



















































































































Автор: Четти П.
Теги: электротехника энергетика электроника электропитание переводная литература энергоатомиздат проектирование ключевых источников питания
ISBN: 5-283-02471-7
Год: 1990



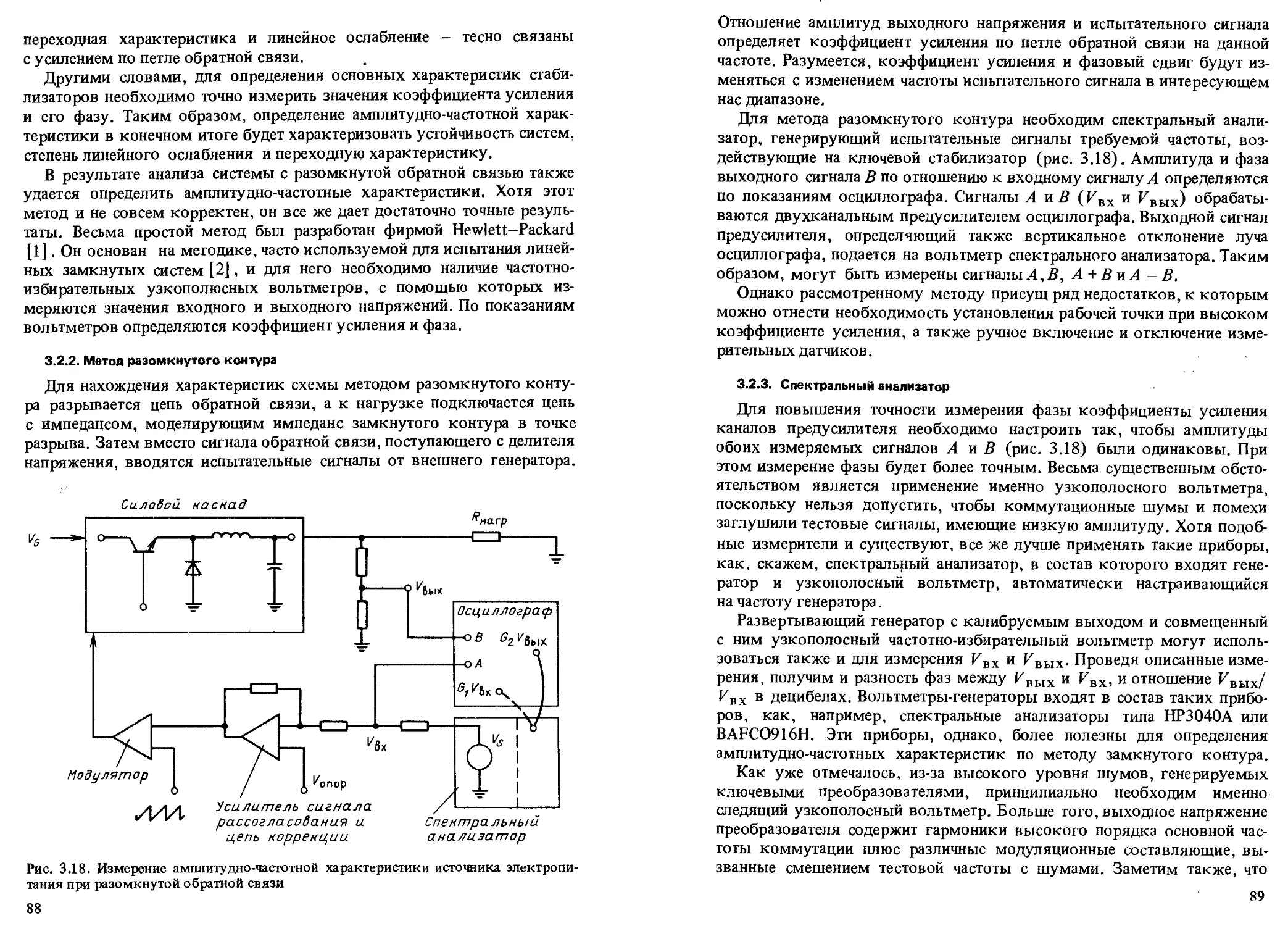
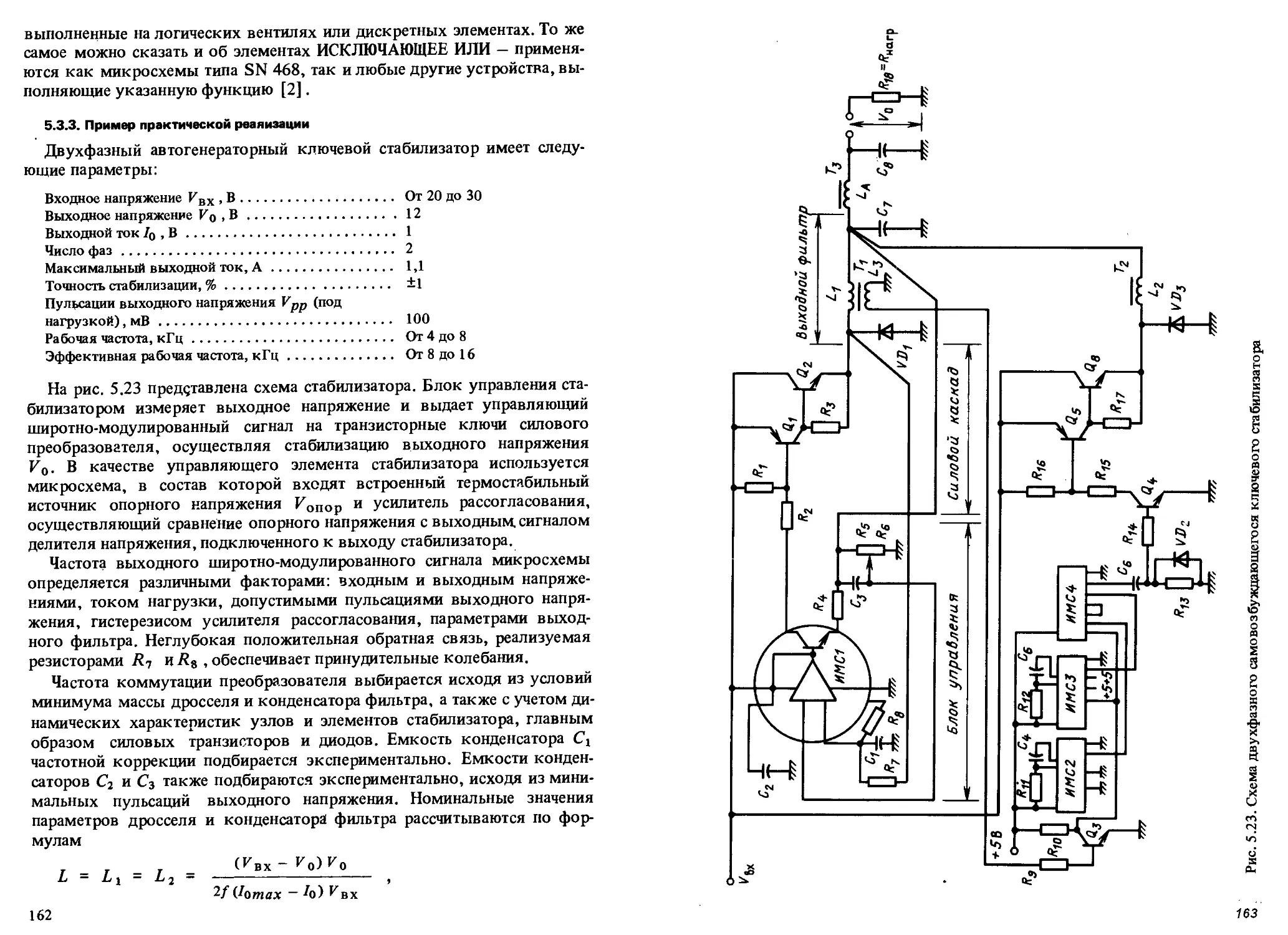
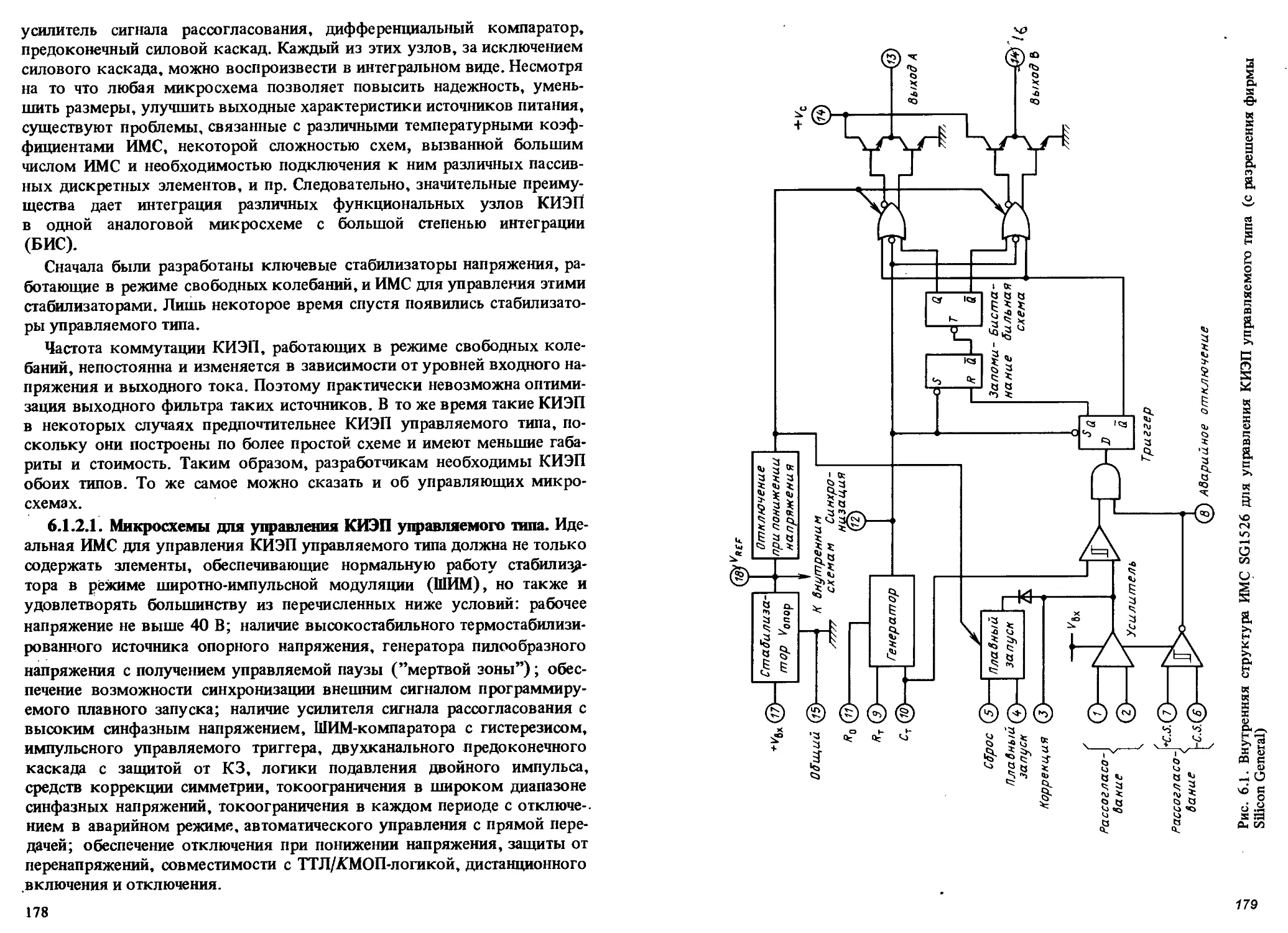
Текст
ББК 31.15
4-52
УДК 621.311.6.001.2
Рецензент А. Поликарпов
Р.Р.К. Ghetty
Switch-mode power supply design
TAB Books Inc., 1986
Четти П.
4-52 Проектирование ключевых источников электропитания:
Пер. с англ. — М.: Энергоатомиздат, 1990. — 240 с.: ил.
ISBN 5-283-02471-7
Последовательно изложены вопросы проектирования мощных клю-
чевых источников электропитания. В книгу вошли главы, посвящен-
ные моделям, анализу, проектированию (включая машинное проекти-
рование) , примерам практических проектов мощных источников пита-
ния, вопросам надежности. В основу проектирования таких источников
положен метод инжекционного тока, предпложенный автором и дове-
денный до практического применения.
Для инженерно-технических работников, занятых в области про-
ектирования мощных полупроводниковых источников электропита-
ния.
2202070500-082
Ч----------------269-89
051 (01)-90
ББК 31.15
ISBN 5-283-02471-7
ISBN 0-2806-2631-Х
© TAB Books Inc., 1986
©Перевод на русский язык.
Энергоатомиздат, 1990
ПРЕДИСЛОВИЕ
В 1960 г. появились высоконадежные эффективные и легкие сис-
темы электроснабжения космических аппаратов В условиях жесткого
ограничения потребления энергии на борту космического аппарата были
разработаны новые методы преобразования электроэнергии. Это от-
крыло эру современной силовой электроники. Сегодня ограничения по
мощности потребления становятся основным условием в обычном про-
ектировании электротехнических устройств. л
Силовая электроника базируется на ключевых режимах преобразова-
ния энергии и связана с современными проблемами анализа проектиро-
вания и синтеза электронных цепей, обеспечивающих эффективное пре-
образование, управление и регулирование электрической энергии.
Одним из направлений силовой электроники является проектирова-
ние и оптимизация преобразователей постоянного напряжения, которые
должны обладать высоким КПД, малыми размерами, массой и другими
высокими показателями.
Эти преобразователи постоянного напряжения с разделительными
трансформаторами могут иметь несколько выходов с напряжениями
различных уровней й полярностей. Стабилизированный источник пита-
ния такого типа широко применяется, особенно в вычислительных систе-
мах, для которых требуется низковольтный и сильноточный источник
с малыми пульсациями выходного напряжения и хорошим качеством
переходных процессов. Кроме того, такие преобразователи, соединен-
ные особым образом, позволяют получить мощные ключевые усилители
переменного тока с достаточно широкой полосой частот и высоким
КПД.
Примерами источников электропитания ключевого типа являются
коммутаторы линий электроснабжения, одноканальные и многоканаль-
ные источники питания на основе преобразователей постоянного напря-
жения, обратимые преобразователи (для заряда и разряда батарей),
инверторы, агрегаты бесперебойного электропитания переменного тока,
мощное сервоуправление, роботы, ключевые усилители низкой частоты
и т.д.
Ключевые источники электропитания получили широкое распростра-
нение в последнее десятилетие. Существенной особенностью эффектив-
ного преобразования энергии является применение полупроводнико-
3
вых приборов в ключевом режиме (для достижения малых потерь)
с использованием для передачи энергии от источника к нагрузке ши-
ротно-импульсной модуляции или резонансной техники. Для сглажива-
ния процессов передачи энергии при малых потерях мощности в ключе-
вых преобразователях используются индуктивные и емкостные эле-
менты.
При повышении частоты коммутации размеры магнитных и емкост-
ных элементов уменьшаются прямо пропорционально возрастанию час-
тоты коммутации. Благодаря лучшим показателям (высокому КПД,
малым размерам и массе, относительно небольшой стоимости) клю-
чевые источники электропитания вытесняют обычные источники элект-
ропитания линейного типа.
Моделирование, анализ и расчет этих ключевых преобразователей по-
стоянного напряжения широко известны, и существует мнение, что точ-
ный расчет позволяет в промышленности использовать простейшую из
возможных топологий построения преобразователей постоянного на-
пряжения. Быстрое развитие техники сохранения энергии в промыш-
ленности способствует резкому уменьшению габаритов и массы обору-
дования. Поэтому потребительское и промышленное применение клю-
чевых источников быстро расширяется.
Среди различных методов, развивающих моделирование и анализ
ключевых преобразователей постоянного напряжения, следует выделить
метод эквивалентной схемы с инжекцией тока и метод установившихся
средних значений, которые используются для создания линеаризованной
модели, корректно отражающей нелинейные свойства преобразователя
как в статике, так и в динамике для малого сигнала низкой частоты
и важнейшие параметры передаточных характеристик между входом
и выходом.
Данные модели позволяют выбрать лучший преобразователь для кон-
кретной задачи и оптимизировать контур обратной связи стабилизатора,
содержащего такой преобразователь.
Кроме того, эти модели позволяют спроектировать ключевой стабили-
затор, устойчиво работающий в широкой полосе частот с высоким
быстродействием и хорошей стабильностью за счет того, что при про-
ектировании могут использоваться стандартные методы анализа цепей
с применением теории линейных систем автоматического регулирования
для расчета систем управления с обратной связью. Однако практически
эти модели и расчеты могут быть получены только путем измерения
частотной характеристики системы для точного определения коэффи-
циента усиления и отставания по фазе цепи обратной связи. Таким обра-
зом, в расчете систем с обратной связью необходимо либо измерять ко-
эффициент усиления обратной связи в функции частоты, чтобы в соот-
ветствии с аналитическим расчетом гарантировать работу системы, либо
корректировать аналитические предпосылки путем измерения реальной
цепи обратной связи.
4
Таким образом, ключевым источникам питания уделено большое
внимание вследствие их высоких показателей, и я намерен изложить все
мои работы по силовой электронике (часть из которых опубликована
в трудах конференций и журналах), с тем чтобы специалисты могли оце-
нить результаты моих трудов.
Итак, эта книга посвящена детальному рассмотрению силовой элек-
троники.
П. Четти
ВВЕДЕНИЕ
Данная книга посвящена рассмотрению вопросов моделирования,
анализа, расчета, измерения и проектирования с использованием ком-
пьютеров ключевых источников электропитания.
В гл. 1 дано общее представление о ключевых источниках электро-
питания. Вначале показано развитие силовой электроники. Затем обос-
новывается значение систем электропитания, которое определяется не
только тем, что последние являются основными источниками энергии
всего электронного оборудования, но и тем, что удачная работа всего
электронного оборудования существенно зависит от правильного и
надежного функционирования системы электропитания. Далее в по-
рядке введения в математическое моделирование и анализ ключевых
источников электропитания приведены определения их основных харак-
теристик, классификация систем электропитания, а также краткое опи-
сание процессов в линейных (рассеивающих) и ключевых (нерассеиваю-
щих) системах электропитания.
В гл. 2 изложен новый метод применения эквивалентной схемы с
инжектированием тока (МЭСИТ) для моделирования силовых каскадов
ключевых преобразователей постоянного напряжения, начиная с экви-
валентных схем и кончая составлением уравнений, полностью описыва-
ющих входные характеристики или схему замещения, справедливую для
малых сигналов низкой частоты. В качестве примера смоделирован пре-
образователь с программируемым коэффициентом заполнения, работа-
ющий в режиме непрерывных токов (РНТ).
Один и тот же МЭСИТ использован для моделей преобразователей, ра-
ботающих в следующих режимах: с заданным коэффициентом заполне-
ния в режиме прерывистого тока (РПТ); с заданным коэффициентом
заполнения в режиме РНТ; с заданным током в режиме РПТ.
Так, преобразователь Кука, способный быть как понижающим, так
и повышающим, не имеющий пульсаций тока как на входе, так и на
выходе, стоит того, чтобы иметь линейную схему замещения. Кроме
того, этот преобразователь обладает оптимальной топологией, так как
использует минимальное число компонентов. С учетом всех этих досто-
инств в § 2.5 приводится математическое моделирование и анализ пре-
образователя Кука.
6
В гл. 3 представлены известные модели ключевых преобразователей
постоянного напряжения и расчет стабилизаторов, использующих рас-
пространенные преобразователи. Подробно описано построение различ-
ных блоков ключевого стабилизатора и приведены математические мо-
дели для всех блоков с использованием передаточных функций, что дает
возможность расчитывать ключевой стабилизатор на устойчивость, за-
данные полосу пропускания, линейное подавление и переходную харак-
теристику. Постепенный (шаг за шагом) расчет компенсационной обрат-
ной связи иллюстируется двумя примерами. Показаны различные схемы
цепей обратной связи и их передаточные функции.
Если рассчитана компенсационная цепь обратной связи и определена
ее схемотехника, то только измерения смогут подтвердить правильность
моделирования и расчета. В гл. 2 и 3 приведены различные способы из-
мерения модуля и фазы передаточных функций ключевых регуляторов,
а также коэффициента усиления цепи обратной связи.
В гл. 4 показано, как организовать процесс проектирования ключевых
регуляторов с помощью вычислительных средств.
Глава 5 дает представление об аспектах практического проектирова-
ния ’’источников электропитания ключевого типа в металле”. В этой гла-
ве приведен проект силового каскада ключевого двухтактного преобра-
зователя с ШИМ мощностью 2,8 кВт, включая весь процесс расчета по
шагам, что в дальнейшем устранит пробы, ошибки и в результате со-
кратит время проектирования. Кроме того, представлен новый подход к
проектированию систем электропитания, в которых используется микро-
процессор в качестве контроллера для цифрового параллельного регу-
лятора (ЦПР). Так как возможности микропроцессора не могут быть
полностью исчерпаны управлением ЦПР, то его одновременно можно
использовать для управления регуляторами заряда и разряда батареи.
С целью создания мощных ключевых элементов из полупроводнико-
вых приборов с ограниченными энергетическими возможностями приме-
няется параллельное соединение отдельных приборов. В этом случае
энергия делится между всеми мощными управляемыми приборами, ко-
торые переключаются одновременно. Однако такая одновременность
переключения создает проблемы фильтрации и электромагнитной сов-
местимости, которые в значительной степени снимаются благодаря при-
менению многофазного режима. Многофазный режим автоколебатель-
ного ключевого регулятора описан в § 5.3. В § 5.4 анализируется преоб-
разователь постоянного напряжения, обеспечивающий питание нагрузки
постоянной мощности даже при значительных изменениях входного
напряжения. Показано, что КПД такого преобразователя уменьшается
при увеличении входного напряжения, а также приведена новая схема
управления током базы, обеспечивающая улучшение КПД при высоком
напряжении.
В большинстве стабилизированных источников электропитания с
входом постоянного тока стабилизация существенно ухудшается при
7
значении выходного напряжения меньшем, чем уровень напряжения вну-
треннего опорного источника. К тому же традиционные схемы ограничи-
вают минимально возможное опорное напряжение и соответственно ми-
нимально возможное выходное напряжение. Схема, представленная в
§ 5.5, имеет конфигурацию, позволяющую привести опорное напряжение
практически к нулю, что является решением всех проблем.
За счет простого изменения соответствующих компонентов схемы
удается улучшить характеристики источников электропитания. Два
таких ’’улучшения” представлены в качестве примера в § 5.6: один —
для линейного источника электропитания, а другой — для ключевого.
Глава 6 посвящена различным аспектам применения интегральных
микросхем (ИМС) в проектировании источников электропитания. Ис-
пользование ИМС в источниках электропитания так же выгодно, как и
применение ключевого метода управления, и обеспечивает компакт-
ность, точность, воспроизводимость, высокие показатели по уменьшению
паразитных явлений и снижение массы изделий. В § 6.1 рассмотрено при-
менение ИМС для управления, защиты и обеспечения XX управляемого
источника электропитания.
В ключевых источниках электропитания могут быть использованы
интегральные стабилизаторы, ИМС стабилизаторов с ШИМ и другие ИМС.
В § 6.2 интегральный задатчик используется в качестве управляющего
элемента для простого регулируемого преобразователя постояннного
напряжения с понижающим, повышающим и инвертирующим поляр-
ность стабилизированными преобразователями.
Глава 7 посвящена системам электропитания космических аппаратов.
В § 7.1 описана типичная система электропитания космического аппа-
рата, состоящая из солнечных элементов, аккумуляторных батарей и
электронных блоков сервисного электропитания и управления.
Там же изложены основные различия между системами электропита-
ния спутников, предназначенных для околоземных орбит, и спутников
для гелиоцентрических орбит. В § 7.2 рассмотрен усовершенствованный
блок сервисного электропитания для стабилизированной шины системы
электропитания космического аппарата, в котором использован общий
блок управления для зарядного, разрядного и параллельного стабилиза-
торов. В этой интегрированной системе, кроме того, применено объ-
единение тяжелых элементов схемы: единый дроссель для зарядного
и разрядного стабилизаторов и единый выходной конденсатор для па-
раллельного и раздельного стабилизаторов.
Глава 8 посвящена вопросам надежности систем электропитания.
Надежность является основным требованием, предъявляемым к любо-
му оборудованию и системам. Низкая надежность может принести боль-
шой ущерб. В § 8.1 изложены важнейшие способы увеличения надеж-
ности различных электронных систем. Методы проектирования систем
с высокой надежностью показаны в сравнении с надежностью, обуслов-
ленной используемыми компонентами и особенностями производства.
8
Вопросы надежности и резервирования рассмотрены применительно к
источникам электропитания. Несмотря на то что надежность, свойствен-
ная схеме, может быть существенно увеличена благодаря использованию
методов схемотехники, разумного подбора компонентов и т.д., только
адаптированное резервирование гарантирует достижение надежности
требуемого уровня. В § 8.2 описаны различные подходы к резервиро-
ванию, например резервирование замещением, резвирование путем рас-
пределения нагрузки (путем параллельного соединения), резервиро-
вание с мажоритарной логикой, частичное резервирование и резервирова-
ние замещением с распределением нагрузки. Хорошие потребитель-
ские характеристики, высокий уровень надежности и низкая стоимость
являются решающими условиями при проектировании систем электро-
питания. Анализ надежности изложен в § 8.3, где рассмотрена оценка
надежности спроектированной системы. В этом же параграфе также опи-
сан метод проб и ошибок (МПО), цель которого — определить и исклю-
чить, где возможно, критические точки вероятных отказов.
Глава 1. ОСНОВНЫЕ ОСОБЕННОСТИ ИСТОЧНИКОВ
ЭЛЕКТРОПИТАНИЯ КЛЮЧЕВОГО ТИПА
1.1. ИСТОЧНИКИ ЭЛЕКТРОПИТАНИЯ КЛЮЧЕВОГО ТИПА
1.1.1. Введение
Основные процессы, на которых базируются системы электропита-
ния, — это преобразование одного вида электроэнергии (вход) в другие
ее виды (заданный выход) Конструктивные блоки, реализующие эти
процессы, известны в качестве источников электропитания, стабилиза-
торов, преобразователей постоянного напряжения, выпрямителей и т.д.,
а вся область техники именуется электроникой преобразования энергии
или просто силовой электроникой.
Источник электропитания является одним из важнейших элементов
в любой комбинации электрического или электронного оборудования.
Это объясняется тем, что он снабжает электроэнергией все электрические
и электронные цепи и обепечивает работоспособность оборудования.
Успешная работа любого комплекта электрического или электронного
оборудования зависит от точного и надежного функционирования ис-
точника электропитания. Особенности же самого источника электропи-
тания полностью определяются характеристиками оборудования. Жест-
кие требования к этим характеристикам (масса, объем, надежность и
стоимость) делают процесс проектирования источника электропитания
строго выполняемой процедурой. По существу источник электропита-
ния должен быть способен передать стабилизированное питание, уровни
напряжения и тока которого отвечают требованиям оборудования.
Уровень передаваемой энергии постоянного или переменного тока может
колебаться от долей ватта до нескольких тысяч ватт, а напряжение —
от нескольких вольт до тысяч вольт. В блоке с выходным напряжением
переменного тока его частота изменяется от нескольких герц до несколь-
ких тысяч герц. Очень важно иметь высокий КПД. С уменьшением КПД
возрастают требования к конвекционному и принудительному охлаж-
дению и поэтому увеличиваются объем и масса систем, что нежелательно.
Таким образом, масса, стоимость и объем систем электропитания дол-
жны быть минимально возможными.
Поскольку средняя наработка на отказ (СНО) любого комплекта
оборудования тесно связана с надежностью источника электропитания,
вопросы проектирования и технологии систем электроитания привле-
кают все большее внимание.
10
В последнее десятиление значительные достижения в области сило-
вой электроники обусловили развитие надежных, легких и высокоэф-
фективных систем электропитания с большим СНО.
Источником энергии для большей части оборудования является пере-
менный ток, но существуют и другие типы источников энергии: бата-
реи, солнечные элементы и т.д. Таким образом, доступной формой энер-
гии ялвяется как переменный, так и постоянный ток. Однако большинст-
во электрического и электронного оборудования работают от постоянно-
го тока. При этом различные виды оборудования работают при постоян-
ных напряжениях нескольких уровней. Для некоторых устройств тре-
буется несколько напряжений постоянного тока для внутренних опе-
раций.
Небольшая часть оборудования работает непосредственно на перемен-
ном токе. Системы электропитания преобразуют напряжение одного вида
или одного уровня в напряжение другого вида или уровня, а в блоках пере-
менного тока — одну частоту в другую. Источники электропитания пре-
образуют вид энергии, одновременно согласовывая полное внутреннее
сопротивление источника энергии с характеристиками нагрузки ил£
оборудования. Другими словами, система электропитания приводит
выходы источника энергии в соответствие с требованиями, которые
предъявляются различными нагрузками или оборудованием..
1.1.2. Определения
Основной функцией источника электропитания является обеспече-
ние стабильного заданного выходного напряжения при изменении в ши-
роких пределах входного напряжения, выходного тока и рабочей темпе-
ратуры. Степень, с которой источник электропитания обеспечивает ста-
бильность выходного напряжения в вышеприведенных условиях, яв-
ляется основным показателем качества источника. Соответственно ста-
бильность источника, %, определяется следующими параметрами:
линейной нестабильностью, %, равной [(ДЕО/ЛЕВХ) /Ео] -100,
где AE0 — изменение выходного напряжения; &ЕВХ — измерение вход-
ного напряжения; Ео — номинальное выходное напряжение;
нагрузочной нестабильностью, %, равной [(Ех — Еп.н.)/Е0] -100,
где Ех — выходное напряжение XX; Епн — выходное напряжение при
полной нагрузке; Ео - номинальное выходное напряжение,
температурным коэффициентом, %, равным ± [(Еотах — Еотгп —
~ ЕоипИ)/Ео (Ттах — Тmin)] -100,
где Евтах — выходное напряжение при Ттах', Eomin - выходное напря-
жение при Tmjn; Ттах — максимальная рабочая температура; Tmin —
минимальная рабочая температура.
11
1.1.3. Классификация систем электропитания
В системах электропитания используются различные методы видо-
изменения энергии и преобразования ее из одной формы в другую.
Системы электропитания подразделяются на рассеивающие (линейные)
и нерассеивающие (ключевые). Так называемые рассеивающие системы
электропитания рассеивают много энергии в процессе преобразования,
и из-за этого бесполезного расхода энергии необходимо применять боль-
шие радиаторы воздушного охлаждения. Мощность потерь изменяется
в зависимости от вариации входного напряжения и нагрузки, отсюда
результат — низкий КПД. Однако такие системы электропитания облада-
ют рядом положительных свойств, например низким уровнем электро-
магнитного излучения (ЭМИ) и наименьшими пульсациями. В дальней-
шем эти системы могут быть классифицированы как системы последова-
тельного и параллельного типов.
Нерассеивающие системы электропитания работают в ключевом ре-
жиме и обеспечивают высокий КПД. В этих системах реализован один
из самых эффективных процессов преобразования постоянного тока
в переменный. Если энергия постоянного тока преобразуется в энергию
переменного тока, то можно легко получить напряжение повышенного
или пониженного уровня, используя облегченные высокочастотные
трансформаторы. В большинстве практических применений трансформа-
торная гальваническая развязка весьма существенна. В особенности
это касается оборудования, на котором работают люди.
Результирующее напряжение постоянного тока получается путем вы-
прямления и фильтрации перменного тока. Существует два метода пре-
образования постоянного тока в переменный. Первый метод — прямо-
угольных сигналов или широтно-импульсной модуляции (ШИМ) - со-
стоит в том, что входное напряжение постоянного тока прерывают с вы-
сокой частотой, получая в результате напряжение прямоугольной фор-
мы. Это напряжение затем приводится к более высокому или более низ-
кому уровню с помощью трансформатора. Выходное напряжение вы-
прямляется и отфильтровывается для получения заданного уровня по-
стоянного напряжения. Если входное напряжение постоянно, то значение
выходного напряжения определяет коэффициент заполнения прямоуголь-
ных импульсов. При излучении входного напряжения или нагрузки ко-
эффициент заполнения изменяется, обеспечивая требуемую стабильность
выходного напряжения. Второй (или резонансный) метод заключается
в том, что входное постоянное напряжение через управляемые ключи
прикладывается к резонансному LC-контуру. При этом частота передачи
энергии определяется не частотой генератора синхронизирующих импуль-
сов, а резонансной частотой контура элементов — накопителей энергии.
Таким образом, источники электропитания (преобразователи
постоянного напряженя) можно рассматривать как линейный или нели-
нейный LC- (или не LC-) генератор (прямоугольных или синусоидаль-
ных колебаний), соединенный через трансформатор и выпрямитель с
12
Рис. 1.1 Классификационное ’’дерево” источников, электропитания
фильтром нижних частот. Классификационное ’’дерево” источников
электропитания представлено на рис. 1.1.
1.1.3.1. Рассеивающие или линейные системы электропитания. В блоке
линейного типа проходной транзистор работает в активном проводящем
режиме так, что напряжение на нем всегда равно разности между вход-
ным и выходным напряжениями. Стабилизатор на стабилитроне и
эмиттерном повторителе является одной из простейших схем, которую
можно себе представить. Такие стабилизаторы, как правило, использу-
ются лишь для грубой стабилизации при малых токах нагрузки и в тех
цепях, где КПД не является важнейшим параметром.
Последовательный стабилизатор. Из всех линейных стабилизирующих
схем наиболее широкое распространение получил последовательный ста-
билизатор, основная схема которого показана на рис. 1.2. Обычно в этих
стабилизаторах в качестве последовательного управляющего элемента
используется транзистор, включенный по схеме с общим эмиттером или
с общим коллектором и управляемый сигналом с выхода схемы управ-
ления или усилителя рассогласования таким образом, чтобы не допус-
кать флуктуаций выходного напряжения. Цепь управления может иметь
различные варианты исполнения, но в любом случае она должна содер-
жать источник эталонного напряжения, с которым сравнивается часть
выходного напряжения, и усилитель сигнала рассогласования. Получен-
ный сигнал ошибки корректирует сигнал управления последовательным
13
Рис. 1.2. Базовая схема последова-
тельного стабилизатора
Рис. 1.3. Базовая схема параллель-
ного стабилизатора
транзистором таким образом, чтобы при всех изменениях входного на-
пряжения и нагрузки напряжение между его коллектором и эмиттером
всегда было равно разнице между входным напряжением и заданным
выходным напряжением. В этом стабилизаторе последовательный про-
ходной транзистор всегда работает в активном режиме, потери энергии в
нем велики. Следовательно, необходимо тщательно выбирать последо-
вательный транзистор, чтобы избежать вторичного пробоя. Стабилизатор
целесообразно использовать для высоких напряжений и средних токов
нагрузки.
Параллельный стабилизатор. Основная схема параллельного стабили-
затора показана на рис. 1.3. Здесь параллельный регулирующий элемент
(транзистор) должен выдерживать полное выходное напряжение, но его
можно не рассчитывать на полный ток нагрузки, если не требуется стаби-
лизировать выходное напряжение при изменении нагрузки от полной до
холостого хода. Коэффициент полезного действия параллельного регуля-
тора довольно низкий, поскольку в последовательном балластном резис-
торе выделяется большая мощность потерь. Предпочтительное примене-
ние параллельного стабилизатора — это средние и низкие напряжения и
большие выходные токи при относительно стабильных нагрузках.
1.1.3.2. Нерассеивающие системы электропитания. Как было изложено
выше, в блоках ключевых или нерассеивающих систем электропитания
проходной транзистор работает либо в режиме насыщения, либо в режи-
ме отсечки и, следовательно, потери в транзисторе минимальны. Ста-
билизация достигается за счет изменения коэффициента заполнения им-
пульсов управления регулирующим транзистором. Выходное напряжение
таких стабилизаторов может быть больше входного напряжения, равно
ему или меньше него. Стабилизаторы подразделяются на три типа: по-
нижающие, повышающие и стабилизаторы с изменением полярности.
Понижающий стабилизатор. В таком стабилизаторе выходное напря-
жение всегда меньше входного и может изменяться практически от 10
до 90% входного напряжения. Ключевой стабилизатор используется в
качестве понижающего трансформатора постоянного тока с высоким
КПД. На рис. 1.4 изображен силовой каскад простого понижающего пре-
образователя. Его выходное напряжение сравнивается с эталонным, уси-
ленный сигнал ошибки воздействует на ШИМ, который управляет дли-
14
Рис. 1.4. Понижающий преобразова-
тель
Рис. 1.5. Повышающий преобразова-
тель
тельностью замкнутого и разомкнутого состояний ключа. Когда ключ
замкнут, ток протекает через дроссель в нагрузку и выходной конден-
сатор. По мере возрастания выходного напряжения до значения эталон-
ного, ключ размыкается.
В этот момент запасенная в дросселе энергия реверсирует полярность
напряжения на нем, ток протекает через диод в нагрузку, а напряжение
на выходе поддерживается конденсатором. Когда вся энергия, запасен-
ная в дросселе, использована, конденсатор разряжается, выходное на-
пряжение уменьшается и процесс продолжается таким образом, что вы-
ходное напряжение поддерживается на уровне, близком к эталонному
напряжению.
Повышающий стабилизатор. В повышающем стабилизаторе выходное
напряжение всегда выше, чем входное. Схема повышающего силового
каскада показана на рис. 1.5. Когда ключ замкнут, ток протекает через
дроссель, в котором запасается энергия. Когда ключ размыкается, энер-
гия, запасенная в дросселе, уменьшается и изменяет полярность напря-
жения на нем таким образом, что напряжение на дросселе складывается
с входным напряжением. Таким образом, напряжение на дросселе и
входное напряжение vg заряжают выходной конденсатор до напряжения
большего, чем входное напряжение.
Стабилизатор с изменением полярности. Этот стабилизатор работает
на принципах повышения и понижения напряжения. Когда ключ замкнут,
дроссель запасает энергию подобно тому, как это происходит в автомо-
бильной системе зажигания. Выходное напряжение соответственно опре-
деляется порцией энергии, возвращенной дросселем. Результатом возвра-
та энергии является уменьшение напряжения и наоборот. На рис. 1.6
показан простой силовой каскад с изменением полярности. Когда ключ
замкнут, дроссель запасает энергию. Когда ключ разомкнут, запасенная
энергия, спадая, вызывает изменение полярности напряжения на дрос-
селе, обеспечивая протекание тока через нагрузку и конденсатор. При
этом полярность выходного напряжения оказывается противоположной
полярности входного напряжения.
Другие типы преобразователей-стабилизаторов. Описанные выше типы
преобразователей-стабилизаторов являются основными. Все другие
15
Рис. 1.6. Инвертирующий преобразова-
тель
преобразователи, подобные преобразователям Кука типа Bell Lab, Wein-
burg, Vanable и т.д., являются развитием этих основных преобразовате-
лей-стабилизаторов .
Стабилизаторы с самовозбуждением и независимым возбуждением.
Ключевые стабилизаторы могут выполняться с самовозбуждением и не-
зависимым возбуждением. Как следует из вышеизложенного, выходное
напряжение сравнивается с опорным напряжением и усиленное напряже-
ние ошибки используется для получения выходных импульсов ШИМ,
которые управляют ключом стабилизатора таким образом, чтобы под-
держивать выходное напряжение на заданном уровне. Эти импульсы
ШИМ могут быть с фиксированной длительностью замкнутого состояния
и изменяющейся длительностью разомкнутого состояния; с изменяющи-
мися длительностями замкнутого и разомкнутого состояний и фикси-
рованной частотой или с фиксированной длительностью разомкнутого
состояния и изменяющейся длительностью замкнутого состояния. Для
каждого конкретного использования стабилизатора в зависимости от
предъявляемых к нему требований должны быть выбраны соответству-
ющие методы ШИМ и схемы их реализации.
С целью увеличения допустимой мощности рассмотренные выше ста-
билизаторы обычно соединяют параллельно и управляют ими со сдвигом
по фазе (многофазные стабилизаторы), что уменьшает радиопомехи и
позволяет решить проблемы электромагнитной защиты. Для улучшения
таких характеристик, как стабильность, быстродействие, линейное по-
давление гармоник и т.д„ управляющая цепь обратной связи приведен-
ных выше стабилизаторов может быть видоизменена таким образом,
чтобы обеспечить чувствительноть к изменению переменной составляю-
щей и к изменениям постоянных составляющих выходного и входного
напряжений.
Глава 2. МОДЕЛИРОВАНИЕ И АНАЛИЗ
2.1. ПРИМЕНЕНИЕ МЕТОДА ЭКВИВАЛЕНТНОЙ СХЕМЫ
С ИНЖЕКЦИЕЙ ТОКА ДЛЯ МОДЕЛИРОВАНИЯ
КЛЮЧЕВЫХ ПРЕОБРАЗОВАТЕЛЕЙ ПОСТОЯННОГО НАПРЯЖЕНИЯ
2.1.1. Введение
В последние годы моделирование ключевых преобразователей при-
влекло значительное внимание. В [1] и [2] сделана попытка дать до-
статочно полный обзор этих методов. Из различных методов моделиро-
вания ключевых преобразователей в настоящее время наиболее общепри-
нятыми являются: метод электронных эквивалентных схем для устано-
вившихся состояний по средним значениям [3—6] и метод управляемой
инжекции тока [2, 7—9]. Любой метод, используемый для определения
переходных характеристик преобразователя, дает в конечном счете тот л
же результат, однако один из них по сравнению с другим может дать
больше информации о свойствах преобразователя. При использовании
метода инжектирования получается структурная схема, линейно описы-
вающая нелинейную систему и моделирующая только переходные харак-
теристики. Метод электронных эквивалентных схем установившихся
состояний дополнительно к переходным характеристикам позволяет
моделировать входные и выходные характеристики. Этот метод может
быть использован проектировщиками электронных схем, но те из них,
кто привык к управляющим типам воздействий, предпочитают для моде-
лирования ключевых преобразователей применять метод управляемой
инжекции тока.
Существует мнение, что основным достоинством метода электронной
эквивалентной схемы для установившегося состояния является просто-
та анализа большинства преобразовательных структур. Кроме того, ис-
пользование эквивалентной схемы позволяет глубже понять физические
процессы и как следствие — оптимизировать проектирование. На основе
изучения и применения обоих методов можно сделать следующие вы-
воды:
1) в режиме непрерывных токов (РНТ) метод управляемой инжекции
тока сопоставим с методом эквивалентной схемы установившегося со-
стояния;
2) в режиме прерывистых токов (РПТ) метод электронных эквива-
лентных схем установившегося состояния для средних значений стано-
вится непонятным, сложным и более громоздким по сравнению с мето-
дом управляемой инжекции тока.
Указанные соображения позволяют заключить, что предпочтительнее
воспользоваться методом управляемой инжекции тока для моделирова-
ния входных и выходных характеристик, тем более что при применении
17
этого метода в эквивалетной схеме определяются и переходные харак-
теристики.
Такой модифицированный метод анализа называется методом экви-
валентной схемы с инжекцией тока (МЭСИТ) и обладает следующими
основными преимуществами:
1) усовершенствованная линейная эквивалентная схема дает пред-
ставление о физических процессах в схеме преобразователя, что позво-
ляет оптимизировать процесс проектирования;
2) доступность модели входной цепи позволяет не проводить анализа
многокаскадных преобразователей каждый раз с самого начала;
3) входные и выходные характеристики моделируются так же, как и
переходные характеристики;
4) в режиме РПТ анализ является простым и понятным.
Применение МЭСИТ для моделирования ключевых преобразователей
в настоящей главе представлено достаточно подробно. Для демонстра-
ции этого метода проведены моделирование и анализ трех основных
типов преобразователей: понижающего, повышающего и преобразова-
теля с изменением полярности.
2.1.2. Метод эквивалентной схемы с инжекцией тока (МЭСИТ)
Последовательное изложение МЭСИТ позволяет унифицировать обра-
ботку большого количества различных силовых каскадов преобразова-
телей, поскольку этот метод очень прост и удобен в применении. Каж-
дый шаг такого моделирования имеет физический смысл. При этом
моделирование опробовано на трех основных типах преобразователей:
понижающем, повышающем и с изменением полярности. Конечным ре-
зультатом моделирования является та или иная система уравнений,
представляющая переходные характеристики преобразователя или ли-
нейную эквивалентную модель нелинейного преобразователя.
При моделировании и анализе используется следующая система обоз-
начений: diTs — интервал, в течение которого транзистор включен, а
диод выключен; d2 Ts — интервал, в течение которого транзистор выклю-
чен, а диод включен; d2 + d2 = 1 и Ts = l//s — период коммутации.
Прописные буквы используются для обозначения установившихся
значений, а специальные знаки (угловые скобки над буквой) — для
обозначения малых возмущений.
На рис. 2.1 показано графическое представление алгоритма МЭСИТ,
обобщенное для использования в различных силовых каскадах. Первой
ступенью этого процесса является разделение преобразователя на две
части — нелинейную и линейную. Это разделение силовой части преоб-
разователя производится таким образом, что нелинейная часть факти-
чески определяет среднее значение тока, инжектируемого в линейную
часть преобразователя. Линеаризация характеристик достигается с по-
мощью усреднения тока через нелинейную часть и инжектирования этого
тока в линейную часть преобразователя. Одна из двух частей преобразо-
18
вателя содержит ключ и полагается нелинейной, так как она может из-
менять свою конфигурацию в зависимости от замкнутого или разомк-
нутого положения ключа. Другая часть не содержит никакого ключа,
остается неизменной в течение всего периода коммутации и потому ли-
нейна.
На рис. 2.2 показаны источник напряжения vg, трехполюсник и парал-
лельная RC-цепь. Предположим, что простейший трехполюсник содержит
идеальный ключ, показанный на рис. 2.2, б. Рассмотрим практические
ограничения в преобразователе для такой теоретической цепи. В начальный
момент, когда конденсатор еще не заряжен, через ключ будет протекать
большой ток, ограниченный только эквивалентным последовательным
сопротивлением конденсатора. Этот ток может привести к разрушению
ключа и, кроме того, к возникновению больших пульсаций, так как в
течение всего периода разомкнутого состояния ключа конднесатор дол-
жен обеспечивать током нагрузку. На рис. 2.2, б показано, как за счет
добавления дросселя в схему решаются эти проблемы. Теперь ток через
трехполюсник ограничен и определяется значением индуктивности дрос-
селя L, которая, конечно, воздействует на параллельную RC-цепь.
Это справедливо, когда вывод 2 подключен к выводу 1 ( источнику)
или к выводу 3 (заземлению). Таким образом, мы получим понижаю-
щий преобразователь. Теперь повернем рис. 2.2, в по часовой стрелке —
получим рис. 2.2, г. Мы знаем, что такая цепь с изменением полярности
является преобразователем. Далее, повернув рис. 2.2, г по часовой стрел-
ке, получим рис. 2.2, Э. Снова имеем хорошо знакомую схему — повы-
шающий преобразователь, что и является одним из объяснений последо-
вательных превращений базовых преобразователей, в которых устанав-
ливается тождественность нелинейных (трехполюсник) и линейных (па-
раллельные R и С) частей. Подобная методика распространяется также
на любой силовой каскад преобразователя.
Как упоминалось выше, трехполюсник представляет собой нелиней-
ную часть, в то время как его вторая часть (параллельные R и С) явля-
ется линейной. Можно представить также, что трехполюсник инжекти-
рует ток во вторую часть схемы, обеспечивая тем самым получение со-
ответствующего выходного напряжения. Диаграммы тока и напряжения
преобразвателя, показанные на рис. 2.3, позволяют установить следую-
щие взаимосвязи:
1) среднее значение тока Оср), определяемого первой (нелинейной)
частью трехполюсника и инжектируемого в его вторую часть на периоде
коммутации;
2) изменение тока дросселя в зависимости от значения индуктив-
ности дросселя и напряжения на нем в каждом подынтервале периода
коммутации;
3) соотношение между средним инжектируемым током и выходным
напряжением v = icpZ, где Z — полное сопротивление линейной части
прео бра зов ател я.
20
Рис. 2.2 Предполагаемая базисная схема, от которой ключевой преобразователь
будет последовательно видоизменяться (а); отдельно трехполюсник (б); дрос-
сель, установленный в соответствующее место трехполюсника (в); вращение по
часовой стрелке относительно рис. 22, в (г); вращение по часовой стрелке отно-
сительно рис. 22, г (д)
Рис. 2.3. Типовые формы тока (2) и
напряжения на дросселе (2) понижа-
ющего преобразователя
Теперь условия установившегося режима достигаются при равенст-
ве нулю производных и приращений (рис. 2.1, карта 5). Поскольку
уравнения преобразователя (рис. 2.1, карта 2) являются линейными, в
соответствии с принципом суперпозиции можно ввести приращения
(рис. 2.1, карта 4) при условии малых изменений переменной составля-
ющей относительно установившегося значения рабочей точки. Как мы
знаем, назависимыми управляющими входными величинами являются
vg и J, а их приращения вызывают приращения гиг. Малые изменения
переменной составляющей относительно установившегося значения ра-
бочей точки незначительны по сравнению с этим установившимся зна-
чением, т.е. v / V < 1, Vg/ Vg < 1, 5/Z>«l,?/Z«l.
Используя приведенные выше приближения, можно независимо от
нелинейных членов второго порядка снова прийти к линейным уравне-
21
ниям. Теперь остается только переменная составляющая, которая описы-
ет режим малого сигнала низкой частоты. Используя эту систему урав-
нений, записываем переходные функции (рис.-2.1, карта 5) вход —выход
и управление — выход. Эквивалентная схема (карта 6), представляющая
собой нелинейный преобразователь в режиме малого входного и выход-
ного сигналов низкой частоты, получается с помощью той же системы
уравнений.
Хотя изложенный метод вытекает из решений уравнений и приводит
к построению модели линейной эквивалентной схемы, разработчики
могут применить (рис. 2.1, карта 2) аналогичный метод, используя мо-
дели эквивалентных схем. Например, в первом методе выполняются
приращения и линеаризация, а окончательная эквивалентная линейная
модель получается проще, чем показанная на рис. 2.1 (карта 6).
Оба эти способа похожи и дают идентичные результаты, поэтому каж-
дый исследователь по своему усмотрению пользуется любым из них.
Способ моделирования дает большее представление о физической
природе результатов, особенно в правой полуплоскости системы коор-
динат в повышающем преобразователе и преобразователе с изменением
полярности. Таким образом, МЭСИТ для моделирования ключевых си-
ловых каскадов преобразователей постоянного напряжения помимо
полного описания свойств нелинейного преобразователя в режиме
малого сигнала низкой частоты позволяет получить и переходные харак-
теристики.
2.1.3. Моделирование повышающего преобразователя
Продемонстрируем применение метода для силового каскада повы-
шающего преобразователя, показаного на рис. 2.4. Предполагается, что
ключи близки к идеальным. Для упрощения анализа исключены из рас-
смотрения паразитные явления и эффекты, связанные с временем пере-
ключения транзистора. Метод эквивалентной схемы с инжекцией тока
используется для преобразователей, работающих в РНТ или РПТ, с за-
данным коэффициентом заполнения или заданным током. Подобным же
образом МЭСИТ применим как для преобразователей с автоколебатель-
ным режимом, так и для преобразователей с фиксированной частотой.
Однако предлагаемое моделирование ограничивается рассмотрением
преобразователей, работающих с фиксированной частотой в РНТ с задан-
ным коэффициентом заполнения.
Временные диаграммы тока и напряжения дросселя показаны на
рис. 2.5. Заштрихованная площадь показывает порцию тока, инжекти-
руемого в выходную линейную цепь (параллельные R и С), d2Ts — это
интервал, в течение которого инжектируется ток.
Среднее значение тока дросселя, инжектируемого в выходную цепь
в течение периода коммутации, определяется из выражения
?ср = id2, (1)
22
Рис. 2.4. Повышающий преобразова-
тель без учета всех паразитных явле-
ний и времени переключения
Рис. 2.5. Временные диаграммы тока
(7) и напряжения на дросселе (2)
повышающего преобразователя по
рис. 2.4
где i — ток дросселя. Производная тока
L(di/dt) = vg - vd2. (2)
Отсюда выходное напряжение
v = 7СрД/(1 + sRC), (3)
где 7?/(1 + sRC) - полное сопротивление выходной цепи. Установивший-
ся режим теперь может быть найден из выражений (1)— (3) путем при-
равнивания производной к нулю. Поэтому вышеуказанные уравнения
приводятся к следующим выражениям:
V/Vg = MDi- I = V](RD2). (4)
Уравнения (1) — (3) относятся к возмущениям относительно рабо-
чей точки установившегося режима, и для того чтобы снова получить
линейную модель для малого сигнала, пренебрегаем нелинейными члена-
ми второго порядка, т.е.
Л Л Л Л
z’cp “ i-Oj Id, I
L (di/dt) = vg - vD2 + Vd, I (5)
v = icp [^/(1 + «ЯС)]. J
Переходные функции вход — выход и управление — выход получают-
ся из (5) при использовании первого преобразования Лапласа
v(s)lvg(s) = (1/Z»2)/(1 + SL/REfy + s2LC/Dj), [
v(s)/d(s) = (^/D2)(l- sL/RDl)/(l +sL/RD22+s2LC/DI). 5 (6)
23
Рис. 2.6. Модель линейной
эквивалентной схемы по-
вышающего преобразова-
теля для малых сигналов
низкой частоты. (Эта схе-
ма может быть непосред-
ственно использована для
моделирования на ЭВМ)
Эти переходные функции являются теми же самыми функциями,
которые получены в [3] и [6] с помощью метода электронной экви-
валентной схемы для средних значений установившегося состояния или
метода управляемого источника тока. Используя схему уравнений (5),
можно получить эквивалентную схему, показанную на рис. 2.6. На
рис. 2.7 осуществлена замена зависимых генераторов тока и напряжения
с помощью эквивалентного трансформатора. Эта схема идентична моде-
ли эквивалентной схемы, полученной в результате применения метода
электронной эквивалентной схемы для установившегося режима сред-
них значений параметров.
На рис. 2.7 источник тока (на месте ключа реальной схемы на
рис. 2.4) расположен между L и С и воздействует на вход схемы, созда-
вая эффект фильтра нижних частот.
Таким образом, воздействие источника тока на вход создает частотно-
зависимый источник напряжения. Полярность источника устанавливается
такой, чтобы решения уравнений переходной функции управление —
выход располагались в правой полуплоскости относительно начала
координат. Следует отметить также, что эффективное значение
индуктивности теперь зависит от установленного значения коэффици-
ента заполнения.
Рис. 2.7. Модель линейной эквива-
лентной схемы повышающего пре-
образователя для малых сигналов
низкой частоты, в которой за-
висимые источники тока в вапря-
жения заменены эквивалентным
трансформатором
Рис. 2.8. Эквивалентная схема для
выражений (1) - (3)
24
Рнс. 2.9. Линейная эквивалентная
схема повышающего преобразова-
теля, приведенная на рис. 2.4, для
малых сигналов низкой частоты
Смешанный метод. В этом методе используется модель эквивалент-
ной схемы непосредственно после линеаризации нелинейной части преоб-
разователя. С помощью выражений (1) — (3) получаем эквивалентную
схему, показанную на рис. 2.8. Очевидно, что в течение установившегося
режима достаточно просто получить модель постоянного тока путем за-
мыкания цепи дросселя и размыкания цепи конденсатора; тогда vg, v ,
di и d2 предполагаются постоянными величинами. Теперь введем в
схему возмущение и, пренебрегая членами второго порядка, снова по-
лучим линейную систему уравнений. Совершенно ясно, что схема на
рис. 2.9 аналогична схеме на рис. 2.6 и от нее можно перейти к эквива-
лентной схеме, подобной показанной на рис. 2.7, после замены зависи-
мых источников трансформатором.
2.1.4. Моделирование преобразователей понижающего
и инвертирующего типов
Метод, описанный в п. 2.3.3, может быть распространен на моделиро-
вание преобразователей понижающего и инвертирующего типов. На
рис. 2.10 показаны принципиальная схема преобразователей понижающе-
го типа и его эквивалентная схема, а на рис. 2.11 — те же схемы для ин-
Рнс. 2.10. Принципиальная схема понижающего преобразователя (д) и его линей-
ная эквивалентная схема (б)
25
Рис. 2.11. Принципиальная схема инвертирующего преобразователя (а) и его ли-
нейная эквивалентная схема (б)
вертирующего преобразователя. Решения для двух наиболее интересных
переходных функций вход — выход и управление - выход приведены
ниже.
Для преобразователей понижающего типа
v(s)/^(s) = (Di/D2)/(1+SL/7?+S2LC),
0(s)/d(s) = vgl(1 + SL/R + S2LC),
а для преобразователей инвертирующего типа
v(s)/^(s) = (DjD^Kl+sL/RlZ + s2LC/I%),
p(s)/<?(s) = [V/(DlD2)](l-sLD1/RCP2)l(l +
+ sL/RI% + s2LC/I%).
Полученные эквивалентные схемы и переходные функции для пони-
жающего и изменяющего полярность преобразователей полностью
соответствуют приведенным в [3].
2.1.5. Сравнение
С помощью нового мётода МЭСИТ выполняются моделирование и
анализ повышающего, понижающего и изменяющего полярность токов
с заданным коэффициентом заполнения преобразователей, работающих
на постоянной частоте в РНТ, и развиваются соответствующие модели
их эквивалентных схем. Переходные характеристики получаются та-
ким же, как и при методе управляемой инжекции тока или электронной
эквивалентной схемы установившегося состояния средних значений.
26
Кроме того, модели эквивалентных схем получаются такими же, как и
в методе установившегося состояния средних значений.
2.1.6. Заключение
Рассмотренный метод (МЭСИТ) для моделирования ключевых преоб-
разователей постоянного напряжения описывает переходные характе-
ристики вход — выход и управление — выход в режиме малого сигнала
низкой частоты так же точно, как входные и выходные характеристики
преобразователя. Моделирование понижающего, повышающего и изме-
няющего полярность преобразователей выполняется для режима с фик-
сированной частотой, заданным коэффициентом заполнения и непрерыв-
ного тока дросселя. Результаты моделирования и анализа сравниваются
с аналогичными результатами, полученными при использовании метода
управляемой инжекции тока и метода электронной эквивалентной схе-
мы установившегося состояния для средних значений.
СПИСОК ЛИТЕРАТУРЫ
1. Middlebrook R.D., Cuk S. Modelling and analysis methods for dc-dc switching
converters. Presented at the IEEE International Semiconductor Power Converter Con-
ference, Orlando, FL, 1977.
2. Fossard AJ., Clique M. Modelisation des cellules elementaires. Technical Report
1, Control 2590/75 AK, European Space Research and Technology Organization, No-
ordwijk, The Netherlands, 1976.
3. Middlebrook R.D., Cuk S. A general unified approach to modeling switching con-
verter power stages. In IEEE Power Electronics Specialists Conference Record, 1976,
p. 18-34.
4. Cuk S., Middlebrook R.D. A general unified approach to modeling switching dc-
to-dc converters in discontinuous conduction mode. In IEEE Rower Electronics Spe-
cialists Conference Record, 1977, p. 36-57.
5. Hsu S.—P., Brown A., Rensink L., Middlebrook R.D. Modeling and analysis of
switching de—de converters in constant frequency current programmed mode. In IEEE Po-
wer Electronics Specialists Conference Record, 1979. P. 284-301.
6. Brown A. State space analysis of pulse width modulated switching converters.
Technical Note T—58, Power Electronics Group, California Institute of Technology,
Pasadena, Feb. 6,1979.
7. Fossard A.J., Clique M. Modeling and design of dc-dc converters using modern
control theory, part 1: molelisation; part 2; open loop analysis and control design.
Presented at the 3rd European Space Research and Technology Organization Spacec-
raft Power Conditioning Seminar, Noordwijk, The Netherlands, 1977.
8. Ferrante J.G., Capel A., Fossard AJ., Clique M. A general linear continuous mo-
del for design of power conditioning units at fixed and free running frequency, In IEEE
Power Electronics Specialists Conference Recorl, 1977, p. 113-124.
9. Prajoux R., Marpinard J.C., Jalade J. Establishment de modeles mathematiques
pour regulaterus de puissance a modulation de largeyr d impulsions (pwm); 2: models
confines. ESA Scientific and Technical Review, 1966, 2(1), 115—129.
2.2. МЕТОД ЭКВИВАЛЕНТНОЙ СХЕМЫ С ИНЖЕКЦИЕЙ ТОКА
ДЛЯ МОДЕЛИРОВАНИЯ КЛЮЧЕВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
ПОСТОЯННОГО НАПРЯЖЕНИЯ В РЕЖИМЕ ПРЕРЫВИСТОГО
ТОКА ДРОССЕЛЯ
2.2.1. Введение
В последние годы все большее внимание привлекает к себе модели-
рование ключевых преобразователей, для чего разработан ряд аналити-
ческих и расчетных методов. Обзор этих методов проделан в [1, 2].
Из всех существующих на сегодня методов моделирования ключевых
преобразователей рассмотрим только два, а именно: метод средних
значений электронной эквивалентной схемы установившегося сотояния
[3—6] и метод управления инжектируемым током [2,7—9].
Какой бы из методов ни использовался для определения передаточной
характеристики преобразователя, результат, естественно, будет одним
и тем же, но один из методов позволяет получить более обширную ин-
формацию о характеристиках преобразователя по сравнению с другим.
С одной стороны, с помощью метода инжекции тока, отражающего
технику управления, удается получить структурную схему линеаризо-
ванного описания нелинейной системы и смоделировать только переда-
точные характеристики. С другой стороны, метод средних значений элек-
тронной эквивалентной схемы установившегося состояния позволяет
в дополнение к передаточной характеристике исследовать также вход-
ную и выходную характеристики. Разработчики электронных схем пред-
почитают, например, метод эквивалентной схемы, а разработчики, зани-
мающиеся управлением, для моделирования ключевых преобразовате-
лей пользуются методом управления инжекцией тока.
Можно также отметить, что одним из наиболее полезных преимуществ
метода средних значений электронной эквивалентной схемы установив-
шегося сотояния является та простота, с которой проводится анализ пре-
образователей весьма сложных структур, и кроме того, эквивалентная
схема способствует пониманию физики процессов и позволяет осущест-
вить оптимальное проектирование. В ходе тщательного анализа и приме-
нения обоих методов были обнаружены весьма интересные факты:
а) для анализа работы преобразователя в режиме непрерывного тока
дросселя (НТД) применение метода управления инжектируемым током
так же удобно, как и метода средних значений электронной эквивалент-
ной схемы установившегося состояния; б) для анализа работы преобразо-
вателя в режиме прерывистого тока дросселя (ПТД) метод эквивалент-
ной схемы установившегося состояния несовершенен [4], сложен и гро-
моздок [6], в то время как метод инжектированного тока в этом случае
весьма прост.
С учетом этих соображений метод управления инжектируемым током
применяется для моделирования входных и выходных, а также переда-
точных характеристик преобразователей при одновременном построении
28
эквивалентной схемы. В дальнейшем такой подход будет называться
методом эквивалентной схемы с инжекцией тока (МЭСИТ).
Будучи разработанным и используемым для анализа работы преобра-
зователей постоянного тока, работающих в режиме НТД [10], МЭСИТ
распространяется также и на преобразователи, работающие в режиме
ПТД. Применение данного метода будет продемонстрировано на примере
трех базовых преобразователей: повышающего, понижающего и инвер-
тирующего.
2.2.2. Метод эквивалентной схемы с инжекцией тока (МЭСИТ)
Для моделирования и анализа примем следующие обозначения:
diTs — временной интервал, на котором транзистор включен, а диод
выключен;
- временной интервал, на котором транзистор выключен, а диод
включен;
d\Ts + i/jTj + d-jTs - Ts,
где Ts = l/fs — период коммутации.
Параметры, обозначенные прописными буквами, относятся к устано-
вившемуся состоянию, а величины, обозначенные буквами с угловыми
скобками сверху, — к малым возмущениям.
На рис. 2.12 представлена в общем виде схема МЭСИТ для модели-
рования преобразователей, работающих в режиме ПТД. На первом этапе
определяются нелинейная и линейная части схемы преобразователя и
осуществляется линеаризация нелинейной части (оставшаяся часть схемы
по существу линейна, карта 1 на рис. 2.12). Нелинейная часть преобра-
зователя определяет средний ток, инжектируемый в его линейную часть.
Далее (карта 2) составляется система связей между переменными,
соответствующая конкретной схеме преобразователя (типичные формы
тока в дросселе и напряжения на нем показаны на рис. 2.13), а именно:
1) вольт-секундный баланс напряжения на дросселе;
2) средний ток (гср), инжектируемый в линейную часть за период
коммутации;
3) соотношение между средним инжектированным током и выход-
ным напряжением
v = iCpZ’
где Z — импеданс1 линейной части преобразователя.
Решение системы в установившемся состояния равными нулю (кар-
та 3). Посльку уравнения преобразователя в карте 2 линейны, справедли-
вы правила суперпозиции и в точку установившегося сотояния может
быть введено малое возмущение. Независимыми входными управля-
1 Импеданс — полное сопротивление цепи. — Прим.пер.
29
Рис. 2.12. Схема МЭСИТ для моделирования ключевых преобразователей постоянного напряжения, работающих в режиме ПТД
Рис. 2.13. Типичные формы тока
дросселя и напряжения на нем в по-
нижающем преобразователе
ющими переменными являются vg и d, изменение двух этих величин
вызывает изменение i или v . Теперь проведем аппроксимацию: малые
отклонения по переменному току от точки установившегося состояния
пренебрежимо малы по сравнению со значениями параметров установив-
шегося состояния, т.е. г/ V < 1,1^/ Vg < Dx < 1, J2/A 1, г/1 < 1.
Используя вышеназванную аппроксимацию, для получения снова ли-
нейной системы уравнений опускаем нелинейные члены второго поряд-
ка. Теперь осталась только часть, описывающая реакцию преобразова-
теля на малые сигналы низкой частоты. С помощью этой системы урав-
нений можно записать передаточные функции вход — выход и управле-
ние — выход (карта 5 на рис. 2.12), отражающие реакцию нелинейной
части преобразователя на малые сигналы низкой частоты. Хотя описан-
ный метод вытекает из уравнений преобразователя и в конечном итоге
приводит к построению эквивалентной линейной схемы, после получения
уравнений (карта 2) можно идти параллельным путем, используя экви-
валентные схемы. Как и в первом методе, вводятся возмущения и про-
изводится линеаризация, а затем из результирующих схемных моделей
образуется подобная полученной на рис. 2.12 эквивалентная схема.
2.2.3. Моделирование повышающего преобразователя
Продемонстрируем предлагаемый метод на примере силового каскада
повышающего преобразователя, представленного на рис. 2.14, Все ключе-
вые элементы преобразователя предполагаются идеальными, частота
коммутации фиксирована, а коэффициент заполнения выбран таким,
чтобы преобразователь работал в режиме ПТД. Постоянная времени
RC предполагается много больше, чем период коммутации Ts.
Формы тока через дроссель и напряжения на нем в повышающем пре-
образователе показаны на рис. 2.15. Заштрихованная часть показывает
’’количество” тока, инжектируемого в выходную линейную цепь (па-
раллельное соединение резистора R и конденсатора С); временной ин-
тервал, на котором происходит инжекция тока, равен d2Ts. Среднее
значение тока дросселя, инжектированного в выходную цепь за период
коммутации,
=
Р 2L v
31
Рис. 2.15. Ток дросселя и напряжение
на нем в повышающем преобразова-
теле на рис. 2.14
Рис. 2.14. Принципиальная схема по-
вышающего преобразователя
вольт-секундный баланс на дросселе
i^(di + <Z2) = Vd2. (2)
Выходное напряжение
v = 0срД)/(1 + sRC), (3)
где Rl(l + sRC) — импеданс выходной цепи. Из (1) — (3), принимая
все производные равными нулю и полагая, что Vg, V, dx,d2 и т.д. имеют
установившиеся значения, можно определить уравнения установивше-
гося состояния. Таким образом, уравнения (1) — (3) сводятся к сле-
дующему соотношению:
Vlvg = 1 + ----
d2r
vgD\D2Ts
2L
(4)
Внесем в уравнения (1) — (3) возмущения относительно точки уста-
новившегося состояния, и, прнебрегая членами с нелинейностью второго
порядка для возобновления линейности системы, получим
A Ts л А
zcp — (ygDiD2 + vgd^D2 + vgDxd2),
Vl»g - Vvglvg = ^/D2 - D^/Dl,
A R A
(5)
Из уравнения (5) с помощью одностороннего преобразования Лап-
ласа имеем передаточные функции вход — выход и управление — выход
А
V 1
— = М----------- ,
vg 1 + s/ Wp
V _ IV I /м-\' 1 \
d 2M- 1 \ у/ KM 1 + s/ Wp I ’
32
где
V Di+D2 2L (2М-1)1
М = — = ; К = ----- Wp = ----------- .
Vg D2 RTs k (M- I) rc
Выведенные передаточные функции ничем не отличаются от резуль-
татов, полученных методом средних значений электронной эквивалент,-
ной схемы установившегося состояния или метода управления инжекти-
руемым током. Используя (5), строим эквивалентную схему
(рис. 2.16), индентичную модели, полученной с помощью метода средних
значений электронной эквивалентной схемы установившегося состояния.
Смешанный (гибридный) метод. Продемонстрируем гибридный ме-
тод моделирования, упоминавшийся в п. 2.2.2, согласно которому экви-
валентная схема строится сразу же после линеаризации нелинейной
части преобразователя с учетом уравнений (1) — (3) (рис. 2.17). Из
этой схемы очевидно, что в установившемся состоянии модель для
постоянного тока получается просто за счет размыкания цепи , конденса-
тора, если считать vg, v , dlt d2 параметрами установившегося состоя-
ния. Далее в схему вносятся возмущения и отбрасываются члены второ-
го порядка нелинейности, тем самым системе возвращается линейность.
Полученная в результате эквивалентная схема (рис. 2.18) идентична
схеме на рис. 2.16.
Рис. 2.16. Линейная эквивалентная схема повышающего преобразователя для ма-
лых сигналов низкой частоты. Данная схема непосредственно применима для моде-
лирования на ЭВМ
Рис. 2.17. Эквивалентная схема, построенная по уравнениям (1) - (3)
33
Рис. 2.18. Линейная схема
низкой частоты
преобразователя для малых сигналов
2.2.4. Моделирование понижающего
и инвертирующего преобразователей
Покажем применение метода, описанного выше, для моделирования
понижающего и инвертирующего преобразователей (см. приложение).
На рис. 2,19 и 2.20 приведены принципиальные и эквивалентные схемы
силовых каскадов соответственно понижающего и инвертирующего пре-
образователей. Передаточные функции вход — выход и управление —
выход для этих преобразователей выглядят следующим образом:
для понижающего преобразователя
Рис. 2.19. Принципиальная схема понижающего преобразователя (а), формы тока
через дроссель и напряжение на нем (б), линейная эквивалентная схема для малых
сигналов низкой частоты (в)
34
Рис. 2.20. Принципиальная схема инвертирующего преобразователя (а) .формытока
через дроссель и напряжение на нем (б), линейная эквивалентная схема для малых
сигналов низкой частоты (в) ;
где
для инвертирующего преобразователя
Л Л
V I V V 1
__ = м_____________ - = --------- -----------
Vg (1 + s/Wp) ’ Му[Г (l+s/Wp)
где
Di
М = — ; К =
D2
2
RC
2.2.5. Заключение
Разработанный для моделирования преобразователей в режиме НТД,
метод эквивалентной схемы с инжекцией тока [10] распространяется
также и на преобразователи, работающие в режиме ПТД. Работа нового
метода продемонстрирована на примере моделирования понижающего,
повышающего и инвертирующего преобразователей, и проведено срав-
нение полученных результатов с моделями, построенными с помощью
метода управления инжектируемым током, а также метода средних
значений электронной эквивалентной схемы установившегося состояния.
35
Приложение
Ш. Понижающий преобразователь. Формы тока через дроссель и на-
пряжения на нем в понижающем преобразователе показаны на рис. 2.19,
б. Заштрихованная область на графике характеризует ’’количество”
тока, инжектируемого в выходную линейную цепь (параллельное соеди-
нение резистора R и конденсатора С). Временной интервал, на котором
осуществляется инжекция, равен (dx + d2)Ts. Средний ток через дрос-
сель, инжектируемый в выходную цепь за период коммутации.
1'ср
(yg - V)diTs
2L
(<Л + d2),
вольт-секундный баланс на дросселе
vgd2 = V(d2 + dx),
а выходное напряжение
/ср R
v = —-------- ,
1 + sRC
(П1.1)
(П1.2)
(П1.3)
где R/ (1 + sRC) — импеданс выходной цепи.
Из (П1.1) — (П1.3), принимаявсе производные равными нулю, можно
определить уравнение установившегося состояния. Таким образом, вы-
ражения (П 1.1) — (П1.3) сводятся к следующим соотношениям:
V = Д1 V = (yg - И)Д1Г,(Д1 -Дг) 4)
Vg D\ + R 2L
Внесем в (П1.1) — (П1.3) возмущения относительно точки устано-
вившегося состояния и, пренебрегая членами, имеющими второй поря-
док нелинейности, линеаризуем систему. В результате
1ср = (vg + vg - V - v) (Dt + di) + D2 + d2),
(V + v)/(vg + vg) = (Di + di)/(Di + di + D2 + Л),
л R
v = icp --------- • (П1.5)
P (1+«ЯС)
Из (П1.5) с помощью одностороннего преобразования Лапласа полу- •
чаем передаточные функции вход — выход и управление — выход:
vg (1+s/H/p)
36
V _ 2И(1 -М) /1 -М 1
J М(2 — М) у/ К (l+s/FVp)
где
V Di
М = — = ---------
Vg Dx + D2
RTS
2 - M \ 1
1 - M / RC
С учетом системы уравнений (П1.5) строим эквивалентную схему (см.
рис. 2.19, в).
П2. Инвертирующий преобразователь. Формы тока через дроссель и
напряжения на нем в инвертирующем преобразователе показаны на
рис. 2.20,6. Заштрихованная область на графике характеризует ’’количест-
во” тока, инжектированного в выходную линейную цепь (параллельное со-
единение резистора R и конденсатора С). Временной интервал, на кото-
ром осуществляется инжекция, равен d2Ts. Средний ток, инжектиру-
емый в выходную цепь за период коммутации через дроссель,
гср
VgdjTsd2
2L
(П2.1)
вольт-секундный баланс на дросселе
Vgdi = Vd2,
а выходное напряжение
(П2.2)
(П2.3)
где R/ (1 + sRC) — импеданс выходной цепи.
Из (П2.1) — (П2.3), приняв все производные равными нулю, можно
определить уравнение установившегося состояния. Таким образом,
уравнения (П2.1) — (П2.3) сводятся к соотношению
И Д1 И VgDiD2Ts
Vg D2 R 2L
Внесем в уравнения (П2.1) — (П2.3) возмущения относительно точки
установившегося состояния и, пренебрегая членами второго порядка
нелинейности, линеаризуем систему. В результате
Tg Л Л Л
*ср ~ (PgDiD2 VgdiD2 + VgDxd2),
37
* A J
V Vg d\
-----V~T = —
Vg Vg °2
di дл R
-Dt — , V = ic? ---------
D2 r (1 + sRC)
(П2.5)
Из (П2.5) с помощью одностороннего преобразования Лапласа полу-
чаем передаточные функции вход — выход и управление — выход:
А А
V 1 К И 1
— = М ------------ , -Г- = ----=-------------- ,
vg (Д+s/Wp) S Му/К (1+s/Wp)
где
V D, 2L 2
М = — = — ; к = ----------- ; wp = — .
Vg d2 rts rc
С учетом системы уравнений (П2.5), строим эквивалентную схему
(рис. 2.20, в).
СПИСОК ЛИТЕРАТУРЫ
1. Middlebrook R.D., Cuk S. Modeling and analy, methods for dc-dc switching con-
verters”, presented at the IEEE Int. Semi-Conductor Power Converter Conf. (Orlando,
FL), 1977.
2. Fossard A J., Clique M. ”Modelisation des cellules elementaires”, Tech. Rep. 1,
ESTEC contract 2590/75 AK, 1976.
3. Middlebrook R.D., Cuk S. ”A general unified approach to modeling switching
converter power states/, m IEEE Power Electron. Specialists Conf., 1976 Rec., p. 18-
34.
4. Cuk S., Middlebrook R.D. ”A general unified approach to modeling switching
dc-to-dc converters in discontinuous conduction mode”, presented at the IEEE Po-
wer Electronics Specialists Conf., June 1977.
5. Hsu S.—P. ел. /Modeling and analysis of switching dc-dc converters in constant
frequency current programmed mode”, in IEEE Power Electron. Specialists Conf.,
1979 Rec.
6. Art Brown. ’’State Space Analysis of pulse wedth modulated switching conver-
ters”, Power Electronics Group, California Institute of Technology, technical note T—58,
Feb. 6,1979.
7. Fossard AJ., Clique M. ’’Modeling and design of dc-dc converters using modern
control theory, Part 1 Modelization, Part 2 Open Loop Analysis and Control Design”,
in Proc. Third ESTEC Spacecragt Power Conditioning Seminar (Noordwijk. The Net-
herlands), 1977.
8. Fossard AJ. e.a. ”A general linear continuous model for design of power con-
ditioning units at fixed and free running frequency”, in IEEE Power Electronics Spe-
cialists Conf., 1977 Rec., p. 113-124.
9. Prajoux R., Marpmard J.C., Jalade J. ’’Establishment de modeles mathemati-
ques pour regulaterus de puissance a modulation de largeur d impulsions (pwm); 2. Mo-
dels continus”, ESA Sci. Tech. Rev., vol. 2, N 1,1966,p. 115-129.
10. K. Chetty PJ*. ’’Current injected equivalent circuit approach (CIECA) to mo-
deling of switching dc-dc converters”, IEEE Trans. Aerospace and Electronic Syst.,
vol. 17, Nov. 1981.
38
2.3. МЕТОД ЭКВИВАЛЕНТНОЙ СХЕМЫ С ИНЖЕКЦИЕЙ ТОКА
ДЛЯ МОДЕЛИРОВАНИЯ КЛЮЧЕВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
ПОСТОЯННОГО НАПРЯЖЕНИЯ С ЗАДАННЫМ ТОКОМ
2.3.1. Введение
За последние 10 лет моделирование ключевых преобразователей по-
стоянного тока в постоянный привлекло к себе заслуженное внима-
ние, и основные работы в этом направлении были посвящены определе-
нию передаточной, а также входной и выходной характеристик в ос-
новном нелинейных преобразователей постоянного напряжения в час-
тотной области. Среди различных методов достижения этой цели наи-
более универсальным представляется метод эквивалентной схемы с
инжекцией тока (МЭСИТ) [1, 2]. Ниже рассмотрена одна из областей
применения МЭСИТ — преобразователи с заданным током, работающие
в режиме НТД.
Преимущества таких преобразователей хорошо известны и заключа-
ются в следующем: 1) активные элементы ключевых преобразователей
защищены от перегрузки и чрезмерных электрических воздействий.
Это позволяет использовать элементы, рассчитанные на меньшие мак-
симально допустимые значения параметров; 2) ключевые преобразова-
тели с заданным током ведут себя в основном как системы первого по-
рядка; 3) возможна параллельная работа нескольких преобразователей
без проблемы разделения токов; 4) пилообразная форма тока дросселя
выгодно заменила опорное пилообразное напряжение, необходимое для
генерации широтно-модулированных управляющих сигналов.
Главной целью является построение малосигнальных эквивалентных
схем, отражающих и входные, и выходные характеристики преобразо-
вателей, которые затем могут быть включены в модели законченных
систем регулирования. При этом возможен полный анализ общих дина-
мических характеристик и стабильности.
2.3.2. Метод эквивалентной схемы с инжекцией тока (МЭСИТ)
Для моделирования ключевых преобразователей, работающих в ре-
жиме программируемого коэффициента заполнения импульсов, раз-
работан метод эквивалентной схемы с инжекцией тока (МЭСИТ) [1,
2]. Поскольку он используется для моделирования и анализа преобра-
зователей, работающих на фиксированной частоте, необходимо привести
его краткое описание. Разумеется, этот метод может быть также при-
менен и для моделирования преобразователей, работающих на перемен-
ной частоте.
Для последующего моделирования и анализа примем обозначения:
dt Ts — временной интервал, на котором транзистор включен, а диод вы-
ключен; <72 Ts — временной интервал, на котором транзистор выключен,
а диод включен, d2Ts + d2Ts = Ts', Ts = 1// — период коммутации. Пара-
39
Рис. 2.21. Схема МЭСИТ для моделирования ключевых преобразователей постоянного напряжения, работающих в режиме НТД
метры, обозначенные прописными буквами, относятся к установивше-
муся состоянию, а величины, обозначенные буквами с угловыми скоб-
ками сверху, — к малым возмущениям.
На рис. 2.21 представлена схема МЭСИТ для моделирования преобра-
зователя, работающего в режме НТД. Она показана в общем виде и при-
менима к различным силовым каскадам. На первом этапе определяются
линейная и нелинейная части схемы преобразователя и осуществляется
линеаризация только нелинейной части схемы, поскольку оставшаяся
часть по существу линейна (карта 1). Нелинейная часть преобразователя
определяет средний ток, инжектируемый в линейную часть. Далее (кар-
та 2) составляется система связей между переменными, соответствую-
щая конкретной схеме преобразователя (типовые формы тока в дроссе-
ле и напряжение на нем показаны на рис. 2.22), а именно:
1) средний ток zcp, инжектируемый в линейную часть за период ком-
мутации;
2) зависимость производной тока дросселя от значения индуктив-
ности дросселя и напряжение на дросселе за период коммутации;
3) соотношение между средним инжектированным током и выход-
ным напряжением v = zcp Z, где Z — импеданс линейной части преобра-
зователя.
Решение системы в установившемся состоянии получаем., положив
все производные и возмущения равными нулю (карта 3 на рис. 2.21).
Поскольку уравнения преобразователя в карте 2 линейны, справделивы
правила суперпозиции и в точку установившегося состояния может быть
введено малое возмущение. Как известно, независимыми входными
управляющими переменными являются vg и d. Изменение двух этих ве-
личин влечет за собой изменение
i или V. Теперь проведем аппро-
ксимацию: малые отклонения от
точки установившегося состоя-
ния пренебрежимо малы по срав-
нению со значениями параметров
установившегося состояния, т.е.
v/V < 1, Vg/Vg < 1, tZi/A < 1,
d2/D2 «1 и i/K 1.
Рис. 2.22. Типичные формы тока
дросселя (7) и напряжения на нем
(2)
41
Используя вышеназванную аппроксимацию для получения снова
линейной системы уравнений, опустим члены второго порядка нели-
нейности. Тогда останется только та часть системы уравнений, которая
описывает реакцию преобразователя на малые сигналы низкой частоты,
и можно записать передаточные функции вход — выход и управление —
выход (карта 5 на рис. 2.21). С помощью той же системы уравнений
строится эквивалентная схема (карта 6 на рис. 2.21), отражающая ре-
акцию нелинейной части преобразователя на малые сигналы низкой
частоты.
2.3.3, Нестабильность преобразователей с заданным током
Как отмечалось в п. 2.3.1, преобразователи с заданным током, рабо-
тающие на фиксированной частоте в режиме НТД, склонны к нестабиль-
ности даже в отсутствие регулирующей обратной связи [4]. Эта неста-
бильность имеет место, когда значение коэффициента заполнения им-
пульсов превышает 0,5. Природа нестабильности заключается в том, что
собственно задание (’’программирование”) тока обеспечивается дейст-
вием внутренней обратной связи, коэффициент усиления которой при
коэффициенте заполнения импульсов 0,5 становится положительным и
достигает 1, а затем увеличивается с возрастанием коэффициента запол-
нения. Таким образом, преобразователи с заданным током даже при ра-
зомкнутой цепи обратной связи и коэффициенте заполнения импульсов,
большем 0,5, склонны к нестабильности.
2.3.4. Моделирование повышающего преобразователя
Продемонстрируем моделирование с помощью МЭСИТ на примере
повышающего преобразователя с заданным током. Схема преобразова-
теля представлена на рис. 2.23. Будем считать, что ключ — идеальный,
т.е. пренебрежем временем рассасывания и другими паразитными эф-
фектами. Формы тока дросселя и напряжения на нем показаны на
рис. 2.24. Заштрихованная область на графике характеризует ’’коли-
чество” тока, инжектированного в выходную линейную цепь (парал-
лельно соединенные резистор R и конденсатор С) за время d2 Ts. Сред-
ний ток, инжектированный в выходную цепь за период коммутации,
1'ср = 1'<^2, (1)
где i — средний ток дросселя; производная тока дросселя
di
L- = vg-d2V , (2)
а выходное напряжение преобразователя
42
Рис. 2.23. Повышающий преобразова-
тель
Рис. 2.24. Формы тока дросселя (?)
и напряжения на нем (2) в повы-
шающем преобразователе
где Rl (1 + sR) - импеданс выходной цепи.
В повышающем преобразвателе заданный или ’’программируемый”
ток фактически является током дросселя, поскольку именно он проте-
кает через ключ, когда последний разомкнут. Таким образом, i опреде-
ляется сигналом управления
iC = i W
Из уравнений (1) - (3), полагая все производные равными нулю,
можно определить условия установишегося сотояния. Таким образом,
(1) — (3) сводятся к соотношениям
V 1
- = — = М, (5)
vg
V
I = — .
rd2
Внесем в уравнения (1) — (4) возмущения относительно точки уста-
новившегося состояния, и, пренебрегая членами с нелинейностью второ-
го порядка для получения снова линейной системы, имеем
гс = ' ’ А (6)
2*Ср — ^2^ — •> (7)
di А л А L — = К - D2 V + Vd, dt * (8)
43
Рис. 2.25. Линейная экви-
валентная схема повыша-
ющего преобразователя с
заданным током, рабо-
тающего в режиме НТД
Применив к (8) преобразование Лапласа, запишем d в виде
d(s) = s£f(s)/F + D,V{s)IV - vg(s)/F. (10)
Из приведенных выше уравнений получаем передаточные функции
линия — выход и управление - выход:
л х
V _ 1 1
vg 2D2 (1 + sRC/2)
v _ rd2 i-slurdI)
tc 2 (1 + sRC/2)
Теперь очевидна характерная особенность полученного результата.
Уравнения показывают, что выходная характеристика без введения
искусственного угла наклона тока имеет один полюс. Эквивалентная
линейная схема, построенная на основе уравнений (7) — (10), представ-
лена на рис. 2.25. Эта схема полностью описывает входные и выходные
характеристики нелинейного повышающего преобразователя с заданным
током, работающего в режиме НТД.
2.3.5. Понижающий и инвертирующий преобразователи
Метод эквивалентной схемы с инжекцией тока может быть применим
к понижающему и инвертирующему преобразователям с заданным
током, работающим в режиме НТД. На рис. 2.26 и 2.27 представлены
принципиальные и эквивалентные схемы соответственно понижающего
и инвертирующего преобразователей. В обоих случаях на интервале di Ts
ток ключа равен току дросселя. Эквивалентные схемы на рис. 2.26, б
и 2.27, б содержат сходные источники тока, работающие на ЛС-цепь.
Это свидетельствует об однополюсных характеристиках преобразовате-
лей в обоих случаях и одинаковых: генераторах тока, выходной сигнал
которых является функцией г'с; сигналах управления и vg; источниках
входного напряжения; фильтре С и параллельной ему нагрузке R.
Наибольший интерес представляют две передаточные функции —
вход — выход и управление — выход.
44
Рис. 2.26. Принципиальная схема понижающего преобразователя (а) и его линей-
ная эквивалентная схема для малых сигналов низкой частоты (б)
Рис. 2.27. Принципиальная схема инвертирующего преобразователя (в) и его ли-
нейная эквивалентная схема для малых сигналов низкой частоты (б)
В понижающем преобразователе v не зависит от vg и
А
К R
tc (1 + sRC)
(12)
а в инвертирующем преобразователе
V _ / Z>1 \ 2 1
vg \в2) (1+sRC/D2)
v/ic = Л(1 - sLeD/R)l{X + sRC/Di),
Le = LjDl . (13)
45
Так же, как и повышающий преобразователь, понижающий и инвер-
тирующий преобразователи имеют выходные характеристики с одним
полюсом, и инвертирующий преобразователи имеют выходные харак-
теристики с одним полюсом, и интересно отметить, что введение искус-
ственного угла наклона тока изменяет результаты моделирования.
2.3.6. Моделирование стабилизированного повышающего
преобразователя с заданным током
Как уже отмечалось в п. 2.3.3, для стабилизации работы преобразова-
теля, даже в отсутствие внешней обратной связи, вводят искусственный
угол наклона коммутируемого тока. На рис. 2.28 показаны фактичес-
кий ток дросселя, сигнал управления и ток ключа с искусственным на-
клоном т. Средний ток дросселя i можно связать ci с следующим со-
отношением:
i = ic - mdiTs - ml di (Ts/2). (14)
Внося в уравенние (14) возмущения и сохраняя только линейные
члены, получаем
i = ic - (т + mt/2)Tsd- (DlTsl2)ml, (15)
где тг — наклон тока дросселя; т — искусственный наклон тока ключа,
вводимый для стабилизации преобразователя с разомкнутой петлей об-
ратной связи.
Для повышающего преобразователя
Vg
mi = -2- , (16)
причем т выбирается по отрицательному наклону задаваемого тока
(тока дросселя) и его значение определяется по формуле
V - Vg
т = . (17)
Учитывая соотношения (16), (17) и применяя преобразования Лап-
ласа, перепишем (15) в виде
Тон ключа с
искусственным
углом наклона
Сигнал
управления
Средний тон
дросселя
дросселя
Рис. 2.28. Фактический ток дросселя в понижающем преобразователе, сигнал
управления и ток ключа с искусственным наклоном
46
л А V (2 - Di) л D .
i(s) = ?c(s) - -2) d(s) - — Avg(S). (18)
RK RK
л
Подставляя выражение для i из
Л sL л Di
ic(s) --- + К (s) —
л V V
d(s) = -------------------------
(18) в (10), получаем
1 л / sLD
---Vg (s) ( 1 + -
L \ RK
(19)
sL (2 - D2)
RK
Используя выражения (7), (9) и (19), можно определить передаточ-
ные функции вход - выход и управление — выход:
~ s
л 1 + ---
K(s) л
_ ^4 — ~2~\ 9
Vg(s) I S S \
1 + — + —
_ ( WQ W2 f _
~ s ~
Л 1-------
K(s) Wz2
?^) с 7 » ’
_ \ WQ W2 I
Предполагая, что Dj < К и Di < К (преобразователь работает в ’’глу-
боком” НТД-режиме), получаем
2 1 RDi
ИИ = — Ts , Ag = - Di, Wz2 = ------------ ,
Di 2 L
D2 2K
Ac = R— , IV2 = — C(2 - D2).
Из приведенных уравнений ясно, что либо передаточная функция
вход — выход, либо функция управление — выход будет двухполюсной,
а зто в свою очередь отличается от преобразователя с заданным током
при отсутствии искусственного угла наклона тока ключа, когда харак-
теристика однополюсная.
2.3.7. Физическое объяснение
Нижеприведенные рассуждения относятся к преобразователям с за-
данным током, работающим в режиме НТД без искусственного угла
наклона тока. Естественно, если коэффициент заполнения импульсов
47
R
Рис. 2.29. Практическая реализа-
ция повышающего преобразовате-
ля с заданным током и искусст-
венным углом наклона тока клю-
ча
окажется больше 0,5, работа преобразователя станет нестабильной. Когда
ток преобразователя ’’запрограммирован”, параметр состояния утра-
чивает свое влияние на местоположение полюса. Это объясняется тем,
что ток дросселя не является более независимой переменной и определя-
ется сигналом управления. Хотя протекание тока через дроссель и зави-
сит от значения его индуктивности, а также других рабочих параметров,
его значение определяется только сигналом управления. Рассмотрим пре-
образователь с заданным или ’’запрограммированным” током, работаю-
щий в режиме НТД, но с искусственным углом наклона тока. Очевидно,
что такой преобразователь будет устойчив на всем рабочем диапазоне из-
менения коэффициента заполнения. Обратимся к рис. 2.29, где пред-
ставлена практическая реализация ’’программирования” тока и введен
искусственный угол наклона тока. Ключ 51 в схему на рис. 2.29 введен
преднамеренно для упрощения объяснения, а напряжение на резисторе
Rs пропорционально току ключа. Когда 51 замкнут, замыкание ключа
S2 приводит к появлению испусственного угла наклона тока ключа,
который регулируется или в высокоэффективных системах постоянно
про граммир уется.
Когда S2 разомкнут, a замкнут, работа преобразователя стабильна
лишь в том случае, если коэффициент заполнения импульсов меньше
0,5. Для того чтобы заставить преобразователь работать стабильно во
всем диапазоне изменения коэффициента заполнения, необходимо замк-
нуть ключ52, вводя искусственный угол наклона тока.
Рассмотрим теперь два случая: 1) только ’’программирование” (за-
дание) тока, т.е. 51 замкнут, a S2 разомкнут; 2) только искусственный
наклон, т.е. разомкнут, a S2 замкнут.
Первый случай проанализирован в начале п. 2.3.7. В отсутствие ис-
кусственного угла наклона тока ключа передаточная функция управле-
ние — выход преобразователей с заданным током имеет один полюс.
48
Рис. 2.30. Диаграмма Боде переда-
точной функции управление — выход
повышающего преобразователя
Рассмотрим теперь второй
случай. В отсутствие тока, про-
порционального току ключа,
присутствует только искусствен-
ный угол наклона. Это означает,
что когда ток ключа равен нулю,
коэффициент заполнения ’’запрограммирован”. Общеизвестно, что эти
преобразователи с заданным (’’запрограммированным”) коэффициен-
том заполнения (понижающие, повышающие, инвертирующие) имеют ха-
рактеристику с двумя полюсами.
Для получения суммарного эффекта необходимо соответствующим
образом объединить оба этих случая. Конечный эффект заключается в
том, что преобразователи теперь имеют двухполюсную характеристику,
но оказываются передемпфированными. Из анализа рис. 2.30 также
очевидно, что полюсы заметно разнесены и отделены друг от друга.
Таким образом, в отсутствие искусственного угла наклона тока преобра-
зователи с заданным током имеют однополюсную характеристику, а
при введении стабилизирующего угла наклона характеристика становит-
ся двухполюсной. Впервые эти сведения были получены с помощью
МЭСИТ.
2.3.8. Моделирование стабилизированных понижающего
и инвертирующего преобразователей с заданным током
Метод эквивалентной схемы с инжекцией тока применим и для
моделирования стабилизированных понижающего и инвертирующего
преобразователей с заданным током, работающих в режиме НТД. Наи-
больший интерес представляют две передаточные функции: вход — вы-
ход и управление — выход.
Для понижающего преобразователя
K(s)/rg(S) = Ag
.1
(1 + s/WQ + s2/W2)
K(s)/ic(s) = Ac
1
(1 + s/WQ + s2/W2)
Принимая Di, D2 < К, получаем
D , К
Ae =------, Ac = R, IT 2 = ---
g К LC
49
Для инвертирующего преобразователя
л a 1+s/W
V(s)tVg(s) = Ag-----------,
s s 1 + s/WQ + s2/W2
V(s)lic(s) = Ac
1 + s/Wz 2
1 + s/WQ + s2/W2
Принимая Dx, Г>2 < К, получаем
W2 = К/ [ZC(1 - 2D/A)].
Как и повышающий преобразователь, понижающий и инвертирующий
преобразователи имеют двухполюсную характеристику.
2.3.9. Заключение
Рассмотренный метод моделирования ключевых преобразователей
распространяется на преобразователи с заданным током, работающие
в режиме НТД. Применение МЭСИТ продемонстрировано на примере мо-
делирования понижающего, повышающего и инвертирующего преобра-
зователей. В отсутствие стабилизирующего искусственного угла наклона
тока ключа преобразователи имеют однополюсную характеристику, а
при введении этого угла характеристика становится двухполюсной и
пере демпфированной. Этот эффект изучен впервые и имеет большое
значение для высокоэффективных систем преобразования мощности.
Таким образом, моделирование преобразователей с заданным током,
работающих на постоянной частоте в режиме НТД методом эквивалент-
ной схемы, позволяет создавать регуляторы для этих преобразователей
с соответствующими характеристиками.
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. Current injected equivalent circuit approach (CIECA) to modeling
of switching de—de converters in continuous inductor conduction mode, Internal Re-
port, Sundstrand Advanced Technology Corporation, Rockford, IL.
2. Chetty P.R.K. Current injected equivalent circuit approach (CIECA) to modeling
of switching dc-dc converters in discontinuous inductor conduction mode. Internal
Report, Sundstrand Advanced Technology Corporation, Rockford, IL.
3. Hsu S.-Р., Brown A., Rensink L., Middltbrook R.D. Modeling and analusis of
switching de—to-de converters in constant frequency current programmed mode. IEEE
Power Electronics Specialists Conference Record, 1979.
4. Capel A., Clique M., Fossard AJ. Current control modulators: general theory on
specigns. IEEE Power Electronic Specialists Conference Record, 1980.
2.4. МЕТОД ЭКВИВАЛЕНТНОЙ СХЕМЫ С ИНЖЕКЦИЕЙ ТОКА ДЛЯ
МОДЕЛИРОВАНИЯ И АНАЛИЗА КЛЮЧЕВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
ПОСТОЯННОГО НАПРЯЖЕНИЯ С ЗАДАННЫМ ТОКОМ,
РАБОТАЮЩИХ В РЕЖИМЕ ПРЕРЫВИСТОГО ТОКА ДРОССЕЛЯ
2.4.1. Введение
В последние годы моделирование ключевых преобразователей по-
стоянного напряжения привлекло к себе заслуженное внимание, и ос-
новные работы в этом направлении посвящены определению передаточ-
ной, а также входной и выходной характеристик в основном нелиней-
ных преобразователей постоянного напряжения в частотной области.
Среди различных методов достижения этой цели наиболее универсаль-
ным является метод эквивалентной схемы с инжекцией тока (МЭСИТ),
сочетающий в себе достоинства метода электронной эквивалентной схе-
мы установившегося состояния и теории управления инжектируемым
током [5, 6] и не имеющий их недостатков. В данном параграфе описа-
но применение МЭСИТ для анализа преобразователей с заданным током,
работающих в режиме прерывистого тока дросселя (ПТД).
Преимущества ’’программирования” (задания) тока хорошо извест-
ны и могут быть сформулированы в следующем виде: 1) активные эле-
менты ключевых преобразователей защищены от перегрузок и импульс-
ных воздействий, что в свою очередь позволяет использовать элементы с
более низкими максимально допустимыми параметрами; 2) ключевые
преобразователи с заданным (’’запрограммированным”) током ведут
себя как системы первого порядка: 3) несколько преобразователей
могут работать параллельно и при этом не возникает проблем разделе-
ния тока нагрузки; 4) пилообразная форма тока дросселя устраняет
необходимость получения пилообразного опорного напряжения, тре-
буемого для формирования широтно-модулированных сигналов управ-
ления.
Рассмотрим работу ключевых преобразователей постоянного напря-
жения на фиксированной частоте в режиме ПТД. Главная цель, как и в
предыдущих работах [1—3], — это построение малосигнальных эквива-
лентных схем, отражающих входные и выходные характеристики пре-
образователей, которые затем могут быть включены в модели закончен-
ных систем регулирования. При этом возможен полный анализ общих
динамических характеристик и стабильности.
2.4.2. Описание метода
Для моделирования ключевых преобразователей, работающих в ре-
жиме ’’программируемого” коэффициента заполнения импульсов, раз-
работан метод эквивалентной схемы с инжекцией тока (МЭСИТ) [1,2].
Ниже приведем его краткое описание. Разумеется, МЭСИТ может также
применяться и для моделирования преобразователей, работающих на
переменной частоте коммутации.
51
Рис. 2.31. Схема МЭСИТ для моделирования ключевых преобразователей постоянного напряжения, работающих в режиме ПТД
Примем следующие обозначения; djTs — временной интервал, на ко-
тором транзистор включен, а диод выключен; d2 Ts — временной интер-
вал, на котором транзистор выключен, а диод включен; d3 Ts — времен-
ной интервал, на котором и транзистор, и диод выключены; dtTs +
+ d2Ts + d3Ts = Ts,rne Ts = 1 Ifs — период коммутации.
Параметры, обозначенные прописными буквами, относятся к уста-
новившемуся режиму, а величины, обозначенные буквами с угловыми
скобками сверху, — к малым возмущениям.
На рис. 2.31 представлена схема МЭСИТ для моделирования преобра-
зователей, работающих в режиме ПТД; она показана в общем виде и
применима к различным силовым каскадам. На первом этапе опреде-
ляются линейная и нелинейная части преобразователя и осуществляется
линеаризация нелинейной части. Оставшаяся часть схемы преобразо-
вателя по существу линейна (карта 1 на рис. 2.31). Нелинейная часть
преобразователя определяет средний ток, инжектируемый в линейную
часть. Затем (карта 2) составляется система связей между перемен-
ными, соответствующая конкретной схеме преобразователя1 (типовые
формы тока дросселя и напряжения на нем показаны на рис. 2.32), а
именно:
1) вольт-секундный баланс напряжения на дросселе;
2) средний тока /ср, инжектируемый в линейную часть за период
коммутации;
3) соотношение между средним инжектируемым током и выходным
напряжением v = icp Z, где Z — импеданс линейной части преобразова-
теля.
Решение системы в установившемся состоянии получаем, приравни-
вая все производные и возмущения к нулю (карта 3 на рис. 2.31).
Поскольку уравнения преобразователя в карте 2 линейны, к ним приме-
нимы правила суперпозиции, и в точку установившегося состояния
могут быть введены малые возмущения. Известно, что независимыми
входными управляющими переменными являются vg и d. Изменение
двух этих величин вызывает изменение i или v . Теперь проведем ап-
проксимацию: малые отклонения по переменному току от точки уста-
новившегося состояния пренебрежимо малы по сравнению со значения-
ми параметров установившегося состояния, т.е. % / V < 1, $g/vg < 1,
<\,ct2/D2 « l,i/I « 1.
Рис. 2.32. Типичные формы тока
дросселя и напряжения на нем
в понижающем преобразователе
Используя вышеназванную аппроксимацию для получения снова ли-
нейной системы уравнений, опустим члены'второго порядка нелиней-
ности, чтобы остались только те члены, которые описывают реакцию
преобразователя на малые сигналы низкой частоты. Используя эту
систему уравнений, можно записать передаточные функции вход — вы-
ход и управление — выход (карта 5 на рис. 2.31). С помощью той же си-
стемы уравнений строится эквивалентная схема, отражающая реакцию
линейной части преобразователя на малые сигналы низкой частоты (кар-
та 6).
2.4.3. Моделирование повышающего преобразователя
Продемонстрируем моделирование с помощью МЭСИТ на примере
повышающего преобразователя, работающего в режиме заданного тока.
Будем считать, что ключ — идеальный, время рассасывания равно нулю,
влиянием паразитных эффектов пренебрегаем. Схема такого преобразо-
вателя показана на рис. 2.33.
На рис. 2.34 показаны формы тока дросселя и напряжения на нем
в повышающем преобразователе. Заштрихованная область на кривой
тока характеризует ’’количество” тока, инжектированного в выходную
линейную цепь (параллельно соединенные резистор R и конденсатор С)
за время d2Ts. Средний ток, инжектируемый в выходную цепь за период
коммутации,
icp = dii •
причем средний ток дросселя
. _ vgd\Ts
Z _ -------
2L
(1)
Вольт-секундный баланс на дросселе
vg(dl + d2) = Vd2,
а выходное напряжение преобразователя
R
V = icp ----------- ,
р (1 + sRC)
(2)
(3)
где R/(1 + sRC) - импеданс выходной цепи.
В повышающем преобразователе заданный или ’’запрограммирован-
ный” ток фактически является током дросселя, поскольку именно он
протекает через ключ, когда последний разомкнут. Таким образом,
справедливо соотношение
_ vgdiTs
'С 1 ’
54
Рис. 2.34. Формы тока дросселя и напря-
жения на нем в повышающем преобра-
зователе
Рис. 2.33. Принципиальная схема по-
вышающего преобразователя
которое можно переписать в виде
d,
LiC
vgTs
(4)
Из (1) — (4) определяются условия установившегося, состояния.
Уравнения сокращаются и принимают следующий вид:
V
= М,
(5)
Dy
vg Di
_ VgD2 TsB2
'cp = —Tl
V = lcpR.
Введем в уравнения (1) — (4) возмущения относительно точки уста-
новившегося состояния и, пренебрегая членами второго порядка нели-
нейности для возобновления линейности ситемы, получаем
vg
V
Ts
21
л
vg
D2
л D\ л
di —-r- d2,
Dl
D2vgdx
л R
VgDxd2) --------
(1+sRC)
(6)
(7)
Л
d.
Lic
vgTs
Di
Vg
vg
(8)
Л
V =
1
A A
Исключая из (6) — (8) члены di и d2 и применяя преобразование
Лапласа, получаем следующее упрощенное соотношение:
У(5)
sRC(M - 1)
1 +---------
2М - 1
55
v9
) J1a1 5 ГЛ л (г
Г । м » J2ai
V
R
Рис. 2.35. Линейная эквивалентная схема повышающего преобразователя с задан-
ным током, работающего в режиме ПТД
2Д(Л/-1)£>2 л М
из которого могут быть определены передаточные функции линия —
выход и управление - выход
Л V М 1
A vg (2М - 1) (1 + s/Шр)
V R у/МК (М - ту 1
?с (2М - 1) (1 + S / СлЭр)
где
2М - 1 2L
ц. — -г- ; к = — .
RC(M - 1) RTS
Из полученных результатов видно, что обе характеристики преобра-
зователя однополюсные, как и у преобразователей с заданным коэф-
фициентом заполнения импульсов, работающих в режиме ПТД.
На рис. 2.35 представлена линейная эквивалентная схема, построен-
ная с помощью уравнений (6) — (8) и полностью описывающая входные
и выходные характеристики нелинейного повышающего преобразова-
теля с заданным током, работающего в режиме ПТД.
2.4.4. Понижающий и инвертирующий преобразователи
Покажем применение предлагаемого метода для моделирования по-
нижающего и инвертирующего преобразователей с заданным током,
работающих в режиме ПТД. Принципиальные и эквивалентные схемы
понижающего и инвертирующего преобразователей приведены соответ-
ственно на рис. 2.36 и 2.37. В обоих случаях на временном интервале
dlTs ток ключа равен току дросселя. Эквивалентные схемы на
рис. 2.36, б и 2.37, б содержат схожие источники тока, работающие на
56
Рис. 2.36. Принципиальная схема понижающего преобразователя (а) и его линей-
ная эквивалентная схема для малых сигналов низкой частоты (б)
Рис. 2.37. Принципиальная схема инвертирующего преобразователя (а) и его ли-
нейная эквивалентная схема для малых сигналов низкой частоты
7?С-цепь. Следовательно, в обоих случаях имеет место однополюсная
характеристика: генераторы тока, выход которых определяется током
ic, сигналом управления и напряжением vg; источники входного на-
пряжения и параллельно соединенные конденсатор С и резистор R.
Полученные передаточные функции вход - выход и коэффициент
заполнения — выход весьма интересны.
В понижающем преобразователе
Л 9
V _ м2 1
vg Т$м - 2) (1 + s/Шр)
57
V _ R\/K(l - M)’ 1
?c (2 - 3M) (1+s/Wp)
где
2 - ЗМ V 2L
con — -------- ; М ~ j К. — -------- .
г RC(l-M) vg RTS
ЕслиМ > 2/3, полюс движется в правую полуплоскость, что свидетель-
ствует о потере стабильности понижающим преобразователем (с разомк-
нутой обратной связью). Объяснение физических причин возникновения
этой нестабильности и пути ее преодоления изложены в [4].
В инвертирующем преобразователе
V _ Rs/F 1
Q? (1 + s /
где
2 2L
Юр — ; К — .
F RC RTS
Интересно отметить, что в инвертирующем преобразователе с задан-
ным током, работающем в режиме НТД, величина v не зависит от vg.
Таким образом, все три преобразователя имеют передаточную функ-
цию управление — выход с одним полюсом, как и в случае преобразо-
вателей с заданным коэффициентом заполнения, работающих в режиме
ПТД. Снижение порядка системы значительно упрощает разработку
контура регулирования.
Передаточные функции понижающего, повышающего и инвертиру-
ющего преобразователей, полученные с помощью МЭСИТ, не отличаются
от передаточных функций, получаемых с помощью метода электронной
эквивалентной схемы установившегося состояния [4] и метода управле-
ния инжектированным током [6]. То же самое можно сказать и об экви-
валентных схемах. Тем не менее МЭСИТ более показателен по сравнению
с [5] и не так громоздок, как метод, описанный в [7]. Кроме того,
МЭСИТ в отличие от метода управления инжектируемым током позво-
ляет строить эквивалентные схемы. Таким образом, МЭСИТ сочетает в
себе достоинства метода электронной эквивалентной схемы установив-
шегося состояния и метода управления инжектированным током и
не имеет их недостатков.
2.4.5. Заключение
Рассмотрено применение метода эквивалентной схемы с инжекцией
тока для моделирования ключевых преобразователей с заданным током,
работающих в режиме ПТД. Использование мтеода демонстрируется
58
на примере понижающего, повышающего и инвертирующего преобра-
зователей. Анализ выявил нестабильность работы понижающего пре-
образователя (при разомкнутой обратной связи), когда отношение на-
пряжений на входе и на выходе равно и больше 2/3.
Характерной особенностью моделей преобразователей всех рассмотрен-
ных типов является то, что при их работе в режимах заданного тока и
ПТД предопределеяется однополюсность передаточной характеристики
управление — выход. Причиной такого поведения выходной характерис-
тики являются начальное и конечное значения тока дросселя, равные
нулю, а также то, что в преобразователе с заданным током входным па-
раметром для дросселя является ток, а не напряжение, как в преобразо-
вателе с заданным коэффициентом заполнения импульсов.
Таким образом моделирование преобразователей с заданным током ра-
ботающих на Постоянной частоте коммутации в режиме ПТД, с помощью
описываемого метода позволяет разрабатывать стабилизаторы для ука-
занных преобразователей с требуемыми выходными характеристиками.
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. Current injected equivalent approach (CIECA) to modeling of swit-
ching de—de converters in continuous inductor conduction mode. Sundstrand Advanced
Technology Corp., Rockford, IL, Internal Rep.
2. Current injected equivalent circuit approach (CIECA) to modeling of switching
of switching dc-dc converters in discontinuous inductor conduction mode. Sundstrand
Advanced Technology Corp., Rochford, IL, Internal Rep.
3. Cunent mjeted equivalent circuit approach to modeling and analysis current prog-
rammed switching de—de converters (continuous inductor conduction mode). Sund-
strand Advanced Technology Corp., Rockford, IL, Internal Rep.
4. Chetty P.R. K., Middlebrook R.D. Modeling and analysis of switching de—de con-
verters in current programmed liscontinuous conduction mode. California Institute of
Technology, Pasadena, CA, Internal Rep.
5. Cuk S., Middlebrook R.D. A general unified approach to modeling switching de—
to-dc converters m discontinuous conduction mode. IEEE Power Specialists Conferen-
ce, 1977 Record, p. 90-111.
6. Capel A., Clique M., Fossard AJ. Current control modulators: General theory
and specific design. IEEE Power Electronics Specialists Conference, 1980 Record.
7. Brown A. State Space Analusis of Pulsewidth Modulated Switchitg Converters.
Power Electronics Group, California Institute of Technologu, Tech, Note T-58, Feb.
6,1979.
2.5. МОДЕЛИРОВАНИЕ И АНАЛИЗ ПРЕОБРАЗОВАТЕЛЯ КУКА
МЕТОДОМ ЭКВИВАЛЕНТНОЙ СХЕМЫ С ИНЖЕКЦИЕЙ ТОКА
2.5.1. Введение
В последние годы моделирование ключевых преобразователей по-
стоянного напряжения привлекло к себе заслуженное внимание. Ос-
новные работы в этом направлении сводились к определению передаточ-
59
ных, а также входных и выходных характеристик ключевых преобразо-
вателей, в основном нелинейных, в частотной области. Среди различных
методов достижения этой цели наиболее универсальным является метод
эквивалентной схемы с инжекцией тока (МЭСИТ). Рассмотрим при-
менение этого метода [1—4] для моделирования сложных преобразо-
вателей, например преобразователя Кука.
Основная задача моделирования и анализа преобразователя Кука,
работающего с заданным (’’программируемым”) коэффициентом
заполнения импульсов, на постоянной частоте в режиме непрерывного
тока дросселя (НТД) — пстроение эквивалентной схемы для малых
сигналов, описывающей как входные, так и выходные характеристики
преобразователя, которая впоследствии может быть включена в модель
законченной системы регулирования с целью анализа общих динамичес-
ких характеристик и стабильности работы.
2.5.2. Описание метода
Для моделирования ключевых преобразователей, работающих в ре-
жиме заданного или ’’программируемого” коэффициента заполенния им-
пульсов, разработан метод эквивалентной схемы с инжекцией тока
(МЭСИТ) [1,2].
Разумеется, этот метод может быть применен также и для моделиро-
вания преобразователей, работающих и на нефиксированной частоте
коммутации.
Примем следующие обозначения: diTs — временной интервал, на ко-
тором транзистор включен, а диод выключен; Ts — временной интер-
вал, на котором транзистор выключен, а диод включен; dxTs + d2Ts =
= Ts, где Ts = l/fs — период коммутации.
Параметры, обозначенные прописными буквами, относятся к уста-
новившемуся состоянию, а величины, обозначенные буквами с угло-
выми скобками сверху, — к малым возмущениям.
На рис. 2.38 представлена схема МЭСИТ для моделирования пре-
образователей, работающих в режиме НТД. Она показана в общем
виде и применима к различным силовым каскадам. На первом этапе
определяются линейная и нелинейная части преобразователя и осущест-
вляется линеризация линейной части, поскольку оставшаяся часть пре-
образователя по существу линейна (карта 1 на рис. 2.38). Нелинейная
часть преобразователя определяет средний ток, инжектируемый в линей-
ную часть. Далее (карта 2) составляется система связей между парамет-
рами, соответствующая конкретной схеме преобразователя.
На рис. 2.39 показаны формы тока дросселя и напряжения на нем
в предположении, что собственная частота, определяемая элементами
фильтра L и С, намного меньше частоты коммутации fs. В практичес-
ких схемах преобразователей это предположение справедливо, так как
необходимо обеспечить малый уровень пульсаций их выходного напря-
жения.
60
Рис. 2.38. Схема МЭСИТ для моделирования ключевых преобразователей постоянного напряжения, работающих в режиме НТД
Рис. 2.39. Типовые формы тока дрос-
селя Ц) и напряжения на нем (2)
Таким образом, прерывистый
нелинейный ток аппроксимиру-
ется до линейного непрерывного
тока (карта 2 на рис. 2.38). Те-
перь, полагая производные рав-
ными нулю, определяем условия
установившегося состояния клю-
чевой схемы (карта 3). Посколь-
ку уравнения преобразователя
линейны (в частотной рабочей
точке), к ним применимы правила
суперпозиции и в точку установившегося состояния могут быть вве-
дены малые возмущения (карта 4 на рис. 2.38).
Как известно, независимыми входными переменными являются vg
и d. Изменение двух этих величин влечет за собой изменение i и v .
Теперь проведем аппроксимацию с учетом того, что малые отклонения
по переменному току от точки установившегося состояния пренебрежи-
мо малы по сравнению с параметрами установившегося состояния, т.е.
v / КС \,vg/vg < < l,d2/Z>2 < l,f/7 < 1.
Применяя вышеназванную аппроксимацию и пренебрегая членами
второго порядка (произведения независимых переменных и ct2 на
v , vg или Т), возвращаем системе уравнений линейность. Теперь осталась
только часть, описывающая реакцию преобразователя на малые сиг-
налы низкой частоты. Используя эту систему уравнений, можно записать
передаточные функции вход — выход и управление — выход (карта 5
на рис. 2.38). С помощю этой же системы строится эквивалентная схема,
отражающая реакцию нелинейной части преобразователя на малые
сигналы низкой частоты.
2.5.3. Моделирование преобразователя Кука
Продемонстрируем применение МЭСИТ для моделирования преобра-
зователя Кука. Схема преобразователя Кука представлена на рис. 2.40.
Предполагается, что ключ идеальный, а паразитные эффекты и время рас-
сасывания не учитываются. Для упрощения анализа условно разделим
преобразователь на две части, как это сделано на рис. 2.40. Первая
часть — от источника vg до сечения X—X — работает на эквивалентную
нагрузку Re, которая определяется в ходе моделирования и анализа.
62
Рис. 2.40. Принципиальная схема преобразователя Кука
Напряжение на конденсаторе С\ равно . Вторая часть преобразовате-
ля — от сечения Y—Y до выхода схемы.
Первая часть преобразователя. Нелинейная часть схемы инжектирует
импульс тока в ее линейную часть, т.е. конденсатор Сх, который в свою
очередь питает нагрузку Re. Ток дросселя L t и напряжение на нем по-
казаны на рис. 2.41. Заштрихованная область на графике характеризует
’’количество” тока, инжектированного в выходную линейную цепь за
время d2Ts. Средний ток, инжектируемый в выходную цепь за период
коммутации,
гср1 = , (О
где i 1 — средний ток дросселя L j.
Производная тока дросселя L j
dix
L — = vg — d2Vx. (2)
dt
В конденсатор Ci инжектируется средний ток /Ср1, определяемый
(1). Конденсатор в свою очередь питает нагрузку Re. Таким образом,
напряжение
где Rel(l + sR3C\) — импеданс выходной цепи.
Будем считать, что вторая часть преобразователя идеальна и преобра-
зует энергию с КПД, равным 100%. Отметим также, что фактически она
является понижающим преобразователем. Тогда эквивалентная нагруз-
ка для первой части преобразователя
R
Re = (4)
«1
63
Рис. 2.41. Ток дросселя L\ (2) и на-
пряжение на нем (2)
Рис. 2.42. Ток дросселя Li (2) и на-
пряжение на нем (2)
Имея систему уравнений (1) — (4) и полагая все производные рав-
ными нулю, определяем условия установившегося сотояния. Таким об-
разом, приходим к системе
(5)
Внесем в (1) — (4) возмущеная относительно точки установившегося
состояниями, линеаризуя полученную систему, опустим члены второго
порядка нелинейности (произведения двух независимых ^озмущений).
Применяя преобразование Лапласа и учитывая, что а2 = — , получаем
s£i?i = Vg — D2V j + VJd1, (6)
*cpi =£>2^ (7)
л R -2R
V\ - icpl ---2--------+ 11^2 ------2-------
P (P?+s2JCi) Di (D2 + sRCi')
Уравнения (6) - (8) можно упростить
a sL x I Di \ s2 L jCj
F, Г + ------ — + ------— =
(8)
64
dj. (9)
+ Fl ( 1 У£1 / Д1 \ 2 1 +£>2
D2 D у R у D2 / 1Э2
Вторая часть преобразователя. Рассмотрим часть схемы преобразова-
теля от сечения Y—Y до ее выхода. Из рис. 2.40 видно, что этот участок
схемы является фактически понижающим преобразователем, входным
напряжением которого является vt. На рис. 2.42 представлены ток дрос-
селя L2 второй части преобразователя и напряжение на нем. Заштрихо-
ванная область на графике характеризует ток, инжектированный в вы-
ходную линейную цепь за период коммутации Ts. Средний ток дросселя
L 2, инжектируемый в выходную цепь за период коммутации,
гср2 “ г2, (Ю)
где i2 — средний ток дросселя.
Производная тока дросселя L 2
di2
L2 ----- = Vjdj - v2, (И)
dt
причем выходное напряжение
Имея систему уравнений (10) — (12) и полагая, что все производные
равны нулю, определяем условия установившегося состояния. В резуль-
тате получаем
(13)
Внесем в уравнения (10) — (12) возмущения относительно точки
установившегося состояния и, линеаризуя полученную систему, пренебре-
гая членами второго порядка нелинейности и применяя преобразование
Лапласа, получаем
гср2 = гг, (14)
sZ2?2 = DlV1 + Kjdi - К2, (15)
л л R
v2 = »ср2 -------Д7Г— • (16)
(1 + sRC2)
65
Рис. 2.43. Линейная эквивалентная схема преобразователя Кука, работающего
в режиме НТД
После упрощения имеем
sL г - \ л _ л л
1 + --- + s2L2C2\V2 = DiVt + Kjdj .
R /
(17)
Объединяя (9) и (17), получаем передаточные функции вход — выход
и управление — выход:
= Pi ________________________1____________________
Va D2 I s - s2 \ / s s2
1 + ---------------------- + — 1 + ------------- + —
\ H'lCl wl I | W2Q2 w22
A
V2
d
где
W2t
1-------+ -y
V2__________\ QzWz wj )_______________
D\D2 I s s2 \ / s s2
1 + ---- + ~y 1 + ------- + -y
\ H'lCl И / \ w2q2 w22
(18)
1
WZQZ
1
На основе уравнений (6) — (8) и (14) — (16) можно построить экви-
валентную схему (рис. 2.43), полностью описывающую входные и вы-
ходные характеристики нелинейного преобразователя Кука, работающе-
го с заданным (’’программируемым”) коэффициентом заполнения им-
пульсов в режиме непрерывного тока дросселя.
бб
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. Cyrrent injected equivalent circuit approach (CIECA) to modeling
of switching de—de converters in continuous inductor conduction mode. IEEE Trans.
Aerosp. Electron. Syst., vol. AES-17, N 6, Nov. 1981.
2. Chetty P.R.K. Current injected equivalent circuit approach (CIECA) to modeling
of swetching de—de converters in discontinuous inductor conduction mode. IEEE Trans.
Ind. Electron., vol. IE-29, N 3, Aug. 1982.
3. Chetty P.R.K. Current injected equivalent circuit approach to the modeling of
current programmed switching de—de convernters. Internal Rep., accepted for publica-
tion in IEEE Trans. Aerospace and Electronic Systems.
4. Chetty P.R.K. Current injected equivalent circuit approach to the modeling and
analysis of current programmed switching dc-dc converters (Discontinuous inductor
conduction mode). IEEE Trans. Ind. Applicat., vol. IA-18, N 3, May/June 1982.
5. Cuk S., Middlebrook R.D. A new optimum topology switching dc-to-dc conver-
ter, in Rec. 1977 IEEE Power Electronics Specialists Conf., p. 160—179.
Глава 3. РАСЧЕТ И ИЗМЕРЕНИЯ
3.1. МОДЕЛИРОВАНИЕ И РАСЧЕТ КЛЮЧЕВЫХ СТАБИЛИЗАТОРОВ
3.1.1. Введение
В последние годы ключевые стабилизаторы привлекают к себе
значительное внимание, что обусловлено все возрастающими требова-
ниями, предъявляемыми к системам преобразования энергии. Ключе-
вые стабилизаторы благодаря своим высоким исполнительским харак-
теристикам почти вытеснили обычные линейные последовательные ста-
билизаторы, так как имеют более высокий КПД, меньшие размеры и
массу при той же надежности.
Ключевые стабилизаторы эффективны при использовании их в раз-
личных преобразователях постоянного и переменного тока, а также для
повышения или понижения уровня напряжения в цепи с гальваничес-
кой развязкой. До того как приступить к оптимизации характеристик,
необходимо понять, что представляют собой ключевые стабилизаторы.
Моделирование и анализ этих стабилизаторов очень важны, но в ли-
тературе до сих пор нет достаточного материала для расчета их стабиль-
ности, желаемой полосы пропускания, переходных характеристик, ли-
нейного ослабления. Ниже описаны различные типовые узлы ключевых
стабилизаторов, приведены их математические модели, показано,
как с их помощью получить полную математическую модель клю-
чевого стабилизатора. Подробно описана процедура расчета компенси-
рующих цепей. Приведен большой ряд различных схем, компенсирую-
щих цепей и их передаточных функций.
3.1.2. Ключевые стабилизаторы
Работа ключевых стабилизаторов основана на принципе накопления
энергии в дросселе в первую часть периода коммутации и на последу-
ющей передаче ее в конденсатор во вторую часть периода. В этом заклю-
67
СалоВой каскад
Рис. 3.2. Базовые преобразователи:
понижающеий (а), повышающий (б)
и инвертирующий (в)
чается их отличие от линейных стабилизаторов последовательного типа,
где для поддержания постоянства выходного напряжения разница между
входным и выходным напряжениями выделяется на последовательном
переменном сопротивлении, в качестве которого используется транзистор
в линейном режиме. Поскольку транзисторы ключевых стабилизаторов
работают в ключевом режиме, т.е. находятся либо в состоянии насыще-
ния, либо в состоянии отсечки (а в идеальных дросселе и конденсаторе
68
Рис. 3.3. Преобразователи:
а — с прямым включением диода; б - двухтактный с квазипрямоугольным
выходом; в - с обратным включением диода; г — Кука; д — Вейнберга; е — ла-
боратории Велла; ж — Венабля
мощность не рассеивается), эти стабилизаторы работают с высоким
КПД.
На рис. 3.1 условно изображена схема типичного ключевого стабили-
затора. В него входят силовой преобразователь постоянного напряжения,
делитель напряжения, элемент постоянного опорного напряжения, уси-
литель сигнала рассогласования, компенсирующая цепь, широтно-им-
пульсный модулятор и предоконечный каскад усилителя мощности.
Выходное напряжение сравнивается с опорным, сигнал рассогласования
усиливается и подается затем на широтно-импульсный модулятор, управ-
ляющий предоконечным каскадом усилителя мощности, генерирую-
щим требуемый сигнал управления силовым каскадом стабилизатора.
Мы уже умеем моделировать силовые каскады преобразователей [1],
теперь необходимо построить модели оставшихся функциональных уз-
лов стабилизаторов.
Силовые каскады или ключевые преобразователи постоянного тока
в постоянный. Ключевые преобразователи постоянного тока являются
силовыми каскадами ключевых стабилизатора. Уже известные нам по-
нижающий, повышающий и инвертирующий преобразователи (рис. 3.2)
можно считать базовыми. Все остальные преобразователи (рис. 3.3)
фактически являются их производными. Например, преобразователь с
прямым включением диода (рис. 3.3, а) — это фактически понижающий
преобразователь с гальванической развязкой между входом и выходом,
а двухтактный преобразователь с квазипрямоугольным выходом яв-
ляется двухтактным преобразователем с прямым включением диода,
в котором преобразуемая мощность делится между двумя силовыми
тразисторными ключами. Преобразователь с обратным включением
диода (рис. 3.3, в) — это инвертирующий преобразователь с гальвани-
ческой развязкой между входом и выходом. Преобразователь Кука
является упрощенным каскадным инвертирующим преобразователем с
минимальным числом ключей. В основном эти преобразователи нелиней-
ны.
3.1.3. Моделирование
В последние годы были созданы модели описанных выше преобразо-
вателей. Это означает, что каждый раз решалась одна частная проблема.
Среди различных методов моделирования наиболее универсальным
представляется метод эквивалентной схемы с инжекцией тока (МЭСИТ)
[1], обладающий рядом преимуществ по сравнению с другими методами.
Силовые каскады ключевых преобразователей постоянного напряже-
ния. Для моделирования и анализа примем следующие обозначения:
<А Ts — временной интервал, на котором транзистор открыт, а диод
закрыт;
d2Ts — временной интервал, на котором транзистор закрыт, а диод
открыт;
70
Рис. 3.4. Схема МЭСИТ для моделирования ключевых преобразователей постоянного напряжения
d\Ts + d2Ts = T„
где Ts = l/fs - период коммутации.
Прописными буквами будем обозначать параметры установившегося
состояния, а буквами с угловыми скобками сверху — малые возму-
щения.
Метод моделирования преобразователей, работающих в режиме не-
прерывного тока дросселя (НТД) с помощью эквивалентной схемы с
инжекцией тока, представлен на рис. 3.4. Алгоритм приведен в общем
виде и применим к различным силовым каскадам. На первом этапе опре-
деляются нелинейная и линейная части преобразователя и осуществляет-
ся линеаризация нелинейной части, так как оставшаяся часть преобразо-
вателя линейна по своему существу (карта 1 на рис. 3.4). Нелинейная
часть преобразователя определяет средний ток, инжектируемый в линей-
ную часть. Далее (карта 2) определяется система связей между пара-
метрами, соответствующая конкретной схеме преобразователя (ток
дросселя и напряжение на нем показаны на рис. 3.5), а именно:
1) средний ток 1кр, инжектируемый в линейную часть за период ком-
мутации;
2) зависимость производной тока дросселя от величины индуктив-
ности дросселя, напряжение на дросселе за период коммутации;
3) связь между средним инжектируемым током и выходным напряже-
нием V = г'ср Z, где Z — импеданс линейной части преобразователя.
Теперь полагая все возмущения и производные равными нулю, опре-
деляем условия установившегося состояния (карта 3 на рис. 3.4). По-
скольку уравнения преобразователя линейны (карта 2), к ним приме-
нимы правила суперпозиции, и в точку установившегося состояния мо-
гут быть введены малые возмущения (карта 4 на рис. 3,4). Как мы зна-
ем, независимыми переменными являются vg и d, их изменение влечет
за собой изменение i и v . Теперь проведем аппроксимацию: малые от-
клонения по переменному току
от точки установившегося со-
стояния пренебрежимо малы по
сравнению с параметрами устано-
вившегося состояния, т.е.
Р/И « 1,
d2/D2 « 1, i/I< 1.
Рис. 3.5. Типовые формы тока дрос-
селя (7) и напряжения на нем (2)
в ключевом преобразователе посто-
янного тока
72
Применяя вышеназванную аппроксимацию и пренебрегая членами
второго порядка нелинейности, возвращаем системе уравнений линей-
ность. Теперь осталась только та ее часть, которая описывает реакцию
преобразователя на малые сигналы низкой частоты. Используя эту
систему уравнений, можно записать передаточные функции вход — вы-
ход и управление — выход (карта 5 на рис. 3.4). С помощью этой же
системы строится эквивалентная схема (карта 6), отражающая реакцию
нелинейной части преобразователя на малые сигналы низкой частоты.
Моделирование понижающего, повышающего и инвертирующего
преобразователей. Для моделирования понижающего, повышающего и
инвертирующего преобразователей применим описанный выше метод
(МЭСИТ). Наиболее важными результатами являются передаточные
функции вход — выход и управление — выход, а также эквивалентные
схемы для малых сигналов низкой частоты (рис. 3.6—3.8).
Рис. 3.6. Эквивалентная схема понижающего преобразователя
Рис. 3.7. Эквивалентная схема повышающего преобразователя
Рис. 3.8. Эквивалентная схема инвертирующего преобразователя
73
В случае понижающего преобразователя
K(s)/^(s) = А(1 + sL/R + !2LC)'1;
^(sy/d^s) = (K/Z>) (1 + sL/R + s2LC)~l,
в случае повышающего преобразователя
F(s)/^(s) = А'О + sL/RDl + s’LC/P?)"1,
К(8)/Л (s) = (K/A)(l - sL/RDl) x
X (1 + sL/RI% + s2LC/Di)-1
и в случае инвертирующего преобразователя
K(s)/vg(s) = (A/A)U + sL/RDl + s2LClDly',
V(s)ldx (s) = (У/АА) (1 - sL/RDl) x
x (1 + sL/RDl + s2LC/Dl)~l.
Усилитель сигнала рассогласования и компенсации. На рис. 3.9 по-
казаны типовая схема усилителя сигнала рассогласования (ошибки)
и компенсирующая цепь. Часть выходного напряжения стабилизатора
сравнивается с постоянным опорным напряжением, и затем осущест-
вляется усиление полученной разности (сигнала рассогласования) с
введением соответствующей компенсации. Поскольку схема линейна,
мы легко можем определить ее передаточную функцию. Компенсирую-
щая цепь выбирается в зависимости от того, какой силовой каскад
используется в конкретном случае и какие требования предъявляются к
стабилизатору.
Для делителя напряжения передаточная функция
K!(s)/r(s) = R./(7?! + R2) = К,
а для усилителя рассогласования
Ms)/A(s) = Zf/ZBX = A(s).
Широтно-импульсный модулятор. Этот модулятор преобразует ана-
логовый сигнал управления в широтно-модулированный сигнал с пере-
менным коэффициентом заполнения импульсов, управляющий силовым
ключом. На рис. 3.10, а изображена типовая схема широтно-импульс-
ного модулятора. Данная схема осуществляет сравнение сигнала, по-
Рис. 3.9. Делитель напряжения и
усилитель рассогласования
74
К1ил
zVPh.:
П_П_ГкГ
шим
Рис. 3.10. Типовая схема ШИМ:
а — синхронный с пилообразным сигналом; б - с сигналом треугольной фор-
мы; в - с выборкой и хранением
ступающего с выхода усилителя сигнала рассогласования, с напряжением
пилообразной или треугольной формы и генерирует выходной широтно-
модулированный сигнал (сигнал с переменным коэффициентом за-
полнения импульсов).
Из диаграмм на рис. 3.10 видно, что если значение усиленного сигнала
рассогласования равно амплитуде пилообразного (или треугольного)
напряжения, коэффициент заполнения импульсов равен 100%. Таким
образом, передаточная функция ШИМ имеет вид
^(х)/Ис(х) = И'1 = Нт (s).
Существует множество широтно-импульсных модуляторов, схемы
и функционирование которых отличаются друг от друга и выбираются
в зависимости от различных специфических условий и режимов работы
преобразователей. Например, модулятор, изображенный на рис. 3.10, в,
содержащий схему выборки-хранения, применяется в условиях повы-
шенных шумов или при очень быстром изменении управляющих сиг-
налов.
Схема на рис. 3.11 аналогична схеме на рис. 3,1, из которой удален
широтно-импульсный модулятор и на которой показаны только источ-
ники напряжения и токозависимые источники. Таким образом, на
рис. 3.11 представлена обобщенная малосигнальная эквивалентная схема
нелинейного ключевого стабилизатора. Основными техническими требо-
ваниями, предъявляемыми к ключевым стабилизаторам, являются точ-
ность поддержания постоянного выходного напряжения (или тока),
выходной импеданс, переходная характеристика и линейное, ослабление.
75
Рис. 3.11. Модель импульсного стабилизатора для малых сигналов низкой частоты
Все эти характеристики тесно связаны с контуром обратной связи
стабилизатора, его коэффициентом усиления. Значение коэффициента
усиления по петле обратной связи равно произведению коэффициентов
усиления типовых звеньев, входящих в контур обратной связи, а его
фазовый сдвиг равен сумме фазовых сдвигов типовых звеньев. Коэф-
фициент усиления по петле обратной связи и его фаза определяют ста-
бильность работы системы и возможность возникновения генерации.
Таким образом, все характеристики ключевых стабилизаторов опреде-
ляются входящими в них различными типовыми узлами.
Коэффициент усиления по петле обратной связи
K(s)
Т= ------- KA(s)Hm(s). (1)
di (s)
Для преобразователя, изображенного на рис. 3.1,
Т = — (1 + sL/R + хЧС)’1 --------—----- K~U(s). (2)
D (Я1+Я2) m
Передаточная функция вход — выход (линейное ослабление), напри- .
мер, понижающего преобразователя (при разомкнутой обратной связи)
F = А (1 + sL/R + s2£C)_I. (3)
76
При замкнутой обратной связи она имеет вид
^"замк ~ ^"разомк/(1
(4)
3.1.4. Критерии стабильности
Для того чтобы система работала стабильно, коэффициент усиления
по петле обратной связи должен стать меньше единицы до того, как
фазовый сдвиг достигнет 360°. Запас по амплитуде определяется раз-
ностью между коэффициентом усиления при фазовом сдвиге, равном
360°, и единицей. Запас по фазе определяется разностью между факти-
ческим сдвигом фаз при единичном коэффициенте усиления и углом
360° (рис. 3.12). Иногда стабильность определяется по сдвигу фаз
в 180°. Объясняется это тем, что даже при постоянном токе обратная
связь отрицательна, т.е. имеет место инверсия фазы на 180°.
Проиллюстрируем на двух примерах расчет компенсирующих цепей.
Пример 1. Уравнение (1) определяет значение коэффициента усиле-
ния по петле обратной связи. Все рассуждения будем проводить, пред-
полагая, что коэффициент усиления усилителя рассогласования равен
единице, а на работу усилителя не накладываются ограничения по час-
тоте.
Коэффициент усиления постоянного тока
h = + R2}]V^.
На частоте сопряжения силового фильтра наклон амплитудно-частот-
ной характеристики становится равным —40 дБ (рис. 3.13, а). Значение
сопротивления нагрузки, паразитные составляющие дроселя [ L и
конденсатора С, а также характеристическое сопротивление фильтра
Рис. 3.12. Определение стабильности — запас по амплитуде, запас по фазе, полоса
пропускания
77
определяют степерь демпфирования (ослабления) фильтра (Q — коэф-
фициент добротности) (рис. 3.13, б).
Пусть линия 0 дБ располагается там, где нам необходимо, что дости-
гается соответствующим выбором параметров в члене уравнения, опре-
деляющем коэффициент усиления постоянного тока. Двухнаправленная
78
стрелка на линии 0 дБ означает, что мы обладаем определенной ’’свобо-
дой” по расположению этой линии (рис. 3.13, в) либо посредством под-
бора коэффициента усиления постоянного тока, либо за счет настройки
коэффициента усиления усилителя рассогласования до требуемого уров-
ня. Генерация в системе, охваченной обратной связью без какой-либо
компенсации, возникает, когда фазовый сдвиг в точке пересечения ли-
нии 0 дБ равен 180°. Расположение полюса показано на рис. 3.13, г.
Двухнаправленные стрелки на линии с наклоном —20 дБ показывают,
что в зависимости от местоположения полюса fp эта линия может сдви-
гаться вправо или влево. Если она сдвигается влево, полоса пропускания
системы сокращается, а стабильность возрастает. Однако из-за сокраще-
ния полосы пропускания ухудшается переходная характеристика. Сле-
довательно, полюс надо передвигать вправо, но до тех пор, пока линия с
наклоном —20 дБ не пересечет линию 0 дБ в точке, соответствующей
частоте fp0, меньшей частоты сопряжения силового фильтра (см.
рис. 3.13, д). Система будет стабильна, когда линия коэффициента уси-
ления пересечет линию 0 дБ с наклоном —20 дБ.
Легко можно определить запасы по амплитуде и фазе. При расши-
рении полосы пропускания переходная характеристика несколько улуч-
шается. Однако дальнейшее расширение полосы пропускания при та-
ком подходе невозможно, поскольку частота сопряжения силового
фильтра, оказавшись вблизи fp0, немедленно добавит 90° к сдвигу фаз
fic. Альтернативный подход мы обсудим позднее, на втором примере.
Дальнейшее улучшение поведения амплитудно-частотной характерис-
тики достигается путем введения полюса-нуля таким образом, Чтобы
частота fz оказалась ниже частоты fp (рис. 3.13, е). При этом повышает-
ся коэффициент усиления на низких частотах, что ведет к повышению
стабилизации выходного напряжения как при изменении нагрузки, так
и при изменении входного напряжения. На рис. 3.13, ж показана ампли-
тудно-частотная характеристика с полной компенсацией.
Компенсация реализуется с помощью практической схемотехники.
Опыт показывает, что доминирующий полюс можно получить путем под-
ключения конденсатора к делителю напряжения, а полюс-нуль — за счет
модификации усилителя рассогласования (рис. 3.14). Передаточные
функции этих узлов соответственно будут
п/кс = [ra/(ra + ад[1 + (ra над-1
и
Ис/^1 = (1 + sRtC^/sR^Ci.
Пример 2. Как отмечалось в примере 1, реально достижимая полоса
пропускания ограничивается частотой сопряжения силового фильтра.
Покажем, каким образом полоса пропускания может быть расширена.
Как и в первом примере, начнем с рис. 3.13. Расположение нуля теперь
79
Рис. 3.14. Компенсирующие цепи
иное (рис. 3.15, а). В зависимости от частоты fzl линия с наклоном
+20 дБ может передвигаться вправо или влево, как это показано дву-
сторонними стрелками. Выбор частоты нуля fz1, равной собственной
угловой частоте силового фильтра /1с, позволяет иметь однополюсную
характеристику (—20 дБ), как показано на рис. 3.15, б.
Варьируя коэффициент усиления, расположим линию 0 дБ таким об-
разом, чтобы достигалась требуемая полоса пропускания. Лучше не до-
пускать на частотах выше частоты точки пересечения нуля внесения в
систему высокочастотных составляющих и полюса (рис. 3.15, в). Даль-
нейшее улучшение поведения амплитудно-частотной характеристики
может быть получено, как и в первом примере, за счет введения полюса-
нуля, при этом частота нуля fz2 должна быть ниже частоты f\c
(рис. 3.15, г).
При этом повышается коэффициент усиления на низких частотах,
что приводит в свою очередь к повышению стабилизации выходного
напряжения как при изменении нагрузки, так и при изменении входного
напряжения. На рис. 3.15,6 показана амплитудно-частотная характерис-
тика с полной компенсацией. Компенсация реализуется с помощью схе-
мы, приведенной на рис. 3.16, с передаточной функцией
_ (l+s^iCi) (1+sR2C2)
Р sC2RiRii [1 + sCi («J II/г! j ]
80
1 IO1 10z 103 10^ 10s
Частота, Гц
Частота, Гц
Частота, Гц
S)
1 Ю1 10г 103 w‘f 10s
Частота, Гц
V
Рис. 3.15. Амплитудао-частотная харак-
теристика
±с _ (1 + sC-jRi) (1 + б’ Cf fff)
И [sCf(Rf + R )] [/ + sG, (R, НЛ’у?)]
Рис. 3.16. Компенсирующая цепь
(пример 2)
и успешно используется в практическом понижающем преобразователе
с пиковой мощностью 10 кВт.
Рассмотренные примеры позволяют осуществлять выбор и расчет раз-
личных компенсирующих цепей для обеспечения стабильности работы
преобразователей с широкой полосой пропускания и высоким коэф-
фициентом усиления, отвечающих требованиям по переходной характе-
ристике и линейному ослаблению.
Хотя схемы компенсации, описанные в примерах 1 и 2, можно пра-
вильно выбрать и рассчитать, практика показывает, что в реальных си-
стемах для определения конкретных параметров компенсирующих це-
пей необходимо проведение ряда экспериментов.
В табл. 3.1 приведен целый ряд различных компенсирующих цепей
с указанием их передаточных функций. В компенсирующих цепях, со-
держащих операционные усилители, не показаны выходные фазоинвер-
торы. Эта информация облегчит разработчикам выбор и расчет компен-
сирующих цепей, а также будет полезна в качестве справочного матери-
ала.
Таблица 3.1. Компенсирующие цепи и их передаточные функции
Схема цепи
Передаточная
функция
*2
Rl+Rz
Комментарий
Постоянный
коэффициент
усиления
- Нуледой фазовый
сдвиг
1
1 R^C^
Один полюс на
частоте
f = -
rp 2oCR1C1
SRjCj
1+sR1C1
Один нуль на нулевой частоте
Один полюс на _ 1
частоте Рв 2CCR1C1
82
Продолжение табл. 3.1
Схема, цепа. Переда точна я функция Комментарий
*7 О—CZ3—Т—О о 1+ S ^2. ^2 i + S С2 (fy Один полюс на частоте fp и один .нуль на частоте fz /X / _ 1 / 2яСРгСг fp ~ ZSCC^R^Rj)
С, Л>, П*2 О' 1 о 1+SC-f(f?i Один нуль на нуледой частоте Один полюс на _ 1 частоте fp 2oCC1(R1 +R2) / fp
Ci Rf ipZ “Т* С2 О » о f \ 1 +S^2^2 \01+Сг)1+3(К1+Кг')(С Один нуль на 1 частоте fz ZSCR2 Сг Один полюс на 2 частоте 2st(R1+R2)(C1\\C2) или /\ rIIC2) Аа] —р /р fz fz
*7 С1 11 2 f f?2 j 1+sC-jfy (/?7 + ff2/r+JC-//?,ll /?2) Один нуль на = 1 частоте fz 2nt’R1C1 Один полюс на 1 ча ст от е fp Zst C1(R1\\RZ) ( fP '/z
*7 о 1о / R2 ) 1+SCjRj [fy* ^2'7 +C2)(H^\\f?2 Один нуль на _ 7 ча стоте fz ZscRf Cf Один полюс на 7 _ частоте fp ZliiC^cflfR^wRf} —Гк ила /\ fp “ \r fp rz TZ
*7 С1 о-£=Н(-Г- Л ’ С2 S/?2^f Один нуль на нулейой частоте Два полюса на _ 7 частоте fp ZstirR1R2CiC2
+^2^2^2^1^ fp
*2 *2 *1 Постоянный ноэ<р<ри и, и ент усиления НулеВой /разоВый сдВиг
83
Продолжение табл. 3.1
Схема цепи
Передаточная
функция
___1_
S Rf C2
7+<$ R2
s C2 R^j
7 S R3C3
7 +
Комментарий
Один полюс на нулевой
частоте
Один полюс на нулевой
частоте
Один нуль на _ 1
частоте fz 23zR2 С2
Один полюс на _ 1
частоте fp 2oCR2 С2
1+S ^2
1
Один полюс _ ____._____
на частотеfp 2^Cj(R2 + Ri')
Один нуль на z 1
'^\частоте/~ 2StC3R3
fp X.
/?
C3
7?Hb
Я>,
C3
1+SR2 ^2
SR^(C2 +Cj)\ 1+sR2(Cz\\C3)\
Один полюс на нулевой частоте
Один нуль на_ 1
частоте fz 2OCR2C2
Другой полюс 1
| /\ l62 CJZ
___________________ fz_________fp \_______________
Один полюс на нулевой частоте
Другой полюс _ 1_____
на частоте fp 20tR2(C2\\C3)
Один нуль на _ 1
(l+sC^^tl+sCiR^ 4acmomefz1 2stR1C1
или fp
£11____fzL
Два нуля * три полюса fp0 = О
f‘-i~2!tC1(R1 + Ri1) ’fzz= 2XC2R2
г <(>\=2Я'/?,С/’Гр2=2я-/? ||C )
[f+SC,fRf+R„)](H-sC2R2) 1 1 z
feR„ (C2-<-C3)'\{l+sR1C1}{l ^sR2(.C2\\С3]
fzl fpz или
fzz fzl
Окончание табл. 3.1
Схема цепи Передаточная функция комментарий
С 7 ^2 2 Дда нуля + Два полюса
тхг 2SCR,Cprzi zsCR.C.
Г-1Г1П ПГ £> 1 О. 1 1 (7-*-5/г’2С2)(/»5С/А’?) - - о fnt= -ргг =-i
11 L -1 \sc2(R^/?„)][i+sc1 f^li/?,,)] fp tpL_ гггсуГ/?у11/?гг)
\ / рР1 fzZ/ 'fzf
Ci ри ПУ~] >?2 - • (R2+l?21}(1+SRlCi)V + {R1 + Rrll(H-S/?2Cz)ll-> Дда нуля + дда полюса ZHCR^fpi ZXR-iGz jC2<ff2llff2/)] fz2 ZSlC2(R2»R21^ SC^^! Rl1^ ^pl ~2StCf(Rf\\Rf1)
г A(-n Один нуль + дВа полюса Г 1 £ ‘ 1
ч 4*2 / /?г lff1+/?1J(1+sC2Rz)[f+ zstRfC-f TpT 2ЛСгРг fa~2SC'O1(Rp\R11) sCffR-f _хг~кали —Г\ ~~f^fplifp}lf ) fz fpz /z (tp2! 'fpl'
c2 Два нуля + три плюса pl 1 ~ 23ГС. R1 Pl * гкс, R, fpo^O1 1 21Z. t)(1+sC2R2) ZsCC^RjWRff)
С] Г~Ч(*П' II <=hf (1+SCjR
<^2 t2 [slC^C^R^R^I- ^^2^2 (f^1' 1 к ^-^или\—.Л>2- 2^z(C2UCj) / ' /р1 fplf ]\
*2 / ff2 ) <r+SCfR„) ! 4 ! ! Z U f X. ! yL Один нуль -ь оба полюса /• — 1 £ = t. - 2lt:R1C1 rp 2SCC1(R1\\R„')
I'fy I (Rf + P„/[f+sCf(R,llR г”—И* fz
4 Один нуль + два полюса - 1 г 1
Rn ll (f+SCffy) /г 2SlR1C1 fpO-U fp1 ZdTC^WR^
[xCg f/fy Ci(R- IIЛ77Л |\ fz fp1 \
85
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. Current injected equivalent circuit approach (CIECA) to modeling
of switching dc-dc converters in continuous inductor conduction mode. IEEE Tran-
sactions on Aerospace Electronics and Systems, Nov. 1981, AES—17, 802-808.
3.2. МЕТОД ЗАМКНУТОГО КОНТУРА КАК СПОСОБ
ИСПЫТАНИЯ КЛЮЧЕВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Определение амплитудно-частотных характеристик — наилучший
способ описания источников электропитания, работающих в ключевом
режиме. Метод замкнутых контуров при использовании стандартных из-
мерительных средств является наиболее эффективным и экономичным.
Возможно, наиболее трудной задачей, возникающей перед современ-
ным разработчиком источников питания, является проверка спроекти-
рованного изделия на соответствие его существующим техническим тре-
бованиям. Основные характеристики источников питания наилучшим
.образом могут быть установлены посредством определения их ампли-
тудно-частотной характеристики, коэффициента усиления и фазы, жела-
тельно для случая, когда система управления имеет свою нормальную
конфигурацию, т.е. когда обратная связь замкнута. Для определения
амплитудно-частотных характеристик обычно необходима специальная
дорогостоящая аппаратура, а измерения осложняются тем, что мы име-
ем дело с нелинейными по своей сути системами, являющимися, кроме
того, источниками шумов и помех, вызываемых коммутационными
процессами. Ниже изложен новый метод определения амплитудно-час-
тотных характеристик с помощью стандартных датчиков тока.
Стабилизированные источники электропитания, работающие в ключе-
вом режиме, содержат силовой каскад постоянного напряжения,
делитель напряжения, источник опорного напряжения, усилитель сигнала
рассогласования, цепь коррекции, широтно-импульсный модулятор
предконечный каскад усилителя мощности (рис. 3.17). В процессе ра-
боты усилитель сигнала рассогласовнаия системы обратной связи срав-
нивает выходной сигнал делителя напряжения с опорным напряжением.
Усиленный сигнал рассогласования поступает на широтно-импульсный
модулятор, управляющий предоконечным каскадом усилителя мощ-
ности, который в свою очередь подает модулированный управляющий
сигнал на силовой каскад преобразователя. Для определения ампли-
тудно-частотной характеристики разработчикам необходимо оперировать
эквивалентными схемами для переменного тока каждого типового узла.
3.2.1. Три топологии преобразователей
В качестве силового каскада могут выступать понижающий, повыша-
ющий и инвертирующий преобразователи. Все другие преобразователи
сводятся к этим трем типам. Будучи в своей основе нелинейными си-
стемами, преобразователи, однако, имеют достаточно простые эквива-
86
рассогласобания и
корректирующая цепь
Рис. 3.17. Обычный источник электропитания, работающий в ключевом режиме
лентные схемы, как и другие линейные элементы, входящие в состав
источника питания (см. приложение). Если схему на рис. 3.17 перерисо-
вать таким образом, чтобы показать эквивалентную схему силового
каскада для переменного тока, можно определить соответствующие
передаточные функции, характеризующие источник питания. Тогда ста-
новится очевидным, что основные характеристики стабилизаторов —
степень стабилизации постоянного напряжения, выходной импеданс,
87
переходная характеристика и линейное ослабление — тесно связаны
с усилением по петле обратной связи.
Другими словами, для определения основных характеристик стаби-
лизаторов необходимо точно измерить значения коэффициента усиления
и его фазу. Таким образом, определение амплитудно-частотной харак-
теристики в конечном итоге будет характеризовать устойчивость систем,
степень линейного ослабления и переходную характеристику.
В результате анализа системы с разомкнутой обратной связью также
удается определить амплитудно-частотные характеристики. Хотя этот
метод и не совсем корректен, он все же дает достаточно точные резуль-
таты. Весьма простой метод был разработан фирмой Hewlett-Packard
[1]. Он основан на методике, часто используемой для испытания линей-
ных замкнутых систем [2], и для него необходимо наличие частотно-
избирательных узкополюсных вольтметров, с помощью которых из-
меряются значения входного и выходного напряжений. По показаниям
вольтметров определяются коэффициент усиления и фаза.
3.2.2. Метод разомкнутого контура
Для нахождения характеристик схемы методом разомкнутого конту-
ра разрывается цепь обратной связи, а к нагрузке подключается цепь
с импедансом, моделирующим импеданс замкнутого контура в точке
разрыва. Затем вместо сигнала обратной связи, поступающего с делителя
напряжения, вводятся испытательные сигналы от внешнего генератора.
СилоВой каскад
цепь коррекции
анализатор
Рис. 3.18. Измерение амплитудно-частотной характеристики источника электропи-
тания при разомкнутой обратной связи
88
Отношение амплитуд выходного напряжения и испытательного сигнала
определяет коэффициент усиления по петле обратной связи на данной
частоте. Разумеется, коэффициент усиления и фазовый сдвиг будут из-
меняться с изменением частоты испытательного сигнала в интересующем
нас диапазоне.
Для метода разомкнутого контура необходим спектральный анали-
затор, генерирующий испытательные сигналы требуемой частоты, воз-
действующие на ключевой стабилизатор (рис. 3.18). Амплитуда и фаза
выходного сигнала В по отношению к входному сигналу А определяются
по показаниям осциллографа. Сигналы А и В (Ивх и Квых) обрабаты-
ваются двухканальным предусилителем осциллографа. Выходной сигнал
предусилителя, определяющий также вертикальное отклонение луча
осциллографа, подается на вольтметр спектрального анализатора. Таким
образом, могут быть измерены сигналы А, В, А +В и А - В.
Однако рассмотренному методу присущ ряд недостатков, к которым
можно отнести необходимость установления рабочей точки при высоком
коэффициенте усиления, а также ручное включение и отключение изме-
рительных датчиков.
3.2.3. Спектральный анализатор
Для повышения точности измерения фазы коэффициенты усиления
каналов предусилителя необходимо настроить так, чтобы амплитуды
обоих измеряемых сигналов А и В (рис. 3.18) были одинаковы. При
этом измерение фазы будет более точным. Весьма существенным обсто-
ятельством является применение именно узкополосного вольтметра,
поскольку нельзя допустить, чтобы коммутационные шумы и помехи
заглушили тестовые сигналы, имеющие низкую амплитуду. Хотя подоб-
ные измерители и существуют, все же лучше применять такие приборы,
как, скажем, спектральный анализатор, в состав которого входят гене-
ратор и узкополосный вольтметр, автоматически настраивающийся
на частоту генератора.
Развертывающий генератор с калибруемым выходом и совмещенный
с ним узкополосный частотно-избирательный вольтметр могут исполь-
зоваться также и для измерения Ивх и Квых. Проведя описанные изме-
рения, получим и разность фаз между Ивых и Ивх, и отношение Ивых/
Ивх в децибелах. Вольтметры-генераторы входят в состав таких прибо-
ров, как, например, спектральные анализаторы типа НР3040А или
BAFCO916H. Эти приборы, однако, более полезны для определения
амплитудно-частотных характеристик по методу замкнутого контура.
Как уже отмечалось, из-за высокого уровня шумов, генерируемых
ключевыми преобразователями, принципиально необходим именно
следящий узкополосный вольтметр. Больше того, выходное напряжение
преобразователя содержит гармоники высокого порядка основной час-
тоты коммутации плюс различные модуляционные составляющие, вы-
званные смешением тестовой частоты с шумами. Заметим также, что
89
наличие частотно-избирательного вольтметра необходимо даже при
наличии фильтра на выходе силового преобразователя, ослабляющего
действие гармоник (собственная частота фильтра, как правило, равна
1/10 или 1/12 частоты коммутации). Обычный вольтметр просто не спо-
собен отличить частоту тестового сигнала от частоты коммутации.
Кроме отмеченных существуют и другие проблемы. Например, кон-
тур необходимо удерживать все время в одной рабочей точке. Очень
трудно, если даже почти невозможно, исследовать методом разомкну-
того контура системы с высоким коэффициентом усиления, находя-
щиеся в состоянии насыщения или отсечки. Также довольно сложным
делом является определение согласующего импеданса замкнутого кон-
тура (цепь, имеющую такой импеданс, необходимо ввести в схему
при размыкании обратной связи). Если система имеет широкую полосу
пропускания, скажем, равную половине частоты коммутации, могут
возникнуть проблемы при измерениях, обусловленные высоким уров-
нем пульсации выходного напряжения.
3.2.4. Магнитная инжекция
Очевидно, более предпочтительным методом определения характерис-
тик преобразователей является метод замкнутого контура, не имеющий
отмеченных выше недостатков. Кроме того, поскольку нет необходи-
мости в размыкании обратной связи, измерения можно провести за очень
короткое время. Как отмечалось, для определения характеристик по ме-
тоду замкнутого контура необходимо специальное оборудование. Но
при проведении измерений по методу, известному под названием ’’ин-
жекция напряжения”, используются всегда доступные токовые зонды,
вводящие сигнал в контур обратной связи. Токовой зонд не оказывает
влияния на цепь обратной связи, так как имеет очень низкий выходной
импеданс. При альтернативном методе ’’инжекции тока” в любую точку
цепи обратной связи, где выходной импеданс много выше входного,
включают ’’плавающий” источник переменного напряжения, частота
которого изменяется в определенном диапазоне.
В любом случае эквивалентный выходной импеданс вводимого в цепь
обратной связи устройства должен быть много меньше входного импе-
данса точки ’’инжекции”. Оба способа ’’инжекции” сигналов применимы
также и к ключевым стабилизаторам, охваченным несколькими обрат-
ными связями. Это объясняется тем, что единственным узлом, форми-
рующим сигнал управления силовым преобразователем и определяю-
щим текущее значение коэффициента заполнения импульсов, является
ШИМ (см. рис. 3.17), на вход которого подается сумма сигналов всех
обратных связей.
Точка суммирования, как правило, удовлетворяет всем требованиям
по значению входного импеданса и, следовательно, является идеальным
местом для ’’инжекции” сигнала. В большинстве ключевых стабилиза-
торов точка, удовлетворяющая этим критериям, находится либо непо-
90
средственно на выходе усилителя сигнала рассогласования (т.е. вклю-
чена последовательно с управляющим напряжением модулятора), либо
непосредственно за выходным емкостным фильтром (включена после-
довательно с входом усилителя сигнала рассогласования).
Когда все требования соблюдены, можно осуществлять измерения для
определения амплитудно-частотных характеристик. Пусть ’’инжектиру-
емый” сигнал вызывает появление сигнала Квх, который, проходя
через усилитель сигнала рассогласования, модулятор и силовой пре-
образователь, вызывает появление выходного напряжения стабилизатора
КВЬ1Х. Три указанных сигнала Квх, КВЬ1Х и Ks образуют векторный тре-
угольник. Отношение Квых/ Квх определяет коэффициент усиления по
петле обратной связи. На низких частотах этот коэффициент высок и на-
пряжение Квых много больше напряжения FBX. На высоких частотах
коэффициент усиления мал и напряжение Квых, как правило, много
меньше напряжения Квх. Из векторного треугольника, используя извест-
ное геометрическое соотношение а2 + b2 - 2ab cos 0 = С и полагая
7ВХ = a, Vs = b и Ивых = с, можно без труда определить угол между на-
пряжениями Квхи 7ВЫХ.
3.2.5. Экономия времени
Благодаря автоматической самонастройке применяемого измеритель-
ного оборудования измерения методом замкнутого контура (рис. 3.19)
могут быть проведены с весьма высокой точностью. Кроме того, изме-
рения методом разомкнутого контура из-за необходимости частого руч-
Силовой преобразователь
Рис. 3.19. Схема измерений по методу замкнутого контура
91
ного переключения приборов обычно занимают несколько дней, в то
время как на измерения методом замкнутого контура необходимо всего
несколько минут. Метод замкнутого контура позволяет непосредственно
получать коэффициент усиления по пеле обратной связи в децибелах,
вычитая входной сигнал А из выходного сигнала В. При желании сигнал
В—А можно увидеть на экране осциллографа, а разность фаз между дву-
мя сигналами измеряется автоматически. Кроме того, выход схемы фазо-
определения иногда подключают к трехкоординатному графопострои-
телю и таким образом быстро и наглядно получают амплитудно- и фазо-
частотные характеристики системы.
По результатам измерений находят две основные передаточные функ-
ции - H(s) = Vg/ Квых и d/ Квых. Первая функция - вход - выход -
несет в себе информацию о способности ключевого стабилизатора ослаб-
лять входные шумы и пульсации. Вторая — управление — выход — опре-
деляет зависимость выходного напряжения от длительности управляю-
щего импульса. В системе с замкнутой обратной связью коэффициент
заполнения зависит от суммарного сигнала усилителя рассогласования и
цепи коррекции. Установка, изображенная на рис. 3.19, позволяет опре-
делять обе названные передаточные функции. Первая функция измеряет-
ся при постоянном коэффициенте заполнения импульсов, вторая —
при постоянном входном напряжении питания Vq.
Приложение. Моделирование источников электропитания,
работающих в ключевом режиме
Принцип работы ключевых стабилизаторов заключается в накопле-
нии энергии в дросселе за первую часть периода коммутации и последу-
ющей передаче ее в конденсатор фильтра и нагрузку за вторую часть
периода коммутации. Этим они отличаются от линейных или последо-
вательных стабилизаторов, где разница между входным и выходным на-
пряжениями падает на последовательном переменном сопротивлении
(роль которого выполняет транзистор, работающий в линейном режи-
ме) , всегда поддерживая выходное напряжение постоянным. Благодаря
тому что в ключевых стабилизаторах транзисторы работают в режиме
переключения, т.е. всегда находятся либо в состоянии отсечки, либо в
состоянии насыщения, а дроссели и конденсаторы можно считать иде-
альными, ключевые стабилизаторы имеют весьма высокий КПД.
Моделирование помогает разработчику определить коэффициент уси-
ления по петле обратной связи, ширину полосы пропускания, переход-
ную характеристику и линейное ослабление разрабатываемых источни-
ков электропитания.
На первом этапе строятся эквивалентные схемы для малых сигналов
низкой частоты всех функциональных узлов, входящих в состав ста-
билизатора, и затем определяются их передаточные функции. Для таких
узлов, как широтно-импульсный модулятор, усилитель рассогласова-
92
рассогласования и
цепь коррекции
Рис. Ш. Эквивалентная схема стабилизатора напряжения
ния, делитель напряжения, передаточные функции могут быть записаны
практически из непосредственного анализа их схем (рис. Ш). Пере-
даточные функции базовых схем преобразователей постоянного напря-
жения, как правило, известны (если же не известны, то они определяют-
ся методом четырехполюсника).
Следующей задачей разработчика является выбор и расчет коррек-
тирующих цепей, обеспечивающих устойчивую работу всей системы ста-
билизатора. После этого определяется точный коэффициент усиления по
петле обратной связи, равный произведению коэффициентов усиления
всех функциональных узлов. Аналогично рассчитывается и полный фа-
зовый сдвиг, он равен сумме сдвигов фаз всех типовых узлов. Из выра-
жения для коэффициента усиления можно найти основные характе-
ристики стабилизаторов — уровень стабилизации постоянного напря-
жения, передаточную функцию, линейное ослабление. Эти характерис-
тики определяются из анализа амплитудно- и фазочастотной харак-
теристик системы.
Несмотря на то что цепь компенсации является очень малой частью
полной схемы стабилизаторов, она является ’’ключом” для устойчивой
работы системы. При разработке таких схем предполагается, что коэф-
фициент усиления усилителя сигнала рассогласования равен единице
и усилитель не содержит частотно-зависимых элементов. Коэффициент
усиления по петле обратной связи по постоянному току системы
93
T_ Vout(s) К А 1 ...
Т = --------- ---------- ----- Л(х).
d(s) (ЯЛ+ЛВ) VM
Амплитудно-частотная характеристика силовых преобразователей
в обычных источниках питания от начальной частоты до частоты, рав-
ной собственной частоте силового фильтра, имеет наклон —40 дБ.
Отметим, что сопротивление нагрузки, индуктивность дросселя L,
емкость конденсатора С, а также характеристическое сопротивление
фильтра определяют коэффициент затухания фильтра. Нанесем на гра-
фик амплитудно-частотной характеристики линию 0 дБ (или опорную),
определяющую рабочую точку системы. Двунаправленная стрелка на
этой линии показывает, что эта линия при изменении постоянного коэф-
фициента в выражении для коэффициента усиления по петле обратной
связи или изменении коэффициента усиления усилителя сигнала рассо-
гласования может передвигаться вверх или вниз.
Если обратная связь в системе замкнута без какой-либо коррекции,
то при фазовом сдвиге 180° точки пересечения линии 0 дБ в системе
начнутся автоколебания. Эта проблема может быть решена путем введе-
ния полюса fp со спадом характеристики —20дБ/дек, как показано
на рис. П2. Здесь двусторонние стрелки показывают, что полюс может
передвигаться влево или вправо. При сдвиге полюса влево сужается по-
лоса пропускания, поэтому система будет устойчива, но переходная ха-
рактеристика ухудшается. По этой причине полюс передвигают вправо
так, чтобы он пересекал линию 0 дБ на частоте/р0 меньшей, чем часто-
та сопряжения силового фильтра fic.
Теперь система будет устойчива, поскольку характеристика пересе-
кает линию 0 дБ под углом —20 дБ. В этом случае легко определяются
запасы по амплитуде и фазе. Кроме того, благодаря расширению полосы
пропускания улучшается переходная характеристика. Дальнейшее расши-
рение полосы пропускания, однако, невозможно по причине близкого
’’соседства” собственной частоты силового фильтра. С этого момента
улучшение амплитудно-частотной характеристики достигается посредст-
вом введения полюса-нуля на частоте fz < fp.
При этом повышается коэффициент на низких чатотах, что улучшает
показатели стабилизации системы. Схемотехнически это осуществляется
подключением к делителю напряжения конденсатора соответствующей
емкости. Соответственно необходимо видоизменить и цепь обратной свя-
зи услителя рассогласования. Таким образом, коэффициент усиления по
петле обратной связи
T=V_______________J_______ (1+«Я2С2) ra 1
Di (1 + sL/R + s2LC) sRyCi (RA + R B) VM
Передаточная функция вход — выход, являющаяся мерой линейного
ослабления системы,
94
Рис. П2. Амплитудно- и фазочастотные характеристики
V out (s) D!
р = --------- = -----—-------- .
PG(s) 1 + sL/R + s2£C
В любом замкнутом контуре функция линейного ослабления
F' = F/T.
СПИСОК ЛИТЕРАТУРЫ
1. Quick A. Convenient Method for Measuring Loop Gain, Hewlett-Packard Journal,
vol. 14, January-February 1963,p. 5-8.
2. Middlebrook RJ), Improved Accuracy Rhase Accuracy Measurement, International
Journal of Electronics, vol. 40, N 1, January, 1976, p. 1 —4.
95
3.3. ИЗМЕРЕНИЕ АМПЛИТУДНО- И ФАЗОЧАСТОТНЫХ ХАРАКТЕРИСТИК
И КОЭФФИЦИЕНТА УСИЛЕНИЯ ПО ПЕТЛЕ
ОБРАТНОЙ СВЯЗИ КЛЮЧЕВЫХ СТАБИЛИЗАТОРОВ
3.3.1. Введение
В 1960 г. в ходе работ, посвященных космическим исследованиям,
возникла необходимость в разработке высоконадежного, экономичного
и легкого электрооборудования для летательных аппаратов. Несмотря
на ограниченную мощность первичных источников энергии, находящихся
на борту летательных аппаратов, инженеры нашли новаторское решение
проблемы преобразования и распределения мощности. Так родилась но-
вая область электроники — силовая электроника. И сегодня не исчезли
проблемы. Вопросы ограниченности мощности первичных источников
энергии автономных объектов прежде всего необходимо учитывать при
разработке систем преобразования и распределения электрической
энергии.
Практически вся силовая электроника изучает вопросы, связанные с
ключевым преобразованием электрической энергии, анализом, синтезом
и разработкой электронных схем для экономичного преобразования,
управления и стабилизации параметров электроэнергии. К области си-
ловой электроники относятся также расчеты и оптимизация преобразо-
вателей постоянного напряжения, имеющих высокий КПД, малые разме-
ры и массы, высокие эксплуатационные характеристики.
Преобразователи постоянного напряжения с разделительными транс-
форматорами могут содержать несколько выходов с различными уров-
нями напряжения и полярностью. Стабилизированные источники элек-
тропитания такого типа применяются, в частности, в ЭВМ, где необхо-
димы низковольтные источники с малыми пульсациями выходного
напряжения, высокими динамическими характеристиками, способные
отдавать в нагрузку большой ток. Кроме того, такие преобразователи,
соединенные в специальные схемы, образуют мощные инверторы (клю-
чевые преобразователи постоянного напряжения в переменное). Силовая
электроника изучает обширную область техники — мощные ключи, пре-
образователи постоянного напряжения с одним и несколькими выходами,
двунаправленные источники электропитания (устройства заряда и раз-
ряда аккумуляторных батарей), инверторы, источники бесперебойного
электропитания, управление электродвигателями, робототехнику, серво-
системы, импульсные усилители звуковой частоты и пр.
В последнее время широкое распространение получили источники
электропитания, работающие в ключевом режиме. Отличительной осо-
бенностью экономичного ’’электронного” преобразования мощности
является применение мощных полупроводниковых приборов (для сни-
жения потерь мощности), управляющих передачей электроэнергии из
источника в нагрузку. Для сглаживания потока электроэнергии исполь-
зуются емкостные и индуктивные элементы, рассеивающие незначитель-
96
ную мощность. При повышении частоты коммутации размеры дросселей
и конденсаторов почти пропорционально уменьшаются. Благодаря своим
характеристикам, т.е. высокому КПД, малым размерам, массе и до-
вольно низкой цене, ключевые источники электропитания повсюду за-
меняют обычные линейные (рассеивающие значительную мощность
вследствие того, что проходной транзистор работает в линейном режиме)
даже при выходных мощностях ниже 25 Вт.
В последние годы выпуск таких источников электропитания постоян-
но возрастает. Считается, что в промышленных коммерческих разработ-
ках используются наиболее простые по топологии преобразователи. Од-
нако их изготовители быстро поняли, что энергосберегающая техника
дает возможность резко снизить массу и габаритные размеры разраба-
тываемого оборудования.
Для моделирования и анализа ключевых преобразователей постоян-
ного напряжения разработаны различные методы, отметим лишь два —
метод эквивалентной схемы с инжекцией тока (МЭСИТ) [1] и усреднен-
ный метод установившегося состояния [2], позволяющие построить ли-
нейные эквивалентные схемы нелинейных преобразователей, точно отра-
жающие их статистические и динамические характеристики и позволяю-
щие определить передаточные функции. Анализ указанных моделей по-
могает правильно выбрать схему преобразователя в каждом конкретном
случае и оптимизировать контур обратной связи стабилизатора, содержа-
щего выбранный преобразователь.
Кроме того, модели позволяют рассчитать устойчивость и полосу про-
пускания ключевых стабилизаторов, их переходные характеристики и
линейное ослабление. Это стало возможным благодаря применению стан-
дартных методов анализа схем, используемых в системах с линейными
обратными связями. Для подтверждения справедливости полученных
моделей и точности расчетов, а также для уточнения коэффициента уси-
ления по петле обратной связи и сдвига фаз целесообразно эксперимен-
тальным путем определить амплитудно-частотную характеристику
системы. Таким образом, при разработке любой системы с обратной
связью необходимо провести ряд измерений петлевого усиления рас-
считанного устройства на различных частотах для подтверждения пра-
вильности аналитических расчетов или их коррекции.
В [3] предложен простой и точный метод экспериментального опре-
деления амплитудо-частотных характеристик линейных систем с обрат-
ными связями [4], пригодный также и для ключевых стабилизаторов
[5, 6], При определении амплитудно-частотных характеристик с по-
мощью вольтметров измеряются только значения напряжений, а петле-
вое усиление и фаза определяются из полученных данных методом век-
торного треугольника. Совершенствуя описанный метод, можно заме-
нить простые вольтметры на частотно-избирательные следящие низкопо-
лосные вольтметры и проводить изменения в разомкнутой и замкнутой
системах (в последней предпочтительнее благодаря различным связан-
ным с ней преимуществам).
3.3.2. Моделирование ключевых преобразователей
постоянного напряжения
В последние годы уделяется значительное внимание моделированию
и анализу ключевых преобразователей постоянного напряжения вследст-
вие повышающихся требований, предъявляемых к системам преобразо-
вания электроэнергии. В большинстве своем все работы, проводимые по
моделированию, направлены на определение передаточных функций не-
линейных преобразователей в частотной области, и разработано значи-
тельное число методов моделирования. Остановимся подробнее на рас-
смотрении одного из них — метода эквивалентной схемы с инжекцией
тока (МЭСИТ).
Примем следующие обозначения: dtTs — временной интервал, на
котором транзистор открыт, а диод закрыт; d2 Ts — временной интер-
вал, на котором транзистор закрыт, а диод открыт; dxTs + d2Ts = Ts,
где Ts = l/fs — период коммутации.
Полисными буквами обозначены параметры установившегося состо-
яния, буквами с ’’шапками” — малые возмущения.
Эквивалентная схема МЭСИТ для моделирования преобразователей,
работающих в режиме непрерывного тока дросселя (НТД), приведена в
общем виде на рис. 3.20 и применима к любым силовым преобразова-
телям. На первом этапе (карта 1) определяются линейная и нелинейная
части преобразователя и осуществляется линеаризация его нелинейной
части. Нелинейная часть определяет средний ток, инжектируемый в ли-
нейную часть. Далее составляется система уравнений, соответствующая
схеме конкретного преобразователя и формам тока и напряжения
(рис. 3.21).
Полагая все производные и возмущения равными нулю, находим ус-
ловия установившегося состояния (карта 3 на рис. 3.20). Поскольку
уравнения в карте 2 линейны, к ним применимы правила суперпозиции,
и в точку установившегося состояния могут быть введены малые возму-
щения. Независимыми входными параметрами являются vg и d. Их
изменение вызывает изменение выходных параметров /иг Проведем
аппроксимацию. Малые отклонения по переменному току от точки уста-
новившегося состояния пренебрежимо малы по сравнению с параметра-
ми установившегося состояния, т.е. v/v < 1, < 1, < 1
Л Л
d2/D2 < 1, //1 •< 1. Снова прибегая к аппроксимации и пренебрегая чле-
нами второго порядка нелинейности, возвращаем системе уравнений ли-
нейность. Теперь рассмотрим только ту ее часть, которая описывает реак-
цию преобразователя на малые сигналы низкой частоты. По этой системе
уравнений можно записать передаточные функции вход — выход и
управление — выход (карта 5 на рис. 3.20). С помощью этой же системы
строится эквивалентная схема (карта 6 на рис. 3.20), отражающая реак-
цию нелинейной части преобразователя на малые сигналы низкой час-
тоты.
98
Рис. 3.20. Схема МЭСИТ для моделирования ключевых преобразователей постоянного напряжения
Рис. 3.21. Типовые формы тока дрос-
селя (7) и напряжения на нем (2)
3.3.3. Моделирование понижающего, повышающего и
инвертирующего преобразователей
Применим описанный выше метод для моделирования понижающего,
повышающего и инвертирующего преобразователей. Основная цель
моделирования — определение передаточных функций вход — выход
и управление — выход преобразователей, а также их эквивалентных схем
для малых сигналов низкой частоты (рис. 3.22—3.24).
Для понижающего преобразователя
v(s) _ 1
$g(s) ‘ (1 + sL/R is2LC)
Рис. 3.22. Принципиальная схема понижающего преобразователя (а) и его линей-
ная эквивалентная схема для малых сигналов низкой частоты (б)
100
Рис. 3.23. Принципиальная схема повышающего преобразователя (а) и его экви-
валентная схема для малых сигналов низкой частоты (б)
Рис. 3.24. Принципиальная схема инвертирующего преобразователя (а) и его
эквивалентная схема для малых сигналов низкой частоты (б)
1
- (r/л) 2
6,1 (s) - (1 +sL/R + s2LC)
для повышающего преобразователя
v(s) = _____________1______________
v?(s) - D2 (1 + sL/RDl + s2LClD\)
101
v(s) _ r(l-s£//?Dl)
Л (s) P2(l +s£/7?D|+ s2LC/D2)
и для инвертирующего преобразователя
3 (») = __________£i____________
5g(s) D2 (1 + sL/RDl + s2LC/Dl) ’
v (s) _ V(l-sL/RD2)
d(s) DtD2 (I + sL/RD2 + s2LC/D2)
Чтобы стабилизировать выходное напряжение, ключевой преобразова-
тель охватывается контуром обратной связи, содержащим соответству-
ющие цепи коррекции (рис. 3.25). Ниже приведены передаточные функ-
ции типовых звеньев ключевых стабилизаторов [7]:
делитель напряжения
v/(s)
v(s)
Ki
R 1 + R2
102
усилитель сигнала рассогласования
= 4(.);
Л z ч \ ’
г/ (s) ^ВХ
модулятор
(S) 1
Л- = — = GmW;
Гс(») Ут
коэффициент усиления по петле обратной связи
л
V (s)
Т = ---- KA(s)Gm(s).
(«)
Для преобразователя-стабилизатора, показаного на рис. 3.25,
И 1 R,
Т =----------------------- -----‘----
D (1 + sL/R + s2LC) (Я1+Л2)
' т
Определение коэффициента усиления по петле обратной связи — важ-
нейший этап при расчете и разработке контура обратной связи. Это объ-
ясняется тем, что частоты, на которых он равен единице, определяют по-
лосы системы. Следовательно, для получения информации об ее устой-
чивости можно воспользоваться критериями Найквиста и Боде [8].
Кроме того, экспериментальное определение коэффициента усиления по
петле обратной связи подтверждает правильность расчетов. Эти измере-
ния являются необходимым этапом разработки, и только после сравне-
ния экспериментальных данных с расчетами можно сделать вывод о ее
успешном завершении.
3.3.4. Экспериментальное определение
амплитудно-частотных характеристик
По амплитудно-частотной характеристике можно судить об устойчи-
вости системы, ее переходной характеристике, способности подавлять
входные шумы и пульсации. Для экспериментального определения ам-
плитудно-частотных характеристик ключевых преобразователей посто-
янного напряжения и стабилизаторов необходима специальная измери-
тельная ацдаратура.
3.3.5. Необходимость е узкополосном следящем вольтметре
При коммутации силовых преобразователей генерируется весьма вы-
сокий уровень шумов. Даже при малом изменении управляющего сигна-
ла (коэффициента заполнения импульсов) на какой-то постоянной час-
тоте FM выходное напряжение будет содержать следующие частотные
103
составляющие: fm ,2f т<.Ут< • • •! /s>2/s,3/s,...; (fs+fm)
и т.п.
Следует отметить, что фильтр низких частот на выходе преобразова-
теля с собственной частотой в диапазоне от Д/20 до Д/10 ослабляет
большинство этих гармоник. Тем не менее для измерения напряжения
только на частоте тестового ’’инжектируемого” сигнала необходим узко-
полосный следящий вольтметр.
Коэффициент усиления, а также фаза двух синусоидальных сигналов
определяются с помощью вольтметров, измеряющих только их ампли-
туды. Отношение выходного сигнала к входному дает коэффициент уси-
ления. Фаза определяется по векторному треугольнику — синусоидаль-
ные сигналы представляются векторами, составляющими треугольник, а
углы треугольника (фазы) определяются по его известным сторонам.
3.3.6. Определение амплитудно-частотной характеристики
методом разомкнутого контура
Для обеспечения устойчивой работы любой системы ее охватывают
отрицательной обратной связью. Измерения в таких системах проводят
путем размыкания обратной связи в соответствующей точке и под-
ключения к этой точке цепи, импеданс которой равен импедансу кон-
тура обратной связи в этой точке. Далее в место разрыва ’’инжектирует-
ся” сигнал, вызывающий появление ответного сигнала на выходе систе-
мы. Отношение этих сигналов определяет коэффициент усиления и фазу
при изменении частоты инжектированного сигнала в нужном диапазоне.
На рис. 3.26 показана схема реализации этого метода на примере ключе-
вого стабилизатора.
Метод разомкнутого контура не свободен от ряда недостатков. Во-
первых, контур обратной связи разорван и работать приходится только
в одной точке. Во-вторых, очень трудно работать с разомкнутой систе-
мой и большим коэффициентом усиления, когда система находится в
состоянии отсечки или насыщения. Кроме того, определить значение
Zcorn (который должен быть включен в место разрыва) достаточно
сложно. Если система рассчитана так, что граница полосы пропускания
лежит вблизи частоты, равной половине частоты коммутации, то резуль-
таты измерений, полученные методами замкнутого и разомкнутого кон-
туров, отличаются друг от друга, что обусловлено взаимодействием
пульсаций с частоты модулирующего пилообразного напряжения.
В силу указанных причин более предпочтительным являетсся ме-
тод замкнутого контура. ’’Инжекция” тестового сигнала в замк-
нутый контур позволяет определять коэффициент усиления и фазу без
размыкания обратной связи.
СилоВой преобразователь
СилоВой преобразователь
v9
Рис. 3.26. Определение амплитудно-частотных характеристик ключевого стабили-
затора методом разомкнутого контура:
а - способ 1; б - способ 2
105
3.3.7. Определение амплитудно-частотных характеристик
методом замкнутого контура
Метод замкнутого контура свободен от недостатков, связанных
с размыканием обратной связи. Следовательно, измерение можно про-
водить в течение очень малого времени.
При проведении измерений для ’’инжекции” сигнала в контур обрат-
ной связи без ее размыкания используются стандартные токовые зонды,
подключенные к источнику тестовых сигналов (рис. 3.27). Зонды не
Силобой преобразователь
Рис. 3.27. Определение амплитудно-частотной характеристики методом замкнутого
контура с ’’инжекцией напряжения”
Рис. 3.28. Определение амплитудно-частотной характеристики методом замкнуто-
го контура с ’’инжекцией тока”
106
вносят искажений в обратную связь, поскольку имеют очень низкий
выходной импеданс. Такой способ известен как ’’инжекция напряже-
ния”. С другой стороны, в любую точку контура обратной связи, где
выходной импеданс много меньше входного, можно включить ’’пла-
вающий” источник переменного тока, частота которого меняется в
требуемом диапазоне. Этот способ называется ’’инжекцией тока”
(рис. 3.28).
3.3.8. Выбор точки "инжекции"
Для того чтобы ’’инжектируемый” сигнал не ослаблялся при нор-
мальной работе системы, выходной импеданс точки ’’инжекции’ должен
быть намного меньше входного импеданса (рис. 3.29). Техника ’’ин-
жекции”, а также способ измерения коэффициента усиления и фазы
применимы также и к ключевым стабилизаторам, охваченным несколь-
кими обратными связями (рис. 3.30). Это объясняется тем, что в систе-
ме присутствует только один управляющий параметр — коэффициент
заполнения импульсов — и соответственно один управляющий сигнал,
для генерации которого осуществляется суммирование сигналов всех
обратных связей в одной точке — на входе широтно-импульсного моду-
лятора. Эта точка, как правило, удовлетворяет требованиям по вход-
ному и выходному импедансам и используется для ’’инжекции” тесто-
вого сигнала. В большинстве ключевых стабилизаторов предъявляемым
требованиям обычно удовлетворяют две точки — непосредственно за
усилителем сигнала рассогласования последовательно с сигналом управ-
Рис. 3.29. Точки ’’инжекции” сигнала
107
Силовой, преобразователь
Рис. 3.30. ’’Инжекция” сигнала в стабилизаторе с несколькими обратными свя-
зями
ления модулятором и на выходе силового емкостного фильтра преоб-
разователя последовательно с сигналом на входе усилителя рассогласо-
вания (рис. 3.29).
3.3.9. Определение коэффициента усиления
и угла сдвига фазы по петле обратной связи
Примем, что ’’инжекция” сигнала Vs вызывает появление сигнала
Ивх (см- Рис- 3.27). Сигнал Ks, проходя через силовой преобразователь
и усилитель сигнала рассогласования, вызывает появление на выходе по-
следнего сигнала Ко. Если требования к импедансам точки ’’инжекции”
удовлетворены, отношение Ко/ ^вх Дает коэффициент усиления. На низ-
ких частотах коэффициент усиления высок и Vo много больше 7ВХ.
Эти три напряжения Квх, Vo и Vs образуют векторный треугольник
(рис. 3.31, а). На высоких частотах коэффициент усиления обычно
мал и Ко много меньше Квх. В этом случае также можно построить
треугольник векторов (рис. 3.31, б). С помощью простых геометричес-
ких соотношений легко определить угол между Квх и Ко. Поскольку
все стороны треугольника известны, угол сдвига фазы
<р = ± cos-1
= ± cos-1
|Л |2 + |Д|2 - |С|2
2|45|
|С*|2 - |Л|2 - IjBI2
2| АВ\
Рис. 3.31. Векторные треугольники,
построенные по результатам изме-
рений:
а - на низких частотах; б - на
высоких частотах; в - при соот-
ветствующем выборе коэффициентов
усиления, когда = Ко
а)
Vs
А = Gt7BX, В = С2К0, С“= \А - Bl, С* = IA + В\,
где Gi — коэффициент усиления измерителя Квх; G2 — коэффициент
усиления измерителя Ко.
3.3.10. Измерительная установка 1
На рис, 3.32 показана схема измерительной установки, в которой клю-
чевым стабилизатором управляет тестовый сигнал заданной частоты и
осуществляется измерение амплитуды и фазы сигнала В по отношению
к сигналу А.
Сигналы обрабатываются предусилителем осциллографа и с выхода
предоконечного усилителя через штепсельный разъем подаются на ам-
плитудный вольтметр. Используя различные селекторы и инвертирую-
щие ключи, можно получить значения сигналов А, В, A-В или А + В.
Для повышения точности измерения угла сдвига фазы коэффи-
циенты усиления каналов предоконечного усилителя должны быть на-
строены так, чтобы амплитуды сигналов .Л и Л на его входах были равны
между собой. В этом случае векторный треугольник становится равно-
сторонним (см. рис. 3.31, в).
Для проведения измерений необходимы осциллограф и спектральный
анализатор. Можно использоать осциллографы серий Tektronix 500 или
Tektronix 7000. При исследовании ключевых стабилизаторов требуется
узкополосный вольтметр, способный отличать реакцию на тестовый сиг-
нал от коммутационных шумов. Такие вольтметры существуют, но луч-
ше использовать приборы, совмещающие в себе функции генератора и
узкополюсного вольтметра,’автоматически настраивающегося на частоту
109
Силобой преобразователь
Рис. 3.32. Установка для определения амплитудно-частотных характеристик клю-
чевых стабилизаторов методом разомкнутого контура
генератора. Речь идет о спектральных анализаторах типа 302А, 310А,
312А, 3590А и 3581А фирмы Hewlett-Packard.
С их помощью можно измерять не только значения Ивх и Ио в деци-
белах и получать их отношение ИО/7ВХ, но и определять угол сдвига
фазы сигнала Ко относительно Ивх.
3.3.11. Измерительная установка 2
На рис; 3.33 приведена схема измерительной установки, обеспечива-
ющей более точные измерения по сравнению с описанной ранее установ-
кой. Ее приборы более совершенны и имеют два отдельных входа (ка-
нала) . Таким образом, оба сигнала измеряются одновременно. Посколь-
ку измерение осуществляется в децибелах, коэффициент усиления мож-
но определить непосредственно, вычитая сигнал А из сигнала В, что осу-
ществляется автоматически. Имеется также фазоизмеритель, определя-
ющий угол сдвига фаз двух сигналов. Выходы измерителей подключают-
ся к двухкоординатному графопостроителю, и, изменяя частоту тестово-
го сигнала в интересующем диапазоне, можно быстро получить графики
изменения коэффициента усиления и фазы от частоты. Все указанные из-
мерения осуществляются с помощью широко известных схемных анали-
заторов, например НР3040А или BAFCO916H.
Измерения, проводимые с помощью первой измерительной установки,
обычно занимают несколько дней, поскольку осуществляются вруч-
110
силовой преобразователь
v3
Рис. 3.33. Установка для определения амплитудно-частотных характеристик ключе-
вых стабилизаторов методом замкнутого контура
ную, вторая же установка позволяет провести все измерения за несколь-
ко минут и с большей точностью. Это объясняется тем, что здесь можно
автоматически изменять частоту тестовых сигналов в широком диапа-
зоне, логарифмировать измеренные сигналы и сразу подавать их на
входы графопостроителя.
3.3.12. Определение передаточных функций
Основными передаточными функциями стабилизаторов являются
функция вход — выход, характеризующая способность схемы подав-
лять входные шумы и пульсации и не пропускать их на выход, и функ-
ция управление — выход, характеризующая степень изменения выходно-
го сигнала различных коэффициента заполнения импульсов. В системе с
замкнутой обратной связью коэффициент заполнения импульсов опреде-
ляется усиленным и компенсированным сигналом рассогласования.
Обе передаточные функции измеряются в интересующем нас диапазоне
частот (рис. 3.34).
111
Силовой преобразователь
Фиксированный коэффициент
заполнения импульсов а)
Рис. 3.34. Измерения передаточных функций:
а - вход-выход; б - управление - выход
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. 1981. IEEE Transactions in Aerospace Electronics and Systems
17 (6).
2. Middlebrook R.D., Cuk S. 1976, IEEE Power Electronics Specialists Conference
18-34.
3. Hewlett-Packard Journal January-February 5—8 1963.
4. Hewlett-Packard Application Note N 59.1965, January.
5. Middlebrook R.D. 1975. International Journal of Electronics 38 (4) 485-521.
6. Middlebrook R.D. 1976. International Jurnal of Electronics 40 (1) 1 -4.
7. Chetty P.R.K. Internal Report on Modeling and Design of Switching Regulators
(Sundstrand Advanced Technology Corporation, Illinois).
8. Electronic Design June 40-41 1965.
Глава 4. АВТОМАТИЗИРОВАННОЕ ПРОЕКТИРОВАНИЕ
4.1. ПАКЕТ ПРИКЛАДНЫХ ПРОГРАММ SPICE-2
ДЛЯ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ
КЛЮЧЕВЫХ СТАБИЛИЗАТОРОВ
4.1.1. Введение
Эффективное использование вычислительной техники при проектиро-
вании ключевых стабилизаторов позволяет разработчикам избежать
дорогостоящих и трудоемких лабораторных исследований и испытаний
разрабатываемых систем. Применение вычислительной техники уско-
ряет разработку источников электропитания, позволяя смоделировать
их основные характеристики и провести предварительный анализ. Клю-
чевые стабилизаторы занимают видное место в силовой электронике
благодаря своим небольшим размерам, массе, высокому КПД, надеж-
ности и т.д. Они почти полностью вытеснили привычные линейные стаби-
лизаторы. Несмотря на присущую этим стабилизаторам нелинейность
в последние годы разработан ряд линейных эквивалентных схем для
малых сигналов низкой частоты, описывающих входные и выходные
характеристики этих систем [1].
Наиболее важными характеристиками, на которые прежде всего
необходимо обратить внимание при разработке ключевых преобразо-
вателей, являются [2]: Не (s) — характеристика фильтра низких час-
тот; Zef — входной импеданс фильтра низких частот; Ze0 — выходной
импеданс фильтра низких частот; v/vg — передаточная функция вход-
выход; г/ d — передаточная функция управление—выход.
Это — характеристики разомкнутой системы, изменяющиеся при за-
мыкании контура обратной связи. Следовательно, при проектировании
ключевых стабилизаторов принципиальный интерес представляют сле-
дующие характеристики: Т — зависимость коэффициента усиления и
угла сдвига фазы по петле обратной связи от частоты; Zj — входной им-
педанс стабилизатора при замкнутой цепи обратной связи; Zo " выход-
ной импеданс стабилизатора при замкнутой обратной связи; F —
передаточная функция вход—выход при замкнутой обратной связи.
Коэффициент усиления по петле обратной связи оказывается доста-
точно большим на постоянном токе и соответственным образом изме-
няется с варьированием частоты. Параметр Zo определяет переходную
характеристику. Чем ниже его значение и меньше подъем при увеличе-
нии частоты, тем лучше переходная характеристика стабилизатора. В
то же время чем выше значение Zo и круче его подъем при изменении
частоты, тем значительнее перерегулирование, больше время выхода
в установившийся режим. Передаточная функция F характеризует спо-
собность стабилизатора подавлять пульсации входного напряжения.
Параметр Z, важен для определения модификации характеристик стаби-
лизатора при введении в его схему входного фильтра.
113
4.1.2. Моделирование
В качестве объекта моделирования рассмотрим ключевой стабилиза-
тор с выходным напряжением 10 В и выходным током 1 А, схема кото-
рого изображена на рис. 4.1. Это — преобразователь понижающего типа,
работающий на частоте 100 кГц. На рис. 4.2 показана его полная экви-
валентная схема, подготовленная для обработки с помощью пакета
Рис. 4.2. Эквивалентная схема преобразователя, изображенного на рис. 4.1, под-
готовленная для обработки с помощью пакета программ SPICE-2
114
Рис. 4.3. Отдельные элементы эквивалентной схемы преобразователя
б-, = NUIZ
SPICE-2 , а на рис. 4.3 изображены отдельные элементы эквивалентной
схемы. Исходные данные для SPICE-2 приведены ниже.
US 4 0 DC 16.85
RS 1 2 0-01
XI 2 0 3 7 17 PWMXFM
VL 3 4
L 4 5 82U
PL 5 6 3.5
R 6 0 20
C 6 8 19U
RC 8 0 0.12
RIN 6 12 22K
RAC 12 9 2K
CAC 9 8 100U
X2 12 13 14 15 16 SG1524
R3 13 16 IK
RF 12 10 10K
CF 10 14 0.0047U
LEX 15 17 1G
CEX 17 18 1MEG
VEX 18 6 AC 1
RP 7 0 0.001
D 7 3 DS
-MODELDS D(RS-.01)
-SUBCKT SG1524 41 42 43 44 45
♦T=10IS TO=,5US TS=,5US EP=3,5V ED=.7V
R1 41 42 100K
Cl 41 42 IP
R1 43 0 5MEG
Cl 43 0 159P
D3 43 48 DS
G1 0 43 42’41 1.6M
115
ED 44 0 46 0 0.01
VR 45 0 DC 10
IX 0 46 DC 5M
GD 0 46 43 47 38M
R0 46 0 IK
D1 46 50 DS
RC 47 43 1G
V0 47 0 DC 0.7
VA 48 0 DC 4
VB 49 0 DC 0.6
D4 49 43 DS
VP 50 0 DC 76.5
VM 51 0 DC 1.25
D2 51 46 DS
-MODEL DS D(RS=.l)
-ENDS SGI 5 24
-SUBCKT PWMXFM 31 32 33 34 35
RD 35 0 1MEG
RO 36 33 0.1
G1 31 32 POLY(2) 36 33 35 0 0 0 0 0 10
G2 36 34 POLY(2) 31 32 35 0 0 0 0 0 1
-ENDS PWMXFM
VAC 61 0 DC -10
EAC 60 61 6 0 1
RVAC 60 0 16
-OP
-OPTIONS LIST
-OPTIONS RELTOL- -IM ABSTOL =1U UNTOL =1U
-OPTIONS ITL1 =150 ITL2=50
-OPTIONS ITL5 =1000 CHGTOL =1U LVLTIM =1
-PRINT AC VDB(15) VP(15) VDB(14) VP(14) VDB(6) VP(6)
-PLOT AC VDB(15) VP(15)
-AC DEC 10 1 100K
-PRINT TRAN V(6) V(60) V(15) V(14) I(VL) I(VS)
-PLOT TRAN V(6)
-PLOT TRAN V(15)
-END
4.1.3. Результаты
Реакция контура. Для проведения анализа разомкнутой системы в
рабочей точке без размыкания обратной связи параметры элементов
ЬЕ% и Сех устанавливаются равными соответсвенно 10“9 Гн и 10-9 Ф.
Такая установка ’’размыкает” контур для проведения анализа на пере-
менном токе. Источник VЕ% ’’инжектирует” переменный сигнал 1 В,
моделирующий напряжение на входе силового преобразователя. Ко-
эффициент петлевого усиления равен напряжению в точке 75, т.е. на
выходе управляющей микросхемы, и показан на рис. 4.4 вместе с изме-
116
Рис. 4.4. Зависимость коэффици-
ента усиления и фазы в разомк-
нутой системе от частоты. Точ-
ками отмечены эксперименталь-
ные данные
рениями по Миделбруку. Оче-
видно, что результаты модели-
рования как по амплитуде,
так и по фазе согласуются до-
вольно точно.
Влияние коэффициента
усиления на низких частотах
на стабилизацию постоянного
напряжения. Элементы Ср и
Rp определяют коэффициент
усиления на низких частотах
при фиксированных входном
сопротивлении или импедансе.
Отметим также, что частота
’’нуля” зависит от параметров
элементов Ср и Rp. В
табл. 4.1 приведена зависи-
мость выходного напряжения
от емкости конденсатора Ср.
Выходной импеданс. Исключим из схемы элементы Vpx и Сех и
введем источник переменного напряжения VqsC' как показано на
рис. 4.5, а, соединенный с конденсатором большой емкости (CL = ),
и источник нулевого напряжения На рис. 4.5, б изображена за-
висимость выходной проводимости при разомкнутой цепи обратной свя-
зи от частоты. При V о SC = 1 В ток через численно равен проводи-
Таблица 4.1. Выходное напряжение и емкость
конденсатора Ср
Емкость Ср , мкФ Коэффициент Выходное напря- усиления при час- жение, В тоте 1 Гц, дБ
0 0,0047 0,047 47 -112 13,8823 70 9,9996 36,5 9,9996 5,95 9,9996
117
Рис. 4.5. Введение в выходную цепь источника переменного напряжения (я), зави-
симости выходной проводимости разомкнутой системы (б), выходного импедан-
са замкнутой системы (в) и выходной проводимости замкнутой системы (г)
от частоты. Точками показаны экспериментальные данные
мости в сименсах. Для определения выходной проводимости при замк-
нутой обратной связи кроме удаления Vgx и ^ЕХ изменяется = 1Р.
Теперь ток через численно равен выходной проводимости замк-
нутой системы в сименсах. Зная проводимость, без труда определяем
импеданс. На рис. 4.5,в показана зависимость выходного импеданса ра-
зомкнутой системы от частоты, а на рис.4.5,г приведены результаты мо-
делирования выходной проводимости замкнутой системы от частоты с
помощью пакета программ SPICE.
Входной импеданс. Введем последовательно существующему источ-
нику входного постоянного напряжения Vs источник переменного на-
пряжения Vqsc> а также для измерения входного тока - источник ну-
левого переменного напряжения У^дм (рис. 4.6, а). Для входной
проводимости разомкнутой системы исключим V^х и ^ЕХ При
118
Рис. 4.6. Введение во входную цепь источника переменного напряжения (я), за-
висимость входной проводимости разомкнутой системы (б), входного импеданса
разомкнутой системы — результаты эксперимента и моделирования (в) и вход-
ной проводимости замкнутой системы (г) от частоты. Точками показаны экспе-
риментальные данные
Vqsc = 1 В ток, протекающий через Кдглм» численно равен входной
проводимости в сименсах. Зависимость входной проводимости разомк-
нутой системы от частоты (результат моделирования с помощью SPICE)
показана на рис. 4.6, б. Зная входную проводимость, без труда опреде-
ляем входной импеданс (рис. 4.6, в). Для отыскания входного импе-
данса замкнутой системы кроме удаления Vex и Сех изменяется
^ЕХ ~ 1^- Зависимость входной проводимости замкнутой системы
от частоты приведена на рис. 4.6, г.
Передаточная функция вход-выход. Для моделирования этой пере-
даточной функции введем последовательно источнику входного напря-
жения источник переменного напряжения Vqsc (рис. 4.7, а). Исключив
из схемы Vex и Сех и поЛагая Vqsc = 1В, по напряжению в узле 6
119
Рис. 4.7. Введение во входную цепь источника переменного напряжения (а), пере-
даточная характеристика вход — выход размомкнутой системы (б), изменение
коэффициента усиления (-----) и фазы (------) от частоты в замкнутой системе
(в), передаточная характеристика вход — выход замкнутой системы (г). Точ-
ками показаны экспериментальные данные
можно судить о передаточной характеристике вход-выход разомкнутой
системы. Для определения передаточной характеристики замкнутой
системы кроме исключения VЕх и Сех изменяется и ЬЕх, а резуль-
таты моделирования представлены на рис. 4.7, в и г.
Выходная характеристика при изменении нагрузки. Для определения
переходной характеристики необходимо ’’устранить” VEx, СЕх и из-
менить Lex = IP. Кроме того, перфокарта ”АС” заменяется на перфо-
карты ’’TRAN” и ’ТС”:
TRAN 10U 1000U OU 1U I С
6 О PWL(0 О 10U0.2)
120
Рис. 4.8. Реакция выходного напряжения стабилизатора на скачок нагрузки (а)
и реакция сигнала управления на скачок нагрузки (б)
На рис. 4.8,а показана реакция стабилизатора (выходное напряжение)
при скачке нагрузки на 0 2 А. Как видно из рисунка, провал выходного
напряжения достигает 1,26%, перерегулирование - 0,8%, время установ-
ления (переходного процесса) равно 370 мкс. На рис. 4.8,6 приведена
реакция управляющего напряжения на скачок нагрузки. Коэффициент
заполнения импульсов, в прежнем установившемся состоянии равный
0,595, сначала возрастает до 0,6316, затем уменьшается до 0,585 и через
370 мкс устанавливается его новое значение 0,5974. Падение напряжения
пропорционально току, и, следовательно, для поддержания выходного
напряжения стабилизатора на постоянном уровне при изменении тока
коэффициент заполнения должен измениться на некоторую небольшую
величину.
Для расширения полосы пропускания модифицируем цепь коррекции,
как показано на рис. 4.9, а. Теперь стабилизатор, амплитудно- и фазочас-
тотная характеристики которого изображены на рис. 4.9, б, имеет полосу
пропускания 10 кГц и запасы по амплитуде и фазе соответственно
30 дБ и 45°. На рис. 4.9, в показана реакция такой модифицированной
системы на скачок нагрузки. Как видно из рисунка, провал выходного
напряжения достигает 1,15%, перерегулирование — 1,1%, а переходной
процесс длится 860 мкс. Очевидно, что несмотря на расширение полосы
пропускания качество переходного процесса не улучшилось. Это объясня-
ется тем, что у выходного импеданса стабилизатора существует ярко
выраженный максимум. В. систему для его устранения необходимо
ввести успокоительную цепь, обеспечивающую затухание (рис. 4.10, а).
121
Рис. 4.9. Модифицированная цепь коррекции (а), амплитудно- и фазочастотная
характеристики (б) и реакция выходного напряжения стабилизатора с модифи-
цированной цепью коррекции на скачок нагрузки (в) :
1 - коэффициент усиления; 2 - фаза
Рис. 4.10. Успокоительный фильтр (а) и реакция выходного напряжения стабилиза-
тора с успокоительным фильтром на скачок нагрузки (б)
Реакция стабилизатора с такой успокоительной цепью на скачок
нагрузки приведена на рис. 4.10, б. Теперь провал выходного напряже-
ния стал равен 0,94%, перерегулирование — 0,6%, а время переходного
процесса сократилось до 290 мкс, т.е. произошло значительное улучше-
ние переходной характеристики.
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. Modeling and Design of Switching Regulators, IEEE Transactions
of Aerospace and Electronic Systems, vol. AES-18, N 3, May 1982.
2. Middlebrook R.D. Input Filter Considerations in Design and Applications of
Switching Regulators. IEEE Industru Applications Societu Annual Meeting, 1976 Record,
p. 366-382.
3. Vincent Bello. Computer Program adds SPICE to Switching Regulator Analusis,
Electronic Design, March 31,1981, p. 89-95.
4. Chetty P.R.K. Closed Loops - On Track for Testing Switchers, Electronic Design,
July 7,1983. p. 135-140.
Глава 5. ПРИМЕРЫ ПРАКТИЧЕСКИХ РАЗРАБОТОК
5.1. АВТОНОМНЫЙ КЛЮЧЕВОЙ СТАБИЛИЗАТОР
МОЩНОСТЬЮ 2,8 кВт С ДВУХТАКТНЫМ ШИМ-ПРЕОБРАЗОВАТЕЛЕМ
ПОСТОЯННОГО НАПРЯЖЕНИЯ
5.1.1. Введение
Автономные источники электропитания, работающие в ключевом
режиме, благодаря своим высоким исполнительским характеристикам,
а именно: высокому КПД, высоким удельной мощности и надежности,
отсутствию громоздкого низкочастотного трансформатора и др., при-
влекают к себе все большее внимание. Так, разработан автономный
ключевой стабилизатор с двухтактным преобразователем, работаю-
щим с широтно-импульсным управлением и преобразующим входное
постоянное нестабилизированное напряжение 165 В в гальванически
развязанное постоянное стабилизированное напряжение 280 В. Выход-
ная мощность преобразователя составляет примерно 2,8 кВт. Входное
нестабилизированное напряжение 165 В образуется посредством вы-
прямления переменного однофазного напряжения ПО В. Ключевой
стабилизатор содержит двухтактный силовой преобразователь с транс-
форматором, выпрямители, LC-фильтр, схему коррекции магнитного
разбаланса, цепь обратной связи, широтно-импульсный модулятор
(ШИМ), оптопары, схемы управления силовыми тразисторами.
Основные параметры ключевого стабилизатора
Вход..............Однофазное переменное напряжение 110 В ± 15%
60 Гц
Выход.............Стабилизированное постоянное напряжение 280 В
Мощность.......... 2,8 кВт (макс.)
123
Точность стабили-
зации ............Меиее 1 % при изменении входного напряжения пре-
образователя в диапазоне ±20 В и менее 1% при изме-
нении нагрузки в диапазоне от 1,0 до 2,5 кВт
Пульсации.........Менее 2% во всем рабочем диапазоне
Защита............ От перегрузок по току и от короткого замыкания
Запуск............ Плавный, без бросков тока
Входным напряжением двухтактного преобразователя является вы-
прямленное нестабилизированное постоянное напряжение с пульсациями
на частоте 120 Гц.
5.1.2. Описание стабилизатора
На рис. 5.1 представлена структурная схема автономного ключевого
стабилизатора с двухтактным силовым преобразователем и широтно-
импульсным управлением. В его состав входит мостовой выпрямитель
с емкостным фильтром, преобразующий однофазное переменное напря-
жение синхронного генератора 110 В частотой 60 Гц в постоянное напря-
жение 165 В. Это напряжение подается на силовой двухтактный ШИМ-
преобразователь с трансформатором на выходе, который преобразует
его в переменное квазипрямоугольное напряжение более высокого
уровня. Затем это напряжение выпрямляется двухполупериодным вы-
Двухтантный Двухполу-
входное преобразователь периодный
однофазное и трансформатор выпрямитель LC-фильтр
Рис. 5.1. Структурная схема автономного ключевого стабилизатора мощностью
2,8 кВт
124
прямителем и подается на даухкаскадный LC-фильтр. С выхода послед-
него снимается выходное постоянное напряжение Ио.
К выходу фильтра подключен делитель напряжения, выходной сигнал
которого подаетсяm один из входов усилителя сигнала рассогласования.
На другой вход этого усилителя подается постоянное опорное напряже-
ние. Усилитель сигнала рассогласования осуществляет сравнение выход-
ного напряжения стабилизатора (точнее, его части — выходного напря-
жения делителя) с постоянным опорным напряжением, усиливает полу-
ченную разность, корректирует ее для обеспечения устойчивой работы
стабилизатора и подает образующийся сигнал на вход широтно-импульс-
ного модулятора. Выходной сигнал модулятора поступает на предоко-
нечный усилитель с парафазным выходом, формирующий управляющие
ШИМ-сигналы в цепи базы силовых транзисторов. Гальваническую
развязку сигналов осуществляет оптопара, входящая в схему предоко-
нечного усилителя. Таким образом, система осуществляет стабилизацию
выходного напряжения, уровень которого определяется уровнем опор-
ного напряжения.
В качестве силовой части стабилизатора выбран двухтактный преобра-
зователь. Это объясняется следующими моментами: выход преобразо-
вателя должен быть гальванически развязан от его входа. Гальваничес-
кая развязка силового канала осуществляется трансформатором сило-
вого преобразователя, а цепи урпавления — с помощью оптопары;
выходное напряжение должно быть выше входного; малые размеры си-
лового трансформатора объясняются тем, что используется вся петля
гистерезиса магнитного материала его сердечника; могут использоваться
полупроводниковые приборы относительно низкой мощности; снижены
пульсаций выходного напряжения вследствие удвоения частоты пульсаций
тока в выходном фильтре. С учетом параметров используемых тран-
зисторов и выпрямительных диодов частота коммутации выбрана равной
50 кГц (сердечник перемагничивается с частотой 25 кГц). Частоты ниже
20 кГц вызывают акустические шумы — сердечник ’’гудит”.
Фактически двухтактный ШИМ-преобразователь является двухфаз-
ным понижающим преобразователем с гальванически развязанным вы-
ходом [1]. Уравнения, описывающие работу двухтактного преобразо-
вателя с широтно-импульсной модуляцией, аналогичны уравнениям по-
нижающего преобразователя, но дополнительно следует учесть еще со-
отношение витков первичной и вторичной обмоток трансформатора.
Поскольку на выпрямительных диодах будет падать некоторое напряже-
неие, напряжение на вторичной обмотке должно рассчитываться так, что-
бы скомпенсировать это падение напряжения.
Следовательно,
Уо = ys - yD, ys = VpD — ,
TVp
где Vp и Vs — соответственно напряжения на первичной и вторичной об-
125
мотках трансформатора; Ид — падение напряжения на диоде; Np nNs —
соответственно число витков первичной и вторичной обмоток трансфор-
матора.
Коэффициент трансформации Ns/Np рассчитывается с учетом Ио,
Vp и VD. В зависимости от значения коэффициента трансфорации Ns/Np
и коэффициента заполнения импульсов D выходное напряжение может
быть больше или меньше выходного напряжения.
Хотя на рис. 5.1 в преобразователе изображены идеальные ключи,
на практике они, как привило, являются ключевыми силовыми транзис-
торами, перетерпевающими при коммутации воздействие значительной
импульсной мощности. Следовательно, их нужно защищать от таких
воздействий, чтобы рабочая точка характеристики всегда лежала внутри
соответствующей эоны безопасной работы независимо от того, находит-
ся транзистор в режиме прямого или обратного смещения базы. Такая
защита реализуется с помощью пассивных демпферных цепей, работаю-
щих на включение или выключение транзистора.
Через запертый тразистор ток не протекает, а напряжение на нем рав-
но входному напряжению. При включении транзистора ток через него
нарастает до своего максимального значения быстрее, чем напряжение
спадает до уровня напряжения насыщения цепи коллектор—эмиттер.
Таким образом, в процессе переключения в транзисторе одновременно
имеют место и высокое напряжение цепи коллектор—эмиттер, и большой
ток коллектора, что является весьма опасным. Для устранения этого
применяются демпферы включения, представляющие собой дроссель в
последовательной цепи с транзистором (рис. 5.2). Дроссель, снижая ско-
рость нарастания тока через транзистор, позволяет напряжению на нем
снизиться до уровня напряжения насыщения до того, как ток достигнет
своего максимального значения. За счет этого устраняется одновремен-
ное существование большого тока коллектора и высокого напряжения
цепи коллектор—эмиттер.
Когда транзистор открыт, ток через него максимален, а напряжение
коллектор—эмиттер минимально. При запирании транизстора напряже-
ние на нем растет быстрее, чем ток спадает до нуля. Таким образом,
опять возникает ситуация, опасная для прибора. Для устранения этой
Рис. 5.2. Демпферные цепи ключевых транзисторов
126
проблемы применяются поляризованные jRCD-демпферы выключения.
При запирании транзистора напряжение на нем пытается вырасти, но
диод смещен в прямом направлении и конденсатор, заряжаясь, сдержи-
вает нарастание напряжения. В результате воздействие на транзистор вы-
сокого напряжения и большого тока одновременно ослабляется. Кроме*
того, некоторая часть энергии, обычно рассеивающаяся в транзисторе',
запасается в конденсаторе. При последующем включении транзистора
конденсатор разряжается через резистор, рассеивающий запасенную
конденсатором энергию.
Очень часто в двухтактных инверторах, осоебнно при высоких уров-
нях мощностей и напряжений, существует опасность насыщения сердеч-
ника силового трансформатора, подключенного к источнику постоян-
ного напряжения. Для предотвращения появления такой ситуации в ста-
билизаторе предусмотрена специальная схема контроля магнитного по-
тока сердечника, в функции которой входит также защита преобразова-
теля от перегзрузки по току и короткого замыкания.
В состав стабилизатора входит также схема плавного запуска, не
допускающая бросков тока при заряде конденсаторов входного фильт-
ра. Для достижения минимального уровня гармоник в выходном напря-
жении стабилизатора в установившемся состоянии коэффициент запол-
нения импульсов выбран равным 70%. Анализ Фурье показывает, что чем
выше коэффициент заполнения, тем ниже порядок генерируемых гар-
моник и проще расчет выходного фильтра. Хотя значение коэффициента
заполнения может быть и выше, оно выбирается равным 70% с целью
обеспечения достаточной ’’гибкости” регулирования и улучшения пере-
ходной характеристики стабилизатора.
Стабилизатор с двухтактным ШИМ-инвертОром рассчитывается на ра-
боту в режиме непрерывного тока дросселя во всем рабочем диапазоне
мощностей. Рассмотрим теперь подробный расчет и анализ различных
типовых узлов преобразователя-стабилизатора.
5.1.3. Расчет автономного ключевого стабилизатора
5.1.3.1. Трансформатор. На частоте выше 20 кГц потери от вихре-
вых токов намного превышают потери от перемагничивания сердечни-
ка трансформатора. Потери от вихревых токов можно минимизировать
путем применения шихтованных сердечников с толщиной листа
(2,5-^5,0)-10“2 мм. В табл. 5.1 приведены параметры и характеристики
некоторых магнитных материалов [2, 3]. К сердечнику трансформатора
предъявляются следующие требования:
Выходная мощность, Вт............. 2800
Рабочая частота F, Гц............. 25 000
Рабочий поток В, Тл............... 0,4
Толщина листа, мм................. 2,5-10-3
Точка Кюри, °C.................... 300
Потери в сердечнике............... Минимальные
Размеры и масса................... Минимальные
127
Таблица 5.1. Характеристика магнитных материалов
S СП . Ь
Материал (торге- Состав Индукция Рекомендован- о н | о
вая марка) насыщения, ная рабочая а Тл частота 2$. Н
Л „ S Ж Л Й, g в 3 1! ? It 1
s ~ о G о
Селектрон, маг- 3%Si,97%Fe 1,5-1,8 60-100 Гц 660*1 2,5 450
несил, микросил, суперсил Ортонал, дель- 50%Nl,50%Fe 1,4-1,6 60-8000 Гц 352 2,5 500
тамакс 49 4—79 79%Ni, 17%Fe, 0,66-0,82 1-75 кГц 121 2,5 460
Супермаллой 4%Mo 78%Ni, 17%Fe, 0,65-0,82 1 -75 кГц 77 2,5 360
Супермендюр 5%Mo 49%Co, 2%Va, 2,2-2,4 0,75-1,5 кГц *3 5 940
Феррит*2 49%Fe MnZn 0,3-0,5 10 кГц-2 МГц 88 — 300
NiZn 0,3-0,5 200 кГц-100 МГц 88 — 450
*1 Экстраполяция.
*2 Максимальная мощность, доступная в настоящее время, - менее 1 кВт на
сердечник.
43 Непригоден при 4 кГц, так как потери слишком велики.
На основе анализа данных табл. 5.1 можно сделать вывод о том, что
оптимальным материалом, отвечающим приведенным требованиям,
является пермаллой 80. По формуле мощность равна 13W/BF, поэтому
выбираем С-сердечник типа MC0017-1D. Согласно закону Фарадея число
витков первичной обмотки
Np = Ур-10*14ВАсР,
где Aq — площадь поперечного сечения сердечника, см2. Число витков
вторичной обмотки Ns рассчитывается исходя из коэффициента транс-
формации, плотность тока [4]
J = *jXp0’14 ,
где Kj — постоянная, зависящая от конфигурации сердечника (для
С-сердечника при температуре 50°С Kj = 468); Ар = 2,52 см2 — площадь
окна. Сечение провода
^действ/J >
где
Действ ~
Ж-
128
С помощью полученных соотношений определяются потери в меди и
потери в сердечнике на единицу массы.
Расчетные параметры трансформатора
Тип сердечника MC0017-1D
Ас, см2..........................3,2
Ер, В............................168,5
Np (прямоугольный провод)........14
Ns...............................35
Яр , Ом......................... 0,0033
Rs , Ом......................... 0,0256
Заполнение окна, %...............51
Потери в меди, Вт................4,12
Потери в сердечнике, Вт..........14,4
Враб, Тл.........................0,375
Обмотки трансформатора. Чем ниже индуктивность рассеяния обмот-
ки трансформатора, тем ниже будут воздействия напряжения на запира-
ющийся транзистор. В то же время чем выше индуктивность рассеяния
обмотки, тем ниже воздействия тока на отпирающийся транзистор.
Так как физически невозможно иметь переменную индуктивность рас-
сеяния трансформатора, полезно снижать ее, насколько это возможно.
Эта проблема решается посредством подключения последовательно
транзистору дросселя насыщения, имеющего разную индуктивность —
в зависимости от того, открыт транзистор или закрыт.
Для снижения индуктивности рассеяния трансформатора необходимо
обеспечить хорошую магнитную связь между его первичной и вторичной
обмотками за счет их чередования и равномерного распределения на маг-
нитопроводе.
Индуктивности обмоток разных типов могут различаться. Например,
если обмотки размещаются на одном магнитопроводе без чередования,
т.е. одна сверху, другая снизу, индуктивность рассеяния равна 3 мкГн.
При размещении обмоток равномерно и поочередно на магнитопроводе
индуктивность утечки составляет 0,9 мкГн.
5.1.3.2. Выпрямитель. Двухполупериодное выпрямление можно осу-
ществить двумя способами: с помощью трансформатора, вторичная об-
мотка которого имеет отвод от средней точки, и двух диодов и с по-
мощью мостового выпрямителя. В последнем случае вторичная обмотка
трансформатора не имеет отвода от средней точки. Хотя второй способ
требует применения большего числа диодов, первый способ, как прави-
ло, используется редко, так как необходимы диоды, имеющие мак-
симально допустимое обратное напряжение, в 2 раза превышающее
напряжение на вторичной обмотке, равное 840 В. В настоящее время от-
сутствуют диоды с малым временем восстановления на токе примерно
7 А и обратным напряжением такого уровня.
Если в преобразователе используется двухполупериодный мостовой
выпрямитель, диоды должны иметь обратное напряжение не ниже 420 В.
129
1
5.1.3.3. Фильтр. Чем меньше пульсации тока, тем ниже загрузка си-
ловых транзисторов и диодов. Для снижения пульсаций выходного тока
и напряжения применяется двухступенчатый L С-фильтр с максимальным
током 13,5 А. Постоянный ток, соответствующий выходной мощности
2,8 кВт, равен 10 А. Падение напряжения на втором дросселе фильтра
составляет 5 В. Индуктивность первого дросселя определяется по фор-
муле
dT
L = VL —
L di
где Vl — напряжение на дросселе; dT - продолжительность включенно-
го состояния; di — размах пульсаций тока дросселя.
В предположении, что пульсации напряжения на первом конденсаторе
фильтра равны 3%, можно рассчитать емкость конденсатора:
dITs
С = ---—
8dKc
где di - размах пульсаций тока дросселя; Ts — период коммутации;
dVc — пульсации напряжения на конденсаторе.
Таким образом, индуктивность дросселя и емкость конденсатора рав-
ны соответственно 300 мкГн и 2 мкФ. Теперь проверим, выполняется ли
при таком значении индуктивности условие непрерывности тока дрос-
селя. Оно справедливо, если 2£/(/?7’закр) > 1. В нашем случае это со-
отношение равно 1,5 при минимальной и 3,2 при максимальной нагрузке.
Выбор материала сердечника. Как правило, для дросселя фильтра
ключевых стабилизаторов с широтно-импульсной модуляцией выбирают-
ся сердечники из феррита или полипермаллоевого порошка1 (МПП).
Индуктивность сердечника из МПП, работающего при постоянном намаг-
ничивании 0,3 Тл, равна лишь 80% начальной индуктивности и редко
уменьшается с повышением поля.
По сравнению с сердечниками из МПП С-сердечники и разрезные сер-
дечники, выполненные из анизотропной кремнистой стали, обладают при-
мерно в 4 раза большей полезной напряженностью поля. Кроме того,
падение индуктивности до 80% происходит при намагничивании 1,2 Тл.
Сердечники из кремнистой стали очень удобны для применения в высо-
кочастотных дросселях — воздушный зазор может иметь любую требу-
емую длину, а относительная магнитная проницаемость остается доста-
точно высокой даже при очень сильных полях.
Использование таких сердечников позволяет разрабатывать малога-
баритные дроссели с малой массой. Однако на стадии разработки дрос-
1 Пресспермаллой. - Прим. пер.
130
селя необходимо учитывать также влияние его собственного магнитного
поля на расположенные рядом с ним другие элементы схемы. Очень
часто для решения этой проблемы приходится прибегать к тороидальным
сердечникам. ’’Удержать” магнитный поток ’’внутри” тороидального
сердечника легче, чем в С-сердечнике, поскольку обмотка покрывает
тороид по всей длине магнитных силовых линий.
Наряду с вышеописанными имеются также /Т-образные и горшкооб-
разные сердечники из феррита — они дешевы и имеют малые потери на
перемагничивание на высоких частотах. Однако в настоящее время от-
сутствуют промышленно выпускаемые ферритовые сердечники, приме-
няемые в ’’киловаттной” области выходных мощностей. Таким образом,
для описываемого стабилизатора выбран сердечник из МПП.
5.1.3.4. Дроссель. Энергия, запасаемая дросселем, характеризуется
произведением LI2, где L — индуктивность дросселя; I - максимальный
постоянный ток через дроссель. Как уже отмечалось, для дросселя вы-
бран середчник из МПП с ’’распределенным” воздушным зазором, по-
зволяющий ему не насыщаться даже при большом постоянном токе. Из
справочных таблиц [5] определяется максимальная магнитная проницае-
мость дросселя, равная 60. Число витков, обеспечивающее требуемую
индуктивность дросселя,
А = Ю4 /----------- ,
V /-юво?
где L - требуемая индуктивность без тока, мкГн; Llooo - номиналь-
ная индуктивность на 1000 витков, мкГн; q - процент проницаемости
[5]. Намагничивающая сила рассчитывается из хорошо известного зако-
на Ампера
_ 0,4ттЛ7
Zz — -------
I
где Н - намагничивающая сила; А- число витков; I - максимальный
намагничивающий ток, А; I — длина средней линии, см.
Из приведенных выше уравнений следует, что q является функцией
намагничивающей силы Н, которая в свою очередь является зависимой
от числа витков N. Таким образом, для определения А необходимо ре-
шить два взаимозависящих уравнения. Полагая, что коэффициент за-
полнения окна WF = 40%, и зная площадь окна сердечника Wc и число
витков А, находим сечение провода А^:
Aw N
Wp =
и'с
Потери на перемагничивание определяются по диаграмме потерь,
которая позволяет рассчитать потери в омах на миллигенри или ваттах
131
на килограмм. В последнем случае
Рс = 4B2R-10~6,
в - £ср'1()8
4AcNf
Яср = y/D(Vl+y + (1 - D-)(Vry\
где Vj+ — напряжение на дросселе, когда ключ замкнут; Vr — напряже-
ние на дросселе, когда ключ разомкнут.
При расчете второй ступени фильтра выполняется аналогичная про-
цедура.
Расчетные параметры дросселя 1:
Тип сердечника.................................. МПП 55083,60Д
Тип температурной стабилизации................ М
Ас,<я&........................................ 1,072
см........................................ 9,84
Масса сердечника W[ , г.......................93
N.............................................85
Потери в сердечнике, Вт.................... 2,3
Потери в меди, Вт.............................4,3
Магнитная проницаемость при полной нагрузке, % .. 49
Влс,Тл........................................9-10-3
L (без подмагничивания), мкГ..................585
Масса дросселя, г.............................176
Расчетные параметры дросселя 2:
Тип сердечника................................ МПП 55083,60Д
Тип температурной стабилизации................М
Aq , см2..................................... 1,072
см........................................ 9,84
Масса сердечника Wt , г.......................93
N.............................................60
Потери в сердечнике...........................Пренебрежимо
малы
Потери в меди, Вт............................. 2,7
Магнитная проницаемость при полной нагрузке, % .. 55
ВЛ£,Тл..................................... 4-10-3
L (без подмагничивания), мкГ..................292
Масса дросселя, г.............................144
5.1.3.5. Диоды демпфера. В двухтактном преобразователе они соз-
дают путь для протекания тока через конденсатор демпфера при за-
пирании транзистора (Gi). Напряжение на аноде диода (VDt) посте-
пенно нарастает и достигает входного. При включении противоположного
транзистора (Q2) напряжение на аноде диода (VDl) становится равным
удвоенному значению входного напряжения преобразователя, что объ-
ясняется работой трансформатора. Кроме того, на практике индуктив-
ность рассеяния трансформаторов не равна нулю, что может вызвать
выплески напряжения, в 1,7—2,1 раза превышающие входное. Таким
132
образом, диод необходимо выбирать так, чтобы он выдерживал это
напряжение и пропускал максимальный ток транзистора, протекающий
через него перед запиранием.
Демпферы. Следует отметить, что демпферы, предназначенные для
снижения воздействия импульсов мощности на транзистор при его от-
пирании, при запирании могут усилить это воздействие, т.е. энергия,
запасенная в шунтирующем конденсаторе, вызывает увеличение тока,
протекающего через транзистор при включении, а энергия, накопленная
в последовательном дросселе, вызывает повышение напряжения на кол-
лекторе транзистора при его запирании
’’Нормальное” значение индуктивности последовательного дросселя
определяется таким образом, чтобы ток коллектора транизстора дости-
гал своего максимального значения одновременно со снижением напря-
жения на транзисторе до нуля. Аналогично определяется и ’’нормальное”
значение емкости конденсатора выключения [6].
’’Нормальные” значения индуктивности и емкости демпфера опреде-
ляются следующим образом:
N ~ VьцТ/Др, С]у — 1р 772ИВХ ,
где 1р ток через транзистор непосредственно перед его запиранием;
Т = 1,0 мкс (принятое значение).
Обнаружено [6], что потери в преобразователе минимальны, когда
потери в демпфере равны потерям в транзисторе, и соответственно для
демпфера
^>опт = 4/9 СОпт ~ С к,
а их расчетные значения L = 1,1 мкГн, С= 0,045 мкФ.
Итоговые параметры дросселя:
Тип сердечника ....................... 55120-М4
Lm,cm.................................. 4,1
Лс,см2................................. 0,192
Масса сердечника, г.................... 7
Я,А/м................................. 3,9
L (при полной нагрузке), мкГн......... 1,3
Число витков сечением 14 мм2.......... 11
Итоговый параметр конденсатора: С= 0,05 мкФ,
5.1.3.6. Потери в транзисторе и демпфере. Энергия, рассеивающаяся
в транзисторе при его отпирании,
Ts / 4
^Т.ОТП ~ ^ВХI 1
к 2 \ 3
L
2Ln
Энергия, рассеивающаяся в транзисторе при его запирании,
^т.зап “
133
Рис. 5.3. Подробная схема автономного ключевого стабилизатора
Однофазное
переменное
напряжение
о
Энергия, запасенная в демпфере отпирания,
Е ~ U2p
el - ~
Ts L
VbxIp 7~ 7
4 Ln
а энергия, запасенная в демпфере запирания,
СИЗХ
Ts с
4 CN
Потери мощности в транзисторе при отпирании
- 21,7 Вг,
Ts
а при запирании
Ts
Другие виды потерь мощности в транзисторе и демпфере:
Статистические потери в транзисторе за время проводи-
мости, Вт............................................. 12
Полные потери в транзисторе, Вт....................... 56, 55
Потери в демпфере отпирания (оба плеча) 1E[JTS, Вт .... 40
Потери в демпфере запирания (оба плеча) 2ЕС/ Ts, Вт...37,2
Полные потери в демпфере, Вт...........................77, 15
5.1.3.7. Схема управления силовым транизстором. Она должна быть
проста и надежна: состояния ’’включено” и ’’выключено” должны фик-
сироваться без ложных переключений, вызванных шумами, помехами
или другими эффектами. Для обеспечения надлежащего процесса вклю-
чения силового транзистора необходим положительный импульс тока с
требуемым временем нарастания. Для быстрого запирания силового
транзистора нужен достаточно высокий отрицательный управляющий им-
пульс тока. Схема управления показана на рис. 5.3 — она достаточно
проста и в дополнительных объяснениях не нуждается. Шунтирующие
конденсаторы ускоряют переходные процессы в схеме.
5.1.4. Выбор элементов
5.1.4.1. Силовые ключевые транзисторы. Как уже отмечалось, тран-
зисторы в преобразователе подвергаются импульсным воздействия трех
видов: транзистор закрыт — малый ток утечки и высокое напряжение на
коллекторе; транзистор открыт — большие ток коллектора и напряже-
ние насыщения коллектор — эмиттер; транзистор отпирается или запи-
рается. В этих переходных состояниях одновременно имеют место и
135
Таблица 5.2. Сравнение интегральных широтно-импульсных модуляторов
Параметр Тип микросхемы
1524 1526* 1525/1527 1525А/1527А
Фиксация ШИМ для предотвращения од- новременности появ- ления управляющих импульсов Нет Есть Нет Есть
Независимое управ- Нет, время Есть Есть Есть
ление временем ’’мертвой
’’мертвой зоны” зоны” опре- деляется хро- нирующим конденсато- ром
Диапазон синфаз- 3,4 В (макси- До опорного напряжения (5,1 В)
ных напряжений усилителя рассогла- сования мум)
Внутренний фик- сирующий диод и Нет Есть Есть Есть
источник тока для плавного запуска Отдельный вывод Нет, но син- Есть Есть Есть
синхронизации хронизация возможна
Рабочая частота >100 кГц 1 Гц-400 кГц 100 Гц- 100 Гц-
400 кГц 500 кГц
Наличие внутрен- Есть. Измере- Цифровое то- Нет Нет
него усилителя то- ние возможно коограничение
коограничения только в об- с широким
щей шине диапазоном ограничения
Блокировка входа Нет Есть Нет Нет
’Микросхема имеет средства для коррекции симметрии входов; ратор с гистерезисом. Входы совместимы с ТТЛ/КМОП-логикой. ШИМ-компа-
высокое напряжение цепи коллектор —эмиттер, и большой ток коллек-
тора. Воздействие мощности на транзистор максимально.
Исходя из результатов расчета и технических требований, предъ-
являемых к силовым ключам, работающим в схеме двухтактного пре-
образователя, в качестве такого ключа выбран транзистор типа РТ
4503 фирмы Power Tech.
5.1.4.2. Диоды. Для силового выпрямителя и демпферов выбраны
диоды типа MR 1376 (фирма Motorola) со следующими параметрами:
Максимальный ток, А......................... 12
Максимальное обратное напряжение, В......... 600
Время восстановления, нс.................... 300
5.1.4.3. Конденсаторы. Для фильтра силового выпрямителя двухтакт-
ного преобразователя выбраны полипропиленовые конденсаторы с низ-
ким эквивалентным сопротивлением и большими допустимыми пуль-
сациями тока. В схеме управления используются стабилизированные
майларовые конденсаторы.
5.1.4.4. Управляющие микросхемы. Множество фирм производят ин-
тегральные микросхемы для источников электропитания ключевого
типа. Опыт работы с различными управляющими микросхемами и их
сравнительный анализ показали, что наиболее приемлемыми из них
являются следующие ШИМ четвертого и более поздних поколений:
1524, 1525/1527, 1526 и 1525А/1527А. Каждая из этих микросхем
содержит узлы управления для стабилизации источника электропитания,
в которые входят: стабилизированный источник опорного напряжения,
усилитель сигнала рассогласования, генератор, собственно широтно-им-
пульсный модулятор, управляющий триггер, два противофазных ключа
и схема введения паузы. Использование стробирующего импульса, за-
пирающего оба выхода микросхемы, гарантирует невозможность по-
явления одновременно двух выходных сигналов в процессе переклю-
чения силовых ключей. В табл. 5.1 приведена некоторая дополнительная
информация о четырех отмеченных типах микросхем. Для описываемого
же стабилизатора выбрана микросхема 1527А.
5.1.4.5. Оптопары. Для реализации полной гальванической развязки
между входными и выходными цепями стабилизатора используются
двухканальные оптопары 6N134 с выходными логическими вентилями.
Для нашего случая наиболее приемлемы именно эти оптопары инверти-
рующего типа. При токе управления 25 мА они имеют коэффициент
передачи тока 400%. Входная цепь представляет собой светодиод, прием-
ная — интегральный фотодетектор с высоким коэффициентом усиления.
На выходе фотодетектора включен транзистор с барьером Шоттки с от-
крытым коллектором.
Выбранные двухканальные оптопары обеспечивают максимальную
изоляцию между входом и выходом как по постоянному, так и по пере-
менному току.
S.1.5. Коррекция
Для того чтобы система была устойчива, коэффициент петлевого уси-
ления должен стать меньше единицы до того, как угол фазового сдвига
системы достигнет 360°. Собственная частота фильтра силового преобра-
зователя в рассматриваемом случае равна 5,2 кГц. Начиная с этой часто-
ты наклон коэффициента усиления системы становится равным —40 дБ.
Для обеспечения устойчивости стабилизатора используется обычная
коррекция частоты доминирующего полюса [1]. Частота доминирующе-
го полюса и полный коэффициент петлевого усиления выбираются таким
образом, чтобы последний пересекал линию 0 дБ на частоте примерно
2 кГц с наклоном —20 дБ. Пара полюс — нуль размещается так, что
137
полюс начинается при частоте нуля, а частота нуля лежит ниже частоты
доминирующего полюса. При этом повышается коэффициент усиления
на низких частотах, что гарантирует высокую стабилизацию при измене-
нии нагрузки и входного напряжения.
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.RJG Modelling and Design of Switching Regulator, IEEE Transactions
on AES, vol. AES, N 3, May, 1982.
2. Inverter Transformer Core Design and Material Selection, Magnetics Inc.
3. A Critical Comparison of Ferritrs with Other Magnetic Materials, Magnetic Inc.
4. McLyman CoLWm.T. Transformer and Inductor Design Handbook. Marcel Dekker,
Inc., New York and Basel.
5. Catalog MPP-3O3S, Molypermalloy Powder Cores, Magnetics Inc.
6. McMurry William. Selection of Snubbers and Clamps to Optimize The Design of
Transistor Switching Converters. IEEE Transactions on Industry Applications, vol. IA-16,
N 4, July/August, 1980.
5.2. СТАБИЛИЗАТОР ПАРАЛЛЕЛЬНОГО ТИПА
С МИКРОПРОЦЕССОРНЫМ УПРАВЛЕНИЕМ
5.2.1. Введение
Применение микропроцессоров для управления системами преобра-
зования электроэнергии, получившее широкое распространение в послед-
ние годы, значительно улучшает их характеристики. Для удовлетворения
требований, предъявляемых к электроборудованию космических лета-
тельных аппаратов, необходимы новые совершенные методы преоб-
разования и управления электрической энергии. Силовые системы долж-
ны иметь модульное построение, чтобы для их разработки не затрачи-
валось дополнительное время, высокую надежность, минимальные объ-
ем, массу и низкую стоимость. С целью удовлетворения предъявляемых
требований был разработан цифровой стабилизатор параллельного
типа (ЦПС) с микропроцессорным управлением.
В настоящее время основным источником электроэнергии космичес-
ких летательных аппаратов являются солнечные батареи. Энергия,
снимаемая с солнечных батарей, не стабилизирована и не управляема,
поэтому для питания бортового оборудования ее первоначально сле-
дует соответствующим образом преобразовать и стабилизировать. Для
этой цели необходимы сетевые стабилизаторы, среди которых наилуч-
шими характеристиками обладает ЦПС с микропроцессорным управле-
нием [1]. Основным преимуществом ЦПС по сравнению с параллель-
ными стабилизаторами других типов является то, что его можно исполь-
зовать в системах большой мощности без увеличения массы и объема
пропорционально мощности системы. Несмотря на то что схемотехника
ЦПС несколько сложнее схемотехники обычных аналоговых стабилиза-
торов, он обладает более высокой надежностью и меньшей стоимостью.
138
В рассматриваемых силовых системах независимо от условий их при-
менения — в Космосе или на Земле — необходимо применение акку-
муляторных батарей, обеспечивающих работу систем в условиях пико-
вых нагрузок, или в тени (затемнении). Аккумуляторная батарея должна
заряжаться в течение периода солнечного (дневного) освещения и разря-
жаться при пиковых нагрузках или в течение периода тени/затемнения.
Кроме того, необходимы специальные меры, предотвращающие переза-
ряд и чрезмерный разряд батареи. Использованию микропроцессоров
для управления аккумуляторными батареями посвящены работы [2, 3].
Микропроцессоры могут применяться также и для управления регуля-
торами заряда и разряда (РЗ и РР).
Таким образом, использование микропроцессоров для управления
ЦПС чрезвычайно полезно, более того, один микропроцессор может
применяться и для управления ЦПС, и для РЗ/РР, и для управления ак-
кумуляторной батареей. Ожидается, что реализация такого подхода при-
ведет к появлению единой интегральной системы (блоку), исполняющей
все упомянутые функции. Кроме того, микропроцессор позволяет кон-
тролировать также состояние как системы управления ЦПС, так и всей
силовой системы в целом.
5.2.2. Цифровой стабилизатор параллельного типа (ЦПС)
На рис. 5.4 представлена структурная схема силовой системы с
цифровым стабилизатором последовательного типа. Как уже отмечалось,
источником энергии является солнечная батарея. Стабилизатор осущест-
вляет преобразование и регулирование энергии, отбираемой от пер-
вичного источника, и подает ее в нагрузку. Солнечная батарея разделена
на N секций. Первая секция постоянно подключена к выходной шине,
а остальные секции подключаются к шине с помощю управляемых клю-
чей. В состав ЦПС входит небольшой аналоговый (линейный) стабилиза-
Рис. 5.4. Структурная схема силовой системы с цифровым стабилизатором парал-
лельного типа
139
тор, рассчитанный на стабилизацию одной секции батареи. ЦПС обраба-
тывает информацию о токе, протекающем через этот стабилизатор, и
в зависимости от его значения подключает или отключает дополнитель-
ные секции. Если этот ток превышает допустимый уровень, например
1тах одной секции, ЦПС подключает к шине одну дополнительную сек-
цию. Если же ток аналогового параллельного стабилизатора ниже мини-
мального уровня Imjn секции, ЦПС отключает от шины одну секцию.
Таким образом, цифровая часть ЦПС осуществляет грубую стабили-
зацию. Точную стабилизацию осуществляет аналоговый стабилизатор.
Подробно работа ЦПС разобрана в следующих параграфах.
Специально для экспериментального исследования ЦПС разработаны
имитаторы секций солнечной батареи, которые подключаются к ЦПС
вместо солнечной батареи, поскольку лабораторная установка послед-
ней затруднительна.
В последующих параграфах будут подробно описаны как различные
узлы ЦПС с микропроцессорным контроллером, так и функциониро-
вание всей системы в целом.
Экспериментальная система, разработанная специально для демон-
страционных целей, имеет следующие параметры:
Выходное стабилизированное напряжение, В........... 28
Максимальная отдаваемая мощность, Вт............... 30
Число секций солнечной батареи, шт.................. 4
5.2.3. Имитатор солнечной батареи
На рис. 5.5, а представлена выходная вольт-амперная характеристи-
ка секции солнечной батареи. Для лабораторной модели, описываемой
здесь, необязательно, чтобы вольт-амперная характеристика имитатора
в точности совпадала с характеристикой секции солнечной батареи,
достаточно принципиального сходства. Довольно точно при наименьшей
сложности солнечная батарея моделируется источником тока (а ячейка
а)
Рис. 5.5. Вольт-амперные характеристики типовой секции солнечной батареи (а) и
имитатора солнечной батареи (б)
140
О
Рис. 5.6. Имитатор секции солнечной батареи
солнечной батареи является именно источником тока) с вольт-амперной
характеристикой, изображенной на рис. 5.5, б.
Каждый имитатор рассчитан на ток 300 мА при напряжении 28 В.
Схема имитатора представлена на рис. 5.6. Четыре таких устройства за-
менили в исследуемой системе блок солнечной батареи. Вольт-амперные
характеристики имитаторов изображены на рис. 5.7. Часть схемы, обве-
денная на рис. 5.6 штрихпунктирной линией, является ключом, подклю-
чающим или отключающим имитатор. Для визуального отображения ин-
формации о том, подключен имитатор или нет, в схему введен свето-
диод.
Рис. 5.7. Вольт-амперные характеристики
всех имитаторов секций солнечной бата-
реи
141
5.2.4. Линейный параллельный стабилизатор
Как уже отмечалось, для точной стабилизации напряжения на выход-
ной шине используется параллельный линейный стабилизатор. Линейные
стабилизаторы в отличие от стабилизаторов с широтно-импульсным
управлением имеют более широкую полосу пропускания и по этой при-
чине предпочтительнее для прецизионной стабилизации.
Схема линейного параллельного стабилизатора представлена на
рис. 5.8. Выходной сигнал делителя напряжения, подключенного к шине
28 В, сравнивается со стабилизированным опорным напряжением. Уси-
ленный сигнал рассогласования определяет ток, протекающий через си-
ловую цепь стабилизатора. Для контроля этого тока в цепь его протека-
ния введен резистор, сопротивления которого выбирается в зависи-
мости от уровня максимального тока стабилизатора. В дальнейшем вы-
ходной сигнал этого резистора подвергается цифровой обработке и ис-
пользуется контроллером ЦПС.
Подстройка
Рис. 5.8. Схема аналогового параллельного стабилизатора
5.2.5. Компараторы тока !тах и Imin
Сигнал, соответствующий току, протекающему через стабилизатор,
подается на схему сравнения (рис. 5.9, а), фиксирующую превышение
тока уровня 1тах или его понижение ниже уровня Imin. Работа схемы
сравнения показана на рис. 5.9, б.
Опорные напряжения, соответствующие уровням Imin и/тах, подают-
ся на входы компаратора схемы сравнения с резистивных делителей, на-
пряжение на которые подается со стабилитрона через резистор, подклю-
ченный к шине +28 В. Опорные напряжения на схему сравнения можно
подавать и с цифро-аналоговых преобразователей. В этом случае, если
142
Шина + 28В
а)
Выход
компаратора /т,п
Выход
компаратора 1так
S)
Рис. 5.9. Компараторы тока - соотношение между токами Imin и 1)пах
необходимо, они изменяются по команде контроллера, что время от вре-
мени необходимо делать для компенсации деградации, вызванной старе-
нием элементов. В бортовых системах космических летательных аппара-
тов подобное изменение осуществляется по команде с Земли, а в назем-
ных системах команда на изменение уровней подается с помощью дис-
танционного управления.
Возможен и другой вариант — преобразование в цифровую форму в
аналого-цифровом преобразователе сигнала, соответствующего току
через параллельный стабилизатор. Затем сигнал, уже в цифровой форме,
сравнивается с цифровым же опорным сигналом непосредственно в
микропроцессоре (рис. 5.10). В этом случае применение цифро-аналого-
вых преобразователей для. подачи опорных напряжений на компараторы
схемы сравнения, как зто отмечалось выше, не требуется.
143
Стабилизируемая шина
Рис, 5.10. Применение ана-
лого-цифрового преобра-
зователя для контроля то-
ка
5.2.6. Синхронизация
Анализируя выходные сигналы компараторов Imin и 1тах , микро-
процессор принимает решение о подключении (отключении) секций сол-
нечной батареи. С целью обеспечения устойчивости работы системы эти
действия осуществляются по тактовым сигналам, подаваемым с син-
хронизирующего генератора. Подробнее об это рассказано в п. 5.2.7.
5.2.7. Микропроцессорный контроллер
На рис. 5.11 показано место включения микропроцессора в систему
цифрового стабилизатора параллельного типа. Поскольку здесь рассмат-
ривается прежде всего работа микропроцессора как элемента системы
стабилизации напряжения, все сигналы и интерфейсы, относящиеся к
различным возможным подготовительным операциям и другим задачам,
решаемым этим же микропроцессором, в данную структурную схему
не включены.
Задачей микропроцессора является только подключение к питающей
сети или отключение от нее секций солнечной батареи А^—Ап с целью
Солнечная батарея
Шина +28Ъ
Рис. 5.11. Место микропроцессора в системе цифрового стабилизатора парал-
лельно типа
144
Рис. 5.12. Структурная схема контура управления системой
поддержания тока аналогового параллельного стабилизатора в зоне
между минимальным и максимальным пределами.
На рис. 5.12 изображена более подробная структурная схема контура
управления системой. Во многих силовых системах изменение их на-
грузки происходит не очень часто. В спутниках связи, например, нагруз-
ка может изменяться всего несколько раз за час — при включении пере-
датчика или изменении положения антенны. Контроллер стабилизатора
построен так, чтобы полностью использовать все преимущества таких
систем.
Пока нагрузка и освещенность солнечной батареи стабильны, напряже-
ние на шине питания стабилизируется линейным параллельным стаби-
лизатором, компенсирующим все девиации напряжения. В этих условиях
микропроцессор свободен от выполнения задач стабилизации системы и
выполняет фоновые программы.
Если в результате изменения нагрузки или условий освещения ток
линейного параллельного стабилизатора выходит за пределы /тгл или
Imax, выполнение микропроцессором фоновых программ прерывается.
При этом инициализируется подпрограмма считывания слова состояния
системы и определения необходимости подключения или отключения
секции солнечной батареи, изменяется слово состояния батареи, опреде-
ляющее число подключенных секций. Затем процессор переходит на
выполнение фоновых программ, ожидая следующего прерывания.
С целью обеспечения максимального быстродействия микропроцессо-
ра в течение одного прерывания подключается или отключается толь-
ко одна секция. Однако полученного быстродействия недостаточно,
145
Время, необходимое
системе на
реакцию на
изменение
Воз брат
из преры-
вания
запрещен
Коммута-
ция
секций
запрещена
Запись слова
состояния
батареи
(по (рронту)
Возврат из
прерывания
(по срезу)
Рис. 5.13. Временная диограмма работы системы
чтобы система успевала отреагировать на подключение или отключе-
ние секции к тому моменту, когда микропроцессор уже готов к возвра-
ту к фоновой программе. Если такой возврат разрешить, фоновая про-
грамма может сразу же вновь прерваться, поскольку даже в случае,
когда одного подключения или отключения секции достаточно для ком-
пенсации изменения нагрузки или условий освещения, система должна
затратить некоторое время, чтобы полностью отреагировать на коррек-
тирующее воздействие. При этом не исключено перерегулирование и ра-
бота системы может стать неустойчивой.
Для устранения такой возможности коммутация секций солнечной
батареи и возврат микропроцессора к выполнению фоновой программы
синхронизируются тактовыми сигналами пониженной частоты (порядка
нескольких килогерц) в отличие от тактовой частоты микропроцессора
(порядка нескольких мегагерц). Бит синхронизации пониженной часто-
той является частью слова состояния системы и считывается микропроцес-
сором. Временная диаграмма работы системы по отношению к тактовым
сигналам пониженной частоты показана на рис. 5.13. Максимальный уро-
вень пониженной частоты непосредственно связан с шириной полосы про-
пускания и переходной характеристикой аналогового стабилизатора.
При низком быстродействии программного обеспечения эта частота огра-
ничивается самим микропроцессором. В этом случае микропроцессор
ухудшает динамические характеристики системы.
Ограничение частоты. На выбор тактовой частоты системы (понижен-
ной частоты синхронизации) оказывают влияние несколько факторов.
Желательно, чтобы зта частота была настолько велика, насколько это
возможно. Число конденсаторов на выходе параллельного стабилиза-
тора (а точнее, их суммарная емкость) обратно пропорционально ско-
146
рости, с которой происходит подключение или отключение секций
солнечной батареи. Конденсаторы необходимы для накопления энер-
гии при изменении нагрузки.
Если произошел скачкообразный наброс нагрузки., параллельный ста-
билизатор реагирует на это уменьшением протекающего через него тока
для достижения его уровня Imin. С этого момента дальнейшее увеличе-
ние потребления тока от солнечной батареи становится невозможным
и до тех пор, пока микропроцессор не подключит к батарее дополнитель-
ную секцию, подпитку нагрузки должны осуществлять конденсаторы.
Чем дольше процессор обрабатывает информацию и подключает секцию,
тем дольше конденсаторы должны поддерживать напряжение на шине
в допустимых пределах. Аналогичная ситуация имеет место и при
скачкообразном сбросе нагрузки, но в этом случае конденсатор должен
взять на себя избыточный ток, пока микропроцессор не отключит от ба-
тареи одну секцию.
Таким образом, максимальная тактовая частота работы системы
определяется временем, затрачиваемым микропроцессором на отработ-
ку сигналов Imin или 1тах.
Однако работа системы на такой частоте невозможна. Ограничения
на переходные процессы, заданные для напряжения на шине питания,
и максимальная тактовая частота определяют минимальное значение
емкости, необходимой для установки на выходе стабилизатора. Емкость
в свою очередь влияет на переходную характеристику параллельного ста-
билизатора, что также необходимо учитывать при выборе тактовой час-
тоты работы системы. Кроме того, на характеристики генератора пони-
женной частоты могут оказывать влияние электромагнитные помехи и
специальные требования, предъявляемые к синхронизации.
Для выполнения одного подключения или отключения и возврата
к фоновой программе после прерывания контроллеру необходимо
46 циклов. Это означает, что при тактовой частоте микропроцессора
1 МГц максимально возможная частота синхронизации системы равна
21 кГц. С учетом динамических характеристик остальных элементов си-
стемы эта частота выбирается равной 10 кГц.
Для полноты информации необходимо отметить, что совсем необяза-
тельно, чтобы тактовые импульсы имели скважность 2 и даже следова-
ли с постоянной частотой. Запрещение возврата микропроцессора из
прерывания к фоновой программе на время, необходимое для заверше-
ния переходного процесса в системе, иногда реализуется и с помощью
одновибратора.
Кроме того, для синхрониза.ции системы необязательно иметь отдель-
ный генератор тактовых импульсов, как это сделано в описываемом
стабилизаторе. В некоторых случаях целесообразно воспользоваться
программируемым делителем частоты и получить синхронизирующие
импульсы непосредственно из тактовой частоты микропроцессора.
147
Аппаратная реализация. Выбор аппаратной части стабилизатора опре-
деляется не только наличием отдельных элементов и микросхем, но
также имеющимся программным обеспечением и средствами отладки.
В качестве основного узла контроллера выбран центральный процессор-
ный элемент (ЦПЭ) 6502 фирмы Rockwell, архитектура которого поз-
воляет выполнять команды за минимальное число машинных циклов, а
свойство адресации к нулевой странице чрезвычайно полезно для ско-
ростной передачи данных. Указанные особенности ЦПЭ позволяют обес-
печить максимальную ’’гибкость” системы и улучшить ее характерис-
тики.
Память контроллера выполняется на двух микросхемах ОЗУ 2114
емкостью 1Кх4 и одной микросхемы ППЗУ 2708 с ультрафиолетовым сти-
ранием емкостью 1Кх8. Декодирование реализуется микросхемами
74138, а генератор пониженной частоты реализуется на интегральном тай-
мере 555. Функции интерфейса выполняют шинный формирователь
74367 с тремя выходными состояниями и триггер 74174. Все вспомога-
тельные логическиефункции И-НЕ/ИЛИ—НЕ/НЕ реализуются микросхе-
мами 7400,7402,7404.
Хотя число элементов контроллера и мало, их все же больше, чем
требуется для системы. Это сделано специально, чтобы иметь возмож-
ность расширения системы в будущем.
Интерфейс. Интерфейс системы не сложен. Для этих целей в ОЗУ
отведено восемь младших слов. Адреса, первоначально находившейся
в ОЗУ, теперь являются портами данных. На рис. 5.14 показано располо-
жение адресов в памяти, а на рис. 5.15 и 5.16 представлены соответствен-
но схемы декодирования и интерфейса.
Поскольку рассматриваемая система весьма проста, используются
только два из Восьми отведенных адресов. Если, например, необходимо
прочесть слово состояния системы, то все, что для этого требуется, —
это прочесть содержимое ячейки с адресом 0000 (адреса записываются
в шестнадцатеричной системе). Запись в эту ячейку запрещается схемой
декодирования. Для подключения/отключения секций солнечной бата-
реи необходимо записать в ячейку с адресом 0003 управляющее слово
состояния батареи. Попытки считывания из этой ячейки запрещаются.
Легко видеть, что поскольку каждое слово содержит 8 бит информа-
ции, с помощью упомянутых ячеек достаточно просто реализовать
несколько функций и посредством модификации декодирующей схемы
увеличить число адресов интерфейса с восьми до двух. __
Интерфейсом линии запроса прерывания процессора (IRQ) является
один ветиль ИЛИ—НЕ. Таким образом, процессор находится в постоян-
ной готовности перехода на прерывание по команде линейного парал-
лельного стабилизатора.
Программное обеспечение. Программу работы контроллера стабили-
затора обычно пишут в системе команд микропроцессора 6500 и подго-
148
Ячейки ОЗУ ,отведенные
для целей интерфейса
ОЗУ (два
статичес-
ких^ 2114
емкостью
1Н*4)
ПЗЧ(два ППЗУ
2706
емкостью
1К*д)
0000
♦
00С7
0000
03FF
1С00
1FFF
0000
0001
0002
0003
0004
Слово состоя-
ния системы
Резерв
Слово состоя-
ния Sama реи
0005 > Резерв
0006
0007
__J 1FFC Рдрес возврата
] 1FFE Мрес прерывания
Рис. 5.14. Распределение ячеек памяти
Рис. 5.15. Схема декодирования:
ф 2 - синхронизация от ЦПЭ; RDSYS - чтение статуса (слова состояния) сис-
темы; ARRAY - загрузка слова состояния батареи; RAMCS - активизация ОЗУ
149
От стабилизатора б ЦПЗ
вход тактодь/х
DO
D1.
D2
3
6
7
Грехетабильный
шее тин аналь-
ный шинный
<рор ми родитель
2
4
PDSYS
J Разрешение
импульсоб
о пониженной
частоты
Максимальный
о тон
параллельного
аналогобого
стабилизатора
Минимальный
6 ток
От ЦПЭ в стабилизатор
Рис. 5.16. Схема интерфейса
параллельного
аналогобого
стабилизатора
Подключение
секции 1
Подключение
секции 2
Подключение
сенции3
тавливают для кросс-ассемблирования. Структурная схема алгоритма
работы контроллера показана на рис. 5.17.
Программа работы контроллера стабилизатора
: THIS SECTION ASECT DEFINES 0000 RAM LOCATIONS
SYSTAT: ASECT BLOK 0003 1 :CLK. MIN. MAX
ENABLE: ASECT BLOCK 0010 1 :DSR5. DSR4. DSR3
SETREG: ASECT BLOCK 0050 1 :ARRAY CONTROL WORD
STACKTOP: BLOCK 20 : RESERVED FOR STACK
: THIS SECTION ASECT ASECT DEFINES 1FFC BKWORD 1FFE BKWORD ROM LOCATIONS RESED :PROGRAM GOES HERE ON RESET ATTN PROGRAM GOES HERE ON
INTERRUPT
150
Рис. 5.17. Структурная схема программы работы контроллера ЦПС
151
PSECT
: INITIALIZATION ROUTINE
RESET: LDA STA #«07 ENABLE : TURN OFF CURRENT SOURCES
STA CLD SETREG INITIALIZE CONTROL REGISTER :CLEAR DECIMAL MODE
LDX TXS #«50 :SET STACK POINTER
ATTN: IMP BACKGRO- UND :GO TO BACKGROUND JOB TASKS : PROGRAM GOES HERE ON INTERRUPT
LDA SYSTAT :LOAD ACCUMULATOR WITH SYSTEM STATUS
AND #=«01 :CHECK TO SEE IF MAX BIT IS SET
BEQ MIN :IF NOT GO TO MIN ROUTINE
LDA ASLA SETREG : REMOVE ONE SECTION OF ARRAY
ORA #«01 :SHIFT IN A”l”
MIN: CLKCHK: IMP LDA LSRA CLKCHK SETREG :NOW WAIT FOR PROPER TIME TO WRITE NEED MORE CURRENT-ADD ONE SECTION : SHIFT IN A ZERO :CHECKS FOR POSITIVE EDBE OF CLOCK
WRITERDY: LDX CPX BPL LDX CPX SYSTAT #«03 CLKCHK SYSTAT #«03 :WAIT FOR CLOCK LOW : WRITE WHEN CLOCK GOES HIGH
BMI WRITERDY :LOOP IF CLOCK STILL LOW
AND #«07 :KEEP ONLY 3 LOWEST BITS
STA ENABLE :WRITE CONTROL WORD TO ARRAY
CLKFALL: STA LDX CPX SETREG SYSTAT #«03 : STORE CONTROL WORD IN RAM :CHECKS FOR NEGATIVE EDGE OF CLOCK
152
BPL CLKFALL :LOOP IF STILL HIGH
CLI :IF NEGATIVE EDGE. CLEAR INTERRUPTS AND RETURN
RTI
BACKGROUND JOB
BACKGROUND: CLI :ENABLE THE INTERRUPTS
LOOP1: LDY #«20 : ROUTINE PRINTS CHARACTERS
LOOP2: U2Y #«5F :TO SIMULATE OTHER POWER
BEQ LOOP1 MANAGEMENT TASKS
STY #«411
INY
LDX #«00
WAIT: INX
CPX #«FF
BNE WAIT
JMP LOOP2
По программе одно подключение/отключение секции солнечной бата-
реи исполняется за наименьшее число машинных циклов. Это сделано
с целью приближения к максимально возможной тактовой частоте рабо-
ты системы.
В описанной экспериментальной системе процессор не выполняет ни-
каких фоновых программ и в отсутствие прерывания находится в
состоянии ’’холостого хода” и ожидания прерывания.
5.2.8. Система в целом
Одновременно с подачей напряжения питания начинает работать парал-
лельный аналоговый стабилизатор. Поскольку напряжение на шине
питания растет медленно, до достижения его уровня +28 В ток через
стабилизатор протекать не будет. Когда напряжение на шине станет
равно +28 В, линейный стабилизатор, контролируя протекающий через
него ток, стремится поддержать напряжение на шине на этом уровне.
Сумма токов нагрузки и линейного стабилизатора постоянно равна току,
отбираемому от солнечной батареи.
При увеличении тока нагрузки ток через параллельный стабилизатор
уменьшается, и наоборот, если ток нагрузки возрастает настолько, что
ток стабилизатора снижается ниже Imin, соответствующий компаратор
схемы сравнения активизирует микропроцессор и тот в свою очередь
подключает одну (или больше) секцию к шине питания. Затем ток через
линейный стабилизатор возрастает до значения, находящегося между
уровнями Imin и 1тах- При дальнейшем увеличении нагрузки ток через
линейный стабилизатор опя-ть падает ниже уровняImin. Процессор снова
153
активизируется и подключает еще одну секцию к шине. Такой процесс
может продолжаться до тех пор. пока к шине не будут подключены все
секции солнечной батареи. Дальнейшее увеличение тока нагрузки невоз-
можно. Система рассчитана именно на такой максимальный ток.
Если ток нагрузки снизился, то для того чтобы поддержать напряже-
ние на шине питания на прежнем уровне, аналоговый параллельный ста-
билизатор увеличивает протекающий через него ток. Допустим, что ток
нагрузки снизился настолько, что ток через линейный стабилизатор
возрос выше уровня 1тах- Тогда соответствующий компаратор схемы
сравнения подает сигнал микропроцессору на отключение одной секции
батареи от шины. Ток через аналоговый стабилизатор в этом случае
уменьшается. При дальнейшем снижении тока нагрузки ток через линей-
ный стабилизатор опять возрастает выше уровня 1тах и процессор от-
ключает от шины еще одну секцию батареи. Если ток нагрузки спадает
до нуля, описанный процесс должен продолжаться до тех пор, пока от
шины не отключатся все секции.
В рассматриваемой же системе одна секция постоянно подключена
к шине. Весь ток, отбираемый от солнечной батареи, течет через ли-
нейный стабилизатор, рассчитанный на ’’поглощение” мощности одной
секции, поэтому напряжение на шине поддерживается на заданном уров-
не даже при полностью отключенной нагрузке.
Таким образом, цифровой параллельный стабилизатор осуществляет
стабилизацию напряжения на шине питания в диапазоне от XX до макси-
мальной нагрузки.
5.2.9. Экспериментальные данные
Как отмечалось выше, был создан макетный вариант описываемой
системы. Приведем некоторые результаты исследований системы в
различных режимах работы.
В табл. 5.3 приведены значения некоторых параметров системы в
установившемся состоянии при различных нагрузках. Уровни Imjn и
Imax составляют соответственно 45 и 400 мА. Параметры выбраны в
соответствии с вольт-амперными характеристиками имитаторов солнеч-
ной батареи. Из табл. 5.3 видно, что точность стабилизации выходного
напряжения равна ±30 мВ во всем диапазоне нагрузок — от XX до
максимальной нагрузки. Видно также, что коммутация секции проис-
ходит, когда при изменении нагрузки ток через аналоговый стабили-
затор пересекает уровни Imj„ или 1тах. Предел регулирования состав-
ляет примерно 1,15 А. В этом случае ток через аналоговый стабилизатор
падает ниже Imjn, а к шине подключены все секции. Дальнейшее увели-
чение тока нагрузки вызывает снижение выходного напряжения.
На рис. 5.18 приведены осциллограммы, иллюстрирующие динами-
ческое поведение рассматриваемой системы. Реакция стабилизатора на
изменение нагрузки, когда это изменение не вызывает достижения то-
154
Таблица 5.3. Состояние системы при различных нагрузках
Ток нагрузки, мА Ток через парал- лельный аналого- вый стабилизатор, мА Состояние ключей секции сол- нечной батареи Выходное на- пряжение, В
S1 St s3
0 290 Выкл. Выкл. Выкл. 28,02
200 90 Выкл. Выкл. Выкл. 27,98
300 310 Вкл. Выкл. Выкл. 28,02
400 210 Вкл. Выкл. Выкл. 28,00
500 110 Вкл. Выкл. Выкл. 27,98
600 320 Вкл. Вкл. Выкл. 28,03
700 220 Вкл. Вкл. Выкл. 28,00
800 120 Вкл. Вкл. Выкл. 27,98
900 280 Вкл. Вкл. Вкл. 28,03
1000 180 Вкл. Вкл. Вкл. 28,01
1100 80 Вкл. Вкл. Вкл. 27,98
1150 30 Вкл. Вкл. Вкл. 27,97
ком линейного стабилизатора порогового значения, показана на
рис. 5.18, а. Верхняя кривая соответствует переменной составляющей
напряжения на шине, центральная кривая отражает ток нагрузки в мас-
штабе 200 мА/дел., а нижняя - ток при нулевой нагрузке. На осцилло-
грамме видно, что при скачке тока нагрузки на 250 мА относительно
постоянного уровня 600 мА выходное напряжение падает примерно
на 60 мВ. Подключения секции батареи к шине при этом не происходит.
Провал напряжения на шине является результатом действия линейного
параллельного стабилизатора. Небольшой наклон осциллограммы напря-
жения обусловлен влиянием предоконечного усилителя динамического
входа осциллографа, используемого при частоте изменения нагрузки
20 кГц.
На рис. 5.18, б изображены осциллограммы, аналогичные осцил-
лограммам на рис. 5.18, а, но уровень постоянного тока нагрузки равен
900 мА (масштаб — 500 мА/дел.). Поведение выходного напряжения
практически идентично предыдущему случаю, но к шине питания под-
ключено на одну секцию батареи больше.
На рис. 5.18, в приведена реакция системы на изменение нагрузки,
вызывающее необходимость подключения к шине еще одной секции ба-
тареи. Масштаб напряжения на осциллограмме — 200 мВ/дел., масштаб
тока - 500 мА/дел. Ток нагрузки скачком увеличивается на 400 мА
относительно постоянного уровня 700 мА. В этот момент увеличения на-
грузки выходное напряжение ’’проваливается”, но затем при подключе-
нии к шине питания еще одной секции батареи повышается и достигает
заданного стабилизатором уровня. При уменьшении нагрузки избыгоч-
155
Рис. 5.18. Осциллограммы, исллюстрирующие поведение системы при изменении
нагрузки
ный ток быстро фиксируется процессором, который отключает от шины
одну секцию батери.
На рис. 5.18, г показана та же ситуация, но в увеличенном масштабе
времени. Для иллюстрации временных соотношений на осциллограмме
представлены также и тактовые импульсы пониженной частоты. Отме-
156
тим, что пока уровень тактового сигнала высок, секция солнечной
батареи к шине не подключается (видно из поведения выходного на-
пряжения) .
Ситуация на рис. 5.18, д идентична приведенной на рис. 5.18,г, но мо-
мент наброса нагрузки относительно тактовых импульсов расположен
по-иному. Процессор вводится в режим прерывания практически по
фронту скачка тока нагрузки, но на исполнение программы подключе-
ния секции ему остается всего 46 мкс. Однако для подключения секции
при выбранном периоде тактовых импульсов этого времени недостаточ-
но. До тех пор, пока не придет следующий тактовый импульс (высокий
уровень), процессор вынужден находиться в состоянии ожидания. Сле-
довательно, допускается более низкий провал выходного напряжения,
чем в предыдущем случае. Таким образом, иногда перед выполнением
одного подключения секции к шине процессор вынужден находиться в
состоянии ожидания целый тактовый период плюс 46 мкс, что необхо-
димо учитывать в качестве наихудшей ситуации при проектировании
системы.
На рис. 5.18, е приведена характеристика, демонстрирующая процессы
в системе, когда при увеличении нагрузки с 500 до 900 мА к шине пита-
ния необходимо подключить две секции батареи. Масштаб тока на осцил-
лограмме — 500 мА/дел. Подключение двух секций к шине проявляется
в последовательном изменении наклона характеристики выходного на-
пряжения.
5.2.10. Расширение системы
На рис. 5.19 показаны резервированные системы ЦПС с микропроцес-
сорным управлением. Несмотря на то что в них используются два микро-
процессора, надежность систем значительно повышается благодаря вза-
имосвязям между ними. Кроме того, ожидается, что такой подход при-
Рис. 5.19. Резервирование системы
157
Рис. 5.20. Интегральная система управления ЦПС, контроля аккумуляторных ба-
тарей и регулирования их разряда / заряда
ведет к построению интегральной системы управления ЦПС, контроля
аккумуляторных батарей и регулирования их заряда/пазряда
(рис. 5.20).
Этот же микропроцессор может выполнять и другие задачи, например
контролировать различные параметры силовой системы как на борту
летательного аппарата, так и в наземных системах.
СПИСОК ЛИТЕРАТУРЫ
1. R. Chetty Р.К. Spacecraft power systems — some new techniques for performance
improvement, Ph. D. Thesis, Indian Institute of Science, Bangalore, India, 1978.
2. Inamure M.S. ел Microprocessor controlled battery protection system. IECEC
1975, Rec., p. 1307-1717.
3. Gayet C. Battery management using microprocessors, ESA-SP-126, p. 251-262,
1977.
158
5.3. МНОГОФАЗНАЯ РАБОТА САМОВОЗБУЖДАЮЩИХСЯ
КЛЮЧЕВЫХ СТАБИЛИЗАТОРОВ
В связи с постоянным повышением сложности разрабатываемых из-
делий и совершенствованием их характеристик к устройствам преобра-
зования электрической энергии — ключевым стабилизаторам, преобра-
зователям постоянного напряжения и др. — предъявляются повышенные
требования. Несмотря на генерируемые ими радиопомехи все большую
популярность благодаря своему высокому КПД в широком диапазоне
входных напряжений завоевывают стабилизаторы ключевого типа.
Низкие потери мощности в этих устройствах исключают необходимость
применения больших объемных теплоотводов и снижают стоимость из-
делий. Кроме того, этому способствует появление специализированных
интегральных микросхем, разработанных для управления ключевыми
стабилизаторами.
Ввиду ограниченности коммутируемой мощности многих силовых по-
лупроводниковых приборов в ключевых преобразователях для обес-
печения треубемой выходной мощности эти приборы часто подключают-
ся параллельно. В этом случае мощность распределяется между при-
борами в фазе, поскольку все они коммутируются одновременно. При
подобной одновременной коммутации ключевых приборов возникает
множество проблем, связанных с фильтрацией выходного напряжения,
электромагнитным экранированием и др. Для минимизации этих проб-
лем используется многофазный режим работы преобразователей.
5.3.1. Принцип работы
Принцип многофазной работы самовозбуждающегося преобразо-
вателя рассмотрим на примере стабилизатора понижающего типа. Анало-
гично может быть реализована многофазная работа преобразователей
и других типов, например параллельного ШИМ-стабилизатора, ШИМ-
стабилизатора повышающего типа и др. На рис. 5.21 показана схема
двухфазного понижающего стабилизатора, число фаз которого при же-
лании можно увеличить. В схему стабилизатора входят делитель напря-
жения, источник опорного напряжения и усилитель сигнала рассогла-
сования ИМС1, на выходе которого генерируется управляющий широт-
но-модулированный сигнал. Этот сигнал подается на ключ Si, а также
на фазосдвигающую цепочку. Сдвинутый по фазе сигнал управления
поступает на ключ S2. Таким образом, ключи St и S2 включаются
и выключаются на фиксированные временные интервалы, но не одно-
временно. Коммутация одного ключа отстает от коммутации друго-
го на некоторое время, определяемое фазосдвигающей цепочкой. Если
частота коммутации автогенератора f = 1/Т, сдвиг фаз в двухфазном ста-
билизаторе устанавливается равным Т/2. В стабилизаторе, имеющем п
159
К нагрузке
Рис. 5.21. Схема двухфазного понижающего стабилизатора. Штриховой линией
показана возможность его расширения до п фаз
фаз, фазовый сдвиг или временная задержка между коммутацией клю-
чей 5i,52, .. .,Sn соответственно равны Т/п.
Частота коммутации самовозбуждающегося преобразователя, работа-
ющего на стабилизированную шину, почти постоянна. В то же время,
если шина не стабилизирована и напряжение на ней изменяется в неко-
тором диапазоне, частота коммутации преобразователя также будет
изменяться. Вместе с тем существует автогенераторный стабилизатор,
частота коммутации которого стабильна даже при изменении входного
напряжения. В любом случае сдвиг фаз (или временная задержка) уста-
навливается по отношению к наивысшей частоте (или по наименьшему
периоду).
В таком режиме работы ток поступает в нагрузку последовательно
с удвоенной частотой. В случае н-фазного стабилизатора эффективная
частота в и раз выше частоты управляющего сигнала.
160
5.3.2. Фазосдвигающая цепь
Фазосдвигающая цепь (рис. 5.22) выполняется на двух одновибра-
торах и двух логических элементах типа ИСКЛЮЧАЮЩЕЕ ИЛИ. Вход-
ной широтно-модулированный сигнал взводит оба одновибратора, при-
чем первый одновибратор взводится фронтом сигнала, а второй — его
срезом (рис. 5.22, а и б). Работа фазосдвигающей цепи очевидна из
временных диаграмм на рис. 5.22, а—д и в дополнительных пояснениях
не нуждается. Коэффициент заполнения импульсов и частота выходно-
го сигнала фазосдвигающей цепи полностью совпадают с коэффициен-
том заполнения и частотой входного управляющего сигнала. Время ре-
лаксации одновибраторов устанавливается равным Т/2.
Схемная реализация одновибраторов может быть любой — использу-
ются интегральные одновибраторы, например SN 74121, или схемы,
Рис. 5.22. Фазосдвигающая цепь и временные диаграммы ее работы
161
выполненные на логических вентилях или дискретных элементах. То же
самое можно сказать и об элементах ИСКЛЮЧАЮЩЕЕ ИЛИ — применя-
ются как микросхемы типа SN 468, так и любые другие устройства, вы-
полняющие указанную функцию [2].
5.3.3. Пример практической реализации
Двухфазный автогенераторный ключевой стабилизатор имеет следу-
ющие параметры:
Входное напряжение Квх , В..................... От 20 до 30
Выходное напряжение Ко,В.....................12
Выходной ток /0 , В.......................... 1
Число фаз.................................... 2
Максимальный выходной ток, А................. 1,1
Точность стабилизации, %..................... ±1
Пульсации выходного напряжения Vpp (под
нагрузкой), мВ............................... 100
Рабочая частота, кГц......................... От 4 до 8
Эффективная рабочая частота, кГц............. От 8 до 16
На рис. 5.23 представлена схема стабилизатора. Блок управления ста-
билизатором измеряет выходное напряжение и выдает управляющий
широтно-модулированный сигнал на транзисторные ключи силового
преобразователя, осуществляя стабилизацию выходного напряжения
Vo. В качестве управляющего элемента стабилизатора используется
микросхема, в состав которой входят встроенный термостабильный
источник опорного напряжения Копор и усилитель рассогласования,
осуществляющий сравнение опорного напряжения с выходным, сигналом
делителя напряжения, подключенного к выходу стабилизатора.
Частота выходного широтно-модулированного сигнала микросхемы
определяется различными факторами: входным и выходным напряже-
ниями, током нагрузки, допустимыми пульсациями выходного напря-
жения, гистерезисом усилителя рассогласования, параметрами выход-
ного фильтра. Неглубокая положительная обратная связь, реализуемая
резисторами /?7 и Т?8 , обеспечивает принудительные колебания.
Частота коммутации преобразователя выбирается исходя из условий
минимума массы дросселя и конденсатора фильтра, а также с учетом ди-
намических характеристик узлов и элементов стабилизатора, главным
образом силовых транзисторов и диодов. Емкость конденсатора С\
частотной коррекции подбирается экспериментально. Емкости конден-
саторов С2 и Сз также подбираются экспериментально, исходя из мини-
мальных пульсаций выходного напряжения. Номинальные значения
параметров дросселя и конденсатора! фильтра рассчитываются по фор-
мулам
, , _ , _ (Гвх - Г0)Г0
Lt ~ Li 1 — Lt 2 • 1 9
(Jomax — А>) Рвх
162
Рис. 5.23. Схема двухфазного самовозбуждающегося ключевого стабилизатора
163
С = (Гвх-Ко)Го
8FBX£f2(Vpp- Vh)
где Vh — ширина гистерезиса усилителя сигнала рассогласования управ-
ляющей микросхемы.
5.3.4. Результаты исследований
В табл. 5.4 представлены характеристики ключевого стабилизатора,
изображенного на рис. 5.23 при различных значениях входного напряже-
ния.
Принципы, реализованные в описанном стабилизаторе, применимы
также к преобразователям и других типов — повышающему, параллель-
Та блица 5.4. Характеристики двухфазного автогенератор иого
ключевого стабилизатора
^вх.В 4х> мА Ио, В /0 , мА л, %
18 800 11,93 1000 81,0
20 740 11,95 1000 80,7
22 685 12,01 1000 79,7
24 625 12,09 1000 78,9
26 585 12,09 1000 77,8
28 530 11,95 1000 78,8
30 500 11,93 1000 77,9
Примечание: 1. Частота коммутации изменяется от 4 до 8,5 кГц.
2. Точность стабилизации (при Ивх = 183-30 В) составляет ±1%.
3. Пульсации выходного напряжения (Ивх = 18-гЗО В) не выше 60 мВ.
Таблица 5.5. Число элементов, необходимых для построения обычного
н многофазного преобразователей с целью организации четырехфазиого
режима
Обычный преобразователь
Многофазный преобразователь
Одни усилитель рассогласования
Два источника опорного напряжения
Два J - /^триггера
Восемь логических элементов И-НЕ
Четыре генератора пилообразного
напряжения
Четыре компаратора
Четыре схемы управления силовыми
транзисторами
Одна управляющая микросхема
Восемь логических элементов
ИСКЛЮЧАЮЩЕЕ ИЛИ
Шесть одновибраторов
Четыре схемы управления силовыми
транзисторами
164
ному и пр. Организация многофазного режима работы ключевых ста-
билизаторов управляемого типа позволяет значительно уменьшить
число элементов схемы управления (табл. 5.5).
СПИСОК ЛИТЕРАТУРЫ
1. Peterson W.A. A frequence stabilized free running dc-to-dc converter circuit
employing pulse wedth modulated control regulation. IEEE Power Electronics Specialists
Conference 1976, p. 200—205.
2. K. Chetty P.R. Exclusive- OR circuit handles wede range of input levels without
power supply. Electronic Design, vol. 22, ED—4, p. 78,1974.
5.4. ПРЕОБРАЗОВАТЕЛИ ПОСТОЯННОГО НАПРЯЖЕНИЯ
С ВЫСОКИМ КПД
5.4.1. Введение
Преобразователи постоянного напряжения находят широкое при-
менение в источниках электропитания различных электротехнических
и электронных систем с целью пбвышения или понижения входного
постоянного напряжения, а также для обеспечения гальваничес-
кой развязки между входными и выходными цепями источников
электропитания. При постоянной нагрузке в зависимости от уровня
входного напряжения КПД преобразователей может изменяться. С по-
вышением напряжения КПД падает.
Как правило, ключевые ШИМ-стабилизаторы отбирают от первичного
источника и передают в нагрузку постоянную мощность при изменении
входного напряжения в широком диапазоне. Например, в источниках
электропитания космических летательных аппаратов входное напряже-
ние преобразователей определяется условиями освещения солнечной
батареи — от полной освещенности солнечными лучами до полной тени.
В нормальных условиях преобразователю приходится передавать в на-
грузку постоянную мощность независимо от изменения входного на-
пряжения, поскольку режимы работы потребителей не должны зависеть
от входных условий.
5.4.2. Преобразователь
На рис. 5.24 представлена схема самовозбуждающегося преобразова-
теля постоянного напряжения, принцип работы которого основан на эф-
фекте насыщения сердечника трансформатора и ключевых свойствах
транзисторов (вариант преобразователя Ройера). Постоянное выходное
напряжение преобразователя, образующееся после выпрямления и филь-
трации прямоугольного переменного напряжения на вторичной обмотке
трансформатора, в зависимости от выбранного коэффициента транс-
165
«
1
'^'постоянная
нагрузка
Рис. 5.24. Схема обычного
преобразователя постоян-
ного напряжения
формации последнего может быть как выше, так и ниже входного на-
пряжения. Преобразователь работатет на повышенных частотах, благо-
даря чему обладает малой массой и высоким КПД.
5.4.3. Анализ схемы преобразователя
Рассмотрим схему на рис. 5.24. Обозначим входную и выходную мощ-
ности преобразователя соответственно Рвх и Ро, а через п — его КПД.
Тогда
Рвх = Ро/п (О
Пренебрегая для упрощения расчетов падением напряжения на тран-
зисторе КС£нас, получаем ток коллектора транзистора, а соответственно
и ток первичной обмотки трансформатора
4; = Рвх / Vg — Pq/п Vg , (2)
где Vg — входное напряжение преобразователя. Следовательно, ток базы
транзистора
hpEmin nVghFEmin
где hpEmin — минимальное значение коэффициента усиления
транзистора по току при токе 1С.
Для уменьшения влияния технологического разброса напряжений
база—эмиттер Vрр транзисторов выходное напряжение цепей управления
транзисторами обычно выбирают равным сумме удвоенного максималь-
ного напряжения база—эмиттер и падения Vp на запускающем диоде.
Таким образом, сигнал обратной связи Vf равен 12Vppmax + Vp\.
Резисторы в базовых цепях транзисторов выбираются так, чтобы падение
напряжения на них составляло примерно Ку/2. Следовательно,
= (4)
2Р0
166
или
2P(>RB (с\
п - ------------— . (5)
vg Vf^FEmin
Учитывая, что Vf = kvg, где к — отношение числа витков обмотки обрат-
ной связи к числу витков первичной обмотки, получаем
л = 2Р0 R-B/vg khFEmin . (6)
Из (6) очевидно, что КПД преобразователя обратно пропорционален
квадрату входного напряжения, так как остальные члены уравнения
можно считать примерно постоянными. Таким образом, если преобразо-
ватель, рассчитанный на входное напряжение vg , работает с входным на-
пряжением выше v , его КПД падает.
Определим условия максимума КПД. Уравнение (5) можно перепи-
сать в виде
л = , (7)
vg
где с = IP^RbIH FEmin и считается практически постоянным. После диф-
ференцирования выражения (7) и приравнивания производной к нулю
получаем
С с
п=---------— dVf - —— dvg = О,
v f vg vf
следовательно,
dvg/vg = dVfIVf . (8)
При изменении входного напряжения, скажем, от vgl до vg2 напряже-
ние обратной связи также изменяется соответственно с Vf2 до Ку2.
Интегрируя (8) в этих пределах, получаем
Vgi/Vgi = vfl/Vf2 . (9)
Очевидно, что для удовлетворения условию (9) напряжение обрат-
ной связи должно изменяться вместе с входным напряжением. Для обес-
печения этого условия необходим трансформатор с несколькими выво-
дами от обмотки обратной связи, однако на практике такое решение не
применяется.
Обратимся еще раз к уравнению (1). ЧленыРо икдЕт/п практически
постоянны, и единственным параметром, который может изменяться,
является базовое сопротивление Яд.
Используя уравнение (5), определим условие максимума КПД при
постянном Ку и переменных vg и Яд :
(1Яд/Яд = 2dvg/vg . . (10)
167
Это означает, что для обеспечения максимального КПД при изменении
входного напряжения от vgl до vg2 сопротивление в базовой цепи тран-
зисторов должно изменяться отЯД1 цо RB2 таким образом, чтобы вы-
полнялось следующее соотношение:
RB-JRB^ ~ (vgi/vgi)2. (и)
Другими словами, сопротивление базовой цепи необходимо изменять
так, чтобы всегда отношение большего сопротивления к меньшему было
пропорционально квадрату отношения большего входного напряжения
к меньшему. Очевидно, что связь сопротивления RB с напряжением vg
нелинейна. Схемная реализация такого уравнения преобразователем опи-
сана в п. 5.4.4.
5.4.4. Практическая реализация
На рис. 5.25 представлена схема управления преобразователем посто-
янного напряжения, реализующая закон управления, описываемый соот-
ношением (11). Схема управления содержит управляющий трехтран-
зисторный каскад, выполненный на транзисторах <2з, 64 и Qs, и актив-
ные базовые резисторы, включенные в базовые цепи ключевых тран-
зисторов Qi и Q2. С увеличением vg повышается напряжение в точке Ь.
Резисторы R2 и R3 выбраны так, чтобы при минимальном vg напряжение
Vb равнялось примерно 1В и тразистор <23 работал в линейном режиме.
Поскольку коллектор транзистора Q2 смещен относительно опорного
напряжения (точка а), сигнал управления, подаваемый на транзистор
<24, изменяется с варьированием напряжения, прикладываемого к базе
транзистора <23. С повышением напряжения в точке b потенциал точки
с снижается. Поскольку транзисторы <34 и 6s работают в режиме эмит-
терного повторителя (с разными коэффициентами усиления), в базы
ключевых транзисторов <21 и Q2 через транзисторы бб и <37 подается
меньший ток и как результат сопротивление между точками 1 —3 и 4—6
(см. рис. 5.25, а) изменяется примерно пропорционально квадрату вход-
ного напряжения, удовлетворяя условию (11).
Экспериментальным путем определяется только один параметр-
напряжение Vj, 5 на базе транзистора <2S. Для этого цепь в этой точке
(на базе) разрывается и в место разрыва подключается внешний регули-
руемый источник напряжения. Входное напряжение Квх устанавливается
равным минимальному ожидаемому значению, а выходное напряжение
регулируемого источника настраивается так, чтобы при номинальной
выходной мощности Ро преобразователя транзисторы Qx и Q2 находи-
лись на границе насыщения. В этом случае измеряется выходное напря-
жение регулируемого источника, соответствующее напряжению V^.
Аналогичная процедура выполняется и при максимальном входном на-
пряжении. В результате определяется напряжение V/,2. Параметры ре-
зисторов R6 и R2 выбираются таким образом, чтобы при минимальном
входном напряжении VbQs было равно а при максимальном вход-
ном напряжении - .
Рис. 5.25. Усовершенствованный преобразователь постоянного напряжения:
а — структурная схема; б - схема блока управления и активных базовых ре-
зисторов (АБР)
5.4.5. Результаты исследований •
На рис. 5.26 приведены зависимости КПД усовершенствованного и
обычного преобразователей от входного напряжения. Очевидно, что КПД
усовершенствованного преобразователя при изменении входного на-
пряжения от 20 до 40 В выходной мощности 8 Вт изменяется весьма
слабо. Небольшое отклонение КПД от некоторого постоянного уров-
ня обусловлено потерями мощности в блоке управления преобразова-
теля (в активных базовых.резисторах).
169
входное напряжение, В
Рис. 5.26. Зависимости КПД усовер-
шенствованного (7) и обычного (2)
преобразователей от входного напря-
жения
5.4.6. Пропорциональное управление силовым транзистором
Из предыдущего анализа следует, что КПД системы можно повысить,
если силовые транзисторы не насыщать глубоко, а поддерживать на гра-
нице насыщения во всем диапазоне изменения тока коллектора. Кроме
того, при работе транзистора в таком режиме повышается его быстро-
действие, поскольку в переходе база—коллектор накапливается меньше
избыточных носителей заряда и как следствие уменьшается время рас-
сасывания. Таким образом, пропорциональное управление силовыми
транзисторами позволяет повысить КПД и частоту коммутации.
Один из вариантов организации пропорционального управления
описан в п.5.4.4, однако возможен и другой ее вариант — с помощью
трансформатора тока (рис. 5.27). Трансформатор, реализующий пропор-
циональное управление, имеет три обмотки — коллекторную (или эмит-
терную), базовую и управляющую. На управляющую обмотку подается
узкий запускающий импульс, отпирающий транзистор, и через последний
начинает протекать ток. Нарастание тока коллектора благодаря транс-
форматорной связи между коллекторной и базовой обмотками транс-
форматора вызывает пропорциональное нарастание тока базы. Процесс
Коллекторна я
обмотка
Управляют,
обмотна
БазоВая
обмотка
Рис. 5.27. Пропорциональное управление
транзистором с помощью трансформатор-
ной токовой связи
170
длится до тех пор, пока ток коллектора изменяется (только нарастает
или только спадает). Транзистор запирается при подаче на управляющую
обмотку трансформатора импульса отрицательной полярности.
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. Spacecraft Power Systems - Some New Techniques for Rerformance
Improvement, Ph. D. The'is, Indian Institute of Science (I.I.Sc), India, 1978.
2. Chetty P.R.K. Dc-Dc converter maintains high efficiency. Electronics, January 3,
1980, p. 159-161.
5.5. ИСТОЧНИКИ ЭЛЕКТРОПИТАНИЯ ЛИНЕЙНОГО ТИПА
5.5.1. Введение
До появления источников электропитания ключевого типа наиболее
часто в системах электроснабжения применялись линейные источники
питания, которые несмотря на большую рассеиваемую ими мощность
обладают широкой полосой пропускания, хорошими динамическими
характеристиками, высоким линейным ослаблением. Линейные источни-
ки применяются и до сих пор, но лишь в тех случаях, когда их исполь-
зование специально обосновано, например в качестве лабораторных ис-
точников электропитания, стабилизированных источников электропита-
ния аналоговых и цифровых схем, гальванически развязанных стабили-
заторов напряжения для усилителей низкоуровневых каналов передачи
данных, бортовых систем и др.
5.5.2. Описание управляющей микросхемы
Несмотря на обилие интегральных микросхем, разработанных спе-
циально для линейных стабилизаторов напряжения, рассмотрим только
одну из них — микросхему LM723 (рис. 5.28). Она представляет собой
Частотная норренция
о
о
23
Термостадили -
зированный
стабили-
трон
^-о Неинв. вход
У опор °—
Усилитель
ра ссогла сода ния
Инд. Вход
И6ых
-о
Усилитель
опорного
напряжения
Тоноогра-
ничение ‘
Измерение
тона
О гранича тель
тона
Vz
-о
2?
Рис. 5.28. Структурная схема твердотельного интегрального стабилизатора напря-
жения LM723
171
твердотельный стабилизатор напряжения, содержащий термостабилизи-
рованный источник опорного напряжения, усилитель рассогласования,
проходной транзистор и схему токоограничения. Если выходной ток ста-
билизатора превышает 150 мА, к микросхеме можно подключить внеш-
ние проходные п - р - п- или р - п — р- транзисторы. В схеме преду-
смотрены средства для настройки узла токоограничения и запирания
внешним сигналом. Можно отметить также, что микросхема имеет низ-
кое собственное потребление мощности в отключенном от нагрузки со-
стоянии, низкий температурный дрейф и высокий коэффициент ослаб-
ления пульсаций и используется в качестве последовательного, парал-
лельного, ключевого или ’’плавающего” Стабилизаторов напряжения.
5.5.3. Пример практической реализации
В большинстве стабилизированных источников электропитания с
постоянным входным напряжением в случаях, когда заданное выходное
напряжение ниже уровня внутреннего опорного напряжения управляю-
щей микросхемы, стабилизация выходного напряжения, как правило,
неудовлетворительна. Кроме того, технологические и схемотехнические
сложности часто ограничивают минимально достижимое внутреннее
опорное напряжение и как следствие - минимально возможное выход-
ное напряжение стабилизатора. В приведенном примере опорное напря-
жение можно снизить практически до нуля, тем самым устранив отме-
ченные выше проблемы.
На рис. 5.29 представлена схема стабилизатора напряжения, выполнен-
ная на основе микросхемы LM723 [1]. Выходные параметры стабили-
затора: напряжение — 12 В, максимальный ток — 1 А. Для обеспечения
работы стабилизатора в указанном выше режиме на один из выводов
питания (— Квх) микросхемы LM723 (вывод 5) необходимо подать от-
рицательное смещение. Это смещение создается с помощью ключевого
инвертора напряжения (обведен штрихпунктарной линией). Стабилиза-
тор работает следующим образом. Выходное напряжение сравнивается
с внутренним опорным напряжением микросхемы LM723, разность
поступает на усилитель сигнала рассогласования, который подает сигнал
управления на проходной транзистор, выполняющий роль переменного
резистора, сопротивление которого является функцией уровня выход-
ного сигнала усилителя рассогласования. При таком типе управ-
ления проходной транзистор так изменяет падение напряжения в цепи
коллектор—Эмиттер, что оно постоянно равно разности между входным
и требуемым выходным напряжениями. Таким образом, выходное напря-
жение стабилизатора постянно соответствует уровню заданного опорно-
го напряжения.
Схема, выполненная на компараторе LM111, представляет собой аста-
бильный мультивибратор с частотой колебаний примерно 10 кГц. С
помощью инвертирующего преобразователя, образованного р-п-р-
транзистором, дросселем с индуктивностью 1 мГн и диодом, управляе-
Рис. 5.29. Детальная схема линейного стабилизатора с регулируемым выходным напряжением
173
172
мого мультивибратором, на микросхему LM723 подается отрицательное
смещение —7,5 В.
Это отрицательное напряжение равно по существу внутреннему опор-
ному напряжению микросхемы LM723 и смещает входящий в ее состав
усилитель опорного напряжения. В результате напряжение на его вы-
ходе становится практически равным нулю. С помощью потенциометров
и 7?2 выходное напряжение стабилизатора настраивается на любой
уровень во всем допустимом диапазоне от нуля до максимального на-
пряжения. Несмотря на то что потенциал Vref относительно общей шины
изменяется, микросхема LM723 не теряет своих стабилизирующих
свойств. Точность стабилизации выходного напряжения как при измене-
нии нагрузки, так и при изменении входного напряжения остается не
хуже 0,4%.
СПИСОК ЛИТЕРАТУРЫ
1. К. Chetty P.R., Barnaba A. Dc-Dc Power Sypply Regulates down to О volt,Electro-
nics, USA, Jan. 5,1976.
5.6. СОВЕРШЕНСТВОВАНИЕ ИСТОЧНИКОВ ЭЛЕКТРОПИТАНИЯ
5.6.1. Введение
За счет небольших изменений схемы источников электроснабжения,
например включения в них некоторых дополнительных элементов, уда-
ется значительно улучшить выходные характеристики и повысить КПД
источников. Приведем два характерных примера подобного усовершен-
ствования в линейном и ключевом источниках электропитания.
5.6.2. Практический пример 1
В источниках электропитания проходной транзистор и токоизмери-
тельный резистор (шунт) являются элементами, в которых рассеива-
ется определенная мощность и, несмотря на способность к токоограни-
чению при КЗ на выходе, для интегральных стабилизаторов характерны
большие потери мощности. Такая ситуация возникает потому, что каж-
дый проходной транзистор должен рассеивать мощность, определяемую
полным входным напряжением при токе незначительно большем, чем
ток полной нагрузки. В этом случае в приборе может рассеиваться
мощность, более чем в 3 раза превышающая мощность, рассеиваемую в
нормальных условиях при полной нагрузке.
Для избежания подобной ситуации стабилизаторы напряжения снаб-
жаются схемами токоограничения с обратным наклоном характеристи-
ки. Ток КЗ в таких схемах зависит от сопротивления токоизмеритель-
ного резистора (шунта), а для достижения минимального значения тока
КЗ необходим шунт с повышенным сопротивлением. Однако в этом
174
Рис. 5.30. Усовершенствованная за счет включения дополнительного диода схема
токоограничения источника электропитания
случае повышается мощность, рассеиваемая в шунте, и понижается КПД
стабилизатора в нормальном режиме работы, а кроме того, необходим
теплоотвод.
Диод, включенный последовательно с токоизмерительным шунтом
(рис. 5.30), улучшает характеристики схемы. В этом случае использу-
ется шунт с меньшим сопротивлением и в результате снижаются по-
тери мощности. Для сравнения приведем два примера. В стабилизаторе
с обычной схемой токоограничения в шунте сопротивлением 15 Ом
рассеивается мощность 3,75 Вт. В усовершенствованной схеме в шунте
сопротивлением 1 Ом рассеивается соответственно 0,60 Вт.
5.6.3. Практический яример 2
Как уже отмечалось, в источниках электропитания проходной тран-
зистор и токоизмерительный шунт являются элементами, в которых
при нормальной работе источника рассеивается определенная мощ-
ность. Даже в стабилизаторах напряжения ключевого типа, где потери
в проходном транзисторе значительно меньше, мощность, рассеиваемая
в шунте, остается неизменной. В большинстве стабилизаторов напряже-
ние срабатывания схемы Токоограничения Кизм = 0,7 В, т.е. равно на-
пряжению цепи база—эмиттер транзистора. При фиксированном выход-
ном токе мощность, рассеивая в тяжелом и имеющем достаточно боль-
шие габариты шунте, зависит от напряжения Кизм (пропорциональна
ему). Благодаря наличию диода, включенного так, как показано на
175
Рис. 5.31. Схема стабилизатора с высоким КПД
рис. 5.31, это напряжение снижается с 0,7 до 0,4 В, уменьшаются потери
в шунте, его масса и габариты, а КПД стабилизатора повышается.
Для сравнения рассмотрим две схемы — обычную и усовершенство-
ванную. Допустим, что обычный стабилизатор рассчитан на выходное
напряжение 5В и максимальный ток 2 А с КПД 80%. Поскольку Иизм =
= 0,7 В, сопротивление шунта Дизм = Иизм//0 = 0,35 Ом. Мощность,
рассеиваемая в шунте, Р = Иизм/0 = 1,4 Вт. Поскольку стабилизатор
имеет КПД 80%, в нем рассеивается мощность 2,5 Вт (мощность на
входе минус мощность на выходе). Эти потери распределяются между
шунтом, проходным транзистором, микросхемой, пассивными элемен-
тами схемы и пр. Потери в схеме, за вычетом потерь мощности, рас-
сеиваемой в шунте, составляют 2,5 — 1,4= 1,1 Вт.
Теперь рассмотрим усовершенствованный стабилизатор. Из рис. 5.31
видно, что VBE = Торизм + ~ падение на диоде) или Кизм =
= Vbe — Ко- При использовании германиевого диода, у которого пря-
мое падение напряжения составляет около 0,3 В, Иизм = 0,7 — 0,3 =
= 0,4 В. Мощность, рассеиваемая в шунте, равна 0,8 Вт, в диоде — 0,1 Вт,
Таблица 5.6. Сравнение обычной и усовершенствованной схем
Параметр Обычная схема У совершенство- ванная схема
Сопротивление шунта, Ом 0,35 0,20
Потери в шунте, Вт 1,4 0,8
Габариты, отн. ед. 1,0 0,6
Масса, отн. ед. КПД, % 80,0 83,3
176
а в остальных элементах схемы — 1,1 Вт. Таким образом, полные потери
в усовершенствованном стабилизаторе составляют 2,0 Вт, а его КПД
равен 83,3%.
В табл. 5.6 представлено сравнение характеристик обычного и усо-
вершенствованного стабилизаторов.
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. Add a diode to improve current foldback. END magazine, October 5,
1978.
2. Chetty P.R.K. Add a diode to improve the efficiency of a regulator. Electronic
Engineering, April 1980.
Глава 6. ИНТЕГРАЛЬНЫЕ МИКРОСХЕМЫ
В КЛЮЧЕВЫХ ИСТОЧНИКАХ ЭЛЕКТРОПИТАНИЯ
6.1. МИКРОСХЕМЫ УПРАВЛЕНИЯ
КЛЮЧЕВЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОПИТАНИЯ
6.1.1. Введение
Инженеры — разработчики систем электроснабжения по достоинству
оценивают преимущества использования ключевых источников электро-
питания (КИЭП). Однако повышение КПД источников, снижение их мас-
сы и габаритов часто сопровождается усложнением схем управления и
как следствие — увеличением числа дискретных элементов и снижением
надежности. Для решения этих задач различные фирмы разработали
специально для КИЭП целый ряд приборов — высокочастотные силовые
транзисторы с широкой областью безопасной работы (как при прямом,
так и при обратном смещении цепи базы), мощные диоды с малым вре-
менем восстановления при запирании, конденсаторы с низким эквива-
лентным последовательным сопротивлением, высокочастотные сердеч-
ники для дросселей и трансформаторов с низкими удельными потерями,
специализированные интегральные микросхемы. Применение в КИЭП
специализированных микросхем позволяет повысить их точность,
воспроизводимость, снизить влияние различных паразитных эффектов и
связей, улучшить массогабаритные показатели.
В этом параграфе рассмотрены специализированные интегральные
микросхемы (ИМС), применяющиеся для управления автогенератор-
ными КИЭП и КИЭП управляемого типа.
6.1.2. Управляющие микросхемы
Появление специализированных ИМС позволило упростить и уско-
рить разработку КИЭП. Как правило, КИЭП включают в себя следующие
функциональные узлы: прецизионный источник опорного напряжения,
177
усилитель сигнала рассогласования, дифференциальный компаратор,
предоконечный силовой каскад. Каждый из этих узлов, за исключением
силового каскада, можно воспроизвести в интегральном виде. Несмотря
на то что любая микросхема позволяет повысить надежность, умень-
шить размеры, улучшить выходные характеристики источников питания,
существуют проблемы, связанные с различными температурными коэф-
фициентами ИМС, некоторой сложностью схем, вызванной большим
числом ИМС и необходимостью подключения к ним различных пассив-
ных дискретных элементов, и пр. Следовательно, значительные преиму-
щества дает интеграция различных функциональных узлов КИЭП
в одной аналоговой микросхеме с большой степенью интеграции
(БИС).
Сначала были разработаны ключевые стабилизаторы напряжения, ра-
ботающие в режиме свободных колебаний, и ИМС для управления этими
стабилизаторами. Лишь некоторое время спустя появились стабилизато-
ры управляемого типа.
Частота коммутации КИЭП, работающих в режиме свободных коле-
баний, непостоянна и изменяется в зависимости от уровней входного на-
пряжения и выходного тока. Поэтому практически невозможна оптими-
зация выходного фильтра таких источников. В то же время такие КИЭП
в некоторых случаях предпочтительнее КИЭП управляемого типа, по-
скольку они построены по более простой схеме и имеют меньшие габа-
риты и стоимость. Таким образом, разработчикам необходимы КИЭП
обоих типов. То же самое можно сказать и об управляющих микро-
схемах.
6.1.2.1. Микросхемы для управления КИЭП управляемого типа. Иде-
альная ИМС для управления КИЭП управляемого типа должна не только
содержать элементы, обеспечивающие нормальную работу стабилиза-
тора в режиме широтно-импульсной модуляции (ШИМ), но также и
удовлетворять большинству из перечисленных ниже условий: рабочее
напряжение не выше 40 В; наличие высокостабильного термостабилизи-
рованного источника опорного напряжения, генератора пилообразного
напряжения с получением управляемой паузы (’’мертвой зоны”); обес-
печение возможности синхронизации внешним сигналом программиру-
емого плавного запуска; наличие усилителя сигнала рассогласования с
высоким синфазным напряжением, ШИМ-компаратора с гистерезисом,
импульсного управляемого триггера, двухканального предоконечного
каскада с защитой от КЗ, логики подавления двойного импульса,
средств коррекции симметрии, токоограничения в широком диапазоне
синфазных напряжений, токоограничения в каждом периоде с отключе-.
нием в аварийном режиме, автоматического управления с прямой пере-
дачей; обеспечение отключения при понижении напряжения, защиты от
перенапряжений, совместимости с ТТЛ/ЛСМОП-логикой, дистанционного
включения и отключения.
178
Рис. 6.1. Внутренняя структура ИМС SG1526 для управления КИЭП управляемого типа (с разрешения фирмы
Silicon General)
179
Типовые ключевые стабилизаторы работают на частотах 50—500 кГц,
и соответственно управляющие ИМС должны быть рассчитаны для ра-
боты на этих же частотах с выходным током порядка 100—200 мА.
На рис. 6.1 представлена внутренняя структура типовой ИМС управле-
ния КИЭП управляемого типа, обладающая большинством из перечис-
ленных выше свойств.
В табл. 6.1 приведены параметры различных микросхем, по которым
можно провести их сравнительный анализ и выбрать ту или иную ИМС
для конкретного применения. Некоторые ИМС обладают специфичес-
кой особенностью — синхронизацией с фазовой автоподстройкой частоты
(ФАПЧ).
6.1.2.2. Микросхемы для управления КИЭП, работающими в режиме
свободных колебаний. Этот тип ИМС на практике мало изучен. В них
отсутствуют какие-либо средства, обеспечивающие возможность такти-
рования или синхронизации. На рис. 6.2 представлена внутренняя струк-
тура типовой ИМС подобного типа. Наиболее общими характерными
свойствами ИМС для управления КИЭП, работающими в режиме сво-
бодных колебаний, являются следующие: рабочее напряжение питания
меньше или равно 40 В; наличие высокостабильного источника опорного
напряжения, усилителя-компаратора рассогласования с гистерезисом,
токоограничения, схемы задержки и отключения; обеспечение отключе-
ния при понижении напряжения, контроля времени открытого и закры-
того состояний и наличие обратного диода.
В табл. 6.2 приведены параметры различных микросхем, на основе
которых можно провести их сравнительный анализ и выбрать ту или
иную ИМС для конкретного применения.
6.1.2.3. Специальные управляющие ИМС. Кроме основных управляю-
щих ИМС выпускаются и специальные управляющие ИМС.
Частотная
коррекция
Термо компен-
сированный,
стадилит-Ж
рон ( _
Источник
тока
Инв. вход
^опор “
Неинв. вход
Проходной
Г транзистор
СтаВилизиро -
• ванный
выход
v Только I
| [—£_ корпуса |
Vcc_ Ограничение Измерение\___munaJи Л/j
тока тока
Усилитель Усилитель
опорного расеогла -
напряжения сования
тель п _—
тока 11 J
Рис. 6.2. Внутренняя структура ИМС UA723 для управления КИЭП в режиме сво-
бодных колебаний (с разрешения фирмы Texas Instruments Inc.)
180
§
s
R
R
а
н
X
£
R
X
о
х
i
в
I
£
<л
да
№
X
£
I
м
О
да
=§
X
X
is
=§
X
X
X
§
£
К
о
X
о
gD
д
X
Е
о
ь>
о
S
I
S
к
X
X
X
Ф
X
а
я
I
§
R
3
S
у
§•
I
X
X
<л
О\
»п
£
p
3
3
О
£
g
К
ё
X
о
¥
в
R
X
X
О
¥
§
о
5
а
X
I
а
х
5
X
X
x
X
§
§
Ю
X
p
p
д
I
•и
5
н
X
со
g
2
СО
?
§
да
£
ffl
a
о
X
Сн
X
Д
л
о
5
X
о
5
X
§
g
X
X
§
о
*
X
да
х
X S
а
о
н
S
§
о
X
X
о
н
3
5
x
I
о
&
&
к
о
X
о
g
I
&
К
о
X
О
S
о
I
а
к
4>
X
еЧ
т
й
а
ч
X
§
X
2
§
а
ё
5
х
X
о
§
а 5
£ »
а
X
X
5
о
X
X*
а
а
X
X
5
О
X
ass
&
I
м
О
В
g
X
X
X
X
в
w
Ф
w
я
i
м
О
И
X
5
8.
н
I
о
&
а
X
4>
X
О
X
О
§
&
&
к
о
X
X
а
н
о
S
ч
а
в S
ах
X
«Е
О
В +1
да <п
а
X
X
5
О
X
X*
а
*
о
S
т
О
СО
X
5
S
X
X
I
5„
*о
9
X
X
4>
Д
X
x
»
Я
X
I
о
&
а
X
иЦ л\
ах
о
s
3
в S
ах
X
X <«*»
а‘г
S
о
X
S
О 2
a
8
1
X
со
X
в
§
4>
*
X
да
к
X
X
x
X
5
X
о
X
Ю
X
Ch
X
а
о
g
о
tt
Q
s
о
X
X
£
X
X
о
X
£
с
О
9
9
2
а
о
в
ffl
4
R
3
о
X
со
"х*
X
о
£ i
5
В
Ч
5
10
§ i
со Л
X
В
В
Е
х
I
да
X
да
к
g
в
о
X
да
о
к
О
о
5
а
о
X
о
в
X
X
181
Продолжение табл. 6.1
182
Тип микросхемы LAS3840*8 LAS3800*9 NE5561*10 ZN1060*11 ZN1066*12
Выполняемая функция Твердотельный ключевой стаби- лизатор Твердотельный ключевой стаби- лизатор Контроллер КИЭП Тве рдотельный ключевой ста- билизатор Управление клю- чевым стабили- затором + пред- каскад
Фирма-изготовитель Lambda Lambda Signetics Ferranti Ferranti
Число выводов 16 16 8 16 24
Частота, кГц 1-500 1-150 100 50-100 500
Напряжение питания Vqq, В 12-40 12-40 18 5 5
Максимальный ток коллектора, мА 200 500 40 40 60
Подавление ’’дребезга” Двойной импульс Двойной импульс Есть Есть Есть
Вход синхронизации*6 Есть Не предусмот- рен, но синхрони- зация возможна Нет Есть Есть
Отключение Есть — Нет Есть Есть
Сброс — — Нет — —
Плавный запуск Есть — Не предусмот- рен, но возмо- жен Есть Не предусмот- рен, нс возмо- жен
Диапазон синфазных напряжений, В 0-11 — — — 1-4
Частота среза, кГц — — 3000 — —
Выход Двойной Двойной Одиночный Одиночный —
Отключение прн понижении напряжения Есть Нет Не применяется
Опорное напряжение, В 1,65 — 3,75 3,73 2,6
Усилитель измерения тока/внеш- ний операционный усилитель Есть — Есть Есть Есть
Контроль выхода Нет Нет — — —
Тип микросхемы SG1524 SG1525/S.G1527 SG1525A/SG1527A SG1526
Выполняемая функция Фирма-производитель Silicon General
Число выводов 16 16 16 18
Частота, кГц Напряжение питания V^, В Максимальный ток коллектора, мА 300 0,1-400 0,1-500 8-40 100 0,001-400
Подавление ’’дребезга” Нет Нет Есть Есть
Вход синхронизации*6 Нет, но синхро- низация возмож- на Есть Есть Есть
Диапазон синфазных напряжений, В 1,8-3,4 1,5—5,2 1,5-5,2 0,0-5,2
Частота среза, кГц Выход 3000 2000 2000 Двухтактный 1000
Отключение при понижении напряжения Отключение Нет Нет Есть Есть Есть
Сброс Нет Нет Нет Есть
Плавный запуск Контроль выхода Нет, но возможен Есть Есть Не применяется —
Опорное напряжение, В 5,0 5,1 5,1 5,0
Усилитель измерения тока/внеш- ннй операционный усилитель Есть Нет Нет Есть
функции ИМС TL495 идентичны функциям ИМС TL494. Кроме того, ИМС TL495 содержит интегральный стабилитрон с
напряжением пробоя 39 В, предотвращающий ее выход из строя прн напряжении питания выше 40 В, а также выполняет допол-
н, ннтельную функцию - переход на внешнее управление, блокирующее внутренний управляющий триггер. Микросхема TL495
S имеет 18 выводов. Вывод 13 ИМС TL494 чувствителен к помехам; прн уменьшении напряжения питания К^ниже 8 В оба
Окончание табл. 6.1
выхода ИМС могут быть открыты одновременно, а в случае применения ИМС в двухтактном преобразователе
возможен ее выход нз строя.
* 2 Функции ИМС TL594 идентичны функциями ИМС TL593, за исключением усилителя токоограничения. Микросхема TL594
содержит два усилителя рассогласования для повышения функциональной гибкости. Микросхема TL594 является совершенст-
вованной разработкой ИМС TL494.
* 3 Содержит интегральный стабилитрон с напряжением пробоя 39 В, имеется возможность внешнего управления.
* 4 В отсутствие входа синхронизации источник электропитания работает на собственной частоте, а при наличии входа синхро-
низации частота задается внешним источником.
* 5 Имеет защиту от повышения напряжения. Для ограничения коэффициента заполнения импульсов необходимы три внеш-
них элемента.
* 6 Микросхема LAS3840 имеет тепловую защиту, генератор пилообразного напряжения со сдвигом частоты при перегрузках
по току, схему динамической вольт-секундной коррекции, схему подавления двойных импульсов. Входное напряжение ИМС
LAS 3820 ограничено на уровне 20 В (у ИМС CAS3850 - 40 В).
* 7 Имеет схему управления сдвигом частоты.
* 8 Вывод 4 может быть использован для плавного запуска, а также для аварийного отключения.
* 9 Имеет защиту от повышения напряжения и насыщения сердечника.
* 10 Предназначена для применения в дешевых КИЭП, где не требуются дополнительные функции.
* 11 Имеет импульсно управляемый триггер.
* 12 Имеет защиту от повышения напряжения и от насыщения сердечника.
Таблица 6.2. Микросхемы для управления КИЭП, работающими в режиме свободной коммутации
Тип микросхемы UA723 SG1532 TL497A UA78S40 LM105 LM104
Выполняемая функция Прецизионный Прецизионный Ключевой ста- Подсистема уни- Стабилизатор Стабилизатор
стабилизатор общецелевой билизатср на- нереального положительно- отрицательного
напряжения ста би ли затор пряжения ключевого го напряжения напряжения
Число выводов 10 (DIP) напряжения 10 (CIR) 14(D/P) ' стабилизатора 16(П7Р) 8 (CIR) 10 (CIR)
Фирма-изготовите ль 10 (CIR) 14 (DIP) TI 14 (DIP) Silicon General TI Fairchild 8 (DIP) TI 14 (DIP) TI
Напряжение питания 9,5-40 4,5-50 4,5-12 2,5-40 8,5-50 8-50
КСС'В Опорное напряжение, В 7,15 2,5 1,2 1,3 1,7
Выходной ток, мА 150 250 500 1500 12-45 20
Синфазное напряжение — — * -0,3 В-В+ * *
Выходное напряжение, В 2-37 2-38 +24- -30 1,3-40 4,5-40 0,015-40
Фиксированное время Нет Нет Есть — Нет Нет
открытого состояния Токоограничение Есть Есть Есть Есть Есть
Задержка/отключение Возможна Возможна Есть — Есть Есть
Обратный диод Нет Нет Есть Нет Нет Нет
* Опорное напряжение связано с одним из входов ЭВМ.
Примечание. DIP - тип корпуса с двухрядным расположением выводов; CIR - тип корпуса с выводами, расположенными
по окружности.
Микросхемы для управления КИЭП микропроцессорных систем.
Микросхемы TCA56OO/TCF56OO являются многофункциональными уз-
лами управления источников электропитания микропроцессорных си-
стем и предназначаются главным образом для использования в изделиях
с питанием от батарей. Такие ИМС обладают максимальной гибкостью
и многофункциональностью при минимальном числе внешних элементов.
Они включают в себя термокомпенсированный источник опорного на-
пряжения, внутрисхемный преобразователь постоянного напряжения,
программируемый стабилизатор напряжения, стабилизатор напряжения
питания 5,0 В с внешним мощным р—п—р-транзистором, схему фик-
сации понижения напряжения, узел задержки при подаче питания, схему
обеспечения безопасности.
Микромощные микросхемы управления КИЭП. Первыми промыш-
ленными твердотельными микромощными ключевыми стабилизаторами
являются ИМС 4191, 4192 и 4193 в 8-выводных корпусах типа мини
DIP1, предназначенные для установки в изделиях, питающихся от бата-
рей. Каждая ИМС содержит термокомпенсированный источник опорного
напряжения 1,3 В, перестраиваемый генератор, компаратор напряжения,
схему фиксации разряда батареи, ключевой транзистор с нагрузочной
способностью 150 мА и выполняет все функции законченного маломощ-
ного ключевого стабилизатора.
6.1.3. Микросхемы управления силовыми транзисторами
Когда инженеры-разработчики систем электроснабжения приобрели
достаточный опыт использования специализированных управляющих
ИМС, обнаружился очевидный разрыв между их нагрузочной способ-
ностью и мощностью, необходимой для управления полупроводни-
ковыми ключами. Для большинства преобразователей источников элек-
тропитания необходимы твердотельные устройства сопряжения со схе-
мами управления и управляющими ИМС, имеющие двухканальный вы-
ход или выходной свободный ключ с большой нагрузочной способ-
ностью.
На рис. 6.3 показана структурная схема двухканальной ИМС сопряже-
ния SG1627. Эта ИМС с двухканальным выходом и внешним источником
тока может работать с токами до 500 мА. Логическая схема SG1627
имеет прямой и инверсный входы, а ее управление осуществляется ана-
логично схеме с открытым коллектором или от ТТЛ-логики. Выходные
выводы оконечных транзисторов ИМС разделены, что расширяет ее функ-
циональные возможности и позволяет реализовать интерфейс не только
с биполярными транзисторами, но и с мощными МДП-транзисторами
и трансформаторами.
1 DIP — корпус с двухрядным расположением выводов. — Прим. пер.
186
Рис. 6.3. Структурная схема микросхемы управления силовым транзистором
SG1627 и пример ее включения (с разрешения фирмы Silicon General)
Микросхема SG1629 имеет на выходе мощный ’’плавающий” ключ
и применяется для сопряжения между вторичной обмоткой управляю-
щего трансформатора и цепью базы силового ключевого транзистора,
а также обеспечивает необходимые условия отпирания и запирания по-
следнего. Для нее не требуется каких-либо внешних источников питания,
достаточно только энергии вторичной обмотки управляющего транс-
форматора и внешенго напопительного конденсатора.
6.1.4. Микросхемы для защиты, котроля и др.
Кроме ИМС, предназначенных непосредственно для управления
ключевыми стабилизаторами напряжения, в большинстве систем элек-
троснабжения присутствуют дополнительные ИМС для обеспечения конт-
Индикация
понижения
напряжения
Отправление
тиристором
©Индикация
повышения
напряжения
Смещение /сравнение Активный уровень (низкий)
Рис. 6.4. Структурная схема микросхемы контроля SG1543 ( с разрешения фирмы
Silicon General)
187
роля выходных характеристик, защиты в случае аварийных режимов
и пр„ получившие название супервизоров. Эти ИМС представляют со-
бой многофункциональные устройства, содержащие схемы фиксации,
понижения и повышения напряжения, измерения тока, включения ти-
ристора схемы, закорачивающей вход стабилизатора при аварийных
ситуациях, логические схемы, прецизионный источник опорного напря-
жения и пр. На рис. 6.4 представлена структурная схема типичной ИМС-
супервизора для контроля параметров источников электропитания.
К супервизорам, например, относятся следующие ИМС: SG3523 —
схема фиксации превышения напряжения; SG1542 — схема измерения
напряжения и защиты; SG1543 - схема контроля выходных параметров
источников электропитания; SG1544 — схема контроля низкого напря-
жения; SG1547 — контроль аварийного режима; SG1549 — схема изме-
рения тока с фиксацией; МС3523/МС3423 — фиксация перенапряжения
для инициализации закорачивающей цепи; МС3425/МС3525 — схема
защиты от перенапряжения; МРС2005 — схема защиты от перенапряже-
ния и перегрева; МС34061/МС34062 — схема защиты при выходе напря-
жения из режима.
СПИСОК ЛИТЕРАТУРЫ
1. Silicon General linear Integrated Circuits - Product Catalog, 1980.
2. Siemens Switched-Mode Power Supplies Using the TDA 4600, Application Note,
Components Group.
3. Siemens. Control ICs TDA 4700/4718 for Switched—Mode Power Supplies-Fun-
ction and Application Note, Application Note; Components Group.
4. Preliminary Data Sheets, Fairchild - A Schlumberger Company.
5. The Linear Control Circuits Data Book for Design Engineers, Texas Instruments
Incorporated.
6. Many other Data Catalogs.
6.2. ПРИМЕНЕНИЕ ИНТЕГРАЛЬНЫХ ТАЙМЕРОВ
ДЛЯ УПРАВЛЕНИЯ ИСТОЧНИКАМИ ЭЛЕКТРОПИТАНИЯ
КЛЮЧЕВОГО ТИПА
6.2.1. Введение
Для управления источниками электропитания, работающими в клю-
чевом режиме, можно использовать не только специализированные
управляющие ИМС или ШИМ, но также микросхемы и других типов,
например интегральные таймеры серии 555. В этом параграфе рассмотре-
ны три практических примера построения источников электропитания,
в которых таймеры используются в качестве контроллеров стабилиза-
торов напряжения ключевого типа.
188
6.2.2. Описание интегрального таймера
Таймер 555 (рис. 6.5) включает в себя два компаратора напряжения,
бистабильный триггер, транзистор разряда и резистивный делитель на-
пряжения. Резистивный делитель напряжения определяет пороги сра-
батывания компараторов, и поскольку сопротивления резисторов дели-
теля равны между собой, пороги срабатывания (опорные напряжения)
компараторов А1 и А2 равны соответственно 2/3 и 1/3 напряжения Vсс.
Выходы компараторов связаны с бистабильным триггером АЗ. При
снижении входного напряжения ниже 1/3 Vcc компаратор изменяет свое
состояние и устанавливает триггер, переводящий выход выходного кас-
када А4 в состояние высокого уровня. Если входное напряжение стано-
вится выше 2/3 Vcc, второй компаратор сбрасывает триггер, который
в свою очередь переключает выход ИМС (оконечного каскада) в состо-
яние низкого уровня и включает разрядный транзистор.
При использовании в качестве контроллера ключевого стабилизатора
напряжения таймер включается по схеме астабильного мультивибратора.
В момент подачи напряжения питания конденсатор начинает заряжаться
и до тех пор, пока напряжение на нем не достигнет 2/3 Ксс, выходной
сигнал таймера имеет высокий уровень. Если напряжение на конденса-
торе превышает 2/3 V сс, триггер переключается и его выходной сигнал
переходит на низкий уровень. При этом включается разрядный транзис-
тор и конденсатор начинает разряжаться. Когда напряжение на разряжа-
ющемся конденсаторе достигает уровня 1/3 Vcc, срабатывает компара-
тор и, устанавливая триггер, переключает выходной сигнал на высокий
уровень, запирает разрядный транзистор. Конденсатор опять начинает
заряжаться, и процесс повторяется. Из рис. 6.5 видно, что заряд конден-
сатора определяется суммарным сопротивлением резисторов Rt ий2,
Рис. 6.5. Структурная схема ИМС таймера 555
189
а разряд — только сопротивлением резистора Rt. Таким образом, часто-
та коммутации таймера
1,44
Л = -------------- .
(«1 + 2Л2)С
6.2.3. Таймер как контроллер ключевого стабилизатора
Как уже отмечалось, внутренний резистивный делитель напряжения
таймера, состоящий из трех резисторов с одинаковым сопротивленим,
имеет два выходных напряжения, равных соответственно 1/3 Усс и
2/3 Усс- Пскольку точка с потенциалом 2/3 Усс выведена на один
из выводов ИМС (вывод 5 на рис. 6.5), периоды заряда и разряда
конденсатора можно контролировать. Для этого на вывод 5 необходимо
в требуемые моменты времени подавать напряжение определенного
уровня, управляя тем самым частотой переключений таймера и коэф-
фициентом заполнения импульсов. Кроме того, вывод 4 (внешний
сброс) может быть использован для принудительного перевода выходно-
го сигнала ИМС на низкий уровень, в котором он будет находиться до
тех пор, пока сигнал на этом выводе также будет иметь низкий уровень,
блокируя внутренние управляющие сигналы таймера. Таким образом,
с помощью вывода 4 также можно управлять частотой переключений
ИМС и коэффициентом заполнения импульсов. Оконечный каскад тай-
мера с нагрузочной способностью 200 мА может управлять силовым тран-
зистором ключевого преобразователя постоянного напряжения. В ста-
билизаторе с замкнутым контуром обратной связи выходное стабилизи-
руемое напряжение сравнивается с опорным и усиленный сигнал рас-
согласования подается на вывод 5 таймера. Таким образом, изменяется
коэффициент заполнения импульсов, который ’’стремится удержать”
выходное напряжение стабилизатора на заданном уровне. Вход ’’Сброс”
может использоваться для целей защиты.
6.2.4. Пример 1
На рис. 6.6 изображена схема понижающего преобразователя, управ-
ляемого таймером 1455 [1]. При высоком уровне выходного сигнала
таймера транзистор Q3 открыт, а следовательно, открыт и проходной
транзистор Q3 и через него и дроссель L в нагрузку и конденсатор
фильтра протекает ток. При переходе выходного сигнала на низкий
уровень транзисторы запираются, включается диод VD, через который
начинает протекать ток до следующего включения транзистора Q3.
В отсутствие обратной связи выходное напряжение преобразователя
будет зависеть как от входного напряжения, так и от коэффициента за-
полнения импульсов. Цепь обратной связи состоит из стабилитрона
V&Z2 > резисторов R3 и /?4 и транзистора Qt.
190
Рис. 6.6. Понижающий преобразователь с интегральным таймером в качестве кон-
троллера
При повышении выходного напряжения уровня (Ууи22 + ^BEQ^
транзистор 21 отпирается и подает на вход ’’Сброс” таймера сигнал
низкого уровня. Транзисторы Q2 и Q3 при этом заперты, и выходное
напряжение начинает снижаться. Таким образом, выходное напряжение
стабилизатора Ивых будет поддерживатся на постоянном уровне, равном
приблизительно (VyDZi + VBEqi>-
Преобразователь имеет следующие характеристики:
Входное напряжение Квх ,В.......................... 15
Выходное напряжение Квых , В....................... 8,4
Ток нагрузки 10 , мА............................... 300
Пульсации тока Ir (/о = 300 мА), мА................ 5
Точность стабилизации при изменении нагрузки
(Гвх = I5 В,/о =04-300 мА), %....................... <0,5
Точность стабилизации при изменении входного на-
пряжения (Увх = 15425 В, /0 = 300 мА), %.............<0,5
Современные интегральные таймеры могут работать на частотах
500 кГц и выше. Максимальное напряжение питания (Vcc на выводе
8, см. рис. 6.5) таймера — 16 В, но в описанном преобразователе стаби-
литроном VDZ1 обеспечивается Гсс, равное всего 8,2 В. Таким об-
разом, входное напряжение может принимать любые значения в преде-
лах, определяемых максимально допустимыми напряжениями проход-
ного транзистора и конденсатора фильтра.
191
6.2.5. Пример 2
На рис. 6.7 представлена схема инвертирующего стабилизатора на-
пряжения [1], отличающаяся от схемы на рис. 6.6 способом соединения
элементов L, С, VD и подключением цепи обратной связи. Когда тран-
зистор 23 закрыт, ток, протекающий через дроссель, заряжает конден-
сатор С, создающий на выходе отрицательное по отношению к общей
точке схемы напряжение. Это напряжение через токоограничивающий
резистор приложено к аноду стабилитрона VDz 2. Если выходное напря-
жение становится более отрицательно^ чем напряжение — (Vvdz2 +
+ VbEq ) < транзистор Qi отпирается и на входе сброса таймера появля-
ется сигнал низкого уровня, удерживающий транзистор в запертом
состоянии. Выходное напряжение при этом начинает уменьшаться (по
абсолютному значению). В результате выходное напряжение стабилиза-
тора поддерживается на уровне, равном приблизительно — (VyDz2 +
+ VbEq^- Выходное напряжение инвертирующего преобразователя
по абсолютному значению может быть меньше входного напряжения,
равным ему и большим него.
Стабилизатор имеет следующие характеристики:
Входное напряжение Квх, В............... 15
Выходное напряжение Квых , В............ -19,4
Ток нагрузки /0 , мА.................... 300
Пульсации и точность стабилизации те же, что и у стабилизатора
на рис. 6.6.
Рис. 6.7. Схема инвертирующего стабилизатора напряжения с интегральным тай-
мером в качестве контроллера
192
6.2.6. Пример 3
На рис. 6.8 представлена схема ключевого понижающего стабилиза-
тора напряжения со схемой защиты. Если на вывод 5 ИМС не подан
внешний сигнал, конденсатор С\ будет заряжаться через резисторы Ri
и R2 до напряжения 2/3 Vи разряжаться через резистор R2 до напря-
жения 1/3Vcc. Таким образом, таймер будет переключаться с частотой,
определяемой номиналами резисторов и R2 и конденсатора Ct, от-
пирая и запирая транзисторы Q\ и Q2. До тех пор, пока выходной сигнал
таймера находится на высоком уровне, через транзистор Q2, дроссель
в нагрузку (Т?2) и конденсатор С2 (фильтр) будет протекать ток. Когда
транзистор Q2 закрыт, включается диод VD и в нагрузку передается
энергия, запасенная в дросселе L и конденсаторе С2. Выходное напряже-
ние стабилизатора поступает на компаратор, образуемый транзистором
05, стабилитроном VDZ> резисторами /?ц иЛ12. При превышении вы-
ходного напряжения уровня, равного напряжению пробоя стабилитрона
плюс напряжение база—эмиттер транзистора, транзистор Qs, коллектор
которого подключен к модуляционному входу таймера (вывод 5),
открывается, тем самым изменяя коэффициент заполнения импульсов
на выходе таймера. Таким образом, организация подобной обратной
связи позволяет поддерживать выходное напряжение стабилизатора на
уровне, равном приблизительно (Vyn + Vreo ). Входное и выходное
напряжения связаны друг с другом соотношением
f BKIJ
(?вкл + ?выкл)
Резистор7?7 выполняет роль датчика тока (шунта). При превышении
током нагрузки уровня, при котором падение напряжения на резисторе
R 7 включает транзистор Q3, открывается транзистор 04. Поскольку кол-
лектор этого транзистора соединен с выводом 4 ИМС, он сбрасывает тай-
мер, переводя его выход в состояние низкого уровня и тем самым за-
^вых =
Рис. 6.8. Схема ключевого стабилизатора с самозащитой и интегральным тймером
в качестве контроллера
193
пирая транзистор Q2. Ток нагрузки падает, и падение напряжения на
резисторе Ra уменьшается, запирая транзисторы Q3 и Q4. Сигнал сброса
с вывода 4 таймера снимается, и его выход переходит в состояние высо-
кого уровня. Если к этому времени условия перегрузки сохранились,
транзисторы 2з и Q4 опять отпираются и сбрасывают триггер. Такой
режим работы стабилизатора будет продолжаться до тех пор, пока су-
ществуют условия перегрузки. При увеличении перегрузки и ток, и вы-
ходное напряжение стабилизатора будут снижаться, а его внешняя харак-
теристика будет иметь обратный наклон.
При входном напряжении 15 В выходное напряжение схемы равно
10 В, выходной ток — 100 мА. Точность стабилизации при изменении
входного напряжения и нагрузки составляет соответственно 0,5 и 1,0%.
Защита срабатывает при токе, равном /Ri-
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. IC Timers Control DC-DC Converters. Electronics, Nov. 13, 1975.
2. Chetty P.R.K. Put a 555 Timer in your Next Swetching Regulator Design. EDN
Magazine, USA, Jan. 19,1978.
Глава 7. СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКИХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
7.1. СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКИХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
7.1.1. Введение
Солнечное излучение является практически неограниченным источ-
ником энергии в космическом пространстве. Для преобразования энер-
гии солнечного излучения в электрическую энергию на борту косми-
ческих летательных аппаратов используются солнечные батареи, эф-
фективно работающие при хорошем освещении. В условиях тени или
затмения солнечные батареи не производят никакой энергии. Следо-
вательно, для обеспечения бортовых потребителей бесперебойным элек-
тропитанием необходимо запасать некоторую часть энергии, произво-
димой солнечной батареей в период освещения, и отдавать ее в нагруз-
ку в период тени. Таким образом, в системы электроснабжения обя-
зательно должна входить комбинация солнечной и греметических
щелочных аккумуляторных батарей. Когда летательный аппарат находит-
ся над освещенной стороной Земли, солнечные батареи обеспечивают
энергией потребители и перезаряжают аккумуляторы, которые, раз-
ряжаясь, питают потребители все время, пока летательный аппарат на-
ходится в тени.
194
Генерация и
преобразование
энергии
(солнечная батарея)
Накопление энергии
(аккумуляторная
батарея)
Управление и преобразование
электрической энергии
Система регулирования
энергии, параллельный
стабилизатор, регулятор
заряда, регулятор разряда,
повышающий и понижающие
преобразователи-стабилизаторы
линейные стабилизаторы
Рис. 7.1. Важнейшие узлы типичной системы электроснабжения космического ле-
тательного аппарата
На рис. 7.1 приведены основные важнейшие узлы типовой системы
электроснабжения космических летательных аппаратов. Эти блоки мо-
гут быть соединены друг с другом различными способами и образо-
вывать различные системы электроснабжения, но в любой подобной си-
стеме выходы солнечной и аккумуляторной батарей должны быть вклю-
чены таким образом, чтобы они обеспечивали бесперебойное электро-
питание бортовых подсистем. Аккумуляторы должны заряжаться
от солнечной батареи в течение орбитального ’’дня” и разряжаться в
нагрузку в течение орбитальной ’’ночи”, а также в случае пиковых на-
грузок, превышающих максимальную нагрузочную способность солнеч-
ной батареи. Все эти режимы обеспечиваются системой управления и пре-
образования энергии (СУПЭ).
7.1.2. Источники энергии
Как уже отмечалось, основным источником энергии в космосе явля-
ется солнечное излучение. Для преобразования солнечной энергии в
электрическую на борту космических летательных аппаратов использу-
ются солнечные батареи. Питание бортовых потребителей электроэнерги-
ей в условиях тени или затемнения обеспечивается аккумуляторными
батареями.
7.1.2.1. Солнечные элементы. Эти элементы по существу являются по-
лупроводниковыми приборами большой площади с неглубоким р-п-
переходом, удельным сопротивлением базы 10 Ом-см и относительно
низкими значениями напряжения XX и тока КЗ. Они должны выдержи-
вать повторяющиеся термоциклы в диапазоне температур от —200 до
+ 100°С в полном вакууме. Солнечные элементы преобразуют энергию
излучения в электрическую энергию с КПД, равным примерно 14,5%,
уменьшающимся с ростом температуры со скоростью 0,6%/° С при тем-
пературе 25°С и полном вакууме.
195
В условиях излучения и микрометеоритных потоков наблюдается де-
градация солнечных элементов, для минимизации которой элементы по-
крывают слоем защитного стекла, прикрепляемого к ним с помощью
специального, стойкого к ультрафиолетовым лучам клея, либо использу-
ют солнечные элементы с интегрированным защитным покрытием из
кварцевого или сапфирового стекла.
Такое защитное покрытие содержит антиотражающий слой на фрон-
тальной поверхности элемента и ослабляющий ультрафиолетовые лучи
многослойный фильтр на его тыльной поверхности с коэффициентом
пропускания обычно не ниже 94%. Для достижения наилучших характе-
ристик температуру солнечных элементов следует поддерживать по воз-
можности достаточно низкой. Этому способствует защитный слой стек-
ла, выполняющий роль фильтра, уменьшающего энергию, поглощаемую
солнечными элементами. Соединяются элементы между собой шинами
из ковара, покрытыми золотом.
Солнечная батарея. Для обеспечения требуемой выходной мощности
солнечные элементы собираются в небольшие модули, а модули — в
большие батареи. С целью создания необходимого уровня выходного
напряжения элементы, согласованные по току, соединяются последова-
тельно, а для обеспечения требуемого тока элементы, согласованные по
напряжению, соединяются параллельно. За счет подключения раздели-
тельных диодов к пробитым или поврежденным элементам удается
устранить влияние последних на выходные характеристики батареи в
целом.
Наиболее предпочтительными структурами являются плоские модули,
так как в этом случае существуют различные варианты их параллельно-
последовательного соединения, обеспечиваются соответствующие те-
пловые характеристики и образуется более жесткая конструкция ба-
тареи. В плоском модуле легче заменить пробитый или поврежденный
элемент; хотя за применение плоских модулей надо ’’заплатить”
уменьшением активной поверхности батареи (что вызвано наличием
соединительных электрических шин, пролегающих по поверхности
батареи). Однако этот недостаток компенсируется высоким коэффи-
циентом упаковки.
7.1.2.2. Накопительные элементы и аккумуляторные батареи. В
любой системе электроснабжения космических летательных аппара-
тов, где в качестве первичного источника энергии используется солнеч-
ное излучение, для обеспечения бесперебойного электропитания потреби-
телей в условиях тени и затмения, а также при пиковых нагрузках,
когда нагрузочной способности солнечной батареи недостаточно, должны
быть установлены накопительные (аккумуляторные) батареи, состоя-
щие из отдельных элементов и согласованные по току, которые соеди-
няются последовательно друг с другом, а необходимый уровень тока ба-
тареи достигается посредством подбора соответствующих номинальных
196
значений их емкостей. По мере необходимости несколько батерий могут
быть соединены параллельно.
Околоземная и геосинхронная орбиты. Количество затмений, а также
их продолжительность находятся в прямой зависимости от высоты ор-
биты и ее наклонения. Космический аппарат, находящийся на низкой
орбите, значительную часть времени проводит в тени, и солнечная бата-
рея, установленная на нем, должна быть рассчитана приблизительно на
двойную среднюю расчетную нагрузку. В то же время летательный ап-
парат, находящийся на геосинхронной орбите, в тени проводит только
5% полетного времени, и соответственно его солнечная батарея произ-
водит энергии всего на 10% больше, чем это необходимо при номиналь-
ной стационарной нагрузке.
На геосинхронной орбите более значительны (по сравнению с около-
земной орбитой) колебания температуры, но количество термоциклов
невелико. Периоды затмения на геосинхронной орбите бывают дважны
в год — весной и осенью, а каждое затмение продолжается 45 сут с мак-
симальным временем тени 1,2 ч/сут. Таким образом, любая аккумуля-
торная батарея на борту космического аппарата, находящегося на геосин-
хронной орбите, характеризуется примерно 90 циклами заряда-разраяда
в год, поскольку аккумуляторы заряжаются в период освещенности
и разряжаются в период тени.
В случае же околоземной орбиты количество затмений возрастает с
понижением орбиты. Например, для орбиты высотой 600 км с продол-
жительностью витка 96 мин происходит 15 затмений в сутки с макси-
мальным временем тени 36 мин и, таким образом, аккумуляторная ба-
тарея заряжается-разряжается примерно 5500 раз в год.
Существуют некоторые типы орбит (например, полярная орбита
с определенным наклонением), на которых космические аппараты
несколько раз в году оказываются в условиях длительного солнечного
освещения и средняя энергия, производимая солнечными батареями
за сутки, может превышать среднюю энергию, необходимую для работы
бортового оборудования. Эта избыточная энергия оптимально использу-
ется только в том случае, когда аккумуляторная батарея заряжается с
большой скоростью. Кроме того, накопительные (аккумуляторные)
элементы должны выдерживать большое количество циклов заряда-
разряда, иметь высокий КПД разряда, быть герметично закрытыми для
предотвращения утечки электролита и коррозии, а также обладать
высокой надежностью при незначительных объеме, массе и стоимости.
Типы накопительных элементов. В табл. 7.1 приведены некоторые
важнейшие характеристики ряда различных накопительных элементов.
Очевидно, что оптимальными характеристиками обладает Ni—Cd-эле-
мент, a Ni—Н2- и Ag—Н2 -элементы еще не обеспечивают требуемого
уровня надежности. Но на некоторых спутниках связи, выведенных не-
которое время назад на геосинхронную орбиту, ввиду присущего ей
малого числа циклов заряда-разряда установлены Ni—Н2-батереи. Рас-
197
Таблица 7.1 Характеристики накопительных элементов
Тип элемента Удельная энер- гия, Вт-ч/кг Габаритная энергия, Вт-ч/кг Допустимое число переза- рядов (относи- тельное) Допущен к при- менению в кос- мосе
Ag-Zn 90-120 260 1 Да
Ag—Cd 40-60 120 26 Да
Ni-Cd 30-35 100 60 Да
Ni—H2 45-55 40 >60 Испытывается1
Ag-H2 70-80 50 — Проводятся ис- 2 следования
1 Установлены на спутнике, находящемся на геосинхронной орбите с периодом
обращения 12 ч. Наземные испытания по ускоренной программе показали, что до-
пустимое число перезарядов больше, чем у Ni-Cd-элементов.
2 Прошли испытания по ускоренной программе.
сматривается вопрос о допуске этих элементов для применения и на низ-
ких околоземных орбитах. Впервые Ni—Н2 -батареи были установлены на
спутнике NTS-2, запущенном в 1976 г., и до сих пор функционируют
весьма успешно. Таким образом, уже в недалеком будущем Ni—Н2-
элементы смогут заменить Ni—Cd-аккумуляторы.
Проведенные исследования и испытания позволяют заключить, что
конкуренцию Ni—Н2 -элементы, поскольку в них достигается удельная
энергия около 70—80 Вт-ч/кг. Конструкция Ag—Н2 -элементов аналогич-
на конструкции существующих Ni—Н2-аккумуляторов.
7.1.3. Системы управления и преобразования энергии
В бортовых системах электроснабжения любого типа выходы солнеч-
ной и аккумуляторной батарей должны быть включены так, чтобы обес-
печить бесперебойное электропитание различных бортовых подсистем.
В течение орбитального дня аккумуляторная батарея будет заряжаться,
а в течение орбитальной ночи (также при пиковых нагрузках, когда на-
грузочной способности солнечной батареи недостаточно) — разряжаться.
Как уже отмечалось, контроль за этими процессами осуществляется с
помощью системы управления и преобразования энергии.
По принципам работы СУПЭ подразделяются на два класса:
рассеивающие системы, не отбирающие от солнечной батареи макси-
мальную мощность. В таких СУПЭ избыточная энергия, производимая
солнечной батареей и не используемая бортовыми подсистемами, рас-
сеивается в параллельном стабилизаторе;
нерассеивающие системы, в любой момент времени отбирающие от
солнечной батареи максимальную мощность благодаря наличию следя-
198
щего преобразователя. Поэтому энергия, рассеивамая в таких СУПЭ,
весьма мала.
Независимо от класса применяемой системы напряжение на шине пи-
тания может быть и стабилизированным, и нестабилизированным. Та-
ким образом, возможен еще один признак классификации СУПЭ: со
стабилизированной и нестабилизированной шинами.
7.1.3.1. Централизация и децентрализация. Независимо от типа шины
питания системы электроснабжения космического аппарата — стабилизи-
рованной или нестабилизированной — для питания бортовых подсистем
требуются различные положительные и отрицательные напряжения с со-
ответствующими требованиями к их стабилизации. Таким образом,
в систему должны входить понижающие и повышающие преобразо-
ватели постоянного напряжения, инверторы, стабилизаторы. Если осу-
ществляется преобразование напряжения на шине с последующей ста-
билизацией или инвертированием специально для каждого отдельно взя-
того потребителя или группы потребителей, такая система называется де-
централизованной. И наоборот, система, в которой все потребители пи-
таются от одной стабилизированной шины, называется централизован-
ной. Достоинством децентрализованной системы является то, что
каждый потребитель может питаться от своей индивидуальной шины оп-
тимальным для него напряжением. В централизованной же системе, где
все подсистемы питаются от одной стабилизированной шины, напряже-
ние на ней выбирается ’’компромиссным” для всех потребителей. Часто
оказывается, что даже в централизованных системах для более точной
стабилизации напряжения и уменьшения его пульсации для некоторых
подсистем все же необходимы дополнительные стабилизаторы и преобра-
зователи.
Концепция построения системы электроснабжения и оптимальная
СУПЭ выбираются отдельно в каждом конкретном случае. Например,
в большом космическом аппарате для обеспечения взаимосвязи между
подсистемами и их электропитания требуется длинная электропроводка.
Чем она длинее, тем больше падение напряжения в ней и хуже стаби-
лизация напряжения на шине (в случае системы со стабилизированной
шиной). Длина электропроводки зависит от относительного располо-
жения бортовых подсистем и различных нагрузок системы электроснаб-
жения. Кроме того, зачастую необходима гальваническая развязка не-
которых потребителей от первичной сети питания. Для этого использу-
ются различные преобразователи-инверторы или преобразователи посто-
янного напряжения. Таким образом, в рассмотренном примере целесо-
образно воспользоваться децентрализованной системой электроснабже-
ния с нестабилизированной шиной.
7.13.2. Контроль заряда-разряда аккумуляторной батареи. Блок
управления зарядом-разрядом аккумуляторной батареи осуществляет
постоянный контроль выходного напряжения солнечной батареи и по
результатам контроля подает команду на подключение или отключение
199
аккумулятора, тем самым вызывая его заряд или разряд. При нахож-
дении космического аппарата на освещенном участке орбиты блок
должен обеспечить заряд аккумуляторной батареи до определенного за-
данного уровня (в режиме стабильного тока или в оптимально следящем
режиме). Блок управления также предотвращает разряд батареи ниже
определенного уровня.
7.1.3.3. Привод солнечной батареи. На спутниках, стабилизированных
по всем трем осям координат, панели солнечных батарей во всех точках
орбиты постоянно должны быть перпендикулярны Солнцу. Для обеспе-
чения этого условия используется приводное устройство.
В привод солнечной батареи входят: шаговый серводвигатель; редук-
тор, передающий момент на валу двигателя солнечной батарее; контакт-
ное кольцо для передачи энергии, производимой солнечной батареей,
через вал потребителям; датчик положения вала двигателя для опреде-
ления относительного положения солнечной батареи и корпуса косми-
ческого аппарата.
7.1.4. Вопросы разработки
На любом космическом аппарате генерируемую мощность можно ус-
ловно классифицировать следующим образом: а) максимальная мощ-
ность для питания всех бортовых подсистем; б) минимальная мощность
для работы минимального числа подсистем в условиях затмения ( конт-
роль высоты, телеметрия и телеуправление и др.).
Максимальная мощность определяет размеры солнечной батареи, а
минимальная — емкость аккумуляторной батареи. Следует также прини-
мать во внимание такой режим работы космического аппарата, как его
запуск и вывод на орбиту. Может оказаться, что аккумуляторная бата-
рея, рассчитанная для питания бортовых потребителей в условиях тени
или затемнения, не отвечает требованиям по питанию в режиме запуска
и вывода на орбиту. В этом случае целесообразно использовать специ-
альный дополнительный аккумулятор. Однако, если запуск производит-
ся с корабля типа ’’Шаттл”, энергия, необходимая для режима запуска,
может ’’поставляться” самим ’’Шаттлом” и в специальном аккумуляторе
нет необходимости. Кроме того, для разработки систем электропитания
необходимо также учитывать режимы коррекции и смены орбиты.
7.1.4.1. Системные вопросы. Конфигурация системы электроснабже-
ния, обеспечивающая оптимальные характеристики, зависит от назна-
чения космического аппарата (спутника), на котором она установлена,
ожидаемого времени его активной жизни, высоты орбиты, ее наклонения
и др. Активная ’’жизнь” современных спутников продолжается, как пра-
вило, 5—10 лет. Большинство спутников связи выводятся на геосин-
хронную орбиту (высота 35 80 км, наклонение нуль градусов).
7.1.4.2. Выбор напряжения. Выбор напряжения солнечной батареи
зависит от потребностей бортовых подсистем и конфигурации системы
электроснабжения. Необходимо обеспечить также некоторый запас для
200
удовлетворительной работы различных систем преобразования и ак-
кумуляторной батареи. Соединение солнечных элементов в батарею
производится таким образом, чтобы при заданном напряжении батарея
отдавала максимальную мощность.
7.1.4.3. Мощность системы. Система электроснабжения должна обес-
печивать потребность в электропитании всех бортовых подсистем и по-
требителей и, как правило, рассчитывается с запасом 10%. Например, ти-
пичный спутник связи кроме системы электропитания несет на себе
лампы бегущей волны, системы телеметрии и телеуправления, коррек-
ции положения орбиты, канал приема-передачи информации и др. Мощ-
ность, необходимая для нормальной работы бортового оборудования
спутника, находящегося на геосинхронной орбите, как привло, составля-
ет 1500—2500 Вт.
7.1.4.4. Площадь солнечной батареи. Как уже отмечалось, КПД одного
солнечного элемента равен 14,5%. Но при расчете размера солнечной ба-
тареи необходимо учитывать следующие факторы: деградацию, вызван-
ную радиацией и потоками микрометеоритов; повреждения из-за ультра-
фиолетового излучения; потери мощности, включая потери в соедини-
тельных проводах; потери в разделительных диодах, сезонные эффекты
(сезонные изменения интенсивности солнечного изучения); темпе-
рутуру (деградацию или потери при термоциклах или при работе
в условиях высокой температуры); потери в защитном стеклянном по-
крытии солнечных элементов; дополнительные потери; ошибку калиб-
ровки и пр.
В зависимости от конфигурации СУПЭ энергия до поступления в раз-
личные подсистемы и потребители преобразуется одним (несколькими)
преобразователями или поступает в накопительные (аккумуляторные)
батареи, заряжая последние. Коэффициент полезного действия этих пре-
образователей находится обычно в диапазоне от 90 до 95%, что также
необходимо учитывать при расчете батареи. Как правило, у спутников
связи, находящихся на геосинхронной орбите с временем жизни 10 лет,
в конце этого срока функционирования мощность, снимаемая с солнеч-
ной батареи, составляет (0,9-Н,1)4(Г2 Вт/см2. Таким образом, если
для обеспечения работоспособности бортовых систем спутника связи
требуется мощность 1500 Вт, площадь солнечной батареи должна состав-
лять примерно 17,1 м2.
7.1.4.5. Конструкция солнечной батареи. Несмотря на то что сол-
нечные батареи раскладного типа менее надежны, чем батареи, установ-
ленные на корпусе космических аппаратов, с учетом таких фа торов, как
совершенствование систем контроля положения и большие энергетичес-
кие потребности солнечных батарей, которые при выводе космического
аппарата на орбиту могут находиться в сложенном состоянии (в виде
’’гармошки”), наиболее предпочтительной является конструкция с гиб-
ким основанием. Обычно из соображений равновесия солнечную бата-
рею изготовляют из двух раздельных панелей.
201
7.1.4.6. Емкость аккумуляторной батареи. Как уже отмечалось, про-
должительность затмений и их количество зависят от высоты орбиты
и ее наклонения. Аккумуляторная батарея, установленная на борту
спутника, выведенного на геосинхронную орбиту, с ожидаемой ’’актив-
ной” жизнью 10 лет должна выдерживать 900 циклов заряда-разряда,
продолжающихся соответственно 22,8 и 1,2 ч. В течение периода затме-
ния на борту работают только система контроля положения и некоторые
вспомогательные системы. Во время вывода спутника на орбиту питание
бортовых систем осуществляется также от аккумуляторной батареи
(предполагается, что запуск производится с помощью ракеты).
С точки зрения оптимизации массы целесообразно иметь две акку-
муляторные батареи: одну — для работы на орбите с большим допусти-
мым числом перезарядов (например, Ni—СЬ- или Ni—Н2 -батареи) и вто-
рую, дополнительную, с малым допустимым числом перезарядов, но с
большой удельной энергией — исключительно для работы во время вы-
вода на орбиту.
Каждый накопительный элемент батареи включает в себя ограничи-
тель обратного напряжения, за счет этого улучшаются выходные харак-
теристики батареи. При превышении напряжения на центральной шине
питания определенного заданного уровня схема управления аккумуля-
торной батареи подключает батарею к шине. Заряд батареи контролиру-
ется с помощью датчиков напряжения, установленных на накопительных
элементах (или группе элементов соединенных последовательно), тем-
пературы и давления в накопительных элементах. Для надежной и
эффективной работы батареи ее температуру необходимо поддерживать
на уровне 0-10°С.
СПИСОК ЛИТЕРАТУРЫ
1. Chetty Р.К.К. Spacecraft Power Systems - Some New Techniques for Performance
Improvement. Ph.D.Thesis, Indian Institute of Science (I.I.Sc), India, 1978.
7.2. УСОВЕРШЕНСТВОВАННЫЙ БЛОК ПРЕОБРАЗОВАНИЯ
МОЩНОСТИ ДЛЯ СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ
СО СТАБИЛИЗИРОВАННОЙ ШИНОЙ
7.2.1. Введение
Для спутников, находящихся на геосинхронной орбите, система
электропитания со стабилизированной шиной имеет ряд преимуществ
по сравнению с системой с нестабилизированной шиной: а) некоторые
потребители могут питаться непосредственно от шины, тем самым повы-
шая полный КПД системы; б) используются более легкие стабилизато-
ры-преобразователи для отдельных потребителей; в) низкий импеданс
шины; г) рабочая точка солнечной батареи фиксирована.
Однако концепция стабилизированной шины имеет два основных не-
достатка.
202
Рис. 7.2. Структурная схема обычной системы электроснабжения и преобразова-
ния энергии со стабилизированной шиной:
СБ - солнечная батарея; СЧПС - силовая часть параллельного стабилизатора;
СЧРЗ - силовая часть регулятора заряда; СЧРР - силовая часть регулятора разря-
да; БУ - блок управления; АБ - аккумуляторная батарея; Н - нагрузка
1. Избыточная энергия, генерируемая солнечной батареей, должна
полностью или частично рассеиваться в параллельном стабилизаторе.
Это накладывает определенные требования на тепловой и механический
расчеты системы электроснабжения.
2. Для контроля потоков энергии необходимы три типа регуляторов
для трех режимов работы системы (стабилизации, заряда и разряда).
Это ведет к усложнению схемы управления шиной, особенно при ре-
зервировании.
На рис. 7.2 представлена структурная схема обычной системы элек-
троснабжения, содержащей параллельный стабилизатор и регуляторы
заряда-разряда. Параллельный стабилизатор поддерживает напряжение на
шине на заданном фиксированном уровне, в то время как регулятор
заряда осуществляет заряд аккумуляторной батареи в режиме стабиль-
ного тока. Параллельный стабилизатор и регуляторы заряда-раэряда
имеют индивидуальные блоки управления. Схема контроля потока мощ-
ности управляет стабилизатором и регуляторами, которые в зависимости
от уровня выходного напряжения солнечной и аккумуляторной батарей
подключаются к шине или отключаются от нее.
Предлагаемая усовершенствованная система электропитания и пре-
образования энергии имеет общий блок управления, содержащий источ-
ник опорного напряжения, усилитель рассогласования, аттенюатор, ши-
ротно-импульсный модулятор, оконечные каскады управления парал-
лельным стабилизатором и регуляторами заряда-разряда (рис. 7.3).
Регулятор заряда поддерживает напряжение на шине на заданном
фиксированном уровне и контролирует процесс заряда аккумуляторной
батареи, осуществляемый-непостоянным, изменяющимся током. Когда
203
Рис. 7.3. Структурная схема усовершенствованной системы электроснабжения и
преобразования энергии со стабилизированной шиной. Обозначения см. на рис. 7.2
батарея полностью зарядится, регулятор заряда отключается и вводится
в действие параллельный стабилизатор. Координирует и контролирует
все рижимы работы описываемой системы единый блок управления (а
не три раздельных блока, как в обычной системе электроснабжения).
Это возможно, поскольку в любой момент времени стабилизация на-
пряжения на шине и (или) заряд аккумуляторной батареи или питание
потребителей осуществляется только одним регулятором-стабилизато-
ром. Кроме того, как видно из рис. 7.3, некоторые компоненты системы
являются общими для всех регуляторов. Например, дроссель (как пра-
вило, тяжелый) может быть общим для регуляторов заряда, а объемный
выходной конденсатор — для всех трех регуляторов.
Другими словами, весь блок управления в некоторых случаях раз-
мещается на одной печатной плате.
7.2.2. Работа усовершенствованного блока
преобразования мощности
7.2.2.1. Режим параллельной стабилизации. На рис. 7.4 изображена
структурная схема параллельного стабилизатора, поддерживающего на-
пряжение на шине на фиксированном уровне Ко. Управление стабилиза-
тором осуществляется посредством сравнения части напряжения на шине
KV0 с опорным напряжением Vref. Разность (сигнал рассогласования)
усиливается и через аттенюатор подается на ШИМ. Модулятор синхрони-
зируется тактовой частотой /, а длительность (ширина) импульсов т на
его выходе пропорциональна усиленному, но ограничиваемому аттеню-
атором сигналу рассогласования. По этим импульсам осуществляется
коммутация транзистора Qx, т.е. происходит контроль стока эмиттера
транзистора Qx (или тока через резистор R) и стабилизация напряжения
на шине.
204
Рис. 7.4. Структурная схема работы системы в режиме параллельной стабилиза-
ции:
СБ - солнечная батарея; Ком — компаратор; Ат - аттенюатор; УР - усилитель
рассогласования; ДН - делитель напряжения; Н - нагрузка; БУ - блок управле-
ния
Диод VDX предотвращает разряд конденсатора фильтра С2 через
открытый стабилизирующий транзистор Qi. Связь между требуемой
выходной мощностью Ро и полезной мощностью солнечной батареи Р
при заданном напряжении на шине Ко описывается соотношением
1 Т
Ро = V0I0 = — J Pdt , (1)
т г
где /0 - ток нагрузки; Т = 1/f — период коммутации.
Хорошо известно, что полезная мощность Р зависит от условий осве-
щения солнечной батареи и ее температуры. С помощью эквивалентной
схемы солнечной батареи, пренебрегая влиянием шунтового (параллель-
ного) сопротивления, можно определить отбираемый от батареи ток:
I = Ig — /s I exp
q(V +IRS)
AKT0
(2)
Полученное уравнение перепишем в виде
АКТ0 ,
V = ------ In
q
(3)
Пренебрегая падением напряжения на диоде VDX, найдем выходное
напряжение солнечной батареи:
АКТ0 / Ie - I
Ко = — In ±----------
q \ k
(4)
- IRS
205
и
Р = V0I =
iakt0 (h-i
4 \ h
- PRS •
Объединяя уравнения (1) и (5),получаем
— IRS dt .
После преобразований и упрощений имеем
Из этого уравнения определяем
АКТ0
— »
(5)
(6)
(7)
(8)
1 Т
Л> = — / I
Т „
где т/Т — коэффициент заполнения импульсов широтно-модулирован-
ного сигнала.
Таким образом, очевидно, что напряжение Ио непосредственно свя-
зано с коэффициентом заполнения импульсов.
7.2.2.2. Режим заряда. Регулятор заряда контролирует заряд аккуму-
ляторной батареи в режиме непостоянного тока при одновременном
поддержании (стабилизации) напряжения на шине на уровне Ко. Струк-
турная схема регулятора заряда приведена на рис. 7.5. Генерация ши-
ротно-модулированного сигнала, ширина (длительность) импульсов
т которого пропорциональна сигналу рассогласования, реализуется точно
Рис. 7.5. Структурная схема работы системы в режиме заряда:
АБ — аккумуляторная батарея. Остальные обозначения см. на рис. 7.4
206
так же, как и в режиме параллельного стабилизатора. Этот сигнал
используется для коммутации транзистора Q2, регулирующего ток, те-
кущий в батарею, и стабилизирующего напряжение Fo на шине. Дроссель
L и диод VD3 обеспечивают непрерывность тока заряда батареи при ком-
мутации транзистора. Входная мощность батареи Рв и максимальный
ток дросселя L связаны следующим соотношением:
1 т
Рв = — S voicdt, (9)
** Т л
а ток
уо-ув
(Ю)
где VB — напряжение на аккумуляторной батарее.
После совместного решения уравнений (9) и (10) и интегрирования
получаем
(И)
2TL
*В ~ У В'в
= К°(Г0- Т2
(12)
Очевидно, напряжение Уо непосредственно зависит от коэффициента
заполнения импульсов широтно-модулированного сигнала. Если ширину
(длительность) импульса ограничить на определенном максимальном
уровне, будет ограничено также и максимальное значение коэффициента
заполнения импульсов. Например, когда т/Т< 1, ток заряда батареи
0 < < iBm , (13)
где iBm — максимальный ток, определяемый из следующего уравнения:
V0T „ / т1 2
iBm = —- (Ио - W - • (14)
v # I 1 J
Из этого уравнения видно, что с увеличением заряда батареи зарядный
ток снижается. Когда батарея полностью заряжается, сигнал об оконча-
нии заряда переводит ее в режим компенсационного подзаряда через
контур, образуемый резистором и диодом, включенными между коллек-
тором и эмиттером регулирующего транзистора Q2 (на рис. 7.5 не пока-
заны). На этой стадии включается параллельный стабилизатор, поддер-
живающий напряжение на шине на фиксированном уровне.
207
Рис. 7.6. Структурная схема
работы системы в режиме
разряда. Обозначения см.
на рис. 7.4, 7.5
Описанный метод заряда батареи, когда зарядный ток уменьшается по
мере накопления заряда согласно уравнению (14), позволяет избежать
образования газа в накопительных элементах, что в свою очередь повы-
шает их время жизни. Таким образом, работа регулятора заряда анало-
гична работе параллельного стабилизатора и вся избыточная энергия,
производимая солнечной батареей, не рассеивается в параллельном ста-
билизаторе, как в обычной системе, а запасается в аккумуляторной ба-
тарее, что ведет к повышению полного КПД системы электроснабжения.
7.2.2.3. Режим разряда. На рис. 7.6 показана структурная схема регу-
лятора разряда, представляющего собой повышающий стабилизатор,
повышающий напряжение на аккумуляторе до уровня напряжения на
шине и стабилизирующий его посредством ШИМ-управления регулиру-
ющим ключом Сз. Коэффициент заполнения импульсов широтно-мо-
дулированного сигнала пропорционален напряжению рассогласования,
генерируемого уже известным нам способом. Когда транзистор Q3 от-
крыт, в дросселе L, включенном последовательно с аккумуляторной ба-
тареей, запасается некоторая энергия и передается в выходной конденса-
тор при запирании транзистора. Таким образом, выходной конденсатор
заряжается до напряжения на шине Vo более высокого, чем напряжение
на аккумуляторе, и поддерживается на этом уровне.
Проанализируем работу системы. Когда транзистор Q3 открыт, источ-
ник напряжения VB отдает энергию, запасенную в дросселе L. На интер-
вале времени 0 — т ток через дроссель линейно нарастает по закону
На интервале времени т — Т транзистор Q3 закрыт, ток продолжает
протекать через батарею, опять являющуюся источником напряжения.
Энергия, накопленная в дросселе за время 0 — т, на интервале т — Т
высвобождается, напряжение повышается, а ток через дроссель падает.
На интервале т —Т ток через дроссель
------ (Г-Г).
(Г-
(16)
208
Следовательно, батарея отдает в нагрузку мощность
Р = - \VBf i{t)dt + V£f
т о т
(17)
Подставляя в (17) выражения (15) и (16), после интегрирования
получаем
Р = V0I0
1 V В ^0 т2
2TL (Го - VB)
(18)
поскольку
То
Г = 7 ----------
(Ио - Кд)
Отсюда
Ио
т т2
2L Т
VB
Го
VB •
(19)
(20)
Таким образом, напряжение Vo непосредственно зависит от коэф-
фициента заполнения импульсов управляющего широтно-модулирован-
ного сигнала.
7.2.3. Система в целом
Из приведенного выше описания режимов работы системы понятно,
что блок управления необходим во всех трех случаях. Поскольку в
любой момент времени работает только один регулятор, в системе це-
Рис. 7.7. Полная структурная схема усовершенствованной системы электропитания,
преобразования и контроля энергии. Обозначения см. на рис. 7 4. и 7.5
209
лесообразно использовать единый блок управления, способный работать
во всех трех режимах (вместо трех отдельных блоков для каждого ре-
гулятора, как это делается в обычных системах электроснабжения).
Реактивные элементы — дроссель и конденсатор — являются общими
для регуляторов заряда-разряда. Кроме единого общего блока управле-
ния, контролирующего работу параллельного стабилизатора и регулято-
ров заряда-разряда, в систему входит также схема контроля потока
мощности, подключающая к шине тот или иной регулятор и подающая
управляющие сигналы на его оконечный каскад. На рис. 7.7 изображена
полная структурная схема усовершенствованной системы электропита-
ния и преобразования энергии.
7.2.4. Схема контроля потока мощности
В любых системах электроснабжения космических летательных
аппаратов солнечная батарея используется на освещенном участке
орбиты для электропитания бортовых подсистем и заряда аккумулятор-
ной батареи. Когда батарея полностью заряжена, она переводится в ре-
жим компенсационного подзаряда и к ней подключается параллельный
стабилизатор, поддерживающий напряжение на шине на фиксированном
уровне. При входе космического аппарата в теневую часть орбиты для
питания ботовых подсистем используется энергия, накопленная в акку-
муляторной батарее. Кроме того, в режимах пиковых нагрузок, превы-
шающих нагрузочную способность солнечной батареи, напряжение на
шине падает, а благодаря подключению к ней регулятора разряда
аккумулятор начинает работать на нагрузку совместно с солнечной ба-
тареей. Функции координации всех этих режимов выполняет схема кон-
троля потока мощности.
7.2.5. Расчетные параметры
Как уже отмечалось, система электроснабжения, преобразования и
контроля энергии со стабилизированной шиной обладает рядом несом-
ненных достоинств. Такая система была разработана и расчитана на
следующие параметры:
Напряжение XX солнечной батареи, В................ 40-50
Напряжение Ио на шине, В.......................... 30,5 ±2%
Ток солнечной батареи при напряжении на шине, равном
Ио, А............................................. 1 ±0,1
Точность стабилизации напряжения на шине, %....... ±1
Пульсации напряжения на шине при полном токе нагруа
ки, мВ............................................ <250
Постоянный ток нагрузок, А........................ 0,5
Не используемая потребителями энергия запасается в аккумулятор-
ной батарее и используется для питания бортовых подсистем на не-
освещенном участке орбиты.
210
Таблица 7.2. Аппаратные затраты, необходимые для
построения обычной и усовершенствованной систем
электроснабжения, преобразования и контроля энергией
Параметр Тип системы Обычная Усовершенст- вованная
Блок управления
Делитель напряжения 3 1
Источник опорного напряжения 3 1
Усилитель рассогласования 3 1
Широтно-импульсный модулятор 3 1
Силовая часть
Дроссель 2 1
Конденсатор (большой емкости) 3 1
Характеристика системы при токе нагрузки
О, 5 А: а) режим заряда: напряжение на шине — 30,7 В; пульсации на-
пряжения — 140 мВ; б) режим параллельного стабилизатора: напряже-
ние на шине — 30,5 В; пульсации напряжения — 200 мВ; в) режим заря-
да: напряжение на шине — 30,8 В, пульсации напряжения — 200 мВ.
Рабочая частота коммутации 12,2 кГц.
В табл. 7.2 представлено сравнение аппаратных затрат, необходимых
для построения обычной и усовершенствованной систем электроснаб-
жения, преобразования и контроля энергии.
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. Spacecraft Power Systems - Some New Techniques for Performance
Improvement. Ph. D. Thesis, Indian Institute of Science (I.I.Sc), India, 1978.
Глава 8. НАДЕЖНОСТЬ
8.1. ОБЕСПЕЧЕНИЕ НАДЕЖНОСТИ
8.1.1. Введение
Требование обеспечения надежности является одним из основных тре-
бований, предъявляемых к любым устройствам или системам. Под
надежностью понимают способность системы, узла, блока, устройства
выполнять определенные функции в определенных условиях за опреде-
ленное время. В тех случаях, когда система, устройства, оборудование
весьма дороги и невозможно их отремонтировать после аварии или от-
каза (например, спутники), обеспечение надежности является скорее
правилом, а не исключением.
211
Известно довольно много способов повышения надежности функцио-
нирования любых электронных систем и устройств, к наиболее важным
из которых относятся совершенствование комплектующих элементов,
снижение импульсных мощностных воздействий, упрощение схем и
систем, соответствующий отбор комплектующих, технологий изго-
товления и сборки и др. И только после того как использованы все эти
методы повышения надежности, целесообразно прибегать к поэлемент-
ному резервированию.
8.1.2. Обеспечение надежности схем
После обеспечения нормальных рабочих режимов отдельных комплек-
тующих элементов, определяющих их надежную работу, а именно, умень-
шения максимальных значений тока, напряжения или мощности, обес-
печения нормального напряжения питания, правильной компоновки и
проч., разработчик должен проверить схему и оценить ее полную надеж-
ность.
Удобно рассматривать надежность отдельно от остальных требований,
которым удовлетворяют схемы.
Во-первых, схема должна выполнять свои функции, во-вторых, раз-
работка схемы непосредственно связана с надежностью комплектующих
ее элементов. После разработки исходной системы необходимо провести
математический анализ надежности отдельных схем, чтобы проверить,
имеет ли исходная система требуемое значение показателей надежности.
По качеству удачно выполненной разработки можно судить о ее надеж-
ности.
На полную надежность системы или устройства оказывают влияние
три следующих фактора — надежность используемых комплектующих
элементов, надежность разработки и надежность технологии и производ-
ства, т.е.
Ра = PdPc Pf .
где Ра - полная надежность; Рд — надежность разработки; Рс — надеж-
ность разработки; Рс — надежность элементов; Ру — надежность про-
изводства.
8.1.3. Надежность разработки
Иногда для повышения надежности, КПД и качества электроэнергии
больших систем, например системы электроснабжения спутника, необ-
ходим системный подход. Не вызовет удивления, если вдруг между
первичным источником электропитания и приемниками электроэнергии
обнаружатся несколько последовательно соединенных стабилизаторов.
Каждый из таких стабилизаторов ненадежен и неэффективен. Значитель-
ная часть полезной энергии первичного источника выделяется в виде
тепла, и поэтому надежность системы уменьшается. Такая ситуация мо-
жет возникнуть, когда отдельные блоки разрабатываются отдельно друг
212
Рис. 8.1. Защита входов БАО от КЗ
К нагрузке А
К нагрузке В
от друга, и ее можно избежать при должном управлении на системном
уровне.
8.1.3.1. Общий стабилизатор. Если две (или более) подсистемы пита-
ются от одного стабилизатора и нет возможности отключить питание
от каждой из них, то в этом случае для избежания влияния отказа одной
подсистемы на остальные между общим стабилизатором и каждой
подсистемой необходимо включать блок аварийного отключения (БАО),
как это показано на рис. 8.1. При внезапном КЗ в какой-либо нагрузке
схема управления БАО быстро отреагирует на это событие и отключит
отказавший потребитель от стабилизатора.
В противном случае стабилизатор может перейти в режим токоограни-
чения или режим с обратным наклоном характеристики и постепенно
обесточить все потребители. В соответствии с этим БАО должен реаги-
ровать не только на любое уменьшение входного импеданса контроли-
руемой подсистемы, но также и на скорость его изменения. Если не при-
нимать специальных мер, при следующих обстоятельствах возможен
выход из строя проходного транзистора БАО:
а) в случае появления обратного напряжения, которое возникает при
отключении активной нагрузки;
б) в случае отказа любого другого потребителя, питающегося от
этого же стабилизатора и на короткое время закорачивающего его вы-
ход. В течение этого времени входное напряжение рассматриваемого
БАО падает до нуля, а напряжение на его выходном конденсаторе при-
кладывается между эмиттером и коллектором проходного транзистора,
что может привести к его зенеровскому (стабилитронному) пробою
и вывести его из строя до того, как отказавший потребитель будет отк-
ключен от стабилизатора.
Проблема может быть решена путем включения антипараллельно про-
ходному транзистору БАО диода, обеспечивающего контур для быстро-
го разряда выходного конденсатора.
Входной фильтр. В некоторых случаях для сопряжения потребителей
с источником электропитания необходимо применение £С-фильтров.
213
t)
Рис. 8.2. Защита £С-фильтра при
сопряжении с источником питания
о
Рис. 8.3. Источник управляющего сиг-
нала с ограничивающими диодами
и стабилитроном
В такой ситуации требуется анализ переходного процесса при включении
потребителя, поскольку в этом режиме возможны резкие выбросы тока
или напряжения, которые могут превысить уровни, опасные для исполь-
зуемых элементов. Например, при размыкании контакта реле (рис. 8.2,
а) на фильтре сопряжения возможен переходной процесс с большим от-
рицательным выплеском напряжения. Избежать этого позволяет введе-
ние в схему двух диодов, как показано на рис. 8.2, б.
8.1.3.2. Управление. Простейшим источником управляющего сигнала
является резистор с двумя ограничивающими диодами (рис. 8.3, а)
или со стабилитроном (рис. 8.3, б). В том случае, если уровни напряже-
ний простейшего источника управляющего сигнала по каким-либо при-
чинам неприемлимы, можно использовать схему с выходным транзис-
тором. На рис. 8.4 и изображены две такие схемы.
8.1.3.3. Логические элементы, управляемые ключевыми элементами.
Когда необходимо подать управляющий сигнал на вход логического вен-
тиля с помощью механического переключателя, можно воспользоваться
схемой, изображенной на рис. 8.5, а. Резистор ослабляет влияние шумо-
вой перекрестной помехи при разомкнутых контактах. Однако замыка-
ние-размыкание механического переключателя сопровождается ’’дребез-
гом” его контактов, генерирующим серию беспорядочных импульсов.
Поэтому в данном случае полезно применить одновибратор, выдающий
одиночный импульс или задерживающий прохождение сигнала на время,
достаточное для завершения ’’дребезга”. Если же имеется перекидной ме-
ханический переключатель, целесообразно использовать хорошо извест-
ную ’’бездребезговую” схему с перекрестными связями (рис. 8.5,5).
Можно использовать также специализированные буферные ИМС.
8.1.3.4. Сопряжение с реле. Реле и цепи их управления являются це-
пями с импульсным потреблением мощности. Очень часто эти схемы
весьма восприимчивы к помехам и шумам, поэтому надежная работа
реле играет значительную роль для обеспечения нормальной работы раз-
личных устройств и систем.
214
Рис. 8.4. Источник управляющего сиг-
нала с выходным транзистором
Рис. 8.5. ТТЛ-вентиль, управляемый
непосредственно механическим пере-
ключателем (а) и с помощью ”без-
дребезговой” схемы (ff)
Чтобы отличить команду от внешних шумов, схема сопряжения долж-
на формировать сигнал, имеющий достаточную амплитуду и длитель-
ность. Широко применяется схема сопряжения с входным ЯС-фильтром
(рис. 8.6, а). Недостатком этой схемы является отсутствие гистерезиса,
обеспечивающего помехоустойчивость. Обычно Л С- цепь имеет тенденцию
интегрировать любой повторяющийся входной сигнал. В зависимости от
коэффициента заполнения шумов и относительных постоянных времени
заряда и разряда конденсатора RC-цепи напряжение на нем может достиг-
нуть уровня, достаточного для отпирания транзистора.
Схема, изображенная на рис. 8.6, б [5], свободна от этих недостатков.
Она формирует четкий выходной сигнал требуемых амплитуды и дли-
тельности, а благодаря наличию гистерезиса обладает высокой помехо-
устойчивостью.
8.1.3.5. Сопряжение с цифровыми схемами. Как правило, данные в
цифровых системах передаются с помощью 8- или 16-битных слов. Каж-
дая подсистема-пользователь располагается по отдельному адресу и при-
нимает информацию по тактовой линии, последовательной линии данных
и линии адреса. Подсистема должна иметь входную декодирующую схе-
му, устанавливающую факт обращения к данной подсистеме для пере-
дачи команды или данных.
Когда дешифратор идентифицирует обращение к подсистеме, генери-
руется импульс, инициализирующий синхронизатор, а данные загружают-
215
ся в сдвиговый регистр. При подаче или восстановлении питания выход-
ной сигнал сдвигового регистра может принимать произвольное значе-
ние, что в некоторых случаях является причиной сбоев.
Например, такая произвольная установка выходного сигнала может
вызвать не санкционирование срабатывания (замыкание-размыкание)
различных реле, узлов, элементов подсистемы, а в случае космичческого
летательного аппарата вызывает нарушение его положения на орбите и
как следствие — потерю ориентации солнечной батареи и др. Для предот-
вращения этого явления необходимо при разработке схемы принимать
специальные меры для того, чтобы при подаче или восстановлении пи-
тания выход схемы принудительно устанавливался в определенное бе-
зопасное состояние, когда выполнение любых команд может быть за-
держано.
ТТЛ-микросхемы. При разработке систем с использованием ИМС
для обеспечения надежности необходимо соблюдать ряд предосторож-
ностей и использовать некоторые специальные приемы функциональ-
ной разработки, например развязку питания ИМС и др.
Неиспользованные входы всех элементов ИЛИ и ИЛИ-HE, а также сек-
ции элементов И, ИЛИ и НЕ должны быть подключены к общей шине.
Длительность сигналов очистки или установки должна быть больше дли-
тельности тактовых импульсов. Неиспользованные 7 - и /С-входы, входы
216
очистки и установки следует подключить к общей шине так же, как не-
использованные входы логических элементов.
8.13.6. Сдвиг уровня. В некоторых случаях необходимо осуществить
переход от уровня сигналов транзисторно-транзисторной логики (ТТЛ) к
напряжению более высокого уровня — уровню КМОП-логики. Схемы
сдвига уровня должны иметь очень низкий выходной импеданс в момен-
ты переключений, поскольку они работают непосредственно на входы
КМОП-элементов, имеющие емкостный характер.
Выход схемы сдвига уровня может находиться в состояниях высокого
и низкого уровней. Соответственно в одном из направлений схема имеет
высокий выходной импеданс. Например, эмиттерный повторитель, вы-
полненный на п— р—«-транзисторе, обладает высоким выходным импе-
дансом для положительных сигналов. Таким образом, если на выходе
из-за перекрестных помех индуцируется сигнал соответствующей поляр-
ности, сигнал на входе управляемого КМОП-элемента иногда выходит
за допустимые пределы.
Диоды, подключенные, как показано на рис. 8.7, помогают решить
эту задачу. Обычно лишь один логический уровень нуждается в подоб-
ной ’’защите”. Резистор Rs, включенный последовательно с выходом уст-
ройства сопряжения, предотвращает появление ’’звона” в линии, причи-
ной которого может стать комбинация, образуемая последовательно
включенными индуктивностью печатных проводников, паразитных ем-
костей и выходной нагрузкой КМОП-вентилей. Однако необходимо при-
нимать и чисто конструктивные меры предосторожности — схемы сдвига
уровня следует располагать как можно ближе к управляемым ими
КМОП-элементам. Слишком сильный ’’звон” серьезно ухудшает работу
схемы.
8.13.7. Условия работы. Информационные материалы различных
фирм-изготовителей содержат полную информацию об условиях экс-
плуатации выпускаемых ими элементов и приборов, и разработчик
аппаратуры обязан прежде всего определить режимы работы и условия,
т.е. напряжение, ток, рассеиваемую мощность, область безопасной рабо-
ты как при прямом, так и при обратном смещении (для транзисторов),
температуру и проч., в которые могут попасть используемые элементы,
и обеспечить невозможность выхода параметров за допустимые пределы.
Например, представим себе, что выпрямитель-фильтр на вторичной
стороне преобразователя постоянного напряжения рассчитан из предпо-
ложения, что нагрузка постоянно подключена к преобразователю (по
этой причине в схему не включен стабилизирующий нагрузочный резис-
тор) . Таким образом, подобный преобразователь не может быть вклю-
чен, если к нему не подключена нагрузка. Следует отметить, что в ряде
случаев напряжение питания подается и без какой-либо нагрузки. Тогда
выходные конденсаторы, выбранные из расчета, что нагрузка постоянно
присутствует, выходят из строя, поскольку напряжение на них превыша-
ет расчетное значение.
217
Рис. 8.7. Диодная защита схемы сдви-
га уровня
Рис. 8.8. Защита последовательно со-
единенных конденсаторов
Если же необходимо работать при напряжении более высоком, чем
допустимое напряжение одного конденсатора, и это напряжение получа-
ется путем соединения двух конденсаторов последовательно друг с дру-
гом, следует принимать меры предосторожности для того, чтобы избе-
жать выхода конденсаторов из строя, если этот выход обусловлен воз-
можным неравенством деления напряжения между ними. Такое неравное
разделение напряжений объясняется допустимым разбросом емкостей
конденсаторов, достигающим 20%. Эту проблему можно решить с по-
мощью двух резисторов, подключенных параллельно конденсаторам
(рис. 8.8), с допустимым разбросом сопротивлений 5%.
8.1.3.8 . Допустимый разброс параметров элементов. При разработке
схем для обеспечения их надежной работы всегда необходимо ориенти-
роваться на худшие условия эксплуатации и учитывать разброс парамет-
ров. Хорошо работающая схема по истечении некоторого времени может
перестать работать по причине естественного старения ее элементов. Не-
которые усилители при изменении номиналов некоторых их элементов
могут ’’впасть” в генерацию. Таким образом, разрабатывая схемы, необ-
ходимо обязательно учитывать разброс параметров используемых в них
элементов и ориентироваться на худшее для данного случая значение па-
раметра.
8.1.4. Надежность элементов
Надежность отдельных элементов так же важна для надежности
системы или изделия в целом, как и надежность разработки. Надежность
работы элементов может быть значительно повышена, если при эксплу-
атации они не будут испытывать значительных мощностных воздействий.
Например, коэффициент снижения для композиционных резисторов ра-
вен 50% номинальной мощности, а напряжение на них не должно превы-
шать 80% максимально допустимого напряжения. Коэффициент раз-
ветвления по выходу цифровых ИМС не должен превышать 80% разре-
шенного фирмой-изготовителем значения. В случае аналоговых ИМС
необходимо принимать меры предосторожности, чтобы снижение на-
пряжения смещения, оговоренного изготовителями, не приводило к
сбою или аварийным режимам работы микросхемы. Коэффициент сни-
218
жения для тактовых конденсаторов равен 50% максимального номиналь-
ного напряжения. Мы привели только несколько примеров.
При выборе элементов следует учитывать также и условия их при-
менения — окружающую среду и пр. Например, некоторые элементы не
могут использоваться в схемах с низким импедансом (например, фильт-
ры источников питания) без последовательно включенных токоограничи-
вающих резисторов.
8.1.5. Надежность производства
Схемы, собранные в единый блок или систему по отдельности рабо-
тающие очень хорошо, могут начать вести себя совершенно неожиданно.
При неудовлетворительных технологии, сборке, монтаже, условиях
производства система может функционировать совсем не так, как ожи-
далось, хотя надежность ее разработки и надежность элементов очень вы-
соки. Таким образом, вопросу производства разрабатываемого оборудо-
вания необходимо также уделять много внимания.
8.1.5.1. Испытания. Для обеспечения надежности на разных стадиях
производства необходимо проводить испытания (тестирование) созда-
ваемого изделия. Производственный процесс включает в себя ряд обя-
зательных правил, которым производитель должен неукоснительно
следовать. Некоторые материалы при длительном хранении корродиру-
ют, поэтому их применение должно быть исключено. Ряд процедур,
например пайка, при неправильном их проведении вызывают закаливание
выводов и приводят к последующему отказу элемента или устройства.
Если работа ИМС вызывает сомнения, часто ее вынимают из сокета
и заменяют другой, не снимая при этом питание со схемы в целом. В
этом случае может иметь место бросок тока, опасный для ИМС, и не-
опытный и неквалифицированный оператор может, таким образом,
ввести из строя целую партию новых ИМС, меняя их последовательно
одну на другую.
В некоторых случаях на модуль, содержащий ИМС, ошибочно может
быть подано напряжение питания более высокое, чем максимально до-
пустимое напряжение ИМС. На рис. 8.9 приведен пример подачи питания
на схему, где избыточное напряжение падает на последовательном резис-
торе и развязывающем конденсаторе, а напряжение на ИМС находится в
допустимых пределах. Однако риск повреждения вставляемой в сокет
ИМС при неснятом питании остается, поскольку напряжение на конден-
Рис. 8.9. Схема, в которой воз-
можно повреждение ИМС высо-
ким напряжением
Питание
219
саторе Ci при свободном сокете возрастает до полного напряжения пи-
тания, которое выше максимально допустимого напряжения ИМС.
Необходимо принимать следующие меры предосторожности: паять ИМС
непосредственно на панель; размещать соответствующие предостерегаю-
щие надписи в руководствах по проведению испытаний и на испытатель-
ном оборудовании.
8.1.5.2. Изготовление и сборка. Надежность любой системы в зна-
чительной мере зависит от технологии и методов сборки как самих
систем, так и используемых в них элементов. Высококвалифицирован-
ная сборка повышает надежность системы, и соответственно при низком
качестве работы надежность значительно снижается.
Приведем такой пример. Часто обмотки различных моточных элемен-
тов выполняются из проводов разного диаметра, которые наматываются
друг на друга. Если обмотка выполнена из тонкого провода и намотана
поверх ’’толстой” обмотки, то она ’’поглощается” ’’толстой” обмоткой,
тепловое расширение витков которой может ’’раздавить” ’’тонкую”
обмотку и оборвать ее. Для предотвращения этого явления обмотка,
выполненная из провода большого диаметра, обматывается слоем тефло-
новой ленты,поверх которого уже наматывается ’’тонкая” обмотка.
СПИСОК ЛИТЕРАТУРЫ
1. Dryden М.Н. Design for Reliability, Mullard Technical Communication, N 130,
April 1976, p. 395-432.
2. Meltzer S.A. Designing for Reliability, IRE Transactions on RQC, PGRQC-8,
Sept. 1956.
3. Web A.D. Designing Electrical Interfaces, Proceedings of Spacecraft Power Con-
ditioning Seminar, 31-23 Sept. 1977, ESA-SP-126,p. 39-48.
4. Norman G., Dennies. Insight into Standby Redundancy via Unreliability. IEEE
Transactions on Reliability, vol. R-23, N 5, Dec. 1974,p. 305-373.
5. Chetty P.R.K., Sivaprasad N.V. An Improved Relay Driver Circuit. Electronic
Engineering, U.K., Aug. 1979.
8.2. НАДЕЖНОСТЬ И РЕЗЕРВИРОВАНИЕ ’
8. 2.1. Введение
Когда использованы все методы и приемы обеспечения надежности
схем — схемотехническое повышение надежности, правильный подбор
используемых элементов с соответствующими максимально допусти-
мыми параметрами, квалифицированная сборка и пр., дальнейшее по-
вышение надежности возможно только с помощью поэлементного или
посхемного резервирования, гарантирующего достижение требуемого
уровня надежности.
220
8. 2.2. Методы резервирования
8.2.2.1. Резервирование с пониженным потреблением мощности.
В этом случае в любой момент времени работает только один из двух
(или нескольких) источников электропитания (рис. 8.10). Для кон-
троля характеристик источников необходимы два или больше детектора
отказов, которые должны быть постоянно запитаны. Возможен и другой
вариант: запитывать лишь тот детектор, чей источник электропитания ра-
ботает в настоящий момент. В этом случае предполагается, что детекто-
ры отказов и схема переключения обладают высокой надежностью,
а резервные блоки в нерабочем состоянии не деградируют.
Необходимо отметить, что при таком резервировании в момент пере-
ключения источников питания, если не принимать специальных мер,
возможен перебой питания нагрузки, обусловленный конечным време-
нем срабатывания реле и продолжающийся не более 3 мс. Если такой
перебой питания недопустим для потребителя, применение резервиро-
вания с пониженным потреблением мощности неприемлимо.
8.2.2.2. Резервирование с разделением нагрузки. В этом случае два или
несколько источников электропитания одновременно работают на одну
нагрузку (рис. 8.11). Отказавший источник питания отключается, и
оставшиеся источники продолжают работать, принимая на себя большую
нагрузку. При таком резервировании не бывает перебоев питания потре-
Рис. 8.10. Резервирование с пониженным потреблением мощности:
ИЭП - источник электропитания; ДО - детектор отказа
Рис. 8.11. Резервирование с разделенной нагрузкой
221
Рис. 8.12. Резервирование с мажоритарной логикой
Рис. 8.13. Резервирование с разделением нагрузки и пониженным потреблением
бителей при коммутации реле. В этой схеме рабочая точка источников
электропитания не является точкой максимальной мощности, поэтому
КПД такой системы невелик.
8.2.2.3. Резервирование с мажоритарной логикой. В этом случае три
или больше источников электропитания одновременно параллельно ра-
ботают на одну нагрузку. Отказавший источник отключается, а остав-
шиеся источники продолжают работать, принимая на себя большую на-
грузку (рис. 8.12). Хотя отдельные детекторы отказов в этом случае
и не нужны, необходим интегральный детектор, входящий в схему ма-
жоритарной логики и выполняющий функции сравнения.
8.2.2.4. Резервирование с разделением нагрузки и пониженным по-
треблением. В этом случае две нагрузки Л и В работают от двух источни-
ков электропитания, имеется один общий резервный источник
(рис. 8.13) и используются три отдельных детектора отказов. Резервный
источник способен работать на суммарную нагрузку А + В. При отказе
ИЭП1 питание нагрузки Л обеспечивает резервный источник, а отказав-
222
Нерезервирован- Резервированна я Нерезервирован-
ная часть часть пая часть
--------------1----------------------1-----------------1
Рис. 8.14. Частичное резервирование
ший блок отключается. Система функционирует с разделенной нагруз-
кой в режиме пониженной потребляемой мощности, изначально работая
с пониженным потреблением и одним резервным блоком для ИЭШ и
ИЭП2. При отказе второго источника резервный блок начинает работать
на суммарную нагрузку А + В с низким КПД. ИЭП2 совместно с резерв-
ным источником работают так, как они работали бы в режиме разделе-
ния нагрузки, хотя питаемые ими нагрузки независимы.
8.2.2.5. Частичное резервирование. Этот метод резервирования
(рис. 8.14) основан на том, что интенсивность отказов пассивных
элементов схем и систем много ниже интенсивности отказов активных
элементов. Следовательно, вместо использования всей схемы или устрой-
ства в качестве резервного блока разумней выделить узлы и подсистемы,
содержащие в основном активные элементы, и дублировать (резерви-
ровать) только их.
8. 2.3. Оптимизация
При выборе метода резервирования необходимо учитывать следую-
щие факторы: надежность, массу, сложность схемы, КПД, стоимость и
др. Метод резервирования выбирается также в зависимости от назначе-
ния резервируемого оборудования, и обязательно проводится ’’ком-
промиссный” анализ, определяющий ’’удельный вес” различных харак-
теристик и параметров устройства или системы в обеспечении выпол-
нения требуемых функций.
8. 2.4. Детектор отказа
Фиксация отказа или сбоя работы является очень важным моментом
функционирования резервированной системы. Детекторы отказов долж-
ны непрерывно контролировать параметры и характеристики источников
223
электропитания. Одиночное или случайное отклонение какого-либо
параметра источника питания может интегрироваться как сбой или
отказ.
Иногда контролируются различные параметры источников питания,
например температура, частота, токи или напряжения в различных точ-
ках схемы, но, как правило, в качестве контролируемых параметров
выбираются Увх и Увых, Ивх и что позволяет абстрагироваться
от внутренней схемы источников питания, принципа их работы. Кроме
того, эти параметры легко измеряются.
Напряжение Ивх и ток I вых не являются параметрами, обязатель-
ными для контроля, поскольку они зависят в основном от первичного
источника и нагрузки. Таким образом, вполне достаточно знать макси-
мальное значение тока /вх и максимальный и минимальный уровни на-
пряжения Ивых. Минимальное значение /вх не играет большой роли, по-
скольку если первичный источник не способен питать нагрузку, напряже-
ние КВЬ1Х снижается.
СПИСОК ЛИТЕРАТУРЫ
1. Baker J.K. е.а. Power Conditioning Reliability Improvement through Standby
Redundancy and Automatic Failure Detection. IECEC Convention Record 1967.
2. Jenson K.J. Synchronization and Failure Isolation for Redundancy Low Input
Voltage Converters. EASTCON Convention Record 1967.
3. James D.C. e.a. Redundancy and the Detection of First Failures. IRE Transacti-
ons on Reliability and Quality Control, vol. RQC-11, N 3, Odt. 1962.
4. Farrell Edward J. improving the Reliability of Digital Devices with Redundancy:
an Application of Decision Theory. IRE Transactions on Reliability and Quality Con-
trol, vol. RQC-11, N 1, May 1962.
8.3. НАДЕЖНОСТЬ И АНАЛИЗ ОТКАЗОВ И АВАРИЙНЫХ РЕЖИМОВ
8.3.1. Введение
В двух предыдущих параграфах была обоснована необходимость вы-
сокой надежности систем и были описаны различные методы и способы
ее повышения. Высокие исполнительные характеристики, надежность,
низкая стоимость — это основные требования, предъявляемые к разра-
ботке любой системы. Полная надежность системы зависит от надеж-
ности входящих в нее элементов, блоков, подсистем.
Ниже приведен пример расчета надежности типичного регулятора,
а также рассмотрен анализ отказов и аварийных режимов (АОАР)
систем электропитания космических летательных аппаратов, предназна-
ченный для индентификации и устранения, если это возможно, еди-
ничных отказов. При невозможности устранения единичного отказа
основной целью является ограничение его распространения по системе
и минимизация его последствий.
224
8.3.2. Система электроснабжения космического
летательного аппарата
Поскольку для иллюстрации анализа надежности и АОАР выбрана си-
стема электроснабжения космического корабля, необходимо дать ее
краткое описание что облегчит понимание АОАР. На рис. 8.15 изображе-
на структурная схема типичной системы электроснабжения спутника,
предназначенного для работы на геосинхронной орбите. Системы такого
типа известны как нерассеивающие системы со стабилизированной ши-
ной. Общий блок управления контролирует силовые каскады параллель-
ного стабилизатора и регуляторы заряда-разряда. Регулятор заряда, в
частности, поддерживает напряжение на шине на заданном фиксирован-
ном уровне и контролирует процесс заряда аккумуляторной батареи.
Когда батарея полностью заряжена, включается параллельный стаби-
лизатор, а регулятор заряда переводится в режим компенсационного
подзаряда аккумулятора. Теперь стабилизация напряжения на шине
осуществляется параллельным стабилизатором. На теневом участке
орбиты регулятор разряда батареи, являющийся преобразователем
повышающего типа, увеличивает напряжение на батарее до напряжения
на шине и стабилизирует его на этом уровне.
Некоторые потребители могут питаться непосредственно от стабилизи-
рованной шины, а для ряда систем, а именно системы телеметрии и теле-
управления, системы контроля положения и орбиты, системы контроля
силовой установки и др., необходимы дополнительные преобразователи
постоянного напряжения или инверторы. Некоторые потребители, на-
пример самописец, питаются непосредственно от аккумуляторной ба-
тареи.
Рис. 8.15. Схема типичной системы электроснабжения космического летательного
аппарата (стабилизированная шина) ;
СБ - солнечная батарея; ПС - параллельный стабилизатор; РЗ - регулятор
заряда; РР - регулятор разряда; АБ - аккумуляторная батарея; СП - самописец;
ППН - преобразователи постоянного напряжения; СТТ — система телеметрии и
телеуправления; СКПО - система контроля положения и орбиты
225
Рис. 8.16. Схема регулятора заряда:
ПКСУК - предкаскад схемы управления ключом; ОУ - операционный усили-
тель; Н — нагрузка. Остальные обозначения см. на рис. 8.15
8.3.2.1. Регулятор заряда. Поскольку для иллюстрации расчета надеж-
ности выбран регулятор заряда аккумуляторной батареи, необходимо
привести его краткое описание. На рис. 8.16 представлены подробная
схема регулятора заряда и управляемая им часть системы электроснаб-
жения (см. рис. 8.15). Регулирование осуществляется путем сравнения
части напряжения на шине со стабильным опорным напряжением. Усили-
тель рассогласования усиливает разность этих сигналов, корректирует ее
и через аттенюатор подает на широтно-импульсный модулятор. Моду-
лятор синхронизируется с частотой тактовых сигналов, а длительность
его выходных сигналов пропорциональна усиленному и скомпенсирован-
ному сигналу рассогласования и ограничивается аттенюатором. Эти
сигналы используются для отпирания-запирания ключа Q. Зарядный ток
батареи регулируется таким образом, что напряжение на шине поддер-
живается на постоянном уровне Ко. Когда ключ Q отперт, в дросселе L
запасается энергия, обеспечивающая протекание непрерывного тока в
батарей при запертом ключе.
8.3.3. Расчет надежности регуляторе заряда
Для определения надежности регулятора заряда необходимо провести
анализ надежности. Примем следующие допущения: а) все элементы
схемы одинаково важны для выполнения ею своих функций; б) влияние
отказа одного элемента на другие элементы схемы не рассматрива-
ется. Параметры элементов, используемые при расчетах, приведены в
табл. 8.1. Надежность определяется по формуле
R = e~Xt
где е — основание натурального логарифма; X — интенсивность отказов;
t — время, ч.
Для расчета надежности примем время работы t = 1 г. Расчет будем
проводить стандартными методами.
226
Таблица 8.1. Интенсивности отказов элементов, используемых в
регуляторе заряда
Элемент Технология Тип Обозначение по MIL-SPEC Коэффици- ент качества Л-IO"’, 1/ч
Маломощный ре - зистор Композици- онный RCR ЛШ.-К-39008 S = 0,01 0,45
Конденсаторы: Пленочный RNR ЛШ.-К-55182 5 = 0,01 2,80
неполярный Слюдяной с посеребрян- ными обклад- ками CMR ЛШ.-С-39001 5=0,01 0,30
полярный Полупроводнико- вые приборы: Танталовый CSR МЛ-С-39003 5=0,01 11,0
транзистор Кремниевый п-р-п MIL-S-19500 JANTXV = = 0,1 28,0
ДИОД Кремниевый — MIL-S-19500 JANTXV = = 0,1 12,0
стабилитрон — — MIL-S-19500 JANTXV = = 0,2 17,0
ИМС . Аналоговая — ЛШ.-М-38510 JAN (класс А)* 12,0
Дроссель - *JAN = 1,0; JAN (класс А) = 0,5 ; JAN (класс В) - 1,0. 7,50
Для последовательного соединения элементов
^ПС = • -Rfl ’
а для параллельного соединения
Япр = 1 - (1 - Ri) (1 - Я2)(1 - Дз) - .-(I - Rn),
где 7?1,Я2, . . .,Rn — собственные надежности используемых элементов
(схем) блоков, включенных последовательно или параллельно.
В табл. 8.2 приведены исходные данные для расчета, а также итоговое
расчетное значение надежности регулятора заряда за один год. Коэффи-
циенты качества и интенсивности отказов различных элементов взяты
из табл. 8.1. Интенсивность отказов в табл. 8.2 приведена с учетом ко-
эффициентов качества. Коэффициент снижения равен отношению при-
кладываемого электрического воздействия на элемент к максимально
допустимому воздействию. Каждая цифра из пятой колонки таблицы
является произведением соответствующих ей значений из второй, треть-
ей и четвертой колонок.
227
Таблица 8.2. Расчет надежности регулятора заряда
Элементы Интенсив- ность отказов Коэффици- ент сниже- ния Количе- ство эле- ментов Эффективная интенсивное ть отказов
Резисторы:
композиционный 0,0045 0,20 2 0,001800
пленочный 0,0280 0,10 1 0,002800
0,0280 0,20 5 0,028000
0,0280 0,50 1 0,014000
Конденсаторы:
танталовый 0,1100 0,30 2 0,066000
слюдяной с посереб- ренными обкладками 0,0030 0,25 3 0,002250
Полупроводниковые при- боры:
ДИОД 1,2000 0,50 1 0,600000
стабилитрон 1,7000 0,20 1 0,340000
кремниевый и-р-и- транзистор 2,8000 0,40 1 1,120000
микросхема (ОУ) 6,0000 0,60 2 7,200000
микросхема (предкаскад) 6,0000 0,75 1 4,500000
Дроссель 7,5000 0,60 1 4,500000
Полная интенсивность — — — 18,374850 х
отказов х 10"’ 1/ч
При мечание. Надежность R = е 18,37485-10"’) (8760) _ 0,999839.
8.3.4. Анализ отказов и аварийных режимов (АОАР)
Как уже отмечалось, главной целью АОАР является идентификация
критичных одиночных отказов. Однако если такой отказ не может быть
устранен, то необходимо уменьшить возможность его распространения и
минимйзировать его последствия. Критичными одиночными отказами
являются отказы, которые делают систему электроснабжения неспособ-
ной питать некоторые критичные бортовые подсистемы.
Для выполнения поставленной задачи космическому кораблю необ-
ходимы все его подсистемы. Не исключены случаи, когда некоторая
часть бортового оборудования может выйти из строя без заметного вли-
яния на систему в целом и на решение задачи, выполняемой космичес-
ким кораблем. Анализ отказов выполняется на уровне подсистем и
блоков, и по каждому блоку проводится анализ всех возможных отка-
зов и аварийных режимов. Конструктивные и пассивные элементы,
такие как шины питания, соединительные провода и др., не включаются
в анализ. Основными отказами и аварийными режимами являются об-
рыв, КЗ и деградации.
В табл. 8.3 представлены данные АОАР применительно к космичес-
ким летательным аппаратам. Из таблицы видно, что для предотвращения
единичных отказов параллельного стабилизатора и регуляторов заряда-
228
Таблица 8.3. Анализ отказов и аварийных режимов системы
электроснабжения космических летательных аппаратов
Подсистема/блок Отказ Влияние отказа на работу систем
Секция солнеч- Обрыв Поскольку солнечная батарея состоит из сек-
ной батареи Короткое за- ций, включенных через разделительные диоды, обрыв одной секции снижает выходной ток ба- тареи на 1/л -ю часть Аналогично случаю обрыва
мыкание или
деградация
Параллельный Обрыв Напряжение на шине не стабилизируется. Для
стабилизатор Короткое за- потребителей, подключенных к шине непосред- ственно, изменение напряжения на шине, ко- торое теперь становится равным напряжению на солнечной батарее, неприемлемо Короткое замыкание солнечной батареи, его-
мыкание рают предохранители многих элементов. На- пряжение на шине не стабилизируется
Регулятор за- Обрыв или Аккумуляторная батарея не может зарядиться.
ряда деградация Эффект аналогичен отсутствию батареи
Короткое за- Напряжение на шине фиксируется на уровне
мыкание на аккумуляторе. Заряд батареи не контроли- руется. Пока батарея заряжается, потребители не работают
Регулятор Обрыв Аккумуляторная батарея не может разряжать-
разряда Короткое за- ся. Потребители Не работают в условиях тени Напряжение на батарее не может повыситься
мыкание до уровня напряжения на шине, и напряжение на шине фиксируется на уровне напряжения на аккумуляторе. Батарея не отключается
Аккумуляторная Обрыв Невозможна работа самописца. Невозможно
батарея Короткое за- функционирование космического корабля в условиях тени Энергия уходит в ’’землю”. Батарею необ-
мыкание ходимо отключить. Невозможна работа са- мописца. Невозможно функционирование космического корабля в условиях тени
Преобразователи Обрыв Автоматический переход на резервный блок
постоянного на- Короткое'за- Автоматический переход на резервный блок
пряжения мыкание
разряда необходимо прибегать к резервированию. Аккумуляторная ба-
тарея должна иметь отводные (’’байпасные”) схемы, защищающие от
обрыва накопительных элементов, и рассчитываться с запасом емкости
для предотвращения влияния КЗ элементов. Самописец, подключенный
непосредственно к аккумуляторной батарее, следует также подключить
к стабилизированной шине.
СПИСОК ЛИТЕРАТУРЫ
1. Chetty P.R.K. Spacecraft Power Systems — Some New Techniques for Performance
Improvement. Ph. D. Thesis, Indian Institute of Science (I.I.Sc), India, 1978.
229
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Автоматизированное проектирова-
ние 113
Анализ отказов и аварийных режимов
(АОАР) 228
Аппаратная реализация 148
Б
Батарея аккумуляторная 196
емкость 202
контроль заряда/раз ряда 199
накопительный элемент 196
----типы 197
регулятор заряда 226
----надежность 226
режим заряда 206
- разряда 208
Батарея солнечная 196
имитатор 140
конструкция 201
площадь 201
привод 200
солнечный элемент 195
В
Векторный треугольник 109
Выбор:
. материала сердечника 130
напряжения 200
элементов 135
Выпрямитель 129
д
Демпферная цепь 126
Детектор отказа 223
Диоды 136
- демпфера 132
И
Импеданс:
входной 118
выходной 117
Инжекция сигнала 106
---магнитная 90
Интерфейс 148
— схема 150
Источник электропитания:
линейный 171
работающий в режиме свободных
колебаний 180
К
Компаратор 142
Конденсаторы 137
Коэффициент усиления:
на низких частотах 117
по петле обратной связи 91, 96,108
м
Метод:
замкнутого контура 86,104
разомкнутого контура 104
эквивалентной схемы с инжекцией
тока (МЭСИТ) 18,29
Микропроцессорный контроллер 144
- параллельный стабилизатор 136
Микросхема:
интегрального таймера 188
специального назначения 180
ТТЛ 216
управления источниками электро-
питания микропроцессорных сис-
тем 186
управляющая 177
230
Моделирование:
инвертирующего преобразова-
теля 26
ключевых источников электропита-
ния 92
повышающего преобразователя 22
понижающего преобразователя 25
преобразователя Кука 62
н
Надежность:
обеспечение надежности схем 212
производства 219
разработки 212
регулятора заряда 226
элементов 218
Неустойчивость при заданном токе 42
Ограничение частоты 146
Определение стабильности 77
Оптопара 137
Орбита:
геосинхронная 197
околоземная 197
п
Передаточная функция 119
Преобразование энергии 198
Прео бразователь:
базовый 68
двухтактный 123
инвертирующий 15
ключевого типа 14
Кука 59
повышающий 15
понижающий 14
постоянного напряжения 14, 165
с заданным током 39
Программное обеспечение 148
Р
Разброс параметров 218
Расчет:
дросселя 131
трансформатора 127
- выбор материала сердечника 130
фильтра 130
Реакция на скачок нагрузки 120
Режим:
заряда аккумуляторной батареи 206
непрерывного тока дросселя
(НТД) 17
параллельной стабилизации 204
прерывистого тока дросселя
(ПТД) 17
разряда аккумуляторной ба-
тареи 208
Резервирование:
оптимизация 223
с мажоритарной логикой 222
с пониженным потреблением 221
с разделением нагрузки 221
частичное 223
С
Сдвиг:
уровня 217
фазы 108
- определение 108
Силовой транзистор 135
управление 135
- пропорпионально-токовое 170
Синхронизация 144
Система электропитания:
космического летательного аппа-
рата 194
линейная 13
не рассеивающая 14
рассеивающая 14
Сопряжение:
с реле 214
с цифровыми микросхемами 215
Средняя наработка на отказ (СНО) 10
Стабилизатор:
инвертирующий 15
ключевого типа 67
многофазный 159
общий 213
параллельный 14,142
- цифровой (ЦПС) 138
- микропроцессорный 138
повышающий 15
понижающий 14
последовательный 13
Схема декодирования 149
т
Тестирование 219
231
У
Узкополосный следящий вольт-
метр 103
Ф
Фильтр:
входной 213
расчет 130
успокоительный 213
ц
Цепь:
демпферная 126
компенсирующая 80, 81
коррекции 82, 83, 84, 85
фазосдвигающая 161
ш
Шина:
дестабилизированная 203
стабилизированная 204
Широтно-импульсный модулятор
(ШИМ) 74
ОГЛАВЛЕНИЕ
Предисловие.......................................................... 3
Введение ............................................................ 6
Глава 1. Основные особенности источников электропитания ключевого
типа................................................................. Ю
1.1. Источники электропитания ключевого типа..................... 10
1.1.1. Введение............................................... Ю
1.1.2. Определения........................................... 11
< 1.1.3. Классификация систем электропитания................... 12
Глава 2. Моделирование и анализ..................................... 17
2.1. Применение метода эквивалентной схемы с инжекцией тока для
моделирования ключевых преобразователей постоянного напряжения . . . 17
2.1.1. Введение.............................................. 17
2.1.2. Метод эквивалентной схемы с инжекций тока (МЭСИТ)....... 18
2.1.3. Моделирование повышающего преобразователя..............22
2.1.4. Моделирование преобразователей понижающего и инверти-
рующего типов.................................................25
2.1.5. Сравнение..............................................26
2.1.6. Заключение............................................ 27
Список литературы........................................... 27
2.2. Метод эквивалентной схемы с инжекцией тока для моделирования
ключевых преобразователей постоянного напряжения в режиме преры-
вистого тока дросселя............................................ 28
2.2.1. Введение............................................. 28
2.2.2. Метод эквивалентной схемы с инжекцией тока (МЭСИТ) .... 29
2.2.3. Моделирование повышающего преобразователя............. 31
2.2.4. Моделирование понижающего и инвертирующего преобра-
зователей ................................................... 34
2.2.5. Заключение............................................ 35
Приложение................................................. 36
Список литературы............................................ 38
2.3. Метод эквивалентной схемы с инжекцией тока для моделирова-
ния ключевых преобразователей постоянного напряжения с заданным
током............................................................ 39
2.3.1. Введение.............................................. 39
2.3.2. Метод эквивалентной схемы с инжекцией тока (МЭСИТ) .... 39
2.3.3. Нестабильность преобразователей с заданным током.......42
2.3.4. Моделирование повышающего преобразователя..............42
2.3.5. Понижающий и инвертирующий преобразователи.............44
2.3.6. Моделирование стабилизированного повышающего преоб-
разователя с заданным током.................................. 46
2.3.7. Физическое объяснение..................................47
2.3.8. Моделирование стабилизированных понижающего и инверти-
рующего преобразователей с заданным током.....................49
233
2.3.9. Заключение........................................... 50
Список литературы.......................................... 50
2.4. Метод эквивалентной схемы с инжекцией тока для моделирования
и анализа ключевых преобразователей постоянного напряжения с задан-
ным током, работающих в режиме прерывистого тока дросселя....... 51
2.4.1. Введение. . . ............................... 51
2.4.2. Описание метода...................................... 51
2.4.3. Моделирование повышающего преобразователя............ 54
2.4.4. Повышающий и инвертирующий преобразователи........... 56
2.4.5. Заключение........................................... 58
Список литературы........................................... 59
2.5. Моделирование и анализ преобразователя Кука методом эквива-
лентной схемы с инжекцией тока.................................. 59
2.5.1. Введение. . . ....................................... 59
2.5.2. Описание метода...................................... 60
2.5.3. Моделирование преобразователя Кука................... 62
Список литературы........................................... 67
Глава 3. Расчет н измерения........................................ 67
3.1. Моделирование и расчет ключевых стабилизаторов............. 67
3.1.1. Введение............................................. 67
3.1.2. Ключевые стабилизаторы............................... 67
3.1.3. Моделирование........................................ 70
3.1.4. Критерии стабильности................................ 77
Список литературы........................................... 86
3.2. Метод замкнутого контура как способ испытания ключевых пре-
образователей .................................................. 86
3.2.1. Три топологии преобразователей....................... 86
3.2.2. Метод разомкнутого контура........................... 88
3.2.3. Спектральный анализатор.............................. 89
3.2.4. Магнитная инжекция................................... 90
3.2.5. Экономия времени..................................... 91
Приложение. Моделирование источников электропитания, рабо-
тающих в ключевом режиме.................................... 92
Список литературы........................................... 95
3.3. Измерение амплитудно-частотных характеристик и коэффициента
усиления по петле обратной связи ключевых стабилизаторов........ 96
3.3.1. Введение............................................. 96
3.3.2. Моделирование ключевых преобразователей постоянного на-
пряжения ................................................... 98
3.3.3. Моделирование понижающего, повышающего и инвертирую-
щего преобразователей.......................................100
3.3.4. Экспериментальное определение амплитудно-частотных харак-
теристик....................................................103
3.3.5. Необходимость в узкополосном следящем вольтметре.....ЮЗ
3.3.6. Определение амплитудно-частотной характеристики методом
разомкнутого контура........................................104
3.3.7. Определение амплитудно-частотных характеристик методом
замкнутого контура..........................................106
3.3.8. Выбор точки ’’инжекции”..............................107
3.3.9. Определение коэффициента усиления и угла сдвига фазы по
петле обратной связи........................................108
3.3.10. Измерительная установка 1...........................109
3.3.11. Измерительная установка 2...........................110
3.3.12. Определение передаточных функций. . ................111
Список литературы...........................................112
234
Глава 4. Автоматизированное проектирование...........................ИЗ
4.1. Пакет прикладных программ SPICE-2 для автоматизированного
проектирования ключевых стабилизаторов............................ИЗ
4.1.1. Введение...............................................ИЗ
4.1.2. Моделирование..........................................И4
4.1.3. Результаты.............................................И6
Список литературы............................................123
Глава 5. Примеры практических разработок............................123
5.1. Автономный ключевой стабилизатор мощностью 2,8 кВт с двухтакт-
ным ШИМ-преобразователем постоянного напряжения..................123
5.1.1. Введение..............................................123
5.1.2. Описание стабилизатора................................124
5.1.3. Расчет автономного ключевого стабилизатора...........127
5.1.4. Выбор элементов.......................................135
5.1.5. Коррекция.............................................137
Список литературы............................................138
5.2. Стабилизатор параллельного типа с микропроцессорным управле-
нием ............................................................138
5.2.1. Введение..............................................138
5.2.2. Цифровой стабилизатор параллельного типа (ЦПС)........139
5.2.3. Имитатор солнечной батареи............................140
5.2.4. Линейный параллельный стабилизатор....................142
5.2.5. Компараторы тока /щах и Imin..........................142
5.2.6. Синхронизация.........................................144
5.2.7. Микропроцессорный контроллер..........................144
5.2.8. Система в целом.......................................153
5.2.9. Экспериментальные данные..............................154
5.2.10. Расширение системы...................................157
Список литературы............................................158
5.3. Многофазная работа самовозбуждающихся ключевых стабилиза-
торов...........................................................1'59
5.3.1. Принцип работы........................................159
5.3.2. Фазосдвигающая цепь...................................161
5.3.3. Пример практической реализации........................162
5.3.4. Реузльтаты исследований...............................164
Список литературы........................................... 165
5.4. Преобразователи постоянного напряжения с высоким КПД....... 165
5.4.1. Введение............................................. 165
5.4.2. Преобразователь..................................... 165
5.4.3. Анализ схемы преобразователя..........................166
5.4.4. Практическая реализация...............................168
5.4.5. Результаты исследований...............................169
5.4.6. Пропорциональное управление силовым транзистором.....170
Список литературы............................................171
5.5. Источники электропитания линейного типа . ..................171
5.5.1. Введение.....'.......................................171
5.5.2. Описание управляющей микросхемы.......................171
5.5.3. Пример практической реализации........................172
Список литературы............................................174
5.6. Совершенствование источников электропитания.................174
5.6.1. Введение..............................................174
5.6.2. Практический пример 1.................................174
5.6.3. Практический пример 2.................................175
Список литературы............................................177
Глава 6. Интегральные микросхемы в ключевых источниках электро-
питания ...................'........................................177
235
6.1. Микросхемы управления ключевыми источниками электропита-
ния ..............................................................177
6.1.1. Введение..............................................177
6.1.2. Управляющие микросхемы................................177
6.1.3. Микросхемы управления силовыми транзисторами..........186
6.1.4. Микросхемы для защиты, контроля и др..................187
Список литературы............................................188
6.2. Применение интегральных таймеров для управления источниками
электропитания ключевого типа.....................................188
6.2.1. Введение..............................................188
6.2.2. Описание интегрального таймера........................189
6.2.3. Таймер как контроллер ключевого стабилизатора.........190
6.2.4. Пример 1..............................................190
6.2.5. Пример 2..............................................192
6.2.6. Пример 3..............................................193
Список литературы............................................194
Глава 7. Системы электроснабжения космических летательных аппа-
ратов............................................................ 194
7.1. Системы электроснабжения космических летательных аппаратов . . . 194
7.1.1. Введение..............................................194
7.1.2. Источники энергии.....................................195
7.1.3. Системы управления и преобразования энергии...........198
7.1.4. Вопросы разработки....................................200
Список литературы............................................202
7.2. Усовершенствованный блок преобразования мощности для систем
электроснабжения со стабилизированной шиной.......................202
7.2.1. Введение..............................................202
7.2.2. Работа усовершенствованного блока преобразования мощ-
ности 204
7.2.3. Система в целом.......................................209
7.2.4. Схема контроля потока мощности........................210
7.2.5. Расчетные параметры...................................210
Список литературы............................................211
Глава 8. Надежность.................................................211
8.1. Обеспечение надежности......................................211
8Л.1. Введение..............................................211
8.1.2. Обеспечение надежности схем...........................212
8.1.3. Надежность разработки.................................212
8.1.4. Надежность элементов..................................218
8.1.5. Надежность производства...............................219
Список литературы............................................220
8.2. Надежность и резервирование.................................220
8.2.1. Введение..............................................220
8.2.2. Методы резервирования.................................221
8.2.3. Оптимизация.......................................... 223
8.2.4. Детектор отказа...................................... 223
Список литературы........................................... 224
8.3. Надежность и анализ отказов и аварийных режимов............ 224
8.3.1. Введение............................................. 224
8.3.2. Система электроснабжения космического летательного ап-
парата ..................................................... 225
8.3.3. Расчет надежности регулятора заряда.................. 226
8.3.4. Анализ отказов и аварийных режимов (АОАР)............ 228
Список литературы......................................... 229
Предметный указатель............................................. 230
В 1990 г. в Эиергоатомиздате выходят в свет следующие книги:
Тейлор П. Расчет и проектирование тиристоров: Пер. с англ. 17 л.:
1р. 70 к.
Обобщены результаты научных и технологических исследований в области дис-
кретных силовых полупроводниковых приборов. Вопросы проектирования увя-
заны с существующими и перспективными процессами изготовления мощных
тиристоров. Рассмотрена работа новых типов приборов: запираемых тиристоров,
гибридов полевого транзистора с тиристором, МОП-транзисторов с встроенной об-
ластью пространственного заряда.
Для широкого круга специалистов по электронной технике.
Трейстер Р., Мейо Дж. 44 источника электропитания для любитель-
ских электронных устройств: Пер. с англ. — 25 л.: Зр.
В популярной форме изложены основные сведения об источниках вторичного
электропитания радиоэлектронной аппаратуры, принципах их работы и методах
построения. Приведено большое количество практических схем источников элек-
тропитания.
Для любителей-конструкторов, занимающихся бытовой электроникой и элект-
ротехникой.
Бэрк Г. Справочное пособие по магнитным явлениям: Пер. с англ. —
28 л.: 2р. 20 к.
Дано систематизированное изложение вопросов происхождения магнитного
поля и электро магнитного взаимодействия. Объяснение основных понятий и эф-
фектов электромагнитных взаимодействий дается на качественном физическом
уровне, доступном широкому кругу читателей. Рассмотрены многочисленные
физические явления, положенные в основу практических приборов и устройств,
которые применяются в физическом эксперименте и в различных областях тех-
ники.
Для инженерно-технических работников, занимающихся исследованием маг-
нитных явлений и созданием аппаратуры, использующей электромагнитные взаимо-
действия.
237
Нерретер В. Расчет электрических цепей на персональной ЭВМ: Пер. с
нем. — 18 л.: 1р. 50 к.
Изложены методы расчета электрических линейных и нелинейных цепей на пер-
сональной ЭВМ. Для цепей постоянного тока показаны приемы решения систем ли-
нейных уравнений; для цепей переменного тока - алгебраических систем уравне-
ний с комплексными коэффициентами. Приведен анализ динамических процессов
при различных воздействиях. Все программы приведены на языках Ейсик и Турбо-
Паскаль.
Для инженерно-технических работников, студентов вузов электротехнических
специальностей.
Кукеков ГА., Васерина КЯ., Лунин В.П. Полупроводниковые элек-
трические аппараты: Учеб, пособие для вузов. — 18 л.: 90 к.
Рассмотрены электрофизические процессы в силовых полупроводниковых при-
борах, дан анализ характеристик в статических и динамических режимах работы.
Описаны основные схемы полупроводниковых аппаратов постоянного и перемен-
ного тока, режимы их работы, эксплуатационные характеристики и области приме-
нения. Изложены основы расчета нагрузочных и коммутационных характеристик
полупроводниковых и комбинированных аппаратов, рассмотрены вопросы их
проектирования.
Для студентов вузов, обучающихся по специальности ’’Электрические ап-
параты”.
Гончарук А.И. Расчет и конструирование трансформаторов; Учебник
для техникумов. — 16 л.: 80 к.
Изложена теория и даны примеры расчета силовых трансформаторов современ-
ных конструкций. Приведены справочные материалы, необходимые для выполне-
ния курсовых проектов. Подробно описаны конструкции всех элементов трансфор-
матора. Даны сведения об испытаниях и эксплуатации трансформаторов.
Для учащихся электротехнических техникумов.
Вдовин С.С. Проектирование импульсных трансформаторов. —2е изд.,
перераб. и доп. — 16 л.: 1р. 10 к.
Рассмотрены основы теории, конструкции и методы расчета импульсных транс-
форматоров для мощных импульсных систем. Излагаются принципы конструиро-
вания трансформаторов с высокими технико-экономическими характеристиками.
Установлены предельные функциональные возможности импульсных трансформа-
торов, дан ряд конструкций и примеры расчета. Первое издание вышло в 1971 г.
Во втором издании основное внимание уделено мощным высоковольтным им-
пульсным трансформаторам для применения в современных областях прикладной
физики и техники.
Для инженерно-технических и научных работников, занятых и области физики
и техники мощных импульсных систем.
238
Костелянец В.С. Режимы и надежность работы тиристорного возбуди-
теля синхронной машины. 8 л. 40 к.
Рассматриваются проблемы повышения надежности и эффективности работы
тиристорных возбудителей генераторов электростанций. Проведен анализ высоко-
частотных электромагнитных переходных процессов в этих возбудителях. Разра-
ботан метод расчета надежности вентильных возбудителей и даны примеры ее рас-
чета и сравнения. Дан анализ переходных процессов синхронной машины с тирис-
торным возбудителем, предложены и обоснованы способы ее защиты от внешних
коротких замыканий и от асинхронных режимов.
Для инженерно-технических работников, занятых исследованием, разработкой,
наладкой и эксплуатацией синхронных машин.