






























































Автор: Григорьев Л.Н.
Теги: электротехника радиолокация радиотехника антенны
ISBN: 978-5-88070-243-5
Год: 2010




Текст
Л. Н.Григорьев
ЦИФРОВОЕ
ФОРМИРОВАНИЕ
ДИАГРАММЫ
НАПРАВЛЕННОСТИ
В ФАЗИРОВАННЫХ
АНТЕННЫХ РЕШЕТКАХ
Л. Н. Григорьев
ЦИФРОВОЕ
ФОРМИРОВАНИЕ
ДИАГРАММЫ
НАПРАВЛЕННОСТИ
В ФАЗИРОВАННЫХ
АНТЕННЫХ РЕШЕТКАХ
Издательство «Радиотехника»
Москва 2010
УДК 621.396.677.494
Г 75
ББК 32.95
Рецензенты:
докт. техн, наук, проф. И. Я. Иммореев',
докт. техн, наук, проф. А. Ф. Котов
Григорьев Л. Н.
Г 75 Цифровое формирование диаграммы направленности в фазиро-
ванных антенных решетках. - М.: Радиотехника, 2010. - 144 с., ил.
ISBN 978-5-88070-243-5
Изложены методы цифрового диаграммообразования с использованием ан-
тенных решеток. Анализируются погрешности, обусловленные наличием деста-
билизирующих факторов. Приведены теоретические результаты и эксперимен-
тальные данные.
Для специалистов-разработчиков радиолокационной аппаратуры, а
также для аспирантов и студентов радиотехнических специальностей.
ISBN 978-5-88070-243-5
УДК 621.396.677.494
ББК 32.95
© Автор, 2010
© ЗАО «Издательство «Радиотехника», 2010
© ЗАО «САЙНС-ПРЕСС», оригинал-макет, оформление, 2010
ОГЛАВЛЕНИЕ
Предисловие................................................ 5
ГЛАВА 1
Системы с цифровым формированием диаграммы
направленности в фазированной антенной решетке.................8
ГЛАВА 2
Цифровое формирование диаграммы направленности
в фазированной антенной решетке ............................. 13
2.1. Классическое цифровое формирование
диаграммы направленности.............................. 13
2.2. Двумерное сканирование лучом .................... 15
2.3. Алгоритмы цифрового формирования
диаграммы направленности.............................. 17
2.4. Варианты построения системы цифрового
диаграммообразования...................................22
2.5. Схемотехнические достоинства фазированной
антенной решетки с цифровой обработкой сигналов........31
ГЛАВА 3
Преобразование аналогового сигнала в цифровой.................33
3.1. Общие сведения...................................33
3.2. Способы обработки сигналов в цифровой фазированной
антенной решетке ......................................44
3.3. Дискретизация низкочастотная (аналого-цифровое
преобразование с использованием квадратурных
демодуляторов) ........................................45
3.4. Устройства регулирования квадратурных каналов....49
3.5. Дискретизация полосовых сигналов
(аналого-цифровое преобразование
на промежуточной частоте)..............................54
3.6. Выбор частоты дискретизации......................58
3.7. Фильтр защиты от наложения спектров..............60
ГЛАВА 4
Погрешности, вносимые дестабилизирующими факторами
при оценке количественных и качественных характеристик
выходного сигнала цифровой антенной решетки ..................63
4.1. Определение динамического диапазона .............63
4.2. Выходной сигнал цифрового устройства
цифровой антенной решетки .............................66
4.3. Исходные предпосылки для оценки дестабилизирующих факто-
ров, ограничивающих динамический диапазон..............69
4.4, Оценка влияния декорреляции, обусловленной
неидентичностью частотных характеристик
приемных каналов цифровой антенной решетки ............78
3
Цифровое формирование ДН в ФАР
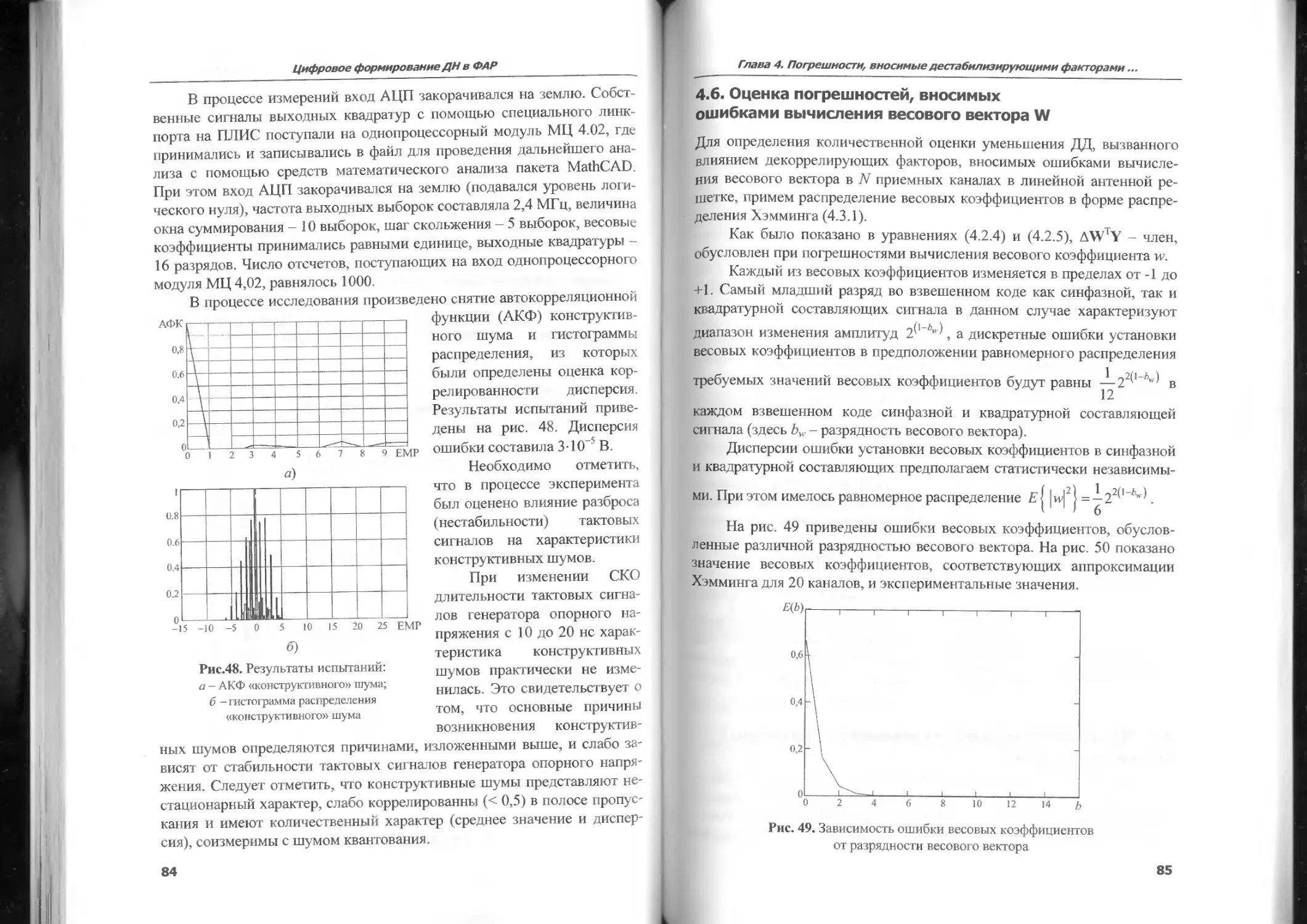
4.5. Оценка погрешностей, связанных с наличием
конструктивного шума W...................................83
4.6. Оценка погрешностей вносимых ошибками
вычисления весового вектора..............................85
4.7. Оценка влияния джиттера времени на параметры
выходного сигнала........................................86
4.8. Оценка эффективности преобразования спектра
ЛЧМ-сигнала на видеочатоту с использованием
специального процессора Digital Down Converter (DDC)
методом моделирования .................................. 96
ГЛАВА 5
Адаптация в РЛС с цифровым диаграммообразованием
при использовании цифровых автокомпенсаторов.....................99
5.1. Использование цифровых автокомпенсаторов
при адаптации ...........................................99
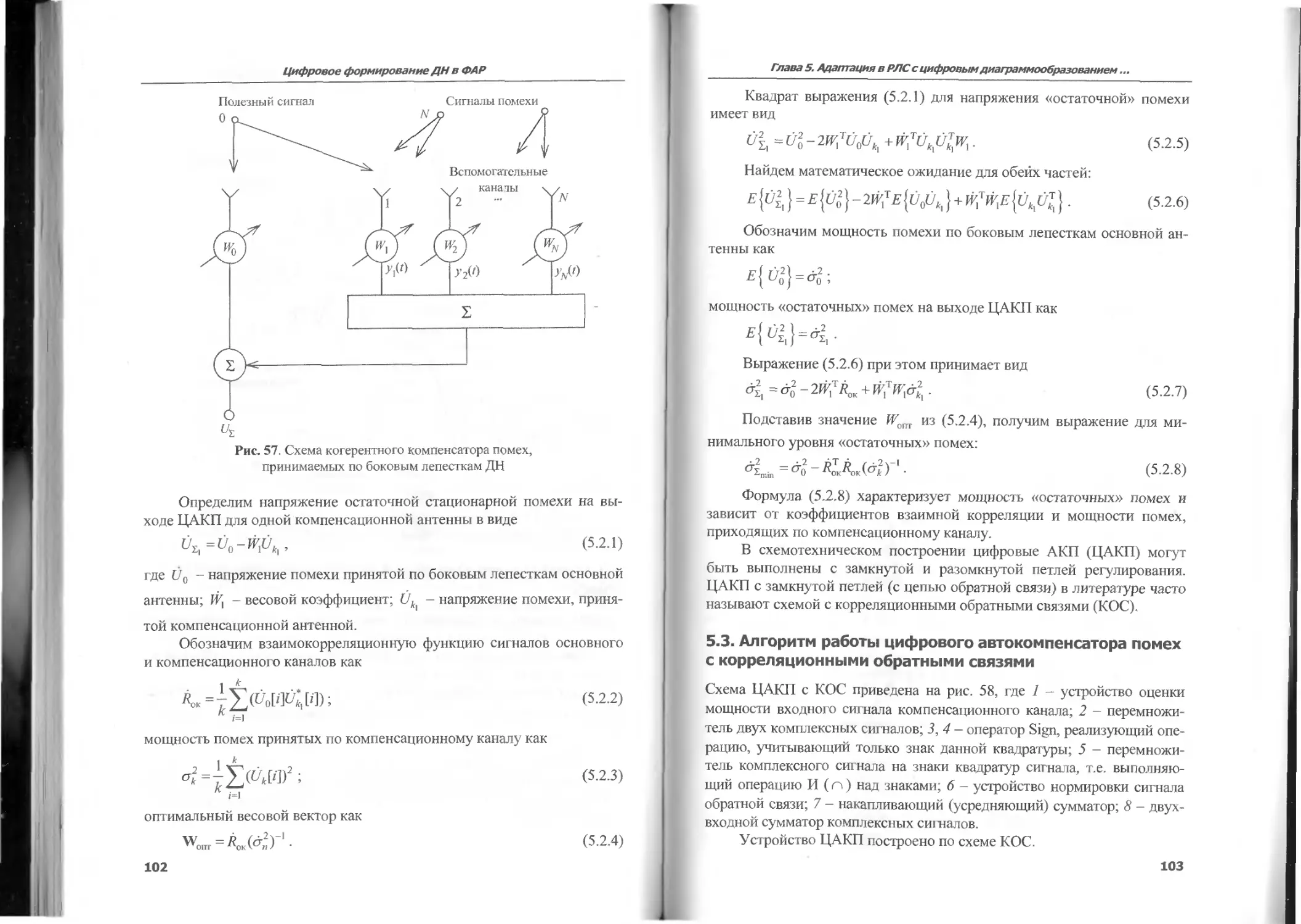
5.2. Основные уравнения цифровых автокомпенсаторов
помех.................................................. 101
5.3. Алгоритм работы цифровых автокомпенсаторов помех
с корреляционными обратными связями.................... 103
5.4. Алгоритм работы цифровых автокомпенсаторов помех
без обратной связи (с разомкнутой петлей) ............. 106
5.5. Оценка дисперсии помех на выходе цифровых
автокомпенсаторов помех от объема выборки ............. 109
5.6. Техническая реализация цифровых автокомпенсаторов
помех без обратной связи .............................. 115
5.7. Экспериментальная проверка работы цифрового
автокомпенсатора помех................................. 116
ГЛАВА 6
Коррекция межканального рассогласования приемных каналов в циф-
ровой антенной решетке....................................... 119
6.1. Межканальное рассогласование ..................... 119
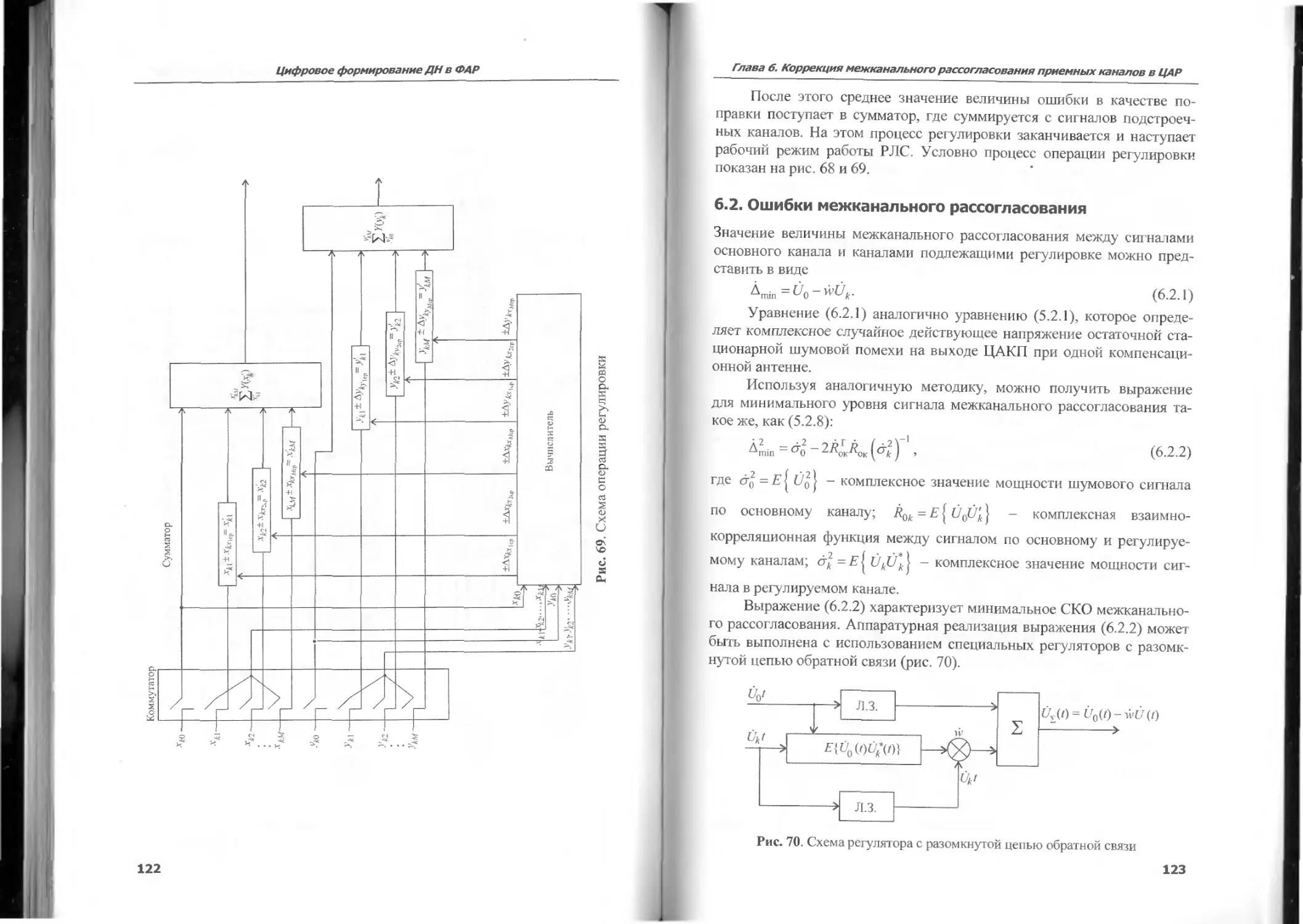
6.2. Ошибки межканального рассогласования ............. 123
6.3. Оценка дисперсии межканального рассогласования
от объема выборок...................................... 126
ГЛАВА 7
Аппаратура фазированной антенной решетки....................... 127
7.1. Построение аппаратуры............................. 127
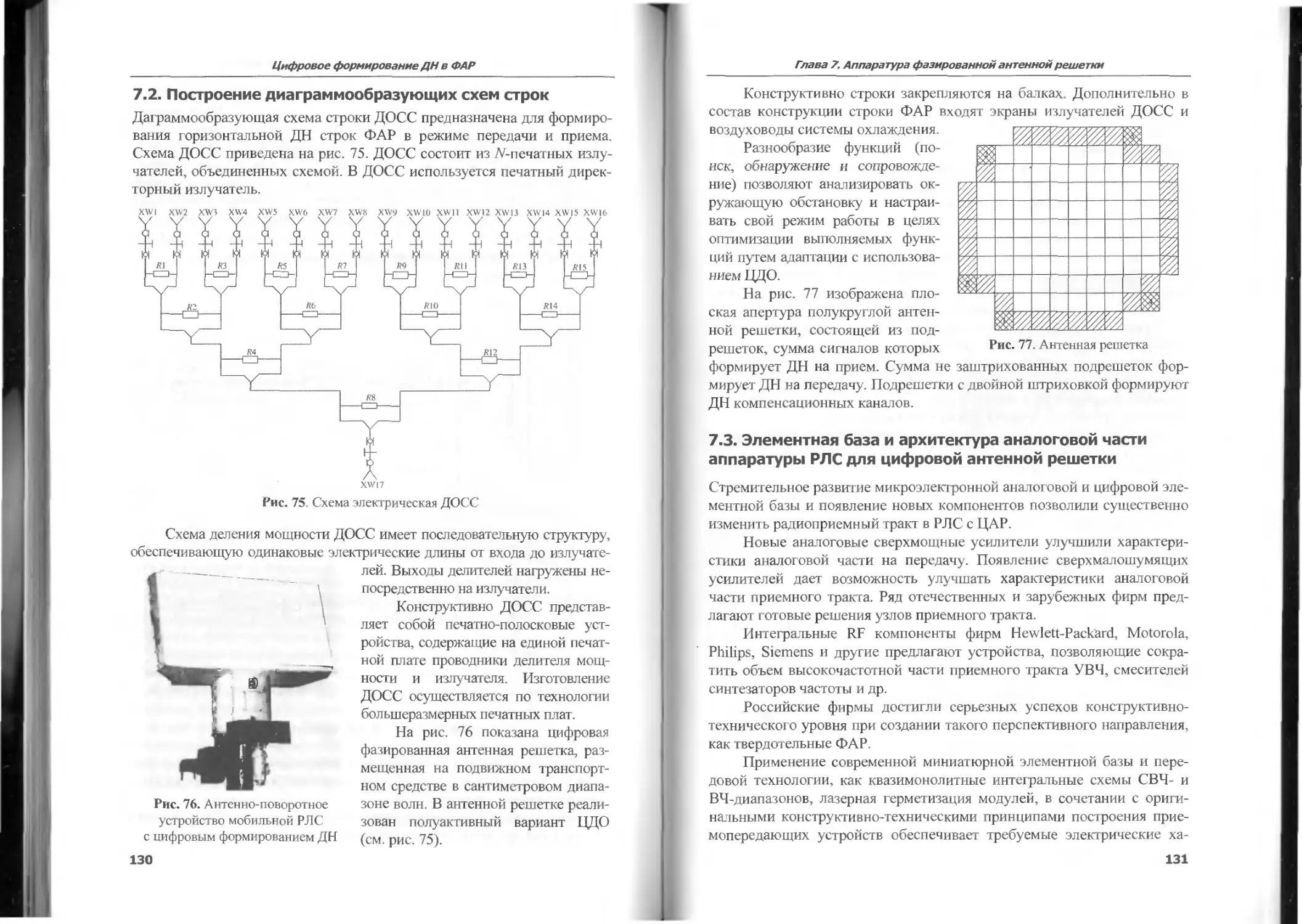
7.2. Построение диаграммообразующих схем строк ........ 130
7.3. Элементная база и архитектура аналоговой части
аппаратуры РЛС для цифровой антенной решетки .......... 131
Заключение..................................................... 134
Литература .................................................... 135
Принятые сокращения.......................................... 139
4
ПРЕДИСЛОВИЕ
Концепция фазированной антенной решетки с цифровым диаграммооб-
разованием (ЦДО) известна сравнительно давно - более 30 лет.
В решетке с ЦДО принятые сигналы преобразовываются в прием-
ном устройстве в цифровую форму на уровне элементарной антенны, а
затем обрабатывается в специальном процессоре для формирования
требуемой диаграммы направленности (ДН) антенны. Такой подход со-
храняет полную информацию, имеющуюся в апертуре (т.е. N индивиду-
альных сигналов {X] , Х2 ... х„}), в противоположность аналоговому спо-
собу формирования ДН, который приводит лишь к взвешенной сумме
этих сигналов и поэтому уменьшается размерность сигналов от N до 1.
Более высокие уровни информативности, связанные с гибкостью
цифровой обработки, обеспечивают ряд привлекательных достоинств,
которые выходят за пределы возможностей обычных решеток.
Характерной тенденцией развития современных многофункцио-
нальных радиолокационных систем является постепенный переход к
цифровым фазированным антенным решеткам (ФАР). Полный переход
на цифровые ФАР не всегда оправдан ввиду их высокой стоимости. В
этих случаях цифровая обработка используется наряду с аналоговой.
Главной проблемой в решетках с цифровым формированием ДН яв-
ляется их высокая стоимость, вызванная высокой стоимостью входящих
элементов (аналого-цифровых преобразователей, специальных процессо-
ров, программируемых логических интегральных схем и др.). Наиболее
высока стоимость для цифровых антенных решеток (ЦАР), которые тре-
буют законченных приемников и аналого-цифровых преобразований
АЦП на каждый элемент. Это вызывает необходимость сильной эконо-
мии с учетом числа цифровых каналов, т.е. числа пространственных сте-
пеней свободы, что привело к созданию систем с ЦАР только в одном из-
мерении или с ограниченным по сканированию применением.
Однако современные достижения в технологии разработок элек-
тронных и микроволновых компаний, а также тенденция их применения
в области перспективных РЛС позволяют надеяться на возможность бо-
лее широкого применения фазированных антенных решеток с цифро-
вым формированием ДН уже в настоящее время.
Плотность электромагнитного окружения возрастает с количествен-
ным ростом случайных и преднамеренных помех. Поэтому от радиолока-
ционных систем требуют еще больше информативности и конкретности.
В этой ситуации представляет интерес новая технология - ЦДО, необхо-
димая для повышения тактико-технических характеристик РЛС.
5
Цифровое формирование ДН в ФАР
Современные методы обработки в раскрывах ФАР рассчитаны в
основном (и даже почти исключительно) на цифровую реализацию, при
этом имеется в виду обработка сигналов, и в первую очередь - радиоло-
кационные приложения, хотя область их применений гораздо шире.
Применение ЦДО дало разработчику и потребителю важные пре-
имущества по сравнению с традиционными аналоговыми решетками:
стабильность параметров;
изменение параметров за счет изменения программного обеспече-
ния без замены аппаратной части;
многоканальность с идентичными характеристиками каналов;
возможность корректировки амплитудного распределения с более
высокой точностью при амплитудном диаграммообразование фазового
распределения, чем при амплитудном диаграммообразование;
обеспечение более высокого динамического диапазона за счет
цифрового суммирования сигналов от составных частей антенны (по
сравнению с аналого-цифровым преобразованием) на выходе устройст-
ва аналогового диаграммообразования;
процесс калибровки ФАР с ЦДО существенно проще, чем аналого-
вых ФАР и может быть выполнен с большей точностью (это весомый ар-
гумент в пользу перехода к цифровой обработке для больших решеток);
выигрыш по объемам аппаратуры при одновременном формирова-
ние большого числа лучей на прием.
Замена громоздкой, тяжелой, нестабильной аналоговой диаграм-
мообразующей схемы с управлением аналоговыми фазовращателями на
высокоточные цифровые диаграммообразующие схемы, подключение
малошумящих усилителей и аналого-цифровых преобразователей близ-
ко к излучающим элементам решетки позволяет минимизировать поте-
ри энергии и осуществить быстрое управление лучом в раскрыве на
прием в ФАР. Применение цифрового формирования диаграммой на-
правленности позволяет более полно реализовать разработанные мето-
ды адаптации к помеховой обстановке.
Высокие потенциальные характеристики ЦАР на практике недос-
тижимы из-за ограничивающих факторов (это, прежде всего, декорре-
ляция сигналов в приемных каналах решетки, обусловленная, в час гно-
сти, неидентичностью АЧХ- и ФЧХ-каналов решетки и разбросом мо-
ментов дискретизации АЦП в различных каналах).
Очевидно, как бы не фазировали и не взвешивали по амплитуде и
фазе сигналы, никогда не удастся получить предельно достижимую
сумму, и суммарный вектор всегда будет тем меньше потенциального,
чем больше декорреляция.
Основная задача, которую ставил перед собой автор при написании
книги, — по возможности, систематически и четко изложить принципи-
6
Предисловие
альные положения рассматриваемых методов цифрового диаграммо-
образования и лежащие в -их основе идеи; выяснить основные отличия
реальных характеристик от очень высоких потенциальных возможно-
стей; продемонстрировать возможность использования современной
элементной базы при построении устройств ЦДО.
Глава 1 книги знакомит читателя с историей внедрения цифровых
методов в формирование диаграммы направленности радиолокацион-
ных систем.
В главе 2 дано теоретическое представление цифрового формиро-
вания диаграммы направленности, приведены соответствующие алго-
ритмы и схемы.
Глава 3 посвящена теоретическому описанию наиболее важного
узла цифрового диаграммообразования - аналого-цифрового образова-
теля. Здесь же подробно рассмотрены возможности формирования
квадратурных компонент, являющихся необходимыми элементами ква-
зиоптимальной обработки сигналов.
В главе 4 проанализированы погрешности, обусловленные наличи-
ем дестабилизирующих факторов, приведены теоретические результаты
и экспериментальные данные.
В главе 5 рассмотрена реализация адаптивной пространственной
фильтрации при использовании цифрового диаграммообразования. По-
казано применение различных видов цифровых автокомпенсаторов.
В главе 6 исследовано влияние неидентичности приемных каналов на
эффективность диаграммообразования в цифровых антенных решетках.
Глава 7 книги посвящена описанию аппаратной реализации циф-
ровых антенных решеток.
Не приходится сомневаться, что рассматриваемые в книге решения
вопросов будут развиваться и найдут новые области применения.
Книга может быть полезна разработчикам, которые занимаются
проектированием аппаратуры ЦАР, а также аспирантам и студентам ра-
диотехнических специальностей.
Автор глубоко признателен Ю. А. Кузнецову за внимание к работе
и полезные замечания. Особая признательность коллегам по работе:
В. А. Голубеву за критические замечания и предоставленные дополне-
ния, которые нашли отражения в данной книге, и Р. Л. Махлину,
взявшему на себя смелость непосредственно реализовать ЦДО в опыт-
но-конструкторских изделиях, экспериментальные результаты которых
частично нашли отражения в книге. Особую признательность и благо-
дарность выражаю своей жене М. А. Григорьевой за помощь в работе
над книгой.
7
ГЛАВА 1
Системы с цифровым
формированием диаграммы
направленности в фазированной
антенной решетке
Самая первая, но все еще наиболее характерная система с цифровым
формированием диаграммы направленности (ДН) - это радиолокацион-
ная система (РЛС) с фазированной решеткой «ELRA», расположена в за-
падной части Германии [1]. Ее основная концепция построения состоит в
широком использовании цифровых методов обработки. В системе РЛС
она имеет раздельные кольцевые передающую и приемную решетки (300
элементов / 1:8.2 множитель заполнения, 768 элементов / 1:6.25 множи-
тель заполнения соответственно) и работает в 5-диапазоне длин волн.
Калибровка элементов выполняется с помощью фиксированного
зонда в ближней зоне. Выходы приемников с двойным преобразованием
объединяются в 48 подрешеток с цифровыми выходами, из которых
формируется ряд лучей и весь лучевой веер выполняет сканирование с
помощью аналоговых фазосдвигающих устройств. РЛС обеспечивает
идеальное место проверки множества методов обработки сигналов.
О нескольких экспериментальных системах с цифровым формиро-
ванием диаграммы направленности сообщалось в [2, 3]. Восьмиэлемент-
ная решетка, предназначенная для демонстрации режекции помех, рас-
сматривается П. Бартоном [2, 6]. В работе [2] представлены эксперимен-
тальные результаты по постановке нуля на главном лепестке ДНА.
Другая система выполнена в виде частично адаптивной решетки с
25 элементами с 3 степенями свободы. Система работает на частоте 3 ГГц
с шириной полосы сигнала 5 МГц. Обсуждение аспектов эксперимента и
результатов дается в [3].
В США имеется большая система - экспериментальная загоризонт-
ная РЛС «CONUS В-ОТН», построенная компанией «Дженерал электрик»
[4]. Она представляет собой бистатическую систему, работающую в диа-
пазоне 6... 12 МГц с шириной полосы приблизительно в 100 кГц.
8
Глава 1. Системы с цифровым формированием ДН в ФАР
На приемной стороне используется 82 элемента для формирования
четырех одновременных лучей, которые покрывают излучаемую шири-
ну луча. Обеспечивается постановка адаптивных нулей и коррекция
ошибки последовательного приемника.
Информация о другой приемной решетке РЙС с цифровым форми-
рованием диаграммы направленности, имеющей 8 элементов в X-диапа-
зоне, с аналоговыми I и Q каналами и 8-битовыми АЦП приведена в ра-
боте [5] Лумиса и Розе, где также проанализировано воздействие оши-
бок от различных компонентов в системе.
Система «RADC» представляет тестирование линейной 32-элемент-
ной решетки в С-диапазоне с приемным модулем тройного преобразо-
вания и с полосой в 0,5 МГц. Решетка содержит возможность самокалиб-
ровки через высокоточную цепь распределения для инжектирования пи-
лот-сигнал ов на входе элементов решетки. Демонстрируются высокока-
чественные диаграммы с низкими уровнями боковых лепестков.
В последние годы фирмой SIEMENS разработана многофункцио-
нальная адаптивная ФАР MESAR. MESAR - улучшенная эксперимен-
тальная антенна, демонстрирующая новые технологии в применении к
адаптивной многофункциональной ФАР. Такая РЛС является адаптив-
ной и позволяет автоматически удовлетворять приоритетам наибольшей
значимости. MESAR содержит приемопередающие модули, цифровой
адаптивный узел формирования луча, программное обеспечение, осно-
ванное на адаптивной сигнальной обработке, систему контроля луча
РЛС и другие элементы. Адаптивное формирование луча позволяет вы-
полнять обнаружение целей в условиях помех.
Плоская ФАР имеет 918 элементов, 156 из которых включают в себя
приемопередающие модули, что вполне подходит для оценки принципов
адаптивных многофункциональных операций. Каждый приемник имеет 4-
разрядный фазовращатель и цифровую микросхему управления.
Цифровое устройство формирования луча адаптивно контролирует
чувствительность антенны к воздействию помех путем минимизации
помех до уровня собственного шума. Это достигается с помощью вы-
числения и применения комплексных весовых коэффициентов для сиг-
налов, принятых по 16 приемным каналам. В целом процесс адаптации
завершается в течение 500 Мкс (0,5 мс).
Подмассивы (подрешетки) внутри антенны собирают сигналы, ко-
торые разводятся по 16 аналоговым приемникам, где усиления I- и Q-co-
ставляющих выходного сигнала оцифровываются и запоминаются.
Комплексные (фаза и амплитуда) коэффициенты (веса) затем при-
меняются для получения суммарного и разностного лучей.
Уровень выборок берется, исходя из возможных шумов подавле-
ния в приемном тракте. Комплексные коэффициенты затем обспечива-
9
Цифровое формирование ДН в ФАР
ются до минимума шума от передатчиков помех, что приводит к по-
строению нулевой ДНА в направлении постановщика помех.
В РЛС MESAR используется цифровое формирование луча для
реализации нескольких лучей приема для моноимпульсного углового
измерения, перекрытия боковых лепестков для вычисления помеховых
сигналов и адаптивного подавления помех по боковым лепесткам и ос-
новному лучу антенны.
В зарубежных источниках появились некоторые данные по РЛС
ЕМРАК - европейской многофункциональной РЛС с ФАР обнаружения
и сопровождения. ЕМРАК - РЛС гигагерцового диапазона с ФАР, раз-
работанная фирмой ALENIA Разнообразие функций этой РЛС (поиск,
корреляция, обнаружение и сопровождение) позволяют анализировать
окружающую обстановку и настраивать свой режим работы в целях оп-
тимизации выполняемых функций путем адаптации с использованием
цифрового диаграммообразования.
Из отечественных РЛС следует отметить появление в 1976 г. при-
емной антенны с использованием полного цифрового формирования ДН
[56]. Сигнал от каждого излучателя после усиления и преобразования по
частоте представлялся в виде числовых последовательностей, из кото-
рых формировалась ДНА. Применение цифрового формирования ДНА
позволило более полно реализовать разработанные методы адаптации к
помеховой обстановке [56]. В это же время в ряде ведущих научно-
исследовательских институтах проводились экспериментальные работы
по созданию РЛС с цифровым управлением ДНА [15].
Из отечественных работ, имеющих отношение к рассматриваемой те-
ме, следует отметить публикации [7-9, 11, 56]. В основном в указанных
работах показаны результаты решения проблем построения активных фа-
зированных антенных решеток (АФАР), полученные различными научны-
ми коллективами методы расчета и проекзирования. Основное внимание
уделено антеннам СВЧ и основам проектирования антенн для систем с
пространственно-временной обработкой сигналов. Рассмотрены варианты
моделей АФАР в твердотехническом исполнении и элементная база.
Высокие потенциальные характеристики ЦАР во многом зависят
от неидентичности сигналов в приемных каналах решетки, обусловлен-
ные, в частности, неидентичностью АЧХ и ФЧХ каналов решетки и раз-
бросом моментов дискретизации аналого-цифрового преобразования в
различных каналах.
Многие вопросы, имеющие непосредственное отношение к цифрово-
му диаграммообразованию, нашли отражение в отдельных публикациях.
Основной фундаментальной работой в области ФАР с цифровым
формированием ДНА является работа П. Бартона [2], где приводится
обзор математических основ цифрового суммирования с анализом глав-
10
Глава 1. Системы с цифровым формированием ДН в ФАР
ных источников погрешностей для того, чтобы дать оценку точности
цифрового метода формирования ДНА по сравнению с более привыч-
ными и более исследованными методами.
В [10] исследуется влияние рассогласования полосы пропускания
промежуточной частоты на корреляцию сигналов между приемными кана-
лами. В [11] дается приблизительная оценка изменений АЧХ в виде смеще-
ния центральной настройки каналов 8, 8 . Введено нормирование /7 от-
£ 2
носительно полос Ал> канала: (3 = -&- , получена оценка дисперсии дв.
Ла> р
Важной проблемой является амплитудное и фазовое рассогласова-
ние ортогональности I и Q квадратурных каналов, которое чрезвычайно
критично и имеет тенденцию быть основным источником ошибок при
суммировании каналов [12]. Это обстоятельство вызвало интерес к аль-
тернативным методикам преобразования, где сигнал выбирают для пре-
образования в цифровую форму на промежуточной частоте, за счет од-
ного более скоростного АЦП и некоторой дополнительной цифровой
схемотехники. Такое построение позволяет значительно снизить раз-
брос квадратур по амплитуде и фазе Однако такое построение очень
чувствительно к разбросам момента дискретизации (джиттеру).
Установлено влияние амплитудно-фазовых ошибок АЦП (неорто-
гональность квадратурных каналов и различие коэффициентов усиления
на них) на спектр собственных значений комплексной корреляционной
матрицы входных сигналов [11].
В [12] рассмотрен случай, когда смешения моментов дискретиза-
ции различны в разных каналах, но одинаковы в двух квадратурах одно-
го канала для аналого-цифрового преобразования на видеочастоте.
В [13] смоделированы изменения момента времени при квадратур-
ной дискретизации на ПЧ.
Использование цифровой антенной решетки (ЦАР), имеющей в сво-
ем составе ряд приемных устройств с множеством каскадированных ак-
тивных компонентов, которые выполняют функции частотного преобра-
зования с понижением, фильтрацию и усиление сигнала до уровня соиз-
меримого с АЦП и оцифровку, требует процедуры калибровки. Если это-
го не делать, эффективность цифрового диаграммообразования снижается
за счет уменьшения суммирующего сигнала. Расстояние между элемен-
тами решетки на практике выбирается меньше половины длины волны
(для реализации широкого сектора сканирования). В двумерных ЦАР
возможна реализация не только независимого управления в двух плоско-
стях. В ряде случаев реализация двумерного сканирования в ЦАР суще-
ственно проще чем в аналоговых. Особенно большой выигрыш может
быть получен при формировании нескольких приемных лучей, симмет-
11
Цифровое формирование ДН в ФАР
ричных относительно общей оси. Методы цифрового диаграммообразо-
вания могут быть легко использованы в неэквидистантных решетках. Для
снижения уровня боковых лепестков при цифром диаграммообразовании
(ЦДО) может быть применена не только амплитудная коррекция, которая
ухудшает отношение сигнал/шум, но и нелинейное фазовое распределе-
ние, которое, как правило, позволяет получить лучшие результаты при
малом числе элементов в решетке. На величину динамического диапазона
ЦАР существенное влияние оказывает разброс коэффициента передачи
аналогового приемного тракта, который в полосе частот может достигать
4-8 дБ. При этом диапазон входных сигналов АЦП должен рассчитывать-
ся с учетом исключения ситуации перегрузки АЦП, что ведет к значи-
тельному снижению динамического диапазона (ДД).
Существуют несколько методов процесса калибровки [2].
Анализ зарубежных источников по РЛС с применением систем ЦДО
позволяет сделать следующие выводы: с середины 70-х до середины 80-х
годов прошлого столетия как за рубежом, так и в России проводились ра-
боты теоретической и экспериментальной разработке систем ЦДО. Дос-
тигнутые результаты позволили в середине 1980-х годов приступить не-
посредственно к практическому осуществлению этих работ.
Однако отсутствие необходимой элементной базы не позволили
осуществить в полной мере этот шаг на практике, и только в конце
XX века появилась элементная база, позволяющая непосредственно
приступить к практической реализации РЛС с ЦДО. Происходит стре-
мительный прорыв в области создания все более скоростных АЦП с
разрядностью до 14 бит, выполненных по монолитной технологии и
доступных по цене.
Производители специализированных интегральных схем предлагают
несколько вариантов процессоров - Digital Dawn Converter (DDC), предна-
значенных для квадратурной обработки сигнала ПЧ. Ряд фирм отечествен-
ных и зарубежных дают готовые решения узлов приемного тракта.
Накопленные теоретические и экспериментальные результаты по-
зволили в настоящее время как за рубежом, так и в России перейти не-
посредственно к разработкам опытно-конструкторских работ (ОКР), где
используется ЦДО.
Существенный вклад в практическую реализацию ФАР с цифровым
управлением ДНА внесли российские ученые, основные материалы кото-
рых нашли отражение в виде статей и докладов на различных конференци-
ях и других материалов, но отсутствует систематизированный материал.
Частичному восполнению этого пробела и посвящена настоящая
работа.
12
ГЛАВА 2
Цифровое формирование
диаграммы направленности
в фазированной антенной решетке
2.1. Классическое цифровое формирование
диаграммы направленности
В упрощенном виде формирование диафрагмы направленности (ДН) со-
стоит в фазовом сдвиге сигнала на каждом излучателе с тем, чтобы сиг-
налы, поступающие с заданного направления, были бы сфазированы в
точке, где они суммируются, формируя ДН (рис. 1). Таким образом, вы-
ход ДН для непрерывных сигналов будет в виде
<211)
и=0
где N - число элементов в решетке; Wn - комплексный весовой коэф-
фициент, необходимый для формирования ДН; Хп - комплексный мо-
дулированный сигнал от /7-го элемента.
Если расстояние между элементами равно d (рис. 1) и фронт волны
распространяется под углом а, то при длине волны Л относительная фа-
за на элементе п, измеряемая в радианах, равна (2md sine/)/А относи-
тельно 0. При этом выходные сигналы от N элементов просто склады-
ваются без какого-либо взвешивания, а сигнал, поступающий с направ-
лением а, описывается формулой
N-]
. ч . 2тг/7б/sin а
у(«) = 2^иехр
и=0
Если для since примем N дискретных значений:
= £=0,l,2.JV-l,
Л N
(2.1.2)
(2.1.3)
Л
то уравнение (2.1.2) можно переписать в виде
13
Цифровое формирование ДН в ФАР
V/ \ V' v Г • 2лгиЛ
У(а) = 2^„ехр -7-тг-
«=о L
(2.1.4)
Выражение (2.1.4) представляет собой дискретное преобразование Фу-
рье для сигнала, имеющего постоянную амплитуду.
Рис. 1. Принцип действия линейной фазированной
антенной решетки
Можно показать, что между взвешиванием и получаемой ДНА с
sincz в качестве аргумента существует зависимость, выражающаяся с
помощью преобразования Фурье. С учетом взвешивания уравнение
(2.1.2) приводим к виду
К(«) = ^Д;,А„ехр
п=0
. 2nnd sin a
(2-1.5)
Wn - весовой коэффициент, который может быть использован для из-
менения уровня боковых лепестков в «-элементов.
Если необходимо формировать луч в направлении ар, то уравнение
можно модифицировать:
14
Глава 2. Цифровое формирование ДН в ФАР
Innd sin ap
~Л
П-\
77=0
2nnd sin a
exp
(2.1.6)
A
Выражение (2.1.6) - основное уравнение для классического фор-
мирования ДНА.
2.2. Двумерное сканирование лучом
Рассмотрим плоскую двумерную прямоугольную антенную решетку,
элементы которой расположены в плоскости X - Y, причем начало коор-
динат совпадает с центральным элементов, как показано на рис. 2.
В направлении оси X решетка имеет Nx элементов - столбцов, рас-
положенных параллельным способом на расстоянии dx друг от друга.
15
Цифровое формирование ДН в ФАР
В направлении оси Y размещены Ny элементов в виде параллельных
строк с расстоянием dy. Общее число элементов решетки равно произ-
ведению NxNy.
Вектор Р(г, 0, <р) характеризует расположение главного луча ан-
тенной решетки прямоугольной формы в пространстве на дальности г,
азимуте (р и угле места 0.
Векторная сумма сигналов от элементов каждого столбца такой
решетки, очевидно, равна соответствующей сумме сигналов линейной
решетки и определяется выражением
nx
1
t (X) = X? ехР [ j ~ 1>х ] > (2-2.1)
Nx
2
где Nx =...-5dx,-4dx,-3dx,-2dx,-dx,dx,2dx,3dx,4dx,5dx,...; a — ампли-
туда источника сигнала; n - номер столбца;
(dx\ .
\рх = 2я — snwcosp .
\ А )
(2.2.2)
Векторная сумма сигналов от элементов каждой строки будет рав-
на соответствующей сумме сигналов линейной решетки:
Ny
)S'(^)=Xflexp[-/(fe^“1)^] (2-2.3)
Ny
где Nx =... - 5dy, -Ady, -3dy, -2dy, -dy, dy, 2dy, 3dy, 4dy, 5dy,...; k - номер
строки;
Wy = 2л- — sin^sin^.
(2.2.4)
Нетрудно видеть, что выходной сигнал плоской решетки зависит
от азимута (р и угла места 0 источника сигнала. Результирующая век-
торная сумма составляющих сигналов для всех элементов решетки оп-
ределяется выражением
Nx Ку
2 _2
(ух^у) = X exp [ j (ndx -1) ] ехР [j (Ыу - !))^] >
Ку
2 ~
(2-2.5)
где a - амплитуда, принятая равной единице.
Поэтому выражение для диаграммы направленности плоской ре-
шетки может быть представлено в виде
16
Глава 2. Цифровое формирование ДН в ФАР
Nx
~2 ~2
А&Ф) = ^]ехр[у(Аф-1)^]=4(0,^Ц.(ад, (2.2.6)
_А Ny
2 2
где
Ах А
Л(^)=ХехрМл^-1)^]’ 4(^)=2/хр[Л^-1)^]- (2-2-7)
А'х Ny
2 2
Из выражения (2.2.7) следует, что ДН плоской антенной решетки,
по сути, есть произведение ДН двух линейных антенных решеток, эле-
менты которых размещены в виде столбцов и строк. В плоской антен-
ной решетке можно управлять ДН Ах(0,<р) и А (0,<р) независимо, соз-
давая соответствующие фазовые сдвиги сигналов в столбцах и строках.
2.3. Алгоритмы цифрового формирования
диаграммы направленности
Рассмотрим операции при цифровом формировании ДН для линейной ре-
шетки, состоящей из элементов, расстояние между которыми одинаково и
равно d, когда с направления а на эгу решетку попадает плоская волна Е.
Принятые узкополосные аналоговые сигналы имеют вид
<2-31)
В результате воздействия волны Е возбуждаемый аналоговый сигнал
имеет равные амплитуды a(f) и различные фазы <рп = (2л nd sin а)/Л соот-
ветствующие их расстоянию от общего фазового фронта. Эти сигналы пре-
образуются в область видеочастот, а фазы срп, имеющие значения для по-
следующего когерентного суммирования, сохраняются с помощью синфаз-
ных /(и) и квадратурных Q(n) каналов, выходные сигналы которых являют-
ся действительными и мнимыми частями комплексных сигналов. Затем эти
сигналы дискретизируются в момент времени нА/, равный дискрету, и
преобразуются в цифровую форму, умножаются на комплексные весо-
вые коэффициенты W и суммируются для того, чтобы сформировать
отклик антенны:
sina
• ж ч . 1А7ГПС1--
ад = о^И'„е -> . (2.3.2)
Коэффициент а отображает принятую информацию, а сумма - зна-
чение диаграммы направленности решетки.
17
Цифровое формирование ДН в ФАР
Принцип цифрового формирования ДН антенны (ДНА) рассмот-
рим более подробно на примере линейной решетки с равномерно разне-
сенными элементами без учета пространственной ДН и поляризации.
Система цифровой антенной решетки состоит из антенного полотна с
излучателями, аналогового приемника, аналого-цифрового преобразовате-
ля и устройства формирования пространственных лучей ДН (рис. 3) [18].
^0 Вr-3 Br Вг+ 1 1
Br = f{t-Tr)^2,lfd^
Взве- Информация Фазирую-
шива- учете щий множн-
ние прихода гель в нап-
сигнала рав.тени г
Информация
о дальности и частоте
Допплера
Рис. 3. Схема цифрового диаграммообразования
18
Глава 2. Цифровое формирование ДН в ФАР
Сначала рассмотрим цифровое формирование ДНА в одной плос-
кости, а затем и в двух плоскостях.
Излучаемый антенной решеткой комплексный сигнал вида е"* с
огибающей a(f) и несущей частотой fQ = d'к (с - скорость света; Л - дли-
на волны) запишем в виде
(/) = а(/ -)ey(2'4'+(f)e-/2^((^’+Jcos<z)/A). (2.3.3)
Здесь^ - доплеровский сдвиг частоты; тг - задержка.
Эхосигнал, принимаемый элементом и, имеет задержку тг и допле-
ровский сдвиг частоты fa. Доплеровская частота обычно значительно
меньше f0.
Информация о положении волнового фронта относительно рас-
крыва решетки содержится в члене (dcosa)/Л, который описывает
разность моментов приема элементами п и п - 1.
Антенная решетка представляет собой естественный «пространст-
венный фильтр» в зависимости от угла падения волны (отсчитываемого
относительно нормали к раскрыву антенной решетки). Сигналы либо
передаются в приемник, либо излучаются в эфир.
Член (d cos a) IЛ - характеризует так называемую пространствен-
ную частоту. Для направления, нормального к раскрыву решетки а=90°,
пространственная частота равна нулю, а разность фаз между элемента-
ми решетки также равна нулю.
Для a = 60° пространственная частота становится равной г//(2Л), а
изменение фазы от элемента к элементу определяется как Tid/k Умень-
шение уровня боковых лепестков достигается за счет весовой обработ-
ки. Весовые множители элемента антенны Wn представляют собой ком-
плексные числа, содержащие синфазную (действительная часть) и квад-
ратурную (мнимая часть) составляющие.
Комплексную выборку формируемого пространственного луча
можно записать в виде дискретного преобразования Фурье (ДПФ) о г
элементов решетки следующим образом:
(dcosa} ,(2л\
Br=f(t-Tr^j27cf,+^Wt^^ 2 , (2.3.4)
и=0
где г - номер луча, г = 0, 1, 2,..., N- 1; е”-/(2ж/ЛГ)иг - множитель, соответ-
ствующий фазировки с помощью фазовращателей, находящихся в при-
емной аналоговой части приемного тракта.
Суммирование дает максимум при r = Ndcosa/ Л, и результат
приблизительно равен нулю при остальных значениях г, соответствую-
щих углу падения волнового фронта сг(при cosa = rA(dN)) на раскрыв
решетки.
19
Цифровое формирование ДН в ФАР
Глава 2. Цифровое формирование ДН в ФАР
Обычно элементы располагаются так, чтобы d = AJ2 . В этом слу-
чае cos а = 2r/N.
Если N = 16, то можно формировать лучи в шестнадцати направ-
лениях. Эти лучи распределены равномерно в пространстве cosa, но не-
однородно по углу а. Расширение лучей, далеких от нормали к раскры-
ву решетки, компенсируется увеличением углового расстояния между
ними в этом диапазоне.
Из уравнения (2.3.4) следует, что для г = 0 изменение фазы по N
элементам равно нулю, а для г = 1 (луч отклонен от нормали на одну
ширину ДН). Изменения фазы по N элементам равно 2 я, а для произ-
вольного г изменения фазы по N элементам составляет 2ттг. Сдвиг луча
на половину его ширины в пространстве cos а можно получить, умножая
п-й элемент при суммировании в уравнении (2.3.4) на e~J(2”‘‘N)nr . Таким
образом, сдвиг по углу соответствует умножению сигнала каждого эле-
мента на комплексную фазу. Аналогичным свойством обладает и БПФ.
В плоской антенной решетке можно управлять лучом в двух изме-
рениях, вводя соответствующий фазовый сдвиг в каждый ее элемент.
Распространяя одномерный случай на двумерное управление лу-
чом, можно записать выражение
W-W-1 -/(—V
Цг,^ = Л(')ХЕ>М(«>'я)е [-м' е , (2.3 5)
л;=0 т-0
r=0,1, ...,А-1;5=0,1,...М-1,
где A(t) - член, содержащий информацию о дальности и доплеровской
частоте; Wnm - весовой коэффициент множителя элемента антенны п-й
колонке и в m-м ряду; S(n,m) содержит информацию об угле сигнала и
элементе с номером и, т.
Можно показать, что
<7., cos/? t/ycosa
j 2лтп —--j 2тгп—---
S(n,ni) = e Л e 2
(2.3.6)
где dx и dy - расстояния между элементами решетки в направлениях х и
у; cos а и cos/З- проекции единичного вектора цели на оси хиу (направ-
ляющие косинусы).
Направляющие косинусы связаны с полярными углами сканирова-
ния 0 и ср, отсчитываемые от нормали к плоскости решетки соотноше-
ниями
cos а = sin# cos cos/? = sin# sin (р. (2.3.7)
Луч можно направить по # и ср или согласовать его направление с
cos а и cos/З, выбирая номера г и 5 такими, чтобы выполнялось условие
20
Ndx cos а
А
Ndy cos [3
- ближайшее целое число,
— ближайшее целое число.
Нецелые значения г и 5 не рассматриваются, так как для БПФ и
аналогичных быстрых преобразований необходимо, чтобы они были
целыми числами.
Двумерное формирование лучей можно представить в виде одно-
мерного, переписав уравнение (2 3.5) следующим образом:
Л-1 [м-\
’ ж ч . .71 1 727.V
5(r,5) = J(/)^j^^S(«,m)e 1
и=0 т=0
(2.3.8)
Такая форма записи показывает, что двумерное ДПФ эквивалентно
ДПФ по Л/-точкам в каждой из tV-колонок с последующим ДПФ по N-
точкам в М-рядах.
Ножевидный (широкий в одной плоскости) луч формируется при
первом ДПФ, после второго он превращается в карандашный. Карандаш-
ные лучи, имеющие одинаковую ширину в общих плоскостях, удобные
для многих типов РЛС.Карандашные лучи обычно формируются плоски-
ми круглыми решетками. Однако здесь возникает вопрос, как обрабаты-
вать сигналы от переменного числа элементов в каждом ряду и колонке
(ряды и колонки по мере удаления от центра имеют все меньшее число
элементов)? Ответ состоит в том, что форма луча определяется не только
диаметром антенны, но и ее весовой функцией (видом распределения по-
ля в раскрыве). Поэтому, например, для антенны с круглым раскрывом
можно применять математический аппарат с двумя одномерными ДПФ,
вместо одного двумерного. Там, где число элементов становится малым,
весовые коэффициенты Wmn берутся равными нулю.
Хотя по своей концепции методы цифрового формирования при-
менимы для режима излучения и для режима приема, но основные их
достоинства реализуются в режиме приема.
Наиболее важными преимуществами этого метода являются:
улучшенное формирование нулей адаптивной ДН; формирование мно-
жества ДН; коррекция ДН элементов решетки; самокалибровка антенны
и сверхнизкие боковые лепестки; гибкое управление мощностью и вре-
менем облучения.
Если же при N элементов решетки нужно сформировать N лучей,
то следует воспользоваться очень эффективным методом формирования
ДН на основе БПФ. По существу БПФ означает быстрое одновременное
выполнение большого числа ДПФ.
21
Цифровое формирование ДН в ФАР
Одним из основных свойств БПФ, определяющим его широкое
распространение при обработке сигналов, является то, что для форми-
рования всех лучей ДНА, требуется выполнение значительно меньшего
числа операций, чем при эквивалентном числе ДПФ [11].
2.4. Варианты построения системы цифрового
диаграммообразования
Возможны несколько основных вариантов построения системы цифро-
вого диаграммообразования (ЦДО), отличающихся организацией связи
между элементами. Выбор варианта построения во многом определяет-
ся требуемыми характеристиками ФАР.
В простейшем варианте схемы ЦДО является частью приемного
тракта каждого элемента ФАР. Вычисление выходного сигнала осуще-
ствляется путем последовательного суммирования отсчетов сигнала,
полученных от предыдущего элемента со взвешенными значениями от-
счетов сш нала собственного приемника.
Таким образом, на выходе N приемника имеется сформированная
ДН (рис. 4).
АЦП Формирователь квадратуры /,
Формирователь квадратуры
АЦП Формирователь квадратуры /,
Формирователь квадратуры g.
Рис.4. Схема цифрового диаграммообразования с использованием
последовательного суммирования
Для этого варианта, наряду с простотой реализации, характерны
ограничения на максимальное число элементов решетки и приемных
22
Глава 2. Цифровое формирование ДН в ФАР
каналов. Это обусловлено ограничениями на скорость передачи данных
между процессорами и наличием физической и логической задержек
передачи информации. Физическая задержка обусловлена ограниченной
скоростью передачи данных, а логическая невозможностью для сле-
дующего процессора начать обработку данных до того, как эти данные
будут обработаны предыдущем процессором. Задержка информации
линейно растет с увеличением числа элементов решетки и числа фор-
мируемых приемных каналов. С ростом задержки усложняется также
процесс синхронизации работы элементов ФАР.
Этих недостатков частично лишена схема (рис.5), в которой умно-
жение на весовые коэффициенты происходит непосредственно в каж-
дом элементе ФАР, а суммирование отсчетов всех элементов осуществ-
ляется в общем устройстве. Вариант с параллельным суммированием
более сложен в реализации чем предыдущий, однако он имеет ряд 23еа-
тоинств: все элементы ФАР работают синхронно, что упрощает управ-
ление их работой; передача части операций вспомогательному устрой-
ству суммирования позволяет экономить ресурсы последующего циф-
рового устройства обработки сигналов и, следовательно, обеспечить
формирование большого числа приемных каналов.
Задержка информации практически не зависит от числа элементов
ФАР, что позволяет их увеличить.
Для ФАР, имеющих очень большое число элементов и сложную
структуру (в частности ФАР с двумерным сканированием), все вычисления
можно реализовать в одном устройстве, общем для всех элементов ФАР.
Осуществление сканирования ДН фазированной антенной решетки в
двух плоскостях с использованием каждого элемента ФАР требует большо-
го объема аппаратуры для ее реализации. Такое построение позволяет соз-
дать А х М- сканирующих лучей в пространстве, но реализация такого по-
строения не всегда оправдано ввиду высокой стоимости. В таких случая^1
цифровое устройство используется наряду с аналоговым. Для этого прием-
ную ФАР разбивают на А антенных секций (подрешеток). Выходные сиг-
налы антенных секций оцифровываются. Межсекционная обработка сигна-
лов является цифровой [40,41,42, 56]. Такое построение уменьшает расхо-
ждение между желаемой обработкой и существующими возможностями с
помощью обработки путем создания подрешеток (рис. 6).
В такой процедуре уменьшается размерность за счет разделения
обработки на два этапа. На первом этапе производится группирование
смежных элементов. Их сигналы объединяются с одинаковыми весовы-
ми коэффициентами и образуют широкие лучи. Эти лучи нужно объе-
динить в другом лучеформирующем устройстве, которое может быть
универсальным, и за счет предшествующей обработки значительно
уменьшено число входных сигналов.
23
Цифровое формирование ДН в ФАР
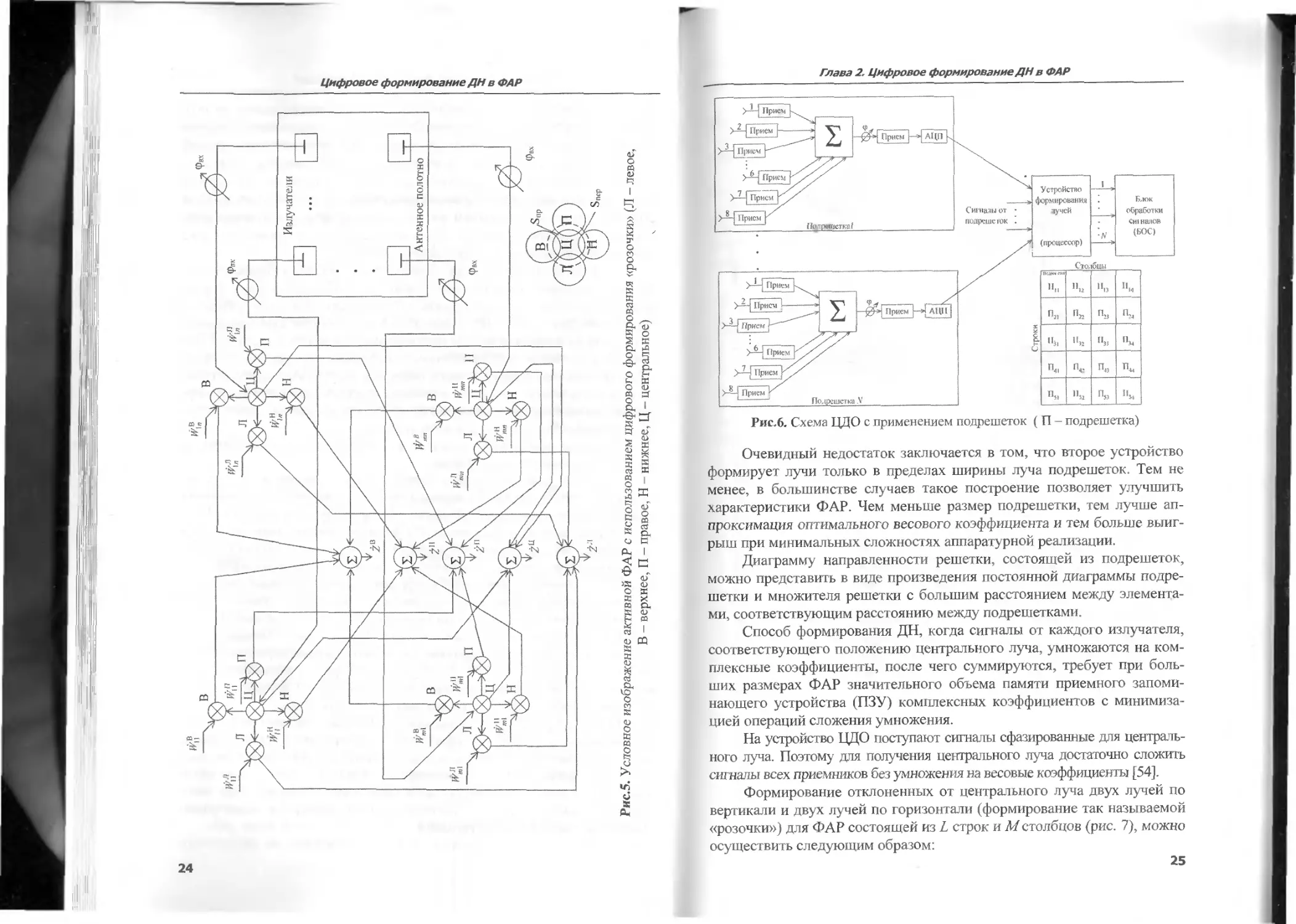
Рис.5. Условное изображение активной ФАР с использованием цифрового формирования «розочки» (Л - левое,
В - верхнее, П - правое, Н - нижнее, Ц - центральное)
24
Глава 2. Цифровое формирование ДН в ФАР
Рис.6. Схема ЦДО с применением подрешеток ( П - подрешетка)
Очевидный недостаток заключается в том, что второе устройство
формирует лучи только в пределах ширины луча подрешеток. Тем не
менее, в большинстве случаев такое построение позволяет улучшить
характеристики ФАР. Чем меньше размер подрешетки, тем лучше ап-
проксимация оптимального весового коэффициента и тем больше выиг-
рыш при минимальных сложностях аппаратурной реализации.
Диаграмму направленности решетки, состоящей из подрешеток,
можно представить в виде произведения постоянной диаграммы подре-
шетки и множителя решетки с большим расстоянием между элемента-
ми, соответствующим расстоянию между подрешетками.
Способ формирования ДН, когда сигналы от каждого излучателя,
соответствующего положению центрального луча, умножаются на ком-
плексные коэффициенты, после чего суммируются, требует при боль-
ших размерах ФАР значительного объема памяти приемного запоми-
нающего устройства (ПЗУ) комплексных коэффициентов с минимиза-
цией операций сложения умножения.
На устройство ЦДО поступают сигналы сфазированные для централь-
ного луча. Поэтому для получения центрального луча достаточно сложить
сигналы всех приемников без умножения на весовые коэффициенты [54].
Формирование отклоненных от центрального луча двух лучей по
вертикали и двух лучей по горизонтали (формирование так называемой
«розочки») для ФАР состоящей из L строк и М столбцов (рис. 7), можно
осуществить следующим образом:
25
Цифровое формирование ДН в ФАР
Рис.7. Схема ЦДО с предварительным суммированием строк и столбцов (Л - левое, В - верхнее,
правое, Н - нижнее, Ц - центральное расположение луча)
26
Глава 2. Цифровое формирование ДН в ФАР
выходные излучатели с каждого излучателя образуют плоский
фронт, соответствующий положению центрального луча;
суммируются построчно сигналы, число выходных сигналов будет
соответствовать числу строк L;
суммируются выходы строчных сумматоров, при этом получается
центральный луч;
сигнал с выхода каждого строчного сумматора подается на два
строчных умножителя, в одном из которых добавляется фаза, необхо-
димая для формирования верхнего луча, а в другом - для формирования
нижнего луча;
выходы строчных умножителей для верхних лучей суммируются,
и получается верхний луч;
выходы строчных умножителей для нижних лучей суммируются, и
получается нижний луч;
суммируются сигналы по столбцам, число выходных сигналов бу-
дет равно числу столбцов М;
сигнал с выхода каждого столбцового сумматора подается на два
столбцовых умножителя, в одном из которых добавляется соответст-
вующая фаза, необходимая для формирования правого луча, а в дру-
гом - для формирования левого луча;
выходы столбцовых умножителей для правого луча суммируются,
и получается правый луч;
выходы столбцовых умножителей для левого луча суммируются, и
получается левый луч;
для формирования центрального луча можно также суммировать
выходные сигналы столбцовых сумматоров, тогда получим два цен-
тральных луча, которые можно также использовать.
Число умножителей для предлагаемой схемы (рис. 7) равно
2(L+M), L и М- число строк и столбцов соответственно.
Для квадратной решетки (£ = М), число умножителей равно 4Z2,
т.е. выигрыш в число умножителей при применении предложенной схе-
мы получается в L раз по сравнению со случаем, когда сигналы от каж-
дого излучателя (соответствующего положению луча) умножаются на
комплексные коэффициенты, после чего сигналы от всех излучателей
суммируются.
Широкое распространение в РЛС кругового обзора получил метод
обзора пространства с цифровым управлением ДНА только по углу мес-
та, а в азимутальной плоскости формируется неуправляемая ДН с по-
мощью диаграммообразующих схем, перемещаемая по азимуту за счет
механического вращения. В этом случае имеем вариант, когда активные
элементы на прием и передачу работают на группу излучателей, входя-
щих в диафрагмообразующую строку (ДОС) (рис. 8).
27
Цифровое формирование ДН в ФАР
Рис. 8. Схема ЦДО с применением диафрагмообразующей строки
Если при двумерном сканировании лучом все вычисления реали-
зовать в одном устройстве, общем для всех элементов ФАР, то можно
использовать либо один высокопроизводительный центральный сиг-
нальный процессор (ЦСП), либо сеть сигнальных процессоров. В таком
варианте скорость передачи данных между элементами ФАР и устрой-
ством формирования ДНА минимальна, что облегчает построение ре-
шетки с большими геометрическими размерами. Возможность управле-
ния характеристиками ФАР ограничена только сложностью конструи-
рования. изготовления и программирования таких систем.
Одна из возможных схем реализации системы ЦДО с использова-
нием сигнального процессора может включать в себя два устройства:
функционально законченный цифровой приемник (ЦП) и процессор
цифровой обработки (DSP), который, собственно, и реализует функции
ЦДО [41-45].
Эти устройства связаны линиями передачи информации и общей
схемой управления. Скорость обмена информационными сигналами
между ними относительно невелика, что является предпосылкой для
реализации удаленного размещения этих устройств.
Функционально DSP может обрабатывать несколько приемных ка-
налов. При этом необходимо учитывать, что DSP является одним из до-
рогих в системе ЦДО, и уменьшение числа DSP может существенно
снизить цену изделия. Поэтому целесообразно использовать один DSP
на несколько каналов. Экспериментально проверена возможность обра-
28
Глава 2. Цифровое формирование ДН в ФАР
ботки в одном DSP на ADSP 2106 до семи пространственных каналов с
полосой до 1 МГц.
Отсчеты квадратур Дп] и Qfn] поступают на сигнальный процессор
DSP, который осуществляет «взвешивание» и суммирование.
Такое построение с использованием нескольких DSP предполагает
предварительное суммирование цифровых кодов от N устройств коди-
рования и диаграммообразования.
Схема такого устройства показана на рис. 9, где рассмотрено пред-
варительное суммирование восьми каналов.
Рис. 9. Схема ЦДО в БОС
29
Цифровое формирование ДН в ФАР
Сигналы от каждого из устройств кодирования и диаграммообра-
зования по каналам передачи поступают на устройство суммирования,
которое обеспечивает суммирование комплексных данных и их совме-
стную обработку с целью формирования пространственных приемных
каналов и дальнейшую передачу данных по отдельным каналам в блок
обработки сигналов (БОС). При очень большом числе приемных кана-
лов может потребоваться несколько устройств суммирования, соеди-
ненных последовательно.
Для передачи данных в устройство суммирования можно исполь-
зовать линии LVDC (например, две линии данных и синхронизации) для
каждого канала. Возможность управления характеристиками ФАР огра-
ничена только сложностью конструирования, изготовления и програм-
мирования таких систем.
При проектировании систем цифрового диаграммообразования
важное место занимают вопросы синхронизации и управления работой
элементов ФАР. Синхронизация работы цифровых приемников обеспе-
чивается использованием единого источника сигнала опорной частоты,
определяющего частоту дискретизации входного сигнала в АЦП и ско-
рость обработки данных ЦСП схем ЦДО.
Алгоритм управления элементами решетки определяется требова-
ниями по скорости изменения характеристики ДН антенны. При этом
важное значение имеет не пропускная способность передачи данных
управления, а задержка передачи данных от управляющего устройства к
элементу решетки и скорость обработки информации управления. При
наличии запаса по производительности обработки данных и исполне-
нию команд управлений могут быть использованы одни и тех же эле-
менты систем ЦДО. В качестве дополнительных функций система ЦДО,
как уже упоминалось, может решать также задачи управления элемен-
тами аналоговой части приемопередающего тракта.
При пост роении схемы ЦДО можно использовать ЦСП. Это обу-
словлено тем, что ЦСП ориентированны именно на использование опе-
раций умножения с накоплением, что позволяет максимально использо-
вать их производительность. Кроме того, программная реализация алго-
ритмов диаграммообразования по сравнению, например, с аппаратурой,
использующей программируемые логические интегральные схемы
ПЛИС, обеспечивает большую простоту разработки и легкость адапта-
ции системы ЦДО к изменению характеристик антенной системы и зон-
дирующих сигналов.
В последнее время ПЛИС становятся все более распространенной
и привычной элементной базой. Последние годы характеризируются
резким ростом плотности упаковки элементов на кристалле с эквива-
лентностью более одного миллиона логических вентилей. Цена на
30
Глава 2. Цифровое формирование ДН в ФАР
ПЛИС неуклонно падает и эта тенденция устойчива. В этой связи появ-
ляется ряд вопросов: какую элементную базу и как использовать в но-
вых разработках, а также каким образом производить модернизацию
существующих систем. В настоящее время быстродействие ПЛИС дос-
тигло величин 250...300 МГц, что позволяет реализовать многие слож-
ные алгоритмы обработки сигналов, в частности ЦДО.
2.5. Схемотехнические достоинства
фазированной антенной решетки
с цифровой обработкой сигналов*
Основными схемотехническими достоинствами ФАР с цифровой обра-
боткой сигналов можно считать следующие:
1. ФАР с цифровой обработкой сигналов имеют существенно бо-
лее простую структуру СВЧ приемного тракта, что упрощает разработ-
ку, дальнейшее изготовление, регулировку и эксплуатацию ФАР.
2. Одной из сложнейших задач для ФАР является настройка (фази-
рование) и дальнейшее поддержание ФАР в рабочем состоянии.
При фазировании приемных каналов аналоговой части ФАР необ-
ходимо проверять разность фаз сигналов приемных каналов поочеред-
но, что требует значительных затрат времени и создает сложности в
управлении приемными устройствами. Результаты фазирования должны
быть переданы в центральное вычислительное устройство, пересчитаны
и корректирующие поправки переданы обратно в приемные модули.
В ФАР с цифровой обработкой сигналов фазирование всех прием-
ных устройств происходит одновременно, а время, необходимое на это,
составляет единицы микросекунд. Расчет ДНА и хранение весовых коэф-
фициентов производится непосредственно в- модуле без участия цен-
трального вычислительного устройства. При поочередном измерении фа-
зовых характеристик прямопередающего модуля (ППМ) не участвующие
в фазировании модули должны быть отключены. Однако добиться раз-
вязки между входом и выходом модуля большей чем 30-49 дБ, затрудни-
тельно, даже если отключить модули по питанию. Просачивание сигнала
через неработающие модули приводит к росту ошибок измерения фазы и
амплитуды сигнала на выходе модуля. При наличии в строке более
20 модулей отношение сигнал/помеха не превысит 20 дБ. Кроме того,
любые коммутации в СВЧ-цепях приводят к неизбежному изменению
входных и выходных сопротивлений цепей. С учетом того, что длина
СВЧ-тракта в десятки раз превосходит длину волны, даже небольшое из-
менение параметров нагрузки может существенно исказить результат из-
* Материалы п. 2.5 подготовлены В. А. Голубевым.
31
Цифровое формирование ДН в ФАР
мерений. Характер искажений труднопредсказуем и существенно зависит
от частоты, на которой производится измерения. При измерении ампли-
тудных и фазовых характеристик ППМ необходимо учитывать параметры
амплитудного и фазового распределения в сумматорах сигналов строк.
Это вносит дополнительную погрешность измерений, особенно для строк
на краю ФАР (из-за спада амплитудного распределения). Дополнитель-
ным источником погрешностей являются ошибки фазовращателей, кото-
рые меняются при изменении значения фазового сдвига. Наличие всех
этих ошибок делает практически невозможным получении СКО фазовых
ошибок менее 10 град.
В ФАР с цифровой обработкой сигналов измерение всех парамет-
ров осуществляется в штатном режиме работы ФАР, а длина СВЧ-трак-
та в десятки раз меньше. Точность установки заданного фазового сдвига
в цифровых модулях составляет десятки доли градуса. Ошибки измере-
ния определяются практически только точностью разводки контрольно-
го сигнала.
3. Модернизация для наращивания характеристик в аналоговых
ФАР практически невозможна, так как требует существенных конструк-
тивных доработок. Например, необходимость увеличения числа прием-
ных модулей требует полной переделки всего СВЧ-тракта ФАР. В ФАРс
цифровой обработкой сигналов такой проблемы нет, и на базе одного
образца можно создавать модификации с существенно отличающими
характеристиками.
4. Возможности совершенствования ФАР с аналоговым диаграм-
мообразованием практически исчерпаны. В то же время быстрое разви-
тие техники цифровой обработкой сигналов позволяет надеяться на по-
вышение характеристик таких устройств при снижении их стоимости.
Это открывает дополнительные возможности по улучшению ха-
рактеристик ФАР.
32
ГЛАВА 3
Преобразование аналогового
сигнала в цифровой
3.1. Общие сведения
При выполнении любого алгоритма цифрового диаграммообразования,
предварительно сигнал нужно представить в цифровом виде. Для этого
необходим процесс аналого-цифрового преобразования, который состо-
ит из следующих этапов:
сигнал (с ограниченной полосой) дискретизируется, т. с. аналого-
вый сигнал преобразуется в дискретный по времени сигнал с непрерыв-
ной амплитудой;
амплитуда каждого дискретного элемента сигнала квантуется в
один из 2s уровней (В - число битов, которым дискретная выборка
представлена в АЦП);
дискретные уровни амплитуды представляются или кодируются в
виде различных слов, каждое из которых имеет длину В бит.
Описанный процесс имеет три различных типа сигналов:
1) аналоговый входной сигнал непрерывен как по времени, так и
по амплитуде;
2) дискретный сигнал непрерывен по амплитуде, но определяется
только в дискретных точках во времени;
3) цифровой сигнал х(п) (и = 0, 1,...) существуют только в дис-
кретных точках по времени и в каждой временной точке может иметь
одно из 2В значений (дискретный во времени сигнал с дискретной ам-
плитудой); дискретный во времени (т. е. дискретизированный сигнал) и
цифровой сигнал можно представить в виде последовательности чисел
х(н7) или просто х(п) (п = 0, 1, 2,...).
Дискретизация - это определение значений непрерывного сигнала
(например, аналогового) в дискретные моменты времени. Это основное по-
нятие обработки сигнала в реальном времени. Пример аналогового сигнала,
подвергшегося дискретизации, показан на рис. 10. В данном идеальном
случае после дискретизации аналоговый сигнал представлен только в дис-
кретные моменты времени, причем значения сигнала в эти моменты равны
соответствующим значениям исходного аналогового сигнала.
2-5760
33
Цифровое формирование ДН в ФАР
Рис. 10. Процесс дискретизации
сигнала
Ниже будет дано качествен-
ное рассмотрение теоремы о дис-
кретном представлении, опреде-
ляющей частоту, с которой должна
осуществляться дискретизация ана-
логового сигнала, чтобы вся важ-
ная информация, содержащаяся в
сигнале, собиралась и сохранялась
при дискретизации. На практике
чаще всего встречаются два вида:
дискретизация низкочастотных и
полосовых сигналов.
Цифровым называется сигнал,
дискретный как во времени, так и по
состоянию (рис. 10). Сигналы этого
типа описываются решетчатыми
функциями ЦпТу которые, однако,
могут принимать только конечное
число значений из некоторого ко-
нечного интервала х'<х<х". Эти
значения называются уровнями
квантования, а соответствующие функции - квантованными.
При анализе дискретных сигналов удобно пользоваться нормиро-
ванным временем Т = tIT , или, подставляя t = пТ, получим
- t
t = —
Т
nt
~Т
Таким образом, номер п отсчета дискретного сигнала может ин-
терпретироваться как нормированное время х(пТ) -х(п).
Теорема Котельникова утверждает, что, если fmax - самый высоко-
частотный компонент сигнала, то элементы выборки полностью описы-
вают сигнал, а дискретизация сигнала должна осуществляться с частотой
не ниже 2 fmax. Дискретизация с частотой меньше той, которую дает тео-
рема Котельникова, приведет к появлению перегибов или наложению
зеркальных частот в интересующей нас частотной области. На практике
это явление устраняется путем предварительного пропускания сигнала
х(0 y(f}=x(/) ® й(0
h(t)
Рис. 11. Схема дискретизации
сигнала
через аналоговый фильтр защиты от нало-
жения спектров.
На рис. 11 показан процесс дискрети-
зации, который можно рассматривать как
умножение аналогового сигнала x(f) на вы-
борочную функцию h(t). Функция й(/) со-
34
Глава 3. Преобразование аналогового сигнала в цифровой
стоит из импульсов единичной амплитуды с шириной dt и периодом Т
(т.е. частота дискретизации равна 1/7^.
Спектр сигнала x(f), функция h(t) и их произведение показаны на
Рис. 12. Спектр сигнала до дискретизации
Рис. 13. Повторение спектра дискретного сигнала в точке,
крайней от частоты дискретизации
дддт.
-2^ 0 FR 2Fa '
Рис. 14. Описание процесса дискретизации сигнала
во временной и частотной областях
-Fs 0 Лх Fs
Рис. 15. Спектр сигнала, прошедшего
процесс дискретизации, на котором
показано наложение
Как уже отмечалось, для
уменьшения эффектов наложения
спектров обычно используют
фильтры защиты от наложения с
резким срезом, которые ограничи-
вают полосу частот сигнала, или
увеличивают частоту дискретиза-
ции, чтобы отодвинуть спектр
сигнала и зеркальный спектр
дальше друг от друга (рис. 15).
Аналого-цифровой преобразователь (АЦП) является наиболее кри-
тичным узлом, ограничивающий как частотные, так и динамические ха-
рактеристики цифровой обработки в целом (рис. 16).
При однородном квантовании и кодировании каждой аналоговой
выборке присваивается одно из 2В значений (рис. 16,6) (В - число битов
АЦП). Этот процесс, называемый квантованием, вносит неустранимую
35
Цифровое формирование ДН в ФАР
погрешность. Уровень этой погрешности является функцией числа битов
АЦП, которое приблизительно равно половине единицы младшего разря-
да (ЕМР), поэтому предполагается округление. Например, у 12-битового
АЦП с диапазоном входных напряжений ± 0,5В ЕМР будет равен 1/2 пВ,
т.е. 244мкВ, а ошибка квантования будет равна 122 мкВ.
Рис. 16. Процесс аналого-цифрового преобразования:
a - плотность распределения непрерывной величины «сигнала + шума» на выходе АЦП;
б - передаточная характеристика АЦП (квантизатора); в - значение дискретной величины
и'; г - плотность распределения дискретного значения «сигнал + шум»
Для АЦП с В двоичными цифрами число уровней квантования
равно 2В, а расстояние между уровнями, т. е. размер шага квантования q,
задается как
_ и ~и
^~2£-1 ~2* ’
36
Глава 3. Преобразование аналогового сигнала в цифровой
где U ~ полный диапазон АЦП с входом в виде биполярного сигнала.
Максимальная ошибка квантования, когда значения округляются до
ближайшего большего или меньшего числа, равна ± q!2. Для синусои-
дального с амплитудного входа с амплитудой А (такой, что удвоенная
амплитуда сигнала как раз заполняет весь входной диапазон АЦП) раз-
мер шага квантования становится равным q = 2 А / 2В
Ошибка квантования для каждой выборки е обычно полагается
случайной и однородно распределенной на отрезке ± q/2 с нулевым
средним значением. В этом случае мощность шума квантования, или
дисперсия, будет в виде
^/2
(
?/2 2
г 2, q
е de =—
J 12
-q!2
Для синусоидального сигнала средняя мощность сигнала равна
А2/2. Отношение сигнал/шум квантования (SNR(q)), дБ. равно
( д2 / 7 ) ( Зх 72В
SNR(q) = 10lgI I = 10lgF__ I = 6,02B +1,76.
Это теоретический максимум. На практике, когда используются
реальные входные сигналы, достижимое SNR(q) меньше чем это значе-
ние. Однако с увеличение числа разрядов В SNR(q) возрастает. Число
используемых битов ограничивают практические факторы: скорость,
внутреннее соотношение сигнал/шум (signal-to-noise ratio - SNR) анало-
гового сигнала и затраты.
В процессе аналого-цифрового преобразования непрерывная случай-
ная величина щ= u(kq) с плотностью вероятности w(uk) преобразуется в
цифровую случайную величину и'к, принимающую установленное число
значений. Так, если случайная величина ик определена в интервале (wmax,
wmin) и назначено т порогов квантования wm;n< щ < и2 <...< Ц-i < и, <...
..< ит < zzmax и разбивающих интервал (wmax, wmin) на (т + 1) подинтервалов
(uh ui+l) (z = 0, 1, 2,..., m), то этой непрерывной случайной величине может
быть сопоставлена цифровая случайная величина и'к, с вероятностью
u/+i
Р(Ч)= f wMduk •
Устройство для квантования амплитуд сигналов (квантизатор)
представляет собой нелинейный элемент с амплитудной характеристи-
кой, изображенной на рис. 16,6.
Интервал zy, изменения амплитуды входного сигнала между порогами
и ui+l называется интервалом или шагом амплитудного квантования.
37
Цифровое формирование ДН в ФАР
Входному сигналу, лежащему в любой точке внутри интервала qt,
соответствует одно значение выходного сигнала w' Значение выходно-
го сигнала может относиться к любой точке внутри интервала q,.
1 . 3
Уровни кодирования входного напряжения равны ±—q ; ±—q ;
и Т-Д- Соответственно этим уровням квантования выходные циф-
ровые сигналы принимают значения 0; ± ± 2<у; ± 3q и т.д.
Если на вход АЦП поступает полезный сигнал ис вместе с адди-
тивным гауссовым шумом, характеризуемым среднеквадратичным от-
клонением ст, то вероятность того, что смесь сигнала и шума находится
в пределах от до^В + ^д , определяющая ДД выходного сиг-
нала и\, можно представить в виде
(B+l/2)q-uc
^сг 2тГ] (B-\l2)q-uc
где В - число разрядов; q - интервал дискретизации.
Для рассматриваемого случая
1 ’? й
Р(2,5<«<3,5) = —-—-ру Je2crJwA.
(о-1 2 2я) 25
При этом площадь заштрихованного участка (рис. 16,г) соответст-
вует вероятности того, что кодированное значение смеси сигнала и шу-
ма будет равно q. Среднее значение кодированного выходного напря-
жения для смеси сигнала и шума находится из выражения
00
E{ut.} = q'^\Pr. Разность между амплитудой выходного сигнала кван-
-00
тизатора и его выходным сигналом представляет собой неусредненную
ошибку цифрового представления аналогового сигнала. Ошибка изме-
няется по пилообразному закону (рис. 17).
На практике в большинстве случаях дискреты квантования q, вы-
бираются одинаковыми, а выходной уровень берется равным середине
соответствующего интервала, т. е.
w' = (ui + ul+]) / 2 .
При этом для оценки потерь квантования можно воспользоваться
известными выражениями из математической статистики [25 - 27].
38
Глава 3. Преобразование аналогового сигнала в цифровой
Рис. 17. Средние ошибки квантования при отношениях ujq
Для первого и второго центральных моментов запишем выражения
1 2
^-w2=0, ^-m2=-q .
Задаваясь допустимым увеличением дисперсии за счет квантова-
ния, можно однозначно определить интервал квантования q.
Необходимо правильно сформулировать требования к АЦГ1, что-
бы, с одной стороны, преобразовать сигнал с минимальными потерями,
а с другой, - не ужесточать требования к АЦП настолько, чтобы реше-
ние не стало очень дорогим или нереализуемым.
Традиционно АЦП принято характеризовать такими параметрами,
как частота дискретизации, время преобразования, интегральная и диф-
ференциальная нелинейность и др. [25, 26].
Ведущие мировые производители АЦП, кроме этих, безусловно, важ-
ных параметров, в характеристиках своих АЦП приводят так называемые
динамические параметры, такие как Total Harmonic Distortion (THD):
тотальный коэффициент гармоник, Signal-to-Noise Ratio (SNR);
отношение сигнал/шум, Signal-to-Noise and -Distortion (SINAD);
сумма шума и гармоник;
эффективное число разрядов, Effective Number of Bits (ENOB);
свободный динамический диапазон, а также зависимость этих па-
раметров от частоты Spurious-Free Dinarnic Ronde (SFDR).
Измерения проводятся одночастотным методом, который в боль-
шинстве случаев является достаточным для оценки вносимых АЦП ис-
кажений и при многочастотном сигнале.
На рис. 18 приведен спектр одночастотного сигнала.
Диапазон SFDR определяется как разница между уровнем 1-й гар-
моники сигнала и максимальной составляющей в спектре сигнала, от-
личной от 1-й гармоники (это паразитная составляющая может быть вы-
звана нелинейностью, конструктивными шумами или постоянными па-
разитными наводками). Измеряется он одночастотным методом.
39
Цифровое формирование ДН в ФАР
Рис. 18. Спектр одночастотного сигнала
Интермодуляционные искажения измеряются двухчастотным мето-
дом при подаче на вход двух сигналов с близкими частотами/] и/, нахо-
дящимися в полосе частот. Интермодуляционное искажение вызвано появ-
лением в спектре частот, на выходе составляющих с частотами 2/ -/ и
2/ -/, возникающих на нелинейности 3-го порядка в тракте приема.
Уровень шума реального АЦП превышает идеальную величину,
причем в спектре шума присутствуют как случайные спектральные
компоненты, так и сосредоточенные. К тому же уровень шума реально-
го АЦП зависит от величины выходного сигнала (прежде всего, это от-
носится к специальным сосредоточенным компонентам).
Параметр SINAD, дБ, позволяет в общем оценить ДД АЦП:
SINAD = 201og
D
^signal
^nois
где A^gnai - среднеквадратическое значение фундаментальной (первой)
гармоники сигнала; RMSnojs - среднеквадратическое значение суммы
всех спектральных составляющих от нулевой частоты до частоты Найк-
виста, исключая постоянный ток.
40
Глава 3. Преобразование аналогового сигнала в цифровой
Параметр SINAD - однозначно связан с параметром эффективной
разрядности АЦП [26]:
ENB^SINAD-1,76
6,02
В реальной системе уровень шума и динамический диапазон опре-
деляется паразитными сосредоточенными шумами, попавшими в полосу
канала приема. Причем уровень и частота этих шумов могут как зави-
сеть, так и не зависеть от входного сигнала.
Как правило, уровень таких шумов превышает уровень равно-
мерного шума в «подвале» спектра. Поэтому при оценке ДД очень
важен параметр SFRD. По сути, он определяет, насколько велика бу-
дет в системе возможность выделить слабые сигналы на фоне мощ-
ных мешающих.
Рассмотрим, откуда берутся сосредоточенные компоненты в спек-
тре шума. Характеристика преобразования АЦП не совсем линейна.
Имеется как отклонение величин элементарных ступеней (квантов) от
идеальной кривой (выражаемая дифференциальной нелинейностью), так
и общий изгиб кривой преобразования (выражаемая интегральной не-
линейностью).
Интегральная нелинейность приводит к появлению в спектре сиг-
нала гармоник на частотах, кратных входной частоте. При этом гармо-
ники могут «заворачиваться», отражаясь от частоты дискретизации.
Нелинейные искажения такого рода приводят к интермодуляцион-
ным и перекрестным искажениям, причем интермодуляционные иска-
жения 3-го порядка вызванные той же нелинейностью, которая приво-
дит к появлению третьей гармоники, а перекрестные искажения 2-го
порядка второй гармоники.
Уровень интермодуляционных и перекрестных искажений примерно
на 6.. .7 дБ ниже уровня третьей и второй гармоник соответственно.
Дифференциальная нелинейность имеет совсем другой характер
влияния на спектры преобразованного сигнала. В результате паразит-
ных модуляций сигнала на малых нелинейностях спектр сигнала «об-
растают» многочисленными спектральными сосредоточениями компо-
нентами, хаотично расположенными по всему спектру. Усреднение и
сужение полосы при канальной фильтрации не позволяет бороться с та-
кими шумами. Если они попадают в полосу канала, с ними можно бо-
роться только с помощью специальных технических решений (напри-
мер, метод борьбы - DITHER [26]).
Таким образом, для качественной работы необходим АЦП с вы-
соким SFDR. При этом нужно обязательно контролировать SFDR в
процессе налаживания системы, не полагаясь только на параметр са-
мого АЦП.
41
Цифровое формирование ДН в ФАР
На практике содержание выражения для SINAD эквивалентно оп-
ределению любого аддитивного шума как части сигнала. Это выраже-
ние описывает сигнал, испытывающий изменение шумового характера.
Отношение сигнал/шум для реальной системы, которая испытывает
воздействие как внутренних, так и внешних источников аддитивного
шума, определяется следующим образом:
5(0
2
SNR = r л —rL л
2+ Ч(') 2+
(3.1.1)
2
где N{(f) - входной шум; АД/)- внутренний (конструктивный) шум
АЦП; N (t)-шум квантования АЦП.
С точки зрения максимизации динамического диапазона приемни-
ка при заданной разрядности, уровень собственных шумов желательно
располагать как можно ниже по сетке уровней квантования. При этом
проектируемая система должна соответствовать заданному отношению
сигнал/шум, при котором обеспечиваются необходимые вероятности
правильного обнаружения D и ложной тревоги F.
Отношение сигнал/шум для реальной схемы, которая испытывает
воздействия как внутренних, так и внешних аддитивных шумов, можно
записать в виде
а2
SNR = , (3.1.2)
А,(/)2+Аа(/)2
где Аа(/)2 - аппаратный шум, равный ((Л\(/)2) = (Nk(t)2)+(N4(t)2).
Аппаратный шум стремятся сделать сколь угодно малыми, хотя
существуют практические ограничения. Эти ограничения связаны с
трудностями обеспечения устойчивой работы цифрового приемника с
малыми уровнями квантования. Так, при этом повышаются требования
к монтажу и источникам питания, а также возрастает сложность при
реализации самого АЦП, его стоимость и доступность, что немаловажно
при проектировании цифровой антенной решетки (ЦАР).
Но в любом случае аппаратный шум стараются снизить до такой ве-
личины, чтобы отношение сигнал/шум определялось входными шумами.
Аппаратный шум определяет ДД снизу. Если шумы квантования
определяются выбором микросхемы АЦП, то конструктивные шумы - в
42
Глава 3. Преобразование аналогового сигнала в цифровой
значительной мере квалификацией разработчика, борьбе с которым раз-
работчики посвящают много времени. Борьба с шумами такого рода
сродни искусству, хотя имеются стандартные приемы минимизации та-
ких шумов. Таким образом, для качественной работы аналого-цифровой
части приемного тракта необходим АЦП с высоким SFDR. При этом
обязательно нужно контролировать SFDR в процессе налаживания сис-
темы, не полагаясь только на параметры АЦП.
Были экспериментально оценены аппаратные шумы реальной ап-
паратуры с использованием метода измерений, изложенных в п. 4.9. Ре-
зультаты измерений приведены в табл. 3.1.
Таблица 3.1. Результаты измерений аппаратных шумов реальной
аппаратуры
Параметры №№ модулей
1 2 3 4 5 6 1 8 9 10 11 12 13 14 15
Уровень аппа- ратных шумов (о-шап), ЕМР 0,81 0,8 0,69 1,8 1,2 0,7 0,9 0,72 0,42 1,57 1,47 1,8 1,9 1,8 1,9
Пересчитанные шумы, мкВ (ЕМР = = 244 мкВ) 198 195 168 439 293 170 220 176 102 383 481 439 464 439 464
Внутренние шумы при (<7швн Oinan <^шкв) кв = 70 мкВ 128 125 98 369 223 100 150 106 32 313 411 369 394 369 399
Теоретически минимальный уровень шумов определяется в аналого-
цифровом приемном тракте шумами квантования, но на практике конст-
руктивные шумы могут превышать уровень шумов квантования. Таким об-
разом, для снижения потерь в пороговом сигнале собственные шумы при-
емного тракта должны превышать уровень аппаратных шумов, в которых
значительную величину могут составлять конструктивные шумы.
Потери определим в виде
= 1 + Л'2,
2
где К2=-^.
пр
Примем уровень собственных шумов приемного тракта ст., пр =
= 500 мкВ.
43
Цифровое формирование ДН в ФАР
Ниже приведены значения величины потерь от отношения стшап а :
К.................. 0,25 0,5 1 1,5 2 2,5 3
Потери, дБ...... 0,6 2,26 6 11 16 19 22
Таким образом, чтобы уменьшить потери, необходимо увеличи-
вать уровень собственных шумов приемного тракта, что, естественно,
приведет к снижению ДД приемного тракта.
Так, если допустить, что дополнительные потери могут составлять
0,5 дБ, то при сгш пр = 500 мкВ необходимо увеличить усиление приемного
тракта на 9 дБ, а при потерях 1 дБ на 6 дБ это приведет к снижению ДД.
3.2. Способы обработки сигналов в цифровой
фазированной антенной решетке*
Обработка сигнала на нулевой промежуточной частоте (ПЧ) (с ис-
пользованием квадратурного демодулятора). В приемном устройстве
используется приемник, состоящий из малошумящего усилителя
(МШУ) и квадратурного демодулятора. Формирование квадратурных
составляющих осуществляется в аналоговой части приемника. Оциф-
ровка осуществляется низкоскоростными АЦП и простым сигнальным
процессором (или программируемой логической интегральной схемой
(ПЛИС). Такие приемные устройства широко применяются в системах
передачи данных в диапазоне 900.. .1900 МГц.
Достоинства: простота, низкая стоимость как аналоговой, так
и цифровой части приемника; возможность получения динамического
диапазона до 67...69 дБ в аналоговой части и его расширение за счет
использования цифровой обработки до 72 более дБ. Предельная просто-
та и низкая стоимость СВЧ-тракта позволяет применить этот способ в
ФАР с большим числом элементов.
Недостатки: вопросы схемотехники и помехозащищенности
таких приемников недостаточно отработаны.
Обработка сигнала на второй промежуточной частоте (клас-
сический метод). В приемном устройстве используется приемник с
двухкратным преобразованием частоты с выходом на промежуточной
частоте 10...70 МГц. Оцифровка и формирование квадратурных состав-
ляющих осуществляется цифровым приемным модулем, включающим
АЦП среднего быстродействия, и специализированным процессором
обработки сигналов.
Достоинства: структура цифрового приемного модуля к на-
стоящему времени полностью отработана.
* Материалы п. 3.2 представлены В. А. Голубевым.
44
Глава 3. Преобразование аналогового сигнала в цифровой
Недостатки: сложная структура аналогового тракта, что не
позволяет получить ДД более 65 дБ. Высокая стоимость аналогового
СВЧ делает нецелесообразным применение этого способа в ФАР с
большим числом приемных модулей.
Обработка сигнала на первой (высокой) промежуточной часто-
те. С конца 90-х годов XX века большинство ведущих производителей
АЦП серийно выпускают АЦП с полосой пропускания 300...600 МГц.
Это позволяет при работе в L-диапазоне и при полосе перестройки час-
тоты 10-15% использовать приемник с однократным преобразованием
частоты. Оцифровка производится высокоскоростным АЦП. Сложность
цифровой обработки будет определяться требуемым динамическим
диапазоном (для получения большего диапазона требуется большая час-
тота дискретизации и более сложная обработка) и шириной спектра
зондирующего сигнала.
Достоинства: простота приемной части модуля, большой ди-
намический диапазон, возможность упрощения СВЧ-тракта за счет пе-
редачи гетеродинного сигнала по тракту зондирующего.
Цифровая обработка сигналов на несущей частоте. В настоящее
время начат серийный выпуск недорогих АЦП с полосой пропускания до
1500 МГц и более. При использовании относительно узкополосных сиг-
налов (с шириной спектра 1 10 МГц) может быть использован режим
субдискретизации, что позволяет получить сравнительно низкоскорост-
ной поток цифровых данных, легко поддающийся цифровой обработке.
Достоинства: предельная простота тракта приемного модуля.
Недостатки: при работе с перестройкой несущей частоты тре-
буется либо изменять значение частоты дискретизации (что усложняет
дальнейшую обработку информации), либо выбирать повышенную час-
тоту дискретизации (что усложняет схему приемного модуля и затруд-
няет синхронизацию модулей).
3.3. Дискретизация низкочастотная (аналого-цифровое
преобразование на нулевой промежуточной частоте
с использованием квадратурных демодуляторов)
Методика решения поставленной задачи частично заимствована из [12].
Рассмотрим типовую схему АЦП на видеочастоте (рис. 19).
Входной узкополосный сигнал .s(/) = SBX cos(rj0/+^(/)) со средней
частотой coq подается синфазно на первые входы фазовых детекторов, на
вторые входы которых со сдвигом я/2 подан гармонический сигнал
иГ (А с частотой бЦ). Фазовый детектор (ФД) выделяет низкочастот-
ную составляющую выходного сигнала, пропорциональную амплитудам
входных сигналов и косинусу разности фаз между ними.
45
Цифровое формирование ДН в ФАР
Рис. 19. АЦП с квадратурными каналами на видеочастоте
Полученные на выходе ФД квадратурные составляющие ком-
плексной огибающей определяются равенством
4,хФД M = [^W + /yW]exP(M)5
где X(f), Y(f) - квадратурные составляющие комплексной огибающей
входного сигнала (гауссовские случайные величины с нулевым средним
и дисперсией о2), не коррелированные в совпадающие моменты време-
ни; (pk - случайные набеги в каналах.
Эти квадратурные составляющие X(f), Y(t) подаются на собствен-
ные АЦП, где они подвергаются дискретизации по времени с частотой
69Д синхроимпульсами (СИ) и квантованию по уровню.
В результате аналого-цифрового преобразования непрерывного
действительного сигнала имеем цифровое преобразование квадратур-
ных составляющих комплексной огибающей:
’^выхд — %к + Jyк ‘
С учетом разброса коэффициентов усиления и неортогональности
квадратурных каналов выражения для SBblx* можно представить как
={(l + A)^+j[0 + rJ(№cos^)]}, k = l,2,...,N, (3.3.1)
где Д, д - случайные величины, соответствующие разбросу коэффици-
ентов усиления в квадратурных каналах; хк, ук - квадратурные состав-
ляющие к-го элемента вектора 5ВХ ; де - ошибка неортогональности
квадратурных каналах.
Выражение (3.3.1) для векторов 5вых^ может быть преобразовано к
виду
^выхА = xSl - yS2 + JS2 + (xS3 + yS4 ) •
(3.3.2)
46
Глава 3. Преобразование аналогового сигнала в цифровой
Векторы, входящие в первую часть последнего выражения, имеют
следующий смысл:
Si={(1 + A)cos4}, S3={(l + /Jsin(^+^)},
S2 = {(1+A)sin4}> s4 = {(i+/A)sin(4+^)}, £ = i,2,..,jv. )
Для корреляционной матрицы, соответствующей S можно по-
лучить выражение [11]
R = 0,5£(s SH } = —(z z"+z z"), (3.3.4)
( вых вых ) 2 1 1 2 2' x '
где верхний индекс H показывает эрмитово сопряжение; векторы zb z2
соответственно равны,
Zj = S1+jS3, z2=S4+jS2. (3.3.5)
Ненулевые средние значения Л, Л2 матрицы можно получить, вы-
числяя собственные значения матрицы
_ ст
VZ2 )
R
(3.3.6)
Таким образом, согласно [11] большее собственное значение, соот-
ветствующее коллинеарной составляющей векторов zb z2,имеет порядок
\ - Ncr2, а меньшее, соответствующее ортогональности составляющей
одного из этих векторов по отношению к другому, имеет порядок
Л=0,5^2(сгй2+сг2/2),
где ст2 « ® - дисперсия относительных флуктуаций коэф-
фициентов усиления квадратурных каналов; индекс a - флуктуации ам-
плитуды; <т2 « ~ дисперсия ошибки неортогональности.
При /Зк = Yk= Wk= 0, т. е. система без ошибок, S! = S4, S2= S3 и ?| = z2
и матрица имеет собственное значение Д = No-2.
Итак, амплитудно-фазовые погрешности квадратурных АЦП при-
водят к появлению дополнительного (паразитного) собственного значе-
ния корреляционной матрицы, отношение которого к основному собст-
венному значению имеет такой порядок дисперсии:
2 2
+ ПРИ Л=^2. (3.3.7)
Ла Л Ц
Выделение комплексной огибающей с помощью квадратурного
преобразователя с неидентичными каналами при наличие доплеровско-
го сдвига приводит к появлению составляющих «зеркальных» по отно-
шению к составляющей полезного сигнала.
47
Цифровое формирование ДН в ФАР
Пусть сигнал на входе фазового детектора имеет вид
.$(/) = Л cos [(7у0 — 3a)t + %], (3.3.8)
а сигналы на вторых входах фазового детектора соответственно равны
cos(6V) и sin( aot+8v), где разбаланс по фазе.
Тогда сигналы на выходе АЦП являются дискретизацией следую-
щих процессов:
%(/) = Tcos(A69/ + $)), (3.3.9)
у(/) = Л(1 +Ao)sin(A&»/ + ^0 , (3.3.10)
где За - относительный разбаланс каналов по амплитуде; <5у/ - относи-
тельный разбаланс каналов по фазе.
Источником разбаланса может служить неточность при настройке,
температурные и временные уходы и другие факторы.
Соотношения (3.3.9) и (3.3.10) рассматриваются как действитель-
ная и мнимая части комплексного сигнала:
z(f) = x(/) + j>(/) =
= у { [1 + (1 + ) е7^] еДАй*+*)1 + [1 -(1 + За)]е~7'(Дй"+^> |. (3.3.11)
При отсутствии разбаланса (да = <5ys= 0) этот сигнал содержит од-
ну комплексную гармонику с частотой доплера За. При наличии разба-
ланса по фазе и (или) по амплитуде появляется паразитная гармоника с
частотой -За и амплитудой по отношению к основной гармонике
Рис.20. Зависимость S от величины
разбаланса 8а и 8у/
(3.2.12)
В реальных условиях величи-
ну 6 технически очень сложно сде-
лать лучше - 40..50 дБ в рабочем
диапазоне температур.
На рис. 20 изображена зависи-
мость паразитных гармоник при раз-
балансе квадратур (да, 8у/) по отно-
шению к основной гармонике.
Динамический диапазон сиг-
налов в радиолокационных прием-
никах зачастую достигает величины
-60...80 дБ и более. При этом пара-
зитные зеркальные гармоники мо-
гут восприниматься как ложные це-
ли. Чтобы избавиться от этого
48
Глава 3. Преобразование аналогового сигнала в цифровой
недостатка, необходимо значение разбалансов ограничить величинами,
определенными из формулы (3.3.12).
Таким образом, дискретизация на видеочастоте при условии, что
Fmax <<: То (Лпах - высшая частота в спектре сигнала; /0 - промежуточная
частота), позволяет снизить требования к частоте дискретизации,
предъявляемые теоремой Котельникова.
Практически невозможно в полосе А/ обеспечить идентичность ам-
плитудно-частотных и фазочастотных характеристик в канале из-за раз-
броса характеристик фазового детектора, фильтра низкой частоты и дру-
гих устройств. Такая точность не позволяет обеспечить приемлемые ха-
рактеристики работы аппаратуры в режимах селекции движущейся цели
(СДЦ), автоматической компенсации помех (АКП) и других режимах.
Кроме того, аналоговый способ формирования квадратур имеет
невысокую стабильность и линейность, а также существуют трудности с
фильтрацией.
Появление таких нежелательных явлений, как дрейф нуля, наличие
постоянной составляющей, неидентичность квадратурных каналов по
амплитуде и фазе, приводит к снижению ДД. Для устранения этих явле-
ний необходимы устройства, осуществляющие автоматическую под-
стройку постоянной составляющей (АППС), регулировку амплитуды и
фазы (РАФК), а также высокостабильные тестовые кварцованные гене-
раторы. Все это требует дополнительных объемов для размещения ап-
паратуры, которую необходимо разместить вблизи ФАР. Однако экспе-
риментальные исследования показали, что такое построение при нали-
чие соответствующих регулировок обеспечивает идентичность квадра-
тур, позволяющее получить ДД при соответствующем АЦП до 55 дБ.
3.4. Устройство регулирования квадратурных
каналов
Устройство регулирования амплитуды и фазы в квадратурных каналах
(РАФК). Устройство РАФК предназначено для коррекции разбаланса ам-
плитуды и фазы в аналоговых квадратурных каналах, вызванного медлен-
ными уходами. Один из вариантов РАФК приведен на рис. 21.
Устройство выполняет задачи вычисления поправочных коэффи-
циентов для входных эталонных сигналов. Данные поступают на вход в
виде дискретов этих сигналов по двум независимым каналам (Xh Y).
По результатам анализа предполагается следующий алгоритм об-
работки. Компенсация производится пузем ввода поправочных коэффи-
циентов для канала X. Вычисление коэффициентов ведется двумя па-
раллельными путями:
определением коэффициента коррекции по амплитуде Л?;
определением разбаланса фаз.
49
Цифровое формирование ДН в ФАР
Рис. 21. Схема устройств РАФК
На первом этапе производится усреднение Хи Y по Л-выборкам:
N N
= = (3.4.1)
Полученные значения Е{Х} и E{Y} участвуют в вычислении коэф-
фициента К:
к_ Е{Х}
E{Y}cosd '
Для вычисления коэффициента 8 моделируется устройство, со-
стоящее из дешифратора и реверсивного счетчика. Принцип его работы
состоит в следующем. У отсчетов, принятых за полупериод эталонного
синусоидального сигнала, оценивается знак, затем производится оценка
для каждой пары отсчетов и берется разность получившихся значений.
Полученная таким образом расность характеризует величину разбаланса
фаз отсчетов X и Y.
После вычисления коэффициентов К и 8 производится корректи-
ровка выходных сигналов;
дляХ Х’1 = Х/(1/К)±У^,
для Y сигнал проходит на вход без изменения.
Алгоритм реализации РАФК приведен на рис. 22.
50
Глава 3. Преобразование аналогового сигнала в цифровой
Рис. 22. Алгоритм реализации РАФК
Регулирование постоянной составляющей в АЦП. При проекти-
ровании АЦП, предназначенного для работы по видеосигналу, возникает
проблема, связанная с подстройкой постоянной составляющей, присутст-
вующей во входном видеосигнале. Данная постоянная составляющая воз-
никает после фазового детектора в результате, например, температурного
дрейфа усилителей постоянного тока (УПТ) фазового детектора. Под по-
стоянной составляющей понимается медленно меняющийся процесс, ко-
торый на периоде измерения практически не меняется. Обычно под-
стройка постоянной составляющей сигнала после фазовою детектора в
АЦП выполняется с помощью регулировки «назад» (рис. 23).
Рис. 23. АЦП с регулировкой «назад»
Регулировка «назад» обладает цепью обратной связи (ОС), которая
в АЦП предусматривает наличие аналоговых устройств, в частности
ЦАП и УПТ ЦАП. Габаритные размеры устройств, обладающих прямой
или обратной связью, практически соизмеримы, что является недостат-
ком при конструировании многоканального приемника. Достоинством
51
Цифровое формирование ДН в ФАР
данной схемы является учет дрейфа УПТ АЦП и УПТ ЦАП в процессе
регулирования, так как все устройства схемы охвачены ОС. При этом
динамические диапазоны выходного кода и видеосигнала равны.
В данной работе рассматривается другой способ подстройки посто-
янной составляющей видеосигнала, который, в отличие от предыдущего
способа обработки сигнала, существенно меняет алгоритм обработки. В
литературе он получил название регулировки «вперед» (рис. 24).
Рис. 24. АЦП с регулировкой «вперед»
Регулировка «вперед» не обладает цепью ОС. В данном случае ре-
гулировка постоянной составляющей выполняется с помощью цифрово-
го вычислительного устройства (ЦВУ), что позволяет уменьшить габа-
ритные размеры специализированного АЦП. Недостатком такой регу-
лировки является появление дополнительной дрейфовой постоянной со-
ставляющей, обусловленной внешними дестабилизирующими фактора-
ми, воздействующими на УПТ АЦП.
В многоканальном приемнике, где к габаритам приемника предъяв-
ляются достаточно серьезные требования, в качестве ЦВУ предложено
использовать ПЛИС. Дрейф постоянной составляющей УПТ АЦП мини-
мизируется за счет применения более совершенных микросхем. ПЛИС
позволяет не только реализовать сложные алгоритмы цифровой обработ-
ки сигнала, но и обслуживать параллельно несколько каналов, (рис. 25).
Рис. 25. Многоканальный специализированный АЦП
52
Глава 3. Преобразование аналогового сигнала в цифровой
L- 1 — ' * * ... ” ” ’ '
В этом случае подстройка постоянной составляющей каждого ка-
нала выполняется с помощью схемы конфигурированной в ПЛИС. Па-
кет программ со схемой подстройки постоянной составляющей для
многоканального приемника, который позволяет конфигурировать схе-
му в ПЛИС, создан с помощью специальной программы МАХ + plus II,
разработанной фирмой Altera.
На рис. 26 приведена упрощенная схема ЦВУ одного из каналов
конфигурированного в ПЛИС, где показано, что схема содержит два сум-
матора и два регистра соответствующей разрядности. Устройство 1 и
устройство Ф 2 образуют накапливающий сумматор. Устройство А 3
представляет собой сумматор, работающий в режиме вычитания. Устрой-
ство ф 4 представлено буферным регистром.
Схема работает следующим образом. На время подстройки посто-
янной составляющей вход фазового детектора закорачивается. Оцифро-
ванный сигнал с АЦП поступает на ПЛИС. Входной сигнал представля-
ет собой смесь случайной и неслучайной составляющих. Неслучайная
составляющая представлена медленно меняющимся процессом. Вели-
чина такой смеси всегда отлична от нуля, а также меняет знак. Накапли-
вающий сумматор усредняет текущую смесь с заданной точностью. По-
сле того, как будет получена оценка текущей смеси, с входа фазового
детектора блокировка снимается. АЦП переходит в рабочий режим, где
из текущих выборок пилот-сигнала вычитается оценка, полученная во
время подстройки. Время следующей подстройки определяется скоро-
стью изменения постоянной составляющей.
Особенностью данной схемы является наличие накапливающего
сумматора, введение которого обусловлено присутствием случайной со-
ставляющей в смеси входного сигнала. Известно, что постоянная и слу-
чайная составляющая смеси входного сигнала накапливаются в суммато-
ре разным образом, поэтому разрядность накопительного сумматора сле-
дует выбирать, исходя из заданной точности оценки нуля и суммарной
накопленной величины постоянной составляющей. Следовательно, оцен-
ка, полученная в процессе накопления, будет определена уравнением
53
Цифровое формирование ДН в ФАР
^=^А‘+в‘>А+^^’ <ЗА2>
где: А — медленно меняющийся входной сигнал (постоянная состав-
ляющая); 6- случайная составляющая входного сигнала; N- число вы-
борок, определяющих точность регулирования; i ~ 1,2,3... - текущий
номер выборки.
Постоянная величина суммируется N раз. Случайная составляю-
щая сосредотачивается вокруг среднего значения т в интервале (т - <?,
т + S'), а сама случайная величина распределена нормально с парамет-
рами (т, S / N). Величина 6 определяется через среднеквадратическое
отклонение (СКО) случайного сигнала:
S = k(v/Jn), (3.4.3)
где 6- максимальная ошибка измерения; сг- среднеквадратическое откло-
нение; N - число выборок; К - коэффициент пропорциональности, кото-
рый определяется вероятностью попадания выборки в заданный интервал.
Далее, задаваясь относительной ошибкой £ = 61 сг, можно опреде-
лить необходимое число выборок:
N = K2l£2. (3.4.4)
Время, необходимое для подстройки постоянной составляющей,
определяется в соответствии с равенством
T=Nt, (3.4.5)
где г- длительность выборки.
При разработке многоканального приемника была разработана ти-
повая ячейка, в состав которой вошли четыре 12-разрядных АЦП и одна
ПЛИС, которая обеспечила независимую параллельную подстройку по-
стоянной составляющей каждого входного сигнала с точностью 0,5
ЕМР. Время подстройки постоянной составляющей в теневом секторе
получилось около 400 мкс. При этом задержка сигнала на цифровую об-
работку в рабочем режиме не более 0,4 мкс. Для сравнения можно при-
вести аналогичную разработку с регулировкой «назад», где при тех же
габаритных размерах типовой ячейки возможно размещение всего одно-
го 11-разрядного АЦП с задержкой в рабочем режиме 0,8 мкс.
3.5. Дискретизация полосовых сигналов
(аналого-цифровое преобразование на промежуточной
частоте)
В некоторых радиотехнических системах (например, радиолокацион-
ных) во многих практических случаях полезный сигнал занимает до-
вольно узкую часть доступной полосы частот.
54
Глава 3. Преобразование аналогового сигнала в цифровой
При аналого-цифровом преобразовании на видеочастоте одной из
проблем является амплитудное согласование и фазовая ортогональность
I- и Q-каналов, которые чрезвычайно критичны и имеют тенденцию
быть основным источником ошибки. Это обстоятельство вызвало инте-
рес к методике преобразования, где сигнал выбирается и преобразуется
в цифровую форму на ПЧ (рис. 27), а комплексный видеосигнал получа-
ется цифровым способом. Этот подход устраняет низкочастотные
фильтры, видеоусилители и преобразователи «аналог-цифра» за счет
одного более скоростного преобразователя «аналог-цифра» и некоторой
дополнительной цифровой схемотехники.
Рис. 27. АЦП входного сигнала на ПЧ
При таком варианте непосредственно «оцифровывается» сам ана-
логовый узкополосный сигнал на промежуточной частоте, а только за-
тем формируются квадратуры (рис. 28).
Для получения квадратур можно использовать специализированный
сигнальный процессор DDC (Digital Down Converter) [26,40].
55
Цифровое формирование ДН в ФАР
Основные назначения DDC - канальная фильтрация, децимация
сигнала и образование квадратуры.
Канальная фильтрация выполняется за счет квадратурного перено-
са на нулевую частоту и последующей низкочастотной (НЧ) фильтраци-
ей. DDC имеет два перемножителя, генератор отсчетов косинусов и си-
нусов, идентичные каналы НЧ децимирующих фильтров. Частота на-
стройки внутреннего генератора может изменяться в диапазоне от 0 до
половины тактовой частоты DDC.
Частота среза фильтров изменяется от сотен герц до сотен кило-
герц или даже единиц мегагерц. Процессор производит децимацию от-
счетов сигнала для того, чтобы скорость потока данных с выхода DDC
соответствовала ширине спектра выходного сигнала.
Применяются как наиболее простые DDC, осуществляющие толь-
ко цифровое понижающее преобразование, так и включающие в себя
сложные элементы демодуляции, цифровой АРУ, ФАПЧ и битовой син-
хронизации [26].
Первый интегральный одноканальный DDC HPS 50016 с внутрен-
ним динамическим диапазоном до 102 дБ выпустила фирма Harris.
Вслед за ней целое семейство DDC выпустила фирма Gray Chip:
микросхему узкополосного DDC GC1011A, широкополосного DDC
GC1011А, четырехканальную микросхему DDC GC 4014. Фирма Analog
Device выпустила одноканальную микросхему AD 6620 и четырехка-
нальную DDC AD 6624.
Краткие характеристики этих приборов приведены в табл. 3.3 [30].
Таблица 3.3. Характеристики приборов
Тип прибора Максимальная частота входных отсчетов, МГц Число разрядов входа\выхода Коэффициент децимации Максимальная полоса пропускания, МГц _ Программируе- мость фильтра Число каналов
HSP 50016 75 16/16 64-131072 0,460 Нет 1
HSP 50214 52 14/16 4-16384 0,500 Есть 1
AD 6620 65 32,5 16+3/16 2-16384 Программируется от CLK/2 Есть 1 2
GC ЮНА 75 12/16 64-65536 0,530 Есть 1
GC 1012 50 12/16 2-64 100 Есть 1
GC 4014 50 14/16 32-65536 1,25 Есть 4
56
Глава 3. Преобразование аналогового сигнала в цифровой
По назначению AD 6620 удачно подходит для решения задач циф-
рового диаграммообразования в РЛС в силу своих широкополосных и
программируемость фильтров.
Краткая характеристика AD 6620:
до 65 МГЦ максимальный поток отсчетов на входе в одноканальном дей-
ствительном режиме;
до 37,5 МГц максимальный поток отсчетов на входе в двухканальном дей-
ствительном режиме;
до 37,5 Мгц максимальный поток отсчетов на входе в одноканальном
комплексном режиме;
16-битовая входная отсчетов, фиксированная и плавающая точка;
свободный динамический диапазон - более 100 дБ;
CIC2, CIC5, RCF фильтры;
программируемость FIR фильтра RCF до 256 отводов;
выходной поток до 12,94 MSPS при выходной сторонней полосе до
1964 кГц;
32-битовый цифровой генератор для канальной селекции и подстройки.
частотная селективность - менее 0,02 Гц;
частота настройки от 0 до 32,5 МГц (при такте 65 МГц);
идентичность ФНЧ в I- и Q-каналах;
коэффициент децимации - от 1 до 16384;
последовательный или параллельный выходной режим.
Рассмотрим функционирование микросхемы AD 6620 (рис. 29).
Входной порт микросхемы построен таким образом, что может прини-
мать 16-битную мантиссу и 3-битную экспоненту с тактовой частотой
до 65 МГц в режиме одного канала действительных данных с частотой
до 32,5 МГц в режиме двухканальных действительных данных или однока-
нальных комплексных данных. Переключение каналов допускает прямое
соединение с АЦП с фиксированной точкой типа AD 9042 или AD 6640 и
Рис. 29. Функционирование микросхемы AD 6620
57
Цифровое формирование ДН в ФАР
с АЦП с плавающей точкой типа AD 6660 фирмы «Analog Device». Формат
входных данных программируется через регистры управления. Входной
порт имеет возможность вводить программируемые ослабления входного
сигнала без уменьшения динамического диапазона в интервале 0.. .42 дБ.
В режиме двухканальных действительных данных микросхема об-
рабатывает оба канала как независимые, однако параметры всех фильт-
ров и NCO для обоих каналов одинаковы.
Генератор комплексной синусоиды 32-разрядный, точность уста-
новки частоты - менее 0,02 Гц. В генераторе имеется возможность вве-
дения фазового и амплитудного джиттера (дрожания) по случайному
закону, что, в общем случае, уменьшает интермодуляционные искаже-
ния умножителей и, следовательно, увеличивает свободный динамиче-
ский диапазон выходного сигнала. Начальная фаза колебаний генерато-
ра программируется с точностью 2я/(216). Удел фазовой синхронизации
NCO может, при необходимости, обеспечить фазовую когерентность
работы нескольких AD 6620.
Комплексный перемножитель осуществляет квадратурную демоду-
ляцию как действительного, так и комплексного входного сигнала. При
необходимости перемножитель может быть программно отключен, сиг-
нал со входа микросхемы в этом случае поступает сразу на CIC2 фильтр.
CIC2 фильтр является децимитрирующим фильтром 2-го порядка с
постоянными коэффициентами.
CIC5 фильтр является децимитрирующим фильтром 5-го порядка с
постоянными коэффициентами.
FIR фильтр - отводный нерекурсивный с программируемыми ко-
эффициентами.
Кроме DDC, существуют еще несколько способов и устройств по-
лучения квадратур [30].
В настоящее время фирмой АО «Инструментальные системы» на
основе зарубежной элементарной базе разработано целое семейство
аналоговых субмодулей с различной разрядностью АЦП (от 8 до 16 раз-
рядов) и частотой дискретизации до 200 МГц.
Отечественная фирма ГУП НЦП «Элвис» разработала микросхемы,
имеющие новые функциональные качества по сравнению с аналогами,
которые позволяют этим сериям превзойти мировой уровень ИМС, дан-
ных классов при худших технологических нормах изготовления.
3.6. Выбор частоты дискретизации
Как правильно выбрать частоту дискретизации АЦП? Прежде всего, вы-
бор частоты дискретизации АЦП определяется шириной спектра сигнала
ПЧ, значением ПЧ и наличием в приемной системе опорного сигнала, ос-
новную частоту или гармонику которого можно использовать для такти-
58
Глава 3. Преобразование аналогового сигнала в цифровой
рования АЦП. Безусловно, частота дискретизации не должна выходить за
границы допустимой для конкретного типа АЦП [73]
В отсчетах сигнала на выходе АЦП присутствует бесконечный спектр,
состоящий из периодически повторяющихся симметричных относительно
гармоник частоты дискретизации спектров. Все равно, где находится спектр
исходного аналогового сигнала - в диапазоне частот от 0 до КдаС1ф или от
Т^дискр^^ до 7*дискр, или от Fдискр^2 до спектр отсчетов сигнала с
выхода АЦП одинаков. Важно лишь то, чтобы ширина спектра сигнала ПЧ
не превосходила половины частоты дискретизации АЦП. Условие для шири-
ны спектра необходимо выполнить для того, чтобы периодически повто-
ряющиеся спектры сигналов в отсчетах АЦП не перекрывались.
Обычно для перекрывающихся внеполосных компонент спектра сиг-
нала ПЧ устанавливаю! требование, чтобы они не превосходили уровень
собственных паразитных помех, возникающих при аналого-цифровом пре-
образовании (собственный уровень помех цифровой обработки пренебре-
жимо мал). Обычно требуется от -60 до -70 дБ. В особых случаях это тре-
бование ужесточают до -80 дБ.
Частоту дискретизации следует выбирать так, чтобы фильтр защиты
от наложения спектров: ослаблял искажение от наложения, попадающее в
полосу пропускания, до уровня, меньшего, чем минимальный среднеквад-
ратический шум АЦП, чтобы оно было неразличимо для АЦП.
Полоса пропускания фильтра ПЧ должна быть как можно уже, но не
должна быть меньше полосы пропускания сигнала ПЧ. Полоса входного
сигнала в значительной степени влияет на выбор частоты дискретизации.
Выбор типа АЦП возможен только после выбора частоты дискретизации.
Пример. Центральная полоса сигнала на входе цифрового при-
емника Fc = 30 МГц, полоса пропускания по уровню - 60 дБ ± 5 МГц.
Обозначим FB = 5 МГц. Поскольку спектр сигнала занимает сравнитель-
но небольшую полосу частот вокруг центральной, искомую частоту
Дискретизации Fs можно определить из выражения
F F
£^+1
Ъ____<Is_<£a
fc + 1 2FB к ’
где к - целое число, к < —--.
Для Гс=30МГц, к <2, 5, к = 0, 1,2; 70,0 МГц < F\ МГц;
35,0 МГц < F] МГц < 50,0 МГц; 23,4 МГц < F, МГц < 25,0 МГц.
К характеристикам фильтров, которые влияют на выбор частоты
Дискретизации, относятся: частотное содержание входного сигнала;
Требования к фильтрации для защиты от наложения спектров; допусти-
мый уровень искажения от наложения спектров; разрядность АЦП.
59
Цифровое формирование ДН в ФАР
Для определения допустимого уровня искажения от наложения
спектров можно использовать связь между частотой дискретизации,
уровнем искажения от наложения и параметрами фильтра. Например,
можно определить допустимый уровень искажения для заданных харак-
теристик фильтра защиты от наложения спектров, а затем определить
частоту дискретизации, необходимую для достижения этого уровня.
Можно также при заданной частоте дискретизации рассчитать мини-
мальное затухание в полосе подавления, которое даст фильтр защиты от
наложения спектров, необходимое для обеспечения определенного
уровня искажения. На практике следует также учитывать разрядность
АЦП, так как она определяет минимальный уровень шумов в системе.
3.7. Фильтр защиты от наложения спектров
Для уменьшения эффектов наложения обычно используют фильтры
защиты от наложения спектров с резким срезом, которые ограничивают
полосу частот сигнала и/или увеличивают частоту дискретизации, что-
бы отодвинуть спектр сигнала и зеркальный спектр дальше друг от
друга. В идеале фильтр защиты от наложения спектров должен устра-
нять все частотные компоненты с частотой, превышающей частоту
наложения.
Фильтр защиты от наложения спектров должен обеспечивать дос-
таточное подавление характеристики на частотах, превышающих часто-
ту Найквиста. Из-за неидеальности характеристик тех фильтров, ко-
торые используются на практике, в качестве эффективной частоты
Найквиста берется^ (частота среза). При спецификации фильтра защи-
ты от наложения спектров полезно также учитывать требования к раз-
рядности АЦП.
Итак, фильтр защиты от наложения спектров следует разрабаты-
вать так, чтобы частоты, превышающие частоту Найквиста, подавля-
лись до уровня, неразличимого для АЦП (например, до уровня, меньше-
го, чем шум квантования). Так, для системы, в которой используется
5-битовый линейный АЦП, минимальное затухание в полосе подавле-
ния фильтра, как правило, будет равно
A,ln=201g(7Ux2B),
где В - число битов АЦП.
Ниже приведены значения y4min для различных В’.
Д™, дБ....50 62 74 98
В........8 10 12 14
Применение для предварительной обработки данных системы
ЦОС аналогового фильтра накладывает еще одно ограничение, так на-
зываемое условие фазового искажения.
60
Глава 3. Преобразование аналогового сигнала в цифровой
--------------------------------------------------------------------
На рис. 30 и 31 изображены частотная и фазовая характеристики
фильтра нижних частот (ФНЧ) Баттерворта 4-го порядка (л = 4) и часто-
той среза cos= 0,2, предназначенного для защиты от наложения спектров.
Рис. 30. Частотная характеристика фильтра Баттерворта 4-го порядка (л = 4)
и частотой среза (II s ~ 0,2)
Рис. 31. Фазовая характеристика фильтра с аналогичными
параметрами
Здесь показано, что фазовая характеристика зависит от частоты нели-
нейно, так что компоненты искомого сигнала будут иметь смещения фазы
или задерживаться на величину, не пропорциональную их частотам.
Величина искажения зависит от характеристик фильтра, включая то,
насколько круто спадает его амплитудно-частотная характеристика. В
большинстве случаев чем круче спад (т.е. чем уже полоса пропускания),
тем больше фазовое искажение вносит фильтр, и тем труднее согласовать
амплитуду и групповую задержку каналов в многоканальной системе. Од-
нако применение фильтров с крутым срезом позволяет использовать низ-
кую частоту дискретизации и менее скоростные (т.е. более дешевые) АЦП.
При обработке сигналов в реальном времени наблюдается тенденция
к использованию высокой частоты дискретизации, т. е. к выборке с запасом
По частоте, даже если это осуществляется за счет применения скоростных и
Дорогих АЦП. Можно использовать простые и дешевые фильгры защиты
от наложения спектров, минимизирующие фазовое искажение.
61
Цифровое формирование ДН в ФАР
Из-за наличия энергии сигнала за пределами представляющей ин-
терес полосы частот всегда существует искажение от наложения. Чтобы
снизить его до приемлемого уровня, перед дискретизацией необходимо
ограничить полосу частот сигнала и, по возможности, провести выборку
с запасом по частоте. Рис. 32 поясняет эффект наложения спектров от
частоты среза фильтра защиты.
Рис. 32. Эффект наложения спектров от частоты среза
фильтра защиты
62
ГЛАВА 4
Погрешности, вносимые
дестабилизирующими факторами
при оценке количественных
и качественных характеристик
выходного сигнала цифровой
антенной решетки
4.1. Определение динамического диапазона
Динамический диапазон является важнейшим параметром РЛС с точки
зрения помехозащищенности. Под ДД понимают отношение макси-
мального значения сигнала на линейном участке его амплитудной ха-
рактеристики к соответствующему эффективному значению мощности
шума приемного тракта. При этом эффективное значение должно соот-
ветствовать пороговому сигналу. Одним из основных преимуществ
ФАР с цифровым формированием ДН является повышенный ДД по
сравнению с традиционным одноканальным построением.
С точки зрения максимизации ДД, при заданной разрядности Ъх
АЦП, уровень собственных шумов желательно располагать как можно
ниже на сетке уровней квантования.
Мгновенный ДД приемной многоканальной системы с цифровой
обработкой сигналов определяется числом разрядов АЦП и параллель-
ных каналов А. Если максимальная амплитуда выходного сигнала АЦП
соответствует Y, то наибольший суммарный сигнал для N каналов равен
А, что соответствует мощности Рг :
J vmax
Рс =1(АУ)2.
''max 2 v 7
Если один разряд АЦП обозначает знак сигнала, то минимальная
мощность суммарного сигнала, соответствующего мощности наимень-
шего значащего разряда, можно определить по формуле
63
Цифровое формирование ДН в ФАР
1Г Y
ги**-1
Рс
vDlin
N,
где Ьх - число разрядов АЦП.
Регулируя усиление таким образом, чтобы собственные шумы
приемного тракта в среднем соответствовали наименьшему значащему
разряду, ДД, дБ (DD) можно определить следующим образом:
рс Г} П max — z = 22^-1^, (4.1.1)
Рс 1 Y2 Ат Спип ДГ 2 (2^-1 )2 = [6(^-l) + 101ogA],
При этом ДД увеличивается на 6 дБ на один разряд, а коэффициент
N выражает его рост, обусловленный когерентным интегрированием N
элементарных сигналов.
Выходной сигнал у фазированной антенной решетки с цифровым
формированием ДН Y с весовыми коэффициентами равен Y = ,
П=1
а в матричной записи Y = XWT = Хт W .
Средняя мощность выходного сигнала определяется как
Рс = е{ yy*) = £:|(xWT)(xTw) | = XXя} W*=WtRcW*, (4.1.2)
где £”{•}- операция усреднения; (-)т* = (-)н - эрмитова сопряженность
(транспонирование и комплексное сопряжение); Rc = Е{ХХЯ} - матри-
ца ковариации вектора сигнала.
Элементарные сигналы {х„} можно выразить в виде вектора-
столбца:
X = (х0,х],х2,...,хЛ,_1) = Y,
где A(t) характеризует рассогласование по коэффициенту усиления ме-
жду приемными каналами.
Тогда ковариационная матрица вектора-сигнала примет вид
Rc=£{xX//} = e||J|2|y¥h. (4.1.3)
Собственный шум выразим тоже в виде вектора-столбца:
Тогда аналогично (4.1.2) находим мощность шума:
PUI=WTR„W\ (4.1.4)
где R„ = Е{г]г/1} - матрица ковариации вектора шума.
64
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
Из уравнений (4.1.2) и (4.1.4), с учетом (4.1.3) получаем отношение
сигнал/шум:
= £{И2}-
wtyy"w*
WRW'
(4.1.5)
При пороговом сигнале, соответствующем собственному шуму
приемного тракта, выражение (4.1.5) фактически является ДД. В (4.1.3)
Rc - корреляционная матрица входных сигналов. Она будет эрмитовой
и положительно определяемой и при гауссовой статистике сигналов со-
держит всю информацию о последних, имеющихся в ЦАР, сигналах:
RC=E^}YYH =cy2AYYH. (4.1.6)
Выражение (4.1.5) можно представить в другом виде:
Р^_ 2 WTYY"W*_ 2 |w"y|2
РШ~°А WTR„W* -^W^R/W’
(4.1.7)
Совокупность корреляционных моментов образует корреляцион-
ную матрицу многомерной случайной величины:
R,
Т?12 7^13 -• 7?1ЛГ
7^21 Т?22 Т?23 • " T?2jv
7?3i 7^32 Т^зз • -
&N2 7?д,з . - RfJN
Совокупность корреляционных моментов (7?ц, /?]2, 7?|з- • ••> 7?1Л) об-
разует строку для ФАР в горизонтальной плоскости, а совокупность
корреляционных моментов (Л]2, /?2ь /?зь ..., Ям) - соответственно стол-
бец для ФАР в вертикальной плоскости. Rc характеризует совокупность
корреляционных моментов в двух плоскостях.
Вектор сигнала образован случайными сигналами от N некоррели-
рованных каналов АР. Тогда с учетом некоррелированности сигналов в
каналах решетки, сигнальная составляющая корреляционной матрицы
Может быть представлена в виде
(4.1.8)
гДе Y, - неслучайный сигнал в раскрыве АР.
Если вектор сигнала включает также составляющую собственных
Нгумов элементов решетки, не коррелированных между каналами и с сиг-
налами, то результирующая корреляционная матрица примет вид [11]
65
Цифровое формирование ДН в ФАР
R = RC+RIU=RS + diag {а2}, (4.1.9)
где стр - мощность шумов АР, одинаковая во всех каналах.
При аналитических исследованиях последнее равенство упрощается:
Л’
R = Rc + ст27 = У су2аГ^и +<т021 , (4.1.10)
/=1
где I - единичная матрица.
Для коррелированной матрицы, как и вообще для любой эрмито-
вой матрицы, справедливо следующее соотношение, известное под на-
званием спектрального разложения (спектр матрицы - это совокупность
ее собственных значений):
N
R = UAU77 = У , (4.1.11)
/=1
где U - унитарная матрица собственных векторов Uf, U = (U],..., U^);
Л - диагональная матрица соответствующих собственных значений Д,
i = 1, ..., N, Л = diag(/i, ..., ЛЛ).
Выражение для R (4.1.11) имеет ранг 1, и ее единственное не нуле-
вое собственное значение будет в виде
(4.1.12)
при соответствующем собственном векторе
где || • || - евклидова норма вектора.
При определении корреляционной матрицы на практике обычно
используется максимально правдоподобная выборочная оценка
1 N
R =—У , получаемая при выборке из N каналов.
i=l
4.2. Выходной сигнал цифрового устройства
цифровой антенной решетки
На практике выходной сигнал ЦАР при прохождении через приемный
тракт РЛС подвергается различным дестабилизирующим факторам. К
дестабилизирующим факторам относятся неидентичность частотных и
фазовых характеристик приемных каналов; ошибки, вызванные вычис-
лением весовых коэффициентов; декоррелирующие явления, обуслов-
ленные наличием шумов; разбросы моментов дискретизации аналого-
цифрового преобразователя в различных каналах и др.
66
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
Сигнал, поступающий в каждый приемный канал, удобно пред-
ставлять в виде комплексной величины, тогда выходной сигнал в и-м
канале можно записать в виде
xn=In+JQn=Yn+&Yn+h„ + pn, (4.2.1)
где Im Qn ~ синфазная и квадратурная составляющие; Yn =an exp(jj/H) -
сигнал в и-м канале; Д^7 - искажение сигнала при прохождении через
приемный тракт; hn - погрешности, обусловленные шумами в каждом
канале; рп - погрешность, обусловленная усечением длины слова.
Чтобы изменить или «взвесить» фазу и амплитуду сигнала хп на
значение комплексный коэффициент й>77 = I + jQw„, примем условие,
что для получения взвешенных выходных сигналов устройство обра-
ботки использует действительную и мнимую части сигналов, который
можно представить в виде алгоритма:
J'n = АЛ - QnQw , Q'n = Ш + Q.JW (4.2.2)
Полное описание приближенного процесса весовой обработки
дискретного сигнала и собственного шума в «-м канале можно предста-
вить следующим образом:
ЧА =(Ч +АЧ)( А +АА +4 + А) ~ ЧА +АЧА +
+ЧА+ЧА (4.2.3)
Это приближенное выражение справедливо только при малых
ошибках.
Если перейти к матричной системе обозначения, то рассматривае-
мый анализ может быть распространен при описании весовой обработки
и суммирования для случая антенной решетки с N приемными каналами.
Квантованные сигналы [хь х2, Л'з, х„] обозначим транспониро-
ванным вектор-столбцом Хт.
Применив матричное обозначение, можно записать
Ут = [Хь Г2, Г3...ад,Д¥т = [ДУ„ДУ2, Д1з...дад
Нт = [A|, hi, h3...hN\, AWT= [Ди'1, Ди>2, Aw3...AwA’],
рТ= [Pi, Pi, P3- -Pn\-
Выходной сигнал £2 цифрового устройства формирования ДНА
Можно представить в виде
£2 = WTX = (W + AW)T(Y + AY + H + p). (4.2.4)
67
Цифровое формирование ДН в ФАР
Если предположить, что ошибки являются малыми, то выражение
(4.2.4) можно разложить в ряд. Опуская члены, относящиеся к ошибкам
2-го порядка малости, выходной сигнал Q запишем так:
Q WY 4 WTAY + AWTY+ WTH + /?WT (4.2.5)
Если не считать первый член, который представляет полезный
сигнал на выходе устройства формирования ДН, все остальные члены
можно отнесяти к ошибкам 1-го порядка малости.
Как правило, в вычислительном устройстве применяется метод
усечения, в котором использовано округление с отбрасыванием дроби
меньше половины цены младшего разряда или путем увеличения числа
на единицу, что позволяет избежать систематической ошибки. В про-
тивном случае возникает систематическая ошибка, дисперсия огр кото-
рой обусловлена ошибкой как в действительной, так и в мнимой части
(и2Ь
выходного сигнала. Она определяется выражением Е
124'л)
6
[1], где Ъу - число разрядов выходного сигнала.
Для этого случая необходимо в выражении (4.2.5) учитывать нали-
чие систематической ошибки.
На рис. 33 изображена гистограмма распределения плотности вероят-
ности шумов на выходе суммирующего устройства ЦАР 40 приемных ка-
налов, когда не используется метод усечения. На гистограмме отчетливо
видно смещение среднего значения относительно нуля. На рис. 34 дана
аналогичная гистограмма с использованием метода усечения. На гисто-
грамме смещения среднего значения относительно нуля не происходит.
Рис. 33. Гистограмма распределения шума при суммировании каналов
без учета округления
68
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
Рис. 34. Гистограмма распределения шума при суммировании каналов
с учетом округления
Таким образом, в алгоритмах обработки необходимо использовать
метод усечения, чтобы избежать систематической ошибки. Поэтому
член сг2ш = у| | в качестве дестабилизирующего фактора, ограни-
чивающего ДД, не учитывается.
4.3. Исходные предпосылки для оценки
дестабилизирующих факторов, ограничивающих
динамический диапазон
Для количественной оценки ошибок, связанных с полезным выходным
сигналом, рассмотрим N приемных каналов в антенной решетке и схему
распределения весовых коэффициентов, взятого в форме распределения
Хэмминга:
Wn = 0,5 1 - cos
2тги
N-l
,« = 1,2, 3, .„AM,
(4-3.1)
где N - число каналов.
Пусть на линейную решетку падает плоская волна А(п) = А, где п
изменяется от 1 до N. Фаза полезного сигнала, на которую воздействует
весовой множитель, является сопряженной с фазой волнового фронта
Падающей плоской волны, поэтому в направлении максимума ДН вы-
ходной мощности полезного сигнала определяется в виде
69
Цифровое формирование ДН в ФАР
lwTv|2=^ хи
(4.3.2)
2
где <тс
= е{|д«)|2}
- дисперсия, характеризующая рассогласование по
коэффициенту передачи между каналами.
Шумовая составляющая, определяемая собственными шумами
приемного тракта и шумами квантования, описывается выражением
= е |wth| =2я2^|и;|2.
(4.3.3)
Тогда выражение (4.1.7), характеризующее потенциальный ДД, с уче-
том (4.3.2) и (4.3.3) можно представить в виде
Рс 0,24сг^2
(4-3.4)
Собственные шумы <т2 и шумы квантования <т2в (где <т2в - — ,
с 12
q - единица младшего разряда (ЕМР)), которые всегда присутствуют
(член Н), можно записать как
(4.3.5)
В рассматриваемом случае используются N приемных устройств,
примерно с одинаковыми качественными паказателями.
Если распределение весовых коэффициентов соответствует рас-
пределению Хэмминга, то выходная мощность полезного сигнала опре-
деляется выражением
I г I2
Ps=|WrY|
ХН »о,24СТ2№.
(4.3.6)
_ И=1
Дисперсия ошибки, обусловленная собственными шумами и шу-
мами квантования, может вычисляться по формуле
2-0,37| сг2+—j.
I 12>
(4.3.7)
2//2ХК12
70
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
Таким образом, потенциальный ДД определяется как отношение
мощности полезного сигнала Рс к мощности собственных шумов и шу-
мов квантования сг2.
В качестве примера примем максимальную амплитуду полезного
сигнала А = 0,7 В и тп = 12 разрядов АЦП. ЕМР соответственно будет
определяться как
9 = ^г = -И_ = 6,8-10“4 В,
2'”- 2048
(У1 =^- = -------L = о, 04 1(Г6 Вт.
кв 12 12
Примем оД. = Зсг2в = 0,12 • 10~6 Вт. Тогда
а* = 2 ( ст2 с + сг2в ) - 2 • 0,37 • (0,12 + 0,04) • 10^ = 0,12 • 10-6 Вт,
DD = — =-----—т = 4-103, £>£>Б = 201оё(4 103) = 72дБ.
<тш 0,346-10'3 дБ v ’
Экспериментальные исследования разбросов усиления приемных
каналов ЦАР (без учета конструктивных шумов). Цель эксперимента
заключалась в оценке величины разброса коэффициентов усиления при-
емных каналов РЛС с ЦФАР. Исследования проводились на начальном
этапе работы РЛС без включенных автоматических регулировок. Предва-
рительно все входящие в ЦФАР устройства были отрегулированы и их
технические параметры соответствовали техническим условиям (ТУ).
Методика эксперимента заключалась в следующем. Проводились
измерения ДД реальной приемной аппаратуры 40 каналов в нормальных
климатических условиях (температура окружающей среды +20°С) на
специальном стенде. Схема приемного канала приведена на рис. 35, а
схема стенда - на рис. 36.
Зондирующий сигнал подавался от генератора Г4-80 в У-диа-
пазоне. Гетеродинные и опорные напряжения формировались специаль-
ным устройством (ФСГП). Г4-80 и ФСГП подключались к аппаратуре
приемного канала на соответствующие входы. Управление работой стен-
да в том числе синхронизация осуществлялись субблоком управления.
Загружалась специальная рабочая программа в ПЭВМ. Для сопряжения
Цифровой части устройства с ПЭВМ в слот ПЭВМ устанавливался мо-
дуль ADP60ISA, разработанный АО «Инструментальные системы»,
включались источники питания, ФСГП, Г4-80. Максимальная амплиту-
да зондирующего сигнала от Г4-80 на выходе цифровой части приемно-
го устройства должна соответствовать линейной части амплитудной ха-
71
Цифровое формирование ДН в ФАР
рактеристики. Из окна «Амп. 1» рабочей панели с экрана монитора счи-
тывался коэффициент усиления (КУ) в условных единицах.
Рис. 35. Схема приемного канала ЦАР
Рис. 36. Схема стенда для проведения измерений ДД
72
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
Отключался входной зондирующий сигнал и из окна «Sigma 1» на
рабочей панели с экрана монитора считывалось эффективное значение
шума приемного тракта сгш.
По аналогичной методике проводились измерения всех 40 каналов.
На основании полученных данных определялся ДД приемного канала
по формуле
(2U
£>дБ=201оё - .
V °ш 7
Сигналы, прошедшие тракт, подверглись весовой обработке, путем
комплексного умножения сигнала на весовые коэффициенты. В качест-
ве весовых функций была выбрана функция Хэмминга. Коэффициенты
функции Хэмминга вычисляются по формуле
w(« + l) = 0,5 1-cos
2тгп
2V-1
« = 0, 1,2, 1,
где N- число каналов.
Коэффициенты усиления между каналами, как показали экспери-
менты, слабо коррелированна. Коэффициент корреляции составляет
0,15... 0,056.
В реальных условиях коэффициент усиления приемных каналов
под влиянием дополнительных климатических и временных факторов
(тепло, холод, влага, механические воздействия, старение и др.) имеет
дополнительные уходы усиления.
На рис. 37 показаны величины разбросов усиления, имеющие ме-
сто при испытаниях серийных РЛС дециметрового диапазона при экс-
плуатации в течение длительного времени (14 каналов). Максимальный
разброс между каналами достигает 12 дБ.
Рис. 37. Гистограмма разброса усиления 14 каналов после 1 месяца работы
73
Цифровое формирование ДН в ФАР
На рис. 38 приведен экспериментальный график измерения коэф-
фициентов КУ в условных единицах для N каналов. Из анализа графика
рис. 38 можно сделать выводы, что реальные каналы имеют разбросы
усиления. Закон распределения близок к равномерному.
Рис. 38. График изменения коэффициентов усиления КУ но каналам
(в условных единицах)
В реальной аппаратуре приемные каналы до установки блоков в ре-
шетку предварительно сортировались таким образом, чтобы аппаратура с
наилучшими параметрами устанавливалась на краях антенной решетки.
На рис. 38-40 приведены гистограммы распределения коэффици-
ентов усиления и шумов 34 каналов. Дисперсия соответственно соста-
вила сгш= 1,025, сгку = 1,053-103. Закон распределения оказался близок к
Рис. 40. Гистограмма распределения
коэффициентов усиления КУ
в условных единицах
(стандартное отклонение
коэффициентов усиления 34 каналов
<тку = 1,053-103)
Рис. 39. Г истограмма распределения
шумов по каналам
(стандартное отклонение шумов
34 каналов сгш = 1,025)
74
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
усеченному гауссовскому. Сигналы, прошедшие через приемный тракт
перед суммированием, подвергались весовой обработке. В качестве ве-
совой функции была выбрана функция Хэмминга. Коэффициенты
функции Хэмминга вычислялись по формуле
FF=[0,5(l-cos(2^/^-l)))],w= 1,2,3, 1.
На рис. 41 и 42 приведены графики изменения стандартное откло-
нение значения шума и коэффициентов усиления по каналам с учетом
весовой обработки по Хэммингу. На рис. 43 изображена зависимость
потенциального ДД рассчитанного по формуле 4.3.4 от числа приемных
каналов N. На этом же рисунке показана зависимость ДД от числа при-
емных каналов, полученная на основании экспериментальных данных.
Соответственно, реальный ДД уменьшился.
Рис. 42. График изменения коэффици-
ентов усиления в условиях единицах
КУ по каналам умноженных
на весовые коэффициенты KS
Рис. 41. График изменения
стандартного отклонения значения
шумов сгш по каналам, умноженных
на весовые коэффициенты КУ
Рис.43. Изменение ДД / стш от числа приемных каналов
75
Цифровое формирование ДН в ФАР
Таким образом, наличие ошибок, вызванных разбросом усиления
между каналами предварительно настроенных входящих устройств при-
емных трактов по своим ТУ, требуют введения соответствующей аппа-
ратуры, реализующей функции коррекции амплитуды и фазы.
Отношение сигнал/шум, который определяет ДД, реальной систе-
мы, испытывающей воздействие как внутренних, так и внешних «пара-
зитных» аддитивных шумов, можно определить выражением
£>£> =
И')
^(0+^(0’
(4.3.8)
где У(?) - входной сигнал; <т2 (?) - входной шум (собственный шум
приемного тракта); сг,2(/) - «паразитный» шум (шум, обусловленный
неидентичностью АЧХ и ФЧХ приемных каналов, конструктивный
шум, шум, вызванный нестабильностью тактовых сигналов (джиттер) и
другими факторами).
С точки зрения максимизации ДД при заданной разрядности Ьх,
уровень собственных шумов приемного тракта желательно располагать
как можно ниже по сетке уровней квантования. При этом проектируе-
мая система должна соответствовать заданному отношению сиг-
нал/шум, при котором обеспечиваются необходимые вероятности пра-
вильного обнаружения D и ложной тревоги F.
В любом случае «паразитные» шумы нужно снизить до уровня,
чтобы отношение сигнал/шум определялось входными шумами сг2 (?).
Пусть сг2 (z) = , тогда для значения т > О
Л2(/)
DD = -------------,
(w2 + l)cr2(?)
(43.9)
где т - отношение среднеквадратического значения (СКО) входного
шума к СКО «паразитных» шумов.
ПриЯ(?)-(2^’')7
(4.3.10)
Здесь Ъх - число разрядов АЦП.
Если ДД АЦП согласован с уровнем случайного сигнала, т.е. равен
тройному среднеквадратическому значению случайного сигнала на вы-
ходе элемента решетки, то
Х?)=(2^’,)^ = 3ос. (4.3.11)
76
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
Тогда мощность сигнала на выходе TV-канального синфазного режима
при воздействии сигнала по максимуму главного лепестка ФАР
А2(2М2 q2
< . (4.4.12)
Считая, что каждый элемент ЦАР имеет одинаковую пересчитан-
ную по входу мощность собственных шумов приемного тракта erf (/) и
примерно одинаковую мощность «паразитных» шумов сгА (/), общая
мощность шумов многоканальной системы будет составлять
(')=(0+о* (')) • Тогда
DD *4(0 ^')2ч2
y(^(l) + ffft2(z)) <72W + ff2(/)'
На рис. 44 изображены графики ДД в функции числа каналов N,
разрядов Ьх, собственных шумов erf (/) и «паразитных» шумов сгА (/)
приемного тракта для случая erf (/) = erf (/).
bx= 12 разрядов, crf(t)=rf(f)=3 ЕМР
а)
N=3Q, crf(f) = cr2(z) = 3 ЕМР
б)
в)
Рис. 44. Зависимость ДД
от числа каналов N (а),
разрядов Ьх (б), мощности собственных
шумов сг2(7) и мощности
«паразитных» шумов стЛ(0 (в)
77
Цифровое формирование ДН в ФАР
4.4. Оценка влияния декорреляции,
обусловленной неидентичностью
частотных характеристик приемных каналов
цифровой аналоговой решетки
Неидентичность частотных характеристик каналов может быть самого
разного рода: в виде различий в ширине полосы пропускания и в частоте
настройки (центральной частоте), различий в форме вершины амплитуд-
но-частотной характеристики, разбросом квадратурных каналов по коэф-
фициенту усиления и фазовому сдвигу и другими факторами.
Устройства обработки аналоговых сигналов в ФАР с цифровым
управлением являются элементами, определяющими многие важные ха-
рактеристики приемного тракта и РЛС в целом ДД, чувствительность,
полоса пропускания и другие параметры. Более того, на совершенном
уровне развития техники именно эта часть аппаратуры ограничивает
предельно допустимые характеристики устройств обработки сигналов в
части ДД. Элементы СВЧ приемного тракта (УВЧ, фильтры СВЧ, сме-
сители), как правило, в РЛС имеют сравнительно широкую полосу час-
тот по сравнению со спектром зондирующего сигнала и не искажают
структуру принятого сигнала.
На выходе последнего преобразователя частоты (смесителя) исполь-
зуют усилитель промежуточной частоты с согласованным (оптимальным)
фильтром, который и определяет в основном полосу пропускания прием-
ного тракта. Нелинейность аппаратуры аналоговой части приемного
тракта предшествующая АЦП должна обеспечить требуемый ДД.
Следует отметить, что за последнее время наметился значитель-
ный прогресс в области создания аппаратуры аналоговой части прием-
ного тракта (это преселекторы, УВЧ, сверхмалошумящие усилители,
смесители, УПЧ). Предлагаются готовые решения узлов приемного так-
та, позволяющие иметь ДД аналоговой части до 85 дБ. Этому способст-
вовали разработанные интегральные ВЧ компоненты фирм Hewlett-
Packard, Motorola, Philips, Siemens и многих других. Однако следует от-
метить, что практическая реализация аналоговой части приемника с вы-
сокими требованиями к ДД с высокой линейностью и низким уровнем
шумов - трудная задача.
Ограничимся рассмотрением амплитудно-частотных характери-
стик гауссовой формы (без учета фазочастотных характеристик) и мо-
делью неидентичности амплитудно-частотных характеристик в виде
смещения центральной частоты настройки каналов на величину А«у„
А*Ч, пульсациями АЧХ в полосе пропускания и разбросами квадратур-
ных каналов по коэффициенту усиления и фазовому сдвигу при анало-
го-частотном преобразовании на видеочастоте.
78
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
Элемент корреляционной матрицы Rik может быть определен как
обратное преобразование Фурье (при т=0) от взаимного энергетического
спектра Sik((v) комплексных огибающих соответствующих каналов.
При равномерном в пределах полос пропускания каналов энерге-
тическом спектре комплексной огибающей входного сигнала S(a>) вза-
имный энергетический спектр определяется передаточными функциями
каналов Kik(ja>y.
SiM = K^a^K^co^cd), (4.4.1)
которые равны
K,k(j(d) = Clk{a))QX^\j(pik(co)\, (4.4.2)
здесь C,7t(<y) и <pik(cd) соответствуют амплитудно-частотной и фазоча-
стотной характеристикам каналов.
При идентичности амплитудно-частотных и фазочастотных харак-
теристик каналов имеем
(4-4-з)
Для элемента корреляционной матрицы Rik при неидентичности
амплитудно-частотных характеристик в [11] предложено оценивать
^K\ja))Kk(-j(o]d(j)
Rlk= , (4.4.4)
J С2
где Rik0 - элемент корреляционной матрицы при идентичных характери-
стиках.
Если принять модель неидентичных амплитудно-частотных харак-
теристик в виде смещения центральной частоты настройки каналов на
величины 5<у„ Ъсок, тогда
СДш) = ехр
(я + ^)
2Д<у2
(4-4.5)
и соответственно
7^=ехр
-я(<5ку;-
2Дй)2
(4.4.6)
Введя нормирование по отношению к полосе До» канала смещения
центральной частоты настройки /? = и задавая изменение (3 = 0,037,
ДбУ
что соответствует на практике Ъш- 150 кГц при полосе частот Да>= 4 МГц,
а также принимая закон распределения величины (3 нормальным с по-
79
Цифровое формирование ДН в ФАР
мощью метода математического моделирования и используя пакет
Matlab, получим
Z=0:l:1000;x = 0,037*randn(size(/)); сг| = cov(x);cr^= 1,02-10-8.
В соответствии с выражением ЕДИ^АУд^2} получим величину
дисперсии ошибки, вызванную неидентичностью частотных характери-
стик каналов
N
а2с = I|2 «!, 02 • 10’8 0,37 = 3,7 • 10"° В2. (4.4.7)
И=1
Часто для обеспечения требований электромагнитной совместимо-
сти применяют фильтры с высоким коэффициентом прямоугольности. К
таким фильтрам можно отнести фильтры на поверхностных акустиче-
ских волнах (ПАВ).
Стремление уменьшить ослабление сигнала при прохождении че-
рез фильтр на ПАВ, что сказывается на уменьшении ДД, приводит к
увеличению амплитудных и фазовых колебаний (пульсаций) частотных
характеристик в полосе пропускания.
Если многие вопросы, связанные с искажениями АЧХ и ФЧХ
фильтра, о которых упоминалось в гл. 1, нашли свое отражение в пуб-
ликациях, то влияние колебаний (пульсаций) в полосе пропускания на
ДД еще требует проведения дополнительных теоретических и экспери-
ментальных исследований.
На рис. 45 приведены экспериментальные АЧХ двух различных
фильтров на ПАВ, откуда, что пульсация и их амплитуда в двух фильт-
рах различаются и практически имеют случайный характер.
Обозначим спектральную плотность широкополосного сигнала как
<д„(/Д, а спектральную плотность сигнала на выходе системы как (рр(со),
которая записывается в виде
(рр( (о)=\Н^ со)-Н{( atf<pn( со). (4.4.8)
Мощность определяется как интеграл от спектральной плотности
ПВ
^ = 2^В J (4-4-9)
-яВ
где В - полоса пропускания фильтра; Яо(ш) - АЧХ с пульсациями;
Я1(ш) - АЧХ без пульсаций.
Пусть спектральная плотность сигнала в требуемой полосе частот
равна единице, тогда составляющая выходной мощности, обусловлен-
ная амплитудной характеристикой, будет равна
1 пВ
[|//0(®)-Н|(<»)р<». (4.4.10)
2-7CD J
-я В
80
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
f МГц
Рис.45. АЧХ фильтра на ПАВ
/, МГц
Введем модель АЧХ, близкую к реальной, в виде [23]
^о(®) =
1 + 7^(/)сО8Л?0Г0
О
при
|<Z>| < 7ГВ,
в остальных случаях,
(4.4.11)
где То =------- - целое число, соответствующее периодам пульсаций
2В
#о(<у) в полосе частот 2?; A0(t) - неравномерность в полосе частот В
фильтра /Уо(<у)-
В качестве фильтра с АЧХ примем идеальный, не имеющий
пульсаций в АЧХ и ФЧХ, т.е. Н^щ) - 1, ул(щ) = 0. Тогда выражение
(4.4.10) примет вид
-лВ
1
= ЪгВ f {[1 + 4)(0cos<y7’o(n)]2-l}^ =
-лВ
= 2лВ f D + ^-1-
-лВ
(4.4.12)
81
Цифровое формирование ДН в ФАР
Для выходной мощности, обусловленной изменением числа пуль-
саций в полосе пропускания, при усредненном значении амплитуды
сигнала выражение (4.4.12) примет вид
<72(j(/),?;(»))=
я В Алах 2 \ (4.4.13)
=----- J J Hl + ^(r)cosft>r0) -l]fE^A)da>dA,
-яв ЛП11П
1 ( А2
где W(A) =-----==ехр —- - усеченный гауссовский закон в интер-
сглл/2л' ^2tr“ J
вале Hmin, Лтах], который характеризует закон изменения амплитуды
АЧХ фильтра на ПАВ в полосе пропускания В.
Примем, что Лтп1 и Лтах соответствуют максимальной и минималь-
ной амплитудам пульсаций АЧХ (Amin = 0,26 дБ, Атах = 0,8 дБ).
Зависимость выходной мощности от числа пульсаций приведена
на рис. 46. Как видно из рисунка, с увеличением числа каналов значение
выходной мощности ошибки уменьшается и стремится к постоянной
величине (в данном примере - 0,082 дБ). Соответственно, мощность
ошибки, обусловленной искажениями АЧХ фильтров на ПАВ, равна
для ошибки 0,51 дБ
( 2) v
Е |wrAs| =a(z)2J^|2 ~0,0231-0,06 =0,00138 В,
для ошибки 0,082 дБ
( 2) N
Е |wrAs| =д(г)^2|и;|2*О,0231-0,0009=0,00021 В.
' ' И=1
82
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
~ ~ ~ ------------------------------------------—--------
4.5. Оценка погрешностей, связанных с наличием
конструктивного шума
Конструктивный шум зависит от оптимального сочетания конструкции
и технологии изготовления печатной платы, компоновки элементов на
плате, наводок и пульсаций цепей питания, «паразитных» наводок ак-
тивных элементов (шинные формирователи, влияние гармоник сигнала
от тактовых импульсных или ВЧ-генераторов и др.)
Теоретические исследования количественных характеристик кон-
структивного шума представляют непреодолимые трудности из-за вза-
имного влияния перечисленных выше причин. Поэтому попытаемся
экспериментально проанализировать и дать количественную оценку ве-
личины конструктивных шумов.
На рис. 47 представлена схема действующего специального стен-
да, разработанного для решения поставленной задачи.
Компьютер 8р Загрузка
/ ПЛИС
Однопроцессорный 16 р Выходной
модуль MI 1,4,02 сигнал
О
Генератор Входной
Г4-158 (30 МГц) сигнал X
о
Генератор Опорное Ж
Г4-107 (24 МГц) напряжение
5
g
Источник питания ± 5 В Напряжение К
±зв питания
Осциллограф С1-99
Рис. 47. Схема стенда
83
Цифровое формирование ДН в ФАР
В процессе измерений вход АЦП закорачивался на землю. Собст-
венные сигналы выходных квадратур с помощью специального линк-
порта на ПЛИС поступали на однопроцессорный модуль МЦ 4.02, где
принимались и записывались в файл для проведения дальнейшего ана-
лиза с помощью средств математического анализа пакета MathCAD.
а)
При этом вход АЦП закорачивался на землю (подавался уровень логи-
ческого нуля), частота выходных выборок составляла 2,4 МГц, величина
окна суммирования - 10 выборок, шаг скольжения - 5 выборок, весовые
коэффициенты принимались равными единице, выходные квадратуры -
16 разрядов. Число отсчетов, поступающих на вход однопроцессорного
модуля МЦ 4,02, равнялось 1 000.
В процессе исследования произведено снятие автокорреляционной
функции (АКФ) конструктив-
ного шума и гистограммы
распределения, из которых
были определены оценка кор-
релированности дисперсия.
Результаты испытаний приве-
дены на рис. 48. Дисперсия
ошибки составила 310 ? В.
Необходимо отметить,
что в процессе эксперимента
был оценено влияние разброса
(нестабильности) тактовых
сигналов на характеристики
конструктивных шумов.
При изменении СКО
длительности тактовых сигна-
лов генератора опорного на-
пряжения с 10 до 20 нс харак-
теристика конструктивных
шумов практически не изме-
нилась. Это свидетельствует о
том, что основные причины
возникновения конструктив-
б)
Рис.48. Результаты испытаний:
a - АКФ «конструктивного» шума;
б - гистограмма распределения
«конструктивного» шума
ных шумов определяются причинами, изложенными выше, и слабо за-
висят от стабильности тактовых сигналов генератора опорного напря-
жения. Следует отметить, что конструктивные шумы представляют не-
стационарный характер, слабо коррелированны (< 0,5) в полосе пропус-
кания и имеют количественный характер (среднее значение и диспер-
сия), соизмеримы с шумом квантования.
84
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
4.6. Оценка погрешностей, вносимых
ошибками вычисления весового вектора W
Для определения количественной оценки уменьшения ДД, вызванного
влиянием декоррелирующих факторов, вносимых ошибками вычисле-
ния весового вектора в N приемных каналах в линейной антенной ре-
шетке, примем распределение весовых коэффициентов в форме распре-
деления Хэмминга (4.3.1).
Как было показано в уравнениях (4.2.4) и (4.2.5), AWTY - член,
обусловлен при погрешностями вычисления весового коэффициента ж
Каждый из весовых коэффициентов изменяется в пределах от -1 до
+1. Самый младший разряд во взвешенном коде как синфазной, так и
квадратурной составляющих сигнала в данном случае характеризуют
диапазон изменения амплитуд 2<,1~/’и^, а дискретные ошибки установки
весовых коэффициентов в предположении равномерного распределения
требуемых значений весовых коэффициентов будут равны — в
каждом взвешенном коде синфазной и квадратурной составляющей
сигнала (здесь bw - разрядность весового вектора).
Дисперсии ошибки установки весовых коэффициентов в синфазной
и квадратурной составляющих предполагаем статистически независимы-
ми. При этом имелось равномерное распределение Е
{и2}=
122(1-Лм.)
6
На рис. 49 приведены ошибки весовых коэффициентов, обуслов-
ленные различной разрядностью весового вектора. На рис. 50 показано
значение весовых коэффициентов, соответствующих аппроксимации
Хэмминга для 20 каналов, и экспериментальные значения.
Рис. 49. Зависимость ошибки весовых коэффициентов
от разрядности весового вектора
85
Цифровое формирование ДН в ФАР
Рис. 50. Значение весовых коэффициентов, соответствующих
аппроксимации Хэмминга для 20 каналов, и их экспериментальные значения
Рис. 51. Зависимость ошибок вычисления
весового вектора для 8- и 12-разрядного
весового вектора в зависимости
от числа каналов
Из рис. 51 можно сделать
вывод, что ошибки резко умень-
шаются с увеличением разрядно-
сти весового вектора AW.
Значение ошибок связанных
с ошибками вычисления весового
вектора можно определить в виде
а2=^(|д^гУ|2| =
= 0,667a2N2'24 (4.6.1)
Зависимость ошибок, связан-
ных с вычислением весового век-
тора для двух значений разрядно-
сти весового вектора (8 и 12 разря-
дов), представлены на рис. 51.
4.7. Оценка влияния джиттера времени на параметры
выходного сигнала
В материалах, изложенных в гл. 2, при анализе многоканальных цифро-
вых систем учитывалось, что дискретизация сигналов при оцифровке
производится неодновременно. Из-за несовпадения моментов дискрети-
зации в различных каналах происходит декорреляция когерентного по-
86
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
лезного сигнала и, как следствие, имеем снижение эффективности при
когерентном суммировании.
Для преобразования полосового аналогового сигнала с ограничен-
ным по частоте спектром на цифровые синфазные и квадратурные со-
ставляющие возможны два варианта формирования квадратур. В пер-
вом варианте аналоговый полосовой сигнал с помощью двух фазовых
детекторов преобразуется на видеочастоту, а затем каждый сигнал
оцифровывается. Во втором варианте непосредственно оцифровывается
аналоговый полосовой сигнал на промежуточной частоте.
Важнейшим фактором при аналого-цифровом преобразовании явля-
ется влияние тактового сигнала. При этом в качестве обобщенной харак-
теристики принята фазовая нестабильность тактового сигнала (ФНТС).
В качестве величины, численно характеризующей ФНТС, использу-
ется параметр - джиттер фронта тактового сигнала (ДФТС) (в иностран-
ных источниках jitter (джиттер)), который определяется как СКО во вре-
мени фронта тактового сигнала относительно ожидаемого значения. В
[48] представлено компьютерное моделирование джиттера времени при
использовании уже упомянутых двух методов формирования квадратур.
Даны аналитические выражения для функции декорреляции, вызванные
джиттером времени. Произведено количественное сравнение теоретиче-
ских результатов и моделирования двух методов формирования квадра-
тур. В качестве модели аппроксимации автокорреляционной функции
входного сигнала выбран прямоугольный энергетический спектр. Пред-
ставляет интерес провести сравнение теоретических результатов с экспе-
риментальными результатами, а в качестве модели входного сигнала ис-
пользовать гауссовский сигнал, который ближе к реальному.
В [11] получены количественною характеристики влияния ФНТС
для варианта формирования квадратур на видеочастоте на эффектив-
ность работы многоканальной системы, в частности, цифровой ФАР.
Расчет наименьшего и наибольшего собственных значений матри-
цы R и их отношения Дпах, ЛП1П будет таким:
Я-тах 3
’ош “’ — 2 2 ’
Anin Л" (Ja
(4.7.1)
где о2 - дисперсия нормированного (по отношению к периоду дискре-
, StAco
тизации) смещения моментов дискретизации г, = —-— .
2я
Среднеквадратичное значение нормированных смещений моментов
Дискретизации сг, соответствующее Ю-3, позволяет получить ^^=51 дБ.
Таким образом, получена количественная характеристика физически
°чевидного снижения эффективности ЦАР вследствие декорреляции
87
Цифровое формирование ДН в ФАР
входных сигналов, обусловленная неодновременностью их дискретиза-
ции в различных каналах решетки. В первом приближении указанное
снижение эффективности определяется равенством (4.7.1). Аналитиче-
ские оценки подтверждены данными моделирования. Представляет прак-
тический интерес сравнить полученные теоретические результаты и ре-
зультаты моделирования с экспериментальными.
В [58] исследовано влияние фазовой нестабильности тактового сигна-
ла на характеристики аналого-цифрового преобразования. Получены ана-
литические зависимости отношения сигнал/шум на выходе преобразовате-
ля для различных искажающих фактов и помех тактового сигнала (ФНТС).
Для анализа ФНТС использовалась математическая модель АЦП.
Таким образом, анализ предшествующих работ по исследованию
влияния джиттера на эффективность сложения когерентных сигналов
при многоканальном построении не позволяет сделать выводы, на-
сколько полученные теоретические результаты соответствуют экспери-
ментальным в процессе натурных испытаний.
Смещение моментов дискретизации сказывается на форме корре-
ляционной матрицы (КМ)
R = -£( ХХ"},
2 1 j
где X = (xi, х2» •••> хт)т - вектор комплексных огибающих (КО) сигналов
с выходов т каналов.
Рассмотрим случай узкополосного входного сигнала и одного
внешнего источника, когда сигналы двух каналов в один и тот же мо-
мент времени связаны соотношением
где (р- набег фазы на средней частоте coq.
Элемент КМ, при совпадении моментов дискретизации в обоих
каналах равен
= ~Е{ xt:(l)x*k (/)} = |х,. (0|2}.
При смещении моментов дискретизации
RikCM = |Е{ х, (t + St,,-)х*к (t + 8tk )j = RikR(8Tik),
где R(t) - нормированная автокорреляционная функция КО входного
сигнала одного из каналов; = St, - 8tk ~ разность смещений моментов
дискретизации в каналах относительно некоторого опорного момента,
выбор которого в значительной мере произволен.
Если сигналы на входе АЦП /-го и к-го каналов идентичны, то для
дискретизации видеосигнала можно записать выражение
х. = Щ) +jQ (0, xk(t) = Ik(t) +JQ^f).
88
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
В дискретизаторах z-ro и k-го каналов наблюдается джиттер вре-
мени. При дискретизации видеосигнала в каждом канале есть два дис-
кретизатора, синфазная и квадратурная составляющие видеосигнала,
которые дискретизируются независимо, и тогда сигналы на выходе дис-
кретизаторов /-го и к-го каналов имеют следующий вид:
xi W = Л(и7,+)+jQSnT + TiQY’1,2,...,
xk(n)^h(n'r+6kI)+jQk(nr+Tke')’n=(),l’2’ •••>
здесь T - период дискретизации; 8^, 8kj, , tkQ - независимые случайные
переменные, характеризующие джиггер времени в дискретизаторах с
функциями плотности вероятности W,{-) для z-канала и %(•) для ^-канала.
Синфазная и квадратурная составляющие сигнала в каждом канале
независимы и имеют идентичные автокорреляционные функции, т.е.
R«(0 = Rkk( 0 и 7?/е( г) - 0.
Для оценки рассогласования каналов за счет джиттера введем по-
нятие функции декорреляции между каналами, которая может быть оп-
ределена следующим образом [48]:
I ( I2
х,хк\
DECOR = 1----!—L-----(4.7.2)
>ЕФ*1}
где * - комплексное сопряжение.
При допущениях о независимости синфазной и квадратурной со-
ставляющих функция корреляции между х, и хк определяется следую-
щим образом:
Е{х,-(и)хл(и)} = Е{[Д(иГ + 8i]) + jQk(nT + 8iQ)\*
+ 8i;) - jQk(nT + 6iQ )]} = Rn (Tj) + Rqq(tq),
где Tj-т^ -Tki и tQ=TiQ -тк^ -две независимые случайные переменные.
Среднеквадратичное значение х,(и) и хк(п) задается выражением
|х((л)|2} = = *п (0) + Rqq(0) = (0) •
Из определения функции декорреляции (4.7.1) получаем
89
Цифровое формирование ДН в ФАР
где Т] = т^ - тк{ и Tq = TiQ - тк$ - две случайные переменные характери-
зующие разность времени дискретизации между z-м и к-м каналами.
Следует отметить, что на практике, джиттер времени может быть
коррелирован между I и Q каналами. Экспериментально установлено,
что корреляция их слабая Значения коэффициентов корреляции состав-
ляет 0,15... 0,2.
Если учитывать корреляцию между каналами, то функция декор-
реляции будет меньше, чем они определяются выражением (4.7.3).
Из симметрии I и Q каналов индекс «/» можно опустить, и тогда
выражение (4.7.3) примет вид
DECOR = 1-—< Е<
2 I Л(°)
(4.7.4)
где Т= Ti- Tq, Ti = Tih тк = тк1.
Из (4.7.4) видно, что декорреляция зависит от функции распреде-
ления джиттера W и автокорреляционной функции модулированного
сигнала R( т).
Полученное выражение (4.7.4) для декорреляции сигналов на вы-
ходе АЦП связана с разбросом моментов дискретизации для схемы ко-
дирования аналоговых сигналов на видеочастоте.
Для метода квадратурной дискретизации на промежуточной часто-
те, когда дискретизируется сигнал ПЧ и для каждого канала использует-
ся только один дискретизатор, сигналы на выходе дискретизаторов z-го
и fc-ro каналов имеют вид:
Xj(n) = х(пТ+ъ), п = 0, 1, ..., хк(п) = х(пТ+тк), п = 0, 1, ..., (4.7.5)
где Tj и тк - две независимые и тождественно распределенные случай-
ные переменные.
Функция декорреляции между сигналами х, и хк получена следую-
щим образом:
Е{х,{п)х^п)} = Е{х,(пТ+ъ) х^пТ+тк)} = Rx.Xk (г) ,
где т = Tj - тк.
Среднеквадратичное значение х,(«) и х>(и) задается выражением
£{хДй)} = £{лДи)} = Квд(0).
Из определения функции декорреляции получаем
90
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
= kw 1—
2 L С (°)
dr,
(4.7.6)
DECOR = 1-£<
тк - две
каждом
где W(z) - функция плотности вероятности джиттера; г = z,-
случайные переменные характеризующие джиттер времени в
канале; RXj4 (г) - функция корреляции для ПЧ сигнала х(/).
Таким образом, функция декорреляции для кодирования видеосиг-
нала имеет вид
DECOR = 1-
2
dz-
.212
dz, (4.7.7)
а для кодирования на ПЧ
DECOR =
Я2 (г)
(4.7.8)
dz .
(4.7.9)
Выражения (4.7.7) и (4.7.8) позволяют оценить влияние ошибок
кодирования за счет джиттера времени при аналого-цифровом преобра-
зовании на видеочастотах и ПЧ.
АЦП на видеочастоте для прямоугольного спектра будет таким:
R(z) sin(jtBz) . п .
—з -- - — ------ = sin с(яВг),
7?(0) zuBz v 7
где В - ширина полосы частот модулированного сигнала.
На практике значения джиттера времени намного меньше значе-
1
ний величины, обратной ширине полосы частот сигнала, т.е. z «—.
Исходя из этого условия, используем разложение в ряд Тейлора для ап-
проксимации автокорреляционных и декорреляционных функций:
2 (
, , = sin с2 (2r2?r)~ 1-
L«(o)j [
Экспериментально установлено, что плотность вероятности рас-
пределения джиттера времени с достаточной для практики точностью
может быть аппроксимирована гауссовским законом распределения.
Однако, в отличие от анализа, проведенного в [48], для реального рас-
пределения джиттера времени характерно отличное от нуля среднее
91
(яВт)2
3!
Я(г)
(4.7.10)
Цифровое формирование ДН в ФАР
значение. Поэтому при анализе коэффициентов декорреляции данное
обстоятельство необходимо учитывать:
WT (г) =-----^== ехр
<7гл/2я-
(т-Л/)2
2а2
(4.7.11)
здесь ст - среднеквадратичное отклонение г, М - математическое ожи-
дание т.
На рис. 52 представлена плотность вероятности распределения
джиттера времени, рассчитанная по формуле (4.7.11) для значений
= М, М= 7,497 нс, полученных экспериментально.
Рис. 52. Плотность распределения вероятности для нормального закона
С учетом (4.7.9) - (4.7.11) уравнение (4.7.7) примет вид
« 4 max
DECOR= - J
rmin
1
----7= exp
2^
1
-----7= exp
(Уту]2л:
J <7гл/2я
rmin
max j
(4.7.12)
1
Получим выражение декорреляции для АЦП на промежуточной
частоте.
Из определения функции декорреляции (4.7.6) имеем
DECOR-1-Е
-^пч (г)
У^пч (0)
92
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
При квадратурной дискретизации на ПЧ получим нормированную
корреляционную функцию ПЧ сигнала:
Япч(Г)_ ДВч(Г) у •)
Япч(0)"Явч(0) ( /ПЧ)’
где./пч - ПЧ сигнала.
С учетом (4.7.9) выражение (4.7.13) можно переписать в следую-
щем виде:
у C0S(Wii4^) = sin c(^r)cos(2^/n4r).
ЛПЧ Пд 'чзч 14)
Используя выражение (4.7.10), получаем
(г в
——
Выражение (4.7.13) можно записать в виде
Дпч(г)
/?ПЧ (0)
cos(2^ /j7-) .
-12
cos(2;r/r)2,
(4.7.13)
(4.7.14)
(4.7.15)
DECORm
^пч(г)
dr =
j (^г)2
6
7?пч(°)
-2
(cos(2^/Jr))2 dr.
(4.7.16)
6
Принимая, что плотность регулировки джиттера времени аппрок-
симирована усеченным гауссовским законом распределения (4.7.11),
получаем
‘max
DECOR = [---------т=х
J сг. х/2я
rinin
хехр
Для спектра модулирующего сигнала, имеющего гауссовское рас-
пределение, получим
^.(f) = е(М2>2 «] _ Дйу , (4.7.18)
7?вч (0)
(4.7.17)
где Д<у - полоса видеочастот.
93
Цифровое формирование ДН в ФАР
С учетом (4.7.9) и (4.7.18) уравнение (4.7.7) примет вид
- гтпах
DECORB4=— J
^min
1
----7= exp
агу/2л
(1-ДбУ2т2) dr-
2
1
----т==ехр
(Ут\/2л
2сг2
(т -М)2
(4.7.19)
1
---т=ехр
су у] 2л
Для АЦП на ПЧ уравнение (4.7.8) с учетом (4.7.13), (4.7.14) и
(4.7.18) примет вид
DECORn4
^пч(г)
^пч (0)
dr -
(4.7,20)
На рис. 53 изображена нормированная корреляционная функция
сигнала на ПЧ. Г рафик построен только для положительного аргумента
д т.е. в силу четности коэффициента корреляции ось ординат является
его осью симметрии. Сплошная кривая соответствует предельному слу-
чаю д?0 - 2л/пч - 0, т.е. корреляционной функции видеосигнала.
Рис. 53. Нормированная корреляционная функция
94
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
Заметим, что график представляет собой произведение медленно
меняющейся функции на высокочастотное заполнение »cos2^r.
Полученное выражение (4.7.20) для вычисления декорреляции
джиттера на ПЧ громоздко.
В первом приближении можно воспользоваться формулами для
вычисления отношения сигнал/шум (SNR) цифрового сигнала, что оп-
ределяет ДД:
SMaB=20k>gf-'l, (4.7.2J)
<сг )
WaB = 201og| —i— I, (4.7.22)
где A - CKO амплитуды сигнала; о - СКО шума, вызванного джиттером
времени; fc - частота сигнала.
Представляют практический интерес экспериментальные резуль-
таты, полученные в работе [57] путем математического моделирования,
которое представлено на рис. 54.
Рис. 54. Зависимость SNR от частоты входного сигнала
при различных СКО ДФТС: 1 - 1 пс; 2 - 3 пс; 3 - 10 не
Анализ приведенных графиков позволяет сказать, что дисперсия
шумов, вызванных джиттером времени, линейно зависит от частоты
сигнала и составляет 65дБ на 30МГц при СКО ДФГС - 3 пс. Для полу-
чения требуемого (при наличии джиттера) ДД, необходимо обеспечить
СКО менее 3 пс.
95
Цифровое формирование ДН в ФАР
4.8. Оценка эффективности преобразования спектра
ЛЧМ-сигнала на видеочастоту с использованием
специальнного процессора Digital Down Converter (DDC)
методом моделирования
В качестве DDC используется специальный процессор AD6620. Схема ис-
следуемых при моделировании устройств представлена на рис. 55.
Формирователь сигнала на ПЧ генерирует ЛЧМ-сигнал на проме-
жуточной частоте 30МГц с частотой дискретизации)^= 24 МГц. При
моделировании были выбраны следующие параметры ЛЧМ-сигнала:
длительность импульса Т = 21,65 мкс; девиация частоты W = 1 МГц;
разрядность сигнала 7р + 1зн.
Рис.55. Схема, используемая при моделировании сигнала
Перенос промежуточной частоты спектра на нулевую частоту
осуществляется с помощью опорного колебания с частотой fon = 6 МГц.
Известно, что
cos фъх cos ^оп = ± {cos (&х - фоп) + cos (^вх + Ф™)} ,
sin фвх cos фоп = |{-sin (^вх - фоп ) - sin (^вх + )},
sinфвх = cos(фвх + 90°), cos(Увх -фоп) , sin(&х -^оп),
а сигналы являются полезными.
В качестве cos^BX использовались четные составляющие ЛЧМ-
сигнала, a sin^BX - нечетные; cos^BX - дискретизированные с частотой
/д= 12 МГц.
Поскольку /оп кратна/д, то cos^0n принимает значения ± 1.
Таким образом, результирующие формулы примут вид
г I 30 тг№(2к'
Л=(-1) cos 2я—2к +----- —
к \ j 24 Т 124
.2 \
24
^-(-1) cos 2я—(2£ = 1) + —
24
(4.8.1)
96
Глава 4. Погрешности, вносимые дестабилизирующими факторами...
При децимации осуществляется снижение частоты дискретизации
в 5 раз до/^= 2,4 МГц, т. е. вычисляется среднеквадратичное значение 5
отсчетов:
/С1С5(«) = ^Л5и + /)’
/=4° (4.8.2)
6cic5W = |X6(5/7 + /)-
° i=0
Трансверсальный фильтр имеет симметричную импульсную ха-
рактеристику, при этом используется 40 отсчетов с fR- 2,4 МГц. Этот
фильтр преобразует сигналы по следующей формуле:
1 39
4ir W=W7 (2пг+
,=0 (4.8.3)
,39 7
2FlR(W) = TM^^(0e(2w + Z')-
Z 1=о
С выхода фильтра информация берется через раз, тем самым на
выходе фильтра сигнала обеспечивается fR = 2,4 МГц.
Для оценки качества преобразования результирующий ЛЧМ-сиг-
нал поступал в фильтр сжатия, где осуществлялась свертка с копий
ЛЧМ-сигнала, имеющей разрядность 4р + 1 зн. Моделирование произво-
дилось для копии с прямоугольной огибающей и копии, взвешенной
функции типа «косинус» на пьедестале.
Влияние дециматора сводится к взвешиванию ЛЧМ-сигнала, что
не ухудшает результирующие характеристики фильтра сжатия, так как
оно может быть учтено при выборе весовой функции.
Трансверсальный фильтр, чтобы не искажать широкополосный
ЛЧМ-сигнал, должен иметь не более двух отсчетов с коэффициентом,
равным единице, остальные коэффициенты должны быть равны нулю.
При свертке преобразованного с использованием DDC ЛЧМ-
сигнала (база TW= 21,65, число дискрет N= 26) с копией, взвешенной
функции типа «косинус» на пьедестале, сжатый сигнал имеет уровень
боковых лепестков не более -26 дБ, ширину пика по уровню 6 дБ при-
близительно 3 тд.
Суммарные потери при этом не превышают 1,5 дБ.
Основные результаты работы, полученные при анализе влияния дес-
табилизирующих факторов на эффективность диаграммообразования
ЦАР, приведены в табл. 4.1, где указаны наименования дестабилизирую-
щих факторов и аналитические выражения для оценки погрешностей.
4-5760
97
Цифровое формирование ДН в ФАР
Таблица. 4.1. Результаты анализа влияния дестабилизирующих
факторов на эффективность диафрагмообразования ЦАР
Наименование дестабилизирующих факторов Аналитическое выражение для оценки погрешности Примечание
Собственные шумы приемного тракта + шумы квантования \ И=1 / = 36 кВ
Неидентичность АЧХ приемных трактов каналов ЦАР смещение центральной частоты настройки канала; неравномерность ЧХ фильтров на ПАВ в полосе пропускания /1=1 /1=1 - дисперсия;
Разброс параметров при аналого-цифровом преобразовании на видеочастоте А>« 2 4 су2а - дисперсия коэффициентов усиления; о-ф - дисперсия ошибок ортого- нальности
Аналого-цифровое преобразование на промежуточной частоте ^дупч -101ё[2жт2 сг2ж - дисперсия джиттера
Конструктивный шум - -
Разброс коэффициентов усиления приемных каналов - —
98
ГЛАВА 5
Адаптация в РЛС с цифровым
диаграммообразованием
при использовании
цифровых автокомпенсаторов
5.1. Использование цифровых автокомпенсаторов
при адаптации
Радиолокационным станциям, работающим в режиме обзора, могут быть
созданы непрерывные активные шумовые помехи (АШП), которые явля-
ются наиболее универсальными среди известных к настоящему времени
помеховых сигналов. Данный тип помех обеспечивает подавление полез-
ного сигнала любой структуры и формы. При воздействии данной поме-
хой на РЛС в устройствах обработки происходит «подавление» полезного
сигнала, что затрудняет оператору обнаруживать цель, а в автоматизиро-
ванных системах нарушает работу вычислительных средств.
В реальных условиях в основном постановщики АШП действуют на
боковые лепестки ДНА. Уровень боковых лепестков и их структуры яв-
ляются индивидуальными характеристиками радиолокационной станции.
Решение задачи уменьшения влияния АШП, действующей по бо-
ковым лепесткам, значительно облегчается в РЛС с ЦАР. Адаптивная
пространственная фильтрация - современные методы обработки сигна-
лов в раскрывах фазированных антенных решетках (ФАР) Она рассчи-
тана в основном на цифровую реализацию, поэтому методы адаптивной
фильтрации мешающих сигналов (помех) хорошо вписываются в циф-
ровую антенную решетку (ЦАР). В этом случае используются практиче-
ски алгоритмы цифровой обработки с использованием вычислительных
методов линейной алгебры и матричных вычислений.
Методам уменьшения влияния АШП на характеристики РЛС посвя-
щено большое число как отечественных, так и зарубежных работ. Наиболее
значимыми являются работы [11, 16-18]. Работа [11] - одна из фундамен-
тальных в области адаптивных методов в ФАР. В ней конкретно рассмот-
99
Цифровое формирование ДН в ФАР
рен метод адаптивной пространственной фильтрации и ее потенциальные и
реальные характеристики, а также способы их реализации.
Объектом анализа явились мощные современные алгоритмы обра-
ботки стохастических сигналов, недоступных до появления цифровых
методов обработки.
Изложенные методы являются хорошими иллюстрациями к соот-
ношению теории с практикой и в части характеристик рассматриваемых
методов и в отношении возможностей и путей реализации. Показано,
что цифровые методы обработки открывают качественно новые воз-
можности, подходы и решения.
Все эти работы посвящены различным способам формирования
провалов в ДН антенных систем с целью уменьшения уровня прини-
маемых АШП. Методы формирования провалов в ДН можно разбить на
три большие группы [15].
Первая группа методов, которую можно назвать алгоритмической,
основана на синтезе ДН с нулями в заданных направлениях при извест-
ном амплитудно-фазовом распределении по раскрыву антенны.
Вторая группа методов основана на измерении амплитудно-
фазового распределения по сигналам от помех с последующим синтезом
ДН с нулями в заданных направлениях по измеренному амплитудно-
фазовому распределению.
К третьей группе относятся адаптивные методы, основанные на
весовом суммировании выходных сигналов по определенному алгорит-
му и критерию (например, максимизация отношений сигнал/шум).
Основными критериями сравнения различных методов формирова-
ния нулей в ДН является качество подавления помех и быстродействие.
Оптимальная пространственная обработка в третьей группе мето-
дов состоит в таком комплексном весовом суммировании выходных
сигналов с антенных систем, которые обеспечивают взаимную компен-
сацию составляющих АШП, принятых по боковым лепесткам основной
и компенсационных антенн РЛС (рис. 56)
Число компенсационных антенн должно соответствовать числу за-
данных поставщиков помех.
К третьей группе методов можно отнести использование автома-
тический компенсатор помех (АКП).
Автоматические компенсаторы помех (АКП) могут быть реализо-
ваны на высокой частоте, промежуточной частоте, видеочастоте (с
квадратурными каналами) и в цифровом исполнении.
Благодаря быстрому развитию цифровой элементной базы за по-
следнее время наибольшее распространение получили АКП в цифровой
реализации - цифровые автокомпенсаторы помех (ЦАКП).
100
Глава 5. Адаптация в РЛС с цифровым диаграммообразованием...
. Главный лепесток ДН
основной антенны
ПА
/ \ ДН основной антенны
/ • \ ’• до адаптации
АЖ
0«
0
ДН компенсационной
антенны на прием
О
е
Азимут
источника
помехи
Результирующая ДН
после адаптации
Рис. 56. Графики, иллюстрирующие способ формирования ДН
адаптивной антенной решетки при одном источнике помехи
5.2. Основные уравнения цифрового автокомпенсатора
помех
Система состоит из основной антенны с высоким КНД, обозначенной
«О», и N компенсационных каналов (рис. 57).
Компенсационные антенны имеют КНД, перекрывающий уровень
боковых лепестков основной антенны.
Суть работы устройства ЦАКП состоит в декорреляции выходного
сигнала основного канала, принятого по боковым лепесткам Uo (/) и от
Uk(t) сигналов компенсационных каналов, коррелированных с поме-
хами, принятыми по боковым лепесткам.
Декорреляция осуществляется путем весовой обработки сигналов
компенсационных каналов с последующим их вычитанием из сигналов
основного канала:
101
Цифровое формирование ДН в ФАР
Рис. 57. Схема когерентного компенсатора помех,
принимаемых по боковым лепесткам ДН
Определим напряжение остаточной стационарной помехи на вы-
ходе ЦАКП для одной компенсационной антенны в виде
(5.2.1)
где (70 - напряжение помехи принятой по боковым лепесткам основной
антенны; - весовой коэффициент; Uk - напряжение помехи, приня-
той компенсационной антенной.
Обозначим взаимокорреляционную функцию сигналов основного
и компенсационного каналов как
(5-22)
мощность помех принятых по компенсационному каналу как
(5.2.3)
оптимальный весовой вектор как
Wom=A,.(<i'2rl- (5-2.4)
102
Глава 5. Адаптация в РЛС с цифровым диаграммообразованием...
Квадрат выражения (5.2.1) для напряжения «остаточной» помехи
имеет вид
«Е, =«о-. (5.2.5)
Найдем математическое ожидание для обейх частей:
Е{(>» } = Е Д } - 21);' Е {бД ) + W?W,E{[7,Д } . (5.2.6)
Обозначим мощность помехи по боковым лепесткам основной ан-
тенны как
мощность «остаточных» помех на выходе ЦАКП как
Выражение (5.2.6) при этом принимает вид
= сг02 - 2^ЧК + . (5.2.7)
Подставив значение FKonT из (5.2.4), получим выражение для ми-
нимального уровня «остаточных» помех:
(5.2.8)
Формула (5.2.8) характеризует мощность «остаточных» помех и
зависит от коэффициентов взаимной корреляции и мощности помех,
приходящих по компенсационному каналу.
В схемотехническом построении цифровые АКП (ЦАКП) могут
быть выполнены с замкнутой и разомкнутой петлей регулирования.
ЦАКП с замкнутой петлей (с цепью обратной связи) в литературе часто
называют схемой с корреляционными обратными связями (КОС).
5.3. Алгоритм работы цифрового автокомпенсатора помех
с корреляционными обратными связями
Схема ЦАКП с КОС приведена на рис. 58, где 1 - устройство оценки
мощности входного сигнала компенсационного канала; 2 - перемножи-
тель двух комплексных сигналов; 3,4 - оператор Sign, реализующий опе-
рацию, учитывающий только знак данной квадратуры; 5 - перемножи-
тель комплексного сигнала на знаки квадратур сигнала, т.е. выполняю-
щий операцию И (п ) над знаками; 6 - устройство нормировки сигнала
обратной связи; 7 - накапливающий (усредняющий) сумматор; 8 - двух-
входной сумматор комплексных сигналов.
Устройство ЦАКП построено по схеме КОС.
103
Цифровое формирование ДН в ФАР
Основной
104
Глава 5. Адаптация в РЛС с цифровым диаграммообразованием...
Принцип работы устройства можно описать следующим образом:
[и] = Й£л [«] + jULy [и], Йо[и] = UOx [и] + jUOy[п], (5.3.1)
[w] = Wxl [«] + jWyl [и], Uk [и] = L/fa [n] + JUky [и],
где (7S - комплексная амплитуда выходного напряжения сумматора;
W\ - комплексный весовой коэффициент; Uk ~ комплексная амплитуда
компенсационного канала.
Значения требуемого для компенсации весового коэффициента для
данной функциональной схемы построения ЦАКП определяются выра-
жениями
И = [« -!] + «1 (signal [и] n U^. [и] + signt/^ [и] n UZy [и]),
wy! И = W> 1 [« - Ч + а1 (signC4xi [”]п И - signt/^, [и] n UZy [и]),
(5-3.2)
где 1Кх)[и], ^[и], ^[и-1], И^][и-1] - квадратурные составляющие
коэффициентов W{ соответственно в и-й и («-1)-й дискрет времени;
«1
- оценка мощности помехи.
На вход основного канала поступают ^-разрядные параллельные
дополнительные коды двух квадратур аддитивной смеси основного эхо-
сигнала, шумового помехового сигнала и собственные шумы приемного
тракта. На вход компенсационного канала поступают А-разрядные па-
раллельные дополнительные коды двух квадратур аддитивной смеси
шумовых помех и собственных шумов приемного тракта, воздействую-
щих по боковым лепесткам приемной ДН.
На первый вход сумматора (рис. 58) поступают сигналы квадратур-
ных составляющих основного канала, на второй вход - сигналы квадратур-
ных составляющих компенсационного канала, взвешенного в перемножи-
теле 2 путем умножения на квадратурные составляющие весовых коэффи-
циенты Wlx, Wiy сформированных цепями обратной связи ЦАКП.
С выхода сумматора скомпенсированный сигнал поступает в цепь
обратной связи на устройство вычисления весовых коэффициентов.
Устройство вычисления весовых коэффициентов Wix, W\y форми-
рует квадратурные составляющие коэффициентов W\x, Wiy и работает по
принципу релейного коррелятора. Над поступающими в эти устройства
105
Цифровое формирование ДН в ФАР
квадратурные составляющие входного компенсационного канала произ-
водится релейная операция, условно выделенная на функциональной
схеме под номером 3 и 4, т.е. операторы 3 и 4 учитывают только знаки
соответствующих квадратурных составляющих. В перемножителях 5
знаки квадратур сигналов компенсационного канала векторно перемно-
жаются на квадратурные составляющие выходного сигнала сумматора.
Для сокращения времени переходного процесса ЦАКП в устройст-
ве производится нормировка величин сигналов обратных связей путем
умножения квадратурных составляющих на коэффициенты а}, которые
вычисляются в устройстве 1 по результатам оценок мощностей сигна-
лов компенсационного канала U^, U^.
Пронормированные составляющие усредняются в накапливающем
сумматоре 7. Сформированные таким образом весовые коэффициенты
Wlx, подаются на управляющие элементы цепей обратных связей -
умножители 2, замыкая эти цепи.
Выбором постоянных значений параметров L\, L2 устройств оце-
нок 1 достигаются требуемыми длительностями переходного процесса
ЦАКП при неработающей цепи нормировки. Последовательность опе-
раций весовых коэффициентов W]x, W\y приведена ниже:
^1 [•] = «I (signt'j, [1] П (7И [1] + signC.% [1] n Uyy [1]),
»'xi[2]=»;i[l]+«i(^[2]nC/Ii[2]+signl/A>,[2]nl/^[2]),
К, ДО=Wil [А^-1]+«! (Ub [Л] nUa [W] + signt^ [ЛГ]пС/г, [Г]),
H'flj = [1]).
Wy [2] = Wy [1] + a, (signt/b [2] n Ua [2] - signl^, [2] n UZy [2]),
IT, M - >]+[«] n C/a [ЛГ]-sign^ [JV] n Uiy [AT]) •
5.4. Алгоритм работы цифрового автокомпенсатора помех
без обратной связи (с разомкнутой петлей)
Преобразование коррелированных напряжений в некоррелированные
можно осуществить на основе процедуры ортогонализации Грамма -
Шмидта [16, 45].
В качестве модели рассмотрим схему ЦАКП с разомкнутой пет-
лей, которая обеспечивает значительно больший ДД и точность по
сравнению со схемой, имеющий КОС.
Практическая реализация такой схемы возможна только при ис-
пользовании цифровой техники.
106
Глава 5. Адаптация в РЛС с цифровым диаграммообразованием...
Сокращение времени баланса, отводимого для адаптации РЛС с
ФАР, является одной из важнейших практических задач при проектиро-
вании РЛС такого класса. В РЛС с ФАР, в составе которой имеется
цифровой автоматический компенсатор активных шумовых помех, при-
нятых по боковым лепесткам основной антенны, время адаптации огра-
ниченно. Работе ЦАКП отводится время всей рабочей зоны действия
РЛС в так называемой служебной зоне. На рис. 59 приведена временная
расстановка сигналов на одном периоде. Необходимое время для адап-
тации определяется промежутком до начала излучения зондирующего
импульса, в течение которого возможен пассивный прием сигналов от
постановщиков активных шумовых помех по основной и компенсаци-
онным антеннам, и длительностью зондирующего импульса, во время
которого необходимо обработать полученные данные.
Время
перестройки
фазовращателей
Рис. 59. Временное распределение сигналов на одном периоде
Задачей АКП является установление весов, которое приводит к
нулевой корреляции между остатком выходного сигнала Zr и компен-
сационным комплексно-сопряженным сигналом Z*k.
Принцип работы устройства ЦАКП без обратной связи можно
описать следующим образом (рис. 60 и 61).
Начало работы ЦАКП начинается с поступления на вход устройст-
ва импульса начала работы ЦАКП (HP ЦАКП). При поступлении HP
ЦАКП в устройстве вырабатываются импульсы, привязанные к шкале
времени, в соответствие с которыми на все устройства поступают ко-
манды управления, обеспечивающие работу в данном режиме.
В первые А дискретов (примем А=16) происходит запись 16-ти вы-
борок квадратур шумовой помехи основного и компенсационного кана-
лов в ОЗУ. Одновременно выборки компенсационного канала поступа-
ют на схему вычисления нормирующего множителя at:
16
'£(x?+^)/i6
107
Цифровое формирование ДН в ФАР
Рис. 60. Схема ЦАКП с разомкнутой петлей обратной связи
Рис. 61. Алгоритм ЦАКП с разомкнутой петлей регулирования
108
Глава 5. Адаптация в РЛС с цифровым диаграммообразованием...
В следующие 16 дискретов из ОЗУ считываются 16 записанных
выборок и подаются на множитель, на второй вход которого поступает
вычисленный ранее коэффициент ах.
После этой операции сигналы компенсационного канала по квад-
ратурам приобретают следующий вид:
xi(l)«! ,х1(2)«1, ..., Х1(16) ,
Далее осуществляется вычисление комплексных коэффициентов
корреляции между шумовыми помеховыми компонентами основного и
компенсационного каналов ROk :
Ла = Л, + jA)2 ?
16
52 (0' хо(О - У1 (0 • ШО)}
16
2 {л (0 • л(0 + *о(0 У1 (0}
^02 = а1 1 д •
1о
После вычисления комплексных коэффициентов корреляции про-
изводится операция по «вычитанию» помеховых коррелированных со-
ставляющих компенсационного канала из основного, принятых по бо-
ковым лепесткам:
Хон(0 = *о(О - х\ (0- У1 (0’
ж (0 = J;o (0 - жг У1 (0+*1 (0 жг •
°к
При компенсации помех полезный сигнал также будет компенси-
роваться, если отсутствуют фазовые (пространственные) и амплитудные
различия сигнала и помехи.
5.5. Оценка дисперсии помех на выходе цифрового
автокомпенсатора помех от объема выборки
Как уже отмечалось в РЛС с ФАР, в составе которой имеется ЦАКП ак-
тивных шумовых, принятых по боковым лепесткам основной антенны,
время для адаптации ограниченно и сокращение временного баланса
является одной из важнейших задач.
Представляет практический интерес оценить поведение системы за-
висимостью мощности «остаточных» помех сг| от объема выборки [44].
109
Цифровое формирование ДН в ФАР
Отсчеты, принадлежащие основному и компенсационным каналам,
являются комплексными гауссовскими случайными переменными, где
действительные и мнимые части распределены по закону Гаусса:
Аж Ь] = Аж Ь] + /Гок [и], Zkk [и] = Хкк [и] + iYkk [и],
Определим комплексный вектор в виде Z=X + iY, имеющий ну-
левое среднее значение и ковариационную матрицу вида
Е [z • ZH} = е|(А + IY) • (ат - /Тт )Т |.
Представим комплексный гауссовский случайный процесс К дис-
кретными ^-мерными выборками:
Ai Ai Z31... Ai
А» А» А»--’А ~ Аз Аз Аз • • ZK2
АР Ар Ар- ZKp
С нулевым средним и эрмитово положительно-определенной ком-
плексной ковариационной матрицей представим выражение
S = £{z/1}=K|I'
Причем
&* =
a2 npnj = k,
(ajK + ifik) npnj^k.
При этом комплексная положительно-определенная матрица рас-
пределена по закону Уишарта [16].
Одномерное комплексное распределение имеет вид
P(z)
ет’’Т(Л’)
exp
Использование выражения распределения для P(z) позволяет опре-
делить среднее значение и дисперсию «остаточной» помехи на выходе
ЦАКП от объема выборки. Выражение
(5.5.1)
характеризует накопленную мощность остатков помех на выходе ЦАКП.
Определим среднее значение (математическое ожидание) и дис-
персию мощности оАп остаточных помех:
[хР(х)А
Л J
о
(5.5.2)
110
Глава 5. Адаптация в РЛС с цифровым диаграммообразованием ...
Вычисляя это выражение, получим
л
гДе ^Lmin = °0 — Rok #кк &ок •
Начальный момент 2-го порядка будет в виде
т1{РТ.}=~^2
К в
Вычисляя выражение (5.5,4), получим
, л Р2
К
Дисперсия случайной величины Р^ находится как
Р2
м2 fc)="г {а - ft}}=- N).
А
(5.5.3)
(5.5.4)
(5.5.5)
(5.5.6)
Полученное выражение позволяет проанализировать, как изменя-
ется мощность «остаточного» шума АШП на выходе ЦАКП от числа
выборок К и компенсационных каналов N.
На рис. 62 приведены результаты вычислений по формуле (5.5.6)
при P£min = 1 для двух компенсационных каналов. Из графика следует,
что при К > 32 дисперсия «остаточной» АШП практически не зави-
сит от К.
Рис. 62. Зависимость дисперсии помех на выходе ЦАКП
от объема выборок
111
Цифровое формирование ДН в ФАР
При 2(K-N) = п выражение для P(z) имеет X1 2 * * * * распределение с
2(K-N) степенями свободы:
П 1
Z —1 е
U )
(5.5.7)
22Г -
Весовые коэффициенты, используемые в реальной аппаратуре, от-
личаются от оптимальных весовых коэффициентов наличием источни-
ков погрешностей [55].
Ошибки весовых коэффициентов определим вектором AW:
^ = FKonT + AW. (5.5.8)
С учетом (5.5.2) средний квадрат напряжения на выходе ЦАКП
(5.5.7) будет определяться выражением
4 =^2+(^„, + ^W)''ff„2(»;irr + AW)-2(»r0„r + AW)A<*. (5.5.9)
Подставив значение WonT = Rok (cr2) в (6.2.4), получим
(5-5-10)
В [59, Приложение А] показано, что вектор AW имеет вид условного
распределения от У и является признаком гауссовского распределения:
1 r J ’
|y|"-Ke ’Ра)
7’(У) =----F-1--------------------, (5.5.12)
(<^)2Г(Я)Г(К-1)..Г(К-7У)
где P(Y) имеет вид распределения Уишарта с дисперсией ст^; Y=Какк; К
- число выборок; N - число компенсационных каналов; ЛИ7 = W ~fPonT;
- значение мощности сигналов, принятых компенсаци-
онными каналами; Г(/С) = (Х-А)!; | • | и tr- соответственно операции
взятия детерминанта и следа матрицы.
Используя выражения (5.5.11) и (5.5.12), можно определить плот-
ность вероятности распределения ошибок и числовые характеристики
весового вектора Р(А)У) как
112
Глава 5. Адаптация в РЛС с цифровым диаграммообразованием...
Р(ДРГ)= jp(A^,r)P(r)6/r =
о
<1Y =
0 М"’'|<72н|“|Г|4 |<ф Г(К)Г(К- 1)...Г(К-N)
(К-ЛГ-2)|сг2и|2
K-N+4 ’
2n(\ + AWTrfkAW) 2
(5.5.13)
A1F1 • A1F = |A1F|2 . (5.5.14)
Из выражения (5.5.13) видно, что P(A1T) зависит от мощности по-
мех. Имея выражение плотности вероятности распределения ошибок
(5.5.13), можно получить числовые характеристики:
математическое ожидание (среднее значение)
тх = Е{Д№] =— |ДИР(Д1Г)4ДИ9 =
о
_(X-7V + 2)|o-2tt|2 ! % ДИ#(ДИ")
2тг Y-L 7 /~"+2’ ( }
°(1 + (ДН^) 2
начальный момент
w2 =£{(Д1Р)2} =— J(ДИ")2 P(AJV)d(AW) =
о
_(X-7V + 2)|cr2tt|2 j % (&w)2d(&W)
2тг X‘JZ 9 х^+2’ ( }
° (1 + (ДН 2
дисперсия
М2{ДИг} = т2(ДИг-т1(ДИг)). (5.5.17)
Полученные выражения (5.5.15)-(5.5.17) позволяют проанализи-
ровать, как изменяется значение дисперсии ошибок весового вектора
AJYot объема выборок К и мощности помех сг2ЛА .
5-5760
113
Цифровое формирование ДН в ФАР
На рис. 63 приведены результаты вычислений значения дисперсии
2
ошибок весового вектора М2 при двух значениях мощности помех ст кк
и числа компенсационных каналов N (N=2, N=4).
Рис. 63. Зависимость дисперсии ошибок весового вектора Aw
от объема выборок
Из графиков видно, что при малых значениях помех сг\к =1 для
случая двух и четырех компенсационных каналов значения дисперсии
ошибок весового вектора М2 перестает практически зависеть от числа
выборок больше 14.
При значениях мощности помех сг2^=1ОО, имеющих практиче-
ское значение, для случая двух и четырех компенсационных каналов,
значение дисперсии ошибок весового вектора практически зависит от
114
Глава 5. Адаптация в РЛС с цифровым диаграммообразованием...
объема выбора при К больше 10. Дисперсия ошибок весового вектора
при этом возрастает с увеличением числа компенсационных каналов.
5.6. Техническая реализация цифрового
автокомпенсатора помех без обратной связи
Рассмотрим в качестве примера техническую реализацию ЦАКП без
обратной связи, предназначенного для подавления АШП поступающей
по боковым лепесткам диаграммы направленности антенны.
Технические характеристики ЦАКП таковы:
число автокомпенсаторов ................................. 1;
разрядность квадратур основных каналов ................. 13;
разрядность квадратур вспомогательных каналов .......... 12;
длительность строба оценки, дискреты дальности ......... 16;
частота входной опорной синхросерии F24, МГц.......... 24 Е0,1
частота рабочей (внутренней) синхросерии, МГц......... 48 Е0,1
Схема ЦАКП приведена на рис. 64 В качестве элементной базы
выбрана ПЛИС.
AL[11..O]
0XYJ12..0]
1XY[12..O]
2XY[12..O|
START. АСР
ACPO-EN
FK STROBE
SEL_CH[0...3
XY.EN
PHASE
F24
___________#1___________
ALLll-0]n.wcSM(1L0]
OXY[12..O] 0_0XY[12..Q]
1XY[12..O]
2XY[12..O]
START-ACP
ACP0_EN
FKSTROBE
SEL_CH[0...3]
XY_EN
PHASE
F24
MCLK
ВО 0XYJ12..0].
ERROR
ACP ER
XY[I2..O|
CHO
CHI
CH2
F48
F48
ХУЦ2..0]
Ai---------
ПЗУ
конфигу-
рации
ЦАКПО
Рис. 64. Схема ЦАКП
В состав устройства входят автокомпенсатор нулевого основного
канала (ЦАКПО); программируемая логическая интегральная схема
(ПЛИС) #1 (D1); ПЗУ вычисления коэффициента AL #2 (D7, D8); ПЗУ
конфигурации #3 (D4).
Автокомпенсатор имеет два режима работы: режим компенсации и
режим транзита сигнала основного канала со входа на выход. Управле-
ние режимами осуществляется по входу ACPJEN. Задержка от входа до
выхода в обоих режимах одинакова.
115
Цифровое формирование ДН в ФАР
Компенсация производится на основе оценки коэффициентов кор-
реляции между основными и вспомогательными каналами. Алгоритм
работы автокомпенсатора соответствует описанному выше.
Оценка коэффициентов корреляции проводится в выделенном стро-
бе оценки по выборкам из 16 последовательных комплексных отсчетов,
взятых в основном и в вспомогательном канале с частотой 1,2 МГц. По-
ложение начала строба оценки задается внешним сигналом СТАРТ АКП.
Полученные в результате оценки коэффициентов обработки ис-
пользуются сразу после их вычисления и до поступления очередного
сигнала СТАРТ АКП. Компенсация осуществляется по каждому эле-
менту дальности.
Работа АКП состоит из двух этапов: настройки и рабочего режима
(режима компенсации). На этапе настройки производится вычисление
нормирующего множителя и комплексного межканального коэффици-
ента корреляции Д)] по выборкам из отсчетов сигнала нулевого z0 и
первого z\ вспомогательного каналов: z0 = х0 + j• у0, zt=xt+ j-y^
Перечень входных и выходных портов ПЛИС #1:
М24 - вход опорной синхронизации;
PHASE - вход фазирования;
START_ACP - вход сигнала, задающего начало интервала оценки;
1ХУ[0... 12] - вход шины квадратур первого подстраемого канала;
OXY[0... 12] - вход шины основного канала;
ACP0_EN - вход сигнала разрешения работы АСРО;
B0_0XY[0...12] - выход шины квадратурных компонент основно-
го канала;
ACP0 ER - выход сигналов неисправностей;
SEL_CN - вход сигнала управления.
5.7. Экспериментальная проверка работы
цифрового автокомпенсатора помех
Объектом испытаний служила аппаратура ЦАКП, проверяемая в назем-
ном эксперименте с использованием генератора шума, имитирующего
АШП, действующую по боковым лепесткам ДН.
В качестве первоисточника АШП-1 использовался генератор стан-
дартных сигналов, генератор шума и измерительная антенна, которая
устанавливалась на дальности 13 м от РЛС при определенном значении
азимута и угла места.
Вторым источником АШП-2 служил генератор стандартных сиг-
налов, генератор шума и пирамидальный рупор с размером раскрыва
160x260 мм; установленный на дальности 18 м при другом азимуте и
угле места.
116
Глава 5. Адаптация в РЛС с цифровым диаграммообразованием...
Имитатор шума (генератор Г4-30 в режиме ЧМ от генератора шу-
ма Г2-37) был настроен на рабочую частоту РЛС.
Перед началом эксперимента по данным регистрации собственных
шумов ФАР на выходе ЦАКП с выключенным и включенным состоя-
ниями проводилась оценка относительного уровня шума, вносимого
ЦАКП. Эта величина составляла s 1,56 дБ.
При включении РЛС и источников АШП на экране монитора визу-
ально наблюдались отметки АШП на азимутах измерительной антенны
и пирамидального рупора, а также несколько «ложных» отметок, полу-
ченных от шумовых сигналов, переотраженных от «местных» предме-
тов, находящихся в районе расположения РЛС.
Проводились измерения значений выборки активных помех на
входе и на выходе ЦАКП (рис. 65).
Рис. 65. Схема ЦАКП на ПЛИС
По данным регистрации производились оценки эффективности
ЦАКП при воздействии двух источников АШП, действующих по ближ-
ним лепесткам ДН (рис. 66 и 67).
Результат оценки усредненный по дистанции и по всем периодам
повторения пачки приведены в табл. 5.2.
Проверка защищенности РЛС от воздействия АШП из-за близкого
расположения источников АШП и РЛС были проведены в условиях не
полностью сформированных ДН по азимуту. Поэтому значения эффек-
тивности ЦАКП является оценкой снизу.
117
Цифровое формирование ДН в ФАР
Ai
2500 г
Рис. 66. Выборка шума на входе ЦАКП
Рис. 67. Выборка шума на выходе ЦАКП
Таблица 5.2. Характеристики источников АШП
Источник шума Уровень шума относительно собственных шумов ФАР, дБ Подавление АШП в ЦАКП, дБ
на входе ЦАКП на выходе ЦАКП
АШП-1+АШП-2 (прием по ближним боковым лепесткам) 40,8 13,9 26,9+1,56=28,46
35,7 7,2 28,5+1,56=30,06
118
ГЛАВА 6
Коррекция межканального
рассогласования приемных каналов
в цифровой антенной решетке
6.1. Межканальное рассогласование
В радиолокационных системах, в которых ДНА осуществляется путем
когерентного суммирования сигналов приемных каналов, в значитель-
ной мере ее параметры определяются разбросами коэффициентов уси-
ления приемных каналов и фазовыми ошибками, а также параметрами
элементов ЦАР антенной решетки.
Величина этих разбросов может настолько исказить ДНА, что про-
изойдет ухудшение КПД антенны и тем самым снизится ДД. Поэтому тре-
буется введение соответствующих устройств компенсации этих разбросов.
Цифровой метод формирования ДН позволяет реализовать ком-
пенсацию межканального рассогласования приемных каналов и тем са-
мым избежать необходимости выдерживать с высокой степенью точно-
сти идентичность и стабильность АФХ приемных каналов.
Коррекция межканального рассогласования осуществляется в пе-
риод молчания РЛС (такой промежуток времени отводится для ФК и
подстройки аппаратуры ЦАР). Подстройка аппаратуры производится с
помощью пилот сигнала. В качестве пилот-сигнала используется эта-
лонный источник излучения. Сигналы от эталонного источника излуче-
ния служат для калибровки и периодически подаются на входы много-
канальной приемной системы ЦАР.
Поскольку наибольший интерес представляют разбросы между ка-
налами, то в качестве опорного (основного) канала выбирается один из
них. Далее решается задача минимизации разности между основным ка-
налом и каналом, выбранным для коррекции. Минимизация произво-
дится путем соответствующей подстройки весового коэффициента w,
который приводит к минимальной ошибке Amin:
A min —' ^0 ~ >
119
Цифровое формирование ДН в ФАР
где [70 - комплексная амплитуда шумового сигнала на выходе основно-
го канала; w - весовой поправочный коэффициент; Uk - напряжение
шумового сигнала на выходе регулируемого канала.
Известны устройства, применяемые для коррекции межканального
рассогласования приемных каналов ЦАР [2, 6]. Они различаются спосо-
бами введения точных тестовых сигналов на вход приемных каналов и
методами коррекции. К ним относятся ввод пилот-сигналов через на-
правленный ответвитель (НО) (с точно известным коэффициентом свя-
зи), фокусирование на специальный радиотехнический источник (спе-
циальную антенну) в ближней или дальней зоне.
Такие пилот-сигналы вводятся в каждый приемный канал и пред-
ставляют собой, как правило, радиочастотные сигналы соответствую-
щей частоты непрерывного излучения или задержанный зондирующий
импульс.
Выявление ошибок межканального рассогласования, вычисление
подстроечных весовых коэффициентов w, выполнение операции под-
стройки рассогласованных приемных каналов осуществляется непо-
средственно в специальном устройстве.
Сущность предлагаемого метода [64, 69], схема которого приведе-
на на рис. 68, заключается в следующем. В качестве пилот-сигнала ис-
пользуется шумовой пилот-сигнал в стробе, который через НО заводит-
ся в каждый приемный канал ЦАР. Шумовой пилот сигнал включается в
период молчания РЛС. Период молчания РЛС соответствует промежут-
ку времени (стробу), который отводится для режима функционального
контроля и осуществления операции регулирования приемных каналов
ЦАР (служебная зона).
В качестве шумового пилот-сигнала предлагается использовать
собственные шумы приемного канала ЦАР. Мощность собственных
шумов приемного тракта выражается формулой
РЩс=4£Т0Д/КшХм,
где к - постоянная Больцмана, равная 1.38-НГ23 Дж/град; То - абсолют-
ная комнатная температура, равная примерно ЗОО°К; А/- шумовая по-
лоса приемного канала; Кш - коэффициент шума; Км - усиление прием-
ного канала по мошности.
Как показала практика, параметры элементов входящих в Р во
времени не требуют охвата корректирующего контура адаптивным
управлением.
В аппаратуре регулирования производится расчет весовых коэффици-
ентов по квадратурным компанентам, вычисление ошибки межканального
рассогласования и расчет среднего значения величины ошибки (рис. 69).
120
Цифровое формирование ДН в ФАР
Коммутатор
Рис. 69. Схема операции регулировки
122
Глава 6. Коррекция межканального рассогласования приемных каналов в ЦАР
После этого среднее значение величины ошибки в качестве по-
правки поступает в сумматор, где суммируется с сигналов подстроеч-
ных каналов. На этом процесс регулировки заканчивается и наступает
рабочий режим работы РЛС. Условно процесс операции регулировки
показан на рис. 68 и 69.
6.2. Ошибки межканального рассогласования
Значение величины межканального рассогласования между сигналами
основного канала и каналами подлежащими регулировке можно пред-
ставить в виде
= (6.2.1)
Уравнение (6.2.1) аналогично уравнению (5.2.1), которое опреде-
ляет комплексное случайное действующее напряжение остаточной ста-
ционарной шумовой помехи на выходе ЦАКП при одной компенсаци-
онной антенне.
Используя аналогичную методику, можно получить выражение
для минимального уровня сигнала межканального рассогласования та-
кое же, как (5.2.8):
AL=^o-2AX(<^)“'’ (6.2.2)
где erf - Е | trf | - комплексное значение мощности шумового сигнала
по основному каналу; ROk = Е {UJJ'k} - комплексная взаимно-
корреляционная функция между сигналом по основному и регулируе-
мому каналам; erf =е{ - комплексное значение мощности сиг-
нала в регулируемом канале.
Выражение (6.2.2) характеризует минимальное СКО межканально-
го рассогласования. Аппаратурная реализация выражения (6.2.2) может
быть выполнена с использованием специальных регуляторов с разомк-
нутой цепью обратной связи (рис. 70).
Рис. 70. Схема регулятора с разомкнутой цепью обратной связи
123
Цифровое формирование ДН в ФАР
Начало работы вычислителя начинается в служебной зоне с посту-
плением на вход устройства начало работы (HP). При поступлении им-
пульса HP в устройстве вырабатывается сигнал, привязанный к шкале
времени, в соответствии с которым на все устройство поступают коман-
ды управления, обеспечивающие работу в данном режиме.
В первые N дискретов по дальности (примем N = 16) происходит
запись в ОЗУ 16 выборок шумового пилот-сигнала основного канала и
каналов, подлежащих подстройке.
Одновременно выборки из каналов, подлежащих регулировке, по-
ступают на схему вычисления нормирующего множителя ах:
16
I »л________________
В следующие 16 дискретов из ОЗУ считываются 16 записанных вы-
борок из каналов, подлежащих регулировке, и производится нормировка:
х*[ 1 ] «1, хА[2] «1,..., хД 16] «1;
ук[Цах,ук[2]а},...,ук[\6\а{.
Далее осуществляется вычисление комплексных весовых подстро-
ечных коэффициентов + jw" по формулам
16
а1]£(^(ФИфУо(«)У*(И))
16
а^(хо («)л («) + Уо (Ф* ("))
После этого оценивается разность в каждом дискрете между сиг-
налами основного канала и подстроечных каналов:
±Л*1 = *о [1] - Ф1И J ±ДУ1 = Уо I1] - ЩУ111];
±Дх2 = х0 [2] - ф] [2]; ±Ду2 = у0 [2] - w"y, [2];
±л*1б = хо [16] - Ф1116]; W16 = у о [*6] - [16]
и вычисляется среднее значение разности для квадратурных каналов х и у:
±Дх _ ±Axt ± Ах2 ±...±Ах16 . _ ±Ду, ± Ду2 ±...± Ду1б
ср 16 ’ ^ср 16
Описанные операции, алгоритм которых дан на рис. 71, произво-
дятся с каждым каналом, подлежащим коррекции.
124
Глава 6. Коррекция межканального рассогласования приемных каналов в ЦАР
яп я(П ЯП МП
J|[2] ЯР] ^1(2] ЯР]
У,[3] 3-0 [3] ЯЛ Я И
Я41 У() [4J Я41 -яН
У,[5] Уо15] Я5! Я (Л
Я61 я га Я61 яга
ял МЛ ял Я1Л
Я8] v0[8] Я8] яга
5 и
оо +
—
ЯП«1 япя
У|[2]«1 Я21«1
Я3]"! х,[3]«(
Я4]»!
Я5]»! Я51«|
Я6!»! Я6И
ЯЛС'1 ЯЛ«1
Я8!*7! Я8]а,
«1 («)-Я («) + V(, (n)xk (/?))
w" = -----------------------------
8
Vi = Ая[<1~ « Г л тО] Avt =.¥„[1 -Яя[|
М’2 =У.(2]-’<У1(2] Av; = .vc[2 2
Vs = ‘-о[3]-ЯУ|[3] 2V,=x0[3 3
Vj = vt,[4]- м£ф] АЯ=Я4 4
А’> =Уо[5]-^Г>|[5] Av5 = x0[5 -«Hi 5
\Я=>о[б]-<у|[б] Av6 =.vj6]-W;.Vi[6
V? =Х>[7]-Я>1[2] V7=vc[7]-h;a-1[7]
Vs =Уо[8]-иГу1[К] Ars
V| ’ V2 + V3 +V| +Vs + Ve +V7 + Vs "Vr” 8 Дл! + Дх, + Да, + Дх, + Д\'5 + Д Х6 + Дх, + Д т8 iVr«p- g -
>lll]± VcP .vjl]! Ucp
y|[2]-Vc|5 Aj (2]± &rcp
>i[3]+V'vP V, [3]+ АтСр
.nWi-Vtp *|[4]±АтСр
.nRi-4 A|[5]± \vcp
rik’JtVq. V|[6]+Avtp
>i[7]±4rcp A‘i[7]± \vCp
v[8]±V'cp лМ^Ахср
Рис. 71. Алгоритм ошибок межканального рассогласования
125
Цифровое формирование ДН в ФАР
Вычисленные средние значения в рабочем режиме в качестве по-
правки вводятся в каждый регулируемый приемный канал ЦАР.
Предлагаемое устройство вычислителя для двух каналов было
промакетировано. В качестве элементной базы использовалась ПЛИС
EPF10R100AQC.
6.3. Оценка дисперсии межканального рассогласования
от объема выборок
Изменение оптимального весового вектора можно характеризовать зависи-
мостью Д2 in от объема выборки, используемый для оценок R$k и df.
Физически это объяснимо тем, что с увеличением качества выбо-
рок точность оценки весового вектора возрастает, что в конечном счете
уменьшает остаточный шумовой сигнал на выходе регулятора, т.е.
обеспечивается минимизация межканальной ошибка связанной с ошиб-
кой в оценке Д^п.
Поскольку подстройке подлежат N каналов ЦАР, то эта подстрой-
ка потребует значительного времени, что увеличивает время служебной
зоны и уменьшает время рабочей зоны РЛС.
Сокращение времени подстройки, отводимого для регулирования в
ЦАР, является одной из важнейших практических задач при проектиро-
вании РЛС такого класса.
Оценку мощности для минимального уровня сигнала межканально-
го рассогласования можно представить на основании выражения (5.2.8)
Amin =(7Q~ ^Ок^Ок ) •
Проследим, как изменяется дисперсия М2 межканального рассогла-
сования от объема выборок К. На рис. 72 приведены графики М2 = fiK)
для 2 и 40 регулируемых каналов.
Рис. 72. Зависимость дисперсии
межканального рассогласования
от К (на один канал),
при минимальной ошибке,
равной 1 В:
для 7V = 2 (сплошная линия);
N= 40 (пунктирная линия)
126
ГЛАВА 7
Аппаратура фазированной антенной
решетки
7.1. Построение аппаратуры
Возможны разные варианты размещения аппаратуры во вращающейся и в
невращающейся частях. В частности, антенна ФАР не вращается и при
неподвижной антенне осуществляется электронное сканирование лучом.
Фазированные антенные решетки условно можно разделить по
конструктивной компановке (плоские прямоугольные, полукруглые,
цилиндрические и др.) и по схемотехнической реализации (активные,
полуактивные и пассивные).
При консгруктивной компоновке аппаратуры исходят из того, чтобы
число соединительных элементов (проводов, кабелей, разъемов) сводилось
к минимуму. Элементы ФАР стараются разместить в непосредственной
близости от излучателя или встраивают непосредственно в излучатель. В
этом случае можно говорить о едином интегральном устройстве.
Большие перемены в области создания радиоэлектронных инте-
гральных элементов (в частности, твердотельных усилителей на транзи-
сторах), а также элементов и устройств приемной аппаратуры в инте-
гральном исполнении (малошумящих усилителей, смесителей, фильтров
и т.д.) позволили применять активные и полуактивные ЦАР уже сегод-
ня. Наиболее эффективным с точки зрения энергетического потенциала
РЛС является применения активных ФАР.
Активной антенной решеткой называют такую многоэлементную
антенну, у которой в тракт каждого излучателя включается активный
элемент (усилитель).
Общим преимуществом единой компоновки приемной аппаратуры в
активном варианте является упрощение схемы разводки высокочастотно-
го сигнала, что уменьшает потери и фазовые ошибки, вносимые высоко-
частотным трактом. В приемной части активной ФАР фазовращатели мо-
гут быть размещены не на входе, а на выходах высокочастотных усилите-
лей. Фазовращатели могут быть общими на прием и на передачу.
127
Цифровое формирование ДН в ФАР
На рис. 73 приведена схема приемной части, работающей с излу-
чателем, активной ФАР.
Рис. 73. Приемная аппаратура активной ФАР
В канале приема на входе имеется устройство защиты МШУ от
проникновения зондирующего сигнала в момент излучения, а также
мощных сигналов от различных радиоустройств.
В приемной части осуществляется перевод сигнала на промежу-
точную частоту и далее происходит оцифровка.
Теоретически возможно оцифровать радиочастотный сигнал непо-
средственно в каждом элементе (после излучателя) с помощью АЦП.
Однако еще не существуют АЦП, работающих на таких высоких часто-
тах, на которых работает РЛС. Кроме того, АЦП не позволяет работать
с сигналами на уровне чувствительности приемных трактов. Поэтому
усиление и преобразование с понижением частоты радиочастотного
сигнала необходимо перед АЦП.
Применение полностью активных ФАР по экономическим сообра-
жениям не всегда может быть оправдано. Иногда полотно ФАР разбива-
ется на секции подрешетки. Внутри каждой подрешетки осуществляется
сканирование луча с использованием аналогового фазовращателя на
прием и передачу. Сигнал внутри подрешетки, полученный от различ-
ных излучателей, суммируется и один сигнал от подрешетки поступает
на оцифровку. Такое построение позволяет уменьшить число АЦП.
Характерной тенденцией развития современных многофункцио-
нальных радиолокационных систем является постепенной приближение
цифровой обработки ближе к антенне.
Широкое распространение в РЛС кругового обзора получил метод
обзора пространства с электронным сканированием лучом только по уг-
лу места, а в азимутальной плоскости формируется неуправляемая ДН с
помощью диаграммообразующих схем (ДОС), перемещаемая по азиму-
ту за счет механического вращения. В этом случае мы имеем дело с по-
луактивным вариантом, поскольку активные элементы на прием и пере-
дачу работают на группу излучателей, входящих в ДОС.
Для повышения точности определения угла места цели при этом
на приеме формируется несколько лучей ДН антенны, перекрывающие
ДН антенны на передачу. ДН на передачу и на прием синхронно скани-
руют по углу места.
128
Глава 7. Аппаратура фазированной антенной решетки
Выбором амплитудных коэффициентов в ЦДО обеспечивается
низкий уровень боковых лепестков приемных каналов в ДНА в угломе-
стной плоскости, а распределением поля в раскрыве ДОС обеспечивает-
ся низкий уровень боковых лепестков ДНА в азимутальной плоскости.
Фазированная антенная решетка (полуактивная на прием) пред-
ставляет собой полотно с излучателями, подключенными к приемной
аппаратуре. Полотно состоит из N одинаковых диаграммо-образующих
схем строки (ДОСС), включающих делители-сумматоры с излучателя-
ми. К каждому входу-выходу ДОСС подключена приемная аппаратура.
Схема ДОСС с приемной аппаратурой представлена на рис. 74.
Строка 1
Передающий канал осуществляет фазирование зондирующих им-
пульсов, управление фазовращателями, усиление и передачу их на вход
усилителя мощности строк.
При работе ФАР в режиме приема строками сигналов формирование
ДН основных приемных каналов осуществляется на программном уровне.
129
Цифровое формирование ДН в ФАР
7.2. Построение диаграммообразующих схем строк
Даграммообразующая схема строки ДОСС предназначена для формиро-
вания горизонтальной ДН строк ФАР в режиме передачи и приема.
Схема ДОСС приведена на рис. 75. ДОСС состоит из A-печатных излу-
чателей, объединенных схемой. В ДОСС используется печатный дирек-
торный излучатель.
XW1 XW2 XW3 XW4 XW5 XW6 XW7 XW8 XVV9 XW10 XW1I XWI2 XW13 XW14 XW15 XWI6
XWI7
Рис. 75. Схема электрическая ДОСС
Схема деления мощности ДОСС имеет последовательную структуру,
обеспечивающую одинаковые электрические длины от входа до излучате-
Рис. 76. Антенно-поворотное
устройство мобильной РЛС
с цифровым формированием ДН
лей. Выходы делителей нагружены не-
посредственно на излучатели.
Конструктивно ДОСС представ-
ляет собой печатно-полосковые уст-
ройства, содержащие на единой печат-
ной плате проводники делителя мощ-
ности и излучателя. Изготовление
ДОСС осуществляется по технологии
большеразмерных печатных плат.
На рис. 76 показана цифровая
фазированная антенная решетка, раз-
мещенная на подвижном транспорт-
ном средстве в сантиметровом диапа-
зоне волн. В антенной решетке реали-
зован полуактивный вариант ИДО
(см. рис. 75).
130
Глава 7. Аппаратура фазированной антенной решетки
Конструктивно строки закрепляются на балках Дополнительно в
состав конструкции строки ФАР входят экраны излучателей ДОСС и
воздуховоды системы охлаждения.
Разнообразие функций (по-
иск, обнаружение и сопровожде-
ние) позволяют анализировать ок-
ружающую обстановку и настраи-
вать свой режим работы в целях
оптимизации выполняемых функ-
ций путем адаптации с использова-
нием идо.
На рис. 77 изображена пло-
ская апертура полукруглой антен-
ной решетки, состоящей из под-
решеток, сумма сигналов которых
формирует ДН на прием. Сумма не заштрихованных подрешеток фор-
мирует ДН на передачу. Подрешетки с двойной штриховкой формируют
ДН компенсационных каналов.
7.3. Элементная база и архитектура аналоговой части
аппаратуры РЛС для цифровой антенной решетки
Стремительное развитие микроэлектронной аналоговой и цифровой эле-
ментной базы и появление новых компонентов позволили существенно
изменить радиоприемный тракт в РЛС с ЦАР.
Новые аналоговые сверхмощные усилители улучшили характери-
стики аналоговой части на передачу. Появление сверхмалошумящих
усилителей дает возможность улучшать характеристики аналоговой
части приемного тракта. Ряд отечественных и зарубежных фирм пред-
лагают готовые решения узлов приемного тракта.
Интегральные RF компоненты фирм Hewlett-Packard, Motorola,
Philips, Siemens и другие предлагают устройства, позволяющие сокра-
тить объем высокочастотной части приемного тракта УВЧ, смесителей
синтезаторов частоты и др.
Российские фирмы достигли серьезных успехов конструктивно-
технического уровня при создании такого перспективного направления,
как твердотельные ФАР.
Применение современной миниатюрной элементной базы и пере-
довой технологии, как квазимонолитные интегральные схемы СВЧ- и
ВЧ-диапазонов, лазерная герметизация модулей, в сочетании с ориги-
нальными конструктивно-техническими принципами построения прие-
мопередающих устройств обеспечивает требуемые электрические ха-
131
Цифровое формирование ДН в ФАР
рактеристики при существенно меньших, по сравнению с возможными,
прототипами массогабаритных характеристик.
Аналоговый приемник является супергетеродинным с двукратным
преобразованием частоты. Сигнал с выхода ДОСС, пройдя через цирку-
лятор, поступает на устройство защиты (УЗ). После усиления МШУ,
фильтрации на СВЧ в полосовом фильтре, двукратного преобразования,
усиления и фильтрации на промежуточной частоте сигнал поступает на
АЦП, где он оцифровывается.
Приемопередающие устройства, объединенные в блок, предназна-
чены для усиления эхосигналов, поступающих с диаграммообразующей
схемы строки (ДОСС); двукратного преобразования входного сигнала;
обеспечения характеристики ЭМС на прием; предварительного усиле-
ния мощности зондирующего импульса.
Приемопередающий блок состоит из субблоков аналогового при-
емника, предварительного усиления мощности. На вход блока поступа-
ют эхосигналы от ДОСС; непрерывные сигналы с первого и второго ге-
теродинов, зондирующих импульсов, а также сигналы тактовой часто-
ты; синхронизирующие сигналы; сигналы управления режимами работы
приемных каналов; источники напряжения питания.
Фирма ТНПП «Исток» предлагает приемопередающий модуль
М2730, предназначенный для РЛС с ФАР. Приведем его основные тех-
нические характеристики.
Основные технические характеристики М2730
Рабочий диапазон частот, ГГц ......................................... 2,7-3,0
Пределы регулировки фазы, град .........................................0-360
Дискрет регулировки, град............................................... 22,5
Точность установки фазы........................................... не более ±5%
Время коммутации прием-передача, мкс .............................. не менее 0,1
Напряжения питания:
U\ .................................................... +9+0,5 В
U2................................................... +5±0,5 В
J73.................................................. -5±О,5 В
Управляющие напряжения ............................................ ТТЛ уровень
Габаритные размеры (без учета разъемов), мм ....................... 50x50x142
Масса, г...........................................................не более 800
Параметры приемного канала
Коэффициент шума, дБ...............................................не более 2,5
Коэффициент передачи, дБ .......................................... не менее 50
Неравномерность коэффициента передачи, дБ .........................не более ±1
Мгновенный динамический диапазон, дБ, при компрессии КР ~1 дБ...... не менее 60
Максимальный динамический диапазон
при использовании встроенного аттенюатора, дБ...................... не менее 90
Частота на выходе приемного канала, МГц................................. 35±5
Уровень подавления зеркального канала, дБ.......................... не менее 50
Частота 1-го гетеродина, ГГц...................................... ЗД4...3,44
Частота 2-го гетеродина, ГГц........................................... 0,475
132
Глава 7. Аппаратура фазированной антенной решетки
Параметры передающего канала
Выходная мощность в импульсе, Вт .................................... не менее 6
Длительность импульса, мкс ........................................... 1...300
Скважность импульсов ................................................ не менее 6
Коэффициент передачи, дБ ............................................ не менее 27
Неравномерность коэффициента передачи, дБ ...........»...............не более 0,5
Максимальная регулировка мощности выходного сигнала, дБ.................... 15
Шаг регулировки, дБ......................................................... 1
Точность установки затухания аттенюатора в интервале, дБ
1...7дБ...................................................................±0,5
8...15 дБ ..................................................±1,0
КПД передающего канала ........................................... не менее 15%
Серьезных успехов в этом на-
правлении добились и другие рос-
сийские фирмы, в частности, фирма
«Пульсар». Вид аналоговой аппара-
туры приемного устройства, разра-
ботанного фирмой «Пульсар», пока-
зан на рис. 78. Один из вариантов
построения аналоговой части прие-
мопередающего устройства РЛС
приведен на рис. 79.
Рис. 78. Вид приемопередающего
устройства
Рис. 79. Схема аналоговой части приемопередающего устройства РЛС
(полуактивный вариант)
133
Заключение
В результате теоретических и экспериментальных исследований, а так-
же математического и компьютерного моделирования рассмотрена важ-
ная задача анализа влияния дестабилизирующих факторов на эффектив-
ность диаграммообразования в ЦАР.
Характерными тенденциями современных РЛС являются сущест-
венное возрастание плотности электромагнитного окружения РЛС, что в
значительной степени связано с количественным ростом случайных и
преднамеренных помех. Одним из важных параметров по помехозащи-
щенности, особенно для РЛС наблюдения за низколетящими целями, яв-
ляется ДД. Экспериментально установлено, что для импульсных РЛС на-
блюдения за низколетящими целями и должна иметь ДД не менее 65 дБ.
Технология цифровой обработки сигналов позволяет в значительной мере
решить эту задачу. Цифровое диаграммообразование (ЦДО) или форми-
рование ДН систем цифровыми методами - одно из значимых среди тех-
нических решений задачи ДД. Данная технология уже стала базовой в
перспективных РЛС.
Установлено, что ДД в ЦАП растет с увеличением числа прием-
ных каналов и в реальных условиях ДД меньше теоретического.
Уменьшение ДД в реальной аппаратуре обусловлено влиянием
дестабилизирующих факторов. Это различные способы формирование
квадратур, неидентичность частотных характеристик приемных кана-
лов, конструктивный шум, ошибки вычисления весового вектора, влия-
ние джиттера времени при кодировании на ПЧ, разбросы гетеродинных
и опорных напряжений и другие факторы.
В значительной мере на уменьшение ДД оказывает влияние конст-
руктивный шум, который обусловлен факторами, зависящими от опти-
мального сочетания разводки печатной платы и технологии изготовле-
ния самой печатной платы, компоновки элементов на плате, наводками
и пульсациями по цепям питания, «паразитными» наводками активных
элементов. В процессе исследования получены автокорреляционная
функция, гистограмма распределения конструктивного шума. Конст-
руктивный шум имеет нестационарный характер и слабо коррелирован
(менее 0,3). Величина конструктивного шума может превышать и шумы
квантования.
134
Литература
1. Sander W. Experimental Phased-Array Radar EL Re. Antenna System // 1EE
Droc. Aug. 1980. V. 127. Pt. F. No. 4.
2. Barton P. Digital Beam Forming for Radar // IEE Droc. Aug. 1980. V. 127. Pt. F.
No. 4.
3. Warcrop B. Experimental Linear Phased Array with Partial Adaptivity // IEE
Droc. Feb. 1983. V. 130. Pt. F.
4. Warcrop B. Digital Beamforming in Radar Systems. A Review. Military Mi-
crowave Conf. Proc. VK. 1984.
5. Loomis J.M., Rose J.F. A Digital Beamforming Array. U.S. Army Micom Tech-
nical Report. RE 83-21. May 1983.
6. Barton P. Multiple Beam Receiving Array Signal Processor. UK Patent
1515486. March 1977.
7. Активные фазированные антенные решетки /Под ред. Д.И. Воскресенского.
М.: Радиотехника. 2003.
8. Устройства СВЧ и антенны. Проектирование фазированных антенных ре-
шеток (Учеб, пособие) / Под ред. Д.И. Воскресенского. М.: Радиотехника.
2003.
9. Воскресенский Д.И. Антенны с обработкой сигнала (Учеб, пособие). М.:
САЙНС-ПРЕСС. 2002.
10. Karl G. The effects of if Band pass Mismatch Error on Adaptive Cancellon. No-
va. Research Laboratory.
11. Ратынский M.B. Адаптация и сверхразрешение в антенных решетках. М.:
Радио и связь. 2003.
12. Путин А.Е., Ратынский М.В., Сапогов В.И., Ермаков Н.А. Влияние иска-
жений квадратурного разложения сигналов на характеристики многока-
нальной системы обработки // Вопросы обработки радиотехнической ин-
формации на современных вычислительных средствах. Сб. научн. трудов
РТИ им. акад. Н.Л. Минца. М. 1988.
13. Путин А.Е., Ратынский М.В., Черемсин О.П. О влияние декорреляции
входных сигналов на эффективность цифровых фильтров выделения
сигналов на фоне помех // Радиотехника и электроника. 1986. Т.31. № 9.
С.1786-1791
14. Ратынский М.В. Оценка влияния ширины полосы на возможность адап-
тивной обработки сигналов в антенных решетках // Радиотехника и элек-
троника. 1980. Т. 25. №7.
15. Тандит А.Л. (канд. дисс.). ВНИИРТ. 1985.
135
Цифровое формирование ДН в ФАР
16. Applebaum S.P. Adaptive Arrays. IEEE Trans. 1976.
17. Ranford M.F. System Applications of Beam-forming networks. Radar 77 // IEE
Conf. Dubl. 155. P. 63-65.
18. Радиотехника сверхвысоких частот И Экспресс информация. 1979. №34.
19. Нуссбаумер Г. Быстрое преобразование Фурье и алгоритмы вычисления
свертки. М.: Радио и связь. 1985.
20. Экспериментальная антенна с цифровым формированием лучей. Пер.
ГИТБ МФ 88/42675.
21. Антенна с цифровым формированием луча / Пер. ГИТБ МФ 88/33192 S.P.
Applebaum. Adaptive arrays И IEEE Trans. 1976. Ар-24. P. 585-348.
22. Цифровые антенные решетки. (Обзор по материалам открытой отечествен-
ной и зарубежной печати за 1979-1986. ГОНТИ. 1986).
23. Монзинго Р.А., Миллер ТУ. Адаптивные антенные решетки. Введение в
теорию / Пер. с англ. М.: Радио и связь. 1986.
24. Адаптивная компенсация помех в каналах связи / Под ред. Ю.И. Лосева.
М.: Радио и связь. 1988.
25. Гарвер. Графики для выбора аналого-цифрового преобразователя И Элек-
троника. 1979 №4.
26. Шлеев С.Б. Элементная база и архитектура цифровых радиоприемных уст-
ройств // Цифровая обработка сигналов. 1999. №1.
27. Бахтиаров Г.Д., Малинин В.В., Шкопин В.П. Аналого-цифровые преобра-
зователи. М.: Сов. радио. 1980.
28. Цифровая обработка сигналов на промежуточной частоте. Пер. ГНТБ
М.Ф. 87/53628.
29. Цифровая обработка сигналов на промежуточной частоте. Пер. ГНТБ 0690
600 4391.
30. Исследование вариантов построения модулей цифровых приемников. М.
1997. АОЗТ «Инструментальные системы».
31. Григорьев Л.Н.. Алексеев С.Д. Цифровое формирование квадратур на про-
межуточной частоте И Труды 2-й Междунар. конф. «Цифровая обработка
сигналов и ее применения». М. 1999.
32. Григорьев Л.Н., Алексеев С.Д. Цифровой приемник для цифровой антенной
решетки // Труды 4-й Междунар. научно-техн. конф. Филиал ВИИЦ С -Пб.
1999.
33. Reed I.S., Mallet J.D. and Brennan L.E. Rapid Convergence Rate in Adaptive
Arrays // IEEE Trans. Nov. 1974. V. AES-10. No. 6.
34. Hudson J.E. Adaptive Array Principles. Peter Pereqrinus Ltd. UK. 1981.
35. Griffiths F., Williams P. Digital Beamforming for Bistatic Radar Receiver // Int.
Conf, on Antennas and Propagation. UK. 1983.
36. Herd J. Array Element Pattern Correction in a Digital Beamforming Array: An
Experimental Study. URSINatl. Radio Science Meeting. Canada. 1985.
136
Литература
37. Cubriel W.F. Spectral Analysis and Adaptive Array Superresolution Techniques
// Proc. IEEE. June 1980. V. 68. No. 6.
38. Mathews B. Non-Linearities in Digital Maniford Phased Arrays // IEEE Trans.
AP. Nov. 1986
39. Wong A.C. Radar Digital Beam Forming // Military Microwave Conf. Proc. UK.
1982.
40. Григорьев Л.Н., Голубев В.А. Цифровое диаграммообразование в фазиро-
ванной антенной решетке (ФАР) // Труды VII Междунар. научно-техн,
конф. «Радиолокация, навигация, связь» (RL NC'2001). Воронеж. 2001.
41. Махлин Р.Л., Голубев В.А., Гушьян Т.Н. Методы цифровой пространственно-
временной обработки сигналов с использованием цифровых сигнальных
процессов // Труды VII Междунар. научно-техн. конф. «Радиолокация, на-
вигация, связь» (RL NC'2001). Воронеж. 2001.
42. Григорьев Л.Н., Голубев В.А. Экспериментальные исследования цифрового
диаграммообразования в фазированной антенной решетке (ФАР) // Труды
5-ой Междунар. конф. «Цифровая обработка сигналов и ее применение».
М. 2003.
43. Григорьев Л.Н., Алексеев С.Д. Экспериментальные исследования устройст-
ва цифрового диаграммообразования (УЦДО) в фазированной антенной
решетке (ФАР) с использованием программируемых интегральных схем
(ПЛИС) // Труды 5-й Междунар. конф. «Цифровая обработка сигналов и ее
применение». М. 2003.
44. A Guide to SHARC DSP. Multiprocessing Solutions. Analog Devices. 1999.
45. Григорьев Л.Н., Алексеев С.Д. Проектирование радиотехнической аппара-
туры на сигнальных процессорах // Тезисы докл. на XLVI конф., посвя-
щенной 50-летию МИРЭА.
46. Muxed Signal and DSR design techniques. Analog Devices. 2000.
47. Analog Devices. Jns USA AD6620, Dual Channel Decimation Receiver. Data
Sheet. 1997.
48. Liv H., Chafoor A., Stockman P. Time jitter analysis for quadrature sampling II
IEEE Transaction on Aerospace and Electronic Systems. NY. 1998.
49. Григорьев Л.Н., Собкина Н.Ю., Сорокина O.H. Исследование эффективно-
сти преобразования спектра ЛЧМ-сигнала на видеочастоту с использова-
нием специального процессора Digital Down Converter (DDC) методом мо-
делирования // Труды 5-й Междунар. конф. «Цифровая обработка сигналов
и ее применение». М. 2003.
50. Информационные технологие в радиотехнических системах / Под ред.
Н.П. Федорова. М. МГТУ им. Н.Э. Баумана. 2003.
51. Бобров Д.Ю., Дображинский А.П., Зайцев Г.В., Маликов Ю В., Цыпин Н.П.
Цифровая обработка сигналов в многоканальной РЛС. Цифровая обработка
сигналов. 2001. №4.
52. Григорьев Л.Н., Алексеев С.Д. Оценка дисперсии помех на выходе циф-
рового автокомпенсатора помех (ЦАКП) от объема выборок // Труды 4-й
137
Цифровое формирование ДН в ФАР
Междунар. конф. «Цифровая обработка сигналов и ее применение».
М. 2002.
53. Григорьев Л.Н., Алексеев С.Д. Цифровой автокомпенсатор помех // Труды
1-й Междунар. конф. «Цифровая обработка сигналов и ее применение».
М. 1998. Т 4.
54. Григорьев Л.Н., Кузнецов Ю.А. Устройство формирования диаграммы на-
правленности цифровой ФАР. Патент на устройство формирования диа-
граммы направленности цифровой ФАР № 52266 от 10 марта 2006 г.
55. Григорьев Л.Н. Анализ ошибок оценок весового вектора Aw в цифровом
автокомпенсаторе помех (ЦАКП) от объема выборок // Труды Российского
научно-технического общества радиотехники, электроники и связи
им. А.С. Попова. Сер. Цифровая обработка сигналов и ее применение
2005. Вып. VII-1 М.
56. Активные фазированные антенные решетки / Под ред. Д.Н. Воскресенско-
го, А.И. Конашенкова. М.: Радиотехника. 2004.
57. Евстратов ГА., Им.мореев И.Я. Цифровые методы формирования диа-
грамм направленности приемных антенных решеток. Проблемы антенной
техники. М.: Радио и связь. 1989.
58. Быков М.Н., Сериков В.С., Смородинов А.В., Толмачев В.А. Исследования
влияния фазовой нестабильности тактового сигнала на характеристики
тракта аналого-цифрового преобразования // Цифровая обработка сигна-
лов. 2004. №2.
59. Goodman N.R. Statistical analysis based on certain multivariate Gaussian distri-
bution// Ann. Math. Stat. March 1963. V. 34.
60. Baggeroer A.B. Confidence intervals for regression (MEM) spectral estimates //
IEEE Trans. Inf. Theory. September. 1976. V. IT-22. No. 5.
61. Григорьев Л.Н., Алексеев С.Д. Проектирование радиотехнической аппара-
туры на сигнальных процессорах // Тезисы докл. на XLVI конф., посвя-
щенной 50-летию МИРЭА.
62. Григорьев Л.Н., Алексеев С.Д. Цифровой автоматический компенсатор по-
мех // Труды 1-й Междунар. конф. «Цифровая обработка сигналов и ее
применение». 1998. Т. IV.
63. Griffiths F., Williams Р. Digital Beamforming for Ristatic Radar Receiver // Inf.
Conf, on Antennas and Propagation. UK. 1988.
64. Григорьев Л.Н., Мелентьева O.H. Оценка влияния декорреляции сигналов
цифровой антенной решетки (ЦАР) обусловленная неидентичностью частот-
ных характеристик фильтров на ПАВ И Труды 8-й Междунар. конф. «Циф-
ровая обработка сигналов и ее применение». Российское научно-техническое
общество радиотехники, электроники и связи им. А.С. Попова. М., 2006.
65. Григрьев Л.Н., Мелентьева О.Н. Патент на полезную модель № 60272 Уст-
ройство коррекции межканального рассогласования приемных каналов в
цифровой ФАР.
138
Литература
66. Мелентьева О.Н. (канд. дисс.). МИРЭА. 2006.
67. Григорьев Л.Н., Мелентьева О.Н. Метод коррекции «межканального рас-
согласования» приемных каналов в цифровой антенной решетке (ЦАР) //
Тезисы докл. на XLVI конф. 2006. МИРЭА.
68. Стейскал X. Антенны с цифровым формированием луча. База ВВС
«Хэнском». США.
69. Девред X., Ротер Дж. Экспериментальная антенна с цифровым форми-
рованием лучей. Копания Томсон. CSF-DRS. Багие. Франция.
70. Голубков А.П., Долматов А.Д., Лукошкин А.П. и др. Проектирование
радиолокационных устройств. Учебное пособие для радиотехнических
специальных вузов/Под ред. М.А Соколова. М.: Высшая школа. 1984.
71. Левин Б.Р. Теоретические основы статистической радиотехники. Кн. 1.
Изд-е 2-е, перераб. и доп. М.: Сов. радио. 1974.
72. Айфичер Э., Джервиг Б. Цифровая обработка сигналов: практический
подход. Изд-е 2-е / Пер.с англ. М.: Издательский дом «Вильямс». 2004.
73. Лайонс Р. Цифровая обработка сигналов: Изд-е 2-е / Пер. с англ. М.: ООО
«Бином-Пресс». 2006.
74. Опенгейм А., Шафер Р. Цифровая обработка сигналов. М.: Техносфера.
2006.
75. Литюк В.И., ЛитюкЛ.В. Методы цифровой многопроцессорной обработки
ансамблей радиосигналов. М.: СОЛОН-ПРЕСС. 2007.
76. Бехар В., Кабакчиев X. Алгоритмы цифровой демодуляции ЛЧМ-сигналов.
77. Григорьев Л.Н., Мелентьева О.Н. Цифровая обработка сигналов. М. 2007.
78. Уидроу Б.,Стирнз С. Адаптивная обработка сигналов / Пер. с англ. М :
Радио и связь. 1989.
139
Принятые сокращения
АКП - автокомпенсатор помех
АЧХ - амплитудно-частотная характеристика
АЦП - аналого-цифровой преобразователь
АШП - активная шумовая помеха
БОС - блок обработки сигналов
БПФ - быстрое преобразование Фурье
ДД - динамический диапазон
ДН - диаграмма направленности
ДНА - диаграмма направленности антенны
ДОСС - диаграммообразующая схема строки
ДПФ - дискретное преобразование Фурье
ДОС - диаграммообразующая строка
ДФТС - джиттер фронта тактового сигнала
КНД - коэффициент направленного действия
КОС - корреляционная обратная связь
лчм - линейно-частотная модуляция
МШУ - малошумящий усилитель
НЧ - низкая частота
ОС - обратная связь
ПАВ - поверхностные акустические волны
ПЗУ - приемное запоминающее устройство
ПЛИС - программируемая логическая интегральная схема
ПЧ - промежуточная частота
РАФК - регулятор амплитуды и фазы
РЛС - радиолокационная станция
140
Принятые сокращения
УП1 - усилитель постоянного тока
ФАР - фазированная антенная решетка
ФД - фазовый детектор
ФНТС - фазовая нестабильность тактовых импульсов
ФСГП - фазостабильный сигнал генератора промежуточной частоты
ФЧХ - фазочастотная характеристика
ЦАКП - цифровой автокомпенсатор помех
ЦАР - цифровая антенная решетка
ЦВУ - цифровое вычислительное устройство
ЦДО - цифровое диаграммообразование
ЦСП, DSP - цифровой сигнальный процессор
ЦП - цифровой приемник
ЦФАР - цифровая фазированная антенная решетка
DDC - цифровой преобразователь сигналов
ППМ - приемопередающий модуль
141
Научное издание
Цифровое формирование
диаграммы направленности
в фазированных антенных решетка
Автор
Лев Николаевич Григорьев
Зав. редакцией: И. А. Кузьмина
Изд. № 18. Сдано в набор 19.05.2009.
Подписано в печать 21.09.2009. Формат 60x90 1/16.
Бумага офсетная. Гарнитура Таймс.
Печать офсетная.
Печ. л. 9. Тираж 400 экз. Зак. №5760.
Издательство «Радиотехника».
107031, Москва, К-31, Кузнецкий мост, д. 20/6.
Тел./факс: (495) 621-48-37; 625-78-72, 625-92-41.
e-mail: info@radiotec.ru
www.radiotec.ru
Отпечатано в ООО ПФ «Полиграфист»,
160001, г. Вологда, ул. Челюскинцев, 3.
ВНИМАНИЕ /
Издательство «Радиотехника» предлагает
Вашему вниманию книги серии
АНТЕННЫ И РАСПРОСТРАНЕНИЕ РАДИОВОЛН
Пономарёв Л.И., Степаненко В.И. Сканирующие многочастотные совмещен-
ные антенные решетки / Под ред. Л.И. Пономарёва.
Рассмотрены сканирующие многочастотные совмещенные антенные ре-
шетки, представлены схемы построения таких ФАР с использованием раз-
личных типов излучателей. Изложены методы расчета и анализа характе-
ристик ряда вариантов ФАР с совмещением разночастотных излучателей:
вибраторно-вибраторных, вибраторно-волноводных, волноводно-волно-
водных. Представлены результаты численного моделирования. Установ-
лены основные особенности и закономерности в поведении характеристик
таких ФАР и определены пути их улучшения и оптимизации.
Для преподавателей и студентов радиотехнических специальностей вузов.
Может быть полезна научным и инженерно-техническим работникам.
Радиоэлектронные системы локации и связи.
Коллективная монография / Под ред. В.А. Обуховца.
Рассмотрены вопросы разработки радиоэлектронных систем локации и
связи: фазированные и отражательные решетки, радиопередающие уст-
ройства и оптические модуляторы, радиолокационные измерения, радио-
локационные устройства и т.д. Теоретические материалы подкреплены ре-
зультатами и примерами расчетов.
Для научных сотрудников, аспирантов, инженерно-технических работ-
ников, а также студентов радиотехнических специальностей вузов.
Излучение и рассеяние электромагнитных волн. Монография /
Под ред. В.А. Обуховца.
Рассмотрены особенности вычисления электромагнитных полей источников в
присутствии многослойных тел вращения, а также принципы построения
многочастотных частотно-избирательных поверхностей и многослойных ЧИП
с требуемыми характеристиками рассеяния; исследованы характеристики из-
лучения и рассеяния конечных и бесконечных решеток излучателей в виде
плоскопараллельных полубесконечных волноводов с проводящим и импе-
дансным фланцем и вопросы нелинейного рассеяния ЭМВ; показаны возмож-
ности расширения полосы частот антенной решетки из печатных излучателей
Вивальди.
Для инженеров и научных работников, преподавателей и студентов ра-
диотехнических специальностей вузов.
По вопросам заказа и приобретения книги обращаться
в ООО «РС-ПРЕСС» по адресу:
107031, г. Москва, К-31, Кузнецкий мост, д. 20/6,
тел./факс: (495) 625-78-72, 621-48-37, 625-92-41
Полный перечень книг, выпускаемых Издательством «Радиотехника»,
размещен на сайте htto://www. radiotec.ru e-mail: info@radiotec.ru
ВНИМАНИЕ/
Издательство «Радиотехника» предлагает
Вашему вниманию книги серии
АНТЕННЫ И РАСПРОСТРАНЕНИЕ РАДИОВОЛН
Чебышев В. В. Микрополосковые антенны в многослойных средах
Изложены основные принципы расчета микрополосковых излучателей,
микрополосковых антенн и антенных решеток в многослойных средах. За
основу расчета принято обоснованное построение математических моделей
микрополосковых антенн, использующих интегралные и интегродифферен-
циальные уравнения 1 -го рода с указанием особенностей их численного ре-
шения. Даны примеры построения математических моделей и вычислитель-
ных алгоритмов анализа различных микрополосковых антенн и фазирован-
ных антенных решеток.
Может быть полезна специалистам в области микрополосковой антен-
ной техники, а также рекомендуется студентам специальности «200700
— радиотехника» и «071500 — Радиофизика и электроника» как дополне-
ние при изучении курса «Устройства СВЧ и антенны», при выполнении
индивидуальных заданий, прохождения лабораторного практикума, кур-
сового и дипломного проектирования.
Обуховец В. А., Касьянов А. О. Микрополосковые отражательные
антенные решетки. Методы проектирования и численное
моделирование. Монография / Под ред. В. А. Обуховца.
Рассмотрены вопросы проектирования и области применения отражательных
антенных решеток (ОАР). Особое внимание уделено построению САПР-
ориентированных моделей микрополосковых ОАР. Представлены этапы по-
строения математических моделей электродинамического уровня для широ-
кого класса микрополосковых решеток. Описан комплекс вычислительных
программ автоматизированного проектирования отражательных и фазирован-
ных антенных решеток (ФАР) в печатном исполнении.
Для студентов радиотехнических специальностей, а также инженеров и
научных работников, занимающихся проектированием и разработкой
антенных решеток.
По вопросам заказа и приобретения книги обращаться
в ООО «РС-ПРЕСС» по адресу:
107031, г. Москва, К-31, Кузнецкий мост, д. 20/6,
тел./факс: (495) 625-78-72, 621-48-37, 625-92-41
Полный перечень книг, выпускаемых
Издательством «Радиотехника»,
размещен на сайте htto://www. radiotec.ru
e-mail: info@radiotec.ru