два устройства пневматического типа приведены на рис. 2.62. Они отли!
чаются от электронных реле способом создания временного сдвига. В пневматических
реле времени используется управляемое истечение воздуха в процессе расширения
или сжатия сильфона, в то время как в электронных реле для этих целей применяется
полупроводниковая электронная схема. Об электронных реле времени будет расска!
зано в главе 6. Реле времени имеют два типа контактов: рабочие и вспомогательные.
Рабочие контакты. Рабочие контакты создают фиксированную или регулируе!
мую задержку, которая управляется процессом синхронизации. Пневматические реле
синхронизации обеспечивают задержку включения или выключения. Рассмотрим вре!
менные диаграммы для реле каждого типа, приведенные на рис. 2.63.
Задержка включения. Реле с задержкой включения имеет обычно рабочие НР! и
НЗ!контакты, не изменяющие своего состояния при подаче питания на катушку, и на!
зываются реле с НР!контактами и установкой времени замкнутым состоянием
(normally open timed!closed — NOTC). После того как катушка реле включается, НР!
контакты остаются разомкнутыми, НЗ! замкнутыми, и такое состояние сохраняется
вплоть до истечения времени задержки. После окончания времени задержки состоя!
ние рабочих контактов изменяется: НР замыкаются, а НЗ — размыкаются и остаются
в этом состоянии, пока катушка не выключается. После выключения катушки рабочие
контакты немедленно возвращаются в начальное состояние (НР!контакты — разомк!
нуты, НЗ! — замкнуты). Временные диаграммы приведены на рис. 2.63a, а условное
обозначение — на рис. 2.61. Обратите внимание, что время задержки отсчитывается
от момента подачи питания на катушку.
Задержка выключения. Реле с задержкой выключения имеет обычно рабочие
НР! и НЗ!контакты, изменяющие свое состояние при подаче питания на катушку, и
называются реле с НР!контактами и установкой времени замкнутого состояния
normally closed timed!closed — NCTC. После того как катушка реле включается, НР!
контакты замыкаются, НЗ! — размыкаются и сохраняют такое состояние вплоть до
Рис. 2 .62. Пневматические реле переменного тока
114
истечения времени задержки. По истечении времени задержки, после выключения
катушки рабочие контакты немедленно возвращаются в начальное состояние (НР!
контакты разомкнуты, НЗ! замкнуты). Временные диаграммы приведены на рис.
2.63б, а условное обозначение — на рис. 2.61. Обратите внимание, что время задерж!
ки отсчитывается от момента снятия питания с катушки. Пневматические реле синх!
ронизации также имеют вспомогательные катушки, изменяющие свое состояние од!
новременно с включением и выключением.
Рис. 2.63 . Временные диаграммы входных и выходных сигналов в реле времени:
а) задержка по включению;
б) задержка по выключению
êÖãÖ
115
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Вспомогательные контакты. Вспомогательные контакты функционируют неза!
висимо от работы системы синхронизации, подобно обычным контактам реле управ!
ления. Когда к катушке прикладывается напряжение, изменяется состояние контак!
тов; когда питание с катушки снимается, контакты возвращаются в нормальное
состояние. Временные диаграммы для вспомогательных контактов мгновенного дей!
ствия при каждом типе задержки приведены на рис 2.63, а условные обозначения —
на рис.2 .61, они совпадают с обозначениями базисных контактов. Обратите внима!
ние, что действие контактов определяется временной диаграммой напряжения, при!
ложенного к катушке.
Характеристики и работа пневматического реле времени. Пневматические реле
времени первого типа включают и реле NOTC, и реле NCTC с диапазоном от 0,05 до 180
с (с точностью 10% от времени задержки). Эти реле выпускаются для переключения пе!
ременного и постоянного тока, с типичным диапазоном тока переключения от 6 до 12 А и
диапазоном напряжения от 120 до 600 В переменного тока. Непрерывный ток обычно
равен 10 А. Работа основана на пневматическом управлении, внешний вид и устройство
прибора показаны на рис. 2 .64. Рассмотрим рис. 2.64б, чтобы познакомиться с компонен!
тами устройства. Когда соленоид оттягивает якорь (10) от стержня (11), это позволяет
пружине (3), размещенной внутри сильфона из синтетической резины (1), поднять пор!
шень механизма синхронизации (4) вверх. Это заставляет механизм переключателя (5)
переместить спусковой язычок переключателя (6) вверх, он толкают пластину (7), кото!
рая, в свою очередь, размыкает контакты (8). Скорость, с которой сильфон может расши!
ряться, регулируется с помощью игольчатого вентиля (2). Если вентиль почти закрыт, то
для расширения сильфона потребуется максимальный отрезок времени. Таким образом,
установка игольчатого вентиля определяет интервал времени, который должен пройти
между срабатыванием соленоида и расширением сильфона до уровня, приводящего к из!
менению состояния контактов. Когда на стержень (11) снова опускается якорь соленоида
(10), он давит на поршень синхронизации (4), выпуская воздух из сильфона через выпуск!
ной клапан (9), и происходит почти мгновенный сброс таймера.
Рис. 2 .64. Пневматические реле времени:
а) внешний вид;
б) конструкция
(б)
Сильфон
Вход воздуха
(a)
10
11
4
9
1
3
6
7
8
12
2
Фильтр на
входе воздуха
Воздушный
канал
Установка времени Выводы 1 и 2
Выводы3и4
Установка времени
5
116
Реле времени выбираются с учетом следующих рабочих характеристик:
требуемого времени задержки;
диапазона значений синхронизации, требуемых для машины или процесса;
параметров синхронизации, требуемых для процесса;
повторяемости и точности установки задержки, требуемой для процесса;
номинального тока, конфигурации и количества рабочих и вспомогательных
контактов, необходимых для обеспечения требуемого алгоритма управления.
2.10. äéçíÄäíéêõ
Контакторы, изображенные на рис. 2 .65, представляют собой разновидность реле,
рассчитанных на переключение больших токов при больших напряжениях источников
питания. Контакторы имеют ряд контактов, чтобы обеспечить возможность подключе!
ния обоих проводов однофазного напряжения или трех линий трехфазного источника
питания. В дополнение к контактам для включения первичного напряжения, имеется
один или несколько контактов, названных дополнительными и предназначенных для
схем управления контакторами. Эти дополнительные контакты часто рассчитаны на на!
пряжение 120 В переменного тока и могут быть НЗ или НР. Контакторы также имеют
систему подавления дуги, возникающей при отключении тока в индуктивных нагрузках.
Контакторы для переменного и постоянного тока имеют различную конструкцию из!за
необходимости предотвращать искрение при размыкании контактов. В контакторах по!
стоянного напряжения предусмотрено подавление дуги постоянного тока.
Внешний вид и конструкция контактора, используемого в схеме управления трех!
фазным двигателем, показаны на рис. 2.66. Напряжение первичной трехфазной сети
переменного тока (входы L1, L2 и L3 на рисунке) составляет обычно 480 В или выше
для двигателя мощностью от 1 л.с. Двигатель подсоединяется на выходы контактора
T1, T2 и T3. Двигатель подключается к сети через входные контакты контактора и мо!
дуль тепловой защиты от перегрузки. Чтобы запустить двигатель, все три контакта
замыкаются с помощью катушки и якоря контактора. Контакты бывают обычно НР,
поэтому при обесточенной катушке питание на двигатель не подается.
Рис. 2.65. Контакторы
äéçíÄäíéêõ
117
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Три тепловых модуля перегрузки снабжены нагревательными элементами. Каждый
нагреватель представляет собой низкоомную металлическую полосу, которая нагревается
при прохождении тока через двигатель. При перегрузке двигателя тепло, выделяемое эти!
ми нагревательными элементами, вызывает размыкание НЗ!контактов (на схеме не пока!
заны). Эти три контакта защиты от перегрузки обычно соединяются последовательно с
катушкой контактора. Вследствие этого катушка контактора выключается, и двигатель
останавливается, когда размыкается любой из НЗ!контактов тепловой перегрузки. Схема
подключения трехфазного двигателя к сети вместе со схемой управления приведена на
рис. 2 .67. Схема управления, называемая трехпроводной схемой, показывает, каким об!
разом два быстро срабатывающих вспомогательных контакта (один НЗ и один НР) вклю!
чаются в цепь управления катушки (она обозначена буквой М внутри круга), чтобы обес!
печить запуск и останов мощного двигателя. Обратите внимание, что для питания схемы
управления используется линейное напряжение между фазами L1 и L2. Рассмотрим, как
работает схема. Дополнительный НР!контакт М контактора подключен параллельно
кнопке ПУСК, а НЗ!контакт O.L, включенный последовательно с катушкой, представля!
ет собой фактически последовательное соединение трех контактов тепловой защиты от
перегрузки. Если нажать и отпустить кнопку ПУСК, катушка контактора останется вклю!
ченной и двигатель будет работать, потому что питание на катушку будет поступать через
замкнутый дополнительный контакт М.
Дополнительный контакт назван контактом самоудержания, потому что он замыка!
ется, шунтируя кнопку ПУСК и разрешая ей вернуться в НР!положение без отключения
катушки контактора. Контактор выключается, и двигатель останавливается только при
нажатии кнопки СТОП или при размыкании любого из контактов перегрузки. Схемы
управления более подробно обсуждаются ниже в настоящей главе.
Рис. 2 .66. Работа контакторов
118
2.11 . äãÄèÄçõ
В промышленных машинах и системах находит применение и множество других элек!
трически управляемых выходных устройств. В этой главе мы рассмотрим дискретные
клапаны и сигнальные лампы. Мы разделили многочисленные типы клапанов на три
группы: клапаны, управляющие процессом, клапаны с пневматическим управлением
и гидравлические клапаны с позиционированием. Группа клапанов, которая включает
клапаны скольжения и вращательные клапаны, далее подразделяется на клапаны
дискретного и пропорционального типов. Напомним, что дискретные клапаны пере!
ключаются между состояниями ВКЛ и ВЫКЛ, а пропорциональные могут быть уста!
новлены в любое положение между 0 и 100% пропускной способности. Пневматичес!
кие клапаны всегда являются дискретными, а гидравлические в зависимости от
применения могут быть еще и пропорциональными. В настоящей главе описаны кла!
паны дискретного типа, а в главах 7 и 14 рассказывается о пропорциональных клапа!
нах, управляющих технологическими процессами.
2.11.1. ÑËÒÍÂÚÌ̊ Í·ԇÌ̊ ‰Îfl ÛÔ‡‚ÎÂÌËfl ÔÓˆÂÒÒÓÏ
Управляющие клапаны, которые используются в промышленных процессах, различа!
ются по конструкции и методике, используемой для управления потоком и механизмом
Рис. 2.67. Трехпроводная схема управления двигателя
äãÄèÄçõ
119
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
активации. Наиболее часто используются два типа конструкции: клапаны скольжения
и вращательные клапаны. Каждый из этих типов характеризуется дополнительными
параметрами. Клапаны скольжения могут быть шаровыми (с двумя и тремя портами),
заслончными (gate) или дроссельными (choke). Вращательные клапаны могут быть
шарового типа или типа баттерфляй. Механизмом привода является обычно солено!
ид, двигатель или диафрагма, управляемая сжатым воздухом. Конструкции клапанов
показаны на рис. 2.68, а три метода привода — на рис. 2 .69 . Рассмотрим сначала типы
конструкции.
Рис. 2 .68. Типы конструкции клапанов:
а) двухходовой шаровой клапан скольжения;
б) трехходовой шаровой клапан скольжения;
в) вращательный шаровой клапан
120
Типы конструции. Промышленый процесс и обрабатываемый материал диктуют
выбор конструкции клапана. Если вы работаете в области промышленной электрони!
ки и управления, то вам необходимо знать, как работают клапаны различных типов. К
первой группе относятся клапаны скольжения (stem), которые включают шаровые,
клапанызаслонки и дроссельные клапаны.
Шаровые клапаны (globe), подобные показанному на рис. 2 .68a, сначала закры!
ваются медленно, чтобы предотвратить гидравлический удар, а затем производят плот!
ное запирание с отсутствием просачивания в запертом состоянии даже при низком дав!
лении. Гидравлический удар вызывается инерцией жидкости в канале, когда клапан
мгновенно останавливает ее движение. Недостаток этой конструкции состоит в том, что
Z!образный канал вызывает ограничения потока и создает карманы, где могут соби!
раться частицы материала или отстаиваться жидкость. Клапан на рис. 2 .68a является
односедельным шаровым клапаном, потому что имеет единственный шток (движущуюся
часть) и седло (фиксированную часть). Он является также двухходовым, поскольку име!
ет два порта (входное и выходное отверстия). Жидкость входит во входное отверстие и
давит снизу на втулку и шток клапана. Привод создает направленную вниз силу, чтобы
закрыть клапан. Для обеспечения нормальной работы клапана сила, создаваемая при!
водом, должна быть больше силы, создаваемой давлением воды снизу. Поэтому такая
конструкция клапана не используется для управления потоками жидкости при высоких
давлениях. Давление жидкости помогает открыть клапан, когда привод отключается.
Трехходовой шаровой клапан, изображенный на рис. 2 .68б, имеет три внешних порта и
используется для смесителей, сливов или разветвителей. Если два порта используются
как входные, а один как выходной, то получается смеситель; если же только один порт
является входным, а два других — выходными, то клапан является раветвительным.
6,3 ∅
Штурвал
Плоский диск
(вид сбоку)
5,5
8,0
ПОРТ I
ПОРТ II
ПОРТIII
B
Плоский диск
(вид сбоку)
A
(г)
Рис. 2.68 . Конструкции клапанов
(продолжение):
г) трехходовой
буферный клапан
äãÄèÄçõ
121
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Клапанзаслонка (gate valves) предназначен для работы в дискретном режиме
(полностью открыт или полностью закрыт) и работает так же, как и шаровые клапаны:
с плавным закрытием, предотвращающим гидравлический удар. Клапан!заслонка
имеет меньшее падение давления, чем шаровой клапан, и обеспечивает хорошую изо!
ляцию под давлением, когда полностью закрыт. Однако небольшая протечка не явля!
ется для него аварийной при давлении около 5 psi.
Дроссельный клапан работает так же, как и клапан!заслонка, но использует
круглый стопор, чтобы замедлить поток.
Ко второй группе относятся клапаны с вращательным движением. Они бывают
шаровыми и типа баттерфляй (butterfly — бабочка).
Шаровые вращающиеся клапаны (ball) имеют вращающийся шар с отверсти!
ем в центре (см. общий разрез клапана на рисунке). Шаровые вращающиеся клапаны,
подобные изображенному на рис. 2.68в, иногда называются клапанами с вращаю!
щимся затвором (rotary plug).
Если шар или втулка поворачиваются так, что отверстие в их центральной части
выравнивается с входным и выходным отверстиями, достигается наименьшее сопротив!
ление потоку. Когда отверстие поворачивается почти перпендикулярно потоку, клапан
закрывается. Клапан может использоваться в пропорциональном режиме или как диск!
ретное устройство, которое переходит из полностью открытого в полностью закрытое
состояние либо обратно. Он имеет низкое падение давления и самую большую пропуск!
ную способность. Такие клапаны быстро открываются и закрываются, являются про!
стыми и безаварийными, хорошо противостоят коррозии. Они часто используются для
управления жидкостями, содержащими волокнистые материалы, такие как деревянная
целлюлоза, бумажное сырье и цементный раствор. Однако слишком быстрое открытие
или закрытие такого клапана может вызвать гидравлический удар.
Клапаны типа баттерфляй (рис. 2.68г) имеют плоский круговой диск, разме!
ры которого совпадают с внутренними размерами корпуса клапана. Диск закреплен на
оси и может поворачиваться ребром к потоку (полностью открытое состояние) либо
перекрывать поток своей плоскостью (полностью закрытое состояние). Подобно ша!
ровым клапанам, они переводятся из полностью открытого в полностью закрытое со!
стояние всего за четверть оборота вала. Клапаны этого типа используются для управ!
ления большими потоками газов или жидкостей при высоких статических давлениях и
небольшом падении давления на клапане. Они очень компактны по сравнению с зас!
лонками и шаровыми клапанами.
В следующем разделе рассматривается второй главный компонент, имеющийся в
каждом клапане, — привод,
Работа привода клапана. Приводами клапанов могут служить вручную переме!
щаемые рычаги и штурвалы либо электрический или пневматический привод. Чаще
всего в качестве приводов используются соленоиды, двигатели или диафрагмы, уп!
равляемые сжатым воздухом (пневматические). Соленоидные приводы клапанов ис!
пользуются только в дискретных режимах, но два других привода могут, кроме того,
применяться и в пропорциональном режиме.
Когда пневматический клапан эксплуатируется в дискретном режиме, управляю!
щее давление для большего клапана управления включается небольшим соленоидом,
приводящим в действие пневматический клапан. Работа соленоидального клапана
(рис. 2.69a) станет яснее, если проследить за якорем соленоида, перемещающего ос!
122
новной клапан вверх (открытое состояние) либо вниз (закрытое состояние). Привод,
показанный на рис. 2.69б, — пневматический, в нем используется давление воздуха
на диафрагму. Когда давление в камере увеличивается, диафрагма смещается вниз,
толкая вниз стержень клапана и закрывая его. Когда давление снижается, пружина
толкает диафрагму вверх и клапан открывается. Привод клапана, работающий с по!
мощью двигателя (рис. 2 .69в), управляет положением шарового клапана. Враща!
тельное движение двигателя с помощью механизмов передачи преобразуется в линей!
ное, чтобы обеспечить скольжение стержня клапана. Работа клапанов в дискретном
режиме станет понятна после изучения рис. 2 .68 и 2.69.
Рис. 2.69 . Приводы
клапанов
äãÄèÄçõ
123
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
2.11.2. ä·ԇÌ̊ Ò ÔÌ‚χÚË̃ÂÒÍËÏ ÔË‚Ó‰ÓÏ
Клапаны с пневматическим приводом являются клапанами прямого действия либо
клапанами шпулечного типа. Клапаны прямого действия могут иметь две конфигура!
ции: двухходовую и трехходовую; клапаны, управляемые шпульками, имеют еще и че!
тырехходовую конфигурацию. Шпулечные клапаны, управляемые подвижными запо!
рами, имеющими форму шпульки, обычно бывают двух! и трехпозиционными по числу
положений, которые может занимать шпулька. Рассмотрим сначала работу клапанов
каждого типа, а затем их характеристики.
Пневматические клапаны прямого действия. Три клапана прямого действия
изображены на рис. 2.70a. Обратите внимание на провода соленоидов и воздушные
порты. Работа нормально закрытого двухходового клапана показана на рис. 2.70б.
Клапан имеет два порта: входной порт 2 и выходной порт 1 (номера портов указаны
около блока, отображающего выключенное состояние). Клапаны прямого действия
обычно используют соленоид для включения клапана и силу возвратной пружины для
возврата его в исходное состояние после снятия напряжения с катушки. Условное обо!
значение для двухходового клапана отражает включенное и выключенное состояния.
Когда клапан выключен, поток не проходит, когда он включен — разрешается про!
хождение потока. Двухходовые клапаны не используются для привода пневматических
цилиндров, а применяются, чтобы управлять такими устройствами, как пневматичес!
кий двигатель или вакуумный генератор. Работа нормально открытого трехходового
клапана прямого действия показана на рис. 2.70в. В этой конфигурации также ис!
пользуется один соленоид и пружина возврата. В выключенном состоянии воздушный
поток проходит из порта 3 в порт 2, а во включенном — из порта 2 в порт 1. Примене!
ние трехходовых клапанов для управления одним пневматическим цилиндром будет
описано ниже в этом разделе.
Рис. 2 .70. Пневматические клапаны прямого действия:
а) конструкция;
б) запертый двухходовой клапан;
в) нормально открытый трехходовой клапан
124
Шпулечные клапаны. Шпулечные клапаны получили свое имя от используемых в
них, чтобы проводить поток, цилиндров, которые по форме напоминают шпульку. Разрез
двухпозиционного шпулечного четырехходового клапана приведен на рис. 2 .71 . Шпуль!
ки могут поочередно занимать два положения: левое и правое. Когда шпульки переме!
щаются вправо, поршень движется влево, поскольку жидкость или газ через порты 1 и 2
поступает в камеру справа от поршня, а через порты 3 и 4 из камеры слева от поршня
жидкость возвращается в резервуар. Когда шпульки перемещаются влево, достигается
противоположный эффект и поршень движется влево. Цилиндр в этом примере назван
цилиндром двойного действия, поскольку поршень движется в обоих направлениях под
давлением жидкости или газа, толкающего поршень.
Рис. 2.71 . Работа шпулечного четырехходового клапана с цилиндром
двойного действия
Еще один пневматический клапан шпулечного типа изображен на рис. 2.72a.
Шпулечные клапаны выпускаются в двух! и трехходовых вариантах, которые показа!
ны с помощью условных обозначений на рис. 2 .70б, в. Схема для двухпозиционной
четырехходовой конфигурации, приведенной на рис. 2.71, показана на рис. 2 .72. Об!
ратите внимание, что клапан имеет один соленоид и возвратную пружину и что показа!
но выключенное состояние. Когда соленоид выключен, тогда порт 1 соединяется с
портом 2, а порты 4 и 5 обеспечивают возврат. При включении соленоида порты 2 и 3
формируют возврат, а порт 1 доставляет жидкость или газ через порт 4. Поршень дви!
жется влево при выключенном соленоиде и вправо — при включенном. Для точного
обозначения клапана не забывайте помещать символ состояния (возбужденный или
выключенный) около квадрата с номерами портов. Изучение рис. 2.71 и 2.72 поможет
вам легче понять работу приведенных устройств.
Приводы одиночного и двойного действия. И пневматические и гидравлические
цилиндры могут применяться в конфигурациях одиночного и двойного действия. Вер!
сия двойного действия была описана ранее и показана на рис. 2.71 и 2.72б. Цилиндр
одиночного действия имеет только один порт, который движет поршень до достижения
наибольшего объема камеры. Поршень возвращается в исходную позицию возврат!
ной пружиной. Двухпозиционный трехходовой клапан, управляющий цилиндром оди!
äãÄèÄçõ
125
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
ночного действия, показан на рис. 2 .73. При выключенном соленоиде поршень втяги!
вается (порты 2 и 3 обеспечивают выход воздуха), а порт 1 блокирован, так что воздух
от компрессора не поступает. При включении же соленоида через порты 1 и 2 сжатый
воздух поступает в цилиндр и поршень выталкивается.
Рис. 2 .72. Четырехходовые клапаны и схема их управления:
а) внешний вид;
б) схема работы с использованием условных обозначений
126
Другие характеристики клапанов. В дополнение к видам конфигураций, описан!
ным в предыдущем разделе, шпулечные клапаны могут иметь соленоид с каждой сто!
роны, что исключает необходимость в возвратной пружине. Это позволяет клапану
оставаться в любом положении после выключения питания. Шпульки остаются в те!
кущем положении, пока не будет подано питание на соленоид, находящийся с проти!
воположной стороны. Кроме того, можно управлять шпульками с помощью дистанци!
онного командного сигнала — в этом случае соленоид управляет пневматическим
приводом, формируя сигнал от воздушного источника низкого давления.
Имеются также шпулечные клапаны на три положения, показанные на рис. 2.74.
Отметим, что в трех моделях на этом рисунке в центральной части клапана имеются
следующие возможности использования портов:
1) блокирование всех портов;
2) использование портов 2 и 4 в качестве выходных для сброса газа или жидкости;
3) использование портов 2 и 4 в качестве входных для подключения к магистра!
ли высокого давления.
Рис. 2 .73 . Трехходовой клапан с одним цилиндром:
а) при подаче питания;
б) при отключении питания
äãÄèÄçõ
127
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Внимательно рассмотрите рисунок, чтобы разобраться, когда работает каждый
соленоид или привод. Центральное положение шпулек достигается, когда питание по!
дано на оба соленоида. Катушки соленоидов выпускаются на напряжение 12 и 28 В
постоянного тока и 120 и 240 В переменного тока. Рабочее давление находится обыч!
но в диапазоне от 25 psi до 150 psi , при минимальном давлении возвратной пружины
45 psi . Некоторые шпулечные клапаны, показанные на рис. 2.72а, смонтированы на
трубопроводах. Трубопроводы позволяют монтировать несколько клапанов рядом, ис!
пользуя общие пути для питания и сброса воздуха или жидкости.
2.12. çÄÉêÖÇÄíÖãà à ëàÉçÄãúçõÖ ãÄåèõ
И наконец, рассмотрим последние два типа выходных устройств: сигнальные лампы и
нагреватели. Нагреватели используются в производственных системах, чтобы повы!
шать температуру жидкостей, газов и твердых тел для проведения технологического
процесса. Одни нагреватели являются резистивными элементами, другие используют
для нагрева горючий газ. Резистивные элементы часто управляются контактами реле
управления, при больших мощностях для управления используются контакторы. На!
пряжение резистивных нагревателей обычно находится в диапазоне от 120 до 440 В, и
для питания некоторых нагревателей используются трехфазные сети. Условное обо!
значение нагревателя показано на рис. 2.75б.
Светосигнальные источники — источники света с высокой степенью защиты
корпуса от воздействия жестких производственных условий, используются в панелях
управления и лицевых панелях технологических установок, чтобы обеспечивать ин!
формацию о событиях и условиях работы системы. Разнообразие моделей ламп дикту!
Рис. 2 .74. Четырехходовой клапан с двумя соленоидами на три пол ожения
128
ется разнообразием изделий, в которых они используются. Сигнальные источники
света двух типов и условные обозначения для каждого из них показаны на рис. 2.75. В
обеих моделях предусмотрена возможность проверки их работы. Верхняя модель име!
ет кнопку проверки, которая включается при нажатии на поверхность светофильтра.
Вторая модель имеет сзади выводы для тестирования, которые могут быть подключе!
ны к схеме проверки, чтобы подать тестирующее напряжение на лампу. Лампы выпус!
каются на напряжения 6,3 В и 120 В переменного тока или 28 В постоянного тока.
Цвет светофильтра обозначен на схеме своей начальной буквой внутри условного обо!
значения (например, красный цвет — red — обозначен буквой R). Выпускаются лам!
пы с прозрачными, красными, зелеными, янтарными и желтыми светофильтрами.
Рис. 2.75. Нагреватели и сигнальные лампы:
а) внешний вид сигнальных ламп,
б) условные обозначения
2.13. ëïÖåõ ìèêÄÇãÖçàü
Схема управления представляет собой вид символического языка, описывающего рабо!
ту электрических и электронных схем промышленного управления. Как и при освоении
любого другого языка, вы должны научиться читать и понимать значение символов, что!
бы разбираться в содержании представленной на схеме информации. Существуют раз!
личные термины для описания схем управления: лестничная логика, лестничные схемы,
релейная лестничная логика, схемы управления двигателями, двухпроводные и трех!
проводные схемы управления. Каждому термину соответствует тип представленной на
рисунке системы. Например, системы, которые включают только реле, называются ре!
лейными логическими лестничными схемами. Когда же схемы описывают управление,
обеспечивамое программируемым логическим контроллером (см. главу 12), они назы!
ваются лестничной логикой или просто лестничными схемами. В этом разделе мы дадим
общее понятие о схемах управления и более подробно остановимся на релейных логи!
ческих лестничных схемах управления. О других схемах управления мы еще будем гово!
рить в следующих главах учебника.
ëïÖåõ ìèêÄÇãÖçàü
129
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
2.13.1 . ǂ‰ÂÌË ‚ ÎÂÒÚÌË̃Ì̊ ÒıÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Лестничная логическая схема управления, реализующая операции управления пуска
и останова контактора двигателя, приведена на рис. 2 .67. Схема расположена гори!
зонтально между двумя вертикальными проводами; когда используется несколько та!
ких схем, общая конфигурация напоминает лестницу. Каждая из горизонтальных вет!
вей схемы будет ступенькой этой лестницы. Термин логическая в названии схемы
свидетельствует, что схема описывает алгоритм управления процессом. Алгоритм ис!
пользует комбинации дискретных переключателей и контактов реле, образующие ло!
гические схемы И и ИЛИ, чтобы создать последовательность действий, необходимую
для производства продукции. Термин релейные означает, что для реализации алгорит!
ма управления используются электромеханические реле.
Двух, и трехпроводные схемы управления. Схемы управления часто называют!
ся двухпроводными или трехпроводными — по количеству проводов между контакто!
ром и схемой его управления. Как можно перестроить рис. 2.67, если не использовать
лестничную схему, показано на рис. 2 .76. Убедитесь, что на обоих рисунках изображе!
на одна и та же схема. В этой схеме используются три компонента для пуска и останова
двигателя: контактор, кнопка ПУСК и кнопка СТОП. На рис. 2.76 три провода соеди!
няют кнопки с контактором.
Поэтому ступенька логической лестничной схемы (см. рис. 2 .67) названа трехпро!
водной схемой. Если для старта и пуска двигателя используется переключатель с фикса!
цией положения, то необходимы лишь два провода для управления контактором, и такая
схема называется двухпроводной. Термины двухпроводные и трехпроводные схемы уп!
равления часто используются в литературе по промышленному управлению.
Рис. 2 .76. Трехпроводная схема управления
130
2.13.2 . îÛÌ͈ËË ÂÎÂÈÌ̊ı ÎÂÒÚÌË̃Ì̊ı ÒıÂÏ ÛÔ‡‚ÎÂÌËfl
В релейных логических лестничных схемах на каждой ступеньке входы расположены
слева, а выходы — справа. Входные контакты могут выполнять четыре стандартные
логические функции: И, ИЛИ, И/ИЛИ и ИЛИ/И. В релейных логических лестнич!
ных схемах принято отображать контакты в их нормальном состоянии: нормально зам!
кнутом (НЗ) или нормально разомкнутом (НР). Если включается катушка, то состоя!
ние изменяется на противоположное. Если входное логическое условие для ступеньки
истинно, то и выход становится активным, или истинным. Реализация четырех логи!
ческих функций, описанных далее, иллюстрируется рис. 2.77.
Рис. 2.77 . Схемы для реализации логических функций:
а) реализация функции И;
б) реализация функции ИЛИ
Функция И. Три контакта селекторного переключателя на рис. 2.77a рассматри!
ваются как вход (левая сторона ступеньки), а сигнальная лампа — как выход (правая
сторона ступеньки). Последовательное соединение реализует функцию И. Состояние
выхода истинно, если имеет место логическое уравнение:
S1ИS2ИНЕS3.
Это означает, что индикаторная лампа включена, если S1 активен, или истинен,
S2 активен, или истинен, и S3 не активен, или не истинен. Таким образом, S1 и S2
ëïÖåõ ìèêÄÇãÖçàü
131
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Мы используем здесь термины истинный и активный (для условия включения)
или не истинный и не активный (для условия выключения), потому что именно та!
кая терминология употребляется в логических программируемых контроллерах.
Функция ИЛИ. Переключатели давления (P1) и потока (FL1) на рис. 2.77б фор!
мируют вход, а соленоид — выход. Оба переключателя имеют НР!контакты, когда
они не активированы. Параллельное подключение реализует функцию ИЛИ. Вход ис!
тинен, когда P1 ИЛИ FL1 активны. Выход истинен (соленоид включен), когда вход
истинен. Таким образом, если переключатель давления ИЛИ переключатель потока
активен, то соленоид включается. Соленоид отключается только тогда, когда оба вхо!
да не активны.
должны быть включены, а S3 выключен. Когда переключатели S1 и S2 активны, ис!
тинны, или включены, тогда НР!контакты замыкаются, и когда S3 не активен, не ис!
тинен, или не включен, его НЗ!контакты остаются замкнутыми. Таким образом, лампа
включена через три замкнутых последовательных контакта. Эти замкнутые контакты
делают входное состояние истинным. Если вход логической схемы истинен, то и выход
истинен, или активен. Если S3 становится активным или если либо S1, либо S2 не
активны, то цепь размыкается и лампа выключается. Рисунок поможет вам понять
работу схемы И.
èËÏ 2.12
Нарисуйте ступеньку лестничной схемы, позволяющую включить сигнальную лампу,
когда три селекторных переключателя имеют следующие условия: переключатель А
выключен, переключатель B включен и переключатель C выключен. Все переключа!
тели — однополюсные с двойным размыканием.
êÖòÖçàÖ
На входе необходимо реализовать функцию И с помощью трех переключателей. Все
переключатели имеют НР! и НЗ!контакты, поскольку выполнены с двойным размыка!
нием. Выход активен, когда S1 и S3 выключены, поэтому в них необходимо использо!
вать НЗ!контакты. Переключатель S2 должен быть выключен при активном выходе,
поэтому в нем используется НР!контакт. Замыкание цепи входной логики достигается
только тогда, когда S1 и S3 выключены (не истинны), а S2 включен (истинен). В ре!
зультате получается логическая лестничная схема, показанная на рисунке внизу.
132
èËÏ 2.13
Нарисуйте ступеньку лестничной схемы, позволяющую включить соленоид клапана,
когда поплавковый переключатель (L1) не активен, а переключатель потока (FL1)
активен, или когда селекторный переключатель (S1) активен. Все контакты — одно!
полюсные с двойным размыканием.
êÖòÖçàÖ
На входе необходимо реализовать функцию ИЛИ, использовав три набора контак!
тов. Все устройства имеют НЗ! и НР!контакты, потому что все они выполнены с
двойным размыканием. Нормальное условие для контактов, когда поплавковый пе!
реключатель не поднят, поток отсутствует, а селекторный переключатель выключен.
Выход должен быть активен (включен), когда поплавок не поднят, или присутствует
поток, или включен селекторный переключатель. Возникающая в итоге логическая
лестничная схема показана на рисунке внизу. Обратите внимание, что на поплавко!
вом переключателе должен использоваться НЗ!контакт, потому что клапан должен
быть включен, когда поплавок не поднят.
Функции И/ИЛИ и ИЛИ/И. Две предыдущие логические функции могут быть
объединены как функция И с функциями ИЛИ внутри или как функция ИЛИ с функ!
циями И внутри. Следующие примеры иллюстрируют, как эти комбинации реализу!
ются в логических лестничных схемах.
èËÏ 2.14
Определите, какой должна быть ступенька логической лестничной схемы, которая
включает контактор и сигнальную лампу, когда выполняются следующие условия для
концевых переключателей: LS1 или LS2 истинен и LS3 или LS4 не истинен. Помни!
те, что термины истинный или активный означают, что переключатель активиро!
ван, не истинный или не активный означают, что он находится в нормальном поло!
жении. Все переключатели — двухполюсные с двойным размыканием.
ëïÖåõ ìèêÄÇãÖçàü
133
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
êÖòÖçàÖ
Четыре переключателя формируют вход для ступеньки, а пускатель двигателя и лам!
па — выход. Все переключатели имеют НЗ! и НР!контакты, потому что они выпол!
нены с двойным размыканием. Входная логика для активного вывода — (LS1 ИЛИ
LS2) И (НЕ LS3 ИЛИ НЕ LS4). Вывод является двумя функциями ИЛИ, объединен!
ными функцией И. Любой переключатель — LS1 или LS2 — должен быть активиро!
ван или включен, чтобы сделать истинным состояние выходов, так что в ступеньке
лестничной схемы используются их НР!контакты. Поскольку переключатель LS3
или LS4 должен быть в нормальном условии или не включен, чтобы сделать состоя!
ние выходов истинным, в ступеньке лестничной схемы используются их НР!контак!
ты. Два параллельных выхода активны, когда вход ступеньки истинен. Отметим, что
несколько выходов на одной ступеньке всегда должны быть параллельны. Возникаю!
щая в итоге логика многозвенной схемы показана на рисунке внизу.
èËÏ 2.15
Определите, какой должна быть ступенька логической лестничной схемы, которая
включает реле управления, когда следующие состояния концевых выключателей яв!
ляются истинными: LS1 и LS2 активны или LS3 и LS4 активны. Вторая ступенька
использует контакты реле управления, чтобы сделать сигнальную лампу активной,
когда активно реле управления. Все переключатели и реле — двухполюсные с двой!
ным размыканием.
êÖòÖçàÖ
Входная логика для активизации выхода — (LS1 И LS2) ИЛИ (LS3 И LS4), пред!
ставляет собой две функции И, объединенные функцией ИЛИ. Переключатели LS1
И LS2 ИЛИ LS3 И LS4 должны быть истиннными, или активированными, чтобы сде!
лать истинным выход, поэтому в ступеньке используются НР!контакты. Одиночное
134
реле управления является выходом на ступеньке 1, а лампа — выходом на ступеньке
3. Вход на ступеньке 3 — НР!контакт реле управления. Следовательно, когда катуш!
ка реле истинна (активирована), контакт в ступеньке 3 истинен (НР!контакт замыка!
ется), делая истинным вход и выход ступеньки 3, и лампа загорается. Возникающая в
результате логическая схема показана на рисунке внизу.
Обратите внимание, что схема на рисунке из примера 2.15 имеет стандартную
маркировку, используемую в промышленности. Манжеты помечены L1 и L2, указы!
вая на линии источника питания. Слева от каждой ступеньки проставлен номер ее
уровня, пронумерован и каждый сегмент ступеньки. Номера сегмента является и но!
мером вывода для смежных устройств и контактов. Сегменты проводов, которые свя!
зывают компоненты между собой, маркируются слева направо, начиная с номера 1
при первом сегменте в левой верхней части. Однотипные компоненты, например кон!
цевые переключатели, нумеруются по порядку слева. Номер справа от ступеньки, на!
пример номер (3) на рисунке, указывает ступеньку с катушкой реле управления, кон!
такт которой используется. Если этот НЗ!контакт, то номер будет подчеркнут.
2.13.3. êÂÍÓÏẨ‡ˆËË ÔÓ ‡Á‡·ÓÚÍ ÎÓ„Ë̃ÂÒÍÓÈ ÎÂÒÚÌË̃ÌÓÈ ÒıÂÏ̊
Проектирование релейных логических лестничных схем можно проводить в соответ!
ствии с определенным набором процедур, гарантирующим правильную работу. Этот
раздел включает правила и соглашения, которые используются при разработке ре!
лейных логических лестничных схем. Процедура позволяет преобразовать условия за!
дачи в релейную логическую лестничную схему.
Правила и соглашения при проектировании релейных логических лестничных
схем. Это следующие правила и соглашения (при их изучении обратитесь к решению
примера 2.15):
1. Вертикальные линии или шины представляют собой проводники, подключенные
к выходу источника питания постоянного или переменного тока. Левая шина
обычно маркируется L1 и указывает фазовый вывод для переменного тока и по!
ложительный полюс для источников постоянного тока. Правая шина обычно мар!
кируется L2 и указывает нейтраль для переменного тока и отрицательный полюс
для постоянного тока. Если схема управления включена на выход понижающего
трансформатора, то шины маркируются как X1 и X2.
2. Горизонтальные строки или ступеньки нумеруются сверху вниз, начиная со сту!
пеньки 1.
3. Сегменты проводов, которые подключают компоненты друг к другу, также прону!
мерованы слева направо, начиная с номера 1 в левом верхнем углу. Общие провода
имеют те же самые номера, даже если они взаимосвязаны с другой ступенькой.
4. Обычно однотипные компоненты пронумерованы слева направо и сверху вниз,
начиная с номера 1.
5. Входы расположены всегда в левой части ступеньки, выходы или приводы — в
правой. Таким образом, лестничная схема читается подобно книге, слева направо
и сверху вниз.
ëïÖåõ ìèêÄÇãÖçàü
135
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
6. Когда на ступеньке имеется несколько выходных устройств, они включаются па!
раллельно.
7. Контакты будут всегда иметь тот же символ и номер, что и управляющее ими уст!
ройство. К управляющим устройствам относятся катушки реле, таймеры и пуска!
тели двигателей. Номера ссылок помещаются справа от правой шины. Номер
указывает ступеньку, на которой используются НР!контакты реле. Если же ис!
пользуются НЗ!контакты, то номер подчеркивается.
8. Все устройства и компоненты показываются в их нормальном, то есть выключен!
ном, или неактивном, состоянии. Исключением из этого правила являются уп!
равляемые процессом переключатели, которые удерживаются в начале процесса
в разомкнутом или замкнутом состоянии. В этом случае НР! и НЗ!символы ис!
пользуются на ступеньке лестничной схемы.
9. НР!контакты замыкаются и станут истинными, когда устройство, которое ими
управляет, включено, то есть активно, или истинно. НЗ!контакты открываются и
становятся истиной, когда устройство, которое ими управляет, включено, то есть
активно, или истинно.
10. Если вход ступеньки истинен, то ступенька истинна. Если ступенька истинна, то
выводное устройство является истинным, активным, или включенным. Чтобы
входные контакты или входная логика были истинны, левая шина должна быть
замкнута на выходное устройство.
Процедуры проектирования лестничной схемы. Следующие процедуры могут
использоваться, чтобы разработать релейную логическую лестничную схему. Одной
из трудностей при разработке таких схем является то, что любая задача может быть
решена множеством способов, каждый из которых будет работоспособен. Поэтому
любую процедуру можно рассматривать только как руководство, которое оставляет
разработчику много вариантов для реализации. Выбранный вариант продиктован
предпочтениями компании и опытом разработчика.
1. Записать более подробное, насколько это возможно, описание задачи и последо!
вательность управления процессом. Релейные логические лестничные схемы
лучше всего подходят для процессов, в которых необходимо управлять последо!
вательными событиями. Сравните следующее описание задачи с иллюстрацией
процесса на рис. 2.78, пока последовательность операций не станет вам ясна.
Пример описания задачи. Резервуар смесителя, подобный показанному на рис.
2.78, используется, чтобы нагреть жидкость. Обратите внимание на расположе!
ние всех устройств. Кнопка ПУСК предназначена, чтобы инициализировать
процессы, а кнопка СТОП — чтобы выключить насос. К входному каналу под!
ключен насос, накачивающий жидкость в резервуар. Когда поплавковый пере!
ключатель низкого уровня L1 активен, или истинен (жидкость выше заданного
уровня), и переключатель температуры не активен, или не истинен (температу!
ра — ниже уставки), контактор для нагревателя истинен, или включен, и жид!
кость в резервуаре нагревается. Когда поплавковый переключатель высокого
уровня L2 активен, или истинен (жидкость выше уровня уставки), насос прекра!
щает заполнение резервуара. Нагревание продолжается до момента, когда пе!
реключатель температуры становится активным (температура выше уставки).
136
При этом нагреватель выключается и выпускной клапан открывается, чтобы
доставить нагретую жидкость к месту технологического процесса.
2. Сделать список всех устройств выхода и всех ручных входных переключателей и
контактов переключателей, управляемых процессом.
Пример перечня выходных и входных устройств. Процесс имеет три вы!
ходных устройства: контактор насоса, нагреватель и соленоид выпускного
клапана. Процесс имеет пять входных контактов: НЗ!контакт кнопки СТОП
PB1, НР!контакт кнопки ПУСК PB2, контакт переключателя низкого уров!
ня жидкости L1, переключателя высокого уровня L2 и переключателя тем!
пературы TS1. Все переключатели — двухполюсные с двойным размыкани!
ем, имеют НЗ! и НР!контакты.
Рис. 2.78. Нагрев жидкости в резервуаре
3. Использовать описание процесса, чтобы записать логические уравнения для
каждого выходного устройства, отобразив входные условия, которые делают дан!
ное устройство активным.
Пример вывода л огических уравнений. Рассмотрим логические уравнения
для трех выходов:
Контактор двигателя насоса = НЕ PB1 И PB2 И НЕ L2.
Контактор двигателя насоса истинен, или включен (насос работает), когда
переключатель кнопка ПУСК была нажата (НР!контакт замкнулся) и за!
шунтирована дополнительным контактом контактора, кнопка СТОП не ак!
тивна (НЗ!контакт замкнут) и поплавковый переключатель высокого уровня
L2 не активен (жидкость — ниже заданного уровня, НЗ!контакт переключа!
теля замкнут).
Контактор нагревателя = L1 И НЕ TS1.
ëïÖåõ ìèêÄÇãÖçàü
137
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
Контактор нагревателя истинен, или включен (жидкость нагревается), когда
поплавковый переключатель низкого уровня L1 активен (жидкость — выше
заданного уровня, так что НР!контакт удерживается замкнутым) и переклю!
чатель температуры TS1 не активен (температура жидкости ниже темпера!
туры уставки, НЗ!контакт переключателя замкнут).
Соленоид выпускного клапана = L1 И TS1.
Соленоид выпускного клапана истинен (клапан открыт), когда поплавковый
переключатель низкого уровня L1 активен (жидкость — выше заданного
уровня, так что НР!контакт удерживается замкнутым) и переключатель тем!
пературы TS1 также активен (температура жидкости выше температуры ус!
тавки, НР!контакт переключателя замкнут).
4. Нарисовать релейную логическую лестничную схему, создав трехпроводные схемы
для каждой ступеньки, реализующей составленные логические уравнения. Такие сту!
пеньки обычно нумеруются в порядке следования операций технологического про!
цесса. Проверить, что используемая логика совпадает с описанием работы. Разме!
тить лестничную схему.
Пример создания релейной л огической лестничной схемы. Логика мно!
гозвенной схемы на рис. 2.79 обеспечивает управление, требуемое для опи!
санной работы. Изучите представленное решение задачи.
Обратите внимание, что насос не перезапускается, так как уровень жидко!
сти начинает опускаться, потому что контакт M1 размыкается, когда насос
выключается переключателем высокого уровня. Однако имеется одна по!
тенциальная проблема с нагревателем. Нагреватель отключается, когда НЗ!
контакт TS1 размыкается при достижении температурой заданной уставки.
Кроме того, открыт выпускной клапан, поскольку НЗ!контакт TS1 удержи!
вается разомкнутым из!за высокой температуры. Когда жидкость вытекает,
температура снижается, контакт TS1 замыкается, что включает нагреватель
и закрывает клапан. Этот цикл будет происходить, пока переключатель низ!
кого уровня L1 не разомкнется, резервуар не опустеет и температура жидко!
сти, оставляющей резервуар, не снизится. Циклическая работа может быть
устранена, если схема управления будет дополнена реле, катушка и контак!
ты которого показаны на рис. 2.79 пунктиром. Изучите эту модификацию,
чтобы понять, как реле управления изменяет работу.
5. Нарисуйте схему электрических соединений, используемую рабочими, чтобы мон!
тировать панель реле. Логика лестничной схемы полезна для понимания работы
системы и алгоритма управления, но ее трудно использовать при монтаже панели.
Пример схемы электрических соединений для лестничной схемы. Для со!
здания схемы соединений необходимо собрать все компоненты одного прибора
вместе. Например, лестничная схема может иметь реле управления с тремя
наборами контактов с двойным размыканием, которые используются во мно!
гих ступеньках. Схема электрических соединений должна показать их вместе с
катушкой, чтобы облегчить монтаж. Вся маркировка и номера проводов, раз!
работанные для лестничной схемы, должны быть перенесены на схему элект!
138
рических соединений. Если на устройство нанесены постоянные номера выво!
дов, отличные от схемных, то они также должны быть отмечены, но номер про!
вода должен соответствовать лестничной схеме. Монтажная схема для двух
для ступенек 1 и 2 показана на рис. 2 .80 .
Рис. 2.79. Релейная лестничная схема для нагрева жидкости в резервуаре
ëïÖåõ ìèêÄÇãÖçàü
139
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
2.14 . èéàëä çÖàëèêÄÇçéëíÖâ
Çé ÇïéÑçõï à ÇõïéÑçõï ìëíêéâëíÇÄï
Каждая минута простоя промышленной системы из!за неисправностей приносит ком!
пании убытки, поэтому хороший наладчик ценится на вес золота. Самый лучший спо!
соб сделать удачную карьеру состоит в том, чтобы показать, что вы можете решать
задачи по поиску и устранению неисправностей в машинах и системах. Мы рассказали
о процессе поиска неисправностей в главе 1. Первая заповедь наладчика заключается
в том, что необходимо иметь план на игру, потому что произвольные и несвязанные
действия редко обеспечивают успешное решение проблем. Вообще, при поиске неис!
правности работа происходит в основном не на машине, основная работа идет в вашей
Рис. 2 .80. Схема
электрических
соединений
140
голове. Это подразумевает ряд шагов. Есть большой соблазн быстро прийти к заклю!
чению о причине неисправности, и иногда оно может быть правильным. Однако мето!
дичный поиск хотя занимает больше времени, но чаще ведет к верному решению. Кро!
ме того, следуя определенному плану, вы приобретаете гораздо больше опыта, а
вместе с этим развивается и ваша интуиция, и способность делать верные предполо!
жения. Обычно планомерная работа состоит из следующих этапов:
1. Проведение внешнего осмотра. Осмотрите всю систему и обратите внимание на
все признаки. Если вы не можете наблюдать лично, опросите нескольких чело!
век, в чем они видят признаки неисправности.
Определите, связана ли неисправность с работой машины или системы или ее
создали пользователи аппаратных средств.
2. Проведите анализ интерфейсов. Неисправности часто возникают в местах сты!
ковки механических и электрических систем. В кабелях и разъемах входов, выхо!
дов, устройств управления и питания часто случаются неисправности. Проверьте
интерфейсы, которые могут вызвать зарегистрированные признаки.
3. Начните движение в системе по пути электрического сигнала или сигнала инфор!
мации. Используйте описанные ранее методы (заключение в скобки, анализ пути
сигнала и метод воронки информации), чтобы сузить область поиска ошибки, огра!
ничив его определенной частью схемы, цепью или компонентом, основываясь на
выходных сигналах системы, показаниях испытательного оборудования и хорошем
понимании работы техники (задействуйте также здравый смысл и интуицию).
4. Определите наиболее вероятный неисправный компонент. Если вы считаете, что
правильно определили неисправный компонент или интерфейс, то его замена по!
зволит проверить ваше подозрение и ускорить процесс поиска.
5. Определите причину сбоя. Нахождение неисправности — только половина зада!
чи для хорошего наладчика. Определение причины сбоя — ее вторая часть. Это
может быть просто старение, но важно узнать, не привели ли какие!либо дей!
ствия пользователя или что!то в работе системы к уменьшению срока службы
устройства.
6. В течение некоторого времени проверяйте работоспособность системы. Она дол!
жна быть испытана в нормальном режиме работы, чтобы убедиться, что причина
установлена верно. Длительность испытания зависит от характера устраненной
неисправности.
2.14 .1 . èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ‚ ÔÂÂÍĮ̂̃‡ÚÂÎflı
Подход к поиску неисправностей для всех переключателей, описанных в этой главе, явля!
ется общим. Неисправности переключателей могут быть разделены на две категории: не!
исправности привода и контактов. Приводами называются механические элементы, кото!
рые переводят контакты из нормального положения в противоположное. Часто привод
совершает необходимое движение, но контакты по какой!либо причине не могут двигать!
ся. Когда происходит сбой привода, контакты могут оставаться в нормальном или в проти!
воположном положении. Неисправности привода обычно воздействуют на все контакты в
èéàëä çÖàëèêÄÇçéëíÖâ Çé ÇïéÑçõï à ÇõïéÑçõï ìëíêéâëíÇÄï
141
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
многополюсной конфигурации с несколькими положениями. Неисправности контактов в
переключателях могут заключаться в том, что контакты остаются всегда разомкнутыми,
всегда замкнутыми или возникает чрезмерно большое сопротивление замкнутых контак!
тов. Если через контакт протекает слишком большой ток или происходит искрение, кон!
такты могут привариться друг к другу и не размыкаться. При тех же условиях переключе!
ния контакты могут подгорать и увеличивать свое сопротивление в замкнутом состоянии.
При подозрении, что причина неисправности системы в переключателе, можно использо!
вать следующие соображения и методы поиска поломки:
если контакт разомкнут, то напряжение на нем будет равно переключаемому
значению;
если контакт замкнут, то напряжение на нем близко к нулю. Большее значе!
ние указывает на увеличение сопротивления контакта;
если имеется подозрение, что сопротивление контакта слишком велико, то
необходимо отсоединить один из проводов переключателя и измерить сопро!
тивление омметром;
если контакт переключателя не замыкается, то подключение пробника па!
раллельно контактам позволит убедиться, что неисправность установлена
правильно;
если переключатель не размыкается, проверить это можно, отсоединив от
контакта один провод.
2.14 .2 . èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ‚ ÂÎÂ
Кроме двух вышеописанных категорий неисправностей, в реле существует еще и тре!
тья категория — помехи на катушке реле, создаваемые источниками промышленной
частоты. Приводом для реле служит электромагнитная катушка или соленоид плюс
механическое сцепление контактов с полюсами. Все проблемы и методы поиска неис!
правностей, рассмотренные для приводов и контактов переключателя, относятся так!
же и к реле. Поскольку контакты реле приводятся в действие с помощью соленоида
или электромагнита, отклонение токов катушки от рабочего диапазона может вызы!
вать некоторые неисправности. Если ток ниже установленного минимального значе!
ния, называемого током притягивания, то он не сможет обеспечить правильного пере!
мещения ярма и изменить состояние контактов. После перемещения ярма требуется
меньшее значение магнитного потока и тока в катушке для его удержания. В результа!
те значение тока катушки значительно ниже тока притягивания. При дальнейшем по!
нижении тока якорь вернется в нормальное состояние. Этот уровень тока называется
током отпускания. Если токи катушки выходят за рабочий диапазон, то якорь не может
полностью перемещаться, что приводит к увеличению сопротивления контактов и пе!
регреванию катушек. Когда якорь неполностью притянут, катушки реле переменного
тока могут перегреваться из более низкого значения реактивного сопротивления ка!
тушки, приводящего к длительному повышению тока через нее. Если же ток катушки
выше тока отпускания, то якорь не может вернуться в исходное состояние. Устрой!
ства, использующие соленоиды переменного тока, имеют одну или несколько одно!
142
витковых катушек, названных защитными кольцами и встроенных перед якорем. Без
этих катушек ярмо имеет тенденцию слегка отходить от магнитопровода при переходе
питающего тока и затем снова притягиваться. Это приводит к появлению дребезга с
частотой промышленной сети. Защитное кольцо, которое уменьшает этот шум, созда!
ет дополнительное магнитное поле, сдвинутое по фазе относительно основного поля.
Оно удерживает якорь в моменты перехода основного поля через нуль. Через какое!то
время защитные кольца могут расколоться из!за постоянного механического воздей!
ствия ярма. Когда это случается, соленоид начинает сильно шуметь, ток катушки уве!
личивается, и это может привести к ее преждевременному выходу из строя.
2.14 .3. èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ‚ ÂÎÂÈÌ̊ı ÎÓ„Ë̃ÂÒÍËı ÎÂÒÚÌË̃Ì̊ı ÒıÂχı
Инженеры и техники, работающие на автоматизированном производстве, рано или
поздно сталкиваются с неисправностями в релейных логических лестничных схемах,
программируемых контроллерах с лестничной логикой или в комбинации обоих сис!
тем. Нередко схемы лестничной программируемой логики имеют 4000 или даже 10000
ступенек логики. Поиск неисправности в столь объемных программах представляет
собой нетривиальную задачу. Кроме того, каждый привод и каждый контакт является
потенциальным источником неисправности. Например, трехполюсное реле с двойным
размыканием контактов имеет семь компонентов (катушка плюс шесть контактов),
каждый из которых может быть причиной неисправности. В таких сложных системах
план поиска неисправностей становится абсолютно необходим. Кроме того, необходи!
мо предпринять шесть шагов, перечисленных в начале раздела 2.14, и применить ме!
тоды, описанные в главе 1. Рассмотрим некоторые примеры.
èËÏ 2.16
Необходимо найти неисправность в схеме управления на рис. 2.79. Нарисуйте блок!
схему для прохождения сигнала в системе.
êÖòÖçàÖ
Каждый компонент может быть источником неисправности, так что схема должна
разбить систему на такие компоненты. Операторы и контакты должны быть объеди!
нены, потому что вы попытаетесь найти дефектное устройство; однако все катушки и
контакты должны быть показаны отдельно (см. следующий рисунок).
Сопоставьте блок!схему прохождения сигнала с лестничной логической схемой,
чтобы лучше понимать, как отображается работа в каждой из них.
èËÏ 2.17
Для каждого из следующих признаков определите, где следует поставить левые и
правые скобки, чтобы сузить область поиска. Не принимайте во внимание возмож!
ность множественных сбоев:
а) трехфазное питание присутствует, но ни один из выходов схемы управления не
активизируется;
èéàëä çÖàëèêÄÇçéëíÖâ Çé ÇïéÑçõï à ÇõïéÑçõï ìëíêéâëíÇÄï
143
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
144
б) насос не включается при нажатии на кнопку ПУСК, и она не шунтируется допол!
нительным контактом;
в) насос выключается, когда резервуар полон, но выпускной клапан никогда не от!
крывается.
êÖòÖçàÖ
А. Левая скобка располагается с левой стороны трансформатора, а правая —
справа от плавкого предохранителя. Эти два компонента ответственны за подачу
питания на схему управления, поэтому они и выделены скобками.
Схема прохождения сигнала для лестничной системы управления нагревом жид!
кости в резервуаре (пример 2.16)
Б. Левая скобка располагается справа от кнопки ПУСК, правая — справа от ка!
тушки контактора. Имеются два признака неисправной работы: (1) кнопка
ПУСК не шунтируется вспомогательным контактом и (2) не включается насос.
Причина может быть в плохих контактах или плохом контакторе. Если насос
начнет работать, а самоудержания не будет, это значит, что питание на контак!
тор подается, а неисправен дополнительный контакт. Поскольку насос не рабо!
тает, неисправность находится в трех блоках, связанных с контактором.
В. Левая скобка располагается слева от переключателя низкого уровня, а пра!
вая — справа от нагревателя и выпускного клапана. Поскольку резервуар на!
полнился и насос выключился, вы знаете, что первая линия потока работает
правильно. Следовательно, за неисправность отвечает сбой нагревателя или
клапана и скобки размещены правильно. Выясним теперь, нагревается ли ре!
зервуар. Если ответ положителен, то скобки перемещаются на последнюю ли!
нию протекания сигнал, если же отрицателен — то на среднюю.
Дополнительное испытание позволило бы сближать скобки в каждой из трех за!
дач примера 2.17 до определения дефектного компонента. Получение дополнительных
данных в большом процессе часто затруднено. Многие из компонентов, участвующих
в процессе, находятся в резервуаре, другие — на пульте управления или на рабочем
месте оператора. Если необходимы дополнительные тесты, постарайтесь сначала вы!
полнить самые простые из них. Применение блок!схемы сигнала для очень большой
системы непрактично. Однако для некоторых ступенек, которые наиболее подозри!
тельны с точки зрения возникшей неисправности, можно было бы составлять график
потока сигнала, чтобы понять, какие элементы схемы могут привести к полученным
признакам неисправности.
2.15. ÇÖÅ-ëÄâíõ èêéàáÇéÑàíÖãÖâ
ÇïéÑçõï à ÇõïéÑçõï ìëíêéâëíÇ
Адреса веб!ресурсов поставщиков входных и выходных устройств, рассмотрен!
ных в этой главе, перечислены ниже. Поставщики часто изменяют адреса сайтов, по!
ÇÖÅ-ëÄâíõ èêéàáÇéÑàíÖãÖâ ÇïéÑçõï à ÇõïéÑçõï ìëíêéâëíÇ
145
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
этому, если какая!то из следующих ссылок не будет работать, используйте механизм
поиска, чтобы найти интересующий вас материал.
Cherry Electrical Products (переключатели мгновенного действия и дисковые
переключатели)
http://www.cherrycorp.com
Honeywell (Honeywell — крупный поставщик таких компонентов автомати!
зации, как переключатели, датчики, клапаны и приводы клапанов, а также
многочисленные системы управления процессами)
http://content.honeywell.com/sensing/
NKK Switches (ручные переключатели, прежде всего для электронного уп!
равления, включая перекидные, вращательные, кулисные, скольжения и ко!
мандные кнопки)
http://www.nkkswitches.com
ASEEMTECH (ртутные переключатели)
http://www.assemtech.co.uk
Rockwell Automation (пилотные выключатели, управляемые процессом)
http://www.rockwellautomation.com
Omron Electronics LLC (пилотные переключатели)
http://www.omron .com
Square D (разъединители, выключатели, управляемые процессом, и кон!
такторы)
http://www.squared.com
NEMA
http://www.nema .org/
äêÄíäàâ éÅáéê ÉãÄÇõ 2
2.1 . ВВЕДЕНИЕ В ДИСКРЕТНОЕ УПРАВЛЕНИЕ
Термин дискретное управление подразумевает, что устройство может нахо!
диться в одном из двух состояний. В электронике эти два состояния переклю!
чателя обычно обозначаются как ВКЛ или ВЫКЛ.
2.2 . КЛАССИФИКАЦИЯ ПЕРЕКЛЮЧАТЕЛЕЙ ПО МЕХАНИЧЕСКИМ И ЭЛЕКТРИЧЕС
КИМ СВОЙСТВАМ
Переключатели классифицированы по следующим четырем признакам: при!
менение, метод приведения в действие, тип и конфигурация контактов.
Конфигурация зависит от количества полюсов и типа контактов: НР и НЗ, с
одинарным или двойным размыканием.
Некоторые дополнительные, часто используемые термины для переключате!
лей: для применения в электронных схемах, для промышленного управления,
пилотный режим работы, контакты с двойным размыканием, НЗ! и НР!кон!
146
такты, переключатели возвратные/с фиксацией положения, номинальные на!
пряжения/токи, срок службы переключателей, снижение нагрузки, группы
защиты от воздействий окружающей среды, быстродействие и частота.
2.3 . РУЧНЫЕ ПЕРЕКЛЮЧАТЕЛИ ДЛЯ ЭЛЕКТРОННЫХ СХЕМ
Переключатели разделены на две группы: для электронных схем и для про!
мышленного управления.
Переключатели, разработанные для использования в бытовых устройствах,
находятся в категории переключателей для электронных схем. Переключа!
тели, предназначенные для использования на технологических установках и
на панелях управления процессами, находятся в группе промышленного уп!
равления.
Ручные переключатели для электронных схем бывают перекидными, кулис!
ными, скользящими, вращательными, клавишными, двухрядными (DIP) и
командными кнопками.
2.4 . ПЕРЕКЛЮЧАТЕЛИ ЭЛЕКТРОННЫХ СХЕМ С МЕХАНИЧЕСКИМ ПЕРЕКЛЮЧЕ
НИЕМ
Переключатели электронных схем с механически приводом бывают позици!
онными и ртутными.
2.5 . МОЩНЫЕ РУЧНЫЕ ПЕРЕКЛЮЧАТЕЛИ ДЛЯ ПРОМЫШЛЕНОГО УПРАВЛЕНИЯ
К ручным переключателям для промышленного управления относятся разъе!
динители или защитные переключатели, пилотные переключатели (селектор!
ные переключатели и командные кнопки), барабанные, ножные и дисковые
переключатели.
2.6 . ПЕРЕКЛЮЧАТЕЛИ ДЛЯ ПРОМЫШЛЕНОГО УПРАВЛЕНИЯ С МЕХАНИЧЕСКИМ
ПРИВОДОМ
Наиболее часто применяемыми переключателями для промышленного управ!
ления с механическим приводом являются концевые переключатели, особен!
но со специально разрабатываемыми собачками, заменяющие позиционные
переключатели для электронных схем.
2.7 . ПЕРЕКЛЮЧАТЕЛИ, УПРАВЛЯЕМЫЕ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ
К приборам, управляемым процессом, относятся как дискретные, так и ана!
логовые приборы. Дискретные переключатели используют чаще всего пере!
ключение по потоку, уровню материала, давлению, вакууму и температуре.
2.8 . ДИСКРЕТНЫЕ ВЫХОДНЫЕ УСТРОЙСТВА — ПРИВОДЫ
Дискретные выходные устройства, или приводы, включают соленоидные ус!
тройства (реле, контакторы и клапаны), а также индикаторы и дисплеи.
Соленоиды преобразовывают электрическую энергию непосредственно в
линейное механическое движение, используя две конструктивные детали:
катушку, намотанную проводом, и магнитный короткозамыкающий поршень.
Режим работы бывает непрерывным или повторно!кратковременным.
Реле делятся на две категории: электромеханические и полупроводниковые.
Электромеханические реле используются, прежде всего, промышленностью
для управления автоматизированными технологическими установками; уп!
äêÄíäàâ éÅáéê ÉãÄÇõ 2
147
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
равляющие реле небольшой мощности используются в электронном обору!
довании и приборах.
Язычковые и ртутные реле предназначены для электронного режима работы
и имеют низкое сопротивление замкнутых контактов, которое необходимо
для переключения сигналов с малыми значениями токов.
Реле выполняют две основные функции: управления электрическим сигна!
лом при больших или малых токах и/или напряжениях и изоляции источни!
ков питания управляющих и силовых цепей.
Реле обычно имеют от одного до восьми полюсов. Контакты НЗ, НР или ком!
бинация контактов обоих типов. Как и для переключателей, нормальное со!
стояние контактов реле соответствует выключенной катушке, именно это
состояние отображается на корпусе при изготовлении.
Реле времени имеют фиксированную или устанавливаемую пользователем
задержку включения. Реле отсчитывает задержку от момента включения или
отключения катушки или от любого из этих событий.
Реле времени образуют ряды типов и размеров, но все они могут быть сгруп!
пированы в два класса: пневматические и электронные. Реле синхронизуют!
ся моментом включения или отключения и обеспечивают задержку или ряд
задержек относительно этих моментов. Вспомогательные контакты функци!
онируют независимо от процесса синхронизации, подобно контактам обыч!
ных реле управления.
Контакторы — реле, рассчитанные на коммутацию больших токов и напря!
жений. Они имеют обычно один или несколько контактов, названных допол!
нительными, для использования в схемах управления контактором. Контак!
торы снабжены также системой подавления дуги, чтобы устранить искрение
при размыкании.
Клапаны делятся на три группы: клапаны, управляющие процессом, клапа!
ны с пневматическим управлением и гидравлические клапаны с позициони!
рованием. Первая группа включает клапаны скользящие и вращательные,
которые, кроме того, подразделяются на клапаны дискретного и пропорцио!
нального типов.
Клапаны управления делятся по двум признакам: типу корпуса и механизму
привода. Существуют клапаны с двумя типами корпуса: скользящие и вра!
щательные. Скользящие клапаны могут быть шаровыми (globe) в двух! и
трехходовом исполнении или заслоночного/дроссельного типов. Вращатель!
ные клапаны могут быть шаровыми (ball) или типа баттерфляй. В качестве
привода используется обычно соленоид, двигатель или диафрагма, управля!
емая сжатым воздухом.
Приводами клапанов могут быть вручную перемещаемые рычаги и штурва!
лы или электрические и пневматические приводы. Обычно в приводах ис!
пользуется включение соленоидов, двигателей или подключение воздушного
давления, управляющего диафрагмами. Клапаны с приводом от соленоидов
работают только в дискретном режиме, но два других могут эксплуатиро!
ваться еще и пропорциональном режиме.
148
Пневматические клапаны управления бывают прямого действия или шпу!
лечными с управлением соленоидами типа бобины. Клапаны прямого дей!
ствия бывают двух конфигураций (двух! и трехходовые), а шпулечные могут
иметь еще и четырехходовую конфигурацию. Кроме того, шпулечные клапа!
ны делятся на двухпозиционные и трехпозиционные — по числу положений,
которые может занимать шпулька.
Нагреватели используются, чтобы поднять температуру технологического
процесса. Нагреватели являются резистивными или используют газовые го!
релки. Резистивные элементы управляются с помощью реле или контакто!
ров. Их рабочее напряжение — обычно 120—440 В, питание осуществляет!
ся от однофазной или трехфазной сети.
Светосигнальные устройства используют лампы в корпусах с высокой степе!
нью защиты от воздействия производственной среды. Они устанавливаются
на панелях управления и лицевых панелях технологических установок, чтобы
отображать события и условия работы в системе.
2.13. СХЕМЫ УПРАВЛЕНИЯ
Схема управления — это тип символического языка, который описывает
электрическую/электронную работу промышленных систем. Существуют
различные термины при описании схем управления: лестничная логика, лес!
тничные схемы, релейная лестничная логика, схемы управления двигателя!
ми, двухпроводные и трехпроводные схемы управления.
При проектировании релейных логических лестничных схем можно следо!
вать установленному набору процедур, чтобы гарантировать правильную ра!
боту системы.
Çéèêéëõ
1. Что подразумевается под термином дискретный?
2. Каково различие между переключателями для электронных схем и для устройств
промышленного управления?
3. Каковы четыре классификационных признака для переключателей?
4. Назовите все условия для описания конфигурации контактов переключателя.
5. Каково различие между пилотным и электронным режимами работы переключа!
телей и контактов реле?
6. Чем отличаются контакты переключателей с двойным размыканием, с коротким
путем прерывания и возвратных/с фиксацией положения?
7. Сопоставьте следующие переключатели для электронных схем: перекидные, ку!
лисные кнопка, скользящие и командные кнопки.
8. Опишите некоторые типичные области применения для поворотных переключа!
телей.
Когда важно применять контакты с малым временем прерывания?
Çéèêéëõ
149
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
9. Что такое позиционные переключатели и как они используются?
10. Почему в позиционных переключателях следует использовать мгновенное пере!
ключение?
11. Приведите некоторые преимущества использования ртутных переключателей.
12. Назовите три типа переключателей, обычно используемых для механического
промышленного управления.
13. Сравните разъединители с перекидными переключателями.
14. Расшифруйте обозначение SPDTDB. Когда применяется такой переключатель?
15. Каково условное обозначение для разъединителя типа 2П3Н?
16. Что означают термины защищенные и незащищенные командные кнопки?
17. Чем селекторные переключатели отличаются от стандартных перекидных пере!
ключателей для электронных схем?
18. Опишите процесс выбора моделей, показанных на рис. 2 .34, используемый, что!
бы сформировать пилотное управляющее устройство для данного приложения.
19. Опишите четыре различные части концевого переключателя.
20. В чем смысл условных обозначений переключателей для удерживаемых замкну!
тыми и удерживаемых разомкнутыми контактов?
21. Что такое собачка для концевых переключателей и как она используется?
22. Опишите ток втягивания и ток отпускания для реле.
23. Чем отличаются соленоиды и электромагниты? В чем они похожи?
24. Как работают пневматические реле времени и каковы два их основных режима?
25. Что такое мгновенный контакт на реле времени?
26. Какие характеристики принимаются во внимание, чтобы выбрать реле времени?
27. Сопоставьте контакторы и реле управления.
28. Для каких целей используются дополнительные контакты на контакторах?
29. Как работает устройство тепловой перегрузки на контакторе при защите двигате!
ля от перегрузки?
30. Опишите четыре типа корпусов тела клапанов, приведенных на рис. 2.68 .
31. Опишите три типа приводов клапана.
32. Каково различие между пневматическими клапанами прямого действия и шпу!
лечного типа?
33. Каково различие между цилиндрами одиночного и двойного действия?
34. Чем различаются двух!, трех! и четырехходовые пневматические клапаны?
35. Чем трехпозиционный шпулечный клапан отличается от двухпозиционного?
36. Как определить, исправна ли лампа в пилотном индикаторе?
37. В какой области применяются термины двухпроводная и трехпроводная схема уп!
равления?
38. Опишите конфигурации переключателя для логических схем И, ИЛИ, И/ИЛИ и
ИЛИ/И.
39. Опишите типичное применение каждого из следующих переключателей: потока,
уровня, давления, вакуума и температуры.
150
40. Опишите работу соленоида и обоснуйте необходимость пластинчатой конструк!
ции магнитопровода.
41. Опишите четыре способа, которыми соленоид или электромагнит может быть
связан с перемещаемыми контактами.
42. Каково различие между непрерывным и повторно!кратковременным режимами
работы реле?
43. Назовите три класса реле.
44. Каково различие между открытой и закрытой конструкциями реле?
45. Каково различие между реле управления и контакторами?
46. Каково различие между реле времени, устанавливаемому по включению, и реле
времени, устанавливаемому по выключению?
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
1. Разработчик собирается использовать концевой выключатель D4MC фирмы
Omron, чтобы управлять нагревателем для запечатывания пакетов, который ра!
ботает от напряжения 125 В переменного тока при мощности 625 Вт. Используй!
те данные на рис. 2 .9, чтобы определить, может ли переключатель работать при
такой нагрузке.
2. Повторите пример 2.3, воспользовавшись веб!сайтом другого изготовителя пе!
реключателей, чтобы выбрать концевой переключатель, который может исполь!
зоваться в схеме на рис. 2.6 .
3. Переключатель в задании 1 переключается между включенным и выключенным
положениями 20 раз в минуту. Используйте оценку ожидаемого срока службы из
рис. 2 .10, чтобы определить, сколько лет прослужит переключатель в данном
проекте. Считается, что в год установка работает 4000 часов.
4. Используйте рис. 2.12, чтобы определить, какая группа защиты корпуса по стан!
дарту NEMA была бы необходима при наружном размещении блока управления
передвижной буровой установки, используемой для сверления скважин.
5. Обратитесь к веб!сайту National Electrical Manufacturers Association (NEMA),
чтобы найти Публикацию стандартов 250–1997 и записать все появившиеся от!
личия от данных, размещенных на рис. 2 .12а и б.
6. Повторите пример 2.7, зайдя на сайт Cherry Electrical Products или другой анало!
гичный веб!сайт, чтобы найти подходящую замену для переключателя.
7. Повторите пример 2.9, использовав данные веб!сайта Square D.
8. Выполните интерактивный поиск, чтобы найти однополюсный переключатель с
двойным размыканием для тяжелых производственных условий с номинальным
током коммутации не менее 10 А. Нарисуйте таблицу, в которой укажите имена,
адреса в Сети, изображения переключателей и их электрические характеристики
для трех производителей.
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
151
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
9. Найдите устройство управления для устройств, найденных на сайтах фирм Square D и
Rockwell Automation. Укажите диапазон измеряемых значений, доступных для выб!
ранных вами устройств:
а) переключатель температуры, чтобы включить вытяжной вентилятор, когда
внутренняя температура установки достигнет заданного уровня;
б) переключатель давления, расположенный у дна резервуара, чтобы включить
смеситель, когда жидкость в резервуаре достигнет заданного уровня;
в) переключатель температуры, чтобы включить нагреватель, когда темпера!
тура материала в резервуаре опустится ниже заданного уровня;
г) переключатель давления, расположенный у дна резервуара, чтобы открыть
клапан входного отверстия, когда уровень материала в резервуаре упадет
ниже заданной отметки
10. Найдите реле управления на сайтах фирм Square D и Rockwell Automation, спо!
собное переключать лампу переменного тока с рабочим напряжением 240 В и то!
ком 9,5 А.
èêéÅãÖåõ èéàëäÄ çÖàëèêÄÇçéëíÖâ
1. Изменить блок!схему прохождения сигнала в примере 2.16, чтобы отразить сле!
дующие изменения в схеме управления на рис. 2.79. Добавлены пилотные лампы,
чтобы указать следующие условия и события: насос включен, жидкость нагрета
до температуры, превышающей уставку, выпускной клапан открыт и уровень
жидкости выше уставки переключателя нижнего уровня.
2. Как нужно дополнить блок!схему прохождения сигнала при поиске неисправнос!
тей в задаче 1, чтобы учесть три ситуации, описанные в примере 2.17?
3. Изменить блок!схему прохождения сигнала в примере 2.16, чтобы отразить из!
менения, отраженные в задаче 6 из следующего раздела.
4. Нарисуйте блок!схему прохождения сигнала для релейной логической лестнич!
ной схемы робота, разработанной в задаче 9 следующего раздела.
5. Нарисуйте блок!схему прохождения сигнала для релейной логической лестнич!
ной схемы робота, разработанной в задаче 10 следующего раздела.
áÄÑÄóà
1. Нарисуйте решение для примера 2.2, использовав переключатель 2П2Н (с одним
размыканием).
2. Три типа двигателей постоянного тока подсоединены к барабанному переключа!
телю, как показано на рисунке внизу. Покажите, как должны подсоединяться об!
мотки к источнику питания при положении переключателя ВПЕРЕД и НАЗАД.
152
3. Разработать собачку без перехода для разметочного стола на предельную скорость
в 1 фут/с с концевым переключателем модели D4A!1101 и рычагом D4A!AOO.
4. Разработать релейную логическую лестничную схему, выполняющую те же функ!
ции, что и схема рис. 2 .8, но при использовании однополюсного селектора с одним
размыканием и двухполюсного реле с двойным размыканием.
5. Разработать релейную логическую лестничную схему, выполняющую те же функ!
ции, что и схема рис. 2 .8, но с дополнительным требованием: двигатель не должен
останавливаться еще в течение 60 с после выключения переключателя. Кроме
того, зеленая лампа должна показывать, что двигатель работает. Измените схему,
представленную на рис. 2 .79, и добавьте необходимые реле управления и времени.
áÄÑÄóà
153
ÇıÓ‰Ì̊Â Ë ‚̊ıÓ‰Ì̊ ‰ËÒÍÂÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ÛÔ‡‚ÎÂÌËfl
6. Изменить рис. 2.78, добавляя вращаемый двигателем смеситель в технологичес!
кую установку. Смеситель начинает работу через 60 секунд после замыкания, пе!
реключатель низкого уровня L1 останавливается, когда жидкость достигает ус!
тавки переключателя высокого уровня L2. Найдите контактор для двигателя
смесителя мощностью в 1 л.с.
7. Изменить схемы рис. 2.78 и 2.79, добавив пилотные лампы для индикации следу!
ющих условий и событий: насос включен, нагреватель включен, температура
выше уставки, выпускной клапан открыт и жидкость поднялась выше уставки пе!
реключателя низкого уровня.
8. Переключатель ПУСК/СТОП, используемый, чтобы управлять насосом, на рис.
2.79 заменен селекторным переключателем. Измените ступеньку лестничной
схемы соответственно данному изменению.
Подсказка: насос не должен перезапускаться, когда система находится
на пустом цикле.
9. Робот, изображенный на рис. 15.29 в главе 15, имеет два цилиндра двойного дей!
ствия для осей (y и z) и цилиндр двойного действия для механизма захвата. Каждая ось
и механизм захвата управляется четырехходовым клапаном с одним соленоидом.
Концевые переключатели установлены в критических точках каждой оси и механиз!
ма захвата, чтобы указать, что привод достиг предельного положения. Робот исполь!
зуется, чтобы подобрать деталь вблизи от своей базы и перенести ее на удаленное от
базы место крепления. Концевой переключатель указывает, что деталь готова для
погрузки и помещена в крепление. Мгновенный переключатель инициализирует
цикл, а переключатель останова указывает, когда цикл должен закончиться. Робот не
будет перемещаться, чтобы подобрать деталь, если отметка погрузки пуста, и не бу!
дет помещать деталь в крепление, если оно занято. Разработайте релейную логичес!
кую лестничную схему, чтобы управлять пневматическим роботом. Используйте кон!
цевые переключатели, чтобы определить момент достижения роботом конца оси.
Используйте реле управления, необходимые для решения.
10. Повторить решение задачи 9 для системы робота, которая не имеет концевых пе!
реключателей в конце каждой оси. Используйте реле времени, позволяющее ог!
раничить время движения таким образом, чтобы не заходить за конец оси. Исхо!
дите из следующих параметров: 3 секунды Исходите из следующих параметров: 3
секунды для поперечного движения, 4 секунды — для продольного и 2 секунды,
чтобы открыть и закрыть механизм захвата.
154
3
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
ñÂÎ̧ „·‚̊
Цель главы 3 — описать процессы в твердотельных устройствах,
начиная с pn перехода и биполярных транзисторов и заканчивая
их применением.
После изучения этой главы сможете:
1. Анализировать процессы в полупроводниках и использовать приемы для проек
тирования цепей.
2. Описать процессы в pn переходе.
3. Различать выпрямительные и сигнальные диоды.
4. Объяснить принцип действия стабилитрона.
5. Описать работу биполярного транзистора.
6. Применять транзистор в качестве ключа и усилителя.
7. Описать временные интервалы цикла переключения транзисторного ключа.
8. Излагать принципы использования твердотельных реле.
9. Разрабатывать и анализировать цепи смещения, обеспечивающие работу бипо
лярных транзисторов в активном режиме.
10. Описать работу транзистора в регуляторах напряжения, инверторах и преобра
зователях постоянного напряжения.
11. Представлять работу полевого транзистора.
12. Разрабатывать и анализировать цепи смещения, обеспечивающие работу поле
вых транзисторов в активном режиме.
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
13. Объяснить работу комплементарных полевых металло
оксид
полупроводнико
вых приборов (МОП).
èêàåÖçÖçàÖ áçÄçàâ Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Твердотельные устройства используются практически в каждом блоке промышленно
го электронного оборудования и являются основным строительным материалом при
разработке систем. Искусство анализа существующих схем или разработки новых
должно отвечать современным требованиям и запросам промышленности. Но, кроме
анализа и проектирования, существуют такие области деятельности, как обеспечение
производства и испытание изделий. В этой сфере деятельности знание внутренних и
внешних характеристик твердотельных устройств является значительным преимуще
ством специалиста в глазах работодателя.
Для работы в компаниях, производящих твердотельные устройства, вам, возмож
но, понадобится приобрести более обширные знания в области инженерных и техно
логических разработок приборов. Эта область включает разработку испытательного
оборудования, а также решение задач взаимодействия различных видов оборудова
ния, системы продаж и поддержки потребителей.
Примером специфического вида деятельности, которая может быть вам предложе
на, является анализ безотказности электронных комплектующих для разрабатываемого
оборудования. Допустим, что вы являетесь инженером фирмы Kaiser Electronics, вы
пускающей электронное оборудование для военных самолетов. Электронное оборудо
вание отказывает на заключительных испытаниях, но замена неисправного узла позво
ляет все же пройти эти испытания. Теперь перед вами стоит задача вывить причину
неисправности на автоматизированном модуле испытательного оборудования IE3000,
позволяющем моделировать работу узла в составе системы. Вы подготовлены к этой
работе и знаете возможности IE3000, и теперь вам предстоит на основе этих знаний и
результатов испытания системы определить причину отказа. Вы обнаруживаете, что
при определенных входных условиях цепь смещения транзистора не обеспечивает необ
ходимого режима. Вы предлагаете отделу испытаний заменить тип транзистора, влияю
щего на режим цепи смещения. Чтобы устранить условия, вызвавшие отказ при испы
таниях, вы предлагаете внести изменения в программное обеспечение IE3000, которые
позволили бы осуществлять проверку режима смещения при условиях, возникших на
испытаниях. Таким образом, вы не только проанализировали работу агрегата, но и пре
дотвратили возможность появления нераспознаваемых отказов этого узла в будущем.
3.1. ǂ‰ÂÌË ‚ ڂ‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
Термин твердотельное устройство предполагает, что вещество, используемое для
этих устройств, является твердым телом в противоположность жидкости или газу. Но
характерным признаком этого материала является не только то, что он является твер
156
дым телом, но и то, что он является полупроводником. Термин «полупроводник» ха
рактеризует удельное электрическое сопротивление материала, величина которого
меньше удельного сопротивления изоляторов, но больше удельного сопротивления
проводников. Удельное сопротивление с определяется как сопротивление изготовлен
ного из данного материала кубика с ребром в 1 см. Чтобы получить сопротивление
тела другой формы и размеров, нужно умножить с на длину тела и разделить на пло
щадь поверхности, к которой подсоединяются электроды. Поскольку в результате со
противление должно выражаться в омах, удельное сопротивление должна иметь раз
мерность (Ом·см2)/см, то есть Ом·см. В системе СИ единица измерения удельного
сопротивления будет выражаться в Ом·м . В табл. 3 .1 дана приближенная оценка
удельных сопротивлений металлов полупроводников и изоляторов в Ом+м.
Таблица 3.1. Соотношение удельных сопротивлений для различных
материалов
Значение сопротивления зависит от вида полупроводника. Важное требование к
материалу для полупроводниковых устройств — наличие монокристаллической струк
туры. Этим требованиям отвечают кристаллические германий и кремний, а также неко
торые более сложные вещества.
3.1.1. èÓ‚Ó‰ËÏÓÒÚ̧
Добавление примесей в полупроводниковый материал обычно повышает его проводи
мость. Отдельные атомы примеси заменяют в кристалле атомы основного материала, не
нарушая кристаллической структуры. В зависимости от природы примеси (валентности
примесных атомов) возможно либо добавление свободных электронов (донорная при
месь), либо возникновение их дефицита (акцепторная примесь). Полупроводниковый
материал с соответствующими примесными атомами называют либо материалом n
типа, поскольку добавление донорных примесей означает появление свободных элект
ронов (n — negative, отрицательный), либо материалом p
типа — в случае добавления
акцепторных примесей, создающих дефицит свободных электронов (p — positive, поло
жительный). Напомним, что направление движения электронов противоположно при
нятому направлению тока, которое обсуждается в этой главе. Полупроводниковые ма
териалы n
типа и p
типа используются для создания твердотельных устройств.
ǂ‰ÂÌË ‚ ڂ‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
157
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.2 . P-N ÔÂÂıÓ‰ Ë Ú‚Â‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
Образование в кристалле материалов p
типа и n
типа создает pn переход. Заметим,
что использован термин создание перехода, а не соединение материалов двух типов.
Ни сильное сжатие, ни даже сварка двух материалов не может образовать надежно
действующий pn переход, поскольку нарушается кристаллическая структура в зоне
контакта. Переход может быть создан лишь на основе непрерывного перехода в одном
монокристалле от материала одного типа к материалу другого типа. Изготовление та
кого перехода — весьма сложный процесс, описание которого выходит за пределы
задач нашего учебника.
3.2.1. äÓ̈ÂÔˆËfl ‰ËÓ‰‡
Концепция диода основана на добавлении к описанию pn перехода принципа его
действия. На рис. 3.1а, б и в показаны структура pn перехода, концепция диода и его
схемное обозначение, соответственно. При изучении обратите внимание на следую
щие положения:
анодом всегда служит положительный p
материал, катодом — всегда отри
цательный n
материал (рис. 3.1а, б);
проводимость (наличие тока) возникает тогда, когда к аноду приложен поло
жительный, а к катоду — отрицательный потенциал. Это создает так назы
ваемое прямое смещение. Зона анода на рис. 3.1б имеет форму стрелки, по
казывающей направление тока;
блокирование (отсутствие тока) имеет место при подаче отрицательного по
тенциала на анод, а положительного — на катод. Это режим обратного
смещения.
Схемное обозначение диода (рис. 3 .1в) является фактически упрощением рис. 3 .1б.
Рис. 3 .1. Pn переход:
а) схема перехода;
б) концепция диода;
в) условное обозначение диода
158
3.2 .2 . èflÏÓÂ Ë Ó·‡ÚÌÓÂ ÒÏÂ̆ÂÌËÂ
Сравним протекание тока через резистор и через диод. На рис. 3 .2а, когда напряжение
равно 1 В, ток, протекающий через резистор R1, вызывает показание прибора М1 1 мА
(I = V / R = 1 В / 1000 Ом = 1мА). На рис. 3 .2б полярность напряжения изменена, и
теперь прибор покажет — 1 мА. Записав серию значений тока и напряжения как при
одной полярности напряжения (прямом смещении), так и при противоположной (обрат
ное смещение), обнаружим линейную зависимость (рис. 3 .2в). Это так называемая
вольтамперная характеристика резистора. Заменив резистор диодом, получим его воль
тамперную характеристику.
Рис. 3.2. Протекание тока через резистор:
а)приU=1В;
б)приU= —1В;
в) вольтамперная характеристика (ВАХ) резистора
P-N ÔÂÂıÓ‰ Ë Ú‚Â‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
159
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
На рис. 3.3 при положительном напряжении диод смещен в прямом направлении,
и когда V достигает +0,6 В, диод проводит. Когда напряжение увеличивается, ток воз
растает, формируя положительную часть вольтамперной характеристики. Когда V от
рицательно, диод не проводит, что соответствует режиму обратного смещения. Ток
через диод характеризуется нелинейной зависимостью, в отличие от тока через резис
тор. Когда обратное смещение достигает напряжения пробоя, диод утрачивает спо
собность блокировать обратное напряжение. Изучение p
n перехода — первый шаг
на пути понимания полупроводниковых устройств, в частности биполярного транзис
тора. Изучите рис. 3.2 и 3.3, чтобы понять режимы прямого и обратного смещения и
различие между диодом и резистором.
3.2.3. ÑËÓ‰̊ ‚ ÔÓÏ̊̄ÎÂÌÌÓÒÚË
Варьируя концентрацию и вид примеси в полупроводниковом материале, можно изго
тавливать диоды, которые находят разнообразное применение. Примеры различных
типов диодов:
выпрямительные диоды — силовые приборы на токи от 1 до 1000 А и даже
более;
сигнальные диоды — малосигнальные приборы с токами порядка несколь
ких мА;
стабилитроны — диоды для получения опорных напряжений в источниках
электропитания;
светоизлучающие диоды — приборы для визуальной индикации (СИД).
Выпрямительные диоды. Одно из наиболее важных назначений их примене
ния — выпрямление переменного тока. Для этой цели подходящим устройством явля
Рис. 3 .3. Протекание тока
через диод.
Вольтамперная
характеристика
диода
160
ется pn переход, обладающий малым сопротивлением для тока одного направления и
пропускающий только весьма малый ток в обратном направлении (область высокого
сопротивления). Если диод соединить последовательно с источником переменного на
пряжения, то диод в течение каждого периода будет смещен то в прямом, то в обрат
ном направлении. Эффект выпрямления обусловлен тем, что токи разных направле
ний существенно различны. Простейший однополупериодный выпрямитель содержит
диод, источник переменного напряжения и сопротивление нагрузки (рис. 3.4а).
Трансформатор Т1 передает переменное напряжение, диод СR1 осуществляет вып
рямление, а нагрузочный резистор R1 ограничивает значение тока в цепи, чтобы обес
печить его требуемый уровень. Под термином «нагрузка» обычно подразумевается
любое устройство, потребляющее ток от источника энергии.
Устройство, потребляющее малый ток, определяют как небольшую нагрузку, а
при потреблении большого тока говорят о большой нагрузке. Таким устройством мо
жет быть обычный резистор либо более или менее сложное электронное устройство.
В течение положительного полупериода, который показан сплошной линией на
рис. 3.4б, верхний вывод трансформатора положителен по отношению к земле. Точки на
трансформаторе обозначают выводы с одинаковой полярностью напряжения. С учетом
этого диод смещен в положительном направлении. Его сопротивление мало, ток проте
кает через диод и нагрузку. Благодаря этому напряжение на нагрузке близко к напряже
нию источника питания. Когда же входное напряжение становится отрицательным в
следующую половину периода, диод получает отрицательное смещение, его сопротив
ление становится очень большим, ток, протекающий через диод, минимален. Для боль
шинства практических цепей можно полагать, что ток отсутствует, следовательно, ток
через нагрузку протекает только в одном направлении, как показано на рис. 3 .4б. Хотя
ток в нагрузке течет только в течение одного полупериода, эти процессы повторяются в
течение каждого периода сети. Поскольку на нагрузку подается всякий раз только поло
жительная полуволна напряжения, схема преобразует переменное напряжение сети в
положительное, пульсирующее. В этом и состоит выпрямляющая функция диода.
Параметры типичного выпрямительного диода представлены на рис. 3.5а и б.
Справочные данные по выпрямителям серий от 1N4001 до 1N4007 и различие между
выпрямителями по предельно допустимым значениям приведены на рис. 3 .5а. На рис.
Рис. 3.4. Однополупериодный выпрямитель:
а) схема выпрямителя;
б) временные диаграммы входного и выходного напряжений
P-N ÔÂÂıÓ‰ Ë Ú‚Â‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
161
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.5б приведены параметры, которые являются общими для всех выпрямителей этих
серий. При проектировании выпрямителей следует уделять особое внимание предель
но допустимым напряжениям.
Рис. 3.5а. Справочные данные диодов IN4001 — IN4007 фирмы ON
Semiconductor
162
Рис. 3 .5б. Справочные данные диодов IN4001 — IN4007 фирмы ON
Semiconductor (окончание)
èËÏ 3.1
Какой диод можно использовать в выпрямительной схеме рис. 3.4, если переменное
напряжение сети 115 В?
êÂ̄ÂÌËÂ
Обратимся к справочным данным производителя, представленным на рис. 3 .5а. Диод
1N4003 может быть применен, поскольку его максимальное обратное напряжение
(вторая строка таблицы на рис. 3.5а) равно 200 В и оно выше, чем напряжение сети.
Сигнальные диоды. Помимо использования в простых выпрямительных устрой
ствах, диоды применяются для смешивания разных сигналов (смесители), для обнару
жения наличия сигналов (детекторы), для переключения состояния цепи включено/
выключено. Названные области применения обычно связаны с так называемыми сиг
нальными диодами. Простейший пример применения сигнального диода в качестве
переключателя приведен на рис. 3.6.
Рис. 3.6 . Диодный ключ
P-N ÔÂÂıÓ‰ Ë Ú‚Â‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
163
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Когда входная цепь находится под нулевым потенциалом, а анод положителен, то
диод проводит и действует как проводник, непосредственно соединяющий выход со
входом при близком к нулю потенциале обоих выводов. Следовательно, диод действу
ет как замкнутый ключ, когда его анод положителен по отношению к катоду. Если же
на вход подан положительный потенциал, равный или более высокий, чем положи
тельный потенциал источника питания, то диод смещается в обратном направлении, а
следовательно, диод выполняет функции разомкнутого ключа, разделяющего вход и
выход схемы. Следовательно, если в цепи диода ток отсутствует, то положительное
напряжение с катода диода не передается на выходной вывод.
Стабилитроны. Стабилитрон использует pn переход, смещенный в обратном
направлении, с целью использовать явление обратного пробоя для стабилизации на
пряжения VZ. Стабилитроны выпускаются на напряжения от 3 до 100 В и более. На
рис. 3 .7а, б и в представлены справочные данные о стабилитронах серии 1N5333В.
Обратите внимание, что изображение стабилитрона на рис. 3 .7а вверху справа не
сколько отличается от изображения диода. На рисунке представлены также предель
но допустимые значения рассеиваемой мощности (5 Вт) и диапазон рабочих темпера
тур (
65. ..+250 °С) для стабилитронов этой серии. Электрические характеристики
представлены в двух разделах. Определение символов и обозначений, а также пара
метры стабилитронов представлены на рис. 3.7б и в. Описание вольтамперной харак
теристики на рис. 3 .7б содержит напряжение стабилизации VZ и ток IZT, при котором
достигается напряжение VZ. Ознакомьтесь со справочными данными стабилитронов
для полного представления об их характеристиках и параметрах.
Стабилитроны представляют собой существенные компоненты для стабилизации
выходного напряжения при колебаниях как входного напряжения, так и сопротивле
ния нагрузки. Простейший стабилизатор напряжения показан на рис. 3 .8. Стабилит
рон VR1 должен поддерживать постоянное выходное напряжение независимо от тока
и колебаний входного напряжения благодаря изменяющемуся падению напряжения
на последовательном сопротивлении RS. Более подробно стабилизаторы напряжения
описываются в разделе 3.8, а пример 3.2 иллюстрирует расчет сопротивления RS.
èËÏ 3.2
Для схемы на рис. 3 .8 рассчитайте сопротивление RS, если VВХ = 10 В, а стабилитрон
выбран типа 1N5338В.
êÂ̄ÂÌËÂ
В соответствии с характеристиками 1N5338В и справочными данными, приведенны
ми на рис. 3.7в, номинальное напряжение стабилизации VZ = 5,1 В. Следовательно,
напряжение на RS составит:
VRS=VВХ—VZ;
VRS=10B—5,1B;
VRS=4,9B.
Если нагрузка RL отсутствует, ток через RS должен быть ограничен значением IZM =
930 мА, которое взято из последней колонки таблицы на рис.3.7в.
164
Рис. 3.7а. Предельные характеристики стабилитрона (из справочных
данных стабилитрона IN5333B фирмы ON Semiconductor)
RS=5,3Ом.
Светоизлучающие диоды (СИД). Светоизлучающий диод — это p
n переход,
который излучает не только тепловую энергию, но и свет. СИД выполняются на осно
ве полупроводниковых материалов: галлия, фосфора, мышьяка вместо кремния. Ком
бинируя в разных пропорциях эти материалы в процессе производства, удается полу
чить источники света с разной длиной волны: красные, зеленые, желтые, голубые.
Полупроводниковые кристаллы (чипы) имеют очень малые размеры и малый световой
поток, но свет обычно фокусируют с помощью пластиковой линзы.
P-N ÔÂÂıÓ‰ Ë Ú‚Â‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
165
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Корпус линзы имеет диаметр около 6 мм (рис. 3.9а). Анодный вывод обычно дела
ют более длинным, благодаря чему его легко отличить. Обозначение СИД приведено
на рис. 3.9б. Направление стрелок на обозначении показывает, что энергия излучает
ся прибором, когда он имеет прямое смещение. Типичное падение напряжения на пря
мо
смещенном СИД — около 1,6 В, что более чем вдвое превышает прямое падение
на других диодах. При обратном смещении СИД ведет себя подобно другим обратно
смещенным диодам. Помимо применения в качестве средства индикации, СИД могут
быть скомпонованы для индикации различных символов и в этом качестве применяют
ся в часах, автомобильных дисплеях, в источниках света и в устройствах сигнализа
ции, например светофорах.
3.3. ÅËÔÓÎflÌ̊È Ú‡ÌÁËÒÚÓ
Основой твердотельной электроники является транзистор, изобретенный в 1947 г. в
Bell Laboratories. Слово «транзистор» является комбинацией слов transfer (перенос,
передача) и resistor (сопротивление). Транзистор применяется как ключ в цифровых
логических схемах, как усилитель или формирователь сигналов в аналоговых схемах и
как преобразователь постоянного напряжения в устройствах регулирования мощнос
ти. В этой главе мы коснемся многих из этих применений.
Рис. 3 .7б. Характеристики и рабочие параметры стабилитрона (из
справочных данных стабилитрона IN5333B фирмы ON
Semiconductor)
166
Рис. 3.7в. Справочные данные стабилитронов IN55хх фирмы ON Semiconductor
ÅËÔÓÎflÌ̊È Ú‡ÌÁËÒÚÓ
167
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.3 .1. éÔËÒ‡ÌËÂ
Биполярный транзистор — твердотельное устройство, образованное соединением двух pn
переходов с полупроводниковым материалом, общим для обоих переходов. В зависимости
от способа соединения двух переходов различают транзисторы типов np n или pn p. На
рис. 3.10 представлены полупроводниковые структуры и обозначения соответственно для
транзистора типа np n (рис. 3.10а и б) и для транзистора pn p (рис. 3 .10в и г).
Рис. 3 .8. Простой
стабилизатор
напряжения
Рис. 3 .9. Светодиод:
а) конструкция;
б) условное обозначение
Транзистор является трехэлектродным прибором, важной особенностью которо
го является способность управлять током, протекающим через два электрода, с помо
щью малых изменений тока через третий электрод или напряжения на нем. Эта спо
собность позволяет усиливать слабые сигналы переменного тока или выполнять
функции ключа с состояниями включено/выключено. Данные операции составляют
смысл и основу функций, выполняемых транзистором. Ознакомьтесь с рис. 3 .10, что
бы научиться распознавать тип транзистора по его обозначению.
3.3.2. àÁ„ÓÚÓ‚ÎÂÌËÂ
Первые транзисторы были изготовлены по сплавной технологии. В то время была
принята практика монтирования образца полупроводникового материала на изолиру
168
3.3.3. èË̈ËÔ ‰ÂÈÒÚ‚Ëfl
Поскольку транзистор является трехэлектродным прибором, возможны три кон
фигурации схем. Идентифицирущим признаком каждой является наличие элемента,
общего для входной и выходной цепи. Транзистор npn типа на рис. 3 .11а, б и в пока
зывает эти три схемные конфигурации: общая база, общий эмиттер и общий кол
лектор соответственно. Иногда вместо термина общий используется термин +за
земленный, поскольку общий элемент обычно служит для возвращения тока входного
сигнала во внешнюю заземленную цепь.
Рис. 3.10. Биполярный транзистор:
а) структура
транзистора npn;
б) условное обозначение
транзистора npn;
в) структура
транзистора pn p;
г) условное обозначение
транзистора pn p
ющем материале, названном подложкой и соединяемом со вплавляемыми областями
эмиттера и коллектора с помощью проводников. В этом случае материал, общий для
базовой и припаянных областей, служил опорой для структуры. Сегодня большинство
транзисторов изготавливается на основе кремния с использованием избирательной
диффузии и оксидного маскирования. Наиболее распространены транзисторы n
p
n
типа. Начиная с n
типа коллекторной части, на поверхности создается слой оксида.
Последующая диффузия примеси бора создает базовый слой. После удаления оксида
и внесения примеси фосфора создается слой эмиттера n
типа. Время и температура
технологических операций должны поддерживаться с высокой точностью, обеспечи
вая тем самым хорошую воспроизводимость приборов.
ÅËÔÓÎflÌ̊È Ú‡ÌÁËÒÚÓ
169
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Рис. 3 .11. Основные
структуры
транзисторных
цепей:
а) каскад с общей
базой (ОБ);
б) каскад с общим
эмиттером (ОЭ);
каскад с общим
коллектором (ОК)
Рис. 3 .12. Каскад ОЭ, диодная модель:
а) каскад с диодной моделью транзистора;
б) каскад с транзистором
170
Обратившись к диодной концепции схемы с общим эмиттером на рис. 3.12, обна
ружим, что когда связанный с базой ползунок А перемещается к положительному вы
воду источника питания, анод диода база
эмиттер становится положительным по от
ношению к катоду. Поскольку прямое смещение этого диода превышает 0,6 В, он
проводит базовый ток и транзистор переходит в проводящее состояние, позволяя про
текать коллекторному току IК. Удаляя ползунок от положительного вывода источника
питания, мы уменьшаем положительное смещение на диоде, и когда оно станет мень
ше, чем 0,6 В, тогда диод, а следовательно, и транзистор переходят в состояние «вык
лючено». Подводя итог сказанному, сформулируем следующие практические выводы:
приближая потенциал базы к потенциалу коллектора, переводим транзистор
в проводящее состояние;
удаляя потенциал базы от потенциала коллекторного источника питания, пе
реводим транзистор в непроводящее состояние «выключено».
Действие транзистора в промежуточном положении между полностью открытым
состоянием, которое называют насыщением, и полностью непроводящим, которое на
зывают режимом отсечки, называют активным режимом. В активном режиме транзи
стор может усиливать входные сигналы. Режимы транзистора включено/выключено и
усилительный более детально обсуждаются в следующих разделах этой главы.
3.3 .4 . 臇ÏÂÚ̊
Параметры транзистора необходимы для разработки транзисторных ключей и транзи
сторных усилителей в электронных устройствах. Эти параметры можно найти в спра
вочных данных по транзисторам, которые предоставляются поставщиками полупро
водниковых изделий. Данные об n
pn транзисторах P2N2222А представлены на
рис. 3 .13а и б. Буква Р указывает, что транзистор выпускается в пластиковом корпу
се, а буква А подчеркивает, что это — новая версия транзистора P2N2222. Справоч
ные данные разделены на блоки, указывающие предельно допустимые параметры,
температурные характеристики и электрические характеристики. Электрические ха
рактеристики, в свою очередь, разделены на четыре категории. Характеристики тран
зистора в режиме отсечки (OFF CHARACTERISTICS) даны на рис. 3.13а, характери
стики насыщенного транзистора (ON CHARACTERISTICS), режимы малого сигнала
(SMALL
SIGNAL CHARACTERISTICS) и режима переключения (SWINCHING
CHARACTERISTICS) представлены на рис. 3 .13б. Малосигнальные характеристики
необходимы, если транзистор работает в активном режиме. Другие характеристики
нужны, если транзистор используется в режиме переключения. Основные параметры
транзистора обсуждаются в последующих разделах.
èËÏ 3.3
Каким будет напряжение пробоя коллектор
эмиттер и коллекторный ток отсечки
транзистора P2N2222A? Почему эти данные приведены как минимальное и макси
мальное значения соответственно?
ÅËÔÓÎflÌ̊È Ú‡ÌÁËÒÚÓ
171
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
êÂ̄ÂÌËÂ
Обратимся к рис. 3.13, на котором представлены справочные данные для P2N2222A.
В разделе «характеристики режима отсечки» дано пробивное напряжение 40 В (пер
вая строка в таблице OFF CHARACTERISTICS), а коллекторный ток отсечки состав
ляет 10 нА (четвертая строка в той же таблице). Пробивное напряжение приведено
как минимальное, поскольку производитель гарантирует, что этот транзистор не бу
дет пробит при меньшем напряжении. Коллекторный ток отсечки приведен как мак
симальный, так как в этом режиме коллекторный ток транзистора P2N2222A не бу
дет превышать 10 нА.
3.4 . í‡ÌÁËÒÚÓÌ̊ ÍĮ̂̃Ë
В режиме переключения транзистор обычно находится в одном из двух состояний, кото
рые характеризуются как включенное и выключенное (другие термины — насыщение и
отсечка). В идеальном случае состояние насыщения равноценно состоянию замкнутой
цепи, а состояние отсечки — разомкнутой. Желательно, чтобы переход из одного состо
яния в другое происходил мгновенно, но на практике транзистор не вполне соответству
ет этой идеализации, поэтому ее следует рассматривать всего лишь как полезную апп
роксимацию. Два состояния транзисторного ключа показаны на рис. 3 .14: рис. 3 .14а
изображает np n транзисторную схему, а рис. 3.14б — форму входного и выходного
напряжения.
Когда выходное напряжение составляет 20 В (VСС), тогда транзистор выключен
(режим отсечки), ток через RL отсутствует, IК = 0. Когда выходное напряжение равно
нулю, тогда транзистор включен (насыщен), ток протекает через RL, а VКЭ = 0 В. Эта
конфигурация транзисторного ключа иногда рассматривается как буферный усили
тель, поскольку он усиливает малый ток маломощного источника входного сигнала,
превращая его в выходную мощность высокого уровня в нагрузке RL. Важнейшие по
нятия транзисторного ключа:
область (режим) отсечки и насыщения;
активная область (режим);
цикл переключения.
3.4.1. ꇷÓÚ‡ ‚ ÂÊËÏ ÓÚÒẪÍË
Запертый транзистор находится в режиме отсечки. Переход база
эмиттер находится в
режиме обратного смещения. Для режима отсечки характерны следующие значения
напряжений с рис. 3.14, сведенные в табл. 3 .2 .
172
Рис. 3.13а. Справочные данные транзистора P2N2222A фирмы ON
Semiconductor
í‡ÌÁËÒÚÓÌ̊ ÍĮ̂̃Ë
173
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Рис. 3 .13б. Справочные данные транзистора P2N2222A фирмы ON
Semiconductor
174
Таблица 3.2. Напряжения отсечки транзистора
Рис. 3.14. Транзисторный ключ:
а) схема;
б) временные диаграммы
В режиме отсечки некоторый ток течет через переход коллектор
база, однако он
очень мал, порядка микроампер. Его называют током утечки и обозначают IК0 или IКБ0.
Отметим, что ток утечки возрастает с температурой. У транзистора в режиме отсечки
рассеиваемая мощность очень мала. Ее можно выразить произведением тока утечки
на напряжение коллектора:
РК0=VК0·IК0.
í‡ÌÁËÒÚÓÌ̊ ÍĮ̂̃Ë
175
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
èËÏ 3.4
Каков обратный ток утечки транзистора P2N2222A при комнатной и высокой темпе
ратуре?
êÂ̄ÂÌËÂ
Обратимся к справочным данным для P2N222A (см. рис. 3.13а). Обратный ток утеч
ки IКБ0 (ICB0, пятая строка таблицы) приведен в разделе характеристик режима отсечки
в колонке «max». Он равен 0,01 мкА при комнатной температуре 25 °С и 10 мкА при
высокой температуре 150 °С .
3.4.2. ꇷÓÚ‡ ‚ ÂÊËÏ ̇Ò̊̆ÂÌËfl
Транзистор в режиме «включено» находится в состоянии насыщения. Переход база
эмиттер смещен в положительном направлении, напряжения в этом режиме приведе
ны на рис. 3 .13б и в табл. 3 .3 . Напряжения в табл. 3.3 могут быть выражены следую
щей формулой:
VКЭ(нас)
= VБЭ+VКБ;
VКЭ(нас)
= 0,6 –0,6 =0В,где
VБЭ и VКБ — напряжения положительно смещенных pn переходов, которые составля
ют примерно 0,6 В.
Примечание: небольшие вариации VБЭ и VКБ делают напряжение VКЭ(нас) несколь
ко отличным от нуля, однако оно не превышает десятых долей вольта.
èËÏ 3.5
Каково напряжение насыщения коллектор
эмиттер транзистора P2N2222A при кол
лекторном токе 15 мА?
êÂ̄ÂÌËÂ
Обратимся к справочным данным для 2PN2222A на рис. 3 .13б. Напряжение насыще
ния коллектор
эмиттер VКЭ(нас) (VКE(sat), вторая строка таблицы ON CHARACTERIS
TICS) приведено в колонке «max». Оно составляет 0,3 В при токе коллектора 15 мА.
3.4.3. ꇷÓÚ‡ ‚ ‡ÍÚË‚ÌÓÏ ÂÊËÏÂ
Для транзистора, работающего в активном режиме, коллекторный ток равен произведе
нию тока базы IБ на усиление транзистора по току, которое обозначается как bdc или hFE:
IК=hFE·IБ.
176
Таблица 3.3. Напряжения насыщенного транзистора
Коэффициент усиления hFE зависит от типа транзистора, а также от коллекторно
го тока и напряжения коллектор
эмиттер. Значение hFE может лежать в интервале от
двадцати и даже менее до нескольких сотен. Этот параметр определяется отношением
коллекторного тока IК к базовому IБ.
èËÏ 3.6
Каков диапазон значений hFE для транзистора P2N222A, работающего при коллек
торном токе 10 мА в активном режиме?
êÂ̄ÂÌËÂ
Обратимся к справочным данным для транзистора P2N222A (см. рис. 3.13б). Ха
рактеристики для малого сигнала пригодны при использовании в активном режиме.
Параметр hFE (строка Small Signal Current Gain) приведен для двух значений коллек
торного тока. Для коллекторного тока 10 мА усиление hFE составит от 50 до 300.
Для транзистора в состоянии глубокого насыщения коллекторный ток рассчиты
вается по следующей формуле:
где
RL — сопротивление нагрузки.
Напряжение на RL можно записать в виде:
VRL = VСС — VКЭ(нас)
.
В режиме насыщения IК/IБ может быть существенно меньше, чем hFE, когда транзи
стор работает в активном режиме. Мощность, рассеиваемая транзистором, в режиме
насыщения в идеальном случае близка к нулю. Она может быть вычислена по формуле:
Pнас
= VКЭ(нас)
· IК(нас)
.
èËÏ 3.7
Используя данные на рис. 3.15а и б, рассчитайте коллекторный ток транзистора с
усилением 50, когда он не вполне насыщен и когда он насыщен с напряжением насы
щения 0,2 В.
í‡ÌÁËÒÚÓÌ̊ ÍĮ̂̃Ë
177
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Рис. 3 .15. Схема к примеру 3.7:
а) активный режим;
б) режим насыщения
êÂ̄ÂÌËÂ
На рис. 3.15а транзистор не вполне насыщен, и его коллекторный ток равен:
IК=hFE×IБ;
IК=50×0,2мА;
IК=25мА.
На рис. 3.15б транзистор насыщен, и его коллекторный ток равен:
IК(нас)
= 29мА.
3.4.4. ñËÍÎ ÔÂÂÍĮ̂̃ÂÌËfl
Цикл переключения транзистора — переход транзистора из режима отсечки к насы
щению и возвращение к состоянию отсечки содержит два этапа:
этап включения;
этап выключения.
Цикл показан на рис. 3.16, из которого видно соотношение времени переключе
ния и времени периода входного сигнала. Прежде чем продолжать изучение темы,
178
внимательно рассмотрите рисунок, чтобы суметь описать различные стадии переклю
чения. На этот процесс влияют емкости переходов коллектор
база и база
эмиттер, а
также паразитные емкости между выводами и, что не менее существенно, условия ра
боты цепи.
Включение транзистора. Время перехода от состояния отсечки к насыщению
называется временем включения, и оно является суммой двух слагаемых:
времени задержки td — интервала, на котором транзистор начинает отпи
раться;
времени нарастания tr
—
интервала, на котором коллекторный ток изменя
ется с 10 до 90% от установившегося значения.
Время включения равно сумме этих времен:
tвкл
= td+tr
.
Рис. 3.16. Временные диаграммы для транзисторного ключа:
а) входной сигнал;
б) выходной ток;
в) выходное напряжение
í‡ÌÁËÒÚÓÌ̊ ÍĮ̂̃Ë
179
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Выключение транзистора. Время перехода от состояния насыщения к отсечке
называется временем выключения. Оно также является суммой двух слагаемых:
времени рассасывания ts
— времени от спадающего фронта входного сигна
ла до достижения коллекторным током значения 90%;
времени спада tf — времени, потребного коллекторному току для изменения
c 90 до 10% от установившегося значения.
Время выключения является суммой времен рассасывания и спада:
tвыкл
=t
s
+ tf.
При создании быстродействующих ключей все эти времена должны быть миними
зированы, однако, как следует из рис. 3 .16, время рассасывания является наиболее су
щественной слагающей в обоих переходах. Поэтому этот параметр наиболее критичен
при создании быстродействующих устройств с малым временем выключения. Время
рассасывания ассоциируется с временем разряда емкости коллекторно
базового пере
хода, которая должна быть разряжена до изменения полярности электрического поля.
èËÏ 3.8
Как долго транзистор будет находиться в режиме насыщения при ширине входного
импульса 10 мкс, если время задержки 10 нс, время нарастания 25 нс, время расса
сывания 225 нс и время спада 60 нс?
êÂ̄ÂÌËÂ
Обратимся к рис. 3.16. Время насыщения, которое определяется как интервал между
90% тока включенного состояния и сигналом переключения, определяется как:
tнас
= 10мкс—(td+tr)+ts;
tнас
= 10000нс—(td+tr)+ts;
tнас
= 10000нс—(10нс+25нс)+225нс;
tнас
= 10 190 нс или 10,19 мкс.
3.4.5. ëıÂχ чÎËÌ„ÚÓ̇
В некоторых устройствах промышленной электроники усиление по току единственно
го транзистора недостаточно для получения требуемого тока в нагрузке. В этой ситуа
ции, когда необходимо большее усиление, два транзистора одного типа (оба PNP или
оба NPN) соединяются: эмиттер одного с базой другого, коллектор одного с коллекто
ром другого, как показано на рис. 3.17. Такая конфигурация называется схемой Дар
лингтона. Ее усиление по току равно произведению коэффициентов усиления отдель
ных транзисторов:
hFE = hFE1 × hFE2.
180
Рис. 3.17. Схема Дарлингтона
èËÏ 3.9
Обратимся к рис. 3.17. Какой базовый ток необходим для насыщения структуры, если
усиление каждого транзистора равно 100, а VКЭ(нас)
= 0,2 В? Сопротивление нагрузки
составляет 250 Ом.
êÂ̄ÂÌËÂ
Базовый ток равен току коллектора, деленному на усиление пары:
Рассчитаем коллекторный ток насыщения:
IК = 111,2 мА.
Определим усиление пары:
hFE = hFE1 × hFE2;
hFE=100×100;
hFE = 10 000.
Базовый ток равен:
IБ = 11,12 мкА.
í‡ÌÁËÒÚÓÌ̊ ÍĮ̂̃Ë
181
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.5 . íÇÖêÑéíÖãúçõÖ êÖãÖ
Твердотельные реле (ТТР) выполняются на электронных компонентах в герме
тичном корпусе. Они обеспечивают выполнение функций переключения при потенци
альной развязке входных и выходных цепей и отсутствии движущихся частей и эле
ментов. Преимущества ТТР перед электромагнитными реле:
полностью электронная схема без движущихся частей;
более высокое быстродействие;
совместимость входных цепей с логическими интегральными схемами;
больший срок службы;
простота обслуживания.
К недостаткам ТТР следует отнести то, что:
может потребоваться наружный теплоотвод;
они могут быть чувствительны к электромагнитным и радиочастотным помехам;
они не являются идеальными ключами в разомкнутом и замкнутом состояниях.
3.5.1. ÇÌÛÚÂÌÌÂÂ ÛÒÚÓÈÒÚ‚Ó
Внутреннее устройство ТТР показано на рис. 3.18а. ТТР содержит:
совместимый по уровню напряжения логический вход;
оптоэлектронную развязку, электрически изолирующую источник входного
сигнала от внутренних узлов и выходных цепей ТТР;
узлы для обнаружения перехода напряжения сети через нулевой уровень;
выходные схемы, содержащие твердотельное устройство; на рисунке пред
ставлено симистором (симисторы обсуждаются в 5 главе) и RC
цепями по
давления помех и переходных процессов.
Выходные узлы ТТР могут выполняться в нормально замкнутой или нормально ра
зомкнутой конфигурации. Выходное устройство на рис. 3 .18а — симистор. В других ти
пах ТТР могут быть использованы транзисторы (pn p или npn типов) либо иные
твердотельные выходные узлы. Функциональная схема ТТР с ограничением тока пред
ставлена на рис. 3.18б. Многие виды ТТР имеют встроенные активные токоограничива
ющие узлы. Эта функциональная особенность позволяет защищать не только ТТР, но и
внешние цепи от аварийных режимов и перегрузок. Срабатывание и сброс осуществля
ются автоматически плавно, быстро и точно. На рис. 3 .18б ток через светоизлучающий
диод (СИД) генерирует излучение, воспринимаемое фотодиодом (ФД). ФД преобразует
излучение в электрическое напряжение, которое непосредственно воздействует на ТТР.
Если ток через ключевой элемент чрезмерен, то токоограничивающая цепь снижает ток
фотодиода и напряжение на ключевых элементах ТТР, а также выключает фотодиод.
Понижение напряжения увеличивает сопротивление ключевых элементов, тем самым
ограничивая ток. Обычно токоограничивающие цепи имеют отрицательный темпера
182
турный коэффициент, благодаря чему ток уменьшается с ростом температуры, тем са
мым ограничивая мощность рассеяния при включенном состоянии реле. После снятия
перегрузки ТТР немедленно возвращается к нормальному рабочему режиму.
Рис. 3.18. Схемы полупроводниковых реле:
а) полупроводниковое реле на симисторе;
б) полупроводниковое реле максимального тока
3.5 .2 . ç‡ÛÊÌ̊È ‰ËÁ‡ÈÌ
ТТР конструктивно оформляются в различных видах корпусов. Шесть видов корпусов
ТТР фирмы Аллен
Бредли представлены на рис. 3.19. Начиная с ТТР в левом верхнем
углу и идя по часовой стрелке, можно увидеть шесть различных конструктивных испол
нений и их фирменные названия. В качестве опций иногда ТТР оснащаются светодиода
ми, которые показывают состояние соответствующего реле (включено/выключено).
Если ТТР выполнены как сменные изделия с многоштырьковыми разъемами, они могут
быть легко заменяемы даже неквалифицированным персоналом. Кроме того, имеются
розетки, которые могут присоединяться пайкой к печатной плате или проводящим до
рожкам. Другая возможная компоновка — в DIP
корпусах (dual
in
line).
На рис. 3.20 представлен 6
штырьковый корпус DIP со снятой крышкой. Внутри
можно увидеть отдельные детали, смонтированные в изолированных диэлектриком
секциях с использованием интегральной технологии. Интегральные методы позволя
ют достичь высокой надежности благодаря уменьшению числа проводниковых соеди
нений, более точному контролю параметров секции и лучшей интеграции токоограни
чивающих и защитных цепей.
3.5 .3. á‡ÍĮ̂̃ÂÌËÂ
Разработчики полагают, что ТТР могут использоваться в разнообразных промышлен
ных изделиях, таких как контроллерно
управляемое оборудование, автоматические
킉ÓÚÂÎ̧Ì̊ ÂÎÂ
183
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
производственные системы, испытательное оборудование и контроллеры состояния
окружающей среды. Разъемный способ монтажа обеспечивает гибкость благодаря
конструктивной совместимости со стандартными розетками и зажимами, многофунк
циональности и широкому выбору модулей таймеров.
Гибкость и совместимость ТТР позволяют поддерживать широкий круг изделий и
изобретений при уменьшении номенклатуры составляющих. Выбор ТТР при разра
ботке облегчается отличным источником справочной информации, коим являются
сайты Internet, посвященные твердотельным реле.
Рис. 3 .19.
Твердотельные
реле (ТТР)
Рис. 3 .20. Полупроводниковое
реле с двухсторонним
расположением
выводов (DIP)
184
3.6 . ñÂÔË ÒÏÂ̆ÂÌËfl Ú‡ÌÁËÒÚÓÌ̊ı ÛÒËÎËÚÂÎÂÈ
Цепями смещения называют схемотехнические решения, позволяющие устанавли
вать и поддерживать ток эмиттера и напряжение коллектор
эмиттер при работе в ак
тивном режиме в качестве усилителя. На рис. 3.21а показан биполярный n
p
n тран
зистор с общим эмиттером, а на рис. 3.21б — его характеристики. Характеристики
представлены семействами зависимостей коллекторного тока от напряжения коллек
тор
эмиттер, снятыми при различных базовых токах. Они показывают весь спектр ре
жимов транзистора: насыщение (транзистор включен), отсечку (транзистор выклю
чен) и активный режим, когда малые изменения базового тока вызывают большие
изменения тока коллектора.
Коэффициент усиления hFE, приводимый разработчиками по его минимальному
гарантированному значению, лежит в диапазоне от 50 до 500. Хотя минимальное уси
ление гарантируется, отдельные транзисторы из одной партии могут различаться
весьма сильно. Поэтому цепи смещения должны быть выполнены в усилительных кас
кадах так, чтобы каскады работали в значительной мере независимо от hFE.
Рис. 3.21.
Характеристики
биполярного транзистора
в схеме ОЭ:
а) схема;
б) характеристики
ñÂÔË ÒÏÂ̆ÂÌËfl Ú‡ÌÁËÒÚÓÌ̊ı ÛÒËÎËÚÂÎÂÈ
185
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.6.1. Ñ‚ÛıÂÁËÒÚÓ̇fl ÒıÂχ ÒÏÂ̆ÂÌËfl
На рис. 3.22а приведена простая схема смещения, а на рис. 3.22б — характеристики
того же транзистора, что и на рис. 3.22б, однако с построенной линией нагрузки. Эта
линия представляет вольтамперную характеристику выходной цепи. Таким образом,
нагрузочный резистор RК ограничивает область, где вольтамперная характеристика
линейна. Линия нагрузки проведена из точки на оси I, где коллекторный ток равен току
включенного транзистора, то есть VСС/RК, в точку на оси V, которая соответствует вык
люченному транзистору, то есть VСС. Режим смещения характеризуется рабочая точ
кой, которая соответствует коллекторному току силой около 2,5 мА.
Отсюда следует, что сопротивление RБ должно быть 286 кОм, как показано на
рис. 3.22а. При коллекторном сопротивлении, включенном между выводом коллекто
ра и источником питания, n
p
n транзистор будет находиться в активном режиме. Точ
ка смещения позволяет входному сигналу изменять базовый ток и управлять усилен
ным коллекторным током.
Рис. 3 .22. Смещение
транзистора
186
Выбранный для этого примера базовый резистор RБ задает значение базового тока IБ:
IБ=50мкА.
Значение hFE близко к 50, что соответствует уравнению: hFE = IК / IБ = 2,5 мА / 50
мкА в рабочей точке на рис. 3.22б. Тем не менее, если усиление окажется равным не
50, а 75 вследствие неизбежного разброса параметров, то рабочая точка смещается до
значения базового тока 80 мкА, вследствие чего коллекторный ток изменится:
IК=IБ×hFE;
IК=50мкА×75;
IК = 3,75 мА.
èËÏ 3.10
Рассчитайте Iб на рис. 3.23а, если усиление транзистора Q1 равно 100, а схема рабо
тает при напряжении на коллекторе 10 В.
êÂ̄ÂÌËÂ
RБ=47кОм.
ñÂÔË ÒÏÂ̆ÂÌËfl Ú‡ÌÁËÒÚÓÌ̊ı ÛÒËÎËÚÂÎÂÈ
187
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Рис. 3 .23. Примеры 3.10 и 3.11:
а) к примеру 3.10;
б) к примеру 3.11
èËÏ 3.11
Рассчитайте напряжение на коллекторе, при котором будет работать схема 3.23б,
если Q1 имеет усиление hFE = 100.
êÂ̄ÂÌËÂ
IБ=74мкА;
IК=IБ+hFE;
188
IК=74мкА+100;
IК=7,4мА.
VК=VСС—IК+RК;
VК=5В—7,4мА+500Ом;
VК=1,3В.
Другая двухрезисторная схема смещения приведена на рис. 3.24. В этой схеме
удается получить несколько более стабильный ток коллектора, поскольку увеличение
коллекторного напряжения увеличивает ток базы. Тогда коллекторный ток также воз
растает, и благодаря увеличению напряжения на RК коллекторное напряжение умень
шается, приближаясь к своему расчетному значению. Тем не менее нестабильность
рабочей точки делает параметры каскада непредсказуемыми для разных транзисторов
и при вариациях температуры. Решение этой задачи возможно при использовании че
тырехрезисторной схемы смещения.
3.6 .2 . óÂÚ̊ÂıÂÁËÒÚÓ̇fl ÒıÂχ ÒÏÂ̆ÂÌËfl
Четырехрезисторную схему смещения называют также схемой с автосмещением
(рис. 3.25). Здесь вариации hFE и VБЭ меньше влияют на положение рабочей точки.
Эмиттерный резистор добавлен для установки усиления по напряжению сигнала в
цепи коллектора, а делитель напряжения в цепи базы добавлен, чтобы режим сме
щения определялся в основном потенциалом базы, который существенно превыша
ет напряжение база
эмиттер VБЭ ≈ 0,7 В. Сопротивления четырех резисторов рас
считываются исходя из следующих соображений:
напряжение на RЭ много больше, чем VБЭ;
усиление сигнала переменного напряжения определяется соотношением RК/RЭ.
R1 и R2 обеспечивают необходимое напряжение смещения базы;
Изменения hFE и VБЭ, вызванные заменой транзистора или температурными изме
нениями, оказывают минимальное влияние на режим смещения, установленный в схе
ме с четырьмя резисторами. Пример расчета схемы с четырьмя резисторами рассмат
ривается в следующем разделе.
3.7 . í‡ÌÁËÒÚÓÌ̊È ÛÒËÎËÚÂÎ̧ Ò Ó·̆ËÏ ̋ÏËÚÚÂÓÏ
Основной элемент всех активных схем — транзистор, а при разработке транзистор
ных усилителей наиболее популярная конфигурация — каскад с общим эмиттером.
Термин общий эмиттер означает, что эмиттер транзистора связан или непосред
ственно или через резистор с источником напряжения, который может быть заземлен
или может быть отрицательным. Используя информацию, обсуждавшуюся в предыду
í‡ÌÁËÒÚÓÌ̊È ÛÒËÎËÚÂÎ̧ Ò Ó·̆ËÏ ̋ÏËÚÚÂÓÏ
189
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
щем разделе, можем продолжить разработку усилителя с общим эмиттером на основе
схемы смещения с четырьмя резисторами. Пример 3.12 определяет параметры эле
ментов схемы и описывает шаг за шагом последовательность вычисления компонен
тов схемы в усилителе с общим эмиттером. Пример 3.13 определяет компоненты схе
мы и описывает последовательность вычисления токов и напряжений.
Рис. 3 .24. Другая схема смещения
с двумя резисторами
Рис. 3.25. Схема смещения с четырьмя
резисторами
èËÏ 3.12
Вычислите сопротивления усилителя на рис. 3 .26а. Технические требования к расчету:
усиление переменного напряжения равно 10 для входного напряжения < 0,5 Vpp (на
пряжение от пика до пика, т.е. двойная амплитуда), входное сопротивление > 3 кОм,
выходное сопротивление < 2,5 кОм, V
СС — напряжение питания — 12 В постоянного
напряжения.
êÂ̄ÂÌËÂ
Шаги, требуемые при проектировании этого усилителя:
1. Выбираем RК, соответствующее требованию выходного сопротивления. Выби
раем значение 2,2 кОм, поскольку это ближайшее стандартное значение.
2. Выбираем RЭ для получения коэффициента усиления 10. Поскольку усиление по
напряжению равно RК/RЭ , получим:
RЭ =220Ом.
3. Найдем ток коллектора, который позволит получить максимальный диапазон выход
ного переменного напряжения (изменение потенциала выхода по отношению к точке
Q — середине этого интервала). Иными словами, потенциал выхода будет изменяться
от нуля до напряжения VСС, а среднее значение составит VК = 1/2 VCC = 6 В:
190
IК=2,73мА=2730мкА.
4. Найдем базовый ток, зная, что он равен току коллектора, деленному на мини
мальное значение hFE транзистора 2N3904, которое составляет 100:
5. Найдем ток эмиттера, зная, что он равен сумме коллекторного и базового токов:
IЭ=2,73мА+27,3мкА;
IЭ = 2,757 мА.
6. Найдем напряжение на базе, если VБЭ = 0,7 В для 2N3904:
VБ=VБЭ+VЭ;
VБ=VБЭ+IЭRЭ;
VБ =0,7В+2,757мА+220Ом;
VБ=1,31В.
7. Вычислим сопротивления резисторов смещения R1 и R2, которые гарантируют,
что входное сопротивление больше, чем 5 кОм. Входное сопротивление вычис
ляется как параллельное соединение R1, R2 и RЭ + h FE. Сначала выберем значе
ние R2 и вычислим R1, используя следующую формулу:
Положив R2 = 5 кОм, получим:
Решив относительно R1, получим:
R1=41кОм.
Продолжая вычисления:
Rвх
= R1||R2||RЭ+hFE,
где
RЭ+hFE=220Ом+100=22кОм,
í‡ÌÁËÒÚÓÌ̊È ÛÒËÎËÚÂÎ̧ Ò Ó·̆ËÏ ̋ÏËÚÚÂÓÏ
191
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
получим окончательно:
RВХ=41кОм||5кОм||22кОм;
RВХ = 3,7 кОм.
Другая проверка значений R1 и R2 состоит в том, что ток делителя R1, R2 должен
быть приблизительно в 10 раз больше тока базы, где IБ = 27,3 мкА, как было ранее
вычислено. Используя закон Ома, получим:
IR1,R2 = 261 мкА.
Рис. 3 .26. Примеры 3.12 и 3.13:
а) к примеру 3.12;
б) к примеру 3.13
èËÏ 3.13
Вычислить IК, IБ, IЭ , VК, и VЭ для усилителя рис. 3.26б, где минимальное значение hFE
для транзистора Q1 равно 75.
êÂ̄ÂÌËÂ
Необходимые шаги для анализа усилителя:
Вычислим ток эмиттера, используя соотношения:
VБ=VБЭ+VЭ.
Так как
VЭ=IЭ+0,33кОм,
то
VБ=VЭ+IЭ+0,33кОм.
192
Поскольку потенциал базы зависит от делителя в цепи базы R1 и R2, а также от тока
базы, рассчитаем в первом приближении потенциал базы, считая базовый ток близ
ким к нулю:
VБ=1,6В.
Выходное сопротивление цепи делителя равно
Рассчитаем эмиттерный ток, сохранив допущение о малости базового тока:
VЭ=VБ—VБЭ;
VЭ=1,6В
0,7В;
VЭ=0,9В;
VЭ=IЭ+RЭ;
0,7В =IЭ+0,33кОм;
IЭ = 2,12 мА.
Учитывая, что ток базы фактически отличен от нуля и соответствует уравнению
IБ=IЭ—IК;
оценим коллекторный ток:
75
1
1
;
IК=2,1мА.
í‡ÌÁËÒÚÓÌ̊È ÛÒËÎËÚÂÎ̧ Ò Ó·̆ËÏ ̋ÏËÚÚÂÓÏ
193
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Ток базы составит:
IБ=0,028мА=28мкА.
Внесем уточнения с учетом тока базы. Вместо VБ
= 1,6 В, получим:
VБ=1,6В—IБ+(R1||R2);
VБ=1,6В—0,028мА+7,3кОм;
VБ=1,4В.
После уточненного расчета получим VЭ , I Э, I
к
и VКЭ:
VЭ=1,4В —0,7В =0,7В;
IЭ = 0,7 В/0,33 к Ом;
IЭ = 2,12 мА;
IК = 2,09 мА;
VКЭ=VСС—IК+RК—IЭ+RЭ;
VКЭ=12В—2,09мА+3,3кОм—2,12мА+0,33кОм;
VКЭ=12В—7В
—
0,7 В;
VКЭ=4,3В.
3.8 . í‡ÌÁËÒÚÓÌ̊È Â„ÛÎflÚÓ Ì‡ÔflÊÂÌËfl
Транзисторный регулятор напряжения использует нерегулируемое постоянное напря
жение и обеспечивает регулируемое постоянное напряжение на нагрузке. Источник
нерегулируемого постоянного напряжения — двухполупериодный мостовой выпря
митель с трансформатором, подключаемый к сети переменного напряжения 120 или
220 В. Нагрузка — как правило, активные электронные компоненты, которые требу
ют стабильного напряжения, в то время как потребляемый ими ток изменяется время
от времени. В следующих разделах обсуждаются два типа регуляторов: последова
тельные и шунтирующие (параллельные).
3.8.1. èÓÒΉӂ‡ÚÂÎ̧Ì̊È Â„ÛÎflÚÓ
Типичный последовательный регулятор представлен на рис. 3.27. Полный ток нагруз
ки протекает через регулирующий транзистор Q1, поэтому его иногда называют про
ходным транзистором. Другие компоненты — ограничивающий ток резистор R1 и ста
194
билитрон CR1. Стабилитрон не проводит ток, пока не будет достигнуто напряжение
пробоя (напряжение стабилизации), после чего он переходит в проводящее состоя
ние. В этом состоянии напряжение на базе транзистора, которое часто называют
опорным, постоянно.
èËÏ 3.14
Каково падение напряжения на транзисторе Q1, если напряжение стабилитрона 15 В, а
напряжение нерегулируемого источника VВХ = 20 В?
êÂ̄ÂÌËÂ
Регулируемое выходное напряжение равно:
VВЫХ = VСТ — VБЭ;
VВЫХ=15В—0,7В =14,3В.
Падение напряжения на Q1найдем из соотношения:
VВХ = VКЭ +VВЫХ;
VКЭ=VВХ—VВЫХ=20В—14,3В=5,7В.
Если происходит изменение входного VВХ или выходного VВЫХ напряжения, оно
воспринимается эмиттером Q1, который производит соответствующее изменение
прямого смещения транзистора. Вновь обратимся к рис. 3 .27 и предположим, что
входное напряжение увеличилось до 20,1 В, что заставляет выходное напряжение воз
расти до 14,4 В. Поскольку напряжение базы Q1 поддерживается на уровне 15 В, на
пряжение VБЭ изменяется до 0,6 В. Поскольку напряжение смещения стало меньше
0,7 В, сопротивление эмиттер
коллектор Q1 возрастает и заставляет снизиться паде
ние напряжения на Q1 до 5,8 В. Это снижение напряжения восстанавливает выходное
напряжение до 14,3 В. Теперь давайте предположим, что вследствие увеличения тока
нагрузки напряжение на ней уменьшилось до 14,2 В. Когда выходное напряжение
уменьшается, VБЭ возрастает до 0,8 В, так как напряжение на базе считается постоян
ным и равным 15 В. Это большее прямое смещение уменьшает сопротивление эмит
тер
коллектор Q1 и падение напряжения на Q1 до 5,6 В.
Вследствие этого выходное напряжение восстанавливается на первоначальном
уровне 14,3 В. Описанные процессы регулирования осуществляются за малые доли
секунды.
Рис. 3.27.
Последовательный
стабилизатор
напряжения
í‡ÌÁËÒÚÓÌ̊È Â„ÛÎflÚÓ Ì‡ÔflÊÂÌËfl
195
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.8.2 . òÛÌÚËŲ̂̆ËÈ Â„ÛÎflÚÓ
Типичный шунтирующий регулятор показан на рис. 3.28. В этой схеме регулирующий
транзистор включен параллельно нагрузке, а другие компоненты идентичны с таковы
ми в последовательном регуляторе за исключением добавочного резистора R2, вклю
ченного последовательно с нагрузкой. Ограничивающий ток резистор R1 и стабилит
рон CR1 обеспечивают постоянное опорное напряжение на переходе база
коллектор
транзистора Q1.
Рис. 3 .28.
Параллельный
стабилизатор
èËÏ 3.15
1. Какое напряжение падает на R2 на рис. 3.28 со стабилитроном 5 В и нерегулиру
емым входным постоянным напряжением 20 В?
2. Каково стабилизированное постоянное напряжение на нагрузке?
êÂ̄ÂÌËÂ
1. При напряжении на CR1 5 В, напряжение на R1 равно 15 В. Напряжение на R2
равно напряжению на R1 минус VБЭ:
VR2=VR1—VБЭ;
VR2=15B—0,7B;
VR2 = 14,3 В.
2. Регулируемое стабилизированное выходное напряжение равно сумме напряже
ния стабилитрона и VБЭ:
VВЫХ = VCR1 + VБЭ;
VВЫХ=5В+0,7В;
VВЫХ = 5,7 В.
Рассмотрим работу шунтирующего регулятора при изменениях входного и выход
ного напряжений. С увеличением входного напряжения до 20,1 В напряжение VБЭ тран
196
зистора Q1 увеличивается до 0,8 В, а напряжение на CR1 остается 5 В. Увеличение пря
мого смещения Q1 понижает его сопротивление, таким образом позволяя ему пропус
кать больший ток. Поскольку ток также проходит через R2, падение напряжения на R2
возрастает до 14,4 В, таким образом возвращая напряжение на нагрузке к 5,7 В. В слу
чае снижения выходного напряжения осуществляется подобный цикл с уменьшением
напряжения на R2, благодаря чему выходное напряжение остается стабильным.
3.9 . í‡ÌÁËÒÚÓÌ̊È ËÌ‚ÂÚÓ
Инвертор — устройство, которое преобразует входное постоянное напряжение в
переменное выходное. Инверторы обычно предназначаются для получения перемен
ного напряжения 115 В от источника низкого постоянного напряжения, обычно 12 В
или 24 В. Они часто используются в качестве бортовых преобразователей на судах и
других транспортных средствах, а также при отсутствии сетевого напряжения 115 В.
Возможный перечень потребителей для инвертора включает микроволновые
печи, телевизоры, видеомагнитофоны, компьютеры, электроинструмент и средства
связи. Кроме того, некоторые преобразователи обладают способностью выпрямлять
напряжение сети 50 или 60 Гц, а затем используют инвертор, чтобы вновь получить
переменное напряжение. На первый взгляд это преобразование может показаться
странным, однако иногда возникает потребность в переменном напряжении регулиру
емой частоты при стабильной частоте сети 50 или 60 Гц. В качестве примера можно
назвать частотно
регулируемый электропривод.
Инвертор использует вход постоянного напряжения и соединяет его с парой (или
больше) переключающих силовых транзисторов. Быстро переводя эти транзисторы в
состояния насыщения и отсечки (вкл. и выкл.) и подавая поочередно входное напря
жение на противоположные выводы трансформатора, мы создаем имитацию подачи
на трансформатор переменного напряжения. Трансформатор изменяет это быстро пе
реключаемое постоянное напряжение 12, 24 или 48 В в переменное 115 В на выходе.
В зависимости от качества и сложности инвертора это напряжение имеет прямоуголь
ную форму (меандр), квазисинусоидальную (ступенчатую аппроксимацию синуса) или
близкую к синусоидальной. Инверторы с прямоугольным напряжением находят огра
ниченное применение для электроинструмента и питания ламп накаливания. Следую
щие разделы обеспечивают понимание принципа действия различных инверторов.
Мы обсудим различные типы инверторов: двухтранзисторный инвертор, инвертор с
двумя парами транзисторов, трехфазный инвертор и инвертор с синусоидальным вы
ходным напряжением.
3.9 .1 . àÌ‚ÂÚÓ Ò ‰‚ÛÏfl Ú‡ÌÁËÒÚÓ‡ÏË
Простой инвертор с двумя транзисторами представлен на рис. 3 .29а. Транзисторы Q1
и Q2 поочередно переводятся в насыщенное состояние сигналами системы управле
ния. Сигналы управления транзисторами и выходное напряжение инвертора пред
í‡ÌÁËÒÚÓÌ̊È ËÌ‚ÂÚÓ
197
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
ставлены на рис. 3.29б — диаграммы (1), (2) и (3). Сигналы управления подаются
между эмиттерами транзисторов (заземленный «минус» источника постоянного на
пряжения) и базами n
p
n транзисторов. Выходное напряжение инвертора на обмотке
повышающего трансформатора имеет форму, заметно отличающуюся от синусоиды,
однако в зависимости от предполагаемого назначения инвертора возможны два следу
ющих варианта:
выходное напряжение инвертора поступает на вход фильтра, который сни
жает содержание высших гармоник и приближает форму выходного напря
жения к синусоидальной (см. пунктируную кривую);
выходное напряжение инвертора используется для получения требуемого дей
ствующего значения напряжения 115 В. В этом случае искажение формы не
играет существенной роли, а колебания напряжения питания можно компен
сировать изменением интервала проводимости транзисторов, то есть ширины
импульсов.
Рис. 3 .29.
Инвертор
на двух
транзисторах:
а) схема
инвертора;
б) временные
диаграммы
инвертора
198
3.9 .2 . àÌ‚ÂÚÓ Ò ‰‚ÛÏfl Ô‡‡ÏË Ú‡ÌÁËÒÚÓÓ‚
Можно выполнить инвертор, содержащий две пары транзисторов: пару 1 (транзисторы
(1) и (2)) и пару 2 (транзисторы (3) и (4)). Первая пара формирует отрицательную полу
волну, которая дает лучшее приближение к синусоиде (рис. 3 .30б). Длительности ступе
ней сделаны одинаковыми, амплитуды ступеней выбираются так, чтобы достичь лучше
го приближения к синусоиде, необходимая амплитуда реализуется выбором количества
витков первичной обмотки. Положительная амплитуда формируется аналогично путем
насыщения транзисторов пары 2 в последовательности: (1); (2); (1). Улучшение формы
выходного напряжения достигается за счет усложнения схемы и сигналов управления.
Инверторы такого типа удовлетворяют требованиям многих потребителей, но могут по
требовать более сложного силового фильтра основной гармоники для питания звуко
усилительной аппаратуры.
Рис. 3.30. Инвертор на
двух парах
транзисторов
í‡ÌÁËÒÚÓÌ̊È ËÌ‚ÂÚÓ
199
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.9.3. íÂıÙ‡ÁÌ̊È ËÌ‚ÂÚÓ
Для промышленных изделий, где требуются большие напряжения и токи, эффективно
используются трехфазные инверторы. Они могут выполняться соединением трех одно
фазных инверторов, как показано на рис. 3.31а. В каждой фазе — а, b или с — один из
транзисторов насыщен (включен), а другой находится в режиме отсечки. Таким образом,
каждая фаза подключена к одному из выводов источника постоянного напряжения (+
или —) . Полный цикл переключения, составляющий один полный период выходного
напряжения, содержит шесть тактов. Положительный полупериод содержит три такта,
когда насыщен один из верхних (нечетных) транзисторов. В отрицательном полупериоде
насыщенными должны быть транзисторы нижней (четной) группы. Трехфазный инвер
тор должен формировать напряжение каждой фазы, сдвинутое по фазе на 120° по отно
шению к предыдущей. Следовательно, диаграммы напряжений рис. 3.31б повторяются,
если сдвинуть их на два такта, длительность которых и составляет 120°.
На каждом такте номера проводящих транзисторов получаются циклическим
сдвигом: 561, 612, 123, 234, 345, 456...
Линейные напряжения на обмотках получаются как разность потенциалов фаз.
Например, на первом такте 561 проводят транзисторы, которые делают линейное на
пряжение Uab = E, на втором такте Uab = E, далее линейное напряжение дает следу
ющую последовательность значений: Е, E, 0, —Е, —Е, 0...
Регулирование напряжения осуществляется выделением на каждом такте нуле
вой паузы напряжения, когда проводят либо три нечетных транзистора 1, 3 и 5, либо
три четных: 4, 6, 2.
Система управления должна обеспечивать отпирание тиристоров в последова
тельности, указанной на рис. 3 .31б. Обратите внимание, что отпирание тиристоров
должно проводиться импульсами, подававемыми на базу транзистора по отношению к
катоду. Из шести тиристоров у трех потенциалы эмиттеров одинаковы, а у других трех
(нечетных) между катодами может быть разность потенциалов, равная линейному вы
ходному напряжению. Поэтому драйверы (выходные каскады системы управления)
должны иметь потенциально несвязанные источники питания.
Синхронизация сигналов управления и возможность регулирования напряжения явля
ются самыми важными и критичными параметрами в трехфазных инверторах напряжения.
3.9.4 . àÌ‚ÂÚÓ Ò ÒËÌÛÒÓˉ‡Î̧Ì̊Ï ‚̊ıÓ‰Ì̊Ï Ì‡ÔflÊÂÌËÂÏ
Как следует из предыдущего обсуждения, большинство инверторов формирует моди
фицированное квазисинусоидальное выходное напряжение, потому что они преобра
зуют постоянное напряжение первичного источника путем переключения транзисто
ров в фиксированной последовательности. Инверторы с синусоидальным выходным
напряжением вырабатывают напряжение, подобное тому, которое вы получаете от
энергопроизводящей компании. Эти инверторы характеризуются более сложной схе
мой, чем модифицированная волна синуса, потому что трудно произвести чистое сину
соидальное напряжение из постоянного на входе. В результате инвертор с синусои
дальным выходным напряжением гораздо дороже при сравнимой выходной мощности.
200
Рис. 3.31. Трехфазный транзисторный инвертор
í‡ÌÁËÒÚÓÌ̊È ËÌ‚ÂÚÓ
201
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Как видно из рис. 3 .32, распространенный тип инвертора с синусоидальным выход
ным напряжением вначале преобразует низкое постоянное напряжение в высокое посто
янное, используя преобразователь постоянного напряжения. Затем используют высоко
частотную широтно
импульсную модуляцию (ШИМ), чтобы преобразовать постоянное
высокое напряжение в последовательность импульсов, которые передаются через кон
денсатор и индуктивность низкочастотного LC
фильтра для получения синусоидального
напряжения 50 или 60 Гц. В схеме инвертора используются транзисторные переключате
ли, которые изменяют свое состояние ВКЛ. и ВЫКЛ. с частотой, многократно превыша
ющей выходную частоту инвертора. Каждая волна синуса состоит из многократно повто
ряющихся импульсов, формируемых транзисторными переключателями. Длительность
каждого прямоугольного импульса регулируется с тем, чтобы изменить период всей груп
пы импульсов, которые составляют волну синуса. Поскольку настройка напряжения и ча
стоты волны синуса довольно сложна, инверторы с синусоидальным напряжением ис
пользуют микропроцессорную систему управления.
3.9.5. á‡ÍĮ̂̃ÂÌËÂ
Инвертор — устройство, которое генерирует переменное напряжение при питании от
источника постоянного напряжения и обычно не выполняется в виде единственной
автономной схемы. Как правило, инверторы содержат другие узлы, такие как выпря
мители, фильтры, преобразователи постоянного напряжения. Инверторы широко ис
пользуются в промышленных устройствах, наиболее распространенное — частотно
регулируемый привод переменного тока.
Рис. 3 .32. Инвертор с синусоидальным
выходным напряжением
202
3.10. í‡ÌÁËÒÚÓÌ̊ ÔÂÓ·‡ÁÓ‚‡ÚÂÎË
ÔÓÒÚÓflÌÌÓ„Ó Ì‡ÔflÊÂÌËfl
Преобразователь постоянного напряжения — это устройство, которое получает
постоянное входное напряжение и производит постоянное напряжение другого уровня
на выходе. Преобразователь постоянного напряжения — правый блок в схеме источ
ника электропитания постоянного напряжения на рис. 3.33. Левый блок — выпрями
тель — преобразует переменное напряжение сети в постоянное. Преобразователи
постоянного напряжения — наиболее распространенный вид преобразователей в ис
точниках питания, потому что любое электронное оборудование нуждается в питании
от источника постоянного напряжения. Кроме того, эти источники обеспечивают ста
билизацию уровня напряжения и защиту от шумов и помех.
Основной вопрос при обсуждении темы преобразователей постоянного напряже
ния — их применение в ключевых источниках электропитания. Ключевые источники
питания стали более популярными, чем линейные, потому что они более эффективны
и используют более легкие и компактные трансформаторы и фильтры. Недостаток
ключевых источников питания — электромагнитные шумы и помехи, которые, одна
ко, могут быть ограничены использованием соответствующих способов управления и
выбором компонентов.
Основная блок
схема ключевого источника электропитания показана на рис. 3 .34.
Первый блок — входной выпрямитель, который преобразует напряжение сети в филь
трованное нерегулируемое постоянное напряжение. Второй блок — переключающая
схема, которая преобразует нерегулируемое постоянное напряжение в высокочастот
ные прямоугольные импульсы с частотой от 20 до 100 кГц. Это преобразование препят
ствует передаче на выход флуктуаций и переходных процессов в питающей сети, а также
обеспечивает более высокую эффективность (КПД) и позволяет уменьшить размеры и
массу трансформаторов и фильтров. Следующий блок — выходной выпрямитель, кото
рый выпрямляет напряжение прямоугольной формы, обеспечивая малые пульсации по
стоянного напряжения. Силовой трансформатор также находится в этом блоке, выпол
няя функции изоляции (потенциальной развязки) и установления требуемого уровня
выходного напряжения. Блок управления и схема обратной связи обычно содержат мо
дулятор ширины импульсов, который обеспечивает стабилизацию уровня выходного
постоянного напряжения, и тактовый генератор для установления частоты и коэффици
ента проводимости в блоке схемы переключения.
Рис. 3.33 . Блоксхема источника питания
í‡ÌÁËÒÚÓÌ̊ ÔÂÓ·‡ÁÓ‚‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó Ì‡ÔflÊÂÌËfl
203
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
В последующих разделах обсуждаются некоторые детали четырех типов схем, ко
торые используются в выходном выпрямительном блоке на рис. 3.34. Этими типами
схем являются: повышающий, понижающий, повышающий и понижающий, или ин
вертирующий, а также прямоходовой или обратноходовой преобразователи. Обрати
те внимание, что выключатель на рисунках преобразователя — не механический, а
электронный ключ — транзистор.
3.10.1 . èÓ‚̊̄‡̨̆ËÈ ÔÂÓ·‡ÁÓ‚‡ÚÂÎ̧
Повышающий преобразователь изображен на рис. 3.35а; форма тока катушки индук
тивности показана на рис. 3.35б; полярность напряжения на катушке индуктивности
сведена в таблицу рис. 3.35в. При разомкнутом ключе напряжение на конденсаторе
равно входному напряжению. Когда ключ замыкается, входное напряжение прикла
дывается к катушке индуктивности, а диод препятствует разряду конденсатора. При
замыкании ключа ток через диод линейно нарастает со скоростью, которая пропорци
ональна входному напряжению, поделенному на индуктивность. Это фаза накопления
энергии в индуктивности.
Когда ключ размыкается снова, напряжение на катушке индуктивности мгновен
но изменяется таким образом, чтобы поддержать ток катушки, который не может из
мениться скачкообразно. Для поддержания тока индуктивности напряжение на ка
тушке должно измениться настолько, чтобы обеспечить прямое смещение диода СR1.
Напряжение на ключе VS превышает напряжение на конденсаторе VВЫХ на величину
падения на диоде Vд. Напряжение на катушке индуктивности должно изменять поляр
ность при изменении состояния ключа. Емкость конденсатора достаточно велика для
того, чтобы изменения напряжения в течение цикла работы ключа можно было счи
тать пренебрежимо малыми. Таким образом, при разомкнутом ключе напряжение на
катушке индуктивности остается постоянным и равно разности VВХ — (VВЫХ + Vд). Ток
катушки индуктивности изменяется по линейному закону, как показано на рис. 3.35б,
скорость изменения тока равна напряжению на катушке индуктивности, поделенному
на индуктивность. Этот цикл повторяется снова и снова в соответствии с сигналами
схемы управления ключом.
Рис.3.34. Блоксхема
импульсного
источника питания
204
Таким образом, когда ключ замыкается, ток через катушку индуктивности возрас
тает. Когда выключатель разомкнут, ток индуктивности течет через диод в цепь выхода.
Внимательно изучите рис. 3 .35, чтобы лучше понять процессы накопления и уменьше
ния энергии.
Рис. 3.35 . Повышающий преобразователь:
а) схема;
б) временная диаграмма тока индуктора;
в) полярность напряжения на катушке L1
í‡ÌÁËÒÚÓÌ̊ ÔÂÓ·‡ÁÓ‚‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó Ì‡ÔflÊÂÌËfl
205
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.10.2 . èÓÌËʇ̨̆ËÈ ÔÂÓ·‡ÁÓ‚‡ÚÂÎ̧
Если поменять местами элементы преобразователя, повышающий преобразователь
становится понижающим, как показано на рис. 3 .36а. Полярности напряжения на ка
тушке индуктивности в зависимости от положения ключа показаны на рис. 3 .36б. В по
нижающем преобразователе ключ замкнут, напряжение на катушке индуктивности рав
но VВХ минус VВЫХ. Первоначально это напряжение равно VВХ, потому что VВЫХ = 0 при
запуске. Линейно изменяющиеся пилообразные токи текут через выходной конденса
тор. Когда ключ размыкается, напряжение на катушке индуктивности мгновенно изме
няет полярность, чтобы позволить току течь через диод и катушку индуктивности в кон
денсатор выхода. Поскольку энергия поступает к выходному конденсатору в течение
каждой половины циклов, понижающий преобразователь характеризуется наиболее
высокой эффективностью. Однако его выходное напряжение всегда меньше входного.
Рис. 3 .36. Понижающий преобразователь:
а) схема преобразователя;
б) полярность напряжения на катушке индуктивности L1
3.10.3. àÌ‚ÂÚËŲ̂̆ËÈ ÔÂÓ·‡ÁÓ‚‡ÚÂÎ̧
Сохранив местоположение ключа в схеме, и поменяв местами катушку индуктивности
и диод в понижающем преобразователе, получим инвертирующий преобразователь, у
которого полярность напряжения на выходе обратна входной (рис. 3.37а). Поляр
ность напряжения на катушке индуктивности в зависимости от состояния ключа пред
ставлена на рис. 3 .37б. Этот преобразователь содержит признаки обоих преобразова
телей — повышающего и понижающего. Когда ключ замкнут, входное напряжение
206
прикладывается к катушке индуктивности, вызывая линейное нарастание тока. Когда
ключ размыкается, ток в индуктивности продолжает течь в том же направлении, а по
лярность напряжения на катушке индуктивности изменяется на противоположную.
Ток течет через диод и заряжает выходной конденсатор, создавая выходное напряже
ние с противоположной полярностью по отношению к входному напряжению (отсюда
название — инвертирующий преобразователь). Поскольку этот преобразователь
имеет качества повышающего и понижающего преобразователей, его выходное на
пряжение может регулироваться как выше, так и ниже уровня входного напряжения.
Рис. 3.37. Инвертирующий преобразователь:
а) схема преобразователя;
б) полярность напряжения на катушке L1
3.10.4 . èflÏÓıÓ‰Ó‚ÓÈ ÔÂÓ·‡ÁÓ‚‡ÚÂÎ̧
Если к понижающему преобразователю добавить трансформатор и другой диод, то
получим прямоходовой преобразователь, показанный на рис. 3.38а. Состояния трех
диодов CR1, CR2 и СR3 в зависимости от состояния ключа S1, показаны на рис. 3 .38б.
В этом преобразователе ключ соединен последовательно с первичной обмоткой
трансформатора. Трансформатор действует как устройство передачи энергии, исполь
зуя энергию, накопленную в индуктивности намагничивания L2, со сбросом ее через
CR3. Когда ключ замкнут, энергия поступает непосредственно через CR1 и катушку
индуктивности L1 на выход. Когда ключ размыкается, CR2 проводит и энергия, накоп
ленная в катушке индуктивности L1, продолжает поступать на выход. Таким образом,
выходной ток непрерывен, что позволяет уменьшить емкость конденсатора благодаря
уменьшенным пульсациям.
í‡ÌÁËÒÚÓÌ̊ ÔÂÓ·‡ÁÓ‚‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó Ì‡ÔflÊÂÌËfl
207
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.10.5 . Ñ‚ÛıÚ‡ÍÚÌ̊È ÔÂÓ·‡ÁÓ‚‡ÚÂÎ̧
Помимо преобразователя с одним ключом, существует группа преобразователей, ис
пользующих два ключа, их называют двухтактными преобразователями. Основ
ной недостаток преобразователей с одним ключом — высокое напряжение, которое
должен выдерживать разомкнутый ключ. Это напряжение вдвое превышает входное
напряжение, что особенно существенно при работе от выпрямленного переменного
напряжения. Преобразователь с единственным ключом не является идеальным реше
нием и в случае необходимости преобразования повышенной мощности — из
за вы
соких требований к допустимым параметрам силового транзистора. Двухтактные пре
образователи используют трансформатор с выводом средней точки как первичной, так
и вторичной обмотки. Первичная обмотка подключается транзисторами, которые уп
равляются так, что в любую половину периода один из них проводит. В следующих
разделах обсуждаются мостовая и полумостовая схемы двухтактного преобразовате
ля. Оба варианта представляют собой понижающие преобразователи, коэффициент
передачи напряжения которых такой же, как в прямом преобразователе.
Рис. 3 .38. Прямоходовой преобразователь:
а) схема преобразователя;
б) состояние ключевых элементов
208
3.10.6. åÓÒÚÓ‚ÓÈ ‰‚ÛıÚ‡ÍÚÌ̊È ÔÂÓ·‡ÁÓ‚‡ÚÂÎ̧
Этот преобразователь формирует на обмотке высокочастотного трансформатора
прямоугольное напряжение, имеющее как положительную, так и отрицательную полу
волну и аппроксимирующее синусоидальное выходное напряжение. Первичное напря
жение V1 может принимать значения +VВХ или —VВХ или нуль — в зависимости от того,
какая пара транзисторов (Q1, Q4 или Q2, Q3) включена, как показано на рис. 3.39б.
Схема управления этими четырьмя транзисторами не приведена для краткости. На вто
ричной стороне трансформатора диодный мост выпрямляет переменное напряжение, а
LC
фильтр сглаживает пульсацию выходного напряжения VВЫХ:
Рис. 3.39 . Мостовой преобразователь:
а) схема преобразователя;
б) временная диаграмма входного напряжения.
Примечание: цепи управления транзисторов Q1...Q4 для простоты
опущены
í‡ÌÁËÒÚÓÌ̊ ÔÂÓ·‡ÁÓ‚‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó Ì‡ÔflÊÂÌËfl
209
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Рис. 3 .40. Преобразователь с отводом от средней точки.
Примечание: цепи управления транзисторов
Q1,Q2 для простоты опущены
где N2/N1 — отношение чисел витков обмоток — коэффициент трансформации
трансформатора, а t1/T — коэффициент проводимости транзисторов.
èËÏ 3.16
Каково выходное напряжение мостового двухтактного преобразователя со входным
напряжением 12 В, работающего с 80
процентным коэффициентом проводимости и с
трансформатором, имеющим коэффициент трансформации 5?
êÂ̄ÂÌËÂ
VВЫХ=12В×(5×0,8);
VВЫХ=48В.
Коэффициент трансформации должен быть больше или равен отношению VВЫХ/
VВХ. Коэффициент проводимости может теоретически быть равным 100 процентам.
Практически, однако, достижение 100 процентов невозможно, потому что последова
тельно переключаемые пары транзисторов Q1, Q4 или Q2, Q3 должны переключаться
с так называемым «мертвым временем» (разрыв прежде замыкания), чтобы избежать
короткого замыкания источника входного напряжения.
210
3.10.7. èÓÎÛÏÓÒÚÓ‚ÓÈ ‰‚ÛıÚ‡ÍÚÌ̊È ÔÂÓ·‡ÁÓ‚‡ÚÂÎ̧
Один из вариантов двухтактного преобразователя — полумостовой преобразователь
на рис. 3.40. Схема управления двумя транзисторами опущена для краткости. Конден
саторы С1 и С2 делят входное напряжение VВХ на 2. Поэтому величина первичного
напряжения равна
VВХ/2, и коэффициент трансформации должен быть больше или
равен отношению 2VВЫХ/VВХ. На рис. 3 .40 двухполупериодный выпрямитель с двумя
диодами используется вместо мостового с четырьмя диодами. Выбор типа выпрямите
ля зависит от выходного напряжения и тока. Различие между этими двумя типами со
стоит в том, что в мостовом выпрямителе ток течет через два последовательных диода,
а в полумостовом — только через один. Следовательно, двухполупериодный преобра
зователь используется для получения большего тока, чтобы уменьшить потери в вып
рямителе, а мостовая схема используется для преобразования высокого напряжения,
чтобы сохранить одну вторичную обмотку трансформатора.
3.11 . Ñˇ„ÌÓÒÚËÓ‚‡ÌË ÒıÂÏ Ò ·ËÔÓÎflÌ̊ÏË Ú‡ÌÁËÒÚÓ‡ÏË
Простое испытание с использованием омметра позволяет определить, работоспособны
ли переходы транзистора. В ходе испытания измеряют прямое и обратное сопротивле
ния база
эмиттер, база
коллектор, коллектор
эмиттер. В некоторых источниках этот
тест называют проверкой исправности транзистора. Ожидаемые результаты этих изме
рений сопротивления и для pn p , и для np n транзисторов приведены в табл. 3 .4 .
Таблица 3.4. Проверка транзисторов с помощью омметра
Тест состоит в подключении положительного вывода омметра к первому выводу
транзистора, упомянутому в табл. 3.4, и отрицательного вывода омметра — ко второ
му упомянутому выводу транзистора. Например, если вы измеряете сопротивление
база
эмиттер pnp транзистора, то тогда положительный вывод омметра связан с
базой, а отрицательный — с эмиттером. Ожидаемым результатом будет высокое по
казание омметра. Заметьте, что омметр должен обеспечить прямое смещение перехо
да транзистора не менее 0,7 В. Однако, если необходимо измерить параметры транзи
стора типа усиления тока, напряжения пробоя и полного сопротивления, простой тест
с использованием омметра будет недостаточен.
Ñˇ„ÌÓÒÚËÓ‚‡ÌË ÒıÂÏ Ò ·ËÔÓÎflÌ̊ÏË Ú‡ÌÁËÒÚÓ‡ÏË
211
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Характериограф для транзистора — прибор, спроектированный для обеспечения
состояний схемы, требуемых при проведении измерений. Один наиболее важный па
раметр — hFE, коэффициент усиления по постоянному току транзистора. Характери
ограф — часть испытательного оборудования, используемого для измерения пара
метров транзистора. Он может генерировать и отображать семейство характеристик
коллекторного тока IК в функции напряжения коллектор
эмиттер VКЭ для различных
значений базового тока IБ. По этим характеристикам непосредственно определено те
кущее значение коэффициента усиления по току hFE. Три основных функциональных
узла используются для формирования и отображения этих характеристик на дисплее:
генератор пилообразного развертывающего напряжения управления напря
жением коллектора;
источник тока базы, который управляется таким образом, чтобы обеспечить
несколько равных приращений базового тока на каждом цикле развертки
коллекторного напряжения;
источник синхронизации, который обеспечивает изменение базового тока в
момент начала цикла развертки коллекторного напряжения.
Внешний вид двух современных характериографов фирмы Tektronix представлен
на рис. 3 .41. Оба устройства программно управляемы, причем модель 370В обеспечи
вает высокое разрешение, а модель 371В обеспечивает высокую мощность. Эти уст
ройства оснащены дисководом гибких дискет для хранения кривых и прямое подклю
чение к стороннему принтеру для получения твердой копии результатов эксперимента.
Некоторые из существенных особенностей отмечены на рис. 3.41, а информация от
носительно деталей, преимуществ и вопросов применения содержится на веб
сайте
Tektronix, о котором упоминается в разделе 3.13 этой главы.
Если транзистор вставлен в держатель, то, конечно, нетрудно вынуть его и прове
рить омметром или подключить к характериографу. Если транзистор впаян своими вы
водами в схему, это не столь просто выполнить. Диагностирующее устройство должно
проверить правильность всех соединений прежде, чем выполнять любое выпаивание.
Нередко и новички, и эксперты делают ошибки в проводном монтаже. Контроль монта
жа может быть утомителен, но он является необходимым условием получения информа
ции диагностическим устройством, чтобы дальнейший поиск неисправностей мог быть
успешен.
3.12. ÑÛ„Ë ڂ‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
Некоторые твердотельные устройства появились и продолжали появляться в течение
многих лет, некоторые были разработаны для уникальных изделий, а другие прошли
испытание временем, как биполярный плоскостной транзистор. В этом разделе об
суждаются три новых для нас твердотельных устройства, популярных до настоящего
времени:
тиристоры;
полевые транзисторы;
212
комплементарные металло
оксидные полупроводниковые приборы (МОП
транзисторы).
Рис. 3.41. Характериографы
3.12 .1 . íËËÒÚÓ̊
Тиристоры объединяют все твердотельные устройства, которые проявляют себя как
переключающие приборы, которые могут находиться в состояниях «включено
вык
лючено» в противоположность приборам с постепенным изменением проводимости.
ÑÛ„Ë ڂ‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
213
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Все они регенеративны по своей природе и не могут работать в линейном режиме.
Существуют три основных типа тиристоров:
тиристор с обратной блокирующей способностью;
двунаправленный триодный тиристор (симистор);
тиристор без обратной блокирующей способности.
Мы не будем здесь останавливаться на этой теме, так как тиристоры обсуждают
ся в главе 5.
3.12 .2 . èÓ΂ÓÈ Ú‡ÌÁËÒÚÓ
Полевой транзистор — полупроводниковый прибор с тремя выводами, в котором
ток течет через два вывода, а третий служит для управления. В отличие от биполярно
го транзистора, полевым транзистором управляет не ток, а напряжение на третьем
электроде. Другое отличие состоит в том, что полевой транзистор является униполяр
ным прибором. Эти устройства хорошо подходят для управляемых переключений
между проводящим и непроводящим состояниями и используются в цифровых схемах.
Они также удовлетворяют требованиям интеграции многих приборов на одном крис
талле (чипе). Наиболее популярны два типа полевых транзисторов: полевой транзис
тор с управляющим переходом (JFET) и металл
оксидный полупроводниковый поле
вой прибор (MOSFET). Полевые транзисторы характеризуются высоким входным
сопротивлением, потому что напряжение управления приложено или к обратно сме
щенному переходу, или к изолятору. Входное сопротивление разных типов устройств
имеет следующий порядок значений:
биполярный плоскостной транзистор в схеме Дарлингтона — тысячи Ом;
полевой транзистор с управляющим переходом (JFET) — тысячи МОм;
полевой транзистор MOSFET — миллионы МОм.
Поскольку MOSFET имеет самое высокое входное сопротивление, он является
меньшей нагрузкой для предшествующих схем и потому предпочтительнее в качестве
входного устройства.
3.12 .3. èÓ΂̊ ڇÌÁËÒÚÓ̊ Ò ÛÔ‡‚Îfl̨̆ËÏ ÔÂÂıÓ‰ÓÏ (JFET)
Структура p
n и схематическое обозначение для полевого транзистора с n
каналом
показана на рис. 3.42а и для транзистора с p
каналом — на рис. 3.42б. Три внешних
вывода JFET — сток, исток и затвор аналогичны коллектору, эмиттеру и базе бипо
лярного плоскостного транзистора. Кроме того, n
канальный JFET походит на тран
зистор npp типа, а p
канальный походит на транзистор pn p. В структуре pn поле
вого транзистора отметим, что твердотельная область полупроводника n
типа или
p
типа формирует основную часть кристалла. Диффундирующие с обеих сторон этой
области два участка из материала противоположного типа проводимости формируют
управляющий электрод — затвор. Часть области между участками материала затвора
214
имеет меньшее поперечное сечение, чем остальная часть области, и формирует канал,
связывающий исток и сток.
Рис. 3.42. Структура и условное
обозначение полевых
транзисторов:
а) nканального
транзистора;
б) pканального
транзистора
Смещение JFET. Давайте присоединим затвор к земле (рис. 3 .43), которая имеет
нулевой потенциал. В этом состоянии область канала представляет сопротивление при
близительно 500 Ом, и приблизительно 10 мА протекает через канал от истока к стоку.
Теперь установим смещение VGG равным —1 В, которое является обратным. При этом
условии область, обедненная носителями вокруг pn перехода, становится больше, что
фактически уменьшает поперечное сечение канала. Это сокращение области канала
увеличивает сопротивление исток
сток и уменьшает ток. Приложение достаточно боль
шого отрицательного напряжения к затвору заставляет обедненную носителями об
ласть расшириться настолько, что ток через канал прекращается полностью. Это на
пряжение смещения называют напряжением смыкания, и оно аналогично напряжению
отсечки транзистора. P
канальный полевой транзистор работает подобно n
канально
му. В p
канальном полевом транзисторе материалы основания и затвора имеют проти
воположные типы проводимости, поэтому напряжения источников также должны быть
реверсированы. P
канальный транзистор требует положительного напряжения на зат
воре для обратного смещения, а ток течет от стока к истоку.
Схема усилителя, содержащая n
канальный транзистор, представлена на рис. 3 .44.
С1 и С2 — разделительные конденсаторы входа и выхода. R1 и R2 устанавливают на
пряжение затвора VG, а RС и RИ — соответственно резисторы стока и истока. Это подоб
но схеме смещения биполярного транзистора с четырьмя резисторами биполярного
плоскостного транзистора. При подаче на вход переменного напряжения выходное на
пряжение сдвинуто на 180
, точно так же, как это было в усилительном каскаде с общим
ÑÛ„Ë ڂ‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
215
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
эмиттером. Схема каскада с общим истоком со значениями сопротивлений приведена на
рис. 3 .44б.
Рис. 3 .43. Смещение транзистора с управляющим
pn переходом
Рис. 3 .44. Усилитель на JFET с общим истоком:
а) схема усилителя;
б) схема к примеру 3.18
èËÏ 3.17. ᇉ‡̃‡ ‡Á‡·ÓÚÍË
Полевой транзистор имеет параметры: напряжение смыкания VP = —4 В, макси
мальный ток стока IСмакс
= 8 мА. Рассчитайте сопротивления резисторов в схеме
рис.3.44дляVСИ=10В,VDD=15В.
216
êÂ̄ÂÌËÂ
Сумма напряжений на RС и RИ и VСИ может быть записана как
VDD=VRC+VRИ+VCИ.
Примем, что падения напряжения на RИ и RС одинаковы:
VRИ = VRС.
В отсутствие других требований разработчик может выбирать распределение напря
жений. Тогда
VDD = 2VRC + VСИ;
15=2VRC+10;
5 = 2VRC.
Следовательно,
VRИ=VRC=2,5В.
Поскольку через R1 и R2 течет один и тот же ток, между ними должно выполняться
соотношение:
Поскольку нет других ограничений на R1 и R2, разработчик может выбрать сопротив
ление одного из них и рассчитать другие. Практическая рекомендация по поддержанию
малым тока делителя R1, R2 позволяет принять R1 = 1 МОм, тогда R2 = 1МОм / 29 =
34,5кОм.
èËÏ 3.18 (Á‡‰‡̃‡ ‡Ì‡ÎËÁ‡)
Полевой транзистор имеет параметры: напряжение смыкания VP = —4 В, макси
мальный ток стока IСмакс
= 8 мА. Рассчитайте режим смещения в форме значений IС и
VСИ для усилителя рис. 3.44б.
êÂ̄ÂÌËÂ
Прежде всего рассчитаем VЗ:
VЗ=1,1В.
ÑÛ„Ë ڂ‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
217
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
Напряжения на затворе и стоке можно определить из выражения для IС:
VЗ=VRИ+VЗИ;
1,1В =1,5кОм×IС+VЗИ;
(1)
Ток IС может быть выражен как
При IСмакс
= 8мАиVP= —4 Вможемзаписать:
(2)
Теперь мы имеем два уравнения (1) и (2) c двумя неизвестными. Аналитическое реше
ние довольно сложно, потому что в системе присутствует уравнение второго порядка.
Поэтому найдем графическое решение или решение методом проб и ошибок. Выбе
рем значение VЗИ и подставим его в уравнение (2), тогда
a) подставим VЗИ
=—1В;
b) IС = 4,5 мА из уравнения (2); подставим 4,5 мА в уравнение (1);
c) VЗИ = —5,65 В из уравнения (1).
Значение VЗИ = —1 В не удовлетворяет обоим уравнениям, поэтому попытаемся еще раз:
a) подставим VЗИ
=—2В;
b) IС = 2 мА из уравнения (2), подставим 2 мА в уравнение (1);
c) VЗИ = —1,9 В из уравнения (1).
Этот результат можно считать приемлемым. Имеем IС = 2 мА. Теперь вычислим VСИ:
VDD=RС·IС+VСИ+RИ·IС;
VDD=1,5кОм×2мА+VСИ+1,5кОм×2мА;
10В=3В+VСИ+3В.
Следовательно, рабочая точка (режим смещения) имеет координаты: IС = 2 мА, V СИ = 4 В .
3.12 .4 . åÂÚ‡ÎÎ-ÓÍÒˉÌ̊ ÔÓ΂̊ ڇÌÁËÒÚÓ̊ (MOSFET)
Металлоксидный полевой транзистор (MOSFET), как и полевой транзистор с управ
ляющим переходом, может быть с каналом p
типа или каналом n
типа, но обычно разраба
тывается для работы в одном из двух основных режимов: режиме обеднения или режиме
обогащения. Каждый тип имеет четыре вывода: затвор, исток, сток и подложку. Символы,
218
соответствующие этим четырем разновидностям, показаны на рис. 3.45а, б, в и г. MOSFET
в режиме обеднения имеет более легированный канал и использует обратное смещение на
затворе. JFET также работает подобным образом. MOSFET в режиме обогащения имеет
слабо легированный канал и использует прямое смещение на затворе.
Конструкция n
канального MOSFET показана на рис. 3.46. Сильно легирован
ная область n
типа, обозначенная N+, диффундирует в p
подложку или основание.
Канал регулярного материала n
типа диффундирует между сильно легированными
областями n
типа. Металл
оксидный изолирующий слой образуется вдоль канала, а
металлический слой затвора формируется вдоль изолирующего слоя. Не существует
никакого электрического соединения затвора с остальными частями устройства.
Принцип действия MOSFET в основном такой же, как у JFET. Ток между истоком
и стоком может управляться напряжением на затворе. Полярность напряжения, не
обходимая для того, чтобы получить прямое или обратное смещение, зависит от того,
является ли MOSFET p
канальным или n
канальным. Принцип действия может рас
сматриваться по аналогии с биполярным транзисторным ключом в режимах отсечки
или насыщения.
Рис. 3.45.
Условные обозначения
транзисторов MOSFET:
а) обедненный n
канальный MOSFET;
б) обедненный pканальный
MOSFET;
в) обогащенный n
анальный MOSFET;
г) обогащенный p
канальный MOSFET
ÑÛ„Ë ڂ‰ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡
219
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.12 .5 äÓÏÔÎÂÏÂÌÚ‡Ì̊ ÏÂÚ‡ÎÎ-ÓÍÒˉÌ̊ ÔÓÎÛÔÓ‚Ó‰ÌËÍÓ‚̊ ÔË·Ó̊
Комплементарные металлоксидные полупроводниковые приборы КМОП (CMOS)
используют транзисторы как p
типа, так и n
типа. КМОП — доминирующая технология,
применяемая в производстве микропроцессоров, блоков памяти и интегральных схем спе
циального назначения. Основное преимущество КМОП перед биполярной технологи
ей — намного более низкая мощность рассеяния. В отличие от биполярных схем, схема на
КМОП почти не потребляет мощности в статическом режиме. Мощность потребляется
только тогда, когда схема переключается, таким образом устройство остается холодным.
Это позволяет интегрировать гораздо большее количество схем на КМОП, чем на бипо
лярных транзисторах, в интегральную схему. Основной логический инвертор на КМОП
показан на рис. 3 .47а, его входное и выходное напряжение представлено на рис. 3 .47б.
Отметьте, что стоки соединены вместе и образуют выходной вывод, в то время как входной
вывод — общее подключение обоих затворов.
P
канальный транзистор имеет отрицательное пороговое напряжение, а n
каналь
ный — положительное пороговое напряжение. Поэтому нулевое входное напряжение
дает нулевое напряжение на затворе для n
канального транзистора, но напряжение
между затвором и истоком p
канала отрицательно. Таким образом, p
канальный тран
зистор включен, а n
канальный выключен, и полное напряжение источника питания VИ
появляется на выходе, то есть VИ появляется на непроводящем n
канальном транзисто
ре. Альтернативно, положительное значение VВХ включает транзистор n
канала и вык
лючает транзистор p
канала. Напряжение на транзисторе n
канала близко к нулю.
Привлекательность этой ситуации состоит в том, что один из транзисторов выключен
при любом входном сигнале. Поскольку транзисторы соединены последовательно, ток
стока отсутствует, за исключением ничтожно малого интервала времени, когда происхо
дит процесс переключения из одного состояния схемы в противоположное. Потребляе
мая мощность очень мала, и это особенно полезно в устройствах типа электронных ча
сов, которые требуют потребления очень малой мощности.
Рис. 3 .46. Структура nканального транзистора MOSFET
220
На рис. 3 .47в изображена pn структура КМОП, которая иллюстрирует форми
рование n
канального устройства на поверхности p
канала. Диффузионную p
об
ласть, содержащую n
канальное устройство, часто называют ванной. При наличии p
ванны диффузные исток и сток выполнены так, чтобы образовать n
канальный и
p
канальный транзисторы.
Рис. 3.47 . Транзисторы КМОП:
а) условное обозначение;
б) временные диаграммы;
в) структура pn КМОПтранзистора: знак + показывает
высоколегированные области
3.13. Ç·-Ò‡ÈÚ̊ Ó Ú‚Â‰ÓÚÂÎ̧Ì̊ı ÛÒÚÓÈÒÚ‚‡ı
Адреса веб
сайтов — универсальные указатели ресурсов (URL) — поставщиков
твердотельных устройств, которые обсуждались в этой главе, перечислены ниже. Ад
реса сайтов поставщиков часто изменяются, поэтому, если какая
либо из следующих
Ç·-Ò‡ÈÚ̊ Ó Ú‚Â‰ÓÚÂÎ̧Ì̊ı ÛÒÚÓÈÒÚ‚‡ı
221
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
ссылок не работает, используйте механизм поиска, чтобы по названию типа устрой
ства найти в Сети интересующий вас материал:
диоды и транзисторы в производстве полупроводниковых компонентов:
http://www.onsemi.com
транзисторы фирмы Phillips Semiconductors:
http://www.semiconductors.phillips.co
твердотельные реле фирмы Allen Breadley:
http://www.ab.com
твердотельные реле фирмы Vishay:
http://www.vishay.com
характериографы фирмы Tektronix:
http://tektronix.com
полевые транзисторы фирмы Fairchild Semiconductors:
http://www.fairchildsemi.com
êÖáûåÖ
3.1. Введение в твердотельные устройства
Основной компонент твердотельного устройства — полупроводник, называ
емый так потому, что он занимает промежуточное место между металлами и
изоляторами по способности проводить электричество.
Полупроводники n
типа и p
типа используются при изготовлении твердо
тельных устройств.
3.2. P n переход и твердотельные устройства
В диоде анод — всегда p
материал с дырочной проводимостью, а катод —
всегда n
материал с электронной проводимостью, их соединение называют
p
n переходом.
Высокая проводимость pn перехода наблюдается, когда положительный
потенциал прикладывается к аноду, а отрицательный — к катоду. Это назы
вают прямым смещением.
Блокирование (отсутствие проводимости) происходит, когда отрицательный
потенциал приложен к аноду, а положительный — к катоду. Это называют
обратным смещением.
Три главных типа диодов — выпрямительные, малосигнальные диоды и ста
билитроны.
3.3. Биполярный плоскостной транзистор
Биполярный плоскостной транзистор — твердотельное устройство, образо
ванное соединением двух pn переходов с общим полупроводниковым мате
риалом для обоих переходов.
222
Поскольку транзистор — трехэлементый прибор, можно управлять им в
трех различных конфигурациях схемы: общая база, общий эмиттер и общий
коллектор.
3.4. Транзисторные переключатели
При операции переключения транзистором обычно управляют так, чтобы он
находился в одном из двух состояний, которые называются отсечкой и насы
щением.
Если транзистор не вполне насыщен, то ток коллектора равен произведению
тока базы и коэффициента усиления транзистора. Этот режим определяется
пребыванием в активной области.
Цикл переключения включает в себя два состояния: включенное и выклю
ченное.
3.5. Твердотельные реле
Твердотельное реле выполнено на основе электронных компонентов в зак
рытом модуле, который обеспечивает функцию переключения и потенциаль
ную развязку входа и выхода реле без подвижных частей.
3.6 . Смещение транзистора и усилителя
Смещение — установление и поддержание постоянного тока эмиттера и на
пряжения коллектор
эмиттер при работе в активной области в усилитель
ном режиме.
В схеме смещения с четырьмя резисторами изменения и разброс параметров
h FE и VБЭ оказывают наименьшее влияние на положение рабочей точки.
Включение с общим эмиттером означает, что эмиттер транзистора связан
непосредственно или через резистор с выводом, потенциал которого равен
нулю (вывод заземлен) или может быть отрицательным.
3.8 . Транзисторный регулятор напряжения и 3.9 . Транзисторный инвер
тор напряжения
Транзисторный регулятор напряжения преобразует входное нерегулируемое
постоянное напряжение в регулируемое постоянное напряжение на нагрузке.
Транзисторный инвертор преобразует постоянное входное напряжение в пе
ременное.
3.10. Транзисторные преобразователи постоянного напряжения
Транзисторные преобразователи постоянного напряжения получают посто
янное входное напряжение и производят постоянное выходное напряжение
другого уровня, чем входное.
Существует четыре типа преобразователей с единственным ключом: повы
шающий, понижающий, инвертирующий и прямоходовой.
Двухтактные преобразователи обычно используют два ключа и трансформа
тор с выводом нулевой точки как первичных, так и вторичных обмоток.
êÖáûåÖ
223
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
3.11 . Поиск неисправностей в схемах на биполярных транзисторах
Транзисторный характериограф — прибор, предназначенный для обеспече
ния таких условий в схеме, которые позволяют измерить параметры транзи
стора: усиление тока, напряжение пробоя, сопротивления.
3.12 . Другие твердотельные устройства
Полевой транзистор — устройство с тремя выводами, в котором ток течет
через два вывода и управляется напряжением на третьем.
Два наиболее популярных типа полевых транзисторов — полевой транзис
тор с управляющим переходом (JFET) и металл
оксидный полевой транзис
тор (MOSFET).
Три вывода полевого транзистора — сток, исток и затвор — походят соответ
ственно на коллектор, эмиттер и базу биполярного плоскостного транзистора.
MOSFET, как и JFET, является прибором p
канальным или n
канальным, но
это обычно связано с тем, чтобы работать в одном из двух режимов: режиме
обеднения или режиме обогащения.
В отличие от биполярных схем, схема комплементарных полевых транзисто
ров CMOS почти не потребляет мощности в статическом режиме. Мощность
фактически потребляется только тогда, когда происходит переключение.
Çéèêéëõ
1. Прочитав раздел «Применение знаний в профессиональной деятельности», рас
скажите о том, какой тип карьеры в области устройств твердотельной электрони
ки был бы наиболее привлекательным для вас.
2. Каково приблизительное значение удельного сопротивления в Ом+см в материа
ле, используемом в твердотельных практических устройствах?
3. Сколько кристаллов используется в формировании pn перехода?
4. Опишите прямое смещение применительно к диоду.
5. Опишите обратное смещение применительно к диоду.
6. Объясните эффект стабилитрона.
7. Опишите отношения между напряжением стабилитрона VZ и его допустимым то
ком IZT.
8. Сколько pn переходов используется в формировании транзистора?
9. Назовите три вывода транзистора.
10. Каковы основные режимы работы транзистора?
11. Из каких материалов и в результате каких процессов сегодня изготавливается
большинство транзисторов?
12. Каковы три основные схемы включения транзистора?
13. Каковы три ключевых терминала, используемых для описания транзисторного
ключа?
224
14. Каковы обозначение и название тока, который течет через транзистор в режиме
отсечки?
15. Произведением каких двух величин выражается коллекторный ток транзистора
не в режиме насыщения (в активной области)?
16. Назовите и определите две составляющие процесса включения транзистора.
17. Назовите и определите две составляющие процесса выключения транзистора.
18. Какой фактор оказывает наибольшее влияние на время переключения транзистора?
19. Опишите, как связаны транзисторы в схеме Дарлингтона.
20. Назовите два достоинства и два недостатка твердотельного реле по сравнению с
электромеханическим.
21. Опишите смещение транзистора.
22. Каковы три эмпирических правила вычисления сопротивлений в схеме смещения
с четырьмя резисторами?
23. Опишите принцип действия транзисторного регулятора.
24. Опишите назначение стабилитрона в стабилизаторах последовательного и па
раллельного действия.
25. Опишите различие между стабилизаторами последовательного и параллельного
действия.
26. Опишите принцип действия транзисторного инвертора.
27. Каково назначение преобразователя постоянного напряжения?
28. Каковы преимущества ключевого источника питания перед линейным?
29. Что происходит с переменным напряжением вторичной обмотки в мостовой схеме
преобразователя постоянного напряжения?
30. Опишите, как область обеднения в полевом транзисторе с управляющим перехо
дом (JFET) влияет на его работу.
31. Определите напряжение смыкания в полевом транзисторе JFET.
32. Сравните три вывода биполярного плоскостного транзистора и металл
оксидного
полевого.
33. Опишите различия между режимом обеднения и обогащения MOSFET относи
тельно степени легирования и режима смещения.
34. Каково преимущество CMOS перед биполярной технологией?
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
1. Где расположена полоса полярности на выпрямительных диодах серии 1N4001?
2. Каков максимальный обратный ток 1N4001 при комнатной температуре?
3. Каков номинальный диапазон напряжения стабилизации для стабилитронов се
рии 1N5333В?
ÇÓÔÓÒ̊ ÔÓ ÒÔ‡‚Ó̃Ì̊Ï ‰‡ÌÌ̊Ï
225
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
4. Каков коэффициент снижения допустимой мощности рассеяния для стабилитро
на 1N5333В, если температура превышает 75 °С?
5. Какова допустимая амплитуда неповторяющегося ударного тока для стабилитро
на 1N5334В?
6. Каково номинальное напряжение для стабилитрона 1N5338В?
7. Какова максимальная допустимая температура перехода P2N2222A?
8. Что является выводом 2 Р2N2222А?
9. Каков максимальный коллекторный ток отсечки P2N2222А при комнатной тем
пературе?
10. Каково минимальное усиление постоянного тока для транзистора Р2N2222А в
активной области при токе коллектора 10 мА?
11. Каково минимальное усиление постоянного тока для транзистора Р2N2222А в
активной области при токе коллектора 1 мА?
áÄÑÄóà
1. Вычислите значение RS на рис. 3 .48, используя данные транзистора.
2. Вычислите коллекторный ток транзистора на рис. 3 .49 с коэффициентом усиле
ния по току 75, если: а) транзистор не насыщен (используйте показанное значе
ние базового тока) и б) транзистор насыщен, напряжение насыщения 0,2 В.
3. Перерисуйте рис. 3.16а и б, используя данные для транзистора рис. 3.13, если
длительность входного импульса 1 мкс.
4. Какой базовый ток необходим для насыщения схемы Дарлингтона на рис. 3.17,
если усиление каждого транзистора равно 75, а сопротивление нагрузки 330 Ом?
5. Проанализируйте схему смещения с четырьмя резисторами на рис. 3 .50 и опреде
лите значения IК, IБ, IЭ, VК и VЭ.
6. Разработайте усилитель с общим эмиттером по схеме с четырьмя резисторами.
Схема имеет усиление по току 20 при входном напряжении, не превышающем 0,3
В (от пика до пика), входное сопротивление более 5 кОм, выходное сопротивле
ние менее 2,5 кОм, напряжение питания 24 В, усиление транзистора hFE = 100.
7. Усилитель, разработанный в задаче 5, использует транзистор с hFE = 100. Партия
транзисторов, используемая разработчиком, имеет hFE = 150. Рассчитайте поло
жение рабочей точки VК для транзистора с более высоким hFE.
8. Определите минимальное значение hFE для транзистора Q2 на рис. 3.51 так, что
бы Q2 был полностью включен и смог активизировать реле К1, если ток обмотки
должен быть 500 мА, а усиление транзистора Q1 hFE = 175.
9. Какое напряжение будет на транзисторе Q1 с рис. 3 .27, если напряжение стаби
литрона 5,1 В, а нерегулируемое напряжение питания 10 В?
10. Какое напряжение будет на R2 в схеме рис. 3.28, если напряжение стабилитрона
5,1 В, а нерегулируемое напряжение питания 10 В?
226
Рис. 3.48.
К задаче 1 (VR1 —
стабилитрон IN5349B)
Рис. 3.51. К задаче 8
Рис. 3.49. К задаче 2
Рис. 3.50. К задаче 5
11. Каково стабилизированное напряжение на нагрузке в задаче 10?
12. Каково выходное напряжение двухтактного мостового преобразователя при вход
ном напряжении 20 В, коэффициенте трансформации 5,5 и коэффициенте прово
димости 0,85?
ᇉ‡̃Ë
227
킉ÓÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‚ ÔÓÏ̊̄ÎÂÌÌÓÈ ̋ÎÂÍÚÓÌËÍÂ
13. Вам предложили использовать омметр для проверки исправности перехода кол
лектор
эмиттер pnp транзистора. Изобразите схемы соединения омметра и
транзистора для этой проверки и запишите ожидаемые результаты.
14. Полевой транзистор с управляющим переходом (JFET) имеет следующие пара
метры: напряжение питания VP = —4 В, максимальный ток стока IСмакс
= 12мА.
Рассчитайте сопротивления резисторов в схеме усилителя рис. 3.44а при напря
жениипитанияVDD=20ВиVСИ =12В.
228
4
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË
Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊Â
ÒıÂÏ̊
ñÂÎ̧ „·‚̊
Основная цель главы 4 — описание операционных усилителей (ОУ)
и принципа их действия, начиная с краткого исторического очер
ка и кончая детальным описанием использования в устройствах
промышленной электроники.
После изучения этой главы вы сможете:
1. Рассказать об истории создания операционных усилителей и о том импульсе, ко
торый они дали развитию линейных электронных устройств.
2. Определять параметры операционных усилителей.
3. Разрабатывать усилительные схемы, используя справочные данные ОУ.
4. Описать действие инвертирующих, неинвертирующих, суммирующих и диффе
ренциальных усилителей.
5. Определять усилительные свойства и расчетные параметры инвертирующих, не
инвертирующих, суммирующих и дифференциальных операционных усилителей.
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
6. Объяснить, как работают преобразователи напряжения в ток и тока в напряжение.
7. Объяснить, как работают операционные усилители в схемах интеграторов и диф
ференциаторов.
8. Объяснить, как работают активные фильтры: низкочастотные, высокочастотные,
полосовые и режекторные.
9. Дать общую характеристику и описать принцип действия измерительных усили
телей.
10. Описать принцип действия и режимы смещения усилителей разностных токов и
их применение.
11. Защищать от отказов схемы с операционными усилителями.
èêàåÖçÖçàÖ áçÄçàâ
Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Поскольку операционные усилители поистине вездесущи, все дороги в области
промышленной электроники открыты для тех, кто знает характеристики и принцип дей
ствия усилителей. Сферы разработки, испытания, производства, контроля качества мо
гут явиться полем для вашей деятельности. Разработка включает в себя создание ли
нейных схем для производственного оборудования и контроля качества в условиях
непрерывного производства. Область испытаний и тестирования включает проверку
пригодности разработанных схем прежде, чем они будут эксплуатироваться в разных
режимах и температурных условиях. Сфера производства включает проверку помехо и
отказозащищенности схем с операционными усилителями, а также инструктирование
производственного персонала по вопросам теории испытательного оборудования. В
сфере контроля качества существует возможность проверок на низшем уровне, таких
как проверка схемотехники прежде, чем элементы будут установлены в оборудование, а
также контроль изделий, поступивших от внешних поставщиков.
Примером специфической производственной задачи может служить разработка
инструкции по применению усилительных устройств. Предположим, что вы работаете в
службе сбыта продукции фирмы Texas Instruments, выпускающей различные электрон
ные компоненты. Вы уже хорошо изучили продукцию, которую вам предстоит поддер
живать, и ваша первая задача состоит в освоении опыта квалифицированных специали
стов по продажам, чтобы понять, как они учитывают запросы пользователей и помогают
им сделать правильный выбор. Если, например, вашего клиента интересует использо
вание измерительных усилителей в промышленных системах управления и оптических
информационных системах, то вы должны предоставить ему справочные данные и дать
рекомендации по применению, которые помогут ему решить свои проблемы. Специа
лист по продажам должен информировать пользователя и о веб сайтах, которые могут
дать больше сведений об измерительных усилителях. Это увлекательная область дея
тельности, поскольку вы имеете возможность помочь потребителям в решении возника
ющих у них вопросов, принося им конкретную и ощутимую пользу.
230
4.1. éèÖêÄñàéççõÖ ìëàãàíÖãà.
äêÄíäàâ àëíéêàóÖëäàâ éóÖêä
Термин операционный усилитель (ОУ) относится к усилителю постоянного тока с
высоким усилением, высоким входным сопротивлением, низким выходным сопротив
лением и дифференциальным входом, что означает подключение двух входных выво
дов, ни один из которых не заземлен.
Операционные усилители были впервые упомянуты в работе Джона Р. Рагаццин
ни (Jonn R. Ragazzinni) «Анализ проблем в динамике», в которой автор использовал
техническую помощь Джорджа Ф. Филбрика (George A. Philbrick). Статья, опублико
ванная в мае 1947 г., была результатом работы, выполненной по плану Национально
го совета по обороне США, и считается классической в электронике.
Около 1947 г. концепция ОУ была реализована на электронных лампах. Позже, в
1950 х, ОУ были выполнены в виде монтажной схемы на индивидуальных транзисторах,
конденсаторах и резисторах. Самая первая серия модульного твердотельного ОУ была
выпущена в 1962 г. фирмами Burr Brown Research Corp. и G.a .Phibrick Researches Inc.
С тех пор ОУ остается «рабочей лошадью» линейных систем.
Первый твердотельный монолитный ОУ был разработан Б. Видларом (Bob
Widlar) и представлен публике в 1963 г. Усилитель был изготовлен фирмой Fairchild
Semiconductor и получил название μA702. Он имел источники питания +12 и —6 В,
причем кратковременное короткое замыкание на выходе приводило к неисправности
прибора. Несмотря на недостатки, это устройство было лучшим в то время. Усилитель
содержал девять транзисторов и продавался приблизительно за 300$, что ограничи
вало его применение военной и космической отраслями промышленности. В 1965 г. Б .
Видлар ввел существенные изменения при создании новой серии ОУ гA709. Усили
тель изготавливался фирмой Fairchild Semiconductor. Он имел более высокий коэф
фициент усиления, широкую полосу пропускания, меньший входной ток и более дру
жественные для пользователя требования к источнику питания — около ±15В.
Огромный успех μA709 был связан с высоким темпом производства и значительным
снижением цены. При первоначальной цене около 70$ эта схема была первой, кото
рая преодолела барьер 10$, а несколько позже и барьер 5$. К 1969 г. ОУ продавался
приблизительно за 2$.
В настоящее время ОУ на рынке доступны в блочном исполнении: в один чип мо
гут быть встроены два или даже четыре ОУ. Эти схемы изготовлены с использованием
биполярных транзисторов, полевых транзисторов MOSFET, JFET, CMOS или их ком
бинаций в едином твердотельном устройстве.
Тема операционных усилителей и их многочисленных применений может занять
целую книгу и даже не одну. Поэтому в этой главе будут излагаться только фундамен
тальные понятия каждого типа ОУ.
Операционные усилители могут быть использованы для выполнения самых раз
личных функций, что облегчает их использование в устройствах промышленной элек
троники. Разработчики промышленных устройств чаще всего используют ОУ в интег
ральном исполнении, поэтому мы ограничимся рассмотрением именно этого класса
схем.
éèÖêÄñàéççõÖ ìëàãàíÖãà. äêÄíäàâ àëíéêàóÖëäàâ éóÖêä
231
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Настоящая глава содержит только поверхностное описание ОУ и вариантов их
применения. Область применения ОУ продолжает расширяться до настоящего време
ни, выходя далеко за пределы первоначального предназначения, для которого они
были созданы в 70 х годах 20 века. Операционный усилитель — главный аналоговый
стандартный узел в промышленной электронике. Поэтому вы должны твердо знать,
как он функционирует в самых разнообразных устройствах.
4.2 . ÇÇÖÑÖçàÖ Ç èÄêÄåÖíêõ éèÖêÄñàéççõï ìëàãàíÖãÖâ
Рабочие характеристики ОУ определяются почти исключительно внешними компо
нентами, присоединяемыми к его выводам: например, коэффициент усиления по на
пряжению, входное и выходное сопротивления зависят от значений и стабильности
внешних компонентов. Таким образом, различные характеристики усилителя могут
быть настроены для соответствия определенным требованиям путем задания неболь
шого числа внешних компонентов.
Прежде чем обсуждать параметры ОУ, рассмотрим рис. 4 .1, на котором изобра
жен основной символ операционного усилителя. ОУ представляет собой устройство с
пятью выводами: двумя входными, одним выходным и двумя выводами источника пита
ния. Входные выводы помечены как «+» и «—», что, однако, обозначает не поляр
ность, а реакцию выхода на полярность поданного входного сигнала. Входной вывод
«+» называют неинвертирующим, что означает положительный сигнал на выходе при
положительном сигнале на входе. Соответственно, отрицательный сигнал на входе
приводит к отрицательному сигналу на выходе. Вход называют инвертирующим, если
положительному сигналу на входе соответствует отрицательный сигнал на выходе.
Соответственно, отрицательный вход приводит к положительному сигналу выхода.
Заметим, что когда входной сигнал подан на один входной вывод, другой входной вывод
заземлен. Положительный вывод источника электропитания подключается к +VS, а
отрицательный к —VS.
Рис. 4 .1. Основная
функциональная
схема ОУ
232
Твердое знание параметров ОУ необходимо для проектирования промышленных
устройств управления. Параметры управления в табл. 4 .1 разделены на группы мак
симально допустимых значений параметров, входных параметров, выходных парамет
ров и динамических параметров.
Ознакомьтесь с определением каждого параметра и убедитесь в том, что вы пони
маете его назначение. Помимо этого существует три дополнительных параметра, ко
торые не входят в названные группы:
потребляемый ток — ток, который ОУ будет потреблять от источника пи
тания;
подавление синфазного сигнала — способность ОУ ограничивать сигна
лы, которые одновременно подаются на оба входа. Это отношение синфазно
го входного напряжения к вызванному им выходному напряжению, обычно
выражаемое в децибелах;
разделение каналов — способность ОУ ограничивать сигнал на выходе ОУ
в отсутствие входного сигнала, когда сигнал приложен к входу смежного ка
нала. Другими словами, это устраняет нежелательную связь между каналами
сигнала, которую называют перекрестной помехой.
4.3. èéüëçÖçàÖ ä ëèêÄÇéóçõå ÑÄççõå
éèÖêÄñàéççõï ìëàãàíÖãÖâ
Справочные данные, которые предоставляются изготовителем ОУ, определяют харак
теристики устройства. Понимание этих данных необходимо при разработке схемотех
ники промышленных устройств. Группы параметров, упомянутые в предыдущем раз
деле, не обязательны для использования всеми изготовителями; между тем ключевые
параметры приводятся в справочных данных всех изготовителей.
Справочные данные для ОУ серии МС34071 показаны на рис. 4.2а — д . Эта се
рия включает МС34071 или МС33071, которые представляют один ОУ в корпусе, а
также МС34072 или МС33072, которые представляют два ОУ в одном корпусе,
МС34074 или МС33074, которые представляют четыре ОУ в одном корпусе. Разли
чие между усилителями МС34ххх и МС33ххх — рабочий диапазон окружающих тем
ператур. Диапазон рабочих температур для МС33ххх —40 °С ÷ +85 °С, а диапазон
рабочих температур для МС34ххх —40 °С ÷ +125 °С, как указано на рис. 4.2с. Кроме
того, А суффикс включается в название ОУ, если он выполняется для использования в
военной и космической отрасли. Как правило, это означает, что изготовитель гаранти
рует соответствие характеристик устройства при работе в расширенном температур
ном диапазоне, например —40... +125 °С. Большинство данных имеет таблицу, кото
рая определяет номер ОУ, включая суффиксы для определения его температурного
диапазона и типа корпуса.
èéüëçÖçàÖ ä ëèêÄÇéóçõå ÑÄççõå éèÖêÄñàéççõï ìëàãàíÖãÖâ
233
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Таблица 4.1 . Параметры операционных усилителей
234
Внутреннее схемотехническое решение ОУ показано на рис. 4 .2б, чтобы разработ
чик имел ясное представление о сложности устройства. Вывод и цоколевка схем ОУ в
этом ряду также изображены на рис. 4.2б. Заметим, что в одиночном ОУ выводятся не
которые внутренние узлы микросхемы на так называемые нулевые штырьки, для того
чтобы разработчик мог добавить внешний потенциометр установки нуля, как показано в
справочных данных. У модулей с двумя и четырьмя ОУ в одном корпусе дополнительный
резистор размещается внутри корпуса, а величина сопротивления устанавливается про
изводителем микросхемы. Установка нуля обсуждается в разделе 4.4 .3 .
Рис. 4.2а. Справочные данные для ОУ серии MC34071
èéüëçÖçàÖ ä ëèêÄÇéóçõå ÑÄççõå éèÖêÄñàéççõï ìëàãàíÖãÖâ
235
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Рис. 4 .2б. Нумерация выводов и предельные параметры для MC34071
236
Рис. 4.2в. Электрические характеристики MC34071
В справочных данных изготовитель утверждает, что представленная серия ОУ
будет работать от единственного источника питания с напряжением от 3 до 44 В. Это
означает, что отрицательный вывод источника питания, помеченный как VEE , соединя
ется с землей, а положительный (VCC) — с положительным выводом источника напря
жения от 3 до 44 В. показывает Подключение единственного источника напряжения
питания и двух источников питания показано на рис. 4.2д .
èéüëçÖçàÖ ä ëèêÄÇéóçõå ÑÄççõå éèÖêÄñàéççõï ìëàãàíÖãÖâ
237
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Рис. 4.2г. Электрические характеристики и схемы подключения MC34071
238
Рис. 4 .2д. Электрические характеристики MC34071
èéüëçÖçàÖ ä ëèêÄÇéóçõå ÑÄççõå éèÖêÄñàéççõï ìëàãàíÖãÖâ
239
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
При использовании справочных данных обратите особое внимание на указанную
размерность, потому что размерность всех величин, участвующих в вычислениях, дол
жны быть приведены в соответствие. Например, на рис 4.2в усиление разомкнутой
схемы ОУ выражено в В/мВ. Согласно справочным данным, типичное значение для
AVOL — 100 V/mV , но когда обсуждается коэффициент усиления в промышленных
устройствах, обычно используется безразмерная величина. Таким образом, в данном
примере усиление составляет 100000. Кроме того, заметьте, что токи могут выра
жаться в миллиамперах (мА), микроамперах (мкА) или наноамперах (нА). При непра
вильном выборе единиц результат вычислений будет ошибочен.
В справочных данных не определяется максимальная мощность рассеивания как
параметр, но приводится характеристическая кривая, связанная с окружающей тем
пературой.
Наибольшая рассеиваемая мощность, как показано на рис. 4.2д, зависит не толь
ко от окружающей температуры, но и от вида корпуса. Зависимости снижения мощно
сти с ростом температуры приводятся для 8 и 14 штырьковых пластиковых корпусов
с двумя рядами выводов (DIP), а также для поверхностного монтажа (SOIC).
Изучите справочные данные на рис. 4.2, прежде чем продолжить изучение мате
риала этой главы.
4.4 . àçÇÖêíàêìûôàÖ ìëàãàíÖãà
В схемах с ОУ используются два режима: разомкнутый режим и режим с обратной
связью. В разомкнутом режиме усиление ОУ не снижается внешними компонентами,
как это происходит в замкнутых схемах с обратной связью.
Поскольку ОУ имеет высокий внутренний коэффициент усиления, превышаю
щий потребности любых устройств промышленной электроники, разработка и анализ
схемы усилителя выполняется только для усилительных систем с замкнутой обратной
связью.
В режиме с обратной связью внешние компоненты используются, чтобы подать часть
выходного напряжения на вход ОУ с целью уменьшения величины входного напряжения.
Напряжение обратной связи сдвинуто на 180° по отношению к входному сигналу. Такую
связь называют отрицательной обратной связью. Она уменьшает чрезвычайно высокий
коэффициент усиления разомкнутого ОУ до практически приемлемых значений. Замыка
ние петли обратной связи резистором RF, показанное на рис. 4.3, образует структуру ин
вертирующего усилителя. Заметим, что на этом рисунке не показаны выводы источников
питания. При разработке устройств, содержащих ОУ, избегают приводить выводы источ
ников питания других узлов схемотехнического решения, содержащихся в справочных
данных, чтобы не загромождать схему вспомогательными элементами.
В работе инвертирующего усилителя имеется два ключевых момента:
отрицательным входным выводом ОУ является виртуальная земля;
коэффициент усиления ОУ определяется отношением RF/R1.
Отрицательный входной вывод ОУ имеет потенциал, близкий к нулю, т.е. близкий
к потенциалу виртуальной земли, независимо от напряжений Vвх и Vвых
. При учете
240
практически нулевого потенциала входного вывода ОУ, входной ток составит прибли
зительно Iвх
=V
вх
/ R1.
Ток через RF составит приблизительно:
Iвх
=V
вых
/ RF.
Рис. 4.3 . Инвертирующий
усилитель.
Напряжения питания
+15и—15В
4.4.1. ÇıÓ‰ÌÓÂ Ë ‚̊ıÓ‰ÌÓ ÒÓÔÓÚË‚ÎÂÌËfl
Входное сопротивление равно R1, потому что отрицательный входной вывод ОУ имеет
потенциал виртуальной земли. Поэтому Rвх
= R1.
Выходное сопротивление определяется внутренним сопротивлением выхода ОУ и
приближается к нулю, потому что оно равно внутреннему сопротивлению, деленному
на отношение коэффициента усиления разомкнутой схемы ОУ к коэффициенту усиле
ния замкнутой системы. Типичное значение усиления разомкнутой системы — сотни
тысяч. Тогда
где AVOLOPEN — усиление разомкнутой системы ОУ, AVOLCLOSED — усиление замкнутой
системы с обратной связью.
èËÏ 4.1.
Определите усиление схемы рис. 4 .3, если R1 = 10 кОм и RF = 330 кОм.
êÂ̄ÂÌËÂ:
AV= —RF/R1;AV= —330кОм/10кОм;AV= —33.
èËÏ 4.2
Используя усиление, вычисленное в примере 4.1, определите выходное напряжение
при входном сигнале 200 мВ.
àçÇÖêíàêìûôàÖ ìëàãàíÖãà
241
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
êÂ̄ÂÌËÂ:
Vвых
=V
вх
+ AV;
Vвых
= 0,2 В’(—33);
Vвых
= —6,6 В.
4.4 .2. ç‡Ò̊̆ÂÌË ‚̊ıÓ‰‡
Идеально потенциал выхода ОУ должен быть в состоянии принимать любое значение
между выводами источника питания +VCC и —VEE. Однако если уровень входного сигна
ла будет настолько велик, что расчетное значение выходного сигнала выйдет за пределы
уровней источников питания, то сигнал выхода будет ограничен напряжениями питания.
Это называют насыщением выхода или ограничением выхода. Типичное значение
падения напряжения на внутренних цепях ОУ составляет около 2 В от общего напряже
ния питания. Таким образом, размах выходного напряжения усилителя с питанием ±15
В составит примерно ±14 В или 28 В от пика до пика (VPP). Уменьшение напряжения от
пикадопикана2Вприпитанииотисточника±15Возначает:VPP =30В—2В=28В
(см. рис. 4 .4).
èËÏ 4.3
Используя коэффициент усиления из примера 4.1, определите наибольшее входное
напряжение, при котором отсутствовало бы ограничение выхода.
êÂ̄ÂÌËÂ:
Vвх<VвыхPP/AV;
Vвх<28В/33;
Vвх < 0,85 В.
èËÏ 4.4
В схеме рис. 4.3 определите, какова будет наибольшая двойная амплитуда напряже
ния (от пика до пика), если использован ОУ MC34071 и нагрузка RL = 10 кОм.
êÂ̄ÂÌËÂ:
Обратимся к справочным данным для ОУ MC34071 на рис. 4.2с. В столбце Non suffix
для наибольшего размаха выходного напряжения указано, что высокий уровень вы
хода VOH составляет 14 В, низкий уровень VOL = —1 4,7 В.
Поэтому максимальное напряжение двойной амплитуды составит 28,7 В. Кроме того,
следует учесть, что это напряжение является функцией нагрузки. Наибольшая двойная
амплитуда на 3 В меньше полного напряжения источников питания: VPP = 28 В — 3 В =
25 В.
242
Рис. 4.4 . Ограничение
выходного сигнала
4.4.3. ëÏÂ̆ÂÌË ‚̊ıÓ‰‡
Из за токов утечки на входном выводе ОУ присутствует весьма незначительное напря
жение. Однако оно умножается на коэффициент усиления разомкнутой схемы ОУ, по
рождая напряжение смещения постоянного тока на выходе. Это означает, что, при пода
че на вход переменного напряжения сигнала, выходное напряжение колеблется
относительно напряжения смещения постоянного тока, а не относительно нулевого
уровня. Это явления называют смещением выхода. Оно показано на рис. 4 .5 . Это сме
щение может быть устранено или, по крайне мере, ослаблено добавлением резистора
между неинвертирующим входным выводом ОУ и землей, как показано на рис. 4 .6 . Со
противление резистора, обозначенного Rб, может быть вычислено по формуле:
Rб=R1×RF/(R1+RF).
èËÏ 4.5
Вычислите Rб на рис. 4.6, если R1 = 10 кОм, а RF = 330 кОм.
êÂ̄ÂÌËÂ:
àçÇÖêíàêìûôàÖ ìëàãàíÖãà
243
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Рис. 4 .5. Смещение
выходного
напряжения
Рис. 4 .6. К примеру 4.5
Поскольку включение резистора Rб может не свести к нулю напряжение смеще
ния выхода, одиночный ОУ в корпусе с дополнительными выводами коррекции нуля
может быть использован в том критическом случае, когда напряжение смещения дол
жно быть устранено полностью. На рис. 4.7 показано включение корректирующего
потенциометра 10 кОм для получения Vвых
= 0В.
244
4.5 . çÂËÌ‚ÂÚËŲ̂̆Ë ÛÒËÎËÚÂÎË
Неинвертирующий усилитель показан на рис. 4.8 . Заметим, что R1 и RF соединены так
же, как в инвертирующем усилителе, за исключением того, что R1 присоединен к зем
ле, а вход теперь связан с выводом «+». Два ключевых положения справедливы и для
неинвертирующих усилителей: потенциал инвертирующего входа приблизительно ра
вен Vвх, коэффициент усиления равен (RF / R1 + 1).
4.5.1. ÇıÓ‰ÌÓÂ Ë ‚̊ıÓ‰ÌÓ ÒÓÔÓÚË‚ÎÂÌËÂ
Входное сопротивление неинвертирующего усилителя намного выше, чем инвертирую
щего, поскольку оно является функцией коэффициента усиления разомкнутой системы:
Рис. 4.7. Устранение
смещения нуля
Рис. 4.8. К примеру 4.5
çÂËÌ‚ÂÚËŲ̂̆Ë ÛÒËÎËÚÂÎË
245
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
AVOL — усиление разомкнутой системы;
AVCL — усиление замкнутой системы;
Ri — внутреннее входное сопротивление ОУ.
Так, при типичном Ri = 1 МОм входное сопротивление Rвх возрастает настолько,
что влияние ОУ на источник входного сигнала практически отсутствует. При разра
ботке устройств, где это влияние должно быть предельно ослаблено, неинвертирую
щий усилитель имеет преимущество перед инвертирующим.
Выходное сопротивление неинвертирующего усилителя чрезвычайно низко и
сравнимо с сопротивлением инвертирующего:
где RO — внутреннее сопротивление ОУ.
Вы можете видеть, что RO — очень малая величина, которая делится на усиление
разомкнутой системы, т.е . на очень большую величину; следовательно, сопротивле
ние выхода для неинвертирующего усилителя имеет тенденцию приближаться к нулю.
èËÏ 4.6
Чему равно усиление замкнутой системы на рис. 4 .8, если R1 = 20кОм и RF = 220кОм?
êÂ̄ÂÌËÂ:
AV=RF/R1+1;
AV=220кОм/20кОм+1;
AV=11.
èËÏ 4.7
Используя усиление, вычисленное в примере 4.6, определите выходное напряжение
при входном сигнале 500 мВ.
Решение:
Vвых
=V
вх
·AV
Vвых
= 0,5В·11
Vвых
= 5,5В
èËÏ 4.8
Используя усиление, вычисленное в примере 4.6, определите входное сопротивление,
если усиление разомкнутого ОУ составляет 200000, внутреннее сопротивление 2 МОм.
246
êÂ̄ÂÌËÂ:
Rвх
= 26,4 МОм
4.5.2 . èÓ‚ÚÓËÚÂÎ̧ ̇ÔflÊÂÌËfl
Повторитель напряжения — уникальный неинвертирующий усилитель, у которого
выход подключен непосредственно к инвертирующему входу, таким образом на выходе
формируется напряжение, которое равно входному напряжению на неинвертирую
щем входе по амплитуде и полярности (рис. 4.9). Поскольку выходное напряжение
равно входному, коэффициент усиления всегда равен 1, поэтому повторитель напря
жения иногда называют усилителем с единичным усилением.
Рис. 4.9 . Повторитель
напряжения
Разность потенциалов между двумя входами усилителя очень близка к 0 за счет
высокого усиления разомкнутой системы, а потенциал выхода равен сигналу обратной
связи на инвертирующем входе. Другими словами, если на неинвертирующий вход
подано напряжение 3 В, то на инвертирующем входе будет напряжение 3 В, и разность
этих напряжений равна 0. Повторители напряжения используются при разработке
активных фильтров, которые обсуждаются в разделе 4.12, а также как усилители с
повышенным входным сопротивлением.
4.6 . ëÛÏÏËŲ̂̆ËÂ ÛÒËÎËÚÂÎË
Суммирующий усилитель — инвертирующий усилитель с двумя или более входны
ми сигналами, связанными с инвертирующим входом ОУ. Суммирующий усилитель с
двумя входами и резисторами R1 и R2 показан на рис. 4 .10. Напомним, что потенциал
ëÛÏÏËŲ̂̆ËÂ ÛÒËÎËÚÂÎË
247
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
инвертирующего входа ОУ равен нулю, т.е . потенциалу виртуальной земли, таким об
разом, напряжение на каждом входном резисторе равно соответствующему входному
напряжению. Поэтому входные токи могут быть выражены как
IR1= V1/R1,
IR2= V2/R2.
Ток через резистор обратной связи RF равен сумме входных токов и может быть
выражен как
IRF=IR1+IR2.
Напряжение на RF равно Vвых0
, поскольку один вывод резистора связан с вирту
альной землей, а другой вывод — с Vвых
. Это напряжение может быть выражено как
—V
вых
= (IR1+IR2)×RF.
Заметим, что эта величина отрицательна из за инвертирующей функции усилите
ля. Это может быть выражено в терминах входных напряжений:
—V
вых
= (V1/R1+V2/R2)×RF
или
—V
вых
= RF×V1/R1+RF’V2/R2.
Рис. 4 .10. Суммирующий
усилитель
èËÏ 4.9
Обратимся к рис. 4.10. Вычислите Vвых и значение Rб, если R1 = 10 кОм, R2 = 22кОм,
RF=33кОм,V1=1,5ВиV2= —1,0В.
êÂ̄ÂÌËÂ:
248
Vвых
= – (4,95B – 1,5В)
Vвых
= – 3,45В
Сопротивление Rб равняется сопротивлению параллельно включенных R1, R2 и RF
, т.е.
10 кОм, 22 кОм и 33 кОм, откуда следует Rб = 5,7 кОм.
èËÏ 4.10
Обеспечьте положительное напряжение в примере 4.9.
êÂ̄ÂÌËÂ:
Введя дополнительный инвертирующий каскад U2 с коэффициентом усиления —1
между выходом U1 и Vвых
, получим неизменным усиление по модулю и положительное
значение Vвых
. Это решение проиллюстрировано на рис. 4.11.
Рис. 4.11 . Решение примера 4.10
4.7. ÑËÙÙÂÂ̈ˇÎ̧Ì̊ ÛÒËÎËÚÂÎË
Дифференциальный усилитель усиливает разность потенциалов двух входов, ни один
из которых не заземлен. Дифференциальный усилитель приведен на рис. 4.12. По
скольку ни один из входов не связан с виртуальным нулем, уровень помех и шумов на
входе усилителя уменьшается вследствие того, что эти помехи поступают на входы
«+» и «—» ОУ. При R1 = R 2 и RF = RD на рисунке выходное напряжение дифференци
ального усилителя запишется в форме:
ÑËÙÙÂÂ̈ˇÎ̧Ì̊ ÛÒËÎËÚÂÎË
249
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Рис. 4 .12. Дифференциальный
усилитель
Это соотношение еще раз показывает, что усиление ОУ определяется исключи
тельно соотношением сопротивлений внешних резисторов. Итак, максимальное на
пряжение, которое может быть приложено между двумя входами дифференциального
усилителя, указывается в таблице справочных данных. В соответствии с таблицей
максимально допустимых значений рис. 4 .2в диапазон входных максимально допусти
мых напряжений дифференциального усилителя VIDR не должен превышать величины
VCC или VEE, которые обычно составляют +15 В или —15 В соответственно. И, соглас
но справочным данным, это напряжение может быть приложено к одному или обоим
входным выводам дифференциального усилителя.
èËÏ 4.11
Рассчитайте выходное напряжение дифференциального усилителя рис. 4 .12 при V1 = 2,2 В,
V2 = 1,5 В, RD = RF = 86 кОм и сопротивлении всех остальных резисторов, равном 10 кОм.
êÂ̄ÂÌËÂ:
Vвых
= (–0,7В)·8,6
Vвых
= –6В
4.8 . èÂÓ·‡ÁÓ‚‡ÚÂÎË Ì‡ÔflÊÂÌËfl ‚ ÚÓÍ
В некоторых промышленных устройствах возникает потребность в обеспечении ре
жима источника тока, а не источника напряжения. Потребность в таких устройствах
возникает тогда, когда сопротивление нагрузки изменяется вследствие изменения
температуры или старения элементов, а ток требуется поддерживать неизменным.
Если ток требуется поддерживать на уровне от 4 до 20 мА, то аппаратное решение
может быть предложено по схеме рис. 4.13. Преобразователь напряжения в ток обес
печивает пропорциональное преобразование входного напряжения в ток нагрузки. В
250
преобразователе нагрузка включена в контур обратной связи, а входной сигнал пода
ется на неинвертирующий вход ОУ. Нагрузка является сопротивлением обратной свя
зи. В этой схеме ток нагрузки протекает через R1, вызывая появление напряжения на
инвертирующем входе ОУ.
Это позволяет эффективно поддерживать ток нагрузки пропорциональным вход
ному напряжению. Как следует из рис. 4.13, ток нагрузки равен Il = V
вх
/ R1.
Рис. 4.13. Преобразователь
«напряжение — ток»
Как вытекает из уравнения, единственным фактором, влияющим на соотношение
между током нагрузки и входным напряжением, является стабильность R1. А выполне
ние высокостабильных резисторов — сравнительно легко решаемая задача.
èËÏ 4.12
Рассчитайте величину R1 на рис. 4 .13, если требуемый ток нагрузки равен 5 мА при
входном напряжении Vвх
= 8В.
êÂ̄ÂÌËÂ:
R1=V
вх
/ IN,
R1=8В/5мА,
R1 = 1,6 кОм.
Преобразование напряжения в ток должно быть предусмотрено в таких устрой
ствах, как, например, датчики давления, температуры, момента, т.е . соответственно
пьезоэлектрические элементы, термопары и акселерометры. Выходной сигнал этих
датчиков служит источником Vвх, а типичной нагрузкой — измерительное устройство.
При изменении Vвх от 0 до 100% ток измерительного устройства должен изменяться в
пределах от 4 до 20 мА.
4.9 . èÂÓ·‡ÁÓ‚‡ÌË ÚÓ͇ ‚ ̇ÔflÊÂÌËÂ
Обратную функцию выполняет преобразователь тока в напряжение. Входом преобра
зователя служит источник тока, а выходом — источник напряжения, пропорциональ
èÂÓ·‡ÁÓ‚‡ÌË ÚÓ͇ ‚ ̇ÔflÊÂÌËÂ
251
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
ного входному току. Мы видим на рис. 4.14 ОУ, используемый в качестве преобразова
теля тока в напряжение. Эта схема предназначена для работы с датчиками, которые
имеют ток в качестве выходной величины. Ток датчика поступает непосредственно в
цепь инвертирующего входа ОУ. Этот ток замыкается через резистор обратной связи,
потому что инвертирующий вход имеет высокое входное сопротивление.
Неинвертирующий вход ОУ связан с виртуальной землей, поэтому падение на
пряжения на резисторе обратной связи является также выходным напряжением, т.е .
Vвых
=—I
вх
× RF.
Нетрудно видеть, что выходное напряжение пропорционально входному току. Как
и в преобразователе напряжения в ток, стабильность RF — единственный фактор, ко
торый определяет линейность преобразователя.
4.10. àÌÚ„‡ÚÓ̊ Ë ‰ËÙÙÂÂ̈ˇÚÓ̊
ОУ в схемах интеграторов и дифференциаторов выполняют математические операции
интегрирования и дифференцирования. Вначале обсудим интегратор, а дифференциа
тор опишем как устройство, выполняющее обратную функцию.
Рис. 4 .14. Преобразователь
«ток — напряжение»
Рис. 4 .15. Интегратор на ОУ:
а) схема; б) диаграммы напряжений
252
4.10.1 . àÌÚ„‡ÚÓ̊ ̇ ÓÔ‡ˆËÓÌÌ̊ı ÛÒËÎËÚÂÎflı
Интегратор на ОУ имеет входную цепь, подключенную к инвертирующему входу ОУ,
как показано на рис. 4.15а. Стандартный инвертирующий усилитель использует два
резистора и формирует выходной сигнал, который может изменяться почти мгновен
но. В отличие от инвертирующего усилителя, выход интегратора не может изменяться
мгновенно, он является функцией времени, которая зависит от резистивно емкостной
цепи R1 и C1, т.е . от сопротивления резистора и емкости конденсатора. Как показано
на рис. 4 .15б, когда входной сигнал изменяется, конденсатор заряжается до нового
значения напряжения, а время Т, которое требуется для заряда, определяется интег
ралом, причем Vвых получает большее отрицательное значение.
Интегратор выполняет математическую функцию интегрирования, и его выходное
напряжение может быть выражено следующей формулой:
, где Vвх
и dt соответственно представляют собой входное напряжение и приращение времени.
èËÏ 4.13
Обратитесь к рисунку 4.15а. Вычислите максимальное значение Vвых для Vвх
, которое
представляет собой прямоугольное напряжение с частотой 1 кГц и амплитудой 1 В.
êÂ̄ÂÌËÂ:
Входной сигнал определен как прямоугольное напряжение, принимающее значение +1 В
и —1 В с частотой 1 кГц. Это означает, что входное напряжение составит +1 В в течение
500 мкс и —1 В в течение следующих 500 мкс. Следовательно, максимальное входное
напряжение равно:
Vвых
= – 104·500·10–6
Vвых
= –5В
èËÏ 4.14
Нарисуйте входной сигнал и выходное напряжение в функции времени для примера 4.13.
êÂ̄ÂÌËÂ:
Входное напряжение прямоугольной формы (меандр) принимает значение +1 В в те
чение 500 мкс и —1 В в течение следующих 500 мкс. Эти диаграммы напряжений
показаны на рис. 4 .16.
àÌÚ„‡ÚÓ̊ Ë ‰ËÙÙÂÂ̈ˇÚÓ̊
253
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
4.10.2 . ÑËÙÙÂÂ̈ˇÚÓ̊ ̇ ÓÔ‡ˆËÓÌÌ̊ı ÛÒËÎËÚÂÎflı
Дифференциатор на операционном усилителе выполняет математическую операцию
дифференцирования, которая обратна операции интегрирования. В дифференциаторе
на рис. 4.17 резистор R1 и конденсатор C1 поменялись местами по сравнению с интег
ратором на рис. 4 .15а.
Выходное напряжение дифференциатора пропорционально скорости изменения
входного, тогда как выходное напряжение кнтегратора пропорционально протяженно
сти интервала, на котором присутствует входное напряжение. Выходное напряжение
может быть выражено формулой:
где dVвх
—
изменение входного напряжения,
dt — изменение времени.
Дифференциатор может использоваться для: обнаружения скачков входного на
пряжения, а также для генерации импульсов от входного пилообразного напряжения.
Рис. 4 .16. К примеру 4.14
Рис. 4 .17. Дифференцирующий усилитель
254
Мы видим на рис. 4.18а формы волны входа и выхода дифференциатора, когда он ис
пользуется как датчик скачков напряжения.
Звон на выходе датчика рис. 4.18а — функция паразитных индуктивности и емко
сти схемы.
Рис. 4.18. Отклик дифференцирующего усилителя:
а) реакция на прямоугольное напряжение;
б) реакция на пилообразное напряжение
èËÏ 4.15
Вычислите Vвых на рис. 4 .17, где R1 = 2,2 кОм, C1 = 0,001 мкФ и Vвх
— в ход пилооб
разного сигнала, который изменяется от —5 В до +5 В за 50 мкс.
àÌÚ„‡ÚÓ̊ Ë ‰ËÙÙÂÂ̈ˇÚÓ̊
255
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
êÂ̄ÂÌËÂ:
Vвых
= – 0,44В
4.11. äÓÏÔ‡‡ÚÓ̊ Ë ‰‡Ú̃ËÍË ÓÍ̇
Компаратор — схема, которая имеет два независимых входа и выход, который прини
мает одно из двух значений в зависимости от знака неравенства между входными на
пряжениями. Когда ОУ используется как компаратор, он функционирует как ключе
вая схема и не обеспечивает линейных отношений между входом и выходом, о чем
говорилось в предыдущем разделе. Будучи ключевой схемой, компаратор формирует
уровень выходного сигнала, равный уровню положительного (близкий к +VCC) или
уровню отрицательного насыщения (близкому к VEE). Есть также линейная ИС, на
званная компаратором, которая спроектирована для выполнения этой функции и чей
выход — открытый коллектор. Функция открытого коллектора как выключателя
обеспечивает или замыкание выхода на виртуальную землю, или размыкание цепи.
Схема датчика окна обычно использует два компаратора, формируя некоторое фикси
рованное значение выхода, если входной сигнал попадает в пределы окна, т.е . лежит
между фиксированным верхним и нижним уровнями. Функция датчика окна рассмот
рена в разделе 4.11.3.
4.11.1 . äÓÏÔ‡‡ÚÓ
Компаратор на ОУ представлен на рис. 4.19а. Заметьте, что опорное напряжение Vоп, кото
рое является постоянным напряжением, приложено к инвертирующему входу, а входное на
пряжение Vвх приложено к неинвертируещему входу. Как следует из рис. 4.19б, выход нахо
дится в состоянии положительного насыщения, когда Vвх более положительно, чем Vоп, и в
состоянии отрицательного насыщения, когда Vвх менее положительно, чем Vоп
. Скорость из
менения Vвх не имеет значения, изменение Vвых происходит практически мгновенно.
Выходной сигнал, который представляет собой прямоугольное напряжение,
можно считать цифровым, или дискретным, откликом на аналоговый вход. Схему ком
паратора с входным сигналом Vвх на неинвертирующем входе можно описать следую
щим образом: если Vвх больше, чем Vоп, выход положителен; если Vвх меньше, чем Vоп,
выход отрицателен.
256
Рис. 4.20. Компаратор опорного и
пил ообразного
напряжений:
а) схема;
б) диаграммы
напряжений
Рис. 4.19. Компаратор
пилообразного и
опорного напряжений:
а) схема;
б) диаграммы
напряжений
äÓÏÔ‡‡ÚÓ̊ Ë ‰‡Ú̃ËÍË ÓÍ̇
257
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Мы видим, что на рис. 4.20а постоянное напряжение Vоп приложено к неинверти
рующему входу, а входное напряжение Vвх
—к
инвертирующему входу. Формы напря
жений на входе и выходе представлены на рис. 4.20б. Схему компаратора с Vвх на ин
вертирующем входе можно описать следущим образом: если Vвх больше, чем Vоп,
выход отрицателен; если Vвх меньше, чем Vоп, выход положителен.
èËÏ 4.16
Определите Vвых для компаратора на рис. 4.21, если Vвх
= 6 В, а R2 отрегулировано на
7,5кОмиVCC=15В.
êÂ̄ÂÌËÂ:
ë̇̃‡Î‡ ‚̊̃ËÒÎËÏ VÓÔ ÒΉŲ̂̆ËÏ Ó·‡ÁÓÏ:
Vоп
= VCC×’R2/(R1+R2),
Vоп
=15 В × 7,5 кОм / 17,5кОм,
Vоп
= 6,4В.
Если Vвх
= 6ВиVоп
= 6,4 В, то Vвх меньше, чем Vоп
, и следовательно, V
вых
равно отри
цательному напряжению насыщения.
Рис. 4 .21. К примеру 4.16
Компараторы часто используются в промышленности для дискретизации сигна
лов датчика. Например, компаратор может контролировать аналоговые датчики тем
пературы и датчики вибрации в испытательном оборудовании. Когда температура Vвх
падает ниже предварительно установленного значения Vоп, компаратор активизирует
свою нагрузку (тепловое реле) и включает нагреватель. Это пример позиционного уп
равления. Когда датчик вибрации Vвх превышает предварительно установленное зна
чение Vоп, компаратор активизирует свою нагрузку, реле срабатывает и вибрация пре
кращается. Это пример защитного отключения.
258
4.11 .2 . ãËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊ ÍÓÏÔ‡‡ÚÓÓ‚
Линейная ИС компаратора — универсальное устройство, сравнивающее напряжение.
Она может выполнять многие функции с точностью, достаточной для промышленных
систем, и успешно работает во многих промышленных аналоговых системах. Линейные
компараторы полезны в схемах, требующих значительной чувствительности и точности,
таких как пороговые датчики сигналов низкого уровня, схемы передачи данных или ста
бильные автогенераторы. Компараторы могут работать при питании от единственного
источника напряжения или от стандартных источников питания ОУ±15 В. Точность ли
нейных ИС компаратора не уступает точности ОУ, а быстродействие на порядок превос
ходит ОУ, использованные в качестве компараторов. Интегральная схема компаратора
имеет инвертирующий и неинвертирующий вход и ту же систему обозначения, что ОУ.
Выходом компаратора служит схема с открытым коллектором, и при подаче сигнала Vвх
на инвертирующий вход функция компаратора описывается следующим образом: если
Vвх больше, чем Vоп, выход обеспечивает замыкание на землю; если Vвх меньше, чем Vоп,
выход обеспечивает размыкание цепи.
В промышленности эти линейные ИС выполняют функции компараторов выбора.
Компаратор обладает гибкостью, так как выполняет различные функции с высокой
точностью, требуемой в цифровых системах. Справочные данные серий популярных
компараторов приведены на рис. 4 .22 . Как и данные для ОУ, справочные данные ком
параторов содержат способ подключения схемы, предельно допустимые режимы и
электрические характеристики. Отметим, что в разделе характеристик на рис. 4 .22
указано время отклика 80 нс, что значительно меньше времени отклика обычных ОУ.
Изучите справочные данные на рис. 4.22, прежде чем продолжить чтение этой главы.
4.11.3 . чÚ̃ËÍË ÓÍ̇
Схема датчика окна состоит из двух линейных ИС компараторов. Каждый из них име
ет опорное напряжение VLT и VHT, но общее управляющее входное напряжение Vвх, как
показано в справочных данных компаратора на рис. 4 .22 . Заметим, что ОУ не могут
использоваться как компараторы в датчиках окна, поскольку их выходы не могут быть
соединены между собой. Обращение к VHT и VLT как к соответственно верхнему и ниж
нему уровням помогает понять работу детектора окна, который обеспечивает индика
цию состояния, когда Vвх превышает верхнюю границу или оказывается ниже нижней
границы, иными словами, находится вне окна. Выходы двух ОУ, где Vвх занимает разное
положение относительно VHT и VLT , описаны в следующей таблице:
Заметим, что на рис 4.22 детектор окна имеет резистор, названный подтягиваю
щим, который соединен с источником питания 5 В компараторов так, что VOUT имеет
äÓÏÔ‡‡ÚÓ̊ Ë ‰‡Ú̃ËÍË ÓÍ̇
259
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
либо потенциал земли, либо 5 В. Детектор окна может использоваться для проверки,
лежит ли напряжение питания в заданных пределах. Выход детектора может быть свя
зан с индикатором или источником сигнализации, который становится активным, если
напряжение источника выходит за пределы окна.
Рис. 4 .22. Справочные данные сдвоенного компаратора
260
Рис. 4.22 . Справочные данные сдвоенного компаратора (окончание)
äÓÏÔ‡‡ÚÓ̊ Ë ‰‡Ú̃ËÍË ÓÍ̇
261
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
4.12. ëıÂÏ̊ ‡ÍÚË‚Ì̊ı ÙËÎ̧ÚÓ‚
Фильтром называют схему, которая пропускает сигнал определенной частоты или по
лосы частот, препятствуя пропусканию всех остальных частот. Активный фильтр со
держит пассивные компоненты (обычно резисторы и конденсаторы) и по крайней
мере один ОУ. В противоположность ему пассивные фильтры содержат только пассив
ные компоненты. Существует два основных типа фильтров: низкочастотный и высоко
частотный пропускающий фильтр, и для них применяется термин «частота отсечки»
при определении того, какие частоты удалены из сигнала. На практике частота среза
для фильтров низкой частоты меньше 1 МГц, а для фильтров высокой частоты она пре
вышает 1 МГц. Объединение этих двух основных фильтров позволяет создать более
сложные фильтры, например полосовой режекторный (фильтр с подавлением поло
сы). В этом разделе рассматриваются четыре типа фильтров:
низкочастотный фильтр, который удаляет частоты выше, чем частота сре
за, позволяя пропустить более низкие частоты;
высокочастотный фильтр, который удаляет частоты ниже частоты среза,
позволяя пропустить более высокие частоты;
полосовой фильтр, в котором используется комбинация низкочастотного и
высокочастотного фильтров, чтобы позволить пропускать только частоты,
близкие к частоте среза;
режекторный фильтр подавления полосы, в котором использована комби
нация низкочастотного и высокочастотного фильтров, чтобы удалить только
частоты, близкие к частоте среза.
Эти четыре схемы активных фильтров применяются в самых разнообразных уст
ройствах промышленной электроники не только для подавления шумов, но и для созда
ния условий прохождения сигнала. В области электросвязи полосовые фильтры исполь
зуются в диапазоне звуковой частоты (от 0 до 20 кГц) для модемов и процессоров
речевой обработки. Высокочастотные фильтры на несколько сотен мегагерц использу
ются для выбора канала в многоканальных системах связи. Системы сбора данных
обычно требуют низкочастотных сглаживающих фильтров, подавляющих низкочастот
ные шумы за пределами полосы пропускания. В системах источников питания часто ис
пользуются фильтры для подавления частот, близких к частоте сети 60/50 Гц, и высоко
частотные переходные процессы.
Прежде чем мы углубимся в детальное описание каждого из четырех типов филь
тра, приведем свод правил выбора ОУ для активных фильтров.
Значения сопротивлений должны быть между 1 кОм и 10 кОм. Нижний предел
обусловлен стремлением избежать чрезмерной нагрузки выхода ОУ. Верхний предел
преследует цель избежать чрезмерного шума.
Емкости конденсаторов должны быть между 1 нФ и несколькими мкФ. Низкий
предел обусловлен стремлением уменьшить влияние паразитных емкостей, а верхний
связан со стремлением избежать снижения точности реакции фильтра.
Выбор ОУ должен быть основан на таком усилении разомкнутой системы, кото
рое превышало бы в 100 раз усиление фильтра, позволяющего ограничить 1 процен
том ошибку в коэффициенте замкнутой системы.
262
4.12 .1 îËÎ̧Ú ÌËÁÍËı ̃‡ÒÚÓÚ
Простой активный фильтр низких частот показан на рис. 4.23.
Заметим, что усилитель при такой обратной связи представляет собой повтори
тель напряжения, т.е. его коэффициент усиления немного меньше единицы. Операци
онный усилитель служит буфером высокого сопротивления между RC цепью и на
грузкой. Поскольку в этой схеме не используется усиление, характеристики фильтра
определяются RC цепью.
Рис. 4.23. Активный низкочастотный фильтр
Определим параметры RC цепи. Сопротивление конденсатора определяется как
Отметим, что ХС увеличивается с уменьшением частоты, благодаря чему большая
доля входного сигнала приходится на конденсатор. Частота, при которой ХС равно R1
(или напряжение на С1 равняется напряжению R1), называется частотой среза.
Частота среза может выражаться как
fCО = 1 / (2π.R1.C1)
Частотная характеристика низкочастотного фильтра, т.е . зависимость напряже
ния от частоты, показана на рис. 4.24. Заметим, что точку, в которой напряжение на
С1 равно напряжению на R1 , называют точкой половинной мощности и что часть
кривой от точки половинной мощности до точки, где выходное напряжение равно
нулю, называют областью непрозрачности фильтра. Реакция фильтра в области
непрозрачности обычно выражается в
Это логарифмическая оценка отношения напряжений или ослабления фильтра.
èËÏ 4.17
Вычислите область непрозрачности фильтра на рис. 4 .23, где R1 = 3,3 кОм и С1 = 0,47 мкФ.
Входной сигнал — синусоидальный, действующее значение 5 В на частоте 10×fCО
.
ëıÂÏ̊ ‡ÍÚË‚Ì̊ı ÙËÎ̧ÚÓ‚
263
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Рис. 4 .24. Амплитудночастотная
характеристика
низкочастотного
фильтра
êÂ̄ÂÌËÂ:
Сначала вычислим fCО:
fCО = 103 Гц.
При выходном сигнале 10 × fCО,
или 1,03 кГц, вычислим новое значение ХС:
Xc = 0,33 кОм
Теперь рассчитаем Vвых:
Vвых
=0,5 B.
264
Определим ослабление сигнала в зоне непрозрачности:
дБ = —20.
Этот результат означает, что область непрозрачности характеризуется наклоном 20 дБ
на декаду, где декадой называют десятикратное соотношение между частотой среза и
частотой входного сигнала. Отрицательные 20 дБ на декаду означают, что усиление
снижается на 20 дБ при увеличении частоты входного сигнала в 10 раз. Например, из
менение частоты от 100 рад/с до 1000 рад/с вызывает уменьшение усиления на 20 дБ.
Наконец, активный фильтр, в котором область непрозрачности характеризуется
наклоном частотной характеристики 20 дБ на декаду, называют фильтром первого по
рядка. При использовании большого усиления ОУ и дополнительных компонентов ха
рактеристики фильтра в области непрозрачности могут быть улучшены: так, фильтр
второго порядка может иметь наклон характеристики —40 дБ на декаду, а фильтр тре
тьего порядка будет иметь наклон характеристики —60 дБ на декаду.
В идеальном случае наклон частотной характеристики представляет собой сту
пенчатую функцию. Иными словами, выходное напряжение для частот, превышаю
щих частоту среза, должно быть равно нулю. Приближение фильтров высокого поряд
ка к идеальной ситуации может быть достигнуто каскадным включением фильтров
первого порядка, как показано на рис. 4.25.
Рис. 4.25. Активный низкочастотный фильтр 4го порядка. Каждое звено —
фильтр первого порядка
В настоящее время получили распространение три классических типа активных
фильтров с малым числом ОУ, поскольку они не используют каскадного включения
фильтров первого порядка. Оптимальный выбор типа фильтра зависит от области его
конкретного применения. Названные три типа:
фильтр Баттерворта, обладает очень плоской частотной характеристикой в
пределах полосы пропускания;
ëıÂÏ̊ ‡ÍÚË‚Ì̊ı ÙËÎ̧ÚÓ‚
265
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
фильтр Чебышева, достигает более крутого спада частотной характеристики
при меньшем количестве компонентов;
фильтр Бесселя, обеспечивает высокую линейность фазовой характеристики.
В пределах этих классических типов фильтров может иметься различная тополо
гия схем. Однако обсуждение комбинаций всех характеристик типов фильтров и раз
личной топологии выходит за пределы этого раздела. Теме разработки фильтров по
священа обширная литература, здесь мы ограничились информацией, достаточной
для введения в теорию классической разработки фильтров.
Изображенный на рис.4.26 фильтр второго порядка обеспечивает уменьшение
входного сигнала в области непрозрачности с наклоном 40 дБ на декаду. Две RC цепи,
R1C1 и R2C2, обеспечивают эффект фильтра второго порядка, а два резистора R3 и R4
устанавливают тип фильтра. Соотношение R3/R4 должно иметь следующие значения
для фильтров:
Баттерворта R3/R4 = 0,568;
Чебышева R3/R4 = 0,234;
Бесселя R3/R4 = 0,268.
Рис. 4 .26. Активный низкочастотный
фильтр 2го порядка
Ослабление сигнала для частоты ниже частоты отсечки определяется соотноше
нием
Частота отсечки определяется соотношением
Для фильтра второго порядка ослабление сигнала с увеличением частоты, назы
ваемое диаграммой Боде, проиллюстрировано на рис. 4.27.
266
Рис. 4.27. Диаграмма Боде для низкочастотного фильтра 2го порядка
èËÏ 4.18
Используем фильтр на рис. 4.26 как фильтр Баттерворта и предположим, что R1 =
R2 = 4,7 кОм и С1 = С2 = 0,02 мкФ. Найдем следующие параметры для входного
сигнала 0,5 В:
1. Частоту отсечки.
2. Значение Vвых в пределах полосы пропускания.
3. Значение Vвых на частоте отсечки.
4. Значение Vвых в области непрозрачности.
êÂ̄ÂÌËÂ:
1. Поскольку R1 = R2 и С1 = С2, частота отсечки может быть выражена как
fCО= 1,7кГц.
2. В пределах полосы пропускания:
Для фильтра Баттерворта:
А = 1,568;
ëıÂÏ̊ ‡ÍÚË‚Ì̊ı ÙËÎ̧ÚÓ‚
267
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Vвых
= А×Vвх;
Vвых
= А×Vвх
= 1,568×0,5B;
Vвых
= 0,784 B.
3. На частоте отсечки:
Vвых
= 0,707 × Vвх;
Vвых
= 0,707 × 0,5;
Vвых
= 0,354 B.
4. Для фильтра второго порядка наклон частотной характеристики в области непроз
рачности составляет 40 дБ на декаду, следовательно, на частоте 10fCО = 17 кГц
Антилогарифм (—2) = V
вых
/ 0,5;
0,01=V
вых
/ 0,5;
Vвых
= 0,005 В.
Низкочастотный фильтр второго порядка с единичным усилением показан на рис. 4.28.
Рис. 4 .28. Активный низкочастотный фильтр с единичным усилением
268
4.12 .2 . îËÎ̧Ú ‚̊ÒÓÍËı ̃‡ÒÚÓÚ
Простой активный фильтр высоких частот показан на рис. 4.29.
Отметим, что резистор и конденсатор поменялись местами по сравнению с филь
тром низкой частоты. Для этого фильтра полоса пропускания содержит частоты выше
частоты отсечки fCО, как показано на рис. 4.30. Это фильтр первого порядка, частотная
характеристика в зоне непрозрачности изменяется с наклоном 20 дБ на декаду, и зави
симость Vвых от Vвх выражается соотношением
Как и для фильтра низкой частоты, частота отсечки высокочастотного фильтра
выражается соотношением
Рис. 4.29. Активный
высокочастотный
фильтр
Рис. 4.30. Амплитудно
частотная
характеристика
высокочастотного
фильтра
ëıÂÏ̊ ‡ÍÚË‚Ì̊ı ÙËÎ̧ÚÓ‚
269
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Высокочастотный фильтр второго порядка представлен на рис. 4.31.
Коэффициент передачи с частотами, превышающими fCО, определяется соотно
шением
Частота отсечки выражается как
Соответствующее ослабление сигнала (диаграмма Боде) представлена на рис. 4 .32.
Рис. 4 .31. Активный высокочастотный
фильтр 2го порядка
Рис. 4 .32. Диаграмма
Боде для
высокочастотного
фильтра 2го
порядка
270
4.12 .3. èÓÎÓÒÓ‚ÓÈ ÙËÎ̧Ú
Фильтры второго порядка могут быть соединены каскадно (последовательно), чтобы
создать фильтр более высокого порядка или полосовой фильтр. Если два низкочастот
ных фильтра второго порядка соединить последовательно, получится фильтр четвер
того порядка, точно так же, как при последовательном соединении двух высокочастот
ных фильтров второго порядка. Но если соединить последовательно высокочастотный
фильтр с низкочастотным, как показано на рис. 4.33, получится полосовой фильтр.
Заметим, что здесь использованы фильтры с единичным коэффициентом передачи в
зоне прозрачности, однако можно использовать любые фильтры, например фильтры
Баттерворта. Частоты отсечки для низкочастотного и высокочастотного фильтров, со
ответственно fCO1 и fCO2, определяются соотношениями:
Полосовой фильтр передает только определенную полосу пропускания частот,
расположенную между частотами отсечки высокочастотного и низкочастотного.
Диаграмма Боде, иллюстрирующая этот сценарий, представлена на рис. 4.34.
Центральная частота полосы пропускания:
Другой параметр — ширина полосы пропускания — является разностью в гер
цах между верхней и нижней частотами на уровне 3дБ. Этот параметр может быть
выражен как
Наконец, качественным показателем полосового фильтра служит отношение
центральной частоты полосы пропускания к ширине этой полосы:
Если сближать нижнюю и верхнюю частоты, получится узкополосный фильтр и,
соответственно, более высокий показатель Q. Наоборот, раздвигая низкие и высокие
частоты, мы формируем широкополосный фильтр. Принято следующее правило для
классификации полосовых фильтров:
узкополосные фильтры имеют Q > 10;
широкополосные фильтры имеют Q < 10.
èËÏ 4.19
Вычислите верхнюю и нижнюю частоты отсечки для полосового фильтра на рис. 4 .33, где
С1=С2=0,047мкФ,R1=R2=870Ом,С3 =С4=0,01мкФиR3=R4=2,2кОм.
ëıÂÏ̊ ‡ÍÚË‚Ì̊ı ÙËÎ̧ÚÓ‚
271
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
êÂ̄ÂÌËÂ:
Верхняя частота среза выражается формулой
Поскольку С3 = С4 и R3 = R4, верхняя частота среза определяется как
Рис. 4 .33. Полосовой фильтр
Рис. 4 .34. Диаграмма Боде для полосового фильтра
272
fco2
= 7236 Гц
Нижняя частота среза выражается формулой
Поскольку R1 = R2 и С1 = С2, нижняя частота среза запишется как
fco1
= 3893 Гц
èËÏ 4.20
Вычислить центральную частоту ширину полосы пропускания и показатель качества
полосового фильтра, у которого нижняя частота среза равна 5 кГц и верхняя частота
среза — 8 кГц.
êÂ̄ÂÌËÂ:
Сначала определяем
fc
= 6,3 кГц
Далее:
BW=f
co2
–
fco1
BW = (8–5) кГц
BW=3кГц
Окончательно:
ëıÂÏ̊ ‡ÍÚË‚Ì̊ı ÙËÎ̧ÚÓ‚
273
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
èËÏ 4.21
Является ли полосовой фильтр в примере 4.20 узкополосным или широкополосным?
Обоснуйте свой ответ.
êÂ̄ÂÌËÂ:
Это широкополосный фильтр, потому что Q меньше, чем 10.
4.12 .4 . êÂÊÂÍÚÓÌ̊È ÙËÎ̧Ú
Режекторный фильтр представляет собой противоположность полосовому фильтру, то
есть он не пропускает только подавляемую полосу частот, тогда как полосовой фильтр
пропускает только разрешенную. Другие термины, характеризующие этот фильтр, —
заграждающий или подавляющий фильтр. Когда полоса режекции является очень уз
кой (обычно это одна частота), его называют фильтром пробкой. Каскадное включе
ние, которое эффективно работает в полосовых фильтрах, не может применяться для
режекторного фильтра, потому что отклики характеристик накладывались бы, ослабляя
все входные сигналы. Одна методика формирования режекторного фильтра суммирует
выходы низкочастотного и высокочастотного фильтров, как показано на рис. 4 .35 . Заме
тим, что выходные сигналы высокочастотного фильтра, построенного на базе U1, и низ
кочастотного фильтра, созданного на базе U2, суммируются в сумматоре, использую
щем операционный усилитель U3. Совокупность трех перечисленных схем формирует
характеристику режекторного фильтра.
4.13. äéçíêéãúçé-àáåÖêàíÖãúçõÖ ìëàãàíÖãà
Контрольноизмерительный усилитель — усилительное устройство с обратной
связью, с дифференциальным входом и единственным выходом, сигнал которого фор
мируется относительно некоторого опорного, обычно нулевого, уровня. Назначение
контрольно измерительного усилителя состоит в том, чтобы усилить малые разно
стные сигналы и ослабить так называемую синфазную помеху, т.е. сигнал, присутству
ющий на обоих входах. Источником малых разностных сигналов служат устройства
ввода данных, датчики или мостовые схемы. Схемы измерительных усилителей служат
также для усиления сигналов ошибки или рассогласования и находят широкое приме
нение в промышленных устройствах.
274
Приведем некоторые примеры:
усиление сигналов, полученных от датчиков давления, температуры, тензо
датчиков, измерителей деформации, детекторов температуры;
медицинские измерения — мониторинг частоты пульса, давления крови,
дефибрилляция и пр.;
мониторинг электроники управления и контроля — контроль тока и
напряжения в различных сигнальных системах;
программноуправляемые применения — мониторинг программно уп
равляемых резисторных чипов, которые позволяют программным способом
управлять аппаратными средствами;
аудиоприменения — микрофонные предусилители, которые позволяют
восстанавливать слабые полезные сигналы при наличии шумов в окружаю
щей среде;
видеоприменения — использование в приборах с зарядовой связью (ПЗС),
видеосистемах, кабельном телевидении и при обработке высокочастотных
сигналов;
управление средствами силовой электроники — измерение токов и на
пряжений, фазовых соотношений в трехфазных системах привода перемен
ного тока.
Измерительные усилители успешно используются в тех случаях, когда сигнал со
провождается шумами и когда важно не загружать источник входного сигнала.
Рис. 4.35 . Режекторный фильтр
äéçíêéãúçé-àáåÖêàíÖãúçõÖ ìëàãàíÖãà
275
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
4.13.1 . ÑËÒÍÂÚÌÓÂ Ë ÏÓÌÓÎËÚÌÓÂ ËÒÔÓÎÌÂÌËÂ
Измерительные усилители могут разрабатываться как гибридные схемы с отдельными
ОУ (дискретное исполнение) или быть заказаны как единая интегральная схема (моно
литное исполнение). В монолитном исполнении индивидуальные усилители и компонен
ты подбираются для лучшего согласования, они совместно используют общую подлож
ку, поэтому являются предпочтительными. Дискретные измерительные усилители
обладают большей гибкостью и могут иногда обеспечивать очень высокое быстродей
ствие, недостижимое в монолитных усилителях. Монолитные устройства, напротив,
обеспечивают выполнение разнообразных функций, имея более высокую точность ре
жимов постоянного тока благодаря заводской настройке.
Монолитные усилители поставляются в виде интегральных схем, содержащих два
или три ОУ, как показано на рис. 4 .36а и б соответственно. Топология с тремя ОУ
является базовой для измерительной аппаратуры. Эти устройства обеспечивают уси
ление от единицы до нескольких тысяч и гарантируют высокое качество. Отметим, что
коэффициент усиления устанавливается единственным внешним резистором.
Симметричное усиление инвертирующего и неинвертирующего каналов обеспе
чивает лучшее подавление синфазной помехи на высоких частотах. В некоторых типах
усилителей используется обратная связь по току, поддерживающая отличную частот
ную характеристику при большом усилении.
Топология с двумя ОУ может обеспечить более широкие возможности общего
режима, особенно при использовании единственного источника питания. Более про
стая схема позволяет уменьшить размер модуля и снизить его стоимость. Однако эта
топология сама по себе не позволяет получить усиление меньше четырех.
При выборе усилителя обратимся к типичным справочным данным производите
ля. Пример таких данных для устройств, которые отвечают определенным условиям
разработки, приведен на рис. 4.37. Эти условия должны включать следующие спра
вочные данные:
выбор напряжения питания — выбор низкого напряжения единственного
или двуполярного источника в соответствии с требованиями разработки;
Рис. 4 .36. Монолитные интегральные усилительные устройства
RG
RG
Vоп
Vвх
Vвх
Vвх
+
Один
источник
питания
Два
источника
питания
Vвых
=
(Vвх
–V
вх
+ )G+Vоп
V–
Защита от перенапряжений
Защита от перенапряжений
G=1+560кОм
RG
100 кОм 25 кОм 25 кОм 100 кОм
60 кОм
60 кОм
25 кОм
60 кОм
60 кОм
V+
Vвых
Vвых
(а)
(б)
276
Рис. 4.37. Руководство по выбору измерительного усилителя
äéçíêéãúçé-àáåÖêàíÖãúçõÖ ìëàãàíÖãà
277
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
требования по коэффициенту усиления. Требуется предусмотреть общий
низкий уровень шума, поскольку он определяет дрейф, ток смещения и необ
ходимые напряжения компенсации ошибок;
диапазон напряжений общего режима — диапазон входных напряжений, с
которыми должен работать усилитель;
входной ток смещения — для устройств, управляемых малыми токами или
работающих с датчиками, имеющими очень большое сопротивление и, соот
ветственно, малые входные токи смещения;
напряжение баланса и дрейф. Если требуется большое усиление, то напря
жение баланса и дрейф должны быть приняты во внимание;
соотношение сигналов обратной связи по току и по напряжению для входных
каскадов, обеспечивающее сочетание широкой полосы пропускания с воз
можностью плавного на уровне 3 дБ регулирования полосы пропускания для
различных значений усиления.
4.13.2 . á‡ÍĮ̂̃ÂÌËÂ
Возможно, что во многих случаях нежелательные сигналы синфазной помехи не пред
ставляют проблемы. Вместе с тем на практике заземляющие межсоединения несовер
шенны, поэтому может оказаться, что кажущееся работоспособным однопроводное
подключение усилителя является причиной накопления ошибок. Это объясняется тем,
что напряжения помех, вызванные токами, протекающими в цепях заземления, сумми
руются с полезным входным сигналом и усиливаются асимметричным входным усилите
лем с одним входом. Даже в заземляющих цепях с малым сопротивлением могут наво
диться напряжения от блуждающих магнитных полей. При повышении требований к
точности становится затруднительно проектировать точные схемы с асимметричными
входными усилителями. Использование дифференциального входного измерительного
усилителя дает решение проблемы.
4.14 . ìëàãàíÖãà êÄáçéëíçõï íéäéÇ
Операционные усилители, которые обсуждались до сих пор, оперировали с разно
стными напряжениями на входах, тогда как усилитель разностных токов (УРТ), или
усилитель Нортона, реагирует на разность токов, но выходным сигналом обоих типов
усилителей — как обычного ОУ, так и УРТ — является напряжение. Условное обо
значение УРТ представлено на рис. 4.38. Оно подобно общепринятому обозначению
ОУ, однако УРТ предназначается для работы с токовыми сигналами на входе и может
использоваться при единственном источнике питания. Принцип действия УРТ можно
пояснить, используя следующие допущения:
входные сигналы на обоих входах (инвертирующем и неинвертирующем) яв
ляются токовыми, I
вхи
и Iвхн соответственно;
278
входные токи обоих входов должны быть равны Iвхи
=I
вхн
;
потенциалы обоих входов близки к нулю.
Создать устройства, удовлетворяющие этим допущениям, позволяет так называ
емое «зеркало токов».
Зеркало токов можно пояснить на примере рис. 4 .39 . При таком включении UКЭ =
UБЭ > UКЭнас
. Следовательно, транзистор Т1 ненасыщен. Поскольку UБЭ1 = UБЭ2, то при
хорошо согласованных по параметрам транзисторах: IБ1 = IБ2 = IБ, IK1 = IК2 = βIБ, где β —
статический коэффициент тока. При этом
Iвх
= βIБ+2IБиIвх
= βIБ.
Поскольку β>>1, то Iвых
= βIвх/(β+2)≈I
вх
. Таким образом, выходной ток схемы
почти повторяет входной, поэтому схема и получила название токового зеркала. Уси
литель Нортона усиливает разность входных токов (Iвхи
—
Iвхн) и пытается поддержать
ее близкой к нулю.
Рис. 4.38 . Усилитель разностных
токов — УРТ
V
VВЫХ
Инвертирующий
вход
Неинвертирующий
вход
Земля
Рис. 4.39 . Упрощенный каскад зеркала токов УРТ
ìëàãàíÖãà êÄáçéëíçõï íéäéÇ
279
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
4.14.1. ëÏÂ̆ÂÌË ìêí
Типичная конфигурация цепи смещения для УРТ показана на рис. 4.40. Ток неинвер
тирующего входа (Iвхн
= IБ) протекает через резистор RБ. Благодаря действию зеркала
тока, близкий по значению ток IF протекает через резистор обратной связи RF. Токи
через RБ и RF можно записать в виде формулы
где значение 0,7 В соответствует падению на внутреннем переходе «база — коллек
тор УРТ». Поскольку VБ существенно превышает это падение, ток через RБ прибли
женно равен
а выходное напряжение равно
Рис. 4 .40. Смещение УРТ
Рис. 4 .41. Инвертирующий УРТ
280
èËÏ 4.22
Для рис. 4 .40 вычислите ток смещения и входное напряжение, если RF
= 510кОм,R
Б
=
1МОм,аVБ=12В.
êÂ̄ÂÌËÂ:
Ток IБ может быть выражен как
Выходное напряжение равно
4.14 .2 . é·̆ÂÂ ÔËÏÂÌÂÌËÂ ìêí
Общее применение УРТ так же разнообразно, как и применение обычных ОУ. В этом
разделе мы обсудим сопоставимые варианты применения инвертирующих и неинвер
тирующих УРТ.
Инвертирующий УРТ. Основная схема инвертирующего УРТ изображена на
рис. 4 .41. Ток инвертирующего входа Iвхи равен разности
Iвхи
=IF — I1.
Зеркало токов обеспечивает выполнение равенства
Iвхи
= IБ=IF—I1=I
вхн
.
Когда на вход поступает отрицательная полуволна входного сигнала Vвх, направ
ления токов соответствуют изображенным. Зеркало токов, которое поддерживает не
изменным ток Iвхи, заставляет ток через RF увеличиваться на величину полуволны тока
входного сигнала I1.
Таким образом, изменение тока через R1 заставляет настолько же увеличиваться
ток IF. Усиление напряжения (как в обычном ОУ) выражается соотношением
ìëàãàíÖãà êÄáçéëíçõï íéäéÇ
281
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Поскольку токи I1 и IF равны, усиление запишется как
èËÏ 4.23
Для данных инвертирующего усилителя УРТ на рис. 4.42а вычислить ток смещения и
выходное постоянное напряжение.
êÂ̄ÂÌËÂ:
Ток выражен соотношением
Выходное постоянное напряжение равно
èËÏ 4.24
Для данных, приведенных на рис. 4.42а, вычислите коэффициент усиления и пере
менное выходное напряжение.
êÂ̄ÂÌËÂ:
Коэффициент усиления равен
Выходное переменное напряжение равно
Vвых
= A·V
вых
282
Vвых
= – 10·0,2 BPK
Vвых
= –2BPK
Рис. 4.42. УРТ для примеров 4.23, 4.24 и 4.25
Для выходного напряжения указана двойная амплитуда переменной составляющей
(от пика до пика). Соотношение между выходным напряжением постоянного тока и пе
ременным выходным напряжением проиллюстрировано на рис. 4 .42б. Заметьте, что
ìëàãàíÖãà êÄáçéëíçõï íéäéÇ
283
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
выходное переменное напряжение 2ВPK отсчитывается от пьедестала 5 В, благодаря
чему потенциал выхода циклически изменяется между 3 и 7 В. Емкость разделительного
конденсатора С1 на рис. 4 .42а составляет 10 мкФ. Емкость этого конденсатора имеет
существенное значение, поскольку, если она будет слишком мала, снизится усиление на
низких частотах:
На рис. 4.42а ХС при входной частоте 1 кГц составит:
Поскольку ХС много меньше сопротивления R1, конденсатор связи не влияет на
усиление схемы. Но каким станет реактивное сопротивление ХС, если входная частота
снизится до 1 Гц?
Хотя это значение относительно мало по сравнению с сопротивлением R1, оно ста
новится существенным. Хорошее эмпирическое правило: емкостное сопротивление
должно быть меньше, чем 10% сопротивления R1 на самой низкой входной частоте.
èËÏ 4.25
Используя данные рис. 4.42а, вычислите минимальное значение С1 для входной час
тоты 20 Гц.
êÂ̄ÂÌËÂ:
или
Устанавливая ХС на уровне 10% от R1, что соответствует 10 кОм, получим:
284
Неинвертирующий УРТ. Основная схема неинвертирующего УРТ изображена на
рис. 4 .43а, а формы сигналов входа и выхода представлены на рис. 4.43б. Усиление
для неинвертирующего УРТ имеет то же значение, что и для инвертирующего, за ис
ключением знака
Остальные уравнения для неинвертирующего УРТ те же, что и для инвертирую
щего.
èËÏ 4.26
Для схемы рис. 4.43а вычислить ток смещения и выходное постоянное напряжение.
êÂ̄ÂÌËÂ:
Ток запишется формулой
Входное постоянное напряжение выражается как
èËÏ 4.27
Для схемы рис. 4.43а вычислить усиление переменного напряжения и значение вход
ного напряжения, если амплитуда входного напряжения составляет 0,1 В.
êÂ̄ÂÌËÂ:
Коэффициент усиления:
ìëàãàíÖãà êÄáçéëíçõï íéäéÇ
285
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Рис. 4 .43. УРТ для примеров 4.26, 4.27 и 4.28
286
Выходное напряжение:
Vвых
= A·V
вых
Vвых
= 10·0,1 В
Vвых
=1В
èËÏ 4.28
Нарисуйте сигналы входа и выхода для примера 4.27.
êÂ̄ÂÌËÂ:
Амплитуда входного переменного напряжения 0,1 В, выходного — 1 В на пьедестале
5 В, как показано на рис. 4.43б.
á‡ÍĮ̂̃ÂÌËÂ
Мы проанализировали некоторые детали инвертирующего и неинвертирующего УРТ.
Подобно обычному ОУ, УРТ может использоваться как компаратор, датчик окна, по
вторитель напряжения или генератор. Фактически самые обычные схемы на ОУ могут
быть продублированы на УРТ. Дополнительная информация относительно УРТ и его
использования в промышленности приведена в информационных материалах компа
нии National Semiconductors (NS). Образец типичного УРТ, используемого в про
мышленности, — микросхема LM35, описанная в общем информационном листе дан
ных NS и представленная на рис. 4.44. На рисунке мы видим типичное применение
сдвоенного УРТ в схеме инвертирующего усилителя с дополнительными элементами
подключения, обычно используемыми для твердотельных устройств. Микросхема
LM359 имеет выводы (штырьки 1 и 8) для нарастания сигнала в обоих устройствах и
выводы компенсации частоты (штырьки 3 и 12), по одному для каждого усилителя.
Существенная особенность этого устройства — работа от единственного источника
питания с напряжением от 5 до 22 В.
4.15. èéàëä çÖàëèêÄÇçéëíÖâ Ç ìëíêéâëíÇÄï çÄ ÅÄáÖ éì
Первый и самый важный шаг в поиске неисправностей — проверка правильности
подключения выводов. Этот шаг может быть утомителен, но он имеет большое значе
èéàëä çÖàëèêÄÇçéëíÖâ Ç ìëíêéâëíÇÄï çÄ ÅÄáÖ éì
287
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Рис. 4 .44. Справочные данные для УРТ
288
ние. Это обычно отправной пункт в получении диагностической информации, которая
необходима для поиска неисправностей, поскольку нередко и новичок, и опытный спе
циалист делают ошибки при монтаже. Если ОУ вставлен в розетку разъема (сокет) и
не припаян, нужно вынуть его и заменить другим. Такая замена, в свою очередь, может
быть причиной отказа в случае неправильного подключения источника питания. Пос
ле проверки правильности подключения проверяется сигнал на выходе ОУ. На этом
шаге может быть выявлено, что выходной сигнал:
отсутствует;
имеет низкий уровень;
искажен.
В таком случае делается вывод о том, что причиной отказа является выход ОУ..
Последовательность диагностирования и нахождения неисправностей в схемах на
базе ОУ обычно состоит из этапов проверки:
наличия надлежащих напряжений на выводах ОУ;
правильности входного сигнала ОУ;
наличия надлежащего заземления выводов и компонентов;
правильности выбора и установки пассивных компонентов.
Если все этапы дали положительный результат, то следующий шаг — замена ОУ.
Надо заметить, что последовательность шагов при поиске неисправностей индивидуа
лизирована и основана на личном опыте, поскольку люди приобретают необходимые
навыки на практике.
4.16. ÇÖÅ-ëÄâíõ èé éèÖêÄñàéççõå ìëàãàíÖãüå
Ниже перечислены адреса веб сайтов поставщиков, о которых упоминалось в этой
главе. Однако адреса сайтов в Интернете часто изменяются, поэтому если какая либо
ссылка неактивна, воспользуйтесь механизмом поиска в Сети, чтобы найти необходи
мый материал.
ОУ в Semiconductor Component Industries
http://www.onsemi.com
Дифференцальные усилители тока (ДУТ) в National Semiconductors
http://www.national.com
Измерительные усилители в Texas Instruments
http://www.ti .com
ÇÖÅ-ëÄâíõ èé éèÖêÄñàéççõå ìëàãàíÖãüå
289
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
êÖáûåÖ
4.1. Операционные усилители — краткая историческая справка
Термин «операционные усилители» впервые появился в публикациях в 1947 г.
Первый ОУ на дискретных компонентах создан в 1962 г. Первый интеграль
ныйОУ—в1963г.
Изготовленный фирмой Fairchild ОУ mA709 был первым массово произво
димым высококачественным устройством , широко применяемым в промыш
ленной электронике. Разработчики устройств используют почти исключи
тельно интегральные схемы ОУ.
4.2. Введение в параметры ОУ
Рабочие характеристики ОУ зависят почти исключительно от внешних ком
понентов, связанных с его выводами.
Рабочие параметры ОУ, предназначенных для звукоусилительной аппарату
ры, также необходимы при проектировании промышленных управляющих
устройств.
4.3. Пояснение к справочным данным ОУ
На листах данных от изготовителей перечислены параметры, связанные с
максимальными оценками входа, выхода и динамических характеристик ОУ.
Читая таблицы справочных данных, обращайте внимание на столбец, в кото
ром указаны единицы измерения, поскольку величины в формулах могут
быть выражены в других единицах.
4.4. Инвертирующие усилители
В ОУ с обратной связью внешние компоненты используются, чтобы подать
на вход часть выходного напряжения.
Положительный входной вывод инвертирующего ОУ является виртуальной
землей.
Коэффициент усиления инвертирующего усилителя устанавливается отно
шением R2/R1.
Ограничение входного сигнала происходит, когда уровень входного сигнала
таков, что рассчитанное значение выходного сигнала в схеме с обратной свя
зью оказывается за пределами напряжения источника питания.
4.5. Неинвертирующие усилители
Положительный вывод неинвертирующего усилителя является входным по
отношению к виртуальной земле. Коэффициент усиления неинвертирующе
го усилителя равен R2/R1+1.
Входное сопротивление неинвертирующего усилителя намного выше, чем
инвертирующего, благодаря высокому коэффициенту усиления разомкнутой
системы.
290
4.6 и 4.7. Суммирующий усилитель. Дифференциальный усилитель
Суммирующий усилитель — инвертирующий усилитель с двумя или боль
шим количеством входов, соединенных с отрицательным (инвертирующим)
входом ОУ.
Дифференциальный усилитель усиливает разность между двумя сигналами,
ни один из которых не связан с землей.
4.8 и 4.9. Преобразователь напряжения в ток. Преобразователь тока в
напряжение
В преобразователе напряжения в ток нагрузка включается в контур обрат
ной связи, а входной сигнал прикладывается к инвертирующему входу ОУ.
Преобразователь напряжения в ток преобразует входное напряжение в про
порциональный входному напряжению выходной ток.
В преобразователе тока в напряжение источник входного тока связан непос
редственно с инвертирующим входом ОУ.
Преобразователь тока в напряжение преобразует входной ток в пропорцио
нальное ему выходное напряжение.
4.10. Интеграторы и дифференциаторы
Интегратор и дифференциатор выполняют сложные математические опера
ции интегрирования и дифференцирования над входным сигналом.
Выходное напряжение дифференциатора пропорционально скорости изме
нения входного сигнала, тогда как выход интегратора пропорционален про
изведению входного сигнала на протяженность интервала времени, когда
входной сигнал присутствует.
4.11 . Компараторы и датчики окна
Компаратор — схема, которая имеет два независимых входа. Она обеспечи
вает выход, определяемый отношением между двумя входными сигналами
(«больше/меньше»).
Когда ОУ используется как компаратор, он функционирует как ключевая
схема и не обеспечивает линейных соотношений между входами и выходом.
Аналоговая схема интегрального компаратора представляет собой универсаль
ное устройство для сравнения напряжений, которое может выполнять многие
функции с точностью, требуемой в промышленных цифровых схемах. Компара
торы успешно работают во многих промышленных аналоговых устройствах.
Датчик окна содержит два линейных интегральных компаратора, каждый из
которых имеет собственное опорное напряжение, обычно называемое верх
ним и нижним пределом, но совместно использует общее входное напряжение.
Функция датчика окна должна обеспечивать индикацию, когда входное на
пряжение превышает верхний предел или падает ниже нижнего предела или,
другими словами, оказывается вне окна.
4.12 . Схемы активных фильтров
Фильтр нижних частот удаляет частоты выше, чем частота среза, позволяя
таким образом пропустить низкие частоты.
êÖáûåÖ
291
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Фильтр высших частот удаляет частоты ниже, чем частота среза, позволяя
таким образом пропустить высокие частоты.
Полосовой фильтр использует комбинацию фильтров низших и высших час
тот, чтобы пропустить только частоты, близкие к частотам среза.
Активный фильтр, у которого характеристика в зоне непрозрачности имеет
наклон в 20 Дб на декаду, определяется как фильтр первого порядка.
Фильтры второго и более высоких порядков могут быть выполнены по схе
мам Баттерворта, Чебышева или Бесселя.
Если режекторный фильтр предназначен для устранения очень узкой полосы
частот, в пределе единственной частоты, его называют фильтром пробкой.
4.13. Измерительные усилители
Измерительный усилитель — схема с обратной связью, которая имеет диф
ференциальные входы и единственный выход относительно опорного уровня,
обычно уровня земли.
Назначение измерительного усилителя состоит в том, чтобы усилить малый
разностный сигнал, подавив постоянную составляющую синфазной помехи.
Измерительные усилители используются как усилители ошибки или рассогла
сования в мостовых схемах и находят широкое применение в промышленности.
Монолитные устройства обеспечивают полный набор измерительных функ
ций усилителя, включая заводскую подгонку и настройку, благодаря чему дос
тигается их более высокая точность, чем гибридных и дискретных устройств.
4.14. Усилители разностных токов
Усилитель разностных токов (УРТ), или усилитель Нортона, реагирует на
разностный ток.
УРТ зеркально отражает через резистор обратной связи такой же ток, как
ток через резистор смещения.
Применение УРТ во многом сопоставимо с применением обычных ОУ.
4.15. Поиск неисправностей в устройствах на базе ОУ
Отказы в работе ОУ обычно проявляются в виде отсутствия или искажения
выходного сигнала низкого уровня.
Первый этап диагностирования ОУ состоит в проверке правильности монта
жа и межсоединений.
Çéèêéëõ
1. Прочитав раздел «Применение знаний в профессиональной деятельности», рас
скажите, какая работа в области операционных усилителей является для вас наи
более привлекательной.
2. Какими двумя недостатками обладали первые твердотельные монолитные опера
ционные усилители?
292
3. Дайте определение входного тока смещения ОУ.
4. Дайте определение тока короткого замыкания выхода ОУ.
5. Дайте определение времени фронта (скорости нарастания) сигнала на выходе ОУ.
6. Дайте определение перекрестных помех.
7. Что такое DIP корпус?
8. Почему для промышленных устройств использование ОУ в разомкнутых схемах
непрактично?
9. Что такое отрицательная обратная связь?
10. Как подводимая к ОУ мощность влияет на схемотехнические решения при разра
ботке промышленных устройств?
11. Расскажите, когда выход ОУ оказывается в режиме отсечки.
12. Какой вывод в инвертирующем ОУ является виртуальной землей?
13. Как можно компенсировать частичное смещение выхода инвертирующего ОУ?
14. Сравните и сопоставьте формулы для инвертирующего и неинвертирующего ОУ.
15. Что такое суммирующий усилитель?
16. Что такое дифференциальный усилитель?
17. Сравните и сопоставьте преобразователь напряжения в ток с преобразователем
тока в напряжение.
18. Какая схема обеспечивает пропорциональность выхода длительности входного
сигнала, если входной сигнал постоянен?
19. Какая схема с ОУ функционирует как переключатель?
20. Дайте определение термина «окно».
21. Что такое активный фильтр?
22. Назовите правила для определения частотного диапазона фильтров низких и вы
соких частот.
23. Какие правила применяются при выборе компонентов активного фильтра?
24. Что такое частота отсечки фильтра?
25. Определите наклон частотной характеристики в области непрозрачности фильтра.
26. Какой наклон имеет частотная характеристика фильтра второго порядка?
27. Какой фильтр вы использовали бы для получения очень плоской частотной харак
теристики в пределах полосы пропускания?
28. Опишите диаграмму Боде.
29. Опишите полосовой фильтр.
30. Каким образом вы создали бы полосовой фильтр?
31. Какова формула для добротности полосового фильтра?
32. Как определяется величина Q для широкополосного фильтра?
33. Сравните режекторный фильтр с фильтром пробкой.
34. Каким образом вы создали бы фильтр с устранением участка полосы пропускания?
35. Каково назначение измерительного усилителя?
36. Как устанавливается усиление измерительного усилителя?
Çéèêéëõ
293
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
37. Опишите зеркало тока, используемое в УРТ.
38. Объясните соотношение между реактивным сопротивлением конденсатора свя
зи и сопротивлением входного резистора в схеме УРТ.
39. Опишите соотношение между постоянной и переменной составляющими в ин
вертирующей схеме УРТ.
40. Объясните, почему важно проверить вначале правильность подключения эле
ментов схемы при диагностировании отказа в ОУ.
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
1. Каково типичное значение входного напряжения для ОУ 34071А?
2. Каково минимальное значение скорости нарастания напряжения для ОУ 34071А?
3. Каков типичный уровень разделения каналов для ОУ 34071А?
4. Каков максимальный диапазон входных напряжений для ОУ 34071А?
5. Каково максимальное значение выходного напряжения насыщения для компара
тора LM119 при температуре ниже 0 oC?
6. Каково типичное время переключения для компаратора LM119?
7. Какая характеристика отличает компаратор LM119 от LM219?
8. Какой измерительный усилитель вы выберете, если потребуется получить усиле
ние 1, а напряжение питания равно 15 В?
9. Что означает часть номера сдвоенного измерительного усилителя INA322?
10. Каково типовое значение скорости нарастания для единичного усиления УРТ
LM359?
11. Какое максимальное напряжение может быть подано на вход УРТ LM359?
12. Каково назначение выводов ISET(вх) и ISET(вых) для УРТ LM359?
áÄÑÄóà
1. Вычислите усиление замкнутой системы с обратной связью и выходное напряже
ние инвертирующего усилителя в схеме рис. 4 .45.
2. Используя коэффициент усиления задачи 1, определите максимальный размах
входного напряжения, при котором отсутствует ограничение сигнала.
3. Рассчитайте Rб для рис. 4.45.
4. Рассчитайте усиление в замкнутой системе и выходное напряжение неинвертиру
ющего ОУ в схеме рис. 4.46.
5. Вычислите выходное напряжение суммирующего усилителя в схеме рис. 4.47,
еслиV1= —1,2B,V2=+0,5B,V3= —2,8B.
294
6. Обратимся к задаче 5, V1 и V3 остаются теми же самыми. Каким должно быть зна
чение V2, чтобы выходное напряжение стало равно +1,5 В?
7. Рассчитайте сопротивление резистора обратной связи в схеме дифференциаль
ного усилителя на рис. 4.12, если выходное напряжение равно —7,5 В, все ос
тальные сопротивления равны 10 кОм, V1 = 1,9 B, V2 = 2,4 B.
8. Обратитесь к рис. 4.15а. Вычислите максимальное значение Vвых для Vвх, пред
ставляющего собой прямоугольное напряжение с частотой 2 кГц и амплитудой —
1,8 В.
9. Нарисуйте формы волны входа и выхода для задачи 8.
10. Вычислите Vвых на рис. 4 .17, если R1 = 1,5 кОм, С1 =0,0047 мкФ, а Vвх представля
ет собой линейно изменяющееся (пилообразное) напряжение от —5 до +5 В за
100мс.
11. Вычислите скорость реакции компаратора LM119 в В/мкс. Сопоставьте ее с ти
пичной скоростью реакции ОУ МС34071А.
12. Для инвертирующего УРТ на рис. 4.48 вычислите ток смещения и усиление пере
менного напряжения.
13. Для задачи 12 рассчитайте постоянную и переменную составляющую выходного
напряжения.
Рис. 4.45. ОУ к задачам 1—3
Рис. 4.46. ОУ к задаче 4
áÄÑÄóà
295
éÔ‡ˆËÓÌÌ̊ ÛÒËÎËÚÂÎË Ë ÎËÌÂÈÌ̊ ËÌÚ„‡Î̧Ì̊ ÒıÂÏ̊
Рис. 4.47. ОУ к задачам 5 и 6
Рис. 4 .48. ОУ к задачам
12и13
296
5
èË·Ó̊
ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
ñÂÎ̧ „·‚̊
Основная цель главы 5 состоит в том, чтобы описать функциони
рование семейства силовых полупроводниковых приборов, в основ
ном тиристоров, симисторов и других трехэлектродных прибо
ров, а также способов их переключения.
После изучения этой главы вы сможете:
1. Описать структуру и функционирование тиристоров, симисторов и приборов ти
ристорного семейства.
2. Описать модель тиристора и характерные кривые токов и напряжений тиристор
ных устройств.
3. Использовать справочные данные тиристоров для разработки схем.
4. Описать переключение тиристора сигналами управляющего электрода.
5. Описать формы напряжений в тиристорных переключающих устройствах.
6. Описать функционирование тиристорных переключающих устройств: диода
Шокли, переключающего диода, однопереходного транзистора.
7. Анализировать и разрабатывать схемы релаксационных генераторов, которые
используют однопереходный транзистор.
8. Описать модель симисторного устройства и характерные кривые и формы волны.
9. Различать символы различных тиристорных электронных приборов.
10. Применять справочную информацию о симисторах для проектирования уст
ройств.
11. Описать функционирование симистора в различных промышленных устройствах.
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
12. Описать функционирование управляющих трехэлектродных переключающих
приборов тиристорного семейства.
èêàåÖçÖçàÖ áçÄçàâ
Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Тиристоры важны в тех промышленных устройствах, которые требуют управления ко
личеством передаваемой электроэнергии. Область техники, связанная с промышлен
ным применением переключающих схем, управлением направлением вращения и час
тотой двигателей постоянного тока, импульсными источниками света, диммерами
(регуляторами силы света), открыта для тех, кто знаком с характеристиками, возможно
стями и ограничениями тиристоров. Эта область включает разработку, анализ, испыта
ние и оценку устройств. Производство автомобилей, нагрев, сварка, промышленные и
бытовые устройства — вот области применения тиристоров в бизнесе и производстве.
Дипломированные специалисты — разработчики и технологи — могут сделать
карьеру в компаниях, занимающихся производством тиристоров. Профессиональный
рост таких специалистов может происходить как в процессе разработки, производства
и испытания изделий, так и при налаживании производственных связей, организации
продаж и поддержки клиентов.
К примеру, вам может быть предложено заняться оценкой тиристорных устройств и
разработкой их документации для включения в справочники, поставляемые клиентам.
Вы можете работать в группе поддержки клиентов компаниях, производящих полупро
водниковые компоненты, в частности тиристоры. Ваша обязанность будет состоять в
том, чтобы с помощью специалистов компании обеспечить схемотехническую подготов
ку для испытаний разработанных схем с использованием стандартного лабораторного
оборудования (осциллографа, цифрового вольтметра и генератора сигналов). Помимо
того, что вы разберетесь в работе схемы в целом, вам придется проанализировать фун
кцию каждого компонента с тем, чтобы полностью описать применение схемы. Затем
ваше руководство по применению — как текст, так и схемное решение — будут подвер
гнуты компьютерной обработке. После того как ваш руководитель одобрит документа
цию, вы представите ее группе, объединяющей всю информацию в сборник справочных
данных (Data Sheets). И когда он будет издан, вы получите удовлетворение, увидев свой
труд на страницах книги.
5.1. ÇÇÖÑÖçàÖ Ç íàêàëíéêõ
Многие задачи промышленной электроники требуют управления большими напряже
ниями промышленной сети (приблизительно 500 В) и большими токами (порядка
50 А). Управление такими большими токами и напряжениями, конечно, возможно пу
тем использования регулировочного трансформатора или включения реостата после
298
довательно с нагрузкой. Однако регулировочные трансформаторы и реостаты дороги,
имеют большую массу и требуют обслуживания. С появлением твердотельных уст
ройств управление различными типами двигателей, универсальными источниками пи
тания и другим силовым оборудованием может осуществляться с помощью относи
тельно небольших, недорогих устройств с малыми эксплуатационными расходами —
так называемых тиристоров.
Термин «тиристор» появился как комбинация терминов «тиратрон» (газонапол
ненный трехэлектродный прибор) и «транзистор» (трехэлектродный твердотельный
прибор). Этот термин объединяет все твердотельные устройства, которые обладают
релейными характеристиками, изменяя проводимость не постепенно, а дискретно.
Все они регенеративны по своей природе и не могут работать в линейном режиме.
Тиристоры — твердотельные переключающие приборы, они имеют много разно
видностей, но обладают одним общим свойством. Все они ведут себя как разомкнутая
цепь, способная выдерживать допустимое номинальное напряжение до тех пор, пока
не поступил сигнал переключения. После этого тиристор переходит в состояние высо
кой проводимости, пока ток через него не прекращается или не снижается ниже мини
мального значения, называемого током удержания. Будучи однажды включенным, т.е .
переведенным в состояние высокой проводимости, тиристор продолжает оставаться в
этом состоянии даже после прекращения управляющего тока. К семейству тиристор
ных переключающих приборов принадлежат тиристоры и симисторы. При этом тири
сторы используются для переключения тока одного направления, симисторы способ
ны переключать токи нагрузки в обоих направлениях.
Структурно все тиристоры состоят из нескольких чередующихся слоев материала
p
типа и материала n
типа, образуя многослойную pn структуру. Конкретная струк
тура зависит от вида устройства. Нагрузка включается последовательно с многослой
ной pn структурой. Переключающий ток вводится в один из pn переходов. Он позво
ляет току нагрузки течь через устройство, обеспечивая регенеративное действие,
которое поддерживает ток нагрузки даже после того, как переключающий ток прекра
тился. Компоновка тиристоров выполняется различными способами, два наиболее
распространенных вида — штыревой и таблеточный тиристоры. Мы обсудим в этой
главе следующие тиристорные устройства:
однооперационный тиристор с обратной блокирующей способностью;
двунаправленный триодный тиристор — симистор.
двухэлектродный тиристор: диод Шокли, однопереходный транзистор (ОПТ),
программируемый ОПТ.
По сравнению с механическим выключателем тиристор обладает значительно бо
лее длительным сроком службы, более высоким быстродействием. Эти качества делают
тиристоры чрезвычайно полезными в устройствах промышленной электроники. Из
за
малого времени включения и выключения, регенеративного действия и низкого сопро
тивления включенного прибора тиристоры полезны как силовые контроллеры, устрой
ства защиты от перенапряжений и простые переключающие устройства. Тиристоры ис
пользуются для управления двигателями, лампами накаливания и многими другими
видами оборудования. Со справочными данными (Data Sheets) и рекомендациями по
применению (Applicati°n N°tes) можно познакомиться на веб
сайтах поставщиков твер
дотельных устройств. Адреса полезных сайтов приведены в конце этой главы.
ÇÇÖÑÖçàÖ Ç íàêàëíéêõ
299
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
5.2. äÂÏÌË‚̊ ÛÔ‡‚ÎflÂÏ̊ ‚ÂÌÚËÎË
Кремниевый управляемый вентиль (тиристор) — относительно недорогой прибор не
большого размера, не нуждающийся в обслуживании. Появившийся в начале 1960
х
годов, этот прибор может управлять током в несколько сотен ампер и работать в схемах
с очень высокими напряжениями. Поскольку в его названии содержится слово «вен
тиль», предполагается, что он может проводить ток только в одном направлении. Тири
стор во многом похож на выключатель: когда он замкнут, то обеспечивается путь для
тока нагрузки через цепь с малым сопротивлением, а когда разомкнут, ток практически
отсутствует. Поскольку тиристор представляет собой твердотельное устройство, пере
ключение происходит очень быстро. Если тиристор проводит только в течение малой
доли положительной части синусоидальной волны напряжения, то средний ток нагрузки
мал. Если доля периода, когда тиристор проводит (интервал проводимости), велика, то
средний ток нагрузки становится большим. Таким образом, ток нагрузки может регули
роваться изменением интервала проводимости тиристора. Тирис
торы применяют для управления освещением, частотой вращения
двигателя, процессами нагрева и сварки. Тиристоры незаменимы в
промышленных устройствах, требующих регулирования количе
ства электроэнергии.
Тиристор управляет током одного направления и блокирует
(запирает) ток другого направления. Он представляет собой уст
ройство с тремя выводами и предназначен для переключения тока
нагрузки одного направления и действует как твердотельный вык
лючатель, пропускающий ток нагрузки от анода к катоду. Схемное
обзначение тиристора показано на рис. 5 .1а, четырехслойная
структура pnpn представлена на рис. 5 .1б.
Заметим, что три его вывода обозначены как А (анод), К (катод)
и УЭ (управляющий электрод). Анод и катод тиристора соответству
ют аналогичным выводам диода. Третий вывод УЭ — управляющий.
Когда ток переключения протекает через управляющий электрод,
тиристор включается, позволяя, таким образом, току протекать от
вывода анода к выводу катода.
Контур тока нагрузки замыкается, когда тиристор включен
последовательно с нагрузкой, как показано на рис. 5.2 . Входное
напряжение обычно представляет собой напряжение сети часто
той 60/50 Гц, и тиристор находится в проводящем состоянии в
течение определенной доли периода сети и в непроводящем — в
течение остальной доли периода.
Тиристор отпирается на интервале положительной полуволны
в любой момент, когда сигнал, отпирающий тиристор, поступает на
управляющий электрод. Изменяя момент поступления управляю
щего сигнала можно регулировать значение тока нагрузки.
Если тиристор отпирается в момент начала положительного
полупериода, то ток в цепи нагрузки будет протекать в течение по
чти целой половины периода (180°) . Если тиристор будет отпи
Рис. 5 .1.
Кремниевый
управляемый
вентиль:
а) условное
обозначение;
б) pn
структура
300
раться с запаздыванием на 90°, то средний ток нагрузки уменьшится примерно вдвое от
предыдущего значения. Нетрудно видеть, что ток нагрузки может регулироваться путем
задержки момента отпирания тиристора на некоторую долю положительного полупери
ода. Тиристор может проводить только в течение положительной полуволны, иными
словами, только тогда, когда анод тиристора положителен по отношению к катоду. Таким
образом, тиристор на рис. 5 .2 может быть включен только в течение интервала, не пре
вышающего половину периода, поскольку в течение другой (отрицательной) половины
периода его анод отрицателен по отношению к катоду.
5.2.1. åÓ‰ÂÎ̧ ÚËËÒÚÓ‡
Моделью тиристора могут служить два транзистора включенные по схем рис. 5.3а или
многослойная pnpn структура на рис. 5.3б, в которой эти два транзистора совмес
Рис. 5.2 . Однополупериодное
выпрямление:
а) тиристорная
схема;
б) входное
переменное
напряжение;
в) ток нагрузки при
отсутствии
задержки отпирания
äÂÏÌË‚̊ ÛÔ‡‚ÎflÂÏ̊ ‚ÂÌÚËÎË
301
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
тно используют две средние области. В модели с двумя транзисторами их взаимосвязь
помогает пояснить регенеративное действие тиристора. Важно отметить, что:
базовый ток транзистора Q1 есть не что иное, как коллекторный ток Q2;
базовый ток транзистора Q2 есть не что иное, как коллекторный ток Q1.
Рис. 5 .3. Транзисторная модель тиристора:
а) схема;
б) pn pn структура
Если инжектировать ток в вывод управляющего электрода, увеличивается базовый
ток Q2. Цепь, по которой протекает этот ток, замыкается через переход база
эмиттер
Q2, стимулируя, таким образом, отпирание Q2. Этот начальный ток проводимости про
текает через переход база
эмиттер Q1, стимулируя, таким образом, протекание тока от
анода к катоду тиристора. Поскольку базовый ток протекает через Q1, этот транзистор
быстро включается, а его ток коллектора теперь выполняет функции базового тока Q2.
Кроме того, базовый ток, введенный в Q1, становится коллекторным током Q2. Поэто
му внешний ток управляющего электрода может быть удален, а ток в анодной цепи про
должает течь. Регенерация произошла. Ток включенного состояния ограничен внешним
сопротивлением анодной цепи и продолжает течь, пока условия в анодной цепи не
уменьшат его до значения, названного током удержания.
Чтобы выключить тиристор, необходимо произвести некоторые изменения в
токе. Может показаться, что для этого достаточно замкнуть цепь «управляющий элек
трод — катод». Однако в тиристорной структуре область управляющего электрода
составляет лишь малую долю области катода. Поэтому на практике ток должен быть
уменьшен ниже тока удержания прежде, чем выключение может начаться.
302
5.2.2. ÍÚÂÌ̊ ÍË‚̊Â Ë ÙÓÏ̊ ‚ÓÎÌ̊
Рабочие характеристики тиристора могут быть классифицированы по трем категориям:
электрические (включения и выключения);
тепловые;
динамические.
Параметры, влияющие на эти характеристики: напряжение, ток и температура.
Кроме того, для каждого типа тиристоров установлены максимально
допустимые зна
чения, их превышение приводит к неисправности прибора.
Рис. 5.4 . Вольтамперная
характеристика
тиристора
Таблица 5.1. Параметры тиристора
Электрические характеристики. Электрические характеристики как в выклю
ченном, так и во включенном состоянии (в зависимости от тока управляющего элект
рода) иллюстрируются вольтамперной характеристикой рис. 5.4. Используемые сим
äÂÏÌË‚̊ ÛÔ‡‚ÎflÂÏ̊ ‚ÂÌÚËÎË
303
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
волы на этом рисунке, представленные ими параметры и их определения приведены в
табл. 5.1 .
Характеристики включения. Как видно из рис. 5 .4, в выключенном состоянии ток
тиристора IDRM очень мал, а прямое напряжение VDRM велико. Но после подачи управля
ющего тока IУТ напряжение быстро падает до значения VTM, а ток быстро нарастает до
тока, превышающего ток удержания IH. Теперь тиристор находится во включенном со
стоянии. Включение тиристора может быть выполнено током управляющего электрода
при любом напряжении на участке кривой VDRM. Существуют три нежелательных метода
отпирания (аварийные режимы):
превышение напряжения пробоя.
избыточный ток утечки.
превышение скорости нарастания напряжения dV/dt.
Прежде всего, напряжение на тиристоре никогда не должно превышать допусти
мого значения VDRM, т.к . в противном случае тиристор может перейти в проводящее
состояние даже при отсутствии тока управления (пробой).
Если напряжение превышает пробивное значение, тиристор переходит в проводя
щее состояние и ток будет протекать через тиристор даже после снижения напряжения.
Таким образом, тиристор может быть переведен в проводящее состояние единственным
случайным импульсом, который превысит значение допустимого блокирующего напря
жения. При выборе тиристора его напряжение пробоя должно быть значительно выше,
чем напряжение, которое может возникнуть в схеме в любом режиме. Если существует
вероятность появления напряжения, которое превышает это значение, следует исполь
зовать шунтирующие защитные устройства, которые предотвратят возможность слу
чайного отпирания тиристора.
Ток утечки пропорционален температуре перехода. Температура перехода рабо
тающего тиристора повышается, поэтому выделяющаяся мощность должна быть рас
сеяна либо температура должна контролироваться с тем, чтобы ток утечки был сведен
к минимуму. Если ток утечки достигает достаточного уровня, тиристор может пере
ключиться в проводящее состояние. Обычно применяют теплоотводящие элементы
(радиаторы) и вентиляторы, чтобы поддерживать температуру перехода на безопас
ном уровне.
Наконец, dV/dt — скорость нарастания напряжения. Емкость pn перехода на
чинает заряжаться, когда к аноду тиристора прикладывается положительное напря
жение. Если скорость нарастания напряжения между анодом и катодом превышает
допустимое значение, тиристор может переключиться в открытое состояние.
èËÏ 5.1
Резистор сопротивлением 200 Ом включен, как показано на рис. 5 .5. Управляющий
ток, требуемый для отпирания тиристора, равен 9 мА. Каково входное напряжение
Vвх
, требуемое для отпирания тиристора?
êÂ̄ÂÌËÂ
Напряжение Vвх должно быть больше, чем напряжение перехода управляющий элек
трод — катод VУК , типичное значение которого 0,7 В, и чтобы заставить ток 9 мА про
текать через сопротивление 200 Ом, необходимо:
304
Vвх
= VУТ+IУТ·R;
Vвх
= 0,7В+9мА×200Ом;
Vвх
= 2,5В.
Рис. 5.5. К примеру 5.1
Характеристики выключения. Время выключения тиристора обычно на порядок
(в десятки раз) превышает время включения и может быть найдено в справочном ма
териале, приведенном в разделе 5.2 .3. Время выключения — это интервал между мо
ментом, когда ток начинает протекать в обратном направлении, и моментом, когда ти
ристор способен блокировать очередную волну прямого напряжения. Факторы,
вызывающие увеличение времени выключения: увеличение температуры перехода,
амплитуды прямого тока и амплитуды блокируемого напряжения. Это время критично
для определения максимальной рабочей частоты тиристора.
Температурные характеристики. Температурные характеристики, представлен
ные на рис. 5.6 —5.8, дают представление о зависимостях тока управляющего элект
рода, напряжения на управляющем электроде и тока удержания от температуры. Каж
дый из этих параметров уменьшается с увеличением температуры, что означает
необходимость меньшего тока отпирания при более высоких температурах и большего
тока отпирания при более низких температурах. Поэтому условия работы схемы, ко
торые определяют отпирание тиристора, должны быть выбраны для самых низких
ожидаемых температур перехода, в то время как условия работы схемы, обеспечиваю
щие запирание тиристора, должны быть выбраны для работы в условиях максималь
ной температуры перехода.
Рис. 5.6 . Температурная
зависимость
отпирающего
тока управления
тиристора
äÂÏÌË‚̊ ÛÔ‡‚ÎflÂÏ̊ ‚ÂÌÚËÎË
305
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
Динамические характеристики. Динамические характеристики тиристора опреде
лены как допустимая скорость нарастания напряжения между анодом и катодом dV/dt,
выражаемая в В/мкс (вольт в микросекунду).
Если эта норма превышена, тиристор может включиться даже в отсутствие управ
ляющего сигнала. Чтобы защитить тиристор от ложного отпирания большим dV/dt, ис
пользуется RC
цепь, как показано на рис. 5 .9 . Приведенные значения RC типичны для
тиристора с допустимым значением dV/dt 50В/мкс. Подобные цепи называют снаббе
рами, и они обычно используются в промышленных устройствах.
Формы волны тиристорных выпрямителей. Для описания формы волны тирис
торного выпрямителя используются два параметра:
угол отпирания, выраженный в градусах;
угол проводимости, выраженный в градусах, когда тиристор включен.
Чтобы познакомиться с этими терминами, рассмотрим формы волны на рис. 5 .10а,
б и в. Исходная форма синусоидального напряжения в течение двух периодов по 360
изображена на рис. 5.10а. Форма напряжения на тиристоре, где отмечена часть перио
да, когда тиристор выключен, показана на рис. 5 .10б. Форма напряжения на нагрузке
Рис. 5 .7. Температурная
зависимость
отпирающего
напряжения на
управляющем
переходе
Рис. 5 .8. Температурная
зависимость
тока
удержания
306
представлена на рис. 5 .10в, где отмечена часть периода, когда тиристор включен. Тири
стор отпирается (см. рис. 5.10в) при угле около 45° (угол отпирания) и проводит в
течение примерно 130°, от 45° до 180° (угол проводимости). Тиристор выключен в те
чение отрицательного полупериода. Тиристор действует подобно выключателю, по
скольку при проводящем включенном тиристоре напряжение сети приложено к на
грузке, а когда тиристор выключен, он воспринимает напряжение сети.
В некоторых источниках используется термин «угол задержки отпирания» вместо
«угол отпирания». В обоих случаях речь идет о времени, когда тиристор выключен перед
тем, как от перейдет в проводящее состояние. Поэтому в обоих случаях речь идет об
одном и том же значении.
Рис. 5.10. Тиристорный
регулятор
напряжения:
а) напряжение
сети;
б) напряжение на
тиристоре при угле
управления 45°;
в) напряжение на
нагрузке при угле
проводимости 135°
Рис. 5.9 . Цепь снаббера
äÂÏÌË‚̊ ÛÔ‡‚ÎflÂÏ̊ ‚ÂÌÚËÎË
307
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
5.2 .3. ëÔ‡‚Ó̃Ì̊ ‰‡ÌÌ̊ ÚËËÒÚÓ‡
Выбирая подходящий тиристор для промышленного применения, вы найдете необхо
димую информацию на листах справочных данных тиристора. Тиристоры обычно вы
бираются на основе максимально допустимого действующего (среднеквадратичного)
тока IT, который может протекать через включенный тиристор, и амплитуды прямого
напряжения на выключенном тиристоре — VDRM, которое тиристор может выдержать,
оставаясь выключенным.
Эти две ключевые характеристики содержатся в справочных данных. Они также
включают в себя области применения тиристоров и все типовые характеристики в
табличной форме. Сведения о тиристорах серии 2N6504 помещены на рис. 5.11а и б.
В верхней части рис. 5.11а слева перечислены основные области применения ти
ристоров: управление двигателями, управление нагревателями и управление источ
никами питания. Справа показаны два ключевых параметра IT и VDRM, приведенные для
среднеквадратичного тока 25 А и напряжения от 50 до 800 В соответственно.
Предельные характеристики тиристоров представлены в таблице с общим назва
нием «Максимально допустимые значения» (Maximum Ratings) на рис. 5 .11a, а тепло
вые и электрические характеристики для включенного и выключенного состояний, а
также динамические характеристики — на рис. 5 .11б. В таблице максимально допусти
мых значений указано единственное значение напряжения для каждого из пяти типов
тиристоров данного ряда, а все остальные характеристики будут идентичными. В табли
це характеристик включения (ON CHARACTERISTICS) ток удержания (пятая строка)
составляет 40 мА при температуре корпуса (TC) 25 °C и 80 мА при TC= —40 °С . Необхо
димо обеспечить анодный ток 80 мА, чтобы поддержать тиристор в проводящем состоя
нии после прекращения действия сигнала на управляющем электроде. Поэтому если
тиристор должен работать при низких температурах, необходимо быть уверенным в том,
что в анодной цепи будет обеспечен соответствующий ток не меньший, чем ток удержа
ния. Приведенные в таблице параметры содержат также времена включения и выклю
чения тиристора. Эти времена устанавливают максимальную частоту или скорость пе
реключения, с которой тиристор может функционировать.
Конструкция тиристоров серии 2N6504 изображена на рис. 5.11а. Она представ
ляет одну из разновидностей корпуса K
220AB (вариант 3). Разновидности типов кор
пуса перечислены на рис. 5 .11а, варианты относятся к назначениям штырьков выво
дов тиристора, которые перечислены в таблице под рисунком тиристора.
èËÏ 5.2
В схеме, которую вы разрабатываете, тиристор должен обеспечивать ток 25 А во
включенном состоянии и выдерживать напряжение 500 В в выключенном состоянии.
Какой из тиристоров серии 2N6504 следует использовать?
êÂ̄ÂÌËÂ
В таблице максимально допустимых значений на рис. 5.11а выберите соответствую
щий столбец. Вы можете использовать тиристор 2N6508, поскольку он может рабо
тать с током 25 А в проводящем состоянии и выдерживать напряжение 600 В в вык
люченном состоянии.
308
Рис. 5.11а. Предельные характеристики тиристоров 2N560x (справочные
данные Semiconductor Component Industries)
äÂÏÌË‚̊ ÛÔ‡‚ÎflÂÏ̊ ‚ÂÌÚËÎË
309
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
5.2 .4 . íËÔË̃Ì̊ ÒıÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Существует две простые схемы управления:
резисторная;
резисторно
конденсаторная.
Резисторная схема. Основная резистивная схема представлена на рис. 5 .12а. Ког
да ключ замкнут, а входное напряжение положительно, ток в цепи управляющего элек
трода отпирает тиристор. Если R2 мало, тиристор отпирается при низком входном на
Рис. 5 .11б. Динамические и тепловые характеристики тиристоров 2N560x
(справочные данные Semiconductor Component Industries)
310
пряжении. Если R2 велико, тиристор отпирается при высоком входном напряжении.
Поэтому угол отпирания может быть различен: от нескольких градусов (в зависимости
от R2) до 90°, что приводит к углам проводимости приблизительно 180° и 90° соответ
ственно. Эти углы изображены на рис. 5 .13, который показывает напряжение на тирис
торе при различных управляющих токах. Угол управления приблизительно 90° при ма
лом управляющем токе показан на рис. 5 .13а, а рис. 5 .13б показывает угол управления,
близкий к нулю, насколько это возможно при более высоком токе управления. Резистор
R1 не только устанавливает минимальный угол управления, но также защищает вход
ную цепь от сверхтоков, когда сопротивление резистора R2 равно нулю.
èËÏ 5.3.
Каким должно быть значение R2 в резисторной схеме рис. 5 .12а для угла управления 90°?
Амплитуда входного напряжения — 160 В при 90°, R1 = 1 кОм, а тиристор 2N6507.
êÂ̄ÂÌËÂ
Из справочных данных для 2N6504 следует, что максимум входного тока управления
составляет 30 мА. Поэтому полное сопротивление составит 160В / 30 мА = 5,3 кОм.
Значение R2 равно:
R2=5,3кОм—1кОм
R2 = 4,3 кОм.
Рис. 5.12. Резисторные схемы управления:
а) простейшая схема;
б) управление с помощью делителя напряжения
Отличительной особенностью схемы рис. 5 .12б по сравнению с рис. 5.12а служат
два дополнительных элемента: диод CR1 и резистор R3. Диод CR1 разрешает протека
ние тока управления только в течение положительного полупериода, предотвращая,
таким образом, появление отрицательного напряжения и обратного тока управляю
щего электрода. Шунтирующий резистор R3 ослабляет влияние разброса тока отпи
äÂÏÌË‚̊ ÛÔ‡‚ÎflÂÏ̊ ‚ÂÌÚËÎË
311
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
рания управляющего электрода. Положительное влияние шунтирования достигается
тем, что ток через R3 по крайней мере в десять раз превышает ток переключения в
цепи управляющего электрода.
Рис. 5 .13. Диаграммы напряжения на тиристоре:
а) угол управления около 90°;
б) угол управления близок к 0°
312
èËÏ 5.4
Вычислите значение R3 на рис. 5.12б, если R1=3,3 кОм, максимальный ток переключе
ния тиристора 300 мкА и максимальное напряжение управляющего электрода 900 мВ.
êÂ̄ÂÌËÂ
Сначала рассчитаем ток через R3:
Теперь вычислим R3:
èËÏ 5.5
Если R2 — потенциометр 50 кОм, установленный в среднее положение, вычислите
мгновенное значение напряжения управляющего электрода, которое ожидается в
момент отпирания тиристора в примере 5.4.
êÂ̄ÂÌËÂ
В момент отпирания тиристора мгновенное значение напряжения источника может
быть выражено как:
èËÏ 5.6
Рассчитайте угол отпирания для тиристора в примере 5.5, если действующее значе
ние напряжения на входе 115 В.
êÂ̄ÂÌËÂ
Сначала найдем амплитуду входного напряжения:
äÂÏÌË‚̊ ÛÔ‡‚ÎflÂÏ̊ ‚ÂÌÚËÎË
313
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
Синус угла управления равен мгновенному напряжению, деленному на амплитуду на
пряжения:
Угол отпирания равен 35,75° .
Рис. 5 .14. Резисторно
конденсаторная
схема управления
Резисторно
конденсаторная схема. Резистивно
конденсаторная схема приведена
на рис. 5 .14 . Она предоставляет разработчику возможность фазового регулирования, то
есть способность устанавливать угол регулирования даже более 90
. Это возможно пото
му, что конденсатор С1 заряжается отрицательным напряжением в течение отрицатель
ного полупериода входного источника. Когда входной источник становится положитель
ным, конденсатор С1 начинает перезаряжаться, достигая положительного напряжения,
достаточного для отпирания тиристора. После отпирания тиристора конденсатор С1 раз
ряжается практически до 0 В и готов к очередной смене полярности. Следовательно, за
держка момента отпирания от начала положительной полуволны является функцией по
стоянной времени τ = (R1 + R2) + C1 и может превышать 90°. Постоянная времени
должна выбираться в диапазоне от 0,001 до 0,03 с. Это позволит получить угол управле
ния в желаемом диапазоне и обеспечить нормальное функционирование.
èËÏ 5.7
Используйте схему рис. 5.14, чтобы вычислить значения R1 и R2, если С1 составляет
0,5 мкФ.
êÂ̄ÂÌËÂ
Постоянная времени τ = (R1 + R2) + C1 должна быть в диапазоне от 0,001 до 0,030 с.
Так, для минимальной постоянной времени:
314
Для максимальной постоянной времени:
5.2.5 . ê„ÛÎËÓ‚‡ÌË ÏÓ̆ÌÓÒÚË
Наиболее общий способ регулирования мощности с использованием тиристоров — двух
полупериодное регулирование. При этом способе тиристор поддерживается во выклю
ченном состоянии в течение части положительного полупериода, а затем включается в
момент, определяемый схемой управления. Ток схемы ограничивается только нагрузкой и
приложенным напряжением за вычетом малого падения напряжения на тиристоре.
Двухполупериодное регулирование мощности. Два тиристора, связанные с
трансформатором с выводом нулевой точки для обеспечения двухполупериодного ре
гулирования, представлены на рис. 5.15а. Когда напряжение на вторичной обмотке
положительно, может быть включен тиристор SCR1, и на нагрузку подается напряже
ние одной полуобмотки трансформатора. С началом отрицательного полупериода мо
жет быть включен тиристор SCR2. Ток через нагрузку протекает в том же направле
нии, обеспечивая двухполупериодное выпрямление. Форма входного напряжения и
напряжения на нагрузке при угле регулирования около 60° показана на рис. 5.15б
Два тиристора, соединенные встречно
параллельно (анод одного соединен с ка
тодом другого), представлены на рис. 5 .16а. В этой схеме тиристор SCR1 может отпи
Рис. 5.15. Двухполупериодный тиристорный выпрямитель:
а) схема;
б) временные диаграммы напряжения сети и нагрузки
äÂÏÌË‚̊ ÛÔ‡‚ÎflÂÏ̊ ‚ÂÌÚËÎË
315
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
раться в течение положительного полупериода, а тиристор SCR2 — в течение отрица
тельного полупериода. Ток через нагрузку течет поочередно в обоих направлениях.
Переменное входное напряжение и напряжение нагрузки для угла управления 120
показаны на рис. 5 .16б.
Рассмотрим двухполупериодное регулирование постоянного тока. Два тиристора,
используемые в мостовой схеме, иногда называемой полууправляемым мостом, пока
заны на рис. 5 .17а. На положительном полупериоде тиристор SCR1 и диод CR2 сме
щены в положительном направлении. Тиристор SCR2 и диод CR1 смещены в проводя
щем направлении на отрицательном полупериоде. Форма напряжения на нагрузке
похожа на форму с рис. 5.15. На схеме рис. 5.17б тиристор SCR включен последова
тельно с диодным мостом. Форма напряжения на нагрузке в этой схеме также похожа
на показанную на рис. 5.15.
Рис. 5 .16. Тиристорный регулятор напряжения:
а) схема;
б) диаграммы напряжения сети и нагрузки
5.3. ìÒÚÓÈÒÚ‚‡ ÔÂÂÍĮ̂̃ÂÌËfl ÚËËÒÚÓ‡
Переключение тиристоров должно обеспечиваться передачей определенной энергии
в цепь управляющего электрода, и есть много способов выполнить это. Вообще гово
ря, отпирание должно выполняться энергично и быстро, тем самым минимизируя вли
яние эффекта dV/dt. Устройства переключения тиристора, обсуждаемые здесь, — это
устройства регенеративного типа, основанные на лавинном пробое. Эти устройства не
включают структуру, подобно переключению тиристора, но переключают структуру
перепадом напряжения лавинного пробоя, который должен быть достаточным для ре
генеративного процесса, приводящего к проводящему состоянию.
Устройства переключения, обсуждаемые в этом разделе:
диод Шокли;
двухэлектродный двунаправленный переключатель — диак;
316
однопереходный транзистор;
программируемый однопереходный транзистор.
Рис. 5.17. Регулируемый
тиристорный
выпрямитель:
а) с двумя
тиристорами;
б) с одним
тиристором
5.3.1. ÑËÓ‰ òÓÍÎË
Диод Шокли — четырехслойный диод, названный в честь Уильяма Шокли (Shockley),
который предполагал использовать его для замены механических реле в электронном
коммутаторе телефонной станции. Это была прекрасная идея, опередившая свое время
из
за сложности реализации. Сегодня это — полезный однонаправленный тиристор с
регенеративной характеристикой, то есть прибор, который проводит только тогда, когда
превышено его напряжение переключения. Его схемотехническое изображение показа
но на рис. 5 .18а, а его структура, подобная тиристорной без управляющего электрода,
показана на рис. 5 .18б. Внешние выводы названы анодом и катодом. Этот диод исполь
ìÒÚÓÈÒÚ‚‡ ÔÂÂÍĮ̂̃ÂÌËfl ÚËËÒÚÓ‡
317
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
зуется главным образом как спусковой механизм в схемах управления тиристорами и
иногда используется как однонаправленное устройство лавинного пробоя.
Диод Шокли не проводит (за исключением малого тока утечки), пока не достигнуто
напряжение переключения. Обратимся к его характеристике, показанной на рис. 5.19.
В начале области отрицательного сопротивления он входит в режим лавинного повыше
ния проводимости, и напряжение на нем резко снижается, создавая ток лавинного про
боя, достаточный для отпирания тиристора.
Работа диода Шокли подобна работе тиристора без управляющего электрода.
Подобно тиристору, диод Шокли остается в проводящем состоянии, пока ток не станет
меньше тока удержания.
Рис. 5 .18. Диод Шокли:
а) условное
обозначение;
б) pn структура
Рис. 5 .19. Вольтамперная характеристика
диода Шокли
5.3 .2. ÑˇÍ
Диак — двухвыводной трехслойный двунаправленный тиристор. Двунаправленность
означает, что ток через него может протекать в обоих направлениях. Следовательно,
он может быть включен в схему при любой полярности. Условное обозначение и
структура пирбора показаны на рис. 5.20а и б. Выводы А1 и А2 являются анодом 1 и
анодом 2. Обозначение прибора напоминает два диода, соединенные встречно
парал
лельно. Диаграммы pn структуры указывают, что главная часть диака представляет
собой pnp структуру, дополненную n
слоями с обеих сторон. С этими n
слоями и
соединены аноды.
318
Рис. 5.20. Диак — двухтиристорный
переключающий прибор:
а) условное обозначение;
б) pn структура
Возможен вариант выполнения диака на основе npn структуры. Обе структуры
имеют сходные электрические характеристики. Назначение диака — переключение
симистора или тиристора. В некоторых источниках диак рассматривается как симмет
ричный триггер или как неуправляемый симистор.
Диак не проводит ток (за исключением малого тока утечки) до тех пор, пока пря
мое или обратное напряжение не достигает напряжения переключения.
Рассмотрим характеристику на рис. 5.21. В точке переключения диак переходит в
режим лавинного пробоя, для которого характерно отрицательное сопротивление, а
падение напряжения на диаке быстро снижается примерно до 5 В, создавая импульс
тока, достаточный для отпирания симистора или тиристора. Диаки выпускаются на
различные напряжения лавинообразования, удовлетворяя различные требования
схемы. Поскольку диак может обеспечить как положительный, так и отрицательный
импульс, он может успешно использоваться для управления сигналами переменного
тока. Преимущество диака перед другими переключающими приборами — хорошая
температурная стабильность и симметричная характеристика переключения. Хотя
большинство диаков обладает симметричной характеристикой, некоторые могут быть
асимметричными. Типичные значения рассеиваемой мощности диаков лежат в преде
лахот0,5до1Вт.
Рис. 5.21. Вольтамперная
характеристика
диака
ìÒÚÓÈÒÚ‚‡ ÔÂÂÍĮ̂̃ÂÌËfl ÚËËÒÚÓ‡
319
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
5.3.3. é‰ÌÓÔÂÂıÓ‰Ì̊È Ú‡ÌÁËÒÚÓ
Однопереходный транзистор (ОПТ) — твердотельное устройство, которое активно
используется в импульсной схемотехнике. Это устройство, которое работает в режиме
пробоя. Многие устройства промышленной электроники используют ОПТ: таймеры,
генераторы и наиболее важные узлы управления тиристорами и симисторами.
ОПТ — устройство с тремя выводами, имеющее характеристики, существенно от
личные от обычных двухпереходных биполярных транзисторов. Обозначение ОПТ и его
p
n структура представлены на рис. 5.22а и б. Заметим, что выводы обозначены E, B1 и
B2 и они являются эмиттером, базой 1 и базой 2 соответственно. ОПТ — генератор им
пульсов с напряжением переключения, приложенным к эмиттеру. Это напряжение явля
ется частью напряжения между базой 1 и базой 2, то есть межбазового напряжения.
Рис. 5 .22. Однопереходный
транзистор:
а) условное обозначение;
б) pn структура
Принцип действия ОПТ. Когда потенциал эмиттера повышается и достигает значе
ния, которое превышает напряжение переключения, внутреннее сопротивление B1
снижается почти до нуля и ток от Е течет к В1. Изменение внутреннего сопротивления
В1 происходит очень быстро, поэтому напряжение на В1 возрастает до пикового значе
ния VP, а затем спадает почти до нуля. Характеристика ОПТ изображена на рис. 5 .23. На
этой характеристике показаны: пиковое напряжение (VP), пиковый ток (IP), минималь
ное напряжение (VV) и минимальный ток (IV). Внутреннее сопротивление В1 изменяется
обратно пропорционально току эмиттера. Если ток эмиттера увеличивать, внутреннее
сопротивление В1 уменьшается. Точка минимума на характеристике — точка, в которой
сопротивление В1 уменьшилось до его минимального значения. Поскольку нарастание
напряжения В1 происходит почти мгновенно, ОПТ является почти идеальным источни
ком сигналов переключения.
Характеристики ОПТ. Типичные параметры ОПТ с определениями и обозначе
ниями:
межбазовое напряжение (VBB) — максимальное напряжение, которое мо
жет быть приложено между В1 и В2;
собственный коэффициент переключения (η) — отношение напряже
ния на В1 к напряжению на В2, необходимое для включения ОПТ. Примеча
ние: η — греческая буква «эта»;
320
пиковый ток эмиттера (IP) — максимальный ток эмиттера, выраженный
в микроамперах;
пиковое напряжение эмиттера (VP) — напряжение эмиттера, необходи
мое для включения ОПТ.
Рис. 5.23. Вольтамперная
характеристика ОПТ
Релаксационный генератор. Простая RC
схема таймера на ОПТ и ее типичные
формы напряжений показаны соответственно на рис. 5.24а и б. Эту схему обычно на
зывают релаксационным генератором. Заметим, что напряжение на R3, имеющее
форму коротких импульсов, создано быстрым разрядом C1 через R3. Частота колеба
ния вычисляется по формуле:
где Т — период колебаний:
Другое важное условие для понимания релаксационного генератора — ограниче
ния на значение R1. Эти ограничения обусловлены принципом действия ОПТ. Если со
противление R1 слишком велико, то минимальный ток эмиттера ОПТ не может быть
достигнут, даже при максимальном напряжении. Если же R1 слишком мало, то ОПТ не
выключаться после включения. Максимальное значение R1 можно вычислить, приме
нив закон Ома к эмиттерной цепи ОПТ:
где VBB — напряжение на ОПТ, VP — пиковое напряжение на эмиттере, а IP — пико
вый ток эмиттера. Минимальное значение R1 вычислено следующим образом:
ìÒÚÓÈÒÚ‚‡ ÔÂÂÍĮ̂̃ÂÌËfl ÚËËÒÚÓ‡
321
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
где VBB — напряжение на ОПТ, VV — напряжение эмиттера в точке минимума, а IV —
ток эмиттера в точке минимума.
Рис. 5 .24. Релаксационный
генератор на ОПТ:
а) схема;
б) временные
диаграммы
напряжений
Собственный коэффициент переключения. Собственный коэффициент пере
ключения ОПТ, обозначенный греческой буквой «эта» — η, является функцией внут
ренних сопротивлений. Эквивалентная схема ОПТ с внешними источниками напря
жения показана на рис. 5 .25. Напряжение на эмиттере, необходимое для включения
ОПТ, называют пиковым напряжением. Значение входного напряжения VIN может
быть вычислено следующим образом:
322
где VEB — падение напряжения на переходе эмиттер
база, которое близко к 0,6 В.
Собственный коэффициент переключения может быть вычислен путем использова
ния отношения напряжений на В1 и В2:
Собственный коэффициент переключения может быть также вычислен при ис
пользовании отношений внутренних сопротивлений rB1 и rB2:
где
èËÏ 5.8
Вычислите значение rBB и rB2, где rB1 = 6,32 кОм и η = 0,6.
êÂ̄ÂÌËÂ
Вычислим rBB:
rBB = 10,53 кОм.
Рис. 5.25. Эквивалентная схема ОПТ
ìÒÚÓÈÒÚ‚‡ ÔÂÂÍĮ̂̃ÂÌËfl ÚËËÒÚÓ‡
323
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
Затем вычислим rB2:
rBB=rB1+rB2;
10,53 кОм = 6,32 кОм + rB2;
rB2 = 10,53 кОм — 6,32 кОм;
rB2 = 4,21 кОм.
èËÏ 5.9
Используя рис. 5 .24а с сопротивлением R1, установленным на максимум, и полагая η =
0,6, рассчитайте период и частоту колебаний.
êÂ̄ÂÌËÂ
Напомним уравнение:
T=3мс.
Частота колебаний:
f=333Гц.
Напряжение, при котором ОПТ переключается, может быть вычислено умноже
нием напряжения питания на η — собственный коэффициент переключения — и до
бавлением потенциала входного перехода, который обычно близок к 0,6 В.
èËÏ 5.10
Используя рис. 5 .24а и с учетом h = 0,6, вычислите напряжение переключения ОПТ.
êÂ̄ÂÌËÂ
Напомним, что:
VT=η×VBB+0,6;
VT=0,6×20В+0,6В;
VT=12,6В.
324
5.3.4 . èÓ„‡ÏÏËÛÂÏ̊È Ó‰ÌÓÔÂÂıÓ‰Ì̊È Ú‡ÌÁËÒÚÓ
Программируемый однопереходный транзистор эффективно обеспечивает такие же
характеристики, как ОПТ в подобных случаях. ПОТ — четырехслойное устройство,
подобное тиристору, но с иным принципом действия. Различия состоят в следующем:
тиристор управляется сигналом, прикладываемым между управляющим элек
тродом и катодом;
ПОТ управляется сигналом, прикладываемым между управляющим элект
родом и анодом.
Схемотехническое обозначение ПОТ, его pn структура и двухтранзисторная мо
дель показаны соответственно на рис. 5 .26а, б и в. Как видно из двухтранзисторной
модели, ПОТ представляет собой тиристор, управляемый отрицательным сигналом на
управляющем электроде по отношению к аноду. Этот сигнал переводит ПОТ из непро
водящего в проводящее состояние.
Принцип действия ПОТ. Характеристики ПОТ и ОПТ подобны, однако способы
переключения различны. Различия состоят в следующем:
в ОПТ уровень переключения фиксирован и задан внутренними сопротивле
ниями прибора;
в ПОТ уровень переключения регулируется и может задаваться внешними
резисторами.
Характерная форма вольтамперной характеристики анод
катод показана на рис. 5.27.
Точки экстремумов (максимума и минимума) — стабильные опорные точки; пиковое напря
жение (VP) — по существу совпадает с опорным управляющим напряжением; единственное
различие обусловлено внутренним падением на диоде. Поскольку опорное управляющее
напряжение зависит от схемы, но не от прибора, оно может быть использовано как програм
мируемый параметр VP.
Характеристики ПОТ. Типичные характеристики ПОТ изображены на рис. 5.27 и
перечислены ниже.
Пиковый ток (IP) — ток, при котором устройство переходит от блокирующего
состояния (меньше, чем IP) к проводящему состоянию (больше, чем IP).
Пиковое напряжение (VP) — напряжение, соответствующее пиковому току.
Ток точки минимума (IV) — минимальное значение тока, при котором устрой
ство все еще остается стабильным.
Напряжение точки минимума (VV) — напряжение, соответствующее точке
минимального тока.
Анодный ток утечки (IGA °) — ток, который течет от управляющего электрода к
аноду при разомкнутом катодном выводе.
Релаксационный генератор. Релаксационный генератор на основе ПОТ при
веден на рис. 5.28. Делитель напряжения на резисторах R2 и R3 является типичным
способом получения опорного напряжения на управляющем электроде. Встроенный
делитель обеспечивает расчетное значение опорного напряжения, как это выполня
ется в ОПТ, за исключением того, что R2 и R3 используются вместо внутренних со
противлений.
ìÒÚÓÈÒÚ‚‡ ÔÂÂÍĮ̂̃ÂÌËfl ÚËËÒÚÓ‡
325
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
Рис. 5 .26. Программируемый ОПТ:
а) условное обозначение;
б) pn структура;
в) тиристорная модель
Рис. 5 .27. Вольтамперные
характеристики
ПОТ
Рис. 5 .28. Релаксационный
генератор на ПОТ
326
èËÏ 5.11
Используйте релаксационный генератор на рис. 5.28 для расчета встроенного дели
теля напряжения.
êÂ̄ÂÌËÂ
η = 0,313.
èËÏ 5.12
Используйте релаксационный генератор на рис. 5.28, чтобы вычислить частоту коле
баний.
êÂ̄ÂÌËÂ
T = 0,0109 × ln 1,0456;
T = 0,0109 × 0,3756;
T=4,09мс;
f=244Гц.
5.4 . èËÏÂÌÂÌËfl ÚËËÒÚÓÓ‚
Способы применения тиристоров в промышленной электронике весьма разнообраз
ны. Мы рассмотрим схемы четырех из них:
регулируемой задержки;
светового маяка
мигалки;
èËÏÂÌÂÌËfl ÚËËÒÚÓÓ‚
327
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
управления скоростью двигателя;
защиты от перенапряжения.
5.4 .1 . ëıÂχ „ÛÎËÛÂÏÓÈ Á‡‰ÂÊÍË
В схеме на рис. 5 .29 используется ОПТ для переключения тиристора и обеспечивается
регулируемая задержка от 0,4 миллисекунды до 1 минуты. Начало интервала задержки
привязано к моменту включения напряжения питания. В конце интервала задержки,
который определен значениями R1 и С1, ОПТ (Q1) вызывает отпирание тиристора. Ток
нагрузки ограничен допустимым значением тока тиристора. Если необходим больший
ток, следует применять тиристор с теплоотводом.
Рис. 5 .29. Схема регулируемой задержки включения
Сопротивление R1 должно быть не слишком большим, чтобы обеспечивать ми
нимальный ток переключения Q1 плюс ток утечки конденсатора, когда эмиттер ОПТ
смещен до пикового напряжения. Это устанавливает предельные значения парамет
ров: 500 кОм для R1 и 100 мкФ для С1. Выбором сопротивления R2 может быть обес
печена лучшая стабилизация в необходимом температурном диапазоне. Резистор 27
Ом может быть заменен импульсным трансформатором, если времязадающая цепь
должна быть изолирована от переключающей схемы, которая может быть связана с
питающей сетью переменного напряжения.
Схема на рис. 5.29 эффективно снижает минимально необходимый ток IP более
чем в 1000 раз за счет импульсного характера тока верхней базы Q1 при амплитуде
328
импульса 0,75 В и постоянной времени R1C1, равной 0,02 с. Импульс вызывает неко
торое уменьшение пикового напряжения, если напряжение на С1 превышает уровень,
необходимый для получения тока IP, заданного характеристиками ОПТ. Требование
малого тока утечки легко выполняется при использовании конденсаторов на основе
майлара. Использование калиброванных сопротивлений в качестве резисторов R1
позволяет получить набор заданных задержек в широком диапазоне после начальной
калибровки.
5.4.2. ëıÂÏ̊ Ò‚ÂÚÓ‚Ó„Ó Ï‡fl͇-ÏË„‡ÎÍË
Схема на рис. 5.30 представляет собой маяк
мигалку с питанием от сети 120 В перемен
ного напряжения. После первого включения сети 120 В тиристор заперт, конденсатор
С2 начинает заряжаться через R2, а потенциал эмиттера Q1 возрастает, стремясь к на
пряжению базы, которое составляет 35 В. Когда С2 зарядится до напряжения большего,
чем 35 В, тиристор включается. Выключение тиристора происходит при спаде напряже
ния из
за разряда конденсатора С2, после чего повторяется процесс заряда С2 до оче
редного достижения потенциала переключения ОПТ и отпирания тиристора.
Элементы С1 и R1 выполняют две функции: сглаживают пульсации напряжения на
выходе диодного моста и защищают тиристор от чрезмерного тока разряда. Элементы
R2 и С2 определяют частоту вспышек, длительность вспышки устанавливается сопро
тивлением R3, а R4 используется для обеспечения надежного запирания тиристора.
Рис. 5.30 . Световой маякмигалка
èËÏÂÌÂÌËfl ÚËËÒÚÓÓ‚
329
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
5.4 .3. ëıÂÏ̊ ÛÔ‡‚ÎÂÌËfl ÒÍÓÓÒÚ̧̨ ‰‚Ë„‡ÚÂÎfl
Схема на рис. 5.31 использует тиристор для управления скоростью двигателя с посто
янными магнитами, часто используемым в бытовой технике, например в смесителях.
Потенциометр R3 и диод CR1 образуют зарядную цепь постоянного тока для конденса
тора C1; переменное сопротивление R1 и сопротивление R2 формируют цепь заряда,
которая создает пилообразное напряжение на конденсаторе. Резистор R4 и диод CR2
служат для разделения цепи управления двигателем от источника пилообразного на
пряжения в течение отрицательного полупериода.
Рис. 5 .31. Регулятор
скорости
вращения
двигателя
5.4 .4 . ëıÂχ Á‡̆ËÚ̊ ÓÚ ÔÂÂ̇ÔflÊÂÌËÈ
Данная схема используется, чтобы защитить источники питания от броска напряже
ния. В схеме на рис. 5.32 показан тиристор, присоединенный к выходу. Схема защиты
от перенапряжения отпирает тиристор, когда возникает бросок напряжения. В ре
зультате происходит короткое замыкание, ток возрастает настолько, что сгорает плав
кий предохранитель, защищая, таким образом, источник электропитания.
Простая схема датчика, реагирующего на перенапряжения, показана на рис. 5 .32б.
Когда выходное напряжение Vвых превышает пороговое напряжение стабилитрона, он
входит в лавинный режим и отпирает тиристор. Эта схема не предусматривает никакой
настройки, кроме замены стабилитрона, и обеспечивает наиболее простой способ отпи
рания тиристора. Более сложная регулируемая схема показана на рис. 5 .32в: регулятор
напряжения с внешним потенциометром для настройки порога срабатывания.
5.5. ëËÏËÒÚÓ̊
Развитие симисторов обусловлено потребностью управлять значением переменного
тока нагрузки, чего не мог выполнять одиночный тиристор. До появления симистора
разработчики использовали два тиристора, включенных встречно
параллельно, что
бы обеспечить двунаправленную проводимость. Симистор не ограничен углом про
водимости 180° на периоде, как тиристор. Он может обеспечить проводимость до 360°
при соответствующем управлении. Иными словами, он выполняет функцию двухполу
330
периодного регулирования переменного тока вместо однополупериодного, как тирис
тор. Симистор представляет собой трехэлектродный прибор, который переводится в
состояние проводимости сигналом на управляющем электроде. Название «симистор»
происходит от «симметричный тиристор». В отличие от тиристора, симистор проводит
ток любого направления при управляющем сигнале, который может быть положи
тельным или отрицательным. Сигнал управления должен быть импульсным для вклю
чения симистора. Симистор останется проводящим, пока не будут выполнены условия
запирания. Устройство симистора поясняется на рис. 5.33: а — схемотехническое
изображение; б — pn структура; в — транзисторная модель.
Рис. 5.32. Схема защиты от перенапряжений:
а) функциональная схема;
б) датчик перенапряжения;
в) уставка порога срабатывания
Заметим, что в некоторых изданиях ОВ1 (основной вывод один) и ОВ2 (основной
вывод два) заменены анодом 1 и анодом 2 соответственно. В p
n структуре симистора
можно видеть, что область между ОВ1 и ОВ2 представляет собой npnp четырех
слойную структуру: тиристор параллельно с pnpn четырехслойной структурой
(комплементарный тиристор с центральной областью p, образующей управляющий
электрод).
Симистор применяется для регулирования переменного тока, поскольку он дей
ствует как два тиристора, включенных встречно
параллельно. Таким образом, в поло
жительном полупериоде проводит один из тиристоров, в отрицательном полупериоде —
другой. Транзисторная модель облегчает понимание работы симистора. Если вывод
ОВ2 положителен по отношению к ОВ1, а сигнал управления отсутствует, ток симисто
ра представляет собой только малый ток утечки между основными выводами. Если на
вход подан положительный импульс, внутренние тиристоры Q3 и Q4 отпираются, а Q1 и
Q2 (комплементарные внутренние тиристоры) остаются выключенными. Когда управ
ляющий сигнал спадает до 0 В, Q3 и Q4 фиксируются во включенном состоянии, как в
ëËÏËÒÚÓ̊
331
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
обычном тиристоре. Если ОВ2 отрицателен по отношению к ОВ1, следующий импульс,
поданный на вход управления, вызывает обратный эффект: Q1 и Q2 отпираются, а Q3 и
Q4 остаются выключенными.
Рис. 5 .33. Симистор:
а) условное обозначение (основные выводы ОВ1, ОВ2 и
управляющий электрод УЭ);
б) pn структура;
в) транзисторная модель
5.5 .1 . ÍÚÂËÒÚËÍË Ë ÙÓÏ̊ ‚ÓÎÌ̊
Некоторые термины, которые характеризуют симистор, приведены в табл. 5.2 и пока
заны на вольтамперной характеристике рис. 5 .34.
Рис. 5 .34. Вольтамперная
характеристика
симистора
332
Таблица 5.2. Рабочие параметры симистора
Характеристики. На рис. 5 .34 квадрант 1 — область, где ОВ2 положителен по
отношению к ОВ1, а квадрант 3 — область противоположных полярностей. VDRM —
наибольшее напряжение, которое симистор может блокировать при любой его поляр
ности. Для симистора полярность определяется напряжением на ОВ1, и если напря
жение на управляющем электроде положительно, то это означает полярность по отно
шению к ОВ1.
Полярность отпирания симистора в зависимости от квадранта:
квадрант 1 — ОВ2 положителен по отношению к ОВ1, управляющий элект
род положителен;
квадрант 2 — ОВ2 положителен по отношению к ОВ1, управляющий элект
род отрицателен;
квадрант 3 — ОВ2 отрицателен по отношению к ОВ1, управляющий элект
род отрицателен;
квадрант 4 — ОВ2 отрицателен по отношению к ОВ1, управляющий элект
род положителен.
Симистор обычно работает в квадрантах 1 и 3.
Симистор должен выбираться по напряжению VDRM, которое, по крайней мере,
должно быть больше амплитудного значения входного переменного напряжения, что
бы обеспечить надежное управление его состоянием. Также важно иметь в виду, что
симистор должен обладать двусторонней проводимостью, поэтому существует лишь
короткий интервал, в течение которого синусоидальный ток проходит через нулевое
значение и который должен быть достаточен для восстановления запирающей способ
ности симистора. Вследствие этого наиболее надежно симистор функционирует в низ
кочастотных устройствах.
ëËÏËÒÚÓ̊
333
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
Формы волны симистора. Формы волны симистора подобны формам волны ти
ристора, исключая тот факт, что симистор обладает двунаправленной проводимостью,
как показано на рис. 5.35а и б. Как и у тиристора, важнейшими параметрами являют
ся угол отпирания и угол проводимости. Обе части рисунка показывают напряжения
между выводами симистора V(ОВ2 — ОВ1) и на нагрузке V(L).
Форма напряжения на симисторе и на нагрузке при угле проводимости 120° на
обоих полупериодах изображена на рис. 5.35а, аналогичные кривые при угле прово
димости 30° представлены на рис. 5.35б. Как и в тиристорных регуляторах, угол отпи
рания равен 180° минус угол проводимости. Форма входного переменного напряжения
отображается пунктирной линией, показывающей соотношения между положитель
ным и отрицательным полупериодами.
Рис. 5 .35. Временные диаграммы напряжений симисторной схемы:
а) угол проводимости 120°;
б) угол проводимости 30°
èËÏ 5.13
Используйте схему на рис. 5.36, чтобы найти угол регулирования при установке R2 на
максимальное значение.
êÂ̄ÂÌËÂ
Угол регулирования — фазовый сдвиг между напряжением сети и напряжением на
управляющем электроде симистора. Этот фазовый сдвиг может быть выражен следу
ющим уравнением:
334
xC1 = 8,04 кОм;
R=R1+R2;
R=0,47кОм+50кОм;
R = 50,47 кОм.
Отсюда
θ = 9,3°.
Угол регулирования равен: 90° — 9,3° = 80,7° . Он обусловлен отстающим фазовым
сдвигом, который вносит RC
цепь. Более подробно это обсуждалось в пояснении к
рис. 5 .14.
Рис. 5.36 . Схема к
примеру 5.13.
Для схемы на рис. 5.36 фазовый сдвиг по отношению к напряжению питающей
сети составит 90° + 80,7° = 1 70,7°.
Сопротивление резистора R2 от 0 до 50 кОм
èËÏ 5.14
Используя результаты примера 5.13, вычислите пиковое напряжение VT, если R2 ус
тановлено на максимальное значение.
êÂ̄ÂÌËÂ
VT(peak) = sin θ + Vвх(peak).
Подставив sin q = 0,161, как было вычислено в примере 5.13, получим:
VT(peak) = 27,3 В.
ëËÏËÒÚÓ̊
335
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
5.5 .2. àÒÔÓÎ̧ÁÓ‚‡ÌË ÒÔ‡‚Ó̃Ì̊ı ‰‡ÌÌ̊ı ÒËÏËÒÚÓÓ‚
Подобно тиристору, симисторы также выбираются на основе действующего (средне
квадратического) тока во включенном состоянии (IT), максимального тока проводяще
го симистора и максимального напряжения, которое прибор может выдержать в вык
люченном состоянии VDRM. Справочные данные содержат эти два основных параметра
и таблицы основных применений симисторов с характеристиками для симисторов се
рий 2N6344 и 2N6349 (рис. 5 .37а и б).
В верхней левой части рис. 5.37а перечислены основные применения симисто
ров: регуляторы силы света (диммеры), регуляторы скорости двигателей, регуляторы
нагревательных устройств и источников питания. В верхней правой части рисунка
представлены два основных параметра: ток IT и напряжение VDRM и типовые характе
ристики в табличной форме. Симисторы предназначены для регулирования действую
щего тока I T до 8 А и напряжений VDRM до 600 В (для симистора 2N6344) и до 800 В (для
симистора 2N6349). Если напряжение превышает значение VDRM (ОВ1 или ОВ2), си
мистор может перейти в проводящее состояние. Это не вызывает повреждения при
бора, но означает утрату управляемости. Поэтому важно при выборе тиристора обес
печить требуемое значение VDRM. В таблице справочных данных перечислено много
симисторов, различающихся только параметром VDRM.
Заметим, что параметры, указанные в таблицах, делятся на две группы. Первая
содержит предельно допустимые электрические параметры (рис. 5.37а), вторая со
держит электрические и тепловые параметры. В таблице предельно допустимых зна
чений указано единственное значение VDRM для каждого симистора серии.
5.5 .3. èË̈ËÔ ‰ÂÈÒÚ‚Ëfl ÒËÏËÒÚÓ‡
Принцип действия симистора можно объяснить, используя его электрическую схему
замещения, как показано на рис. 5 .38, который изображает параллельное соединение
двух тиристоров. Если отпирается тиристор 1, ток течет от вывода ОВ1 к ОВ2; при
отпирании тиристора 2 ток течет в противоположном направлении.
Симистор имеет несколько преимуществ перед механическими ключами. Посколь
ку его ток положителен во включенном состоянии и равен нулю в выключенном, он не
нарушает работу в результате образования дуги, как это свойственно механическому
переключателю. Симисторы обладают значительно более высоким быстродействием по
сравнению с реле, благодаря чему обеспечивается более точное регулирование.
Переключение симистора. Переключение симистора может осуществляться по
стоянным, переменным, выпрямленным напряжением или импульсными сигналами.
Простейшая система управления симистором — RC
цепь, которая обсуждалась в раз
деле 5.2 . Благодаря малой энергии, необходимой для отпирания симистора, схема уп
равления может быть выполнена на основе любых дешевых твердотельных устройств,
таких как транзистор, ОПТ, диод Шокли и пр. Применение ОПТ проиллюстрировано
рисунком 5.39 . В этой схеме, когда подано напряжение питания +15 В, С1 начинает
заряжаться. Когда достигается напряжение переключения ОПТ VP, он генерирует им
пульс тока в первичной обмотке трансформатора Т1. Этот импульс передается во вто
336
ричную обмотку Т1 и поступает на управляющий электрод симистора и отпирает его на
оставшуюся часть полупериода. Поскольку подача напряжения +15 В синхронизирова
на с переменным напряжением сети, процессы повторяются в следующем полупериоде.
Другими словами, напряжение +15 В должно поступать от мостового выпрямителя.
Это напряжение дважды за период спадает до нулевого значения. При этом конденсатор
разряжается. Трансформатор Т1 служит для потенциальной развязки симистора и пере
ключательной схемы. Он имеет коэффициент трансформации 1:1.
Рис. 5.37а. Предельные характеристики симисторов 2N6344 и 2N6349
(справочные данные Semiconductor Component Industries)
ëËÏËÒÚÓ̊
337
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
Рис. 5 .38. Тиристорный эквивалент симистора
Рис. 5 .37б. Динамические и тепловые характеристики симисторов 2N6344 и
2N6349 (справочные данные Semiconductor Component Industries)
338
Рис. 5.39 . Схема управления симистором на базе ОПТ. Сопротивление
резистора R4 от 0 до 100 кОм, VBB — источник постоянного
напряжения 15 В
Скорость, с которой заряжается С1, определяется делителем напряжения R1 и
R4. Таким образом, напряжение на базе Q1 может быть выражено как:
Если R1 больше, чем R4, ток базы Q1 обеспечивает быстрый заряд конденсатора
С1. В этой ситуации ОПТ переключается быстрее. Если R1 мало по сравнению с R4, ток
заряда меньше, чем в предыдущем случае, и переключение ОПТ происходит позже.
Схема заряда конденсатора С1 обеспечивает постоянную скорость изменения на
пряжения, поскольку зарядный ток постоянен. Этот зарядный ток является коллек
торным током транзисторов с большим коэффициентом усиления. Он равен току
эмиттера. Ток эмиттера может быть выражен уравнением:
VR1=IE+R2+VBE.
Заменяя IE на IC и решая относительно IC, получим:
èËÏ 5.15
Используя схему на рис. 5.39, найдите угол отпирания, если R4 = 10 кОм и η =0,5.
ëËÏËÒÚÓ̊
339
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
êÂ̄ÂÌËÂ
Чтобы найти угол отпирания, необходимо узнать, когда ОПТ вызовет включение си
мистора. Это произойдет, когда С1 зарядится до напряжения переключения ОПТ со
скоростью заряда конденсатора С1:
Вначале определим напряжение переключения VP:
VP=η×VBB+VEB1,
где VEB1 — напряжение на p
n переходе между эмиттером и базой 1 ОПТ в момент
переключения. Таким образом,
VP=0,5×15+0,6В;
VP=8,1В.
При постоянном токе заряда IC транзистора Q1 скорость изменения напряжения на
C1 может быть выражена соотношением:
где
Если все сопротивления выражены в кОм, то
IC = 1,43 мА.
Таким образом,
340
Тогда
T=5,66мс.
Поскольку 360° составляет 1 период, равный 16,67 мс на частоте 60 Гц, угол отпира
ния θ вычисляется из пропорции:
θ = 122°.
èËÏ 5.16
Используйте схему на рис. 5.39, чтобы найти значение R4 для угла отпирания 60° .
êÂ̄ÂÌËÂ
Мы можем использовать пропорцию примера 5.15, но в этом примере следует найти
значение Т из уравнения:
T=2,78мс.
Таким образом, скорость изменения напряжения:
ëËÏËÒÚÓ̊
341
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
Поскольку
Решая относительно IC, получим:
IC=2,9мА.
Так как
и
то
Решая относительно R4, получим:
R4=3кОм.
Гистерезис. Типичная операция в схемах фазового регулирования с применением
симистора может быть искажена эффектом гистерезиса, если он должным образом не
компенсирован. На рис. 5 .40 показано, что в течение первого полупериода, когда си
мистор проводит, С1 разряжается через триггерное устройство. На последующих по
лупериодах симистор отпирается быстрее, потому что C1 не был полностью разряжен
до 0 В в первом полупериоде. В этом заключается проявление гистерезиса.
Добавление второй RC
цепочки может уменьшить этот эффект (см. рис. 5 .40).
Теперь С2 частично перезаряжает С1 после переключения, ослабляя таким образом
влияние гистерезиса.
342
5.6 . èËÏÂÌÂÌË ÒËÏËÒÚÓÓ‚
Мы рассмотрим три типа применения симисторов в промышленной электронике:
простые выключатели переменного тока;
регуляторы освещенности (диммеры);
переключатели нулевого напряжения.
5.6.1. èÓÒÚÓÈ ‚̊ÍĮ̂̃‡ÚÂÎ̧ ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇
Одно из полезных применений симитора — прямая замена механического реле. Схема
управления обычно проста (рис. 5 .41а и б). В этом применении симистор осуществляет
релейное управление, и его схема содержит источник управляющего тока и силовой вык
лючатель. Симистор с низковольтным управлением изображен на рис. 5.41а. Когда вык
лючатель S1 замкнут, ток управляющего электрода протекает от источника постоянного
тока10 В. Чтобы уменьшить вероятность отказа (невключения), управляющий ток дол
жен быть в пять
десять раз больше, чем максимальный ток управления, необходимый для
отпирания симистора. Симистор остается включенным, пока S1 не будет разомкнут. Эта
схема включается при нулевом анодном напряжении, кроме момента первого включения.
Устройство S1 может быть очень чувствительно, поскольку управляется только малым
током управляющего электрода. показан Симисторный выключатель на рис. 5.41б имеет
Рис. 5.40. Схема с ослабленным влиянием гистерезиса
èËÏÂÌÂÌË ÒËÏËÒÚÓÓ‚
343
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
такие же характеристики, что и схема на рис. 5.41а, исключая потребность в источнике
постоянного тока. Сигнал управления поступает от источника напряжения, питающего
главный вывод.
Рис. 5 .41. Выключатели переменного напряжения:
а) простая схема управления симисторным выключателем;
б) статический контактор переменного напряжения.
5.6 .2. ê„ÛÎflÚÓ ÓÒ‚Â̆ÂÌÌÓÒÚË — ‰ËÏÏÂ
Электронная схема регулятора освещенности на основе симистора 2N6349 показана
на рис. 5 .42. Регулирующий мощность симистор, управляется посредством диака —
двухэлектродного 4
слойного ключа. Установка R2 определяет фазовый сдвиг между
входным напряжением и напряжением на C2, которое, в свою очередь, устанавливает
угол отпирания и интенсивность света лампы. Каждый полупериод входное напряже
ние заряжает С2 через R1, R2 и R3, пока напряжение на диаке не достигнет уровня
переключения. В результате происходит разряд С2 через диак и отпирание симистора.
В отсутствие С1 напряжение на С2 резко изменилось бы после срабатывания диака,
что вызвало бы нежелательный эффект гистерезиса. Напряжение на С1 частично вос
станавливает напряжение на С2 после срабатывания, таким образом ослабляя эф
фект гистерезиса. Параметры спускового механизма поддерживаются постоянными
благодаря сопротивлению R4.
Для уменьшения помех во входной цепи часто используется LC
фильтр, не пока
занный на рисунке. Типичные значения L и С фильтра — 2,5 мкГн и 0,15 мкФ.
Сложные регуляторы освещенности, применяемые в освещении кинотеатров,
выполняются на основе встроенных микроконтроллеров. (Встроенные микроконт
роллеры обсуждаются в главе 13.) Эти устройства управления, обеспечивающие ши
рокий диапазон возможностей входной информации, типа последовательного интер
фейса, могут соответствовать стандартам театрального освещения или цифровым
интерфейсам музыкальных инструментов. Электронные регуляторы мощности на си
мисторах с фазовым управлением могут применяться для регулирования ламп накали
вания. Программное обеспечение микроконтроллера поддерживает все функции: от
344
декодирования сигналов входных интерфейсов до применения синхронизации тайме
ров, управляющих симисторами на выходе. Электроника обеспечивает уровень осве
щенности в кинотеатре от очень яркого при выходе зрителей из зала до среднего и
низкого уровня в начале просмотра и в течение сеанса.
Рис. 5.42. Регулятор света для ламп накаливания.
Сопротивление R2 регулируется от 0 до 470 кОм
5.6.3. èÂÂÍĮ̂̃‡ÚÂÎ̧ ÌÛÎÂ‚Ó„Ó Ì‡ÔflÊÂÌËfl
Переключение нулевого напряжения — методика, посредством которой устройство управ
ления срабатывает в тот момент, когда входное напряжение проходит через нулевое значе
ние. Эта методика минимизирует электромагнитные помехи, обусловленные переходными
процессами переключения. Схема ручного управления включением резистивной нагрузки с
переключением при нулевом напряжении изображена на рис. 5 .43. В начальной части поло
жительного полупериода при разомкнутом выключателе S1 (тиристор заперт) напряжение
быстро изменяется от нуля, вызывая большой ток, заряжающий конденсатор С2. Этот ток
течет через R4 и CR3 в С3 и через CR4 в цепь управляющего электрода симистора, стимули
руя его включение при близком к нулю напряжении. После отпирания симистора конденса
тор С3 заряжается через CR5 до амплитуды напряжения сети.
Когда напряжение сети проходит через максимум, CR5 смещается в обратном на
правлении, C3 начинает разряжаться через CR4 и вход симистора. В это время напря
жение на С3 отстает от напряжения сети. Когда напряжение сети проходит через нуль,
есть все еще некоторое напряжение на С3, так что когда напряжение сети начинает
становиться отрицательным, С3 все еще способен отпереть симистор в самом начале
отрицательного полупериода. Процессы повторяются в каждом периоде, пока ключ
S1 остается замкнутым, а тиристор — проводящим. Проводящий тиристор шунтирует
управляющий электрод симистора в течение каждого положительного полупериода,
препятствуя его отпиранию. Симистор не может включиться в течение отрицательно
èËÏÂÌÂÌË ÒËÏËÒÚÓÓ‚
345
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
го полупериода, потому что С3 не может зарядиться, если симистор не проводил в те
чение предшествующего полупериода.
Переключение нулевого напряжения, когда S1 открыт, обеспечивается характе
ристикой тиристора. Если S1 открыт в течение положительного полупериода, то тири
стор продолжает проводить в течение целого полупериода и симистор не может вклю
читься в середине положительного полупериода. Симистор начинает проводить в
первом полном положительном полупериоде. Если S1 открыт в течение отрицатель
ного полупериода, то симистор снова не может включиться до начала положительного
полупериода, поскольку C3 незаряжен.
Рис. 5 .43. Переключатель нулевого напряжения
5.7. ìÔ‡‚ÎflÂÏ̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
Эти переключатели — тиристоры с малой мощностью управления, в отличие от ранее
рассмотренных тиристоров являются двухоперационными, , то есть могут не только
включаться, но и выключаться сигналом на управляющем электроде. В этом разделе
обсуждаются три вида таких переключателей:
двухоперационный тиристор (ДОТ);
кремниевый управляемый переключатель (КУП);
кремниевый двунаправленный переключатель (КДП).
5.7 .1. Ñ‚ÛıÓÔ‡ˆËÓÌÌ̊È ÚËËÒÚÓ
Двухоперационный тиристор (ДОТ) — переключательное устройство с однонаправ
ленной проводимостью (вентиль). Оно обладает такими же характеристиками включе
346
ния, как однооперационные тиристоры, но может быть выключено подачей отрицатель
ного потенциала на управляющий электрод. Для выполнения этой операции необходи
мы относительно большие по модулю значения положительного и отрицательного тока
управления по сравнению с током управления однооперационного тиристора, однако
возможность запирания ДОТ обеспечивает преимущество перед тиристором в устрой
ствах с низким уровнем мощности управления. В некоторых источниках ДОТ известен
как запираемый тиристор (gate turnoff, GTO). Обозначение ДОТ и его транзисторная
модель показаны соответственно на рис. 5.44а и б.
Схема автомобильного зажигания представлена на рис. 5 .45а, а на рис. 5 .45б и в
показаны формы напряжений. Эти рисунки иллюстрируют функции ДОТ. В схеме ис
пользуются транзисторный ключ и ДОТ для управления подачей импульсов высокого
напряжения к свечам зажигания, а также автомобильный аккумулятор для питания этой
схемы. Транзистор Q1 работает в ключевом режиме, т.е . он находится в состоянии от
сечки или насыщения. Работая совместно с L1 и С1, Q1 управляет формированием пе
реключающих импульсов на входе ДОТ. Амплитуда импульсных сигналов на входе ДОТ
достигает максимума приблизительно в 22 В (11 В на С1 при источнике питания 12 В,
когда Q1 выключен, плюс 11 В от энергии электромагнитного поля, накопленной в L1,
когда Q1 переключается из состояния насыщения в состояние отсечки и обратно). Пе
реключение ДОТ осуществляется с частотой, определяемой синхросигналами датчика.
Другие примеры применения ДОТ — схемы драйвера в печатающих устройствах ком
пьютерных принтеров и в телевизионных системах горизонтальной развертки.
5.7.2 . äÂÏÌË‚̊È ÛÔ‡‚ÎflÂÏ̊È ÔÂÂÍĮ̂̃‡ÚÂÎ̧
Кремниевый управляемый переключатель (КУП) — устройство с односторонней
проводимостью и с двумя управляющими электродами. Его схематическое обозначе
ние и транзисторная модель изображены соответственно на рис. 5.46а и б. Заметим,
что АУ — анодный управляющий электрод, КУ — катодный управляющий электрод.
Рис. 5.44 . Двухоперационный тиристор (ДОТ):
а) условное обозначение;
б) транзисторная модель
ìÔ‡‚ÎflÂÏ̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
347
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
Транзисторная модель КУП — такая же, как модель тиристора, но с добавлением вы
вода АУ. КУП подобен ДОТ, но два вывода управления позволяют подать на один из
них запирающее смещение, а другой оставить открытым, либо подать смещение на
оба управляющих электрода в соответствии с применением КУП. Сигналы управле
ния на выводах АУ и КУ комплементарны, т.е . положительный импульс на КУ отпира
ет КУП, точно так же, как это делает отрицательный импульс на АУ.
Рис. 5 .45. Устройство зажигания на двухоперационном тиристоре:
а) схема;
б) диаграмма напряжения на коллекторе транзистора Q1;
в) диаграмма напряжения на управляющем переходе ДОТ
348
Переключающая схема постоянного тока показана на рис. 5.47а, а на рис. 5.47б —
формы напряжений. Эти рисунки иллюстрируют операции КУП. Нагрузкой на схеме
рис. 5 .47а может служить звуковой сигнал или индикаторная лампа. Положительный
входной импульс одного источника S1 дифференцируется конденсатором С1 в цепи ка
тодного управляющего электрода КУ, таким образом управляя нагрузкой, включенной
последовательно с КУП. Положительный входной импульс фиксирует включенное со
стояние КУП, а отрицательный фиксирует его выключенное состояние. Второй источ
ник S2 фиксирует включенное состояние КУП при отрицательном перепаде входного
сигнала S2 и выключает его положительным перепадом. Кроме указанных вариантов
применения, КУП используется в логических переключающих устройствах, например в
счетчиках.
5.7.3. äÂÏÌË‚̊ ‰‚Û̇ԇ‚ÎÂÌÌ̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
Кремниевый двунаправленный переключатель (КДП) — твердотельное переклю
чающее устройство, которое вырабатывает переключающий импульс как при поло
жительном, так и при отрицательном напряжении. Обозначение КДП показано на
рис. 5.48а, а наб изображена его вольтамперная характеристика. Три внешних вывода
КДП (см. рис. 5.48), обозначенные А1, А2 и УЭ, изображают анод 1, анод 2 и управля
ющий электрод соответственно. При разомкнутой цепи УЭ функционирование КДП
описывается вольтамперной характеристикой, подобной характеристике диака, но па
дение напряжения на приборе характеризуется большим разнообразием. Заметим,
что когда КДП входит в проводящее состояние, напряжение между А1 и А2 составляет
примерно 1 В, а напряжение переключения при любой полярности близко к 8 В. Для
лучшего понимания работы КДП рассмотрим эквивалентную схему рис. 5.49.
При потенциале А1 более положительном, чем А2, напряжение эмиттер
база Q1
и перехода CR1 становится положительным, тогда как Q3 иQ4 продолжают оставаться
запертыми. Пока потенциал вывода А1 не достигнет уровня эмиттера Q1 плюс напря
жение стабилитрона CR2 (VBE1 + VCR 2), Q2 и СR2 смещены в обратном направлении и
ток между А1 и А2 практически равен нулю. Когда достигнут уровень потенциала А1,
равный (VBE1 + VCR 2), тогда Q1 и CR 2 смещаются в положительном направлении и CR2
Рис. 5.46. Кремниевый управляемый
переключатель (КУП):
а) условное обозначение;
б) транзисторная модель
ìÔ‡‚ÎflÂÏ̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
349
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
работает в области стабилизации. Однако ток коллектора Q1 течет в цепь базы Q2,
заставляя Q2 включиться. Когда Q1 и Q2 насыщены, ток между анодами КДП поддер
живает КДП во включенном состоянии при напряжении между анодами приблизи
тельно 1 В. Точно так же Q3 и Q4 выполняют эту функцию, когда потенциал А1 стано
вится ниже потенциала А2.
Рис. 5 .47. Кремниевый управляемый переключатель:
а) схема;
б) временные диаграммы напряжений
350
Рис. 5.49. Эквивалентная схема
кремниевого
двунаправленного
переключателя (КДП).
CR1иCR2—
стабилитроны на 7,5 В
Рис. 5.48. Кремниевый
двунаправленный
переключатель:
а) условное обзначение;
б) характериситка
управления. V —
напряжение между А1 и А2
ìÔ‡‚ÎflÂÏ̊ ÔÂÂÍĮ̂̃‡ÚÂÎË
351
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
Вывод управляющего электрода КДП может использоваться для изменения
уровня переключения, как показано на рис. 5.50. Включение стабилитрона 2,9 В меж
ду управляющим электродом и анодом А2 показано на рис. 5.50а, а результирующую
вольтамперную характеристику иллюстрирует рис. 5.50б. Обратите внимание, что
внешний стабилитрон (см. рис. 5.50а) включен параллельно внутреннему CR2. По
скольку внешний стабилитрон 2,9 В имеет намного более низкое напряжение стаби
лизации, чем внутренний 7,5 В, напряжение переключения и вольтамперная харак
теристика определяются внешним стабилитроном — напряжение переключения
составляет приблизительно 3,5 В. Поскольку при обратном напряжении внутренний
стабилитрон CR1 не задействован, обратное напряжение переключения сохраняет
значение, близкое к 8 В.
Рис. 5 .50. Схема управления КДП:
а) подключение стабилитрона к цепи управления КДП;
б) характеристики управления схемы подключения
352
5.8 . èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ÚËËÒÚÓÓ‚
При поиске неисправностей тиристоров важно практическое знание вольтамперных харак
теристик устройства, поэтому наиболее информативный тест предполагает использование
осциллографа. Статическое испытание тиристора или симистора может выполняться с ис
пользованием омметра, который дает достаточный ток для переключения тиристора. Этот
тест должен подтвердить, что устройство представляет собой разомкнутую цепь, когда оно
выключено, и имеет падение напряжения порядка 1 В, когда оно включено.
Чтобы проверить тиристор, обратимся к рис. 5 .51. Сначала присоединим положи
тельный вывод омметра к аноду, а отрицательный — к катоду, установим шкалу
R×10000. Прибор должен показать очень высокое сопротивление. Теперь соединим
анод с управляющим электродом. Это вызывает отпирание тиристора и вследствие это
го низкие значения показаний омметра. Удаление проводника, замыкающего управляю
щий электрод и анод, не будет выводить тиристор из проводящего состояния. Только
повторное переключение омметра приведет к показанию высокого сопротивления. По
добный простой тест может быть использован и для проверки симисторов.
5.9 . Ç·-Ò‡ÈÚ̊ Ó ÚËËÒÚÓ‡ı
Адреса сайтов поставщиков тиристоров, которые обсуждались в этой главе, перечис
лены ниже. Сайты поставщиков часто изменяются и обновляются, поэтому если ка
кой
то из названных сетевых ресурсов неактивен, воспользуйтесь механизмом поиска
по типу устройства «тиристор» или «симистор».
Semiconductor Components Industries
http://www.onsemi.com
American Microsemiconductor, Inc.
http://www.americanmicrosemi.com
Phillips Semiconductors, Inc.
http//www.semiconductors.phillips.com
Рис. 5.51. Проверка тиристора
с помощью омметра
Ç·-Ò‡ÈÚ̊ Ó ÚËËÒÚÓ‡ı
353
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
êÖáûåÖ
5.1. Введение в тиристоры
Тиристоры — твердотельные переключающие устройства, действующие как
разомкнутые цепи, способные выдерживать номинальное напряжение, пока
не поступит сигнал включения.
Когда тиристор включен, ток управления может быть прерван без выключе
ния силовых цепей.
Тиристоры содержат несколько чередующихся слоев материала p
типа и n
типа, образуя многократные pn переходы.
Справочные данные тиристоров и рекомендации по применению могут быть
получены на веб
сайтах поставщиков твердотельных устройств.
5.2. Кремниевые управляемые выпрямители
Тиристор — трехвыводное устройство, выводы которого — анод, катод и уп
равляющий электрод.
Тиристор включается путем инжекции тока в цепь управляющего электрода.
Выключение (запирание) осуществляется уменьшением анодного тока ниже
тока удержания или обратным смещением анод — катод.
Выбирая надлежащий тиристор для промышленного применения, можно
воспользоваться информацией из справочных данных.
Два метода управления тиристорами основаны на использовании резистор
ной и резисторно
конденсаторной схемы.
Время запирания тиристора обычно в десять раз превышает время включения.
Возможны три нежелательных способа включения тиристора: превышение
напряжения пробоя, чрезмерный ток утечки и превышение скорости нарас
тания dV/dt.
С целью регулирования мощности тиристор поддерживается в непроводящем
состоянии в течение части положительного полупериода, а затем переводится
в проводящее состояние в момент, определяемый схемой управления.
5.3. Устройства для переключения тиристоров
Диод Шокли — однонаправленный тиристор, который становится проводя
щим, когда превышено его напряжение переключения.
Диак — двунаправленный тиристор с двумя выводами, который проводит
ток в обоих направлениях, когда превышено его напряжение переключения.
Однопереходный транзистор — трехвыводное устройство. Он отличается от
биполярного транзистора тем, что проводит ток, когда превышено его напря
жение переключения, названное пиковым напряжением.
Простую RC
времязадающую схему таймера, в которой используется одно
переходной транзистор, называют релаксационным генератором.
Программируемый однопереходной транзистор подобен тиристору, но имеет
иной характер управления. Тиристор управляется сигналом на управляющем
354
электроде относительно катода, а программируемый однопереходный тран
зистор управляется сигналом на управляющем электроде относительно ано
да. Программируемый однопереходной транзистор подобен однопереходному
транзистору, но использует другой метод установки уровня переключения,
который задается не внутренними, а внешними резисторами.
5.5 . Симисторы
Симистор — тиристор с тремя выводами: МТ1, МТ2 и управляющий элект
род. В отличие от тиристора симистор, будучи включенным, может прово
дить ток в любом направлении.
Отличие симистора от тиристора состоит в том, что он переходит в проводя
щее состояние при положительном или отрицательном сигнале управления.
Выбирая надлежащий симистор для промышленного применения, обрати
тесь к справочным данным прибора.
Симистор может быть переключен постоянным напряжением, переменным
напряжением, выпрямленным напряжением или импульсными сигналами.
5.7. Управляемые двухоперационные вентили
Двухоперациооный тиристор представляет собой полупроводниковый вен
тиль, который может быть выключен подачей отрицательного напряжения
на управляющий электрод.
Кремниевый управляемый переключатель — управляемый вентиль с двумя
управляющими электродами, который может быть включен сигналом на
один или оба управляющих электрода.
Кремниевый двунаправленный переключатель — твердотельное устрой
ство, вырабатывающее переключающий импульс для отпирания как в поло
жительном, так и в отрицательном направлении.
5.8 . Поиск неисправностей тиристоров
Практическое знание вольтамперных характеристик тиристора важно, посколь
ку наиболее информативные тесты связаны с использованием осциллографа.
Быстрые статические испытания тиристоров и симисторов могут быть вы
полнены с использованием омметра.
Çéèêéëõ
1. Прочитав раздел «Цели обучения», расскажите, каким типом деятельности, ка
сающейся производства тиристоров, вы хотели бы заняться.
2. Назовите четыре способа включения тиристора.
3. Какова функция схемы демпфера?
4. Назовите два устройства, основанных на переключении при достижении порого
вого напряжения.
Çéèêéëõ
355
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
5. Опишите различия между ОПТ и программируемым ОПТ в терминах входных ха
рактеристик и переключающих свойств.
6. Определите собственный коэффициент переключения ОПТ.
7. Определите влияние температуры на напряжение переключения тиристора.
8. Объясните принцип действия симистора на основе тиристорной модели.
9. Определите угол проводимости, угол регулирования и задержку угла отпирания
тиристора.
10. Перечислите полярность напряжения на каждом из трех выводов симистора в
каждом из четырех квадрантов работы.
11. Изобразите схематический символ диода Шокли и объясните, как он переключается.
12. Что произойдет с входным током переключения тиристора, когда температура
уменьшится?
13. Что означает допустимое значение dV/dt тиристора?
14. Почему важна оценка dV/dt тиристора?
15. Сопоставьте собственный коэффициент переключения ОПТ и программируемо
го ОПТ.
16. Перечислите различия между тиристором и симистором.
17. В каких квадрантах преимущественно работают симисторы?
18. Объясните работу тиристора с использованием двухтранзисторной модели.
19. Каковы сходства и различия между ОПТ и биполярным транзистором?
20. Каково общее название для двухэлектродного двунаправленного тиристора с тре
мя слоями полупроводника?
21. Если ваша тиристорная схема будет подвергнута действию низких температур, сле
дует ли проектировать ее для более высокого или более низкого тока удержания?
22. Каково назначение шунтирующего резистора в резистивной тиристорной пере
ключающей схеме?
23. Что такое двухоперационный тиристор?
24. Какова уникальная особенность кремниевого управляемого переключателя?
25. Почему диак называют двунаправленным тиристором?
26. Каково назначение и принцип действия защиты от перенапряжений?
27. Что такое переключение при нулевом напряжении и почему это важно?
28. Опишите эффект гистерезиса в симисторной схеме.
29. Сопоставьте характеристики включения и выключения тиристора и двухопераци
онного тиристора.
30. Сопоставьте названия выводов и их функции для тиристора и двухоперационного
тиристора.
31. Каков максимальный угол управления для резистивной схемы управления тирис
тором?
32. Включает ли термин тиристор все твердотельные устройства с определенными
характеристиками?
356
33. Каково общее название для тиристора с однонаправленной проводимостью и с
двумя управляющими электродами?
34. Назовите два альтернативных названия диака.
35. Определите два функциональных преимущества диака перед другими переключа
ющими устройствами.
36. Определите кремниевый двунаправленный переключатель.
37. В чем сходство диака и кремниевого двунаправленного переключателя?
38. Каково назначение управляющего электрода кремниевого двунаправленного пе
реключателя?
39. Какая минимальная частота переключения наиболее надежна для функциониро
вания тиристора?
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
1. Какова максимальная температура перехода, при которой тиристор 2N6504 мо
жет управляться?
2. Исходя из информации, представленной в справочных данных для 2N6504, ска
жите, что делает этот тиристор представителем среднего класса?
3. Каков номер вывода управляющего электрода тиристора 2N6504?
4. Каково максимальное запираемое напряжение тиристора 2N6505?
5. Какое значение тока удержания вы использовали бы при разработке тиристорной
схемы на 2N6505, которая предназначена для работы при низкой температуре?
6. Каково различие между тиристорами 2N6505 и 2N6508?
7. Каково различие между симисторами 2N6344 и 2N6349?
8. Какое значение тока удержания вы будете использовать при разработке симис
торной схемы, если используется 2N6344, который должен работать при низких
температурах?
9. Каково пиковое значение блокирующего тока симистора 2N6344, работающего
при комнатной температуре?
10. Каково максимальное время включения симистора 2N6344?
áÄÑÄóà
1. Рассчитайте значения R1 и R2 для схемы рис. 5.52 и опишите способ регулирова
ния, представляемый этой схемой.
2. Нарисуйте форму волны напряжения на тиристоре и на нагрузке для угла управле
ния 60° в схеме рис. 5 .52. Входное напряжение — синусоидальное с частотой 1 кГц.
3. Решите задачу 2 для угла управления 150° .
áÄÑÄóà
357
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
4. Используйте схему рис. 5.53, чтобы вычислить угол управления при R 2 = 20 кОм
иη=0,5.
Рис. 5 .52. Схема к задаче 1
Рис. 5 .53. Схема к задаче 4
5. Вычислите значение R2 в задаче 4 для угла управления 100°.
6. Каков будет угол управления в задаче 4, если все данные — те же, за исключени
ем замены ОПТ другим с η = 0,6?
7. Чтобы получить угол управления меньший, чем используемый в задаче 4, следует
увеличить или уменьшить значение С1? Объясните свой ответ.
8. Вычислите максимальное и минимальное значения R1 на рис. 5.54.
358
9. Используйте рис. 5.54, чтобы вычислить напряжение,
необходимое для включения ОПТ.
10. Используйте результаты решения задач 8 и 9, чтобы
вычислить частоту колебаний при установке R1 в сред
нее положение.
11. Вычислите угол управления для схемы рис. 5.12б при
R1 = 2,2 кОм, R2 = 30 кОм и среднеквадратичном зна
чении переменного напряжения 115 В. Максимальный
ток управления тиристором — 200 мкА, максимальное
напряжение управления — 700 мВ.
12. Вычислите значения rBB и η, если rB1 = 4,7 кОм, а rB2 =
5,1 кОм.
13. Используйте программируемый ОПТ схемы рис. 5.28
(ПОТ), чтобы вычислить встроенное значение соб
ственного коэффициента переключения, используя
следующие значения сопротивлений: R1 = 120 кОм,
R2=10кОм,R3=20кОм.
14. Вычислите значение R3 для схемы, представленной на рис. 5 .55, и опишите на
значение R3 и CR1.
Рис. 5.54.
Схема к задачам 8 и 9
Рис. 5.55 . Схема к задачам
14и15.
IGT(MAX) = 1 мА, VGT(MAX) = 1,6 В,
R2 = 1 кОм, сопротивление
резистора R1 от 0 до 10 кОм
15. Объясните, почему сопротивление R3 существенно меньше по сравнению с дру
гими сопротивлениями в схеме рис. 5 .55 .
16. Вычислите напряжение VT для схемы рис. 5.56 при сопротивлении R1, установ
ленном на максимум.
17. Если диак на рис. 5.56 имеет напряжение переключения 30 В, будет ли он пере
ключаться? Почему?
18. При каком значении R1 диак будет переходить в проводящее состояние и вклю
чать симистор?
áÄÑÄóà
359
èË·Ó̊ ËÁ ÒÂÏÂÈÒÚ‚‡ ÚËËÒÚÓÓ‚
19. При каком угле управления симистор в задаче 18 станет проводящим?
20. Используя решение задачи 19, нарисуйте входное напряжение и укажите, когда
симистор смещен в непроводящее и когда — в проводящее состояние.
Рис. 5 .56. Схема к задачам
16и17.
VGT=1В,R1 —
потенциометр на 50 кОм
360
6
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡
‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
ñÂÎ̧ „·‚̊
Цель этой главы состоит в том, чтобы дать краткий обзор разнооб
разных датчиков, используемых в автоматизированном производ
стве. В дополнение к подробному описанию датчиков приближения и
фотоэлектрических датчиков, в главе приведено также описание сис
тем технического зрения.
Изучив эту главу, вы сможете:
1. Описать различие между ключами, изменяющими состояние по заданному усло
вию, и дискретными аналоговыми электронными датчиками.
2. Описать различие между контактной и бесконтактной работой датчиков.
3. Описать различие между работой дискретных и аналоговых датчиков.
4. Назвать шесть задач, выполнение которых обеспечивается датчиками в техноло
гических установках.
5. Описать работу различных типов бесконтактных датчиков, включая индуктивные
и емкостные датчики приближения и фотоэлектрические датчики.
6. Выбрать соответствующий бесконтактный датчик обнаружения с необходимыми
параметрами для конкретного применения и встроить датчик в систему.
7. Согласовать выходы датчика со входами контроллера, использующего высокопо
тенциальное и низкопотенциальное подключение (current source и current
sinking).
8. Назвать и описать компоненты узлов системы технического зрения и рассказать
об их работе.
9. Выбрать соответствующий тип системы технического зрения, предназначенной для
задачи обнаружения, и определить параметры источников света для этой системы.
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
èêàåÖçÖçàÖ áçÄçàâ
Ç èêéîÖëëààéçÄãúçéâ ÑÖüíÖãúçéëíà
Современное развитие автоматизированного производства создало большую вторич
ную промышленность электронных устройств для определения параметров производи
мой продукции. При переходе от ручного к автоматизированному производству, датчики
должны сообщать автоматизированной системе о том, что они видят, слышат и чувству
ют, точно так же как операторы делают это при неавтоматизированном производстве.
Вы можете применить знания, полученные из этой главы, став, например, сотруд
ником одной из многих компаний, разрабатывающих датчики для автоматизации и уп
равления технологическими процессами: например, компании Allen Bradley, Honeywell,
Omron или Siemens — либо работать специалистом по датчикам в компании, которая
занимается автоматизацией производства и разрабатывает технологическое оборудова
ние и процессы для изготовителей. Если вы решите работать на фирме изготовителя
датчиков, в дальнейшем вы должны будете определиться, заниматься ли вам аналоговы
ми устройствами управления технологическим процессом или дискретными датчиками.
Правда, некоторые компании производят приборы обоих типов, однако их применение в
промышленности четко разделяется по этим двум группам.
Такие компании, как Honeywell или Emerson/Rosemount, производят аналоговые
датчики, позволяющие измерять разнообразные параметры процесса, например темпе
ратуру, давление, поток и вязкость. Датчики технологических процессов обсуждаются в
главе 7. С другой стороны, такие компании, как Omron или Allen Bradley, производят,
прежде всего, дискретные датчики, которые используются для управления системами
автоматизации производства. Именно такие датчики и описаны в настоящей главе.
К работам, которые должны выполнять специалисты на этих фирмах, относятся
испытания, внедрение разработок в промышленное производство, техническая поддер
жка у заказчиков и техническое обеспечение продаж. Чаще всего требуется тесное вза
имодействие с заказчиком при разработке конкретных технологических установок, тех
ническая поддержка и продажи. Специалисты — инженеры и технологи — часто не
рассматривают сферу продаж как область, где можно сделать успешную карьеру, из
за
ложных представлений о торговле. Но занятие коммерцией в области технологии про
изводства совершенно не похоже на обычную розничную торговлю. Кроме умения нала
живать контакты и и работать в команде с другими специалистами, для такой деятельно
сти необходима высокая техническая квалификация, поскольку реализуемая продукция
является сложным техническим комплексом. Специалист по продажам должен пони
мать структуру и технологический процесс системы заказчика, рекомендовать аппарат
ные и программные решения, предлагать изменения в целях усовершенствования и
обеспечивать своевременное получение точной информации. Работа менеджера по про
дажам и интересна, и обеспечивает хороший достаток. Служба технической поддержки
и продаж может находиться на филиале фирмы, поскольку длительность поездки на слу
жебной машине по обслуживаемому региону не должна превышать одного дня. В других
случаях, когда вы работаете с продукцией для специфической промышленной корпора
ции, например для химического предприятия, вы можете работать в центральном офисе
и составить план командировок на предприятия заказчика. Работа проектировщика и
362
разработчика конкретных технологических установок требует наиболее частых коман
дировок при базовом размещении в одном из проектных центров компании. Двух
или
четырехлетнее обучение в области электроники — наилучший способ подготовки к ка
рьере менеджера по автоматике и технологии применения датчиков. Допустим, что вы
работаете на фирме, производящей датчики. Вам может быть поручено решение специ
фической задачи, связанной с модификацией существующего датчика. Например, круп
ная компания по производству автомобилей хочет получить датчик для использования в
роскошном автомобиле. Чтобы помочь изготовителю выбрать подходящее устройство,
вы должны собрать информацию о датчиках с близкими характеристиками и о примерах
их применения. Существующий аналог может быть испытан в модели, чтобы проверить
работоспособность предлагаемого решения, но в окончательном варианте датчик дол
жен быть меньшего диаметра и иметь специальные крепежные фланцы для установки.
Вы заново проектируете корпус, используя компьютерные программы проектирования
(например, CAD), и обнаруживаете, что плата усилителя слишком велика. Прежде чем
вносить какие
либо изменения в электронную плату, вы планируете встречу с инжене
рами автомобильного производства, чтобы обсудить новый проект корпуса. Им нужны
дополнительные изменения, и вы ведете переговоры о выполнении некоторых, но не
всех их запросов. Вы представляете новую плату усилителя и получаете окончательное
утверждение нового проекта. Разработка проекта заняла у вас три недели и потребовала
от вас принятия ряда интересных технических решений.
6.1. ÇÇÖÑÖçàÖ Ç ùãÖäíêéççõÖ ÑÄíóàäà
Датчики — это глаза, уши и органы осязания машин, установленных в автоматичес
ких линиях. Даже самый неквалифицированный рабочий может определить, что де
таль упала на пол или что готовая деталь не вышла из машины, но автоматизирован
ная система не может этого сделать без помощи датчиков. Правильно установленные
датчики обеспечивают систему автоматизации теми же данными, которые дают опера
тору пять его чувств. Например, датчик на рис. 6 .1 проверяет до сборки двух деталей,
соответствует ли количество отверстий для стыковки. Датчик на рисунке испускает
луч света, который отражается от детали и возвращается на встроенный приемник.
Если в детали имеется отверстие, луч проходит через него, не отражаясь. Можно про
верить положение каждого отверстия отдельным фотоэлектрическим датчиком. Но
можно проверить и всю плату с помощью системы технического зрения. Оба класса
устройств мы рассмотрим ниже в разделах 6.3 и 6.8. Но прежде перечислим шесть
задач, которые выполняют датчики в технологических установках:
1. Обнаружение условий, при которых оператор или другой работник может полу
чить травму от производственного оборудования.
2. Обнаружение условий, при которых машина могла бы быть повреждена другим
производственным оборудованием.
3. Сбор данных о состоянии автоматизированной системы, чтобы гарантировать
правильную установку ее параметров.
4. Автоматический контроль работы для обнаружения и анализа сбоев системы.
ÇÇÖÑÖçàÖ Ç ùãÖäíêéççõÖ ÑÄíóàäà
363
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
5. Измерение выпускаемых деталей для определения уровня качества.
6. Идентификация изготовленных деталей, контроль их расположения и ориентации
для подготовки к обработке на следующих автоматических линиях.
В нашем распоряжении имеется огромное количество датчиков с уникальными ком
бинациями характеристик чувствительности, выходных характеристик и установочных па
раметров. Для отслеживания и контроля отдельных функций автоматической линии часто
используются индивидуальные датчики. В других системах используются многочисленные
датчики, чтобы управлять каждой операцией автоматизированной системы. Датчики или
индивидуально связаны с управляющим компьютером, или входят в состав сети передачи
данных DeviceNet, связывающей датчики с многоканальным сетевым кабелем. Датчики
для систем автоматики делятся на три категории: индуктивные, или емкостные, датчики
приближения, фотоэлектрические датчики и системы технического зрения. Все три кате
гории рассматриваются в этой главе; однако следует сначала понять разницу между кон
тактными и бесконтактными датчиками, которые вдобавок имеют возможность дискрет
ного или аналогового измерения.
6.1 .1 ä·ÒÒËÙË͇ˆËfl ÒÂÌÒÓÌ̊ı ÛÒÚÓÈÒÚ‚
Сенсорные устройства сгруппированы в две категории: контактные и бесконтактные.
Обе категории используются для управления автоматизированными системами в це
хах, при серийном производстве, на автоматизированных линиях и в системах непре
рывного производства, описанных в главе 1 и приведенных на рис.1.1 Перед тем как
продолжить изучение, рекомендуется ознакомиться с описанием этих систем.
Контактные устройства физически соприкасаются со средой, параметры которой
они измеряют. Например, переключающий датчик уровня, описанный в главе 2,
имеет поплавок, который держится на поверхности жидкости, так что он находится в
контакте с исследуемой средой. Бесконтактные устройства считывают или измеряют
Рис. 6 .1. Проверка наличия отверстий с помощью датчика
364
параметр среды без физического соприкосновения с ней. Например, фотоэлектричес
кие датчики, описанные в этой главе, реагируют на приближающийся объект прежде,
чем объект касается фотоэлектрического устройства.
Эти устройства обычно называются датчиками, и они используют твердотельные
электронные устройства для считывания измеряемого параметра без какого
либо физи
ческого контакта. Добавление электронного управления обуславливает наличие много
численных вариантов выходных параметров режимов работы. Электронный интерфейс
позволяет твердотельным датчикам функционировать в качестве дискретных или анало
говых устройств. Различия между дискретным и аналоговым устройствами рассматри
ваются далее.
Дискретные устройства. Дискретные устройства имеют одну точку переключе
ния. Например, контактный переключатель уровня жидкости, описанный ранее, меха
нически переводит контакт из включенного в выключенное состояние, когда жидкость
достигает заданного уровня. Другой пример переключателя этого типа — термостат,
который управляет системой обогрева жилого дома. Установлен определенный уро
вень температуры (68 °Ф), и система обогрева работает в режиме замкнутой обратной
связи, включаясь и выключаясь в зависимости от того, ниже и выше заданной темпе
ратуры становится температура в здании.
Три наиболее отличительные характеристики датчиков с переключаемым выход
ным сигналом и твердотельных датчиков:
1) наличие одного входного условия или установленного параметра, который вызы
вает изменение состояния внешнего устройства;
2) выход прибора находится во включенном либо в выключенном состоянии;
3) это основной тип датчиков, применяемых для управления итерационными и ли
нейными системами автоматики. Световой датчик на рис. 6 .1 также демонстриру
ет эти характеристики.
Единственное входное условие — присутствие или отсутствие отверстия в плате;
выходной сигнал сенсорного устройства переключается от нулевого уровня (состоя
ние ВЫКЛ) на уровень 24 В постоянного напряжения (состояние ВКЛ), и датчик ис
пользуется для автоматизации сборки изделий. Наиболее часто датчики с переключа
емым выходным сигналом применяются для формирования сигнала, приводящего к
изменению состояния на выходе, замыкая или размыкая некоторый набор электричес
ких контактов. Эти контакты используются для переключения напряжения или тока,
необходимого для управления устройством.
Дискретные твердотельные датчики используются в электронных схемах для вы
полнения функции считывания, и в них выходное напряжение, в зависимости от состо
яния ключа, может находиться на двух уровнях.
В качестве выходных напряжений для состояний включено/выключено часто ис
пользуются уровни постоянного напряжения 0 и 24 В или уровни переменного напря
жения 0 и 115 В. Уровень переключения в этих датчиках обычно устанавливается та
ким образом, чтобы изменение на выходе приводило бы к изменению условий на входе
в диапазоне, диктуемом характеристиками датчика.
Например, чувствительность приемного устройства на рисунке 6.1 может быть
настроена на различные уровни светового потока, с учетом материала, из которого
изготовлена плата.
ÇÇÖÑÖçàÖ Ç ùãÖäíêéççõÖ ÑÄíóàäà
365
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Подведем итог. Сенсорные переключатели — дискретные контактные устрой
ства, которые соединены с автоматизированной системой с помощью нормально
зам
кнутых или нормально
разомкнутых контактов. Электронные датчики, напротив, со
держат твердотельные схемы бесконтактных датчиков, имеют дискретные выходы,
которые либо изменяют свое сопротивление как контактные устройства, либо диск
ретно изменяют уровень постоянного или переменного напряжения от одного до дру
гого значения. Они используются прежде всего для автоматизации управления непре
рывным производством и линиями сборки.
Аналоговые устройства. В отличие от дискретного датчика, аналоговый датчик изме
ряет входные величины в определенном диапазоне и генерирует выходной сигнал в опреде
ленном диапазоне. Например, при аналоговом измерении температуры сенсорная система
может формировать сигнал, который изменяется от 1 до 5 В или от 4 до 20 мА при изменении
температуры от 0 до 100 °C. Существует прямо пропорциональная зависимость между вход
ными параметрами и сигналом на выходе. Например, 0 °C формирует напряжение в 1 В на
выходе, 100 °C соответствует 5 В, а 50 °C — напряжению в 3 В. Другие датчики имеют
обратно пропорциональную зависимость между входными и выходными параметрами, а не
которые типы датчиков (термопара, например) формируют нелинейный выходной сигнал
при линейном изменении сигнала на входе. К аналоговым относятся все датчики, которые
измеряют общие параметры процесса, такие как температура, давление, уровень, поток и
положение. Существуют аналоговые датчики для всех существенных параметров, так что
большинство изменений технологического процесса можно измерить. Чаще всего подобные
аналоговые датчики находят применение в перерабатывающих отраслях промышленности,
таких как пищевая, химическая и нефтеперерабатывающая, поэтому эти датчики относятся
к категории системы непрерывного производства. Аналоговые датчики, которые могут быть
как контактными, так и бесконтактными — в зависимости от системы — подробно рассмат
риваются в следующей главе.
6.2 . ÅÖëäéçíÄäíçõÖ ÑÄíóàäà èêàÅãàÜÖçàü
Как следует из названия, датчики приближения дают информацию о состоянии рабо
чей установки без физического контакта с деталями. Датчики приближения имеют ди
апазон чувствительности от 0,3 мм (0,008 дюймов) до немного более чем 100 мм (2,54
дюймов). Датчики приближения относятся к одному из трех типов бесконтактных дат
чиков, используемых для автоматизации производства продукции, состоящей из от
дельных деталей.
Многочисленные модели датчиков поставляются на рынок многими производите
лями (см. раздел о веб
сайтах).
6.2 .1. à̉ÛÍÚË‚Ì̊Â Ë ÂÏÍÓÒÚÌ̊ ‰‡Ú̃ËÍË ÔË·ÎËÊÂÌËfl
Индуктивные датчики приближения работают по принципу катушки индуктивности, и,
когда деталь из стали или цветного металла появляется в магнитном поле, созданном ка
366
тушкой, датчик обнаруживает ее присутствие. Производятся индуктивные датчики при
ближения пяти типов: цилиндрические, прямоугольные, миниатюрные, для жестких усло
вий окружающей среды и для специальных целей, причем 70% всех датчиков имеют ци
линдрический корпус с резьбой по всей его длине. Форма детали, которую нужно
обнаружить, и специфика технологического процесса диктуют форму корпуса, оптималь
ную для работы. Перечень некоторых типов индуктивных и емкостных датчиков прибли
жения, производимых фирмой Omron Electronics LLC, приведен на рис. 6 .2 и 6.3 . Рас
смотрим восемь датчиков, изображенных на этих рисунках. Индуктивные датчики
представлены на рис. 6 .2 . Первые два датчика относятся к стандартному типу датчиков с
цилиндрической резьбой, третий — миниатюрный тип, и последний — прямоугольный.
Первые два датчика на рис. 6.3 также индуктивные и классифицируются как датчики спе
циального назначения. Последние два относятся к емкостным датчикам приближения с
цилиндрическим и прямоугольным корпусом.
Работа емкостных датчиков приближения основана на измерении электрической емко
сти, и объект из любого материала обнаруживается при появлении его в электрическом
поле, создаваемом входящими в состав датчика пластинами конденсатора; обкладка(ки)
конденсатора в датчике. Конденсаторные датчики приближения, среди которых наиболее
популярны цилиндрические датчики с резьбой, используются не так часто, как индуктивные.
Популярными являются также датчики квадратной конфигурации, которые пред
ставлены двумя последними моделями на рис. 6.3. Наиболее часто используемые типы
датчиков, которые производятся многочисленными фирмами (см. раздел 6.10), изоб
ражены на рис. 6 .2 и 6.3.
6.2.2. ꇷÓÚ‡ ‰‡Ú̃ËÍÓ‚ ÔË·ÎËÊÂÌËfl
Датчики приближения обнаруживают детали без прямого контакта с ними помощью
магнитного поля — для индуктивного или электрического поля — для емкостного
датчика. Применение датчиков в системах автоматизации требует понимания основ
ных принципов их работы.
Работа индуктивного датчика приближения. Индуктивные датчики используют
свойство резонансного контура, добротность которого уменьшается от потерь на вих
ревые токи в проводящем материале. Детальное описание этого устройства начнем с
типичного RLC
генератора на базе операционного усилителя (рис. 6 .4). Этот тип схе
мы используется в индуктивных датчиках, чтобы создать электромагнитное поле для
обнаружения детали. Схема представляет собой неинвертирующий операционный
усилитель с резистором положительной обратной связи R1, подающим сигнал с выхо
да на вход, к которому подключена резонансная RLC
цепь. Коэффициент усиления
усилителя задается резисторами R3 и R4, а частота колебаний — конденсатором C,
катушкой индуктивности L и переменным резистором R2. Резистор R2 моделирует
неизбежные потери в колебательном контуре. Частота его может регулироваться от
100 кГц до 1 МГц при изменении значений L и C. Колебания происходят только при
выполнении следующего условия:
ÅÖëäéçíÄäíçõÖ ÑÄíóàäà èêàÅãàÜÖçàü
367
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Рис. 6 .2. Индуктивные датчики приближения
368
Рис. 6.3. Индуктивные и емкостные датчики приближения
ÅÖëäéçíÄäíçõÖ ÑÄíóàäà èêàÅãàÜÖçàü
369
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Форма электромагнитного поля, создаваемого индуктивностью L, показана на
рис. 6.5. Обратите внимание, что поле имеет форму тороида, расположенного у фрон
тальной поверхности датчика, и определяется двумя конструктивными элементами:
сердечником катушки, выполненным из феррита с высокой магнитной проницаемос
тью, и экраном вокруг катушки. Экран может быть встроен в катушку производителем
датчика либо составлять часть конструкции его крепления. В любом случае экраниро
вание приводит к большей фокусировке поля.
Когда в поле вводится металлический объект, в его проводящем материале наво
дятся вихревые токи, как показано на рис. 6.5. При этом энергия поля катушки умень
шается на величину, пропорциональную уровню созданных вихревых токов, который
зависит от:
расстояния и положения металлической детали в поле;
размера и формы детали;
проводимости и магнитной проницаемости материала детали.
Если любой из этих факторов или их комбинация приведет к увеличению вихре
вых токов до уровня, который не может быть обеспечен генератором, то колебания
прекратятся. Фазы движения детали относительно катушки датчика приближения по
казаны на рис. 6.6 . Обратите внимание на связь положения детали с амплитудой коле
баний и выходным сигналом датчика. По мере роста вихревых токов амплитуда и час
тота колебаний генератора уменьшаются, пока колебания вообще не прекратятся.
После выпрямления и сглаживания выходного напряжения генератора, на выходе
датчика получается временная диаграмма, приведенная на рис. 6.6в.
Рис. 6 .4. Схема усилителя для индуктивного датчика
370
Схемы на базе индуктивных датчиков выполняют следующие функции:
обнаружение всех материалов, которые являются электрическими провод
никами;
обнаружение деталей из немагнитных материалов;
обнаружение неподвижных и движущихся объектов;
наилучшую работу с плоскими гладкими деталями;
энергия измерительного воздействия невелика, поэтому не возникают ра
диопомехи и деталь не нагревается.
Работа емкостного датчика приближения. Емкость конденсатора определяется
размерами пластин, расстоянием между ними и характером диэлектрика, заполняющего
промежуток между пластинами. Емкостные датчики приближения используют измене
ния емкости датчика при изменениях в диэлектрике. Когда приближающаяся деталь
взаимодействует с электрическим полем датчика, емкость датчика изменяется. Это из
менение в емкости приводит к возникновению колебаний генератора на базе ОУ, встро
енного в датчик. Схема подобна приведенной на рис. 6.4 для индуктивного датчика. Но в
отличие от индуктивного датчика, в котором используется электромагнитное поле ка
тушки индуктивности, пластины емкостного датчика создают электрическое поле у его
фронтальной поверхности, как показано на рис. 6 .7 . Обратите внимание, что электри
ческое поле создается с помощью пластины конденсатора, названной активным элект
Рис. 6.5. Электромагнитное поле индуктивного датчика
ÅÖëäéçíÄäíçõÖ ÑÄíóàäà èêàÅãàÜÖçàü
371
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
родом и расположенной на стороне датчика устройства. Конденсатор, создающий поле,
является частью резонансного RLC
контура, который в свою очередь входит в состав
генератора на базе ОУ, встроенного в датчик, схема которого подобна приведенной на
рис. 6 .4 . Когда в электрическом поле датчика отсутствуют внешние детали (состояние
«нет объекта»), колебания в генераторе отсутствуют и выход датчика не активен или
разомкнут. Когда деталь с диэлектрической постоянной, равной или большей 1,2, вво
дится в электростатическое поле, в генераторе возникают колебания, поскольку значе
ние емкости становится выше порогового. При этом выход датчика становится актив
ным или замыкается.
В датчиках используются два типа конфигурации емкости: диэлектрический и
кондуктивный (см. рис. 6.8). В датчике диэлектрического типа присутствуют обе пла
стины емкости, подключенной к встроенному генератору. Когда деталь находится в
поле, емкость увеличивается и колебания указывают на присутствие детали. Этот тип
может использоваться, чтобы обнаружить все типы диэлектрических материалов, по
стоянная которых хотя бы ненамного превышает диэлектрическую постоянную возду
ха, равную 1.0 . Второй тип, кондуктивный, имеет только один из электродов, подклю
ченный к генератору, встроенному в датчик. Вторым электродом, как показано на рис.
6.7, является проводящий материал детали, который создает поле и увеличивает ем
кость, что приводит к возникновению колебаний. Работа датчиков обоих типов проил
люстрирована на рис. 6 .8. Проводящий тип датчика пригоден для просмотра материа
ла изоляции, типа каучука, стекла или бумаги, он позволяет обнаружить присутствие
проводящего материала, подобного жидкости или металлу.
Рис. 6 .6.
Выходные сигналы
индуктивного
датчика
приближения и
встроенного в него
генератора
372
Рис.6.7 . Электрическое поле емкостного датчика
Рис. 6.8. Диэлектрические и кондуктивные типы емкостных датчиков
Емкостные датчики имеют следующие свойства и характеристики:
частота генератора изменяется в диапазоне от 100 кГц до 1 Мгц;
ÅÖëäéçíÄäíçõÖ ÑÄíóàäà èêàÅãàÜÖçàü
373
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
исследуемыми материалами могут быть проводники, изоляторы, пластмасса,
стекло, керамика, масла и смазки, вода и все материалы с высокой влажнос
тью или диэлектрической постоянной, превышающей 1,2;
обнаружение постоянных и движущихся объектов;
наилучшая работа с плоскими гладкими деталями;
энергия измерительного воздействия невелика, поэтому не возникают ра
диопомехи и деталь не нагревается.
Так как датчик способен обнаруживать воду, то наличие влаги на нем представляет
серьезную проблему. В некоторых из разработанных устройств датчики могут легко на
капливать влагу. В тех случаях, когда используется датчик с компенсирующим электро
дом, электрод компенсирует влагу на поверхности датчика и не влияет на чувствитель
ность на расстоянии обнаружения. Компенсирующий электрод показан на рис. 6 .7 .
Примеры емкостных датчиков типа E2K
C и E2K
F приведены на рис. 6 .3 .
6.2 .3. åÓ‰ÂÎË ‰‡Ú̃ËÍÓ‚ ÔË·ÎËÊÂÌËfl
Два типа датчиков приближения, индуктивный с высокочастотными колебаниями и ем
костной электростатический, и их основные характеристики приведены на рис. 6 .2 и 6.3 .
Чтобы было легче сравнить различные типы, в итоговой таблице приведены восемь
параметров. Первым шагом при выборе этих часто используемых датчиков является изу
чение характеристик, приведенных на рис. 6.2 и 6.3. Первое различие между индуктивны
ми и емкостными датчиками заключается в типах материалов, исследуемых датчиком. Ин
дуктивные датчики дают информацию о присутствии только металлических деталей, в то
время как некоторые емкостные датчики обнаруживают детали, сделанные из всех типов
материала. Продолжим сравнение параметров, рассматривая отдельные строки таблицы
с рис. 6.2 и6.3:
Строка 3 — «Свойства» описывает характеристики обнаружения и типичные
применения для каждой модели датчика. Например, некоторые датчики имеют встро
енные твердотельные усилители, в то время как другие предполагают использование
отдельных или in
line усилителей. Чаще всего в качестве выходных устройств приме
няются транзисторные переключатели, но в некоторых датчиках эту роль исполняют
тиристорные ключи или контакты реле.
Строки 4 и 5 — здесь определяются расстояния обнаружения как для экраниро
ванных, так и для неэкранированных датчиков. Датчик приближения обычно имеет
фиксированное расстояние обнаружения; например, модель E2EC выпускается на
шесть различных расстояний обнаружения, от 0,5 до 4 мм. Однако некоторые модели,
например E2K
C, имеют переменное расстояние обнаружения. Оно регулируется пу
тем подстройки усилителя, встроенного в датчики. Экранированные и неэкранирован
ные датчики будут рассмотрены в следующем разделе.
Строки 6 и 7 — двухпроводные или трехпроводные конфигурации выхода опреде
ляют тип интерфейса датчика с контроллером автоматической линии. Схемы подклю
чения выхода и спецификации интерфейса обсуждаются в разделе 6.7. Для каждого
типа выхода приведено максимальное значение выходного тока.
374
Рис. 6.9. Таблица из справочных данных индуктивного датчика
приближения E2EM
ÅÖëäéçíÄäíçõÖ ÑÄíóàäà èêàÅãàÜÖçàü
375
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Строка 8 — частотная характеристика, показывающая, насколько быстро может
переключаться датчик из включенного в выключенное состояние и обратно или на
сколько быстро может изменяться входной сигнал датчика. Обратите внимание, что
датчики емкостного типа намного более инерционны, чем индуктивные.
Более подробное описание характеристик приводится в двух следующих разделах.
6.2 .4. ÍÚÂËÒÚËÍË Ë̉ÛÍÚË‚Ì̊ı ‰‡Ú̃ËÍÓ‚ ÔË·ÎËÊÂÌËfl
Полные характеристики индуктивного датчика приближения общего применения приве
дены на рис. 6.9, а на рис. 6.10 представлена конструкция двух цилиндрических датчиков.
Внимательно изучите спецификации перед продолжением чтения. Для применения
датчиков приближения необходимо понимать смысл ряда характеристик, приведенных в
справочных данных. Эти характеристики обсуждаются в следующих разделах.
Расстоянием обнаружения называется такое расстояние от образцового объекта
до поверхности датчика, названной опорной плоскостью, при котором выход датчика
переходит из выключенного во включенное состояние. Термин «образцовый объект»
используется потому, что данные о расстоянии обнаружения нормируются только для
объекта заданной формы и размеров и сделанного из определенного материала. На
пример, образцовым объектом для датчика M8, приведенного в справочной информа
Рис. 6 .9. Таблица из справочных данных индуктивного датчика
приближения E2EM (продолжение)
Примечания:
1. При использовании модели М8 в диапазоне температур от 70 до 85 °C (от 158 до 185 °Ф) диапазон
изменения напряжения должен быть от 10 до 30 В пост. напряжения и максимальный выходной ток
должен иметь значение 100 мА.
2. Учитывается среднее значение времени отклика ключа на пост. токе.
376
ции на рис. 6 .9, является пластина из мягкой стали с размерами 8+8+1 мм. Если ре
альная деталь отличается от образцового объекта, то для определения расстояния об
наружения должен быть введен поправочный коэффициент. Расстояние обнаружения
для индуктивных датчиков воспроизводится с точностью до 1/10000 дюйма.
Рис. 6.10. Индуктивные датчики приближения цилиндрического типа
У некоторых датчиков расстояние обнаружения определено для вертикального и гори
зонтального обнаружения. Параметры для движения образцового объекта в вертикальном и
горизонтальном направлениях относительно опорной плоскости и показаны расстояния вклю
чения и выключения датчика для каждого случая отражены на рис. 6 .11. В случае горизонталь
ного движения точки включения и выключения лежат на сплошной и пунктирной кривых. Как
видно из рисунка, чем ближе образцовый объект к опорной плоскости, тем раньше происходит
переключение. Внимательно изучите рисунок, чтобы получить ясное представление о рассто
янии обнаружения. Однако в практических установках деталь не всегда соответствует образ
цовому объекту, описанному в справочной информации для датчика. Кроме того, иногда нельзя
ввести поправочный коэффициент для детали, которую нужно обнаружить. В этих случаях
расстояние обнаружения необходимо определять экспериментально, измеряя расстояние
включения, когда деталь движется к датчику в реальной системе.
èËÏ 6.1
Каково расстояние обнаружения для образцовой квадратной пластины со стороной в
30 мм, которая движется относительно опорной оси датчика E2M
X
15B/C (рис. 6 .12)?
êÖòÖçàÖ
Кривые расстояния обнаружения для датчика показывают, что стандартный объект
пересечет кривую приблизительно в 14,5 мм от оси.
Поправочный коэффициент для реального объекта. Образцовым объектом об
наружения является стальная пластина толщиной 1 мм, длина и ширина которой рав
няются диаметру лицевой части индуктивного датчика. Вся справочные данные нор
мируются для работы датчика с образцовым объектом. Если форма, размер, и матери
ал объекта изменяются, должны быть скорректированы и расстояния обнаружения.
Например, если ширина объект в примере 6.1 была бы равна 10 мм, то расстояние
обнаружения будет приблизительно 13 мм (высота, на которой деталь шириной 10 мм
вошла бы в соприкосновение с кривыми).
ÅÖëäéçíÄäíçõÖ ÑÄíóàäà èêàÅãàÜÖçàü
377
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Рис. 6 .11. Параметры расстояния обнаружения:
а) обнаружение в вертикальном направлении;
б) обнаружение в горизонтальном направлении
378
Рис. 6.12. Расстояния обнаружения для датчика приближения
Изменение материала и толщины детали оказывает тем большее влияние на рассто
яние обнаружения, чем меньше ее размер. Материал с высокой проводимостью рассредо
точивает вихревые токи и не позволяет им сформироваться, при этом объект должен по
дойти ближе к опорной плоскости датчика, чтобы вихревые токи стали достаточными для
его переключения. Такое же влияние оказывает и толщина объекта. Плотность вихревых
токов уменьшается, поскольку увеличивается сечение; следовательно, объект должен по
дойти ближе к датчику для изменения его состояния. Поэтому изготовители датчиков при
водят поправочные коэффициенты для различных размеров и материалов объекта. Не
сколько форм введения поправочного коэффициента показаны на рис. 6 .13. Кривые,
приведенные на рис. 6 .13a, показывают зависимость расстояния обнаружения от размера
стороны пластины при различных типах ее материала типа. Поправочный коэффициент
для различных материалов приведен на рис. 6.13б. Примеры 6.2 и 6.3 иллюстрируют, как
эти поправочные коэффициенты применяются при разработке конкретных проектов.
èËÏ 6.2
Индуктивный датчик фирмы Omron на 30 мм используется для обнаружения медного
объекта с шириной стороны 10 мм. Найдите максимальное расстояние обнаружения.
êÖòÖçàÖ
Найдите кривую для меди на рис.6 .13a и проведите вертикальную линию для длины
стороны объекта 10 мм. Пересечение вертикальной строки и кривой представляет
новое расстояние обнаружения:
Snew=8мм.
èËÏ 6.3
Датчик фирмы «Аллен Брадлей» с номинальным расстоянием обнаружения 50 мм
для мягкой стали используется для алюминиевой детали. Найдите новое расстояние
обнаружения.
ÅÖëäéçíÄäíçõÖ ÑÄíóàäà èêàÅãàÜÖçàü
379
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
êÖòÖçàÖ
В таблице рис. 6.13б найдите поправочный коэффициент для алюминия. Умножите
номинальное расстояние на поправочный коэффициент, чтобы получить новое рас
стояние обнаружения:
Snew=50мм×0,35
Snew = 17,5 мм
Рис. 6 .13. Поправочные коэффициенты:
а) график зависимости расстояния обнаружения от площади и
материала объекта;
б) поправочные коэффициенты для учета материала объекта
Расстояние выключения. Расстоянием выключения (или расстоянием сброса) на
зывается расстояние до точки, в которой выходной сигнал датчика, полученный от об
разцового объекта, отключается. Расстояние сброса отмечено как выключенное (выкл.)
на рис. 6 .11 . Расстояние между точкой обнаружения и точкой отключения называется
разностным расстоянием.
Разностное расстояние. Разностное расстояние (см. рис. 6.11) равно разности
между расстояниями выключения и обнаружения и характеризует гистерезис системы.
380
Этот гистерезис изменяется в зависимости от типа выбранного датчика и составляет
обычно от 3 до 10% от полного расстояния обнаружения. Разностное расстояние необ
ходимо, чтобы предотвратить повторные включения и выключения (дребезг) датчика
приближения из
за шума или колебаний объекта около точки переключения.
Установленное расстояние. Установленное расстояние представляет собой мак
симальное расстояние обнаружения для датчика и образцового объекта при наихуд
шем сочетании температуры окружающего воздуха и допустимого питающего напря
жения. Когда это возможно, установленное расстояние должно быть использовано в
качестве стандарта для проектов, в которых используются датчики, поскольку оно
представляет наихудший случай для применения на производстве. Однако геометрия и
материал обнаруживаемой детали могут отличаться от соответствующих параметров
образцового объекта, при этом фактическое расстояние обнаружения должно быть
определено экспериментально. В этом случае установленное расстояние для образцо
вого объекта неприменимо к текущему проекту, и для нестандартной детали должно
быть определено новое установленное расстояние.
Новое значение установленного расстояния Lу.нов
определяется по формуле:
где
Lизм
—
измеренное расстояние для нестандартного объекта,
Lу
—
установленное расстояние для образцового объекта,
Lобн
— расстояние обнаружения для образцового объекта.
Другими словами, новое расстояние установки найдено с использованием изме
ряемого расстояния обнаружения и отношения установленного расстояния к расстоя
нию обнаружения при образцовом объекте, взятом из спецификации датчика.
èËÏ 6.4
Датчик E2M
X
15B/C фирмы Omron используется для обнаружения большого медно
го корпуса. Экспериментальные исследования показали, что расстояние обнаружения
для этого объекта равно 9 мм. Определите новое расстояние установки с помощью дан
ных на рис. 6.9.
êÖòÖçàÖ
Определите расстояние обнаружения и установленное расстояние для образцового
объекта по спецификации, приведенной на рис. 6.9.
Расстояние обнаружения (образцовый объект) = 15 мм.
Установленное расстояние (образцовый объект) = 12 мм.
По формуле, приведенной выше, вычислите новое расстояние установки:
Следовательно, датчик, помещенный на расстоянии 7,2 мм от места расположения
детали, при наихудшем сочетании температуры и питающего напряжения надежно ее
обнаружит.
ÅÖëäéçíÄäíçõÖ ÑÄíóàäà èêàÅãàÜÖçàü
381
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Экранированные и неэкранированные датчики. Датчики приближения произ
водятся в экранированной или неэкранированной конфигурациях. Расположение эк
рана в индуктивном датчике показано на рис. 6 .5, а на рис. 6.10 — экранированный и
неэкранированный цилиндрические датчики. Обратите внимание, что на рис. 6 .10 эк
ранированная версия имеет резьбу вплоть до торцевой поверхности датчика, а на не
экранированном типе резьба заканчивается на некотором расстоянии от торца. Для
неэкранированного варианта обычно характерны более широкие границы чувстви
тельности и более широкая область обнаружения, в то время как поле чувствительно
сти экранированных датчиков лучше сфокусировано.
Внимательно рассмотрите сечения экранированных и неэкранированных индук
тивных датчиков, приведенные на рис. 6.14.
Рис. 6 .14. Сечение экранированных и неэкранированных индуктивных
датчиков приближения
Сфокусированное поле экранированного емкостного датчика приближения лучше все
го подходит для наиболее трудных для обнаружения объектов из материала с низкой диэлек
трической постоянной. Однако большая чувствительность приводит к ошибкам при загряз
нении или увлажнении торца датчика. Менее сфокусированное электростатическое поле
неэкранированных моделей делает их надежным датчиком для объектов с высокой диэлект
рической постоянной или для различения материалов с высокими и низкими диэлектричес
кими постоянными. Кроме того, неэкранированные емкостные датчики приближения име
ют большие расстояния обнаружения, чем экранированные версии.
Неэкранированные модели оборудованы электродом компенсации (см. рис. 6.7),
который позволяет датчику игнорировать туман, пыль, изменения во влажности окру
жающей среды, а также небольшие частицы грязи — капельки масла или воды, на
капливающиеся на поверхности датчика. Следовательно, для пыльных и/или влажных
сред лучше применять неэкранированные модели датчиков. Неэкранированные емко
стные датчики более подходят также для обнаружения поплавков через пластмассо
вые стенки датчика. Датчик заключается в изолирующий корпус. Стенки датчика изо
382
лируют отверстие, направленное в сторону резервуара. Датчик обнаруживает присут
ствие жидкости в резервуаре через корпус.
Частотная характеристика. Частотная характеристика определяет максималь
ную скорость, с которой образцовый объект может изменять состояние выхода датчи
ка. Частота переключений определяет максимальное быстродействие, с которым дат
чик может генерировать отдельные импульсы, когда образец входит и выходит из поля
обнаружения. Время отклика зависит от размера объекта, расстояния от объекта до
поверхности обнаружения, скорости объекта и модели датчика. Этот параметр изме
ряется количеством переключений в секунду. A обзор данных по частотным характе
ристикам датчиков на рис. 6.3 показывает широкий диапазон для частоты отклика.
Температура и изменения напряжения. Датчики приближения чувствительны к
изменениям температуры; рабочая температура окружающей среды для большинства
моделей лежит в диапазоне от —13 до 158 °Ф. Приборы фирмы Omron имеют макси
мальное расстояние обнаружения при 74 °Ф и дают 15
процентное изменение рассто
яния обнаружения при изменении температуры устройства в рабочем диапазоне.
Датчики также чувствительны к изменениям в напряжении. Питающее напряже
ние лежит в диапазоне от 10 до 30 В постоянного тока. Однако расстояние обнаружения
датчиков фирмы Omron изменяется на ±1% при изменении питающего напряжения.
Интерференционные взаимодействия. Установка и взаимное расположение дат
чиков приближения требуют осторожного подхода, потому что расположенное рядом
оборудование или поля других датчиков могут накладываться на область обнаружения и
уменьшать расстояние обнаружения, вызывать ложные сигналы или препятствовать
обнаружению детали. Когда несколько индуктивных датчиков приближения устанавли
ваются рядом друг с другом на смежных каналах или перпендикулярно друг другу, любой
индуктивный датчик может испытывать эффект интерференции, определяемый взаим
ными помехами. Взаимно помехи создаются, когда на поле датчика приближения накла
дывается поле другого близко установленного датчика. Результат — появление частоты
биений в одном или в обоих датчиках, которая заставляет датчики произвольно пере
ключаться (приводит к дребезгу).
Общие требования к установке и взаимному расположению экранированных и
неэкранированных датчиков приближения, позволяющие избежать взаимных помех,
приведены на рис. 6 .15. Прежде чем выбрать и разместить датчики на установке, спе
цифическая установка и требования позиционирования для этой модели должны быть
согласованы с производителем датчика. Обратите внимание, что большее расстояние
обнаружения для неэкранированных датчиков требует и большего расстояния между
соседними датчиками. Требования по выбору, интерфейсу подключения и поиску не
исправностей датчиков приближения приведены в разделах 6.6 и 6.9. В разделе 6.10
приведен список веб
сайтов поставщиков. Целесообразно, пользуясь информацией с
сайтов, сравнить характеристики датчиков по крайней мере от двух поставщиков.
6.3. ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
Фотоэлектрические датчики используются во многих устройствах и отраслях промыш
ленности, чтобы обеспечить точное обнаружение объектов без физического контакта с
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
383
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
ними. В состав всех фотоэлектрических датчиков входят два компонента: источник света
и приемник света, позволяющий обнаружить присутствие источника. В большинстве
случаев фотоэлектрический датчик является устройством, подобным предельному пе
реключателю, в котором луч света заменяет предельный переключатель, управляемый
механическим движителем. Фотоэлектрические устройства обнаруживают присутствие
объекта или детали, когда она или разрывает пучок света, или отражает луч на фотопри
емник. Изменение светового потока может быть результатом присутствия или отсут
ствия объекта или результатом изменения размера, формы, отражающей способности
или цвета объекта. Фотоэлектрические датчики функционируют на расстояниях от 5 мм
(0,2 дюйма) до более чем 250 м (820 футов). Некоторые устройства лазерного типа мо
гут функционировать на расстоянии до 304 м (1000 футов).
Рис. 6 .15. Монтаж датчиков приближения:
а) экранированные датчики;
б) неэкранированные датчики
384
Все фотоэлектрические датчики изготавливаются при различных размерах кор
пуса и его конструкции. Некоторые типы фотоэлектрических датчиков, производимых
фирмой Omron Electronics LLC, приведены на рис. 6.16 и 6.17. Рассмотрим восемь
датчиков, представленных на этих рисунках.
Рис. 6.16. Фотоэлектрические датчики
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
385
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Некоторые из изображенных моделей датчика имеют источник и приемник света,
смонтированные в отдельных корпусах (рис. 6 .17г), в то время как в других источник и
приемник размещены в одном и том же корпусе (рис. 6 .17б). Размер модулей изменя
ется от датчика с головкой меньше, чем 0,1 дюймов в диаметре (рис. 6 .16в), до датчи
ков, размер которых сопоставим с размерами конечных переключателей (рис. 6.17в).
Один из модулей имеет U
образную форму (рис. 6 .17a) с источником и приемником на
противоположных сторонах U. Перед продолжением работы с фотоэлектрическими
датчиками рекомендуется изучить рисунки и спецификации.
6.3.1. ꇷÓÚ‡ ÙÓÚÓ̋ÎÂÍÚË̃ÂÒÍËı ‰‡Ú̃ËÍÓ‚
Понимание принципа работы фотодатчиков — первый шаг в их использовании и эф
фективном поиске неисправностей. Каждый фотоэлектрический датчик содержит
пять основных компонентов:
источник света или излучатель;
фотоприемник;
линзы;
логическую схему;
выходное коммутирующее устройство.
Источник света. Светоизлучающие диоды (светодиоды) используются как источ
ник света для многих фотодатчиков. Конструкция светодиода, используемая в фотодат
чиках, показана на рис. 6 .18. Чтобы получить различные характеристики чувствитель
Рис. 6 .16. Фотоэлектрические датчики (продолжение)
386
ности, используются светодиоды с излучателями, работающими в инфракрасном диапа
зоне, а также красные, зеленые и синие светодиоды для видимого диапазона. Например,
наиболее эффективные светодиоды инфракрасного излучения генерируют больше све
товой и меньше тепловой энергии, чем светодиоды любого другого цвета. Поэтому инф
ракрасные светодиоды используются в датчиках с максимальным диапазоном чувстви
тельности. Во многих изделиях используется видимый красный луч, чтобы помочь в
установке или визуально контролировать работу датчика. Другие цвета видимого диапа
зона, синий и желтый, используются в устройствах, где важны конкретный цвет диода
или цветовые контрасты. Светодиоды являются хорошими источниками света, посколь
ку они работают в широком диапазоне температур и устойчивы к удару и вибрациям.
Когда необходимы большие расстояния между источником и приемником света, в датчи
ках в качестве источников света используются лазеры. При подобном применении воз
можны расстояния до 304, 5 м (1,000 футов). Обычно применяется лазер красного цве
та так, чтобы обеспечить согласование характеристик источника и приемника.
Рис. 6.17 . Фотоэлектрические датчики
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
387
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Рис. 6 .17. Фотоэлектрические датчики (продолжение)
Рис. 6 .18. Светодиодные источники для фотоэлектрических датчиков
388
Фотоприемник. Фотоприемник используется, чтобы обнаружить присутствие ис
точника света. Этот прибор генерирует ток, изменение которого прямопропорциональ
но количеству падающего на него света. Фотодиоды или фототранзисторы являются на
дежными твердотельными компонентами, наиболее часто используемыми в качестве
фотоприемников. Частоты излучения для источника и приемника часто согласованы,
чтобы улучшить эффективность передачи.
Линза. Светодиоды обычно излучают свет в широкой области (рис. 6 .19), и фото
приемники имеют также широкую область чувствительности к свету. Обратите внима
ние на существенное расширение светового пятна (основания конуса) с увеличением
расстояния. Вследствие этого вместе со светодиодными источниками света и фотоде
текторами используются линзы чтобы сузить область передачи света (рис. 6 .19) и уве
личить расстояние обнаружения датчика. При узком луче источника и узкой области
чувствительности приемника света или поля юстировка может быть затруднена. Однако
при более широком поле видимости уменьшается общая чувствительность датчика.
Рис. 6.19. Линзы фотоэлектрических датчиков
Логическая схема. Логическая схема имеет три функции: (1) модулирует светоди
одный источник света, (2) усиливает выходной сигнал фотоприемника и (3) определяет,
изменилось ли состояние выхода. Интенсивность света, излучаемого светодиодом, пря
мо пропорциональна проходящему через него току. Поскольку светодиоды быстро пере
ключаются, они могут периодически формировать импульсные последовательности с
малым коэффициентом заполнения. При этом импульсы тока имеют высокую амплитуду
при существенно меньшем среднем значении, что позволяет снижать тепловые потери в
приборе при достаточно высоком значении тока.
Выходное устройство. Как только достаточное изменение светового уровня об
наруживается приемником, логическая схема фотодатчика включает выходное уст
ройство датчика, чтобы сообщить системе управления, что состояние рабочей среды
изменилось. Выходное устройство представляет собой комбинацию дискретных и ана
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
389
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
логовых узлов с различными коммутационными устройствами. Сравнение различных
выходных устройств показано на рис. 6.20; изучите рисунок и ознакомьтесь с пред
ставленными параметрами. Дополнительное обсуждение проблем связи с помощью
интерфейса будет продолжено в разделе 6.7.
Рис. 6 .20. Сравнение выходных устройств фотоэлектрических датчиков
Запас. Запас (также называется рабочим запасом или превышением коэффици
ента усиления) — важное понятие, касающееся применения фотоэлектрических дат
чиков. Запасом называется отношение действительного уровня света, зафиксирован
ного приемником к минимальному уровню, необходимому для изменения состояния
выхода. Например, из значений запаса следует:
запас, равный 0, получается, когда фотоприемник не обнаруживает света от
источника. Выход датчика находится на уровне отсутствия света;
запас, равный 1, получается, как только света становится достаточно для измене
ния состояния выхода (из выключенного во включенное состояние или обратно);
запас, равный 20, достигается, когда минимальный световой уровень, требуе
мый, чтобы изменить состояние превышается в двадцать раз. Состояние выхо
да противоположно состоянию с нулевым уровнем запаса.
Запас выражается отношением типа 8:1 или целым числом, сопровождаемым знаком
«раз», например 8×. Оба обозначения указывают, что в восемь раз превышено минималь
390
ное значение света, необходимое для изменения состояния выхода. Запас, или превышение
коэффициента усиления, обычно приводится в справочных данных для фотоэлектрического
датчика в виде графика зависимости запаса от расстояния обнаружения. Превышение ко
эффициента усиления датчика фирмы Omron показано на рис. 6.21. Обратите внимание,
что запас не постоянен, но имеет максимум в некоторой точке в середине диапазона.
Рис. 6.21. Типовой рабочий запас,
или кривая превышения
коэффициента усиления
6.3.2 . êÂÊËÏ̊ ӷ̇ÛÊÂÌËfl, ÔËÏÂÌflÂÏ̊ ‚ ÙÓÚÓ̋ÎÂÍÚË̃ÂÒÍËı ‰‡Ú̃Ë͇ı
Многочисленные модели фотоэлектрических датчиков, изображенные на рис. 6.16 и 6.17,
работают в трех различных режимах обнаружения: проходящего луча света, в режиме об
ратного отражения (иногда упоминаемом как режим отражения) и в диффузном режиме
(также известном как режим приближения или диффузного отражения). Типичные вариан
ты применения, их преимущества и недостатки сведены в таблицу на рис. 6.22. Здесь приве
ден один режим проходящего луча, два режима обратного отражения, пять режимов для
диффузного отражения. Изучите варианты типичного применения каждого типа и выясните
их преимущества. Одни датчики могут функционировать во всех трех режимах, другие же
работают только в одном или двух. Стекловолоконные датчики функционируют во всех ре
жимах и, кроме того, в диффузном режиме со смещенным лучом (на рисунке не показан).
Найдите на рис. 6.16 и 6.17 датчики, которые функционируют в двух или более режимах.
Режим проходящего луча. В датчике для режима проходящего луча, или луча
преломленного света, источник и приемник света размещены в разных корпусах. Эти
два модуля располагаются прямо друг против друга так, чтобы свет источника падал
прямо на приемник (рис. 6 .23). Деталь должна прервать или частично заслонить путь
луча от источника света к приемнику. Датчики луча прямого света характеризуются
самым большим расстоянием обнаружения и самым высоким уровнем рабочего запа
са. Например, на рис. 6.23 датчик 42CA фирмы «Аллен Брадлей» имеет запас, превы
шающий 1000, когда излучатель и приемник вплотную подведены друг к другу, но он
падает до 1 на расстоянии 20 м (65,6 футов). Другие датчики проходящего луча могут
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
391
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
работать при расстояниях между источником и приемником в 274 м (900 футов). Из
за
высоких рабочих запасов режим проходящего луча — самый лучший режим обнару
жения при действии в пыльных или загрязненных индустриальных средах. Например,
при запасе 300× датчик может продолжать правильно работать, даже если 99,67%
общей поверхности линзы между источником и приемником света будет покрыто гря
зью. Эффективный диаметр луча в датчике проходящего света эквивалентен диаметру
линзы между источником и приемником света (рис. 6.24a). Надежное обнаружение
происходит, когда непрозрачный объект перекрывает, по крайней мере, 50 процентов
эффективного сечения луча. Обнаружение объектов меньших, чем эффективный диа
метр луча, лучше всего может быть осуществлено при уменьшении диаметра пучка
апертурами на торцевых сторонах источника и приемника света (рис. 6 .24б). При при
кладном применении следует иметь в виду, что:
режим проходящего луча надежнее всего применять в случаях, когда в отсут
ствие объекта запас высок, а при перекрытии луча объектом — близок к 0,
то есть для непрозрачных объектов;
датчики луча проходящего света не рекомендуется использовать для обнару
жения прозрачных или полупрозрачных объектов. Высокий уровень запаса
позволяет датчику видеть через эти объекты, поэтому датчики с обратным
или диффузным отражением гораздо лучше подходят в этих случаях.
Датчики с обратным и диффузным отражением рассмотрены в следующих разделах.
Рис. 6 .22. Режимы фотоэлектрических датчиков
392
Рис. 6.22 . Режимы фотоэлектрических датчиков (продолжение)
èËÏ 6.5
Датчик 42CA в режиме проходящего луча, или режиме луча преломленного света, на
рис. 6.23 имеет расстояние в 2 фута между сточником и приемником света. Каков
запас на этом рабочем расстоянии?
êÖòÖçàÖ
На рис. 6 .23 пересечение вертикальной линии, проведенной через точку отметки 2
футов на горизонтальной оси, с кривой запаса показывает уровень запаса на верти
кальной оси слева. В этой точке запас равен 100, следовательно, надежная работа
датчика обеспечена.
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
393
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Режим с обратным отражением луча. При самом часто используемом режиме
обнаружения, который называется режимом с обратным отражением луча или отра
жательным режимом, источник и приемник света размещены в одном корпусе. Пучок
света, испускаемый источником (рис. 6 .25), отражается специальным отражательным
устройством обратно на приемник, что вызывает изменение состояния выходного уст
ройства. Объект обнаруживается, когда он разрывает этот пучок света и изменяет со
стояние выходного устройства. Для отражения используются специальные рефлекто
ры, отражающие ленты с цепочками стеклянных ячеек или повернутый ребром куб,
поэтому отражатель распложен не совсем перпендикулярно по отношению к датчику.
Поворот грани рефлектора или отражательной ленты на 15° несущественно влияет на
рабочий запас системы. График кривой запаса для стандартного датчика с обратным
Рис. 6 .23. Режим проходящего луча для фотоэлектрического датчика 42CA
Рис. 6 .24.
Эффективный диаметр луча:
а) полное поле обзора;
б) уменьшение сечения луча с
помощью апертуры
394
отражением луча 42CA приведен на рис. 6.25. Максимальный запас датчика равен 20
(обратите внимание на логарифмический масштаб вертикальной оси) на расстоянии
1 м (3,2 фута). Максимально доступное расстояние обнаружения для этого режима
частично зависит от коэффициента отражения рефлектора или отражательной ленты.
Для изделий датчиков фирмы «Брадлей» в качестве стандарта для определения мак
симального расстояния обнаружения используется круглый рефлектор с коэффици
ентом отражения 100 и диаметром 78 мм (3 дюйма). Рефлектор с коэффициентом 82
отразил бы только 82 процента света относительно стандарта в 78 мм.
Рис. 6.25. Фотоэлектрический датчик 42CA в режиме с обратным
отражением луча
С точки зрения применения датчики имеют следующие характеристики:
монтаж датчиков с обратным отражением луча проще, чем для датчиков прохо
дящего луча, так как необходимо установить и подсоединить только один корпус;
запас при отсутствии обнаруживаемого объекта обычно в 10...1000 раз
ниже, чем в датчиках с проходящим лучом; следовательно, рассматриваемые
датчики нежелательно применять при высоком загрязнении рабочей среды;
трудно использовать стандартные датчики с обратным отражением для обна
ружения объектов, освещенных солнцем, или объектов с высоким коэффи
циентом отражения. Сам объект может отражать достаточно света, чтобы
состояние датчика не изменилось при перекрытии луча объектом. В таких
ситуациях лучшим решением является поляризованный датчик с обратным
отражением.
èËÏ 6.6
Датчик с обратным отражением луча 42CA (рис. 6.25) используется с отражающим
кубом, повернутым ребром и расположенном на расстоянии 3,5 м.
a) Каков рабочий запас на этом расстоянии?
б) Каково максимальное расстояние обнаружения для этого датчика, если запас
должен быть выше 1?
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
395
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
êÖòÖçàÖ
a) На рис. 6 .25 вертикальная линия, проведенная для расстояния 3,5 м на горизон
тальной оси, пересекает кривую запаса на уровне 3, так что надежная работа
датчика возможна.
б) Кривая запаса падает ниже 1 на расстоянии приблизительно 4,75 м, которое и
является максимальным расстоянием обнаружения.
Поляризованный режим с обратным отражением луча. В поляризованных дат
чиках с обратным отражением луча перед источником света и перед приемником рас
положены поляризующие фильтры, фазы которых сдвинуты на 90° относительно друг
друга (рис. 6.26). Из рисунка ясно, что свет источника после прохождения фильтра
имеет горизонтальную поляризацию, и только после прохождения фильтра, располо
женного у приемника, поляризация становится вертикальной. Когда луч прерывается
хорошо отполированным или освещенным солнцем объектом, на приемник приходит
горизонтально поляризованный луч. Вертикальный фильтр блокирует этот поток све
та, приемник на него не реагирует. И выходное устройство остается выключенным.
Рис. 6 .26. Режим поляризованного
обратно отраженного
луча
Когда объект отсутствует, испускаемый горизонтально поляризованный луч ис
точника отражается обратно специальным отражателем, становясь неполяризован
ным. Часть неполяризованного света проходит через вертикальный поляризационный
фильтр приемника и активизирует его, вызывая включение выходного устройства.
Поскольку отражатель деполяризует испускаемый источником свет, приемник
может его «видеть». Свет, отраженный объектом, не изменяет поляризации, так что
приемник «не видит» отражения от полированных деталей. Таким образом, возможно
396
надежное обнаружение объектов с высоким коэффициентом отражения. Применение
датчиков имеет следующие особенности:
расстояние обнаружения для поляризованных датчиков с обратным отраже
нием луча сокращается на 30–40% и запас уменьшается по сравнению с
неполяризованными датчиками. Эти недостатки вызваны потерями в фильт
рах и необходимостью использования видимых красных источников света,
которые являются менее эффективными, чем инфракрасные источники, ис
пользуемые в неполяризованных датчиках. Сравните кривые запаса для по
ляризованного 42CA датчика на рис. 6 .21 с неполяризованной кривой запаса
для того же самого датчика на рис. 6.25. Обратите внимание, что максималь
ный запас для неполяризованного датчика вдвое превышает максимальный
запас для поляризованной модели;
отражающий объект не может быть обнаружен, если он обернут в пластмас
совую пленку, поскольку поляризованный свет деполяризуется, проходя че
рез обертку. Когда
неполяризованный свет отражается блестящим объектом, он проходит через
фильтр приемника, указывая, что луч не был прерван. Для таких случаев не
обходимо рассмотреть применение других режимов обнаружения;
все стандартные рефлекторы деполяризуют свет и подходят для поляризо
ванного режима обратного отражения луча;
только специальные отражающие ленты деполяризуют свет и пригодны для
поляризованного режима обратного отражения луча.
Диффузный режим. В режимах проходящего света и обратного отражения необходи
мо устанавливать узлы системы обнаружения с обеих сторон обнаруживаемого объекта.
Однако часто невозможно получить доступ к обеим сторонам объекта. В этих случаях един
ственным выбором может быть датчик с диффузным режимом. В датчиках с диффузным ре
жимом, иногда называемых фотодатчиками приближения, источник и приемник света нахо
дятся в одном корпусе, так же как и в датчиках с обратным отражением; однако они не
используют специального отражателя. Объект, приближение которого необходимо зафик
сировать, сам отражает луч света от источника обратно на приемник. Свет от источника,
падающий на поверхность объекта, рассеивается, или отражается, под всевозможными уг
лами. Небольшая часть отраженного света, тем не менее, попадает обратно на датчик, обна
руживается приемником и используется, чтобы переключить выходное устройство. Этот
режим работы называется стандартно
диффузным. Общий вид датчика стандартно
диф
фузного режима и соответствующие кривые запаса представлены на рис. 6.27.
Цель состоит в том, чтобы получить как можно более высокий запас для поверхно
стного отражения света. Когда же объект, который нужно обнаружить, отсутствует, от
ражение от других фоновых поверхностей должно быть минимальным, чтобы обеспе
чить запас, как можно более близкий к 0. Диаграмма отражения может быть самой
разнообразной. При отражении от блестящей или зеркальной поверхности большая
часть света отражается в одном направлении, а не рассеивается под всевозможными
углами. Торцевая поверхность датчика должна быть в этом случае параллельна поверх
ности объекта. Напротив, темные матовые объекты могут поглощать большую часть
падающего света; при этом датчик должен быть расположен вблизи от поверхности
объекта. Следовательно, расстояние обнаружения для датчика с диффузным режимом
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
397
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
является функцией цвета объекта, текстуры его поверхности и поверхностной отража
ющей способности. Обратите внимание, что на рис. 6 .27 для датчика 42CA, используе
мого в диффузном режиме, приведены две кривые запаса, соответствующие различным
типам поверхности обнаруживаемого объекта. Чтобы определить максимальное рас
стояние обнаружения, для устройств с диффузным режимом необходимо использовать
калиброванный диффузный объект. В качестве образцового объекта компания «Аллен
Брадлей» использует лист белой бумаги 216×292 мм2 (8,5×11 дюймов2). Такой объект
отражает 90 процентов световой энергии источника. Реальные детали в производстве
чаще всего отражают меньше света. Примеры отражающей способности для типичных
промышленных изделий приведены на рис. 6 .28. Изучите диаграмму и сравните ее с
кривыми запаса на рис. 6 .27.
Рис. 6 .27. Диффузный режим фотоэлектрического датчика 42CA
398
Рис. 6.28. Значения отражающей способности поверхностей для различных
объектов
èËÏ 6.7
Проектировщик системы автоматизации планирует использоватьдатчик 42CA на
100 мм (см. рис. 6.27), чтобы обнаружить картонную коробку, используя стандарт
ный диффузный режим. Коробки расположены на расстоянии 55 мм от датчика.
а) Каков приблизительный запас? Является ли этот проект эффективным?
б) Как можно улучшить разработку?
êÖòÖçàÖ
а) Согласно рис. 6.28, отражающая способность картона равна 40%. Нарисуйте
кривую запаса, изображенную на рис. 6.27, которая должна, очевидно, лежать
между кривой для серой бумаги (коэффициент отражения 18%) и кривой для
белой бумаги (коэффициент отражения 100%). Разность между двумя кривыми
составляет 82% (100–18), а половина от 82 равна 41. Кривая, которая будет
проведена ровно посредине между заданными кривыми, будет соответствовать
отражающей способности 59% (18 + 41). Значение 40% для кривой отражаю
щей способности картона будет примерно посредине между кривыми, соответ
ствующими 59 и 18%. Когда эти оценочные кривые будут построены на графике,
мы увидим, что запас для расстояния в 55 мм лишь немного превышает 1. Следо
вательно, проект должен работать, хотя не очень надежно.
б) Больший запас и более надежная работа получились бы, если бы был выбран
датчик на 400 мм. На расстоянии обнаружения 55 мм этот датчик обеспечил бы
запас между 8 и 9. Обнаружение деталей, расположенных близко к отражающе
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
399
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
му фону, связано с проблемами. В этом случае может потребоваться применение
датчика с диффузным режимом специального типа. Изготовителями предлага
ются пять описанных ниже дополнительных типов датчиков диффузного режима:
с крутым спадом, с фиксированным фокусом, широкоугольный, с фоновым по
давлением и с измерением расстояния до объекта.
Диффузный режим с крутым спадом. Датчики с крутым спадом разработаны так,
чтобы луч исходил от источника света под углом. Таким образом, луч света падает на
объект и отражается на приемник под углом той же величины, но противоположного
знака.Вследствие этого датчики более чувствительны на коротких расстояниях и дают
меньше ложных срабатываний из
за близкого отражающего фона.
Диффузный режим с фиксированным фокусом. В датчиках, предназначенных
для режима с фиксированным фокусом, источник света и приемник установлены под
углом друг к другу, так же как и в режиме с крутым обрезом. Следовательно, их опти
ческие оси пересекаются в некоторой точке перед датчиком. Линзы источника и при
емника фокусируют испускаемый и отраженный свет в определенной точке на фикси
рованном расстоянии перед датчиком. Датчик является очень чувствительным в этой
точке, но намного менее чувствителен вне этого фокуса. Датчики фиксированным фо
кусом в основном имеют три области применения:
надежное обнаружение небольших деталей, помещенных в фокус;
обнаружение на фиксированном расстоянии и игнорирование объектов,
расположенных ближе или дальше этой точки;
обнаружение отпечатанной цветной маркировки при использовании источ
ника света в видимой области (обычно красного, зеленого или синего).
Диффузный широкоугольный режим. Широкоугольные диффузные датчики со
держат источники света с широким углом излучения и приемники со столь же широ
ким углом чувствительности. Вследствие этого датчики идеально подходят для двух
следующих целей:
обнаружение витков. Датчик может обнаруживать присутствие чрезвычайно
тонких многожильных проводов или нитей из другого материала, располо
женных вблизи датчика. Обрыв нити легко обнаруживается, даже когда про
вод перемещается из стороны в сторону перед датчиком;
игнорирование отверстий или дефектов в объектах. Датчики во время обнару
жения игнорируют такие детали, как маленькое отверстие или дефект в объекте.
Диффузный режим с измерением расстояния. Эти датчики работают, как обыч
ные датчики диффузного режима, но могут не только обнаруживать объект, но и изме
рять расстояние от него до датчика.
Режим с подавлением отражения от фона. Это устройство диффузного режима
сравнивает световой уровень естественного отражения от фона со световым уровнем в
присутствии объекта. Выходное устройство управляется разностью этих сигналов, что
позволяет установить присутствие объекта. Фоновое подавление позволяет датчику иг
норировать присутствие фона с высоким коэффициентом отражения позади темного,
менее отражающего объекта. Этот диффузный режим обнаружения идеален, но из
за
сложности датчика его стоимость выше, что ограничивает область его применения.
400
6.3.3. ÍÚÂËÒÚËÍË ÙÓÚÓ̋ÎÂÍÚË̃ÂÒÍËı ‰‡Ú̃ËÍÓ‚
Для наглядности десять основных характеристик датчиков сведены в итоговую табли
цу на рис. 6.16 и 6.17. Рассмотрим содержание отдельных строк.
Строка 1 — «Тип усилителя» идентифицирует тип усилителя (встроенный или
отдельный, постоянный ток/переменный ток) для управления фотоэлектрическим
датчиком. Встроенный датчик подразумевает, что усилитель собран в одном корпусе с
датчиком.
Строка 2 — «Модель», в которой приведено обозначение модели датчика.
Строка 3 — «Свойства» описывает различные характеристики и типичное приме
нение для каждой модели датчика. Например, одни датчики имеют встроенные твердо
тельные усилители, а другие предлагают удаленные или in
line усилители. Транзистор
ные переключатели являются наиболее обычным интерфейсом выхода, но в некоторых
датчиках применяются в качестве выходных контакты реле, изменяющие свое состоя
ние при переходе от световых к темновым состояниям датчика.
Строки 4, 5, и 6. Расстояния обнаружения определены здесь соответственно как
расстояние в режиме проходящего луча, обратного и диффузного отражения,. Обра
тите внимание, что для некоторых моделей приведены все три расстояния; такие моде
ли могут функционировать в трех режимах. Если имеется значение в одной строке, то
датчик предназначен для работы только в данном режиме.
Строки 7 и 8. Выход переменного тока (AC) или постоянного тока (DC) определя
ет конфигурацию выхода, используемую при подключении к управляемому устрой
ству. При конфигурации переменного тока (AC) обычно к выходу подсоединяются кон
такты реле или тиристоры; при конфигурации постоянного тока (DC) на выход
подключается, прежде всего, транзистор или твердотельные переключатели для npn
или pnp
приборов (более подробно интерфейсы датчиков рассмотрены в разделе 6.7.)
Строка 9 — строка источников света. Здесь указан тип и цвет источника света,
изменение интенсивности которого при приближении объекта вызывает изменения в
состоянии приемника и схемы выходного устройства.
Строка 10 — частотная характеристика. Она отражает время, требуемое для
циклических переключений датчика от одного дискретного состояния выхода в другое
при изменении состояния приемника. Характеристика показывает, насколько быстро
выход датчика может циклически переключаться движением объектов, взаимодей
ствующих с лучом света.
Более подробное описание характеристик будет приведено ниже.
6.3.4 àÌÚÂÔÂÚ‡ˆËfl ı‡‡ÍÚÂËÒÚËÍ ÙÓÚÓ̋ÎÂÍÚË̃ÂÒÍËı ‰‡Ú̃ËÍÓ‚
Сокращенный список характеристик для универсального фотоэлектрического датчи
ка модели E3S
A фирмы Omron приведен на рис. 6 .29 и 6.30 . Полные характеристики
и примеры применения можно найти на веб
страницах Omron (см. раздел 6.10). Дат
чик E3S
A выпускается в пяти моделях, и для некоторых из моделей существуют раз
личные модификации Некоторые из характеристик были описаны в предыдущем раз
деле, здесь приведены дополнительные описания.
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
401
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Расстояния обнаружения и образцовые объекты. Расстоянием обнаружения на
зывается расстояние от поверхности датчика до объекта, при котором объект будет об
наружен и выход датчика перейдет из выключенного во включенное состояние. Обрати
те внимание, что расстояние обнаружения на рис. 6 .29 и 6.30
—
функция метода
обнаружения или режима и типа обнаруживаемого объекта. Самое большое расстояние
—
для режима проходящего луча, меньшее расстояние соответствует режиму поляри
зованного обратного отражения, а минимальное расстояние получается для диффузного
режима. Тип и форма образцового объекта также влияет на расстояние обнаружения.
Научитесь различать в справочных данных варианты для различных моделей.
Рабочие коэффициенты, которые воздействуют на расстояние обнаружения,
приводятся на трех типичных графиках рис. 6.31. На рис. 6.31a приведена кривая из
быточного коэффициента усиления, или кривая запаса для работы датчика в диффуз
ном режиме. Обратите внимание, что меньший объект имеет меньший максимальный
запас и уменьшенное расстояние обнаружения.
График на рис. 6 .31б показывает, насколько близко могут быть расположены два
параллельных датчика при работе в режиме проходящего луча, чтобы не возникало вза
имного влияния. К примеру, при расстоянии обнаружения 5 м два модуля могут быть
расположены на расстоянии 30 см, и их работа не ухудшится. Если расстояние обнару
жения становится меньше, позволенное расстояние сближения также уменьшается.
Степень, в которой размер объекта воздействует на расстояние обнаружения при
работе в диффузном режиме, показана на рис. 6 .31в. Как показывает график, чем боль
ше объект, тем больше расстояние обнаружения. Надежное обнаружение происходит
на любом расстоянии под кривой ВКЛ на рисунке. Обратите также внимание, что оче
виден гистерезис устройства. Например, объект 30×30 включает датчик на расстоянии
приблизительно 30 см, но датчик не выключится до тех пор, пока объект не будет ото
двинут приблизительно до 32 см.
èËÏ 6.8
Используйте кривые на рис. 6.31а и в, чтобы определить максимальное расстояние
обнаружения, когда используется белый объект 10×10. Также определите запас на
максимальном расстоянии для того же размера объекта. Каков гистерезис для этого
размера?
êÖòÖçàÖ
Анализ рис. 6 .31в показывает, что для белого объекта 10×10 вертикальная линия
пересекается с кривой ON на расстоянии обнаружения в 27,5 см. Это расстояние
обнаружения отложено на горизонтальной оси, и проведена вертикальная линия
(см. рис. 6 .31а). Эта вертикальная строка пересекается с кривой 10+10 см при за
пасе приблизительно 1.
Этот результат соответствует условию, согласно которому максимальное расстояние
обнаружения соответствует точке, в которой запас уменьшается до 1. Гистерезис при
работе в диффузном режиме по справочным данным составляет 10% от расстояния
обнаружения. Кривые рис. 6.31в показывают гистерезис в 3 см (при значении в 31,5
см для состояния ВЫКЛ и значении 27,5 см для состояния ВКЛ), который близок к
10%, указанным в справочных данных.
402
Рис. 6.29. Характеристики фотоэлектрических датчиков E3S фирмы Omron
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
403
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Рис. 6 .29. Характеристики фотоэлектрических датчиков E3S фирмы Omron
(продолжение)
404
Рис. 6.30 . Характеристики фотоэлектрических датчиков E3S фирмы Omron
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
405
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Рис. 6 .30. Характеристики фотоэлектрических датчиков E3S фирмы Omron
(окончание)
Рис. 6 .31.
Характеристики
датчика E3SA:
а) запас по
коэффициенту
усиления в
диффузном режиме;
б) диапазон
параллельной
работы в режиме
проходящего луча;
в) зависимость
расстояния
обнаружения от
размеров объекта
для двух датчиков
406
Рис. 6.32. Использование датчиков для обнаружения бутылок
Время срабатывания. Вторым важным параметром является время срабатыва
ния. Этот параметр указывает, насколько быстро датчик может циклически переклю
чаться между включенным и выключенным состояниями. Например, если фотоэлектри
ческий датчик применяется для подсчета количества бутылок, пересекающих отметку
на конвейере, то быстрое время срабатывания датчика должно быть меньше времени
пересечения лучом очередной бутылки.
Датчик E3S
A на рис. 6.29 и 6.30 имеет максимальное время срабатывания 0,5 мс
при изменении включенного состояния на выключенное. Использование этой харак
теристики проиллюстрировано примером 6.9 .
èËÏ 6.9
Датчик E3S
A в режиме проходящего луча используется для подсчета количества бу
тылок с аперитивом во время их схода с конвейера, как показано на рис. 6.32.
а) Определите серию датчика, предназначенного для горизонтального крепления, с
выходом для управления pnp
транзистором.
б) Определите максимальную скорость движения конвейера в футах в секунду, при
которой датчик может обеспечить надежный счет.
êÖòÖçàÖ
а) Модель датчика, необходимого для этого применения, — E3S
AT36.
б) Анализ рис. 6.32 показывает, что приемник выключается в точке 1, когда бутыл
ка пересекает луч, и включается в точке 2, когда бутылка минует луч. На осцил
лограмме приемника выключенное состояние продолжается a секунд, а вклю
ченное b секунд. Следовательно, на интервале в a секунд приемник должен
перевести датчик из включенного в выключенное состояние. Поскольку задан
параметр датчика в 0,5 мс для такого перехода, временной интервал а должен
быть не меньше ширины импульса, то есть 0,5 мс. Бутылка может продвинуться
на 1 дюйм (ширина горлышка бутылки) не более чем за 0,5 мс, поэтому макси
мальная скорость движения конвейера Vконв будет равна:
Vконв
= 1д/0,5мс×1фут/12дюймов×1мс/0,001с=166,7фут/с.
Время выключения датчика является критическим, поскольку оно соответствует
кратчайшему расстоянию. Время включения не критично для циклической работы, по
ÅÖëäéçíÄäíççõÖ ÑÄíóàäà îéíéùãÖäíêàóÖëäéÉé íàèÄ
407
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
скольку предоставляемое для этого время вдвое больше. В этом примере показана связь
между временем срабатывания датчика и скоростью движения объекта, взаимодейству
ющего с датчиком. Однако скорость работы датчика редко ограничивает скорость техно
логического процесса автоматической линии. Более часто датчик выбирается, чтобы
соответствовать потребностям системы. Следующий пример 6.10 иллюстрирует этот
принцип.
èËÏ 6.10
Необходимо выбрать датчик для работы в режиме проходящего луча, чтобы считать
миниатюрные реле (см. рис. 6.33). Реле имеют длину 0,5 дюйма и расположены через
такой же разделяющий интервал. Если конвейер движется с максимальной скорос
тью 30 футов/с, каково должно быть минимальное время срабатывания для датчика?
êÖòÖçàÖ
Уравнение в примере 6.9 переписано для времени срабатывания:
Любой датчик со временем срабатывания меньшим, чем 13,9 мс, будет в этом случае
работать нормально.
Рис. 6 .33. Применение
фотоэлектрических
датчиков при упаковке
Другие параметры датчика. При разработке системы автоматизации каждый пара
метр датчика должен быть проверен и сопоставлен с предельными значениями, возникаю
щими при эксплуатации установки. Большинство остальных спецификаций описано в
разделе 6.6.3, или они очевидны. Однако некоторые из них требуют дополнительного по
яснения, которое дается ниже.
Включение при свете/включение в темноте. Включение при свете происходит,
когда выход становится активным при освещении приемника светом источника, вклю
чение в темноте получается в противоположном режиме. Эти режимы выбираются либо
с помощью переключателя, либо путем выбора вывода выходного устройства датчика.
Управление выходным устройством. Имеются датчики с различными схемами вы
ходного устройства, которые соответствуют потребностям интерфейса связи с контрол
лерами систем автоматизации. На рис. 6 .20 приведены преимущества и недостатки наи
408
более часто используемых выходных устройств. Итоговое обсуждение выходных уст
ройств датчиков и требований к связи с помощью интерфейса содержится в разделе 6.7 .
Времена включения и выключения. Устройства задержки обеспечивают пере
менную задержку изменения состояния выхода относительно момента изменения со
стояния входа. Например, датчик E3S
A на рис. 6.29 и 6.30 имеет переменную задер
жки от 0 до 100 мс. Задержка на выбранное время происходит, когда датчик переходит
из включенного в выключенное состояние.
Требования к выбору датчиков приближения, их подключению с помощью интер
фейса и поиску неисправностей в них рассмотрены в разделах 6.7 и 6.9. В разделе 6.10
приведен список веб
сайтов производителей. Используйте Интернет для получения до
полнительной информации о датчиках приближения.
6.4 . àçíÖêîÖâëõ ÇõïéÑçéÉé ìëíêéâëíÇÄ ÑÄíóàäÄ
Пять наиболее часто используемых типов выходного интерфейса датчиков перечисле
ны на рис. 6 .20. Каждый тип выходного интерфейса имеет свои преимущества, необ
ходимые для успешного соединения с контроллером системы. Символы и схемные ре
шения для некоторых из схем вывода показаны на рис. 6.34. Изучите каждый вывод
схемы, чтобы идентифицировать используемый компонент, и сравните схемы с их опи
саниями на рис. 6.20.
6.4.1. Ç̊ıÓ‰̊ ‚̊ÒÓÍÓ„Ó Ë ÌËÁÍÓ„Ó ÛÓ‚Ìfl
Прежде чем описывать индивидуальные схемы, мы изложим концепцию выходов высо
кого уровня (current sourcing) и низкого уровня (current sinking). Выходы низкого уров
ня связаны с npn
транзистором в выходной схеме датчика. В выходах низкого уровня
выходной npn
транзистор активного датчика насыщен (полностью включен), так что это
обеспечивает низкоомный путь на землю. В этом случае выход датчика выглядит как
короткое замыкание на землю для внешней загрузки. При этих условиях ток от положи
тельного внешнего источника на устройство интерфейса течет через нагрузку и выход
датчика, как показано на рис. 6 .34е. Следовательно, при выходе низкого уровня ток те
чет через выход на землю.
Напротив, схема выхода с транзистором pnp реализует выход высокого уровня,
как показано на рис. 6 .34д. Подобно выводу npn, это выход с открытым коллекто
ром (нет никакого внутреннего резистора, подсоединенного к коллектору), при этом
внешнее устройство обеспечивает сопротивление нагрузки коллектора. Когда дат
чик активен, выходной транзистор обеспечивает низкоомный путь к положительно
му полюсу источника питания через эмиттер. Следовательно, напряжение на выходе
датчика (коллектор транзистора) приблизительно равно напряжению питания. При
этих условиях ток течет от вывода датчика по внешней нагрузке на землю. Рассмот
рим схемы рисунков 6.34д и е, чтобы понять концепцию выходов высокого и низкого
уровня.
àçíÖêîÖâëõ ÇõïéÑçéÉé ìëíêéâëíÇÄ ÑÄíóàäÄ
409
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
6.4 .2. äÓÌÙË„Û‡ˆËË ‚̊ıÓ‰‡ ‰‡Ú̃ËÍÓ‚
Интерфейсы выходов датчиков, показанные на рис. 6 .34, представляют собой восемь
различных конфигураций подключения выхода к внешним устройствам. Этими устрой
ствами могли бы быть реле, включающие высокие токи, лампа или пневматический
клапан. В каждом случае внешняя нагрузка должна иметь номинальное напряжение и
ток, согласованные с максимальными значениями выходного устройства датчика.
Например, выходы датчика E3A2 на рис. 6.34д и е рассчитаны на постоянное на
пряжение в 30 В и максимальный ток 200 мА. Внешние устройства не могут превы
шать эти пределы. Рассмотрим различные выходные устройства на рис. 6.34.
Релейное выходное устройство. Релейное выходное устройство на рис. 6.34а
имеет транзисторный ключ npn, который включает реле с набором контактов 1Н2П.
Рис. 6 .34. Схемы выходных цепей датчиков
410
Внешний источник для нагрузки может быть или переменного, или постоянного тока
без всяких требований к полярности. Диод, подключенный параллельно катушке, слу
жит для обеспечения пути спада тока в катушке после размыкания транзисторного
ключа. Напряжение нагрузки полностью изолировано от напряжения питания датчи
ка. Контакты реле в этом датчике E3A2 могут переключать ток в 3 А при напряжении
250 В переменного напряжения или ток в 3 А при 30 В постоянного напряжения.
Выходное устройство с кремниевым управляемым вентилем. Выходное устрой
ство с кремниевым управляемым вентилем (КУВ) показано на рис. 6 .34б. Обратите
внимание на условное обозначение КУВ, включенного в диагональ диодного моста. Для
питания внешней нагрузки используется переменное напряжение. КУВ действовал бы
как выпрямитель, проводя ток только в одном направлении, если бы нагрузка была под
ключена непосредственно к нему, поэтому ток проходил бы только в течение положи
тельного полупериода переменного напряжения. Наличие мостового выпрямителя по
зволяет току протекать через нагрузку в течение обоих полупериодов: и положительного
и отрицательного. В некоторых датчиках КУВ и мост заменены симметричным тиристо
ром (триаком), который проводит ток на обоих полупериодах переменного напряжения.
Оптрон связывает основную схему выходного устройства датчика со схемой драй
вера. Это фотооптическое устройство гарантирует, что источники питания управляю
щей и силовой части датчика будут электрически изолированы друг от друга. Как пока
зывает схема, этот выходной ключ нормально разомкнутого типа. КУВ и мост проводят
ток в 200 мА при максимальном значении 250 В переменного напряжения, минималь
ный ток составляет 5 мА, максимальный ток при включении 2 A и максимальный ток
утечки 1 мА. Минимальный ток необходим, чтобы сохранить КУВ во включенном состо
янии, а ток утечки проходит через КУВ в запертом
Выходное устройство на полевом транзисторе. Выходное устройство на поле
вом транзисторе (FET) приведено на рис. 6.34в. В нем используется полевой транзис
тор, который включается при освещении фотодиода в основной схеме датчика. Ис
пользование полевых фототранзисторов приводит к такой же изоляции выходной цепи
датчика от цепи управления, какая уже была описана ранее. Два полевых транзистора
представляют собой комплементарную пару (истоки соединены электрически), и пе
реходы сток
исток шунтированы обратными диодами, что позволяет ключу проводить
как переменный ток, так и постоянный ток любой полярности. Предельные значения
токов и напряжений указаны на рисунке для датчика модели E3JU.
Ключ высокого и низкого уровня на одном выводе. Схема рис. 6.34г построена
на транзисторе npn. При такой конфигурации выходного устройства можно форми
ровать схему высокого или низкого уровня, в зависимости от того, как подключается
нагрузка относительно источника питания. Наличие мостовой схемы позволяет под
ключать положительный полюс источника питания на красный или черный выход дат
чика и формировать на его выходе питание любой полярности. Полярность внешнего
источника используется, чтобы выбрать режим включенного состояния при освещен
ном или затененном приемнике. Например, полярность на рис. 6 .34г соответствует
включенному состоянию при освещенном приемнике.
Для того чтобы реализовать схему низкого уровня, нагрузка подключается между бе
лым выводом и положительным полюсом источника питания. Схема высокого уровня со
здается при подключении нагрузки, показанном на рис. 6 .34г, — между тем же белым
выводом и землей. Можно использовать один и тот же источник для питания датчика и
àçíÖêîÖâëõ ÇõïéÑçéÉé ìëíêéâëíÇÄ ÑÄíóàäÄ
411
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
внешней нагрузки. При конфигурации высокого уровня (sourcing current) нагрузка может
быть подключена на напряжение логического уровня, и датчик может потреблять ток от
1,5 до 3 мА для логического управления. Это означает, что выходное устройство конфигу
рации высокого уровня может обеспечивать входной сигнал для контроллера системы,
например, для программируемого логического контроллера. В конфигурации низкого
уровня датчик E3S
VS может создавать максимальный ток нагрузки в 80 мА с максималь
ным напряжением эмиттер
коллектор в 1 В. Чтобы защитить выходной npn транзистор
при его случайном закорачивании на источник питания, используется стабилитрон.
Np n и pn p датчики с нормально закрытым и нормально открытым выходом. P
np датчик на рис. 6.34д и np n датчик на рис. 6.34е обеспечивают два варианта выходного
устройства. Один из них имеет обычно разомкнутую конфигурацию (НР), а другой замкну
тую (НЗ). В результате использования транзисторов в схеме рис. 6.34д получается конфигу
рация высокого уровня (current
sourcing), при которой верхний транзистор разомкнут при
отсутствии света, а нижний замкнут. Транзисторные эмиттеры подключены на положитель
ный полюс источника питания, поэтому ток протекает от эммитера к коллектору pn p тран
зистора и затем в нагрузку. Один из выходов драйвера работает в НР
режиме, другой в НЗ.
Для обоих драйверов предусмотрена оптоизоляция, транзисторы шунтированы защитными
стабилитронами, предотвращающими случайное закорачивание выхода на землю.
Схема низкого уровня на рис. 6.34е работает аналогично, но с npn транзисто
рами, подключающими выход на землю, что обеспечивает прохождение тока нагрузки.
В этом случае, так же как и на рис. 6.34д, обеспечиваются НР
и НЗ
режимы выходов
и все другие свойства блока высокого уровня. Оба типа датчиков имеют максимум
тока нагрузки 200 мА при 30 В постоянного тока. Падение напряжения на насыщен
ном транзисторе при токе 200 мА составляет 2 В.
Np n и pnp датчики с переключаемыми выводами. Последние две схемы на
рисунках 6.34ж и з могут работать в режимах высокого и низкого уровня в зависимости
от изменения позиции переключателя. Изучите обе схемы. Обратите внимание, что в
каждой из них используется верхний транзистор pnp типа и нижний np n типа. В
зависимости от положения переключателя выход подключается на коллектор одного из
устройств. Когда переключатель находится в верхнем положении, образуется датчик с
выходом высокого уровня на транзисторе pn p, когда же он переключается в нижнее
положение, активной становится схема низкого уровня на транзисторе pnp. На лице
вой панели датчика (рис. 6 .35) показан переключатель устройств np n/pn p, резис
тор корректировки диапазона чувствительности, переключатель режимов «включено
при освещении» (режим L) и «включено в темноте» (режим D); светодиодные индика
торы стабильной работы и наличия светового потока.
Диапазоны напряжения и максимальных токов для датчика приведены на рисун
ках 6.34ж и з. Падение напряжения на насыщенном транзисторе при максимальном
токе составляет 1,2 В для датчиков npn и 2 В для датчиков pnp .
6.4 .3 . ñÂÔË Ò‚flÁË ‰‡Ú̃ËÍÓ‚ Ò ÍÓÌÚÓηÏË ‡‚ÚÓχÚËÁËÓ‚‡ÌÌ̊ı ÒËÒÚÂÏ
Интерфейсы датчиков, описанные в разделе 6.4 .2, предназначены для тех изде
лий, в которых датчики управляют дискретными устройствами: реле, сигнальными
412
лампами или пневматическими клапанами. Выходные устройства этого типа при соот
ветствующем подключении источника и нагрузки могут работать в конфигурациях как
высокого, так и низкого уровня. Кроме того, датчики часто соединяются с общими
контроллерами автоматизированной системы, такими как программируемые логичес
кие контроллеры ПЛК (PLCS) или контроллеры для станков с числовым программ
ным управлением. В этих случаях для обеспечения совместимости с контроллером не
обходимо тщательно выбирать тип датчика.
Рис. 6.35 . Лицевая панель датчика
6.4.4. ëӄ·ÒÓ‚‡ÌË ˆÂÔÂÈ ‰‡Ú̃Ë͇ Ë ÍÓÌÚÓη
Выходное устройство датчика показано на рис. 6.36 вместе с интерфейсом контролле
ра. Датчик имеет npn
интерфейс низкого уровня, в то время как входной модуль ПЛК
конфигурирован как узел высокого уровня. Общее правило состоит в том, что необхо
димо согласовать выход датчика с входом модуля. Справедливо также и обратное: дат
чики с выходом на высоком уровне должны быть согласованы со входом низкого уров
ня ПЛК. В схеме рис. 6.36 ток вытекает из входного модуля и втекает в выходное
устройство датчика. Обратите внимание, как включены источники питания для этого
интерфейса; токи и напряжения, связанные с этим интерфейсом, должны быть хоро
шо подобраны.
6.5 . ÄçÄãéÉéÇõÖ ÑÄíóàäà Ñãü ëàëíÖå ÄÇíéåÄíàáÄñàà
Дискретные и аналоговые датчики были описаны в начале этой главы. Вы можете вер
нуться к разделу 6.1 .1, прежде чем продолжить дальнейшее изучение материала. Ана
логовые датчики наиболее часто используются в технологических процессах, в кото
рых некоторыми из важных измеряемых параметров являются температура, давление,
ÄçÄãéÉéÇõÖ ÑÄíóàäà Ñãü ëàëíÖå ÄÇíéåÄíàáÄñàà
413
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
поток и уровень. Датчики для перерабатывающей промышленности описываются в
следующей главе. В автоматизированном производстве для сбора почти всей необхо
димой информации используются дискретные датчики; однако иногда необходимы и
аналоговые датчики. В большинстве случаев аналоговые датчики измеряют расстоя
ние. Чаще всего используется два типа аналоговых датчиков: фотоэлектрический дат
чик смещения и индуктивный ультразвуковой датчик расстояния. Работа этих двух
датчиков рассматривается в разделах 6.5.1 и 6.5 .2.
Рис. 6 .36. Согласование цепей датчика и контроллера
6.5 .1 . îÓÚÓ̋ÎÂÍÚË̃ÂÒÍË ‡Ì‡ÎÓ„Ó‚̊ ‰‡Ú̃ËÍË
Многочисленные версии аналоговых датчиков смещения этого типа предлагаются
большинством изготовителей. Здесь описан датчик Z4W
V фирмы Omron (рис. 6 .37).
Корпус датчика не отличается от корпуса любого дискретного фотоэлектрического
датчика, и работа аналогична описанной выше работе дискретных датчиков с диффуз
ным режимом. Однако выходной ток, как показано на рис. 6.37, прямо пропорциона
лен расстоянию от датчика до объекта и изменяется в диапазоне от 4 до 20 мА.
Измеряется расстояние от датчика до боковой поверхности детали, проходящей
перед ним. При изменении толщины объекта изменяется и расстояние до его поверх
ности. При номинальной толщине расстояние составляет 25 мм, и ток датчика равен
12 мА. Когда толщина объекта изменяется на ±4 мм (от 25 до 29 мм и от 25 до 21 мм),
выходной ток изменяется в диапазоне от 4 до 20 мА. В результате расстояние в 21 мм
соответствует 4 мА, при расстоянии 25 мм ток равен 12 мА, а при 29 мм — 20 мА. При
обычном изменении постоянного выходного напряжения от 1 до 5 В расстояние изме
няется от 21 до 29 мм.
Другие характеристики относятся к красному светодиодному источнику света с
диаметром светового пятна в 2 мм в точке измерения. Для точности измерения повер
хность объекта должна быть больше, чем этот диаметр пучка. Разрешающая способ
414
ность датчика — 10 микрон (0,000394 дюймов) в 3000 люкс при внешнем освещении
от лампы накаливания.
Линейность составляет ±3% от полного масштаба, время срабатывания — 5 мс,
изменение из
за влияния температуры составляет ±3% на градус Цельсия, в диапа
зоне температур от —10 до 55 °C. Полный набор характеристик можно посмотреть на
веб
сайте фирмы Omron (см. раздел 6.10).
Рис. 6.37. Светодиодные датчики смещения Z4WV
èËÏ 6.11
При проходе детали под светодиодным датчиком расстояния его выходной сигнал ра
вен 8,571 мА. Определите, насколько эта деталь отличается по толщине от номи
нального значения.
êÖòÖçàÖ
Выходной ток при номинальной толщине детали составляет 12 мА, поэтому в нашей
задаче деталь производит снижение тока на 3,429 мА (12 мА — 8,571 мА). Ток мень
ше 12 мА, так что расстояние от датчика до детали составляет от 21 до 25 мм. Связь
между изменением расстояния и изменением выходного тока установим, поделив
8 мм (±4 мм) на изменение тока в 16 мА (20 мА — 4 мА). Результат равен 0,5 мм/мА.
Изменение расстояния ∆L в миллиметрах для этого примера может быть найдено
следующим образом:
ÄçÄãéÉéÇõÖ ÑÄíóàäà Ñãü ëàëíÖå ÄÇíéåÄíàáÄñàà
415
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
∆L=3,429мА×0,5мм/мА=1,715мм
Итак, измеряемое расстояние равно 23,285 мм (25 мм — 1,715 мм), и деталь имеет
толщину, превышающую номинальное значение на 1,715 мм.
Обратите внимание, что датчик не указывает общую толщину детали, а только ее
изменение по отношению к номинальной толщине.
Рис. 6 .38. Характеристики
датчика 873C
фирмы Rockwell
Automation, Inc.
416
6.5.2. à̉ÛÍÚË‚Ì̊ ÛÎ̧Ú‡Á‚ÛÍÓ‚̊ ‡Ì‡ÎÓ„Ó‚̊ ‰‡Ú̃ËÍË
Индуктивные ультразвуковые датчики для измерения расстояния применяются уже
много лет. Некоторые из первых модулей использовались в системах защиты, чтобы
обнаружить движение, и в камерах «поляроида» для автоматической фокусировки.
Современные датчики имеют широкий диапазон и улучшенную повторяемость при из
мерении расстояний в автоматизированном производстве.
В справочные характеристики датчика 873C фирмы Rockwell Automation (рис. 6.38)
включены характеристики как для аналогового, так и для корректируемого дискретного вы
ходного сигнала. Аналоговая модель имеет выходное напряжение постоянного тока от 1 до
10 В, которое линейно изменяется с изменением расстояния до объекта от 300 мм
(11,8 дюймов) до 1 м (3,3 фута). Кроме того, эффект корректируемого подавления фонового
сигнала позволяет получить максимальный диапазон аналогового устройства, устраняя лю
бые отражения из фоновых объектов, расположенных вне максимального диапазона. Диск
ретная модель имеет выходное устройство с pnp
транзистором для управления нагрузкой.
Наиболее высокая эффективность достигается при выполнении следующих условий:
эталонные объекты имеют плоскую гладкую поверхность. Расстояние обна
ружения уменьшается, когда объект имеет неплоскую округлую форму;
объект должен находиться внутри конуса ультразвуковых импульсов, кото
рый имеет угол не более 4° относительно средней оси;
мягкие материалы, подобные пене или ткани, трудно обнаружить, потому что
они неадекватно отражают звуковые импульсы частотой 200000 Гц;
отражающие поверхности должны быть расположены так, чтобы отразить
ультразвуковые волны обратно на приемник;
температура объекта не должна превышать 100 °C;
любые условия окружающей среды, которые ослабляют звук (например, ко
лебания воздуха), могут уменьшить эффективность датчика.
Другие полезные характеристики включают повторяемость измерений в ±5 мм в
осевом направлении и гистерезис ±15 мм. Полный набор характеристик можно найти
на веб
сайтах фирмы Allen Bradley (см. раздел 6.10).
6.6 . ÇõÅéê à èêàåÖçÖçàÖ ÑÄíóàäéÇ
Датчики используются в различных системах, описание которых заняло бы слишком
много места; однако некоторые типовые варианты применения для индуктивных дат
чиков приближения показаны на рис. 6 .39 .
6.6.1 èËÏÂÌÂÌË ‰‡Ú̃ËÍÓ‚ ÔË·ÎËÊÂÌËfl
Индуктивные датчики приближения на рис. 6 .39a, б, в и д используются в производ
стве, чтобы проверить наличие детали.
ÇõÅéê à èêàåÖçÖçàÖ ÑÄíóàäéÇ
417
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
На рис. 6.39г датчик обнаруживает детали, которые неправильно ориентирова
ны, а на рис. 6.39е — устанавливает пределы перемещения детали при шлифовке.
Применение емкостных и ультразвуковых датчиков показано на рис. 6.40. В пер
вых трех вариантах (рис. 6.40а, б и в) используется емкостной датчик приближения, а
в двух последних (рис. 6 .40г и д) — ультразвуковой датчик, подобный датчику 873C,
описанному выше. Три варианта обнаружения уровня приведены на рис. 6 .40a, б и г. В
первых двух емкостные датчики помещаются около стенки лотка, чтобы проверять
уровень жидкости (рис. 6 .40а) и гранулированного материала (рис. 6 .40б) в лотке.
Чтобы определять уровень жидкости через стенку, жидкость должна иметь значитель
но более высокую диэлектрическую постоянную, чем материал, используемый для
лотка, а стенки лотка должны быть тонкими.
Рис. 6 .39. Применение индуктивных датчиков
418
В третьем варианте обнаружения уровня ультразвуковой датчик используется,
чтобы определить уровень жидкости в резервуаре. В последних двух (рис. 6.40в и г)
датчики проверяют наличие изделий. В первом случае три емкостных датчика прове
ряют, что бисквиты упакованы в коробку. Отметим, что датчики просматривают биск
виты через крышку коробки. Во втором случае набор ультразвуковых датчиков для
работы в дискретном режиме определяет, что ящик правильно заполнен канистрами.
Рис. 6.40. Применение емкостных и ультразвуковых датчиков приближения
6.6.2 èËÏÂÌÂÌË ÙÓÚÓ̋ÎÂÍÚË̃ÂÒÍËı ‰‡Ú̃ËÍÓ‚
Фотоэлектрические датчики могут применяться в трех режимах работы: проходящего,
обратно отраженного и диффузного луча. Все режимы представлены на рис. 6.41.
Датчики на рис. 6.41a, д и ж действуют в диффузном режиме. На первом из этих ри
сунков волоконно
оптические модули расширяют диапазон расстояний обнаружения
при применении диффузного датчика. Здесь присутствие пробки и изоляции для изде
ÇõÅéê à èêàåÖçÖçàÖ ÑÄíóàäéÇ
419
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
лия проверяется через прозрачную крышку при прохождении бутылками контрольной
позиции на конвейере. На двух последних рисунках датчик используется для контроля
двух различных движущихся по конвейеру объектов.
В варианте на рис. 6 .41б датчик с обратным отражением луча используется, чтобы
определить момент, когда бумажные рулоны достигнут заданного диаметра. В вариантах
на рисунках 6.41в и г используется режим проходящего луча с источником света в одном
участке маршрута и приемником на другом его участке. Датчик на рис. 6 .41г использует
контроллер от изготовителя датчика, чтобы обеспечить управление процессом с обрат
ной связью. Приложение на рис. 6 .41д использует два аналоговых датчика расстояния,
чтобы измерить разность расстояний до двух поверхностей детали. При этом, чтобы ука
зать момент, когда деталь находится в положении измерения, используется стандартный
дискретный диффузный датчик, а затем контроллер датчиков записывает значения рас
стояний от обоих аналоговых датчиков.
В следующем разделе показано, как выбрать наиболее подходящий датчик.
6.6 .3. Ç̊·Ó ‰‡Ú̃Ë͇
Существует много различных типов датчиков, и еще большее количество моделей име
ется для каждого типа. Наличие столь широкого ассортимента приборов делает выбор
датчика, наиболее подходящего для конкретного применения, трудной задачей. Для
многих задач одинаково хорошо может подходить несколько различных типов датчиков,
но в некоторых ситуациях для надежной работы необходим специфический тип датчика.
В процессе выбора мы должны последовательно определить следующие четыре
момента:
1. Место, где будет применяться датчик.
2. Должен ли датчик быть юстирован.
3. Какой именно тип датчиков должен использоваться для реализации данного
процесса.
4. Конкретную модель (серию) для выбранного типа датчика.
Рассмотрим каждый этап подробнее.
Где необходимы датчики? На первом этапе необходимо определить место в произ
водственном процессе, где датчики необходимыдля обеспечения обратной связи или
проверки правильности хода выполнения процесса. Поскольку датчики автоматизации
заменяют оператора, вы можете спросить себя: «Что проверял бы оператор?» Ответом
на этот вопрос будет список параметров, которые должны быть измерены и проверены
контактными или бесконтактными датчиками с устройствами обнаружения.
Любая производственная система состоит из многих видов работ или процессов,
таких как подготовка материалов, изготовление, сборка, выходной контроль, упаков
ка и материальный учет. При выполнении этих работ необходимы действия по обнару
жению, идентификации, подсчету, индексации, удалению, заполнению, сортировке и
конвейерной транспортировке. Датчик — это идеальное устройство для обнаружения
изменяющихся условий, связанных с этими действиями и работами. Система датчиков
обеспечивает идентификацию текущего процесса, определяет, соответствует ли ре
альный режим работы установки заданному.
420
Надо определить:
какие условия необходимы для каждой операции, которую нужно выполнить;
какая обратная связь требуется в процессе каждой операции;
как проверить успешное выполнение операции.
Ответы на эти вопросы и укажут на возможные места расположения датчиков
систем.
Считывать или не считывать информацию. На следующем шаге выбора датчика
необходимо решить, насколько важна каждая из идентифицированных областей про
Рис. 6.41 . Применение фотоэлектрических датчиков
ÇõÅéê à èêàåÖçÖçàÖ ÑÄíóàäéÇ
421
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
цесса. Как правило, датчик используется, если стоимость самого датчика и интегриро
вания его в систему меньше, чем стоимость системы без применения датчика. Напри
мер, на рис. 6 .41a два диффузных датчика используются, чтобы проверить, правильно
ли бутылки закрыты пробками. Допустим, что никаких датчиков нет и какая
то бутылка
прошла на следующую операцию без пробки. Повреждение оборудования на следую
щем шаге производственного процесса жидкостью из открытой бутылки может повлечь
гораздо большие расходы, чем установка датчиков, поэтому в этом случае датчики необ
ходимы. В других вариантах применения, аналогичных бункерам на рис. 6 .40a и б, дол
жен быть определен уровень обрабатываемого материала, для того чтобы процесс вы
полнялся правильно.
Здесь необходимо ответить на следующие вопросы:
насколько велика вероятность повреждений или потерь при нарушении ус
ловий работы;
насколько высока вероятность такого нарушения условий работы;
является ли данная операция критичной для всей промышленной системы.
Если вы ответили на любой из этих вопросов «да», значит, вам нужен датчик,
чтобы контролировать эту операцию в системе. Также важно понять, имеются ли тре
бования по технике безопасности. Если ошибка в обнаружении неправильной работы
может привести к производственной травме или смерти оператора, необходимо при
нять меры для обеспечения безопасности.
Если оказалось, что датчик необходим, то требуется определить:
доступные источники питания переменного и/или постоянного тока;
требования к выходным параметрам и нагрузке, а также типу выходного уст
ройства;
время срабатывания — частота срабатывания или время, требуемое для
применения;
характеристики объекта: форма, масса, цвет, отражающая способность, не
прозрачность, материал и расстояние до датчика;
условия окружающей среды — влажность, температура, оседание влаги,
аэрозолей и воздушных взвесей.
Определение типа датчика, пригодного для использования. После принятия
решения о необходимости датчика должен быть определен его тип. Сначала выберем,
какие устройства — контактные или бесконтактные — лучше использовать.
Применение контактных устройств имеет следующие преимущества:
легкость применения и простота понимания работы с нормально замкнутым
и нормально разомкнутым выходом;
высокую повторяемость и устойчивость к электрическим и радиочастотным
помехам;
прочность и изоляцию от производственной среды;
переключение высокого напряжения и тока с минимальным током утечки и
падением напряжения соответственно.
Главный недостаток контактных датчиков — более короткий срок службы кон
тактов из
за быстрого износа механических деталей. Если характеристики и преиму
422
щества контактных датчиков перевесят их недостатки, то следует использовать конеч
ные переключатели. Проектировщик выбирает конечный переключатель, тип приво
да и разрабатывает собачку для данного применения. Однако если применение кон
тактного устройства невозможно или бесконтактные датчики имеют безусловные
преимущества, то должны использоваться последние. К бесконтактным дискретным
датчикам относятся приборы трех типов: индуктивные и емкостные датчики прибли
жения и фотоэлектрические датчики. Для обеспечения надежной работы необходимо
при выборе этих датчиков руководствоваться двумя общими правилами:
1. Использовать фотоэлектрические датчики с проходящим лучом всякий раз,
когда объект проходит на расстоянии более 50 мм от источника и достаточно
велик, чтобы разорвать луч.
2. Использовать индуктивные датчики приближения всякий раз, когда объект
металлический и может проходить на расстоянии менее 50 мм от датчика.
Вообще говоря, фотоэлектрические датчики имеют самый широкий диапазон расстоя
ния обнаружения: от 0 до 39,6 м (130 футов) для некоторых моделей. Обратите внимание,
что увеличение диапазона не обязательно связано с увеличением стоимости и размеров дат
чика. Фотоэлектрические датчики имеют три режима работы: проходящего, обратно отра
женного и диффузного луча. Ниже описаны преимущества и недостатки каждого режима.
Режим проходящего луча:
устойчивость к поверхностной отражающей способности и цвету объекта;
такие датчики лучше всего применять при подсчете изделий;
самый высокий запас и самая лучшая эффективность в загрязненных средах;
способность видеть через прозрачные объекты, которая может быть как пре
имуществом, так и недостатком.
Режим обратного отражения и поляризованного обратноотраженного луча:
является следующим лучшим выбором после режима проходящего луча, осо
бенно когда монтаж возможен только с одной стороны объекта;
расстояния обнаружения меньше, чем в режиме проходящего луча;
оптимальны для больших расстояний, поскольку датчики имеют мертвую
зону (отсутствие обнаружения) обычно на расстоянии 25–150 мм (1–6 дюй
мов) от торца датчика;
более надежная работа, особенно с блестящими объектами; всегда выбирайте
поляризованную модель вместо стандартной модели, если такой выбор доступен;
плохая работа стандартной модели для прозрачных или отражающих объек
тов; используйте специальную модель с поляризованным лучом.
Режим датчиков с диффузным лучом:
расстояния обнаружения от нескольких дюймов до нескольких футов; надеж
но работают в случаях, когда режимы проходящего и обратно отраженного
луча неприменимы;
обнаружение при различной поверхностной отражающей способности объектов;
недостаточная эффективность в подсчете объектов при поглощающих свет по
верхностях, при блестящих поверхностях, неперпендикулярных лучу, а также
ÇõÅéê à èêàåÖçÖçàÖ ÑÄíóàäéÇ
423
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
когда присутствуют очень маленькие детали, среда загрязнена и объекты по
являются в мертвой зоне.
Имеется список дополнительных рекомендаций по выбору датчиков с диффузным
лучом:
используйте датчики с крутым спадом для определения уровня заполнения
сыпучих материалов в открытых бункерах, но не для объектов на неопреде
ленных расстояниях от торца датчика;
используйте датчики с подавлением фона, чтобы обнаружить объекты с низ
кой и высокой отражающей способностью при наличии фона с высоким ко
эффициентом отражения;
используйте датчики с фиксированным фокусом, чтобы:
1. обнаружить грани объектов (второй по оптимальности выбор для по
добных случаев, после режима проходящего луча);
2. обнаружить маленькие детали, равные или больше диаметра пучка;
3. распознать цветную метку с использованием цветного светодиодного
излучателя.
Не используйте датчики с фиксированным фокусом для объектов, располо
женных на неопределенных расстояниях от центра датчика;
используйте широкоугольные датчики с диффузным лучом для маленьких
объектов на близком расстоянии, где слепое пятно может создавать пробле
мы, или для блестящих круглых объектов типа канистр.
Применение индуктивных и емкостных датчиков приближения и ультразвуковых
датчиков в некоторых случаях имеет уникальные преимущества. Перечень достоинств
и недостатков таких датчиков приведен ниже.
Индуктивные датчики приближения:
надежно работают при любом применении с металлическими деталями, которые
проходят близко от датчика (в диапазоне от 0 до 50 мм (1,97 дюймов)), когда:
1. среда сырая и загрязненная или нет необходимости обнаруживать по
верхность;
2. недопустимо наличие мертвой зоны или нет необходимости в обнаруже
нии цветных меток.
Емкостные датчики приближения:
надежно работают, когда детали не металлические, не могут использоваться
фотоэлектрические датчики и деталь проходит на расстоянии от 0 до 30 мм
(1,18 дюймов) от торца датчика;
способны «видеть» сквозь стенки контейнера, сделанные из некоторых ма
териалов, и обнаруживать объекты внутри него;
вызывают проблемы при работе в жестких условиях окружающей среды, на
пример, при высокой влажности.
Ультразвуковые датчики приближения:
обнаруживают крупные объекты на расстоянии до 15 м (49 футов), но со зна
чительными мертвыми зонами;
424
обнаруживают объекты, плоскость которых перпендикулярна направлению
распространения волны;
имеют хорошую устойчивость к фоновому шуму, но большое время сраба
тывания;
плохо обнаруживают мягкие объекты, такие как ткань или пена.
Вторым шагом в процессе выбора датчика является использование только что
описанных критериев. И заключительным шагом является выбор конкретной модели
(серии) датчика, описанный ниже.
Выбор бесконтактных моделей датчика. На этом шаге тип бесконтактного датчика
(фотоэлектрического или датчика приближения) уже установлен и определен его режим
(индуктивный, емкостной, проходящего, обратно отраженного или диффузного луча). Од
нако имеются сотни моделей датчиков, из которых приходится выбирать, так что необхо
димо и далее сужать область поиска, чтобы найти конкретный датчик, оптимальный для
данного применения. Должны быть определены следующие параметры: тип датчика, точ
ное расстояние обнаружения, напряжение источника питания, метода или режима, тип
выходного устройства и частотная характеристика или время срабатывания. Основываясь
на этих параметрах, изготовители датчика обеспечили на своих веб
сайтах поиск всех мо
делей, которые удовлетворяют этим критериям. Инструмент поиска по параметрам для
устройства фирмы Omron показан на рис. 6 .42. Обратите внимание, что для каждого из
параметров предусмотрено раскрывающееся меню для выбора критерия поиска. Пользо
ватель вводит только самую необходимую информацию, и механизм поиска выдает пере
чень всех датчиков, которые удовлетворяют перечисленным критериям. Полученный спи
сок включает все датчики, которые удовлетворяют одному или нескольким выбранным
критериям. Критерии размещены в верхней части списка и выделены полужирным шриф
том. Пользователь может просмотреть список и найти датчик, в наибольшей степени со
ответствующий необходимым критериям.
Рис. 6.42. Поиск фотоэлектрических датчиков фирмы Omron по параметрам
ÇõÅéê à èêàåÖçÖçàÖ ÑÄíóàäéÇ
425
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
èËÏ 6.12
Выберите тип датчика и режим, наиболее подходящий для каждой из следующих тех
нологичесских операций:
a. Счет коробок (квадратных со стороной 18 дюймов) на 24
дюймовой конвейер
ной ленте, с полным доступом к обеим сторонам конвейера.
б. Счет блестящих сосудов для термосов, перемещающихся по конвейеру. Разре
шен доступ к обеим сторонам конвейера, но датчик должен быть расположен на
расстоянии 18 дюймов от деталей.
в. Обнаружение маленьких металлических винтов, поступающих из подающего
лотка на пару металлических направляющих.
г.
Обнаружение маленького черного реле на печатной монтажной плате с высоким
коэффициентом отражения. Датчик должен быть размещен на 6 дюймов выше
реле и платы.
д. Проверка уровня шампуня в прозрачных пластмассовых бутылках, движущихся
по конвейеру. Единственный датчик должен быть расположен на расстоянии 0,5
дюйма с одной стороны от проходящей бутылки.
е. Предложите другой датчик для примера на рис. 6.40a.
ж. Обнаружение передней кромки пластины, перемещающейся по конвейеру.
Имеется доступ только сверху от детали.
з. Обнаружение блестящих круглых пластмассовых канистр на входе в машину для
маркировки. Датчик должен быть установлен в 1,5 дюймах от детали, с другой
стороны объекта может быть установлен отражатель.
и. Обнаружение присутствия куска металла при входе на машину подделывания.
Доступ имеется только с одной стороны машины, но датчик может быть установ
лен настолько близко к детали, насколько это необходимо.
êÖòÖçàÖ
a. Следует использовать датчик с проходящим лучом, поскольку это наилучший
выбор при доступе к обеим сторонам объекта.
б. Следует использовать датчик с проходящим лучом, поскольку отражения могут
уменьшить вероятность обнаружения. Используйте поляризованный датчик с
обратно отраженным лучом для надежности обнаружения.
в. Металлические направляющие не позволяют использовать индуктивные датчи
ки приближения. Используйте датчик с диффузным лучом и с фиксированным
фокусом, сфокусировав его на винтах. Широкоугольные датчики с диффузным
лучом не могут использоваться из
за других устройств, которые могут находить
ся в поле обнаружения.
г.
Основными проблемами здесь являются фон с высоким коэффициентом отра
жения, неметаллический объект, отсутствие бокового доступа и расстояние об
наружения в 6 дюймов. Расстояние слишком велико для емкостного датчика
приближения, поэтому необходимо использовать датчик с диффузным лучом и
подавлением фона.
д. Прозрачная пластмассовая бутылка допускает применение емкостного датчика
приближения или датчика с диффузным лучом. Однако малое расстояние обна
ружения не позволяет использовать простой датчик с диффузным лучом из
за
426
наличия мертвой зоны. Может быть использован датчик с диффузным лучом и с
фиксированным фокусом, чтобы после обнаружения пробки проверить присут
ствие бутылки, а затем может быть проверен и уровень.
е. В этом случае могут использоваться два датчика с диффузным лучом и крутым
спадом. В качестве альтернативного решения можно предложить один ультра
звуковой датчик.
ж. Для обнаружения границы может быть предложен либо датчик с проходящим
лучом, либо датчик с диффузным лучом и фиксированным фокусом. При доступе
только с одной стороны должен использоваться датчик с диффузным лучом и
фиксированным фокусом.
з. Для выполнения этой задачи мог бы быть предложен датчик с обратным отраже
нием, но близкое расстояние обнаружения приходится на мертвую зону. Следо
вательно, в данном случае широкоугольный датчик с диффузным лучом является
самым лучшим выбором.
и. Для этой цели лучше всего применить индуктивный датчик приближения.
èËÏ 6.13
Используйте поиск по параметрам на веб
сайте фирмы Omron (см. рис. 6.42), чтобы
получить список датчиков, удовлетворяющих следующим условиям:
a. Датчик на рис. 6 .41б, фотоэлектрический с поляризованным обратно отражен
ным лучом и расстоянием обнаружения в 2 м. Выходное устройство должно ис
пользовать реле.
б. Датчик на рис. 6 .39б, используемый, чтобы обнаружить металлическую крышку
бутылки, является индуктивным датчиком приближения и расположен на 35 мм
выше крышки. Выходное устройство должно представлять собой устройство низ
кого уровня и включаться при обнаружении.
в. Повторить предыдущий пункт этого примера, воспользовавшись руководством
по выбору датчиков приближения фирмы Allen Bradley.
êÖòÖçàÖ
Для решения каждого из пунктов примера, используйте поиск на веб
сайте фирмы
Omron. Откройте веб
сайт фирмы Omron (см. раздел 6.10), чтобы ввести параметры
для поиска. Вы должны выбрать интересующий вас , затем воспользоваться автома
тическим поиском, который выдаст внизу страницы краткий список датчиков. Попро
буйте самостоятельно повторить следующие шаги и сверить свои результаты с приве
денными ниже.
a. Для поиска были введены три параметра: метод обнаружения — поляризован
ный обратно отраженный луч, расстояние обнаружения — 2 м и тип выходного
устройства — реле. Результатом поиска явилось большое количество датчиков
с одной или несколькими подходящими характеристиками. Например, первые
двадцать четыре датчика с поляризованным обратно отраженным лучом пригод
ны для расстояния обнаружения в 2 м, но не имеют реле в качестве выходного
устройства. Только двадцать пятым в списке был универсальный датчик с поля
ризованным обратно отраженным лучом E3JU
R5M4
MN1, имеющий расстоя
ние обнаружения в 5 м (необходимое расстояние 2 м, но при 5 м датчик работает
так же хорошо) и выходное устройство, содержащее реле.
ÇõÅéê à èêàåÖçÖçàÖ ÑÄíóàäéÇ
427
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Рис. 6 .43. Опции поиска датчика приближения
б. Три параметра были введены в поля поиска для датчиков приближения (рис. 6 .43).
Материал объекта — железо, как и было задано, но поскольку расстояние обнару
жения 35 мм не было доступно, то использовалось ближайшее доступное расстоя
ние 50 мм — больше заданного. Было выбрано выходное устройство с np n тран
зистором, поскольку оно обеспечивает требуемый выход низкого уровня. Первый
датчик, полученный в результате поиска, TL
LP50, имел подходящие характеристи
ки, однако был слишком велик (диаметром в 3 дюйма). Проект крепления датчика
был изменен так, чтобы датчик находился в 20 мм от крышки бутылки. Поиск по
расстоянию обнаружения в 20 мм дал несколько датчиков, удовлетворяющих крите
риям. Эти датчики цилиндрического типа имели диаметр всего 1,65 дюйма и удов
летворительно работали в проекте.
Из приведенного примера следует важный вывод: часто решение является комп
ромиссом между желаниями проектировщика системы и решениями, определя
емыми имеющимся на рынке оборудованием. Окончательный вариант проекта с
расстоянием обнаружения 20 мм прекрасно работает, а выбранный датчик на
много проще монтировать, чем датчик большего диаметра.
в. Опции поиска датчика приближения фирмы Allen Bradley приведены на рис. 6 .44 .
Следуя алгоритму блок
схемы, вы достигнете результата перед последним или
предпоследним вопросом. Проверка характеристик датчика показывает, что ма
ленькие датчики имеют максимальное расстояние обнаружения в 15 мм. Однако
датчик 871F имеет расстояние обнаружения от 50 до 65 мм, но относительно боль
шую площадь.
428
Датчики подвергаются разнообразным воздействиям производственной среды,
поэтому они повреждаются чаще, чем другие элементы автоматизированной системы.
Если вы станете инженером или технологом производства, вы должны будете уметь
найти подходящую замену сломанному датчику. А при решении этой задачи вышепре
веденная информация по выбору датчика может вам весьма пригодиться.
6.7 . èéÑäãûóÖç.àÖ ÑÄíóàäéÇ
ä ñÖèüå èàíÄçàü à ìèêÄÇãÖçàü
Датчики обычно имеют следующие номинальные напряжения питания: от 10 до 30 В
постоянного тока, от 20 до 130 В переменного тока, от 90 до 250 В переменного тока и от
20 до 250 В постоянного или переменного тока. Эти варианты питающих напряжений
обычно доступны в цеховых сетях питания. Когда используются датчики и нагрузки пе
ременного тока, один и тот же источник переменного тока может питать датчик и нагруз
ку, но большинство датчиков постоянного тока требуют раздельных источников питания
и нагрузки, чтобы изолировать электронику датчика от сети переменного тока.
6.7.1 . Ñ‚ÛıÔÓ‚Ó‰Ì̊Â Ë ÚÂıÔÓ‚Ó‰Ì̊ ‚̊ıÓ‰̊ ‰‡Ú̃ËÍÓ‚
Выходы датчиков обычно разделяются на двухпроводные и трехпроводные. Двухпро
водные устройства имеют выходной ключ, который подключается последовательно с
нагрузкой и источником питания.
Реле, КУВ и выводы полевого транзистора на рис. 6 .34a, б и в соответственно
являются примерами двухпроводных выходных устройств. Обратите внимание, что
нагрузка, источник питания и выходной ключ соединены последовательно. Как видно
из рис. 6.34в, датчик имеет два дополнительных вывода, подводящих питание к его
схеме управления. Однако в некоторых двухпроводных датчиках источники питания
нагрузки используются и для питания датчика, так что необходимо только два провода.
В конфигурации трехпроводного выхода два провода из трех подводят питание для
датчика, а третий подключает нагрузку.
Выходы низкого уровня (с npn
транзисторами) и высокого уровня (с pnp
транзи
сторами), показанные на рис. 6 .34г — 6.34и, представляют собой примеры трехпро
водных выходов. Обратите внимание, что в каждом из этих выходов два провода ис
пользуются для подачи питания на датчик, а третий провод подсоединяется к нагрузке.
6.7.2 . чÚ̃ËÍË ‚ ÎÂÒÚÌË̃Ì̊ı ÂÎÂÈÌ̊ı ÎÓ„Ë̃ÂÒÍËı ÒıÂχı
Автоматические системы, которые используют бесконтактные датчики, обычно уп
равляются от программируемого контроллера, управляющего всей системой по за
данному алгоритму. Если для этой цели применяется логический контроллер (PLC), то
каждый датчик подключается к соответствующим выводам его входной платы. Состо
èéÑäãûóÖç.àÖ ÑÄíóàäéÇ ä ñÖèüå èàíÄçàü à ìèêÄÇãÖçàü
429
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
яние датчика преобразуется в состояние внутреннего логического бита в PLC. На
грузки или выходы подключаются к соответствующим выводам выходной платы PLC.
Логика подключения нагрузок или выходов определяется сложным алгоритмом уп
равления PLC, в котором используются и данные от датчиков системы.
Рис. 6.44 . Алгоритм выбора датчика (из руководства по выбору датчиков
приближения фирмы Allen Bradley)
430
6.7.3. èÓÒΉӂ‡ÚÂÎ̧ÌÓÂ Ë Ô‡‡ÎÎÂÎ̧ÌÓ ÔÓ‰ÒÓ‰ËÌÂÌË ‰‡Ú̃Ë͇
Датчики могут использоваться и без PLC
контроллера в схемах с последовательной или
параллельной конфигурацией, чтобы выполнять простые алгоритмы управления нагруз
ками в лестничных релейных логических схемах. Выходные устройства с реле и полевыми
транзисторами, показанные на рис. 6.34a и в, можно включать последовательно или па
раллельно в соответствии со схемами рис. 6.45. Выходные устройства с np n и pnp
транзисторами на рис. 6.34г — 6 .34з также можно подключить по схеме на рис. 6 .46,
чтобы реализовать последовательное и параллельное логическое управление. Парал
лельное подключение датчиков с np n или pnp транзисторами на выходе можно осу
ществить по схемам рис. 6 .46a и б, но они все должны иметь выводы одинакового типа.
Количество датчиков в таких схемах может увеличиваться до тех пор, пока суммарный ток
утечки не станет проблемой.
Рис. 6.45. Монтажные схемы датчиков с двумя проводами
Последовательное соединение трехпроводных выходных устройств с npn
транзистора
ми может осуществляться по схеме рис. 6 .46в. Обратите внимание, что земляной вывод
одного датчика связан с сигнальным выводом следующего и лишь последний датчик ряда
подключен на землю. В результате время срабатывания равно времени отклика первого дат
чика плюс сумма времен включения других. При этом выход каждого датчика должен быть
рассчитан на сумму максимальных токов нагрузки последующих датчиков и тока нагрузки.
èéÑäãûóÖç.àÖ ÑÄíóàäéÇ ä ñÖèüå èàíÄçàü à ìèêÄÇãÖçàü
431
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Последовательное соединение трехпроводных выходных устройств с pnp тран
зисторами может осуществляться по схеме рис. 6.46г. Однако выход одного датчика
связан с выводом питания следующего, и лишь последний датчик ряда подключен на
источник питания. Последний вывод нагрузки подключен на землю. Для времени сра
Рис. 6 .46. Монтажные схемы датчиков с тремя проводами
432
батывания и уровней тока нагрузки справедливо все, что было рассказано выше о пос
ледовательном соединении устройств с npn транзисторами.
6.8 . ëàåíÖåõ íÖïçàóÖëäéÉé áêÖçàü
Применение систем технического зрения при автоматизации производства быстро
расширяется, поскольку при этом снижается стоимость системы, существенно растут
ее возможности и интеллект, а размеры камеры и ее контроллера резко снижаются.
Применяются такие системы при пяти общих операциях: идентификации детали, рас
положении детали, ориентации детали, проверке детали и нахождении диапазона.
Идентификация детали. Система технического зрения сохраняет данные для различ
ных деталей в памяти, чтобы использовать для идентификации при входе деталей в рабо
чую область. Система может узнавать характеристики различных деталей и идентифици
ровать каждую деталь по двухмерному изображению. Основываясь на анализе образа
детали, система технического зрения определяет форму воздействия технологической ус
тановки на конкретную деталь. Системы технического зрения также выполняют многие
функции, которые прежде возлагались на системы штрихового кода. Такие системы счи
тывают штриховые коды и с их помощью извлекают из базы данных данные об изделии.
Размещение детали. Технология системы технического зрения позволяет авто
матизированной системе размещать в рабочей области беспорядочно поступающие
детали. Система технического зрения измеряет координаты X и Y от центра системы
координат камеры до центра появившейся детали. Эта операция наиболее часто ис
пользуется системой робота для подведения механизма захвата к детали, которую не
обходимо переместить.
Ориентация детали. Ориентация детали и ее расположение связаны, потому что
механизмом захвата робота каждая деталь должна быть захвачена определенным спо
собом. Система технического зрения обеспечивает информацию об ориентации дета
ли и данные, которые используются, чтобы управлять механизмом захвата робота и
обеспечить его правильную ориентацию для осуществления захвата. При автоматизи
рованной обработке детали система технического зрения использует множество пара
метров ориентации, как полученных путем измерения, так и рассчитанных по изме
ренным данным. Информация об ориентации детали используется, когда роботы не
могут проверить, правильно ли детали или изделия ориентированы для осуществления
автоматизированной сборки.
Проверка детали. Системы технического зрения используются, чтобы проверить
точность размеров детали (например, ее диаметр) и ее геометрию (например, количе
ство отверстий). Детали измеряются камерой и вычисляются их размеры; одновре
менно система технического зрения проверяет детали на отсутствие любого свойства
или на изменение в геометрии детали.
Определение пространственного положения. В некоторых случаях система ис
пользует две или несколько камер, чтобы измерить координаты X, Y, Z, определяющие
пространственное положение детали. Эта методика также применяется для измере
ний и вычислений, относящихся к внутренним областям деталей.
ëàåíÖåõ íÖïçàóÖëäéÉé áêÖçàü
433
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Оборудование, которое может использоваться в пяти вышеописанных операци
ях, выпускается большинством изготовителей систем технического зрения.
6.8 .1. ëËÒÚÂÏ̊ ÚÂıÌË̃ÂÒÍÓ„Ó ÁÂÌËfl Ë ‚‡Ë‡ÌÚ̊ Ëı ÔËÏÂÌÂÌËfl
Блок
схема системы технического зрения фирмы Omron, приведенная на рис. 6 .47, пока
зывает архитектуру, используемую для реализации системы технического зрения. В этой
конфигурации система технического зрения полностью автономна; однако некоторые из
готовители роботов, например фирма Adept, встраивают систему технического зрения не
посредственно в контроллер робота. В состав основных компонентов систем технического
зрения входит одна или несколько камер, контроллеры камер, схемы интерфейса и общая
система управления для камеры и технологического оборудования (PLC), дискретные
входы для синхронизации датчиков, источник питания, жидкокристаллический дисплей
(ЖКД) с плоским экраном, пульт программирования и система освещения деталей.
Рис. 6 .47. Компоненты системы технического зрения
434
Работа системы. Технологическая система технического зрения обрабатывает изобра
жения, зафиксированные с помощью камер, использующих полупроводниковые приборы с
зарядовой связью (ПЗС) или устройства на базе комплиментарной металло
оксидной тех
нологии (CMOS). Камеры обоих типов используют массив твердотельных светочувстви
тельных ячеек, называемых пикселями, сформированных на подложке интегральной схемы.
Каждая ячейка, или пиксель, является маленьким световочувствительным транзистором,
выходной сигнал которого зависит от интенсивности падающего на него света.
Существуют две основные конфигурации таких систем: матричные формирователи
изображения и линейные матрицы. На рис 6.48 показано, как организованы датчики
каждого типа. Камера с матричным изображением 1024×1280 пикселей и закреплен
ным на ней светодиодным источником света, показанная на рис. 6 .48a, фиксирует при
движении конвейера числовую информацию и данные штрихового кода. На рис. 6 .48б
линейная матрица на 6144 пикселей, установленная на высокоскоростном конвейере,
одновременно просматривает данные одной строки. Скорость просмотра при этом
выше, поскольку при каждом просмотре обрабатывается только малая часть изображе
ния. Линейная матрица выполняет просмотр строки, в то время как матричный форми
рователь изображения выполняет просмотр целой области. Камеры с ПЗС точны, име
ют высокое быстродействие и хорошую линейность.
Измерения в системе технического зрения проводятся в единицах серой шкалы,
измеряемым параметром является интенсивность света, а элементом измерения служит
пиксель. Линза системы технического зрения фокусирует свет от детали на световочув
ствительную поверхность ПЗС или CMOS. Двумерная поверхность на рис. 6 .48 разде
лена на маленькие области, или ячейки, названные пикселями. Разрешающая способ
ность системы технического зрения непосредственно пропорциональна числу пикселей
на светочувствительной поверхности. Например, ПЗС с массивом 1024×1280 будет
иметь более высокую разрешающую способность, чем ПЗС с массивом 128×128 пиксе
лей. Каждый пиксель создает заряд, пропорциональный количеству света, достигающе
го светочувствительной поверхности через объектив фотокамеры. Это значение заряда
представляет собой аналоговый сигнал, который преобразуется в двоичный код цент
ральным процессором системы технического зрения. В отсутствие света пиксель вык
лючен, но когда интенсивность света достигает уровня насыщения, пиксель полностью
включается. Между этими двумя предельными значениями существуют полутона, кото
рые заставляют пиксель быть возбужденным, то есть частично включенным. Число про
межуточных состояний между включенным и выключенным называется шкалой ярко
сти. Современные системы имеют шкалу яркости 0 до 255. Шкала яркости пикселя дает
численное выражение яркости для одного маленького пятна на детали. Камеры в боль
шинстве систем технического зрения соответствуют стандарту RS
170, который требу
ет сканирования этого изображения, со скоростями, достигающими тридцати кадров в
секунду, с чередованием четных и нечетных строк.
Система технического зрения фиксирует изображение, когда сигнал синхрони
зации от датчика показывает, что деталь находится в положении, необходимом для
сбора данных об изображении. Когда изображение зафиксировано, система переда
ет данные на центральный процессор для анализа их системой технического зрения.
Тип анализа зависит от алгоритма работы системы и требований, определяемых ее
применением.
ëàåíÖåõ íÖïçàóÖëäéÉé áêÖçàü
435
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Применение. Четыре типичных применения для системы технического зрения изоб
ражены на рис. 6 .49. Внимательно прочтите надписи на рисунке. На рис. 6 .49a показано,
как используется датчик синхронизации, чтобы инициировать сбор данных изображения в
момент, когда коробка будет находиться перед камерой. Обратите внимание, что коробки
расположены равномерно и что следующая коробка на конвейере снова инициирует про
Рис. 6 .48. Камеры линейных плоскостных систем технического зрения:
а) матричный массив;
б) линейный массив
436
верку. Камера 0 проверяет размер коробки и определяет, закрыта ли она, в то время как
камера 1 читает метку. Во втором случае, показанном на рис. 6 .49б, система технического
зрения осматривает упаковку с таблетками, чтобы проверить наличие таблеток в упаков
ке, и проверяет коды даты и партии. Данные, зашифрованные в метке, пересылаются из
системы технического зрения по каналу последовательной связи в систему управления
процессом. На рис. 6 .49в показано использование двух камер в целях проверки размера,
соответствия и данных кода на бутылках, перемещающихся с высокой скоростью. Здесь
датчик синхронизации также запускает сбор данных об изображении при появлении оче
редной бутылки. И наконец, в случае, показанном на рис. 6 .49г, используется одна камера
для определения координат X и Y для беспорядочно размещенных на конвейерной ленте
деталей. Данные передаются по шине последовательной связи на контроллер робота, ко
торый, основываясь на полученных данных, изменяет координаты захвата.
Рис. 6.49. Применение систем технического зрения
ëàåíÖåõ íÖïçàóÖëäéÉé áêÖçàü
437
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
6.8 .2. íËÔ̊ ÒËÒÚÂÏ ÚÂıÌË̃ÂÒÍÓ„Ó ÁÂÌËfl
Системы технического зрения делятся по типу используемого сигнала на три класса:
двоичные, серые и цветные. Основными системами визуальной проверки являются дво
ичные системы как самые дешевые и простые в использовании. Они работают с изобра
жениями, составленными из черно
белых пикселей, и вычисляют результаты, считывая
пиксели, чтобы определить форму или размер объекта. Двоичные системы позволяют
проверять силуэты, конфигурации и контуры и лучше всего подходят для измерения пло
щади и установки размеров. Этот тип системы плохо работает, когда контрастность света
низка или изменяется в процессе измерения, в этом случае система не может обнаружить
недостатки в появляющихся деталях. Полутоновое отображение обычно обрабатывает
изображения, использующие 256 черно
белых уровней. Наиболее популярная полутоно
вая методика обработки изображений сравнивает появляющееся изображение с шабло
ном или моделью. Корреляция между изображением и шаблоном используется, чтобы
принять решение об отбраковке детали. Полутоновая обработка при определении разме
ров более точна, чем двоичная, благодаря методике обработки подпикселей. При этом
край объекта может быть определен с точностью менее одного пикселя, поэтому могут
быть обнаружены поверхностные недостатки, шероховатости, текстура и тени. Однако
это более дорого и в некоторых случаях требует большего времени на обработку. Цветные
системы обработки информации используют красные, синие и зеленые части цветового
спектра, чтобы обнаруживать и различать оттенки цвета, которые имеют значение в пи
щевой фармацевтической промышленности. Задачи нахождения пятен на пищевых про
дуктах и проверки цвета таблеток в лекарственных упаковках требуют цветной системы
технического зрения. Цветные системы более дороги, чем системы первых двух типов, но
в некоторых вариантах применения они обеспечивают уникальные преимущества, кото
рые компенсируют повышение стоимости.
6.8 .3. äÓÌÙË„Û‡ˆËË ÒËÒÚÂÏ̊ ÚÂıÌË̃ÂÒÍÓ„Ó ÁÂÌËfl
Существует три конфигурации системы технического зрения: автономная, основанная
на персональном компьютере (ПК) и основанная на VME.
Автономные системы. Наряду с тем, что все три конфигурации предполагают
некоторую степень модульности для настройки, автономные системы, подобные моде
ли F160 фирмы Omron (рис. 6 .47), обладают еще и свойствами, которые делают их
хорошо подходящими для целей автоматизации производства. Эта система техничес
кого зрения «черных ящиков» использует интегральные схемы, специфичные для
каждого применения (ASIC), или системы на чипах (SoC), что позволяет им повысить
скорость обработки информации. Поэтому они являются самыми быстродействующи
ми из существующих систем. Кроме того, автономные системы непосредственно со
гласуются с другими устройствами автоматизации производства типа программируе
мых логических контроллеров, фотоэлектрических датчиков и датчиков приближения,
с системами передачи данных и радиочастотными системами идентификации. Они пи
таются от промышленной сети и работают в широком диапазоне температур, механи
ческих колебаний и электрических помех.
438
Cистема с использованием ПК. Обычно состоит из микроЭВМ и платы обработ
ки, которая включает специализированную ИС системы технического зрения. При
использовании центрального процессора (ЦП) компьютера снижается стоимость сис
темы и облегчается совершенствование технологического процесса. Несмотря на то,
что стандартные системы дешевле остальных, они не могут функционировать в жест
ких условиях промышленного производства. Существуют, конечно, и ПК, предназна
ченные для использования в таких условиях, но они дороже, что уменьшает преимуще
ства использования систем с использованием ПК.
Системы, основанные на VME, стандартных шинах Института электрических и
электронных инженеров (ИИЭРА), используются в промышленных устройствах про
верки, в которых надежность работы системы сочетается с гибкостью платформы
пользователя. Система технического зрения и компьютерные компоненты подключа
ются с помощью штырьковых и разъемных соединений к шине, которая увеличивает
скорость передачи сигнала и меньше подвержена воздействию производственной сре
ды. Однако такие системы стоят дороже.
Каждая конфигурация предполагает три уровня эффективности.
Высокая эффективность/фиксированная позиция. На этом уровне применяет
ся просмотр пакетов с помощью одной или нескольких камер со скоростью 560 кад
ров/мин. Интервал пакета на конвейерах с шириной ленты до 75 дюймов обычно со
ставляет 8 дюймов. Хорошее поле обзора (FOV) достигается с помощью установки
камеры в 36 дюймах от деталей.
Средняя эффективность/фиксированная позиция. Этот уровень находит примене
ние для чтения штрихового кода при складской идентификации и используется для общей
сортировки изделий при движении конвейера. Одна или несколько камер используется
при скорости сбора данных 350 кадров/мин или менее. Типичная глубина резкости изоб
ражаемого пространства (DOF) и перекрытие составляют обычно 25 дюймов.
Низкая эффективность. Объекты перемещаются медленно или вообще непод
вижны (перемещаются, а затем останавливаются). Такие системы обычно применя
ются на производственных линиях и складах. Скорость передачи информации — 250
кадров в минуту или меньше; камера имеет линзу с фиксированным фокусом и неболь
шое поле обзора (FOV), обычно в диапазоне 1–2 дюйма.
В настоящее время изготовителями предлагается достаточно много конфигураций
системы технического зрения, чтобы поддерживать возрастающее число применений
систем технического зрения во всех областях автоматизированного производства.
6.8.4 . ëËÒÚÂχ ÚÂıÌË̃ÂÒÍÓ„Ó ÁÂÌËfl —
ÏÂÚÓ‰̊ ÒËÒÚÂÏÌÓ„Ó ÔÓ„‡ÏÏËÓ‚‡ÌËfl
Параметры программирования для системы технического зрения исходят не из опреде
ленных требований программирования для конкретного применения, но из общих требо
ваний создания очень гибкой среды программирования с использованием языков Visual
Basic или C++. В некоторых системах используется интерфейсное меню, которое соби
рает внутреннюю программу с помощью механизма выбора «указать и щелкнуть». Этот
метод легок в использовании и обладает умеренной гибкостью. В других системах, исполь
ëàåíÖåõ íÖïçàóÖëäéÉé áêÖçàü
439
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
зующих языки программирования высокого уровня, требуется умелое программирование
и знание алгоритмов системы технического зрения. Пульт на рис. 6 .47 применяется для
программирования автономной системы фирмы Omron.
6.8 .5. éÒ‚Â̆ÂÌË ‚ ÒËÒÚÂχı ÚÂıÌË̃ÂÒÍÓ„Ó ÁÂÌËfl
Хотя освещение является важным фактором для любого применения систем технического
зрения, ему часто не уделяется должного внимания со стороны разработчиков. Во многих
случаях большая концентрация на освещении и проблемах оптики позволяет использо
вать менее сложные и более дешевые системы технического зрения. Целью улучшенного
освещения является создание высококонтрастного изображения, чтобы лучше выявить
свойства, которые необходимо зафиксировать. Хорошее освещение может:
сократить время распознавания и анализа изображения;
увеличить количество зафиксированных изображений в единицу времени;
улучшить качество зафиксированных данных;
уменьшить тени и отблески, что позволяет избежать проблем при анализе.
Источники света и их конфигурации. Тип источника света, выбранный для при
менения системы технического зрения, является критичным для успешного проекта. К
основным типам источников света относятся лампы накаливания и кварцевые гало
генные лампы, люминесцентные лампы, светодиоды, импульсные ксеноновые лампы
и лазеры. Каждый из этих источников света имеет уникальные свойства: расположе
ние источника, частоту излучения, срок службы, выделяемое количество тепла, уров
ни световой энергии, когерентность излучения и необходимость защиты от излучения
рабочего места оператора. Наиболее значимые характеристики каждого из часто ис
пользуемых источников света приведены ниже.
Лампы накаливания и кварцевые галогенные лампы обычно используются в
различных областях. Это и стандартные бытовые ламп с отражателями, и мощные
кварцевые галогенные лампы. Последние часто используются с волоконной оптикой,
позволяющей передавать свет на отдельные части детали. Двумя главными недостат
ками являются малый срок службы ламп и высокий уровень тепловыделения. А пре
имущество состоит в малом снижении интенсивности света в процессе эксплуатации.
Люминесцентные лампы. Уменьшенная доля излучения в инфракрасной области
(меньше тепла) при увеличенном сроке службы делает эти источники эффективнее
ламп накаливания и кварцевых галогенных ламп. Естественный рассеянный свет, со
здаваемый люминесцентным освещением, предпочтителен для систем технического
зрения, применяемых при обработке светоотражающих деталей.
Светодиоды. Сборки светодиодов при различных конфигурациях образуют кру
говые и линейные источники света для эффективного освещения деталей. Светодиоды
также имеют большой срок службы и производят немного тепла.
Импульсные ксеноновые лампы являются эффективным источником света для
систем технического зрения, в которых используются стробоскопические режимы, на
пример, при необходимости фиксировать изображение движущихся деталей. Вспышка
длительностью от 5 до 200 мкс освещает деталь в одной из фаз движения. Поскольку
440
камеры ПЗС системы технического зрения являются устройствами с некоторым време
нем запоминания, то изображение детали, созданное вспышкой сохраняется камерой, и
свойства детали просматриваются с использованием этой памяти. Кроме того, ксеноно
вые лампы излучают высокоинтенсивный свет в широкойм области диапазоне частот.
Лазеры. Лазер — важный источник света, поскольку он генерирует когерентный
высокофокусированный световой луч, с очень небольшой расходимостью на пути от
источника до объекта. Диаметр лазерного луча на объекте очень близок к его диамет
ру на выходе из лазера. В структурных световых установках лазеры используются,
чтобы сформировать на объекте тонкий луч света. Он следует за контурами детали,
так что камера системы технического зрения может фиксировать форму детали.
Методы освещения. При проектировании системы технического зрения должны
быть решены две проблемы, связанные с освещением:
1. Выбор источника света.
2. Место расположения осветительного устройства относительно объекта.
Вообще, наиболее применимые типы подсветки делятся на две категории: фрон
тальную и заднюю подсветку. При освещении передней стороны объект освещается
сверху, и угол освещения изменяется, позволяя получить различные желательные эф
фекты. Одна из проблем системы технического зрения — отражение от зеркальных
поверхностей, которые отражают световой луч в одном направлении от любой данной
точки на поверхности. Если присутствуют зеркальные поверхности, то осветительная
система пытается минимизировать зеркальные отражения.
Задняя подсветка выявляет контур объекта, потому что источник света помеща
ется позади или ниже объекта. Несколько методов освещения, их свойства и типич
ные варианты применения приведены на рис. 6.50. Осветительные схемы на рис. 6 .50
должны использовать стробоскопические источники света, если объекты быстро пе
ремещаются относительно камеры.
èËÏ 6.14
Компания, применяющая датчик для процесса на рис. 6 .39г, хочет использовать систе
му технического зрения, поскольку необходима проверка размеров, которую невоз
можно выполнить с помощью имеющихся датчиков. Чтобы загрузить детали в систему
транспортировки, они должны быть осмотрены после поступления из подающего лотка
для определения соответствия ориентации и точности размеров. Если деталь загружена
неправильно, то может произойти серьезное повреждение машины. Используйте при
веденную в этом разделе информацию об осветительных системах (рис. 6 .50), чтобы
выбрать систему технического зрения и конфигурацию освещения.
êÖòÖçàÖ
Предварительный анализ показывает, что стоимость проекта при выполнении систе
мы обнаружения существенно снижается. А согласно дополнительному анализу, не
обходима также проверка размеров.
Цветной системы технического зрения не требуется, поэтому выбор проводим между
двоичной и полутоновой системой. Полутоновая система выбрана потому, что она
обеспечивает лучшую точность измерения размеров. Выбрана автономная система
из
за простоты установки, программирования и обслуживания. Поскольку детали
ëàåíÖåõ íÖïçàóÖëäéÉé áêÖçàü
441
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
движутся медленно, не требуется высокой скорости передачи кадров. Это позволяет
применить камеру с низкой эффективностью и менее дорогостоящее решение. До ка
меры на конвейере установлен датчик, используемый для формирования импульса на
входе синхронизации контроллера камеры. Камера связана с контроллером процесса
и обеспечивает сигналы для следующих действий:
1) при наличии детали надлежащего качества позволяет роботу загрузить машину;
2) при детали, выполненной с надлежащим качеством, но неправильно ориентиро
ванной, робот выполняет операцию поворота перед загрузкой;
3) при размере детали, превышающем допустимый предел, она перемещается в
лоток переделки;
4) при размере детали меньше допустимого она перемещается в лоток брака.
Необходимо выбрать между использованием фронтальной или задней подсветки.
Выбрана задняя подсветка, поскольку силуэт детали идеален для автоматического из
мерения ее диаметра. Деталь помещена между диффузным отражателем света и оди
ночной камерой, ось которой перпендикулярна к оси цилиндрической детали. Пере
мещение деталей медленное, поэтому достаточно стандартного источника света.
6.8 .6. éÔÚË͇
Линзы, как и освещение, являются определяющим фактором для достижения эффек
тивной работы системы технического зрения. Существуют различные линзы: от деше
вых, разработанных для промышленного наблюдения, до высококачественных, с высо
ким разрешением, необходимых для точного измерения и для обнаружения дефектов на
мелких деталях.
При выборе линзы важно правильно определить необходимое поле обзора. Сле
дует решить, какая часть детали должна быть на изображении. Выбор линзы состоит
из следующих этапов:
1. Определить поле обзора (FOV), как показано на рис. 6 .51a. Обратите вни
мание, что область обзора должна включать не весь объект или изделие, а
только часть его, представляющую интерес.
2. Определить расстояние от камеры до наблюдаемого объекта, называемое
расстоянием установки. Расстояние не должно быть определено жестко,
чтобы не был ограничен выбор линзы.
3. Найти приблизительное расстояние установки на вертикальной оси графика
рис. 6 .51б, и по кривой для рекомендуемой линзы определить на горизон
тальной оси поле обзора. При этом t — расстояние от объектива камеры до
линзы (рис. 6.51a). Регулировка этого расстояния позволяет сфокусировать
линзу на объекте, расположенном на расстоянии установки.
èËÏ 6.15
В примере 6.14 была выбрана камера Omron F160 с запланированным расстоянием
установки 300 мм (11,8 дюйма) и FOV 25 мм (0,98 дюйма). Найдите линзу и расстоя
ние t, необходимое для применения.
442
Рис. 6.50 . Параметры освещения для систем технического зрения
ëàåíÖåõ íÖïçàóÖëäéÉé áêÖçàü
443
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Рис. 6 .50. Окончание
444
Рис. 6.51. Руководство по выбору линзы
êÖòÖçàÖ
По расстоянию до камеры A и диаметру L поля обзора (FOV) из графика на рис. 6.51б
определяем, что наиболее подходящей является линза L50. Чтобы добиться полного
соответствия с L50, необходимо изменить расстояние установки или FOV. Наиболее
критический параметр — L, потому что установлен самым большим диаметром
(0,875 дюймов) проверяемой детали. Если L оставить равным 25 мм, то расстояние
установки увеличивается приблизительно до 400 мм (15,7 дюйма), а последующее
удаление линзы L50 от объектива на расстояние 6,5 мм (0,26 дюйма) позволяет полу
чить необходимый результат.
6.9 . èéàëä çÖàëèêÄÇçéëíÖâ
èêà èêàåÖçÖçàà ÑàëäêÖíçõï ÑÄíóàäéÇ
В главе 1 при обсуждении поиска неисправностей была рассмотрена общая стратегия
определения места неисправности в электрических и электронных системах. В настоя
щем разделе рассмотренные методы применяются к системам, использующим датчики;
а кроме того, даются некоторые советы по поиску типичных для датчиков неисправнос
тей. Перед изучением предлагаемого материала полезно восстановить в памяти матери
ал раздела 1.6 главы 1.
èéàëä çÖàëèêÄÇçéëíÖâ èêà èêàåÖçÖçàà ÑàëäêÖíçõï ÑÄíóàäéÇ
445
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Датчики никогда не используются самостоятельно, потому что всегда имеется не
которая нагрузка, которая управляется выходным сигналом датчика. В большинстве
систем датчики связаны с контроллером системы, таким как программируемый логи
ческий контроллер (PLC) или промышленный робот. В результате наиболее типичная
модель потока сигнала содержит линейный поток сигнала со сходящимися входами и
расходящимися выходами. Лучше всего продемонстрировать это на примере.
При операции штамповки (рис. 6.52) используются многочисленные датчики и пре
дельные переключатели, чтобы гарантировать безопасную и эффективную работу с пред
ставленным роботом. Однако этот пример иллюстрирует в основном процесс удаления
лишнего металла с отштампованной детали. Обратимся к схеме соединения системы дат
чиков и блок
схемы прохождения сигнала во время работы (рис. 6 .53a и б соответствен
но). Процесс начинается в момент, когда робот выгрузил деталь из штампа и зажал нео
бработанную деталь в захвате. Прежде чем программа разрешит роботу поместить деталь
в штамп, должны прийти сигналы от трех датчиков. Датчик 1 (наверху пресса) включает
ся, когда штамп поднят, датчик 2 (позади пресса на уровне штамповки) включается, когда
деталь находится в штампе, и датчик 3 (на механизме захвата робота) включается, когда
деталь находится в механизме захвата. Поэтому датчик 1 и датчик 3 должны быть включе
ны, а датчик 2 выключен прежде, чем будет дан сигнал для робота, чтобы продолжить
работу. В дополнение к формированию этого сигнала контроллер PLC также включает
панель сигнальных ламп, чтобы показать, что начался цикл штамповки. Изучение блок
схемы прохождения сигнала на рис. 6 .53б показывает, что при неисправностях в много
численных модулях не может происходить никакого движения робота и индикации течения
процесса. Дефект в любом блоке в любой из трех линий подключения головок датчиков ко
входу модуля PLC останавливает робот и гасит панель индикаторов процесса. Если это
очередной цикл работы установки, то светящаяся панель при отсутствии движения робота
указывает на проблемы в выходном модуле PLC или входном модуле робота. Но если это
первый цикл рабочего дня, то проблема может заключаться и в сбое программы, который
может произойти при подаче питания на установку.
Рис. 6 .52. Робот для резки
кристаллов
446
Концепция обнаружения неисправностей предполагает, что прежде, чем рассое
динить разъемы, проверяются сигналы индикаторов или положения переключателей
и измеряются уровни напряжения. Полезно использовать многочисленные индикато
ры, имеющиеся обычно на аппаратных средствах. Например, усилители датчика име
ют индикаторы, показывающие состояние датчиков, а на входных и выходных модулях
PLC установлены светодиоды, показывающие наличие входных и выходных сигналов.
Если левые скобки помещены на датчиках и правые скобки помещены на один или оба
выхода, то начать целесообразно с проверки сигналов светодиодов на ПЛК.
6.9.1. ëÓ‚ÂÚ̊ ÔÓ ÔÓËÒÍÛ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ
‚ ÒËÒÚÂχı Ò ‰‡Ú̃Ë͇ÏË ÔË·ÎËÊÂÌËfl
Советы в этом разделе могут быть полезны, если появляется проблема в усилителе
датчика или самом датчике. Датчики от различных производителей имеют различные
рабочие характеристики, поэтому прежде всего необходимо выяснить, как датчики
работают в системе. Советы даны в произвольном порядке и не предусматривают ка
кой
то определенной последовательности выполнения. Ознакомьтесь с предлагаемы
Рис. 6.53 . Схема потока сигнала для определения неисправности
èéàëä çÖàëèêÄÇçéëíÖâ èêà èêàåÖçÖçàà ÑàëäêÖíçõï ÑÄíóàäéÇ
447
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
ми советами и найдите среди них те, которые помогут вам в поиске конкретной неисп
равности:
проверьте, что на датчик подается питающее напряжение. Проверка другого
действующего оборудования, подключенного к той же шине питания, также
позволит определить наличие питающего напряжения;
проверьте правильность параметров настройки усилителя. Многие усилите
ли датчиков имеют корректировку чувствительности, подобную показанной
на рис. 6.54a; удостоверьтесь, что защитная изоляция не повреждена;
проверьте, что все переключатели установлены в правильном положении;
используйте индикатор работы на датчике или усилителе датчика (см. рис. 6.54a)
чтобы определить, распознает ли датчик присутствие детали. Включенное состоя
ние индикатора работы обычно указывает, что транзистор или реле выходного ус
тройства работают. Датчик Omron с выходным устройством с нормально разомк
нутым (НР) состоянием имеет индикатор, который включается при обнаружении
объекта. Противоположное справедливо для нормально замкнутого (НЗ) выхода.
Лучше всего перемещать деталь к датчику по тому же пути, который используется
в технологическом процессе, и определить, насколько близко требуемое расстоя
ние обнаружения к максимальному значению;
проверьте, что посторонний объект не создает проблем для одной из малень
ких головок обнаружения;
проверьте, что скорость деталей, проходящих перед датчиком, не превышает
значения, соответствующего частотной характеристике модуля;
проверьте, что расстояние обнаружения не снизилось из
за изменения тем
пературы окружающего воздуха или питающего напряжения.
6.9 .2. ëÓ‚ÂÚ̊ ÔÓ ÔÓËÒÍÛ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ÙÓÚÓ̋ÎÂÍÚË̃ÂÒÍËı ‰‡Ú̃ËÍÓ‚
Следующие советы могут быть полезны, если проблема появляется в усилителе дат
чика или в самом датчике.
Прежде всего необходимо удостовериться в том, что обеспечена нормальная ра
бота датчика в системе:
проверьте, что на датчик подается питающее напряжение. Проверка другого
действующего оборудования, подключенного к той же шине питания, — хо
роший способ проверки наличия питающего напряжения;
проверьте, что все установки усилителя правильны. Многие усилители датчиков
имеют подстройку чувствительности, как, например, усилитель на рис. 6.54а.
Убедитесь, что пломба, фиксирующая положение подстроечного элемента, на
ходится на месте;
используйте индикатор работы на датчике или усилителе датчика (см. рис. 6.54а),
чтобы определить, распознает ли датчик присутствие детали. Включенное состоя
ние индикатора работы обычно указывает, что транзистор или реле выходного ус
тройства работают. Адреса веб
сайтов поставщиков датчиков, которые обсужда
448
лись в этой главе, упомянуты ниже. Датчики Omron с выходным устройством с
нормально включенным состоянием (NO) имеет индикатор, который включается
при обнаружении объекта. Противоположное справедливо для нормально вык
люченного (NC) выхода;
проверьте, что линзы чисты и свободны от посторонних предметов;
проверьте, что скорость детали, проходящей мимо датчика, обеспечивает до
статочное время для переключения модуля;
проверьте, что расстояние обнаружения не уменьшилось из
за изменения
температуры окружающего воздуха или питающего напряжения.
Рис. 6.54. Усилитель датчика
6.10. ÇÖÅ-ëÄâíõ Ñãü ÑàëäêÖíçõï
ÑÄíóàäéÇ ÄÇíéåÄíàáÄñàà
Ниже приведены адреса веб
сайтов поставщиков датчиков, которые обсуждались в
этой главе. Производители часто изменяют адреса своих веб
ресурсов, поэтому, если
какая
либо из упомянутых ссылок неактивна, используйте в поисковой системе имя
сайта, чтобы найти действующий ресурс:
технология систем технического зрения от Accu
Sort Systems Inc.
http://www.accusort.com/
фотоэлектрические датчики и датчики приближения от Allen Bradley Corporation
http://www.ab.com
технология системы технического зрения от Cognex Corporation:
http://www.cognex.com
ÇÖÅ-ëÄâíõ Ñãü ÑàëäêÖíçõï ÑÄíóàäéÇ ÄÇíéåÄíàáÄñàà
449
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
технология освещения для системы технического зрения от Dolan
Jenner
Industries Inc.
http://dolanjenner.com
датчики от Honeywell Inc.
http://content.honeywell.com/sensing/
датчики приближения, фотоэлектрические и датчики систем технического
зрения от Omron Electronics LLC
http://omron.com
http://oeiweb.omron .com/Downloads/photoelectri c1. pdf
датчики (все бесконтактные датчики приближения) от Siemens AG Corporation
http://www.siemens.com
êÖáûåÖ
6.1 Введение в электронные датчики
Датчики используются, чтобы защитить людей и машины от повреждений,
для проверки сбоев системы и правильности параметров, для определения
качества изделий, а также наличия детали и ее ориентации.
Датчики являются дискретными или аналоговыми, могут быть контактными
или бесконтактными. Они обычно подразделяются на три класса: датчики
приближения, фотоэлектрические датчики и системы технического зрения.
Датчики имеют электронные средства управления; механические переклю
чатели в них не используются.
Дискретные датчики имеют один сигнал запуска и два состояния выхода. Они
используются наиболее часто в производственных линиях и в повторном
производстве, могут быть как контактными, так и бесконтактными.
Аналоговые датчики работают в определенном диапазоне входных сигналов,
и их выходные сигналы также лежат в некотором диапазоне. Они могут иметь
прямо пропорциональную, обратно пропорциональную или нелинейную
связь между входными и выходными значениями. Подобно дискретным дат
чикам, они могут быть контактными или бесконтактными. Аналоговые датчи
ки часто измеряют температуру, давление, уровень и поток.
6.2. Бесконтактные датчики приближения
Необходимо предусмотреть устранение взаимных помех в тех случаях, когда
несколько датчиков приближения устанавливаются вблизи друг от друга.
Важным параметром для датчиков приближения является расстояние обна
ружения, расстояние выключения, разностное расстояние и расстояние ус
тановки.
6.2.1 . Индуктивные и емкостные датчики приближения
Это бесконтактные датчики с диапазоном от 0,3 до приблизительно 100 мм.
450
Датчики работают на принципе изменения магнитного поля датчика за счет
вихревых токов, создаваемых в металлическом объекте.
Интенсивность вихревых токов зависит от материала, размера и расположе
ния объекта в поле.
Характеристики позволяют обнаружить любой проводящий или металличес
кий объект, находящийся в покое или перемещающийся. Лучше всего рабо
тать с плоскими гладкими объектами. Они создают небольшие радиопомехи
и генерируют немного тепла вследствие низкого уровня энергии.
Экранированные датчики имеют более узкий максимальный диапазон обна
ружения, чем неэкранированные, но они могут устанавливаться около ме
таллических поверхностей и вблизи других датчиков.
Бесконтактные датчики изменяют свое состояние, когда в электрическое
поле датчика вводится материал с диэлектрической постоянной больше 1,2.
Имеются конфигурации двух типов: диэлектрическая, когда обе пластины
конденсатора подключены к генератору, и проводниковая, в которой одна
пластина подключена к схеме, а другой пластиной является сам объект.
Характеристики позволяют обнаружить любой покоящийся или перемеща
ющийся объект с диэлектрической постоянной больше 1,2. Плоские гладкие
объекты обнаруживаются лучше всего. Радиопомехи и выделяемое тепло
невелики из
за низкой энергии взаимодействия.
6.3. Бесконтактные датчики фотоэлектрического типа
Эти датчики состоят из пяти компонентов: источника света, приемника све
та, линзы, логической схемы и выходного устройства.
В большинстве случаев в качестве источника света в них используется све
тодиод; наиболее эффективен инфракрасный свет.
В качестве фотоприемника используется фотодиод или фототранзистор.
Эти датчики используют линзу, чтобы увеличить диапазон обнаружения, но
при одновременном сокращении поля обзора, что затрудняет юстировку.
Логическая схема используется для импульсной модуляции источника света,
позволяющей уменьшить тепловыделение, и синхронизует выходное устрой
ство, которое связывается с помощью интерфейса с устройством управления
автоматизированной системы.
Выходные устройства могут содержать в качестве ключевых элементов реле,
полевые транзисторы, МОП
транзисторы, КУВ и симисторы, а также бипо
лярные npn и pnp
транзисторы.
Запас или избыточный коэффициент усиления представляет собой количе
ство света на приемнике, превышающее уровень, необходимый для пере
ключения выходного устройства.
6.3.2 Режимы обнаружения фотоэлектрических датчиков
Имеются три основных режима: режим проходящего луча, режим обратно
отраженного и диффузного луча. В последних двух могут быть выделены под
режимы, различающиеся между собой по ряду параметров.
êÖáûåÖ
451
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
Режим проходящего луча является оптимальным, если имеется доступ к обе
им сторонам объекта и необходимо большое расстояние обнаружения.
Режим обратно отраженного луча — наиболее часто используемый тип, при
котором источник и приемник света собраны в одном корпусе. Свет отража
ется от специальной мишени, расположенной с обратной стороны объекта,
который должен быть обнаружен. Версия с поляризованным лучом исполь
зуется для блестящих объектов.
В датчиках с диффузным режимом источник и приемник также заключены в один
корпус. Переключает датчик отражение излучения от поверхности объекта.
Имеются варианты датчиков с диффузным лучом специального назначения: с
крутым спадом, с фиксированным фокусом, широкугольные, с подавлением
излучения фона и с измерением расстояния.
6.3.3 Характеристики фотоэлектрических датчиков
К важным характеристикам датчика относятся такие, как расстояние обна
ружения, размер образцового объекта, время срабатывания, режимы вклю
чения «включение при освещении» или «включение в темноте», управление
выходом и время включения и выключения.
Выходные устройства могут быть построены на базе реле, полевых транзис
торов, МОП
транзисторов, КУВ и симисторов, а также биполярных npn
(для выходов высокого уровня) и pnp (для выходов низкого уровня) тран
зисторов.
Выходные устройства датчиков согласованы с требованиями входных уст
ройств контроллеров автоматизированной системы и обеспечивают ее работу.
Выводы датчиков могут быть соединены в последовательные и параллельные
логические схемы, но в большинстве случаев датчики подключаются непос
редственно на входной модуль контроллера автоматизированной системы.
6.5 Аналоговые датчики для систем автоматизации
Фотоэлектрические аналоговые датчики используются, прежде всего, для
измерения расстояния.
Индуктивные аналоговые датчики, названные ультразвуковыми датчиками,
используются для измерения расстояния.
6.6 Выбор и применение датчиков
Процесс выбора необходимого датчика можно разделить на четыре этапа,
при которых датчик сначала выбирается по стоимости и типу обнаружения, а
затем выбирается конкретная модель.
Общие правила: если контактный датчик может работать, то он является
наименее дорогостоящим выбором; если требуется бесконтактный датчик,
попробуйте использовать сначала проходящий луч, затем поляризованный
обратно отраженный луч; используйте индуктивные датчики приближения
для металлических объектов в тех случаях, когда не превышается расстояние
обнаружения для таких датчиков.
Используйте механизм поиска устройств на веб
сайтах поставщиков, чтобы
найти соответствующий тип датчика и выбрать его конкретную серию.
452
6.8 . Системы технического зрения
Системы технического зрения могут выполнять пять операций: идентифика
цию детали, определение расположения детали, ориентацию детали, провер
ку детали и нахождение диапазона.
Системы технического зрения включают одну или более камер ПЗС или ка
мер с зарядовой памятью на базе КМОП, контроллер камеры, схемы интер
фейса, дискретные вводы, источник питания, ЖКД, пульт программирова
ния и осветительную систему.
Существует три типа систем: двоичная, полутоновая и цветная.
Используются три конфигурации: автономная, основанная на ПК и основан
ная на VME.
6.8.5. Освещение в системах технического зрения
В качестве источников света применяются лампы накаливания и кварцевые
галогенные лампы, люминесцентные лампы, светоизлучающие диоды (све
тодиоды), импульсные ксеноновые лампы и лазеры.
Используются два типа освещения: передняя и задняя подсветка.
Соответствующая оптическая линза и насадка для камеры выбраны с учетом
поля обзора и расстояния от камеры до объекта.
Çéèêéëõ
1. Назовите шесть причин использования датчиков.
2. Каково различие между контактным и бесконтактным устройством измерения?
3. Чем датчики отличаются от переключателей обнаружения, рассмотренных в главе 2?
4. Назовите три характеристики дискретных переключателей и датчиков.
5. Каковы основные различия между дискретными и аналоговыми датчиками?
6. Каковы возможные схемы подключения входов и выходов для аналоговых датчиков?
7. Какие параметры процесса наиболее часто измеряются аналоговыми датчиками?
8. Каков основной принцип работы индуктивного датчика приближения?
9. Опишите схему, используемую в индуктивных датчиках приближения для обнару
жения металлических объектов.
10. Назовите пять типов датчиков приближения, предлагаемых производителями.
Какой тип чаще всего используется?
11. Чем определяется уровень вихревых токов в объекте, помещенном в электромаг
нитное поле индуктивного датчика?
12. Назовите пять характеристик эффективности индуктивных датчиков приближения.
13. Как влияет экранирование на расстояние обнаружения индуктивных датчиков?
14. Дайте определения следующих терминов: вертикальное и горизонтальное расстоя
ние обнаружения, опорная ось, образцовый объект, стандартный поправочный ко
Çéèêéëõ
453
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
эффициент, расстояние отключения, разностное расстояние, расстояние установ
ки, частотная характеристика, изменение температуры и напряжения.
15. Что такое экранированные индуктивные датчики приближения, как они работают
и какие преимущества обеспечивают?
16. Какие преимущества обеспечивают неэкранированные индуктивные датчики
приближения?
17. Что такое взаимное влияние и как его избежать при использовании датчиков при
ближения?
18. Каковы основные принципы работы емкостного датчика приближения?
19. Каковы отличия в картинах полей и в генераторах для индуктивного и емкостного
датчиков приближения?
20. Опишите схему, используемую в емкостных датчиках приближения для обнару
жения металлических объектов.
21. Опишите два типа используемой конфигурации емкости в емкостных датчиках
приближения.
22. Назовите пять характеристик эффективности емкостных датчиков приближения.
23. Сравните максимальный диапазон для датчиков приближения и фотоэлектричес
ких датчиков.
24. Опишите четыре элемента, имеющихся во всех фотоэлектрических датчиках.
25. Какие цветные светодиоды используются в качестве источников света в фото
электрических датчиках и какие из них наиболее эффективны?
26. Какие приборы используются для фотоприемников в фотоэлектрических датчи
ках и как система линз увеличивает расстояние обнаружения?
27. Каковы функции логической схемы и выходного устройства?
28. Почему логическая схема светодиодного источника создает короткий импульс
света при длительной паузе?
29. С какими типами выходных устройств выпускаются обычно фотоэлектрические
датчики? Назовите одно преимущество и один недостаток для каждого типа.
30. Определите рабочий запас, или избыточный коэффициент усиления. Почему так
важно работать при больших значениях этого параметра?
31. Каковы три основных режима обнаружения, применяемых в фотоэлектрических
датчиках?
32. Какие подрежимы существуют для режима обратного отражения луча и для диф
фузного режима?
33. Создайте таблицу, которая показывает относительный диапазон и избыточный
коэффициент усиления для датчиков в каждом режиме и подрежиме.
34. Каковы проблемы поля обзора для датчиков с проходящим лучом света?
35. Опишите работу обычного и поляризованного датчиков с обратным отражением луча.
36. Опишите обычный диффузный режим работы и назовите причину, по которой на
графике отображаются две кривые запаса.
37. Как использование объекта с отражающей способностью, которая меньше, чем
отражающая способность белой бумаги, влияет на поле запаса и расстояние об
454
наружения для стандартного диффузного датчика? Обратитесь к рис. 6 .28, чтобы
проиллюстрировать свой ответ.
38. Опишите пять других типов датчиков с диффузным режимом и назовите области
применения, лучше всего подходящие для их использования.
39. Определите следующие условия применения фотоэлектрических датчиков, напри
мер, таких, как на рис. 6 .29 и 6.30: метод обнаружения, расстояние обнаружения,
образцовый объект, время отклика, гистерезис, «включение при освещении» и
«включение в темноте», время задержки и тип выходного устройства.
40. Каким образом можно сравнивать частотные свойства датчиков, отображаемые
частотной характеристикой для индуктивных датчиков, с временами нарастания и
спада для фотоэлектрических датчиков?
41. Опишите каждую схему выходного устройства на рис. 6.34.
42. Опишите, как работают выходы высокого и низкого уровня. Почему выходы низ
кого уровня связаны с npn
, а выходы высокого уровня с pnp
транзисторами?
43. Каковы требования к интерфейсу связи датчиков и контроллеров?
44. Опишите работу фотоэлектрического и ультразвукового аналоговых датчиков.
45. Какие предосторожности необходимы при использовании ультразвуковых датчиков?
46. Опишите последовательное (по схеме И) и параллельное (по схеме ИЛИ) соеди
нения для двух
и трехпроводных выходных устройств датчиков.
47. Опишите пять областей применения системы технического зрения.
48. Идентифицируйте все схемные элементы системы технического зрения.
49. Опишите процесс сбора данных изображения в системе технического зрения и
два типа используемых приемников изображения с зарядовой связью.
50. Назовите три класса системы технического зрения.
51. Опишите источники света, используемые при применении системы технического
зрения.
52. Опишите методы освещения, используемые при применении системы техничес
кого зрения.
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
1. Найдите подробные характеристики на веб
сайте фирмы Omron для каждого дат
чика приближения, описанного на рис. 6.2 и 6.3.
2. Найдите следующую информацию для индуктивного датчика приближения E2EM
X4B/C (с помощью рис. 6.9): размеры образцового объекта, расстояние обнаруже
ния, частота отклика, расстояние установки и тип.
3. Найдите три индуктивных датчика приближения на веб
сайте фирмы Omron, ко
торые имеют как экранированные, так и неэкранированные модификации. Вы
числите уменьшение в расстоянии обнаружения для экранированных версий по
сравнению с неэкранированными. Можно ли использовать общее значение, что
бы показать, как экранирование уменьшает расстояние обнаружения?
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
455
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
4. Используйте веб
сайт фирмы «Аллен Брадлей», чтобы найти набор датчиков при
ближения, которые являются эквивалентными датчикам Omron на рис. 6 .2 и 6.3 .
5. Найдите справочные данные для емкостного датчика приближения E2K
C на веб
сайте фирмы Omron и сравните характеристики E2K
C с характеристиками индук
тивного датчика на рис. 6 .9 . Обратите внимание на различие данных для двух датчи
ков. Сравните взаимные помехи для индуктивных и емкостных датчиков.
6. Найдите подробные справочные данные на веб
сайте фирмы Omron для каждого
фотоэлектрического датчика, приведенного на рис. 6.16 и 6.17.
7. Используйте веб
сайт фирмы «Аллен Брадлей», чтобы найти набор фотоэлектри
ческих датчиков, которые являются эквивалентными датчикам Omron на рис. 6 .16
и 6.17.
8. Сравните характеристики гистерезиса для датчика E3S
A на рис. 6.29 со значе
нием, рассчитанным в задаче 11. Какова полученная разница?
9. Используйте веб
сайт фирмы «Аллен Брадлей», чтобы найти набор фотоэлект
рических датчиков, которые являются эквивалентными датчикам Omron E3S
A,
показанным на рис. 6.29. Составьте таблицы для сравнения режима, питающего
напряжения, расстояния обнаружения, размеров образцового объекта, гистере
зиса, времени срабатывания и параметров выходного устройства.
èêéÅãÖåõ èéàëäÄ çÖàëèêÄÇçéëíÖâ
1. Измените блок
схему сигнала на рис. 6.53б для проекта датчика, полученного в
задаче 21. Включите в нее сигнальные лампы для отображения состояния каждо
го устройства (открытое или закрытое) и выходы для запуска точного пресса и
машины для резки кристалла.
2. Для блок
схемы сигнала на рис. 6.53б определите, где поставить скобки в начале
поиска неисправностей и как изменилось бы их расположение при анализе следу
ющих состояний системы:
а. Робот остановлен в прецизионном прессе с деталью в механизме захвата. Све
тодиоды датчика 1 и соответствующего входного модуля PLC светятся, свето
диод датчика 2 светится, а светодиод соответствующего входного модуля PLC
— нет, светодиоды, светодиоды датчика 3 и соответствующего входного моду
ля PLC светятся, светодиоды выходных модулей PLC светятся, светодиод
входного модуля робота и лампа индикатора цикла штамповки не светится.
б. Робот остановлен в прецизионном прессе с деталью в механизме захвата.
Светодиоды датчика 1 и соответствующего входного модуля PLC светятся,
светодиоды датчика 2 и соответствующего входного модуля PLC светятся,
светодиоды, светодиоды датчика 3 и соответствующего входного модуля PLC
светятся, светодиоды выходных модулей PLC не светятся, светодиод входно
го модуля робота и лампа индикатора цикла штамповки не светится.
в. Робот остановлен в прецизионном прессе с деталью в механизме захвата. Свето
диод датчика 1 светится а светодиод соответствующего входного модуля PLC —
456
нет, светодиоды датчика 2 и соответствующего входного модуля PLC не светят
ся, светодиоды, светодиоды датчика 3 и соответствующего входного модуля PLC
светятся, светодиоды выходных модулей PLC светятся, светодиод входного мо
дуля робота и лампа индикатора цикла штамповки не светится.
áÄÑÄóà
1. Определить вертикальное расстояние обнаружения для квадратного объекта со
стороной 10 мм, который приближается к датчику, избраженному на рис. 6 .12.
2. Определить горизонтальное расстояние обнаружения для образцового объекта,
перемещающегося горизонтально на расстоянии 8 мм от торца датчика.
3. Использовать график на рис. 6.13, чтобы определить расстояние обнаружения
для медного объекта со стороной 10 мм. Повторите процесс, чтобы найти попра
вочный коэффициент из таблицы на том же рисунке.
4. Датчик E2M X15B/C фирмы Omron используется, чтобы обнаружить присут
ствие алюминиевой скобки. Экспериментальные измерения показывают, что
расстояние обнаружения для этого объекта 2,5 мм. Определите новое расстояние
установки, воспользовавшись данными на рис. 6.9 .
5. Датчик E2S, показанный на рис. 6 .2, используется, чтобы считать обороты колеса.
Поднимающаяся металлическая табличка расположена на расстоянии 5 дюймов от
центра колеса и проходит под датчиком E2S при каждом обороте колеса. Исполь
зуйте значение частоты отклика для датчика, чтобы определить максимальную ско
рость вращения (обороты в минуту), которую может измерить датчик.
6. Определите минимальное расстояние между двумя цилиндрическими датчиками
E2EM
X8B/C, когда они установлены вблизи друг от друга и оси их параллельны.
Для решения используйте информацию на рис. 6 .9 и 6.15.
7. Источник и приемник света датчика с проходящим лучом 42CA на рис. 6.23 рас
положены на расстоянии в 10 футов. Каков запас поля при этом рабочем рассто
янии?
8. Датчик 42CA должен использоваться в режиме с обратным отражением луча и
иметь запас не менее 10. Каковы минимальные и максимальные расстояния меж
ду источником и деталью, при которых запас превышает 10?
9. Проектировщик системы автоматизации планирует использовать 400
миллимет
ровый датчик 42CA, приведенный на рис. 6.27, чтобы обнаружить неопреновую
изоляцию с помощью стандартного датчика с диффузным режимом. Изоляция по
является на расстоянии 50 мм от датчика. Каково приблизительное поле и явля
ется ли этот проект наилучшим?
10. Отдел разработки автоматизированных систем для производителя завтраков плани
рует использовать 100
миллиметровый датчик 42CA, представленный на рис. 6 .27,
чтобы обнаружить коробки с завтраком с помощью стандартного диффузного датчи
ка. Запас должен быть больше или равен 2. Каков должен быть приблизительный
диапазон расстояний от датчика до коробки для хорошего проекта?
áÄÑÄóà
457
чÚ̃ËÍË Ë ÛÒÚÓÈÒÚ‚‡ ‰ËÒÍÂÚÌÓÈ ‡‚ÚÓχÚËÍË
11. Воспользуйтесь кривыми на рис. 6 .31a и б, чтобы определить максимальное рас
стояние обнаружения для белого квадрата со стороной 20×20 мм. Также опреде
лите запас на максимальном расстоянии для объекта того же размера. Каков бу
дет гистерезис для такого объекта?
12. Воспользуйтесь кривыми на рис. 6.31б, чтобы определить максимальное смеще
ние от световой оси, которое допустимо на расстоянии обнаружения 8 м.
13. Решите пример 6.9 для другого типа бутылки с горлышком в 0,75 дюйма и при
промежутке между горлышками в 1,5 дюйма. Используйте датчик E3S
A.
а. Определите серию датчика с горизонтальным креплением и выходным уст
ройством с npn
транзистором.
б. Определите максимальную скорость движения конвейера в футах/с, при ко
торой обеспечивается правильный подсчет с помощью датчика.
14. Воспользуйтесь данными о времени срабатывания датчика E3S
A, чтобы вычис
лить для него частотную характеристику. Проверьте, соответствует ли ваше по
нимание частотной характеристики определению, приведенному в разделе 6.2.4 .
15. Датчик в режиме проходящего луча требуется, чтобы считать миниатюрные реле в
примере на рис. 6.33 . Реле имеют длину 0,75 дюймов, промежуток между ними со
ставляет 0,5 дюймов. Если реле движутся с максимальной скоростью 10 футов/с,
то на какое минимальное время срабатывания должен быть рассчитан датчик?
16. Решите пример 6.11 при других условиях. Деталь, проходящая перед светодиод
ным датчиком расстояния с рис. 6.37, создает выходной ток датчика в 12,452 мА.
Определите, насколько эта деталь отличается по толщине, исходя из желатель
ного значения в 25 мм при токе в 12 мА (см. рис. 6 .37).
17. Выходное напряжение датчика 873C на рис. 6.38 равно 3 В. Каково расстояние от
датчика до измеряемого объекта? Используйте график на рисунке, чтобы опреде
лить слепую зону датчика.
18. Выберите тип датчика и метод обнаружения или режим для каждой из следующих
ситуаций:
а. Считаются ящики (площадью 18 кв. дюймов) на конвейерной ленте шириной
в 24 дюйма с доступом для подсоединения кабеля только с одной стороны
конвейера.
б. Считаются блестящие сосуды для термосов, поступающие в технологичес
кую установку. Доступ ограничен одной стороной конвейера, но датчик мо
жет быть установлен к сосуду настолько близко, насколько это необходимо.
в. Требуется обнаружить пластмассовые зажимы, поступающие с подающего
шарообразного лотка на две металлические направляющие.
г. Требуется обнаружить маленькое белое реле на темной печатной схеме пла
ты. Датчик должен быть размещен на 6 дюймов выше реле и платы.
д. Проверить уровень молока в прозрачных пластмассовых бутылках, переме
щающихся по конвейеру. Имеется доступ к обеим сторонам конвейера, и нет
ограничений на расстояние между датчиком и бутылками.
е. Требуется обнаружить переднюю кромку квадратного отверстия в пластине,
перемещающейся по конвейеру. Имеется доступ снизу и сверху конвейера.
458
ж. Требуется на входе упаковочной машины обнаружить и посчитать коробки с
брикетами мороженого, покрытые алюминиевой фольгой. Датчик должен
быть установлен 2 дюймах от ящика, а отражатель может быть установлен с
другой стороны объекта.
з. Требуется обнаружить присутствие металлической отливки на входе в обра
батывающий центр. Доступна лишь одна сторона отливки, но датчик может
быть установлен как угодно близко к детали.
19. Использовать поиск по параметрам на веб
сайте Omron (см. рис. 6.42), чтобы
получить список датчиков, которые удовлетворили бы следующим условиям:
а. Датчик на рис. 6 .39б, используемый для обнаружения крышек бутылок или
канистр. Расстояние обнаружения не ограничено. Выходным устройством дат
чика должно быть реле для канистр или npn
транзистор для бутылок.
б. Решите задачу 19a, воспользовавшись руководством по выбору для датчиков
приближения фирмы «Аллен Брадлей».
20. Разработайте установку с применением системы технического зрения для каждой
ситуации в задачах 18a—18з. Выберите тип системы технического зрения, кон
фигурацию, уровень эффективности, осветительную методику, тип источника
света и линзы. Сравните варианты возможных решений.
21. Выберите датчики для установки резки кристаллов на рис. 6.52. Датчики требу
ются для определения открытого или закрытого состояния машины для резки
кристалла, механизма захвата робота и прецизионного пресса и, кроме того, не
обходимы для определения, находится ли деталь в механизме захвата, в прессе
или на выходе конвейера. Определите тип датчика, номер модели, режим работы
и тип выходного устройства, чтобы подключить датчики к низкопотенциальному
(current sinking) входу модуля PLC.
áÄÑÄóà
459
7
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊Â
ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl
‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
ñÂÎ̧ „·‚̊
В этой главе приведен краткий обзор широкого спектра датчиков и
устройств, используемых в управлении технологическими процесса
ми. Кроме того, представлено полное описание клапанов управления
и датчиков температуры, давления, потока, уровня и пол ожения.
После изучения этой главы вы сможете:
1. Объяснить принцип работы электромагнитных и управляющих клапанов.
2. Описать типы и применение нагревательных элементов.
3. Объяснить связи датчиков, цепей передачи и преобразователей.
4. Объяснить принцип работы термопары.
5. Объяснить принцип работы резистивных датчиков температуры и терморезисторов.
6. Описать трубку Бурдона, мембранные и сильфонные датчики давления.
7. Описать работу и применение дифференциальных датчиков давления.
8. Сравнить работу тензорезисторов и датчиков веса.
9. Описать различные методы измерения потока жидкостей.
10. Объяснить различия между конечными выключателями и непрерывными датчи&
ками уровня.
11. Описать работу линейного переменного дифференциального трансформатора
(LVDT).
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
èêàåÖçÖçàÖ áçÄçàâ
Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Сделать карьеру в данной области можно, работая в одной из многих компаний, производя&
щих датчики и исполнительные устройства для аналогового управления производственными
процессами, а также занимаясь эксплуатацией датчиков на производстве или работая в ка&
честве специалиста по датчикам в компании, разрабатывающей технологические системы
для производителей различной продукции. Деятельность в фирме, производящей компонен&
ты, может быть посвящена разработке новых моделей датчиков, производству и испытани&
ям существующих моделей, разработке вариантов их применения, технической поддержке
заказчиков и продаже производимой продукции. Наибольшее число рабочих мест обеспечи&
вают работы, требующие взаимодействия с заказчиком, такие как внедрение, техническая
поддержка и продажа. Между тем техники и дипломированные специалисты часто даже не
рассматривают в качестве возможной карьеры работу в области коммерции из&за некоторо&
го предубеждения и неверного восприятия такого рода деятельности. Конечно, она прежде
всего потребует от вас коммуникабельности, но коммерческая работа в области технологии
совершенно отличается от профессии продавца в розничной торговле. Здесь предметом куп&
ли&продажи является технический комплекс, поэтому для такой работы требуется дипломи&
рованный специалист, обладающий обширными знаниями в данной области.
Продавец технического комплекса должен понимать структуру и технологический про&
цесс системы, установленной у заказчика, давать рекомендации по выбору оптимальных ап&
паратных и программных решений, предлагать изменения, которые усовершенствовали бы
проект, и обеспечивать своевременное получение заказчиком точной информации. Такая
работа не только интересна, но и обеспечивает хороший заработок. Служба технической
поддержки и продаж может быть размещена на филиале фирмы, поскольку длительность
служебных поездок по региону не должна превышать одного дня. А возможно, вы будете
работать с корпорацией, занимающейся производством специфической продукции, напри&
мер, химической обработкой, — тогда вы будете сотрудником центрального офиса и состав&
лять план своих командировок на предприятия заказчика. Работа проектировщика и разра&
ботчика конкретных технологических установок в одном из проектных центров компании
потребует от вас наиболее частых командировок. Двух& или четырехлетнее обучение по кур&
су электроники — наилучший способ подготовиться к деятельности специалиста по прода&
жам устройств автоматики, содержащих в своем составе датчики.
Специфическая задача, выполнение которой может быть вам поручено, может заклю&
чаться, например, в подтверждении правильности теоретического расчета внутренней тем&
пературы электронного оборудования для выбранной конструкции самолета, который нахо&
дится в стадии разработки. Допустим, что вы являетесь молодым специалистом в группе
климатических испытаний компании Rockwell Collins, производящей электронное оборудо&
вание для самолетов, ракет и космических кораблей. Вы вместе с другими сотрудниками
своей группы выбираете и закрепляете термоэлектрические датчики на оборудовании, в
точках, указанных в расчете температурного профиля. Вы устанавливаете электронное обо&
рудование в климатическую камеру, которая будет циклически изменять температуру окру&
жающего воздуха, заключенную между экстремальными значениями, которым оборудова&
ние подвергается в условиях эксплуатации. Затем вам необходимо будет сравнить экспери&
462
ментальные данные, полученные от термопар, с теоретическим расчетом. После этого вы
встречаетесь с инженером, производившим расчеты, и обсуждаете все расхождения между
экспериментальными и теоретическими данными. Итогом вашей встречи могут явиться ре&
комендации об изменениях проекта, позволяющих снизить перегрев оборудования и исклю&
чить возникновение проблем при эксплуатации. Для такой деятельности вам будут жизнен&
но необходимы сведения о работе термоэлектрических датчиков.
7.1. ÇÇÖÑÖçàÖ
Устройства и датчики, обсуждаемые в этой главе, обычно используются в системах уп&
равления технологическими процессами. Необходимо иметь твердые знания об устрой&
ствах и датчиках, которые формируют входные и выходные сигналы и обеспечивают об&
ратную связь для системы управления процессом. Это поможет вам лучше использовать
общие принципы электронных систем управления технологическими процессами. Дат&
чики являются частью оборудования, позволяющего измерять входные переменные
процесса и преобразовывать их в электрические сигналы, которые используются для
вычисления таких характеристик переменных, как скорость их изменения и достигаемые
ими предельные значения. Это позволяет управлять выходными исполнительными уст&
ройствами процесса: силовыми приводами, клапанами и нагревательными элементами.
7.2 . ëàãéÇõÖ èêàÇéÑõ à ÇõïéÑçõÖ ìëíêéâëíÇÄ
Силовые приводы, которые бывают гидравлическими (работающими с помощью воды
или масла), пневматическими (работающими с помощью воздуха) или электрически&
ми, обеспечивают энергетическое воздействие, позволяющее достичь конечной цели
управления процессом. Гидравлические приводы используются для перемещения тя&
желых деталей или для работы, которая требует медленных и точных движений. Пнев&
матические приводы используются для более легких деталей и в случае необходимости
быстрого срабатывания. Электрическими приводами являются чаще всего двигатели
или соленоиды. Управляющие клапаны, с которыми вы непременно столкнетесь, ра&
ботая в области промышленной электроники, используют приводы, чтобы управлять
своим состоянием. Рассмотрим работу этих устройств более подробно.
7.3. ìèêÄÇãüûôàÖ äãÄèÄçõ
Управляющие клапаны представляют собой конечный элемент управления во многих
системах промышленной электроники. В этом разделе будет рассказано о конструк&
ции и работе управляющих клапанов следующих четырех типов:
электромагнитных клапанов, которые полностью открываются или полнос&
тью закрываются, при управлении с помощью электроники;
ÇÇÖÑÖçàÖ
463
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
пропорциональных клапанов, степень открытия которых изменяется с помо&
щью электроники от 0 до 100%;
клапанов с пневматическим приводом, у которых полностью открытое и зак&
рытое состояние или степень открытия от 0 до 100% определяются давлени&
ем воздуха;
клапанов с электроприводом, у которых полностью открытое и закрытое со&
стояние или степень открытия от 0 до 100% определяются управляющим
двигателем.
7.3.1 ùÎÂÍÚÓχ„ÌËÚÌ̊È Í·ԇÌ
Электромагнитный клапан — это электромеханическое устройство, используемое,
чтобы управлять потоком газов или жидкостей, таких как воздух, инертные газы, вода,
масло и охлаждающие жидкости. Электромагнитный клапан является наиболее про&
стым выходным устройством и широко используется в промышленных системах уп&
равления. Основная конструкция нормально замкнутого двухпозиционного электро&
магнитного клапана (полностью открытого или полностью закрытого) показана на
рис. 7.1. Разрез электромагнитного клапана представлен на рис. 7.1a, а его детали&
ровка — на рис. 7 .1б.
Пружина, навитая вокруг поршня, создает усилие на подвижном клапане, удерживая
его в положении, не позволяющем потоку проходить от входного отверстия к выходному,
устанавливая тем самым запертое состояние. Когда на катушку подается питание, она со&
здает магнитное поле, поднимающее узел пистона и клапана, позволяя потоку проходить
через клапан. Магнитное поле преодолевает усилие пружины, которая стремится переме&
стить поршень в направлении, противоположном полю. Такой клапан управляет, напри&
мер, потоком масла в гидравлическом цилиндре или потоком воздуха в пневматическом
цилиндре. Производятся также электромагнитные клапаны с нормально открытым состо&
янием, которые закрываются при подаче питающего напряжения на катушку.
Два других популярных электромагнитных клапана — трехходовой и трехпозицион&
ный. Трехходовой электромагнитный клапан имеет входное и выходное отверстие и слив&
ной порт. Когда на катушку подается питание, жидкость или воздух проходят с входного на
выходное отверстие; когда питание снимается, поток направляется в сливной порт. Слив&
ной порт необходим для того, чтобы возвратить накопленную в цилиндре жидкость обрат&
но в систему или сбросить воздух через звукопоглотитель.
Трехпозиционный клапан имеет два соленоида: одно состояние получается, когда
оба соленоида выключены, другое возникает при подаче питания на один из соленои&
дов, третье — при подаче питания на другой соленоид.
Условные обозначения электромагнитных клапанов. Условные обозначения элек&
тромагнитных клапанов используются, чтобы отобразить на схеме состояния клапана при
поданном и снятом питании соленоида, и являются стандартными для изготовителей элек&
тромагнитных клапанов. Условное обозначение двухпозиционного трехходового электро&
магнитного клапана, представленное на рис. 7 .2, содержит следующие компоненты:
два больших прямоугольника со стрелками внутри представляют положение
клапана в зависимости от состояния соленоида;
464
маленький прямоугольник с наклонной чертой вправо представляет солено&
ид. Он примыкает к большому прямоугольнику, в левой стороне которого
представлено состояние клапана при подаче питания на соленоид;
символ в виде перевернутой буквы W, примыкающий к большому блоку, ото&
бражает пружину. Правая сторона большого блока изображает положение
клапана, когда соленоид выключен;
цифры 1, 2, и 3 указывают номера трех портов клапана;
символ в виде буквы T показывает, что порт закрыт;
стрелки показывают направление потока (в порт или из него).
Условное обозначение клапана на рис. 7.2 показывает, что жидкость течет между
портами 1 и 2 и что порт 3 закрыт, когда соленоид выключен. При подаче питания на
соленоид закрывается порт 2, и жидкость течет между портами 1 и 3. Рассмотрите
рис. 7.2, чтобы понять, как отображается поток жидкости с помощью компонентов ус&
ловного обозначения клапана.
Рис. 7.1. Электромагнитный клапан:
а) разрез клапана;
б) деталировка
ìèêÄÇãüûôàÖ äãÄèÄçõ
465
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
7.3.2 . ä·ԇÌ̊ Ò ÔÓÔÓˆËÓ̇Î̧Ì̊Ï ÛÔ‡‚ÎÂÌËÂÏ
Пропорциональные клапаны являются электромеханическими устройствами, кото&
рые могут пропускать от 0 до 100% максимального потока. Они используются в тех
случаях, когда невозможно обойтись двухпозиционным управлением: при регулировке
потока воздуха в медицинских респираторах, в установках для диализа, при окраске и в
системах производства полупроводниковых приборов. Преимущество этих клапанов
заключается в том, что они легко могут изменять поток — пропорционально входному
току, который обеспечивает схема управления на операционных усилителях (ОУ).
Схемы на ОУ для этих клапанов обычно обеспечивают выход на переменном токе и
выполнены по схеме интеграторов, обеспечивая пилообразный сигнал на входе про&
порционального клапана. Вы можете вернуться к главе 4, где говорится об операци&
онных усилителях, чтобы освежить в памяти принцип работы интегратора.
Большинство таких клапанов отличается по основным характеристикам, что мо&
жет затруднять точное управление. Гистерезис, максимальный поток и коэффициент
усиления могут различаться от модуля к модулю. Заводская настройка магнитопрово&
дов, которые допускают корректировку магнитного поля, обеспечивает некоторую
компенсацию изменений, возникающих из&за механических допусков. Эти проблемы
решаются в цифровых пропорциональных клапанах, представляющих собой следую&
щее поколение пропорциональных клапанов. Пользователь программирует модули по
точным характеристикам вне установки, поэтому не теряется время при установке
клапана на машину или при последующем обслуживании. Метки, уникальные для
каждого модуля, дают возможность идентифицировать каждый клапан, зафиксиро&
вать параметры настройки и обеспечить эффективность контроля. Клапаны могут
быть связаны с сетями DeviceNet или Fieldbus (промышленные сети передачи данных)
и данными, отображенными на компьютерном терминале или на программируемом
логическом контроллере (ПЛК). Эти сети и ПЛК подробно обсуждаются в следующих
главах книги. Цифровая электроника гарантирует, что клапаны будут работать с необ&
ходимой точностью при любой скорости и в любом состоянии. Клапаны достигают
времени срабатывания < 100 мс при ступенчатом изменении от 10 до 90%. Они иде&
Рис. 7 .2. Условное обозначение двухпозиционного трехканального
электромагнитного клапана
466
альны для использования на любом этапе технологического процесса, где необходимы
точность и высокоскоростные изменения.
7.3.3. ä·ԇÌ̊ Ò ÔÌ‚χÚË̃ÂÒÍËÏ ÛÔ‡‚ÎÂÌËÂÏ
Клапаны с пневматическим управлением (управляемые сжатым воздухом) открыва&
ются и закрываются электрическим сигналом, который преобразуется в давление воз&
духа, позволяя клапану открываться частично, находясь между полностью открытым и
полностью закрытым состоянием. Эти клапаны используются, главным образом, что&
бы управлять потоком жидкости через каналы с большим диаметром, или при наличии
взрывоопасной среды (например, при химической обработке и окраске распылением).
Применение электромагнитных клапанов ограничено каналами с малым диаметром, и
для прямого управления потоком жидкости через каналы с большим диаметром они не
применяются. Однако электромагнитный клапан используется в качестве управляю&
щего или приводящего клапана, чтобы управлять потоком воздуха в пневматическом
клапане, который, в свою очередь, управляет потоком через канал большого диамет&
ра. Пневматический клапан управления показан на рис. 7.3: электромагнитный кла&
пан с тремя путями, управляющий клапаном с пневматическим приводом.
Рис. 7.3. Клапан с пневматическим управлением
ìèêÄÇãüûôàÖ äãÄèÄçõ
467
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Когда соленоид выключен, тогда входное отверстие закрыто, а вытяжное откры&
то. Когда на соленоид подано питание, наоборот, входное отверстие открыто, а вытяж&
ное закрыто. При этом давление воздуха, изменяясь от 3 до 15 psi, определяет поло&
жение диафрагмы и тем самым устанавливает степень открытия основного клапана,
который находится в трубе большого диаметра.
Давление воздуха над диафрагмой уменьшается за счет выхода воздуха через вы&
тяжной порт, когда соленоид выключается и пружина под диафрагмой закрывает глав&
ный клапан. Для управления таким клапаном в полном диапазоне, от полностью от&
крытого до полностью закрытого состояния, в отличие от дискретного управления
вкл/выкл, показанного на рис. 7.3, требуется преобразователь, плавно изменяющий
давление над диафрагмой.
Преобразователь тока в давление. Преобразователь тока в давление позволяет
клапанам с пневматическим управлением работать во всем диапазоне: от полностью
открытого до полностью закрытого состояния. Преобразователь может быть смонти&
рован либо внутри клапана, либо рядом с ним. Он называется I/P&преобразователем,
поскольку он преобразует сигнал тока от 4 до 20 мА в пропорциональное выходное
давление, которое изменяется от 3 до 15 фунтов/дюйм2 (psi). Другими словами, когда
ток равен 4 мА, давление равно 3 psi; при токе в 20 мА давление составляет 15 psi. При
этих пределах пропорциональная связь между током и давлением может быть выра&
жена следующим образом:
или:
где I выражается в мА, а P в psi.
èËÏ 7.1
Вычислите давление вывода для входного тока 9,5 мА для I/P&преобразователя.
êÖòÖçàÖ
Из пропорции:
При токе в 9,5 мА получим:
468
Решим относительно P:
P=12×0,34375+3=7,125psi.
Позиционер клапана. Основная задача позиционера состоит в том, чтобы увели&
чить точность положения клапана. Позиционером обычно называется устройство, ко&
торое использует цилиндр высокого давления, чтобы перемещать клапан или подоб&
ную ему конструкцию. Позиционер принимает сигнал о положении клапана и
гарантирует, что клапан находится в нужном положении: он открыт, закрыт или нахо&
дится где&либо в середине. Позиционер присоединяется непосредственно к клапану и
может рассматриваться как его составная часть. Клапаны могут работать и без пози&
ционера, но с меньшей точностью. Позиционер измеряет фактическое положение и, в
случае необходимости, корректирует значение давления, приложенного к диафрагме в
диапазоне от 3 до 15 psi. Во многих моделях позиционеров применяется преобразова&
ние сигнала, а в некоторых используется микропроцессорное управление, обеспечи&
вающее быстрое и точное позиционирование.
Позиционер пневматического клапана, который управляет клапаном типа «ба&
бочка», показан на рис. 7.4a, а на рис. 7.4б — позиционер с микропроцессорным уп&
равлением, который управляет поршневым клапаном. Различные пневматические
схемы подключения позиционеров для клапана показаны на рис. 7 .5a, а схема работы
позиционера — на рис. 7.5б.
Рис. 7.4. Позиционеры клапана:
а) пневматический позиционер клапана типа «бабочка»;
б) позиционер клапана с микропроцессорным управлением
ìèêÄÇãüûôàÖ äãÄèÄçõ
469
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Рис. 7 .5. Позиционеры клапана:
а) пневматические схемы подключения позиционеров;
б) устройство механического позиционера
470
Входное давление (см. рис. 7.5б) действует на входном модуле, который управля&
ет реле с прикрывающимся соплом (сечение А—А на рисунке). Входное давление под&
водится к реле, а выходное давление подается с реле на пневматический привод кла&
пана. При этом увеличение давления во входном модуле перемещает балансир,
который прикрывает сопло заслонкой. Это увеличение давления перемещает диаф&
рагму привода вниз. Движение диафрагмы подается обратно на коромысло через ры&
чаг обратной связи и пружину, что заставляет заслонку немного отойти от сопла, что&
бы предотвратить дальнейшее увеличение выходного давления. Позиционер снова
устанавливает равновесие, но при более высоком давлении, несколько отличном по&
ложении крышки и новой позиции поршня клапана.
7.3.4 . ä·ԇÌ̊ Ò ̋ÎÂÍÚÓÔË‚Ó‰ÓÏ
Чтобы управлять открытием и закрытием клапанов, могут также использоваться дви&
гатели с медленным вращением вала в пределах одного оборота. Время вращения
вала, которое необходимо для перевода вентиля из открытого в закрытое состояние
или обратно, составляет обычно от 10 до 20 с. Поворот заслонки в системах обогрева
помещений или кондиционирования является типичным применением клапанов с
электроприводом. Заслонка, поворот которой регулируется электроприводом, пока&
зана на рис. 7.6 .
Рис. 7.6. Заслонка с электроприводом
ìèêÄÇãüûôàÖ äãÄèÄçõ
471
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Двигатель может плавно изменять положение заслонки от полностью открытого
до полностью закрытого, поскольку вал вращается только тогда, когда на двигатель
подано питание. Если двигатель отключается, то вал фиксируется в достигнутом поло&
жении. Конечные выключатели устанавливают максимальный диапазон вращения
вала (принцип работы конечных выключателей изложен в главе 6, посвященной дис&
кретным устройствам). Таким образом, когда вал поворачивается на полный оборот по
часовой стрелке, это приводит к размыканию конечного выключателя и прекращению
вращения по часовой стрелке. Чтобы начать вращение против часовой стрелки, необ&
ходимо снова подать питание на двигатель. Если вал совершает полный оборот против
часовой стрелки, то конечный выключатель снова останавливает вращение до нового
подключения источника питания на двигатель. Конечно, для запуска и остановки дви&
гателя может использоваться сигнал обратной связи, допустим, от датчика температу&
ры, чтобы запускать и остановливать двигатель. В системе обогрева заслонка исполь&
зуется, чтобы управлять температурой. Когда температура понижается, тогда датчик
включает двигатель и заслонка приоткрывается, пока не не будет достигнута установ&
ленная температура. И наоборот, если температура повышается, то заслонка слегка
закрывается, пока не будет снова достигнута установленная температура.
Смешение и возврат воды в систему на базе двух управляемыми двигателями трех&
ходовых клапанов показано на рис. 7 .7: на рис. 7 .7a показано применение, рис. 7 .7б
изображает трехходовой клапан с электроприводом, а рис. 7 .7в показывает разрез кла&
панов. Холодная вода (см. рис. 7 .7a) поступает на вход левого трехходового распредели&
тельного клапана и делится на пропорциональные количества на обоих выходах. Вода,
поступающая из нижнего выхода, нагревается в теплообменнике и смешивается с водой
из другого выхода. Другой клапан используется, чтобы отвести часть воды мимо тепло&
обменника. Степень открытия обоих клапанов и температура теплообменника являются
средствами управления температурой воды на выходе смесителя.
7.4 . ùãÖäíêéçÄÉêÖÇÄíÖãúçõÖ ùãÖåÖçíõ
Электронагревательные элементы являются преобразователями электрической энергии в
тепловую. Нагревательные элементы производятся во всех формах и размерах, стандартных
или заказных, чтобы удовлетворять различные требования к нагреву. Большое семейство
электронагревательных элементов, имеющихся в продаже, вы можете видеть на рис. 7.8.
Каждый из нагревательных элементов семейства используется в специфических
целях. Ленточные нагреватели используются, чтобы нагреть цилиндрические объек&
ты или жидкость в цилиндрических контейнерах, таких как трубы и барабаны. Приме&
нение кассетных нагревателей связано с погружением в нагреваемую жидкость или с
расположением в отверстии объекта. Если не удается подобрать стандартные нагре&
вательные элементы, могут быть изготовлены заказные нагреватели, соответствую&
щие требованиям пользователя.
При выборе электронагревательных элементов должна быть вычислена скорость
теплопередачи, требуемая для конкретного применения. Скорость потока теплоты,
необходимая, чтобы поднять температуру объекта, зависит от теплоемкости объекта и
472
времени повышения температуры до необходимого значения. Формула теплового по&
тока может быть выражена следующим образом:
где
Q — скорость потока тепла, требуемая, для нагрева за заданное время, Вт,
CT — теплоемкость, Дж/°C,
TF — конечная температура, °C,
TI — начальная температура, °C,
t — время нагрева, с.
Рис. 7.7. Трехходовые клапаны с электроприводом, применяемые в качестве
разветвителя и смесителя для системы подачи теплой воды:
а) схема соединения клапанов;
б) общий вид клапана;
в) разрез клапана
ùãÖäíêéçÄÉêÖÇÄíÖãúçõÖ ùãÖåÖçíõ
473
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Теплоемкость объекта CT — количество теплоты, необходимое для повышения
температуры на 1 °C, выражается следующим образом:
CT = pVSh,
Рис. 7 .8. Нагревательные элементы
474
где
p — плотность объекта, кг/м3,
V — объем объекта, м3,
Sh — теплопроводность объекта, Дж/(кг °C).
èËÏ 7.2
Вычислите мощность, требуемую, чтобы нагреть масло за 1 минуту от 20 °C до 60 °C.
Масло течет со скоростью 0,003 м3/мин. Из справочника: плотность масла — 880 кг/м3,
теплопроводность — 2100 Дж/(кг °C).
êÖòÖçàÖ
Вычислим объем масла V:
V= скорость потока × время = 0,003 м3/мин × 1 мин = 0,003 м3.
Вычислим теплоемкость:
CT = pVSh = 880 кг/м3 × 0,003 м3 × 2100 Дж/(кг °C) = 5040 Дж/°C.
Определим требуемую мощность:
Q=CT×(TF—TI)/t=5040Дж/°C×(60°C —20°C)/60с=3360Вт.
7.5 . éÅáéê ÑÄíóàäéÇ, ìëàãàíÖãÖâ à èêÖéÅêÄáéÇÄíÖãÖâ
Ñãü ëàëíÖå ìèêÄÇãÖçàü
В системах управления промышленными технологическими установками датчики, усили&
тели и преобразователи имеют исключительно важное значение, так как используются не
только в управлении технологическим процессом, но и при управлении движением. Фак&
тически устройства этих трех типов применяются почти во всех системах управления, по&
скольку дают информацию о «самочувствии» системы — другими словами, о том, пра&
вильно ли она работает. Можно дать следующие определения этих устройств:
датчик — устройство, чувствительное к таким видам энергии, как теплота,
давление, движение и свет;
усилитель — устройство, которое усиливает сигналы до уровней, пригодных
для использования в системе;
преобразователь — устройство, которое получает энергию одного типа и
преобразует ее в энергию другого типа. Он обычно включает датчик и усили&
тель. Например, преобразователь температуры воспринимает температуру и
преобразует ее в электрический сигнал, который затем передает системе уп&
равления процессом для использования в качестве сигнала обратной связи
или переменной в системе управления процессом.
éÅáéê ÑÄíóàäéÇ, ìëàãàíÖãÖâ à èêÖéÅêÄáéÇÄíÖãÖâ Ñãü ëàëíÖå ìèêÄÇãÖçàü
475
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Все эти устройства (иногда называемые приборами в литературе, посвященной
промышленным системам) можно разделить на группы — по типу энергии, использу&
емой на их входе; кроме того, они могут быть разбиты на подгруппы по типу формиру&
емых ими сигналов управления или по типу переменных, создаваемых ими на выходе.
После обсуждения сигналов управления, стабилизации и калибровки мы рассмотрим
устройства, воспринимающие с помощью интерфейса энергии различных типов. Вы
получите базовые знания, которые позволят провести анализ, выбрать тип и конкрет&
ную серию датчиков температуры, давления, потока, уровня и положения.
7.5.1. íËÔ̊ Ò˄̇ÎÓ‚ ÛÔ‡‚ÎÂÌËfl
Изменение энергии на входе датчика обычно преобразуется в аналоговый электричес&
кий сигнал, который является входным для усилителя. Выходной же сигнал усилителя
используется в системе как сигнал управления. Типичными видами сигналов управле&
ния являются напряжение, ток, полное сопротивление (активное, емкостное или индук&
тивное) и частота. Могут использоваться и обратные величины, например проводи&
мость, которая является величиной, обратной сопротивлению, и период — величина,
обратная частоте. В системах управления могут использоваться не только аналоговые,
но и цифровые сигналы, величина которых выражается числом битов. Например, ана&
логовый сигнал, который может принимать и положительные и отрицательные значе&
ния, можно преобразовать в 12&разрядный цифровой сигнал. В одном из 12 разрядов в
этом случае будет отображен знак числа, положительный или отрицательный, а в ос&
тальных 11 разрядах будет записана информация о величине сигнала.
7.5.2 . ëӄ·ÒÓ‚‡ÌËÂ Ë ÛÒËÎÂÌË Ò˄̇·
Согласование сигнала — это преобразование уровня или типа сигнала к другому
уровню или типу сигнала, пригодному для использования в другом звене системы. Уси&
лителем, выполняющим согласование сигнала, обычно является широко используе&
мый формирователь электрического сигнала — операционный усилитель ОУ. По&
скольку на выходе датчиков обычно формируется небольшой сигнал напряжения или
незначительно изменяется их сопротивление, ОУ должен усиливать сигналы малых
уровней, создавая на выходе сигналы с уровнем, достаточным для использования сис&
темой управления. Две типичные схемы согласования сигнала приведены на рис. 7 .9.
Фотоэлемент, который изменяет сопротивление под действием света, представ&
лен на рис. 7.9а Сопротивление фотоэлемента является входным сопротивлением для
схемы на базе ОУ, коэффициент усиления которой изменяется в зависимости от этого
входного сопротивления.Схема с солнечной батареей, которая изменяет под действи&
ем света свое выходное напряжение, приведена на рис. 7.9б. Схема на базе ОУ усили&
вает напряжение солнечной батареи. Обратите внимание, что солнечная батарея, в
отличие от фотоэлемента, не нуждается во входном источнике питания, так как она
создает собственное напряжение.
476
Усилением называется изменение уровня сигнала, необходимое для того, чтобы
удовлетворить требования другого звена системы. Усилитель выполняет функцию
масштабирования, потому что он усиливает входной сигнал до уровня, необходимого
на выходе. В тех случаях, когда коэффициент усиления одного усилителя недостаточен
для масштабирования, необходим еще один каскад усиления.
7.5 .3 . ä‡Î˷ӂ͇
Калибровкой называется процедура определения точности измерительного устрой&
ства для замены или ремонта устройства, которое не обеспечивает заданной точности.
При калибровке датчиков эталонный источник энергии, имеющий, например, задан&
ную температуру, воздействует на вход датчика, и при этом измеряется выходной сиг&
нал датчика, чтобы определить, насколько точно выходное напряжение соответствует
входному сигналу. Изготовители датчиков обычно производят также и тестирующие
устройства для калибровки своих датчиков. При калибровке усилителей на их вход
подается минимальное и максимальное напряжение, и при этом для проверки точнос&
ти коэффициента усиления измеряется выходное напряжение.
Рис. 7.9 .
Примеры согласования
сигналов
а) фоторезистор
изменяет сопротивление
при освещении;
б) солнечная батарея
изменяет напряжение под
действием света
éÅáéê ÑÄíóàäéÇ, ìëàãàíÖãÖâ à èêÖéÅêÄáéÇÄíÖãÖâ Ñãü ëàëíÖå ìèêÄÇãÖçàü
477
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
При калибровке ряд известных значений формируется на входе датчика (или ком&
бинации датчика с усилителем), и измеряются соответствующие значения на выходе.
Например, на вход датчика давления можно подавать известные давления и измерять
при этом соответствующие им выходные токи.
Таблица 7.1 . Характерные температуры, представленные по различным
шкалам в трех масштабах температуры
Если измеренные данные нанести на график (давление по вертикальной оси, а ток —
по горизонтальной), то по этим точкам с помощью метода наилучшего приближения мож&
но построить кривую, которая называется градуировочной кривой. По этой кривой, для
любого значения давления, отложенного на вертикальной оси, можно на горизонтальной
оси найти соответствующий выходной ток. Использование градуировочной кривой осо&
бенно необходимо в нелинейных системах.
7.6 . ÑÄíóàäà íÖåèÖêÄíìêõ
Температура определяет степень нагрева или охлаждения тела или среды. Степень на&
грева или охлаждения выражается в градусах по шкалам Цельсия, Фаренгейта или
Кельвина. В промышленности обычно используется шкала Цельсия. Температуры в
различных характерных точках, выраженные в градусах соответствующих шкал, при&
ведены в табл. 7 .1. Поскольку шкала Фаренгейта также часто применяется в про&
мышленности, как и шкала Цельсия, часто необходимо преобразование значений, и
вы должны уметь им пользоваться. Преобразование осуществляется по следующим
формулам:
Измерение температуры — одна из наиболее важных функций в любом техноло&
гическом процессе. Оно используется, чтобы поддерживать температуру процесса
внутри некоторого диапазона или совершать определенные операции, если темпера&
тура поднимается выше или падает ниже установленного предела. Измерение темпе&
ратуры используется также для контроля процесса или для определения его эффек&
тивности. В следующих разделах мы обсудим различные промышленные датчики
температуры.
478
7.6 .1 . ä·ÒÒËÙË͇ˆËfl ‰‡Ú̃ËÍÓ‚ ÚÂÏÔ‡ÚÛ̊
Двумя наиболее популярными датчиками температуры являются заполненные жидко&
стью термометры, которые широко используются для измерения температуры тела, и
биметаллические пластины, применяемые при двухпозиционном регулировании тем&
пературы системы. Эти датчики относятся к бытовым устройствам, а наше обсужде&
ние касается промышленных датчиков температуры, которые могут быть классифици&
рованы по типу выходной величины следующим образом:
датчики, у которых сопротивление зависит от температуры, — резистивные
детекторы температуры и терморезисторы;
датчики, у которых напряжение зависит температуры, — термопары, твер&
дотельные датчики температуры;
датчики, у которых излучение зависит температуры, — пирометры.
7.6 .2 . êÂÁËÒÚË‚Ì̊ ‰ÂÚÂÍÚÓ̊ ÚÂÏÔ‡ÚÛ̊
Резистивные детекторы температуры (RTD) — датчики температуры, которые ис&
пользуют изменение сопротивления металлов в зависимости от температуры. Наибо&
лее часто используемые в RTD металлы, их температурный диапазон и коэффициенты
сопротивления, обозначаемые греческой буквой альфа (a), приведены в табл. 7 .2. Ко&
эффициент сопротивления представляет собой изменение сопротивления при изме&
нении температуры на 1 °C. Для чистых металлов изменение сопротивления прибли&
зительно линейно. Внутри указанного температурного диапазона эта связь может
быть выражена как
R2=R1(1+α·∆T).
где
R2 — сопротивление при любой температуре,
R1 — сопротивление при определенной температуре,
α — коэффициент сопротивления,
∆T — изменение температуры.
Таблица 7.2. Материалы, используемые в RTD
èËÏ 7.3
Каково сопротивление платинового RTD при 60 °C, если сопротивление при 20 °C
равно 135 Ом?
ÑÄíóàäà íÖåèÖêÄíìêõ
479
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
êÖòÖçàÖ
Коэффициент сопротивления платины (см. табл. 7.2) равен 0,0039, с учетом этого
получим:
R2=R1×(1+α·∆T)=135Ом×[1+0,0039×(60°C —20°C)]=
= 135Ом×1,156=156Ом.
Изменение сопротивления RTD должно быть преобразовано в изменение напря&
жения или тока, так именно эти величины могут быть использованы в других узлах
системы. Два вывода сопротивления RTD подключены к мостовой схеме, в диагональ
которой (точки X и Y моста) включен вход дифференциального усилителя (рис. 7 .10).
Обратите внимание, что RTD представлен как переменный резистор RT. При комнат&
ной температуре мост сбалансирован так, чтобы разность потенциалов на его выходе
и, следовательно, на входе ОУ была равна нулю. Если изменяется температура датчи&
ка RTD, то изменяется его сопротивление. Мост больше не сбалансирован, что при&
водит к появлению разности потенциалов на входе дифференциального усилителя и на
его выходе. Когда мост сбалансирован, потенциалы точек X и Y должны быть одинако&
вы, и падения напряжения на R1 и R2 равны друг другу, так же как и падения напряже&
ния на R3 и RT. При этом значение сопротивления RTD, при котором мост сбалансиро&
ван, можно определить из выражения:
èËÏ 7.4
Каково значение сопротивления RTD на рис. 7.10 для сбалансированного моста, если
R1, R2 и R3 составляют 47 кОм, 56 кОм и 110 кОм соответственно?
êÖòÖçàÖ
Кроме RTD с двумя выводами существуют RTD с тремя и четырьмя выводами.
Они используются в тех случаях, когда требуется высокая точность измерений. В мос&
товой схеме один дополнительный вывод в RTD с тремя выводами устраняет ошибки,
вызванные сопротивлением подводящего провода, когда RTD должен быть размещен
на большом расстоянии от моста. Сопротивление RTD с четырьмя выводами устраня&
ет ошибки, вызванные сопротивлением подводящих проводов, и уменьшает ошибки,
вызванные шумом. На рис. 7 .11a и б показаны сопротивления RTD с тремя и с че&
тырьмя выводами соответственно, подключенные к мостовой схеме. Компенсация
подводящих проводов необходима в тех случаях, когда изменение расстояние от датчи&
ка RTD до усилителя вносит недопустимые ошибки. Уменьшение ошибок из&за шума
необходимо, если требуется высокая степень точности измерений.
480
Рис. 7.10. Мостовая схема с двухвыводным резистивным детектором
температуры
Рис. 7.11 . Мостовая схема с
резистивными датчиками
температуры:
а) с тремя выводами;
б) с четырьмя выводами
ÑÄíóàäà íÖåèÖêÄíìêõ
481
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
7.6.3. íÂÏÓÂÁËÒÚÓ̊, ËÎË ÚÂÏËÒÚÓ̊
Терморезисторы, или термисторы, представляют собой электронные компоненты, ко&
торые существенно изменяют свое сопротивление при изменении температуры корпу&
са. Для терморезистора, так же как и для RTD, графическое условное обозначение
совпадает с условным обозначением переменного резистора, и на схемах он также
обозначается как RT. Термин «термистор» образован путем объединения английских
слов thermal (тепловой) и resistor (резистор). В зависимости от своего типа термисто&
ры имеют отрицательный температурный коэффициент сопротивления (NTC) или по&
ложительный температурный коэффициент сопротивления (PTC). Электрическое со&
противление терморезисторов NTC уменьшается с ростом температуры среды и уве&
личивается при понижении температуры. Электрическое сопротивление терморезис&
торов PTC увеличивается с ростом температуры среды и уменьшается при понижении
температуры. Графики температурных зависимостей для NTC& и PTC&терморезисто&
ров показаны на рис. 7.12. Оба типа термисторов имеют свои свойства и преимуще&
ства, что делает их идеальными для определенных применений датчиков. NTC&терми&
сторы изготавливаются из окисей переходных металлов (таких как марганец, кобальт,
медь и никель) и являются термозависимыми полупроводниковыми резисторами. При
работе в диапазоне от —200 °C до +1000 °C они выпускаются в стеклянных ячейках,
дисках, чипах и пакетах. NTC&терморезисторы следует выбирать, когда требуется не&
прерывное изменение сопротивления в широком диапазоне температур. Они облада&
ют механической, тепловой и электрической стабильностью и высокой степенью чув&
ствительности. Превосходное сочетание цены и эффективности привело к широкому
использованию NTC&термисторов в случаях, когда необходимо измерение и управле&
ние температурой, компенсация температуры, подавление колебаний и измерение по&
тока жидкостей.
Рис. 7 .12. Температурные зависимости термисторов
482
PTC&терморезисторы представляют собой термозависимые резисторы, которые
обычно изготавливаются из титаната бария. Их следует выбирать, если необходимо
существенное изменение сопротивления в применении, где требуются соответствую&
щие температуры и уровни тока или когда необходим линейный выход. Терморезисто&
ры с положительным температурным коэффициентом (PTC — positive temperature
coefficient) могут работать в следующих режимах:
при измеряемых температурах в диапазоне от 60 °C до 180 °C, например, при
защите обмоток в электрических двигателях и трансформаторах;
в твердотельных плавких предохранителях — системах защиты от токовой
перегрузки, в пределах от нескольких миллиампер до нескольких ампер и
при непрерывных напряжениях до 600 В, например, в источниках питания
для разнообразного электрического оборудования;
в поплавковых датчиках — как защита против перегревания жидкости, на&
пример, в резервуарах с парафином для покрытия деталей.
На рынке имеются также комбинированные термисторы, которые содержат терми&
сторы и с положительным и с отрицательным (NTC — negative temperature coefficient)
коэффициентом сопротивлений. Они имеют характеристику температуры сопротивле&
ния, подобную NTC&термистору, но с областью постоянного сопротивления. Комбини&
рованные датчики на термисторах с постоянным сопротивлением в определенном диа&
пазоне первоначально были разработаны для измерения температуры автомобильного
хладагента. При таком применении датчики работают как обычные сопротивления при
средней степени нагрева в нормальном режиме работы машины. В то же время сохраня&
ется чувствительность датчиков к перегреву или переохлаждению, и автомобилисты
могут быть своевременно предупреждены об аварийных условиях. По конструкции и
технологии производства терморезисторы обычно делятся на два широких класса:
приборы со стеклянным покрытием, имеющие форму цепочек ячеек, зондов
и стержней;
приборы с металлическим покрытием, имеющие форму чипов, дисков и шайб.
Форма термисторов, как и у РТД, диктуется особенностями применения. Термисторы
для стиральных машин часто привинчиваются к объекту, в котором контролируется изме&
нение температуры. Терморезисторы в форме шайбы популярны для силовых устройств.
Стержневые термисторы пригодны для контроля изменений температуры в электронном
оборудовании из&за своего высокого сопротивления и умеренных потерь мощности.
7.6 .4 . íÂÏÓÔ‡̊
В качестве датчиков температуры могут использоваться термопары, которые создают
небольшое напряжение в несколько милливольт, зависящее от температуры. Термопа&
ры, которые изготавливаются с использованием двух различных металлических прово&
дов, приведены в табл. 7 .3, вместе с соответствующим диапазоном измеряемых темпе&
ратур и условным обозначением типа. График температурных зависимостей напряжения
для четырех наиболее часто применяемых типов термопар показан на рис. 7 .13. Обра&
тите внимание, что 0 °C соответствует напряжению 0 В.
ÑÄíóàäà íÖåèÖêÄíìêõ
483
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Термопары обязаны своим появлением Томасу Зеебеку (Seebeck), который в на&
чале 19 в. открыл эффект, позже названный его именем. Зеебек обнаружил, что если
два провода, сделанные из различных металлов, спаяны в кольцо с двумя спаями, то в
этой цепи при нагревании одного из спаев возникает небольшой ток. Эффект Зеебека
проиллюстрирован на рис. 7.14a, ниже на рис. 7 .14б показан вольтметр, заменяющий
один из переходов, где небольшое выравнивающее напряжение пропорционально ко&
личеству теплоты, выделяющейся в другом переходе.
Таблица 7.3 . Термоэлектрические материалы
В контуре, показанном на рис. 7.14б, точка соединения провода термопары с про&
водом вольтметра образует дополнительный переход из неодинаковых металлов; та&
ким образом, создается небольшое напряжение, направленное навстречу напряже&
нию рабочего спая и вызывающее ошибку при измерении напряжения. Однако если
температура этого перехода, называемого свободным спаем, равна 0 °С, то вольтметр
измеряет правильное значение напряжения. После 1800&х годов свободный спай ста&
ли называть холодным спаем, потому что он был погружен в ванну со льдом, которая
сохраняла температуру 0 °C, и таким образом поддерживал напряжение на уровне 0 В.
В настоящее время существуют более удобные методы:
чтобы поддерживать заданную температуру холодного спая, он помещается в
термостат (рис. 7.15);
в контур термопары последовательно включаются компенсирующие цепи,
создающие компенсирующий сигнал, при этом суммарный сигнал такой же,
какой создавал бы холодный спай при 0 °C;
напряжения обоих переходов преобразуются в цифровую форму и передаются
на компьютер, программа которого учитывает напряжение на холодном спае.
Напряжение на выходе термопары составляет несколько милливольт, поэтому для
согласования ее с другими узлами необходим усилитель. Обычно используется конт&
рольно&измерительный усилитель с высоким коэффициентом усиления и выходным на&
пряжением от 1 до 5 В или от 0 до 10 В или током от 4 до 20 мА. Усилители для термопар
содержат измерительные потенциометры, позволяющие вводить корректировки, чтобы
устанавливать более низкий предел выходного сигнала при минимальной температуре и
в более высокий — при максимальной. Чтобы сохранить целостность выхода термопа&
ры при низких уровнях, обычно принимаются следующие меры предосторожности:
термопара заземляется;
напряжение к термопаре подводится с помощью витой пары;
усилитель имеет высокий уровень смещения в режиме с общим входом.
484
Рис. 7.13.
Вольт
температурные
характеристики термопар
Рис. 7.14 . Соединение переходов термопары, основанных на эффекте
Зеебека:
а) измерение тока;
б) измерение напряжения
ÑÄíóàäà íÖåèÖêÄíìêõ
485
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
7.6 .5 . 킉ÓÚÂÎ̧Ì̊ ‰‡Ú̃ËÍË ÚÂÏÔ‡ÚÛ̊
Твердотельный датчик температуры — это интегральная схема (ИС), выходной сигнал
которой прямо пропорционален температуре, обычно по шкале Цельсия. Проектиров&
щики внедрили эти ИС почти в каждое электронное изделие, толщина которого больше
толщины пейджера. Сотовые телефоны обычно включают один или несколько датчиков
в батарею аккумуляторов, ноутбук может иметь четыре или большее количество датчи&
ков для проверки температуры в ЦПУ, батарее, адаптере переменного тока и в других
нагревающихся узлах. И хотя датчики температуры ИС не всегда могут заменить тради&
ционные датчики температуры — детекторы температуры сопротивления, терморезис&
торы и термопары, но предлагают много преимуществ. Например, они не требуют ника&
кой линеаризации или компенсации опорного перехода. Фактически они часто
обеспечивают или компенсируют холодный переход в термопарах. Кроме того, они все&
гда обеспечивают лучшую помехоустойчивость с помощью выходных сигналов более
высокого уровня, а некоторые обеспечивают и цифровой выход, который с помощью
интерфейса может быть подключен непосредственно к цифровым системам.
Справочные данные для типичного твердотельного датчика температуры LM35,
производимого фирмой National Semiconductor, приведены на рис. 7.16.
Датчик формирует выходное напряжение, равное 10 мВ на °C, в диапазоне темпе&
ратур от —55 до +125 °C. Выходное напряжение может быть выражено как:
где VOUT — выходное напряжение, В,
T — температура, °C.
Рис. 7 .15. Блок холодного спая термопары
486
7.6 .6 . èËÓÏÂÚ̊
Пирометр — это датчик, измеряющий температуру без прямого контакта с измеряе&
мым объектом по исходящему от него излучению. Этот датчик температуры называет&
ся также лучевым, оптическим или инфракрасным пирометром. Блок&схема типично&
го пирометра приведена на рис. 7.17.
Пирометр принимает энергию излучения, испускаемого объектом, температуру
которого необходимо измерить. Оптическая система фильтрует энергию; фокусируя
Рис. 7.16. Справочные данные для твердотельного температурного
датчика LM35 фирмы National Semiconductor
ÑÄíóàäà íÖåèÖêÄíìêõ
487
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
ее на детекторе, который преобразует ее в электрический сигнал, управляющий дисп&
леем. Пирометр является ручным или устанавливается на штативе и направляется на
исследуемый объект. Пирометр используется как датчик температуры в следующих
ситуациях, когда датчики с прямым контактом неприменимы:
для объектов измерения с высокой температурой типа расплавленного же&
леза и раскаленных печей;
для наблюдения за температурой перемещающихся деталей, когда нагрев
свидетельствует об отклонении от нормального процесса;
в случаях, когда датчики с непосредственным контактом могут загрязняться
в ходе технологического процесса.
Таблица 7.4. Сравнение датчиков температуры
Небольшие пирометры используются в электронной промышленности, чтобы
обнаружить области перегрева или перегретые компоненты при испытаниях разраба&
тываемых устройств, а в некоторых случаях и при проверке качества готовой продук&
ции. Эти небольшие пирометры иногда называют инфракрасными термопарами.
Преимущества и недостатки резистивных детекторов температуры (RTD), термо&
резисторов, термопар и твердотельных датчиков температуры приведены в табл. 7.4.
Рис. 7 .17. Работа пирометра
488
7.7. ÑÄíóàäà ÑÄÇãÖçàü
Датчики давления — устройства, которые обнаруживают силу, с которой один объект
воздействует на другой. Датчики давления используются для таких целей, как:
определение уровня жидкости в резервуаре — за счет связи давления с вы&
сотой столба жидкости;
определение температуры — за счет связи давления газа или жидкости в
замкнутом объеме с температурой;
определение потока жидкости — за счет связи падения давления на диаф&
рагмах, помещенных в поток.
Прежде чем продолжить обсуждение различных датчиков давления и их примене&
ние, важно дать определение используемым при этом терминам. Прежде всего, опреде&
лим давление как силу, приложенную к площади, — оно обычно и выражается в едини&
цах силы, приходящейся на единицу площади. Часто давление выражается в фунтах на
квадратный дюйм, и эта единица давления называется psi. Давление в жидкостях назы&
вается гидравлическим давлением, давление в газах обычно не является постоянной ве&
личиной и является одной из переменных состояния. Понятие силы применяется ко мно&
гим ситуациям — в основном, когда тела тянут или толкают друг друга. Вращательное
движение вала двигателя вызывает воздействие, называемое вращающим моментом.
Изменение в объектах, к которым приложена сила, называется механическим напряже&
нием. Важно также знать единицы измерения для давления. Атмосферное давление, ко&
торое равно 14,7 psi, является основной величиной при измерении давления. На каждый
квадратный дюйм земли, расположенный на уровне моря, атмосфера давит с силой
14,7 фунтов. Поскольку атмосфера всегда находится вокруг нас, атмосферное давление
используется в большинстве случаев как отправная точка или эталон при измерении
давления. Кроме того, вы должны знать следующие термины:
давление датчика (gage pressure) — разность между измеряемым и атмос&
ферным давлением;
вакуум — давление меньшее, чем атмосферное;
абсолютный вакуум — отсутствие давления;
абсолютное давление — разность между измеряемым давлением и абсолют&
ным вакуумом;
дифференциальное давление — разность между измеряемым и опорным
давлением.
7.7.1 . ä·ÒÒËÙË͇ˆËfl ‰‡Ú̃ËÍÓ‚ ‰‡‚ÎÂÌËfl
Датчики давления обычно классифицируются по способу измерения и делятся на сле&
дующие группы:
отклоняющиеся датчики давления: трубки Бурдона, мембраны и сильфоны;
дифференциальные датчики давления;
ÑÄíóàäà ÑÄÇãÖçàü
489
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
пьезоэлектрические и твердотельные датчики;
непосредственные датчики давления, например тензодатчики и тензорезисторы.
7.7.2 . íÛ·ÍË ÅÛ‰Ó̇, ÏÂÏ·‡ÌÌ̊Â Ë ÒËÎ̧ÙÓÌÌ̊ ‰‡Ú̃ËÍË
Трубка Бурдона, мембранные и сильфонные датчики являются датчиками давления со
смещением и состоят из следующих основных звеньев:
первичного звена, которое преобразует измеряемое давление в пропорцио&
нальное смещение. Примеры первичных звеньев показаны на рис. 7.18;
промежуточного звена, которое преобразует смещение в изменение элект&
рической величины;
усилителя, который преобразует изменение электрической величины в сигнал,
пригодный для использования в индикаторах, контроллерах или компьютерах.
Трубка Бурдона — изогнутая, полая металлическая трубка, открытая с одного
конца и запаянная с другого. Имеются трубки различной формы: в форме буквы C, как
на рис. 7.18a, или спирали. Спираль изготавливается из бронзы, стали или, чаще все&
го, из нержавеющей стали. Жидкость, давление которой измеряется, вводится в меха&
нически закрепленный открытый конец. Трубка под действием давления стремится
выпрямиться, обеспечивая смещение, пропорциональное приложенному давлению.
Предельная величина измеряемых давлений достигает приблизительно 10000 psi.
Промежуточное звено использует смещение трубки, чтобы управлять механизмами и
стрелкой индикации для датчиков давления. Смещение может передаваться также на
движок измерительного потенциометра, приводя к изменению сопротивления или на&
пряжения на измерительном потенциометре, включенном в мостовую схему.
Мембранные датчики имеют гибкую мембрану, изготовленную из резины для дат&
чиков низкого давления или из металла для датчиков высокого давления. (Высоким
здесь считается давление примерно в 300 psi.)
Мембранный датчик показан на рис. 7.18б. Мембрана устанавливается в цилин&
дре, имеющем полости с обеих сторон. Одна из полостей открыта для атмосферы, а
другая связана с источником измеряемого давления. Когда прикладывается давление,
мембрана прогибается, причем величина ее перемещения пропорциональна прило&
женному давлению. Промежуточное звено использует перемещение, чтобы управлять
измерительным потенциометром, вызывая изменение его сопротивления, или меха&
ническим переключателем при достижении предельных значений давления.
Сильфонный датчик (рис. 7.18c) содержит сильфон — тонкий запаянный метал&
лический цилиндр с рифлеными сторонами, подобными мехам аккордеона. Когда дав&
ление прикладывается к сильфону, он раздвигает свои мехи, что приводит к смеще&
нию, величина которого пропорциональна приложенному давлению. Этот тип датчика
используется, чтобы измерить давления низкого уровня — до 30 psi. Промежуточное
звено использует смещение, чтобы управлять скользящим контактом измерительного
потенциометра, вызывая изменение сопротивления, или чтобы управлять подвижным
сердечником трансформатора, вызывая изменение индуктивности дифференциально&
го линейного трансформатора (LVDT).
490
Рис. 7.18. Первичные узлы датчиков давления со смещением:
а) трубка Бурдона;
б) датчик давления с мембраной;
в) датчик давления с сильфоном
Рис. 7.19. Дифференциальный датчик давления
ÑÄíóàäà ÑÄÇãÖçàü
491
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
7.7.3. ÑËÙÙÂÂ̈ˇÎ̧Ì̊ ‰‡Ú̃ËÍË ‰‡‚ÎÂÌËfl
Дифференциальный датчик давления — модифицированный мембранный датчик, в ко&
тором давление может прикладываться к обоим входам цилиндра. Когда давление при&
кладывается к обоим входам, диафрагма смещается в сторону входа с более низким дав&
лением. Дифференциальный датчик давления показан на рис. 7 .19, где P1 и P2 — два
входных давления датчика. Смещение диафрагмы пропорционально разности давлений
и приводит к изменению положения штока концевого переключателя или движка изме&
рительного потенциометра. Для улучшения движения диафрагмы с одной или обеих ее
сторон создаются складки.
В промышленности дифференциальные датчики давления обычно используются
для создания детекторов неисправностей, которые показывают, что требуется ремонт
или замена устройства. Промышленным устройством в схеме на рис. 7.19 может быть,
например, фильтр в канале вентиляции. Когда фильтр чистый, давления P1 и P2 равны
друг другу, но когда фильтр загрязняется, появляется разность давлений. Состояние
ключа при этом изменяется, показывая, что необходима замена фильтра. В системах
водоснабжения, напротив, высокая разность давлений P1 и P2 наблюдается при нор&
мальном рабочем режиме, а о неисправности может свидетельствовать снижение раз&
ности давлений.
7.7.4 ȩ̀ÂÁÓ̋ÎÂÍÚË̃ÂÒÍË ‰‡Ú̃ËÍË ‰‡‚ÎÂÌËfl
Пьезоэлектрические датчики давления используют при работе явление пьезоэлектри&
чества, обнаруженное в 1881 году Жаком и Пьером Кюри (Jcques, Pierre Curie). Яв&
ление пьезоэлектричества происходит, когда давление прикладывается к кристаллу,
деформируя его, что приводит к появлению небольшого напряжения, пропорциональ&
ного деформации. Поскольку полное внутреннее сопротивление кристалла велико, а
напряжение мало, необходим ОУ, чтобы получить пригодный для использования уро&
вень напряжения. Пьезоэлектрический датчик давления показан на рис. 7 .20. Диаф&
рагма отклоняется, когда прикладывается давление, и стержень передает движение
непосредственно на пьезоэлектрический кристалл. Давление на кристалл производит
небольшое напряжение, пропорциональное давлению.
7.7.5 . 킉ÓÚÂÎ̧Ì̊ ‰‡Ú̃ËÍË ‰‡‚ÎÂÌËfl
Твердотельный датчик давления измеряет давление, приложенное к одной стороне
мембраны. В отличие от электромеханического датчика твердотельные не состоят из
нескольких дискретных компонентов, а содержат как электрические, так и механичес&
кие компоненты, встроенные в одну кремниевую пластину. С обратной стороны плас&
тины вырезают глубокий паз, оставляя тонкую (около 15 мм) диафрагму. Небольшое
отклонение диафрагмы заставляет интегрированные в пластине резисторы изменять
свое сопротивление. Датчик преобразует это изменение в напряжение, которое может
легко интерпретироваться как непрерывно и линейно изменяющееся давление. Кроме
492
того, лазерная подгонка нескольких резисторов в цепи устройства обеспечивает тем&
пературную компенсацию и калибровку.
Полупроводниковые технологии обеспечили твердотельным датчикам давления широ&
кую область использования. В настоящее время они требуют меньшего количества кремния
и упаковочного материала. Это позволяет значительно снизить их стоимость при сохранении
высокой надежности и точности, которые характерны для электронных датчиков. Датчики
давления фирмы Motorola серии MPXM, показанные на рис. 7.21, выпускаются в корпусах,
приспособленных для поверхностного монтажа на печатной плате. Обратите внимание, что
одна конфигурация имеет трубчатый порт для удобного подключения к трубопроводу. Серия
MPXM имеет непрерывный линейный выход с калибровкой и температурной компенсаци&
ей, что облегчает ее использование. Точки переключения давления корректируются не ап&
паратными средствами, а с помощью программного обеспечения. Такая гибкость упрощает
оптимизирование системы, позволяя не устанавливать при разработке заранее определен&
ные точки измерения. Это означает, что проектировщик может оценивать множество точек
одним и тем же датчиком.
Рис. 7.21. Твердотельный датчик
давления фирмы Motorola
Рис. 7.20. Пьезокристаллический датчик давления
ÑÄíóàäà ÑÄÇãÖçàü
493
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
При замене электромеханического датчика давления твердотельным можно значи&
тельно усовершенствовать систему. Например, при заполнении бака стиральной машины
водой перед стиркой электромеханический датчик сообщает только о достижении водой
соответствующего уровня. Твердотельный датчик формирует во время заполнения бака
непрерывный сигнал. Если поток воды прекратился, то датчик указывает фактический
уровень воды. Дополнительный интеллект обеспечивает удобство пользователю, что, в
свою очередь, увеличивает объем продаж стиральных машин производителями. В систе&
мах кондиционирования воздуха и пылесосах может контролироваться поток воздуха.
Снижение его до минимально допустимого уровня в процессе эксплуатации указывает на
неисправность системы либо на необходимость замены фильтра. Для пылесосов датчик
давления может обнаруживать заполнение бака пылью, загрязнение фильтра или засоре&
ние шланга либо насадки. Помимо использования в бытовых приборах, датчики давления
находят применение в технологических процессах, включая пневматическое управление,
текущий контроль химических процессов, в медицинском оборудовании, в автомобильных
двигателях внутреннего сгорания и в системах защиты. Мы привели здесь лишь немногие
примеры систем, в которых можно повысить качество измерения давления..
7.7.6 . íÂÌÁÓÂÁËÒÚÓ̊ Ë Ì‡„ÛÁÓ̃Ì̊ fl̃ÂÈÍË
Механическим напряжением в теории сопротивления материалов называется количе&
ственная характеристика степени деформации тела из&за приложенного давления или
силы. Более конкретное определение: напряжением называется малое изменение дли&
ны — положительное (при растяжении) или отрицательное (при сжатии). Оно может из&
меряться тензорезистором, изготовленным из очень тонкого провода или металлической
фольги, вырезанной в форме фигурной сетки, как показано на рис. 7.22. Сетка прикрепля&
ется к тонкой несущей подложке, которая прикрепляется непосредственно к измеряемому
объекту. При этом напряжение, испытываемое объектом измерения, передается непос&
редственно на тензорезистор, электрическое сопротивление которого линейно изменяет&
ся с изменением длины. Тензорезистор, прикрепленный к испытуемому объекту, показан
на рис. 7 .23a. Поскольку к сетке сила не прикладывается, приращение ее длины при рас&
тяжении (или сжатии) равно приращению длины испытуемого объекта, как показано на
рис. 7 .23б. Чтобы правильно соединить датчик напряжения с испытуемым объектом, важ&
но следовать инструкциям изготовителей тензорезистора. Только в этом случае напряже&
ние может быть точно передано с испытуемого образца через связующее вещество на под&
ложку тензорезистора и затем непосредственно на тензорезистор.
Основной параметр тензорезистора — чувствительность к напряжению — коли&
чественно выражается коэффициентом датчика (GF). Коэффициент датчика равен от&
ношению относительного изменения электрического сопротивления к относительно&
му изменению длины и вычисляется как
где через e обозначено относительное приращение длины DL/L. Коэффициент датчи&
ка для металлических тензорезисторов лежит обычно в диапазоне от 2 до 4.
494
Рис. 7.22.
Датчик механического
напряжения на
подложке
Рис. 7.23.
Датчик механического
напряжения, прикрепленный к
исследуемому образцу, и
мостовая схема:
а) датчик механического
напряжения, прикрепленный к
исследуемому образцу;
б) расположение провода на
образце и приложенные силы;
в) мостовая схема с датчиком
механического напряжения
ÑÄíóàäà ÑÄÇãÖçàü
495
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
èËÏ 7.5
Каково изменение сопротивления для испытуемого экземпляра, который подверга&
ется напряжению при использовании датчика на 120 Ом с коэффициентом датчика,
равным 2, если ε = 500×10—6?
êÖòÖçàÖ
Вычисляем:
∆R/R=2×500×10&6
,
∆R/R = 0,001,
∆R/120 = 0,001,
∆R = 0,12 Ом.
Чтобы измерять столь малые изменения сопротивления, тензорезисторы почти
всегда используются в мостовой схеме. Тензорезистор, включенный в мостовую схему,
показан на рис. 7 .23в. Тензорезистор RG включен в одно из плеч моста, в противополож&
ное плечо включен резистор RT, который используется, чтобы сбалансировать сопро&
тивление тензорезистора. Когда к тензорезистору не приложена сила, мост сбалансиро&
ван. Это означает, что выходное напряжение UВЫХ равно нулю. Балансировка моста с
помощью RT компенсирует как изменения резисторов, так и небольшое предваритель&
ное напряжение, составляющее малую часть давления, приложенного к тензорезистору
при измерении. Когда сила прикладывается к тензорезистору, сопротивление изменяет&
ся, и это изменение пропорционально деформации провода в тензорезисторе; выходное
напряжение моста обычно линейно зависит от давления.
Изменения температуры могут вызывать небольшие изменения сопротивления
тензорезистора. Чтобы их компенсировать, в схему добавлен второй тензорезистор,
названный фиктивным датчиком. Фиктивный датчик закреплен параллельно линии
приложения силы и не испытывает, таким образом, никакого воздействия. Тензорези&
стор, который измеряет давление, называется активным датчиком. Обратите внима&
ние, что на рис. 7.24a тензорезисторы названы активными и фиктивными датчиками.
Мостовая схема с двумя датчиками изображена на рис. 7.24б. В этой схеме любое со&
противление изменяется при изменении температуры. Изменение происходит и в ак&
тивных, и в фиктивных датчиках, и изменения компенсируются, поскольку датчики
включены в противоположные плечи моста. Балансировка моста с помощью RT ком&
пенсирует изменение для резистора и для предварительной нагрузки, так как в мосте
используется только активный датчик.
Когда необходимо очень точное измерение веса, большое количество тензорезис&
торов специально размещается под различными углами на испытуемом образце, чтобы
496
обеспечить максимальную стабильность температуры. Специально разработанный дат&
чик силы на тензорезисторах называется нагрузочной ячейкой. Нагрузочная ячейка
может рассматриваться как датчик силы, который преобразует силу или вес в электри&
ческий сигнал. Для измерения веса или давления в нагрузочных ячейках используется
ряд тензодатчиков, соответствующим образом распределенных по поверхности ячейки.
Рис. 7.24. Активный и фиктивный датчики:
а) активный и фиктивный датчики на испытуемом образце;
б) активный и фиктивный датчики, включенные в плечи моста
Нагрузочные ячейки используются почти в каждой электронной системе взвеши&
вания. После освоения принципов работы нагрузочных ячеек вам будет проще понять
и работу систем, в которых они используются. Тензорезисторы являются основой на&
грузочных ячеек. Как было упомянуто ранее, тензорезистор — это устройство, кото&
рое изменяет свое сопротивление под действием механической нагрузки. Оно хими&
чески прикрепляется к тонкой диэлектрической подложке датчика. Подложка датчика
затем приклеивается к элементу напряжения связующими веществами определенно&
го состава. Точное расположение датчика, рекомендованные материалы и процедура
установки — все это влияет на результаты измерений и определяет общие характери&
стики нагрузочных ячеек.
ÑÄíóàäà ÑÄÇãÖçàü
497
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Каждый слой датчика состоит из одного или нескольких тонких проводов, при&
крепленных к поверхности элемента для измерения механического напряжения (луча,
кольца, или столбца) внутри нагрузочной ячейки. Поскольку поверхность, к которой
прикреплен датчик, испытывает механическую нагрузку, провода растягиваются или
сжимаются, изменяя при этом свое сопротивление, пропорционально приложенной
нагрузке. При изготовлении нагрузочной ячейки используется один или несколько
датчиков напряжения. Нагрузочная ячейка давления и работающая на изгиб стержне&
вая нагрузочная ячейка представлены соответственно на рис 7.25a и б.
Рис. 7 .25.
Тензодатчики давления
а) тензодатчик типа
«бочка» на нагрузку в
50000 фунтов;
б) консольный
тензодатчик на нагрузку
в 20000 фунтов
Несколько тензорезисторов могут быть включены в четыре плеча моста Уитстона,
как показано на рис. 7 .26. При подаче на мост входного напряжения, на его выходе появ&
ляется напряжение, пропорциональное силе, приложенной к ячейке. Этот выходной сиг&
нал может быть усилен и подан на стандартные измерительные электронные приборы.
В современных автоматизированных технологических процессах системы изме&
рения веса используются как в статических, так и в динамических режимах. Некото&
рые продвинутые технологические системы связаны с помощью интерфейса с компь&
ютерами для создания базы данных и используют микропроцессорную технику для
дозированного введения материалов и управления скоростью их подачи. Чтобы пере&
слать информацию о весе на вход компьютера, используются формирователи сигна&
лов, позволяющие преобразовать аналоговый сигнал нагрузочной ячейки в цифровой.
Вся система может быть создана из набора базовых модулей, в состав которого входят:
нагрузочные ячейки и кабели;
распределительный блок, объединяющий сигналы ячеек в один выходной
сигнал;
498
измерительные приборы, такие как индикаторы и формирователи сигналов;
периферийное оборудование, например принтеры и компьютеры.
Рис. 7.26.
Конфигурация моста
тензодатчика
7.8. ê‡ÒıÓ‰ÓÏÂ̊
Измерение расхода жидкостей и газов является важной составляющей управления
технологическими процессами. Измерение расхода показывает, сколько жидкости ис&
пользуется или распределяется в процессе, и часто используется в качестве перемен&
ной управления, которая помогает в поддержании эффективности процесса. Расход
используется также, чтобы указать такие дефекты, как неудовлетворительная произ&
водительность насоса и засорение слива.
Прежде чем продолжить обсуждение расходомеров, рассмотрим некоторые усло&
вия и формулы для технологических процессов, использующих измерение расхода.
Расход определяется как объем материала, проходящего через фиксированную отмет&
ку в единицу времени. Под материалом подразумеваются твердые тела, жидкости или
газы, например древесина, переданная на распилочный участок, или жидкость, пере&
мещающаяся по гидравлической системе трубопроводов. В этой книге мы будем гово&
рить о расходе флюидов — жидкостей и газов. Расход жидкости, проходящей через
канал, может быть выражен следующей формулой:
Q=V×A,
где Q — расход жидкости, проходящей через канал,
V — скорость жидкости,
A — площадь поперечного сечения канала.
èËÏ 7.6
Каков расход краски, которая проходит со скоростью 40 дюймов в секунду через 4&дюй&
мовый канал?
êÖòÖçàÖ
Q=V×A,
êÄëïéÑéåÖêõ
499
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
где
A = π × (d/2)2 = 3,14 × (4/2)2 = 12,56 дюймов2.
Следовательно:
Q = 40 дюймов/с × 12,56 дюймов2 = 502,4 дюймов3/с.
Для описания потока жидкости существуют еще два термина: «ламинарный» и
«турбулентный». Оба типа потока изображены на рис. 7.27 и определяются следую&
щим образом:
ламинарный поток — жидкость течет плавно, параллельно стенкам трубы;
турбулентный поток — жидкость течет вдоль канала, но в потоке образуются
завихрения.
На рис. 7.27а и б изображен ламинарный поток, но форма потока на рис. 7.27б,
неравномерного относительно стенок трубы, указывает на неустойчивость в характе&
ристиках трения жидкости о стенки. На рис. 7 .27в изображен турбулентный поток и
показаны завихрения внутри потока.
7.8.1. ä·ÒÒËÙË͇ˆËfl ‰‡Ú̃ËÍÓ‚ ‡ÒıÓ‰‡
Изготовители и пользователи классифицируют расходомеры различными способами;
однако в общем виде датчики могут быть разделены на два широких класса:
вязкие — датчики, которые нарушают поток жидкости при измерении;
невязкие — датчики, которые не нарушают поток жидкости при измерении.
Классификация датчиков по методам измерения наиболее удобна при рассмотре&
нии технологических установок, и именно ее мы опишем в данной книге. Методы изме&
рения потока можно классифицировать следующим образом:
дифференциальные — расход определяется с помощью вычисления разно&
сти давлений (или падения давления) при прохождении жидкости через пре&
граду, такую как пластина с отверстием;
скоростные — расход определяется по скорости протекания жидкости через
турбину;
перемещения — расход определяется путем измерения объема всей исполь&
зованной жидкости;
массовые — расход определяется путем измерения объема жидкости, кото&
рая проходит через датчик.
Другим критерием классификации является выходной сигнал датчика потока, по&
казывающий расход:
в различных точках системы на дисплее или измерительном приборе;
для всего потока, определяя общий объем жидкости в единицу времени. Это
значение записывается или передается системе управления.
500
7.8 .2 . чÚ̃ËÍË ‡ÒıÓ‰‡ ÔÓ ‡ÁÌÓÒÚË ‰‡‚ÎÂÌËÈ
Измерение расхода по разности давлений (или падению давления) основано на том факте,
что различие давления с обеих сторон физического препятствия в потоке жидкости про&
порционально квадрату скорости потока. Другими словами, скорость потока пропорцио&
нальна корню квадратному от разности давлений и выражается следующим образом:
где Q — скорость потока,
k — константа, отражающая свойства препятствия, в галлонах в минуту (г/мин),
Рис. 7.27. Ламинарное и турбулентное течение жидкости
êÄëïéÑéåÖêõ
501
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
P1 — давление перед пластиной с отверстием, в фунтах на квадратный дюйм (psi),
P2 — давление позади пластины с отверстием, в фунтах на квадратный дюйм (psi).
Несколько типов устройств используют эту связь падения давления со скоростью
потока. Эти устройства различаются по методу создания разности давлений, но все
они для создания выходного сигнала используют дифференциальный датчик давления,
о котором говорилось выше в разделе 7.7. Ниже приводится краткий обзор некоторых
доступных на рынке устройств.
Диафрагма. Диафрагма — устройство, имеющее форму шайбы, которое уста&
навливается в систему трубопроводов. Расход определяется по разности давлений пе&
ред диафрагмой и после нее. Диафрагма, установленная в канале (отверстие показано
пунктиром), показана на рис. 7.28. Отверстие точно калибровано по размеру, которо&
му соответствует константа k в формуле скорости потока. Фланцы диафрагмы имеют
выступы для монтажа и обеспечивают удобный доступ для осмотра или установки ди&
афрагмы. Обратите внимание, что на порты для измерения давления нанесены метки
P1 и P2, позволяющие различать датчики, установленные до и после препятствия по
направлению потока.
èËÏ 7.7
Какова скорость потока в галл/мин, если давление с одной стороны отверстия пласти&
ны равно 5,6 psi, с другой составляет 5,2 psi, а константа пластины отверстия равна 11?
êÖòÖçàÖ
Подставим значения:
Обратите внимание, что P1 больше, чем P2.
Трубка Вентури. Трубка Вентури, предназначенная для измерения расхода, пред&
ставляет собой постепенное сужение и последующее постепенное расширение прово&
дящего канала трубопровода. Она показана на рис. 7.29. В месте, где канал сужается,
поток ограничивается, создавая, таким образом, разность давлений на входе и выходе
узкой области. Порт высокого давления P1 используется для измерения давления на
входе, порт P2 — для измерения давления на выходе из узкой области. В больших
трубах Вентури используются дополнительные порты, чтобы определить среднее дав&
ление. Труба Вентури не имеет никаких частей для монтажа и вызывает намного мень&
шие возмущения в потоке жидкости, чем диафрагма с отверстием.
Трубка Пито. Трубкой Пито называется устройство для измерения расхода, состоя&
щее из двух трубок, помещенных в поток жидкости, чтобы измерить два давления —
полное и статическое. На рис. 7 .30 представлена трубка Пито, установленная в канале.
Две части трубки Пито устанавливаются вплотную друг к другу. Трубка, которая направ&
лена навстречу потоку, измеряет полное давление, а другая трубка, направленная по
потоку, измеряет статическое давление. Более высоким является полное значение дав&
ления. Различие между двумя давлениями используется, чтобы определить расход.
502
Рис. 7.30 . Трубка Пито
Рис. 7.28. Диафрагменный датчик потока
Рис. 7.29. Трубка Вентури
êÄëïéÑéåÖêõ
503
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Датчик потока со встроенным соплом. Датчик потока представляет собой диф&
фузор, установленный внутри системы трубопровода, чтобы получить разностное дав&
ление (рис. 7.31). Сопло диффузора обычно изготавливается из нержавеющей стали,
но может также быть сделано и из других устойчивых к коррозии материалов. Обычно
диффузор устанавливается между фланцами канала, но может быть изготовлен и с
кольцом, выточенным по наружному диаметру, что позволяет вварить этот прибор в
разрез трубопровода, поместив датчик полностью внутри канала. Датчик потока со
встроенным соплом часто используется как измерительный элемент для воздушного и
газового потока в технологических установках. Порты P1 и P2 используются, чтобы
измерить разность давлений для определения скорости потока.
Коленный датчик. Если в системе трубопровода имеется колено, то оно может ис&
пользоваться, чтобы получить дифференциальное давление; эта методика показана на
рис. 7.32. При протекании жидкости через колено создается небольшая разность давле&
ний. Давление жидкости, которая течет вблизи внешнего радиуса колена, немного выше
давления в жидкости, текущей вблизи внутреннего радиуса. Порты давления P1 и P2 яв&
ляются соответственно портами высокого и низкого давления. В зависимости от радиуса
колена расстояние, которое жидкость проходит по внешнему радиусу, несколько превы&
шает расстояние для внутреннего радиуса. В этом случае могут использоваться два порта
с обеих сторон колена, чтобы получить среднее значение для каждого из давлений. Это
обеспечивает более точное измерение. Расход определяется по разности давлений.
7.8.3. ëÍÓÓÒÚÌ̊ ‰‡Ú̃ËÍË ‡ÒıÓ‰‡
Скоростные датчики расхода измеряют поток жидкости, основываясь на изменении
скорости движения жидкости. В этом разделе мы обсудим крыльчатый (paddlewheel),
турбинный, вихревой, электромагнитный и ультразвуковой расходомеры.
Рис. 7 .31. Датчик со встроенным соплом
504
Крыльчатые расходомеры. Этот расходомер устанавливается в канале так, чтобы по&
ток жидкости заставлял вращаться крыльчатку (водяное колесо). На рис. 7.33 показан мон&
таж датчика на трубопроводе. Датчик устанавливается так, чтобы только часть лопатки на&
ходилась в потоке. Крыльчатый датчик потока врезается прямо в трубопровод на участке,
где поток ламинарен. Поток заставляет крыльчатку вращаться, и обороты крыльчатки пре&
образуются в электронные выходные сигналы. На лопатки крыльчатки устанавливается
магнит, который при вращении создает электромагнитные импульсы. Выходной сигнал дат&
чика обычно представляет собой переменное напряжение или прямоугольную волну с час&
тотой, зависящей от скорости потока, но некоторые датчики имеют электронный дисплей с
питанием от батареек, установленный на датчике для простого просмотра. Типичный крыль&
чатый датчик потока показан на рис. 7.34. Эти датчики поставляются с красной или синей
начальной буквой, что обеспечивает быстрое определение типа установленных датчиков.
Красной начальной буквой маркируются датчики, кабель которых может иметь длину до 200
футов, а синяя начальная буква говорит о том, что кабель может быть удлинен до 1000 фу&
тов. Крыльчатый датчик — это дешевое устройство, которое используется там, где не требу&
ется высокая степень точности. Например, в пожарном оборудовании необходим дешевый,
но быстродействующий датчик, чтобы работать с потоками до 10000 галлонов в минуту.
Турбинные датчики расхода. Турбинные датчики расхода имеют разнообразную
конструкцию, но обычно все они основаны на одном и том же принципе: при движении
жидкости по трубопроводу, она толкает лопасти винтовой турбинки, заставляя ее вра&
щаться. Турбинный датчик потока с винтовой турбиной показан на рис.7 .35 . Принцип
действия этого датчика такой же, как у крыльчатого датчика: измеряется скорость
вращения и затем вычисляется расход. Для снижения трения и обеспечения длитель&
ного срока службы применяются высококачественные опоры из драгоценного камня и
никель&вольфрамовые валы турбины. Фланцевое крепление гарантирует вертикаль&
ность и необходимую глубину установки турбины в трубопроводе. Вращение ротора
обычно фиксируется датчиком Холла и преобразуется в последовательность прямоу&
гольных импульсов, которые могут быть переданы на расстояние до 2000 футов (рабо&
та датчика Холла описана в главе 11). Частота импульсов пропорциональна расходу, и
точность составляет приблизительно 0,1%, что выше, чем у датчиков потока с лопа&
точными турбинами. Турбинный датчик расхода с залитым электронным модулем по&
Рис. 7.32. Коленный датчик
êÄëïéÑéåÖêõ
505
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
казан на рис. 7.36. Модуль может быть снят для ремонта или замены без демонтажа
датчика. Для турбинных датчиков потока число электронных импульсов связано с
объемом жидкости, проходящей через датчик, следующим соотношением:
V=K×N,
где V — объем жидкости,
K — турбинная константа в см3,
N — число импульсов.
Расход Q выражается следующим образом:
Q=V/T,
где T — время подсчета импульсов.
Рис. 7 .33. Крыльчатый датчик
Рис. 7 .34. Крыльчатый датчик фирмы
George Fisher Signet
506
Рис. 7.35 . Датчик с винтовой турбинкой
Рис. 7.36. Турбинный датчик
3–2100 фирмы
George Fisher Signet
èËÏ 7.8
Определите скорость потока, если турбинный датчик потока имеет коэффициент k,
равный 13 см3, и число импульсов, пришедших за 150 секунд, равно 530.
êÖòÖçàÖ
Q=V/T,V =K×N,откуда
Q=K×N/T=13см3×530/(150с)=46см3/с.
Вихревые датчики потока. Вихревой датчик потока имеет помещенный в поток
жидкости объект сложной формы (тело обтекания), который создает в потоке завих&
рения. Когда поток жидкости встречает тело обтекания, происходит ряд завихрений.
На рис. 7.37 показаны завихрения вокруг тела обтекания в потоке жидкости. Завихре&
ние образуется, когда вдоль потока чередуются зоны низкого и высокого давления.
êÄëïéÑéåÖêõ
507
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Сбоку от тела обтекания, где поток становится турбулентным, скорость жидкости по&
вышается, а давление понижается. По мере того как области завихрения движутся
вдоль потока, они расширяются и усиливаются и, в конечном счете, отсоединяются.
Это сопровождается формированием завихрений с другой стороны тела обтекания.
Завихрения следуют друг за другом на равных расстояниях. Тело обтекания на рисунке
имеет форму трапеции, но и другие формы будут работать так же, пока тело обтекания
заполняет достаточно большую часть общего сечения канала, чтобы весь поток был
турбулентным.
Рис. 7 .37. Вихревой датчик со встроенным телом обтекания
В большинстве случаев электронные компоненты вихревых датчиков расхода явля&
ются пьезоэлектрическими или емкостными датчиками, которые обнаруживают колеба&
ние давления вокруг тела обтекания. Эти устройства преобразуют колебание давления в
низковольтный выходной сигнал — с той же частотой, что у колебаний давления. Имеют&
ся, однако, интеллектуальные вихревые датчики потока, обеспечивающие на выходе циф&
ровой сигнал расхода. Микропроцессор датчика может давать информацию об искривле&
нии трубы, о различии между диаметрами бура и сопряженного канала и о тепловом
расширении тела обтекания. Такие датчики недороги, выполняются в виде отдельных мо&
дулей и легко могут быть заменены. Они работают в широком диапазоне температур, что
позволяет применять их и для криогенных жидкостей, и для перегретого пара. Частота
следования завихрений прямо пропорциональна скорости жидкости в канале и, следова&
тельно, расходу. Она не зависит от таких свойств жидкости, как плотность, вязкость и про&
водимость, если обеспечивается турбулентность потока для создания завихрений. Вихре&
вой датчик потока из литой под давлением пластмассы, показанный на рис. 7.38, снабжен
интегральным электронным модулем, который обеспечивает линейное выходное напря&
жение или выходной сигнал для подсчета частоты импульсов.
Электромагнитные датчики расхода. Электромагнитный датчик потока измеряет
электрический заряд в протекающей жидкости, который пропорционален расходу. Работа
508
основана на законе Фарадея: напряжение, вызванное в проводнике, перемещающемся
через магнитное поле, пропорционально скорости этого проводника. Электромагнитный
датчик потока показан на рис. 7.39 . Он имеет небольшую глубину чувствительности (при&
близительно 0,2 дюйма), поэтому неравномерность распределения давлений по сечению
не отражается на его показаниях. Блок катушек создает магнитное поле. Когда жидкость
течет через магнитное поле, она действует подобно электрическому проводнику и стано&
вится электрически заряженной. С помощью нескольких электродов датчик обнаружива&
ет и измеряет электрический заряд и по нему определяет расход. В некоторых датчиках
используются микропроцессоры, которые позволяют обеспечить не только измерение, но
и такие функции диагностики, как проверка драйвера катушки или обнаружение частич&
ного незаполнения канала жидкостью.
Рис. 7.39. Электромагнитный датчик потока
Рис. 7.38 . Вихревой датчик потока 7000/7001
фирмы Georg Fisher Signet
Электромагнитные датчики потока широко используются в системах водоотвода
и в технологических целях, когда необходимы невязкие датчики потока. Примером
здесь может служить измерение потока химикалий, вязкого отстоя, бумаги и целлю&
лозной массы, добываемой породы и кислот. Два электромагнитных датчика потока
êÄëïéÑéåÖêõ
509
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
показаны на рис. 7.40: один с индикатором направления потока, другой — с реле ава&
рийной сигнализации на выходе.
Ультразвуковые датчики расхода. Работа ультразвукового датчика расхода ос&
нована на движении источника звука и влиянии этого движения на частоту звука. Это
явление было открыто и описано в середине 19 в. Христианом Иоганом Доплером
(Christian Johann Doppler). За счет эффекта Доплера частота отраженного сигнала
изменяется в зависимости от скорости и направления потока жидкости. Если жид&
кость движется к датчику, частота отраженного сигнала увеличивается; если жидкость
удаляется от датчика — уменьшается. Разность частот посланного и отраженного сиг&
нала используется, чтобы вычислить скорость потока жидкости.
Рис. 7 .40. Датчики 2550/2560 фирмы
George Fisher Signet:
а) индикатор локального
расхода;
б) датчик аварийного сигнала
об уровне расхода
На рис. 7 .41 изображен закрепленный на трубопроводе ультразвуковой датчик
расхода, который содержит передатчик и приемник. Пузырьки или твердые частицы,
имеющиеся в жидкости, отражают звуковой сигнал обратно на приемник, который
является измерителем Доплера. Этот прибор измеряет разность частот посланного и
отраженного звукового сигнала. Погрешность измерения расхода лежит обычно в
пределах 1%, а быстродействие менее 1 с. Этот тип датчика потока не создает препят&
ствий для движения жидкости, что позволяет легко изменять место его монтажа. По&
этому он может использоваться как инструмент для поиска неисправностей, то есть
мест, в которых скорость потока отклоняется от нормальной, а также служить резерв&
ным измерительным средством для стационарных расходомеров или проверять суще&
ствующие измерители, расположенные в нескольких местах. Можно приобрести так&
же карманный преобразователь на базе микропроцессора, который обеспечивает
вывод данных расхода на локальный графический дисплей с помощью вспомогатель&
ной клавиатуры и может, кроме того, обеспечить связь с ПК через шину последова&
тельной связи RS&232.
7.8.4 . чÚ̃ËÍË ‡ÒıÓ‰‡ ‚̊ÚÂÒÌËÚÂÎ̧ÌÓ„Ó ÚËÔ‡
Датчик вытеснительного типа измеряет расход жидкости, используя прецизионные ше&
стерни в качестве измерительных элементов, когда точно известен объем жидкости, пе&
510
ремещаемый за один оборот шестерни. Скорость вращения ротора при этом пропорци&
ональна объему перемещаемой жидкости. Число оборотов ротора подсчитывается ин&
тегральной схемой электронного счетчика импульсов и преобразуется в объем и ско&
рость потока. Конструкция ротора вытеснительного датчика бывает нескольких видов:
пистонные насосы — через полый поршень протекает известное количество
жидкости; таким образом, скорость расхода — функция числа ходов поршня;
овальные шестерни — фиксированный объем жидкости проходит через
две вращающиеся шестерни овальной формы, имеющие механизмы с синх&
ронизированными, плотно подогнанными зубцами на каждом обороте вала;
таким образом, скорость потока может быть точно рассчитана;
Рис. 7.41 . Ультразвуковой датчик потока
нутирующие диски — движущиеся диски, установленные на концентри&
ческой сфере, размещенной в сферической камере. Давление жидкости,
протекающей через камеру, вращает эти диски, не поворачивая их относи&
тельно собственных осей. Каждый диск при полном обороте перемещает из&
вестное количество жидкости, поэтому число оборотов диска может быть
подсчитано. Следовательно, может быть вычислен и расход;
вращающиеся лопасти — эти лопасти одинаково равномерно распределе&
ны по окружности, вращая рабочие колеса внутри корпуса. Рабочие колеса
находятся в непрерывном контакте с корпусом и перемещают фиксирован&
ный объем жидкости за один оборот. Подсчитав число оборотов рабочих ко&
лес, можно рассчитать и расход.
èËÏ 7.9
Какова скорость потока жидкости в галлонах в минуту (gpm), если она накачивается че&
рез поршень, имеющий объем 0,2 галлона и движущийся со скоростью 250 ходов/мин?
êÄëïéÑéåÖêõ
511
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
êÖòÖçàÖ
Скорость потока = объем поршня × скорость движения поршня.
Датчики потока вытеснительного типа могут использоваться для всех относи&
тельно нежестких жидкостей типа осветительного масла, смазочного масла, полимер&
ных добавок, животного и растительного жира, чернил для печати, фреона и много
другого. Погрешность обычно составляет ±0,1% от полной скорости вытеснения.
7.8.5 . å‡ÒÒÓ‚̊ ‰‡Ú̃ËÍË ‡ÒıÓ‰‡
Массовые датчики расхода непосредственно измеряют скорость потока жидкостей,
особенно газов, и имеют высокую точность с пределом погрешности менее 0,1%. Два
таких датчика — тепловой массовый датчик расхода и массовый датчик расхода на
базе эффекта Кориолиса — описываются в настоящем разделе.
Тепловые массовые датчики расхода. Тепловой массовый датчик потока функ&
ционирует независимо от плотности, давления и вязкости. Эти датчики используют
нагревательный датчик, который изолирован от потока жидкости. Тепло, переданное
от нагревательного элемента, измеряется датчиками температуры. Разность темпера&
тур между датчиками прямо пропорциональна переданной массе и скорости потока.
Тепловой массовый датчик потока показан на рис. 7.42. Обратите внимание, что один
датчик температуры расположен вверх по потоку от нагревателя, а другой датчик —
вниз по потоку. Один из типов теплового массового датчика использует термобатарею,
которая состоит из тысяч термопар, собранных на полосе из пластмассы или ленты. В
состав электронных узлов тепловых массовых датчиков потока входит анализатор по&
тока, узлы компенсации температуры и формирователь сигнала.
Рис. 7 .42. Датчик потока с нагретой массы
512
Массовые датчики расхода на базе эффекта Кориолиса. Датчик на базе эффекта
Кориолиса использует вибрирующую U&образную трубку, чтобы измерить скорость по&
тока жидкости. Эффект, основанный на проявлении инерции во вращающихся инерци&
альных системах, открыт в середине 19 в. Густавом&Каспаром Кориолисом (Gustave&
Gaspard Coriolis) и назван его именем. Жидкость, поток которой нужно измерить,
пропускается через U&образную трубку, которая может совершать вращательные коле&
бания (рис. 7 .43). Жидкость, текущая через трубку, заставляет ее деформироваться,
поворачиваясь под некоторым углом, и угол поворота прямо пропорционален потоку
жидкости. Угол поворота измеряется датчиками, установленными вблизи трубки и уп&
равляющими формирователем сигнала. В качестве сигнала используется обычно пере&
менное напряжение. Это напряжение используется, чтобы определить скорость потока
жидкости. Кориолисовы датчики потока не требуют компенсации температуры, что яв&
ляется их преимуществом по сравнению с тепловыми массовыми датчиками потока.
В добывающей промышленности и в других отраслях промышленности, исполь&
зующих вязкие материалы или высококоррозийные и грязные жидкости, применение
Кориолисовых датчиков потока непрактично из&за быстрого износа трубки.
Рис. 7.43. Кориолисов датчик потока:
а) вид сверху;
б) вид спереди
7.8 .6 . ÇËÁÛ‡Î̧Ì̊ ‰‡Ú̃ËÍË ‡ÒıÓ‰‡
В некоторых случаях более удобно применять визуальную индикацию скорости пото&
ка, чем электрический сигнал. Визуальный датчик потока, называемый также измери&
телем с переменной площадью потока, или ротамером, состоит из вертикальной стек&
лянной или пластмассовой трубки с раструбом наверху и с измерительным поплавком,
который может свободно двигаться внутри трубки. Визуальный датчик потока показан
на рис. 7.44 . Поток жидкости заставляет поплавок в трубке подниматься, поскольку
направленное вверх давление жидкости уравновешивает силу тяжести. Другими сло&
вами, сила тяжести перемещает поплавок, и поток жидкости также может переме&
щать его. Движение поплавка вверх до кольцевой области, соответствующей опреде&
ленному делению шкалы, позволяет достичь состояния динамического равновесия
между давлением и силой тяжести. Трубка отградуирована в единицах скорости пото&
êÄëïéÑéåÖêõ
513
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
ка, и высота поплавка указывает скорость потока с точностью до 1% от полного масш&
таба. Этот тип индикатора потока используется там, где вода является охлаждающим
агентом в технологическом процессе; поток регулируется вручную установкой по&
плавка на желательной отметке шкалы датчика.
Рис. 7 .44. Поплавковый
датчик потока
7.9 . ÑÄíóàäà ìêéÇçü
При технологическом применении часто требуется измерение уровня сырья или жид&
кости в резервуаре или лотке. Датчики уровня используются как в сугубо бытовых
целях, например, для управления уровнем воды в бачке туалета, так и в высокотехно&
логичных, таких как управление уровнем хладагента на атомной электростанции. Дат&
чики могут выполнять различные задачи, требующие измерения уровня; в настоящем
разделе мы обсудим многие из них. Некоторые датчики, о которых шла речь в предыду&
щих разделах, пригодны и для использования в качестве датчиков уровня.
7.9.1. ä·ÒÒËÙË͇ˆËfl ‰‡Ú̃ËÍÓ‚ ÛÓ‚Ìfl
Имеется два широких класса датчиков уровня:
датчики достижения заданного уровня. Уровень измеряется в заданной
точке;
непрерывные датчики уровня. Измеряется любое значение уровня в за&
данном диапазоне: от минимального до максимального.
514
7.9 .2 . äÓÌÚ‡ÍÚÌ̊ ‰‡Ú̃ËÍË Á‡‰‡ÌÌÓ„Ó ÛÓ‚Ìfl
Контактные датчики заданного уровня измеряют заданный уровень твердых частиц
или жидкостей. Когда датчики этого типа считывают заданный уровень, большинство
их них активизирует переключатель. Датчики уровня, обсуждаемые в этом разделе:
крыльчатые, поплавковые, погруженные, с вибратором, электрооптические, прово&
димости и термисторные.
Крыльчатые датчики уровня. Крыльчатые датчики уровня подобны крыльчатым
датчикам потока, но они установлены на боковой или верхней части резервуара; когда
сырье в резервуаре достигает крыльчатки датчика, вращаемого электродвигателем,
последний останавливается. Бросок тока, вызванный остановкой двигателя, фиксиру&
ется, чтобы показать достижение заданной отметки. Двигатель, который управляет
датчиком, является неявнополюсным, он не повреждается при остановке (о работе
неявнополюсных двигателей см. главу 10). Определение уровня таких материалов,
как гранулированное сырье или жидкость высокой плотности, — типичные области
применения для крыльчатого датчика.
Поплавковые датчики уровня. Поплавковый датчик уровня — это обычное уст&
ройство, которое регулирует уровень воды в бачке вашего туалета. Поплавковый дат&
чик уровня может принадлежать к одному из двух основных типов, показанных на
рис. 7 .45. Поплавковый датчик уровня, в котором сферический поплавок связан с го&
ризонтальным плечом, изображен на рис. 7.45а. Когда плечо поднимается, выключа&
тель замыкается. На рис. 7.45б изображен поплавковый датчик уровня со сферичес&
ким поплавком, связанным с вертикальным плечом, который включает выключатель,
когда плечо поднято. Некоторые датчики с плавающей точкой используют не сфери&
ческий, а цилиндрический поплавок. В каждой из этих конструкций плечо поднимает&
ся, когда жидкость в резервуаре достигает заданной отметки. Магнитный переключа&
тель включается, когда постоянный магнит на конце плеча подходит вплотную к маг&
ниту выключателя. Контакты выключателя обычно включены в цепь двигателя, уп&
равляющего количеством жидкости, поступающей в бачок или сливающейся из него.
По выбору пользователя длина плеча поплавковых датчиков может либо соответство&
вать одной из стандартных величин, либо быть изготовлена как деталь нестандартной
длины. Поплавковый датчик уровня используется в случаях, когда поверхность жид&
кости спокойна. Многоуровневые поплавковые датчики работают так же, как и датчи&
ки с одним уровнем, но обеспечивают набор из нескольких уровней включения, как
показано на рис. 7.46. Поплавок перемещается жидкостью вверх и вниз вдоль направ&
ляющего стержня и вдоль ряда переключателей на стенке резервуара. В этой конфи&
гурации на поплавке установлен постоянный магнит. Когда поплавок с магнитом при&
ближается к переключателю, последний активируется; когда же поплавок удаляется
от переключателя, тот дезактивируется.
Погруженные датчики уровня. Погруженный датчик уровня работает подобно
поплавковому, но не находится на поверхности жидкости, а частично погружен в нее
(рис. 7 .47). Как и в поплавковых, в погруженном датчике поплавок перемещается
вверх и вниз вдоль стержня, следуя за уровнем жидкости, и активизирует выключа&
тель. Чтобы поплавок был погружен в жидкость, его плотность должна быть несколь&
ко больше плотности жидкости, и на него не действует волнение на поверхностности.
Однако если на поверхности имеются плавающие частицы, то датчики обычно погру&
ÑÄíóàäà ìêéÇçü
515
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
жают на большую глубину, чтобы получить более точное измерение. Контроллеры
уровня жидкости используются с погруженными датчиками, которые обеспечивают
стандартный выходной сигнал, пропорциональный уровню, в диапазоне от 4 до 20 мА;
контроллеры на базе микропроцессоров обеспечивают измерение не только уровня,
но и удельного веса, или измеряют положение уровня раздела «жидкость — жид&
кость» в сепараторах жидкости и при самодиагностике.
Рис. 7 .45. Поплавковые датчики уровня:
а) с горизонтальным рычагом;
б) с вертикальным рычагом
Рис. 7 .46. Многопозиционные поплавковые датчики уровня
516
Датчики уровня на базе вибратора. Датчик уровня на базе вибратора содержит
стержень, вибрирующий на частоте механического резонанса, задаваемого электрон&
ной системой датчика. Он обычно используется для определения уровня таких сыпу&
чих материалов, как пищевые шарики, мука, гранулированные пластмассы, песок и
зерно. Датчик уровня с вибрирующим стержнем показан на рис. 7 .48. Когда материал
приближается к датчику, колебания демпфируются, что фиксируется электроникой,
которая активизирует переключатель. Этот датчик лучше датчика с механическими
вилами, или датчика уровня с ответвителями, поскольку он устраняет проблему, свя&
занную с налипанием материала и ложной подачей сигналов, присущую зубчатому
датчику. Кроме того, вибрирующий стержень в большинстве случаев самоочищает&
сяприменений, что также устраняет проблему налипания материала. Он также не за&
висит от таких характеристик материала, как влажность, температура или плотность.
Мы видим на рис. 7 .49 однокорпусной датчик уровня с вибрирующим стержнем, элек&
тронный блок которого содержит пьезоэлектрический кристалл и выходное реле, пе&
реключающееся при достижении установленного уровня.
Электрооптические датчики уровня. Чтобы обнаружить уровень жидкости, в
электрооптическом датчике уровня используется свет. Датчик содержит светоизлуча&
ющий диод (светодиод), луч от которого направлен на призму, и приемник света, как
показано на рис. 7.50. При отсутствии жидкости свет отражается от грани призмы и
попадает на приемник. При повышении уровня призма погружается в жидкость, свет
проходит в жидкость, преломляясь, и его поток, падающий на приемник, резко умень&
Рис. 7.47 . Погруженный поплавковый датчик уровня
ÑÄíóàäà ìêéÇçü
517
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
шается или вовсе исчезает. При этом приемник изменяет состояние электронного
ключа внутри модуля, приводя в действие внешнее устройство аварийного сигнала
или схему управления. Отсутствие движущихся частей делает эти датчики идеальными
для измерения уровня, особенно в случаях, когда критичными являются стоимость и
надежность. Датчики находят применение в медицинских лабораториях и в цехах по
производству продовольствия, напитков и нефтехимических веществ.
Рис. 7 .48. Датчик уровня со стержневым вибратором
Рис. 7 .49. Датчик уровня со
стержневым
вибратором фирмы
Momnitor Technologies
518
Датчики уровня на базе измерения проводимости. Датчик уровня на базе проводи&
мости использует свойство жидкости проводить небольшой электрический ток между дву&
мя электродами, установленными на заданном уровне. Такой датчик показан на рис. 7 .51.
Один электрод установлен вблизи дна резервуара, а второй — около точки, где должен
измеряться уровень. Пока уровень жидкости не достигнет второго электрода, сопротивле&
ние воздуха слишком велико и ток между электродами не течет. Когда жидкость достигает
второго электрода, небольшой ток проходит через жидкость между двумя электродами.
Электронная схема обнаруживает этот ток и переключает ключ. В качестве электродов
могут использоваться либо два провода, либо пробник. В последнем случае в качестве
второго электрода выступают металлические стенки резервуара. Если сигнал или визу&
альную индикацию необходимо формировать для нескольких уровней жидкости, могут ис&
пользоваться несколько пробников. Примерами применения могут служить аварийные
сигналы по достижении низкого и высокого уровня воды в бойлерах или уровня масла в
двигателях внутреннего сгорания и сигналы управления различными процессами, вклю&
чая регулирование потока воды в охлаждающих башнях.
Рис. 7.50 . Электрооптический датчик уровня
Рис. 7.51. Датчик уровня на основе проводимости
Термисторные датчики уровня. Термисторный датчик уровня использует измене&
ние сопротивления термистора в зависимости от температуры, чтобы обнаружить изме&
ÑÄíóàäà ìêéÇçü
519
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
нение в уровне жидкости в резервуаре. Подобно другим датчикам уровня, которые мы
обсуждали, термисторные датчики уровня тоже устанавливаются в резервуаре выше
уровня жидкости. Когда жидкость покрывает датчик, изменяется сопротивление терми&
стора, поскольку температура воздуха отличается от температуры жидкости. Термистор
включается в мостовую схему, выводной сигнал которой переключает ключ.
7.9 .3. çÂÔÂ̊‚Ì̊ ‰‡Ú̃ËÍË ÛÓ‚Ìfl
Непрерывные датчики уровня обеспечивают непрерывный выходной сигнал, свиде&
тельствующий об уровне твердых частиц и жидкости, который изменяется в диапазоне
от минимального до максимального значения. Обычно в качестве выходного сигнала
используется стандартный аналоговый сигнал от 4 до 20 мА. Обратите внимание, что
имеется много типов датчиков уровня для различных вариантов применений, отлича&
ющихся типом контейнера и жидкой или гранулированной средой.
Датчики уровня на базе дифференциальных датчиков давления. Дифференци&
альный датчик давления можно использовать для определения уровня жидкости на
основе измерения давления столба жидкости, поскольку столб жидкости с площадью
основания в один квадратный дюйм вызывает давление, пропорциональное высоте
столба. Другими словами, чем больше глубина жидкости, тем больше давление. Это
давление называется главным давлением или главным гидростатическим давле
нием. Глубина воды в резервуаре вычисляется следующим образом:
P=D×P0,
где P — главное давление, psi,
D — глубина резервуара, фут,
P0 — давление столба воды высотой в 1 фут.
Поскольку столб воды высотой в 1 фут оказывает давление в 0,434 psi можно
записать:
P = 0,434 psi/фут × D.
èËÏ 7.10
Определите главное давление на дне резервуара, глубина воды в котором равна 50 футам.
êÖòÖçàÖ
P = 0,434 psi/фут × D =0,434 psi /фут × 50 футов = 21,7 psi.
èËÏ 7.11 .
Определите уровень воды в резервуаре, если главное давление равно 18 psi.
êÖòÖçàÖ
Как было указано ранее:
520
P = 0,434 psi/фут × D,
откуда:
D = P / (0,434 psi/фут) = 18 psi / (0,434 psi/фут) = 41,5 футов.
Датчик уровня на базе дифференциального датчика давления, показанный на рис. 7.52,
установлен на подземном резервуаре. Обратите внимание, что этот датчик установлен на
крышке, но можно устанавливать датчики и сбоку таких резервуаров, как бассейны, танки
или ямы. Датчик опускают на дно резервуара, обращают торцевой частью ко дну и датчик
давления тензорезистора измеряет давление на этой глубине. Чувствительная поверхность
датчика сконструирована таким образом, чтобы его не могли вывести из строя жидкости с
высоким содержанием нерабочих частиц, например грязная вода или цемент. Электронная
система создает стандартный сигнал от 4 до 20 мА или управляет жидкокристаллическим
дисплеем (ЖКД). Датчик может функционировать на глубинах от 1 до 36 футов жидкости и
применяется для использования в таких бассейнах, отстойниках и резервуарах, где нижняя
часть или боковая сторона недоступна для установки датчика. По сравнению с датчиками
емкостного или радарного типа, о которых будет рассказано ниже, дифференциальный дат&
чик давления для измерения уровня не требует заземления и периодической очистки для
надежной работы.
Рис. 7.52. Датчик уровня на основе дифференциального датчика давления
ÑÄíóàäà ìêéÇçü
521
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Емкостные датчики уровня. Емкостные датчики, чтобы определить уровень, посы&
лают импульсы из радиочастотной области датчика через антенну в резервуар, содержа&
щий жидкий или гранулированный материал. В некоторых литературных источниках этот
датчик называется радиочастотным (РЧ) датчиком уровня полной проводимости. Величи&
на импульсной РЧ&энергии зависит от диэлектрика или емкости между антенной и стенкой
резервуара (заземленной поверхностью). Когда уровень жидкости или материала начина&
ет повышаться, изменяется толщина диэлектрика между антенной и стенками резервуара,
следовательно, изменяется и количество энергии, излучаемой антенной. Изменение энер&
гии пропорционально уровню жидкости или материала. Изменение в диэлектрике может
измеряться непрерывно в процессе изменения уровня жидкости или материала относи&
тельно антенны. Емкостной датчик уровня, установленный в контейнере для зерна, пока&
зан на рис. 7.53 . Обратите внимание на то, что антенна установлена вплотную к стенке
контейнера, чтобы диэлектрик между антенной и заземленной поверхностью мог быть из&
мерен с большей точностью. Типичный выходной сигнал — это сигнал аварии, который
звучит, когда достигается определенный уровень зерна. Если контейнер с жидкостью или
материалом не металлический, используются антенна из двух частей, установленных
вблизи друг от друга. Метод определения уровня жидкости или материала остается тем
же, что и при одной антенне и стенке резервуара. Мы видим на рис. 7.54 ряд емкостных
датчиков с антеннами различной длины. Электроника в этих датчиках содержит встроен&
ный микроконтроллер, который обеспечивает такие возможности датчика, как калибров&
ка «на месте», выбор чувствительности, компенсация температуры и самопроверка
(встроенные микроконтроллеры обсуждаются в главе 13).
Рис. 7 .53. Емкостной
датчик
уровня
Ультразвуковые датчики уровня. Работа ультразвукового датчика уровня осно&
вана на быстродействующем измерении звуковых волн, проходящих через воздух или
газ. Звуковые волны излучаются электронным блоком датчика. Когда звуковые волны
достигают жидкой или твердой поверхности, они отражаются обратно и фиксируются
522
приемником датчика. Другие электронные узлы датчика измеряют время прохождения
звуковых волн и преобразуют его в расстояние. Такой датчик, установленный в резер&
вуаре, содержащем жидкость, показан на рис. 7.55. Ультразвуковой датчик уровня хо&
рошо подходит для измерения уровня в резервуарах, содержащих грязные или липкие
материалы, таких как смесь породы или черный уголь. Ультразвуковой датчик уровня
также используется для коррозийных или жестких материалов, которые повреждают
датчик при исследовании. Для резервуаров, содержащих порошкообразные, пенящи&
еся или пузырящиеся материалы, неприменимы ультразвуковые датчики уровня, по&
тому что они не отражают звуковые волны, а стремятся поглотить их.
Рис. 7.54. Емкостные датчики
уровня фирмы Momnitor
Technologies
Рис. 7.55. Ультразвуковой
датчик уровня
Радарные датчики уровня. Радарные датчики уровня работают так же, как ульт&
развуковые датчики уровня, за исключением того, что они передают и получают не
звуковые, а электромагнитные волны радиочастотного диапазона. Радарные датчики
уровня идеальны для отражающих жидкостей, которые имеют пузырящиеся поверх&
ности, пары или пыль и поэтому ультразвуковые датчики для них непригодны. Кроме
ÑÄíóàäà ìêéÇçü
523
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
того, радарный датчик уровня подходит для использования в условиях, когда содержи&
мое резервуара находится в полужидком состоянии и через какое&то время частицы
будут выпадать в осадок. Датчик может измерять уровень более легкой жидкости на&
верху и более тяжелой жидкости в нижней части.
Звуковой датчик уровня. Звуковой датчик уровня, или эхолот уровня, использу&
ет изменение в механическом напряжении каната для определения уровня жидкого
или гранулированного материала в контейнере.
Датчик опускает канат с грузом на конце в контейнер. Во время опускания груза
напряжение каната остается неизменным, пока груз не входит в контакт с содержи&
мым контейнера. Когда датчик обнаруживает изменение напряжения, спуск прекра&
щается и груз вытягивается за счет обратного вращения бобины. Число оборотов бо&
бины при полном сматывании каната подсчитывается и преобразуется в измеренную
глубину. Электроника датчика размещается в водо& и пылезащищенном корпусе. Дат&
чик со звуковым сигналом состоит из прочной, защищенной чехлом измерительной
ленты, позволяющей измерять расстояние с точностью до 0,01 фута; бобина с лентой
предназначена для работы на глубинах до 500 футов. На рис. 7.56 изображен датчик
уровня со звуковым сигналом, используемый в резервуаре с жидкостью. Такие датчи&
ки обычно используются для измерения глубины водяных скважин, сельскохозяй&
ственных резервуаров и лотков, а также уровня чернил в чане для печатных прессов.
На рис. 7.57 изображен эхолот для определения глубины скважины, который включа&
ет электронный блок и бобину с лентой. Этот эхолот выполняется на 9&вольтовой ба&
тарейке и снабжен зуммером и сигнальной лампой.
Рис. 7 .56. Электронный
лот в качестве
датчика уровня
Рис. 7.57. Электронный лот фирмы Global Water
524
Пузырьковые датчики уровня. Пузырьковые датчики уровня предназначены для
измерения давления в системах, могущих образовывать воздушные пузырьки, и пре&
образуют считываемое давление в точно измеренный уровень. Датчик, обычно управ&
ляемый микропроцессором, обеспечивает превосходную точность и стабильность.
Пузырьковые системы измеряют уровень жидкости путем определения давления, при
котором воздух будет выходить из погруженной трубки. Конец трубки установлен
ниже жидкой измеряемой поверхности, и воздух выходит из нижней части трубки в
виде потока пузырьков. Скорость потока воздуха относительно невелика, но она дол&
жна быть достаточной, чтобы предотвратить попадание жидкости трубку, так как дав&
ление, требуемое, чтобы прогнать воздух через трубку, равно давлению на выходе
трубки. Это давление пропорционально глубине жидкости на уровне нижнего конца
трубки. Пузырьковые системы применяются для определения уровня подземных вод,
для текущего контроля за уровнем подсыпки при ландшафтном дизайне и за сточными
водами, для слежения за уровнем воды в дамбах, танках и резервуарах.
Большим преимуществом пузырьковых датчиков является их размещение на возду&
хе, а не в жидкости. Погруженные датчики подвержены коррозии, засорению и заморажи&
ванию и могут быть повреждены твердыми частицами, животными или людьми. Един&
ственной погруженной частью пузырьковой системы является недорогая воздушная
трубка, которую при повреждении можно просто заменить. Недостатки этой системы:
высокая стоимость, наличие большого количества устройств, необходимость обслужива&
ния и зависимость от соответствующей настройки. Пузырьковая система обычно состоит
из одного или двух воздушных компрессоров, регулятора давления, стрелочного клапана,
датчика давления, измерителя воздушного потока и погружаемой трубки. Типичная про&
блема при эксплуатации этих систем — необнаруженные утечки воздуха, которые приво&
дят к неточным измерениям уровня и преждевременному износу компрессоров.
7.10. ÑÄíóàäà èéãéÜÖçàü
Датчики положения измеряют положение объектов как при линейном, так и при вра&
щательном движении. В этом разделе мы обсудим датчики положения трех типов: ли&
нейные и вращательные измерительные потенциометры и линейный переменный
дифференциальный трансформатор (LVDT).
7.10.1. ãËÌÂÈÌ̊ ËÁÏÂËÚÂÎ̧Ì̊ ÔÓÚÂ̈ËÓÏÂÚ̊
Линейные измерительные потенциометры — это датчики, выходное сопротивление
которых пропорционально смещению или положению. Линейные измерительные по&
тенциометры по сути представляют собой прямоугольные или цилиндрические пере&
менные резисторы, изготовленные из какого&либо провода или проводящего пласти&
ка. На резистор подается входное напряжение, при этом выходное напряжение на
ползунке является линейной функцией его положения. В качестве линейных измери&
тельных потенциометров широко используются контактные датчики положения на
ÑÄíóàäà èéãéÜÖçàü
525
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
базе переменных резисторов с тремя выводами. Два из них подключены к концам ре&
зистора, и сопротивление между ними постоянно. Третий вывод соединяется с ползун&
ком или скользящим контактом, который передвигается по резистору, причем сопро&
тивление между ним и любым из двух других выводов изменяется. Например, при
общем сопротивлении линейного измерительного потенциометра в 1000 Ом сопро&
тивление между выводом скользящего контакта и любым из двух других выводов мо&
жет изменяться от 0 до 1000 Ом в зависимости от положения скользящего контакта.
Мы видим на рис. 7.58 линейный измерительный потенциометр, используемый в ка&
честве датчика положения с тремя выводами T1, T2 и T3. Обратите внимание, что рука
механически связана со скользящим контактом, определяя таким образом его поло&
жение на резисторе. Наиболее важной характеристикой для линейных измерительных
потенциометров является рабочий диапазон, или расстояние перемещения. Точность
и линейность оценивается в процентах от полного перемещения. Важно также общее
сопротивление, допуск сопротивления и срок службы. Линейные измерительные по&
тенциометры имеют типичный срок службы в миллионы перемещений. Эти устрой&
ства могут быть простыми датчиками сырья или сложными приборами, оборудован&
ными локальным дисплеем, средствами управления и имеющими выход для передачи
информации на главный компьютер. Типичными областями применения являются ма&
шины для литья под давлением, печатные прессы, сельскохозяйственное и конструк&
торское оборудование и тяжелое машиностроение.
Рис. 7 .58. Линейный потенциометр в качестве датчика позиции
Рис. 7 .59. Вращательный
потенциометр в качестве
датчика угла поворота
526
7.10.2. LJ̆‡ÚÂÎ̧Ì̊ ËÁÏÂËÚÂÎ̧Ì̊ ÔÓÚÂ̈ËÓÏÂÚ̊
Вращательные измерительные потенциометры — датчики, выходное сопротивление ко&
торых пропорционально углу поворота. Они работают в электрических схемах, так же как
и линейные измерительные потенциометры. Вращательные измерительные потенцио&
метры являются обычными контактными датчиками положения с тремя выводами на базе
переменных резисторов. Два вывода соединены с концами резистора, поэтому сопротив&
ление между ними постоянно. Третий вывод соединяется со скользящим контактом резис&
тора, который механически связан с валом измеряемого объекта. При движении ползунка
сопротивление между одним его выводом и двумя другими изменяется. Например, для
вращательного измерительного потенциометра с общим сопротивлением в 1000 Ом со&
противление между выводом скользящего контакта и любым из двух других выводов мо&
жет изменяться от 0 до 1000 Ом и преобразовываться в углы поворота от 0 до 360° соот&
ветственно. Если потенциометр повернут на 180°, сопротивление будет равно 500 Ом.
Вращательный измерительный потенциометр изображен на рис. 7.59 .
Старое убеждение, что измерительные потенциометры, как линейные, так и вра&
щательные, являются надежными, но недолговечными, сменяется сейчас пониманием
того, что новая технология измерительных потенциометров, объединенная с творчес&
кими конструктивными решениями механических проектов, в основном уменьшила
влияние сопротивления и скользящего контакта на срок службы модуля. Теперь при
определении долговечности модуля должны учитываться опоры и другие компоненты.
Измерительные потенциометры имеют сейчас срок службы в миллиарды операций; а
несколько лет назад он измерялся в миллионах операций. Во многих случаях срок
службы линейных и вращательных измерительных потенциометров больше срока
службы установок, в которых они применяются.
7.10.3. ÑËÙÙÂÂ̈ˇÎ̧Ì̊ ڇÌÒÙÓχÚÓ̊ Ò ÔÓ‰‚ËÊÌ̊Ï Ò‰ẪÌËÍÓÏ
Линейный трансформатор с подвижным сердечником (LVDT) — датчик положения, со&
стоящий из трансформатора с перемещаемым сердечником, как показано на рис. 7 .60.
Трансформатор имеет первичную обмотку и две идентичных вторичных обмотки, намотан&
ных на полой трубке, внутри которой находится подвижный сердечник. Он механически
соединен с объектом, положение которого необходимо измерять. Выходное напряжение
вторичной обмотки А максимально, когда сердечник находится под ней, то же справедливо
и для обмотки В. Если сердечник находится точно посредине между обмотками, выходное
напряжение равно 0. Это положение датчика называется нулевым (рис. 7.60а). Таким об&
разом, выходное напряжение может изменяться от 0 до максимального значения. В нуле&
вом положении напряжения на обмотках А и В одинаковы, но компенсируют друг друга,
поскольку обмотки намотаны в противоположных направлениях. Когда сердечник нахо&
дится под вторичной обмоткой A (рис. 7.60б), выходное напряжение совпадает по фазе со
входным, когда же он находится под обмоткой B (рис. 7 .60в), выходное и входное напря&
жения находятся в противофазе.
Выходной сигнал LVDT является сигналом переменного тока, и его действующее
значение увеличивается при движении в любом направлении относительно нулевого по&
ÑÄíóàäà èéãéÜÖçàü
527
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
ложения. Следовательно, необходимо фиксировать не только модуль, но и фазу выходного
сигнала, чтобы знать положение сердечника. Выходной сигнал датчика положения нахо&
дится в фазе или в противофазе со входным сигналом в зависимости от положения сердуч&
ника. Электроника, которая связана с датчиком с помощью интерфейса, объединяет ин&
формацию о фазе и модуле выходного сигнала и преобразует его затем в выходное
напряжение постоянного тока, указывающее положение относительно электрического
нуля. Этот выходной сигнал и отражает положение объекта измерения.
Рис.7.60. Дифференциальный трансформатор с подвижным
магнитопроводом:
а) нулевое положение;
б) сердечник под обмоткой A;
в) сердечник под обмоткой B
528
7.11. ÑêìÉàÖ ÑÄíóàäà èêéñÖëëÄ
В этом разделе рассматриваются некоторые датчики процесса, применяемые не так
широко, как описанные ранее, все же имеющие важное значение в технологической
области. Ниже мы поговорим о датчиках плотности, вязкости и влажности.
7.11 .1 . чÚ̃ËÍË ÔÎÓÚÌÓÒÚË
Прежде чем рассматривать датчики плотности, дадим определение некоторым терминам.
Плотность (D) определяется как отношение массы объекта к его объему при определен&
ной температуре и обычно используется наряду с термином «удельный вес» (SG). Однако
удельный вес представляет собой отношение плотности объекта к плотности воды. По&
скольку плотность воды равна 1, удельный вес объекта является безразмерной величи&
ной, имеющей то же самое числовое значение, что и плотность объекта. Плотность же не
безразмерна и обычно выражается в граммах на кубический сантиметр или фунтах на ку&
бический фут. Ниже приведены формулы для плотности (D) и удельного веса (SG):
D=M/V,
где М — масса объекта,
V — объем объекта.
SG=DL/DW,
где DL — плотность объекта (обычно жидкости) при установленной температуре,
DW — плотность воды при той же температуре.
èËÏ 7.12
Каков удельный вес 1 фут3 шоколадного сиропа, который имеет масса в 70 фунтов при
22 °C? Плотность и удельный вес воды при данной температуре равны 1 и 62,4 фунт/фут3
соответственно.
êÖòÖçàÖ
D=M/V,
D = 70 фунтов/1 фут3 = 70 фунт/фут3
,
SG = DL / DW = 70 фунт/фут3 / 62,4 фунт/фут3 = 1,12.
Датчики плотности могут предназначаться для измерения жидкостей только одного
типа, таких как тяжелая сырая нефть и продукты ее очистки, специфических жидкостей
типа этилена или двуокиси углерода и большого числа жидкостей, используемых в об&
щепромышленных технологических процессах. Такие ранее описанные методы измере&
ний, как вибрационные и измерение с помощью трансформаторов с перемещаемым
сердечником LVDT, применяются и в датчиках плотности. Датчик плотности, в котором
ÑêìÉàÖ ÑÄíóàäà èêéñÖëëÄ
529
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
используется вибратор, чтобы измерить частоту вибрации трубки, содержащей обраба&
тываемую жидкость, является одним из наиболее точных и широко используемых при&
боров при производсте соды. Измеряется частота вибрации трубки, а поскольку масса
трубки постоянна, частота выходного сигнала изменяется только в зависимости от плот&
ности жидкости. В другом типе датчика плотности используется LVDT, чтобы измерить
положение ферромагнитной каретки или поплавка, который погружен в исследуемую
жидкость. Каретка в жидкости поднимается или опускается в зависимости от плотности
жидкости. Для достижения высокой точности должно быть определено и компенсирова&
но влияние температуры на плотность жидкости. Изготовитель датчика обычно сообща&
ет дополнительные коэффициенты, которые используются при вычислении плотности.
Типичное применение для датчиков плотности — измерение относительной плот&
ности жидкостей в различных продуктах на автоматических линиях или в резервуарах.
В этом случае определение плотности жидкости необходимо, чтобы направлять каж&
дое изделие на соответствующий склад или конкретному заказчику.
7.11.2 . чÚ̃ËÍË ‚flÁÍÓÒÚË
Вязкость является мерой сопротивления потоку жидкости. Жидкости с меньшей вязко&
стью обладают большей текучестью, чем вязкие жидкости. Датчики вязкости использу&
ются в промышленности, когда контейнеры заполняются полужидкими материалами,
вязкость которых должна контролироваться, чтобы достигать заданной величины. В
датчиках вязкости, как и в датчиках плотности, применяются вибрационные датчики или
датчики Вентури. Когда для измерения вязкости используется вибратор с заданной час&
тотой колебаний, амплитуда колебаний увеличивается с уменьшением вязкости. Изме&
нения в вязкости могут измеряться и датчиком Вентури, поскольку разность давлений
между двумя портами зависит от вязкости протекающей через них жидкости.
7.11 .3. чÚ̃ËÍË ‚·ÊÌÓÒÚË
Прежде всего мы должны дать определение двум величинам: влажности, которая
отражает содержание влаги в воздухе, и относительной влажности, которое явля&
ется отношением количества водяного пара, фактически присутствующего в воздухе,
к самому большому его количеству, возможному при данной температуре. Управление
влажностью важно для обеспечения необходимых условий, например, в чистых ком&
натах, где производятся интегральные схемы, и на сборочных участках, где компонен&
ты поверхностного монтажа устанавливаются на электронные платы. Конструкция
датчиков влажности показана на рис. 7 .61: они заключаются в корпуса с односторон&
ним расположением выводов (SIP) или в стандартные транзисторные корпуса. Обра&
тите внимание, что верхний слой защищает от загрязнения три нижних слоя емкостно&
го датчика. Эти датчики питаются от постоянного напряжения в 5 В и обеспечивают
выходное напряжение, линейно зависящее от влажности.
Другой областью, где используются датчики влажности, являются промышленные
процессы, в которых любая влага в сырье обратилась бы при высокой температуре в пар
530
и вызвала бы в законченном изделии дефекты поверхности. К таким процессам относят&
ся литье пластмассы под давлением и экструзия. На складах кинопленки или чувстви&
тельной к влажности электроники также используются датчики влажности, чтобы уп&
равлять осушением и увлажнением воздуха для поддержания требуемой влажности.
Рис. 7.61. Конструкция
датчика влажности
7.12. ìëíêéâëíÇÄ ìèêÄÇãÖçàü èêéñÖëëéå
èéàëäÄ çÖàëèêÄÇçéëíÖâ à ÑÄíóàäà
Общие методы поиска неисправностей, предварительно рассмотренные в главе 1, и по&
шаговый план в главе 2, конечно, применимы для устройств управления процессом и
датчиков. Поэтому прежде чем продолжить изучение материала, вы можете вновь обра&
титься к разделам 1.6 и 2.1 . При поиске неисправностей не забудьте, что датчики от
различных поставщиков имеют различные рабочие характеристики, поэтому вам преж&
де всего необходимо знать, как работают датчики в системе. Рассмотрим некоторые об&
щие операции, которые следует выполнить при обнаружении неисправности датчика:
проверьте правильность установки датчика;
проверьте, что посторонние объекты не мешают его работе;
убедитесь, что на датчик подано питание, соответствующее его техническим
характеристикам. Проверка питания на другом действующем оборудовании,
подключенном к той же линии питания, является для этого хорошим способом;
проконсультируйтесь с руководством изготовителя датчика, чтобы получить
квалифицированные советы по поиску неисправностей.
7.12 .1 èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ‰‡Ú̃ËÍÓ‚ ÚÂÏÔ‡ÚÛ̊
При наличии резистивных детекторов температуры (RTD) и терморезисторов измере&
ние сопротивления омметром является простым способом проверки работоспособности
ìëíêéâëíÇÄ ìèêÄÇãÖçàü èêéñÖëëéå èéàëäÄ çÖàëèêÄÇçéëíÖâ à ÑÄíóàäà
531
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
устройства, которое при этом должно быть вынуто или изолировано от схемы. Перед
снятием устройства удостоверьтесь, что его вводы не повреждены. Подключив омметр к
устройству, нагрейте его электронной тепловой пушкой и проверьте, что сопротивление
изменяется. У RTD сопротивление должно увеличиться, но только на несколько ом. С
отрицательным терморезистором коэффициента температуры сопротивление должно
значительно уменьшиться — существенно больше, чем у RTD. Загляните в справочный
листок изготовителя, в котором определены температурные характеристики устрой&
ства. Если сопротивление устройства не изменяется или все время равно бесконечнос&
ти, то, значит, устройство неисправно и должно быть заменено.
При проверке термопар необходим точный милливольтметр, чтобы измерить за&
висимость выходного напряжения термопары от температуры. Большинство изгото&
вителей снабжает термопару испытательным устройством, включая милливольтметр,
источник питания и устройство компенсации опорного перехода. Просто подключите
термопару к испытательному устройству и выберите диапазон температуры, при кото&
ром обеспечивается измерение.
7.12 .2 . èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ‚ ÚÂÌÁÓÂÁËÒÚÓ‡ı Ë fl̃ÂÈ͇ı ̇„ÛÁÍË
Как тензорезисторы, так и ячейки нагрузки действуют подобно резистивным датчикам
в мостовой схеме. Если входное напряжение на мосте правильно, то необходимо при&
ложить к датчику механическую нагрузку, чтобы проверить правильность работы уст&
ройства. Справочные данные изготовителя определяют диапазон нагрузок, в котором
работает устройство. Выберите значение в среднем диапазоне и измерьте выходное
напряжение, которое выражается формулой:
VТЕСТ = PТЕСТ × VMAX / PMAX,
где
VТЕСТ — тестируемое выходное напряжение,
VMAX — максимальное измеряемое выходное напряжение,
PMAX — максимальная нагрузка,
PТЕСТ — тестируемая нагрузка.
èËÏ 7.13
Проверьте правильность работы нагрузочной ячейки, которая может работать при
максимальной силе давления в 600 фунтов. Выходное напряжение зависит от напря&
жения питания, номинальное значение которого равно 8 В, и составляет 3 мВ на 1 В
питающего напряжения.
êÖòÖçàÖ
VТЕСТ = VMAX × PТЕСТ / PMAX.
Выберем тестовую нагрузку в 300 фунтов:
VТЕСТ = (3мВ/В×8В)×(300фунтов/600фунтов) =12мВ.
532
7.12 .3. èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ‚ ÛÔ‡‚Îfl̨̆Ëı Í·ԇ̇ı
При проверке правильности работы управляющего клапана он должен быть отсоеди&
нен от источника питания и поток жидкости должен быть выключен, чтобы предотвра&
тить нежелательный поток в процессе поиска неисправностей. Вы можете приложить
и снять полное напряжение, чтобы проверить операцию вкл/выкл. Для пропорцио&
нальных клапанов вы можете использовать источник питания, чтобы приложить на&
пряжение в диапазоне от 0 до полного напряжения шкалы.
7.13. ÇÖÅ -ëÄâíõ èé ìëíêéâëíÇÄå ìèêÄÇãÖçàü
èêéñÖëëéå à ÑÄíóàäÄå
Ниже приведены адреса веб&сайтов поставщиков устройств управления процессом и дат&
чиков, рассмотренных в этой главе. Эти адреса в Сети часто изменяются, поэтому, если
какая&либо из приведенных ссылок неактивна, воспользуйтесь механизмом поиска в Ин&
тернете по названию устройства или датчика, чтобы найти интересующие вас материалы.
Управляющие клапаны, I/P&преобразователи и позиционеры в средствах
управления BSI
http://www.bucksales.com
Датчики температуры фирмы Honeywell
http://www.honeywell.com
Нагревательные элементы фирмы Watlow Electric
http://www.watlow.com
Терморезисторы фирмы Vishay
http://www.vishay.com
Твердотельные датчики фирм Motorola и National
http://www.motorola.com
http://www.national.com
Тензорезисторы и ячейки нагрузки фирмы Omega Engineering
http://www.omega.com
Датчики потока фирм Omega Engineering, GF Signet и Seametrics
http://www.omega.com
http://www.gfsignet.com
http://www.seametrics.com
Датчики уровня фирм Emerson, Delta Controls и Madison Company
http://www.emersonprocess.com
http://www.deltacnt.com
http://www.madisonco.com
ÇÖÅ-ëÄâíõ èé ìëíêéâëíÇÄå ìèêÄÇãÖçàü èêéñÖëëéå à ÑÄíóàäÄå
533
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Линейные и вращательные измерительные потенциометры фирм NovoTechnik
и Honeywell
http://www.novotechnik.com
http://www.honeywell.com
Датчики влажности фирмы Honeywell:
http://www.honeywell.com
êÖáûåÖ
7.3. Клапаны управления
Существуют четыре основных класса клапанов управления: электромагнит&
ные, пропорциональные, клапаны с пневматическим приводом и клапаны,
управляемые электродвигателями.
Для обозначения клапанов в схемах используются стандартные условные
обозначения, позволяющие графически отобразить состояния клапана при
поданном и снятом питании соленоида.
Преобразователь «ток&давление» (I/P&преобразователь) позволяет управ&
ляющим клапанам с пневматическим приводом работать в диапазоне от пол&
ностью открытого до полностью закрытого состояния.
Чтобы увеличить точность положения клапана, используются позиционеры.
7.4. Электронагревательные элементы
Термоэлектрические нагреватели (ТЭН) преобразуют электрическую энер&
гию в тепловую.
При выборе термоэлектрического нагревателя должна быть рассчитана ве&
личина теплового потока, необходимая в конкретном применении.
7.5 . Обзор датчиков, усилителей и преобразователей для систем управления
Датчики чувствительны к таким энергиям, как теплота, давление, движение
и свет.
Усилители преобразуют маленькие сигналы в большие, более пригодные для
использования в системах управления.
Преобразователи получают энергию одного типа и преобразуют ее в энер&
гию другого типа. Преобразователь обычно включает датчик и усилитель.
Согласованием сигнала называется преобразование уровня или типа сигнала в
другой тип или уровень, пригодный для использования в следующем узле системы.
Калибровка — процедура для определения точности измерительного уст&
ройства и замены или восстановления устройства, если оно не обеспечивает
необходимой точности.
7.6. Датчики температуры
Температура — степень нагрева или охлаждения тела или среды, выражен&
ная в градусах Цельсия, Фаренгейта или Кельвина.
534
Детектор температуры сопротивления (RTD) — датчик температуры, кото&
рый обнаруживает изменение сопротивления металла при изменениях тем&
пературы.
Терморезисторы — электронные компоненты, значительно изменяющие
свое сопротивление при изменении температуры своего корпуса.
Термопары — датчики температуры, которые создают небольшое напряже&
ние в несколько милливольт, величина которого зависит от температуры.
Твердотельные датчики температуры — интегральные схемы (ИС), выход&
ной сигнал которых прямо пропорционален температуре, выражаемой обыч&
но в градусах Цельсия.
Пирометр — датчик температуры, который измеряет температуру объекта
без непосредственного контакта с ним, воспринимая световое излучение, со&
здаваемое объектом.
7.7. Датчики давления
Датчики давления обнаруживают силу, прикладываемую одним объектом к
другому.
Давление — количество силы, приложенной к единице площади, давление
выражается в фунтах на квадратный дюйм.
Трубка Бурдона — изогнутая полая металлическая трубка, открытая с одно&
го конца и запаянная с другого, обычно имеет форму буквы C или форму
плоской или винтовой спирали.
Трубка Бурдона стремится распрямиться под давлением, обеспечивая таким
образом смещение, пропорционально приложенному к ней давлению.
Мембранный датчик давления снабжен мембраной — гибкой сплошной пе&
ремычкой, сделанной из каучука для измерения низких давлений и из метал&
ла — для высоких давлений.
Мембрана расширяется под давлением, и ее смещение пропорционально
приложенному давлению.
Сильфон — тонкий запаянный металлический цилиндр с рифлеными сторо&
нами, подобными складкам аккордеона.
Сильфон стремится развернуть складки под давлением, таким образом про&
изводя смещение, пропорциональное приложенному давлению.
Дифференциальный датчик давления — модификация мембранного датчика,
в котором давление может быть приложено к обоим концам цилиндра.
В пьезоэлектрических датчиках давления давление прикладывается к крис&
таллу, деформируя его и создавая между его торцами небольшое напряже&
ние, пропорциональное деформации или давлению.
Твердотельный датчик измеряет давление, приложенное с одной стороны ди&
афрагмы. Все электрические и механические компоненты интегрированы в
одну кремниевую пластину.
Тензодатчик состоит из очень тонкого провода или металлической фольги, вы&
резанной в форме сетки. Металлический провод или фольги растягивается в
направлении, параллельном приложенному механическому напряжению.
êÖáûåÖ
535
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Напряжение, испытываемое объектом, прикладывается непосредственно к
тензорезистору, вызывая изменение его электрического сопротивления,
пропорциональное приложенному давлению.
Нагрузочная ячейка использует тензорезисторы, установленные специфи&
ческим образом на объекте, который должен подвергнуться приложенному
давлению.
Как тензорезистор, и так нагрузочная ячейка включаются в мостовую схему.
Когда к мосту прикладывается входное напряжение, выходное напряжение
пропорционально измеряемому давлению на объекте.
7.8. Датчики потока
При измерении потока важным понятием является скорость потока, которая
представляет собой объем материала, проходящего через фиксированную
отметку в единицу времени.
Ламинарный поток означает, что жидкость течет довольно гладко, парал&
лельно стенкам канала. Турбулентный поток означает, что жидкость течет по
каналу, циркулируя внутри потока.
Измерение потока по падению давления возможно вледствие того, что раз&
ность давлений, измеренных с обеих сторон от физического препятствия, по&
мещенного в поток жидкости, пропорциональна квадрату скорости потока.
Пластинчатая диафрагма — устройство, имеющее форму шайбы, которое
устанавливается в трубопроводе для измерения скорости потока по разности
давлений на его входе и выходе.
Трубка Вентури — устройство для измерения потока, представляющее собой
плавно сужающийся и затем плавно расширяющийся до прежнего размера канал.
Падение давления на таком препятствии используется для измерения потока.
Трубка Пито — устройство измерения потока, состоящее из двух трубок, по&
мещенных в поток жидкости. Трубки позволяют измерять два давления: пол&
ное (включая и динамическое давление) и статическое.
Сопло — устройство для сужения струи, устанавливаемое внутри трубопро&
вода, чтобы получить падение давления.
Скоростные датчики потока измеряют скорость потока жидкости на основе
измерения скорости ее частиц.
В крыльчатых (paddlewheel) датчиках поток заставляет вращаться турбинку.
При этом число оборотов пропорционально значению потока.
Датчик потока с винтовой турбинкой работает так же, как турбинный датчик.
Он измеряет скорость вращения, чтобы вычислить затем значение потока.
Для создания вихревого датчика потока в трубопровод помещают тело обте&
кания сложной формы, после которого в потоке создаются завихрения. Раз&
ность давления в завихрении используется для вычисления потока.
Электромагнитные датчики потока измеряют электрический заряд в проте&
кающей жидкости, пропорциональный ее скорости.
Ультразвуковые датчики потока вычисляют поток жидкости на основе разно&
сти частот посылаемого и отраженного ультразвукового сигнала.
536
Вытеснительные датчики потока измеряют жидкостный поток. В них исполь&
зуются прецизионные роторы в качестве измерительных элементов потока.
При этом подсчитывается число оборотов ротора и умножается на известный
объем жидкости, вытесняемой за один оборот.
Тепловые массовые датчики потока используют нагревательный элемент и
два датчика температуры, устанавливаемые снаружи трубопровода. Раз&
ность температур между датчиками прямо пропорциональна массовой ско&
рости потока.
Кориолисовы датчики потока используют вибрирующую U&образную трубку
для определения потока жидкости на основе измерения гармонических коле&
баний угла поворота трубки.
Визуальные датчики потока состоят из вертикальной стеклянной или пласт&
массовой трубки с раструбом сверху и поплавка. Измеряется положение по&
плавка относительно нанесенной на трубке шкалы, градуированной в едини&
цах потока жидкости.
7.9. Датчики уровня
Датчики уровня разделяются на два класса: контактные датчики уровня, ко&
торые дают сигнал о достижении заданного уровня, и непрерывные датчики
уровня, которые измеряют уровень в некотором диапазоне от минимального
до максимального значения.
Поплавковые датчики уровня — устройство в вашем туалетном бачке, кото&
рое регулирует уровень воды в резервуаре.
Погруженный датчик уровня действует подобно поплавковому датчику, но
отличается тем, что поплавок частично погружен в жидкость.
Вибраторный датчик уровня представляет собой резонансную систему, в ко&
торой поддерживаются механические колебания в резонансном режиме.
Когда вокруг датчика появляется материал, резонансные колебания демп&
фируются, обеспечивая тем самым измерение уровня материала.
Электрооптический датчик уровня передает и получает световой сигнал.
Когда световой луч прерывается, это свидетельствует о достижении матери&
алом уровня, на котором расположен датчик.
Датчик уровня, основанный на проводимости, использует проводимость
жидкости, чтобы получить небольшой электрический ток между двумя элек&
тродами, установленными на заданном уровне.
Терморезисторный датчик уровня использует зависимость сопротивления термо&
резистора от температуры, чтобы обнаруживать изменение в уровне жидкости.
Дифференциальный датчик давления может определять уровень жидкости, из&
меряя давление столба жидкости и преобразуя измеренный сигнал в уровень.
Емкостной датчик уровня посылает высокочастотные электромагнитные им&
пульсы через исследуемый резервуар с жидкостью или гранулированным
материалом, чтобы определить уровень материала.
Ультразвуковые и радарные датчики уровня испускают звуковые волны. Ког&
да звуковые волны достигают жидкости или твердого материала, они отра&
жаются обратно и обнаруживаются датчиком.
êÖáûåÖ
537
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
Эхолот использует изменение механического напряжения каната, на конце
которого подвешен груз, при достижении грузом поверхности жидкости или
гранулированного материала в контейнере.
Пузырьковые датчики уровня применяются для измерения уровня воды по
давлению, необходимому для пропуска воздуха через погруженный шланг.
7.10 Датчики положения
Линейные измерительные потенциометры — датчики, выходное сопротив&
ление которых пропорционально смещению или положению.
Вращательные измерительные потенциометры — датчики, выходное сопро&
тивление которых пропорционально углу поворота.
Дифференциальный трансформатор с линейным перемещением сердечника
(LVDT) — датчик положения, состоящий из трансформатора с перемещаемым
сердечником, прикрепленным к объекту, положение которого измеряется.
7.11 . Другие датчики процессов
Датчики плотности измеряют массу объекта с помощью вибратора и вычис&
ляют плотность, используя объем объекта.
Датчики вязкости используют вибратор и измеряют амплитуду его колеба&
ний. Увеличение амплитуды вибрации указывает на уменьшение вязкости.
Датчики влажности — интегральные схемы, которые обеспечивают линей&
ное выходное напряжение, пропорциональное влажности.
Çéèêéëõ
1. Расскажите, какая работа в сфере производства и продажи устройств управления
и датчиков для вас наиболее привлекательна.
2. Сравните аналоговые датчики процесса и устройства, используемые на входе и
выходе автоматизированной технологической системы.
3. Каково различие между гидравлическим и пневматическим приводами исполни&
тельных элементов?
4. Опишите работу электромагнитного клапана.
5. Для чего служит условное обозначение электромагнитного клапана?
6. Какова функция преобразователя «ток — давление»?
7. Каково различие между I/P&преобразователем и позиционером?
8. Назовите два основных варианта использования клапанов с пневматическим
приводом.
9. Назовите области применения трехпозиционного клапана с электроприводом.
10. Какая характеристика должна быть вычислена при выборе нагревательного эле&
мента?
11. Объясните связь между датчиками, усилителями и преобразователями.
12. Каково различие между согласованием сигнала и усилением сигнала?
538
13. Почему важна калибровка датчика?
14. Объясните принцип работы резистивного детектора температуры (RTD).
15. Каковы преимущества RTD с четырьмя выводами перед RTD с двумя выводами?
16. При каких условиях следует выбирать термистор с положительным, а не с отри&
цательным тепловым коэффициентом?
17. Какие механические характеристики определяют использование термисторов?
18. Объясните принцип работы и конструкцию термопары.
19. Почему опорный переход термопары назван холодным спаем?
20. Каково преимущество пирометров перед другими датчиками температуры?
21. Какой датчик вы бы использовали, чтобы измерить температуру литьевого железа?
22. Что такое давление?
23. Каково различие между дифференциальным датчиком и датчиком атмосферного
давления?
24. Какими общими свойствами обладают трубки Бурдона, мембранные и сильфон&
ные датчики давления?
25. Объясните принцип работы трубки Бурдона.
26. Объясните принцип работы дифференциального датчика давления.
27. Почему явление пьезоэлектричества применимо для измерения давления?
28. Объясните принцип работы твердотельного датчика давления.
29. Каково различие между напряжениями растяжения и сжатия?
30. Каково определение коэффициента датчика?
31. Опишите конструкцию тензорезистора.
32. Объясните принцип работы нагрузочной ячейки.
33. Какова функция распределительной коробки в системе с несколькими нагрузоч&
ными ячейками?
34. Как компенсируются изменения температуры в тензорезисторах?
35. Какова связь между потоком жидкости через канал и его диаметром?
36. Сравните условия ламинарного и турбулентного потока.
37. Объясните, как определяется поток при использовании величины падения давления.
38. Объясните принцип работы диафрагмы при вычислении потока.
39. Что такое трубка Вентури и как в ней используется падение давления для измере&
ния потока?
40. Каково преимущество трубки Вентури перед диафрагмой?
41. Объясните принцип работы трубки Пито при измерении потока.
42. Как используется сопло при измерении потока?
43. Как может использоваться существующее колено в трубопроводе для определе&
ния потока жидкости?
44. Что общего у турбинных датчиков потока с лопаточной и винтовой турбиной?
45. Объясните принцип работы вихревого датчика потока.
46. На каком принципе работают электромагнитные датчики потока?
Çéèêéëõ
539
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊xÏË ÔÓˆÂÒÒ‡ÏË
47. Объясните принцип работы вытеснительных датчиков потока.
48. В каких случаях вы бы использовали ультразвуковой датчик вместо других датчи&
ков потока?
49. Почему ультразвуковой датчик потока эффективен при поиске неисправностей?
50. Объясните принцип работы теплового датчика массы потока.
51. Что такое термобатарея?
52. Каково преимущество Кориолисова массового датчика потока перед тепловым
массовым датчиком потока?
53. Почему Кориолисов датчик и массовый датчик потока непрактичны при высоких
скоростях движения жидкости?
54. Сравните контактные датчики уровня с непрерывными.
55. Какое устройство обычно активизируется по достижении материалом уровня
контактного датчика?
56. Объясните принцип работы поплавкового датчика уровня.
57. Каково преимущество вибрирующего стержня перед вибрирующими вилами?
58. Объясните принцип работы электрооптического датчика уровня.
59. Как работает радиочастотный (РЧ) датчик полной проводимости?
60. Каково преимущество радарного датчика перед ультразвуковым?
61. Каковы недостатки пузырькового датчика уровня?
62. Почему линейные и вращательные измерительные потенциометры можно рас&
сматривать как датчики положения?
63. Объясните принцип работы дифференциального трансформатора с линейным
перемещением сердечника (LVDT).
64. Чем отличается плотность от удельного веса?
65. Чем отличается влажность от относительной влажности?
66. Какая общая методика используется при поиске неисправностей в резистивных
детекторах температуры и в терморезисторах?
áÄÑÄóà
1. На основе анализа рис. 7.62 опишите работу четырехходового двухпозиционного
электромагнитного клапана при подаче и снятии питания с соленоида.
2. Для I/P&преобразователя вычислите выходное давление при входном токе в 9,5 мА.
3. Какова теплоемкость скипидара, поток которого равен 0,002 м3/мин, если плот&
ность его составляет 870 кг/м3, а удельная теплоемкость — 720 Дж/(кг×°C)?
4. Вычислить мощность теплового потока, необходимую, чтобы нагреть скипидар от
30 до 42 °C при условиях, приведенных в задаче 3.
5. Как выразить 20° по Фаренгейту в градусах Цельсия?
6. Каково сопротивление платинового RTD при 50 °C, если его сопротивление при
20 °C равно 130 Ом?
540
7. Каково выходное напряжение схемы на базе ОУ (см. рис. 7.63), если температура
окружающего воздуха —50 °C и сопротивление терморезистора RT равно 810 Ом?
8. Каково изменение сопротивления для испытуемого экземпляра, который подвер&
гается напряжению, при использовании датчика на 150 Ом с коэффициентом дат&
чика, равным 2,5, если ε = 500×10—6?
9. Каково давление на нагрузочную ячейку, которая может использоваться до мак&
симального давления 500 фунтов, если выходное напряжение равно 15 мВ при
масштабном множителе 3 мВ/В, а входное напряжение равно 10 В?
10. Какова скорость шоколадного сиропа, текущего через 6&дюймовый канал, при
потоке 3 фут/с?
11. Какова величина потока в галлонах/м, если давление до и после отверстия диаф&
рагмы равно 8,6 и 8,1 psi соответственно, а постоянная отверстия диафрагмы
равна 12?
12. Определить поток, если коэффициент K крыльчатого датчика равен 11 см3 и в
течение 1250 с было зафиксировано 760 импульсов.
13. Каково число ходов в минуту для поршня, который имеет объем 0,2 галлона, и
поток равен 45 галлонов/мин?
14. Определите уровень воды в резервуаре при напоре (давлении воды, вытекающей
из крана, раположеннного на его дне), равном 35 psi.
15. Каков удельный вес 1 фут3 томатного соуса, если его масса составляет 55 фунтов
при 25 °C?
Рис. 7.62. К задаче 1
áÄÑÄóà
541
чÚ̃ËÍË Ë ËÒÔÓÎÌËÚÂÎ̧Ì̊ ÛÒÚÓÈÒÚ‚‡ ‰Îfl ÛÔ‡‚ÎÂÌËfl ‡Ì‡ÎÓ„Ó‚̊ÏË ÔÓˆÂÒÒ‡ÏË
Рис. 7 .63. К задаче 7
542
8
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
ñÂÎ̧ „·‚̊
Основная цель главы 8 состоит в том, чтобы рассказать об основ
ных аппаратных средствах и устройствах техники безопасности и
рассмотреть организационные мероприятия и практику предприя
тий, касающиеся операторов, обслуживающего и ремонтного пер
сонала. Помимо этого уделено внимание требованиям техники безо
пасности, как государственным, так и разработанным компаниями.
После изучения этой главы вы сможете:
1. Назвать организации, которые устанавливают стандарты промышленной безо!
пасности.
2. Описать личные защитные средства, используемые для безопасности персонала.
3. Рассказать о мероприятиях по технике безопасности производственного участка.
4. Описать работу трех типов датчиков давления.
5. Охарактеризовать принципы работы энергетических и управляющих устройств
блокировки и концепцию положительного режима работы переключателя.
6. Вычислить безопасное расстояние для ограждения и охранное расстояние.
7. Разработать стратегию безопасности, включая оценку риска, его устранение или
снижение.
8. Разработать технико!экомическое обоснование проекта системы безопасности.
èêàåÖçÖçàÖ áçÄçàâ
Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Для технических специалистов имеется много возможностей сделать хорошую карьеру
в области обеспечения безопасности людей и механизмов. Один из таких путей — это
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
работа в компании, которая производит устройства для охраны машин, например свето!
вые завесы, коврики давления и блокировочные выключатели. Изготовители этих уст!
ройств нуждаются в инженерах, техниках и коммерческом персонале. Другое направле!
ние дятельности — работа в компаниях, оказывающих консультационные услуги,
связанные с безопасностью, такие как оценка риска, разработка систем безопасности и
проверка безопасности. Еще одна возможность — работа в качестве специалиста в
компаниях, производящих автоматизированные системы. В больших компаниях, обла!
дающих сетью национальных и международных филиалов, вы могли бы стать более уз!
ким специалистом, например, специалистом по оценке риска.
Деятельность инженера по технике безопасности может быть связана с любым
этапом промышленного производства. Специалисты этого профиля обеспечивают
технику безопасности на рабочих местах или безопасность изделий и охрану здоровья
обслуживающего персонала, применяя знание как технологических процессов, так и
основных законов механики, химии и психологии. Они должны быть способны прогно!
зировать, распознавать и оценивать опасные условия, а также разрабатывать меры по
обеспечению безопасности работы. И конечно, они должны быть знакомы с основны!
ми требованиями правил техники безопасности и охраны здоровья.
Работа, относящаяся к разработке средств безопасности, их применению и техничес!
ким продажам, требует изучения стандартов, перечисленных в этой главе. Рекомендуется
пройти специальные курсы по технике безопасности на автоматизированных технологи!
ческих установках, потому что профессиональный рост в области техники безопасности
часто начинается после работы в качестве поставщика или пользователя автоматических
линий и зачастую наградой для служащих, стремящихся к расширению своих знаний и
навыков, служит оплаченное компанией образование.
Например, в качестве специфической задачи вам может быть поручена разработ!
ка рекомендаций по вопросам применения средств безопасности для нового автомати!
зированного производственного участка. Допустим, что вы недавно получили диплом
специалиста и начали работу в отделе техники безопасности и охраны труда фирмы
Robbins Manufacturing Company, которая производит металлические и пластмассо!
вые шары. Вы вместе со старшим, более опытным сотрудником отдела участвуете в
разработке общей концепции производственного участка, и вам поручено рассмот!
реть план общего размещения участка. Окончательный вариант проекта участка бу!
дет включать ваши рекомендации по обеспечению безопасности, но прежде вы долж!
ны представить свой проект аналитической группе для предварительного обсуждения.
Вы согласовываете необходимые параметры с вышестоящим сотрудником вашего от!
дела и с представителями поставщиков средств безопасности. Ваша идея заключается
в использовании комбинации металлического экрана и световой завесы. Затем вы
подготавливаете обоснование своих рекомендаций по выбору средств для обеспече!
ния безопасности и защиты. Ваш проект по технике безопасности может претерпеть
изменения в процессе разработки производственного участка, а также в результате
учета замечаний рецензента. Описанная здесь общая схема типична для разработки
новых проектов. Одобрение коллегами разработанного вами проекта безопасности
послужит прекрасным стимулом для дальнейшего повышения вашего профессио!
нального уровня.
544
8.1. ÇÇÖÑÖçàÖ Ç íÖïçàäì ÅÖáéèÄëçéëíà
Техника безопасности охраняет производственную деятельность от возникновения
опасных, рискованных или травматических ситуаций, и важность ее для технологичес!
ких процессов невозможно переоценить. Производственные фирмы заинтересованы,
прежде всего, в обеспечении безопасности обслуживающего персонала; однако ме!
роприятия, гарантирующие, что оборудование не будет повреждено в результате дей!
ствий операторов или работы приборов также имеют высокий приоритет. В этой главе
при обсуждении обеспечения безопасности как обслуживающего персонала, так и
оборудования будут затронуты следующие темы:
государственные и корпоративные требования безопасности;
средства личной безопасности обслуживающего персонала и безопасность
оборудования;
оборудование и приборы для обеспечения безопасности;
разработка стратегии безопасности.
Знакомство с требованиями стандартов безопасности, оборудованием и мероп!
риятиями по обеспечению безопасности, которым посвящена эта глава, даст вам фун!
дамент для изучения правил техники безопасности на вашем предприятии.
8.2 . íêÖÅéÇÄçàü íÖïçàäà ÅÖáéèÄëçéëíà
Управление по профессиональной безопасности и здоровью (Occupational Safety and
Health Administration — OSHA) разрабатывает основные требования промышленной
безопасности для Соединенных Штатов, а общие промышленные правила техники бе!
зопасности основаны на стандартах, разработанных тремя главными организациями:
Международной организацией по стандартизации (International Organization
for Standardization — ISO);
Международной электротехнической комиссией (МЭК, International Elec!
trotechnical Commission — IEC);
Американским национальным институтом стандартов (American National
Standards Institute — ANSI).
Обратите внимание, что аббревиатура ISO не соответствует имени организации,
потому что если бы это было так, то аббревиатура для разных языков была бы различ!
на: «IOS» по!английски и «OIN» по!французски (Organization Internationale de
Normalisation).
Организация решила использовать сокращение греческого слова isos, означаю!
щего «равный». Таким образом, для любой страны, на любом языке аббревиатурой
Международной организации по стандартизации всегда будет ISO.
Системы автоматизированного производства обычно состоят из нескольких ма!
шин, управляемых либо одним контроллером, либо несколькими контроллерами,
ÇÇÖÑÖçàÖ Ç íÖïçàäì ÅÖáéèÄëçéëíà
545
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
каждый из которых запрограммирован для производства отдельных деталей или узлов.
Существует два стандарта, которые являются основой при разработке мер по обеспе!
чению безопасности, связанных с эксплуатацией таких систем:
ISO 11161 — международный стандарт, устанавливающий требования по
безопасности монтажа, программирования, работы, обслуживания и ремон!
та этих систем;
ANSI B11. 20 — стандарт, определяющий конструкцию, безопасность и ис!
пользование этих систем.
Когда машины в автоматической линии работают автономно, должен действовать
стандарт IEC 61495 для отдельных машин. Он содержит специфические требования,
такие как возможность выключения с помощью выключателей, управляемых вруч!
ную, установка местных ограждений и соответствующее конструктивное исполнение
трансформаторов.
8.2 .1 . ìÔ‡‚ÎÂÌË ÔÓÙÂÒÒËÓ̇Î̧ÌÓÈ ·ÂÁÓÔ‡ÒÌÓÒÚË Ë Á‰ÓÓ‚̧fl — OSHA
Управление OSHA было учреждено в 1970 году правительственным актом США и
предназначено для установления стандартов безопасности в целях охраны жизни и здо!
ровья, предотвращения травм и болезней, возникающих в результате опасных или не!
здоровых условий работы. Правила широко известны под названием 29 CFR 1910 или
просто 1910. Они содержат стандарты, касающиеся всех аспектов безопасности, такие
как безопасное применение асбеста, ограждение машин, личные средства защиты и бе!
зопасность рабочего места. Например, в разделе O стандарта 29 CFR 1910 определяют!
ся требования по безопасности обслуживания машин. Главный акцент в них сделан на
защите операторов и другого персонала от травм на рабочем месте. Здесь говорится, что
необходимы ограждения, предотвращающие опасное воздействие оборудования на ка!
кую!либо часть тела оператора. Другим примером служит раздел I стандарта 29 CFR 19,
определяющий личные средства защиты, включая защитную одежду, очки и перчатки, и
такие личные средства, как респираторы и затычки для ушей. Веб!сайт OSHA (см. раз!
дел 8.10) содержит все необходимые материалы для изучения правил техники безопас!
ности и новейших решений и мероприятий по ее обеспечению.
8.2 .2. äÓÔÓ‡ÚË‚Ì̊ Òڇ̉‡Ú̊
Многие корпорации вырабатывают собственные требования безопасности, которые
являются зачастую более строгими, чем требования OSHA. Большинство промышлен!
ных корпораций проводит для всех служащих обязательные ежегодные брифинги по
вопросам безопасности и ежемесячно информирует сотрудников обо всех новостях, на!
правляя их в форме экспресс!информации или через электронную почту. Комитеты по
технике безопасности, учрежденные во многих компаниях, проверяют состояние техни!
ки безопасности на предприятиях и обеспечивают персонал необходимыми инструкция!
ми с помощью плакатов на корпоративных досках объявлений. Несмотря на то что со!
546
гласно закону ответственность за безопасность производства несет предприниматель,
служащие также отвечают за собственную безопасность и должны применять безопас!
ные методы работы.
8.2.3. ÑÛ„Ë ӄ‡ÌËÁ‡ˆËË
Некоторые правительства штатов имеют собственные организации по обеспечению бе!
зопасности, правила которых не менее строги, чем федеральные правила OSHA. Кроме
того, некоторые организации проверяют и удостоверяют целостность электрической
изоляции и безопасность изделий и оборудования. Две такие организации — Канадская
Ассоциация Стандартов (CSA) и Лаборатория страховых компаний (UL). Управление
OSHA аккредитовало их в качестве национальных испытательных лабораторий
(NRTLS), и каждое изделие, которое удовлетворяет испытательным стандартам CSA
или UL, удостоверено и отмечено знаками — соответственно NRTL/C или C!UL.
8.3. ÅÖáéèÄëçéëíú éÅëãìÜàÇÄôÖÉé èÖêëéçÄãÄ
Обеспечение безопасности для обслуживающего персонала — наиболее важная про!
блема при создании рабочего места. Понимание сотрудником того, что он сам ответстве!
нен за собственную безопасность, играет главную роль в охране труда на рабочем месте.
Ваша безопасность зависит от надлежащего использования личных средств защиты,
которые вы должны носить, вашего знания оборудования и/или материалов, с которыми
вы работаете, и усвоения вами правил техники безопасности, действующих в компании.
8.3.1. ãË̃Ì̊ Ò‰ÒÚ‚‡ Á‡̆ËÚ̊
Личные средства защиты (ЛСЗ) разрабатываются для защиты обслуживающего персо!
нала от серьезных травм на рабочем месте или болезней, которые могут быть вызваны
контактами с опасными материалами. Компании информируют своих служащих о том:
как правильно использовать ЛСЗ;
в каких случаях требуется использовать ЛСЗ;
какие ЛСЗ в какой ситуации необходимы;
в каких пределах может защитить ЛСЗ;
как поддерживать в исправности ЛСЗ.
Защитные очки и затычки для ушей. Два типа наиболее часто применяемых
ЛСЗ — это защитные очки и затычки для ушей. Защитные очки имеют небьющиеся
линзы и боковые экраны и должны носиться всеми работниками на определенных учас!
тках производства и в технических лабораториях. В некоторых средах, где имеется риск
повреждения летящими фрагментами, голова должна быть защищена шлемом, закры!
ÅÖáéèÄëçéëíú éÅëãìÜàÇÄôÖÉé èÖêëéçÄãÄ
547
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
вающим все лицо, а защитные очки заменены боковыми щитками. Защита ушей — за!
тычки для ушей или наушники, или и то и другое — необходима при работе на многих
производственных установках. Затычки для ушей обычно делаются из пенопласта, во!
щеного хлопка или волокнистых материалов, которые легко принимают нужную форму,
плотно закрывая канал уха. Важно помнить, что любой чрезмерный шум на производ!
стве опасен и может вызвать со временем необратимое ухудшение слуха.
Другое защитное оборудование. Жесткие каски могут защищать обслуживаю!
щий персонал от травм головы, проникающих и электрических повреждений, которые
могут быть вызваны летящими или низко висящими объектами. Ботинки или боты со
стальной защитой для пальцев требуются на производственных участках, где имеются
тяжелые объекты. Некоторые специально приспособленные ботинки имеют стальные
подошвы, которые защищают ступни при ходьбе по острым объектам. В дополнение к
ботинкам со стальной защитой применяются колготы, изготовленные из кожи или
алюминизированного искусственного шелка, защищающие персонал от таких источ!
ников опасности, как вращающиеся объекты или расплавленные металлы. Защита
необходима и тогда, когда воздух на рабочем участке загрязнен. Для защиты от возду!
ха, загрязненного дымом, пылью и парами, используются респираторы. Они обычно
должны защищать нос и рот или все лицо или голову, в зависимости от ситуации. Не!
которые постоянно повторяющиеся действия в промышленности, например, подъем
тяжелых деталей и повторные движения по закручиванию болтов, травмируют опре!
деленные группы мышц. В этих случаях применяется бандаж, чтобы защитить муску!
лы спины, всей руки или запястья.
При работе возле оборудования, которое имеет движущиеся части, недопустимо
носить свободную одежду и драгоценности. Много несчастных случаев происходит
ежегодно из!за того, что одежда или драгоценности запутываются в оборудовании.
Часы и кольца должны быть сняты всякий раз, когда имеется вероятность их попада!
ния в машину или устройство.
Во многих компаниях всем сотрудникам запрещается появление на некоторых ра!
бочих местах без спецодежды, поскольку обычная одежда представляет собой опас!
ность для технологического процесса. В электронной промышленности, например, спе!
цодежда имеет антистатические свойства, чтобы защитить электронные компоненты от
электрического повреждения. Наряду с использованием ЛСЗ, компании обязаны обес!
печить соблюдение правил техники безопасности для обслуживающего персонала.
8.3.2. èÓÚË‚ÓÔÓʇ̇fl Á‡̆ËÚ‡
Защита от огня на производстве охватывает три области: предотвращение воспламене!
ния, пожаротушение и персональная защита. Многие производственные компании ин!
структируют своих служащих о мерах противопожарной защиты и о планах/маршрутах
эвакуации персонала при пожаре. Эти компании считают, что огнетушители являются
главным образом защитным реквизитом, в то время как для служащих безопаснее всего
покинуть помещение, не пытаясь гасить огонь. Ниже приводится краткий обзор средств
пожаротушения, поскольку служащие должны знать, какие существуют виды горящих
объектов и соответствующие им средства пожаротушения. В табл. 8 .1 описаны четыре
548
вида объектов возгорания, соответствующие им гасящие среды и максимальные рас!
стояния, на которых могут применяться средства пожаротушения для каждого из объек!
тов. Пожары на производстве приводят к очень небольшому числу смертельных случаев
по сравнению с числом погибших при пожарах на других объектах. Однако это обстоя!
тельство не должно снижать нашего внимания к мерам противопожарной безопасности
на производстве.
8.3.3. чÌÌ̊ ӷ ÓÔ‡ÒÌ̊ı χÚ¡·ı
Перечень опасных материалов (MSDS) — это документ, в котором содержится ин!
формация о потенциально вредных для здоровья материалах и описываются методы
безопасной работы с химическими продуктами. Перечень является необходимым эле!
ментом при разработке программы по защите жизни и здоровья, входящей в общую
корпоративную стратегию безопасности.
Таблица 8.1. Виды объектов возгорания и соответствующие гасящие
средства
Стратегия безопасности всесторонне обсуждается в разделе 8.7 . Она должна вклю!
чать в себя оценку потенциальной опасности при использовании, хранении, обработке
материалов и чрезвычайные меры по ее устранению. Перечень MSDS дает гораздо боль!
ше информации о материалах, чем маркировка на изделии, и должен быть подготовлен
поставщиком. В документе сообщается, какую опасность представляет изделие, в чем со!
стоят методы его безопасного использования, к чему может привести невыполнение дан!
ных рекомендаций и что делать, если это все же произошло, как распознать признаки по!
ражения и что делать, если они обнаружены.
Категории в MSDS устанавливаются требованиями OSHA по оповещению об опас!
ности 29CFR1900.1200. Перечень MSDS должен содержать следующую информацию:
наименование продукта, используемое на ярлыке, и химическое и обычное на!
звание(я) компонентов, опасных для здоровья, содержание которых в продукте
составляет 1% или более, за исключением канцерогенных веществ, которые
должны быть указаны, если их концентрация составляет 0,1 % или более;
химическое и обычное название(я) всех компонентов, представляющих фи!
зическую опасность при смешивании;
ÅÖáéèÄëçéëíú éÅëãìÜàÇÄôÖÉé èÖêëéçÄãÄ
549
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
физические и химические характеристики опасных химикалий (такие как
давление пара и температура воспламенения);
наличие физических опасностей, включая опасность возгорания, взрыва и
химической активности;
наличие опасности для здоровья, включая симптомы и признаки химического
воздействия, а также любые проявления, обычно распознаваемые как хими!
ческое поражение;
основной путь(и) проникновения в тело;
допустимые OSHA пределы времени воздействия вещества;
является ли опасный химический реагент канцерогенным веществом или по!
тенциальным канцерогенным веществом;
меры предосторожности при обработке и использовании, включая соответ!
ствующие гигиенические действия, защитные меры при ремонте и обслужи!
вании загрязненного оборудования и процедуры очистки пятен и утечек;
соответствующие организационные мероприятия, такие как обеспечение
средствами личной защиты и технического контроля, практический контроль
за выполнением установленных правил;
действия при авариях и процедуры оказания скорой помощи;
дата выпуска или последнего изменения MSDS;
имя, адрес, и номер телефона изготовителя химического продукта, импорте!
ра, предпринимателя или другого лица, подготовившего или разославшего
MSDS, которое в случае необходимости может дать дополнительную инфор!
мацию об опасных химических свойствах и действиях при аварии.
8.4 . éïêÄçÄ íêìÑÄ çÄ èêéàáÇéÑëíÇÖççõï ìóÄëíäÄï
Тип, степень и избыточность защиты производственного участка напрямую зависят от
типа и уровня опасностей, которые имеются на участке. Защитными средствами явля!
ются барьеры, блокировки, охрана по периметру участка и сигналы опасности. Произ!
водственный участок может быть разделен на три зоны, как показано на рис. 8.1:
зона 1 — область снаружи производственного участка, не имеющая никаких
ограничений на пребывание людей;
зона 2 — область внутри производственного участка, недостижимая для ма!
шины. Только обслуживающему и персоналу по эксплуатации участка разре!
шается пребывание в этой области;
зона 3 — область внутри корпуса машины, пребывание в которой запрещено,
пока машина находится в автоматическом режиме работы. Чтобы разделить
зоны 1 и 2, устанавливается физический барьер, зону 1 обычно выделяют жел!
тые знаки и желтый свет. Линия на полу очерчивает зону 3, а электронные
детекторы часто используются как в зоне 2, так и в зоне 3.
550
8.4.1. ÄÔÔ‡‡ÚÌ̊ Ò‰ÒÚ‚‡ ·ÂÁÓÔ‡ÒÌÓÒÚË
Поставщики, специализирующиеся на производстве систем безопасности, обеспечи!
вают широкий выбор аппаратных средств безопасности. Краткий обзор главных аппа!
ратных средств приведен ниже. Детальные описания часто используемых элементов
приводятся в следующих разделах книги.
Физические барьеры — первой линией защиты людей от опасностей явля!
ются физические барьеры, включая цепи и посты защиты, шины безопасно!
сти и ограждение проволочной сеткой.
Датчики присутствия — когда эти элементы фиксируют присутствие че!
ловека, выполняются операции по охране человека от опасных условий.
Устройства аварийного отключения питания — эти устройства от!
ключают питание от машины в аварийных ситуациях. Примерами являются
грибковые кнопки аварийной остановки и тросовые аварийные выключатели
(grab wire safety switch — эти выключатели могут быть приведены в действие
с помощью троса, протянутого по всей длине конвейра).
Устройства автоматической блокировки — эти устройства связывают
дверь защитного ограждения с выключателем питания источника опасности. Су!
ществуют два типа блокировки: блокировка питания и блокировка управления.
Механизмы отключения могут язычковыми, стержневыми или бегунковыми.
Бл оки управления безопасностью — это интеллектуальные контролле!
ры, которые связывают элементы системы безопасности с интерфейсом сис!
тем аппаратных средств автоматизированного участка.
8.5 . ÑÄíóàäà èêàëìíëíÇàü
Эти устройства часто используются на автоматизированных производственных участ!
ках. Датчики приближения, световые завесы и коврики, ощущающие давление, при!
меняются наиболее часто и описаны в следующих разделах.
Рис. 8.1 . Зоны безопасности
ÑÄíóàäà èêàëìíëíÇàü
551
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
8.5 .1. чÚ̃ËÍË ÔË·ÎËÊÂÌËfl
Датчики приближения используют ультразвуковую или лазерную технологию, чтобы
обнаружить присутствие человека или объекта на фиксированном опасном расстоя!
нии. Лазерный датчик приближения (ЛДП) дает самые лучшие результаты и пред!
ставляет собой программируемое устройство в едином корпусе. ЛДП может форми!
ровать изображение области, имеющей форму рабочего участка, и покрывать поле
обзора в 180° без отражателей или отдельных приемников. Он может использоваться
в постоянном положении для охраны опасной области или сканировать путь подвиж!
ной части производственного агрегата. ЛДП использует инфракрасный лазерный луч
для создания трех независимых зон обнаружения: зоны безопасности, зоны раннего
предупреждения и зоны обслуживания. Эти зоны показаны на рис. 8.2. Вход в зону
раннего предупреждения инициализирует сигнал предупреждения; движение в зону
безопасности завершает любое опасное движение машины. Зона области обслужива!
ния используется, чтобы поддерживать позиционирование и управление движением
машины. Список типичных характеристик ЛДП приведен в табл. 8 .2.
Рис. 8 .2. Зоны, определяемые лазерными датчиками приближения
8.5 .2. ë‚ÂÚÓ‚̊ Á‡‚ÂÒ̊
Световая занавеса — это наиболее гибкий защитный барьер, вызывающий к тому же наи!
меньшую утомляемость оператора. Световые завесы называются также световыми экрана!
ми, оптической защитой и барьерами присутствия. По сравнению с твердыми барьерами,
световые завесы упрощают стандартные задачи установки, обслуживания и ремонта.
552
Таблица 8.2 . Типичные технические характеристики ЛДП
Работа световой завесы. Компоненты системы световой завесы показаны на рис. 8.3.
В световой завесе излучатель посылает массив синхронизированных параллельных инфра!
красных пучков света на приемник. Если непрозрачный объект прерывает один или не!
сколько лучей, модуль управления световой завесы посылает сигнал останова на охраняе!
мую машину. Модуль управления световой завесы возбуждает светодиоды излучателя,
которые формируют импульсы невидимого инфракрасного излучения. Импульсы отдельных
диодов формируются в определенной последовательности и модулируются специфической
частотой. Фототранзисторы в приемнике, который управляется модулем управления, реаги!
руют только на специфическую последовательность импульсов определенной частоты. Эта
методика гарантирует безопасность работы и отсутствие помех от внешних источников ос!
вещения. Надежное управление световой завесой выгодно отличает эти датчики от обычных
фотоэлектрических. Управление включает встроенную схему, которая проверяет правиль!
ность работы и отключает машину, пока обнаруженный дефект не будет исправлен. Избы!
точные выходные реле устраняют отдельные сбои реле (которые, в свою очередь, могли бы
привести к неправильной работе).
Применение световой завесы. Световые завесы используются для защиты:
операторов от опасностей зоны выполняемого процесса, которая называется
также зоной опасной работы или точкой контакта;
пальцев и рук. Такой тип завесы предназначен для прессов и штампов, фор!
мовочных машин и машин автоматической сборки;
границ опасного приближения к машине. Такой тип завесы называется за!
щитой периметра.
Защита периметра обнаруживает присутствие людей в опасной области и управля!
ет машиной, чтобы предотвратить несчастный случай. Защита периметра, показанная
на рис. 8 .4, имеет горизонтальную световую завесу на входе в рабочий участок робота.
Применение световой завесы может обеспечить также защиту на участке сверления,
который изображен на рис. 8.5. Участок имеет две стороны, огражденные металлическим
экраном, и две стороны, охраняемые световой завесой. Обратите внимание, что световая
завеса имеет один излучатель с несколькими лучами, единственным приемником и угло!
вым зеркалом. Это применение световой завесы относится к защите «рабочей точки».
Когда поле световой завесы нарушено, сверление прекращается. После того как
рабочее поле освободится и система безопасности возвратится в исходное положение,
сверление продолжится.
Система световой завесы предлагает два различных средства управления: снятие
и создание окна. Снятие временно останавливает работу световой завесы, позволяя
ÑÄíóàäà èêàëìíëíÇàü
553
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
призводить автоматическую подачу материала через завесу. Создание окна отключает
определенную часть световой завесы, позволяя материалу проходить через эту часть.
Рис. 8 .3. Компоненты системы световой завесы
Рис. 8 .4.
Защита периметра
производственной
ячейки робота
554
Стандарты световой завесы можно разделить на прикладные и конструктивные. При!
кладные стандарты объясняют, как использовать световую завесу для защиты машин и как
применять световой занавес для машины, указанной в стандарте. Примером этого типа
стандартов является стандарт ANSI/RIA R15.06, касающийся системы защиты робота.
Конструктивные стандарты обеспечивают проектную, конструктивную и испытательную
информацию для датчиков присутствия. Пример стандарта этого типа — IEC61495, «Безо!
пасность машин — Защитное оборудование с электродатчиками».
Вычисление расстояния до световой завесы. При использовании световых за!
навес в системах защиты машин существует важный момент — вычисление мини!
мального безопасного расстояния. Стандарт ANSI B11.19!1990 (4.2.33.3.5) описыва!
ет безопасное расстояние следующим образом:
Эффективное поле обнаружения должно быть размещено на таком рассто
янии от самого близкого опасного объекта, чтобы оператор или другой пер
сонал не смог бы до момента прекращения движения опасных частей кос
нуться опасного объекта рукой или другой частью тела.
Стандарт OSHA также требует, чтобы расстояние от завесы до любой точки опе!
рации было не короче, чем стандартное расстояние для физической защиты. Другими
словами, световой занавес должен быть размещен на таком расстоянии от машины,
чтобы завеса могла вызывать машинный останов до того, как рука оператора сможет
достичь опасной области.
Стандарт ANSI выражает безопасную формулу расстояния как
DS=K×(TS+TС+Tr+Tbm)+Dpf,
Рис. 8.5. Защита рабочего участка сверления
ÑÄíóàäà èêàëìíëíÇàü
555
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
где DS — безопасное расстояние,
K — скорость движения руки, равная 63 дюймам в секунду,
TS — время останова машины, измеряемое от момента выключения управляющего
элемента, c,
TС — время срабатывания схемы управления машины, необходимое для активизации
тормоза машины, с,
Tr
— время срабатывания световой завесы, равное 0,045 с, если изготовитель не уста!
новил другое значение,
Tbm
— время остановки, определяемое средствами контроля эффективности тормоза,
с. Если тормоз слишком изношен, монитор тормоза останавливает машину, когда вре!
мя останова превышает заданный предел. Следовательно,
Tbm
= уставка монитора тормоза — (TS + TС).
Dpf — дополнительное расстояние, в дюймах, которое вычисляется как
Dpf =(S—0,3)/0,3,
где S — минимальная разрешающая способность обнаружения объекта в дюймах. Эта по!
правка учитывает маленькие объекты, такие как пальцы оператора, которые могут прони!
кать через завесу, потому что чувствительность завесы недостаточна, чтобы обнаружить их
присутствие. Большинство изготовителей световых завес приводит значение для Dpf.
Описанные переменные относятся только к машинам, в которых присутствует
текущий контроль тормоза. Другие случаи рассмотрены в стандарте ANSI.
èËÏ 8.1
Механический пресс имеет время остановки механизма с помощью тормоза, равное
0,34 с, и время задержки схемы управления 0,04 с. Монитор тормоза установлен на
0,48 с, минимальная объектная чувствительность к объекту составляет 0,76 дюймов.
Вычислите минимальное безопасное расстояние от пресса, на котором должна быть
установлена световая завеса.
êÖòÖçàÖ
DS=K×(TS+TС+Tr+Tbm)+Dpf
Tbm
= уставка монитора тормоза — (TS + TС)
Tbm
= 0,48с—(0,34с+0,04с)
Tbm
= 0,10с
Dpf =(S—0,3)/0,3
Dpf = (0,76 дюйма — 0,3) / 0,3
Dpf = 1,43 дюйма
DS=6,3дюйма/с×(10,34с+0,04с+0,045с+0,10с)
DS = 33,075 дюйма — 1,43 дюйма
DS = 34,505 дюйма
556
8.5.3. äÓ‚Ó‚̊ ‰‡Ú̃ËÍË ÔËÒÛÚÒÚ‚Ëfl
Ковровые датчики присутствия представляют собой простое и относительно недорогое
решение для многих проблем безопасности, связанных с определением присутствия лю!
дей на участке. Ковровые датчики предлагают совешенно очевидный и доступный для
рабочих участков, простой режим работы, что и является основным их преимуществом.
Работа ковровых датчиков присутствия. Электрическая схема коврового датчика
присутствия обычно представляет собой разомкнутый ключ. Он замыкается, когда к ков!
рику прикладывается определенный минимальный вес, что заставляет схему управления
коврика прекратить работу охраняемой машины. Два проводника, разделенные неболь!
шим изолирующим промежутком, образуют переключатель коврика. Проводники ключа
связаны с интерфейсом схемы управления. Замыкание ключа выключает реле в схеме уп!
равлении коврика, размыкая контакты, подающие питание на машину. Компоненты ков!
рика обычно заливаются компаундом, образуя прочный модуль. Из ковриков различных
размеров можно собирать дорожки, обеспечивающие определение присутствия для боль!
шой поверхности. Из схем управления ковриков можно создать общую схему, чтобы обес!
печить подачу сигнала остановки машины при приложении минимальной силы к любому
коврику из группы. Системы безопасности с ковровыми датчиками присутствия обладают
следующими свойствами:
высокой надежностью системы управления;
возможностью непрерывного контроля целостности монтажа коврика;
удаленным доступом к функциям проверки состояния и сброса;
возможностью диагностики с помощью встроенных индикаторов.
8.6 . ìëíêéâëíÇÄ ùãÖäíêéåÖïÄçàóÖëäéâ ÅãéäàêéÇäà
Одним из наиболее важных устройств безопасности для машин являются устройства
электромеханической блокировки, связанные с дверями защищаемого участка и от!
ключающие электропитание машины при открытой двери. Когда дверь защиты откры!
та, питание на машину не подается, и это гарантирует безопасность для работника.
Существует много различных типов переключателей для блокировки, поэтому важно
выбрать тип устройства, подходящий для конкретного применения. Электромехани!
ческие блокировки должны удовлетворять двум основным требованиям:
обеспечивать надежную работу при неблагоприятных условиях окружающей
среды;
защищать от попыток несанкционированного вмешательства в работу меха!
низма или от его повреждения.
Обслуживающий персонал часто пытается отменить действие блокировки, чтобы
ускорить выполнение задания или сэкономить рабочее время. Блокировка может
иметь различные уровни защиты — от сопротивления до импульсного отпирания, при
котором почти невозможно повредить защиту. Самую высокую степень защиты обес!
печивают выключатели, недоступные при открытой защитной двери. Надежная рабо!
ìëíêéâëíÇÄ ùãÖäíêéåÖïÄçàóÖëäéâ ÅãéäàêéÇäà
557
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
та устройств блокировки обеспечивается в двух режимах: регламентируемом аварий!
ном режиме и положительном режиме блокировочного выключателя.
Регламентируемый аварийный режим имеет блокировки, при которых компоненты
защиты при сбое переходят в стандартное состояние: контакты размыкаются и питание
машины выключается. Все компоненты блокировки, которые являются критическими
при выполнении функций защиты, дублируются. Дублирование схемы гарантирует, что
если не сработают одни компоненты, то функции защиты будут выполнены дублирую!
щими компонентами.
Отрицательный и положительный режим блокировочного выключателя, пока!
занные соответственно на рис. 8 .6a и б, возникают при воздействии одного объекта на
другой вследствие прямого механического контакта или через жесткие конструктив!
ные элементы. При отрицательном режиме (см. рис. 8 .6a) убирается препятствие, и
размыкание происходит только за счет действия пружины. В этом случае при открыва!
нии двери контакты могут не разомкнуться в случае залипания или недостаточного
усилия пружины. При положительном режиме (см. рис. 8 .6б) открывание двери при!
водит к механическому воздействию на контакт специального кулачка, и контакты ра!
зомкнутся даже в случае залипания.
Рис. 8 .6. Блокировки с различными режимами работы:
а) отрицательный режим;
б) положительный режим
8.6 .1. íËÔ̊ ÛÒÚÓÈÒÚ‚ ̋ÎÂÍÚÓÏÂı‡ÌË̃ÂÒÍÓÈ ·ÎÓÍËÓ‚ÍË
Имеется два основных типа систем электромеханической блокировки: блокировка си!
ловой цепи и блокировка управления. В случае блокировки силовой цепи при откры!
вании двери защиты, размыкается непосредственно цепь источника питания машины.
При блокировке управления устройство блокировки воздействует на цепи, управляю!
щие подачей питания на машину, разрывая таким образом цепь питания. Классифика!
ция современных типов блокировки приведена на рис. 8.7.
Блокировка силовой цепи. При этом типе блокировки движение защитной двери
воздействует на блокировку, включенную непосредственно в цепь питания машины.
558
Это означает, что устройство блокировки должно быть рассчитано на значения напря!
жения и тока, необходимые для питания машины. Такая блокировка только в редких
случаях используется для промышленных машин, поскольку для питания большин!
ства из них применяется трехфазное напряжение при относительно высоком значении
тока. Когда применяются мощные выключатели, один из способов состоит в том, что!
бы использовать охранный замок, в котором ключ, открывая охраняемую область, от!
ключает одновременно питание машины. Ключ блокирован, пока переключатель на!
ходится в рабочем положении (дверь защиты закрыта), но его можно вынуть, когда
дверь защищаемого участка открыта и машина выключена.
Блокировка управления. Наиболее распространенный тип блокировки — бло!
кировка управления, при которой контакты переключателя размыкаются всякий раз,
когда открывается дверь защиты. Контакты переключателя воздействуют на схему
управления, которая отключает питание цепи возбуждения или размыкает контактор,
подающий силовое питание на машину. Как следует из схемы на рис. 8 .7, блокировка
управления может применяться без физической блокировки на двери защиты.
Рис. 8.7. Категории защитных блокировок
Вычисление безопасного расстояния. Безопасное расстояние между защитным
устройством и источником опасности, которое оператор не сможет преодолеть, даже
двигаясь с максимальной скоростью, определяется формулой
S=(K×T)+C,
где S — минимальное расстояние от опасной зоны до края открывающейся защитной
двери, мм,
K — скорость движения оператора, обычно принимается равной 1600 мм/с,
T — общее время от открытия блокировки до прекращения опасности, с,
C — дополнительное расстояние, учитывающее, насколько далеко оператор может
проникнуть через защиту, прежде чем начнется действие останова, инициализирован!
ное устройством безопасности, мм.
èËÏ 8.2
Система робота имеет защитный барьер, ограждающий рабочий участок. Общее вре!
мя полного останова системы после отключения питания равно 1 с, а дополнительное
расстояние 3 фута требуется из!за высоты порога, который нужно перешагнуть опе!
ратору. Определите минимальное расстояние от ворот защиты до закрытой части
корпуса работы робота.
ìëíêéâëíÇÄ ùãÖäíêéåÖïÄçàóÖëäéâ ÅãéäàêéÇäà
559
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
êÖòÖçàÖ
K = 1600 мм/с;
T=1с;
C = 3фута.
Выразим C в миллиметрах:
C = 3 фута + 304,8 мм/фут = 914,4 мм;
S=(K×T)+C;
S=(11600мм/с×1с)+914мм;
S=2514мм.
8.6 .2. åÂı‡ÌË̃ÂÒÍË ÛÒÚÓÈÒÚ‚‡ ·ÎÓÍËÓ‚ÍË
В другой группе устройств открывание двери приводит к работе блокировочного вык!
лючателя в положительном режиме. Механические устройства блокировки бывают
трех типов:
язычковые;
стержневые;
бегунковые.
Язычковые устройства — наиболее широко применяемые, имеют язычковый
привод, установленный на воротах защиты. Когда ворота закрыты, язычок входит в
переключатель, замыкая его контакты. Контакты размыкаются, когда язычок вытяги!
вается из переключателя при открытии ворот. Устройство, изображенное на рис. 8.8,
представляет собой пример защитного переключателя язычкового типа. Эти пере!
ключатели обладают следующими характеристиками:
их действие трудно отменить;
они легко устанавливаются;
их работа надежна;
они могут использоваться на скользящих, подвешенных на петлях и подъем!
ных воротах.
при их эксплуатации необходима юстировка;
их трудно полностью очистить.
Стержневые устройства устанавливаются сверху на раме, подвешенной на пет!
лях двери защиты. Когда дверь открыта, поворот петли вызывает вращение стержня
внутри переключателя. При этом приводится в действие механизм, работающий в по!
ложительном режиме, размыкающий контакты и отключающий источник питания от
охраняемой машины. Устройство, изображенное на рис. 8.9, является примером за!
560
щитного механического переключателя стержневого типа. Эти переключатели обла!
дают следующими характеристиками:
идеальны для защитных дверей на стержневых петлях, в которых имеется до!
ступ к средней линии стержня;
обеспечивают защиту, начиная с поворота двери защиты на 3°;
при их применении чрезвычайно трудно достичь источника опасности, не де!
монтировав дверь защиты;
широкие двери защиты имеют слишком большое открытие при повороте
двери на 3° .
тяжелые двери могут создавать слишком большое усилие на приводящем ва!
лике переключателя.
Рис. 8.8. Язычковые устройства
Рис. 8.9.
Навесные
блокировочные
устройства
ìëíêéâëíÇÄ ùãÖäíêéåÖïÄçàóÖëäéâ ÅãéäàêéÇäà
561
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
Бегунковое устройство представляет собой предельный переключатель с линей!
ным или вращательным бегунком, работающим в положительном режиме. Это устрой!
ство часто используется для скользящих дверей защиты, где бегунок вынуждает корот!
козамыкающий поршень отодвигаться при открытой двери, размыкая контакты в цепи
управления и выключая силовое питание. Устройство, изображенное на рис. 8 .10, пред!
ставляет собой пример механического переключателя бегункового типа. Эти переклю!
чатели обладают следующими характеристиками:
их система миниатюрна, но надежна;
они не подходят для поворотных или подъемных дверей защиты;
конструкция блокировки должна гарантировать, что бегунок и защита всегда
будут в контакте;
износ бегунка может привести к сбою или неправильной работе.
Рис. 8 .10. Бегунковые
устройства
8.6 .3 . ÅÂÒÍÓÌÚ‡ÍÚÌ̊ ÛÒÚÓÈÒÚ‚‡ ·ÎÓÍËÓ‚ÍË
В случае бесконтактных устройств блокировки положение защитной двери связано со
схемой управления машины через контакты, управляемые магнитным или электри!
ческим полем. Магнитный способ привода переключателя в бесконтактном примене!
нии показан на рис. 8 .11 .
Эти устройства не работают в положительном режиме, они используют другие мето!
ды, чтобы гарантировать защиту охраняемой системы. Два метода, о которых говорилось
выше: регламентируемый аварийный режим и дублирование и текущий контроль — ис!
пользуются, чтобы обеспечить необходимый уровень эффективности. Единственная не!
исправность, угрожающая устройству защиты, — это приваривание пластины к контакту,
который может нагреваться чрезмерным током переключателя. Чтобы предотвратить
чрезмерный ток через контакты, используется внутреннее невосстанавливаемое устрой!
ство максимальной токовой защиты (рис. 8 .11). Внешний плавкий предохранитель, номи!
нальный ток которого ниже, чем у внутреннего плавкого предохранителя, используется,
чтобы защитить устройство от необратимых токовых перегрузок. Обычные устройства
приближения, активируемые стальными сердечниками, являются неподходящей заменой,
поскольку другие объекты могут вызвать ложное срабатывание. В некоторых бесконтакт!
ных переключателях степень безопасности повышается с помощью изменяющегося кода
между приводом и контактами. Этот переключатель имеет следующие характеристики:
562
он идеален для областей, требующих гигиены, поскольку модули полностью
залиты и могут быть очищены паром;
его легко установить;
он может быть защищен какими!либо футлярами без нарушения работоспо!
собности;
в нем предусмотрена возможность электронного кодирования для повыше!
ния степени защиты.
Блоки управления могут контролировать до шести датчиков, управлять контакто!
рами и поддерживать работу всего комплекса (рис. 8 .12).
Рис. 8.11 . Бесконтактные переключатели блокировки
Рис. 8.12. Схема переключателей
блокировки и блока
управления
8.6.4. ÅÎÓÍËÓ‚Ó̃Ì̊ ‚̊ÍĮ̂̃‡ÚÂÎË Ò Á‡̆ËÚÌ̊Ï Á‡ÏÍÓÏ
Изображенные на рис. 8 .7 защитные блокировки — следующий уровень в иерархии за!
щитных устройств. Блокировки с защитным замком необходимы для машин с медленным
ìëíêéâëíÇÄ ùãÖäíêéåÖïÄçàóÖëäéâ ÅãéäàêéÇäà
563
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
закрытием или характеристиками останова; вместе с тем такие блокировки могут повы!
сить уровень защиты для большинства типов машин. Блокировки с защитным замком
можно разделить на два класса: с безусловным и условным разблокированием защиты.
Безусловное разблокирование защиты. Ручка или кнопка, управляемые вручную,
открывают блокировку защитной двери, одновременно размыкая контакты схемы уп!
равления. Пример одного из устройств этого типа показан на рис. 8 .13. Конструкция на
рисунке объединяет контакты переключателя и глухую блокировку болтом для ворот
защиты. Обороты ручки оттягивают болт, и первые несколько поворотов активизируют
контакты переключателя. Ворота защиты, однако, остаются зафиксированными, пока
оператор не повернет ручку на значительное число оборотов, тем самым извлекая болт
из ворот полностью. Дополнительные повороты обеспечивают 20!секундное запазды!
вание, которое необходимо для остановки машины. Этот тип переключателя имеет сле!
дующие характеристики:
его легко установить;
работает быстро и надежно;
подходит главным образом для ворот скольжения;
требует предварительной установки времени останова движения;
при его применении для остановки ворот должен использоваться механичес!
кий ограничитель, чтобы предотвратить выпадание болта, когда ворота нахо!
дятся в открытом состоянии.
Рис. 8 .13. Защитная блокировка с безусловным разблокированием
Условное разблокирование защиты. При условном разблокировании защита мо!
жет быть открыта, если присутствует сигнал о выполнении одного из следующих усло!
вий: выключен контактор питания машины, истек предварительно установленный ин!
тервал или прекратилось опасное движение. Информация о наличии одного из этих
условий поступает от дополнительных контактов на контакторе питания машины, моду!
ля таймера или установленного на машине детектора остановки движения. Эта методи!
ка обеспечивает блокировку источника питания опасного движущегося объекта и пре!
дотвращает открытие ворот до того, как будут выполнены все условия безопасности.
564
8.7 . êÄáêÄÅéíäÄ ëíêÄíÖÉàà éÅÖëèÖóÖçàü ÅÖáéèÄëçéëíà
Законом установлено требование, обязывающее предпринимателя обеспечить безо!
пасную рабочую среду. Но безопасность определяется не случайными процессами;
она является результатом заранее разработанной и запланированной стратегии. Безо!
пасная работа оборудования определяется тремя аспектами:
начальной целостностью оборудования;
местом, где оно используется;
целью, для которой оно используется.
Следовательно, стратегия обеспечения безопасности на автоматизированных
участках является критически важной. Она содержит два главных элемента: оценку
риска и снижение риска.
8.7.1 . ëÚ‡Ú„Ëfl ÓˆÂÌÍË ËÒ͇/ÒÌËÊÂÌËfl ËÒ͇
Оценка риска, подобно анализу всех операций производства, начинается с ясного пони!
мания границ опасных зон и операций на рабочем участке. Эти факторы исследуются,
чтобы определить, какие из них несут потенциальную опасность. По полученным дан!
ным может быть оценена степень риска. В зависимости от результата определяется эф!
фективность существующих мер по обеспечению безопасности и потребность в допол!
нительных мерах, необходимых для снижения риска. Второй элемент стратегии —
уменьшение риска — применяется к областям, в которых необходима дополнительная
защита. Затем процесс повторяется с самого начала, чтобы удостовериться, что приня!
тые меры повысили безопасность производства.
Описанный процесс является основой стратегии обеспечения безопасности. Де!
тальная блок!схема показана на рис. 8.14. Ведомость контроля безопасности, изобра!
женная на рис. 8.15, может использоваться для гарантии, что все области включены в
процесс, и для представления результатов в наглядном виде. Следующие подразделы
посвящены специфическим методам выполнения оценки и снижения риска. Эти мето!
ды могут применяться для одной автоматизированной машины или для всей автомати!
зированной системы производства.
Определение опасностей. Определение опасностей необходимо, потому что это от!
правная точка для любой стратегии безопасности. Первый шаг при оценке заключается в
определении опасных областей рабочего участка и источников опасности. Окончательный
список должен включать информацию обо всех отдельных машинах и системах, в которых
машины связаны вместе механически или системами управления. Затем проводится ана!
лиз каждой машины и системы машин, чтобы определить, представляет ли она какую!
либо опасность. Этот процесс относится к установке машины, вводу ее в эксплуатацию,
обслуживанию и демонтажу. При анализе рассматривается как правильная эксплуатация
и работа машины, так и неправильн ее эксплуатация и сбои. Существуют такие опасности,
как удары, резаные травмы, запутывание волос и одежды, вылет частей, присутствие па!
ров, радиации, ядовитых веществ, тепла и шума. Потенциальные опасности определяются
êÄáêÄÅéíäÄ ëíêÄíÖÉàà éÅÖëèÖóÖçàü ÅÖáéèÄëçéëíà
565
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
и регистрируются для каждой машины. После определения возможных опасностей можно
переходить к оценке риска.
Рис. 8 .14. Блоксхема стратегии обеспечения безопасности
566
Рис. 8.15. Ведомость контроля безопасности
êÄáêÄÅéíäÄ ëíêÄíÖÉàà éÅÖëèÖóÖçàü ÅÖáéèÄëçéëíà
567
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
Расчет риска. Это наиболее фундаментальный аспект машинной безопасности.
Мы рассмотрим простой, но эффективный подход к проблеме. Эксплуатация всех ма!
шин связана с риском, следовательно, важно выразить в относительных единицах уро!
вень возможного риска: от минимума до максимума. При этом необходимо руковод!
ствоваться следующими четырьмя правилами:
требуется подробное описание алгоритма работы и документированная
оценка риска;
количественная оценка имеющегося риска производится по вероятности по!
лучения повреждений и возможной степени их тяжести;
требуется учесть все определенные ранее потенциальные опасности;
для каждой машины и производственного участка необходима индивидуаль!
ная оценка риска.
Для получения каждого из двух главных компонентов стратегии обеспечения безопас!
ности — оценки риска и расчета риска — должен быть разработан определенный процесс.
Трехступенчатый процесс оценки риска. При оценке риска необходимо ответить
на два вопроса:
1. Какова может быть тяжесть понесенного ущерба?
2. Какова вероятность появления ущерба?
Вы должны совершить три шага, чтобы получить ответы на эти вопросы:
1. Определить серьезность возможного ущерба.
2. Определить частоту появления риска.
3. Определить вероятность ущерба.
Тяжесть возможного ущерба. Повреждения, которые может получить работник,
по степени тяжести разделяются на четыре категории:
фатальные — потеря жизни (оценка 10);
главные — необратимый ущерб с потерей работоспособности (оценка 6);
серьезные — обратимый ущерб со значительной потерей работоспособнос!
ти (оценка 3);
небольшие — такие повреждения, как порезы и ушибы, а также поврежде!
ния в результате воздействия света (оценка 1).
Оценка риска начинается с присвоения каждой потенциальной опасности одной
из четырех вышеперечисленных категорий.
èËÏ 8.3
Определите степень риска и назначьте категорию тяжести ущерба, проставив соот!
ветствующую оценку, в следующих ситуациях:
а) Опытный оператор машины должен выгрузить большие отштампованные ме!
таллические листы из пресса. При этом он должен наклониться, подставив верх!
нюю часть тела под пресс, чтобы удалить обрезки материала.
б) Два оператора низкой квалификации загружают пластины в зажим робота на
участке сварки и разгружают готовые изделия. Когда работают операторы, ро!
бот приостанавливает свою работу, находясь в режиме паузы.
568
êÖòÖçàÖ
а) Тяжесть возможного ущерба является фатальной, потому что осуществление
процесса штамповки во время работы оператора привело бы к его смерти —
оценка 10.
б) Тяжесть ущерба серьезна, потому что робот в режиме паузы может сделать случай!
ное перемещение, которое нанесет серьезную травму операторам, — оценка 3.
Частота возникновения опасной ситуации. Анализ операции определяет, на!
сколько часто персонал подвергается опасности. Очевидно, что чем чаще персонал
подвергается опасности, тем выше опасность причинения ущерба. В зависимости от
частоты возникновения рискованных ситуаций делаются следующие оценки:
частое — несколько раз в день (оценка 4);
случайное — ежедневно (оценка 2);
редкое — еженедельно или реже (оценка 1).
èËÏ 8.4
Дайте оценку частоте возникновения опасных ситуаций в следующих случаях:
а) Опытный оператор машины должен выгрузить большие отштампованные ме!
таллические листы из пресса. При этом он должен наклониться, подставив верх!
нюю часть тела под пресс, чтобы удалить обрезки материала.
б) Два оператора низкой квалификации загружают пластины в зажим робота на
участке сварки и разгружают готовые изделия. Когда операторы работают, ро!
бот приостанавливает свою работу, находясь в режиме паузы. Робот запрограм!
мирован так, что в режиме паузы он находится каждые 20 минут, в то время как
операторы работают.
êÖòÖçàÖ
а) Настройка штампа происходит раз в несколько дней, поэтому частота возникно!
вения риска находится между определениями «случайное» и «редкое» — оценка
1,5.
б) Цикл сварки продолжается 20 минут, поэтому возникновение риска определим
как частое — оценка 4.
Оценивая частоту возникновения риска, вы должны использовать любые доступные
данные предыдущих исследований и экспертные оценки. Решения должны быть основаны
на оценке наихудшего варианта развития событий. Кроме того, рассмотрите случай, когда
защитная система не действует или не может предотвратить опасную ситуацию. Следова!
тельно, при анализе должны приниматься во внимание все маловероятные случаи.
Вероятность ущерба. Оценки в этой группе определяются взаимодействием
между персоналом и машиной в процессе работы, а также некоторыми параметрами,
такими как быстродействие машины при запуске.
Существуют следующие оценки вероятности ущерба:
несомненный — оценка 6;
вероятный — оценка 4;
êÄáêÄÅéíäÄ ëíêÄíÖÉàà éÅÖëèÖóÖçàü ÅÖáéèÄëçéëíà
569
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
возможный — оценка 2;
маловероятный — оценка 1.
èËÏ 8.5
Для следующих ситуаций оцените степень риска и назначьте оценку вероятностии
ущерба:
а) Опытный оператор машины должен выгрузить большие отштампованные ме!
таллические листы из пресса. В этом случае он должен наклониться, подставив
верхнюю часть тела под пресс, чтобы удалить обрезки материала.
б) Два оператора низкой квалификации загружают пластины в зажим робота на
участке сварки и разгружают готовые изделия. Когда операторы работают, ро!
бот приостанавливает свою работу, находясь в режиме паузы. Робот запрограм!
мирован так, что в режиме паузы он находится каждые 20 минут, в то время как
операторы работают.
êÖòÖçàÖ
а) Основываясь на знании машинного цикла и анализе предложенной ситуации,
можно оценить вероятность ущерба как возможную — оценка 2.
б) Быстродействие машины и близость операторов к роботу делают ущерб вероят!
ным — оценка 4.
Таблица 8.3. Дополнительные усл овия, влияющие на оценку риска
Окончательная оценка. Окончательная оценка представляет собой сумму трех
оценок с корректировкой в зависимости от условий, подобных приведенным в табл. 8 .3 .
Следует заметить, что для разного типа машин может существовать разный набор кор!
ректировок.
èËÏ 8.6
Включив специальные поправки из табл. 8.3, дайте окончательную оценку для следу!
ющих ситуаций:
а) Опытный оператор машины должен выгрузить большие отштампованные металли!
ческие листы из пресса. В этом случае он должен наклониться, подставив верхнюю
часть тела под пресс, чтобы удалить обрезки материала.
б) Два оператора низкой квалификации загружают пластины в зажим робота на
участке сварки и разгружают готовые изделия. Когда операторы работают, ро!
570
бот приостанавливает свою работу, находясь в режиме паузы. Робот запрограм!
мирован так, что в режиме паузы он находится каждые 20 минут, в то время как
операторы работают.
êÖòÖçàÖ
а) Начальные оценки: тяжесть возможного ущерба оценивается как 10, оценка ча!
стоты 1,5, оценка вероятности ущерба 2, сумма оценок 13,5 из возможных 20.
Специальные корректировки в этой ситуации не требуются, поэтому число 13,5
для окончательной оценки безопасности не изменяется.
б) Начальные оценки: тяжесть возможного ущерба оценивается как 3, оценка час!
тоты 4, оценка вероятности ущерба 4, сумма оценок 11 из возможных 20. Одна!
ко в этой ситуации следует произвести две корректировки. Во!первых, оценка
тяжести ущерба должна быть умножена на 2, потому что работают два операто!
ра (оценка тяжести становится равной 2 × 3 = 6), и, во!вторых, 2 дополнитель!
ных пункта должны быть добавлены к сумме оценок, поскольку работают опера!
торы низкой квалификации. Поэтому окончательная оценка становится равной
6+4+4+2=16извозможных20.
Анализ двух ситуаций в примере 8.6 приводит к выводу о том, что крайне важно,
не полагаясь на интуитивную оценку ситуации, проводить последовательную страте!
гию безопасности. Первая ситуация, в которой оператор мог бы получить смертель!
ные повреждения, на первый взгляд кажется более опасной по сравнению со второй.
Однако при окончательном, более формальном анализе сумма оценок риска для опе!
ратора была равна 13,5, а для обработчиков деталей — 16. Оба участка работы тре!
буют усиленных мер безопасности, но при сварке имеется более высокая вероятность
получения травм.
Суть стратегии безопасности, описанной в этом разделе, заключается в систематичес!
ком анализе условий работы и группировке по степени риска всех опасных участков, выяв!
ленных на производстве. Что остается сделать — так это свести все опасности к минимуму.
Снижение опасности. Каждая из опасностей должна быть выявлена, а потенци!
альный риск исключен или уменьшен. Стандарт предусматривает три основных мето!
да, в порядке убывания приоритета:
1. Устранить или уменьшить вероятность риска, по мере возможности, еще на
этапе проектирования.
2. Предусмотреть меры защиты для каждой рискованной ситуации, которая не
может быть исключена на этапе проектирования машины.
3. Информировать пользователей о вероятности риска, которую не удалось уст!
ранить при проектировании машины и принятии защитных мер, настаивать на
необходимости обучения персонала и использовании средств личной защиты.
Ниже приведен перечень средств защиты, наиболее часто используемых на авто!
матизированных производственных участках:
1. Механическая блокировка питания.
2. Перемещаемые защитные блокировки или устройства защиты в форме световых
завес, ковриков с датчиками присутствия или других эффективных устройств.
êÄáêÄÅéíäÄ ëíêÄíÖÉàà éÅÖëèÖóÖçàü ÅÖáéèÄëçéëíà
571
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
3. Монтажные приспособления типа крюков, держателей или стержней, кото!
рые позволяют операторам подавать или удалять детали из рабочей зоны, на!
ходясь на безопасном расстоянии.
4. Свободный доступ к информации, инструкциям, обучающим материалам и
контролю за соблюдением техники безопасности. Обучение безопасным ме!
тодам работы, безусловно, важно, но это не снимает с предпринимателяй
обязанности принятия мер, перечисленных в первых трех пунктах.
Несмотря на все усилия изготовителей оборудования, направленные на выпуск безо!
пасной продукции, операторам часто требуется надевать такие личные защитные средства,
как специальные перчатки, очки, респираторы и рабочая одежда, о которых говорилось бо!
лее подробно в разделе 8.3.1 . Перечисленные выше меры дают основную гарантию безо!
пасности при работе с машиной, но использование личных защитных средства дополнитель!
но страхует работника от получения травмы на рабочем месте. Такое сочетание мер защиты
часто используется, чтобы гарантировать безопасность на производстве.
8.7.2. îÓÛÏ HAZOP
Сокращение HAZOP образовано из двух слов, переводимых как «опасность» и «эксплуа!
тационные возможности» (hazard and operability). Это название форума для представите!
лей различных технических дисциплин, позволяющего специалистам делиться своим опы!
том и знаниями по вопросам обеспечения безопасности или решения задач оперативного
управления. Специалисты собираются на плановые конференции, по результатам кото!
рых публикуются отчеты. На конференциях рассматривается теория и методы определе!
ния опасностей и проблем на участках обработки, а также практические вопросы, касаю!
щиеся режимов работы и типов опасностей на различных производственных линиях. К
помощи форума часто прибегают представители перерабатывающих отраслей промыш!
ленности, прежде всего на этапе проектирования или модернизации предприятия. Случа!
ется, что предприятия, расширившие свои производственные площади, вынуждены от!
клониться от первоначального проекта и принятой концепции безопасности. Обращение
к материалам HAZOP помогает при анализе и оценке таких изменений. Кроме того, сведе!
ния, полученные на форуме, существенно помогают в максимизации прибыли, поэтому
непременно приведут к решению об изменении первоначальногопроекта. Но для проведе!
ния модернизации требуется время, следовательно, оптимальный момент для изучения
материалов форума — начало рабочего проекта.
8.7.3. ëÚ‡Ú„ËË ·ÂÁÓÔ‡ÒÌÓÒÚË ÍÓÏÔ‡ÌËÈ
Большинство компаний при проектировании рабочего места применяет стратегию бе!
зопасности. Это может быть стратегия оценка риска/снижение риска, обращение к
информации форума HAZOP или другая стратегия типа анализа «что, если» или ана!
лиз влияния сбоев режима (FEMA). Стратегия обеспечения безопасности компании
обычно излагается в руководстве, которое создается в процессе взаимодействия меж!
ду проектировщиками и конечными пользователями. В стратегии должен быть скон!
572
центрирован весь опыт и знания сотрудников проектирующих компаний и пользовате!
лей, чтобы сделать процесс производства как можно более безопасным.
8.8 . êÖäéåÖçÑÄñàà èêà èêéÖäíàêéÇÄçàà
Цель каждой рабочей операции состоит в том, чтобы увеличить производство продукции, а
следовательно, и прибыль, и в погоне за этой целью часто ищется компромисс между требо!
ваниями безопасности и увеличением прибыли. Необходимость соблюдать требования бе!
зопасности при одновременном увеличении производительности труда — сложная задача,
которая неизбежно встает перед инженером по технике безопасности и проектировщиком
системы. Решение этой задачи должно базироваться на принятых в стране стандартах безо!
пасности. Минимальные требования промышленной безопасности в США содержатся в
федеральных правилах, перечисленных в разделе 8.2 . Обычно во всех американских стан!
дартах для каждой технологической опасности определяется унифицированный процесс ее
оценки и перечень действий, необходимых для ее уменьшения. Методика и приоритеты для
обеспечения безопасности, рекомендуемые OSHA и ANSI, сводятся к следующему:
1. Использовать автоматизированное проектирование, чтобы устранить воз!
можную опасность еще на этапе проектирования машины.
2. Применять защитные методы, чтобы контролировать опасность.
3. Использовать на производстве предупредительные знаки и устройства.
4. Использовать в работе личные средства защиты.
5. Провести обучение всего персонала.
Проект обеспечения безопасности должен включать в себя идентификацию и
правильную оценку каждойой потенциальной опасности. Кроме того, в проекте долж!
ны быть использованы все пять вышеперечисленных методов обеспечения безопас!
ности. Поставщики оборудования предлагают широкий выбор компонентов устройств
и вспомогательных программ (подробно описанных в этой главе), призванных помочь
вам в обеспечении производственной безопасности.
8.9 . èéÑëóÖí ëíéàåéëíà
èêéÉêÄååõ éÅÖëèÖóÖçàü ÅÖáéèÄëçéëíà
Выполнить подсчет стоимости программы обеспечения безопасности трудно, поскольку
большинство изменений и требований увеличивает стоимость изделия. Установить связь
между уровнем безопасности и стоимостью изделия непросто, но программа безопасности
защищает служащих — наиболее ценный ресурс компании. Косвенный материальный
результат выполнения программы заключается в уменьшении издержек. Издержки и фи!
нансовые потери компании в форме потерянного дохода и оттока наличности связаны с
причинением ущерба персоналу и оборудованию из!за недостаточности принятых мер бе!
êÖäéåÖçÑÄñàà èêà èêéÖäíàêéÇÄçàà
573
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
зопасности. Программа обеспечения безопасности может быть обоснована расчетом уве!
личения стоимости продукции. При расчете учитываются такие непосредственно измеря!
емые показатели, как потерянное рабочее время и медицинские издержки. Однако на
практике реальные финансовые потери вследствие несчастных случаев чаще всего невоз!
можно выделить как отдельные составляющие в затратах на единицу продукции или в чи!
стой прибыли компании. Существует две теории относительно несчастных случаев:
закон Генриха (Heinrich), также названный теорией домино, выявляющий
связь между рискованными действиями и несчастными случаями;
теория несчастных случаев Дюпона, которая утверждает, что все несчастные
случаи можно предотвратить путем установления и учета персональной фи!
нансовой ответственности.
Исследования Генриха показали, что на каждые 3000 случаев рискованного пове!
дения приходится один несчастный случай. Данные Генриха и работы Дюпона показы!
вают, что потери могут быть значительно уменьшены с помощью программы обеспе!
чения безопасности. Реальные потери состоят из следующих скрытых издержек:
стоимости рабочего времени, потерянного в результате аварии или травмы;
стоимости времени машинного простоя, которая состоит из стоимости вре!
мени простоя поврежденной машины и стоимости времени простоя других
машин участка вследствие несчастного случая;
стоимости ремонта поврежденной машины;
стоимости времени, потраченного на ликвидацию последствий несчастного
случая и выполнение многих установленных законом процедур, например, на
заполнение федеральных форм;
стоимости продукции, которая не была произведена из!за потери опытного
работника;
стоимости федеральных штрафов и штрафов, предусмотренных законами штата;
стоимости обучения нового рабочего для замены;
стоимости дополнительного времени, необходимого для производства про!
дукции, недополученной вследствие простоя.
Исследования Дюпона показывают, что скрытые издержки часто составляют че!
тыре десятых от явных потерь, покрываемых страховыми компаниями. Тщательное
документирование всех издержек, связанных с несчастными случаями на производ!
стве, является первым шагом при составлении полного баланса стоимости программы
обеспечения безопасности.
8.10. ÇÖÅ -ëÄâíõ èé íÖïçàäÖ ÅÖáéèÄëçéëíà
Ниже приведены адреса веб!сайтов поставщиков устройств управления процессом и
датчиков, рассмотренных в этой главе. Эти адреса часто изменяются, поэтому, если
какая!либо из ссылок неактивна, воспользуйтесь механизмом сетевого поиска, чтобы
по названию устройства или датчика найти интересующие вас материалы:
574
Правила техники безопасности OSHA
http://www.osha.gov
Приборы для защиты машин в Scientific Technologies
http://www.sti.com
Лазерные датчики близости в SICK Optic!Electronic, Inc.
http://www.sick.com.au
Световые завесы в Omron Electronics, LLC
http://www.omron .com
Приборы для защиты машин в National Instruments
http://www.ni.com
Информация относительно стратегии безопасности FMEA
http://www.fmeainfocentre.com
êÖáûåÖ
8.1. Введение в технику безопасности
Безопасность — гарантия отсутствия опасности, возникновения риска или
причинения ущерба. Ее важность для производства нельзя переоценить.
8.2. Требования безопасности
Администрация профессиональной безопасности и здоровья (Occupational
Safety and Health Administration — OSHA) представляет основные промыш!
ленные требования безопасности в Соединенных Штатах.
8.3. Безопасность обслуживающего персонала
Личные защитные средства — ЛЗС (Personal protective equipment — PPE)
разработаны для защиты служащих от серьезных повреждений на рабочем
месте или болезней, вызванных контактом с опасными материалами.
Компании обучают своих служащих надлежащему использованию ЛЗС, ин!
формируют, когда и какой ЛЗС следует применять, в каких пределах он за!
щищает, а также как поддерживать ЛЗС в исправности.
Два наиболее распространенных типа ЛЗС — защитные очки и затычки для ушей.
8.4. Защита рабочего участка
Рабочий участок обычно разделен на три зоны, определяющие ограничения
доступа.
Аппаратные средства безопасности включают физические барьеры, датчики
присутствия, электромеханические блокировки и блоки управления защитой.
8.5 . Датчики присутствия
В датчиках приближения использована ультразвуковая или лазерная техно!
логия, благодаря чему они фиксируют присутствие людей или объектов на
определенном расстоянии от источника опасности.
êÖáûåÖ
575
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
Световая завеса — электрооптический защитный барьер, который фикси!
рует присутствие человека или объекта, если пучки света прерываются.
Ковровые датчики присутствия устанавливают присутствие людей или объек!
тов, если на коврик воздействует определенный минимальный вес.
8.6. Устройства блокировки
Эти устройства связаны с дверями защищаемого участка и отключают элек!
тропитание машины при открытой двери.
При блокировке управления контакты переключателя размыкаются всякий
раз, когда открывается дверь защиты. Контакты переключателя управляют
подачей электропитания на машину.
Механические устройства блокировки делятся на язычковые, стержневые и
бегунковые.
При бесконтактных устройствах блокировки положение двери защиты с по!
мощью магнитного или электрического поля определяет состояние контак!
тов в схеме управления.
При безусловном разблокировании защиты управляемая вручную рукоятка
или кнопка освобождает блокировку двери защиты и одновременно размы!
кает контакты схемы управления.
При условном разблокировании защиты дверь защиты может быть открыта,
если сигнал показывает, что выполнено одно из следующих условий: разомк!
нут контактор питания машины, истек предварительно установленный вре!
менной интервал или прекратилось опасное движение.
8.7. Разработка стратегии безопасности
Двумя основными методами, применяемыми при разработке стратегии обес!
печния безопасности, являются оценка риска и снижение риска.
При оценке риска определяется тяжесть потенциального ущерба, частота
появления опасности и вероятность ущерба.
Меры по снижению опасности заключаются в установке замков с механи!
ческой фиксацией, блокировок, устройств с датчиками присутствия, приме!
нении личных защитных средств и в обучении персонала.
В дополнение к стратегии оценки риска/уменьшения риска используется
изучение HAZOP или другие стратегии, такие как анализ «что, если» или
анализ влияния сбоев режима (FEMA).
8.8. Рекомендации проекта
Процесс проектирования состоит из пяти шагов — разработки безопасного
машинного проекта, защиты, предупреждающих знаков и устройств, опреде!
ления личных защитных средств и мероприятий по обучению персонала.
8.9. Баланс безопасности
Расчет стоимости проекта безопасности должен включать в себя явную часть,
которая состоит в оценке ущерба вследствие несчастных случаев, и скрытую
часть, которая состоит из оценки размера каждого понесенного ущерба, оцен!
ки времени машинного простоя, стоимости работы административного аппа!
рата и оплаты отработанного сверхурочного времени.
576
Çéèêéëõ
1. Расскажите, какая деятельность в области обеспечения безопасности является
для вас наиболее привлекательной.
2. В чем заключается миссия OSHA?
3. Назовите три метода, к которым прибегает большинство компаний, чтобы ин!
формировать своих служащих о проблемах безопасности.
4. Каким образом требования безопасности компании соотносятся с правитель!
ственными правилами?
5. Какие три типа материалов и почему используются в затычках для ушей?
6. Помимо очков и затычек для ушей, перечислите шесть других личных защитных
средств для обслуживающего персонала.
7. Какой тип гасящей среды должен использоваться для тушения оборудования, не
отключенного от питания?
8. Сравните назначение зон на охраняемом рабочем участке.
9. Что является первой линией защиты людей от опасности?
10. Чем устройства E!останова отличаются от блокировки?
11. Опишите функцию блока управления безопасности.
12. Опишите функции и принцип работы лазерного датчика близости.
13. Опишите принцип действия световой завесы.
14. Почему —использование световой завесы предпочтительней традиционных ба!
рьеров для защиты машины?
15. Какая защита показана на рис. 8.4?
16. Определите условия для световой завесы: рабочую точку, снятие и открытие окна.
17. Расскажите о различиях между защитой периметра и защитой машины.
18. Что означает термин «среднее расстояние завесы»?
19. Назовите четыре свойства безопасности коврового датчика присутствия.
20. Опишите работу коврового датчика давления.
21. В чем заключаются два базисных требования для переключателей блокировки?
22. Какова основная функция переключателя блокировки?
23. Опишите условия, при которых применяются устройства блокировки: ориенти!
руемый режим сбоя и положительный режим.
24. В чем заключаются недостатки механических устройств блокировки: язычковых,
стержневых и бегунковых?
25. Что связывает внутреннюю плавкую вставку с внешним плавким предохраните!
лем в бесконтактном устройстве блокировки?
26. Что такое блокировочный замок и когда он используется?
27. В чем заключается различие между условным и безусловным снятием блокиро!
вочного замка?
28. Сопоставьте блокировку мощности с блокировкой управления.
Çéèêéëõ
577
ÅÂÁÓÔ‡ÒÌÓÒÚ̧
29. В чем заключается различие между оценкой риска и снижением риска?
30. Опишите процесс оценки риска.
31. Каким образом классифицируются повреждения при изучении опасностей?
32. Какова связь между частотой появления риска и опасностью поражения?
33. Какие связи рассматриваются при категоризации вероятности ущерба?
34. Какой процесс должен использоваться при уменьшении опасности?
35. Опишите меры по защите машин, представляющих опасность.
36. Почему критически важен момент изучения материалов HAZOP?
37. В чем заключаются пять шагов программы обеспечения безопасности?
38. Охарактеризуйтерасчетную и реальную стоимость несчастного случая.
39. Что является отправной точкой в полном расчете стоимости программы обеспе!
чения безопасности?
áÄÑÄóà
1. Вычислите безопасное расстояние для машины, которая имеет время остановки и
время срабатывания схемы управления 0,25 с и 0,07 с соответственно. Монитор пре!
рывания установлен на 0,42 с. Время срабатывания световой завесы — 0,035 с, ми!
нимальная объектная чувствительность — 0,80 футов.
2. Световая завеса типа RS2300 имеет время срабатывания 42 мс и коэффициент
глубины резко изображаемого пространства 1,35 фута. Вычислить безопасное
расстояние, если механический пресс, охраняемый световой завесой, имеет уста!
новку монитора тормозов на 0,5 с.
3. Программируемая машина со временем отключения 3 с должна быть защищена
воротами с блокировкой. Ворота высотой 4 фута требуют дополнительного рас!
стояния в 0,5 м при скорости подхода 2000 мм/с. Определите минимальное рас!
стояние от блокируемых ворот до ближайшей части корпуса машины.
4. Преобразуйте формулу расстояния безопасной работы для использования с еди!
ницами измерения, принятыми в англоязычных странах: футами и секундами.
5. Робот на рабочем участке должен быть заменен. Рабочий участок снабжен стан!
дартными воротами с механической блокировкой, которые находятся в 2,5 футах
от ближайшего края корпуса робота. Расстояние для системы безопасности уста!
новлено в 1 фут. Определите максимальное расстояние и время останова для но!
вого робота при указанных условиях защиты.
6. Определите оценку потенциального ущерба, частоты появления риска, вероят!
ности поражения и общую оценку для следующих ситуаций:
а) оператор низкой квалификации должен войти на рабочий участок, чтобы на!
полнять охлаждающий резервуар при каждом ходе пресса. Оператор входит
на участок, когда робот ожидает завершения цикла машины привода пресса
и добавляет воду в резервуар;
578
б) неквалифицированный рабочий загружает обрабатывающий пресс горячи!
ми металлическими заготовками. Пресс выталкивает обработанное изделие
автоматически, но иногда обработанная деталь застревает в прессе. Опера!
тор использует плоскогубцы, чтобы освободить деталь из пресса перед заг!
рузкой новой заготовки.
7. Предложите решение, которое уменьшило бы риск операторов для каждого усло!
вия в задаче 6.
áÄÑÄóà
579
9
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇
Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
ñÂÎ̧ „·‚̊
Основная цель главы 9 состоит в том, чтобы изложить принципы
работы и характеристики различных типов двигателей посто
янного тока, включая описание их внутренних компонентов. Рас
смотрены также схемы реверса и методы торможения и вопросы,
касающиеся скорости двигателей постоянного тока.
Изучив эту главу, вы сможете:
1. Изложить магнитную теорию и правило правой руки для магнитов и электромагнитов.
2. Дать определение вращающего момента, работы и мощности двигателя постоян
ного тока и вычислить эти величины.
3. Описать части двигателя постоянного тока: ротор, статор, торцевые пластины и щетки.
4. Описать электрический интерфейс двигателя постоянного тока.
5. Подробно объяснить принципы работы и вывести характеристики электродвига
теля постоянного тока с последовательным возбуждением.
6. Объяснить связь противо ЭДС с другими напряжениями в электродвигателе по
стоянного тока с последовательным возбуждением.
7. Вычислить константы электродвигателя постоянного тока с последовательным
возбуждением.
8. Описать конструкцию и работу универсального двигателя.
9. Подробно объяснить принцип работы и вывести характеристики электродвигате
ля постоянного тока с параллельным возбуждением.
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
10. Вычислить константы электродвигателя постоянного тока с параллельным воз
буждением.
11. Описать методы управления скоростью и направлением вращения электродвига
телей постоянного тока с последовательным и параллельным возбуждением.
12. Описать процесс поиска неисправностей для электродвигателей постоянного
тока с последовательным и параллельным возбуждением.
13. Перечислить различия между электродвигателями постоянного тока с последо
вательным и параллельным возбуждением.
14. Подробно объяснить принцип работы двигателей со смешанным возбуждением
при согласном и встречном включении обмоток возбуждения.
15. Описать метод управления направлением вращения и скоростью двигателей со
смешанным возбуждением.
16. Выбрать методы пуска для различных двигателей постоянного тока.
17. Объяснить принцип работы H моста.
18. Рассказать, как используется широтно импульсная модуляция для управления
скоростью двигателя.
19. Описать различные методы торможения двигателя постоянного тока.
èêàåÖçÖçàÖ áçÄçàâ Ç èêéîÖëëéçÄãúçéâ ÑÖüíÖãúçéëíà
Поскольку двигатели постоянного тока используются во многих областях промышленности,
знание принципа работы и методов управления ими очень важны для карьерного продвиже
ния в таких технических областях, как проектирование и обслуживание автоматизирован
ных производственных систем, станков и промышленной робототехники. Самое большое
число рабочих мест обеспечивают области деятельности, в которых требуется взаимодей
ствие с заказчиком, например участие в разработке проектов фирм заказчиков, внедрение,
техническая поддержка и продажи. Работа в службе технических продаж требует глубокого
понимания конструкции и работы двигателей постоянного тока, чтобы всесторонне обсуж
дать с заказчиками вопросы конкретного применения изделий. Техническая поддержка и
продажи связаны с поездками к заказчикам.
Кроме того, специалисты, обладающие прочными знаниями о двигателях постоян
ного тока, могут сделать карьеру в тех отраслях промышленности, которые производят
ручной электроинструмент, электрокары, буксировочные двигатели и другие формы
подвижного оборудования. Профессиональный рост в этих областях может быть связа
на не только с разработкой, проверкой и оценкой техники, но также и с техническими
продажами, с поиском путей повышения качества производимой продукции.
Примером специфической деятельности является работа менеджера по продаже кон
такторов и пусковых устройств для двигателей постоянного тока в центральных областях
севера Соединенных Штатов, на фирме Bridgeway Sales. Эта компания занимается изготов
лением двигателей и устройств управления для них. Допустим, что вы являетесь членом не
большого коллектива регионального представительства фирмы, которое должно распрост
ранять информацию об изделиях и способствовать их использованию в проектах фирм за
582
казчиков. Для этого вам необходимо налаживать контакты с компаниями — потенциальны
ми потребителями, сначала по телефону, затем встречаясь лично с их официальными пред
ставителями. Наряду с этим вы должны следить за бизнес конференциями, которые прово
дит ваша компания, чтобы получать новую информацию о ее продукции и услугах. Для карь
еры такого типа необходимы хорошие технические навыки и коммуникабельность. Сознание
того, что вы помогли многим потребителям в решении их насущных производственных про
блем, принесет вам большое моральное удовлетворение от своей работы. Кроме того, такая
деятельность обуславливает наличие обширных связей со специалистами из различных об
ластей промышленности.
9.1. ÇÇÖÑÖçàÖ
Двигатель постоянного тока является электромеханическим устройством, которое преоб
разует электрическую энергию постоянного тока в механическую энергию. При подаче
постоянного напряжения на двигатель начинает вращаться его вал, который физически
связан с машиной или другим механическим устройством, преобразующим электроэнер
гию постоянного тока в механическую работу. Поскольку рассматриваемые двигатели ра
ботают на постоянном токе, они не могут быть просто включены в сетевую розетку, для их
питания необходимы аккумуляторная батарея или выпрямитель. Поскольку батарея по
стоянного тока является автономным источником питания, двигатели постоянного тока
находят самое разнообразное применение в портативном оборудовании, таком как ручной
электроинструмент, и в радиоуправляемых транспортных средствах, карах и вентилято
рах. В промышленной электронике двигатели постоянного тока используются и при низ
ких, и при высоких мощностях. Как упоминалось в главе 3, преобразование переменного
тока в постоянный довольно просто осуществляется посредством использования диодного
моста. Программируемые логические контроллеры и роботы (обсуждаемые соответ
ственно в главах 12 и 15) используют двигатели постоянного тока, чтобы точно позицио
нировать объекты, необходимые для производства.
Управление двигателем осуществляется внешней электронной схемой, использу
ющей твердотельные приборы типа транзисторов или тиристоров.Внешней схемой
определяются три характеристики двигателя постоянного тока:
скорость вращения — насколько быстро вращается вал;
вращающий момент — специфический тип механического воздействия;
направление вращения.
Чтобы понять, как работают схемы управления, необходимо знать электротехни
ческие методы, позволяющие управлять двигателем посредством изменения характе
ра его движения.
В этой главе рассматриваются основные принципы работы двигателя постоянного
тока: от теории магнетизма, типов и компонентов двигателей до расчета схем управле
ния. Здесь не приводится вывод уравнений, так как в целях упрощения изучения работы
двигателей постоянного тока материал дан в сжатом виде. Такое изложение позволяет
вам сконцентрировать свое внимание на физических аспектах теории двигателей посто
янного тока, а не на запоминании сложных математических преобразований.
ÇÇÖÑÖçàÖ
583
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
9.2. íÖéêàü åÄÉçÖíàáåÄ
В этом разделе вы познакомитесь с основными принципами и понятиями магнетизма
для постоянных магнитов и электромагнитов. Термин «магнетизм» происходит от сло
ва Magnesia — названия области в Малой Азии, где еще в глубокой древности были
обнаружены залежи магнитной железной руды.
9.2 .1 . 凄ÌËÚ̊
Магнит — это материал, притягивающий железо или сталь двумя полюсами — се
верным и южным, которые создаются за счет движения электронов в магнитном мате
риале. Существует два основных закона магнитов:
1. Магниты отталкиваются друг от друга, если сблизить их одноименные полю
са (северный с северным или южный с южным).
2. Магниты притягиваются друг к другу, если сблизить их разноименные полюса.
При создании магнитных цепей оба полюса магнита работают вместе. Невидимые
линии, называемые силовыми линиями магнитного поля, выходят из северного полюса
магнита и входят в южный полюс. Обратите внимание на то, как обозначены на рисунке
северный и южный полюса магнита и на соответствующее направление магнитных линий.
9.2 .2 . ùÎÂÍÚÓχ„ÌËÚ̊
Электромагнит — это тип магнита, в котором силовые магнитные линии создаются за
счет электрического тока в проводниках. На рис. 9 .2 показан этот эффект. Прямой провод
Рис. 9 .1.
Прямоугольный
магнит и силовые
магнитные линии
584
на рис. 9 .2а подключен к аккумуляторной батарее с помощью ключа S1 и переменного
резистора R1. Когда ключ S1 замкнут, ток через проводник создает магнитные линии, по
казанные на рисунке. Если резистор R1 установлен на максимальное значение, ток в цепи
минимален и плотность силовых линий также минимальна. Наоборот, когда резистор R1
переведен положение минимального сопротивления, ток и плотность силовых линий мак
симальны. На рис. 9 .2б показана катушка с несколькими витками провода. Поля, создава
емые отдельными витками, складываются, увеличивая плотность силовых линий и созда
вая таким образом более сильное магнитное поле. Если число витков увеличивается, то
увеличивается интенсивность магнитного поля. Как и для прямого провода, увеличение
тока вызывает увеличение магнитного поля. Дополнительный метод для увеличения маг
нитного поля состоит в том, чтобы вставить внутрь катушки деталь из магнитного матери
ала (например, мягкой стали), которая называется сердечником. В сердечнике возникает
более сильное магнитное поле. Упрощенно можно представить себе, что в магнитном ма
териале сердечника имеются маленькие контуры с круговыми токами. Плоскости, в кото
рых текут эти токи, при отсутствии внешнего поля имеют хаотичную направленность, по
этому их магнитные поля компенсируют друг друга. Внешнее поле начинает выстраивать
эти контуры в одной плоскости, и к виткам катушки как бы добавляются дополнительные
витки внутренних контуров. Чем больше внешнее поле, тем большее число внутренних
контуров выстраивается в направлении, задаваемом внешним полем.
Но при определенной величине внешнего поля уже все внутренние контурные
токи выстроены, наступает процесс насыщения магнитного сердечника, и дальнейший
рост поля происходит так же, как и при воздушном сердечнике.
Рис. 9.2. Силовые магнитные линии электромагнитов:
а) для прямого проводника;
б) для катушки с током
íÖéêàü åÄÉçÖíàáåÄ
585
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
На рис. 9.3а показано направление магнитных линий вокруг прямого проводника
с током. Точка указывает, что ток течет на нас, а знак «плюс» соответствует противо
положному направлению. Отметим, что показано общепринятое условное направле
ние тока, а не реальное направление движения электронов. Когда ток течет к нам,
линии магнитного поля направлены по часовой стрелке. И наоборот, при токе, теку
щем от нас, магнитные линии направлены против часовой стрелки. На рис. 9.3б пока
зан другой метод определения направления магнитных линий — правило буравчика.
Представьте себе, что вы закручиваете штопор в пробку. И острие его движется по
направлению тока. Тогда направление вращения его ручки будет совпадать с направ
лением линий магнитного поля. Обычно стандартное направление тока известно: для
этого можно использовать амперметр. И по правилу буравчика нетрудно определить
направление магнитных линий.
Рис. 9 .3. Направление магнитного потока:
а) направление силовых линий;
б) правило буравчика
Поскольку двигатели постоянного тока работают на принципах магнетизма, важ
но не только понимать концепции магнитного поля, но и знать, как управлять силой
электромагнита.
Интенсивность магнитного поля электромагнита может управляться:
значением тока в проводниках;
числом витков обмотки;
типом сердечника.
Прежде чем продолжить чтение, убедитесь, что вы поняли принципы и концепции
магнитов и электромагнитов, потому что для понимания работы двигателей постоян
ного тока необходимо твердое знание магнитной теории.
586
9.3. ÇéáåéÜçéëíà ÑÇàÉÄíÖãü èéëíéüççéÉé íéäÄ
Возможности двигателя постоянного тока описываются тремя ключевыми характери
стиками: вращающим моментом, работой и мощностью, выражаемой обычно в лоша
диных силах. Понимание этих основных величин необходимо для понимания работы и
управления двигателем постоянного тока.
9.3.1 . LJ̆‡̨̆ËÈ ÏÓÏÂÌÚ
Вращающий момент — воздействие, приложенное к объекту, которое приводит к
его вращению. Термин «вращающий момент» (torque) происходит от латинского сло
ва torqueo, что означает «крутить». Эта величина часто фигурирует при обсуждении
работы вращающихся систем. Например, автомобильный двигатель создает вращаю
щий момент на маховике с помощью силы, приложенной к коленчатому валу и созда
ваемой поршнями. В двигателях вращающее воздействие заставляет крутиться вал
мотора, приводя в действие различные механические нагрузки, такие как вентилятор,
насос или лента конвейера. Эти механические нагрузки движутся по разному, но все
они управляются вращающим моментом двигателя. Численное значение вращающего
момента, который производит двигатель, получается в результате умножения силы на
плечо, равное расстоянию между центром вала и точкой приложения силы:
Вращающий момент = Сила × Плечо
или просто:
T=F×D,
где
T — вращающий момент, футофунты,
F — сила, действующая на двигатель, фунт,
D — плечо силы, то есть расстояние между осью вращения и точкой приложения
силы, фут.
Некоторые изготовители двигателей определяют вращающий момент в ньютоно
метрах (Н·м), измеряя силу в ньютонах, а плечо в метрах. Формула для преобразова
ния футофунтов в ньютонометры:
1 ньютонометр = 0,73756 футофунта.
Для менее мощных двигателей вращающий момент обычно определен в унцие
дюймах, при этом сила измерется в унциях, а плечо — в дюймах.
Если с валом двигателя связана нагрузка, она проявляет сопротивление и создает
тормозящий момент в направлении, противоположном направлению вращения двига
теля. Если тормозящий момент нагрузки меньше, чем вращающий момент двигателя, то
двигатель продолжает вращаться. Если же тормозящий момент больше, чем вращаю
щий момент двигателя, то двигатель перестает вращаться, но вращающий момент все
еще производится. Даже при неизменных физических свойствах двигателя мы можем
ÇéáåéÜçéëíà ÑÇàÉÄíÖãü èéëíéüççéÉé íéäÄ
587
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
управлять его вращающим моментом, изменяя интенсивность магнитных полей внутри
двигателя. Понятие вращающего момента проиллюстрировано на рис. 9 .4 . Здесь пока
зан двигатель, врающающий лебедку, чтобы поднять вес в 50 фунтов. Рассчитаем, ка
ким должен быть вращающий момент:
Вращающий момент = Сила + Плечо,
где
сила равна весу, составляющему 50 фунтов;
расстояние представляет собой радиус шкива в 1,5 фута.
Следовательно:
Вращающий момент = 50 фунтов × 1,5 фута = 75 футофунтов.
Имея достаточный вращающий момент двигателя, можно всегда поднять необходи
мый вес. Например, если нагрузку на рис. 9.4 утроить, то двигатель обеспечил бы доста
точный вращающий момент, чтобы поднять более тяжелую нагрузку. При этом условии
двигатель обеспечил бы 225 футофунтов вращающего момента (3,50 фунтов × 1,5 фута).
Рис. 9 .4. Лебедка, поднимающая вес в 50 фунтов
В различных режимах работы двигателя вращающий момент неодинаков. Различа
ют рабочий вращающий момент, создаваемый при номинальной нагрузке, и пусковой
вращающий момент. Рабочий вращающий момент создается нагруженным двигателем
при постоянной скорости вращения. Пусковой вращающий момент возникает, когда вал
двигателя находится в покое и не вращается. Пусковой момент двигателя постоянного
тока обычно в несколько раз больше рабочего момента (от двух до пяти раз).
èËÏ 9.1
Вычислите вращающий момент двигателя постоянного тока, который вращает бара
бан лебедки диаметром в 8 дюймов, поднимая вес в 270 фунтов.
êÖòÖçàÖ
Используем уравнение
T=F×D,
где D — радиус лебедки, равный 4 дюймам, или трети фута.
588
Следовательно:
T = 270 фунтов × 1/3 фута = 90 футофунтов.
9.3.2 . ꇷÓÚ‡
Двигатель постоянного тока выполняет механическую работу, когда перемещает объект
на заданное расстояние, прикладывая к нему силу. Главная цель двигателя и состоит в том,
чтобы выполнять необходимую работу. Понятие работы проиллюстрировано на рис. 9.5.
Работа равна произведению расстояния на приложенную силу и выражается формулой
W=D×F,
где
W — работа, футофунт,
D — расстояние, фут,
F — сила, производимая вращающим моментом двигателя, фунт.
èËÏ 9.2
Вычислите работу, выполненную двигателем постоянного тока (см. рис. 9 .5), если вес
равен 200 фунтам, а расстояние, на которое нужно его переместить, равно 15 футам.
êÖòÖçàÖ
W=D×F=15футов×200фунтов=3000футофунтов.
Рис. 9.5. Лебедка, перемещающая вес в 100 фунтов
9.3.3. åÓ̆ÌÓÒÚ̧, ËÁÏÂflÂχfl ‚ ÎÓ̄‡‰ËÌ̊ı ÒË·ı
Одна лошадиная сила представляет собой предельную мощность, которую может развить
лошадь при перемещении груза. Поскольку сила, которую может развивать лошадь, имеет
широкий диапазон значений, мы остановимся на понятии лошадиной силы, касающемся
двигателей постоянного тока. Лошадиная сила является единицей мощности, а мощность
определяется как скорость выполнения работы, равная количеству работы, которое может
быть выполнено в единицу времени, и выражается формулой
ÇéáåéÜçéëíà ÑÇàÉÄíÖãü èéëíéüççéÉé íéäÄ
589
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Мощность = Работа / Время
и ли просто:
P=W/T,
где
P — мощность, футофунты/мин,
W — работа, футофунты,
T — время, мин.
Мощность в одну лошадиную силу (л.с.) развивается, когда груз в 33000 фунтов
перемещается на 1 фут за 1 минуту. Другими словами:
P [л.с.] = P [футофунты/мин] / 33000.
èËÏ 9.3
Вычислите мощность в лошадиных силах, необходимую, чтобы за 3 мин поднять ле
бедкой груз в 7500 фунтов на высоту 10 футов.
êÖòÖçàÖ
W=D×F,
W = 10 футов × 7500 фунтов = 7500 футофунтов,
P = W / T = 75000 футофунтов / 3 мин = 25000 футофунтов/мин.
Выразим мощность в лошадиных силах:
P = (25000 футофунтов/мин) / 33000 = 0,76 л.с.
Мощность некоторых двигателей дается не в лошадиных силах, а в ваттах (Вт).
Переводной множитель из лошадиных сил в ватты равен 746 Вт/л.с.
èËÏ 9.4
Мощность двигателя постоянного тока равна 3,5 кВт. Переведите это значение в ло
шадиные силы.
êÖòÖçàÖ
P = 3500 Вт / 748 Вт/л.с. = 4,69 л.с.
9.4 . äéåèéçÖçíõ ÑÇàÉÄíÖãü èéëíéüççéÉé íéäÄ
В этом разделе детально рассматриваются три главных компонента двигателя постоянно
го тока. Чтобы понять принцип работы двигателя, которая определяется взаимодействием
590
всех его частей, необходимо знать функции, выполняемые основными компонентами. В
следующих подразделах подробно обсуждаются схемы устройств, управляющих вращаю
щим моментом, направление вращения и скорости двигателя. Многочисленные составля
ющие части двигателя постоянного тока можно объединить в три основных узла:
1. Ротор, содержащий все вращающиеся части.
2. Статор, содержащий все неподвижные части.
3. Торцевые платы, содержащие подшипники вала и держатели щеток.
Наряду с тремя основными компонентами, в этом разделе мы рассмотрим электри
ческий интерфейс двигателя постоянного тока. Внимательно изучите рис. 9 .6, на кото
ром изображен типичный двигатель постоянного тока и показано расположение трех
основных узлов и станины для размещения двигателя на рабочей поверхности.
Рис. 9.6. Типичный двигатель постоянного тока
9.4.1. êÓÚÓ
Ротором называется вращающаяся часть двигателя постоянного тока, которая движется
внутри статора. Он состоит из цилиндрического сердечника, набранного из пластин листо
вой стали и закрепленного на валу. Пластинчатая конструкция позволяет обеспечить макси
мальное значение магнитного поля ротора, потому что при этом снижаются основные поте
ри. Основные потери состоят из потерь на вихревые токи и потерь на перемагничивание.
Вихревые токи — это токи проводимости, которые циркулируют близко к поверхности сер
дечника, вызывая его нагревание. Поскольку сердечник набран из изолированных пластин,
вихревые токи не могут протекать между соседними пластинами, поэтому их действие дей
ствительно уменьшается. Потери на перемагничивание — магнитные потери, которые ос
лабляют магнитное поле. Их можно снизить за счет увеличения размеров сердечника, но
сердечник из пластин может выполнить это без увеличения массы или размера. Основные
части ротора показаны на рис. 9.7.
äéåèéçÖçíõ ÑÇàÉÄíÖãü èéëíéüççéÉé íéäÄ
591
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Обратите внимание, что внешняя поверхность пластинчатого сердечника на рис. 9.7
имеет пазы по всей длине. Расположенные под пазами слои провода формируют петлю, кон
цы которой выведены на коллектор. Коллектор (или механический выпрямитель, как он
называется в некоторых книгах) — это коммутационное устройство, которое изменяет на
правление тока в петле. Коллектор представляет собой кольцо, которое разбито на два сег
мента, к каждому из которых подключен один из концов обмотки. Имеется один сегмент для
каждого конца обмотки. Это означает, что для шести витков провода необходимо двенадцать
коллекторных пластин. Для изоляции пластин друг от друга между ними вставлен тонкий
лист изолирующего материала. Вал представляет собой стержень, на который насажены
пластинчатый сердечник и коллектор. У конца вала закреплены лопасти вентилятора, ох
лаждающего при вращении внутренние части двигателя. Свободный конец вала немного
выступает из передней части двигателя, обеспечивая механическое соединение с нагрузкой.
9.4 .2 . ëÚ‡ÚÓ
Статор — это имеющая форму барабана рама для двигателя, смонтированная на станине.
Внутри статора размещены магнитные полюса. Он является статичным, невращающимся
узлом. Статор и станина показаны на рис. 9.8. Магнитные полюса — это стационарные ча
сти двигателя постоянного тока, окружающие вращающийся ротор, размещенный в центре
статора. Магнитные полюса, как и ротор, собраны из стальных пластин, и на них располо
жены обмотки. Эти обмотки, прикрепленные к полюсам, называются обмотками возбужде
ния. На провод нанесено изолирующее покрытие, которое защищает его от окружающей
среды. Число витков и схема намотки провода зависят от типа двигателя, о чем будет расска
зано ниже в разделе 9.5 .
Станина примыкает к статору. Она имеет набор отверстий или пазов для крепле
ния двигателя на рабочую поверхность. Количество и форма отверстий зависят от раз
мера станины и определяются изготовителем двигателя. Торцы статора обработаны
таким образом, чтобы торцевые пластины могли быть жестко закреплены.
Рис. 9 .7. Ротор
592
9.4.3. íӈ‚̊ Ô·ÒÚËÌ̊
Торцевые пластины завершают конструкцию двигателя. Они обычно прикручиваются
к статору проходными болтами, что упрощает разборку двигателя при обслуживании.
На каждой торцевой пластине установлены узлы подшипников качения или скольже
ния, шариковые или втулочные. Они образуют опоры вала ротора, обеспечивающие
его плавное вращение. Условия необходимой смазки подшипников детально оговари
ваются в составленном изготовителем руководстве по обслуживанию.
И в завершение упомянем еще об одном понятии, относящемся к конструкции
двигателя, — о воздушном зазоре, который представляет собой расстояние между
поверхностями полюса и ротора (рис. 9 .9). Воздушный зазор влияет на магнитное
поле: чем уже зазор, тем больше магнитное поле. А чем выше уровень магнитного
поля, тем выше эффективность двигателя. Однако чем уже зазор, тем более жесткими
будут допуски на изготовление, что увеличит стоимость двигателя, и тем меньше будет
допустимое радиальное смещение ротора. Обычно эффективные промышленные дви
гатели имеют воздушный промежуток приблизительно в одну шестнадцатую дюйма, в
то время как менее эффективные двигатели имеют воздушный промежуток в диапазо
не четверти дюйма.
9.4.4 . ôÂÚÍË Ë ̋ÎÂÍÚË̃ÂÒÍËÈ ËÌÚÂÙÂÈÒ
Щетки — это скользящие контакты из графитного композита, которые соединяются
с коллекторными пластинами при вращении ротора. Щетки установлены на статоре
или торцевой пластине для удобства обслуживания. Блок щетки состоит из держателя
и пружины, как показано на рис. 9.10.
Рис. 9.8. Статор и станина
äéåèéçÖçíõ ÑÇàÉÄíÖãü èéëíéüççéÉé íéäÄ
593
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Пружина в блоке должна обеспечить достаточное давление на щетки, чтобы осуще
ствился соответствующий контакт с коллекторными пластинами. Величина этого давле
ния является критичной: если она мала, то щетки будут отходить от коллектора и искрить,
если же она слишком велика, щетки будут быстро изнашиваться и потребуют преждевре
менной замены. Вследствие того что щетки являются часто сменяемым элементом, их со
стояние необходимо периодически проверять, чтобы предотвратить повреждение комму
татора при их чрезмерном износе. Для упрощения текущего контроля на щетки наносится
покрытие, на котором гравировкой отмечается допустимая область износа. Когда щетка
изнашивается до метки, ее необходимо заменить, чтобы предотвратить повреждение ком
мутатора или сбой настройки пружины.
Рис. 9 .9.
Воздушные зазоры
в двигателе
постоянного тока
Рис. 9 .10. Блок щетки
594
Щетки относятся к электрическому интерфейсу двигателя. Питающее напряжение по
стоянного тока подводится к щеткам, контактирующим с коллекторными пластинами, кото
рые питают обмотки возбуждения. Источник питания подключается к неподвижным щет
кам, а не к какой либо вращающейся части двигателя. Каждая щетка проводом подключа
ется на положительный или отрицательный полюс источника постоянного напряжения.
Двигатели имеют четное количество щеток, половина которых связана с положительным
напряжением, а другая половина — с отрицательным. Конец щетки, который начинает кон
тактировать с коллекторной пластиной, имеет форму, позволяющую обеспечить минималь
ное контактное сопротивление. Эта форма называется седлом щетки, и, когда устанавлива
ются новые щетки, соответствие седла и щетки должно быть проверено.
9.5 . êÄÅéíÄ ÑÇàÉÄíÖãÖâ èéëíéüççéÉé íéäÄ
à àï éëçéÇçõÖ íàèõ
Двигатели постоянного тока, используемые в промышленности, делятся на три основ
ных типа: электродвигатели с последовательным, параллельным и смешанным воз
буждением. Их основные свойства:
электродвигатель с последовательным возбуждением может запускаться с
очень большой приложенной нагрузкой;
электродвигатель с параллельным возбуждением позволяет управлять ско
ростью двигателя при работе на высоких скоростях;
электродвигатель со смешанным возбуждением сочетает в себе возможнос
ти двигателей последовательным и параллельным возбуждением.
Прежде чем рассматривать каждый из этих типов, рассмотрим работу двигателя про
стейшей конструкции, имеющего всего два сегмента коллекторных пластин. На рис. 9 .11
показаны четыре рабочих положения такого двигателя: A, B, C и D. Сначала рассмотрим
положение A, отмечая расположение каждой части двигателя: двухполюсного магнита,
создаваемого обмотками возбуждения; вала; ротора и его обмоток; коллекторных пластин
и щеток. Обратите также внимание, что источник питания постоянного тока подключен
положительным полюсом к одной щетке, отрицательным — к другой. Основной режим
двигателя можно описать как смену четырех положений ротора A, B, C и D. Рассмотрим
состояние двигателя в каждом из них:
в положении А: ток течет через отрицательную щетку в коллекторную плас
тину, обмотку ротора и через другую коллекторную пластину на положитель
ную щетку. Магнитное поле, созданное в роторе, заставляет его вращаться
по часовой стрелке, как показано на рис. 9.11а. Обратите внимание на маг
нитный полюс, создаваемый статором у концов ротора в каждой из позиций.
Вращение происходит по часовой стрелке, поскольку северный полюс рото
ра притягивается к южному полюсу статора;
в пол ожении B: каждая щетка входит в контакт с обеими коллекторными
пластинами, и ток течет от одной щетки к другой через коллекторные пласти
êÄÅéíÄ ÑÇàÉÄíÖãÖâ èéëíéüççéÉé íéäÄ à àï éëçéÇçõÖ íàèõ
595
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
ны, минуя обмотку ротора. Поскольку магнитное поле в роторе отсутствует,
нет и вращающего момента; однако ротор продолжает вращаться по инер
ции, проходя это положение короткозамкнутых коллекторных пластин;
в положении C: ситуация противоположна положению A, и коллекторные
пластины изменяют направление тока через ротор. Этот реверс заставляет
ток течь через ротор, опять формируя в его нижней части южный полюс. Со
здаваемый при этом вращающий момент заставляет ротор продолжать вра
щение по часовой стрелке;
в положении D: ситуация такая же, как в положении B. Ротор продолжает
вращаться по инерции, перемещаясь в положение A, и цикл повторяется.
Рис. 9 .11. Режим работы двигателя постоянного тока: четыре пол ожения
при повороте ротора на 360°
596
Положения двигателя на рис. 9 .11 показывают, как коллекторные пластины дви
жутся под щетками при вращении ротора. Каждая пластина коллектора становится по
ложительной, проходя под щеткой, связанной с положительным напряжением, и отри
цательной при прохождении под щеткой, связанной с отрицательным напряжением.
Коллекторные пластины непрерывно меняют свою полярность с положительной на от
рицательную, что заставляет и магнитное поле в роторе изменять полярность. Коллек
тор закреплен на оси так, чтобы переключатель полярности ротора соответствовал рас
положению магнитных полей ротора и обмотки возбуждения. Другими словами, ротор
вращается в одном и том же направлении благодаря тому, что коллектор изменяет на
правление тока через его обмотки, и поэтому поле ротора одинаково взаимодействует с
полем статора, непрерывно поддерживая одно и то же направление вращающего мо
мента. Этот процесс называется коммутацией.
Двигатель с двумя коллекторными пластинами использовался в этом примере
ради простоты изложения, но он, конечно, не применяется на практике. Промышлен
ные двигатели имеют более четырех обмоток ротора, соответствующее число пар кол
лекторных пластин и несколько полюсов статора, обычно создаваемых не постоянны
ми магнитами, а электромагнитами. Реальные двигатели, в отличие от двигателя с
двумя коллекторными пластинами, создают равномерный вращающий момент, необ
ходимый для плавного вращения ротора.
9.6 . ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ
ë èéëãÖÑéÇÄíÖãúçõå ÇéáÅìÜÑÖçàÖå
Электродвигатель постоянного тока с последовательным возбуждением, показанный на
рис. 9.12, имеет обмотку возбуждения, включенную последовательно с обмоткой ротора,
что и определяет название этого двигателя. Поскольку обмотка возбуждения и обмотка
ротора включены последовательно, через них проходит один и тот же ток, значение кото
рого определяется сопротивлением обмоток. Это сопротивление не очень велико, так как
в электродвигателях с последовательным возбуждением необходимо обеспечить высокое
значение пускового тока и высокий вращающий момент. Значением тока через обмотки
определяется вращающий момент, который может создать электродвигатель с последова
тельным возбуждением. Двигатели этого типа обычно работают только на коротких вре
менных промежутках. Например, двигатель стартера автомобиля работает только во вре
мя запуска двигателя внутреннего сгорания.
9.6.1. ꇷÓÚ‡
При подключении источника питания к электродвигателю с последовательным возбуждени
ем ток проходит от положительного полюса источника питания через обмотки статора и ро
тора на отрицательный полюс (рис. 9.12). При отключении источника ротор не вращается, и
сопротивление цепи определяется только активным сопротивлением обмоток. Провод име
ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èéëãÖÑéÇÄíÖãúçõå ÇéáÅìÜÑÖçàÖå
597
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
ет очень низкое сопротивление, и ток двигателя при включении достаточно высок. При вы
соком значении тока возникает и большое магнитное поле, а следовательно, создается боль
шой вращающий момент на валу ротора. Это позволяет преодолевать большие моменты
торможения, что необходимо, например, при запуске холодного автомобильного двигателя
зимним утром.
Рис. 9 .12. Двигатель
постоянного тока с
последовательным
возбуждением
èËÏ 9.5
При подаче напряжения 14,4 В на обмотку ротора двигателя постоянного тока через
двигатель протекает пусковой ток 2,5 A. Каково сопротивление обмотки ротора?
êÖòÖçàÖ
Применим закон Ома:
RA=VA/IA=14,4В/2,5А =5,76Ом.
èËÏ 9.6
Когда ротор вращается, в двигателе (см. условия задачи 9.5) возникает напряжение (VAI).
Оно составляет 90% от напряжения ротора при полной скорости двигателя (VAO ). Каково
значение тока в это время?
êÖòÖçàÖ
На роторе теперь создается пониженное напряжение, выражаемое как
VAR=VAO—VAI=14,4 —0,9×14,4 =1,44.
Сопротивление равно
RA=VA/IA,
откуда
IA=VA/RA=1,44/5,76=0,25А=250мА.
Чтобы лучше понять, как работает двигатель, рассмотрим его характеристики.
598
9.6.2 . ÍÚÂËÒÚËÍË ̋ÎÂÍÚÓ‰‚Ë„‡ÚÂÎÂÈ
Работа электродвигателя с последовательным возбуждением характеризуется двумя
графиками: зависимостью вращающего момента от скорости ротора и зависимостью
вращающего момента от тока ротора. Эти две зависимости приведены на рис. 9 .13а и б.
Обратите внимание, что для кривой на рис. 9 .13а по оси X откладывается вращающий
момент (T) в ньютонометрах, а по оси Y — скорость ротора (nA), то есть частота враще
ния (об/мин). Эта кривая называется также линией постоянного напряжения. На ри
сунке показано не только то, что скорость ротора нелинейна, но и насколько резко ско
рость nA увеличивается при уменьшении момента T. Это опасное условие называется
опрокидыванием. Оно происходит, когда вращающий момент приближается к нулю и
скорость очень высока: например, когда связь между валом двигателя и нагрузкой раз
рывается. На такой высокой скорости обмотка ротора может вылететь из пазов, войти
затем в контакт с обмотками возбуждения и повредить двигатель. Чтобы предотвратить
опрокидывание, на двигатель устанавливается защита, содержащая датчик, который
отключает двигатель, если скорость превышает установленное значение.
Другой представляющий интерес элемент графика на рис. 9 .13а — точка кривой, в
которой скорость ротора равна нулю. Точка соответствует условию торможения ротора,
и вращающий момент в ней называется моментом торможения. Когда ток ротора нуле
вой, напряжение подается на двигатель и ротор ведет себя так, как будто он зафиксиро
ван. Это происходит каждый раз при запуске двигателя из режима полного останова.
Ротор не вращается, пока не возникнет момент, достаточный для начала вращения.
На рис. 9.13б показан график зависимости вращающего момента (по оси X) от
тока ротора (по оси Y). Эта характеристика также нелинейна. Но, как мы и ожидали,
при нулевом токе вращающий момент также равен нулю, а когда ток максимален, то
максимален и вращающий момент. Этот большой вращающий момент и заставляет
ротор начать вращение.
9.6.3. èÓÚË‚Ó-ùÑë
Когда ротор начинает вращаться, создается встречно направленная электродвижу
щая сила (ЭДС). В некоторых технических изданиях она называется противо ЭДС
(cemf — counter EMF). Это напряжение имеет полярность, противоположную поляр
ности источника, который питает двигатель, и оно вычитается из напряжения источ
ника питания. Таким образом, на обмотке возбуждения напряжение действительно
уменьшается при увеличении скорости. Вместе с напряжением уменьшается и ток, что
приводит к уменьшению вращающего момента двигателя и увеличению скорости в
соответствии с характеристикой на рис. 9.13а.
Такая работа дает двигателю преимущество, потому что ток уменьшается, как
только нагрузка начинает двигаться, и следовательно, нагрев двигателя в рабочем ре
жиме снижается.
Рассмотрим рис. 9 .14, на котором показано распределение напряжений в цепи
двигателя с последовательным возбуждением. Напряжения распределены в соответ
ствии со следующим соотношением:
ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èéëãÖÑéÇÄíÖãúçõå ÇéáÅìÜÑÖçàÖå
599
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
VIN=VF+VA+Е,
где
VIN — напряжение источника питания на двигатель,
VF — падение напряжения на обмотке возбуждения,
VA — падение напряжения на сопротивлении обмотки ротора,
Е — противо ЭДС.
Рис. 9 .13. Характеристики двигателя постоянного тока с
последовательным возбуждением
600
Рис. 9.14 . Распределение напряжений в схеме замещения двигателя
постоянного тока с последовательным возбуждением
Две константы, KE и KT, зависят от физической конструкции двигателя постоянно
го тока и учитывают соответственно воздействие противо ЭДС и вращающего момен
та двигателя. Значения KE и KT остаются относительно постоянными, пока двигатель
не разобран и физически не изменен. На величину KT немного воздействует нагрева
ние проводов при высоких значениях тока и сопротивление воздуха при быстром вра
щении ротора. Значение KE вычисляется по формуле
KE = E/(IF×nA),
где
E — противо ЭДС, В,
IF — ток возбуждения, A,
nA — скорость ротора, об/мин.
Следовательно, KE выражается в В/(А об/мин).
Значение KT определяется выражением
KT= T/(IF×IA),
где
T — вращающий момент, Н·м, (1 Н·м = 0,73756 футофунтов),
IF — ток возбуждения, A,
IA — ток ротора, A.
Следовательно, KT выражен в Н·м/A2.
èËÏ 9.7
Найдите константы KE и KT для электродвигателя постоянного тока с последовательным
возбуждением при следующих параметрах: E = 100 В, P = 1/8 л.с., IF = 0,75 A, nA =
1300 об/мин. Двигатель также имеет сопротивление обмотки возбуждения и обмотки
ротора соответственно 50 и 5 Ом.
êÖòÖçàÖ
VIN=VF+VA+E
ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èéëãÖÑéÇÄíÖãúçõå ÇéáÅìÜÑÖçàÖå
601
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
VIN=(IF×RF)+(IA×RA)+E.
Преобразуем:
E=VIN— (IF×RF)—(IA×RA).
Для электродвигателя с последовательным возбуждением IF = IA, поэтому
E=100—(0,75×50)—(0,75×5)=58,75В.
Для коэффициента KE:
KE = E / (IF × nA) = 58,75 В / (0,75 А × 1300 об/мин) = 0,06 В/(А+об/мин).
Для коэффициента KT:
KT = T/(IF×IA).
Величина T в футофунтах в 5252 раз больше отношения мощности двигателя в л.с . к
его скорости в об/мин. Следовательно:
T = 5252 (1/8) / 1300 = 0,505 футофунтов.
Выразим это значение в ньютонометрах:
T = 0,505 футофунтов / 0,73756 футофунтов/Н+м = 0,685 Н·м .
Подставляем значение T:
KT =T/(IF×IA)=0,685Н·м/(0,75А×0,75А)=1,22Н·м/А2.
èËÏ 9.8
Найдите вращающий момент останова двигателя в примере 9.7 .
êÖòÖçàÖ
KT=T/(IF×IA)
откуда
T=KT×(IF×IA)=KT×IA
2.
В рабочем режиме
VIN =(IF×RF)+(IA×RA)+E,
но при останове двигателя ротор не вращается, противо ЭДС равна нулю и поэтому
VIN = (IF× RF)+(IA× RA),
VIN=IA×(RF+RA),
откуда
IA=VIN/(RF+RA)=100В/(50А+5А)=1,82А.
Определим Т:
T=KT×IA
2 = 1,22Н+м/А2× (1,82А)2 = 4,04 Н·м.
602
9.6.4 . ëıÂÏ̊ ‚ÂÒ‡ Ë Â„ÛÎËÓ‚ÍË ÒÍÓÓÒÚË
Изменение направления вращения (реверс) электродвигателя с последовательным воз
буждением можно осуществить, изменив полярность ротора или обмотки возбуждения.
Обратите внимание, что простое изменение полярности источника питания изменяет
полярность обоих обмоток и поэтому не достигает результата. Чтобы понять, как осуще
ствляется реверс двигателя, рассмотрим рис. 9 .15. Выводы обмотки ротора обозначены
как A1 и A2, а выводы обмотки возбуждения как F1 и F2. Обратите также внимание, что
S1 — это переключатель на два положения и два направления (2П2Н — DPDT).
При положении S1, показанном на рис. 9.15а, вывод F1 подключен к A1, а вывод
A2 — к положительному полюсу источника питания. При этом условии потенциал A1
Рис. 9.15. Схема реверса для двигателя постоянного тока с
последовательным возбуждением:
а) ключ S1 в положении исходного направления вращения;
б) ключ S1 в положении обратного направления вращения
ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èéëãÖÑéÇÄíÖãúçõå ÇéáÅìÜÑÖçàÖå
603
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
отрицателен относительно A2. Когда подается питание, ротор начинает вращаться.
Когда S1 переключается в положение, показанное на рис. 9 .15б, вывод F1 переклю
чается на A2, а вывод A1 — на положительный полюс источника питания. При этом
вывод A1 становится положительным относительно A2, и двигатель изменяет направ
ление вращения.
Эта простая схема приведена нами только ради иллюстрации принципа реверса. В
промышленности применяются не механические переключатели, а твердотельные уст
ройства управления ключами, или силовые ключи, выполненные непосредственно на
твердотельных устройствах. Более сложные схемы реверса обсуждаются в разделе 9.9 .
9.6 .5. ìÌË‚ÂÒ‡Î̧Ì̊ ‰‚Ë„‡ÚÂÎË
Универсальные двигатели могут работать как от источников постоянного тока, так и от
однофазных источников переменного тока. Обмотки универсального двигателя показа
ны на рис. 9 .16. Когда прикладывается постоянное напряжение, через обмотки возбуж
дения и обмотки ротора проходит один и тот же ток. Направление вращения определено
направлением тока, протекающего через обмотки ротора и возбуждения. Когда для пи
тания применяется однофазное напряжение переменного тока, направление тока чере
дуется с частотой входного источника питания. Но поскольку направление тока изменя
ется одновременно в обмотке ротора и в обмотке возбуждения, то и магнитные поля
изменяются одновременно. Это не приводит к реверсу вращения ротора, и он вращается
все время в одном направлении. Не изменяется при этом и направление вращающего
момента. Существует три главных различия между электродвигателем с последователь
ным возбуждением постоянного тока и универсальным двигателем:
1. Конструкция магнитного сердечника:
двигатели постоянного тока используют магнитотвердые стали;
универсальные двигатели используют листовую сталь.
2. Скорости холостого хода:
двигатели постоянного тока сталкиваются с явлением опрокидывания;
универсальные двигатели обычно оснащаются коробкой передач, что пре
дотвращает явление опрокидывания.
3. Напряженность поля:
двигатели постоянного тока имеют постоянную напряженность поля;
для универсальных двигателей характерны флуктуации в напряженности
поля, приводящие к уменьшению выходного вращающего момента.
В универсальных двигателях увеличено число витков обмотки ротора, чтобы час
тично компенсировать уменьшение выходного вращающего момента. В двигатель
встроена третья обмотка, называемая обмоткой компенсации, которая включается
последовательно с обмотками ротора и возбуждения, чтобы компенсировать нежела
тельное напряжение, связанное с индуктивностью ротора.
На рис. 9.17 показаны характеристики универсального двигателя, представляю
щие собой зависимости относительной скорости от относительного момента. Приве
604
дены три кривые: для постоянного входного напряжения и для переменных напряже
ний с частотами 25 и 60 Гц. Эффективность в области номинальной нагрузки близка
для всех видов питающего напряжения, вращающий момент при запуске высок, и ре
гулирование скорости недостаточно.
Рис. 9.16. Обмотки двигателя постоянного тока с последовательным
возбуждением
Рис. 9.17.
Характеристики
универсального
двигателя
Универсальные двигатели работают обычно при высоких скоростях (от 3500 до
20000 об/мин), имея в результате высокие значения удельной мощности по массе и объе
му. Это делает их эффективными для таких портативных инструментов, как дрели, пыле
ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èéëãÖÑéÇÄíÖãúçõå ÇéáÅìÜÑÖçàÖå
605
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
сосы, полирующие и отделочные инструменты. С этими ручными инструментами часто
обращаются неправильно, что приводит к износу щеток. Таким образом, щетки нуждают
ся в частой замене, а обмотки ротора могут закорачиваться при перегрузке.
9.6 .6. ìÒÚ‡Ìӂ͇ ̋ÎÂÍÚÓ‰‚Ë„‡ÚÂÎÂÈ ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇
Ò ÔÓÒΉӂ‡ÚÂÎ̧Ì̊Ï ‚ÓÁ·ÛʉÂÌËÂÏ Ë ÔÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ
Установка электродвигателя постоянного тока с последовательным возбуждением включа
ет в себя подключение к электросети и механический монтаж. Подключение к электросети
осуществляется довольно просто, поскольку двигатель имеет только два провода, которые и
подключаются к источнику питания через пускатель. Типичный ручной пускатель показан на
рис. 9.18. Ключ пускателя S1 обычно удерживается пружиной в выключенном состоянии,
пока создаваемое вручную механическое усилие не переведет его во включенное положе
ние, в котором он будет удерживаться электромагнитом. В некоторых ручных дрелях двига
тель остается включенным, пока к S1 приложено давление, а когда S1 освободится, пружи
на возвратит S1 в выключенное состояние. Дискретно регулируемый резистор R1 снижает
ток двигателя, и ручное переключение ключа S2 увеличивает значение R1 на низких скоро
стях, предотвращая, таким образом, повышение тока двигателя до недопустимого уровня.
Электродвигатель с последовательным возбуждением используется в изделиях с непосред
ственным механическим приводом; то есть нагрузка двигателя должна быть непосредствен
но связана с валом. Применение ременного привода не рекомендуется, поскольку обрыв или
пробуксовка ремня может привести к опрокидыванию двигателя. В электродвигателях по
стоянного тока с последовательным возбуждением могут возникнуть две наиболее вероят
ные неисправности:
двигатель не запускается;
двигатель работает, но не может перемещать номинальную нагрузку.
Рис. 9 .18. Ручной пускатель
для двигателя с
последовательным
возбуждением
Поиск неисправностей двигателя начинается с проверки напряжения на его вы
водах с помощью вольтметра. Этот тест определяет, является ли неисправность для
двигателя внешней или внутренней. Если вольтметр не показывает никакого напря
606
жения, то проблема внешняя. Если же вольтметр показывает полное напряжение, то
неисправность нужно искать внутри двигателя. В отсутствие напряжения на зажимах
двигателя, неисправным может оказаться сам источник питания или пускатель. Если
источник питания исправен, то, переведя переключатель пускателя в крайнее правое
положение, попытайтесь перезапустить двигатель. Если он все равно не запускается,
то замените пускатель или проведите ремонт согласно инструкциям изготовителя.
При полном напряжении на зажимах двигателя он должен быть разобран, чтобы найти
неисправность. Но прежде чем разобрать его полностью, проверьте, были ли заменены
щетки согласно инструкции по эксплуатации. Замените щетки, если это необходимо, и по
пробуйте запустить двигатель снова. Если неисправность все еще не устранена, разберите
двигатель согласно интрукциям изготовителя. Вероятно, в одной из обмоток произошел об
рыв или нет контакта между щетками и ротором. Используйте омметр, чтобы измерить со
противления обмоток возбуждения и ротора. Если при каком либо из этих измерений со
противление оказалось бесконечно большим, двигатель должен быть перемотан. Если оба
измерения показывают целостность обмоток, то проверните вручную ротор и проверьте, нет
ли пятен изношенности на коллекторе или правильно ли положение щеток. После этого
выньте ротор из статора для замены или продолжения осмотра . Если двигатель работает, но
не развивает необходимого момента, то, возможно, неэффективно работают щетки или воз
никает перегрев. Визуально проверьте правильность положения щеток или степень их изно
са. Перегревание обычно вызывается люфтом, повреждением ротора либо обмоток воз
буждения или недостаточной смазкой опоры вала. Если обнаружена какая либо из этих
неисправностей, двигатель может быть отремонтирован на месте, заменен или возвращен в
мастерскую для ремонта.
9.7 . ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ
ë èÄêÄããÖãúçõå ÇéáÅìÜÑÖçàÖå
Электродвигатель с параллельным возбуждением, показанный на рис. 9 .19, имеет
обмотку возбуждения, подключенную параллельно ротору, или шунтовую обмотку,
поэтому такой двигатель носит название электродвигателя с параллельным возбужде
нием. Обратите внимание, что к обоим обмоткам приложено одно и то же напряжение,
а ток через обмотки различен. Поскольку обмотка возбуждения не проводит большого
тока ротора, она намотана токим проводом. При меньшем диаметре провода обмотка
возбуждения имеет большее сопротивление и меньший ток, чем обмотка ротора. Для
создания магнитного поля достаточной силы обмотка возбуждения должна иметь
большее число витков.
9.7.1 . ꇷÓÚ‡
Когда напряжение питания подается на электродвигатель с параллельным возбуждени
ем, ток источника разветвляется на ток обмотки возбуждения и ток ротора (рис. 9 .19).
ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èÄêÄããÖãúçõå ÇéáÅìÜÑÖçàÖå
607
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Взаимодействие между магнитными полями ротора и статора создает вращающий мо
мент, который вызывает
Рис. 9 .19. Двигатель с
параллельным
возбуждением
вращение вала двигателя. Если напряжение источника питания будет удвоено, то
вращающий момент учетверится, потому что удвоятся оба тока: через обмотку шунта и
через обмотку ротора. Таким образом, удваиваются и напряженности обоих магнит
ных полей. Когда обмотка возбуждения подключена параллельно, магнитное поле по
стоянно. Когда ротор начинает вращаться, возникает противо ЭДС, как и в электро
двигателе с последовательным возбуждением, но это никак не влияет на магнитное
поле обмотки возбуждения. Следовательно, при изменении нагрузки скорость двига
теля прямо пропорциональна току ротора.
èËÏ 9.9
Определите силу тока через обмотку возбуждения сопротивлением 900 Ом, если на
пряжение в 100 В подается на электродвигатель постоянного тока с параллельным
возбуждением мощностью 1/9 л.с.
êÖòÖçàÖ
Применим закон Ома:
IF=VF/RF=100В/900Ом=0,11А.
Рассмотрим, как ведет себя электродвигатель с параллельным возбуждением при
двух рабочих режимах, в которых:
нагрузка увеличивается;
нагрузка отсутствует.
Когда нагрузка увеличивается, скорость двигателя несколько уменьшается,
вследствие этого:
1. Ротор двигателя начинает вращаться медленнее.
2. Более медленное вращение пропорционально уменьшает противо ЭДС, что
приводит к увеличению тока ротора.
3. Увеличение тока ротора приводит к росту магнитного потока, который взаимо
действует с потоком статора и таким образом увеличивает вращающий момент.
4. Скорость ротора стабилизируется на более низком уровне.
608
Когда нагрузка снимается, скорость двигателя несколько увеличивается, вслед
ствие этого:
1. Ротор двигателя начинает вращаться быстрее.
2. Более быстрое вращение увеличивает противо ЭДС.
3. Увеличение противо ЭДС уменьшает ток ротора до величины, достаточной,
чтобы вращать двигатель и преодолеть таким образом внутреннее трение
двигателя.
4. Скорость ротора стабилизируется при некотором значении, характерном для
холостого хода.
Поскольку диапазон изменения скорости при изменении нагрузки от нуля до пре
дельного значения составляет обычно около 10%, электродвигатель параллельного
возбуждения можно считать двигателем с постоянной скоростью. Это свойство элект
родвигателей параллельного возбуждения делает их полезными в устройствах, требую
щих стабилизации частоты вращения, например в машинах с цифровым управлением.
èËÏ 9.10
Найдите константы двигателя KE и KT для электродвигателя параллельного возбуждения
постоянного тока со следующими параметрами: напряжение 100 В, мощность 1/
4
л.с ., ток
1,2 А, скорость 1600 об/мин, сопротивление обмотки возбуждения и ротора соответ
ственно 750 и 10 Ом.
êÖòÖçàÖ
Уравнения для констант двигателя не отличаются от аналогичных уравнений для дви
гателей с последовательным возбуждением:
KE = E/(IF×nA).
Для электродвигателя параллельного возбуждения:
IF=VF/RF=100В/750Ом=0,133А.
Сумма токов равна
IIN=IF+IA,
откуда
IA=IIN—IF=1,2 —0,1333=1,07А.
Падение напряжения на сопротивлении обмотки ротора может быть выражено как
VA=IA×RA=1,07А×10Ом=10,7В.
Вычислим теперь E следующим образом:
E=VIN—VA=100В—10,7В =89,3В,
откуда:
KE = E / (IF × nA) = 89,3 В / (0,133 А × 1600 об/мин) = 0,42 В/(А·об/мин).
Вычислим KT:
KT=T/(IF ×IA).
ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èÄêÄããÖãúçõå ÇéáÅìÜÑÖçàÖå
609
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Поскольку величина T в футофунтах равна мощности двигателя в л.с., умноженной на
5252 и деленной на скорость двигателя в об/мин, то
T = 5,252 × (1/4) / 1600 = 0,82 футофунта.
Выразим Т в ньютонометрах:
T = 0,82 футофунта / 0,73756 футофунтов/Н·м = 1,1 Н·м .
С учетом этого
KT=T/(IF ×IA)=1,11Н·м/(0,133А×1,07А)=7,8Н+м/А2.
9.7.2 . ÍÚÂËÒÚËÍË
Работа электродвигателя постоянного тока с параллельным возбуждением характеризу
ется двумя графиками: графиками зависимости скорости и тока ротора от вращающего
момента. Эти графики приведены на рис. 9.20а и б. Обратите внимание, что на графике
рис. 9.20а по оси X откладывается вращающий момент T (в ньютонометрах), а по оси Y —
скорость ротора (nA), то есть частота вращения (в об/мин). Эта кривая называется также
линией постоянного напряжения. Хотя электродвигатель с параллельным возбуждением
называется двигателем с постоянной скоростью, связь между вращающим моментом и
скоростью не представляет собой линию с постоянным значением, как можно было бы
ожидать. На самом деле при повышении нагрузки скорость все же несколько снижается,
хотя диапазон изменения скорости при изменении от максимального значения (FL — full
load) до нуля (NL — no load) очень невелик. На рис. 9.20б показан график зависимости
тока ротора (по оси Y) от вращающего момента (по оси X), который также отображает
линейную связь: при увеличении вращающего момента увеличивается и ток.
9.7.3. ëıÂÏ̊ ‚ÂÒ‡ Ë Â„ÛÎËÓ‚ÍË ÒÍÓÓÒÚË
Изменение направления вращения электродвигателя с последовательным возбужде
нием можно осуществить, изменив полярность или ротора, или обмотки возбуждения.
Схема на рис. 9 .21 поясняет, как осуществляется реверс двигателя. Выводы обмотки
ротора обозначены как A1 и A2, а выводы обмоткой возбуждения — как F1 и F2. Кро
ме того, обратите внимание, что S1 — переключатель на два положения и два направ
ления (DPDT — 2П2Н).
Вывод F1 постоянно подключен к положительному полюсу источника питания, а
вывод F2 — к отрицательному. При положении S1, показанном на рис. 9.21а, вывод
A1 подключен к положительному полюсу источника питания, а A2 — к отрицательно
му. При этом условии потенциал A2 отрицателен относительно A1. Когда подается
питание, ротор начинает вращаться. Когда S1 переключается в положение, показан
ное в рис. 9.21б, вывод подключается на A2 на положительный полюс источника пита
ния, а вывод A1 — на отрицательный. При этом вывод A2 становится положительным
относительно A1, и двигатель изменяет направление вращения.
610
Эта простая схема используется только для иллюстрации принципов реверса. В про
мышленности применяются не механические переключатели, а твердотельные устрой
ства управления ключами, или силовые ключи, выполненные непосредственно на твердо
тельных устройствах. Более сложные схемы реверса обсуждаются в разделе 9.9 .
Управление скоростью электродвигателя с параллельным возбуждением может
быть выполнено посредством изменения:
тока возбуждения;
тока ротора.
Скорость электродвигателя с параллельным возбуждением может изменяться
вблизи номинального значения путем изменения тока в обмотке возбуждения. Вклю
ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èÄêÄããÖãúçõå ÇéáÅìÜÑÖçàÖå
Рис. 9.20.
Характерситики
двигателя с
параллельным
возбуждением:
а) зависимость
скороти от момента;
б) зависимость тока
от момента
611
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
чение переменного резистора R1 последовательно с обмоткой возбуждения, как пока
зано на рис. 9 .22, позволяет осуществить такое управление. Когда сопротивление R1
увеличивается, растет и скорость. Когда сопротивление R1, наоборот, уменьшается,
скорость также уменьшается. Может показаться, что с увеличением сопротивления
скорость должна уменьшиться, поскольку ток в обмотке возбуждения уменьшился, но
происходит противоположное. Скорость электродвигателя параллельного возбужде
ния на самом деле увеличивается, потому что уменьшенный ток вызывает уменьшен
ный поток, который, в свою очередь, заставляет противо ЭДС ротора уменьшаться.
Это уменьшение противо ЭДС заставляет увеличиваться ток ротора и вращающий
момент. Скорость ротора уcтанавливается, когда вращающий момент нагрузки стано
вится равным вращающему моменту двигателя.
Рис. 9 .21. Изменение направления вращения двигателя (реверс):
а) прямое направление вращения;
б) обратное направление вращения
612
При изменении напряжения на обмотке ротора скорость электродвигателя с парал
лельным возбуждением может снижаться относительно номинального значения. Поскольку
ток обмотки ротора существенно превышает ток возбуждения, управление с помощью пе
ременного резистора нерационально, потому что это требует чрезвычайного увеличения его
размеров. Но регулирование частоты вращения может быть выполнено при подключении
отдельных источников питания к обмотке возбуждения и обмотке ротора. Такая конфигура
ция называется раздельным возбуждением электродвигателя с параллельным возбуждени
ем. Если обмотка возбуждения и обмотка ротора подключены к одному источнику, такая
конфигурация называется двигателем с самовозбуждением. С помощью изменения напря
жения на роторе при постоянном напряжении на обмотке возбуждения можно снижать ско
рость двигателя относительно номинального значения. Только при самих самых низких ско
ростях запуска пусковой момент влияет на скорость ротора.
Рис. 9.22 . Схема
регулировки
скорости
вращения при
параллельном
возбужении
двигателя
Коэффициент регулирования скорости — это мера того, насколько изменяется
скорость при изменении нагрузки от минимума (условие холостого хода) до максимума
(условие предельной нагрузки). Коэффициент регулирования скорости может быть
выражен следующим образом:
nREG = (nNL — nFL) / nFL,
где
nREG — относительное изменение скорости, выраженное в процентах,
nNL — скорость при нулевой нагрузке,
nFL — скорость при предельной нагрузке.
èËÏ 9.11
Найти относительное изменение скорости для электродвигателя параллельного воз
буждения, который вращается со скоростью 3200 об/мин на холостом ходу и 2850
об/мин при предельной нагрузке.
êÖòÖçàÖ
nREG = (nNL — nFL)/nFL=
= (3200 об/мин — 2850 об/мин) / 2850 об/мин = 0,12.
ùãÖäíêéÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èÄêÄããÖãúçõå ÇéáÅìÜÑÖçàÖå
613
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
9.7 .4 ìÒÚ‡Ìӂ͇ ̋ÎÂÍÚÓ‰‚Ë„‡ÚÂÎÂÈ ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇
Ò Ô‡‡ÎÎÂÎ̧Ì̊Ï ‚ÓÁ·ÛʉÂÌËÂÏ Ë ÔÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ
Как и в случае электродвигателя с последовательным возбуждением, установка элек
тродвигателя с параллельным возбуждением включает в себя подключение к электро
сети и механический монтаж. К электрической сети необходимо подключить четыре
вывода: выводы ротора A1 и A2 и выводы обмотки возбуждения F1 и F2. Схема под
ключения электродвигателя параллельного возбуждения с типичным ручным пуска
телем показана на рис. 9.23. Обратите внимание, что A2 и F2 подключены к выводу E3
пускателя, вывод A1 подключен к выводу E1, а F1 — к выводу E2 пускателя. Ключ
пускателя S1 обычно удерживается пружиной в выключенном состоянии, пока созда
ваемое вручную механическое усилие не переведет его во включенное положение, в
котором он удерживается электромагнитом. Реостат R1 с дискретным переключением
снижает ток в рабочем режиме и обеспечивает большой пусковой ток с помощью руч
ного ступенчатого регулирования сопротивления при переключении ключа S2. Введе
ние сопротивления в цепь ротора в рабочем режиме предотвращает также повышение
тока двигателя до недопустимого уровня в случае неисправностей.
Рис. 9 .23. Схема двигателя с параллельным возбужением и ручным
пускателем
При механической установке электродвигателя параллельного возбуждения обыч
но применяется ременный привод механической нагрузки. Когда вы будете устанавли
вать нагрузку согласно инструкциям изготовителя, проверьте, что ремень выровнен от
614
носительно вала двигателя, и проверьте натяжение ременной передачи. Как показывает
практика, прогиб ремня не должен превышать 1/4 — 1/2 дюйма для обеспечения при
емлемого натяжения. Кроме того, проверьте при включенном двигателе, что натяжение
ремня не слишком велико и он не проскальзывает. Отрегулируйте ремень так, чтобы
обеспечить его нормальное движение.
При неисправности электродвигателя параллельного возбуждения постоянного
тока наиболее вероятно могут возникнуть две проблемы:
двигатель не запускается;
двигатель перегревается под нагрузкой.
Если двигатель не запускается, сначала проверьте напряжение входного источ
ника на зажимах пускателя с помощью вольтметра. Если вольтметр показывает отсут
ствие напряжения, то неисправен либо двигатель, либо пусковое устройство. Если
источник питания исправен, то, переведя переключатель пускателя в самое нижнее
положение, попытайтесь перезапустить двигатель. Если он не запускается или пере
ключателя в схеме нет, то замените пусковое устройство или проведите ремонт со
гласно инструкциям изготовителя.
Если источник питания и пусковое устройство исправны, то источником проблемы яв
ляется, скорее всего, неисправность обмотки возбуждения или ротора. Проверьте сначала
обмотку возбуждения, поскольку она намотана тонким проводом и ее обрыв более вероятен.
Отключите питающее напряжение и отсоедините двигатель от пускового устройства. Отсо
едините обмотку возбуждения от обмотки ротора и проверьте целостность обмотки возбуж
дения с помощью цифрового вольтомметра или омметра, переключив его в диапазон высо
ких сопротивлений. Если обмотка возбуждения не оборвана, то проверьте обмотку ротора,
отсоединив ее от обмотки возбуждения. Если при каком либо из этих измерений обнаружен
обрыв, то двигатель должен быть перемотан. Если измерение омметром не показывает об
рывов, разберите и осмотрите двигатель, включая коллектор и щетки, для определения из
носа или дефекта сборки. Отремонтируйте или замените двигатель. Если оба измерения не
выявляют обрыва, то проверните вручную ротор и проверьте, нет ли пятен изношенности на
коллекторе и правильно ли расположены щетки. Затем выньте ротор из статора и, в зависи
мости от результата проверки, продолжите осмотр или замените ротор.
Если электродвигатель параллельного возбуждения работает, но перегревается, от
ключите питание и проверьте двигатель. Возможно, несколько ослабло крепление обмотки
возбуждения, что может привести к небольшой вибрации и перегреву двигателя. Возможно,
ослабло крепление обмоток ротора. В этих случаях возвратите двигатель изготовителю или
отправьте в ремонтную мастерскую. Продолжать эксплуатацию перегревающегося двига
теля нельзя, поскольку это может вызвать его необратимое повреждение.
9.8 . ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ
ëé ëåÖòÄççõå ÇéáÅìÜÑÖçàÖå
Двигатель постоянного тока со смешанным возбуждением (компаундный двигатель)
представляет собой электродвигатель с комбинацией последовательного и параллель
ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ëé ëåÖòÄççõå ÇéáÅìÜÑÖçàÖå
615
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
ного возбуждения. Эта комбинация обеспечивает двигателю характеристики регулиро
вания скорости, подобные характеристикам для параллельного возбуждения, и характе
ристики вращающего момента, сходные с аналогичными характеристиками при после
довательном возбуждении. Характеристики двигателей со смешанным возбуждением не
столь эффективны, как характеристики для несмешанного возбуждения, но такие дви
гатели являются практичной «золотой серединой». Существует три основных типа дви
гателей со смешанным возбуждением:
с согласным включением обмоток возбуждения;
со встречным включением обмоток возбуждения;
с дополнительными полюсами.
9.8 .1 . Ñ‚Ë„‡ÚÂÎË Ò Òӄ·ÒÌ̊Ï ‚ÍĮ̂̃ÂÌËÂÏ Ó·ÏÓÚÓÍ ‚ÓÁ·ÛʉÂÌËfl
Двигатели с согласным включением обмоток возбуждения названы так потому, что
поля обмоток параллельного и последовательного возбуждения имеют одинаковую
направленность с полем обмотки ротора и все поля помогают друг другу. Существует
две конфигурации включения обмоток:
схема двигателя с частичным шунтированием;
схема двигателя с полным шунтированием.
Названные конфигурации показаны на рис. 9.24. Схема с частичным шунтирова
нием изображена на рис. 9.24а, где обмотка параллельного возбуждения подключена
параллельно ротору. Схема с полным шунтированием показана на рис. 9.24б. Здесь
обмотка параллельного возбуждения подключена параллельно цепи из последова
тельно включенных обмоток ротора и последовательного возбуждения. Из двух кон
фигураций наиболее часто используется полное шунтирование, поскольку в этом слу
чае обмотка параллельного возбуждения имеет при постоянной входной мощности
относительно постоянный ток и, как следствие, постоянную напряженность поля.
Рис. 9 .24. Двигатели с согласным включением обмоток возбуждения:
а) с частичным шунтированием;
б) с полным шунтированием
616
Двигатель с согласным включением обмоток является одним из наиболее попу
лярных двигателей постоянного тока, используемых в промышленности. Он обеспе
чивает высокий пусковой момент наряду с эффективным регулированием двигателя
при высоких скоростях. Этот двигатель может запускаться при большой нагрузке и
плавно работать, когда на высокой скорости нагрузка немного изменяется. Характе
ристики для двигателя с согласованным включением обмоток и двигателей с парал
лельным и последовательным возбуждением показаны на рис. 9.25. На рис. 9 .25а
приведен график зависимости вращающего момента от тока ротора, а на рис. 9.25б —
график зависимости скорости от тока ротора. Как видно из рисунка, двигатель с со
гласным включением обмоток создает более высокий пусковой момент, чем электро
двигатель с параллельным возбуждением, и имеет лучшее регулирование скорости,
чем двигатель с последовательным возбуждением.
Рис. 9.25.
Характеристики
двигателя с согласным
включением обмоток:
а) зависимость момента
от тока ротора;
б) зависимость скорости
от тока ротора
ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ëé ëåÖòÄççõå ÇéáÅìÜÑÖçàÖå
617
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
9.8 .2. Ñ‚Ë„‡ÚÂÎË ÒÓ ‚ÒÚẪÌ̊Ï ‚ÍĮ̂̃ÂÌËÂÏ Ó·ÏÓÚÓÍ ‚ÓÁ·ÛʉÂÌËfl
Двигатель со встречным включением обмоток возбуждения назван так потому, что
обмотки параллельного возбуждения подключены навстречу обмоткам ротора и пос
ледовательного возбуждения. Как и при согласном включении обмоток, двигатель мо
жет быть включен в конфигурациях с частичным и полным шунтированием, как пока
зано на рис. 9 .26. Обратите внимание, что выводы F1 и F2 обмотки параллельного
возбуждения перевернуты относительно схемы с согласным включением на рис. 9.24.
При таком способе подключения обмотки параллельного возбуждения характеристи
ка момента нарастает более резко, чем в случае двигателя с параллельным возбужде
нием, а это означает, что двигатель имеет тенденцию к увеличению скорости, когда
нагрузка уменьшается и скорость с ростом тока падает в меньшей степени, чем у дви
гателя с согласным включением. Характеристики двигателя со встречным включени
ем показаны на рис. 9 .27. На рис. 9.27а приведен график зависимости вращающего
момента от тока ротора, а рис. 9.27б показывает график зависимости скорости от тока
ротора. Как следует из рисунка, пусковой момент двигателя со встречным включением
обмоток снижается при высоких значениях тока ротора, а скорость при этом растет,
что приводит к неустойчивости скорости при высоких нагрузках. Хотя двигатели с со
гласным и встречным включением обмоток состоят из одних и тех же частей, в про
мышленности чаще используется двигатель с согласным включением обмоток.
Рис. 9 .26. Двигатели со встречным включением обмоток возбуждения:
а) с частичным шунтированием;
б) с полным шунтированием
9.8 .3. Ñ‚Ë„‡ÚÂÎË Ò ‰ÓÔÓÎÌËÚÂÎ̧Ì̊Ï ÔÓĮ̂ÒÓÏ
Двигатель с дополнительным полюсом — это двигатель с согласным включением,
имеющий дополнительный полюс и дополнительную обмотку последовательного воз
буждения. Такая конструкция двигателя позволяет устранить искрение щеток из за
сильного магнитного поля и увеличить за счет этого срок службы щеток. Дополни
тельная обмотка включается последовательно с обмотками ротора и последователь
ного возбуждения, как показано на рис. 9.28.
618
Дополнительная обмотка намотана таким же проводом, как и обмотка последова
тельного возбуждения, имеет ту же полярность и конструктивно размещена позади
обмотки последовательного возбуждения. Если полярность межполюсной обмотки не
согласована с полярностью обмотки последовательного возбуждения, двигатель бу
дет перегреваться и может быть поврежден. Дополнительные обмотки настолько эф
фективны, что ими обычно оснащаются все двигатели со смешанным возбуждением,
мощность которых превышает 1/2 л.с.
9.8.4 . ëıÂÏ̊ ‚ÂÒ‡ Ë Â„ÛÎËÓ‚ÍË ÒÍÓÓÒÚË
Полярность обмотки ротора определяет направление вращения для всех рассмотрен
ных двигателей со смешанным возбужением. Изменение полярности обмотки ротора
Рис. 9.27. Характеристики двигателя со встречным включением обмоток:
а)зависимость момента от тока ротора;
б) зависимость скорости от тока ротора
Рис. 9.28. Двигатель
с дополнительным полюсом
ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ëé ëåÖòÄççõå ÇéáÅìÜÑÖçàÖå
619
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
вызывает реверс направления вращения двигателя. Однако если двигатель имеет до
полнительную обмотку, то и ее полярность должна быть изменена при изменении по
лярности ротора. Скорость в этих двигателях может управляться путем регулирова
ния тока в обмотке параллельного возбуждения.
Схема управления частотой и направлением вращения для двигателя со смешан
ным возбуждением показана на рис. 9 .29. Рассмотрим изображенные здесь реле, что
бы лучше понять их функции. Если вам необходимо вспомнить о работе и условных
обозначениях нормально замкнутых (НЗ) и нормально разомкнутых (НР) контактов,
вернитесь к разделу 2.2.
Рис. 9 .29. Схема управления направлением вращения и скоростью двигателя
620
Когда основной переключатель питания S1 замкнут, входное напряжение прикла
дывается к обмотке параллельного возбуждения. Обратите внимание, что K4 1 перво
начально замыкает накоротко резистор R1, чтобы обеспечить пусковой ток в обмотке
параллельного возбуждения. Также обратите внимание, что K3 1 первоначально разом
кнут так, чтобы нарастание тока в роторе было ограничено безопасным значением. Ког
да оператор нажимает на кнопку К1, замыкаются контакты K1 1 и K1 2, подавая мощ
ность на последовательную цепочку, образованную ротором, дополнительной обмоткой
и обмоткой последовательного возбуждения, и ротор начинает вращаться в прямом на
правлении. Через несколько секунд включается реле времени K3, замыкая контакты
K3 1, закорачивающие резистор R2. При этом ток ротора увеличивается, позволяя по
высить момент до рабочего значения. Затем включается второе реле времени K4, раз
мыкая K4 1, что позволяет оператору управлять скоростью двигателя с помощью пере
менного резистора R1. Аналогичный алгоритм работы осуществляется и когда оператор
нажимает на кнопку обратного вращения K2 вместо кнопки K1. Эти две кнопки механи
чески соединены так, что одновременное включение K1 и K2 невозможно.
9.9 . ÑêìÉàÖ åÖíéÑõ ìèêÄÇãÖçàü ëäéêéëíúû
à çÄèêÄÇãÖçàÖå ÇêÄôÖçàü
До сих пор мы обсуждали методы управления скоростью и направлением вращения
двигателей постоянного тока концептуально на довольно простых базисных схемах.
Настоящий раздел посвящен обсуждению компонентов, реально имеющихся на рын
ке, которые могут помочь разработчику при управлении скоростью и направлением
вращения двигателей постоянного тока. Будут раскрыты следующие темы:
как выбрать соответствующий тип пускателя для двигателя постоянного тока;
реверс двигателей постоянного тока с помощью H мостов;
регулирование частоты вращения двигателя постоянного тока с помощью
широтно импульсной модуляции (ШИМ);
регулирование частоты вращения двигателя постоянного тока с помощью
тиристорных приводов.
9.9.1. Ç̊·Ó Ë ÛÒÚ‡Ìӂ͇ ‡ÁÏÂÓ‚ ÔÛÒ͇ÚÂÎÂÈ ‰‚Ë„‡ÚÂÎfl ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇
Прежде чем проанализировать выбор типоразмера пускателей двигателя, кратко рас
смотрим компоненты пускателя. Типичный пускатель двигателя состоит из контакто
ров, которые по принципу работы подобны реле, но разработаны для коммутации
больших токов, и из блока перегрузки, обеспечивающего максимальную токовую за
щиту двигателя с помощью нагревателя и реле перегрузки.
Основные детали контакторов — это релейные переключатели на большие токи
и катушки. Они содержат также дугогасители, которые подавляют дугу при размыка
ÑêìÉàÖ åÖíéÑõ ìèêÄÇãÖçàü ëäéêéëíúû à çÄèêÄÇãÖçàÖå ÇêÄôÖçàü
621
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
нии и замыкании контактов, предотвращая повреждение контактов и расположенных
рядом с ними элементов. На опорной плате собраны все элементы контактора; она же
используется для установки контактора на электрической панели, крышке или в вы
тяжном шкафу.
Большинство блоков перегрузки рассчитаны на реализацию одного из следую
щих трех основных методов защиты:
блоками защиты на базе эвтектических сплавов;
на базе биметаллических контактов;
на базе чувствительности к изменению фазового угла.
Блок перегрузки первого типа использует эвтектический сплав, подобный исполь
зуемым при пайке, но с более низкой температурой плавления, чтобы управлять храпо
виком, который размыкает контакты при перегрузке. При низкой температуре сплава
храповик удерживается на месте; когда сплав расплавляется, храповик смещается и
размыкает контакты, прерывая ток двигателя. При отключении двигателя сплав снова
затвердевает. Когда оператор нажимает кнопку сброса, затвердевший сплав снова удер
живает храповик на месте и двигатель может быть перезапущен.
Биметаллический блок перегрузки использует два неодинаковых металла, соеди
ненных вместе, чтобы обеспечить движение, которое размыкает контакты при пере
грузке. При превышении тока биметаллическая полоса нагревается и два металла
расширяются с различным коэффициентом расширения, что приводит к появлению
зазора между контактами. Ток двигателя прекращается. Процесс сброса происходит
так же, как в эвтектическом блоке защиты.
Метод phase loss sensiniviny подобен методу c биметаллическими контактами за ис
ключением того, что разность токов в любом из фазорасцепителей фазорасцепительного
блока активирует режим перегрузки и отключает питание двигателя. Процесс сброса тот
же самый, что и в первых двух случаях. При выборе пускателя используйте типоряд для
пускателей двигателей ассоциации NEMA (National Electrical Manufacturers Association).
Данные NEMA приведены в табл. 9 .1. Обратите внимание, что размеры пускателей изме
няются от 1 до 8. Номинальный ток для размера 1 пускателя — 25 А; для размера 8 он
составляет 1350 А. Размеры 1 до 4 доступны для двух стандартных значений постоянных
промышленных напряжений, в то время как большие размеры рассчитаны только на
230 В. При выборе пускателя следует учесть, что его номинальный ток должен быть боль
ше фактического тока, который он должен проводить.
Таблица 9.1. Типоряд пускателей для двигателей постоянного тока
622
èËÏ 9.12
Используйте табл. 9.1, чтобы выбрать соответствующий размер пускателя, который
должен переключать нагрузку при токе 120 А и напряжениии 115 В.
êÖòÖçàÖ
Поскольку выходной ток равен 120 А, мы должны выбрать падения между размерами
3 (номинальный ток 100 А) и 4 (номинальный ток 150 А), и должен быть выбран боль
ший размер стартера — 4. Другим критически важным параметром является размер
нагревателя, который должен соответствовать полному току нагрузки двигателя. Как
мы уже говорили, размер пускателя относится к размеру контактов, определяющему
предельный ток нагрузки, который может проводить пускатель. Следовательно, не
обходимо выбрать размер для нагревателя так, чтобы пускатель двигателя мог реаги
ровать на ситуацию перегрузки по току.
В табл. 9.2 приведен список нагревателей пускателей размерами от 0 до 4 для
двигателей с различными предельными токами нагрузки. Обратите внимание, что пе
речислены нагреватели типа W, в которых обычно используется метод защиты от пе
регрузки с помощью эвтектического сплава. В таблице приведены параметры нагре
вателей с типоразмерами W10 — W84.
èËÏ 9.13
Используйте табл. 9.2, чтобы выбрать соответствующий нагреватель пускателя 2 го
размера для двигателя, ток которого при предельной нагрузке равен 22 А.
êÖòÖçàÖ
Найдите в столбце для пускателя размером 2 (см. табл. 9.2) значение 22 А. Посколь
ку значение 22 А отсутствует в таблице, выберем ближайшее превышающее его зна
чение, то есть 23,1 А. Оно соответствует нагревателю типа W62.
9.9.2 . H -ÏÓÒÚ
H мост — это схема переключения, с помощью которой происходит управление на
правлением вращения двигателя постоянного тока. Схема называется так потому, что
ключи в ней образуют символ H (рис. 9.30). Переключатели замыкаются попарно, то
есть S1 и S4 или S2 и S3. Когда S1 и S4 замкнуты, а S2 и S3 разомкнуты, напряжение
прикладывается к ротору и двигатель вращается в прямом направлении. Когда S2 и S3
замкнуты, а S1 и S4 разомкнуты, к ротору прикладывается напряжение обратной по
лярности и двигатель вращается в обратном направлении.
В качестве ключей моста можно использовать реле, но лучше всего управление дви
гателем обеспечивается схемой с твердотельными переключателями типа биполярных
плоскостных или полевых транзисторов (FET). Как и контакты реле, эти твердотельные
переключатели обеспечивают подачу питания и подключение ротора. Для создания клю
чей высокого уровня необходимы биполярные транзисторы типа p
n
p и p канальные по
левые транзисторы. Для ключей низкого уровня необходимы биполярные n
p
n
транзис
ÑêìÉàÖ åÖíéÑõ ìèêÄÇãÖçàü ëäéêéëíúû à çÄèêÄÇãÖçàÖå ÇêÄôÖçàü
623
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
торы или n канальные полевые транзисторы. На рис. 9.31 и 9.32 показаны схемы H мос
тов, использующие эти твердотельные устройства. На рис. 9 .31 изображен H мост на би
полярных транзисторах, а на рис. 9 .32 — этот же мост на полевых транзисторах.
Таблица 9.2. Нагреватели пускателей типа W
624
Твердотельные ключи отираются попарно (Q1 и Q4 или Q2 и Q3), чтобы управлять
направлением вращения двигателя. Диод, включенный параллельно каждому транзистору,
используется в качестве фиксатора, чтобы защитить транзисторные переходы от обратных
напряжений. Важно, чтобы четыре ключа в плечах H моста правильно включались. Вслед
ствие неподходящего алгоритма переключения ток от источника питания может проходить
прямой путь, минуя двигатель, что переведет мост в так называемый режим «сквозных то
Продолжение Таблицы 9.2.
ÑêìÉàÖ åÖíéÑõ ìèêÄÇãÖçàü ëäéêéëíúû à çÄèêÄÇãÖçàÖå ÇêÄôÖçàü
625
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
ков». В этом режиме через ключи проходят очень большие токи короткого замыкания источ
ника питания, которые могут привести к выходу ключей из строя.
Рис. 9.31. Н
мост на биполярных
транзисторах
Рис. 9 .30. Н
мост
Рис. 9 .32. Н
мост на полевых транзисторах
Намного проще и безопаснее, чем разрабатывать собственную схему, использо
вать имеющиеся на рынке H мосты. Два устройства: H мосты LMD18200 фирмы
National Semiconductor и модуль интеллектуального привода на базе Н моста — по
казаны соответственно на рис. 9 .33 и 9.34.
626
Рис. 9.33 . Интегральная схема Н
моста
ÑêìÉàÖ åÖíéÑõ ìèêÄÇãÖçàü ëäéêéëíúû à çÄèêÄÇãÖçàÖå ÇêÄôÖçàü
627
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Рис. 9 .34. Интеллектуальный модуль на базе Н
моста
628
Устройство LMD18200 на рис. 9.33 помещено в DIP корпус с 24 выводами и рас
считано на непрерывный выходной ток до 3 А при напряжении питания до 55 В. При
производстве LMD18200 используют как технологию биполярных приборов, так и
технологию CMOS, что позволяет получить преимущества обоих типов транзисторов.
В этом приборе за счет использования дискретных компонентов устраняются также
сквозные токи. Функциональная диаграмма LMD18200 показывает, что устройство
помимо изменения направления тока обеспечивает и дополнительные функции: уп
равляет торможением и обеспечивает широтно импульсную модуляцию (ШИМ). Обе
функции рассматриваются ниже в этом разделе.
Модуль привода с выбором алгоритма управления на рис. 9 .34 выполнен в корпусе с
40 выводами, может обеспечивать до 4 А непрерывного выходного тока при питающих
напряжениях до 24 В и предназначен для управления одним или двумя двигателями посто
янного тока. Он реализует различные режимы широтно импульсной модуляции, включая
торможение.Обратите внимание, что модуль может обеспечивать ток только в 2,5 А без
охлаждения и 4 А с охлаждением.
9.9.3. òËÓÚÌÓ-ËÏÔÛÎ̧Ò̇fl ÏÓ‰ÛÎflˆËfl
Скорость двигателя постоянного тока пропорциональна питающему напряжению. Если
посадка напряжения слишком велика, двигатель не получает достаточно мощности для
работы, но в некотором диапазоне напряжения, обычно 50% от номинального значения,
двигатель будет работать при изменении скорости. Наиболее эффективным способом уп
равления скоростью двигателя является широтно импульсная модуляция (ШИМ), при
которой двигатель включается и отключается на определенных временных промежутках,
моделируя изменяющееся напряжение. Два примера ШИМ показаны на рис. 9 .35.
Рис. 9.35 . Временные диаграммы
напряжения на
двигателе
ÑêìÉàÖ åÖíéÑõ ìèêÄÇãÖçàü ëäéêéëíúû à çÄèêÄÇãÖçàÖå ÇêÄôÖçàü
629
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Мы видим, что на рис. 9 .35а коэффициент заполнения импульсов равен 50%. Это
означает, что время, когда питающее напряжение включено, равно времени, когда оно
выключено. В этой ситуации среднее напряжение равно половине питающего напря
жения; таким образом, скорость двигателя составляет приблизительно половину но
минальной скорости.
На рис. 9.35б коэффициент заполнения импульсов составляет 25%; таким обра
зом, среднее напряжение равно четверти напряжения питания, и скорость двигателя
также составляет примерно четверть номинальной скорости.
èËÏ 9.14
Каков коэффициент заполнения схемы с ШИМ, обеспечивающей уменьшение ско
рости до 800 об/мин при номинальной скорости 2500 об/мин?
êÖòÖçàÖ
Коэффициент заполнения КЗ равен текущему значению скорости, деленному на но
минальное значение и умноженному на 100%:
КЗ = (800 об/мин / 2500 об/мин ) × 100% = 32%.
Блок схема системы ШИМ показана на рис. 9 .36, а соответствующие временные
диаграммы представлены на рис. 9.37. Мы видим, что на рис. 9.36 сигнал генератора
пилообразного напряжения (ГПН) работает при фиксированной частоте, блок компа
ратора генерирует импульсы на тех временных интервалах, когда напряжение пилооб
разного сигнала опускается ниже опорного напряжения, а драйвер снимает напряже
ние питания с двигателя.
Рис. 9 .36. Структурная
схема привода с
широтно
импульсной
модуляцией
На рис. 9.37а показаны временные диаграммы выходного напряжения ГПН, а на
рис. 9.37б — напряжение на выходе компаратора, которое модулируется сигналом
опорного напряжения и определяет ширину импульса. При малом опорном напряже
нии на выходе компаратора формируется сигнал с низким коэффициентом заполнения
(узкие импульсы). При повышении опорного напряжения коэффициент заполнения
630
увеличивается (импульсы становятся шире). Следовательно, двигатель обеспечивает
большую механическую мощность при большем опорном напряжении.
Рис. 9.37.
Временные диаграммы выходных
напряжений на узлах
стркутурной схемы рис. 9 .36:
а) напряжение на генераторе
пилообразного напряжения;
б) напряжение на компараторе
èËÏ 9.15
Воспользуйтесь рис. 9.37, чтобы вычислить среднюю мощность, если входной пило
образный сигнал изменяется от 0 и 10 В, опорное напряжение равно 3 В сопротивле
ние, обмотки ротора составляет 5 Ом.
êÖòÖçàÖ
При включенном состоянии ключа мощность, передаваемая на двигатель, может
быть выражена как
P=V2/R,
где V — напряжение на роторе, В,
R — сопротивление обмотки ротора, Ом.
Следовательно:
P=242/5=115Вт.
Средняя мощность равна
PA=(VS/VR)×P=(3/10)×115=34,5Вт,
где VS — опорное напряжение,
VR — максимальное напряжение пилообразного сигнала.
èËÏ 9.16
Используйте исходные данные и результаты примера 9.15, чтобы вычислить среднюю
мощность при опорном напряжении в 6 В.
ÑêìÉàÖ åÖíéÑõ ìèêÄÇãÖçàü ëäéêéëíúû à çÄèêÄÇãÖçàÖå ÇêÄôÖçàü
631
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
êÖòÖçàÖ
PA=(VS/VR)×P=(6/10)×115=69Вт.
Обратите внимание, что средняя мощность, вычисленная в примере 9.16, в два
раза больше, чем в примере 9.15. Имеются твердотельные устройства, позволяющие
не только изменять направление вращения, но и осуществлять ШИМ двигателя по
стоянного тока. При их применении вы освобождаетесь от необходимости разрабаты
вать самостоятельно схему на дискретных компонентах и заниматься проблемами син
хронизации. Устройства на рис. 9.33 и 9.34 имеют встроенный регулятор с ШИМ.
9.9 .4. íËËÒÚÓÌ̊ ÔË‚Ó‰̊
Скорость двигателя постоянного тока прямо пропорциональна току ротора, поэтому
можно изменять ток и скорость двигателя с помощью простой схемы тиристорного при
вода. Такая схема, состоящая из тиристора и схемы управления, приведена на рис. 9 .38 .
Тиристор здесь выполняет две функции:
1. Выпрямляет сигнал входного переменного напряжения, обеспечивая в рото
ре пульсирующий постоянный ток.
2. Управляет значением тока ротора.
Рис. 9 .38. Тиристорнгый привод двигателя постоянного тока с
однополупериодным регулируемым выпрямителем
Входное напряжение сети переменного тока 115 В преобразуется в пульсирую
щее постоянное напряжение со средним значением 50 В, вызываемый этим напряже
нием ток ротора течет в одном направлении. Поскольку тиристор может быть включен
в любое время в течение положительного полупериода сетевого напряжения, можно
управлять током ротора. Этот однополупериодный выпрямитель не обеспечивает эф
632
фективной работы двигателя, но замена выпрямителя двухполупериодным позволяет
повысить эффективность. На рис. 9.39 показана схема управляемого двухполупериод
ного мостового выпрямителя, состоящая из двух диодов и двух тиристоров. В течение
каждого положительного полупериода ток течет через последовательно включенные
тиристор и диод, генерируя импульсное напряжение на обмотке ротора.
Рис. 9.39 . Тиристорнгый привод двигателя постоянного тока с
двухполупериодным регулируемым выпрямителем
В момент отпирания тиристора на роторе появляется напряжение, повторяющее
сетевое напряжение на всем интервале, пока тиристор проводит ток. Скорость ротора
управляется фазовым углом сетевого напряжения, который соответствует моменту
включения тиристора, определяемому схемой управления.
Схема управления тиристором состоит из релаксационного генератора на однопе
реходном транзисторе (см. главу 5) и из инвертирующего усилителя (см. главу 4). Схема
релаксационного генератора показана на рис. 9 .40а, входной узел системы регулирова
ния частоты вращения изображен на рис. 9 .40б. Конденсатор C1 заряжается через ре
зистор R1 и биполярный транзистор Q1, когда превышается пороговое напряжение и
включается однопереходный транзистор UJT, формируя импульс на управляющем элек
троде тиристора. Это происходит на каждом полупериоде входного сигнала. Скорость
двигателя управляется потенциометром R4. Когда движок R4 перемещается вверх (в
сторону источника 15 В), модуль отрицательного выходного напряжения усилителя U1
увеличивается, ток транзистора Q1 растет и конденсатор C1 заряжается быстрее. Сле
довательно, транзистор UJT и тиристор включаются раньше, при меньшем фазовом угле
сетевого напряжения. При этом увеличивается ток ротора и скорость двигателя.
9.10. íüÉéÇõÖ ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ
Тяговые двигатели постоянного тока представляют собой управляемые реостатами
двигатели постоянного тока, используемые для трамвайного привода с начала 20 века.
íüÉéÇõÖ ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ
633
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Сегодня они вновь становятся популярны. На рис. 9.41 приведена принципиальная
схема тягового двигателя, обеспечивающего движение трамвая.
Рис. 9 .40. Схема управления скоростью двигателя:
а) релаксационный генератор на ОПТ для упрвления тиристором;
б) усилитель на ОУ для управления скоростью
Рис. 9 .41. Тяговый двигатель постоянного тока
Как было указано ранее, при запуске двигателя постоянного тока внутри двигателя
возникают магнитные поля, при взаимодействии которых генерируется противо ЭДС.
Это обратное напряжение направлено против приложенного напряжения, и ток ротора
определяется их разностью. С ростом скорости двигателя растет и противо ЭДС, эффек
тивное напряжение падает, и уменьшается ток через двигатель и вращающий момент.
Двигатель естественно снижает скорость, когда механическая нагрузка, создаваемая
трамваем, и вращающий момент двигателя растут. Чтобы увеличить скорость трамвая,
контакторы закорачивают часть секций реостата. С закорачиванием каждой секции уве
личивается напряжение, а вместе с ним ток и вращающий момент. Это действие переклю
чения в старых трамваях можно было слышать и ощущать как ряд щелчков под полом,
каждый раз сопровождаемых толчком ускорения, так как вращающий момент резко уве
личивался в ответ на новый скачок тока. Если закорочены все секции реостата, полное
634
питающее напряжение подается непосредственно на двигатель. Скорость трамвая остает
ся постоянной при постоянном вращающем моменте двигателя, определяемом эффектив
ным напряжением и равном тяге трамвая (иногда это называется балансом скорости).
Если трамвай идет вверх, скорость уменьшается, поскольку увеличивается тяга и враща
ющий момент. Но уменьшение скорости приводит к снижению противо ЭДС и повыше
нию эффективного напряжения, пока не установится новый режим двигателя.
Понятие баланса скорости актуально и сегодня, поскольку разработаны тяговые дви
гатели на топливных элементах, питающих электрические транспортные средства. Фирма
Emerson Motors, отделение компании Emerson Inc., разработала прототип тягового моду
ля, в котором двигатель внутреннего сгорания полностью заменен встроенными топливы
ми элементами, питающими электромобили. В октябре 2003 года компания Saminco ос
настила тяговым двигателем самое быстрое в мире электрическое транспортное средство,
рекордная скорость которого составила в 256,9 миль/час. Наряду с использованием в ав
томобильной промышленности тяговые двигатели применяются в землеройных машинах
и сверлильных станках.
9.11. åÖíéÑõ íéêåéÜÖçàü
Остановка двигателя столь же важна, как его пусковой и рабочий режимы. Очевидно,
что выключение питания двигателя вызовет его останов в свободном режиме. Но в про
мышленности важно обеспечить быстрое торможение двигателя, потому что нагрузка
должна остановиться в определенном положении, как, например, в подъемнике. И кро
ме того, у оператора обычно нет времени, чтобы ждать, когда двигатель остановится
самостоятельно. Рассмотрим три метода торможения:
динамическое торможение;
рекуперативное торможение;
торможение подключением обратного напряжения (торможение переклю
чением).
Характеристики для этих методов торможения показаны на рис. 9.42. Здесь по
оси Y — скорость двигателя в об/мин, а по оси X — текущее время в секундах. Обра
тите внимание, что быстрее всего двигатель останавливается при торможении пере
ключением, а дольше всего, когда находится свободном торможении после снятия пи
тающего напряжения.
9.11.1. ÑË̇ÏË̃ÂÒÍÓ ÚÓÏÓÊÂÌËÂ
Динамическое торможение выполняется при переключении ротора с источника питания
на резистор. Этот метод торможения показан на рис. 9.43. На рис. 9 .43а ключ S1 нахо
дится в рабочем положении, когда ротор подключен к источнику питания, а резистор R1
отключен от схемы. При этом условии ток течет в показанном направлении, создавая
прямой вращающий момент. Если S1 выключен, то, согласно схеме рис. 9.43б, двига
åÖíéÑõ íéêåéÜÖçàü
635
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
тель продолжает вращаться, а параллельно ротору подключается резистор. При этом
противо ЭДС выступает в качестве источника, создавая ток в обратном направлении. В
результате создается обратный вращающий момент, который тормозит ротор. Посколь
ку двигатель замедляется, противо ЭДС уменьшается, а следовательно, уменьшается и
ток. Отсюда вытекает, что основное торможение происходит вначале, при более высо
ких скоростях. Когда ротор останавливается, противо ЭДС становится равной нулю и
торможение заканчивается. Чем меньше сопротивление резистора, тем больше обрат
ный ток ротора и меньше время торможения. Резистор для динамического торможения
обычно бывает проволочным на керамическом основании. Выбирая этот резистор, об
ратите внимание на то, чтобы начальный ток торможения был вдвое больше номиналь
ного тока двигателя. Динамическое торможение обычно применяется в мощных двига
телях, работающих в лебедках, локомотивах и подъемниках.
Рис. 9 .42.
Характеристики
торможения двигателей
9.11.2. êÂÍÛÔ‡ÚË‚ÌÓ ÚÓÏÓÊÂÌËÂ
Рекуперативное торможение подобно динамическому торможению, но вместо того,
чтобы использовать резистор, рассеивающий мощность, при рекуперативном тормо
жении мощность возвращается обратно в источник. При рекуперативном торможении
обмотка возбуждения двигателя используется в качестве накопителя, чтобы сохра
нить энергию, когда двигатель выключается, и возвратить ее в источник питания. Этот
метод проиллюстрирован на рис. 9.44 . Когда S1 переключается из рабочего положе
ния в положение торможения, схема управления замыкает S2, позволяя обмотке ро
тора сохранить энергию в магнитном поле. Когда энергия достигает установленного
значения, схема управления размыкает S2 и замыкает S3, а затем передает энергию,
сохраненную в магнитном поле обмотки возбуждения, обратно во входной источник
питания, восстанавливая его заряд.
636
Рис. 9.43. Динамическое
торможение:
а) рабочий режим двигателя;
б) режим торможения
Рис. 9.44 . Рекуперативное торможение
åÖíéÑõ íéêåéÜÖçàü
637
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Для реализации рекуперативного торможения необходимо, чтобы противо ЭДС
двигателя превышала входное напряжение источника питания. Практическим приме
ром рекуперативного торможения является применение его в электромобиле. Рекупе
ративное торможение в электромобиле используется совместно с механическим тормо
жением. Когда автомобиль останавливается, электрический двигатель превращается в
электрический генератор, создавая ток, подзаряжающий батарею, и сохраняя энергию,
чтобы использовать ее во время возобновления движения. Фактически всякий раз, ког
да электромобиль замедляется при снятии акселератора или нажатии на тормоз, приво
дится в действие регенеративная система, чтобы генерировать электроэнергию.
9.11.3. íÓÏÓÊÂÌËÂ ÔÂÂÍĮ̂̃ÂÌËÂÏ
Метод торможения переключением заключается в подключении входного источника пита
ния к ротору в обратной полярности. Переключение создает момент, сравнимый с началь
ным моментом при динамическом торможении, но относительно постоянный, в отличие от
тормозного момента при динамическом торможении, когда тормозной момент уменьшается
по мере снижения скорости ротора. Метод переключения показан на рис. 9.45.
Обратите внимание, что когда S1 находится в рабочем положении, напряжение
на роторе приложено плюсом к верхнему выводу и минусом к нижнему выводу, а когда
S1 находится в позиции торможения, полярность напряжения на роторе изменяется.
Переключатель S2 называется центробежным переключателем. Когда ротор останав
ливается, S2 автоматически открывается, снимая напряжение с ротора. Эта предос
торожность необходима, чтобы ротор не начал вращаться в противоположном на
правлении. Подключающийся переключатель обычно крепится на валу двигателя, и,
когда центробежная сила приближается к нулю, ключ S2 размыкается.
9.12. ÇÖÅ-ëÄâíõ èé ÑÇàÉÄíÖãüå èéëíéüççéÉé íéäÄ
à ëïÖåÄå ìèêÄÇãÖçàü
Ниже приведены адреса сайтов фирм поставщиков двигателей постоянного тока и
средств управления ими, рассмотренных в этой главе. Адреса веб ресурсов постав
щиков часто изменяются, поэтому, если какая либо из ссылок неактивна, воспользуй
тесь режимом поиска в Сети, чтобы по соответствующему термину или названию дви
гателя найти интересующие вас материалы:
Двигатели и пускатели фирмы Allen Bradly
http://www.ab.com
Пускатели двигателя и средства управления от фирмы Hubbell Industrial Controls
http://www.hubbell
icd.com
H мосты от Natoinal Semiconductors и от Parallax
http://www.national.com
638
http://www.parallax.com
Тяговые двигатели в Emerson и в Saminco
http://www.emerson .com
http://www.samincoinc.com
Рис. 9.45. Торможение переключением
ÇÖÅ-ëÄâíõ èé ÑÇàÉÄíÖãüå èéëíéüççéÉé íéäÄ à ëïÖåÄå ìèêÄÇãÖçàü
639
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
êÖáûåÖ
9.1. Введение
Двигатель постоянного тока — электромеханическое устройство, которое преоб
разовывает электрическую энергию постоянного тока в механическую энергию.
9.2. Магнитная теория
Магнитная теория содержит базисные принципы и понятия магнетизма, от
носящиеся к магнитам и электромагнитам.
Два основных закона магнитов заключаются в том то, что магниты отталки
ваются друг от друга, если сблизить их одноименные полюса (северный с се
верным или южный с южным), и притягиваются друг к другу, если сблизить
их разноименные полюса.
Электромагнит — это тип магнита, в котором силовые магнитные линии со
здаются электрическим током в проводниках.
Интенсивность магнитного поля электромагнита может изменяться за счет
тока в проводе, числа витков и типа сердечника.
9.3 Возможности двигателей постоянного тока
Вращающий момент двигателя определяется произведением силы на рас
стояние между центром вала и точкой приложения силы (плечо силы).
Различные режимы работы двигателей характеризуются вращающими мо
ментами двух типов: рабочим и пусковым.
Двигатель постоянного тока совершает механическую работу, когда создает
силу, перемещающую объект на определенное расстояние.
Мощность двигателя определяется скоростью выполнения работы. Едини
цей измерения мощности является лошадиная сила.
9.4. Компоненты двигателя постоянного тока
Тремя главными узлами двигателя постоянного тока являются ротор, статор
и торцевые пластины.
Ротор содержит все вращающиеся части, статор включает все неподвижные ча
сти, а торцевые пластины включают элементы, поддерживающие вал и щетки.
Щетки представляют собой скользящие контакты из графитного композита,
обеспечивающие связь с сегментами коллектора, которые связаны обмотка
ми вращающегося ротора.
9.6 и 9.7. Электродвигатели постоянного тока с последовательным воз
буждением. Электродвигатели постоянного тока с параллельным воз
буждением.
Направление вращения электродвигателей с последовательным или парал
лельным возбуждением можно изменить, изменив полярность обмотки рото
ра или обмотки возбуждения.
При вращении ротора возникает напряжение, направленное навстречу на
пряжению источника питания и названное противо ЭДС.
640
Главными отличиями универсального электродвигателя от двигателя посто
янного тока с последовательным возбуждением являются материал сердеч
ника, рост скорости на холостом ходу и флуктуации в напряженности поля.
Электродвигатели постоянного тока с параллельным возбуждением имеют
лучшее регулирование скорости, чем двигатели с последовательным воз
буждением, но не могут развивать большой пусковой вращающий момент.
Скорость электродвигателя параллельного возбуждения может изменяться
вблизи номинального значения с помощью тока в обмотке возбуждения.
9.8. Двигатели постоянного тока со смешанным возбуждением
Двигатели постоянного тока со смешанным возбуждением содержат обмот
ки параллельного и последовательного возбуждения.
Обмотки дополнительных полюсов предотвращают искрение щеток при на
растании магнитного поля.
9.9. Другие методы управления скоростью и направлением вращения
Типичные пускатели двигателей включают контакторы, которые подобны
реле, за исключением того, что рассчитаны на большие токи и имеют блок
защиты от перегрузки, который обеспечивает защиту от максимального тока
двигателя с нагревателем и реле перегрузки.
H мосты, широтно импульсная модуляция и тиристорные приводы — ти
пичные средства управления работой двигателей постоянного тока.
9.10. Тяговые двигатели постоянного тока
Баланс скорости тягового двигателя остается постоянным в точке, где вра
щающий момент двигателя, управляемого действующим напряжением, рав
няется тяговому моменту.
9.11 . Методы торможения
Динамическое торможение выполяется переключением ротора с источника
питания на тормозной резистор.
Рекуперативное торможение подобно динамическому торможению, но вмес
то сброса на резистор энергия возвращается обратно в источник.
Метод торможения подключением заключается в подключении источника
питания к ротору в обратной полярности.
Çéèêéëõ
1. Опишите наиболее привлекательный для вас тип карьеры в области разработки и
внедрения двигателей постоянного тока.
2. Дайте определение двигателя постоянного тока.
3. Какие функции двигателей постоянного тока управляются внешней схемой?
4. Назовите два базовых закона магнетизма.
5. Объясните, что представляют собой силовые магнитные линии.
Çéèêéëõ
641
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
6. Опишите связь между силовыми линиями и магнитным полем.
7. Каково различие между магнитами и электромагнитами?
8. Сравните между собой электромагниты с прямым проводом и с соленоидом.
9. Каким образом можно управлять интенсивностью магнитного поля электромагнита?
10. Дайте определение вращающего момента.
11. Какие существуют две основные единицы измерения вращающего момента и как
они связаны между собой?
12. Опишите пусковой и рабочий вращающие моменты .
13. Дайте определение понятия «работа».
14. Дайте определение мощности и единицы мощности в одну лошадиную силу.
15. Как перевести мощность, измеряемую в футофунтах/мин, в другие единицы из
мерения — лошадиные силы и ватты?
16. Объясните процесс коммутации применительно к двигателям постоянного тока с
последовательным возбуждением.
17. Каково численное соотношение между числом витков обмотки ротора и числом
коллекторных пластин в ряде двигателей постоянного тока с последовательным
возбуждением?
18. Сравните обмотки ротора и обмотки возбуждения в двигателях с последователь
ным возбуждением.
19. Дайте определение понятия «основные потери».
20. Почему вихревые токи нежелательны в электродвигателях с последовательным
возбуждением?
21. Как устроен механический выпрямитель в электродвигателях с последователь
ным возбуждением?
22. Какова связь между условием остановки ротора и вращающим моментом останова?
23. Что такое седло щетки?
24. Когда возникает противо ЭДС?
25. Приведите уравнение, описывающее распределение напряжений в цепи двигате
ля с последовательным возбуждением.
26. Объясните, как можно управлять направлением вращения двигателя с последо
вательным возбуждением.
27. Опишите различия между универсальным двигателем и двигателем постоянного
тока с последовательным возбуждением.
28. Если электродвигатель постоянного тока с последовательным возбуждением не
запускается, то какое диагностическое средство прежде всего следует применить
для проверки и почему?
29. Сравните между собой электродвигатели постоянного тока с параллельным и с
последовательным возбуждением.
30. Расскажите, что случится с вращающим моментом двигателя с параллельным
возбуждением, если удвоить входное напряжение.
31. Объясните, почему скорость электродвигателя параллельного возбуждения умень
шается с ростом тока возбуждения.
642
32. Каково различие между двигателями с самовозбуждением и с раздельным воз
буждением?
33. Дайте определение двигателя со смешанным возбуждением.
34. Что такое двигатели со встречным и согласным включением обмоток возбуждения?
35. Для чего предназначены дополнительные полюса в двигателях со смешанным
возбуждением?
36. Каким образом можно управлять скоростью в двигателях со смешанным возбуж
дением?
37. В чем состоит метод выбора соответствующего пускателя для двигателя?
38. Опишите связь между размером двигателя и нагревателя в пускателе двигателя.
39. Что называетс сквозными токами в схеме H моста и как можно устранить это явление?
40. Каким образом используется широтно импульсная модуляция для управления
скоростью двигателя?
41. Объясните, как можно использовать тиристор для управления скоростью двигателя.
42. Что такое свободное торможение двигателей постоянного тока?
43. Какой метод торможения вы использовали бы для двигателя подъемника?
44. В чем состоят различия между динамическим и рекуперативным торможением?
45. Объясните, как осуществляется торможение двигателя при методе переключения.
áÄÑÄóà
1. Вычислить вращающий момент двигателя постоянного тока, который поворачи
вает лебедку диаметром 6 дюймов, связанную с нагрузкой в 250 фунтов.
2. Вычислить работу, выполненную двигателем постоянного тока, который подни
мает груз весом 150 фунтов на расстояние 12 футов.
3. Вычислить мощность в л.с. для 2 киловаттного двигателя, который должен под
нять лебедкой груз весом 8000 фунтов на высоту 20 футов за 2 мин.
4. Какова потребляемая мощность двигателя задаче 3?
5. При приложении к обмотке ротора напряжения 15,2 В в ней возникает пусковой
ток 2,25 А. Найти ток ротора, который вращается с полной скоростью, если инду
цированное напряжение составляет 90% от напряжения на роторе.
6. Найти константы KE и KT для двигателя постоянного тока с последовательным воз
буждением мощностью 1/4 л.с. при входном напряжении 115 В и токе в 0,8 A при
скорости двигателя 1500 об/мин. Сопротивление обмоток возбуждения и ротора
составляет 60 и 5,5 Ом соответственно
7. Найти вращающий момент останова двигателя в задаче 6.
8. Построить график зависимости скорости от вращающего момента, используя ре
зультаты решения задач 6 и 7.
9. Вычислить ток через обмотку возбуждения сопротивлением 750 Ом, когда на
пряжение 110 В прикладывается к двигателю постоянного тока с параллельным
возбуждением мощностью 1/4 л.с.
áÄÑÄóà
643
Ñ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇ Ë Ëı ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
10. Найти константы KE и KT для двигателя постоянного тока с параллельным возбуж
дением мощностью в 1/4 л.с. при входном напряжении 115 В, которое вызывает
ток 1,6 A при скорости двигателя 1500 об/мин. Сопротивление обмоток возбуж
дения и ротора составляет 600 и 8,5 Ом соответственно
11. Найти относительное изменение скорости для электродвигателя с параллельным
возбуждением, который вращается со скоростью 2800 об/мин на холостом ходу и
2400 об/мин при предельной нагрузке.
12. Используйте табл. 9 .1, чтобы выбрать соответствующий размер пускателя, кото
рый должен работать при напряжениях 100 и 200 В.
13. Используйте табл. 9 .2, чтобы выбрать соответствующий нагреватель для пуска
теля размера 0, при предельном токе нагрузки 6 A.
14. Каково типичное сопротивление H моста LMD18200 при включенном состоянии?
15. Каков коэффициент заполнения схемы ШИМ, если он обеспечивает уменьшение
скорости до 900 об/мин от номинальной скорости в 2100 об/мин?
16. Используйте рис. 9.46, чтобы вычислить среднюю мощность при напряжении на
роторе 28 В, сопротивлении обмотки ротора 4,5 Ома и опорном напряжении 4 В.
17. Какова средняя мощность, если опорное напряжение в задаче 16 уменьшено до 3 В?
Рис. 9 .46. Временная диаграмма к задаче 16
644
10
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇
Ë ÔË‚Ó‰̊
Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
ñÂÎ̧ „·‚̊
Основная цель главы 10 состоит в том, чтобы рассмотреть принцип
работы и характеристики однофазных и трехфазных двигателей пе
ременного тока, включая описание их внутренних компонентов. Рас
сматриваются также вопросы, связанные со скоростью двигателей
переменного тока и схемами управления вращением, кроме того, опи
саны различные системы приводов.
После изучения этой главы вы сможете:
1. Объяснить, как формируется переменное поле двигателя переменного тока.
2. Объяснить принцип создания вращающегося поля в двигателях переменного тока.
3. Дать определение скольжения двигателя и вычислить значение этой величины.
4. Детально описать общую конструкцию двигателя и функцию каждого из его внут%
ренних компонентов.
5. Объяснить принцип работы центробежного пускового выключателя.
6. Сравнить различные способы пуска двигателей: за счет сопротивления в цепи ро%
тора, конденсаторного пуска и пуска двигателей с неявновыраженным полюсом.
7. Объяснить, как создается вращающееся поле в однофазном асинхронном двигателе.
8. Вычислить предельную нагрузку и пусковые токи холостого хода трехфазного
двигателя.
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
9. Описать преимущества и недостатки двигателя с фазным ротором.
10. Описать конструкцию трехфазного синхронного двигателя.
11. Объяснить принцип работы трехфазного синхронного двигателя.
12. Определить коэффициент мощности и описать методы его изменения в промыш%
ленных устройствах.
13. Рассказать, как управлять напряжением, скоростью и направлением вращения
трехфазного двигателя.
14. Выбрать соответствующий пускатель двигателя переменного тока для различных
промышленных устройств.
15. Расшифровать таблички с данными на двигателях переменного тока.
16. Рассказать об основных устройствах привода двигателей переменного тока.
17. Сравнить регулирование с помощью изменения напряжения и широтно%импульс%
ное регулирование.
18. Объяснить, как действует вектор потока.
19. Описать принцип работы программируемого привода двигателя переменного тока.
èêàåÖçÖçàÖ áçÄçàâ Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Поскольку двигатели переменного тока используются во многих областях промышленно%
сти, знание принципа их работы и систем управления ими чрезвычайно важно для профес%
сиональной деятельности в различных областях промышленного производства, таких как
машиностроение и промышленная робототехника. Работа в заводских цехах требует ис%
пользования, подключения и переподключения двигателей переменного тока, поэтому
спрос на специалистов, разбирающихся в схемах электропривода, никогда не падает. Ка%
рьерное продвижение в большинстве отраслей промышленности может быть связано с
проектированием техники, ее проверкой и оценкой, покупкой и продажей. Большое число
рабочих мест обеспечивают области деятельности, в которых требуется взаимодействие с
заказчиком, например, участие в разработке проектов фирм%заказчиков, техническая
поддержка и продажи. Должность специалиста по технической поддержке и продажам
требует глубоких знаний конструкции и работы двигателей переменного тока, чтобы про%
рабатывать с заказчиками вопросы конкретного применения изделий. Техническая под%
держка и продажи связаны со служебными командировками на предприятия заказчиков.
Сервисные компании должны поддерживать в рабочем состоянии и модернизиро%
вать свои источники питания — генераторные станции. Для этого им нужны специа%
листы по двигателям переменного тока. Поиск неисправностей и обслуживание дви%
гателей переменного тока особенно важны в сервисных компаниях, где необходимо
минимизировать время простоя из%за большого числа заказчиков.
Примером специфической задачи, которая может быть решена специалистом в облас%
ти промышленной техники, является замена неисправного двигателя переменного тока. До%
пустим, что вы — член группы наладчиков в Acme Paper Company. Вы определяете соответ%
ствие инструкции по эксплуатации изготовителя двигателя системным требованиям
бумагоделательной машины, установленной в цеху. Представитель предприятия помогает
646
ÇÇÖÑÖçàÖ
вам в испытании двигателя, в том числе в проверке того, что двигатель имеет конфигурацию
«беличьей клетки» и вращается в требуемом направлении. После проверки работоспособ%
ности двигателя вы проводите дальнейшие испытания и заносите их результаты в карту об%
служивания потребителя. И когда машина снова начнет работать, вы можете гордиться тем,
что принятые вами меры обеспечили удачное возобновление производственного цикла.
10.1. ÇÇÖÑÖçàÖ
Двигатель переменного тока является электромеханическим устройством, которое
преобразовывает электрическую энергию переменного тока в механическую энергию.
Двигатель переменного тока — самый распространенный тип двигателей, используе%
мых в промышленной электронике, поскольку проще всего использовать в качестве
источника питания сеть переменного тока. В продаже имеются как однофазные
(обычно меньше, чем 3 л.с.) так и трехфазные двигатели (обычно меньше, чем 50 л.с.,
но могут достигать и мощности несколько тысяч лошадиных сил). Однофазные двига%
тели применяются в воздушных кондиционерах, печах, духовках и стиральных маши%
нах; трехфазные — в подъемных кранах, насосах и станках.
Двигатели переменного тока имеют ряд преимуществ перед двигателями постоянного
тока. И главное заключается в том, что они требуют значительно меньшего обслуживания,
чем двигатели постоянного тока, поскольку не содержат щеток и коллекторов, требующих
частой замены в двигателях постоянного тока. Для создания двигателя переменного тока эти
компоненты не нужны, потому что двигатель питается от источника синусоидального напря%
жения, который создает магнитное поле в роторе за счет индукции. Концепция создания маг%
нитного поля за счет индукции детально описана ниже в этом разделе и в разделе 10.4. За
счет снижения потребности в обслуживании увеличивается и срок службы двигателя. Дру%
гим, особенно ценным преимуществом двигателей переменного тока, является то, что с их
помощью легко поддерживать постоянную скорость, которая определяется частотой пере%
менного напряжения, приложенного к входным зажимам двигателя. Для случаев, в которых
необходимо изменение скорости, более подходят двигатели постоянного тока; однако ско%
рость двигателей переменного тока тоже может регулироваться, хотя и в небольших преде%
лах. Кроме работы однофазных и трехфазных двигателей переменного тока, мы подробно
обсудим в этой главе каждый их компонент. Будут рассмотрены методы поиска неисправно%
стей и различных сбоев в работе двигателя, методы управления напряжением, направлени%
ем вращения и скоростью двигателя, а также системы электропривода. Эта глава познако%
мит вас с критериями для оценки различных типов двигателей, даст понимание принципа
работы двигателя и процесса поиска неисправностей в двигателях переменного тока.
10.2 . éëçéÇçõÖ èêàçñàèõ êÄÅéíõ
Основная диаграмма, поясняющая принцип работы двигателя переменного тока, приве%
дена на рис.10.1. Обратите внимание, что показаны два полюса поля статора, с постоян%
647
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
ным магнитом, размещенным между ними, причем и обмотки статора подключены к ис%
точнику переменного напряжения. Как и в двигателях постоянного тока, обмотки, закреп%
ленные на полюсах, формируют неподвижный электромагнит, который называется стато%
ром, в то время как постоянный магнит, вращающийся на оси, называется ротором.
Рис. 10.1. Устройство
двигателя
переменного
тока
10.2 .1 . èÂÂÏÂÌÌÓ ÔÓÎÂ
Подключенный на вход двигателя источник переменного напряжения генерирует пе%
ременное магнитное поле между полюсами, как показано на рис. 10.2 . Это перемен%
ное поле заставляет ротор вращаться на оси, делая один оборот за каждый период
входного источника переменного напряжения. Взаимное расположение ротора и ста%
тора для различных фаз от T0 до T4 в течение одного оборота изображено на рис. 10.2.
Интервал от T0 до T4 является также и периодом переменного напряжения входного
источника питания.
В момент T0 магнитное поле отсутствует, поскольку напряжение источника
равно нулю.
На интервале от T0 до T1 входное переменное напряжение положительно и
генерирует магнитное поле. Поскольку полюса отталкиваются, ротор начи%
нает вращаться. Он притягивается к противоположным полюсам статора, в
момент T1 осевые линии полюсов ротора и статора совпадают.
На интервале от T1 до T2 магнитное поле стремится к нулю, но ротор про%
должает вращаться по инерции.
На интервале от T2 до T3 генерируется магнитное поле с противоположной
полярностью, и ротор снова отталкивается, продолжая вращаться.
На интервале от T3 до T4 магнитное поле снова стремится к нулю, но ротор
продолжает вращаться по инерции. Это вращение продолжается для следу%
ющего периода переменного входного напряжения, и цикл повторяется.
648
10.2 .2 . LJ̆‡̨̆ÂÂÒfl ÔÓÎÂ
Внимательно рассматривая работу двигателя от источника переменного напряжения
(см. рис. 10.2), мы должны предположить, что ротор начнет вращаться только при неко%
тором сдвиге от положения, параллельного силовым линиям поля, и будет вращаться в
направлении этого смещения. Если бы ротор был точно параллелен магнитному полю
статора, силы отталкивания были бы направлены по оси и не создавали бы вращающего
Рис. 10.2 .
Вращающееся
магнитное поле в
двухфазном
двигателе
переменного тока.
Показаны обмотки
статора
éëçéÇçõÖ èêàçñàèõ êÄÅéíõ
649
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
момента. Однако если бы магнитное поле статора могло вращаться, вместо того чтобы
изменяться по амплитуде, то ротор также стал бы вращаться. Физическое вращение
полюсов статора на практике не применяется. При питании от источников переменного
напряжения вращение поля осуществляется схемными методами. Это может быть вы%
полнено, например, при использовании двигателя с двумя обмотками, уложенными на
статоре, на каждую из которых подано собственное синусоидальное напряжение, при%
чем входные напряжения сдвинуты друг относительно друга на 90°. Эта конфигурация
двухфазного, двухполюсного двигателя показана на рис. 10.3 . Переменные напряжения
входных источников питания переменного тока обозначены как VА и VB, и синусоидаль%
ное напряжение VА на 90° опережает по фазе напряжение VB. Напряжение VА управляет
обмотками, которые создают вертикальный поток, а напряжение VB — обмотками, со%
здающими горизонтальный поток. Эти смещенные по фазе входные напряжения созда%
ют вращающееся поле статора, и по этой причине ротор вращается. Рассмотрим
рис. 10.4, на котором показаны два входных напряжения, сдвинутых на 90°, и последова%
тельность положений ротора в течение одного оборота. На рисунке как фаза A обозна%
чен входной источник питания переменного тока, связанный с вертикальными обмотка%
ми статора, а как фаза B — источник, связанный с его горизонтальными обмотками.
Рис. 10.3. Двухфазный двухполюсный двигатель переменного тока. Ротор и
рама для наглядности опущены
650
В момент T0 напряжение фазы А максимально и создает максимальный ток в
вертикальных обмотках, а напряжение фазы B равно нулю. При этом ротор
находится в вертикальном положении, совпадающем с вертикальным полем.
На интервале от T0 до T1 напряжения фаз А и B стремятся к одному уровню,
в момент T1 токи через вертикальные и горизонтальные обмотки сравнива%
ются, и ротор поворачивается на угол 45°.
На интервале от T1 до T2 напряжение фазы B увеличивается до максимума,
создавая максимальный ток в горизонтальной обмотке, а напряжение фазы А
стремится к нулю. В момент T2 ротор находится в горизонтальной позиции,
повернувшись еще на 45°.
На интервале от T3 до T4 ток фазы А в вертикальных обмотках изменяет на%
правление, а ток фазы B в горизонтальных обмотках уменьшается по величи%
не, и ротор поворачивается еще на 45°.
Результирующие поля на интервале от T4 до T8 заставляют ротор вращаться на
45° за каждый временной интервал в одну восьмую периода, что перемещает ротор в
начальную позицию за время от T0 до T8, а затем начинается следующий оборот. Сле%
довательно, вращающееся поле может быть создано двумя перпендикулярными друг к
другу обмотками статора, к которым приложены напряжения, сдвинутые на 90° отно%
сительно друг друга.
Двухфазный двигатель, описанный нами, редко используется в промышленности.
Здесь он взят только в качестве простейшей модели для объяснения принципа созда%
ния вращающегося поля. Этот принцип используется в трехфазных и однофазных дви%
гателях переменного тока. В трехфазном двигателе входные переменные напряжения
равны по частоте и амплитуде, но сдвинуты на 120° по отношению друг к другу. В одно%
Рис. 10.4 . Вращающееся магнитное поле в двухфазном двигателе
переменного тока
éëçéÇçõÖ èêàçñàèõ êÄÅéíõ
651
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
фазном двигателе разность фаз получается за счет подключения конденсатора или ка%
тушки индуктивности к одной из обмоток. В примере 10.1 показано, как число полю%
сов влияет на скорость вращения двигателя.
èËÏ 10.1
Какова частота вращения двигателя переменного тока с четырьмя полюсами и вход%
ным напряжением с частотой 60 Гц?
êÖòÖçàÖ
Скорость может быть выражена как
SF= (f×120)/P,
где SF — скорость, об/мин,
f — частота входного напряжения, Гц,
P — число полюсов.
Следовательно:
SF = (f×120)/4,
SF = 1800 об/мин.
Таким образом, двигатели, имеющие более двух полюсов, вращаются медленнее, чем
двухполюсные. Если бы тот же самый двигатель имел шесть полюсов, скорость была
бы еще ниже и составила 1200 об/мин.
Скольжение. Ротор не может вращаться с той же скоростью, с какой вращается
поле. Если бы это происходило, то не было бы никакого движения ротора относитель%
но поля и никакой ток не наводился бы. Скорость ротора всегда ниже, чем скорость
вращающегося поля. Это различие характеризуется скольжением и выражается как
Скольжение = SF — SR,
где SF — скорость вращающегося поля,
SR — скорость ротора.
èËÏ 10.2
Используйте скорость, полученную в примере 10.1, чтобы вычислить скольжение
для двигателя, вращающегося со скоростью 1750 об/мин на холостом ходу.
êÖòÖçàÖ
Скольжение = SF — SR.
Скольжение = 1800 —1750 = 50 об/мин.
èËÏ 10.3
Используйте скольжение, рассчитанное в примере 10.2, чтобы вычислить относи%
тельное скольжение для двигателя на холостом ходу.
652
êÖòÖçàÖ
Относительное скольжение = Скольжение / SF × 100%.
Относительное скольжение = (50 об/мин) / (1800 об/мин) × 100%.
Относительное скольжение = 2,8%.
Индуктивное сопротивление ротора. Когда скорость двигателя изменяется, то
изменяется и скорость пересечения полем проводников ротора. При этом изменяется
также напряжение на роторе и ток в нем. Следовательно, токи в витках ротора ограни%
чиваются не столько активным сопротивлением витков, сколько индуктивным сопро%
тивлением ротора, которое может быть выражено как
XL=2π×f×L,
где
f — частота тока, текущего через проводники ротора,
L — индуктивность проводников ротора.
Поскольку частота тока ротора равна скольжению, оно должно учитываться при
вычислении индуктивного сопротивления ротора XLR, которое выражается как
XLR=2π×f×L×s.
При запуске, когда скольжение высоко, частота наведенных токов ротора также
высока, а когда ротор разгоняется, скольжение снижается, что приводит к снижению
наведенного реактивного сопротивления ротора.
10.3. äéåèéçÖçíõ ÑÇàÉÄíÖãü èÖêÖåÖççéÉé íéäÄ
Двигатель переменного тока состоит из трех основных компонентов: статора, ротора и
торцевых крышек. Статор является неподвижным компонентом, ротор — вращаю%
щимся, а торцевые крышки привинчиваются к корпусу статора и создают опоры для
ротора, обеспечивая его свободное вращение. Помимотрех основных компонентов мы
рассмотрим в этом разделе центробежный пусковой выключатель и электрические
разъемы.
10.3.1 . äÓÌÒÚÛ͈Ëfl ÒÚ‡ÚÓ‡
Статор состоит из следующих основных компонентов:
сердечника статора и обмоток;
корпуса, в который заключен двигатель;
соединительной коробки, которая является частью рамы. В этой коробке
размещены разъемы для подключения двигателя к электросети.
станины, которая также является частью рамы.
äéåèéçÖçíõ ÑÇàÉÄíÖãü èÖêÖåÖççéÉé íéäÄ
653
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
Для больших двигателей рама, помимо прочего, снабжена подъемным кольцом, ко%
торое используется для крепления к такелажным средствам при установке и перемеще%
нии двигателя. Разрез типичного двигателя переменного тока представлен на рис. 10.5 .
Рассмотрите рисунок и размещение компонентов статора, ротора и торцевых крышек.
Рис. 10.5. Конструкция двигателя переменного тока
Сердечник и обмотки статора. Цилиндрический сердечник статора обычно изго%
тавливается из магнитных стальных пластин, стянутых специальными болтами, и фик%
сируется в раме. На рис. 10.6а показан вид сердечника статора спереди. Сердечник со%
стоит из пакета пластин, формирующих полый цилиндр. В сердечнике имеются пазы для
размещения обмоток, равномерно распределенные по его окружности. Для создания
обмоток наматываются катушки определенной формы из провода заданной длины, кото%
рые затем обертываются изоляцией и вставляются в пазы. Изоляцией могут служить
различные материалы: обычно это хлопок, шелк или бумага — для маломощных двига%
телей, и стекловолокно, слюда или другие неорганические материалы — для мощных
двигателей. После того как катушки вставлены в пазы, весь блок заливается эпоксид%
ной смолой, которая помогает удерживать катушки в сердечнике и предотвращает раз%
рушение изоляции во влажной среде. Готовый сердечник статора показан на рис. 10.6б.
Корпус. Корпус двигателя обычно изготавливается из трубы с приваренной к ней
станиной или отливается из стали вместе со станиной. Корпуса двигателей, согласно
классификации NEMA, делятся на два типа: открытые и полностью закрытые. Откры%
тые корпуса обеспечивают вентиляцию, позволяя воздуху проходить через двигатель.
Наоборот, полностью закрытые двигатели не обеспечивают никакого потока воздуха.
Открытые корпуса более распространены в промышленности, и NEMA разделяет
двигатели по виду защиты, обеспечиваемой корпусом, на следующие типы:
654
каплезащищенные или брызгозащищенные;
защищенные или полузащищенные кожухом;
защищенные от погодных условий.
Рис. 10.6 . Конструкция статора
Полностью закрытые двигатели используются в специальных устройствах и соот%
ветствуют специальным стандартам по воздействию окружающей среды. NEMA вы%
деляет следующие типы полностью закрытых двигателей:
невентилируемые или охлаждаемые вентилятором;
взрывозащищенные или защищенные от воспламеняемой пыли;
водонепроницаемые.
Здесь перечислены только некоторые типы открытых и полностью закрытых дви%
гателей.
10.3.2. äÓÌÒÚÛ͈Ëfl ÓÚÓ‡
Конструкция роторов бывает двух видов: на пластинчатом сердечнике с катушками и
без катушек. Ротор с катушками называется фазным ротором, а беспроводной ротор
носит название «беличьей клетки». Лопасти вентилятора, охлаждающего двигатель,
также являются частью ротора и отливаются вместе с ним.
Фазный ротор. Число катушек фазного ротора равно числу катушек статора.
Каждый вывод катушки подпаян на пластину коллектора, закрепленного на валу дви%
гателя. Как и в двигателе постоянного тока, по пластинам коллектора скользят щетки.
Токи в катушках, протекающие через щетки от внешних источников, создают магнит%
ные поля. Вследствие трудоемкости обслуживания коллектора и щеток, конструкция
фазного ротора нечасто применяется в двигателях переменного тока, предназначен%
ных для промышленности.
äéåèéçÖçíõ ÑÇàÉÄíÖãü èÖêÖåÖççéÉé íéäÄ
655
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
Ротор «беличья клетка». Наиболее часто применяется конструкция ротора типа
«беличьей клетки». Она получила имя от названия общеизвестного колеса, созданно%
го нами для наших любимых грызунов — белок и хомяков. Ротор представляет собой
пакет пластин с равномерно распределенными по периметру проводящими стержня%
ми (вид спереди представлен на рис. 10.7а). Материалом основной части ротора слу%
жит кристаллический алюминий, и из пластин обычно прессуется пакет сердечника.
На рис. 10.7б показан готовый ротор, насаженный на вал. Проводящие стержни рото%
ра закреплены на короткозамыкающих кольцах, которые обеспечивают замкнутый
контур для токов ротора. Обратите внимание на небольшое смещение двух торцевых
пластин, которое уменьшает акустические помехи от источника промышленной часто%
ты и увеличивает вращающий момент.
Рис. 10.7. Конструкция ротора типа «беличьей клетки»:
а) сердечник ротора, вид спереди;
б) ротор в сборе
10.3.3. èÛÒÍÓ‚ÓÈ ˆÂÌÚÓ·ÂÊÌ̊È ÔÂÂÍĮ̂̃‡ÚÂÎ̧
Пусковой центробежный переключатель представляет собой механический блок, состоя%
щий из концевого переключателя и его приводного механизма. Переключатель обычно мон%
тируется в корпусе статора или на торцевой крышке, а сборка механических приводов уста%
навливается на валу. Переключатель до пуска двигателя удерживается во включенном
состоянии пружиной. На рис. 10.8а показана сборка механических приводов, закрепленных
на валу при малой скорости его вращения, а на рис. 10.8б — при большой. На рисунках
показаны грузики, подвижно закрепленные на пластине. К грузикам прикреплены кулачки
привода. При вращении вала грузики удаляются от оси за счет центробежных сил. Когда
двигатель достигает приблизительно 95% от полной скорости, кулачки размыкают контак%
ты переключателя, отключая пусковую обмотку двигателя от электрической схемы. При
этом слышен щелчок, сопровождающий размыкание контактов переключателя. Щелчком
656
сопровождается также и замыкание контактов при остановке двигателя, когда пусковые
обмотки снова подключаются к схеме.
Рис. 10.8. Центробежный
выключатель:
а) при малой
скорости двигателя;
б) при рабочих
скоростях
10.3.4. à‰ÂÌÚËÙË͇ˆËfl ‚̊‚Ó‰Ó‚
Для идентификации выводов двигателей переменного тока используется стандартная
система нумерации, дополненная цветовыми кодами. Однако не все изготовители
придерживаются стандартных цветовых кодов, поэтому в данной книге мы обсудим
только систему нумерации. В то же время все изготовители сопровождают двигатели
инструкцией по установке, в которой описывается система маркировки, необходимая
при установке и поиске неисправностей двигателя. Идентификация выводов для одно%
фазных и трехфазных двигателей идентична. В настоящем разделе и в разделе 10.6
рассматриваются также методы подключения этих выводов.
Однофазные двигатели. Нумерация выводов для однофазного двигателя приве%
дена на рис. 10.9 . Две рабочие полуобмотки T1 — T2 и T3 — T4 и две пусковые полу%
äéåèéçÖçíõ ÑÇàÉÄíÖãü èÖêÖåÖççéÉé íéäÄ
657
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
обмотки T5 — T6 и T7 — T8 показаны на рис. 10.9а. Наличие двух рабочих полуобмо%
ток позволяет подключать двигатель к высокому (обычно 220 В) или к более низкому
(обычно 110 В) напряжению, как показано на рис. 10.9б. Обратите внимание, что
если двигатель подключается на более высокое напряжение, то две рабочие полуоб%
мотки соединяются последовательно; при меньшем напряжении питания они соединя%
ются параллельно. Две пусковые полуобмотки обычно включаются последовательно
и маркируются как T5 и T8 (см. рис. 10.9б).
Рис. 10.9. Идентификация выводов для однофазного двигателя:
а) разметка выводов;
б) подключение катушек при низком и высоком напряжениях
Трехфазные двигатели. Обозначения выводов для трехфазных двигателей, соеди%
ненных в звезду (Y) и треугольник (D), показаны на рис. 10.10а и б соответственно.
Схема соединения выводов на рис. 10.10в применима к обеим конфигурациям. Обрати%
те внимание, что выводы пронумерованы по часовой стрелке, начиная сверху. Схема со%
единения выводов, показанная на рис. 10.10в, применяется для питания от трехфазных
сетей с высоким напряжением (обычно 440 В), которое подается на выводы T1, T2, T3.
658
10.3.5. á‡̆ËÚ‡ ÓÚ ÚÂÔÎÓ‚̊ı Ô„ÛÁÓÍ
Защита от тепловых перегрузок представляет собой механический узел, состоящий из
нагревателя и биметаллического переключателя. Блок защиты от тепловых перегру%
Рис. 10.10. Обозначения выводов
трехфазных двигателей:
а) при соединении обмоток
в звезду;
б) при соединении обмоток
в треугольник;
в) таблица соединений
äéåèéçÖçíõ ÑÇàÉÄíÖãü èÖêÖåÖççéÉé íéäÄ
659
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
зок обычно размещается вблизи блока центробежного выключателя. Ток, необходи%
мый для работы двигателя, течет через нагреватель защиты и контакты биметалли%
ческого переключателя. При превышении порогового тока нагреватель выделяет дос%
таточно тепла, чтобы разомкнуть переключатель и отключить тем самым двигатель.
В зависимости от конструкции и схемы управления двигателя, тепловая пере%
грузка сбрасывается автоматически или вручную. При автоматическом сбросе нагре%
ватель охлаждается до температуры, при которой биметаллический переключатель
замыкается, и двигатель начинает работать снова. Если дефект, приведший к токовой
перегрузке двигателя, не устранен, блок защиты от тепловой перегрузки непрерывно
включает и выключает двигатель. При ручном сбросе двигатель остается выключен%
ным, пока оператор не нажмет кнопку сброса.
10.3.6 . íӈ‚̊ Í̊̄ÍË
Торцевые крышки, по одной на каждой стороне, закрывают корпус двигателя. Доволь%
но длинные болты, проходящие сквозь них, и корпус статора крепят торцевые крыш%
ки, когда гайки затянуты на болтах. Для открытых двигателей в торцевые крышки
встроены жалюзи, позволяющие воздуху проходить через двигатель. В крышках также
размещают подшипники ротора, обычно это подшипники скольжения или шарикопод%
шипники, и предусматривают маслопроводящие каналы или специальное приспособ%
ление для смазки подшипников. Типичная торцевая крышка изображена на рис.10.11.
Если на корпусе статора нет клеммной коробки для электрического монтажа, то она
может быть смонтирована на торцевой крышке.
Рис. 10.11 . Торцевая крышка
двигателя
переменного тока
660
10.4 . éÑçéîÄáçõÖ ÄëàçïêéççõÖ ÑÇàÉÄíÖãà
Однофазный асинхронный двигатель — это двигатель переменного тока, который пи%
тается от однофазного входного источника и в котором использована определенная
методика для запуска. Двигатель получает две фазы от одного однофазного входа. В
зависимости от методики запуска существуют двигатели:
с резистивным запуском;
с конденсаторным запуском;
с расщепленными полюсами.
Рассмотрим работу и поиск неисправностей этих двигателей. Следует иметь в
виду, что двухполюсный однофазный двигатель использован нами только для простоты
иллюстрации, а более широко в промышленности применяются четырехполюсные и
шестиполюсные двигатели.Прежде чем рассматривать каждый тип однофазных дви%
гателей, исследуем такие типичные характеристики двигателей, как зависимость мо%
мента от скорости. На рис. 10.12 приведена характеристика, где по вертикальной оси
отложена скорость, а по горизонтальной — вращающий момент. Кривая делится на
три участка, каждый из которых важен и заслуживает обсуждения:
1. Участок кривой между предельной скоростью на холостом ходу nхх и рабочей
скоростью двигателя nном
.
2. Участок кривой между номинальным вращающим моментом и максималь%
ным вращающим моментом — область, в которой нагрузка становится чрез%
мерной. Двигатель может работать в этой области только кратковременно.
3. Участок кривой между номинальным вращающим моментом и минимальным
вращающим моментом — область, где двигатель останавливается из%за
большой внешней механической нагрузки. Если нагрузка слишком велика,
то вращающий момент может упасть до нуля.
Кроме того, эта кривая может рассматриваться и при обратном процессе — от
запуска до рабочего режима двигателя. Минимальный вращающий момент Ммин соот%
вествует запуску; максимальный вращающий момент Ммакc
—
опрокидыванию, кото%
рое наступит, если «вставить палку в колесо» конвейера или компрессора; и рабочий
вращающий момент Мном соответствует нормальному рабочему диапазону.
10.4 .1 . Ñ‚Ë„‡ÚÂÎ̧ Ò ÂÁËÒÚË‚Ì̊Ï ÔÛÒÍÓÏ
Полное название этого устройства — асинхронный двигатель с резистивным пуском. Две
обмотки включены параллельно, как показано на рис.10.13а. Одна из обмоток является
рабочей или основной, а другая — пусковой или дополнительной обмоткой. Название дви%
гателя определяется высоким сопротивлением пусковой обмотки, содержащей большое
число витков тонкого провода; сопротивление этой обмотки выше, чем сопротивление ра%
бочей обмотки. Кроме того, при более низком сопротивлении рабочая обмотка имеет и бо%
лее высокую индуктивность, чем пусковая обмотка. При подаче питающего напряжения,
оно появляется на обеих обмотках, но ток в пусковой обмотке лишь немного отстает от пита%
éÑçéîÄáçõÖ ÄëàçïêéççõÖ ÑÇàÉÄíÖãà
661
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
ющего напряжения за счет высокого сопротивления, а ток в рабочей обмотке отстает значи%
тельно больше за счет высокой индуктивности. Фазовые соотношения между входным на%
пряжением и токами в обмотках показаны на рис. 10.13б. Обратите внимание, что разность
фаз токов пусковой и рабочей обмоток не равна 90° (т.е . не соблюдается условие максималь%
ного вращающего момента), а составляет угол в 40°, который типичен для таких двигателей.
Однако и этой разности фаз достаточно для того, чтобы генерировать два сдвинутых по фазе
магнитных поля, формируя, таким образом, вращающееся магнитное поле, которое создает
вращающий момент на роторе и запускает двигатель. Когда скорость ротора становится
близкой к максимуму, он следует за переменным магнитным полем, созданным рабочей об%
моткой, и поэтому в пусковой обмотке больше нет необходимости. Центробежный пере%
ключатель, подобный рассмотренному в разделе 10.3.3, размыкается, отсоединяя таким об%
разом пусковую обмотку от схемы. Двигатель с резистивным запуском имеет свои преиму%
щества и недостатки.
Рис. 10.12. Типичная зависимость скорости однофазных двигателей от
вращающего момента: nхх
—
скорость вращения на холостом ходу,
nном
—
скорость вращения при номинальной нагрузке
Преимущества его заключаются в следующем:
относительно недорог;
почти не нуждается в обслуживании;
скорость его в рабочем режиме близка к постоянной.
662
Но он имеет и ряд недостатков:
пусковой момент его довольно низок;
его не стоит применять в режимах с частым запуском и остановкой;
уровень шума достаточно высок.
Двигатели этого типа относительно маломощны (от 0,03 до 0,5 л.с.) и широко
используются в изделиях, которые не требуют изменения скорости, а также частых
запусков и остановок: например, в канализационных насосах, сверлильных станках и
различных бытовых приборах.
Рис. 10.13. Асинхронный двигатель с резистивным пуском:
а) схема включения;
б) фазовые соотношения (амплитуды, не масштабированы)
éÑçéîÄáçõÖ ÄëàçïêéççõÖ ÑÇàÉÄíÖãà
663
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
10.4 .2 . Ñ‚Ë„‡ÚÂÎ̧ Ò ÍÓ̉ÂÌÒ‡ÚÓÌ̊Ï ÔÛÒÍÓÏ
Существует два типа двигателей с конденсаторным пуском:
с индуктивной рабочей цепью;
с конденсаторной рабочей цепью.
Как и двигатель с резистивным пуском, оба типа двигателей с конденсаторным
пуском имеют пусковую и рабочую обмотки, которые подключены параллельно к ис%
точнику входного однофазного напряжения.
Двигатель с индуктивной рабочей цепью. Этот тип двигателя имеет конденсатор
C1, включенный последовательно с пусковой обмоткой, как показано на рис. 10.14а.
Конденсатор, чтобы к нему имелся легкий доступ в случае необходимости замены,
обычно устанавливается в металлическом корпусе наверху двигателя. Обратите вни%
мание, что конденсатор включен последовательно с пусковой обмоткой и контактами
центробежного переключателя. Конденсатор (емкость которого обычно составляет от
100 до 300 мкФ, но может достигать и 1000 мкФ) обеспечивает пусковой вращающий
момент — больший, чем у двигателя с резистивным запуском. Включение конденса%
тора в цепь пусковой обмотки обеспечивает ток, опережающий по фазе входное на%
пряжение. Ток в рабочих обмотках запаздывает относительно входного напряжения,
так же как и ток в рабочей обмотке двигателя с резистивным запуском. Как показано
на рис. 10.14б, это обеспечивает сдвиг фазы почти в 90° между токами в двух обмот%
ках, что, в свою очередь, создает высокий пусковой вращающий момент. Как и в дви%
гателе с резистивным запуском, центробежный переключатель отключает пусковую
обмотку от схемы, когда двигатель приближается к рабочей скорости. Эти два типа
двигателей работают примерно одинаково.
Этот тип двигателя также имеет свои преимущества и недостатки. Плюсы в том,
что он имеет:
высокий пусковой вращающий момент;
постоянную скорость;
небольшой бросок пускового тока.
А минусы его в том, что:
конденсатор чувствителен к перегреву;
недействующий центробежный переключатель может вызвать повреждение
конденсатора.
Этот тип двигателя производится в расчете на мощность от 0,5 до 7,5 л.с ., он ши%
роко используется в устройствах, требующих частого пуска и остановки при высоком
стартовом моменте, таких как водяные насосы, конвейеры и компрессоры для сжатого
воздуха. Направление вращения этого двигателя можно изменять, просто изменяя
подключение одной из обмоток — пусковой или рабочей.
Двигатель с конденсаторной рабочей цепью. Этот тип двигателя, изображенный на
рис. 10.15, имеет два конденсатора — C1 и C2. Конденсатор большей емкости C1 подклю%
чается к схеме при запуске. Центробежный переключатель разрывает цепь пусковой об%
мотки так же, как и в двигателе с индуктивной работой и конденсаторным запуском, но в
рассматриваемом типе двигателя конденсатор меньшей емкости C2 включен в цепь и в
664
рабочем режиме. Если нагрузка на двигателе немного увеличивается, то при стремлении
двигателя замедлиться рабочий конденсатор обеспечивает небольшой сдвиг фазы, вызы%
вая увеличение вращающего момента и тем самым восстанавливая потерянную скорость.
Таким образом, рабочий конденсатор обеспечивает относительно постоянную скорость
при изменении нагрузки. Направление вращения этого двигателя изменяется так же, как
и в двигателе с индуктивной рабочей цепью и конденсаторным запуском. Этот тип двига%
телей производится в расчете на мощность от 5 до 25 л.с . и используется, прежде всего, в
вытяжных компрессорах для систем кондиционирования воздуха.
Рис. 10.14. Асинхронный двигатель с конденсаторным пуском:
а) схема включения;
б) фазовые соотношения (амплитуды, не масштабированы)
éÑçéîÄáçõÖ ÄëàçïêéççõÖ ÑÇàÉÄíÖãà
665
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
10.4 .3. ÄÒËÌıÓÌÌ̊ ‰‚Ë„‡ÚÂÎË Ò ‡Ò̆ÂÔÎÂÌÌ̊ÏË ÔÓĮ̂Ò‡ÏË
Асинхронный двигатель с расщепленными полюсами — это однофазный двигатель, кото%
рый использует уникальный метод запуска: у него всего одна обмотка, то есть нет рабочих
и пусковых обмоток, как в ранее рассмотренных однофазных двигателях. На рис. 10.16
показан двигатель с экранированным полюсом, в котором полюс статора разделен на две
части. Меньшая из них и является экранированным полюсом, который окружен, или эк%
ранирован, медной полоской, называемой экранирующей катушкой. Большая часть пред%
ставляет собой основной, или неэкранированный, полюс. Когда на вход двигателя подает%
ся однофазное питающее напряжение, ток через обмотку создает магнитное поле. При
этом ток в экранирующей катушке вызывает сдвиг фазы, который приводит к начальному
повороту ротора. Полоска заставляет поле двигаться обратно по поверхности полюса, как
показано на рис. 10.17. Рассмотрим, как изменяется поле на полупериоде однофазного
напряжения при изменении его угла от 0 до 180° (см. рис. 10.17):
при 0° все силовые линии направлены к неэкранированной части полюса;
Рис. 10.15. Асинхронный двигатель с конденсаторным пуском и емкостной
рабочей цепью
Рис. 10.16. Двигатель с расщепленными полюсами
666
при изменении угла от 0 до 90° силовые линии, распространяясь по поверх%
ности полюса, проходят через полоску. Напряжение, наведенное в ней, со%
здает ток, который формирует поле, направленное против основного поля, и
снижает интенсивность результирующего поля;
при 90° поле достигает максимального значения. Поскольку силовые линии
перестали расширяться, в полоске больше не наводится ЭДС и не генериру%
ется компенсирующее магнитное поле. В результате основное поле равно%
мерно распределяется по поверхности экранированных и неэкранированных
частей полюса;
на интервале от 90° до 180° основное поле начинает уменьшаться, или сверты%
ваться внутрь. Поле, возбужденное в полоске, действует против свертывания
поля, концентрируя силовые линии в экранированной части полюса;
при 180° все силовые линии концентрируются на неэкранированной части
полюса.
Рис. 10.17 .
Движение поля между
экранированным и
неэкранированным полюсами:
а) при угле питающего
напряжения 0°;
б) при угле питающего
напряжения 90°;
в) при угле питающего
напряжения от 90° до 180°;
г) при угле питающего
напряжения 180°
Как мы видим, на интервале от 0° до 180° основное поле перемещалось от неэкра%
нированной к экранированной части полюса и обратно, к неэкранированной, в проти%
éÑçéîÄáçõÖ ÄëàçïêéççõÖ ÑÇàÉÄíÖãà
667
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
воположность другим однофазным двигателям, где магнитные поля вращаются. От
180° до 360° основное поле проходит то же самое изменение, что и на интервале от 0%
до 180°, но теперь в противоположном направлении. Работа экранированной части
полюса не зависит от направления поля. Движение поля на втором полупериоде такое
же, как и на первом.
Двигатель с экранированным полюсом имеет следующие преимущества:
недорог.
требует минимального обслуживания.
потребляет небольшую входную мощность.
Недостатки его заключаются в следующем:
имеет малую мощность.
довольно неэффективен.
имеет малый стартовый вращающий момент.
Двигатели этого типа выпускаются обычно в расчете на мощность от 0,0075 до
0,05 л.с. Эти небольшие двигатели используются там, где требуется малая мощность,
например, в игрушках, фенах и вентиляторах.
10.4 .4 . èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ‚ ‡ÒËÌıÓÌÌ̊ı ‰‚Ë„‡ÚÂÎflı
Знание наиболее вероятного режима сбоя двигателя является ключевым для успеш%
ного поиска неисправностей. Всегда необходимо сначала выяснить наличие наиболее
вероятных дефектов перед тем, как перейти к дальнейшему осмотру.
Наиболее вероятно возникновение следующих дефектов:
в двигателе с резистивным пуском — обрыв в пусковой цепи;
в двигателе с конденсаторным пуском — обрыв конденсатора;
в двигателе с экранированным полюсом — износ подшипников.
Прежде всего проверьте, подается ли напряжение на двигатель. Если оно подает%
ся, то сбои обычно бывают двух родов:
1) двигатель не запускается,
2) двигатель гудит, но не запускается.
Если двигатель с резистивным пуском не запускается, проверните вал вручную. Если
после этого двигатель запустится, то, значит, произошел обрыв в схеме запуска: в центро%
бежном переключателе, пусковой обмотке или на клеммной колодке. После снятия питания
можно определить место обрыва с помощью омметра. Если двигатель гудит и не запускает%
ся, это означает неисправность в конденсаторе. Отключите питание и проверьте сначала
конденсатор, затем исправность центробежных переключателей и пусковой обмотки. Если
двигатель с расщепленным полюсом не запускается, его в большинстве случаев необходимо
просто заменить, поскольку поиск неисправностей и ремонт может потребовать затрат, пре%
вышающих стоимость нового двигателя. Смазка или замена подшипников могут быть вы%
полнены только тогда, когда эта операция дешевле замены двигателя. И наконец, ведите
точные записи сделанных вами операций по обслуживанию двигателя, чтобы на основе соб%
668
ственного опыта выработать алгоритм поиска неисправностей и вероятных причин сбоев.
Поэтому не забывайте постоянно вести записи.
10.5 . íêÖïîÄáçõÖ ÑÇàÉÄíÖãà èÖêÖåÖççéÉé íéäÄ
Трехфазные двигатели — в некоторых технических изданиях называемые еще много%
фазными двигателями, — широко используются в промышленности. Они были разра%
ботаны, чтобы воспользоваться преимуществом характеристик трехфазных сетей пи%
тания. Временные диаграммы фазовых напряжений в трехфазных сетях показаны на
рис. 10.18. Поскольку напряжения сдвинуты относительно друг друга на 120°, магнит%
ные поля также сдвинуты на 120°. Следовательно, одно из полей будет всегда увеличи%
ваться, когда другие уменьшаются, и результирующее магнитное поле двигателя ни%
когда не будет равно нулю.
Рис. 10.18. Диаграммы фазных напряжений в трехфазной сети
Следовательно, напряженность поля в трехфазном двигателе больше, чем в од%
нофазном. Как уже было сказано в разделе 10.3.4, генераторы входных напряжений
могут быть соединены в звезду или в треугольник.
Напряжения, связанные с этими конфигурациями: фазные — VA, VB и VC и линей%
ные — VAB, VBC и VCA. Они показаны на рис. 10.19а и б, соответственно для соедине%
ний в звезду и треугольник.
èËÏ 10.4
Воспользуйтесь рис. 10.19а, чтобы вычислить VAB при VA = VB = VC = 100 В.
íêÖïîÄáçõÖ ÑÇàÉÄíÖãà èÖêÖåÖççéÉé íéäÄ
669
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
êÖòÖçàÖ
Приведенные ниже уравнения получены из векторных диаграмм. (Если вы хотите позна%
комиться с теорией, просмотрите учебники по теории двигателей переменного тока.)
Следовательно:
Рис. 10.19. Подключение
трехфазного двигателя:
а) по схеме звезды;
б) по схеме треугольника
èËÏ 10.5
Воспользуйтесь рис. 10.19б, чтобы вычислить VAB при VA = VB = VC = 100 В.
670
êÖòÖçàÖ
Как видно из рис. 10.19б, линейное напряжение равно фазному. Следовательно:
VAB=100В.
В этом разделе рассматриваются следующие типы трехфазных двигателей:
асинхронный двигатель с «беличьей клеткой»;
асинхронный двигатель с фазным ротором;
синхронный двигатель.
Прежде чем рассматривать двигатели перечисленных типов, исследуем рабочие
характеристики трехфазных двигателей. Кривые зависимости скорости от вращающе%
го момента для трех типовых двигателей показаны на рис. 10.20. Двигатели с характе%
ристикой 1 могут использоваться в изделиях, в которых необходима точная регулиров%
ка скорости и не нужен высокий пусковой момент. Двигатель с характеристикой 3
может использоваться в изделиях, в которых, напротив, необходим высокий пусковой
момент, но не нужно точное регулирование скорости. Изготовители двигателей могут
разработать специальный двигатель с любой точно заданной формой характеристики.
Описание рабочих характеристик — зависимостей скорости от вращающего момента
для однофазного двигателя применимо и к трехфазным двигателям, поскольку прин%
ципы их применения концептуально одинаковы. Очевидное различие — использова%
ние трех фаз вместо метода разбиения фазы для формирования магнитных полей.
10.5 .1 . ÄÒËÌıÓÌÌ̊È ‰‚Ë„‡ÚÂÎ̧ Ò «·ÂÎȨ̈̃ÂÈ ÍÎÂÚÍÓÈ»
Общая конструкция этого трехфазного двигателя подобна однофазному асинхронному
двигателю; то есть ротор изготовлен из пластин магнитной стали и имеет встроенные
Рис. 10.20.
Типичные зависимости
скорости от
вращающего момента
для трех типов
двигателей, FL —
момент двигателя при
полной нагрузке
íêÖïîÄáçõÖ ÑÇàÉÄíÖãà èÖêÖåÖççéÉé íéäÄ
671
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
стержни из проводящего материала, а статор состоит из сердечника с полюсами, на
которых закреплены катушки. Однако трехфазный двигатель имеет следующие пре%
имущества над однофазным:
повышенную удельную мощность;
постоянный, а не пульсирующий вращающий момент;
низкую себестоимость.
Как и в однофазном асинхронном двигателе, в трехфазном двигателе вращающееся
магнитное поле создается статором, поэтому ранее описанная концепция вращающего%
ся поля применима и к трехфазным двигателям. Временные диаграммы трехфазных
входных токов показаны на рис. 10.21. Рассматривается семь моментов времени от T0
до T6, определяющих шесть временных интервалов. Каждый интервал соответствует
фазовому углу в 60° для входного трехфазного напряжения. Токи — IA, IB и IC — это три
фазовых тока, которые протекают через катушки статора. В момент T0 ток IA через ка%
тушку в фазе A создает поле с максимальной напряженностью; в момент T1 поле с наи%
большей напряженностью производит ток IC через катушку фазы C. Это направленное
изменение напряженности поля заставляет ротор повернуться на 60° против часовой
стрелки. В момент T2 ток IB через катушку в фазе B создает поле с максимальной напря%
женностью, приводя к повороту ротора еще на 60° . В каждый из оставшихся интервалов
времени происходит изменение на 60° фазы входного напряжения, что вызывает пово%
рот на 60° магнитного поля и, следовательно, ротора. Типичные рабочие характеристики
трехфазного асинхронного двигателя показаны на рис. 10.22. Зависимость момента от
скольжения приведена на рис. 10.22а, зависимость предельного тока нагрузки от сколь%
жения — на рис. 10.22б. Обратите внимание, что на рис. 10.22а точка опрокидывания
соответствует скольжению приблизительно в 25%, а максимальный вращающий мо%
мент в этой точке — приблизительно три раза больше момента при предельной нагруз%
ке. В точке опрокидывания сопротивление ротора приблизительно равно индуктивному
сопротивлению ротора. За точкой опрокидывания вращающий момент уменьшается и
двигатель останавливается. При остановке двигателя индуктивное сопротивление рото%
ра примерно в пять раз больше активного сопротивления. При полной нагрузке, однако,
индуктивное сопротивление ротора намного меньше активного. Обратите внимание, что
при аппроксимации характеристик трехфазного асинхронного двигателя могут быть по%
лезны три правила:
1. Ток предельной нагрузки IПР.Н может быть выражен как
IПР.Н
= k×P/V,
где k — константа, равная 600,
P — выходная мощность, л.с.,
V — напряжение статора, Вт.
2. Ток холостого хода составляет приблизительно 0,3 от тока предельной нагрузки.
3. Пусковой ток приблизительно в шесть раз превышает ток предельной нагрузки.
èËÏ 10.6
Вычислите ток при предельной нагрузке, ток холостого хода и пусковой ток для трех%
фазного асинхронного двигателя мощностью 10 л.с. при напряжении 440 В.
672
Рис. 10.21. Диаграмма питающих напряжений трехфазной сети с указанием
направления вращения поля на отдельных временных интервалах
Рис. 10.22. Зависимости момента и тока от скольжения
íêÖïîÄáçõÖ ÑÇàÉÄíÖãà èÖêÖåÖççéÉé íéäÄ
673
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
êÖòÖçàÖ
Ток предельной нагрузки:
IПР.Н
= k×(P/V)=600×(10/440)=13,6А.
Ток холостого хода:
IХХ = 0,3 × IПР.Н
= 0,3×13,6 =4,1А.
Пусковой ток:
IП= 6×IПР.Н
= 6×13,6 =81,6А.
10.5 .2 . ÄÒËÌıÓÌÌ̊È ‰‚Ë„‡ÚÂÎ̧ Ò Ù‡ÁÌ̊Ï ÓÚÓÓÏ
Асинхронный двигатель с фазным ротором имеет схожие конструкции ротора и статора.
Вместо «беличьей клетки» для ротора используются три катушки, а статор такой же, как
и у двигателя с «беличьей клеткой». Когда поле статора вращается, в обмотках ротора,
так же как и в проводниках «беличьей клетки», создается переменный ток. Упрощенная
схема асинхронного двигателя с фазным ротором показана на рис. 10.23. Обратите внима%
ние, что это схема для двигателя со статором, включенным по схеме треугольника, с рото%
ром, соединенным в звезду, и с тремя коллекторами. Коллекторы подключают ротор к
внешней реостатной цепи, представляющей собой три реостата для запуска двигателя,
соединенных в звезду. При пуске реостаты выведены на максимальное сопротивление,
ограничивая ток ротора. При этом резистивное сопротивление в цепи обмоток ротора
больше индуктивного сопротивления, поэтому фазовые углы полей статора и ротора по%
чти совпадают, а напряженности этих полей достигают максимумов примерно в одно вре%
мя, обеспечивая высокий пусковой момент. Когда скорость двигателя увеличивается,
уменьшается наведенное напряжение, ток и момент. Чтобы создать постоянный вращаю%
щий момент, значение внешних резисторов уменьшается по мере выхода двигателя на ра%
бочую скорость, а затем сопротивления реостатов устанавливаются в нуль. Это уменьше%
ние сопротивления реостатов выполняется вручную или автоматически. Когда реостаты
выведены в нуль, обмотки ротора закорачиваются и двигатель работает так же, как двига%
тель с «беличьей клеткой».
Относительно двигателя с «беличьей клеткой» у двигателя с фазным ротором
имеются некоторые преимущества:
выше пусковой момент;
более плавное ускорение при больших нагрузках;
хорошие пусковые характеристики.
Вместе с темможно отметить и его недостатки:
выше стоимость производства;
выше эксплуатационные издержки;
КПД ниже вследствие потерь во внешних реостатах.
Типичное применение асинхронного двигателя с фазным ротором — автомат для
прессовки старых автомобилей на свалках. В этом случае двигатель работает при больших
674
пусковых нагрузках, которые необходимы для прессовки больших деталей автомобилей.
Когда это происходит, тепло рассеивается не в двигателе, а во внешних резисторах.
Рис. 10.23. Асинхронный
двигатель с
фазным
ротором
10.5 .3. ëËÌıÓÌÌ̊È ‰‚Ë„‡ÚÂÎ̧
Этот трехфазный двигатель называется синхронным, поскольку ротор вращается с той
же скоростью что и магнитное поле статора. В случае асинхронного двигателя ротор
вращается несколько медленнее поля статора, и различие между двумя скоростями ха%
рактеризуется скольжением. Синхронный двигатель, напротив, не имеет никакого
скольжения. Синхронизация скоростей определяет два основных качества двигателя:
1. Преобразование электрической мощности в механическую происходит очень
эффективно.
2. Работа с опережающим коэффициентом мощности может обеспечить ис%
правление коэффициента мощности.
Конструкция. Конструкция статора для синхронного двигателя такая же, как и
для асинхронного. Трехфазное входное напряжение прикладывается к обмоткам ста%
тора, создавая вращающееся магнитное поле.
íêÖïîÄáçõÖ ÑÇàÉÄíÖãà èÖêÖåÖççéÉé íéäÄ
675
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
Основное различие между синхронным и асинхронным двигателями заключается
в конструкции ротора. Ротор имеет обмотки двух типов (рис. 10.24):
1. Обмотки явновыраженного полюса.
2. Демпферные обмотки.
Рис. 10.24. Часть полюса ротора с обмотками для синхронного двигателя
Обмотки явновыраженного полюса представляют собой катушки провода, которые
размещаются на пластинчатых сердечниках, как и в двигателях постоянного тока. Смеж%
ные катушки намотаны в противоположных направлениях и подсоединяются к внешнему
источнику с помощью щеток и коллектора, установленного на валу ротора. «Явный по%
люс» означает, что он выступает наружу от вала двигателя. Демпферные обмотки пред%
ставляют собой стержни «беличьей клетки», закороченные проводящими кольцами, как
в асинхронном двигателе. В асинхронном двигателе стержни равномерно располагаются
по периметру ротора, в синхронном же двигателе они установлены только на передней
части каждого полюса. Отдельные полюса собираются на звездчатой основе, также пред%
ставляющей собой магнитопровод, набранный из изолированных пластин магнитного ма%
териала (рис. 10.25). Обратите внимание, что каждый полюс закреплен одним концом на
этой «звездочке» с помощью «ласточкиного хвоста» и металлического стержня, называ%
емого ключом. На другом конце этого полюса расположена область «беличьей клетки»,
выполненная из немагнитного материала и закрепленная обычно с помощью пайки. Стер%
жни, образующие «беличью клетку», снаружи закорочены.
676
Работа. В процессе эксплуатации синхронный двигатель работает в двух режимах: за%
пуска и синхронизации скорости. При запуске трехфазное входное напряжение приклады%
вается к статору, создавая вращающееся магнитное поле, которое проходит через катушки
ротора. Демпферные обмотки обеспечивают пусковой вращающий момент; при этом синх%
ронный двигатель действует как асинхронный с «беличьей клеткой». Когда скорость ротора
приближается к скорости поля статора, к ротору подключается источник постоянного тока.
Поскольку смежные полюса ротора имеют различные полярности, каждый полюс притяги%
вается к определенной области вращающегося магнитного поля статора. Момент, необхо%
димый, чтобы фиксировать положение ротора относительно поля статора, называется под
синхронным вращающим моментом. Ротор теперь вращается со скоростью поля статора,
переходя, таким образом, в синхронный режим.
Поскольку ротор вращается со скоростью поля статора, и демпферные обмотки
не пересекают поле, ток в демпферных обмотках более не проходит и двигатель выхо%
дит из режима асинхронного двигателя с «беличьей клеткой».
Типичная схема возбуждения синхронного двигателя показана на рис.10.26. Кон%
троллер управляет совокупностью реле, обеспечивая необходимую синхронизацию для
подачи постоянного тока и отключения реостата. Реостат снижает ток, создаваемый по%
лем, до тех пор, пока не будет достигнута синхронная скорость. После достижения этой
скорости нагрузка на двигателе может увеличиваться, но чрезмерная нагрузка может
разорвать силу притяжения между ротором и полем статора. При увеличении нагрузки
вращающий момент ротора может быть увеличен за счет увеличения постоянного тока
возбуждения; однако при некотором значении двигатель перегружается, и постоянная
магниная связь между ротором и статором разрывается.
Вращающий момент, при котором теряется синхронизация, называется вращаю%
щим моментом выпадения из синхронизма.
Рис. 10.25. Звездчатый блок
ротора. «Звездочка»
ротора имеет восемь
зубцов
íêÖïîÄáçõÖ ÑÇàÉÄíÖãà èÖêÖåÖççéÉé íéäÄ
677
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
Синхронный двигатель является одним из наиболее эффективных двигателей пе%
ременного тока, используемых в промышленности. Его дополнительное преимуще%
ство состоит в том, что коэффициент мощности может регулироваться при изменении
тока возбуждения.
10.5 .4 . äÓ̋ÙÙˈËÂÌÚ ÏÓ̆ÌÓÒÚË
Коэффициент мощности (PF) представляет собой отношение активной мощности к
полной мощности. Активная мощность — мощность, потребляемая нагрузкой, может
быть измерена ваттметром, а полная мощность определяется произведением действу%
ющих значений входного тока и напряжения и измеряется в вольт%амперах (ВА). Ко%
эффициент мощности выражен следующим образом:
PF=PO/S,
где PF — коэффициент мощности,
PO — активная мощность, потребляемая нагрузкой,
S — полная мощность, произведение действующих значений входного напряжения и
входного тока.
Рассмотрим более подробно каждую из этих величин. В системе с чисто активной
нагрузкой входной ток и входное напряжение находятся в фазе между собой и с нагруз%
кой, и произведение входного напряжения и входного тока равно мощности, выделяемой
в нагрузке. Другими словами, активная мощность равна полной мощности, и коэффици%
Рис. 10.26. Схема возбуждения для синхронных двигателей
678
ент мощности равен 1. В системе с чисто реактивной нагрузкой, не потребляющей ника%
кой мощности, коэффициент мощности равен 0. Однако ни одна система не имеет чисто
активного или чисто реактивного сопротивления нагрузки, на практике имеется актив%
ная и реактивная составляющие нагрузочного сопротивления, и входные ток и напряже%
ние не совпадают по фазе с нагрузочными. Другими словами, активная мощность всегда
меньше полной мощности, и коэффициент мощности меньше 1.
В электротехнике различают опережающий и отстающий коэффициенты мощно%
сти. Когда нагрузка емкостная, ток опережает по фазе напряжение и система имеет
опережающий коэффициент мощности. При индуктивном характере нагрузки ток от%
стает по фазе от напряжения, и система имеет отстающий коэффициент мощности. В
большинстве отраслей промышленности нагрузка индуктивная, поскольку состоит из
катушек индуктивности.
èËÏ 10.7
Вычислите коэффициент мощности для трехфазного асинхронного двигателя пере%
менного тока мощностью 90 л.с., при напряжении 440 В и токе 120 A.
êÖòÖçàÖ
Применим формулу:
PF=PO/S,
в которой
S=√3×(V×I).
Напряжение в этом уравнении — это линейное напряжение, равное векторной сумме
фазовых напряжений, которая в √3 раз превышает фазовое напряжение.
S=1,73×(440В×120A)=91,344ВА.
Как было указано ранее, для преобразования лошадиных сил в ватты необходимо ум%
ножить мощность на коэффициент 746:
PO=746×90=67,140Вт.
Откуда:
PF=PO/S=67,140Вт/91,344ВА=0,735.
èËÏ 10.8
Вычислите активную мощность для трехфазного асинхронного двигателя переменно%
го тока с коэффициентом мощности 88% при полной мощности в 60 кВА.
êÖòÖçàÖ
Применим формулу:
PF=PO/S.
После преобразования получим:
PO=PF×S=0,88×60кВА=52,8кВт.
íêÖïîÄáçõÖ ÑÇàÉÄíÖãà èÖêÖåÖççéÉé íéäÄ
679
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
10.5 .5 . äÓÂ͈Ëfl ÍÓ̋ÙÙˈËÂÌÚ‡ ÏÓ̆ÌÓÒÚË
Большинство двигателей переменного тока, используемых в промышленности, — это
асинхронные двигатели, которые представляют собой индуктивную нагрузку и, следо%
вательно, их ток отстает от напряжения. Отстающий ток нежелателен, поскольку по%
тери электроэнергии в линии увеличиваются, когда необходимо обеспечивать боль%
ший входной ток при той же нагрузке. Во многих случаях энергетические компании
налагают штрафы, если системы промышленных потребителей имеют коэффициент
мощности ниже согласованных значений. Таким образом, для промышленных пред%
приятий экономически выгодно улучшать коэффициент мощности своих систем до
значений, близких к единице. Существуют следующие три метода исправления коэф%
фициента мощности предприятия:
1. Подключать батареи конденсаторов параллельно линиям входного напряжения.
2. Максимально нагружать асинхронные двигатели.
3. Подключать на линиивходного напряжения синхронныедвигатели вместе с
другими двигателями, как показано на рис. 10.27.
Рис. 10.27. Улучшение коэффициента мощности за счет подключения
синхронных двигателей с опережающим коэффициентом мощности
Коэффициент мощности синхронного двигателя зависит от значения тока возбуж%
дения. Корректировка тока возбуждения вызывает изменение тока ротора, что приводит
к опережению, отставанию или совпадению по фазе тока статора относительно входного
напряжения. На рис. 10.28 показаны временные диаграммы тока и напряжения для этих
трех случаев, причем сдвиг определяется значением тока возбуждения. При недовоз%
бужденном поле ротора получается отстающий коэффициент мощности, нормальный
уровень возбуждения дает коэффициент мощности, равный единице, а перевозбужден%
ное поле ротора приводит к опережающему коэффициенту мощности. Таким образом,
синхронный двигатель может одновременно выполнять две функции: эффективно уп%
равлять нагрузкой и улучшать при этом результирующий коэффициент мощности всей
системы потребителей.
680
10.5 .6 . èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ‚ ÚÂıÙ‡ÁÌ̊ı ‰‚Ë„‡ÚÂÎflı
Знание наиболее вероятных режимов сбоя двигателя является ключевым условием
успешного поиска неисправностей. Всегда следует сначала проверить наличие наибо%
лее вероятных дефектов, перед тем как искать неисправности в других местах.
Начинайте всегда с простых тестов, а затем прибегайте к более сложным провер%
кам, пока не решите проблему. Методика поиска неисправностей в трехфазных двига%
телях такая же, как и в однофазных. И наиболее типичная неисправность — отсут%
ствие одной из фаз входного напряжения. Прежде всего проверьте входной плавкий
предохранитель или схему контактора. Затем определите, какая из фаз отсутствует, и
найдите оборванный провод. Если весь монтаж не поврежден, дальнейший поиск не%
исправности может потребовать разборки двигателя в ремонтной мастерской.
Рис. 10.28. Влияние тока возбуждения на
коэффициент мощности
синхронного двигателя:
а) недовозбужденное поле
ротора — ток отстает от
напряжения;
б) обычное поле возбуждения
ротора — коэффициент
мощности равен единице;
в) перевозбужденное поле
ротора — ток опережает
напряжение
íêÖïîÄáçõÖ ÑÇàÉÄíÖãà èÖêÖåÖççéÉé íéäÄ
681
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
И наконец, ведите точные записи сделанных вами операций по обслуживанию
двигателя, чтобы на основе собственного опыта выработать алгоритм поиска неисп%
равностей и вероятных причин сбоев.. Поэтому не забывайте регулярно вести записи.
10.6 . ìèêÄÇãÖçàÖ íêÖïîÄáçõåà ÑÇàÉÄíÖãüåà
Дополним идентификацию выводов, рассмотренную в разделе 10.3, чтобы показать,
как надлежит подключать выводы трехфазного двигателя, чтобы управлять напряже%
нием, скоростью и направлением вращения. Чтобы осуществить такое управление,
девять выводов от T1 до T9, расположенных в соединительной коробке двигателя пе%
ременного тока, можно подключать различными способами. Изготовителями двигате%
лей переменного тока приводятся схемы электрических соединений и таблицы для оп%
ределения того, как должны быть подключены выводы двигателя для обеспечения его
управления. Кроме таких схем и таблиц, в настоящем разделе описан процесс выбора
типа и размеров пускателей двигателя.
10.6.1. ëıÂÏ̊ ÔÓ‰ÍĮ̂̃ÂÌËfl ÔË ‡ÁÎË̃Ì̊ı ÛÓ‚Ìflı ̇ÔflÊÂÌËfl
Включение двигателя по схемам звезды и треугольника используется для работы при
низком или высоком напряжениях питания, обычно при 220 или 440 В соответственно.
На рис. 10.29а показана схема включения треугольником для высокого входного напря%
жения, а на рис. 10.29б — для низкого входного напряжения. На рис. 10.30а показана
схема включения звездой для высокого входного напряжения, на рис. 10.30б — для низ%
кого. Кроме того, на рис.10.29в и 10.30в в табличной форме показаны связи при высо%
ком и низком напряжениях, соответственно для включения треугольником и звездой.
Обратите внимание, что низковольтные схемы имеют те же самые номера выво%
дов, но перестроены для ясности в виде двух наборов обмоток. Две обмотки в схеме
треугольника соединены параллельно, как и в схеме звезды, обеспечивая тем самым
низковольтный вход.
10.6 .2 . ê„ÛÎËÓ‚‡ÌË ÒÍÓÓÒÚË
Некоторые двигатели производятся с достаточным числом выводов, чтобы обеспечить под%
ключения, которые позволят двигателю работать при различных скоростях. В таких много%
выводных двигателях обычно предусмотрено до четырех различных уровней скорости. Как
мы уже упоминали, скорость двигателя зависит от числа полюсов следующим образом:
двухполюсный двигатель работает со скоростью 3600 об/мин;
четырехполюсный двигатель работает со скоростью 1800 об/мин;
шестиполюсный двигатель работает со скоростью 1200 об/мин;
восьмиполюсный двигатель работает со скоростью 900 об/мин.
682
Рис. 10.29. Подключение обмоток двигателя по схеме треугольника:
а) при высоком напряжении питания;
б) при низком напряжении питания;
в) таблица соединений
ìèêÄÇãÖçàÖ íêÖïîÄáçõåà ÑÇàÉÄíÖãüåà
683
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
Рис. 10.30 . Подключение обмоток двигателя по схеме звезды:
а) при высоком напряжении питания;
б) при низком напряжении питания;
в) таблица соединений
684
Изготовители приводят для многовыводных двигателей схемы электрических соедине%
ний и таблицы, позволяющие устанавливать выбранную скорость. Две типовые схемы регу%
лирования скорости путем выбора схемы соединений, приводимые изготовителями, показа%
ны на рис. 10.31а и б. На этих рисунках приведены как схемы, так и таблицы соединений,
которые показывают подключение двигателя для получения двух различных скоростей вра%
щения. Каждая таблица имеет шесть столбцов: скорость, L1, L2, L3, свободные и объеди%
ненные выводы. В столбце «Скорость» в общем виде охарактеризована скорость двигателя,
в столбцах L1, L2 и L3 указаны выводы, которые будут связаны с входными линиями для
получения данной скорости. В столбцах «Свободны» и «Соединены» показаны выводы, ко%
торые не подключаются к схеме, и, соответственно, выводы, которые должны быть соедине%
ны вместе. Если выводы связаны перемычками, то лучше всего закрыть группу выводов
крышкой, чтобы изолировать их от воздействия окружающей среды. То же делается и для
свободных выводов. Описанный метод позволяет дискретно регулировать скорость, уста%
навливая только несколько ее фиксированных значений. Способ плавного регулирования
скорости от нуля до максимального значения рассматривается в разделе 10.8.
Рис. 10.31. Регулировка скорости двигателей путем изменения схемы включения
обмоток в трехфазных двигателях с большим числом выводов:
а) соединение «звезда»;
б) соединение «треугольник»
ìèêÄÇãÖçàÖ íêÖïîÄáçõåà ÑÇàÉÄíÖãüåà
685
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
èËÏ 10.9
Каким образом на рис. 10.31а следует соединить выводы двигателя, чтобы эксплуа%
тировать его при высокой скорости?
êÖòÖçàÖ
Обратимся к строке таблицы, соответствующей высокой скорости. Как видно из табли%
цы, вывод T4 необходимо подключить на линию L1, T5 — на линию L2 и T6 — на линию
L3. Выводы T1, T2 и T3 следует объединить, не связывая их с другими точками схемы.
10.6.3. ìÔ‡‚ÎÂÌË ̇ԇ‚ÎÂÌËÂÏ ‚‡̆ÂÌËfl
Для изменения направления вращения при соединении двигателя в звезду и треугольник,
достаточно поменять местами любые две из трех входных линий питания. Такое переклю%
чение показано на рис. 10.32 для «треугольника» и на рис.10.33 для «звезды». Реверс
входного напряжения может быть использован для быстрого торможения двигателя, по%
скольку при этом создается магнитное поле, вращающееся в направлении, противопо%
ложном начальному. При этом скорость вращения по часовой стрелке снижается, дости%
гает нуля, а затем двигатель начинает вращаться в обратном направлении. Таким образом
осуществляется торможение или изменение направления вращения двигателя.
Рис. 10.32. Изменение направления вращения при соединении обмоток
треугольником:
а) соединение при прямом направлении вращения;
б) соединение при обратном направлении вращения
10.6.4 . Ç̊·Ó ÚËÔÓ‡Áχ ÔÛÒ͇ÚÂÎfl ‰‚Ë„‡ÚÂÎfl
Как было упомянуто в главе 9, в состав типичного пускателя двигателя входят контакто%
ры, подобные реле, но позволяющие пропускать большие токи, и блок защиты от пере%
грузки, который обеспечивает защиту по максимальному току для двигателя и содержит
686
нагреватели и тепловые реле. Контакторы используются для отключения при предельно
допустимых токах. Еще одной частью пускателя является дугогаситель, который предох%
раняет пускатель от возникновения дуги. Дуга может возникать, когда контакты размы%
каются или сближаются, и дугогаситель предотвращает повреждение контактов или
расположенных вблизи от них элементов конструкции пускателя. На опорной плате со%
браны все элементы контактора, она же используется для установки контактора на
электрической панели, крышке или в вытяжном шкафу. Большинство блоков перегруз%
ки осуществляет защиту с помощью эвтектических сплавов, биметаллических контак%
тов, а также на основе датчиков, чувствительных к изменению фазового угла (если вы
хотите подробно ознакомиться с этими методами, обратитесь к главе 9).
Рис. 10.33. Изменение направления вращения при соединении обмоток звездой:
а) соединение при прямом направлении вращения;
б) соединение при обратном направлении вращения
При выборе пускателя используйте спецификации NEMA для пускателей двига%
телей (табл. 10.1). Обратите внимание, что пускатели имеют размер от 00 до 9. Номи%
нальный ток для размера 00 составляет 9 А, а для размера 9 — 2250 А. При выборе
пускателя имейте в виду, что его номинальный ток отключения должен быть больше
его рабочего тока.
èËÏ 10.10
Используйте табл. 10.1, чтобы выбрать пускатель соответствующего размера, кото%
рый должен обеспечить рабочий ток в 40 A при напряжении в 200 В для трехфазного
двигателя мощностью в 6 л.с.
êÖòÖçàÖ
Рабочий ток в 40 А находится между рабочими токами для размера 1 (27 А), и размера
2 (45 A), поэтому должен быть выбран больший размер. Обратите внимание, что пус%
катель размера 2 может использоваться для двигателей до 10 л.с. при 200 В.
ìèêÄÇãÖçàÖ íêÖïîÄáçõåà ÑÇàÉÄíÖãüåà
687
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
Таблица 10.1. Электрические характеристики для пускателей по стандарту NEMA
688
10.7 . ê‡Ò̄ËÙӂ͇ ‰‡ÌÌ̊ı, Ô˂‰ÂÌÌ̊ı ‚ Ú‡·ÎË̃ÍÂ
̇ ‰‚Ë„‡ÚÂÎÂ
Табличка данных двигателя, в которой приводится важная информация, необходимая
для выбора и эксплуатации двигателей, обычно крепится на раме двигателя с помощью
заклепок. Типичная табличка (nameplate) для двигателя переменного тока показана на
рис. 10.34. Каждый из блоков таблички определяет одну из характеристик двигателя.
ID (идентификационный номер) содержит обозначение типа и серии двигателя.
Идентификационный номер обычно представляет собой строку алфавитно%цифрового
Таблица 10.1 . Электрические характеристики для пускателей по стандарту
NEMA (окончание)
êÄëòàîêéÇäÄ ÑÄççõï, èêàÇÖÑÖççõï Ç íÄÅãàóäÖ çÄ ÑÇàÉÄíÖãÖ
689
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
шифра и присваивается каждым изготовителем двигателя в соответствии со стандар%
том фирмы. Этот номер важен при обсуждении проблем применения или при заказе
двигателя для замены его изготовителем.
Рис. 10.34. Табличка данных для трехфазного двигателя
Тип определяет тип корпуса двигателя. Обозначение в этой графе обычно при%
сваивается изготовителем в соответствии с собственным стандартом и состоит из ал%
фавитно%цифрового шифра, который определяет следующее:
метод охлаждения, могущий представлять собой проточную вентиляцию с
помощью встроенных в двигатель лопастей вентилятора или естественное
охлаждение, когда значительно большая часть тепла рассеивается внутри
двигателя;
размер частиц, которые задерживаются фильтром: от защиты от проникнове%
ния любой пыли до защиты от частиц, превышающих 50 мм или еще больших;
уровень водозащищенности с различной степенью защиты: от минимальной, когда
обеспечивается защита от вертикально падающих капель воды, до максимальной,
когда обеспечивается защита при полном погружении двигателя в воду.
Рама — число в этой графе указывает размер двигателя. Таблица размеров для каж%
дого типоразмера рамы приведена на рис. 10.35 . Размеры заданы в дюймах и определяют
длину вала V, его диаметр U, высоту оси вала D и присоединительные размеры. Обозначе%
ние типоразмера (404U) будет записано в столбце FRAME (рама) на рис. 10.35 и в соот%
ветствующем поле на табличке, прикрепленной к двигателю.
HP (horsepower) — число в этой графе определяет мощность двигателя в лоша%
диных силах. Обычно она представлена десятичным числом, но для двигателей с мощ%
ностью меньше 1 л.с. она может быть представлена и правильной дробью типа 1/4.
SF (коэффициент перегрузки) — эксплуатационный коэффициент, который оп%
ределяет допустимую степень перегрузки. Например, двигатель с эксплуатационным
коэффициентом 1,2 может быть перегружен на 20 процентов. Другими словами, дви%
гатель с номинальной мощностью 5 л.с. может фактически развивать мощность в на%
грузке, равную 6 л.с. Чтобы вычислить предельную мощность, умножьте номиналь%
ную мощность на коэффициент перегрузки. Однако при непрерывной эксплуатации
двигателя в перегруженном режиме срок службы будет меньше номинального, кото%
рый устанавливается для номинальной мощности.
690
Рис. 10.35. Размеры стандартных станин для двигателей
PH (число фаз) — число в этом поле может быть равно 1 или 3, соответственно
для однофазного и трехфазного двигателя.
AMPS (амперы) — число в этом поле представляет собой ток предельной нагруз%
ки. Это число помогает пользователю в определении типоразмеров нагревателя в пус%
кателе, внешнего датчика тока и плавкого предохранителя.
Volts — число в этом поле показывает номинальное напряжение для двигателя.
Оно необходимо пользователю для выбора соотвествующего источника питания.
êÄëòàîêéÇäÄ ÑÄççõï, èêàÇÖÑÖççõï Ç íÄÅãàóäÖ çÄ ÑÇàÉÄíÖãÖ
691
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
RPM (об/мин) — это число определяет скорость двигателя при номинальных
значениях мощности, напряжения и частоты. Другими словами, число показывает, с
какой скоростью вращается вал при полной нагрузке, когда он подключен к источнику
с номинальным напряжением и частотой.
Hertz (Герцы) — в этом поле показана частота питающей сети двигателя, которая
составляет обычно 60 Гц в США и 50 Гц в Европе.
Duty (режим работы) — эта характеристика двигателя относится к режиму рабо%
ты и определяет коэффициент заполнения рабочих интервалов двигателя. Двигатель
может работать в следующих режимах:
непрерывный режим — двигатель включается и затем работает в течение
нескольких часов;
повторно%кратковременный режим — двигатель часто запускается и оста%
навливается в процессе работы;
форсированный режим — через двигатель пропускается большой пусковой
ток при повторных стартах и остановках, например, при толчковом запуске.
Обозначение режимов в этом поле приводится в сокращенном виде. Например,
непрерывный режим (continuous) обозначается как CONT.
AMB (условия окружающей среды) — число в этом поле указывет температуру
окружающего воздуха, при которой двигатель может нормально работать длительное
время. Обычно она составляет 40 °C (104 °F) для вентилируемого двигателя и 50 °C
(122 °F) для двигателя с естественным охлаждением. На некоторых табличках символ
C или F следует за надписью AMB, а значение записывается потом. Работа двигателя
при температуре окружающего воздуха выше номинальной уменьшает его срок служ%
бы. Увеличение температуры окружающего воздуха на 10 °C может вдвое сократить
срок службы двигателя.
Date code (дата выпуска) — число в этом поле указывает, когда был выпущен
двигатель. Код даты может содержать месяц и год выпуска (например, 0804) или неде%
лю и год, отделенные символом A (например, 22A04). Код даты определяется изгото%
вителем и отмечается в журнале выпуска двигателей.
Insul class (класс изоляции) — символ в этом поле представляет собой темпера%
туру перегрева, которую может выдержать двигатель при работе. В табл. 10.2 пере%
числены четыре класса изоляции — A, B, F и H. Двигатель с изоляцией класса F име%
ет максимальную внутреннюю температуру 145 °C (40 °C, температура окружающей
среды, плюс 105 °C, температура превышения). Класс изоляции определяется пре%
дельно допустимой температурой в центре обмотки двигателя, где температура счита%
ется наиболее высокой.
NEMA design (тип по стандарту NEMA) — Национальная электрическая ассо%
циация изготовителей (NEMA) разработала спецификации для четырех типовых про%
ектов двигателей переменного тока (A, B, C и D). Эти проекты основаны на стандарти%
зации таких характеристик двигателя, как пусковой ток, скольжение, и характерных
значений вращающего момента.
Тип А: имеет нормальный пусковой момент (обычно от 150 до 170 процентов
от номинального) и относительно высокий пусковой ток. Момент опрокиды%
вания — самый высокий среди всех типов NEMA. Это позволяет выдержи%
вать большие импульсные перегрузки. Скольжение составляет не более 5%.
692
К типичным применениям относятся, например, инжекторно%литьевые ма%
шины.
Тип B: наиболее популярный тип асинхронных двигателей переменного тока. Он
имеет нормальный пусковой момент, как и тип A, но малый пусковой ток. Мо%
мент опрокидывания достаточно высок, чтобы обеспечить пуск нагрузок в боль%
шинстве промышленных устройств. Скольжение составляет не более 5%. КПД
двигателя и коэффициент мощности при полной нагрузке сравнительно высоки,
что обеспечивает популярность проекту. Типичные области применения — при%
воды насосов, вентиляторов и станков.
Тип C: проект имеет высокий пусковой вращающий момент (примерно вдвое
больший,чем для типов А и B) и полезен для запуска мощных отключающих%
ся нагрузок. Эти двигатели предназначены для работы со скоростями, близ%
кими к предельным, без больших перегрузок. Пусковой ток невелик; сколь%
жение составляет не более 5%.
Таблица 10.2 . Обозначения класса изоляции двигателей
Класс изоляции
Температура, °C
A
105
B
130
F
135
H
180
Тип D: имеет высокий пусковой момент (самый высокий среди типов двигателей
по стандарту NEMA). Пусковой ток и скорость при предельной нагрузке низкие.
Высокие значения скольжения (от 5 до 13 процентов) делают этот двигатель
подходящим для устройств с измененяющимися нагрузками и сопутствующими
быстрыми изменениями скорости двигателя, как, например, машины с механи%
ческими накопителями энергии (маховиками). Несколько подклассов проекта
покрывают довольно широкий диапазон скольжения. Заказы на этот тип двига%
теля оформляются, как правило, в специальном порядке.
Двигатели, произведенные для Eвропы и международных рынков, соответствуют
различному набору проектов и спецификаций, которые определены Международной
Электротехнической комиссией МЭК (IEC). Например, один из типов двигателей по
стандарту МЭК — тип N — имеет характеристики, близкие к типам двигателей А и B
по стандарту NEMA.
KVA code (код пусковой мощности) — символ в этом поле представляет мощ%
ность (в квА/л.с.), соответствующую току при замкнутом роторе и требующуюся дви%
гателю при запуске. В первом столбце табл. 10.3 приведен символ кода, во втором —
величина относительной мощности в кВА/л.с.
EFF (КПД) — число в этом поле показывает КПД двигателя в процентах. Он
отражает часть входной электрической энергии, преобразуемой в выходную механи%
ческую энергию. Чем больше это число, тем более эффективно двигатель использует
подводимую электрическую мощность.
êÄëòàîêéÇäÄ ÑÄççõï, èêàÇÖÑÖççõï Ç íÄÅãàóäÖ çÄ ÑÇàÉÄíÖãÖ
693
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
10.8 . èêàÇéÑõ ÑÇàÉÄíÖãÖâ èÖêÖåÖççéÉé íéäÄ
Смысл термина привод довольно свободно трактуется в промышленности. Некото%
рые используют этот термин, чтобы описать комплекс электрических и механических
компонентов, включая двигатель, которые все вместе приводят в движение нагрузку.
Но термин «привод двигателя переменного тока» означает электронный блок, кото%
рый питает двигатель переменного тока и управляет его скоростью. Управление ско%
ростью двигателя в приводах переменного тока происходит с помощью изменения ча%
стоты питающего напряжения, подаваемого на двигатель, и обычно привод в этом
случае называется частотнорегулируемым, или приводом с регулируемой скростью. В
процессе развития своих систем управления приводы для двигателей переменного
тока перешли от систем управления на дискретных компонентах к технологиям, ис%
пользующим микропроцессорное программирование. Некоторые из приводов могут
программироваться путем загрузки параметров от других систем с микропроцессор%
ным управлением, например, от программируемых логических контроллеров.
Таблица 10.3. Коды для относительных мощностей
10.8 .1. ǂ‰ÂÌË ‚ ÔË‚Ó‰̊ ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇
Привод переменного тока представляет собой часть общей системы и состоит из трех
основных блоков: пульта управления оператора, собственно привода и двигателя, ко%
торые показаны на рис. 10.36. Пульт оператора содержит обычно средства ручного
управления или управляющую клавиатуру, или комбинацию обоих этих компонентов,
694
которые позволяют оператору управлять приводом двигателя переменного тока. При%
вод двигателя состоит в основном из выпрямителя, который преобразует входное пе%
ременное напряжение фиксированной амплитуды и частоты в напряжение постоянно%
го тока; инвертора, который преобразует напряжение постоянного тока в напряжение
переменного тока с регулируемой амплитудой и частотой; и схемы управления, кото%
рая управляет работой привода. Последним болоком системы является двигатель пе%
ременного тока, который преобразует сигналы переменного тока, поступающие от
привода, в механическую энергию. В этом разделе будут представлены различные
приводы двигателей переменного тока, от прежних проектов, использующих дискрет%
ные компоненты, до приводов с микропроцессорным управлением. Будут отдельно
рассмотрены следующие устройства:
инверторный привод с изменяемым переменным выходным напряжением;
привод с широтно%импульсной модуляцией (ШИМ);
привод с изменением вектора потока;
программируемый привод двигателя.
Рис. 10.36. Блок
схема привода двигателей пременного тока
10.8 .2 . àÌ‚ÂÚÓÌ̊È ÔË‚Ó‰ Ò ËÁÏÂÌflÂÏ̊Ï Ì‡ÔflÊÂÌËÂÏ
Привод на базе регулируемого инвертора с изменяемым напряжением (VVI —
Variable Voltage Inverter) — один из самых ранних приводов для двигателей перемен%
ного тока. Поскольку на момент его создания микропроцессорные системы управле%
ния не были еще доступны для таких областей применения, в нем использовалась су%
ществующие твердотельные технологии. Блок%схема для такого привода приведена на
рис. 10.37а, а на рис. 10.37б показана временная диаграмма выходного напряжения.
Блок%схему на рис. 10.37а образуют четыре основных блока: конвертер, фильтр, ин%
вертор и схема управления. Они выполняют следующие функции:
конвертер — обычно тиристорный мостовой выпрямитель, который преоб%
разовывает входное трехфазное напряжение в нерегулируемое напряжение
постоянного тока;
фильтр сглаживает нерегулируемое напряжение постоянного тока с помо%
щью пассивной и/или активной системы фильтрации;
èêàÇéÑõ ÑÇàÉÄíÖãÖâ èÖêÖåÖççéÉé íéäÄ
695
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
инвертор состоит из шести полупроводниковых ключей, которые преобразо%
вывают выходное напряжение фильтра в трехфазное напряжение перемен%
ного тока для двигателя;
схема управления — электронное устройство в этом блоке управляет тирис%
торами выпрямительного моста и формирует сигналы для частотного управ%
ления выходным напряжением инвертора.
Как можно видеть из рис. 10.37б, выходное напряжение инвертора имеет форму
шести ступеней, которая получается при переключении полупроводниковых ключей
инвертора, которые изменяют свое состояние между включенным и выключенным.
Поэтому такой инвертор носит назавание шестиступенчатого. Привод VVI имеет два
основных недостатка:
1. Скорость двигателя может колебаться из%за ступенчатой формы выходного
напряжения инвертора.
2. Регулирования частоты вращения недостаточно, поскольку конденсаторы
низкочастотного фильтра должны заряжаться и разряжаться, чтобы изме%
нять напряжение.
Рис. 10.37. Привод с регулируемым выходным напряжением инвертора:
а) блок
схема привода;
б) шестиступенчатое выходное напряжение инвертора
696
10.8 .3. èË‚Ó‰ Ò òàå
Приводы с широтно%импульсной модуляцией (ШИМ) вытеснили из систем управляемого
привода инверторный VVI привод. Привод с ШИМ так же, как и VVI, использует шесть
ключей; однако эти ключи включаются и выключаются до двенадцати раз за полупериод,
производя довольно сглаженное трехфазное выходное напряжение. На рис. 10.38 показа%
ны временные диаграммы мгновенного напряжения на выходе инвертора и его усреднен%
ного значения, образующего напряжение синусоидальной формы. Блок%схема рис. 10.37
применима и для ШИМ, однако схема управления в последнем случае получается более
сложной. Привод с ШИМ преодолевает два недостатка привода VVI, создавая более глад%
кое напряжение синусоидальной формы. Изменяя одновременно ширину и число импуль%
сов, можно быстро изменить выходное напряжение. Таким образом, на привод с ШИМ
заряд и разряд конденсаторов практически не влияет.
Рис. 10.38. Временные диаграммы напряжений привода, регулируемого с
помощью широтно
импульсной модуляции
10.8 .4 . èË‚Ó‰ Ò ËÁÏÂÌÂÌËÂÏ ‚ÂÍÚÓ‡ ÔÓÚÓ͇
Некоторые устройства требуют, чтобы привод плавно управлял двигателем при рез%
ких изменениях параметров нагрузки. Приводы с VVI и ШИМ не могут эффективно
отрабатывать такие изменения нагрузки, но это можно реализовать в приводе с изме%
нением вектора потока, изменяя модуль и фазовый угол потока статора.
Манипулирование потоком статора позволяет приводу обеспечивать работу дви%
гателя переменного тока с управлением вращающим моментом, как и у двигателей
постоянного тока. Векторный привод подобен приводу с ШИМ, но имеет две незави%
симые петли обратной связи, показанные на рис. 10.39. Это усложняет систему уп%
равления, поэтому векторный привод дороже привода с ШИМ. Одна из обратных свя%
зей, называемая обратной связью по току, использует выходной сигнал датчиков тока,
установленных на трехфазном входе двигателя, чтобы оценить изменения нагрузки.
При увеличении нагрузки такой привод не позволяет увеличиваться скольжению, что%
бы не допустить возрастания тока двигателя. Чтобы отреагировать на увеличение на%
грузки, привод увеличивает вращающий момент. Это реализуется с помощью другой
èêàÇéÑõ ÑÇàÉÄíÖãÖâ èÖêÖåÖççéÉé íéäÄ
697
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
обратной связи, называемой обратной связью по скорости. Чтобы оценить изменение
нагрузки, она использует сигнал декодера скорости ротора. При изменении нагрузки
изменяется скорость ротора, и в ответ на это изменение привод изменяет частоту поля
статора до тех пор, пока линии потока статора не образуют относительно линий потока
ротора угол в 90° (угол максимального вращающего момента).
Рис. 10.39 . Блок
схема привода с регулированием вектора потока
10.8 .5 . èÓ„‡ÏÏËÛÂÏ̊ ÔË‚Ó‰̊ ‰‚Ë„‡ÚÂÎÂÈ
Программируемый привод имеет те же самые основные блоки, что и рассмотренные ранее
приводы, но в его состав входит микропроцессорная система управления, которая предо%
ставляет пользователю разнообразные возможности, наряду с управлением работой дви%
гателя со встроенной панели управления при помощи клавиатурного набора. Программи%
руемый привод двигателя переменного тока PowerFlexTM 40, выпускаемый фирмой Allen
Bradly, показан на рис. 10.40. Некоторые свойства программируемого привода:
встроенная вспомогательная клавиатура с четырехразрядным дисплеем и до%
полнительными светодиодными индикаторами обеспечивает интуитивное
управление;
вспомогательная клавиатура панели управления и измерительный потенци%
ометр упрощают запуск;
встроенная шина RS485 дает возможность использовать привод в сетевой
конфигурации, а шина последовательной связи обеспечивает его связь с дру%
гими контроллерами;
мониторинг ошибок помогает при поиске неисправностей в приводе;
привод может программироваться с карманной дистанционной клавиатуры со
встроенным ЖКД%дисплеем или с помощью дистанционного измерительного
потенциометра, который обеспечивает дополнительную гибкость управления.
Программируемый привод в настоящее время наиболее популярен из всех приво%
дов для двигателей переменного тока, используемых в промышленности, и имеет боль%
698
шое будущее. Его легко приспособить к сложным задачам, поскольку можно добавлять
и изменять программно задаваемые параметры. Их можно изменять непосредственно в
приводе или загружать в него из других микропроцессорных систем, например из кон%
троллеров с программируемой логикой, которые будут рассмотрены в главе 12.
Рис. 10.40. Привод переменного тока
Power FlexTM 40 фирмы
Allen Bradly
10.8 .6 . èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ‚ ÔË‚Ó‰‡ı ‰‚Ë„‡ÚÂÎÂÈ ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇
При поиске неисправностей в приводе двигателя переменного тока, необходимо отсо%
единить его от двигателя и перед проверкой привода удостовериться, что сам двига%
тель не поврежден. Поскольку техническое сопровождение привода обеспечивается
продавцом, изготовитель обычно включает в комплект поставки схемы привода. От%
кройте привод, как указано в описании, и примените традиционные методы поиска не%
исправностей в электронных устройствах, используя схемы привода. При отсутствии
схемы привод должен быть возвращен продавцу, если вы убеждены, что все входные
устройства, необходимые для работы привода, исправны.
Большинство программируемых приводов имеет программное обеспечение для диаг%
ностики неисправностей, благодаря которому осуществляется быстрый поиск дефектов.
Если различные неисправности приводят к одинаковым внешним признакам, программа
поиска дефектов обычно перечисляет неисправности в установленном порядке : наиболее
вероятная неисправность приводится первой, наименее вероятная — последней.
10.9 . ÇÖÅ-ëÄâíõ èé ÑÇàÉÄíÖãüå èÖêÖåÖççéÉé íéäÄ
à èêàÇéÑÄå ë êÖÉìãàêéÇÄçàÖå ëäéêéëíà
Ниже приведены адреса веб%сайтов фирм%поставщиков двигателей переменного тока
и средств управления ими, рассмотренных в этой главе. Адреса сетевых ресурсов по%
ÇÖÅ-ëÄâíõ èé ÑÇàÉÄíÖãüå èÖêÖåÖççéÉé íéäÄ à èêàÇéÑÄå ë êÖÉìãàêéÇÄçàÖå ëäéêéëíà
699
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
ставщиков часто изменяются, поэтому, если какая%либо из ссылок неактивна, вос%
пользуйтесь механизмом поиска в Интернете, чтобы по термину или названию двига%
теля, представляющего интерес, найти соответствующие материалы:
Двигатели и пускатели фирмы Allen Bradly
http://www.ab.com
Контроллеры синхронных двигателей фирмы Saftronics
http://www.saftronics.com
Программируемый привод двигателей на сайте фирмы Allen Bradly
http://www.ab.com/drive
êÖáûåÖ
10.1 . Введение
Двигатели переменного тока представляют собой электромеханическое устрой%
ство, преобразующее электрическую энергию переменного тока в механическую.
10.2 . Основной принцип действия
Работа двигателя переменного тока основана на вращении магнитного поля
статора.
10.3 . Компоненты двигателя переменного тока
Двигатели переменного тока состоят из трех основных компонентов: стато%
ра, ротора и торцевых крышек.
Центробежный переключатель пуска отсоединяет обмотку пускателя от схе%
мы, когда двигатель достигает приблизительно 95 процентов полной скорости.
10.6 . Управление трехфазными двигателями
Можно изменять напряжение двигателя, скорость и направление вращения
(порядок чередования фаз), подключая внешние выводы в соответствии с оп%
ределенными схемами.
Изготовители двигателей приводят в технической документации схемы и таб%
лицы электрических соединений, необходимые для управления двигателями.
10.7 .
Расшифровка данных, приведенных в табличке на двигателе
В табличке данных (nameplate), закрепленной на станине двигателя, приводится
важная информация, необходимая для выбора и эксплуатации двигателя.
10.8 .
Приводы двигателей переменного тока
Привод двигателя переменного тока состоит в основном из конвертера, который
преобразует входное сетевое напряжение с фиксированной амплитудой и часто%
той в напряжение постоянного тока; инвертора, который преобразует напряже%
ние постоянного тока в переменное напряжение с регулируемой частотой; и си%
стемы управления, которая задает необходимые режимы работы привода.
700
Программируемый привод двигателя содержит микропроцессорную систему
управления, которая предоставляет пользователю разнообразные возмож%
ности для применения, наряду с управлением работой двигателя при помощи
клавиатурного набора на встроенной панели управления.
Çéèêéëõ
1. Опишите наиболее привлекательный для вас тип карьеры в области разработки и
внедрения двигателей переменного тока.
2. Дайте определение двигателя переменного тока.
3. В каких случаях лучше использовать двигатели постоянного, а не переменного тока?
4. Воспользуйтесь рис. 10.4, чтобы описать вращение ротора на интервале от T4 до T7.
5. Определите три главных компонента двигателя переменного тока.
6. Что такое соединительную коробка в двигателях переменного тока?
7. Что такое подъемное кольцо?
8. Объясните различие между открытым и полностью изолированным корпусом
двигателя.
9. Что такое скольжение?
10. Как частота индуцированного в роторе напряжения связана со скольжением?
11. Как размечаются выводы питания?
12. Почему двигатели переменного тока имеют центробежный переключатель пуска?
13. Опишите, каким образом включается и выключается центробежный переключатель.
14. Каковы функции торцевых крышек?
15. В каком из двигателей выше пусковой момент — в асинхронном двигателе с кон%
денсаторным или с резистивным пуском — и почему?
16. Какие стандартные мощности в лошадиных силах существуют для однофазных
асинхронных двигателей ?
17. Какова связь между экранированным полюсом и экранирующей катушкой?
18. Назовите преимущества и недостатки двигателей с расщепленным полюсом.
19. Объясните, почему поле, создаваемое трехфазным двигателем, больше, чем со%
здаваемое однофазным.
20. Объясните различия между фазным ротором и ротором типа «беличей клетки».
21. Почему целесообразно использовать асинхронный двигатель с фазным ротором в
утилизаторе старых автомобилей на свалках?
22. Какое преимущество синхронная скорость дает синхронному двигателю?
23. Какова конструкция статора синхронного двигателя? Сравните ее с конструкцией
статора в асинхронном двигателе.
24. Назовите две обмотки ротора в синхронном двигателе.
Çéèêéëõ
701
Ñ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇ Ë ÔË‚Ó‰̊ Ò Â„ÛÎËÓ‚‡ÌËÂÏ ÒÍÓÓÒÚË
25. Сравните режимы запуска и работы с синхронной скоростью для синхронных дви%
гателей.
26. Что такое возбудитель применительно к двигателям переменного тока?
27. Дайте определение подсинхронного момента в синхронных двигателях.
28. Дайте определение момента выпадания из синхронизма для синхронного двигателя.
29. Каким образом рассчитывается коэффициент мощности?
30. Сравните коэффициент мощности для опережающих и отстающих цепей.
31. Назовите три способа улучшения коэффициента мощности на промышленном
предприятии.
32. Объясните, как можно регулировать напряжение трехфазного двигателя пере%
менного тока.
33. Объясните, как управлять скоростью трехфазного двигателя переменного тока.
34. Какова связь между числом полюсов и скоростью трехфазного двигателя пере%
менного тока?
35. Объясните, как управлять направлением вращения трехфазного двигателя пере%
менного тока.
36. Каков эксплуатационный коэффициент двигателя переменного тока?
37. Определите три типа режимов трехфазного двигателя переменного тока, возни%
кающих при различных коэффициентах заполнения.
38. Сравните три основных типа двигателей по стандарту NEMA.
39. Что такое код относительной мощности (код KVA)?
40. Определите три основных типа блоков привода переменного тока.
41. Назовите недостатки привода на базе инвертора с переменным напряжением.
42. Почему привод инвертора с переменным напряжением называется также шести%
ступенчатым инвертором напряжения?
43. Каким образом в приводе с ШИМ преодолены недостатки привода инвертора с
переменным напряжением?
44. Чем привод вектора потока отличается от привода с ШИМ?
45. Почему программируемый привод более подходит для сложных механических на%
грузок, чем другие типы привода?
áÄÑÄóà
1. Какова скорость вращения шестиполюсного двигателя переменного тока при ча%
стоте питающего напряжения 60 Гц?
2. Используйте скорость, вычисленную в задаче 1, чтобы рассчитать скольжение
для двигателя, вращающегося со скоростью 1000 об/мин на холостом ходу.
3. Используйте скольжение, вычисленное в задаче 2, чтобы выразить скольжение
для двигателя на холостом ходу в процентах.
702
4. В трехфазном двигателе, соединенном в звезду, определите значение напряжения
VAB, если значения VB и VC равны 120 В.
5. Решите задачу 4 для трехфазного двигателя, соединенного в треугольник.
6. Вычислите предельную нагрузку и пусковой ток холостого хода для трехфазного
асинхронного двигателя мощностью 100 л.с при питании его от сети 480 В.
7. Вычислите коэффициент мощности для асинхронного двигателя в 100 л.с. при
56 кВА, потребляющего от сети ток 80 A.
8. Вычислите активную мощность трехфазного асинхронного двигателя, имеющего
полную мощность 240 ВА при коэффициенте мощности 90%.
9. Как нужно соединить выводы для двигателя на рис. 10.31б, чтобы эксплуатиро%
вать его при низкой скорости?
10. Воспользуйтесь рис. 10.35, чтобы определить, какой размер станины был бы за%
несен в поле двигателя с длиной вала 8,25 дюйма и диаметром вала 3,375 дюйма.
11. Каков эксплуатационный коэффициент двигателя, обеспечивающего в данном
применении мощность 55 л.с., если максимальная мощность, которую он мог бы
фактически обеспечить в нагрузке, равна 75 л.с.?
áÄÑÄóà
703
11
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË
Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
ñÂÎ̧ „·‚̊
Основная цель главы 11 состоит в том, чтобы описать работу и
характеристики двигателей специального назначения, а также
их внутренние компоненты и различные варианты промышленно
го применения. Рассмотрены также устройства управления типа
оптических кодеров и резольверов.
После изучения этой главы вы сможете:
1. Описать различия между двигателем с постоянными магнитами и двигателем по
стоянного тока со статорными обмотками.
2. Объяснить классификацию и характеристики двигателей с постоянными магни
тами (ПМдвигателей).
3. Описать различия между стандартным двигателем с постоянными магнитами,
двигателем без сердечника и моментным двигателем.
4. Описать конструкцию и работу бесщеточного двигателя постоянного тока.
5. Объяснить системы коммутации и датчиков бесщеточного двигателя постоянного
тока.
6. Описать работу шагового двигателя.
7. Рассказать об интерпретации характеристик серводвигателей.
8. Объяснить принципы работы оптического кодера и различия между инкремент
ным и абсолютным декодером.
9. Описать свойства и принципы работы резольвера.
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
èêàåÖçÖçàÖ áçÄçàâ Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Двигатели специального назначения используются во многих отраслях промышленности.
Знания принципов их работы и их характеристик важны для профессиональной деятельнос
ти в любой области техники, где применяются сервомоторы, например, при работе на стан
ках и с промышленной робототехникой. Эти знания можно применить и в космической про
мышленности, особенно в проектах, касающихся гироскопов, лентопротяжных механизмов
и видеосистем с высокой надежностью записи. Другой областью приложения полученных
знаний является биомедицинская промышленность, разработка насосов для искусственно
го сердца и криогенных холодильников. В каждой из этих отраслей ваша деятельность может
касаться проектирования техники, ее проверки и оценки, а также вопросов приобретения и
управления качеством поставляемой продукции. Востребованы также все виды деятельнос
ти, в которых необходимо взаимодействие с заказчиком. Специалисты по прикладным раз
работкам, технической поддержке и продажам пользуются высоким спросом, но, чтобы
удовлетворить все запросы заказчиков, от вас потребуются глубокие знания конструкции и
работы двигателей специального назначения.
Специфической задачей, которую вам могут поручить, является, например, оценка ком
понентов оборудования от различных поставщиков. Допустим, что вы являетесь разработчи
ком и членом группы внедрения компании LaBarge, которая занимается массовой сборкой
устройств на печатных платах. Запланировано обновление сборочного оборудования компа
нии. Если вы хорошо знаете шаговые двигатели, то вы будете ключевым членом рабочей груп
пы. Рассмотрев документацию на оборудование, предлагаемое вашей компании различными
поставщиками, вы составляете список вопросов для рассылки поставщикам. После встреч с
поставщиками вы вместе с членами вашей группы выбираете сборочное оборудование для
закупки. В процессе приобретения к вам обращаются по любым техническим вопросам, кото
рые могут возникнуть. Вы входите также в состав группы внедрения, отслеживая, чтобы новое
оборудование работало в соответствии техническими условиями. Такая задача очень интерес
на, поскольку вы имеете возможность следить за проектом от начального периода оценки до
приобретения и заключительного введения в строй нового оборудования.
11.1 . ÇÇÖÑÖçàÖ
Иногда при низких и средних мощностях двигателей требуется частый пуск и останов
ка в случае значительных нагрузок или прецизионное управление скоростью и поло
жением нагрузки. Для решения таких задач двигатели постоянного тока специального
назначения оказываются более пригодными, чем традиционные двигатели с фазным
ротором или двигатели постоянного тока с обмотками возбуждения.
В этой главе мы обсудим следующие двигатели специального назначения:
двигатели постоянного тока с постоянными магнитами (ПМдвигатели) —
эти устройства используют постоянные магниты вместо обмоток;
бесщеточные двигатели постоянного тока — в них вместо механических ще
ток и коллекторов используются полупроводниковые переключатели;
706
шаговые двигатели, которые используют электронные цифровые сигналы,
чтобы реализовать дискретное механическое движение;
серводвигатели постоянного и переменного тока — в этих системах для уп
равления двигателем широко используются обратные связи.
Кроме того, мы рассмотрим следующие два типа устройств управления:
Оптические декодеры — датчики, использующие источник и приемник света,
чтобы преобразовать угловое положение вала в сигнал двоичного кода.
Резольверы, которые используются для точного измерения углов поворота вала
двигателя.
11.2 . ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ
ë èéëíéüççõåà åÄÉçàíÄåà
В двигателях постоянного тока с постоянными магнитами (в дальнейшем ПМдвига
тели) магнитное поле создается постоянными магнитами, а не обмотками электромаг
нита, как в двигателях постоянного тока со статорными обмотками (в дальнейшем
СОдвигатели). В начале 80х годов дорогие СОдвигатели попытались заменить
ПМдвигателями, и это оказалось возможным. ПМ двигатели обладают следующими
преимуществами перед традиционными СОдвигателями:
им необходим только один источник питания, потому что отсутствует поле
возбуждения;
КПД их выше, поскольку нет потерь в статорных обмотках;
в ПМдвигателях поток всегда постоянен, в то время как в СОдвигателях
поток постоянный только при постоянном токе возбуждения.
Вследствие постоянства потока в ПМдвигателях, зависимости скорости и тока
от момента линейны, как видно из рис. 11 .1.
Обратите внимание на скорость холостого хода и вращающий момент останова на
рис. 11.1а. Скорость холостого хода соответствует нулевому вращающему моменту, по
скольку в отсутствие нагрузки никакого вращающего момента не требуется. При останове
двигатель уже не может обеспечить вращающий момент, требуемый нагрузкой, и враще
ние вала двигателя прекращается. Теперь обратите внимание на ток холостого хода и ток
останова на рис. 11.1б. Ток холостого хода не равен нулю, поскольку небольшой ток необ
ходим для компенсации механических и электрических потерь холостого хода. Ток же оста
нова достаточно велик, потому что противоЭДС при этом становится нулевой.
11.2.1. èÓ͇Á‡ÚÂÎ̧ ͇̃ÂÒÚ‚‡
Показатель качества (figure of merit) — число, которое обеспечивает объективную и
довольно точную характеристику возможностей ПМдвигателя, — чем больше пока
затель качества, тем лучше двигатель.
ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èéëíéüççõåà åÄÉçàíÄåà
707
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Показатель качества (M) может быть выражен как
где Nn
—
скорость холостого хода двигателя, в об/мин,
Рис. 11.1. Характеристики двигателя с постоянными магнитами:
а) зависимость скорости от момента;
б) зависимость тока от момента
708
In
—
ток холостого хода,
dN — изменение скорости в диапазоне от холостого хода до предельной нагрузки,
dI — изменение тока в диапазоне от холостого хода до предельной нагрузки.
Показатель качества может использоваться, чтобы вычислить максимальный
КПД двигателя, а также входную и выходную мощности, скорость и вращающий мо
мент при максимальном КПД. Эти вычисления приближенны, поскольку не учитыва
ется падение напряжения на щетках и момент трения. Однако погрешность невелика,
потому что эти значения обычно малы по сравнению с другими параметрами. Рассмот
рим пример 11.1, который иллюстрирует вычисление показателя качества.
èËÏ 11.1
Двигатель имеет следующие параметры:
Номинальное напряжение 24 В, ток холостого хода 8 мА, ток нагрузки 200 мА, ско
рость холостого хода 4400 об/мин, скорость при предельной нагрузке 3400 об/мин.
Вычислите показатель качества, максимальный КПД, а также входную и выходную
мощности, скорость и вращающий момент при максимальном КПД.
êÖòÖçàÖ
Вычислим сначала dI и Dn:
dI=200—8 =192мА,
dN = 4400 — 3400 = 1000 об/мин.
И после подстановки значений:
Максимальный КПД ηмакс может быть выражен как
Входная мощность при максимальном КПД определяется из выражения
PВХ=M×V×In
= 10,32×24×0,008 =1,98Вт.
Выходная мощность при максимальном КПД вычисляется как
Скорость при максимальном КПД равна
ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èéëíéüççõåà åÄÉçàíÄåà
709
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Момент составляет
11.2 .2. ä·ÒÒËÙË͇ˆËfl Ë ı‡‡ÍÚÂËÒÚËÍË
Двигатели с постоянными магнитами делятся на три основные класса:
стандартные ПМдвигатели, подобные двигателям постоянного тока с фаз
ным ротором;
ПМдвигатели без сердечника, не имеющие магнитопровода из электротех
нической стали в роторе;
моментные ПМдвигатели, способные длительное время работать при низ
кой скорости или в условиях останова.
Характеристики ПМдвигателя зависят от применяемого магнитного материала.
Материал характеризуется магнитной индукцией и коэрцитивной силой, которая
определяет остаточное намагничивание материала.
В магнитах для ПМдвигателей используются следующие три типа материалов:
сплав алкино (alcino) — сплав с большой плотностью потока и низкой коэр
цитивной силой;
керамический или ферритовый — имеет низкую магнитную индукцию и вы
сокую коэрцитивную силу;
редкоземельные сплавы — имеют большую плотность потока и высокую ко
эрцитивность.
Редкоземельный материал, используемый в этих магнитах, — обычно сплав ко
бальта с самарием или неодимом. Магнит из редкоземельных материалов для ПМ
двигателей выбирается не только изза высоких значений плотности потока и коэрци
тивной силы, но также изза низкой стоимости.
11.2.3. é·̊̃Ì̊ èå-‰‚Ë„‡ÚÂÎË
Обычный ПМдвигатель, известный также как ПМдвигатель с фазным ротором, по
добен двигателю постоянного тока с фазным ротором и параллельным пуском. Он так
же обладает ротором, собранным на сердечнике из стальных ламинированных плас
тин, с обмотками в пазах ротора, коммутатором и щетками. Отличие от традиционного
двигателя состоит в том, что магнитное поле в ПМдвигателях создается не электро
магнитами, а постоянными магнитами. Постоянные магниты стандартных ПМдвига
телей намагничены по длине (продольное намагничивание) или по их ширине (попе
710
речное намагничивание), как показано на рис. 11.2. В магнитах с продольным намаг
ничиванием используется обычно алкино или керамический материал, а в магнитах с
поперечным намагничиванием — редкоземельные материалы.
Рис. 11.2 . Картина магнитного поля в двигателях с постоянными
магнитами:
а) с продольным намагничиванием — магнитные линии проходят
через раму и входят в магнитные полюса по всей длине;
б) с поперечным намагничиванием — магнитные линии проходят
по воздуху и входят в полюса по всей ширине
ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èéëíéüççõåà åÄÉçàíÄåà
711
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
На рис. 11 .2a линии потока выходят по всей длине из северного полюса, проходят
через обычный сердечник ротора и затем входят по всей длине в южный полюс. Линии
потока полностью проходят через раму, как в двигателе постоянного тока. На рис. 11 .2б
поток проходит по ширине магнитных полюсов и совсем не проходит раму. Поскольку
рама не проводит магнитный поток, эти двигатели имеют более тонкую раму, которая
вдвое легче, чем у двигателей с продольным намагничиванием. Это приводит к общему
снижению массы и размеров двигателей с поперечным намагничиванием.
Стандартные ПМдвигатели применяются в электрическом оборудовании, кото
рое требует высокой эффективности, высокой мощности и минимальных размеров,
например, в моторизованных автокарах, инвалидных колясках и скутерах.
11.2.4. èå-‰‚Ë„‡ÚÂÎË ·ÂÁ Ò‰ẪÌË͇
ПМдвигатель без сердечника, также известный как двигатель с ротором без стали,
или магнитоэлектрический двигатель, не содержит пластин электротехнической стали
в роторе, на что и указывает его название. Отсутствие магнитного сердечника в роторе
обеспечивает этому двигателю следующие преимущества:
1. Он обладает малой инерционностью и может быстро изменять скорость.
2. Индуктивность его ротора меньше, и вследствие этого он быстро реагирует
на изменения входного напряжения.
3. В нем отсутствуют вихревые токи и потери на гистерезис, что повышает его КПД.
4. Он не стремится остаться в какомлибо определенном положении относи
тельно статора, что устраняет эффект зацепления (cogging). Эффект зацеп
ления появляется, когда ротор скользит и останавливается в определенном
положении, пока вращающий момент не заставит его продвинуться.
В этом разделе мы обсудим два типа структуры ПМдвигателей без сердечника,
цилиндрический и дисковый. Обе структуры используют проводники, взаимодействую
щие с постоянным магнитом, для создания вращающего момента. Дисковая структура
менее инерционна, чем цилиндрическая, и может работать при больших скоростях, од
нако двигатели без сердечника не могут конкурировать с двигателями с фазным ротором
при применении с высоким моментом нагрузки. Однако ПМдвигатели без сердечника
очень популярны благодаря плавному изменению вращающего момента и высокой ско
рости. Они используется, например, в периферийном оборудовании компьютеров.
Цилиндрическая структура. Цилиндрическая структура, также называемая ча
шечной или канистровой, представляет собой тонкий полый цилиндр, закрепленный с
одного конца на валу рядом с коллектором, а с другого конца помещенный между по
стоянными магнитами (рис. 11.3). Цилиндр обычно сделан из стекловолокна с медны
ми проводами, закрепленными на его внутренних и внешних поверхностях; сегменты
провода на конце цилиндра подключены на внешние выводы.
Дисковая структура. Дисковая структура для ПМдвигателей без сердечника со
стоит из тонкой тороидальной стекловолоконной платы с медными проводниками с
обеих сторон и с шестью постоянными магнитами, которые закреплены на торцевых
крышках, как показано на рис. 11.4. Обратите внимание, что проводники на передней
712
и задней сторонах платы соединены медными сегментами, закрепленными на ребре
диска. Такое соединение подобно двусторонней плате печатного монтажа с проводни
ками на грани. Шесть постоянных магнитов (три пары полюсов северюг) установле
ны под углом 60°, и северные полюса на одной концевой пластине установлены напро
тив южных полюсов на другой.
Рис. 11 .3. Цилиндрическая
структура ПМ
двигателя без
сердечника
11.2.5 . åÓÏÂÌÚÌ̊ èå-‰‚Ë„‡ÚÂÎË
Моментные ПМдвигатели предназначены для длительной работы с низкими скорос
тями вплоть до остановки. Не все двигатели постоянного тока могут работать в таких
режимах.
Рис. 11.4 . Дисковая структура ПМ
двигателя без сердечника
ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ ë èéëíéüççõåà åÄÉçàíÄåà
713
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Просмотрев снова материалы главы 9, мы увидим, что противоЭДС прямо про
порциональна скорости якоря. При низких скоростях якоря значения противоЭДС в
уравнении для тока малы, что приводит к большим значениям тока. Моментные дви
гатели способны рассеивать тепло, создаваемое большими токами. Моментные ПМ
двигатели имеют три основные области применения в промышленности:
намотка катушек, когда вращающий момент ПМдвигателя должен быть при
ложен к нагрузке при остановках, чтобы не ослаблять натяжение провода;
открытие и закрытие клапанов, когда моментные двигатели осуществляют
всего лишь несколько поворотов шпинделя с низкой скоростью;
привод лентопротяжных механизмов, где моментный двигатель все время
должен работать на низких скоростях.
11.3. ÅÖëôÖíéóçõÖ ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ
Бесщеточный двигатель постоянного тока — это двигатель, коммутируемый с помо
щью полупроводниковых ключей и использующий для коммутации датчики углового
положения вала. Блоксхема бесщеточного двигателя постоянного тока показана на
рис. 11.5. Система датчиков сообщает контроллеру об угловом положении ротора, а
контроллер переключает в определенной последовательности электронный коммута
тор, который, в свою очередь, управляет питанием обмоток статора. Система датчи
ков может быть как электрической, так и механической; ее блоки связаны и со стато
ром и с ротором. Каждый из этих блоков будет подробно рассмотрен в этом разделе.
Рис. 11.5. Блок
схема
бесщеточного
двигателя
постоянного тока
11.3.1. äÓÌÒÚÛ͈Ëfl Ë ÔË̈ËÔ ‰ÂÈÒÚ‚Ëfl
Конструкции бесщеточного двигателя постоянного тока и постоянного ПМдвигателя
показаны соответственно на рис. 11.6a и б. Обратите внимание на различия в разме
щении обмоток и в расположении магнитов. В бесщеточном двигателе обмотки разме
714
щены в пазах статора, а магниты — в роторе. В ПМ двигателях обмотки размещены в
пазах ротора, магниты — в статоре.
Рис. 11.6 . Конструкции двигателей:
а) бесщеточного;
б) с постоянными магнитами
Блоксхема бесщеточного двигателя, приведенная на рис. 11.5, расширена и по
казана более подробно на рис. 11.7 . Переключатели, показанные на этом рисунке,
представляют собой обычно транзисторы, тиристоры или пары МОПтранзисторов,
которые управляют работой бесщеточного двигателя. Ток от положительного к отри
цательному полюсу источника питания течет через обмотки статора и двухпозицион
ные ключи. Положительный или отрицательный ток создает переменное магнитное
поле в статоре, которое, в свою очередь, вызывает вращение ротора.
Работа бесщеточного двигателя при повороте ротора на 90° отображена на рис. 11 .8.
Переключатели в электронном коммутаторе установлены в состояние, обеспечивающее
протекание тока через обмотки статора A и C, устанавливая полярности полюсов статора,
показанные на рис. 11 .8a, а ротор следует за магнитным полем. Затем переключатели уста
навливаются в состояние, позволяющее току проходить и через обмотки B и D, и ротор вра
щается по часовой стрелке, следуя за результирующим полем, как показано на рис. 11 .8б.
Затем ток через обмотки А и C выключается, и ротор продолжает вращаться по часовой
стрелке до положения, показанного на рис. 11 .8в. Сигнал обратной связи от системы датчи
ков используется для включения тока в моменты, позволяющие осуществить плавное вра
щение ротора. Движение включенного состояния двухпозиционных переключателей проис
ходит против часовой стрелки, в направлении, обратном направлению вращения ротора.
11.3.2 . ëËÒÚÂχ ‰‡Ú̃ËÍÓ‚
Мы уже упомянули, что система датчиков бесщеточного двигателя постоянного тока
может быть либо электрической, либо механической. Наиболее часто применяется
ÅÖëôÖíéóçõÖ ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ
715
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
система с электрическими датчиками Холла и механическая система с оптическими
датчиками.
Рис. 11.8. Работа бесщеточных двигателей постоянного тока:
а) угловое положение ротора 0°;
б) угловое положение ротора 45°;
в) угловое положение ротора 90°
Рис. 11.7. Подробная блок
схема бесщеточного двигателя постоянного тока
716
Датчики Холла. В начале 1800х годов Эдвард Холл обнаружил, что если помес
тить магнит перпендикулярно к одной стороне проводника с током, то на другой его
стороне появится напряжение. Это напряжение обычно порядка одного милливольта
и пропорционально току в проводнике и напряженности магнитного поля. Это явле
ние, известное как эффект Холла, может использоваться для измерения напряженно
сти магнитного поля. Датчиком Холла называется устройство, которое создает напря
жение в присутствии магнитного поля. Напряжение может быть положительным или
отрицательным, в зависимости от направления магнитного поля. На рис. 11.9а пока
заны датчики Холла установленные в двигателе, а на рис. 11.9б — увеличенное изоб
ражение датчика U1. Напряжение, приложенное к горизонтальным сторонам этого
датчика, обозначено как V1, а его выходное напряжение VU1 снимается с вертикаль
ных сторон. Поскольку выходное напряжение мало, в датчики Холла встроен усили
тель с высоким коэффициентом усиления, позволяющий получить приемлемый уро
вень выходного напряжения. Датчик U2 подключается аналогично, его входное
напряжение обозначается как V2, а выходное — как VU2.
Рис. 11.9 . Датчики Холла в бесщеточных двигателях:
а) расположение датчиков Холла в двигателе;
б) проявление эффекта Холла в датчике
Когда один из полюсов ротора достигает положения 12 часов, полярности напря
жений VU1 и V1 совпадают, а когда он переходит в положение 6 часов, эти полярности
становятся противоположными. Точно так же полярность VU2 противоположна по
лярности V2 в положении ротора на три часа и полярности этих напряжений совпада
ют в положении ротора на девять часов. Как мы уже упоминали, эти выходные напря
жения датчиков подаются на контроллер, который обеспечивает необходимый
алгоритм переключения двухпозиционных переключателей, управляя токами через
обмотки статора и вращением ротора.
Оптический датчик. Оптический датчик состоит из диска, установленного на
валу двигателя, и светоизлучающих диодов и фотоприемников, установленных вокруг
вала (рис. 11.10). . Диск является заслонкой, открывающей при вращении вала в каж
ÅÖëôÖíéóçõÖ ÑÇàÉÄíÖãà èéëíéüççéÉé íéäÄ
717
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
дый момент только один из трех оптических датчиков. Как и в системе с датчиками
Холла, выходной сигнал с фотоприемников передается на контроллер для изменения
состояния переключателей.
Рис. 11.10. Системы оптических датчиков:
а) вид сбоку;
б) вид спереди
11.3 ..3. ëËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl ÏÓ̆ÌÓÒÚ̧̨
Управление мощностью в бесщеточном двигателе постоянного тока может быть вы
полнено с помощью одной из следующих двух систем:
системы регулирования напряжения, изменяющей напряжение, подавае
мое на переключатели коммутатора, которое в действительности создается
последовательным стабилизатором, управляя, таким образом, напряжени
ем, которое подключается к обмоткам статора;
системы управления током, которая позволяет переключателям коммутато
ра изменять ток двигателя. Это обеспечивается либо работой переключателей в
режиме постоянного тока, а не постоянного напряжения, либо использованием
режима ШИМ, в котором регулируется соотношение периодов проводящего и
непроводящего состояния ключей.
11.3.4 . èËÏÂÌÂÌË ·ÂÒ̆ÂÚÓ̃Ì̊ı ‰‚Ë„‡ÚÂÎÂÈ ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇
Поскольку бесщеточные двигатели постоянного тока имеют высокую надежность и
низкие эксплуатационные расходы и работают на высоких скоростях, они хорошо под
ходят для космических и биомедицинских отраслей промышленности:
в космической промышленности ими оснащаются гироскопы; лентопротяжные
механизмы для прочных высоконадежных видеомагнитофонов и других систем;
718
в биомедицинской промышленности они применяются для создания насосов
для искусственного сердца и криогенных холодильников.
11.4. òÄÉéÇõÖ ÑÇàÉÄíÖãà
Шаговый двигатель преобразует электронные цифровые импульсы в дискретные ме
ханические. Когда шаговый двигатель получает цифровой импульс, возбуждающий об
мотку статора, вал двигателя поворачивается на специфическое угловое расстояние
(шаг), и затем остается в этом положении до прихода следующего импульса. В зависи
мости от параметров импульса вал может поворачиваться по часовой стрелке или в об
ратном направлении. Таким образом, шаговый двигатель способен эффективно управ
лять скоростью, углом поворота и направлением вращения механической нагрузки.
Прежде чем приступить к обсуждению двух основных типов шаговых двигате
лей — с постоянными магнитами и с переменной реактивностью, — определим неко
торые важные термины, относящиеся к шаговым двигателям:
скорость — максимальное число шагов двигателя за 1 секунду;
угол шага — угол поворота вала за 1 шаг;
пусковой момент (holding torque) — момент, создаваемый нагрузкой, при
котором двигатель, возбужденный полем статора, не сможет переместиться
из текущего положения;
удерживающий момент (detent torque) — момент, создаваемый нагруз
кой, при котором ротор остается в текущем положении при выключенном
статоре. Значение обычно составляет около 10% от пускового момента.
11.4.1. ò‡„Ó‚̊È ‰‚Ë„‡ÚÂÎ̧ Ò ÔÓÒÚÓflÌÌ̊ÏË Ï‡„ÌËÚ‡ÏË
Шаговый двигатель с постоянными магнитами состоит из обмоток статора и ротора,
выполненного в виде постоянного магнита. Его работа основана на том, что разно
именные полюса притягиваются, а одноименные отталкиваются. На рис. 11.11 пред
ставлена конструкция шагового двигателя с постоянным магнитом, имеющего четыре
статорных обмотки и ротор, выполненный в виде шестиполюсного магнита. В каждый
момент возбуждена только одна пара противолежащих обмоток, причем одна из них
создает южный полюс, а другая — северный. Статорная обмотка, образующая север
ный полюс, притягивает ближайший южный полюс ротора, а обмотка, образующая
южный полюс, — ближайший северный полюс ротора.
Обратите внимание, что четыре обмотки статора на рис. 11.11 обозначены как A,
B, C и D, а шестиполюсный ротор образует три магнита, пары полюсов которых обо
значены как S1 и N1, S2 и N2, S3 и N3. Для положения ротора, отображенного на
рисунке, обмотка А, представляющая в данный момент северный полюс, и полюс ро
тора S1 находятся друг против друга. Будем считать, что этому положению ротора со
ответствует угол в 0° . Контроллер затем выключает обмотку А и возбуждает обмотку
òÄÉéÇõÖ ÑÇàÉÄíÖãà
719
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
B, которая становится северным полюсом. Это заставляет ближайший к обмотке В
южный полюс ротора S2 повернуться по часовой стрелке и расположиться напротив
B, повернув при этом ротор на 30° по часовой стрелке. Затем контроллер выключает
обмотку B и возбуждает обмотку C в качестве северного полюса. Это заставляет бли
жайший к С южный полюс ротора S3 повернуться по часовой стрелке и расположить
ся напротив С, снова повернув при этом ротор на 30° по часовой стрелке.
Рис. 11.11 . Сечение ПМ
двигателя: обмотки статора обозначены как A, B, C и
D; полюса ротора помечены N1, S1, N 2, S2, N3, S3
Таблица 11.1.
Положения полюсов ротора и обмоток статора при
пошаговом движении ротора в двигателе с постоянным
магнитом (для полного оборота ротора)
Примечание: при указании угловых положений ротора считается, что он вращается по часовой стрелке.
720
Пошаговое вращение и далее продолжается аналогичным образом. Последова
тельности возбужденных обмоток и взаимодействующих с ними полюсов для одного
законченного цикла вращения представлены в табл. 11.1. Обратите внимание, что в
таблице статорная обмотка, образующая северный полюс, отмечена буквой N, а об
мотка, создающая южный полюс — буквой S. Обмотки статора, перечисленные в
столбцах «Полюса ротора» взаимодействуют с полюсами ротора, указанными в заго
ловке столбца. Изучение табл. 11.1, в которой представлена вся последовательность
шагов при полном повороте на 360° по часовой стрелке, позволит вам познакомиться с
работой шагового двигателя с постоянными магнитами, показанного на рис. 11.11.
èËÏ 11.2
Исходя из данных табл. 11.1, определите, какова позиция ротора относительно обмо
ток статора для углового положения 270°?
êÖòÖçàÖ
Для угла 270° обмотка статора B образует северный полюс, а обмотка D — южный по
люс, как отмечено в столбцах «Обмотки статора». В столбцах «Полюса ротора», показа
но, что полюс ротора S1 взаимодействует с обмоткой B, а полюс N1 — с обмоткой D.
11.4 .2 . ò‡„Ó‚̊È ‰‚Ë„‡ÚÂÎ̧ Ò ÔÂÂÏÂÌÌÓÈ Â‡ÍÚË‚ÌÓÒÚ̧̨
Шаговый двигатель с переменной реактивностью состоит из электромагнитных обмоток
статора, как в двигателе с ПМ, и ненамагниченного зубчатого ротора. Вал двигателя по
ворачивается в положение с минимальным магнитным сопротивлением потоку. Магнит
ное сопротивление аналогично электрическому сопротивлению, так что можно сказать,
что вал вращается к позиции наименьшего сопротивления. Двигатели с переменным маг
нитным сопротивлением имеют намного меньший пусковой момент, чем двигатели с ПМ,
и действительно нулевой удерживающий момент, потому что ротор немагнитный. Кроме
того, шаговые двигатели с переменным магнитным сопротивлением работают с намного
большей скоростью (до 15000 шагов/с), чем шаговые двигатели с ПМ.
На рис. 11 .12 представлен поперчный разрез трехфазного переменного реактивно
го шагового двигателя с двенадцатью обмотками статора и восемью полюсами ротора.
Обратите внимание, что обмотки статора установлены через 30°, а полюса ротора —
через 45°. Полюса ротора имеют обозначения от T1 до T8, и обмотки статора, обозна
ченные как А, также поочередно помечены как северные N и южные S полюса. Чтобы
избежать загромождения рисунка, обмотки B и C не помечены соответствующими по
люсами. Одной и той же буквой обозначены несколько последовательно соединенных
обмоток статора, относящихся к одной фазе трехфазной сети:
фазу A образуют обмотки статора на позициях в двенадцать, три, шесть, и
девять часов;
фазу B — обмотки на позициях в один, четыре, семь и десять часов;
фазу C — обмотки на позициях в два, пять, восемь и одиннадцать часов.
òÄÉéÇõÖ ÑÇàÉÄíÖãà
721
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
При подаче питания на фазу A обмотки на позициях двенадцать и шесть часов соот
ветствуют северным полюсам, обмотки на позициях в три и девять часов — южным, а
зубцы ротора расположены, как показано на рис. 11 .12. Затем обмотки фазы А выклю
чаются, и питание подается на обмотки B. Изза притяжения между магнитными полю
сами статора ротор вращается против часовой стрелки так, что зубцы T2, T4, T6 и T8
становятся напротив полюсов B статора. При этом система стремится занять положе
ние с наименьшими воздушными промежутками, уменьшая таким образом магнитное
сопротивление пути потока. Затем те же процессы повторяются с обмотками фазы C.
Вращение происходит против часовой стрелки; угол шага равен 15° и является разницей
между угловыми положениями полюсов статора (30°) и зубцов ротора (45°).
11.4.3. êÂÊËÏ̊ ‡·ÓÚ̊ Ë ‚ÓÁ·ÛʉÂÌËfl
Шаговые двигатели могут действовать в четырех рабочих режимах.
Режим ожидания: обмотки статора выключены, и ротор не поворачивается, по
скольку момент меньше удерживающего момента.
Режим останова: обмотки статора возбуждены, но ротор не поворачивается,
поскольку момент нагрузки превышает пусковой момент.
Двунаправленный режим: ротор непрерывно поворачивается, затем останав
ливается. После этого он может продолжать вращение в том же направлении или в
обратном.
Однонаправленный режим: скорость ротора больше, чем при двунаправленном
режиме, и ротор не может мгновенно перейти к обратному вращению. В некоторых
технических изданиях этот режим назван режимом прогона.
Рис. 11.12. Трехфазный двигатель с
переменной реактивностью
722
Эти режимы работы изображены на кривых зависимости вращающего момента
от скорости на рис. 11.13.
èËÏ 11.3
Найдите скорость вращения двигателя (см. рис. 11.11) в об/мин, если скорость, вы
раженная в шагах/с, составляет 200.
êÖòÖçàÖ
Мы можем использовать следующее выражение для скорости двигателя:
где N — скорость двигателя, об/мин,
S — шаговая скорость, шаг/с,
Y — приращение шага, °/шаг,
K — константа, равная 6.
При угле шага двигателя 30 °/шаг, показанном на рис. 11.11, мы можем записать ис
комую скорость двигателя как
èËÏ 11.4
Для двигателя, действующего в однонаправленном режиме при угле шага 2°, вычис
лите вращающий момент, чтобы при нагрузке 10 фунт/дюйм2 набрать скорость от 0
до 800 шагов/с за 0,5 с.
êÖòÖçàÖ
Примените следующую формулу:
где T — вращающий момент, унция+дюйм,
L — нагрузка, фунт × дюйм2,
S — шаговая скорость, шаг/с,
Y — угол шага, градусы,
K — константа, равная 2,160,
t — время, с.
Следовательно:
Т = 47,2 унций × дюйм.
òÄÉéÇõÖ ÑÇàÉÄíÖãà
723
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Режимы возбуждения шагового двигателя классифицируются следующим образом:
двухфазный и двухфазный модифицированный,
полушаговый и микрошаговый,
трехфазный и трехфазный модифицированный.
Рассмотрим каждый режим подробно.
Двухфазный и двухфазный модифицированный режимы. При описании работы
ПМдвигателя в разделе 11.4 .1 было установлено, что в каждый момент времени воз
буждена только одна обмотка.Положения ротора при вращении подробно отражены в
табл. 11 .1, там же описан двухфазный режим возбуждения. При модифицированном
двухфазном режиме, показанном на рис. 11 .14, обе обмотки статора возбуждены одно
временно. При этом, когда обмотки статора B и C образуют северные полюса, а обмотки
А и D — южные, результирующий магнитный поток находится в середине между обмот
ками B и C. Ближайший зубец массивного ротора устанавливается в этой средней пози
ции, вызывая поворот ротора на 15°. Затем возбуждаются обмотки А и B, результирую
щий поток находится между обмотками А и B, и ближайший зубец массивного ротора
устанавливается в этой позиции. При этом ротор поворачивается еще на 30°. На рис.
11.14а показан поворот на 15° по часовой стрелке от положения 0°, а на рис. 11.14б —
поворот на 30° от предыдущего положения в 15° . В табл. 11.2 описаны состояния статор
ных обмоток при последовательности шагов в 30° в течение одного полного оборота ро
Рис. 11.13. Зависимости скорости от момента для различных режимов работы
724
тора. Сопоставляя данные из табл. 11.2 с рис. 11.14, можно понять, как происходит по
ворот ротора на 360° в модифицированном двухфазном режиме.
Рис. 11.14 .
Движение ротора в
модифицированном
двухфазном режиме:
а) ротор
поворачивается на 15°
от нулевого пол ожения;
б) поворот ротора еще
на 30° от позиции 15°
òÄÉéÇõÖ ÑÇàÉÄíÖãà
725
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Полушаговый и микрошаговый режимы. Полушаговый режим можно получить,
объединяя двухфазный и модифицированный двухфазный режимы. В этом режиме
двигатель управляется с шагом 15°. Режим детально описан в табл. 11.3 для поворота
ротора на 180°. Обратите внимание, что в последовательности возбужденных обмоток
статора чередуются фрагменты последовательностей из табл. 11 .1 и 11.2.
В полушаговом режиме вращающий момент выше, чем в режиме с полным ша
гом, поскольку поле при двух возбужденных полюсах получается более интенсивным.
Однако скорость движения ротора в полушаговом режиме меньше.
Таблица 11.2 . Модифицированный двухфазный режим
Таблица 11.3 . Полушаговый режим
В микрошаговом режиме малые углы шага получаются путем регулирования тока
двигателя с помощью амплитудноимпульсного или широтномпульсного регулирова
726
ния напряжения, возбуждающего обмотки статора. Такой режим возбуждения значи
тельно уменьшает неравномерность хода двигателя в полушаговом режиме и может
управляться имеющимися на рынке устройствами. Одним из таких устройств является
микросхема LMD18245 фирмы National Semiconductor, показанная в справочных
данных на рис. 11.15. Это устройство управляет одной обмоткой статора шагового
двигателя и может управлять двигателем в полно полу или микрошаговом режимах.
Обратите внимание, что схема привода двигателя — это Hмост, который обсуждался
в главе 9. Управляет всем устройством микроконтроллер (а возможно, и микропро
цессор). Типичное применение микросхемы LMD18245 в приводе двигателя показано
на рис. 11 .16. Если вас интересуют дополнительные подробности, в частности харак
теристики устройства и указания по применению, вы можете найти их в справочных
данных (data sheet) на микросхему LMD18245.
Трехфазный и трехфазный модифицированный режимы. Шаговый двигатель в
этих режимах работает так же, как в двухфазном и модифицированном двухфазном ре
жимах. На рис. 11 .17 показан трехфазный регулируемый реактивный двигатель, где три
обмотки статора помечены как A, B и C, а положения ротора имеют номера от 1 до 6.
При возбуждении обмотки А ротор находится в позиции 6, когда же возбуждается B,
ротор поворачивается в положение 2. Все положения ротора соответствуют возбужден
ному состоянию одной из обмоток или сразу двух обмоток трехфазного двигателя, это
соответствие показано в табл. 11 .4 . Сопоставляя информацию табл. 11 .4 с рис. 11 .17,
вы можете понять, как работает двигатель в трехфазном и модифицированном трех
фазном режимах возбуждения.
Таблица 11.4 .
Трехфазный и трехфазный модифицированный режимы:
соответствие положений ротора возбужденным
обмоткам статора.
11.4 .4 . è„ÛÎËÓ‚‡ÌËÂ Ë Á‡ÚÛı‡ÌËÂ
Неспособность шагового двигателя точно следовать командам на шаге приводит к перере
гулированию, сопровождаемому колебаниями. Это явление представлено на рис. 11 .18.
Колебания, показанные на рисунке, затухают довольно быстро в шаговых двигателях ПМ,
потому что магнитный ротор притягивается магнитным полем возбужденных обмоток ста
тора. Поскольку ротор в двигателях с переменной реактивностью не намагничен, колеба
ния его затухают медленно и могут быть довольно серьезны при инерционной нагрузке. На
самом деле, если колебания не затухают до следующего шага, реактивный двигатель мо
жет сделать обратный шаг.
òÄÉéÇõÖ ÑÇàÉÄíÖãà
727
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Рис. 11.15. Справочные данные на микросхему LMD18245
728
Рис. 11.16. Применение LMD18245 в приводе шагового двигателя
Рис. 11.17. Трехфазный шаговый
двигатель
òÄÉéÇõÖ ÑÇàÉÄíÖãà
729
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Методы снижения перерегулирования и подавления колебаний называются дем
пфированием. Демпфирование может быть осуществлено электрически или механи
чески. Два довольно дешевых метода электрического демпфирования, называемых
резистивным и емкостным демпфированием, показаны соответственно на рис. 11.19а
и б. При резистивном методе небольшой ток протекает через резисторы и две невоз
бужденные обмотки, которые создают при этом небольшой обратный вращающий мо
мент. Скорость колебаний ротора при этом снижается, что приводит к ограничению
перерегулирования. При емкостном методе демпфирования, когда возбужденная об
мотка выключается, тогда подключенный параллельно ей заряженный конденсатор
также создает обратный момент, приложенный к ротору. Преимущество этого метода
состоит в том, что потери при этом ниже, чем при резистивном демпфировании, и,
следовательно, меньше потребляемая мощность.
Поскольку многие шаговые двигатели с переменной реактивностью имеют доступ к
валу с обоих торцов двигателя, может быть применено и механическое демпфирование —
путем установки на свободном конце вала фрикционной муфты, увеличивающей трение в
системе, снижающей скорость ротора и уменьшающей перерегулирование. Однако при
износе муфты трение уменьшается, и перерегулирование демпфируется недостаточно.
11.4.5. èËÏÂÌÂÌË ̄‡„Ó‚̊ı ‰‚Ë„‡ÚÂÎÂÈ
Отличительное свойство шаговых двигателей состоит в том, что они могут управляются
цифровыми входными сигналами, которые обычно создаются компьютерами. Это свойство
делает их привлекательными для применения при управлении компьютерными периферий
ными устройствами, офисным оборудованием, технологическими процессами и станками. К
компьютерным периферийным устройствам, в которых применяются шаговые двигатели,
относятся принтеры, графопостроители и дисководы. В офисном оборудовании такие двига
Рис. 11.18. Временная диаграмма движения вала при идеальном и реальном шаге
730
тели включают фокусировку объективов и подачу бумаги. При управлении процессами они
нужны для позиционирования деталей на сборочных линиях и XY позиционирования в опе
рациях лазерной подгонки деталей. Применение двигателей в станках связано с позициони
рованием вала для роботов, а также для фрезерных и токарных станков.
Рис. 11.19. Методы демпфирования:
а) резистивный метод;
б) емкостной метод
11.5. ëÖêÇéÑÇàÉÄíÖãà
Серводвигатель получил свое название от латинского servus, что означает «раб». Он яв
ляется позиционером, направляющим движение двигателя по образцу, создаваемому ис
точником управления. Серводвигатель является частью сервосистемы, которая работает,
как замкнутая система обратной связи, называемая обычно контуром сервосистемы или
просто сервоконтуром. В некоторых источниках сервосистема называется системой уп
равления серводвигателем, сервомеханизмом или просто серводвигателем. Блоксхема
контура сервосистемы показана на рис. 11.20. Тремя ее основными блоками являются
сервоусилитель, серводвигатель и датчик. Сервоусилитель состоит из входного блока, ко
торый создает управляющий сигнал для выходного блока, и этот сигнал, как правило, со
здается из разности между опорным управляющим сигналом VCS и сигналом обратной
связи VFC, приходящим от датчика.
Вообще говоря, любой двигатель постоянного или переменного тока может ис
пользоваться как серводвигатель; но двигатели, специально предназначенные для
сервосистем, должны обладать некоторыми дополнительными свойствами:
вращающий момент должен быть достаточен, чтобы удерживать нагрузку в
фиксированном положении.
ëÖêÇéÑÇàÉÄíÖãà
731
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
работа в режиме ожидания и во всем диапазоне скоростей не должна вызы
вать перегрева двигателя.
изменение скорости должно быть плавным и при прямом, и при обратном
вращении.
11.5.1. ë‚Ӊ‚Ë„‡ÚÂÎË ÔÓÒÚÓflÌÌÓ„Ó ÚÓ͇
Типичный серводвигатель постоянного тока показан на рис. 11.21. Напряжения, при
ложенные к обмотке возбуждения VF и к якорным обмоткам VA, обеспечиваются раз
личными источниками питания. Почти во всех сервосистемах с применением двигате
ля постоянного тока сервоусилители управляют напряжением якоря, в то время как
напряжение возбуждения стабильно. Напротив, в универсальном двигателе постоян
ного тока одно напряжение управляет и обмоткой возбуждения, и обмоткой якоря.
Характеристики серводвигателя постоянного тока отображены на рис. 11.22, где при
ведены зависимости скорости от вращающего момента для различных значений на
пряжения на якоре. Отметим, что при любом заданном напряжении якоря момент дви
гателя больше при низких скоростях, чем при высоких.
Рис. 11.20. Блок
схема сервосистемы
Рис. 11.21. Серводвигатель
постоянного тока
732
Это позволяет двигателю быстро разгоняться от состояния ожидания до заданной
скорости. Когда состояние двигателя приближается к заданному, напряжение якоря от
значения VA уменьшается до нуля, а скорость двигателя снижается до значения, показан
ного на характеристике (см. рис. 11.22). Отметим, что при более низких уровнях VA при
кладывается обратный вращающий момент, который уменьшает перерегулирование.
11.5 .2 . ë‚Ӊ‚Ë„‡ÚÂÎË ÔÂÂÏÂÌÌÓ„Ó ÚÓ͇
Типичный серводвигатель переменного тока показан на рис. 11.23. Напряжение VF,
приложенное к фиксированной обмотке, и напряжение VC, приложенное к управляю
щей обмотке, получены от одного и того же источника, при этом они находятся в фазе
или в противофазе. На рисунке конденсатор C1 обеспечивает опережающий ток в об
мотке статора, сдвигая его относительно напряжения VF приблизительно на 90° . Ина
че говоря, если напряжение, которое управляет обмоткой управления, находится в
фазе с напряжением статорной обмотки, то ток в обмотке управления будет отставать
от тока статорной обмотки приблизительно на 90° и двигатель будет вращаться по ча
совой стрелке. Если же напряжение, приложенное к управляющей обмотке, находит
Рис. 11.22. Характеристики серводвигателя постоянного тока
ëÖêÇéÑÇàÉÄíÖãà
733
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
ся в противофазе с напряжением статорной обмотки, то ток управляющей обмотки
будет опережать ток статорной обмотки приблизительно на 90°, и двигатель будет вра
щаться против часовой стрелки. При изменении полярности подключения управляю
щей обмотки ее ток и момент, создаваемый на роторе, изменят свое направление.
Рис. 11.23. Серводвигатель
переменного тока:
напряжения VC и VF
могут совпадать
по фазе или
находиться в
противофазе
Семейство нагрузочных характеристик серводвигателя переменного тока для раз
личных напряжений управления показано на рис. 11 .24. Как показывают характеристики,
самый большой вращающий момент создается при малых скоростях и уменьшается с рос
том скорости. Обратите внимание, что при малых напряжениях управления серводвига
тель обеспечивает обратный вращающий момент, который снижает перерегулирование.
Если вследствие инерции нагрузки ротор начинает вращаться со скоростью большей, чем
заданная, магнитное поле статорной обмотки взаимодействует с быстро вращающимся
ротором, заставляя ток обмотки управления течь в обратном направлении.
Однако в серводвигателях все же наблюдается перерегулирование, и постепен
ное изменение скорости небольшими шагами заставляет двигатель вращаться более
плавно и снижает опасность перерегулирования. Существует немало методов для
предотвращения перерегулирования; некоторые из них довольно сложны, и их рас
смотрение выходит за рамки этого учебника.
Вообще, серводвигатели переменного тока предпочтительнее серводвигателей
постоянного тока: они прочнее, требуют меньшего обслуживания и могут работать
при более высоких температурах. Это, в основном, те же причины, которые играют
роль и при выборе обычных двигателей; однако для сервосистем большой мощности
обычно выбираются все же серводвигатели постоянного тока.
11.5.3. èË‚Ó‰̊ Ò‚Ӊ‚Ë„‡ÚÂÎÂÈ
Первые серводвигатели управлялись просто сервоусилителем, на вход которого пода
вался сигнал рассогласования между управляющим напряжением и сигналом обрат
ной связи с датчика, а выходное напряжение управляло двигателем. Для серводвига
телей постоянного тока эти усилители были обычными пушпульными усилителями,
собранными на дискретных компонентах и транзисторах. Усилители, которые управ
ляли серводвигателями переменного тока, были обычно ключевыми преобразовате
734
лями на дискретных компонентах, формирующими из импульсов постоянного тока си
нусоидальное напряжение переменного тока. На смену этим простым усилителям те
перь пришел электропривод с микропроцессорным управлением.
Рис. 11.24. Характеристики серводвигателей переменного тока
В настоящее время сервоусилители в большинстве случаев заменены контролле
рами. Контроллер сервосистемы состоит не только из усилителя, который управляет
серводвигателем по заданной программе, но также содержит схему, которая управляет
системой, получая сигналы от датчиков, и посылает сигналы программируемому логи
ческому контроллеру, управляющему несколькими системами серводвигателей. Кон
троллер серводвигателя постоянного тока C842 фирмы Polytec показан на рис. 11.25.
Контроллер C842 управляется ПК и обеспечивает полный доступ к внутренним функ
ëÖêÇéÑÇàÉÄíÖãà
735
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
циям процессора через адресное пространство входа/выхода. Он использует быстро
действующий цифровой сигнальный процессор, реализуя высокоэффективное управле
ние движением с выбором различных параметров фильтрации. Угловое положение, ско
рость и ускорение могут независимо программироваться в процессе работы, восемь
логических входов и столько же логических выходов доступны для гибкого автоматичес
кого программного управления, например, с вызовом функций. Некоторые основные
особенности контроллера C842:
одновременное управление несколькими (до четырех) серводвигателями по
стоянного тока;
встроенные малошумящие линейные усилители мощности;
инструментальные средства программирования из среды Windows;
двенадцать логических вводов для предельных и нулевых переключателей;
программируемые пределы вращающего момента.
Контроллер C842 — только один многих контроллеров серводвигателей, имею
щихся на рынке. Другие модели имеют различный стиль исполнения: от стиля монта
жа печатных плат до стиля стойки. В разделе 11.9 перечислены вебсайты изготовите
лей, где вы можете найти целый ряд наименований фирмпоставщиков контроллеров
серводвигателей.
Рис. 11.25. Плата контроллера C
842 для сервомотора постоянного тока
11.6 . éèíàóÖëäàÖ äéÑÖêõ
Как было отмечено выше в разделе 11.5, чтобы точно позиционировать вал двигателя,
используется датчик, позволяющий измерить и передать на контроллер угловое поло
жение вала. Одним из таких датчиков является оптический кодер.
Оптический кодер — датчик параметров механического движения, преобразую
щий скорость, направление вращения и угловое положение вала в электрические сиг
736
налы. На рис. 11 .26 показаны четыре основных элемента оптического кодера: источ
ник освещения, диск с узкими щелями, световой датчик и схема, формирующая сигна
лы логического уровня.
Рис. 11.26. Устройство и компоненты оптического кодера
Если диск вращается, то сигнал от источника света на приемник проходит только
тогда, когда между ними появляется щель диска (рис. 11.27). Обратите внимание, что
диск имеет много щелей и что источник освещения установлен на одной стороне диска,
а приемник света — прямо напротив него на другой стороне.
Рис. 11.27. Работа оптического кодера
éèíàóÖëäàÖ äéÑÖêõ
737
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Фотоприемник поочередно открывается либо закрывается диском при вращении.
На рисунке показан диск, имеющий 32 щели, период следования импульсов датчика
составляет:
θ=360°/32щели=11,25°,
где один оборот вала составляет 360° .
èËÏ 11.5
Сколько градусов приходится на период следования импульсов, если диск имеет 80 щелей?
êÖòÖçàÖ
θ=360°/80щели=4,5°.
èËÏ 11.6
Сколько импульсов будет на выходе датчика в примере 11.5, если диск повернется на
180°?
êÖòÖçàÖ
Если один импульс выводится каждые 4,5°, то nИМП = 180 / 4,5 = 40.
Ниже обсуждаются два типа оптических кодеров, инкрементный и абсолютный.
Многие модели оптических кодеров этих типов имеются на рынке (см. раздел 11.9,
список вебсайтов поставщиков).
11.6.1. àÌÍÂÏÂÌÚÌ̊ ̋ÌÍÓ‰Â̊
Инкрементный энкодер — оптический энкодер, который выводит один импульс для каж
дого обнаруживаемого приращения поворота вала, и положение вала вычисляется просто
путем подсчета числа импульсов, пришедших за время движения от предыдущего положе
ния. Самая простая форма энкодера имеет одну дорожку прорезей по периферии диска.
Число прорезей равно числу импульсов, выводимых за один оборот вала. Скорость может
быть вычислена путем измерения временного интервала между импульсами или путем
подсчета числа импульсов в определенном временном интервале. Однако однодорожеч
ный кодер не может определить направление вращения — для этого необходимы две до
рожки прорезей.
На рис. 11.28а показана часть диска с двумя дорожками, А и B, где каждая дорож
ка имеет одинаковое количество прорезей. Каждая дорожка имеет собственный ис
точник освещения и световой датчик, но ради упрощения рисунка они не показаны.
При вращении диска создаются две последовательности импульсов (рис. 11.28б и в).
Дорожки размещены на диске таким образом, что последовательности импульсов на
четверть периода смещены относительно друг друга. Когда диск вращается по часовой
стрелке, сигналы дорожки A отстают от сигналов дорожки B на четверть периода. При
вращении диска против часовой стрелки сигналы дорожки A опережают сигналы до
738
рожки B на четверть периода. Последовательности выходных сигналов энкодера при
вращении диска по часовой стрелке показаны на рис. 11.28б, при вращении против
часовой стрелки — на рис. 11.28в. Внешний счетчик подсчитывает число импульсов
для определения скорости вращения и содержит, кроме того, детектор фазы для опре
деления направления вращения вала.
Рис. 11.28. Инкрементный кодер:
а) расположение дорожек на диске;
б) выходные сигналы при вращении по часовой стрелке;
в) выходные сигналы при вращении против часовой стрелки
Кроме того, инкрементные кодеры содержат третью дорожку C, которая имеет
только одну прорезь, и ее датчик выводит один импульс за оборот. Этот импульс на
зван индексным импульсом или в некоторых источниках импульсом нулевой от
метки. Индексный импульс используется, чтобы сбросить счетчик, обеспечивая, та
ким образом, отсчет угла поворота от контрольной точки на диске. Индексные
импульсы также могут быть подсчитаны, чтобы получить общее число оборотов.
Выходные устройства кодера — обычно сбалансированные дифференциальные
драйверы линии, по одному для каждого из трех выходов, соответствующих дорожкам
A, B и C. Электрическая схема выходного устройства и форма выходного напряжения
приведены на рис. 11.29. Линией связи между драйвером и приемником служит обыч
но витая пара, параллельно входу приемника подключается резистор. Драйвер линии,
как правило, защищен от коротких замыканий, которые могут возникать на его выходе
в течение длительного времени. Он может также использоваться как одновыводное
éèíàóÖëäàÖ äéÑÖêõ
739
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
устройство, совместимое с входами цифровых систем. Выходные сигналы драйвера U1
на выходах 1 и 2 являются дополнительными.
Рис. 11.29. Выходные цепи оптического энкодера:
а) схема выходного устройства;
б) временная диаграмма выходных сигналов
Важной характеристикой кодера является разрешающая способность, которая пред
ставляется углом поворота в градусах на импульс. Чем меньше угол поворота на импульс,
тем лучше разрешающая способность. При использовании внешних цифровых схем раз
решающая способность кодера может увеличиваться с помощью методики умножения.
На рис 11.30 показаны три основных режима умножения: X1, X2 и X4. Они опре
деляются следующим образом:
режим X1 — подсчитывается число передних фронтов импульсов дорожки A,
равное числу прорезей на дорожке A;
режим X2 — подсчитывается число передних и задних фронтов импульсов
дорожки A, равное удвоенному числу прорезей на дорожке A;
режим X4 — подсчитывается число передних и задних фронтов импульсов
дорожки A и число передних и задних фронтов импульсов дорожки B, равное
сумме удвоенного числа прорезей дорожек A и B.
èËÏ 11.7
Какова разрешающая способность кодера, имеющего 1200 прорезей для режима X4?
êÖòÖçàÖ
Поскольку число прорезей в дорожках A и B одинаково, мы можем записать:
Разрешающая способность X4 = число импульсов на оборот × 4,
где число импульсов на оборот равно числу прорезей в дорожке.
Таким образом:
Разрешающая способность X4 = 1200 имп/об × 4 = 4800 имп/об.
Первая страница справочных данных для типичного инкрементного энкодера по
казана на рис. 11.31. Мы видим, что приведены два значения для максимальной разре
740
шающей способности: 7200 имп/об для описанного режима X4 и 144000 имп/об, ко
торое получено при использовании внешней электронной системы пользователя. Ис
точники питания, необходимые для этих энкодеров, должны иметь постоянное выход
ное напряжение +5, +12 или +15 В.
Рис. 11.30 . Режимы
умножения
Общая ошибка кодера является комбинацией инструментальной ошибки, квадра
турной ошибки (ошибке в сдвиге дорожек), интерполяционной ошибки и ошибки кван
тования Q. Изготовитель определяет все ошибки, но ошибка квантования зависит от
выбранной пользователем разрешающей способности. Она равна +1/2 шага квантова
ния, где шаг квантования зависит от выбранной пользователем разрешающей способ
ности для одного оборота.
èËÏ 11.8
Вычислите ошибку квантования Q для кодера на рис. 11.31, если пользователь выб
рал разрешающую способность, обеспечиваемую режимом X1.
êÖòÖçàÖ
В соответствии со справочными данными разрешающая способность в режиме X1
составляет 1800 имп/об, откуда
éèíàóÖëäàÖ äéÑÖêõ
741
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Рис. 11.31. Инкрементный кодер
742
11.6 .2 . Ä·ÒÓĮ̂ÚÌ̊ ÍÓ‰Â̊
Абсолютным кодером называется датчик механического движения, который дает уникаль
ную информацию об абсолютном угловом положении, в отличие от инкрементного энко
дера, который дает информацию об угловом смещении от определенного предшествую
щего положения. Абсолютные кодеры имеют несколько концентрических дорожек на
диске, каждая с собственным источником и приемником света. Часть диска абсолютного
кодера показана на рис 11.32. Положению вала соответствует число в двоичном коде, со
стоящее из нулей и единиц. Если свет проходит от источника на приемник, то выводится 1;
если нет — то 0. Число дорожек определяет разрешающую способность кодера. Кодер с
десятью дорожками имеет 1024 позиции, обеспечивая разрешающую способность 210.
Чтобы понять эту концепцию, рассмотрим кодер четырьмя дорожками, представленный
на рис. 11.33 . Затененные области не позволяют свету от источника пройти на приемник
при этом на выходе формируется сигнал логического 0; прозрачные области позволяют
свету пройти на датчик, сформировав на выходе сигнал логической 1. Радиальные фраг
менты круга на рис. 11 .33 помечены числами 4, 3, 2, 1, 16, 15.
Рис. 11.32. Сечение кодера
Внешняя дорожка обозначена как значение 20; следующая — как 21; далее как 22
и 23. Когда на линии источниковприемников появляется сектор 1 диска, перекрыты
все дорожки и на выходе формируется цифровой код 0000. Когда этой линии достигает
éèíàóÖëäàÖ äéÑÖêõ
743
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
сектор 2, код на выходе изменяется на 0001, а при достижении линии сектором 3 — на
0010. Эта двоичная последовательность заканчивается сектором 16 с выходным ко
дом 1111; затем цикл повторяется.
Рис. 11.33 . Диск с четырьмя
дорожками
В ранних кодерах возникала проблема, когда выходной код изменялся от 0111
(десятичного числа 7) до 1000 (десятичного числа 8), поскольку в этот момент изменя
ли состояние все четыре выхода, но не одновременно.
Таким образом, мог получаться ложный код положения. Эта проблема была ис
правлена применением методики, названной серым кодом, при которой в каждый мо
мент возможно изменение только одного бита. Серый код легко выполняется на диске
соответствующим изменением положения прорезей. Однако эта методика требует
внешних преобразователей серого кода в двоичный для использования информации во
внешних системах.
Последовавшие усовершенствования в технологии кодеров и в микропроцессор
ной электронике сделали излишним применение серого кода, чтобы гарантировать
точность. Абсолютные кодеры, подобные показанному на рис. 11.34, выводят есте
ственный двоичный код, позволяя использовать простые аппаратные средства и про
граммное обеспечение.
Обратите внимание на высокое разрешение (217) кодера на этом рисунке. Этот
кодер обеспечивает параллельный и последовательный выходы и работает от источ
ника постоянного напряжения питания +5 В. Параллельный выход осуществляется
через высокоскоростные драйверы шины CMOS с тремя состояниями, совместим по
чти со всеми логическими устройствами, питающимися от источников +5 В, а после
довательный выход обеспечивается через дифференциальный драйвер линии.
Виртуальные абсолютные кодеры. Виртуальный абсолютный кодер представляет
собой прибор, производимый по новой технологии фирмой Gurley Precision Instruments.
Этот кодер соединяет оптикомеханическую простоту инкрементного кодера с надежно
стью системы и легкостью согласования интерфейса абсолютных энкодеров. Подобно
инкрементному кодеру, виртуальный абсолютный кодер использует только инкремент
ные и индексные дорожки; однако ни кодер, ни внешняя схема не обеспечивают инкре
ментного счета. Вместо этого декодируются четыре состояния цикла (см. рис. 11 .28),
чтобы управлять пространственной синхронизацией из индексации операций. Индекс
ная дорожка кодирована не так, как в стандартном инкрементном кодере, ее кодировка
позволяет формировать код абсолютной позиции, в последовательном формате. Каж
дый оптический цикл инкрементной дорожки, названной дорожкой синхронизации, от
744
мечен уникальным 14разрядным кодом, который декодируется сложной проверкой
последовательности, выдавая точные данные позиции. Разрешающая способность вир
туального абсолютного кодера составляет 220, что соответствует 1048576 имп/об.
Рис. 11.34. Абсолютный кодер
éèíàóÖëäàÖ äéÑÖêõ
745
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
11.6.3. 뇂ÌÂÌË ÍÓ‰ÂÓ‚
И инкрементный и абсолютный кодеры имеют свои преимущества и недостатки, поэто
му выбор каждого из них определяется конкретными задачами. Приведенные ниже ха
рактеристики позволяют провести некоторое сравнение между этими двумя приборами:
абсолютный кодер не требует протяженного процесса счета, чтобы опреде
лить положение вала, как инкрементный кодер, и не теряет информацию при
провалах питающего напряжения. Он определяет фактическое положение и
не нуждается в опорной точке отсчета;
абсолютный кодер обычно менее восприимчив к электрическим помехам;
оба типа кодеров используют высокоскоростные драйверы линии в качестве
последовательного интерфейса;
инкрементный кодер всегда дешевле, чем абсолютный кодер. Но с выходом
на рынок новых технологий соотношения стоимость/качество для этих двух
стандартных типов становятся более размытыми. Примером служит рас
смотренный выше виртуальный абсолютный кодер.
11.7 . êÖáéãúÇÖêõ
Традиционный резольвер — это прибор, содержащий статорные и роторные обмотки
и способный измерять угловое положение. Физическая структура резольвера, кото
рый в основном состоит из ротора и статора, показана на рис. 11.35. Две обмотки ро
тора выводятся на коллекторные кольца устройства; две обмотки статора выводятся
непосредственно на клеммы устройства. Ротор механически соединен с вращающим
ся валом, скорость которого нужно измерить, а статор неподвижен.
Резольвер можно рассматривать как вращающийся трансформатор; первичной
обмоткой может служить либо статор, либо ротор. Поскольку вал вращается, поло
жение ротора относительно статора изменяется, вызывая изменения амплитуды на
пряжения или сдвиг фаз, который соответствует позиции вала. Далее мы обсудим сле
дующие режимы работы:
однофазный режим, в котором для определения положения вала использует
ся изменение амплитуды напряжения;
двухфазный режим, в котором для определения положения вала использует
ся изменение фазового сдвига.
11.7 .1. é‰ÌÓÙ‡ÁÌ̊È ÂÊËÏ
Схематическое представление решающего устройства, используемого в однофазном
режиме, показано на рис. 11.36. Напряжение ввода переменного тока прикладывает
ся к одной из обмоток статора, в то время как другая не используется и закорочивает
746
ся. Амплитуда напряжения на обмотках ротора при этом является функцией синуса и
косинуса угла поворота и может быть выражена следующим образом:
VA=VC×sinθ,
VB=VC×cosθ,
где VA — напряжение на одной из обмоток ротора,
VB — напряжение на другой обмотке ротора;
VC — напряжение входного переменного тока, приложенное к обмотке статора;
θ — угловое положение ротора.
Рис. 11.35. Структура резольвера
Рис. 11.36. Схема решающего устройства в однофазном режиме работы
êÖáéãúÇÖêõ
747
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Чтобы преобразовать напряжение ротора в угловое положение, требуется внешнее
электронное устройство, типичная блоксхема которого представлена на рис. 11 .37. Пе
ременное напряжение ротора преобразуется в постоянное, которое и управляет аналого
цифровым преобразователем. Выход преобразователя подается на вход микропроцессор
ной системы, в памяти которой хранится поисковая таблица, содержащая цифровые коды
угловых положений.
Рис. 11.37. Блок
схема системы, преобразующей напряжение ротора в угловое
положение
11.7 .2 . Ñ‚ÛıÙ‡ÁÌ̊È ÂÊËÏ
Схема резольвера при работе в двухфазном режиме показана на рис. 11.38 . Обратите
внимание, что обе обмотки статора управляются источниками переменного тока, на
пряжения которых при равных амплитудах сдвинуты относительно друг друга на 90° .
Подача на две статорные обмотки, которые пространственно сдвинуты на 90°, двух
напряжений, сдвинутых на 90° по фазе, вызывает вращающееся магнитное поле (этот
способ создания вращающегося магнитного поля уже обсуждался в главе 10).
Рис. 11.38 . Схема работы
резольвера в
двухфазном режиме:
фазовый угол сдвига
между напряжениями
VC и VC1 равен 90°
В этом режиме работы амплитуда вызванного напряжения, наведенного в роторе
резольвера, является постоянной и не зависит от углового положения вала. Однако
фаза напряжения ротора изменяется, как показано на рис. 11.39. Когда вал поворачи
748
вается на угол и, напряжение ротора VA смещается по фазе на θ° u относительно на
пряжения статора VC. Точно такой же сдвиг фазы получается и для напряжения ротора
VB относительно напряжения статора VC1.
Как и в однофазном режиме, требуется внешнее устройство, типовая блоксхема ко
торого приведена на рис. 11.40. Синусоидальные напряжения с двух выходов преобразу
ются в переменные прямоугольные напряжения, которые подаются на входы фазового
детектора. Блок детектора выводит напряжение постоянного тока, пропорциональное фа
зовому сдвигу, которое затем преобразуется в цифровой код, показывающий угловое по
ложение относительно статорной обмотки.
Рис. 11.39. Фаза напряжения на роторе:
и представляет собой
фазовый сдвиг напряжения
на роторе относительно
напряжения на статоре
Рис. 11.40. Блок
схема внешних систем при двухфазном режиме работы: VD —
выходное напряжение, пропорциональное угловому положению
вала, отставание или опережение представлено знаком
напряжения
11.7.3. çÂÚ‡‰ËˆËÓÌÌ̊ ÂÁÓÎ̧‚Â̊
Нетрадиционные резольверы выполняют ту же функцию, что и традиционные, за ис
ключением того, что они используют сплошной ротор без обмоток. Они работают в
однофазном режиме, который был описан выше, но все обмотки при этом находятся в
êÖáéãúÇÖêõ
749
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
статоре. Другими словами, одна обмотка первичная; другие две обмотки вторичные,
напряжения на них изменяются в функции косинуса и синуса. Эти резольверы механи
чески и электрически совместимы с традиционными резольверами и могут замещать
их в различных случаях. Резольверы этого типа имеют ряд преимуществ:
меньшее количество катушек обеспечивает более высокую надежность;
низкий импеданс означает улучшенную помехоустойчивость;
более простая конструкция обуславливает меньшую стоимость и более про
стую наладку.
Компания Advanced Motor Technology Inc. производит резольверы Rotasyn со сплош
ным ротором.
11.8 . ëêÄÇçÖçàÖ ÑÇàÉÄíÖãÖâ ëèÖñàÄãúçéÉé çÄáçÄóÖçàü
Сравнение свойств двигателей специального назначения, рассмотренных в этой гла
ве, дано в табл. 11.5.
Таблица 11.5 . Сравнение двигателей специального назначения
11.9 . ÇÖÅ-ëÄâíõ èé ÑÇàÉÄíÖãüå ëèÖñàÄãúçéÉé
çÄáçÄóÖçàü à ìëíêéâëíÇÄå ìèêÄÇãÖçàü àåà
Ниже приведены адреса вебсайтов фирмпоставщиков двигателей специального на
значения и устройств управления ими, рассмотренных в этой главе. Адреса сайтов по
ставщиков часто изменяются, поэтому, если какаялибо ссылка неактивна, восполь
зуйтесь механизмом поиска в Сети, чтобы по термину или названию двигателя найти
интересующие вас материалы:
Двигатели фирм Allen Bradly и Mill Shaf Technologies, Inc.
http://www.ab.com
http://www.steppercontrol.com
750
Приводы двигателей в National Semiconductor
http://www.nationalsemi.com
Контроллеры в Physik Instrumente (PI)
http://www.physikinstrumente.com
Оптические кодеры в Gurley и в US Digital
http://www.gurley.com
http://www.usdigital.com
Решающие устройства в Advanced Motor Technology
http://www.admotec.com
êÖáûåÖ
11.1 . Введение
Двигатели постоянного тока с постоянными магнитами (ПМдвигатели) ис
пользуют постоянные магниты вместо обмоток.
Бесщеточные двигатели постоянного тока используют твердотельные пере
ключатели вместо механических щеток и коммутаторов.
Шаговые двигатели используют электронные цифровые сигналы, чтобы ге
нерировать дискретное механическое движение.
В серводвигателях постоянного и переменного тока для управления широко
используются обратные связи.
11.2. Двигатели постоянного тока с постоянными магнитами
В двигателях постоянного тока с постоянными магнитами (ПМдвигатели)
используются для создания магнитного поля постоянные магниты вместо об
моток, которые используются в двигателях со статорными обмотками.
Поток в ПМдвигателях постоянный, а зависимости скорости и тока от мо
мента линейны.
Показатель качества — число, которое действительно характеризует качество
ПМдвигателя и позволяет довольно точно определить его возможности.
ПМдвигатели делятся на три класса: 1) стандартный, 2) бесщеточный, 3)
моментный.
Поток и коэрцитивная сила постоянного магнита для двигателей зависят от
материала магнита, который может быть сплавом алкино, керамикой или
редкоземельным сплавом.
Стандартный ПМдвигатель подобен двигателю постоянного тока с фазным ро
тором и параллельным пуском. Ротор собран на пластинчатом стальном сердеч
нике, обмотки размещены в пазах ротора, применяется коммутатор и щетки.
ПМдвигатель без сердечника не имеет электротехнической стали в якоре и
может выполняться в цилиндрической или дисковой структуре.
êÖáûåÖ
751
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
Моментные двигатели разработаны для функционирования при низких ско
ростях или в режиме останова в течение длительных периодов времени.
11.3 . Бесщеточные двигатели постоянного тока
Бесщеточный двигатель постоянного тока — это двигатель постоянного
тока, который коммутируется с помощью полупроводниковых ключей. В
бесщеточном двигателе постоянного тока обмотки размещены в пазах стато
ра, а магниты — в роторе.
С бесщеточными двигателями широко используются две системы датчиков: элек
трические датчики Холла и оптические датчики с механическими системами.
Мощностью в бесщеточном двигателе постоянного тока можно управлять
путем регулирования напряжения или тока.
11.4 . Шаговые двигатели
Шаговый двигатель преобразует электронные цифровые импульсы в шаги ме
ханического вращения, он способен инкрементально управлять скоростью, уг
ловым положением и направлением вращения механической нагрузки.
Шаговый двигатель с ПМ состоит из обмоток статора и магнитов ротора. Он
работает за счет использования общего принципа, согласно которому разно
именные полюса притягиваются, а одноименные — отталкиваются.
Шаговый двигатель с переменной реактивностью состоит, как и шаговый
двигатель с ПМ, из электромагнитных обмоток статора и немагнитного зуб
чатого ротора.
Имеется четыре рабочих режима шагового двигателя: ожидание, останов,
двунаправленный и однонаправленный режимы.
Режимы возбуждения шагового двигателя разделяются на двухфазный, мо
дифицированный двухфазный, полушаговый и микрошаговый, а также трех
фазный и модифицированный трехфазный режимы.
Неспособность шаговых двигателей точно следовать за шаговыми команда
ми приводит к перерегулированию, сопровождаемому колебаниями. Метод
для минимизации перерегулирования и для подавления колебаний называет
ся демфированием.
11.5 . Серводвигатели
Серводвигатель — это позиционирующий или исправляющий движение
двигатель. Он следит за опорным сигналом источника управления и является
частью системы автоматического регулирования, охваченной петлей обрат
ной связи сервомотора, которая обычно называется сервосистемой.
В серводвигателях постоянного тока напряжение, приложенное к статорным
обмоткам, и напряжение, приложенное к обмотке якоря, обеспечиваются от
различных источников питания.
В серводвигателях переменного тока напряжение, приложенное к неподвиж
ным обмоткам и напряжение, приложенное к обмотке управления, получены
от одного источника, так что их фазы либо совпадают, либо смещены на 180° .
Контроллер серводвигателя состоит из усилителя и схемы, получающей сиг
налы от датчиков и средств управления системой и посылающей сигналы
752
программируемому логическому контроллеру, который может управлять не
сколькими сервосистемами.
11.6 . Оптические кодеры
Оптический кодер — датчик механического вращения. Он преобразует та
кие параметры движения, как скорость, направление вращения и угловое
положение вала, в электрические сигналы.
Четырьмя основными элементами оптического кодера служат источник све
та, диск с прорезями, световой приемник и схема согласования сигналов.
Инкрементный кодер — это оптический кодер, генерирующий на выходе
один импульс для каждого обнаруженного приращения углового положения
вала при его вращении.
Абсолютные кодеры механического движения обеспечивают уникальный код
для каждого углового положения.
Абсолютный кодер не требует процесса счета, чтобы определить положения,
как инкрементный кодер, и не теряет информации изза провалов питающе
го напряжения.
11.7 . Резольверы
Традиционный резольвер — вращательное устройство, состоящее из обмо
ток статора и ротора и способное измерять угловое положение связанного с
ним вала.
Резольвер может работать в двух режимах: 1) в однофазном режиме, в кото
ром используется изменение амплитуды, чтобы определить позицию вала; 2)
в двухфазном режиме, в котором для определения углового положения вала
используется разность фаз.
Нетрадиционный резольвер действует во многом так же, как и традицион
ный, за исключением того, что он имеет сплошной ротор без обмоток.
Çéèêéëõ
1. Прочитав раздел «Применение знаний в профессиональной деятельности», опи
шите наиболее привлекательный для вас род занятий в области разработки и вне
дрения двигателей специального назначения.
2. Чем заменены статорные обмотки в ПМдвигателях постоянного тока?
3. Чем заменены щетки и коллекторы в бесщеточном двигателе постоянного тока?
4. В каком двигателе используются электронные цифровые сигналы, чтобы созда
вать дискретное механическое движение?
5. Назовите три преимущества ПМдвигателя постоянного тока перед двигателем
постоянного тока с обмотками.
6. Почему в ПМдвигателях постоянного тока ток холостого хода не равен нулю?
7. Какие три класса ПМдвигателей существуют?
Çéèêéëõ
753
ëÔˆˇÎ̧Ì̊ ‰‚Ë„‡ÚÂÎË Ë ˆÂÔË ÛÔ‡‚ÎÂÌËfl
8. Составьте таблицу относительных значений магнитной индукции и коэрцитивной
силы для трех материалов, используемых в постоянных магнитах.
9. В чем отличие стандартного ПМдвигателя от двигателя постоянного тока с фаз
ным ротором и параллельным пуском?
10. Как связаны магнитные линии с магнитными материалами?
11. Объясните преимущества двигателя без сердечника.
12. Объясните различия между двигателями без сердечника с цилиндрической и с
дисковой структурой ротора.
13. Объясните, какую роль играет противоЭДС в моментных двигателях.
14. Назовите три области применения моментного двигателя.
15. Объяснить различия в конструкции ПМдвигателей и бесщеточных двигателей.
16. Опишите принцип действия датчика Холла.
17. Объясните различия между системой регулирования напряжения и системой ре
гулирования тока для управления мощностью в бесщеточных двигателях.
18. В чем состоит различие между моментом останова и удерживающим моментом?
19. Объясните различия между полушаговым и микрошаговым режимом работы ша
гового двигателя.
20. Объясните различие между перерегулированием в шаговых ПМдвигателях и в
двигателях с переменной реактивностью.
21. Опишите резистивные и емкостные методы демпфирования.
22. Какую функцию выполняет сервоусилитель в сервосистемах?
23. Какими тремя возможностями должен обладать двигатель, чтобы его можно было
назвать серводвигателем?
24. Почему контроллеры серводвигателей получили более широкое применение, чем
сервоусилители?
25. Назовите четыре основных элемента оптического кодера?
26. Как инкрементный кодер функционирует в режиме X4?
27. Почему абсолютный кодер менее восприимчив к электрическим помехам?
28. Объясните различия между инкрементным и абсолютным кодером.
29. Опишите однофазный и двухфазный режим традиционного резольвера.
30. Каковы свойства и преимущества резольвера, имеющего безобмоточный ротор?
áÄÑÄóà
1. Двигатель имеет следующие параметры: номинальное напряжение 20 В, ток пре
дельной нагрузки 7 мА, ток нагрузки 100 мА, скорость холостого хода 4000 об/мин
и скорость предельной нагрузки 3000 об/мин. Вычислите следующие параметры:
а) показатель качества.
б) максимальный КПД, используя показатель качества, рассчитанный в пункте a;
754
в) входную мощность, выходную мощность, скорость и момент при максималь
ном КПД, рассчитанном в пункте б.
2. Определите из табл. 11 .1 положение ротора относительно обмоток статора для
углового положения 240°.
3. При скорости двигателя 1200 об/мин определите угол шага, если шаговая ско
рость составляет 400 шагов.
4. Двигатель работает в однонаправленном режиме с углом шага 2,5°. Вычислите
нагрузку в футах × дюймы2 при вращающем моменте 50 унций × дюйм и нараста
нии скорости от 0 до 1000 шагов/с за 0,5 с.
5. Используйте значение нагрузки, полученное в задаче 4, для вычисления момента,
который требуется, чтобы ускорить нагрузку от 0 до 1200 шагов/с за 0,5 с. Угол
шага двигателя равен 2°.
6. На сколько градусов диск с 480 прорезями поворачивается между каждыми двумя
импульсами, приходящими от светового датчика?
7. Используйте результаты, полученные в задаче 6, чтобы вычислить число импуль
сов, необходимое для поворота диска на 36°.
8. Какова разрешающая способность кодера с 7200 прорезями в режиме X2?
9. Вычислите ошибку квантования для кодера с 2400 прорезями и для разрешаю
щей способности, соответствующей режиму X2.
áÄÑÄóà
755
12
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍËÂ
ÍÓÌÚÓÎÎÂ̊
ñÂÎ̧ „·‚̊
Цель этой главы состоит в том, чтобы представить краткий об
зор программируемых логических контроллеров (ПЛК, PLC), а
также программы, соответствующие международному стан
дарту 61131, предложенному Международной электротехничес
кой комиссией (МЭК, IEC) Описан стандартный интерфейс и ме
тоды связи ПЛК с промышленными системами автоматизации.
После изучения материалов главы вы сможете:
1. Дать определение ПЛКсистемам и рассказать о сходстве и различиях ПЛК и
персонального компьютера.
2. Назвать основные компоненты программируемого логического контроллера и
описать назначение и работу каждого компонента.
3. Описать типы ПЛКсистем, применяемых в настоящее время.
4. Перечислить языки, представленные в стандарте IEC 61131, и дать общее описа
ние каждого из них.
5. Создавать традиционные LDпрограммы лестничных логических схем (LD —
ladder diagram) с помощью программного пакета SLC 500 фирмы Allen Bradley
для технологических процессов или для задач автоматического управления.
6. Создавать FBDпрограммы на языке функциональных блоксхем (FBD —
function block diagram) с помощью программного пакета RSLogix 5000 компании
Allen Bradley для стандартных задач управления процессами.
7. Создавать STпрограммы на языке структурированного текста (ST — structured
text) с помощью программного пакета RSLogix 5000 компании Allen Bradley для
стандартных задач управления процессами.
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
8. Создавать SFCпрограммы на языке последовательных функциональных диаг
рамм (SFC — sequential function chart) с помощью программного пакета RSLogix
5000 компании Allen Bradley для стандартных задач управления процессами.
èêàåÖçÖçàÖ áçÄçàâ Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Объем бизнеса, связанного с программируемыми логическими контроллерами
(ПЛК, PLC — programmable logic controller), составляет 6,5 миллиардов долларов и
возрастает на 20 % в год, и все же мало кто, кроме экспертов, непосредственно свя
занных с этим бизнесом, вообще подозревает об их существовании. Контроллеры
ПЛК — незаметные, но могучие участники автоматизации производства во всем
мире. Интерактивный поиск продавцов ПЛК выдает 110 ссылок, и еще более чем
1000 продавцов предлагают платы расширения и другие периферийные устройства
для ПЛК. Вдвое больше компаний занимается разработкой заказных ПЛК решений
для производства. Такие объемы продаж позволяют предполагать, что для профессио
нальной деятельности студентов, которые желали бы посвятить себя работе в этой в
области, имеется широкий выбор вакансий.
Промышленные микрокомпьютеры управляют самыми разнообразными техно
логическими процессами: от изготовления автомобилей до штамповки шоколадного
печенья. Виды деятельности как в компаниях, производящих ПЛК, так и в компаниях,
применяющих их на производстве, многообразны. Продавцы ПЛК постоянно создают
новые проекты аппаратного и программного обеспечения своих изделий, поддержива
ют заказчиков, разрабатывая типовые применения, и осуществляют техническое со
провождение как вне цеха, так и на рабочем месте. Еще больше возможностей для
специалистов по ПЛК существует на производстве, потому что большинство предпри
ятий имеет такие контроллеры в составе своего оборудования. Следовательно, им
требуются инженеры и техники, чтобы устанавливать, программировать, устранять
неисправности и обслуживать ПЛК в автоматизированных системах.
Ваша работа может быть не связана с разъездами и затратой времени на дорогу.
Работать обычно приходится как с аппаратными средствами, так и с программным обес
печением, но зачастую необходимы и «чистые» программисты. Вы можете работать в
международной компании, подобной Siemens AG Corporation или Rockwell Automation,
или создать собственную небольшую фирму с двумятремя профессионалами. Если вам
нравится работать с ПЛК, то успешная карьера в этой области ждет вас.
Допустим, что вы уже пятнадцать лет разрабатываете программы для ПЛК и стали
квалифицированным специалистом на фирме их основного производителя. Изготовите
ли двигателей использовали систему ПЛК для управления двигателем с помощью якор
ной обмотки. После изменения системы изготовитель обнаружил дефекты у двух моде
лей, имеющихся в системе. Вы проводите день на предприятии, собирая данные и
пытаясь всеми доступными способами найти решения для всех проблемВам удается ис
править все дефекты, кроме одного. Следующие несколько дней вы работаете вместе с
инженерамиразработчиками вашей компании, пытаясь воспроизвести условия, при
ведшие к последней проблеме, и понять, таким образом, в чем же причина дефекта. В
758
конце концов группа определяет причину неисправности. Командировка на фирму за
казчика завершена, и система снова полностью работоспособна. На протяжении всей
вашей деятельности ваша работа постоянно будет требовать от вас решения массы по
добных проблем различной степени трудности на многих предприятиях заказчиков.
12.1. ÇÇÖÑÖçàÖ
Начнем изучение программируемых логических контроллеров (ПЛК) с определения
объекта исследования. ПЛК — это промышленные компьютеры, разработанные как для
самостоятельного использования, так и для работы в различных автоматизированных се
тях, состоящих из нескольких компьютеров и предназначенных для управления самыми
разнообразными производственных машинами и системами. Для создания программ, уп
равляющих работой ПЛК, используется один из пяти языков программирования.
Промышленные компьютеры, в отличие от персональных или офисных, предназ
начены для работы в жестких условиях промышленного производства при наличии
электрических помех, что характерно для многих предприятий. Программируемый ло
гический контроллер Control Logix фирмы Allen Bradley (AB) изображен на рис. 12.1.
Рис. 12.1 . Программируемый логический контроллер Control Logix
фирмы Allen Bradley
В промышленной электронике используется несколько различных типов сетевых
технологий, чтобы обеспечить передачу данных между цеховыми компьютерами, ПЛК
и другими интеллектуальными машинами. Для управления одиночными промышлен
ными машинами можно использовать всего один ПЛК, но при управлении большой
промышленной системой часто их требуется несколько. В них использован один из
пяти языков программирования, которые описаны в части 3 стандарта 611313 по
программированию ПЛК, разработанного Международной электротехнической ко
миссией (МЭК, IEC International Electrotechnical Commission)., Наиболее часто ис
ÇÇÖÑÖçàÖ
759
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
пользуемым языком программирования в Северной Америке является язык лестнич
ной логики, причем синтаксис команд разрабатывается каждым из производителей
самостоятельно. ПЛК применяются, например, чтобы включать и выключать двига
тель насоса с помощью переключателя уровня жидкости для общего управления всем
конвейером по упаковке. Система используется также объединенной службой посы
лок, чтобы сортировать пакеты по почтовым индексам адресата (destination zip codes).
12.1.1. ëڇ̉‡Ú̊ èãä
Первый стандарт для ПЛК был издан в 1978 Национальной Электрической Ассоциа
цией Изготовителей (NEMA). Однако быстрый выход ПЛК за национальные границы
потребовал появления международного стандарта. В 1979 году МЭК (IEC) создала
рабочую группу, чтобы рассмотреть окончательный вариант стандарта для ПЛК, на
званный IEC 1131 (позже название стандарта изменилось на IEC 61131), который
состоит из следующих частей:
Часть 1. Общая информация. Устанавливает определения и идентифициру
ет принципиальные характеристики, не зависящие от выбора и областей
применения программируемых контроллеров и связанных с ними перифе
рийных устройств.
Часть 2. Требования к оборудованию и тестированию. Определяет требо
вания к оборудованию и связанному с ним тестированию программируемых
контроллеров и их периферийных устройств.
Часть 3. Языки программирования. Определяет минимальный набор ба
зисных элементов программирования и синтаксических и семантических
правил для традиционных языков программирования, а также основные об
ласти применения, соответствующие тесты и средства расширения, которы
ми изготовители могут дополнять или адаптировать базисные наборы в соб
ственных проектах. Определены также пять языков ПЛК.
Часть 4. Руководство пользователей. Техническое руководство, содержа
щее краткий обзор, общую информацию и рекомендации по применению
стандарта для пользователей программируемых контроллеров.
Часть 5. Спецификация сообщений (MMS — manufacturing message
specification). Определяет обмен данными между программируемыми кон
троллерами и другими электронными системами, использующими специфи
кации производственных сообщений (MMS) из международного стандарта
ISO/IEC 9506.
Часть 6. Зарезервирована для будущего использования, определенного на
значения пока не имеет.
Часть 7. Программирование управления с нечеткой логикой. Определяет
базисные элементы программирования для управления с нечеткой логикой,
которое используется в программируемых контроллерах.
Часть 8. Рекомендации по применению и реализации языков программиро%
вания. Руководство по языкам программирования, определенным в части 3.
760
Часть 3 стандарта «Языки программирования для программируемых контроллеров»
(Programming Languages for Programmable Controllers) была выпущена в 1993 году и опре
деляет стандарты для программного обеспечения ПЛК. В части 3 (IEC 611313) рассматри
вается конфигурация ПЛК, программирование и хранение данных. Стандарт IEC 611313
дает специализированное и подробное описание программирования ПЛК. Стандарт про
граммирования определяет пять языков PLC, которые могут применяться разработчиками,
если их контроллер совместим с IEC 61131:
лестничные (релейноконтактные) схемы (LD — ladder diagram);
последовательные функциональные диаграммы (SFC — sequential function
chart);
функциональные блоксхемы (FBD — Function block diagram);
структурированный текст (ST — structured text);
набор команд на языке машинных кодов (IL — instruction list).
Языки, на которых предпочитают составлять программы программисты разных
континентов и разных стран, значительно разнятся между собой. Немецкие програм
мисты, например, предпочитают набор команд IL и структурированный текст ST; мно
гие из французских экспертов ПЛК составляют свои программы на языке последова
тельных функциональных диаграмм (SFC). В Соединенных Штатах излюбленной
платформой программирования является язык лестничной логики, с некоторым ис
пользованием структуры SFC. Языки стандарта IEC 611313 и американские специа
лизированные языки не могут быть непосредственно объединены, потому что каждый
имеет свойства, которыми не обладают другие. Так как язык лестничных схем LD ис
пользуются почти исключительно американскими изготовителями, многие из свойств
других языков были включены в синтаксис схем лестничной логики в США. Изготови
тели США не только добавили выражения булевой алгебры, как в лестничных схемах
IEC 611313, но также и алгоритмы программирования для многих типов данных и
многих функций. Хотя некоторые американские программные решения для ПЛК на
писаны на языке ST, они часто используют и встроенные структуры SFC.
Принятие языков стандарта 61131 американскими изготовителями идет медлен
но, но наблюдатели отмечают, что началось использование языков FB, SFC и ST. В
этой главе будет описан синтаксис программ и на языках LD, и на SFC, FBD и ST.
Язык набора команд не описывается, потому что он не используется в программах,
имеющихся на американском рынке, и не поддерживается главными изготовителями
ПЛК в США. Рассмотрим прежде всего язык релейноконтактных схем, или програм
мирования лестничных логических схем (LLP — ladder logic programming). Однако
перед рассмотрением конкретных языков проведем краткий обзор программируемых
логических контроллеров.
12.1.2 . 뇂ÌÂÌË èä Ë èãä
Первоначально программируемые логические контроллеры ПЛК были названы про
сто программируемыми контроллерами ПК (РС). Использование этой аббревиатуры
для программируемого контроллера не вызывало никаких разночтений до тех пор,
ÇÇÖÑÖçàÖ
761
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
пока не приобрели столь широкого распространения персональные компьютеры, и
для них также стали часто использовать аббревиатуру ПК (РС). Чтобы избежать не
доразумений, многие изготовители программируемых контроллеров стали добавлять
слово «логический» в название своего изделия, создав новый термин — «программи
руемый логический контроллер», ПЛК (PLC). Но вы до сих пор можете найти в техни
ческой литературе ссылки на PC, причем материал будет касаться не персональных
компьютеров, а программируемых контроллеров.
В нашем учебнике мы будем употреблять полное название — «программируемый
логический контроллер» или аббревиатуру ПЛК, чтобы избежать всякой путаницы.
Аббревиатура ПК будет относиться только к персональному компьютеру. ПК и ПЛК
имеют ряд характеристик, которые отличают их друг от друга. Архитектуры систем ПК
и ПЛК подобны между собой; они состоят из системной платы, процессора, памяти и
разъемов для плат расширения. Процессор ПЛК состоит из центрального процессора
(ЦП), представляющего собой микропроцессор компании Intel или другой подобный
ему по архитектуре МП (рис. 12.2). Изучите рисунок и убедитесь, что архитектура
ПЛК подобна архитектуре микроЭВМ.
Рис. 12.2. Архитектура программируемых логических контроллеров
Так совпадут ли когданибудь функции персонального компьютера и программируе
мого логического контроллера? Такие производители ПЛК, как AB и Siemens, говорят —
когданибудь, но промышленный ПК никогда полностью не заменит ПЛК. В некоторых
современных применениях ПК выполняют функции управления, присущие ПЛК. Про
граммное обеспечение, подобное SoftLogic от кампании Rockwell Automation, позволяет
персональным компьютерам моделировать функции ПЛК. И несмотря на технические
различия, промышленный ПК и ПЛК становятся все более похожи между собой.
762
12.2 . ëàëíÖåÄ èãä à ÖÖ äéåèéçÖçíõ
Рассмотрите блоксхему системы ПЛК на рис. 12.3, чтобы запомнить названия компо
нентов. Обратите внимание, что система ПЛК — это совокупность нескольких различ
ных компонентов и модулей. Для больших систем все модули установлены в стойке, как
показано на рис. 12.4 . В малых системах ПЛК составляющие модули интегрированы в
одиночный модуль. Стойка на рис. 12.4б обеспечивает механическое крепление, элект
рические соединения между компонентами, а также передачу данных между всеми моду
лями ПЛК и процессорами с помощью интерфейса. Опишем каждый из компонентов,
показанных на блоксхеме ПЛК:
Соединительная плата. Питание модулей и передача данных между ними обеспе
чивается в стойке соединительной платой (см. рис. 12.4б). Соединительная плата — это
печатная плата с монтажной схемой, выполненной медными проводами, называемыми
дорожками. Они подводят питание к модулям и образуют шины для обмена данными
между модулями и ЦП. Модули вставляются в стойку (конструкция системы Allen
Bradley может иметь 4, 7, 10 или 13 гнезд) и входят в контакт с разъемами на соедини
тельной плате, получая от нее питание и информацию по шинам данных.
Рис. 12.3 . Блоксхема
программируемого
логического
контроллера
ëàëíÖåÄ èãä à ÖÖ äéåèéçÖçíõ
763
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Процессор и источник питания. Центральный прямоугольник на рис. 12.3 назы
вается процессором ПЛК и является центральным модулем обработки информации
(ЦП), или микроЭВМ, которая обрабатывает все логические операции и выполняет
все математические вычисления. Процессор занимает слот 0 в стойке на рис. 12.4a.
Источник питания ПЛК изображен выше процессорного блока в блоксхеме и нахо
дится в крайней левой части стойки на рис. 12.4a. Источник питания обеспечивает
питание процессора и модулей стойки.
Устройство программирования. Устройство программирования, связанное с ЦП
на рис. 12.3, используется для загрузки в ПЛК управляющих программ на языке лес
тничных логических схем. На рисунке в качестве устройства программирования изоб
ражен компьютер, однако в комплект установки производитель ПЛК может по жела
нию заказчика включить специальный пульт или обучающий терминал.
Интерфейс входов и выходов. Используемый в ПЛК интерфейс входов и выхо
дов может быть двух видов: неразъемный или модульный. Неразъемный интерфейс
связан с малыми, или микроПЛКсистемами, где все компоненты интегрированы в
один модуль. Число входов и выходов фиксировано для каждой модели и не может
быть изменено. Модульные типы используют стойку, поэтому число и тип входоввы
ходов может быть изменен, чтобы приспособить их для конкретного применения.
Неразъемный или модульный ввод обеспечивает связь между процессором ПЛК
и такими внешними устройствами ввода данных, как переключатели, датчики, выводы
машины или другие выводы ПЛК. Устройства ввода данных часто называются пери
ферийными, поскольку они не входят в состав аппаратных средств ПЛК. Входы ПЛК
обеспечивают физический интерфейс для соединения проводов, а также электричес
кий интерфейс и интерфейс данных, чтобы определить состояние переключателей или
уровни сигналов от периферийных устройств. Несколько входов (и при неразъемном,
Рис. 12.4. Стойка системы ПЛК:
а) вид стойки спереди с шестью модулями;
б) модуль и интерфейс стойки
764
и при модульном вариантах) могут передавать дискретные (0 или 24 В) или аналого
вые (0—10 В или 4—20 мА) сигналы. Кроме того, число входов в модуле изменяется
(Allen Bradley предлагает 4, 8 или 16 входов), сигнал может быть либо постоянного,
либо переменного тока, а выход может быть высоко или низкопотенциальным (в ак
тивном состоянии выход подсоединяется либо к источнику, либо к земле). Несколько
входных модулей показаны в стойке на рис. 12.4a.
12.2 .1 . ëÔˆˇÎ̧Ì̊ ÏÓ‰ÛÎË Ë Ò͇ÌÂ̊ Ò‚flÁË
Специальные модули и сканеры (считывающие устройства) связи, показанные на рис. 12.3,
обеспечивают связь процессора ПЛК с другими управляемыми компьютерами, машинами и
устройствами, которые должны совместно использовать данные и функции управления
ПЛК. Приведены пять типов интерфейсов: DeviceNet, ControlNet, интеллектуальный ин
терфейс входоввыходов, удаленные стойки, интерфейс входоввыходов ASCII и интерфейс
SERCOS. Кроме того, поле сетевых соединений указывает, что ПЛК связан с сетями ин
формационного уровня, подобным Ethernet, Ethernet/IP, и со специализированными сетя
ми, носящими название частных сетей. Использование этих модулей связи позволяет
ПЛК действовать в качестве хаба, или концентратора, данных для этих пяти подсетей и в
качестве Ethernetсвязи с предприятием. Ethernet/IP (IP означает «промышленный прото
кол») — это версия стандартного Ethernet, который устанавливается для обмена данными
высокого уровня между устройствами и системами автоматизации. В некоторых случаях не
сколько ПЛК от одного производителя объединяются в специализированную, или частную,
сеть (см. рис. 12.3). Магистраль данных от Allen Bradley является примером специализиро
ванной сети такого типа. Рассмотрим следующие части сетевой технологии:
DeviceNet — система связей на уровне устройства, она подключает к ПЛК входы
и выходы устройств, соответствующие стандарту DeviceNet. DeviceNet — это интел
лектуальное устройство, которое способно связать встроенные микропроцессоры в
единую сеть, избавляя вас, таким образом, от разработки индивидуальных устройств
подсоединения, которая потребовала бы много времени и материальных затрат. Дру
гие преимущества DeviceNet заключаются в следующем:
устройства, совместимые с DeviceNet, изготавливаются многими продавцами;
одна и та же сеть обеспечивает обмен данными как между отдельными уст
ройствами, так и с ПЛКустройствами в сети и с ПЛКпроцессорами;
наладчики могут использовать для поиска и устранения неисправностей ди
агностику на уровне конкретного устройства, получаемую от единого удален
ного компьютера.
DeviceNet — это открытый сетевой стандарт, то есть любой продавец может разра
батывать DeviceNetизделие без лицензионного взноса. Кампания Rockwell Automation
разработала систему DeviceNet в 1993 году, используя испытанную сетевую технологию,
носящую название локальной сети контроллеров (controller area network — CAN). При
наличии многих продавцов, предлагающих датчики и приводы, совместимые с DeviceNet,
разработчики систем автоматизации могут выбрать наилучшую комбинацию устройств от
нескольких продавцов, чтобы решить задачи управления. Поэтому DeviceNet сейчас наи
более интенсивно расширяющаяся сеть устройств в мире, насчитывающая более 500 000
ëàëíÖåÄ èãä à ÖÖ äéåèéçÖçíõ
765
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
установленных устройств. Изучая изображенную на рис. 12.5 сеть DeviceNet, обратите
внимание на многие различные типы устройств, совместно использующих данные сети.
Отметим также следующие важные свойства этих сетей:
модули сканеров и платы расширения сети DeviceNet разработаны для боль
шинства ПЛК и промышленных микроЭВМ;
к устройствам, выполненным по стандарту DeviceNet, относятся датчики,
пульты операторов, пускатели двигателей, блоки удаленных дискретных и
аналоговых входоввыходов, блоки управления постоянным и переменным
Рис. 12.5. Сеть DeviceNet
766
током, мониторы с сенсорными экранами, контроллеры двигателей, стойки
источников света, стойки пневматических клапанов и промышленные ПК;
DeviceNet поддерживает удаленные порты входоввыходов с различными вход
ными параметрами платы, подобными устройствам входоввыходов FLEX от
фирмы Allen Bradley. Эти удаленные сетевые устройства используют стандарт
ные дискретные датчики и приводы;
DeviceNet может выполнять роль подсетей ControlNet, Ethernet или Ethernet/IP.
ControlNet. Эта сеть, разработанная в 1995 году, является другим открытым сете
вым стандартом, поддерживаемым несколькими продавцами и расположенным на один
уровень выше сетей DeviceNet в иерархии систем управления. В то время как основной
функцией DeviceNet является работа с сетями устройств входоввыходов, ControlNet ис
пользует сеть модели производитель/потребитель, чтобы распространять информацию,
требующую быстрого отклика в технологических процессах и промышленной автоматиза
ции. Эта модель позволяет всем узлам сети (потребителям) одновременно обращаться к
одному и тому же источнику данных (производителю информации). Кроме того, метод дос
тупа потребителей к источникам информации в ControlNet использует модель производи
тель/потребитель, чтобы позволить нескольким контроллерам управлять вводомвыво
дом данных на одном том же сетевом сегменте. Этот метод обеспечивает значительное
преимущество перед другими сетями, которые позволяют управление только от одного
главного регулятора сети. Сеть ControlNet также позволяет групповую (одновременно на
несколько устройств) передачу как входных, так и одноранговых данных, уменьшая таким
образом трафик на шинах и увеличивая эффективность системы.
ControlNet обладает высоким детерминизмом и воспроизводимостью режимов
работы. Детерминизм — это возможность надежно предсказать, в какой момент будут
получены данные, а воспроизводимость гарантирует, что времена передачи постоянны
и не зависят от состояния и числа активных устройств в сети. Эти две критически важ
ные характеристики гарантируют надежную, синхронизированную и координирован
ную передачу данных в режиме реального времени. В результате ControlNet разреша
ет передачу данных, таких как программы, осуществляет передачу, прием и текущий
контроль данных в режиме реального времени — в гибкие, но предсказуемые отрезки
времени. Управление и конфигурация всей системы может выполняться как из како
голибо узла самой сети ControlNet, так и из узла сети более высокого уровня, напри
мер сети Ethernet. ControlNet может связывать различные устройства и, кроме того,
обеспечивать канал связи с другими сетями типа DeviceNet и Foundation Field Bus.
Рассмотрите сеть ControlNet на рис. 12.6 и отметьте аппаратные средства и сис
темы, которые могут совместно использовать данные сети. Обратите внимание на
следующие важные моменты:
для большинства ПЛК и промышленных применений в ControlNet имеются
модули сканеров и платы расширения ПК;
среди устройств, которые могут быть подключены к сети ControlNet, мы ви
дим ПЛК, промышленные и стандартные микроЭВМ, операторские терми
налы с экранами сенсорного управления, удаленные модули входоввыходов,
приводы двигателей и контроллеры движения;
в состав носителей, используемых для передачи данных в ControlNet, входят
как коаксиальные кабели, так и стекловолоконные оптические каналы;
ëàëíÖåÄ èãä à ÖÖ äéåèéçÖçíõ
767
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
ControlNet может служить сетью нижнего уровня для Ethernet или Ethernet/IP.
Рис. 12.6. Сеть ControlNet
Ethernet и Ethernet/IP (Ethernet промышленного протокола) являются сетевыми
архитектурами верхнего уровня в цеховой АСУ ТП. Рассмотрите три уровня сетевого уп
равления, показанные на рис. 16.11 из главы 16, и ознакомьтесь с параметрами интер
фейса сетей Ethernet, ControlNet и DeviceNet. Вы можете заметить, что в архитектуре
заводской АСУ ТП выявилось три уровня: Ethernet, ControlNet, и DeviceNet/Foundation
Field Bus. На самом высоком уровне сеть Ethernet обеспечивает управление сбором дан
ных на производственных участках и работу программ по их обслуживанию. На среднем
768
уровне ControlNet обеспечивает автоматизацию и управление для входоввыходов в ре
жиме реального времени, координирует время обновления данных (осуществляет моди
фикацию времени между несколькими приложениями) и передачу сообщений. На самом
низком уровне, уровне устройств, поддерживается эффективное сопряжение отдельных
устройств. На этом уровне сеть DeviceNet обеспечивает дискретные данные, а Foundation
Field Bus чаще всего связана с управлением аналоговыми сигналами. Интерфейсы ПЛК
показаны на рис. 12.3 .
Интеллектуальные интерфейсы входов%выходов. Различные изготовители ПЛК
имеют собственные сетевые протоколы, согласовывающие производимые ими сети и уст
ройства. Связь ПЛК с такими частными сетевыми интерфейсами показана на рис. 12.3.
Одним из общих применений для таких частных сетей является использование интеллек
туальных устройств ввода/вывода. Термин «интеллектуальный» подразумевает, что в уст
ройство или интерфейс включен микропроцессор, запрограммированный на управление
обменом сетевыми данными. Пусть, например, по всей АСУ распределены индикаторные
панели, показывающие состояние технологических и машинных параметров. Эти интел
лектуальные панели вводавывода отображают сотни параметров и имеют переключате
ли и уставки для управления процессами. Интерфейс между этими панелями операторов и
ПЛК обеспечивается только одним коаксиальным сетевым кабелем для передачи данных.
Существует очень много интеллектуальных внешних устройств, таких как приводы двига
телей, технологические контроллеры, устройства считывания текста, полноцветные гра
фические сенсорные дисплеи для ручного управления, устройства речевого ввода и выво
да, а также дискретные и аналоговые устройства ввода и вывода. И функционирование
всех этих устройств управления будет обеспечиваться сетями DeviceNet и ControlNet.
Удаленные стойки. Чтобы распределить возможности управления в большой си
стеме автоматизации, продавцы ПЛК предлагают удаленные стойки. Стойка, подоб
ная приведенной на рис. 12.4б, использует стандартные модули ввода и вывода для
управления машинами и процессами; однако модуль процессора заменен удаленной
стойкой модуля связи. Процессор, размещенный в главной стойке ПЛК, связывается
с модулями в удаленной стойке, пользуясь частным протоколом сети по единственно
му сетевому кабелю. Применение этой технологии позволяет разместить модули вво
да/вывода вблизи от объектов управления. При этом нет необходимости в длинных
проводах, которые понадобились бы при связи датчиков с главной стойкой ПЛК. Сети
DeviceNet и ControlNet, в конечном счете, обеспечат и эту функцию управления.
Интерфейс ввода/вывода ASCII%кода является другим специальным модулем
связи, приведенным на рис. 12.3. Этот ресурс связи либо встроен в модуль процессо
ра, либо поддерживается отдельным модулем. В обоих случаях интерфейс ASCII до
пускает последовательную передачу данных, использующую несколько стандартных
интерфейсов, таких как RS232 или RS422. Это, например, интерфейс обмена дан
ными между ПЛК и устройствами считывания штрихового кода или интеллектуальны
ми датчиками. Через такой интерфейс к ПЛК также часто присоединяют микроЭВМ,
используемые для их программирования.
Интерфейс SERCOS — последний специальный модуль связи, который также
передает сигналы по шине последовательной связи в реальном масштабе времени
(Serial Realtime Communications System — SERCOS). SERCOS может обеспечить
связь модуля управления движением в ПЛК с приводом двигателя сервомотора через
волоконнооптический кабель. Стекловолоконные кабели обеспечивают последова
ëàëíÖåÄ èãä à ÖÖ äéåèéçÖçíõ
769
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
тельную передачу данных с улучшенной помехоустойчивостью и малым временем об
новления данных. SERCOS позволяет управлять движением по скорости, вращающе
му моменту или по положению. Несколько серводвигателей могут быть собраны в
гирляндную цепь на одной стекловолоконной сети SERCOS.
12.2.2 . åÓ‰ÛÎË ÒÔˆˇÎ̧ÌÓ„Ó Ì‡Á̇̃ÂÌËfl
Последним элементом в блоксхеме ПЛКсистемы на рис. 12.3 являются специаль
ные модули. Этот термин отражает широкую совокупность модулей, разработанных
продавцами ПЛК для автоматизации управления и не относящихся к базовым диск
ретным модулям ввода/вывода для переменного и постоянного токов. Сюда входят,
например, модули для аналогового ввода/вывода, для измерения температуры (тер
мопары и резистивные датчики), ПИДрегуляторы (пропорциональный, интеграль
ный, дифференциальный) для обратной связи и для управления двигателями, сервод
вигателями и шаговыми двигателями, высокоскоростными счетчиками и ОЗУ для
гидравлического управления. Модули специального назначения для ПЛК используют
частные аппаратные средства и программное обеспечение, которые требуют замены
при смене поставщика. Вместе с тем существует много поставщиковпосредников,
предлагающих модули и компоненты систем для разнообразных популярных ПЛК.
Хотя ПЛКсистемы от каждого продавца уникальны, все они соответствуют блоксхе
ме, представленной в этом разделе. Закончив рассмотрение базовой системы, перей
дем к описанию трех существующих типов ПЛК.
12.3. íàèõ èãä
Все ПЛК могут быть разделены на три группы: системы, использующие адреса стойки и
слота; системы, основанные на метках; и ПЛК с программной эмуляцией, или ПЛК, уп
равляемые персональными компьютерами. Системы, использующие адреса стойки и сло
та, хотя и появились в самых первых ПЛК, но до сих пор используются наиболее часто.
12.3.1 . ëËÒÚÂÏ̊ ̇ ·‡Á ‡‰ÂÒÓ‚ ÒÚÓÈÍË/ÒÎÓÚ‡
ПЛКсистема, представленная на рис. 12.4, относится к системам, использующим
адреса стойки и слота, потому что расположение платы ввода/ вывода в стойке уста
навливает адрес для ввода или вывода сигналов, связанных с платой. Рассмотрим эту
концепцию подробнее. Платы, помещенные в стойку справа от процессора (слоты с
номером 1 и более высокими номерами), чаще всего представляют собой платы выво
да или ввода. Тип внешнего устройства, подключаемого к ПЛК, и тип передаваемого
им сигнала (переменный или постоянный ток, дискретный или аналоговый) диктуют и
тип выбираемой платы ввода/вывода. Каждая из используемых плат ввода/вывода
выполняет две функции: 1) обеспечивает контакты для подключения выходных прово
770
дов устройства и 2) обеспечивает приведение внешних входных сигналов к виду, со
гласованному с внутренними структурами ПЛК. Все сигналы, представленные на
входном модуле, отображаются внутри ПЛК переменными, которые характеризуются
обычно символом и номером адресной ячейки терминала. Поскольку каждый постав
щик ПЛК имеет определенную схему адресации стоек и слотов, адрес определяется
типом платы (входной или выходной), номером слота/стойки модуля и номером выво
да, используемым для связи. Например, чтобы адресовать дискретные вводы на систе
ме SLC 500 Allen Bradley, используется следующий синтаксис:
I: (Номер слота стойки)/(номер вывода)
Номер вывода на входном модуле, к которому подсоединен вход, и номер слота и
стойки, в которую помещен входной модуль, определяет имя входной переменной ад
реса в SLCсистемах Allen Bradley. Символ I (input) указывает, что данный контакт
является вводом, двоеточие (:) разделяет символ типа модуля от адресной ссылки, а
косая черта (/) отделяет номер слота и стойки от номера вывода. Пример 12.1 иллюс
трирует эту концепцию адресации.
èËÏ 12.1
Система SLC 500 от фирмы Allen Bradley использует стойку, подобную той, что изоб
ражена на рис. 12.4, и адресную систему на базе адресов стойки/слота. Определите
адрес для дискретного входного сигнала, приложенного ко входу 5 входного модуля
постоянного тока на рис. 12.4.
êÖòÖçàÖ
Адрес для дискретного входа постоянного тока:
I:1/5.
Символ I указывает, что адресуется вход, 1 указывает, что входной модуль постоянно
го тока находится в слоте 1, а 5 указывает, что дискретный (вкл. или выкл.) входной
сигнал связан с входом 5.
Система адреса стойки/слота Allen Bradley немного изменяется при использова
нии ПЛК компании Micrologix. Вспомним, что ПЛК Micrologix не имеют стойки с мо
дулями ввода/вывода, а фиксированное число входов и выходов интегрировано в па
кет одного процессора. В результате адреса для вводов и выводов имеют номер слота 0
в адресе для символов входных контактов и выходных катушек. Некоторые из приме
ров, используемых в этой главе, программировались для процессоров Micrologix, по
этому для решения таких задач на языке логических лестничных схем используется
только слот 0.
Файлы таблиц данных и регистры. Система адресации на базе адресов стойки/
слота использует ряд файлов данных или регистров, чтобы поддерживать различные
типы данных. Адрес файла данных используется как имя переменной для отличия кон
тактов от команд. Файлы таблиц данных содержат информацию состояния, связанную
с вводом/выводом внешних данных и всеми другими командами, используемыми в
главной программе и в файлах программы лестничной логики. Они хранят, кроме того,
информацию об алгоритмах работы контроллера, а также наборы параметров процес
са и поисковые таблицы.
íàèõ èãä
771
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
В SLCконтроллерах Allen Bradley области таблиц данных создаются автомати
чески, когда вы помещаете команду на ступеньку лестничной схемы и вводите адрес
контакта или команды. Например, назначение адреса I:5/1 в примере 12.1 приводит к
созданию таблицы данных. При этом назначается и адрес для контакта ступеньки.
В этом случае был определен бит 1 в таблице данных 5. В реализации Allen Bradley
файлы данных — это регистры булевых, целочисленных и действительных переменных.
Файлы, созданные этим способом, имеют глобальный доступ. SLCконтроллеры под
держивают до 256 файлов данных (с номерами от 0 до 255) для каждого типа данных. Тип
информации для первых восьми файлов данных задан по умолчанию, как описано в при
веденной ниже таблице; для остальных файлов он определяется пользователем.
12.3.2 . ëËÒÚÂÏ̊ ̇ ·‡Á Ú„ӂ, ËÎË ÔÂÂÏÂÌÌ̊ı
Системы на базе тегов, или переменных, используются во всех новых моделях ПЛК,
предлагаемых сегодня, таких, например, как модели семейства Control Logix фирмы
Allen Bradley. При этой системе адресации в процессе проектирования системы уп
равления ее входам и выходам назначаются имена переменных (разработчики Allen
Bradley предпочитают термину «переменная» термин «тег»). Термин «переменная»
стали использовать позднее, имя переменной присваивается модулю ввода/вывода и
конкретному его контакту. Если при разработке программы используется один из пяти
стандартных языков IEC 61131, то тег, или имя переменной, является единственной
используемой ссылкой. При использовании тегов или переменных становится доступ
ным широкий набор типов данных.
Типы данных, адресуемых с помощью тегов, или переменных. Стандартом IEC 61131
определено пять типов данных: булевы, целочисленные, действительные, строковые и опреде
ляемые пользователем. Для некоторых групп, подобных булевым переменным, определен
только один тип данных. А, например, для группы целых чисел определено восемь типов дан
ных. Благодаря категории типов, определяемых пользователем, система разрешает разработ
чикам и программистам ПЛК создавать уникальные типы данных, специфические для управ
772
ляемого процесса. Некоторые из наиболее часто используемых типов данных приведены в
таблице ниже:
Разнообразие и в то же время устойчивость типов данных важны для языков стан
дарта IEC 61131, используемых при управлении технологическими процессами, кото
рое требует значительного объема вычислений.
12.3.3. èÓ„‡ÏÏ̇fl ̋ÏÛÎflˆËfl èãä, ËÎË ÛÔ‡‚ÎÂÌËÂ
Ò ÔÓÏÓ̧̨̆ ÔÂÒÓ̇Î̧ÌÓ„Ó ÍÓÏÔ̧̨Ú‡
Система управления на базе персонального компьютера (ПК), названная программной эму
ляцией ПЛК (Soft PLK) в системе Allen Bradley, обычно описывается как эмуляция ПЛК при
использовании программного обеспечения ПК. При этой реализации используются про
мышленные ПК и некоторые методы, позволяющие совместить процесс ввода/вывода дан
ных в системе ПК с прикладным программным обеспечением таким образом, чтобы ПК ра
ботал подобно обычному ПЛК. Самый распространенный способ состоит в том, чтобы
поместить плату сканера DeviceNet в ПК и осуществлять обычный процесс ввода/вывода,
выполняемый в распределенной сети DeviceNet. При другом способе используется стандар
тный ПЛК с промышленным модулем ПК, помещенным в один из слотов стойки ПЛК. В
этом случае ПК подключается на соединительную плату ПЛК и управляется прикладной
программой, как и любой модуль ввода/вывода в стойке ПЛК. При применении программ
ной эмуляции ПЛК чаще всего используется один из этих двух способов.
Когда программная эмуляция ПЛК является оптимальным решением? Обычно при
дискретном управлении с небольшим числом вводов/выводов лучше применять стойки
ПЛК. Однако, если необходимо хранение большого объема данных и манипулирование ими
в процессе циклического управления, программная эмуляция ПЛК может оказаться опти
мальным выбором. Если возможности ПК могут использоваться, например, при хранении и
обработке данных или при графическом отображении процесса, то это преимущество может
компенсировать повышение стоимости, связанное с программной эмуляцией ПЛК.
12.4 . ëíÄçÑÄêíçõÖ üáõäà IEC 61131-3
Настоящий раздел познакомит вас с тем, как использовать пять стандартных языков для
решения проблем автоматизации управления. Вы узнаете, какой язык следует выбрать
ëíÄçÑÄêíçõÖ üáõäà IEC 61131-3
773
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
для решения того или иного типа задач и как при этом структурировать решение. Внача
ле дадим общее описание каждого языка:
набор команд (IL — instruction list): основан на тексте язык нижнего уровня,
использует мнемонические схемы (мнемонические команды), как при исполь
зовании машинного кода в микропроцессорах. IL — мощный язык, но он имеет
и много недостатков. Он труден для чтения и понимания и не очень пригоден
для большинства конкретных случаев. Поэтому IL должен использоваться,
только когда этого требует конкретное применение. Фирма Allen Bradley не
поддерживает этот язык изза его ограниченного применения в управлении;
структурированный текст (ST — structured text): основан на тексте язык вы
сокого уровня, подобного БЕЙСИКУ, C или ПАСКАЛЮ. Его команды под
держивают разработку высоко структурированных программ и решение
сложных математических уравнений;
лестничные схемы (LD — ladder diagram): графический язык, основанный на
традиционных лестничных схемах релейной логики, он используется для логи
ческих операций с булевыми переменными, имеющими два значения — «исти
на» и «ложь». Элементы языка в 611313 включают только контакты и катушки
реле, которые соединяются, чтобы обеспечить требуемую логику. Если требу
ются таймеры, счетчики или другие специальные функции, то в схему лестнич
ной логики включаются элементы, способные такие функции обеспечить;
функциональные блоксхемы (FBD — Function block diagram): другой графи
ческий язык, где базисные элементы программирования являются блоками,
которые вместе со связями формируют окончательную схему. Блоки управля
ют данными, которые проходят с входных на выходные связи. Данные могут
быть как булевыми, числовыми или текстовыми, так и других поддерживаемых
типов. Имеется также большая библиотека стандартных функциональных
блоков. Этот язык чаще всего используются при управлении процессами;
последовательные функциональные диаграммы (SFC): графический язык,
основанный на французском стандарте GRAFCET; этот графический язык
используется наиболее часто для задач последовательного управления.
Включает элементы языка БЕЙСИК: шаги или состояния с действиями и
переходами. Действия связаны с выходами и условиями перехода, использу
емыми, чтобы перейти от текущего состояния к следующему. Действия и ус
ловия могут программироваться на четырех других языках. Поэтому язык
SFC часто используется для основного последовательного потока програм
мы, а FBD, LD и ST вызываются при необходимости на любом шаге SFC,
чтобы обеспечить необходимое управление системой.
Два языка, набор команд IL и структурированный текст ST, являются структури
рованными, так как команды и их параметры одновременно вводятся с клавиатуры в
одной строке. Остальные три языка — лестничные схемы, функциональные блоксхе
мы и последовательные функциональные диаграммы — относятся к графическим.
Чтобы создать программу на дисплее устройства программирования, используется
графический редактор. В различных отраслях промышленности начинают использо
ваться комбинации LD, FBD, ST и SFC для написания тех частей управляющей про
граммы, где использование конкретного языка улучшает качество управления.
774
12.4 .1 . ëÓ‚ÏÂÒÚËÏÓÒÚ̧
Многие производители ПЛК поддерживают стандарт 61131; однако степень соответ
ствия стандарту у них значительно различается. Существует всемирная независимая орга
низация PLCOPEN, которая поддерживает открытые стандарты для ПЛКсистем, в том
числе и стандарт 61131. Значительную часть работы PLCOPEN составляет сертифика
ция совместимых систем. В настоящее время определены три уровня согласования:
совместимость на базовом уровне определяет необходимую базу стандарта
61131 и необходимые свойства каждого поддерживаемого языка. Программа мо
жет быть зарегистрирована как совместимая на базовом уровне с одним, несколь
кими или всеми языками. Совместимость на базовом уровне включает небольшое
число базисных типов данных и ограниченный набор стандартных функций;
совместимость на уровне преемственности определяет больший набор
требуемых свойств и должна обеспечивать инструмент импорта/экспорта, по
зволяющий изменить программное обеспечение 61131 так, чтобы стала воз
можной связь с другой системой, совместимой на уровне преемственности;
полная совместимость указывает на полное соответствие стандарту
61131 и полную взаимозаменяемость программ.
Для достижения взаимозаменяемости программ различным производителям
ПЛК придется пройти еще долгий путь. Однако поддержка стандарта уже улучшила
качество программирования ПЛК. Стандарт все еще относительно нов, и задача дос
тижения согласования трудна, так как большинство современных производителей не
выполняет всех требований стандарта.
12.5. üáõä ãÖëíçàóçõï ëïÖå (LD) èé ëíÄçÑÄêíì IEC 61131-3
Начнем рассмотрение языков программирования ПЛК, соответствующих стандарту
IEC 611313, с языка лестничных схем, который является продвинутой версией тра
диционного языка лестничных схем ПЛК. Программирование с помощью лестничных
схем использовалось, начиная с момента введения ПЛК Диком Морлеем в начале
1968 года. Однако версия стандарта 611313 совершенно отличается от языка лест
ничных схем, предлагаемого продавцами ПЛК.
12.5 .1 . ëÚÛÍÚÛ‡ Ë ‡·ÓÚ‡ ÎÂÒÚÌË̃Ì̊ı ÒıÂÏ
Структура лестничных схем, показанная на рис. 12.7, очень напоминает ступеньку из
современной релейной лестничной схемы для PLC. Рассмотрим рисунок подробнее.
Структура имеет левую шину, по которой мощность поступает на левые контакты,
проходит по элементам ступеньки и возвращается в источник по правой шине.
Условные обозначения элементов на ступеньке связаны с шинами питания или
другими элементами линиями связи. На рис. 12.7 помечены только первые три звена,
üáõä ãÖëíçàóçõï ëïÖå (LD) èé ëíÄçÑÄêíì IEC 61131-3
775
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
но все отрезки линий, и горизонтальные и вертикальные, между символами и шинами
питания — это звенья связи. Над условными обозначениями помещены соответству
ющие им переменные. Использование имени переменной, а не физического адреса
говорит нам о том, что эта система основана на тегах. Соглашение о логических сим
волах, означающих логические операции И и ИЛИ, описанное в главе 2, справедливо
также и для логических лестничных схем.
Рис. 12.7. Структура
лестничной
схемы LD
Работа ступеньки лестничной схемы. Работа ступеньки лестничной схемы связана
с представлением о прохождении потока мощности от левой шины питания через вход
ные элементы на выходную катушку. Помните, что ступенька лестничной схемы —
символическая; реальный ток не проходит через контакты, как в логической релейной
схеме, описанной в главе 2. Каждый символ входного контакта представляет состояние
булевой переменной, хранимой в памяти PLC. Записанная в памяти переменная, соот
ветствующая контакту, управляется вешним устройством, таким как дискретный пре
дельный переключатель или температурный датчик. Например, когда условные обозна
чения СливЗакрыт и ДверьЗакрыта на рис. 12.7 имеют входные переменные, которые
равны 0 (или являются ложными), то поток мощности к катушке через них не поступает.
Состояние входных переменных СливЗакрыт и ДверьЗакрыта, хранящихся в памяти,
определяется внешними переключающими устройствами. Звенья связи также имеют
булево состояние, которое является или 1 (истинное, или включенное), или 0 (ложное,
или выключенное). Состояние звена также является синонимом прохождения потока
мощности. Так что звено связи, соединенное с левой шиной питания (звено связи 1 на
рис. 12.7), всегда имеет значение 1, или «истина». Когда бит памяти для СливЗакрыт
подходит к контакту с символом 1, или истина, символ контакта становится истинным,
связь 2 становится истинной и поток мощности подходит к условному обозначению
ДверьЗакрыта. Когда символ контакта ДверьЗакрыта становится истинным, поток
мощности достигает катушки и бит памяти ее выхода становится истинным. Этот бит
памяти управляет состоянием ее выхода, на который подключено внешнее устройство.
Прочитайте еще раз описание этой последовательности операций, чтобы усвоить рабо
ту ступеньки, показанной на рис. 12.7.
Символы контактов ступеньки представляют входы внешних устройств. Символ
катушки представляет булеву переменную для дискретного внешнего привода, напри
мер насоса, реле или индикатора. Следовательно, лестничная схема — символичес
776
кий логический интерфейс между внешними переключателями входных устройств или
датчиками и внешними выходными устройствами, которыми они управляют. В заклю
чение отметим, что символ насоса на рис. 12.7 представляет реле пускателя, которое
активируется, когда мощность может течь от левой шины источника питания до вы
ходного символа. Переменная Насос также является булевой переменной. Она также
устанавливается в истинное состояние, когда символы контактов СливЗакрыт и
ДверьЗакрыта истинны или когда истинен символ контакта РучноеВключение. Кон
такты отражают на схеме состояние булевых входных переменных.
12.5 .2 . ÅË·ÎËÓÚÂ͇ ÒËÏ‚ÓÎÓ‚
Стандарт лестничных схем имеет ограниченный набор символов, соответствующий
современному набору команд программирования PLC.
Набор символов/команд для стандарта лестничных схем отображен на рис. 12.8
(обозначения контактов), рис 12.9 (обозначения катушек) и рис. 12.10 (обозначения
специальные катушек). Тщательно изучите каждый из этих рисунков.
Рис. 12.8 . Контакты в языке LD
Ряд контактов используется, чтобы отражать нормальные и инверсные состоя
ния, прямые и обратные переходы с помощью изменяющихся булевых переменных.
Обозначения для первых двух типов контактов: исследование включения и исследова
ние выключения являются необычными, потому что в традиционных схемах контакты
называются нормально замкнутыми (НЗ) и нормально разомкнутыми (НР). Но для
логических схем такие названия неудачны, поскольку их можно спутать с реальными
НЗ и НРконтактами внешних устройств.
Контакты проверки включения пропускают поток мощности, если их бит памяти
равен 1 (другими словами, если они истинны, включены, установлены), а контакты
üáõä ãÖëíçàóçõï ëïÖå (LD) èé ëíÄçÑÄêíì IEC 61131-3
777
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
проверки выключения пропускают поток мощности, если их бит памяти равен 0 (дру
гими словами, если они ложны, выключены, сброшены). Стандартная промышленная
запись должна относиться к состоянию контактов как к ложному, если они находятся
при нормальных условиях, и как к истинному при инверсных условиях. Внешние уст
ройства или не активны (нормальное условие) или активны (условие удержания). Мы
вернемся к обсуждению этой записи в разделе 12.6.
Рис. 12.9. Катушки в языке LD
Две библиотеки символов катушек на рис. 12.9 и 12.10 предлагают четкий набор
параметров для активации внешних устройств. Наиболее часто используются первые
два символа из приведенных на рис. 12.9 . Устанавливаемая и сбрасываемая катушки
фиксируют состояние выхода после активации, возврат может осуществляться коман
дой сброса, получаемой с другой ступеньки. Символы специальных запоминающих кату
шек на рис. 12.10 сохраняют состояние выхода и после снятия напряжения питания.
Пример решения лестничной схемы. Приведенный набор символов относится
только к входным контактам и выходным катушкам. Если же необходимы приборы для
реализации любых других функций, например таймеры или счетчики, то используются
элементы языка функциональных блоксхем (FBD) из стандарта IEC 61131. Возмож
ность интегрирования языков LD и FBD разрешает элементам этих стандартных язы
ков работать вместе, чтобы решать задачи управления любого уровня (язык функцио
нальных блоксхем описан полностью в разделе 12.7). Приведем пример объединения
этих двух стандартных языков. Рассмотрим схему, в которой объединены компоненты
языков LD и FBD, приведенную на рис. 12.11. Функциональный блок MAX в языке
FBD определяет максимальное целочисленное значение из двух или более значений,
поданных на входы (INn), и пропускает это значение на выход (OUT).
Разрешающий (EN) и разрешающий для выхода (ENO) — это булевы биты, ко
торые пропускают поток мощности на следующий элемент ступеньки. В этом приме
ре, когда контакт Test истинен (равен 1), функциональный блок MAX получает разре
шение на обработку входных сигналов. Блок MAX языка FBD имеет три входа, на
778
которые подаются целочисленные значения температуры, и два выхода: ENO и OUT.
Вывод ENO для блока MAX истинен, или равен 1, когда самое большое целочислен
ное входное значение появляется на выходе OUT.
Рис. 12.10. Обозначения и свойства специальных катушек
Рис. 12.11 . Объединение
компонентов LD и FBD
Когда выход ENO блока MAX истинен, он разрешает начать работу блоку «боль
ше, чем» (GT) языка FBD. Блок GT выполняет две функции: 1) переменная ENO ус
танавливается в состояние истины, следовательно, ее состояние изменяется от 0 до 1,
что переводит бит катушки (P), фиксирующий положительный переход, в состояние
истины, или включения, и указывает, что тест закончен; и 2), если максимальная тем
пература, поданная на вход IN1 блока GT больше, чем 500 (IN2 — входное значение),
то булева переменная OUT истинна и бит Cool катушки истинен, или включен. При
этом соответствующее реле включает вентилятор, и начинает работать система ох
лаждения.
üáõä ãÖëíçàóçõï ëïÖå (LD) èé ëíÄçÑÄêíì IEC 61131-3
779
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
12.6 . íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ
ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
Программирование логических лестничных схем глубоко укоренилось в практике про
ектирования американских систем автоматизации производства, в рамках этого метода
созданы тысячи программ и миллионы ступенек лестничных схем. При таких значитель
ных капиталовложениях трудно ожидать быстрого внедрения стандарта 61131 в систе
мы управления логическими лестничными схемами различных отраслей промышленно
сти. Любая технология имеет шансы на внедрение лишь тогда, когда она экономит
капиталовложения или увеличивает производительность. Однако оба эти преимуще
ства при внедрении не столь значительны, чтобы обеспечить переход к новому стандарту
61131 от испытанной и освоенной производителями методики программирования логи
ческих лестничных схем. Следовательно, американская промышленность пока останет
ся с традиционным проектированием лестничных схем для ПЛК.
Современные языки программирования логических лестничных схем представ
ляют собой комбинацию лестничных схем и функциональных блоксхем стандарта
61131 IEC. Этот параллелизм существует потому, что современные языки ПЛК вклю
чают булевы комбинации для контактов проверки включения и выключения и выход
ных катушек наряду с широким набором таких функциональных блоков, как таймеры,
счетчики и компараторы. Хотя отойти от современных языков программирования лес
тничных схем трудно, в некоторых случаях удается достичь экономии средств и повы
шения производительности, пользуясь языками структурированного текста, функцио
нальных блоксхем и последовательных функциональных диаграмм.
Обзор логических команд, часто используемых для лестничных схем систем SLC 500
фирмы Allen Bradley, приводится в следующих разделах. Представлены не все, а лишь
наиболее употребительные команды, применяемые в большинстве программ ПЛК. Эти
команды имеют одинаковый синтаксис для большинства ПЛКсистем.
Команды Allen Bradley включают контакты проверки включения ( ||
) если кон
такт замкнут (XIC) и контакт проверки отключения ( | / | ), если он разомкнут (XIO).
Мы продолжим использовать записи IEC стандарта «проверка включенного и вылю
ченного состояния» в этой главе. После краткого обзора команд для лестничных схем
фирмы Allen Bradley, будут описаны языки функциональных блоксхем, структуриро
ванного текста и последовательных функциональных схем.
12.6 .1. 뇂ÌÂÌË ÂÎÂÈÌÓÈ ÎÓ„ËÍË Ò ÎÓ„ËÍÓÈ ÎÂÒÚÌË̃Ì̊ı ÒıÂÏ
Программируемая логика лестничных схем ПЛК расширяет логику релейных лест
ничных схем, которую она непосредственно заменяет в ПЛКреализациях. Просмот
рите снова логические релейные лестничные схемы, приведенные на рис. 2 .78—2.80
в главе 2. В релейных лестничных схемах контакты внешних переключателей, управ
ляемых процессом, а также катушки и нагревательные элементы в качестве выходных
внешних устройств включены непосредственно в ступеньку лестничной логической
780
релейной схемы. На примере системы, приведенной на рис. 12.12, сравним решение в
релейных лестничных схемах из главы 2 с решением на языке логических лестничных
схем ПЛК. Отличия схемы ПЛК заключаются в следующем:
входные переключатели связаны с входными модулями, а выходные устрой
ства вывода — с выходными модулями;
и входные и выходные модули являются низкопотенциальными;
все устройства ввода данных выведены в начальную или исходную позицию
прежде, чем нажимается кнопка пуска;
символы контактов и выходных катушек, используемые в логических лест
ничных схемах ПЛК, являются лишь логическими представлениями внешних
устройств;
ступенька с пускателем двигателя с помощью контактора M1, в ПЛК систе
мах отсутствует, поскольку механическая аппаратная система обеспечивает
большую безопасность;
система адресации типа стойка/слот для SLC 500 компании Allen Bradley,
используемая для устройств ввода и вывода в логических лестничных схемах
и рассмотренная в разделе 12.3 .1.
Чтобы избежать путаницы в разработках логических лестничных схем в ПЛК,
необходимо правильно выбирать вид контактов, помещаемых на ступеньку для каждо
го из входных внешних устройств. Например, все контакты, используемые в лестнич
ной схеме на рис. 12.12б, относятся к типу проверяемых на замыкание (символ ||
).
Однако часть переключателей внешних устройств имеют НР, а другая часть — НЗ
контакты. Инженерам зачастую требуется преобразовывать схемы релейной лестнич
ной логики в схемы для ПЛК или разрабатывать новые схемы для ПЛК. Для решения
подобных задач вы должны знать, следует ли применить в схеме контакт проверки
включения или выключения для представления данного контакта внешнего устрой
ства. Эти проблемы рассматриваются в следующем разделе.
12.6 .2 . äÓÌÚ‡ÍÚ̊ ÔÓ‚ÂÍË ‚ÍĮ̂̃ÂÌËfl Ë ‚̊ÍĮ̂̃ÂÌËfl
Если ПЛК используется для последовательного управления системой автоматизации,
проектировщик должен выбрать тип внешнего устройства (выключатель или датчик —
НР или НЗ), который удовлетворял бы условиям технологического процесса, и тип кон
такта для ступеньки логической лестничной схемы ПЛК (контакты проверки включения
[ | | ], или выключения [ | \ | ]), чтобы обеспечить нужное управление. Контакты внеш
него устройства и символы, отображающие их в лестничной схеме, а также соответству
ющий бит в памяти, который связывает их, являются тремя элементами в ПЛК, которые
могут создать путаницу. Рассмотрим каждый из этих объектов:
1. Переключатель или датчик, который может быть НР либо НЗ, подключает 0
или 24 В на вход ПЛК. Взгляните на рис. 12.13a и отметьте, что предельный
НРпереключатель не обеспечивает никакого напряжения (0 В), когда он ра
зомкнут (не активирован), и подключает ток напряжением 24 В, когда удержи
вается замкнутым (активирован).
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
781
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Рис. 12.12. Решение задачи с рис. 2.78 на языке лестничных логических схем ПЛК:
а) схема включения ПЛК;
б) ступенька для реализации циклического слива;
в) ступенька для реализации нециклического слива
782
Рис. 12.13. Работа контактов проверки включения и выключения:
а) работа контакта проверки включения;
б) работа контакта проверки выключения;
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
783
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
2. Регистр и бит памяти связаны с выводами входного модуля. Бит памяти ра
вен 0, когда напряжение на соответствующем входе равно 0 В, и 1, когда
внешнее устройство подает на этот вход напряжение 24 В. Вы можете видеть
эту ситуацию на рис. 12.13a.
3. Имеется два варианта для контакта, помещенного на ступеньку лестничной
схемы: контакт проверки включения или выключения. Обозначение контакта
проверки включения ( ||
) выглядит как НРконтакт и так же ведет себя по
отношению к потоку мощности. В нормальном состоянии (не истинном, или не
активном) поток мощности не проходит и наблюдается разрыв цепи. Однако в
активном состоянии (истинном) поток мощности проходит, и символ контакта
соответствует замкнутому состоянию, обеспечивая непрерывность цепи. Рас
смотрите изображение выполнения этих условий на рис. 12.13a. Контакт про
верки включения ( | / | ) выглядит как обычный НЗконтакт и работает анало
гично. В нормальном состоянии (не истинном, или не активном), поток мощно
сти проходит и цепь непрерывна. В активном же состоянии (истинном) потока
мощности нет и символ контакта соответствует разомкнутому состоянию. Рас
смотрите изображение выполнения этих условий на рис. 12.13б.
Символы контактов лестничной схемы связаны с внешним устройством при помощи
адреса входа, на который это устройство подсоединено. Например, на рис. 12.13 символ
контакта проверки включения имеет адрес I:3/10, что означает вход 10 входного модуля в
третьем слоте (запись по стандарту компании Allen Bradley). Условие активности или неак
тивности контакта лестничной схемы определяется значением входа 10 (1 или 0). Это также
иллюстрируется на рисунке. Программа ПЛК указывает, что контакт истинен, или активен,
изменением его цвета или затушевыванием фона. Когда контакты на рис. 12.13a и б затуше
ваны, они замкнуты и обеспечивают прохождение мощности. Использование условий про
верки на включение или выключение несколько усложняет общую картину, но оно необхо
димо, потому что символы контактов отображают состояние битов памяти ПЛК, а не
контактов переключателя. Чтобы в этом убедиться, снова посмотрите на рис. 12.13, и вы
поймете связь между условиями внешнего устройства, значениями бита памяти и условием
(активный или не активный) символа ступеньки лестничной схемы.
12.6 .3. ÇıÓ‰̊, ‚̊ıÓ‰̊ Ë ‚ÂÏfl Ò͇ÌËÓ‚‡ÌËfl
В предыдущем разделе была рассмотрена связь между внешними устройствами и входны
ми контактами логической лестничной схемы. Однако для того, чтобы понять работу вы
ходных устройств ступеньки логической лестничной схемы, необходимо сначала рассмот
реть процесс сканирования выходных устройств ПЛК и понятие времени сканирования.
Время сканирования. Логические лестничные схемы ПЛК имеют более чем одну
ступеньку; следовательно, должен использоваться какойто процесс, чтобы коорди
нировать изменения во входных контактах на всех ступеньках и связанные изменения
состояния выходов. Используемый для этого процесс — это сканирование (опрос со
стояния) ПЛК. Три компонента такого сканирования показаны на рис. 12.14:
1. Первым действием при сканировании должно быть считывание состояния
всех внешних устройств и установка 0 или 1 во входных регистрах по напря
жениям на входах модуля.
784
2. Второе действие можно разбить на три шага:
символы всех входных контактов изменяются, чтобы отразить состояние
битов во входном регистре;
с помощью выражений булевой логики по состоянию входов контактов
проверки включения и выключения определяется состояние выходов
(истинное или ложное) на всех ступеньках, начиная со ступеньки 0;
символ выходной катушки или выходного элемента устанавливается в
состояние «истина», если ступенька истинна, и в «ложь», если ступень
ка ложна.
3. Последнее действие должно изменить состояние выхода, бит регистра, свя
занный со ступенькой лестничной схемы, символ катушки или элемента и со
стояние выходного модуля. Если выходная катушка истинна, то связанный с
ней бит регистра равен 1 и выходной модуль включает внешнее устройство,
подключенное на этот выход. Если состояние выходной катушки ложное, то
связанный с ней бит регистра равен 0 и выходной модуль отключает внешнее
устройство, подключенное на этот выход.
Время, требуемое для сканирования, названное временем сканирования, непос
тоянно, оно зависит от объема памяти, используемого для хранения состояния сту
пеньки (необходимо затратить 1 мкс для считывания 1000 байт памяти программы) и
от времени выполнения некоторых команд, используемых в программе. Время скани
рования может изменяться от 0,2 до 50 мкс.
Компоновка входов и выходов. Вся работа ПЛК, от входных до выходных внешних
устройств, проиллюстрирована на рис. 12.15. Шаги сканирования показаны на рис. 12.15a,
б, в и г. На отдельных фрагментах показано движение потока информации в течение полного
цикла сканирования ПЛК. Состояние системы до начала сканирования изображено на
рис. 12.15a. Обратите внимание, что концевой переключатель (LS) уже замкнулся, но вход
ной регистр пока не отражает этого изменения. На рис. 12.15б вход уже сканирован и вход
Рис. 12.14. Процесс сканирования в ПЛК
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
785
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
ной регистр модифицирован (состояние разряда изменилось с 0 на 1). На следующем этапе
сканирования (рис. 12.15в) программа логической лестничной схемы сначала выполняет
изменение всех входов и затем оценивает требуемые изменения в выходных катушках. В
этом примере контакт проверки включения I:3/10 становится истинным (замыкается и про
пускает поток мощности). Поскольку замыкается звено связи, подводящее к катушке, выход
O:4/7 становится истинным и символ катушки становится истинным. На последнем этапе
цикла (рис. 12.15в), состояние выходного регистра изменяется и значение разряда изменя
ется с 0 на 1. Это изменение состояния выходного регистра заставляет выходной модуль в
слоте 4 включить сигнальную лампу, подсоединенную к выходу 7.
Рис. 12.15. Цикл сканирования: последовательность операций
Регистры, показанные на рис. 12.15, соответствуют ПЛК фирмы Allen Bradley; одна
ко описанный цикл сканирования применяется в ПЛК любого поставщика. Предполага
786
ется, что внешние устройства, так же как и входные и выходные модули, согласованы с
помощью низкопотенциального и высокопотенциального интерфейса (currentsinking и
currentsourcing методы), рассмотренного в главе 6. Теперь вы уже можете определить
состояние внешнего устройства, задаваемое логикой лестничной схемы, а также условие и
тип внешних входных устройств. Попробуем решить пример 12.2.
èËÏ 12.2
Входные внешние устройства на рис. 12 .12a имеют в начале сканирования следующие
условия: переключатель L1 удерживается замкнутым, переключатель температуры ак
тивен (НРконтакты замкнуты, а НЗ — разомкнуты), и контакты теплового реле замк
нуты. Используйте программу логики многозвенной схемы рис. 12 .12б, чтобы предска
зать состояние, в котором выходные внешние устройства будут на конце сканирования.
êÖòÖçàÖ
В начале сканирования биты входного регистра для входов 1, 3 и 4 будут в состоянии 1,
потому что на эти входы подается напряжение 24 В. И тогда символы контактов на
рис.12.12б: I:3/1, I:3/3, и I:3/4 — будут истинны, то есть будут пропускать поток мощ
ности. Звено связи, подводящее мощность к O:5/2 (клапан слива), истинно, так что
O:5/2 истинен. После сканирования клапан включается. Нагреватель же не включен,
потому что контакт I:3/2 не истинен, следовательно, звено связи, подводящее к нагре
вателю, ложно и ступенька разорвана.
Поняв цикл сканирования и методику перехода от состояний входов к состояниям
выходов в ПЛК, вы можете легко оценивать программы логических лестничных схем,
обладая лишь поверхностным знанием систем, которыми они управляют. Проведите
анализ полной программы ПЛК на рис. 12.12, воспользовавшись описанием процес
са, приведенным в разделе 2.13.3. Понимание процесса сканирования в ПЛК также
полезно при поиске неисправностей в системах, управляемых ПЛК. Разработка про
грамм для логических лестничных схем в конкретных системах является более трудной
задачей, чем понимание их работы. Следующий раздел посвящен тому, как выбрать
правильную логическую лестничную схему с заданными внешними входными и выход
ными устройствами и необходимым алгоритмом работы системы.
12.6 .4 . Ç̊·Ó ÍÓÌÚ‡ÍÚÓ‚ ‰Îfl ÔÓ‚ÂÍË ‚ÍĮ̂̃ÂÌËfl ËÎË ‚̊ÍĮ̂̃ÂÌËfl
Необходимость уметь создавать программы для логических лестничных схем обуслов
лена двумя причинами:
1. В промышленности все еще существует много систем управления реле логи
ческих лестничных схем, и они должны постепенно заменяться схемами
ПЛК. При этом вы должны подключить внешние устройства на входные и
выходные модули и затем разработать программу для ПЛК, обеспечиваю
щую необходимый режим работы.
2. ПЛК фактически стал стандартным устройством для последовательного уп
равления технологическими машинами и для постоянно растущего числа его
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
787
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
применений в управлении процессами. Поэтому вы должны уметь разраба
тывать ПЛКпрограммы логических лестничных схем.
Важно понимать, что внешнему входному устройству с НЗконтактами в лестнич
ной логической схеме ПЛК не обязательно должен соответствовать символ контакта
проверки на размыкание ( | / | ) .
Кроме того, на выбор символа проверки на размыкание или замыкание в ПЛК
влияет желательное рабочее состояние внешнего выходного устройства.
Четыре шага выбора типа контактов ПЛК. Выбор входных контактов проверки
на размыкание или замыкание, размещаемых на левой стороне ступеньки логической
лестничной схемы ПЛК, является наиболее сложным и запутанным. Необходима не
которая стратегия, позволяющая определить, какой тип контакта следует использо
вать на данной ступеньке. На рис. 12.16 показано, как эти контакты выбираются при
различных состояниях входных и выходных устройств. Схема на рисунке составлена
для низкопотенциального входа на ПЛК, при котором наличие напряжения 24 В на
входе означает, что через него течет ток, а при 0 В на входе ток отсутствует. Прежде
чем двигаться дальше, изучите диаграмму на рис. 12.16.
Проектирование обычно начинается с задания, описывающего, как должны реа
гировать выходы системы на изменение состояния переключателей и датчиков. На
пример, резервуар на рис. 2.78 имеет сливной клапан, который был включен или от
крыт, когда и поплавковый НРпереключатель нижнего уровня, и НРпереключатель
температуры были замкнуты. В проекте каждому из этих переключателей будет соот
ветствовать контакт на ступеньках логической лестничной схемы, который должен
быть контактом проверки на включение или выключение. Воспользуемся этой зада
чей, чтобы посмотреть, приведет ли нас схема рис. 12.16 к правильному выбору:
1. Выберем переключатель или датчик и определим тип контакта. В столбце 1
таблицы найдем четыре соответствующие строки для этого типа контакта.
В примере с резервуаром поплавковый переключатель нижнего уровня
имеет НРконтакт, что соответствует строкам 1—4 таблицы.
2. Определим, приводится или не приводится в действие датчик или переклю
чатель на желательном выводе внешнего устройства. Найдите две строки в
столбце 2 диаграммы, которая соответствует этому условию.
В примере с резервуаром поплавковый переключатель нижнего уровня
должен быть активизирован (НРконтакты замкнуты), чтобы сливной
клапан был открыт. Выбраны строки 3 и 4, потому что они представляют
НРконтакты с активизированным внешним устройством. Обратите вни
мание, что на обеих строках столбца 3 к входному терминалу приложено
напряжение 24 В, которое устанавливает входные биты регистра в 1.
3. Определим желательное условие (вкл. или выкл .) для внешнего устройства в
столбце 4. Необходимо выбрать одну из двух строк, выделенных на шаге 2.
В примере с резервуаром клапан слива должен быть включен или открыт
(столбец 4); строка 4 имеет все параметры, которые описывают операцию,
требуемую для этих входных и выходных внешних устройств. В этом случае
выходная катушка (столбец 5) должна быть истинна, поэтому входная логи
ка должна быть активна и подводить поток мощности к катушке.
788
Рис. 12.16. Схема выбора контактов проверки на включение или выключение
4. Выберем тип входного контакта ступеньки лестничной схемы (столбец 6),
который удовлетворяет это применению.
В примере с резервуаром входной контакт ступеньки должен быть в этом
случае контактом проверки включения ( ||
) . Контакт проверки включе
ния истинен, когда вход регистрирует бит как 1. Значение 1 подводит по
ток мощности к выходной катушке, которая открывает сливной клапан.
Процесс был продемонстрирован на внешних входных и выходных устройствах,
но он работает таким же образом и с внутренними входными и выходными битами.
После того как вы решите несколько примеров, процесс выбора контактов проверки
включения или выключения для ступеньки лестничной схемы станет вам ясен, и вы
сможете осуществлять выбор даже без использования схемы рис. 12.16.
èËÏ 12.3
НЗдатчик выключает внешнее выходное устройство, когда не активирован, то есть
замкнут. Определите необходимый тип контакта логической лестничной схемы.
êÖòÖçàÖ
Воспользуемся диаграммой на рис. 12 .16, чтобы выбрать строки в следующем порядке:
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
789
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
1. Строки 5–8 для внешних входных устройств с НЗконтактами (столбец 1).
2. Строки 5 и 6 для неактивизированных внешних входных устройств (столбец 2).
3. Строка 5, поскольку выходное устройство должно быть выключено (столбец 4).
Следовательно, необходимо выбрать контакт из ячейки на пересечении строки 5 и
столбца 6, соответствующей проверке на выключение ( | / | ) .
12.6.5 . ä‡ÚÍËÈ Ó·ÁÓ ÔÓˆÂÒÒÓÓ‚ SLC 500 ÍÓÏÔ‡ÌËË Allen Bradly
В этом разделе приведен краткий обзор наиболее часто используемых команд для се
мейства процессоров SLC 500 компании Allen Bradly. Если вы хорошо понимаете син
таксис команд программирования логических лестничных схем SLC 500, то можете
просто бегло просмотреть этот материал. Переходу к лестничным схемам стандарта
IEC (LD) и дискретным функциональным блоксхемам (FBD) существенно помогает
понимание синтаксиса команд современного языка программирования ПЛК. Кроме
того, некоторые из команд в FBD и языке последовательных функциональных диаг
рамм (SFC) подобны современным командам ПЛК, так что знание программирования
традиционных лестничных схем оказывается полезным. В следующем разделе рас
смотрен синтаксис команд SLC 500 для таймеров, счетчиков, компараторов, матема
тических операторов, обработки данных и управления потоком данных программы.
Команды таймера. Время включенного состояния таймера (TON) используется,
чтобы задерживать действие или изменение состояния переменной в течение предвари
тельно установленного отрезка времени. Команда таймера TON показана на рис. 12.17a,
б и в. На рис. 12.17a таймер TON включен в ступеньку лестничной схемы последователь
но с управляющим (I:0/0) контактом проверки включения таймера (XIC), позволяющим
запускать и останавливать таймер. Команде таймера присвоен адрес T4:0 (первый таймер
в таблице данных 4), временная база выбрана равной 1 с, а предварительно установлен
ное время равно 15 с. Как показано на рис. 12.17б, можно использовать три временных
базы. Работа таймера иллюстрируется временными диаграммами на рис. 12.17в. Таймер
имеет три булевых выходных переменных (EN, DN и TT) и два целочисленных регистра
(PRE и ACC). Рассмотрим описания этих элементов таймера:
Бит допуска (EN) — элемент EN таймера включен, или истинен, когда вход
ступеньки (управление таймера, I:0/0) истинен, или активен, и выключен, когда сту
пенька ложна, или не истинна. Таймер становится активным, когда бит допуска (EN)
включен.
Бит таймирования (TT) — элемент TT таймера включен, или истинен, только
тогда, когда в аккумуляторе имеется установленное значение и определена база вре
мени. Бит TT включается, или становится истинным, когда таймер получает разреше
ние и остается включенным, пока число в аккумуляторе не достигнет предварительно
установленного значения. Когда значение ACC равняется PRE, бит TT выключается.
Бит выполнения (DN) — элемент DN таймера выключен, или не истинен, когда
бит TT истинен и значение в аккумуляторе нарастает. Состояние DN изменяется на
включенное, или истинное, когда значение в аккумуляторе сравнивается с предвари
тельно установленным. Бит выполнения остается включенным, или истинным, пока
включен бит допуска таймера EN. Бит DN выключается при выключении бита EN.
790
Уставка времени (PRE). Элемент PRE таймера — целочисленное значение (от 0
до 32767) или целая переменная, помещенная в поле команды таймера, представляет
собой желательное запаздывание.
Аккумулятор (ACC). Элемент ACC таймера является целочисленным регист
ром, который увеличивается со скоростью, выбранной командой TON. Увеличение
продолжается, пока бит EN истинен и значение ACC меньше, чем PRE.
Работа таймера иллюстрируется временными диаграммами на рис. 12.17в. Срав
ните работу, показанную на рисунке, с приведенными выше описаниями. Пример 12.4
иллюстрирует использование таймеров TON.
Рис. 12.17. Команды таймера SLC 500
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
791
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
èËÏ 12.4
a. Разработать программу логической лестничной схемы, которая задерживает на
чало работы насоса, заполняющего резервуар, на 25,5 с после старта.
б. Разработать программу логической лестничной схемы, которая начинает запол
нение резервуара сразу после старта, а прекращает наполнение через 5 мин.
в. Изменить программу пункта б так, чтобы контакт начала мог быть мгновенного типа.
êÖòÖçàÖ
a. Решение многозвенной схемы для схемы задержки накачки для пункта a проиллю
стрировано рисунком. Обратите внимание, что выход контактора насоса O:1/1 на
ступеньке 1 истинен, когда бит контакта проверки включения становится истин
ным. DNбит становится истинным через 25,5 с (2550 × 0,01 с) после того, как
включается селекторный переключатель пуска.
б. Для пункта б имеется два правильных решения, в зависимости от того, какой из
выходных битов таймера (DN или TT) вы используете. Первое решение использу
ет бит TT таймера, когда вход ступеньки 1 делает выходной бит O:1/1 истинным,
если аккумулятор таймера увеличивается. Тем самым обеспечивается включение
насоса при включении селекторного переключателя пуска, работа насоса поддер
живается в течение 5 мин (300 с это и есть 5 мин), пока таймер считает.
Во втором решении используется контакт проверки выключения с адресом
T4:0/DN и контакт проверки включения переключателя старта. Когда переклю
чатель пуска замыкается, I:0/4 подводит мощность и таймер активируется. Ког
да бит выполнения таймера становится ложным, контакт проверки выключения
с адресом T4:0/DN подводит поток мощности к выходной катушке, которая
включает контактор насоса. Через 5 мин бит DN таймера становится истинным,
поэтому контакт проверки выключения T4:0/DN размыкается, прекращает под
вод мощности к выходной катушке и контактор насоса выключается.
792
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
793
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
в. В этом пункте бит ТТ используется, чтобы обеспечить самоудержание при старте, да
ваемом возвратным контактом, и бит ENтаймера и контактор насоса сохраняются
истинными в течение 300 с (5 мин). Когда аккумулятор таймера достигает 300, бит ТТ
становится ложным, как и бит ENтаймера, состояние катушки контактора насоса
также становится ложным, или выключенным (см. рис. к пункту в примера 12.4).
В логических лестничных схемах любая задача имеет множество решений. Вари
анты, используемые в примере 12.4, были подобраны таким образом, чтобы вы могли
видеть, как используются все выходные биты таймера.
Порядок конфигурации таймеров в САУ. Использование таймеров в САУ требу
ет трех дополнительных шагов:
1. Включить запись, позволяющую опознать команду как команду таймера.
Контроллер SLC 500 использует символ T4 (T означает «таймер»), чтобы
обозначить команду таймера.
2. Выбрать номер для таймера в адресе таймера T4:x. Здесь x — натуральное
число от 0 до 255. Вы можете иметь максимум 256 таймеров в программе.
3. Выбрать временную базу (1, 0,01 или 0,001 с), ввести уставку времени в
единицах временной базы, а также ввести данные и выходные биты таймера в
программу управления приложением.
Другие команды таймера в контроллере SLC 500. В дополнение к команде тай
мера TON, SLC 500 — задержка от выключения таймера (TOF) и сохраняющего тай
мера (RTO). Команда задержки от выключения (TOF) устанавливает бит выполнения
в 1 и сбрасывает аккумулятор, когда ступенька таймера и бит EN переходят от ложно
го состояния к истинному. Когда ступенька и бит возвращаются в ложное состояние,
аккумулятор начинает наращивать свое значение, стремясь к значению уставки. Тай
мер TOF выключает бит выполнения, когда сумматор достигает значения уставки пос
ле перехода от истинного к ложному состоянию, который запустил TOFтаймер. TOF
таймер имеет такое же графическое обозначение, что и ТON.
Сохраняющий таймер (RTO) продолжает считать интервалы базового времени
каждый раз, когда ступенька изменяет состояние от ложного к истинному. Этим пере
ходом значение сумматора не сбрасывается в 0, как в таймере TON. Условное обозна
чение RTO также напоминает обозначение таймера TON.
Команды сравнения. Команды сравнения — входные элементы для сравнения значе
ний двух переменных. Процессором SLC поддерживаются следующие команды сравнения:
EQU (равно), NEQ (не равно), LES (меньше чем), LEQ (меньше чем или равно), GRT
(больше чем) и GEQ (больше чем или равно). Работа команды равенства EQU показана на
рис. 12.18. Обратите внимание, что команда находится на входе ступеньки, потому что она
оценивает истинность или ложность управления выходной катушкой или другой командой.
Когда команда EQU сканируется ПЛК, процессор определяет, равно ли числовое значение,
вызываемое из источника А, числовому значению, вызываемому из источника B. Если два
исходных значения равны (A = B), то входное условие для ступеньки устанавливается в ис
тинное состояние; однако если источник А не равен источнику B, то ступенька остается в
ложном состоянии. Программа SLC 500 требует, чтобы в источниках были данные, вызван
ные указателем адреса, являющимся либо 16разрядным словом, либо одним битом. Ис
пользуемые для адреса слова чаще всего содержат адрес аккумулятора таймера (например,
794
T4:0.ACC T4:0.3), счетчика аккумулятора (например, C5:2. ACC, или C5:2.3), целочислен
ное значение (например, N7:3 — значение в целочисленном регистре 3), значение с плава
ющей запятой (например, F8:5) или слово состояния. Обычно используемый бит адресует
значения в источнике A, включая ссылки на входы (например, I:5/3), ссылки на выходы (на
пример, O:6. 4), ссылки на двоичные разряды (например, B3:0/3), биты регистров состоя
ния и биты 16разрядных слов (например, N7:3/5 — 5й бит из регистра 5).
Команда EQU на ступеньке, изображенной на рис. 12.18, сравнивает значение
аккумулятора таймера (T4:5.ACC) с целым числом 45. Когда сумматор таймера равня
ется 45, команда оценивает состояние как истинное и звено связи к катушке тоже как
истинное. В результате выход становится истинным и пневматический клапан включа
ется. Вопросительные знаки под каждым исходным значением указывают, где отобра
жается фактическое значение источника, когда лестничная схема выполняется. Пара
метры данных, помещенных в источники А и B, содержатся в табл. 12.1.
Таблица. 12.1 . Примеры команд сравнения
Рис. 12.18.
Бл ок
сравнения
EQU языка RS
Logix 500
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
795
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Таблица. 12.1 . Примеры команд сравнения (окончание)
Таблица 12.2 . Команды сравнения
Другие команды сравнения — NEQ (не равно), LES (меньше), LEQ (меньше или
равно), GRT (больше) и GEQ (больше или равно) — подобны команде EQU. В каждом
случае значения в источниках A и B используются, чтобы определить, являются ли усло
вия истинными или ложными. Если условие истинно, команда истинна; если условие
ложно, то и команда ложна. Работа остальных команд сравнения приведена в табл. 12.2 .
èËÏ 12.5
Разработайте ПЛКпрограмму лестничной логики, которая управляла бы работой
пневматического привода механизма коробочной упаковки на конце конвейера. Сис
796
тема запускается стандартным устройством ПУСК/СТОП с НЗпереключателем
СТОП и НРпереключателем ПУСК. НРдатчик, который обнаруживает коробку в
рабочей области, запускает цикл упаковки. Пневматический клапан должен быть
включен на 4 с, чтобы выдвинуть привод и затем выдать сигнал запуска процесса упа
ковки. Через 5 с после выдвижения упаковщик завершает процесс, пневматический
клапан выключается, и привод за 4 с убирается. Импульс длительностью в 1 с, по
сланный на выталкиватель, позволяет удалить коробку. Отобразите логическую лес
тничную схему и схему подключения ПЛК.
êÖòÖçàÖ
Решение представлено на рисунках к примеру. При рассмотрении схемы обратите
внимание на следующее:
бит активации системы (B3:0/0) используется, чтобы обеспечить самоудержа
ние кнопки ПУСК;
таймер сбрасывается, когда выталкиватель удаляет упакованную коробку из ра
бочей области.
В качестве решения можно было бы предложить множество работающих вариантов,
но мы выбрали такой, при котором вы могли бы увидеть наибольшее количество ко
манд сравнения. А сколько других решений могли бы предложить вы?
Команды счета. В языке RSLOGIX 500 имеются команды прямого (CTU) и об
ратного (CTD) счета. При работе каждой из этих команд считается число переходов
ступеньки от ложного к истинному состоянию. С каждым таким переходом команда
CTU увеличивает, а команда CTD уменьшает значение счетчика на 1.
Рассмотрите счетчик на ступеньке логической лестничной схемы на рис. 12.23.
Счетчик прямого счета CTU на рис. 12.23a увеличивается на 1 всякий раз, когда вход
ной контакт переходит от ложного состояния к истинному. Кроме обозначения счетчи
ка на ступеньке, на рис. 12.23б показано, как команда счета распределяет три 16раз
рядных слова, используемых для хранения данных счета.
Биты разрешения для счетчиков прямого (CU) и обратного (CD) счета включаются
при переходе ступеньки от ложного состояния к истинному. Они остаются установленны
ми, пока ступенька не возвратится к ложному состоянию. Значение аккумулятора (ACC)
равно числу переходов от ложного состояния к истинному, каждый из которых делает ис
тинным звено связи слева от команды таймера. Предварительно установленное значение
(PRE) — это значение аккумулятора счетчика ACC, при котором включается бит выпол
нения DN. Биты переполнения (OV) и отрицательного переполнения (UN) становятся
истинными, когда переход ступеньки пытается установить значение счетчика, превышаю
щее максимально допустимое (+32,767) или меньшее минимального допустимого значе
ния (—32,768). UA — бит обновления аккумулятора. Все значения данных счетчика мо
гут использоваться как входные адреса команд.
Адресация счетчика. Адреса счетчиков в контроллерах компании Allen Bradley имеют
ту же форму, что и адреса таймеров, за исключением стартового символа, который для счет
чиков изменяется на C. Типичный адрес счетчика C5:0/15 указывает, что это командасчет
чик (C), номер файла контроллера ПЛК по умолчанию — пятый (5), 0 — номер счетчика
(может изменяться от 0 до 255) и 15 — номер разряда, дающего разрешение на счет для CU
(слеш обозначает ссылку на номер бита). Альтернативная форма адреса — C5:0/CU.
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
797
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Решение для примера 12.5 .
798
Решение для примера 12.5 . (окончание)
Рис. 12.23. Счетчик прямого счета
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
799
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Во втором примере, C5:7/13, выполняемый бит (13) вызывается из счетчика но
мер 7. Как и в таймерах, может быть адресовано слово (точка указывает ссылку на
слово) с помощью любого номера слова или имени, указывающего на слово; напри
мер, C5:34.1 является адресом для слова 1, представляющего собой значение уставки
(PRE) для счетчика номер 34. Альтернативная форма вызова — C5:34. PRE.
Команды счетчиков ПЛК. Для SLC 500 имеются три команды счетчиков: прямо
го счета (CTU), обратного счета (CTD) и команда сброса (RES). Обычно бит выпол
нения команд CTU и CTD устанавливается, когда аккумулятор равен значению устав
ки. Счетчик продолжает увеличивать значения ACC и после достижения значения
PRE, и бит выполнения остается включенным до поступления команды сброса RES,
обнуляющей ACC. Биты переполнения (OV) и отрицательного переполнения (UV), а
также обновления аккумулятора (UA) остаются на низком уровне, пока не наступит
соответствующее условие в счетчике.
Команда сброса (RES) используется, чтобы очистить значения таймеров, а также
CTU и CTDсчетчиков. Команда RES имеет тот же самый адрес, что и таймер или счет
чик, который должен быть очищен. Команда очистки RES и сброс аккумуляторов тайме
ров и счетчиков поступает каждый раз, когда звено связи, подходящее к команде, стано
вится истинным. Работа команд счета и команды сброса показана в примерах 12.6 и 12.7 .
èËÏ 12.6
В систему из примера 12.4, оклеивающую коробки упаковочной лентой, должна быть
заправлена новая лента после того, как будут оклеены 500 коробок. Измените про
грамму лестничной логики ПЛК в примере 12.4 так, чтобы она считала число оклеен
ных коробок и, кроме того, останавливала процесс и зажигала красную сигнальную
лампу, информируя о необходимости замены ленты, когда число в счетчике достигнет
500. Обеспечьте также сброс счетчика при каждом пуске системы.
êÖòÖçàÖ
Решение многозвенной схемы для измененной системы оклеивания коробок проил
люстрировано рисунком к примеру. Сравним решение примера 12.5 с решением,
приведенным ниже, и отметим следующие изменения:
сигнал на выталкиватель используется, чтобы увеличить на 1 число в счетчике;
контакт проверки выключения вместе с адресом бита выполнения счетчика по
мещены в схему ПУСК/СТОП, чтобы заблокировать систему, когда число в
счетчике достигнет 500;
контакт проверки выключения со встречным выполненным разрядным адресом
используется, чтобы включить предупреждение об обслуживания, когда число в
счетчике достигнет 500. Соединение с внешним сигнальным устройством, пре
дупреждающим о необходимости обслуживания, не показано;
бит активности системы (B3:0/0) и однократной фиксации фронта (OSR — one
shot rising) используется, чтобы сбрасывать аккумулятор каждый раз при запус
ке системы пусковым переключателем. Как только бит активности системы пе
реходит от ложного к истинному состоянию, система фиксации фронта делает
истиной связь команды сброса только для одного сканирования. Язык RSLOGIX
500 имеет команды однократной фиксации фронта (OSR) и среза (OSF — one
shot falling). Если команда однократной фиксации помещается на ступеньку не
800
посредственно выходной командой, она делает выходную команду истинной для
сканирования, следующего сразу за соответствующим переходом (фронтом или
спадом). Команды OSR или OSF используются, чтобы реагировать на фронт или
срез входного логического сигнала.
èËÏ 12.7
Разработайте логическую ступенчатую схему счетчика с переключением направле
ния счета, которая реализует счетчик прямого счета, когда истинен контакт I:0/0, и
обратного счета, когда истинен контакт I:0/1.
êÖòÖçàÖ
Язык SLC 500 не имеет контактов для команды переключения направления счета, но вы
можете формировать его из команд CTU и CTD. Логическая ступенчатая схема счетчика
с переключением направления счета показана на рисунке к примеру. Обратите внимание,
что счетчики с прямым и обратным счетом используются с одним и тем же адресом кон
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
801
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
тактов C5:6. В результате аккумулятор для счетчика — C5:6.ACC; он будет увеличен на 1,
когда истинен контакт I:0/0, и уменьшен на 1, когда истинен контакт I:0/1. Следователь
но, он ведет себя так же, как счетчик с переключением направления счета. Используются
две новые команды, очень похожие на команды, которые вы уже знаете. Команда преде
лов имеет три параметра: нижнего предела, верхнего предела и тестирования. Для всех
трех могут использоваться константы или команды регистров. Обычно верхний предел
равен или больше нижнего предела, при этом выходная команда истинна, если тестовое
значение равно любому пределу или находится между ними. Любое другое тестовое зна
чение дает ложный результат. Вторая новая команда — выходная команда с защелкой
(OTL — output latch) — работает так же, как и стандартная выходная команда (OTE),
отличаясь, однако, тем, что состояние однажды установленного бита команды OTL фик
сируется. Как только бит OTL был включен (установлена 1 в памяти), то он останется в
этом состоянии, даже если условие ступеньки станет ложным. Бит должен быть сброшен
только командой сброса (OTU — output unlatch) с тем же адресом.
802
Арифметические команды. В языке RSLOGIX 500 существует 22 математичес
кие команды для программирования SLC 500 ПЛК. Чаще всего используются коман
ды сложения (ADD), вычитания (SUB), умножения (MUL), деления (DIV), обнуления
(или очистки) регистра (CLR), извлечения квадратного корня (SQR), абсолютного
значения (ABS), возведения X в степень Y (XPY), синуса (SIN), косинуса (COS), тан
генса (TAN), натурального логарифма (LN) и десятичного логарифма (LOG). Обычно
математические команды вводят одно или два значения, выполняют над ними матема
тическую операцию и пересылают результат в назначенную ячейку памяти.
Типичная ступенька лестничной схемы с командой ADD приведена на рис. 12.24.
Отметим, что источники A и B могут иметь любые адреса (например, T4:10.PRE), кото
рые содержат входные значения или константы (например, 100). Адрес назначения —
это адрес (N7:0), где должен быть сохранен результат операции. Некоторые процессоры
могут поддерживать только операции с целыми числами, в то время как другие могут
работать со строковыми переменными (алфавитноцифровые) или с числами с плаваю
щей запятой (действительными числами).
Рис. 12.24. Команда ADD
Если ответ превышает предельное значение для регистра результатов, то фор
мируется сигнал ошибки переполнения.
Адреса могут быть прямые, подобно N7:1 (целочисленный файл 7, целочислен
ное слово 1), или могут быть заданы смешением при прямой индексной адресации.
Индекс обозначается символом #. Если вы используете адрес с символом # перед
идентификатором, реальный адрес получается при добавлении к указанному в нем ад
ресу значения, записанного в регистре S:24. Например, если вы вводите ваш адрес
как #N7:10, а S:24 имеет значение 10, то фактически используемым адресом будет
N7:20. Это свойство может использоваться, чтобы изменять адрес, преобразуя значе
ние, записанное в S:24, с помощью заданной математической операции. SLC 500 так
же поддерживает косвенную адресацию и индексную косвенную адресацию.
Другие команды. Другими часто используемыми командами являются команда
перемещения (MOV) и команды подпрограмм (JSR, SBR и RET). Команды обработ
ки данных, подобные команде MOV, перемещают значения из одной ячейки памяти в
другую, выполняют преобразования и производят побитовое сравнение данных. Ко
манда перемещения (MOV) просто перемещает значение от источника информации
к приемнику.
íêÄÑàñàéççéÖ èêéÉêÄååàêéÇÄçàÖ ãéÉàóÖëäàï ãÖëíçàóçõï ëïÖå
803
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
èËÏ 12.8
Разработайте программу для логической лестничной схемы с использованием селек
торного переключателя, чтобы переслать две различные уставки времени (20 и 50 с)
в команду таймера.
êÖòÖçàÖ
Решение задачи представлено на рисунке. Обратите внимание, что в любой момент
времени истинна только одна команда MOV, потому что для контактов проверки за
мыкания и размыкания используется один и тот же бит. Следовательно, уставка тай
мера определяется той командой MOV, которая является истинной при очередном
сканировании.
Команды выполнения программы разрешают выполнять различные наборы сту
пенек, в зависимости от состояния входов или от какихлибо других программных ус
ловий. Команды безусловного перехода (JMP) и перехода по метке (LBL), использу
ются совместно, чтобы пропустить часть программы лестничной логики. Команда
JMP возбуждает указанный выход. Когда ступенька возбуждается этой командой,
программа переходит на определенную метку (между 0 и 999). Метка появляется как
первая команда на ступеньке при продолжении сканирования.
Вызов подпрограммы (JSR) используется, чтобы выполнять одинаковый набор
операций в нескольких частях программы. Команда возврата (RET) является после
804
дней командой в подпрограмме. Она возвращает программу к тому месту, из которого
была вызвана подпрограмма. Подпрограммы могут вызывать другие подпрограммы,
при этом возможно вложение до восьмого уровня.
12.7 . üáõä îìçäñàéçÄãúçõï Åãéä-ëïÖå (FBD)
В этом разделе рассматривается язык функциональных блоксхем (FBD), первый гра
фический язык из набора языков ПЛК в стандарте IEC 61131. Язык FBD использует
ся тогда, когда надо выразить поведение функций, функциональных блоков и програм
мы в виде набора взаимосвязанных графических блоков. Язык FBD основан на
описании системы в терминах потока сигналов между элементарными процессорами,
которое подобно описанию потоков в электронных цепях. Типичная схема потока сиг
налов в FBD представлена на рис. 12.25. Обратите внимание, что функциональные
блоки связаны между собой, чтобы создать схему, которая удовлетворяет некоторым
требованиям управления. Входы находятся слева, выходы — справа, а между входами
OCON и выходами ICON проведены линии связи.
Рис. 12.25. Пример схемы FBD
На этом языке разрабатывается поведение программ, функций и функциональ
ных блоков. Функциональная блоксхема используется, когда в задаче имеется поток
сигналов между управляющими блоками. Схема FBD аналогична схеме электричес
üáõä îìçäñàéçÄãúçõï Åãéä-ëïÖå (FBD)
805
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
кой цепи, где линии, связывающие элементы, изображают пути прохождения элект
рического сигнала между ними. Типичное применение FBD имеет широкий диапазон:
от циклов управления до булевой логики. Разработчики программ, знакомые с элект
рическими схемами и графическими методами программирования, часто предпочита
ют FBD текстуальным языкам типа списка команд или структурированных текстов.
Функциональный блок изображается в виде прямоугольника со входами с левой и
выходами с правой стороны. Название функционального блока всегда показывается
внутри него, а формальные имена входов и выходов FBD показываются внутри блока
около точек входа и выхода. На рис. 12.26 представлен типичный блок программы FBD,
дающий общее представление о символах и обозначениях этой среды программирова
ния для процессоров Control Logix 5000 фирмы Allen Bradley. Схема на рис. 12.27 пока
зывает, какие элементы FBD необходимо выбрать, чтобы построить на FBD схему уп
равления, подобную показанной на рис. 12.25.
Рис. 12.26. Пример функционального
блока FBD
Рис. 12.27. Выбор элементов FBD
806
Каждый функциональный блок использует тег, или переменную, чтобы сохранить
конфигурацию и информацию состояния относительно команды FBD. Когда команда фун
кционального блока вставляется в программное обеспечение RSLOGIX 5000 на языке
FBD, тег для блока создается автоматически. Кроме того, программист должен создать
имя тега или имя переменной или назначить уже имеющийся тег для всех используемых
IREF и OREF системы. Схема на рис. 12.28 показывает формат для имен тегов.
12.7.1. íËÔ̊ ÔÓÚÓÍÓ‚ ‰‡ÌÌ̊ı Ò˄̇·, ÔÓfl‰ÓÍ ‡·ÓÚ̊
Ë ‰‡ÌÌ̊ „ËÒÚ‡-Á‡̆ÂÎÍË
В FBD имеются два типа потоков данных сигнала: для булевых и для действительных
значений. На рис. 12.25 показано, как булевы и действительные значения отобража
ются в FBD. Порядок работы продиктован типом сигнала, управление процессом реа
лизуется с помощью данных, записанных в регистрезащелке. Поток всегда направ
лен от левых входов к правым выходам схемы. Если имеется путь обратной связи, то
поток ее сигнала проходит от правого выхода обратно к левому входу. Основной же
поток сигнала походит от одного функционального блока к следующему слева напра
во. Работа каждого функционального блока определяется путем потока сигнала. Од
нако на работу воздействуют данные, записанные в регистрезащелке.
Фиксация данных — это методика, используемая, чтобы считывать значения вход
ных данных, которые затем используются алгоритмом функционального блока. Когда в
блок IREF загружаются входные данные для функционального блока (рис. 12.25), дан
ные или тег, записываемые в IREF, недоступны для сканирования подпрограммой функ
ционального блока. Контроллер модифицирует все данные IREF перед каждым скани
рованием. Когда один и тот же тег IREF используется на нескольких входах, на каждый
из них подаются одни и те же данные. Если тег IREF использует адрес выхода, значение
выхода не изменяется, пока заперты все входы этого тега.
Рис. 12.28. Обозначения переменных в программе FBD
где:
X – расположение первого элемента в массивах первой, второй и третьей размерности.
Y – расположение второго элемента в массивах второй и третьей размерности.
Z – расположение третьего элемента в массивах третьей размерности.
üáõä îìçäñàéçÄãúçõï Åãéä-ëïÖå (FBD)
807
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
12.7.2 . èÂÚÎfl Ó·‡ÚÌÓÈ Ò‚flÁË
Когда выход блока связан с его же входом (рис. 12.29a), образуется простая петля
обратной связи. Обратной связью охвачен только один блок, поэтому порядок работы
не имеет значения, поскольку вход использует то выходное значение, которое выход
имел на предыдущем сканировании.
Если же обратной связью охвачена группа блоков, как на рис. 12.29б, то кон
троллер не может определить, операции какого из блоков выполнять сначала, поэто
му цикл не может выполняться. Вопросительные знаки на функциональных блоках
указывают, что порядок выполнения не ясен.
Для решения этой проблемы на входе функционального блока, подпрограмма ко
торого должна быть выполнена первой, устанавливается метка присутствия принима
емых данных, как показано на рис. 12.29в.
Рис. 12.29. Обратная связь в функциональных блоках:
а) один блок охвачен обратной связью;
б) несколько блоков охвачено обратной связью;
в) определение порядка следования блоков и индикатор
присутствия данных
808
Здесь блок использует данные, полученные при предыдущем выполнении блоком
своей подпрограммы. Этот вход использует выходные данные, которые получены от
блока 3 на предыдущем сканировании. Такая разметка приемников данных определяет
поток данных в линии обратной связи и указывает, как будут использоваться данные
предыдущего сканирования.
Рис. 12.30. Список функциональных блоков программы RSLOGIX 5000
üáõä îìçäñàéçÄãúçõï Åãéä-ëïÖå (FBD)
809
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Рис. 12.30. Список функциональных блоков программы RSLOGIX 5000 (окончание)
810
12.7.3. èÓÒΉӂ‡ÚÂÎ̧ÌÓÒÚ̧ ‡Á‡·ÓÚÍË ÔÓ„‡ÏÏ
̇ flÁ̊Í ÙÛÌ͈ËÓ̇Î̧Ì̊ı ·ÎÓÍ-ÒıÂÏ
Разработка FBDподпрограммы для задач управления проводится в следующем порядке:
1. Разрабатывается стратегия управления, необходимая для решения задачи.
2. Выбираются функциональные блоки.
3. Выбираются имена тега для элемента и для каждого входа и выхода.
4. Определяется порядок выполнения функций.
5. Идентифицируются все звенья соединения и обратные связи между блоками.
6. Определяются области применения ручного и программного управления.
7. Вставляются функциональные блоки
8. Вставляются звенья связи.
9. Назначаются теги или постоянные значения для всех IREF.
10. Блоки соединяются с выходами OCON и входами ICON, которые находятся на
разных листах.
11. Проводится проверка подпрограммы.
12.7.4. èÓ„‡ÏÏËÓ‚‡ÌË ̇ flÁ̊Í PFC ‚ ÔÓ„‡ÏÏ RSLOGIX 5000
ÓÚ ÙËÏ̊ Allen Bradley
Последняя версия программы Logix 5000 поддерживает функциональные блоки язы
ка PFC в соответствии со стандартом 61131. Блоки объединены в четырнадцать
групп; многочисленные команды для каждой группы приведены на рис. 12.30. Изучите
этот список, чтобы составить представление о синтаксисе команд управления, приме
няемых в языке PFC.
Синтаксис команд RSLOGIX 5000 приведен в справочных данных в PDFфайле,
открываемом программой Adobe Acrobat. Общая ссылка на язык — номер 1756
rm003genp, а команды управления процессом и пересылки — номер 1756rm003c
enp. Оба файла можно найти на сайте фирмы Allen Bradley, зайдя на страницу индексов
изделий и найдя соответствующий материал в библиотеке публикаций. Обратитесь к
этим файлам и посмотрите синтаксис для некоторых команд из каждой группы, приве
денной на рис. 12.30 .
èËÏ 12.9
Разработайте решение FBD для управления процессом смешивания двух жидкостей и
нагрева смеси резервуаре, показанном на рис. 12 .31. Жидкая смесь в резервуаре долж
на состоять из 25% одного жидкого компонента и 75% второго (в весовом соотноше
нии). Нагрев жидкости начинается, когда общий ее вес превышает 750 фунтов, и про
должается после заполнения резервуара, пока ее температура не достигнет 180°. Цикл
слива начинается через 30 с после выключения нагревателя. Процесс смешивания дол
жен продолжаться, пока резервуар не опорожнится.
üáõä îìçäñàéçÄãúçõï Åãéä-ëïÖå (FBD)
811
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Рис. 12.31. Процесс смешивания в резервуаре
êÖòÖçàÖ
Примем для определенности общий вес жидкости равным, скажем, 1000 фунтов, и
выполним следующие шаги для разработки FBDпрограммы:
1. Разработаем стратегию управления. Опишем сначала логику процесса управле
ния выходных устройств:
клапан 1 — открывается только на цикле заполнения, если включен пере
ключатель ПУСК и вес жидкости в резервуаре меньше, чем 250 фунтов;
клапан 2 — открывается только на цикле заполнения, если включен пере
ключатель ПУСК и вес жидкости в резервуаре больше, чем 250 фунтов, но
меньше или равен 1000 фунтов;
смеситель — включен только на цикле заполнения, если вес жидкости в
резервуаре больше, чем 499 фунтов;
смеситель — выключен только на цикле слива, если вес жидкости в резер
вуаре равен 0 фунтов;
клапан пара (нагреватель) — открыт только на цикле заполнения, если вес
жидкости в резервуаре больше или равен 750 фунтов;
клапан пара (нагреватель) — закрыт, если резервуар полон и температура
жидкости достигла 180°;
клапан 3 — открывается через 30 с после того, как вес жидкости в резерву
аре стал более 1000 фунтов и температура достигла 180°;
клапан 3 — закрывается только на цикле слива, когда вес жидкости равен 0
фунтов.
812
2. Выберем функциональные блоки из набора языка FBD. Выбор этих элементов —
итеративный процесс. Начнем с исходного набора, а затем будем изменять его в про
цессе разработки проекта. Список для этого проекта включает следующие элементы:
Список функциональных блоков для примера 12.9
3. Выберем имя тега для элемента и для каждого входа и выхода.
Имена тегов — переменные, в которых хранятся данные для процесса. Насколь
ко возможно, они должны носить описательный характер при использовании
наименьшего к.оличества слов. Имена тегов включают имена значений данных и
имена блоков FBD. И те и другие приведены в таблице ниже.
4. Сформируем систему управления, начиная с первого условия управления на шаге 1:
выберем функциональный блок, удовлетворяющий логическому условию;
üáõä îìçäñàéçÄãúçõï Åãéä-ëïÖå (FBD)
813
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
назначим теги или постоянные значения всем IREF и теги всем OREF;
подключим функциональные блоки.
5. Повторим последовательность действий шага 4 для всех логических условий уп
равления.
Имена, типы данных и описания тегов для примера 12.9
Подключим блоки, которые находятся на различных листах с OCON и ICON. Шаги 4 и 5
переносят все функциональные блоки в область программирования с применением стан
дартного программного обеспечения. Поскольку этот проект является разработкой про
граммы на языке FBD, процесс его составления имеет несколько итераций и, возможно,
множество работающих решений. Одно из них приведено на рисунках к примеру 12.9 .
На первый взгляд, FBD решение кажется сложным и трудным для интерпретации, одна
ко после небольшой практики вы сможете читать их даже легче, чем лестничные логичес
кие схемы. Сплошные линии представляют целые и действительные числа, а пунктирные
представляют булевы переменные или дискретные биты вкл/выкл. Входные переменные
814
Функциональные блоки клапанов 1 и 2 и смесителя для примера 12.9
находятся слева, а выходные значения — справа. Соединительные провода обозначены
символами OCON (указаны справа) и ICON (указаны слева), а клеммы — словом
Jumper_x внутри. Числа под каждым соединительным проводом являются координатами
страницы, на которую должен прийти другой конец провода.
üáõä îìçäñàéçÄãúçõï Åãéä-ëïÖå (FBD)
815
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Функциональные блоки нагревателя клапана 3 для примера 12.9
6. Проверим подпрограмму. Подпрограмма проверяется Rockwell — программ
ным обеспечением, позволяющим найти любые синтаксические ошибки в про
цессе программирования, затем проектировщик должен удостовериться, что
программа выполняет все требования технического задания проекта и обеспе
чивает корректное протекание процесса. Проверка проекта требует от разра
ботчика следующих шагов:
примем, что переключатель ПУСК выключен и резервуар пуст для первого
просмотра системы. Отметим значения входов перед сканированием и зна
чения выходов после сканирования для каждого блока FBD;
допустим теперь, что переключатель ПУСК нажат. Снова отметим значе
ния входов перед сканированием и значения выходов после сканирования
для каждого блока FBD;
816
примем, что вес жидкости только что перешел отметку в 250 фунтов. Отме
тим значения входов перед сканированием и значения выходов после скани
рования для каждого блока FBD;
продолжим далее последовательность операций, отмечая изменения на
входах и выходах на каждой стадии процесса;
проверим, что записанный таким образом алгоритм работы удовлетворяет
техническому заданию проекта.
èËÏ 12.10
Изучите логику включения и выключения смесителя на шаге 1 из примера 12.9 и про
верьте, что решение FBD в примере 12.9 обеспечивает правильное управление.
êÖòÖçàÖ
1. Сначала Liquid_weight — меньше, чем 500, так что выход компаратора
Weight_over_500 является ложным или равен 0. Блок доминантного сброса
(Latch_mixer) имеет 0 на входе установки и значение 1 на входе сброса, создан
ное на клемме Jumper 1. Начальное состояние Jumper 1 задается подпрограм
мой компаратора Weight_at_0. Оно равно 1, или истинно, потому что выход
Liquid_weight равен 0. Следовательно, Latch_mixer имеет 0 на установочном
входе и 1 на входе сброса, что дает на выходе 0, и смеситель выключен.
2. Когда резервуар начинает заполняться, состояние Jumper 1 изменяется на 0, посколь
ку Liquid_weight становится больше нуля (проверьте это по рис. к примеру 12.9). По
этому входы установки и сброса на Latch_mixer равны 0 и вывод также остается рав
ным 0: смеситель выключен. Когда Liquid_weight превышает 500, выход компаратора
Weight_over_500 становится истинным, или равным 1, что переводит в 1 и установоч
ный вход Latch_mixer. При этом истинным, или равным 1, становится и его выход, а
смеситель включается.
3. На установочном входе Latch_mixer остается 1 и на входе сброса — 0, когда вес
жидкости нарастает до 1000 фунтов и когда он снижается при сливе до 500 фунтов.
После снижения Liquid_weight ниже 500, установочный вход Latch_mixer стано
вится равным 0, как и вход сброса, а выход остается истинным, или равным 1: сме
ситель попрежнему включен. И лишь когда вся жидкость из резервуара сливает
ся и Liquid_weight становится равным 0, Jumper_1 становится равным 1 и подает
сигнал истины на вход сброса Latch_mixer, переводя его выход из 1 в 0: смеситель
выключается.
Воспользуйтесь методикой, изложенной в последнем примере, чтобы проверить
все выходы в примере 12.9, прежде чем перейти к следующему разделу.
12.8 . üáõä ëíêìäíìêàêéÇÄççéÉé íÖäëíÄ (ST)
Язык структурированного текста (ST) в стандарте 61131 подобен языку Паскаль или
другому языку структурированного программирования. Программа выполняется строка
за строкой, начиная с первой строки программы и кончая последней. Команды или син
üáõä ëíêìäíìêàêéÇÄççéÉé íÖäëíÄ (ST)
817
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
таксис команд достаточно устойчивы и не содержат команд безусловного перехода
(GOTO), которые используются в других языках, подобных БЕЙСИКУ, чтобы изменять
ход выполнения программы. Рассмотрим язык ST на примере структуры программного
обеспечения RSLOGIX 5000. В версии, разработанной фирмой Allen Bradley, язык ST
соответствует стандарту 61131.
12.8 .1. éÔ‡ÚÓ ÔËÒ‚ÓÂÌËfl
Операторы присвоения используются, чтобы изменить значение, сохраненное в пере
менной или в теге. Этот оператор имеет следующий синтаксис:
Tag := expression;
Следующая таблица объясняет каждый компонент оператора присвоения:
Тег сохраняет присвоенное значение, пока оно не будет изменено другим операто
ром присвоения. Выражение может быть простым, приравнивающим тег к постоянному
значению, например к целому числу или другому имени тега. Но оно может быть также и
сложным, включающим несколько математических операторов и/или функций.
12.8.2 . Ç̊‡ÊÂÌËfl
Выражения являются частью любого оператора присвоения и могут содержать имя
тега, уравнение или сравнение.
Выражения написаны с использованием следующих компонентов:
имен тегов, в которых хранятся значения (переменные);
чисел, которые вводятся непосредственно в выражение (непосредственных
значений);
функций типа ABS, TRUNC;
операторов типа +, —, <, >, И, ИЛИ.
818
При составлении выражений применяются следующие общие правила:
в тегах можно использовать любую комбинацию символов верхнего и ниж
него регистра;
для составления сложных выражений, используются круглые скобки для
группировки выражений внутри выражений. Эта методика делает общее вы
ражение более легким для чтения и гарантирует необходимую последова
тельность вычислений.
В структурированном тексте используются два типа выражений.
Булево выражение — выражение из булевой алгебры, дающее в результате
одно из двух значений логической переменной: истинное (логическая 1) или ложное
(логический 0):
булево выражение использует булевы теги, операторы отношения и логи
ческие операторы, чтобы сравнивать значения или проверять истинность
или ложность условий. Например, булево выражение tag1 > 65 позволяет
определить, является ли значение tag1 больше, чем 65;
простое булево выражение может содержать всего один булев тег. Напри
мер, выражение IF tag2 THEN эквивалентно выражению IF tag2 = 1 THEN.
Равенство 1 означает, что используется условие истинности тега. Аналогич
но NOT tag2 означает, что tag2 = 0;
булевы выражения обычно связаны с выполнением других логических опе
раций.
Численное выражение — числовое выражение, которое вычисляет целое зна
чение или действительное значение с плавающей запятой:
численное выражение использует арифметические операторы, арифмети
ческие функции и поразрядные операторы. Пример: числовое выражение
tag1 + 5 добавляет 5 к текущему значению tag1;
можно вставлять численное выражение внутрь булева. Пример: выражение
(tag1+5)>65.
12.8 .3. éÔ‡ÚÓ̊ Ë ÙÛÌ͈ËË
Операторы присвоения могут также использовать операторы и функции в составе
выражений. Вы можете объединять ряд операторов и функций в алгебраических вы
ражениях, чтобы вычислять новые значения.
В языке структурированного текста используются следующие алгебраические
операторы:
üáõä ëíêìäíìêàêéÇÄççéÉé íÖäëíÄ (ST)
819
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Алгебраические функции выполняют специфические математические операции
на целых или действительных числах, небулевых тегах или выражениях. Язык ST
поддерживает выполнение следующих функций:
12.8 .4 . éÔ‡ÚÓ̊ ÓÚÌÓ̄ÂÌËÈ
Операторы отношений (сравнения) используются в выражениях, чтобы сравнить зна
чения двух строковых или численных переменных и получить в результате значение
логической переменной: истинное (1) или ложное (0). В языке ST поддерживаются
следующие операторы отношений:
12.8 .5 . ãÓ„Ë̃ÂÒÍËÂ Ë ÔÓ‡Áfl‰Ì̊ ÓÔ‡ÚÓ̊
Логические операторы используются в выражениях, чтобы выполнить логические ком
бинации на одиночных битах или булевы теги; поразрядные операторы выполняют по
разрядные логические комбинации на битах тегов DINT. Если тег результата в инструк
ции назначения имеет булев тип данных, затем используются логические операторы.
Когда тип данных — DINT, затем используются поразрядные операторы. Результат ло
гической операции имеет булев тип данных, и результат поразрядной операции — тип
данных DINT. Ниже перечислены логические и поразрядные операторы:
820
Первые шесть примеров в приведенной ниже таблице иллюстрируют логические
операции с данными и тегами булевого типа. Седьмой пример — поразрядную опера
цию на тегах типа DINT с результатом того же типа.
В примерах обратите внимание, что тег или переменная относятся к данным типа
DINT (double integer), но используются в выражениях, дающих результат в булевых
переменных.
üáõä ëíêìäíìêàêéÇÄççéÉé íÖäëíÄ (ST)
821
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
12.8 .6 . äÓÌÒÚÛ͈ËË
Конструкции являются ключевыми стандартными блоками для разработки программ.
Структура, полученная с их помощью, обеспечивает выполнение программы от нача
ла до конца без использования команд перехода. Язык ST поддерживает такие конст
рукции,как:IF...THEN,CASE...OF,
FOR...DO,WHILE...DOиREPEAT...UNTIL.
Следующая таблица указывает, какие условия программирования диктуют выбор
определенной конструкции:
Несколько вариантов доступны для некоторых из конструкций, и каждый из них
имеет собственный синтаксис. В следующих разделах мы приведем подробное его
описание.
IF . . . THEN. Эта конструкция имеет следующий синтаксис:
Чтобы использовать ELSIF или ELSE, руководствуйтесь следующими правилами:
1. Если имеется несколько возможных условий, которые будут оцениваться в
процессе выполнения операции, добавьте необходимое количество инструк
ций ELSIF следующим образом:
822
каждый ELSIF представляет альтернативный путь;
определите столько путей ELSIF, сколько необходимо для выполнения
задачи;
контроллер выполняет первый истинный IF или ELSIF и пропускает все
оставшиеся ELSIF и ELSE.
2. Чтобы сделать еще чтото, когда все условия IF и ELSIF ложны, добавьте
инструкцию ELSE.
èËÏ 12.11
Необходимо выключить индикатор движения конвейера, если он движется в прямом
направлении. Индикатор должен светиться, если конвейер не движется в прямом на
правлении. Разработайте программу на ST, позволяющую решить эту задачу.
êÖòÖçàÖ
IF conveyor_direction THEN
light := 0;
ELSE
light [:=] 1;
(* Присвоение [:=] сообщает контроллеру о необходимости сбросить бит light, когда в
программе встречается режим RUN. *)
END_IF
Комментарии, которые не умещаются на одной строке, помещаются в круглых
скобках следующим образом:
(* текст комментария *).
Обратите внимание на комментарий, добавленный коду в примере 12.11.
èËÏ 12.12
Если температура резервуара выше 100°, выполните наполнение медленно, но если
температура выше 200°, увеличьте скорость наполнения. При всех других условиях
выключайте насос. Разработайте программу на ST, которая бы обеспечивала этот
алгоритм управления.
êÖòÖçàÖ
IF tank.temp > 200 THEN
pump.fast :=1; pump.slow :=0; pump.off :=0;
ELSEIF tank.temp > 100 THEN
pump.fast :=0; pump.slow :=1; pump.off :=0;
ELSE
pump.fast :=0; pump.slow :=0; pump.off :=1;
END_IF
В примерах 12.11 и 12.12, ELSEIF и ELSE не обязательны и могут быть удалены,
если не нужны для решения.
FOR . . . DO. Эта конструкция выполняет операцию определенное число раз и
имеет следующий синтаксис:
üáõä ëíêìäíìêàêéÇÄççéÉé íÖäëíÄ (ST)
823
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Термины и элементы, используемые в синтаксисе FOR...DO, описаны в следую
щей таблице:
èËÏ 12.13
Необходимые позиции (открытый = 1 и закрытый = 0) для десяти клапанов сохране
ны в массиве с именем Pos [0 — 9].
Теги для клапанов также хранятся в массиве с именем Valve, который начинается с
элемента 5. Напишите STподпрограмму, чтобы установить десять клапанов в соот
ветствии со значениями базы данных.
êÖòÖçàÖ
FORcount:=0to9BY1DO
//в count записывается значение текущего цикла
Valve_num := count + 5
//Устанавливает номер клапана, превышающий на 5 число в count
Valve [valve_num] :=Pos [count]
824
//Устанавливает для первого цикла клапан на нулевую позицию Pos [0]
END_FOR
Обратите внимание, что комментарии на одной строке вставляются в программу
с помощью символов //, как показано в настоящем примере.
WHILE . . . DO. Этот цикл выполняется все время, пока булево выражение оста
ется истинным (равным 1), и имеет следующий синтаксис:
èËÏ 12.14
Входной клапан резервуара, тег V23, должен быть открыт (клапан включен или пода
но питание), пока переключатель уровня с тэгом LS_LOW — ложный (равен 0), а
сливной клапан с тэгом V10 закрыт (клапан выключен или питание снято). Разрабо
тайте программу на ST, реализующую этот алгоритм.
êÖòÖçàÖ
WHILE NOT LS_low AND NOT V10 DO // Низкий уровень выключателя
// означает ложный или выключенный
V23 :_ 1;
//Включение входного клапана
IF Emerg_stop THEN
V23 :_ 0;
EXIT;
END_WHILE;
èËÏ 12.15
Разработайте программу на языке ST для решения задачи для резервуара на рис. 12 .31.
Используйте операции приведенные в примере 12.9, для программы на ST.
êÖòÖçàÖ
WHILE NOT LS_low AND NOT V10 DO //Выключатель низкого уровня и
// клапан слива ложный или равный 0
V23 := 1;
// Включение входного клапана
IF Emerg_stop THEN
V23 := 0;
EXIT;
END_WHILE
üáõä ëíêìäíìêàêéÇÄççéÉé íÖäëíÄ (ST)
825
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
REPEAT . . . UNTIL. Цикл REPEAT . . . UNTIL выполняется, пока булево выраже
ние истинно (равно 1). Он имеет такой же синтаксис, как WHILE . . . DO, но работает
с более сложной логикой. WHILE . . . DO выполняется, пока верно булево выраже
ние; REPEAT . . . UNTIL — пока выполняется условие. Другое отличие заключается в
том, как проводятся вычисления. REPEAT . . . UNTIL выполняет все тело цикла до
последней команды, затем проверяет условие, и если оно истинно, то начинает новый
цикл... Тело цикла выполняется в REPEAT. . . UNTIL всегда до последней команды.
Конструкция же WHILE . . . DO прерывается на любой команде внутри тела цикла,
как только условия становятся истинными.
CASE . . . OF. Эта конструкция использует целочисленные значения, чтобы опре
делить, какое из выражений должно вычисляться. Конструкция CASE¦OF выполняет
те же функции, что и операторпереключатель в языках C и C++. В конструкции
CASE, однако, контроллер выполняет только те операторы, которые отмечены при
проверке ключа выбора. Выполнение всегда прерывается после выполнения этого
ключа, и программа переходит к оператору END_CASE. Конструкция имеет следую
щий синтаксис:
èËÏ 12.16
Разработайте STпрограмму для решения задачи с резервуаром на рис. 12.31. Вос
пользуйтесь описанием операций, приведенным в примере 12.9.
êÖòÖçàÖ
STкод для задачи с резервуаром представлен ниже.
Изучите код программы на ST из примера 12.15, чтобы понять, как используются
конструкции и синтаксис для решения данной задачи.
826
( *** Разрабатывается ST%решение для задачи с резервуаром,
приведенной на рис. 12.31. Резервуар должен быть наполнен
на 25% одной жидкостью и на 75% другой (в весовом соотно%
шении). Жидкость начинает нагреваться, когда ее вес в
резервуаре станет больше, чем 750 фунтов, и нагревание
продолжается и после заполнения резервуара, пока темпера%
тура смеси не достигнет 180° . Цикл слива начинается через 30
с после выключения нагревателя. Смешивание должно
продолжаться до полного слива резервуара. ***)
// Управление клапаном один и сброс в 0 служебных
// битов Tank_empty и system_reset
IF Start & Liquid_weight < 249 & NOT Latch_tank_full THEN
( * Примечание: когда в условиях используются такие булевы
переменные, как Start и Tank_full, не следует применять в
условиях операторы отношения (= 0 или = 1). *)
Valve_One [=:]1;
System_reset =: 0;
ELSE
Valve_One := 0;
END_IF;
// Управление клапаном два
IF Start & Liquid_weight >= 250 & NOT Latch_tank_full THEN
Valve_Two [:=]1;
END_IF;
// Управление смесителем
IF Liquid_weight > 500 THEN
Mixer[:=]1;
ELSE IF Liquid_weight < 500 & Latch_tank_full THEN
Mixer := 1;
END_IF;
// Управление нагревателем
IF Liquid_weight > 750 & Temperature < 179 & NOT Valve_three & NOT Timer_start THEN
Heater[:=]1;
ELSE
Heater:=0;
END_IF;
//Установка бита%защелки при наполнении резервуара и выключение вентиля два
IF Liquid_weight >= 1000 THEN
Latch_tank_full:=1;
üáõä ëíêìäíìêàêéÇÄççéÉé íÖäëíÄ (ST)
827
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Valve_Two:=0;
END_IF;
// Управление таймером при заполнении резервуара и температуре > = 180
IF Temperature >= 180 & Latch_tank_full THEN
Timer_start[:=]1;
END_IF;
// Функциональный блок TONR%таймера с уставкой в 30 мин
Timer_30min.Pre := 30000;
Timer_30min.Reset := System_reset;
Timer_30min.TimerEnable := Timer_start;
TONR(Timer_30s);
Timer_done := Timer_30s.DN;
(* Структурированный текст (ST) в этих командах таймера
эквивалентен командам TONR на языке FBD. Другие парамет%
ры здесь включают использование вызова подпрограммы в
FBD с представленным блоком TONR или вызова подпрограм%
мы в лестничных схемах с таймером TON *)
// Через 30 с после полного слива резервуара
IF timer_done THEN
Valve_Three:=1;
END_IF;
// Установка начальных условий для служебных битов
IF Liquid_weight=0 THEN
system_reset[:=]1;
Mixer:=0;
Timer_start:=0;
Valve_Three:=0;
Latch_tank_full:=0;
END_IF;
12.9 . èéëãÖÑéÇÄíÖãúçõÖ îìçäñàéçÄãúçõÖ
ÑàÄÉêÄååõ (SFC)
Последний язык программирования из стандарта 61131, описанный в этом учебни
ке, — язык последовательных функциональных диаграмм (sequential function chart —
SFC). SFC — мощная графическая методика для описания последовательного пове
дения управляющей программы. Описание SFC в стандарте IEC было составлено на
828
базе современной программы типа GRAFCET, графического языка, соответствующе
го французскому национальному стандарту.
Один из наиболее важных аспектов SFC заключается в том, что он показывает
основные состояния системы, все возможные изменения состояний и условия, вслед
ствие которых эти изменения происходят. Поэтому SFC часто используется, чтобы
структурировать решение системы управления, а затем используется некоторая ком
бинация из лестничных схем, функциональных блоксхем, и структурированного тек
ста, чтобы получить необходимое решение. Такая методика чаще всего применяется в
программных продуктах, имеющихся на американском рынке.
12.9 .1 . ãËÌÂÈÌ̊ SFC-ÔÓÒΉӂ‡ÚÂÎ̧ÌÓÒÚË
Поскольку SFC — это графический язык, программа представляет собой ряд шагов.
Типовой вид простой программы показан на рис. 12.32. Каждый шаг в SFC представ
ляет состояние, через которое проходит процесс и после которого необходимо выпол
нить следующую операцию. Шаги связаны вертикальными линиями, которые указы
вают последовательность, или путь. В короткой горизонтальной строке между шагами
записывается условие перехода. SFC остается в текущем состоянии, выполняющем
текущее действие, пока условие перехода не станет истинным. В этот момент актив
ность текущего состояния прекращается и активизируется следующее состояние. По
ток управления следует за графически связанными прямоугольниками. Рассмотрим
простую схему управления, приведенную на рис. 12.32.
Линейная последовательность на этом рисунке начинается со стартового блока в двой
ной рамке; все последующие блоки заключены в одинарные рамки. Шаги указывают, какое
действие вызывает следующий шаг, а блоки действия указывают, какое именно действие
производится. Например, во втором блоке действием является заполнение резервуара, а
блок действия указывает, что для начала этого действия должен быть открыт клапан 1. С
началом шага 3 связаны сразу два блока действия, а на шаге 4, где выполняется операция
ветвления, присутствуют два условия перехода для каждой из ветвей. Условием перехода
может также быть логическая комбинация булевых тегов, что иллюстрируется тегами, свя
занными операцией И (Start_switch =1 AND Time_drain. DN=1) для шага 4. Простая ком
бинация шагов, аналогичная приведенной на рис. 12.32, называется одиночной последова
тельностью. Но в SFC разрешается и несколько последовательностей.
12.9 .2 . èÓÒΉӂ‡ÚÂÎ̧ÌÓÒÚË SFC
В SFC имеются последовательности четырех типов: одиночная последовательность,
расходящаяся и сходящаяся последовательность с выбором ветви, одновременно вы
полняемая расходящаяся и сходящаяся последовательность и петля обратной связи.
Последовательности каждого из этих типов показаны на рис. 12.33. Число шагов и
число параллельных ветвей, подобных показанным на рис. 12.33, неограниченно. По
скольку одиночную последовательность мы уже рассмотрели, рассмотрим последова
тельность с выбором ветви.
èéëãÖÑéÇÄíÖãúçõÖ îìçäñàéçÄãúçõÖ ÑàÄÉêÄååõ (SFC)
829
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Последовательность с выбором ветви (см. рис. 12.33) проверяет входные перехо
ды в определенном порядке, и первый переход, который является истинным, указыва
ет путь, по которому должна выполняться программа. По умолчанию входные перехо
ды проверяются слева направо, начиная с крайнего левого перехода. Пакет RSLOGIX
5000 разрешает программисту изменять порядок, в котором проверяется истинность
входов. В результате можно считать последовательности с выбором операцией ИЛИ,
поскольку выполняется только один путь из всех.
Рис. 12.32. График потока
830
Одновременная последовательность оказывается подобна операции И, потому
что выходной переход не может быть достигнут, пока последний шаг в каждом из па
раллельных путей не будет закончен. Работа каждой последовательности описана на
рис. 12.33 в правом столбце. Внимательно изучите это описание, чтобы понять работу
всех последовательностей.
Рис. 12.33. Типы SFCпоследовательностей
èéëãÖÑéÇÄíÖãúçõÖ îìçäñàéçÄãúçõÖ ÑàÄÉêÄååõ (SFC)
831
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
12.9 .3. èÓ„‡ÏÏËÓ‚‡ÌË ̄‡„Ó‚ ‚ SFC
После того как будет установлена последовательность шагов, для решения задачи не
обходимо конфигурировать каждый шаг. На рис. 12.34 показаны два типовых шага
программы RSLOGIX 5000 для языка SFC. Изучив рисунок, вы убедитесь, что:
начальный шаг имеет один блок действия, устанавливающий значение тега
счетчика равным 0;
второй шаг, ServosOn, имеет три блока действия. Первый из них является
программой на языке ST, позволяющей установить значение тега счетчика, а
два последних — обращения к функциям, которые включают вал 0 и вал 1
сервомоторов клапанов;
каждый блок действия имеет спецификатор действия, который диктует, как
действие должно быть выполнено;
и шаг, и блок действия связаны с соответствующей вкладкой диалогового
окна конфигурации;
описанием действия может быть просто оператор присвоения, как в первом
блоке действия, или сложный ряд инструкций программы, как в Action_009;
условием перехода может служить логическое выражение или булев тег.
Конфигурирование шага. Для конфигурации шага используется диалоговое окно,
которое активизируется связью в левом верхнем углу поля шага (см. рис. 12.34). Это диа
логовое окно показано на рис. 12.35 . Шаг имеет встроенный таймер, который может ис
пользоваться, чтобы установить отрезок времени, на котором шаг является активным.
Когда шагу соответствует несколько полей действия, порядок выполнения опре
деляется установкой приоритетов на вкладке Action Order. На рис. 12.36 показана та
кая вкладка для второго шага программы, представленной на рис. 12.34. Поля дей
ствия выполняются в следующем порядке: 009, 000 и 008.
Конфигурирование блока действия. Каждый шаг в SFC может быть связан с дей
ствием, сохраненным в блок действия. Действие содержит описание одного или не
скольких вариантов поведения или действий, которые должны произойти в результате
активности шага. Блоки действия, соответствующие шагу, имеют три необходимых эле
мента и один необязательный. Блоки действия на рис. 12.34 должны иметь действие
спецификатор, имя тега действия и описание действия либо оператор присвоения. Опи
сание действия может быть выражено на любом из языков стандарта 61131: на ST, LD,
FBD и IL. Анализ SFC на рис. 12.37 позволяет установить следующее:
один из шагов имеет три блока действия, а другой не имеет их вовсе. Шаг без
блока действия приведет к тому, что программа будет ожидать, какой тип
процесса будет выбран;
спецификаторы действия типа N и P (описания спецификаторов приведены в
следующем разделе);
два описания действия используют операторы присвоения на языке ST, а
третье вызывает подпрограмму, в которой помещено описание;
в ST для оператора присвоения используются два символа:
:= и (:=). Скобки во втором случае означают несохраняющееся условие
—
тег должен быть установлен в 0, когда шаг становится неактивным;
832
имена действия или теги: Tank_mixer, Tank_heater и Reset_wt_count.
Спецификатор действия. Спецификатор действия точно определяет, какое должно
быть выполнено действие после того, как шаг станет активным. Имеется одиннадцать
спецификаторов, которые приведены на рис. 12.38 . Наиболее часто используемые спе
цификаторы подробно описаны на рис. 12.39 . Обратите внимание, что диаграмма Step
представляет состояние шага (неактивное — низкий уровень и активное — высокий), T
представляет условие перехода после шага, а action1 или 2 представляет изменение в
действии выхода, которое отражено в выражении, приведенном в описании действия.
Изучите спецификаторы, чтобы понять диапазон доступных параметров.
Рис. 12.34. Фрагмент программы управления на SFC
èéëãÖÑéÇÄíÖãúçõÖ îìçäñàéçÄãúçõÖ ÑàÄÉêÄååõ (SFC)
833
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Рис. 12.35 . Диалоговое окно конфигурации шага
834
Рис. 12.36. Диалоговое окно, устанавливающее порядок для выполнения поля
действия
Рис. 12.37. Конфигурация блоков действия SFC
èéëãÖÑéÇÄíÖãúçõÖ îìçäñàéçÄãúçõÖ ÑàÄÉêÄååõ (SFC)
835
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Информация, используемая для конфигурации шага:
Type: Поле Type (Тип) используется, чтобы сделать начальный шаг (Initial) и все
остальные шаги (Normal). Только один шаг может быть начальным.
Preset: каждый шаг имеет встроенный таймер. Поле Preset (Уставка) использует
ся, чтобы ввести желательное время или проверить выражение, введенное в поле про
верки (Expression), чтобы вычислить время для таймера. Когда аккумулятор достигает
заданного значения времени, будет установлен флаг выполнения и тег ServosOn. DN
станет истинным. ServosOn — имя тега для шага.
Timer: поле Timer (Таймер) отображает время активности таймера (в миллисекун
дах), соответствующее последнему проходу программы через SFCпоследовательность.
Timer Max: в поле Timer Max сохраняется самое высокое из когдалибо достигну
тых значений длительности шага (Step Timer — T).
Count: поле Count (Счет) сохраняет число переходов шага в активный режим,
после того как счетчик Step Count был сброшен последним сбросом SFC.
Условие перехода. Условие перехода сообщает об изменении в шагах или состо
яниях. Когда переход оценивается как истинный, текущий активный шаг становится
неактивным, а следующий становится активным. Зачастую шаг должен стать актив
ным в течение заданного времени. В этом случае условие перехода вызвано флагом
выполнения таймера. Если таймер используется внутри шага, то условием перехода
является истинность step_tag. DN, где step_tag — тег или имя, относящееся к шагу.
Рис. 12.38 . Спецификаторы действия в SFC
Примечание: Спецификатор требует задания периода времени.
836
ÏÎÑËÅÄÎÂÀÒÅËÜÍÛÅ ÔÓÍÊÖÈÎÍÀËÜÍÛÅ ÄÈÀÃÐÀÌÌÛ (SFC)
Рис. 12.39. SFCспецификаторы действия
837
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Рис. 12.40. Условия перехода SFC с применением языков LD и ST:
а) фрагмент программы SFC;
б) фрагмент программы лестничных схем
На рис. 12.40 показано, как таймер на ступеньке лестничной схемы может быть
вызван подпрограммой и использоваться для определения времени окончания шага.
Анализ рисунка показывает следующее:
команда JSR в ST вызывает LDпрограмму по имени LadderFile с параметром 0;
выполняется LDпрограмма таймера и через 2 с устанавливает бит DN в вы
сокое состояние для одного сканирования;
булево выражение timer.dn становится истинным через 2 с, и программа
SFC переходит к следующему шагу.
Пример на рис. 12.40 показывает объединение нескольких программ, когда про
грамма SFC использует STфункцию jumptosubroutine (переход к подпрограмме),
чтобы выполнить ступеньку LDпрограммы для определения времени шага в про
грамме SFC.
èËÏ 12.16
Разработайте программу SFC для управления резервуаром на рис. 12.31. Используй
те для программы список операций, приведенный в примере 12.9 .
êÖòÖçàÖ
Код SFC для задачи с резервуаром приводится ниже. Изучите программу, чтобы ясно
представлять себе, какие шаги, действия и переходы используются для решения. Об
ратите внимание: чтобы использовать несохраняющий сброс [:=] тега, когда шаг де
зактивируется, контроллер должен работать в режиме автоматического сброса. Сле
дующие шаги описывают ход разработки программы для управления событиями
последовательного процесса:
838
1. Изучите работу системы во всех подробностях.
2. Сделайте пронумерованный список последовательных шагов технологического
процесса, в котором опишите последовательность выполнения независимых
операций. Эти шаги и станут шагами SFC.
3. Идентифицируйте и перечислите все выходы системы и действия, требуемые для
работы выхода. Они станут блоками действия, описаниями действий и тегами
выходов в SFCпрограмме.
4. Установите условия перехода от каждого технологического шага к следующему.
5. Определите продолжительность цикла для выходов или действий и определите,
продолжаются ли действия в течение одного шага, части шага или нескольких
шагов. В случае необходимости нарисуйте временные диаграммы для выходов,
отображающие ход процесса. Эта информация может использоваться для опре
деления, какой спецификатор должен быть выбран.
6. Перечислите все датчики в системе. Они станут входными тегами, используемы
ми при переходах.
7. Используйте данные шагов 1–5, чтобы создать последовательную функцио
нальную диаграмму.
8. Проверьте проект SFC.
9. Проверьте систему.
12.10. ÇÖÅ -ëÄâíõ
é èêéÉêÄååàêìÖåõï ãéÉàóÖëäàï äéçíêéããÖêÄï
Ниже приведены адреса вебсайтов фирмпоставщиков аппаратных средств и про
граммного обеспечения программируемых логических контроллеров, рассмотрен
ных в этой главе. Адреса сайтов часто изменяются, поэтому, если какаялибо из ссы
лок неактивна, воспользуйтесь механизмом сетевого поиска по интересующему вас
типу прибора или наименованию изготовителя ПЛК, чтобы найти соответствующие
материалы:
Поставщики ПЛК
Allen Bradley Corporation
http://www.ab.com
Omron Electronics LLC
http://omron.com
Siemens AG Corporation
http://www.siemens.com
Modicon and Telemecanique
http://www.telemecanique.com
GE Fanuc
http://www.geindustrial.com/cwc/gefanuc/index.HTML
ÇÖÅ-ëÄâíõ é èêéÉêÄååàêìÖåõï ãéÉàóÖëäàï äéçíêéããÖêÄï
839
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Решение на языке SFC для примера 12.16
840
Решение на языке SFC для примера 12.16 (продолжение)
ÇÖÅ-ëÄâíõ é èêéÉêÄååàêìÖåõï ãéÉàóÖëäàï äéçíêéããÖêÄï
841
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Решение на языке SFC для примера 12.16 (окончание)
842
Automation Direct
http://web2. automationdirect.com/adc/Home/Home
Специальные сайты об изделиях и демонстрационных версиях программного
обеспечения фирмы Allen Bradley
информация о программном пакете RSLOGIX 5000
http://www.ab.com/catalogs/b113/controllogix/s oftware.html
демонстрационные версии программного обеспечения RSLOGIX 5000 (за
каз и загрузка)
http://www.ab.com/logix/rslogix5000/
загрузка демонстрационной версии программы RSLOGIX 500 (щелкните по
«Get software»)
http://www.ab.com/ПЛКlogic/micrologix/
информация о программах Logix компании Rockwell Automation
http://www.ab.com/logix/
справочники Rockwell Automation
http://www.theautomationbookstore.com
http://www.ab.com/manuals/
êÖáûåÖ
12.1 . Введение
Программируемые логические контроллеры (ПЛК) определяются как спе
циализированные компьютеры, разработанные для самостоятельного ис
пользования и для работы в различных сетях автоматизации, состоящих из
нескольких компьютеров. ПЛК предназначены для управления самыми раз
нообразными производственными машинами и системами и используют один
из пяти языков программирования.
Первый стандарт для ПЛК был составлен в 1978 году Национальной Электричес
кой Ассоциацией Изготовителей (NEMA). Текущий стандарт был написан в 1991
Международной Электротехнической Комиссией (МЭК, IEC — International
Electrotechnical Commission). Он называется IEC 61131, состоит из восьми час
тей и нормирует, в частности, пять языков для программирования ПЛК.
В стандарте 61131 описаны следующие языки: лестничных (LD — ladder diagram)
и последовательных функциональных диаграмм (SFC — sequential function chart),
функциональных блоксхем (FBD — Function block diagram), структурированно
го текста и набора команд на языке машинных кодов (IL — instruction list).
ПК и ПЛК имеют одинаковую архитектуру вычислительной системы, но работа
ют при различных условиях окружающей среды и имеют различное применение.
ПЛК состоят из следующих компонентов: соединительной платы, микропро
цессора, источника питания, устройства программирования и интерфейса вво
да/вывода.
êÖáûåÖ
843
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
ПЛК используют следующие специальные модули связи: DeviceNet, ControlNet,
Ethernet, Ethernet/IP, интеллектуальный интерфейс ввода/вывода, удаленные
стойки, интерфейс ввода/вывода ASCIIкода и последовательный интерфейс
SERCOS (Serial Realtime Communications System).
Существуют три класса ПЛК, использующих различные способы адресации:
системы, использующие адреса стойки/слота; системы, применяющие теги;
программные ПЛК, или ПЛК, управляемые ПК.
Существуют три уровня совместимости со стандартом 61131: минимальный
уровень (совместимость не на всех языках), мобильность (поддерживается
экспорт программ в разработки других изготовителей) и уровень полной со
вместимости (удовлетворяются все требования стандарта 61131).
12.5 . Язык лестничных схем (LD) по стандарту IEC 611313
Язык LD представляет собой графический язык, использующий схемы, по
добные лестничным двухпроводным и трехпроводным релейным схемам, ко
торые моделируют прохождение потока мощности со входа на выход ступень
ки. Вход ступеньки расположен слева, выход справа. В отличие от релейных
схем, в ПЛК нет реальных потоков мощности, проходящих через контакты к
катушке на каждой ступеньке лестничной схемы.
Современный язык логических лестничных схем американских производите
лей отличается от языка LD в стандарте 61131. Стандартный язык LD имеет
только контакты для входов и катушки для выходов, в нем используются ко
манды стандартного языка функциональных блоксхем (FBD).
Основные контакты ступеньки в LD: контакты проверки включения ( || ) и кон
такты проверки выключения ( | \ | ), которые указывают, когда поток мощности
слева направо происходит по ступеньке. Контакты могут истинными (активны
ми, или замкнутыми) или ложными (неактивными, или разомкнутыми).
Поток мощности проходит только тогда, когда контакты проверки включения
истинны, а контакты проверки выключения ложны. Если мощность протека
ет через звенья связи (провода, подключенные с каждой стороны контактов),
то они также истинны. Если звено связи, подходящее к катушке, истинно, то
выходная катушка истинна и внешнее выходное устройство работает.
Внешние устройства — переключатели и датчики, используемые для ПЛК
входные устройства и выходные приводы для изменения процесса. Входные
внешние устройства могут иметь или нормально разомкнутые (НР) или нор
мально замкнутые (НЗ) контакты и высоко или низкопотенциальные выходы.
Состояние контактов ПЛКступеньки (истинное или ложное) определяется
состоянием булевых битов (0 или 1) во входном регистре, связанном с этим
контактом. Булев бит устанавливается условием внешнего устройства (про
теканием или отсутствием тока через переключатель или датчик), который
подключен на вход модуля, связанного с этим битом регистра.
ПЛК считывает состояние всех входов, помещает результаты во входные ре
гистры, оценивает логическое состояние каждой ступеньки (истинное или
ложное), основываясь на значениях в регистрах, определяет, какие выходы
являются истинными, а какие ложными, и устанавливает регистры выхода,
844
основываясь на входных условиях. Этот процесс происходит при сканирова
нии ПЛК.
Новые модели ПЛК от американских производителей поддерживают LD
стандарта IEC 61131. Команды LD, включенные стандарт, очень напомина
ют команды, используемые в старых, несоответствующих стандарту ПЛК
системах.
Чаще всего в LD используются команды таймера, счетчика, сравнения, пе
ресылки, математических операций и подпрограмм переходов.
12.7 . Язык функциональных бл оксхем (FBD)
Язык функциональных блоксхем (FBD), графический язык стандарта 61131
IEC, может использоваться, чтобы выразить поведение функций, функцио
нальных блоков и программ с помощью набора взаимосвязанных графичес
ких блоков.
Язык FBD основан на представлении системы в терминах потока сигналов
между элементами процесса. Входы, названные IREF, помещаются слева, а
выводы OREF — справа.
Поддерживается большое число элементарных блоков процесса, названных
функциональными блоками; для специальных машин и процессов могут со
здаваться новые функциональные блоки.
Два типа потоков данных используются в FBD: булевы и действительные.
Первые отображаются пунктирными линиями, вторые — сплошными. Вы
полнение операций происходит слева направо, по пути потока сигнала.
Когда провод от выхода блока подается обратно на его вход, создается цепь
обратной связи. При анализе сложных цепей используется символ присут
ствия на входе петли обратной связи данных, принимаемых с ее выхода.
Процесс разработки программы на FBD состоит из одиннадцати шагов.
Программный пакет RSLOGIX 5000 фирмы Allen Bradley состоит из 87 фун
кциональных блоков, реализующих самые разнообразные функции: от самых
простых до сложных, таких как функции расширенного ПИДуправления.
12.8 . Язык структурированного текста (ST)
Язык структурированного текста (ST) подобен Паскалю или любому другому
структурированному языку. Выполнение программы производится строка за
строкой, начиная с первой строки программы и кончая последней.
Программист на ST должен понимать назначение команды, типы выражений
(булевых или числовых), назначение операторов (арифметических, отноше
ния, логических и поразрядной логики), функций и конструкций (IF . . .
THEN,CASE...OF,FOR...DO,WHILE...DOиREPEAT...UNTIL).
12.9 . Язык последовательных функциональных диаграмм (SFC)
Язык SFC — графический язык для описания поведения последовательной
управляющей программы, полученный из таких современных программных
методов, как GRAFCET.
SFC показывает основные состояния системы, все возможные изменения
состояний и условия, приводящие к таким изменениям.
êÖáûåÖ
845
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
Программы на SFC часто используются для создания систем, управляемых
определенной комбинацией фрагментов на языках LD, FBD и ST.
В SFC имеется четыре типа последовательностей: одиночная последова
тельность, ветвление с выбором и последующим слиянием, ветвление с ра
ботой и последующим слиянием и циклы обратной связи.
Программы на SFC составлены из шагов, блоков действия и условий перехо
да. Первый шаг — начальный, а остальные называются нормальными.
Блоки действия состоят из спецификатора действия, имени тега действия и
описания действия или оператора присвоения с описанием действия, напи
санным на языках ST, LD, FBD и IL.
Спецификатор действия точно определяет, каким образом должно быть вы
полнено действие после того, как шаг станет активным. Имеется одиннад
цать спецификаторов (см. рис. 12.38).
Условие перехода сообщает об изменении в шагах или состояниях с помощью
отношений ложности или истинности.
Чтобы шаг стал активным на установленном временном интервале, исполь
зуют условие перехода, которое определяется появлением бита выполнения
на таймере или внутри шага либо устанавливается в описании действия.
Проект SFC разрабатывается по методике, состоящей из девяти шагов.
Çéèêéëõ
1. Дайте определение программируемого логического контроллера.
2. Опишите части стандарта 61131 IEC, относящиеся к управлению ПЛК.
3. Назовите и охарактеризуйте языки, приведенные в стандарте IEC 611313.
4. Чем язык лестничных схем LD, определенный в стандарте IEC 611313, отлича
ется от языков лестничных схем, используемых в современных ПЛК?
5. Как ПК может использоваться в качестве ПЛК?
6. Опишите сходство и различие между решениями ПЛК и решениями релейных ле
стничных схем.
7. Каково основное различие между физическими реле, используемыми в логичес
ких релейных лестничных схемах, и виртуальными реле, используемыми в ПЛК
программах на языке лестничных схем?
8. Назовите все основные схемные элементы ПЛКсистемы.
9. Опишите главные компоненты ПЛКсистемы.
10. Каково различие между неразъемными и разъемными интерфейсами ввода/вывода?
11. Опишите различия между многочисленными типами модулей связи.
12. Чем различаются три типа сетей — DeviceNet, ControlNet и Ethernet/IP — и как
каждый из них используется в ПЛКрешениях?
13. В каком году и кем был изобретен ПЛК?
846
14. Опишите различия между тремя типами ПЛК: основанными на адресации стой
ки/слота, основанными на тегах и программными ПЛК.
15. Адрес ввода SLCсистемы фирмы Allen Bradley — I:3/12. Определите значение
каждого элемента адреса.
16. Выходной модуль SLCсистемы фирмы Allen Bradley находится в слоте 5, и при
вод подсоединен на вывод 8. Каким будет адрес?
17. Каковы предельные номера контактов виртуального реле или биты управления
реле в ПЛКпрограмме на языке LD?
18. Как размещаются входные контакты и символы выхода на ступеньке лестничной
схемы ПЛК?
19. Почему при внесении изменений в алгоритм работы системы управления необхо
димо делать сравнительно меньше изменений в монтажных соединениях, чем в
схемах релейной логики?
20. Опишите работу контактов проверки включения и выключения, когда они связа
ны с внешними НЗ и НРконтактами .
21. Воспользуйтесь схемой выбора контактов проверки на включение или выключение
(см. рис. 12.16), чтобы выбрать контакты для системы, изображенной на рис. 12.12a.
22. Опишите цикл сканирования в ПЛК.
23. Опишите процесс выбора типа контакта для ступеньки лестничной схемы по за
данному входному внешнему устройству и требуемому алгоритму работы внешне
го выходного устройства.
24. Опишите работу TON, TOF и RTOтаймеров.
25. Какие языки стандарта IEC 61131 используются в мировой промышленности?
26. Опишите связи между контактами проверки на включение и выключение, вход
ным регистром, типами контактов входных внешних устройств и высоко и низко
потенциальными вариантами модулей датчиков/входов.
27. Опишите связь между входами, выходами и временем сканирования.
28. Почему —НР и НЗконтакты внешних устройств нельзя непосредственно заменить
символами контактов проверки на включение и выключение на ступеньке ПЛК?
29. Расскажите, как выбрать желательный контакт для ступеньки ПЛК в ситуации,
когда определены входное и выходное внешние устройства и задана реакция вы
ходного устройства на условия, создаваемые на входном устройстве.
30. Перечислите биты команды таймера и расскажите, как они изменяются при раз
личных состояниях таймера.
31. Перечислите команды сравнения и опишите их действие.
32. Перечислите биты команд счетчика и опишите, как они изменяются при различ
ных состояниях счетчика.
33. Перечислите арифметические команды и опишите их действие.
34. Опишите операции пересылки и команды перехода подпрограмм.
35. Опишите работу программы на языке FBD в терминах входов, выходов и потока
сигнала.
36. Зачем в языке FBD используется символ присутствия принимаемых данных?
Çéèêéëõ
847
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
37. Опишите последовательность шагов при разработке программы на FBD.
38. Сравните язык структурированного текста ST с другими структурированными
языками программирования, которые вы знаете. В чем их сходство и различие?.
39. В чем заключается различие между символами «:=» и «=» в языке ST?
40. В чем заключается различие между оператором присвоения и выражением в языке ST?
41. В чем заключается различие между оператором и функцией в языке ST?
42. Составьте список конструкций, доступных в языке ST, и опишите их.
43. Почему язык последовательных функциональных диаграмм SFC подходит для
разработки программ управления последовательными процессами?
44. На каком современном языке ПЛК базируется язык SFC?
45. Опишите четыре SFCпоследовательности.
46. Чем выполнение SFCпоследовательности с выбором отличается от выполнения
одновременной последовательности?
47. В чем заключается функция блока шага в SFC и как он конфигурируется?
48. В чем заключается функция блока действия в SFC и как он конфигурируется?
49. В чем заключается функция условия перехода в SFC и как оно конфигурируется?
50. Перечислите и опишите элементы блока действия в SFC.
51. В чем заключается функция описания действия в SFC? Назовите доступные па
раметры программирования.
52. Перечислите обычно используемые спецификаторы действия в языке SFC и опи
шите их действие.
53. Опишите процесс разработки программы на языке SFC.
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
Для ответа на вопросы используйте справочные данные, размещенные на веб
сайтах производителей.
1. Разработчик собирается использовать ПЛК Pico фирмы Allen Bradley для управ
ления своей установкой. Определите по справочным данным, контроллер какой
серии обеспечивает шесть дискретных входов (на 24 В постоянного напряжения)
и пять выходов на реле.
2. Какая входная мощность необходима для контроллера, выбранного в п. 1 данного
раздела?
3. Разработчику, имеющему систему SLC 500, необходимо выбрать дискретный низ
копотенциальный входной модуль, чтобы обработать входной сигнал 24 В постоян
ного тока. Определите серию и модель модуля, который должен быть заказан.
4. Разработчику из п. 3 настоящего раздела требуется выходной модуль для подклю
чения трех устройств, работающих от 120 В переменного напряжения. Макси
мальный ток для двух из этих устройств составляет 1 A, а для третьего — 2 A.
848
Устройства должны работать при комнатной температуре. Определите серию и
модель модуля, который должен быть заказан.
5. Определите, какие аналоговые модули совместимы с системой Logix 1756.
6. Определите, какие модули управления движением совместимы с системой Logix 1756.
7. Используйте вебсайт поставщика, чтобы выбрать мгновенный переключатель
ПУСК/СТОП для системы, описанной в примере 12.5 .
8. Используйте вебсайт поставщика, чтобы выбрать сигнальные устройства для
системы, описанной в задаче 13 из следующего раздела.
9. Определите, как работает команда LIM в примере 12.7, когда нижнее предельное
значение будет больше верхнего. В этом же решении определите, как использу
ется выход без защелки, чтобы сбросить защелку на выходе устройства защиты.
10. Перечислите команды сравнения для SLC 500 и опишите, как они работают.
11. Перечислите математические команды для SLC 500 и опишите, как они работают.
12. Перечислите тригонометрические команды для SLC 500 и опишите, как они ра
ботают.
13. Опишите, как работают следующие способы адресации для SLC 500: прямая ад
ресация, косвенная адресация и индексная косвенная адресация.
14. Сделайте обзор информации о языках стандарта IEC 61131, имеющейся на веб
сайте фирмы Allen Bradley, и расскажите, следует ли фирма этому стандарту.
15. Какие системы Allen Bradley поддерживают языки стандарта IEC 61131 и какие
языки имеются в этом стандарте?
áÄÑÄóà
Используйте элементы и условные обозначения ПЛК Control Logix 500 и 5000
фирмы Allen Bradley для решения следующих задач. Фирма Allen Bradley разрешает
загружать демонстрационные версии каждого языка на персональный компьютер (см.
раздел 12.10, посвященный вебсайтам).
1. Получите на языке LD стандарта IEC 61131 эквивалент для схем лестничной ло
гики ПЛК, представленных на рис. 12.12б и в.
2. Процесс, представленный на рис. 2.78 и 12.12, измените следующим образом:
все поплавковые переключатели замените датчиками приближения;
добавьте третий датчик для отметки 50процентного заполнения резервуара;
добавьте второй насос;
второй насос должен начинать работу, когда жидкость достигнет 50процентного
уровня, и выключаться по сигналу датчика при 100 процентноом наполнении.
a) Выберите модели датчиков фирм Allen Bradley или Omron, которые мо
гут заменить поплавковые переключатели. Считайте, что в корпусе ре
зервуара можно сделать необходимые отверстия для крепления.
б) Используйте схему выбора на рис 12.16, чтобы изменить программу
ПЛК на рис. 12.12 соответственно необходимым изменениям в системе.
áÄÑÄóà
849
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
3. Измените систему в задаче 2. Добавьте смеситель, управляемый таким же кон
тактором, какой используется для нагревателя. Смеситель должен начинать ра
боту, когда жидкость достигнет 50процентного уровня, и продолжать работать,
пока резервуар не опорожнится. Используйте схему выбора на рис 12.16, чтобы
изменить программу ПЛК на рис. 12.12 для добавления смесителя.
4. Измените систему в задаче 2. Добавьте переключатель потока на две ступеньки
заполнения и на ступеньку полного слива. Добавьте на панель оператора три сиг
нальные лампы, показывающие, что насосы работают и что клапан слива открыт,
но потока нет. Сигнальные лампы должны загореться через 20 с после того, как
насосы или клапан включатся, а переключатель потока не будет фиксировать на
личие потока. Используйте схему выбора на рис 12.16, чтобы изменить програм
му ПЛК на рис 12.12 с учетом добавления переключателей потока.
5. Укажите, как должна измениться программа на LD в задаче 1, если сборку пере
ключателей ПУСК/СТОП заменить селекторным переключателем. Подсказка:
насос не должен перезапускаться, когда резервуар опорожняется.
6. Используйте схему выбора контактов на рис 12.16, чтобы преобразовать релей
ную лестничную схему из задачи 6 главы 2 в лестничную схему ПЛК.
7. Используйте схему выбора контактов на рис 12.16, чтобы преобразовать релей
ную лестничную схему из задачи 7 главы 2 в лестничную схему ПЛК.
8. Используйте схему выбора контактов на рис 12.16, чтобы преобразовать релей
ную лестничную схему из задачи 8 главы 2 в лестничную схему ПЛК.
9. Используйте схему выбора контактов на рис 12.16, чтобы преобразовать релей
ную лестничную схему из задачи 9 главы 2 в лестничную схему ПЛК.
10. Используйте схему выбора контактов на рис 12.16, чтобы проверять выбор кон
тактов для сборки переключателей ПУСК/СТОП в решении примера 12.5.
11. Измените решение системы для оклейки коробок упаковочной лентой из примера 12.5
таким образом, чтобы переключатель СТОП не мог останавливать цикл во время опе
рации.
12. Измените решение системы для оклейки коробок упаковочной лентой из примера 12.5
таким образом, чтобы переключатель СТОП не мог останавливать цикл во время про
цесса оклейки.
13. Измените решение системы для оклейки коробок упаковочной лентой из примера 12.5
таким образом, чтобы сигнальные лампы указывали следующие шаги процесса: систе
ма активна (зеленая), система неактивна (красная), привод выдвинут (янтарная), уст
ройство оклеивания активно (белая), привод втянут (янтарная) и коробка выгружена
(зеленая).
14. Разработайте программу логической лестничной схемы для перемещения деталей с
двумя пневматическими управляемыми координатами и механизмом захвата детали.
Исходное положение системы — механизм захвата открыт и все оси втянуты. Машина
имеет следующую последовательность операций: выдвигается координата 1, сжимает
ся захват, втягивается координата 1, выдвигается координата 2, выдвигается координа
та 1, разжимается захват, втягивается координата 1, втягивается координата 2. Устано
вите 3 с для выдвижения и втягивания координаты и 2 с для сжатия и разжатия захвата.
Процесс начинается, когда НЗдатчик сигнализирует о присутствии детали.
850
15. Создайте последовательность таймеров, реализующих следующий порядок рабо
ты: когда НЗ возвратная кнопка PB1 нажимается и отпускается, тогда красная
лампа зажигается на 2 с и гаснет на 1 с. Счетчик подсчитывает число включений
сигнальной лампы. Когда красный индикатор числа включений красной лампы
становится равным 10, включается зеленая лампа. В любой момент процесса мо
жет быть нажата кнопка PB2, чтобы сбросить счетчик и остановить процесс.
16. Измените лестничную схему в ПЛКрешении примера 12.6 так, чтобы индикатор
запроса на обслуживание непрерывно горел в течение 5 мин, а затем мигал,
включаясь и выключаясь на 1 с.
17. Измените лестничную схему в ПЛКрешении задачи 15 так, чтобы при значении
счетчика, равном 5, увеличить время включенного состояния в цикле с 2 до 5 с,
используя команду ADD для увеличения предварительно установленного значе
ния таймера.
18. Создайте простой калькулятор на четыре арифметических действия (+, —, * и /),
который получает входные значения с N7:0 и N7:1, использует четыре кнопки, чтобы
выполнить каждую из математических операций, и затем помещает ответ в N7:2.
19. Измените лестничные схемы в ПЛКрешениях примеров 12.5 и 12.6 следующим
образом:
используйте селекторный переключатель, чтобы задавать два различных
времени упаковки в системе таймера и компараторов;
установки времени 1 следующие: общее время 14 с, начало оклейки через 4
с, остановка оклейки через в 8 с;
установки времени 2 следующие: общее время 20 с, начало оклейки через 4
с, остановка оклейки через 14 с.
20. Разработайте логическую лестничную схему для задачи с резервуаром в примере 12.9.
21. Разработайте решение на языке функциональных блоксхем для процесса, пред
ставленного на рис. 2 .78 и 12.12.
22. Измените процесс на рис. 2.78 и 12.12 следующим образом:
добавьте третий датчик для 50процентной отметки заполнения резервуара;
добавьте второй насос, который начинает работать с отметки 50процентно
го уровня и выключается, когда становится активным датчик 100процент
ного заполнения. Измените программу на FBD в задаче 21 соответственно
изменениям в системе.
23. Разработайте программу на языке структурированного текстеа для процесса ,
изображенного на рис. 2.78 и 12.12.
24. Измените процесс на рис. 2.78 и 12.12 следующим образом:
добавьте третий датчик для 50процентной отметки заполнения резервуара;
добавьте второй насос, который начинает работать с отметки 50процентно
го уровня и выключается, когда становится активным датчик 100процент
ного заполнения. Измените программу на ST в задаче 23 соответственно из
менениям системы.
25. Разработайте SFCрешение для процесса, изображенного на рис. 2.78 и 12.12.
26. Измените процесс на рис. 2.78 и 12.12 следующим образом:
áÄÑÄóà
851
èÓ„‡ÏÏËÛÂÏ̊ ÎÓ„Ë̃ÂÒÍË ÍÓÌÚÓÎÎÂ̊
добавьте третий датчик для 50процентной отметки заполнения резервуара;
добавьте второй насос, который начинает работать с отметки 50процентно
го уровня и выключается, когда становится активным датчик 100процент
ного заполнения. Измените программу на SFC в задаче 25 соответственно
изменениям системы.
852
13
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
ñÂÎ̧ „·‚̊
Основная цель главы 13 — описание встроенных микроконтроллеров,
включая обзор основных концепций их программирования и аппарат
ных решений. Кроме того, проанализировано использование языков
высокого уровня, а также современных систем развития и эмуляции.
Значительное место уделено вопросам применения встроенных мик
роконтроллеров в коммерческой деятельности и промышленном про
изводстве.
После изучения этой главы вы сможете:
1. Рассказать о различиях между микрокомпьютером, микропроцессором и микро
контроллером.
2. Объяснить, как устроен микроконтроллер.
3. Рассказать об основах программирования микроконтроллера, о работе ассемб
лера и компилятора.
4. Описать концепции развития микроконтроллерных систем, включая BASIC Stamp.
5. Описать различные варианты систем со встроенными микроконтроллерами.
èêàåÖçÖçàÖ áçÄçàâ Ç èêéîÖëëààéçÄãúçéâ ÑÖüíÖãúçéëíà
Многие промышленные компании применяют встроенные микроконтроллеры в своей
производственной деятельности, а в выпускаемых изделиях, открывая тем самым ши
рокое поле деятельности для тех, кто владеет знаниями о микроконтроллерах. Работа
в области техники и технологии подразумевает разработку, проектирование, марке
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
тинг, а также техническую поддержку покупателей и продавцов встроенных микро
процессорных систем в различных отраслях, таких как транспор, производство потре
бительских товаров, электронные средства в оборонной технике. Компании, обеспе
чивающие поддержку производства встроенных электронных средств, нуждаются в
специалистах, имеющих опыт в производстве и применении микроконтроллерных уст
ройств. Вам может быть предоставлена работа в компаниях, занимающихся проекти
рованием и производством устройств, их испытанием и наладкой. Применение микро
контроллеров развивается, и это развитие носит взрывной характер, когда компании
решают обновить свои технологии и ищут пути повышения показателей цена каче
ство и прибыль затраты. Таким образом, область деятельности для специалистов по
микроконтроллерам расширяется, и эта тенденция сохранится в обозримом будущем.
В качестве примера задачи, решение которой вам может быть предложено, назо
вем выбор микроконтроллера, который должен быть встроен в систему автоматизации
наполнения бутылок. Предположим, что вы являетесь разработчиком системы, произ
водящей фармацевтическую продукцию, и предлагаете автоматизировать ручную опе
рацию наполнения тары. Встроенный микроконтроллер должен автоматически вклю
чать привод насоса, который забирает жидкость из резервуара при непрерывном
контроле скорости истечения вплоть до появления сигнала датчика заполнения, после
чего должна последовать остановка насоса по достижении необходимого уровня.
Вы собираете данные об электрических характеристиках датчиков уровня жидко
сти на выходе и требованиях к насосу подачи на входе. Затем подбираете подходящий
тип контроллера из предлагаемых на рынке, а затем останавливаете свой выбор на
конкретной модели, способной управлять приводом насоса посредством твердотель
ного реле и обеспечивать выполнение функции счета и отображения информации о
скорости заполнения тары. Вы приобретаете микроконтроллер, разрабатываете ин
терфейс, пишете рабочую программу для системы. Хотя этот подход к решению про
блемы потребует от вас нескольких месяцев работы, в результате вы добъетесь опти
мальных показателей цена качество.
13.1. ÇÇÖÑÖçàÖ
Краткий обзор встроенных микроконтроллеров, приведенный в этой главе, даст вам
возможность уяснить основные идеи их применения в промышленной электронике.
Чтобы получить детальное представление об аппаратных средствах, возможностях
ввода и вывода информации, технике программирования, требуется изучение отдель
ного курса, посвященного встроенным микроконтроллерам. Прежде чем углубиться в
принцип действия и применения микроконтроллеров, введем основные определения и
рассмотрим сходство и различие между микроконтроллерами, микрокомпьютерами, а
также между персональными компьютерами (ПК), программируемыми логическими
контроллерами (ПЛК) и микропроцессорами.
Микрокомпьютер, или персональный компьютер (ПК), — типичная настольная
или портативная компьютерная система, которая предоставляет пользователям обшир
ные возможности, такие как обработка текстов и анализ крупноформатных таблиц. В
связи с этими устройствами в памяти всплывают прежде всего названия таких произво
854
дителей, как Hewlett Packard, Apple, Compaq. Приобретенный вами микрокомпьютер
включает аппаратную и программную часть, необходимую для работы системы. В аппа
ратную часть входят клавиатура, мышь, монитор и системный блок, а также программ
ное обеспечение, включающее операционную систему и некоторые прикладные про
граммы. Внутри системного блока находятся дисководы, приводы компакт дисков (CD и
DVD), печатные платы с монтажом. Один из печатных узлов — центральный процес
сорный элемент (ЦПЭ), часто для простоты называемый микропроцессором.
Программируемый логический контроллер (ПЛК) содержит микрокомпьютер с
более развитым интерфейсом пользователя. Этот интерфейс предназначается для
специфического промышленного применения в системах и устройствах с широким ди
апазоном средств управления и автоматизации.
Микропроцессор представляет собой центральный процессорный элемент микро
компьютера, который содержит регистры памяти, буферные узлы, узлы синхронизации,
таймер, арифметические логические устройства (АЛУ). Центральный процессорный эле
мент взаимодействует с другими элементами микропроцессорной системы, к которым от
носятся устройства ввода и вывода информации (УВВ) и различные виды запоминающих
устройств. Микропроцессор содержит записанную в памяти программу, которая позволя
ет ему начинать работу каждый раз после включения. Он передает данные в накопители
большой емкости, такие как жесткие и компакт диски, а также обеспечивает связь с пе
риферийным оборудованием, например с принтерами и сканерами. Подобная система мо
жет использоваться в качестве компьютера общего назначения. Между тем, если требу
ется специализированное устройство для применения с какой либо единственной целью,
правильным выбором будет микроконтроллер, а не микропроцессор.
Микроконтроллер (МК), как правило, представляет собой единую интегральную
схему (ИС), содержащую аппаратные компоненты (центральный процессор, узлы па
мяти, запоминающие устройства, линии параллельного и последовательного портов
ввода/вывода, аналого цифровой преобразователь (АЦП), таймеры). Внутреннее
строение микроконтроллера нацелено на выполнение им единственной функции: об
работки данных и управления процессами.
Структурная схема такого микроконтроллера представлена на рис. 13.1.
Рис. 13.1. Блоксхема
микроконтроллера
ÇÇÖÑÖçàÖ
855
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
Термин встроенный отражает тот факт, что МК обслуживает как потребителя
(пользователя), так и и производственный процесс. Другими словами, мы в первую
очередь обращаем внимание не на функционирование МК, а на процесс производства
или на работу оборудования. Изделия, снабженные встроенными МК, по характеру
выполняемых функций можно разделить на два вида:
удовлетворяющие запросы потребителя: например, бытовые регуляторы по
требления энергии, электронные записные книжки, средства мобильной
связи, электронные игры;
удовлетворяющие запросы производства: например, роботы, контроллеры
процессов, сети и системы маршрутизации, сборки автомобильного обору
дования и инструментов.
13.2 . ÄèèÄêÄíçõÖ ëêÖÑëíÇÄ åàäêéäéçíêéããÖêéÇ
Основные узлы структурной схемы микроконтроллера — центральный процессор,
оперативное и постоянное запоминающее устройство, устройства ввода и вывода, ло
гическое управляющее устройство — представлены на рис. 13.1 . После знакомства с
названными узлами будут рассмотрены два типа микроконтроллеров, один сравни
тельно простой по схемотехнике, другой — более сложный.
13.2 .1 . ñÂÌÚ‡Î̧Ì̊È ÔÓˆÂÒÒÓÌ̊È ̋ÎÂÏÂÌÚ
Центральный процессорный элемент (ЦП) управляет всеми активными данными, вы
полняет расчеты, осуществляет выбор решений. Его деятельность определяется пос
ледовательностью инструкций, которая называется программой. Инструкции отно
сятся к одному из трех главных типов: передача данных, арифметические и логические
операции. ЦП микроконтроллера относительно прост по сравнению с ЦП, используе
мыми в портативных персональных компьютерах. Наибольшее распространение по
лучили 8 битовые МК. Число 8 определяет длину слова данных.
13.2 .2 . éÔ‡ÚË‚Ì̊Â Ë ÔÓÒÚÓflÌÌ̊ Á‡ÔÓÏĘ̈̇̆Ë ÛÒÚÓÈÒÚ‚‡
Оперативные и постоянные запоминающие устройства (ОЗУ и ПЗУ) имеют дело с па
мятью для хранения данных (оперативной памятью) и программ (постоянной памятью).
Содержимое ОЗУ полностью утрачивается при выключении питания, тогда как содер
жимое ПЗУ остается неизменным. Все виды памяти доступны для чтения, но не все при
годны для записи. Память, содержание которой доступно для чтения и записи, называют
памятью с произвольной выборкой (Random Access Memory — RAM). Память с произ
вольной выборкой представляет собой ОЗУ, в которое записывается и в котором хра
нятся данные МК. Память только для чтения (Read Only Memory — ROM) является
856
разновидностью ПЗУ, и в ней содержатся некоторые программы микроконтроллера.
Существуют различные виды ПЗУ, и в некоторых из них имеется возможность пере
программирования. Содержимое ПЗУ иногда можно перепрограммировать. Виды ПЗУ,
включая те, которые пригодны для стирания и репрограммирования, перечислены в
табл. 13.1. Стирание обязательно должно предшествовать программированию.
Таблица 13.1. Различные виды постоянных запоминающих устройств
13.2 .3. ìÒÚÓÈÒÚ‚‡ ‚‚Ó‰‡ Ë ‚̊‚Ó‰‡
Существует два основных типа устройств ввода и вывода (УВВ) — параллельные и
последовательные:
параллельные представляют собой систему входных и выходных цепей, уп
равляемых центральным процессором. Некоторые из этих цепей могут быть
запрограммированы для работы в качестве или входных, или выходных. В не
которых источниках параллельные УВВ называются УВВ общего назначения;
последовательные УВВ — более распространенный класс УВВ. Они подразде
ляются на асинхронные и синхронные последовательные порты ввода/вывода:
–
синхронные последовательные порты имеют собственные средства синх
ронизации и служат для внутренней связи и организации, например, для
связи одного микроконтроллера с другим и для связи микроконтроллера с
периферией. Синхронные последовательные порты имеют особое значе
ние во встроенных однокристальных микроконтроллерах, поскольку дают
возможность развития систем без шинной организации связей;
–
асинхронные последовательные порты служат для связи с компьютерами
через последовательный интерфейс RS232. Многие встроенные микрокон
ÄèèÄêÄíçõÖ ëêÖÑëíÇÄ åàäêéäéçíêéããÖêéÇ
857
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
троллеры, тем не менее, не располагают интерфейсом для связи с компью
тером; порт служит для обслуживания и тестирования.
Другим популярным ресурсом ввода/вывода являются таймеры, аналого цифро
вые и цифро аналоговые преобразователи (АЦП и ЦАП). Таймеры осуществляют кон
троль и регулирование в некоторой системе отсчета времени и помогают уменьшить на
грузку на центральный процессор путем создания системы прерываний реального
времени. АЦП служат для автоматического управления, которое предполагает исполь
зование аналоговых входных сигналов, таких как ручное изменение угла поворота диска.
13.2 .4 . ìÔ‡‚Îfl̨̆‡fl ÎÓ„Ë͇
Управляющая логика микроконтроллера служит средством, которое обеспечивает гар
моничное выполнение разнообразных взаимосвязанных функций. Она содержит такие
компоненты, как счетчики, декодеры, мультиплексоры, переключатели режимов источ
ников питания и шинные формирователи. Примерами функционирующих устройств
служат шинные формирователи направления передачи информации, шинные защелки с
фиксацией шинных сигналов и устройства подтверждения информации.
13.2 .5 . òËÌ̇fl Ó„‡ÌËÁ‡ˆËfl
Шинная организация микроконтроллера обеспечивает совместное использование ма
гистралей для обмена данными между различными блоками. Две основные магистрали в
системе — это шина адреса и шина данных. Шина адреса связана с выходом централь
ного процессора и содержит адрес или указание местоположения источника данных.
Местоположение в общем случае определяется на двух уровнях. Во первых, адрес вы
бирает устройство, во вторых, это устройство декодирует адрес, чтобы определить мес
тонахождение адресуемого источника. Шина данных является двунаправленной, ее ли
нии соединяют центральный процессор и устройства памяти или устройства ввода/
вывода. Как уже упоминалось выше в этой главе, 8 битовый микроконтроллер характе
ризуется разрядностью данных 8 бит, а 16 битовый микроконтроллер имеет 16 битовую
разрядность. Эти шины данных и их использование в функциональных узлах микроконт
роллеров детально описаны в разделе справочных данных.
13.3. ëÔ‡‚Ó̃Ì̊ ‰‡ÌÌ̊ ÏËÍÓÍÓÌÚÓÎÎÂÓ‚
В этом разделе мы обстоятельно познакомимся с возможностями и характеристиками
микроконтроллеров. Поскольку микроконтроллеры являются необыкновенно попу
лярными устройствами и находят бесчисленное множество разнообразных примене
ний, существует огромное количество поставщиков на рынке изделий, использующих
некоторые разновидности микроконтроллеров, которые, в свою очередь, допускают
сотни различных модификаций.
858
Рассмотрим две разновидности микроконтроллеров, одна из которых наиболее
проста и имеет ограниченные возможности, а другая, напротив, имеет их расширен
ный спектр. Это Microchip PIC 12C5XX и Atmel 8 бит Atmega 128.
Справочные данные для микроконтроллера Microchip PIC12C5XX приведены на
рис. 13.2 . Восьмибитовый микроконтроллер содержит восьмиштырьковую интеграль
ную схему, которая использует процессор с сокращенной системой команд (RISC), на
считывающей всего 33 инструкции. Заметим, что таблица памяти в справочных данных
указывает тип и объем запоминающих устройств в зависимости от конкретного типа ус
тройства. Возможности периферии, перечисленные в справочных данных, дают инфор
мацию о ключевых функциях микроконтроллера.
Рис. 13.2 . Справочные данные микроконтроллера PIC12C5XX
ëèêÄÇéóçõÖ ÑÄççõÖ åàäêéäéçíêéããÖêéÇ
859
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
Одно из функциональных устройств, которое может быть вам неизвестно, — это
сторожевой таймер, являющийся частью логики управления, которая генерирует сиг
нал сброса (reset), если центральный процессор определил зависание системы или
невозможность корректного выполнения последовательности команд. Блок схема
МК с таким таймером показана на рис. 13.3 .
Рис. 13.3. Блоксхема микроконтроллера PIC12C5XX
Заметим, что ЦП содержит арифметическо логическое устройство (АЛУ), ре
гистр W, и что запоминающее устройство представлено модулями ПЗУ ROM, EPROM
и ОЗУ (RAM). Устройства ввода и вывода (УВВ) представлены шестью портами, а
остальная часть схемотехники приходится на управляющий логический блок. Система
шин имеет много различных магистралей, включая 8 битовую магистраль данных и
12 битовую магистраль адреса. Несмотря на элементарную структуру, этот контрол
лер представляет в известном смысле совершенное изделие для использования в ус
ловиях жестких ограничений на объем и энергопотребление устройств — например, в
системах идентификации, безопасности, управления удаленными средствами связи
(передатчиками и приемниками).
Восьмибитовый микроконтроллер Atmel AVR характеризуется данными, представ
ленными на рис. 13.4 . Он выполнен в 64 выводном корпусе, содержащем RISC процес
сор с 133 командами. Запоминающее устройство содержит не только ПЗУ (EEPROM) и
ОЗУ (RAM), но и встроенную репрограммируемую флеш память. Отметим впечатляю
щие возможности периферии, которая содержит два 8 битовых широтно импульсных мо
860
дулятора ШИМ (PWM), 8 канальный 10 битовый АЦП (ADC); сдвоенный программи
руемый универсальный синхронно асинхронный приемо передатчик УСАПП (USART),
программируемый сторожевой таймер и другие специальные устройства. Одна из функ
ций, которая не столь общеизвестна, — это интерфейс объединенного теста функциони
рования ОТФ (JTAG), который предоставляет возможность программирования и самоте
стирования содержимого флеш памяти во встроенном режиме. Все эти возможности
отображены на рис. 13.5 .
Рис. 13.4 . Справочные данные микроконтроллера
ëèêÄÇéóçõÖ ÑÄççõÖ åàäêéäéçíêéããÖêéÇ
861
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
Заметим, что центральный процессор содержит арифметическо логическое устрой
ство и соответствующие регистры, а также электрически стираемую память (EEPROM),
статическое ОЗУ (SRAM) и программируемую флеш память. Порты ввода/вывода выде
лены в отдельный блок, содержащий шесть портов драйверов, каждый с шестью вывода
ми, и один драйвер с пятью выводами, и все они составляют большую часть из 64 внешних
выводов устройства. Другие возможности ввода/вывода — АЦП и приемо передатчик
УСАПП (USART) — также представлены на диаграмме с 8 битовой шиной данных, свя
зывающей порты ввода/вывода с разнообразными управляющими логическими блоками
и другими важнейшими функциональными узлами.
Представленные справочные данные дают полную и детальную картину электри
ческих и механических компонентов микроконтроллера, необходимую и достаточную
для разработки системы или встраивания его в систему.
Рис. 13.5. Блоксхема микроконтроллера PIC12C5XX
862
13.4 . éÒÌÓ‚̊ ÔÓ„‡ÏÏËÓ‚‡ÌËfl ÏËÍÓÍÓÌÚÓÎÎÂÓ‚
Для программирования микроконтроллеров используются языки трех уровней. Как пра
вило, более высокий уровень языка делает программирование эффективнее, однако эф
фективность заставляет жертвовать управлением операциями центрального процессора.
Справедливо и обратное: более низкий уровень языка программирования способствует
лучшей управляемости операциями ЦП.
Известно три уровня языка программирования:
машинный язык — язык двоичных чисел (нулей и единиц), используется не
посредственно центральным процессором в микроконтроллере;
язык ассемблирования — язык низкого уровня, который использует мнемони
ческие инструкции ЦП и может быть преобразован в машинные инструкции;
язык высокого уровня — органичное сочетание английского языка и мате
матических инструкций, без детальной привязки к инструкциям ЦП. Чаще
всего применяется язык С, который позволяет решить практически полнос
тью все проблемы разработки встроенных контроллеров. Язык С занимает
промежуточное положение между языками низкого и высокого уровня, по
скольку содержит типы данных и операции, выполняемые непосредственно
над битами, байтами и адресами микроконтроллера.
В дополнение к вышесказанному добавим термины, связанные с программированием:
источник кодов и объектные коды. Источником кодов является код, генерируемый програм
мистом. Например, если вы программируете на языке ассемблера, источником кодов явля
ется код ассемблера. Объектный код — это код для микроконтроллера, используемый ма
шиной или устройством (машинный код). Код, написанный программистом, объединен в
различные группы. Две группы, используемые наиболее часто, — это процедуры и модули.
Процедура представляет собой блок кода, описывающего выполнение одной функции, на
пример вычисление синуса угла, или блок кода инициализации. На языке ассемблера про
цедура называется подпрограммой, на языке С она называется функцией. Модуль — это
набор определенных процедур, объединенных одной общей программой.
Другой термин, используемый в мире микроконтроллеров, — это прерывание.
Прерывание, которое может произойти в любой момент времени, представляет собой
внешний запрос, обычный для обслуживания внешних устройств. Микроконтроллер,
выполняющий свою работу, переключается на обслуживание запроса, после чего воз
вращается к выполнению прерванной функции. Прерывание инициализирует выпол
нение специальной программы, обслуживающей запрос периферийного устройства.
Другой тип прерывания — это программное прерывание, которое представляет собой
инструкцию, инициализирующую процесс прерывания и используемую в целях диаг
ностирования или отладки программ.
13.4 .1. ÄÒÒÂÏ·ÎÂ̊ Ë ÍÓÏÔËÎflÚÓ̊
Программа, написанная на языке ассемблера или на языке высокого уровня, должна
быть оттранслирована для перевода на машинный язык, так как центральный процес
éëçéÇõ èêéÉêÄååàêéÇÄçàü åàäêéäéçíêéããÖêéÇ
863
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
сор микроконтроллера воспринимает поступающие к нему команды только на машин
ном языке. Трансляция программ осуществляется ассемблером и компилятором. Рас
смотрим рис. 13.6, чтобы выяснить, как осуществляется процесс взаимодействия этих
языков и трансляторов.
Ассемблер — это компьютерная программа, которая переводит язык ассемблера
в коды машинного языка. На рис. 13.6 . представлено преобразование кода ассембле
ра в машинные коды и листинг программы. Листинг программы — это ее бумажная
копия, она содержит номера строк, адреса команд, машинные коды, коды ассемблера
и комментарии к командам для центрального процессора. Фрагмент листинга про
граммы приведен в табл. 13.2.
Таблица 13.2 . Листинг программы на языке ассемблера
Рис. 13.6. Алгоритм
преобразования
программного кода
языка высокого уровня
в машинный код
864
Фрагмент программы содержит вычитание константы CON1 из переменной VAR1
и запоминание результата как переменной VAR2. Каждая строка листинга в табл. 13.2
представляет собой команду для центрального процессора (ЦП). Обратимся к стро
ке 25 и разберем ее различные составляющие. Адрес ячейки памяти, в которой содер
жится команда, — 0042, машинный код — 200736, код ассемблера — LDA VAR1. Ма
шинный код обычно содержит две части: код операции и адрес ячейки памяти или
константу. В строке 25 код операции — 20, что соответствует команде «загрузить», а
0736 — адрес переменной VAR1, которая должна быть загружена в регистр.
Поскольку команда вызывает конкретную операцию ЦП, язык ассемблера явля
ется процессорно зависимым, иными словами, он не может быть воспринят другими
ЦП. В заключение добавим, что суть программы, результатом которой станет получе
ние VAR2 путем вычитания CON1 из VAR1, неочевидна, поскольку оно описано тремя
командами ассемблера.
Программирование на языке ассемблера требует некоторого априорного знания,
чтобы написать команды для микроконтроллера. Для активного освоения языка ас
семблера потребовался бы отдельный специальный курс.
Компилятор транслирует коды языка высокого уровня в машинные коды через
коды ассемблера, как показано на рис. 13.6 . На языке высокого уровня программа
записывается более лаконично:
VAR2 = VAR1 — CON1
Программа сократилась до одной строки вместо трех, таким образом, используя
язык высокого уровня, получаем:
более короткий листинг программы;
более удобное восприятие (читаемость) кода;
независимость программы от инструкций конкретного ЦП.
Поскольку отсутствует прямая зависимость программы от команд ЦП, количество
машинных кодов, генерируемых компилятором, может быть несколько больше или мень
ше, чем количество операторов в программе на языке ассемблера. Заметим также, что
хотя компилятор для программирования не используется, нельзя игнорировать ассембли
рование. Вам следует постоянно просматривать генерируемые компилятором коды, чтобы
устранить некорректные, неожиданные или неэффективные команды. Если используется
язык ассемблера, необходимо пройти специальный курс языка программирования высо
кого уровня, такого как С, чтобы уяснить, как различные части программы на языке С
выглядят после трансляции на ассемблере и в машинных кодах.
И в заключение относительно рис. 13.6 следует отметить, что блоки, обозначенные
как «ассемблер» и «компилятор», выполняют соответственно функции кросс ассемб
лера и кросс компилятора, поскольку здесь трансляция осуществляется с помощью
другого ЦП, не того, который использует машинные коды в контроллере. Другими сло
вами, микроконтроллер не используется для трансляции языка программирования в
машинный язык, поэтому и применяется префикс «кросс». В технической литературе
префикс «кросс» встречается редко, однако он хорошо известен и применяется для опи
сания процесса трансляции кодов, которые не являются машинными.
До начала разработки проекта должно быть проведено обоснование выбора кон
кретного языка программирования из всех языков, применяемых в системах встроен
éëçéÇõ èêéÉêÄååàêéÇÄçàü åàäêéäéçíêéããÖêéÇ
865
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
ных микроконтроллеров, поскольку язык влияет не только на выбор типа микроконт
роллера, но и на возможность перенесения программы на МК других типов, удобство
чтения и функциональную надежность программ. Другим важным свойством является
возможность использования программных кодов в других условиях. То есть программ
ные коды, разработанные для существующих систем, можно использовать и в других
проектах, в которых применяются те же микроконтроллеры. Это обстоятельство, а
также объем программы наряду с коммерческими факторами определяют выбор язы
ка программирования. Важные свойства языка С отражены в табл. 13.3 .
Таблица 13.3. Сравнение языка ассемблера и языка С
13.4 .2 . ëËÒÚÂχ ‡Á‡·ÓÚÍË ÔÓ„‡ÏÏ
Программирование — это ключевой элемент в процессе разработки встроенных мик
роконтроллеров и оборудования. Разработка программы включает в себя такие этапы,
как написание, компоновка, отладка и прогон. Блок схема разработки представлена на
рис. 13.7 . Компакт диск (CD) и отладочная плата, в комплекте с руководством для
пользователей, поставляются обычно производителями контроллеров или поставщика
ми соответствующего оборудования. Компакт диск содержит программное обеспече
ние для разработки программ, включая ассемблер, компилятор и отладчик. Программа
для микроконтроллера пишется с использованием текстового редактора персонального
компьютера (PC), ассемблируется на PC, затем загружается в ОЗУ для отладки. В ходе
программирования могут быть обнаружены две разновидности ошибок:
ошибки разработки, скрывающиеся в синтаксисе команд или в постановке
задачи и невыявленные в ходе ассемблирования и компиляции;
866
случайные ошибки программирования или неправильная интерпретация
требований, не обнаруженные в процессе прогона программы.
После обнаружения и устранения ошибки программа реассемблируется (реком
пилируется) и запускается вновь. Процесс носит итеративный характер, и число ите
раций зависит от размера и сложности программы.
Рис. 13.7 . Блоксхема системы для разработки программ
Программирование на С усложняет отладку, поскольку не существует однозначного
соответствия между исходным кодом и командами ЦП. Использование С добавляет другие
источники ошибок при компиляции, связанные с ошибками компилятора, неэффективном
его использованием или неправильным применением языка С программистом. Необходима
обратная трансляция кода центрального процессора на язык С, поскольку ее ручное выпол
нение оказывается крайне утомительным. Поэтому для сопровождения программы приме
няется отладчик, работающий на уровне исходного кода. Этот отладчик должен проверять
выполнение программы на эталонном устройстве и корректировать исходный код по резуль
татам проверки. Эталонным устройством может служить симулятор, эмулятор или микро
контроллер, работающий под управлением отлаживаемой системы. Обычно при отладке на
уровне исходного кода используется эмулятор, управляющий центральным процессором,
выбирающий данные из памяти и загружающий программу в память. Такие отладчики наи
более эффективны, но и наиболее дороги, поскольку для них требуется дорогостоящая аппа
ратура, обеспечивающая эмуляцию. Если используются более мощные персональные ком
пьютеры (ПК), то все более распространенными становятся отладчики, работающие в среде
Windows. При этом отсутствует необходимость в реальной управляемой системе, что сни
жает стоимость разработки при полном сохранении функциональности программы.
Средства отладки. Помимо отладчиков при разработке систем со встроенными
микроконтроллерами, используются и другие средства отладки, такие как осциллог
раф, логический анализатор, симулятор и внутрисхемный эмулятор.
Осциллографы и логические анализаторы важны в системах отладки, поскольку
функционирование системы связано как с аналоговыми, так и с цифровыми сигнала
ми. Логический анализатор схож с осциллографом, поскольку отображает форму сиг
нала, но только логического, а не аналогового. Логический анализатор имеет некото
рое множество входных каналов и дает возможность наблюдать в реальном времени
éëçéÇõ èêéÉêÄååàêéÇÄçàü åàäêéäéçíêéããÖêéÇ
867
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
результат работы микроконтроллера при получении некоторой фиксированной после
довательности команд.
Симулятор и встроенный эмулятор дают системе отладки две дополнительные воз
можности. Симуляторы, более простые в использовании, представляют собой компью
терную программу, которая симулирует работу ЦП, не требуя дополнительных аппарат
ных средств. Эмуляторы имеют встроенную функцию монитора, которая позволяет
получить подтверждение исполнения команд центральным процессором. Это подтверж
дение позволяет проверять и редактировать содержимое памяти и регистров. Слабым
местом эмулятора является невозможность симуляции сигналов входа выхода и схемо
техники интерфейса, которые являются частью функционирования встроенных микро
контроллерных систем. Встроенные схемы эмуляторов представляют собой комбина
цию аппаратных и программных средств и эмулируют микроконтроллер обычно путем
включения его соответствующего разъема в системный блок. Эти встроенные средства
обеспечивают главным образом функционирование программ отладки, выполняя неко
торые функции логического анализатора. Встроенные эмуляторы дороги, но обеспечи
вают быстрый и точный процесс отладки встроенного микроконтроллера.
BASIC Stamp. Семейство микросхем, имеющих размер почтовой марки (Stamp) и
способных понимать язык высокого уровня Beginners All Purpose Symbolic Instruction
Code (BASIC) — Бейсик. Это семейство разработано фирмой Parallax Inc в 1992 году для
простого программирования микроконтроллеров, главным образом Microchip PIC. Ис
пользование Бейсика делает предельно простой разработку программного обеспечения
для микроконтроллеров, причем этот процесс не требует компилятора. Микроконтроллер
монтируется на малой монтажной плате с питанием от батареи 9 В. Разъем микроконт
роллера вставляется в один из последовательных портов персонального компьютера.
Программа на Бейсике в сжатом виде загружается из персонального компьютера в стира
емую память микроконтроллера (EEPROM) для последующего исполнения. Едва ли каж
дый производитель будет использовать BASIC Stamp в разработке реальных устройств,
так как Stamp дорог и относительно медленно работает. Однако он получил признание
благодаря тому, что оказался весьма удобным в образовательных целях, в разработке про
тотипов, в демонстрационных устройствах благодаря своей предельной простоте, удоб
ству установки и портативности.
Благодаря способности BASIC Stamp к совершенствованию возникли новые вер
сии микросхемы. Так, BASIC Stamp Web Server оказался функционально удобным для
использования в микроконтроллерных веб серверах и для обслуживания клиентов E
mail. Он обеспечивает связь через Ethernet. Версия Stamp to Stamp дает возможность
посылать сообщения в любой среде — это связь через Интернет. Аналогом BASIC
Stamp, в котором используется программирование на языке высокого уровня Java яв
ляется Javelin Stamp.
13.5 . èËÏÂÌÂÌË ‚ÒÚÓÂÌÌ̊ı ÏËÍÓÍÓÌÚÓÎÎÂÓ‚
Промышленное применение встроенных микроконтроллеров для преобразования данных
и управления процессами обычно требует измерения разных физических величин. Соот
ветствующие датчики с аналоговым выходом являются источниками входных сигналов для
868
микроконтроллера и требуют преобразования аналогового сигнала в дискретный. Под уп
равлением программы микроконтроллер может сравнивать измеренное значение с устав
кой или заданием, принимать логические решения на основе этого сравнения, выполнять
математические операции, осуществлять функции регулирования. Выходные интерфейсы
позволяют управлять такими устройствами, как тиристоры или симисторы, жидкокрис
таллические дисплеи, двигатели, вентиляторы, нагреватели, принтеры. Процедура разра
ботки подобного применения встроенных микроконтроллеров состоит из следующих че
тырех этапов:
1. Разработки или выбора датчика для измерения или отображения требуемой
физической величины.
2. Разработки или выбора схемотехнических средств для создания интерфейса
между выходом датчика и входом микроконтроллера.
3. Разработки или выбора схемотехнических средств для создания интерфейса
между цифровыми линиями выхода микроконтроллера и периферийными ус
тройствами.
4. Создания программы для обработки данных, решения задач и реализации уп
равляющих функций.
èËÏ 13.1
Руководствуясь вышеприведенным описанием четырех этапов разработки, составьте
план разработки простого тостера, управляемого от встроенного микроконтроллера .
Блок схема тостера изображена на рис. 13.8.
êÖòÖçàÖ
Сигнал датчика степени потемнения (поджаривания) тоста должен быть усилен для
восприятия микроконтроллером. Программное устройство дискретизации устанавли
вает, к примеру, шестнадцать оттенков степени потемнения. Программа включает на
гревающий элемент и запускает таймер с установленной степенью потемнения (поджа
ривания). В конце интервала приготовления программа выключает нагреватель и
выталкивает приготовленный тост. Интерфейс выхода осуществляется двумя силовы
ми ключами: один управляет нагревателем, а другой — выталкиванием тоста.
Пример 13.1 показывает, насколько обширными знаниями в области технологии
датчиков, программирования и электронной схемотехники должен обладать разработ
чик. И это только малая часть цикла разработки встроенных микропроцессорных сис
тем. Встроенные системы для решения промышленных задач можно дополнить следу
ющими примерами:
измерение и использование данных о дифференциальном измерителе давле
ния на фильтре очистки воздуха;
управление направлением вращения и скоростью двигателя постоянного тока;
контроль наполнения бутылок из резервуара с жидкостью;
измерение температуры и печать результатов;
измерение веса купленного продукта и отображение его цены на экране
дисплея.
èêàåÖçÖçàÖ ÇëíêéÖççõï åàäêéäéçíêéããÖêéÇ
869
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
Когда компании, совершенствующие свою технологию, находят экономичные и
прибыльные пути использования микроконтроллеров, число их применений растет со
скоростью взрыва. Например, Master Card International разработала новую систему
оплат, которая использует бесконтактный способ, названный Pay Pass. В карте, ис
пользующей радиочастотную технологию идентификации (RFID), содержится встро
енный микроконтроллер и антенна. Такие карты начали применяться в ресторане
McDonalds в Далласе в конце 2004 года, а уже в 2005 году испытания были продолже
ны в других штатах. Эта система платежей позволяет просто прижать или поднести
достаточно близко платежную карточку к специально оборудованному торговому тер
миналу, который исключает необходимость пропускать карточку через считывающее
устройство. Новое техническое решение идеально подходит там, где необходимо быс
трое обслуживание большого числа клиентов: в закусочных, на заправочных станци
ях, в торговых автоматах и киосках, кинотеатрах, аэропортах.
Концепция микроконтроллера, встроенного в карту, используется некоторыми
крупными корпорациями для контроля доступа и обеспечения пропускной системы в
закрытых объектах. Микроконтроллер может быть встроен в портфель (саквояж,
кейс), и служащему достаточно будет пронести его возле терминала, чтобы получить
доступ к объекту. Встроенные микроконтроллеры находят все более широкое приме
нение в сфере производства и потребления. Огромным достоинством микроконтрол
леров является их низкая стоимость и превосходные характеристики. Именно превос
ходные характеристики позволили фирме Adidas разработать практичную спортивную
обувь для бега, в которой упругость подошвы настраивается автоматически в процес
се пробежки. Магнитный датчик, расположенный около пятки, на каждом шаге изме
Рис. 13.8. Блоксхема процесса приготовления тостов
870
ряет усилие, развиваемое бегуном, и передает эту информацию встроенному микро
контроллеру, расположенному в области свода стопы. Микроконтроллер активизиру
ет крошечную жесткую систему упругого кабельного амортизатора, который накачи
вает воздух, делая более жесткой подошву при пробежке по тротуару и смягчая ее при
переходе к режиму прогулки по газону. Вся система в целом весит около 40 г. Изделие
было предложено потребителям в конце 2004 года. Нетрудно заметить, что области
применения встроенных микроконтроллеров практически безграничны.
13.6 . ÇÖÅ-ëÄâíõ ë àçîéêåÄñàÖâ
é ÇëíêéÖççõï åàäêéäéçíêéããÖêÄï
Ниже приведены адреса веб сайтов поставщиков микропроцессорного оборудования
и связанных с ним систем, обсуждавшихся в этой главе. Адреса сайтов в Сети часто
изменяются, поэтому, если какая либо из ссылок неактивна, воспользуйтесь механиз
мом поиска, чтобы по соответствующим микропроцессорным терминам найти интере
сующие вас материалы.
Поставщики микроконтроллеров Atmel, Microchip, Intel:
http://www.atmel.com
http://www.microchip.com
http://www.intel.com
BASIC Stamp от Parallax
http://www.parallax.com
Встроенные микроконтроллерные системы
http://www.microcontroller.com
Развитие систем отладки от Green Hulls Software и EPI Embedded Performance
http://www.ghs.com
http://www.epitools.com
êÖáûåÖ
13.1 . Введение
Универсальный инструмент для решения множества прикладных задач уп
равления — микрокомпьютеры, или персональные компьютеры (PC), вклю
чая и портативные компьютеры.
Центральный процессор (ЦП) микрокомпьютера является важнейшим уз
лом, который выполняет множество разнообразных задач.
Микроконтроллер представляет собой единую интегральную схему (ИС),
которая состоит из центрального процессора (ЦП), запоминающего устрой
ÇÖÅ-ëÄâíõ ë àçîéêåÄñàÖâ é ÇëíêéÖççõï åàäêéäéçíêéããÖêÄï
871
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
ства (ЗУ) и некоторых других интегральных элементов и предназначена для
выполнения определенных задач управления.
13.2 . Основы аппаратных решений микроконтроллера
Важнейшими аппаратными узлами микроконтроллера являются централь
ный процессор, постоянная и оперативная память, устройства ввода/вывода
и логика управления.
Наиболее популярны микроконтроллеры с 8 разрядным ЦП. Число 8 взято
за основу при определении разрядности данных.
Оперативная память используется для хранения данных, постоянная — для
хранения программ микроконтроллера.
Существует два основных типа устройств ввода/вывода: параллельный и пос
ледовательный. Последовательный может быть синхронным и асинхронным.
Шина адреса является выходом ЦП, содержащим источник передаваемых
данных или признак их местоположения.
Шина данных представляет собой группу двунаправленных линий, по кото
рым может происходить обмен данными между ЦП, устройствами памяти и
ввода/вывода.
13.3 . Справочные данные о микроконтроллерах
8 битовые микроконтроллеры имеют сокращенную систему команд ЦП (RISC).
Сторожевой таймер (watchdog), являющийся частью логической схемы уп
равления, генерирует сигнал сброса для центрального процессора, если об
наружилось зависание или утрата способности к генерированию корректной
последовательности кодов.
Объединенная группа тестирования (JTAG, Joint Test Action Group) обеспе
чивает интерфейс со встроенными схемами флеш памяти и встроенными
схемами самотестирования.
13.4 . Основы программирования микроконтроллеров
Для программирования микроконтроллеров используются языки трех уров
ней: машинные коды, язык ассемблера и языки высокого уровня.
Ассемблер представляет собой компьютерную программу, которая трансли
рует язык ассемблера в машинные коды.
Компилятор транслирует язык высокого уровня в машинные коды через ас
семблер.
Программирование микроконтроллера включает разработку структуры про
граммы, написание, отладку и прогон.
Как правило, система разработки предполагает программирование микро
контроллера с использованием текстового редактора на персональном ком
пьютере с последующим ассемблированием и перезагрузкой ОЗУ в системе
программирования и отладки.
В процессе создания программного обеспечения выявляются ошибки, кото
рые могут быть отнесены к одному из двух типов: ошибки программирования
и ошибки исполнения программы.
872
В процессе отладки встроенных микроконтроллеров используются различ
ные средства отладки: осциллограф, логический анализатор, симулятор,
встроенный эмулятор.
Специально для разработки программ микроконтроллеров создано средство,
названное BASIC Stamp.
BASIC Stamp представляет собой микроконтроллер, имеющий размер по
чтовой марки (Stamp) и способный понимать язык высокого уровня про
граммирования микроконтроллеров, названный Бейсик (BASIC).
BASIC Stamp изначально предназначался для целей обучения, демонстрации
или для разработки прототипов.
13.5 . Применение встроенных микроконтроллеров
Процедура разработки встраиваемых микроконтроллеров содержит четыре
этапа:
1. Разработка и выбор датчика для измерения или мониторинга некоторой
физической величины.
2. Разработка или выбор схемотехнических средств для интерфейса выхо
да датчика и входа микроконтроллера.
3. Разработка или выбор схемотехнических средств для интерфейса циф
рового выхода микроконтроллера и входа периферийного устройства.
4. Написание программы для восприятия данных, решения проблемы и ре
ализации функции управления.
Çéèêéëõ
1. После ознакомления с разделом «Применение знаний в профессиональной дея
тельности» опишите вид деятельности в области встроенных микроконтролле
ров, который представляется вам наиболее привлекательным.
2. Определите различие между микропроцессором, микрокомпьютером и микро
контроллером.
3. Что обозначает термин «встроенный»?
4. Каково назначение ЦП в микроконтроллере?
5. Что такое постоянная память?
6. Что такое оперативная память?
7. Определите различия между ОЗУ и ПЗУ.
8. Опишите действие синхронного порта ввода/вывода микроконтроллера.
9. Опишите действие асинхронного порта ввода/вывода микроконтроллера.
10. Помимо параллельного и последовательного портов ввода/вывода назовите дру
гие ресурсы ввода/вывода информации встроенного микроконтроллера.
11. Опишите уровни доступа к адресной шине микроконтроллера.
12. Почему шина данных микроконтроллера должна быть двунаправленной?
Çéèêéëõ
873
ÇÒÚÓÂÌÌ̊Â ÏËÍÓÍÓÌÚÓÎÎÂ̊
13. Что означает число 16 в термине «16 битовый микроконтроллер»?
14. Воспользуйтесь информацией из справочных данных о микроконтроллерах Atmel
и Microchip, чтобы заполнить таблицу 13.4.
15. Опишите различие в области применения контроллеров Microchip и Atmel.
16. Что означает «программируемая память только для считывания (PROM)»?
17. Назовите три основных языка программирования микроконтроллеров.
18. В чем состоит различие между ассемблером и компилятором?
19. Каково назначение листинга программы, написанной на ассемблере?
20. В чем состоит преимущество использования языка высокого уровня при про
граммировании микроконтроллеров?
21. В чем состоят два основных недостатка при использовании языков высокого уровня
для программирования микроконтроллеров?
22. Почему невозможно программу, написанную на языке ассемблера для одного
микроконтроллера, использовать для работы с другими микроконтроллерами?
23. В чем состоит различие между программой и программным модулем?
24. Опишите два типа прерываний.
25. В чем состоит различие между ассемблером и кросс ассемблером?
26. Почему при проектировании следует как можно раньше выбрать язык програм
мирования, используемый для встроенных микроконтроллеров?
27. Из каких этапов состоит разработка программ?
28. Назовите основные функции системы разработки программ.
29. На каком этапе отладки могут быть найдены ошибки в синтаксисе и структуре
программы?
30. Что такое уровень средства отладки?
31. В чем заключается различие между осциллографом и логическим анализатором?
Таблица 13.4. К вопросу 14
874
32. В чем состоит недостаток симулятора как средства отладки микроконтроллера?
33. В чем состоит преимущество встроенных эмуляторов как средства отладки мик
роконтроллеров?
34. Что такое BASIC Stamp?
35. Назовите три применения BASIC Stamp.
36. Перечислите четыре этапа разработки встроенной микропроцессорной системы.
áÄÑÄóà
1. Каково максимальное потребление мощности микроконтроллером Microchip
(см. рис. 13.2) при питании от источника 5 В?
2. Исходя из описания четырех этапов разработки, приведенного в этой главе, рас
скажите о этапах разработки встроенного микроконтроллера для цифрового тер
мометра.
3. Изобразите блок схему решения предыдущей задачи.
4. Изобразите блок схему решения задачи, приведенной в разделе «Применение
знаний в профессиональной деятельности» в этой главе.
áÄÑÄóà
875
14
ìÔ‡‚ÎÂÌËÂ
ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
ñÂÎ̧ „·‚̊
Цель этой главы состоит в том, чтобы дать представление о сред
ствах управления автоматизированными машинами и процессами,
которые позволяют наблюдать и автоматически корректировать
процессы, если они выходят за установленные пределы.
После завершения работы над данной главой вы сможете:
1. Объяснить функциональную схему замкнутой системы и определить назначение
каждого узла.
2. Установить характеристики, которые создают различия между эффективной и не%
эффективной системой управления.
3. Перечислить режимы работы замкнутой системы управления и объяснить, как
эти режимы способствуют коррекции ошибок системы.
4. Назвать причины, по которым двухпозиционные системы релейно%импульсного
регулирования («включено/выключено») стали наиболее распространенными.
5. Объяснить термин «пропорциональный регулятор».
6. Обсудить проблему установившейся ошибки, или статизма пропорционального
регулятора, и объяснить, почему эта ошибка не может быть исключена в регуля%
торах данного типа.
7. Объяснить, почему пропорционально%интегральный регулятор устраняет стати%
ческую ошибку регулирования.
8. Описать влияние изменения постоянной времени интегрирования на работу про%
порционально%интегрального контроллера.
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
9. Объяснить преимущества пропорционально%интегрально%дифференциального ре%
жима регулятора перед более простыми режимами. Определить условия процесса,
которые требуют такого режима регулирования.
10. Описать влияние изменения производной постоянной времени (времени нарастания)
в пропорциональном плюс интегральном плюс дифференциальном контроллере.
11. Описать, как аналоговые и цифровые контроллеры различаются в способах уп%
равления переменными регулятора.
12. Предложить интерпретацию таблицы, которая связывает характеристики про%
мышленных процессов с соответствующими режимами регулятора, предназна%
ченного для управления этими процессами.
13. Описать выбор цикла и реакцию процесса при настройке контроллера.
14. Обсудить самонастраивающийся адаптивный контроллер.
èêàåÖçÖçàÖ áçÄçàâ Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Системы управления предоставляют специалисту широчайшие возможности карьерного
роста, позволяя специализироваться как в области аппаратных средств, так и в разработ%
ке программ. Потребность в таких специалистах существует в компаниях, занимающихся
разработкой систем управления или их компонентов, необходимых для поддержания про%
цессов управления. Эти вакансии связаны с разработкой систем, развитием их примене%
ния, ориентированного на пользователя, созданием программного обеспечения, со служ%
бами продаж и технического обслуживания, а также с установкой, испытанием и наладкой
конкретных производственных систем у пользователей.
Такие же вакансии существуют и в компаниях, использующих контроллеры в си%
стемах автоматизации и в аналоговых управляющих системах. Эти компании нужда%
ются в специалистах, способных устанавливать и поддерживать работу систем управ%
ления, настраивать и регулировать системы при их модернизации и создавать новые
управляющие алгоритмы при появлении новых управляющих процессов. Деятель%
ность, непосредственно связанная с системами управления, может осуществляться и
в компаниях, разрабатывающих аппаратную и программную части управляющих сис%
тем и обслуживающих соответствующие секторы рынка. В аналоговых системах уп%
равления могут использоваться все компоненты, рассмотренные в предыдущих главах
книги. Еще одна группа компаний обеспечивает работу программ, которые собирают
и обрабатывают данные и управляющую информацию. В результате специалист в об%
ласти технологий производства может в полной мере использовать свою квалифика%
цию для того, чтобы сделать блестящую карьеру в области управляющих систем.
Компании заинтересованы в специалистах, обладающих знаниями по большин%
ству инженерных и технологических дисциплин, особенно в области электротехники,
электромеханики, механики, химии, компьютерных и управляющих систем.
В устройствах промышленной электроники и в схемах, которые были рассмотре%
ны в предыдущих главах, используются и непрерывные процессы, и системы позици%
онного (релейно%импульсного) регулирования, так что глубокое понимание этих кон%
цепций очень важно для работы в области регулирования.
878
Примером специфической задачи, которая может быть вам предложена, служит
пуск и наладка помехозащищенного и отказоустойчивого регулятора температуры па%
рогенератора бумагоделательной машины. Предположим, что вы являетесь инжене%
ром%технологом на бумагоделательном производстве фирмы Westvaco, выпускающем
крафт%бумагу для упаковки. Как дипломированный специалист с десятилетним опы%
том работы в области регулирования технологических процессов, вы оказываетесь
одним из пяти инженеров%технологов на предприятии. Вы отвечаете за пуск, наладку,
безотказную работу и общее успешное функционирование более 1500 систем с замк%
нутым контуром управления на трех больших бумагоделательных машинах. Сегодня
оператор машины No 2 обнаружил сбои в регулировании температуры парогенерато%
ра, и вам предстоит разобраться с этой проблемой. При этом вам необходимо взаимо%
действовать с руководством отдела главного энергетика, которое должно обеспечить
вам поддержку в выполнении всех необходимых работ. Температура в системе оказа%
лась на 15° ниже, чем должна быть в соответствии с уставкой. Это отклонение пред%
ставляет собой статическую ошибку, которая превышает допустимую величину. Выход
контроллера свидетельствует о его нормальной работе, поэтому вы предполагаете,
что неисправен последний регулирующий элемент — теплообменная установка. Пос%
ле консультации с отделом готовой продукции вы решаете произвести тестирование
реакции теплообменника на малое возмущающее воздействие. Как показали ваши
наблюдения, бросок мощности на выходе регулирующего клапана при изменении тем%
пературы уставки составляет 5 процентов. Это свидетельствует, что управляющий
клапан неисправен или оказывает слишком большое сопротивление вследствие кор%
розии. Вы непосредственно указали сотруднику, что именно необходимо сделать с си%
стемой смазки клапанов и какие коррективы необходимо внести в состав смазываю%
щей жидкости. Это решение устаняет возникшую проблему, однако существует
необходимость более радикального и рассчитанного на длительный срок решения.
Вам следует провести полное обслуживание клапана в любой доступный интервал
времени, не связанный с остановкой производства, и скорректировать требования к
контроллеру, который должен быть добавлен к системе регулирования клапанов. Кон%
троллер клапана должен представлять собой систему позиционирования с обратной
связью, чтобы была возможность убедиться, что клапан достигает положения, кото%
рое соответствует указанному выходу контроллера.
Проделанная вами работа решила проблему, за счет чего снизился выход брако%
ванной или ненадлежащего качества продукции. Успешное решение инженерной за%
дачи дает вам чувство удовлетворения, а деньги, которые вы сэкономили для компании
благодаря уменьшению брака, ставят вас в ранг перспективных сотрудников.
14.1. ÇÇÖÑÖçàÖ
Трудно прожить даже один день без обращения к управляющим системам. Если вы настраи%
ваете систему климатизации в своем доме (отопление — охлаждение) или устанавливаете
скорость автомобиля в системе круиз%контроля, вы задаете значение входной величины си%
стеме автоматического регулирования. Эти системы являются автоматическими, поскольку
они поддерживают регулируемую величину (температуру или скорость) на указанном уров%
ÇÇÖÑÖçàÖ
879
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
не. Не менее часто используется и ручное управление. Например, в процессе управления
автомобилем вы задаете направление движения вручную, основываясь на информации,
предоставляемой вашими органами чувств. Автоматическое управление предполагает ис%
пользование только машины, как в случае регулирования температуры в доме, где темпера%
тура управляется системой отопления зимой или системой кондиционирования летом. Обе
системы используют уставку термостата для того, чтобы переключать любую из систем тер%
мостатирования в состояние «включено/выключено». Таким образом, автоматическое уп%
равление можно определить следующим образом: автоматическое регулирование осуще%
ствляется в системе, где регулируемая величина принудительно поддерживается на
заданном уровне, называемом уставкой.
В примере с отоплением или охлаждением помещения регулируемой величиной
служит температура, а величина уставки задается термостатом. Система отопления или
охлаждения жилища, система круиз%контроля служат примером самокорректирующей%
ся системы. Например, если температура в жилище упала ниже заданного уровня (уров%
ня уставки), включается отопитель, который должен вернуть температуру к заданному
значению (уставки). Класс систем, которые являются самокорректирующимися, назы%
вают системами с обратной связью или замкнутыми системами регулирования.
Система круиз%контроля проиллюстрирована на рис. 14.1. Обратная связь пред%
ставляет собой процесс измерения фактического значения регулируемой переменной
(температуры или скорости автомобиля) и сравнения ее с уставкой, т.е. заданными
значениями. Любые отклонения измеренной регулируемой величины от значения ус%
тавки вызывают появление сигнала ошибки, который используется для того, чтобы
минимизировать или исключить ее.
Рис. 14.1. Система с замкнутой обратной связью для круизконтроля
автомобиля
В примере круиз%контроля на рис. 14 .1 измеритель скорости (спидометр) изме%
ряет регулируемую величину (скорость автомобиля), а контроллер сравнивает истин%
ное значение скорости с уставкой. Любые отклонения скорости корректируются из%
менением подачи топлива в двигатель, которое изменяет скорость автомобиля.
880
Промышленные процессы и регулирование скорости автомобиля имеют много об%
щего. Например, процесс изменения скорости истечения жидкости устанавливается на
определенный уровень путем ручной регулировки значения скорости, вводимой в кон%
троллер при разомкнутой цепи обратной связи. Тогда установленное значение равно
этой скорости потока, и система переключается с ручного режима на автоматический. С
момента этого переключения управляющая система поддерживает поток неизменным.
В случае круиз%контроля водитель включает круиз%контроль и затем приводит
скорость автомобиля к желаемой путем ручного управления подачей топлива или пе%
далью газа при включенном регуляторе скорости. Когда желаемая скорость достигну%
та, водитель включает систему круиз%контроля, после чего скорость будет поддержи%
ваться системой автоматически. Любые вариации скорости автомобиля или уставки
круиз%контроля вызывают изменения подачи топлива в двигатель, и скорость автомо%
биля изменяется так, чтобы получить заданное значение уставки. Похожую работу
обеспечивают системы, которые будут нами рассмотрены на большом количестве
примеров, включенных в эту главу.
На абсолютно ровной дороге при отсутствии ветра и при постоянном значении тре%
ния обратная связь в системе круиз%контроля теряет смысл, поскольку скорость будет
оставаться постоянной и равной тому значению, которое было задано системой круиз%
контроля. Система без обратной связи называется разомкнутой системой. На самом
деле не бывает идеальных неизменных условий движения, идеальных дорог и совершен%
ных систем управления, поэтому всегда существуют возмущающие факторы, которые
делают параметры процесса выше или ниже желаемого значения. Под внешним возму%
щением (см. рис. 14 .1) принято рассматривать уклон дороги, который может замедлять
движение автомобиля при движении на подъем или ускорять в противном случае.
Внимательно изучите рисунок и процесс круиз%контроля, пока концепция обрат%
ной связи в замкнутых системах не станет вам абсолютно ясной. Преимущества сис%
тем управления могут быть сгруппированы в четыре категории.
Усиление мощности: при малых затратах энергии во входной цепи, например,
путем поворота движка потенциометра, осуществляется управление большой мощно%
стью, необходимой для поворота большой «тарелки» антенны.
Удаленное управление: входное устройство может быть размещено на значи%
тельном расстоянии от выхода процесса, управляемого этим входным устройством.
Необходимость или желательность преобразования вида входного сигнала:
изменение сопротивления потенциометра, которое осуществляется наиболее простым
и дешевым способом, вызывает изменение температуры регулируемого процесса.
Компенсация возмущающих воздействий: процессы в замкнутой системе уп%
равления поддерживают неизменной регулируемую величину, несмотря на действие
возмущающих факторов.
14.2 . êÖÄäñàü ëàëíÖåõ
Процессы в резервуаре (баке) смесителя из главы 12, который используется для пере%
мешивания и нагревания двух жидкостей, иллюстрируются рис. 14 .2 . Система позици%
онного регулирования (включено/выключено) из главы 12 здесь заменена системой
êÖÄäñàü ëàëíÖåõ
881
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
пропорционального регулирования с обратной связью для лучшего регулирования тем%
пературы жидкости. Новая система регулирования поясняется на рис. 14.3 . Новый ре%
гулятор температуры имеет входной потенциометр для установки желаемой величины
температуры и контроллер для сравнения температуры уставки и фактической темпера%
туры, названной переменной процесса регулирования. В результате сравнения форми%
руется сигнал ошибки, равный разности температур. Процесс управляется паровым
клапаном, теплообменным устройством для нагревания жидкости и терморезистором в
качестве датчика температуры жидкости. Система регулирования отрывает или закры%
вает паровой клапан, чтобы поддержать температуру жидкости на желаемом уровне.
Внимательно изучите рис. 14.2 и 14.3, пока принцип действия регулятора температуры
не станет совершенно ясен.
Рис. 14.2. Процессы в резервуаре смесителя
Реакция всякой системы регулирования и ее быстродействие в данном процессе во
многом зависит от того, насколько удачно она была спроектирована. Стимулом процесса
регулирования может быть изменение уставки температуры или возмущающее воздей%
ствие. Переменная величина, характеризующая процесс, представляет текущие условия
в системе, а кривая переходного процесса является фактической зависимостью реакции
системы. В новом примере регулятора температуры входной потенциометр позволяет из%
менять уставку температуры от 78 °F до 180 °F, причем температура растет от текущего
значения к желаемому уровню. На рис. 14.4 представлены значения температуры и харак%
тер переходного процесса (от 78 °F до 178 °F) для новой системы регулирования темпера%
туры. Значение уставки (входной шаг на рис. 14.4) представляет ситуацию, когда мы хоте%
ли бы пройти весь интервал регулирования как можно быстрее, однако процесс отработки
системой переходного процесса будет происходить так, как это показано на рис. 14 .4 . Кри%
вая переходного процесса — это реакция системы на единичное изменение уставки или на
возмущающее воздействие. На рисунке указаны три интервала: мертвое время (время за%
паздывания), интервал переходного процесса и установившийся режим, которые обус%
лавливают отличие регулируемой величины от значения уставки.
882
Р
и
с
.
1
4
.
3
.
С
и
с
т
е
м
а
р
е
г
у
л
и
р
о
в
а
н
и
я
т
е
м
п
е
р
а
т
у
р
ы
д
л
я
п
р
о
ц
е
с
с
а
н
а
р
и
с
.
1
4
.
2
êÖÄäñàü ëàëíÖåõ
883
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
14.2.1. åÂÚ‚Ó ‚ÂÏfl
Мертвое время — это интервал между моментом изменения уставки и моментом, ког%
да процесс начинает реагировать на изменение уставки. Величина интервала мертвого
времени зависит от типа датчика в цепи обратной связи и от его местоположения в
реальной системе. Например, датчик температуры для душа может быть расположен
около точки, где вода выходит из головки душа, либо в баке с горячей водой, который
может быть размещен на некотором расстоянии. Переходной процесс, как следует из
оценки пользователя, принимающего душ, будет существенно различаться для ука%
занных примеров размещения датчика. Датчик в баке нагревателя будет реагировать
быстрее, когда температура бака с горячей водой достигает значения уставки, чем в
случае, когда датчик расположен на некотором удалении от головки душа. Задержка
мертвого времени часто оказывается встроенной в процесс, поскольку расположение
датчика на некотором расстоянии от процесса неизбежна. Например, в прокатных
станах, производящих прокат стального листа, валки, регулирующие толщину прока%
та, часто устанавливают на расстоянии с некоторым упреждением по отношению к
датчику, измеряющему толщину проката и регулирующему его параметры. В подоб%
ных случаях часто используют понятия: транспортное запаздывание, транспортная за%
держка и задержка как функция «расстояние — скорость». Задержки, которые явля%
ются частью производственного процесса, часто не могут быть минимизированы, а
исключение их влияния на производственный процесс в замкнутой системе регулиро%
вания является сложной задачей.
14.2 .2 . ǂ‰ÂÌË ‚ ÚÂÓĘ̈ ÔÂÂıÓ‰Ì̊ı ÔÓˆÂÒÒÓ‚
Временем переходного процесса в системе считают интервал, в течение которого регулиру%
емая переменная изменяется на 10—90 % процентов от установившегося значения после
Рис. 14.4. Реакция системы на ступенчатое воздействие
884
скачкообразного изменения уставки. Изменение положения потенциометра на рис. 14.3 за%
дает изменение уставки и представлено ступенью задающего сигнала на рис. 14.4. Размер
бака на рис. 14.2 и окончательное количество тепловой энергии, которая может быть введе%
на в процесс практически мгновенно потоком пара в теплообменную установку, вызывают
протекание переходных процессов, которые по характеру отличаются от ступенчатого вход%
ного управляющего воздействия. Переходной процесс характеризует изменение энергии в
процессе изменения температуры от 78 °F до 180 °F. Кривая переходного процесса характе%
ризует физические процессы, обусловленные накоплением и рассеянием энергии в резуль%
тате введенного скачка управляющего сигнала.
В физических системах такие величины, как температура, скорость, положение и
другие инерционные параметры не могут изменяться мгновенно. В результате все реаль%
ные системы изменяют свое состояние во время переходного процесса, который включает
задержку реакции системы по отношению к изменению уставки и постепенное приближе%
ние к желаемому ходу процесса, подобное тому, которое представлено на рис. 14.4. При%
емлемое значение задержки и желаемое течение переходного процесса зависят от процес%
сов в системе регулирования. Например, приемлемая задержка в управлении ракетной
системой должна быть малой при запуске космического корабля на самотормозящуюся
орбиту, поскольку эта задержка может иметь жизненное значение, тогда как допустимая
задержка в поджаривании пищи в процессе приготовления может быть значительной, и
это не будет вызывать никаких системных проблем. Конфигурация системы управления и
ее параметры диктуются выбором характера переходного процесса и требуемыми услови%
ями применения системы. Выбору параметров процесса и наиболее подходящей конфигу%
рации системы посвящено содержание этой главы.
14.2 .3. éˆÂÌ͇ ÛÒÚ‡ÌÓ‚Ë‚̄„ÓÒfl ÒÓÒÚÓflÌËfl ÒËÒÚÂÏ̊
Установившееся состояние системы определяется сразу после окончания переходного
процесса (см. рис. 14.4). Это состояние является реакцией физической системы на
входное возмущающее воздействие. В приведенном примере с регулированием темпе%
ратуры установившееся значение должно составлять 180 °F. Тот факт, что установив%
шееся значение не соответствует в точности желаемому (178 °F вместо 180 °F), свиде%
тельствует об ошибке системы, которую мы назовем установившейся погрешностью.
Установившаяся погрешность может возникать вследствие:
ограниченной точности параметров компонентов системы;
погрешности или нестабильность в задании уставки;
ошибки в проектировании системы.
В нашем примере регулирования температуры способность датчика к преобразованию
температуры служит примером проявления погрешности. Сосуд с жидкостью, которая не%
идеально изолирована от окружающей среды, может служить причиной погрешности, обус%
ловленной колебаниями окружающей температуры. Неудачный выбор контроллера для ре%
гулирования температуры и использование ошибочных значений регулируемых параметров
типа коэффициента передачи системы служит объяснением причины появления установив%
шейся погрешности. Величина этой погрешности, которая может служить оценкой качества
системы, также зависит от характера регулирующего процесса. Так, если регулированию
êÖÄäñàü ëàëíÖåõ
885
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
подлежит температура томатного супа, то ее отклонение на несколько градусов в ту или
иную сторону не вызовет серьезных проблем. А вот в случае регулирования температуры
кремниевого кристалла для производства полевых транзисторов допустимая погрешность
не должна превышать половины градуса.
Прежде чем обсуждать выбор мертвого времени переходного процесса и устано%
вившейся погрешности, нам потребуется узнать несколько больше о системах управ%
ления и регулирования. Начнем с изучения конфигурации замкнутой и разомкнутой
систем регулирования.
14.3. êÄáéåäçìíõÖ à áÄåäçìíõÖ ëàëíÖåõ ìèêÄÇãÖçàü
Обобщенная иллюстрация разомкнутой и замкнутой системы управления изображена
соответственно на рис. 14 .5а и б. Изучите обе схемы, чтобы их блоки и терминология
стали вам понятны. На рисунках представлены функциональные схемы, содержащие
функциональные узлы и их связи в системе, начиная с входных сигналов слева и кон%
чая выходными сигналами справа. Основные элементы, связи и термины описаны
ниже. Обратимся к рис. 14.5 в процессе изучения описаний схемы и к рис. 14.3, чтобы
уяснить новые процессы в системе регулирования.
Рис. 14.5.
Системы управления с
замкнутой и разомкнутой
обратной связью:
а) связь разомкнута;
б) связь замкнута
886
Исходное пол ожение. Исходным положением служит целое или реальное зна%
чение, вводимое в систему управления и обозначающее желаемое значение управляе%
мой переменной. Синонимы того же понятия — значение уставки, установочное
значение, идеальное значение, команда, опора. Мы будем использовать в этой
главе термины уставка и опора.
Пример: Уставка потенциометра на рис. 14.3 соответствует 180 °F для индикации
желаемой температуры.
Задатчик величины уставки — это устройство, которое преобразует желае%
мое значение в такую физическую величину, которая однозначно воспринимается сис%
темой регулирования. Другие термины, которые используются в промышленности как
синонимы — входное измерительное устройство, входное детектирующее ус
тройство, контроллер уставки и входной детектор. Мы будем в данной главе
пользоваться термином задатчик уставки.
Пример: В новой управляющей системе рис. 14 .3 используются потенциометр для
установки напряжения и электронное устройство, генерирующее ток 18,4 мА, не%
обходимый для суммирующего усилителя, который соответствует уровню темпера%
туры 180 °F.
Суммирующий переход — функциональный узел с двумя входами и одним выхо%
дом, который алгебраически складывает два входных значения, формируя на выходе
сумму или разность входных значений. Другие термины, применяемые в промышлен%
ности: компаратор, суммирующий контроллер, детектор ошибки, суммирую
щий усилитель, дифференциальный детектор. В этой главе используется термин
суммирующий переход.
Пример: Величина на выходе задатчика уставки вычитается (отметим знак минус
на входе суммирующего усилителя рис. 14.3) из значения уставки (знак плюс на
входе суммирующего усилителя), а разность (ошибка) поступает на вход усилите%
ля в контроллере.
Знаки входов суммирующего перехода — знаки, связанные с каждым входом, ко%
торые необходимо учитывать, поскольку они указывают, является ли обратная связь отри%
цательной (когда оба входных сигнала противофазны) или положительной (когда оба
входных сигнала синфазны). Если обратная связь отрицательна, то знаки входных сигна%
лов противоположны (один входной сигнал имеет знак плюс, а другой знак минус). Если
обратная связь положительна, знаки входных сигналов совпадают (обычно используется
знак плюс для обоих сигналов). Знаки указывают, как суммирующий переход будет под%
держивать входы (вычитая входные сигналы, если знаки противоположны, и складывая
их, если знаки совпадают); и не имеет значения, каков знак входного сигнала, положи%
тельный или отрицательный. На функциональной схеме рис. 14 .5 возмущение суммирую%
щего перехода имеет два знака плюс, поэтому значение рассогласования прибавляется к
управляющему сигналу. Суммирующий переход обратной связи имеет знаки плюс и ми%
нус, тем не менее, поскольку обратная связь отрицательна, вычисляется разность двух
входных сигналов. Терминология функциональных схем предполагает наличие точек сум%
мирования как суммирующих переходов, но фактически процесс реализуется суммирую%
щим усилителем или арифметическим сумматором в реальном контроллере.
êÄáéåäçìíõÖ à áÄåäçìíõÖ ëàëíÖåõ ìèêÄÇãÖçàü
887
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Пример: В задаче регулирования температуры рис. 14.3 уставка составляет 18,4 мА
(180 °F) и имеет знак плюс на входе суммирующего усилителя. Если температура
жидкости составляет 180 °F, переменная процесса или выход задатчика обратной свя%
зи составляет 18,4 мА и задает на входе суммирующего усилителя сигнал со знаком
минус. Разные знаки указывают на необходимость вычитания двух входных сигналов
(уставки и регулируемой переменной) для определения значения ошибки. В этом слу%
чае ошибка равна нулю, и никаких изменений в сигналах контроллера не требуется.
Если бы температура жидкости составляла 170 °F, сигнал обратной связи с задатчика
обратной связи составил бы 17,6 мА. Разность, или сигнал ошибки, составила бы
0,8 мА (18,4 мА — 17,6 мА); таким образом, положительный корректирующий фак%
тор воздействует на контроллер, вызывая увеличение нагрева жидкости.
Ошибка, или сигнал рассогласования, — это разность между регулируемой перемен%
ной процесса и точкой уставки или опорным сигналом. Если регулируемая переменная непос%
редственно сравнивается с точкой уставки, то результат сравнения назовем ошибкой. Однако
если опорный сигнал и сигнал задатчика обратной связи имеют разные значения, результат
называют сигналом рассогласования. Другие синонимы, используемые в промышленности:
дифференциальный сигнал, девиация, системная ошибка, системная девиация. В этой
главе мы используем термины ошибка, системная ошибка и сигнал рассогласования.
Пример: Если суммирующий усилитель в новом регуляторе температуры выраба%
тывает разностный сигнал между значением опорного сигнала задатчика 18,4 мА
(180 °F) и сигналом обратной связи задатчика 17,6 мА (170°F), то разницу в 0,8 мА
называют сигналом рассогласования, а не ошибкой.
Контроллер — это пневматическое, электронное или цифровое устройство, ко%
торое воспринимает входной сигнал рассогласования и генерирует выходной сигнал,
который воздействует на процесс в направлении коррекции ошибки между перемен%
ной процесса и желаемым значением уставки. Термин контроллер используется как
универсальное название для узла системы регулирования в промышленности.
Пример: Значение выхода контроллера равно произведению входного сигнала и уси%
ления контроллера. Некоторые контроллеры обеспечивают дополнительную ком%
пенсацию выходного значения, чтобы улучшить управляемость. Значение ошибки
представляет разность между уставкой и текущим значением регулируемой перемен%
ной. Произведение сигнала ошибки на усиление контроллера (см. рис. 14 .3) исполь%
зуется для изменения тепла, поступающего в бак теплообменника, при изменении
положения регулирующего клапана, который увеличивает поток пара и приводит
температуру жидкости к желаемому уровню.
Контроллер выхода не следует воспринимать как аппаратный элемент, это ско%
рее сигнал, используемый в системном анализе. Контроллер выхода — это выходное
напряжение или ток, используемые для управления выходным регулирующим элемен%
том. Диапазон 0—100 % контроллера выхода соответствует либо уровню 1—5 В по%
стоянного напряжения, либо уровню 4—20 мА постоянного тока.
Пример: В новой системе управления на рис. 14 .3 выходной параметр контрол%
лера указывается как значение сигнала, который возникает между контроллером
процесса и выходным управляющим элементом.
888
Замыкающий управляющий элемент — не является функциональным узлом
на рис. 14.5, но используется в других узлах, обсуждаемых в настоящей главе. Термин
отражает тот факт, что элемент связан с первичным управляющим элементом или с
управляющим устройством, воздействующим на переменную величину в процессе ре%
гулирования или выходную величину в замыкающем звене замкнутой системы регули%
рования. Другие термины, используемые в промышленных устройствах: выходное
корректирующее устройство, корректирующий элемент, движущий эле
мент. Мы будем использовать в этой главе термин замыкающий элемент.
Пример: В новой системе управления на рис. 14 .3 замыкающий элемент указан
как управляющий клапан для регулирования расхода пара в теплообменнике. За%
метим, что этот клапан управляет процессом регулирования температуры и пере%
менной процесса.
Манипулируемая переменная — переменная, управляемая замыкающим эле%
ментом и обеспечивающая желаемое значение переменной процесса. Другие терми%
ны, используемые в промышленности: замыкающий, или оконечный, выходной
элемент, элемент балансировки. Однако последний термин используется редко и в
этой главе мы пользоваться им не будем.
Пример: Манипулируемая переменная в процессе на рис. 14.3 — это поток пара
в теплообменник (выраженный в процентах пропускной способности регулирую%
щего клапана). Изменение этой переменной влечет за собой изменение регулиру%
емой переменной, т. е . температуры жидкости в баке.
Возмущение — это любое воздействие, которое изменяет переменную регули%
рования. На рис. 14.5 показаны два возмущающих воздействия, но любое их число
может быть представлено любой точкой на диаграмме управления. Другие термины,
используемые как синонимы возмущающих воздействий, — изменение нагрузки и
процесс нагружения. Ниже в этой главе мы будем использовать термины возмуще
ние и изменение нагрузки.
Пример: Возмущением для контроллера регулятора температуры жидкости в
баке является изменение окружающей температуры. Это изменение влечет изме%
нение количества тепла, которое должно быть передано жидкости в баке.
Процесс — блок процесса содержит модель процесса с переменными, определяю%
щими, как осуществляется действие контроллера. Термин процесс является универ%
сальным и используется во всех промышленных системах управления и регулирования.
Пример: Суммирующий переход, или значение выхода контроллера, является кор%
ректирующим фактором в процессе. Если переменная процесса равна значению
уставки, то корректирующий фактор равен нулю и не требуется никакой коррек%
ции. Если же переменная отличается от уставки, входное значение сигнала процес%
са должно привести значение переменной к уставке. В процессе регулирования
температуры на рис. 14 .3 контроллер изменяет состояние парового клапана (коэф%
фициент открытого состояния) с целью изменения тепла, передаваемого жидкости.
Управляемая переменная — это параметр процесса, который является регули%
руемым. Другие термины, используемые в промышленности: выход, выходной про
êÄáéåäçìíõÖ à áÄåäçìíõÖ ëàëíÖåõ ìèêÄÇãÖçàü
889
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
цесс, управляемый выходной сигнал и регулируемая величина. Использование
меньшего количества терминов уменьшает вероятность неправильного понимания
сложного понятия.
Пример: Когда температура жидкости в баке равна 170 °F, переменная процесса
равна 170 °F.
Переменная процесса используется, чтобы указать численное значение процес%
са. В некоторых публикациях используется обозначение переменной процесса как
значение сигнала задатчика обратной связи, вводимого в качестве управляющей пе%
ременной в задатчике. Это различие введено, поскольку единица сигнала изменяется в
задатчике обратной связи. Другие термины, используемые в промышленности:изме
ряемая величина, действительное значение. Мы будем использовать термин пе
ременная процесса.
Пример: Задатчик обратной связи преобразует измеряемый параметр процесса в °F в
соответствующий ток. Если процесс протекает при 170 °F, ток обратной связи, назы%
ваемый переменной процесса, равен 17,6 мА.
Задатчик обратной связи— устройство, преобразующее измеряемую ве%
личину переменной процесса в физическую форму, которая соответствует входным
требованиям системы управления. Другие термины, используемые в промышленнос%
ти, выходное измерительное устройство, выходное детектирующее устрой
ство, выходной задатчик, датчик, кондиционер сигнала, выходной детектор.
В этой главе мы будем использовать термин опорный задатчик.
Пример: В новой системе управления на рис. 14 .3 температура жидкости измеря%
ется резистивным датчиком температуры. Изменение сопротивления датчика с
температурой преобразуется в ток задатчика обратной связи. Задатчик тока обрат%
ной связи, который представляет текущую переменную процесса и температуру
жидкости, представляет собой суммирующий усилитель в цепи обратной связи.
Внимательно рассмотрите рис. 14 .3 и 14.5, чтобы уяснить все термины, связан%
ные с разомкнутыми и замкнутыми системами.
Используемые в системах регулирования термины могут поначалу ввести в заб%
луждение, поскольку существует большое разнообразие наименований для обозначе%
ния одного и того же параметра. Применениеругих терминов вовсе не обязательно
являются некорректным. Однако мы будем употреблять только следующие термины,
наиболее часто использующиеся специалистами в области замкнутых систем:
точка уставки — желаемое значение переменной;
опорный задатчик — задатчик сигнала уставки или устройство, генерирую%
щее сигнал уставки;
суммирующий переход — узел, в котором осуществляется сравнение сигна%
лов уставки и переменной процесса;
сигнал ошибки — выходной сигнал суммирующего устройства;
контроллер — цифровое или аналоговое устройство обработки сигналов;
выход контроллера — выходной сигнал контроллера;
890
выходной управляющий элемент — аппаратное устройство, управляющее
процессом;
переменная процесса — параметр, который указывает, как осуществляется
процесс;
задатчик сигнала обратной связи — устройство, генерирующее сигнал пере%
менной процесса для введения его в контур обратной связи.
14.3.1 . åÓ‰ÂÎËÓ‚‡ÌË ÒËÒÚÂÏ̊
Функциональная схема на рис. 14.5 представляет модель системы управления и процес%
сов в ней. Переходной процесс на рис. 14.4 показывает изменение на выходе системы при
заданном входном сигнале — ступенчатом воздействии. Этот переходной процесс содер%
жит статическую и динамическую компоненты. В процессе моделирования обе компонен%
ты складываются в единое математическое выражение, характеризующее систему.
Когда система смоделирована, переходная характеристика каждого элемента си%
стемы определяется как соотношение между выходом и входом элемента. Функциони%
рование каждого отдельного элемента и его описание создают возможность определе%
ния математического выражения, связывающего выход и вход системы в целом.
Соотношение «выход/вход» для каждого узла системы на рис. 14.5 обозначено
как G1 — G5 и H1. Это соотношение называют усилением во временной области или
передаточной функцией, когда она выражается с использованием преобразования
Лапласа в частотной области. В любом случае это соотношение представляет собой
коэффициент передачи соответствующего узла. Поскольку принят термин «усиле%
ние», его значение может быть выражено любым числом больше нуля. Следователь%
но, функциональный узел производит ослабление сигнала, если его коэффициент пе%
редачи G или H меньше 1, и усиление, если коэффициент больше 1. В этой главе мы
будем пользоваться представлением усиления во временной области, поэтому термин
«усиление» должен использоваться при построении системы управления. Обычно
усиление определяют выражением:
.
Полностью смоделированные процесс и система управления должны иметь опре%
деленные значения коэффициента усиления, и тогда можно рассчитать реакцию сис%
темы и выходные величины при любом заданном возмущающем воздействии. Некото%
рые конкретные ситуации могут быть проанализированы с использованием пакетов
программ моделирования, таких как MatLab. Таким образом, моделирование дает воз%
можность проанализировать и предсказать реакцию системы прежде, чем физическая
система будет включена.
èËÏ 14.1
Входной задатчик на рис. 14.3 может изменять положение входного потенциометра на
15° и входной ток на 3,7 мА. Определите коэффициент передачи входного задатчика G1.
êÄáéåäçìíõÖ à áÄåäçìíõÖ ëàëíÖåõ ìèêÄÇãÖçàü
891
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
êÂ̄ÂÌËÂ
G1 = 1,247 мА/°.
èËÏ 14.2
Используя значения усиления и входного сигнала для сегмента функциональной схе%
мы на приведенном ниже рисунке, рассчитайте выход Y суммирующего перехода пос%
ле подачи возмущающего сигнала.
êÂ̄ÂÌËÂ
Усиление узлов G1, G2 и G3, а также значения сигналов уставок и возмущений приведе%
ны на рисунке к примеру . Расчеты должны начинаться с входного задатчика, поскольку
усиления и входные уставки заданы. Дополнительные расчеты позволяют определить
значение Y0. Уравнения, используемые при расчетах, представляют выходную величину
узла, равную произведению входного сигнала и усиления узла.
Опорный задатчик:
X1 = 236° × 0,013 В/°,
X1=3В.
Суммирующий переход — воздействующий сигнал:
X0=X1—X2,
X0=3В—2,5В,
892
X0=0,5В.
Контроллер:
Y1=0,5В×29мА/В,
Y1 = 14,5мА.
Сигнал возмущения:
Y2=0,02В×25мА/В,
Y2=0,5мА.
Суммирующий переход — входной сигнал:
Y0=Y1+Y2,
Y0=14,5мА+0,5мА,
Y0=15мА.
èËÏ 14.3
Определите переменную процесса Y0, которая задана сегментом функциональной схемы,
приведенной на рисунке внизу и содержащей узлы процесса и возмущения регулятора.
êÂ̄ÂÌËÂ
Узлы усиления G4 и G5 с узлами входа процесса и возмущения регулятора заслонки
показаны на рисунке. Расчет следует начать со входа процесса, поскольку усиление и
значение сигнала известны. Дополнительные расчеты должны быть выполнены для
определения Y0. Уравнение, используемое для расчета выхода, есть не что иное, как
произведение входного узла на коэффициент усиления.
Процесс:
Y1=10мА×16°/мА,
Y1 = 160°.
Возмущение регулятора заслонки:
Y2 = – 10 дюймов × 0,4°/дюйм,
Y2 = –4°.
Суммирующий переход:
Y0=Y1+Y2,
êÄáéåäçìíõÖ à áÄåäçìíõÖ ëàëíÖåõ ìèêÄÇãÖçàü
893
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Y0 = 160° + (–4°),
Y0 = 156°.
Заметим, что отрицательное значение входного возмущения в примере 14.3 обус%
ловлено суммированием двух значений, из которых одно является отрицательным.
Моделирование условия управления. Концепция управления, обсуждаемая в
этой главе, предполагает, что процессы могут быть смоделированы и описаны как
процессы в линейных системах с времянезависимыми параметрами. В промышленно%
сти многочисленные системы этого типа применяются в непрерывных системах регу%
лирования. Законченные вертикально интегрированные системы мельниц по приго%
товлению пульпы, например, могут иметь более 2000 контуров обратной связи.
Промышленные системы распадаются на три категории:
новую систему: в этой ситуации процессы во вновь разрабатываемых системах
дают широкие возможности для опций. В зависимости от сложности системы те%
оретическая модель может более или менее успешно предвидеть операционные
параметры и поведение системы;
операционную систему при старой технологии: в этих обстоятельствах система
функционирует, реализуя управление по старой технологии. Очень старые системы
могут использовать пневматические контроллеры и пневматические исполнительные
механизмы. Более современные системы могут быть выполнены одноконтурными с
аналоговым или цифровым управлением. В любом случае компания вправе предлагать
движение по пути к распределенной системе управления, использующей программиру%
емый логический контроллер, или по пути к распределенной системе управления про%
цессом, например, с программным обеспечением типа Дельта%V. Обычно такие систе%
мы предоставляют меньше возможностей для изменения в системе управления,
поскольку многие компоненты замкнутой системы жестко заданы и не могут быть изме%
нены. Таким образом, система может продолжать производство продукции, тогда как в
системе управления осуществляется переход к более современным контроллерам;
операционную систему при текущей технологии: при этом сценарии осуществля%
ется полная функциональная возможность управления системой и текущее регулиро%
вание системы. Важнейшая задача управления — оптимизация процесса и достижение
наиболее эффективного управления. Возможно создание оригинальных моделей сис%
тем управления, но использование данных, полученных с учетом опыта эксплуатации,
при возможности внесения изменений в процесс будет давать более полное представ%
ление о поведении системы. Это та область управления, где инженеры ищут более эф%
фективные пути управления на пути создания лучших конфигураций системы.
Наряду с разработками новых систем управления, большинство промышленных
управляющих систем относится к двум последним категориям.
14.3.2 . ê‡ÁÓÏÍÌÛÚ̊ ÒËÒÚÂÏ̊ ÛÔ‡‚ÎÂÌËfl
Разомкнутые системы управления, такие как на рис. 14 .5а, не являются саморегулиру%
емыми в силу отсутствия обратных связей. Поэтому они не могут автоматически ком%
894
пенсировать влияние возмущений, вносимых переменной процесса. Например, возму%
щение 1 на рис. 14 .5а представляет собой шум, вносимый другими промышленными
процессами. Тогда этот шумовой сигнал будет добавлен к выходу контроллера и умно%
жен на усиление процесса G4. Это условие было продемонстрировано в примере 14.2 .
Переменная процесса в разомкнутой системе также подвержена влиянию возмущений,
подобным возмущению 2 процесса. Такая ситуация была описана на примере 14.3 . Сле%
довательно, разомкнутые системы не могут корректировать возмущения, и характер из%
менения процесса всего лишь представляет собой произведение входного сигнала на
усиление управляющих элементов.
Примером разомкнутой системы может служить тостер, с которым вы, конечно,
знакомы, если вам когда%либо проходилось готовить тосты. Разомкнутая система со%
держит таймер, который должен обеспечивать коричневый цвет поджаренных тостов.
Поскольку тостер не имеет датчика цвета или влажности, цвет продукта будет зави%
сеть от сорта хлеба и толщины его ломтиков.
Анализ разомкнутых систем управления. Рассмотрим более детально разомкну%
тую систему круиз%контроля, описанную выше. Функциональная схема круиз%контроля
(см. рис. 14 .1) была преобразована в разомкнутую функциональную схему на рис. 14.6,
использующую общую функциональную схему разомкнутых систем, которую мы изуча%
ли на рис. 14 .5а. Сравните эти функциональные схемы, чтобы понять, как круиз%конт%
роль осуществляет управление в системе на рис. 14 .6 . Увеличение наклона дороги при
движении на подъеме (возмущение) будет вызывать уменьшение скорости при модели%
ровании так, что положительный наклон проявляется в отрицательном знаке возмуще%
ния на суммирующем переходе, вследствие чего изменяется уставка подачи топлива на
выходе суммирующего перехода (положение педали газа).
Рис. 14.6 . Функциональная
блоксхема для
системы круиз
контроля при
разомкнутой
обратной связи
Следующий этап анализа — определение усиления каждого узла в системной
модели. Для установки усиления должны быть выбраны данные, характеризующие
процесс, — кузов автомобиля и его двигатель. В промышленных устройствах процес%
сы относят к специфическим эксплуатационным условиям, чтобы определить пара%
метры системы. Для оценки поведения системы в статических и переходных режимах
должны быть выполнены как статические, так и динамические тесты. Это справедли%
êÄáéåäçìíõÖ à áÄåäçìíõÖ ëàëíÖåõ ìèêÄÇãÖçàü
895
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
во и для описываемой системы, однако в данном примере мы ограничимся только ана%
лизом установившихся процессов. Кроме того, положим, что система является линей%
ной в анализируемом диапазоне параметров. Было установлено, что:
изменение уставки педали газа на 2% при установившейся скорости 55 миль/
час на горизонтальном отрезке дороги и при отсутствии ветра вызывает из%
менение скорости на 10 миль/час;
изменение уклона на 2 процента вызывает изменение скорости на 5 миль/час
при фиксированном положении педали газа.
Входные и выходные параметры для всех функциональных узлов и коэффициенты
передачи узлов приведены в таблице.
R — уставка скорости; S — фактическая скорость и переменная процесса; G —
уклон в процентах. Все переменные с нулевыми индексами на суммирующих перехо%
дах должны быть выражены в тех же единицах, что и уставка педали газа. Усиление
определяется следующим образом:
Контроллер:
;
—
положение педали на 1 миль/час.
Процесс:
;
G4 = 5 миль/час на градус положения.
Возмущение в градусах уклона:
;
G4 = 0,5 — положение педали на градус уклона.
Анализ расчета усиления показывает, что усиление контроллера должно быть вели%
чиной, обратной усилению системы. В реальных промышленных ситуациях точное опре%
деление усиления затруднительно, и оно часто оценивается в процессе создания и разви%
тия модели. Итак, усиление G3 не выражается в единицах, которые должны определить
896
выходную величину. Следовательно, необходимо произвести преобразование единиц, что%
бы получить положение педали газа в единицах, применяемых как выходная величина.
Изучите технику расчета коэффициента усиления на представленном примере.
Функциональная схема системы с описанным выше добавлением показана на рис. 14 .7 .
Рис. 14.7 . Блоксхема круизконтроля с коэффициентами усиления
Cтатическое уравнение выхода запишется в следующей форме:
S=5×S0миль/час,
S = 5 (R0 – S0) миль/час,
S=5[(0,2×R)–(0,5×G)]миль/час,
S=R –2,5G.
èËÏ 14.4
Определите статическое значение выхода для разомкнутой системы круиз%контроля
для опорного значения скорости 55 миль/час и уклона 0, 1 и 2 %.
êÂ̄ÂÌËÂ
Произведем оценку при уклоне 0 %:
S=R –(2,5×G)S=55 –(2,5×0)=55миль/час.
Оценка при подъеме с уклоном 1 %:
S=55 –2,5×1=55 –2,5 =52,5миль/час.
Оценка при подъеме с уклоном 2 %:
S=55 –2,5×2=55 –5 =50миль/час.
Модель предсказывает поведение системы круиз%контроля в статическом состоянии.
Поскольку система разомкнутая и не обладает свойством самокоррекции, любое воз%
мущение, в частности изменение профиля дороги (уклон, подъем), вызывает измене%
ние скорости и ее отклонение от значения уставки. В реальных промышленных про%
êÄáéåäçìíõÖ à áÄåäçìíõÖ ëàëíÖåõ ìèêÄÇãÖçàü
897
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
цессах усиление узлов функциональной схемы трудно определить, и любая ошибка в
определении усиления системы непосредственно влияет на ошибку в определении
значения переменной составляющей.
14.3.3. á‡ÏÍÌÛÚ̊ ÒËÒÚÂÏ̊ „ÛÎËÓ‚‡ÌËfl
Замкнутые системы являются саморегулируемыми и исключают многие из недостатков
разомкнутых систем, таких как чувствительность к возмущениям и неспособность кор%
ректировать возмущения, проявляющиеся в разомкнутых системах. Обзор признаков
архитектуры замкнутых систем был приведен на рис. 14.5в, а сравнение с разомкнутыми
структурами — на рис. 14 .5а. Существенное различие между двумя типами архитектур
обусловлено наличием обратной связи между выходом системы и ее входом.
Введение этой петли обратной связи делает необходимым добавление двух эле%
ментов в функциональную схему: 1) преобразователя сигнала обратной связи и 2)
суммирующего перехода между преобразователем опорного сигнала и контроллером.
Преобразователь сигнала обратной связи был описан ранее как устройство, которое
приводит измеренное значение регулируемого параметра к таким физическим величи%
нам, которые необходимы в качестве входных величин системы регулирования.
Преобразователь сигнала обратной связи представляет собой комбинацию дат%
чика (сенсора) и кондиционера — устройства, которое преобразует сигнал, подвергая
его фильтрации и делая возможным получение отсчетов измеряемого параметра для
их сравнения с сигналами уставки (задания).
Коэффициент передачи преобразователя сигнала часто обозначается буквой Н, и
его значение принимают равным единице во многих замкнутых системах. Функция
кондиционера в преобразовании сигнала обратной связи состоит в том, что сигнал об%
ратной связи должен выражаться в тех же единицах, что и сигнал задатчика (уставки),
поскольку оба эти сигнала сравниваются на суммирующем переходе.
Значения обоих этих сигналов диктуются контроллером, который вводит преоб%
разованный сигнал суммирующего перехода во входную цепь. Обычно контроллеры
оперируют с токовыми сигналами от 4 до 20 мА или с сигналами напряжения от 1 до 5
В при изменении параметра сигнала в полном диапазоне от 0 до 100 %.
Контроллеры прямого и обратного действия. Суммирующий переход, осуще%
ствляющий сравнение сигнала обратной связи с уставкой, вырабатывает сигнал, знак
которого зависит от входных сигналов, которые противоположны в случае системы с
отрицательной обратной связью. Если сигнал уставки (СУ) на входе суммирующего
перехода положителен, а переменная процесса (ПП) отрицательна, то сигнал рассог%
ласования равен СР = СУ — ПП. Если знаки сигналов противоположны, то сигнал
ошибки СР запишется как СР = ПП — СУ. Характеристики процесса подсказывают,
какое из уравнений ошибки следует использовать. Например, два процесса с поддер%
жанием уровня жидкости представлены на рис. 14.8 . Трубопровод поступающей жид%
кости с управляющим приточным клапаном представлен на рис. 14.8а, трубопровод
стока с противодавлением вытекающей жидкости создает неоднородность стока.
Во втором примере (рис. 14.8б) рассматривается противоположная ситуация:
трубопровод стока управляет потоком жидкости, вытекающей из бака, а наполняю%
898
щий трубопровод поступающей жидкости обеспечивает неравномерное поступление
от внешнего источника. На рис. 14.8а контроллер должен поддерживать уровень жид%
кости в баке при колебаниях стока, в то время как на рис. 14.8б контроллер выполняет
эту задачу при вариациях входного потока поступающей жидкости.
Рис. 14.8 . Соотношения регулирования при прямой и обратной ошибках:
а) регулируемый приток;
б) регулируемый сток
Последовательность операций управления для системы на рис. 14.8а следующая:
если уровень жидкости (ПП) понижается в результате возросшей интенсивности стока,
то значение сигнала ошибки возрастает, выходной сигнал контроллера увеличивается,
вызывая большее открывание входного клапана и увеличение притока жидкости. Кон%
êÄáéåäçìíõÖ à áÄåäçìíõÖ ëàëíÖåõ ìèêÄÇãÖçàü
899
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
троллер устанавливается в соответствии с логикой обратного действия (ошибка равна
СУ — ПП), поскольку выход контроллера требует увеличения сигнала, когда ПП
уменьшается. Изучите работу системы поддержания уровня и работу функциональной
схемы на рис. 14 .8а, пока работа контроллера обратного действия не станет для вас
очевидной.
Последовательность операций управления для системы на рис. 14 .8б следующая:
если уровень жидкости в баке падает (ПП уменьшается) вследствие внезапного умень%
шения притока, то значение сигнала ошибки должно уменьшиться, поэтому сигнал на
выходе контроллера может уменьшиться, вызывая прикрывание клапана стока и сни%
жение интенсивности стока. Контроллер устанавливается в режим прямого действия
(ошибка равна ПП — СУ), поскольку выход контроллера требует уменьшения значения
сигнала, когда ПП снижается. Изучите работу системы на рис. 14 .8б, пока работа регу%
лятора прямого действия не станет для вас очевидной.
Анализ замкнутых систем регулирования. Составим себе более подробное
представление о работе системы круиз%контроля с добавленным контуром обратной
связи. Функциональная схема системы круиз%контроля (см. рис. 14.1) преобразована
в схему разомкнутой системы (см. рис. 14.6). Контур обратной связи добавлен к схеме
с рис. 14.6, так что полученная система (рис. 14.9) приобрела свойства замкнутой си%
стемы. Изучите работу замкнутой системы и сравните ее с разомкнутой на рис. 14.6.
Замкнутая система содержит контроллер, установленный на коэффициент усиления
150, и суммирующее устройство, чтобы сравнить выход S с сигналом уставки R. Эта сис%
тема обратного действия вызывает увеличение открывания дроссельной заслонки
(«газ»), когда скорость (ПП) падает (в миль/час). Значение 150 усиления контроллера
выбрано без расчета применительно к этой модели, оно взято наобум, как некоторая стар%
товая величина. На практике усиление обычно определяется экспериментально в дей%
ствующей системе. Определение оптимальных параметров контроллера обсуждается в
разделе 14.7. Анализ замкнутой системы выполняется как развитие анализа разомкнутых
систем. Установившиеся значения параметров заимствованы из модели разомкнутой сис%
темы, поэтому результаты анализа справедливы только для установившегося режима.
Кроме того, предполагается, что система линейна в диапазоне исследуемых значений.
Для анализа установившегося состояния предлагается сделать следующие шаги.
Уравнение 1:
S=5S0;
S=5(R0–G0).
Уравнение 2:
R0=150(R–S);
R0=150R–150S.
Подставляя уравнение 2 в 1 и решая относительно S, получим:
S=5(R0—G0);
S=5(150R—150S—G0);
S=750R—750S—5G0;
S+750S=750R—5G0;
900
751S=750R—5G0;
S=0,999R—0,007G0.
Рис. 14.9 . Блоксхема круизконтроля при замкнутой петле обратной связи
èËÏ 14.5
Определите установившееся значение скорости для замкнутой системы круиз%контроля
при опорном значении 55 миль/час и коэффициенте передачи G, равном 0, 1, 10 и 20 %.
êÂ̄ÂÌËÂ
Оценим скорость при коэффициенте передачи 0 %:
S=0,999R–0,007G0;
S = (0,999 × 55 миль/час) – 0,007 × 0);
S = 54,945 миль/час.
Определим скорость при 1 %:
S=0,999×55–0,007×1;
S = 94,938 миль/час.
Оценим скорость при 10 %:
S=(0,999×55)–(0,007×10);
S = 54,875 миль/час.
Оценим скорость при 20 %:
S=(0,999×55)–(0,007×20);
S = 54,805 миль/час.
êÄáéåäçìíõÖ à áÄåäçìíõÖ ëàëíÖåõ ìèêÄÇãÖçàü
901
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Как следует из примера 14.5, ошибка весьма незначительна, поскольку усиление
контроллера велико (150). Таблица внизу показывает результаты сравнения ошибок
регулирования разомкнутой и замкнутой систем регулирования скорости круиз%конт%
роля при различных коэффициентах передачи и усилении системы.
Из таблицы видно, что качество замкнутых систем значительно выше разомкну%
тых. Сделаем следующие выводы:
при коэффициенте передачи, составляющем всего 1 %, разомкнутая систе%
ма дает ошибку 4,55 %. С повышением коэффициента передачи ошибка су%
щественно возрастает;
наибольшая ошибка в замкнутой системе составляет 0,35 % при коэффици%
енте передачи 20 %;
усиление процесса трудно установить с высокой точностью, и оно может от%
личаться от константы, поэтому должно быть рассмотрено влияние измене%
ния усиления. Изменение усиления будет оказывать слабое влияние в замк%
нутых системах, но может существенно влиять в системах разомкнутых;
выходная погрешность в замкнутых системах (порядка 0,1 %) при отсут%
ствии внешних возмущающих факторов является частью установившейся
погрешности, присущей всем видам замкнутых систем;
нечувствительность выходной скорости ко всем видам возмущений и измене%
ний в процессе усиления в замкнутых системах объясняется большим значе%
нием усиления контроллера (150). Однако, если усиление слишком велико,
система может стать неустойчивой.
Резюмируя сказанное, отметим, что преимущество замкнутых систем состоит в их
более высокой точности по сравнению с разомкнутыми. Они также менее восприимчи%
вы к шумам, внешним возмущающим факторам и изменению окружающих условий.
Кроме того, они относительно просто поддаются коррекции переходных процессов и ус%
тановившихся погрешностей путем воздействия на усиление разомкнутой системы и
введением компенсирующих воздействий в контроллер. Вместе с тем замкнутые систе%
мы более сложны и дороги по сравнению с разомкнутыми и требуют более квалифици%
рованного управления и обслуживания для достижения эффективного регулирования.
902
14.3.4. ÇÓÁÏÛ̆ÂÌËÂ, ‚̊Á‚‡ÌÌÓ ËÁÏÂÌÂÌËÂÏ Ì‡„ÛÁÍË
Система с обратной связью необходима для того, чтобы обеспечить корректное управле%
ние процессом, если изменяется значение уставки или проявляется влияние возмущаю%
щих факторов. Термин возмущение часто используется и присутствует на функциональ%
ной схеме разомкнутой и замкнутой систем рис. 14.5. Два вида возмущений, «возмущение
1» и «возмущение 2», представляют изменения, воздействующие на один из управляю%
щих элементов и на параметры процесса. Тип возмущений, который часто определяется
как «возмущение 2», связан с воздействием на параметры процесса. Примеры: неравно%
мерность потока на входе или на выходе при регулировании уровня жидкости или непосто%
янство температуры поступающей жидкости при регулировании температуры. В обоих
примерах переменная величина регулируемого процесса (уровень жидкости или темпера%
тура смеси) носит ступенчатый характер изменения вследствие возмущений. Поэтому
этот тип возмущений получил название процесса изменения нагрузки.
Процесс изменения нагрузки хорошо объясняется на примере системы отопления
помещений. Потери тепла через стены, пол и потолок возмещаются поступлением тепла
от системы отопления. Потери тепла изменяются непрерывно вследствие колебаний ок%
ружающей температуры и других климатических факторов, претерпевающих многосту%
пенчатые изменения. Система регулирования должна обеспечивать баланс потерь тепло%
вой энергии и ее поступления путем воздействия на управляющий элемент (газовый
клапан в горелке) и, следовательно, на температуру в доме. Нагрузка является фактором,
воздействие которого на процесс совершенно очевидно. В системах с обратной связью
изменение проявляется в значении переменной процесса (ПП) и в ошибке системы. Дей%
ствие контроллера вызывает соответствующее изменение в установке выходной величи%
ны управляющего элемента, которая корректирует первоначальное изменение нагрузки.
В идеальном случае действие контроллера полностью компенсирует изменение перемен%
ной процесса (ПП), которая сохраняет значение уставки. Поэтому оптимальным спосо%
бом определения нагрузки системы будет определение значения переменной процесса.
Следовательно, можно сказать, что нагрузка в системе регулирования — это такое изме%
нение окружающих условий, которое вызывает отклонение процесса от значения уставки,
причем степень отклонения отражается на изменении переменной процесса.
Нагрузка системы регулирования вследствие действия возмущающих факторов никог%
да не бывает неизменной. Когда процесс в системе должен корректировать изменение на%
грузки, необходимо использовать замкнутую самокорректирующую систему, в которой из%
менение выхода контроллера осуществляется автоматически. Нерегулируемые параметры
системы и переменные значения являются наиболее частой причиной, вызывающей изме%
нение нагрузки. Например, изменение окружающих условий (температуры, влажности,
давления, напряжения источников питания), качества материалов, используемых в процес%
се, скорости истечения потоков требуют вмешательства в систему регулирования.
14.4 . èéäÄáÄíÖãà ùîîÖäíàÇçéëíà ìèêÄÇãüûôàï ëàëíÖå
Системы регулирования являются динамическими системами, поскольку они реаги%
руют на входные воздействия до того момента, когда система достигла установившего%
èéäÄáÄíÖãà ùîîÖäíàÇçéëíà ìèêÄÇãüûôàï ëàëíÖå
903
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
ся состояния поблизости от значения уставки. Более динамичные изменения уставки
требуют лучшего качества регулирования, чтобы система могла отслеживать измене%
ния уставки. Чтобы достичь такого уровня управления, система должна разрабаты%
ваться с учетом трех главных факторов: обеспечения желаемого качества переходного
процесса, уменьшения установившейся погрешности (статизма) и обеспечения устой%
чивости. Кроме того, разработчики должны учитывать соотношение цена%качество и
ясность и логичность управления.
14.4 .1. èÂÂıÓ‰Ì̊ ÔÓˆÂÒÒ̊
Переходные процессы являются существенным атрибутом управления, поскольку все
физические системы обладают инерционностью, которая сопротивляется любым изме%
нениям, а изменения — это тот самый способ воздействия, которым система должна
обладать для выполнения своего назначения. В некоторых практических случаях ско%
рость, с которой система реагирует на изменение нагрузки, не столь существенна. На%
пример, автомат летательного аппарата должен реагировать на изменения курса и по%
рывы ветра значительно быстрее, чем кухонный нагреватель для приготовления супа —
на уставку температуры. Другой пример: система управления подъемным краном может
быть настолько быстродействующей, насколько это допускается безопасностью эксп%
луатации и прочностью конструкции. Следовательно, применение часто диктует допус%
тимую динамику, и система регулирования должна обеспечивать оптимальное быстро%
действие для данной области применения. Из сказанного выше должно быть ясно, что
система регулирования реагирует на изменения уставки или нагрузки установкой ново%
го значения управляющего воздействия с некоторым запаздыванием. Первоочередная
задача эффективной системы регулирования — обеспечить требуемый уровень регули%
руемого параметра настолько быстро, насколько это возможно.
Реакция на изменения. На рис. 14.10 показаны типичные переходные процессы
в системе регулирования температуры смесителя (см. рис. 14 .2). В баке осуществля%
ется перемешивание и нагревание нескольких жидкостей в ходе непрерывного про%
цесса. Изменение нагрузки происходит, когда один из ингредиентов начинает посту%
пать с температурой, превышающей нормальную. Зависимости на рис. 14.10а, б и в
показывают соответственно изменение нагрузки, переменную процесса (ПП) и выход
контроллера (ВК). Сигнал ВК — это сигнал, управляющий паровым клапаном. Ана%
лиз кривых переменной процесса (ПП) на рис. 14.10б и выхода контроллера (ВК) на
рис. 14.10в показывает, что:
изменение процесса начинается, когда произошло изменение нагрузки (см.
рис. 14.10а);
существует время задержки (мертвое время), прежде чем переменная про%
цесса (ПП) начнет изменяться;
температура жидкости в баке смесителя возрастает, это стимулирует частич%
ное закрывание парового клапана и уменьшает приток тепла в бак (точка А);
температура в баке становится слишком низкой, и паровой клапан приотк%
рывается, чтобы скорректировать это отклонение (точка В);
904
колебания температуры продолжаются, пока не будет достигнуто новое уста%
новившееся значение переменной процесса (точка С);
идеальное или желаемое значение ПП указано на рисунке пунктирной линией.
Чтобы достичь такого уровня сигнала ВК, он должен обеспечивать долю откры%
того состояния парового клапана, показанную на кривой ВК пунктирной линией;
установившееся значение переходного процесса не в состоянии обеспечить
полную компенсацию возросшей температуры бака, поэтому существует не%
которая постоянная статическая ошибка (статизм).
Рис. 14.10. Отклик на изменение нагрузки:
а) ступенька изменения температуры;
б) изменение переменной процесса;
в) изменение выходного сигнала контроллера
Проанализируйте кривые, чтобы взаимодействие процессов стало для вас совер%
шенно ясным.
Чтобы достичь оптимального результата, следует уменьшить четыре показателя
обсуждаемых процессов:
1) время установления процессов;
èéäÄáÄíÖãà ùîîÖäíàÇçéëíà ìèêÄÇãüûôàï ëàëíÖå
905
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
2) максимальное значение ошибки при переходном процессе;
3) статизм, или установившееся значение ошибки;
4) мертвое время.
Первые два показателя связаны с анализом переходных процессов, третий обус%
ловлен анализом установившихся процессов. Последний — мертвое время — наибо%
лее труден, а зачастую даже не поддается коррекции, поскольку обусловлен внутрен%
ними свойствами процесса. Некоторые аспекты, связанные с мертвым временем,
будут обсуждаться ниже в этом разделе.
Реакция контроллера и демпфирование. Первый показатель качества переход%
ных процессов для эффективного управления — снижение времени установления,
необходимого для перехода системы к новому установившемуся значению. Второй по%
казатель — снижение максимальной погрешности. Существует три ясно выраженных
типа переходных процессов: чрезмерное демпфирование, критическое демпфирова%
ние и недостаточное демпфирование. На рис. 14 .11б, в и г показано, как система уп%
равления каждого типа реагирует на ступенчатое воздействие (рис. 14.11а). На каж%
дой кривой представлено относительное время нарастания (время, необходимое для
изменения выходной величины на 10 до 90 % от окончательного значения). Кроме
того, на кривых указаны относительные значения коэффициента демпфирования (чис%
ленный коэффициент от 0 до 1). Некоторые выводы анализа этих кривых:
чрезмерно демпфируемый контроллер характеризуется очень большим вре%
менем нарастания и коэффициентом демпфирования 0,8 ÷ 0,9, в то время как
время нарастания недостаточно демпфированного контроллера с коэффици%
ентом 0,4 ÷ 0,5 очень мало;
если требуется обеспечить быстрый переходной процесс, следует отдать
предпочтение системе с немного недостаточным демпфированием, однако
при этом будут значительны максимальная погрешность и время установле%
ния, сопровождающееся колебаниями, которые называют звоном;
контроллер с критическим демпфированием занимает промежуточное поло%
жение между крайними экстремальными уровнями, давая относительно быс%
трое время нарастания (коэффициент демпфирования 0,6 ÷ 0,7) и отсут%
ствие колебательности;
степень демпфирования и реакция контроллера непосредственно связаны с
усилением контроллера.
Увеличение коэффициента усиления вызывает изменение степени демпфирова%
ния от чрезмерной до критической и даже недостаточной.
Оптимальным следует считать процесс с критическим или слегка недостаточным
демпфированием, отвечающим требованиям регулирования. Все коммерческие раз%
работки относятся к одной из трех рассмотренных здесь групп — оптимальная форма
переходного процесса для данного конкретного применения обычно является резуль%
татом компромисса.
Выбор переходного процесса. Выбор переходного процесса диктуется требова%
ниями к применению. Тем не менее в большинстве случаев находится компромисс
между наилучшим возможным временем нарастания и минимальным возможным пе%
ререгулированием (другое название максимальной ошибки), а кратчайшее достижи%
906
мое время установления будет критерием достижения оптимума. Разработка контрол%
леров и замкнутых систем регулирования — это комплексный процесс.
Рис. 14.11. Демпфирование переходного процесса:
а) ступенька изменения уставки;
б) чрезмерное демпфирование;
в) оптимальное демпфирование;
г) недостаточное демпфирование
Можно найти множество публикаций, относящихся к выбору одного из компонен%
тов этого процесса. Для начала обсудим с целью лучшего понимания следующие четыре
реакции системы: четырехкратное уменьшение амплитуды, пиковое значение перерегу%
лирования в процентах, минимальную интегральную абсолютную погрешность и крити%
ческое демпфирование. Эти реакции часто используются для оценки в случаях, когда не
требуется более жестких оценок, и проиллюстрированы на рис. 14 .12. Ступенчатое те%
стовое изменение уставки показано на рис. 14 .12а.
Рассмотрим каждый тип отклика.
Четырехкратное уменьшение амплитуды (рис. 14.12б). Уровень звона (за%
тухающих колебаний) оценивается как допустимый, если каждый последующий поло%
жительный пик не превышает одну четвертую предшествующего. Система настраива%
ется с целью выполнения этого условия. Признак четырехкратного уменьшения
амплитуды часто применяется на практике благодаря простоте его контроля. Этот
признак имеет коммерческое преимущество перед тремя остальными: временем нара%
стания, перерегулированием и временем установления.
Пиковое значение перерегулирования в процентах — ПЗП (рис. 14.12в)
определяется максимальным пиковым значением (МП) перерегулирования в процен%
тах при ступенчатом изменении входа:
.
èéäÄáÄíÖãà ùîîÖäíàÇçéëíà ìèêÄÇãüûôàï ëàëíÖå
907
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Рис. 14.12. Оптимизация отклика на изменение уставки:
а )ступенька изменения уставки;
б) четырехкратное изменение максимума ошибки;
в) ограничение относительного пикового значения ошибки;
г) минимизация интеральной ошибки;
д) критическое демпфирование
908
МП рассчитывается путем установки желаемого ПЗП для ожидаемого измене%
ния переменной процесса (ПП). Параметры системы регулирования настраиваются
для получения желаемого результата. Подобно четырехкратному уменьшению ампли%
туды, этот показатель сравнительно просто поддается контролю, поэтому можно на%
страивать время нарастания как функцию перерегулирования.
Минимум абсолютной интегральной ошибки (рис. 14.12г) — основа выбо%
ра отклика системы с целью минимизации заштрихованной площади на рисунке. Заш%
трихованная область представляет расстояние между кривой идеального процесса
(ступенью) и реальной переменной процесса (ПП). Эта методика используется при
моделировании и цифровом интегрировании процессов в системе управления.
Критическое демпфирование (14.12д) — такое демпфирование, при котором
отсутствует перерегулирование. Критическое демпфирование характеризуется при%
ведением ПП к желаемому уровню с наилучшей скоростью нарастания, но без звона
(колебаний).
14.4 .2 . ìÒÚ‡ÌÓ‚Ë‚̄ËÈÒfl ÓÚÍÎËÍ ÒËÒÚÂÏ̊
Второе важнейшее назначение системы регулирования — уменьшение установившейся
ошибки. Отклик системы после того, как закончились переходные процессы, проиллюст%
рирован на рис. 14 .4 и 14.10. Если отклик всегда равен новому значению уставки после ее
изменения или равен предыдущему значению переменной процесса после изменения на%
грузки, то обсуждение вопроса об установившемся отклике можно было бы считать за%
конченным. Однако, как показано на рис. 14 .4 и 14.10, часто наблюдается установившая%
ся погрешность или отклонение переменной процесса (ПП) после изменения уставки или
нагрузки. Прежде всего давайте исследуем, почему возникает установившаяся погреш%
ность или отклонение ПП, после чего будем искать методы коррекции.
Установившаяся погрешность. Возникновение установившейся погрешности
часто бывает нелегко объяснить студентам, только начинающим изучать управление в
замкнутых системах. Замкнутая система круиз%контроля (см. раздел 14.3.1) не проде%
монстрировала точное совпадение выхода с ожидаемым выходом вследствие статичес%
кой погрешности. Возвратимся к обзору приведенных расчетов. Как следует из рас%
четных предпосылок, статическая погрешность возникает вследствие того, что сигнал
на выходе оконечного управляющего элемента контроллера принимает значение, ко%
торое смещает процесс в желаемом направлении после изменения уставки или на%
грузки. Эта концепция, вообще говоря, справедлива и при словесном описании, но
часто на примере можно более убедительно продемонстрировать условия возникнове%
ния установившейся погрешности. Регулирование уровня жидкости в баке, показан%
ное на рис. 14.8, модифицировано добавлением механической системы регулирования
уровня жидкости в баке, как изображено на рис. 14.13.
Вытекающий из резервуара поток составляет 5 галлонов в минуту (гал/мин).
Входной клапан вручную настроен на заполнение бака до уровня 75 % (рис. 14.13а). В
этой точке относительное время отрытого состояния входного клапана отрегулирова%
но так, что втекающий поток составляет 5 гал/мин, поэтому уровень жидкости остает%
ся неизменным и равным 75 %. Система в этой ситуации управляется автоматическим
èéäÄáÄíÖãà ùîîÖäíàÇçéëíà ìèêÄÇãüûôàï ëàëíÖå
909
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
регулятором, и механическое устройство регулирования поддерживает постоянство
уровня жидкости. А теперь давайте рассмотрим сценарий изменения нагрузки:
1. Вследствие изменений в технологическом процессе выходной поток ступен%
чато возрос до 6 гал/мин. Увеличение оттока влечет снижение уровня жид%
кости до 70 % (рис. 14.13б). Звено А с поплавком следует за снизившимся
уровнем жидкости. Это поднимает звено В и увеличивает входной поток до 7
гал/мин, что влечет за собой некоторое перерегулирование.
2. Возросший приток (7 гал/мин) восстанавливает при новой нагрузке баланс при%
тока и расхода, и при установлении нового состояния равновесия уровень жид%
кости составит 73 % (рис. 14 .13в). В этой точке поступление через входной кла%
пан составляет 6 гал/мин, что соответствует балансу поступления и расхода.
После изменения нагрузки система установилась при уровне жидкости 73 %.
Почему новое значение уровня отличается от предыдущего, равного 75 %? И почему
звено А находится под несколько иным углом наклона по сравнению с начальным его
значением? Ответ на эти вопросы является ключом к пониманию происхождения ус%
тановившейся ошибки, и получить этот ответ можно, рассматривая процессы в кон%
троллере. Некоторые ответы приведены ниже.
Если бы уровень жидкости сохранился на значении 75 %, то звенья А и В сохра%
нили бы то же состояние входного клапана, при котором приток равнялся 5 гал/
мин, как в исходном состоянии. Поскольку баланс невозможен при новом возрос%
шем значении расхода в 6 гал/мин, клапан должен изменить свое положение для
покрытия возросшего расхода в 6 гал/мин. Но такой приток может быть достиг%
нут только при уровне жидкости 73 %, но никак не 75 %! Эта разница и составля%
ет статическую погрешность.
Разность в 2 % между желаемым уровнем (75 %) и состоянием системы (73 %) и
составляет статическую погрешность.
Другое возможное объяснение могло бы быть таким:
С данным механическим контроллером погрешность неизбежна и необходима, что%
бы изменить состояние управляющего элемента (впускной клапан) до значения,
обеспечивающего приток 6 гал/мин, тогда система окажется сбалансированной.
Если бы ошибка равнялась нулю, выходной управляющий элемент контроллера не
смог бы обеспечить новое значение притока после изменения нагрузки.
Форма волны отклика при изменении нагрузки показана на рис. 14 .14а. Вслед%
ствие возмущения — увеличения оттока жидкости в 1 гал/мин, возникает увеличение
притока, первоначально — до 7 гал/мин, как показано на рис. 14.14б. Затем достига%
ется баланс притока и оттока жидкости при притоке 6 гал/мин.
В случае достижения системой состояния баланса, достигнутого при неизменном
уровне жидкости, когда скорость притока должна быть равна скорости оттока, отклик
процесса иллюстрируется рис. 14.14в. Отметим, что вначале уровень быстро падает
вследствие скачкообразно возросшего оттока до 6 гал/мин. Уровень жидкости пони%
жается до 70 % и начинает восстанавливаться только вследствие возросшего прито%
ка, превышающего новое значение оттока 6 гал/мин.
910
Рис. 14.13. Статическая ошибка при управлении уровнем жидкости в
резервуаре:
а) уровни притока и слива устанавливаются равными оператором
при уровне 75 %;
б) слив увеличивается до 6 гал/мин, уровень снижается до 70 %,
приток увеличивается до 7 гал/мин;
в) приток и слив равны 6 гал/мин при уровне 73 %
èéäÄáÄíÖãà ùîîÖäíàÇçéëíà ìèêÄÇãüûôàï ëàëíÖå
911
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Рис. 14.14 . Диаграммы отклика при изменении потоков на 1 гал/мин:
а) изменение нагрузки в потоке F2;
б) отклик потока F1;
в) отклик переменной процесса
Когда интенсивность притока превышает 7 гал/мин, уровень жидкости начинает
возрастать, стремясь к установившемуся значению 73 %. Приток падает до 6 гал/мин,
обеспечивая баланс и новое устойчивое состояние системы при уровне 73 %. Следо%
вательно, 2%процентная ошибка в уровне необходима в системе регулирования при
значении притока 6 гал/мин и равного ему оттока. Внимательно изучите рис. 14.13 и
14.14, а также все, что было сказано выше о причине установившейся погрешности,
чтобы понять реакцию системы.
èËÏ 14.6
Отток жидкости в системе происходит со скоростью 6 гал/мин, как показано на рис. 14.13.
Опыт выявил снижение оттока на 1 гал/мин после ступенчатого изменения нагрузки. Оп%
ределите установившееся значение выхода системы.
êÂ̄ÂÌËÂ
Результаты изменений в системе вследствие уменьшения нагрузки сводятся к следу%
ющему:
1. Уменьшенное значение оттока составляет 5 гал/мин, тогда как приток сохранил%
ся на уровне 6 гал/мин.
2. Возросшее поступление жидкости вызывает повышение уровня до 78 %, по%
скольку бак заполняется быстрее, чем происходит отток.
912
3. Возросший уровень жидкости поднимает поплавок и опускает звено В, которое при%
крывает входной клапан, уменьшающий приток жидкости до значения 4 гал/мин.
4. Уменьшение притока до 4 гал/мин позволяет уровню жидкости снизиться с 78 %
до нового равновесного значения 75 %.
5. Когда уровень снижается до 75 %, входной приток приближается к 5 гал/мин, т.е .
к значению оттока жидкости.
6. Система возвратилась к состоянию баланса, и установившаяся ошибка равна 0.
Отсутствие установившейся погрешности при возвращении нагрузки к начальному значе%
нию объясняется тем, что система вручную настроена на уровень 75 %. Отсутствие систем%
ной ошибки должно быть подтверждено установкой входного впускного клапана на уровень
5 гал/мин, поскольку это соответствовало начальному условию регулирования.
Коррекция установившейся погрешности. Выполненный нами анализ изменения
нагрузки свидетельствует о возможности коррекции установившейся погрешности. Что%
бы найти решение, изучим более детально систему изменения нагрузки на рис. 14.15. От%
метим следующие важные наблюдения:
Наблюдение системы в состоянии баланса (рис. 14.15а):
з
желаемый уровень жидкости — 75 %. При таком уровне отток составляет
5 гал/мин;
з
чтобы поддержать этот уровень, звено В регулируется таким образом, чтобы
входной (приточный) клапан был открыт на 40 %, что обеспечивает приток в
5 гал/мин;
з
система находится в состоянии баланса.
Реакция системы на возмущение, переходной процесс (рис. 14 .15б):
з
изменение оттока с 5 до 6 гал/мин вызывает снижение начального уровня
жидкости до 70 %;
з
изменение положения поплавка и уровня жидкости обозначено как Z1. Шар%
нир производит соответствующее изменение положения звена В, которое
обозначено как Z2. Поскольку плечо А2 вдвое длиннее, чем А1 (длина звена А
измеряется с каждой стороны от оси вращения), изменение уровня точки Z2
составляет только половину изменения уровня Z1;
з
подъем звена В из%за изменения Z2 открывает входной клапан на 44 %;
з
увеличенный до 7 гал/мин приток является результатом приоткрытия клапа%
на до уровня 44 % и переходного процесса с увеличением стока;
з
на этом этапе отклика на возмущение система ищет такой процент открытия
клапана, при котором возможен баланс притока с новым оттоком в 6 гал/мин;
з
положение звена В непрерывно изменяется, когда система движется к ново%
му положению баланса.
Новые значения притока и оттока при балансе системы (рис. 14 .15в):
система с обратной связью для данного управления (звенья А и В) определяет уро%
вень жидкости в 73 %, при этом значении Z2 открывает входной клапан на 42 %;
42 % открытия клапана обеспечивают приток в 6 гал/мин, что обеспечивает
баланс с новым значением стока 6 гал/мин;
èéäÄáÄíÖãà ùîîÖäíàÇçéëíà ìèêÄÇãüûôàï ëàëíÖå
913
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Рис. 14.15. Анализ установившейся ошибки:
а) начальный установившийся режим;
б) переходной процесс;
в) конечный установившийся режим
914
разность нового уровня жидкости (73 %) и желаемого уровня (75 %) состав%
ляет 2 %, которые и представляют статическую погрешность, обусловлен%
ную изменением нагрузки;
важное заключение, которое можно сделать из вышесказанного, состоит в
том, что в течение всего времени, пока система сбалансирована, клапан дол%
жен оставаться в положении 42 % открытия, чтобы обеспечить требуемый
поток в 6 гал/мин, поэтому текущее значение Z2 не может изменяться.
Ясно, что необходимо поддерживать фиксированным новое состояние системы
после изменения нагрузки. Закономерно возникновение следующего вопроса: что
следует изменить на рис. 14.15в, чтобы поднять уровень жидкости до 75 %, поддержи%
вая неизменным значение Z2?
Ответ на этот вопрос подводит к одному из возможных решений проблемы стати%
ческой ошибки.
Статическая ошибка: поиск решения. Данная точка зрения предполагает, что стати%
ческая ошибка обусловлена системой регулирования. Существует несколько решений про%
блемы статической ошибки, однако для начала рассмотрим рис. 14.16. На рисунке пред%
ставлена задача управления уровнем после возмущения, внесенного изменением нагрузки
(см. рис. 14 .13в и 14.15в), когда система вернулась к состоянию баланса притока и оттока на
уровне 6 гал/мин. В этой точке статическая погрешность уровня составляет 2 % (75 % —
желаемый уровень жидкости, 73 % — фактический, 2 % — ошибка).
Рис. 14.16. Один из спосбов снижения статической ошибки
Положение звена В зафиксировано на уровне Z2, при этом степень открытия вход%
ного клапана составляет 42 %, а приток жидкости — 6 гал/мин. Звено А разделено на
две части: от центра поплавка до оси вращения — А1, от оси вращения до шарнира,
соединяющего звено А и звено В — А2. Поскольку Z2 не может изменяться, угол звена А
также зафиксирован. Следовательно, если поплавок перемещается к шарниру, уровень
èéäÄáÄíÖãà ùîîÖäíàÇçéëíà ìèêÄÇãüûôàï ëàëíÖå
915
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
жидкости будет подниматься, а положение входного клапана останется неизменным.
Таким образом, изменение положения поплавка от Р1 (уровень жидкости — 73 %) к Р2
позволяет поднять уровень жидкости в баке до 73,6 %, уменьшив установившуюся ста%
тическую погрешность до 1,6 %.
Если продолжить перемещение поплавка до положения Р3, уровень жидкости
поднимется до 74,3 %, а погрешность снизится до 0,7 %. Чтобы понять, какие измене%
ния в системе регулирования позволяют достичь такого уровня статической погреш%
ности, представим узлы системы регулирования в виде функциональной схемы.
Такая схема изображена на рис. 14 .17 . Сравните узлы этой схемы и рис. 14.13,
который иллюстрирует процедуру установления начального уровня, равного 75 %.
Длина звена В устанавливается такой, чтобы получить желаемый уровень жидкости,
следовательно, это звено выполняет функцию уставки. Текущее значение уровня фик%
сируется поплавком, который выполняет функции датчика обратной связи. Контрол%
лером служит рычаг А, поскольку он определяет, каким должно быть изменение поло%
жения замыкающего элемента, если уровень уставки и фактический не совпадают.
Контроллер суммирующего перехода выявляет положительную погрешность в уровне
жидкости в баке, которая увеличивала бы степень отрывания входного клапана — за %
мыкающего элемента. Возмущение на суммирующем переходе — это сумма сбалан%
сированного потока жидкости и отклонения, обусловленного изменением нагрузки.
Рис. 14.17 . Функциональная блоксхема для управления уровнем жидкости для
системы, представленной на рис. 14.13
Поскольку изменение положения поплавка на звене А может уменьшить статическую
погрешность, рассмотрим, каким образом это уменьшение осуществляется в системе.
Звено А представляет собой рычаг с заданным положением оси вращения. Когда по%
плавок перемещается из положения Р1 в положение Р3, изменяется длина левого плеча ры%
чага. Это изменение иллюстрируется на рис. 14.18. Каждый рычаг имеет входной и выход%
ной конец, как показано на рис. 14.18а. Изменение входа и выхода — это разность между
оригинальным положением рычага (горизонтальным) и окончательным положением (отли%
чающимся некоторым поворотом относительно оси вращения). Мы исходим из того, что
вход расположен слева, а выход — справа. Используя известные соотношения сторон для
916
подобных треугольников, определим усиление, т.е . соотношение между выходом (или Y) по
отношению ко входу (или X). Применим выводы из анализа положения рычагов на рис.
14.18а к изменению положения поплавка в задаче о регулировании уровня жидкости в баке.
Заметим, что когда поплавок перемещается ближе к оси вращения, усиление возрастает с
0,5 до 2. В предыдущем разделе мы выяснили, что когда поплавок перемещается ближе к
оси вращения, установившаяся погрешность уменьшается. Следовательно, установившая%
ся погрешность и усиление системы связаны обратной зависимостью: увеличение коэффи%
циента усиления контроллера уменьшает установившуюся погрешность. Управление уси%
лением подразумевает общий эффект усиления всеми функциональными узлами, исключая
технологические блоки. Например, увеличение усиления замыкающего элемента уменьша%
ет установившуюся погрешность точно так же, как увеличение усиления контроллера. Тем
не менее простейший путь изменения усиления — воздействие на контроллер.
Рис. 14.18. Анализ коэффициента усиления:
а) общее выражение;
б) минимальное значение КУ;
в) КУ=1;
г) максимальное значение КУ
Побочные проявления усиления контроллера. Уменьшение установившейся
погрешности путем увеличения коэффициента усиления контроллера КУ вызывает
проблемы в других характеристиках отклика системы. Анализ поведения системы в
процессе установления после изменения нагрузки (рис. 14.15б) иллюстрирует эту
проблему. Предположим, что поплавок находится в положении Р2. Усиление контрол%
лера изменяется от 0,5 до 1, и отклик системы модифицирован с целью увеличения
èéäÄáÄíÖãà ùîîÖäíàÇçéëíà ìèêÄÇãüûôàï ëàëíÖå
917
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
усиления по рис. 14 .15б и приведен в соответствие с рис. 14.19. Сравните два рисун%
ка, чтобы понять, как это увеличение повлияет на положение клапана.
Рис. 14.19. Изменения в переходном процессе при увеличении КУ
При увеличении усиления от 0,5 до 1 начальное снижение уровня в баке после
изменения нагрузки приведет уровень приблизительно к 70 %. Баланс притока и отто%
ка жидкости имеет место при 6 гал/мин. Тем не менее существуют два отличия: уста%
новившаяся погрешность снижается с 2 до 1,4 % при большем усилении и значение Z2
положения входного клапана оказывает вдвое большее корректирующее действие,
когда усиление равно 1. Большее изменение Z2 вызывает открывание входного клапа%
на на 48 %, что приводит к увеличению притока жидкости до 9 гал/мин.
Этот чрезмерный отклик не только уменьшает темп снижения уровня, но и вызы%
вает восстановление уровня до значения, превышающего 74 %, вместо равновесных
73,6 %. Возрастание усиления уменьшает установившуюся погрешность и улучшает
быстродействие, но не улучшает качество переходного процесса из%за большой мак%
симальной погрешности и возросшего времени установления. Оптимальное усиление
контроллера будет компромиссом между следующими показателями:
значение установившейся погрешности, которая может быть признана допу%
стимой;
минимальное требуемое значение времени нарастания;
максимально допустимое перерегулирование;
максимально допустимое время установления.
Если компромисса не удается достичь, приоритет должен быть за усилением кон%
троллера.
Коррекция установившейся погрешности путем смещения. Второй способ
уменьшения установившейся погрешности — использование начального смещения на
входе контроллера. На функциональной схеме контроллера уровня жидкости в баке на
рис. 14 .17 указано дополнительное смещение, изображенное на схеме рис. 14 .20. Срав%
918
ним рис. 14.20 и 14.17. Функция смещения, или начальной установки входа, состоит в
добавлении некоторого слагаемого к сигналу замыкающего элемента, которое компен%
сирует установившуюся погрешность. В нашем примере смещение входа должно ком%
пенсировать сигнал ошибки, генерируемый при уровне жидкости ниже 75 %. Если сме%
щение увеличивает приток через входной клапан, то подлежащий компенсации сигнал
ошибки увеличивает приток жидкости в бак. Увеличенный приток жидкости снижает
установившуюся погрешность, и сигнал контроллера поддерживает приток на уровне 6
гал/мин. Если смещение полностью компенсирует сигнал, необходимый для приоткры%
вания входного клапана, то ошибка на входе контроллера и его выходе, а следовательно,
и установившаяся погрешность уменьшаются до нуля. Ограничение этого способа свя%
зано с тем, что он эффективен только при заданных значениях уставки или нагрузки. В
других ситуациях смещение может ухудшить ситуацию. По крайней мере, оно должно
устанавливаться всякий раз при изменениях уставок или нагрузки.
Рис. 14.20. Смещение контроллера при снижении установившейся ошибки
14.4 .3 ëÚ‡·ËÎ̧ÌÓÒÚ̧
Улучшение переходных процессов и снижение установившейся погрешности — толь%
ко малая часть проблем, связанных со стабильностью и устойчивостью системы. Ста%
бильность связана с общим откликом системы, который является суммой свободной и
вынужденной составляющих.
Свободная составляющая характеризует поведение системы после возмущения или
изменения уставки, она должна либо стремиться к нулю, либо сохранять неизменную ам%
плитуду колебаний. Однако в некоторых системах свободные колебания характеризуются
возрастающей амплитудой. Реакция, показанная на рис. 14.21, иллюстрирует две эти си%
туации. Первую назовем стабильной системой с постоянной амплитудой колебаний, вто%
рая относится к нестабильным системам с нарастающей амплитудой колебаний. Для мно%
гих процессов первая ситуация не представляет опасности и может использоваться в
процессе настройки системы. Вторая может оказаться деструктивной и полностью нару%
èéäÄáÄíÖãà ùîîÖäíàÇçéëíà ìèêÄÇãüûôàï ëàëíÖå
919
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
шить работу системы. В любой из ситуаций коэффициент демпфирования равен нулю, т.е.
система недемпфирована.
Общий отклик системы, как показано на рис. 14.4, содержит задержку мертвого
времени, участок переходного процесса и участок установившегося состояния. Об%
щий отклик системы представляет сумму свободной и вынужденной составляющих
(ступенчатое изменение на рис. 14 .4). В стабильной системе свободная составляющая
отклика после возмущения затухает, а изменения уставки оставляют только вынуж%
денную составляющую отклика (новая ступень выходного уровня). Этот случай пред%
ставлен на рис. 14.4, но не на рис. 14 .21.
Рис. 14.21. Осциллограммы отклика системы:
а) система устанавливается с постоянной амплитудой
колебаний;
б) система нестабильна — амплитуда колебаний нарастает
Свободная составляющая описывает, как система получает и рассеивает энергию.
Вход системы не влияет на форму отклика, поскольку отклик определяется только пара%
метрами системы. Тем не менее вход системы непосредственно влияет на форму и при%
роду вынужденных переходных процессов. Результирующий отклик на рис. 14 .4 — это
то, что мы реально наблюдаем, и он является комбинацией свободной и принужденной
составляющих, которые определяются тремя компонентами: мертвым временем запаз%
дывания, переходным процессом и статической ошибкой.
Свободная составляющая отклика системы управления приближается к нулю
или совершает колебания в устойчивой системе. Если же амплитуда свободной со%
ставляющей колебаний неограниченно возрастает и не стремится к нулю, то система
неустойчива. В этом случае свободная составляющая много больше, чем вынужден%
ная, а система утрачивает способность регулирования. Эта ситуация определяется
как нестабильная и может повлечь саморазрушение системы, если при проектирова%
нии не будут предусмотрены ограничения.
Целью является создание стабильной системы регулирования. Для ее достиже%
ния необходимо, чтобы свободная составляющая процесса с течением времени зату%
хала до нуля или носила характер колебаний с неизменной амплитудой. Переходные
процессы обычно доминируют в системах со свободной составляющей. Как переход%
ные, так и установившиеся режимы могут быть рассчитаны на этапе проектирования
для стабильных систем.
920
При разработке систем регулирования следует рассмотреть два других важных
фактора: стоимость и логичность разработки (робастность). Разработчики систем
должны учитывать экономическую целесообразность проекта, основанную на объеме
финансирования и конкурентоспособности. Компоненты, которые определяют пара%
метры системы, ее переходные характеристики, статические и динамические погреш%
ности, стабильность, могут быть подвергнуты изменениям после завершения работы
над системой. Возможным последствием может стать то, что система не будет отве%
чать своему назначению. Понятие робастности предполагает, что система должна
быть не слишком чувствительна к изменению параметров компонентов.
14.5 . èêéñÖëëõ ë éèÖêÖÜÖçàÖå à áÄèÄáÑõÇÄçàÖå
Концепция моделирования системы была введена в разделе 14.3 .1 при рассмотрении
круиз%контроля. В теории управления принято процесс моделирования представлять
совокупностью математических выражений, которые описывают связь между измене%
ниями параметров входа системы и ее выхода. Наиболее часто эти выражения пред%
ставляют собой дифференциальные уравнения первого, второго или более высокого
порядка. Уравнения во временной области могут быть преобразованы в частотные за%
висимости путем преобразования Лапласа. Переходные функции (коэффициенты
усиления) могут быть преобразованы для всех узлов функциональной схемы в систему
частотных характеристик и затем в характеристику единого узла, объединяющего
функции всех узлов системы. Преобразование Лапласа позволяет анализировать сис%
тему регулирования с позиции ее стабильности и чувствительности к изменениям па%
раметров. Параметры могут быть изменены с целью получения желаемого отклика, но
существует и возможность обратного преобразования во временную зависимость от%
клика системы на ступенчатое изменение или на возмущение. Поскольку анализ сис%
тем управления на этом уровне выходит за рамки настоящей главы, с целью более
ясного представления задач моделирования будет изложено поведение систем перво%
го или второго порядка с запаздыванием.
14.5 .1 ëËÒÚÂÏ̊ ÔÂ‚Ó„Ó ÔÓfl‰Í‡ Ò Á‡Ô‡Á‰̊‚‡ÌËÂÏ
Системы первого порядка с запаздыванием часто встречаются в задачах управления. Эти
системы содержат один накапливающий элемент и один элемент, рассеивающий энергию.
Резистивно%емкостная цепь в электронике — это пример такого рода систем. Накаплива%
ющий элемент — это конденсатор, а рассеивающий — резистор. В качестве других при%
меров можно назвать нагреватель жидкости на рис. 14 .2, регулятор уровня жидкости в
баке на рис. 14.13, датчик температуры, упрощенную модель электродвигателя и опера%
ционные усилители, работающие в широком диапазоне усилений и частот. Уравнения в
реальном времени описывают поведение системы первого порядка с запаздыванием диф%
ференциальным уравнением с первой производной. Во временной области решение для
выхода такой системы при ступенчатом воздействии на входе запишется в форме:
èêéñÖëëõ ë éèÖêÖÜÖçàÖå à áÄèÄáÑõÇÄçàÖå
921
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
,
где θ(t) — отклик выхода, S — амплитуда ступенчатого возмущения, К — усиление,
t — время в секундах (с), τ — постоянная времени в с.
Отклик системы представляет собой типичный переходной процесс для RC%элек%
тронной схемы (рис. 14 .22). Пример регулятора температуры в баке на рис. 14 .2 име%
ет такой же характер, поскольку система накапливает тепловую энергию в жидкость
(накапливающий элемент) и рассеивает энергию (рассеивающий элемент) в форме
теплового сопротивления. Таков же отклик системы регулирования уровня жидкости.
Давайте рассмотрим пример на рис. 14 .7.
Рис. 14.22 . Отклик системы первого порядка с отставанием
èËÏ 14.7
Система регулирования уровня жидкости имеет усиление 4, постоянная времени —
0,05 с при уровне, выраженном в м (L(t)), и входном притоке, выраженном в м3/с.
Вначале бак пуст, а входной клапан открывается с величиной ступени от 0 до 0,5 м3/с.
Определите уровень жидкости через 0,07 с и установившийся уровень в баке.
êÂ̄ÂÌËÂ
Отклик системы запишется уравнением:
.
922
Через 0,07 с уровень составит:
;
L(t) = 1,51 м.
Уровень жидкости при t, стремящемся к бесконечности:
;
L(t)=2м.
Частотная и фазовая характеристика системы первого порядка с запаздыва(
нием. Процесс первого порядка с запаздыванием моделируется одним резистивным
элементом (рассеивающим энергию) и одним емкостным (накопительным). На низкой
частоте усиление и фазовый сдвиг определяются резистивным элементом, на высокой
частоте усиление и фазовый сдвиг управляются емкостным элементом. Для изобра%
жения связи усиления системы фазового сдвига в широком диапазоне частот исполь%
зуется диаграмма Боде. На рис. 14.23а изображена диаграмма Боде для системы пер%
вого порядка с запаздыванием.
Рис. 14.23. Графики Боде:
а) исходные
характеристики;
б) линейная
аппроксимация
графиков
èêéñÖëëõ ë éèÖêÖÜÖçàÖå à áÄèÄáÑõÇÄçàÖå
923
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Усиление обычно выражается в децибелах (дБ), т.е . в значениях 20 log (Vвых/Vвх),
частоты также изображаются в логарифмическом масштабе. Напомним, что усиление
определяется отношением изменения выходного сигнала к изменению входного. Диаг%
рамма изображена для единичного усиления (K = 1) и единичной ступени (S = 1), так
что усиление в дБ начинается с нуля (20 log 1 = 20 × 0) и затем становится отрица%
тельным, что означает значение усиления меньше единицы (ослабление, аттенюация).
Фазовый сдвиг между выходом и входом начинается с нуля, когда управление осу%
ществляется резистивным элементом, а затем достигает —90°, когда управление осу%
ществляется конднсатором. Прямолинейная аппроксимация диаграммы Боде часто
используется для ее упрощенного изображения, как показано на рис. 14.23б. Заме%
тим, что некоторые детали диаграммы утрачены, хотя характер зависимости остается
очевидным. Точка пересечения двух прямых и точка, где фазовый сдвиг равен 45°, на%
зывается угловой частотой wс или частотой излома. Эта точка связана с постоянной
времени t соотношением:
wс
= 1/t.
Снижение усиления за частотой излома происходит с постоянным наклоном 20 дБ
на декаду, т.е . на десятикратное изменение частоты. Следовательно, вы можете нари%
совать диаграмму Боде для системы первого порядка с запаздыванием, зная только
постоянную времени.
èËÏ 14.8
Нарисуйте диаграмму Боде для системы первого порядка с запаздыванием, если уси%
ление равно 2, а постоянная времени 0,05 с.
êÂ̄ÂÌËÂ
Усиление системы равно 2, а t равно 0,05 с. Найдем частоту излома и усиление систе%
мывдБ.
Усиление в дБ = 20 log 2.
Усиление в дБ = 6,02.
Частота излома
.
Частота излома
.
Частота излома = 20 рад/с.
924
Система первого порядка с опережением. Системы первого порядка с опере%
жением также применяются в некоторых подсистемах регулирования. Системы с
опережением представляют собой дополнение к системам с запаздыванием. Частот%
ная характеристика, т.е. диаграмма Боде для усиления и фазового сдвига, зеркально
отражает аналогичные зависимости систем с запаздыванием по отношению к оси
0 дБ и 0° фазового сдвига. Усиление возрастает с частотой с наклоном 20 дБ на дека%
ду, начиная с частоты излома и фазового сдвига, который начинается с 0° и заканчи%
вается значением +90° .
14.5 .2 . ëËÒÚÂÏ̊ Ò Á‡Ô‡Á‰̊‚‡ÌËÂÏ ‚ÚÓÓ„Ó ÔÓfl‰Í‡
Системы второго порядка с запаздыванием находят широкое применение в системах
регулирования. Они содержат два запоминающих и один рассеивающий элемент.
Примером таких систем может служить электронная цепь с резистором, индуктивным
элементом и конденсатором (RLC%цепь). Элементами с накоплением служат индук%
тивность и конденсатор, а рассеивающим элементом является резистор. В качестве
других примеров подобных систем назовем:
процесс нагревания жидкости, когда источник тепла нагревает жидкость, ко%
торая, в свою очередь, нагревает жидкий материал, участвующий в процессе
(теплоноситель);
процесс в клапане, управляющем потоком жидкости, при наличии пружины,
массы и демпфера;
датчик температуры, установленный в защитной изолирующей оболочке;
более развитую модель двигателя постоянного тока.
В каждом примере наличие двух накопительных элементов обеспечивает второй
порядок. Уравнение в реальном времени, описывающее процесс в системе второго
порядка с запаздыванием, — это уравнение с второй производной. Решение такого
уравнения в функции времени запишется в форме:
,
где θ(t) — отклик выхода, K — усиление, t — время в с, w
n
—
собственная частота
системы в рад/c, ζ % коэффициент затухания.
Отклик системы второго порядка с запаздыванием более сложен, чем отклик си%
стемы первого порядка. Отметим, что в нем присутствует переходная компонента
( ) и синусоидальная компонента
.
Наличие этих компонент указывает, что отклик может носить характер колебаний
(«звона») с амплитудой, затухающей по экспоненциальному закону. Этот тип отклика
изображен на рис. 14 .11г. Наличие второго накопительного элемента делает возмож%
ным обмен энергией между ними и создает колебания в отклике.
Реакция системы второго порядка с запаздыванием на ступенчатое возмущение
запишется в форме:
èêéñÖëëõ ë éèÖêÖÜÖçàÖå à áÄèÄáÑõÇÄçàÖå
925
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
,
где S — амплитуда ступенчатого входного воздействия, а значение выражения arсtan
должно быть больше нуля, но меньше 180° . Отклик системы зависит от коэффициента
затухания ζ. Возможны три вида реакции системы, зависящие от степени затухания:
Передемпфированная система (ζ > 1). В этом случае колебания отсутствуют, а
выход достигает максимума по экспоненциальной кривой. Этот тип реакции является
наиболее медленным, время нарастания увеличивается с возрастанием коэффициента
затухания (см. рис. 14 .11б).
Критически демпфированная система (ζ = 1). В этом режиме коэффициент
затухания точно равен 1, колебания на выходе отсутствуют, установившееся значение
достигается по экспоненциальному закону. Подобная система может быть представ%
лена двумя одинаковыми системами первого порядка с запаздыванием. Этот режим
обеспечивает наиболее быстрое нарастание без перерегулирования и без колебаний
(см. рис. 14.11в).
Недодемпфированный режим (ζ < 1). В этом режиме коэффициент затухания
меньше 1, система демонстрирует отклик недостаточно демпфированной системы на сту%
пенчатое воздействие. Выход демонстрирует колебательный характер, степень перерегу%
лирования возрастает с уменьшением степени демпфирования (см. рис. 14.11г и 14.24).
Рис. 14.24.
Недодемпфированный
режим
Отметим, что на рис. 14.24 приведены два значения ζ. Очевидно, что меньшему
значению затухания соответствует большая амплитуда выброса перерегулирования.
Тем не менее снижение времени нарастания часто приводит к улучшению качества
процесса. Смешивание компонентов в химических реакциях, регулирование темпера%
туры и скорости двигателя — это те области, где недодемпфирование часто бывает
предпочтительнее.
926
Параметры недодемпфированного отклика при ступенчатом воздействии. По%
скольку некоторые процессы имеют отклик системы второго порядка с запаздыванием
и должны быть недодемпфированы, рассмотрим их отклик детальнее. Все параметры
таких систем могут быть рассчитаны, если известна собственная частота wn и выбран
коэффициент затухания. В уравнениях полагают, что нормализованное усиление сис%
темы равно 1 и используется единичная ступень входного воздействия. Обратимся к
рис. 14 .25, выполненному при названных условиях и допущениях. Отклик достигает
максимального значения MP в момент tP:
,
где
;
.
Перерегулирование в процентах РО определяется по отношению к установивше%
муся значению:
.
Полагая время установления как интервал, необходимый для спада колебаний
(«звона») до 2 или 5 % от установившегося значения, получим:
2% времени установления
;
5% времени установления
.
Собственная частота wd определяется как частота затухающих колебаний отклика:
.
Время нарастания, определяемое как интервал, за который отклик изменяется от
10 до 90 % от установившегося значения:
.
Типичные значения для диаграммы Боде разомкнутой системы второго порядка с
запаздыванием представлены на рис. 14.26. Отметим, что усиление падает на соб%
ственной частоте системы с наклоном 40 дб на декаду. Фазовый сдвиг изменяется от 0°
на низкой частоте до —180° на высокой.
14.5 .3. éÚÍÎËÍ Á‡ÏÍÌÛÚÓÈ ÒËÒÚÂÏ̊ ‚ÚÓÓ„Ó ÔÓfl‰Í‡ Ò Á‡Ô‡Á‰̊‚‡ÌËÂÏ
Вплоть до настоящего момента обсуждение касалось разомкнутых систем. В качестве
сигнала возбуждения рассматривалось ступенчатое воздействие, а реакция системы
èêéñÖëëõ ë éèÖêÖÜÖçàÖå à áÄèÄáÑõÇÄçàÖå
927
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
касалась отклика на него. В случае анализа диаграмм Боде входное воздействие пред%
полагало гармоническое воздействие на вход в диапазоне частот от 1 до нескольких
тысяч радиан в секунду. Усиление системы и фазовое запаздывание выхода по отноше%
нию ко входу наблюдались и изображались в полулогарифмическом масштабе.
Рис. 14.26. Графики Боде для системы второго порядка с отставанием
Рис. 14.25. Параметры отклика при малом демпфировании
928
Теперь нам предстоит замкнуть систему и понаблюдать, как изменится диаграмма
Боде. Предметом обсуждения будет упрощенная замкнутая система, представленная
на рис. 14 .27. Знаки сигналов на суммирующем устройстве (положительный для
опорного сигнала и отрицательный для сигнала обратной связи) указывают, что сиг%
нал обратной связи с выхода не синфазен с опорным входным. В результате возникает
сигнал ошибки, определяемый как разность этих двух сигналов. Если сигнал входа и
обратной связи точно противофазны, они могут полностью компенсироваться и обес%
печить сигнал ошибки, равный 0 (см. рис. 14.27б). Однако анализ, который только что
был выполнен для систем с запаздыванием первого и второго порядка, указывает, что
фазовый сдвиг, производимый процессом (от 0 до —90° для систем первого порядка и
от 0 до —180° для систем второго порядка), не является постоянной величиной. Сле%
довательно, разность фазовых сдвигов опорного сигнала и сигнала обратной связи
может отличаться от 180° . Если это происходит, суммирующий переход не будет выра%
батывать сигнал ошибки, равный нулю (см. рис. 14 .27в). Эта ситуация порождает не%
сколько вопросов:
Какая разность может считаться допустимой и не вызывать сис
темных проблем?
Если разность фаз составляет 180°, система будет достаточно медлительной,
она не сможет быстро реагировать на изменения нагрузки. Подобная раз%
ность возникает при коэффициенте затухания, близком к 1. Если разность
фаз близка к 0, система становится слишком чувствительной и может быть
неустойчивой. Это происходит при коэффициенте затухания, близком к 0.
Следовательно, разность фаз должна быть больше 0, но меньше 180°. Реаль%
ная разность фаз называется запасом по фазе и определяется так: запас по
фазе — это тот дополнительный фазовый сдвиг по отношению к 180°, кото%
рый увеличивает отклик системы, но не приводит к ее неустойчивости.
Что вызывает изменения фазового сдвига в системах первого и вто
рого порядка с запаздыванием?
Изменение фазы обусловлено несколькими факторами, включая число нако%
пительных элементов, участвующих в процессе, частоту опорного сигнала и
возмущения, демпфирование процесса и усиление контроллера. Разработ%
чик может воздействовать на два фактора: коэффициент затухания и общее
усиление системы. Разработчик настраивает эти значения с тем, чтобы полу%
чить оптимальную разность фаз для быстрой реакции системы при сохране%
нии устойчивости.
Как трактуется диаграмма Боде для замкнутой системы?
Диаграмма Боде для замкнутой системы представлена на рис. 14 .28. Максимум
общего усиления GP наблюдается при 1 рад/c, т.е. собственной частоте системы
wn
. На этой же частоте фазовый сдвиг составляет половину характерного изме%
нения от 0 до —180° . Заметим также, что усиление и фазовый сдвиг остаются
неизменными в диапазоне частот от 0,1 до 0,3 рад/с. Далее при частотах более
0,3 рад/с фазовый сдвиг становится отрицательным. Его изменение вызывает
возрастание модуля выхода без изменения опорного сигнала, поскольку ошибка
системы возрастает от начального нулевого значения. Ошибка — разница меж%
ду фиксированным опорным сигналом и сигналом обратной связи — возрастает
вследствие изменения фазы сигнала обратной связи, который не может быть
èêéñÖëëõ ë éèÖêÖÜÖçàÖå à áÄèÄáÑõÇÄçàÖå
929
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
полностью скомпенсирован, как показано на рис. 14 .27в. Когда фазовый сдвиг
быстро уменьшается, стремясь к —90°, то тогда все меньшая часть опорного
сигнала компенсируется и сигнал выхода возрастает, что соответствует росту
общего усиления системы.
После прохождения точки —90° проявляется реактивная природа накопи%
тельного элемента, и усиление уменьшается, пока фазовый сдвиг не достиг%
нет —180°. На этой частоте спад усиления составляет —40 дБ/дек.
Пик усиления 20 дБ на рис. 14.28 является результатом весьма малого затухания.
Уровень этого пика свидетельствует о хорошем качестве системы. Многие разработ%
чики систем стремятся к тому, чтобы удержать этот пик на уровне от 2 до 3 дБ выше
нуля, чтобы сохранить хороший отклик системы без обострения проблемы стабильно%
сти. Пиковые значения усиления и частоты GP и wP можно определить из нижеследую%
щих уравнений.
Рис. 14.27. Система с замкнутой обратной связью:
а) блоксхема системы;
б) временные диаграммы сигналов при фазовом сдвиге 180°;
в) временные диаграммы сигналов при фазовом сдвиге 175°
930
Пик усиления — значение усиления замкнутой системы GP, когда частота при%
ближается к собственной частоте системы. Пиковое усиление выражается не в дБ.
.
Пик частоты wP — частота, на которой усиление достигает максимума. Она
несколько меньше собственной частоты.
.
Контроллер должен обеспечить уверенное срабатывание выходного элемента
(показанного на рис. 14 .3), чтобы реакция системы первого или второго порядка соот%
ветствовала желаемой. Выбор контроллера определяется управляемым процессом и
наложенными на него ограничениями. Выбор наиболее подходящего контроллера яв%
ляется темой следующего раздела.
14.6 . äéçíêéããÖêõ èéáàñàéççõï êÖÉìãüíéêéÇ
Контроллер — сердце и душа системы регулирования, он может выполняться в несколь%
ких различных конфигурациях. Различают две категории контроллеров: позиционные и
непрерывного действия. Эти категории отражают, как осуществляется отслеживание вы%
ходной величины процесса. Позиционное, или релейно%импульсное, управление является
дискретным и обеспечивает режимы включено/выключено. Следовательно, выход позво%
ляет получить два значения сигнала: 100 или 0 %. В противоположность контроллерам
Рис. 14.28. Диаграммы Боде для системы с отставанием второго порядка при
замкнутой обратной связи
äéçíêéããÖêõ èéáàñàéççõï êÖÉìãüíéêéÇ
931
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
этой категории, непрерывные контроллеры могут варьировать выходной сигнал в полном
диапазоне от 0 до 100 % с бесконечным множеством значений. Режимы работы каждой
категории приведены ниже.
Позиционные
управление состояниями включено/выключено.
Непрерывного действия
пропорциональное (П) регулирование;
интегральное (И) регулирование;
дифференциальное (Д) регулирование, регулирование по производной;
пропорционально%интегральное (ПИ) регулирование;
пропорционально%дифференциальное (ПД) регулирование;
пропорционально%интегрально%дифференциальное (ПИД) регулирование;
регулирование с запаздыванием или с опережением (прогнозирующее);
нечеткое регулирование.
Все названные способы регулирования реализуются тремя типами контроллеров:
пневматическими;
аналоговыми;
цифровыми.
Первые семь из перечисленных контроллеров непрерывного действия используют
аналоговые или цифровые сигналы, а контроллеры на основе нечеткой логики используют
только цифровые сигналы. Позиционное регулирование обычно осуществляется цифровы%
ми контроллерами, хотя может использовать и непрерывные пропорциональные контрол%
леры с очень большим усилением. ПИД%контроллер содержит три узла и может работать в
трех режимах, которые осуществляют пропорциональное, интегральное и дифференциаль%
ное регулирование. Аналоговые и цифровые ПИД%контроллеры обладают наибольшей гиб%
костью, поскольку позволяют реализовать пропорциональное (П), интегральное (И) и диф%
ференциальное (Д) регулирование, а также любые комбинированные режимы работы: ПИ,
ПД, ПИД. Обычно контроллеры не используются при чисто интегральном или чисто диф%
ференциальном регулировании.
Процесс управления исторически начинается с пневматического оборудования,
пневматических контроллеров и исполнительных механизмов. Сегодня большинство
пневматических устройств заменено аналоговыми или цифровыми контроллерами. Ана%
логовые контроллеры конфигурируются из комбинации операционных усилителей.
Цифровые контроллеры вначале развивались как некоторая модификация аналоговых,
но современные цифровые контроллеры обладают гораздо большей гибкостью, чем их
аналоговые предшественники. Цифровые контроллеры позволяют реализовать любую
из названных стандартных конфигураций плюс некоторые новые и специфические алго%
ритмы.
Нечеткие контроллерные алгоритмы реализуются на цифровых контроллерах, ос%
нованных на нечеткой логике. Наличие дешевых и доступных микроконтроллеров сти%
мулирует применение недавно развившегося нечеткого регулирования. Это направле%
ние используется в ряде направлений, которые включают интеллектуальное жилище
(«разумный дом») и некоторые промышленные объекты.
932
В этом разделе мы обсудим тему контроллеров и режимов управления более конк%
ретно. В некоторых источниках термин компенсатор используется как синоним контрол%
лера. Оба термина отсылают нас к элементам внутри обведенного штрихами прямоуголь%
ника на рис. 14.20, который содержит суммирующий элемент для введения сигнала
уставки и переменной процесса (ПП), усилительный элемент и переход, суммирующий
сигнал с выхода контроллера и сигнал цепей смещения, или компенсации ошибки.
14.6 .1 . êÂÎÂÈÌÓ-ËÏÔÛÎ̧ÒÌ̊ ÍÓÌÚÓÎÎÂ̊
Релейно%импульсное регулирование получило широкое распространение, включая бы%
товое использование для регулирования нагревателей и кондиционеров в жилых поме%
щениях и офисах. Применяются три типа релейно%импульсных контроллеров: двухпози%
ционные аналоговые, двухпозиционные цифровые и многопозиционные контроллеры.
Двухпозиционное регулирование. При этом методе регулирования выход кон%
троллера мгновенно следует за изменением сигнала ошибки Е, где
Е = уставка — переменная процесса.
Когда уровень уставки меньше, чем переменная процесса, выход контроллера со%
ставляет 0 %. Когда уставка превышает переменную процесса, выход контроллера
равен 100 %.
Метод управления не отличается эффективностью, поскольку он постоянно требует
переключения из состояния «выключено» в состояние «включено» и обратно. Метод уп%
равления иллюстрируется на рис. 14.29а. Метод «включено/выключено» используется
не так часто, как метод двухпозиционного регулирования, вследствие частых переключе%
ний регулирующего элемента, поскольку переключения происходят в единственной точке
при ошибке, равной 0. Постоянная времени или емкость и инерционность процесса опре%
деляют, когда этот способ регулирования следует рассматривать. Постоянная времени,
емкость или инерционность процесса — те параметры, которые устанавливают, насколь%
ко быстро изменяется переменная процесса. Например, эти параметры для дома средних
размеров с хорошей теплоизоляцией будут сравнительно большими. Потребуется некото%
рое время для того, чтобы температура поднималась и падала. С другой стороны, неболь%
шой объект без тепловой изоляции не сможет поддерживать температуру неизменной в
течение сколько%нибудь значительного интервала. Если двухпозиционное регулирование
используется для объектов с малой постоянной времени, то переключение состояний
включено/выключено происходит с большой частотой. Тем не менее в процессах, где теп%
ловая инерция объекта велика по сравнению с инерцией источника энергии, как, напри%
мер, большое здание, обогреваемое относительно малой печью, двухпозиционное регули%
рование способом, показанным на рис. 14.29а, — это хорошее решение. Кроме того, если
измерительное устройство снабжено встроенным узлом гистерезиса, оно позволит ус%
пешно использовать систему с двухпозиционным регулированием.
Примеры двухпозиционного регулирования. Аналоговый двухпозиционный
контроллер на рис. 14.29б поясняет функционирование двухпозиционного регулиро%
вания. Твердотельный датчик температуры LM35 имеет чувствительность 10 мВ/°C .
Операционный усилитель А1 осуществляет усиление, усилитель А2 выполняет
сравнение выхода А1 с выходом делителя напряжения 10 кОм потенциометра и двух
äéçíêéããÖêõ èéáàñàéççõï êÖÉìãüíéêéÇ
933
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
резисторов по 2 кОм. Выход компаратора сканирует сигнал от +12 В (если перемен%
ная процесса меньше, чем уставка) и —12В (переменная процесса больше уставки).
Положительный выход компаратора насыщает транзисторную схему Дарлингтона и
включает нагреватель. Отрицательное значение выхода выключает нагреватель. Вы%
ходное напряжение датчика температуры равно произведению его чувствительности
на температуру в °С . Для температуры в 40 °С выходной сигнал датчика составляет
0,4В(40°С×0,01В/°C =0,4В).
Рис. 14.29. Управление методом включения/выключения;
а) диаграмма управления;
б) схема аналогового контроллера
Логическая схема программируемого логического контроллера (ПЛК) и функци%
ональная схема двухпозиционного цифрового регулятора представлены на рис. 14.30а
и б соответственно. В лестничной логической схеме первая ступень устанавливает
переменную системы — температуру, равную напряжению датчика входа. Вторая сту%
пень сравнивает измеренную температуру с заданной уставкой и включает нагрева%
тель, если уставка превышает измеренное значение. Решение в виде функциональной
схемы должно содержать, по крайней мере, один блок.
14.6 .2 . Ñ‚ÛıÔÓÁˈËÓÌÌÓ „ÛÎËÓ‚‡ÌËÂ
Двухпозиционный контроллер предполагает добавление функции гистерезиса или нейт%
ральной зоны к функции контроллера «включено/выключено». (Нейтральную зону иногда
934
называют мертвой зоной или полосой.) Введение гистерезиса порождает ошибку включе%
ния — величина, которая определяется шириной нейтральной зоны и значением сдвига ее
по отношению к значению сигнала выключения исполнительного элемента. Рассмотрим эту
концепцию, изображенную на рис. 14.31. Отметим, что уставка производится по центру
мертвой зоны, поэтому ее смещение вправо делает погрешность (СУ — ПП) отрицатель%
ной. Таким образом, состояние контроллера должно соответствовать «выключено». Слева
от центра погрешность положительна, контроллер должен быть в состоянии «включено».
Двухпозиционное регулирование не означает немедленного переключения, оно задержива%
ется на время прохождения нейтральной зоны. Гистерезис, или нейтральная зона, вызыва%
ется смещением выхода переменной процесса (ПП) выше точки уставки, если контроллер
включен (выход 100 %) и ниже точки уставки, если контроллер выключен (выход 0 %).
Добавление нейтральной зоны существенно снижает частоту переключений, но оно также
позволяет переменной процесса (ПП) изменять свое значение и быть как выше, так и ниже
желаемой точки уставки. Выбранная ширина нейтральной зоны должна быть достаточно
велика для ощутимого снижения частоты переключения, но она должна оставаться в преде%
лах допустимого по условиям изменения ПП. Рассмотрим пример 14.9.
Рис. 14.30. Программная реализация управления методом включения/
выключения с помощью ПЛК:
а) программа на языке лестничных схем;
б) программа на языке функциональных схем
äéçíêéããÖêõ èéáàñàéççõï êÖÉìãüíéêéÇ
935
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Рис. 14.31. Работа двухпозиционного контроллера
èËÏ 14.9
Дом отапливается газовой печью с регулированием двухпозиционным термостатом. Пе%
ременная процесса (ПП) — температура в доме, измеряемая близ термостата. Специфи%
кация системы: диапазон регулируемых температур от 0 до 85 °F, мертвая полоса –4 °F
(±2 °F), комнатная температура (ПП) равна 65 °F, температура уставки (СУ) равна 70 °F
и ошибка в момент включения системы составляла СУ — ПП = 70° – 65° = 5 °F. Опиши%
те, как двухпозиционный контроллер будет управлять нагревателем печи.
êÂ̄ÂÌËÂ
Последовательность управления нагревателем следующая:
1. Двухпозиционный термостат включает нагреватель, поскольку измеренная тем%
пература (ПП) равна 65°. Ошибка положительна и составляет 5 °F, управление
начнется с точки А на рис. 14.31. Печь включилась, и тепло распределяется по
всему помещению посредством тепловентилятора.
2. Температура начинает возрастать (ПП) и будет следовать по сплошной линии на
рис. 14.31. Когда температура достигнет значения СУ (70 °F) и пересечет его,
нагреватель продолжает оставаться включенным, а температура продолжает
повышаться.
3. Когда температура (ПП) достигнет верхнего уровня (уставка + допустимая поло%
жительная погрешность 72 °F, точка В на рис. 14.31), нагреватель должен был бы
выключиться, однако температура (ПП) будет продолжать возрастать, поскольку
датчик температуры в термостате является звеном первого порядка с запаздыва%
нием, поэтому выключение произойдет с некоторой задержкой. Вследствие этого
ПП будет продолжать возрастать и достигнет точки С на рис. 14 .31.
936
4. После выключения нагревателя ПП начинает снижаться и следует вдоль пунк%
тирной прямой от точки С к точке D, нижнему пределу 68 °F на рис. 14.31. Заме%
тим, что температура продолжает падать и после перехода температуры через
значение уставки благодаря отрицательной погрешности в пределах нейтраль%
ной полосы.
5. Когда ПП достигает нижнего предела нейтральной полосы — точки D, нагрева%
тель включается, однако ПП продолжает снижаться до точки Е, поскольку вен%
тилятор не включится, пока печь продолжает оставаться нагретой.
6. Цикл будет продолжен, пока не изменится уставка или печь не будет выключена.
Графики на рис. 14 .32 отражают ПП в термостате и действие выходного исполни%
тельного элемента, осуществляющего двухпозиционное регулирование. Период цикла
увеличивается, если расширяется нейтральная полоса, и теплоемкость или инерцион%
ность системы возрастают. Любой параметр, который увеличивает интенсивность на%
грева или охлаждения, сокращает продолжительность соответствующей части цикла
контроллера.
Рис. 14.32. Изменение выходной переменной при двухпозиционном управлении
Аналоговый двухпозиционный контроллер. Аналоговая версия двухпозицион%
ного контроллера представлена на рис. 14.33. Изучите предложенную схему и попы%
тайтесь предсказать, как контроллер будет обеспечивать верхнюю и нижнюю границы
переключения.
Переменная процесса ПП подается на один вход операционного усилителя, на
котором выполнен дифференциальный усилитель. На другой вход подается уставка.
Усиление первого усилителя равно 1. Наиболее интересен второй усилитель, на ин%
вертирующий вход которого подается сигнал ошибки. Усилитель представляет собой
äéçíêéããÖêõ èéáàñàéççõï êÖÉìãüíéêéÇ
937
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
компаратор с положительной обратной связью, у которого выход соединен с положи%
тельным входом, а следовательно, изменение выхода совпадает по фазе с изменением
сигнала ошибки. Схемы такого типа нестабильны, но благодаря положительной об%
ратной связи обеспечивают регенеративный процесс с быстрым переключением меж%
ду двумя устойчивыми состояниями.
Рис. 14.33 . Аналоговый двухпозиционный контроллер
Рассмотрим А2 более обстоятельно. Выход операционного усилителя ОУ насы%
щен при потенциале +10 В или —10 В в зависимости от входного сигнала ошибки и
напряжения обратной связи. Для заполнения таблицы использованы следующие со%
отношения:
Ошибка = ПП — СУ.
Vref
= A2вых × [R3/(R2+R3)].
А2вых = +10 В, если Vref больше, чем ошибка.
А2вых = – 10 В, если Vref меньше, чем ошибка.
СО=+10Вили100%,еслиА2вых=+10В.
СО = +0,6 В или 0 %, если А2вых = –10В (СО — выход контроллера).
Теперь рассмотрим таблицу параметров типичного процесса переключения (все
напряжения приведены в вольтах).
Строки таблицы a, b, d, e, f, h просматриваются сравнительно однозначно. Начи%
ная со столбца переменной процесса (ПП), состояния схемы на рис. 14 .33 могут полу%
чить однозначную верификацию в каждой позиции.
938
Строки с и g представляют больший интерес и требуют дополнительных поясне%
ний. Для каждой из этих строк значение ошибки равно Vre f
, благодаря чему на входе
усилителя сигнал равен нулю (Vre f
= 0). Значение ошибки не изменяется, но при Vre f
=
0 разность входов составляет 1 В. Сигнал 1 В на дифференциальном входе переводит
усилитель в режим насыщения в направлении, противоположном исходному.
Новое значение напряжения насыщения, которое порождает Vre f
, такое же по зна%
чению и противоположное по знаку. Изучите таблицу, чтобы переключающее дей%
ствие контроллера стало для вас совершенно понятным.
Значения R2 и R3 определяют ширину мертвой зоны двухпозиционного контрол%
лера. В примере 14.9 эта зона составляет 4 °F. Назначение диода на выходе — отсе%
кать отрицательное напряжение на выходе контроллера, которое при выходном на%
пряжении усилителя –10 В не должно быть ниже –0,6 В.
Цифровой двухпозиционный контроллер. Цифровой двухпозиционный кон%
троллер представлен блок%схемой, использующей программное обеспечение RSLogix
5000 компании Allen Bradley, как показано на рис. 14 .34. Цифровой контроллер ис%
пользует RS%триггеры, чтобы зафиксировать включенное состояние выхода, когда
ПП становится выше верхнего предела.
Отдельные блоки позволяют установить значение уставки и значение допустимой
отрицательной и положительной погрешностей. Изучите этот рисунок, чтобы понять
функции блоков.
Механические двухпозиционные контроллеры. В главе 2 рассматривались неко%
торые переключающие процессы: регулирование давления, температуры, уровня. Эти
переключатели и связанные с ними контроллеры используют конструктивно закрытые
электрические контакты. В одноконтурных системах регулирования они характеризуют%
ся минимальной стоимостью и наиболее простой схемой. И хотя они не лишены некото%
рых ограничений, но могут решать задачи регулирования с использованием единствен%
ного контроллера.
Переключатель давления от Allen Bradley (рис. 14 .35а) осуществляет двухпози%
ционное регулирование.
Его можно отрегулировать на диапазон от 6 до 250 фунтов на квадратный дюйм
(фкд) и на разность давлений от 4 до 45 фкд. Двухпозиционный регулятор температуры
на рис. 14.36 имеет диапазон регулирования 200—360 °F и ширину нейтральной зоны
в пределах этого диапазона от 8 до 72°. Определение терминов для каждого из регуля%
торов приводится ниже.
Регулируемый рабочий диапазон (Adjustable operating range) — общий ин%
тервал значений, в пределах которого контакты могут быть настроены на срабатыва%
ние и отпускание.
äéçíêéããÖêõ èéáàñàéççõï êÖÉìãüíéêéÇ
939
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Рис. 14.34. Программная реализация двухпозиционного контроллера на базе ПЛК
Уставка срабатывания (Trip setting) — высшее значение температуры или
давления, при котором контакты переходят из своего нормального состояния в изме%
ненное.
Уставка отпускания (Reset setting) — низшее значение температуры или
давления, при котором контакты возвращаются в нормальное состояние.
940
Рис. 14.35. Двухпозиционный механический контроллер давления:
а) внещний вид контроллера;
б) временная диаграмма работы контроллера
äéçíêéããÖêõ èéáàñàéççõï êÖÉìãüíéêéÇ
941
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Регулируемый дифференциал (Adjustable differential) — разность между зна%
чениями срабатывания и отпускания.
Выход сигнал контроллера для обоих устройств представлен на рис. 14.35б. Он
изменяется между значениями дифференциала.
14.6 .3. åÌÓ„ÓÔÓÁˈËÓÌÌÓ „ÛÎËÓ‚‡ÌËÂ
Многопозиционное регулирование представляет собой расширенный вариант двухпози%
ционного с тремя (0, 50 и 100 %) или большим числом выходных уровней. На рис. 14 .37
представлены три рабочих состояния многопозиционного контроллера: 0, 50 и 100 %.
Выход контроллера составляет 100 %, если ошибка превышает верхнее пороговое значе%
ние, и равен 0 %, если ошибка ниже нижнего порогового значения. Если значение ошибки
лежит между верхним и нижним порогами, то выход контроллера составит 50 %. Много%
позиционные контроллеры обладают пониженной частотой срабатываний по сравнению с
двухпозиционными системами.
Функциональная блок%схема приведена на рис. 14 .38 . Отметим, что для определе%
ния факта нахождения погрешности за пределами диапазона используются компарато%
ры, а для определения выходного значения корректирующего контроллера применяется
селективный корректор ошибки. Например, если ошибка ниже нижнего предела, акти%
Рис. 14.36 . Двухпозиционный контроллер температуры
942
визируется селектор ошибки и выходной регулирующий элемент оказывается под воз%
действием минимального (в процентах) выходного сигнала.
Рис. 14.37. Многопозиционный
контроллер
Рис. 14.38. Представление многоуровнего контроллера на языке
функциональных блоксхем
äéçíêéããÖêõ èéáàñàéççõï êÖÉìãüíéêéÇ
943
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Другие компараторы действуют подобным образом. Блок LIM вырабатывает ис%
тинное значение выхода, если тестовое значение оказывается между граничными.
Блок SSUM позволяет получать на выходе единственный выбранный сигнал, по%
скольку в каждый момент будет выбрана только одна линия. На блок%схеме не показа%
ны блоки расчета ошибки (СУ — ПП), а также нижняя и верхняя границы ошибки
(ошибка минус отрицательная полоса ошибки, ошибка плюс положительная полоса
ошибки соответственно).
14.7 . äéçíêéãÖêõ çÖèêÖêõÇçéÉé ÑÖâëíÇàü
ë éÑçéâ èÖíãÖâ éÅêÄíçéâ ëÇüáà
В разделе 14.6 была описана работа контроллеров релейно%импульсного действия,
используемых там, где инерционность системы или емкость накопителя значительны,
либо где высокая частота переключений допустима. Настоящий раздел посвящен кон%
троллерам непрерывного действия. Классификация контроллеров и режимов управ%
ления приведена ниже.
Непрерывный режим:
1. Пропорциональное (П) регулирование.
2. Интегральное (И) регулирование.
3. Дифференциальное (Д) регулирование.
4. Пропорционально%интегральное (ПИ) регулирование.
5. Пропорционально%дифференциальное (ПД) регулирование.
6. Пропорционально%интегрально%дифференциальное (ПИД) регулирование.
7. Регулирование с запаздыванием и опережением.
8. Нечеткое регулирование.
Немного типов аналоговых контроллеров используется сегодня в промышленно%
сти. Большинство контроллеров выполняются цифровыми с одноконтурной системой,
с распределенной системой регулирования (РСР) либо с программируемыми логичес%
кими контроллерами (ПЛК). Тем не менее аналоговые контроллеры часто удобнее для
понимания принципа действия. Поэтому здесь они используются для введения кон%
цепции пропорционального, интегрального и дифференциального режимов управле%
ния. Вслед за описанием аналоговых будет рассказано о цифровых контроллерах.
14.7.1 . èÓÔÓˆËÓ̇Î̧Ì̊ ÍÓÌÚÓÎÎÂ̊
Контроллеры релейно%импульсного действия (двухпозиционные) требуют, чтобы пере%
менная процесса (ПП) сканировала интервал между двумя граничными значениями, ха%
рактеризовалась большой инерционностью и не предъявляла жестких требований к ча%
стоте сканирования. Пропорциональные контроллеры незаменимы в случаях, когда:
944
процесс должен поддерживаться при специфических условиях уставки;
процесс характеризуется малым значением емкости;
имеют место возмущающие воздействия на контроллер и на процесс.
Пропорциональные контроллеры характеризуются:
аналоговыми входным и выходным сигналами, выраженными целыми или
реальными числами с диапазоном изменения, достаточным для управления
процессами;
выходным регулирующим элементом, который является аналоговым устрой%
ством с возможностью изменения выхода от 0 до 100 %;
выходной величиной, которая является произведением усиления контролле%
ра К на величину ошибки (ПП — СУ или СУ — ПП);
выходом контроллера, который изменяет состояние выходного элемента с
тем, чтобы переменная процесса была возможно ближе к значению уставки.
Пропорциональное регулирование осуществляется двумя методами: широтно%
импульсным и амплитудным.
Модуляция выхода контроллера. Значение выхода контроллера связано прямой
зависимостью с сигналом ошибки на входе. Если ошибка возрастает, выходная вели%
чина контроллеров также должна увеличиваться. Используется обычно два метода
для управления выходным сигналом контроллера: широтно%импульсная модуляция
(ШИМ) и произведение усиление%ошибка (ПУО). Хотя ШИМ не получила широкого
распространения в регулировании1, следует разобраться в ее работе. В режиме ШИМ
выход контроллера переключается от состояния «выключено» до состояния «включе%
но» с постоянной частотой. Значение ошибки определяет коэффициент заполнения
(синоним — коэффициент проводимости) напряжения прямоугольной формы. На%
пример, если ошибка невелика, время включенного состояния в каждом периоде мо%
жет составлять 5 % периода, время выключенного состояния — остальные 95 %. Это
принято называть 5%процентным коэффициентом заполнения. Среднее значение та%
кого сигнала близко к 0, что и соответствует малой ошибке на входе. Теперь рассмот%
рим большее значение ошибки. Эта ошибка могла бы вырабатывать сигнал с коэффи%
циентом заполнения 80 %, что означает включенное состояние контроллера в течение
80 % периода, а выключенное — в течение 20 %.
Такая последовательность импульсов будет характеризоваться большим средним
значением, соответствующим большей ошибке. При ШИМ выходной управляющий
элемент обычно настраивается на получение значения ПП, эквивалентного уставке
50 %, если выход контроллера обеспечивает коэффициент проводимости 50 %. Таким
образом, на выходе контроллера коэффициент заполнения составит 50 %, если ошиб%
ка равна нулю. Уход ошибки от нулевого значения будет означать увеличение или
уменьшение коэффициента заполнения в зависимости от того, является ли процесс
процессом прямого или обратного действия. Регулирование нагревательных уст%
ройств часто использует этот тип контроллеров с тиристором или симистором в каче%
стве выходного управляющего элемента.
1
Оставим это утверждение на совести авторов. — Прим. пер .
äéçíêéãÖêõ çÖèêÖêõÇçéÉé ÑÖâëíÇàü ë éÑçéâ èÖíãÖâ éÅêÄíçéâ ëÇüáà
945
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Работа контроллера амплитудного действия. Наиболее часто** используемая
конфигурация контроллера основана на произведении усиление%ошибка (амплитуд%
ный метод регулирования). В этой конфигурации значение сигнала на выходе контрол%
лера равно произведению усиления контроллера (Кр) на сигнал ошибки. Аналоговый
сигнал выхода контроллера имеет величину напряжения или тока, пропорциональную
сигналу ошибки. Усиление контроллера К р определяется требованиями процесса. Оно
может быть задано двояким образом: пропорциональным числом либо соответствую%
щим пропорциональным интервалом.
Пропорциональное усиление определяется как отношение изменения сигнала
на выходе к изменению сигнала на входе. Оно может быть описано формулой:
.
Вернемся к задаче регулирования уровня жидкости, представленной на рис. 14.13
и получившей развитие на рис. 14 .15—14 .19. Система, описываемая этими рисунками
и надписями на них, представляет собой пропорциональный контроллер непрерывного
действия. Функциональная схема на рис. 14 .17 указывает, что звено А — усилительный
элемент контроллера. На рис. 14 .18 приведены рассчитанные коэффициенты усиления
для звеньев различной длины. Выводы, сделанные на основе анализа непрерывных
пропорциональных регуляторов уровня жидкости, таковы:
непрерывная пропорциональная система регулирования дает возможность
получить нулевую статическую погрешность только при определенном зна%
чении уставки и предварительно установленном выходе;
в случае возмущения или изменения уставки неизбежным следствием будет
некоторая статическая ошибка;
статическая ошибка и усиление контроллера находятся в обратной зависи%
мости (увеличение усиления уменьшает статическую погрешность);
максимальный пик и время установления связаны прямой зависимостью с
усилением контроллера (увеличение усиления увеличивает перерегулирова%
ние и звон);
установившаяся погрешность не может быть полностью исключена увеличе%
нием усиления.
Функциональная схема на рис. 14.7 поясняет взаимодействие блоков пропорцио%
нальной системы регулирования. Реакция каждого сигнала на изменение нагрузки проил%
люстрирована на рис. 14 .39. Изучите этот рисунок и объясните взаимодействие блоков.
Амплитудный метод регулирования. Усиление контроллера, сформулированное
ранее, может быть выражено для амплитудного метода как процентное изменение
ошибки, которое вызывает изменение состояния выходного элемента в его относи%
тельных долях.
Следовательно, амплитудный метод можно определить формулой:
.
**
Это тоже оставим на совести авторов. — П рим. пер.
946
Рис. 14.39. Работа пропорционального контроллера
äéçíêéãÖêõ çÖèêÖêõÇçéÉé ÑÖâëíÇàü ë éÑçéâ èÖíãÖâ éÅêÄíçéâ ëÇüáà
947
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Реализация пропорционального контроллера. В процессах регулирования приме%
няются как аналоговые, так и цифровые контроллеры. Аналоговая схема пропорциональ%
ного контроллера представлена на рис. 14 .40а. Обратите внимание, что селекторным пе%
реклчателем можно осуществить регулятор прямого или обратного действия, сохранив
неизменным инвертирующий усилитель. Усиление выходного каскада А3 равно единице,
усиление каскада А2 регулируется с помощью R2, усиление дифференциального каскада
А1 равно единице. Изучите принцип действия схемы для ее полного понимания.
Обозначение пропорционального контроллера представлено на рис. 14.40б, для
него используется символ Кп
. Пропорциональное регулирование успешно применяет%
ся во многих процессах, однако если установившаяся ошибка должна быть уменьшена
до нуля, для контроллера следует вводить другое обозначение, так как при этом к про%
порциональному действию контроллера добавляется интегральное.
Рис. 14.40. Аналоговый пропорциональный контроллер:
а) схема контроллера;
б) его обозначение на языке функциональных блок схем
Функциональная схема пропорционального контроллера RSLogix 5000 от Allen
Bradley представлена на рис. 14.41. Заметим, что суммирующий переход с сигналом
ошибки находится внутри контроллера, а сигналы СУ и ПП поступают на его входы.
Третий вывод и единственный выход контроллера связан с выходным управляющим
элементом. Изучите схему для полного понимания функционирования всех ее блоков.
14.7.2 . èÓÔÓˆËÓ̇Î̧ÌÓ-ËÌÚ„‡Î̧ÌÓ (èà) „ÛÎËÓ‚‡ÌËÂ
Установившаяся статическая погрешность возникает после изменения нагрузки или ус%
тавки, и она не может быть исключена полностью при пропорциональном регулировании.
948
Исключить ее можно, лишь добавив интегральное звено в регулятор. Интегральное звено
никогда не применяется как единственное звено регулятора, оно всегда используется в
комбинации с пропорциональным или амплитудным звеном регулирования.
Интегрирующее действие контроллера. Давайте еще раз обратимся к задаче ре%
гулирования уровня жидкости на рис. 14.13 и рис. 14.15—14.19. Изменение усиле%
ния помогает уменьшить установившуюся погрешность, но вызывает значительное
перерегулирование и звон (колебательный процесс) после возмущения или измене%
ния уставки. Контроллер для регулирования уровня жидкости после начального воз%
мущения (см. рис. 14.15в) повторен на рис. 14 .42 с целью решения проблемы устано%
вившейся погрешности. Напомним, что звено А с точкой опоры выполняет функции
пропорционального регулирующего элемента. Для исключения установившейся по%
грешности (статизма) поплавок и уровень жидкости на рис. 14.42 должны были бы
быть на 2 % выше, однако для коррекции изменения нагрузки входной клапан должен
сохранить неизменным приток на уровне 6 гал/мин.
Рис. 14.41. Цифровой пропорциональный контроллер
Рис. 14.42. Интегрирующее
действие
механического
контроллера
äéçíêéãÖêõ çÖèêÖêõÇçéÉé ÑÖâëíÇàü ë éÑçéâ èÖíãÖâ éÅêÄíçéâ ëÇüáà
949
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Удовлетворить оба этих требования можно, сократив длину звена В до значения
Z2 на рисунке. Таким образом, звено В, которое автоматически стало укороченным на
значение статической ошибки, выполняет функции интегрирующего звена контролле%
ра. Изучите это пояснение к интегральному регулированию для уяснения принципа
действия механического контроллера.
Такое же интегрирующее действие осуществляется в электронном контроллере,
использующем конденсатор и цифровой контроллер с соответствующим программ%
ным обеспечением. В каждой системе пропорциональный контроллер корректирует
как можно более значительную часть погрешности, обусловленной изменением на%
грузки или уставки, затем оставшаяся часть статической погрешности устраняется
интегрирующим контроллером. Попробуем понять, как это происходит, на примере
аналогового интегрального контроллера.
Аналоговые интегральные контроллеры. Обратимся к схеме интегрирующего
аналогового операционного усилителя (см. рис. 14.43а). Анализ параметров выпол%
нен в предположении, что операционные усилители (ОУ), входящие в состав контрол%
лера, обладают весьма большим коэффициентом усиления и на их основе выполнены
инвертирующие каскады:
потенциал отрицательного входа Vi полагаем равным нулю;
ток отрицательного входа Ii полагаем равным нулю;
входной ток I1 равен входному напряжению, деленному на R1, так как Vi
=0;
ток обратной связи I2 равен I1, так как Ii
=0;
выходное напряжение Vо отрицательно и равно напряжению на элементе об%
ратной связи С1.
Напомним, что потенциал инвертирующего входа равен нулю. Поскольку конден%
сатор включен между выходом и землей (инвертирующий вход имеет потенциал зем%
ли), выходным напряжением будет напряжение на конденсаторе.
Рассмотрим теперь, как интегратор вписывается в систему регулирования:
1. Положительное напряжение ошибки Ve создает ток I1 инвертирующего входа
и равный ему ток I2 через конденсатор С1.
2. Ток I2 заряжает конденсатор с полярностью, указанной на рис.14.43а.
3. Выход усилителя продолжает заряжать конденсатор током I2, пропорцио%
нальным напряжению ошибки, увеличивая напряжение отрицательной по%
лярности.
4. Усилитель выходного напряжения изменяет состояние выходного управляю%
щего элемента, приближая переменную процесса ПП к желаемому значению.
5. По мере приближения ПП к сигналу уставки СУ ошибка Vc и ток обратной
связи, заряжающий конденсатор, уменьшаются.
6. Пока напряжение ошибки отлично от нуля, конденсатор продолжает заря%
жаться, оказывая корректирующее воздействие на ПП.
7. Когда же ПП достигает, наконец, значения СУ, входное напряжение ошибки
равно нулю, конденсатор остается заряженным до напряжения статической
ошибки, а выход усилителя продолжает поддерживать выходной управляю%
щий элемент в состоянии коррекции статической ошибки.
950
Рис. 14.43. Интегрирующее действие в анал оговом контроллере:
а) модель аналогового интегратора;
б) интегральный контроллер;
в) пропорционально интегральный контроллер
äéçíêéãÖêõ çÖèêÖêõÇçéÉé ÑÖâëíÇàü ë éÑçéâ èÖíãÖâ éÅêÄíçéâ ëÇüáà
951
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Рекомендуется прочитать это описание несколько раз, чтобы уяснить принцип кор%
рекции статической ошибки посредством корректирующего элемента. Схема интегратора
на рис. 14.43б является типичной для подобных устройств. Резистор 680 кОм ограничива%
ет наибольший коэффициент усиления интегрирующего звена значением 6,8 (680 кОм,
поделенные на 100 кОм). Аналоговый ПИ%контроллер представлен на рис. 14 .43в. На%
пряжение на выходе суммирующего усилителя инвертируется, чтобы избежать инверти%
рования сигнала интегратором и пропорциональным усилителем.
Приведенная последовательность преобразования сигналов имеет место при отри%
цательной статической погрешности. Цифровые интеграторы, описанные в разделе 14.8,
дают подобные результаты, но используют цифровые логические элементы и программ%
ные алгоритмы ПИ%регулирования.
Цифровые интегральные контроллеры. Цифровая версия ПИ%контроллера,
выполненная по схеме программируемого логического контроллера (ПЛК) от Allen
Bradley, представлена на рис. 14.44а. Сравнение пропорционального контроллера на
рис. 14.41 и этой функциональной схемы указывает на единственное различие — до%
бавление входного канала с интегрированием. Блок%схема системы с каналом интег%
рирования изображена на рис. 14.44б.
Рис. 14.44 .
Цифровой ПИконтроллер:
а) реализация на языке
функциональных блоксхем;
б) блоксхема со звеном
интегрирующего действия
952
Выполнение сброса. В ссылках на интегральное регулирование в технической
литературе часто используются термины сброс, повторение, время интегрирова
ния. Выходной сигнал контроллера продолжает нарастать даже после прекращения
действия пропорционального канала, если в схеме присутствуют интегральный канал
и статическая ошибка. Скорость нарастания выходного сигнала зависит от действия
сигнала сброса. Этот термин поясняется следующими характеристиками:
Сброс — число повторений операции в минуту или секунду.
Время интегрирования — период повторения операции.
Интегральное действие быстро становится абстракцией, как только вы начинаете
использовать этот термин. Сброс определяет скорость, с которой выход интегрально%
го контроллера изменяется относительно выхода пропорционального контроллера.
Если пропорциональный контроллер производит 10%процентное изменение выхода,
то интегральный элемент дополнительно дает 10%процентное изменение за 1 минуту,
если сброс осуществляется 1 раз в минуту. Если же сброс осуществляется дважды за
минуту, то дополнительное 10%процентное изменение происходит каждые 30 секунд,
или дополнительно изменяется выход на 20 % за 1 минуту. Более высокая частота
сброса увеличивает влияние интегрирующего звена. Время интегрирования связано
обратной зависимостью с частотой сброса, т.е . время интегрирования — это интер%
вал, за который интегрирующий элемент производит тот же эффект, что и пропорцио%
нальный контроллер. Таким образом, отклик интегрального контроллера требует
большего времени, поэтому отклик ПИ%контроллера оказывается не так резко очер%
чен, как отклик П%контроллера. В результате интегральное действие устраняет уста%
новившуюся погрешность, но снижает быстродействие системы.
14.7.3. èÓÔÓˆËÓ̇Î̧ÌÓ-‰ËÙÙÂÂ̈ˇÎ̧ÌÓ (èÑ) „ÛÎËÓ‚‡ÌËÂ
Быстрое изменение нагрузки или уставки вызывает отклонение переменной процесса
(ПП) от начального уровня сигнала уставки (СУ). Возрастание скорости возмущений
порождает отличие переменной процесса от сигнала уставки. Увеличение пропорцио%
нального усиления снижает это отличие, но порождает более заметное перерегулиро%
вание и колебательный процесс («звон») на выходе. В некоторых случаях эти эффек%
ты нежелательны. Для коррекции быстрых возмущений используется третий способ
регулирования — по производной процесса. Канал производной формируется диффе%
ренцированием процесса превышения ПП по отношению к СУ. Следовательно, ошиб%
ка будет постоянна, если производная процесса равна нулю.
Подобно интегральному, канал регулирования по производной (дифференцирующий)
не используется без пропорционального. Выход дифференцирующего элемента комбиниру%
ется с выходом пропорционального, чтобы воздействие на выходной элемент контроллера
корректировало возмущение. Например, значительное быстро возрастающее изменение
нагрузки вызывает быстрое возрастание ПП и, следовательно, ошибки. Допустим, что про%
порциональный элемент с усилением 1 изменяет выходной сигнал от 50 до 60 %, которые
подобраны для компенсации процентного изменения ошибки. Если регулирование осуще%
ствляется только пропорциональным регулятором, изменение нагрузки оказывает суще%
ственное влияние на ПП, поскольку отклик пропорционального регулятора недостаточен
для компенсации возмущения. Дифференцирующий выход осуществляет реакцию на быст%
äéçíêéãÖêõ çÖèêÖêõÇçéÉé ÑÖâëíÇàü ë éÑçéâ èÖíãÖâ éÅêÄíçéâ ëÇüáà
953
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
рое изменение ПП путем добавления отклика на дополнительные 30 % изменения выходно%
го сигнала контроллера. В результате 90 % выходного сигнала контроллера быстро компен%
сируют большое и быстрое изменение нагрузки.
Рис. 14.45. Работа пропорциональноинтегрального контроллера
954
Параметр, пропорциональный производной, устанавливает, какую часть этого сигнала
надлежит передавать на выход контроллера в качестве слагаемого. Этот параметр сравни%
вает продолжительность выходного сигнала ПД%регулятора с сигналом П%контроллера.
Например, установка времени канала производной равным 1 минуте удваивает оклик кана%
ла производной по сравнению с временем отклика, которое было установлено на 2 минуты.
ПД%регулирование плохо подходит для систем с большим содержанием шума,
поскольку шумовые сигналы содержат высокочастотные составляющие, которые уси%
ливаются в канале производной. Эти усиленные сигналы передаются на выход кон%
троллера и могут производить нежелательные воздействия на выходной управляющий
элемент. Использование канала производной делает отклик контроллера более быст%
рым, чем это возможно с пропорциональным регулятором.
Аналоговые дифференцирующие контроллеры. Аналоговый дифференцирующий
контроллер с каналом производной (рис. 14.46а) полезен для понимания его принципа
действия. Усиление усилителя Кд определяется делителем в цепи обратной связи: резисто%
ром R1 и конденсатором во входной цепи С1. Эффективное сопротивление конденсатора
обратно пропорционально частоте входного сигнала. Например, если частота сигнала
ошибки возрастает, сопротивление С1 уменьшается. Ошибка при ступенчатом изменении
входа, представленная на рис. 14 .46б, теоретически содержит бесконечный набор гармо%
ник. Следовательно, С1 представляет собой короткозамкнутый участок цепи в момент
скачка напряжения. Когда изменения уровня отсутствуют, отсутствуют и все гармоничес%
кие составляющие, следовательно, сигнал является сигналом постоянного напряжения,
для которого конденсатор представляет бесконечно большое сопротивление. И поэтому в
моменты быстрых изменений входного сигнала конденсатор С1 передает их без ослабле%
ния, а после перехода к постоянному уровню входного сигнала усиление падает до 0, как
показано на рис. 14.46б. Дифференцирующий элемент корректирует быстрые изменения
возмущения и воздействует на ПП быстрее при ступенчатом изменении уставки.
Рис. 14.46. Аналоговая схема дифференциального контроллера:
а) модель дифференциатора;
б) зависимость коэффициента усиления Kд от времени при
ступенчатом воздействии
äéçíêéãÖêõ çÖèêÖêõÇçéÉé ÑÖâëíÇàü ë éÑçéâ èÖíãÖâ éÅêÄíçéâ ëÇüáà
955
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Рис. 14.46. Окончание
956
Схема на рис. 14.46в аналогична схеме дифференцирующего элемента. Инверти%
рующий усилитель А1 осуществляет операцию дифференцирования, другой инверти%
рующий усилитель А2 обеспечивает совпадение по фазе выходного сигнала и сигнала
ошибки. Резистор R2 введен в схему, чтобы ограничить усиление канала производной
при скачке входного сигнала. Если R1 установлен на 50 кОм, усиление дифференци%
рующего канала равно 5 для быстрых перепадов и 0 для установившегося стационар%
ного режима. Аналоговая реализация ПД%контроллера представлена на рис. 14.46г.
Изучите эти схемы, чтобы иметь полное представление об их функционировании.
Цифровой дифференцирующий контроллер. Цифровая реализация ПД%контрол%
лера представлена блок%схемой Allen Brabley Control Logix ПЛК, как изображено на
рис. 14 .47а. Сравнение схем на рис. 14 .44 и приведенного ПД%контроллера показыва%
ет, что единственным различием служит добавление блока производной и исключение
блока интегрирования. Структурная схема ПД%контроллера изображена на рис. 14 .47б.
Рис. 14.47. Цифровой ПДконтроллер:
а) реализация на языке функциональных блоксхем;
б) блоксхема со звеном дифференцирующего действия
äéçíêéãÖêõ çÖèêÖêõÇçéÉé ÑÖâëíÇàü ë éÑçéâ èÖíãÖâ éÅêÄíçéâ ëÇüáà
957
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Сигнал производной добавляется к сигналу, обусловленному изменением нагруз%
ки (см. рис. 14.15), как это изображено на рис. 14 .48. Заметим, что амплитуда сигнала
производной соотнесена с наклоном функции ошибки. Наклон или скорость измене%
ния ошибки на участке от точки А до точки B вдвое больше, чем на участке между
точками В и С. Следовательно, действие производной на интервале от А до В должно
быть вдвое более эффективным, чем на участке между В и С. Измерения, выполнен%
ные при испытаниях, подтверждают этот результат. Режимы пропорционального (П),
пропорционально%интегрального (ПИ), пропорционально%дифференциального (ПД)
регулирования описаны в разделах ниже. А в заключение настоящего раздела рас%
смотрим один из наиболее употребительных режимов — пропорционально%интег%
рально%дифференциальный (ПИД).
Рис. 14.48. Работа пропорциональноинтегральнодифференциального
контроллера
958
14.7 .4. èÓÔÓˆËÓ̇Î̧ÌÓ-ËÌÚ„‡Î̧ÌÓ-‰ËÙÙÂÂ̈ˇÎ̧ÌÓ (èàÑ) „ÛÎËÓ‚‡ÌËÂ
Пропорционально%интегрально%дифференциальное (ПИД) регулирование — наибо%
лее употребительный способ. Оно сочетает достоинства названных способов с незначи%
тельными ограничениями. При комбинировании в едином контуре обратной связи спо%
собы управления дополняют друг друга самым лучшим образом. Таблица на рис. 14 .49
указывает наилучшие области применения этих способов. Единственный способ управ%
ления, который успешно работает во всех ситуациях, — это ПИД%регулятор.
Выпускаемые цифровые контроллеры обеспечивают все способы регулирования,
поэтому стоимость систем при использовании ПИД%контроллеров оказывается не
выше, чем при использовании пропорциональных (П) режимов. Аналоговый ПИД%кон%
троллер представлен на рис. 14.50 . Выходы П, И и Д каналов суммируются усилителем
АЧ. Изучите работу приведенной схемы. Контроллер может поддерживать любой из
способов управления — П, ПИ, ПД, ПИД — в зависимости от положения переключа%
телей S1, S3 и S3. Цифровая версия ПИД%контроллера представлена на рис. 14 .51 с
Рис. 14.48. Окончание
äéçíêéãÖêõ çÖèêÖêõÇçéÉé ÑÖâëíÇàü ë éÑçéâ èÖíãÖâ éÅêÄíçéâ ëÇüáà
959
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
функциональной схемой и используемыми символами во всех комбинациях режимов.
Диаграммы сигналов для всех каналов ПИД%регулятора при возмущении в виде измене%
ния нагрузки представлены на рис. 14 .52. Рассмотрите выходы всех каналов ПИД%кон%
троллера и сравните их с индивидуальными выходами для каждого режима.
Рис. 14.49. Выбор типа контроллера в зависимости от параметров процесса
Рис. 14.50 .
Аналоговый
ПИДконтроллер
960
Рис. 14.51. Цифровой ПИДконтроллер:
а) реализация на языке функциональных блоксхем;
б) блоксхема со звеньями интегрирующего и дифференцирующего
действия
äéçíêéãÖêõ çÖèêÖêõÇçéÉé ÑÖâëíÇàü ë éÑçéâ èÖíãÖâ éÅêÄíçéâ ëÇüáà
961
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Рис. 14.52. Работа пропорциональноинтегральнодифферециального
контроллера
14.8 . ñàîêéÇéÖ ìèêÄÇãÖçàÖ
Цифровые контроллеры работают весьма отличными от аналоговых способами. Ана%
логовый ПИД%контроллер реагирует следующим образом:
где ВК — выход контроллера, e — сигнал ошибки, равный разности сигнала уставки и
переменной процесса:
.
962
Рис. 14.52. Окончание
ñàîêéÇéÖ ìèêÄÇãÖçàÖ
963
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Аналоговые контроллеры реализуются на операционных усилителях, которые
выполняют функции пропорционального усилителя, интегратора и дифференциатора.
Быстродействие усилителя или его полоса пропускания определяют скорость измене%
ния выхода в зависимости от изменения входа. При высокой скорости изменения вход%
ного сигнала изменение на выходе появляется практически мгновенно. Термин непре
рывный часто применяют к аналоговому ПИД%регулятору, подразумевая отсутствие
задержки сигнала на выходе по отношению к сигналу на входе. Фактически небольшая
задержка присутствует, но она мала по сравнению с более медленными процессами в
узлах схемы, поэтому не сказывается на работе регулятора.
14.8.1. ñËÙÓ‚‡fl ‚̊·Ó͇ Ë ı‡ÌÂÌËÂ
Цифровая система не является непрерывной в том смысле, который имелся в виду при ис%
пользовании операционных усилителей, поскольку здесь каждая операция выполняется по
шагам в системе отсчетов времени. Эта концепция проиллюстрирована на рис. 14.53:
ошибка на входе считывается, когда ключ S1 замкнут, а выход контроллера ВК изменяется
несколько позже. Изменение отсчетов и расчет желаемого выхода должны производиться в
последующие отсчетные моменты. Состояние процесса в дискретные моменты времени на%
зывается отсчетами или системой дискретного времени. В этой системе или в последова%
тельности отсчетов с периодом Т формируется сигнал ошибки, который воспринимается
контроллером. Схема внутри контроллера, которая воспринимает и хранит значения сигна%
лов ошибки, называется устройством выборки и хранения (УВХ). Поступление новых дан%
ных позволяет контроллеру рассчитать выходной сигнал и сделать его доступным до получе%
ния следующего отсчета на вход. Следовательно, выход контроллера тоже представляет
собой последовательность отсчетов, следующих с той же частотой, что и входная.
Изменение сигнала ошибки, представленное системой отсчетов, и соответствую%
щих сигналов на выходе контроллера изображено на рис. 14.54. Последовательность
сигналов ошибки обычно обозначается как е(n). Значение n указывает на то, что
ошибка e представлена последовательностью отсчетов. Например, значение е(2) оз%
начает значение сигнала ошибки на втором интервале дискретного времени. Изучите
эту последовательность отсчетов сигналов ошибки и выходных сигналов контроллера
для получения ясного представления о работе цифрового контроллера.
14.8 .2 . èÓÔÓˆËÓ̇Î̧ÌÓ „ÛÎËÓ‚‡ÌËÂ
Для аналогового контроллера пропорциональный выход представлен произведением
сигнала ошибки на коэффициент усиления:
Это выражение в дифференциальной форме указывает, что ошибка изменяется с
частотой следования дискретных отсчетов. Результат запишется в форме:
.
964
Рис. 14.53. Выборка данных в цифровых контроллерах
Рис. 14.54. Сигнал на входе ошибки и выходной сигнал в процессе выборки
Производная d(BK)/dt и de/dt представляет скорость изменения переменной во
времени. Алгоритм пропорционального цифрового контроллера довершает, что выход
контроллера ВК изменяется в КП раз более значительно, чем изменение входной ошиб%
ки е. Таким образом, общее выражение для выхода контроллера запишется в форме:
где n представляет номер отсчетного интервала, в котором выход контроллера соот%
ветствует желаемому, а n%1 — номер предшествующего интервала. Отметим, что вы%
ход контроллера на предшествующем интервале должны быть добавлен, поскольку
расчет для текущего интервала — всего лишь изменение по отношению к предше%
ствующему интервалу. В конце второго отсчетного интервала (n=1 или интервал вре%
мени, равный Т) на рис. 4.54 выход контроллера составит:
.
Таким образом, новое значение выхода контроллера равно предыдущему значе%
нию плюс пропорциональное усилению контроллера изменение значения ошибки от
интервала 0 до интервала 1.
èËÏ 14.10
Используя алгоритм цифрового пропорционального контроллера и применение ус%
тавки (в процентах от полной шкалы), а также соответствующее изменение перемен%
ñàîêéÇéÖ ìèêÄÇãÖçàÖ
965
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
ной процесса ПП на пятнадцати интервалах Т, заполните таблицу, иллюстрирующую,
как работает алгоритм формирования выхода контроллера.
êÂ̄ÂÌËÂ
Результаты расчета приведены на рисунке к примеру, в части а. Графики, показываю%
щие изменение уставки, переменной процесса, ошибки и выхода контроллера пред%
ставлены в частях б, в и г соответственно. Отметим, что изменение выхода контрол%
лера не может превышать 100 %, поэтому расчетные изменения мы должны были бы
изобразить за пределами рисунка.
Пример расчета:
ВК(5)=295+7×(30–35)=210.
а) результаты расчета;
б) графики изменения уставки и переменной процесса ПП;
966
в) график изменения ошибки;
г) график изменения выхода контроллера
Рис. 14.55. Составляющие сигнала ошибки:
а) интегральная составляющая;
б) дифференциальная составляющая
14.8 .3. àÌÚ„‡Î̧ÌÓ „ÛÎËÓ‚‡ÌËÂ
В режиме интегрального регулирования любая ошибка смещает выход контроллера в
область, расположенную над кривой ошибки. Алгоритм работы контроллера в этом
режиме запишется в форме:
.
ñàîêéÇéÖ ìèêÄÇãÖçàÖ
967
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Здесь
— площадь под кривой ошибки на рис. 14.54в. Значение производной
аналогового выражения соответствует:
.
d(BK)/dt представляет скорость изменения выхода контроллера, правая часть
уравнения описывает приращение погрешности в единицу времени, такой единицей
обычно служит интервал Т между отсчетами — период дискретизации. Следователь%
но, для одного интервала дискретизации выражение можно переписать:
.
Здесь в правой части записана площадь под кривой, равная произведению ошиб%
ки на время интегрирования и на усиление КИ. Поэтому алгоритм утверждает, что вы%
ход контроллера будет продолжать изменяться, пока сигнал ошибки отличен от нуля.
Значение добавки в выход контроллера изменяется с каждым интервалом дискретиза%
ции в соответствии с рис. 14.55а. Изучите эти рисунки, чтобы получить ясное пред%
ставление о формировании интервала ошибки.
Алгоритм ПИ%контроллера осуществляет комбинацию рассмотренных режимов.
Она запишется следующим образом:
.
Это выражение можно использовать для разработки ПИ%контроллера с любыми циф%
ровыми узлами, способными складывать, вычитать и умножать входящие в них функции.
14.8 .4 . ÑËÙÙÂÂ̈ˇÎ̧Ì̊ „ÛÎflÚÓ̊
В дифференциальных регуляторах изменение ошибки вызывает изменение выхода
контроллера, пропорциональное скорости изменения сигнала ошибки. Алгоритм диф%
ференциального контроллера описывается выражением
.
Здесь de/dt представляет мгновенное значение наклона кривой ошибки в данный
момент времени. Это значение зависит от того, в каком направлении и с какой скоро%
стью изменяется ошибка, поэтому корректирующее воздействие можно выбрать еще
до того, как уровень ошибки изменится. Это наводит на мысль об интеллектуальном
контроллере, который работает с упреждением.
Алгоритм цифрового регулирования с упреждением можно получить из выраже%
ния для производной сигнала аналогового выражения:
.
Производная d(BK)/dt представляет скорость изменения выхода контроллера, а
правая часть уравнения — скорость изменения ошибки или наклон кривой в течение
968
периода квантования Т. Наклон кривой иллюстрируется на рис. 14 .55б. Упрощенное
уравнение, преобразованное к одному интервалу квантования, запишется в форме:
.
Выражение в правой части изображает изменение наклона за время от предыдуще%
го до текущего интервала квантования, а KД — усиление дифференцирующего узла.
Цифровой ПИД —контроллер. Алгоритм ПИД%контроллера представляет со%
бой комбинацию алгоритмов каждого из рассмотренных типов. Выход контроллера
запишется в форме:
.
Вы можете разрабатывать ПИД%контроллер на основе любых цифровых кон%
троллеров, которые могут выполнять операции сложения, вычитания и умножения.
Улучшенная оценка De. Улучшенная оценка De потребуется для получения бо%
лее сглаженного значения производной на выходе контроллера. Теория оценки по%
грешностей предполагает несколько способов повышения точности, однако полное
обсуждение этой проблемы выходит за рамки настоящего учебника. Повышение точ%
ности возможно путем увеличения числа интервалов квантования, для которых вы%
полняется расчет наклона. Часто используемый алгоритм оценки таков:
.
В результате добавления узла оценки к ПИД%контроллеру получим:
,
где n — число выбранных для оценки интервалов, Т — период дискретизации, или
интервал квантования, К — усиление соответствующего узла, ВК — выход контрол%
лера, е — ошибка: е = СУ – ПП. Такую форму записи часто называют учебным посо%
бием по ПИД%регуляторам.
Выполнение инженерных разработок привело к созданию некоторых модификаций
алгоритма, которые улучшают результаты регулирования. Чаще всего изменения каса%
ются расположения уставки в уравнении. Перемещение уставки обусловлено тем, что
действие производной не является необходимым при изменении уставки. В уравнении
,а
.
В операциях, требующих учета изменения сигнала ошибки, ее учет переносится в
слагаемое ПП, поскольку СУ фиксировано и не подлежит изменению. После соответ%
ствующего изменения алгоритм ПИД%регулятора запишется в форме:
.
Здесь ПП — переменная процесса. Такая форма записи используется во многих
промышленных контроллерах, в частности в Allen Bradley Control Logux, а также во
многих других программируемых логических контроллерах (ПЛК).
ñàîêéÇéÖ ìèêÄÇãÖçàÖ
969
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
14.9 . êÖÜàå êìóçéÉé ìèêÄÇãÖçàü
à ÅÖáìÑÄêçéÖ èÖêÖäãûóÖçàÖ
Большинство промышленных контроллеров снабжено режимом ручного управления.
Оператор может переключать режим управления с автоматического управления на
ручное, как показано на рис. 14.56. В ручном режиме выход контроллера переключа%
ется оператором, как и выходной элемент, управляющий процессом.
Рис. 14.56 . Режим ручного управления
Значения усиления звеньев П, И и Д устанавливаются, а переменная процесса
ПП контролируется. Если ПП достигает значения, близкого к сигналу уставки СУ,
процесс переключается на автоматическое управление. При близких ПП и СУ кон%
троллер осуществляет управление без резких изменений ПП или с незначительным
возмущением. Если контроллер снабжен устройством безударного переключения, пе%
реключение на автоматическое управление может быть выполнено даже при жела%
тельном различии СУ и ПП. Тогда контроллер вначале выполняет операцию прибли%
жения ПП к СУ — прежде чем перейти на автоматическое управление.
14.10. äéçíêéããÖêõ ë çÖóÖíäàå ìèêÄÇãÖçàÖå
Подобно многим темам этой главы, нечеткая логика могла бы стать предметом целого
курса. В этом разделе будет сделано введение в концепцию контроллеров с нечеткой
логикой, однако оно не покрывало всех проблем, связанных с этой быстро развиваю%
щейся областью управления.
Рассмотрим примеры, иллюстрирующие работу контроллеров с нечеткой логи%
кой. Уровнь жидкости в баке должен поддерживаться между двумя уровнями — низ%
ким уровнем НУ и высоким уровнем ВУ — путем воздействия на запоминающий кла%
пан V1. Если используется двухпозиционный контроллер, клапан полностью открыт
970
(100 %), когда уровень оценивается как НУ, и закрыт в случае уровня ВУ. Если бак
заполняется оператором, он или она начинает прикрывать клапаны при достижении
примерно положенного уровня, затем уменьшает его до нуля, когда бак почти запол%
нен. Эти словесные описания существенно отличаются от результатов физических из%
мерений. Нечеткий контроллер работает подобным образом, используя лингвисти%
ческие переменные, как входные. Таким образом, состояние процесса операции с
клапаном V1 выглядит следующим образом:
V1 = 1, когда НУ производит переключение с 1 до 0 (от состояния «включено» в
состояние «выключено»).
V1 = 0, когда ВУ производит переключение от 0 до 1 (от «выключено» к
«включено»).
Другое описание операций с клапаном V1: если уровень низкий (НУ), открывает%
ся клапан V1; если уровень высокий (ВУ), закрывается клапан V1. Традиционная
стратегия удобна для программируемых логических контроллеров (ПЛК), использую%
щих булеву логику, а более поздний подход лучше подходит для контроллеров с ис%
пользованием нечеткой логики.
Все процессы управления, обсуждавшиеся в предыдуюших разделах, требуют
наличия некоторой модели системы, которая необходима для создания алгоритма уп%
равления. Помимо этого потребуются некоторые знания в области теории управле%
ния, чтобы процесс управления протекал эффективно. Нечеткая логика, методологи%
чески развитая в 1960 г. профессором Лотфи Заде (Lotfi Zadeh), Калифорнийский
университет, Беркли), использует правила и причинные принципы, подобные челове%
ческим способам решения проблем. Человеческие решения редко бывают однознач%
ными («да» или «нет»), они часто содержат полутона.
Например, рассмотрим следующий вопрос: какова температура на улице сегод%
ня? Возможен ответ «тепло», поскольку вчера на улице было 10 °F, а сегодня всего
лишь 32 °F. Некоторая нечеткость или двусмысленность часто связана с нашими оцен%
ками, поскольку каждый привносит свою долю личного опыта, который влияет на
наши суждения.
Тем не менее оказывается возможным формировать вполне четкие выводы, осно%
вываясь на неопределенных или нечетких знаниях о состоянии проблемы. Нечеткая
логика — это метод, который подражает человеческому мышлению и его способности
генерировать четкие выводы или решения при нечетких или неполных данных о вход%
ных переменных.
14.10.1. íÂÏËÌÓÎÓ„Ëfl ÌẪÂÚÍÓÈ ÎÓ„ËÍË
Первая концепция — это степень участия, которая позволяет объекту принимать бо%
лее одного значения или состояния в данное время. Приведем некоторые полезные
термины.
Четкое значение — переменная, значение которой может быть выражено чис%
лом (23, 46, 62). Во многих случаях четкое значение выражается в размерных едини%
цах (градусы по Фаренгейту, литры в минуту).
äéçíêéããÖêõ ë çÖóÖíäàå ìèêÄÇãÖçàÖå
971
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Четкая переменная — физическая переменная, которую можно инструмен%
тально измерить и записать ее четкое значение.
Степень вхождения (m) — степень, с которой четкое значение или четкая пе%
ременная принадлежит нечеткой системе переменных. Обычно степень вхождения
выражается в долях единицы (от 0,0 до 1,0) или в процентах (от 0 до 100 %).
èËÏ 14.11
Диаграмма на рисунке к этому примеру показывает процесс изменения температуры
при введении формовочной земли в литейном производстве. Существуют три нечет%
кие градации температуры, которые определены как холодная, нормальная и горячая.
Опишите, как будут располагаться зоны температуры или уставки температуры и су%
щественные признаки нечетких элементов.
êÂ̄ÂÌËÂ
По вертикальной оси отложена степень вхождения в системе нечетких признаков в ди%
апазоне от 0 до 100 %. Горизонтальная ось содержит полный диапазон температур фор%
мовочной земли, названный температурой процесса. Представлены три градации
температуры для решения этой задачи: холодная, нормальная и горячая. Число гра%
дации и степень их участия могут быть определены горизонтальной линией, проходя%
щей через любые значения вертикальной оси — от 0 до 100 %. Например, все три
градации имеют 50 % вхождения в точке В, как изображено на рисунке. Степень вхож%
дения каждого значения температуры должна давать в сумме 100 %. Заметим, что в
точке В1, которая характеризуется температурой 270 °F, обе градации — холодная и
нормальная имеют 50%процентную степень вхождения, сумма этих значений составля%
ет 100 %. Степень вхождения нормальной температуры в точке А, или 300 °F, составля%
ет 100 %. В обеих точках С (холодная и горячая) степень вхождения составляет
100 %, а нормальная имеет 0 %. В точках, где вертикальные линии пересекают функ%
цию степени вхождения, эта степень вхождения определяется по вертикальной оси.
Ниже 160 °F и выше 460 °F точки не являются частью любой градации уставок.
Нечеткая система градаций и уставок позволяет точно определить переменные, ко%
торые обладают внутренней размытостью. Горизонтальные и наклонные линии опреде%
ляют степень участия функциональных зависимостей, которые изображаются гра%
фически и показывают, насколько четкая переменная принадлежит нечеткой градации.
972
Нелинейная функция вхождения может аппроксимироваться отрезками прямых
(горизонтальных или наклонных), либо треугольной, трапецеидальной или параболи%
ческой зависимостью. Простейшая — треугольная — обычно используется в цифро%
вых контроллерах. Введем еще несколько терминов:
фаззификация — процесс присвоения четких числовых оценок значениям чет%
ких переменных и установление соотношений между нечеткими градациями и функци%
ями вхождения;
нечеткое значение — значение, выраженное лингвистической переменной, т.е .
нормальный, прохладный, холодный, теплый, горячий;
нечеткие лингвистические переменные — переменные, выраженные только
лингвистическими терминами, которые не могут быть заменены точными значениями.
14.10.2 . î‡ÁÁËÙË͇ˆËfl
Точные значения переменных могут входить более чем в одну систему градаций, но
обычно ограничиваются двумя. Расширим пределы изменения температуры при вве%
дении формовочной земли в литейном производстве (пример 14.11), чтобы включить
большее число градаций и исследовать этот процесс более глубоко.
èËÏ 14.12
Модифицируем диаграмму температур примера 14.11, чтобы приспособить ее к сле%
дующим условиям:
горячо
> 380 °Ф;
тепло
≥ 300°Ф и <380 °Ф;
норма
≥260°Фи<340°Ф;
прохладно ≥ 220 °Ф и <300 °Ф;
холодно
<240 °Ф;
диапазон температур — от 180 °Ф до 420 °Ф.
êÂ̄ÂÌËÂ
Решение для этой системы градаций представлено на рисунке ниже.
äéçíêéããÖêõ ë çÖóÖíäàå ìèêÄÇãÖçàÖå
973
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Принята система, содержащая пять градаций: горячий, теплый, нормальный,
прохладный и холодный. Число градаций всегда нечетное, наиболее часто встречается
пять или семь, реже — минимальное количество три. Для упрощения графического
представления значение температуры может принадлежать максимум двум градаци%
ям. Поэтому если провести вертикальную линию из некоторой точки на шкале темпе%
ратур, эта линия пересечет только две кривых функции вхождения. Температура ниже
220 °F имеет 100 % функции вхождения в градацию «холодный»; температура выше
380°F имеет 100 % функции вхождения в градацию «горячий», а температуры от 260
°F до 340 °F делят градацию «нормальный» с одной из двух других: «теплый» и «холод%
ный». Чтобы поддерживать температуру на уровне, наиболее высоком из названных,
верхняя граница градации «холодный» установлена на 260 °F, а нижняя граница «го%
рячий» — на 340 °F. Для всех градаций холодных и горячих значений температуры
вхождение с вероятностью 100 % выбрано на середине интервала между верхней и
нижней граничными значениями. Треугольные границы выбраны для каждой града%
ции, а три функции вхождения выбраны в середине диапазона и показаны на графиках.
Фаззификация значений температуры включает две трапецеидальные фигуры на каж%
дом из граничных участков и три треугольника в середине.
Пример 14.12 описывает, как входная величина нечеткой задачи может быть описана
с использованием функций вхождения. Далее предстоит сконструировать функцию выхо%
да контроллера, для чего должны быть разработаны нечеткие алгоритмы и правила.
Правила, основанные на знании — знания или опыт, выраженный в форме пра%
вил. Обычно правила формулируются в форме: «Если вход равен Х, то выход равен Y».
Выходная часть правила иллюстрируется на рис. 14 .57, когда ток, генерируемый выход%
ным узлом управляющего элемента, должен изменяться в пределах от 4 до 20 мА. Как
входное, так и выходное значение выражены в форме лингвистических переменных.
14.10.3. éÒÌÓ‚Ì̊ ÌẪÂÚÍË ԇ‚Ë·
Следующим этапом разработки управляющей системы на основе нечеткой логики бу%
дет создание системы соответствий типа «если ..., то ...», основанной на опыте и зна%
ниях разработчика.
Температура оценивается нечеткими лингвистическими градациями, размещенными
в левом столбце, а управляющий сигнал на выходе контроллера — нечеткими лингвисти%
ческими реакциями контроллера ВК (правый столбец), как показано на рис. 14.56 .
Правило 1: если температура «холодная», то ВК — «очень низкий», ОН.
Правило 2: если температура «прохладная», то ВК — «низкий», Н.
Правило 3: если температура «нормальная», то ВК — «средний», С.
Правило 4: если температура «теплая», то ВК — «высокий», В.
Правило 5: если температура «горячая», то ВК — «очень высокий», ОВ.
Нечеткие значения не могут быть использованы для управления выходным эле%
ментом контроллера, так как для генерации управляющих сигналов на выходе систе%
мы необходимы четкие физические значения. Для их получения используется опера%
ция дефаззификации.
974
14.10.4 . ÑÂÙ‡ÁÁËÙË͇ˆËfl
Дефаззификация — это процесс получения нечетких значений и их превращения в
четкие физические численные значения. Обычно мы используем такие нечеткие инст%
рукции, как «открой кран немного больше», в результате интуитивного преобразова%
ния в численное значение физической величины. Компьютерный контроллер требует
инструкций в форме численных значений напряжения или тока.
Рис. 14.57. Фаззификация входа и выхода:
а) фаззификация входа;
б) фаззификация выхода, значения выхода: ОН — очень низкий, Н —
низкий, С — средний, В — высокий, ОВ — очень высокий
äéçíêéããÖêõ ë çÖóÖíäàå ìèêÄÇãÖçàÖå
975
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Заключительный этап разработки нечеткого логического контроллера — преоб%
разование нечетких команд, полученных в результате приведенных правил для данной
температуры, во вполне определенную физическую величину. Дефаззификация, та%
ким образом, сводится к нахождению такого значения на выходе контроллера, которое
наилучшим образом соответствует входной информации, содержащейся оценках
входной переменной. Например, входная температура 250 °F на рис. 14.57 дает 75%
процентное вхождение в нечеткую градацию «прохладный» и 25%процентное вхожде%
ние в градацию «прохладный». Следовательно, правило 1 предлагает использовать
его на 25 %, а правило 2 — на 75 %. Соответствующее графическое представление
использования правила 1 на 25 % и правила 2 — на 75 % показано на рис. 14.58 .
Предлагаемый метод дефаззификации получил название центроидного. Он пред%
полагает использование четкого выходного сигнала, определяемого взвешенной сум%
мой центроидов активных нечетких градаций. Для примера на рис. 14.57 с температу%
рой 250 °F значение центроида ВК определится формулой:
где х1 — значение выхода 5,6 мА при 100 % вхождения данной градации, умноженное
на процент вхождения μ1 (ОН), а х2 — значение выхода 8,8 мА при 100 % вхождения,
умноженное на процент вхождения μ2 (Н). Результат решения:
.
Общее выражение для вычисления выхода центроидным методом:
,
где i принимает значения от 1 до 0 общего числа лингвистических переменных, для
которых степень вхождения отлична от нуля.
Рис. 14.58 . Дефаззификация выходного сигнала контроллера
976
14.10.5. äÓÌÚÓÎÎÂ̊ ÌẪÂÚÍÓÈ ÎÓ„ËÍË (äçã)
Нечеткая логика эффективна при анализе следующих типов систем:
комплексных, для которых затруднено или невозможно моделирование;
управляемых с привлечением экспертов;
функционирующих под управлением сложных и непрерывных входных и вы%
ходных сигналов;
в которых входы или правила функционирования основаны на наблюдении с
участием человека;
с естественной нечеткостью, например, социальных систем.
Пример типичной системы нечеткой логики приведен на рис. 14.59а, а контрол%
лера нечеткой логики КМЛ — на рис. 14 .59б.
Рис. 14.59. Система управления с нечеткой л огикой
Предпроцессор, оперирующий со входным сигналом, получает обычно результа%
ты измерений от датчиков физических величин, а не в форме лингвистических пере%
менных. Конечный результат процесса помогает интерпретировать правила, прочие
блоки были описаны выше. Постпроцессор преобразует масштаб выходных величин.
äéçíêéããÖêõ ë çÖóÖíäàå ìèêÄÇãÖçàÖå
977
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Все операции нечеткой логики выполняется компьютерными средствами: специ%
альными или ПИД%контроллерами. В специальных контроллерах модуль нечеткой ло%
гики заменяет собственный ПИД%модуль. Вход контроллера нечеткой логики (КНЛ) —
это сигнал ошибки, а выход КНЛ управляет выходным управляющим элементом. КНЛ
часто предшествует ПИД%контроллерам, выполняя функции формирования настроек
задания уставок с целью избежать перерегулирования и улучшить реакцию системы при
различных возмущениях. Чаще всего КНЛ используются в сочетании с подходящими
ПИД%контроллерами, а не в качестве их замены. Подходы нечеткой логики эффективны
в качестве систем, осуществляющих надзор над процессами регулирования движения,
транспортных потоков, контроля качества.
Преимущества управления на основе нечеткой логики. Некоторые из преиму%
ществ управления на основе нечеткой логики:
может быть учтено и оценено большее количество переменных системы;
присутствует большее сходство со способом человеческого мышления, по%
скольку лингвистические переменные оперируют не с количественными
оценками величин;
возможна большая степень неопределенности, поскольку зависимость выхо%
да от входа для некоторых типов систем лучше поддается контролю;
возможно решение новых, прежде нерешенных задач;
более быстрая сходимость разрабатываемых решений, т.к . разработчик не дол%
жен располагать всей полнотой информации до начала работы над системой;
более робастное (логичное, уверенное) управление;
упрощение приобретения и представления новых знаний.
Недостатки управления на основе нечеткой логики. Отметим следующие недо%
статки:
имеется трудность создания моделей на основе нечетких представлений;
нечеткие системы требуют более тщательной настройки до их включения в
процесс управления;
менталитет специалистов в Соединенных Штатах, базирующийся на точных
количественных линейных моделях, затрудняет усвоение принципов нечет%
кой логики.
14.11. èêéñÖëë çÄëíêéâäà ìèêÄÇãüûôàï ëàëíÖå
В этом разделе описана настройка стандартных типов процессорных контроллеров: П,
ПИ, ПД или ПИД, обсуждавшихся ранее. Настройка — это процесс установки коэф%
фициентов усиления режимов П, И или Д. Определение участия каждого из режимов
в работе контроллера — это основная задача разработчика. В некоторых случаях на%
значение системы определяет выбор используемого режима, в других случаях этот
выбор основан на результатах экспериментов в ходе процесса, называемого настрой%
кой контроллера. Контроллер должен обладать способностью использовать все три
978
режима, однако чаще всего настройка начинается с использования пропорционально%
го режима для введения системы в рабочий режим. После этого добавляется состав%
ляющая интегрального режима и в заключение — производная. Главный вопрос: ка%
кие значения коэффициентов усиления должны быть установлены для каждого из
режимов — КП, КИ и КД? Настройка контроллера должна дать ответ на этот вопрос.
Обычно используются два метода: метод поиска предельного цикла и метод определе%
ния реакций системы. Нет необходимости иметь аналитическую модель объекта для
выбора того или иного метода.
14.11.4 . åÂÚÓ‰ Ô‰ÂÎ̧ÌÓ„Ó ˆËÍ·
В методе предельного цикла усиление системы выбирается таким, чтобы вызвать коле%
бательное движение системы с постоянной амплитудой (см. рис. 14 .21) и затем изме%
рить параметры этого колебательного процесса. Это достигается следующими шагами:
1. Осуществляется замкнутая конфигурация системы, а значения коэффициен%
тов КИ и КД устанавливаются или равными нулю, или такому значению, при
котором отсутствует влияние соответствующих звеньев на выход системы.
Устанавливают сравнительно небольшой коэффициент усиления пропорци%
онального звена (обычно 1).
2. Увеличивают усиление КП и исследуют реакцию системы на малые измене%
ния уставки. Если система возвращается к установившемуся стационарному
режиму, снова несколько увеличивают КП и вновь проверяют систему на воз%
действие малыми изменениями уставки.
3. Шаг 2 повторяется до тех пор, пока в системе не возникают устойчивые ко%
лебания параметра процесса (ПП).
4. Фиксируются (записываются) значения пропорционального усиления Уи,
при котором возникают автоколебания и их период Ри, называемый крити%
ческим (см. рис. 14.21).
5. Постановкой в формулы значений Уи и Ри определяются значения усилении
КП, КИ и КД. Формулы, упомянутые в шаге 5, суть:
Режим П%регулятора:
КП = 0,5Уи
.
Режим ПИ%регулятора:
КП = 0,45Уи;
КИ = 1,2 / Ри (минут %1).
Режим ПИД%регулятора:
КП = 0,6Уи
.
КИ=2/Ри(минут%1);
КД=Р
и
/ 8 (минут).
èËÏ 14.13
Режим управляющей системы должен быть настроен методом предельного цикла. Режим
дифференциальный выключен, режим интегральный присутствует на минимальном уров%
не. Усиление плавно увеличивают до возникновения режима автоколебаний после малых
возмущений. Уставка усиления составляет 3, 2, период автоколебаний — 3 минуты. Ис%
пользуя метод предельного цикла, определите параметры уставок ПИД%контроллера.
èêéñÖëë çÄëíêéâäà ìèêÄÇãüûôàï ëàëíÖå
979
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
êÂ̄ÂÌËÂ:
Метод предельного цикла был развит Циглером и Никольсом (Z. Y. Ziegler, N. B.
Nickols) и опубликован в 1942 году. Он получил название метода настройки Цигле%
ра—Никольса. С тех пор разными исследователями и научными группами были пред%
ложены многочисленные модификации метода: некоторые из этих модификаций обес%
печивают лучшие результаты при изменениях уставки, другие делают систему более
восприимчивой к изменениям нагрузки. Промышленный опыт, который использует
эту методику, получил название модифицированного метода Циглера—Никольса. Он
предлагает следующие шаги настройки:
1. Определяется только параметр Ри, конечный период, вычисленный методом
Ц—Н .
2. Вычисляются КИ и КД по формулам для каждого режима:
П%режим: КП определяется по значению, при котором устанавливаются не%
затухающие автоколебания.
ПИ%режим: КП определяется по значению, при котором устанавливаются
незатухающие автоколебания.
.
ПИД%режим: КП определяется по значению, при котором устанавливаются
незатухающие автоколебания.
,
.
3. В зависимости от характера регулируемого процесса в систему вводятся зна%
чения интегрального и дифференциального параметров.
980
4. При установленном интегральном и (или) дифференциальном режиме опреде%
ляется модифицированное значение КП, исходя из результатов испытаний и из%
мерения ошибки. Производится возмущение путем малого изменения уставки и
измерения отклика системы в форме изменения параметра процесса (ПП) при
достижении желаемого отклика. При этом часто используется критерий одной
четвертой амплитуды (обратимся вновь к рис. 14.12) каждой последующей амп%
литуды затухающих колебаний. Возможно использование и других критериев,
включая упомянутые на рис. 14 .12. Можно продолжать настройку усиления си%
стемы и наблюдать реакцию по ее отклику. Настройка усиления сравнительно
проста. Если система чрезмерно демпфирована, увеличивают усиление, если
система недостаточно демпфирована, усиление уменьшают: как правило, увели%
чение усиления снимает степень демпфирования и наоборот.
Такая же процедура используется для критически демпфированного отклика сис%
темы (см. рис. 14.11). Хотя метод предельного цикла может применяться с любыми
типами систем, наиболее успешно он применяется с относительно быстродействую%
щими системами. Может потребоваться несколько часов наблюдений, чтобы опреде%
лить усиление, которое вызывает возникновение незатухающих автоколебаний, по%
скольку значение периода этих колебаний велико. Например, может потребоваться
целый день, чтобы настроить систему с циклом порядка 60 минут. Другой метод на%
стройки, который также пригоден для любых процессов, но особенно полезен для мед%
ленных систем, — метод определения реакций системы.
14.11.2 . åÂÚÓ‰ ÓÔ‰ÂÎÂÌËfl Ô‡‡ÏÂÚÓ‚ ‡͈ËË ÒËÒÚÂÏ̊
Метод определения параметров реакции системы предполагает ступенчатое измене%
ние входа разомкнутой системы управления. Для определения параметров режимов
П, И и Д определяются три параметра из графика переходного процесса. Метод пред%
полагает в качестве первого шага использовать ручное воздействие на контроллер,
поскольку цепь обратной связи разомкнута. Мы исходим из предположения, что про%
цесс в первом приближении может быть представлен моделью первого порядка с за%
паздыванием и с небольшим мертвым временем. Даже если процесс не вполне адек%
ватен этой модели, полученные параметры служат хорошей основой для начала
настройки работоспособной системы. Три параметра могут быть получены из анализа
поведения разомкнутой системы при ступенчатом возмущении. Процесс начинается с
ручного введения возмущения при установившемся исходном режиме — постоянном
значении ПП. После введения ступенчатого возмущения осуществляется запись пе%
ременной процесса (ПП): Полученный в результате график реакции системы и станет
предметом дальнейшего исследования.
Типичный пример такого графика показан на рис. 14 .60 . Две переменных — эф%
фективная задержка D и угол наклона линейного участка S — вычисляются из графи%
ка с помощью метода определения реакции системы. Третья переменная — ∆BK —
процентное изменение выходного управляющего элемента или выхода контроллера.
Так, если выходной управляющий элемент или выход контроллера BK составлял 25 %
до входной ступени возмущения и достигает 40 % после воздействия ступени, то ∆BK
èêéñÖëë çÄëíêéâäà ìèêÄÇãüûôàï ëàëíÖå
981
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
составляет 40 – 25 = 15 процентов. Значение D определяется непосредственно из
графика, а значение S рассчитывается по формуле:
процентов в минуту,
где DПП — изменение переменной процесса в разомкнутой системе.
Рис. 14.60 . Метод определения параметров реакции системы
Значение DBK представляет собой процентное изменение состояния выходного
управляющего элемента. Названные три числа используются для расчета пропорцио%
нального, интегрального и дифференциального режимов контроллера. Формулы для
каждого из режимов приведены ниже.
Пропорциональный П%режим управления:
Пропорционально%интегральный ПИ%режим:
;
.
Пропорционально%интегрально%дифференциальный ПИД%режим:
;
(минута%1);
982
.
Главное преимущество метода реакций перед методом предельного цикла состоит
в том, что однажды полученная зависимость ПП от времени может быть использована
немедленно для расчета любых режимов. Метод предпочтителен для медленных про%
цессов, когда большая протяженность во времени установления предельных циклов
делает этот процесс длительным и утомительным.
Главный недостаток метода реакций обусловлен тем, что большинство процессов
физически являются процессами второго порядка с запаздыванием и мертвым време%
нем, как это показано на графике рис. 14 .60. Эти более сложные процессы требуют,
чтобы ПИД%параметры настраивались после того, как отклик системы, близкий к
идеальному, достигнут с использованием расчетных значений упрощенной модели.
èËÏ 14.14
В процессе подготовки к настройке выходной управляющий элемент системы регули%
рования поддерживается в фиксированием состоянии, пока параметр процесса ПП
не достигнет установившегося значения. Затем производится изменение уставки, в
результате которого выходной управляющий элемент (клапан) изменяет свое состоя%
ние на 10 %. График переходного процесса приведен на рисунке к примеру. Опреде%
лите параметры ПИД%регулятора.
êÂ̄ÂÌËÂ
∆BK составляет 20 %. Из графика находим:
Задержка D составляет 1 минуту, ∆ПП равна 50 (ПП2 – ПП1 = 80 – 30),
∆tравна2мин(4мин–2мин),
(процентов в минуту),
(процентов в минуту).
,
èêéñÖëë çÄëíêéâäà ìèêÄÇãüûôàï ëàëíÖå
983
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
,
,
,
,
.
Процесс настройки, который выглядит как хорошее теоретическое упражнение,
часто должен давать быстрое завершение переходного процесса где%то между крити%
ческим демпфированием и достаточно демпфированным процессом. Рассмотренные
методы предлагают такую настройку ПИД%регуляторов, которые делают характер
процесса близким к желаемому. Таким образом, инженерные рекомендации удачно
схватывают ход процесса для установки окончательных параметров регулятора.
14.11 .3. èÓ‰‚ËÌÛÚ̊ ÛÔ‡‚Îfl̨̆Ë ÒËÒÚÂÏ̊
Во многих случаях вполне достаточны одноконтурные ПИД%системы регулирования,
однако в некоторых более сложных системах требуется комплексный подход к управ%
лению. Опишем четыре вида наиболее популярных систем такого рода:
каскадные системы регулирования;
системы регулирования по возмущению;
управление соотношением;
адаптивное управление.
Каскадное регулирование и регулирование по возмущению обладают более высо%
ким быстродействием по сравнению с ПИД%регуляторами, поскольку в системах это%
го типа возмущения обнаруживаются раньше и корректирующее действие происходит
быстрее, сокращая влияние мертвого времени и постоянной времени процесса. Уп%
равление соотношением и адаптивное управление оказываются полезными в специ%
фических процессах управления и задачах измерения.
Каскадное управление. Каскадные контроллеры используются в системах с
большими значениями постоянной времени и возмущающими воздействиями в систе%
ме параметров, которые компенсируются действием выходного управляющего эле%
мента. Все одноконтурные системы регулирования служат для реагирования на пере%
менную процесса (ПП), которая подвержена влиянию изменяющейся нагрузки.
Однако системы с большими постоянными времени, например, управление тепловы%
ми процессами, часто не могут корректировать возмущения с большой скоростью. Для
решения такого рода проблем применяют каскадное включение систем регулирования.
984
Рассмотрим систему регулирования температуры на рис. 14 .2 и 14.3 . Две жидкости сме%
шиваются и нагреваются с использованием пара и теплообменной установки. Давление
пара часто не может поддерживаться постоянным, т.к . имеются другие потребители теп%
ловой энергии, питающиеся от того же источника. Когда давление пара падает вследствие
возросшей нагрузки на бойлер, температура пара понижается. Когда расход пара понижа%
ется, давление пара растет, что влечет увеличение его температуры. Поскольку в качестве
теплоносителя используется пар, изменение его давления и соответствующие изменения
температуры порождают дополнительные проблемы при использовании одноконтурных
регуляторов. Единственный датчик в одноконтурной системе осуществляет измерение
температуры. В результате имеют место дополнительные задержки в системе регулирова%
ния, поскольку давление пара может измениться в любой момент.
Каскадная система регулирования решает эту проблему разделением функций
системы между двумя контроллерами, первичным и вторичным, как изображено на
рис. 14 .61. Первичный контроллер использует температурные изменения процесса
для воздействия на паровой клапан, тогда как вторичный контур использует давление
пара для воздействия на этот же самый клапан. Вторичный контур называют также
внутренним контуром, а первичный контроллер воздействует на внешний контур.
Первичный контроллер (внешний контур) имеет внешний вход уставки температуры.
Это значение уставки сравнивается с температурой, измеренной с помощью задатчика
температуры в контуре обратной связи. Контроллер выхода первичного контура зада%
ет уставку входа вторичного контроллера (внутреннего контура). Вторичный контрол%
лер часто называют удаленным контроллером, поскольку он получает сигнал уставки
от первичного контроллера. Кроме того, внутренний контур получает сигнал от датчи%
ка обратной связи в контуре измерения давления в магистрали подачи пара. Контрол%
лер выхода вторичного контура управляет выходным управляющим элементом, т.е .
паровым клапаном. Изучите интерфейсы сигналов каскадной управляющей системы.
Два условия заставляют выходной управляющий элемент (паровой клапан) изме%
нять поток пара, поступающего в теплообменник:
1. Всякое изменение давления пара по отношению к уставке вызывает измене%
ние расхода пара. Если давление падает, клапан приоткрывается, поскольку
снижается температура пара. Если давление растет, происходят обратные
процессы. Качество управления улучшается, т.к. изменение давления пара не%
медленно вызывает изменение количества пара. Возмущение в подаче пара
корректируется прежде, чем оно приведет к изменению температуры, обус%
ловленному более высоким или более низким давлением пара.
2. Любые изменения уставки температурного режима или любые возмущения в
первичной системе вызывают изменения выхода первичного контроллера
(ВК). ВК задает уставку вторичного контроллера, поэтому изменения посту%
пают непосредственно на выходной управляющий элемент, возвращая сис%
тему к сбалансированному состоянию.
Если давление пара не включено как параметр в контур регулирования, то изме%
нение давления заставляет изменяться температурный режим. Изменение темпера%
турного режима воздействует на положение клапана в магистрали пара, компенсируя
возмущение давления пара. В одноконтурном ПИД%контроллере температурный ре%
жим должен измениться прежде, чем возмущение в магистрали пара будет скомпенси%
èêéñÖëë çÄëíêéâäà ìèêÄÇãüûôàï ëàëíÖå
985
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
ровано. В каскадном контроллере коррекция возмущения в магистрали пара происхо%
дит раньше, чем успевает измениться температурный режим. Улучшение качества ре%
гулирования вполне очевидно.Изучите этот раздел, чтобы преимущества каскадного
способа регулирования стали для вас очевидны.
Рис. 14.61. Каскадное управление
Некоторые аспекты использования каскадных регуляторов:
вторичный или внутренний контур всегда должен быть более быстродейству%
ющим, чтобы корректировать источник возмущения температурного режи%
ма — давление пара;
каскадное регулирование, выполняемое двумя пропорциональными кон%
троллерами, обеспечивает более быстрое и точное регулирование, чем един%
ственный ПИД%регулятор;
вторичный или внутренний контур регулирования настраивается первым,
внешний контур настраивается последним;
вторичный контроллер должен иметь более высокий коэффициент усиления
пропорционального режима, чем контроллер первичного контура;
986
постоянная времени вторичного контура должна быть в пять%десять раз
меньше, чем постоянная времени первичного контура.
Регулирование по возмущению плюс действие обратной связи. Регулирование по
возмущающему воздействию плюс действие обратной связи во многом очень похоже на
каскадное регулирование, которое обсуждалось выше. Изучим процесс в реакторе, пред%
ставлением на рис. 14 .62. Жидкость, проходящая через паровой теплообменник, нагрева%
ется до температуры, при которой должна протекать химическая реакция. Температура
жидкости на выходе определяется датчиком, а контроллер в замкнутом контуре изменяет
положение клапана на входе магистрали пара с тем, чтобы поддержать температуру жид%
кости на выходе теплообменника равной 140°. Выходная температура жидкости поддер%
живается на уровне 140° столь долго, сколько времени температура и скорость жидкости
на входе поддерживаются на заданном уровне. Например, если входной поток усиливает%
ся, жидкость протекает через теплообменник с большей скоростью, а выходная темпера%
тура опускается ниже желаемого уровня в 140° . Снижение температуры корректируется
контуром регулирования, увеличением потока пара через теплообменник. Тем не менее
продукт на выходе реактора не будет нагрет до требуемой температуры. Чтобы избежать
этой ситуации, требуется ввести дополнительное регулирование. Будет ли работать кас%
кадное регулирование или следует ввести регулирование по возмущению в дополнение к
замкнутому контуру? Выбор между каскадным регулированием и регулированием по воз%
мущению далеко не однозначен. Убедительным доводом в пользу каскадного включения
является справедливость следующих положений:
1. Одноконтурное регулирование невозможно, т.к. не позволяет компенсиро%
вать возможные возмущения.
2. Измерение переменной или наличие датчиков делает возможным обнаруже%
ние существенных возмущений.
3. Существует прямая зависимость между состоянием выходного регулирую%
щего элемента и переменной параметра при существенных возмущениях.
4. Вторичная переменная и ее контур имеют более высокое быстродействие,
чем первичный контур регулирования.
Если все эти положения справедливы, то следует использовать каскадное вклю%
чение регуляторов. Если же положения 1, 2 и 4 справедливы, а 3 — нет, то следует
использовать регулирование по возмущению. При обсуждении каскадного регулиро%
вания предполагалось, что существенным возмущением является изменение давления
пара, а положение выходного регулирующего элемента определяет паровой клапан.
Следовательно, существует причинно%следственная связь между положением регули%
рующего элемента, положением парового клапана и изменением давления пара, про%
ходящего через этот клапан. Поскольку все четыре положения справедливы, можно
рекомендовать каскадное включение контроллеров.
Реактор на рис. 14 .62 имеет паровой клапан, но существенным возмущением следует
считать скорость входящей в реактор жидкости — реагента. Поскольку здесь причинно%
следственная связь отсутствует, положение 3 не справедливо, поэтому следует рекомен%
довать регулирование по возмущению. В контроллер, регулирующий по возмущению,
вводится дополнительный контур, который реагирует на существенные возмущения пу%
тем изменения состояния выходного управляющего элемента. Следовательно, состояние
выходного управляющего элемента (клапана) и ход процесса модифицируются либо пер%
èêéñÖëë çÄëíêéâäà ìèêÄÇãüûôàï ëàëíÖå
987
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
вичной переменной процесса (ПП), либо входным возмущением непосредственно. Про%
цесс с участием прямого воздействия возмущения изображен на рис. 14.63 . Важные раз%
личия по отношению к системе с двумя контурами управления приведены ниже.
Первичный контур, или главный контур обратной связи, компенсирует любые из%
менения в процессе, которые являются результатом воздействия на уставку или любо%
го иного возмущения.
Рис. 14.62. ПИДуправление
Рис. 14.63 .
Процесс с
прямым
воздействием
возмущения
988
Вторичный контур, или контур регулирования по возмущению, компенсирует
только изменение входящего потока поступающей в реактор жидкости.
Контур регулятора по возмущению корректирует изменение входящего потока
жидкости прежде, чем проявится заметное изменение первичной переменной процес%
са, то есть изменение выходной температуры жидкости.
Управление соотношением и адаптивное управление. Управление соотношени%
ем применяется в тех случаях, когда требуется смешать два материала, точно выдер%
жав их пропорцию. Например, при изготовлении большинства мягких напитков такие
ингредиенты, как вода и сироп, должны быть смешаны с точным соблюдением про%
порций. Бак смесителя на рис. 14.2 служит идеальным примером этого типа объектов
управления. Рассмотрим его применение на рисунке.
Контроллер соотношения имеет в своем составе жидкостный расходомер, кото%
рый представляет собой дифференциальный датчик давления (ДД) на калиброванием
отверстии в плате для каждого материала питающих линий. Предложим, что ДД до%
бавлены к питающим линиям, которые управляются пропорциальными клапанами 1 и
2 (см. рис. 14.2). Система управления соотношением производит регулирование пу%
тем установки одного из клапанов на некоторое фиксированное значение расхода
(между 0 и 100 %), называемое неконтролируемым стоком. Этот сток не регулирует%
ся, но изначально устанавливается примерно на половинный расход материалов дан%
ной заправки. Клапан другой линии регулируется контроллером соотношений с целью
получения требуемого точного соотношения, основанного на уровне неконтролируе%
мого стока. Второй поток называется регулируемым стоком.
Контроллеры соотношений используются как в непрерывном, так и в дозирован%
ном (порционном) режимах. Например, их можно использовать для добавления флуо%
рида в питьевую воду, которая непрерывно поступает в цех водоподготовки, или в пор%
цию заправки для безалкольных напитков.
Адаптивное управление — общее название, указывающее на функции контроллера,
который настроен для выполнения вполне определенных требований. Например, ДД%дат%
чик, добавленный к рис. 14.2, используется для управления соотношением, но ДД%датчик
является нелинейным устройством. Вместе с тем процесс требует осуществления линей%
ных зависимостей отклика. Два устройства служат для коррекции нелинейных измерите%
лей сигналов: узел извлечения квадратного корня и адаптивный контроллер соотношения.
Если к ДД%датчику добавлен узел извлечения квадратного корня, то нелинейные зависи%
мости на входе контроллера становятся практически линейными. Если используется адап%
тивный контроллер,то вычислительные функции, выполняемые средствами контроллера,
позволяют достичь высокой степени линейности математическими методами. Адаптивное
управление применяется во многих задачах автоматизации для того, чтобы приспособить
сигналы к использованию в производстве контроллеров.
14.12. ëàëíÖåÄ éÅéáçÄóÖçàâ à ëíÄçÑÄêíçõï ëàåÇéãéÇ
В схемах используется специфическая система символов, которую необходимо уметь
читать и интерпретировать, если предстоит заниматься задачами управления. Типич%
ëàëíÖåÄ éÅéáçÄóÖçàâ à ëíÄçÑÄêíçõï ëàåÇéãéÇ
989
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
ная система регулирования изображена на рис. 14 .64. Описание многих символов,
используемых в управлении, приведено на рисунках ниже.
Символы для генерации узлов приборов и функции — рис. 14.65. Здесь
представлены различные типы многих приборов и функции : обозначения мно%
гообразных клапанов, вентилей, стимуляторов; другая группа символов содер%
жит обозначения процессов. Дополнительные символы предусмотрены для
специальных типов машин и процессов, но приведены лишь наиболее употре%
бительные из них. Запомните эти символы для того, чтобы пользоваться ими.
Рис. 14.64. Типовые символы в системах регулирования
Символы для изображения сигналов, процессов и потоков — рис. 14.66.
Для облегчения идентификации сигналов и потоков используются коды, изу%
чите их, см. также рис. 14 .64.
Используемая терминол огия в наименовании датчиков и передатчи
ков — рис. 14.67. Бирка с номерами или иной идентификатор помещается
внутри каждого символа, чтобы отобразить критическую информацию. Бук%
венно%цифровой код, называемый функциональным идентификатором, по%
мещается у вершины символа, чтобы определить внутреннюю функцию.
Первая буква отражает процесс или измеряемую величину: P (pressure) —
давление, T (temperature) — температура, и т.д . Вторая буква сообщает
функцию прибора: I (indicate) — индикация, R (record) — запись, и т.д . В
случае наличия третьей и четвертой букв возможна дополнительная инфор%
мация относительно первой буквы, например, PDI отображает дифференци%
альное давление: P — pressure, D — differential, I — indicate % отображение;
PDAH — указатель дифференциального давления, если давление настолько
велико, что превышен уровень тревожной сигнализации: А — alarm, H —
high. См. также пояснения к рис. 14.64.
990
Рис. 14.65. Обозначения клапанов, исполнительных элементов и приборов
ëàëíÖåÄ éÅéáçÄóÖçàâ à ëíÄçÑÄêíçõï ëàåÇéãéÇ
991
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Рис. 14.65 . Обозначения клапанов, исполнительных элементов и приборов
(окончание)
992
Рис. 14.66. Обозначение потоков
Рис. 14.67. Идентификация приборов
ëàëíÖåÄ éÅéáçÄóÖçàâ à ëíÄçÑÄêíçõï ëàåÇéãéÇ
993
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Рис. 14.67. Идентификация приборов (окончание)
Аббревиатуры для источников:
AS – источник воздуха;
IA – воздушный инструмент;
PA – Заводской воздух;
ES – Электрический источник питания;
GS – Источник газа;
HS – Гидравличекий источник;
NS – Источник азота;
SS – Источник пара;
WS – Источник воды.
994
ëàëíÖåÄ éÅéáçÄóÖçàâ à ëíÄçÑÄêíçõï ëàåÇéãéÇ
995
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Изучите указатели на рис. 14 .64 и идентификаторы всех элементов на рис. 14 .65 –
14.67. Промышленные процессы характеризуются комплексным характером, интегра%
цией большого количества связей и систем. Следовательно, проблема управления та%
кой системой также носит комплексный характер. В связи с этим задача обеспечения
безотказности процесса в каждой отдельно рассматриваемой системе может оказаться
непростой. Вместе с тем некоторые общие принципы и процедуры могут помочь в лока%
лизации проблемы:
Знание процесса — прежде чем начать заниматься проблемой безотказности
системы управления конкретным процессом, необходимо понимать характер процес%
сов как внутри, так и вне системы. Необходимо изучить процесс, чтобы отчетливо
представлять себе, как он происходит, какие возмущающие факторы воздействуют на
переменные процесса.
Знание системы управления — не менее важно знать систему управления этим
процессом. Если применена продвинутая система типа каскадного управления или
управления по возмущению, то понимание принципа управления еще более необходи%
мо. Важно отличать результаты настройки контроллера от последствий отказов эле%
ментов — это первое важное отличие, которое вы должны уметь определять. Если с
помощью настройки не удается устранить проблему, значит имеют место неисправно%
сти в системе или ее компонентах.
Характер процесса в зависимости от задач управления — возможны три
ситуации при появлении дефектной продукции:
1. Процесс может осуществляться корректно, но система управления функци%
онирует неправильно либо не настроена должным образом.
2. Система управления действует корректно, но процесс может быть непра%
вильным.
3. Как сам процесс, так и система управления функционируют неправильно.
Третье предположение вначале можно проигнорировать, поскольку множествен%
ные отказы элементов гораздо менее вероятны, чем одиночные. Последовательность
операций при поиске неисправностей определяется симптомами, но если приблизить%
ся к решению проблемы сразу не удается, начните с предположения о неправильности
процесса, поскольку система управления обычно очень надежна и содержит мало эле%
ментов, которые могут отказать.
Первое, с чего стоит начать, — это глубокое представление о процессах в систе%
ме. Можно представить себе процесс, протекающий под ручным управлением (без
обратных связей) и испытать все приборы на их способность к правильному функцио%
нированию. Можно определить, удается ли получить хорошую продукцию при ручном
управлении, и сделать выводы о том, какие процессы не вызывают сомнения. Если
функционирование таких элементов, как двигатель, клапан, нагреватель или индика%
тор, вызывает сомнения, то надо изучить обслуживание этих элементов. Система дол%
жна пройти детальное тестирование в разомкнутом режиме, прежде чем будет осуще%
ствлен переход к замкнутой системе.
Во%вторых, если система работоспособна, ее следует подвергнуть испытанию на
ударные воздействия путем изменения уставки на 5 или 10 %. Проверяется, не слиш%
ком ли велика статическая погрешность и лежит ли время установления в заданных
пределах. Если какой%либо из параметров выходит за пределы допусков, следует про%
996
верить, удается ли его установить на требуемом уровне. Элементами системы управ%
ления, которые могут стать причиной неисправностей, обычно являются датчики, вы%
ходные управляющие элементы, источники опорного сигнала или сигналов обратных
связей и, наконец, контроллеры.
Замена системы управления. Можно установить новую систему управления
процессом или модифицировать параметры прежней: поскольку ранее система никог%
да не работала корректно, то любые узлы измерения и преобразования информации
могут быть причиной возникших проблем управления и функционирования. Если про%
верке подвергается правильность функционирования, можно использовать описан%
ную ранее процедуру для начала процесса. Модернизированная система может иметь
множественные проблемы, которые позволят локализовать две или более из них.
Проблемы управления в системе, которая функционировала корректно, не может
быть решена изменением параметра единственного элемента.
14.11. ÇÖÅ-ëÄâíõ èé ìèêÄÇãÖçàû
çÖèêÖêõÇçõåà èêéñÖëëÄåà
Адреса веб%сайтов поставщиков аппаратных и программных средств приведены ниже.
Поскольку адреса в Сети часто изменяются, может оказаться, что некоторые ссылки
неактивны. В этом случае используйте любую поисковую систему, чтобы найти инте%
ресующие вас материалы.
Allen Bradley Corporation
http://www.ab.com
Omron Electronics LLC
http://omron.com
Siemens AY Corporation
http://www.siemens.com
Emerson Controls
http://www.emersonprocess.com/fisher/innek.html
êÖáûåÖ
14.1 . Введение
Автоматическое управление — такое управление, при котором переменная
процесса устанавливается и поддерживается на желаемом уровне, называе%
мом уставкой.
Преимущества системы управления: усиление мощности, удаленное управ%
ление, преобразование формы сигнала и компенсация возмущений.
êÖáûåÖ
997
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
14.2 . Отклик системы
Отклик любой системы управления на данный процесс стимулирует измене%
ние установленного состояния вследствие изменения уставки или возмуще%
ния в той мере, которая зависит от качества разработанной системы.
Отклик системы — это реакция на ступенчатое изменение уставки или на
внешнее возмущение.
Существуют три составляющие отклика: мертвое время, переходной про%
цесс и установившаяся погрешность.
Мертвое время — это интервал между изменением уставки и моментом, ког%
да процесс начинает реагировать на это изменение.
Переходной процесс в системе оценивается временем, за которое перемен%
ная процесса изменяется от 0 до 90 % установившегося значения после из%
менения уставки.
Установившаяся ошибка — это отношение регулируемого параметра (пере%
менной процесса) вследствие недостаточной точности элементов системы
управления, нестабильности уставки или из%за внутренних проблем разра%
ботанной системы регулирования.
14.3 . Разомкнутые и замкнутые системы регулирования
Элементы, участвующие в контуре управления: источник сигнала уставки,
опорный задатчик, суммирующий переход, контроллер, выходной управляю%
щий элемент, процесс, задатчик сигнала обратной связи.
Возмущением назовем любое условие, которое вызывает изменение пере%
менной процесса.
Выходной управляющий элемент — это первичное устройство, воздейству%
ющее на переменную процесса и обычно являющееся аппаратным заверше%
нием контура управления.
Контроллер — пневматическое, электронное или цифровое устройство, которое
усиливает и компенсирует входной сигнал, а также генерирует выходной сигнал с
целью скорректировать различие между переменной процесса и уставкой.
Суммирующее устройство — устройство, в котором алгебраически сумми%
руются входы и имеется единственный выход, пропорциональный сумме или
разности входов.
Задатчик опорного сигнала — устройство, которое преобразует желаемое
значение уставки в такую физическую форму, которая согласуется с систе%
мой управления.
Задатчик сигнала обратной связи — устройство, которое преобразует изме%
ренное значение переменной процесса в такую физическую форму, которая
согласуется с требованиями к входным сигналам системы управления.
Отклик разомкнутой системы — это сигнал на выходе устройства обратной
связи, когда цепь обратной связи разомкнута.
Отклик замкнутой системы формируется следующим образом: берется сигнал
уставки; сравнивается с сигналом обратной связи (переменной процесса), гене%
рируется сигнал ошибки. Входной сигнал контроллера вырабатывает выходной
998
сигнал контроллера, который есть не что иное, как произведение сигнала ошиб%
ки на усиление контроллера. Выходной управляющий элемент, который изменя%
ет переменную процесса, управляется выходным контроллером ВК.
Модель системы устанавливает соответствие между выходом системы и ее
входом.
14.5 . Процессы с запаздыванием и опережением
Проектирование системы должно решать три основные задачи: получение
требуемого отклика системы; снижение установившейся ошибки; обеспече%
ние устойчивости. Другие важные факторы — стоимость проектирования и
надежность функционирования.
Один из важнейших показателей системы — возможно более высокое быст%
родействие.
Оптимальные качества системы могут быть достигнуты, когда уменьшаются
время установления, установившаяся погрешность и мертвое время.
Существуют три типа переходных процессов: чрезмерно демпфированные (боль%
шое время установления, отсутствие перерегулирования), критически демпфиро%
ванные (оптимальное время нарастания, отсутствие перерегулирования), недо%
статочно демпфированные (малое время нарастания, наличие звона).
Четыре показателя часто используются для оценки качества переходного
процесса: показатель одной четверти амплитуды колебательного процесса,
пиковое значение перерегулирования в процентах, минимум интеграла абсо%
лютной ошибки, критическое демпфирование.
Увеличение усиления контроллера снижает установившуюся погрешность.
Установившаяся погрешность может быть снижена смещением и введением
интегрального режима.
Стабильность системы связана с общим откликом системы, который являет%
ся суммой свободной и вынужденной составляющих.
Системы первого порядка с запаздыванием, часто используемые в системах
регулирования, содержат один накопительный элемент (конденсатор) и один
рассеивающий энергию элемент (резистор).
Системы второго порядка имеют два накопительных элемента и один рассеи%
вающий элемент.
Поведение систем первого и второго порядка описывается диаграммой Боде в
полулогарифмическом масштабе, которая изображает зависимость модуля и
фазы выходного сигнала системы в зависимости от частоты входного сигнала.
14.7. Одноконтурные непрерывные системы
Режимы управления системами делятся на позиционные (включено/выклю%
чено), непрерывные (пропорциональные П, интегральные И, дифференци%
альные Д, пропорционально%интегральные ПИ, пропорционально%диффе%
ренциональные ПД, пропорционально%интегральные%дифференциональные
ПИД), системы с запаздыванием и опережением, системы на основе нечет%
кой логики.
êÖáûåÖ
999
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
Пневматические (все реже используемые), аналоговые (все еще находящие
применение), цифровые (наиболее распространенные) применяются для ре%
ализации различных режимов.
Прерывистое (позиционное) управление используется для объектов с боль%
шой инерционностью.
В двух позиционных контроллерах добавляется гистерезис или нейтральная
зона в дополнение к принципу «включено — выключено».
Плавающий режим управления или многопозиционный режим имеет три
уровня (0, 50 или 100 %) выходного сигнала или более.
Пропорциональный контроллер используется в тех случаях, когда процесс
должен удерживаться в заданных границах, имеет малую емкость и подвер%
жен воздействию помех.
Выход пропорционального контроллера равен произведению усиления Kп на
значение сигнала ошибки.
Пропорциональный канал характеризуется таким изменением сигнала ошиб%
ки, которое вызывает полное изменение состояния выходного элемента.
Интегральный режим управления (И) применяется для исключения стати%
ческой ошибки.
Сброс определяет число повторений операций интегрирования в единицу вре%
мени, а время интегрирования — интервал между операциями интегрирования.
Сброс определяет, насколько быстро интегральный контроллер изменяет
выход относительно пропорционального контроллера.
Дифференциальный режим (Д) применяется для коррекции быстро меняю%
щихся возмущений. Он всегда используется вместе с пропорциональным ре%
гулятором и никогда не применяется в системах с высоким уровнем шумов.
Время нарастания определяет, насколько действие производной изменяет
выход контроллера.
ПИД%контроллер совмещает все достоинства каждого из режимов управле%
ния с некоторыми ограничениями.
Аналоговые контроллеры непрерывно реагируют на изменение ошибки, а
цифровые — на изменение ошибки в течение интервала, называемого ин%
тервалом квантования.
Безударное переключение плавно приводит систему в рабочее состояние пос%
ле переключения из режима ручного управления в режим замкнутой системы.
Нечеткие контроллеры используют более абстрактные лингвистические пе%
ременные для описания процессов и значений параметров.
14.11. Настройка систем регулирования
Настройка — процесс установления коэффициентов усиления для режимов
П,ИиД.
Используются два метода настройки: метод предельного цикла и метод реак%
ций процесса.
Метод предельного цикла предполагает введение замкнутой системы в ре%
жим автоколебаний с постоянной амплитудой, измерение усиления системы
1000
и периода автоколебаний для использования этих значений при определении
коэффициентов усиления в режимах П, И и Д.
Метод реакции основан на ступенчатом изменении уставки в разомкнутой
системе управления и использовании параметров переходного процесса для
расчета коэффициентов усиления в режимах П, И и Д.
Каскадные системы используются при больших постоянных времени в сис%
теме параметров, регулируемых выходным управляющим элементом.
Системы с регулированием по возмущению используются при больших посто%
янных времени, но при отсутствии причинно%следственных связей между воз%
мущением и параметром, регулируемым выходным управляющим элементом.
Регулирование соотношений используется в случае, когда два материала
должны быть смешаны в строго заданной пропорции.
Адаптивное управление — общий термин, используемый с целью указать
функцию контроллера, которая отвечает требованиям процесса.
14.13. Системы с повышенной отказоустойчивостью
Системы с повышенной отказоустойчивостью требуют знания процессов,
знания систем управления, способность различать процессы в объекте и си%
стеме управления, использовать различные процедуры для новых разрабо%
ток, которые будут иметь преимущества в течение некоторого времени.
Çéèêéëõ
1. Опишите, чем бы вы хотели заниматься в той области, которая представляется
наиболее привлекательной для вас.
2. В чем различие и сходство ручного и автоматического управления?
3. Что такое автоматическое управление?
4. Расскажите, как используется самоконтроль в замкнутых системах регулирования.
5. Опишите работу трех автоматических систем управления, которыми вы регуляр%
но пользуетесь.
6. Опишите допустимое мертвое время, переходной процесс и статическую ошибку
в каждой из трех систем, названных в ответе на предыдущий вопрос.
7. Опишите преимущества, которые должны обеспечить системы управления.
8. Объясните, почему каждое из преимуществ, названных вами в ответе на преды%
дущий вопрос, важны в системах, упомянутых в ответе на вопрос 5.
9. Дайте определение следующим терминам: входное воздействие, кривая переход%
ного процесса в системе, мертвое время, переходной процесс, установившийся
процесс, установившаяся ошибка, разомкнутая система и замкнутая система ре%
гулирования.
10. Назовите три причины возникновения установившейся ошибки.
11. Опишите все элементы разомкнутой системы.
Çéèêéëõ
1001
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
12. Расскажите, каким образом разомкнутая система может быть преобразована в
замкнутую.
13. Назовите три разомкнутые системы, которыми вы пользуетесь каждый день.
14. Опишите наиболее часто используемые в промышленности типы систем управления.
15. Как влияют возмущающие факторы на процесс, в котором они сосредоточены, и
как можно ослабить их влияние?
16. Опишите суммирующий переход и проанализируйте свой выбор знаков (плюс или
минус), влияющих на характер процесса.
17. Если увеличение уровня в примере 14.4 трактуется как отрицательный вход, то
как это будет влиять на процессы на рис. 14 .6?
18. Напишите уравнения погрешностей в контроллерах прямого и обратного дей%
ствия и опишите действие этих контроллеров.
19. Расскажите о трех наиболее существенных назначениях систем регулирования.
20. Как соотношение цена%качество влияет на разработку систем регулирования?
21. Что такое робастность системы?
22. Объясните, почему установившаяся погрешность непосредственно связана с
уровнем жидкости в задаче на рис. 14.13.
23. Предположим, что приток жидкости на рис. 14.13 увеличился до 6 галлонов в
минуту. Расскажите, что произойдет в системе регулирования и каким будет со%
стояние системы после достижения баланса.
24. При каких положениях процесс регулирования, упомянутый в предыдущем воп%
росе, осуществляется без статической погрешности? Если такой процесс возмо%
жен, то опишите, как он происходит.
25. Каким образом смещение может быть использовано для устранения статической
погрешности? Какие проблемы возникают, если смещение используется для
уменьшения статической ошибки?
26. Каковы критерии процессов, которые должны быть учтены в системах первого
порядка с запаздыванием? Какие виды процессов требуют учета этих критериев?
27. Опишите отклик системы первого порядка с запаздыванием.
28. Что такое диаграмма Боде и как она используется при анализе процессов?
29. Опишите диаграмму Боде для системы первого порядка с запаздыванием.
30. Каковы критерии процессов, которые должны быть учтены в системах второго
порядка с запаздыванием? Какие виды процессов требуют учета этих критериев?
31. Опишите отклик системы второго порядка с запаздыванием.
32. Опишите диаграмму Боде для системы второго порядка с запаздыванием.
33. Определите следующие термины: угловая частота, чрезмерно демпфированная
система, критически демпфированная система, недостаточно демпфированная
система, коэффициент демпфирования, круговая частота, естественное затуха%
ние, резонансная частота, усиление на резонансной частоте, процент перерегули%
рования, время установления, время нарастания, запас по фазе.
34. Что ограничивает максимальное усиление, которое должно быть представлено
диаграммой Боде в системах второго порядка с запаздыванием?
1002
35. Каково оптимальное значение коэффициента усиления в замкнутых системах
второго порядка с запаздыванием?
36. Как влияет коэффициент демпфирования на переходной процесс и установивше%
еся значение отклика?
37. Опишите работу двухпозиционного ключевого и и астатического контроллеров. В
чем их сходство и в чем различие?
38. Каково назначение диода на рис. 14 .29б? Подсказка: диод имеет более высокое
напряжение пробоя, чем транзистор.
39. Какова наиболее подходящая область применения для регулирования способом
«включено — выключено»?
40. Опишите работу аналоговых и цифровых П, ПИ, ПД, ПИД регуляторов.
41. Какие критерии используются для выбора режима работы регулятора в системе?
42. Объясните, каким образом интегральный режим работы регуляторов исключает
установившуюся погрешность.
43. Объясните, каким образом контроллер с режимом регулирования по производ%
ной форсирует работу выходного исполнительного элемента при отработке быст%
рых и значительных изменений нагрузки.
44. Объясните, почему установившаяся погрешность неизбежно присутствует в про%
порциональных регуляторах при изменении уставки или нагрузки.
45. Расскажите, как действуют цифровые контроллеры в сравнении с аналоговыми.
46. Расскажите, как действуют контроллеры нечеткой логики в сравнении с цифро%
выми и аналоговыми.
47. Что такое безударный переходной процесс и каким образом он применяется?
48. Опишите настройку процесса методом предельного цикла.
49. Опишите результат воздействия процесса настройки.
50. Расскажите, как действуют каскадные регуляторы и регуляторы по возмущению.
В чем их различие?
51. Как вы будете делать выбор между каскадом и регулятором по возмущению?
52. Что такое регулирование соотношений?
53. Что такое адаптивное регулирование?
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
1. Выберете двухточечный механический переключатель температуры и контрол%
лер от Allen Bradley для регулирования температуры в баке на рис. 14.2. Процесс
должен поддерживать температуру при 180 °F при дифференциале 10°. Покажи%
те, каким образом система должна быть присоединена к паровому клапану с вход%
нымисигналамиот1Вдо5В(1В—клапаноткрытна0%,5В—клапаноткрыт
на 100 %). Контроллер типа SPDT имеет установку контактов и требует питания
10 В постоянного напряжения.
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
1003
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
2. Как следовало бы подключить контроллер из предыдущей задачи при использова%
нии контроллера с входными сигналами 4—20 мА (4 мА — клапан открыт на 0 %,
20мА—на100%)?
3. Составьте таблицу, отображающую типы одноконтурных контроллеров, способ%
ных выполнять основные функции, например П%, ПД%, ПИ% и ПИД%регулирова%
ние , а также каскадные, адаптивные контроллеры, контроллеры по возмущению
и контроллеры соотношений.
4. Проведите в Интернете поиск контроллеров нечеткой логики и назовите два воз%
можных источника коммерческой информации по этим контроллерам.
áÄÑÄóà
1. Нарисуйте разомкнутую систему регулирования температуры, действующую по
блок%схеме на рис. 12.31.
2. Преобразуйте систему регулирования температуры (см. рис. 12.31) в систему с
обратной связью, нарисуйте функциональную блок%схему (FBD) для полученной
системы. Введите в систему источник возмущающих воздействий, которые, по
вашему мнению, могут создавать трудности.
3. Рассчитайте значения коэффициентов усиления G1¦G5 для схемы на рис. 14.5а,
используя следующие данные:
4. Процесс регулирования температуры в баке на рис. 12.31 имеет следующие харак%
теристики. При температуре жидкости 150 °F и окружающей температуре 70 °F из%
менение состояния клапана на 1 % изменяет температуру жидкости на 10 °F. Повы%
шение окружающей температуры на 10 °F повышает температуру жидкости на 1 °F.
Полагаем, что в этом диапазоне температур система линейна.
a. Изобразите функциональную схему разомкнутой системы для процесса пе%
ремешивания жидкости в баке.
b. Определите коэффициенты усиления блоков в модели процесса.
c. Используйте свою модель для предсказания температуры жидкости при воз%
растании окружающей температуры на 0 °F, 10 °F, 20 °F.
5. Решите задачу 4 при условии процесса в замкнутой системе и усилении контрол%
лера 100.
1004
6. Проверьте значения скорости в примере 14.5 по сравнению со значениями в табли%
це для разомкнутой и замкнутой систем круиз%контроля при усилении, равном 4.
7. Составьте сравнительную таблицу, подобную таблице для круиз%контроля, чтобы
сравнить разомкнутую и замкнутую системы регулирования температуры в зада%
чах4и5.
8. Дополните модели и системы уравнений для замкнутой системы круиз%контроля в
системе на рис. 14.9 при значениях усиления контроллера 50 и 100.
9. Используйте систему уравнений задачи 8 для расчета скорости при значении на%
клона 0, 1, 10 и 20 %. Уставка скорости составляет 55 миль в час, усиление равно
5. Сравните результаты решения этой задачи со значениями, полученными в при%
мере 14.4, и объясните, как усиление влияет на чувствительность к изменению
наклона.
10. Опишите условия процесса перемешивания жидкости в баке, предложенные в
примере 14.6. Опишите изменение уровня жидкости и изменение состояния кла%
пана стока в процессе коррекции изменения нагрузки.
11. Опишите отклик системы на ступенчатое изменение нагрузки (F1), потока на вы%
ходе (F2) и переменной процесса (уровня жидкости в баке) для задачи, описанной
в примере 14.6.
12. Система регулирования уровня имеет усиление 6, постоянную времени 0,02 с и
устанавливает уровень жидкости в м [L(t)] при входящем потоке в м3/с. Если
вначале бак пуст, входной клапан открывается ступенями от 0 до 0,25 м3/с. Опре%
делите уровень жидкости в баке через 0,05 с и окончательно установившийся
уровень.
13. Нарисуйте диаграмму Боде для системы первого порядка с запаздыванием, ана%
лизируемой в задаче 12.
14. Рассчитайте максимальное значение и момент его достижения, процент перере%
гулирования, 3%процентное время установления, собственную частоту демпфи%
рования и время нарастания для системы второго порядка с запаздыванием со
следующими характеристиками: собственная частота — 10 рад/c, коэффициент
демпфирования 0,5.
15. Система задачи 14 замкнута. Определите максимальное усиление и максималь%
ную частоту системы.
16. Найдите в Интернете характеристики LM35 для рис. 14.29. Определите установ%
ку потенциометра для уставки 80 °С . Опишите работу контроллера, регулирую%
щего температуру.
17. Замените двухпозиционный контроллер с рис. 14 .33 на контроллер с мертвой зо%
ной 0,4 В. Опишите его действие.
18. Замените программируемый логический контроллер (ПЛК) его программным экви%
валентом для функциональной схемы двухпозиционного контроллера на рис. 14.34.
19. Замените лестничный ПЛК эквивалентной схемой многопозиционного контрол%
лера на рис. 14 .38 .
20. Добавьте функциональную блок%схему к рис. 14 .38, чтобы рассчитать ошибку
(СУ — ПП) и верхний и нижний пределы ошибки (ошибка минус отрицательный
áÄÑÄóà
1005
ìÔ‡‚ÎÂÌË ÌÂÔÂ̊‚Ì̊ÏË ÔÓˆÂÒÒ‡ÏË
допуск и ошибка плюс положительный допуск). Используйте уставку 160 °F, диапа%
зон регулирования 100 °F, минимальную температуру 110 °F и мертвую зону 12 %.
Изобразите эти значения.
21. Система регулирования должна быть настроена методом предельного цикла. Ре%
жим производной отсутствует, режим интегральный настроен на минимальное
значение. Усиление постепенно увеличивается до тех пор, пока ПП не устанавли%
вается в режим автоколебаний при малых возмущениях. Уставка усиления равна
3,2, период колебаний — 3 минуты. Используя методику Циглера и Никольса,
определите уставку ПИД%контроллера.
22. Добавьте второй контур регулирования по возмущению к рис. 14.63 для коррек%
ции вариаций входной температуры.
23. Изобразите диаграммы процессов для рис. 14 .61 и 14.63, используя стандартные
символы, представленные в разделе 14.12. Предусмотрите показывающий дат%
чик температуры и тревожную сигнализацию при превышении допустимого зна%
чения давления. Сделайте необходимые дополнения, чтобы завершить рисунок.
1006
15
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl
Ë ÔÓ„‡ÏÏËÓ‚‡ÌËÂ
ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
ñÂÎ̧ „·‚̊
Основная цель главы — дать описание, принцип действия и про
граммирование промышленных роботов, применяемых в производ
ственной автоматике. Помимо этого затрагивается тема стра
тегии безотказного применения роботов.
После изучения этой главы вы сможете:
1. Назвать две основные группы, на которые разделяются роботы, и описать харак
теристики каждой группы.
2. Описать характеристики каждой из четырех категорий роботов, основанных на
геометрии руки и на применении каждого типа.
3. Назвать силовые системы, используемые для привода роботов, преимущества и
недостатки каждого типа.
4. Описать возможные способы программного управления роботами, пригодные
для выполнения вспомогательных и основных операций.
5. Составить программу для типичных вариантов применения вспомогательных и
основных роботов.
6. Обеспечить безотказность робототехнических систем изолированием проблем
ных областей.
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
èêàåÖçÖçàÖ áçÄçàâ Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Промышленные роботы составляют смысл и содержание сферы деятельности, кото
рая предполагает получение образования в области промышленной электроники и
технологии. Возможна работа в компаниях, производящих робототехнические сред
ства и системы. Эта сфера охватывает разработку роботов и контроллеров, испытание
на отказоустойчивость роботов, поставляемых конечному пользователю, разработку
управляющих программ, техническое обслуживание продаж, установку, сопровожде
ние и предоставление услуг пользователям.
Полный комплекс запросов существует и в сфере использования роботов в сис
темной автоматике. Здесь необходимы специалисты для установки и поддержки в ра
ботоспособном состоянии робототехнических систем, специалисты по программиро
ванию и оборудованию рабочих ячеек для роботов в производственном процессе.
Помимо названных занятий, непосредственно связанных с роботами, существует при
мерно равная по объему сфера деятельности, связанная с аппаратным обеспечением
робототехнических систем. Например, чтобы робот мог нормально функционировать,
должно существовать приспособление, связанное с «рукой» робота, его «конечнос
тью», способной удерживать инструмент, — так называемый гриппер (захват).
Эта конечность должна быть специально разработана, изготовлена, испытана и встро
ена в рабочую ячейку. Другой пример периферийного аппаратного обеспечения включает
датчики, средства безопасности и защиты, системы визуального контроля. Роботоуправля
емая рабочая ячейка может содержать любые промышленные электронные устройства,
узлы и схемы, рассмотренные в предыдущих главах, поэтому квалифицированное понима
ние этих концепций необходимо для работы в сфере робототехники. Пример специфическо
го вида деятельности в этой сфере — разработка рабочей ячейки для робота, выполняюще
го операции автоматической загрузки изделий. Для этого придется изучить существующие
ручные устройства и механизмы, чтобы удостовериться, что автоматическая ячейка работа
ет нормально. Поскольку это ваша первая разработка, вы приглашаете инженера фирмы
FANUC Robots, чтобы он помог вам в выборе робота и его встраивании в систему. Вы об
суждаете потребности в датчиках и программируемых логических контроллерах (ПЛК) с
инженерами фирмы Allen Bradley по поставкам оборудования и его применению. После сбо
ра необходимых данных вы производите предварительную разработку компьютеризованно
го устройства и его совмещение с программой, использующей новую версию IEC61131 пос
ледовательной функциональной карты языка программирования. После четырехнедельного
процесса разработки вы передаете окончательный вариант проекта в производственный от
дел. Вам потребуется еще шесть недель для встраивания ячейки в систему полностью авто
матизированного производства.
15.1. ÇÇÖÑÖçàÖ
Промышленный робот — отличный пример промышленной электронной машины, так
как он содержит компоненты и использует технологические узлы и приемы, описан
ные во всех предыдущих главах этой книги. Роботы содержат механические переклю
1008
чатели во входных цепях, световые индикаторы состояния узлов, контроллеры, вы
полненные на основе всех типов твердотельных устройств, рассмотренных ранее, дви
гатели и узлы для перемещения (движители), датчики для определения их положения
и набор программ для их перемещения. Роботы используются для автоматизации ра
бочих ячеек, которые также содержат встроенные компоненты промышленной элект
роники. В следующих разделах рассматривается идентификация, принцип действия и
программирование промышленных роботов.
15.2 . éèêÖÑÖãÖçàÖ èêéåõòãÖççõï êéÅéíéÇ
Промышленные роботы — уникальные производственные машины. Хотя многочислен
ные производственные машины могут выполнять сложные действия, подобно роботам,
при более детальном ознакомлении вы обнаружите существенные различия. Строгое
определение поможет отличить промышленный робот от множества автоматически
действующих машин и производственных механизмов. В стандарте ISO/TR/8373/2.3,
разработанным Международной организацией по страндартизации (International Stan
dardization Organization — ISO), промышленный робот определяется следующим об
разом: робот — автоматически управляемый репрограммируемый многоцелевой мани
пулятор с несколькими репрограммируемыми осями координат, которые могут быть
либо фиксированными, либо подвижными с целью их использования в промышленной
автоматизации. Ключевые слова здесь — репрограммируемый и многоцелевой, по
скольку большинство одноцелевых машин не отвечает обоим этим требованиям. Реп
рограммируемость означает два свойства: первое — записанная программа использу
ется для управления движением робота; второе — программа может быть существенно
модифицирована изменением содержимого рабочей ячейки, которая управляет движе
нием «руки». Гибкость программирования демонстрируется, например, управлением
движения «руки», которая должна брать детали, координаты которых в процессе дви
жения сообщаются роботу системой видения. Многоцелевой характер подчеркивает тот
факт, что робот может выполнять множество различных функций в зависимости от про
граммы и от установленного инструмента. Например, одна компания может запрограм
мировать робот на выполнение сварочных работ, другая будет использовать такой же
робот для укладывания коробок в упаковку. Определениям употребительных в робото
технике терминов посвящен материал следующего раздела.
15.2 .1 . íÂÏËÌÓÎÓ„Ëfl Ó·ÓÚÓÚÂıÌËÍË
Подобно всякой новой технологии, робототехника вводит новую терминологию, кото
рая должна быть изучена пользователями для работы в этой области. Большинство
терминов в робототехнике может быть усвоено в процессе чтения этой главы, но неко
торые из них требуют предварительного пояснения. Спецификация и размеры робота
LR MATE 100i фирмы FANUC представлены на рис. 15.1 . Для каждого определения,
приведенного ниже, найдите соответствующее значение в спецификации.
éèêÖÑÖãÖçàÖ èêéåõòãÖççõï êéÅéíéÇ
1009
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Рабочее пространство. Рабочее пространство — это тот объем, в котором захват
робота может перемещаться без ограничений, помимо тех, которые накладываются
внутренними связями. На рис. 15.2 показано рабочее пространство, или рабочий объем,
для робота Unimate — первого производственного робота, примененного фирмой
General Motors, а рядом приведено аналогичное рабочее пространство для человека.
Рабочий инструмент робота. Это рабочий инструмент, который связывает основа
ние или инструментальную плату с оконечной точкой плеча робота. Инструментальная
Рис. 15.1. Чертежи и спецификация робота LR MATE 100i фирмы FANUC
1010
плата изображена на рис. 15.1; найдите оконечную точку плеча на этом рисунке. Суще
ствует несколько терминов для определения инструментального оснащения робота, в
том числе оконечная точка плеча, захват, эффектор. Однако термин «захват» ис
пользуется чаще.
Рис. 15.2 . Рабочее пространство робота LR MATE 100i фирмы FANUC:
а) для оператора;
б) для робота
Оси и нумерация осей. Каждое подвижное сочленение плеча робота называют
осью, и их нумеруют в определенном порядке. Принятый порядок нумерации осей ис
пользуется производителями роботов, включая три этапа:
1. Начинаем с монтажной платы (основания робота).
2. В процессе продвижения вдоль плеча робота маркируем первую ось движе
ния, или связь, которую отметим как ось 1.
3. Продолжаем движение вдоль плеча до оконечной точки плеча и нумеруем по
порядку каждую следующую ось.
Рассмотрите нумерацию осей робота на рис. 15.1 и убедитесь, что оси пронумерова
ны именно таким образом. Оси робота характеризуются положением или ориентацией.
Положение осей. Положение осей обычно обозначается цифрами 1, 2 и 3 на пле
че робота. Эти три связи обеспечивают достаточную возможность для того, чтобы по
местить рабочий инструмент в любую точку рабочего пространства, где работа может
быть выполнена. Для человека аналогичные положения осей соответствуют связям в
талии, плече и локте. Изучите робот
FANUC на рис. 15.1 и убедитесь, что положения осей соответствуют этой аналогии.
Ориентация осей. Ориентация осей, помеченная цифрами 4 (тангаж) и 5 (рота
ция) на рис. 15.1, изменяет наклон оконечной части плеча робота, так что связи захва
та или инструмента позволяют изменять углы наклона и положения трех координат
ных осей вращения. Робот может выполнять три вида движений в пространстве:
изменять угол наклона в двух взаимно перпендикулярных плоскостях и осуществлять
вращение. Изменение ориентации осей робота подобно движению человеческой руки.
Рука перемещает свою кисть в ту точку пространства, где предмет может быть взят,
при этом должна иметься уверенность в надежном захвате предмета и фиксации его
éèêÖÑÖãÖçàÖ èêéåõòãÖççõï êéÅéíéÇ
1011
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
определенного положения. Аналогия движения робота с движением кисти руки пока
зана на рис. 15.3 . Применяются три различных способа воспроизводства движения
кисти руки. На рис. 15.3б представлены три названных вида движений: изменение уг
лов наклона в двух перпендикулярных плоскостях и вращение. Робот на рис. 15.3в
осуществляет те же движения, используя иную кинематическую схему, зависящую от
положения первой оси вращения. Изучите рисунок, чтобы получить ясное представ
ление об ориентации осей.
Третий тип и способ перемещения, основанный на трех вращательных движени
ях, показан на рис. 15.4 . Здесь представлен вид спереди с осью, соединяющей плечо
на верхней части рисунка с инструментальной платой слева.
Рис. 15.3. Повороты запястья руки:
а) у человека;
б) у робота первой конструкции;
в) у робота второй конструкции
Рис. 15.4. Робот,
работающий
на базе трех
вращательных
движений
Три концентрических привода связывают плечо робота в верхней части рисунка с
комплексной передачей внутри шара, обеспечивающего три возможные ориентации дви
жения. Инструментальная плата (с левой стороны шара на рис. 15.4) обеспечивает вра
щательное движение. Линия раздела, проходящая через сферу, делит ее на две полусфе
ры, которые могут поворачиваться относительно друг друга. Полная сфера может
поворачиваться у конца руки робота, где вершина полусферы, помеченная буквой А, со
1012
единяется с осью. Нижняя полусфера, помеченная буквой В, может поворачиваться по
отношению к верхней полусфере для изменения ориентации инструментальной платы.
Обратите внимание, что поворот нижней полусферы на 180 (см. рис. 15.4) перемещает
инструментальную плату из положения 1 в положение 2. В результате любой угол наклона
при движении в двух взаимно перпендикулярных плоскостях может быть получен комби
нацией вращений верхней полусферы А и нижней полусферы В по отношению к верхней.
Главное достоинство этой кинематической схемы — малый объем рабочего пространства,
требуемый для перемещения в трех взаимно перпендикулярных направлениях.
Степень свободы. Каждое сочленение, или подвижная ось, дает одну степень
свободы. Машина с пятью подвижными сочленениями, как показано на рис. 15.1,
имеет пять степеней свободы. Ориентация инструмента требует максимум трех степе
ней свободы, а еще три степени свободы необходимы для позиционирования в преде
лах рабочего пространства. Если робот поместить на линейную поверхность скольже
ния — для перемещения по параллельным прямым, то добавляется четвертая степень
свободы. Промышленные роботы обычно имеют 4—7 степеней свободы.
Системы координат. Программа, записанная в систему управления роботом, опре
деляет его движение через систему заданных точек. Все запрограммированные точки
идентифицируются в базовой системе координат, определяемой тремя позициями: А, В и
С. Число степеней свободы робота определяет число значений, требуемых для определе
ния запрограммированной точки. Система координат с шестью степенями свободы пока
зана на рис. 15.5. Запрограммированные точки часто называют точками трансляции.
Рис. 15.5 . Шесть координат определяет состояние рабочего захвата
Точность. Понятие точности лучше объяснить на примере стрельбы по мишени.
Результаты стрельбы из двух различных винтовок, наведенных в центр мишени, пока
заны на рис. 15.6 . Результаты на рис. 15.6а не вполне хороши, поскольку они смеще
ны относительно центра. Однако воспроизводимость результатов (кучность) удовлет
ворительна, попадания в мишень занимают такую же площадь, как на рис. 15.6б, где
оба показателя — кучность и площадь рассеяния — хороши.
В робототехнике точность оценивается степенью близости рабочего органа (руки)
робота к специфически заданной позиции, когда система координат: 1) вводится офлай
новой программной станцией; 2) рассчитывается внутренней программой; 3) передает
ся телевизионной системой; 4) генерируется симулятором рабочей ячейки. Например,
телевизионная система определила, что робот должен переместиться в точку с коорди
натами Х = 50,00 дюймов, Y = 45,30 дюйма, Z = 10,01 дюйма (расчетная порция инст
румента), А = 0,00°, В = 90,00°, С = 100,00° (ориентация инструмента). Это движение
éèêÖÑÖãÖçàÖ èêéåõòãÖççõï êéÅéíéÇ
1013
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
предполагает перемещение инструмента в точку 50,00 дюймов по оси Х, 45,30 дюйма по
оси Y и 10,01 дюйма по оси Z. Угол наклона инструмента изменяется в той мере, как это
задано описанием. Точность определяет, насколько близко рабочий инструмент окажет
ся к точке, заданной телевизионной системой. В общем случае точность робота опреде
ляется расстоянием между фактическим положением инструмента и его координатами,
заданными одним из четырех описанных выше способов. Обычно точность робота быва
ет в десять раз ниже, чем воспроизводимость (кучность) результата перемещения. Спе
цификация трех роботов компании ABB Robotics приведена на рис. 15.7 . Обратите вни
мание на спецификацию точности каждого робота.
Рис. 15.6. Точность при стрельбе по мишени:
а) хорошая кучность при сбитом прицеле;
б) стрельба с высокой точностью и хорошей кучностью
Номинальная скорость определяется по стандарту МОС (ISO)
Рис. 15.7. Спецификация трех роботов АВВ
Изучение робота на рис. 15.1 указывает, что робот имеет базу, относительно ко
торой задается смещение рабочего органа. Законы геометрии требуют, чтобы каждая
ось, или степень свободы, была привязана к предыдущей оси: ось 1 связана с основа
1014
нием, ось 2 связана с осью 1 и так до последней оси, или степени свободы. Степень
точности оценивается суммой механических допусков на элементы кинематики, когда
они смонтированы вместе и взаимосвязаны.
Воспроизводимость. Воспроизводимость — это способность робота вернуться в
заданную программой точку рабочего пространства данной ячейки. Робот часто обучают
требованию перемещать захват в рабочее положение и возвращаться к нему после вы
полнения некоторого перемещения. Воспроизводимость определяет, насколько точно
рабочий орган возвращается к заданной точке после выполнения некоторого программ
ного цикла. Лучшая оценка воспроизводимости робота составляет 0,0005 дюйма.
Воспроизводимость робота не связана непосредственно с допуском на точность,
поскольку инструмент или захват устанавливается с желаемой степенью локализации
в рабочем пространстве или программно, или с помощью визуальных средств и меха
нических устройств. Координаты робота, которые не могут быть точно связаны с его
перемещением либо утратили точность вследствие износа, обуславливают ошибку
воспроизводимости. Воспроизводимость датчиков, которые измеряют перемещения
по каждой из координат, также влияет на спецификацию воспроизводимости робота.
Центр координат инструмента. Местоположение инструмента, установленного на
роботе или монтажной плате, называют началом координат или центром координат ин
струмента (ЦКИ). На рис. 15.8 сварочный инструмент связан с монтажной платой. Рас
положение инструмента в центре монтажной платы имеет координаты начальной устав
ки 0 или для трехмерного пространства — 0, 0, 0, т.е . смещение по оси инструмента,
смещение вверх или вниз и смещение влево или вправо. ЦКИ для сварочной горелки
имеет координаты: L = 14,00 дюймов, A = —4,00 дюйма, В = 0,00 дюймов. Значение А
отрицательно, поскольку соответствует движению вниз. В приведенном примере со сва
рочной горелкой робот будет управлять движением сварочного электрода, когда это
движение последовательно происходит через запрограммированные точки. В некоторых
робототехнических системах местоположение инструментов является одним из компо
нентов языка программирования. Так, в языке Seiko DARL, например, команда смеще
ния записывается в виде: DEFTL <1—9> X1, Y1, Z1. До девяти значений смещения мо
жет быть задано командой смещения ЦКИ для координат Х, Y и Z.
Быстродействие. Скорость, с которой робот может перемещаться вдоль каждой
оси под управлением программы ЦКИ, определяет быстродействие системы. Ско
рость может выражаться в линейных или угловых единицах, в системе метрической
или принятой в Англии.
Скорость перемещения механизма между запрограммированными точками на
много выше средней скорости движения между этими же точками, так как связана с
многократными ускорениями и замедлениями механизма в процессе движения ЦКИ и
изменениями направления движения. Скорость наиболее быстродействующих робо
тов семейства FANUC (см. рис. 15.1) может быть 240—480 дюймов в секунду.
èËÏ 15.1
Скорость ненагруженного робота VNL
= 20 дюймов в секунду, при нагрузке, обуслов
ленной весом захвата, — 18 дюймов в секунду, а при максимальной нагрузке — 60 %
от скорости ненагруженного робота. Робот перемещается на 250 дюймов при макси
мально загруженном захвате и на 225 дюймов с пустым захватом. Имеется тридцать
запрограммированных точек и 6 секундная программная задержка. Проверьте дан
éèêÖÑÖãÖçàÖ èêéåõòãÖççõï êéÅéíéÇ
1015
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
ные испытаний, указывающих, что каждая запрограммированная точка исполняется
в среднем за 0,1 с. Найдите полное время цикла.
êÂ̄ÂÌËÂ
Найдем время движения робота с ненагруженным захватом:
TimeNL = 12,5 c.
Найдем время движения с полной нагрузкой:
TimeFL = 20,8 c.
Найдем время прохождения тридцати запрограммированных точек:
TimePP = число точек × время на одну точку;
TimePP = 30 точек × 0,1 с/точку;
TimePP = 3 c.
Время полного цикла = TimeFL + TimeNL + TimePP + задержка;
Времяполногоцикла=12,5с+20,8с+3с+6с;
Время полного цикла = 42,3 с.
Рис. 15.8.
Инструментальная
плата робота со
сварочной горелкой
1016
Нагрузочная способность. Предельно допустимая нагрузочная способность оп
ределяется весом монтажной платы, которую робот, разработанный для перемещения
с предусмотренными в технических условиях разработчика ускорениями, замедления
ми и скоростями, способен перемещать в полном объеме рабочего пространства.
Нагрузочная способность робота, аналогичного изображенному на рис. 15.1, ча
сто определяется исходя из специфических функций, для которых он предназначен.
Нагрузочная способность представляет собой комбинацию веса захвата или инстру
мента, которым заканчивается рука робота, а также других его подвижных частей (на
грузочная способность = вес инструмента + вес движущихся частей). Изучите специ
фикацию робота FANUC на рис. 15.1. Обратите внимание на то, как нагрузочная
способность этой модели влияет на скорость.
èËÏ 15.2
Робот должен перемещать груз 15 фунтов. Если максимальная нагрузочная способ
ность (РМ) составляет 30 фунтов, то каков допустимый наибольший вес захвата (WG)
при необходимом запасе надежности 25 %?
êÂ̄ÂÌËÂ
Найдем максимально допустимый вес при максимально допустимой нагрузке и 25 %
запаса надежности.
Расчетный максимальный вес = максимально допустимая нагрузка +
+ (1 — запас надежности).
Расчетный максимальный вес = 30 фунтов + (1 — 0,25).
Расчетный максимальный вес = 22,5 фунта.
Найдем максимально допустимый вес захвата.
Допустимый вес захвата = расчетный максимальный вес –
–
вес подвижных частей.
Допустимый вес захвата = 22,5 фунта — 15 фунтов.
Допустимый вес захвата = 7,5 фунтов.
15.3. éëçéÇçÄü ëàëíÖåÄ êéÅéíÄ
Ассоциация Института Робототехники (RIA) определяет систему промышленного ро
бота следующим образом:
Система (системы) промышленного робота включает аппаратное и программное
обеспечение, состоящее из манипуляторов, источников питания, контроллеров, око
нечных эффекторов, любого оборудования, устройств, датчиков, с которыми робот не
посредственно взаимодействует, любого оборудования, устройств, датчиков, которые
необходимы для того, чтобы робот выполнял свои функции, любого интерфейса связи,
который обеспечивает мониторинг систем робота, его оборудования и датчиков.
éëçéÇçÄü ëàëíÖåÄ êéÅéíÄ
1017
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Основная система робота представлена на рис. 15.9. Частями системы являются
механическая рука с оконечным инструментом и источники энергии (гидравлические
или пневматические).
Рис. 15.9. Блоксхема рабочей ячейки
Оконечный инструмент связан с инструментальной платой, которая представляет
собой окончание руки робота. Электронные контроллеры, изображенные в центре
блок схемы, осуществляют выполнение интеллектуальных программ и всех требуе
мых операций. Обучающая подвеска робота, интерфейс рабочей ячейки и память про
грамм служат для связи робота с контроллером и обеспечивают интерфейс с другими
рабочими системами и узлами хранения программ.
Несколько устройств осуществляют интерфейс с рабочей ячейкой, включая кон
троллер рабочей ячейки, рабочие станции программирования, последовательные и
параллельные магистрали передач данных, цифровые датчики и актуаторы (исполни
тельные механизмы).
1018
Компьютер рабочей ячейки координирует движение робота и перемещение дру
гих подвижных частей, действует как интеллектуальный контроллер рабочей ячейки.
Часто этот контроллер выполняется на основе программируемых логических схем
(ПЛК) или программируемых микрокомпьютеров. Внешняя станция программирова
ния часто представляет собой промышленный микроконтроллер и может выполнять
функцию рабочей ячейки контроллера. Заметим, что рабочая ячейка контроллера или
компьютера и программирующая станция соединяются в рабочую ячейку интерфейса
либо посредством Ethernet, либо последовательным интерфейсом. Датчики подклю
чаются к роботу для обеспечения его информацией о перемещениях и состоянии рабо
чей ячейки, и тогда робот может инициировать через интерфейс действия актуатора
(рабочего механизма).
15.3.1 . åÂı‡ÌË̃ÂÒ͇fl Û͇
Рука — это механическое устройство, приводимое в действие электродвигате
лем, пневматическим устройством или гидравлическим устройством (актуатором).
Основным элементом привода является актуатор с вращающим или линейным пере
мещением. Комбинация движений, которые могут осуществляться механической ру
кой, определяется типом геометрии. Основные типы геометрии — ортогональная
(картезианская), цилиндрическая, сферическая или шарнирно сферическая.
Шарнирно сферическая механическая рука со всеми обозначенными степенями
свободы изображена на рис. 15.10. Шесть видов движений делятся на две группы.
Первая группа, называемая позиционным движением, включает рыскающее движе
ние руки (движение стеклоочистителя), вращательное движение плеча и поступатель
ное движение локтевого сустава. Комбинация этих трех движений позволяет руке пе
ремещаться в любое требуемое положение в пределах рабочего пространства.
Вторая группа движений, связанная с кистью руки, включает вращение в трех
взаимно перпендикулярных плоскостях (рыскание, тангаж и ротацию). Комбинация
этих трех движений, называемая ориентацией, позволяет фиксировать угол наклона
платы с инструментом и инструмента по отношению к обрабатываемому объекту. За
метим, что каждая точка шестимерного пространства состояний робота задется про
граммой с помощью шести координат: три из них описывают местоположение в трех
мерном пространстве, а три других — углы поворота и наклона плоскостей вращения.
Изучите рисунок с видами движений и изменением координат робота, чтобы вам стали
ясны движения руки робота от одной до другой точки шестимерной траектории, зада
ваемой программой.
15.3.2. ä·ÒÒËÙË͇ˆËfl ‚‡Ë‡ÌÚÓ‚ „ÂÓÏÂÚËË ÛÍË Ó·ÓÚ‡
Основные конфигурации движений руки робота, или варианты геометрии движений ро
бота манипулятора, сводятся к ортогональной, цилиндрической, сферической и шар
нирно сферической системам. Ортогональная (картезианская) система делится на две
группы: поперечные перемещения и подвижная рама тележка. Шарнирно сферичес
éëçéÇçÄü ëàëíÖåÄ êéÅéíÄ
1019
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
кая делится на две подгруппы: горизонтальную и вертикальную. Далее приводятся опи
сания каждой из названных конфигураций.
Рис. 15.10. Шесть степеней свободы движения руки робота
Ортогональная (картезианская) геометрия. Робот с ортогональной геометрией
может перемещать свой захват (гриппер) или инструмент, которым заканчивается
рука, в любое положение в объеме куба, определяющего рабочее пространство. Эту
геометрию образуют две конфигурации: подвижная рама и поперечные перемещения,
которые используются большинством приводов. Пример на рис. 15.11 представляет
машину с подвижной тележкой, которая может перемещаться вдоль осей Х, Y и Z,
давая три степени свободы для позиционирования. Обработка связана с перемещени
ем инструментальной платы. Прямоугольный объем рабочего пространства роботов
этого типа часто используется для перемещения изделий от конвейерной системы к
рабочим позициям, однако некоторые продавцы робототехнических систем и сегодня
предпочитают эту систему. На рисунке рамы с тележкой стрелками показаны направ
ления перемещения в направлениях Х, Y и Z, обеспечивающие три степени свободы
для позиционирования. Три степени свободы А, В и С обеспечивают поворот гриппера
(захвата), смонтированного на инструментальной плате. Робот на рис. 15.11 имеет,
таким образом, шесть степеней свободы, включая три для позиционирования и три
для ориентации.
Другой пример ортогональной геометрии представлен на рис. 15.12. Он организует
перемещения последовательно: вначале осуществляется перемещение по горизонталь
ной оси Х, происходит фиксация положения с помощью монтажных захватов — фиксато
1020
ров, затем устанавливается вторая горизонтальная координата Y, и, наконец, задается
вертикальная координата Z. Ориентация инструмента производится точно так же, как в
других системах роботов с углами поворота в трех взаимноперпендикулярных плоскостях.
Робот на рис. 15.12 имеет только плату инструмента и захват (гриппер), но не позволяет
изменять ориентацию инструмента, так как используется обычно для размещения и уклад
ки объектов. Порядок позиционирования осей может варьироваться в разных моделях, а
число осей (1, 2 или 3) определяется требованиями к автоматической ячейке, которая об
служивается роботом.
Рис. 15.11. Робот с картезианской геометрией и подвижной тележкой
Рис. 15.12.
Робот с
картезианской
геометрией
портального типа
éëçéÇçÄü ëàëíÖåÄ êéÅéíÄ
1021
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Перемещения робота вдоль осей в ортогональной системе координат осуществ
ляются, как правило, электроприводами, хотя существуют и системы с возвратно по
ступательными движениями на основе пневмоприводов.
Изучите движения картезианских роботов на рис. 15.11 и 15.12, чтобы хорошо
разобраться в этой геометрии.
Цилиндрическая геометрия. Цилиндрическая система координат представлена на
рис. 15.13. Она перемещает гриппер (захват) в рабочем пространстве, которое представ
ляет собой цилиндр. Робот в цилиндрической системе координат обеспечивает два линей
ных перемещения по осям Х и Z и угловое перемещение относительно оси Y. Ориентация
осей осуществляется тем же способом, что и у остальных классов роботов: поворотом ин
струмента на конце позиционируемой оси в трех взаимно перпендикулярных плоскостях.
Перемещения в цилиндрической системе координат выполняются обычно с использова
нием пневмоприводов, но с возможностью использования в ряде моделей электроприво
да. Изучите движения цилиндрического робота по рис. 15.13, чтобы получить ясное пред
ставление о действиях в этой системе координат.
Рис. 15.13. Цилиндрическая система координат
Сферическая геометрия. Рука в роботе сферической геометрии, иногда называ
емой полярной системой координат, представлена на рис. 15.14. Рука робота в сфери
ческой системе координат осуществляет два вращательных движения относительно
двух перпендикулярных осей координат и одно линейное перемещение. Как и в ранее
рассмотренных системах, ориентация инструмента осуществляется вращением отно
сительно трех взаимно перпендикулярных осей А, В и С. В настоящее время на рынке
практически отсутствуют модели, работающие в сферической системе координат, но
исторически они были первыми (система unimation).
Шарнирная геометрия. Шарнирные промышленные роботы, называемые часто шар
нирно сферическими, а также шарнирной рукой, вращающейся или антропоморфической
машиной, имеют нерегулярное рабочее пространство. Этот тип роботов выполняется в двух
главных вариантах: вертикально шарнирном и горизонтально шарнирном.
1022
Вертикально шарнирный робот представлен на рис. 15.15. Эта одна из наиболее рас
пространенных геометрий промышленных роботов выполняет три главных угловых движе
ния на основе вращения относительно оси 1, вращения плеча (ось 2) и вращения сустава
предплечья (ось 3). Нерегулярность рабочего пространства поясняется на рис. 15.16. Как и
для предыдущих разработок руки, ориентация инструментальной платы выполняется тремя
вращательными движениями. Электрические серво приводы являются единственными ис
точниками энергии для выполнения этих движений. Два шарнирно сферических робота для
покраски изделий методом распыления представлены на рис. 15.17.
Робот на задней части рисунка служит для открывания и удерживания дверей в
заданном положении, тогда как второй робот используется для распыления краски.
Роботы этого типа разрабатываются специально для нанесения краски на окрашивае
мые поверхности.
Рис. 15.14. Сферическая система координат
Рис. 15.15. Вертикальношарнирный робот
éëçéÇçÄü ëàëíÖåÄ êéÅéíÄ
1023
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Горизонтально шарнирный робот выполняет два угловых перемещения для позицио
нирования инструмента (вращение руки и предплечья) и одно линейное перемещение по
зиционирования вертикальной плоскости. Рука горизонтально шарнирных роботов вы
полняется в двух механических конфигурациях: 1) шарнирная рука с избирательной
податливостью (SCARA), представленная на рис. 15.18; 2) горизонтально ориентирован
ная шарнирная рука.
Рис. 15.16. Рабочее пространство вертикальношарнирного робота:
а) план;
б) профиль
Рис. 15.17 . Два шарнирных робота на участке сборки автомобилей
1024
Избирательно податливая шарнирная рука робота (selective compliance articulated
robot arm — SCARA) представляет собой машину с двумя горизонтально связанными
сегментами руки (оси 1 и 2 на рис. 15.18) и жестко зафиксированной вертикальной коор
динатой. Позиционирование в пределах цилиндрического рабочего пространства осуще
ствляется изменением положения осей, обозначенных цифрами 1 и 2. Вертикальное пере
мещение платы гриппера осуществляет перемещение по оси Z (ось 3 на рис. 15.18), при
этом изменяется положение конца руки. Роботы SCARA обычно выполняют только одно
вращательное движение (ось 4). Этот тип геометрии получил распространение в монтаж
ных и сборочных операциях в электронике благодаря приспособленности к перемещению
изделий только в одном вертикальном направлении (вставка деталей в фиксированные
места на плате).
Рис. 15.18.
Робот с шарнирной
рукой SCARA
Горизонтально ориентированная шарнирная рука использует конструкцию, похожую
на SCARA за одним исключением: вертикальная ось Z расположена между жестко задан
ным вертикальным основанием и плечевым суставом (оси 1) в верхней части руки. При та
кой конфигурации кисть руки и гриппер расположены в конце предплечья, и ориентация
осей обычно допускает повороты во всех трех взаимно перпендикулярных плоскостях. Ро
боты, выпускаемые фирмой Reis Company, сделали эту конфигурацию популярной.
15.4 . àçëíêìåÖçíÄãúçÄü éëçÄëíäÄ
Рука робота сама по себе не обладает способностью выполнять производственные опера
ции, но рука, оснащенная соответствующим инструментом, становится эффективной произ
àçëíêìåÖçíÄãúçÄü éëçÄëíäÄ
1025
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
водственной системой. Оснастка, позволяющая выполнять производственные функции,
связывает монтажную или инструментальную плату после окончательной ориентации осей
на конце руки робота. Оснастка часто может иметь следующие наименования: инструмен
тальное окончание руки, конечный эффектор, захват или гриппер (термин, часто используе
мый для описания оснастки робота). Термин гриппер определяет инструментальную оснас
тку, функции которой сводятся к схватыванию и удержанию или освобождению детали либо
инструмента. В настоящее время инструментальная оснастка роботов включает следующие
три категории:
устройства захвата;
специальные инструменты, встроенные в оконечную часть гриппера;
многофункциональные системы грипперов.
15.4 .1. ìÒÚÓÈÒÚ‚Ó Á‡ı‚‡ÚÓ‚
Первая категория из приведенных выше включает простое устройство для схватывания
и удержания деталей. Наиболее распространенные угловые или параллельные захваты
приведены на рис. 15.19 и 15.20. Захваты имеют две основные части: основание и меха
низм схватывания (сжатия), т.е. пальцы. Захватывающие пальцы могут быть универ
сальными, т.е . не связанными с какими либо требованиями по профилю, либо ориенти
рованными на работу с какими либо определенными деталями, например болтами.
Рис. 15.19. Захваты двух типов:
а) угловой захват;
б) параллельный захват
Стандартный гриппер имеет стоимость 4–8 % от стоимости робота. Захваты для
миниатюрных деталей могут стоить до 1000 долларов. В специально разработанных
оконечных исполнительных механизмах стоимость гриппера может достигать 20 % от
стоимости робота. Гриппер робота должен открываться и закрываться под управлени
ем программы, когда робот передвигается в процессе выполнения производственных
операций. Контроллер робота получает электрические сигналы в результате опера
ций, выполняемых гриппером.
1026
В большинстве роботов источником энергии является сжатый воздух (пневмати
ка) с электрическим управлением клапанами, которые сжимают и освобождают зах
ват. Существуют грипперы с гидравлическим приводом, но они гораздо менее распро
странены. В грипперах используется как внешняя, так и внутренняя геометрия для
выполнения функций захвата. Два гриппера на рис. 15.21 показывают, как стандарт
ный гриппер может использовать форму детали для схватывания ее снаружи или ис
пользования внутренних возможностей захвата. На рис. 15.21а представлено исполь
зование внутренней полости гриппера для создания оси вращения относительно
наружной поверхности. На рис. 15.21б захват использован для вращающейся детали,
имеющей отверстие в центре. Варианты захватов (пальцев) столь же многочисленны,
как и формы захватываемых деталей.
Рис. 15.20. Внешний вид промышленных захватов
Рис. 15.21. Внешний (а) и внутренний (б) захват обрабатываемой детали
àçëíêìåÖçíÄãúçÄü éëçÄëíäÄ
1027
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Другая возможность варьирования стандартных грипперов связана с числом
пальцев захвата. В большинстве случаев достаточно двухпальцевых захватов. Однако
если гриппер должен центрировать захватываемую деталь, используют трех и четы
рехпальцевые захваты. Четырехпальцевый гриппер показан на рис. 15.20.
15.4 .2 . ÑÛ„Ë Òڇ̉‡ÚÌ̊ „ËÔÔÂ̊
Некоторые иные конструкции грипперов показаны в табл. 15.1. Они применяются в
автоматике, как, например, стандартные вакуумные грипперы, использующие ваку
умные присоски, магнитные грипперы, различные виды устройств, основанных на ис
пользовании сжатого воздуха. Внимательно изучите таблицу, чтобы получить ясное
представление об этих важных видах стандартных грипперов.
15.4.3. ä·ÒÒËÙË͇ˆËfl Ë ‚̊·Ó „ËÔÔÂÓ‚
Грипперы классифицируются по трем критериям:
1. Тип гриппера может быть задан в соответствии с геометрией, весом, разме
ром, качеством поверхности, жесткостью изделия. Например, захватывание
прямоугольных стальных брусков требует иной спецификации для гриппера,
чем захватывание мягких картонных коробок.
2. Детали должны оставаться в том же положении и с той же ориентацией, что
и в момент захвата. Детали, которые проскальзывают в гриппере из за уско
рений руки робота, должны быть должным образом позиционированы и ори
ентированы, когда робот занимает исходную позицию.
3. Податливость, или возможность смещения инструмента, необходима для того,
чтобы подогнать части, находящиеся в различных положениях при сборке из
делий. Так, для помещения стержня в отверстие должна иметься некоторая
возможность взаимного смещения двух частей.
Выбор гриппера. Процесс выбора одного из стандартных грипперов не является
научной проблемой. Скорее, это практическое решение вопроса, какой из стандартных
типов подходит наилучшим образом в данном случае, и это решение принимается на ос
новании опыта предшествующих разработок. Форма детали часто определяет правиль
ный выбор инструмента. Например, для цилиндрических деталей лучше подходит трех
пальцевый захват, тогда как двухпальцевый удобнее при прямоугольных деталях. Вид
деталей также играет роль. Тонкие жесткие пластинчатые детали часто нуждаются в ва
куумных присосках на плоской поверхности, поскольку нельзя использовать жесткие
края. Для толстых металлических пластин подходят двух или четырехпальцевые пнев
матические захваты за края пластин. Масса изделия и вид поверхности также влияют на
выбор. Вакуумные присоски могут быть неподходящими для тяжелых деталей с неров
ной поверхностью или с отверстиями. Тщательно обработанные поверхности могут тре
бовать очень осторожного обращения с применением грипперов на сжатом воздухе.
Часто работоспособными оказываются несколько стандартных грипперов, но обычно
какой либо один из них наилучшим образом отвечает требованиям задачи.
1028
Т
а
б
л
и
ц
а
1
5
.
1
.
Н
е
к
о
т
о
р
ы
е
в
и
д
ы
с
т
а
н
д
а
р
т
н
о
й
о
с
н
а
с
т
к
и
.
àçëíêìåÖçíÄãúçÄü éëçÄëíäÄ
1029
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Т
а
б
л
и
ц
а
1
5
.
1
.
Н
е
к
о
т
о
р
ы
е
в
и
д
ы
с
т
а
н
д
а
р
т
н
о
й
о
с
н
а
с
т
к
и
(
о
к
о
н
ч
а
н
и
е
)
1030
Усилия захвата стандартного гриппера. Основное требование к конечности ро
бота, удерживающей инструмент, — захват и надежная фиксация детали.
Способность удерживать части гриппера — нормальная функция, связанная с
созданием необходимого усилия захвата. Это усилие зависит от коэффициента трения
между пальцами гриппера и удерживаемой деталью. Заметим, что привод гриппера
управляется клапаном, который сближает пальцы (рис. 15.21). Усилие сжатия между
пальцами и изделием устанавливается пневматическим устройством и может регули
роваться давлением воздуха. Минимальное усилие, необходимое для удержания дета
ли гриппером в фиксированном положении, называют критическим усилием. Способ
ность гриппера удерживать деталь определяется нормальным усилием, направленным
под углом 90 к поверхности изделия, и коэффициентом трения в точке контакта. Ко
эффициент трения используется для расчета усилия сжатия между деталью и пальца
ми гриппера. Статический коэффициент трения определяется при неподвижном поло
жении детали в гриппере, но как раз в момент, предшествующий проскальзыванию
между двумя поверхностями. Статический коэффициент трения зависит от контакти
рующих материалов и принимает значение от 0 до 1.
Количественное соотношение между силой трения и силой нормального давления
определяется формулой:
Fr
= μS+FN,
где Fr
— сила трения, направленная противоположно усилию проскальзывания; μS —
статический коэффициент трения; FN — сила нормального давления (направленная
под углом 90° к поверхности проскальзывания).
Параллельный гриппер на рис. 15.22а показывает, как детали удерживаются
пальцами гриппера. На рис. 15.22б показано направление приложения нормальных
усилий Fn
, вес изделия W и силы трения Ff. Пока сумма двух сил трения превышает или
равна весу изделия, изделие не будет проскальзывать в гриппере. Пример 15.3 иллю
стрирует это положение.
èËÏ 15.3
Определите минимальное нормальное усилие, необходимое для удержания изделия
весом 4 фунта, если статический коэффициент трения между изделием и пальцами
гриппера составляет 0,75.
êÂ̄ÂÌËÂ
Из рис. 15.2б следует:
W=Ff+Ff;
W=F
n
×μS+Fn×μS;
4 фунта = 2Fn × 0,75;
Fn
= 2,67 фунта.
àçëíêìåÖçíÄãúçÄü éëçÄëíäÄ
1031
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
В примере 15.3 предполагалось, что рука робота неподвижна или движется с по
стоянной скоростью, так что отсутствуют дополнительные усилия, связанные с ускоре
нием. Если же имеет место ускорение в вертикальном направлении (см. рис. 15.22а), то
нормальное сжатие Fn (см. рис. 15.22в) должно быть увеличено на значение произведе
ния массы на ускорение изделия.
Рис. 15.22 . Диаграмма сил, действующих в захвате:
а) деталь в захвате;
б) баланс сил в неподижном захвате;
в) баланс сил в движущемся захвате
Удерживающая сила. Удерживающая сила грипперов вакуумного типа прямо связа
на с давлением воздуха, окружающего вакуумную присоску. На уровне моря одна атмос
фера давления на поверхность объекта составляет примерно 14,7 фунта на квадратный
дюйм. В каталогах продавцов часто используется также единица давления 1 атмосфера,
равная 76 см ртутного столба, или 1,0133 бар. Это атмосферное давление используется
для удержания объектов путем понижения давления в объеме, заключенном между ваку
умной присоской и поверхностью изделия. Это понижение, естественно, меньше, чем ат
мосферное давление, поэтому удерживающая сила определяется разностью давлений по
обе стороны вакуумной присоски. Кроме того, следует учесть экономическую нецелесооб
разность создания более глубокого вакуума в присоске, чем 0,5—0,8 бар (напомним, что
нормальное атмосферное давление соответствует 1,0133 бар). Пример 15.4 дает пред
ставление об удерживающей силе присоски в табл. 15.1.
èËÏ 15.4
Вакуумная присоска из табл. 15.1 обеспечивает следующую удерживающую силу, га
рантируемую продавцами роботов:
В этой таблице диаметр присоски определяется ее наружным диаметром, а усилие
оценивается в ньютонах при значении вакуума 0,8 бар. Рассчитайте удерживающую
силу в фунтах для 30 мм присоски при вакууме 0,8 бар.
1032
êÂ̄ÂÌËÂ
Определим удерживающую силу из таблицы и пересчитаем ее в фунты. Удерживаю
щая сила в фунтах:
Удерживающая сила = 42,4 Н × 0,225 фунтов/Н.
Удерживающая сила = 9,52 фунтов.
Качество поверхности материала может оказать большое влияние на вес удержи
ваемого груза. Ровные и гладкие поверхности способствуют увеличению удерживаю
щей силы. Во всяком случае, увеличивающую поправку на несовершенное качество
поверхности следует вносить при разработке роботов.
Сжимающая сила гриппера. Сжимающая сила с пневматическими захватами рас
считывается по единой методике для стандартных грипперов. Сжатый воздух, использу
емый для расширения диафрагмы гриппера, действует непосредственно на части диаф
рагмы, контактирующие с изделием. Для круглых деталей полагают равномерное
распределение усилия по окружности. Это положение иллюстрируется примером 15.5.
èËÏ 15.5
Диафрагменный гриппер из табл. 15.1 диаметром 0,8 дюйма используется для захва
та изделия с диаметром внутреннего отверстия 1 дюйм. Если используется сжатый
воздух с давлением 25 фунтов на квадратный дюйм, рассчитайте сжимающую силу
гриппера, прикладываемую к детали.
êÂ̄ÂÌËÂ
Рассчитаем площадь контакта АС между деталью и гриппером. Диаметр изделия d1 =
1 дюйм, глубина контакта h = 0,8 дюйма.
АС = диаметр отверстия + глубина контакта;
АС=d1×π×h;
AC=1дюйм×π×0,8дюйма;
АС = 2,51 дюйма2.
Далее рассчитаем сжимающую силу F:
F = AC × давление воздуха;
F = 2,51 дюйма2 × 25 фунтов/квадратный дюйм;
F = 62,75 фунтов.
Определение сжимающей силы гриппера для шпилек производится с использо
ванием такой же процедуры, как и для диафрагменного гриппера.
èËÏ 15.6
Пневматический гриппер из табл. 15.1 используется для захвата изделий прямоу
гольной формы 0,5×4 дюйма со скругленными концами. Рассчитайте сжимающее
àçëíêìåÖçíÄãúçÄü éëçÄëíäÄ
1033
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
усилие на прямоугольную часть изделия, если давление сжатого воздуха составляет
30 фунтов на квадратный дюйм.
êÂ̄ÂÌËÂ
Найдем площадь области сжатия АС
. Высота h = 0,5 дюйма, длина I = 4 дюйма, два
скругленных конца эквивалентны окружности:
АС = прямоугольная область + площадь скругленных концов.
AC = 2,2 дюйма2.
Теперь рассчитаем сжимающую силу F:
F = AC × давление воздуха;
F = 2,2 дюйма2 × 30 фунтов/квадратный дюйм;
F = 6,6 фунтов.
Податливость. Податливость осуществляет вид контакта между двумя изделиями,
которые должны быть пригнаны друг к другу. Поскольку полное совершенство в контак
те двух изделий (стержня и отверстия) невозможно, податливость должна решать про
блему некоторого несоответствия. Эта податливость определяется как вынужденное
или допустимое взаимное перемещение с целью стыковки пары сочетаемых изделий.
Податливость необходима для стыковки пары изделий (типа «стержень — отвер
стие») одним из трех способов: фаской в районе контакта; скользящим контактом; двухто
чечным контактом. Фасочный контакт имеет место, когда стержень и отверстие неидеаль
но пригнаны, и тогда фасочный край отверстия способствует стыковке. Скользящий
контакт бывает, когда после соприкосновения в области фаски стержень вращается, и
скользящие поверхности в результате плотно контактируют.
Двухточечный контакт: при достаточно большом рассогласовании размеров стер
жень входит в отверстие под некоторым углом, осуществляя в результате контакт в
двух точках. Поверхность стержня проскальзывает относительно внешней кромки от
верстия, а его торец скользит по внутренней стенке.
Проблема согласования деталей в сборке решается методами активной и пассив
ной податливости. В обеих методиках одна из контактирующих деталей может сме
щаться в осевом направлении или путем вращательного движения относительно цен
тра, расположенного в точке контакта. Поскольку каждое движение рассматривается
независимо, поступательное и вращательное движения происходят одновременно.
Активная система податливости, часто называемая системой, воспринимающей силу
и момент (СИМ), реагирует на попытки робота состыковать детали в процессе сборки.
Система СИМ использует кольцевой адаптер, помещенный между гриппером и платой
1034
робота, для измерения усилия и момента в точке контакта между соединяемыми деталями.
Отклонение, которое наблюдается в результате контакта деталей, измеряется кольцевым
датчиком адаптера. Результат измерения преобразуется в трехкомпонентный вектор силы
и трехкомпонентный вектор момента, которые используются ро
ботом для формирования запрограммированного перемещения.
Датчик усилия позволяет роботу обнаружить вариации положе
ния деталей или инструмента для коррекции программы движе
ния. В системе датчиков СИМ движения робота базируются на
требуемых или измеренных перемещениях для коррекции про
граммы перемещения от точки к точке. В системе датчиков СИМ
движения робота определяются результатами измерений сигнала
датчиков вместо следования по траектории запрограммирован
ных точек. Датчик СИМ активной податливости устройства, рас
положенный между гриппером и инструментальной платой робо
та, изображен на рис. 15.23. Фирма Adept Technology, Inc.
выпускает роботы с интегральным управлением СИМ датчиком
в контроллере, которые могут реагировать на инструментальный
контакт за время менее 3 мс. В интегральной технике Adept воз
можна следующая стратегия: движение до тех пор, пока усилие не
превысит некоторого порогового значения, затем движение по
некоторой спиральной траектории в поисках отверстия, и наконец
движение, осуществляющее стыковку — до защелкивания в со
стоянии сборки. СИМ датчики выполняются для работы в диапа
зоне следующих усилий и моментов: от 3 фунтов и 1 фунта на
дюйм до 600 фунтов и 3600 фунтов на дюйм.
Альтернативная техника пассивной податливости осуще
ствляется, например, с помощью устройства удаленной цент
ральной податливости (УЦП). Современные устройства УЦП,
подобные изображенному на рис. 15.24а и б, содержат три пру
жинящие связи между двумя алюминиевыми дисками и ограни
чительным стержнем для защиты от чрезмерных смещений. По
добное УЦП называют однокаскадным устройством распределения усилий. Основой
устройства является конструкция, содержащая от пятнадцати до тридцати сменных дис
ков из пружинящего пластика — неопрена — или металла. Верхняя плата связана с
инструментальной платой робота, а гриппер связан с нижней платой. Пружинящие свя
зи обладают большой жесткостью в осевом направлении, но податливы для боковых
перемещений и вращательных движений. Небольшое угловое смещение пружинящих
связей вызывает эффект податливости при вращательном перемещении, описываемый
ниже. Заметим, что на схематическом изображении рис. 15.24а и б показано, как легкое
вращательное перемещение гибких связей увеличивает и уменьшает расстояния между
верхней и нижней платами. Дополнительный поворот нижней платы вызывается другой
пружинящей связью, которая стремится занять вертикальное положение, а следова
тельно, увеличивает расстояние между платами.
Комбинация этих перемещений способствует вхождению стержня в состояние совме
щения с отверстием. Боковые перемещения податливости изображены на рис. 15.24а. Изу
чите действие устройства для получения ясного представления об осевой и поперечной по
Рис. 15.23.
Датчик активной
податливости
СИМ
àçëíêìåÖçíÄãúçÄü éëçÄëíäÄ
1035
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
датливости. Две дополнительные принадлежности — фиксирующие стержни и защелки —
завершают оснастку выпускаемых в настоящее время УЦП устройств для улучшения их
свойств. Фиксирующие стержни защищают пружинящие связи от непредвиденных и неже
лательных перегрузок. Фиксирующие защелки устраняют податливость УЦП, жестко огра
ничивая свободу перемещения верхнего и нижнего дисков, когда устройство не представля
ет собой готовую сборку. Эти принадлежности придают устройству жесткость при переме
щениях в тех операциях, когда податливость нежелательна.
Рис. 15.24. Устройство удаленной центральной податливости
Избирательная податливость шарнирной руки робота SCARA. Другая разно
видность пассивной податливости использована в конструкции робота SCARA. Робот
Adept One, использующий технологию SCARA, обеспечивает переменную жесткость
движения инструмента для обеспечения податливости в запрограммированных точ
ках. Когда инструмент достигает запрограммированной точки, контроллер освобож
1036
дает сервосистему, поэтому гриппер получает возможность свободно перемещаться в
плоскостях X и Y в некоторых пределах. Если гриппер попытается выйти за эти преде
лы, сервосистема становится жесткой и фиксирует положение гриппера. Некоторые
роботы, не входящие в систему SCARA, например Seico RT 3000, содержат в языке
команд возможность разрешать податливость по любой из осей. Эта команда для Seico
имеет вид: «свободна <ось> координата». Аргумент <ось> содержит букву, указыва
ющую ось, податливость которой следует разрешить.
15.4 .4 . åÌÓ„ÓÔÓÁˈËÓÌ̇fl ÓÒ̇ÒÚ͇ ÒÔˆˇÎ̧ÌÓ„Ó Ì‡Á̇̃ÂÌËfl
Вторая категория оснастки — оснастка специального назначения — содержит концевые
эффекторы, исполнительные механизмы, которые связывают оснастку с выполняемой
производственной деятельностью. Примерами широко используемых инструментов слу
жат сверлильные станки, сварочные пистолеты (рис. 15.25), резаки и краскораспылители
(см. рис. 15.17), устройства для маркировки и герметизации (рис. 15.26), для заточки и
шлифовки. На рис. 15.25 показан робот, в атмосфере инертного газа выполняющий свар
ку детали, которая удерживается устройством позиционирования. В то время, когда робот
осуществляет сварку, устройство позиционирования передвигает детали с целью обеспе
чить наилучшие условия для сварочного шва соединяемых деталей. Робот на рис. 15.17
использует две руки для окраски как внутренней, так и наружной поверхности кузова ав
томобиля. Как робот накладывает герметизирующую смазку на пол автомобиля в процес
се сборки, когда тот перемещается мимо робота, показано на рис. 15.26.
Третья категория оснастки, называемая многофункциональным гриппером, пред
ставляет собой эффекторы (исполнительные механизмы), предназначенные для выполне
ния нескольких операций. В эту группу входят инструменты с несколькими грипперами
(больше одного), соединяющими детали с различной геометрией или требующие выпол
нения более одной операции в процессе обработки. Например, на рис. 15.17 показан ро
бот со специально разработанной рукой и оснасткой, который удерживает дверь автомо
биля открытой в то время, когда второй робот окрашивает ее внутреннюю поверхность.
Рис. 15.25.
Робот выполняет сварку в
атмосфере инертного газа.
Деталь удерживается
позиционером
àçëíêìåÖçíÄãúçÄü éëçÄëíäÄ
1037
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
15.5 äéçíêéããÖê êéÅéíÄ
Контроллер — наиболее сложная и существенная часть робота. Он представляет со
бой либо специально разработанный производителем роботов компьютер, либо вы
носной программируемый логический контроллер (ПЛК), используемый производи
телем роботов для последовательного управления автоматикой. Специализированные
компьютеры используются для управления электрическими приводами роботов, тогда
как ПЛК получили преимущественное распространение для роботов с пневмоприво
дами координат. Тем не менее, ADEPT имеет в составе своих систем серво робот,
программируемый на основе логики лестничного типа. Сервоприводы руки робота
вписываются в общую концепцию замкнутых робототехнических систем, или роботов
сервотипа. Роботы с пневмоприводами попадают в категорию разомкнутых робото
технических систем или роботов не сервотипов.
15.5.1. äÓÌÚÓÎÎÂ̊ Á‡ÏÍÌÛÚ̊ı ÒËÒÚÂÏ Ò‚ÓÓ·ÓÚÓ‚
Структурная схема на рис. 15.27 содержит типичный набор модулей контроллеров
серво управляемого типа. В центральной части рисунка расположено сердце систе
мы: центральный процессор (ЦП), который обеспечивает управление памятью, сис
темами ввода вывода, обработкой информации каждой из координатных осей. Произ
водители роботов используют различные конфигурации ЦП, включая:
выносные миникомпьютеры или одноплатные компьютеры, на основе кото
рых разрабатывается контроллер;
32 или 64 битовый микропроцессор для робота с системой управления или
систему 32 и 64 битовых микропроцессоров, объединенных аппаратно и
Рис. 15.26.
Робот герметизирует пол
автомобиля специальной
мастикой
1038
программно для выполнения функций ЦП. Большинство современных высо
котехнологичных машин используют практику распараллеливания процес
сорных операций, благодаря чему удается существенно повысить быстро
действие, используя возможность нескольких микропроцессоров.
Система микропроцессоров обладает несколькими преимуществами при исполь
зовании в группе высокотехнологичных роботов. Операционная система работает на
много быстрее, когда вычислительные функции ЦП поделены между несколькими
различными параллельно работающими процессорами.
Рис. 15.27. Блоксхема контроллера для серворобота
Серво:, или замкнутая система. Вновь обратимся к рис. 15.27 и отметим, что
ЦП посылает сигналы управления приводами каждой из осей робота и принимает сиг
налы обратной связи о координате и скорости каждой из осей координатной системы.
Замкнутая система привода по каждой из осей поясняется на рис. 15.28. В замкнутой
системе осуществляется управление системой измерения и регулирования положения
и скорости центральной точки инструмента робота (ЦТИ) в каждый момент его дви
жения в рабочем пространстве. Замкнутая система, или сервосистема, на рис. 15.28
использует информацию, предоставляемую датчиками положения и генераторами та
äéçíêéããÖê êéÅéíÄ
1039
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
хометра, чтобы определить текущее положение и скорость ЦТИ. Изучите рис. 15.28,
чтобы представить себе путь прохождения сигналов датчиков в замкнутой системе.
Рис. 15.28. Замкнутая система привода
Замкнутая система получает информацию о желаемом положении и скорости от
программируемого устройства задания траектории. Эти данные сравниваются с сиг
налами датчиков обратной связи о фактическом значении координат и их разности,
которая воспринимается как сигнал ошибки и усиливается. Усиленный сигнал ошибки
используется сервоконтроллером для воздействия на серводвигатель и приведения
координат к желаемым значениям. Для поддержания скорости на запрограммирован
ном уровне используется аналогичная процедура.
На рисунке угловая информация о положении шарнира поступает с датчика поло
жения, который может представлять собой потенциометр, оптический датчик или
иной преобразователь углового перемещения в код. Датчик скорости может выпол
няться на основе тахогенератора, изображенного на рисунке, либо информация о ско
рости может быть получена обработкой данных о положении. Каждая координата ро
бота определяется посредством схемы, подобной изображенной на рисунке, для
управления положением, скоростью и, в некоторых случаях, ускорением. Если робот
имеет шесть степеней свободы, или шесть осей координат, то значение каждой коор
динаты измеряется индивидуально и электрические сигналы по проводам поступают в
контроллер для анализа средствами электроники. Отсчетные значения координат и
соответствующие корректирующие воздействия вырабатываются много раз в секунду,
поэтому визуальный эффект от перемещения руки робота из одной позиции в другую
сглаживается и воспринимается как непрерывное перемещение. В результате серво
робот можно запрограммировать на перемещение от одной точки к другой по бесчис
ленному множеству траекторий в пределах рабочего пространства. Следовательно,
замкнутая система находит применение в тех случаях, когда необходимо формировать
траекторию, как в системах сварки, покраски, сборки.
Снова вернемся к изучению рис. 15.27 и обратим внимание на то, что ЦП взаимодей
ствует с несколькими другими внешними устройствами. Периферийный интерфейс явля
1040
ется способом взаимодействия с другими поддерживающими устройствами, а датчики и
управляющий интерфейс дают возможность контроллеру получать информацию от датчи
ков с работающей ячейки и активизировать исполнительные механизмы, управляемые
датчиками. Сервороботы этого типа изображены на рис. 15.1, 15.11, 15.12, 15.17, 15.18.
Сервороботы характеризуются хорошей воспроизводимостью — до 0,0005 дюйма для
лучших образцов и точностью до 0,005 дюйма у подобных систем этого ряда.
15.5 .2 . äÓÌÚÓÎÎÂ̊ ‡ÁÓÏÍÌÛÚ̊ı ÔÌ‚χÚË̃ÂÒÍËı ÒËÒÚÂÏ
Разомкнутые робототехнические системы лишены датчиков, которые сообщают контрол
леру местоположение и скорость руки, когда она перемещается между запрограммиро
ванными точками. Роботы с таким способом действия в англоязычной литературе называ
ют nonservo robot (мы будем использовать термин разомкнутая робототехническая
система). В них нашли применение пневмоприводы исполнительных механизмов и грип
перов. Робот фирмы FESTO на рис. 15.29 использует пневмоприводы по двум координат
ным осям и пневмопривод гриппера. Он работает в режиме разомкнутой системы. Изучи
те рисунок, поясняющий, как робот осуществляет перемещение вдоль горизонтальной
оси Y под действием пневматики и перемещение вдоль вертикальной оси Z. В конце пере
мещения вдоль оси Z трехпальцевый гриппер захватывает движущуюся деталь.
Разомкнутые робототехнические системы обычно снабжены компонентами линейного
и вращающего пневмопривода. Эти компоненты от множества различных поставщиков и
изготовителей могут быть смонтированы в различных конфигурациях. Робот с рис. 15.29
изображен в полуразобранном состоянии на рис. 15.30. Обратите внимание, как собраны
отдельные агрегаты модуля. Воспроизводимость и точность этой системы оценивается для
лучших образцов значением 0,0004 дюйма. Быстродействие робота зависит от давления
воздуха в пневмосистеме, но оно на порядок превышает быстродействие замкнутых систем.
Основные компоненты пневматических разомкнутых систем представлены на
рис. 15.31. Изучите этот рисунок, чтобы хорошо представлять себе принцип действия
соленоидных клапанов и импульсных клапанов, а также координатных приводов робо
та. Соленоидный воздушный клапан представляет собой управляемое электрическим
сигналом устройство для линейного перемещения шпулечного клапана с пружинными
противодействием.
Два положения, которые может занимать шпулечный клапан, позволяют прохо
дить сжатому воздуху из магистрали для перемещения в требуемом направлении пор
шня, находящегося в пневмоцилиндре. Приводы координатных осей робота имеют два
фиксированных состояния, по одному на каждой границе возможного диапазона пере
мещений. Фиксированные состояния для линейных перемещений могут смещаться,
сближаться или удаляться, для вращательных движений возможны перемещения в
пределах полного оборота как по, так и против часовой стрелки. Конечные положения
называют положениями фиксированного останова или упора, они обеспечивают пре
восходную повторяемость и точность такой системы. В некоторых системах фиксиро
ванные состояния упора могут выполняться с использованием регулируемых скользя
щих блоков, которые останавливают исполнительный механизм, когда он движется
поступательно или возвращается в исходное состояние.
äéçíêéããÖê êéÅéíÄ
1041
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Рис. 15.30 . Пневматическая система робота в разрезе
Рис. 15.29. Робот без
сервоуправления
1042
В других ситуациях регулируемые скользящие блоки управляются второй системой
пневматических исполнительных механизмов, допускающих третье состояние фиксиро
ванного упора. Усилие, развиваемое сжатым воздухом, прикладывается к подвижным
частям исполнительного механизма против блоков регулируемого скольжения. Поло
жение инструментов робота задается расположением блоков регулируемого скольже
ния. Робот, работающий в режиме перемещения между фиксированными положениями
останова, осуществляет возвратно поступательные движения («банг банг машина»).
Ограниченные возможности позиционирования пневматических роботов не повлекли
за собой ограниченности их областей применения. Благодаря отличной повторяемости,
точности, высокому быстродействию и короткому времени цикла пневматические робо
ты во всем мире распространеныбольше, чем любые другие.
Разомкнутые системы управления. Как показано на рис. 15.31, координатные
цилиндры получают только сигнал управления приводом, а контроллер устраняет вза
имозависимость перемещений по каждой из осей исполнительного механизма в про
цессе перехода руки робота в запрограммированное состояние. Надежность разомк
нутых систем базируется на надежности используемых комплектующих компонентов.
Комплектующие компоненты (пневмоцилиндры и клапаны), применяемые в разомк
нутых пневмосистемах, получили общее признание как компоненты с высокой надеж
ностью и большим средним временем наработки на отказ.
Разомкнутые робототехнические системы представляют собой последовательные
машины, т.е. изменение каждой из координат происходит в последовательности, позволя
ющей роботу дотягивать до фиксированной точки или возвращаться к пропущенной точке.
Стандартный цикл установки координат для робота представлен на рис. 15.29. Простой
переключатель и источник электропитания, используемые для управления клапанами на
рис. 15.31, должны быть заменены контроллером, управляющим разомкнутой робототех
нической системой, способной выполнять заданную последовательность команд. Суще
ствует несколько типов устройств последовательного управления пневматическими робо
тами, но сегодня становится очевидным выбор в пользу программируемых логических
контроллеров (ПЛК). Блок схема контроллера, управляющего разомкнутой робототех
Рис. 15.31. Управление осями пневматического робота без сервопривода
äéçíêéããÖê êéÅéíÄ
1043
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
нической системой с использованием ПЛК, представлена на рис. 15.32. Изучите эту схему
и обратите внимание на то, что ПЛК могут применяться для управления не только пневма
тическими роботами, но и многими другими видами производственных ячеек. В описанных
применениях ПЛК они используются для управления системой пневмоклапанов «вклю
чено/выключено», управляющих исполнительными механизмами роботов для линейных
и возвратно поступательных движений. Программа в памяти ПЛК управляет исполни
тельными механизмами робота, задавая последовательность движений, необходимых для
выполнения заданной операции. Программа координирует также движения робота с дру
гими событиями и действиями, которые происходят в рабочей ячейке. ПЛК и ячейка уп
равления компьютера связаны по соответствующим каналам с сетью цехового уровня
Ethernet. Интерфейс между пневмороботом и ПЛК в укрупненном виде показан на
рис. 15.33. Обратите внимание, что источник питания и управляющие ключи смещены по
сравнению с рис. 15.32 для более ясного представления функции ПЛК. Типичный блок
клапанов и управляющий ими ПЛК были описаны в главе 2.
Рис. 15.32. Блоксхема управления роботом в разомкнутой системе
с помощью ПЛК
15.6 . éÅìóÄûôàÖ ëíÄçñàà
Программирование робота осуществляется через посредство нескольких обучающих
интерфейсов, таких как обучающие подвески, обучающие терминалы, управляющие
1044
лицевые панели. Некоторые роботы допускают применение комбинации этих про
граммирующих устройств, тогда как другие предполагают возможность применения
какой либо единственной системы программирования. Кроме того, некоторые роботы
используют микрокомпьютеры и программное обеспечение, поддерживающее про
граммирующие станции при работе в среде Microsoft Windows.
Рис. 15.33. Упрощенная схема робота с четырьмя степенями
Обучающие станции поддерживают три вида деятельности:
1) включение робота в сеть и подготовку к программированию;
2) ввод и редактирование программ;
3) исполнение программы рабочей ячейкой.
Выполнение роботом программы представляет собой двухступенчатый процесс:
1) написание и ввод кодов программы, описывающей движения робота на язы
ке программирования контроллера;
2) обучение робота прохождению последовательности позиций, совокупность
которых представляет движения рабочей ячейки.
Первый этап программирования обычно представляет собой создание интерфей
са контроллера робота, а на втором этапе чаще всего используется специальное обу
чающее устройство, выполненное в виде клипсы, соединенной с контроллером.
15.7 . éëçéÇõ èêéÉêÄååàêéÇÄçàü êéÅéíéÇ
Программирование робота задает траекторию, по которой движется инструмент в про
цессе выполнения операций. Роботы располагают несколькими вариантами (опциями)
траекторий, выбор которых зависит от производственной ситуации и от типа используе
мого робота. Прежде чем знакомиться с четырьмя типами управления траекториями,
éëçéÇõ èêéÉêÄååàêéÇÄçàü êéÅéíéÇ
1045
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
следует изучить способы запоминания контроллером программируемых точек траекто
рии. Эти точки называются в программе управления роботом точками трансляции или
позиционирования. На рис. 15.34 показана упрощенная схема робота с четырьмя степе
нями свободы, запрограммированного на схватывание и удержание деталей. Робот
изображен в трех состояниях, через которые он должен пройти, чтобы взять деталь. Точ
ка 1 — стартовая позиция; точка 2, обычно называемая точкой приближения, устанав
ливает гриппер непосредственно над деталью; точка 3, называемая точкой схватывания,
устанавливает гриппер в положение, когда параллельные захваты тисков могут сбли
жаться, обеспечивая надежную фиксацию детали. Для выполнения этой операции необ
ходимый минимум составляют три точки трансляции. Робототехническая система долж
на записать в память контроллера необходимую информацию о каждом сочленении руки
робота, чтобы он мог возвратиться в эти три точки после выполнения программы. Каж
дый тип траектории перемещения описан в следующих разделах.
15.7.1 . ìÔ‡‚ÎÂÌË «ÚÓ͇̃ Á‡ ÚÓ̃ÍÓÈ»
В режиме управления «точка за точкой» каждая ось координат изменяется с макси
мальной скоростью, поэтому те оси, перемещение вдоль которых имеет минимальную
длину, достигают следующей запрограммированной точки раньше, чем оси с большим
количеством движений. Это условие всегда обнаруживается в системах пневматичес
ких роботов, подобно машине на рис. 15.29, где две координаты изменяются одновре
менно. Прохождение траектории «точка за точкой» для двухкоординатного пневморо
бота показано на рис. 15.35 . Вертикальная ось короче, поэтому перемещение по этой
оси завершается прежде, чем движение по горизонтали. В пневмороботах этот тип
Рис. 15.34. Упрощенная схема робота с четырьмя степенями свободы
1046
движения часто называют «от стопа до стопа», так как движение начинается с прину
дительной остановки и заканчивается принудительной остановкой.
При движении «от стопа до стопа» пневморобот работает как разомкнутая систе
ма, где в процессе движения положение и скорость исполнительного органа неизвес
тны контроллеру. Так, робот на рис. 15.35 должен перемещаться между точками А и В,
запрограммированными как промежуточные точки траектории. Поскольку движение
исполнительного органа не контролируется системой обратных связей, его реальное
положение неизвестно до того момента, когда все исполнительные механизмы достиг
нут состояния аппаратного останова, а все концевые датчики активизируются. Следо
вательно, единственная информация в памяти программ носит характер команд
«включить/выключить» для каждого привода или пневмоклапана в случае пневмати
ческого исполнительного органа. На рисунке состояние памяти соответствует коман
де «включено» для исполнительного органа 1, за которым последует включение ис
полнительного органа 2.
Управление «точка за точкой» применяется в большинстве сервороботов, кото
рые осуществляют прямолинейные перемещения. На рис. 15.34 движение от точки 1
к точке 2 осуществляется по способу «точка за точкой» (точка на углу пальца гриппе
ра принята за опорную). Заметим, что движение по оси 4 вверх, в то время как движе
ние по осям 2 и 3 направлено вниз, обеспечивает горизонтальное перемещение, пока
не прекратится перемещение по оси 4. В результате движение не является прямоли
нейным и не соответствует кратчайшей траектории между программируемыми точка
ми, хотя отклонения от прямолинейного движения не создают никаких проблем.
15.7.2. ãËÌÂÈÌÓ „ÛÎËÓ‚‡ÌËÂ
Линейное управление (называемое также управляемым линейным движением или пря
молинейным перемещением) показано на рис. 15.34 между точками 2 и 3. Когда гриппер
Рис. 15.35.
Программируемое
движение:
управление от точки
к точке
éëçéÇõ èêéÉêÄååàêéÇÄçàü êéÅéíéÇ
1047
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
движется по направлению к точке схватывания и приближается к ней, движение должно
быть прямолинейным. Любые отклонения от линейного перемещения вызывают столк
новения с деталями робота прежде, чем гриппер займет должное положение для схваты
вания детали. Линейность перемещения достигается тем, что каждая ось робота должна
достигать своего конечного положения в одно и то же время. Скорость сближения сты
куемых деталей изменяется, однако сближение при максимальной скорости происходит
быстрее, чем при ее вариациях. Поэтому всякое перемещение частей в процессе их сты
ковки должно начинаться и заканчиваться в один и тот же момент.
15.7.3. çÂÔÂ̊‚ÌÓ „ÛÎËÓ‚‡ÌË ڇÂÍÚÓËË ‰‚ËÊÂÌËfl
Основное различие между управлением движения «точка за точкой», линейным регу
лированием, описанным ранее, и непрерывным регулированием траектории движе
ния заключается в количестве программируемых точек, хранимых в памяти контрол
лера, и в способе их хранения. В способе программирования «точка за точкой» и
линейном программировании инструмент в руке робота перемещался с помощью уп
равляющей клипсы (подвески) к точке, через которую ему предстояло пройти. Далее
кнопка записи фиксировалась, и контроллер робота записывал картезианские коор
динаты этой единственной точки в памяти и команду вращения для правильной ориен
тации инструмента. Этот процесс повторяется для каждой очередной точки програм
мируемого перемещения. На рис. 15.34 изображены три точки, которые необходимо
задать для того, чтобы рука робота осуществила схватывание детали.
Пунктирная линия на рисунке показывает траекторию гриппера, если програм
мирование осуществляется с использованием обучающей клипсы (подвески) для из
менения каждой координаты в процессе перемещения инструмента от точки к точке.
Важно заметить, что траектория инструмента, когда он перемещается в процессе про
граммирования от точки к точке, и при линейном управлении не оказывает влияния на
траекторию руки робота в процессе исполнения программы.
Непрерывное траекторное управление существенно отличается способом записи
программируемых точек и исполнением программы. Назовем некоторые из этих отличий:
рука робота или обучаемого механизма реально перемещается программис
том вдоль программируемого участка траектории;
выборки координат по каждой из осей записываются фрагментами через се
кундные интервалы в виде непрерывной последовательности данных о пози
ции и ориентации осей;
для каждой прикладной программы составляется последовательность, со
держащая тысячи программируемых точек;
программируемая и исполняемая траектории совпадают;
когда программа выполнена, рука робота возвращается обратно, следуя че
рез запрограммированные и записанные в памяти позиции;
непрерывное траекторное управление применяется исключительно для уп
равления краскораспылителями и роботами, когда движения инструмента
должны быть записаны в программу путем выборки и записи действий, вы
полняемых специалистами профессионалами.
1048
В заключение отметим причину большого различия в числе запоминаемых точек в
методе записи программируемой траектории. При программировании «точка за точкой»
и при линейном программировании программист перемещает робот в желаемое поло
жение (точка 1 через точку 3 на рис. 15.34) и нажимает кнопку записи на клипсе. Таким
образом, зафиксированной оказывается единственная точка. После выполнения после
довательности таких перемещений программа завершена. Линейное программирование
или «точка за точкой» заставляет робот перемещаться от точки к точке. В противопо
ложность этому при непрерывном программировании траектории программист обучает
робот требуемым передвижениям, используя специальные обучающие позиции или фи
зические перемещения руки робота. Кнопка программирования, зафиксированная в на
чале движения, не освобождается до тех пор, пока желаемый участок траектории не бу
дет пройден. В течение всего времени, когда кнопка записи зафиксирована, система
записи программы непрерывного перемещения записывает в память точки прохожде
ния траектории со скоростью не менее шести точек в секунду.
15.7.4 íÓ̃ÍË ÔÓ„‡ÏÏËÓ‚‡ÌËfl Ë ÔÓ„‡Ïχ ÔÓÁˈËÓÌËÓ‚‡ÌËfl
Программа робота представляет собой набор инструкций, которые обеспечивают вы
полнение производственного задания. Программа содержит две основные части: про
граммируемые точки (называемые также точками трансляции и точками позициони
рования) и программу позиционирования.
Точки трансляции. Первая часть представляет собой совокупность точек в про
странстве (точек трансляции), по некоторым робот будет двигаться в процессе выпол
нения программы. Точки трансляции или запрограммированные точки, расположенные
в рабочем пространстве робота, представляют те положения, через которые должна
проходить центральная точка инструмента. Точки трансляции всегда определяются в
картезианской системе координат, привязанной к опорной базе основания робота.
Число запрограммированных точек для замкнутых и разомкнутых робототехничес
ких систем существенно различается. Любое расположение рабочего пространства для
серворобота (замкнутой робототехнической системы) может быть запрограммировано
как совокупность точек трансляции. Например, робот на рис. 15.34 имеет три такие точ
ки. Тем не менее, общее возможное число точек программирования практически беско
нечно, ограничение связано только с разрешающей способностью сервосистемы приво
да руки и с объемом располагаемой памяти. В противоположность этому в разомкнутых
системах, или пневмороботах, число точек программирования ограничено числом про
граммируемых аппаратных команд «стоп». Например, пневморобот на рис. 15.29 имеет
двухкоординатную руку с четырьмя программируемыми местоположениями.
Программируемые местоположения. Вторая часть программы робота состоит
из программы позиционирования на языке программирования робота. Она выполняет
четыре функции:
определяет порядок и особенности условий перемещения;
устанавливает логику и условия принятия решений;
получает информацию об операциях, выполняемых рабочей ячейкой;
анализирует и обрабатывает данные для связи и взаимодействия с другими
машинами.
éëçéÇõ èêéÉêÄååàêéÇÄçàü êéÅéíéÇ
1049
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Большая часть сервороботов имеет жесткую систему команд, дающую возмож
ность программисту управлять движением руки. Позиционирование осуществляется
структурными командами, используемыми в компьютерных языках высокого уровня и
объединенными в некоторую систему. Разомкнутые системы роботов обычно управля
ются последовательностью команд, управляющих клапанами пневмороботов и управ
ляемых программируемыми логическими контроллерами (ПЛК). Следовательно,
язык программирования представляет собой логическую последовательность или ди
аграмму последовательности операций, а команды позиционирования устанавливают
ся программируемым логическим контроллером, который управляет рукой робота.
15.7.5 . í‡ÌÒÎflˆËfl ÚÓ̃ÂÍ ÔÓ„‡ÏÏËÓ‚‡ÌËfl
Для трансляции точек программирования используется пять методов:
1. Трансляция обучающих точек путем позиционирования робота.
2. Трансляция обучающих точек путем ввода координат.
3. Создание новых точек трансляции с использованием алгебраических выра
жений.
4. Создание новых точек трансляции методом внешних прерываний.
5. Загрузка новых точек трансляции с помощью последовательного порта
RS232C.
Каждый метод подробно описан ниже.
Метод 1: обучающие точки позиционирования робота. Этот метод программи
рования доступен для всех сервороботов (с обратной связью) и применяется наиболее
часто. При использовании контроллеров с режимами ручного управления или с обуча
ющей клипсой перемещение инструмента контролируется визуально и корректирует
ся средствами ручного управления, затем осуществляется ввод транслируемой точки в
программу. В некоторых системах роботов для записи программируемой точки надо
нажать кнопку на клипсе. В других системах, например Seiko, вводится с клавиатуры
номер команды трансляции (HERE T <0 399>), таким образом возможно запрограм
мировать до 400 точек трансляции.
Рука робота имеет различные режимы движения, используемые в процессе обу
чения. Режимы робота Yaskawa называются «шарнир», «картезиан», «инструмент».
Эти режимы, описанные ниже, представлены на рис. 15.36.
Режим шарнира: обучающая клипса имеет пару кнопок для каждой оси. Следо
вательно, движение по каждой из осей может управляться независимо в любом на
правлении. Этот режим используется для грубого позиционирования руки.
Картезианский режим: обучающая клипса имеет пару кнопок для перемещения
вдоль каждой оси X, Y и Z в пределах рабочего пространства. В этом режиме изменя
ются значения координат позиционируемых осей с целью обеспечения неизменности
положения инструмента при его перемещении вдоль одной из этих трех осей. При де
тали, ориентированной в картезианской системе координат робота, этот режим позво
ляет перемещать деталь вдоль любой из координатных осей. Ориентация осей в дан
ном случае может быть тоже любой.
1050
Режим инструмента: обучающая клипса имеет пару кнопок для каждой оси X, Y и
Z, которые позволяют настраивать координаты гриппера. В этом режиме контроллер
перемещает инструмент в картезианских координатах гриппера. Этот режим полезен,
если возникает необходимость выравнивания вставляемой детали по координате Z
(рис. 15.36в).
Четыре описанных режима установки точек программирования поддерживают
визуальное программирование с использованием обучающей клипсы и используются
исключительно в методе 1 для обучения робота прохождению по точкам трансляции.
Метод 2: координатный ввод точек обучения. Обучение робота с помощью вво
да координат требует фиксации и задания положения и ориентации гриппера (цент
ральная точка инструмента) или путем записи команд в процессе программирования,
или посредством клавиатуры контроллера. В большинстве языков программирования
роботов предусмотрена поддержка этого типа позиционного программирования.
Метод 3: создание точек по алгебраическим выражениям. Новые запрограм
мированные точки могут быть созданы на основе предварительно определенных точек
с использованием алгебраических выражений.
Рис. 15.36. Три режима обучаемого робота:
а) координаты сочленения;
б) система декартовых координат;
в) инструментальная система координат
éëçéÇõ èêéÉêÄååàêéÇÄçàü êéÅéíéÇ
1051
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Координаты точек трансляции могут быть добавлены, либо исключены, либо скор
ректированы путем применения различных операций над целыми числами. Метод ис
пользуется для расчета смещения существующих запрограммированных точек, которое
минимизирует их количество, что может быть полезно при обучении робота методом 1.
Метод 4: создание точек с использованием внешних прерываний. Чтобы приоста
новить выполнение текущего потока команд и переключить программу на создание новых
точек программирования, используют либо внешний сигнал, либо команду прерывания
контроллера. Новая точка фиксирует положение гриппера в точке схватывания (цент
ральная точка инструмента) в момент прерывания. Создание точек, позиционированных
по прерываниям, широко используется в контроллерах замкнутых робототехнических си
стем. Этот метод удобен при погрузке и разгрузке таких предметов, которые можно оха
рактеризовать как «тюфяк», «охапка».
Метод 5: загрузка точек из сети. Метод позволяет вводить точки позициониро
вания от внешних источников информации, например от управляющих компьютеров
высшего уровня, симуляторов, внешних станций программирования (off line) и теле
визионных систем. Данные передаются в коде ASCII через последовательные каналы
или Ethernet в контроллер робота.
15.8 . èêéÉêÄååàêìÖåõÖ ëÖêÇéêéÅéíõ
Вторая часть программы робота составляет перечень команд позиционирования, ко
торые перемещают руку робота и инструмент от одной запрограммированной точки к
другой, как было описано выше. Этапы составления программ для роботов сводятся к
следующему:
1. Установление базовой структуры программы.
2. Анализ производственного процесса, в котором будет использоваться робот.
3. Разделение действий робота на основные и вспомогательные.
4. Выстраивание последовательности основных операций для выполнения дви
жений и описание точек трансляции.
5. Задание численных значений переменных системы, управляющей движением.
6. Описание и ввод команд позиционирования.
7. Создание точек трансляции или выполнение процесса обучения.
8. Испытание программы, выявление и устранение погрешностей, доводка.
Некоторые из этих шагов, требующих пояснений, обсуждаются в следующих разделах.
15.8.1. ò‡„ 1: ·‡ÁÓ‚‡fl ÒÚÛÍÚÛ‡ ÔÓ„‡ÏÏ̊
Первым шагом является установление базовой структуры программы (см. рис. 15.37). Все
программы стартуют, начиная с исходной позиции HOME, от которой начинается движение
к стартовой точке в цикле, названном CYCLE START. Точка программы CYCLE START дол
1052
жна быть расположена как можно ближе к основным перемещающимся частям робота, так
как роботу предстоит возвращаться в эту точку в каждом производственном цикле. Конеч
ная точка программы, называемая END OF CYCLE, обеспечивает подготовку команды раз
ветвления для прямого выполнения возврата в точку CYCLE START. Программа позицио
нирования робота, решающая производственные проблемы, должна располагаться между
точками CYCLE START и END OF CYCLE. Операции подразделяются на основные и вспо
могательные, причем основные встроены в главное тело программы, а вспомогательные
включаются в виде подпрограмм, вызываемых из главного тела программы.
15.8 .2 . ò‡„ 2: ÔÓˆÂÒÒ ‡Ì‡ÎËÁ‡
Разработка программы начинается с анализа производственных задач, которые пред
стоит решать роботу. Программист должен иметь полное представление о производ
ственном процессе, в котором будет участвовать робот. Исходя из этих представлений,
программист будет продумывать необходимые команды и движения, подразделять их на
основные и вспомогательные, устанавливать значения системных переменных, как, на
пример, скорость инструмента на каждом участке программируемой траектории.
15.8 .3. ò‡„ 3: ÓÒÌÓ‚Ì̊Â Ë ‚ÒÔÓÏÓ„‡ÚÂÎ̧Ì̊ Á‡‰‡̃Ë
На основе глубокого понимания производственного процесса программист разделяет дви
жения робота на основные и вспомогательные. Главным является выполнение основной
программы, вспомогательное включает выполнение подпрограмм, вызываемых в процессе
выполнения основной программы. Для их разделения используют следующие правила:
если существуют и могут быть выбраны альтернативные действия, основан
ные на внешних входных управляющих программах, выполняйте каждый
альтернативный вариант в виде отдельной подпрограммы;
если движение робота или последовательность команд (например, включе
ние аварийной сигнализации) оператору требуется осуществлять в двух или
Рис. 15.37. Установление базовой
структуры программы
èêéÉêÄååàêìÖåõÖ ëÖêÇéêéÅéíõ
1053
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
более местах программы, выполняйте это действие как вспомогательное и
помещайте его в подпрограмму;
если некоторые движения и действия робота требуют частой модификации
или замены данных, оформляйте эту часть программы как вспомогательную
и помещайте ее в подпрограмму.
После разделения действий робота на основные и вспомогательные общая про
грамма робота считается установленной.
15.8 .4. ò‡„ 4: „‡Ù ÚÓ̃ÂÍ Á‡‰‡ÌËfl
Граф точек задания (ГТЗ) представляет собой удобную для визуального восприятия
программу перемещений и движений руки робота, необходимых для выполнения про
изводственного задания. ГТЗ содержит все заданные точки трансляции (запрограмми
рованные местоположения), движение переменных, используемое в каждой точке, и
логические зависимости для принятия решений в каждой точке исполнения програм
мы. ГТЗ представляет собой вертикальную линию с жирными точками, отмечающими
каждую запрограммированную точку задания.
Такие данные, как скорость, действия гриппера, задержки для каждой програм
мируемой точки, отмечены пунктиром. Упрощенная версия ГТЗ была использована в
разделе 15.9, когда описывались запрограммированные команды. Каждая запрограм
мированная точка на ГТЗ содержит несколько видов данных: имя программируемой
точки, ее короткое описание, скорость инструмента, ветвление программы или пере
ход к подпрограмме, состояние гриппера и другие необходимые команды.
15.8 .5 . ò‡„ 5: ÔÂÂÏÂÌÌ̊ ÒËÒÚÂÏ̊
Движение переменных, непосредственно связанное с точками трансляции, определя
ется и служит добавлением к ГТЗ.
15.8 .6 . ò‡„ 6: ÓÔËÒ‡ÌËÂ Ë ‚‚Ó‰ ÔÓ„‡ÏÏ̊
Шестой шаг состоит в описании программы робота в кодах, использующих упомянутые
запрограммированные точки и ГТЗ в качестве путеводителя. Коды программы записы
ваются с использованием структуры и синтаксиса языка программирования робота.
15.8.7. ò‡„ 7: Ó·Û̃‡̨̆‡fl ÔÓ„‡Ïχ ËÎË ÚÓ̃ÍË Ú‡ÌÒÎflˆËË
Программируемые точки в рабочем пространстве служат предметом обучения робота
или создаются с использованием данных из ГТЗ с помощью одного из пяти методов
программирования точек, описанных ранее.
1054
15.8 .8 . ò‡„ 8: ËÒÔ̊Ú‡ÌËÂ Ë ÓÚ·‰Í‡ ÔÓ„‡ÏÏ̊
Завершающий этап разработки программы робота состоит в испытании программы и
устранении неизбежных некорректностей. Некоторые соображения делают этот пос
ледний этап безопасным для робота и других аппаратных средств рабочей ячейки:
поддерживайте скорость между точками трансляции на возможно более низ
ком уровне во время первого прогона, чтобы любые случайные и неожидан
ные движения могли быть прекращены аварийным остановом;
используйте функцию единственного шага. Если контроллер поддерживает
функцию единственного шага, то программа может выполняться с паузами
после завершения каждого движения;
испытайте каждую подпрограмму индивидуально до ее включения в основ
ную программу;
позаботьтесь, чтобы никакие предметы не попали в линию подачи деталей
или в движущиеся части механизма;
непременно держите одну руку на кнопке аварийного останова при любых
движениях.
15.9. ëàçíÄäëàë üáõäÄ èêéÉêÄååàêéÇÄçàü ëÖêÇéêéÅéíéÇ
Материал настоящего раздела посвящен синтаксису и кодам, используемым при про
граммировании замкнутых робототехнических систем. Следует учитывать, что языки
программирования роботов различных основных производителей, различаются между
собой, поэтому невозможно установить единый стандарт, которому соответствовали
бы все модели и типы. Тем не менее, если вы знаете основные правила составления
программ, то их освоение не представит для вас больших трудностей. В качестве при
мера в следующих разделах приведены некоторые команды, наиболее часто использу
емые в роботах МК3 Yaskawa Performer.
На самом деле в языке содержится гораздо больше команд, здесь же представле
ны только те команды, которые используются наиболее часто.
15.9 .1 . íËÔ̊ ‰‡ÌÌ̊ı
Язык программирования контроллеров ACL (Advenced Control Language — продвину
тый язык управления) содержит два типа переменных: глобальные, которые могут при
меняться в любых программах, и частные, используемые только в программах, в кото
рых определены эти переменные. Примеры определения переменных обоих типов:
DEFINE X — определяется частная переменная X.
GLOBAL Top — определяется глобальная переменная Top.
DIM A[20] — определяется массив, названный А, с двадцатью частными пере
менными.
ëàçíÄäëàë üáõäÄ èêéÉêÄååàêéÇÄçàü ëÖêÇéêéÅéíéÇ
1055
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
DIMG App[5] — определяется массив, названный App, с пятью глобальными пе
ременными.
15.9 .2 . äÓχ̉̊ ÛÔ‡‚ÎÂÌËfl ÓÒflÏË ÍÓÓ‰Ë̇Ú
Некоторые команды служат для управления осями координат робота, шарнирами и
гриппером. Некоторые из команд используются совместно, например MOVE и
SPEED, в зависимости от сопровождающего их описания.
MOVE approach1 Перемещает гриппер к точке, названной approach1, с теку
щим значением скорости
SPEED var
Устанавливает скорость координатных осей, равную var, где
var принимает значение в процентах от 1 до 100. При отсут
ствии данных устанавливается скорость 50. После задания
скорости она поддерживается на заданном уровне до более
позднего шага программы
Следующие фрагменты программ иллюстрируют применение этих команд:
Комментарии к графу точек задания программы (ГТЗ) Программа робота
Задание скорости
SPEED 60
Подведение к точке М
MOVE approach M
Перемещение гриппера в точку задания, названную Y, MOVEL Y
вдоль прямой линии с ранее заданной скоростью
Устанавливает линейную скорость оси на уровне
SPEEDL var
переменной var, где var — значение, заданное
в мм/c, до 500 мм/c
Подведение к точке P
MOVE approach P
Умеренная скорость
SPEEDL 110
Деталь — гриппер в положении захвата детали
MOVEL part
Часто используются дополнительные пять команд:
OPEN
Открыть гриппер
CLOSE
Закрыть гриппер
DELAY var
Задержать выполнение команды на время, равное
значению var в сотнях миллисекунд
HOME
Поиск микропереключателя для установки исходного
положения по всем координатам
SET var1 = var2
Устанавливает значение var2 равным var1
Следующие фрагменты показывают использование этих команд.
Комментарии к графу точек задания программы (ГТЗ) Программа робота
Исходное состояние
HOME
Умеренная скорость
SPEED 60
1056
Комментарии к графу точек задания программы (ГТЗ) Программа робота
К началу цикла
MOVE cyclest
Открыть гриппер
OPEN
Увеличение скорости
SPEED 80
Подведение гриппера к детали
MOVEL part
Задержка 1 секунда
DELAY 1000
Закрыть гриппер
CLOSE
Задержка 1 секунда
DELAY 1000
Малая скорость
SPEED 30
Подведение детали к точке P
MOVEL approach P
15.9 .3. ìÔ‡‚ÎÂÌË ÔÓÚ‡ÏË ‚‚Ó‰‡/‚̊‚Ó‰‡ (I/O)
ÔÓ„‡ÏÏÓÈ ‚̊ÔÓÎÌÂÌËfl ÍÓχ̉
Следующие команды выполняются на одном из шестнадцати дискретных уровней пор
тами контроллера робота.
SET OUT[n] = {0/1} Эта команда устанавливает состояние выхода n равным
«1» (включено) или «0» (выключено), где n — номер
порта выхода (от 1 до 16)
IF IN[n] = {0/1}
Эта условная команда IF проверяет напряжение на вхо
де порта n, чтобы убедиться, равно ли это напряжение
значению, указанному в скобках: {0} = 0 В и {1} = 28 В
постоянного напряжения
Команда IF может использоваться также с численными значениями и с системой пе
ременных. Значения любых стандартных логических операций могут использоваться вме
сто знака равенства. Операторы могут иметь значения: больше (>); меньше (<); равно
(=); меньше или равно (<=); больше или равно (>=); не равно (<>). Если значение опе
ратора истинно, то используется следующая линия программы. В противном случае ис
полнение передается команде, следующей за ELSE (иначе), если таковая имеется, либо
команде, следующей за ENDIF (если команда ELSE отсутствует). Команды ANDIF и
ORIF позволяют дополнительно рассматривать условия AND (И) и OR (ИЛИ).
Следующие примеры иллюстрируют использование этих команд:
Комментарии к графу точек задания программы (ГТЗ) Программа робота
ЕСЛИ на входной порт 5 подано напряжение (28 В) IF IN[5] = 1
И переменная С больше, чем 1
ANDIFC>1
ИЛИ А не равно В,
ORIF A<> B
Движение вверх к точке top
MOVE top
ИНАЧЕ
ELSE
Движение вниз к точке bottom
MOVE bottom ENDIF
Развернуть движение конвейера (выход порт 5)
SET OUT[5] = 1
ëàçíÄäëàë üáõäÄ èêéÉêÄååàêéÇÄçàü ëÖêÇéêéÅéíéÇ
1057
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Этот пример демонстрирует, как используется команда IF. Если на входе порта 5 вы
сокое напряжение, И если значение переменной С больше, чем 1, ИЛИ значение пере
менной А не равно переменной В, то исполняется команда MOVE, осуществляя движение
в направлении точки top. Если же оба условия ИЛИ не выполняются, то выполняется
команда MOVE, осуществляя движение в направлении bottom. Команды ANDIF и ORIF
могут быть использованы для реализации соответствующих логических условий.
Ниже описаны некоторые команды.
GOSUB <имя программы> Эта команда передает управление от главной про
граммы робота другой программе, названной после
синтаксической команды gosub (перейти к подпрог
рамме). Исполнение главной программы задержи
вается до завершения подпрограммы.
Следующий пример демонстрирует, как исполняются несколько только что упо
мянутых команд.
Комментарии к графу точек задания программы (ГТЗ) Программа робота
Телевидение — перемещение детали
MOVE vision
в поле зрения телекамеры
Задержка 1 секунда
DELAY 1000
Послать сигнал телевизионной системы
SET OUT[5] = 1
для опознания образа
Задержка 3 секунды
DELAY 3000
Приближение V — движение к точке
MOVE approach V
наилучшего восприятия телевизионного изображения
Если на входе порта 10 высокое напряжение
IFIN[10]=1
истинно, то переход к подпрограмме управления
MOVE conveyor
конвейером (изделие в хорошем состоянии);
ИНАЧЕ
ELSE
переход к подпрограмме удаления
MOVE scrap ENDIF
изделия (изделие плохое)
В приведенных кодах программы робот должен переместить последнее обработанное
изделие в поле зрения телекамеры. Секундная задержка необходима, чтобы убедиться в ос
тановке изделия в исходной позиции. Команда SET OUT [5] = 1 включает вывод 5 робота,
который либо включает вход телевизионного сигнала контроллера, либо вход программиру
емого логического контроллера ПЛК к телевизионной системе. Включение напряжения те
левизионной системы является частью проверки работоспособности. Трехсекундная задер
жка необходима, чтобы предоставить телевизионной системе время для опознания образа.
Робот перемещает изделие ближе к телевизионной камере для того, чтобы телесистема по
слала сигнал индикации качества изделия (0 В, если деталь должна быть забракована, и
высокое напряжение, если деталь исправна). Телевизионная система может послать сигнал
на вход робота или на вход ПЛК (входной сигнал ПЛК, в конечном счете, поступает на ро
бот). Следовательно, результат проверки качества поступает на вход порта 10 робота, и про
грамма выдает команду IF IN[10] = 1 для перехода к выполнению соответствующей под
1058
программы gosub в случае хорошего качества изделия либо команду IN[10] = 0 для брако
ванного. Обычно ПЛК поддерживает обмен данными между роботом и телевизионной сис
темой наряду с другими средствами контроля рабочей ячейки.
Обмен данными между ПЛК и контроллером робота или другими компьютерно
управляющими устройствами обслуживается следующей командой. Этот процесс, на
зываемый рукопожатием, часто используется при разработке автоматических систем
управления. Описываемый код программы предусматривает обмен информацией
между телевизионной системой и контроллером робота. Эта проблема весьма суще
ственна при разработке. Разберитесь в коде из приведенного ниже примера, и вам
станет ясна суть проблемы:
WAIT var1 <operator> var2 Команда WAIT (ожидание) приостанавливает вы
полнение программы робота до выполнения соот
ветствующего оператора. Две переменные var1 и
var2 могут быть любыми переменными, целочислен
ными или системными параметрами, а оператор мо
жет быть любым стандартным оператором, опреде
ленным ранее в группе команд IF (если)
В предыдущем примере программы имелся один серьезный изъян — после про
верки изделия телевизионной системой и использования трех команд задержки, необ
ходимых для того, чтобы убедиться, что результаты телевизионной проверки достигли
робота. Допустим, что результаты телевизионной проверки положительны, но данные
телевизионной системы не достигли робота в течение 3 секундного интервала. Коман
да IF IN[10] = 1 не будет восприниматься как истинная, в результате изделие будет
направлено в брак. Техника, называемая рукопожатием, используется для того, чтобы
исключить возможность такого ошибочного действия, пока присутствуют данные.
В программе рукопожатия между роботом и ПЛК команда IN[n] используется в
команде WAIT на месте переменной var1. Команда при этом запишется как WAIT
IN[n] = 1/0, и при ее выполнении бит 0 или 1 переключится на входной порт. Элек
трический интерфейс, необходимая логическая программа ПЛК лестничного типа,
программа робота с подпрограммой рукопожатия между роботами, собственно ПЛК
и часть системы подачи изделий представлены на рис. 15.38 . Прежде чем рассмат
ривать пример рукопожатия (пример 15.7), изучите интерфейс и поймите структуру
программ взаимодействия систем.
èËÏ 15.7
Рукопожатие между ПЛК и роботом иллюстрируется на рис. 15.38. Требования руко
пожатия описаны ниже.
Робот используется для подачи изделий от питающего конвейера к обрабатывающей
машине, которая просверливает отверстие в изделии. Робот не должен предпринимать
попытки взять изделие, пока питающий конвейер не подаст очередную деталь. Рукопо
жатие робота и ПЛК должно подтвердить, что изделие присутствует, прежде чем робот
начнет движение от подающего конвейера. Датчик, который обнаруживает присут
ствие изделия на подающем конвейере питателя, связан с входным модулем ПЛК.
Объясните, как операция рукопожатия удовлетворяет требованиям нормального
функционирования системы.
ëàçíÄäëàë üáõäÄ èêéÉêÄååàêéÇÄçàü ëÖêÇéêéÅéíéÇ
1059
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Рис. 15.38. Интерфейс и программы для реализации рукопожатия двух роботов:
а) интерфейс робота и ПЛК;
б) программа лестничной логики для ПЛК;
в) программа робота
êÂ̄ÂÌËÂ
ПЛК знает состояние питателя (системы подачи деталей) благодаря входу (I2), кото
рый соединен с датчиком питателя. Последовательность операций приводится ниже:
1. Робот приближается к точке, находящейся над позицией питателя, и выполняет
команду SET OUT[3] = 1, которая передает сигнал 1 (напряжение высокого
уровня) от порта 3 к выводу 1 на входном модуле ПЛК (адрес входа I1).
2. Лестничный логический контроллер ПЛК (уровни 00 на рис. 15.38б) использует
входные контакты для подачи на выход бита В1.
3. Если на питателе присутствует изделие, датчик посылает сигнал 1 (высокое на
пряжение) на вывод 2 ПЛК входного модуля (адрес входа I2).
1060
4. Ступень лестничного ПЛК (уровень 01 на рис. 15.38б)) командой AND подтвер
ждает состояния В1 и I2 входных контактов, так что если оба условия истинны,
выход этой ступени также является истинным, т.е . активным. Таким образом,
если робот запрашивает подачу очередного изделия от питателя (В1 истинно) и
датчик подтверждает присутствие изделия (I2 истинно), то ПЛК выставляет на
выходе О2 значение «истинно».
5. Выход ПЛК О2 связан со входным портом 5 робота, поэтому при условии истин
ности О2 команда WAIT IN[5] = 1 выполняется и робот оставляет состояние ожи
дания и выполняет MOVEL feeder, тем самым возвращая изделие от питателя.
Изучите пример 15.7, чтобы понять, как осуществляется рукопожатие между
ПЛК и другими компьютерно управляемыми устройствами.
Следующие команды создают циклы FOR и осуществляют переходы в программах:
FOR var1 = var2 TO var3
Эта команда выполняет все программные линии
между командой FOR и командой ENDFOR столько
раз, сколько указано между значениями var2 и var3.
Значение var1 всегда должно быть переменной, а
var2 и var3 могут быть или переменными, или целы
ми числами
ENDFOR
Все циклы FOR обязательно должны завершаться
командой ENDFOR
Применение этой команды иллюстрируется следующим примером:
FORL=MtoN
MOVE POS[L]
ENDFOR
Если предположить, что M = 1 и N = 5, то код между командами FOR и ENDFOR
будет исполнен пять раз. В течение каждого цикла значение L изменяется от 1, прини
мая последовательно значения 2, 3, 4 и 5. Массив POS[L] представляет собой массив
из пяти точек обучения (POS[1], POS[2], POS[3], POS[4] и POS[5]). Цикл FOR пре
дусматривает движение робота ко всем пяти позициям массива. Последняя команда
служит для перехода внутри подпрограммы.
GOTO n Эта команда осуществляет переход на линию с данным номером
метки
LABEL n Отмечает линию в программе, которая должна быть исполнена
после того, как исполнена команда GOTO n, где n — любое число
между 1 и 9999
Следующая программа служит иллюстрацией того, как используются эти команды:
Комментарии к графу точек задания программы (ГТЗ) Программа робота
LABEL 100
Начало цикла
MOVE cyclest
Открыть гриппер
OPEN
Большая скорость
SPEED 80
ëàçíÄäëàë üáõäÄ èêéÉêÄååàêéÇÄçàü ëÖêÇéêéÅéíéÇ
1061
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Комментарии к графу точек задания программы (ГТЗ) Программа робота
Конец цикла
MOVE eoc
При IN[4] = 1
IFIN[4]=1
Переход на метку 100
GOTO 100
ИНАЧЕ
ELSE
Конец работы
END
ENDIF
В этом примере программы выключатель рабочей ячейки подает сигнал на входной
порт 4 робота, вызывая повторение цикла. Если включение состоялось, программа пе
реходит к началу и повторяет цикл программы, если нет — программа завершается.
15.10. èêéÉêÄååàêéÇÄçàÖ êÄáéåäçìíõï
êéÅéíéíÖïçàóÖëäàï ëàëíÖå
Разомкнутая робототехническая система на рис. 15.29 представляет собой двухкоор
динатный пневморобот, управляемый ПЛК, причем ПЛК управляет приводом обеих
координатных осей и гриппера. ПЛК мог бы также управлять другими рабочими ячей
ками. Изучите стандартный рабочий цикл, представленный на рис. 15.29б. Простей
шая выбранная лестничная логическая программа — это временная программа, в ко
торой каждой координате отводится фиксированное время для выполнения. Более
сложная лестничная программа осуществляет действия в зависимости от исхода пре
дыдущих действий (событийная программа), в которой сигналы датчиков ограничены
в управлении перемещением исполнительного органа, и это перемещение может про
изойти не раньше, чем осуществилось очередное изменение положения руки робота.
Наконец, наиболее сложная программная реакция использует современный язык
программирования IEC 61131 3 для ПЛК, названный картой последовательных фун
кций. Примеры 15.8 и 15.9 показывают, как можно использовать первый (программи
рование с помощью лестничной логики) и третий (на языке IEC 61131 3) типы про
граммирования применительно к разомкнутым системам роботов. Модернизация
программ с использованием событийного программирования является одной из про
блем, обсуждаемых в конце главы.
èËÏ 15.8
На рис. 15.29 показан стандартный цикл движения робота по заданной временной
программе. Пусть движение по каждой из осей координат требует 3 с, а открывание и
закрывание гриппера — 2 с. Гриппер берет изделие в точке А и перемещает его в
точку В. Цикл не может начаться, пока датчик наличия изделий в точке А не сообщит
о наличии изделия в этом месте рабочего пространства. Цикл начинается и заверша
ется селекторным ключом с исходной позиции (HOME). Исходная позиция означает
начальное значение для обеих координат. Ось Y управляется пневмоклапаном, кото
рый, в свою очередь, управляется выходом ПЛК O: 2/1; ось Z управляется клапаном
1062
с выхода O: 2/2, и гриппер управляется выходом O: 2/3. Датчик наличия детали —
вход I: 1/1, а ключ старта — I: 1/2. Разработайте программу управления роботом.
êÂ̄ÂÌËÂ
Управление роботом осуществляется лестничной логической программой, представ
ленной ниже.
Изучите управление пневмороботом на этом примере, пока вам не станет ясна
логика управления на каждом шаге. Заметьте, что таймер запускается и команды дви
жения робота поступают в последовательности, образующей 22 секундный цикл.
Если селектор стартового ключа запускает цикл, робот будет продолжать действия по
выполнению этого цикла независимо от того, присутствует ли на месте новое изделие.
Если стартовый ключ разомкнут, робот останавливается после завершения цикла.
èËÏ 15.9
Робот на рис. 15.29 проходит стандартный цикл действий, образующих карту после
довательных действий. Он берет изделие в точке цикла А и перемещает его в В. Цикл
не может начаться раньше, чем датчик в точке цикла А не укажет на наличие изделия.
Цикл начинается и останавливается в соответствии с состоянием селекторного клю
ча. Ось Y управляется пневмоклапанном посредством выхода O: 2/1 ПЛК, ось Z уп
равляется сигналом выхода O: 2/2, гриппер управляется выходом O: 2/3. Датчики
состояния системы выдают следующие сигналы на входы ПЛК: датчик наличия изде
лия — I: 1/1; ключ старта — I: 1/2; подъем по оси Z — I: 1/3; движение вниз по оси
Z — I: 1/4; движение по оси Y — I: 1/5; возврат по оси Y — I: 1/6. Составьте про
грамму управления роботом.
êÂ̄ÂÌËÂ
Карта последовательных функций (КПФ), осуществляющая желаемое управление
роботом, приведена на рисунке к данному примеру.
Изучите карту последовательных функций для двухкоординатного робота.
Если вы не уверены в правильности прочтения КПФ, обратитесь к разделу 12.9 в
главе 12. Заметьте, что программа стартует, когда start_sw становится истинным,
а действие робота начинается с ожидания появления детали на исходной позиции:
wait_part. Каждое из движений индицируется стрелкой на рис. 15.29. Стандарт
ный цикл осуществляется шагами КПФ, где указывается состояние исполнитель
ного органа «включено» или «выключено». Условия перехода определяются сиг
налами датчиков состояния исполнительного органа при достижении конечного
положения («концевые выключатели»). Использование ограничителей в приводах
координатных осей и гриппера позволяет роботу провести цикл за минимально
возможное время. Заметим, что S и R действия (установка — set и сброс —
reset) имеют смысл установки выхода (выход включен) и сброс выхода (выход вык
лючен). Возвращение к началу программного цикла обеспечивает создание замк
нутой траектории перемещения, которая будет исполняться до тех пор, пока стар
товый ключ замкнут, а очередное изделие зафиксировано в положении, удобном
для того, чтобы его взять.
èêéÉêÄååàêéÇÄçàÖ êÄáéåäçìíõï êéÅéíéíÖïçàóÖëäàï ëàëíÖå
1063
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Лестничная схема к примеру 15.8
1064
К
а
р
т
а
п
о
с
л
е
д
о
в
а
т
е
л
ь
н
ы
х
ф
у
н
к
ц
и
й
(
К
П
Ф
)
к
п
р
и
м
е
р
у
1
5
.
9
èêéÉêÄååàêéÇÄçàÖ êÄáéåäçìíõï êéÅéíéíÖïçàóÖëäàï ëàëíÖå
1065
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
15.11. ÅÖáéèÄëçéëíú êéÅéíÄ
Безопасность персонала или оборудования — важное условие в любой сфере производ
ства, но оно становится особенно существенным, если одним из участников производства
является робот. Безопасность обеспечивается подробным планом функционирования,
поэтому подготовка такого плана должна быть неотъемлемой частью проектирования
любой машины и производственной ячейки.
15.11 .1 . í·ӂ‡ÌËfl ·ÂÁÓÔ‡ÒÌÓÒÚË Í ÔÓÂÍÚËÓ‚‡ÌĘ̈ ‡·Ó̃ÂÈ fl̃ÂÈÍË
Требования к разработке безопасной ячейки таковы:
максимально достижимые точки рабочего пространства робота должны быть
четко обозначены на полу помещения контрастной лентой или краской;
перемещающиеся предупреждающие устройства и части привода должны быть
хорошо видны с любой точки в пределах рабочего пространства робота. Предуп
реждающие устройства следует снабжать проблесковыми маячками, включаемы
ми автоматически вместе с подачей питания на приводные двигатели, исполни
тельные механизмы или любые движущиеся части робота. Обычно контроллеры
робота содержат дополнительные контакты для выполнения этих функций;
в рабочем пространстве робота не должно быть никаких аппаратных средств, за
исключением тех, которые связаны непосредственно с его рабочими операциями;
персонал должен быть защищен от непредвиденного контакта с рукой робота
с помощью защитных ограждений рабочей ячейки. Ограждение может быть
частью оборудования рабочей ячейки или стандартной защитной конструк
цией. В ситуации, когда производственная необходимость препятствует со
оружению твердых барьеров, должны применяться защитные занавески, ос
нащенные датчиками для обесточивания робота и перевода его в безопасное
состояние;
выключатели для аварийной остановки должны быть размещены в стратеги
чески важных точках вокруг рабочей ячейки для обесточивания робота при
обнаружении проблемной ситуации;
необходимо использовать предупреждающие знаки, чтобы ясно указать, где
находится программируемое устройство, которое в любой момент может на
чать двигаться;
должны быть предусмотрены меры, которые позволили бы обслуживающе
му персоналу запирать доступ к панелям управления и электропитания во
время выполнения работ в системе.
15.11 .2 . êÛÍÓ‚Ó‰ÒÚ‚Ó ÔÓ ·ÂÁÓÔ‡ÒÌÓÏÛ ËÒÔÓÎ̧ÁÓ‚‡ÌĘ̈ Ó·ÓÚ‡
Робот может причинить травму разными путями, но наиболее часто возникает две си
туации: удар движущейся частью руки робота или его инструмента и попадание части
1066
тела между рукой робота и неподвижной частью конструкции (защемление). Оба типа
несчастных случаев приводят к серьезным травмам, причем второй — к более серьез
ным, хотя его легче избежать. Некоторые правила, позволяющие избежать и/или ми
нимизировать травматизм, приведены ниже:
избегайте точек защемления. Вы должны всегда быть настороже и избегать
тех точек, где ваше тело или любая его часть может оказаться зажатой между
роботом и неподвижными частями конструкции. Большинство подобных си
туаций возникает вследствие того, что персонал, находясь в рабочем про
странстве робота, делает следующие некорректные предположения:
если рука робота неподвижна, программа полностью остановлена: на практи
ке во многих случаях программа приостанавливает движение робота до тех
пор, пока некоторое внешнее устройство не получит сигнал, подтверждающий
выполнение своих операций. Например, робот, передающий изделия на кон
вейер, может выдерживать паузу при выполнении подпрограммы, обуслов
ленную тем, что предыдущее изделие еще не покинуло свою позицию. Если
предыдущее изделие оказалось заклиненным на конвейере, робот может оста
новиться на некотором расстоянии от конвейера. Подобная ситуация может не
происходить месяцами, пока однажды не произойдет такое заклинивание.
Оператор, который обслуживает этот участок, попадает между роботом и кон
вейером, чтобы удалить заклиненную деталь. При этом оператор совершает
две ошибки: 1) предполагает, что робот остановился, потому что он не может
двигаться; и 2) входит в зону действия рабочего органа робота;
если робот выполняет некоторые повторяющиеся действия, то эти действия
будут повторяться и впредь. Программа робота часто бывает снабжена под
программой, которая заставляет его изменить характер движений под дей
ствием некоторой внешней команды. Например, робот может выполнять
программу, передающую формы для отливки из штамповочной машины к
прессу для окончательной доводки. Из нескольких сотен изделий одна может
оказаться с дефектом, который будет выявлен датчиком, после чего форма
для отливки будет направлена вместо доводочного пресса в контейнер для
брака. При этом сложившаяся последовательность действий машины будет
существенно изменена — один раз на несколько сотен изделий;
если робот движется медленно, то предполагается, что такой темп движения
будет продолжаться и впредь: между тем программист имеет в своем распоря
жении широкий диапазон возможных изменений скорости, которые могут
быть реализованы программой. Медленное выполнение одного движения не
гарантирует, что следующее движение будет выполняться с той же скоростью;
если вы программируете движение руки робота, то предполагаете, что он бу
дет двигаться в том же темпе, в котором вы хотели бы видеть его движения.
Однако программа робота предполагает две ступени: 1) точки желаемого
местоположения, которые робот должен посещать в результате его обуче
ния; и 2) команды программы, которые образуют структуру для перемещения
робота к запрограммированным точкам с корректной скоростью. Отнюдь не
редкость ситуация, когда замена запрограммированных точек посещения ро
бота или их идентификация будет вызывать изменение скорости. В то время
ÅÖáéèÄëçéëíú êéÅéíÄ
1067
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
как вы думаете, что робот будет перемещаться к одной из запрограммиро
ванных точек посещения, он иногда будет перемещаться к совершенно иной
точке с целью корректного выполнения программы в целом.
Аварийные ситуации и несчастные случаи могут происходить при трех видах действий
с участием роботов: регулярная работа, программирование, облуживание. Некоторые из
них могут быть вызваны неправильным действием систем робота или периферийных сис
тем или устройств. Отказы системы невозможно полностью исключить, но тщательно
продуманной системой обслуживания можно предотвратить несчастные случаи, обуслов
ленные отказом техники или ее компонентов. Хорошее обучение персонала снижает веро
ятность травматизма, так как позволяет избежать многих ситуаций, которые вызываются
некорректными действиями операторов или обслуживающего персонала.
Существует сравнительно мало причин для пребывания персонала в рабочем про
странстве робота. Производственные системы и процессы могут разрабатываться так,
чтобы обеспечить отсутствие персонала в опасных зонах. Значительная часть работ по
обслуживанию не требует присутствия персонала в рабочей зоне робота при его испы
таниях. Хорошо продуманная процедура облуживания и подготовленный персонал по
зволяет существенно снизить травматизм в этой сфере деятельности. По существу,
единственный вид деятельности, требующий присутствия человека поблизости от руки
робота и рабочих инструментов, — программирование точек обучения робота.
В процессе программирования для программиста часто возникает необходимость
иметь хороший визуальный контакт с частями робота, чтобы убедиться в их определен
ном положении, прежде чем соответствующая точка будет запрограммирована. В тече
ние этого времени программист перемещает инструмент, управляя роботом с помощью
клипсы. Когда процесс обучения робота в программируемых точках производится вруч
ную, программист вынужденно находится в контакте с активной системой привода. Что
бы минимизировать риск травматизма, необходимо придерживаться следующих правил:
всегда иметь оператора или другого программиста, держащего руку на кноп
ке аварийного останова;
никогда не стоять в положении, опасном для защемления, если выполняются
действия по программированию;
всегда использовать режим малой скорости перемещения, если программи
рование требует тесного контакта с инструментом;
никогда не пересоединять электрические кабели или проводники шин вход
выход при включенном питании;
никогда не стоять в рабочем пространстве робота, если вы посылаете инст
румент в запрограммированную точку с целью проверки точности отработки
команды. Посылайте команду на движение к программируемой точке извне
области рабочего пространства и проверяйте точность отработки после пре
кращения всех движений робота;
никогда не стоять в рабочем пространстве робота при испытании новой или
модифицированной программы;
если это возможно, держать одну руку на руке робота, когда Вы перемещаете
его в ходе обучения с помощью клипсы. Если отказ системы приводит к вне
запному движению робота в вашу сторону, такое расположение вашей руки и
1068
руки робота приведет к выталкиванию вас из опасной зоны, минимизируя
таким образом контакт с движущимися частями.
Хотя возможность травматизма нельзя никогда исключить полностью, выполне
ние следующих положений ее существенно снизит:
используйте по периметру ячеек роботов и роботоподобных устройств эф
фективные предупреждения, ограничения, барьеры;
организуйте обучение и тренировки низшего звена персонала, обращая осо
бое внимание на факторы безопасности;
организуйте специальные тренировки и учения для операторов, работающих
в рабочей ячейке робота;
установите специальную программу по поддержанию роботов и рабочих яче
ек в рабочем состоянии и по их обслуживанию с участием специально подго
товленного персонала для работы как с аппаратного, так и с программного
обеспечения.
В дополнение к мерам безопасности от механических воздействий необходимо
учитывать также меры безопасности от поражения электрическим током, и опаснос
ти, связанные с повреждением магистралей сжатого воздуха и жидкостей под боль
шим давлением. Травматизма можно избежать, используя названные рекомендации и
принцип «трех R»: Robots Require Respect (Роботы Требуют Уважения).
15.12. ÑàÄÉçéëíàêéÇÄçàÖ êéÅéíéíÖïçàóÖëäàï ëàëíÖå
Проблема поиска неисправностей в любых компьтеризованных системах существенно
сложнее, чем в электронных системах. А в случае рабочей ячейки с роботами ПЛК, про
мышленными контроллерами в единой системе, задача определения неисправности ус
ложняется. Некоторое преимущество таких систем состоит в том, что они обычно попа
дают к пользователю с инструкцией по идентификации отказавшего элемента или
подсистемы (с другой стороны, если вы не можете найти отказавшую шайбу в системе,
то каждый продавец машины будет утверждать, что причиной отказа послужила не его,
а другая машина). Таким образом, интегрированные компьютерно управляемые маши
ны имеют аппаратные компоненты и программное обеспечение, и проблема может от
носиться либо к одной, либо к другой сфере. Например, датчик ПЛК системы может не
соответствовать размеру детали, помещенной в область, контролируемую датчиком, и
тогда проблема будет связана с аппаратурой (ошибочный сигнал датчика; ошибочный
сигнал, связанный с неправильным монтажом; отказ источника питания; датчик под
ключен не к тому выводу ПЛК; неправильная работа входного модуля ПЛК) либо с про
граммным обеспечением (ссылка на входной сигнал с терминала ошибочна).
Во всяком случае, важно различать эти два вида проблем. Эффективный метод
диагностирования на этом уровне — выделение и изоляция отказавшей части систе
мы. Начальным пунктом диагностирования следует считать выяснение вопроса, про
изошел ли отказ во вновь устанавливаемой системе или в системе, которая работала
некоторое время без каких бы то ни было изменений в аппаратуре или программе.
ÑàÄÉçéëíàêéÇÄçàÖ êéÅéíéíÖïçàóÖëäàï ëàëíÖå
1069
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
15.12 .1 . Ñˇ„ÌÓÒÚËÓ‚‡ÌË Á‡ÔÛÒ͇ÂÏÓÈ ÒËÒÚÂÏ̊
Диагностирование вновь запускаемых систем — наиболее сложная задача, поскольку ни
оборудование, ни программа не могут быть проверены при возникновении отказа. Для
выделения и изоляции проблемной части можно рекомендовать следующую процедуру:
испытывайте каждую часть системы (робот, ПЛК, другие механизмы) с ис
пользованием простых программ тестирования, чтобы убедиться, что каждая
часть установлена правильно и функционирует;
соедините части в единую систему, в то же время проверяя, что каждая часть
системы нормально функционирует под управлением своей программы;
если произошел отказ, по имеющимся симптомам локализуйте место отказа
до определенного узла или линии программы.
15.12 .2 . Ñˇ„ÌÓÒÚËÓ‚‡ÌË ÓÔ‡ˆËÓÌÌÓÈ ÒËÒÚÂÏ̊
Поиск отказавших узлов в системе, которая до момента отказа работала нормально,
происходит с помощью метода исключения. Записанная в память программа, вероят
но, может быть причиной отказа, но если она не подвергалась изменению, то будет
продолжать работать. Если отказ возможен в операционной системе и после перезаг
рузки причина отказа не выявлена, то причиной отказа может оказаться аппаратная
часть. Если отказ произошел после модификации кодов операционной системы, то
наиболее вероятная причина отказа связана с программой.
Следует сделать одну оговорку в отношении очень больших и сложных систем. Удоб
нее пояснить ситуацию на следующем примере. Большая бумагоделательная машина с
тысячами датчиков, ключей, исполнительных механизмов управляется ПЛК, и его про
грамма содержит более 12000 ступеней лестничных логических узлов, которые способны
работать многие годы. После отладки и пуска система работала без сбоев и отказов. Спу
стя несколько месяцев с начала эксплуатации произошел отказ, который после изучения
был признан отказом программного обеспечения. Дело оказалось в том, что вследствие
сложности и больших размеров системы в течение нескольких месяцев после ее запуска
не возникала та уникальная комбинация сигналов датчиков ключей и исполнительных ме
ханизмов, при которой происходит отказ программного обеспечения.
15.12 .3. ëÚÛÍÚÛ̇fl ÒıÂχ Ó·ÓÚ‡
Структурная схема системы робота с ПЛК показана на рис. 15.39а. Изучите эту схему,
пока взаимодействие ее частей не станет для вас совершенно ясным. Обратите внима
ние, что хотя на рисунке изображен один датчик, но каждый датчик, ключ или другой
вид входных устройств может использовать любую последовательную цепь узлов. Та
ким образом, единственный исполнительный орган может быть продублирован в не
скольких экземплярах, и каждый будет управляться одним контроллером, подключен
ным поочередно к разным исполнительным органам (режим мультиплексирования).
1070
Вы можете разрабатывать структурную схему системы, пользуясь этим методом, по
добно тому, как пользовались методом заключения в скобки, изложенным в главе 1.
Общая структурная схема робота показана на рис. 15.39б. Каждый узел обычно пред
ставляет собой печатную плату внутри контроллера робота. Однако некоторые систе
мы могут управляться двумя контроллерами для двух координатных осей либо могут
управлять приводом на одной печатной плате. На рисунке показаны только две коор
динатные оси, однако структурная схема может содержать аналогичные узлы для
большего числа осей робота.
Диагностирование системы робота обычно ограничивается уровнем платы. Важно
вместе с продавцом проверить, что системы робота не имеют повреждений. Часто име
ется возможность убедиться в работоспособности робота после замены платы, подозре
ваемой на неисправность, на заведомо исправную, предоставленную продавцом. Платы,
подозреваемые на неисправность, обычно заменяются большинством производителей.
15.13. ÇÖÅ-ëÄâíõ é èêéåõòãÖççõï êéÅéíÄï
Ниже перечислены адреса веб сайтов поставщиков роботов и грипперов. Поскольку
адреса сайтов часто изменяются, то можно использовать любую поисковую систему,
чтобы найти нужную информацию в Сети.
Поставщики роботов:
ABB Robotics
http://www.abb.com
CRS Robotics
http://www.crsrobotics.com
ElectroPneumatics Ltd.
http://www.electropneumatics.com
FANUC Corp.
http://www.fanucrobotics.com
FESTO
http://www.festo.com
Mack Corporation
http://www.mackcorp.com
Mitsubishi
http://www.mitsubishi.com
Reis Robotics
http://www.reisrobotics.com
Techno Isel
http://www.technoisel.com
Tol O Matic
http://www.tolomatic.com
ÇÖÅ-ëÄâíõ é èêéåõòãÖççõï êéÅéíÄï
1071
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Поставщики грипперов:
Compact Air Products
http://compactair.com
Mack Corporation
http://www.mackcorp.com
Techno SOMMER Automatic
http://www.technosommer .com
Рис. 15.39 . Блоксхема для поиска неисправности робота:
а) путь прохождения дискретного сигнала;
б) поток данных робота
êÖáûåÖ
15.1 и 15.2 . Введение. Определение промышленных роботов
Робот — автоматически управляемая перепрограммируемая многоцелевая
машина манипулятор с несколькими перепрограммируемыми степенями
1072
свободы. При использовании в промышленной автоматике он может быть
фиксированным в пространстве или мобильным.
Важные понятия и термины робототехники: рабочее пространство, инстру
ментальная оснастка, нумерация осей координат, позиционирование осей,
ориентация осей, степени свободы, системы координат, точность, воспроизво
димость, центральная точка инструмента, скорость, нагрузочная способность.
Воспроизводимость —величина всегда более критичная, чем точность. Вос
производимость обеспечивает способность возвращаться в заранее задан
ную точку.
Точность — величина отклонения координат точки, заданной контроллеру
робота от внешнего устройства.
Нагрузочная способность — внешняя нагрузка плюс вес изделия.
15.3. Основные системы робота
Система промышленного робота включает в себя собственно робот (роботы) и
аппаратные средства и программное обеспечение. Составными частями систе
мы являются манипулятор, источник питания, контроллер, исполнительные ме
ханизмы, вспомогательное оборудование, датчики, интерфейсы связи с другим
оборудованием, системы мониторинга, дополнительное оборудование и датчики.
Рука робота — механическое устройство, приводимое в действие электродвигате
лями, пневматическими или механическими исполнительными устройствами. Воз
можны линейные или вращающиеся исполнительные механизмы.
Основные типы геометрических представлений: прямоугольный, цилиндри
ческий, сферический и объединенный сферический.
Картезианская геометрия обеспечивает движение в двух взаимно перпенди
кулярных плоскостях и выполняется в двух конфигурациях: портал и под
вижная тележка.
Система цилиндрических координат робота может перемещать гриппер в
пределах рабочего пространства, которое представляет собой цилиндр.
Сферическая, или полярная, система координат позиционирует кисть робота
посредством дух вращательных движений и одного линейного, формируя
сферическое рабочее пространство.
Шарнирные промышленные роботы формируют рабочее пространство не
правильной формы, и их называют шарнирно сочлененными, вращающими
ся или антропоморфическими машинами. Существует два типа таких машин:
вертикально шарнирные и горизонтально шарнирные
Горизонтально шарнирные машины выполняются в двух конфигурациях: 1)
избирательная податливость шарнирного сочленения руки робота (SCARA)
и 2) горизонтально ориентированная шарнирная рука робота.
15.4. Производственный инструмент
Производственный инструмент, которым заканчивается рука, определяется
как: 1) технические приспособления, предназначенные для удерживания об
рабатываемых изделий; 2) специальный инструмент, встроенный в гриппер,
которым заканчивается рука робота; 3) многофункциональный гриппер.
êÖáûåÖ
1073
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
Стандартный гриппер снабжен множеством средств для удержания изделий.
Наиболее распространенными являются угловые или параллельные тиски
захваты.
Гриппер может быть снабжен пальцами для удерживания детали либо может
иметь отверстие для болта, чтобы в него входил палец гриппера.
Гриппер чаще всего оснащен пневмоприводом и имеет два, три или четыре пальца.
Другие стандартные типы грипперов могут быть снабжены одним из трех ти
пов вакуумных захватов (стандартный, вакуумный внешний, с вакуумной
присоской); существуют магнитные грипперы и четыре типа грипперов, ис
пользующих давление воздуха (пальцевый, диафрагменный, стержневой и с
пневмозахватом).
Грипперы делятся по признакам, учитывающим форму деталей, размер, гео
метрию, необходимость ориентации. Усилие, требующееся для удержания
детали, определяется процессом и податливостью детали.
Податливость обеспечивает или допускает возможность некоторого переме
щения детали с целью стыковки соединяемых деталей.
Для коррекции податливости при смещениях и вращательных движениях соеди
няемых деталей используются как активные, так и пассивные методы. К актив
ным относятся методы, использующие датчики усилия или момента в замкнутом
контуре контроллера. При пассивных методах применяются устройства смеще
ния центра податливости, роботы SCARA и программные средства.
Для ограничения области перемещения исполнительного органа при выпол
нении таких операций, как сверление, сварка, разрезание, покраска, штам
повка и перемалывание материала применяются специальные инструменты.
15.5 . Контроллер робота
Роботы классифицируются по наличию или отсутствию контура управления.
При его наличии их называют роботами сервотипа. Пневмо роботы с пнев
моприводом исполнительного механизма называются разомкнутыми систе
мами роботов.
Сервороботы могут быть запрограммированы на произвольное и практически
неограниченное число точек в рабочем пространстве, тогда как разомкнутые
пневмороботы могут использовать в качестве запрограммированных точек по
сещения только конечные точки траектории пневматических исполнительных
органов.
Сервороботы могут управлять скоростью, ускорением, формой траектории
движения и расположением точек посещения с помощью программного уп
равления. Разомкнутые системы имеют более скромные возможности для
управления параметрами движения.
Для управления разомкнутыми системами применяются ПЛК с пневмокла
панами в качестве исполнительных устройств с режимами «включено» и
«выключено» для каждой координатной оси.
Сервороботы выдают информацию о позиции и скорости руки робота кон
троллеру, управляющему движением.
1074
Çéèêéëõ
1. Что отличает робот от других средств автоматизации?
2. Нарисуйте структурную схему робота.
3. Каковы основные элементы робототехнической системы?
4. Какое различие существует между позиционированием и ориентацией руки робота?
5. Назовите три категории, на которые подразделяется инструментальная оснастка
робота.
6. Опишите четыре основных типа геометрии, применяемых в робототехнике.
7. Опишите два типа картезианской геометрии.
8. Опишите два типа шарнирной геометрии.
9. Опишите три различных типа инструментальной оснастки робота. Расскажите об
их применении.
10. Как отличить многоцелевой инструмент от гриппера?
11. Назовите основные компоненты контроллера робота.
12. Опишите, как работает станция обучения робота, или клипса.
13. Опишите различия между замкнутой робототехнической системой (серворобо
том) и разомкнутой.
14. Опишите преимущества сервороботов.
15. Назовите два параметра, измеряемых в каждом суставе большинства сервоуп
равляемых роботов.
16. Какими преимуществами обладают разомкнутые робототехнические системы?
17. Опишите приемы, используемые для позиционирования разомкнутых робототех
нических систем.
18. Какие типы производственных процессов наилучшим образом обслуживаются
разомкнутыми робототехническими системами?
19. Какие типы производственных процессов наилучшим образом обслуживаются
замкнутыми робототехническими системами (сервороботами)?
20. Дайте определение воспроизводимости и точности роботов и объясните, в чем
заключается различие этих понятий.
21. Определите следующие термины: рабочее пространство, степени свободы, поло
жения осей, центральная точка инструмента, максимальная нагрузочная способ
ность, быстродействие и координаты рабочей ячейки.
22. Опишите три типа управления траекторией движения серворобота и укажите,
когда они используются.
23. В чем заключается функция команд начала цикла и конца цикла (CYCLE START,
END OF CYCLE) при программировании робота? Где располагается оптималь
ное положение точки старта?
24. Что такое граф точек задания (ГТЗ) и какая информация содержится в графе?
25. Опишите две части программы серворобота.
Çéèêéëõ
1075
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
26. Опишите пять методов, используемых для трансляции точек программ робота.
Какие методы наиболее часто используются в настоящее время?
27. Чем различаются инструментальный, шарнирный и картезианский операцион
ные режимы? Определите, какие режимы используются в следующих ситуациях:
a. Обучение робота движению в точках между фиксированными состояниями
рабочей ячейки.
b. Циклическая замена рабочей оснастки путем перехода от одной стороны ра
бочей ячейки к другой без подъема или изменения длины руки робота.
c. Движение вдоль ряда изделий (пластин), если координаты изделий согласо
ваны с координатами робота.
d. Движение вставления детали в плату, если координаты платы не согласова
ны с координатами робота.
e. Отделение инструментальной оснастки робота от арматуры в случае отказа
системы, вызванного выключением , чего мы не можем себе позволиьконт
роллера в середине выполнения операции.
28. Опишите шаги в процессе выполнения роботом заданной программы.
29. Как идентифицируются задания и подзадания в программе? Каким образом они
поддерживаются программой робота?
30. Перечислите семь основных правил, призванных обеспечить безопасность работ
с использованием роботов.
31. Что такое точка защемления и как можно ее избежать?
32. Опишите четыре неверных предположения, связанных с движением руки робота,
которые часто являются причиной травм работника.
Çéèêéëõ èé ëèêÄÇéóçõå ÑÄççõå
Используя веб сайты продавцов роботов, перечисленные в разделе 15.13, определи
те, в чем отличаются между собой сервороботы примерно одного размера и геомет
рии, поставляемые тремя различными продавцами, и три различные разомкнутые ро
ботосистемы, также поставляемые тремя различными продавцами. Для этого:
1. Составьте развернутую таблицу для сравнения трех сервороботов, используя
следующие критерии: вертикальные перемещения, горизонтальные перемеще
ния, повторяемость, точность, число осей, скорость, нагрузочная способность.
Если продавец не предоставляет каких либо данных, исключите их из таблицы.
2. Составьте развернутую таблицу для сравнения разомкнутых систем роботов, ис
пользуя следующие критерии: вертикальные перемещения, горизонтальные пе
ремещения, повторяемость, точность, число осей, число программируемых то
чек, давление в магистрали сжатого воздуха, скорость, нагрузочная способность.
Если продавец не располагает данными о специфических параметрах, исключите
их из таблицы.
1076
èêéÅãÖåõ ÅÖáéèÄëçéëíà
1. Определите начальное размещение скобок и расположение первого теста при симп
томах отказа для блок схемы робота, представленной на рис. 15.39а. Предположим,
что система ранее работала нормально и в нее не было внесено никаких изменений.
a. Робот не реагирует на изделие, воспринятое датчиком 1, но реагирует на из
делия, прошедшие через другие датчики.
b. Сигналы датчика воспринимаются процессором ПЛК, но не вызывают сра
батывания исполнительного органа.
c. Программа в центральном процессоре робота указывает на корректность
данных, полученных от датчика, но реакция исполнительного органа на выхо
де отсутствует.
d. Исполнительный орган 1 не реагирует на сигналы, хотя другие исполнитель
ные органы работают нормально.
2. Определите начальное размещение скобок и дайте предложения по локализации
места отказа в плате робота на рис. 15.39б. Предположите, что ранее система
работала нормально и никаких изменений в систему не вносилось.
a. Ось 1 функционирует нормально, а ось 2 неподвижна.
b. Ни ось 1, ни ось 2 не реагируют на команды программы.
áÄÑÄóà
1. Производитель предполагает использовать робот FANUC LR Mate 100i (см.
рис. 15.1.) для сборки электродвигателей. Если вес якоря 4 фунта, каков макси
мально допустимый вес оснастки во всех трех режимах? Каков максимальный вес
оснастки при 30 % коэффициента безопасности?
2. Программа робота предусматривает перемещение центральной точки инстру
мента (ЦТИ) с нагрузкой 10 фунтов на расстояние 425 дюймов при движении с
изделием в оснастке и перемещение на 350 дюймов со свободным гриппером.
Программа содержит 45 точек программирования. Рассчитайте время, необходи
мое для завершения одного цикла, если движение осуществляется со скоростью
30 % от максимальной при загруженном гриппере и со скоростью 60 % от макси
мальной при разгруженном гриппере. Положим, что время прохождения через
запрограммированную точку — 0,08 с и максимальная скорость должна быть 5
футов в секунду.
3. Найдите решение задачи 1 для робота Adept на рис. 15.12. Необходимые данные
получите на веб сайте Adept Robotics (см. раздел 15.13).
4. Рассчитайте время, необходимое для перемещения из точки A в точку B в рабочем
пространстве, изображенном в верхней части рис. 15.1, для стандартной скорос
ти и высокой скорости, с нагрузочной способностью 3 кг. Подсказка: при движе
нии основной осью, ограничивающей время, будет ось номер 1, поскольку она
áÄÑÄóà
1077
èË̈ËÔ ‰ÂÈÒÚ‚Ëfl Ë ÔÓ„‡ÏÏËÓ‚‡ÌË ÔÓÏ̊̄ÎÂÌÌ̊ı Ó·ÓÚÓ‚
связна с наибольшим расстоянием перемещения. Используйте данные о скорости
при движении вдоль этой оси.
5. Сравните линейную скорость, рассчитанную для задачи 4, с линейной скоростью
для наиболее быстрого робота Adept. Используйте данные веб сайта Adept
Robotics (см. раздел 15.13).
6. Какое давление необходимо для параллельного гриппера с контактной площадью
0,75 квадратных дюйма, чтобы удержать деталь, если сила, действующая на кон
тактную поверхность, равна 35 фунтам?
7. Определите минимальное нормальное усилие (см. рис. 15.22), необходимое для
удержания 6 фунтового изделия, если статический коэффициент трения между
изделием и пальцами гриппера равен 0,8.
8. Пальцы параллельного гриппера развивают нормальное усилие сжатия 50 Н на
каждую сторону пластикового изделия. Статический коэффициент трения равен
0,7. Рассчитайте максимальный вес изделия в фунтах, который может быть под
нят без проскальзывания.
9. Определите площадь контакта в квадратных дюймах для пальцев параллельного
гриппера. Условия: m = 0,85; изделие представляет собой картонную коробку,
весящую 197 Н и способную выдержать давление 1 фунт на квадратный дюйм с
25 процентным запасом для безопасного подъема.
10. Определите диаметр вакуумной присоски, которая развивает усилие в 14,7 фунта
при разрежении 0,7 бар.
11. Разработайте вакуумный гриппер с пятью присосками, который может поднимать
ветровое стекло автомобиля в процессе сборки. Используйте следующие данные
для разработки: разрежение 0,75 атмосфер, вес стекла — 22 фунта, коэффици
ент безопасности — 50 %. Используйте данные веб сайта Techno SOMMER
Automatic (см. раздел 15.13), чтобы выбрать подходящие вакуумные присоски.
Для решения задач 12—18 используйте процедуру кастинга (выбора путем го
лосования), проиллюстрированную на рис. 15.40, а также следующий процесс
анализа ячейки робота для программирования шага 2:
Робот ожидает, когда поступит сигнал от датчика формовочной машины, после
чего выбрасывает законченное изделие. Затем робот переключается на другую
формовочную машину. Изделие остывает в баке для охлаждения, а робот осуще
ствляет цикл набивки следующей пресс формы. Изделие поступает на конвейер
после получения подтверждения о готовности пресса. Изделие помещается на
конвейер после подтверждения факта о наличии места.
12. Используя данные о процессе формовки, составьте программу третьего этапа:
разделение на задания и подзадания.
13. Используя данные о процессе формовки, составьте программу этапов 4 и 5: со
здание графа точек выполнения задания и добавление переменных движения.
Предположим, что датчики и сигналы переключения имеют интерфейс с портами
входа и выхода.
14. Используя данные о формовочной машине, выполните шаг 4: создание програм
мы робота. Воспользуйтесь примерами кодов, приведенными в этой главе.
1078
15. Модифицируйте программу, составленную для задачи 14, применив ПЛК. Сигна
лы от датчиков и переключателей должны быть поданы на ПЛК, а контроллер
робота должен реализовать операцию рукопожатия.
16. Нарисуйте временную диаграмму для осей Z и Y в примере 15.8. Почему невоз
можно создать временную диаграмму для примера 15.9?
17. Замените для примера 15.9 структуру программы в последовательных функцио
нальных кодах на лестничную функциональную программу.
18. Опишите, как для примера 15.8 вы стали бы развивать лестничное логическое
решение, в котором вместо таймера используются датчики ограничения переме
щений для пневматических исполнительных органов.
Рис. 15.40. Рабочая ячейка машины для резки кристаллов
áÄÑÄóà
1079
16
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂʉÛ
ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
ñÂÎ̧ „·‚̊
Основная цель главы 16 состоит в том, чтобы рассмотреть основы
обмена данными в сетях предприятий и детализировать сетевую ар
хитектуру. Рассматривается сетевая топология и методы управле
ния доступом, а также различные системы сети предприятия и сети
передачи данных для управления технологическими процессами.
После изучения этой главы вы сможете:
1. Перечислить компоненты сети предприятия.
2. Описать семь уровней открытых систем для модели OSI.
3. Проанализировать различия между кабелем витой пары, коаксиальным и воло
конно
оптическим кабелем в качестве сетевой среды.
4. Описать функции управления доступом к сетевой среде.
5. Описать назначение и функции интерфейсов Ethernet, Ethernet/IP, ControlNet и
DeviceNet.
6. Описать функцию контроллеров рабочей ячейки гибкого производства и про
граммного обеспечения для управления ячейкой.
7. Описать функции сети передачи данных для управления технологическими про
цессами.
8. Рассказать о методах поиска неисправностей в сетях передачи данных.
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
èêàåÖçÖçàÖ áçÄçàâ Ç èêéîÖëëàéçÄãúçéâ ÑÖüíÖãúçéëíà
Почти в любой отрасли промышленности дипломированных инженеров и програм
мистов ожидают широкие возможности карьерного роста, связанные с сетями, — не
только в области их проектирования, но и испытания, технической поддержки, наладки и
ремонта сетей. Имеются вакансии и в компаниях, производящих оборудование для сетей
передачи данных, а также в областях, связанных с его проектированием и продажей. Цеха
могут быть связаны через сетевую структуру с другими службами предприятия, а также с
внешними сетями партнеров по совместному производству, в котором отдельные техноло
гические операции распределены между различными предприятиями. Работа на таких со
вместных предприятиях, как правило, связана со служебными командировками.
Те знания, которые вы почерпнули из глав настоящего учебника, посвященных
устройствам управления процессами, программируемым логическим контроллерам и
роботам, будут очень полезны и при работе с сетями данных. Превосходным выбором
является также и карьера в области наладки сетей передачи данных, поскольку неисп
равности в сетях передачи данных — это постоянный бич промышленности. Специа
листы, ответственные за решение сетевых проблем, должны обладать широкой эруди
цией и высокой работоспособностью для быстрого поиска неисправностей. Вместе с
тем для успешной карьеры при работе с сетями требуется пройти четырехлетний курс
обучения информатике и получить лицензию от таких компаний, как Microsoft или
Cisco, которая требует ежегодного возобновления. Типичная руководящая должность
в этой области — это сетевой администратор, который отвечает за анализ, установку
и модернизацию сетей компании. В его ежедневные обязанности входит контроль за
эффективностью сети, поиск неисправностей и обеспечение защиты сети. Другим ви
дом деятельности является помощь заказчикам при работе с операционными система
ми и сетевыми адаптерами, конфигурирование маршрутизаторов и аттестация сете
вых приборов других предприятий. Работа, связанная с сетями, пробуждает творчес
кую жилку и открывает много возможностей, но в то же время требует непрерывного
обучения и самообразования.
Пример специфической задачи, которая может быть вам поручена, — разработка про
екта подключения фотоэлектрического датчика, датчика приближения и концевого пере
ключателя к существующей сети DeviceNet. Допустим, что вы входите в состав группы, за
нятой промышленными сетями в компании Pimco, изготовителе контейнеров. Вы знаете,
что разработчиком DeviceNet является компания Allen Bradley, поэтому вы обращаетесь за
помощью к ней, сообщив, что должны подключить три устройства к DeviceNet. Представи
тель компании Allen Bradley встречается с вами для обсуждения вариантов вашего подклю
чения. Представитель рекомендует вам использовать в DeviceNet модуль сканера, блок вво
да/вывода, Т
образные кабельные соединители и разветвительные кабели (Y
кабели). На
основе этих рекомендаций вы разрабатываете схемы подключения и показываете их вашему
куратору. После утверждения вашего проекта куратором и другим техническим персоналом
компании, вы заказываете сетевые компоненты и контролируете установку необходимых
устройств в сеть. Таким образом, на практике вам становится ясно, что поставщики уст
ройств всегда готовы оказать вам помощь в оптимальном выборе комплектующих для раз
личных проектов.
1082
16.1. ÇÇÖÑÖçàÖ
Интеллектуальные машины, используемые в компании, обычно связаны в единую сеть,
которая охватывает все компоненты. Для передачи данных между компонентами сети
используются различные протоколы (правила, используемые при связи машин между
собой) и специальные методы, позволяющие реализовать сетевое управление без по
стоянного вмешательства оператора. Сети обычно состоят из следующих компонентов:
сетей предприятий — локальных сетей, состоящих из связанных машин,
расположенных в одном здании или в группе зданий;
глобальных сетей, объединяющих сети предприятий;
объектов и средств удаленного подключения, которые связывают офисы и
отдельных мобильных пользователей с локальными сетями предприятий или
Интернетом.
В сетях предприятий интеллектуальные машины связаны в локальную сеть (LAN —
Local Area Network), представляющую собой магистраль данных для обмена информацией
между машинами. Скорость этого обмена зависит от скоростей выборки машин и средств
связи. Скорость передачи информации измеряется в битах/с (биты в секунду; в некоторых
источниках называемые бодами). Между скоростью, выраженной в бит/с, и временем пе
редачи одного бита данных существует однозначная связь.
èËÏ 16.1
Какова скорость передачи данных в бит/с, если время передачи бита tБ составляет 500 мкс?
êÖòÖçàÖ
Сеть предприятий содержит несколько уровней оборудования и программного обес
печения, которые в совокупности образуют сеть. Международная организация по стан
дартизации (МОС, ISO — International Standards Organization) создала семиуровневую
модель, названную соединением открытых систем (OSI — open systems interconnect),
которая описывает стандартные уровни сети. Цель стандартизации уровней состоит в том,
чтобы обеспечить четко определенные функции для каждого уровня в целях улучшения
связи между интеллектуальными машинами на производстве. Совокупность уровней об
разует архитектуру сети, в которой каждому уровню соответствует определенный стан
дарт ввода и вывода данных. Для понимания всего процесса обмена данными между интел
лектуальными машинами необходимо знать функции каждого уровня.
16.1 .1. ÄıËÚÂÍÚÛ‡ ÒÂÚË
При разработке архитектуры сетей интеллектуальных машин используется один или
несколько уровней семиуровневой модели открытых систем OSI. Рассмотрим уровни
ÇÇÖÑÖçàÖ
1083
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
этой модели сверху вниз, начиная с уровня пользователя PC, и проследим, что случается
с файлом пользователя, когда этот файл проходит через различные уровни модели OSI.
Традиционный подход состоит в том, что рассматривается движение информации
снизу вверх: от физического уровня передачи данных до прикладного уровня, где данные
используются в стандартных программах, написанных на языке, доступном пользовате
лю. Мы использовали противоположный подход, чтобы показать, как файлы пользова
теля преобразуются, проходя через различные уровни и превращаясь в поток физичес
ких сигналов, передаваемых по реальным кабелям сети.
Модель OSI имеет семь следующих уровней:
уровень 7 — прикладной уровень (верхний), application layer;
уровень 6 — уровень предоставления, presentation layer;
уровень 5 — сеансовый уровень, session layer;
уровень 4 — транспортный уровень, transport layer;
уровень 3 — сетевой уровень, network layer;
уровень 2 — уровень передачи данных, data link layer;
уровень 1 — физический уровень (нижний), physical layer.
Поскольку в этом разделе мы будем обсуждать каждый из приведенных уровней,
рассмотрим схему функциональных уровней модели OSI для однопользовательской
среды, показанную на рис. 16.1. Обратите внимание, что в некоторых системах уровни
модели OSI объединены, и это объединение называется стеком. Персональный комп
пьютер пользователя на рис. 16.1 состоит из клавиатуры, программного обеспечения,
центрального процессора (ЦП), операционной системы и локального жесткого диска.
Передача данных с клавиатуры осуществляется под управлением ЦП и программного
обеспечения. Обмен данными с локальным жестким диском происходит через опера
ционную систему, которая запрашивает ЦП, чтобы посылать и получать данные. Вни
мательно рассмотрите все связи на рис. 16.1 и возвращайтесь к нему снова и снова ,
читая описания каждого уровня модели OSI, .
Уровень приложений (application layer). В состав уровня приложения входят се
тевая система переадресации и средства обмена сообщениями. Когда ПК установлен
в качестве рабочей станции сети, программное обеспечение, называемое сетевой сис
темой переадресации, связывает ЦП и локальную операционную систему. Сетевая
система переадресации представляет для ЦП сетевой жесткий диск в качестве еще
одного локального жесткого диска и прерывает все запросы на обслуживание, пока
ЦП не проверит, запрашивается ли локальный или же сетевой диск. Если запрошен
локальный диск, запрос передается на локальную операционную систему, если же
запрошен сетевой диск, запрос передается на сетевую операционную систему. Сеть,
поддерживающая приложения, управляет электронной почтой, базой данных, обслу
живанием клиентов, играми, которые запускаются сетью, серверами файлов и печати,
удаленными входами в систему и сетевыми программами управления. Сеть, поддер
живающая приложения, способна непосредственно связаться с подключенными к ней
другими сетевыми приложениями. Кроме того, уровень приложений реализует интер
фейс и преобразование данных пользователя ПК, обеспечивая полную совместимость
ПК с другими машинами сети. Средства уровня приложений обеспечивают совмести
мость в тех случаях, когда пользователи соединены с несколькими сетями.
1084
Уровень представления. Функцией уровня представления является преобразование
данных приложения в сетевой формат и обратно. Специфические функции этого уровня:
преобразование форматов всех источников в общий, однородный формат, с
которым могут работать остальные уровни модели OSI;
обеспечение преобразования протокола и шифровки/расшифровки данных;
работа с расширенными графическими командами и сжатие данных;
установка стандартов для различных систем в целях обеспечения их бесшов
ной стыковки.
Рис. 16.1 . Схема уровней модели OSI
ÇÇÖÑÖçàÖ
1085
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
Уровень сеанса. Предоставление, поддержание и завершение сеансов связи меж
ду пользователями сети является функцией сеансового уровня. Специфические задачи
этого уровня:
идентификация имени, чтобы только известные системе пользователи могли
участвовать в сеансе;
определение, кто может передавать данные на конкретном временном ин
тервале;
обеспечение входа в систему, идентификация пароля и предоставление связи
для передачи файла.
Транспортный уровень. Функцией транспортного уровня является распределе
ние потоков данных между пользователями сети и управление этими потоками. При
этом решаются следующие специфические задачи:
потоки данных делятся на крупные блоки, или пакеты; узел транспортного
уровня приемника восстанавливает данные из принятых пакетов;
обеспечивается проверка ошибок, чтобы гарантировать корректную переда
чу данных;
обеспечивается подтверждение успешной передачи данных, и формируются
запросы на их повторную передачу.
Если в некоторых пакетах будут обнаружены ошибки, то программное обеспече
ние транспортного уровня определит их класс или тип с учетом степени сложности
аппаратной реализации нижних уровней. Имеются шесть классов, от 0 до 5. Класс 0
является самым простым транспортным уровнем, потому что аппаратные уровни
очень сложны, а класс 5 наиболее сложен, потому что аппаратные средства очень про
сты. Существует три типа уровней обслуживания: A, B и C. Тип А аналогичен классу 0,
типB—классам1—4,атипC—классу5.
Сетевой уровень. К функциям сетевого уровня относятся адресация и маршрути
зация. На этом уровне выполняются следующие специфические задачи:
логические сетевые адреса и имена переводятся в физические адреса, напри
мер, имя компьютера превращается в адрес управления доступом;
решаются такие сетевые проблемы, как накопление и хранение данных, пе
реключение и маршрутизация их потоков;
производится регулирование размера данных и дробление данных на мень
шие модули.
Канальный уровень. Преобразование пакетов в неструктурированные данные,
то есть в единицы и нули, является основной функцией канального уровня. На этом
уровне решаются следующие специфические задачи:
данные сетевого уровня преобразуются в данные физического уровня;
пакеты неструктурированных данных физического уровня преобразуются в
пакеты данных сетевого уровня;
обеспечивается безошибочная передача пакетов данных другим пользовате
лям через физический уровень;
определяются методы для передачи и получения данных от сети;
1086
осуществляется связь с платой сетевого интерфейса и определяется тип ис
пользуемых средств связи.
Физический уровень. Основная функция этого уровня состоит в передаче неструк
турированных данных по кабелям. Специфические функции этого уровня следующие:
определение конкретного кабеля, платы и всех аппаратных аспектов и со
единений;
определение методов пересылки неструктурированного потока по кабелю.
Некоторые реализации сетевых устройств на физическом уровне осуществляют
связь в широком диапазоне параметров. Иногда в нестандартную сеть пользователя
связаны всего лишь несколько устройств. В других случаях к сетям подключено боль
шое количество устройств и используется сетевое оборудование типа маршрутизато
ров, переключателей и концентраторов, которые будут рассмотрены ниже в этой главе.
Последовательная передача данных. Чтобы гарантировать совместимость между
модулями, поставляемыми различными изготовителями, и приемлемое качество пере
дачи данных на определенное расстояние с заданной скоростью, были разработаны
стандарты передачи данных. Чаще всего обмен осуществляется по стандартным после
довательным шинам RS232, RS423, RS422 и RS485, предназначенным для соединения
двух или более устройств. (RS — recommended standard, означает «рекомендуемый
стандарт»). Для этого последовательного интерфейса обмена данными в стандартах ис
пользуются термины «терминальное оборудование пользователя» (DTE) и «аппаратура
передачи данных» (DCE).
Терминал DТE — компонент, который связан с другим компонентом, располо
женным в другом месте, например, с другим ПК. DCE — это компонент типа модема,
фактически осуществляющий связь или выполняющий функции генератора и прием
ника. Некоторые ключевые характеристики обмена последовательными данными с
помощью стандартных интерфейсов сравниваются в табл. 16.1.
Таблица 16.1. Стандарты интерфейсов физического уровня
Примечание 1: К шине RS485 может быть подключено до 32 драйверов, но в любой заданный момент времени может
функционировать только один из них.
Примечание 2: Для интерфейсов RS422 и RS485 максимальная скорость передачи данных при длине кабеля в 40 футов
равна 10 Мбит/с.
ÇÇÖÑÖçàÖ
1087
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
Протоколы. Каждый уровень в модели OSI работает по определенному протоко
лу. Список типовых протоколов приведен в табл. 16.2. При ее изучении обратите осо
бое внимание на аббревиатуры, поскольку они всегда используются при описании об
мена данными между интеллектуальными машинами.
16.2 . äãÄëëàîàäÄñàü ëÖíÖÇõï ëêÖÑ èÖêÖÑÄóà ÑÄççõï
Сетевые среды представляют собой физические пути, по которым распространяется
электрический сигнал, перемещаясь от одного пользователя сети к другому; другими
словами, это проводники, связывающие интеллектуальные машины. В этом разделе
описываются обычные типы сетевых сред: кабели с витыми парами, коаксиальные
волоконно
оптические и радиочастотные кабели. Свойства сред, используемых в се
тях передачи данных, определяются четырьмя основными характеристиками:
диапазоном — среда каждого типа не имеет ограничения на длину линии пе
редачи данных между машинами;
шириной полосы частот — среда каждого типа имеет ограничения на частот
ный диапазон, от которого зависит скорость передачи данных в сети. По ши
рине частотной полосы можно разделить среды на два типа:
1. широкополосные системы, использующие одну и ту же среду для пере
дачи сигналов на нескольких частотах, каждая из которых предназначе
на для определенной машины в системе;
2. узкополосные системы, рассчитанные на одну частоту модуляции и ис
пользующие принцип временного разделения тех потоков информации,
которые предназначены для различных машин в системе;
помехоустойчивостью — восприимчивость среды к электромагнитным по
мехам;
стоимостью — носители с более высокими характеристиками эффективнос
ти стоят дороже.
16.2 .1. 䇷ÂÎË Ò ÔËÏÂÌÂÌËÂÏ ‚ËÚÓÈ Ô‡̊
Кабель на базе витых пар состоит из пар проводов, которые формируют каналы для пе
редачи данных. Провода свиваются, чтобы обеспечить защиту от взаимных помех между
отдельными каналами передачи данных. При протекании электрического тока по прово
ду вокруг него создается небольшое круговое магнитное поле. Когда два провода разме
щены вплотную друг к другу, их магнитные поля взаимно компенсируются, поэтому сна
ружи такой системы магнитного поля почти нет. Скручивание проводов еще более
уменьшает магнитное поле, поскольку оба провода находятся в равных условиях. При
использовании компенсации вместе со скручиванием проводов обеспечивается самоэк
ранирование отдельных каналов среды друг от друга. Существуют два типа сред на базе
витых пар: экранированная и неэкранированная витая пара.
1088
Чтобы ограничить снижение эффективности передачи сигнала, вызываемое элект
ромагнитными и радиочастотными помехами, в неэкранированных витых парах (UTP)
используется эффект скручивания провода. Как сетевая среда, кабель UTP имеет четы
ре витые пары, в которых каждый проводник состоит из 22 или 24 медных жил. Полное
сопротивление неэранированного кабеля составляет обычно около 100 Ом. Снаружи
кабель покрыт изолирующим чулком. Кабель UTP изображен на рис. 16.2 .
Таблица 16.2. Протоколы различных уровней OSI
Примечание: аббревиатура RS означает «рекомендуемый стандарт»; однако она иногда заменяется на EIA (Electronics
Industry Association — объединение промышленной электроники).
Рис. 16.2 . Неэкранированная
витая пара
Поскольку кабель UTP имеет небольшие размеры (его внешний диаметр состав
ляет приблизительно 0,43 см, или 0,17 дюйма), он может быть выгоден при проклад
ке. Вследствие его малого диаметра, в монтажных коробах остается свободное место,
которое можно использовать при развитии и модернизации сети. Этот фактор может
быть чрезвычайно важен, особенно при прокладке сетей в старых зданиях. Кабель
UTP дешевле других, и его проще прокладывать, чем кабели других типов.
äãÄëëàîàäÄñàü ëÖíÖÇõï ëêÖÑ èÖêÖÑÄóà ÑÄççõï
1089
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
Экранированная витая пара (STP) использует как метод свивания провода, так и
метод экранирования для защиты кабеля от помех. С помощью экранирования удается
уменьшить электростатические помехи, но оно неэффективно для защиты от электро
магнитных помех. Каждая пара проводов обернута в металлический экран, и затем все
четыре пары проводов обертываются вместе металлическим шнуром или чулком.
Полное сопротивление кабеля STP составляет обычно около 150 Ом. Хотя STP лучше
защищен от помех, чем UTP, но он дороже и сложнее в прокладывании. Металличес
кий экран должен быть заземлен только с одного конца, чтобы предотвратить возник
новение контуров, проходящих по поверхности земли. При неправильном заземлении
экран действует подобно антенне и принимает нежелательные сигналы. Конструкция
кабеля STP показана на рис. 16.3.
Рис. 16.3. Экранированная
витая пара
16.2.2 . äÓ‡ÍÒˇÎ̧Ì̊ ͇·ÂÎË
Коаксиальный кабель состоит из полого внешнего цилиндрического проводника, в
который заключен внутренний провод, изготовленный из двух элементов. Одним из
этих элементов, размещенных в центре кабеля, является медный провод. Он окружен
гибкой диэлектрической изоляцией, изготовляемой обычно из полиэтилена или теф
лона. Над этим изоляционным материалом расположен внешний экран, обычно обра
зуемый тонким слоем алюминия, нанесенного на полиэстерную пленку. Этот внешний
экран покрыт чулком из плетеного медного шнура, который действует и как второй
провод в схеме, и как экран для внутреннего проводника.
Этот экран, помогающий снизить уровень помех, проникающих снаружи, покрыт
изолирующим внешним чулком, который обеспечивает прочность, целостность и пол
ную защиту внутренних компонентов. Конструкция коаксиального кабеля представ
лена на рис. 16.4.
Поскольку металлический шнур в коаксиальном кабеле представляет собой полови
ну проводника, проводящего полезный электрический сигнал, необходимо обращать осо
бое внимание на его правильное заземление. Он должен быть хорошо соединен с заземле
1090
нием с одного конца. Однако при прокладке кабеля не всегда можно обеспечить правиль
ное заземление; и тогда экранирующее действие может оказаться недостаточным; в этом и
заключается одна из самых больших проблем при прокладке коаксиального кабеля. Про
блемы подключения приводят к электрическим помехам, которые искажают сигналы, пе
редаваемые в сетевой среде. В дополнение к проблемам с заземлением, коаксиальный
кабель труднее прокладывать, чем кабели UTP или STP.
Когда сетевые данные передаются по коаксиальному кабелю или по кабелям на
базе витой пары, генерируются магнитные поля. При использовании этих двух типов
физических носителей существует опасность несанкционированного считывания дан
ных с магнитного поля специальными приборами обнаружения. Волоконно
оптичес
кие кабели, о которых будет рассказано ниже, не связаны с таким риском, и поэтому
информация в них лучше защищена.
Рис. 16.4 . Коаксиальный кабель
16.2 .3. ÇÓÎÓÍÓÌÌÓ-ÓÔÚË̃ÂÒÍË ͇·ÂÎË
Волоконно
оптический кабель представляет собой цилиндрический прозрачный канал, вы
полненный стекла, пластмассы или комбинации стекла с пластмассой, который может пе
редавать свет от одного конца канала до другого. С тех пор как физик Джон Тиндалл (John
Tyndall) высказало в 1870 году идею светопроводящего канала, волоконно
оптические ка
бели непрерывно совершенствовались и приобрели широкую популярность. Ученый, ис
следуя прохождения света через поток прозрачной воды в реактивных двигателях, показал,
что световой канал может быть согнут под некоторым углом. В последние годы стало очевид
но, что волоконная оптика постепенно заменяет медный провод в качестве среды для пере
дачи сообщений. Волоконно
оптические кабели могут покрывать значительные расстояния
между местными телефонными системами и обеспечивать основу для многих сетевых сис
тем. Объектами, в которых могут использоваться волоконно
оптические кабели, являются
системы кабельного телевидения, университетские городки, офисы, промышленные пред
приятия и сервисные электроэнергетические компании.
äãÄëëàîàäÄñàü ëÖíÖÇõï ëêÖÑ èÖêÖÑÄóà ÑÄççõï
1091
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
Конструкция волоконно
оптического кабеля показана на рис. 16.5. Основой ка
беля является стеклянное или пластмассовое волокно, через которое передается свет.
Металлическое покрытие, иногда называемое плакированием, имеет низкий коэффи
циент преломления, что позволяет обеспечить минимальные световые потери на гра
нице счетовода и термопластического покрытия. Для обеспечения высокой прочности
кабели изготавливаются из арамидного стекловолокна или синтетического полиамид
ного волокна, которое имеет высокую прочность, низкую температуру плавления и
устойчиво к воздействию огня.
Рис. 16.5. Конструкция волоконно
оптического кабеля
Волоконно
оптическая система подобна системе с медным проводом. Различие
состоит в том, что волоконная оптика использует световые импульсы, чтобы переда
вать информацию по волоконной линии, вместо того чтобы передавать электрические
импульсы по медным проводам. Рассмотрим компоненты волоконно
оптической сис
темы, показанной на рис. 16.6, чтобы понять, как волоконно
оптическая система ра
ботает совместно с электронными системами. На рис. 16.6a показана структура кана
ла передачи данных на базе волоконно
оптического кабеля, а на рис. 16.6б приведена
схема распространения света по оптическо
волоконному кабелю.
На одном конце системы находится световой передатчик, на вход которого посту
пают электронные импульсы. Передатчик преобразует их в световые импульсы, про
ходящие по волоконному кабелю до светоприемника. Входной сигнал к передатчику
приходит по медным проводам от электронной системы передачи информации. Пере
датчик затем преобразует эту информацию в эквивалентные световые импульсы.
Для формирования световых импульсов может использоваться светодиод или ин
жекционно
лазерный диод. Линза направляет световые импульсы в волоконно
опти
1092
ческую среду, по которой они передаются на приемник. Световые импульсы легко
проходят по волоконно
оптической линии, испытывая полное внутреннее отражение
от стенок кабеля. Как известно, при этом угол падения равен углу отражения. Вплоть
до критического значения угла свет не может выйти за границы световода. Источник
света работает в импульсном режиме, переключаясь из выключенного во включенное
состояние и обратно, а фотоприемник на другом конце кабеля снова преобразует све
товые сигналы в логические электрические сигналы (нули и единицы), соответствую
щие исходному электрическому сигналу.
Рис. 16.6 . Передача сигнала по волоконно
оптическому кабелю:
а) структура системы передачи сигнала;
б) распространение света по кабелю
Интенсивность сигнала, передаваемого по волоконно
оптическому кабелю, сни
жается по мере удаления от источника, в основном, из
за двух факторов: модовой дис
персии и дисперсии среды. Действие модовой дисперсии заключается в том, что лучи
отражаются под различными углами, следуя по разным путям, что приводит к задерж
ке сигнала. Действие дисперсии материала проявляется при распространении неко
геррентного излучения (например, от светодиодов) и заключается в том, что луч рас
ширяется при прохождении по кабелю. Ослабление сигнала в волоконно
оптическом
кабеле может быть выражено следующим образом:
äãÄëëàîàäÄñàü ëÖíÖÇõï ëêÖÑ èÖêÖÑÄóà ÑÄççõï
1093
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
где А — ослабление, дБ/км;
PВХ — входная мощность, Вт;
PВЫХ — выходная мощность, Вт;
L — длина кабеля, км.
èËÏ 16.2
Каково ослабление волоконно
оптического кабеля на расстоянии 4 км, если входная
мощность равна 100 мВт, а выходная — 75 мВт?
êÖòÖçàÖ
Имеются два основных типа волоконно
оптических кабелей: многомодовый и од
номодовый. Многомодовые стекловолокна обычно управляются диодными источника
ми и приемниками на каждом конце кабеля, в то время как одномодовые используют
лазерные генераторы.
Ширина полосы частот одномодовых волоконных световодов может достигать
намного более высоких значений, чем у многомодовых, но они более тонкие (10 мкм) и
менее прочные, чем многорежимные стекловолокна. Затраты на оборудование для
передачи и получения сигналов одномодового волоконного световода намного выше
(по крайней мере, в четыре раза), чем для многомодовых световодов. Главной причи
ной использования стекловолокна в некоторых установках является то, устройства
электронного шпионажа не могут перехватывать данные, передаваемые светом.
16.2 .4 . ÅÂÒÔÓ‚Ó‰Ì̊ Ò‰̊
Беспроводная связь использует для передачи данных между машинами или устрой
ствами радиочастотные или инфракрасные волны. Ключевым компонентом здесь яв
ляется беспроводной концентратор, или пункт доступа, используемый для распреде
ления сигнала, как это показано на рис. 16.7 . Чтобы получать сигналы от пункта
доступа, на машине должна быть установлена беспроводная сетевая плата адаптера
интерфейса. Беспроводные сигналы — это электромагнитные волны, которые могут
распространяться в воздухе. Поэтому для распространения радиосигналов не требу
ется никакой специальной физической среды, что делает их чрезвычайно универсаль
ным способом формирования сетей. Беспроводная связь для передачи данных приме
няется в следующих случаях:
1094
доступ к Интернету с сотового телефона;
установление частного или корпоративного подключения к Интернету через
спутник;
передача данных между двумя карманными компьютерами;
использование беспроводной клавиатуры и мыши для ПК;
использование беспроводной портативной ЭВМ для доступа к Интернету.
Рис. 16.7 . Беспроводная передача данных
äãÄëëàîàäÄñàü ëÖíÖÇõï ëêÖÑ èÖêÖÑÄóà ÑÄççõï
1095
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
Таблица 16.3. Сравнение сетевых сред
16.2 .5 . 뇂ÌÂÌË ÒÂÚ‚̊ı Ò‰
В табл. 16.3 сравниваются общие свойства физических сетевых сред. Среда является,
возможно, наиболее важным долгосрочным капиталовложением в сеть. Выбор среды
определяет тип плат сетевого интерфейса, быстродействие сети и возможности ее
расширения и модернизации. Рассмотрим различные типы топологии сетевых сред и
способы управления доступом к сетям.
16.2 .6 . íËÔ̊ ÚÓÔÓÎÓ„ËË ÒÂÚÂÈ
Топология обуславливает форму сети, другими словами, тип соединений между сете
выми узлами. Топология определяет, как различные узлы в сети связаны между собой
и как происходит передача данных между ними. Топология может быть либо физичес
кой, либо логической.
Физическая топология, или физическая структура сети, это пути, связывающие
машины в сеть через физические кабели, по которым производится передача данных.
Машины и приборы могут быть связаны друг с другом по сети предприятий с помощью
трех основных физических топологий, показанных на рис. 16.8.
Тремя основными топологиями являются:
топология шины — все машины связаны с центральными сетевыми носителя
ми, которые называются шинами или магистралями сети. Топология шины от
носительно недорога и довольно просто устанавливается для маленьких сетей;
1096
кольцевая топология — все машины связаны с друг другом в форме петли.
Кольцевая топология относительно дорога и трудна в установке, но она харак
теризуется широкой полосой частот и может охватывать большие расстояния;
звездообразная топология — все машины связаны с центральным концент
ратором. Звездообразные сети относительно просты в установке, но в них
могут возникать критические ситуации, потому что вся связь должна прохо
дить через концентратор.
Рис. 16.8 . Различные топологии сетей:
а) шинная топол огия;
б) кольцевая топология;
в) звездообразная топология
Еще одна топология, наподобие древесной, может быть создана при использова
нии комбинации двух базовых топологий из имеющихся трех. Древесная топология —
комбинация шинной и звездообразной топологии, где группы звездообразно сконфи
гурированных машин связаны с центральными носителями.
В отличие от физической, логическая топология — это пути, по которым сигналы
действуют на сетевые носители, или пути, по которым данные проходят через сеть от
одного устройства до следующего, независимо от физического соединения устройств.
Протокол Ethernet — общий логический протокол для топологии шины.
Логическая передача — общая логическая топология для шины или протокола
звездообразной топологии, а эстафетное кольцо — общелогический протокол для коль
цевой топологии. Логическая топология сети не обязательно повторяет физическую то
пологию. Например, витая пара Ethernet реализует логическую топологию шины при
размещении в физической топологии звезды, в то время как эстафетное кольцо — логи
ческая кольцевая топология, которая устанавливается в звездообразной топологии.
Логический протокол передачи «прослушивает» узлы сети и разрешает начать
передачу данных, только если сеть не занята другим трафиком.
В некоторых источниках вместо термина «логический диалог» используется тер
мин «проверка на пересечение коллективного доступа с опросом несущей» (CSMACD).
Протокол эстафетного кольца обращается к передаче и получению данных в упорядо
äãÄëëàîàäÄñàü ëÖíÖÇõï ëêÖÑ èÖêÖÑÄóà ÑÄççõï
1097
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
ченной последовательности. Маркер, который является двоичным числом, циркулирует
между узлами, когда там нет никакого сетевого трафика. Как только узел получает мар
кер, он имеет исключительное право на использование сети. Когда использование сети
узлом закончено, автоматически снова обеспечивается доступ к маркеру для всех узлов.
16.2 .7. ìÔ‡‚ÎÂÌË ‰ÓÒÚÛÔÓÏ Í Ò‰Â
Уровень передачи данных модели OSI имеет два подуровня: управление логической
связью (подуровень LLC) и управление доступом к среде (подуровень MAC):
на уровне управления логическими связями (LLC) происходит управление
потоком трафика в сетевой среде;
на уровне управления доступом к среде (MAC) осуществляется совместное
использование физического подключения к сети нескольких машин или уст
ройств. Физическое устройство любого типа относится к определенному по
дуровню MAC, на котором каждая машина и устройство имеет собственный
MAC
адрес.
Адрес MAC — уникальный аппаратный номер вашей машины. Когда вы связывае
тесь с Интернетом с вашего устройства, то ваш физический MAC адрес с помощью таб
лицы соответствия переводится в адрес протокола Интернет (IP). В наиболее широко
распространенных сегодня уровнях протокола Интернет, IP
адрес является 32
разряд
ным номером, который идентифицирует каждого отправителя или получателя информа
ции и пересылает пакеты информации по сети Интернет. Бесклассовая междоменная
маршрутизация (CIDR), иногда называемая суперснеттингом, является более гибким
способом идентификации и распределения в Интернете, чем IP
адресация. С использо
ванием CIDR количество доступных интернет
адресов значительно увеличивается. Си
стема маршрутизации CIDR используется в настоящее время почти всеми главными
межсетевыми компьютерами в Интернете. И администраторы Интернета рекомендуют
сейчас всем провайдерам (ISP) использовать для маршрутизации эту систему.
16.3. ëÖíà èêÖÑèêàüíàâ
Сеть предприятия объединяет здание или группу зданий в одну общую сеть, которая
состоит из многих локальных сетей (LAN). Однако локальные сети могут быть взаимо
связаны, даже находясь на больших расстояниях, с помощью проводных или беспро
водных систем связи. Система взаимосвязанных LAN называется глобальной сетью
(WAN — wide area network). Предприятие представляет собой обычно часть компании
или целую компанию, привязанную к определенной географической области. Сеть
предприятия определена как частная система связи, которая поддерживает обмен ин
формацией и данными между различными устройствами, связанными с сетью на рас
стоянии от нескольких фут до тысяч миль. Хорошая производственная сеть обеспечи
вает доступ ко всем подразделениям компании, от администрации до цеховых рабочих
1098
ячеек. Внекоторых источниках такая система упоминается как управление цепочкой
процессов, обеспечивающих производство (supply
chain management).
Отличительной характеристикой производственной сети является то, что компа
ния, которая владеет самим предприятием и его сетью для передачи данных, обычно
является также собственником компонентов, используемых в LAN.
16.3.1 . äÓÏÔÓÌÂÌÚ̊ LAN
Локальные сети LAN, используемые в сетях предприятий, состоят в основном из сле
дующих аппаратных компонентов:
Кабели — кабели различных типов для подключения интеллектуальных машин к
сети (см. раздел 16.2).
Рабочие станции — компьютеры на рабочих местах, включая локальные при
боры и доступные для сети периферийные устройства.
Серверы — высокопроизводительные автоматизированные рабочие места, вы
полняющие специфическую функцию, например, обслуживание файлов, Интернета
или электронной почты.
Платы интерфейса — электронные устройства, которые связывают индивиду
альные приборы с сетью, согласовывая тип устройства с типом передающих кабелей.
Периферийные устройства — сетевые устройства, такие как принтеры, гра
фопостроители, факсы и резервирующие устройства.
Концентраторы — устройства, создающие узлы сети, к которым могут под
ключаться другие устройства.
Если LAN должна быть разделена или расширена вследствие слишком большого
трафика, многочисленности узлов или большого расстояния между устройствами, ис
пользуются следующие компоненты:
Повторитель — устройство, используемое для повторной передачи сигнала,
когда длина кабеля превышает предельную величину, при которой для данного типа
кабеля можно обеспечить надежную передачу сигнала. Функции повторителя на фи
зическом уровне модели OSI заключаются в передаче всех полученных сообщений от
одного сегмента кабеля к другому.
Соединитель — устройство, используемое для подключения сегментов LAN,
которые могут отличаться на физическом уровне, но быть совместимыми на уровне
передачи данных. Например, мост может подключить сегмент Ethernet 10Base5 к сег
менту 10BaseT. Эти типы сегментов Ethernet рассматриваются в разделе 16.4 .
Маршрутизатор — устройство для подключения отдельных LAN и WAN, кото
рые совместно используют общий сетевой протокол и совместимы на сетевом уровне.
Коммутатор — устройство, которое подразделяет локальные сети на меньшие
модули.
Шлюз — устройство для соединения LAN и WAN, которые используют различ
ные сетевые протоколы и, следовательно, требуют согласования протоколов.
Соединение LAN через быстрые коммутаторы Ethernet, применяемое, чтобы все
пользователи имели быстрый доступ к общим данным, а также к внешним ресурсам и
системам, показано на рис. 16.9. Интеллектуальные машины на LAN связаны друг с
другом с помощью различных технологий LAN, перечисленных в табл. 16.4 .
ëÖíà èêÖÑèêàüíàâ
1099
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
Таблица 16.4 . Технологии LAN
Рис. 16.9. Коммутаторы Ethernet: I/O — входы/выходы, HMI — интерфейс
управления концентратором
В локальных сетях уровень передачи данных (уровень 2) традиционно обеспечи
вается коммутаторами, а сетевой уровень (3) — маршрутизаторами. Коммутаторы
LAN, маршрутизаторы и многопозиционные коммутаторы, которые обеспечивают
работу на уровнях 2 и 3, поставляются многими производителями, например Cisco
Systems.
1100
16.3.2. íËÔÓ‚‡fl ÒÂÚ̧ Ô‰ÔËflÚËfl
На рис. 16.10 показана типовая производственная сеть с соединениями между различ
ными подразделениями, такими как отделы финансового планирования, исследования
и производства. Изображены компоненты сети: маршрутизаторы, коммутаторы, сер
веры и концентраторы. Внимательно изучите, как соединены между собой все элемен
ты схемы, перед тем как продолжить чтение.
Рис. 16.10. Сеть предприятия
ëÖíà èêÖÑèêàüíàâ
1101
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
16.4 . ëÖíú èêÖÑèêàüíàü
Цеховая сеть, которая является частью сети предприятия, показана на рис. 16.11. Как
следует из рисунка, цеховая архитектура делится на три уровня: Ethernet, ControlNet и
DeviceNet/Foundation Fieldbus.
Рис. 16.11 . Цеховая сеть
Рассмотрим функции каждого уровня:
Ethernet — самый высокий уровень, обеспечивает сбор данных для управле
ния предприятием и программное обслуживание всей сети;
ControlNet средний уровень, обеспечивает автоматизацию и управление вво
дом/выводом данных в режиме реального времени, координацию (определяю
щую распределение времени между приложениями) и обмен сообщениями;
1102
DeviceNet/Foundation Fieldbus — самый низкий уровень, обеспечивает рен
табельное объединение индивидуальных устройств: интерфейс для дискрет
ных устройств осуществляется сегментом DeviceNet, а для аналоговых —
сегментом Foundation Fieldbus.
Функции и работа каждого уровня обсуждаются более подробно в следующих раз
делах. Как и прежде, проведем исследование от высшего уровня к низшему, от Ethernet
до DeviceNet.
16.4 .1 . Ethernet
Доктор Роберт М. Меткалф (Robert M. Metcalfe) изобрел сеть Ethernet в исследовательс
ком центре Xerox Palo Alto в 1970
х . Она было создана, чтобы поддерживать исследования
бюро перспективных проектов по разработке одного из первых в мире персональных авто
матизированных рабочих мест Xerox Alto. Первая система Ethernet работала со скоростью
приблизительно в 3 Мбит/с и была известна как экспериментальный Ethernet. В 1980 году
консорциум продавцов преобразовал экспериментальный Ethernet в открытую систему
Ethernet промышленного качества, которая работала со скоростью 10 Мбит/с. Затем коми
тет стандартов LAN института инженеров по электротехнике и электронике (ИИЭР) при
нял технологию Ethernet для стандартизации, с формальным заголовком IEEE 802.3 . Сегод
ня стандарт Ethernet определяет не только систему 10 Мбит/с, но также и систему быстрого
Ethernet (100
Мбит/сМбит/с), гигабитного и 10
гигабитного Ethernet
Система Ethernet состоит из трех основных элементов:
1. Физической среды, используемой для передачи данных между компьютерами.
2. Набора правил управления доступом к среде, внедренных в каждый интер
фейс Ethernet, которые осуществляют арбитражный доступ для нескольких
компьютеров к общедоступному каналу Ethernet.
3. Кадра (пакета) Ethernet, который состоит из стандартизированного набора
битов, используемых для передачи данных в системе.
Работа. Каждый компьютер, совместимый с Ethernet на основе протокола CSMA
CD
и называемый автоматизированным рабочим местом, функционирует независимо от осталь
ных автоматизированных рабочих мест, имеющихся в сети. Все рабочие места присоединя
ются к общедоступной системе передачи сигналов Ethernet, называемой также средой, и
используют для обмена данными обычно протокол TCP/IP. Сигналы Ethernet передаются
последовательно, бит за битом, по общедоступным каналам на каждую рабочую станцию.
Станция анализирует состояние канала, и, когда канал свободен, автоматизированное рабо
чее место передает данные в форме кадра, или пакета, Ethernet. После каждой передачи
кадра (пакета) все станции сети должны конкурировать за возможность следующей переда
чи кадра (пакета), когда канал снова освободится. Эта операция, использующая CSMA
CD,
гарантирует одинаковый доступ к каналу сети, и ни одна из станций не может блокировать
доступ других станций к общему каналу. Доступ определяется механизмом управления дос
тупом (MAC), внедренным в интерфейс, подключающий к Ethernet каждую станцию. Стан
дартный Ethernet может использовать следующие типы сред:
10Base5 — стандартный толстый коаксиальный кабель;
ëÖíú èêÖÑèêàüíàü
1103
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
10Base2 — тонкий коаксиальный кабель;
10BaseT — UTP;
100BaseT — UTP;
10BaseFL — волоконная оптика.
Обозначение XBasey интерпретируется следующим образом:
x — скорость передачи сигналов, Мбит/с;
Base — термин, который означает, что сигнал использует кабель для модулирую
щей частоты, а не широкополосный кабель для многочастотной, многока
нальной модуляции;
y — набор символов, характеризующих тип среды.
Ethernet промышленного протокола. Ethernet промышленного протокола (Ethernet/
IP) — открытый промышленный сетевой стандарт, который позволяет использовать пре
имущества стандартизированной коммерческой связи Ethernet устройств и физические сре
ды. В отличие от многих других вариантов индустриальных систем Ethernet, Ethernet/IP ис
пользует открытый протокол на уровне приложений, который поддерживается тремя
организациями, работающими с сетями: ControlNet International (CI), the Industrial Ethernet
Association (IEA) и Open DeviceNet Vendor Association (ODVA).
Ethernet/IP упрощает взаимодействие меду различными поставщиками уст
ройств для цеховых сетей, используя для приложений DeviceNet совместно с коммер
ческой сетью Ethernet (ИИЭР 802.3). Этот открытый стандарт регламентирует связь
в режиме реального времени между разнообразными устройствами промышленной
автоматики, включая программируемые логические контроллеры (ПЛК), процессо
ры, контроллеры роботов, адаптеры ввода/вывода, интерфейсы оператора и станции
дистанционного управления.
Ethernet/IP создан из широко распространенного стандарта, используемого в
ControlNet и DeviceNet и названного комплексным информационным протоколом
(CIP). Этот протокол взаимодействует с устройствами сетевой структуры как с сово
купностью объектов. Он определяет доступ, поведение объектов и расширения, кото
рые позволяют обращаться напрямую с несовместимыми устройствами с помощью
общего механизма. Сотни поставщиков поддерживают в настоящее время протокол
CIP с изделиями Ethernet/IP. Ethernet/IP основан на понятном и широко применяе
мом стандарте, при этом не нужен отдельный период обучения, свойственный для про
цесса освоения новой технологии .
16.4 .2 . ControlNet
ControlNet является открытой сетью. Это означает, что любая компания может разрабаты
вать изделия, соответствующие ControlNet, без лицензионного взноса. Эта сеть расположе
на один уровень выше DeviceNet в иерархии управления. Высокоскоростное (5 Мбит/с)
управление и пропускные возможности передачи данных значительно расширяют эффек
тивность ввода/вывода и связь «пользователь — пользователь». ControlNet использует
модель сети производитель/потребитель для критичного по времени обмена информацией
как для процессов, так и для автоматизации производства. Эта модель разрешает всем узлам
1104
потребителей обращаться к одним и тем же данным, создаваемым одним источником. Кроме
того, метод доступа к среде ControlNet использует модель производитель/потребитель, что
бы позволить нескольким контроллерам управлять вводом/ выводом на одном и том же сег
менте сети. Это свойство обеспечивает ControlNet значительное преимущество над другими
сетями, которые позволяют иметь только один ведущий контроллер в сети. ControlNet так
же позволяет осуществлять одновременную радиопередачу многим устройствам как данных
от ведущего контроллера, так и одноранговых данных, таким образом уменьшая трафик по
проводам и увеличивая эффективность системы.
Работа. Доступ к сети управляется алгоритмом синхронизации, названным кол
лективным доступом с конкуренцией во временной области (CTDMA), который регу
лирует возможность узлов передавать информацию на каждом временном интервале.
Сеть конфигурирована частотой сетевых интервальных повторений, которая, в свою
очередь, определяется выбором сетевого интервала обновления (NUT). Самый ко
роткий NUT, котрый можно задать, равен 2 мс. Информация, для которой время кри
тически важно, посылается в течение планируемой части NUT. Информация, которая
может быть доступна без ограничений по времени (например, данные конфигурации),
посылается в течение незапланированной части NUT.
Свойства. Сеть ControlNet обладает высокой детерминированностью и повторяе
мостью. Детерминированность — это способность верно предсказывать, когда данные
будут поставлены, а повторяемость гарантирует, что время передачи постоянно и не за
висит от подсоединения или отсоединения устройств от сети. Эти две критические ха
рактеристики гарантируют надежность, синхронизацию и эффективное координирова
ние в режиме реального времени. В результате ControlNet разрешает передачу данных,
например программ, в режиме реального времени, передает и загружает текущие дан
ные контроля в гибко выбираемые, но предсказуемые сегменты времени. Управление и
конфигурация всей системы может выполняться из одного устройства в ControlNet или
из одного устройства в сети с информационным уровнем, например в Ethernet. Сеть
ControlNet может связывать различные типы устройств, включая приводы двигателей,
контроллеры движения, удаленные модули ввода/вывода, ПЛК и интерфейсы операто
ра. Кроме того, ControlNet может обеспечивать связь с другими сетями типа DeviceNet
и Founation Fieldbus. Отметим следующие важные свойства ControlNet:
к сети ControlNet могут быть подсоединены платы сканеров ввода/ вывода
ПЛК и индустриальные микроЭВМ;
устройства, подсоединяемые к сети ControlNet, включают в себя ПЛК, про
мышленные микроЭВМ, терминалы интерфейса операторов, удаленные мо
дули ввода/вывода, приводы двигателей и персональные компьютеры;
в качестве физических сред для передачи данных в ControlNet используются
коаксиальные и волоконно
оптические кабели;
ControlNet является подсетью Ethernet или Ethernet/IP.
ControlNet может работать в качестве средства формирования сложных систем
управления типа координатных приводов, систем управления сварочными и транс
портными устройствами, систем технического зрения, сложных устройств группового
управления, систем управления процессом, систем с несколькими контроллерами и
человеко
машинными интерфейсами. Эта сеть является идеальной для систем с не
сколькими контроллерами на базе ПК и для связи между несколькими ПЛК. При этом
ëÖíú èêÖÑèêàüíàü
1105
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
каждый из них может обладать как собственным блоком ввода/вывода, так и общедо
ступными входами и обмениваться данными с каждым из остальных ПЛК в любой воз
можной комбинации.
16.4.3. DeviceNet
DeviceNet является открытой сетью. Это означает, что любая компания может разра
батывать изделия, соответствующие DeviceNet, без лицензионного взноса. Эти сети
основаны на надежно работающей технологии связи контроллеров (CAN), которая
используется почти во всех отраслях промышленности, включая автомобильную, тек
стильную, сельскохозяйственную, медицинскую, строительную, судостроительную и
аэрокосмическую.
При наличии большого числа поставщиков, предлагающих датчики и приводы
DeviceNet, проектировщики могут выбирать самую лучшую комбинацию устройств
для решения задач управления. В результате DeviceNet стала самой быстрорастущей
сетью в мире, имеющей полмиллиона установленных устройств.
Работа. DeviceNet может работать со многими форматами передачи сообщений,
эти форматы могут смешиваться и согласовываться внутри сети, чтобы добиться наи
более полной по содержанию и своевременной передачи сетевой информации. Суще
ствуют следующие типы передачи сообщений:
поллинг — каждое устройство посылает запрос на передачу сообщения или
получает сигнал на изменение своего состояния. Такой обмен требует при
ема и передачи сообщений каждым узлом сети. Это наиболее точный, но наи
менее эффективный по временным затратам способ обмена информацией;
стробирование — сигнал на изменение состояния передается на все уст
ройства. Каждое устройство отвечает по очереди, сначала приходит ответ с
узла 1, затем с узла 2, узла 3, узла 4 и т.д . Номера узлов могут быть располо
жены по приоритетам сообщения. Поллинг и стробирование — наиболее
часто используемые форматы передачи сообщений;
циклический опрос — устройства должны автоматически посылать сооб
щения на заданных временных интервалах. Этот тип передачи сообщений
иногда называется сообщением «я жив» и часто используется совместно с
передачей сообщений об изменении состояния, чтобы показать, что устрой
ство все еще работает;
сообщение об изменении состояния — устройства посылают сообщения
только тогда, когда их состояние изменяется. Этот тип передачи сообщений
занимает абсолютный минимум сетевого времени и широко используется в
сетях. Часто он в несколько раз превосходит по быстродействию метод пол
линга. Правда, иногда страдает точность информации, поскольку пропускная
способность и время отклика становятся неопределенными;
явная передача сообщений — протокол с явной передачей сообщений ука
зывает, как устройство должно интерпретировать сообщение. Это обычно
используется на сложных устройствах, подобных приводам и контроллерам,
1106
чтобы загружать параметры, изменяемые время от времени, значительно
реже, чем данные самого процесса. Явная передача сообщений обеспечива
ет универсальный, многоцелевой канал связи между двумя устройствами и
средства для выполнения функций запроса/ответа, что необходимо, напри
мер, при конфигурации устройства;
фрагментированная передача сообщений — при необходимости переда
чи сообщений, превышающих максимальный объем данных для DeviceNet (8
байт), эти сообщения могут быть разбиты на любое число 8
байтовых сег
ментов и затем снова собраны на другом конце канала. Этот процесс требует
пересылки нескольких коротких сообщений для получения одного сложного
сообщения;
менеджер несвязанных сообщений (UCMM) — интерфейс UCMM сети
DeviceNet обеспечивает одноранговую связь. В отличие от простой системы
связи в конфигурации ведущего/ведомого компьютеров, каждое устройство,
имеющее интерфейс UCMM, может связываться с другим таким же устрой
ством непосредственно, не выходя на уровень ведущего компьютера.
UCMM
устройства должны принимать все CAN
сообщения, а затем от
фильтровывать ненужные сообщения на верхнем программном уровне. Этот
тип передачи сообщений требует большего количества памяти RAM и ROM,
чем обычная передача сообщений с ведущим/ведомым компьютерами.
Свойства. Сеть DeviceNet связывает такие промышленные устройства, как кон
цевые переключатели, фотоэлектрические датчики, датчики клапанов, пускателей
двигателей, датчики процесса, панели дисплеев и интерфейсов оператора в единую
сеть. Не требуется дорогой монтаж и отсутствует возможность ошибок из
за увеличе
ния числа связей. Применение сетей также уменьшает стоимость и время установки
устойств автоматизированного производства при обеспечении надежной взаимозаме
няемости компонентов от многих поставщиков. Прямое подключение обеспечивает
улучшенную связь между устройствами, а также возможность диагностики на уровне
устройства, которую нелегко осуществить через аппаратные интерфейсы ввода/вы
вода. Необходимо отметить следующие важные свойства сети:
DeviceNet поддерживает работу отдельных устройств, совместимых с сетью,
таких как датчики, рабочие места операторов, пускатели двигателей, приво
ды, пневматические клапаны и микроЭВМ;
DeviceNet поддерживает удаленные порты ввода/вывода с различными вход
ными параметрами плат. Эта удаленная сеть портов использует стандартные
дискретные датчики и исполнительные устройства;
DeviceNet является обычно подсетью ControlNet, Ethernet или Ethernet/IP.
DeviceNet — это протокол, основанный на подсоединениях: до начала обмена
информацией необходимо установить все устройства, подключенные к сети. В сети
применяется объектное моделирование, каждый тип информации структурирован в
виде определенного объекта. Чтобы обработать информационный обмен, необходимы
четыре базисных объекта:
1. Объект идентификации. В этом объекте хранится такая информация, как
идентификационное обозначение поставщика ID, конфигурация устройства
ëÖíú èêÖÑèêàüíàü
1107
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
и изменения устройства. Пользователи могут идентифицировать определен
ный объект и при удаленном доступе к нему.
2. Маршрутизатор сообщения — этот объект обрабатывает явные сообще
ния, направляя их на объекты, соответствующие адресу.
3. Объект DeviceNet содержит всю информацию, касающуюся DeviceNet, на
пример MAC
адрес устройства и скорость передачи информации в бодах.
4. Объект подключения обрабатывает подключение модулей передачи сообще
ний, таких как явная передача сообщений и передача сообщений ввода/вывода.
16.4.4 . ñÂıÓ‚̊ ‡·Ó̃Ë fl̃ÂÈÍË
Цеховые рабочие ячейки бывают двух видов: неинтеллектуальные (рис. 16.12) и ин
теллектуальные (рис. 16.13). Большинство устройств, подобно датчикам и клапанам
на рис. 16.12, являются неинтеллектуальными. Интеллектуальные устройства пред
назначены для компьютерного управления и должны допускать программирование и
сетевые операции. Подобно датчикам и устройствам считывания штрихового кода,
показанным на рис. 6.12, неинтеллектуальные аппаратные устройства часто исполь
зуют твердотельную электронику для согласования и преобразования сигналов, но
они не программируются.
Все данные рабочей ячейки, изображенной на рис. 16.12, передаются через ло
кальный контроллер ячейки, что ограничивает скорость передачи информации в сеть
предприятия и скорость загрузки информации в рабочую ячейку. Скорость передачи
последовательного интерфейса невелика — обычно менее 100 Кбит/с. Для рабочей
ячейки, изображенной на рис. 16.13, Ethernet пересылает данные со скоростью при
близительно в 100 Мбит/с. Во многих компаниях более новая технология, изобра
женная на рис. 16.13, заменила старую (см. рис.16.12). Рабочие ячейки редко бывают
совершенно идентичными, но обсуждаемые здесь концепции можно распространить и
на рабочие ячейки других типов.
Рабочая ячейка на рис. 16.13, которая представляет собой промышленный ком
пьютер или автоматизированное рабочее место, обычно подключается к цеховому
Ethernet, работает с ОС Windows XP или UNIX и содержит жесткий диск, дисковод,
платы сетевого интерфейса, клавиатуру и монитор. Эти операционные системы вы
полняют несколько прикладных программ одновременно, обеспечивая, таким обра
зом, многозадачный режим работы, например, осуществляя сбор данных от датчиков и
загрузку обучающей программы на машину с ЧПУ. Программное обеспечение ячейки
обычно состоит из трех уровней: уровня операционной системы, которой является
чаще всего Windows 2000/XP; уровня интерфейса прикладной программы и уровня
драйвера устройства. Уровень интерфейса прикладной программы обрабатывает опе
рации верхнего уровня, общего для широкого круга приложений, таких как:
программы управления сетевым и последовательным интерфейсом;
программное обеспечение сбора данных;
программное обеспечение для управления циклом технологического процесса.
1108
Р
и
с
.
1
6
.
1
2
.
У
п
р
а
в
л
е
н
и
е
г
и
б
к
о
й
п
р
о
и
з
в
о
д
с
т
в
е
н
н
о
й
я
ч
е
й
к
о
й
ч
е
р
е
з
л
о
к
а
л
ь
н
у
ю
с
е
т
ь
ëÖíú èêÖÑèêàüíàü
1109
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
Уровень драйвера устройства связывается с платами сетевых интерфейсов, кото
рые обычно относятся к одной из следующих категорий:
сеть, например Ethernet;
последовательный интерфейс, например RS232;
частный интерфейс, например, для ПЛК и роботов.
16.4.5. SERCOS
Serial real
time communication system (SERCOS) — это открытые интефейсы переда
чи данных от контроллеров к интеллектуальным устройствам, рассчитанные на высоко
скоростную последовательную передачу в реальном времени сигналов обратной связи по
волоконно
оптическими кабелям. Интерфейс SERCOS устанавливается в контроллерах,
которые обычно подключены к Ethernet. При таком интерфейсе используются все воз
можности современных интеллектуальных цифровых приводов, которые не просто заме
няют стандартный аналоговый интерфейс, но и позволяют создать мощные двусторонние
связи между управлением и приводом. Система SERCOS была разработана группой по
разработке систем управления технологическими установками, образованной нескольки
ми изготовителями сетей передачи данных. В 1991 году SERCOS стала европейским
Рис. 16.13. Управление рабочей ячейкой через коммутаторы Ethernet
1110
стандартом, а в 1995 году была одобрена МЭК. Теперь она используется также и в Север
ной Америке.
Аналоговые интерфейсы были разработаны ранее интеллектуальных приводов и
даже вообще до появления цифровых средств управления. Использование этого ана
логового интерфейса в совокупности с сегодняшними интеллектуальными цифровыми
приводами серводвигателей не только ухудшает эффективность системы, но и не по
зволяет изменять любые данные, касающиеся состояния, параметров и диагностики
относительно базовых значений. Цифровой интерфейс SERCOS позволяет осуще
ствить надежную, без помех, передачу данных между сервомотором и системой управ
ления. Передаются все 32
разрядных данные, включая команды управления, инфор
мацию о состоянии, параметрах и диагностическую информацию. Топология SERCOS
показана на рис. 16.14.
Рис. 16.14. Топология SERCOS
Интерфейс SERCOS имеет кольцевую структуру управления и разделение переда
чи сигналов во времени, которое устраняет коллизии доступа при управлении приводом.
Это не налагает никаких ограничений на количество обратных связей, работа которых
может быть синхронизирована. SERCOS поддерживает распределенную обработку
данных, что обеспечивает управление многими затратными по времени задачами.
16.5 . ëÖíà FIELDBUS
Данные в режиме реального времени используются на всех уровнях предприятия, чтобы
обеспечить текущий контроль и расширенное управление процессом, систематизацию
данных о продукции, учет и планирование материалов, продвинутую диагностику, пла
нирование производства и управление активами. Благодаря современному развитию
технологий сетью обычно объединяют устройства, оптимизированные для дискретной
автоматизации производства.
ëÖíà FIELDBUS
1111
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
Хотя Fieldbus, в основном, сети уровня устройств, они ассоциируются также и
даже более ориентированы на процессы в системе «прибор — сеть». Дискретные
сети, подобные DeviceNet, реализуют высокоскоростную передачу обычно небольших
информационных пакетов. Сеть Fieldbus, с другой стороны, жертвует быстродействи
ем ради более безопасной передачи больших пакетов информации о процессе и имеет
встроенные возможности защиты информации, что необходимо для многих приложе
ний процесса. Продвинутые системы управления процессом учитывают наличие не
скольких сетей Fieldbus, которые будут развернуты одновременно, обеспечивая, та
ким образом, высокую степень гибкости в настройке параметров управления и
позволяя пользователям установить требуемые устройства и использовать функцио
нальные возможности шин для управления специфическими задачами. Выбор и раз
вертывание сетей Fieldbus обеспечивает беспрецедентную эффективность производ
ственного процесса на любом заводе любой страны.
Сети Fieldbus предоставляют многообразные преимущества, которые делают их
превосходными инструментом почти во всех средах управления процессом. Вот неко
торые примеры:
уменьшаются затраты на проводку, поскольку многие устройства связаны с
контроллерами всего двумя проводами;
модернизация аппаратуры и оснастки для технологического процесса, заме
на существующей аппаратуры и добавление новой аппаратуры могут быть
выполнены без остановки производственного процесса;
проектные и эксплуатационные расходы снижаются, потому что требуется
намного меньше площадей для панелей, стоек ввода/вывода, кабелей,
уменьшается количество плат интерфейса и панелей, необходимых для обо
рудования системы управления;
возможность взаимодействия между различными изготовителями обуслов
лена открытостью архитектуры, что обеспечивает намного более простое и
быстрое интегрирование стратегии управления различных поставщиков.
Изучение семейства сетей автоматизации Profibus и протокола процесса автома
тизации Foundanion знакомит и с необходимыми терминами, использующимися при
работе с сетями Fieldbus. Обе эти темы рассмотрены в следующем разделе.
16.5.1. Profibus
Сеть Profibus была создана в 1989 в Германии консорциумом поставщиков оборудова
ния для промышленной автоматики. Вначале она использовалась в Европе, но затем
получила распространение и во всем мире. Первоначально разработанная для диск
ретного производства, Profibus была расширена для автоматизированных процессов и
приложений в масштабах предприятия.
Архитектура Profibus, показанная на рис. 16.15, охватывает несколько стандарты
промышленных шин:
Profibus
DP — шина уровня устройства, которая поддерживает как аналого
вые, так и дискретные сигналы;
1112
Profibus
PA — полнофункциональная шина Fieldbus, которая используется
для управления процессом и оснащения аппаратурой уровня процесса;
Profibus
FMS — шина управления, в основном используемая для связи меж
ду распределенными системами управления (DCS) и ПЛК
системами.
Рис. 16.15. Архитектура Profibus
Profibus
DP использует физический и канальный уровни передачи данных (уров
ни 1 и 2), соединенные с интерфейсом пользователя для быстрой и эффективной пере
дачи данных. Уровни 3 до 7 не определены. Прямой канал связи обеспечивает доступ
между интерфейсом пользователя и канальным уровнем, с функциями приложения,
определенными в интерфейсе пользователя. На физическом уровне используется
RS485 или волоконно
оптическая технология передачи данных. Profibus
DP работает
на скоростях от 9,6 Кбит/с до 12 Мбит/с при расстояниях 100—1200 м.
Profibus
PA, которая названа сетью управления процессом, является расширением
Profibus
DP для передачи данных. На физическом уровне она использует IEC 1158
2,
который обеспечивает встроенную защиту для оснащения аппаратурой уровня процес
са, и работает на скорости 31,25 Кбит/с при максимальном расстоянии 1900 м. Эти сети
управления процессом — наиболее продвинутые из сетей Fieldbus, используемых се
годня. Они обеспечивают связи при сложных измерительных процессах, управляют
оборудованием и могут быть легко расширены для нового или существующего оборудо
вания. Современные инструменты проектирования позволяют создавать грамотные и
эффективные проекты. Устройства, обычно связанные с сетями, управляющими про
цессом, — это клапаны, датчики температуры и давления, оборудование для измерения
уровня, измерители потока и измерительные приборы процесса. Profibus
FMS опреде
ляет уровни 1, 2 и 7, то есть соответственно физический, канальный и уровень приложе
ния. Уровни 3 до 6 не определены. Уровень приложения совмещает спецификацию про
ëÖíà FIELDBUS
1113
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
изводственных сообщений и собственно интерфейс уровня. Спецификация сообщений
выполняет протокол прикладной программы и поддерживает услуги связи, а интерфейс
уровня осуществляет связь и обеспечивает не зависящий от устройства доступ к каналу
Fieldbus на уровне 2. Уровень 1 выполняется на шине RS485 или на волоконной оптике.
16.5.2. FÓundation Fieldbus
Система Foundation Fieldbus была создана в 1994 группой поставщиков, занимаю
щихся автоматизацией технологических процессов, и была разработана специально
для промышленных процессов. Поэтому Fоundation Fieldbus способна обеспечить
всю сложную систему управления процессом, включая мониторинг переменных про
цесса, детерминированное управление процессом в режиме реального времени и ди
агностику. Она обладает встроенной защитой и обеспечивает передачу питающего на
пряжения и сигнала всего по двум проводам. Хотя она заказана для аналоговых
приборов, таких как клапаны управления и передатчики, но часто бывает пригодна и
для двухпозиционных клапанов. Например, при непрерывных процессах (в которых
имеется немного дискретных устройств) часто проще передавать дискретный сигнал
для двухпозиционных клапанов по Foundation Fieldbus, чем использовать стандарт
ный двухпроводный монтаж или прокладывать различные сетевые шины всего для не
скольких дискретных клапанов. А при пакетной работе (много дискретных устройств),
в которой должна быть обеспечена безопасность, Fоundation Fieldbus — часто един
ственный логичный выбор для сетей, управляющих двухпозиционными клапанами.
Fоundation Fieldbus является лидером на этом уровне и занимает в Северной Америке
большой сегмент рынка, а ее распространение по всему миру все возрастает.
Последовательность уровней Fоundation Fieldbus показана на рис. 16.16. Система
использует уровни 1, 2 и 7 (соответственно физический, канальный и уровень приложе
ния). Уровни 2 и 7 рассматриваются как связанные в один блок (стек) в данной последо
вательности. Уровни 3–6 не используются. Канальный уровень управляет передачей
данных по шине с помощью блока оперативного управления. Станции данных и мосты
используются, чтобы управлять шиной и расширять ее. Подуровень доступа Fieldbus
работает со спецификацией сообщений Fieldbus, чтобы формировать уровень приложе
ния только с помощью приложений пользователя. Услуги подуровня доступа в Fieldbus
описываются через виртуальные связи, наподобие тех, которые используются на быст
родействующих телефонных станциях для связи абонентов. Такие связи позволяют быс
тро устанавливать связь для устройств, подключенных к Fieldbus. Виртуальные связи
используются и для связи с оператором, для сообщения о событиях, для анализа тенден
ций и публикации данных. Спецификация сообщений Fieldbus обеспечивает связь меж
ду данными объектов и функциональными блоками по шине.
16.6 . èéàëä ëÖíÖÇõï çÖàëèêÄÇçéëíÖâ
Поиск неисправностей — процесс, состоящий из формулирования общей проблемы, а
затем постепенного сужения поиска до одного конкретного компонента. Начальный шаг
1114
в поиске неисправностей сетевой системы состоит в сборе информации от пользовате
лей относительно характера проблем, с которыми они столкнулись, и в сборе данных из
сети. Системы поиска сетевых неисправностей особенно важны, потому что время на
поиск обычно очень ограниченно. Вообще, необходимо сразу же выявить любую неисп
равность, потому что простой сети может очень дорого обойтись предприятию.
Рис. 16.16. Уровни системы
Foundation Fieldbus
Стоимость времени простоя слагается из следующих компонентов: расходы на
ремонт, потери в бизнесе и снижение производительности. Самая простая составляю
щая стоимости времени простоя — расход на устранение неисправности, который, в
свою очередь, состоит из издержек на замену аппаратного обеспечения, из зарплаты
наладчиков и т.д. Несмотря на то что из всех компонентов стоимости простоя этот наи
более материален, он наименее дорогостоящ для предприятия. Вместе с тем снижение
производительности и потерянный доход в результате простоя могут быть настолько
велики, что в случае неудачной сетевой системы компании вынуждены будут тратить
на ее ремонт неограниченно много средств. Предприятия, которые потратили деньги
на установку сети, зачастую считают, что именно сеть представляет собой критичес
кий фактор для бизнеса и технологического процесса. Эта ситуация особенно ясна для
компаний — провайдеров Интернета, для которых работа сети и есть основной источ
ник дохода. В таких организациях время простоя можно непосредственно перевести в
потерянный доход. Неисправности сетей весьма разнообразны, но все они начинаются
с жалоб пользователя или оператора. Возможно, пользователь не может соединиться
со специфическим пунктом или у оператора процесс проходит неправильно. У таких
проблем может быть очень много причин: сетевой сбой, сбой маршрутизатора или от
сутствие контакта в разъеме, связывающем узел с сетью. Вам необходимо организо
вать процесс поиска неисправностей, чтобы как можно быстрее решить проблему.
Модель OSI предлагает свой процесс поиска сетевых неисправностей.
16.6 .1 . èÓËÒÍ ÌÂËÒÔ‡‚ÌÓÒÚÂÈ ‚ ÒÂÚË Ò ËÒÔÓÎ̧ÁÓ‚‡ÌËÂÏ ÏÓ‰ÂÎË OSI
Процесс поиска неисправностей должен быть методичным и хорошо организованным,
и модель OSI обеспечивает удобную и привычную организацию. Поиск неисправнос
èéàëä ëÖíÖÇõï çÖàëèêÄÇçéëíÖâ
1115
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
тей можно начать с вершины модели OSI (уровень приложения) или с ее основания
(физический уровень) — это вопрос вкуса. Процесс поиска сетевых неисправностей,
основанный на модели OSI, показан на рис. 16.17. В этом разделе приводится только
краткий обзор проблемы поиска неисправностей, имеющиеся утилиты и инструмен
тальные средства поиска. Если вы хотите получить более подробную информацию,
пройдите какой
либо учебный курс по сетям передачи данных.
Рис. 16.17 . Использование модели OSI при поиске неисправностей
Проводя поиск неисправностей на физическом уровне, проверьте все аспекты
физического контакта. Проверьте исправность связи клиент
сервер, проверьте и кли
ентскую систему, и систему сервера, имеется ли физическая связь между их сетевыми
платами интерфейса и сетевым оборудованием. Затем проверьте, действительно ли
сетевое оборудование физически связано с остальной частью сети, включая все обо
рудование, которое участвует в связи между двумя узлами. Если все подключено пра
вильно, то, используя оборудование для тестирования кабелей или средства самотес
тирования интерфейса, проверьте, что все соединение работает.
Стоимость оборудования для тестирования бывает как очень малой, так и очень
большой, а само оборудование выпускается в самых различных формах и размерах.
Типичным элементом оборудования являются контакты для подключения двух концов
кабеля и подачи сигналов с одного из концов. Далее следует проверить целостность
кабеля посредством наблюдения за трафиком, который получается на другом его кон
це, и убедиться, что все данные получены и соответствуют исходным. К интерфейсу
1116
самотестирования просто подключается вход и выход кабеля. По проводам передается
сигнал; таким образом, любые сгенерированные сигналы будут немедленно получены
интерфейсом. Такой монтаж позволяет системе связываться только с собой и, следо
вательно, может быть полезен только при поиске неисправностей. Большинство се
тей связывает с помощью интерфейса платы и оборудование поддержки сети, исполь
зующее самотестирование связей с помощью интерфейса, чтобы диагностировать
проблемы с сетевой платой и/или физическим интерфейсом. Без использования ин
терфейса самотестирования проблемы специфического интерфейса платы может
быть диагностировать чрезвычайно трудно.
Поиск неисправностей на канальном уровне более труден, хотя на этом уровне
неисправности встречаются редко. Осмотреть кабели и определить, подключены ли
они в гнезда, — несложно, но намного труднее определить, правильно ли выполняет
ся протокол на уровне 2. Вы не можете просто посмотреть электрические сигналы на
разъемах. Необходимы более сложные инструментальные средства; например анали
заторы протокола и некоторые утилиты, которые встроены в программное обеспече
ние типа протокола преобразования адресов (ARP). Если система отвечает успешно
на запрос ARP, то вы знаете, что она показывает некоторые минимальные возможнос
ти канального уровня.
Поиск неисправностей на сетевом уровне может раскрыть общий источник сете
вых проблем. Все проблемы, связанные с IP, такие как проблемы маршрутизации и не
соответствие адресам IP, относятся к этой категории. Первичные утилиты для поиска
неисправностей сетевого уровня — PING и TraceNet. Утилита PING проверяет канал
связи, чтобы установить, что клиент, сервер и все, что находится между ними, связаны с
сетью правильно и правильно действуют. Применение этой утилиты зачастую является
только начальным шагом в поиске неисправностей, потому что успешное прохождение
теста в утилите PING гарантирует невозможность сбоя на сетевом уровне и ниже. Эта
проверка также сообщает нам, что удаленная система является интерактивной и дей
ствует правильно. Утилита TraceNet подобна утилите PING, потому что посылает серию
PING
сигналов проверки с изменяющимися данными по каналу связи.
При поиске неисправностей от транспортного уровня до уровня представления
исследуется управление протоколом передачи (TCP) и протоколом пользовательских
дейтаграмм (UDP, упрощенной версией TCP). Наиболее частая проблема транспорт
ного уровня — неисправный маршрутизатор, который фильтрует информацию и дан
ные, основываясь на номере порта. Анализаторы протокола и/или сети часто исполь
зуются для поиска неисправностей на транспортном уровне. Утилита Telnet может
использоваться для проверки того, что определенный порт TCP на определенном
главном компьютере получает сигналы от входных разъемов, и подтверждения пра
вильности обслуживания на уровнях сеанса и представления. Применение анализато
ров протокола и сети можно рассматривать как некий заключительный шаг в поиске
неисправностей инструментальными средствами, поскольку они дают наладчику пред
ставление об электрических и оптических сигналах в проводах и световодах, позволяя
ему точно увидеть, что случилось. Однако требуется некоторый навык, чтобы интер
претировать данные этих анализаторов.
Поиск неисправностей на уровне приложения имеет важное значение, потому что
этот уровень наиболее часто является источником проблем во многих современных сре
дах. Производство сетей, в частности сетевых аппаратных средств, хорошо отлажено и
èéàëä ëÖíÖÇõï çÖàëèêÄÇçéëíÖâ
1117
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
обычно бывает очень надежно, но на последнем и самом объемном звене в цепи про
граммного обеспечения многие предприятия соблазняются устанавливать менее совер
шенные программы. Кроме того, программное обеспечение на уровне приложений ис
пользуется сравнительно недолго и, следовательно, вполне вероятно его ежегодное
обновление, что означает недостаток времени на поиск ошибок запуска.
Таким образом, поиск неисправностей на уровне приложения в большинстве слу
чаев является трудной задачей. Такие устройства, как серверы FTP и серверы Web,
обеспечивающие сетевые услуги на прикладном уровне, недостаточно надежны и име
ют много проблем, особенно модели первых выпусков. Поиск неисправностей на этом
уровне обычно заключается в тестировании с помощью специфических для приложе
ния утилит типа Telnet, NSLOOKUP и сетевых браузеров, хотя могут применяться и
сложные анализаторы протокола.
Подводя итог, можно сказать, что эффективный поиск неисправностей миними
зирует время простоя сети, что модель OSI обеспечивает организованный процесс
поиска неисправностей и что существует много утилит и инструментальных средств,
которыми может воспользоваться наладчик. Если сетевая система давно установлена
и работает приемлемо устойчиво, поиск неисправностей лучше начать с верхней части
модели OSI. Если же сетевая система новая или недавно была подвержена суще
ственной модификации, такой как модификация кабельных соединений, поиск неисп
равностей рекомендуется начать с нижнего уровня. Сети передачи данных могут быть
достаточно сложными, поэтому специалисты, ответственные за обслуживание сетей,
должны обладать высокой квалификацией и хорошей смекалкой, чтобы отыскать не
исправность. Время простоя системы и пользователя должно быть сведено к миниму
му, поэтому квалифицированный наладчик обычно делает попытку оптимистического
подхода в решении сетевой проблемы, как показано в примере 16.3.
èËÏ 16.3
Пользователь вызывает вас и жалуется, что он больше не имеет доступа к своему
любимому файлу на сервере. Пользователь выключает и снова включает свою рабо
чую станцию, но безрезультатно. Какой процесс поиска неисправностей вы бы ис
пользовали?
êÖòÖçàÖ
Поиск неисправностей с верхнего уровня модели OSI здесь является очевидным вы
бором, потому что эта сетевая система была установлена и работала правильно еще
до обращения этого пользователя. Однако вы решаете использовать оптимистичес
кий подход в попытке решить проблему быстро.
1. Вы пытаетесь открыть файл, находящийся на другой рабочей ячейке той же са
мой подсети, использовав вашу учетную запись. Если попытка дает положитель
ный результат, это исключает предположение о неисправности вследствие по
вреждения сервера и файла.
2. Затем вы продолжаете поиск неисправности на сетевом уровне и просите
пользователя запустить программу PING для сервера. Если в результате этого
выясняется, что сеть работает, то, значит, неисправна рабочая станция пользо
вателя или неверно установлен его IP
адрес.
1118
3. Если шаг 2 дает сбой, то вы продолжаете поиск неисправности. Если после про
верки пользователем окажется, что подсоединение в его автоматизированной
рабочей станции не повреждено, то следует использовать модель OSI, двигаясь
к нижним слоям модели. Если же пользователь обнаружит, что проблема в под
соединении, то двигаться следует к верхним ее слоям (восходящий метод).
16.7 . ÇÖÅ-ëÄâíõ é ëÖíüï èÖêÖÑÄóà ÑÄççõï
Ниже приведены адреса веб
сайтов фирм
поставщиков сетевых изделий и сетевой
технологии, рассмотренных в этой главе. Эти адреса часто изменяются, поэтому, если
какая
либо из ссылок неактивна, воспользуйтесь механизмом сетевого поиска по со
ответствующему термину, чтобы найти интересующий вас материал.
изделия LAN
технологии в Cisco и Allen Bradley
http://www.cisco.com
http://www.ab.com
DeviceNet и технология Ethernet/IP в ODVA
http://www.odva.org
ControlNet, DeviceNet и технология Ethernet/IP у Allen Bradley
http://www.ab.com/networks
Технология Profibus
http://www.profibus.com
Технология Fieldbus
http://www.fieldbus.com
Протокол и сетевые анализаторы в Acterna
http://www.acterna.com
êÖáûåÖ
16.1 . Введение
Сети предприятий состоят из связанных в локальные сети машин, находя
щихся в одном или в нескольких зданиях.
Международная организация по стандартизации (МОС) — International
Organization for Standardization (ISO) — создала семиуровневую модель,
названую моделью открытых систем (OSI) и описывающую уровни в сетях.
Имеется семь уровней модели OSI: уровни приложения, представления, се
анса, транспортный, сетевой, канальный и физический.
16.2. Классификация сетевых сред
Сетевые среды формируют фактический путь, по которому распространяют
ся электрические сигналы от одного пользователя к другому.
ÇÖÅ-ëÄâíõ é ëÖíüï èÖêÖÑÄóà ÑÄççõï
1119
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
Общие типы сетевых сред: кабель с витой парой, коаксиальный кабель, во
локонно
оптический кабель и эфир для радиочастотных волн.
Кабель с витой парой состоит из двух проводов, которые формируют цепь для
передачи данных.
Коаксиальный кабель состоит из полого внешнего цилиндрического провод
ника, в который заключен внутренний провод, изготовленный из двух прово
дящих элементов.
В волоконной оптике используются световые импульсы, чтобы передать ин
формацию по волоконным световодам, вместо того чтобы использовать
электрические импульсы для передачи информации по меленым проводам.
В беспроводной связи используются радиочастоты или инфракрасное излу
чение, чтобы передавать данные между машинами или устройствами.
16.4 . Заводская сеть передачи данных
Существует три уровня заводской сети: Ethernet, ControlNet и DeviceNet.
Ethernet представляет собой сеть передачи данных, в которой по физической
среде распространяются кадры (пакеты) данных, образующих стандартизи
рованный набор битов, используемый, чтобы передавать данные по системе.
Для Ethernet свойственен также набор правил управления доступом к среде,
встроенный в каждый интерфейс.
ControlNet — это среда управляющего уровня, работающая в режиме ре
ального времени и обеспечивающая высокоскоростную передачу данных
ввода/вывода и сообщений.
DeviceNet — открытая, дешевая линия связи промышленных устройств.
Программно управляемая рабочая ячейка управляется контроллером с по
мощью интерфейса, имеющего три уровня: уровень операционной системы,
уровень прикладной программы и уровень драйверов устройств.
Система SERCOS представляет собой открытый интерфейс от контроллера
к интеллектуальному устройству. Система является быстродействующим
последовательным интерфейсом передачи данных, работающим в режиме
реального времени с одной или несколькими петлями обратной связи. В ка
честве среды используется волоконно
оптический кабель.
16.5 . Сети Fieldbus
Сети Fieldbus предоставляют множество преимуществ, которые делают их
превосходным выбором почти для всех сред, управляющих технологическим
процессом.
Profibus
DP использует физический и канальный уровни передачи данных
(уровни 1 и 2), подключенные к интерфейсу пользователя для быстрой и эф
фективной передачи данных.
Интерфейс Profibus
PA используется как сеть управления процессами, а его
расширение Profibus
DP может использоваться и для передачи данных.
Интерфейс Foundation Fieldbus может управлять процессами любой сложности
и обеспечить обработку переменных технологического процесса, детерминиро
ванное управление процессом в режиме реального времени и диагностику.
1120
16.6 . Поиск сетевых неисправностей
Если поиск неисправностей осуществляется на физическом уровне, про
верьте все аспекты физических связей.
При поиске неисправностей на уровне передачи данных используйте анали
заторы протокола и утилиты, которые встроены в программное обеспечение.
Основными утилитами для поиска неисправностей на сетевом уровне явля
ются PING и TraceNet.
При поиске неисправностей на уровнях от сетевого до уровня представления
используйте анализаторы протокола, сетевые анализаторы и утилиту Telnet.
Поиск неисправностей на уровне приложения обычно включает тестирова
ние со специальными утилитами, такими как Telnet, NSLOOKUP и браузеры
сети, хотя можно использовать и анализаторы протокола.
Çéèêéëõ
1. Расскажите о том, какой вид деятельности в области сетей данных показался вам
наиболее привлекательным после прочтения раздела «Применение знаний в
профессиональной деятельности».
2. Что такое протоколы?
3 Что является функцией уровней в модели OSI?
4. В чем заключается функция сетевой системы переадресации?
5. Какой уровень в модели OSI обеспечивает преобразование протокола и шифров
ку/дешифровку данных?
6. Какой уровень в модели OSI обеспечивает вход в систему и пароль распознавания?
7. Для какого уровня в модели OSI определяются используемые методы передачи и
получения данных относительно сети?
8. Расскажите о сетевых средах.
9. Объясните различие между широкополосными системами и системами с полосой
частоты модулирования.
10. Объясните, каким образом кабель витой пары обеспечивает защиту от взаимных
помех.
11. Что такое внешний чулок кабеля?
12. Каким образом осуществляется электрическое экранирование в экранированном
кабеле с витой парой?
13. Сравните преимущества и недостатки экранированного и неэкранированного ка
беля с витой парой.
14. Опишите конструкцию коаксиального кабеля.
15. Опишите работу волоконно
оптического кабеля.
16. Опишите конструкцию волоконно
оптического кабеля.
17. В чем заключается различие между физической и логической топологиями?
18. Проанализируйте различия между логическим диалогом и протоколом эстафет
ного кольца.
Çéèêéëõ
1121
é·ÏÂÌ ‰‡ÌÌ̊ÏË ÏÂÊ‰Û ËÌÚÂÎÎÂÍÚÛ‡Î̧Ì̊ÏË Ï‡̄Ë̇ÏË
19. Что такое управление доступом к сети?
20. Чем различаются Ethernet и Ethernet/IP?
21. Опишите функцию ControlNet.
22. Опишите функцию DeviceNet.
23. Как осуществляется связь между производственной ячейкой и программным
обеспечением управления ячейки?
24. Почему SERCOS является важной системой интерфейса?
25. Что принесено в жертву в устройстве сетей Fieldbus ради повышения безопасно
сти передачи больших объемов информации технологического процесса?
26. Каким образом применение сетей Fieldbus уменьшает затраты на технику и эксп
луатационные расходы?
27. Чем отличаются интерфейсы Profibus
DP, Profibus
PA и Profibus
FMS?
28. Какой отрасли промышленности наибольшую пользу приносит интерфейс
Foundation Fieldbus?
29. Как Foundation Fieldbus выполняет требования модели OSI?
30. Что является первым шагом в поиске неисправностей сети передачи данных?
31. На какие три составляющих стоимости воздействует время простоя сети переда
чи данных?
32. Почему полезно использовать модель OSI как базу для поиска неисправностей в
сети передачи данных?
33. Каким образом проводится поиск неисправностей на физическом уровне?
34. Какие инструментальные средства вы бы использовали для поиска неисправнос
тей на канальном уровне?
35. Опишите инструментальные средства, доступные для поиска неисправностей на
сетевом уровне.
36. При каких сетевых условиях вы бы использовали нисходящий подход к поиску не
исправностей в модели OSI?
37. При каких сетевых условиях вы бы использовали восходящий подход к поиску не
исправностей в модели OSI??
áÄÑÄóà
1. Вычислите время передачи одного бита при скорости передачи 2,5 кбод.
2. При какой длине волоконно
оптического кабеля входная мощность в 100 мВт умень
шается до выходной мощности 60 мВт, если коэффициент затухания равен 1,8 дБ/км?
3. Нарисуйте топологию физической среды названную древесной топологией.
4. Вы получили жалобу от пользователя, который не может выйти в Интернет. Опи
шите последовательность технологических операций по поиску неисправности,
которые вы применили бы для решения этой проблемы.
5. Разработайте план поиска неисправностей в недавно установленной промышлен
ной рабочей ячейке (см. рис. 16.13), в которой не работают электронные датчики.
6. Разработайте план поиска неисправностей в действующей промышленной рабо
чей ячейке (см. рис. 16.13), в которой не работают электронные датчики.
1122
ÉÎÓÒÒ‡ËÈ
Абсолютный вакуум
Нулевое давление.
Абсолютное давление
Разность между измеренным давлением и абсолютным вакуумом.
Абсолютный энкодер
Датчик механического движения, сигнал которого однозначно связан с угловым по
ложением.
АНИС (ANSI)
Американский национальный институт стандартов — правительственное учрежде
ние, устанавливающее электротехнические стандарты.
Анод
Положительный электрод прибора.
Ассемблер
Компьютерная программа, переводящая язык ассемблера в машинные коды.
АСУ по нагрузке
Управление значениями переменных, позволяющее устранить влияние нагрузки на
выходные параметры.
Барабанный переключатель
Промышленный управляющий переключатель, используемый при управлении дви
гателями.
Беспроводная связь
Методика, при которой для передачи данных используются радиочастоты или инф
ракрасные волны.
Блокировка
Защитное звено, которое управляет работой машины или устройства в зависимости
от режима работы других машин или устройств.
Блок"схема
Совокупность условных обозначений, применяемая, чтобы отобразить все части си
стемы.
Вакуум
Среда, давление в которой ниже атмосферного.
Виртуальное заземление
Входные выводы ОУ, на которых суммируются входные и выходные напряжения и
устанавливается суммарное напряжение, близкое к 0 В.
ÉãéëëÄêàâ
Вихревой датчик потока
Датчик, который использует нелинейное тело обтекания, помещенное в поток жид
кости или газа, после которого в потоке образуются завихрения.
Влажность
Влага, содержащаяся в воздухе.
Встроенный
Термин, отражающий тот факт, что микроконтроллеры ЁскрытыЁ как в сетях потре
бителей, так и в производимом продукте.
Высокочастотный фильтр
Цепи, пропускающие высокие частоты и ослабляющие низкие.
Выпрямитель
Диодная или тиристорная выпрямительная схема, преобразующая переменное на
пряжение в постоянное.
Вязкость
Мера сопротивления протеканию жидкости или газа по трубопроводу.
Герц
Единица частоты периодического переменного электрического или электромагнит
ного поля, равная одному циклу в секунду.
Грузоподъемность
Максимальный вес материала, который может быть безопасно обработан промыш
ленной установкой в рабочем режиме.
Давление
Сила, приложенная к единице площади, обычно измеряется в фунтах на квадратный
дюйм (psi).
Дарлингтона схема
Каскадное соединение двух транзисторных усилителей.
Датчик
Прибор, чувствительный к таким физическим условиям, как нагрев, давление, дви
жение и свет, и создающий на выходе электрический сигнал, пропорциональный
входному измеряемому воздействию.
Датчик давления
Прибор для обнаружения силы, прикладываемой одним объектом к другому.
Датчик потока электромагнитный
Датчик, измеряющий заряд протекающего объема жидкости, который пропорцио
нален скорости жидкости.
Датчик приближения
Прибор, определяющий присутствие объекта без непосредственного механическо
го контакта и использующий различные методы, например электромагнитные поля.
Датчик присутствия
Прибор для определения присутствия человека в некотором пространстве или
объеме.
Датчик расхода
Прибор, измеряющий расход на базе измерения скорости потока.
Двигатель без сердечника
Двигатель с постоянными магнитами, не имеющий стального или железного сердеч
ника в роторе.
1124
ÉãéëëÄêàâ
Двигатель постоянного тока со смешанным пуском
Двигатель постоянного тока, схема запуска которого представляет собой комбина
цию последовательного и параллельного пуска.
Двигатель с параллельным пуском
Двигатель постоянного тока, обмотка возбуждения которого включена параллельно
с якорной обмоткой.
Двигатель с последовательным пуском
Двигатель постоянного тока, обмотка возбуждения которого включена последова
тельно с якорной обмоткой.
Двунаправленный кремниевый ключ (SBS)
Тиристор с регулируемым напряжением переключения.
Декартовы координаты
Координаты, образованные тремя взаимно перпендикулярными прямолинейными
осямиX,YиZ.
Дефаззификация
Процесс преобразования нечетких переменных в четкие, характеризуемые четкими
значениями.
Диафрагма
Гибкая мембрана: резиновая для измерений при низких давлениях и металличес
кая — при высоких.
Динамическое торможение
Способ торможения двигателя при снятии постоянного напряжения питания с якоря
и переключении якоря на резистор.
Диод
Двухэлектродный прибор, проводящий в одном направлении.
Диод Шокли
Однонаправленный ключевой прибор.
Дифференциальное давление
Разность между измеряемым и опорным давлениями.
Дифференциальные трансформаторы с подвижным сердечником (LVDT)
Датчики положения на базе трансформаторов с подвижным сердечником.
Заградительный фильтр
Цепь, которая снижает уровень сигнала в определенном частотном диапазоне и про
пускает сигнал на остальных частотах.
Закон Фарадея
Напряжение, индуцированное в проводнике, движущемся в магнитном поле про
порционально скорости движения проводника.
Затухание
Процесс, при котором амплитуда колебаний уменьшается.
Захват
Пальцевое устройство, используемое для захвата, удержания, переноса и вкладыва
ния деталей.
«Звон»
Затухающие колебания, предшествующие достижению установившегося значения
при переходных процессах.
1125
ÉãéëëÄêàâ
Измерительный усилитель
Усилитель с замкнутой петлей обратной связи, дифференциальным входом и несим
метричным выходом, используемый в измерительных цепях.
Инвертор
Устройство, создающее при входном напряжении постоянного тока переменное вы
ходное напряжение.
Инкрементный энкодер
Оптический энкодер, формирующий один электрический импульс при каждом за
фиксированном приращении угла поворота оси.
Инструмент
Робототехнический термин, обозначающий исполнительное устройство, закреплен
ное на инструментальной плате робота.
Исходный код
Код, генерируемый программатором.
Кабель с витой парой
Пара проводов, образующая цепь для передачи данных. Провода свиваются, чтобы
обеспечить защиту от перекрестных помех.
Калибровка
Процедура определения точности прибора и замены или ремонта прибора, если точ
ность становится ниже заданного значения.
Канальный униполярный транзистор (МОП, FET)
Трехэлектродный прибор, в котором ток, протекающий через два электрода, управ
ляет напряжением на третьем электроде.
Катод
Отрицательный электрод электронного прибора.
КМОП
Комплементарный металлооксидный полупроводник.
Коаксиальный кабель
Проводящая система, состоящая из двух элементов: полого цилиндрического про
водника и расположенного внутри него сплошного провода.
Кольцевая топология
Топология сети, при которой отдельные машины связываются в замкнутое кольцо.
Коммутатор
Цилиндрическая сборка, смонтированная на вращающемся вале и содержащая
пластины, соединенные с обмотками якоря.
Компаратор
Цепь, в которой имеются два независимых входа и состояние выхода определяется
соотношением сигналов на входах.
Компилятор
Компьютерная программа, которая преобразует код высокого уровня в машинный
код с помощью ассемблера.
Контактор
Реле, рассчитанное на переключение больших токов при больших напряжениях ис
точника.
МЭК
Международная электротехническая комиссия.
1126
ÉãéëëÄêàâ
Напряжение переключения
Напряжение, необходимое для переключения прибора во включенное состояние.
Нечеткое значение
Значение, которое формулируется в лингвистических (языковых) терминах.
Нечеткие лингвистические переменные
Переменные, которые не могут быть представлены числовыми значениями, а выра
жаются только в лингвистических терминах.
Нечеткая логика
Метод, использующий мыслительные способности человека, чтобы получить чис
ленное решение или конкретное действие при нечеткой или неполной информации
об исходных переменных.
Низкочастотный фильтр
Устройство, которое пропускает низкочастотный сигнал и ослабляет сигналы высо
кой частоты.
H"мост
Ключевая схема, используемая для изменения направления вращения двигателей
постоянного тока.
Область пропорциональности
Процентное изменение ошибки, приводящее в результате к достижению исполни
тельным элементом управления границы линейной области.
Обратная ЭДС
См. противо
ЭДС.
Обратное смещение
Напряжение, получающееся при приложении положительного потенциала к отри
цательному и отрицательного к положительному электроду полупроводникового
прибора, например, к катоду и аноду диода.
Объектный код
Код, используемый непосредственно для управления машиной или прибором.
Окружающая температура
Температура среды, окружающей прибор.
Отклик системы управления
Реакция какой
либо системы управления на заданное входное воздействие, отража
ющая качество этой системы.
Относительная влажность
Отношение количества водяного пара, действительно находящегося в воздухе, к
наибольшему возможному при данной температуре количеству.
Относительное давление
Разность между измеренным и атмосферным давлением.
Операционный усилитель (ОУ)
Усилитель постоянного тока с высоким коэффициентом усиления, используемый
для усиления входного сигнала или для развязки входа и выхода.
ОПТ
Однопереходный транзистор, имеющий три вывода и собственную внутреннюю цепь
смещения.
Оптический энкодер
Прибор, преобразующий угловое положение оси в бинарный код с использованием
источника и приемника света.
1127
ÉãéëëÄêàâ
Оптоволоконный кабель
Кабель, передающий информацию с помощью оптических импульсов, распростра
няемых по оптоволоконному световоду.
Оси ориентации
Оси 4, 5 и 6 на рис. 15.1 или соответственно оси тангажа, ротации и рыскания.
Оси положения
Оси 1, 2 и 3 на рис. 15.1 или соответственно оси X, Y и Z.
Передатчик
Прибор, преобразующий малый сигнал в больший, более пригодный для использо
вания.
Перекидной переключатель
Небольшой электрический переключатель широкого применения.
Переключатели в корпусе DIP
Группа однополюсных кулисных переключателей в корпусе с двусторонними выво
дами.
Переменная процесса
Значение выходного сигнала, подаваемого на вход суммирующего у устройства от
усилителя обратной связи.
Переменный ток
Электрический ток, который периодически изменяется от положительного до отри
цательного уровня и обратно.
Переход
Движение робота между двумя программными точками.
Пилотные переключатели
Переключатели различных типов, рассчитанные на большие значения тока и напря
жения.
Пирометр
Термочувствительный прибор, определяющий температуру без физического кон
такта с объектом, только с помощью анализа его светового излучения.
Плата диафрагмы
U
образный прибор, устанавливаемый в трубопровод. Скорость потока измеряется
по разности давлений до платы и после нее.
Плотность
Отношение массы объекта к его объему при заданной температуре.
Повторитель напряжения
Схема на ОУ, напряжение на выходе которой повторяет напряжение на инвертирую
щем входе, формируя, таким образом, выходное напряжение, совпадающее со вход
ным по амплитуде и по знаку.
Поиск неисправностей
Процесс общей постановки проблемы, сужения области поиска до единственного
компонента и определение этого компонента.
Показатель качества
Численное значение, которое обеспечивает объективный и довольно точный метод
определения относительных возможностей двигателя.
Полосовой фильтр
Цепь, которая пропускает сигнал в некотором диапазоне частот и ослабляет сигна
лы на остальных частотах.
1128
ÉãéëëÄêàâ
Полупроводник
Материал с проводимостью, значение которой ниже проводимости металлов и выше
проводимости изоляторов, обладающий способностью проводить электрический ток.
Полюс
Внутренний проводник в переключателе, приводимый в движение механизмом пе
реключения.
Последовательная система интерфейса в режиме реального времени (SERCOS)
Открытый стандарт для шины последовательной связи контроллеров с интеллекту
альными устройствами с цифровым приводом.
Постоянный ток
Ток, текущий только в одном направлении.
Правило буравчика
Если буравчик вкручивается в проводник по направлению тока, то направление
вращения его ручки совпадает с направлением магнитных силовых линий, создавае
мых током.
Превышение уставки
Превышение установленного значения, перерегулирование.
Преобразователь
Прибор, получающий энергию одного типа и преобразующий ее в энергию другого
типа. Обычно содержит датчик и передающее устройство.
Преобразователь постоянного напряжения в постоянное
Цепь с постоянным напряжением на входе и на выходе, которая обычно имеет раз
личные уровни входного и выходного напряжений.
Прерывание
Режим обслуживания внешних устройств центральным процессором, инициируе
мый в основном по запросам периферийных устройств.
Приборы, снимающие питание (E"stop)
Приборы, отключающие источник питания от машины в аварийных ситуациях.
Программируемый логический контроллер (ПЛК, PLC)
Специализированный компьютер, рассчитанный на одного пользователя, или один
из нескольких компьютеров в сети автоматизации, предназначенный для управле
ния разнообразными технологическими установками и системами, в котором ис
пользуется один из пяти стандартных языков программирования.
Программируемый ОПТ
Переключающий прибор с регулируемым напряжением переключения.
Проектное производство
Производство сложной продукции, имеющей много компонентов и зачастую един
ственной в своем роде (такой, например, как космический или морской корабль).
Пропорциональные клапаны
Электромеханические устройства, способные регулировать поток жидкости или
газа в диапазоне от 0 до 100 % от максимального значения.
Противо"ЭДС (cemf)
Наведенное напряжение в двигателе, противоположное по направлению питающе
му напряжению.
Протокол
Правила обмена данными между интеллектуальными машинами.
1129
ÉãéëëÄêàâ
Процедура
Набор программного кода, реализующий стандартную функцию, например вычис
ление синуса или выполнение программы инициализации.
Пульт обучения
Ручное управляющее устройство, используемое для программирования роботов,
когда известны программные точки.
Пьезоэлектрический эффект
При воздействии давления кристалл деформируется и на нем создается небольшое
электрическое напряжение, пропорциональное степени деформации.
Прямое смещение
Напряжение, получающееся при приложении положительного потенциала к поло
жительному и отрицательного к отрицательному электроду полупроводникового
прибора, например, к аноду и катоду диода.
Работа
Количество энергии, преобразованное из одной формы в другую.
Рабочая зона робота
Объем, ограниченный рабочими пределами движения робота.
Разностное расстояние
Разность между расстоянием выключения и расстоянием обнаружения.
Расстояние выключения
Точка, в которой выходное устройство датчика приближения переходит из включен
ного состояния в выключенное за счет удаления объекта от датчика
Расстояние установки
Максимальное расстояние между датчиком и объектом при наихудшем сочетании
температуры и напряжения питания.
Регенеративное торможение
Обычное динамическое торможение, при котором вместо рассеяния на резисторах
энергия возвращается обратно в источник.
Регулируемые параметры
Переменные, регулируемые с помощью оконечного элемента управления с целью
достижения требуемого значения управляемой переменной.
Резистивный датчик температуры (RTD)
Термочувствительный прибор, определяющий температуру измерительного резис
тора по изменению его сопротивления.
Резольвер
Вращающийся прибор, способный измерять положение.
Реле
Переключатель дистанционного действия, состоящий из электромагнита, соленои
да и переключающихся контактов.
Робот
Автоматически управляемая, перепрограммируемая, многоцелевая машина
мани
пулятор с несколькими перепрограммируемыми осями, которые могут быть как дви
жущимися, так и статичными. Применяется в промышленной автоматике.
Робототехническая система
Аппаратное и программное обеспечение роботов, состоящее из манипулятора, ис
точника питания и контроллера, исполнительного элемента (ов), некоторых видов
1130
ÉãéëëÄêàâ
оборудования, приборов и датчиков, встроенных непосредственно в робот; а также
из оборудования, приборов и датчиков других типов, которые требуются для реше
ния специфических задач и должны быть снабжены соответствующим интерфейсом
для работы и управления.
Световая завеса
Оптический датчик приближения или система таких датчиков.
Светодиод
Диод, излучающий свет.
Сервомеханизм
Система с цепями обратной связи для управления работой.
Сеть предприятия
Сети, объединяющие вычислительные устройства, расположенные во всем здании
предприятия или даже в нескольких зданиях и состоящие из нескольких локальных
сетей (LAN).
Сигнал обратной связи
Сигнал, который является частью выходного сигнала и подается обратно на вход
усилительного устройства, складываясь (алгебраически) с входным сигналом.
Силы
Тянущие или толкающие механические усилия.
Сильфон
Тонкий отпаянный металлический прибор, который действует, как мехи аккордеона.
Симметричный динистор (диак)
Переключающий прибор, проводящий в положительном и отрицательном направ
лениях при включенном состоянии.
Синхронный двигатель
Двигатель, в котором ротор вращается с той же скоростью, что и магнитное поле.
Скольжение
Величина, характеризующая соотношение скорости поля и скорости ротора.
Скорость изменения напряжения dv/dt
Мгновенное значение скорости изменения напряжения.
Скорость потока
Количество материала, проходящего в единицу времени через данное сечение. Ма
териалами могут быть жидкости, газы или твердые тела.
Смещение
Совокупность постоянного эмиттерного тока и напряжения между коллектором и
эмиттером, которое позволяет транзистору работать в активной области.
Смещения нуля выходного напряжения
Значение постоянного напряжения, около которого колеблется переменная состав
ляющая.
Собачка
Деталь, приводящая в действие концевой выключатель. Собачка поворачивает рычаг,
опускает плунжер или спускает защелку на механическом концевом переключателе.
Собственный коэффициент переключения
Отношение входного напряжения к напряжению питания, необходимое для включе
ния ОПТ.
1131
ÉãéëëÄêàâ
Согласование сигналов
Преобразование уровня или типа выходного сигнала одного из блоков системы пе
ред подачей его на вход следующего блока.
Соединение открытых систем (OSI)
Модель для описания стандартных многоуровневых сетей.
Соединительная плата
Печатная плата, которая питает вставляемые модули и подводит шину данных для
обмена данными между модулями и ЦПУ.
Соленоид
Электромеханическое устройство, преобразующее электрическую энергию в ли
нейное механическое перемещение.
Соленоидный клапан
Электромеханический прибор, используемый для управления потоком воздуха или
жидкостей, таких, например, как вода, инертные газы, легкое масло и хладагенты.
Сопло потока
Сужение, устанавливаемое внутри трубопроводной системы для измерения разно
сти давлений.
Стабилитрон
Диод, проводящий в обратном направлении и работающий в области напряжения
зенеровского пробоя.
Степени свободы
Оси руки робота, относительно которых может происходить ее движение.
Степень членства
Степень, в которой четкое значение или четкая переменная принадлежит нечеткому
множеству.
Сферические координаты
Координаты, задаваемые двумя углами и одним линейным расстоянием.
Твердотельное реле
Реле, выполненное в виде залитого компаундом модуля с полупроводниковыми ком
понентами.
Твердотельный датчик давления
Датчик, который производит измерение давления, приложенного с одной стороны
диафрагмы.
Температура
Степень нагрева или охлаждения тела или окружающей среды.
Термистор
Электрический компонент, который характеризуется большим изменением сопро
тивления при изменении температуры.
Термопара
Термочувствительное устройство, которое создает небольшое напряжение в милли
вольтовом диапазоне, зависящее от температуры. В нем используется спай двух
проводов из разнородных металлов.
Тиристор
Четырехслойный полупроводниковый прибор, используемый обычно в силовых цепях.
Ток удержания
Ток, позволяющий удерживать тиристор во включенном состоянии после снятия уп
равляющего сигнала.
1132
ÉãéëëÄêàâ
Ток утечки
Нежелательный паразитный ток в таких электронных компонентах, как транзисто
ры и конденсаторы.
Торможение двигателем
Изменение знака момента, приложенного к якорю, для быстрой остановки двигателя.
Топология
Форма сети, другими словами, способ соединения сетевых узлов.
Топология звезды
Сетевое соединение, при котором машины подсоединяются к центральному ведуще
му компьютеру (хабу).
Точка инструментального центра (TCP)
Точка, в которой робот начинает работать инструментом, необходимым для проведе
ния технологического процесса.
Транзистор
Прибор с тремя выводами, в котором ток через два вывода может управляться ма
лыми изменениями тока или напряжения на третьем выводе.
Триак
Прибор с тремя выводами, полупроводниковый ключ для работы на переменном токе,
который во включенном состоянии может проводить ток в обоих направлениях.
Трубка Бурдона
Деформируемая полая металлическая трубка, открытая с одного конца и запаянная
с другого.
Трубка Вентури
Прибор для измерения потока, содержащий постепенное сужение и затем постепен
ное расширение канала трубопровода.
Трубка Пито
Прибор для измерения потока, состоящий из двух трубок, помещенных в поток жид
кости или газа и измеряющий два давления: полное и статическое.
Турбулентный поток
Поток в трубопроводе с завихрениями, то есть с временным изменением направле
ния движения части потока.
Убытки
Финансовые потери компании, потери прибыли и денежных средств — в результате
производственных травм персонала и повреждения оборудования.
Удельный вес
Отношение плотности материала к плотности воды.
Удерживающий момент
Момент, создаваемый нагрузкой, при котором ротор остается в текущем положении
при выключенном статоре.
Управляемая переменная
Реальное значение выходного сигнала, зависящее от процессов в системе.
Усилитель петли обратной связи
Операционный усилитель (ОУ), в котором внешние компоненты используются для
создания обратной связи выхода цепи с входом.
Уставка
Целое или действительное значение, введенное в систему управления, которое по
казывает желательную величину переменной процесса.
1133
ÉãéëëÄêàâ
Фаззификация
Процесс представления числовых (четких) значений четких переменных в форме
нечетких множеств с помощью функций членства.
Фильтр
Цепь, пропускающая электронный сигнал в определенном диапазоне частот и не
пропускающая сигнал на остальных частотах.
Фотоэлектрический прибор
Прибор, который регистрирует на наличие объекта при прерывании им прямого или
отраженного светового луча.
Функция членства (вхождения)
Показывает, насколько полно четкая переменная входит в нечеткое множество.
Центральное процессорное устройство (ЦПУ)
Электронная цепь, которая контролирует все изменения данных в микроконтролле
ре, участвующих в процессе и обеспечивающих решение. Его работа управляется
последовательностью команд.
Центробежный переключатель
Автоматический переключатель, который подключает или отключает питание пус
ковой обмотки.
Цеховое производство
Производство простой продукции с малым числом деталей и малым объемом произ
водства.
Цилиндрические координаты
Координаты, определяемые двумя расстояниями и одним углом.
Четкая переменная
Физическая переменная, которая может быть измерена приборами и которой может
быть сопоставлено числовое значение, называемое четким значением.
Четкое значение
Значение переменной, заданное определенным числом.
Чувствительность тензодатчика
Отношение относительного приращения электрического сопротивления к относи
тельному приращению длины.
Шаговый двигатель
Двигатель, использующий твердотельные переключатели вместо механических ще
ток и коммутатора.
Шарнир
Вращающееся или линейное сочленение между двумя звеньями руки робота.
Шарнирный
Имеющий возможность двигаться на шарнирах.
Шарнирный робот с избирательной податливостью руки (SCARA)
Робот с горизонтальным сочленением плеча и локтя и осями, привязанными к ос
новным направлениям вращения, с линейным перемещением исполнительного ин
струмента на конце локтевого звена.
Шинная топология
Метод соединения цепей, при котором машины подсоединяются в магистральной
среде передачи данных.
1134
ÉãéëëÄêàâ
Широтно"импульсная модуляция (ШИМ)
Техника регулирования сигнала за счет изменения ширины импульсов. Может при
меняться и для уменьшения гармоник в выходном напряжении, например, при ин
вертировании постоянного напряжения.
Штамп BASIC
Специальный прибор, облегчающий разработку программ для микроконтроллеров.
Щеточные двигатели
Двигатели, которые используют электронный коммутатор.
Электромагниты
Вид магнитов, в которых магнитный поток создается за счет протекания электричес
кого тока через проводник.
Электронагревательные элементы
Преобразователи вида энергии, трансформирующие электрическую энергию в теп
ловую.
Эстафетное кольцо
Эстафетная кольцевая сеть, в которой передача данных основана на том, что каж
дый узел кольца ожидает прибытия короткой уникальной последовательности битов
(маркера) из смежного предыдущего узла. Поступление маркера указывает на то,
что можно передавать сообщение из данного узла в следующий.
Эффект Доплера
Явление, при котором частота, скорость и направление отраженного сигнала изме
няется при распространении его в протекающей жидкости.
Эффект Холла
Создание небольшого напряжения на проводнике с током при помещении его в маг
нитное поле.
Язык ассемблера
Язык программирования низкого уровня, преобразуемый в машинный язык и ис
пользующий мнемонические команды ЦПУ
Языки высокого уровня
Языки программирования, использующие обычный английский язык и математи
ческие команды и не учитывающие детально работу ЦПУ.
Язык последовательных функциональных диаграмм (SFC)
Графический язык, основные элементы которого являются шагами или состояния
ми, связанными с действиями или перемещениями, а также условиями перехода от
текущего состояния к следующему.
Язык структурированного текста
Язык высокого уровня, основанный на таких языках, как BASIC, C или PASCAL, с
командами, которые поддерживают разработку высокоструктурированных про
грамм и возможность расчетов сложных математических выражений.
Язык функциональных блок"схем (FBD)
Графический язык, в котором основные программные элементы представлены в
виде блоков.
Якорь
Подвижная часть магнитной цепи, например, вращающаяся часть мотора.
Ячейки нагружения
Преобразователи механического усилия или веса в электрический сигнал.
1135
ÉãéëëÄêàâ
BJT
Биполярный плоскостной транзистор.
ControlNet
Среда в САУ, управляющая входными и выходными сигналами, их связями и сооб
щениями.
DeviceNet
Уровень сети для оптимальной по цене интеграции отдельных приборов.
Ethernet
Информационный уровень сети предприятия с широким набором данных и про
граммных продуктов.
Ethernet промышленного протокола (Ethernet/IP)
Открытый стандарт для промышленных вычислительных сетей, обеспечивающий
коммерческую выгоду для промышленно изготовляемых сетей Ethernet и предназ
наченных для них приборов.
Fieldbus
Сеть уровня приборов; представляет собой также сетевой инструмент, ориентиро
ванный преимущественно на процессы.
FOUNDATION Fieldbus
Сеть передачи данных, способная поддерживать управление всем комплексом про
цессов в САУ, включая управление переменными процесса, управление детермини
рованными процессами в режиме реального времени и диагностику.
МОС (ISO)
Международная организация по стандартизации, разрабатывает стандарты для пра
вительств, фирм и объединений.
MOSFET
Металло
оксидный полупроводниковый полевой транзистор.
NEMA
National Electrical Manufacturers Association (Национальное объединение электро
производителей) — организация , занимающаяся стандартизацией электрообору
дования.
OSHA
Управление США по охране труда и промышленной гигиене. Правительственное
учреждение, которое устанавливает правила техники безопасности и следит за их
соблюдением на практике.
Profibus
Европейский сетевой стандарт, открытый для использования отдельными произво
дителями. Он распространяется на процессы автоматизации производства на уров
не предприятий.
RS232, RS422, RS423 и RS449
Стандарты, устанавливающие электрические механические и рабочие характерис
тики интерфейсов для обмена данными между интеллектуальными машинами.
UL
Underwriters Laboratory — организация, создавшая сеть лабораторий по технике
безопасности в США
1136