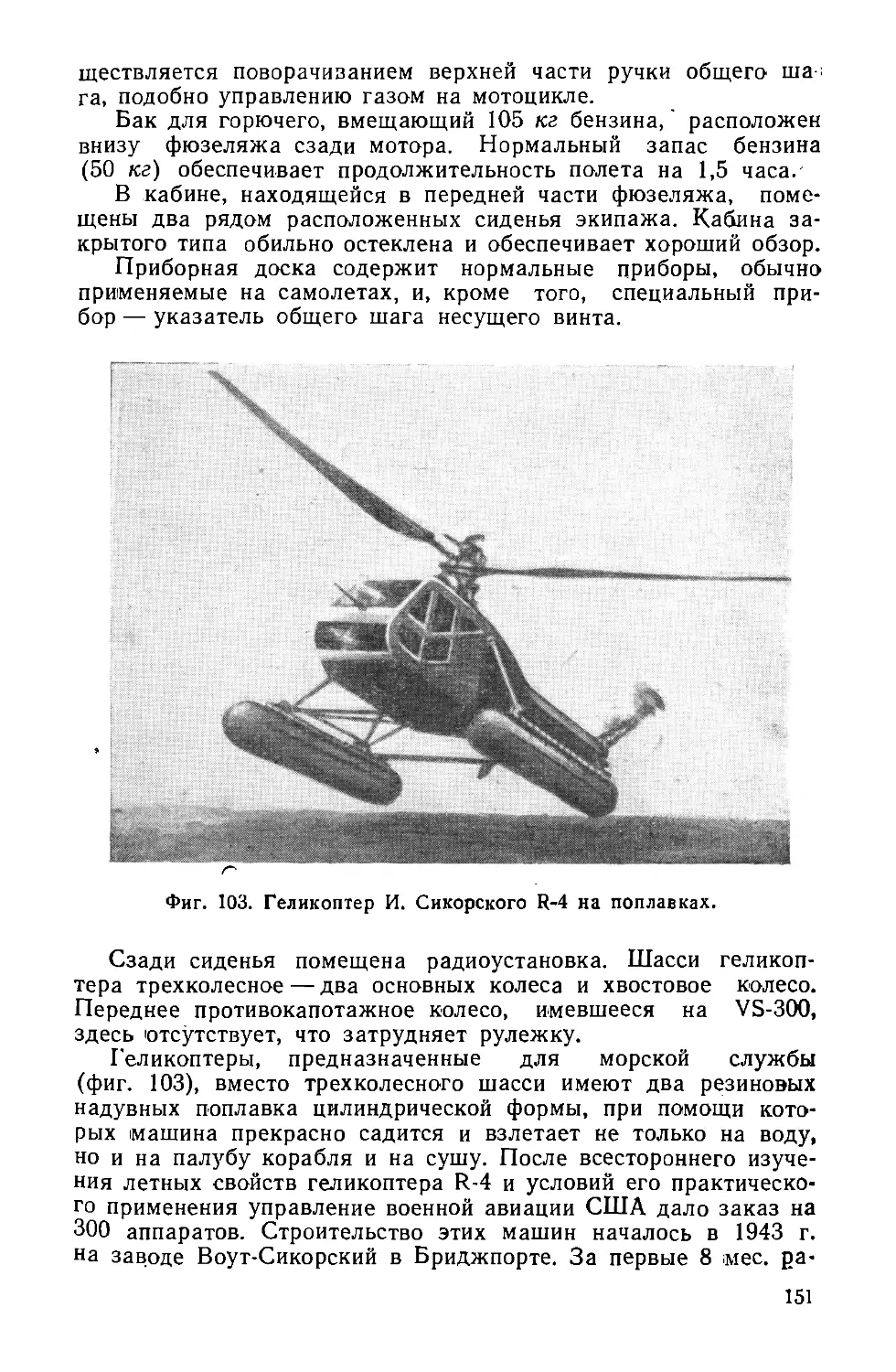
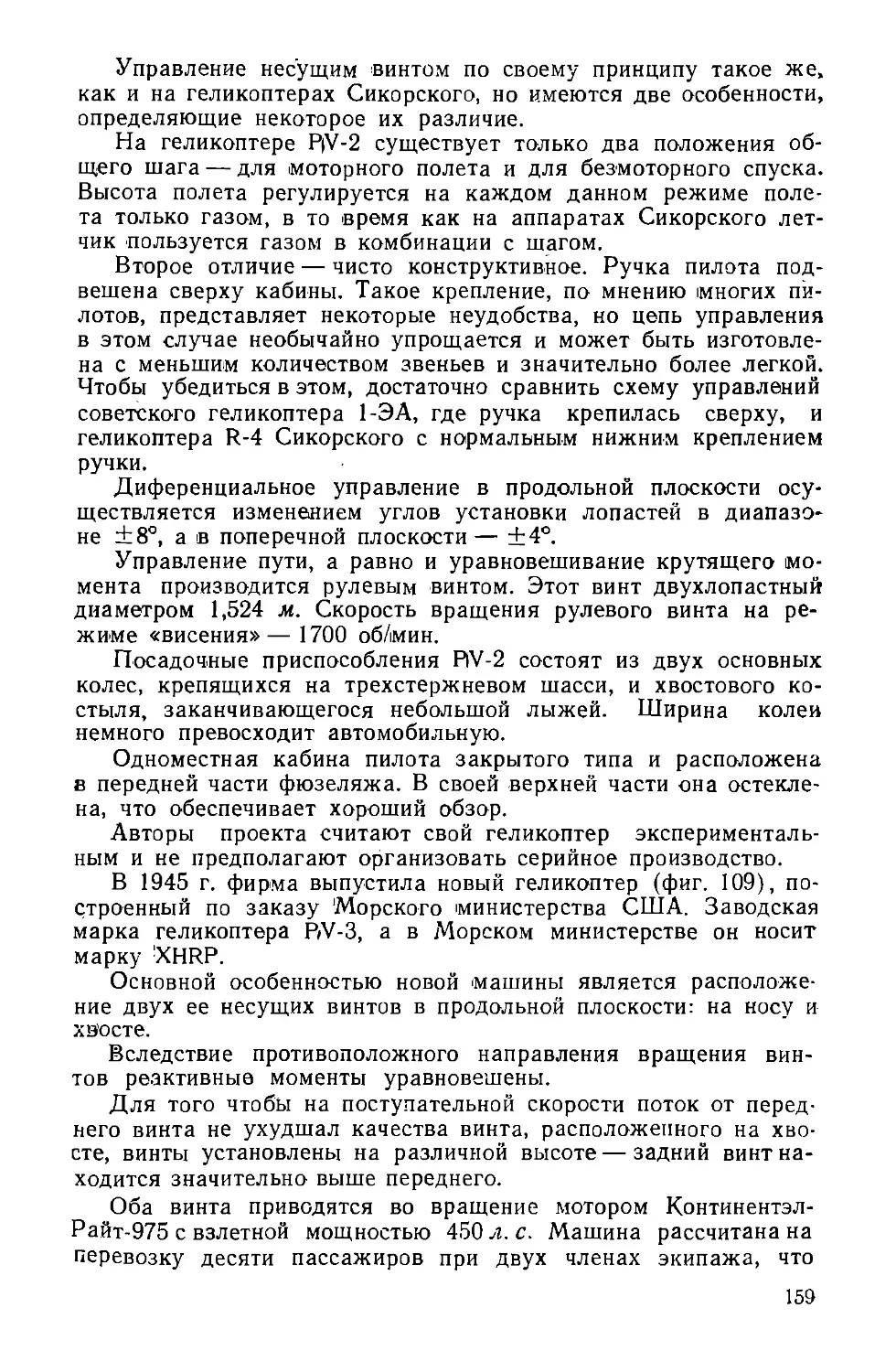
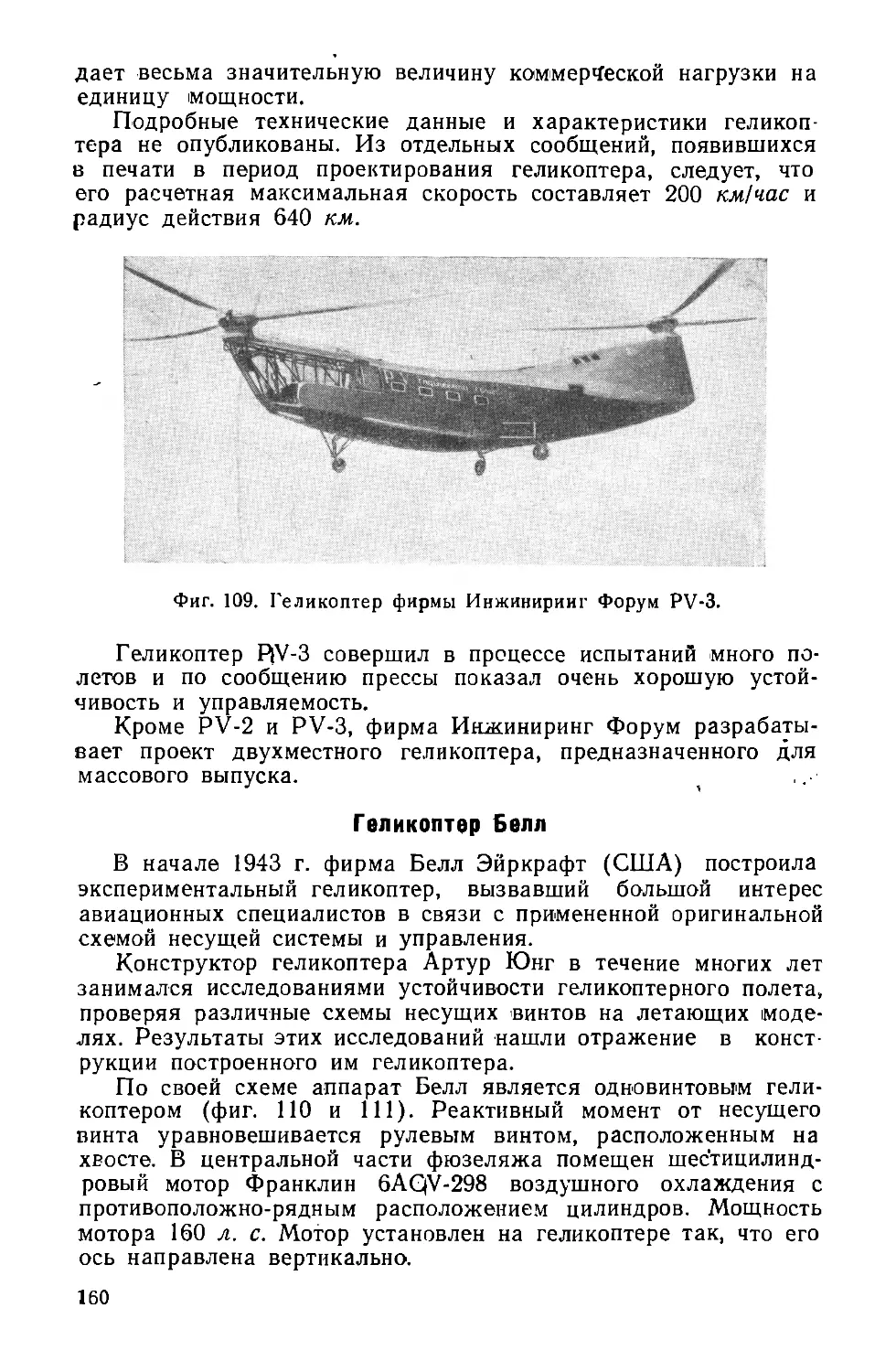
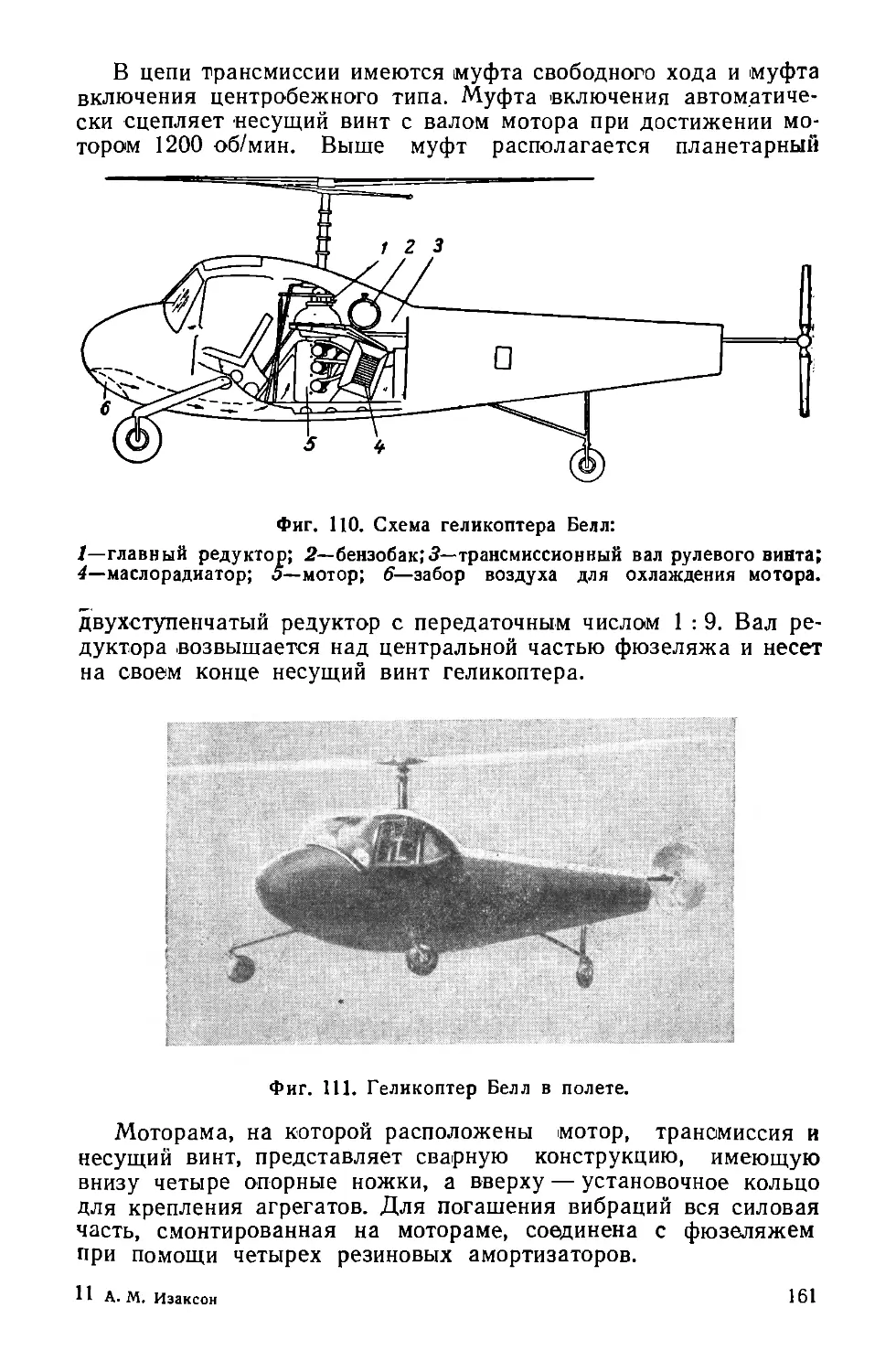
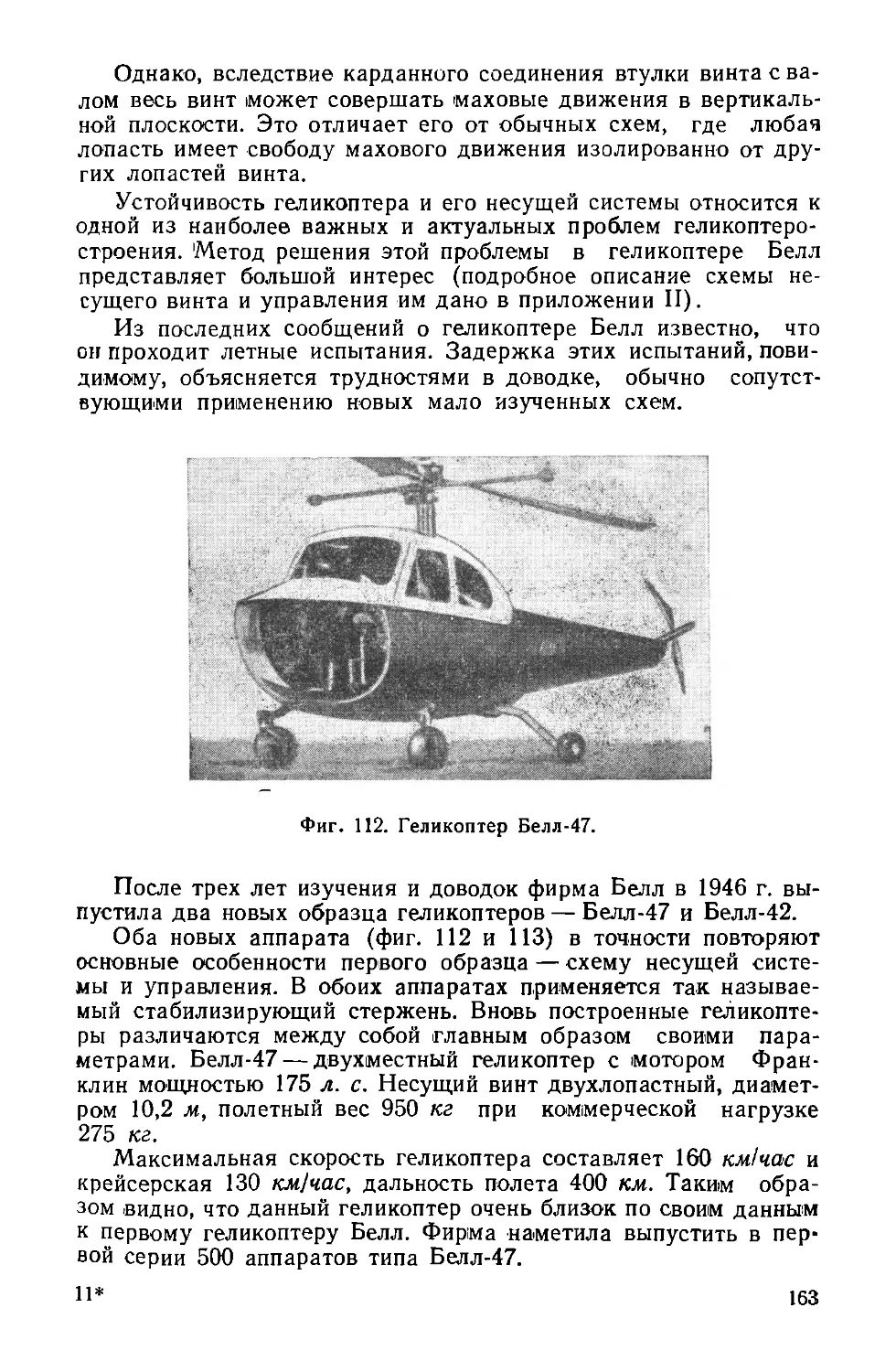
/













































































Автор: Изаксон А.М.
Теги: авиация вертолеты издательство оборонгиз главная редакция авиационной литературы
Год: 1947




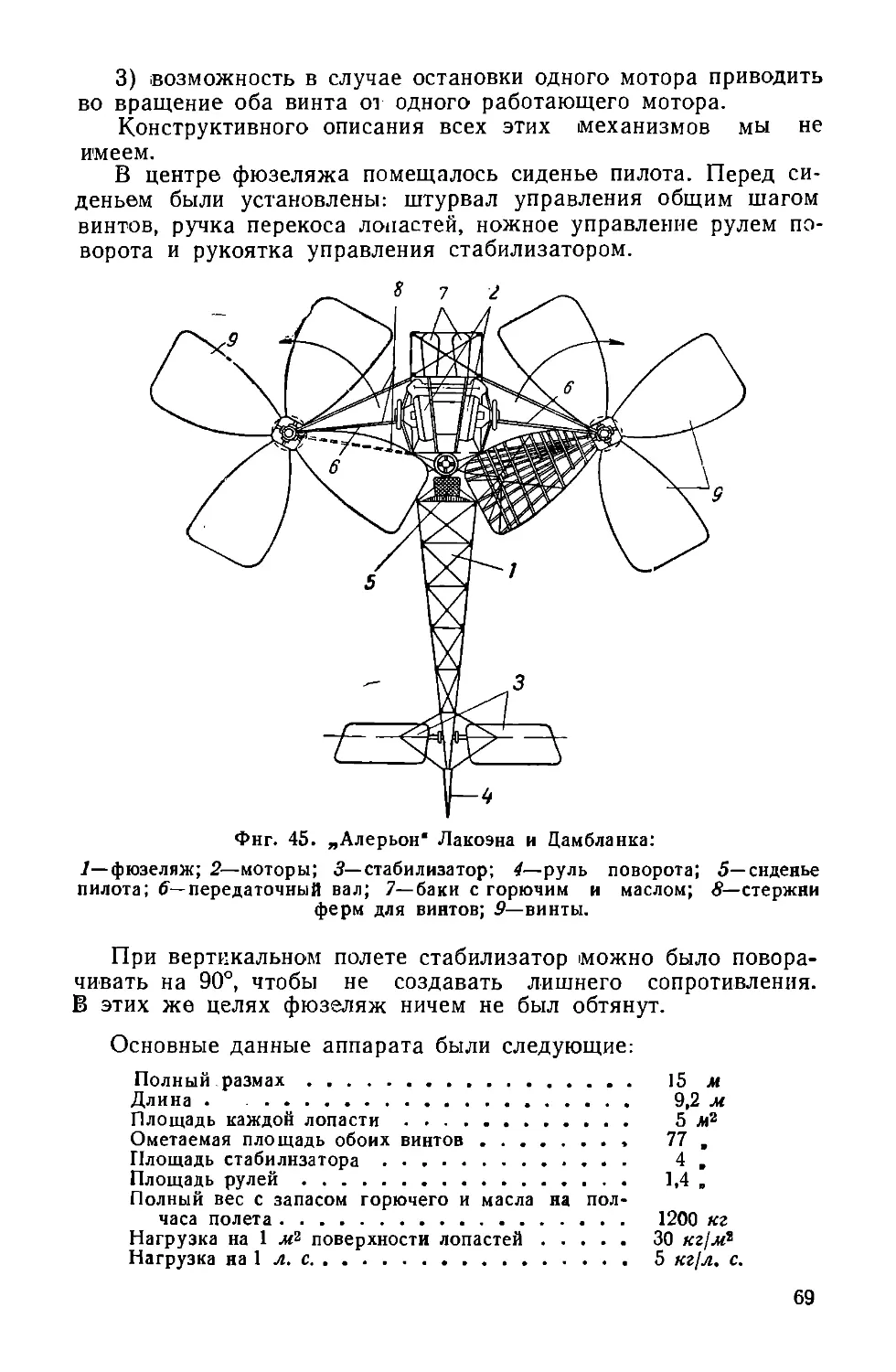
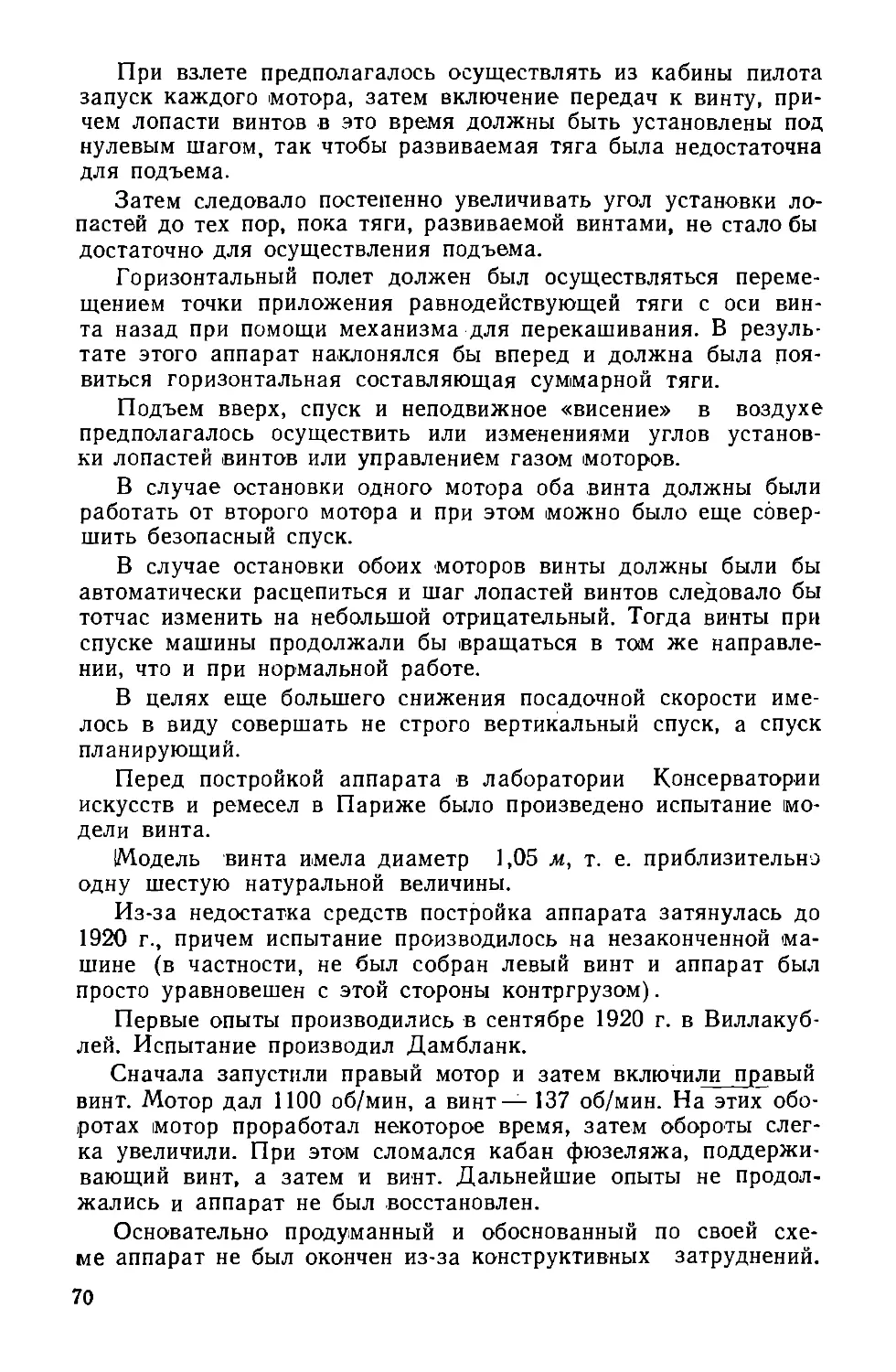
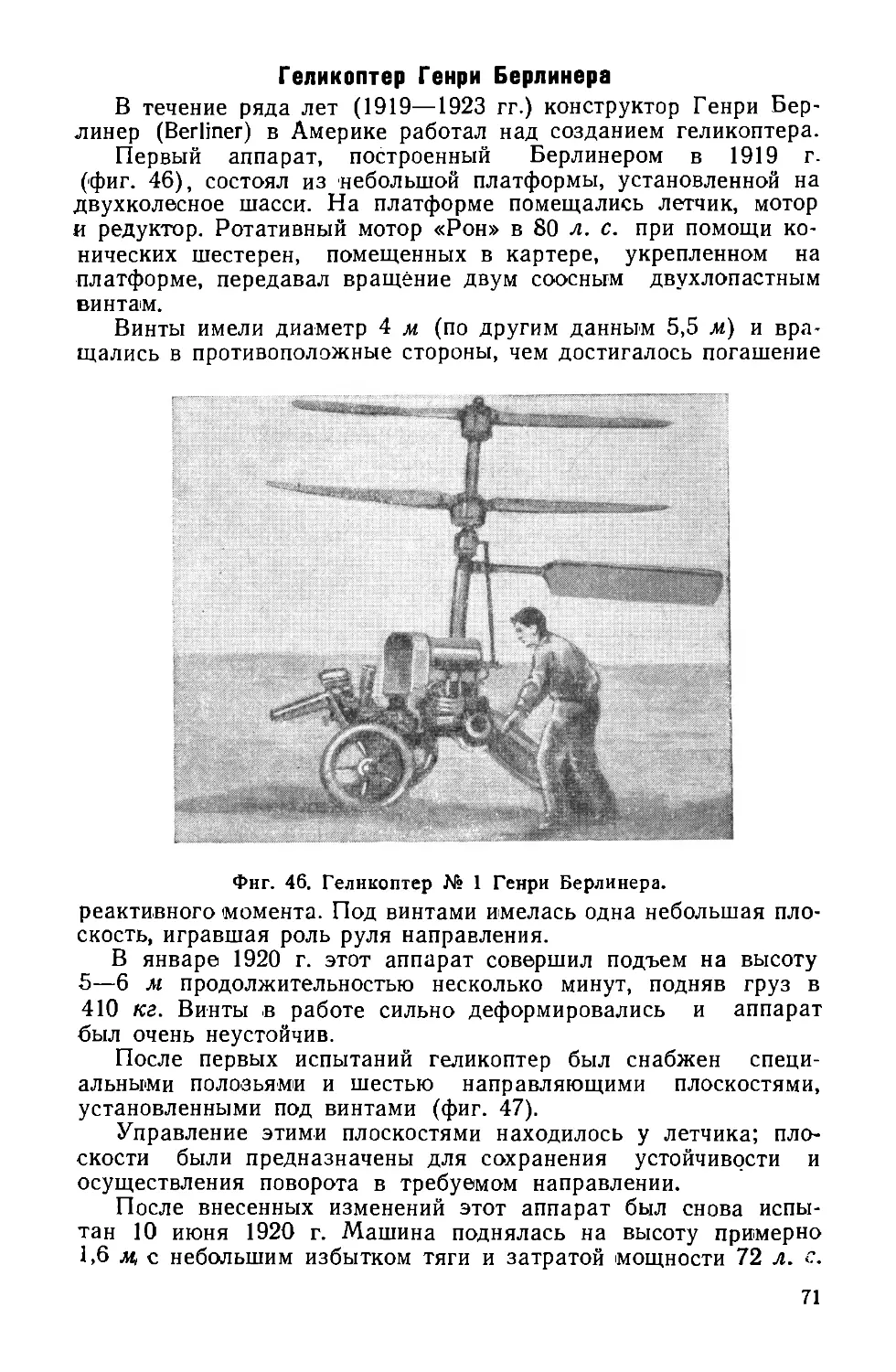
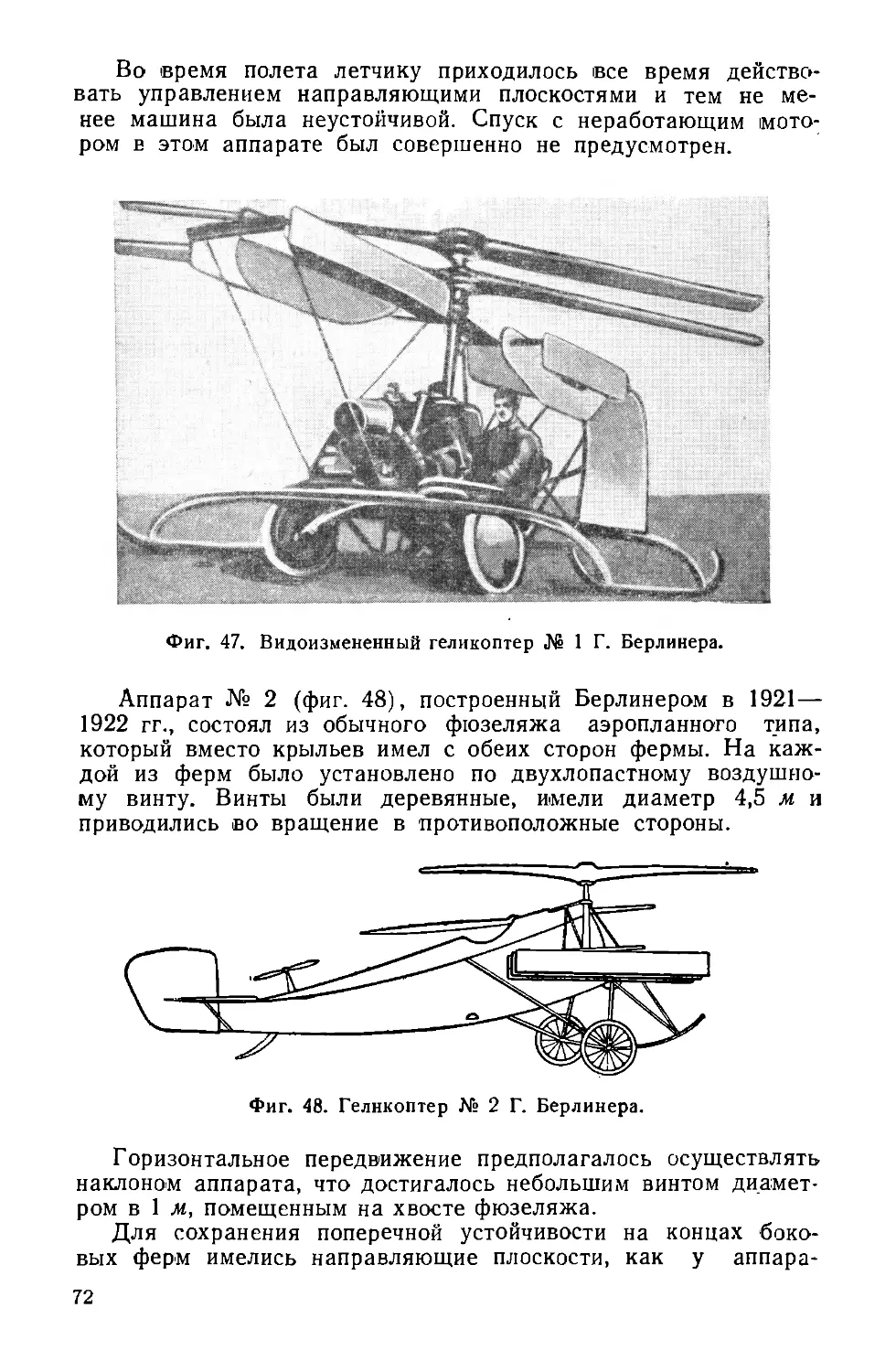
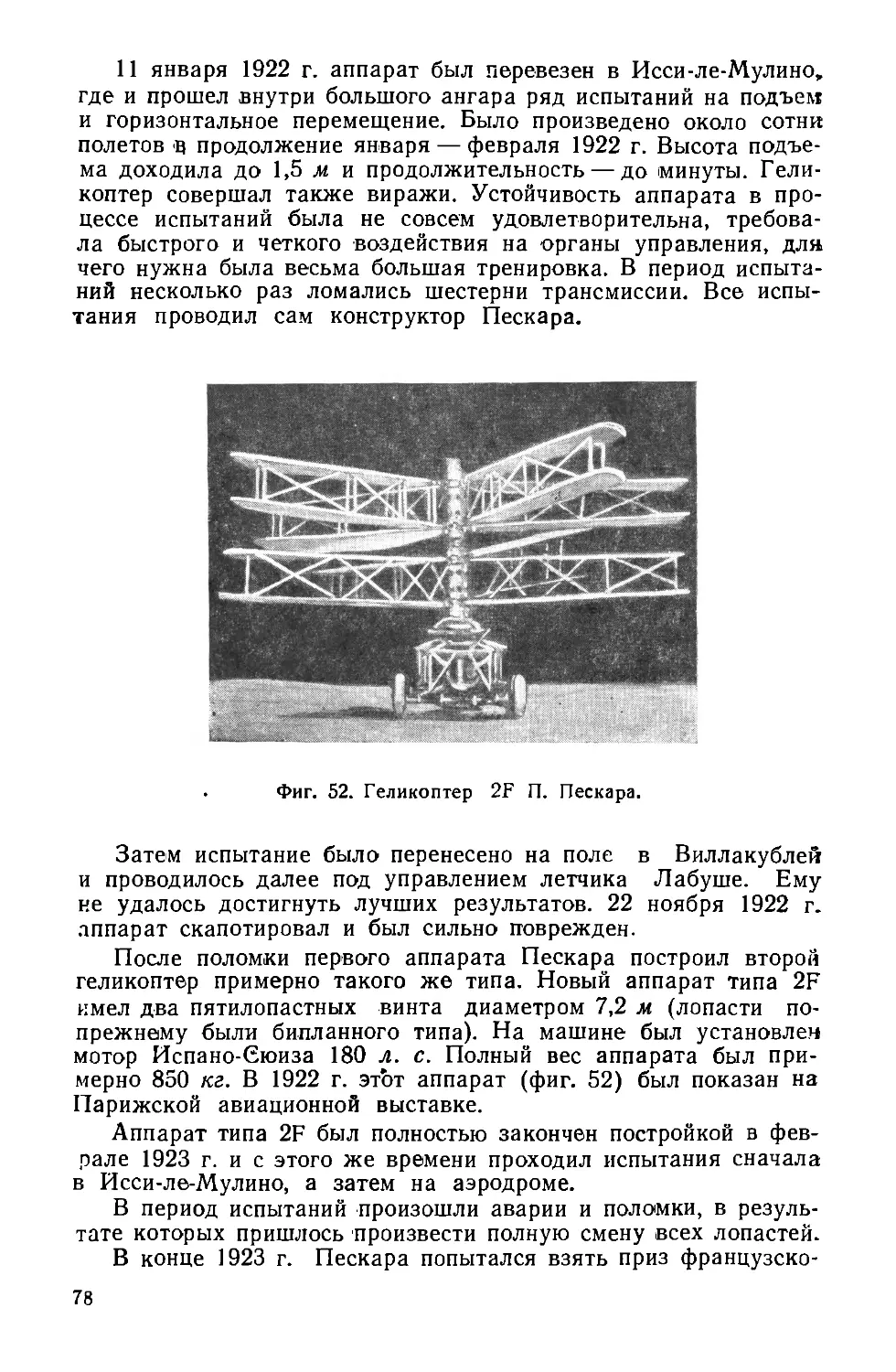
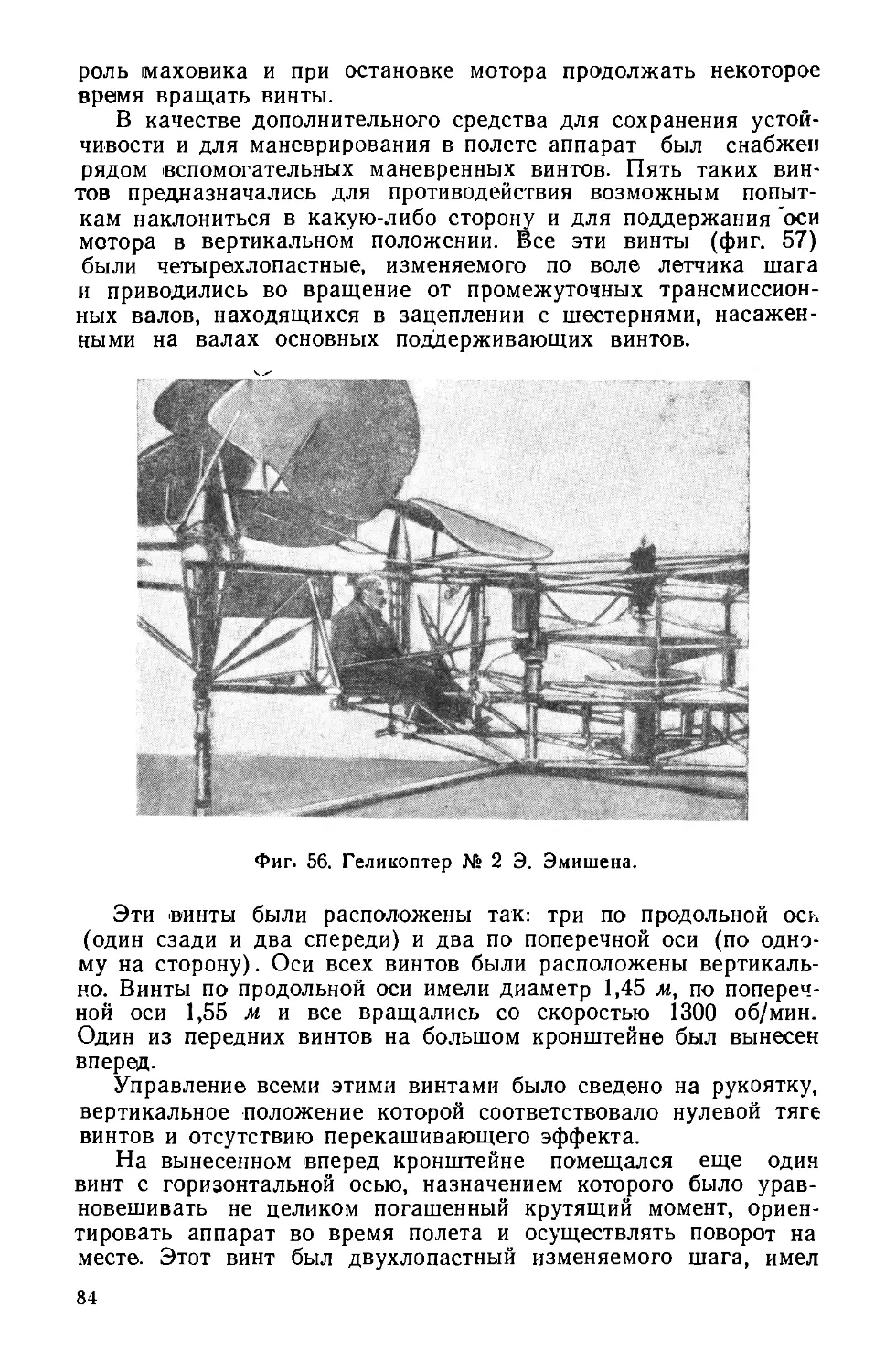
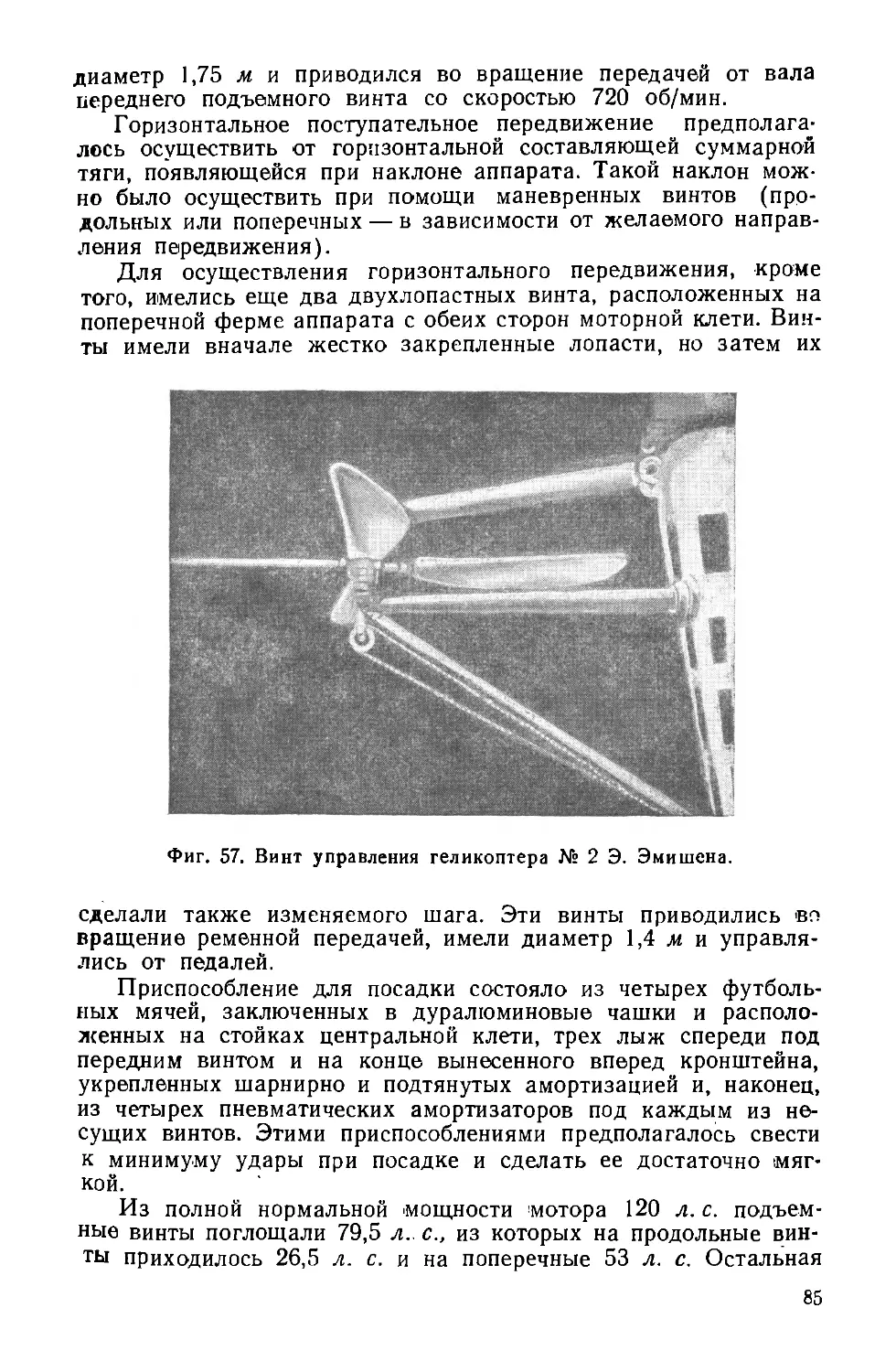
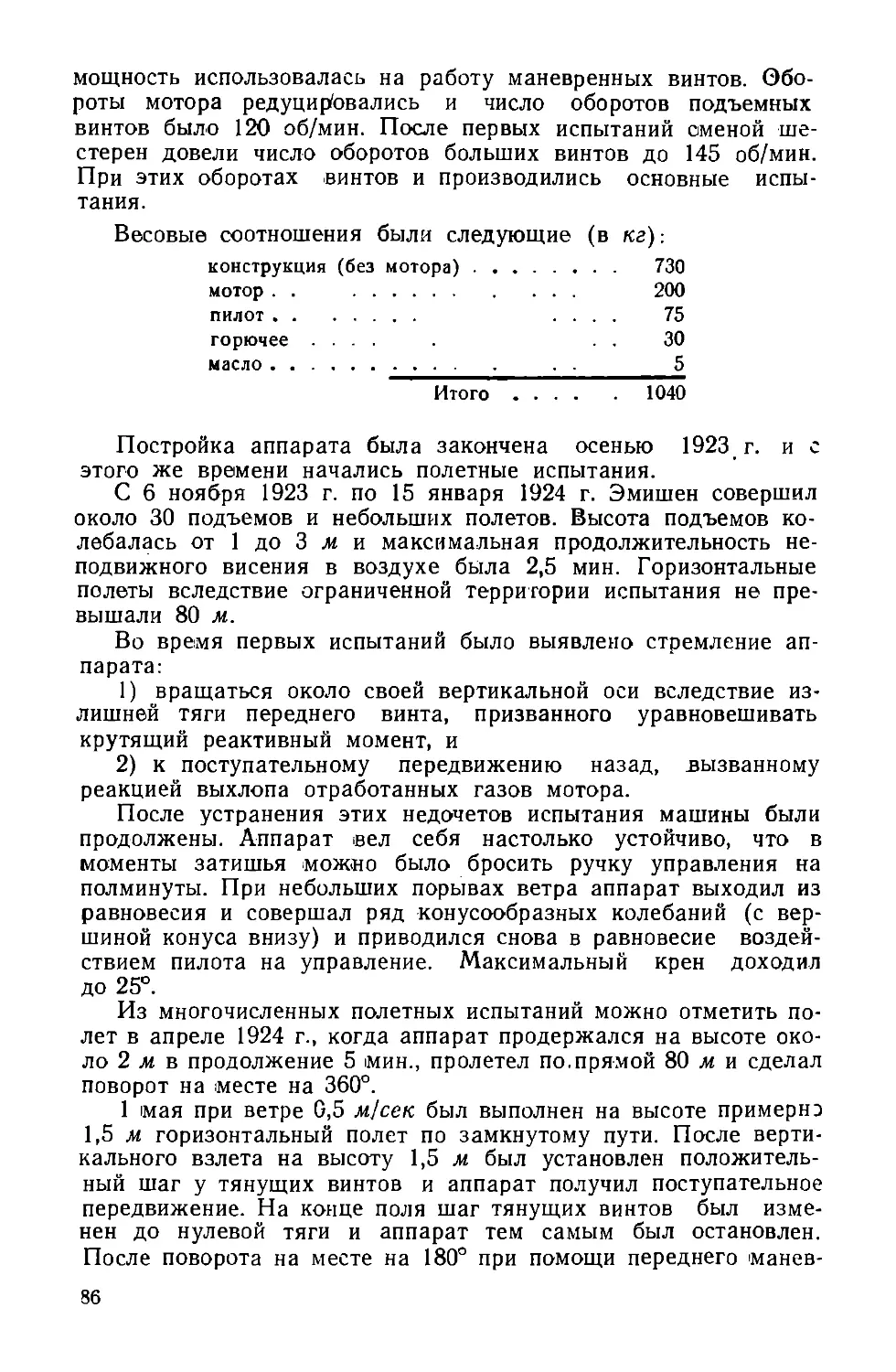
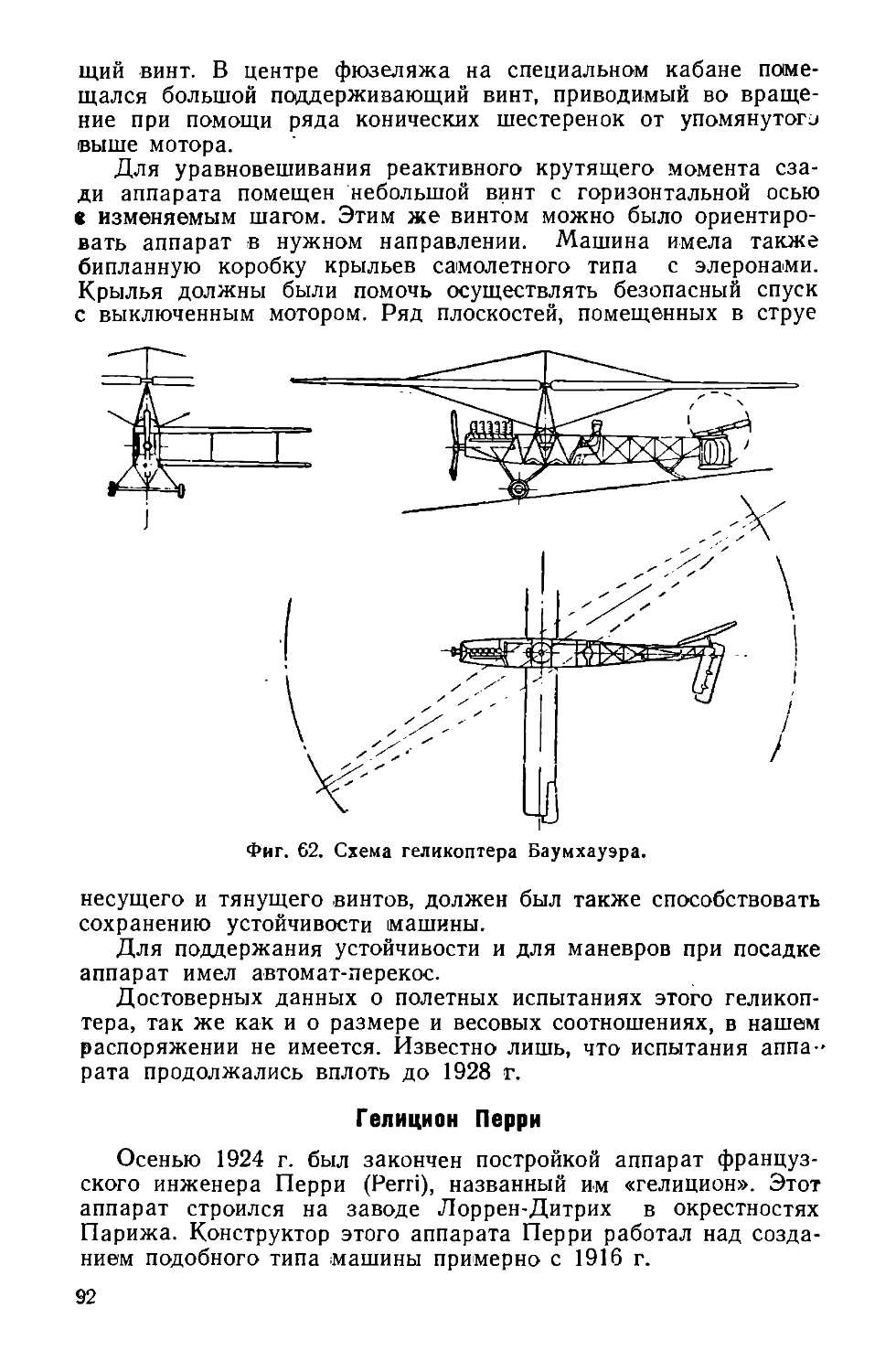
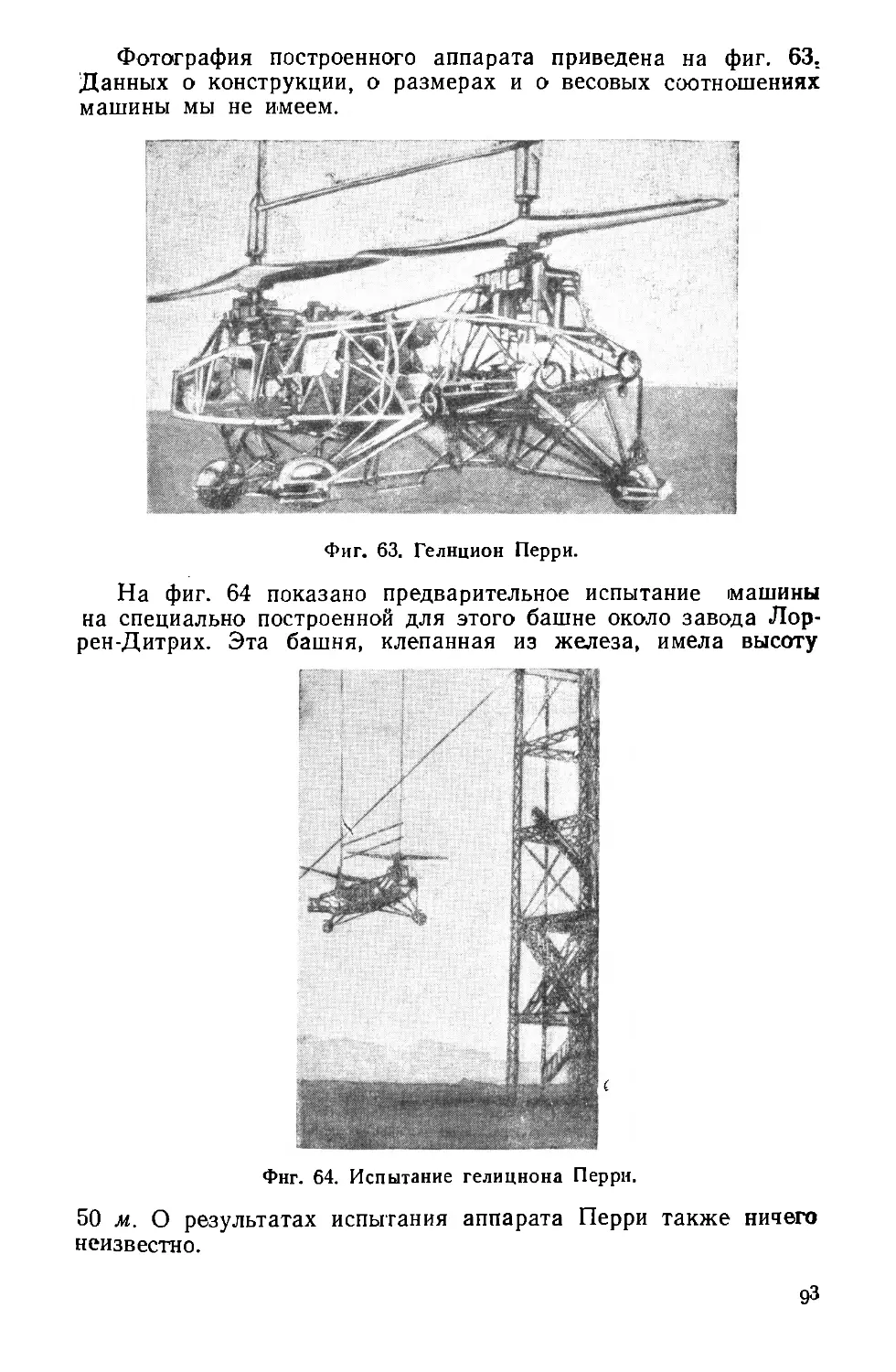
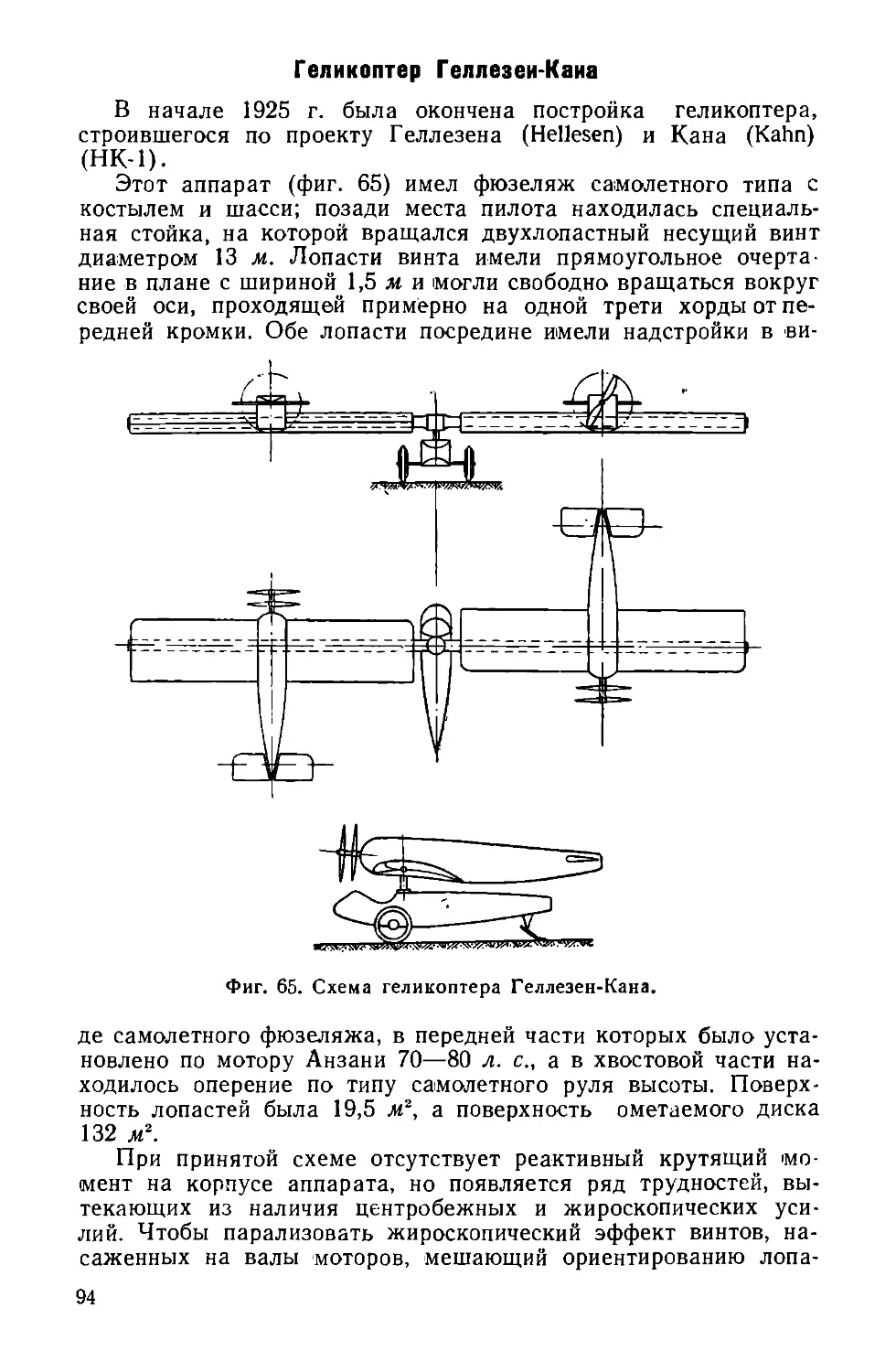
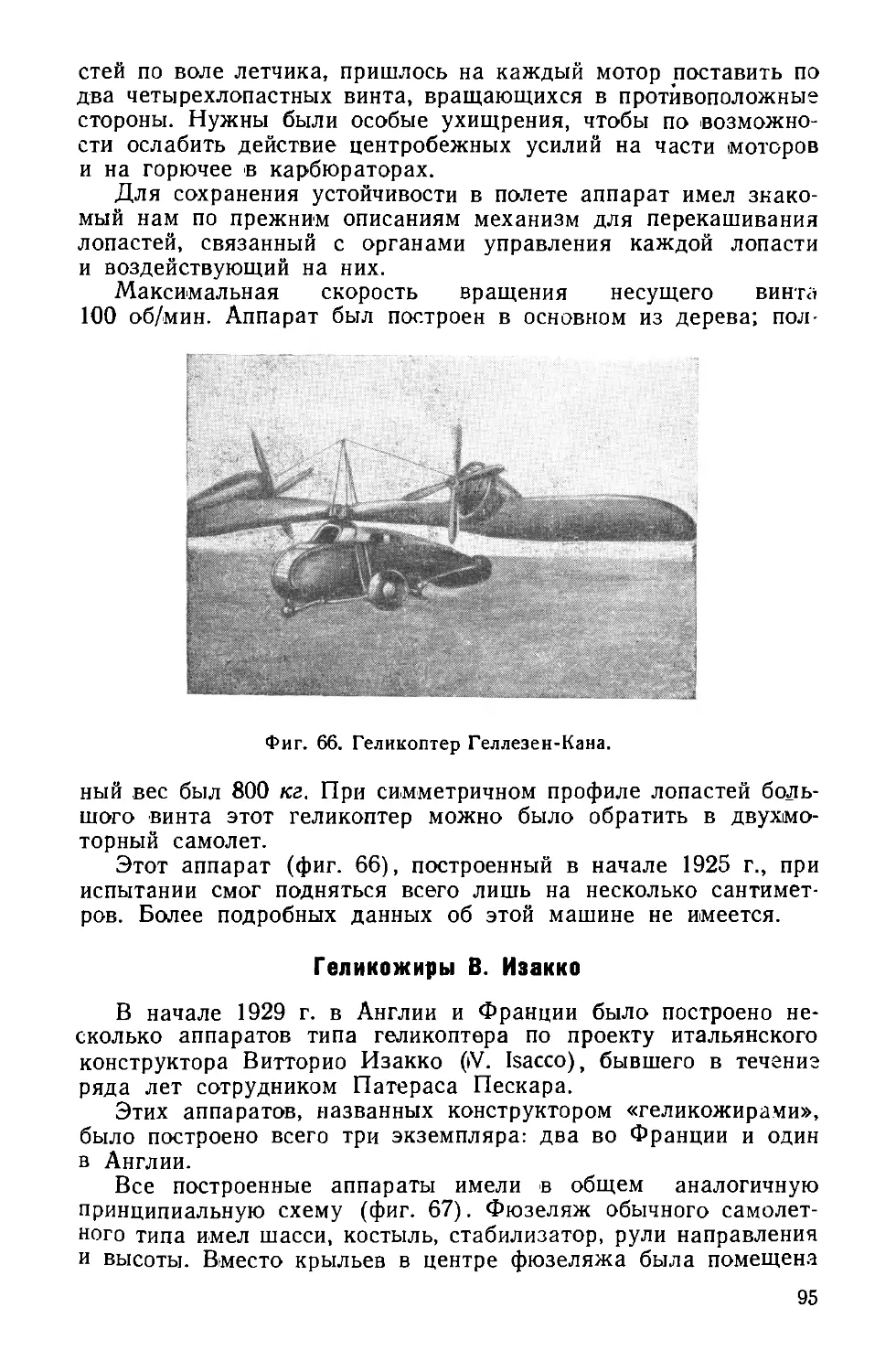
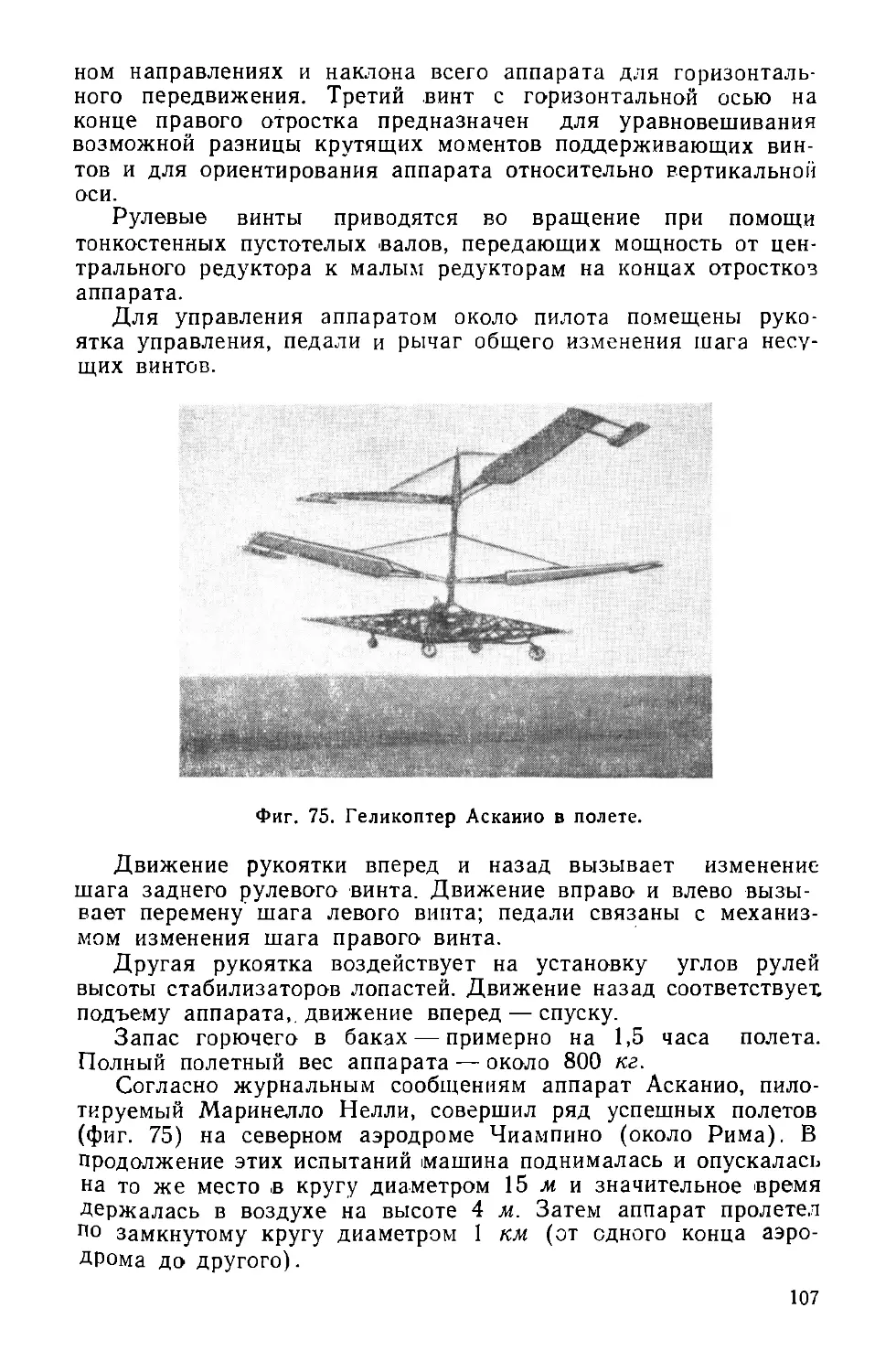
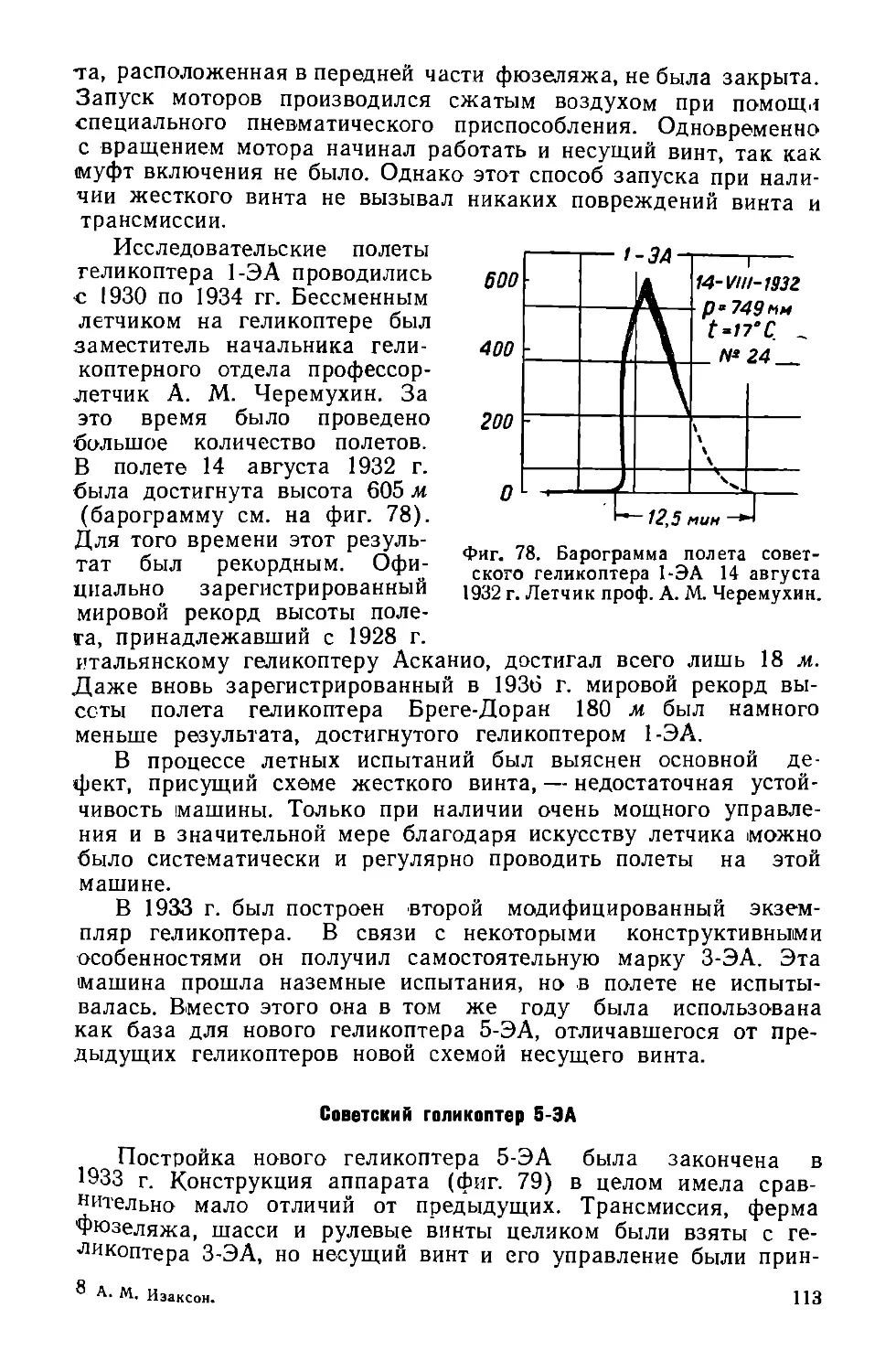
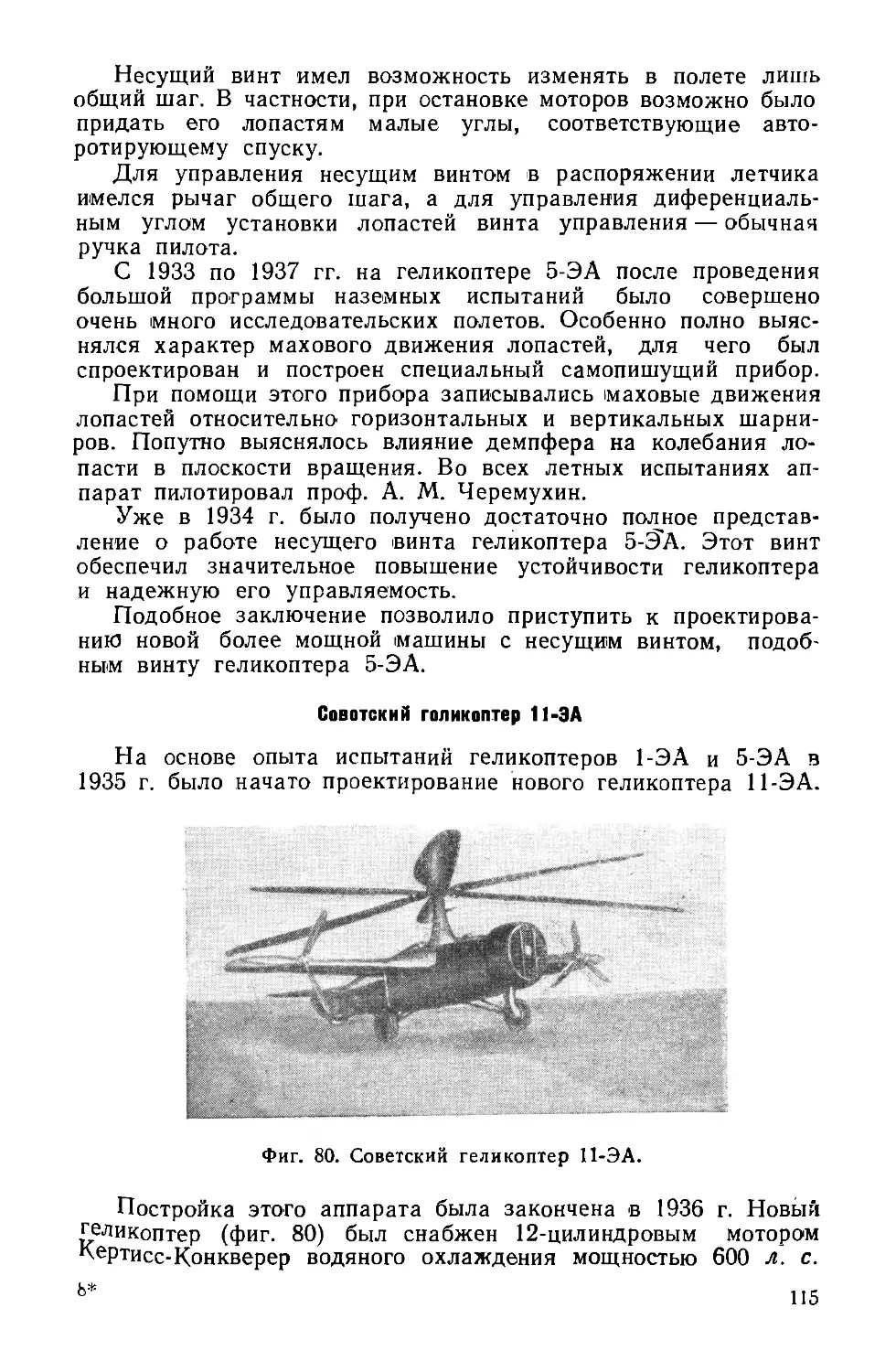
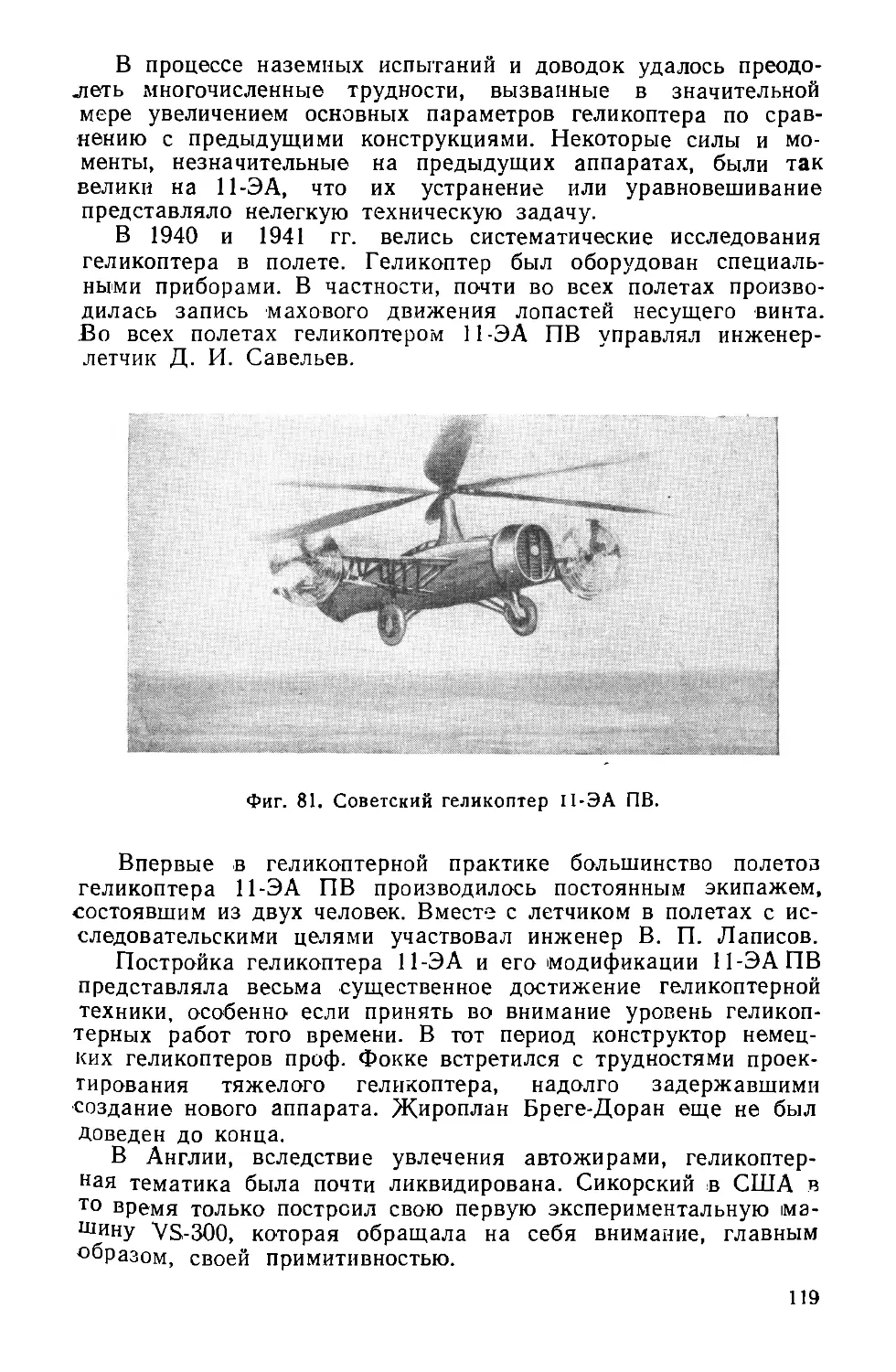
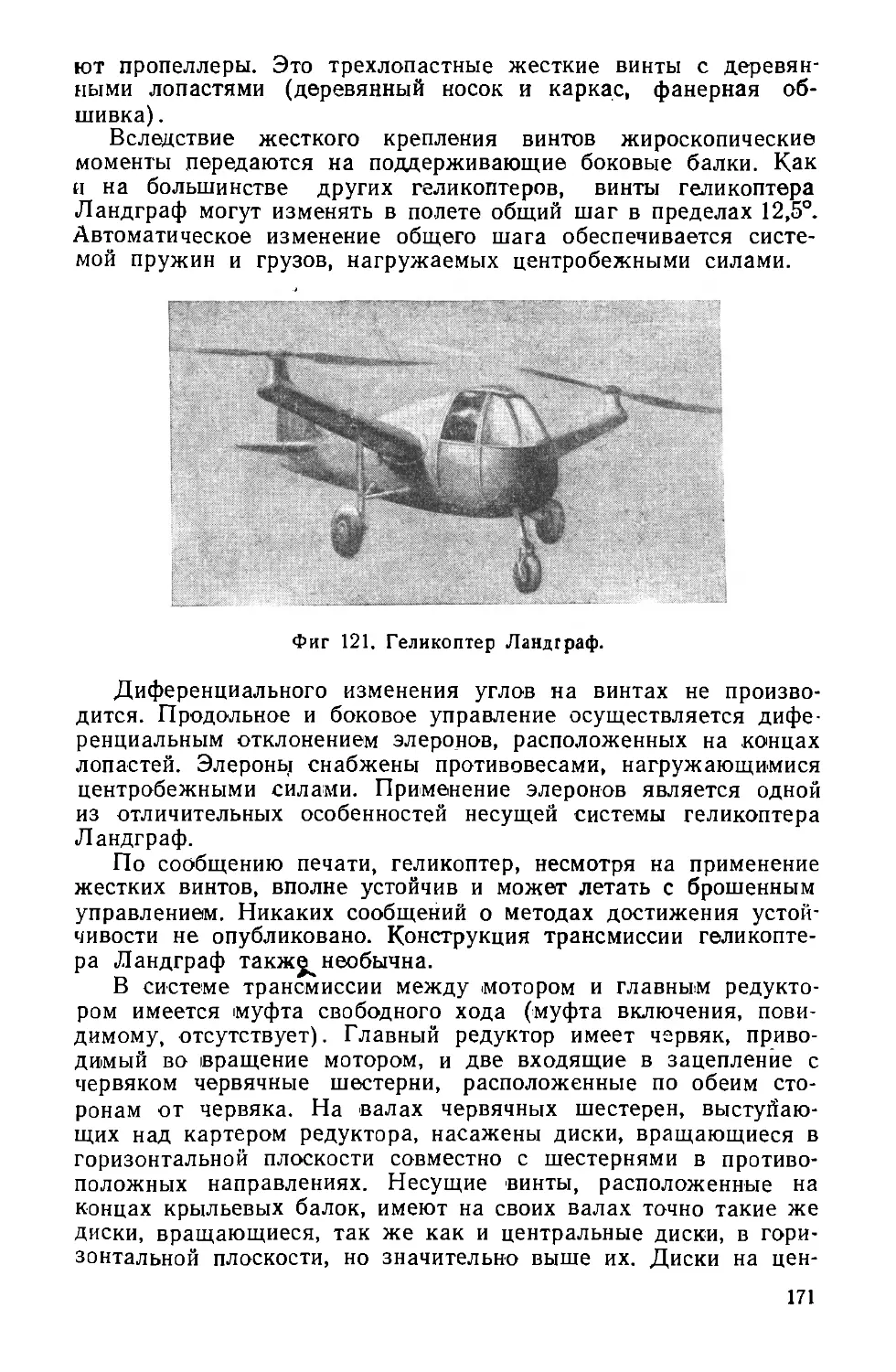
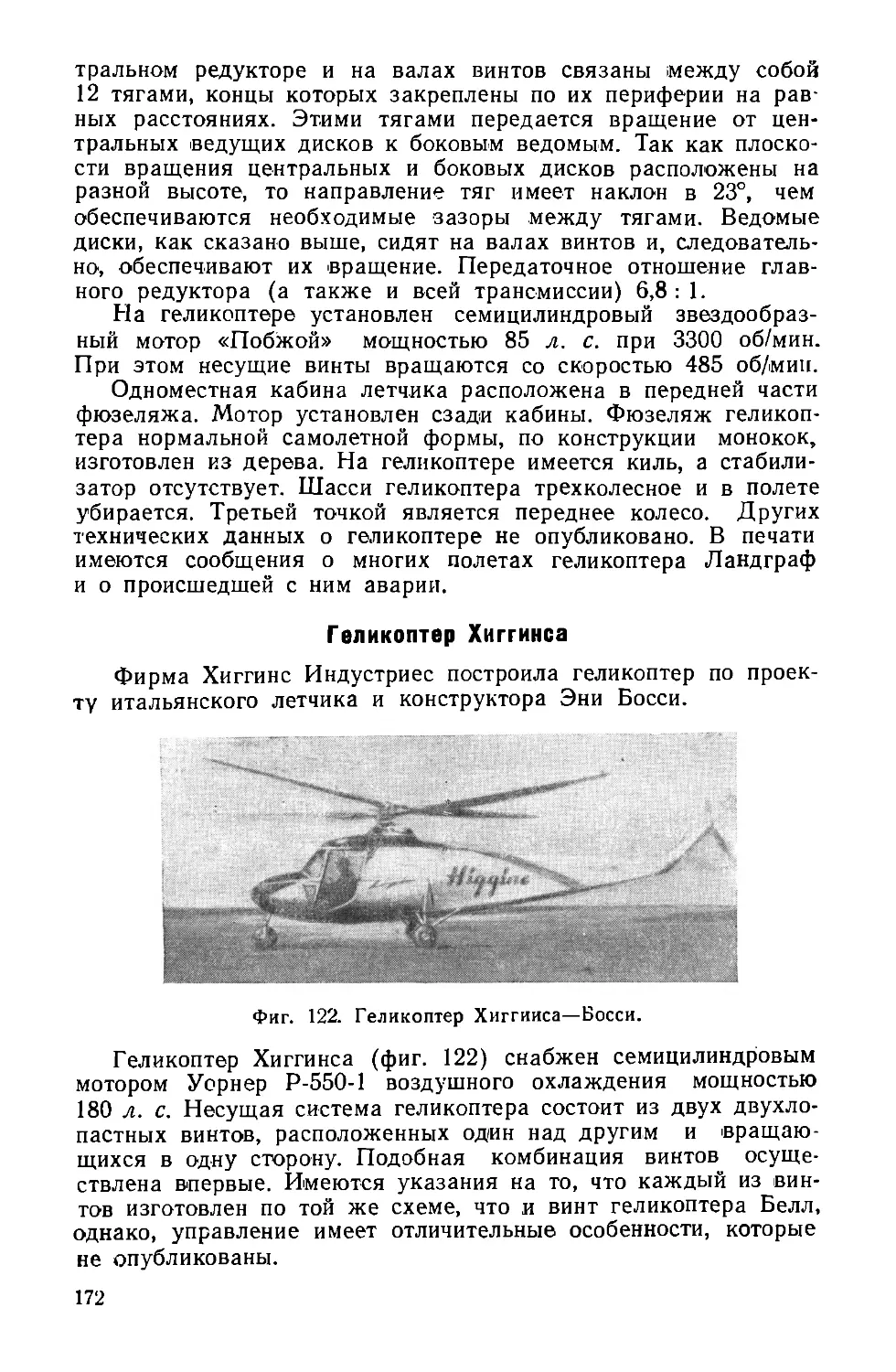
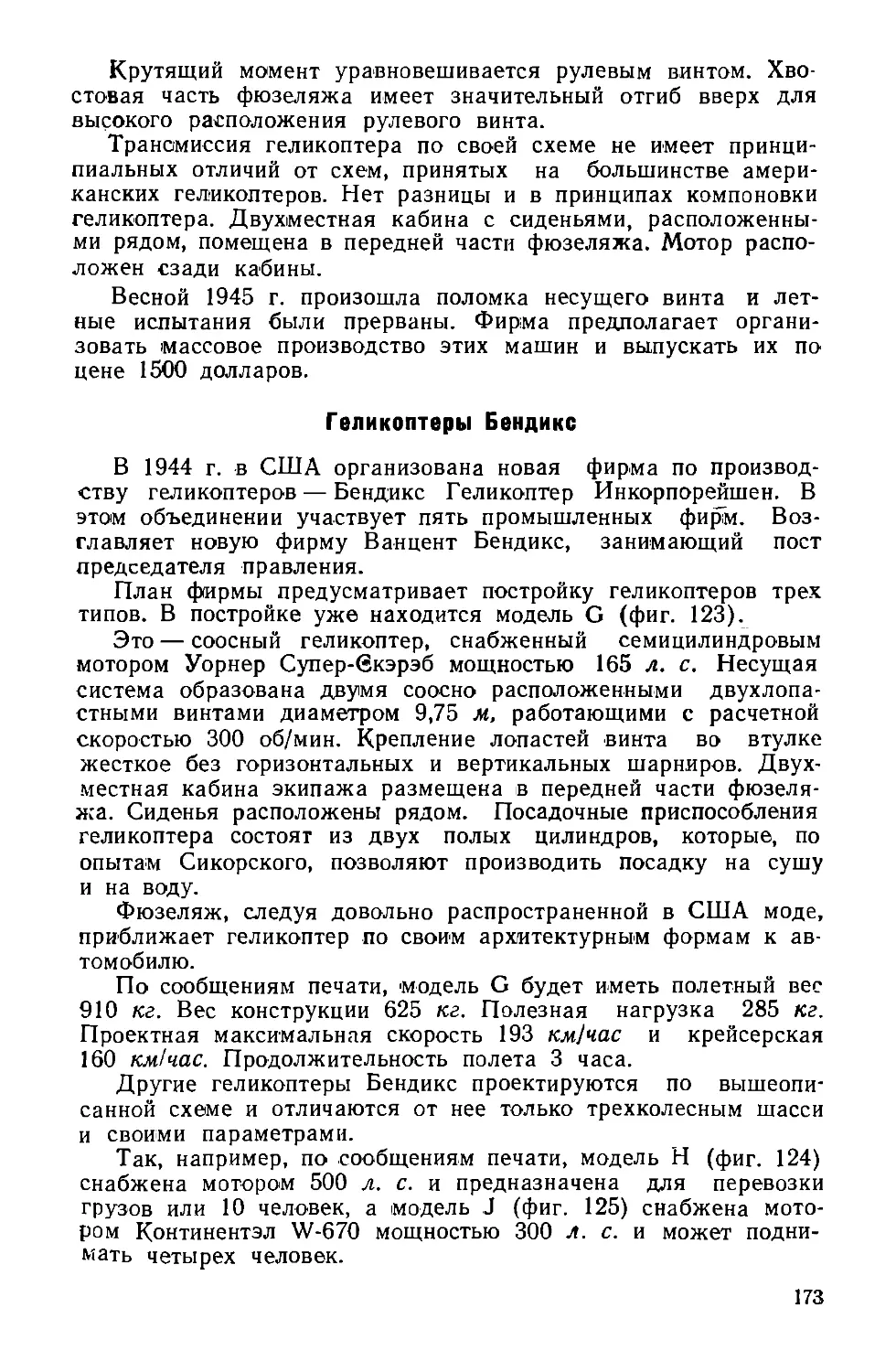
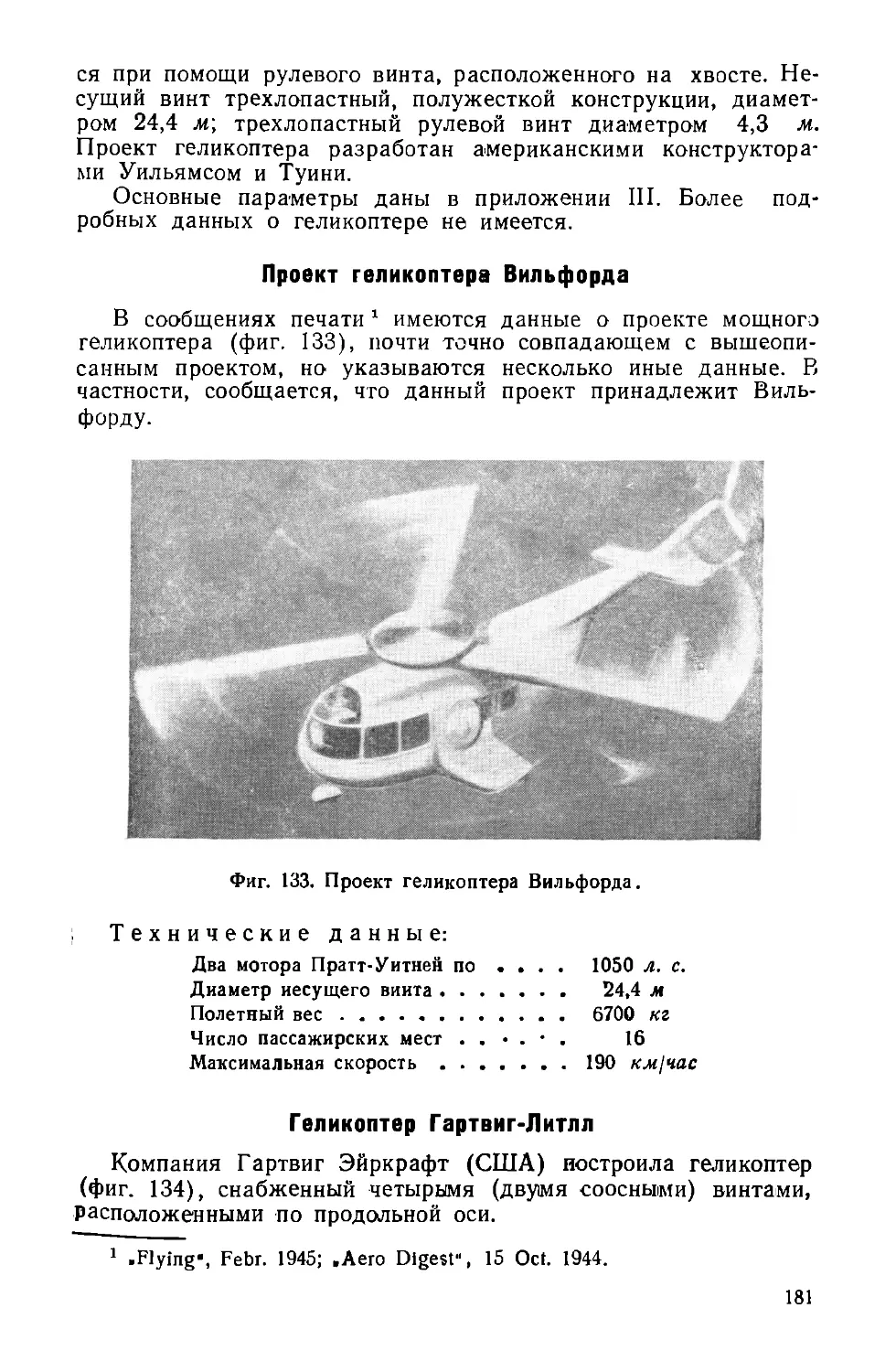
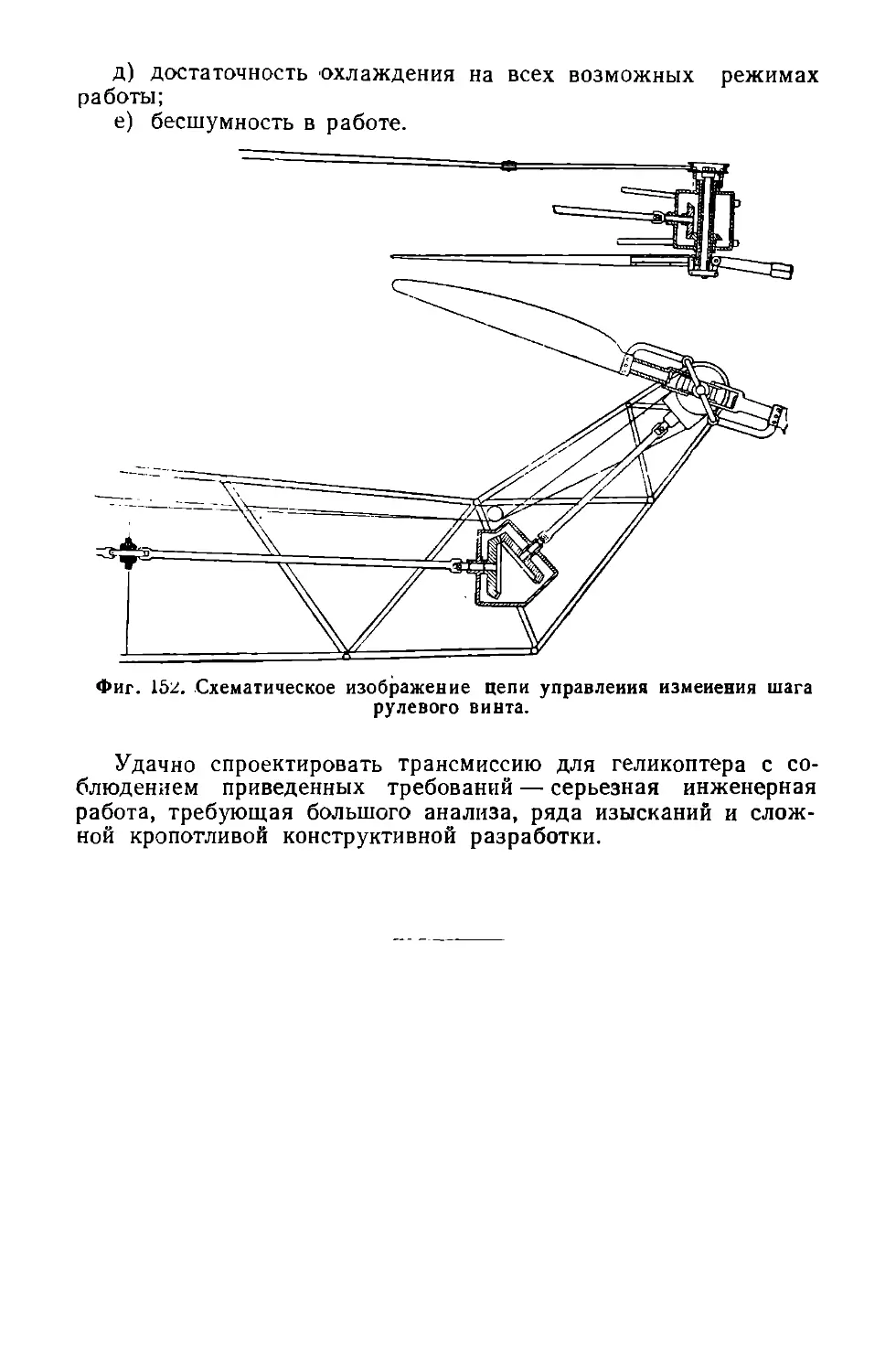
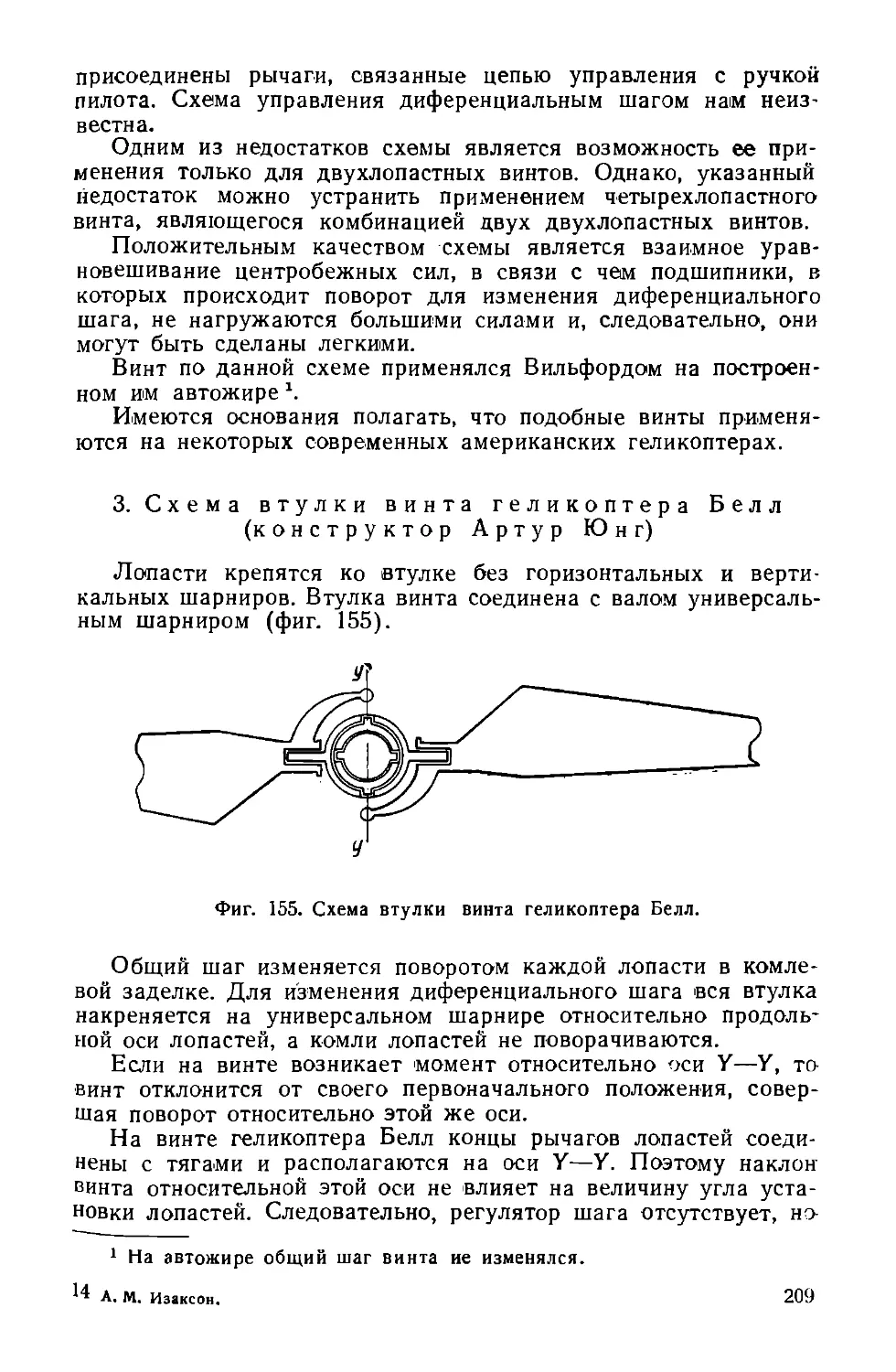
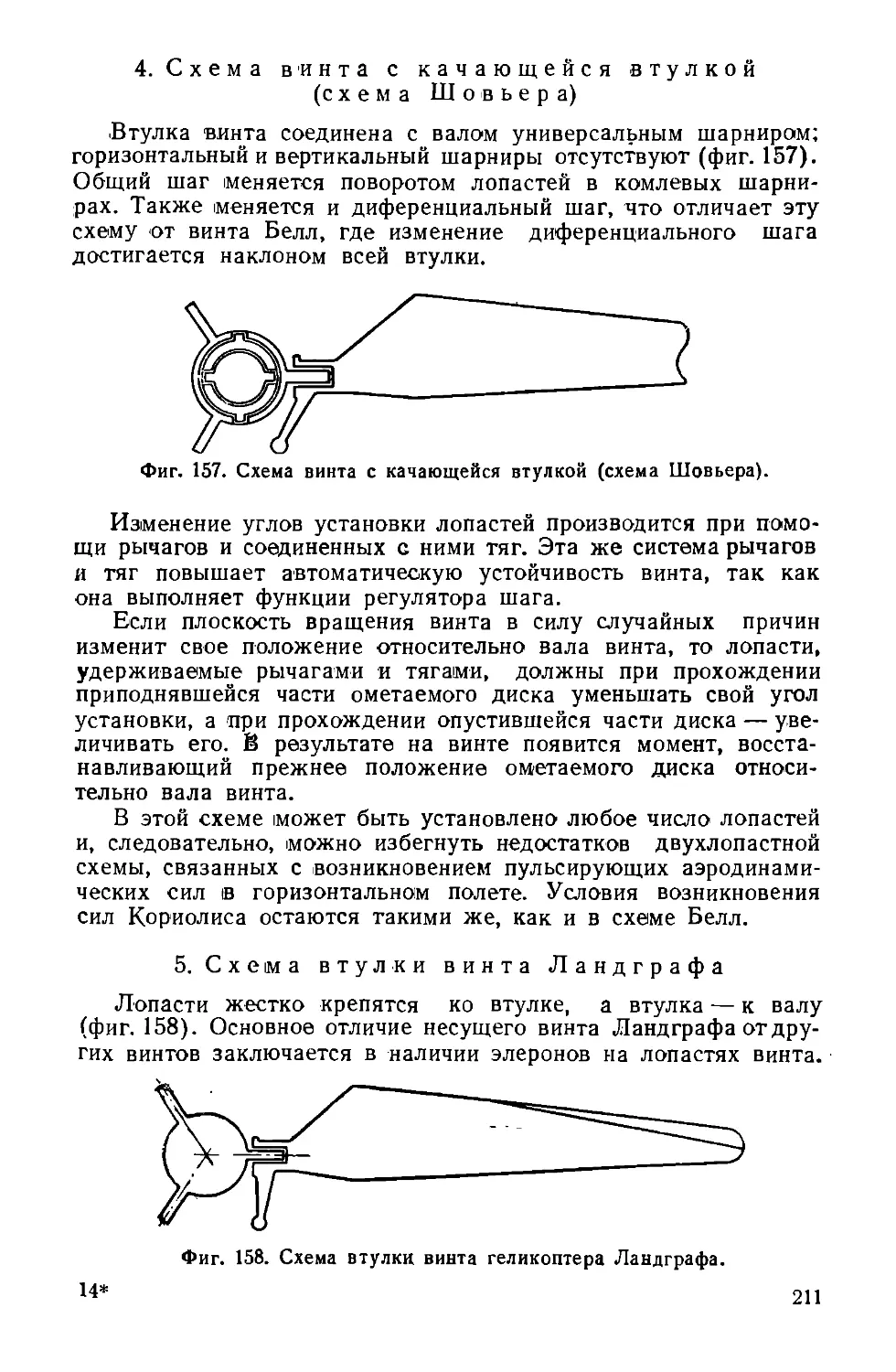
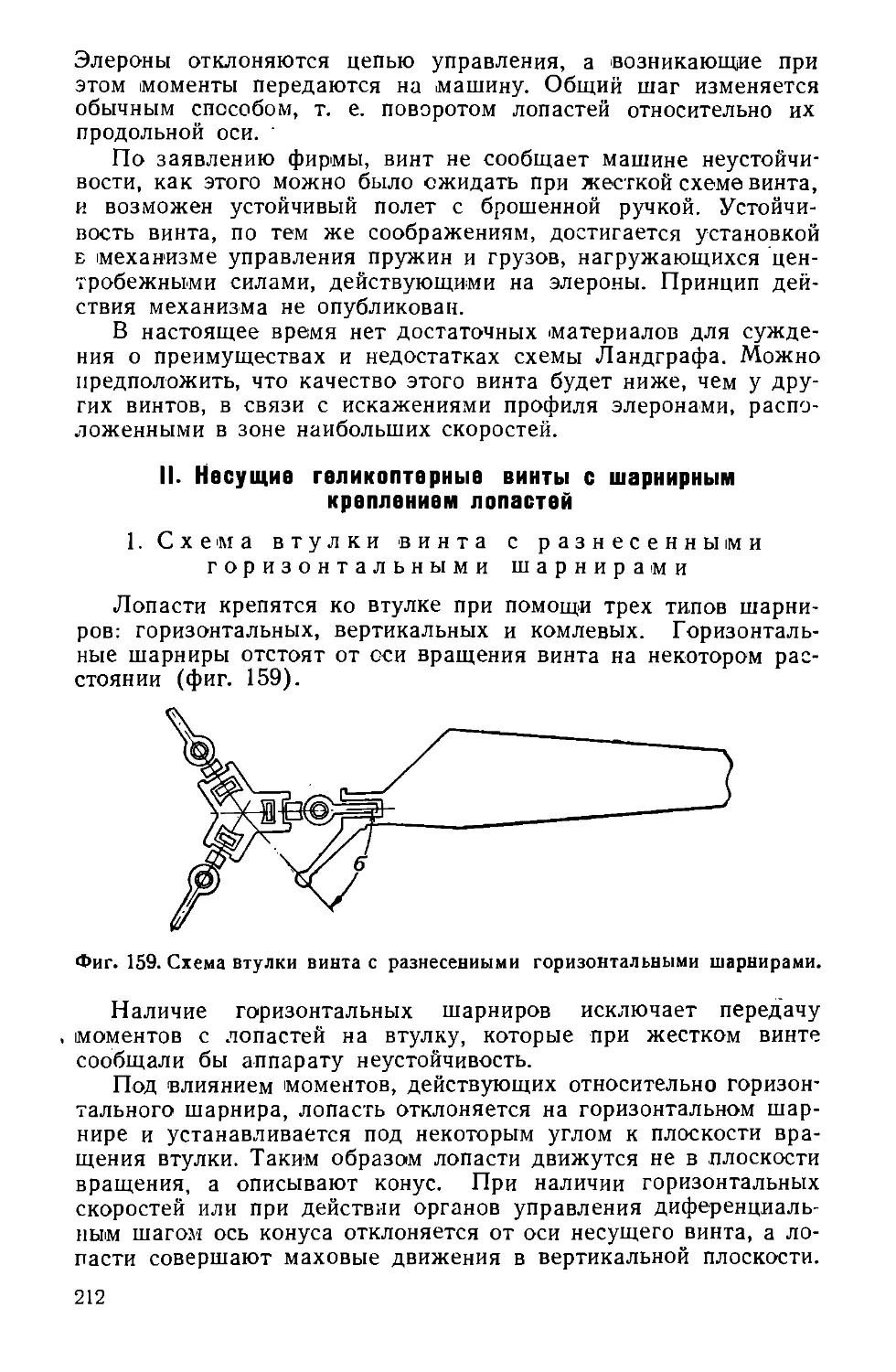
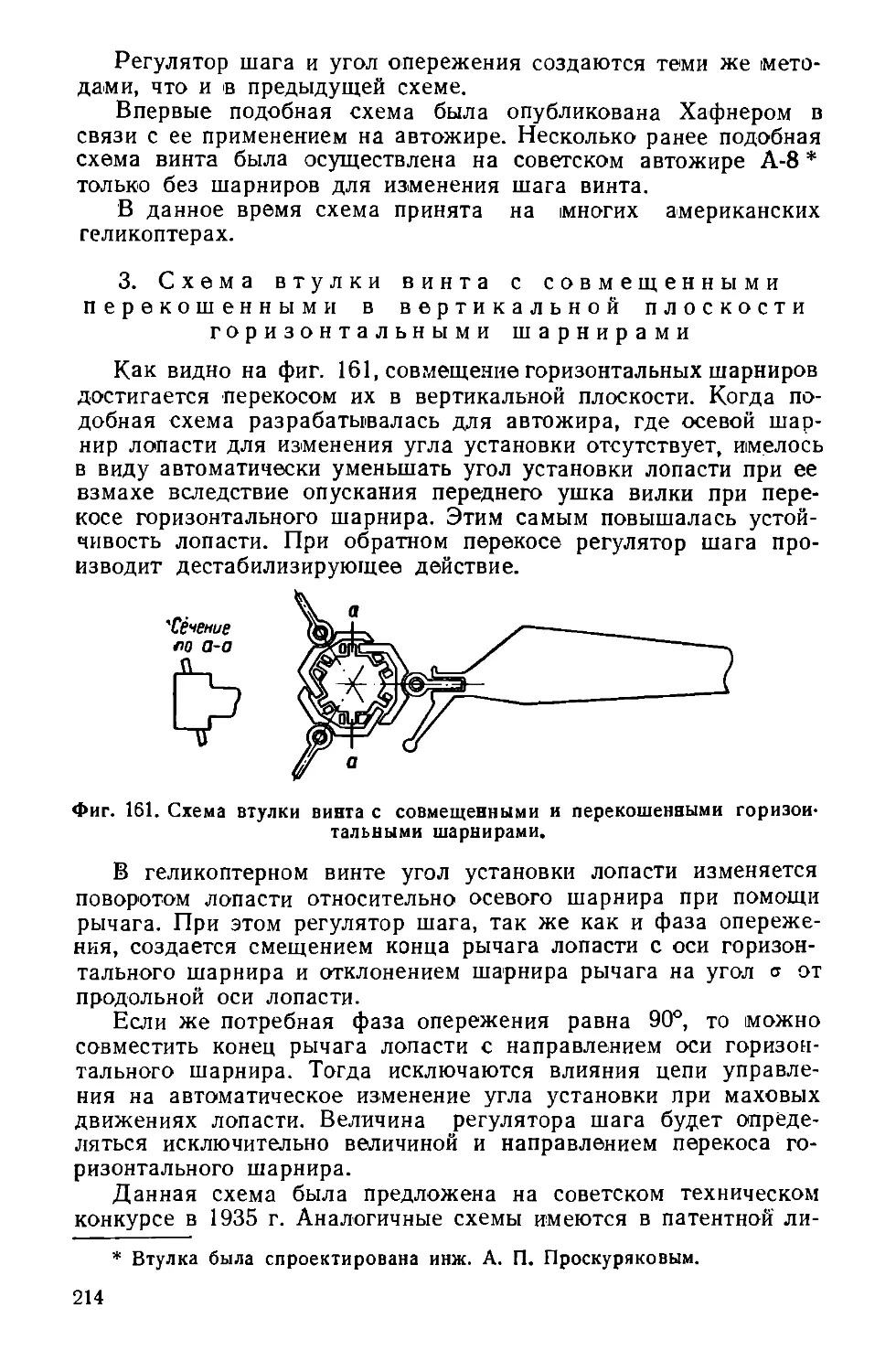
Текст
«л»
О ь Q Р о и ГИЗ
I 9 А ?
A. M. ИЗАКСОН
Г еликоптеры
ОБОРОНГИ 3
ГЛАВНАЯ РЕДАКЦИЯ АВИАЦИОННОЙ ЛИТЕРАТОРЫ
МОСКВА 1947
В книге показана история разви-
тия геликоптеров, начиная с XV в.
и до наших дней.
Много внимания уделено описани-
ям конструкций и летно-техническим
свойствам существующих геликоп-
теров. Кроме того, приведены общие
подробные статистические таблицы
геликоптеров. Отдельно даны описа-
ния типовых втулок несущих вин-
тов и органов управления.
К описаниям большинства гели-
коптеров даны иллюстрации.
ПРЕДИСЛОВИЕ
Книга «Геликоптеры» вышла в свет в 1931 г.1 За прошед-
шие 15 лет в общей проблеме геликоптера произошли коренные
изменения.
В момент выхода в свет первого издания книги геликопте-
ры, могущие подниматься в воздух, были редким явлением, вы-
зывавшим к себе всеобщее внимание и интерес. В настоящее
время имеются десятки аппаратов, построенных на протяжении
последних лет, успешно летающих или находящихся в процессе
летных испытаний и доводок.
В 1931 г. официальные рекордные показатели геликоптеров
были следующие:
Максимальная высота подъема . . 18 м
Максимальная продолжительность
полета без касания земли . . . 8 мнн. 45,5 сек.
Наибольший путь, пройденный без
касания земли..................... 1100 м
Спустя 15 лет в январе 1946 г. на геликоптере Сикорского
R-5 было установлено шесть международных рекордов:
Высоты............................. 6400 м
Скорости на дистанцию 20 км . . . 184,4 км/час
С контрольным грузом 500 кг\
скорости........................177 км/час
высоты.......... 4880 м
С контрольным грузом 750 кг-.
скорости........................168,9 км/час
высоты........ 3355 км
Современные геликоптеры прекрасно можно характеризо-
вать следующими двумя фактами.
На геликоптере Сикорского R-6 летчик с пассажиром пере-
летел без посадки расстояние 623 км, пробыв в воздухе
4 час. 55 мин. При перелете они пересекли Аллеганские горы
на высоте 1524 м; средняя скорость полета была 127 км/час,
несмотря на сильный встречный ветер.
Второй, известный нам, случай — это переброска в Англию
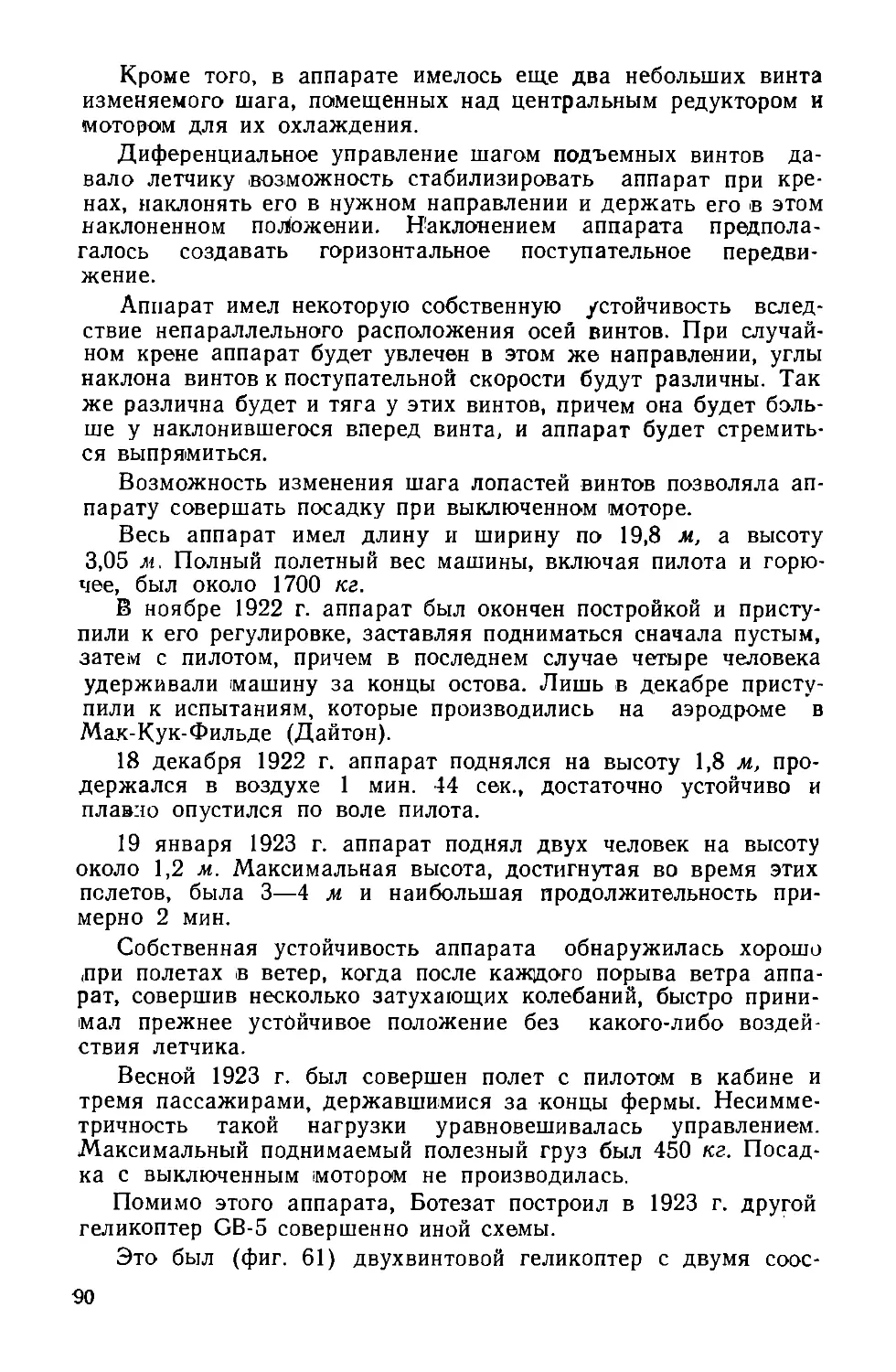
геликоптера Сикорского R-4, купленного в Америке. Геликоптер
1 См. А. М. Изаксон, Геликоптеры, изд. ГНТИ, 1931.
3
взлетел с аэродрома и совершил посадку на торговый корабль,
который не был специально для этого оборудован и вез свой
обычный груз. Во время плавания геликоптер несколько раз
взлетал и вновь садился на палубу. По прибытии в английский
порт геликоптер взлетел с корабля и приземлился на, площадке.
По сравнению с первым изданием книги в нов.ое издание
внесены следующие изменения:
1. Значительно сокращен описательный материал за старые
годы. Из старого материала оставлено лишь то, что сохранило
свое техническое значение для нашего времени и может быть
полезным при проектировании геликоптера.
2. Пересмотрена и значительно изменена прежняя разбивка
всей истории геликоптера на этапы. .
3. Введены новые разделы: а) применение геликоптера и
б) описание типового геликоптера и его основных элементов;
примерная классификация разных схем геликоптеров.
4. Подробный дополнительный материал приведен по гели-
коптерам, появившимся за период с 1931 г. по 1946 г. (совет-
ские геликоптеры, Фокке-Вульф FW-61, Бреге, американские,
немецкие и английские геликоптеры).
5. В качестве приложения в книге даются материалы:
а) о рациональной компоновке элементов трансмиссии ге-
ликоптера;
б) схемы втулок несущих геликоптерных винтов и меха-
низмов управления ими;
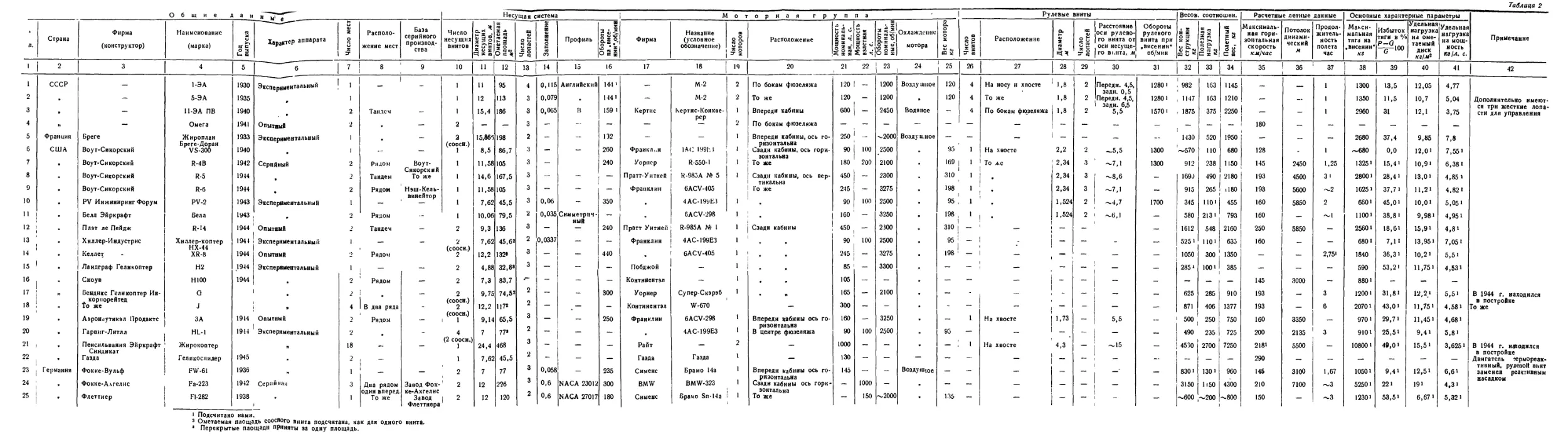
в) сводная статистическая таблица основных данных гели-
коптеров;
г) библиографический список.
В первом издании нашей книги уже отмечались чрезвычайно
интересные работы по геликоптерам в России за старые годы.
Как можно убедиться из приводимого в книге фактического
материала, заслуга в разрешении проблемы геликоптера и до-
стижении первых решающих успехов принадлежит СССР.
Этот факт уже отмечался в нашей печати.
Мы рассчитываем, что материал по данному вопросу, поме-
щаемый в новом издании нашей книги, должен надежно закре-
пить за Советским Союзом приоритет в разрешении проблемы
геликоптера.
При переработке нашей книги и подготовке ее ко второму
изданию большую помощь оказал один из старейших работни-
ков советского геликоптеростроения — инженер Виктор Павло-
вич Лаписов. Он подготовил в основном описание советских
геликоптеров, геликоптеров Фокке-Вульф и Бреге и американ-
ских геликоптеров за период 1940—1946 гг. За эту помощь, а
также за ряд ценных советов по другим разделам книги счи-
таю приятным долгом принести ему большую благодарность.
Декабрь 1946 г.
А. М. Изаксон
ВВЕДЕНИЕ
Слово геликоптер в переводе на русский язык буквально
означает — аппарат, снабженный винтовым крылом (грече-
ское gelikos — винт и pteron — крыло).
Геликоптер является летательным аппаратом тяжелее воз-
духа, подымающимся при помощи одного или нескольких воз-
душных винтов, установленных на нем и приводимых во вра-
щение одним или несколькими моторами. Поддержание в воз-
духе, так же как и спуск геликоптера, осуществляется этим же
несущим винтом.
Как и всякая летательная машина, геликоптер должен обла-
дать определенной маневренностью (повороты, виражи и пр.).
Естественно, что помимо поддерживающего винта геликоптер
должен иметь органы, которые позволяли бы ему совершать
требуемые маневры.
Основные возможные летные свойства геликоптера выте-
кают из принципиальной схемы его устройства. Анализируя
очень большое количество самых разнообразных вариантов ге-
ликоптера (проектов и построенных машин), можно эти свой-
ства свести к перечню летных возможностей геликоптера.
Геликоптер имеет возможность:
1. Взлетать вертикально прямо с места без предваритель-
ного разбега.
2. Неподвижно держаться в воздухе на той или иной тре-
буемой высоте без какого-либо горизонтального перемещения,
как бы вися над данным местом.
3. Передвигаться поступательно в горизонтальной плоско-
сти, подобно самолету, строго горизонтально или же вместе с
тем набирая или теряя высоту.
4. Совершать повороты в любом направлении как на ходу,
так и при висении на месте.
5. Производить вертикальную посадку без всякого пробега
как в нормальной обстановке, так и в случае вынужденной по-
садки при остановившихся моторах.
Из этого перечня основных летных свойств геликоптера вид-
но его отличие от самолета.
В то время как для подъема и посадки самолета нужен зна-
чительный участок ровной поверхности для разбега и пробега,
Для геликоптера необходимость в этом отпадает.
5
Самолет может держаться в воздухе только вследствие по-
ступательного передвижения и не может «висеть» неподвижно
над данным местом. Геликоптеру это свойство вполне доступно.
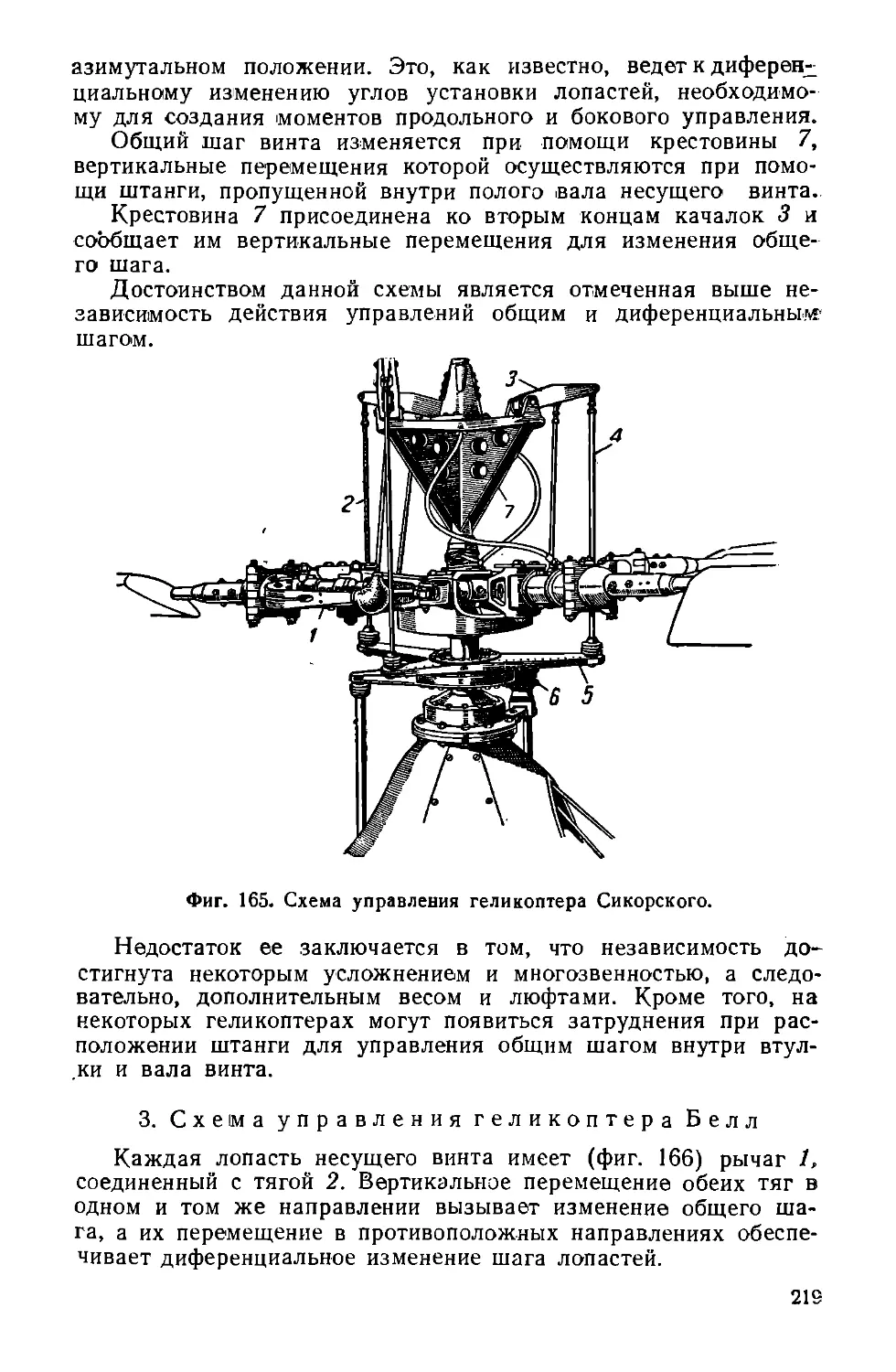
В отношении маневренности в виде высоких вертикальных
скоростей взлета и самых разнообразных маневров на месте
(как-то: движения во всех направлениях, поворот на месте и
пр.) геликоптер, несомненно, обладает рядом преимуществ по
сравнению с самолетом.
Указанные выше специфические летные качества геликопте-
ра делают заманчивым его применение в военно-воздушном
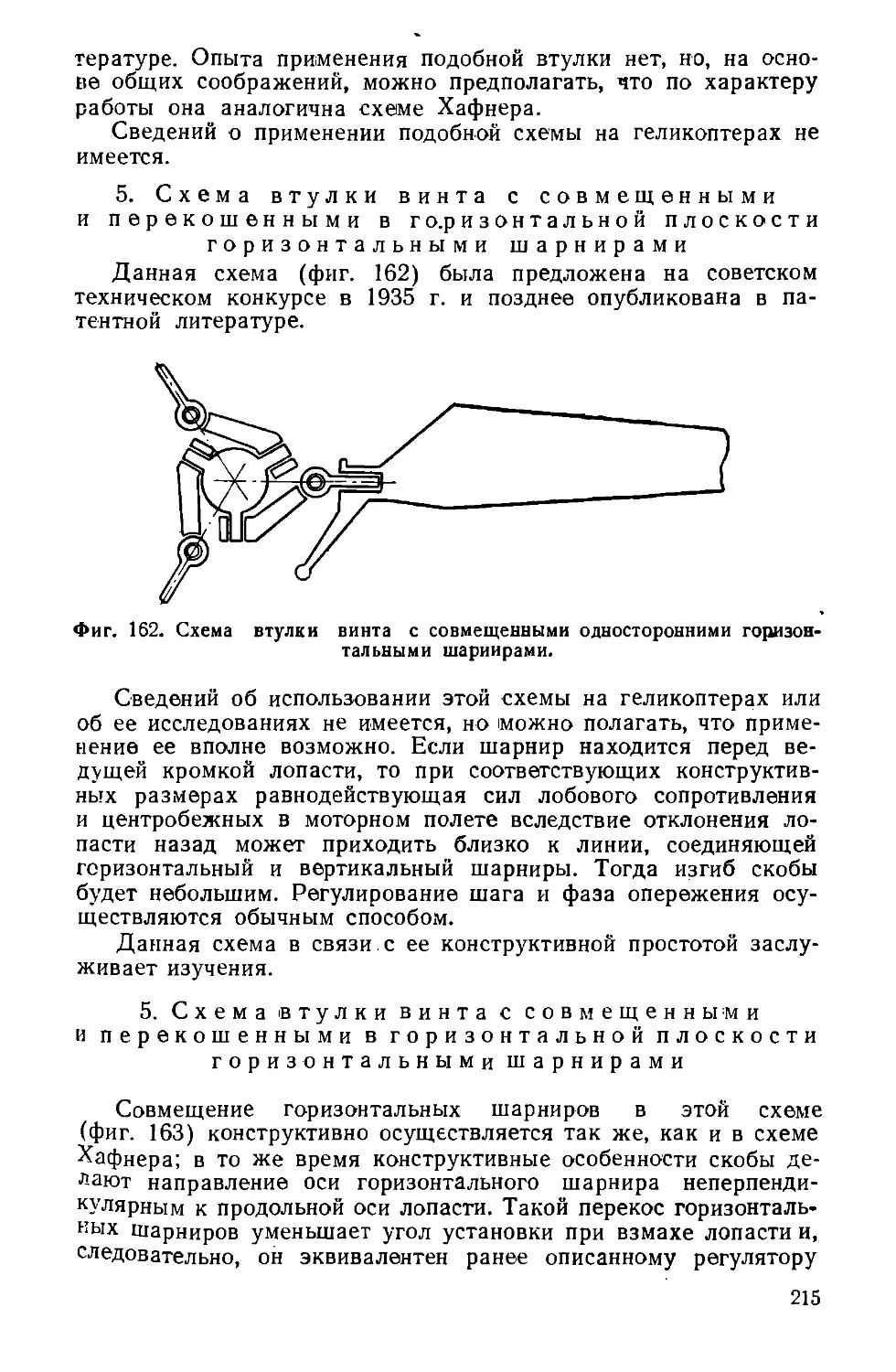
флоте и в гражданской авиации. Это обстоятельство, несомнен-
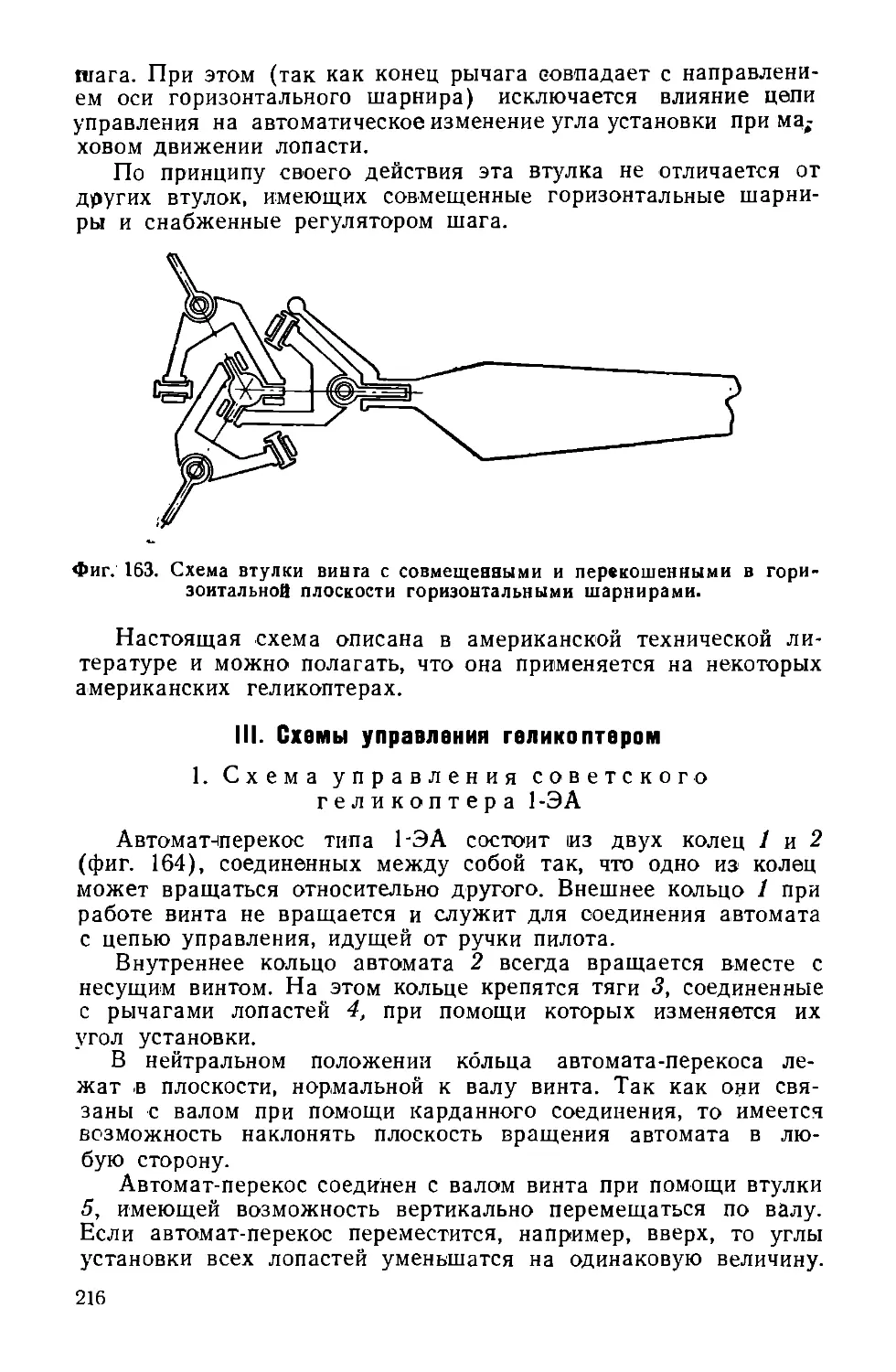
но, сыграло большую роль в поддержании интереса к проблеме
геликоптера.
История создания аппарата типа геликоптера, насчитываю-
щая свыше 450 лет, чрезвычайно интересна и поучительна с
точки зрения общего технического прогресса.
На общее направление работ по созданию геликоптера и
усиление внимания к этой проблеме среди широких техниче-
ских кругов значительную роль сыграли правительственные
субсидии, призы и отдельные поощрения, а также назначаемые
и широко рекламируемые конкурсы. Из таких конкурсов 1 сле-
дует отметить испанский 1921 г., английский 1924—1925 гг. и
французский 1930 г.
При попытке просуммировать весь имеющийся материал по
геликоптерам можно видеть множество самых разнообразных
проектов и предложений, большое количество разного типа
моделей (летающих и демонстрационных) и, наконец, значи-
тельное количество осуществленных аппаратов. Далеко не все
эти работы представляли технический интерес.
На начальном этапе внимание сосредоточивалось на том,
чтобы добиться лишь подъема и спуска аппарата, доказав этим
осуществимость самого принципа геликоптера. В последующий
период требования к геликоптеру стали значительно сложнее.
Аппарат должен был не только взлетать и опускаться, но быть
устойчивым, обладать необходимой маневренностью и прочими
свойствами, могущими характеризовать летающую машину.
Последние годы явились периодом успехов в развитии геликоп-
теров.
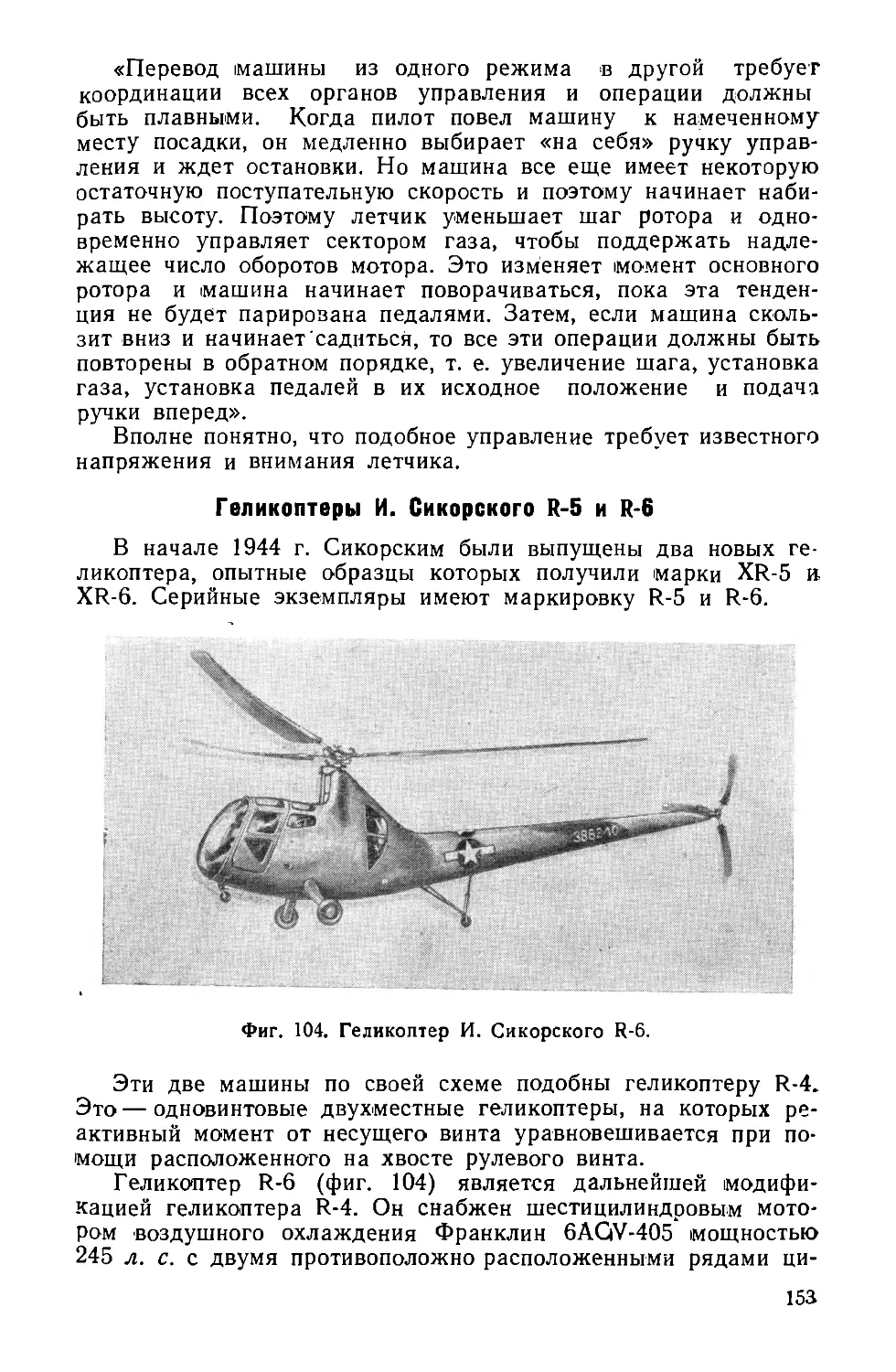
Обилие успешно летающих геликоптеров (аппараты Сикор-
ского R-4, R-5 и R-6, Белл, Пясецкого, Хиллера и многих дру-
гих в США, геликоптер «Омега» И. П. Братухина в СССР,
геликоптеры Фокке-Вульфа и Флеттнера в Германии и т. п.),
серийный выпуск ряда геликоптеров, большое количество аппа-
ратов, находящихся в стадии проектирования и постройки,
первые благоприятные результаты практического применения
геликоптеров в армии и в гражданской авиации — все это в
достаточной мере характеризует масштабы работ по строи-
тельству геликоптеров за последнее время.
1 Подробнее см. книгу А. М. Изаксон, Геликоптеры, изд. ГНТИ, 193;.
6
Однако предстоит исключительно большая работа по даль-
нейшему усовершенствованию геликоптера, упрощению его
конструкции, улучшению устойчивости и управляемости, по-
вышению безопасности, упрощению и облегчению пилотиро-
вания на нем, повышению его летных качеств и дальнейшему
расширению его применения. Совершенствование геликоптера
потребует большой затраты энергии и сил, глубоких теорети-
ческих изысканий, больших экспериментальных исследований
и обстоятельного изучения всего накопленного практического
опыта по разрешению проблемы геликоптера. Это, в свою
очередь, вызывает необходимость основательного знакомства
с обильным историческим материалом по геликоптерам.
Нам представляется целесообразным и правильным историю
развития геликоптера разбить на следующие этапы.
I. Начальный этап в
истории геликоптера
II. Переломный этап в
истории геликоптера
III. Первые успехи
IV. Проблема геликоп-
тера в основном разре-
шена
V. Дальнейшее успеш-
ное развитие и усовер-
шенствование геликоп-
теров. Накопление опыта
практического примене-
ния
Охватывает период с XV в. до начала XX в.
Отдельные высказывания об идее геликоптера.
Первые эскизные наброски, предложения и по-
луфантастические проекты. Демонстрационные и
летающие модели для доказательства принципи-
альной осуществимости геликоптера.
Охватывает период с начала XX в. до войны
1914 г. Большое количество проектов геликопте-
ров. Первые попытки построить геликоптер в
натуральную величину (Леже, Корню, Бреге и
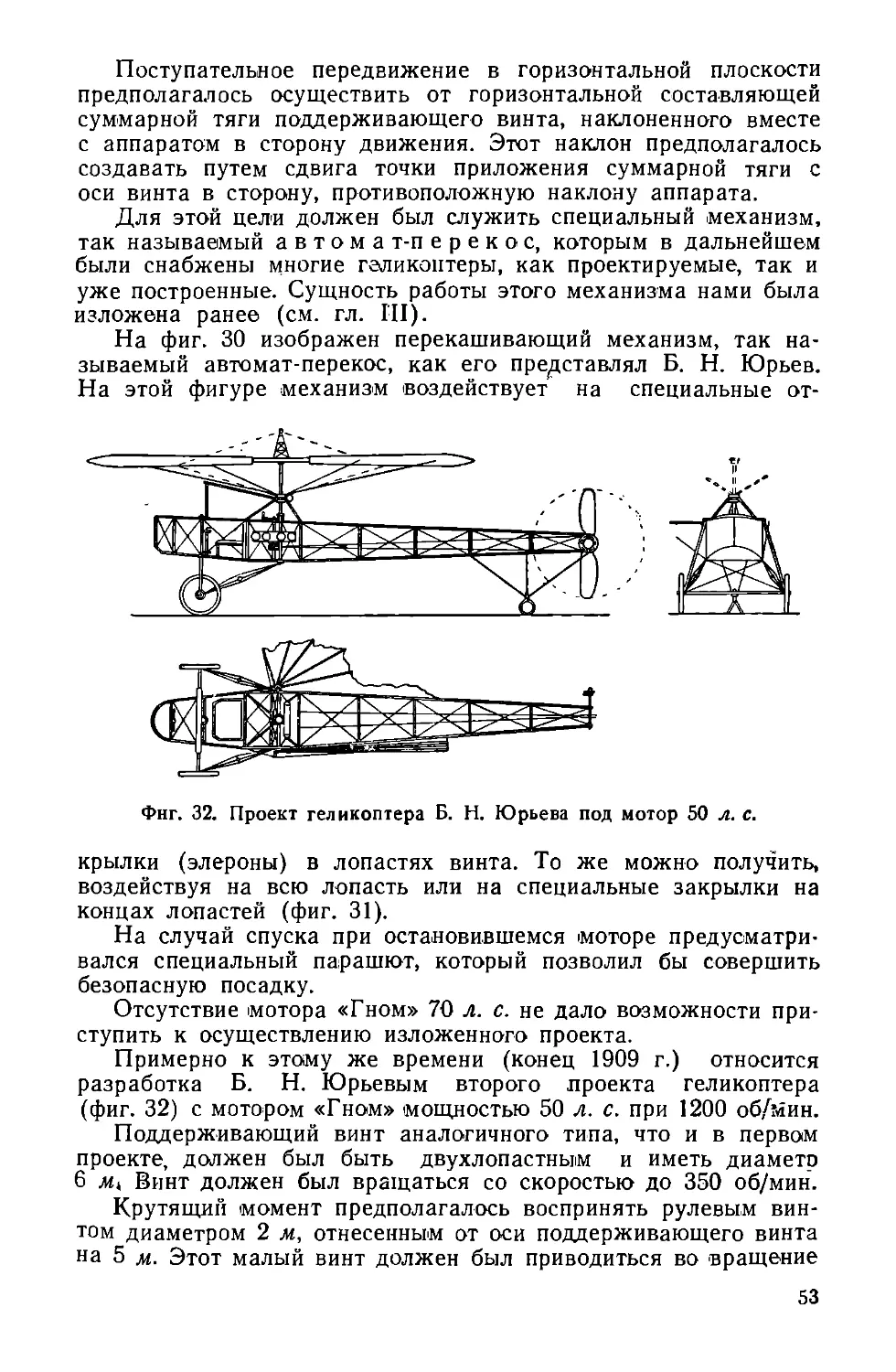
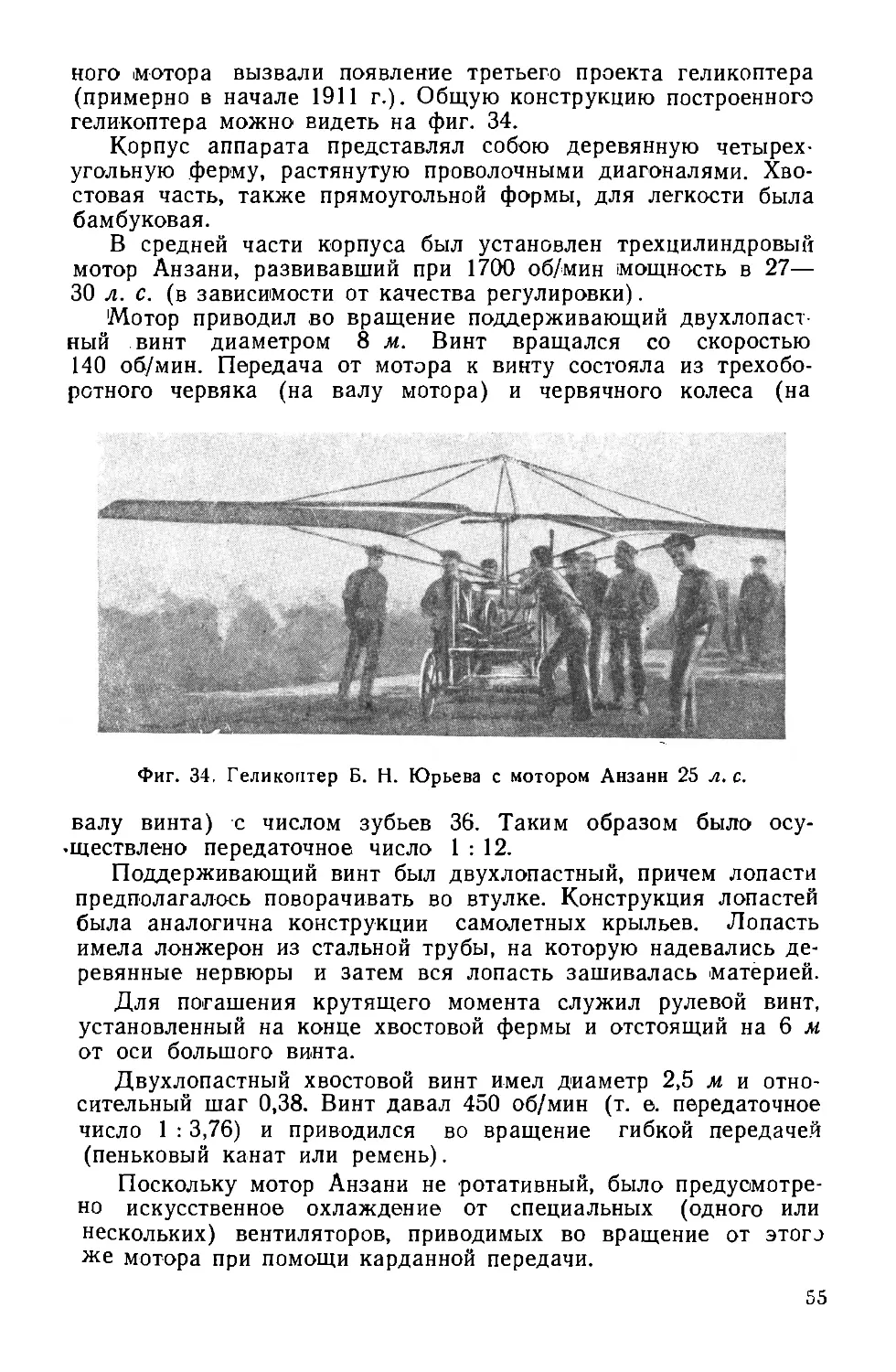
Рише, Б. Н. Юрьев, И. Сикорский и др.).
Появление первых теоретических и экспери-
ментальных работ по геликоптерам.
Охватывает период 1914—1930 гг. Расширение
работ по геликоптерам за время 1914—1918 гг.
Привязные геликоптеры (Петроцци, Карман, Цу-
ровец и др.).
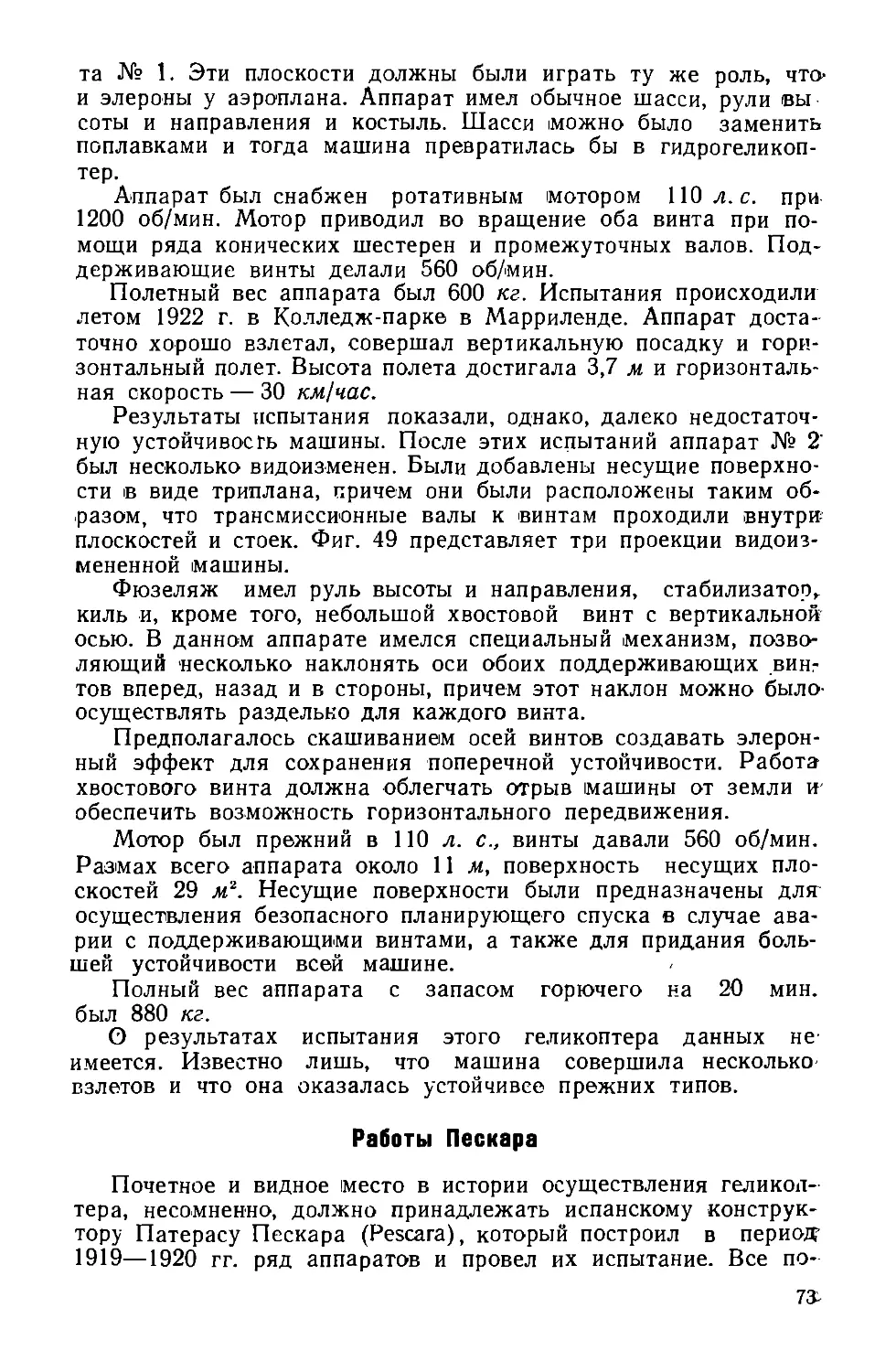
Первые геликоптеры, поднимавшиеся в воздух
(Г. Берлинер, П. Пескара, Э. Эмишен, Г. Ботезат
и др.).
Охватывает период 1930—1940 гг. Значитель-
ный размах исследовательских работ. Создание
экспериментальных геликоптеров (геликоптеры
Асканио, Бреге-Доран, Фокке-Вульф FW-61, со-
ветские геликоптеры 1-ЭА, 5-ЭА и 11-ЭА), обла-
дающих всеми специфическими летными качест-
вами, присущими аппаратам этого типа. Систе-
матические полеты. Завоевание новых рекордов
Накопление конструкторского и эксплоатацион-
ного опытов. Развертывание теоретических
изысканий и экспериментальных исследований.
Охватывает период с 1940 г. по настоящее
время. Широкое развертывание работ по гели-
коптерам. Ряд новых опытных машин, осущест-
вляемых по различным принципиальным схемам
(американские геликоптеры Сикорского R-4, R-5
и R-6, Пясецкого, Белл, Хиллер, Ландграф, совет-
ский геликоптер И. П. Братухина: „Омега*).
Серийный выпуск геликоптеров. Обилие новых
7
проектов и новых опытных аппаратов. Первые
шаги по практическому применению геликопте-
ра в армии, морском флоте и гражданской авиа-
ции.
Организация новой геликоптерной специаль-
ности в учебных заведениях, специальной школы
летчиков, дальнейший расцвет науки н экспери-
ментальных исследований в области геликопте-
ров.
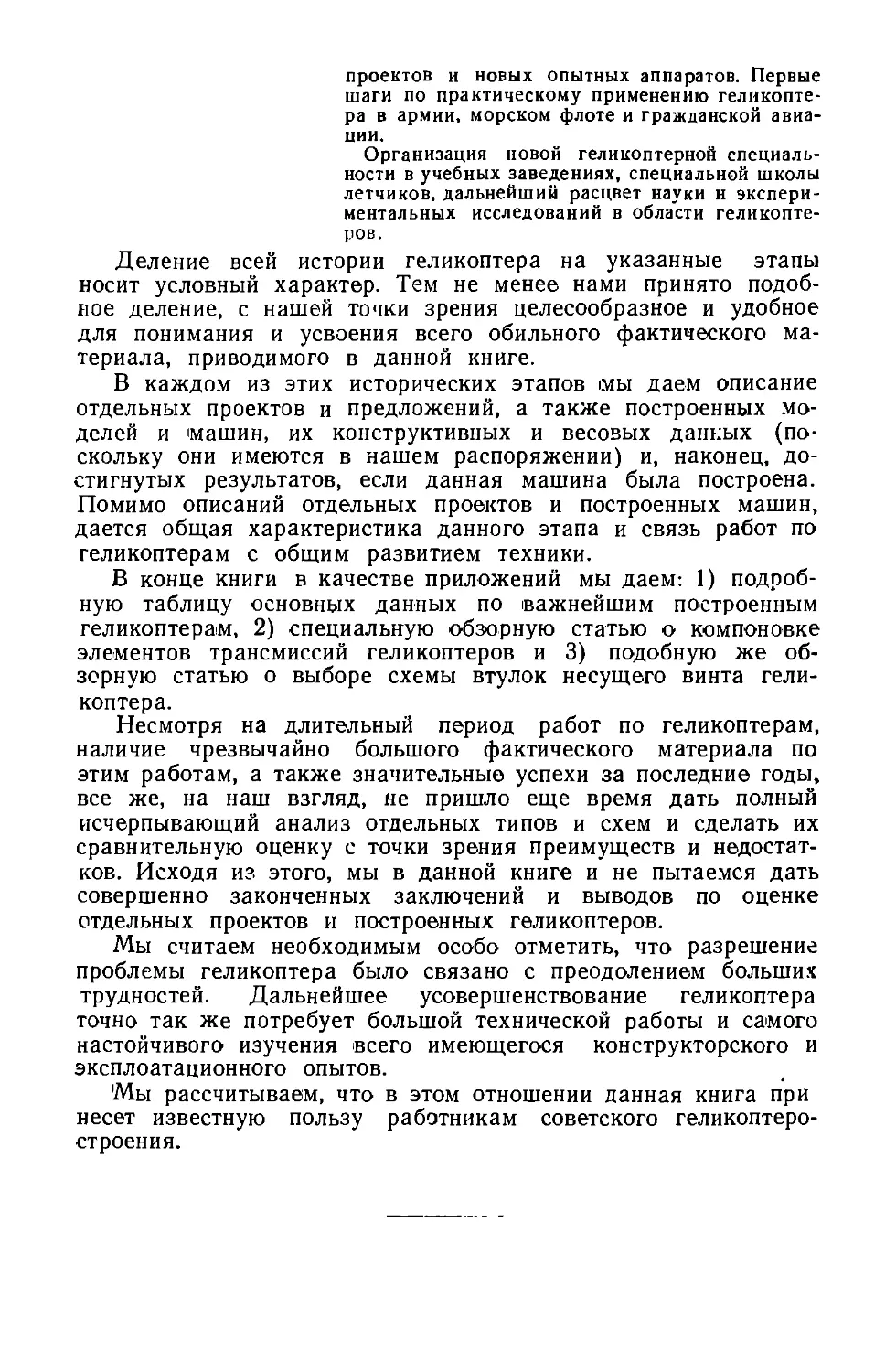
Деление всей истории геликоптера на указанные этапы
носит условный характер. Тем не менее нами принято подоб-
ное деление, с нашей точки зрения целесообразное и удобное
для понимания и усвоения всего обильного фактического ма-
териала, приводимого в данной книге.
В каждом из этих исторических этапов мы даем описание
отдельных проектов и предложений, а также построенных мо-
делей и машин, их конструктивных и весовых данных (по-
скольку они имеются в нашем распоряжении) и, наконец, до-
стигнутых результатов, если данная машина была построена.
Помимо описаний отдельных проектов и построенных машин,
дается общая характеристика данного этапа и связь работ по
геликоптерам с общим развитием техники.
В конце книги в качестве приложений мы даем: 1) подроб-
ную таблицу основных данных по важнейшим построенным
геликоптерам, 2) специальную обзорную статью о компоновке
элементов трансмиссий геликоптеров и 3) подобную же об-
зорную статью о выборе схемы втулок несущего винта гели-
коптера.
Несмотря на длительный период работ по геликоптерам,
наличие чрезвычайно большого фактического материала по
этим работам, а также значительные успехи за последние годы,
все же, на наш взгляд, не пришло еще время дать полный
исчерпывающий анализ отдельных типов и схем и сделать их
сравнительную оценку с точки зрения преимуществ и недостат-
ков. Исходя из этого, мы в данной книге и не пытаемся дать
совершенно законченных заключений и выводов по оценке
отдельных проектов и построенных геликоптеров.
Мы считаем необходимым особо отметить, что разрешение
проблемы геликоптера было связано с преодолением больших
трудностей. Дальнейшее усовершенствование геликоптера
точно так же потребует большой технической работы и самого
настойчивого изучения всего имеющегося конструкторского и
эксплоатационного опытов.
Мы рассчитываем, что в этом отношении данная книга при
несет известную пользу работникам советского геликоптеро-
строения.
Глава I
ПРИМЕНЕНИЕ ГЕЛИКОПТЕРА. ОБЩИЕ СООБРАЖЕНИЯ О СФЕРЕ
ПРИМЕНЕНИЯ И ПЕРВЫЕ ФАКТИЧЕСКИЕ ДАННЫЕ
Специфические летные качества геликоптера определяют в
полной мере сферу возможного и наиболее рационального его
применения в военной и гражданской авиации. Свойства гели-
коптера совершать вертикальный взлет без разбега и такую
же отвесную посадку без пробега делают чрезвычайно удоб-
ным его применение в прифронтовой полосе, при частых пере-
базированиях, при отсутствии подходящих аэродромных пло-
щадок и т. п.
Эта особенность геликоптера, в сочетании с возможностью
неподвижного «висения» над определенной точкой и осуществ-
ления при этом любых поворотов на месте, дает возможность
использовать его в качестве артиллерийского наблюдателя и
корректировщика, т. е. выполнять ту роль, которую до послед-
него времени выполняют привязные аэростаты.
Для этих целей геликоптер будет, несомненно, значительно-
удобнее и рациональнее, чем аэростаты (возможность «висеть»
на месте и «бороться» с ветром, компактность и простота в
транспортировке и обслуживании, меньшая уязвимость от не-
приятельского огня).
Эти особенности делают достаточно заманчивым и возмож-
ным применение геликоптера для фотосъемки, высадки в тылу
неприятеля своих агентов и разведчиков, связи с отрядами за
линией фронта, переброски предметов вооружения и боепри-
пасов, а также людей в труднодоступные места (в частности,,
в горах).
Для оказания помощи экипажам самолетов при авариях
и посадках в недоступных местах, для срочной вывозки из та-
ких мест больных или раненых геликоптер также может най-
ти широкое применение. Чрезвычайно ценным может быть
использование геликоптера для нужд войсковой связи штабов
непосредственно с частями, для срочной переброски команд-
ного состава, для передачи донесений и распоряжений, а также-
Для прокладывания линий связи в непроходимых мевтах.
9
Во флоте геликоптер может быть достаточно успешно ис-
пользован при охране морских караванов в качестве развед-
чика (для наблюдения за подводными лодками противника и
борьбы с ними), поскольку геликоптер может работать даже с
небольшого корабля.
Точно так же геликоптер может найти применение в бере-
говой охране (патрулирование побережья, спасание на море,
разведка, связь).
Летные особенности геликоптера делают возможным широ-
кое применение его в гражданской авиации для охраны нефте-
проводов и электросетей, противопожарного наблюдения за
лесными массивами, разведки движения рыбы, ледовой раз-
ведки в арктических экспедициях, в сельском хозяйстве
(борьба с сельскохозяйственными вредителями). Геликоптер
применим для почтово-пассажирского сообщения на малые
расстояния с посадкой в труднодоступных или гористых ме-
стах, где отсутствуют пригодные аэродромные площадки, а
также внутри больших городов.
Просуммировать весь наличный, весьма небольшой, опыт
практического использования геликоптеров, к сожалению, за-
труднительно, так как сведения публикуются скупо и в общих
выражениях.
Имеются сведения, что некоторое количество геликоптеров
Сикорского YR-4 состояло на вооружении 3-й американской
воздушной армии и принимало участие в воздушно-десантных
операциях в юго-восточной Азии (Бирма). Эти геликоптеры
использовались для эвакуации раненых из труднодоступных
мест в джунглях, перевозки крови в полевые госпитали, для
связи и корректировки артиллерийской стрельбы.
Специальный штат пилотов, прошедших подготовку на за-
воде Сикорского, прибыл в Бирму в январе 1944 г. одновремен-
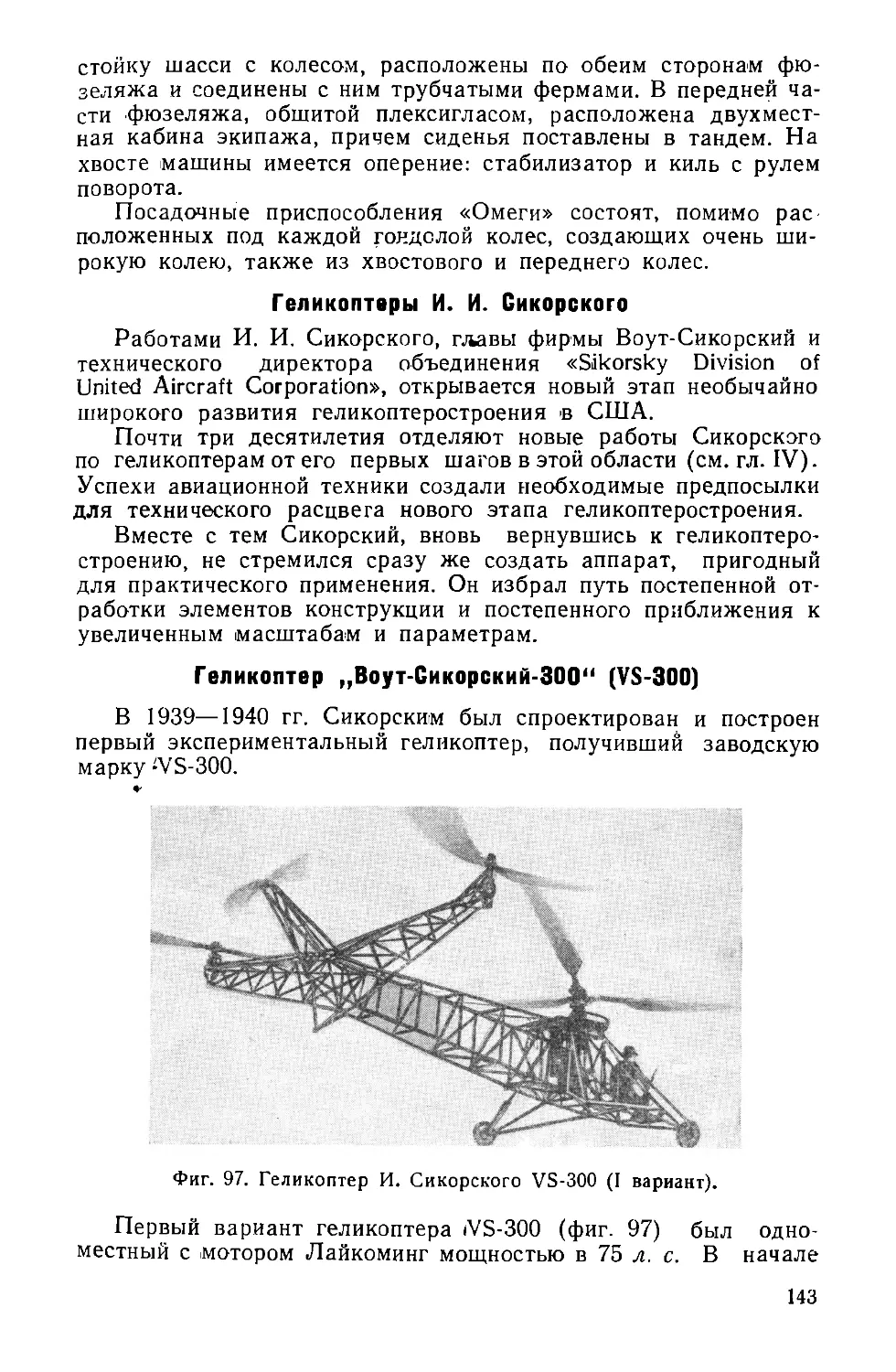
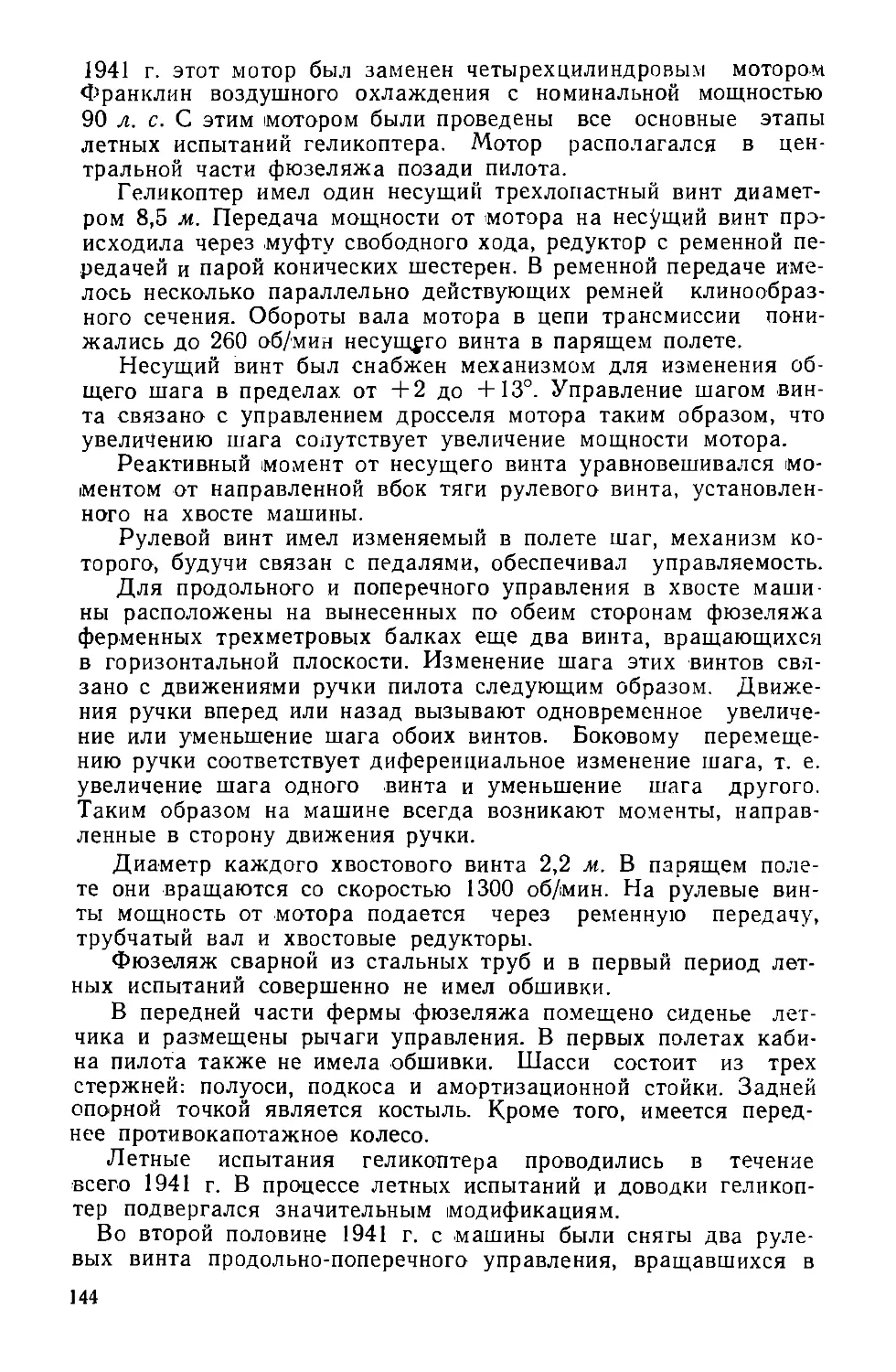
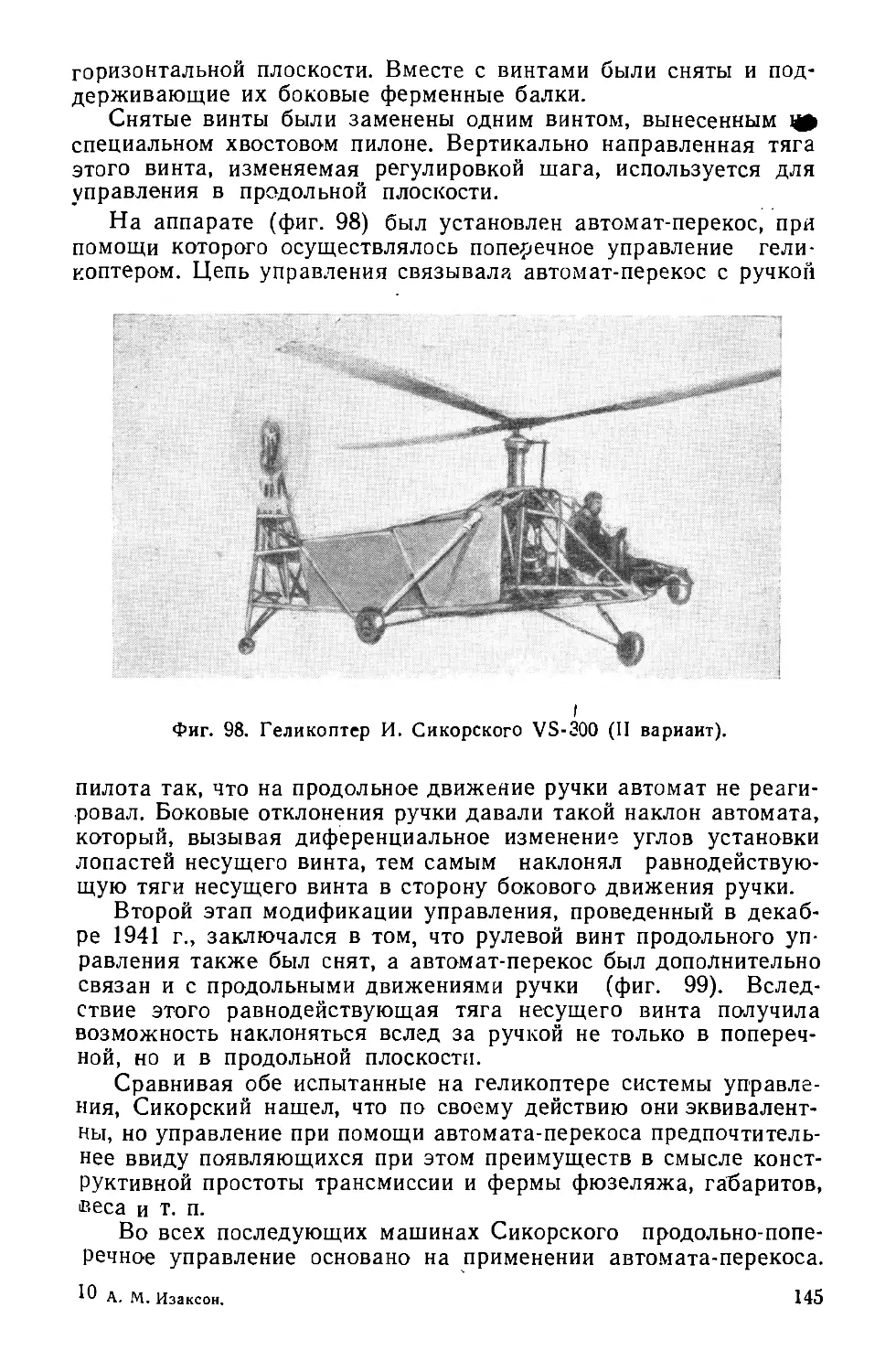
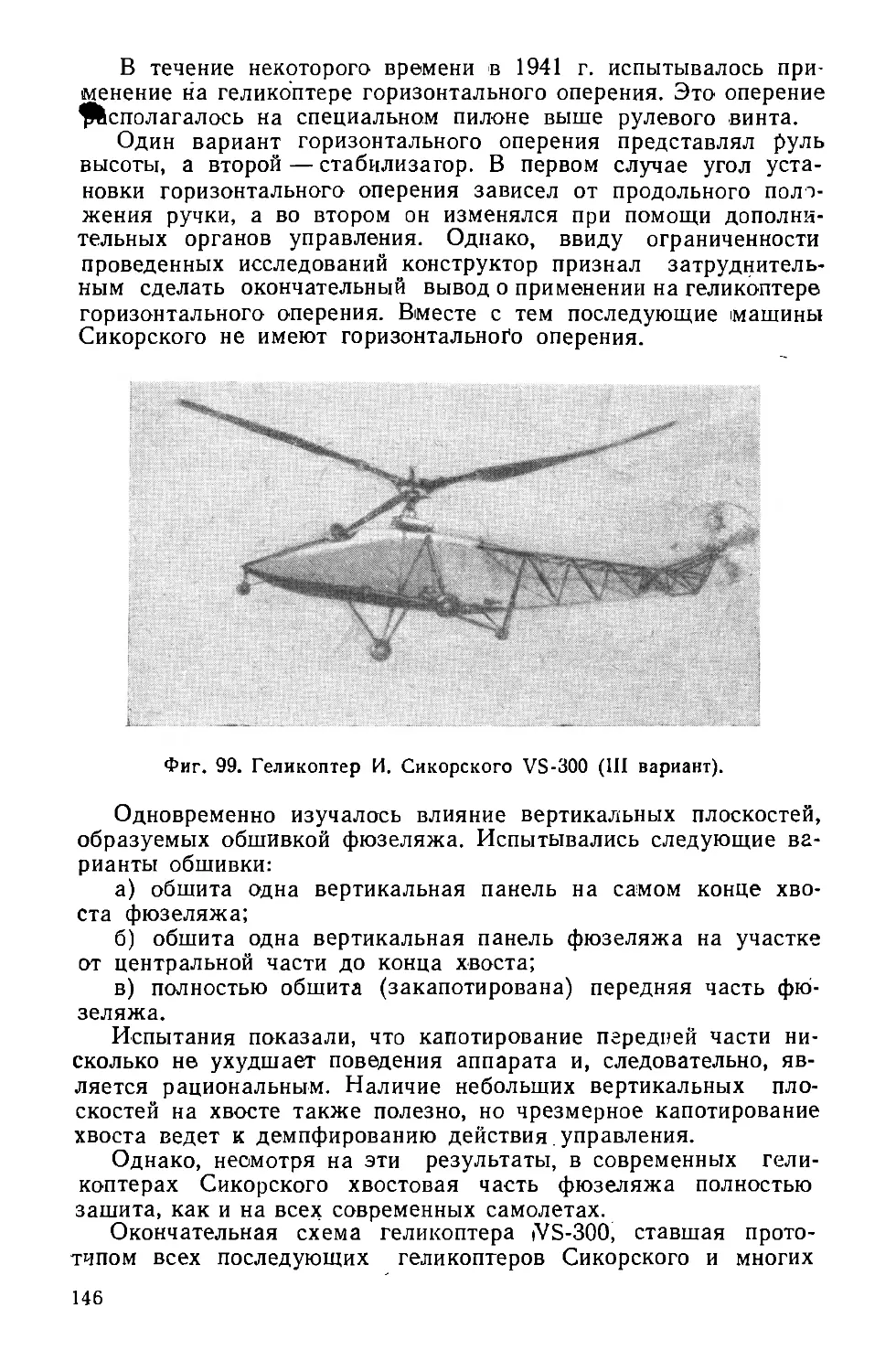
но с прибытием геликоптеров.
В 1942 г. проводились специальные испытания геликоптера
Сикорского VS-ЗОО (ранняя модель геликоптера R-4) для вы-
яснения возможности применения его для охраны морских ка-
раванов (разведка и борьба с подводными лодками). Геликоп-
тер размещался на транспортном нефтеналивном судне «Ли-
берти» водоизмещением 10 000 т.
Взлет и посадка производились со специально оборудован-
ной площадки размером 24X15 м, ограниченной корабельными
пристройками, мостиками и мачтами (фиг. 1). Было совершено
24 взлета и посадки с движущегося на разных скоростях суд-
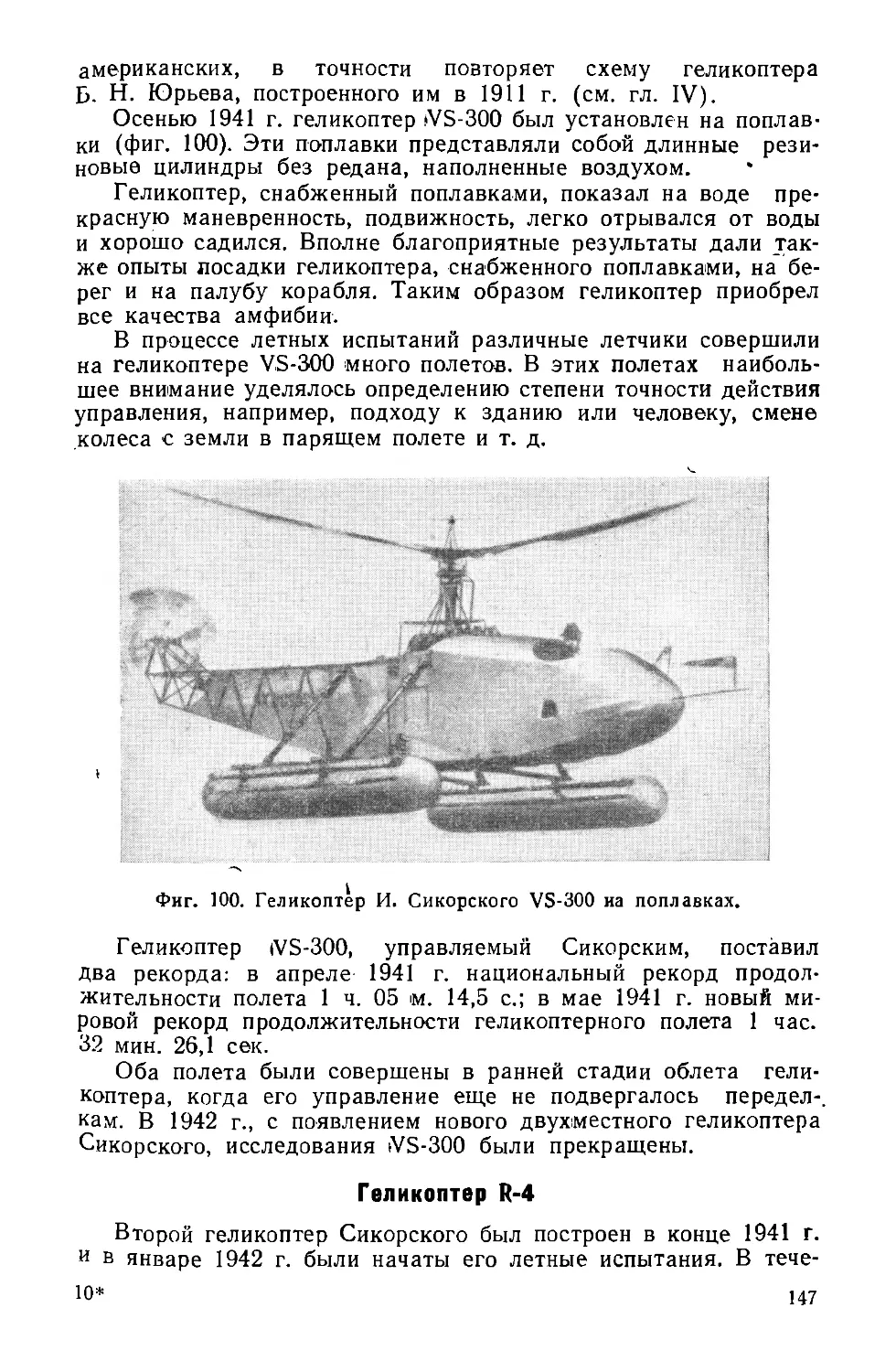
на и перелеты с корабля на берег. Аппарат VS-300 имел по-
плавки и мог совершать посадки как на палубу, так и на воду.
'Эти испытания, проходившие в присутствии вице-председателя
морской комиссии адмирала Говарда Викерта, дали вполне
удовлетворительные результаты, после чего было признано ра-
циональным использование геликоптера на палубах транспорт-
ПО
ных судов для сопровождения их при следовании в кара-
ванах.
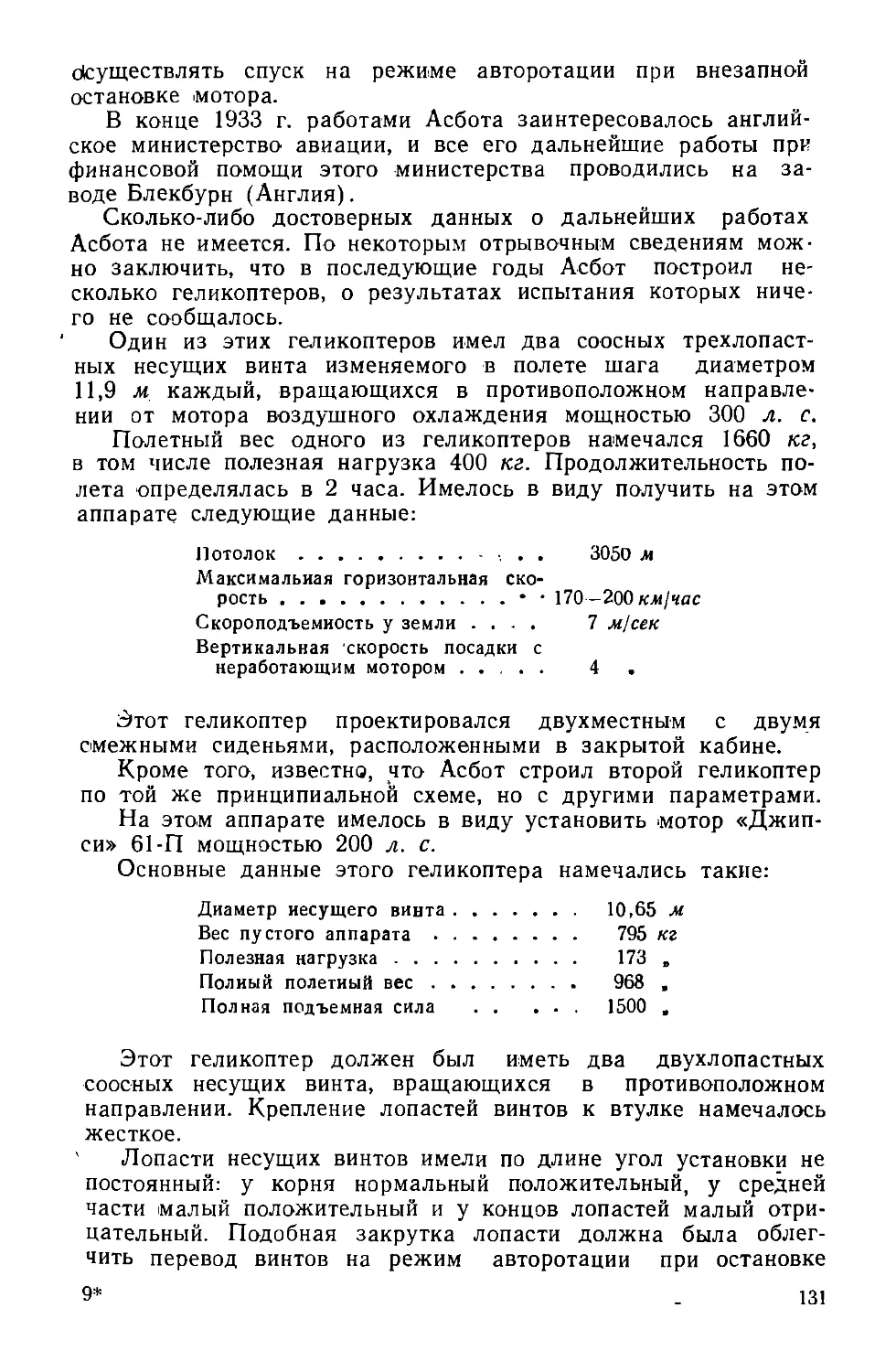
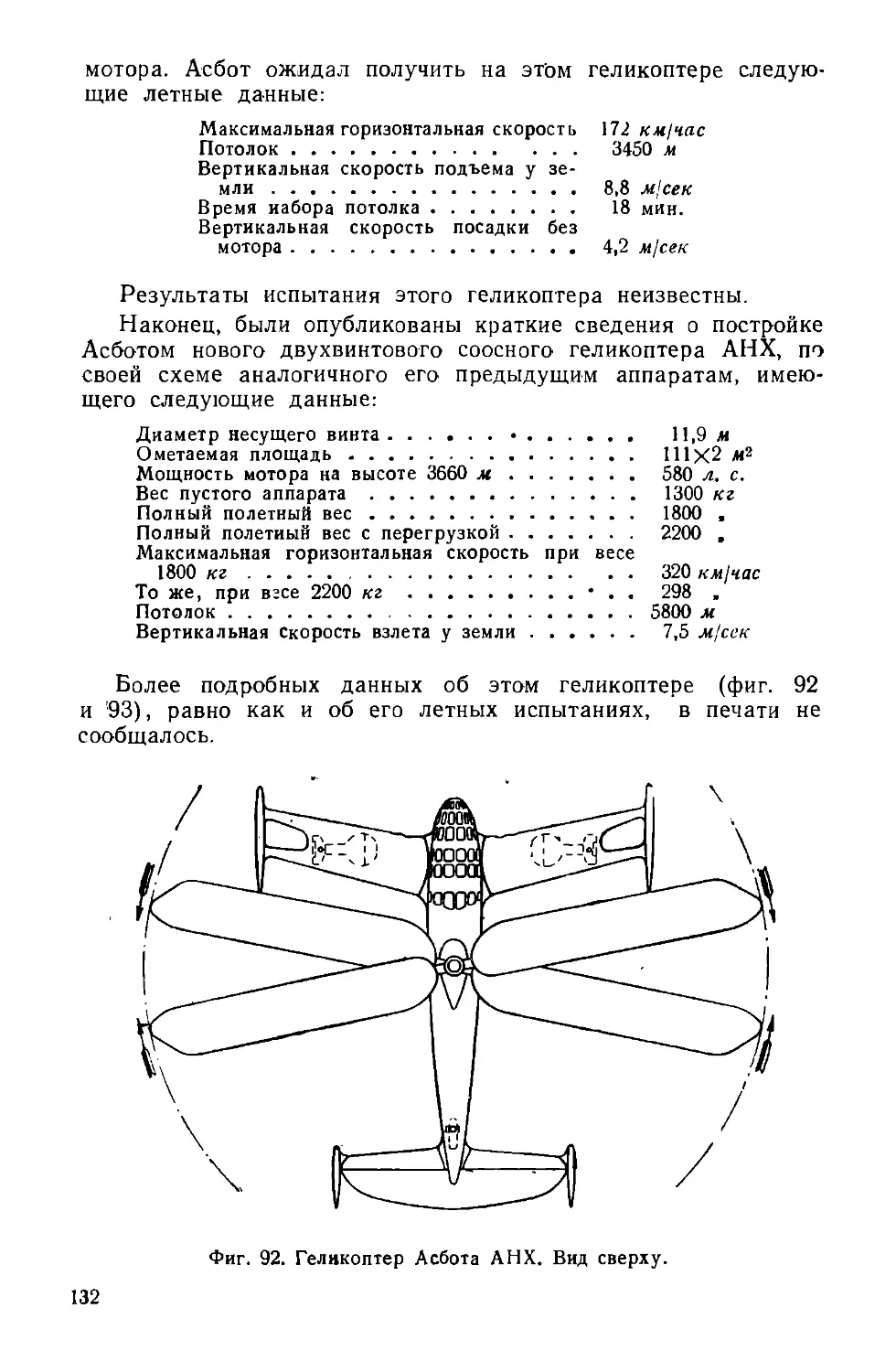
Успешные результаты практических испытаний, произве-
денных полковником Н. Грегори, вызвали большой интерес
в Англии и в Канаде. Для военно-морского флота Англии было
заказано несколько геликоптеров Сикорского. Шесть аппаратов
этого типа были приобретены для Канады.
Подобные испытания были повторены в 1944 г. При этом
было совершено 162 взлета и посадки со специальной плат-
формы на палубе большого транспорта. Испытывались два
геликоптера: один на колесах, другой на поплавках. Разница
Фиг. 1. Взлет н посадка геликоптера Сикорского VS-300, базирующе-
гося на транспортном судне .Либерти".
оказалась весьма незначительной и испытания дали прекрас-
ные результаты.
Весьма интересно применение геликоптера Сикорского R-4
для спасательных операций при взрыве корабля «Turner» в за-
ливе Джерсей.
Сквозь слепящий снежный шторм, парализовавший все
движение в гавани, спасательный геликоптер береговой служ-
бы стартовал с аэродрома и доставил медикаменты на место
катастрофы.
Наличие в районе морской катастрофы геликоптера на по
плавках, безусловно, поможет спасению большого количества
пострадавших. Геликоптер может взять пострадавшего из во-
ды или с палубы гибнущего корабля, передать пищу и медика-
менты на спасательные плоты или поплавки или даже отбук-
сировать тонущего человека к спасательному судну (фиг. 2 и 3).
11
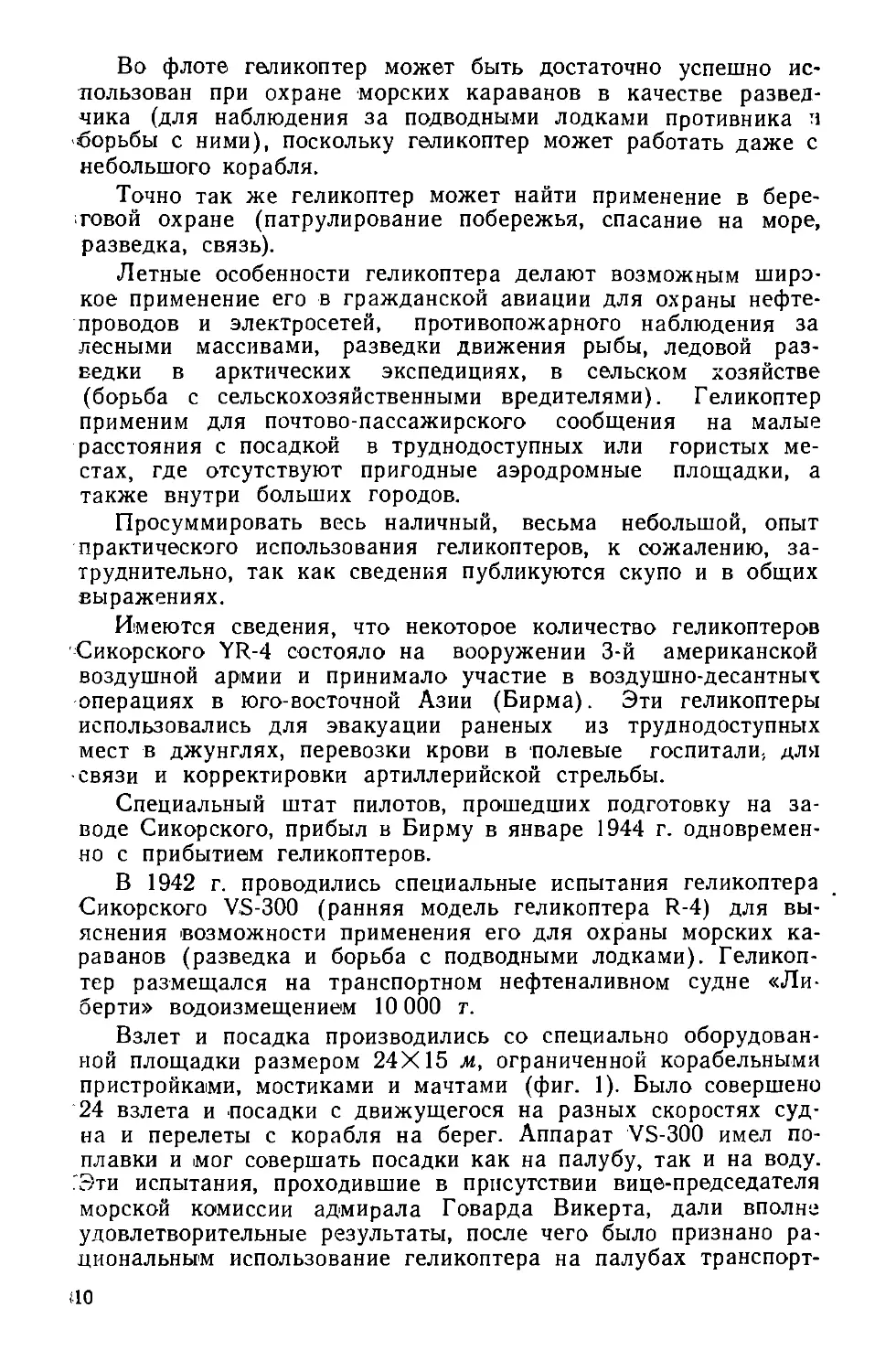
Ранее упоминалось о применении геликоптеров Сикорско-
го YR-4 для санитарных целей в Бирме. Бригадный генерал
медицинской службы Давид Грант недавно сообщил о том,
что в армии ведутся приготовления для применения геликоп-
теров с двумя парами носилок при эвакуации раненых. Про
Фнг. 2. Пример спасательной операции при помощи геликоптера.
Геликоптер Сикорского R-4 забирает человека с поплавка в море.
ектируется использование геликоптера также с четырьмя па-
рами носилок.
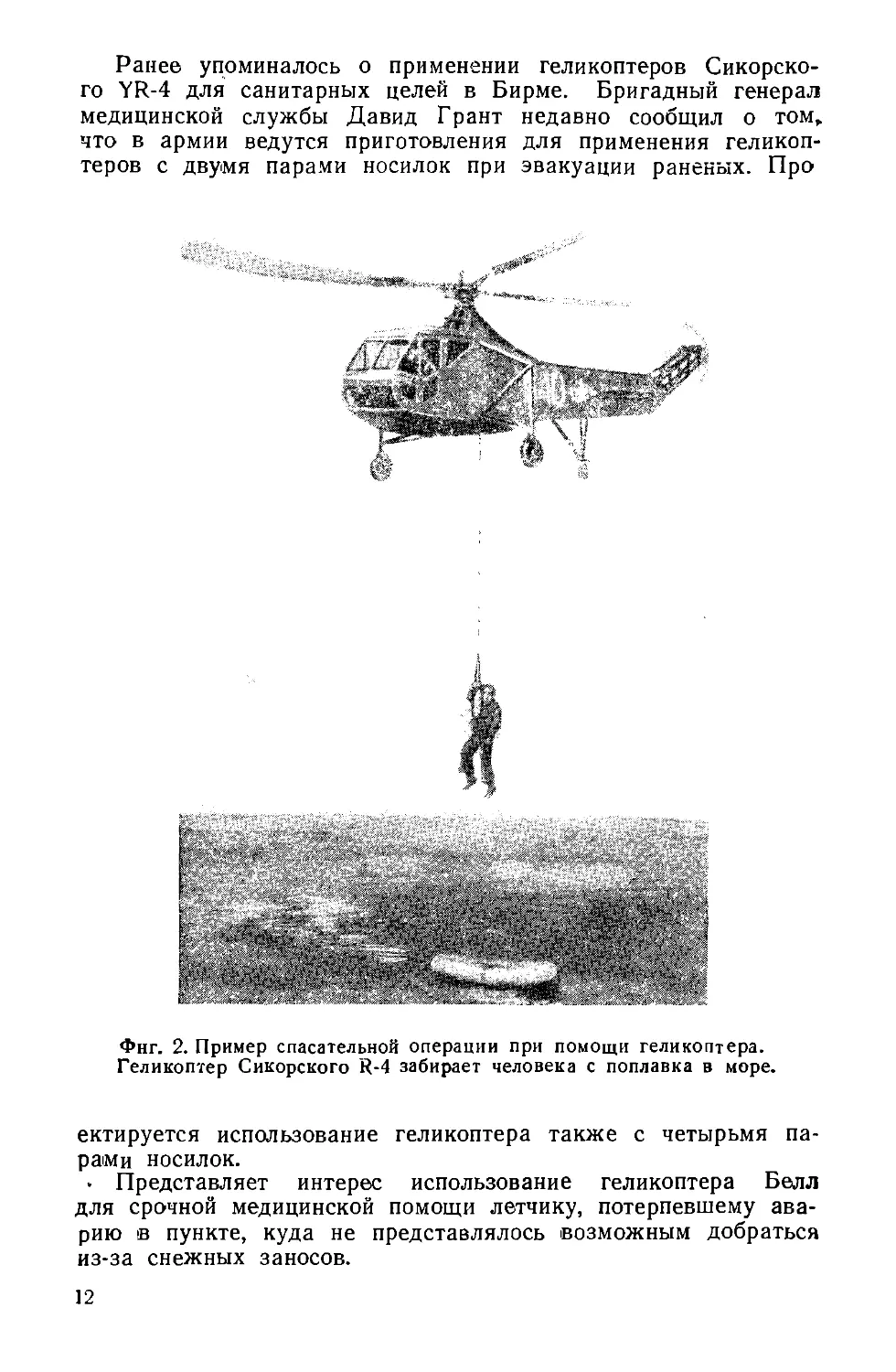
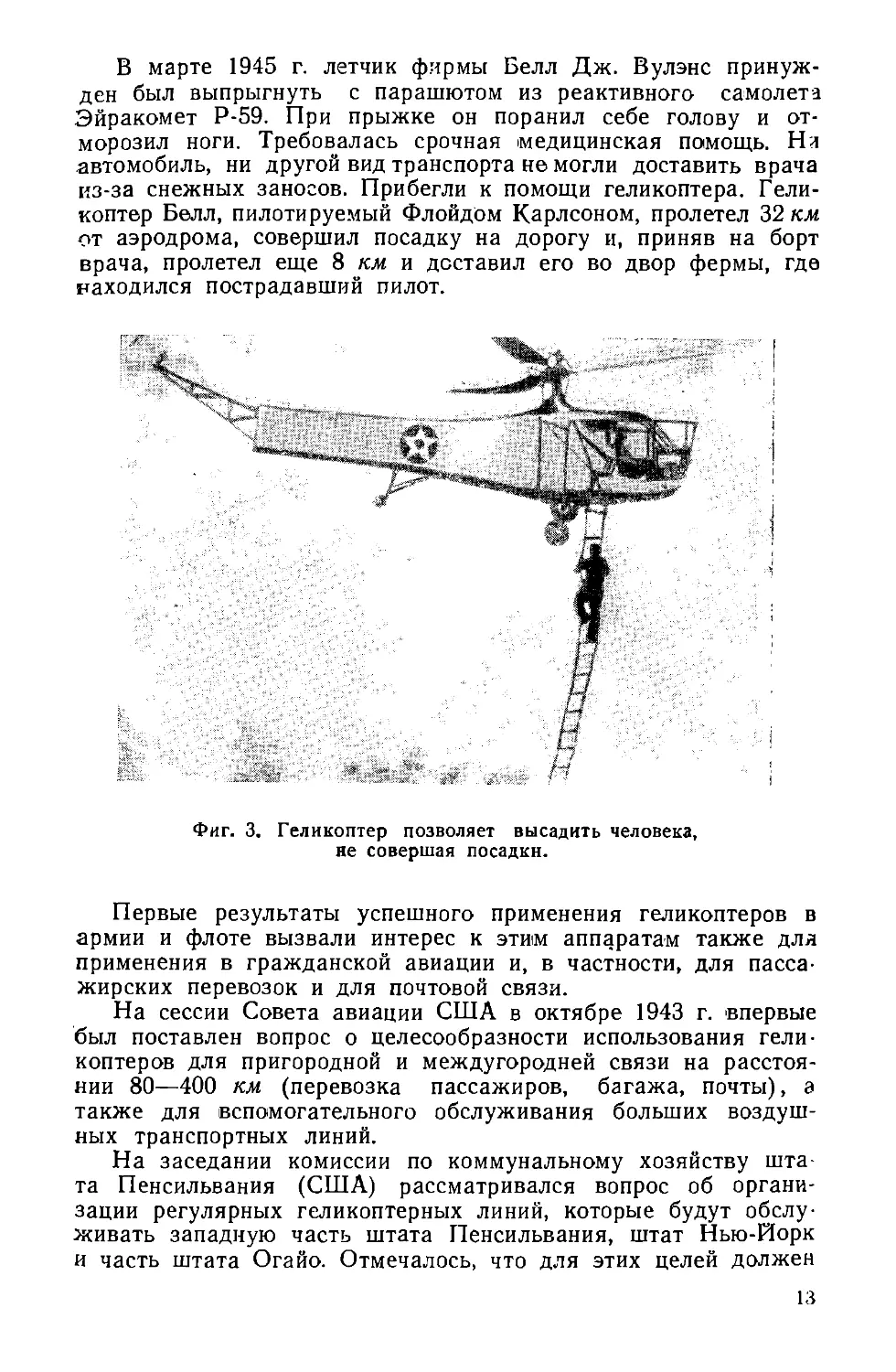
• Представляет интерес использование геликоптера Белл
для срочной медицинской помощи летчику, потерпевшему ава-
рию в пункте, куда не представлялось возможным добраться
из-за снежных заносов.
12
В марте 1945 г. летчик фирмы Белл Дж. Вулэнс принуж-
ден был выпрыгнуть с парашютом из реактивного самолета
Эйракомет Р-59. При прыжке он поранил себе голову и от-
морозил ноги. Требовалась срочная медицинская помощь. Ни
автомобиль, ни другой вид транспорта не могли доставить врача
из-за снежных заносов. Прибегли к помощи геликоптера. Гели-
коптер Белл, пилотируемый Флойдом Карлсоном, пролетел 32 км
от аэродрома, совершил посадку на дорогу и, приняв на борт
врача, пролетел еще 8 км и доставил его во двор фермы, где
находился пострадавший пилот.
Фиг. 3. Геликоптер позволяет высадить человека,
не совершая посадки.
Первые результаты успешного применения геликоптеров в
армии и флоте вызвали интерес к этим аппаратам также для
применения в гражданской авиации и, в частности, для пасса-
жирских перевозок и для почтовой связи.
На сессии Совета авиации США в октябре 1943 г. впервые
был поставлен вопрос о целесообразности использования гели-
коптеров для пригородной и междугородней связи на расстоя-
нии 80—400 км (перевозка пассажиров, багажа, почты), а
также для вспомогательного обслуживания больших воздуш-
ных транспортных линий.
На заседании комиссии по коммунальному хозяйству шта-
та Пенсильвания (США) рассматривался вопрос об органи-
зации регулярных геликоптерных линий, которые будут обслу-
живать западную часть штата Пенсильвания, штат Нью-Йорк
и часть штата Огайо. Отмечалось, что для этих целей должен
13
быть создан специальный пассажирский геликоптер на восемь
человек (пилот и семь пассажиров), что вполне возможно при
современной технике геликоптеростроения. Проект одного из
возможных аппаратов представлен на фиг. 4.
Фиг. 4. Один из проектов пассажирского геликоптера.
В последнее время в периодической прессе неоднократно
появляются заметки о возможном, использовании и применении
геликоптеров в гражданской авиации. Сообщается, что авто-
бусная компания Грейхоунд Бас Лайнс (Greyhound Bus Lines)
хочет организовать авиалинию на геликоптерах параллельно
своим автобусным линиям. Образована новая компания в Эйс-
брей Парк (штат Нью-Джерси)- для организации регулярной
связи на геликоптерах между северными пригородами Ныо
Джерси и Нью-Йорком.
Глава //
ОПИСАНИЕ ТИПОВОГО ГЕЛИКОПТЕРА И ЕГО ОСНОВНЫХ
ЭЛЕМЕНТОВ. ПРИМЕРНАЯ КЛАССИФИКАЦИЯ РАЗНЫХ СХЕМ
ГЕЛИКОПТЕРОВ
В дальнейшем мы даем достаточно полный исторический'
обзор наиболее интересных работ в области осуществления-
геликоптера. Эти работы охватывают геликоптеры, начиная с
самых первоначальных, достаточно примитивных набросков,
вплоть до последних геликоптеров в США, успешно прошедших
испытания, выпускаемых серийно и находящих все более широ-
кое применение в военной и гражданской авиации.
При этом мы особо оттеняем все то новое и представляю-
щее технический интерес, что внесли рассматриваемые работы
в общее разрешение проблемы геликоптера.
Для более отчетливого и глубокого понимания целесообраз-
но дать разбор типовой конструкции одного из современных
геликоптеров, описание основных его элементов, их особенно-
стей и разновидностей, а также их роли в осуществлении тех
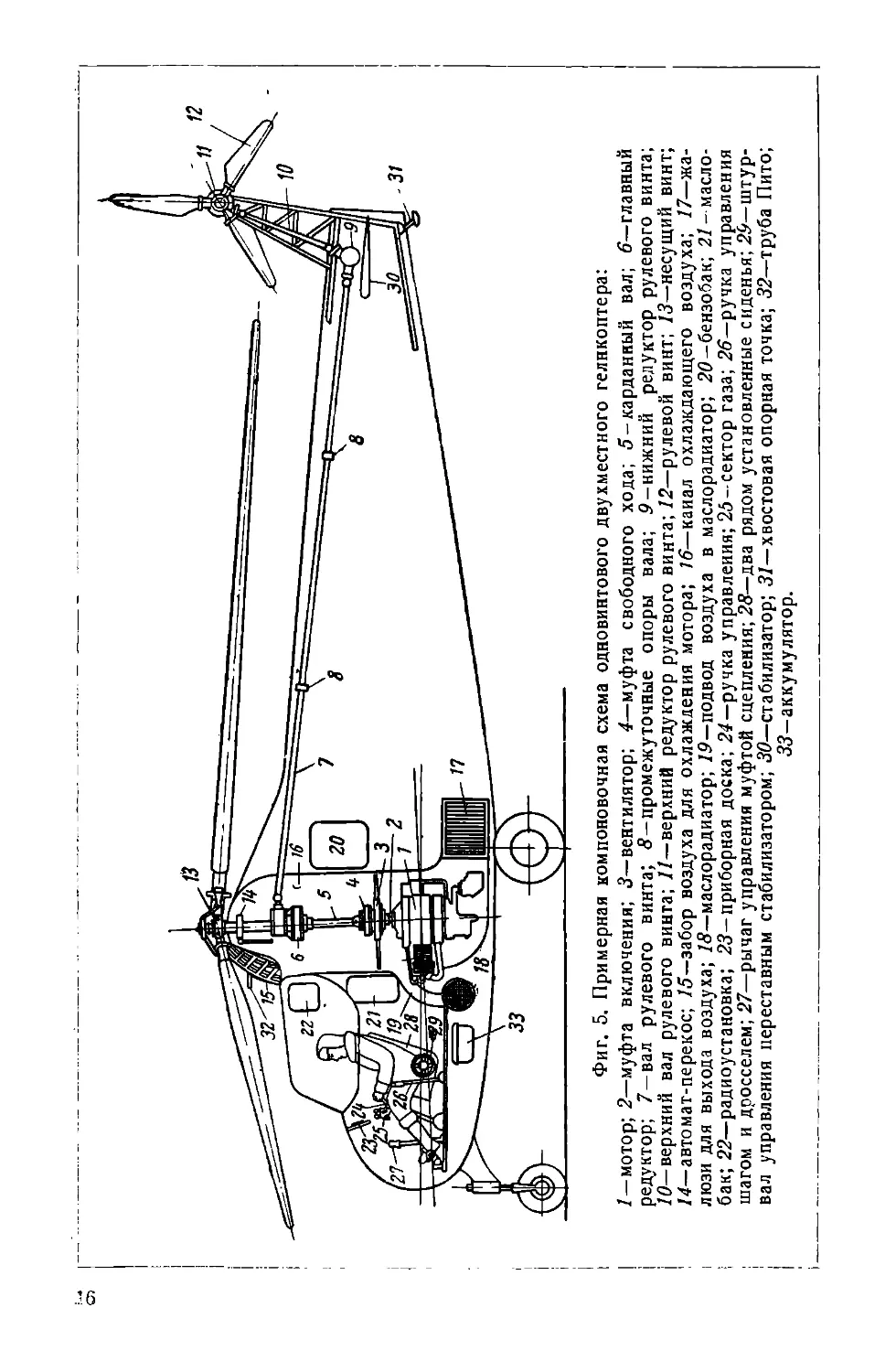
или иных функций геликоптера. В качестве такой типовой кон-
струкции (фиг. 5) мы разберем схему одновинтового геликоп-
тера, напоминающего геликоптер Сикорского R-4.
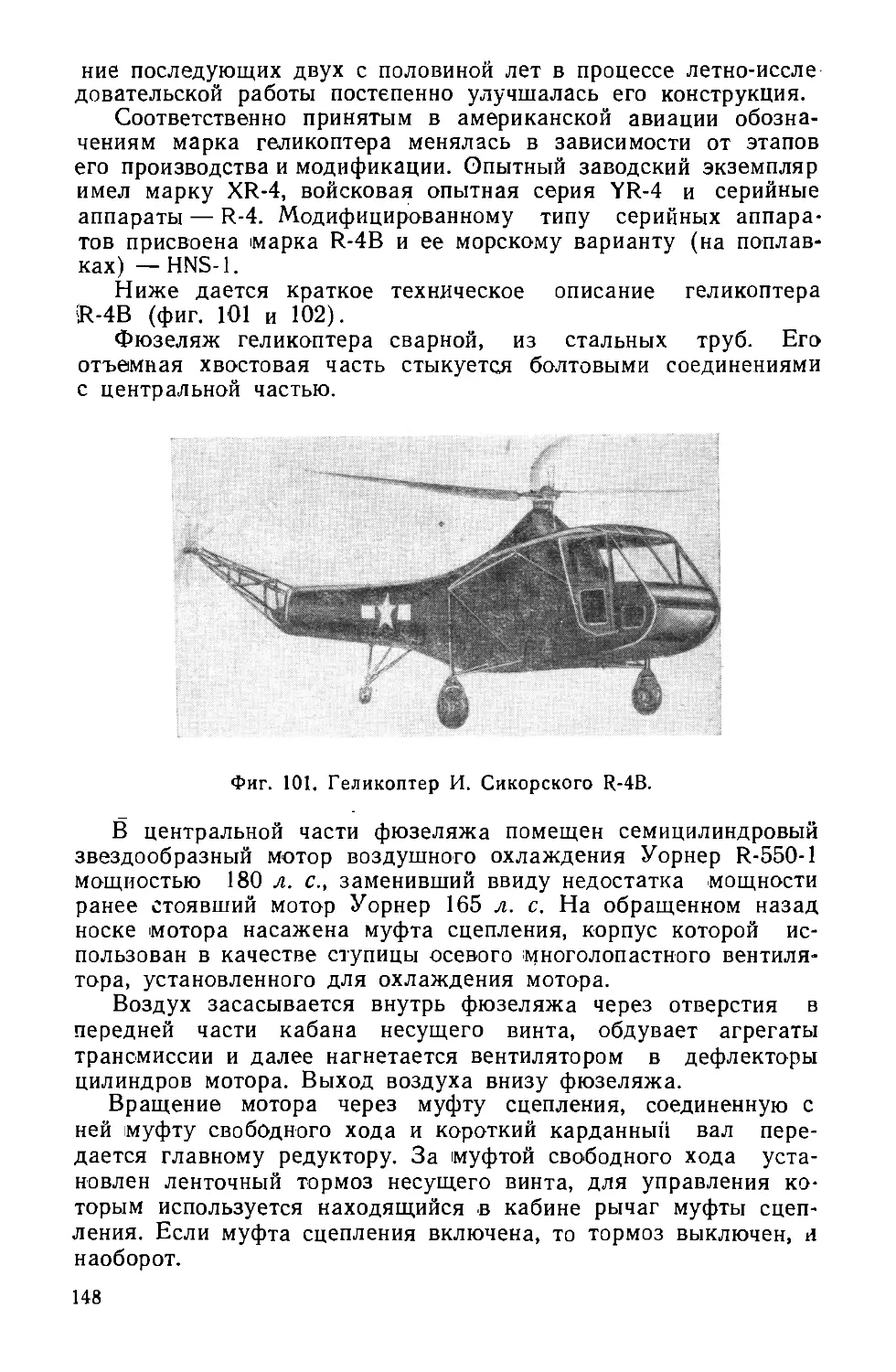
Фюзеляж, размещение экипажа, приборное оборудование,
обзор
Фюзеляж геликоптера по своему назначению и по кон-
струкции аналогичен фюзеляжу самолета. Некоторая специ-
фичность его конфигурации вызвана конструктивными особен-
ностями геликоптера. В носовой части фюзеляжа размещена
кабина экипажа. Большинство построенных геликоптеров,
имевших экспериментальный характер, были одноместные и
кабина предназначалась лишь для одного пилота.
Опытные аппараты, предназначавшиеся для практическог;
использования и внедрения в серию, как правило, двухмест-
ные и имеют или одну двухместную кабину (пилот и наблюда-
тель расположены рядом) или две кабины, расположенные
тандем.
1&
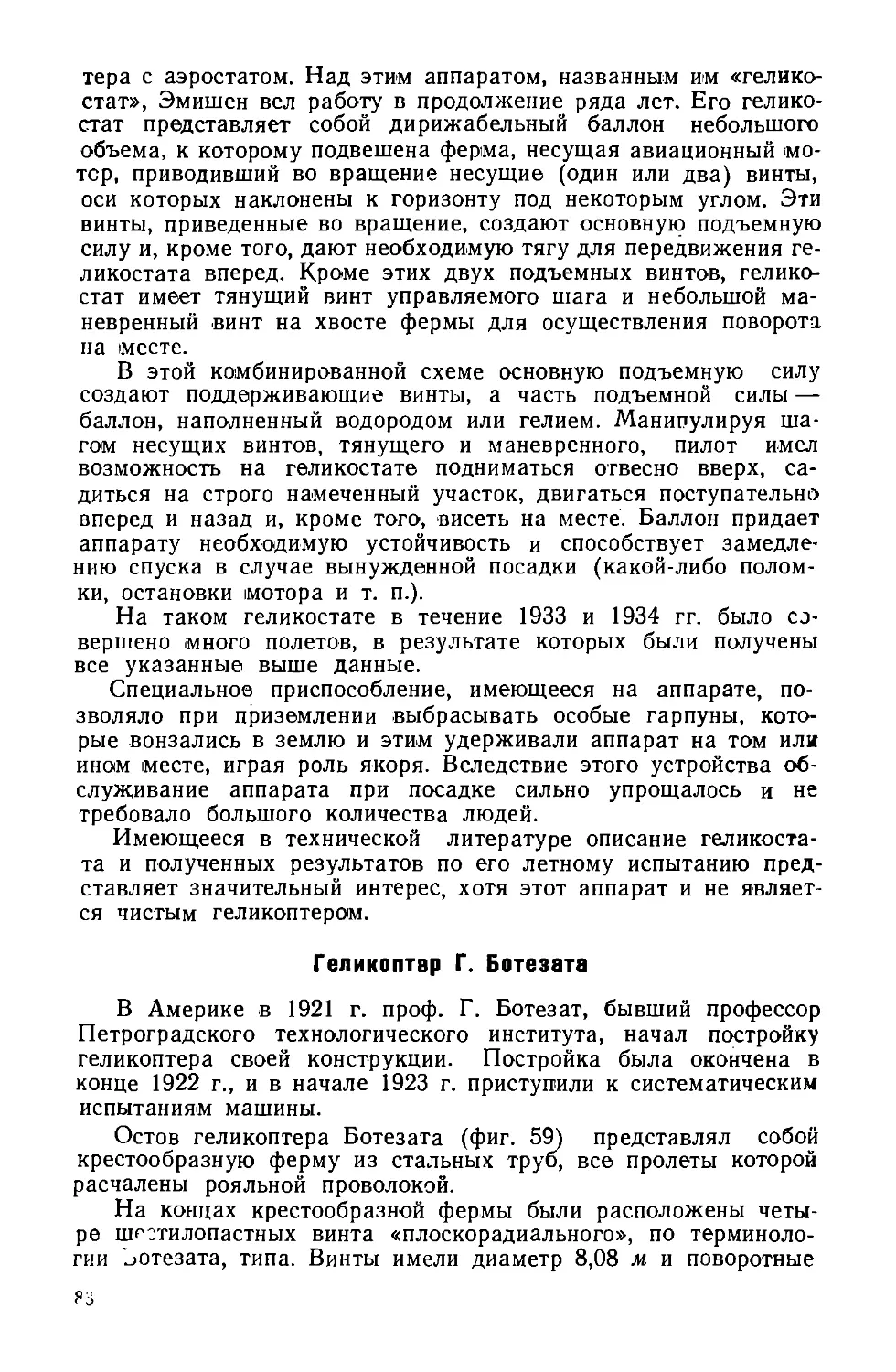
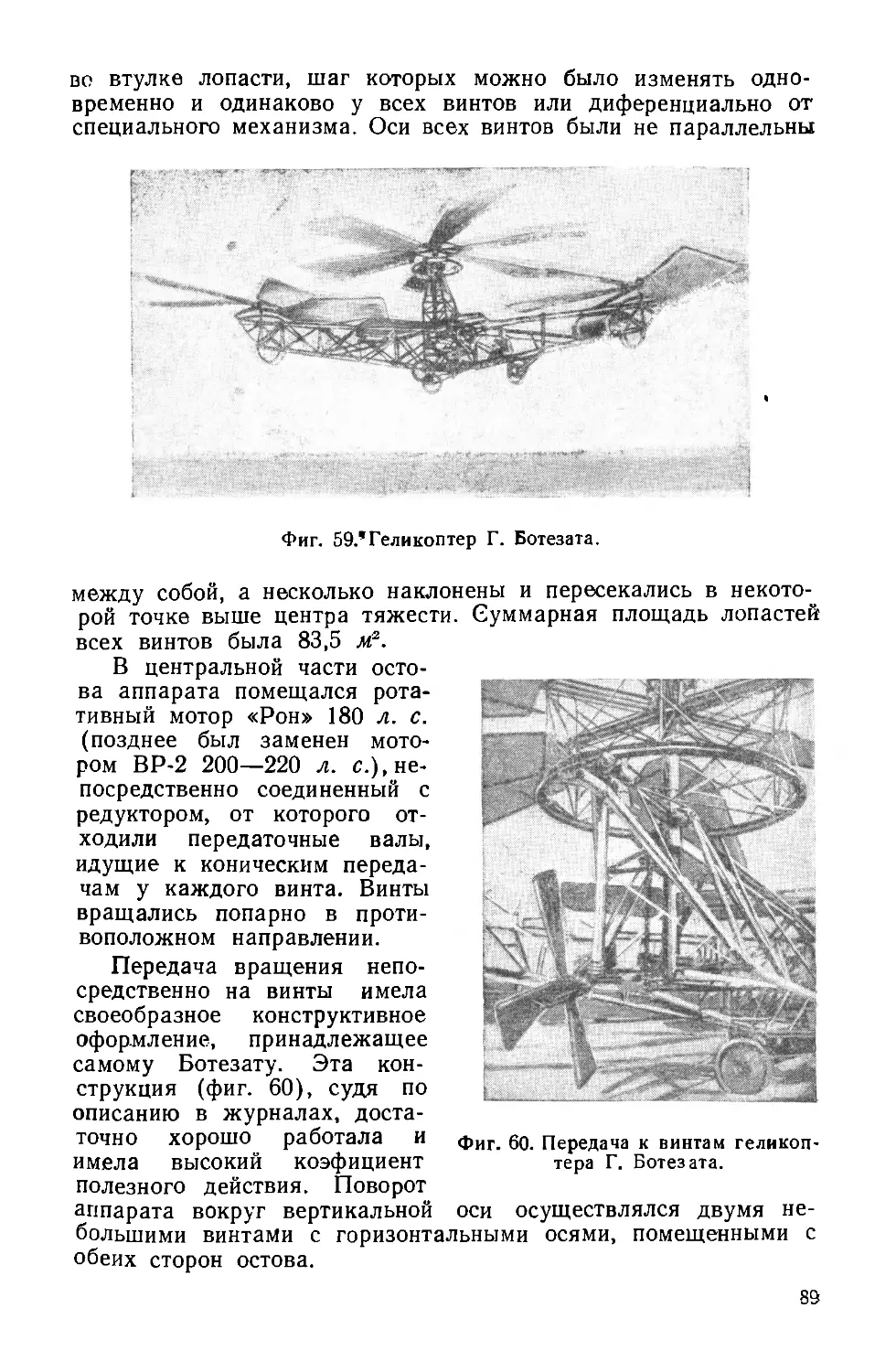
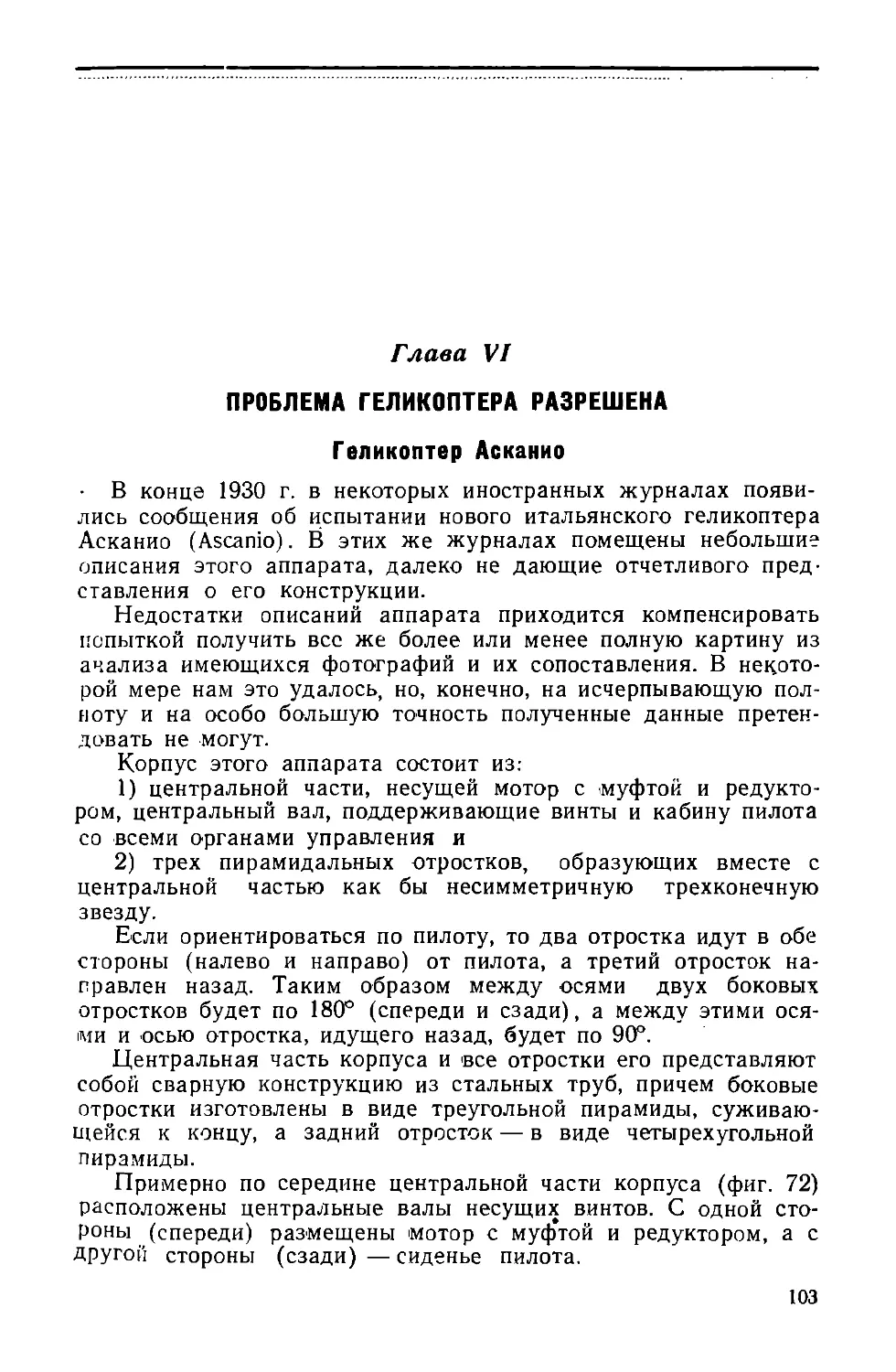
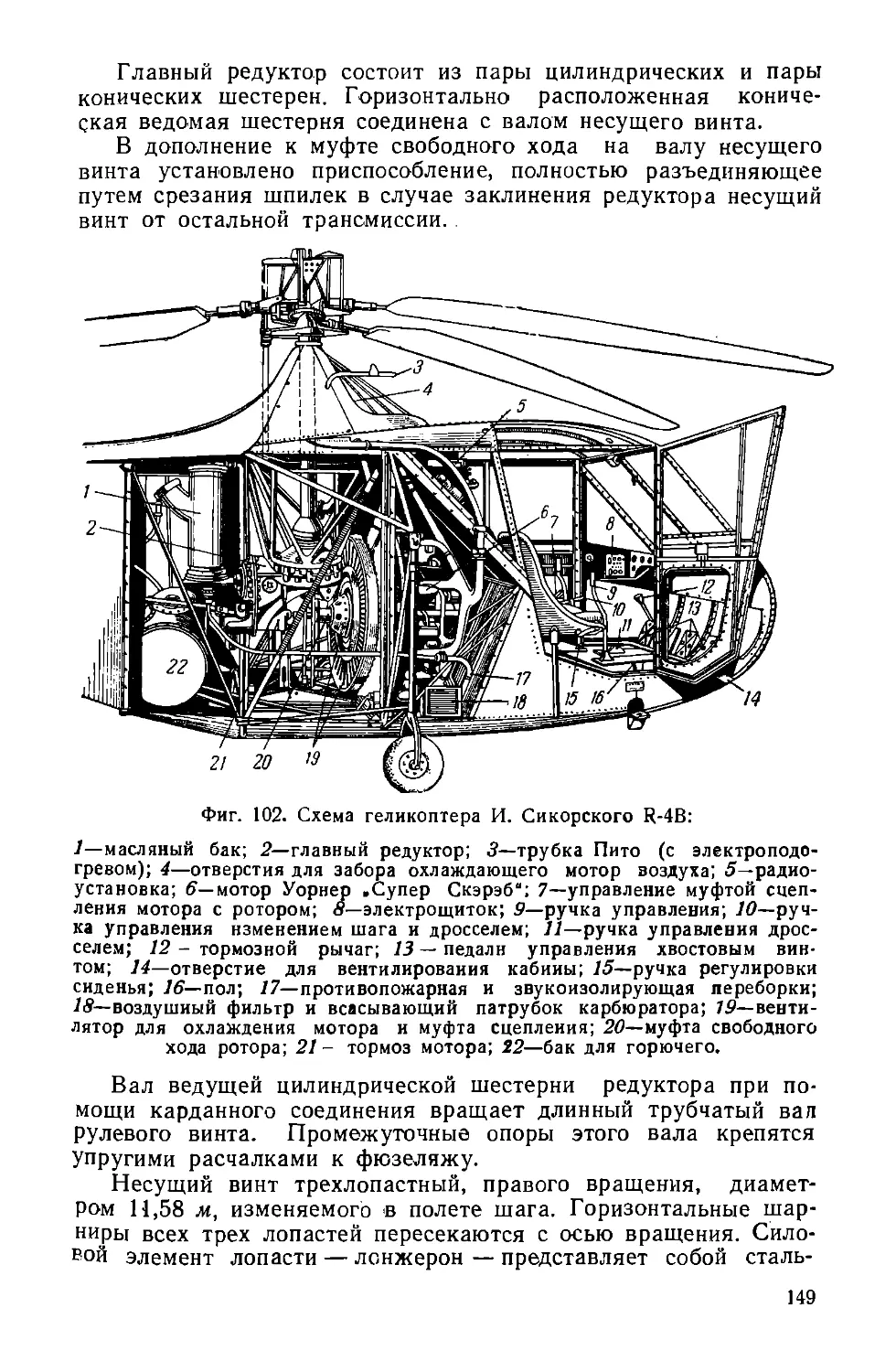
Фиг. 5. Примерная компоновочная схема одновинтового двухместного геликоптера:
/—мотор; 2—муфта включения; 3— вентилятор; 4—муфта свободного хода; 5-карданный вал; б—главный
редуктор; 7—вал рулевого винта; 5—промежуточные опоры вала; 9-нижний редуктор рулевого винта;
10— верхний вал рулевого винта; //—верхний редуктор рулевого винта; /2—рулевой винт; 13—несущий винт;
14— автомат-перекос; /5—забор воздуха для охлаждения мотора; 16—канал охлаждающего воздуха; 17—жа-
люзи для выхода воздуха; 18—маслорадиатор; 19—подвод воздуха в маслорадиатор; 20—бензобак; 21- масло-
бак; 22—радиоустановка; 23— приборная доска; 24— ручка управления; 25 —сектор газа; 26—ручка управления
шагом и дросселем; 27—рычаг управления муфтой сцепления; 28—два рядом установленные сиденья; 29— штур-
вал управления переставным стабилизатором; 30—стабилизатор; 31—хвостовая опорная точка; 32—труба Пито;
33—аккумулятор.
Размещенная перед пилотом приборная доска имеет те же
навигационные приборы, что и на самолете, и, кроме того, при-
боры, определяющие режим работы несущего винта (обороты,
шаг лопастей и т. п.). Поскольку у большинства геликоптеров
в носовой части фюзеляжа отсутствует моторная установка,
представляется возможным создать пилоту наилучшие условия
для обзора вперед и вбок. Для этой же цели вся кабина пилота
(в том числе и низ) застеклена.
Несущий винт, втулка и лопасти несущего винта,
управление шагом лопастей винта
Несущий винт выполняет в геликоптере ту же роль, что и
крылья самолета. В зависимости от принципиальной схемы ге
ликоптера устанавливают один (одновинтовой геликоптер),
два (двухвинтовой геликоптер) и несколько (многовинтовой
геликоптер) несущих винтов.
Несущий винт состоит из втулки винта, лопастей, укреп-
ленных во втулке, и элементов управления установкой шага
этих лопастей.
В большинстве современных геликоптеров несущие винты
имеют машущие лопасти, т. е. лопасти прикреплены ко втулке
на горизонтальных и вертикальных шарнирах. Винтом такого
типа снабжен рассматриваемый нами «типовой» геликоптер.
Также имеются геликоптеры, у которых несущие винты жест
кой конструкции, т. е. лопасти жестко крепятся ко втулке.
В зависимости от схемы геликоптера и типа несущего винта
меняется и конструкция втулки. Однако, несмотря на много-
образие конструкций втулок несущих винтов, их можно свести
к достаточно ограниченному количеству типовых схем (см.
приложение II).
Втулка винта насаживается на конец главного вала транс-
миссии, через которую вращение от мотора передается несу-
щему винту.
В большинстве известных нам геликоптеров несущие вин-
ты имеют три лопасти. Наряду с этим имеются аппараты с
двухлопастными и реже четырехлопастными несущими вин-
тами. Профиль лопастей, их ширина и толщина в разных се-
чениях, а также форма в плане сильно отличаются в разных
аппаратах.
Как правило, лопасти несущих винтов состоят из стального
трубчатого лонжерона, набора деревянных нервюр, насажен-
ных на лонжерон, и обшивки.
В то время как у самолета управление в продольном и по-
перечном направлениях достиЬается/воздействием на руль вы
соты и элероны, у одновинтовогв геликоптера эту роль выпол-
няют элементы управления uiarW лопастей несущего винта.
Пилот, действуя на ручку управления, посредством специального
перекашивающего механизма, свя^ан^ого с лопастями несущего
2 А. М. Изаксон. 17
винта, заставляет периодически менять угол установки каждой
лопасти в период прохождения ее по окружности за время од-
ного оборота. Вследствие этого каждая лопасть несущего винта
имеет максимальный угол установки в определенном азимуте
ометаемого диска, в зависимости от направления наклона ручки
управления, и минимальный угол установки в прямо противо-
положном азимуте.
Вследствие этого у несущих винтов с жестким креплением
лопастей происходит сдвиг суммарной результирующей тяги в
направлении той части окружности, где лопасти при своем
прохождении имеют максимальный угол установки.
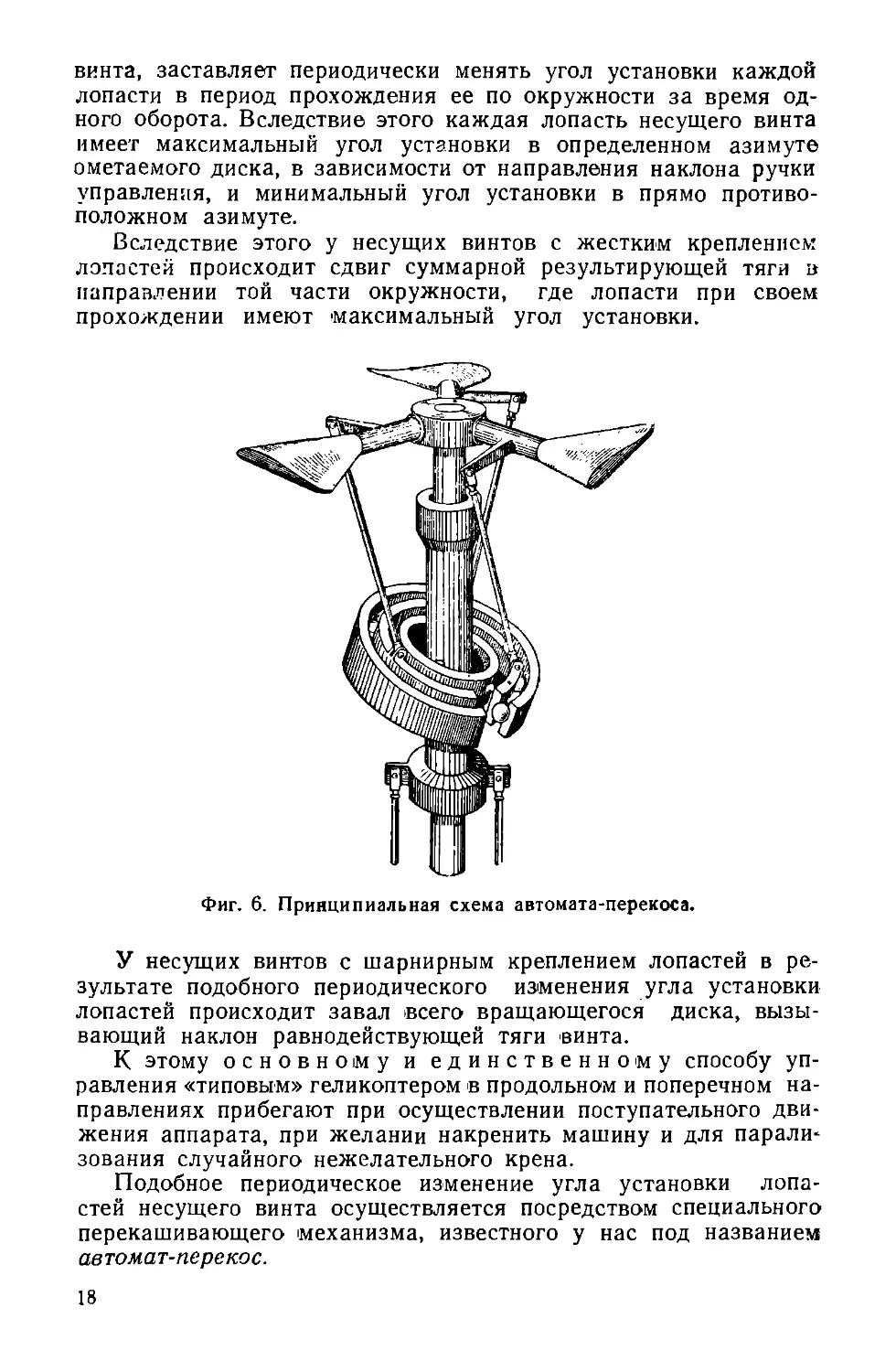
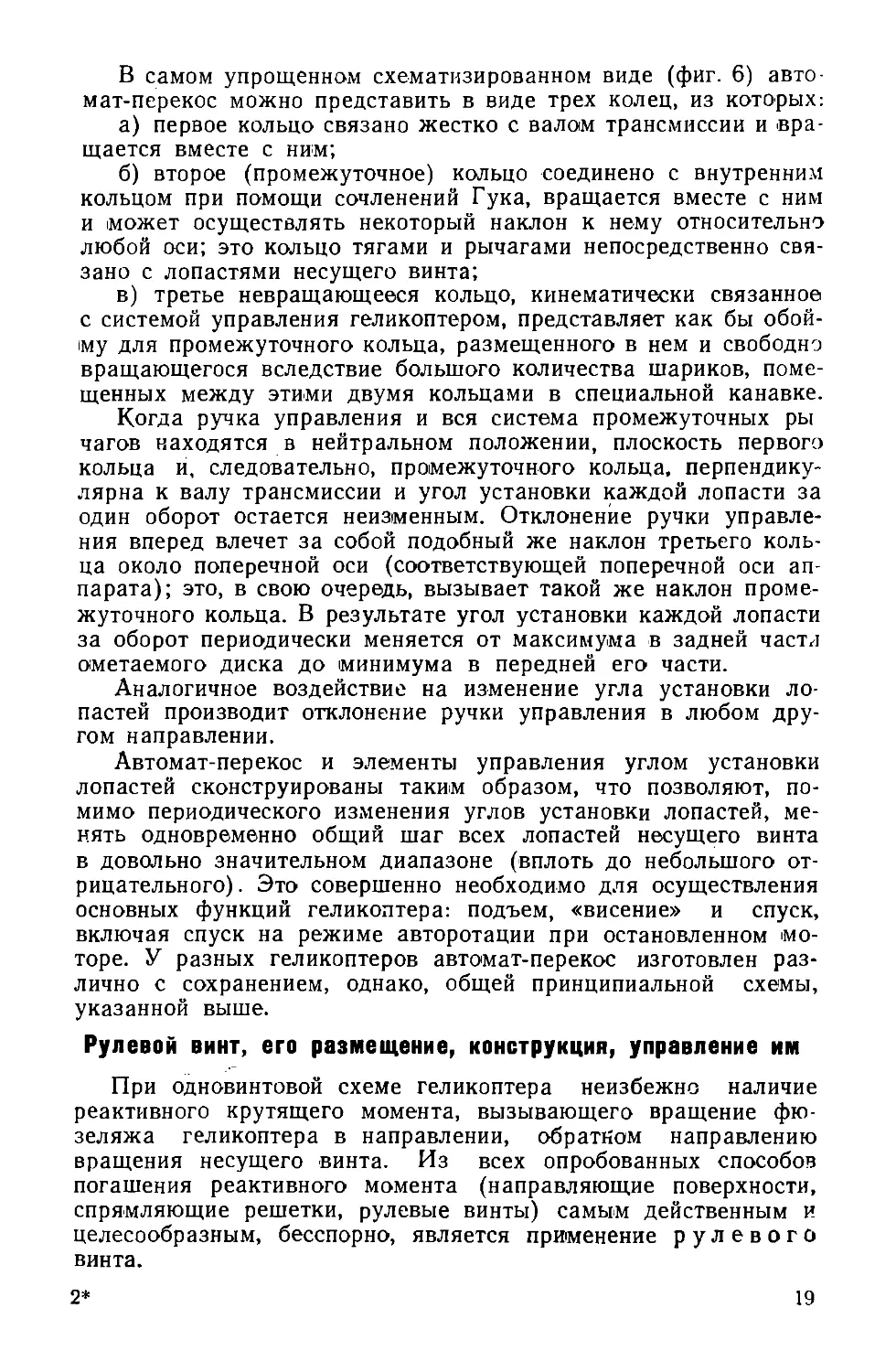
Фиг. 6. Принципиальная схема автомата-перекоса.
У несущих винтов с шарнирным креплением лопастей в ре-
зультате подобного периодического изменения угла установки
лопастей происходит завал всего вращающегося диска, вызы-
вающий наклон равнодействующей тяги винта.
К этому основному и единственному способу уп-
равления «типовым» геликоптером в продольном и поперечном на-
правлениях прибегают при осуществлении поступательного дви-
жения аппарата, при желании накренить машину и для парали-
зования случайного нежелательного крена.
Подобное периодическое изменение угла установки лопа-
стей несущего винта осуществляется посредством специального
перекашивающего механизма, известного у нас под названием
автомат-перекос.
18
В самом упрощенном схематизированном виде (фиг. 6) авто-
мат-перекос можно представить в виде трех колец, из которых:
а) первое кольцо связано жестко с валом трансмиссии и вра-
щается вместе с ним;
б) второе (промежуточное) кольцо соединено с внутренним
кольцом при помощи сочленений Гука, вращается вместе с ним
и может осуществлять некоторый наклон к нему относительно
любой оси; это кольцо тягами и рычагами непосредственно свя-
зано с лопастями несущего винта;
в) третье невращающееся кольцо, кинематически связанное
с системой управления геликоптером, представляет как бы обой-
му для промежуточного кольца, размещенного в нем и свободно
вращающегося вследствие большого количества шариков, поме-
щенных между этими двумя кольцами в специальной канавке.
Когда ручка управления и вся система промежуточных ры
чагов находятся в нейтральном положении, плоскость первого
кольца и, следовательно, промежуточного кольца, перпендику-
лярна к валу трансмиссии и угол установки каждой лопасти за
один оборот остается неизменным. Отклонение ручки управле-
ния вперед влечет за собой подобный же наклон третьего коль-
ца около поперечной оси (соответствующей поперечной оси ап-
парата); это, в свою очередь, вызывает такой же наклон проме-
жуточного кольца. В результате угол установки каждой лопасти
за оборот периодически меняется от максимума в задней часта
ометаемого диска до минимума в передней его части.
Аналогичное воздействие на изменение угла установки ло-
пастей производит отклонение ручки управления в любом дру-
гом направлении.
Автомат-перекос и элементы управления углом установки
лопастей сконструированы таким образом, что позволяют, по-
мимо периодического изменения углов установки лопастей, ме-
нять одновременно общий шаг всех лопастей несущего винта
в довольно значительном диапазоне (вплоть до небольшого от-
рицательного) . Это совершенно необходимо для осуществления
основных функций геликоптера: подъем, «висение» и спуск,
включая спуск на режиме авторотации при остановленном мо-
торе. У разных геликоптеров автомат-перекос изготовлен раз-
лично с сохранением, однако, общей принципиальной схемы,
указанной выше.
Рулевой винт, его размещение, конструкция, управление им
При одновинтовой схеме геликоптера неизбежно наличие
реактивного крутящего момента, вызывающего вращение фю-
зеляжа геликоптера в направлении, обратном направлению
вращения несущего винта. Из всех опробованных способов
погашения реактивного момента (направляющие поверхности,
спрямляющие решетки, рулевые винты) самым действенным и
целесообразным, бесспорно, является применение рулевого
винта.
2*
19
Для погашения реактивного момента в чистом виде необ-
ходимо наличие двух рулевых винтов, расположенных с обеих
сторон от несущего винта (в носовой и хвостовой частях фю-
зеляжа). Многие построенные геликоптеры имели рулевые вин-
ты по такой именно схеме.
Для упрощения и облегчения конструкции одновинтовые
геликоптеры, появившиеся в последние годы, имеют лишь по
одному рулевому винту. При этом погашается только реактив-
ный момент; боковую же силу, появляющуюся при этом, при-
ходится специально погашать постоянным наклоном тяги, что
достигается отклонением вбок ручки управления (постоянное
отклонение внешнего кольца автомата-перекоса).
Назначение рулевого винта, помимо погашения реактивно-
го момента, — управление геликоптером в горизонтальной пло-
скости (аналогично рулю направления у самолета).
Ввиду того, что при разных режимах полета геликоптера ве
личина реактивного момента может меняться, а также в силу
использования рулевого винта для управления аппаратом в го-
ризонтальной плоскости этот винт должен быть изменяемо-
г о шага, устанавливаемого пилотом.
Управление шагом лопастей рулевого винта связано с педа-
лями, находящимися в кабине пилота. Рулевой винт насажен на
вал хвостового редуктора, связанного промежуточным валом с
центральной трансмиссией (от мотора к несущему винту).
Моторная установка, трансмиссия и управление моторной
группой
Место установки мотора в значительной степени зависит от
принципиальной схемы геликоптера. В одновинтовых геликоп-
терах для повышения надежности в работе трансмиссии и умень-
шения ее веса мотор размещают обычно в непосредственной
близости от основного потребителя мощности — несущего винта
(под ним).
Из этих же соображений (повышение надежности, уменьше
ние веса и упрощение компоновки) на некоторых геликоптерах
мотор размещают таким образом, чтобы ось коленчатого вала
была вертикальной и совпадала с направлением оси несущего
винта. Это позволяет избежать специальной угловой передачи,
но предъявляет в то же время специальные требования по при-
способлению мотора к нормальной работе при подобном, не-
сколько необычном, расположении.
Имея в виду специфические режимы геликоптера («висение»
на месте, малые скорости горизонтального передвижения), при-
ходится принимать особые меры по обеспечению нормального
охлаждения мотора. Для этой цели в каждом геликоптере уста-
навливают вентилятор, являющийся одним из основных элемен-
тов моторной установки. При моторе водяного охлаждения вен-
тилятор обдувает радиаторы, при моторе воздущного охлажде-
ния — непосредственно цилиндры и картер мотора.
20
В первом случае вентилятор приводится во вращение при по-
мощи специального трансмиссионного устройства; во втором
случае вентилятор обычно устанавливают непосредственно на
валу мотора. Для регулирования температурного режима мото-
ра при различных режимах его работы и полета геликоптера
устанавливают управляемые жалюзи.
В зависимости от схемы геликоптера также варьируется и
схема трансмиссии (см. приложение I). Однако основные эле-
менты трансмиссии, несмотря на варианты их размещения, оста-
ются неизменными и присущи большинству геликоптеров.
К таким постоянным элементам трансмиссии, помимо пере-
дачи к вентилятору, относятся:
а) муфта включения (кулачковая, фрикционная или иного
типа);
б) главный редуктор для передачи мощности на несущий
винт и редуцирования его оборотов;
в) муфта свободного хода;
г) специальный редуктор для передачи мощности на рулевой
винт;
д) отдельный редуктор рулевого винта;
е) ряд карданных сочленений, облегчающих монтаж транс-
миссии и обеспечивающих нормальную работу при наличии де-
формаций отдельных частей конструкции геликоптера.
При начале работы мотор запускают вхолостую и затем
плавно включают муфту сцепления, вследствие чего приходит во
вращение и несущий винт. Затем, после прогрева мотора, по-
степенно увеличивают обороты и устанавливают требуемый ре-
жим работы мотора. Современные моторы развивают 2000—
2500 об/мин; обороты несущих винтов большинства современ-
ных геликоптеров колеблются в пределах 200—350 об/мин. Тем
самым определяется необходимая редукция от коленчатого ва-
ла мотора к валу несущего винта в пределах, примерно,
V. - 712.
Степенью редукции определяется тип главного редуктора
(простые шестеренчатые передачи, планетарные передачи, ком-
бинация их и т. п.).
Чтобы обеспечить нормальное вращение несущего винта ге-
ликоптера. в случае перебоев в работе мотора или внезапной
его остановки, все современные геликоптеры обязательно име-
ют муфту свободного хода.
Выбранные схемы погашения реактивного крутящего мо-
мента и основные конструктивные параметры (расстояние ру-
левого винта от оси несущего винта, диаметр рулевого винта и
его обороты) определяют тип и конструкцию трансмиссионной
передачи к рулевому винту (редукция в главном редукторе,
редукция в отдельном редукторе рулевого винта, наличие про-
межуточных угловых редукторов и т. п.).
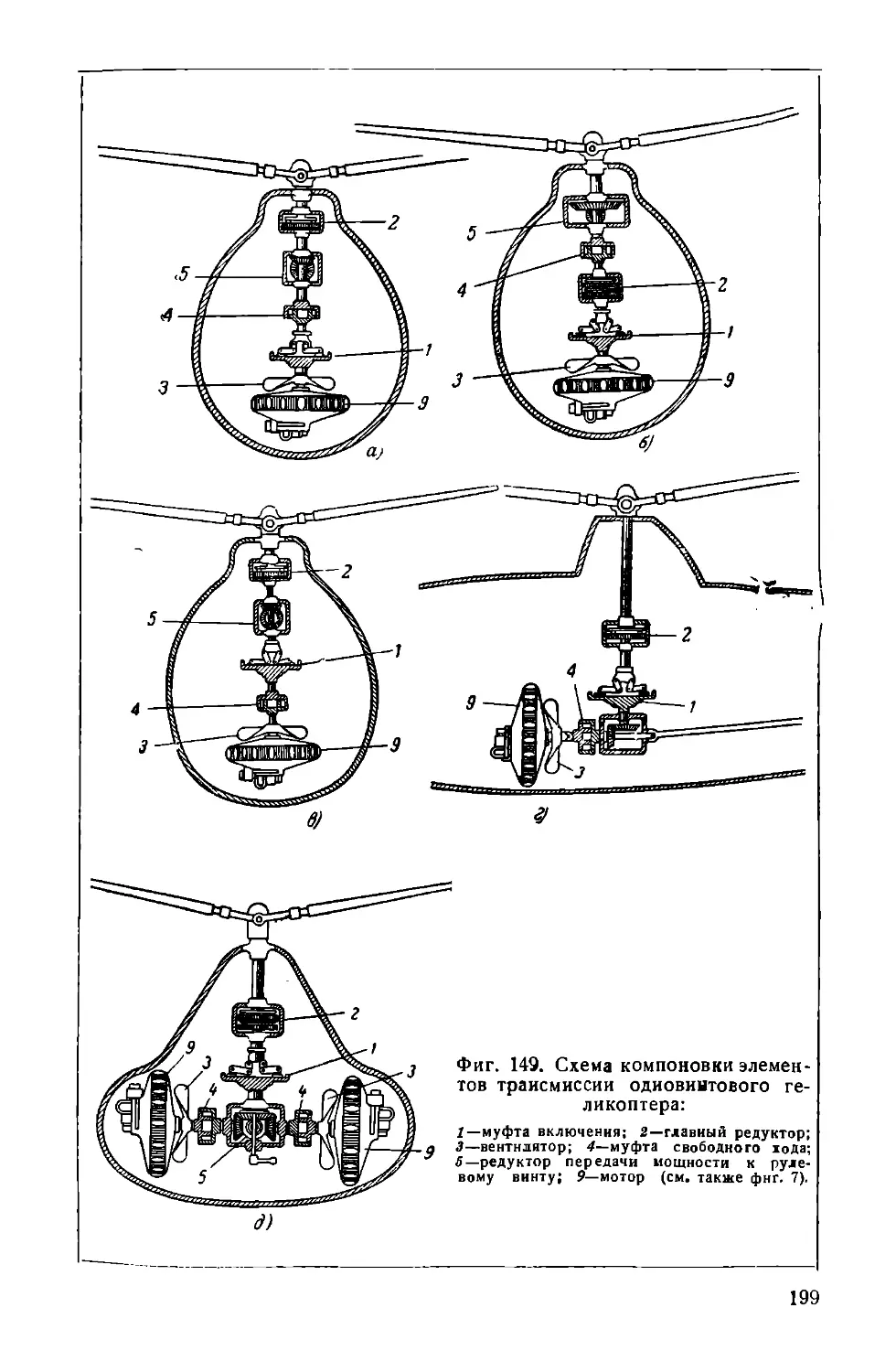
На фиг. 7 показана одна из возможных схем трансмиссия,
типичная для одновинтового геликоптера.
21
К2
I
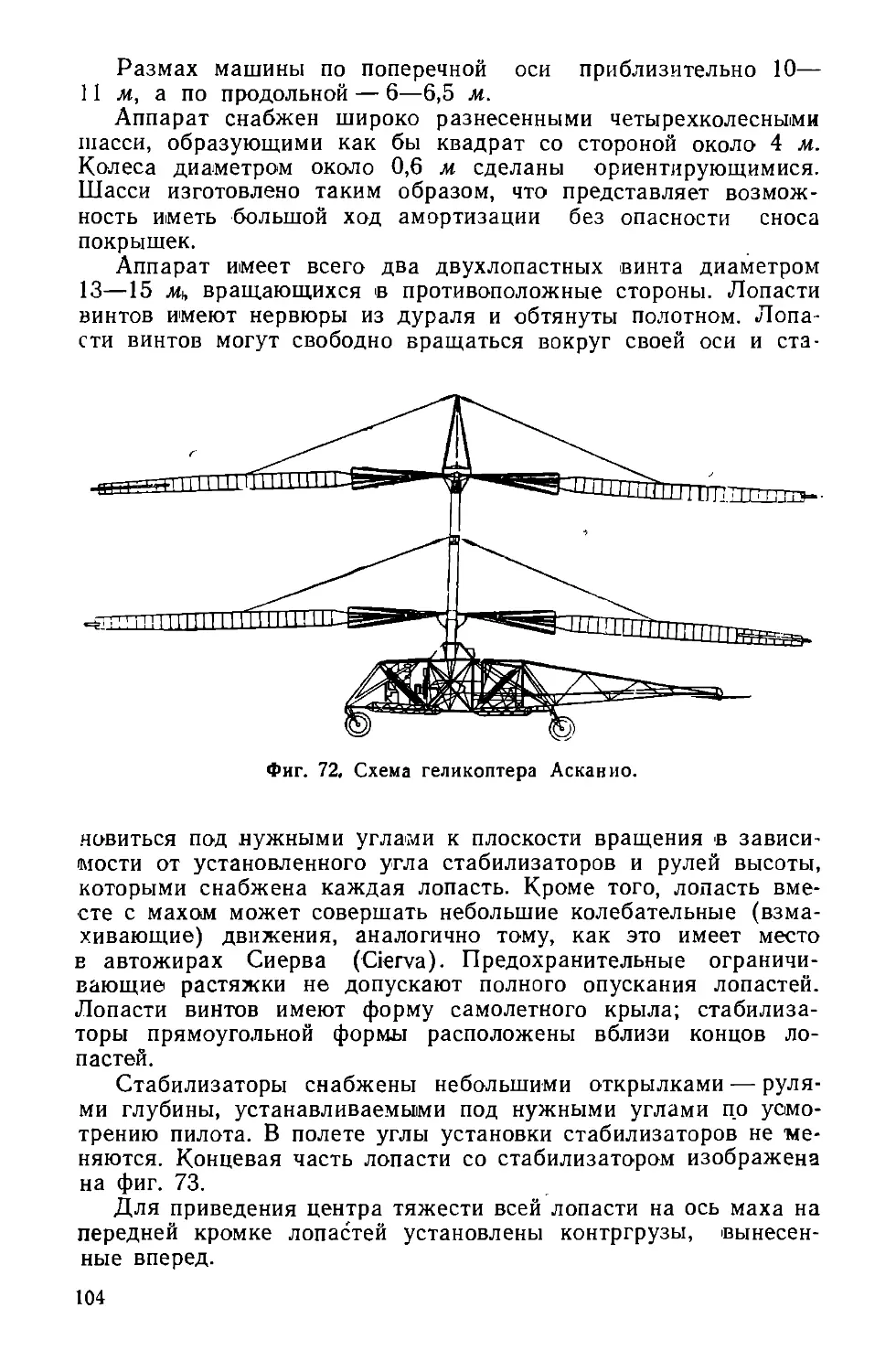
Фиг. 7. Типовая схема размещения элементов трансмиссии одновинтового геликоптера:
/—муфта включения; 2—главный редуктор; 3-вентилятор; 4—муфта свободного хода; 5—редуктор передачи
мощности к рулевому винту; 6—редуктор рулевого виита управления; 7—угловой промежуточный редуктор;
3—карданные сочленения; 9-мотор.
Системы бензо- и маслопитания моторной установки гели-
коптера не отличаются от самолетных, за исключением того,
что в геликоптере должно быть обеспечено принудительное
охлаждение масляного радиатора от основного вентилятора,
установленного на моторе.
Управление моторной группой геликоптера, расположенное
в кабине пилота, состоит из рукоятки управления дросселем
мотора и рычага, воздействующего на муфту включения.
Система управления геликоптером
Основные эволюции геликоптера — взлет, подъем, «висение»,
спуск и посадку — пилот осуществляет рукояткой общего
шага несущего винта (в сочетании с дросселем мотора).
Этой же рукояткой, размещаемой обычно слева от пило-
та, пользуются для перевода несущего винта на режим авторо-
тации при вынужденной остановке мотора, а также для резко-
го увеличения шага несущего винта («подрыв») при безмотор-
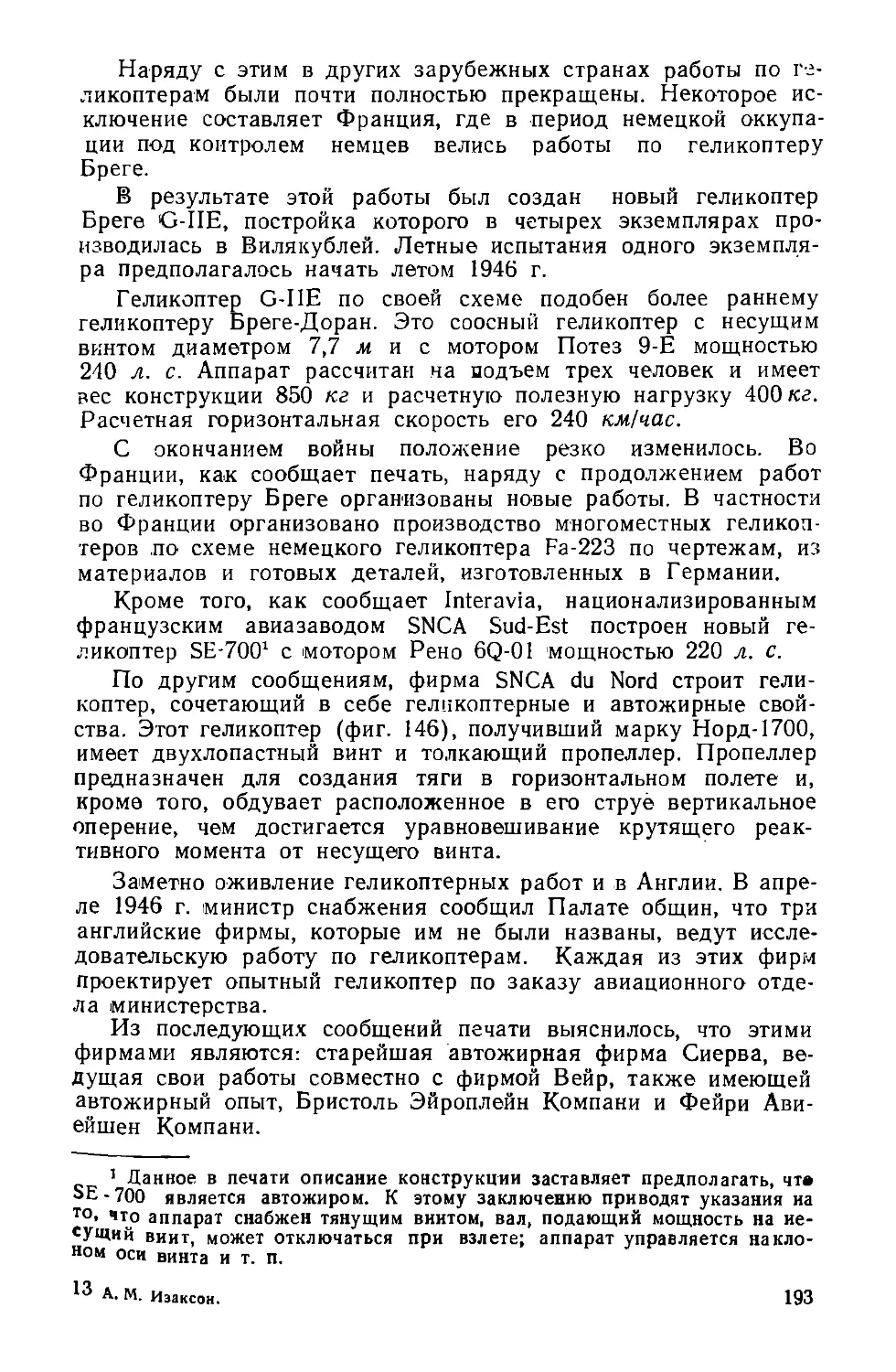
ной посадке геликоптера. Управление геликоптером в продоль-
ном и поперечном направлениях осуществляется ручкой управ-
ления, находящейся перед сиденьем пилота. Ручка управле-
ния связана системой тяг с перекашивающим механизмом (ав-
томат-перекос) диференциального шага лопастей несущего
винта.
Курсовое управление геликоптером осуществляется изме-
нением шага лопастей рулевого винта при помощи педалей, на-
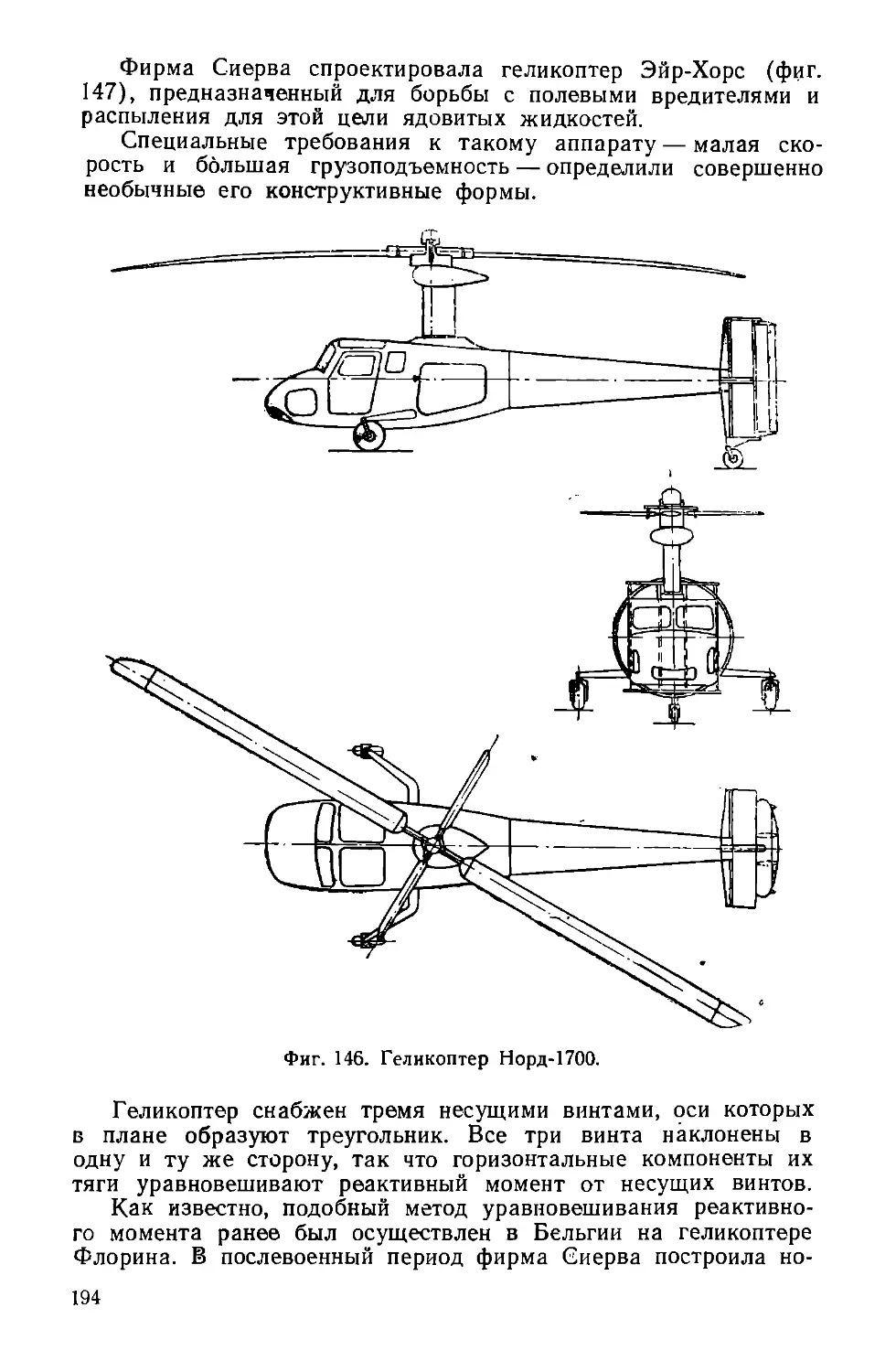
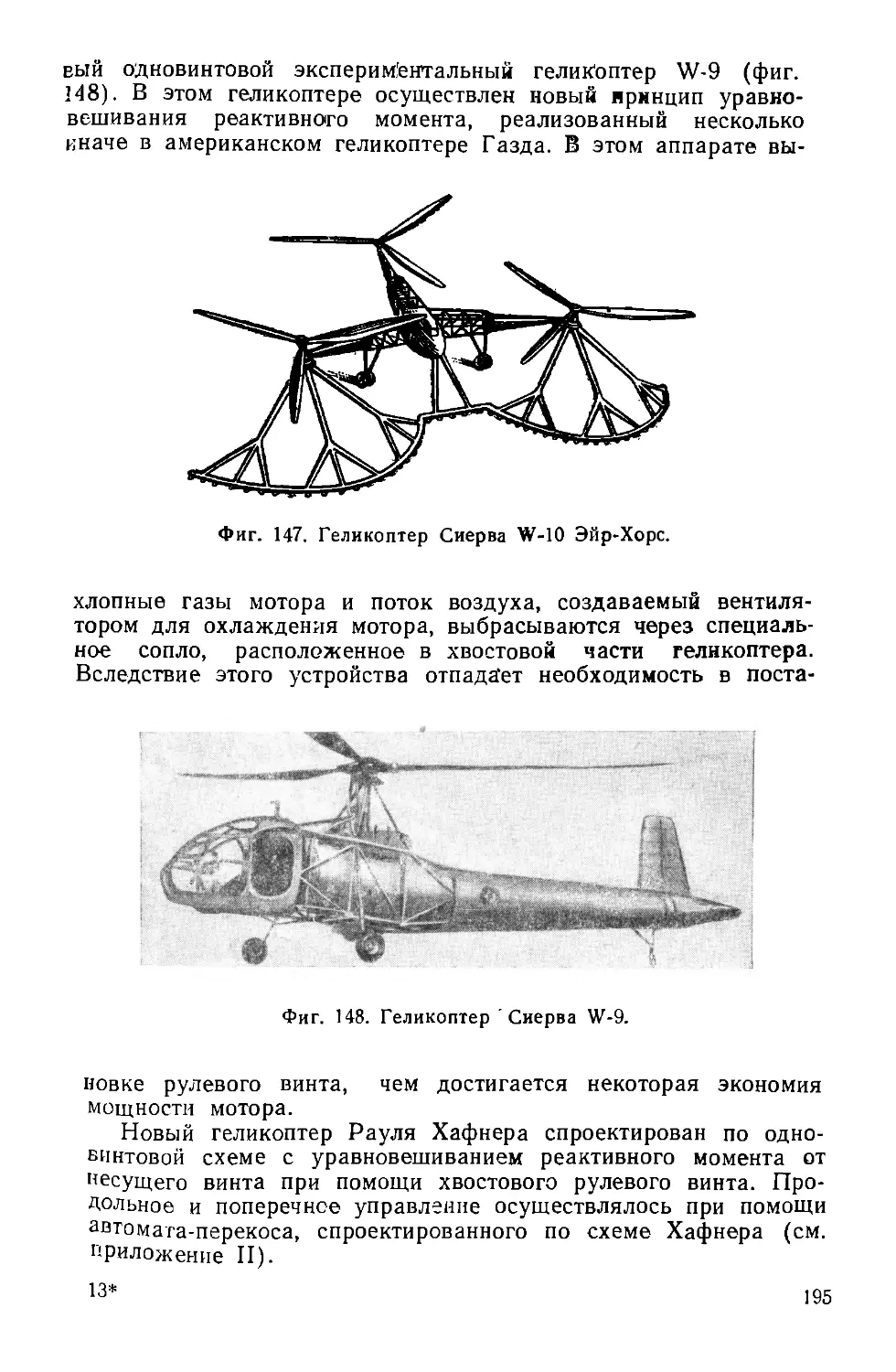
ходящихся внизу кабины пилота.
Элементы автоматизации в управлении геликоптером.
Посадочное устройство
Как следует из вышесказанного, для полета на геликопте-
ре и осуществления на нем всех присущих аппаратам этого ти-
па эволюций пилот имеет в своем распоряжении несколько
органов управления. Существует постоянная взаимозависи-
мость между многими из этих органов.
Ввиду этого для максимального упрощения техники пило-
тирования геликоптером на некоторых построенных машинах
введена автоматизация в управлении.
В качестве примера подобной автоматизации следует наз-
вать:
а) постоянную кинематическую связь шага лопастей несу-
щего винта с дросселем мотора для сохранения постоянства
оборотов винта;
б) автоматическую связь шага лопастей несущего винта и
шага лопастей рулевого винта для обеспечения постоянного
уравновешивания реактивного крутящего момента;
в) автоматический перевод несущего винта на режим авто-
ротации (перевод шага лопастей на отрицательный) при вне-
запной остановке мотора.
23
Конструкция посадочных устройств геликоптера (шасси,
хвостовое колесо) в общем аналогична самолетным. Имея в ви-
ду специфические маневры, доступные геликоптеру, на многие
построенные аппараты устанавливают ориентирующиеся коле-
са, дающие возможность свободного передвижения по земле в
любом направлении.
Некоторые из построенных геликоптеров снабжены шасси с
носовым колесом, что сильно облегчает рулежку по аэродро-
му. Ввиду возможной значительной величины вертикальной
составляющей посадочной скорости при посадке без мото-
ра особое внимание уделяется прочности посадочного устрой-
ства.
Выше дано краткое описание элементов конструкции «ти-
пового» одновинтового геликоптера, близкого' по своей схеме к
аппарату Сикорского. Рассмотрим осуществление различных
эволюций на таком геликоптере.
После запуска и прогрева мотора дают небольшие обороты;
затем плавно сцепляют муфту включения, раскручивая тем
самым несущий винт, имеющий при этом небольшой шаг. Руч-
ка управления находится в нейтральном положении и устанав-
ливается необходимая величина общего шага. Затем дроссель
мотора приоткрывается, чтобы придать винту обороты, соответ-
ствующие взлету.
Если управление общим шагом винта и дросселем мотора свя-
зано кинематически, то две последние операции выполняют одно-
временно. Геликоптер начинает подниматься и пилот должен
при помощи ручки управления и педалей сохранять нормаль-
ное положение аппарата. Все возникающие крены и повороты
должны немедленно устраняться. Высота подъема регулирует-
ся шагом винта и положением дросселя мотора. При же-
лании перейти на горизонтальный полет пилот дает от себя
ручку управления, вектор тяги несущего винта при этом
наклоняется вперед, вызывая поступательное движение гели-
коптера.
Геликоптерный винт, обдуваемый встречным потоком воз-
духа под некоторым углом к ометаемому диску, работает на
режиме, как принято называть, «косой обдувки». Вследствие
эффекта косой обдувки подъемная сила, развиваемая винтом
при той же затрате мощности, возрастает вместе со скоростью.
Таким образом геликоптер начинает вновь набирать высоту
без увеличения шага винта. Для строго горизонтального поле-
та необходимо несколько задросселировать мотор, что может
быть выполнено при неизменном шаге несущего винта или с
одновременным уменьшением шага.
После достижения некоторого значения наивыгоднейшей
скорости дальнейшее увеличение скорости вызовет увеличение
потребной мощности. Поэтому максимальная мощность мото-
ра используется для набора высоты или для получения макси-
мальной скорости горизонтального полета. Значительная мощ-
24
ность затрачивается также при «висении» геликоптера. При
поступательном движении на несущем винте появляется доба-
вочная подъемная сила и максимальная высота подъема при
поступательном движении (так называемый «динамический» по
толок) больше, чем при строго вертикальном подъеме («стати-
ческий» потолок).
Перевод геликоптера на режим снижения при работающем
моторе производится соответствующим уменьшением шага вин-
та и дросселированием мотора. Шагом и дросселем регулирует-
ся также скорость спуска.
Перед самой посадкой геликоптер несколько «зависает» (за-
медляется спуск) вследствие влияния земли, или, как,, говорят,
«воздушной подушки».
При посадке необходимо строго следить за положением ап-
парата, не допуская кренов или поступательного движения в ка
ком-либо направлении.
При остановке мотора (поломка или другая причина) несу-
щий винт должен быть переведен немедленно на режим авто-
ротации.
Для уменьшения скорости посадки выгодно осуществлять
спуск не строго отвесно, а по наклонной траектории (не парашю-
тирующий, а планирующий спуск), так как при этом вертикаль-
ная скорость спуска снижается. Теоретически можно предпо-
лагать, что резкое увеличение шага несущего винта перед самой
посадкой может мгновенно несколько увеличить подъемную си-
лу вследствие накопленной кинетической энергии вращающего-
ся винта и тем самым уменьшить скорость приземления.
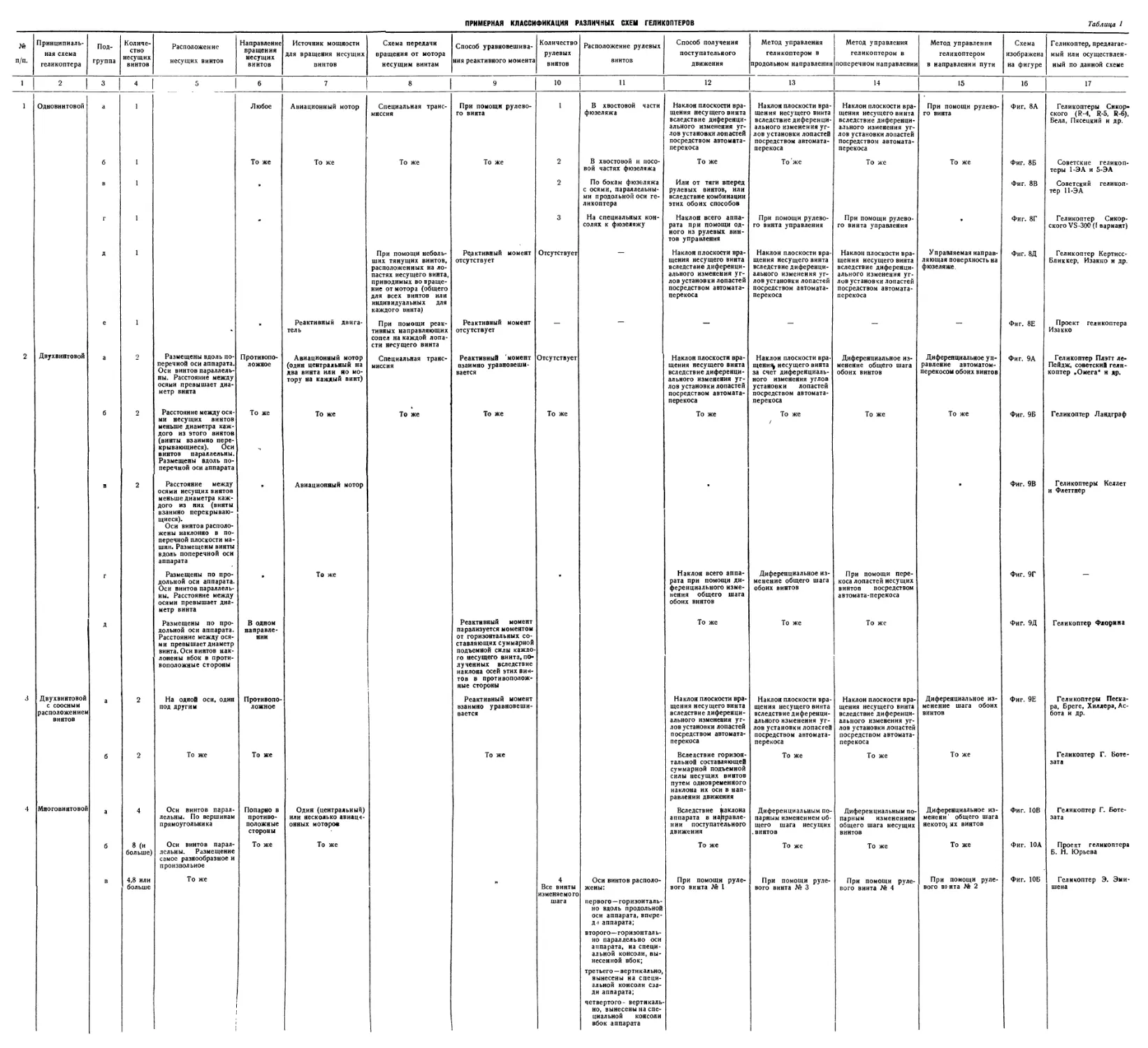
Примерная классификация разных схем
геликоптвров
Для более отчетливого представления о ходе развития гели-
коптера, его усовершенствовании и возникающих новых техни-
ческих проблемах мы даем примерную классификацию разных
типов и схем геликоптеров.
Ввиду того, что подобная классификация дается впервые, ее
следует рассматривать как самую предварительную, нуждаю-
щуюся в дальнейших уточнениях.
Исходным материалом для подобной классификации явились
как все построенные геликоптеры, так и отдельные, известные
нам, проекты, патентные предложения и пр.
При составлении нашей классификации и при определении в
ней места для различных геликоптеров (построенных или проек-
тировавшихся) мы руководствовались следующими основными
признаками.-
I. По общей принципиальной схеме:
а) одновинтовые;
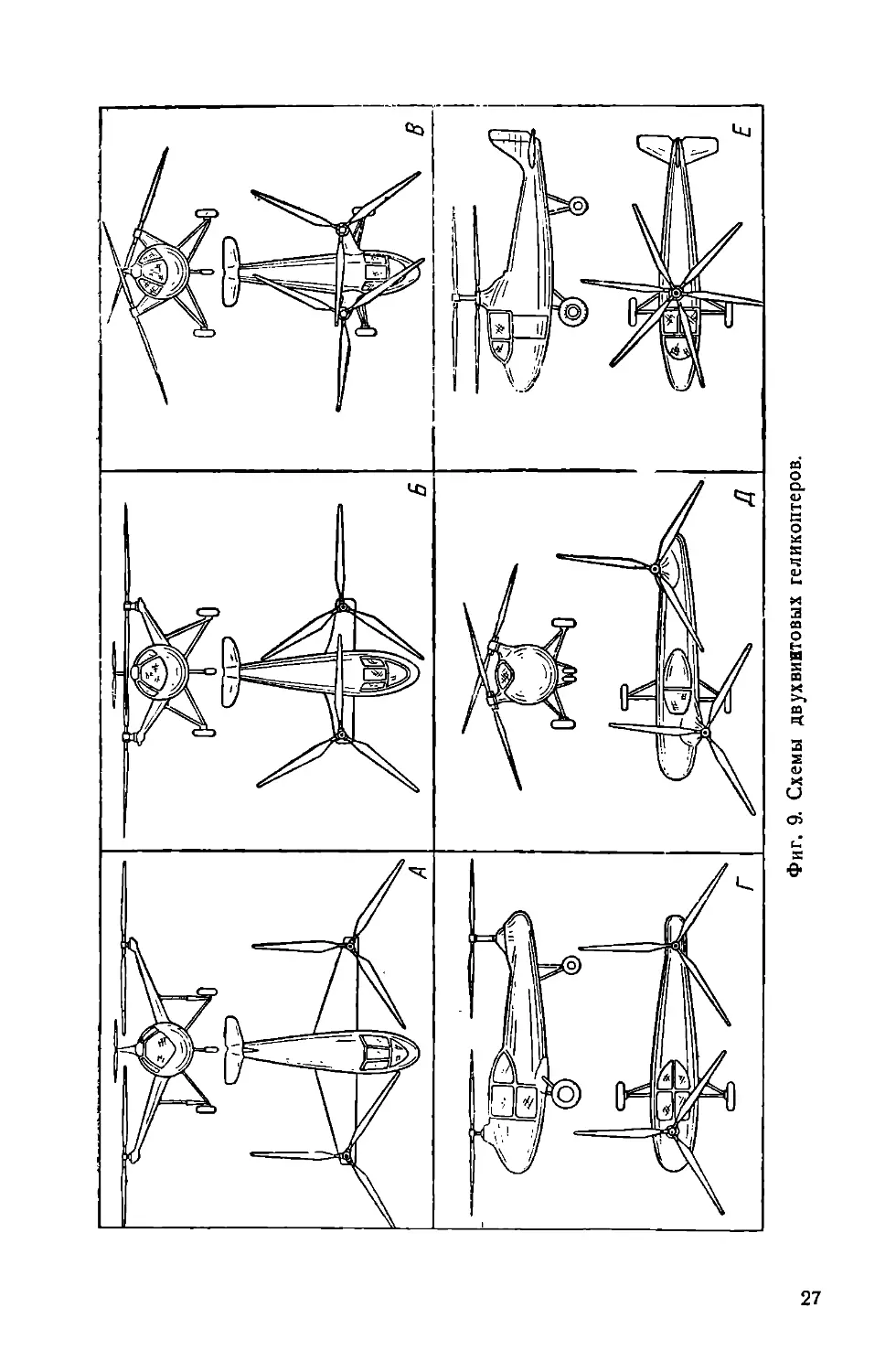
б) двухвинтовые (с осями, параллельно расположенными и
несколько наклоненными друг к другу);
25
Фиг. 8. Схемы одновинтовых геликоптеров.
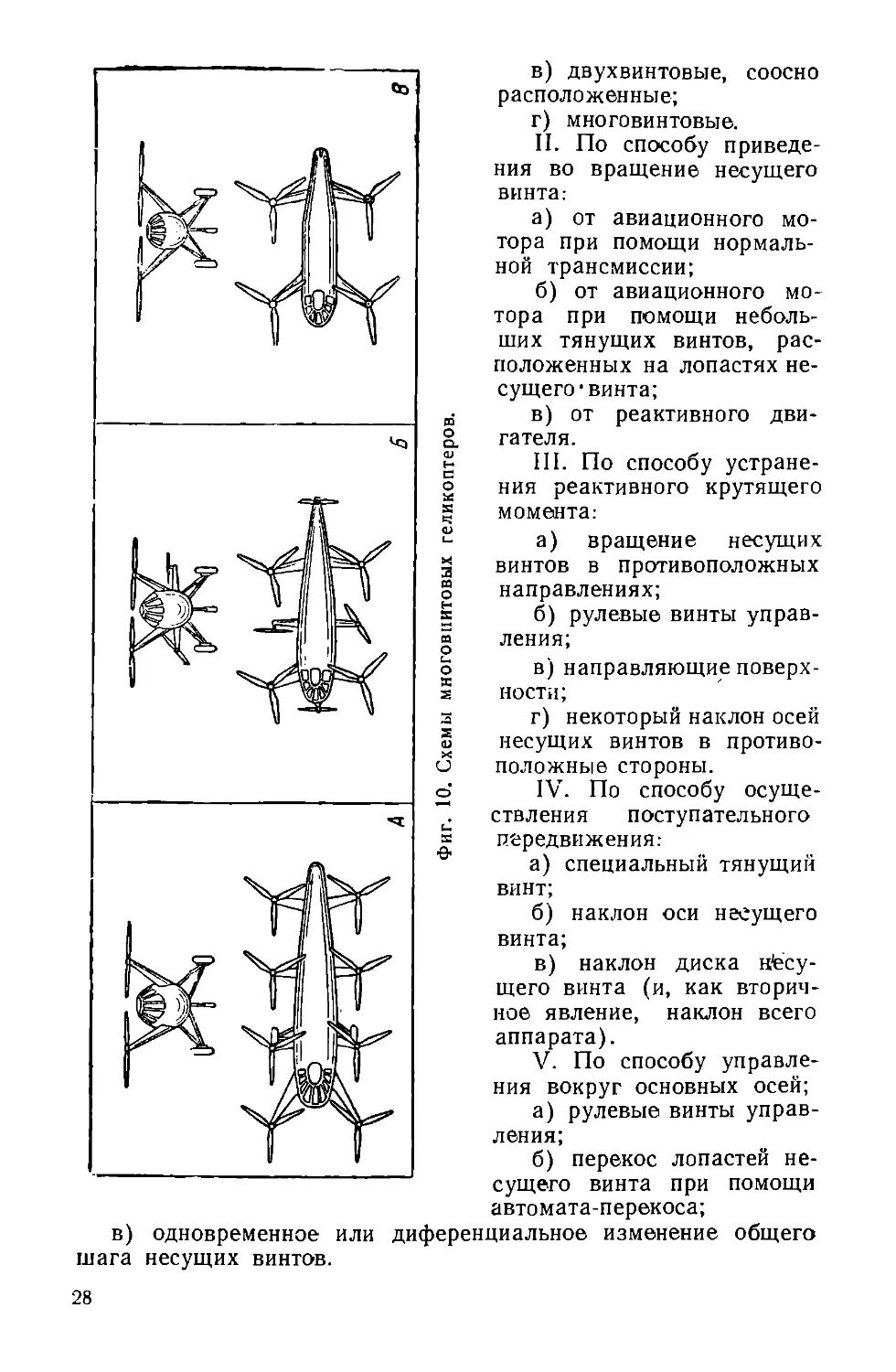
Фиг. 9. Схемы двухвинтовых геликоптеров.
в) двухвинтовые, соосно
расположенные;
г) многовинтовые.
II. По способу приведе-
ния во вращение несущего
винта:
а) от авиационного мо-
тора при помощи нормаль-
ной трансмиссии;
б) от авиационного мо-
тора при помощи неболь-
ших тянущих винтов, рас-
положенных на лопастях не-
сущего1 винта;
в) от реактивного дви-
гателя.
III. По способу устране-
ния реактивного крутящего
момента:
а) вращение несущих
винтов в противоположных
направлениях;
б) рулевые винты управ-
ления;
в) направляющие поверх-
ности;
г) некоторый наклон осей
несущих винтов в противо-
положные стороны.
IV. По способу осуще-
ствления поступательного
передвижения:
а) специальный тянущий
винт;
б) наклон оси несущего
винта;
в) наклон диска несу-
щего винта (и, как вторич-
ное явление, наклон всего
аппарата).
V. По способу управле-
ния вокруг основных осей;
а) рулевые винты управ-
ления;
б) перекос лопастей не-
сущего винта при помощи
автомата-перекоса;
в) одновременное или диференциальное изменение общего
шага несущих винтов.
28
В этой классификации мы не принимали во внимание более
частные, хотя и не менее важные, признаки, как-то: тип креп-
ления лопастей несущего винта (жесткое крепление или шар-
нирная подвеска), принципиальную схему втулки несущего
винта и автомата-перекоса, тип авиационного мотора (воздуш-
ного или водяного охлаждения) и его расположение и т. п.
Примерную классификацию см. в таблице 1 в конце книги.
Необходимо иметь в виду, что некоторые признаки для клас-
сификации, которые могут найти применение в разных схемах
геликоптеров, мы для упрощения отнесли к одной определенной
схеме.
Глава III
НАЧАЛЬНЫЙ ЭТАП В ИСТОРИИ ГЕЛИКОПТЕРА
Эскиз и запись Леонардо да Винчи
Идея осуществления летательного аппарата тяжелее возду-
ха, обладающего способностью вертикального взлета, впервые
была предложена известным итальянским художником и меха-
ником Леонардо да Винчи (Leonardo da tVincj).
В одном из найденных в 'Миланской библиотеке манускрип-
тов, относящихся к 1475 г., были обнаружены эскиз и описание
воздушного винта. Приводя винт во вращение, Леонар-
до да Винчи предполагал осуществлять вертикальный взлет
проектируемого им летательного аппарата.
Фиг. 11. Эскиз геликоптера Леонардо да Винчи.
Около эскиза (фиг. 11) имеется следующая заметка: «Остов
винта должен быть сделан из железной проволоки толщиной в
веревку; расстояние от окружности до центра должно равнять-
ся 8 локтям. Если прибор сделан как следует, т. е. из прочной
парусины, поры которой тщательно замазаны крахмалом, то я
думаю, что при вращении его с известной скоростью такой винт
как бы опишет в воздухе свою нарезку и поднимется вверх. В
этом ты легко можешь убедиться, рассекая воздух широкой тон-
кой линейкой: тогда твоя рука будет вынуждена следовать на-
правлению ребра линейки.
30
Парусина должна быть укреплена на каркасе из длинного
толстого камыша. Можно сделать небольшую модель из 'бумаги
с осью из туго скрученной металлической пружины. Если пру-
жину предоставить самой себе, то она заставит винт вра-
щаться».
Эта запись свидетельствует, что Леонардо да Винчи не только
впервые подал мысль о возможности вертикального взлета с по-
мощью воздушного винта, но и производил опыты с небольшими
моделями.
Работы М. В. Ломоносова
Записи Леонардо да Винчи были впервые опубликованы в
конце XVIII в.
Не будучи знакомым с записями Леонардо да Винчи и неза-
висимо от него, интереснейшие работы по созданию геликоптера
проводил величайший русский ученый М. В. Ломоносов.
Работы М. В. Ломоносова над геликоптерами были связаны
с его исследованиями воздушных явлений, что требовало выпол-
нения большого количества обширных систематических метео-
рологических наблюдений, в том числе и в высших слоях атмо-
сферы.
Для того чтобы обеспечить подъем в эти слои атмосферы
саморегистрирующих анемометров (им же изобретенных) и воз-
душных термометров, Ломоносов упорно работал над пробле-
мой создания специального летательного аппарата, пригодного
для этой цели.
4 февраля 1754 г. на собрании Академии наук М. Ломоно-
сов сделал сообщение об изобретенной им специальной «маши-
не», могущей поднимать на нужную высоту метеорологические
приборы.
В протоколах Академии наук сохранилось следующее сооб-
щение:
«Г-дин сов. и проф. Ломоносов собранию представил о ма-
шинке маленькой, которая бы вверх подымала термометры и
другие малые инструменты метеорологические и предложил оной
же машины рисунок; того ради г-да заседающие оное его пред-
ставление опробовали и положили канцелярию Академии наук
репортом просить, чтобы соблаговолено было приказать речен-
ную машину по приложенному при сем рисунку для опыта сего
изобретения сделать под его г-на автора смотрением мастером
Фуциусом. И о вышеописанном в виду протокола академическо-
го собрания репортую марта 4 дня 1754 г.».
К июлю 1754 г. эта машина, под непосредственным руковод-
ством Ломоносова и по его чертежам, была построена и опробо-
вана. В латинских протоколах конференции от 1 июля 1754 г.
сохранилось следующее описание этого геликоптера:
«Высокопочтенный советник Ломоносов показал изобретен-
ную им машину, называемую аэродинамической (воздухобеж-
31
ной), которая должна употребляться для того, чтобы с помощью
крыльев, движимых горизонтально в различных направлениях
силой пружины, какой обычно снабжаются часы, нажимать воз-
дух (отбрасывать его вниз), отчего машина будет подниматься
в верхние слои воздуха с той целью, чтобы можно было обсле-
довать условия (состояние) верхнего воздуха посредством ме-
теорологических машин (приборов), присоединенных к этой аэро-
динамической машине. Машина подвешивалась на шнуре, про-
тянутом по двум блокам, и удерживалась в равновесии грузика-
ми, подвешенными с противоположного конца. Как только пру-
жина заводилась, машина поднималась в высоту и потому обе-
щала достижение желаемого действия. Но это действие, по суж-
дению изобретателя, еще более увеличится, если будет увеличена
сила пружины и если увеличить расстояние между той и другой
парой крыльев, а коробка, в которой заложена пружина, будет
сделана для уменьшения веса из дерева. Об этом он (изобретя
тель) обещал позаботиться».
В своем отчете о трудах за истекший год в декабре 1754 г.
Ломоносов писал: «Делал опыт машины, которая бы, подымаясь
кверху сама, могла поднять с собой маленький термометр, да-
бы узнать градус теплоты на вышине, которая хотя слишком на
два золотника облегчалась, однако к желаемому концу не при-
ведена».
Очевидно, другие неотложные работы не дали возможности
Ломоносову довести осуществление геликоптера до «желаемо-
го конца».
Работа Поктона
В 1768 г. Поктон (Paucton) в своей работе «Теория архимедо-
ва винта» дал описание геликоптера, снабженного двумя вин-
тами «птероферами» — по его терминологии, из которых один
поддерживающий, а другой тянущий. Винты он предполагал
приводить во вращение рукой человека. Кроме того, он особо
предусматривал возможность уменьшить скорость падения ап-
парата путем «закрытия канала винтов, откуда вытекает воз-
дух», делая тем самым «из основания птерофера сплошную по-
верхность, которая будет сопротивляться потоку и значительно
замедлит падение машины».
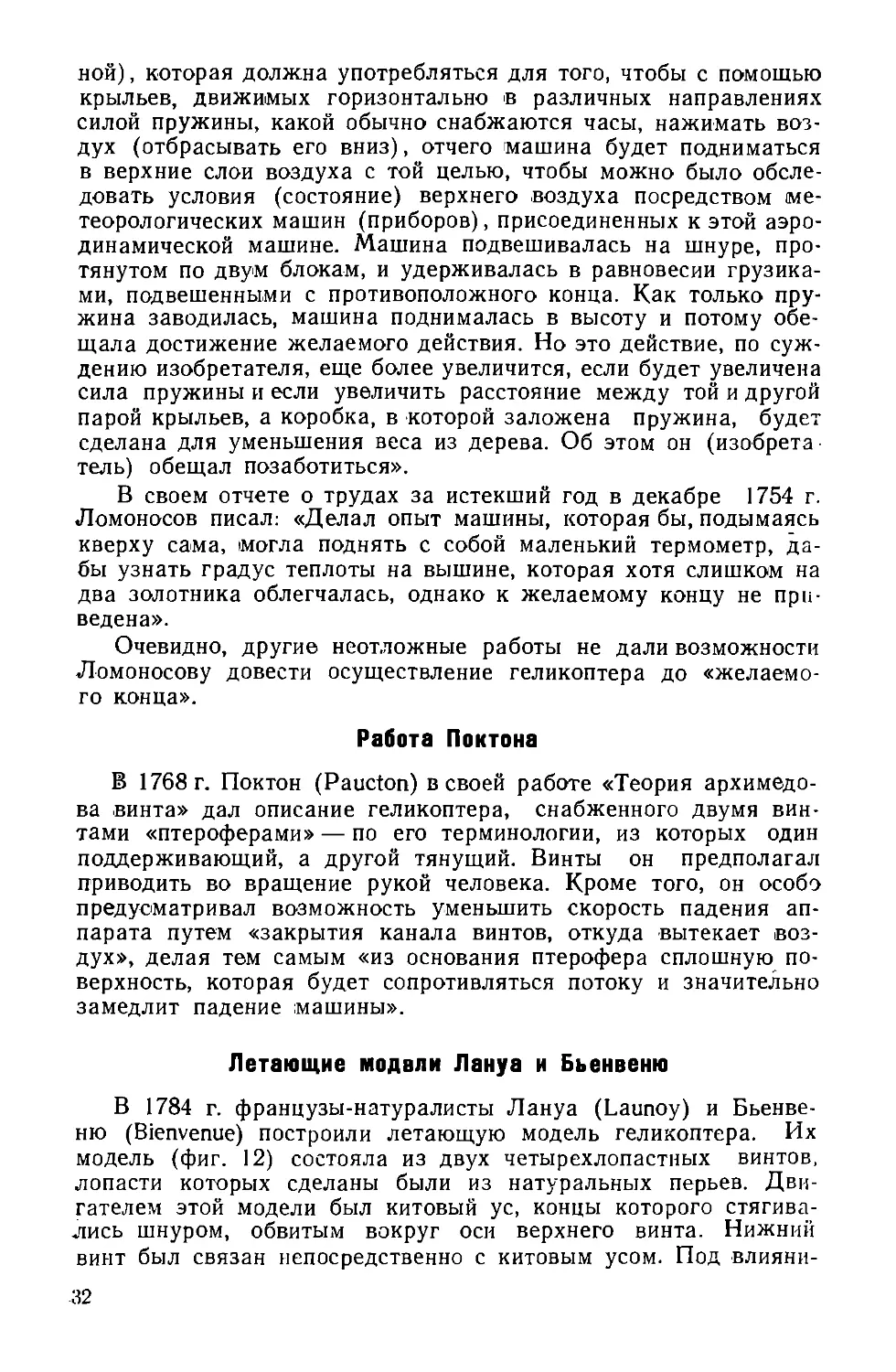
Летающие модели Лануа и Бьенвеню
В 1784 г. французы-натуралисты Лануа (Launoy) и Бьенве-
ню (Bienvenue) построили летающую модель геликоптера. Их
модель (фиг. 12) состояла из двух четырехлопастных винтов,
лопасти которых сделаны были из натуральных перьев. Дви-
гателем этой модели был китовый ус, концы которого стягива-
лись шнуром, обвитым вокруг оси верхнего винта. Нижний
винт был связан непосредственно с китовым усом. Под влияни-
32
ем натяжения тетивы винты начинали вращаться в противопо-
ложные стороны.
Вес модели составлял 85 г. Модель с натянутым при помо-
щи шнура китовым усом, которому затем предоставлялась воз-
можность свободно распрямляться, поднималась в воздух и па-
дала обратно, как только китовый ус выпрямлялся, возвраща-
ясь в свое начальное положение.
Для того времени эта модель
была большим изобретением, так
как практически доказывала воз-
можность подъема в воздух аппа-
рата тяжелее воздуха.
Специальная комиссия, назна-
ченная Парижской Академией
наук в апреле 1784 г., после до-
клада Лонуа и Бьенвеню и испы-
тания модели в своем отчете писа-
ла:
«Мы не сомневаемся, что при
более тщательном изготовлении
такой машины можно достигнуть
как увеличения поднимаемого ею фиг 12 Летающая модель ге.
груза, так и высоты самого подъе- ликоптера Лануа и Бьенвеню.
ма, однако пределы этого увеличе-
ния не могут быть особенно широкими. Во всяком случае этот
механический способ, при помощи которого тело поднимается
само на воздух, кажется нам простым и остроумным».
Воздухоплавание в конце XVIII и XIX вв.
и работы по геликоптерам
Конец XVIII в. ознаменовался появлением воздушных ша-
ров Монгольфье и Шарля. Первые успешные полеты человека,
пребывание в воздухе сравнительно продолжительное время
вызвали массовое ликование и вселяли убеждение, что пробле-
ма завоевания человеком воздушной стихии разрешена. Вни-
мание общественности и отдельных технических работников
было сосредоточено на воздушных шарах и их усовершенство-
вании. При таких условиях внимание и интерес к проблеме
создания геликоптера понизились, что отразилось на работах
в этой области.
Примерно в середине XIX в. наступило некоторое разоча-
рование в возможности при помощи аэростатов подчинить
человеку силы воздушной стихии. Соприкасаясь ближе с ре-
зультатами полетов на воздушных шарах, стали убеждаться,
что воздушные шары разрешают лишь задачу отрыва от земли
и подъема в воздух, но не передвижения в воздухе в желаемом
направлении по воле пилота. Поднявшись в воздух, аэростат
3 А. М. Изаксон.
33
34
3*
35
становится игрушкой ветра, воздушных течений и пр., не имея
возможности с ними бороться. Попытки сделать аэростаты
управляемыми, предпринятые в начале XIX в., не увенчались
успехом.
Необходимо было создать двигатель, который можно было
бы установить на аэростат, но подходящих двигателей в то
время еще не было.
При появлении таких двигателей их большой вес и неболь-
шая мощность не позволили особенно повысить скорость по-
лета первых управляемых аэростатов. Для завоевания воздуш-
ной стихии начались вновь изыскания в другой области — в
области аппаратов тяжелее воздуха.
Исключительные успехи во всех областях науки и техники
на протяжении XIX в., открытие и внедрение в жизнь электри-
чества, телефонии, телеграфии, появление пароходов и желез-
ных дорог, успехи в области управляемых аэростатов, откры-
тие планирующих полетов и первые удачные работы с аэро-
планом — все это создавало соответствующие условия для
усиления работ и в области геликоптера.
Работы по созданию моделей геликоптера
За этот период следует отметить создание целого ряда ле-
тающих и демонстрационных моделей геликоптера. В процес-
се создания моделей происходило изыскание рациональных
схем, конструктивных форм и особенностей, постройка необ-
ходимых для подъема моделей двигателей и проводилась
большая экспериментальная работа по изучению поведения
моделей в полете.
Также исследовалось влияние различных параметров на
качество моделей и т. п.
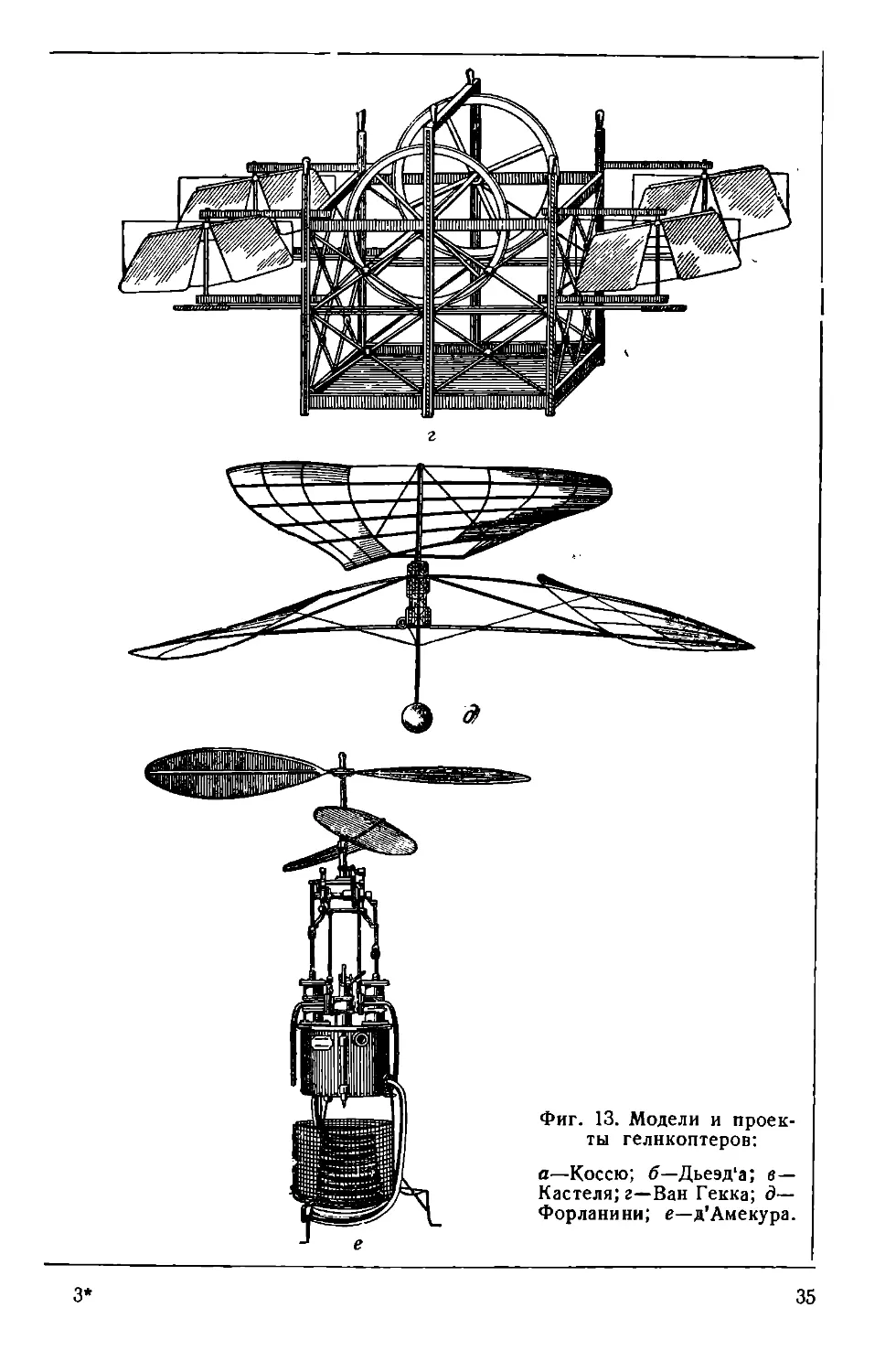
Наибольший интерес (фиг. 13) представляли модели Коссю
(1845 г.), Ван Гекка (1847 г.), д’Амекура (1863 г.), Альфонса
Пено (1871 г.), Дьеэд’а (1877 г.), Форланини (1877 г.), Кастеля
(1878 г.) и ряд других.
Необходимо отметить особую роль в пропаганде идеи
создания летательных аппаратов тяжелее воздуха типа гели-
коптера трех энтузиастов: Понтона д’Амекура, Габриэля де
ла Ланделля и Феликса Надара (1853—1863 гг.). Большая
развернутая ими агитационная кампания, выпуск специальных
книг, опубликование «манифеста динамического воздухопла-
вания», демонстрации своих моделей, статьи в журналах —
все это повысило интерес к проблеме геликоптера.
В результате этой кампании возник журнал «Аэронавт»,
организовалось «Общество содействия воздушным сообщениям
при помощи аппаратов тяжелее воздуха» и были изданы тру-
ды и мемуары на эту тему. Членом указанного общества, в
частности, являлся Жюль Верн.
Идея геликоптера нашла свое блестящее отражение в тру-
дах знаменитого романиста.
36
На фиг. 14 изображен «Аэронеф» де ла Ланделля, пропа-
гандированный указанной группой.
Фнг. 14. «Аэронеф* де ла Ланделля.
Работы по геликоптерам в XIX в. в России
М. А. Рыкачев, моряк по профессии, впоследствии акаде-
мик и директор Главной физической обсерватории, работал
над созданием геликоптера, на котором можно было бы, из-
меняя направление оси винта, передвигаться в воздухе в же-
лаемом направлении. В 1870—1871 гг. Рыкачев предпринял
специальные экспериментальные исследования воздушных
винтов для определения потребной мощности и развиваемой
ими тяги. Для своих опытов Рыкачев построил специальную
установку (фиг. 15).
'М. А. Рыкачев был одним из первых русских ученых, серь-
езно изучавшим работу воздушного винта для геликоптера.
Известный русский ученый А. Н. Лодыгин явился одним из
первых изобретателей геликоптера с электрическим двигате-
лем.
Представляя в 1869 г. Главному инженерному управлению
свой проект «электролета», А. Н. Лодыгин выдвинул следую-
щее основное положение: «Если к какой-либо массе приложить
работу архимедова винта и когда сила винта будет более тя-
жести массы, то масса двинется по направлению силы».
По описанию А. Н. Лодыгина, его «электролет» представ-
ляет собой длинный цилиндр, оканчивающийся в передней
части конусом, а сзади — полушарием. Остов снаряда состоял
37
из продольных и поперечных брусьев, скрепленных медными
скобами и обшитых снаружи кровельным железом. Со стороны
полушария на горизонтальной оси был укреплен винт, сооб-
щавший снаряду движение в горизонтальной плоскости. Этот
винт мог отклоняться вправо и влево, чем обеспечивалось
управление аппаратом. Второй винт был расположен сверху
снаряда и его лопасти были несколько наклонены к корпусу
«электролета». Устанавливая лопасти винта под различными
углами, Лодыгин рассчитывал изменять в полете тягу, а ком-
Фиг. 15. Прибор М. А. Рыкачева для испытания моделей геликоптерных
винтов.
бинируя при помощи особого механизма работу горизонталь-
ного и вертикального винтов, — сообщать движение в гори-
зонтальной или вертикальной плоскости. Уменьшая тягу
подъемного винта, можно было добиться плавной посадки
«электролета».
Для вращения винтов изобретатель спроектировал электро-
двигатель мощностью 300 л. с., а для прерывания и замыкания
тока—особый регулятор, делающий 20 об/сек. Регулятор обес-
печивал десять прерываний и замыканий тока во время одного
оборота; таким образом процесс прерывания и замыкания тока
происходил 200 раз в секунду. Вращение передавалось вин-
там через специальный передаточный механизм, состоявший из
якоря, рычага и системы зубчатых колес (напоминающий со-
временный редуктор). «Электролет» весил около 500 пудов.
Остается неизвестным, какие аккумуляторы намеревался
использовать Ладыгин для своего электродвигателя.
Главное инженерное управление отказало в средствах для
постройки «электролета» и этот проект не был осуществлен.
38
В 1891 г. изобретатель Гроховский разработал проект ле-
тательного аппарата, представляющего собой комбинацию
геликоптера и самолета. По его проекту геликоптер имел два
восьмилопастных винта, при помощи которых имелось в виду
осуществлять взлет и «висение». Винты должны были вращать-
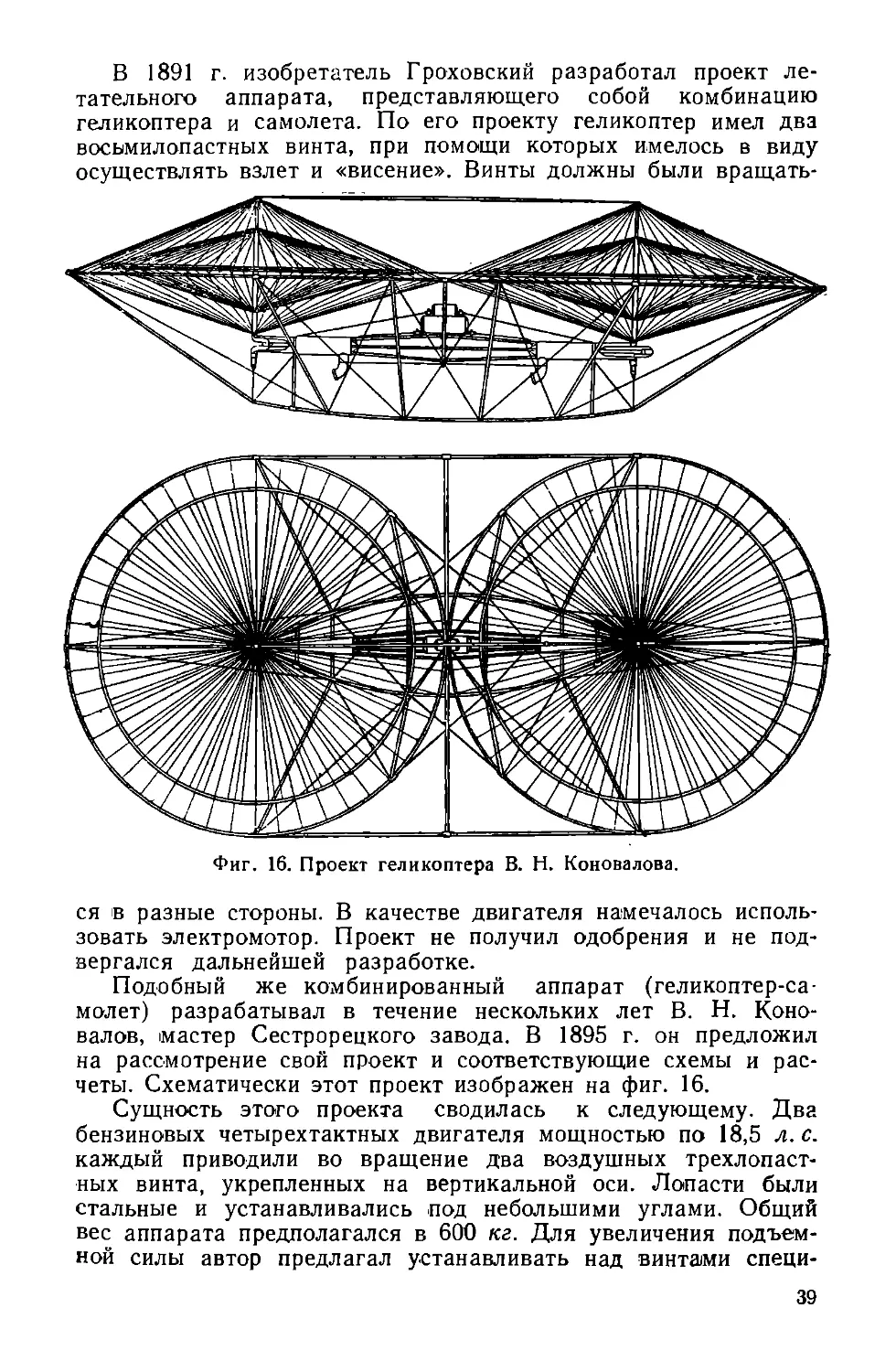
Фиг. 16. Проект геликоптера В. Н. Коновалова.
ся в разные стороны. В качестве двигателя намечалось исполь-
зовать электромотор. Проект не получил одобрения и не под-
вергался дальнейшей разработке.
Подобный же комбинированный аппарат (геликоптер-са-
молет) разрабатывал в течение нескольких лет В. Н. Коно-
валов, мастер Сестрорецкого завода. В 1895 г. он предложил
на рассмотрение свой проект и соответствующие схемы и рас-
четы. Схематически этот проект изображен на фиг. 16.
Сущность этого проекта сводилась к следующему. Два
бензиновых четырехтактных двигателя мощностью по 18,5 л. с.
каждый приводили во вращение два воздушных трехлопаст-
ных винта, укрепленных на вертикальной оси. Лопасти были
стальные и устанавливались под небольшими углами. Общий
вес аппарата предполагался в 600 кг. Для увеличения подъем-
ной силы автор предлагал устанавливать над винтами специ-
39
альные «тенты», меняя наклон которых можно было изменять
направление движения аппарата.
Необходимых средств на осуществление проекта В. Н. Ко-
новалов не получил, и дальнейшие работы были прекращены.
В 1897 г. изобретателем И. Быковым был предложен фанта-
стический проект геликоптера-велосипеда, приводимого в дви-
жение силой человека (фиг. 17). Проекты подобного типа
много раз предлагались в России и за границей.
Фиг. 17. Проект геликоптера-велосипеда И. Быкова.
В конце XIX в. в России проводились большие теоретиче-
ские и экспериментальные работы по теории авиации, аэроди-
намике, воздушным винтам и т. п. известными русскими уче-
ными: С. К. Джевецким, Д. И. Менделеевым, Н. Е. Жуков-
ским, С. А. Чаплыгиным, К. Э. Циолковским и др.
Своими научными трудами эти ученые сделали ценнейшие
вклады в дело общего прогресса авиации, в том числе и в
развитие геликоптера.
Глава IV
ПЕРЕЛОМНЫЙ ЭТАП В ИСТОРИИ ГЕЛИКОПТЕРА
Общая характеристика работ по геликоптерам в начале XX в.
Начало XX в., до мировой войны 1914 г., отмечено больши-
ми успехами во всех областях науки и техники, в том числе
в области воздухоплавания и авиации.
Создание небольших управляемых аэростатов Сантос-Дю-
мона, появление первых дирижаблей Цеппелина и успешные
полеты на них, первые полеты на аэропланах братьев Райт
в Америке, Фармана и Блерио во Франции — все это доста-
точно характеризует общее направление работ в области воз-
духоплавания и авиации за этот период. Появлялись новые по-
требности, которые, 9 свою очередь, воздействовали на раз-
вертывание технических работ в этой области.
Одновременно с успешными работами по усовершенство-
ванию дирижаблей и аэропланов продолжались работы по ге-
ликоптерам.
В отличие от более ранних работ по геликоптерам, которые
сводились к созданию летающих и демонстрационных моделей
и к разработке мало реальных, часто полуфантастических
проектов, в начале XX в. появилось значительное количества
интересных технически обоснованных проектов и делались
многочисленные попытки построить натуральный летающий ге-
ликоптер.
Эти попытки не дали успешных результатов по многим при-
чинам: слабость авиационной науки, отсутствие легких подхо-
дящих авиационных моторов, отсутствие средств, материалов
и т. п.
Предлагаемые проекты геликоптеров и осуществляемые
опытные образцы были в большинстве достаточно примитивны;
задаваясь целью осуществить вертикальный взлет и «висение»,
конструкторы уделяли совершенно ничтожное внимание устой-
чивости, управляемости, охлаждению моторов, трансмиссиям
и т. п. Однако, несмотря на это, работы по геликоптерам за
этот отрезок времени дали много поучительного.
41
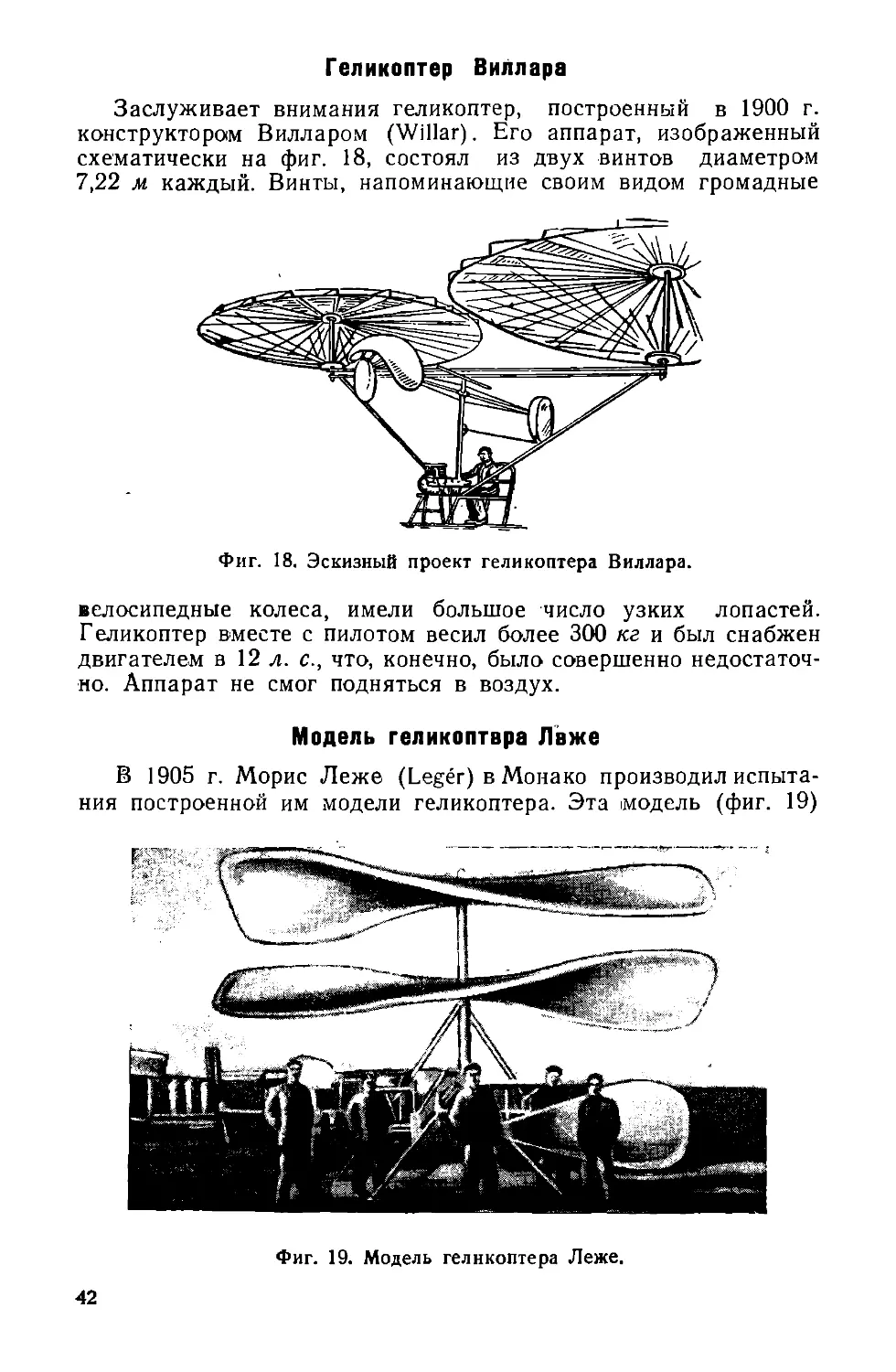
Геликоптер Виллара
Заслуживает внимания геликоптер, построенный в 1900 г.
конструкторам Вилларом (Willar). Его аппарат, изображенный
схематически на фиг. 18, состоял из двух винтов диаметром
7,22 м каждый. Винты, напоминающие своим видом громадные
Фиг. 18. Эскизный проект геликоптера Виллара.
велосипедные колеса, имели большое число узких лопастей.
Геликоптер вместе с пилотом весил более 300 кг и был снабжен
двигателем в 12 л. с., что, конечно, было совершенно недостаточ-
но. Аппарат не смог подняться в воздух.
Модель геликоптвра Лвже
В 1905 г. Морис Леже (Leger) в Монако производил испыта-
ния построенной им модели геликоптера. Эта модель (фиг. 19)
Фиг. 19. Модель геликоптера Леже.
42
имела два соосных винта диаметром 6,25 м, вращающихся в
противоположных направлениях. Винты приводились во враще-
ние электромотором, находившимся на земле, при помощи гиб-
кого вала длиной 1 м со специальными шарнирами на концах.
Винты были алюминиевые и весили 21 кг каждый. Общий вес
модели составлял 85 кг.
При испытании модели винтам давали разное число оборо-
тов, меняли загрузку и производили замер развиваемой вин-
тами подъемной силы, увеличивая мощность электромотора.
При мощности 12 л. с. винты развивали 60 об/мин и суммарный
поднимаемый груз был равен 180 кг.
Во время одного из испытаний в начале 1906 г. аппарат под-
нялся, но упал и разбился.
Геликоптер Сантоо-Дюмона
В начале 1906 г. Сантос-Дюмон (Santos-Dumont), считавший-
ся ранее большим приверженцем аппаратов легче воздуха,
предпринял постройку геликоптера. Эскиз его геликоптера по-
казан на фиг. 20.
Фиг. 20. Эскиз геликоптера Сантос-Дюмона.
Прямоугольная бамбуковая рама несла на своих концах оси
двух поддерживающих винтов 1 диаметром 6 м. Винты также
имели жесткий бамбуковый каркас и были обтянуты лакиро-
ванным шелком. Винты приводились во вращение двигателем 2
Левассера (Антуанетт) в 24 л. с., имевшим восемь цилиндров,
расположенных iV-образно. От мотора при помощи двух кони-
ческих шестерен вращение передавалось вертикальному валу
со шкивом вверху. От этого шкива вращение передавалось ре-
менной передачей двум другим шкивам, сидящим на осях вин-
тов. Эти последние шкивы были просто велосипедными коле-
43
сами, обтянутыми тросами. Для передвижения в горизонталь-
ном направлении имелся специальный тянущий винт 3, а для
управления при движении аппарат был снабжен сзади рулем 4.
Винты весили по 13,6 кг каждый. Весь аппарат вместе с пило-
том весил 170 кг. При начальных испытаниях подъемная сила
достигала лишь 90 кг при затрате мощности примерно 9 л. с.
Аппарат не обладал устойчивостью и дальнейшие опыты с ним
были прекращены.
Геликоптер Корню
В результате многочисленных достаточно успешных работ с
моделями Корню (Cornu) в 1907 г. построил геликоптер
(фиг. 21). Этот геликоптер имел раму из толстых стальных
труб, согнутых под тупым углом. Длина рамы была 6,2 м и
устанавливалась на четырех колесах, а в центре было место
для пилота и мотора. На концах рамы были смонтированы оси
Фиг. 21. Геликоптер Корню.
двух двухлопастных винтов диаметром 6 м. У винтов можно бы-
ло менять установку шага лопастей. Каждая лопасть винта со-
стояла из каркаса и стальной трубы, сплющенной к концу, при
этом мах лопасти прикреплялся шарнирно к ободу алюминие-
вой пластинкой, а затем неподвижно ко втулке. Каркас лопасти
был обтянут прорезиненным шелком. Длина лопастей была
1,8 м, а наибольшая ширина — 0,9 м. Для разгрузки лопастей
от больших изгибающих моментов к этим легким лопастям
присоединялись на расстоянии 2/3 радиуса свинцовые пластины,
центробежная сила которых создавала момент, противополож-
ный моменту на лопасть от силы тяги. Кроме того, лопасти были
растянуты специальными тросами к ободу винта.
Винты приводились во вращение от мотора Антуанетт 24 л. с.
с передаточным числом 1 : 10 при помощи бесконечного ремня.
44
Внизу, около шасси, были установлены резервуары с водой, го-
рючим и маслом и аккумуляторы для системы зажигания. Перед
пилотом слева было управление муфтой между мотором и вер-
тикальным валом, справа — управление газом. Перевод аппа-
рата на горизонтальное перемещение предполагалось осуществ-
лять двумя плоскостями, находящимися в струе винтов спереди
и сзади и могущими менять свой наклон путем поворачивания
вокруг своей оси при помощи специальных рычагов. Плоскости
состояли из стального каркаса, обтянутого материей, общим
размером 2,5 м длины и 0,6 м ширины. Рама геликоптера весила
50 кг, каждый винт весил 24,5 кг', направляющие плоскости
вместе с управлением весили 9 кг. Весь аппарат без пилота
весил 203 кг.
В августе 1907 г. начались испытания геликоптера, причем
наибольшие неприятности происходили от соскальзывания рем-
ня, передающего вращение и, кроме того, нужно было подо-
брать соответствующий шаг винта. Первый подъем произошел
при 85 об/мин винта (т. е. 850 об/мин мотора) при относитель-
ном шаге винта 0,5; причем поднятый вес был равен 235 кг.
В ноябре того же года аппарат поднялся (при том же шаге
винтов) на высоту 30 см при весе 260 кг (с пилотом). При этом
винт развивал 90 об/мин, что соответствовало мощности
12—14 л. с. При последующем испытании аппарат поднял на
высоту 1,5 м, кроме пилота, его помощника (полный вес 328 кг).
Во время опытов с машиной выяснилось, что наибольшая го-
ризонтальная поступательная скорость, получавшаяся вслед-
ствие отклонения направляющих плоскостей, не превышала
12 км]час при вращении винтов со скоростью 70 об/мин. Пред-
полагалось довести эту скорость до 25—30 км/час при враще-
нии винтов 100 об/мин, относительном шаге 0,5 и отклонении
направляющих плоскостей на 45° от вертикали. Последующие
испытания производились с аппаратом на привязи.
В дальнейшем Корню предпринял целый ряд эксперимен-
тальных исследований по выбору наивыгоднейшего геликоптер-
ного винта, производя свои опыты с мотором в 10—20 л. с.
В конце 1908 г. Корню разработал новый проект геликоп-
тера с двумя винтами, вращающимися в противоположные сто-
роны от одного мотора при помощи ряда зубчатых передач. Под
винтами помещались направляющие плоскости для придания
аппарату поступательной скорости. Предполагалось достичь ско-
рости горизонтального передвижения до 40 км/час. О постройке
аппарата по этому проекту ничего неизвестно.
Геликоптеры Бреге и Рише
В 1907 г. братья Бреге (Breguet) совместно с профессором
Рише (Richet) построили в авиационных мастерских Бреге ге-
ликоптер (фиг. 22). Схема этого геликоптера приведена на
фиг. 23. На специальной ферме вращались четыре бипланных
45
Фиг. 22. Геликоптер Бреге и Рише.
Фиг. 23. Схема геликоптера Бреге и Рише.
Фиг. 24. Геликоптер Бреге и Рише № 2.
46
четырехлопастных винта диаметром 8 м. На аппарате был уста-
новлен бензиновый мотор Антуанетт мощностью 45 л. с. с нор-
мальным числом оборотов 1380 об/мин. Полный вес геликоп-
тера — 578 кг. Винты развивали подъемную силу 620 кг и при
этом машина несколько раз поднималась вертикально на высоту
нескольких метров.
Вслед за этим Бреге и Рише построили второй аппарат
(фиг. 24). Этот аппарат имел два бипланных четырехлопастных
винта диаметром 7,85 м, расположенных по обеим сторонам фю-
зеляжа обычного типа. Оси этих винтов были слегка наклоне-
ны в целях получения горизонтальной слагающей для поступа-
тельного передвижения. Кроме винтов, аппарат имел крылья
в виде бипланной несущей коробки, а также рулевые поверхно-
сти. Полная поверхность несущих планов была 50 м2. Винты
приводились во вращение от мотора Антуанетт в 40 л. с. посред-
ством ряда шестерен, причем число оборотов редуцировалось
в отношении 1 :7,75. Аппарат весил при полной нагрузке
600 кг, подъемная сила винтов достигала лишь 480 кг. Таким
образом как геликоптер машина не в состоянии была поднять-
ся. Что касается подъема в качестве аэроплана с разбегом, то
аппарат мог подниматься со скоростью примерно 25 км!час при
максимальной расчетной скорости в 72 км!час.
Этот аппарат совершил несколько полетов, имея тенденцию
все время кабрировать. Во время одного из таких испытаний
в июле 1908 г. под управлением инженера Волюмара аппарат
поднялся на 10 м, но скабрировал, упал на хвост и был сильно
поврежден.
Геликоптер Кимбальса
В Америке к концу 1908 г. инженер Кимбальс (Kimballs)
построил геликоптер (фиг. 25) в виде легкой рамы, несущей
20 маленьких деревянных винтов, расположенных в одной пло-
скости. Для использования горизонтальной составляющей тяги
Фиг. 25. Геликоптер Кимбальса.
47
при поступательном передвижении оси винтов поставлены
несколько наклонно к вертикали. Винты приводились во враще-
ние от мотора в 50 л. с., установленного внизу рамы. Для
управления в полете геликоптер был снабжен рулем высоты и
шестью небольшими рулями направления треугольной формы.
О результатах испытания этого аппарата ничего неизвестно.
Жироптер Давидсона
В 1909 г. конструктором Давидсоном (Dawidson) в Англии
был построен своеобразный жироптер. Два винта этого аппа-
рата (фиг. 26) имели большое число лопастей. Этот аппарат
Фиг. 26. Жироптер Давидсона.
весил около 1000 кг и был снабжен паровой машиной в Юл. с.,
что было совершенно недостаточно. Поэтому впоследствии были
установлены две паровые машины по 60 л. с. каждая. О резуль-
татах опытов с этой машиной ничего неизвестно.
Геликоптер К. А. Антонова
В 1907 г. в России военный инженер К. А. Антонов подал
заявку о выдаче патента на геликоптер. Около трех лет ушло
на детальную разработку проекта и только в июне 1909 г. была
начата постройка этого аппарата на заводе Лесснера. Геликоп-
тер (фиг. 27) был готов в январе 1910 г.
Два винта состояли из отдельных алюминиевых треугольных
пластин-лопастей, скрепленных двумя большими обручами. Ло-
пасти винтов могли поворачиваться вокруг своих продольных
осей. Изменяя по желанию углы атаки лопастей, можно было
образовать своеобразный парашют. Небольшой винт должен
был создавать тягу, обеспечивающую горизонтальное передви-
жение. Аппарат был снабжен горизонтальным стабилизатором
и рулем поворота. Винты приводились в движение бензиновым
мотором мощностью 30—35 л. с. Аппарат установили на тележ-
ку, три колеса которой были поворотными.
Испытания показали, что аппарат не мог развить необходи-
мой подъемной силы. Этот геликоптер был одним из самых
больших для того времени.
48
Фиг. 27. Геликоптер К. А. Антонова.
Фиг. 28. Геликоптер И. И. Сикорского.
4 А. М. Изаксон.
49
Геликоптер И. И. Сикорского
Геликоптер, построенный в 1908 г. студентом Киевского по-
литехнического института И. И. Сикорским, имел два двухлопаст-
ных винта, укрепленные на вертикальной оси на некотором рас-
стоянии один от другого. Винты приводились в движение трех-
цилиндровым бензиновым двигателем Анзани мощностью
12 л. с.
Испытания показали, что мощность двигателя была недоста-
точной для подъема. Несмотря на неудачу, Сикорский к весне
1910 г. построил второй геликоптер (фиг. 28). Этот геликоптер
имел два трехлопастных винта и был снабжен более мощным
двигателем Анзани в 25 л. с. Аппарат весил 180 кг.
Сикорский не довел до конца своих работ над геликоптером,
начав с увлечением работать над аэропланом, и скоро добился
в этой области крупных успехов.
Работы Б. Н. Юрьева
В России в период 1908—1913 гг. весьма интересные работы
в области геликоптера проводил Борис Николаевич Юрьев \
бывший в то время студентом Московского высшего техническо-
го училища.
Изучая работы Б. Н. Юрьева 1 2 по основным режимам гели-
коптера (взлет, посадка и т. п.), конструктивному оформлению
нескольких вариантов геликоптеров и его отдельных элементов,
следует отметить, что эти работы значительно опережали общий
уровень состояния этих вопросов в то время. Будучи опублико-
ванными, эти работы, несомненно, дали бы сильный толчок для
дальнейшего прогресса в области геликоптера. Позднее большая
часть этих предложений и вариантов, интересных и новых для
периода 1908—1914 гг., нашла отражение в осуществленных
геликоптерах и в предложенных проектах.
Тем не менее нам представляется совершенно необходимым
подробно остановиться на. изложении работ Б. Н. Юрьева, по-
скольку это имеет большой интерес для общего понимания исто-
рии развития геликоптера и всей проблемы в целом.
Б. Н. Юрьев один из первых разработал проект одновинто-
вого геликоптера с мотором в 70 л. с., схематически представ-
ленного на фиг. 29. Разработка этого проекта относится к на-
чалу 1909 г.
Корпус геликоптера проектировался из трех частей: сред-
ней части — для мотора, поддерживающего винта и шасси, пе-
редней носовой части (ладьи) — для пилота и управления всем
аппаратом и, наконец, хвостовой части—для установки руле-
вого винта и костыля. Весь корпус намечалось сделать из де-
1 Ныне академик, профессор Военно-воздушной ^академии имени
Н. Е. Жуковского.
2 Более подробно см, Изаксон А. М., Геликоптеры, изд. ГНТИ, 1931.
50
ревянных брусков или бамбуковых прутьев в виде простран-
ственной коробки, расчаленной диагональными растяжками.
Этот геликоптер проектировался под мотор «Гном» 70 л. с.
при 1250 об/мин.
Поддерживающий винт был предложен двухлопастный
(второй вариант — четырехлопастный) диаметром 9 м, кон-
структивно изготовленный аналогично самолетному крылу.
Бинт должен был вращаться при 215 об/мин, т. е. с передаточ-
ным числом от мотора 1 : 6,25. Это передаточное число осу-
ществлялось при помощи четырех шестеренок с числом зубьев
20 (на валу мотора), 50 и 20 (промежуточные на одной оси) и
снова 50 (на валу винта).
Фнг. 29. Проект геликоптера Б. Н. Юрьева под мотор 70 л. с.
Реактивный крутящий момент должен был воспринимать
рулевой двухлопастный винт диаметром 3 м, отстоящий от оси
основного винта на 8 м. Рулевой винт приводился во вращение
ременной передачей и делал 600 об/мин. Рулевой винт должен
был иметь поворотные лопасти, устанавливаемые пилотом. Ба-
ланс мощности намечался такой (в л. с.):
На хвостовой винт................... 3
На поддерживающий винт..............60
Потерн в передаче на хвостовой винт . . I
„ „на большой вннт . . 6
Итого......... 70
При этом поддерживающий винт должен был развивать тягу
примерно 455 кг (в наилучшем случае 519 кг), а рулевой винт—
около 27—30 кг.
4*
51
Фиг. 30. Эскиз перекашивающего механизма
геликоптера Б. Н. Юрьева.
Фиг. 31. Три варианта воздействия перекашивающего меха-
низма на лопасть несущего винта в геликоптере Б. Н. Юрьева.
52
Поступательное передвижение в горизонтальной плоскости
предполагалось осуществить от горизонтальной составляющей
суммарной тяги поддерживающего винта, наклоненного вместе
с аппаратом в сторону движения. Этот наклон предполагалось
создавать путем сдвига точки приложения суммарной тяги с
оси винта в сторону, противоположную наклону аппарата.
Для этой цели должен был служить специальный механизм,
так называемый автомат-перекос, которым в дальнейшем
были снабжены многие геликоптеры, как проектируемые, так и
уже построенные. Сущность работы этого механизма нами была
изложена ранее (см. гл. III).
На фиг. 30 изображен перекашивающий механизм, так на-
зываемый автомат-перекос, как его представлял Б. Н. Юрьев.
На этой фигуре механизм воздействует на специальные от-
Фнг. 32. Проект геликоптера Б. Н. Юрьева под мотор 50 л. с.
крылки (элероны) в лопастях винта. То же можно получить,
воздействуя на всю лопасть или на специальные закрылки на
концах лопастей (фиг. 31).
На случай спуска при остановившемся моторе предусматри-
вался специальный парашют, который позволил бы совершить
безопасную посадку.
Отсутствие мотора «Гном» 70 л. с. не дало возможности при-
ступить к осуществлению изложенного проекта.
Примерно к этому же времени (конец 1909 г.) относится
разработка Б. Н. Юрьевым второго лроекта геликоптера
(фиг. 32) с мотором «Гном» мощностью 50 л. с. при 1200 об/мин.
Поддерживающий винт аналогичного типа, что и в первом
проекте, должен был быть двухлопастным и иметь диаметр
6 Mi Винт должен был вращаться со скоростью до 350 об/мин.
Крутящий момент предполагалось воспринять рулевым вин-
том диаметром 2 м, отнесенным от оси поддерживающего винта
на 5 м. Этот малый винт должен был приводиться во вращение
53
ременной передачей (плоский ремень шириной 28 мм или круг-
лый диаметром около 15 мм) до 600 об/мин. Рулевой винт предпо-
лагался с поворотными лопастями и должен был развивать нор-
мальную тягу в 20 кг. '
Баланс мощности намечался такой (в л. с.):
На рулевой винт...................... 2,5
На поддерживающий винт............... 45
Потери в передаче на рулевой винт . . 0,5
. , на большой винт . . 2
Итого....... 50
При этом винт должен был развивать тягу 286 кг (при
удачном винте — 326 кг). Вес аппарата вместе с весом пилота
предполагался 256 кг, т. е. запас тяги во всяком случае не ниже
30 кг.
Фиг. 33. Один нз вариантов проекта геликоптера Б. Н. Юрьева.
Общая схема поступательного передвижения, осуществле-
ния безопасного спуска и сохранения устойчивости была такая
же, что и в проекте первого аппарата. Точно так же предпола-
гался к постановке автомат-перекос прежнего типа, знакомый
из описания первого проекта. Ввиду отсутствия необходимого
мотора второй проект также не получил осуществления.
К этому же периоду относится разработка геликоптера не-
сколько иного варианта, представленного на фиг. 33. Наличие
мотора Анзани 25 л. с. и невозможность получения более силь-
54
кого мотора вызвали появление третьего проекта геликоптера
(примерно в начале 1911 г.). Общую конструкцию построенного
геликоптера можно видеть на фиг. 34.
Корпус аппарата представлял собою деревянную четырех-
угольную ферму, растянутую проволочными диагоналями. Хво-
стовая часть, также прямоугольной формы, для легкости была
бамбуковая.
В средней части корпуса был установлен трехцилиндровый
мотор Анзани, развивавший при 1700 об/мин мощность в 27—
30 л. с. (в зависимости от качества регулировки).
’Мотор приводил во вращение поддерживающий двухлопаст
ный винт диаметром 8 м. Винт вращался со скоростью
140 об/мин. Передача от мотора к винту состояла из трехобо-
ротного червяка (на валу мотора) и червячного колеса (на
Фиг. 34. Геликоптер Б. Н. Юрьева с мотором Анзанн 25 л. с.
валу винта) с числом зубьев 36. Таким образом было осу-
ществлено передаточное число 1 : 12.
Поддерживающий винт был двухлопастный, причем лопасти
предполагалось поворачивать во втулке. Конструкция лопастей
была аналогична конструкции самолетных крыльев. Лопасть
имела лонжерон из стальной трубы, на которую надевались де-
ревянные нервюры и затем вся лопасть зашивалась материей.
Для погашения крутящего момента служил рулевой винт,
установленный на конце хвостовой фермы и отстоящий на 6 м
от оси большого винта.
Двухлопастный хвостовой винт имел диаметр 2,5 м и отно-
сительный шаг 0,38. Винт давал 450 об/мин (т. е. передаточное
число 1 : 3,76) и приводился во вращение гибкой передачей
(пеньковый канат или ремень).
Поскольку мотор Анзани не ротативный, было предусмотре-
но искусственное охлаждение от специальных (одного или
нескольких) вентиляторов, приводимых во вращение от этого
же мотора при помощи карданной передачи.
55
Распределение мощности намечалось следующее (в л. с.):
На рулевой винт.......................... 2
„ поддерживающий винт..................23—26
„ охлаждение мотора (работа вентиляторов) 2
При таком балансе мощности предполагалось получить сле-
дующие тяги: от большого винта примерно 240—260 кг, от ру-
левого винта 18—21 кг.
Ввиду малой мощности мотора Анзани и отсутствия более
мощного мотора было решено при постройке аппарата в целях
его облегчения не делать лопасти винта поворотными с открыл-
ками и не ставить автомата-перекоса.
Основная цель свелась к наблюдению за общим поведением
аппарата и определению получаемой тяги.
Лишь в случае удовлетворительной величины тяги предпо-
лагалось на этот же аппарат поставить все же автомат-перекос
для выяснения общих условий его работы, величины получае-
мых моментов и влияния на тягу винта.
По этому проекту аппарат был построен к весне 1912 г.
Недостаток средств повлиял на качество изготовления отдель-
ных частей. По этой причине некоторые детали были сделаны
не по расчету, а с использованием имеющегося материала.
Результаты взвешивания отдельных частей построенного ап-
парата дали такие весовые соотношения (в кг):
Вес корпуса с сиденьем для пилота................. 39,7
, главного вала с кабаном...........•.......... 25
, деталей трансмиссии большого винта (червяк, шес-
терня, опоры, подшипники)................... 25
, большого вннта............................... 25,5
. малого винта с поворотным механизмом лопастей 5,3
, деталей трансмиссии к малому винту............ 1,2
, деталей охлаждения мотора..................... 1,6
. шасси с колесами............................. 12
. мотора с принадлежностями .................... 67,2
Итого . . . 202,5
Проект этого геликоптера был осуществлен при материаль-
ной помощи Леденцовского общества (ссуда 500 руб.) и аппа-
рат был выставлен на 2-й Международной выставке воздухопла-
вания в Москве весной 1912 г. Конструктор машины
Б. Н. Юрьев получил золотую медаль за «прекрасную теоре-
тическую разработку проекта геликоптера и его конструктивное
осуществление». После выставки были предприняты первые ис-
пытания аппарата.
Первым недочетом при испытании оказалась большая нерав-
номерность работы мотора (трехцилиндровый мотор), который
сообщал неравномерное вращение большому винту. Затем при
первом же испытании сломался главный вал винта.
Причина этой поломки заключалась в том, что вместо вала
из хромоникелевой стальной трубы со стенками 6 мм была по-
56
ставлена простая стальная труба со стенками 3 мм. Поломка
вала прервала испытания. Из-за недостатка средств аппарат
больше не был восстановлен.
Помимо работ по осуществлению одновинтового геликопте-
ра, следует отметить разработку Б. Н. Юрьевым ряда вариан-
тов многовинтового геликоптера. Один из таких вариантов
(восьмивинтовой геликоптер) изображен на фиг. 35.
Фиг. 35. Схема восьмивинтового геликоптера Б. Н. Юрьева.
Имелось в виду создание такого геликоптера из ряда со-
вершенно подобных элементов, состоящих из мотора, трансмис-
сии и несущего винта.
Фиг. 36. Эскиз морского геликоптера Б. Н. Юрьева.
Довольно обстоятельно разрабатывалась конструкция тако-
го элемента, подсчитывались веса, определялась подъемная си-
ла, разрабатывались вопросы управления и устойчивости. Раз-
рабатывались комбинации многовинтового геликоптера, состоя-
щие из различного числа одинаковых элементов (от 4 до 14}-
под моторы в 10 и 20 л. с.
На основе предварительных изысканий Б. Н. Юрьев, сов-
местно с группой студентов Московского высшего технического
училища, приступил вплотную к постройке одного такого эле-
57
мента и его всесторонним испытаниям. Одновременно начато
-было и проектирование мотора для такого элемента.
Отсутствие средств не давало возможности быстро осу-
ществить все эти начинания. Эти работы затянулись до 1914 г,
когда начавшаяся война оторвала автора работ Б. Н. Юрьева
и его группу от занятий, что повлекло за собой приостановку
всех работ по геликоптерам.
Из отдельных предложений Б. Н. Юрьева этого периода сле-
дует отметить еще эскизный проект морского геликоптера
(фиг. 36).
Геликоптер Н. И. Сорокина
Из работ русских конструкторов следует отметить геликоп-
тер, построенный в 1913—1914 гг. Н. И. Сорокиным (фиг. 37).
Фиг. 37. Геликоптер Н. И. Сорокина.
Данных о размерах аппарата, весовых соотношениях и пр.
мы не имеем. Опыты с машиной не удалось довести до конца
:из-за отсутствия требуемого мотора.
Геликоплан Деказа
В 1913 г. Деказ (Decazes) во Франции, в течение ряда лет
производивший множество изысканий, приступил в Виллакуб-
лей к опытам с аппаратом, названным им «геликоплан». Этот
аппарат (фиг. 38) был построен фирмой Диоре и Оливье
(Liore et Olivier) по указанию конструктора и состоял из остова-
фюзеляжа, на котором были укреплены друг за другом две не-
сущие плоскости площадью 25 м2 каждая и два соосных винта
.диаметром 4 м, вращающихся в противоположные стороны.
Винты приводились во вращение от мотора «Гном» в 50 л. с.
Второй такой же мотор, расположенный на переднем конце
фюзеляжа, приводил во вращение тянущий винт, предназначен-
.58
ный для осуществления поступательного движения. Для управ-
ления служил ряд вспомогательных плоскостей — элероны и ру-
ли высоты и направления.
Опыты с этим аппаратом были неудачны. Вначале сломалась
стальная муфта вертикального вала. После возобновления опы-
Фнг. 38. Геликоплан Деказа.
тов в январе 1914 г. сломался ввиду плохого качества стали
один из поддерживающих винтов, развивая вместо нормальных
300 лишь 200 об/мин. О дальнейшей судьбе этого аппарата
ничего неизвестно.
Жироптер Папена и Руйи
Аппарат Папена (Papin) и Руйи (Rouilly) (фиг. 39), назван-
ный ими «жироптер», состоял в основном из винта, имеющего
одну лопасть общей поверхностью 12 м2. Этот винт вращался
реактивно при помощи вентилятора, помещенного протиз
лопасти и приводимого в движение ротативным мотором «Рон»
80 л. с. Этот вентилятор (общий расход 7 м31сек) нагнетал воз-
дух в две трубы, проходящие по краям лопасти винта и сходя-
59
щиеся на конце в одно отверстие, через которое воздух выходил
в направлении, противоположном вращению винта. Расчетная
скорость выхода воздуха из отверстия на конце лопасти наме-
чалась в 100 м!сек.
Аппарат напоминал лист сикоморы \ так что предполага-
лось, что в случае остановки мотора он сможет, подобно этому
листу, спуститься винтообразно.
Фиг. 39. Жироптер Папена и Руйи.
Лопасть винта должна при этом сама установиться под не-
большим отрицательным углом, необходимым для вращения
винта в том же направлении, что и при подъеме. Установку ло-
пасти под положительным углом, необходимым для подъема
аппарата, конструкторы рассчитывали получить от воздействия
жироскопической пары мотора, ось которого несколько отстояла
от оси вращения всей системы.
Летчик помещался в особой круглой гондоле над централь-
ным ядром аппарата, установленной на шариковых подшипни-
ках и поддерживаемой с боков роликами.
Вследствие наличия особой деревянной трубы — «антенны»,
в которую подавалась часть нагнетаемого вентилятором воздуха
и которую можно было направлять по своему усмотрению, лет-
1 Лист фигового дерева.
60
чик мог ориентировать свою гондолу в любом положении и даже
перемещать весь аппарат в нужном направлении. Под гондолой
помещался поплавок, предназначенный для опытов на воде и
игравший роль амортизатора. Для сохранения устойчивости
конструкторы рассчитывали на гироскопический эффект. Пол-
ный вес аппарата вместе с летчиком составлял 500 кг.
Фиг. 40. Жироптер Папена и Руйи перед испытанием.
Опыты производились (фиг. 40) лишь в 1915 г. на озере в
Серсей около Пульи-ай-Оксуа. Во время этого испытания винт
давал 47 об/мин, но ввиду неудовлетворительной центровки ап-
парат бросало во все стороны и вода его заливала. Аппарат не
мог оторваться от воды и был частично поврежден. О дальней-
ших работах над этим аппаратом ничего неизвестно.
Глава V
ПЕРВЫЕ УСПЕХИ
С началом мировой войны (1914 г.) прекратились почти все
(за малыми исключениями) работы по геликоптерам.
Запросы и нужды военного времени чрезвычайно способ-
ствовали усовершенствованию авиационных моторов и во время
войны были созданы легкие авиационные моторы достаточно
большой мощности. Появление таких моторов явилось благо-
приятным обстоятельством для более успешных работ по ге-
ликоптерам.
Значительные работы во время войны по проектированию
геликоптера проводились в Австро-Венгрии.
Привязной геликоптер Петроцци
В 1916 г. Петроцци (Petroczy), офицер летной школы в
Винер-Нейштадте, предложил построить привязной геликоп-
тер, могущий заменить привязной аэростат, применяемый для
разведки и корректирования артиллерийского огня.
Привязные аэростаты, необходимые на фронте для наблюда-
телей, были слишком уязвимы, громоздки и дороги в эксплоата-
ции, а при передвижении требовали многочисленного обслужи-
вающего персонала. Поэтому мысль заменить их привязным ге-
ликоптером, мало уязвимым и чрезвычайно подвижным, была
воспринята с большим интересом.
При начальных наметках предполагалось для первого при-
вязного геликоптера использовать электромотор в 300 л. с.,
только что построенный заводом Даймлер.
Этот мотор, специально сконструированный, предназначен
был для работы на постоянном токе в 600 V, должен был давать
6000 об/мин, редуцируемых планетарной передачей до
1000 об/мин. Электромотор должен был весить вместе с пере-
дачей 250 кг.
К привязному геликоптеру предъявлялось требование совер
шать подъем на высоту 500—1000 м при ветре до 8 м!сек. Вес
геликоптера предположительно должен был составлять 960 кг.
62
Предполагалось снимать с винта по 4 кг с 1 л. с., т. е. всего;
иметь тягу 1200 кг, так что должно было остаться 240 кг для
подъема пулемета, телефона и в качестве запаса тяги.
Разные варианты привязного геликоптера Петроцци пред-
ставлены эскизно на фиг. 41. Простая ферма должна была нести-
мотор 1, приводивший во вращение винт 2. Вместо шасси пред-
полагалось иметь опорные поверхности 3. Привязывать гели-
коптер предполагалось за рычаг 4.
Фиг. 41. Эскизные проекты привязного геликоптера Петроцци.
Было организовано обширное экспериментальное исследова-
ние геликоптерных винтов. Опыты производились с винтами
больших диаметров (примерно около 6 м) на специально по-
строенном станке с электромотором 100 л. с. При испытании
изучалось влияние чисел оборотов, диаметра, профиля сечений,
шага и величины хорды на работу винта и на его коэфициент
полезного действия.
Эти опыты, доставившие весьма интересные данные, привели
все же работавших в этом направлении к выводу, что при
больших располагаемых мощностях одновинтовая конструкция
геликоптера не является* наилучшей и что при этом выгоднее-
эту мощность раздать на несколько винтов, так как это должно
Дать повышение коэфициента полезного действия всей уста-
новки.
63;
Привязной геликоптер Карман-Цуровец
Проф. Карман (Karman) предполагал построить многовинто-
вой геликоптер (до 10—12 винтов). Эти винты намечалось рас
пределить по окружности машины, создав в середине место
для размещения пилота. Постановкой такого большого количе-
ства винтов Карман имел намерение использовать более вы-
годные коэфициенты полезного действия сравнительно неболь-
ших винтов, работающих на малых мощностях.
Однако самая предварительная наметка весовых соотноше-
ний показала, что передаточные валы, шестерни, подшипники
и пр. были такого большого веса, что затруднили бы создание
машины, не говоря уже о ненадежности их работы.
В этом смысле вариант че-
тырехвинтового геликоптера,
казалось, был наилучшим, так
как при этом удавалось урав-
новесить крутящий момент и
вместе с тем эта схема имела
не такое большое количество
передач.
По такой схеме проф. Кар-
ман и инж. Цуровец (Zuro-
wez) был построен геликоп-
тер, изображенный схемати-
чески на фиг. 42.
Фиг. 42. Схема привязного геликоп-
тера Карман-Цуровец.
При проектировании аппарата основные трудности, с кото-
рыми пришлось столкнуться конструкторам, заключались в под-
боре подходящих винтов и в достижении устойчивости в полете.
Если удалось довольно быстро подобрать винт, то изучение
устойчивости было весьма затруднительным.
Исследовать вопросы устойчивости можно было лишь на мо-
делях. Экспериментировать на небольших моделях с резиновым
двигателем не имело смысла, другого же мотора не было. По-
этому специально для этой цели был спроектирован и построен
небольшой ротативный мотор мощностью 6 л. с. при 2400 об/мин,
работающий сжатым воздухом в 50 ат. Для работы с этим мо-
тором был построен малый геликоптер с фанерным фюзеляжем
и двумя четырехлопастными винтами диаметром 1,4 м, распо-
ложенными рядом и вращающимися в противоположные сто-
роны. Передача вращения от мотора осуществлялась ремнями
с передаточным числом 1:2, т. е. винты вращались со ско-
ростью до 1200 об/мин.
Геликоптер имел внизу три резиновых шара диаметром
0,3 м, играющих роль амортизаторов. Общий вес модели был
35 кг. Воздух подавался в мотор через гибкий шланг от бал-
лонов со сжатым воздухом, находившимся под давлением
200 ат.
Опыты производились в винтовой лаборатории в Фишаменде.
Чтобы модель не упала и не была повреждена, она была при-
64
вязана бесконечным канатом, огибающим направляющие роли-
ки на полу и на потолке испытательного помещения, имевшего
высоту 30 м.
В период с июня 1917 г. по март 1918 г. было произведено
до 100 экспериментов с этой моделью. Были испытаны всевоз-
можные методы привязывания модели разным количеством при-
вязей с добавлением различных направляющих плоскостей
снизу и сверху аппарата, изменялись привязи относительно его
центра тяжести и т. п.
Опыты показали, что хорошая устойчивость может быть до-
стигнута при трех привязях без всяких плоскостей. При этом
способе привязывания модель совершила целый ряд удачных
полетов на высоте 10—15 м.
В марте 1918 г. фирмой МАГ был построен по вышеуказан-
ной схеме геликоптер в натуру. На длинном трубчатом фю-
зеляже были поставлены в один ряд четыре четырехлопастных
винта, вращающихся два по часовой стрелке и два — в проти-
воположном направлении. Винты имели диаметр 3,8 м (два вин-
та) и 4,2 м (остальные) и вращались со скоростью 800 об/мин.
Электромотор давал лишь 190 л. с. (вместо предполагаемых
225 л. с.) при 6000 об/мин и весил 195 кг. Геликоптер покоился
на воздушных шарах диаметром в 0,8 и 0,5 м.
Для привязывания геликоптера были выпущены из фюзеля-
жа три специальных отростка, как это видно на фиг. 42.
Мотор был расположен в середине фюзеляжа и там же было
место для пилота. Полный вес машины составлял 600 кг. При
испытании геликоптера его сначала привязывали, так что он не
мог подняться выше 0,5 м. Нагруженный весом трех человек,
аппарат смог подняться при 750 об/мин. Во время опытов мотор
сильно нагревался, а при четвертом опыте был совсем сожжен,
и испытание аппарата на этом было прекращено.
Привязной геликоптер Карман-Петроцци-Цуровец
Параллельно с описанным выше привязным геликоптером
с электромотором группой Карман-Петроцци-Цуровец был
спроектирован второй геликоптер с бензиновым мотором, стро-
ившийся на заводе Липсак и К° около Будапешта.
Этот аппарат, построенный в марте 1918 г., имел корпус,
сваренный из стальных труб в виде трехконечной звезды. На
валу центральной части корпуса были смонтированы два винта
диаметром 6 м, вращающиеся в противоположные стороны. В
трех отростках корпуса было установлено по ротативному мото-
ру «Рон» 120 л. с. Всего имелось три мотора общей мощностью
360 л. с. при нормальном числе оборотов 1300 об/мин.
Все три мотора передавали мощность при помощи кониче-
ских шестерен непосредственно на валы винтов, вращавшиеся
со скоростью 600 об/мин. Весь аппарат устанавливался на че-
5 А. М. Изаксон.
65
тырех резиновых баллонах-амортизаторах, давление в которых
поддерживалось от насоса, работавшего от тех же моторов.
Эти амортизаторы были распределены следующим образом:
большой баллон диаметром 1 м был установлен под центральной
частью корпуса, три меньшие, диаметром 0,4 м, были укреплены
на концах отростков.
Около каждого мотора помещался бак с горючим. Над вин-
тами помещалась корзина для пилота высотой 1,5 м и диамет-
ром 1,3 м, связанная с аппаратом через полый вал. У пилота
имелся парашют в 250 м2, способный амортизировать падение
всего аппарата. Кроме того, пилот имел индивидуальный пара-
шют.
Геликоптер привязывался тремя тросами, прикрепленными
к концам отростков. Эти тросы через укрепленные на земле бло-
ки передавались на лебедку, находившуюся в 70 м от места
подъема машины. Испытание аппарата производилось в апре
ле 1918 г. во дворе завода Липсак и К°. Сначала запускался
один мотор, который запускал в свою очередь остальные. За-
тем давали полный газ моторам, а когда развиваемая тяга ста-
новилась больше веса, отпускали постепенно тросы и аппа-
рат поднимался. Притягивали его к земле свертыванием
тросов при помощи лебедки.
Вначале на машине были установлены три мотора «Гном»
по 100 л. с.; однако запас мощности был мал и аппарат смог
подняться лишь на 1,2 м. После этого были установлены моторы
«Рон» по 120 л. с. Запас тяги возрос до 150—200 кг на земле,
уменьшаясь на высоте 50 м до 40—60 кг. Испытания показали,
что аппарат весьма спокойно вел себя при натянутых тросах.
При ослабленных тросах машина испытывала значительные ко-
лебания. За период испытаний было совершено до 30 успешных
полетов на разных высотах, вплоть до высоты 50 м, где аппа-
рат держался вполне спокойно около получаса, передвигаясь
при помощи канатов взад и вперед.
Во время одного из таких испытаний в присутствии офици-
альной военной комиссии аппарат потерпел аварию. Вследствие
слабого натяжения привязывающих тросов машина начала
сильно колебаться. Эти колебания не удалось быстро ликвиди-
ровать и геликоптер ударился концами винтов о землю, сломал
винты и погнул валы и рычаги. Аппарат восстановлен не был.
Полный вес машины был 1400 кг, в том числе запас горю-
чего на 1 час полета 140 кг. Максимальный поднятый вес на
высоту 50 м был 1814 кг.
Привязной геликоптер Асбота
Из других относящихся к тому же периоду попыток по-
строить привязной геликоптер с бензиновым мотором нужно
отметить аппарат, изображенный на фиг. 43.
66
На четырех пирамидальных свар-
ных стальных кронштейнах, отходя-
щих от сварного цилиндрического
остова, были установлены четыре
винта диаметром 3 м, вращающих-
ся попарно в противоположные
стороны. Винты приводились в дви-
жение коническими шестернями от
ротативного мотора, расположенно-
го внизу цилиндрического остова.
Пилот помещался в средней части,
мог в случае надобности выбраться
наверх и при падении аппарата
спастись на парашюте. Для привя-
зывания служила особая карданная
подвеска свободно вращающаяся
около кольца на остове аппарата,
©бзор с ЭТОГО геликоптера был фиг. 43. Привязной геликоп-
весьма хороший, так же как и тер Асбота-
возможный обстрел. Этот аппарат
был построен Асботом (Asbathe) в бытность его директором вин-
тового завода в Будапеште. Окончить аппарат не удалось, так
как он сильно пострадал при пожаре.
Геликоптер Дузре
В 1919—1920 гг. проводились испытания геликоптера, по-
строенного конструктором Дуэре (Douheret) во Франции еще
до войны.
На небольшом пирамидальном сварном остове устанавли-
вались два двухлопастных винта, вращавшиеся в противопо-
ложные стороны. В целях экономии веса и наибольшей простоты
оба винта работали непосредственно от мотора.
Ротативный мотор «Гном» 50 л. с. при 1000 об/мин был
установлен таким образом, что его цилиндры были непосред-
ственно соединены с нижним винтом диаметром 4,6 м и при ра-
боте приводили его во вращение. Коленчатый вал мотора, вра-
щающийся при этом в противоположном направлении, приводил
в движение соединенный непосредственно с ним второй (верх-
ний) винт, имевший диаметр 2,3 м.
Был произведен целый ряд подсчетов для определения наи-
выгоднейшего соотношения между диаметрами и числами обо-
ротов обоих винтов. Теоретические подсчеты показали, что мак-
симум тяги получится при винтах одного диаметра 3,2 м, вра-
щающихся с одинаковым числом оборотов.
Для управления имелся ряд плоскостей, помещенных в струе
винтов.
5* 67
Были проведены испытания описанного выше аппарата, при-
чем он не мог совершать подъема продолжительное время, а
Фиг. 44. Геликоптер Дуэре в процессе испытаний.
делал лишь небольшие отрывы от земли и осуществил несколько
рулений по полю. Фиг. 44 изображает машину во время испы-
тания.
Геликоптер Лакозна и Дамбланка
В 1920 г. профессор Лакоэн (Lacoin) и инженер Дамбланк
(Damblanc) во Франции построили геликоптер, названный ими
«Алерьон». , )
Этот аппарат заинтересовал военное министерство, и оно ча-
стично субсидировало постройку «Алерьона».
«Алерьон» Лакоэна и Дамбланка (фиг. 45) имел фюзеляж
самолетного типа, с двух сторон которого на специальных труб-
чатых пирамидах помещались оси двух несущих винтов диамет-
ром 7 м каждый, вращающихся в противоположные стороны.
Винты приводились во вращение от двух моторов «Рон» мощ-
ностью по 120 л. с., размещенных по обе стороны фюзеляжа.
При помощи вала и ряда конических шестерен вращение от
мотора передавалось винтам с редукцией 1 : 8, т. е. винты вра-
щались со скоростью 150—160 об/мин.
Лопасти винтов могли поворачиваться около стальной оси,
укрепленной во втулке винта. Аппарат был снабжен механиз-
мом для симметричного перекашивания углов установки лопа-
стей обоих винтов.
Особенностями «Алерьона», кроме этого механизма, были:
1) возможность производить запуск каждого мотора вхоло-
стую (т. е. без винта) из кабины пилота;
2) сцепление мотора с валом винта по желанию пилота и
автоматическое расцепление при внезапной остановке или по-
ломке мотора;
68
3) !возможность в случае остановки одного мотора приводить
во вращение оба винта от одного работающего мотора.
Конструктивного описания всех этих механизмов мы не
имеем.
В центре фюзеляжа помещалось сиденье пилота. Перед си-
деньем были установлены: штурвал управления общим шагом
винтов, ручка перекоса лопастей, ножное управление рулем по-
ворота и рукоятка управления стабилизатором.
Фнг. 45. „Алерьон* Лакоэна и Цамбланка:
/—фюзеляж; 2—моторы; 3—стабилизатор; 4—руль поворота; 5—сиденье
пилота; б—передаточный вал; 7—баки с горючим и маслом; 3—стержни
ферм для винтов; 9—винты.
При вертикальном полете стабилизатор можно было повора-
чивать на 90°, чтобы не создавать лишнего сопротивления.
В этих же целях фюзеляж ничем не был обтянут.
Основные данные аппарата были следующие:
Полный размах................................. 15 jm
Длина . ................................. 9,2 м
Площадь каждой лопасти.......................... 5 л2
Ометаемая площадь обоих винтов................. 77 ,
Площадь стабилизатора........................... 4 ,
Площадь рулей.................................. 1,4 „
Полный вес с запасом горючего и масла на пол-
часа полета.................................... 1200 кг
Нагрузка на 1 л2 поверхности лопастей........ 30 кг/мг
Нагрузка на 1 л. с............................. 5 кг[л. с.
69
При взлете предполагалось осуществлять из кабины пилота
запуск каждого мотора, затем включение передач к винту, при-
чем лопасти винтов в это время должны быть установлены под
нулевым шагом, так чтобы развиваемая тяга была недостаточна
для подъема.
Затем следовало постепенно увеличивать угол установки ло-
пастей до тех пор, пока тяги, развиваемой винтами, не стало бы
достаточно для осуществления подъема.
Горизонтальный полет должен был осуществляться переме-
щением точки приложения равнодействующей тяги с оси вин-
та назад при помощи механизма для перекашивания. В резуль-
тате этого аппарат наклонялся бы вперед и должна была поя-
виться горизонтальная составляющая суммарной тяги.
Подъем вверх, спуск и неподвижное «висение» в воздухе
предполагалось осуществить или изменениями углов установ-
ки лопастей винтов или управлением газом моторов.
В случае остановки одного мотора оба винта должны были
работать от второго мотора и при этом можно было еще совер-
шить безопасный спуск.
В случае остановки обоих моторов винты должны были бы
автоматически расцепиться и шаг лопастей винтов следовало бы
тотчас изменить на небольшой отрицательный. Тогда винты при
спуске машины продолжали бы вращаться в том же направле-
нии, что и при нормальной работе.
В целях еще большего снижения посадочной скорости име-
лось в виду совершать не строго вертикальный спуск, а спуск
планирующий.
Перед постройкой аппарата в лаборатории Консерватории
искусств и ремесел в Париже было произведено испытание мо-
дели винта.
(Модель винта имела диаметр 1,05 м, т. е. приблизительно
одну шестую натуральной величины.
Из-за недостатка средств постройка аппарата затянулась до
1920 г., причем испытание производилось на незаконченной ма-
шине (в частности, не был собран левый винт и аппарат был
просто уравновешен с этой стороны контргрузом).
Первые опыты производились в сентябре 1920 г. в Виллакуб-
лей. Испытание производил Дамбланк.
Сначала запустили правый мотор и затем включили правый
винт. Мотор дал 1100 об/мин, а винт — 137 об/мин. На этих обо-
ротах мотор проработал некоторое время, затем обороты слег-
ка увеличили. При этом сломался кабан фюзеляжа, поддержи-
вающий винт, а затем и винт. Дальнейшие опыты не продол-
жались и аппарат не был восстановлен.
Основательно продуманный и обоснованный по своей схе-
ме аппарат не был окончен из-за конструктивных затруднений.
70
Геликоптер Генри Берлинера
В течение ряда лет (1919—1923 гг.) конструктор Генри Бер-
линер (Berliner) в Америке работал над созданием геликоптера.
Первый аппарат, построенный Берлинером в 1919 г.
(фиг. 46), состоял из небольшой платформы, установленной на
двухколесное шасси. На платформе помещались летчик, мотор
и редуктор. Ротативный мотор «Рон» в 80 л. с. при помощи ко-
нических шестерен, помещенных в картере, укрепленном на
платформе, передавал вращение двум соосным двухлопастным
винтам.
Винты имели диаметр 4 м (по другим данным 5,5 м) и вра-
щались в противоположные стороны, чем достигалось погашение
Фиг. 46. Геликоптер № 1 Генри Берлинера,
реактивного момента. Под винтами имелась одна небольшая пло-
скость, игравшая роль руля направления.
В январе 1920 г. этот аппарат совершил подъем на высоту
5—6 м продолжительностью несколько минут, подняв груз в
410 кг. Винты в работе сильно деформировались и аппарат
был очень неустойчив.
После первых испытаний геликоптер был снабжен специ-
альными полозьями и шестью направляющими плоскостями,
установленными под винтами (фиг. 47).
Управление этими плоскостями находилось у летчика; пло-
скости были предназначены для сохранения устойчивости и
осуществления поворота в требуемом направлении.
После внесенных изменений этот аппарат был снова испы-
тан 10 июня 1920 г. Машина поднялась на высоту примерно
1,6 м, с небольшим избытком тяги и затратой мощности 72 л. с.
71
Во время полета летчику приходилось все время действо-
вать управлением направляющими плоскостями и тем не ме-
нее машина была неустойчивой. Спуск с неработающим мото-
ром в этом аппарате был совершенно не предусмотрен.
Фиг. 47. Видоизмененный геликоптер № 1 Г. Берлинера.
Аппарат № 2 (фиг. 48), построенный Берлинером в 1921 —
1922 гг., состоял из обычного фюзеляжа аэропланного типа,
который вместо крыльев имел с обеих сторон фермы. На каж-
дой из ферм было установлено по двухлопастному воздушно-
му винту. Винты были деревянные, имели диаметр 4,5 м и
приводились во вращение в противоположные стороны.
Фиг. 48. Геликоптер № 2 Г. Берлинера.
Горизонтальное передвижение предполагалось осуществлять
наклоном аппарата, что достигалось небольшим винтом диамет-
ром в 1 м, помещенным на хвосте фюзеляжа.
Для сохранения поперечной устойчивости на концах боко-
вых ферм имелись направляющие плоскости, как у аппара-
72
та № 1. Эти плоскости должны были играть ту же роль, что-
и элероны у аэроплана. Аппарат имел обычное шасси, рули вы
соты и направления и костыль. Шасси можно было заменить
поплавками и тогда машина превратилась бы в гидрогеликоп-
тер.
Аппарат был снабжен ротативным мотором НО л. с. при
1200 об/мин. Мотор приводил во вращение оба винта при по-
мощи ряда конических шестерен и промежуточных валов. Под-
держивающие винты делали 560 об/мин.
Полетный вес аппарата был 600 кг. Испытания происходили
летом 1922 г. в Колледж-парке в Марриленде. Аппарат доста-
точно хорошо взлетал, совершал вертикальную посадку и гори-
зонтальный полет. Высота полета достигала 3,7 м и горизонталь-
ная скорость — 30 км1час.
Результаты испытания показали, однако, далеко недостаточ-
ную устойчивость машины. После этих испытаний аппарат № 2
был несколько видоизменен. Были добавлены несущие поверхно-
сти в виде триплана, причем они были расположены таким об-
разом, что трансмиссионные валы к винтам проходили внутр»
плоскостей и стоек. Фиг. 49 представляет три проекции видоиз-
мененной машины.
Фюзеляж имел руль высоты и направления, стабилизатор,
киль и, кроме того, небольшой хвостовой винт с вертикальной
осью. В данном аппарате имелся специальный механизм, позво-
ляющий несколько наклонять оси обоих поддерживающих винг
тов вперед, назад и в стороны, причем этот наклон можно было-
осуществлять раздельно для каждого винта.
Предполагалось скашиванием осей винтов создавать элерон-
ный эффект для сохранения поперечной устойчивости. Работа
хвостового винта должна облегчать отрыв машины от земли и
обеспечить возможность горизонтального передвижения.
Мотор был прежний в ПО л. с., винты давали 560 об/мин.
Размах всего аппарата около 11 м, поверхность несущих пло-
скостей 29 м2. Несущие поверхности были предназначены для
осуществления безопасного планирующего спуска в случае ава-
рии с поддерживающими винтами, а также для придания боль-
шей устойчивости всей машине.
Полный вес аппарата с запасом горючего на 20 мин.
был 880 кг.
О результатах испытания этого геликоптера данных не-
имеется. Известно лишь, что машина совершила несколько
взлетов и что она оказалась устойчивее прежних типов.
Работы Пескара
Почетное и видное место в истории осуществления геликоп-
тера, несомненно, должно принадлежать испанскому конструк-
тору Патерасу Пескара (Pescara), который построил в период
1919—1920 гг. ряд аппаратов и провел их испытание. Все по-
7&
Фиг. 49. Модифицированный геликоптер
№ 2 Г. Берлинера.
.74
строенные Пескара геликоптеры имели два соосных винта, вра-
щавшихся от одного мотора в противоположные стороны.
Особенностью всех аппаратов, построенных Пескара, явля-
лось наличие специального механизма для перекашивания лопа-
стей винтов, так называемого автомата-перекоса, о работе ко-
торого мы уже говорили ранее.
Первый свой аппарат Пескара осуществил в Барселоне в
1919—1920 гг. Он имел фюзеляж наподобие автомобильного
шасси, на котором были установлены мотор, передаточные ме-
ханизмы, место пилота, шасси и колонка поддерживающих
винтов.
Аппарат имел два шестилопастных винта диаметром 6,4 м
(по другим данным 6,3 м) с бипланной конструкцией лопастей.
Каждая лопасть имела в длину 2,8 м, в ширину 0,4 м. Суммар-
ная площадь всех лопастей обоих винтов была равна примерно
30 м2.
Винты, как было уже указайо, вращались® противоположные
стороны. От мотора при помощи ряда конических шестерен при-
водился во вращение нижний винт, от которого передачей ди-
ференциального типа приводился в действие верхний винт.
Сателлиты диференциальной передачи были укреплены в спе-
циальной стойке, проходящей через полые валы винтов и свя-
занной с шасси аппарата.
В корпусе аппарата с одной стороны центральной стойки
(колонки) помещался мотор, с другой — сиденье пилота с
управлением мотором, винтами и сцеплением.
Перед сиденьем пилота помещалась штурвальная колон-
ка для поперечного управления. Поворот штурвальной колонки
налево увеличивал углы атаки лопастей винта, вращающего-
ся по часовой стрелке (если смотреть сверху), уменьшая углы
атаки лопастей винта, вращающегося против часовой стрелки.
При повороте колонки направо получался соответственно про-
тивоположный эффект.
Таким образом поворотом штурвала можно было ориенти-
ровать аппарат вокруг вертикальной оси. Штурвальная колон-
ка посредством системы блоков и тросов была связана с особы-
ми кулачковыми выступами на специальных кольцах, вращаю-
щихся вместе с винтами (по одному кольцу для каждого вин-
та). Кольца имели количество выступов соответственно коли-
честву лопастей каждого винта. Эти выступы и управляли пе-
рекосом лопастей.
Наклон штурвальной колонки соответствовал уменьшению
углов атаки лопастей винтов при прохождении их в той зоне
ометаемого диска, куда наклонена колонка, и увеличению уг-
лов при прохождении их в противоположной зоне. Тем самым
равнодействующая тяга сдвигалась с оси и аппарат наклонял-
ся в том же направлении, куда был произведен наклон штур-
вальной колонки.
75
Наконец, специальная рукоятка, поднимая или опуская ку-
лачки на кольцах, позволяла изменять (увеличивать и умень-
шать) углы атаки одновременно у всех лопастей. Аппарат имел
автомобильный мотор Испано-Сюиза мощностью 45 л. с. при
1980 об/мин. Мощность мотора была, естественно, недостаточна
для подъема аппарата, весившего 700—800 кг.
При этом моторе удалось лишь произвести ряд измерений
подъемной силы шести- и затем трехлопастных винтов при раз-
ных шагах и оборотах. Для этой цели был устроен специальный
станок с гидравлическими весами. Описанный аппарат при за-
Фнг. 50. Геликоптер № 1 П. Пескара.
трате мощности 36 л. с. при 1500 об/мин давал подъемную силу
360 кг при числе оборотов винтов 102 об/мин. Этот аппарат изоб-
ражен на фиг. 50.
После предварительных опытов с мотором 45 л. с., измере-
ний тяги, центровки и т. п. мотор сменили и поставили «Рон*
1,70—180 л. с. Лишь после этого можно было приступить к проб-
ным испытаниям машины. Фиг. 51 представляет три проекции
этого аппарата после перестановки мотора.
Испытания геликоптера начались с мая 1921 г. Опыты вна-
чале оказались неудачными, так как аппарат делал лишь не-
большие прыжки. В конце мая геликоптер достроили и при-
ступили к его регулярным испытаниям. Аппарат производил не-
большие подъемы, во время которых его поддерживали помощ-
ники Пескара.
В августе—сентябре аппарату удалось подняться на высоту
1 м и продержаться в течение нескольких секунд на этой высоте.
Во время одного из таких полетов аппарат был брошен на
землю порывом ветра.
76
j
Фиг. 51. Модифицированный геликоптер № 1 П. Пескара.
77
И января 1922 г. аппарат был перевезен в Исси-ле-Мулино,
где и прошел внутри большого ангара ряд испытаний на подъем
и горизонтальное перемещение. Было произведено около сотни
полетов в продолжение января — февраля 1922 г. Высота подъе-
ма доходила до 1,5 м и продолжительность — до минуты. Гели-
коптер совершал также виражи. Устойчивость аппарата в про-
цессе испытаний была не совсем удовлетворительна, требова-
ла быстрого и четкого воздействия на органы управления, для
чего нужна была весьма большая тренировка. В период испыта-
ний несколько раз ломались шестерни трансмиссии. Все испы-
тания проводил сам конструктор Пескара.
• Фиг. 52. Геликоптер 2F П. Пескара.
Затем испытание было перенесено на поле в Виллакублей
и проводилось далее под управлением летчика Лабуше. Ему
не удалось достигнуть лучших результатов. 22 ноября 1922 г.
аппарат скапотировал и был сильно поврежден.
После поломки первого аппарата Пескара построил второй
геликоптер примерно такого же типа. Новый аппарат типа 2F
имел два пятилопастных винта диаметром 7,2 м (лопасти по-
прежнему были бипланного типа). На машине был установлен
мотор Испано-бюиза 180 л. с. Полный вес аппарата был при-
мерно 850 кг. В 1922 г. этот аппарат (фиг. 52) был показан на
Парижской авиационной выставке.
Аппарат типа 2F был полностью закончен постройкой в фев-
рале 1923 г. и с этого же времени проходил испытания сначала
в Исси-ле-Мулино, а затем на аэродроме.
В период испытаний произошли аварии и поломки, в резуль-
тате которых пришлось произвести полную смену всех лопастей.
В конце 1923 г. Пескара попытался взять приз французско-
78
го Аэроклуба за пройденный километр по замкнутому пути, од-
нако, эта попытка не увенчалась успехом.
Все же, несмотря на это, аппарат дал интересные достиже-
ния, продемонстрированные им 29 ноября в присутствии пред-
ставителя Аэроклуба. Аппарат прошел больше половины тре-
буемого пути, включая вираж около колышка, отмечавшего на
расстоянии 500 м от точки отправления противоположный ко-
нец замкнутого пути. Полет продолжался примерно 5,5 мин.
Отдельные журнальные статьи и заметки сообщают о сле-
дующих полетных испытаниях этого геликоптера типа 2F:
а) 16 января 1924 г. аппарат, поднявшись в воздух, держал-
ся в продолжение 8,25 мин. и пролетел на небольшой высоте в
различных направлениях около 1 км;
б) 21 января аппарат пролетел 624 м в 4,4 мин.; в этот же-
день после полудня пролетел 610 м, держась на высоте 1 м;
в) 25 января машина пролетела почти 400 м на средней вы-
соте 1,2 м, достигая моментами высоты 2 м;
г) 29 января аппарат пролетел 560 м в 7,9 мин. и затем
7J0 м в 10,2 мин.
В том же 1922 г. Пескара предпринял постройку нового ге-
ликоптера типа 3F и этот аппарат, еще не совсем достроенный,.,
фигурировал на Парижской авиационной выставке 1922 г.
Аппарат этот был закончен постройкой лишь в 1925 г. По
общей схеме он почти не отличался от ранее построенных типов.
Аппарат в отличие от прежних имел два четырехлопастных вин-
та бипланного типа диаметром 7,2 м с площадью всех лопастей.
27 м2 (фиг. 53).
Аппарат был снабжен мотором Испано-Сюиза мощностью
180 л. с. (по другим данным 260—300 л. с.), причем мотор при-
водил во вращение оба винта непосредственно через демульти-
пликатор с передаточным числом 1 : 14. Винты попрежнему вра-
щались в противоположные стороны. Вся конструкция была осу-
ществлена на шарикоподшипниках.
Полная высота аппарата была 3,25 м, длина 7,2 м и рас-
стояние между винтами 0,6 м.
Весовые данные этого аппарата были следующие (в кг):
Вес конструкции без мотора ...........
, мотора ............................
. горючего...........................
. полезного груза (в том числе пилот)
600
270
30
100
Полный вес в полете . .
1000
Этот аппарат, подобно всем предыдущим типам, имел меха-
низм для перекашивания лопастей винтов. Однако, схема управ-
79
.80
ления винтами и конструктивное оформление этого механизма в
новом аппарате были несколько видоизменены.
Для поворота всего аппарата вокруг вертикальной оси слу-
жили педали, посредством которых можно было увеличивать
углы атаки лопастей на одном винте и уменьшать на другом.
При этом подъемная сила оставалась неизменной, а разница
сопротивлений вращению первого и второго винтов создавала
момент, который и должен был повернуть весь аппарат.
Для управления перемещением по горизонтали имелась руч-
ка. При наклонении ее вперед происходит увеличение углов
атаки лопастей винтов при прохождении их над хвостовой ча-
стью и уменьшение углов атаки при прохождении над носовой
частью, в результате чего аппарат должен наклониться «носом»
и получить передвижение вперед. Совершенно аналогичное
явление происходит при наклоне ручки в другие стороны.
При спуске с остановившимся мотором лопастям винтов
дается небольшой отрицательный угол. Винты продолжают
вращаться в прежнем направлении и при этом геликоптер
должен совершить посадку со скоростью примерно 10 м/сек.
Внезапным увеличением углов атаки лопастей винтов при
подходе к земле можно уменьшить скорость посадки до 3—
4 м/сек, используя инерцию вращающихся винтов.
Аппарат был закончен постройкой лишь в 1925 г. В про-
цессе испытаний этот тип не дал лучших результатов, чем
все предыдущие, и о дальнейших опытах с ним ничего
неизвестно.
Работы Э. Эмишена
Весьма значительная роль в области работ по постройке
геликоптера, несомненно,; принадлежит Этьену Эмишену
(d’Emichen), инженеру завода Пэжо в Валентиней — Франция.
Этьен Эмишен начал после окончания войны свои исследова-
ния по авиации, занимаясь изучением полета птиц, конструиро-
ванием летательных приборов с машущими крыльями и, нако-
нец, изучением полета моделей геликоптеров. В результате этих
работ он построил в 1920 г. свой первый геликоптер, описание
которого мы даем.
Геликоптер состоял из деревянной фермы длиной 10 м, ши-
риной 1 м и высотой 2,5 м, растянутой стальными струнами.
Ферма имела в центре двухцилиндровый мотор водяного охлаж-
дения типа Дютейль-Шальмер мощностью 20—25 л. с. с нор-
мальным числом оборотов 1380 об/мин. На обоих концах фермы
было установлено по одному двухлопастному винту диаметром
6,4 м с площадью лопастей 12 м2.
Винты, приводимые во вращение от мотора при помощи ре-
менной передачи, перекинутой через блоки, вращались в проти-
воположном направлении.
6 А. М. Изаксон.
81
Весовые соотношения были следующие (в кг):
Мотор с радиатором и горючим......... 94
Винты с валами........................ 63
Шкивы с ремнями . . •.............. 29
Корпус с шасси........................ 76
Вес без пилота.........................262
Вес пилота..........................• 76
Полный вес.................•......... 338
Первые испытания производились без пилота и было совер-
шено до 70 подъемов с достижением максимальной высоты 6,5 м.
Фнг. 54. Геликоптер № 1 Э. Эмишена.
Развиваемой тяги было недостаточно для подъема аппарата
с пилотом, так как винты давали 265 кг тяги при полном весе
338 кг. С целью получения добавочной подъемной силы, а также
для придания машине большей устойчивости этот геликоптер
был подвешен к баллону вместимостью 144 м3, наполненному
водородом. При этом винты давали тягу примерно 265 кг, а "бал-
лон поднимал лишь 71 кг, т. е. Vs полного веса.
В таком виде аппарат (фиг. 54) совершил несколько опытных
полетов на высоте от 0,5 до 1,5 м и держался в воздухе около
минуты.
В 1922 г. Эмишен построил второй аппарат (Эмишен № 2),
схематически представленный на фиг. 55.
Остов этого аппарата представлял собой неравноплечую кре-
стообразную ферму из дуралюминовых труб с растяжками из
рояльной проволоки. Большая ветвь «креста» была направлена
вдоль продольной оси аппарата. На каждом конце крестообраз-
ного остова был помещен двухлопастный винт системы Эми-
шена, имевший трубчатый металлический лонжерон и нервюры.
82
Винты имели следующие диаметры: установленные по про-
дольной оси 6,4 м и установленные по поперечной оси 7,5 м. Сум-
марная площадь лопастей поперечных винтов 22,3 м2 и продоль-
ных 18,8 м2, а всего 41,1 м2.
Винты были посажены на специальные конические ступицы
(фиг. 56), вращающиеся на шариковых опорах. Винты враща-
лись с одинаковым числом оборотов попарно в разные стороны.
В центральной части остова, имевшей форму параллело-
грама, помещался ротативный мотор «Рон»-1 мощностью
120 л. с. Мотор соединялся с центральным редуктором, откуда
Фиг. 55. Общая схема геликоптера № 2 Э. Эмишена:
1— мотор; 2—жироскоп; 3—редуктор; 4— поддерживающие винты; 5—винты
управления; б—сиденье пилота; 7 —вспомогательные винты для поступательно-
го передвижения; <У—вспомогательный винт для уравновешивания крутяще-
го момента; 9— амортизаторы.
попарно на разной высоте выходили трубчатые валы, приводив-
шие во вращение винты с их ступицами.
Горючее в мотор поступало из двух баков вместимостью
60 л, расположенных по обе стороны от мотора и автоматиче-
ски изолирующихся друг от друга при крене.
Для придания аппарату устойчивости в полете и при «висе-
нии» на одном месте непосредственно на валу мотора был
установлен жироскоп, изготовленный в виде большого волчка из
двух соединенных воронкообразных дисков. Максимальная ок-
ружная скорость внешних, наиболее удаленных от оси, точек
жироскопа достигала 130 м!сек. Этот жироскоп должен был
придавать устойчивость аппарату в спокойном воздухе и умень-
шать колебания при ветре. Кроме того, жироскоп мог сыграть
6*
83
роль маховика и при остановке мотора продолжать некоторое
время вращать винты.
В качестве дополнительного средства для сохранения устой-
чивости и для маневрирования в полете аппарат был снабжен
рядом вспомогательных маневренных винтов. Пять таких вин-
тов предназначались для противодействия возможным попыт-
кам наклониться в какую-либо сторону и для поддержания оси
мотора в вертикальном положении. Все эти винты (фиг. 57)
были четырехлопастные, изменяемого по воле летчика шага
и приводились во вращение от промежуточных трансмиссион-
ных валов, находящихся в зацеплении с шестернями, насажен-
ными на валах основных поддерживающих винтов.
Фиг. 56. Геликоптер № 2 Э. Эмишена.
Эти винты были расположены так: три по продольной ось
(один сзади и два спереди) и два по поперечной оси (по одно-
му на сторону). Оси всех винтов были расположены вертикаль-
но. Винты по продольной оси имели диаметр 1,45 м, по попереч-
ной оси 1,55 м и все вращались со скоростью 1300 об/мин.
Один из передних винтов на большом кронштейне был вынесен
вперед.
Управление всеми этими винтами было сведено на рукоятку,
вертикальное положение которой соответствовало нулевой тяге
винтов и отсутствию перекашивающего эффекта.
На вынесенном вперед кронштейне помещался еще один
винт с горизонтальной осью, назначением которого было урав-
новешивать не целиком погашенный крутящий момент, ориен-
тировать аппарат во время полета и осуществлять поворот на
месте. Этот винт был двухлопастный изменяемого шага, имел
84
диаметр 1,75 м и приводился во вращение передачей от вала
переднего подъемного винта со скоростью 720 об/мин.
Горизонтальное поступательное передвижение предполага-
лось осуществить от горизонтальной составляющей суммарной
тяги, появляющейся при наклоне аппарата. Такой наклон мож-
но было осуществить при помощи маневренных винтов (про-
дольных или поперечных — в зависимости от желаемого направ-
ления передвижения).
Для осуществления горизонтального передвижения, кроме
того, имелись еще два двухлопастных винта, расположенных на
поперечной ферме аппарата с обеих сторон моторной клети. Вин-
ты имели вначале жестко закрепленные лопасти, но затем их
Фиг. 57. Винт управления геликоптера № 2 Э. Эмишена.
сделали также изменяемого шага. Эти винты приводились во
вращение ременной передачей, имели диаметр 1,4 м и управля-
лись от педалей.
Приспособление для посадки состояло из четырех футболь-
ных мячей, заключенных в дуралюминовые чашки и располо-
женных на стойках центральной клети, трех лыж спереди под
передним винтом и на конце вынесенного вперед кронштейна,
укрепленных шарнирно и подтянутых амортизацией и, наконец,
из четырех пневматических амортизаторов под каждым из не-
сущих винтов. Этими приспособлениями предполагалось свести
к минимуму удары при посадке и сделать ее достаточно мяг-
кой.
Из полной нормальной мощности мотора 120 л. с. подъем-
ные винты поглощали 79,5 л. с., из которых на продольные вин-
ты приходилось 26,5 л. с. и на поперечные 53 л. с. Остальная
85
мощность использовалась на работу маневренных винтов. Обо-
роты мотора редуцировались и число оборотов подъемных
винтов было 120 об/мин. После первых испытаний сменой ше-
стерен довели число оборотов больших винтов до 145 об/мин.
При этих оборотах винтов и производились основные испы-
тания.
Весовые соотношения были следующие (в кг):
конструкция (без мотора)............... 730
мотор . . ...................... 200
пилот.............. .... 75
горючее .... . . 30
масло............................ .5
Итого.............1040
Постройка аппарата была закончена осенью 1923 г. и с
этого же времени начались полетные испытания.
С 6 ноября 1923 г. по 15 января 1924 г. Эмишен совершил
около 30 подъемов и небольших полетов. Высота подъемов ко-
лебалась от 1 до 3 м и максимальная продолжительность не-
подвижного висения в воздухе была 2,5 мин. Горизонтальные
полеты вследствие ограниченной территории испытания не пре-
вышали 80 м.
Во время первых испытаний было выявлено стремление ап-
парата:
1) вращаться около своей вертикальной оси вследствие из-
лишней тяги переднего винта, призванного уравновешивать
крутящий реактивный момент, и
2) к поступательному передвижению назад, вызванному
реакцией выхлопа отработанных газов мотора.
После устранения этих недочетов испытания машины были
продолжены. Аппарат вел себя настолько устойчиво, что в
моменты затишья можно было бросить ручку управления на
полминуты. При небольших порывах ветра аппарат выходил из
равновесия и совершал ряд конусообразных колебаний (с вер-
шиной конуса внизу) и приводился снова в равновесие воздей-
ствием пилота на управление. Максимальный крен доходил
до 25°.
Из многочисленных полетных испытаний можно отметить по-
лет в апреле 1924 г., когда аппарат продержался на высоте око-
ло 2 м в продолжение 5 мин., пролетел по.прямой 80 м и сделал
поворот на месте на 360°.
1 мая при ветре 0,5 м!сек был выполнен на высоте примерна
1,5 м горизонтальный полет по замкнутому пути. После верти-
кального взлета на высоту 1,5 м был установлен положитель-
ный шаг у тянущих винтов и аппарат получил поступательное
передвижение. На конце поля шаг тянущих винтов был изме-
нен до нулевой тяги и аппарат тем самым был остановлен.
После поворота на месте на 180° при помощи переднего манев-
86
ренного винта аппарат тем же способом пролетел до противопо-
ложного конца поля. Изменением шага тянущих винтов на нуле-
вой, а затем на отрицательный аппарат был остановлен и пущен
задним ходом; над местом взлета он был снова остановлен и
опустился вертикально на 1 м в сторону от намеченного пункта.
Пройденный путь равнялся 120 м. Поступательная скорость не
превышала 10 км!час, причем шаг тянущих винтов не доводил-
ся до максимальной величины вследствие недостатка мощности
мотора.
4 мая 1924 г. в присутствии официальной комиссии военно-
го ведомства Эмишен совершил в 8 час. вечера круговой полет
общей длиной 1100 м, отмеченный тремя колышками, забитыми
в вершинах треугольника. Полет продолжался 7 мин. 40 сек. и
происходил на средней высоте 1 м, временами достигая 2—3 м.
Фиг. 58. Геликоптер № 2 Э. Эмишена в полете.
25 мая, при ветре 3 м/сек было совершено четыре полета
продолжительностью от 5 до 8 мин. каждый на высоте около 3 м
с промежуточными касаниями земли лыжами, так что на каж-
дое неподвижное «висение» приходилось около 2 мин. Послед-
ний полет был прерван ввиду остановки мотора.
9 июня аппарат поднял, кроме пилота, еще двух пассажиров,
державшихся за концы его поперечной фермы.
Больших достижений аппарат не показал за все его много-
численные полетные испытания (около 500 подъемов). Этот ге-
ликоптер не был приспособлен для спуска с остановленным мо-
тором и поэтому во избежание аварии высота подъема аппа-
рата не превышала 3 м. На фиг. 58 представлен аппарат во
время одного из полетов.
Слабым местом в геликоптере Э. Эмишена была недостаточ-
ная устойчивость, с чем ему так и не удалось справиться.
По этой причине Эмишен перешел в своих дальнейших рабо-
тах к новому типу геликоптера — комбинации чистого ге..чкоп-
87
тера с аэростатом. Над этим аппаратом, названным им «гелико-
стат», Эмишен вел работу в продолжение ряда лет. Его гелико-
стат представляет собой дирижабельный баллон небольшого
объема, к которому подвешена ферма, несущая авиационный мо-
тор, приводивший во вращение несущие (один или два) винты,
оси которых наклонены к горизонту под некоторым углом. Эти
винты, приведенные во вращение, создают основную подъемную
силу и, кроме того, дают необходимую тягу для передвижения ге-
ликостата вперед. Кроме этих двух подъемных винтов, гелико-
стат имеет тянущий винт управляемого шага и небольшой ма-
невренный винт на хвосте фермы для осуществления поворота
на месте.
В этой комбинированной схеме основную подъемную силу
создают поддерживающие винты, а часть подъемной силы —
баллон, наполненный водородом или гелием. Манипулируя ша-
гом несущих винтов, тянущего и маневренного, пилот имел
возможность на геликостате подниматься отвесно вверх, са-
диться на строго намеченный участок, двигаться поступательно
вперед и назад и, кроме того, висеть на месте. Баллон придает
аппарату необходимую устойчивость и способствует замедле-
нию спуска в случае вынужденной посадки (какой-либо полом-
ки, остановки мотора и т. п.).
На таком геликостате в течение 1933 и 1934 гг. было со-
вершено много полетов, в результате которых были получены
все указанные выше данные.
Специальное приспособление, имеющееся на аппарате, по-
зволяло при приземлении выбрасывать особые гарпуны, кото-
рые вонзались в землю и этим удерживали аппарат на том или
ином месте, играя роль якоря. Вследствие этого устройства об-
служивание аппарата при посадке сильно упрощалось и не
требовало большого количества людей.
Имеющееся в технической литературе описание геликоста-
та и полученных результатов по его летному испытанию пред-
ставляет значительный интерес, хотя этот аппарат и не являет-
ся чистым геликоптером.
Геликоптер Г. Ботезата
В Америке в 1921 г. проф. Г. Ботезат, бывший профессор
Петроградского технологического института, начал постройку
геликоптера своей конструкции. Постройка была окончена в
конце 1922 г., и в начале 1923 г. приступили к систематическим
испытаниям машины.
Остов геликоптера Ботезата (фиг. 59) представлял собой
крестообразную ферму из стальных труб, все пролеты которой
расчалены рояльной проволокой.
На концах крестообразной фермы были расположены четы-
ре шестилопастных винта «плоскорадиального», по терминоло-
гии Ьотезата, типа. Винты имели диаметр 8,08 м и поворотные
яз
во втулке лопасти, шаг которых можно было изменять одно-
временно и одинаково у всех винтов или диференциально от
специального механизма. Оси всех винтов были не параллельны
Фиг. 59.’Геликоптер Г. Ботезата.
между собой, а несколько наклонены и пересекались в некото-
рой точке выше центра тяжести. Суммарная площадь лопастей
всех винтов была 83,5 м2.
В центральной части осто-
ва аппарата помещался рота-
тивный мотор «Рон» 180 л. с.
(позднее был заменен мото-
ром ВР-2 200—220 л. с.), не-
посредственно соединенный с
редуктором, от которого от-
ходили передаточные валы,
идущие к коническим переда-
чам у каждого винта. Винты
вращались попарно в проти-
воположном направлении.
Передача вращения непо-
средственно на винты имела
своеобразное конструктивное
оформление, принадлежащее
самому Ботезату. Эта кон-
струкция (фиг. 60), судя по
описанию в журналах, доста-
точно хорошо работала И Фиг. 60. Передача к винтам геликоп-
имела высокий коэфициент тера Г. Ботезата.
полезного действия. Поворот
аппарата вокруг вертикальной оси осуществлялся двумя не-
большими винтами с горизонтальными осями, помещенными с
обеих сторон остова.
89
Кроме того, в аппарате имелось еще два небольших винта
изменяемого шага, помещенных над центральным редуктором и
мотором для их охлаждения.
Диференциальное управление шагом подъемных винтов да-
вало летчику возможность стабилизировать аппарат при кре-
нах, наклонять его в нужном направлении и держать его в этом
наклоненном положении. Наклонением аппарата предпола-
галось создавать горизонтальное поступательное передви-
жение.
Аппарат имел некоторую собственную устойчивость вслед-
ствие непараллельного расположения осей винтов. При случай-
ном крене аппарат будет увлечен в этом же направлении, углы
наклона винтов к поступательной скорости будут различны. Так
же различна будет и тяга у этих винтов, причем она будет боль-
ше у наклонившегося вперед винта, и аппарат будет стремить-
ся выпрямиться.
Возможность изменения шага лопастей винтов позволяла ап-
парату совершать посадку при выключенном моторе.
Весь аппарат имел длину и ширину по 19,8 м, а высоту
3,05 м. Полный полетный вес машины, включая пилота и горю-
чее, был около 1700 кг.
В ноябре 1922 г. аппарат был окончен постройкой и присту-
пили к его регулировке, заставляя подниматься сначала пустым,
затем с пилотом, причем в последнем случае четыре человека
удерживали машину за концы остова. Лишь в декабре присту-
пили к испытаниям, которые производились на аэродроме в
Мак-Кук-Фильде (Дайтон).
18 декабря 1922 г. аппарат поднялся на высоту 1,8 м, про-
держался в воздухе 1 мин. 44 сек., достаточно устойчиво и
плавно опустился по воле пилота.
19 января 1923 г. аппарат поднял двух человек на высоту
около 1,2 м. Максимальная высота, достигнутая во время этих
полетов, была 3—4 м и наибольшая продолжительность при-
мерно 2 мин.
Собственная устойчивость аппарата обнаружилась хорошо
(при полетах в ветер, когда после каждого порыва ветра аппа-
рат, совершив несколько затухающих колебаний, быстро прини-
мал прежнее устойчивое положение без какого-либо воздей-
ствия летчика.
Весной 1923 г. был совершен полет с пилотом в кабине и
тремя пассажирами, державшимися за концы фермы. Несимме-
тричность такой нагрузки уравновешивалась управлением.
Максимальный поднимаемый полезный груз был 450 кг. Посад-
ка с выключенным мотором не производилась.
Помимо этого аппарата, Ботезат построил в 1923 г. другой
геликоптер GB-5 совершенно иной схемы.
Это был (фиг. 61) двухвинтовой геликоптер с двумя соос-
«0
ными винтами, вращающимися в противоположных направле-
ниях.
Кабина геликоптера GB-5 одноместная и имела обтекаемую
форму. Лопасти винтов, достаточно широкие у корня, сужива-
лись к концу.
Мотор помещался между несущими винтами над кабиной
и запускался вхолостую. Сцепление с винтами совершалось ав-
томатически при определенном открытии дросселя. При дости-
жении требуемых оборотов пилот при помощи управления утя-
желял шаг винтов и машина начинала подниматься вертикаль-
но. Шаг изменялся одновременно у всех лопастей. Управление
аппаратом осуществлялось наклоном оси несущих винтов
Фиг. 61. Геликоптер GB-5 Г. Ботезата.
(вместе с мотором) в сторону полета с одновременным сдви-
гом всей винтомоторной установки в противоположном направ-
лении. Так, например, при желании двигаться вперед пилот
дает ручку «от себя», ось винтов наклоняется вперед и вся
винтомоторная группа немного сдвигается назад. Судя по
некоторым сообщениям, этот аппарат Ботезата успешно прошел
Испытания, будучи простым в управлении и достаточно устой-
чивым. Более подробных данных об этом геликоптере и о ре-
зультатах его испытаний мы не имеем.
Геликоптер Баумхаузра
В 1923—1924 гг. голландский инженер Баумхауэр (Baum-
hauer) построил геликоптер, описание которого известно лишь
в самых общих чертах из его доклада на конгрессе в Дельфте
в 1924 г.
Этот аппарат, изображенный схематически на фиг. 62, имел
фюзеляж обычного самолетного типа с нормальными шасси и
костылем. В носовой части фюзеляжа был установлен мотор
водяного охлаждения, несущий на своем валу нормальный тяну-
91
щий винт. В центре фюзеляжа на специальном кабане поме-
щался большой поддерживающий винт, приводимый во враще-
ние при помощи ряда конических шестеренок от упомянутого
выше мотора.
Для уравновешивания реактивного крутящего момента сза-
ди аппарата помещен небольшой винт с горизонтальной осью
е изменяемым шагом. Этим же винтом можно было ориентиро-
вать аппарат в нужном направлении. Машина имела также
бипланную коробку крыльев самолетного типа с элеронами.
Крылья должны были помочь осуществлять безопасный спуск
с выключенным мотором. Ряд плоскостей, помещенных в струе
Фиг. 62. Схема геликоптера Баумхауэра.
несущего и тянущего винтов, должен был также способствовать
сохранению устойчивости машины.
Для поддержания устойчивости и для маневров при посадке
аппарат имел автомат-перекос.
Достоверных данных о полетных испытаниях этого геликоп-
тера, так же как и о размере и весовых соотношениях, в нашем
распоряжении не имеется. Известно лишь, что испытания аппа-'
рата продолжались вплоть до 1928 г.
Гелицион Перри
Осенью 1924 г. был закончен постройкой аппарат француз-
ского инженера Перри (Perri), названный им «гелицион». Этот
аппарат строился на заводе Лоррен-Дитрих в окрестностях
Парижа. Конструктор этого аппарата Перри работал над созда-
нием подобного типа машины примерно с 1916 г.
92
Фотография построенного аппарата приведена на фиг. 63.
Данных о конструкции, о размерах и о весовых соотношениях
машины мы не имеем.
Фиг. 63. Гелнцион Перри.
На фиг. 64 показано предварительное испытание машины
на специально построенной для этого башне около завода Лор-
рен-Дитрих. Эта башня, клепанная из железа, имела высоту
Фнг. 64. Испытание гелицнона Перри.
50 м. О результатах испытания аппарата Перри также ничего
неизвестно.
93
Геликоптер Геллезеи-Каиа
В начале 1925 г. была окончена постройка геликоптера,
строившегося по проекту Геллезена (Hellesen) и Кана (Kahn)
(НК-1).
Этот аппарат (фиг. 65) имел фюзеляж самолетного типа с
костылем и шасси; позади места пилота находилась специаль-
ная стойка, на которой вращался двухлопастный несущий винт
диаметром 13 м. Лопасти винта имели прямоугольное очерта-
ние в плане с шириной 1,5 м и могли свободно вращаться вокруг
своей оси, проходящей примерно на одной трети хорды от пе-
редней кромки. Обе лопасти посредине имели надстройки в ви-
Фиг. 65. Схема геликоптера Геллезен-Кана.
де самолетного фюзеляжа, в передней части которых было уста-
новлено по мотору Анзани 70—80 л. с., а в хвостовой части на-
ходилось оперение по типу самолетного руля высоты. Поверх-
ность лопастей была 19,5 м2, а поверхность ометаемого диска
132 м2.
При принятой схеме отсутствует реактивный крутящий мо-
мент на корпусе аппарата, но появляется ряд трудностей, вы-
текающих из наличия центробежных и жироскопических уси-
лий. Чтобы парализовать жироскопический эффект винтов, на-
саженных на валы моторов, мешающий ориентированию лопа-
94
стей по воле летчика, пришлось на каждый мотор поставить по
два четырехлопастных винта, вращающихся в противоположные
стороны. Нужны были особые ухищрения, чтобы по возможно-
сти ослабить действие центробежных усилий на части моторов
и на горючее в карбюраторах.
Для сохранения устойчивости в полете аппарат имел знако-
мый нам по прежним описаниям механизм для перекашивания
лопастей, связанный с органами управления каждой лопасти
и воздействующий на них.
Максимальная скорость вращения несущего винта
100 об/мин. Аппарат был построен в основном из дерева; пол-
Фиг. 66. Геликоптер Геллезен-Кана.
ный вес был 800 кг. При симметричном профиле лопастей боль-
шого винта этот геликоптер можно было обратить в двухмо-
торный самолет.
Этот аппарат (фиг. 66), построенный в начале 1925 г., при
испытании смог подняться всего лишь на несколько сантимет-
ров. Более подробных данных об этой машине не имеется.
Геликожиры В. Изакко
В начале 1929 г. в Англии и Франции было построено не-
сколько аппаратов типа геликоптера по проекту итальянского
конструктора Витторио Изакко (iV. Isacco), бывшего в течение
ряда лет сотрудником Патераса Пескара.
Этих аппаратов, названных конструктором «геликожирами»,
было построено всего три экземпляра: два во Франции и один
в Англии.
Все построенные аппараты имели в общем аналогичную
принципиальную схему (фиг. 67). Фюзеляж обычного самолет-
ного типа имел шасси, костыль, стабилизатор, рули направления
и высоты. Вместо крыльев в центре фюзеляжа была помещена
95
специальная стойка, на которой на подшипниках насажена втул-
ка несущего винта. Лопасти (две или четыре, в зависимости от
типа) сочленены со втулкой таким образом, что они могут вра-
щаться вокруг своей оси и, кроме того, делать «взмахивающие»
движения, подобно ротору автожиров Сиерва (Cierva). При
остановленном винте лопасти удерживаются от опадения рас-
тяжками, идущими к центральной стойке.
На лопастях были установлены небольшие многооборотные
авиационные моторы с тянущими винтами. При помощи тяги
этих винтов приводился во вращение основной поддерживающий
винт, который давал при этом подъемную силу, необходимую
для поддержания аппарата. Лопасти несущего винта имели на
задней кромке специальные открылки-элероны.
При вращении винта лопасти автоматически устанавлива-
лись под действием аэродинамических и центробежных сил та-
ким образом, что на них не появлялись изгибающие моменты.
Точно так же при подобном способе приведения во вращение
несущего винта аппарат не подвергался действию реактивного
крутящего момента, так что отпадала необходимость в приме-
нении каких-либо рулевых винтов, направляющих плоскостей
и иных приспособлений.
96
Для изменения углов атаки лопастей несущего винта, что
необходимо для осуществления подъема, спуска и «висения»,
пилот воздействует на элероны лопастей при помощи специаль-
ного управления около сиденья пилота.
Для горизонтального передвижения аппарата в передней
части фюзеляжа установлен отдельный мотор с тянущим вин-
том. Для управления машиной при поступательном передвиже-
нии служат рули направления и высоты.
Моторы, установленные на лопастях, развивали 4000—
5000 об/мин. Располагались они или по середине лопастей или
на самых концах. В последнем случае вес этих моторов частич-
но погашал колебания лопастей, но влияние центробежных сил
на все части мотора весьма сильно осложняло и затрудняло их
работу.
В каждой лопасти помещался бак с горючим для мотора,
расположенного на этой лопасти.
Фиг. 68. Геликожир № 1 В. Изакко.
Первый геликожир, построенный для французского военного
министерства (фиг. 68), имел четыре лопасти, на двух из кото-
рых были установлены посредине моторы Анзани 50 л. с. Таким
образом винт вращался от общей мощности 100 л. с. Для_ гори-
зонтального полета на носу фюзеляжа имелся мотор Анзани
35 л. с.
Этот аппарат весил 843 кг и несколько раз поднимался
с земли.
Второй геликожир, также построенный во Франции, имел
лишь две лопасти, на концах которых было установлено по мо-
тору Бристоль-Черуб 32 л. с. Для горизонтального перемещения
был установлен мотор Анзани 50 л. с. Эта машина, как сооб-
щают, совершила несколько небольших подъемов при общем
весе 594 кг.
Наконец, последний аппарат, построенный для английского
воздушного министерства на заводе Sanders в Cowes, имел че-
тыре лопасти, на концах которых помещалось по мотору Бри-
столь-Черуб 32 л. с., т. е. всего 128 л. с. Для горизонтального
полета имелся мотор Женет 100 л. с.
7 А. М. Изаксон.
97
Фнг. 69. Схема геликоптера М. Бликкера.
98
Геликожир был двухместный, вес его неизвестен. О резуль-
татах испытаний этого аппарата, так же как и предыдущих,
данных мы не имеем.
Для парализования жироскопического эффекта тянущих
винтов на лопастях поддерживающего винта все машины имели
по два четырехлопастных винта, вращающихся в противополож-
ные стороны. Размеры всех построенных геликожиров неизвест-
ны, о них можно судить лишь по фотографиям.
Из доклада Изакко в Лондонском королевском обществе
воздухоплавания следует, что при остановке части моторов на
лопастях оставшиеся моторы должны обеспечить вращение не-
сущего винта и безопасный спуск аппарата. Даже при остановке
всех моторов на лопастях имелось в виду наклонить аппарат
назад и совершить полет, как на автожире.
При остановке всех моторов аппарат должен совершить па-
рашютирующий спуск, который возможно замедлить внезап-
ным увеличением углов атаки лопастей при подходе к земле.
Более подробных данных о машинах Изакко и о результатах их
испытаний в литературе не имеется.
Геликоптер М. Бликкера
Начиная с 1927 г., в технической литературе время от времени
появлялись небольшие заметки о работах американского инже-
нера М. Бликкера (М. Bleecker) по постройке нового геликоп-
тера. Согласно этим сообщениям, работы велись на заводе
Фнг. 70. Геликоптер М. Бликкера.
Кертисс при непосредственном участии руководителей этой
фирмы.
Первые построенные модели оказались неудовлетворитель-
ными: геликоптер поднимался вертикально, но совершенно не
поддавался управлению. Новый аппарат был несколько видо-
изменен и от него ожидали получить лучшие результаты.
В начале лета 1930 г. этот аппарат был закончен постройкой
и 18 июня выставлен для осмотра на аэродроме фирмы Кертисс
7*
99
Основной составной частью геликоптера Бликкера (фиг. 69
и 70) является четырехлопастный поддерживающий винт диа-
метром 14,5 м, вращающийся около вертикальной оси.
Лопасти винта крепились шарнирно в двух точках на
расстоянии одной трети от передней кромки и могли пово-
рачиваться вокруг маха, изменяя угол установки от —12,5°
до ;+27,5°. Лопасти имели профиль № 387 Геттингенской
лаборатории.
Конструкция лопастей состоит из шести деревянных лонже-
ронов (спрус и фанера), трубчатого остова из дуралюминовых
и хромомолибденовых труб и фанерного покрытия в два слоя
на большей несущей части. Та часть лопастей, где нагрузка
наименьшая, обтянута специальной материей. Ширина ло-
пастей в наибольшей части равна 1,69 м и уменьшается к кон-
цам. Поверхность всех четырех лопастей составляет 29,9 м2.
Поддерживающий винт приводится во вращение при помощи
деревянных четырехлопастных винтов диаметром 2,06 м, поме-
щающихся впереди всех четырех лопастей на специальных
вынесенных кронштейнах.
Эти винты отстоят на расстоянии 2,28 м от оси поддержи-
вающего винта.
Все лопасти поддерживающего ввдта на стороне задней
кромки имеют на специальных консолях особые вспомогатель-
ные плоскости, так называемые «стабоваторы». Эти стабовато-
ры имеют поверхность в 1,15 м2 каждый, т. е. 4,6 м2 все вместе.
Таким образом каждая лопасть поддерживающего винта имеет
вид как бы самолета, крылом которого является сама лопасть,
а рулем высоты — стабоватор.
Несколько ниже поддерживающего винта рдсположен ста-
ционарный девятицилиндровый звездообразный мотор воздуш-
ного охлаждения фирмы Пратт-Уитней мощностью 425 л. с.
Мотор снабжен редуктором и дает номинально 2100 об/мин.
Обороты мотора при помощи стандартной передачи редуциру-
ются таким образом, что главный вертикальный вал вращается
со скоростью 1050 об/мин. Наверху этот главный вал связан с
редуктором, где при помощи конических шестерен вращение
передается четырем горизонтальным валам, вращающимся со
скоростью 1420 об/мин.
Эти горизонтальные валы подводят мощность к четырем ма-
лым тянущим винтам, расположенным у передней кромки ло-
пастей поддерживающего винта. Около этих винтов при помощи
специальных редукторов с коническими шестернями число обо-
ротов снова редуцируется и винты имеют номинальную ско-
рость вращения 1530 об/мин.
Схема передачи от центрального вала к одному из тянущих
винтов изображена на фиг. 71.
Как уже указывалось, четыре тянущих винта приводят во
вращение основной поддерживающий винт. Число оборотов
этого винта, необходимое для взлета аппарата, равно 60 об/мин.
100
Максимальное число оборотов винта, соответствующее наиболь-
шей подъемной силе аппарата, приблизительно 120 об/мин.
Основной вал, на котором установлен мотор, в верхней и
нижней частях фюзеляжа монтирован на шарикоподшипниках
в особых кольцах диаметром 300 мм.
Назначение стабоваторов заключается в управлении шагом
лопастей основного поддерживающего винта единовременно и
аналогично у всех лопастей или диференциально на определен-
ном участке ометаемого диска.
Изменение угла установки стабоватора автоматически вле-
чет за собой соответствующее изменение шага лопастей несу-
щего винта. Единовременное изменение углов установки стабо-
ваторов осуществляется специальным рычагом, помещенным в
кабине с левой стороны. Посредством подобного управления
стабоваторами можно осуществлять подъем, «висение» и по-
садку с работающим мотором.
Фиг. 71. Схема трансмиссии геликоптера М. Бликкера.
В случае посадки с остановленным мотором соответствую-
щей перестановкой углов стабоваторов можно придать лопа-
стям винта малый шаг и перевести их на режим авторотации.
Геликоптер Бликкера снабжен перекашивающим механиз-
мом, о принципиальной сущности и работе которого мы не-
сколько раз уже говорили выше. В этом аппарате перекашива-
ние производится воздействием соответствующим образом на
стабоваторы, которые затем уже вызывают надлежащее ojiuio-
нение лопастей винта.
Управление перекашивающим механизмом сведено на ру-
коятку перед пилотом. Отклонение рукоятки вперед влечет за
собой наклон всего аппарата вперед и соответствующее дей-
ствие получается при отклонении рукоятки в другую сторону.
Горизонтальное передвижение достигается от горизонталь-
ной составляющей тяги при общем наклоне. Максимальная го-
ризонтальная скорость ожидается при наклоне аппарата на 15°
от вертикальной оси. Аппарат не способен рулить, а взлет и
посадка должны производиться вертикально без разбега и про-
бега.
Внизу под мотором аппарат имеет фюзеляж-кузов в виде
легкой трубчатой рамы, покрытой материей. Перед валом имеет-
ся место для пи пота, сзади — место для пассажира или меха-
ника.
101
Остов аппарата на двух шарикоподшипниках может повора-
чиваться вокруг основного вала. Для ориентировки кузова во-
круг вертикальной оси служит специальный руль позади аппа-
рата, могущий по воле пилота поворачиваться вокруг горизон-
тальной оси. Отбрасываемый винтом поток, действуя на эту
повернутую поверхность, дает боковую слагающую, достаточ-
ную для поворота всего кузова.
Аппарат имеет шасси и хвостовое колесо вместо костыля.
Шасси снабжено масляной и дисковой резиновой амортизацией.
Для охлаждения мотора имеется специальный вентилятор.
Двухлопастный вентилятор диаметром около 1,07 м вра-
щается на коленчатом валу мотора и охлаждает цилиндры мо-
тора и масло. По сообщениям печати, вентилятор поглощает
всего :14 л. с., или около 3% полной мощности.
Горючее — примерно 100 кг — находится в алюминиевом ба-
ке, помещенном около вертикального вала и вращающемся
вместе с ним. Масло помещено в баке внизу мотора. Вмести
мость масляного бака — около 15 кг.
Полный вес аппарата 1550 кг, причем полезная нагрузка
(пилот, горючее, приборы и пр.) достигает 20% полного веса.
Известно, что было несколько попыток приступить к првиз-
водству систематических испытаний аппарата, но данных о ре
зультатах этих попыток и о поведении машины в воздухе мы
не имеем.
Глава VI
ПРОБЛЕМА ГЕЛИКОПТЕРА РАЗРЕШЕНА
Геликоптер Асканио
• В конце 1930 г. в некоторых иностранных журналах появи-
лись сообщения об испытании нового итальянского геликоптера
Асканио (Ascanio). В этих же журналах помещены небольшие
описания этого аппарата, далеко не дающие отчетливого пред-
ставления о его конструкции.
Недостатки описаний аппарата приходится компенсировать
попыткой получить все же более или менее полную картину из
анализа имеющихся фотографий и их сопоставления. В некото-
рой мере нам это удалось, но, конечно, на исчерпывающую пол-
ноту и на особо большую точность полученные данные претен-
довать не могут.
Корпус этого аппарата состоит из,-
1) центральной части, несущей мотор с муфтой и редукто-
ром, центральный вал, поддерживающие винты и кабину пилота
со всеми органами управления и
2) трех пирамидальных отростков, образующих вместе с
центральной частью как бы несимметричную трехконечную
звезду.
Если ориентироваться по пилоту, то два отростка идут в обе
стороны (налево и направо) от пилота, а третий отросток на-
правлен назад. Таким образом между осями двух боковых
отростков будет по 180° (спереди и сзади), а между этими ося-
ми и осью отростка, идущего назад, будет по 90°.
Центральная часть корпуса и все отростки его представляют
собой сварную конструкцию из стальных труб, причем боковые
отростки изготовлены в виде треугольной пирамиды, суживаю-
щейся к концу, а задний отросток — в виде четырехугольной
пирамиды.
Примерно по середине центральной части корпуса (фиг. 72)
расположены центральные валы несущих винтов. С одной сто-
роны (спереди) размещены мотор с муф*той и редуктором, а с
другой стороны (сзади) — сиденье пилота.
103
Размах машины по поперечной оси приблизительно 10—
11 м, а по продольной — 6—6,5 м.
Аппарат снабжен широко разнесенными четырехколесными
шасси, образующими как бы квадрат со стороной около 4 м.
Колеса диаметром около 0,6 м сделаны ориентирующимися.
Шасси изготовлено таким образом, что представляет возмож-
ность иметь большой ход амортизации без опасности сноса
покрышек.
Аппарат имеет всего два двухлопастных винта диаметром
13—15 Mi, вращающихся в противоположные стороны. Лопасти
винтов имеют нервюры из дураля и обтянуты полотном. Лопа-
сти винтов могут свободно вращаться вокруг своей оси и ста-
Фиг. 72. Схема геликоптера Асканио.
яовиться под нужными углами к плоскости вращения в зависи-
мости от установленного угла стабилизаторов и рулей высоты,
которыми снабжена каждая лопасть. Кроме того, лопасть вме-
сте с махом может совершать небольшие колебательные (взма-
хивающие) движения, аналогично тому, как это имеет место
в автожирах Сиерва (Cierva). Предохранительные ограничи-
вающие растяжки не допускают полного опускания лопастей.
Лопасти винтов имеют форму самолетного крыла; стабилиза-
торы прямоугольной формы расположены вблизи концов ло-
пастей.
Стабилизаторы снабжены небольшими открылками — руля-
ми глубины, устанавливаемыми под нужными углами пр усмо-
трению пилота. В полете углы установки стабилизаторов не ме-
няются. Концевая часть лопасти со стабилизатором изображена
на фиг. 73.
Для приведения центра тяжести всей лопасти на ось маха на
передней кромке лопастей установлены контргрузы, вынесен-
ные вперед.
104
Полная высота вместе с вынесенным кверху кабанчиком
(считая от верхней грани фюзеляжа) равняется 5 м; расстоя-
ние между винтами — около 2,5 м.
Геликоптер Асканио снабжен установленным в центральной
части корпуса аппарата авиационным мотором Фиат А-505
мощностью 95—100 л. с.
Раздача мощности от мотора осуществлена следующим
образом (фиг. 74). Вал мотора муфтой соединен с редуктором,
который посредством двух конических шестерен передает мощ-
ность по длинному пустотелому и тонкостенному валу, поме-
щенному внутри полого вала, на самый верх, где имеется
в расширяющейся части внешнего вала планетарная передача.
Внутренняя шестерня этой передачи связана с внутренним тон-
костенным валом; обойма сателлитов соединена с внешним ва-
лом и передает часть мощности на нижний винт, а внешняя вен-
цевая шестерня связана со втулкой верхнего винта.
Фнг. 73. Конец лопасти со стабилизатором у геликоптера Асканио.
Верхний и нижний винты вращаются примерно с одной ско-
ростью, делая по 75 об/мин. Муфта сцепления между мотором
и редуктором работает таким образом, что передает мощность
в одном лишь направлении (от мотора к винтам), автоматиче-
ски выключаясь при остановке мотора.
Подъем, спуск и «висение» аппарата достигаются измене-
нием шага лопастей винтов, что, в свою очередь, происходит
автоматически в зависимости от перемены угла установки ру-
лей высоты стабилизаторов. Установка рулей высоты и изме-
нение их углов в полете производятся пилотом при помощи
специального управления.
В случае отказа мотора лопасти винтов при помощи тех же
стабилизаторов с рулями высоты должны автоматически встать
под небольшими отрицательными углами, перейдя тем самым на
режим авторотации и осуществив замедленный парашютирую-
щий спуск машины.
Для сохранения устойчивости и управления аппаратом
имеются три небольших маневренных винта на концах трех от-
ростков корпуса. Два из этих винтов на концах левого и зад-
него отростков с вертикально расположенными осями служат
для придания машине управляемости в продольном и попереч-
105
Фиг. 74. Схема раздачи мощности от мотора к винтам
иа геликоптере Асканно.
106
ном направлениях и наклона всего аппарата для горизонталь-
ного передвижения. Третий винт с горизонтальной осью на
конце правого отростка предназначен для уравновешивания
возможной разницы крутящих моментов поддерживающих вин-
тов и для ориентирования аппарата относительно вертикальной
оси.
Рулевые винты приводятся во вращение при помощи
тонкостенных пустотелых валов, передающих мощность от цен-
трального редуктора к малым редукторам на концах отросткоз
аппарата.
Для управления аппаратом около пилота помещены руко-
ятка управления, педали и рычаг общего изменения шага несу-
щих винтов.
Фиг. 75. Геликоптер Аскаиио в полете.
Движение рукоятки вперед и назад вызывает изменение
шага заднего рулевого винта. Движение вправо и влево вызы-
вает перемену шага левого винта; педали связаны с механиз-
мом изменения шага правого винта.
Другая рукоятка воздействует на установку углов рулей
высоты стабилизаторов лопастей. Движение назад соответствует;
подъему аппарата,, движение вперед — спуску.
Запас горючего в баках — примерно на 1,5 часа полета.
Полный полетный вес аппарата — около 800 кг.
Согласно журнальным сообщениям аппарат Асканио, пило-
тируемый Маринелло Нелли, совершил ряд успешных полетов
(фиг. 75) на северном аэродроме Чиампино (около Рима). В
продолжение этих испытаний машина поднималась и опускалась
на то же место в кругу диаметром 15 м и значительное время
Держалась в воздухе на высоте 4 м. Затем аппарат пролетел
по замкнутому кругу диаметром 1 км (от одного конца аэро-
дрома до другого).
107
Максимальная достигнутая высота полета была 18 м, макси-
мальная продолжительность полета 8 мин. 45,5 сек. По дально-
сти и высоте эти полеты были рекордными для геликоптеров
того времени.
Геликоптер Асканио совершил ряд полетов внутри эллинга
для дирижабля.
Несмотря на завихрения, он оставался несколько минут в
воздухе, поворачиваясь во всех направлениях, и неизменно вел
себя достаточно устойчиво.
Работы по геликоптерам в СССР
В 1925 г. в СССР был начат1 ряд экспериментальных изы-
сканий по изучению различных режимов геликоптерного винта,
по выбору его наивыгоднейших параметров и по другим вопро-
сам, связанным с осуществлением геликоптера.
В конце 1926 г. была создана специальная геликоптерная
группа, перед которой были поставлены задачи:
а) развернуть и объединить теоретические и эксперимен-
тальные исследования по геликоптерной тематике;
б) организовать глубокое изучение проблемы создания ге-
ликоптера, всего имеющегося в этой области опыта, различных
вариантов и схем геликоптеров и их основных элементов;
в) организовать проектирование и конструктивную разра-
ботку геликоптера с доведением его до постройки;
г) провести все необходимые опытные работы, летные испы-
тания и исследования, необходимые для изучения, освоения и
доводки осуществимых экспериментальных образцов гели-
коптеров.
В осуществление указанных задач вновь созданной группой
были развернуты обширные экспериментальные исследования
по изучению работы геликоптерных винтов на разных режимах
и по выявлению влияния различных параметров на их каче-
ство.
На основе изучения всего исторического материала по гели-
коптерам было проведено эскизное проектирование нескольких
типов геликоптеров.
Анализ этих эскизных проектов позволил выбрать наиболее
реально осуществимые варианты (так называемые «фавори-
ты»), которые и явились объектом дальнейшей более углублен-
ной конструктивной разработки.
Среди значительного количества проведенных эксперимен-
тальных исследований, предшествовавших проектированию и
постройке выбранного типа геликоптера, следует отметить ис-
ключительное практическое значение опытов с натуральным
1 Этими работами руководил проф. Б. Н. Юрьев. Проводились они груп-
пой молодых работников, пришедших в этот период в ЦАГИ (в их числе
был и автор данной книги).
108
шестиметровым геликоптерным винтом, проведенных на спе
циально построенном стенде во дворе ЦАГИ.
Винт приводился во вращение от мотора М-2 мощностью
120 л. с. при помощи специально построенного редуктора. Винт
был двухлопастный с жестким креплением лопастей во втулке
(лопасти не машущие). Лопасти могли менять угол установки
как одновременно, так и диференциально при помощи автомата-
перекоса.
Построенный стенд давал возможность получать необходи-
мые данные по работе натурального геликоптерного винта
большого масштаба (тяга и потребная мощность), полную кар-
тину работы автомата-перекоса, обнаружить влияние на работу
геликоптерного винта близости земли и взаимное влияние двух
взаимно перекрывающихся винтов, а также данные по транс-
миссии, запуску мотора и т. п.
Результаты работ на стенде дали богатейший практический
материал для дальнейших изысканий по осуществлению гели-
коптера. »
Наряду с экспериментально-исследовательской работой,
проектными и конструкторскими работами, много внимания уде-
лялось уточнению теории и разработке методов практических
расчетов.
В процессе расширения проводимых работ созданная гели-
коптерная группа была реорганизована сначала в Секцию осо-
бых конструкций, а затем в самостоятельный Отдел особых
конструкций ЦАГИ *.
Советское геликоптеростроение, зародившееся еще в период
1 Представляет некоторый интерес персональный состав работавших
в этой области иа разных этапах развития этих работ. До 1928 г. руковод-
ство всеми этими работами принадлежало проф. Б. Н. Юрьеву. Непосред-
ственными его помощниками в тот период были А. М. Черемухин и
А. М. Изаксон. С 1928 г. после перехода проф. Б. Н. Юрьева на другую
работу руководил всеми геликоптерными работами в ЦАГИ А. М. Изаксон
(автор данной книги) до конца 1937 г. Следует отметить исключитель-
ную роль в руководстве конструкторскими работами и в проведении всех
летных испытаний и исследований все эти годы проф. А. М. Черемухина
(заместитель руководителя Отдела и летчик-испытатель). Большой техни-
ческий вклад в эту работу внесли инж. К. А. Буикин, инж. Д. И. Антонов,
инж. И. П. Братухин, инж. Г. И. Солнцев, инж. В. П. Лаписов, инженеры
И. Я. Никитин, Д. Т. Мацицкий, Б. Я. Жеребцов, М. С. Аболдуев,
А. А. Докучаев и значительное количество конструкторов, техников,
расчетчиков и бортмехаников.
Интерес к делу, технические способности (а у некоторых и талант),
энтузиазм в работе, — все это с избытком отдавали на протяжении ряда
лет разрешению проблемы геликоптера указанные выше работники гели-
коптерного дела в ЦАГИ.
Наряду с работами по геликоптерам, указанная организация вела
большую работу по автожирам (теоретические и экспериментальные иссле-
дования, проектирование и постройка опытных образцов, их летные испы-
тания, изучение областей применения). Среди работавших в этой области
следует отметить инженеров Камова Н. И., Кузнецова В. А., Скржин-
ского Н. К, Миль М. Л., Петрунина В. Г., Михайлова А. Н., Проску-
рякова А. П., Квашнина В. М., Богатырева Б. В. и др.
109
первого десятилетия советского государства, сумело добиться
(см. дальнейшее изложение советских работ) прекрасных ре-
зультатов и высоких технических показателей. Наша геликоп-
терная техника, даже в начальный период своего развития,
создавала систематически летавшие машины.
Если в процессе летных испытаний достигались рекордные
результаты, которые никогда не были самоцелью, то строи-
тели советских геликоптеров, чуждые рекламных соображе-
ний, не опубликовывали эти данные, считая свою работу не
законченной.
Однако, если сравнить советские экспериментальные гели-
коптеры с геликоптерами, созданными в тот же период за ру-
бежом, то следует признать, что советской технике геликоптеро-
строения все эти годы принадлежала ведущая роль.
Нашими инженерами решено немало проблем, связанных с
проектированием геликоптеров, рациональным выбором и оцен-
кой геликоптерных схем, с разработкой вопросов устойчи-
вости^и управляемости геликоптеров. Число неясных вопросов
геликоптерной тематики, затрудняющих инженерный подход
к проектированию геликоптеров, с каждым годом умень-
шается.
Все это создает условия для перехода от эксперименталь-
ного геликоптеростроения к более широкому развертыванию
строительства опытных и серийных машин. Это отнюдь не озна-
чает, что область экспериментального геликоптеростроения
должна быть сужена. Наоборот, потребности промышленного
геликоптеростроения должны намного увеличить требования к
теоретической и экспериментальной работе, которая в связи
с этим должна получить еще более широкий размах.
Мы имеем все основания надеяться, что советское геликоп-
теростроение будет содействовать дальнейшему росту техниче-
ского прогресса нашей страны.
Советский геликоптер 1-ЭА
На основе большого количества экспериментальных иссле-
дований и в результате конструктивной разработки ряда ва-
риантов на опытном заводе ЦАГИ в августе 1930 г. была за-
кончена постройка первого советского геликоптера 1-ЭА (пер-
вый экспериментальный аппарат).
Аппарат 1-ЭА—одноместный, одновинтовый, двухмоторный
геликоптер (фиг. 76 и 77). Реактивный момент уравновешивал-
ся на нем при помощи рулевых винтов.
На машине были установлены два ротативных девятици-
линдровых мотора М-2 по 120 л. с.
Ротативные моторы были выбраны из тех соображений, что
для их охлаждения на режиме «висения» не требовалось ника-
ких дополнительных приспособлений. Моторы располагались по
обеим сторонам центральной части фюзеляжа, так что своими
носками они были обращены внутрь фюзеляжа.
ПО
Моторы передавали свою мощность главному редуктору
через муфты свободного хода, установленные на случай авто-
ротирующего безмоторного спуска. В главном редукторе две
ведущие конические шестерни приводили во вращение ведомую
шестерню, вращавшуюся в горизонтальной плоскости. На одном
валу с этой шестерней находилась центральная шестерня пла-
Фиг. 76. Советский геликоптер 1-ЭА.
нетарной передачи, расположенной в верхней части главного
редуктора. Обойма сателлитов планетарной передачи была со-
стыкована с валом несущего винта. Передаточное число глав-
Фиг. 77. Советский геликоптер 1-ЭА в полете.
ного редуктора было 1 : 7,84. Таким образом при 1200 об/мин
мотора несущий винт делал 153 об/мин.
Верхней опорой вала несущего винта служил роликовый
подшипник большого диаметра нестандартного типа, изготов-
ленный специально для данной машины.
Несущий винт был четырехлопастным, диаметром 11 м. Его
лопасти жестко крепились ко втулке винта.
111
В целях разгрузки лопастей от изгибающих моментов от
подъемных сил лопасти были отогнуты вверх так, что их оси
образовывали с плоскостью вращения угол в 5°.
Крепление лопастей осуществлялось двумя опорами. Первая
опора располагалась непосредственно на втулке винта. В ней
были размещены радиальный и упорный подшипники. Вторая
опора в целях облегчения веса была вынесена на сварном ка-
бане. Так как для управления винтом требовался поворот лопа-
сти в сравнительно узком диапазоне углов, оказалось возмож-
ным на второй опоре не ставить подшипника. Подшипник был
заменен параллелограмным механизмом.
В первом варианте лопасти геликоптера 1-ЭА были металли-
ческими. Из листового дуралюмина были изготовлены лонже-
рон, нервюры и обшивка. Однако производственные искажения
геометрической формы лопастей были весьма существенны.
Поэтому впоследствии был изготовлен новый комплект лопас-
тей. Их лонжероны попрежнему были склепаны из листового
дураля, но нервюры и стрингеры были деревянными. Фанер-
ная обшивка обтягивалась полотном. Профиль лопастей был
английский; коэфициент заполнения несущего винта 0,115.
Крутящий момент от несущего винта уравновешивался че-
тырьмя рулевыми винтами, попарно поставленными на нос и
хвост машины. Для приведения рулевых винтов во вращение па
центральном редукторе были дополнительно установлены две
конические шестерни, находившиеся в зацеплении с горизон-
тальной конической шестерней. Хвостовики этих шестерен пои
помощи упругих муфт были связаны с длинными валами руле-
вых винтов, вращающимися с теми же оборотами, что и мотор.
На носу и хвосте находились редукторы, на ведомых валах ко-
торых были установлены рулевые винты. Редукторы повышали
обороты в отношении 1 : 1,125. Таким образом при 1200 об/мин
мотора скорость вращения рулевых винтов составляла
1350 об/мин.
Рулевые винты имели изменяемый в полете шаг. Механизм
изменения шага, будучи связан тросами с педалями, позволял
осуществлять управление пути.
Геликоптер имел фюзеляж ферменной конструкции, сварен-
ный из труб. Прямоугольное сечение с диагональными расчал-
ками носовой и хвостовой балок первоначальной конструкции
впоследствии из-за крутильных колебаний было заменено трех-
гранным сечением и_жесткими фермами с раскосами.
Шасси аппарата имело стойки со шнуровой резиновой
амортизацией. Ширина колеи была 2,5 м. Третьей опорной
точкой вначале был костыль, замененный впоследствии хвосто-
вым колесом из-за опасностей поломки при случайном заднем
ходе.
Для удобства обслуживания и наблюдения за механизмами
фюзеляж не имел никакой обшивки. Точно так же кабина пило-
112
-га, расположенная в передней части фюзеляжа, не была закрыта.
Запуск моторов производился сжатым воздухом при помощи
специального пневматического приспособления. Одновременно
с вращением мотора начинал работать и несущий винт, так как
муфт включения не было. Однако этот способ запуска при нали-
чии жесткого винта не вызывал никаких повреждений винта и
трансмиссии.
Исследовательские полеты
геликоптера 1-ЭА проводились
с 1930 по 1934 гг. Бессменным
летчиком на геликоптере был
заместитель начальника гели-
коптерного отдела профессор-
летчик А. М. Черемухин. За
это время было проведено
большое количество полетов.
В полете 14 августа 1932 г.
была достигнута высота 605 м
(барограмму см. на фиг. 78).
Для того времени этот резуль-
тат был рекордным. Офи-
циально зарегистрированный
мировой рекорд высоты поле-
Фиг. 78. Барограмма полета совет-
ского геликоптера 1-ЭА 14 августа
1932 г. Летчик проф. А. М. Черемухин.
та, принадлежавший с 1928 г.
итальянскому геликоптеру Асканио, достигал всего лишь 18 м.
Даже вновь зарегистрированный в 1936 г. мировой рекорд вы-
соты полета геликоптера Бреге-Доран 180 м был намного
меньше результата, достигнутого геликоптером 1-ЭА.
В процессе летных испытаний был выяснен основной де-
фект, присущий схеме жесткого винта, — недостаточная устой-
чивость машины. Только при наличии очень мощного управле-
ния и в значительной мере благодаря искусству летчика можно
было систематически и регулярно проводить полеты на этой
машине.
В 1933 г. был построен второй модифицированный экзем-
пляр геликоптера. В связи с некоторыми конструктивными
особенностями он получил самостоятельную марку 3-ЭА. Эта
машина прошла наземные испытания, но в полете не испыты-
валась. Вместо этого она в том же году была использована
как база для нового геликоптера 5-ЭА, отличавшегося от пре-
дыдущих геликоптеров новой схемой несущего винта.
Советский голикоптер 5-ЭА
Постройка нового геликоптера 5-ЭА была закончена в
1933 г. Конструкция аппарата (фиг. 79) в целом имела срав-
нительно мало отличий от предыдущих. Трансмиссия, ферма
Фюзеляжа, шасси и рулевые винты целиком были взяты с ге-
ликоптера 3-ЭА, но несущий винт и его управление были прин-
8 А. М. Изаксон. 113
ципиально новыми. Этот винт 1 представлял комбинацию двух
трехлопастных винтов. Три большие лопасти образовывали не-
сущий винт диаметром 12 м, а три малые лопасти, закреплен-
ные на втулке между большими лопастями, составляли управ-
ляемый винт диаметром 7,8 м.
Для повышения устойчивости машины лопасти несущего
винта были прикреплены ко втулке при помощи горизонталь-
ных шарниров, которые к этому времени получили широкое
распространение в автожирной практике. В первом варианте
винта вертикальных шарниров не было, но вследствие силь-
Фнг. 79. Советский геликоптер 5-ЭА.
ных вибраций несущей системы вскоре были поставлены вер-
тикальные шарниры, а вместе с ними и фрикционные демпфе-
ры колебаний.
Одновременно с постановкой вертикальных шарниров бы-
ли поставлены упругие резиновые ограничители колебаний
лопасти относительно этих шарниров для смягчения удара
при запуске мотора, так как -муфты сцепления на -машине не
было.
Лопасти управляемого винта крепились во втулке жестко,
без горизонтальных и вертикальных шарниров. Эти лопасти
не несли на себе веса аппарата, а лишь создавали моменты,
необходимые для управления в продольном и поперечном на-
правлениях. Лопасти устанавливались перпендикулярно к оси
винта и не имели отгиба вверх, как лопасти несущего винта
1-ЭА.
При помощи рычагов и тяг лопасти управляемого винта
были связаны с автоматом-перекосом, которым и создавалось
диференциальное изменение углов установки лопастей, необ-
ходимое для целей управления.
1 Принципиальная схема такого комбинированного винта была предло-
Ж*на инж. И. П. Братухиным.
114
Несущий винт имел возможность изменять в полете лишь
общий шаг. В частности, при остановке моторов возможно было
придать его лопастям малые углы, соответствующие авто-
ротирующему спуску.
Для управления несущим винтом в распоряжении летчика
имелся рычаг общего шага, а для управления диференциаль-
ным углом установки лопастей винта управления — обычная
ручка пилота.
С 1933 по 1937 гг. на геликоптере 5-ЭА после проведения
большой программы наземных испытаний было совершено
очень много исследовательских полетов. Особенно полно выяс-
нялся характер махового движения лопастей, для чего был
спроектирован и построен специальный самопишущий прибор.
При помощи этого прибора записывались маховые движения
лопастей относительно горизонтальных и вертикальных шарни-
ров. Попутно выяснялось влияние демпфера на колебания ло-
пасти в плоскости вращения. Во всех летных испытаниях ап-
парат пилотировал проф. А. М. Черемухин.
Уже в 1934 г. было получено достаточно полное представ-
ление о работе несущего винта геликоптера 5-ЭА. Этот винт
обеспечил значительное повышение устойчивости геликоптера
и надежную его управляемость.
Подобное заключение позволило приступить к проектирова-
нию новой более мощной машины с несущим винтом, подоб-
ным винту геликоптера 5-ЭА.
Советский голикоптер 11-ЭА
На основе опыта испытаний геликоптеров 1-ЭА и 5-ЭА в
1935 г. было начато проектирование нового геликоптера 11-ЭА.
Фиг. 80. Советский геликоптер 11-ЭА.
Постройка этого аппарата была закончена в 1936 г. Новый
геликоптер (фиг. 80) был снабжен 12-цилиндровым мотором
Кертисс-Конкверер водяного охлаждения мощностью 600 л. с.
Мотор на геликоптере был установлен в передней части фюзе-
ляжа и обращен носком вала назад. Впереди хвостовой части
мотора был установлен водяной радиатор и сзади него осевой
трехлопастной вентилятор, вращавшийся от одного из моторных
приводов и засасывавший воздух через радиатор. Воздух вы-
ходил через щель позади радиатора. Так как при запуске мо-
тора шпильки на валу вентилятора неоднократно срезались,
впоследствии в цепи передачи мощности к вентилятору была
поставлена фрикционная максимальная муфта. Редуктор мото-
ра Кертисс-Конкверер был снят с мотора, а на его место вмон-
тирован центральный редуктор геликоптера. Последний имел
четыре конические шестерни. На коленчатом валу мотора была
посажена ведущая шестерня; одна ведомая шестерня враща-
лась в горизонтальной плоскости и приводила во вращение вер-
тикальный вал несущего винта, а две другие ведомые шестерни
вращались в вертикальных боковых плоскостях с обеих сторон
мотора. Эти шестерни приводили во вращение валы рулевых
винтов.
Главный редуктор геликоптера был расположен внутри
втулки несущего винта и представлял собой двухступенчатую
планетарную передачу. Общее передаточное число трансмис-
сии несущего винта было 1 : 13,4.
При 2450 об/мин коленчатого вала мотора несущий винт
вращался со скоростью 183 об/мин. Фрикционная многодиско-
вая муфта сцепления размещалась в одном корпусе с глав-
ным редуктором. Она располагалась между быстроходным
вертикальным валом и ведущей шестерней планетарного ре-
дуктора. Силовая цепь главного редуктора соединялась со втул-
кой винта через муфту свободного хода.
Втулка несущего винта крепилась на сварном кабане.
Винт геликоптера 11-ЭА был аналогичен винту 5-ЭА. Так
же как и винт 5-ЭА, он представлял комбинацию трех шар-
нирно закрепленных несущих лопастей и трех жестких ло-
пастей. Последние обеспечивали продольно-поперечное управ-
ление. Несущий винт имел диаметр 15,4 м. Его лопасти с про-
филем «В» в первом варианте были деревянной конструкции, а
во втором — металлические, клепаные. Управляемый винт диа-
метром 9,2 м имел деревянные лопасти симметричного про-
филя.
Впоследствии фрикционные демпферы для гашения колеба-
ний лопастей несущего винта относительно вертикальных шар-
ниров были заменены масляно-пружинными.
Путевое управление машиной, так же как и уравновешива-
ние реактивного момента от несущего винта, обеспечивалось
двумя рулевыми винтами. На первых двух геликоптерах 1-ЭА и
5-ЭА рулевые винты располагались на носу и хвосте машины.
На новом геликоптере рулевые винты располагались в попе-
речной плоскости и крепились на концах небольших крыльев.
Расстояние между осями рулевых винтов составляло 8 м.
116
Двухместная кабина экипажа с тандемным расположени-
ем сидений помещалась сзади мотора и несущего винта. Из
соображений постоянства центровки летчик помещался на
заднем сиденьи. На аппарате имелось нормальное самолетное
оперение — киль с рулем поворота и стабилизатор с рулем
глубины.
На крыльях, кроме того, имелись элероны. Все органы уп-
равления самолетного типа: рули и элероны были связаны г
обычными рычагами управления — ручкой и педалями, имев-
шимися в кабине пилота и в кабине летнаба. Очевидно, рули
и элероны действовали только при наличии поступательной
горизонтальной скорости. Поэтому параллельно с ними име-
лось управление геликоптерного типа: диференциальное изме-
нение шага управляемого винта при помощи автомата-переко-
са и рулевые винты.
Принципиальная особенность геликоптера 11-ЭА заключа-
лась во взаимной связи его несущего винта и рулевых винтов,
осуществляемой при помощи, системы управления.
Обороты несущего и рулевых винтов, связанные единой си
стемой трансмиссии, всегда остаются синхронными. В то же
время, ввиду изменения общего шага несущего и рулевых вин-
тов, доля потребляемой ими мощности менялась в очень широ-
ких пределах.
На режиме «висения» на несущем винте устанавливается
максимальный общий шаг. Один из рулевых винтов создает
тягу, направленную по полету, а второй винт, работающий на
режиме реверса, тянет в обратном направлении. Пара сил,
возникающая при этом, уравновешивает реактивный момент от
несущего винта, хотя суммарная тяга рулевых винтов в на-
правлении полета равна нулю.
Как известно, на режиме малых скоростей горизонтального
полета геликоптерный винт, работая на режиме «косой обдув-
ки», потребляет меньше мощности, чем в парящем полете.
Вследствие этого при переходе на горизонтальный полет шаг
несущего винта должен быть уменьшен. Одновременно с этим
уменьшится величина реактивного момента от несущего винта
и для его уравновешивания потребуется меньшее диференци-
альное изменение общего шага рулевых винтов. Это означает,
что общий шаг винта, тянущего вперед, должен быть уменьшен
так же, как и уменьшается абсолютная величина отрицатель-
ного шага винта, тянущего назад. Вследствие этого рулевые
винты, так же как и несущий винт, будут потреблять меньше
мощности на режиме висения.
Вся мощность мотора, освободившаяся при этом, может
быть употреблена на увеличение скорости горизонтального по-
лета. Для этого требуется лишь увеличить шаги обоих рулевых
винтов, увеличив тем самым их тягу в направлении полета.
Все три операции, связанные с переходом от парящего по-
лета к режиму горизонтальных скоростей, — уменьшение шага
117
несущего винта, увеличение шага рулевых винтов и уменьше-
ние диференциального различия в шагах рулевых винтов, —
производились одним органом — штурвалом, расположенным в
кабине пилота. Последняя из этих операций — уменьшение ди-
ференциации общих шагов рулевых винтов — могла произво-
диться при помощи диференциального механизма, независимо
от управления изменением шагов рулевых винтов, осуществляе-
мого педалями. Диференциальный механизм обеспечивал урав-
новешивание реактивного момента от несущего винта на всех
режимах полета, в то время как управление, курсом осуще-
ствлялось при помощи педалей.
Постепенное изменение шагов несущего и рулевых винтов
могло производиться в пределах, обеспечивающих переход не-
сущего винта на режим авторотирующего полета.
В этом случае вся мощность мотора потреблялась бы руле-
выми винтами, работающими на максимальных и одинаковых
шагах. Таким образом геликоптер обратился бы в автожир, а
рулевые винты — в тянущие.
В этом заключалась принципиальная схема геликоптера
11-ЭА и основное отличие ее от ранее предлагавшихся гели-
коптерных схем. Совершенно очевидно, что появление схемы
11-ЭА, представляющей сочетание геликоптера и автожира,
стало возможным лишь с изобретением автожира. Опыт строи-
тельства советских автожиров был полностью использован при
проектировании геликоптера 11-ЭА.
Известно, что крылатые автожиры того времени, снабжен-
ные самолетными органами управления (рулями и элеронами),
обладали крупнейшими недостатками, будучи по существу не
управляемыми в момент посадки. 11-ЭА был лишен этих недо-
статков, так как даже на автожирных режимах полета и при
автожирной посадке управлялся, кроме рулей и элеронов,_ па-
раллельно действующими органами управления геликоптерно-
го типа.
Многочисленные трудности доводки вызывали необходи-
мость последовательной отработки агрегатов геликоптера. В
первую очередь было необходимо испытать только несущий
винт.
С этой целью в первом этапе испытаний крылья с рулевыми
винтами были сняты и заменены легкими боковыми фермами,
концах которых были поставлены две пары рулевых винтов
(типа применявшихся на геликоптерах 1-ЭА и 5-ЭА). По-
скольку эти винты не были приспособлены для получения боль-
шой тяги, поступательная скорость должна была создаваться
наклоном плоскости вращения несущего винта.
Пропульсивный режим работы несущего винта в горизон-
тальном полете сам по себе представлял большой интерес.
Видоизмененному варианту геликоптера (фиг. 81) была
присвоена марка 11-ЭА ПВ (одиннадцатый экспериментальный
аппарат, пропульсивный вариант).
118
В процессе наземных испытаний и доводок удалось преодо-
леть многочисленные трудности, вызванные в значительной
мере увеличением основных параметров геликоптера по срав-
нению с предыдущими конструкциями. Некоторые силы и мо-
менты, незначительные на предыдущих аппаратах, были так
велики на 11-ЭА, что их устранение или уравновешивание
представляло нелегкую техническую задачу.
В 1940 и 1941 гг. велись систематические исследования
геликоптера в полете. Геликоптер был оборудован специаль-
ными приборами. В частности, почти во всех полетах произво-
дилась запись махового движения лопастей несущего винта.
Во всех полетах геликоптером 11-ЭА ПВ управлял инженер-
летчик Д. И. Савельев.
Фиг. 81. Советский геликоптер П-ЭА ПВ.
Впервые в геликоптерной практике большинство полетоз
геликоптера 11-ЭА ПВ производилось постоянным экипажем,
состоявшим из двух человек. Вместе с летчиком в полетах с ис-
следовательскими целями участвовал инженер В. П. Лаписов.
Постройка геликоптера 11-ЭА и его модификации 11-ЭА ПВ
представляла весьма существенное достижение геликоптерной
техники, особенно если принять во внимание уровень геликоп-
терных работ того времени. В тот период конструктор немец-
ких геликоптеров проф. Фокке встретился с трудностями проек-
тирования тяжелого геликоптера, надолго задержавшими
создание нового аппарата. Жироплан Бреге-Доран еще не был
Доведен до конца.
В Англии, вследствие увлечения автожирами, геликоптер-
ная тематика была почти ликвидирована. Сикорский в США в
то время только построил свою первую экспериментальную ма-
шину VS-ЗОО, которая обращала на себя внимание, главным
образом, своей примитивностью.
119
В этой обстановке регулярные полеты тяжелого двух!мест-
ного геликоптера 11-ЭА мы вправе считать весьма большим
достижением. Попутно отметим, что геликоптер 11-ЭА по мощ-
ности мотора, диаметру и грузоподъемности его винта до на-
стоящего времени не превзойден геликоптерами США, где
за последние годы геликоптеростроение получило такой широ-
кий размах. Схема геликоптера 11-ЭА1, предложенная еще в
1934 г., и в настоящее время имеет большой практический
интерес.
Геликоптеры инж. Флорина
В период 1926—1934 гг. значительные работы по созданию
геликоптеров проводил проживавший в Бельгии русский инже-
нер Флорин.
При проектировании геликоптера возникает неизменно весь-
ма серьезный вопрос, как парализовать реактивный крутящий
момент, действующий на аппарат от вращающегося несущего
винта. В разных схемах геликоптера эта задача решается по-
разному.
В двухвинтовых геликоптерах этот вопрос разрешается
наиболее просто, так как при вращении двух винтов в проти-
воположные стороны гасится реактивный крутящий момент. В
этом случае одновременно пропадает и жироскопический эф-
фект больших вращающихся масс — несущих винтов.
Существовала точка зрения (в частности, проф. Кармана),
что наличие жироскопического эффекта в значительной степе-
ни решает вопрос собственной устойчивости геликоптера.
При устранении реактивного момента путем вращения несу-
щих винтов в противоположных направлениях одновременно
парализуется и собственная жироскопическая устойчивость
этих винтов. Вслед за этим аппарат становится чрезвычайно
чувствительным к различного рода колебаниям и случайным
порывам ветра.
Сущность предложения Флорина сводилась к тому, чтобы
в двух- или в многовинтовом геликоптере несущим винтам дать
одинаковое направление вращения, наклонив одновременно оси
этих винтов на небольшой угол по отношению к вертикали. При
этом используются появляющиеся при наклоне осей горизон-
тальные составляющие суммарной тяги для создания необходи-
мого момента, парализующего реактивный крутящий момент.
На фиг. 82 дано схематическое изображение геликоптера
Флорина. Нами подсчитано, что при выбранных им парамет-
рах необходимый наклон осей несущих винтов должен дости-
гать 3—3,9°. При этом потеря в величине подъемной силы
составляла всего лишь 0,2—0,3%.
1 Принципиальную схему геликоптера 11-ЭА предложил ннж. И. П. Бра-
тухин. Он же руководил непосредственным проектированием этой машины,
будучи в то время начальником специальной бригады в Отделе особых
конструкций ЦАГИ (см. сноску стр. 109).
120
Фиг. 82. Принципиальная схема геликоптера Флорина.
121
В соответствии со своим предложением Флорин провел
•целый ряд работ по постройке такого геликоптера. Начиная
с 1927 г., в аэродинамической лаборатории Роде-Сен-Женез
'Флорин проводил много экспериментов с винтами геликоптер-
ного типа, разрабатывая одновременно проект геликоптера в
‘натуральную величину. Он же провел испытания геликоптерных
винтов диаметром 0,6 м, работающих от электромотора. Вслед
за этим была сконструирована упрощенная модель геликоптера
с двумя винтами диаметром 3 м каждый. Винты этой модели
геликоптера приводились в движение вначале от одного элек-
тромотора при помощи ременной передачи. Затем ременная
передача была заменена цепной передачей и, наконец, для при-
ведения во вращение каждого винта было поставлено по само-
стоятельному электромотору с зубчатыми передачами. Эта мо-
дель весила 36 кг и поднималась несколько раз в воздух. Ис-
пытание этой модели дало достаточно благоприятные резуль-
таты, которые позволили Флорину приступить к дальнейшей
работе по постройке настоящего геликоптера.
По принципиальной схеме геликоптер Флорина (как № 1,
так и № 2) представляет собой следующую конструкцию. На
ферме помещены: моторная установка, сиденье пилота, валы
несущих винтов, трансмиссии от мотора к винтам, посадочные
приспособления, рычаги управления и специальный вентиля-
тор для охлаждения мотора. Аппарат имеет два винта, уста-
новленные на двух противоположных концах фермы фюзеляжа.
Оси этих винтов имеют некоторый наклон в противоположные
стороны, в соответствии с патентами Флорина. Несущие вин-
ты осуществлены таким образом, что лопастям можно прида-
вать различные углы установки. Оба винта снабжены спе-
циальными перекашивающими механизмами.
Этот механизм позволял увеличивать или уменьшать об-
щую подъемную силу несущих винтов аппарата и, кроме того,
диференциально изменять тягу каждого из винтов. Создавая
перекосом лопастей винтов момент относительно центра тяжести,
можно наклонить аппарат в том или ином направлении. При
наклоне вперед можно осуществить поступательное движение,
используя появляющуюся при этом горизонтальную составляю-
щую от суммарной тяги несущих винтов.
Все управление сводится таким образом к:
1) управлению газом мотора;
2) увеличению или уменьшению угла установки лопастей
одного или обоих винтов;
3) перекашиванию лопастей каждого винта раздельно или
обоих винтов одновременно.
При помощи этого управления рассчитывалось осуществить
;на аппарате все необходимые эволюции, как-то: спуск, «висе-
ние», передвижение вперед и пр.
По строенный Флориным по этой схеме геликоптер № 1
122
имел мотор Испано-Сюиза мощностью 180 л. с. Вал мотора
расположен горизонтально и на нем вместо втулки винта уста-
новлены карданный шарнир и муфта фрикционного типа. За
фрикционной муфтой установлены в специальном редукторе
две конические шестерни, передающие вращение на вертикаль-
ный вал. На конце вала укреплен вентилятор, охлаждающий
водяной радиатор мотора, расположенный непосредственно под
ним.
Примерно на высоте радиатора находился второй редуктор
с коническими передачами, при помощи которых вращение пе-
редавалось двум горизонтальным валам, идущим к несущим
винтам. У каждого винта эти горизонтальные валы входили в
специальные редукторы с коническими зубчатками, передаю-
Фиг. 83. Геликоптер № 1 Флорина.
«
щими вращение валам винтов. Здесь обороты редуцировались
в шесть раз, так что винт вращался в шесть раз медленнее, чем
вал мотора.
Винты имели четыре лопасти с небольшой закруткой; диа-
метр винтов 7,2 м при ширине лопасти 0,6 м. Лопасть состояла
из дуралюминового лонжерона с насаженными деревянными
нервюрами и фанерного покрытия.
Фюзеляж- геликоптера был деревянный и обшит фанерой.
Шасси имело нормальные колеса и допускало достаточно
большой ход амортизации. Управление винтами было подве-
дено к специальной ручке, на которой укреплен дополнитель-
ный штурвал. Геликоптер № 1 изображен на фиг. 83.
Этот аппарат был построен в конце 1929 г. и тогда же при-
ступили к его испытаниям. При первых же испытаниях было
выявлено, что ручка пилота для управления углом установка
лопастей винтов имеет тенденцию совершать некоторые движе-
ния и, кроме того, сильно трясет и создает большое давление.
Все эти явления сильно увеличивались по мере нарастания ско-
рости вращения винта и на больших оборотах у пилота не-
123
хватало силы, чтобы удержать ручку в нормальном положе-
ния. Во время последующих испытаний внезапно сломались
четыре лопасти.
После этих испытаний был проведен подробный анализ бие-
ний ручки управления и машина была несколько модифициро-
вана. Был изменен профиль лопасти несущих винтов, причем
был выбран профиль с постоянным центром давления. Кроме
того, хорда лопасти была сделана шириной лишь 0,3 м в мак-
симальном сечении и 0,2 м у концов. Помимо этого, передняя
кромка лопасти была сделана более массивной — из деревян-
ного бруска, а задняя кромка, наоборот, облегчена и изготов-
лена из фанеры с целью перенесения центра тяжести лопасти
Фиг. 84. Геликоптер № 2 Флорина в полете.
ближе к оси лонжерона. Отремонтированный и несколько ви
доизмененный аппарат был готов к испытаниям в июле 1930 г.
Эти испытания подтвердили правильность проведенного ана-
лиза причин аварий и при полете ручка пилота оставалась со-
вершенно спокойной. Однако, при новых испытаниях выяви-
лись ненормальности в работе трансмиссии: вибрации и закрут-
ка трансмиссионных валов.
При одном из испытаний был замечен дымок, после которо-
го последовало несколько толчков. При осмотре обнаружили
поломку передней части картера мотора, моторной рамы и из-
гиб коленчатого вала.
Ввиду того что геликоптер № 1 весил около 1200 кг и были
большие опасения, что он сильно перетяжелен и не сможет под-
няться в воздух, было решено заново переконструировать аппа-
рат. Так как мотор водяного охлаждения со специальным
вентилятором был очень тяжел, то решили перейти к мотору
124
воздушного охлаждения, который дал бы некоторую экономию
в весе.
Вновь построенный геликоптер № 2 с мотором Ренард
200 л. с. (фиг. 84 и 85) по своей схеме не отличался от гели
коптера № 1, но был оформлен конструктивно иначе. Фюзеляж
этого аппарата был сварной из стальных труб. Колеса шасси
были заменены специальными электронными лапами. 'Мотор
воздушного охлаждения, находящийся в центре аппарата, был
расположен таким образом, что его вал стоял вертикально, что
сокращало трансмиссию на одну передачу. Муфты сцепления
не было и картер с коническими шестеренками, передающими
вращение горизонтальными валами к несущим винтам, был
Фиг. 85. Несущий винт геликоптера № 2 Флорина.
укреплен непосредственно на моторе. Над ним был располо-
жен вентилятор для охлаждения мотора. Вес нового аппарата
составляет 950 кг.
В апреле 1933 г. все работы по конструированию и построй-
ке этого аппарата были закончены, и он был готов для испы-
тания. Все последующие испытания проводились инженером
Технической авиационной школы Робертом Колэн.
Первые испытания происходили 12 апреля 1933 г., а затем
почти в течение всего 1933 г. В процессе испытаний изучалось
поведение геликоптера, а также выявлялись и устранялись об-
наруженные дефекты.
Начав с небольших подъемов на высоту 1 —1,5 м продол-
жительностью 1—2 сек., постепенно увеличивали высоту и вре-
мя полета. 25 октября 1933 г. аппарат поднялся на высоту
5 м и продержался в воздухе 9 мин. 58 сек., превысив офици-
альный рекорд Асканио (8 мин. 49 сек.).
125
Фиг. 86. Геликоптер № 3 Флорина.
Фиг. 87. Несущий винт геликоптера № 3 Флорина.
126
По отчету об испытании видно, что достигнутая высота 5—
6 м не является предельной, так как мотор работал не на пол-
ном газе. Испытания геликоптера № 2 показали, что устойчи-
вость и маневренность аппарата были достаточны; кроме то-
го, была доказана возможность совершать на аппарате подоб-
ного типа нормальные эволюции, присущие геликоптеру.
Устойчивость была удовлетворительна и пилот несколько раз
выпускал на короткие мгновения ручку управления.
Ввиду того что в процессе испытаний этого геликоптера
произошло несколько поломок лопастей несущего винта и их
подкосов, то был построен новый вариант — геликоптер № 3-
(фиг. 86 и 87).
В этом геликоптере осуществили шарнирное крепление ло-
пастей и внесли новые конструктивные изменения.
При испытании этого варианта обнаружились значительно
меньшая устойчивость машины в полете и склонность к опроки-
дыванию при убирании газа.
В результате длительных всесторонних испытаний осущест-
вленных вариантов геликоптера Флорин пришел к выводу,
что его начальные предположения, оправдавшиеся при жест-
ких лопастях, неприменимы при их шарнирной подвеске и, кро-
ме того, при выбранной им схеме неизбежно нарушение равно-
весия вокруг вертикальной оси при изменении режима работы
двигателя.
Хотя Флорин убедился, что геликоптер, осуществленный пэ
предложенной им схеме, не оправдал себя и не имеет практи-
ческого будущего, все же проведенные им исследования и ис-
пытания построенных им аппаратов представляют значитель-
ный интерес.
Работы Наглера и Хафнера
В 1933 г. появились в печати сведения о проводившихся в
Хестоне (Англия) работах двух австрийских конструкторов
Наглера и Хафнера.
Первый построенный ими геликоптер (фиг. 88) имед один
несущий винт, приводимый во вращение мотором воздушного
охлаждения Сальмсон мощностью 40 л. с. Для парализования
реактивного момента и придания машине большей устойчиво-
сти их аппарат был снабжен двумя специальными лопастеоб-
разными открылками, установленными сзади. Угол установки
открылков можно было менять по желанию пилота.
Геликоптер Наглера и Хафнера имел специальное приспо-
собление, уже достаточно известное нам, для управления ло-
пастями несущих винтов во время их работы и перекашивания
этих лопастей в нужном направлении с целью управления всей
машиной.
Этот построенный геликоптер, насколько нам известно, не
вышел из стадии начальных испытаний и конструкторы ветре-
127
тились со многими затруднениями, как-то: несбалансирован-
ность и биение несущего винта, сильный нагрев мотора и слиш-
ком малый запас подъемной силы.
Фнг. 88. Геликоптер Наглера и Хафнера.
При испытании аппарат удерживался на привязи к земле и
шри этом поднимал передние колеса, заднее колесо, или все
три колеса вместе.
Изменяемый шаг лопастей
несущего винта, а также на-
личие у этого винта втулки
свободного хода позволили бы,
по замыслу конструкторов, ис-
пользовать эту машину как
автожир в случае внезапной
остановки мотора.
Из отдельных отрывочных
сообщений известно, что Наг-
лер и Хафнер продолжали
свои работы по созданию ге-
ликоптера и работают в атой
области по настоящее время.
Фиг. 89. Геликожир Наглера.
В печати промелькнуло сообщение о геликожире Наглера
(фиг. 89), представляющем собой комбинацию геликоптера и
автожира.
Точно так же в печати были опубликованы сообщения о не-
которых работал Хафнера в области геликоптера. К сожале-
нию, более определенных и достоверных данных мы не имеем.
Работы Асбота
Первые работы венгерского инженера Асбота относятся к
•периоду 1916—1918 гг., когда он, будучи директором завода
самолетных винтов в Будапеште, спроектировал и построил че-
тырехвинтовой привязной геликоптер (см. стр. 66).
Работы Асбота по геликоптеру за тот период не увенчались
должным успехом. Однако, несмотря на это, Асбот не прерывал
128
своих изысканий и продолжал работать над созданием более
совершенного проекта геликоптера.
Первые испытания вновь построенного Асботом геликоптера
начались в конце 1928 г. в Будапеште. За это время им было
построено четыре геликоптера, отличавшихся между собой
отдельными модификациями,' которые, начиная с 1928 г. и по
настоящее время, прошли большой период летных испытаний и
изучения. Все построенные им аппараты имели два соосных де-
ревянных несущих винта диаметром 4,35 м, расположенных
один над другим и вращающихся в противоположном направ-
лении. Эти винты приводились во вращение при помощи рота-
тивных моторов: Рон 110 л. с. в первых трех типах и Клерже
НО л. с. в четвертом. Устойчивость в полете и поступательное
передвижение аппарата достигались воздействием на специ-
Фнг. 90. Геликоптер Асбота.
альные плоскости, помещенные под винтами в их струе. Эти
плоскости, так называемые дефлекторы, можно было откло-
нять вокруг их горизонтальной оси и тем самым управлять
аппаратом.
В последнем аппарате этого типа АН-4 был вращающийся
от того же мотора тянущий винт, который давал возможность
аппарату передвигаться горизонтально.
Эти четыре геликоптера (фиг. 90 и 91) совершили много ин-
тересных полетов (около 200). Официальных результатов испы-
тания геликоптеров Асбота не имеется, так как изобретатель
Работал в одиночестве. По данным, сообщаемым им самим, на
его машинах было налетано 29 час., причем сравнительно боль-
шое количество полетов по продолжительности превышало
полчаса. По заявлению Асбота, самый продолжительный по-
лет — 53 мин. — был осуществлен им на машине АН-3 с мото-
9 А. М. Изаксон. 129
ром Рон. На последующем аппарате АН-4 с мотором Клерже
продолжительность полета не превышала нескольких минут из-
за перегрева мотора.
Максимальная достигнутая высота на аппаратах Асбота
была 30 м, максимальная дальность полета — 3 км при наи-
большей горизонтальной скорости 20 км/час.
По заверению конструктора, большая высота не была до-
стигнута только потому, что пилот не хотел рисковать, так как
аппарат его не был рассчитан на посадку в случае внезапной
остановки мотора.
Последний тип геликоптера АН-4 подвергался испытанию в
1930 г. в присутствии официальных представителей английско-
го и французского правительств, приехавших специально для
Фиг. 91. Геликоптер Асбота в полете.
этого в Будапешт. По их отзывам, этот геликоптер обладал все-
ми свойствами, присущими этому типу аппаратов.
Вслед за этим в течение примерно трех месяцев был постро-
ен несколько модифицированный геликоптер АН-4А по той же
принципиальной схеме, что и предыдущие аппараты.
Геликоптер АН-4 А имел два соосных несущих винта диа-
метром 5 м каждый. Винты приводились во вращение от ро-
тативного мотора Рон мощностью 180 л. с. Фюзеляж аппара-
та был сварной из стальных труб. Полетный вес был 600 кг
и геликоптер «висел» при 1100 об/мин. несущих винтов.
Сообщалось, что летные испытания аппарата дали весьма
удовлетворительные результаты. В частности, пилот Фаскан
Кеумантье совершал полеты продолжительностью до 30 мин.,
причем аппарат имел хорошую устойчивость и маневренность.
Геликоптер АН-4 А рассматривался как опытный аппарат
лишь для обучения пилота и на нем не предусматривалось
130
осуществлять спуск на режиме авторотации при внезапной
остановке мотора.
В конце 1933 г. работами Асбота заинтересовалось англий-
ское министерство авиации, и все его дальнейшие работы при
финансовой помощи этого министерства проводились на за-
воде Блекбурн (Англия).
Сколько-либо достоверных данных о дальнейших работах
Асбота не имеется. По некоторым отрывочным сведениям мож-
но заключить, что в последующие годы Асбот построил не-
сколько геликоптеров, о результатах испытания которых ниче-
го не сообщалось.
Один из этих геликоптеров имел два соосных трехлопаст-
ных несущих винта изменяемого в полете шага диаметром
11,9 м каждый, вращающихся в противоположном направле-
нии от мотора воздушного охлаждения мощностью 300 л. с.
Полетный вес одного из геликоптеров намечался 1660 кг,
в том числе полезная нагрузка 400 кг. Продолжительность по-
лета определялась в 2 часа. Имелось в виду получить на этом
аппарате следующие данные:
Потолок...............- . 3050 м
Максимальная горизонтальная ско-
рость .....................• • 170 -200 км/час
Скороподъемность у земли .... 7 м/сек
Вертикальная скорость посадки с
неработающим мотором .... 4
Этот геликоптер проектировался двухместным с двумя
смежными сиденьями, расположенными в закрытой кабине.
Кроме того, известно, что Асбот строил второй геликоптер
по той же принципиальной схеме, но с другими параметрами.
На этом аппарате имелось в виду установить мотор «Джип-
си» 61-П мощностью 200 л. с.
Основные данные этого геликоптера намечались такие:
Диаметр несущего винта.............. 10,65 м
Вес пустого аппарата.................. 795 кг
Полезная нагрузка..................... 173 ,
Полный полетный вес.................. 968 »
Полная подъемная сила ............... 1500 ,
Этот геликоптер должен был иметь два двухлопастных
соосных несущих винта, вращающихся в противоположном
направлении. Крепление лопастей винтов к втулке намечалось
жесткое.
Лопасти несущих винтов имели по длине угол установки не
постоянный: у корня нормальный положительный, у средней
части малый положительный и у концов лопастей малый отри-
цательный. Подобная закрутка лопасти должна была облег-
чить перевод винтов на режим авторотации при остановке
9*
131
мотора. Асбот ожидал получить на этом геликоптере следую-
щие летные данные:
Максимальная горизонтальная скорость 172 км/час
Потолок............................. 3450 м
Вертикальная скорость подъема у зе-
мли ................................. 8,8 м/сек
Время набора потолка.................. 18 мин.
Вертикальная скорость посадки без
мотора............................... 4,2 м/сек
Результаты испытания этого геликоптера неизвестны.
Наконец, были опубликованы краткие сведения о постройке
Асботом нового двухвинтового соосного геликоптера АНХ, по
своей схеме аналогичного его предыдущим аппаратам, имею-
щего следующие данные:
Диаметр несущего винта................
Ометаемая площадь.....................
Мощность мотора на высоте 3660 м .......
Вес пустого аппарата .................
Полный полетный вес...................
Полный полетиын вес с перегрузкой.....
Максимальная горизонтальная скорость при весе
1800 кг ..................
То же, при весе 2200 кг...........• . .
Потолок...............................
Вертикальная скорость взлета у земли..
11,9 м
111X2 л»2
580 л. с.
1300 кг
1800 .
2200 .
320 км/час
298 .
5800 м
7,5 м/сек
Более подробных данных об этом геликоптере (фиг. 92
и 93), равно как и об его летных испытаниях, в печати не
сообщалось.
Фиг. 92. Геликоптер Асбота АНХ. Вид сверху.
132
Не имея достаточно достоверных и обстоятельных сведе-
ний о геликоптерах Асбота за весь период с 1933 г., мы тем не
менее уделили его работам, известным лишь по самым отры-
Фнг. 93. Геликоптер Асбота АНХ. Вид спереди.
вочным, не всегда надежным сообщениям, довольно много
внимания. Асбот и поныне является одним из основных прак-
тических работников в области геликоптеров в Англии.
Геликоптеры Бреге
После значительного перерыва (см. гл. IV, работы Бреге
и Рише), примерно в 1930 г., Бреге вернулся к своим старым
работам по осуществлению геликоптера. Он предпринял при
помощи молодого инженера его фирмы М. Дорана1 разра-
ботку проекта нового геликоптера, названного ими «жироплан
Бреге-Доран».
На Дорана была возложена преимущественно конструк-
торская работа, а на известного французского авиационного
специалиста Девильера — теоретическая и расчетная.
После большой конструктивной разработки проекта с боль-
шим количеством теоретических и экспериментальных изыска-
ний по отдельным вопросам геликоптер был построен и его
испытания начались в конце 1932 г.
Жироплан Бреге-Доран имел фюзеляж самолетного типа,
снабженный шасси весьма широкой колеи и нормальным са-
молетным оперением. В центре фюзеляжа был укреплен спе-
циальный пилон-кабан, несущий поддерживающие винты.
В носу фюзеляжа впереди этого кабана» был установлен авиа-
ционный мотор мощностью 250 л. с. Непосредственно позади
пилона помещалась открытая кабина пилота с сиденьем, при-
борной доской и всеми органами управления.
1 М. Доран—сын известного военного инженера Дорана, который ру-
ководил во время войны 1914— 1918 гг. техническим отделом Управления
воздушИЬ1Х снл Франции.
133
На пилоне были укреплены два несущих винта диаметром
15,886 м каждый, вращающихся в противоположных направ-
лениях. Эти винты приводились во вращение специальной
трансмиссией от мотора с передаточным числом примерно
1 : 15, т. е. при нормальных оборотах мотора около 2000 об/мин
винты вращались со скоростью 132 об/мин.
Оба несущих винта были двухлопастные с шарнирным креп-
лением лопастей ко втулке. Шарнирное крепление лопастей
ко втулке на жироплане Бреге-Доран имело свои особенно-
сти. Помимо обычных для современных винтовых аппаратов
горизонтальных и вертикальных шарниров, расположенных
вблизи втулки, лопасти жироплана имели дополнительные
вертикальные шарниры, удаленные от втулки на некоторое
расстояние.
Лопасти обоих винтов могли поворачиваться относительно
их продольной оси, меняя тем самым угол установки.
На пилоне были установлены два автомата-перекоса: один
между винтами, управляющий шагом верхнего винта, и вто-
рой, помещенный ниже его, для управления шагом нижнего
винта.
Особое свойство автомата-перекоса (если им же изменяет-
ся и общий шаг) применительно к двухвинтовому геликоптеру
с соосным расположением несущих винтов заключается в воз-
можности использовать его для путевого управления геликоп-
тером. Это достигается одновременным увеличением шага
одного винта и уменьшением шага второго винта, что произ-
водится от педалей. При этом нарушается существовавшее
равновесие крутящих моментов и аппарат начинает разворачи-
ваться в нужном направлении.
Управление общим шагом, а также диференциальным изме-
нением шага несущих винтов производится от специальных
органов управления, находящихся в кабине пилота. Кроме того,
лопасти несущего винта автоматически изменяют угол установ-
ки в зависимости от взмаха лопасти. Для этой цели в цепи
управления жироплана имеется механизм регулятора шага,
который на данном аппарате уменьшает угол установки на ве-
личину, равную половине угла подъема лопасти (угла взмаха).
Втулки обоих несущих винтов имеют свободный ход, что
позволяет переводить эти винты в случае внезапной остановки
мотора на режим авторотации.
Поступательное движение геликоптера создавалось нали-
чием горизонтальной составляющей от тяги несущих винтов
при наклоне аппарата вперед. Фюзеляж жироплана имел
сварную ферменную конструкцию и был обшит полотном. Ло-
пасти несущего винта металлические, клепаные были обшиты
листовым дуралюмином.
Вес конструкции жироплана составлял 1430 кг при общем
полетном весе 1950 кг.
134
При проектировании жироплана имелось в виду поставить
на него мотор в 600 л. с. Перед постановкой на аппарат несу-
щие винты были испытаны от мотора в 500 л. с., причем при
180 об/мин полная тяга была 3900 кг. Исходя из этого, пред-
полагалось при установленном моторе мощностью 250 л. с
и при 132 об/мин иметь полную тягу 2450 кг. При испытании
этого жироплана в Виллякублей его сначала держали на глу-
хой привязи к земле, а затем освобождали, давая ему возмож-
ность подыматься.
Судя по некоторым заметкам в технической печати, кон-
структор этого жироплана встретился при испытании машины
с многочисленными трудностями, преодоление которых заняло
1933—1934 гг.
Фиг. 94. Жироплаи Бреге-Дораи в процессе испытаний.
В процессе испытания этого аппарата (фиг. 94) выявилась
его неудовлетворительная устойчивость.
В процессе испытаний наблюдался случай удара лопастей
верхнего и нижнего винтов. В связи с этим был установлен
ограничитель, предотвращающий удары лопастей. Этот жиро-
план во время одного из испытаний потерпел аварию и его по-
леты возобновились лишь весной 1935 г.
В процессе летных испытаний на жироплане были установ-
лены в 1936 г. следующие мировые рекорды по классу гели-
коптеров:
Максимальная скорость............ 99 км/час
Наибольшая высота полета......... 180 м
Наибольшая продолжительность полета 1 ч. 02 м. 50 с.
Дальность по замкнутому кругу ... 44 км
На основе материала, накопленного в
пытаний жироплана, Бреге приступил к
процессе летных ис-
проектированию но-
135
вого аппарата, получившего марку G-10. Достоверных сведе-
ний о постройке этой машины не имеется.
Несколько позднее, в 1942 г., т. е. уже в период войны и
после капитуляции Франции, появились сообщения о новом
проекте Бреге с маркой G-10A, но никаких данных о постройке
машины по этому новому проекту также нет.
Оба эти проекта не имеют между собой принципиального
различия и очень сходны по своей схеме с ранее построенным
жиропланом Бреге (двухвинтовая соосная схема).
Намечалось использовать жироплан G-10 для почтовой и
санитарной службы. Имелось в виду снабдить его мотором
Испано-90(? мощностью 350 л. с. Охлаждение мотора намеча-
лось принудительное от вентилятора; трансмиссия геликоптера
в точности повторяла схему первого жироплана.
Управление машиной, в основном выполненное по схеме
жироплана Бреге-Доран, в то же время имело два существен-
ных дополнения. Первое заключалось в том, что перевод вин-
тов на авторотирующий режим полета мог быть осуществлен
не только летчиком при помощи специальных органов управ-
ления, но и производился автоматически при внезапной останов-
ке мотора. Второе нововведение в управлении предусматривало
автоматическую установку шага несущих винтов в зависимости
от установившегося режима полета, с тем чтобы этот шаг со-
ответствовал его оптимальному расчетному значению.
Фюзеляж, так же как и на первом геликоптере, был фермен-
ный, сварной из стальных труб. Кабина закрытого типа, двух-
местная, сиденья расположены рядом. Помимо нормальных
дверей, имелись люки для прыжков с парашютом. В отличие от
первого аппарата стабилизатор на G-10 отсутствовал.
Проект G-1OA представлял пассажирский вариант геликоп-
тера, который в то же время мог быть использован как грузо-
вой, почтовый и санитарный. На нем предполагалось устано-
вить более мощный мотор Гном-Рон 14 (14-цилиндровая двух-
рядная звезда) мощностью 600 л. с.
Мотор устанавливался в нижней части фюзеляжа и охлаж-
дался вентилятором. Несущие винты, как н на первом гели-
коптере и в отличие от G-10, здесь намечались двухлопастные
диаметром 15,75 м.
Трансмиссия была во всем аналогична вышеописанному
проекту. В управлении имелось дополнительное устройство, на-
значением которого являлось поддержание параллельности
плоскостей вращения обоих винтов на всех режимах полета.
Как известно, на режиме «висения» плоскости вращения1
обоих винтов должны быть взаимно параллельны при парал-
1 В действительности лопасти вращаются ие в плоскости, а описывают
коиус, но для рассматриваемого вопроса это обстоятельство не имеет зна-
чения.
136
дельном положении плоскостей вращения их автомата-перекоса.
При поступательном движении относительные скорости на ло-
пастях справа и слева от машины, представляющие сумму
окружной и поступательной скоростей, будут различны.
Асимметрия потока заставит плоскость вращения наклонить-
ся на некоторый угол назад и в сторону. Но так как винты
имеют различное направление вращения, то боковые наклоны
винтов также произойдут в различных направлениях, что таит
в себе опасность столкновения лопастей. Для возвращения
плоскости вращения обоих винтов к параллельному положению
надо повернуть их автоматы-перекосы в различных направле-
ниях. При обычных схемах цепи управления это сделать невоз-
можно. Поэтому проектом G-10A дополнительно предусматри-
валась возможность боковых наклонов автоматов-перекосов в
различных направлениях, причем эти наклоны должны были
осуществляться автоматически в зависимости от замеряемого
трубкой Пито скоростного напора.
Еще одна оригинальная особенность в управлении G-10A за-
ключалась в том, что лопасти несущих винтов при соприкосно-
вении колес с землей на посадке автоматически переводились
на малый шаг, чтобы резкая потеря тяги винтов предотврати-
ла возможность «взмывания» машины.
Кабина экипажа с двумя рядом расположенными сиденьями
помещалась в передней части фюзеляжа, а мотор находился в
нижней его части.
Сзади кабины было пассажирское помещение на семь пас-
сажиров, которое могло быть приспособлено для перевозки«гру-
зов. Связь между помещениями намечалась по боковому кори-
дору, в котором имелся люк для доступа к мотору.
Геликоптер Фокке-Вульф
26 июня 1936 г. был совершен первый полет геликоптера
Фокке-Вульф FW-61, продолжавшийся 28 сек. Четвертый полет
уже продолжался 16 мин., а через год на FW-61 были уста-
новлены все мировые геликоптерные рекорды высоты, скорости,
дальности и продолжительности полета.
Быстрый успех нового геликоптера был обеспечен большой
предварительной теоретической и экспериментальной работой
проф. Фокке и привлеченных им к этому делу крупных специа-
листов.
Расчетные характеристики винта были проверены на экспе-
рименте с его моделью. Модель несущего винта представляла
трехлопастный винт диаметоом 1,5 л с шарнирным креплением
лопастей. Лопасти этого винта трапецевидной формы имели
хорды у комля 80 мм и на концах 30 мм. При испытаниях винт
приводился во вращение электромотором мощностью 3 л. с. при
скорости вращения 1700 об/мин.
137
Кроме того, проводились большие исследования летающей
модели. Модель геликоптера была снабжена бензиновым двух-
цилиндровым двигателем мощностью 0,7 л. с. Полетный вес мо-
дели составлял 4,9 кг. Несмотря на то, что летающая модель
очень часто ломалась, с ней было проведено очень много цен-
ных испытаний.
Наряду с изысканиями по выбору наивыгоднейшего винта,
определением его характеристик и изучением поведения при ра-
боте на месте и в косом потоке были проведены исследования
устойчивости и перехода от моторного полета к авторотирующе-
му спуску.
Фиг. 95. Геликоптер Фокке-Вульф FW-61.
Все элементы конструкции геликоптера по мере их по-
стройки проходили испытания. Из этих испытаний следует от-
метить исследования колебаний и напряжений в элементах
мотора и трансмиссии. Точно так же система принудительного
охлаждения была испытана совместно с Бранденбургским
моторным заводом до окончания постройки.
Наконец, полностью собранный аппарат, но без обшивки,
капотов и обтекателей прошел тщательные испытания на при-
вязи. После этих испытаний он совершил свой первый и впол-
не успешный полет.
FW-61 (фиг. 95) является одномоторным одноместным
двухвинтовым геликоптером с расположением его несущих
винтов на поперечной оси. Крутящие моменты обоих винтов
взаимно уравновешиваются вследствие противоположного на-
правления их вращения.
Мотор «Брамо» 14а, 7-цилиндровая звезда номинальной
мощностью 145 л. с., специально переделанный для установки
на геликоптер, был укреплен на нормальной мотораме в перед-
ней части фюзеляжа, повидимому, носком коленчатого вала
вперед. На носке был установлен двухлопастный вентилятор,
а с усиленного хвостовика коленчатого вала бралась мощ-
ность на несущие винты.
138
В цепи трансмиссии имелась муфта сцепления для плавного
включения несущих винтов после запуска мотора и муфта сво-
бодного хода, отключающая несущие винты на авторотирую-
щем спуске. При помощи главного редуктора, боковых валов
и боковых редукторов мощность передавалась несущим вин-
там.
Несущие винты были трехлопастные, диаметром 7 м. Лопа-
сти винтов были прикреплены ко втулке при помощи горизон-
тальных и вертикальных шарниров, обеспечивающих маховое
движение лопастей в вертикальной плоскости и в плоскости вра-
щения. Колебания лопастей в горизонтальной плоскости гаси-
лись фрикционными демпферами. Трапецевидные лопасти су-
жались от комля к концу; заполнение винта составляло 0,058.
Проф. Фокке отказался от закрутки лопасти по ее радиусу
и лопасти были сделаны плоскими, т. е. с одним и тем же углом
установки для всех ее сечений. В данном случае конструктор
сознательно отказался от возможности несколько увеличить
к. п. д. винта, стремясь повысить его авторотирующие свойства.
Силовым элементом лопасти являлся лонжерон, на котором
крепились нервюры, обшитые фанерой и полотном. Несущие
винты имели изменяемый в полете шаг. Изменение шага и бла-
годаря этому управление машиной могли производиться двумя
различными способами.
1. Изменение общего шага винта. Углы установки всех трех
лопастей менялись одновременно и на одну и ту же величину.
На геликоптере FW-61 общий шаг обоих винтов мог быть из-
менен специальным рычагом, расположенным в кабине пилота
справа от сиденья. Существовали два положения общего шага,
соответствующие моторному полету и безмоторному спуску.
Этим геликоптер FW-61 отличался от большинства современных
американских геликоптеров, у которых величина общего шага
винта меняется вместе с изменением регулировки газа мотора.
В случае неожиданной остановки мотора перевод винта на
шаг, обеспечивающий авторотацию, несмотря на наличие ручки
общего шага, мог производиться автоматически.
Общий шаг винтов можно было изменять не только рычагом,
но и при помощи боковых отклонений ручки. Но это последнее
изменение общего шага производилось диференциально, т. е.
при увеличении шага одного винта уменьшался шаг другого.
Тем самым создавался момент, кренящий машину в направлении
бокового отклонения ручки, что использовалось для управле-
ния машиной в боковом направлении.
2. Другой вид изменения шага — диференциальное измене-
ние шага лопастей одного и того же винта. Оно осуществля-
лось при помощи автомата-перекоса и могло быть вызвано ли-
бо продольными движениями ручки, либо педалями.
Если ручка перемещена в продольной плоскости (напри-
МеР, «от себя»), то каждая лопасть каждого винта настолько
Уменьшит свой угол установки при прохождении переднего сек-
139
тира ометаемого диска, насколько он будет увеличен при про-
хождении лопастью заднего положения диска. В результате
плоскости вращения обоих винтов будут наклонены вперед и
горизонтальный компонент тяги создаст пикирующий момент.
Точно так же движение ручки «на себя» вызовет появление
кабрирующего момента.
Эта зависимость использовалась для управления машиной в
продольной плоскости, а также для поступательного полета.
Иначе изменялся диференциальный шаг, если он был вызван
движением педалей. В этом случае горизонтальная слагающая
от тяги одного винта была направлена вперед, а от другого —
назад. Пара этих сил создавала момент относительно верти-
кальной оси геликоптера, что позволяло осуществлять путевое
управление.
Несущие винты располагались на специальных боковых фер-
мах, сваренных из хромомолибденовых труб п пристыкованных
к фюзеляжу.
Фюзеляж геликоптера сварной ферменной конструкции так-
же был изготовлен из хромомолибденовых труб и имел полотня-
ную обшивку. На хвосте машины имелись килЪ и руль поворота
нормального типа.
Горизонтальное оперение было представлено высокораспо-
ложенным стабилизатором, угол установки которого мог менять-
ся в полете при помощи самостоятельных органов управления.
В горизонтальном полете соответствующей установкой стабили-
затора могли быть получены моменты, удерживающие фюзеляж
в горизонтальном положении при заваленной вперед плоскости
вращения несущих винтов.
Шасси основных колес трехстержневое и состоит из полуоси
и горизонтального подкоса, крепящихся к узлам фюзеляжа, и
масляной стойки, закрепленной своим верхним концом на бо-
ковой ферме.
Третьей опорной точкой был костыль. При стоянке на ко-
стыле машина отклонялась на некоторый угол назад. Величина
этого угла, повидимому, определялась условиями приземления
машины при безмоторной авторотирующей посадке. Кроме того,
имелось переднее противокапотажное колесо, на котором прово-
дилась рулежка.
Кабина пилота открытого типа помещалась сзади мотора. В
кабине расположены обычные для самолета органы управления:
ручка, педали, управление углом установки стабилизатора и
сектор моторного управления. Кроме того, имелось два допол-
нительных органа: ручка управления муфтой включения и ручка
общего шага. Приборная доска, помимо нормальных самолет-
ных приборов, имела дополнительно тахометры несущих винтов.
При летных испытаниях геликоптера были выявлены доста-
точная устойчивость на всех режимах полета и хорошая управ-
ляемость. Эти качества машины позволили проводить регуляр-
ные демонстрации полета геликоптера в закрытом помещении
140
цирка. В короткое время геликоптер FW-61 завоевал существо-
вавшие в то время мировые рекорды, а именно:
Высота .......................... • 2429 м
Скорость...........................122,5 км/час
Дальность.......................... 230 км
Продолжительность....................1 ч. 22 м.
Для того времени приведенные данные были так значитель-
ны, что вызвали в авиационных кругах скептическое отношение
к их достоверности. Так, например, Асбот выступил в печати с
обвинениями Фокке в том, что его машина являлась не геликоп-
тером, а автожиром. Этому заблуждению отчасти способство-
вала необычная форма двухлопастного вентилятора, часто
принимаемого за пропеллер.
Геликоптер FW-61 был построен в двух экземплярах, на
которых проводились демонстрационные и исследовательские
полеты. Проф. Фокке рассматривал свою машину как модель
многоместного геликоптера для практического назначения. Про-
ектирование такой, значительно более тяжелой, машины было
начато примерно в 1939 г.
Однако трудности перехода от легкой машины к тяжелой,
которые на геликоптере выражаются значительно резче, чем на
самолете, задержали постройку ее на многие годы.
Глава VII
ДАЛЬНЕЙШЕЕ УСПЕШНОЕ РАЗВИТИЕ И УСОВЕРШЕНСТВОВАНИЕ
ГЕЛИКОПТЕРОВ
Советский геликоптер ,,0мегв“
Начиная с 1939 г., И. П. Братухин (возглавляя в это время
Специальное конструкторское бюро) при участии академика
Б. Н. Юрьева вел проектирование нового геликоптера, назван-
ного им «Омега».
Фиг. 96. Советский геликоптер И. П. Братухина .Омега".
Летом 1941 г. постройка этого геликоптера была закончена
и начались летные испытания. Однако, трудные условия военно-
го времени надолго задержали окончание летных испытаний,
проводившихся летчиком-испытателем К. И. Пономаревым. По
сообщениям печати, этот геликоптер в настоящее время доста-
точно исследован и показал хорошие летные данные.
По своей схеме «Омега» (фиг. 96) является двухвинтовым
двухмоторным и двухместным геликоптером. Две гондолы, каж-
дая из которых включает мотор, трансмиссию, несущий винт и
142
стойку шасси с колесом, расположены по обеим сторонам фю-
зеляжа и соединены с ним трубчатыми фермами. В передней ча-
сти фюзеляжа, обшитой плексигласом, расположена двухмест-
ная кабина экипажа, причем сиденья поставлены в тандем. На
хвосте машины имеется оперение: стабилизатор и киль с рулем
поворота.
Посадочные приспособления «Омеги» состоят, помимо рас
положенных под каждой гондолой колес, создающих очень ши-
рокую колею, также из хвостового и переднего колес.
Геликоптеры И. И. Сикорского
Работами И. И. Сикорского, главы фирмы Воут-Сикорский и
технического директора объединения «Sikorsky Division of
United Aircraft Corporation», открывается новый этап необычайно
широкого развития геликоптеростроения в США.
Почти три десятилетия отделяют новые работы Сикорского
по геликоптерам от его первых шагов в этой области (см. гл. IV).
Успехи авиационной техники создали необходимые предпосылки
для технического расцвета нового этапа геликоптеростроения.
Вместе с тем Сикорский, вновь вернувшись к геликоптеро-
строению, не стремился сразу же создать аппарат, пригодный
для практического применения. Он избрал путь постепенной от-
работки элементов конструкции и постепенного приближения к
увеличенным масштабам и параметрам.
Геликоптер „Воут-Сикорский-300“ (VS-300)
В 1939—1940 гг. Сикорским был спроектирован и построен
первый экспериментальный геликоптер, получивший заводскую
марку ^УБ-ЗОО.
Фиг. 97. Геликоптер И. Сикорского VS-300 (I вариант).
Первый вариант геликоптера iVS-ЗОО (фиг. 97) был одно-
местный с мотором Лайкоминг мощностью в 75 л. с. В начале
143
1941 г. этот мотор был заменен четырехцилиндровым мотором
Франклин воздушного охлаждения с номинальной мощностью
90 л. с. С этим мотором были проведены все основные этапы
летных испытаний геликоптера. Мотор располагался в цен-
тральной части фюзеляжа позади пилота.
Геликоптер имел один несущий трехлопастный винт диамет-
ром 8,5 м. Передача мощности от мотора на несущий винт про-
исходила через муфту свободного хода, редуктор с ременной пе-
редачей и парой конических шестерен. В ременной передаче име-
лось несколько параллельно действующих ремней клинообраз-
ного сечения. Обороты вала мотора в цепи трансмиссии пони-
жались до 260 об/мин несущего винта в парящем полете.
Несущий винт был снабжен механизмом для изменения об-
щего шага в пределах от +2 до +13°. Управление шагом вин-
та связано с управлением дросселя мотора таким образом, что
увеличению шага сопутствует увеличение мощности мотора.
Реактивный момент от несущего винта уравновешивался мо-
ментом от направленной вбок тяги рулевого винта, установлен-
ного на хвосте машины.
Рулевой винт имел изменяемый в полете шаг, механизм ко-
торого, будучи связан с педалями, обеспечивал управляемость.
Для продольного и поперечного управления в хвосте маши-
ны расположены на вынесенных по обеим сторонам фюзеляжа
ферменных трехметровых балках еще два винта, вращающихся
в горизонтальной плоскости. Изменение шага этих винтов свя-
зано с движениями ручки пилота следующим образом. Движе-
ния ручки вперед или назад вызывают одновременное увеличе-
ние или уменьшение шага обоих винтов. Боковому перемеще-
нию ручки соответствует дифереициальное изменение шага, т. е.
увеличение шага одного винта и уменьшение шага другого.
Таким образом на машине всегда возникают моменты, направ-
ленные в сторону движения ручки.
Диаметр каждого хвостового винта 2,2 м. В парящем поле-
те они вращаются со скоростью 1300 об/мин. На рулевые вин-
ты мощность от мотора подается через ременную передачу,
трубчатый вал и хвостовые редукторы.
Фюзеляж сварной из стальных труб и в первый период лет-
ных испытаний совершенно не имел обшивки.
В передней части фермы фюзеляжа помещено сиденье лет-
чика и размещены рычаги управления. В первых полетах каби-
на пилота также не имела обшивки. Шасси состоит из трех
стержней: полуоси, подкоса и амортизационной стойки. Задней
опорной точкой является костыль. Кроме того, имеется перед-
нее противокапотажное колесо.
Летные испытания геликоптера проводились в течение
всего 1941 г. В процессе летных испытаний и доводки геликоп-
тер подвергался значительным модификациям.
Во второй половине 1941 г. с машины были сняты два руле-
вых винта продольно-поперечного управления, вращавшихся в
144
горизонтальной плоскости. Вместе с винтами были сняты и под-
держивающие их боковые ферменные балки.
Снятые винты были заменены одним винтом, вынесенным I*
специальном хвостовом пилоне. Вертикально направленная тяга
этого винта, изменяемая регулировкой шага, используется для
управления в продольной плоскости.
На аппарате (фиг. 98) был установлен автомат-перекос, при
помощи которого осуществлялось поперечное управление гели-
коптером. Цепь управления связывала автомат-перекос с ручкой
I
Фиг. 98. Геликоптер И. Сикорского VS-300 (II вариант).
пилота так, что на продольное движение ручки автомат не реаги-
ровал. Боковые отклонения ручки давали такой наклон автомата,
который, вызывая диференциальное изменение углов установки
лопастей несущего винта, тем самым наклонял равнодействую-
щую тяги несущего винта в сторону бокового движения ручки.
Второй этап модификации управления, проведенный в декаб-
ре 1941 г., заключался в том, что рулевой винт продольного уп-
равления также был снят, а автомат-перекос был дополнительно
связан и с продольными движениями ручки (фиг. 99). Вслед-
ствие этого равнодействующая тяга несущего винта получила
возможность наклоняться вслед за ручкой не только в попереч-
ной, но и в продольной плоскости.
Сравнивая обе испытанные на геликоптере системы управле-
ния, Сикорский нашел, что по своему действию они эквивалент-
ны, но управление при помощи автомата-перекоса предпочтитель-
нее ввиду появляющихся при этом преимуществ в смысле конст-
руктивной простоты трансмиссии и фермы фюзеляжа, габаритов,
леса и т. п.
Во всех последующих машинах Сикорского продольно-попе-
речное управление основано на применении автомата-перекоса.
Ю А. М. Изаксон. 145
В течение некоторого времени в 1941 г. испытывалось при-
менение на геликоптере горизонтального оперения. Это оперение
^сполагалось на специальном пилоне выше рулевого винта.
Один вариант горизонтального оперения представлял руль
высоты, а второй — стабилизатор. В первом случае угол уста-
новки горизонтального оперения зависел от продольного поло-
жения ручки, а во втором он изменялся при помощи дополни-
тельных органов управления. Однако, ввиду ограниченности
проведенных исследований конструктор признал затруднитель-
ным сделать окончательный вывод о применении на геликоптере
горизонтального оперения. Вместе с тем последующие машины
Сикорского не имеют горизонтального оперения.
Фиг. 99. Геликоптер И. Сикорского VS-300 (III вариант).
Одновременно изучалось влияние вертикальных плоскостей,
образуемых обшивкой фюзеляжа. Испытывались следующие ва-
рианты обшивки:
а) обшита одна вертикальная панель на самом конце хво-
ста фюзеляжа;
б) обшита одна вертикальная панель фюзеляжа на участке
от центральной части до конца хвоста;
в) полностью обшита (закапотирована) передняя часть фю-
зеляжа.
Испытания показали, что капотирование передней части ни-
сколько не ухудшает поведения аппарата и, следовательно, яв-
ляется рациональным. Наличие небольших вертикальных пло-
скостей на хвосте также полезно, но чрезмерное капотирование
хвоста ведет к демпфированию действия. управления.
Однако, несмотря на эти результаты, в современных гели-
коптерах Сикорского хвостовая часть фюзеляжа полностью
зашита, как и на всех современных самолетах.
Окончательная схема геликоптера iVS-ЗОО, ставшая прото-
типом всех последующих геликоптеров Сикорского и многих
146
американских, в точности повторяет схему геликоптера
D. Н. Юрьева, построенного им в 1911 г. (см. гл. IV).
Осенью 1941 г. геликоптер ‘VS-300 был установлен на поплав-
ки (фиг. 100). Эти поплавки представляли собой длинные рези-
новые цилиндры без редана, наполненные воздухом.
Геликоптер, снабженный поплавками, показал на воде пре-
красную маневренность, подвижность, легко отрывался от воды
и хорошо садился. Вполне благоприятные результаты дали так-
же опыты посадки геликоптера, снабженного поплавками, на бе-
рег и на палубу корабля. Таким образом геликоптер приобрел
все качества амфибии.
В процессе летных испытаний различные летчики совершили
на геликоптере VS-ЗОО много полетов. В этих полетах наиболь-
шее внимание уделялось определению степени точности действия
управления, например, подходу к зданию или человеку, смене
колеса с земли в парящем полете и т. д.
Фиг. 100. Геликоптер И. Сикорского VS-300 иа поплавках.
Геликоптер iVS-ЗОО, управляемый Сикорским, поставил
два рекорда: в апреле 1941 г. национальный рекорд продол-
жительности полета 1 ч. 05 м. 14,5 с.; в мае 1941 г. новый ми-
ровой рекорд продолжительности геликоптерного полета 1 час.
32 мин. 26,1 сек.
Оба полета были совершены в ранней стадии облета гели-
коптера, когда его управление еще не подвергалось передел-,
кам. В 1942 г., с появлением нового двухместного геликоптера
Сикорского, исследования iVS-ЗОО были прекращены.
Геликоптер R-4
Второй геликоптер Сикорского был построен в конце 1941 г.
и в январе 1942 г. были начаты его летные испытания. В тече-
10* 147
ние последующих двух с половиной лет в процессе летно-иссле
довательской работы постепенно улучшалась его конструкция.
Соответственно принятым в американской авиации обозна-
чениям марка геликоптера менялась в зависимости от этапов
его производства и модификации. Опытный заводский экземпляр
имел марку XR-4, войсковая опытная серия YR-4 и серийные
аппараты — R-4. Модифицированному типу серийных аппара-
тов присвоена марка R-4B и ее морскому варианту (на поплав-
ках) — HNS-1.
Ниже дается краткое техническое описание геликоптера
iR-4B (фиг. 101 и 102).
Фюзеляж геликоптера сварной, из стальных труб. Его
отъемная хвостовая часть стыкуется болтовыми соединениями
с центральной частью.
Фиг. 101. Геликоптер И. Сикорского R-4B.
В центральной части фюзеляжа помещен семицилиндровый
звездообразный мотор воздушного охлаждения Уорнер R-550-1
мощностью 180 л. с., заменивший ввиду недостатка мощности
ранее стоявший мотор Уорнер 165 л. с. На обращенном назад
носке мотора насажена муфта сцепления, корпус которой ис-
пользован в качестве ступицы осевого многолопастного вентиля-
тора, установленного для охлаждения мотора.
Воздух засасывается внутрь фюзеляжа через отверстия в
передней части кабана несущего винта, обдувает агрегаты
трансмиссии и далее нагнетается вентилятором в дефлекторы
цилиндров мотора. Выход воздуха внизу фюзеляжа.
Вращение мотора через муфту сцепления, соединенную с
ней муфту свободного хода и короткий карданный вал пере-
дается главному редуктору. За муфтой свободного хода уста-
новлен ленточный тормоз несущего винта, для управления ко-
торым используется находящийся в кабине рычаг муфты сцеп-
ления. Если муфта сцепления включена, то тормоз выключен, и
наоборот.
148
Главный редуктор состоит из пары цилиндрических и пары
конических шестерен. Горизонтально расположенная кониче-
ская ведомая шестерня соединена с валом несущего винта.
В дополнение к муфте свободного хода на валу несущего
винта установлено приспособление, полностью разъединяющее
путем срезания шпилек в случае заклинения редуктора несущий
винт от остальной трансмиссии.
Фиг. 102. Схема геликоптера И. Сикорского R-4B:
/—масляный бак; 2—главный редуктор; 3— трубка Пито (с электроподо-
гревом); 4—отверстия для забора охлаждающего мотор воздуха; 5—радио-
установка; 6— мотор Уорнер .Супер Скэрэб”; 7—управление муфтой сцеп-
ления мотора с ротором; 8— электрощиток; 9—ручка управления; 10—руч-
ка управления изменением шага и дросселем; 11—ручка управления дрос-
селем; 12 - тормозной рычаг; 13 — педали управления хвостовым вин-
том; 14—отверстие для вентилирования кабины; 15— ручка регулировки
сиденья; 16— пол; 17—противопожарная и звукоизолирующая переборки;
18— воздушный фильтр и всасывающий патрубок карбюратора; 19— венти-
лятор для охлаждения мотора и муфта сцепления; 20— муфта свободного
хода ротора; 21 - тормоз мотора; 22—бак для горючего.
Вал ведущей цилиндрической шестерни редуктора при по-
мощи карданного соединения вращает длинный трубчатый вал
рулевого винта. Промежуточные опоры этого вала крепятся
упругими расчалками к фюзеляжу.
Несущий винт трехлопастный, правого вращения, диамет-
ром 11,58 м, изменяемого в полете шага. Горизонтальные шар-
ниры всех трех лопастей пересекаются с осью вращения. Сило-
вой элемент лопасти — лонжерон — представляет собой сталь-
149
ную цельнотянутую трубу с шестью ступенями, диаметр кото-
рых постепенно уменьшается от комля к концу. Диаметр трубы
лонжерона — от 51 до 16 мм и толщина его стенок — от 3,2 до
1,25 мм. Обшивка лопастей полотняная.
Крутящий момент несущего винта уравновешивается момен-
том от боковой тяги рулевого трехлопастного винта диаметром
2,34 м, расположенного на отогнутом вверх концевом участке
хвостовой балки.
Высокое расположение рулевого винта объясняется, невиди-
мому, стремлением конструктора улучшить поперечную балан-
сировку машины.
Дело в том, что во избежание сноса машины от боковой тя-
ги рулевого винта создается обратно ей направленный боковой
компонент тяги несущего винта. Если тяга рулевого винта ле-
жит ниже плоскости вращения несущего винта, то эти две си-
лы образуют поперечную опрокидывающую пару. Эта пара сил
может быть уравновешена обратно направленной парой от вер-
тикального компонента тяги и веса машины в том случае, если
между их направлениями образуется плечо от бокового крена
машины.
Следовательно, при низком расположении рулевого винта
геликоптер должен летать либо со сносом, либо с креном.
Высокое расположение рулевого винта на R-4, надо пола-
гать, преследует цель если не устранить, то хотя бы уменьшить
это неприятное явление.
Так как из-за проходимости лопастей высоко расположить
хвостовую балку невозможно, приходится отгибать вверх толь-
ко ее концевую часть. Это в свою очередь ведет к большим на-
пряжениям в конструкции хвоста от скручивания тягой рулевого
винта. Учитывая эти факторы, на последующем геликоптере R-6
прямая хвостовая балка постепенно повышается к своему кон-
цу, а рулевой винт несколько снижен.
Рулевой винт геликоптера R-4 посажен на вал хвостового
редуктора, уменьшающего 2200 об/мин мотора до 1300 об/мин.
Шаг рулевого винта изменяется в пределах от '+.12,5° дэ
—5°. 'Такой большой диапазон вызван необходимостью обеспе-
чить при помощи рулевого винта путевую управляемость как в
моторном полете, так и при авторотирующем спуске, когда ма-
шина не нагружена крутящим моментом от несущего винта.
Управление шагом рулевого винта осуществляется педаля-
ми, связанными тросами со специальным механизмом, смон-
тированным на хвостовом редукторе.
Для изменения общего шага в кабине пилота имеется спе-
циальная ручка, связанная со штангой, пропущенной в полом
валу. Поскольку изменению общего шага должно соответство-
вать изменение мощности, эта же ручка связана и с управлени-
ем дроссельной заслонкой. Но так как изменение мощности не-
сколько отстает от изменения шага, то появляется необходи-
мость в дополнительном управлении дросселем, которое осу-
150
ществляется поворачиванием верхней части ручки общего ша-
га, подобно управлению газом на мотоцикле.
Бак для горючего, вмещающий 105 кг бензина,' расположен
внизу фюзеляжа сзади мотора. Нормальный запас бензина
(50 кг) обеспечивает продолжительность полета на 1,5 часа.
В кабине, находящейся в передней части фюзеляжа, поме-
щены два рядом расположенных сиденья экипажа. Кабина за-
крытого типа обильно остеклена и обеспечивает хороший обзор.
Приборная доска содержит нормальные приборы, обычно
применяемые на самолетах, и, кроме того, специальный при-
бор — указатель общего шага несущего винта.
Фиг. 103. Геликоптер И. Сикорского R-4 на поплавках.
Сзади сиденья помещена радиоустановка. Шасси геликоп-
тера трехколесное — два основных колеса и хвостовое колесо.
Переднее противокапотажное колесо, имевшееся на VS-300,
здесь отсутствует, что затрудняет рулежку.
Геликоптеры, предназначенные для морской службы
(фиг. 103), вместо трехколесного шасси имеют два резиновых
надувных поплавка цилиндрической формы, при помощи кото-
рых машина прекрасно садится и взлетает не только на воду,
но и на палубу корабля и на сушу. После всестороннего изуче-
ния летных свойств геликоптера R-4 и условий его практическо-
го применения управление военной авиации США дало заказ на
300 аппаратов. Строительство этих машин началось в 1943 г.
на заводе Воут-Сикорский в Бриджпорте. За первые 8 мес. ра-
151
боты было выпущено 30 аппаратов. Имеются также сведения о
применении впервые в геликоптеростроительной практике кон-
вейерной сборки этих геликоптеров.
Большинство построенных машин поступает на снабжение
армии и флота США. Несколько экземпляров геликоптера R-4
закуплены Англией и Канадой для изучения возможностей их
применения при розыске и спасении летчиков, потерпевших ава-
рию в труднодоступных местах.
Как мы указывали выше (см. гл. I), геликоптер R-4 являет-
ся первой машиной, сравнительно широко использованной для
практических целей.
Однако конструктор и авиационные специалисты рассматри-
вают эту машину только как прототип последующих геликопте-
ров, которые, обладая преимуществами этого типа машин,
должны быть лишены недостатков, присущих R-4.
Важнейшие недостатки геликоптера, выявленные при испы-
тании в Райт-Филд, в основном относятся к работе несущего
винта и системы его управления. Движение лопастей несущего
винта на R-4 не обладает необходимой устойчивостью. Недоста-
точность устойчивости несущего винта геликоптера R-4 может
привести к тому, что лопасти винта, по выражению инструкто-
ра геликоптерных полетов Райт-Филда Морриса, могут сложить-
ся. «как зонтик от сильного ветра».
На этом основании летчиков геликоптера предупреждают о
катастрофических последствиях снижения оборотов «ниже на-
дежного минимума». Моррис отмечает, что на несущем винте ге-
ликоптера R-4 нет регулятора шага, автоматически уменьшаю-
щего угол установки лопасти при ее взмахе, а постановка
регулятора связана с некоторыми конструктивными трудно-
стями.
Другим недостатком машины является некоторая сложность
управления и его координации. Например, для перехода от го-
ризонтального полета на режим парящего полета требуются
следующие координированные действия:
1) взять ручку «на себя»;
2) опустить рычаг общего шага;
3) уменьшить открытие дросселя;
4) «дать правую ногу», чтобы удержать машину от разво-
рота.
Прежде чем машина остановится, требуется немедленно
проделать те же операции, но в обратном порядке:
• 1) поднять рычаг общего шага;
2) увеличить открытие дросселя;
3) поставить педали в нейтральное положение;
4) отжать ручку «от себя».
Вот что говорит по этому поводу инструктор Райт-Филда
Моррис в своей статье1:
1 .Aviation", Aug. 1944.
152
«Перевод машины из одного режима в другой требует
координации всех органов управления и операции должны
быть плавными. Когда пилот повел машину к намеченному
месту посадки, он медленно выбирает «на себя» ручку управ-
ления и ждет остановки. Но машина все еще имеет некоторую
остаточную поступательную скорость и поэтому начинает наби-
рать высоту. Поэтому летчик уменьшает шаг ротора и одно-
временно управляет сектором газа, чтобы поддержать надле-
жащее число оборотов мотора. Это изменяет момент основного
ротора и машина начинает поворачиваться, пока эта тенден-
ция не будет парирована педалями. Затем, если машина сколь-
зит вниз и начинает садиться, то все эти операции должны быть
повторены в обратном порядке, т. е. увеличение шага, установка
газа, установка педалей в их исходное положение и подача
ручки вперед».
Вполне понятно, что подобное управление требует известного
напряжения и внимания летчика.
Геликоптеры И. Сикорского R-5 и R-6
В начале 1944 г. Сикорским были выпущены два новых ге-
ликоптера, опытные образцы которых получили марки XR-5 и
XR-6. Серийные экземпляры имеют маркировку R-5 и R-6.
Фиг. 104. Геликоптер И. Сикорского R-6.
Эти две машины по своей схеме подобны геликоптеру R-4.
Это—одновинтовые двухместные геликоптеры, на которых ре-
активный момент от несущего винта уравновешивается при по-
мощи расположенного на хвосте рулевого винта.
Геликоптер R-6 (фиг. 104) является дальнейшей модифи-
кацией геликоптера R-4. Он снабжен шестицилиндровым мото-
ром воздушного охлаждения Франклин 6AQV-405 мощностью
245 л. с. с двумя противоположно расположенными рядами ци-
153
линдров. Мотор установлен в центральной части фюзеляжа
таким образом, что его ось имеет вертикальное направление.
Такое расположение мотора позволяет осуществить более лег-
кую трансмиссию и избегнуть конических передач. Вместе с
тем при этой схеме трансмиссии появляется необходимость в
дополнительном редукторе с парой конических шестерен для
передачи мощности от мотора на вал рулевого винта.
Более мощный мотор, вертикальное направление его вала
при установке на аппарате и изменение трансмиссии, вызван-
ное новым положением мотора, определяют основные отличия
нового геликоптера R-6 от R-4. Других принципиальных раз-
личий между этими аппаратами нет. В частности, они имеют
несущие винты, одинаковые по диаметру, числу лопастей и на-
правлению вращения. Схема управления также осталась не-
изменной. Некоторое различие, не имеющее принципиального
характера, состоит в том, что R-6 имеет более округленные и
обтекаемые формы, в связи с чем по своему внешнему виду
он выгодно отличается от R-4.
Хвостовая балка не имеет на своем конце отгиба вверх.
В связи с этим рулевой винт расположен на ней несколько ни-
же, чем на R-4. Это разгружает хвостовую балку от закручи-
вающего момента, но увеличивает разницу в боковых кренах
при моторном полете и при планирующем спуске. Шасси, в от-
личие от ферменной конструкции R-4, здесь изготовлено в виде
полуосей, не подкрепляемых стойками и раскосами. Амортиза-
ционное устройство шасси расположено внутри фюзеляжа.
Кроме обычных трех точек, шасси имеет еще четвертое про-
тивокапотажное переднее колесо для обеспечения безопасной
рулежки. Кабина имеет звукоизоляцию и обогрев.
Серийное производство геликоптеров R-6 организовано на
заводах компании Нэш-Кельвинейтор, причем изготовление де-
талей й агрегатная сборка в основном сосредоточены на заво-
дах компании в Грэнд-Релидсе, а окончательная сборка — на
заводе той же компании в Детройте.
Геликоптер R-6 принят на вооружение армии и флота США,
где имеется в виду использовать его для связи, борьбы с подвод-
ными лодками и в санитарных целях. Увеличенная мощность
мотора значительно повышает грузоподъемность геликоптера,
которая может быть использована для увеличения дальности
полета или для бомбовой нагрузки. Для использования машины
для санитарных целей имеются приспособления для укрепления
двух носилок. На геликоптере R-6 были перекрыты все ранее
установленные рекорды.
Геликоптер R-5 (фиг. 105) является наиболее тяжелым из
всех геликоптеров Сикорского, не отличаясь от других его аппа-
ратов по своей принципиальной схеме.
На R-5 был установлен мотор Пратт и Уитни R-985AN5 воз-
душного охлаждения, 9-цилиндровая звезда мощностью 450 л. с.
По величине мощности, потребляемой одним геликоптерным
154
винтом, R-5 уступает только советскому геликоптеру 11-ЭА, ле-
тавшему в 1940—1941 гг.
Ось мотора, как и в геликоптере R-6, имеет вертикальное
направление.
В двухместной кабине сиденья расположены последователь-
но, что позволило значительно сузить фюзеляж. В центральной
части фюзеляжа имеются лишь местные расширения для разме-
щения цилиндров мотора, выступающих за габариты фюзеляжа.
Вся поверхность кабины закрыта прозрачной пластмассой, обес-
печивающей прекрасный обзор. Шасси трехколесное, а противо-
капотажное колесо, имеющееся на R-6, здесь отсутствует.
Основное шасси изготовлено в виде мощных консольных балок,
на концах которых крепятся амортизационные стойки и вилки
с колесами.
Несущий винт трехлопастный диаметром 14,6 м. По своим
размерам этот винт точно так же уступает только винту совет-
ского геликоптера 11-ЭА. Принципиальная схема винта и управ-
ления такая же, как и у других геликоптеров Сикорского.
Нововведением в оборудовании является наличие бортового
подъемного приспособления, позволяющего загружать аппарат
тяжелыми грузами вне аэродрома. Для перевозки раненых
может быть установлено четверо носилок, расположенных
попарно по бортам.
Геликоптер принят на вооружение армии США. Начало его
серийного производства было назначено на осень 1944 г. Серий-
155
ный выпуск должен производиться заводом Воут-Сикорский,
где к тому времени производство R4-B должно было пре-
кратиться.
Работы по усовершенствованию геликоптера R-5 привели к
созданию новой модели S-51, которая по внешнему виду
(фиг. 106) мало отличается от своего прототипа. Основные эле-
менты конструкции — мотор и несущий винт на модифицирован-
ном образце — оставлены без изменения. По данным печати вес
конструкции уменьшен на 30 кг, а полетный вес увеличен на
Фнг. 106. Геликоптер И. Сикорского S-51.
50 кг. Таким образом увеличение полезной нагрузки составляет
80 кг.
Геликоптеры Сикорского приняты на вооружение в Англии.
В составе военно-воздушных сил Англии геликоптер R-4 назы-
вается «Ховерляй-I», a R-6 — «Ховерляй-П». Для обучения пи-
лотов на этих геликоптерах в Андовере создана геликоптерная
летная школа.
Проект пассажирского геликоптера И. Сикорского
На страницах американских журналов достаточно активно
обсуждается возможность применения геликоптеров на пасса-
жирских линиях. Приведено много доводов рентабельности ис-
пользования геликоптеров, особенно в тех случаях, когда в свя-
зи с относительно небольшим расстоянием полета и удаленностью
аэродрома преимущества самолетов в скорости не могут быть
использованы.
Одновременно появляются многочисленные сообщения о
проектировании как небольших, так и грузоподъемных геликоп-
теров.
В американской печати приводятся данные по проекту пасса-
жирского геликоптера Сикорского (фиг. 107), который, по его
словам, может быть реализован в течение 1—2*/е лет:
Число моторов............................ 2
Мощность каждого мотора.................... 600 л. с.
Полетный вес.............................. 5500—6000 кг
156
Полезная нагрузка ........................... 1900 кг
Число пассажирских мест....................... 14
Экипаж.......................................... 2 чел.
Расчетная крейсерская скорость............. 160 км/час
Потолок...................................... 3000 м
Расход горючего в час......................... 118 кг
Фиг. 107. Проект 14-местного геликоптера И. Сикорского.
Геликоптер Пясецкого и Даланд PV-2
В 1943 г. к числу известных в США своими полетами гели-
коптеров Сикорского VS-300 и R-4 добавился новый геликоптер
фирмы Инжиниринг Форум под маркой P|V-2. Этот геликоптер,
спроектированный президентом компании Франком Пясецким и
главным инженером Элиотом Даланд, был закончен постройкой
и прошел летные испытания в начале 1943 г. в Филадельфии, а я
октябре — в Вашингтоне. Его полеты были продемонстрирова-
ны представителям армии и корреспондентам.
i Оба автора ранее (в 1941 г.) работали в области геликоп-
терной техники на заводе Плэтт ле Пейдж в Эдистоне \
Их первая машина представляла одномоторный одномест-
ный одновинтовой геликоптер, на котором крутящий момент от
несущего винта уравновешивается моментом от тяги рулевого
винта, расположенного на хвосте машины. По своей принципи-
альной схеме P1V-2 не отличается от аппаратов Сикорского.
Своеобразные конструктивные особенности отмечены ниже.
На P|V-2 (фиг. 108) в центральной части фюзеляжа уста-
новлен четырехцилиндровый мотор Франклин 4АЕ-199ЕЗ воз-
душного охлаждения с номинальной мощностью 90 л. с. Ось мо-
1 Оба имеют большой стаж технической работы в авиации, причем
Пясецкого называют пионером геликоптеростроения.
157
тора расположена вертикально \ Для уменьшения вибрации мо-
тор крепится на фюзеляже при помощи амортизаторов.
В печати опубликованы очень ограниченные данные о кон-
струкции геликоптера. Известно, что в цепи трансмиссии имеет-
ся муфта свободного хода, обеспечивающая авторотацию при
выключенном моторе. Однако, нет данных о муфте включения,
которая на всех современных геликоптерах обеспечивает плав-
ное приключение несущего винта к ранее запущенному мотору.
В главном редукторе обороты мотора снижаются до
350 об/мин в парящем полете. От главного редуктора, кроме то-
го, мощность передается по трубчатому валу на рулевой винт.
Фиг. 108. Геликоптер Пясецкого PV-2.
Мотор охлаждается вентилятором, приводимым во вращение
от моторного привода.
Несущий винт геликоптера PiV-2 трехлопастный, диаметром
7,62 м. Его лопасти имеют лонжерон из стальной конической
трубы, диаметр которой 30 мм у комля и 25 мм на конце. На
лонжероне монтируется каркас, состоящий из деревянных нер-
вюр, носового и хвостового стрингеров. Обшивка лопастей по-
лотняная. Хорда лопасти постоянна по всему радиусу и равна
242 мм.
Втулка винта и механизм управления закрыты необычно ши-
роким круглым обтекателем диаметром 915 мм. Лопасти крепят-
ся во втулке,' как и на большинстве других современных гели-
коптеров, при помощи горизонтальных и вертикальных шарни-
ров и могут изменять свой шаг.
1 Вертикальное расположение оси мотора на современных геликопте-
рах получило очень широкое распространение. Следует отметить, что это
конструктивное новшество’впервые было осуществлено на геликоптере PV-2.
158
Управление несущим винтом по своему принципу такое же,
как и на геликоптерах Сикорского, но имеются две особенности,
определяющие некоторое их различие.
На геликоптере P|V-2 существует только два положения об-
щего шага — для моторного полета и для безмоторного спуска.
Высота полета регулируется на каждом данном режиме поле-
та только газом, в то время как на аппаратах Сикорского лет-
чик пользуется газом в комбинации с шагом.
Второе отличие — чисто конструктивное. Ручка пилота под-
вешена сверху кабины. Такое крепление, по мнению многих пи-
лотов, представляет некоторые неудобства, но цепь управления
в этом случае необычайно упрощается и может быть изготовле-
на с меньшим количеством звеньев и значительно более легкой.
Чтобы убедиться в этом, достаточно сравнить схему управлений
советского геликоптера 1-ЭА, где ручка крепилась сверху, и
геликоптера R-4 Сикорского с нормальным нижним креплением
ручки.
Диференциальное управление в продольной плоскости осу-
ществляется изменением углов установки лопастей в диапазо-
не ±8°, а в поперечной плоскости— ±4°.
Управление пути, а равно и уравновешивание крутящего мо-
мента производится рулевым винтом. Этот винт двухлопастный
диаметром 1,524 м. Скорость вращения рулевого винта на ре-
жиме «висения»— 1700 об/мин.
Посадочные приспособления PIV-2 состоят из двух основных
колес, крепящихся на трехстержневом шасси, и хвостового ко-
стыля, заканчивающегося небольшой лыжей. Ширина колеи
немного превосходит автомобильную.
Одноместная кабина пилота закрытого типа и расположена
в передней части фюзеляжа. В своей верхней части она остекле-
на, что обеспечивает хороший обзор.
Авторы проекта считают свой геликоптер эксперименталь-
ным и не предполагают организовать серийное производство.
В 1945 г. фирма выпустила новый геликоптер (фиг. 109), по-
строенный по заказу 'Морского министерства США. Заводская
марка геликоптера BV-3, а в Морском министерстве он носит
марку !XHRP.
Основной особенностью новой машины является расположе-
ние двух ее несущих винтов в продольной плоскости: на носу и
хвосте.
Вследствие противоположного направления вращения вин-
тов реактивные моменты уравновешены.
Для того чтобы на поступательной скорости поток от перед-
него винта не ухудшал качества винта, расположенного на хво-
сте, винты установлены на различной высоте—задний винт на-
ходится значительно выше переднего.
Оба винта приводятся во вращение мотором Континентэл-
Райт-975 с взлетной мощностью 450 л. с. Машина рассчитана на
перевозку десяти пассажиров при двух членах экипажа, что
159
дает весьма значительную величину коммерческой нагрузки на
единицу мощности.
Подробные технические данные и характеристики геликоп-
тера не опубликованы. Из отдельных сообщений, появившихся
в печати в период проектирования геликоптера, следует, что
его расчетная максимальная скорость составляет 200 км/час и
радиус действия 640 км.
Фиг. 109. Геликоптер фирмы Инжиниринг Форум PV-3.
Геликоптер P|V-3 совершил в процессе испытаний много по-
летов и по сообщению прессы показал очень хорошую устой-
чивость и управляемость.
Кроме PV-2 и PV-3, фирма Инжиниринг Форум разрабаты-
вает проект двухместного геликоптера, предназначенного для
массового выпуска.
Геликоптер Белл
В начале 1943 г. фирма Белл Эйркрафт (США) построила
экспериментальный геликоптер, вызвавший большой интерес
авиационных специалистов в связи с примененной оригинальной
схемой несущей системы и управления.
Конструктор геликоптера Артур Юнг в течение многих лет
занимался исследованиями устойчивости геликоптерного полета,
проверяя различные схемы несущих винтов на летающих моде-
лях. Результаты этих исследований нашли отражение в конст-
рукции построенного им геликоптера.
По своей схеме аппарат Белл является одновинтовым гели-
коптером (фиг. ПО и 111). Реактивный момент от несущего
винта уравновешивается рулевым винтом, расположенным на
хвосте. В центральной части фюзеляжа помещен шестицилинд-
ровый мотор Франклин 6AQV-298 воздушного охлаждения с
противоположно-рядным расположением цилиндров. Мощность
мотора 160 л. с. Мотор установлен на геликоптере так, что его
ось направлена вертикально.
160
В цепи трансмиссии имеются муфта свободного хода и муфта
включения центробежного типа. Муфта включения автоматиче-
ски сцепляет несущий винт с валом мотора при достижении мо-
тором 1200 об/мин. Выше муфт располагается планетарный
Фиг. ПО. Схема геликоптера Белл:
/—главный редуктор; 2— бензобак;3— трансмиссионный вал рулевого винта;
4—маслорадиатор; 5— мотор; 6—забор воздуха для охлаждения мотора.
двухступенчатый редуктор с передаточным числом 1 : 9. Вал ре-
дуктора возвышается над центральной частью фюзеляжа и несет
на своем конце несущий винт геликоптера.
Фиг. 111. Геликоптер Белл в полете.
Моторама, на которой расположены мотор, трансмиссия и
несущий винт, представляет сварную конструкцию, имеющую
внизу четыре опорные ножки, а вверху — установочное кольцо
для крепления агрегатов. Для погашения вибраций вся силовая
часть, смонтированная на мотораме, соединена с фюзеляжем
при помощи четырех резиновых амортизаторов.
И А. М. Изаксон
161
Мотор охлаждается вентилятором, имеющим ременную пе-
редачу от одного из приводов мотора. Ось вентилятора лежит
в горизонтальной плоскости. Воздух поступает через расположен-
ную в носу фюзеляжа решетку, проходит под полом кабины и
далее нагнетается вентилятором по туннелям в пространство
между цилиндрами. Воздух имеет выход на бортах в стыке цент-
ральной и хвостовой частей фюзеляжа.
Для протока воздуха через маслорадиатор используется
разрежение от выхлопа мотора. Выхлопные коллекторы выво-
дятся с двух сторон на борта хвостовой балки.
Конструкция передней и центральной частей фюзеляжа
Представляет собой «люльку», образованную продольными бал-
ками. В передней ее части располагается закрытая кабина эки-
пажа с двумя- помещенными рядом сиденьями.
Позади кабины в центральной части фюзеляжа установлены
винтомоторная группа и центральный узел управления с автома-
том-перекосом.
Хвостовая балка фюзеляжа, изготовленная из листового ду-
ралюмина, по своей конструкции полумонокок. Для уменьшения
сопротивления балка в своем сечении представляет обтекаемый
профиль, обращенный носком вверх. Хвостовая балка фюзеляжа
стыкуется с моторной рамой при помощи трех узлов крепления,-
два узла расположены вверху и один внизу.
На конце хвостовой балки размещен двухлопастный рулевой
винт диаметром 1,524 м. Лопасти винта деревянные. Винт име-
ет изменяемый в полете шаг, обеспечивающий путевое управле-
ние. Винт монтируется на валу хвостового редуктора, имеюще-
го передаточное отношение 1 .- 2. Этот редуктор связан трубча-
тым валом с центральной трансмиссией.
Амортизация основного шасси расположена внутри фюзеля-
жа. Поэтому на каждой стороне фюзеляжа имеется только по
одной трубе без стоек и подкосов, на которой крепится ориенти-
рующаяся вилка с колесом. Хвостовая стойка и колесо — обыч-
ного типа.
Таким образом в геликоптере Белл мы видим повторение об-
щеизвестных принципов компоновки одновинтового геликоп-
тера.
Оригинальной его особенностью является, как это сказано
выше, конструкция несущего винта и управления.
Несущий винт геликоптера Белл диаметром 10,06 м имеет
две лопасти симметричного профиля, изготовленные из дерева с
металлической оковкой носка, поставленной для балансировки
лопасти.
Соединение лопастей со втулкой винта позволяет им повора-
чиваться в заделке для изменения общего шага винта. Горизон-
тальных и вертикальных шарниров и сочленений лопастей со
втулкой, применяемых на большинстве винтовых аппаратов, в
этом геликоптере нет.
162
Однако, вследствие карданного соединения втулки винта с ва-
лом весь винт может совершать маховые движения в вертикаль-
ной плоскости. Это отличает его от обычных схем, где любая
лопасть имеет свободу махового движения изолированно от дру-
гих лопастей винта.
Устойчивость геликоптера и его несущей системы относится к
одной из наиболее важных и актуальных проблем геликоптеро-
строения. 'Метод решения этой проблемы в геликоптере Белл
представляет большой интерес (подробное описание схемы не-
сущего винта и управления им дано в приложении II).
Из последних сообщений о геликоптере Белл известно, что
он проходит летные испытания. Задержка этих испытаний, неви-
димому, объясняется трудностями в доводке, обычно сопутст-
вующими применению новых мало изученных схем.
Фиг. 112. Геликоптер Белл-47.
После трех лет изучения и доводок фирма Белл в 1946 г. вы-
пустила два новых образца геликоптеров — Белл-47 и Белл-42.
Оба новых аппарата (фиг. 112 и ИЗ) в точности повторяют
основные особенности первого образца — схему несущей систе-
мы и управления. В обоих аппаратах применяется так называе-
мый стабилизирующий стержень. Вновь построенные геликопте-
ры различаются между собой главным образом своими пара-
метрами. Белл-47 — двухместный геликоптер с мотором Фран-
клин мощностью 175 л. с. Несущий винт двухлопастный, диамет-
ром 10,2 м, полетный вес 950 кг при коммерческой нагрузке
275 кг.
Максимальная скорость геликоптера составляет 160 км!час и
крейсерская 130 км]час, дальность полета 400 км. Таким обра-
зом видно, что данный геликоптер очень близок по своим данным
к первому геликоптеру Белл. Фирма наметила выпустить в пер-
вой серии 500 аппаратов типа Белл-47.
И*
163
Второй из вновь выпущенных геликоптеров Белл-42 являете»
более тяжелым и пятиместным. Мощность установленного на
нем мотора (повидимому, взлетная) составляет 450 л. с., вес пу-
Фиг. 113. Геликоптер Белл-42.
стого аппарата равняется 1563 кг, полетный вес 2218 кг. Та-
ким образом полезная нагрузка составляет 655 кг. Максималь-
ная расчетная скорость 201 км!час.
Геликоптер Плэтт ле Пейдж R-1A
Первые результаты работы Плэтт ле Пейдж по геликопте-
рам стали известны в 1944 г. после демонстрации полета по-
строенного геликоптера.
Фиг. 114. Геликоптер Плэтт ле Пейдж R-1A.
По своей принципиальной схеме — это двухвинтовой гели-
коптер (фиг. 114). Его несущие трехлопастные винты диамет-
ром 9,3 м расположены на концах боковых обтекаемых балок и
вращаются в противоположных направлениях.
164
Геликоптер снабжен мотором Пратт-Уитней R-985 AN1. Это
девятицилиндровая звезда номинальной мощностью 450 л. с. при
2300 об/мин. Вес сухого мотора 310 кг.
Двухместная кабина экипажа с тандемным расположением
сидений помещена в передней части фюзеляжа впереди моторно-
го отсека. Кабина обшита прозрачной пластмассой не только в
верхней, но й в нижней части.
Фюзеляж сварной и обшит полотном. На геликоптере имеет-
ся оперение—высоко расположенный стабилизатор, укреплен-
ный подкосами, и киль с рулем поворота.
Посадочные приспособления представлены основными коле-
сами, стойки которых укреплены на боковых балках, и хвосто-
вым колесом. Данные о схеме трансмиссии и управления не
опубликованы.
Геликоптер уже прошел заводские испытания и передан для
испытаний в Райт-Филд.
В данное время фирма имеет разработанный проект значи-
тельно более мощного геликоптера полетным весом 7700 кг,
рассчитанного на перевозку 12—14 пассажиров.
По своей схеме проектируемый геликоптер, как и R-1A, двух-
винтовой.
Геликоптер Хиллера
Геликоптер Хиллера, названный им «Хиллер-коптером»,—
первый из американских летающих геликоптеров соосной схе-
мы (фиг. 115 и 116).
Фиг. 115. Геликоптер Хиллера.
В настоящее время в США разработано очень много проек-
тов соосных геликоптеров. Интерес к этому типу повысился в
связи с быстрым успехом геликоптера, построенного 19-летним
юношей Стенли Хиллером в условиях домашнего гаража, сила-
ми самого конструктора и его школьных товарищей.
На геликоптере установлен четырехцилиндровый противопо-
ложнорядный мотор Франклин 4AG-199E3 мощностью 90 л. с.
Моторный отсек расположен в хвостовой части фюзеляжа.
165
Передняя и центральная части заняты закрытой одноместной
кабиной. Кабина очень тесна, так как конструктор строил гели-
коптер для себя и поэтому он не руководствовался существую-
щими нормами.
Над моторным отсеком возвышаются соосные валы, на кото-
рых смонтированы двухлопастные несущие винты диаметром
7,62 м, вращающиеся в противоположных направлениях.
Расстояние между плоскостями несущих винтов очень неве
лико и отношение его к диаметру винта составляет всего лишь
около 0,05.
Фиг. 116. Геликоптер Хиллера в полете.
Несущие винты по своей схеме жесткие и их лопасти крепят-
ся к втулке без горизонтальных и вертикальных шарниров, но
имеют возможность поворачиваться относительно продольной оси
для изменения угла установки. Лопасти установлены под пря-
мым углом к оси винта. В полете они отгибаются вверх вслед-
ствие изгиба от подъемной силы лопастей.
Из опубликованных сообщений известно, что на несущих вин-
тах «Хиллер-коптера» может меняться общий и диференциаль-
ный шаг, что составляет принципиальную основу обычного ге-
ликоптерного управления. Однако схема управления, так же как
и принцип обеспечения устойчивости, при внезапно возникаю-
щих на несущем винте моментах являются секретными. По со-
общению конструктора, им разработан и запатентован механизм
для автоматического перевода винта на режим авторотирующе-
го спуска в случае аварии мотора.
Этот механизм применен в конструкции «Хиллер-коптера».
В кабине пилота размещены органы управления: ручка, пе-
дали и рычаг общего шага, связанный, как и на большинстве дру-
гих американских геликоптеров, с дроссельным управлением
мотора. В сообщениях нет указаний о наличии ручки, управ-
ляющей муфтой включения. Это дает основание предположить,
166
что винты включаются автоматически при 'помощи центробеж-
ной муфты при достижении мотором необходимых оборотов,
как на геликоптере Белл, либо муфта включения вообще отсут-
ствует. Приборная доска содержит только два прибора: тахо-
метр и указатель скорости.
Фюзеляж геликоптера ферменной конструкции, сварной и
обшит полотном. По внешнему своему виду он больше напоми-
нает кузов малолитражного автомобиля, чем авиационный фю-
зеляж.
Посадочные приспособления состоят из двух основных ко-
лес, укрепленных на трехстержневом шасси без амортизационной
стойки, и из хвостового колеса.
В периодической печати неоднократно сообщалось о хоро-
шей устойчивости в полете «Хиллер-коптера». Однако можно
выразить сомнение в достоверности этих сообщений, потому
что трудно ожидать устойчивости пути от аппарата, лишенного
Фиг. 117. Геликоптер Хиллера
.Комьютер".
каких бы то ни было стабилизирующих плоскостей оперения,
при боковой поверхности носовой части фюзеляжа, почти в
два раза превышающей боковую поверхность хвостовой части.
Геликоптер Хиллера является исключительно эксперимен-
тальным. В данное время лицензию на производство геликоп-
теров подобного типа купил известный американский промыш-
ленник Генри Кайзер, которому Хиллер демонстрировал поле-
ты, прилетев для этого под окна его конторы.
Впоследствии Хиллер прекратил работы у Кайзера и орга-
низовал свою геликоптерную фирму в Сан-Франциско «Юнай-
тед Геликоптер». Этой фирмой уже построен новый геликоптер
(фиг. 117), получивший название «Комьютер», предназначенный
для частного пользования.
По своей схеме новый геликоптер Хиллера подобен его пер-
вому, но отличается от него улучшенными формами и несколько
увеличенными параметрами. «Комьютер» является двухместным,
167
мощность его мотора составляет 150 л. с., несущая система со-
стоит из двух двухлопастных соосных винтов диаметром
9,75 м, вращающихся в разные стороны со скоростью 260 об/мин.
В отличие от прототипа расстояние между винтами значительно
увеличено.
Основные расчетные данные нового геликоптера таковы:
Вес конструкции...................... 490 кг
Полезная нагрузка.................... 235 „
Полетный вес......................... 725 ,
Крейсерская скорость................160 км/час
Радиус действия...................... 480 км
Практический потолок................ 3000 м
Имеются сообщения о работах фирмы «Юнайтед Геликоп-
тер» над пятиместным вариантом геликоптера.
Геликоптер Келлет
7 августа 1944 г. был произведен первый полет геликоптера
американской фирмы Келлет XR-8.
Фиг. 118. Геликоптер Келлет XR-8 в полете.
XR-8, отличаясь оригинальной схемой, подобных которой нет
среди других американских геликоптеров, представляет собой
двухвинтовой геликоптер с расположением винтов на попереч-
ной оси (фиг. 118).
Винты трехлопастные диаметром 11 м. Лопасти крепятся ко
втулке винта при помощи горизонтальных и вертикальных шар-
ниров.
Оригинальная особенность несущей системы заключается в
очень большом сближении осей несущих винтов. Это сближение
осей достигнуто развалом их в боковой плоскости, вследствие
чего лопасти одного винта проходят выше втулки соседнего вин-
168
та. Винты имеют различное направление вращения и их оборо-
ты синхронизированы. Вследствие этого лопасть одного винта
проходит зону, перекрытую другим винтом, находясь между его*
двумя лопастями и не соприкасаясь с ними (фиг. 119).
Будучи двухвинтовым геликоптером, XR-8 ввиду очень боль-
шого перекрытия его винтов по существу приближается к соос-
ным геликоптерам.
Фюзеляж геликоптера обтекаемой формы. В передней его
части расположена закрытая двухместная кабина экипажа с
двумя расположенными рядом сиденьями. В верхней и перед-
ней частях кабина обшита плексигласом.
Геликоптер XR-8 снабжен шестицилиндровым мотором-
Франклин 6AQV-405 мощностью 245 л. с., установленным поза-
ди пилотской кабины.
Фиг. 119. Расположение несущих винтов геликоптера Келлет XR-8.
Шасси геликоптера трехколесное. Верхний узел стойки ос-
новного колеса крепится к трехстержневой пирамиде, а ниж-
ний узел закреплен двумя подкосами. Третья опорная точка —
переднее колесо. В отличие от большинства других американ-
ских геликоптеров XR-8 имеет развитое оперение, стабилизатор»
и киль с рулем поворота. В целях повышения путевой устойчи-
вости на концах стабилизатора дополнительно поставлены
шайбы.
После начала испытаний геликоптер сделал много полетов,
в числе которых были полеты по заданному маршруту.
Фирма Келлет рассматривает геликоптер XR-8 как опытный?
образец военного геликоптера, требующий еще значительных
работ по доводке, которые должны быть произведены прежде,
чем будет организован их серийный выпуск для повседневного,
использования.
Кроме XR-8, фирма Келлет спроектировала более мощный,,
двухмоторный геликоптер XR-10 на 12 пассажиров.
169
Геликоптер Ландграф Н-2
Геликоптер Н-2 представляет собой двухвинтовой аппарат
с расположением несущих винтов на поперечной оси (фиг. 120
и 121). Винты установлены по бокам фюзеляжа на балках
крыльевого типа. По своей схеме геликоптер Н-2 сходен с ге-
ликоптером Плэтт ле Пейдж, но в то же время он отличается
от последнего принципом своей несущей системы и имеет ори-
тинальные конструктивные особенности в части трансмиссии.
Фиг. 120. Схема геликоптера Ландграф.
На этом аппарате несущие винты взаимно перекрываются.
При диаметре винтов в 4,88 м расстояние между его осями
составляет 3,35 м.
Несущие винты вращаются в противоположных направлени-
ях и их лопасти находятся как бы в зацеплении, подобно зубь-
ям шестерен, но вследствие синхронизации они никогда не
касаются друг друга.
Несущие винты геликоптера своеобразной конструкции.
По внешнему своему виду и по форме лопастей они напомина-
170
ют пропеллеры. Это трехлопастные жесткие винты с деревян-
ными лопастями (деревянный носок и каркас, фанерная об-
шивка) .
Вследствие жесткого крепления винтов жироскопические
моменты передаются на поддерживающие боковые балки. Как
и на большинстве других геликоптеров, винты геликоптера
Ландграф могут изменять в полете общий шаг в пределах 12,5°.
Автоматическое изменение общего шага обеспечивается систе-
мой пружин и грузов, нагружаемых центробежными силами.
Фиг 121. Геликоптер Ландграф.
Диференциального изменения углов на винтах не произво-
дится. Продольное и боковое управление осуществляется дифе-
ренциальным отклонением элеронов, расположенных на концах
лопастей. Элероны снабжены противовесами, нагружающимися
центробежными силами. Применение элеронов является одной
из отличительных особенностей несущей системы геликоптера
Ландграф.
По сообщению печати, геликоптер, несмотря на применение
жестких винтов, вполне устойчив и может летать с брошенным
управлением. Никаких сообщений о методах достижения устой-
чивости не опубликовано. Конструкция трансмиссии геликопте-
ра Ландграф такж^ необычна.
В системе трансмиссии между мотором и главным редукто-
ром имеется муфта свободного хода (муфта включения, неви-
димому, отсутствует). Главный редуктор имеет червяк, приво-
димый во вращение мотором, и две входящие в зацепление с
червяком червячные шестерни, расположенные по обеим сто-
ронам от червяка. На валах червячных шестерен, выстуйаю-
щих над картером редуктора, насажены диски, вращающиеся в
горизонтальной плоскости совместно с шестернями в противо-
положных направлениях. Несущие винты, расположенные на
концах крыльевых балок, имеют на своих валах точно такие же
диски, вращающиеся, так же как и центральные диски, в гори-
зонтальной плоскости, но значительно выше их. Диски на цен-
171
тральном редукторе и на валах винтов связаны между собой
12 тягами, концы которых закреплены по их периферии на рав-
ных расстояниях. Этими тягами передается вращение от цен-
тральных ведущих дисков к боковым ведомым. Так как плоско-
сти вращения центральных и боковых дисков расположены на
разной высоте, то направление тяг имеет наклон в 23°, чем
обеспечиваются необходимые зазоры между тягами. Ведомые
диски, как сказано выше, сидят на валах винтов и, следователь-
но, обеспечивают их вращение. Передаточное отношение глав-
ного редуктора (а также и всей трансмиссии) 6,8 : 1.
На геликоптере установлен семицилиндровый звездообраз-
ный мотор «Побжой» мощностью 85 л. с. при 3300 об/мин.
При этом несущие винты вращаются со скоростью 485 об/мин.
Одноместная кабина летчика расположена в передней части
фюзеляжа. Мотор установлен сзади кабины. Фюзеляж геликоп-
тера нормальной самолетной формы, по конструкции монокок,
изготовлен из дерева. На геликоптере имеется киль, а стабили-
затор отсутствует. Шасси геликоптера трехколесное и в полете
убирается. Третьей точкой является переднее колесо. Других
технических данных о геликоптере не опубликовано. В печати
имеются сообщения о многих полетах геликоптера Ландграф
и о происшедшей с ним аварии.
Геликоптер Хиггинса
Фирма Хиггинс Индустриес построила геликоптер по проек-
ту итальянского летчика и конструктора Эни Босси.
Фиг. 122. Геликоптер Хиггинса—Босси.
Геликоптер Хиггинса (фиг. 122) снабжен семицилиндровым
мотором Уорнер Р-550-1 воздушного охлаждения мощностью
180 л. с. Несущая система геликоптера состоит из двух двухло-
пастных винтов, расположенных один над другим и вращаю-
щихся в одну сторону. Подобная комбинация винтов осуще-
ствлена впервые. Имеются указания на то, что каждый из вин-
тов изготовлен по той же схеме, что и винт геликоптера Белл,
однако, управление имеет отличительные особенности, которые
не опубликованы.
172
Крутящий момент уравновешивается рулевым винтом. Хво-
стовая часть фюзеляжа имеет значительный отгиб вверх для
высокого расположения рулевого винта.
Трансмиссия геликоптера по своей схеме не имеет принци-
пиальных отличий от схем, принятых на большинстве амери-
канских геликоптеров. Нет разницы и в принципах компоновки
геликоптера. Двухместная кабина с сиденьями, расположенны-
ми рядом, помещена в передней части фюзеляжа. Мотор распо-
ложен сзади кабины.
Весной 1945 г. произошла поломка несущего винта и лет-
ные испытания были прерваны. Фирма предполагает органи-
зовать массовое производство этих машин и выпускать их по
цене 1500 долларов.
Геликоптеры Бендикс
В 1944 г. в США организована новая фирма по производ-
ству геликоптеров — Бендикс Геликоптер Инкорпорейшен. В
этом объединении участвует пять промышленных фирм. Воз-
главляет новую фирму Ванцент Бендикс, занимающий пост
председателя правления.
План фирмы предусматривает постройку геликоптеров трех
типов. В постройке уже находится модель G (фиг. 123).
Это — соосный геликоптер, снабженный семицилиндровым
мотором Уорнер Супер-вкэрэб мощностью 165 л. с. Несущая
система образована двумя соосно расположенными двухлопа-
стными винтами диаметром 9,75 м, работающими с расчетной
скоростью 300 об/мин. Крепление лопастей винта во втулке
жесткое без горизонтальных и вертикальных шарниров. Двух-
местная кабина экипажа размещена в передней части фюзеля-
жа. Сиденья расположены рядом. Посадочные приспособления
геликоптера состоят из двух полых цилиндров, которые, по
опытам Сикорского, позволяют производить посадку на сушу
и на воду.
Фюзеляж, следуя довольно распространенной в США моде,
приближает геликоптер по своим архитектурным формам к ав-
томобилю.
По сообщениям печати, модель G будет иметь полетный вес
910 кг. Вес конструкции 625 кг. Полезная нагрузка 285 кг.
Проектная максимальная скорость 193 км/час и крейсерская
160 км/час. Продолжительность полета 3 часа.
Другие геликоптеры Бендикс проектируются по вышеопи-
санной схеме и отличаются от нее только трехколесным шасси
и своими параметрами.
Так, например, по сообщениям печати, модель Н (фиг. 124)
снабжена мотором 500 л. с. и предназначена для перевозки
грузов или 10 человек, а модель J (фиг. 125) снабжена мото-
ром Континентэл W-670 мощностью 300 л. с. и может подни-
мать четырех человек.
173
Фиг. 123. Геликоптер Бендикс. Модель G.
174
175
Расчетные данные последней модели: полетный вес 1377 кг,
(вес конструкции 871 кг, максимальная скорость 193 км!час и
радиус действия 675 км.
Кроме того, есть сообщения о проектировании фирмой ап-
парата с мотором мощностью 1200 л. с. и грузоподъемностью,
рассчитанной на перевозку 20 пассажиров.
Геликоптер фирмы Аэронаутикэл Продакте Инкорпорейшен
Аэронаутикэл Продакте Инкорпорейшен (США) в 1944 г.
'Построила геликоптер, получивший заводскую марку ЗА.
Этот аппарат (фиг. 126 и 127) принадлежит к числу одно-
винтовых геликоптеров, у которых реактивный момент от не-
сущего винта уравновешивается при помощи хвостового руле-
Фиг. 126. Схема геликоптера фирмы Аэронаутикэл Продакте
Инкорпорейшен.
•вого винта. В отличие от всех американских геликоптеров мо-
тор установлен в передней части фюзеляжа перед кабиной
экипажа.
Как известно, на большинстве американских геликоптеров
расположение кабины экипажа в передней, а мотора — в цен-
тральной части фюзеляжа стало стандартным. На последних
моделях, кроме того, ось мотора располагается вертикально.
176
Подобные схемы компоновки преследуют улучшение обзора и
упрощение трансмиссии.
Отступление от этих схем фирма объясняет желанием
упростить доступ к мотору и удешевить производство. Повиди-
мому, кроме того, упрощается задача получения желательной
центровки аппарата и неизменности ее при полете без пассажи-
ра, сиденье которого располагается в этой схеме близко к цен-
тру тяжести.
На геликоптере установлен мотор Франклин 6AGV-298
мощностью 160 л. с. По своему типу этот мотор противополож-
норядный шестицилиндровый, воздушного охлаждения. Несу-
щий винт диаметром 9,14 м имеет три шарнирно закрепленные
лопасти и вращается со скоростью 250 об/мин. Рулевой винт
диаметром 1,73 м помещен на хвосте машины. В закрытой ка-
бине экипажа, расположенной, как сказано выше, за мотором,
Фиг. 127. Геликоптер фирмы Аэронаутикэл Продакте Инкорпорейшен.
имеются два стоящие рядом сиденья. Основные колеса, постав-
ленные на трехстержневое шасси, вынесены сравнительно да-
леко вперед. Третья опорная точка — костыль.
Известно, что после окончания постройки геликоптера были
проведены его летные испытания.
По сообщениям печати, геликоптер имеет следующие дан-
ные:
Полетный вес................................. 750 кг
Вес конструкции................... 500 ,
Максимальная скорость..............160 кя[час
Расчетный потолок................. 3350 м
Габаритные данные фюзеляжа (в я)
Длина................................. 6,9
Высота ............................ 2,63
Ширина.............................. Ц14
Ширина колеи........................ 2,4
12 A. M. Изаксон.
177
Геликоптер Скоув Н-100
Член детройтского инженерного общества А. Скоув, кото-
рый ранее работал в авиационных фирмах Кертисс и Стиксон,
спроектировал двухвинтовой геликоптер с расположением не-
сущих винтов на поперечной оси.
По сообщениям печати, геликоптер уже построен, успешно
прошел испытания и будет выпускаться серийно фирмой, где
автор проекта назначен главным инженером.
Особенностью геликоптера Скоув (фиг. 128) является на-
личие, помимо несущих винтов, толкающего винта, установлен-
ного в хвостовой части фюзеляжа.
Фиг. 128. Геликоптер Скоув.
Геликоптер имеет двухместную кабину в передней части
фюзеляжа с сиденьями экипажа, размещенными рядом.
Геликоптер Н-100 — цельнометаллический. Лопасти несу-
щих винтов обшиты полотном. Винты приводятся во вращение
четырехцилиндровым противоположнорядным мотором Конти-
нентал мощностью 105 л. с.
Имеются сообщения о том, что Скоув проводил испытания
модели своего геликоптера в построенной им трубе собствен-
ной конструкции, в которой модель могла обдуваться в любом
направлении.
Геликоспидер Гаэда
По сообщениям американской печати, изобретатель в обла-
сти вооружения Антон Газда построил геликоптер (фиг. 129 и
130), названный им «геликоспидером» и основанный на приме-
нении спроектированного им термического реактивного движи-
теля.
Этот движитель наряду с передачей крутящего момента на
несущий винт создает тягу для поступательного полета вслед-
178
ствие реакции газов, выбрасываемых назад через сопло, распо
ложенное в хвосте машины.
Фиг. 129. Схема сил, действующих иа геликоптер Газда.
Ру—подъемная сила; Ргр—сопротивление ротора; Рх*^ —сопротивление
фюзеляжа; G—вес.
Аппарат не имеет рулевого винта и уравновешивание кру-
тящего момента от несущего винта, так же как и управление
курсом, должно осуществляться реактивным методом, для че-
го в хвостовой части имеются направленные в обе стороны на-
садки.
Фиг. 130. Геликоптер А. Газда.
Несущий винт двухлопастный диаметром 7,62 м. Подробно-
сти о конструкции винта и управлении им неизвестны.
Проект геликоптера Ховер-Туин
Фирма Туин Коач Компани (США) разработала проект
двухместного геликоптера с соосными винтами (фиг. 131).
Геликоптер имеет двухлопастные винты диаметром 9,14 м.
Лонжерон лопасти и каркас деревянные, обшивка полотняная.
На геликоптере устанавливаются два мотора Континентал
по ;75 л. с. каждый. По проекту геликоптер может держаться в
12*
179
воздухе при работе одного мотора. Фюзеляж геликоптера сва-
рен из труб и обшит полотном. Основные параметры даны в
приложении III.
Более подробных данных не имеется.
Фиг. 131. Геликоптер Ховер Туин.
Жирокоптер фирмы Пенсильвания Зйркрафт Синдикат
Пенсильвания Эйркрафт Синдикат в 1944 г. начала построй-
ку спроектированного фирмой мощного пассажирского жиро-
коптера, рассчитанного на перевозку 18 пассажиров (фиг. 132).
Фиг. 132. Проект жирокоптера Пенсильвания Эйркрафт Синдикат.
На аппарате устанавливаются два мотора фирмы Райт «Цик-
лон» 1000 л. с. каждый. По своей схеме жирокоптер — одновинто-
вой геликоптер, в котором реактивный момент уравновешивает-
180
ся при помощи рулевого винта, расположенного на хвосте. Не-
сущий винт трехлопастный, полужесткой конструкции, диамет-
ром 24,4 м; трехлопастный рулевой винт диаметром 4,3 м.
Проект геликоптера разработан американскими конструктора-
ми Уильямсом и Туини.
Основные параметры даны в приложении III. Более под-
робных данных о геликоптере не имеется.
Проект геликоптера Вильфорда
В сообщениях печати 1 имеются данные о проекте мощного
геликоптера (фиг. 133), почти точно совпадающем с вышеопи-
санным проектом, но указываются несколько иные данные. В
частности, сообщается, что данный проект принадлежит Виль-
форду.
Фиг. 133. Проект геликоптера Вильфорда.
Технические данные:
Два мотора Пратт-Уитнен по .... 1050 л. с.
Диаметр несущего винта............. 24,4 м
Полетный вес....................... 6700 кг
Число пассажирских мест 16
Максимальная скорость..............190 км/час
Геликоптер Гартвиг-Литлл
Компания Гартвиг Эйркрафт (США) построила геликоптер
(фиг. 134), снабженный четырьмя (двумя соосными) винтами,
Расположенными по продольной оси.
1 .Flying*, Febr. 1945; .Aero Digest", 15 Oct. 1944.
181
Для уменьшения влияния передних винтов на задние при
горизонтальном полете плоскость вращения задних винтов рас-
положена значительно выше плоскости вращения передних вин-
тов.
Аппарат имеет обтекаемую сигарообразную форму и в пе
редней части фюзеляжа помещена кабина с двумя располо-
женными рядом сиденьями.
Фиг. 134. Геликоптер Гартвиг-Литлл.
На геликоптере установлен мотор Франклин 4АС-199ЕЗ с
противоположнорядным расположением четырех цилиндров но-
минальной мощностью 90 л. с., который применяется на боль-
шинстве легких американских геликоптеров.
Геликоптер закончен постройкой и проходит летные испы-
тания.
Проект геликоптера Стоут
Фирмой Консолидейтед Валти (США) разработан проект
одновинтового геликоптера Стоут, названного ею «геликэб»
(фиг. 135).
Основные данные проекта таковы:
Мощность мотора . . . . •......... 125 л. с.
Диаметр несущего винта •....•. 10,06 м
Диаметр рулевого винта ....... 1,83 м
Полетный вес...................... 770 кг
Полетный вес включает от двух до пяти пассажиров и
багаж.
182
Возможность осуществления многоместного геликоптера с
таким малым полетным весом представляется весьма сомни-
тельной.
Фиг. 135. Проект .геликэба* Стоут.
Проект геликоптера Вест-Коуст
Компанией Вест-Коуст (США) разработан проект геликоп-
тера (фиг. 136), сходный с геликэбом Стоут.
Фиг. 136. Проект геликоптера Вест-Коуст.
Проектируемый геликоптер снабжен соосными двухлопаст-
ными винтами диаметром 7,62 м, вращающимися со скоростью
325 об/мин.
Расчетные данные геликоптера предполагаются следую-
щие:
Мощность мотора................................ 90 л. с.
Максимальная скорость...................."... 150 км/час
Крейсерская скорость..........................128 ,
Потолок...................................... 1524 м
Радиус действия при запасе горючего 19 л ... . 64 км
183
Прочие американские проекты
Американская печать в изобилии снабжает читателя инфор-
мацией о проектировании, строительстве и применении гели-
коптеров.
Наряду с серьезной информацией о направлении работ, о
разрешении технических проблем и связанных с этим трудно-
стей, значительная доля информации рисует близкую пер-
спективу применения геликоптеров в таких же широких мас-
Фиг. 137. Проект геликоптера будущего.
штабах, каких достиг в Америке автомобиль. Высказывания
Сикорского о том, что геликоптеры в ближайшие годы будут
выпускаться миллионами, включение в геликоптеростроение
известного своей предприимчивостью промышленника Генри
Фиг. 138. Проект геликоптера будущего.
Кайзера, используются для предсказаний наступления «ге-
ликоптерной эры», когда каждый средний американец смо-
жет наряду с автомобилем держать в своем гараже геликоп-
тер для деловых целей и загородных семейных прогулок. Не-
удивительно, что в этой обстановке появилось очень большое
число проектов геликоптеров от больших «воздушных авто-
бусов» до миниатюрных аппаратов с мотоциклетным мотором,
184
предназначенных для подъема одного человека. Подавляющее
большинство этих проектов имеет своей целью создание гели-
коптера частного пользования.
Для иллюстрации мы приводим некоторые из этих проектов.
Фиг. 137. 138, 139, 140 изображают геликоптеры будущего.
Фиг. 139. Проект геликоптера будущего.
Фиг. 140. Проект геликоптера будущего.
Имеются проекты аппаратов портативного типа. Так, напри-
мер, Пентекост спроектировал и построил геликоптер, снабжен-
ный мотоциклетным мотором, названный им «хоппикоптер».
Как видно на фиг. 141 и 142, аппарат укрепляется на спине
человека.•
185.
Есть также сообщения о применении двухцилиндрового дви-
гателя на геликоптере частного пользования фирмы Локхид,
которая предполагает выпускать геликоптеры стоимостью
в 800 долларов.
Фиг. 141. .Хоппикоптер*
Хорейс Пеитекоста. Вид спереди.
Фиг. 142. .Хоппикоптер"
Хорейс Пеитекоста.
Вид сзади.
Геликоптерные работы в Германии во время второй
мировой войны
Во время второй мировой войны геликоптерные работы в
Германии проводились в необычайно широком масштабе.
Вследствие настойчивых требований военно-морского ведомства
интенсивные работы по геликоптерам проводились тремя немец-
кими фирмами — Фокке-Ахгелис, Флеттнер, Добльгоф, австрий-
ской фирмой Наглер и Рольц и, кроме того, в оккупированной
Франции под контролем немцев велись работы по геликоптеру
Бреге. В результате работы этих фирм за сравнительно корот-
кий период в Германии было создано несколько типов геликоп-
теров и разработан ряд новых проектов, представляющих тех-
нический интерес.
Геликоптер Фокке-Ахгелис
В главе VI дано описание геликоптера, построенного фирмой
Фокке-Вульф (Германия). Успех этого геликоптера привел к
образованию специальной геликоптерной фирмы Фокке-Ахгелис,
руководимой профессором Фокке. Построенный геликоптер FW-61
рассматривался как модель, на которой должны быть отра-
186
ботаны и проверены принципы полета геликоптера двухвинтовой
схемы, которой Фокке отдавал предпочтение перед всеми други-
ми. Полученные данные многочисленных летных исследований
были положены в основу разработки нового проекта большого
геликоптера.
Начало разработки этого проекта геликоптера, получившего
впоследствии марку Fa-223, можно отнести приблизительно
к J937 г. Однако, огромные технические трудности перехода от
легкого геликоптера к тяжелому надолго задержали выпуск но-
вого аппарата, который оказалось возможным выпустить лишь
в 1942 г.
Фиг. 143. Геликоптер Фокке-Ангелис Fa-223.
По своей принципиальной схеме геликоптер Fa-223 (фиг. 143)
подобен FW-61. Небольшое отличие заключается в том, что
мотор располагался не в носовой части аппарата, а внутри фюзе-
ляжа, за кабиной пилота.
Геликоптер Fa-223 снабжен девятицилиндровым звездообраз-
ным мотором Брамо Фафнир-323 мощностью 1000 л. с. В кар-
тер мотора вмонтирован центральный редуктор с передаточным
отношением 1:1, при помощи которого мощность мотора пере-
дается двум трехлопастным несущим винтам, расположенным
по обе стороны фюзеляжа на боковых фермах сварной кон-
струкции. Трехлопастные винты диаметром 12 м установлены
на головках, каждая из которых объединяет в себе редуктор с
передаточным отношением 1 : 9, аварийное приспособление для
перевода винта на авторотацию в случае заклинения в транс-
миссии, втулку винта, автомат-перекос, изменяющий диферен-
ниальный шаг только в продольной плоскости, и механизм из-
менения общего шага винта.
На центральном редукторе, кроме передаточного механизма,
имеются вентилятор для охлаждения мотора, гидравлическая
187
муфта включения и гидравлический регулятор шага для бы-
строго автоматического перевода шага винта на режим авто-
ротации в случае нарушений в работе мотора или трансмиссии.
На новом геликоптере имеется перестанавливаемый в полете
стабилизатор, киль и руль направления; шасси геликоптера
трехколесное. На хвосте, кроме того, установлен костыль с ма-
слянопневматической амортизацией.
Многие конструктивные особенности геликоптера Fa-223 за-
служивают серьезного внимания. Так, например, звездообраз-
ный мотор установлен не на мотораме, а расчален системой тро-
сов. Тросы укрепляются в задней части мотора на специальном
кольце, соединенном с бобышками мотора, и в передней части
мотора на центральном редукторе. Каждая из этих групп тросов
закреплена в узлах фюзеляжа, лежащих в той же поперечной
плоскости, в которой тросы закреплены на моторе. Для того
чтобы мотор не имел свободы перемещений в продольной плос-
кости, имеются ограничения, сделанные из труб. Выгоды подоб-
ного крепления очевидны, при этом достигается экономия в весе,
эластичность крепления мотора и жесткость в поперечном сече-
нии фюзеляжа, которую другими способами получить значитель-
но сложнее, так как большой отсек фюзеляжа занят мотором,
редуктором и вентилятором.
Другой конструктивной особенностью является фрикционная
муфта оцепления с большим числом стальных дисков, работаю-
щих в масле. Включение муфты производится при помощи дав-
ления масла, создаваемого помпой мотора. Если мотор не ра-
ботает, давления масла нет и в этом случае муфта всегда вы-
ключена. Как видно, подобная схема позволяет обойтись без
муфты свободного хода, так как внезапная остановка мотора
приводит к мгновенному отключению мотора. Дополнительно
предусмотрено, что даже при работающем моторе масляное дав-
ление на муфту дается только в том случае, если летчик откры-
вает соответствующий кран. Управление этим краном связано
с управлением мотора таким образом, что на малом газу (при
запуске мотора) кран закрыт, муфта выключена и лишь по
мере дачи газа кран постепенно открывается и муфта плавно
включается.
Другая важная функция также осуществляется при помощи
давления масла. Если давление масла падает (соответствует
случаю остановки мотора), то винты немедленно уменьшают
шаг и становится возможной авторотация. При помощи специ-
ального приспособления тот же эффект может быть получен и
в том случае, когда синхронность в оборотах винта нарушается,
что может произойти в случае нарушения трансмиссии. В этом
же случае одновременно снимается давление масла с муфты
включения, что также требуется для обеспечения авторотирую-
щего спуска.
Особенность длинных валов, передающих мощность на вин-
ты, состоит в том, что они, в целях устранения колебаний, изго-
188
товлены из двух половин, соединенных между собой при помощи
шарнира Гука, а каждая половина имеет на середине опору
с фрикционным демпфером колебаний.
Лопасть несущего винта имеет стальной лонжерон из цель-
нотянутой конической трубы. Деревянные нервюры крепятся
к лонжерону на стяжных хомутах, вследствие чего в лонжероне
нет ни одного сверления, что весьма существенно повышает его
прочность. В лопасти имеется два стрингера — носовой и хво-
стовой. Передняя кромка лопасти закрыта фанерой и вся ло-
пасть зашита полотном. Для гашения колебаний лопасти отно-
сительно вертикального шарнира имеются фрикционные демп-
феры.
По своей схеме управление геликоптером Fa-223 не отличает-
ся от большинства других геликоптеров, но в конструкции управ-
ления есть свои оригинальные особенности. На каждом винте
имеется механизм изменения общего шага и автомат-перекос
для диференциального изменения шага в продольной плоскости.
Эти виды управления комбинируются для разных целей сле-
дующим образом.
Для продольного управления оба винта при помощи авто-
матов-перекосов наклоняют вектор тяги в продольной плоскости
в одну и ту же сторону — вперед или назад.
Для бокового управления на обоих винтах диференциальнэ
меняется общий шаг: на одном из винтов шаг увеличивается,
а на другом уменьшается.
Для путевого управления винты различно изменяют диферен-
циальный шаг, вследствие чего вектор тяги одного из винтов
наклоняется вперед, а второго — назад.
Особенностью управления геликоптером Фокке является на-
личие инерционного демпфера, поставленного в цепи, управле-
ния, при помощи которого гасятся крутильные колебания лопас-
тей и пульсации от этих колебаний не передаются на ручку
управления.
Работы по исследованию и доводке Fa-223 велись в течение
нескольких лет вплоть до полного военного разгрома Германии.
В конечном счете геликоптер показал данные, хорошо харак-
теризующие его летные свойства, устойчивость и управляемость.
В летных испытаниях получена максимальная скорость
210 км/час и потолок 7100 м. Полетный вес 4300 кг, вес конструк-
ции 3150 кг и полезная нагрузка 1150 кг. Таким образом Fa-223
является наиболее тяжелым и наиболее грузоподъемным гели.-
коптером из числа построенных до 1946 г.
Работы по геликоптеру Fa-223, так же как и по другим не-
мецким геликоптерам, всемерно форсировались вследствие на-
стойчивых требований военного ведомства. По его настоянию
было построено несколько небольших серий геликоптера Fa-223.
Сведений о широком применении их на театре военных действий
нс имеется.
По схеме Fa-223 профессор Фокке спроектировал еще более
189
мощный геликоптер Fa-284 с двумя моторами BMW-801 и с
огромной полезной нагрузкой, составляющей в перегрузочном
варианте 6500 кг. Однако в производстве этот аппарат не был
закончен.
Геликоптер Флеттнера
В 1938 г. в Германии был построен геликоптер Флеттнера
F1-282.
Схема F1-282 (фиг. 144) в основном совпадает со схемой ра-
нее описанного американского геликоптера фирмы Келлет
XR-8, выпущенного в 1944 г. При описании последнего было
указано, что принципиальная особенность схемы заключается в
Фиг. 144. Геликоптер флеттнера F1-282.
очень большом сближении втулок двух несущих винтов, распо-
ложенных на поперечной оси машины. На F1-282 это расстояние
между винтами составляет 600 мм, а на XR-8 —1200 мм. Не
повторяя разбора схемы, рассмотренной при описании XR-8,
укажем лишь основные конструктивные различия.
Геликоптер F1-282 снабжен звездообразным семицилиндро-
вым мотором «Брамо» 14а мощностью 150 л. с. Через централь-
ный редуктор, короткий карданный вал и верхний редуктор
мощность передается двум двухлопастным винтам, имеющим
диаметр 12 м.
Передаточные отношения центрального редуктора 1 : 1,4 и
верхнего редуктора 1 :7. Таким образом при 2200 об/мин мото-
ра на полной мощности винты вращаются со скоростью
220 об/мин. Конструкция лопасти винта состоит из трубчатого
цилиндрического лонжерона, набора деревянных нервюр, фа-
нерной н полотняной обшивки. Хорда лопасти вдоль радиуса по-
стоянная.
190
Ось шарнира для изменения угла установки лопасти откло-
нена вверх от горизонтальной плоскости на 6° для разгрузки
лопасти центробежными силами от изгибающих моментов.
В сочленении лопастей со втулкой имеются совмещенные
в одной точке горизонтальные и вертикальные шарниры, раз-
гружающие лопасть от моментов.
F1-282 — одноместный геликоптер с открытой кабиной пило-
та, расположенной впереди. В центральной части фюзеляжа
располагается мотор с центральным редуктором, муфтой вклю-
чения (муфта свободного хода вмонтирована в верхний редук-
тор) и вентилятором.
Оперение состоит из переставляемого в полете стабилизато-
ра, киля и руля направления. Продольное управление геликоп-
тером осуществляется обычным для всех геликоптеров мето-
дом — путем диференциального изменения шага обоих винтов в
продольной плоскости.
Схема других видов управления имеет много своеобразных
особенностей. Путевое управление достигается не противопо-
ложным изменением диференциального шага на обоих винтах
(как, например, на геликоптере Фокке), а диферецциальным из-
менением общего шага винтов. Разворот производится, следова-
тельно, от разности крутящих моментов на винтах. Нетрудно
видеть, что при этом возникает крен, который при выбранном
направлении вращения хорошо согласуется с разворотом. Бо-
ковое же управление осуществляется путем диференциального
изменения шага обоих винтов в боковой плоскости.
По сообщениям печати, геликоптер F1-282 показал хорошую
маневренность и управляемость и удовлетворительную устой-
чивость. I
В течение нескольких последних лет было построено несколь-
ко мелких серий геликоптеров F1-282. Изучение их применения
производилось в войсковых частях и на кораблях военно-мор-
ского флота.
Геликоптер Добльгофа
В годы второй мировой войны конструктор Добльгоф по-
строил в Германии геликоптер V-1 с реактивным двигателем.
Этот аппарат (фиг. 145) является первым геликоптером подоб-
ной схемы, который доведен до стадии практических полетов.
В центре фюзеляжа V-1 установлен мотор Вальтер-Микрон
мощностью 60 л. с., который приводит во вращение центробеж-
ный нагнетатель, снятый с мотора Аргус 411. Воздух подается
нагнетателем в. полые вращающиеся лопасти несущего винта п
через них поступает в камеры сгорания реактивных двигателей,
установленных на концах каждой из трех лопастей винта. По-
добно этому в камеру сгорания подводится и горючее. Продукты
сгорания выбрасываются через специальное сопло, обращенное
в сторону задней кромки. Суммарная мощность реактивных дви-
гателей составляет 90 л. с. Как сказано выше, на подачу воздуха
191
в камеры сгорания расходуется мощность мотора в 60 л. с.
Прибавка мощности в 30 л. с. невелика, но не она определяет
ценность реактивной схемы.
Помимо устранения передачи реактивного момента с несу-
щего винта на аппарат, имеется выигрыш в весе аппарата (вес
конструкции составляет всего лишь 285 кг) и в дешевизне его
изготовления. При всем этом возможности применения реактив-
ного геликоптера весьма ограничены из-за большого потребле-
ния горючего — 80 кг/час и невозможности взять достаточный
запас для длительного полета.
Следует все же отметить, что конструктором найдено вполне
приемлемое техническое решение. Оно заключается в том, что
свойства реактивного геликоптера должны использоваться
Фиг. 145. Геликоптер Добльгофа V-1.
лишь на [малых горизонтальных скоростях. По мере же пере-
хода на большие скорости вместо нагнетателя к мотору может
быть приключен пропеллер, что превращает аппарат из гели-
коптера в автожир.
После капитуляции Германии геликоптер Добльгофа был
вывезен в США, где организованы работы по его изучению и
доводке.
Работы по геликоптерам в западноевропейских странах
в послевоенный период
При рассмотрении процесса развития работ по геликопте-
рам обнаруживается, что во время второй мировой войны и в
значительной мере вследствие войны эти работы получили не-
виданный ранее размах в США и значительно расширились
в Германии. В обеих этих странах и особенно в Германии
строительство геликоптеров велось вследствие настойчивых тре-
бований военного ведомства.
192
Наряду с этим в других зарубежных странах работы по ге-
ликоптерам были почти полностью прекращены. Некоторое ис-
ключение составляет Франция, где в период немецкой оккупа-
ции под контролем немцев велись работы по геликоптеру
Бреге.
В результате этой работы был создан новый геликоптер
Бреге G-IIE, постройка которого в четырех экземплярах про-
изводилась в Вилякублей. Летные испытания одного экземпля-
ра предполагалось начать летом 1946 г.
Геликоптер G-I1E по своей схеме подобен более раннему
геликоптеру Бреге-Доран. Это соосный геликоптер с несущим
винтом диаметром 7,7 м и с мотором Потез 9-Е мощностью
240 л. с. Аппарат рассчитан на подъем трех человек и имеет
вес конструкции 850 кг и расчетную полезную нагрузку 400 кг.
Расчетная горизонтальная скорость его 240 км/час.
С окончанием войны положение резко изменилось. Во
Франции, как сообщает печать, наряду с продолжением работ
по геликоптеру Бреге организованы новые работы. В частности
во Франции организовано производство многоместных геликоп-
теров по схеме немецкого геликоптера Fa-223 по чертежам, из
материалов и готовых деталей, изготовленных в Германии.
Кроме того, как сообщает Interavia, национализированным
французским авиазаводом SNCA Sud-Est построен новый ге-
ликоптер SE-7001 с мотором Рено 6Q-01 мощностью 220 л. с.
По другим сообщениям, фирма SNCA du Nord строит гели-
коптер, сочетающий в себе геликоптерные и автожирные свой-
ства. Этот геликоптер (фиг. 146), получивший марку Норд-1700,
имеет двухлопастный винт и толкающий пропеллер. Пропеллер
предназначен для создания тяги в горизонтальном полете и,
кроме того, обдувает расположенное в его струе вертикальное
оперение, чем достигается уравновешивание крутящего реак-
тивного момента от несущего винта.
Заметно оживление геликоптерных работ и в Англии. В апре-
ле 1946 г. министр снабжения сообщил Палате общин, что три
английские фирмы, которые им не были названы, ведут иссле-
довательскую работу по геликоптерам. Каждая из этих фирм
проектирует опытный геликоптер по заказу авиационного отде-
ла министерства.
Из последующих сообщений печати выяснилось, что этими
фирмами являются: старейшая автожирная фирма Сиерва, ве-
дущая свои работы совместно с фирмой Вейр, также имеющей
автожирный опыт, Бристоль Эйроплейн Компани и Фейри Ави-
ейшен Компани.
1 Данное в печати описание конструкции заставляет предполагать, чт»
SE-700 является автожиром. К этому заключению приводят указания иа
то, что аппарат снабжен тянущим винтом, вал, подающий мощность на ие-
сУШий виит, может отключаться при взлете; аппарат управляется накло-
ном оси винта и т. п.
13 А. и. Изаксон. 193
Фирма Сиерва спроектировала геликоптер Эйр-Хорс (фиг.
147), предназначенный для борьбы с полевыми вредителями и
распыления для этой цели ядовитых жидкостей.
Специальные требования к такому аппарату — малая ско-
рость и большая грузоподъемность — определили совершенно
необычные его конструктивные формы.
Фиг. 146. Геликоптер Норд-1700.
Геликоптер снабжен тремя несущими винтами, оси которых
в плане образуют треугольник. Все три винта наклонены в
одну и ту же сторону, так что горизонтальные компоненты их
тяги уравновешивают реактивный момент от несущих винтов.
Как известно, подобный метод уравновешивания реактивно-
го момента ранее был осуществлен в Бельгии на геликоптере
Флорина. В послевоенный период фирма Сиерва построила но-
194
вый одновинтовой экспериментальный геликоптер W-9 (фиг.
148). В этом геликоптере осуществлен новый принцип уравно-
вешивания реактивного момента, реализованный несколько
иначе в американском геликоптере Газда. В этом аппарате вы-
Фиг. 147. Геликоптер Сиерва W-10 Эйр-Хорс.
хлопные газы мотора и поток воздуха, создаваемый вентиля-
тором для охлаждения мотора, выбрасываются через специаль-
ное сопло, расположенное в хвостовой части геликоптера.
Вследствие этого устройства отпадает необходимость в поста-
Фиг. 148. Геликоптер ' Сиерва W-9.
новке рулевого винта, чем достигается некоторая экономия
мощности мотора.
Новый геликоптер Рауля Хафнера спроектирован по одно-
винтовой схеме с уравновешиванием реактивного момента от
несущего винта при помощи хвостового рулевого винта. Про-
дольное и поперечное управление осуществлялось при помощи
автомата-перекоса, спроектированного по схеме Хафнера (см.
приложение II).
13*
195
Аппарат рассчитан на перевозку трех или четырех пасса-
жиров и предназначен для использования в качестве воздуш-
ного такси.
Авиационная фирма Фейри организовала геликоптерный фи
лиал, который прректирует новый шестиместный геликоптер,
получивший название «Гиродин». В работах по проектирова-
нию принимает участие известный специалист винтовых аппа-
ратов доктор Беннет.
В 1945 г. в Англии организовано научно-техническое гели-
коптерное общество, что является еще одним подтверждением
повысившегося интереса к этой области техники.
Выше отмечалось, что, ввиду отсутствия геликоптероз
английского производства, в Англии используются американские
геликоптеры Сикорского.
Наконец, следует отметить факт возобновления геликоптер-
ных работ после очень длительного перерыва в Италии.
Автор первого итальянского геликоптера (см. гл. VI) инже-
нер Асканио (в данное время конструктор фирмы Пьяджо)
ведет работы по проектированию геликоптера «Пьяджо PD3».
Этот геликоптер имеет один несущий трехлопастный винт
диаметром 13 м. Крутящий момент от винта уравновешивается
рулевым винтом, расположенным на хвосте геликоптера.
Аппарат снабжается мотором Альфа-Ромео 115 мощностью
200 л. с., управление осуществляется при помощи автомата-
перекоса и механизма изменения общего шага.
Основные данные геликоптера по проекту следующие:
Полетный вес........... . . от 1000 до 1200 кг
Максимальная скорость .... 150 км/час
Потолок...................... 3000 м
Дальность.................... 300 км
ПРИЛОЖЕНИЕ I
О РАЦИОНАЛЬНОЙ КОМПОНОВКЕ ЭЛЕМЕНТОВ
ТРАНСМИССИИ ГЕЛИКОПТЕРА
От удачного выбора схемы трансмиссии, рациональной кон-
структивной компоновки отдельных ее элементов и от их изго-
товления в значительной степени зависит успех вновь создавае-
мого современного геликоптера, т. е. безотказность и надеж-
ность в работе отдельных агрегатов геликоптера, простота и
удобство эксплоатации, минимальный вес конструкции и, тем
самым, достаточный запас тяги.
Выбор принципиальной схемы геликоптера известным обра-
зом предопределяет ту или иную конструктивную схему разме-
щения элементов трансмиссии.
Однако, для всех принципиальных схем геликоптера суще-
ствует постоянная общая номенклатура этих элементов.
В этом разрезе представляет интерес появившаяся в зару-
бежной печати статья \ в которой делается первая попытка
установить известную классификацию в схемах трансмиссии
геликоптеров и выработать правильный технический подход к их
выбору и компоновке.
Все известные нам современные геликоптеры, независимо от
их схемы, имеют следующие элементы:
а) авиационный мотор, установленный на моторной раме;
б) вентилятор для его обдува и охлаждения * 2;
в) муфту включения (кулачковую, фрикционную или иного
типа);
г) главный редуктор для редуцирования оборотов;
д) муфту свободного хода;
е) специальный редуктор для передачи мощности на руле-
вой винт управления3 (предназначен для парализования реак-
тивного крутящего момента и для управления);
’Жозеф С. Пике р, .Basic drives'* for Helicopteres", .Aviation"
№ 11 Nov. 1944.
2 Мы исходим из того, что подавляющее большинство геликоптеров
имеет моторы воздушного охлаждения. В случае мотора водяного охлаж-
дения необходимо иметь вентилятор для обдува и охлаждения водорадиаторов.
3 Это относится лишь к разным вариантам одновинтовой схемы гели-
коптера.
197
ж) отдельный редуктор у рулевого винта;
з) ряд карданных сочленений, облегчающих монтаж транс-
миссии и обеспечивающих нормальную работу при деформации
отдельных частей конструкции геликоптера.
Большинство построенных геликоптеров имеет моторы воз-
душного охлаждения. Для большей простоты и удобства компо-
новки всей трансмиссии мотор чаще устанавливают таким обра-
зом, чтобы ось коленчатого вала располагалась вертикально.
Поэтому моторные фирмы соответствующим образом приспо-
сабливают мотор. Вентилятор для обдува и охлаждения мотора
устанавливают обычно на коленчатом валу.
На фиг. 7 1 показана типовая схема размещения элементов
трансмиссии одновинтового геликоптера.
Применительно к основным известным нам принципиальным
схемам ряда геликоптеров (см. табл. 1, фиг. 8, 9, 10) на фиг. 149
изображены различные варианты компоновки и размещения
элементов трансмиссии, заимствованные нами из указанной вы-
ше статьи.
На фиг. 149 приведены разные схемы компоновки элементов
трансмиссии одновинтового геликоптера:
а, б, в — при вертикальном расположении оси коленчатого
вала мотора;
г —при горизонтальном расположении оси коленчатого вала
мотора;
д — при одновременной установке по бокам фюзеляжа двух
моторов с горизонтальным расположением оси коленчатого
вала.
Из рассмотрения этих фигур можно наметить несколько ва-
риантов размещения основных элементов трансмиссии и оце-
нить их преимущества и недостатки.
а) Муфта свободного хода размещена между мотором и ре-
дуктором передачи мощности на рулевой винт. Тем самым обес-
печивается совместная работа несущего винта и рулевого винта
управления при работе несущего винта на режиме авторотации
(в случае заклинения или другого дефекта мотора).
б) Главный редуктор размещен между втулкой несущего
винта и прочими элементами трансмиссии. Поскольку эти эле-
менты расположены на валу с большим числом оборотов (мень-
ший крутящий момент), представляется возможным изготовить
их значительно- более легкими по весу и более портативными,
что является несомненным преимуществом данного варианта
размещения. Недостатком подобного размещения является то
обстоятельство, что при выключенном моторе и при авторотации
несущего винта последнему приходится вращать рулевой винт
через центральный редуктор. Подобное размещение представ-
ляет большую опасность в случае заклинения или другого серь-
1 Условные обозначения, принятые нами на фиг. 7, применены далее
на всех остальных иллюстрациях.
198
199
езного повреждения главного редуктора, так как повлечет при
этом остановку несущего винта, т. е. аварию аппарата.
в) С этой точки зрения наиболее рациональным является
размещение редуктора передачи мощности на рулевой винт и
(вслед за ним) муфты свободного хода между втулкой несущего
винта и главным редуктором. Недостаток подобного расположе-
ния — несколько большие габариты этих элементов и увели-
ченный вес, так как они размещены на валу с пониженными обо-
ротами (больший крутящий момент).
г) При установке мотора с горизонтальным расположением
оси коленчатого винта прибавляется пара конических шестерен
(одна коническая передача) для передачи мощности под углом.
Все соображения о преимуществах и недостатках разных схем
установки элементов трансмиссии, отмеченные выше, остаются
в силе.
д) Установка в одновинтовом геликоптере двух моторов по-
вышает степень надежности, так как дает возможность при
заклинении одного мотора вращать несущий винт при помощи
другого.
Есть основание полагать, что постановка двух моторов в ве-
совом отношении будет значительно менее выгодна, нежели
постановка одного мотора той же суммарной мощности.
На фиг. 150 показаны схемы размещения элементов транс-
миссии для двухвинтового геликоптера:
а — для установки мотора с вертикальным расположением
оси коленчатого вала и
б — для установки мотора с горизонтальным расположением
оси коленчатого вала.
Указанные выше соображения о преимуществах и недостат-
ках того или иного размещения элементов трансмиссии полно-
стью остаются в силе и для двухвинтового геликоптера.
Схема, приведенная на фиг. 147,6, может иметь место лишь
в том случае, если можно снять значительную мощность с хво-
стовика коленчатого вала.
Для двухвинтового геликоптера в некоторых случаях может
представить интерес установка вместо одного центрального мо-
тора с распределением мощности на два несущих винта двух
моторов — по одному под каждым винтом. При большой протя-
женности и сложности трансмиссии с центральным расположе-
нием мотора второй вариант может иметь в отдельных случаях
некоторое преимущество, в том числе и в весовом отношении.
При постановке индивидуального мотора у каждого несущего
винта схема трансмиссии (и размещение отдельных ее элемен-
тов) будет подобна схемам, разобранным нами применительно
к одновинтовому геликоптеру. В этом случае нужно иметь в виду
необходимость соединить валы обоих несущих винтов специаль-
ным дополнительным валом с целью:
а) приводить во вращение оба несущие винта при помощи
одного мотора (в случае остановки другого мотора);
200
Фиг. 150. Схемы размещения элементов трансмиссии для двухвинтового
геликоптера:
7~муфта*включения; 2— главный редуктор; 3—ветилятор; 4—муфта свободного кода-
5—редуктор передачи мощности к рулевому винту; 9—мотор (см. также фнг. 7). ’
201
б) синхронизировать обороты обоих несущих винтов при
нормальной работе моторов;
в) синхронизировать обороты обоих несущих винтов на ре-
жиме авторотации.
На фиг. 151 приведена одна из возможных схем трансмис-
сии двухвинтового геликоптера с соосным расположением несу-
щих винтов, вращающихся в противоположном направлении.
Фиг. 151. Схема трансмиссии двухвинтового
геликоптера с соосным расположением несу-
щих винтов, вращающихся в противополож-
ном направлении (обозначения см. фиг. 7).
Фиг. 152 дает представление об одном из возможных вари-
антов передачи мощности на рулевой винт одновинтового гели-
коптера. На этой же фигуре показано схематическое изображе-
ние цепи управления изменением шага рулевого винта.
При выборе схемы трансмиссии геликоптера и того или
иного варианта компоновки элементов трансмиссии необходимо
иметь в виду ряд требований, общих для всех случаев и всех
схем:
а) надежность и безотказность в работе всех элементов и
трансмиссии в целом;
б) минимальный вес;
в) длительный срок работы без переборок и смены подшип-
ников;
г) простота сборки, регулировки, демонтажа и обслужива-
ния’;
202
д) достаточность охлаждения на всех возможных
работы;
е) бесшумность в работе.
режимах
Фиг. 152. Схематическое изображение цепи управления изменения шага
рулевого винта.
Удачно спроектировать трансмиссию для геликоптера с со-
блюдением приведенных требований — серьезная инженерная
работа, требующая большого анализа, ряда изысканий и слож-
ной кропотливой конструктивной разработки.
ПРИЛОЖЕНИЕ II
СХЕМЫ ВТУЛОК НЕСУЩИХ ГЕЛИКОПТЕРНЫХ ВИНТОВ
И МЕХАНИЗМОВ УПРАВЛЕНИЯ ИМИ
Режимы полета, свойственные геликоптеру, весьма разнооб-
разны. Наряду с горизонтальным полетом геликоптер обладает
способностью вертикального взлета и спуска, неподвижного
«висения» в воздухе и перемещения под любым углом к гори-
зонту. При этом скорости его движения могут меняться в широ-
ком диапазоне — от нуля до максимума.
Это разнообразие возможных режимов полета геликоптера
предъявляет специфические требования к основным его агрега-
там, в частности к системе втулки несущего винта и управле-
ния им.
Если на режиме «висения» лопасти несущего винта рабо-
тают только в окружных скоростях, то при наличии поступатель-
ного движения относительные скорости складываются из окруж-
ных скоростей лопастей вращающегося винта и поступательной
скорости геликоптера. При этом лопасти на одной стороне оме-
таемого диска движутся в направлении полета и работают в сум-
ме скоростей, а на противоположной стороне они идут обратно
и находятся в разности этих же скоростей. Асимметричное рас-
пределение скоростей по сметаемому диску создает на винте
моменты, влияющие как на самый винт, так и на аппарат в це-
лом. Наличие этих моментов является одним из важнейших
факторов, определяющих выбор схемы несущего винта.
Изыскание рациональных схем винта преследовало цель
создать такой винт, у которого возникающие моменты уравно-
вешивались бы на винте в целом или на каждой его лопасти
и была бы исключена возможность передачи этих моментов на
аппарат.
Эта задача была решена при создании несущего винта с шар-
нирным креплением лопастей и винта с жестким креплением
лопастей, но с шарнирным сочленением его втулки с валом
винта.
Специфичность различных режимов геликоптерного полета
предъявляет особые требования также и к схеме управления ге-
ликоптером. Так, например, на режиме «висения» при отсут-
204
ствии поступательных скоростей обычные самолетные органы
управления — рули и элероны — бесполезны. Поэтому в совре-
менных геликоптерах управление в продольной и боковой плос-
костях осуществляется тем же несущим винтом. Лишь одно-
винтовые геликоптера (только для управления курсом) снаб-
жены дополнительным органом управления — рулевым винтом.
Для осуществления подъема, «висения» на месте или спуска
пилот геликоптера должен иметь возможность воздействовать
на величину подъемной силы, развиваемой несущим винтом,
увеличивая или уменьшая ее в зависимости от необходимого
маневра.
Это достигается соответствующим регулированием газа мо-
тсра или регулированием газа в комбинации с шагом винта.
С этой целью в любой схеме несущего геликоптерного винта
предусматривается возможность изменения в полете углов уста-
новки лопастей, что достигается поворотом лопастей во втулке
относительно их продольной оси.
Подобное изменение общего шага несущего винта исполь-
зуется также и для перевода винта на режим авторотации при
безмоторном спуске.
Возможность регулировать в полете общий шаг является
основным требованием к любой схеме несущего геликоптерного
винта.
Осуществление функций продольного и поперечного управ-
лений является вторым основным требованием, предъявляемым
к несущему винту геликоптера.
Принципиальной основой геликоптерного управления в про-
дольной и боковой плоскостях является метод диференциального
изменения углов установки лопастей несущего винта (диферен-
циальный шаг винта). Этот метод получил в американской
технической литературе название циклического управ-
ления.
При таком управлении угол установки каждой лопасти
периодически меняется за один оборот и достигает максималь-
ного значения в некотором азимутальном положении, а мини-
мального значения — в диаметрально противоположном. Таким
образом одну половину ометаемого диска все лопасти проходят
с увеличенными углами установки, а вторую — с уменьшенными.
Если прикрепление лопастей ко втулке или втулки к валу осу-
ществлено при помощи шарниров, то неравномерное распреде-
ление тяги винта по ометаемому диску, возникающее вследствие
диференциального изменения углов установки, заставит плос-
кость вращения винта наклониться относительно осей машины.
Тяга несущего винта при этом также наклонится и создаст мо-
мент относительно центра тяжести, нужный для управления ге-
ликоптером. Если же винт жесткий и плоскость его вращения
не может изменить свое положение относительно осей машины,
то момент, возникающий на винте при диференциальном изме-
нении шага, непосредственно воздействует на аппарат.
205
Механизм управления должен, следовательно, обеспечить
периодическое изменение углов установки лопастей винта. При
этом величина диференциального изменения углов и азимуталь-
ное положение максимума и минимума должны создаваться со-
ответствующим отклонением ручки пилота.
Подобный механизм, получивший в СССР название авто-
мат-перекос, схематически изображен на фиг. 6. Основной
составной частью этого механизма является диск, вращающий-
ся совместно с несущим винтом на одной оси и имеющий воз-
можность наклоняться на кардане в продольной и поперечной
плоскостях. Специальные рычаги, крепящиеся к корневой части
лопастей, при помощи тяг соединены с периферийными точками
диска. Если плоскость вращения диска наклонена и не перпен-
дикулярна оси винта, то тяги, совершая вращение вместе с на-
клонным диском, при помощи рычагов вызовут периодические
изменения углов установки лопастей за каждый оборот.
Более подробно различные конструктивные схемы автомата-
перекоса будут рассмотрены ниже на конкретных примерах
(см. стр. 216—223).
При рассмотрении этих схем необходимо обратить внимание
на конструктивное решение еще двух вопросов, имеющих боль-
шое значение для нормальной работы системы управления ге-
ликоптером:
1. Синхронизация завала плоскости (диска) несущего винта
с соответствующим наклоном диска автомата-перекоса и, тем
самым, с отклонением ручки пилота.
2. Изыскание способов повышения устойчивости лопасти.
При маховом движении шарнирно подвешенных лопастей
появляются инерционные силы, вызывающие некоторый сдвиг
фаз между направлениями завала плоскости несущего винта
и соответствующего наклона диска автомата-перекоса.
Добиться должной синхронизации можно специально подо-
бранной кинематикой всей цепи управления, позволяющей вве-
сти некоторое опережение в наклоне диска автомата-перекоса
относительно соответствующего завала плоскости винта при его
вращении.
Второй, более простой и употребительный способ заклю-
чается в расположении шарнира рычага лопасти впереди оси
лопасти. В этом случае воздействие автомата-перекоса через
этот рычаг на лопасть начинается в некотором азимутальном
положении раньше, чем лопасть придет в это положение. На-
клон диска автомата-перекоса при этом может совпадать с от-
клонением ручки пилота. Комбинацией этих двух способов так-
же можно достичь необходимой синхронизации.
Для винтов с жестким креплением лопастей не существует
вопроса об устойчивости движения лопасти, поскольку их траек-
тория относительно осей втулки и вала винта постоянна и со-
вершенно определенна.
206
Для винтов с шарнирным креплением лопастей вопросы
устойчивости движения самой лопасти приобретают существен-
ное значение.
Шарнирно закрепленная лопасть, характеризующаяся обыч-
но принятыми параметрами, обладает необходимой устойчиво-
стью движения, поскольку всякому отклонению лопасти от
установившейся траектории движения препятствуют возникаю-
щие при этом демпфирующие и восстанавливающие моменты.
Однако, в практике известны случаи, когда неудачный подбор
основных параметров создает при некоторых режимах полета
неустойчивость движения лопастей.
Выше (см. гл. VII) было сказано, что при снижении оборо-
тов несущего винта серийного геликоптера Сикорского R-4 ни-
же «надежного минимума» лопасти винта могут сложиться.
Для повышения устойчивости движения лопасти иногда при-
меняется такая кинематическая связь, при которой взмах ло-
пасти автоматически влечет за собой уменьшение у?да уставов,ки.
Существующие конструкции подобного регулятора шага бу-
дут рассмотрены нами ниже применительно к конкретным
схемам.
Необходимо учесть, что при отсутствии механизма регуля-
тора шага на геликоптерной винте с шарнирным креплением
лопастей возникает дестабилизирующая зависимость между
углом взмаха лопасти и углом ее установки. Это происходит по-
тому, что в моторном полете лопасть под действием сил лобзво-
го сопротивления отклонена назад, а взмах лопасти, отклонен-
ной назад, автоматически увеличивает угол установки. На упо-
мянутом выше геликоптере R-4 имеет место подобная зави-
симость.
Рассматриваемые ниже схемы втулок несущих геликоптер-
ных винтов подразделяются на:
а) схемы втулок с жестким креплением лопастей и
б) схемы втулок с шарнирным креплением лопастей.
В первую группу входят винты, имеющие жесткое соединение
втулки с валом, и винты, имеющие свободу колебаний втулки
относительно вала винта.
I. Несущие геликоптерные винты с жестким
креплением лопастей
1. Схема втулки винта советского
геликоптера 1-ЭА
Лопасти крепятся ко втулке без горизонтальных и вертикаль-
ных шарниров. Для изменения общего и диференциального шага
углы установки могут меняться поворотом лопасти в комлевом
шарнире. Число лопастей в этой схеме может быть любое.
Основной недостаток схемы (фиг. 153) заключается в том,
что моменты, возникающие от случайных изменений распреде-
207
ления сил тяги по ометаемому диску, целиком передаются на
геликоптер, и возникающие крены необходимо немедленно па-
рировать при помощи управления.
Винт подобной схемы применялся на геликоптере Б. Н. Юрье-
ва, построенном в 1911 г., и на первом советском геликоптере
1-ЭА, летавшем с 1930 по 1934 гг.
Фиг. 153. Схема втулки винта советского геликоптера 1-ЭА.
На советских геликоптерах 5-ЭА, 11-ЭА и 11-ЭА ПВ по
данной схеме были установлены вспомогательные винты для
целей управления.
На современных геликоптерах несущие винты по этой схеме
больше не применяются.
2. Схема втулки винта Вильфорда
Лопасти крепятся ко втулке без горизонтальных и вертикаль-
ных шарниров. Общий шаг изменяется поворотом каждой лопа-
сти относительно ее оси. Для изменения диференциального шага
весь винт с обеими лопастями может быть повернут относитель-
но оси XX (фиг. 154).
Фиг. 154. Схема втулки винта Вильфорда.
Если на одной из лопастей возникают подъемные силы, пре-
вышающие силы, действующие на второй лопасти, то обе ло-
пасти поворачиваются относительно оси XX. При этом автома-
тически происходит диференциальное изменение углов установ-
ки лопастей, вследствие чего разность в подъемных силах
уменьшается.
Управление общим шагом по этой схеме не представляет за-
труднений. Для этой цели к комлям лопастей должны быть
208
присоединены рычаги, связанные цепью управления с ручкой
пилота. Схема управления диференциальным шагом нам неиз-
вести а.
Одним из недостатков схемы является возможность ее при-
менения только для двухлопастных винтов. Однако, указанный
недостаток можно устранить применением четырехлопастного
винта, являющегося комбинацией двух двухлопастных винтов.
Положительным качеством схемы является взаимное урав-
новешивание центробежных сил, в связи с чем подшипники, в
которых происходит поворот для изменения диференциального
шага, не нагружаются большими силами и, следовательно, они
могут быть сделаны легкими.
Винт по данной схеме применялся Вильфордом на построен-
ном им автожире \
Имеются основания полагать, что подобные винты применя-
ются на некоторых современных американских геликоптерах.
3. Схема втулки винта геликоптера Белл
(конструктор Артур Юнг)
Лопасти крепятся ко втулке без горизонтальных и верти-
кальных шарниров. Втулка винта соединена с валом универсаль-
ным шарниром (фиг. 155).
Фиг. 155. Схема втулки винта геликоптера Белл.
Общий шаг изменяется поворотом каждой лопасти в комле-
вой заделке. Для изменения диференциального шага вся втулка
накреняется на универсальном шарнире относительно продоль-
ной оси лопастей, а комли лопастей не поворачиваются.
Если на винте возникает момент относительно оси V—У, то
винт отклонится от своего первоначального положения, совер-
шая поворот относительно этой же оси.
На винте геликоптера Белл концы рычагов лопастей соеди-
нены с тягами и располагаются на оси У—У. Поэтому наклон
винта относительной этой оси не влияет на величину угла уста-
новки лопастей. Следовательно, регулятор шага отсутствует, но
1 На автожире общий шаг винта ие изменялся.
14 А. м. Изаксон. 209
винт геликоптера Белл сочетается с так называемым «стабили-
зирующим стержнем», повышающим устойчивость винта. Прин-
цип его действия указан при описании схемы управления ге-
ликоптера Белл.
Колебания фюзеляжа относительно универсального шарнира
гинта не влияют на его работу и в этой системе не возникает
моментов для гашения колебаний этого рода.
Если бы автор схемы не ставил перед собой цели исключить
зависимость угловых положений плоскости вращения винта и
фюзеляжа, он имел бы полную возможность установить обыч-
ный регулятор шага. Для этого пришлось бы сместить положе-
ние конца рычага в положение, указанное на фиг. 156. Тогда
при маховых движениях лопасть, идущая вверх, уменьшала бы
угол установки, а идущая вниз — увеличивала бы его.
Если при этом угол о сделать достаточно малым (на
фиг. 156 рычаг показан пунктиром), то можно достичь значи-
тельной эффективности регулятора шага. В этом случае винт
по своим свойствам приближается к схеме Вильфорда, в кото-
рой малому вертикальному перемещению лопасти соответствует
большое изменение угла установки.
Фиг. 156. Схема втулки виита геликоптера Белл.
Как видно на фиг. 156, конец рычага лопасти на 90° раньше
лопасти подвергается воздействию автомата. Однако суммарная
величина опережения может быть не равна 90°, так как надо
дополнительно учесть кинематическую связь автомата-перекоса
и ручки пилота.
Рассматривая винт геликоптера Белл, следует отметить про-
стоту его схемы.
Специфический недостаток этой схемы заключается в том,
что лопасти, совершая в горизонтальном полете маховые дви-
жения в вертикальной плоскости, при отсутствии вертикальных
шарниров нагружаются действующими в плоскости вращения
значительными силами Кориолиса, которые могут стать источ-
ником вибраций.
210
4. Схема винта с качающейся втулкой
(схема Ш о в ь е р а)
Втулка винта соединена с валом универсальным шарниром;
горизонтальный и вертикальный шарниры отсутствуют (фиг. 157).
Общий шаг меняется поворотом лопастей в комлевых шарни-
рах. Также меняется и диференциальный шаг, что отличает эту
схему от винта Белл, где изменение диференциального шага
достигается наклоном всей втулки.
Фиг. 157. Схема винта с качающейся втулкой (схема Шовьера).
Изменение углов установки лопастей производится при помо-
щи рычагов и соединенных с ними тяг. Эта же система рычагов
и тяг повышает автоматическую устойчивость винта, так как
она выполняет функции регулятора шага.
Бели плоскость вращения винта в силу случайных причин
изменит свое положение относительно вала винта, то лопасти,
удерживаемые рычагами и тягами, должны при прохождении
приподнявшейся части ометаемого диска уменьшать свой угол
установки, а при прохождении опустившейся части диска — уве-
личивать его. В результате на винте появится момент, восста-
навливающий прежнее положение ометаемого диска относи-
тельно вала винта.
В этой схеме может быть установлено любое число лопастей
и, следовательно, можно избегнуть недостатков двухлопастной
схемы, связанных с возникновением пульсирующих аэродинами-
ческих сил в горизонтальном полете. Условия возникновения
сил Кориолиса остаются такими же, как и в схеме Белл.
5. Схема втулки винта Ландграфа
Лопасти жестко крепятся ко втулке, а втулка — к валу
(фиг. 158). Основное отличие несущего винта Ландграфа от дру-
гих винтов заключается в наличии элеронов на лопастях винта.
14*
Фиг. 158. Схема втулки винта геликоптера Ландграфа.
211
Элероны отклоняются цепью управления, а возникающие при
этом моменты передаются на машину. Общий шаг изменяется
обычным способом, т. е. поворотом лопастей относительно их
продольной оси.
По заявлению фирмы, винт не сообщает машине неустойчи-
вости, как этого можно было ожидать при жесткой схеме винта,
и возможен устойчивый полет с брошенной ручкой. Устойчи-
вость винта, по тем же соображениям, достигается установкой
е механизме управления пружин и грузов, нагружающихся цен-
тробежными силами, действующими на элероны. Принцип дей-
ствия механизма не опубликован.
В настоящее время нет достаточных материалов для сужде-
ния о преимуществах и недостатках схемы Ландграфа. Можно
предположить, что качество этого винта будет ниже, чем у дру-
гих винтов, в связи с искажениями профиля элеронами, распо-
ложенными в зоне наибольших скоростей.
II. Несущие геликоптерные винты с шарнирным
креплением лопастей
1. Схема втулки винта с разнесенными
горизонтальными шарнирами
Лопасти крепятся ко втулке при помощи трех типов шарни-
ров: горизонтальных, вертикальных и комлевых. Горизонталь-
ные шарниры отстоят от оси вращения винта на некотором рас-
стоянии (фиг. 159).
Фиг. 159. Схема втулки винта с разнесенными горизонтальными шарнирами.
Наличие горизонтальных шарниров исключает передачу
, моментов с лопастей на втулку, которые при жестком винте
сообщали бы аппарату неустойчивость.
Под влиянием моментов, действующих относительно горизон-
тального шарнира, лопасть отклоняется на горизонтальном шар-
нире и устанавливается под некоторым углом к плоскости вра-
щения втулки. Таким образом лопасти движутся не в плоскости
вращения, а описывают конус. При наличии горизонтальных
скоростей или при действии органов управления диференциаль-
ным шагом ось конуса отклоняется от оси несущего винта, а ло-
пасти совершают маховые движения в вертикальной плоскости.
212
Возникающие при этом моменты от переменных сил Кориолиса,
а также от переменных сил лобового сопротивления не пере-
даются на втулку вследствие наличия вертикального шарнира.
Часть сил, переходящая на втулку, ввиду разноса вертикальных
шарниров, пренебрежимо мала. Управление шагом винта обес-
печивается наличием комлевого шарнира. В этой схеме число
лопастей может быть любым.
Если конец рычага не лежит "на оси горизонтального шар-
нира, как показано на фиг. 159, то автоматически создается
регулятор шага, повышающий устойчивость.
Угол опережения управления получается относом конца ры-
чага лопасти на угол о.
Впервые подобная схема, но без комлевых шарниров широко
была применена конструктором автожиров Сиерва. Эта схема
применялась на многих геликоптерах: советских 5-ЭА, 11-ЭА,
11-ЭА ПВ, французском Бреге-Доран, немецком FW-61 и др.
2. Схема втулки с совмещенными
горизонтальными шарнирами (схема Хафнера)'
Эта схема (фиг. 160) отличается от предыдущей тем, что в
ней горизонтальные шарниры совмещены с осью вращения винта.
Основное преимущество от совмещения горизонтальных шар-
ниров заключается в том, что фаза отставания равнодействую-
щей аэродинамических сил от плоскости наклона автомата-пере-
коса сохраняет свою величину на всех режимах полета, что не
имеет места при разнесенных шарнирах.
Фиг. 160. Схема втулки винта с совмещенными горизонтальными шарнирами!
Основным недостатком схемы, помимо ее сложности, являет-
ся понижение стабилизации аппарата.
При разнесенных шарнирах хорошим средством стабилизации
фюзеляжа является пара центробежных сил, действующая на
плече, равном проекции разноса шарниров на плоскость, нор-
мальную к центробежным силам. Эта пара всегда восстанавли-
вает положение фюзеляжа при его отклонениях от оси конуса
винта, чего нет в схеме винта с совмещенными горизонтальными
шарнирами.
213
Регулятор шага и угол опережения создаются теми же мето-
дами, что и в предыдущей схеме.
Впервые подобная схема была опубликована Хафнером в
связи с ее применением на автожире. Несколько ранее подобная
схема винта была осуществлена на советском автожире А-8 *
только без шарниров для изменения шага винта.
В данное время схема принята на многих американских
геликоптерах.
3. Схема втулки винта с совмещенными
перекошенными в вертикальной плоскости
горизонтальными шарнирами
Как видно на фиг. 161, совмещение горизонтальных шарниров
достигается перекосом их в вертикальной плоскости. Когда по-
добная схема разрабатывалась для автожира, где осевой шар-
нир лопасти для изменения угла установки отсутствует, имелось
в виду автоматически уменьшать угол установки лопасти при ее
взмахе вследствие опускания переднего ушка вилки при пере-
косе горизонтального шарнира. Этим самым повышалась устой-
чивость лопасти. При обратном перекосе регулятор шага про-
изводит дестабилизирующее действие.
Фиг. 161. Схема втулки винта с совмещенными и перекошенными горизон-
тальными шарнирами.
В геликоптерном винте угол установки лопасти изменяется
поворотом лопасти относительно осевого шарнира при помощи
рычага. При этом регулятор шага, так же как и фаза опереже-
ния, создается смещением конца рычага лопасти с оси горизон-
тального шарнира и отклонением шарнира рычага на угол а от
продольной оси лопасти.
Если же потребная фаза опережения равна 90°, то можно
совместить конец рычага лопасти с направлением оси горизон-
тального шарнира. Тогда исключаются влияния цепи управле-
ния на автоматическое изменение угла установки при маховых
движениях лопасти. Величина регулятора шага будет опреде-
ляться исключительно величиной и направлением перекоса го-
ризонтального шарнира.
Данная схема была предложена на советском техническом
конкурсе в 1935 г. Аналогичные схемы имеются в патентной ли-
* Втулка была спроектирована инж. А. П. Проскуряковым.
214
тературе. Опыта применения подобной втулки нет, но, на осно-
ве общих соображений, можно предполагать, что по характеру
работы она аналогична схеме Хафнера.
Сведений о применении подобной схемы на геликоптерах не
имеется.
5. Схема втулки винта с совмещенными
и перекошенными в горизонтальной плоскости
горизонтальными шарнирами
Данная схема (фиг. 162) была предложена на советском
техническом конкурсе в 1935 г. и позднее опубликована в па-
тентной литературе.
Фиг. 162. Схема втулки винта с совмещенными односторонними горизон-
тальными шарнирами.
Сведений об использовании этой схемы на геликоптерах или
об ее исследованиях не имеется, но можно полагать, что приме-
нение ее вполне возможно. Если шарнир находится перед ве-
дущей кромкой лопасти, то при соответствующих конструктив-
ных размерах равнодействующая сил лобового сопротивления
и центробежных в моторном полете вследствие отклонения ло-
пасти назад может приходить близко к линии, соединяющей
горизонтальный и вертикальный шарниры. Тогда изгиб скобы
будет небольшим. Регулирование шага и фаза опережения осу-
ществляются обычным способом.
Данная схема в связи.с ее конструктивной простотой заслу-
живает изучения.
5. Схема втулки винта с совмещенными
и перекошенными в горизонтальной плоскости
горизонтальными шарнирами
Совмещение горизонтальных шарниров в этой схеме
(фиг. 163) конструктивно осуществляется так же, как и в схеме
Дафнера; в то же время конструктивные особенности скобы де-
лают направление оси горизонтального шарнира неперпенди-
кулярным к продольной оси лопасти. Такой перекос горизонталь-
ных шарниров уменьшает угол установки при взмахе лопасти и,
следовательно, он эквивалентен ранее описанному регулятору
215
шага. При этом (так как конец рычага совпадает с направлени-
ем оси горизонтального шарнира) исключается влияние цепи
управления на автоматическое изменение угла установки при ма;
ховом движении лопасти.
По принципу своего действия эта втулка не отличается от
других втулок, имеющих совмещенные горизонтальные шарни-
ры и снабженные регулятором шага.
Фиг. 163. Схема втулки винта с совмещенными и перекошенными в гори-
зонтальное плоскости горизонтальными шарнирами.
Настоящая схема описана в американской технической ли-
тературе и можно полагать, что она применяется на некоторых
американских геликоптерах.
III. Схемы управления геликоптером
1. Схема управления советского
геликоптера 1-ЭА
Автомат-перекос типа 1-ЭА состоит из двух колец / и 2
(фиг. 164), соединенных между собой так, что одно из колец
может вращаться относительно другого. Внешнее кольцо 1 при
работе винта не вращается и служит для соединения автомата
с цепью управления, идущей от ручки пилота.
Внутреннее кольцо автомата 2 всегда вращается вместе с
несущим винтом. На этом кольце крепятся тяги 3, соединенные
с рычагами лопастей 4, при помощи которых изменяется их
угол установки.
В нейтральном положении кольца автомата-перекоса ле-
жат в плоскости, нормальной к валу винта. Так как они свя-
заны с валом при помощи карданного соединения, то имеется
возможность наклонять плоскость вращения автомата в лю-
бую сторону.
Автомат-перекос соединен с валом винта при помощи втулки
5, имеющей возможность вертикально перемещаться по валу.
Если автомат-перекос переместится, например, вверх, то углы
установки всех лопастей уменьшатся на одинаковую величину.
216
Если же при вращении винта автомат-перекос займет на-
клонное положение, то углы установки каждой лопасти будут
периодически изменяться, достигая максимального значения в
том же азимутальном положении, в котором лежит низшая точ-
ка кольца автомата, и минимального значения при прохожде-
нии высшей точки этого кольца \ Диференциальное изменение
угла установки лопастей (шага винта) создает на винте мо-
менты, необходимые для управления машиной.
Фиг. 164. Схема управления советского геликоптера 1-ЭА.
Могут быть предложены различные схемы цепи управле-
ния для наклона плоскости вращения автомата-перекоса в лю-
бом направлении. Мы отметим здесь только схему управления,
осуществленную на первом советском геликоптере 1-ЭА.
На этом геликоптере ручка пилота была подвешена к верх-
ним трубам фермы фюзеляжа. Подобное расположение ручки
пилота впоследствии получило широкое распространение на
бескрылых автожирах с так называемым «непосредственным
управлением».
1 При направлении рычагов лопасти 4 в сторону носка профиля дол-
жны соответственно измениться и направления движения автомата.
217
Верхний конец ручки соединялся с рычагом («ухватом»),
при помощи которого производились боковые наклоны автома-
та-перекоса.
Наклоны в продольной плоскости осуществлялись тягами
6 и 7 и рычагом 8.
К недостаткам описанной схемы автомата и управления им
надо отнести следующее:
а) изменение общего шага влияет на величину диферен-
циального шага; следует, однако, заметить, что это влияние
крайне незначительно;
б) верхнее расположение ручки пилота, которое, по мне-
нию некоторых летчиков, представляет неудобства при эксплоа-
тации и дополнительную опасность при поломках цепи управле-
ния.
Положительными качествами схемы являются:
а) простота и малый вес; из всех известных по технической
литературе схем геликоптерного управления подобного типа
управление геликоптера 1-ЭА является самым простым;
б) минимальное число звеньев, а следовательно, и мини-
мальные люфты управления.
2. Схема управления геликоптера
Сикорского
На геликоптере Сикорского R-4, в целях независимости
действия управлений общим и диференциальным шагом винта,
рычаги лопасти 1 (фиг. 165) и тяги 2 соединены с механизмами
этих управлений не непосредственно, а через качалки 3. Тяги
2 присоединены к качалкам 3 на половине их длины. Таким об-
разом вертикальное перемещение любого конца качалки 3
всегда влечет вдвое меньшие перемещения тяги 2 и соответст-
вующие изменения угла установки лопасти независимо от вер-
тикального положения второго конца качалки.
Один из концов качалки присоединен к механизму управле-
ния общим шагом, а второй при помощи тяги 4 к автомату-
перекосу.
Автомат-перекос состоит из двух дисков. Верхний диск 5,
укрепленный на валу несущего винта при помощи карданного
соединения, вращается вместе с несущим винтом и может на-
клоняться в любую сторону.
Этот диск имеет три рычага, соединенных тягами 4 с качал-
ками 3. При помощи радиального подшипника верхний диск 5
соединен с нижним диском 6. Последний не вращается, но мо-
жет наклоняться вместе с верхним диском на общем для них
карданном соединении с валом. Нижний диск имеет два рычага,
оси которых образуют прямой угол. Рычаги связаны тягами 6
с цепью продольного и бокового управления. При помощи вер-
тикальных перемещений тяг 3, осуществляемых ручкой пилота,
плоскость вращения автомата может быть наклонена в любом
218
азимутальном положении. Это, как известно, ведет к диферен-
циальному изменению углов установки лопастей, необходимо-
му для создания моментов продольного и бокового управления.
Общий шаг винта изменяется при помощи крестовины 7,
вертикальные перемещения которой осуществляются при помо-
щи штанги, пропущенной внутри полого вала несущего винта.
Крестовина 7 присоединена ко вторым концам качалок 3 и
сообщает им вертикальные перемещения для изменения обще-
го шага.
Достоинством данной схемы является отмеченная выше не-
зависимость действия управлений общим и диференциальным-
шагом.
Фиг. 165. Схема управления геликоптера Сикорского.
Недостаток ее заключается в том, что независимость до-
стигнута некоторым усложнением и многозвенностью, а следо-
вательно, дополнительным весом и люфтами. Кроме того, на
некоторых геликоптерах могут появиться затруднения при рас-
положении штанги для управления общим шагом внутри втул-
,ки и вала винта.
3. Схема управления геликоптера Белл
Каждая лопасть несущего винта имеет (фиг. 166) рычаг 1,
соединенный с тягой 2. Вертикальное перемещение обеих тяг в
одном и том же направлении вызывает изменение общего ша-
га, а их перемещение в противоположных направлениях обеспе-
чивает диференциальное изменение шага лопастей.
219
Каждая тяга 2 соединена со своей качалкой 3. Один конец
качалки связан с механизмом автомата-перекоса и служит для
передачи управления от летчика через тяги 4. Второй конец ка-
чалки шарнирно скреплен с так называемым «стабилизирую-
щим стержнем», представляющим одну из важнейших ориги-
нальных особенностей несущей системы геликоптера Белл.
Фиг. 166. Схема управления геликоптера Белл.
«Стабилизирующий стержень», будучи соединен шарниром
«с валом винта, имеет возможность совершать колебания в вер-
тикальной плоскости, расположенной перпендикулярно к пло-
скости махового движения лопастей. При вращении вместе с
валом винта он стремится сохранить свою плоскость вращения,
подобно ротору жироскопа. При всяком самопроизвольном из-
менении углового положения плоскости вращения винта «ста-
билизирующий стержень» при помощи качалки 3 и тяги 2 соз-
дает диференциальное изменение углов установки лопастей.
:220
Вместе с диференциальным изменением углов установки
на винте возникнут моменты, восстанавливающие прежнее по-
ложение его плоскости вращения.
Очевидно, что если бы на геликоптере не было описанного
выше стабилизирующего устройства, то качалка 3 отсутствова-
ла бы, а тяга 4 служила бы простым продолжением тяги 2.
Центральный узел управления, связанный с несущим винтом
тягами 4, состоит из автомата-перекоса и механизма управле-
ния общим шагом. Взаимная независимость их действия дости-
гается устройством рычагов 5, которые сообщают присоединен-
ным к ним тягам 4 диференциальные перемещения при наклоне
автомата-перекоса 7 через тяги 6 или перемещения в одном
направлении от движения муфты 8 по валу. Первый вид пере-
мещений меняет диференциальный, а второй — общий шаг
винта.
Автомат-перекос состоит из двух дисков. Верхний диск вра-
щается вместе с валом винта и с цепью управления, находящей-
ся выше его. Нижний диск не вращается, хотя он совершает
наклоны вместе с верхним диском на общем для них кардан-
ном соединении с валом. Это кольцо через два рычага 9, лежа-
щих во взаимно перпендикулярных плоскостях, и дальнейшую
пепь управления связано с ручкой пилота.
Механизм управления общим шагом представлен муфтой 8,
вращающейся вместе с винтом. Эта муфта связана с невращаю-
щимся рычагом 10 и при помощи дальнейшей цепи с рычагом
общего шага, расположенным в кабине.
Как видно, схема управления геликоптера Белл имеет мно-
го общего с управлением геликоптера Сикорского. Достоинства
и недостатки схемы Сикорского могут быть отнесены также и к
схеме Белл.
Оригинальной особенностью геликоптера Белл является,
как это было ранее отмечено, наличие стабилизирующего
устройства. Заметим, кстати, что это устройство в таком про-
стом виде применимо только для двухлопастных винтов.
4. Схема управления автожира
Хафнера
Настоящий автомат-перекос был применен Хафнером на его
автожире AR-III, но он также успешно может быть осуществлен
и на геликоптере.
В этой схеме (фиг. 167) довольно громоздкие кольца авто-
мата-перекоса заменены легкой втулкой 1, соединенной при
помощи подшипников со стержнем 2. Ко втулке шарнирно
прикреплены рычаги 3, которые вместе с рычагами лопасти 4
управляют углом установки лопасти.
Однако один из рычагов 3 жестко присоединен ко втул-
ке 1. Он выполняет роль поводка, сообщающего вращение
втулке 1 синхронно с оборотами несущего винта. Весь этот
221
механизм может наклоняться в любую сторону на шаровом
шарнире стержня 2, что необходимо для наклона плоскости
вращения автомата в целях диференциального изменения уг-
лов установки лопасти. К нижнему концу стержня 2 присое-
диняется цепь управления, связанная с ручкой пилота. На
автожире AR-III Хафнер поставил дополнительный стержень 5,
что, конечно, не является обязательным для других схем. Ме-
ханизм автомата перекоса смонтирован в цилиндре 6. Верти-
кальное перемещение этого цилиндра, осуществляемое спе-
циальным рычагом, расположенным в кабине, вызывает изме-
нение общего шага.
1
Фиг. 167. Схема управления автожира Кафнера.
Цилиндр 6 располагается внутри втулки винта, но он не
может вращаться вместе с винтом, потому что соединен с цепью
управления общего шага.
Шарниры рычагов 3 располагаются близко к плоскости го-
ризонтальных шарниров лрпасти для того, чтобы линейная за-
висимость между ходом ручки и диференциальным шагом не
нарушалась слишком сильно. Однако, при изменении общего
шага шарниры рычагов 3 вместе со всем механизмом автомата
222
перемещаются по вертикали и отдаляются от плоскости гори-
зонтальных шарниров лопасти. Поэтому отклонения от линей-
ной зависимости между ходом ручки и изменением угла уста-
новки могут быть значительными, что приводит к влиянию из-
менений общего шага на величину диференциального шага.
Недостатки схемы:
а) указанное выше влияние изменения общего шага на ве-
личину диференциального шага;
б) ограниченная возможность применения в связи с распо-
ложением автомата внутри втулки винта.
Подобное расположение оказывает влияние на конструктив-
ную схему трансмиссии.
Достоинством схемы Хафнера является ее конструктивная
простота.
ПРИЛОЖЕНИЕ III
СВОДНАЯ СТАТИСТИЧЕСКАЯ ТАБЛИЦА ОСНОВНЫХ
ДАННЫХ ГЕЛИКОПТЕРОВ
В целях систематизации имеющегося материала по постро-
енным геликоптерам и для удобства сравнительной оценки ни-
же приводится сводная статистическая таблица их основных
данных (см. табл. 2).
Включенные в таблицу технические данные иностранных ге-
ликоптеров взяты из периодической печати. Материалы, зача-
стую не вполне достоверные и противоречивые, подвергнуты
критической оценке и обработке.
Из-за отсутствия ряда сведений некоторые характеристики,
представляющие интерес, подсчитаны нами. При этом были при-
няты параметры, указанные ниже, которые могут несколько
расходиться с действительными данными отдельных геликопте-
ров.
Так, например, для подсчета величины максимальной тяги
несущего винта геликоптера величина относительного к. п. д.
при работе винта на месте принята равной 0,75, что может не-
сколько расходиться с действительной величиной к. п. д., но это
расхождение для современных винтов не может быть значитель-
ным. Вместе с тем принятое допущение позволяет провести
сравнение геликоптеров по одному из важнейших параметров.
При подсчете отдельных параметров были применены сле-
дующие формулы:
1. Заполнение
nR ’
где о —коэфициент заполнения несущего винта;
к — число лопастей;
b — хорда лопастей в лг, при переменной хорде прини-
малась хорда на г=0,7;
R — радиус несущего винта в м.
224
2. Обороты несущего винта на режиме
«в и с е н и я»
« = /гтах1/ -Я- об/мин,
где п — обороты несущего винта на режиме «висения» в
об/мин;
лш»х—обороты несущего винта на взлетной мощности мото-
ра в об/мин;
G — полетный вес в кг;
Р — тяга несущего винта на взлетной мощности мото-
ра в кг.
Здесь сделано допущение, что шаг несущего винта на «висе-
нии» и при потреблении взлетной мощности остается неизмен-
ным.
3. Полезная нагрузка
При отсутствии данных полезная нагрузка ориентировочно
подсчитывалась по принятым у нас весовым нормам. Расход
горючего на все время полета условно принят соответствую-
щим мощности, равной 0,9 от мощности, потребляемой на ре-
жиме «висения».
Удельный расход принят 0,25 кг/л. с. час.
4. Максимальная тяга несущего винта
на режиме «висения»
2
Р= (33,25т)0Л7Э)— кг (формула Вельнера),
3
где “Чо — относительный к. п. д. винта при работе на месте;
N — мощность, потребляемая винтом, в л. с.;
D — диаметр винта в м.
Принималось, что для современных машин ‘Чо=0,75.
Мощность N определялась:
где Мм= ^”°м взлетная мощность мотора;
Nn — величина потерь мощности в л. с.
При отсутствии данных о потерях для современных аппа-
ратов приняты следующие величины потерь в процентах:
На трансмиссию.......................... 5
, охлаждение мотора..................... 5
15 а. м. и заксон.
225-
Потери на рулевой винт подсчитывались индивидуально
для каждой машины, причем тяга рулевого винта определя-
лась по формуле Вельнера.
Для двухвинтовых машин формула подсчета тяги изменя-
лась следующим образом:
Р=2
1о
Максимальная тяга соосных геликоптеров подсчитана по
гой же формуле, что и одновинтовые машины, но 1% соосного
-винта принималось равным не 0,75, а 0,78, чем ориентировочно
учитывалось отсутствие закрутки в отходящей струе соосного
винта.
5. Избыток тяги несущего винта
(в процентах)
100,
а
где Р—тяга несущего вин*га на взлетной мощности мото-
ра в кг;
G —полетный вес геликоптера в кг.
6. Удельная нагрузка на мощность
G /
---- кг л. с.
м
•**ном
Здесь — номинальная мощность мотора в л. с.
7. Удельная нагрузка налметаемую
винтом площадь
— кг м\
s '
сметаемая винтом площадь.
4
ЛИТЕРАТУРА
1. Г. 3. Б а р ш, Воздухоплавание в его прошлом и настоящем, СПБ, 1906.
2. Л. Бодри де Сонь е, Воздухоплавание и авиация, перевод и ре-
дакция проф. Н. Б. Делоне, Киев, 1909.
3. К. Вейгелин и Н. Ш т е р н. Как покорили воздух, Л,—М., 1926.
4. А. М. И з а к с о н, А. М. Ч е р е м у х и и. Геликоптер, Техническая
энциклопедия № 5, 1929.
5. А. М. Изаксон, Геликоптеры, изд. ГНТИ, 1931.
6. „Истогия воздухоплавания и авиации в СССР", изд. Обороигиза, 1944,
под редакцией В. А. Попова.
7. А. М. Изаксон, Заграничные работы по геликоптерам за последние
два года, , ТВФ • № 8 за 1935" г.
8. А. М. Изаксон, Геликоптер Флорина, „ТВФ" № 6 за 1934 г.
9. А. М. Изаксон, Геликостат Э. Эмишена, »ТВФ“ № 10 за 1931 г.
10. Маколей, The Helicopteres аге Coming, New-York, 1944.
11. Е. М. П о м о р ц е в а, Первые поборники авиации, Москва, 1924Т
12. В. Т а т э и, Теория и практика авиации, перевод с французского
под редакцией проф. Н. Б. Делоне, издание Н. Л. Полякова, Киев, 1911.
13. Журналы: „Техника воздушного флота", „Вестник воздушного
флота", „Самолет", „Хроника воздушного флота*.
14. М. Л. Франк, т. 1, История воздухоплавания и его современное
состояние, СПБ, 1910.
15. Флорин, Эксперименты с геликоптером, проведенные в Бельгии.
Luftwisen, Bd 7, № 4, April 1940.
16. Б. Н. Юрьев, Проблема геликоптера, „Известия Академии Наук"
№ 6, 1945.
17. А. В г а с k е, Les Helicopteres Paul Cornu, Paris, 1908.
18. .Les documents Aeronautique", Paris.
19. „Flight", London.
20. F. Ferber, L’aviation, Paris, 1910.
21. Charles F о 11 о t, Traite d’Aviation d’Ecole du vol, Paris, 1914.
22. Artur F ii r s t, Das Weltreich der Technik, 3 Band, Berlin, 1926.
23. M. Lame, Le vol vertical et la sustentation independante. Helicopteres
Gyropteres. Avi(ins-H61icopteres, Paris, 1926.
24. M. L am e, Le vol vertical, Paris, 1934.
25. W. Margoulis, Les Helicopteres, Paris, 1924.
26. Dr. Raitnond Nimfiir, Leitfaden der Luftschiffahrt und Flugtechnik,
Wien und Leipzig, 1909.
27. „Revue Generale de i’Aeronautique", No. 1, 2, 3.
28. Amedee Sebillot, Les helicopteres-Aeroplanes, Paris, 1910.
29. Zeitschrift fiir Flugtechnik und Motorluftschiffahrt (ZFM).
3u. .Aero Digest", U.S.A; .L’Aerophile", „L’Air", Paris; „L’Ala d’ltalia",
Roina; „Aviation", London; „L’Aeronautique", Paris; „Flugsport", Berlin.
15*
ОГЛАВЛЕНИЕ
Стр.
Предисловие........................................................ 3
Введение..........•................................................ 5
Глава I. Применение геликоптера. Общие соображения о сфере при-
менения и первые фактические данные.......................... 9
Глава II. Описание типового геликоптера и его основных элементов.
Примерная классификация разных схем геликоптеров .... 15
Глава III. Начальный этап в истории геликоптера................... 30
Глава IV. Переломный этап в истории геликоптера................... 41
Глава V. Первые успехи............................................ 62
Тлава VI. Проблема геликоптера разрешена..........................103
Глава VII. Дальнейшее успешное развитие и усовершенствование
геликоптеров.................................................... 142
Приложение I. О рациональной компоновке элементов трансмиссии гели-
коптера ....................................................197
Приложение //.Схемы втулок несущих геликоптерных винтов и меха-
низмов управления ими.......................................204
Приложение III. Сводная статистическая таблица основных данных ге-
ликоптеров .................................................224
Литература........................................................227
Редактор Л. М. Сагалов. Техн, редактор И. М. Зудакин.
МЧ2.9И Подп. к печати 3/1II 1947 г. Печ. л. 141/,(-|-2 вкл.
Уч.-изд. л. 15,7. Кол. зн. в печ. л. 44100. Формат 60Х921/1в.
Тираж 10000. Цена 12 руб. Зак. 939/1141.
Типография Оборонгиза.
ПРИМЕРНАЯ КЛАССИФИКАЦИЯ РАЗЛИЧНЫХ СХЕМ ГЕЛИКОПТЕРОВ
Таблица 1
№ п/п. Принципиаль- ная схема геликоптера Под- группа Количе- ство несущих винтов Расположение несущих винтов Направление вращения несущих винтов Источник мощности для вращения несущих винтов Схема передачи вращения от мотора несущим винтам Способ уравновешива- ния реактивного момента Количество рулевых винтов Расположение рулевых винтов Способ получения поступательного движения Метод управления геликоптером в продольном направлении Метод управления геликоптером в поперечном направлении Метод управления геликоптером в направлении пути Схема изображена на фигуре Геликоптер, предлагае- мый или осуществлен- ный по данной схеме
1 2 3 5 6 7 8 1 9 10 11 12 13 14 15 16 17
1 Одновинтовой а 1 Любое Авиационный мотор Специальная транс- миссия При помощи рулево- го винта 1 В хвостовой части фюзеляжа Наклон плоскости вра- щения несущего винта вследствие диференци- ального изменения уг- лов установки лопастей посредством автомата- перекоса Наклон плоскости вра- щения несущего винта вследствие диференци- ального изменения уг- лов установки лопастей посредством автомата- перекоса Наклон плоскости вра- щения несущего винта вследствие диференци- ального изменения уг- лов установки лопастей посредством автомата- перекоса При помощи рулево- го винта Фиг. 8А Геликоптеры Сикор- ского (R-4, R-5, R-6), Белл, Пясецкий и др.
б 1 То же То же То же То же 2 В хвостовой и носо- вой частях фюзеляжа То же Тоже То же То же Фиг. 8Б Советские геликоп- теры 1-ЭА и 5-ЭА
в 1 • 2 По бокам фюзеляжа с осями, параллельны- ми продольной оси ге- ликоптера Или от тяги вперед рулевых винтов, или вследствие комбинации этих обоих способов Фиг. 8В Советский геликоп- тер 11-ЭА
г 1 - 3 На специальных кон- солях к фюзеляжу Наклон всего аппа- рата при помощи од- ного из рулевых вин- тов управления При помощи рулево- го винта управления При помощи рулево- го винта управления • Фиг. 8Г Геликоптер Сикор- ского VS-300 (I вариант)
Д 1 При помощи неболь- ших тянущих винтов, расположенных на ло- пастях несущего винта, приводимых во враще- ние от мотора (общего для всех винтов или индивидуальных для каждого винта) Реактивный момент отсутствует Отсутствует Наклон плоскости вра- щения несущего винта вследствие диференци- ального изменения уг- лов установки лопастей посредством автомата- перекоса Наклон плоскости вра- щения несущего винта вследствие диференци- ального изменения уг- лов установки лопастей посредством автомата- перекоса Наклон плоскости вра- щения несущего винта вследствие диференци- ального изменения уг- лов установки лопастей посредством автомата- перекоса Управляемая направ- ляющая поверхность на фюзеляже. Фиг. 8Д Геликоптер Кертисс- Бликкер, Изакко и др.
е 1 • Реактивный двига- тель При помощи реак- тивных направляющих сопел на каждой лопа- сти несущего винта Реактивный момент отсутствует — — — — — Фиг. 8Е Проект геликоптера Изакко
2 Двухвинтовой Размещены вдоль по- перечной оси аппарата. Оси винтов параллель- ны. Расстояние между осями превышает диа- метр винта Противопо- ложное Авиационный мотор (один центральный на два винта или но мо- тору на каждый винт) Специальная транс- миссия Реактивный момент взаимно уравновеши- вается Отсутствует Наклон плоскости вра- щения несущего винта вследствие диференци- ального изменения уг- лов установки лопастей посредством автомата- перекоса Наклон плоскости вра- щение несущего винта за счет диференциаль- ного изменения углов установки лопастей посредством автомата- перекоса Диференциальное из- менение общего шага обоих винтов Диференциальное уп- равление автоматом- перекосом обоих винтов Фиг. 9А Геликоптер Плэтт ле- Пейдж, советский гели- коптер «Омега* н др.
б 2 Расстояние между ося- ми несущих винтов меньше диаметра каж- дого из этого винтов (винты взаимно пере- крывающиеся). Оси винтов параллельны. Размещены вдоль по- перечной оси аппарата То же То же То же То же То же То же То же / То же То же Фиг. 9Б Геликоптер Ландграф
в 2 Расстояние между осями несущих винтов меньше диаметра каж- дого из них (винты взаимно перекрываю- щиеся). Оси винтов располо- жены наклонно в по- перечной плоскости ма- шин. Размещены винты вдоль поперечной оси аппарата Авиационный мотор Фиг. 9В Гели копте ры Келлет и Флеттнер
г Размещены по про- дольной оси аппарата. Оси винтов параллель- ны. Расстояние между осями превышает диа- метр винта То же Наклон всего аппа- рата при помощи ди- ференциального изме- нения общего шага обоих винтов Диференциальное из- менение общего шага обоих винтов При помощи пере- коса лопастей несущих винтов посредством автомата-перекоса Фиг. 9Г
д Размещены по про- дольной оси аппарата. Расстояние между ося- ми превышает диаметр винта. Оси винтов нак- лонены вбок в проти- воположные стороны В одном направле- нии Реактивный момент парализуется моментом от горизонтальных со- ставляющих суммарной подъемной силы каждо- го несущего винта, по- лученных вследствие наклона осей этих вин- тов в противополож- ные стороны То же То же То же Фиг. 9Д Геликоптер Флорина
3 Двухвинтовой с соосным расположением винтов а 2 На одной оси, один под другим Противопо- ложное Реактивный момент взаимно уравновеши- вается Наклон плоскости вра- щения несущего винта вследствие диференци- ального изменения уг- лов установки лопастей посредством автомата- перекоса Наклон плоскости вра- щения несущего винта вследствие диференци- ального изменения уг- лов установки лопасгей посредством автомата- перекоса Наклон плоскости вра- щения несущего винта вследствие диференци- ального изменения уг- лов установки лопастей посредством автомата- перекоса Диференциальное из- менение шага обоих винтов Фиг. 9Е Геликоптеры Песка- ра, Бреге, Хиллера, Ас- бота и др.
б 2 То же То же То же Вследствие горизон- тальной составляющей суммарной подъемной силы несущих винтов путем одновременного наклона их оси в нап- равлении движения То же То же То же Геликоптер Г. Боте- зата
4 Многовинтовой а 4 Оси винтов парал- лельны. По вершинам прямоугольника Попарно в противо- положные стороны Один (центральный) или несколько авиаци- онных моторов Вследствие наклона аппарата в направле- нии поступательного движения Диференциальным по- парным изменением об- щего шага несущих .винтов Диференциальным по- парным изменением общего шага несущих винтов Диференциальное из- менени общего шага некото! ых винтов Фиг. 10В Геликоптер Г. Боте- зата
б 8 (и больше) Оси винтов парал- лельны. Размещение самое разнообразное и произвольное То же То же То же То же То же То же Фиг. 10А Проект геликоптера Б. Н. Юрьева
в 4,8 или больше То же 4 Все винты изменяемого шага Оси винтов располо- жены: первого—горизонталь- но вдоль продольной оси аппарата, впере- ди аппарата; При помощи руле- вого винта № 1 При помощи руле- вого винта № 3 При помощи руле- вого винта № 4 При помощи руле- вого в> нта № 2 Фиг. 10Б Геликоптер Э. Эми- шена
второго—горизонталь- но параллельно оси аппарата, на специ- альной консоли, вы- несенной вбок;
третьего—вертикально, вынесены на специ- альной консоли сза- ди аппарата;
1 четвертого- вертикаль- но, вынесены на спе- циальной консоли вбок аппарата
Общие дай и Несущая система ; мот
2 С5 X п
Фирма Наименование eg 2 Располо- База Число ££*- О Ч <5 3 i-l Название 1 о
л. Страна (конструктор) (марка) 5 | Характер аппарата О X у жение мест серийного производ- ства несущих винтов Диаме- несущ винтов ОЗ 03 £3 Я § с СП Профиль Оборо на ,ви нии*,о( Фирма (условное обозначение) 1 1ft |
1 2 3 4 5 ё 7 8 9 10 И 12 13 14 15 16 17 18 19
—
1 СССР — 1-ЭА 1930 Экспериментальный 1 — - 1 И 95 4 0,115 Английский 144 1 — М-2 2
2 — 5-ЭА 1935 - 1 1 12 113 3 0,079 144 । — М-2 2
3 — 11-ЭА ПВ 1940 2 Тандем 1 15,4 186 3 0,065 В 159 1 Кертис Кертнс-Конкве- 1
рер
4 » — Омега 1941 Опытный 2 — 2 — — 3 — — — — — 2
5 6 Франция США Бреге Воут-Сикорский Жироплан Бреге-Доран VS-300 1933 1940 Экспериментальный 1 2 (соосн.) 1 15,865 8,5 198 86,7 2 3 - - 132 260 Фраикл..н 1АС 199F3 1 1
7 Воут-Сикорский R-4B 1942 Серийный 2 Рядом Воут- Сикорский 1 11,58 105 з - 240 Уорнер R-550-1 1
8 Воут-Сикорский R-5 1944 2 Тандем То же 1 14,6 167,5 3 — — — Пратт-Уитией R-985A № 5 1
9 Воут-Сикорский R-6 1944 2 Рядом Нэш-Кель- 1 11,58 105 3 - - — Франклин 6ACV-405
10 PV Инжиниринг Форум PV-2 1943 Экспериментальный 1 - винейтор 1 7,62 45,5 3 0,06 - 350 4АС-19УЕЗ 1
11 1 Белл Эйркрафт Белл 1943 > Рядом 1 10,06 79,5 2 0,035 Симметрич- 6ACV-298
ный
12 I Плэт ле Пейдж R-14 1944 ' Опытный 2 Тандем — 2 9,3 136 3 — — 240 Пратт Уитней R-985A № 1 1
13 X н ллер-И ндустрис Хиллер-коптер 1944 Экспериментальный 1 2 7,62 45,62 2 0,0337 — — Франклин 1 4АС-199ЕЗ
НХ-44 (соосн.) 6ACV-405
14 Келлет XR-8 1944 Опытный 2 Рядом 2 12,2 1328 — — 440
15 1 Ландграф Геликоптер Н2 1944 Экспериментальный 1 — - 2 4,88 32,8® 3 — - — Побджой
16 1 Скоув Н100 1944 | 2 Рядом — 2 7,3 83,7 - - — — Континентал — 1
17 Бендикс Геликоптер Ин- G 2 2 9,75 74,52 2 — — 300 Уорнер Супер-Скэрэб 1
кориорейтед i (соосн.) W-670
io ; То же J 4 1 В два ряда - 2 12,2 1172 — — — Коитинентэл
19 Аэронаутикэл Продакте | ЗА 1944 Опытный 2 Рядом - (соосн.) 1 1 9,14 65,5 3 — - 250 Франклин 6ACV-298 1
20 Гарвиг-Литлл HL-1 1944 1 Экспериментальный 2 - 4 7 77® 2 - — — 4АС-199ЕЗ 1
21 , Пенсильвания Эйркрафт ' Жирокоптер 18 (2 соосн.) 1 24,4 468 3 — — Райт — 2
Синдикат 1
22 . Газда | Геликосиидер 1945 2 — 1 7,62 45,5 — — — Газда Газда
23 1 Германия Фокке-Вульф 1 FW-61 1936 и 1 — — 2 7 77 3 0,058 — 235 Сименс Брамо 14а 1
24 ; Фокке-Ахгелис । Fa-223 1942 Сернйиа» 3 Два рядом Завод Фок- ' 2 12 226 3 0,6 NACA 23012 300 BMW BMW-323 1
25 Флеттиер j Fl-282 1938 1 один вперед. То же ке-Ахгелис Завод Флеттнера 1 2 12 120 2 0,6 NACA 27017 180 Сименс Брамо Sn-14a
1 Подсчитано нами.
s Ометаемая площадь соосного впита подсчитана, как для одного винта.
• Перекрытые площади приняты за одну площадь.
Таблица 2
о р н а я труп п а Рулевые винты Весов, соотношен. Расчетные летные данные Основные характерные параметры Примечание
Расположение Мощност ь номиналь- ная, л. с. Мощность взлетная л. с. Обороты номиналь- ные, об/мин Охлаждение мотора Вес мотора кг go = | Расположение Диаметр Число лопастей Расстояние оси рулево- го винта от оси несуще- го винта, м Обороты рулевого виита при .висении* об/мин X X о я о сх <2 й з it I Сх«| Максималь- ная гори- зонтальная скорость км/час Потолок динами- ческий м Продол- житель- ность полета час Макси- мальная тяга на .висении* кг Избыток тяги в % P—G —100 Удельная нагрузка на оме- таемый диск кг/мг Удельная нагрузка на мощ- ность кг/л. с.
20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 ' 37 38 39 40 41 1 «2
По бокам фюзеляжа 120 - 1200 Возду шиое 120 4 На носу н хвосте 1,8 2 Передн. 4,5, 12801 ! 982 163 1145 1 1300 13,5 12,05 4,77
1200 задн. 0,5
То же 120 — 120 4 То же 1,8 2 Передн. 4,5, задн. 6,5 5,5 12801 , 1147 163 1210 — — 1 1350 11,5 10,7 5,04 Дополнительно имеют-
Впереди кабины 600 - 2450 Водяное - 4 По бокам фюзеляжа 1,8 2 15701 . 1875 375 2250 — - 1 2960 31 12,1 3,75 ся три жесткие лопа- сти для управления
По бокам фюзеляжа — — — — — — — — — — — — — — 180 — — — — — —
Впереди кабины, ось го- ризонтальна Сзади кабины, ось гори- 250 >-2000 Возду иное — — — - - - 1430 520 1950 — - - 2680 37,4 9,85 7,8
90 100 2500 95 1 На хвосте 2,2 2 -5,5 1300 ~570 НО 680 128 1 ->-680 0,0 12,01 7,551
зонтальна 169
То же 180 200 2100 1 То же 2,34 3 ~7,1 1300 912 238 1150 145 2450 1,25 13251 15,4* 10,91 6,381
Сзади кабины, ось вер- 450 — 2300 310 1 2,34 3 ~8,6 — 1690 490 2180 193 4500 3 । 28001 28,41 13,01 4,851
тикальиа Го же 245 - 3275 198 2,34 3 - - 915 265 .180 193 5600 ~2 16251 37,71 11,21 4,821
90 100 2500 95 1 1,524 2 ->-4,7 1700 345 1101 455 160 5850 2 6601 45,01 10,01 5,051
1 | 160 1 — 3250 198 , 1 1 1,524 2 । ~6,1 — 580 2131 793 160 — ~1 11001 38,81 9,981 4,951
Сзади кабины 450 ' — 2300 310 | — 1 — । - - - 1612 548 2160 250 5850 — 25601 18,61 15,91 4,81
90 100 2500 95 1 | 1 — - - — 5251 1101 635 160 - — 6801 7,11 13,951 7,051
245 - 3275 198 1 — 1 — — — — 1050 300 1350 — — 2,75' 1840 36,31 10,21 5,51
85 — 3300 - - ! — - - — — 285* 1001 385 — - - 590 53,21 11,751 4,531
105 - — — - 1 - — — - — — — 145 3000 — 8801 - - —
165 — 2100 — 1 - — 625 285 910 193 3 12001 31,81 12,2 1 5,51 В 1944 г. находился
в постройке
— 300 — — — — , — — — — 871 406 1377 193 — 6 20701 43,01 11,751 4,581 То же
Впереди кабины ось го- 160 — 3250 - 1 На хвосте | 1,73 - 5.5 - 1 500 250 750 160 3350 — 9701 29,71 11,451 4,681
В центре фюзеляжа 90 100 2500 95 — 1 — — — - 490 235 725 200 2135 1 3 9101 25,51 9,41 5,81
1000 — — — 1 На хвосте 4,3 ~15 4530 2700 7250 2181 5500 108001 49,01 15,51 3,6251 В 1944 г. находился
130 1 в постройке
— —- — — — j —- — — — — 290 — — — — — Двигатель термореак-
Впереди кабины ось го- Воздушюе тивный, рулевой винт
145 •— — — — — — — 8301 1301 960 145 3100 1,67 10501 9,41 12,51 6,61 заменен реактивным
ризонтальна Сзади кабины ось гори- юоо — 3150 1150 4300 210 7100 ~з 52501 221 191 4,31 насадком
зонтальна
То же — 150 ->-2000 135 — “ 1 - — ~600 ~200 ->-800 150 — ~3 12301 53,51 6,671 5,321