














































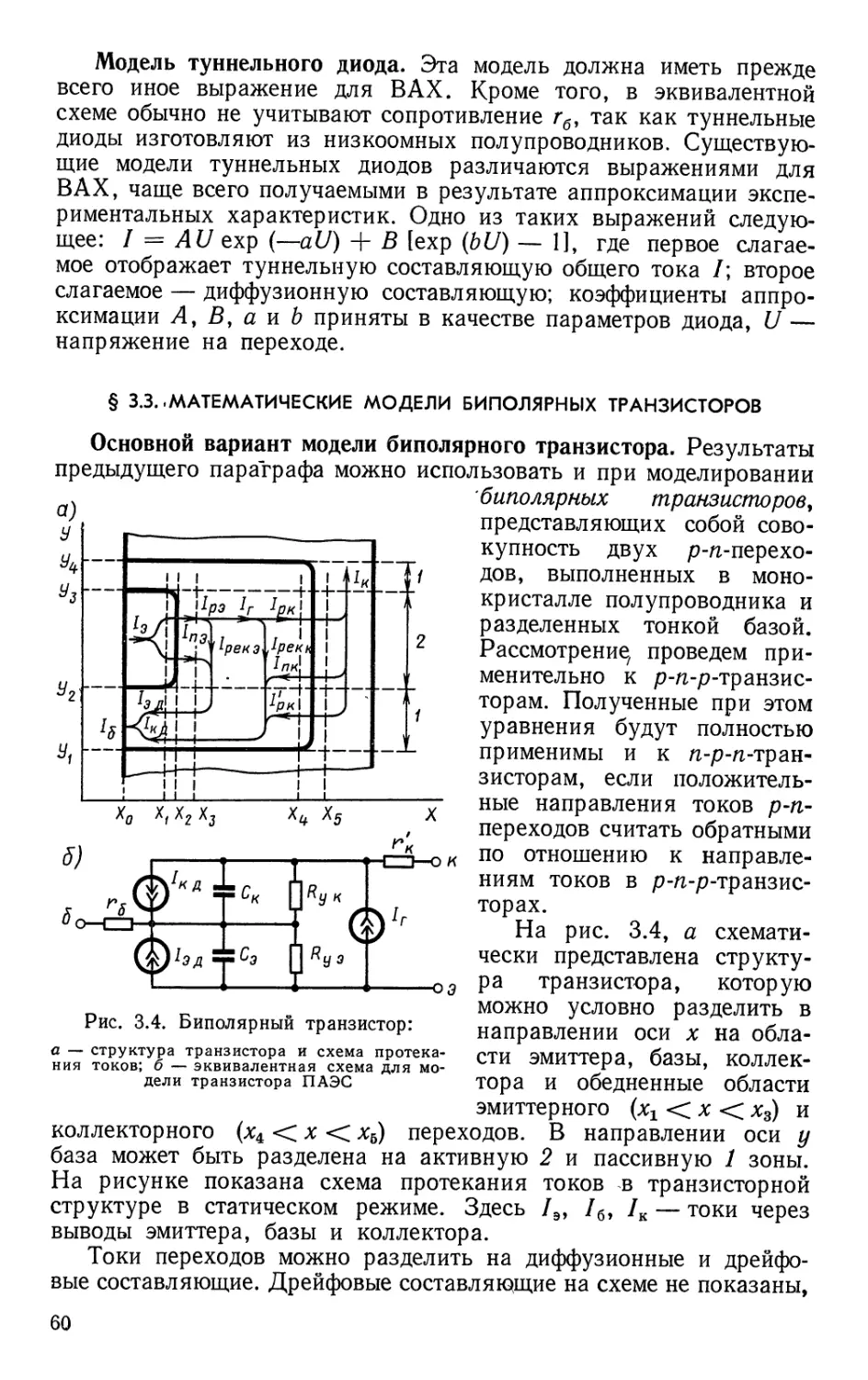







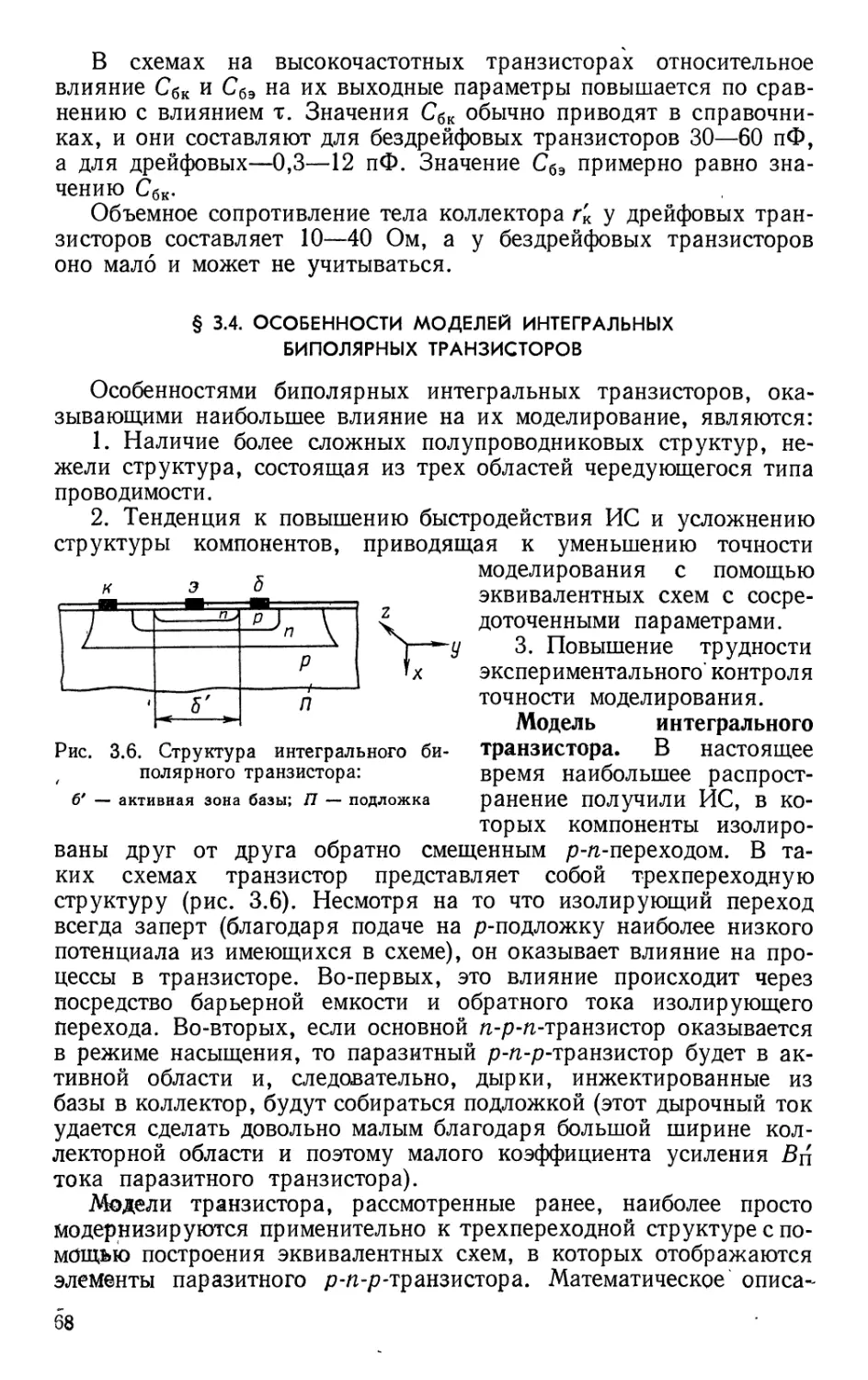



























































































































































































































Текст
Б. В. АНИСИМОВ,
Б. И. БЕЛОВ,
И. П. НОРЕНКОВ
МАШИННЫЙ
РАСЧЕТ
ЭЛЕМЕНТОВ
ЭВМ
Допущено
Министерством высшего и среднего
специального образования СССР
в качестве учебного пособия
для студентов, обучающихся по специальности
«Электронные вычислительные машины»
МОСКВА «ВЫСШАЯ ШКОЛА» 1976
.3
УДК 681.3(0.75)
Рецензенты: кафедра схемотехники Московского института
электронной техники и докт. техн. наук, проф. Соловьев Г. Н.
Борис Владимирович Анисимов
Борис Иванович Белов
Игорь Петрович Норенков
МАШИННЫЙ РАСЧЕТ ЭЛЕМЕНТОВ ЭВМ
Редактор Л. П. Андрианова. Художник В. 3. Казакевич
Художественный редактор Н. К. Гуторов. Технический
редактор Э. М. Чижевский. Корректор Г. И. Кострикова
Т-09922. Сдано в набор 21/1—76 г. Подп. к печати 10/V—76 г. Формат 60X90*/i6. Бум.
тип. № 3. Объем 21 печ. л. Усл. печ. л. 21. Уч.-изд. л. 23,31. Изд. № СТД-255.
Тираж 20 000 зкз. Цена 1 р. 05 к. Зак. № 1299
План выпуска литературы издательства
«Высшая школа» (вузы и техникумы) на 1976 г. Позиция № 109
Москва, К-51, Неглинная ул., д. 29/14,
Издательство «Высшая школа»
Союзполиграфпром при Государственном комитете Совета Министров СССР по
дедам издательств, полиграфии и книжной торговли. Отпечатано в типографии
№ 6, 196006, Ленинград, Московский пр., 91 с матриц ордена Трудового Красного
Зяамени Ленинградского производственно-технического объединения «Печатный
Двор» им, А. М. Горького'197136, Ленинград, П-136, Гатчинская, 26.
Анисимов Б. В. и др.
А67 Машинный расчет элементов ЭВМ. Учеб. пособие для
вузов. М., «Высш., школа», 1976.
336 с. с ил.
Перед загл. авт.: Б. В. Анисимов, Б. И. Белов, И. П. Норенков.
В учебном пособии даны современные методы проектирования
принципиальных электрических схем элементов ЭВМ, являющиеся методами машинного
проектирования; методы и алгоритмы моделирования, анализа и оптимизации
электронных переключательных систем; описываются особенности универсальных
программ машинного проектирования и приводятся примеры их применения.
Предназначается для студентов вузов, обучающихся по специальности
«Электронные вычислительные машины». Может быть полезна инженерам,
занимающимся расчетом элементов ЭВМ.
30502—269 6Ф7.3
А 109—76
001(01)—76
© Издательство «Высшая школа», 1976.
ВВЕДЕНИЕ
К важным задачам развития народного хозяйства СССР
относится задача обеспечения дальнейшего прогресса электроники
и вычислительной техники, разработки проблем прикладной
математики и кибернетики для широкого применения математических
методов и электронной вычислительной техники в инженерном
проектировании сложных технических систем и устройств. В связи
с этим важное народнохозяйственное значение приобретает
проблема создания и использования систем автоматизации процесса
проектирования электронных схем.
Изделия электронной техники — сложные технические
устройства как с точки зрения изготовления, так и с точки зрения
проектирования. При их проектировании решают широкий круг задач
схемотехнического, конструкторского и технологического
характера. Разработка принципиальных электрических схем изделий
электронной техники составляет схемотехнический аспект
проектирования. Создание конструкции изделий, включая разработку
печатных плат, топологических схем размещения компонентов
на подложках или платах, составляет задачу конструкторского
или технического проектирования. При технологическом
проектировании устанавливают последовательность и режимы выполнения
технологических операций, выбирают оснастку и т. л.
Одно из центральных мест в системе автоматизации
проектирования должны занимать математический аппарат и программное
обеспечение схемотехнического проектирования. Традиционные
методы проектирования электронных схем, основанные на
ориентировочных ручных расчетах с дальнейшей доработкой схем путем
экспериментального макетирования, не обеспечивают возрастающие
требования к качественным показателям электронных схем с
приемлемыми затратами времени и средств на разработку. Недостатки
ручных методов проектирования стали особенно заметны с
появлением и развитием микроэлектроники, дальнейший прогресс
которой и реализация имеющихся технологических возможностей
создания схем средней и большой степени интеграции зависят от
успехов в области создания методов и средств машинного
проектирования и уровня их практического использования.
Математическим описанием процессов в электронных схемах
являются системы нелинейных уравнений высокого порядка,
решение которых практически невозможно -без применения средств
вычислительной техники. Поэтому немашинные методы анализа
и расчета электронных схем основаны на существенном упрощении
математического описания электрических процессов в последних.
Отсюда вытекают главные недостатки немашинных расчетных
методов. Во-первых, пути существенного упрощения математиче-
3
ской формулировки задач проектирования далеко не всегда
очевидны, более того, в ряде случаев они вообще отсутствуют или
остаются неизвестными. Следовательно, для каждой группы
однотипных схем необходимо создавать свою специфичную методику
анализа и расчета, что обычно не под силу инженеру-схемотехнику,
и тогда проектирование схемы зависит только от опыта и интуиции
инженера и применения экспериментального макетирования. Во-
вторых, существенные упрощения математического описания
обусловливают низкую точность немашинных методов анализа и
расчета. Поэтому математический аппарат схемотехнического
проектирования с помощью ЭВМ не может быть основан на имеющихся
немашинных методах анализа и расчета вследствие их
неуниверсальности, ориентации лишь на простейшие схемы и низкой
точности получаемых результатов. Но общая для широкого класса
электронных схем математическая формулировка задач
проектирования приводит к большим вычислительным трудностям, и
применение многих из известных методов вычислительной математики
практически неосуществимо. Это обусловливает четко выраженный
проблемно-ориентированный характер математического аппарата
машинного проектирования электронных схем и его программной
реализации. Создание программ не может сводиться к простой
компиляции тех или иных частей существующего математического
обеспечения ЭВМ. Поэтому машинное проектирование
электронных схем рассматривают как новое самостоятельное
научно-техническое направление в электронике.
Теория машинного проектирования создавалась в последние
несколько лет. Естественно, что ряд ее аспектов носит еще
незавершенный характер. Однако заметны и ее успехи, приведшие к
созданию ряда комплексов программ проектирования. Последние
широко используют в организациях, разрабатывающих
электронные и микроэлектронные схемы.
Теория машинного проектирования электронных схем включает
в себя разделы моделирования отдельных компонентов,
моделирования, анализа и оптимизации самих схем. В ней широко
используются достижения в областях физики полупроводниковых
приборов, вычислительной математики, теории электрических цепей,
математического программирования и др. Появление машинного
проектирования явилось мощным стимулом для дальнейшего
развития этих областей науки.
ГЛАВА 1
ОСОБЕННОСТИ ЭЛЕМЕНТОВ ЭВМ
Современный уровень развития науки и техники требует
создания все более сложных многосвязных электронных
вычислительных устройств, машин и систем. При этом значительно возрастает
количество взаимосвязанных элементов вычислительной
аппаратуры, все более жесткими становятся требования к качеству их
функционирования.
В настоящее время отечественная промышленность находится
на этапе широкого внедрения ЭВМ третьего поколения,
характеризующихся высокой степенью типизации электронных схем и
конструкций. С помощью небольшой номенклатуры элементов
обеспечивается техническая реализация весьма разнообразных и
различных по сложности функциональных узлов, блоков, устройств.
Поэтому задача проектирования и изготовления элементов ЭВМ
может рассматриваться как достаточно обособленная в общем
круге задач построения ЭВМ в целом. Элементами ЭВМ называют
те наименьшие функциональные части, на которые разбивается
v машина при логическом проектировании и технической
реализации [8J. Элементы представляют собой электронные схемы,
выполняющие какие-либо простые логические действия над дискретными
сигналами (И, ИЛИ, НЕ и т. п.) или их физическое преобразование
(усиление, формирование).
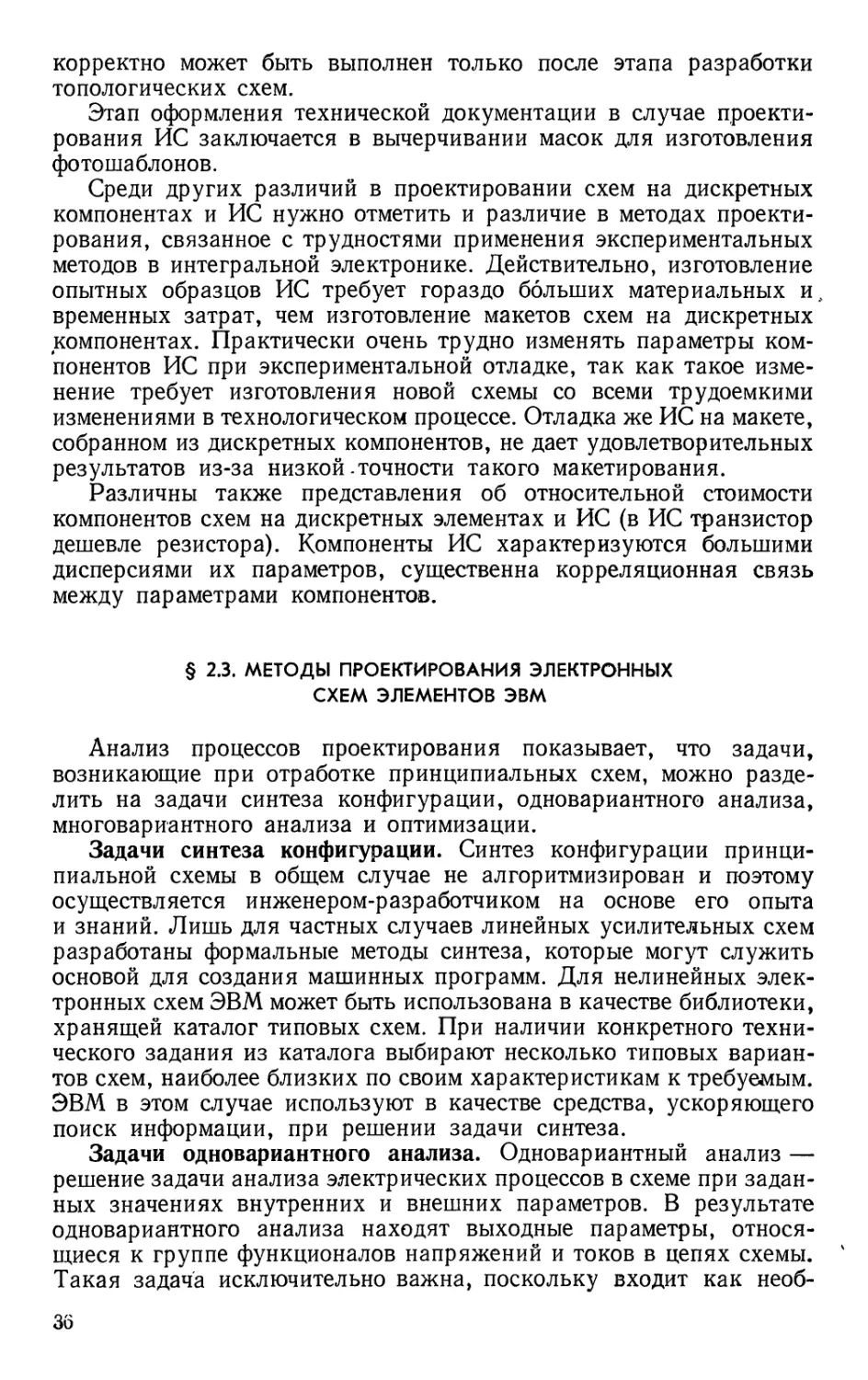
§ 1.1. ОСОБЕННОСТИ РАБОТЫ ЭЛЕМЕНТОВ В СОСТАВЕ ЭВМ
В ЭВМ информация представляется в виде дискретных
сигналов потенциального или импульсного типа. В большинстве
случаев дискретные сигналы применяют для изображения двоичных
цифр 0 или 1.
При потенциальном способе 0 и 1 соответствуют различные
уровни напряжения (У (0) и U (1) (рис. 1.1, а). Если, например,
в течение такта Т имеет место уровень напряжения U (1),
превышающий минимально допустимую величину U (1)тш, то это
соответствует коду 1. Уровень напряжения U (0), который в течение
такта Т меньше максимально допустимой величины U (0)тах,
соответствует коду 0.' Под тактом Т здесь понимается малый промежуток
времени, определяемый схемой управления ЭВМ. Длительность
такта должна выбираться значительно большей времени
переключения элементов ЭВМ из одного состояния в другое. Максимально
и минимально допустимые уровни напряжения U (0)тах и U (1)т{п
в основном определяются электрическими свойствами элементов.
Для надежной работы схем необходимо, чтобы U (1)тш > U (0)тах
5
с некоторым запасом. Уровни напряжения U (1) и U (0) могут
изменяться в довольно широких пределах. При этом
работоспособность схемы обеспечивается электронными приборами (диодами,
транзисторами и т. п.), работающими в режимах
«включено-выключено». Режимы «включено-выключено» дают более стабильные
значения токов и напряжений, чем линейные режимы работы
электронных приборов. При этих режимах разброс таких параметров
электронных приборов, как коэффициенты усиления, мало влияет
на уровни сигналов. Достоверность передачи информации
обеспечивается при U (1) ^ U (l)min, U (0) ^ U (0)тах.
о и
и,
0 .
—
6
0
—
0 |
—1
/ 1
п
1
п
1
0 .
У7#л
TTTTTITt
~иЮ1
Рис. 1.1. Способы представления двоичных цифр потенциальными
(а), импульсными (б, в) и аналоговыми (г) электрическими
сигналами
Изображение единицы высоким уровнем напряжения, а нуля —
низким условно. В равной степени возможно изображать нуль
высоким, а единицу низким уровнями напряжения. Если принята
первая условность, то соответствующие элементы обладают
«положительной логикой»; второй условности соответствует
«отрицательная логика». Напряжения U (1) и U (0) могут иметь как
положительную, так и отрицательную полярность.
Импульсный способ предполагает представление единиц
наличием, а нулей отсутствием импульсного сигнала в течение
рассматриваемого такта (рис. 1.1, б). Длительность импульса обычно
меньше длительности такта. При изображении нуля допускается
наличие небольших помех. Условиями достоверной передачи
информации будут Um^ U (l)min; Un
г/(0)я
где Um —
амплитуда импульса; £/пом — амплитуда помехи; U (1)тт — минимально
допустимая амплитуда импульсного сигнала, представляющего 1;
U (0)max — максимально допустимое значение помехи. Величины
6
U (l)min и U (0)max определяются порогами срабатывания
импульсных элементов.
Для повышения надежности работы импульсных элементов
иногда используют способ представления цифр 0 и 1 при помощи
двуполярных импульсных сигналов (рис. 1.1, б). Отсутствие
импульса положительной или отрицательной полярности в течение такта
является сигналом неисправности.
Импульсный способ изображения цифровой информации, так же
как и потенциальный, характеризуется сравнительно невысокими
требованиями к стабильности амплитуд и длительностей сигналов:
достаточно обеспечить превышение амплитуды импульса над U (l)min,
амплитуду помех меньше U (0)тах и длительности импульсов меньше
такта (расположение импульса внутри такта существенной роли
не играет). Эти требования сравнительно легко реализуются при
помощи импульсных схем, в которых электронные приборы
работают в переключательных режимах. По сравнению с аналоговыми
схемами у импульсных схем производственный разброс таких
параметров, как коэффициенты усиления и предельная частота
работы, обычно мало влияет на форму импульсных сигналов и,
следовательно, на достоверность передачи информации.
В современных ЦВМ импульсный и потенциальный способы
изображения информации часто применяют совместно. Цифровое
представление информации этими способами в отношении
требований к точности передачи напряжений (или токов) выгодно
отличается от аналогового (рис. 1.1, г), при котором численное значение
физической величины в момент времени t представлено
напряжением и (t). Если напряжение и (t) имеет погрешность, то и
соответствующая физическая величина представлена с погрешностью,
т. е. точность аналоговых представлений определяется точностью
работы электронных схем. Точность цифрового представления
определяется количеством разрядов числа. Обычно непрерывно
изменяющаяся физическая величина в цифровом виде бывает
представлена с точностью до единицы или половины единицы младшего
разряда числа. Например, ^-разрядное двоичное число при
абсолютной точности до единицы младшего разряда имеет
относительную точность 1/271"1. Точность цифрового представления
физических величин не зависит от точности передачи электрических
сигналов между элементами, работающими по потенциальному или
импульсному принципу. Однако это утверждение действительно
только в случае, если погрешности напряжений (или токов),
соответствующих цифрам 1 и 0, не станут настолько большими, что
нарушатся условия U (1) ^ U (l)min и U (0) ^ U (0)тах
(нарушение этих условий хотя бы в одном из элементов ЭВМ приводит
к нарушению хода вычислительного процесса, рассматриваемому
как отказ или сбой).
Таким образом, характерная особенность элементов ЭВМ —
сравнительно высокая устойчивость против воздействия
дестабилизирующих факторов в виде изменений параметров
комплектующих деталей и приборов, отклонений питающих напряжений, воз-
7
действия помех, изменений температуры и т. п. Пока воздействие
комплекса дестабилизирующих факторов не превосходит
некоторых предельных значений, качество функционирования машины
остается неизменным. Если хотя бы в одном из элементов порог
срабатывания будет превзойден из-за воздействия
дестабилизирующих факторов, то качество работы ЭВМ изменяется скачкообразно,
она окажется или полностью неработоспособной, или существенно
изменит эффективность своей работы. Отказ элемента в процессоре,
центральном устройстве управления, выводит ЭВМ из строя. Отказ
элемента одного из внешних устройств обычно приводит к
снижению оперативных возможностей, т. е. снижению эффективности.
Часто даже сравнительно большие изменения параметров
комплектующих деталей и приборов, превосходящие нормы
технических условий, не приводят к отказам элементов. Надежность
и стабильность параметров компонентов в элементах ЦВМ обычно
выше, чем у аналоговых машин. Это объясняется тем, что при
работе элементов в переключательных режимах многие из деталей
и приборов эксплуатируются в существенно облегченных
электрических режимах. Например, в бистабильных схемах типа «триггер»
один из транзисторов закрыт, т. е. ток через него не протекает.
Важная особенность ЭВМ — широкая унификация их элементов.
Из экономических и технологических соображений оказалось
целесообразным строить ЭВМ из унифицированных или типовых
элементов, удовлетворяющих требованиям функциональной
взаимозаменяемости. В результате очень сложные машины имеют в своем
составе ограниченное количество типонаименований элементов
(5—10 типов). Экономические, технологические и
эксплуатационные преимущества такого принципа конструирования значительно
превышают некоторые дополнительные издержки, связанные с
избыточностью оборудования и' дополнительными трудностями при
разработке элементов. Избыточность оборудования может быть
обусловлена тем, что многие из логических схем типа И, ИЛИ
изготовляют с максимальным количеством входов. Поэтому в узлах,
собираемых из таких типовых элементов, часть входов и
относящихся к ним деталей и приборов остаются незадействованными,
т. е. избыточными. Избыточность определяется иногда и
конструктивным выполнением элементов. В целях экономии объема и
сокращения количества разъемных соединений широкое
распространение получили конструкции ячеек и модулей, каждая из которых
содержит по нескольку однотипных или разнотипных элементов.
Некоторые элементы при конструктивной разработке той или иной
логической схемы более высокого уровня оказываются
избыточными (использовать их для других логических схем не всегда
целесообразно).
Построение различных логических схем из ограниченной
номенклатуры типовых элементов создает ряд затруднений при
разработке электрических схем элементов. Поэтому непосредственной
разработке электронной схемы должен предшествовать тщательный
анализ условий применения того или иного элемента, различных
8
вариантов их взаимных соединений, требований к амплитудам,
фронтам и временным задержкам и т. п. Анализ дает возможность
сформулировать и количественно оценить технические требования
к тому или иному элементу, входящему в комплекс типовых
элементов. Эти требования уточняются по мере проработки схемных
вариантов элементов.
К особенностям элементов ЭВМ относится также и требование
логической и физической полноты системы элементов, выражаемое
в том, что состав простых логических функций; выполняемых
элементами системы, должен быть достаточен для реализации любой
сложной логической функции. Но реализация логических
преобразований часто сопровождается затуханием электрических
сигналов. Поэтому для надежной работы схем необходимо
восстановление амплитудных и временных параметров электрических
сигналов. Обеспечение взаимного согласования сигналов различных
элементов называют физической полнотой. Физическая полнота
может обеспечиваться соответствующей проработкой схем
логических элементов или применением дополнительных усилителей,
формирователей, линий задержки и т. п.
Кр@ме унифицированных и типовых элементов в ЭВМ обычно
имеются и специальные элементы, необходимые для усиления
малых сигналов и формирования импульсов тока в запоминающих
и внешних устройствах.
§ 1.2. РАЗМЕРНАЯ И ФУНКЦИОНАЛЬНАЯ ВЗАИМОЗАМЕНЯЕМОСТЬ
Стандартизация, нормализация и унификация элементов ЭВМ
открывают широкие технико-экономические возможности.
Стандартизация — сведение многочисленных видов продукции
и технических условий на нее к ограниченному количеству
обязательных для применения образцов-стандартов. Практически
стандартизация заключается в сведении большого количества
различных типов и размеров одноименных деталей (модулей, ячеек и
т. п.) к целесообразно ограниченному их числу. Это обеспечивает
возможность с наименьшими затратами организовать массовое
изготовление стандартизованных изделий, применять
высокоавтоматизированные технологические процессы с дорогостоящей
оснасткой. Такое производство обеспечивает высокое качество
продукции, стабильность основных характеристик схем, что в свою очередь
обусловливает повышение надежности и долговечности изделий.
Экономически обоснованной становится при этом тщательная
отработка электронных схем, которая слишком дорога и трудоемка
при мелкосерийном характере производства.
Нормализация — стандартизация, проводимая в масштабе
отрасли, министерства, завода (существуют также межотраслевые нерма-
ли, охватывающие несколько отраслей). Нормали могут относиться
и к изделиям, охваченным ГОСТами, если необходимо ограничить
сортамент стандартизованных деталей применительно к нуждам
9
данной отрасли и уточнить или улучшить показатели,
регламентированные ГОСТом.
Унификация предусматривает устранение излишнего
многообразия изделий путем сокращения их числа и максимального
объединения. Она обеспечивает широкое использование в новых
конструкциях деталей и узлов ранее сконструированных и
испытанных машин и устройств. Унификация может проводиться как для
стандартизованных, так и для нестандартизованных объектов.
Широкие возможности для унификации имеются в области
создания и применения элементов электронной вычислительной
техники. В ЭВМ первого поколения практически каждая машина имела
свою систему элементов. Унификация распространялась лишь
на машины, преемственные по конструкции, например «Урал-1»,
«Урал-4», и практически выражалась в том, что данная ЭВМ
строилась из ограниченной номенклатуры типовых элементов.
Например, одна из первых ламповых ЭВМ «Стрела» имела 24 типонаиме-
нования элементов при общем количестве элементов около 7000.'
Ограничение номенклатуры типовых элементов позволило
организовать их серийное производство, ускорило сроки
проектирования и изготовления машины. Оно стало возможным благодаря тому,
что типовые элементы разрабатывались с учетом требований
размерной и функциональной взаимозаменяемости, хотя и в
ограниченных пределах ЭВМ одного типа. Размерная взаимозаменяемость
выражается в том, что элементы одного типа имеют одинаковое
конструктивное оформление, геометрические размеры и разъемные
электрические соединения. Идентичны эти элементы и в отношении
источников питания. В случае выхода типового элемента из строя
ремонт ЭВМ сводится к замене модуля (ячейки), содержащего
отказавший элемент. Размерная взаимозаменяемость
распространяется также на комплектующие радиодетали и приборы,
входящие в состав элемента. Схема элементов рассчитывается так, чтобы
замена резисторов, конденсаторов, диодов, транзисторов не
нарушала ее работоспособности. При этом электрические параметры
деталей и приборов должны находиться в пределах допусков,
предусмотренных нормами технических условий. При заменах
дополнительные подгонки и регулировки не допускаются.
Функциональная взаимозаменяемость элементов выражается в том, что
согласованность уровней входных-выходных сигналов, общность
эксплуатационных свойств должны гарантировать нормальное
функционирование элемента в любом месте ЭВМ без дополнительных
регулировок и подгонок. Практически условия функциональной
взаимозаменяемости можно выразить так: любые перестановки
однотипных модулей (ячеек, субблоков), проводимые без
дополнительных регулировок и подгонок, не должны нарушать
нормального функционирования ЭВМ или других устройств электронной
автоматики.
Размерная и функциональная взаимозаменяемость приобретает
еще большее значение с развитием микроэлектроники, особенно
производства интегральных полупроводниковых схем. Полупро-
19
водниковые микросхемы изготовляют по интегральной технологии-:
за один технологический цикл получают пластины
полупроводника, содержащего сотни микросхем. Отдельные элементы схемы
обычно представляют собой результат обработки участков пластины
теми или иными методами на соответствующем этапе
технологического процесса. Естественно, что разброс исходных характеристик
и разброс режимов технологического процесса приводят к
отклонениям физических размеров обрабатываемых участков от
номинальных значений и соответствующим отклонениям электрических
параметров р-/г-переходов. Для обеспечения требуемой
стабильности электрических параметров микросхемы в целом необходима
ее весьма тщательная отработка с учетом дестабилизирующего
влияния разброса отдельных параметров р-я-переходов.
§ 1.3. ОСНОВНЫЕ ТРЕБОВАНИЯ К ЭЛЕКТРИЧЕСКИМ
ПАРАМЕТРАМ ЭЛЕМЕНТОВ ЭВМ
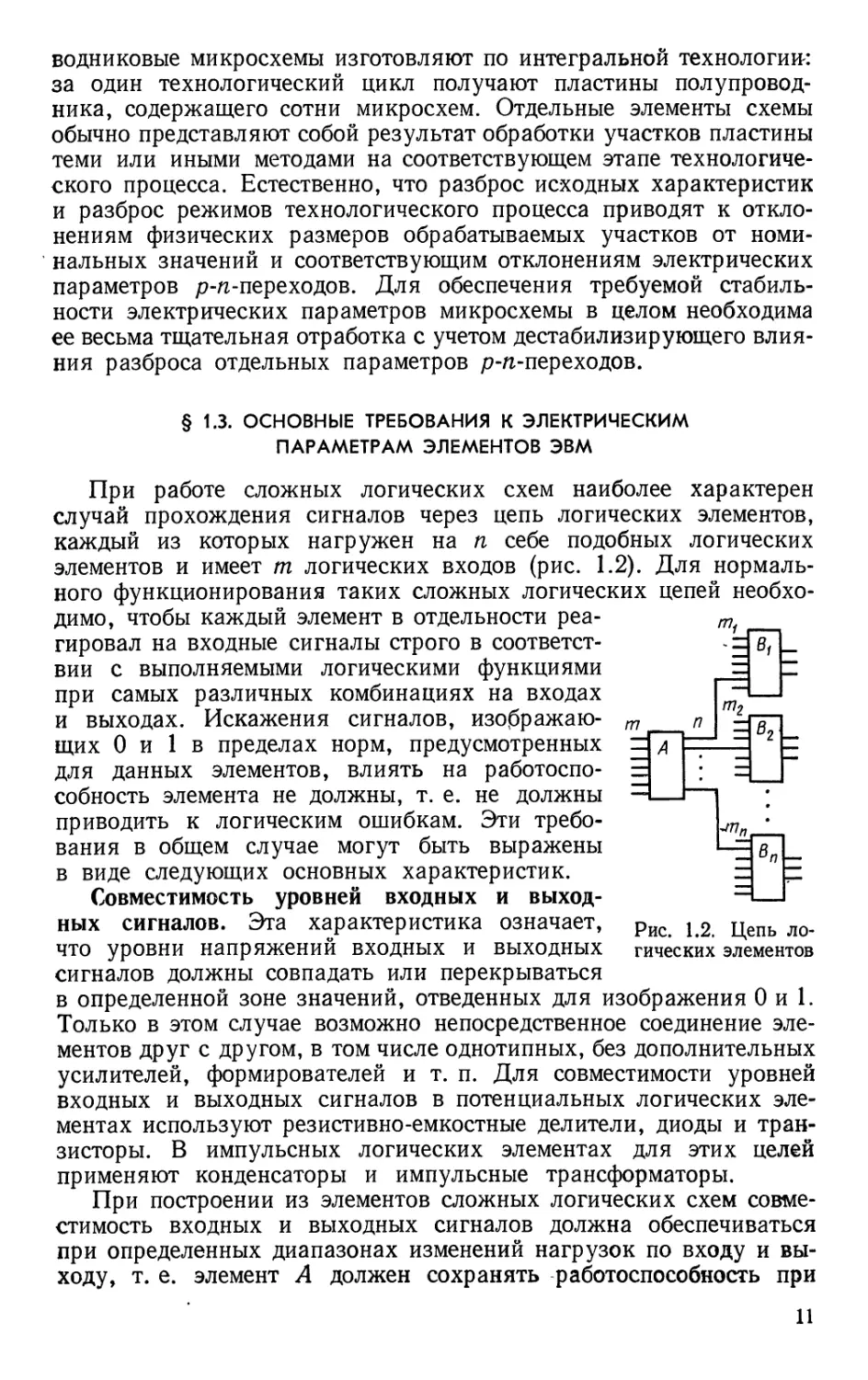
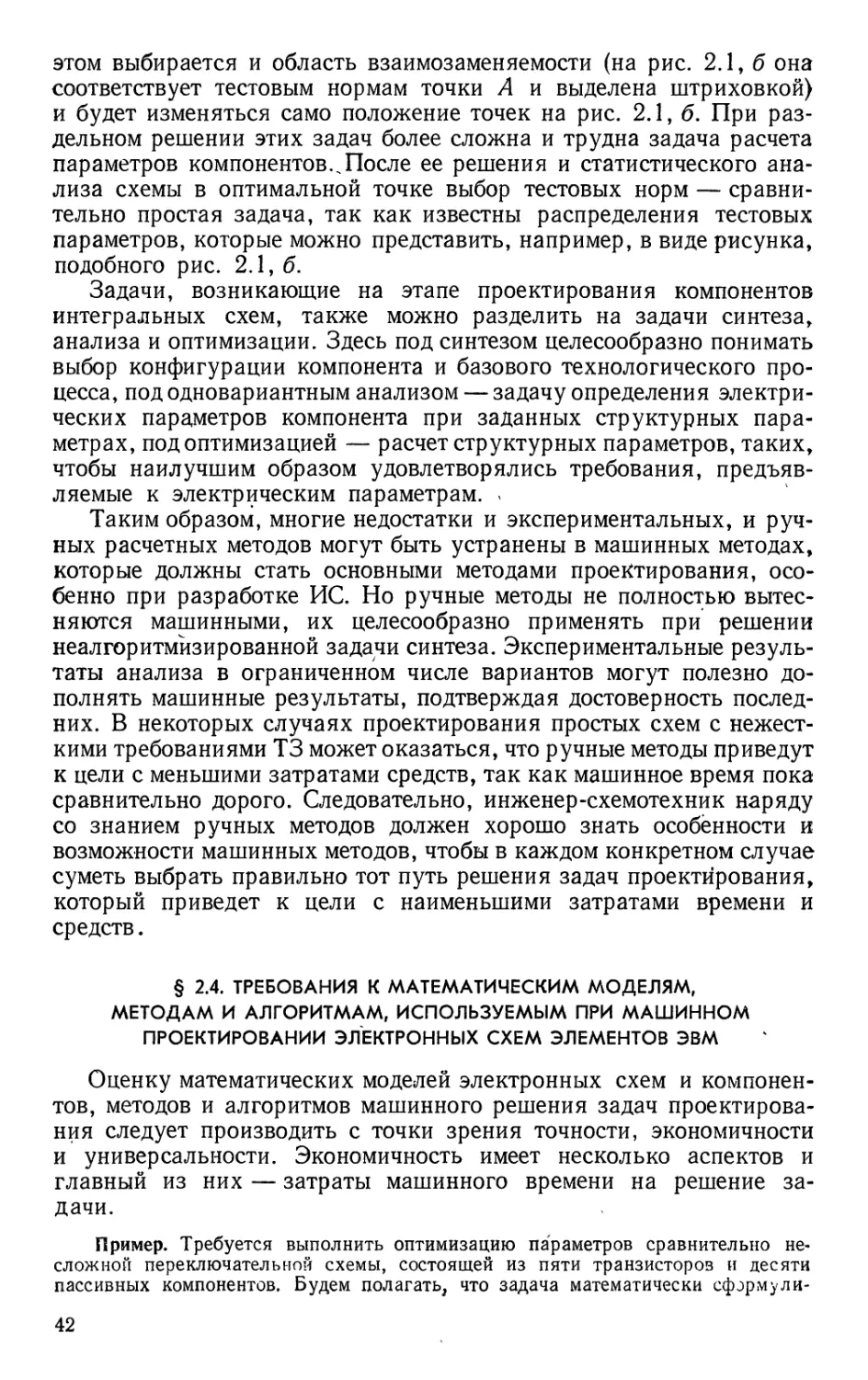
При работе сложных логических схем наиболее характерен
случай прохождения сигналов через цепь логических элементов,
каждый из которых нагружен на п себе подобных логических
элементов и имеет т логических входов (рис. 1.2). Для
нормального функционирования таких сложных логических цепей
необходимо, чтобы каждый элемент в отдельности
реагировал на входные сигналы строго в
соответствии с выполняемыми логическими функциями
при самых различных комбинациях на входах
и выходах. Искажения сигналов,
изображающих 0 и 1 в пределах норм, предусмотренных
для данных элементов, влиять на
работоспособность элемента не должны, т. е. не должны
приводить к логическим ошибкам. Эти
требования в общем случае могут быть выражены
в виде следующих основных характеристик.
Совместимость уровней входных и
выходных сигналов. Эта характеристика означает, Рис 1>2 Цепь ло-
что уровни напряжений входных и выходных гических элементов
сигналов должны совпадать или перекрываться
в определенной зоне значений, отведенных для изображения 0 и 1.
Только в этом случае возможно непосредственное соединение
элементов друг с другом, в том числе однотипных, без дополнительных
усилителей, формирователей и т. п. Для совместимости уровней
входных и выходных сигналов в потенциальных логических
элементах используют резистивно-емкостные делители, диоды и
транзисторы. В импульсных логических элементах для этих целей
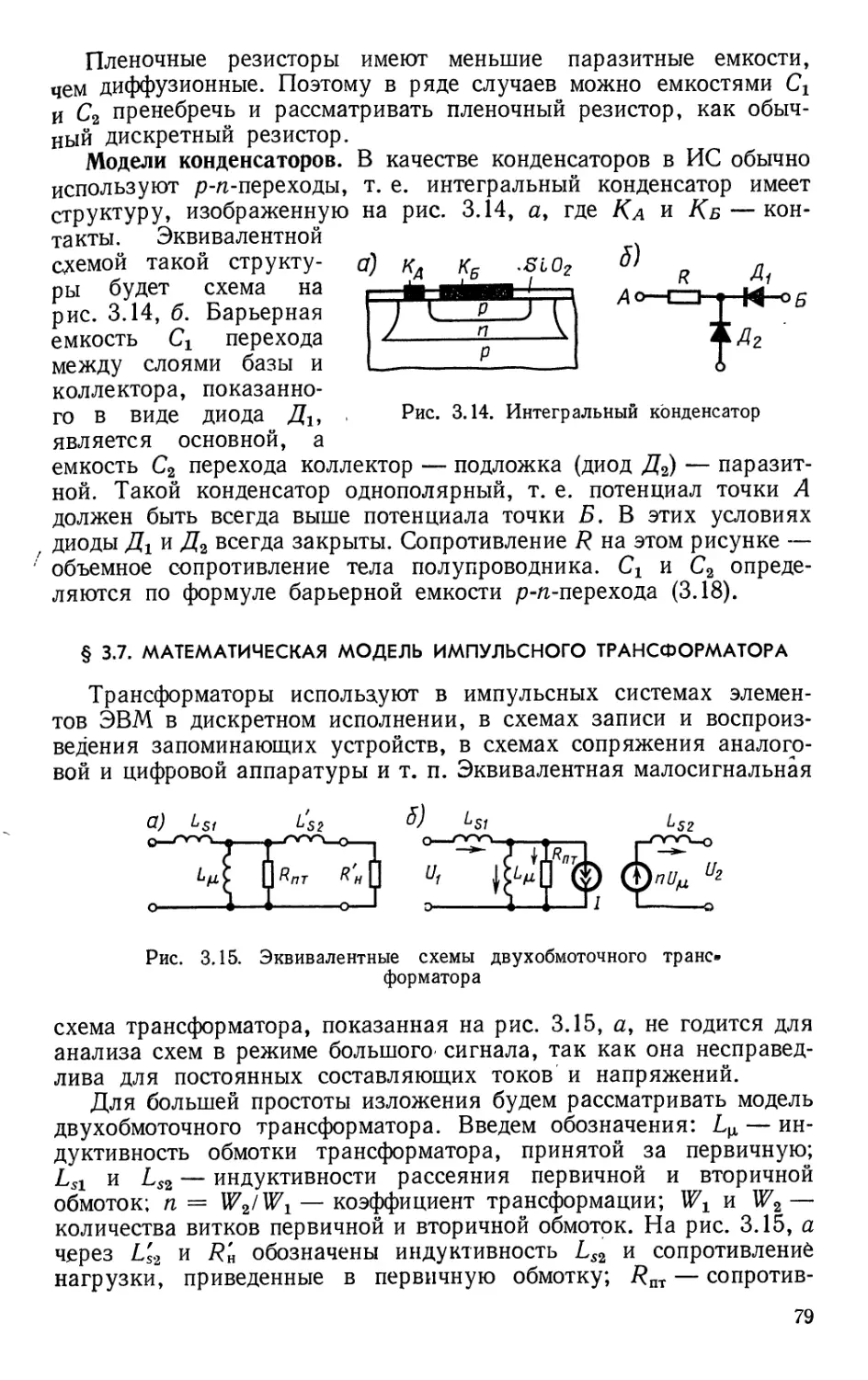
применяют конденсаторы и импульсные трансформаторы.
При построении из элементов сложных логических схем
совместимость входных и выходных сигналов должна обеспечиваться
при определенных диапазонах изменений нагрузок по входу и
выходу, т. е. элемент А должен сохранять работоспособность при
\Т
п
.
—
__
Vi
,
11
управлении им по нескольким логическим входам т и
присоединении к его выходу нескольких других логических элементов п
(рис. 1.2). Нагрузочную способность по выходу называют
коэффициентом разветвления или коэффициентом нагружения, а
нагрузочную способность по входу — коэффициентом объединения.
Коэффициент разветвления п логического элемента определяется
количеством входов других элементов, которое можно подключить
к выходу данного элемента, не вызвав искажений сигнала,
превышающих заданные границы отображения 0 и 1. Коэффициент
объединения т определяется количеством выходов других элементов,
которое можно подключить к входам данного элемента, не вызвав
у результирующего выходного сигнала искажений, превышающих
заданные границы отображения 0 и 1.
Коэффициенты объединения т и разветвления п в общем
случае зависят от длительности такта. Если длительность такта
соизмерима с временами переходных процессов в элементах, то
значения коэффициентов разветвления уменьшаются. Если же
длительность такта значительно больше времен переходных процессов
в элементах, то значения коэффициентов разветвления и
объединения остаются практически постоянными. Существует
промежуточная область длительности тактов Г, для которых зависимости п =
= Д (7) и m = Д СП близки к линейным. Поскольку логические
элементы ЭВМ работают в сугубо нелинейных электрических
режимах, то их входы и выходы с электрической точки зрения
представляют собой нелинейные цепи, параметры которых зависят
от сочетания и значимости сигналов в других цепях схемы, а также
от разброса параметров элементов. Если, например, элемент Вг
(рис. 1.2) представляет собой схему И на тх входов, то нагрузка
элемента А со стороны входа элемента Вг будет зависеть от
значений тг — 1 входов. Для случая, когда на все тх входов
поступают 1, ток в цепи А, Вх значительно больше, чем при других
сочетаниях тх входных сигналов Вг. В логической схеме (рис. 1.2)
нагрузки п выходов элемента А будут изменяться в зависимости
от значений сигналов на ти т2, ..., тп входах элементов В1э В2>
..., ВП1 а также значений сигналов (0 или 1) на выходах самого
элемента А. Таким образом, нагрузка выходов логического элемента
может быть различной, хотя общее количество п элементов В>
подключенных к нему, остается неизменным. Коэффициенты
разветвления, указываемые в технических условиях на данный
элемент, должны быть рассчитаны на наихудшие условия нагрузки
элементов А со стороны элементов В.
Уровни 1 и 0 элемента определяются конфигурацией
электронной схемы элемента, параметрами комплектующих деталей и
приборов, величинами питающих напряжений, параметрами входных
сигналов, а также условиями нагружения по входу и выходу.
Обеспечение совместимости входных и выходных сигналов
элементов при наихудших нагрузках по входу и выходу — одна из
основных задач, решаемых при разработке элементов ЭВМ. Задание
условий нагружения в виде коэффициентов разветвления и объеди-
12
нения удобно при использовании элементов для построения
сложных логических схем. Разработчики же элементов часто
представляют эти условия эквивалентными схемами нагрузки,
содержащими емкости, сопротивления, генераторы тока или напряжения,
диоды. Параметры эквивалентных нагрузок по входу и выходу
элемента должны с достаточной степенью точности воссоздавать
реальные условия, соответствующие наихудшим случаям нагрузки.
Стремление получить возможно большие диапазоны коэффициентов
разветвления и объединения вступает в противоречие с
требованиями простоты схемных решений, минимальности количества
комплектующих деталей и приборов, минимизации потребляемой
мощности, максимизации быстродействия и т. п.
Помехоустойчивость. Она характеризует нечувствительность
элемента к воздействию помех на уровнях 0 и 1 входного сигнала.
Искажения сигналов, представляющих двоичную информацию
в ЭВМ, в результате воздействия помех приводят к сбоям,
искажающим конечные результаты.
Источники помех с точки зрения физических причин можно
условно разделить на внешние и внутренние. Внешние источники
помех — источники, у которых амплитуда и длительность помехи
не зависят от амплитуд и фронтов полезных сигналов в логических
элементах. Помехи от внешних источников обычно появляются
за счет электромагнитных наводок в соединительных проводах
или воздействий на источники питания. Внешними источниками
помех могут быть электромеханические реле, электродвигатели,
сетевые переключатели, атмосферные грозовые разряды, линии
электропередач, линии городского транспорта. Внутренние
источники помех — источники, у которых амплитуда и длительность
помехи зависят от амплитуд и фронтов рабочих сигналов в
логических схемах. Основные причины появления внутренних помех —
несовершенство ключевых свойств диодов и транзисторов,
накопление и последующая выдача энергии реактивными L, С элементами
и импульсными трансформаторами.
Амплитуды внешних помех не превышают определенный
уровень, зависящий от конструкции ЭВМ. Амплитуды внутренних
помех пропорциональны амплитудам рабочих сигналов.
В большинстве случаев увеличение отношения полезного
сигнала к максимальному уровню помех связано с увеличением
потребляемой мощности и снижением быстродействия схем. Поэтому
выбор уровней (амплитуд) сигналов в элементах производят исходя
из соотношения полезных сигналов и помех и потребляемой
элементами мощности.
Для снижения влияндя помех на надежность работы ЭВМ
применяют ряд мер защиты от внешних и внутренних помех. Защита
от воздействия помех сводится к использованию экранированных
проводов, особенно в цепях передачи малых сигналов, снижению
импедансов цепей питания, развязывающих фильтров и т. п. Однако
наиболее существенную роль играет обеспечение достаточно
высокого запаса помехоустойчивости в элементах ЭВМ. Количественная
13
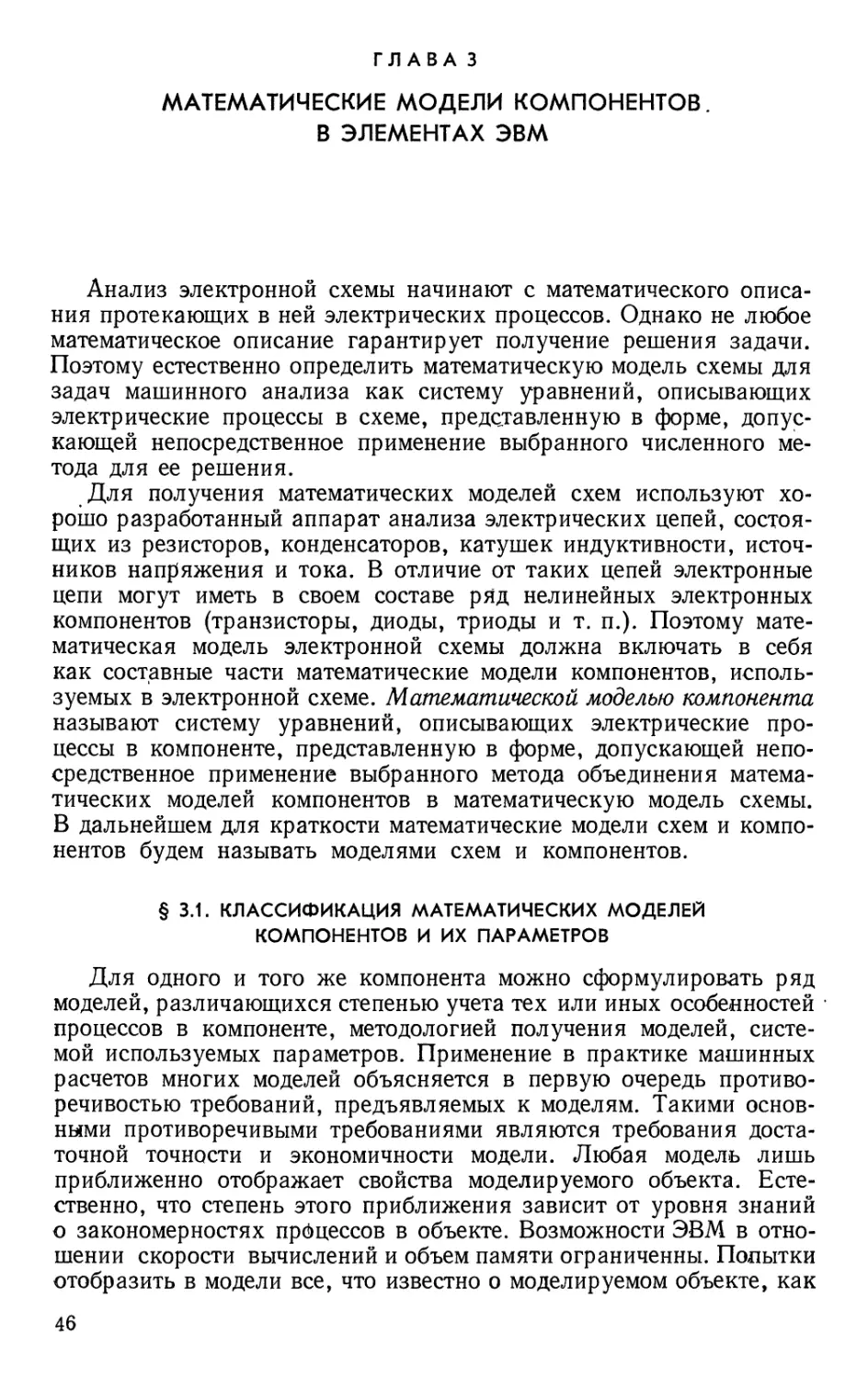
оценка запаса помехоустойчивости потенциальных и многих
импульсных элементов может быть произведена при помощи
амплитудной передаточной характеристики (рис. 1.3, а),
представляющей собой зависимость выходного напряжения элемента от
входного в статическом режиме, т. е. UBblx = / (UBX). Передаточная
характеристика элемента, обладающего формирующими свойствами,
имеет участок BD, на котором дифференциальный коэффициент
передачи (коэффициент усиления) больше единицы, т. е. (dUBblx:
:dUBX)> 1. Работа при больших сигналах, обеспечивающих режимы
fM34^---H
Рис. 1.3. Определение помехоустойчивости потенциальных
элементов
«включено-выключено», обусловила наличие двух участков
характеристики, на которых (dUBUX/dUBX) < 1. Эти участки соответствуют
обычно насыщению и запиранию транзисторов, установлению
туннельных диодов в одно из устойчивых состояний равновесия,
включению цепей нелинейной обратной связи и т. п. Один из участков,
например ED, соответствует логическому нулю, другой, В А, —
логической единице. Граничные точки В и D этих участков найдены
из условия dUBUXldUBX = 1. При рассмотрении амплитудной
передаточной характеристики следует различать два вида
коэффициентов передачи (усиления) элемента: по постоянному току
К = ивых/ивх (1.1)
и дифференциальный, соответствующий тангенсу угла наклона
касательной к кривой UBblx = f (UBX) в данной точке,
K* = dUBbJdUBX. (1.2)
На рис. 1.3, а прямая UBUX = UBX делит плоскость на две части:
для точек, расположенных выше прямой, К> 1, а для точек,
расположенных ниже прямой, К < 1. На участках ED и АВ Кл < 1
и на участке BCD /Сд > 1.
14
Влияние передаточной характеристики на условия передачи
информационных сигналов целесообразно рассмотреть для цепи
последовательно включенных элементов (рис. 1.3, б), имеющих
характеристики, аналогичные характеристике, представленной на
рис. 1.3, а. Условия прохождения сигналов рассматривают для
отдельных участков передаточной характеристики.
Участок ED (К < 1, Кя< 1). Если входной сигнал находится
в пределах этого участка, то каждый последующий элемент
ослабляет его. При достаточно большом количестве элементов п будет
получено установившееся значение UBX = Цвых в точке £. На
входе помимо полезного сигнала £/вх, который можно рассматривать
в пределах такта как постоянное напряжение, может
присутствовать кратковременный импульс помехи. Если суммарное
напряжение сигнала и помехи находятся в пределах участка ED, то помеха
от каскада к каскаду ослабляется. При построении сложных
логических схем цепочка элементов Лх, Л2, ..., Ап часто оказывается
охваченной обратной связью. Очевидно, что при сигналах с
помехами, не выходящих за пределы участка ED, установившееся
значение будет в точке Е. Величина напряжения помехи будет
ослаблена до нуля.
Участок CD (/С<1, /Сд > 1). Входной сигнал постоянного
тока ослабляется каждым последующим элементом и асимптотически
приближается к точке £. Помехи усиливаются с коэффициентом /Сд-
Если (КЖК) > 1, то установившееся значение может оказаться
в точке Л, т. е. возможно искажение передаваемой информации.
Участок ВС (К> 1, /Сд > 1). Входной сигнал постоянного
тока асимптотически приближается к точке Л. Помехи
положительной полярности способствуют ускорению этого процесса. Однако
при достаточно больших помехах отрицательной полярности и
наличии цепи обратной связи возможен приход в состояние,
описываемое точкой £, т. е. возможно искажение передаваемой
информации.
Участок АВ (К > 1, Кж < 1). Для входного сигнала постоянного
тока и импульсных помех установившееся значение описывается
точкой Л. Амплитуда помехи по мере роста количества элементов п
быстро затухает.
Таким образом, неискаженная передача информации при
наличии помех имеет место лишь в случае, если алгебраические суммы
напряжений полезных сигналов и помех обеспечивают
положение рабочих точек на участках ED или АВ амплитудной
передаточной характеристики. Следовательно, для надежной неискажен-'
ной передачи информации в сложных логических схемах
необходимо, чтобы величина U (0) совместно с действующими помехами
не превышала величины V (0)тах, а величина U (1) совместна
с действующими помехами была не меньше величины U (l)min
(см. рис. 1.1, а, б и рис. 1.3, а).
Напряжения U (0)ном и U (1)НОм соответствуют номинальным
значениям напряжений, логического 0 и 1. Тогда разности
U (0)max — U (0)ном и О (1)НОм — U (l)min будут характеризовать
15
абсолютные величины запасов помехоустойчивости состояний О
и 1 элемента.
Для практического применения удобнее относительные
величины помехоустойчивости на верхнем Ав и нижнем Лн уровнях
сигнала определять как
Ав = (U (1)ном - U (l)„i„)/(t/ (1)ном - U (0)ном); (1.3)
Ай= (U (0)шах-1/ (0)ВОМ)/(У (1)но--г/ (0)ном). (1-4)
В реальных элементах значения Лв и Лн будут 0,2ч-0,3.
Разброс параметров комплектующих деталей и приборов, входящих
в состав элементов,-изменения температуры окружающей среды,
различия нагрузок по входу и выходу и т. п. приводят к тому,
что амплитудные передаточные характеристики элемента одного
типа имеют некоторый разброс, т. е. вместо одной передаточной
характеристики приходится рассматривать область возможных
ее положений (рис. 1.3, в). Эта область охватывает все возможные
положения передаточной характеристики при изменениях
параметров деталей и приборов в пределах допусков, изменениях
температуры и других дестабилизирующих факторов в пределах норм,
предусмотренных техническими условиями на элемент. Если в
первом приближении считать влияние дестабилизирующих факторов
на положение передаточных характеристик независимым, то
независимыми будут и вероятности попадания изображающих точек
в различные места передаточной области. Например, вероятность
попадания в точку D2 можно считать независимой от вероятности
попадания в точки Б, Ви В2, С, С±, С2 и т. д. При таких
предположениях на рис. 1.3, в можно выделить следующие зоны входных
сигналов: а — зона сигнала 0 (определяет диапазон разброса
сигналов логического нуля, регламентируемый дестабилизирующими
факторами); б — зона помехоустойчивости сигнала 0 (помехи
положительной полярности в пределах этой зоны не вызывают
ложных переключений элемента); в, в' — зоны неопределенных
состояний 0 и 1, в зависимости от воздействия дестабилизирующих
факторов и помех в пределах этих зон происходит или не
происходит переключение элемента; г — зона переключения (определяет
диапазон входных сигналов, которые вызывают переключение
элемента); д — зона помехоустойчивости сигнала 1 (помеха
отрицательной полярности в пределах этой зоны не вызывает ложных
переключений элемента); е — зона сигнала 1 (определяет диапазон
допустимых разбросов сигнала единицы).
Следовательно, разброс амплитудных передаточных
характеристик из-за наличия дестабилизирующих факторов и помех
импульсного типа ужесточает требования к сигналам 0 и 1. Сумма сигнала 0
и помехи не должна выходить за пределы зоны помехоустойчивости,
т. е. (U (0) + Unou) ^ иг. Если относительную амплитуду помех
обозначить Лпом = UnoiimaJ (U (1)ном — U (0)ном), то из (1.3) и (1.4)
следует: ЛВ^(Л2-ЛП0М); (1.5)
Лн^Их-ЛпоЛ, (1.6)
16
где Аг = (иг-и (0)ном)/((/ (1)ном - U (0)ном) и А2 = (U (1)ном -
— U2)/(U (1)ном — ^ (О)ном) — относительные величины,
характеризующие границы зон помехоустойчивости б и д.
Важный параметр, используемый при анализе задержек
моментов переключения элементов, — порог срабатывания — значение
входного напряжения, по достижении которого начинается
процесс переключения элемента, определяемый его собственными
свойствами (К и /Сд). В идеальном элементе порог срабатывания
определяется однозначно точкой С. При воздействии
дестабилизирующих факторов появляется зона переключения г между точками
d и С2. Вследствие этого переключение конкретного элемента
может происходить при значениях входных напряжений от t/BX =
= Uc2 до UBX = Uct. За среднее значение порога срабатывания
обычно принимают UBX — £/с.
Анализ области возможных положений амплитудных
передаточных характеристик позволяет установить количественную связь
между электрическими параметрами элемента и требованиями
к допускам входных и выходных сигналов и помех, являющуюся
основой для разработки технических условий на
помехоустойчивость элементов.
Динамические свойства элементов. Эти свойства определяются
такими параметрами, как максимальная частота переключений
и время задержки сигнала элементом. Иногда для более полного
описания динамических свойств элементов рассматривают
длительность сигнала, времена нарастания переднего и среза заднего
фронтов сигнала. Частота переключений элементов, входящих
в состав ЭВМ, изменяется в широких пределах. Минимальное время
между двумя очередными переключениями одного и того же элемента
определяет общее быстродействие сложной логической схемы.
В свою очередь это время зависит от разрешающей способности
элемента — минимально допустимого интервала времени Тр между
очередными переключениями элемента, который обратно
пропорционален максимальной частоте переключений Fmax:
rp=l//w (1.7)
Разрешающая способность элемента зависит от частотных свойств
комплектующих деталей и приборов, режимов их работы,
принципиальной схемы элементов, нагрузки по входу и выходу и
лимитируется процессами накопления энергии в реактивных L, С-ком-
понентах, диффузионных и барьерных емкостях р-/г-переходов,
индуктивности и емкости соединительных проводов, нагрузки
и т. п. Разрешающая способность элемента фактически
определяется временами переходных процессов в наиболее инерционных
цепях принципиальной схемы. Длительность такта ЭВМ или
ее отдельных схем необходимо выбирать большей разрешающего
времени, т. е. Т > Гр. Иногда в .отдельных логических цепях
допускают частоту переключений, превышающую Fmax. Однако
при этом происходит накопление зарядов на реактивных
компонентах, что вызывает смещение уровней входных и выходных
17
сигналов. Для обеспечения работоспособности элементов в таких
режимах требуется тщательный перерасчет амплитуд входных
сигналов с учетом динамических смещений напряжений за счет
накопленных зарядов. Повышения максимальной частоты
переключений элементов достигают применением высокочастотных
транзисторов и диодов, использованием ненасыщенных режимов их
работы с нелинейными обратными связями, сокращением времен
перезаряда емкостей путем увеличения токов и напряжений. В
общем случае повышение быстродействия вызывает увеличение
мощности, потребляемой элементом. Большие перспективы в отношении
повышения частот переключений имеют интегральные схемы,
у которых удается получить малые величины реактивных
компонентов.
Задержка выходных сигналов элементов относительно входных
бывает по двум основным причинам. Первая причина —
неидеальная форма входных сигналов и наличие порога срабатывания.
Эта составляющая задержки определяется временем нарастания
входного сигнала до величины, равной порогу срабатывания. При
экспоненциальной форме переднего фронта входного сигнала время
задержки срабатывания составит
tu.c = *ln[Um/(Um-UaoJ], (1.8)
где т — постоянная времени экспоненты; Um — амплитуда
входного сигнала; (/пор — порог срабатывания.
Во многих элементах транзисторы работают в насыщенном
режиме. В этом случае фронт сигнала представляет собой лишь
часть экспоненты, которая достаточно точно аппроксимируется
уравнением прямой. При линейной аппроксимации
'зд.с=(^пор/^«)'ф. (1-9)
где £ф — длительность фронта сигнала.
За счет влияния дестабилизирующих факторов большинство
величин, входящих в (1.8) и (1.9),—случайные. Они
характеризуются математическими ожиданиями и дисперсиями. Поэтому
времена задержек срабатывания — также величины случайные.
Отыскание законов их распределения — весьма трудоемкая
вычислительная задача. Кроме того, фронты сигналов часто имеют форму,
существенно отличную от экспоненты.
Вторая причина задержки выходных сигналов — переходные
процессы в схеме элемента, определяемые инерционностью
компонентов* и наличием L- и С-реактивностей. Задержки этого типа
зависят от конфигурации схемы элемента и частотных свойств
комплектующих деталей и приборов.
Общее время задержки сигналов чаще всего измеряется на
уровне 0,5 от Um.
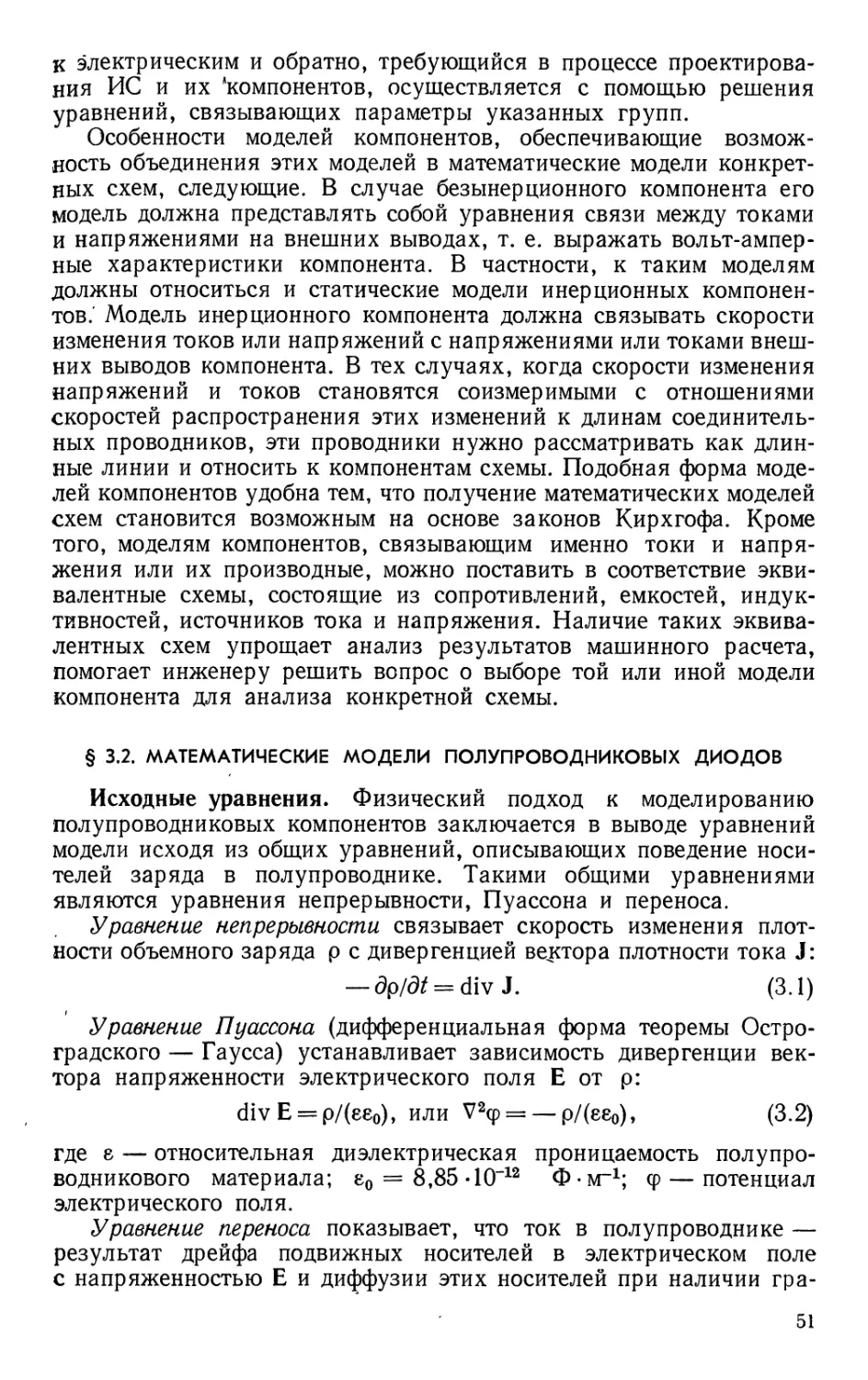
«Проблема гонок». Задержка по времени выходных сигналов
относительно входных на каждом из элементов может приводить
к рассогласованию сигналов по времени в сложных логических
схемах. "Типичный пример, демонстрирующий влияние задержек
18
в сложных логических схемах, — «проблема гонок» (рис. 1.4, а).
Пусть двоичная переменная г = угу2 — функция двоичных
аргументов Xl х2у ..., xh т. е. г = / (*lf х2,..., хЦ = /х (х1у х2у ..., *,) /. (*1э
При определенных сочетаниях переменных х2, л;3, ..., хг сигнал,
изображающий переменную хг (рис. 1.4, б), должен через цепочки
элементов Аъ Л2, ..., Ak и Вь £2, ..., Вт поступать на входы
элемента С в виде напряжений Uyt и Uy%. Каждый из элементов цепочки
Аи А2, ..., Ak задерживает сигнал UXl на время tt ± Д/ь а каждый
из элементов цепочки Ви £2, ..., Вт — на время /у ± Д*у, здесь
U и </ —средние значения задержек, а Д/£ и Д/у — отклонения,
вызванные дестабилизирующими факторами. Вследствие разбросов
времен задержек отдельных
элементов общие времена за- а) х2г
держки имеют верхний и
нижний пределы: для
цепочки элементов Аъ Л2, ..., Ak
и для цепочки элементов
Въ В<
'2>
вт t
зд1 max
= 2'ft+A*i);
t
зд1 min —
И t
t=l
зд2 max —
= 2 <'/+A'/); '
зд2 min —
/=1
%
j*<
6,L_
► • • — &m I—I
= 2 ('/-A*/).
/=1
При существенном
различии количеств элементов в
логических цепочках
возможно временное рассогласова-
п
~£зд1 min
*301 max
>|ГТ
*L' '
i
ЛК\
лп
^, ^3dZmin _1
«6
{-зд2тах
■с >
t
t
Рис. 1.4. «Проблема гонок»:
б — временные
■ функциональная схема;
диаграммы
U и, и U
Jyi
У2
без учета дестабилизирующих факторов при условии
/и. Поэтому при проектировании сложных логи-
ние сигналов
даже
ческих схем учет времен задержек в цепях необходим для обеспе
чения правильного функционирования. Однако учет только
номинальных (средних) времен задержки во многих случаях
недостаточен, поскольку отклонения времен задержек за счет воздействия
дестабилизирующих факторов могут также нарушить условия
правильного функционирования схем. Из рис. 1.4, б видно, что при
4Д1 = 4д1тт и 4Д2 = 4дгтах сигналы U У1 и UУг поступают на схему
С не одновременно, что в данном случае нарушает правильность
функционирования всей схемы. Правильное функционирование
обычно предусматривает временное перекрытие этих импульсов
с точностью Ы при наихудших сочетаниях отклонений, т. е. усло-
19
виями правильного функционирования будут:
I ^зд1 max ^зд2 min | ^^ 0*>
I ^зд2 шах ^зд1 min | ^= 0*«
Часто величину 8t выбирают равной tJ2.
Амплитудные передаточные характеристики, используемые для
оценки помехоустойчивости элементов, — статические. Вид [/вых =
= / (^вх) не зависит от длительностей и формы сигналов, времен
переходных процессов в схемах; поэтому количественные
соотношения (1.3) и (1.4) могут применяться для оценок
помехоустойчивости ограниченного класса схем, у которых влияние динамических
параметров на помехоустойчивость достаточно мало (элементы
потенциального типа, часть элементов импульсного типа). Для
большинства схем импульсного типа эти условия не соблюдаются.
Надежная работа унифицированных элементов в тех или иных
сложных логических схемах связана с решением комплекса
вопросов обеспечения согласования нагрузок, амплитуд и динамических
характеристик. Для каждого конкретного типа элементов
требования к электрическим параметрам выражаются в виде
технических условий на элемент. Последние представляют собой
совокупность количественных ограничений на каждый из электрических
параметров, характеризующих свойства элемента, условия его
эксплуатации, а ,также диапазоны, в которых могут изменяться
внешние дестабилизирующие факторы.
Функциональная взаимозаменяемость требует наличия
определенных запасов по значениям электрических параметров для того,
чтобы элементы надежно работали при всех предусмотренных
техническими условиями режимах эксплуатации. Для решения этой
задачи необходимо решение ряда частных задач, связанных с
анализом электрических процессов в электронных схемах элементов,
учетом влияний производственных погрешностей компонентов на
эти процессы, отклонений напряжений питания, температуры
и т. п. Объем и содержание этих задач настолько обширны, что
решение их под силу только крупным коллективам. Большую
помощь в их решении может оказать применение ЭВМ.
§ 1.4. ТОЧНОСТЬ И НАДЕЖНОСТЬ ЭЛЕКТРОННЫХ
ПЕРЕКЛЮЧАТЕЛЬНЫХ СХЕМ
Технические условия на элементы ЭВМ предусматривают их
взаимное согласование в виде норм на параметры входных и
выходных сигналов, выход за пределы которых при воздействии
дестабилизирующих факторов может повлечь за собой отказ или сбой
в работе машины. К основным дестабилизирующим факторам
относят: отклонения параметров комплектующих деталей за счет
производственных погрешностей и старения; отклонения питающих
напряжений от номинальных значений; изменения температуры
окружающей среды, влажности, давления и т. п. В общем виде
(1.10)
20
параметры выходных сигналов рассматривают как функции
внутренних и внешних параметров схемы:
i/f — f (Х1> х2> ••• » xi> ••• » хп> Й1> <?2> ••• > Qk> ••• > <7m)> (1-11)
где t/j — /-й выходной параметр схемы; xt — f-й внутренний
параметр схемы; qk — k-й внешний параметр схемы.
Параметры выходных сигналов — величины, характеризующие
форму этих сигналов и их расположение во времени. К ним относят:
амплитуды и длительности импульсов; времена переднего и заднего
фронтов; время задержки переднего фронта выходного сигнала
относительно переднего фронта сигнала на входе. В технических
требованиях на соответствующий элемент обычно оговаривают
граничные значения выходных параметров, т. е. их предельно-
допустимые минимальные или максимальные значения.
Внутренние параметры схемы — параметры комплектующих
деталей и приборов, резисторов, конденсаторов, катушек
индуктивности,' транзисторов, диодов, импульсных трансформаторов
и т. п. Параметры комплектующих деталей и приборов в первую
очередь характеризуются номинальными значениями. Однако
вследствие производственных погрешностей при изготовлении у них
имеются отклонения от этих значений. Допустимые отклонения
параметров деталей и приборов регламентируются допусками,
величины которых оговариваются в соответствующих ГОСТах
и ТУ. Ввиду того что при изготовлении элементов ЭВМ селективный
отбор комплектующих деталей и приборов недопустим, то тот
или иной внутренний параметр в конкретной схеме может принять
любое значение в пределах допусков, оговоренных
соответствующими ГОСТами и ТУ. Таким образом, внутренние параметры схемы
следует рассматривать как случайные величины, группирующиеся
около номинальных значений в пределах допусков.
Внешние параметры схемы — температура окружающей среды,
величины напряжений питания, параметры входных сигналов. При
установке в ЭВМ и в процессе эксплуатации элементов значения
внешних параметров могут изменяться в некоторых пределах,
указываемых в нормах технических условий на элементы.
Отклонения внешних параметров проявляются в работе схемы
такГизменения параметров входных сигналов и питающих напряжений обычно*
приводят к непосредственным изменениям величин токов и
напряжений по сравнению с номинальным вариантом; отклонение же
температуры вызывает изменение внутренних параметров
(сопротивлений, емкостей, коэффициентов усиления транзисторов и т. п.).
'Величины токов и напряжений здесь изменяются косвенно.
Для каждой конкретной схемы и условий ее применения
внешние параметры — величины случайные. Однако требования
функциональной взаимозаменяемости предусматривают обеспечение
работоспособности схемы при любых значениях внешних параметров,
установленных нормами технических требований на элемент.
Поэтому при анализе схем элементов целесообразно рассматривать
21
граничные значения внешних параметров, наиболее неблагоприятно
влияющие на выходной параметр.
Таким образом, внешние и внутренние параметры элементов
при их изготовлении^ установке в ЭВМ, а также в процессе
эксплуатации подвержены изменениям относительно своих номинальных
значений, что приводит к соответствующим изменениям
выходных параметров. В этом случае (1.11) может быть записано в виде
qio + bQif ...» <7ло + А<7а. .... Ято + кйт), (1.12)
где yJ0, xiQj qk0 — номинальные значения выходного, внутренних
и внешних параметров, Дг/у, Axh kqk — отклонения
соответствующих параметров от номинальных значений.
Важнейшая задача при проектировании элемента — выбор
такой его электрической схемы, которая обеспечила бы получение
значений выходных параметров #у, лежащих в пределах- норм
технических условий, при любых отклонениях Axt и Lqfc
внутренних и внешних параметров, предусмотренных допусками деталей
и приборов, а также техническими требованиями к элементу.
Если изменения внутренних и внешних параметров схемы дают
отклонения выходного параметра, превышающие предельные
значения, оговоренные нормами технических условий, то это
свидетельствует о возможности отказа машины за счет
рассматриваемого элемента при определенных сочетаниях дестабилизирующих
факторов. Вероятность отказа элемента, установленного в ЭВМ,
возрастает с увеличением отклонений выходных параметров от
норм, предусмотренных техническими требованиями. Особенность
переключательных схем в том, что даже небольшие отклонения
выходных параметров элементов за пределы предусмотренных
норм могут приводить к глубоким качественным изменениям всех
процессов в ЭВМ, т. е. к ее отказу. Это связано с тем, что в ЭВМ
элементы работают по принципу «да — нет». Несрабатывание или
ложное срабатывание при отклонении выходного параметра хотя
бы одного из элементов за предусмотренные нормы может привести
к полному нарушению хода вычислительного процесса. Таким
образом, точностные соотношения в схемах элементов ЭВМ оказывают
непосредственное влияние на надежность ее работы.
Обеспечение надежности ЭВМ при проектировании ее элементов
переходит в задачу проектирования электронных
переключательных схем, сохраняющих выходные параметры в заданных пределах
при предусмотренных диапазонах изменений внутренних и
внешних параметров.
ГЛАВА 2
ЗАДАЧИ ПРОЕКТИРОВАНИЯ ЭЛЕКТРОННЫХ СХЕМ
ЭЛЕМЕНТОВ ЭВМ И МЕТОДЫ ИХ РЕШЕНИЯ
Проектирование элементов ЭВМ связано с решением целого
комплекса задач, охватывающих вопросы разработки технического
задания, выбора логического и физического состава системы
элементов, выявления требований к нагрузочным способностям по
входу и выходу, установления места проектируемой системы
элементов в ряду существующих унифицированных систем,
разработки требований к конструктивному оформлению элементов,
конкретизации условий эксплуатации в отношении климатических
условий и т. д.
Решение вопросов, связанных с применением ЭВМ для
проектирования электронных схем, подразумевает предварительный
анализ процесса проектирования, выявление задач, для которых
возможно и целесообразно использование машинных методов
решения. Для реализации возможностей и преимуществ машинного
проектирования необходимо располагать методами и алгоритмами
решения задач, отвечающими определенным требованиям.
Одна из важнейших стадий проектирования элементов ЭВМ —
отработка принципиальных схем. К началу этой стадии уже
известен перечень логических функций, реализуемых каждым из
элементов, входящих в систему, разработаны технические требования
к параметрам входных и выходных сигналов, проведен
предварительный выбор принципиальных схем отдельных элементов. Стадия
отработки принципиальных схем включает в себя уточнение
параметров компонентов, обеспечивающее надежное функционирование
схем при воздействии дестабилизирующих факторов. Во многих
случаях помимо уточнения параметров компонентов приходится
корректировать конфигурацию принципиальных схем,
технические условия на отдельные элементы или систему в целом.
§ 2.1. КЛАССИФИКАЦИЯ ПАРАМЕТРОВ ЭЛЕКТРОННЫХ
СХЕМ ЭЛЕМЕНТОВ ЭВМ
В теории электрических цепей различают понятия «цепи» и
«схемы». Цепь — реально существующий объект, состоящий из
совокупности проводящих тел и сред, представляющих замкнутые
пути для электрического тока. Схема — рисунок с условными
обозначениями электронных приборов, показывающий способы их
соединения между собой. В интегральной электронике термин
«схема» используют для именования цепи в указанном смысле,
а для именования схем как графических изображений цепи при-
23
меняют термины схема принципиальная, эквивалентная,
топологическая и т. п. Далее будет использоваться терминология, принятая
в интегральной электронике. Отдельные электронные приборы,
используемые в схеме, называют компонентами* Компонентами
будем называть также двухполюсники, фигурирующие в
эквивалентных схемах. Под конфигурацией принципиальной
(эквивалентной) схемы понимается сама принципиальная (эквивалентная)
схема без указания численных значений параметров компонентов.
Конфигурация интегрального компонента — геометрическое
построение, изображающее границы различных диффузионных
областей и слоев металлизации в плане без указания геометрических
размеров, а топологическая схема — чертеж, изображающий в плане
конфигурации компонентов и слоев металлизации с указанием
геометрических размеров.
Параметры схем делят на внутренние, внешние и выходные.
Внутренние параметры. Это параметры компонентов, т. е.
величины, характеризующие свойства отдельных компонентов. В свою
очередь, среди внутренних параметров различают параметры
физико-структурные, геометрические, электрические. К физико-
структурным параметрам относят электрофизические константы
полупроводникового материала, из которого изготовляют
компоненты, и параметры, характеризующие диффузионный профиль —
зависимость концентраций легирующих примесей от глубины
залегания слоя в полупроводниковой пластине. Геометрические
параметры — геометрические размеры областей, занимаемых
компонентом в пластине, в поверхностной плоскости кристалла.
Совокупность физико-структурных и геометрических параметров называют
■структурными параметрами. Структурные параметры используют
при проектировании отдельных компонентов. Электрические
параметры — такие величины, которыми удобно пользоваться при
проектировании принципиальных схем, например параметры
эквивалентных схем компонентов (сопротивления, емкости, тепловые
токи переходов, коэффициенты усиления транзисторов по току,
крутизны вольт-амперных характеристик и т. п.); они суть
функции структурных параметров. К особенностям электрических
параметров относят возможность их измерения на реальных образцах
компонентов с помощью обычных радиоизмерительных средств.
Внешние параметры. Это количественная оценка внешних по
отношению к схеме факторов (температура окружающей среды,
величины напряжений источников питания, параметры входных
сигналов и параметры нагрузки).
Выходные параметры. Это количественное выражение основных
свойств схемы, по которым можно судить о том, выполняет ли
схема свое функциональное назначение. При машинном проекти-
* В ГОСТ 17021—75 электронные приборы, резисторы, конденсаторы
названы элементами. В ЭВМ под элементом принято понимать более крупную
единицу — цепь, реализующую логическую функцию. Поэтому в книге принят
термин «компонент».
24
ровании выходные параметры целесообразно делить на две группы
в зависимости от трудоемкости вычислений при их оценке.
Первая группа выходных параметров представляет собой
функционалы временных зависимостей напряжений или токов тех
или иных ветвей схемы (или напряжений между какими-либо
парами узлов схемы). Чаще всего это функционалы функции
i/вых (0> гДе ^вых — выходное напряжение, t — время. Примерами
выходных параметров группы функционалов являются высокий
и низкий уровни выходного напряжения в потенциальных схемах
или амплитуда и длительность выходного импульса в импульсных
схемах, мощность рассеяния схемы, средняя задержка
распространения сигнала, длительность фронта и среза и т. п. Эти параметры
могут быть найдены по результатам однократного решения
уравнений схемы, так как такое решение как раз и дает зависимости
напряжений и токов ветвей от времени.
Вторая группа выходных параметров — пороговые параметры —
представляет собой граничные значения (максимальные или
минимальные) диапазонов изменения внешних параметров, в которых
выполняется тот или иной частный признак правильности работы
схемы. Примерами таких параметров являются порог срабатывания
ждущих релаксационных схем, определяемый как минимальная
амплитуда входного импульса, при которой происходит
срабатывание (собственно, амплитуда входного импульса может быть'
любой, она не зависит от свойств схемы и потому относится к
внешним параметрам); запасы помехоустойчивости; максимальные
коэффициенты нагружения и объединения; высшая и низшая частоты
полосы пропускания усилителей воспроизведения и т. п.
Особенность таких параметров в том, что их вычисление обычно требует
многократного анализа схемы при различных значениях
соответствующего внешнего параметра.
Совокупности внутренних, внешних и выходных параметров
будем обозначать, как векторы X, Q и Y соответственно: X =
'= (хи *2, ..., хп)\ Q = (qu q2y ..., qk)\ Y = (уг, y2y ..., ym), где каждый
. параметр рассматривается как элемент вектора.
Исходными данными при проектировании схем являются
требования технического задания (ТЗ). ТЗ обычно разрабатывается
для вновь создаваемых комплексов элементов, решение о
необходимости создания которых принимают на основе всестороннего
анализа класса аппаратуры, где будет использован этот комплекс.
При этом учитываются функциональные возможности схем,
требования к быстродействию устройств, необходимый уровень
надежности, вес, габариты, стоимость, климатические условия, объемы
производства и т. п.
Совокупность свойств, которыми должен обладать тот или
иной элемент, входящий в состав создаваемого комплекса,
количественно регламентируется техническими требованиями (ТТ),
указываемыми в ТЗ. Технические требования регламентируют
допустимые значения выходных параметров и диапазоны изменений
внешних параметров, при которых эти значения должны удовлет-
25
воряться. Обозначим совокупность технических требований
вектором ТТ = ТТЪ TT2t ..., TTm.
Условия того, что выходные параметры элемента удовлетворяют
ТТ, называют условиями работоспособности, В зависимости от
физической сущности выходного параметра условия
работоспособности могут быть записаны так:
yj<TTfi (2.1)
У;>ТТ/, (2.2)
yj = TT,±ATTj, (2.3)
где j£ [1 : ml (запись [1 : m] означает множество целых чисел
в интервале 1 -т-т).
Условие работоспособности вида (2.1) устанавливают в том
случае, если имеется одностороннее ограничение сверху. При
этом уменьшение значения параметра соответствует улучшению
свойств элемента. Условие этого вида может быть сформулировано,
например, так: время задержки сигнала или мощность рассеяния
схемы должно быть меньше величины заданных технических
требований.
Для выходных параметров, увеличение которых соответствует
улучшению свойств элемента, устанавливают условия
работоспособности вида (2.2). В этом случае величина TTj представляет
собой минимально допустимое значение выходного параметра.
Условие этого вида может быть сформулировано, например, так:
высокий уровень выходного напряжения или запас
помехоустойчивости должен быть не меньше указанных в технических требованиях
минимально допустимых значений.
Условия работоспособности вида (2.3) применяют в тех
случаях, когда выходной параметр имеет двустороннее ограничение
от TTj — ATTj до TTj + ATTj, здесь TTf соответствует
номинальному значению выходного параметра, ATTf — максимально
допустимым двусторонним отклонениям от номинального
значения. Двусторонние ограничения устанавливают на пороги
срабатывания переключательных схем, коэффициенты усиления усилителей
считывания и др.
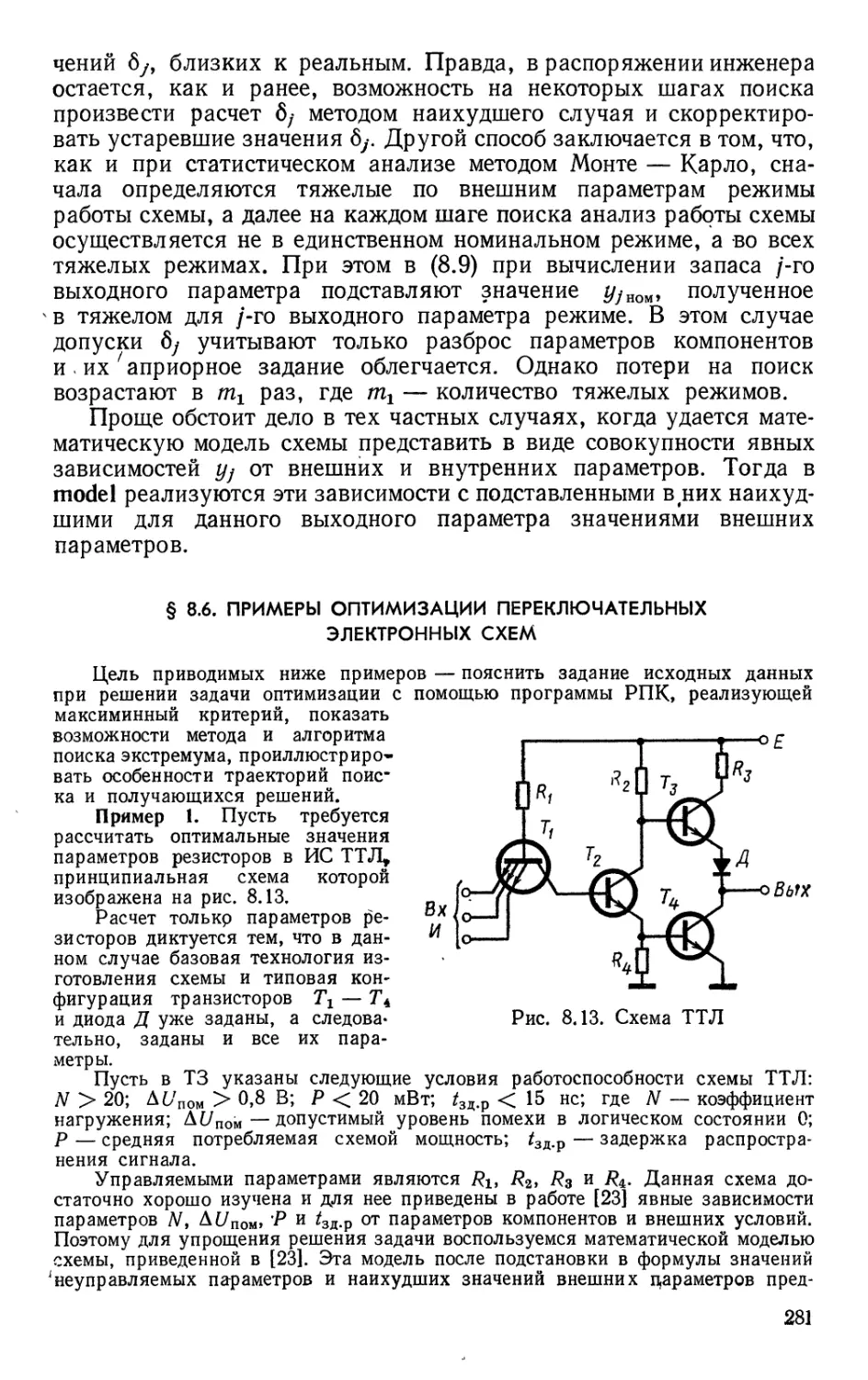
. Цель отработки принципиальной схемы — создание ее
конфигурации и выбор параметров компонентов, обеспечивающих
выполнение условий работоспособности в предусмотренных ТЗ диапазонах
изменения внешних параметров с достаточно большой
вероятностью.
Проведенное выше деление выходных параметров на группы
параметров-функционалов и пороговых параметров выполнено
с позиций особенностей их вычисления с помощью машинных
методов. Существует другой признак деления выходных параметров
с точки зрения особенностей назначения для них технических
требований при проектировании. В ТЗ на проектирование схемы
обычно указывают предельные значения только тех выходных
параметров, которые важны для разработчика радиоэлектронной аппа-
26
ратуры, т. е. по значениям которых можно судить о применимости
схемы для выполнения определенных функций в радиоэлектронном
устройстве. Такие параметры называют функциональными. В
случае потенциальных логических схем к ним в первую очередь относят
среднюю задержку распространения сигнала, мощность рассеяния
схемы, максимальный коэффициент нагружения N.
На примере максимального коэффициента нагружения покажем
различия между функциональными параметрами и стыковочными,
или тестовыми, параметрами. Разработчику аппаратуры,
использующему уже спроектированные схемы, достаточно знания только
параметра N для суждения о нагрузочной способности схемы.
При этом он может быть уверен, что при разработке схемы были
выполнены требования функциональной взаимозаменяемости, и,
следовательно, любая из изготовленных схем может быть нагружена
на N или менее себе подобных схем без потери работоспособности.
Коэффициент нагружения определяется отношением выходного тока
/вых к входному току 1ВХ. Параметр N есть максимально
возможное значение этого коэффициента, при котором схема функционирует
нормально. Очевидно, что максимально возможный ток /вых и
потребляемый схемой от источника сигнала ток /вх также можно
рассматривать как выходные параметры. Однако параметры /вых
и /вх разработчика не интересуют, поскольку ему известен параметр
N. Разработчик же данной электронной схемы вынужден
оперировать параметрами 1ВХ и /вых и предъявлять к ним определенные
требования, чтобы обеспечить функциональную взаимозаменяемость.
Пример. Пусть в ТЗ указано следующее условие работоспособности на
параметр N: N ^ Wmax, т. е. коэффициент нагружения должен быть не менее Nmax.
Это условие можно представить в виде
/ ^N I (2.4)
вых ^;vmaxyBX* к >
На рис. 2.1, а сплошной линией изображена граница между областями
выполнения и невыполнения условия работоспособности, а точки 1—/соответствуют
семи случайно выбранным схемам из партии изготовленных схем. Исходя из
условия (2.4) можно заключить, что схемы 1—5 годны по нагрузочной
способности, а схемы 6 и 7 негодны.
Процент выхода годных по нагрузочной способности схем р= 5-100/7==
= 71,5%. Однако такое заключение будет неверным, так как требование
функциональной взаимозаменяемости не учитывается. Действительно, представим,
что в изготовленном устройстве схема / должна нагружаться на Nmax схем,
идентичных схеме 2. Но при этом окажется, что /вых1 < Nmax/Bx2. Следовательно,
такое сочетание схем неработоспособно.
Рассмотренный выше пример показывает, что при разработке
схемы недостаточно оговаривать условие работоспособности по ее
нагрузочной способности только в отношении параметра N. Это
условие нужно заменить двумя другими условиями
работоспособности, относящимися к параметрам /вх и /вых. Так, очевидно,
необходимо ограничить сверху ток /вх, потребляемый схемой,
/вх</вх.гр (2.5)
27
и ограничить снизу выходной ток:
' вых ^ 1 вых. гр« (^*и)
На рис. 2.1, а показана ситуация, при которой /вх.гр и /вых.гр
выбраны так, что вновь введенные условия работоспособности
выполняются для схем 5, 4 и 5 и не выполняются для схем 6, 7, 1
и 2. Нетрудно проверить простым перебором вариантов, что для
любого сочетания в аппаратуре схем 3—5 выполняется условие
/вых* > ^maxIBx(ui)y где /вых/— выходной ток схемы-источника;
/вх(*+1) — входной ток схемы-нагрузки.
Параметры /вх и /вых относят к тестовым параметрам, а условия
работоспособности (2.5) и (2.6) в отличие от условий
работоспособности функциональных параметров часто называют условиями
Рис. 2.1. К понятиям условий работоспособности и
взаимозаменяемости:
а — область работоспособности по параметру N; б — рассеяние
значений тестовых параметров и область выполнения условий
взаимозаменяемости
■взаимозаменяемости. Значения 1ВЫХлГр и /ВХгр нгазывают тестовыми
нормами. Годность схем цри контроле в технологическом цикле
изготовления проверяют путем измерения тестовых параметров и
их сопоставления с тестовыми нормами.
Принципиальная разница между функциональными и
тестовыми параметрами заключается в том, что технические
требования к функциональным параметрам всегда оговариваются в ТЗ и
их изменение допустимо лишь в крайних случаях по согласованию
с разработчиком ТЗ. Технические требования к тестовым
параметрам — тестовые нормы — в ТЗ не оговариваются, и инженер-
схемотехник, разрабатывающий схему, может назначать их по
своему усмотрению. В связи с этим в процессе проектирования схемы
должна решаться наряду с другими указываемыми ниже задачами
задача выбора тестовых норм на стыковочные параметры
проектируемых схем.
При проектировании схемы оперируют не только величинами,
которые являются параметрами внутренними, внешними или
выходными, но также' величинами токов, напряжений и мощностей в раз-
28
личных ветвях. Среди этих величин особое место занимают
переменные состояния — величины, задание значений которых в некоторый
момент времени полностью определяет дальнейшее поведение схемы
при известных внешних и внутренних параметрах. Поведение
электрической схемы с сосредоточенными параметрами во времени,
т. е. электрические процессы в такой схеме, описывает система
обыкновенных дифференциальных уравнений:
dv1/dt = f1{vly v2, ..., vq, t)\ \
dv2/dt = f2 (viy v2y ..., vq, t)\ I
dVg/dt = fg(vlf V2J ..., Vg, f). |
Система (2.7) может быть записана в более компактной
векторной форме:
-g-=F(V,0, (2.8)
где V = (vl9 v2, ... , vq) — вектор переменных состояния; F (V, /) =
= ifi (V, t)y f2 (V, t), ... , fq (V, /)) — вектор-функция правых частей
{физический смысл переменных vt — напряжения на емкостях и
токи, протекающие через индуктивности, в момент времени t).
Переменные состояния характеризуют запасы энергии в
реактивных компонентах схемы. Задание величин vt в начальный
момент времени означает задание начальных условий для (2.7), (2.8),
что необходимо для численного решения системы уравнений. В
результате решения системы дифференциальных уравнений
определяются законы изменения токов и напряжений схемы во времени.
§ 2.2. ПРОЦЕСС ПРОЕКТИРОВАНИЯ ЭЛЕКТРОННЫХ
СХЕМ ЭЛЕМЕНТОВ ЭВМ
Цель проектирования электронных схем элементов — создание
полной технической документации, необходимой для изготовления
элементов, параметры которых удовлетворяют .требованиям ТЗ.
Помимо требований, непосредственно указанных в ТЗ, разработчик
элементов должен руководствоваться общими принципами
проектирования, согласно которым предпочтение должно отдаваться
наиболее экономичным и технологичным вариантам технических
решений.
Важной задачей проектирования является отработка
принципиальной схемы элемента.
Основные этапы процесса отработки принципиальных схем
элементов на дискретных компонентах представлены блок-схемой
на рис. 2.2.
Этап 1а. На этом этапе синтез конфигурации принципиальной
схемы производится разработчиком в соответствии с логическими
функциями, которые должен реализовать элемент. Основой
синтеза служит опыт создания схем подобных классов, оценки
логических возможностей, быстродействия, надежности функционирования
29
Разработка ТЗ
la
Синтез конфигурации
принципиальной схемы
15
i
Г"
Выбор типов
компонентов
IB
I
—I
Расчет параметров
компонентов (исходный вариант)
Анализ
Модификация
параметров
Контроль условий раб ото-
способности при заданных X и Q
\Иет\
различных вариантов электрических цепей. Большую помощь
разработчику могут оказать справочные материалы и каталоги,
обобщающие опыт разработки, изготовления и эксплуатации элементов,
серийно выпускаемых промышленностью. Во многих случаях можно
найти удачную
конфигурацию новой
принципиальной схемы путем
компиляции отдельных
электрических цепей
существующих схем
элементов. Для реализации
идентичных логических
функций могут быть
применены различные
электрические цепи,
отличающиеся способами
представления
информации посредством
напряжений или токов,
номенклатурой компонентов,
электрическими
режимами работы последних
и т. п. Наибольшее
распространение в
настоящее время получили
следующие принципы
реализации
принципиальных схем логических
элементов: ДТЛ—диод-
но-транзисторная
логика; ТТЛ —
транзисторно-транзисторная
логика; РТЛ — резисторно-
транзисторная логика;
РТЛ (мВт) — резистор-
но-транзисторная
логика (милливаттная);
СЭТЛ — переключатели
тока с эмиттерными
связями. Предварительная
оценка возможностей
указанных принципов реализации схем логических элементов
может быть произведена, например, по усредненным данным,
приведенным в табл. 2.1, составленной по данным [38].
При проектировании комплекса элементов выбор принципа
реализации логики в виде электрических цепей следует проводить
исходя из оценки всех элементов, входящих в комплекс.
К сожалению, общих регулярных алгоритмов для синтеза
конфигурации нелинейных электронных схем с заданной логикой и
'Да
■Н. I Разработка конструкции V-
■+>■
Ш
Испытания на надежность,
разработка тестовых норм,
оценка процента годных схем
Контроль выполнения условий
работоспособности с заданной
вероятностью
ШеТ
До
I Выдача технической документации
Рис.
2.2. Блок-схема алгоритма процесса
ектирования электронных схем'
про-
30
се
Sf
В
Ч
S
Я
u
о
ч
я
я
СО
со
Я
о.
и
я
я
а
а
cj
н
со
н
PQ
Я,
4
н
а.
cj
н
н
Ч
н
*=Г
!-
со
а
со
и
Tj<
*2
т*
см
о
о
со
о
я
о-
а>
ч
СО
со
К
S
CD
Си
ш
0)
(У
к
Си
и
о
см
со
ч
со
2
Я
я
Я
00
о
см
о
^
2
ч
*
О)
Си
си
с
со
g
ВТ
я
СО
п
g
g
в
s
«
o
g
H
0?
03
a
я
u
s
я
И
<L>
6Г
§
ю
of
CM
Ю
00
£-,
CQ
s
w
я
я
<D
В
CO
Си
л
в
о
я
I
s
я
ш из
4 4
« CD
a"
£
CO
о
со
X
о
ч
Я
со
3
о
о-
о
X
о;
СО
1
Си
О
X
s
со
X
со
О
с
я
я
3
а>
я
д
л
Ё
о
Д
S
1
>>
0?
со
я
В"
Я
5
о
0?
сз
a
о
Си
о
X
о?
со
a
о
Си
О
X
я
Си
О
Ш
Е-
Ч
Д
О
5
0?
со
3
о
си
о
X
а>
о
с
S
я
о
О)
Си
W
а>
Си
а>
С
из
я
в*
On
СО
Я
ч
CD
си
X
а
я
си
3
Си
я
Си
cd
Я
а>
Я*
X
си
О
с
*3
«
ю
см
•*
ю
ю
00
§
X
я
я
о
я
а>
я
я
0)
ч
в
О)
Д
со
СО
а
ю
СМ
£+
+1-
*7
1
.- ю
ю .-см
юю —
~ою
+ 1
.- 'ю
ю .-см
+2 +
+++
S+S
+° 1
ю
.-СМ
+т
ю
.«см
+t
• •
••ю
so
О) о
в* -
ja
Си Н
*- 2
со S
а) о
Я н
х 3
я д
1»
со ^
Я со s
О СО
S2 е
со со
3 к
2 ч:
я
ч^
^>»
О
СМ
■н
см
vpxO
ОО
+1+1
ОЛО
coco"
оо
+1+1
осо
coco
vPsO
о о
~см
1 +
оо
iCiO
в4^
о
+1
о
1С
я
ч
я
я
я
я
СО
н
я
я
со
«
я
я
ST
я
О)
я
1*
к «г
си 2
с S
со °з
я
о
31
требуемыми электрическими свойствами до настоящего времени не
существует. Поэтому решение задачи выбора конфигурации
принципиальной схемы элемента в общем случае неоднозначно.
Собственный опыт разработчика и его интуиция играют существенную
роль в успешном выполнении данного этапа.
Этап 16. На этом этапе производятся выбор и ориентировочный
расчет параметров компонентов принципиальной схемы,
оцениваются ее логические возможности, проверяется правильность
выполнения заданных логических функций. Если результаты этой
проверки отрицательны, то происходит возврат к этапу 1а и
выбранная схема либо корректируется, либо заменяется новым
вариантом. Роль этапа оценки логических возможностей схемы возрастает
по мере появления и развития больших интегральных схем (БИС),
реализующих сложные логические преобразования. При
положительных результатах оценки разработчик переходит к следующему
этапу.
Этап /е. На этом этапе отыскиваются номинальные значения
параметров компонентов, обеспечивающие функционирование схемы
в соответствии с логикой ее работы. Начальные значения
параметров компонентов можно определять по упрощенным соотношениям.
При этом возможно применение ручных расчетов, компиляция
значений параметров для цепей, заимствованных из схем ранее
разработанных элементов и т. п. Допустимость приближенных методов
расчета предопределяется тем, что расчеты проводятся при
ограниченном объеме информации, необходимой для оценок
работоспособности схемы.
Уточнение параметров компонентов осуществляется в виде
итерационного процесса, который представлен блоками «Анализ»,
«Модификация параметров», «Контроль условий
работоспособности при заданных X и Q». Блок «Анализ» включает в себя
различные алгоритмы анализа:
1. Анализ статических состояний схемы предусматривает
проверку устойчивости состояний 0 и 1 в цепях электронной схемы,
получение амплитудных передаточных характеристик при
номинальных значениях параметров компонентов. Здесь же могут быть
определены первые оценки запасов помехоустойчивости, порогов
срабатывания и формирующих свойств элемента. Если анализ даст
отрицательный ответ на одно или несколько требований,
предъявляемых к элементу,( то, возвратившись к предыдущим этапам,
разработчик может изменить конфигурацию схемы или типы отдельных
компонентов. Ввиду сложности анализ статических состояний
нелинейных схем целесообразно проводить при помощи ЭВМ, что
существенно снижает трудоемкость стадии отработки. 6 случае
положительных результатов анализа статических состояний
переходят к анализу переходных процессов.
2. Анализ переходных процессов дает возможность оценить
динамические свойства элемента — время задержки сигнала,
длительность сигнала и его фронтов, максимальную частоту
переключений без учета влияния дестабилизирующих факторов (теорети-
32
ческий анализ переходных процессов в нелинейных схемах с
достаточной степенью точности удается провести лишь при
использовании ЭВМ. Приближенные аналитические расчетные соотношения,
применяемые при ручном счете, дают на этом этапе слишком
большие погрешности).
Разработанные к настоящему времени программы оптимизации
позволяют корректировать величины параметров компонентов схемы
при отрицательных результатах анализа динамических свойств.
Если коррекция параметров компонентов не исправляет положения,
то производят изменение конфигурации схемы или ее замену.
3. Статистический анализ дает возможность установить
диапазоны изменений статических и динамических параметров схемы
при воздействии совокупности дестабилизирующих факторов. В
результате этого анализа определяют величины запасов
помехоустойчивости, законы распределения статических и динамических
параметров элементов при отклонениях внутренних и внешних
параметров. При известных законах распределения выходных
параметров можно провести количественную оценку надежности,
элемента по параметрическим отказам.
Программы статистического анализа электронных схем
позволяют проводить оценку диапазонов изменений выходных
параметров за счет разброса внутренних и внешних параметров при
помощи ЭВМ. За счет применения машинных методов сокращается
трудоемкость статистического анализа и повышается точность и
достоверность получаемых результатов. Результаты
статистического анализа дают ответ на вопрос: какова вероятность того, что
выходные параметры схемы не превосходят пределов, указанных
в ТЗ?
Если нормы, указанные в Т3> окажутся невыдержанными, то,
возвратившись к предыдущим этапам, необходимо осуществить
коррекцию схемы. Коррекция может заключаться в применении
комплектующих деталей и приборов с более жесткими допусками
на параметры, изменении номиналов внутренних параметров,
частичном и полном изменении конфигурации схемы. Для
целенаправленной коррекции схем необходимо иметь оценки степени влияния
отклонений внутренних параметров на выходные параметры.
Существенную помощь разработчику могут оказать алгоритмы
и программы оптимизации внутренних параметров по критерию
максимума схемной надежности. Эти алгоритмы предусматривают
отыскание внутренних параметров, обеспечивающих максимально
возможное удаление выходных параметров от границ,
регламентируемых ТЗ. Естественно, что изменения внутренних параметров
ограничены возможностями технической реализации и предельно
допустимыми режимами эксплуатации комплектующих деталей и
приборов. Если оптимизация не обеспечивает получения выходных
параметров в заданных, пределах, то необходимо изменять
конфигурацию схемы или проводить коррекцию ТЗ.
Статистический анализ — одна из наиболее трудоемких задач
в процессе проектирования. Поэтому эту задачу стараются ис-
3*
ключить из итерационного цикла определения номинальных
значений параметров компонентов на этапе 1в, где расчеты проводятся
или без учета, или при неполном учете разброса параметров. При
этом выполнение статистического анализа переносится на этап III
(рис. 2.2).
Этапы II и III. Этапы разработки конструкции и испытаний
предусматривают изготовление опытных образцов элементов в
соответствии с данными, полученными после положительного
завершения предыдущего этапа, и экспериментальную проверку
параметров выходных сигналов. Для сокращения количества изготовляемых
образцов при экспериментальных проверках можно применить
метод граничных испытаний. Сущность этого метода заключается
в том, что отклонения параметров компонентов к границам полей
допуска во многих случаях могут имитироваться эквивалентными
изменениями напряжений источников питания, а иногда входных
сигналов. Измерения параметров выходных сигналов в режимах
граничных испытаний дают возможность оценить соответствие
схемы требованиям ТЗ, уточнить ряд величин, относящихся к
внутренним параметрам (паразитные емкости и индуктивности,
сопротивления утечек изоляции и т. п.). При отрицательных результатах
экспериментальной проверки происходит возврат к одному из
предыдущих этапов. Обычно коррекция схемы по результатам
экспериментальной проверки заключается в перерасчете номиналов и
допусков внутренних параметров на основе уточненных экспериментом
данных. Положительные результаты экспериментальной проверки
позволяют перейти к заключительному этапу отработки
принципиальной схемы — выдаче документации по схеме и коррекции
технических условий на элемент.
Техническая документация помимо конфигурации схемы и
перечня комплектующих деталей и приборов должна содержать сведения
о наиболее тяжелых режимах, в которых последние используются
(по токам, мощностям, напряжениям). Если проверка по
техническим условиям на комплектующие детали и приборы покажет, что
предельные для них режимы не превзойдены, то документация
передается в производство. В противном случае вопрос возможности
применения детали или прибора согласуется с предприятием-
изготовителем. Иногда вопрос решается путем применения детали
или прибора другого типа. Кроме того, в состав технической
документации должны входить данные о режимах контроля
изготовленных схем и критериях оценки их годности.
Если по окончании проектирования некоторые из выходных
параметров оказались значительно лучше норм, предусмотренных
ТЗ, то в технические условия на элемент вносятся улучшенные
значения. В некоторых случаях экономически целесообразно
небольшое ухудшение норм ТЗ вместо применения более сложных
электронных схем. Совокупность требований ТЗ, скорректированная
в соответствии с результатами проектирования, входит в состав
технической документации в виде технических условий на -
элемент.
•34
Рассмотренные последовательность и содержание этапов
проектирования принципиальных электрических схем элементов
показывают, что их отработка — процесс итерационный, требующий при
выполнении очередного этапа неоднократных возвратов к
предыдущим. Указанная последовательность этапов во многом
предопределяется тем, что трудоемкость выполнения работ на
последующих этапах значительно больше, чем на предыдущих. Естественно,
что, только выбрав и уточнив схему путем анализа статических
состояний и переходных процессов, целесообразно переходить
к статистическому анализу.
При отработке принципиальных схем выполнение ряда наиболее
трудоемких работ может быть реализовано при помощи ЭВМ, но
с участием человека-разработчика.
Процесс проектирования интегральных схем (ИС) имеет ряд
отличий от процесса разработки схем на дискретных компонентах.
Наиболее существенные из них заключаются в значительном
расширении состава задач, решаемых на этапах 16 и II (рис. 2.2).
Появляется возможность для каждой новой схемы проектировать
новые компоненты, наилучшим образом отвечающие требованиям
конкретного применения. При этом меньшие затраты времени и
средств будут при проектировании компонентов на основе какой-
либо уже освоенной технологии. В этом случае задан
диффузионный профиль компонентов, т. е. заданы физико-структурные
параметры, вектор которых обозначим ХФ. Тогда задачами этапа 16
проектирования активных компонентов являются разработка
технических требований к электрическим параметрам компонентов
(вектор ХЭ), выбор конфигурации компонентов и расчет значений
геометрических параметров (вектор ХГ) таких, чтобы
удовлетворялись требования к вектору ХЭ. Если разрабатывается новая
технология, то в задачи этапа 16 входит определение значений как
вектора ХГ, так и вектора-ХФ. Возможен случай объединения
этапов 16 и 1в в единый этап, на котором анализ схемы производится
при заданных ХФ, ХГ и Q, а в итерационном цикле проектирования
модифицируются непосредственно структурные параметры. Однако
в этом случае использование любых из существующих методов
проектирования наталкивается на значительные трудности при.
анализе и модификациях параметров.
Этап II при разработке ИС становится этапом проектирования
топологических схем. Он тесно связан с остальными этапами и не
может быть исключен из общего итерационного цикла проектировав
ния. На этом этапе решаются задачи размещения компонентов на
полупроводниковой пластине, разложения общей топологической
схемы на маски, проведения межсоединений. При этом общая
площадь, занимаемая схемой на пластине, должна быть
минимизирована, чт'о приводит к повышению процента выхода годных схем.
Параметры всех компонентов, расположенных на одной пластине,
могут оказаться коррелированными, причем теснота
корреляционной связи зависит от особенностей взаимного расположения
компонентов. Следовательно, прогноз процента выхода годных схем
35
корректно может быть выполнен только после этапа разработки
топологических схем.
Этап оформления технической документации в случае
проектирования ИС заключается в вычерчивании масок для изготовления
фотошаблонов.
Среди других различий в проектировании схем на дискретных
компонентах и ИС нужно отметить и различие в методах
проектирования, связанное с трудностями применения экспериментальных
методов в интегральной электронике. Действительно, изготовление
опытных образцов ИС требует гораздо больших материальных и,
временных затрат, чем изготовление макетов схем на дискретных
компонентах. Практически очень трудно изменять параметры
компонентов ИС при экспериментальной отладке, так как такое
изменение требует изготовления новой схемы со всеми трудоемкими
изменениями в технологическом процессе. Отладка же ИС на макете,
собранном из дискретных компонентов, не дает удовлетворительных
результатов из-за низкой .точности такого макетирования.
Различны также представления об относительной стоимости
компонентов схем на дискретных элементах и ИС (в ИС транзистор
дешевле резистора). Компоненты ИС характеризуются большими
дисперсиями их параметров, существенна корреляционная связь
между параметрами компонентов.
§ 2.3. МЕТОДЫ ПРОЕКТИРОВАНИЯ ЭЛЕКТРОННЫХ
СХЕМ ЭЛЕМЕНТОВ ЭВМ
Анализ процессов проектирования показывает, что задачи,
возникающие при отработке принципиальных схем, можно
разделить на задачи синтеза конфигурации, одновариантного анализа,
многовариантного анализа и оптимизации.
Задачи синтеза конфигурации. Синтез конфигурации
принципиальной схемы в общем случае не алгоритмизирован и поэтому
осуществляется инженером-разработчиком на основе его опыта
и знаний. Лишь для частных случаев линейных усилительных схем
разработаны формальные методы синтеза, которые могут служить
основой для создания машинных программ. Для нелинейных
электронных схем ЭВМ может быть использована в качестве библиотеки,
хранящей каталог типовых схем. При наличии конкретного
технического задания из каталога выбирают несколько типовых
вариантов схем, наиболее близких по своим характеристикам к требуемым.
ЭВМ в этом случае используют в качестве средства, ускоряющего
поиск информации, при решении задачи синтеза.
Задачи одновариантного анализа. Одновариантный анализ —
решение задачи анализа электрических процессов в схеме при
заданных значениях внутренних и внешних параметров. В результате
одновариантного анализа находят выходные параметры,
относящиеся к группе функционалов напряжений и токов в цепях схемы.
Такая задача исключительно важна, поскольку входит как необ-
36
ходимая составная часть в задачи многовариантного анализа и
оптимизации. Ее решение возможно как экспериментальными, так
и расчетными методами.
Экспериментальные методы требуют создания макета схемы, на
котором с помощью радиоизмерительных приборов определяют ее
выходные параметры. Применение экспериментальных методов не
вызывает каких-либо трудностей только при анализе схем на
дискретных компонентах при легко воспроизводимых на макете
значениях внешних и внутренних параметров. К сожалению, не
любые значения внутренних и внешних параметров легко реализовать.
Эксперимент усложняется при температуре окружающей среды,
отличающейся от комнатной, необходимости работать с входными
сигналами иной формы, нежели форма сигналов имеющихся
генераторов. При эксперименте не удается обеспечить любое сочетание
значений внутренних и паразитных параметров. Последнее
наиболее существенно при макетировании ИС, где результаты,
полученные на макете из дискретных компонентов, существенно отличаются
от истинных. Поэтому макетирование ИС производят с помощью
набора тестовых компонентов, расположенных на отдельных
кристаллах. Однако точность результатов макетирования и в этом
случае может оказаться недостаточной. Изготовление же ИС для
каждого очередного варианта анализа при ее проектировании
экономически нецелесообразно.
Ручные (немашинные) расчетные методы, не связанные с
применением ЭВМ, — методы аналитического решения задач. Однако
системы уравнений, описывающие электрические процессы в
электронных схемах, имеют высокий порядок, примерно равный
количеству узлов в эквивалентной схеме, т. е. обычно равный нескольким
десяткам. Приемлемые для ручного счета формулы, являющиеся
результатом решения систем уравнений схемы, получают обычно
при порядке системы не более двух и при условии линейности
уравнений. Следовательно, применение ручных расчетных методов
неизбежно связано с рядом серьезных допущений и упрощений.
Наиболее известные приемы упрощения заключаются в
линеаризации задачи анализа на переменном токе, снижении порядка
системы за счет раздельного анализа в разных диапазонах частот или
раздельного анализа на временных интервалах фронтов и вершин
импульсов. Эти приемы не обеспечивают упрощения задачи в нужной
степени, поэтому необходимо пренебрежение рядом реактивностей
после качественного изучения особенностей их влияния на процессы
в схеме. Очевидно, что при этом не только снижается точность
получающихся расчетов, но и уменьшается их универсальность
в смысле применимости к анализу и расчету сколько-нибудь
широкого класса схем, т. е. каждая новая схема практически требует
создания новой специфической для нее расчетной методики. Для
ряда схем вообще не удается упростить задачу анализа без потери
даже качественного соответствия экспериментальных и расчетных
результатов. Таким образом, ручные расчетные методы позволяют
получить лишь ориентировочные предварительные результаты,
37
которые требуют дальнейшей корректировки с помощью
экспериментальных или машинных методов.
Машинные методы отличаются от ручных расчетных методов
большей точностью и универсальностью, от экспериментальных
методов — возможностью получения более полной информации о
процессах в схеме, причем в ряде случаев это достигается с меньшими
затратами времени и средств. При машинном анализе работа
инженера с физической моделью — макетом схемы — заменяется
работой с математической моделью схемы. Математической моделью
схемы (ММС) называют систему уравнений, описывающую
электрические процессы в схеме и представленную в форме, позволяющей
непосредственное применение какого-либо из известных методов
для ее решения. Термин «моделирование» в настоящее время
используют или для обозначения процесса решения уравнений ММС,
или для обозначения процесса получения уравнений ММС. В
дайной книге этот термин будет использоваться во втором из указанных
толкований.
Математическая модель компонента — система уравнений,
описывающая электрические процессы в компоненту и представленная
в форме, допускающей непосредственное применение какого-либо
из известных методов моделирования схем, в состав которых входит
данный компонент. Процесс получения математической модели
компонента называют моделированием компонента (в дальнейшем
для краткости математические модели будут именоваться просто
моделями).
В зависимости от типа уравнений, составляющих ММС, и
характера определяемых выходных параметров целесообразно задачи
одновариантного анализа разделить на несколько видов. Анализ
переходных процессов естественным образом сводится к решению
систем дифференциальных уравнений типа (2.7), статический
анализ заключается в решении систем алгебраических и
трансцендентных уравнений, анализ частотных характеристик чаще всего
применяется для малосигнальных схем при спектральном
представлении бигналов и требует решения систем линейных алгебраических
уравнений с комплексными коэффициентами или определения
собственных значений матриц.
К отдельным видам одновариантного анализа можно отнести
анализ стационарных режимов схем с периодически изменяющимися
напряжениями на входе и выходе или только на выходе, анализ
устойчивости схем и некоторые другие задачи, если они
математически сформулированы иначе, чем названные выше задачи анализа
переходных процессов, частотных характеристик или статического
анализа.
Большинство выходных параметров схемы — функционалы
зависимостей ее напряжений и токов от времени или частоты, поэтому
их определение не представляет больших трудностей после
получения этих зависимостей в процессе одновариантного анализа. Для
вычисления выходных параметров, относящихся к группе
пороговых, недостаточно выполнить одновариантный анализ при заданных
38
внутренних и внешних параметрах. Обычно такие параметры
определяют по результатам нескольких вариантов анализа, каждый из
которых выполняется при разных значениях соответствующего
внешнего параметра. Назовем задачу определения полной
совокупности выходных параметров схемы задачей анализа работы схемы.
В частном случае, когда схема характеризуется только выходными
параметрами группы функционалов, понятия одновариантного
анализа и анализа работы схемы совпадают.
Задачи многовариантного анализа. Многовариантный анализ
заключается в многократном решении задачи определения выходных
параметров, т. е. включает в себя одновариантный анализ и
межвариантные модификации внутренних и внешних параметров.
Блок-схема многовариантного анализа есть совокупность блоков
1в на рис. 2.2. Под методами и алгоритмами многовариантного
анализа понимают методы и алгоритмы межвариантных модификаций.
Среди задач многовариантного анализа можно выделить
нетиповые и типовые задачи. Алгоритмы нетиповых задач формулируются
инженером при проектировании каждой конкретной схемы заново;
это, например, алгоритмы изменения каких-либо составляющих
векторов X или Q при получении зависимости какого-либо
выходного параметра от интересующих разработчика xt или qk. К наиболее
важным типовым задачам многовариантного анализа относят
анализы чувствительности и статистический. Цель анализа
чувствительности — определение частных производных выходных
параметров по параметрам компонентов и внешних условий.
Статистический анализ заключается в получении информации о функциях
статистического распределения выходных параметров и ожидаемом
проценте выхода годных схем в процессе производства. Результаты
анализа чувствительности и статистического анализа важны при
оптимизации схем, так как дают ответы на вопросы, нужно ли
дальше улучшать схему и если да, то в каком направлении следует
изменять элементы вектора X. Кроме того, эти результаты
позволяют решить задачу выбора допусков на параметры дискретных
компонентов.
Недостатки экспериментальных методов многовариантного
анализа связаны с трудностями, иногда непреодолимыми, при создании
в макете большинства требующихся сочетаний параметров
компонентов и внешних условий. Так, анализ чувствительности требует
в очередном варианте изменения только одного из параметров xt
или qk. Если этот параметр есть параметр транзистора, то при таком
изменении необходима смена транзистора, что вызывает изменение
не одного, а нескольких внутренних параметров.
При расчетных ручных методах многовариантного анализа
необходимо наличие формульных зависимостей вида yf = fj (X, Q).
Однако такие формулы могут быть получены лишь в частных
случаях довольно простых схем и их точность ниже желаемого
уровня.
В рамках машинного проектирования многовариантный анализ
выполняют в двух режимах:
39
1. Режим оперативного взаимодействия инженера с ЭВМ
(оперативный или интерактивный режим). Здесь алгоритмы
межвариантных модификаций не реализуются в какой-либо программе,
составляемой заранее. Решение об изменении X и Q принимается
инженером на основе результатов предыдущих вариантов и реализуется
путем ввода новых значений в ЭВМ через устройство ввода. Такой
режим наиболее удобен для выполнения нетиповых видов
многовариантного анализа, позволяет при несложных правилах
модификации параметров достичь цели быстрее, так как часто только
в процессе анализа можно установить нецелесообразность
выполнения ряда дальнейших вариантов. Удобства оперативного режима
наиболее полно проявляются при работе с ЭВМ в режиме с
разделением времени. Однако оперативный режим находит широкое
применение и в условиях пакетной обработки задач машиной, особенно
при анализе сложных схем.
2. Режим, подразумевающий предварительную реализацию
алгоритмов межвариантных модификаций в программе, автоматически
исполняемой ЭВМ (программный режим). Очевидно, что типовые
задачи многовариантного анализа должны выполняться в
программном режиме.
Обычно многовариантный анализ позволяет инженеру получить
ту или иную информацию о схеме в некоторой окрестности
отображающей точки. Отображающей точкой Хном '= (хном1, хнш2, ... >
хном„) называют точку в/г-мерном пространстве параметров
компонентов ХП, координаты которой—значения xH0Mi, принимаемые
за номинальные значения параметров компонентов на данном этапе
проектирования. Так, статистический анализ даст информацию
о рассеянии выходных параметров именно в окрестности точки Хном.
Задачи оптимизации. Поиск отображающей точки X * в
пространстве параметров компонентов, в которой схема заданной
конфигурации наилучшим образом удовлетворяет требованиям
технического задания, называют задачей оптимизации.
Из экспериментальных методов оптимизации известны методы
граничных и матричных испытаний [9]. Метод граничных
испытаний требует определения области в пространстве параметров
компонентов ХП, в которой выполняются заданные условия
работоспособности. Такую область называют областью работоспособности.
В большинстве практических случаев размерность задачи п > 3,
и при граничных испытаниях находят лишь некоторые сечения этой
области, проходящие через исходную точку Хисх (точка X * — точка,
расположенная в области работоспособности на максимальном
удалении от ее границ). Однако отсутствие полной информации об
области работоспособности не дает гарантии, что точка, принятая
за оптимальную, действительно является точкой X *. Кроме этого
основного недостатка метода граничных испытаний можно назвать
его большую трудоемкость и трудности изменения параметров при
получении сечений области работоспособности, присущие
экспериментальным методам. Метод матричных испытаний оказывается
еще более трудоемким и поэтому его реализация подразумевает
40
наличие специальной установки, в которой смена значений
параметров производится автоматически подключением к макету новых
компонентов. Конструкция такого макета не может быть сколько-
нибудь близкой к конструкции реальной схемы, в макете неизбежно
появление линий связи заметной длины, велики паразитные
параметры. Поэтому метод матричных испытаний применим лишь при
оптимизации низкочастотных схем на дискретных компонентах,
в которых не возникают трудности с обеспечением устойчивости.
Трудоемкость расчетных методов оптимизации бустро растет
с увеличением размерности задачи и оказывается чрезмерной для
ручных вычислений даже при наличии явных зависимостей
выходных параметров от параметров компонентов.,Отсюда следует
целесообразность использования для оптимизации схем расчетных
методов, реализуемых на ЭВМ.
Трудности решения задачи оптимизации при немашинном
проектировании схем обычно заставляют искать не оптимальную точку
X *, а любую точку, находящуюся в пределах области
работоспособности. Поиск такой точки составляет задачу расчета параметров
компонентов. В такой постановке обычно и решается задача при
применении экспериментальных методов анализа, причем процесс
поиска чаще всего не алгоритмизирован.
В общем случае задачу оптимизации электронной схемы следует
рассматривать как задачу расчета оптимальных значений не только
параметров компонентов, но и тестовых норм. Действительно, выше
было показано, что тестовые нормы не принадлежат к исходным
данным, а должны выбираться разработчиком схемы. Очевидно,
что такой выбор может быть более или менее удачным. Что же следует
понимать под удачным, или, более строго, оптимальным, выбором
тестовых норм? Рассмотрим рис. 2.1, б, на котором так же, как и
на рис. 2.1, а, точки соответствуют отдельным экземплярам из партии
изготовленных схем. Рассеяние выходных параметров /вых и /вх
наблюдается из-за производственных погрешностей параметров
компонентов. Если типы компонентов, номинальные значения и
допуски их параметров выбраны, то положение точек на рис. 2.1, б
не может быть изменено. Несмотря на это, процент выхода годных
схем еще не определен и зависит от выбора тестовых норм. Сравним,
например, тестовые нормы /вых.гр и Nmzxl вхгр (см. рис. 2.1, б) в
точках А и Б, учитывая, что эти нормы являются координатами
указанных точек. Здесь тестовые нормы точки А обеспечивают заметно
больший процент выхода годных схем, чем тестовые нормы
точки Б.
Итак, один из критериев оптимизации тестовых норм — процент,
выхода годных схем при их производстве.
Обычно задачи оптимизации параметров компонентов и
тестовых норм решают как отдельные задачи, что облегчает их решение,
поскольку уменьшается размерность пространства, в котором
осуществляется поиск экстремума. Но если исходить только из
принципиальных соображений, то более правильно решать задачи
оптимизации параметров компонентов и тестовых норм совместно. При
41
этом выбирается и область взаимозаменяемости (на рис. 2.1, б она
соответствует тестовым нормам точки А и выделена штриховкой)
и будет изменяться само положение точек на рис. 2.1, б. При
раздельном решении этих задач более сложна и трудна задача расчета
параметров компонентов.^После ее решения и статистического
анализа схемы в оптимальной точке выбор тестовых норм —
сравнительно простая задача, так как известны распределения тестовых
параметров, которые можно представить, например, в виде рисунка,
подобного рис. 2.1, б.
Задачи, возникающие на этапе проектирования компонентов
интегральных схем, также можно разделить на задачи синтеза,
анализа и оптимизации. Здесь под синтезом целесообразно понимать
выбор конфигурации компонента и базового технологического
процесса, под одновариантным анализом — задачу определения
электрических параметров компонента при заданных структурных
параметрах, под оптимизацией — расчет структурных параметров, таких,
чтобы наилучшим образом удовлетворялись требования,
предъявляемые к электрическим параметрам. <
Таким образом, многие недостатки и экспериментальных, и
ручных расчетных методов могут быть устранены в машинных методах,
которые должны стать основными методами проектирования,
особенно при разработке ИС. Но ручные методы не полностью
вытесняются машинными, их целесообразно применять при решении
^алгоритмизированной задачи синтеза. Экспериментальные
результаты анализа в ограниченном числе вариантов могут полезно
дополнять машинные результаты, подтверждая достоверность
последних. В некоторых случаях проектирования простых схем с
нежесткими требованиями ТЗ может оказаться, что ручные методы приведут
к цели с меньшими затратами средств, так как машинное время пока
сравнительно дорого. Следовательно, инженер-схемотехник наряду
со знанием ручных методов должен хорошо знать особенности и
возможности машинных методов, чтобы в каждом конкретном случае
суметь выбрать правильно тот путь решения задач проектирования,
который приведет к цели с наименьшими затратами времени и
средств.
§ 2.4. ТРЕБОВАНИЯ К МАТЕМАТИЧЕСКИМ МОДЕЛЯМ,
МЕТОДАМ И АЛГОРИТМАМ, ИСПОЛЬЗУЕМЫМ ПРИ МАШИННОМ
ПРОЕКТИРОВАНИИ ЭЛЕКТРОННЫХ СХЕМ ЭЛЕМЕНТОВ ЭВМ
Оценку математических моделей электронных схем и
компонентов, методов и алгоритмов машинного решения задач
проектирования следует производить с точки зрения точности, экономичности
и универсальности. Экономичность имеет несколько аспектов и
главный из них — затраты машинного времени на решение
задачи.
Пример. Требуется выполнить оптимизацию параметров сравнительно не*
сложной переключательной схемы, состоящей из пяти транзистороз и десяти
пассивных компонентов. Будем полагать^ что задача математически сфэрмули-
42
рова на и используются известные методы для решения, выбор которых
производите я без учета требования минимизации затрат машинного времени.
Если оптимизация заключается в выполнении Nt шагов поиска экстремума
целевой функции, то на каждом шаге поиска для вычисления целевой функции и,
возможно, ее градиента выполняется многовариантный анализ с Л/2 вариантами.
Пусть каждый вариант представляет собой анализ переходных процессов, при
котором производится Ш шагов численного интегрирования системы
дифференциальных уравнений, а на каждом шаге требуется выполнить jVy арифметических
операций типа умножения. Тогда общее количество операций типа умножения
на решение задачи составит NylUNzN^
Оценим возможные значения сомножителей. Для этого воспользуемся
известной модификацией эквивалентной схемы транзистора по Эберсу и Моллу.
В результате получим систему дифференциальных уравнений в форме Коши
при помощи матричного варианта метода переменных состояния [20]. Как будет
показано в § 4.3, в этом случае приближенной оценкой будет Ny ^ а2 (1,2 +
+ 0,007а) &2, где а — количество ветвей в эквивалентной схеме, причем в
данном примере а = 50, /га — количество вычислений правых частей системы
дифференциальных уравнений на одном шаге интегрирования.
Для интегрирования применим наиболее известный в вычислительной
практике четырехточечный метод Рунге — Кутта, для которого приближенной
оценкой количества шагов Ш будет выражение Ш ^ 0,5 TKQJ%mXny где Гкон —отрезок
интегрирования; tmin — минимальная постоянная времени схемы. Типичные
значения отношения Гкон к xmin для переключательных схем ЫО3-т- ЫО5.
Примем Гкон/тга1п=Ы0*.
В качестве целевой функции выберем вероятность выполнения заданных
условий работоспособности и оценим эту вероятность методом статистических
испытаний. Для этого зададимся количеством таких испытаний N2 = 200. Поиск
максимума указанной вероятности попытаемся осуществить методом градиента
или каким-либо из методов случайного поиска. Можно показать, что при этом
JVX обычно превышает 1-Ю3. Примем заниженную оценку Nx = 1-103. Подсчет
произведения NylUNz^ дает величину 1,55-1013.
На машине «М-220» решение задачи потребует около миллиона часов
машинного времени.
Рассмотренный пример показывает, что практическое использование
методов машинного проектирования подразумевает снижение затрат машинного
времени по сравнению с полученным значением по крайней мере на пять
порядков, что требует применения математического аппарата, специально
ориентированного на решение задач проектирования электронных схем. При выборе
методов и алгоритмов для решения этих задач необходимо прежде всего обращать
внимание на трудоемкость их реализации, прямо определяющую затраты
машинного времени. В этом примере введены также способы количественной оценки
экономичности методов моделирования, анализа и оптимизации: для методов
моделирования схем, т. е. методов получения математических моделей схем,
такой оценкой является /Vy, для методов анализа переходных процессов —Ш,
для методов многовариантного анализа и оптимизации — N2 и Л^.
Оценка экономичности только с позиций затрат машинного
времени — неполная. Другим аспектом экономичности являются
затраты машинной памяти Ям. При оценке математических моделей
компонентов в понятие экономичности следует включить также
количество параметров модели, определяемых путем измерений,
поскольку такие измерения часто оказываются довольно
трудоемкими.
Точность решения задач при машинном проектировании
определяется двумя основными факторами:
приближенностью-математического описания процессов в схеме (погрешностями модели),
погрешностями используемых методов анализа и оптимизации. Тре-
13
бования высокой точности и малых затрат машинного времени Тм
противоречивы, так как увеличение точности моделей и методов
в рамках одних и тех же принципиальных положений, составляющих
их основу, сопровождается в большинстве случаев ростом таких
величин, как a, Я/, Nx и N2. Выдвигать те или иные требования
к точности или затратам машинного времени, не согласуя их между
собой, неправомочно. Верхние границы диапазонов допустимых
затрат Тм и погрешностей решения следует установить исходя из
общих целей машинного проектирования электронных схем. Так
как машинное проектирование призвано исключить длительное и
дорогостоящее макетирование, то машинные методы должны
обеспечивать точность расчетных результатов не ниже точности
результатов экспериментальных методов и быть экономически
оправданными. Следовательно, возможности машинных методов должны
превосходить возможности экспериментальных методов и лишь
в худшем случае совпадать с ними. Отсюда следует, что затраты
машинного времени на решение задач проектирования схемы
средней сложности не должны превышать единиц или десятков часов.
Поскольку погрешности макетирования, обусловливаемые
погрешностями измерительных приборов и наличием в макете
специфических паразитных параметров, составляют при анализе схем на
дискретных компонентах 15 ч- 20%, то такие же значения
погрешностей целесообразно принять в качестве верхней границы
погрешностей машинного анализа.
Практика решения задач моделирования и анализа в ряде
областей техники показывает, что наибольший вклад в общую
погрешность решения задач проектирования, как правило, вносят
погрешности моделей. Это положение справедливо и при проектировании
электронных схем. Действительно, снижение погрешностей
численных методов до нескольких десятых долей или единиц процентов
обычно не вызывает принципиальных трудностей,- в то время как
получение таких же погрешностей моделирования может привести
к непропорционально большому росту сложности моделей или
оказаться вообще невозможным из-за недостаточной изученности
физических процессов в моделируемом объекте. На основании этого
можно заключить, что названные выше значения погрешности
в 15—20% следует рассматривать как верхний предел допустимой
погрешности моделей компонентов, а погрешности методов анализа
не должны превышать нескольких процентов.
Разрабатываемые для машинного проектирования модели
компонентов, методы и алгоритмы должны быть ориентированы на
многократное применение при разработке различных схем. Чем
шире круг схем, для которых могут быть с успехом применены
модели или метод, тем выше степень универсальности этих
моделей или метода. Требование высокой степени универсальности
также противоречит требованию малых затрат машинного времени.
Так, в модели транзистора, ориентированной на анализ
переключательных схем, можно не учитывать или учитывать недостаточно
строго ряд факторов, существенных при анализе дрейфа нуля уси-
44
лителей постоянного тока, но в -последних зато можно менее точно
отражать явления, связанные с режимом насыщения транзисторов.
Подробное отражение в модели всех тех свойств транзистора,
которые могут оказаться существенными в любом из возможных
случаев, усложняет модель и приводит к увеличению объема
вычислений. Также менее экономичным будет метод поиска экстремума,
если требуется гарантия успешного решения задачи оптимизации
во всех возможных случаях целевых функций и математических
моделей схем.
ГЛАВА 3
МАТЕМАТИЧЕСКИЕ МОДЕЛИ КОМПОНЕНТОВ.
В ЭЛЕМЕНТАХ ЭВМ
Анализ электронной схемы начинают с математического
описания протекающих в ней электрических процессов. Однако не любое
математическое описание гарантирует получение решения задачи.
Поэтому естественно определить математическую модель схемы для
задач машинного анализа как систему уравнений, описывающих
электрические процессы в схеме, представленную в форме,
допускающей непосредственное применение выбранного численного
метода для ее решения.
Для получения математических моделей схем используют
хорошо разработанный аппарат анализа электрических цепей,
состоящих из резисторов, конденсаторов, катушек индуктивности,
источников напряжения и тока. В отличие от таких цепей электронные
цепи могут иметь в своем составе ряд нелинейных электронных
компонентов (транзисторы, диоды, триоды и т. п.). Поэтому
математическая модель электронной схемы должна включать в себя
как составные части математические модели компонентов,
используемых в электронной схеме. Математической моделью компонента
называют систему уравнений, описывающих электрические
процессы в компоненте, представленную в форме, допускающей
непосредственное применение выбранного метода объединения
математических моделей компонентов в математическую модель схемы.
В дальнейшем для краткости математические модели схем и
компонентов будем называть моделями схем и компонентов.
§ 3.1. КЛАССИФИКАЦИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
КОМПОНЕНТОВ И ИХ ПАРАМЕТРОВ
Для одного и того же компонента можно сформулировать ряд
моделей, различающихся степенью учета тех или иных особенностей
процессов в компоненте, методологией получения моделей,
системой используемых параметров. Применение в практике машинных
расчетов многих моделей объясняется в первую очередь
противоречивостью требований, предъявляемых к моделям. Такими
основными противоречивыми требованиями являются требования
достаточной точности и экономичности модели. Любая модель лишь
приближенно отображает свойства моделируемого объекта.
Естественно, что степень этого приближения зависит от уровня знаний
о закономерностях процессов в объекте. Возможности ЭВМ в
отношении скорости вычислений и объем памяти ограниченны. Попытки
отобразить в модели все, что известно о моделируемом объекте, как
46
правило, обречены на неудачу, поскольку при этом затраты
машинных времени и памяти оказываются неприемлемо большими
Использование ЭВМ не снимает необходимости упрощающих
допущений, лишь уровень этих допущений оказывается иным, чем при
ручных расчетах.
Степень соответствия объекта и его модели обычно представляет
интерес только с точки зрения тех характеристик и параметров,
которые рассматриваются как результаты анализа. Эта степень
соответствия в указанном смысле и будет точностью модели. Такое
качественное определение точности модели компонента очевидно.
Количественная оценка точности модели компонента более сложна.
Пусть результатом анализа схемы при использовании данной модели
компонента является вектор выходных параметров схемы Y с
компонентами i/f (/' = 1, 2, ... , m). Относительная погрешность
определения yf будет б/ = (#/мод — yfcx)/yfcx, где *//мод — значение yh
полученное на модели схемы; yfcx — истинное значение yf.
Трудности определения количественной оценки точности модели элемента
заключаются в следующем:
1. Оценки 8/ для одинаковых по смыслу yf в разных схемах
оказываются различными, поскольку проявление соответствующих
свойств компонента зависит от особенностей схемы.
2. Точное значение y1zx остается неизвестным. В некоторых
случаях в качестве yfcx можно принять результат анализа с помощью
модели, значительно более точной, чем исследуемая. Однако
необходимы наличие такой более точной модели и проведение
соответствующих исследований, что в связи с первой из указанных причин
может дать лишь частную оценку. Поэтому в качестве yfcx обычно
принимают значение *//э, полученное экспериментально. При этом
корректность оценки &f будет достигнута лишь при условии, что
погрешности эксперимента много меньше 8/.
3. Погрешность 8/ является совокупной оценкой погрешности
не только модели исследуемого компонента, но также
погрешностей моделей других используемых компонентов и погрешностей
численных методов анализа.
4. Так как т > 1, то оценка точности модели должна
производиться дифференцированно по разным выходным параметрам.
Иногда точность модели характеризуют одной величиной ем==
= max |в/|.
/<=[l:mj
В настоящее время для оценки точности модели компонента
чаще всего используют один из следующих двух способов.
Способ 1. Этот способ оценки точности связан с анализом
специально подбираемых тестовых схем. Тестовая схема должна
удовлетворять таким требованиям:
а) в схеме кроме компонента, модель которого исследуется,
должны быть только такие компоненты, для моделей которых
гарантируются значения &м, лежащие ниже допустимого уровня ед;
б) режим, работы исследуемого компонента должен
соответствовать типичному режиму работы таких компонентов для рассматри-
47
ваемого класса схем (например, в случае переключательных схем
нужно в тестовой схеме обеспечить режим переключения);
в) набор выходных параметров в тестовой схеме должен быть
идентичен набору выходных параметров .в рассматриваемом классе
схем;
г) набор выходных параметров и их численные значения в
тестовой схеме должны быть такими, чтобы обеспечивалась погрешность
их измерения с помощью имеющейся радиоизмерительной
аппаратуры, лежащая ниже допустимого уровня.
При анализе на ЭВМ такой тестовой схемы должна быть
обеспечена также соответствующая точность численного метода с учетом
погрешностей округления. Полученные при этом оценки ем или еу
принимают в качестве оценок точности модели, если ем > ед или
18/ I > 8д- При невыполнении этих условий в качестве оценки
точности можно принять 8Д.
Способ 2. Этот способ оценки точности можно назвать
статистическим. Такую оценку можно получить лишь после накопления
достаточного опыта анализа схем с помощью интересующей модели
компонента. Пусть выполнен анализ п схем, в которых, по
предположению, главный источник погрешностей — приближенность
исследуемой модели компонента, и в этих п случаях выполнено также
экспериментальное определение выходных параметров. Тогда
получены п реализаций случайной величины tM или случайного
вектора 8 = (еь е2, ... , гт). Оценки математических ожиданий ем
или составляющих вектора г можно принять в качестве
статистических оценок точности модели компонента.
Экономичность модели. Затраты на анализ схемы на ЭВМ
определяются прежде всего затратами машинного времени Тм, так как
машинное время дорого. Временные затраты определяются как
Тм, так и временем подготовки задачи к решению ТП. При прочих
равных условиях 7М и Ти соответственно будут тем больше, чем
сложнее модели компонентов с точки зрения требуемого объема
вычислений и чем большее число параметров, требующих
экспериментальных намерений, используется в моделях компонентов.
Таким образом, экономичность модели можно характеризовать ее
вкладом в общее машинное время Тм и количеством параметров
модели. В свою очередь вклад модели в Тм можно оценить
количеством арифметических операций или, что более удобно, количеством
арифметических операций определенного типа, например типа
умножения Ny, выполняемых при однократной реализации уравнений
модели.
Универсальность модели. Кроме требований достаточной
точности и экономичности к моделям компонентов предъявляют и
требование универсальности. Степень универсальности модели
определяется ее применимостью к анализу более или менее
широкого класса схем. Так, низкая степень универсальности будет
у модели, в которой учитываются свойства компонента,
определяющие характер процессов лишь в одной конкретной схеме в одном
определенном режиме ее работы. При автоматизации анализа с по-
48
мощью ЭВМ в большинстве случаев стремятся освободить инженера
от необходимости для каждой новой схемы конструировать свои
модели компонентов, т. е. стремятся использовать модели с высокой
степенью универсальности.
Противоречивость требований высокой точности и высокой
степени универсальности, с одной стороны, и высокой
экономичности моделей компонентов, с другой стороны, очевидна: чем
детальнее в модели отображаются различные закономерности
процессов, тем точнее и универсальнее модель, но тем больше объем
вычислений Л/у и количество параметров модели.
Удачное компромиссное удовлетворение требований к модели
в задачах одного вида анализа и одного класса схем может оказаться
далеким от оптимального в других задачах. Это причина большого
числа моделей одних и тех же компонентов, используемых при
машинном анализе. Отсюда вытекает связь классификации моделей
компонентов с характером задач анализа и особенностями
анализируемых схем.
Модели нелинейных компонентов можно разделить на модели
малосигнальные (линейные) и большого сигнала (нелинейные).
При этом линейность или нелинейность модели определяется
соответственно линейностью или нелинейностью уравнений модели.
Более универсальны модели большого сигнала, которые применимы
в, широких диапазонах изменения токов и напряжений. Однако
в случае схем, работающих в малосигнальном режиме, важен
анализ передачи схемой сигнала, что сводится к анализу
зависимостей только приращений токов и напряжений от времени или
частоты по отношению к токам и напряжениям статического
состояния. При малой величине таких приращений появляется
возможность линеаризации вольт-амперных характеристик компонентов
в окрестностях рабочих точек. Малосигнальная модель компонента,
справедливая только для таких приращений, оказывается линейной
и, следовательно, значительно более простой, чем нелинейная
модель. Малосигнальные модели широко используют при анализе
частотных и переходных характеристик малосигнальных
усилителей и фильтров. Очевидно, что анализ статических состояний таких
схем должен производиться уже с помощью нелинейных моделей.
Для анализа переключательных схем ЭВМ малосигнальные модели
имеют крайне ограниченное применение, так как в ЭВМ (за
исключением небольшого числа схем типа первых каскадов усилителей
воспроизведения запоминающих устройств) электронные схемы
работают в переключательном режиме. Поэтому в дальнейшем
будут рассматриваться лишь модели большого сигнала. Из числа
моделей большого сигнала можно выделить группу статических
моделей, которые не отображают инерционных свойств компонента
и потому могут применяться лишь для статического анализа.
При создании моделей компонентов можно использовать один
из двух принципиально различных подходов. Первый из них не
требует изучения физических закономерностей процессов в
компоненте, а целиком основан на экспериментальном исследовании
49
связей между токами и напряжениями на внешних выводах
компонента. Математическое выражение таких связей и кладется в
основу модели, которую в этом случае называют эмпирической или
феноменологической (иногда подобные модели называют
формальными). Второй подход приводит к моделям, уравнения которых
вытекают из физических особенностей процессов в компоненте.
Такие модели не получили специального названия. (В пределах
этой главы будем называть такие модели теоретическими.)
Большее распространение при создании нелинейных моделей получил
второй подход, так как позволяет проще добиться
удовлетворительного соответствия модели и компонента в широких диапазонах
изменения токов и напряжений. В ряде моделей удачно сочетаются
оба подхода. Так, например, вид формульных зависимостей сначала
получается из физических соображений, а затем эти зависимости
корректируются исходя из результатов экспериментов. Также
экспериментально определяют коэффициенты уравнений многих
моделей, принятые за параметры моделей.
Параметры моделей в зависимости от их физического смысла
и той роли, которую они выполняют на различных этапах
проектирования, можно разделить на параметры электрические, физико-
структурные и геометрические. Необходимость такого разделения
параметров проявилась при проектировании ИС, где вопросы
разработки принципиальных схем, компонентов, их конструкции и
технологии находятся в тесной взаимосвязи. К
физико-структурным параметрам относят параметры диффузионного профиля,
например концентрации примесей, подвижности носителей,
глубины залегания переходов интегрального компонента. К
геометрическим параметрам компонентов, изготовляемых по планарной
технологии, относят геометрические размеры областей компонента -
в плане.
Модели, в уравнениях которых фигурируют в качестве
коэффициентов физико-структурные и геометрические параметры,
называют моделями относительно структурных параметров. Такие
модели удобны при решении задач оптимизации ИС, поскольку
конечный результат в этих задачах — оптимальные значения
физико-структурных и геометрических параметров компонентов схемы.
Однако часто модели относительно структурных параметров
оказываются сложными и потому малоэкономичными. Повышение
экономичности моделей может быть достигнуто путем
преобразований уравнений модели. При этом коэффициенты преобразованных
уравнений уже не будут физико-структурными и геометрическими
параметрами модели. Именно эти коэффициенты и называют
электрическими параметрами модели. Численные значения
электрических параметров обычно определяют путем измерения на
реальных компонентах.
Наибольшее распространение при машинном проектировании
принципиальных электрических схем получили модели относительно
электрических параметров вследствие их большей экономичности.
Переход от физико-структурных и геометрических параметров
50
к электрическим и обратно, требующийся в процессе
проектирования ИС и их компонентов, осуществляется с помощью решения
уравнений, связывающих параметры указанных групп.
Особенности моделей компонентов, обеспечивающие
возможность объединения этих моделей в математические модели
конкретных схем, следующие. В случае безынерционного компонента его
модель должна представлять собой уравнения связи между токами
и напряжениями на внешних выводах, т. е. выражать
вольт-амперные характеристики компонента. В частности, к таким моделям
должны относиться и статические модели инерционных
компонентов.' Модель инерционного компонента должна связывать скорости
изменения токов или напряжений с напряжениями или токами
внешних выводов компонента. В тех случаях, когда скорости изменения
напряжений и токов становятся соизмеримыми с отношениями
скоростей распространения этих изменений к длинам
соединительных проводников, эти проводники нужно рассматривать как
длинные линии и относить к компонентам схемы. Подобная форма
моделей компонентов удобна тем, что получение математических моделей
схем становится возможным на основе законов Кирхгофа. Кроме
того, моделям компонентов, связывающим именно токи и
напряжения или их производные, можно поставить в соответствие
эквивалентные схемы, состоящие из сопротивлений, емкостей, индук-
тивностей, источников тока и напряжения. Наличие таких
эквивалентных схем упрощает анализ результатов машинного расчета,
помогает инженеру решить вопрос о выборе той или иной модели
компонента для анализа конкретной схемы.
§ 3.2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ПОЛУПРОВОДНИКОВЫХ ДИОДОВ
Исходные уравнения. Физический подход к моделированию
полупроводниковых компонентов заключается в выводе уравнений
модели исходя из общих уравнений, описывающих поведение
носителей заряда в полупроводнике. Такими общими уравнениями
являются уравнения непрерывности, Пуассона и переноса.
Уравнение непрерывности связывает скорость изменения
плотности объемного заряда р с дивергенцией вектора плотности тока J:
— dp/3/ = div J. (3.1)
Уравнение Пуассона (дифференциальная форма теоремы
Остроградского — Гаусса) устанавливает зависимость дивергенции
вектора напряженности электрического поля Е от р:
div Е = р/(880), или V2cp = — р/(ее0), (3.2)
где е — относительная диэлектрическая проницаемость
полупроводникового материала; е0 = 8,85-10"12 Ф-м-1; ф — потенциал
электрического поля.
Уравнение переноса показывает, что ток в полупроводнике —
результат дрейфа подвижных носителей в электрическом поле
с напряженностью Е и диффузии этих носителей при наличии гра-
51
диента их концентрации:
J = <*п ~Г «*р>
где
J* = <7(/iH7iE + Aigradn); )
где J„ и Jp — электронная и дырочная составляющие плотности
тока, q — заряд электрона; р и п — концентрации дырок и
электронов; \in и \ip — подвижности, a Dnn Dp — коэффициенты диффузии
соответственно электронов и дырок.
Уравнение (3.1) не учитывает процессы рекомбинации носителей
в полупроводнике. Скорость рекомбинации пропорциональна
избыточной концентрации носителей, равной р — р0 для дырок и п — п0
для электронов, гдер0ип0 — равновесные концентрации. Плотность
объемного заряда выражается через р и п при условии, что все
атомы примесей ионизированы: р = ?(Р — ^ + Л/^ — #jf где
NR и Na — концентрации соответственно донорных и акцепторных
примесей, которые должны быть заданы как функции
пространственных координат.
Уточним (3.1), переписав его в виде двух уравнений
непрерывности отдельно для дырок и электронов:
-dp/dt = (l/q) div Jp + (р - д)/тр; (3.4a)
_ дп/dt = (l/q) div J„ + (n - По)/хя, (3.46)
где ТрИТя — времена жизни соответственно дырок и электронов.
Уравнения (3.2) -*- (3.4) являются исходным математическим
описанием процессов в полупроводниковых компонентах.
Граничные условия для решения (3.2) -т- (3.4) могут быть сформулированы
следующим образом: на поверхности структуры нормальные к
поверхности составляющие векторов Е, Jp и Jn равны нулю, в местах
присоединения внешних выводов избыточные концентрации
носителей и плотность заряда равны нулю, заданы потенциалы на внешних
выводах. Полученная в виде системы дифференциальных
уравнений в частных производных модель полупроводникового
компонента не может быть использована на практике из-за чрезмерной
трудоемкости требующихся вычислений. Для практических моделей
необходимо упростить задачу. В настоящее время в нужной мере
удовлетворяют требованию экономичности модели, в которых
устраняются две пространственные координаты из исходных уравнений,
а в направлении третьей координаты структура компонента
разбивается на минимально возможное число частей (секций) таким
образом, что в пределах каждой части удается устранить также и
третью пространственную координату. Таким образом, задача
сводится к решению обыкновенных дифференциальных уравнений, где
независимая переменная — время. Другими словами, упрощение
сводится к переходу от структуры компонента с распределенными
параметрами к упрощенной структуре компонента с
сосредоточенными параметрами. В тех случаях, когда указанные упрощения
приводят к недопустимому уменьшению точности, рассматривают не
(3.3а)
(3.36)
52
одномерную, а двумерную структуру, разбивая ее на ряд секций
в направлении двух пространственных координат. Нужного
повышения точности в рамках одномерных или двумерных моделей
можно добиться увеличением числа секций.
Вольт-амперная характеристика полупроводникового диода.
Применим подобный подход, связанный с исключением
пространственных координат, к получению модели полупроводникового диода.
Для этого примем допущение об одномерности задачи, т. е.
допущение о том, что векторы Е и J имеют отличные от нуля
составляющие только вдоль оси х, являющейся нормалью к плоскости раздела
р- и я-областей диода. В направлении оси х диод представим
состоящим из трех секций:'одна из секций есть обедненная подвижными
носителями область р-/г-перехода (областьпространственного заряда),
простирающаяся от хг до х>, где хг — граница обедненной области
в р-полупроводнике, х2 — то же, в я-полупроводнике; две другие
секции — это р-область при х < хг и я-область при х > х2.
Дальнейшие упрощения будут направлены на то, чтобы обедненную
область представить эквивалентной схемой и соответствующими
этой схеме уравнениями р-д-перехода. Этими уравнениями окажутся
уравнение статической вольт-амперной характеристики (ВАХ)
перехода и дифференциальное уравнение перезаряда емкостей
перехода. Области р и п окажутся представленными в эквивалентной
схеме объемными сопротивлениями тел полупроводника
(объединение сопротивлений в одно приведет к двухсекционной структуре
эквивалентной схемы).
Для одномерной модели уравнения (3.2) ч- (3.4) будут:
дЕ/дх = р/(&е0)', (3.5)
Jn = q [п^пЕ + Dn (дп/дх)]; (3.6а)
JP = Ч [р\*>рЕ - Dp (др/дх)]; (3.66)
dpldt = — (р - р0)/тр - (1/(/) (dJp/dx); (3.7а)
dn/dt = —(n-no)/Tn + (l/q) (dJjdx). (3.76)
Далее примем, что р-область легирована значительно сильнее,
чем я-область, т. е. р0^> п0. Более слабо легированную область
будем называть 'базой. Это позволяет исключить из рассмотрения
уравнения (3.6а) и (3.76) и величины п и Jn. Известно, что в
обедненной области р-/г-перехода результирующий ток дырок на
несколько порядков меньше дрейфовой и диффузионной составляющих
тока в отдельности. Тогда из (3.66) для обедненной области следует
р\хрЕ ^ Dp (dp/dx), где Dp — коэффициент диффузии дырок в р-
области. С учетом соотношения Эйнштейна
Е>р = Ч>тРр> (3-8)
где фг = KT/q — температурный потенциал перехода; К —
постоянная Больцмана; Т — абсолютная температура.
Тогда
§ Е dx = -£- jj dplp = фГ In (рп/Рр), (3.8а)^
* Р pd
53
Х2
где рр = р fo). рп = Р (х2). Так как \ Е dx = — ф0 + U, где
U — напряжение смещения p-n-перехода; ф0 — контактная
разность потенциалов, то из (3.8а) получаем
рр = рп ехр [(ф0 - U)/q>T]. (3.9)
При U = 0 концентрации вне обедненной области равновесны,
т. е. р (х±) = рРокр (х2) = рПо.Поэтому рр0/рРо = (pjpn0)ехр (—U/yT).
Для низких уровней инжекции можно считать рр = рРо, в
результате
Рп = Рп0 ехр(У/фг). (3.9а)
Для получения уравнения статической ВАХ перехода нужно
решить уравнение непрерывности (3.7а) при dpldt = 0. При этом
примем допущение, что /г-область диода электрически нейтральна,
т. е. ток этой области чисто диффузионный. Тогда, подставив
Jp = —qDpdpldx в (3.7а), получим
(p-Pn0)/Tp-Dp(d2p/dx*) = Q.
Решение этого уравнения имеет вид
Р (х) - Рп. = Ах ехр (x/Lp) + Л2 ехр (— хЦр),
где Lp = VDpXp — диффузионная длина дырок в я-области;
Аг и А2 находятся из граничных условий: при х ->оо р -+рПо и
лоэтому Аг = 0; при х = х2 р определяют по (3.9а), следовательно,
А2 = Рп0 fexp ((//фг) — 1]/ехр (— x2ILp). Так как выбор начала
•отсчета по оси х произволен, то можно принять х2 = 0. Тогда
р (х) = рПо [ехр (U/(pT) - 1] ехр (- x/Lp). (3.10)
Из (3.10) можно получить др/дх и подставить его в (3.66), от-'
куда для n-полупроводника вне обедненной области при Е = 0
Jр = qDp {pnJLp) [ехр (UlyT) — И ехр (— x/Lp). Умножая Jр на
площадь p-n-перехода S и полагая х = 0, а также учитывая, что
ток диода одинаков для сечений при любом х, получаем уравнение
ВАХ перехода: , ч
/д = Ыехр([//ф7.)-1], (3.11)
где 1т = qDppn0S/Lp — тепловой ток; /д — статический ток диода.
При получении (3.11) учитывался только ток инжекции дырок
из р-области в n-область. Очевидно, что если рассматривать только
ток инжекции электронов из п- в р-область, то результат был бы
•аналогичен (3.11), но иначе выглядела бы формула для теплового
тока: 1т = qDnnPoS/Ln, где Dny Ln и пРо — соответственно
коэффициент диффузии, диффузионная длина и равновесная концентрация
электронов в р-области. Так как общий ток перехода есть сумма
дырочного и электронного токов, то уравнение (3.11) остается
уравнением ВАХ перехода, а связь теплового тока со структурными
Ы
параметрами следующая:
IT = qS (DpPnjLp + DnnpJLn).
Емкости перехода. Инерционные свойства р-я-перехода
связаны с тем, что при переходных процессах помимо тока /д через
переход должны протекать ток, обеспечивающий изменение заряда
неосновных носителей финж в базе диода и обусловливаемый членом
dpldt в уравнении непрерывности (3.7а), и ток, обеспечивающий
изменение пространственного заряда Qn ионизированных атомов,
примесей в обедненной области. Изменение Qn связано с
изменяющейся при переходных процессах напряженностью Е электрического
поля в переходе, как это можно установить из (3.5). При этом можно
общий ток перехода представлять в виде суммы тока /д и токов
/инж и /п, обеспечивающих изменение зарядов соответственна
Синж и Qn-
Определим ток /инЖ. Для этого (3.7а) умножим на qS и
проинтегрируем по х от х2 до W (W ^> Ьр — ширина базы диода):
W W 1 (W)
qS^ ^-dx = — Ц- J (p-pno)dx- jj dlp,
X2 X2 lp (^2)
где Ip — дырочный ток в /г-области.
W Ip (W)
Поскольку (2инж = 95 $ (P — P"0)d*, a $ dlp = l> то
x2 lp (хг)
dQmJdt = —QmjTp +1. (3.12>
Из (3.12) видно, что общий ток перехода / равен сумме рекомби-
национного тока <2Инж/тр и тока ^инж- Заряд QHH1K, связанный с
напряжением U на переходе зависимостью, которую легко получить
из (3.12) для статического режима, когда / = /д, a dQ^Jdt = О,
равен
<2инж = Тр/д- (3.13)
Поэтому
/ = /д + /инж = 1д + тр dljdi = /д +
+ /гТр/ФгехР (^/Фг) (dU/dt) = I]l + C^dU/dt, (3.14)
где
Сд„ф = (тр/ф7.)(/д-/7.). (3.15)
Уравнение (3.14) можно интерпретировать как уравнение
первого закона Кирхгофа для цепочки параллельно соединенных
зависимого от напряжения U источника тока /д и нелинейной
емкости Сдиф. В результате в виде уравнений (3.14), (3.11) и (3.15)
получается пока еще неполная математическая модель диода,
которой соответствует эквивалентная схема на рис. 3.1.
Диффузионная емкость Сдиф определена в (3.15) как
производная заряда инжектированных в базу дырок по напряжению U
55*
Г0П
с
4h
на переходе. Действительно, Сдиф = dQ^JdU = d (TpIR)/dU =
= (тр/фг)(/д — It), что совпадает с (3.15).
Аналогично определяется и ток /п, изменяющий
пространственный заряд Qn обедненной области, как ток, перезаряжающий
барьерную емкость Сб перехода, причем
CB=dQjdU.
Величина емкости Сб зависит от характера распределения
лримесей в обедненной области. Поэтому определим С б для
случаев: 1) резкого перехода и 2) плавного
перехода. Резкий переход получил свое название из-
за резкого перепада концентрации примесей в
переходе. К таким переходам приближаются,
например, переходы эмиттер — база в
большинстве современных интегральных транзисторов.
Зависимость концентрации примесей от х для
резкого перехода можно аппроксимировать
ступенчатой прямой (рис. 3.2), где принято
х = О для металлургической границы
перехода. Тогда для обедненной области в
интервале [0, х2] р = qNRJ а в интервале [хъ 0] р =
= —qNa. Поскольку для переходов
полупроводниковых приборов обычно используется
существенно различная степень легирования р- и п-
областей, то примем Na ^> Л/д, откуда следует,
что обедненная область значительно глубже
распространяется в я-полупроводник, чем в р-
область. Следовательно, можно принять
допущение, что W ^ х2 есть ширина всей
обедненной области. При этом определим барьерную
емкость резкого перехода. Интегрируя
уравнение Пуассона, получаем [дЫж/(&г0)]х = Е (х) —
— Е (0). Так как Е (х2) = 0, то £ (0) = — 1дЫд/(ее0)] х2. Интег-
1-инж
Рис. 3.1.
Упрощенная эквивалентная
<схема
полупроводникового диода
1
N
1
^J
)
\
^ X
Рис. 3.2. Профиль
резкого
электронно-дырочного
перехода
Л2 ,г Л2
рируя вторично, имеем \ -^-xdx = \ Е (х) dx +
о о
— [(7Л/"д/(2880)] х\ = — ф0 + U. Отсюда
x2 = W = 1/2ее0 (Фо -U)/(qN,).
Но пространственный заряд
880
Хо dx или
(3.16)
Qn = 5 j р dx = SqNRW. ' (3.17)
о
Подставляя в (3.17) значение W из (3.16), получаем зависимость
заряда Qn от напряжения на переходе: Qn = S ]/~2ее0<7Л^д (ср0 — U),
что дает следующую формулу для определения барьерной емкости:
СБ = 5]/"бе0^д/[2 (ф0 -I/)],
56
или
СБ = СБ о [ф0/(фо-£/)]*, (3.18)
где Сбо — барьерная емкость при нулевом смещении перехода:
Сбо = 5К(0,5880^д)/Фо, п = 0,5. (3.19)
Для плавных переходов, примерами которых могут быть
коллекторные переходы интегральных транзисторов, зависимость
концентрации примесей от х можно аппроксимировать линейной
функцией Л^д = ах. Поступая, как и при выводе формулы для Съ
резкого перехода, можно получить
Cb=S^(ee0)2qa/[l2^0-U)]y
или
Сб=СБо[Фо/(Фо-^]л,
что совпадает с (3.18), но п = 1/3, а СБо определяется как
CB0 = 5f (828§^)/(12ф0).
(3.20)
В эквивалентной схеме диода емкости Сдиф и Сб представляются
включенными параллельно. Обозначим
£ СдИф 4" ^Б 9
тогда общий ток перехода
/ = /, + СЛ//Д.
(3.21)
(3.22)
гФн
А
О-Ч
4^
К
Уравнения (3.22), (3.11), (3.15) и (3.18) представляют собой
модель р-я-перехода, полученную целиком из теоретических
положений. Модель диода отличается от модели
p-n-перехода учетом, объемного
сопротивления тел р- и я-области. Такое
сопротивление гб, зависящее от степени легирования
полупроводника и его геометрических
размеров и называемое сопротивлением базы,
включается в эквивалентную схему диода,
показанную на рис. 3.3, последовательно с
эквивалентной схемой р-/г-перехода.
Отличия реальных характеристик диода
от теоретических. Практические наблюдения
показали, что характеристики реальных диодов имеют
некоторые отклонения от теоретических.
1. Сказанное касается В АХ, где значения токов /д несколько
ниже ожидаемых. Подобные отклонения можно объяснить прежде
всего тем, что при получении теоретической модели не учитывалась
генерация и рекомбинация подвижных носителей в обедненной
области. Приблизить характеристику (3.11) к практически
наблюдаемым характеристикам можно с помощью поправочного коэффи-
Рис. 3.3.
Эквивалентная схема
полупроводникового диода
57
циента т в показателе степени экспоненты:
/д = /r[exp [U/(m<pT)] - 1 ]. (3.23)
Коэффициент m обычно находится в диапазоне 1,0 -ь 1,6. В
дальнейшем под температурным потенциалом перехода будет
пониматься произведение mcp7\
2. Обратные токи переходов оказываются больше, чем 1Ту
причем наблюдается зависимость обратного тока от напряжения.
Это явление можно объяснить токами утечки и учесть в модели
диода путем введения в (3.22) дополнительного слагаемого:
I = IA + CdU/dt + U/RY, (3.24)
где Ry — сопротивление утечки перехода.
3. Формула (3.18) была получена в предположении нулевой
концентрации подвижных носителей в области p-n-перехода, что
может привести к заметным погрешностям в определении СБ при
прямых смещениях перехода. Поэтому при прямых смещениях
иногда рекомендуют применять линейную аппроксимацию
зависимости С в от U:
Сб=Сбо[1+{//(/"Рь)]. (3.25)
4. Полученная модель не отображает явления, связанного
с инерционностью установления прямого сопротивления диода
при его включении. Это явление есть следствие зависимости
сопротивления базы гб от заряда Q „нж или> иначе, от тока /д. Отразить
его в модели диода можно, если дополнить модель зависимостью
/7$=l/(*i + VJ. (3.26)
где kx и k2 — коэффициенты аппроксимации.
5. В описанной модели не отражены явления пробоя р-я-пе-
рехода. В большинстве практических схем с импульсными,
выпрямительными или высокочастотными диодами пробой — недопустимое
явление. Поэтому при анализе таких схем нужно лишь установить,
достигает или нет обратное напряжение Uo6? на диоде предельно
допустимого значения Uo6?max. Если не достигает, то это означает
отсутствие пробоя, если достигает, то возможен пробой и
дальнейший анализ после установления факта, что | Uo6? | ^ | Uo6pmax |,
интереса не представляет, так как сначала надо принять меры к
устранению пробоя. В связи с этим в моделях указанных выше типов
диодов можно не отражать явление пробоя, а достаточно лишь
предусмотреть вычисление разности | (Уобр | — | Uo6?max | и при ее
положительном значении или автоматически прекращать анализ,
или сигнализировать оператору ЭВМ о превышении предельно
допустимого напряжения на переходе.
Модель стабилитрона. Иначе обстоит дело с диодами, для которых
работа в пробойной области — нормальный режим. К таким
диодам относятся стабилитроны. В модели стабилитрона необходимо
иметь уравнение ВАХ, справедливое и для пробойной области.
Наиболее просто явление пробоя можно отразить'с помощью фено-
58
менологического подхода, т. е. в (3.24) добавить слагаемое /проб =■
= (U — ^пРоб)/^ь где £/проб — напряжение пробоя (имеющее
отрицательное численное значение), Rt—дифференциальное
сопротивление р-я-перехода в пробойной области.
Более точное представление ВАХ стабилитрона получается
при кусочно-линейной аппроксимации участка характеристики5
в предпробойной и пробойной областях или при нелинейных
аппроксимирующих выражениях. Примером удачного
аппроксимирующего выражения для статической ВАХ может служить выражение
/ = /д + UIRy + /д2, где при напряжениях на переходе, близких
к £/проб> ток / определяется главным образом током /д2 =
= 1Т2 ехр [(/У' — U)/(m<pT2)]. Это выражение внешне совпадает
с выражением ВАХ при прямых смещениях, но параметры U'г
1Т2 и тер/г определяются иначе. На участке обратных напряжений,
где еще не сказываются эффекты пробоя, /д2 не должен сколько-
нибудь заметно влиять на /. Это достигается, если /^ выбрать
значительно меньшим, чем тепловой ток стабилитрона 1Т (например,
1Т2 = 0,1 /г). Далее, пусть известен параметр стабилитрона —
дифференциальное сопротивление /?,-, измеренное при некотором
токе 1Ъ. В математической модели стабилитрона' Rt = гб +
+ тфг2//&, где г6 — объемное сопротивление тела базы. Отсюда
находится параметр /жрг2.
Из условия совпадения некоторой точки реальной ВАХ в
предпробойной области (на нелинейном участке, где уже заметен рост
обратного тока) с соответствующей точкой аппроксимирующей
характеристики находится U'. Пусть координаты этой точки (1аг
Ua). Тогда /а ^ 1Т2 ехр [(£/' — Ua)lm^T2\, откуда и определяется U'.
* Таким образом, окончательно модель диода выпрямительного,
импульсного или высокочастотного типа представляется в виде
дифференциального уравнения
dU/dt=(l/C)(I—Jm)9
где / — функция переменных состояния схемы и, следовательно,,
определяется в математической модели схемы, в состав которой
входит диод, С и /акт — функции только одной переменной
состояния, а именно напряжения на переходе диода О:
/акт = /д + £//ЯУ; /д = /т-{ехр[1//(тфГ)]-1};
С = Сбо [Фо/(Фо - Ц)]я + (т/тфг) (/д - /г).
Электрическими параметрами модели являются ITy rru$T, Ry9,
Сбо» Фо> п> т- Кроме того, в состав модели входит выражение
закона Ома для сопротивления базы гб, которое определяется или
по (3.26), или рассматривается как постоянная величина.
Соответственно к параметрам модели нужно добавить коэффициенты
аппроксимации kx и k2 ИЛИ Гб.
Подобная модель обеспечивает, как правило, достаточную
точность .анализа.
59
Модель туннельного диода. Эта модель должна иметь прежде
всего иное выражение для В АХ. Кроме того, в эквивалентной
схеме обычно не учитывают сопротивление гб, так как туннельные
диоды изготовляют из низкоомных полупроводников.
Существующие модели туннельных диодов различаются выражениями для
В АХ, чаще всего получаемыми в результате аппроксимации
экспериментальных характеристик. Одно из таких выражений
следующее: I = AU ехр (—aU) + В [exp (bU) — 1], где первое
слагаемое отображает туннельную составляющую общего тока /; второе
слагаемое — диффузионную составляющую; коэффициенты
аппроксимации Л, S, а и b приняты в качестве параметров диода, U —
напряжение на переходе.
§ 3.3..МАТЕМАТИЧЕСКИЕ МОДЕЛИ БИПОЛЯРНЫХ ТРАНЗИСТОРОВ
Основной вариант модели биполярного транзистора. Результаты
предыдущего параграфа можно использовать и при моделировании
биполярных транзисторов у
представляющих собой
совокупность двух р-п-перехо-
дов, выполненных в
монокристалле полупроводника и
разделенных тонкой базой.
Рассмотрение проведем
применительно к р-я-р-транзис-
торам. Полученные при этом
уравнения будут полностью
применимы и к п-р-п-трап-
зисторам, если
положительные направления токов р-п-
переходов считать обратными
по отношению к
направлениям токов в р-я-р-транзис-
торах.
На рис. 3.4, а
схематически представлена
структура транзистора, которую
можно условно разделить в
направлении оси х на
области эмиттера, базы,
коллектора и обедненные области
эмиттерного {хг < х < х3) и
коллекторного (#4 < х < хь) переходов. В направлении оси у
база может быть разделена на активную 2 и пассивную 1 зоны.
На рисунке показана схема протекания токов в транзисторной
структуре в статическом режиме. Здесь /э, /б, /к — токи через
выводы эмиттера, базы и коллектора.
Токи переходов можно разделить на диффузионные и
дрейфовые составляющие. Дрейфовые составляющие на схеме не показаны,
Рис. 3.4. Биполярный транзистор:
a — структура транзистора и схема
протекания токов; б — эквивалентная схема для
модели транзистора ПАЭС
60
а диффузионные составляющие в свою очередь разделены на
дырочные и электронные токи. Дырки, инжектируемые эмиттером в базу,
и дырки, инжектируемые коллектором в базу, частично рекомби-
нируют в ней, образуя рекомбинационный ток, а частично
достигают противоположного перехода. Общий дырочный ток через эмит-
терный переход обозначен /рэ, а через коллекторный переход 1рк.
В частном случае активного режима работы, когда эмиттерный
переход открыт, а коллекторный закрыт, 1рэ есть только ток инжек-
ции дырок эмиттером, который разветвляется в рекомбинационный
ток базы и ток 1рк дырок, достигающих обедненной области
коллектора и выбрасываемых в коллектор под действием сильного
ускоряющего поля обедненной области. Рекомбинация происходит во
всей области базы. Имея в виду получение в дальнейшем модели
транзистора с сосредоточенными параметрами, представим
распределенный рекомбинационный ток в виде двух сосредоточенных
составляющих /рек.э и /рек. к- Тем самым ток переноса /г
определяется Как /г = 1рэ — /рек.э-
Электронная составляющая эмиттерного диффузионного тока 1пэ
не создает переноса носителей между эмиттером и коллектором,
так как для основных носителей в базе переходы создают не
пропускающий электроны потенциальный барьер. Поэтому ток 1пэ
полностью входит' в ток базы. Сумму рекомбинационного тока
/рек.э и электронного тока 1пэ обозначим /э д. Аналогично, /кд
есть сумма рекомбинационного тока /рек#к и электронного тока 1пк
коллекторного перехода в активной зоне базы, но в /кд
дополнительно входят дырочный и электронный токи Грк и ГПКУ относящиеся
к пассивной зоне базы. Токи ГРк и 1'пк не вносят вклада в ток
переноса /г.
Теперь задачу получения математической модели транзистора
можно представить" следующим образом: нужно связать токи /г,
/э.д и /к.д с напряжениями на эмиттерном U9 и коллекторном UK
переходах. Тогда, представив эти токи как зависимые источники
тока, можно от схемы токов (рис. 3.4, а) перейти к исходному
варианту эквивалентной схемы транзистора. Дополнив эту схему
емкостями эмиттерного Сэ и коллекторного Ск переходов,
сопротивлениями утечки переходов Ry э и RyK и объемными
сопротивлениями тел базы г'а и коллектора Гк, получим полную
эквивалентную схему транзистора, показанную на рис. 3.4, б (объемное
сопротивление тела эмиттера мало и его можно не учитывать).
Математическое описание процессов в эквивалентной схеме и
будет являться математической моделью транзистора.
При получении зависимостей /г, /э д и /к д от £/э и UK (при
получении статических ВАХ транзистора) будем считать, что
распределение примесей в базе экспоненциальное, концентрация доноров
ЛГд = ЛГд.эехр(— ах), (3.27)
где ЛГД.Э = N, (х3); а = [ In (NA (x^/N^)] (l/W), W = Xi-x3-
ширина базы.
61
При экспоненциальном распределении примесей напряженность
поля в базе постоянна: Е = аут.
Выражение (3.27) достаточно точно описывает реальное
распределение примесей в базах современных транзисторов. Поскольку
со вводом (3.27) было снято допущение об электрической
нейтральности базы, то дифференциальное уравнение, описывающее
распределение дырок вдоль оси х в активной зоне базы и получаемое из
одномерных уравнений непрерывности и переноса, принимает вид
р/тр + Dpadp/dx — Dp d2p/dx2 = О,
где р — только избыточная концентрация дырок в базе.
Решением этого уравнения будет
р (х) = Аг ехр (тгх) + А2 ехр (пг2х)%
где m1 = a/2 + g\ m2> = a/2-g\ g = Y(a/2)2 + l/Ц.
Граничные условия суть уравнения переходов (3.9):
Рбэ = Рбэо ехр р/в/(т<рЛ)]; Рбк = Рбко ехр [£/к/(тфГк)],
где р6э = р (*3), Рбк = Р Му Рбэо и р6к0 — равновесные
концентрации дырок в базе при х = х3 и х = л:4; тц>Тъ и mq>TK —
температурные потенциалы эмиттерного и коллекторного переходов.
Полагая х3 = 0 и определяя Ах и А2 из граничных условий,
получаем следующий закон распределения избыточных дырок
вдоль оси х в базе: р (х) — р6э {[ехр (mlW) ехр (т2х) —ехр (m2W)
ехр (/%*;)]+ рбк [ехр (т^)—ехр (га2х)]}/[ехр (m1W)— ехр (m2W)].
Отсюда можно найти производную dp/dx и определить ее
значения при х = О и х = W. Подставив первое из этих значений
в уравнение переноса (3.66), предварительно умножив (3.66) на
площадь эмиттерного перехода S9, получим выражение для тока 1рэ.
Таким же образом, используя dp/dx в точке х = W, определим
выражение для тока /рк. Разность 1рэ и 1рк есть рекомбинацион-
ный ток /рек, оказывающийся суммой двух слагаемых:
/рек = £i ехр [£/э/(т<рГэ)] + Б2 ехр [£/к/(тфгк)]> (3.28)
где Б1и Б2 — коэффициенты, зависящие от структурных параметров
а> Lp, Dp, S9, W, рбэ0, рбк0. Практическое значение имеют
зависимости от структурных параметров только для коэффициентов,
которые будут фигурировать в окончательных уравнениях модели
и, следовательно, будут являться электрическими параметрами
транзистора. Формулы их связи со структурными параметрами
приводятся как итоговый результат. Опуская детали
промежуточных выкладок, рассмотрим, как получаются окончательные
результаты.
Так как /рек = /рек.э + /рек.к» то с учетом (3.28) можно принять
/рек. э = Бг ехр [£/э/(/пфгэ)]; /рек. к = Б2 ехр [UJinvpTj].
Для определения токов /,гэ, /як, Грк и Гпк нужно проделать
выкладки, аналогичные выкладкам при получении токов /рэ и
62
/ ; составить дифференциальное уравнение, описывающее
распределение электронов или дырок в соответствующей области
транзисторной структуры (при этом можно считать, что поле в областях
эмиттера и коллектора отсутствует). Далее нужно решить
составленные уравнения и найти распределения свободных электронов
в эмиттере, коллекторе и дырок в пассивной зоне базы. Находя
производные концентраций дырок и электронов и подставляя их
в уравнение переноса для соответствующей области структуры
транзистора, получают уравнения для /„э, /як, 1Рк и 1„к (первый из
этих токов — экспоненциальная функция 0ЭУ а три остальных —
экспоненциальные функции UK).
После этого возможно записать окончательные выражения для
токов /э.д, /к<д и /г:
/э.д = 1тъ { ехР WJ (/жрГэ)) — 1}; /к.д = /Гк { ехр [£Ук(тсрГк)] — 1};
/г = В1ЪЖ — Ви /к.д> гДе тепловые токи эмиттерного 1Тэ и
коллекторного 1тк переходов и коэффициенты В, Ви передачи тока базы
в нормальном активном режиме и в инверсном активном режиме —
электрические параметры транзистора. Их связь со структурными
параметрами выражается формулами:
Iib-qb9\Dpp«0\j + g -^щ j+д,, — },
U-a\n О Г9 [0 ch{$W) а\ с ехр(-д1Г/2)] .
Ы ~ Я \РбкО»р [Ьк \g -щ^щ - yj - <Ь9 sh{gW) J +
+ D/ik5k£); [(3.29)
__ qDpgp63 05э ехр (alF/2)
^~ sh (gr) IT9 ;
__ qSBDpgp6K0exp(— aW/2)
**»- sh(gW)ITK
где D„'K, LWK, пк0 — соответственно коэффициент диффузии,
диффузионная длина и равновесная концентрация электронов в
коллекторе; D„9, Ln9 ипэ0 — то же, в эмиттере; SK — площадь
коллекторного перехода.
Формулы (3.29) полезны при проектировании интегральных
схем, поскольку позволяют рассчитать электрические параметры
по известным структурным параметрам. Непосредственно при
анализе принципиальных схем используются электрические
параметры, с ними и приходится иметь дело при применении
программ анализа электронных схем.
Таким образом, полученный вариант модели биполярного
транзистора представляет собой систему двух дифференциальных
уравнений [4]:
dUd/dt=(l/Cd)(h-I
dUjdt = (l/CK)(IK-
'акт*э); 1 (3.30)
' акт. к) > )
где /э и /к — токи через внешние выводы эмиттера и коллектора,
являющиеся функциями переменных состояния схемы, в состав
63
которой входит транзистор; U3 и UK — падения напряжения на
переходах, Сэ, Ск, /акт>9 и /акт.к определяются через UB и UK и
параметры модели по формулам:
'акт. э — 'э. д "Т" ^гТ^э/Ау. э»
' акг. к = ' к. д * г ~Г ^ к/*\у. к»
}
(3.31)
(3.32)
•:}
к» J
/9. д = 1тъ {ехр [^/9/(тфГэ)] - 1};
/к. д = /Гк 1ехР [^к/(^ФГк)] - 1};
/г = В/9. д — Ли/К. д; (3.33)
тФгэ I (3.34)
Ск = Сбко [фко/(фко-^К)ГК + [тв/(тфГ«)] (/к. д ~/гк). )
Здесь транзистор характеризуется следующей группой
параметров: тепловые токи переходов 1Тэ> 1тк\ температурные
потенциалы /пф7-9, тф7-к; сопротивления утечек Ry э, #у к; контактные
разности потенциалов ф90, фк0; коэффициенты, зависящие от
характера перехода, /г9, пк\ нормальный и инверсный коэффициенты
усиления тока В, Би; постоянные времени диффузионных емкостей
т, тп, называемые также эффективным временем жизни неосновных
носителей базы соответственно при нормальном и инверсном
включении транзистора; объемные сопротивления тел базы гб и
коллектора г'к\ Сбэо и Сбко — барьерные емкости переходов при нулевых
напряжениях смещения.
Такая модель транзистора, будучи сравнительно простой,
обеспечивает вполне удовлетворительную точность анализа
большинства переключательных электронных схем. По этой 'причине она
и равноценные ей по точности и сложности варианты модели
транзистора получили наиболее широкое распространение в
программах анализа нелинейных схем. Так, рассмотренный вариант модели
был реализован в отечественных программах ПАЭС, АКИМ, ПА1.
Другие модели биполярного транзистора. Первой нелинейной
моделью транзистора была модель, предложенная Эберсом и Мол-
лом в 1954 г. В ней не учитывались барьерные емкости переходов и,
кроме того, проводимости переходов представлялись как
комплексные функции частоты. Эти обстоятельства не позволяли
непосредственно использовать модель Эберса—Молла для машинного
анализа схем. Однако оказалось нетрудно модифицировать эту модель
для целей анализа на ЭВМ. Примером такой модификации служит
модель, используемая в американской программе анализа NET-1.
Эквивалентная схема для такой модели представлена на рис. 3.5, а.
Уравнениями модели являются такие же, как в модели ПАЭС,
дифференциальные уравнения:
dUjdt = (/э - /акт. 9)/С9; dUjdt = (/к- /акт. К)/Ск,
но токи /акт#э и /акт>к определяются по другим формулам:
•«акт. э == *э 0£и/к Т^э/^у. э»
'акт. к == * к Ot/ э ~Т ^ к/Ау, к»
64
где /э = ^зо { exp lUB/(m<pn)] — 1}, К = /к0 { ехр [£/к/(шфтк)] — 1}.
Коэффициенты усиления тока транзистора при его включении
по схеме с общей базой а и аи в модели зависят от напряжений
на переходах:
а = Я/(5+1); аи = 5и/(5и+1);
5 = а0 + axU9 + oaf/» + fl8£/S; ВИ = Ь0 + bxUK + 62t/2K + bJJ^
где а* и ft/ (i = 0, 1, 2, 3) определяются экспериментально и являются
параметрами транзистора. Для емкостей переходов используют
формулы, аналогичные (3.18).
Из сравнения моделей программ ПАЭС и NET-1 видно, что
система параметров первой из них более удобна. Действительно,
тепловые токи переходов
1Тэ и /гк имеют более
ясно выраженный
физический смысл, чем токи /э0
и /ко- Кроме того,
параметры модели ПАЭС 5, Ви
являются параметрами,
измеренными при включении
транзистора по наиболее
распространенной схеме с
общим эмиттером (в
программе NET-1
используются менее удобные
параметры транзистора,
включенного с общей базой).
Более просто
интерпретируется с физической точки
зрения и природа каждой
ветви в эквивалентной
схеме, соответствующей
модели ПАЭС. Указанные
удобства системы параметров и эквивалентной схемы дают
возможность получения более точных моделей транзистора путем
разбиения его структуры на большее число областей (секций)
в направлении осей х или у и описания каждой области
источниками /г, /рек и диффузионной емкостью, отражающей
накопление заряда подвижных носителей в этой области. Но в модели NET-1
учитываются зависимости коэффициентов усиления а и аи от
напряжений на переходах. Однако такие зависимости можно легко
ввести и в модель ПАЭС, если согласиться на увеличение общего
числа ее параметров.
Другим вариантом модифицированной модели Эберса—Молла
является модель, разработанная для программы ПАЭС-1 [30],
называемая далее моделью ПАЭС-1. Эквивалентная схема этой
модели изображена на рис. 3.5, б, а уравнениями модели являются
дифференциальные уравнения (3.30)/ в которых
'акт.э == 'диф.э+' рэ + ^э/Ау.э •'к'» 'акт. к = ' диф. к + 'рк + ^к/Ау.к— 'э>
Рис. 3.5. Эквивалентные схемы биполярного
транзистора:
а — для модели NET-1; б — для модели ПАЭС-1
65
где/дИф.э = /.oi fexp (UB/ffT) — 1]; /диф.„ = /к01 fexp (UJ<pT) — U;
fPs = /э02 { exp (£/э/(2Фг)] - 1}; /Рк = /ко2 {exp [£/к/(2Фг)] - 1};
/э = *U (/диф.9 + хэ/рэ); 1к = Лк (/диф.к + *K/pK). ЗдеСЬ ИСПОЛЬ-
зуется кусочно-линейная аппроксимация зависимостей
коэффициентов г)э и г)к от напряжений на переходах, /э01, /к01, /э02, /к02, хэ, хк
относятся к параметрам модели. Барьерные и диффузионные емкости
переходов определяются, как и в модели ПАЭС, с той разницей,
что для области прямых смещений переходов барьерная емкость
определяется по (3.25), а в (3.34) для Сдиф вместо тц)Т фигурирует фГ.
Всего в модели транзистора, входящей в программу ПАЭС-1,28
параметров, не считая температурных коэффициентов.
Преимущества модели ПАЭС-1 — более строгий учет генерации
и рекомбинации носителей в обедненной области перехода за счет
разделения тока перехода на составляющие, определяемые
величинами exp (t//q>r) и exp [£//(2<pr)l; разделение объемного
сопротивления 'базы на три составляющие, что точнее отражает
реальные пути протекания базового тока. Эти особенности позволяют
более точно моделировать прежде всего входные характеристики
транзистора. Большая точность модели ПАЭС-1 достигнута за
счет ухудшения ее экономичности. Действительно, по сравнению
с моделью ПАЭС вырос объем вычислений, а общее увеличение числа
параметров повышает трудоемкость их измерения.
Следующей за моделью Эберса—Молла была предложена
зарядовая модель транзистора, нашедшая применение в программе
анализа CIRPAC. Однако эта модель не имеет каких-либо
преимуществ перед моделью Эберса—Молла.
Перечисленные модели позволяют определять выходные
параметры переключательных схем с погрешностями, редко
превышающими 20% (типичные значения погрешностей 5—15%). Однако
заранее предсказать погрешности еу- определения выходных
параметров не удается. По этой причине стараются машинный анализ
сопровождать ограниченным количеством экспериментов,
выполняемых в режимах, наиболее легко воспроизводимых на
экспериментальном макете.
Типичные значения параметров транзисторов. В заключение
параграфа рассмотрим типовые численные значения параметров
транзисторов при комнатной температуре применительно к
двухсекционной модели ПАЭС.
Статические параметры р-я-переходов (тепловые токи и
температурные потенциалы) совместно с объемным сопротивлением
тела базы определяют по результатам измерений координат не менее
чем трех точек ВАХ переходов. Под ВАХ здесь понимают
зависимости тока базы от напряжения на эмиттерном переходе в активной
области работы транзистора и от напряжения на коллекторном
переходе в инверсной активной области работы транзистора. По
точкам первой из этих характеристик определяют тепловой ток 1Т99
температурный потенциал тфгэ эмиттерного перехода и объемное
сопротивление те та базы гб. По точкам второй из этих
характеристик находят параметры 1Т&, /яфгк коллекторного перехода,
66
а также сопротивление тела базы гбк (значения гб и гбк различны
вследствие неодинаковости путей протекания базового тока в
активном и инверсном активном режимах работы транзистора).
Поэтому в модели ПАЭС-1 объемное сопротивление тела базы,
разделенное на три самостоятельных сопротивления, моделируется
более точно. В моделях типа ПАЭС за объемное сопротивление
тела базы принимают значение гб. Обычно у маломощных
транзисторов (а их подавляющее большинство в логических схемах ЭВМ)
сопротивление г6 составляет десятки, реже сотни ом.
Температурные потенциалы тцТв и тц)Тк находятся в более
узком диапазоне (для германиевых транзисторов они составляют
0,025—0,035 В, причем чаще пг<рТк несколько меньше тцТъ\ для
кремниевых транзисторов тц)Тк и т<рТэ на 20—30% больше).
Тепловые токи у разных типов транзисторов могут изменяться
в очень широких пределах. Так, для германиевых и кремниевых
маломощных транзисторов 1Тк составляет соответственно 10~2 -г- 10"4
и 10~7 -*- 10~12 мА. Ток 1Тэ обычно на один-полтора порядка меньше,
чем ток 1Тк. Порядок величины теплового тока влияет прежде всего
-на прямое падение напряжения на переходе £/пр.
Сопротивления утечки переходов Ryb и RyK в большинстве
схем ЭВМ не оказывают существенного влияния на их выходные
параметры (обычно значения Ry э и RYtK лежат в диапазоне от
сотен килоом до тысяч мегаом).
* Один из важнейших параметров транзисторов — коэффициент
усиления В тока. Значение коэффициента В часто существенно
влияет на выходные параметры схем, поэтому при машинных
расчетах его стараются задать по возможности наиболее точно. (Обычно
коэффициент В составляет десятки и реже оказывается в диапазоне
100—300 единиц.) Значения коэффициента В транзисторов в
отличие от рассмотренных выше параметров приводятся в
справочниках. В ряде моделей транзистора учитывается зависимость
коэффициента В от тока /э#д и напряжения UK. В активной области
и при статическом режиме работы транзистора ток /ЭжД примерно
равен току /б. Поскольку измерения коэффициента В не
представляют сложности, то нетрудно, измерив В при разных токах и
напряжениях UKJ подсчитать коэффициенты аппроксимирующих
зависимостей В от /б и UK.
Инверсный коэффициент усиления Ви, как правило* мало влияет
на выходные параметры схем. Значения коэффициента Вш у
бездрейфовых транзисторов составляют 1 -*- 5, у дрейфовых —
0,01 -*■ 0,5.
Инерционные свойства транзисторов определяются параметрами
т> ти> Сбэ и Сбк. На динамические параметры схем на
низкочастотных транзисторах главное влияние оказывают параметры т и тн.
Параметр т определяют по приводимому в справочниках значению
граничной частоты fB коэффициента усиления В или частоты fa
коэффициента а» усиления : т = (В + 1)/(2я/а) = 1/(2jt/b).
Параметр ти у бездрейфовых транзисторов обычно на 10—30% меньше т,
а у дрейфовых транзисторов — больше т в 2—б раз.
67
В схемах на высокочастотных транзисторах относительное
влияние Сбк и Сбэ на их выходные параметры повышается по
сравнению с влиянием т. Значения Сбк обычно приводят в
справочниках, и они составляют для бездрейфовых транзисторов 30—60 пФ,
а для дрейфовых—0,3—12 пФ. Значение Сбэ примерно равно
значению Сбк.
Объемное сопротивление тела коллектора гк у дрейфовых
транзисторов составляет 10—40 Ом, а у бездрейфовых транзисторов
оно мало и может не учитываться.
Г^\
1
'
к *" nJ
5'
-« *-
CD—п
—J" \
р 1
/7
§ 3.4. ОСОБЕННОСТИ МОДЕЛЕЙ ИНТЕГРАЛЬНЫХ
БИПОЛЯРНЫХ ТРАНЗИСТОРОВ
Особенностями биполярных интегральных транзисторов,
оказывающими наибольшее влияние на их моделирование, являются:
1. Наличие более сложных полупроводниковых структур,
нежели структура, состоящая из трех областей чередующегося типа
проводимости.
2. Тенденция к повышению быстродействия ИС и усложнению
структуры компонентов, приводящая к уменьшению точности
s моделирования с помощью
эквивалентных схем с
сосредоточенными параметрами.
3. Повышение трудности
экспериментального' контроля
точности моделирования.
Модель интегрального
транзистора. В настоящее
время наибольшее
распространение получили ИС, в
которых компоненты
изолированы друг от друга обратно смещенным р-/г-переходом. В
таких схемах транзистор представляет собой трехпереходную
структуру (рис. 3.6). Несмотря на то что изолирующий переход
всегда заперт (благодаря подаче на р-подложку наиболее низкого
потенциала из имеющихся в схеме), он оказывает влияние на
процессы в транзисторе. Во-первых, это влияние происходит через
посредство барьерной емкости и обратного тока изолирующего
перехода. Во-вторых, если основной я-р-я-транзистор оказывается
в режиме насыщения, то паразитный р-д-р-транзистор будет в
активной области и, следовательно, дырки, инжектированные из
базы в коллектор, будут собираться подложкой (этот дырочный ток
удается сделать довольно малым благодаря большой ширине
коллекторной области и поэтому малого коэффициента усиления Ви
тока паразитного транзистора).
Модели транзистора, рассмотренные ранее, наиболее просто
модернизируются применительно к трехпереходной структуре с
помощью построения эквивалентных схем, в которых отображаются
элементы паразитного р-я-р-транзистора. Математическое описа-
Рис. 3.6. Структура интегрального
биполярного транзистора:
б' —• активная зона базы; Я — подложка
68
яие процессов в такой эквивалентной схеме представляет собой
модель интегрального транзистора.
Примером эквивалентной схемы интегрального транзистора
служит схема, показанная на рис. 3.7, где указано, на какие секции
разбивается структура транзистора при одномерном приближении.
Модель транзистора, соответствующая этой схеме, выражается
следующими уравнениями:
dUjdt = (1/Сэ) (/. - /акт. 9); dUjdt = (1/Ск) (7К - /акт. к - /п);
Л/п/Л = (1/Сп)(/п-/.„.п);
ГДе /акт.э == 'э.д | 'г> •'акт.к == *к.д 'г 'гП> -*акт.П == 'Пд *Г.П
1/э.д» Лсд и /Пд определяют по (3.23)], /г = В/Э.д — £и/к п; /рП =
= В7К
Ви/пд; для определения емкостей переходов используют
1?
Ж
Jr
ф
зл
2Г1
^ф;р
Ш
/!,'
'г/,
■е-
ДГ
Efc
Рис. 3.7. Эквивалентная схема интегрального
биполярного транзистора:
/ — переход эмиттер — база; // — область базы; /// —
переход коллектор — база; IV — область коллектора; V —
переход коллектор — подложка; П — подложка
формулы (3.18); 5' и Ви — прямой и инверсный коэффициенты
усиления тока паразитного р-я-р-транзистора, сопротивления утечек Ry
переходов обычно не учитываются.
Модели многоэмиттерного транзистора. Распространенный
компонент в ИС — многоэмиттерный транзистор. На рис. 3.8, а
показан пример конфигурации четырехэмиттерного транзистора в
плане. Каждый ft-эмиттерный транзистор можно представить как
совокупность п транзисторных структур и каждую структуру в свою
очередь — эквивалентной схемой (см. рис. 3.4, б, рис. 3.7).
Полученная при этом эквивалентная схема для п = 2 показана на рис. 3.8, б.
Здесь элементы эквивалентной схемы диода (источник /д и емкость
Сд) моделируют часть перехода коллектор—база, соответствующую
пассивной зоне базы. При построении схемы не учитывалось
взаимное влияние эмиттеров через торцовые части переходов эмиттер—
база, так как расстояние между ними достаточно велико и
коэффициенты передачи тока от одного эмиттера к другому
пренебрежимо малы. Объемные сопротивления базы и коллектора разбиты
на части, причем гб1, гб2, гК1, гК2 соответствуют автономным путям
протекания токов каждой транзисторной структуры, а гбз и г£3 —
областям структуры, где токи сливаются. Для простоты на схеме
не показан переход коллектор—подложка. Эту схему можно
упростить, если объединить базовые сопротивления в одно сопротив-
69
ление гб, а коллекторные сопротивления — в сопротивление г'к,
что равносильно допущению — разность потенциалов одинакова по
всей площади коллекторного перехода. Тогда эквивалентная схема
принимает вид, показанный на рис. 3.8, в, но соответствующая этой
схеме модель транзистора оказывается недостаточно точной.
Источники погрешностей моделей транзисторов. Главные
причины погрешностей моделей типа Эберса—Молла заключаются
в замене дифференциальных уравнений в частных производных
Рис. 3.8. Многоэмиттерный транзистор:
/ — области эмиттеров; 2 — область базы; 3 — контакты эмиттеров; 4 — область кол-
лектора; 5 — контакты базы; 6 — контакт коллектора
системой обыкновенных дифференциальных уравнений с порядком,
равным количеству р-я-переходов. С физической точки зрения
такая замена приводит к следующим основным нежелательным
последствиям: не учитывается эффект вытеснения токов переходов,
упрощенно описываются процесс рассасывания неосновных
носителей из области базы после достаточно глубокого насыщения
транзистора и процесс распространения перепада избыточной
концентрации неосновных носителей через базу от эмиттера к коллектору.
Эффект вытеснения тока отсутствовал бы в случае г6 = 0.
Тогда потенциал любой точки активной зоны базы на границе
с областью эмиттерного перехода был бы одинаков. Однако г6 Ф О
и протекающий вдоль оси у (см. рис. 3,6) базовый ток обусловливает
непостоянство потенциала и, следовательно, неодинаковость
смещения перехода вдоль оси у. Если переход открыт, то ток через
70
него будет уменьшаться по направлению от базового контакта.
Но вытеснение тока в сторону базового контакта не учитывается
в уравнении ВАХ (3.23), что является следствием допущения об
одномерности модели. Описание процесса рассасывания неосновных
носителей в одномерных моделях связано с отсутствием учета
накопления заряда носителей в пассивной зоне базы. При глубоком
насыщении этот заряд распространяется в глубь пассивной зоны и его
отождествление с зарядом сосредоточенной диффузионной емкости
перестает быть корректным.
Упрощенное описание процесса
распространения неосновных
носителей в базе вдоль оси. х —
следствие устранения трех
пространственных координат при моделиро-
а)
о-
yt
I
Нг
5)
й*
Чз
JEH
JBo
ndf
I
г3
Рис. 3.9. Концентрация
инжектированных в базу дырок
для различных моментов
времени
Рис. ЗЛО. Эквивалентная схема
транзистора по Линвиллу
вании процессов в базе с помощью уравнения зарядов (3.12). Рис. 3.9
иллюстрирует характер зависимости концентрации р х>т
координаты х в реальном бездрейфовом транзисторе (пунктирные линии)
при подаче идеального перепада отпирающего тока в эмиттерный
переход и характер той же зависимости в модели на основе (3.12)
(сплошные линии). На рисунке кривые 1У 2, 3 соответствуют
последовательным моментам переходного процесса (например, кривая 1
относится к более раннему моменту). Практическим следствием
использования (3.12) является некоторое уменьшение задержки
импульса коллекторного тока в модели по сравнению с
экспериментом.
На первый взгляд, может показаться, что в двухсекционных
моделях полностью игнорируются все отмеченные выше эффекты:
вытеснение тока, накопление заряда в пассивной зоне базы,
задержка распространения носителей в базе и т. п. Но это неверно,
если электрические параметры моделей измеряются на реальных
образцах приборов. Тогда в результате измерений будет учтено
71
некоторое усредненное влияние всех перечисленных факторов.
Недостаток двухсекционных моделей — усредненное (интегральное)
отображение эффекта вытеснения тока, процесса рассасывания
неосновных носителей и процесса распространения носителей
вдоль базы.
Направления работ по более точному моделированию
интегральных транзисторов. Первое направление (см. § 3.2) —
повышение точности моделей — связано с созданием многосекционных
эквивалентных схем и моделей. Предложение использовать
многосекционные модели транзисторов впервые было сделано Д. Лин-
виллом. В модели Линвилла вся структура полупроводникового
компонента разбивается на некоторое число одинаковых секций.
Эквивалентная схема одной секции модели Линвилла представлена
на рис. 3.10, а, где Нс — элемент, отражающий явление
рекомбинации носителей; S — элемент, отображающий накопление заряда;
Hdf — элемент, отражающий перенос носителей вследствие дрейфа
и диффузии. Если транзисторную структуру разбить только на
две секции, то получится двухсекционная эквивалентная схема,
изображенная на рис. 3.10, б. Назовем эту схему п-секционной.
Данной схеме соответствуют уравнения:
/. = NB (Hdf + Нсэ) - NKHdf + d (SJtJ/dt + С Бэ (dUB/dt);
/к = ВД*/ - ^к (Hdf + Нск) - d (SKNK)/dt + С БК (dUjdt),
где Сбэ и Сбк — барьерные емкости, a JV9 = exp [UJ{mq>TB)] — 1
и NK = exp WK/(m(pTK)] — 1.
Результаты анализа с использованием двухсекционной модели
Линвилла и других двухсекционных моделей совпадают.
Действительно, имеется однозначное соответствие между ветвями
эквивалентных схем, показанных на рис. 3.4, б и ЗЛО, б: Hdf
соответствует /г, Нсэ и Нск — источникам /э д и IKR\ Свэ и S3 — емкости Сэ,
а Сбк и 5к — емкости Ск. Ветви Ry э и RyK (см. рис. 3.4, б) можно
ввести и в схему, изображенную на рис. ЗЛО, б.
Многосекционная модель Линвилла позволяет правильно
моделировать рассмотренные выше эффекты. Однако это может
произойти лишь при разбиении структуры транзистора на очень большое
количество секций. Практически затраты машинного времени на
анализ схем остаются выше желаемого уровня даже при
использовании сравнительно простых моделей типа Эберса—Молла. В связи
с этим приходится ограничиваться минимальным количеством
секций в модели Линвилла, т. е. использовать схему, показанную
на рис. ЗЛО, б. Но, как было показано выше, в этом варианте
модель Линвилла не имеет преимуществ перед другими моделями той
же точности. К тому же система параметров модели Линвилла
непривычна для инженера-схемотехника и не может быть
непосредственно измерена. И хотя идея методики Д. Линвилла о разбиении
структуры на ряд секций теоретически полезна, сама модель
Линвилла нашла ограниченное практическое применение. Примером
одной из программ, где используется модель Линвилла, является
программа АСАМС-Ф [2].
72
Частный случай многосекционной модели — модель, при
получении которой структура транзистора разбивается на ряд секций
вдоль оси у в пределах только активной зоны базы, причем каждая
секция представляется какой-либо из простых моделей транзистора,
например- моделью программы ПАЭС. В такой модели будет тем
точнее отражен эффект вытеснения тока переходов, чем больше
количество секций.
Второе направление повышения точности моделей связано
с поиском решений уравнений в частных производных (3.5) ч- (3.7)
при допущениях, не исключающие отражение в модели того или
иного из упомянутых выше эффектов. Однако многосекционные
модели и модели с уравнениями в частных производных
приводят к существенному росту затрат машинного времени и
практически могут использоваться только для анализа самих
транзисторов, но не анализа проектируемых электронных схем.
К третьему направлению относятся работы, в которых повышение
точности ищется на путях учета зависимостей параметров уже
имеющихся моделей от токов и напряжений на переходах.
Связь электрических и структурных параметров. В модели
ПАЭС связь электрических параметров транзистора с физико-
структурными и геометрическими параметрами устанавливается
с помощью формул (3.19), (3.20), (3.29). Но эти формулы получены
при принятии ряда допущений и иногда их точность может оказаться
неудовлетворительной. Тогда определение электрических
параметров по известным структурным параметрам должно
производиться путем решения систем уравнений, реализованных в
программах анализа транзисторов. Эти системы уравнений, в частности,
могут быть дифференциальными уравнениями в частных
производных или уравнениями многосекционных 'моделей.
§ 3.5. МАТЕМАТИЧЕСКИЕ МОДЕЛИ МДП-ТРАНЗИСТОРОВ
МДП-транзисторы (МОП-транзисторы) являются полевыми
приборами с изолированным затвором и имеют структуру
металл—диэлектрик—полупроводник, схематически показанную на рис. 3.11, а,
где И — исток; 3 — затвор (металл); Si02 — диэлектрик; С — сток;
Si — полупроводник; П — подложка. МДП-транзисторы
сравнительно легко реализуются с помощью интегральной технологии,
причем для МДП-схем характерна более высокая степень
интеграции, чем для биполярных схем. МДП-транзисторы позволяют
проектировать достаточно надежные и простые логические схемы ЭВМ,
не содержащие других компонентов, кроме МДП-приборов.
Однако униполярные схемы .имеют меньшее быстродействие, чем
биполярные.
Поскольку МДП-схемы — интегральные, то желательно, чтобы
в моделях МДП-транзисторов использовались физико-структурные
и геометрические параметры. Выполнить это требование
оказывается легче, чем для моделей биполярных транзисторов, поскольку
формулы связи электрических параметров с физико-структурными
73
и геометрическими параметрами для МДП-транзисторов более
простые.
Основу модели МДП-транзистора составляет формула для
статического тока стока Id в функции напряжений между стоком и
истоком Uс, затвором и истоком £/3 и подложкой и истоком Uп.
Эта формула определяет статические ВАХ прибора (рис. 3.11, б).
Инерционные свойства транзистора обусловливаются емкостью между
затвором и каналом С. Полная модель получается, как описание
с помощью законов Кирхгофа электрических процессов в
эквивалентной схеме, которая включает источник тока IdJ емкость С,
эквивалентные схемы переходов сток—подложка и исток—подложка,
а также омические
сопротивления
полупроводниковых областей стока Re и
истока #и, не
перекрываемых затвором.
ж.
SlOo
\UL
П
L
р* i !
' 1
SL
Граница оЫстей
I иЛ
^
Ч.
т
Сз-и
#
"В**
ОИ
Дс-п
Ди-п
Рис. 3.11. МДП-транзистор:
структура прибора; б -
рактеристики
стоковые ха-
Рис. 3.12. Эквивалентная
схема МДП-транзистора
Наиболее употребительна эквивалентная схема
МДП-транзистора, показанная на рис. 3.12. Здесь емкость затвора С разделена
на емкость затвор—исток Сз-и и емкость затвор—сток Сз—с-
Переходы сток—подложка и исток—подложка показаны в виде диодов
Дс-п и Ди—п.
Формула для тока Id получается из физических соображений
с принятием некоторых допущений. Для определенности будем
рассматривать МДП-транзистор с индуцированным каналом р-типа
(полученные результаты будут справедливы и для других
разновидностей МДП-транзисторов). Прежде всего можно считать, что ток
в канале есть результат только дрейфа основных носителей
(дырок) под действием электрического поля, создаваемого
напряжением стока £/с, т. е. уравнение переноса (3.7а) записывается в виде
Jd = qp\iEyy (3.35)
где Jd — плотность тока в канале; р — концентрация дырок;
\i — усредненная подвижность дырок в канале; Еу = — dqldy —
74
напряженность поля в канале; ф (у) — распределение потенциала
в канале вдоль оси у (см. рис. 3.11, а). При этом считается, что
вектор напряженности Е в канале есть Е^.
Перейдем от плотности тока Jd к току стока Idy для чего
умножим (3.35) на Wdx и проинтегрируем по глубине канала, где W —
*i
ширина канала: Id = q\nEyW $ pdx, где х± — граница канала и
о
обедненной области перехода канал—подложка (х = 0
соответствует границе между каналом и диэлектриком).
Теперь задача заключается в определении $ pdx. Для этого
о
рассмотрим электрические заряды, имеющие место в структуре
МДП. Заряд подвижных дырок обозначим Qp, зарядом подвижных
электронов Qn пренебрежем, так как этот заряд мал и, по
сделанному допущению, не влияет на ток Id, заряд на пластине затвора Q3
вызван напряжением затвора £/3, в обедненной области имеется
заряд неподвижных ионов Qc0 и, кроме того, на поверхности
раздела диэлектрик—полупроводник присутствует заряд Qn0B,
обусловленный, например, разностью работ выхода диэлектрика и
полупроводника, ловушками, образованными на границе раздела,
и т. п. В статическом состоянии алгебраическая сумма всех этих
зарядов равна нулю, т. е. Q3 + QP + Qc0 + QnoB = 0.
Пусть Qp, Q3, Qco и Qn0B суть заряды, приходящиеся на единицу
площади Д5 = Wdy. Тогда Qp = qWdy^ pdx и
о
Id = liEyQp/dy. ' (3.36)
Нужно выразить Q3, Qco и Qn0B через параметры МДП-тран-
зистора и подставить значение их суммы вместо значения Qp в (3.36).
Обозначим емкость затвора, приходящуюся на единицу площади,
через Су. Тогда Q3 есть заряд конденсатора с емкостью Су при
разности потенциалов между его пластинами Us — <р, т. е. Q3 =
= (£/з — ф) Су. При Q3 + Qco + QnoB = 0, что соответствует
границе между ситуациями «Qp = 0 — нет канала» и «Qp > 0 — есть
канал», напряжение на затворе имеет некоторое значение £/пор:
-(Qco + Q„c»)=^nopC1/, (3.37)
где Uuop — пороговое напряжение.
Поэтому
QP = - (Q3 + Qco + QnoB) = - (U3 - Ф - Uuop) Су. (3.38)
Формулой для Су является обычная формула емкости плоского
конденсатора Су = (8е0/£дл) Wdy, где е — относительная
диэлектрическая проницаемость слоя диэлектрика; е0 —
диэлектрическая постоянная вакуума; tAn — толщина слоя диэлектрика.
Подставим (3.38) в (3.36) и получим Id = — \лЕу (U3 — Ф — i/n0p) X
X (ее0//дд) W. Так как Еу = —dyldy, то Iddy = \i (ее0//дд) W (из —
75
— £/„op — ф) ^ф. Произведя интегрирование по длине канала от О
до L с учетом того, что ф (0) = 0 и ф (L) = £/ск> имеем
h = И [e*oW/(t»L)] [(U3 - f/nop) «/с, - ^ск/2], (3.39)
где £/Ск = Uс — Ic (Re + /?и), т. е. /7Ск есть напряжение стока
за вычетом падения напряжения на малых сопротивлениях Rc
и Rn (рис. 3.12).
Используя такой электрический параметр МДП-транзистора,
как р — удельную крутизну стоко-затворной характеристики,
запишем (3.39) в виде
la = Р [(Us - t/„op) ^ск - С/£к/2], (3.40)
где Р = jx [ее0Г/(/дл£)].
Так как полная емкость затвора
C = eEoWL/t„, (3.41)
то р можно выразить через С:
P-jxC/L2. (3.42)
Полученное выражение для Id справедливо до момента
перекрытия канала, т. е. в крутой области характеристик (область /
на рис. 3.11, б). Пологая область характеристик (область // на
рис. 3.11, б) соответствует режиму насыщения МДП-транзистора,
и ток Id в этой области в первом приближении не зависит от UcK.
Тогда для границы крутой и пологой областей из условия d/d/di/cK=
= 0 находим
UcK = U0 = U3-Unopi
где U0 — напряжение насыщения. Следовательно, подставляя U0
вместо Uqk в (3.40), получим формулу для Id в области насыщения:
/^р(£/з-£/Пор)2/2. (3.43)
Реальные стоковые характеристики в области насыщения имеют
отличный от нуля угол наклона к оси абсцисс, что говорит о
конечной величине дифференциального выходного сопротивления
прибора. Основная причина этого — модуляция длины канала
напряжением стока. Поэтому (3.43) можно уточнить, переписав в виде
ld = р (Us - £/„ор)2 (1+ / Ц/ск 1)/2,. (3.44)
где / — коэффициент модуляции длины канала.
В третьей возможной области работы транзистора — области
отсечки, характеризующейся отсутствием канала, ток равен нулю:
/, = 0. (3.45)
Выразим пороговое напряжение 1/пор через параметры
транзистора. Если бы напряжение между подложкой и истоком Un
оставалась постоянным, то напряжение Unop также было бы
постоянной величиной, т, е. параметром транзистора. Однако
напряжение Un может изменяться, а это приводит к изменению
76
ширины обедненной области и, следовательно, к изменению
заряда Qco- При этом, как видно из (3.37), будет изменяться и Unop.
Зависимость Unop от Un при некоторых допущениях может быть
получена в виде [8]
^пор = ^пор + Ь (V'Un + 2qv- V2<Vf)> (3.46)
где Unop — пороговое напряжение при Un = 0; <pF — контактный
потенциал материала подложки, т. е. расстояние в вольтах на
энергетической диаграмме между уровнем Ферми и серединой
запрещенной зоны я-полупроводника подложки;
b = (t,Jz)V2qNneKp/e0, (3.47)
где Nn — концентрация доноров в n-подложке; екр —
относительная диэлектрическая проницаемость кремния.
Итак, математической моделью МДП-транзистора является
система дифференциальных уравнений, описывающих перезаряд
емкостей в эквивалентной схеме рис. 3.12. Величина тока Id,
фигурирующего в этих уравнениях, определяется по формулам: (3.45) —
в режиме отсечки, (3.40) — в крутой области характеристик и
(3.44) — в режиме насыщения. Параметрами МДП-транзистора
при этом будут: р, С, Unop, by ср>, а также /?с, #и, / и параметры
закрытых переходов сток—подложка и исток—подложка. Связь
электрических параметров р, С и b с физико-структурными и
геометрическими параметрами выражается формулами (3.42), (3.41) и (3.47),
а для параметров (7Пор и <pF существуют формулы [8]: [/ПоР =
= -^Qno*-bVWF\ <Pf = Фг In (Nn/Nt), где Фг = KT/q -
ceo
температурный потенциал, Nt — концентрация электронов в
собственном полупроводнике.
Рассмотренная модель МДП-транзистора не является
единственно возможной. Так, находят применение модели, в которых
выражение для тока Id получают на основе феноменологического
подхода, -аппроксимируя тем или иным способом стоковые
характеристики. Иногда сочетают элементы теоретических и
феноменологических моделей, например удобным является выражение [23]
h= 1 (Us - Unop)*[l - ехр (и™%по J] + K{U3-Uuoly4Jc*, (3.48)
где второе слагаемое учитывает конечную выходную проводимость,
п = 1 -г- 2; К — постоянный коэффициент.
Формула (3.48) удобна тем, что справедлива для крутой и
пологой областей стоковых характеристик открытого транзистора.
§ 3.6. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ИНТЕГРАЛЬНЫХ
ПАССИВНЫХ КОМПОНЕНТОВ
К пассивным компонентам ИС относят резисторы и
конденсаторы.
Модели резисторов. В полупроводниковых ИС находят
применение резисторы пленочные и диффузионные. Более распростра-
77
нены диффузионные резисторы, поскольку они получаются в
подложке ИС одновременно с формированием областей транзисторной
структуры, показанной на рис. 3.6. Сопротивление резистора —
это сопротивление того или иного из слоев транзисторной
структуры, зависящее от концентрации примесей в слое и его
геометрических размеров. Чаще всего используется базовый слой и тогда
схематическое устройство диффузионного резистора иллюстрирует
рис. 3.13, а, где К — контакты. Эквивалентной схемой резистора
может служить схема, представленная на рис. 3.13, б, на которой
базовый слой дан сопротивлениями ARiy переход между базовым
и коллекторным слоями — диодами Д{, а изолирующий переход —
диодом Д". Чем больше количество секций ARt — Д£, тем точнее
моделируется распределенная структура, но тем хуже
экономичность модели. Учитывая, что диоды Д1 и Д" всегда закрыты, и
пренебрегая их обратными токами, можно в схеме на рис. 3.13, б
Рис. 3.13. Интегральный резистор
заменить эти диоды барьерными емкостями переходов. Разделяя
емкость перехода база—коллектор только на две составляющие,
получаем схему с емкостной звездой, от которой можно перейти
к схеме, показанной на рис. 3.13, в. Эта схема и используется
наиболее часто, как двухсекционная эквивалентная схема
диффузионного резистора. В этой схеме обычно принимается, что /?, Сх и С2
постоянны, хотя на самом деле они зависят от приложенных к р-я-пе-
реходам напряжений U\ Действительно, о зависимости барьерной
емкости от напряжения говорилось выше, а величина резистивного
слоя R зависит от величины напряжений V постольку, поскольку
изменение напряжения' U приводит к изменению размеров обед-*
ненной области перехода, что меняет и размеры собственно
резистивного слоя.
Основной электрический параметр резистора R связан с фи- <
зико-структурными и геометрическими параметрами так: R =
= psL/W9 где L — длина; W — ширина резистивного слоя; ps =
= 1 / lq § (х [Na (х) — Na (х)] dx\ — сопротивление участка слоя,
имеющего в плане форму квадрата (здесь \i — подвижность дырок в ре-
зистивном р-слое; Na (х) и Л^д (х) — концентрации акцепторных и
донорных примесей в резистивном слое; х — направление нормали
к поверхности структуры, причем х = 0 на верхней границе
резистивного слоя и х = h на нижней границе).
78
Пленочные резисторы имеют меньшие паразитные емкости,
чем диффузионные. Поэтому в ряде случаев можно емкостями Сг
и С2 пренебречь и рассматривать пленочный резистор, как
обычный дискретный резистор.
Модели конденсаторов. В качестве конденсаторов в ИС обычно
используют р-д-переходы, т. е. интегральный конденсатор имеет
структуру, изображенную на рис. 3.14, а, где К а и Кб —
контакты. Эквивалентной
5)
* fo
£_
/7
.SL02
1 р (
-T-W
Г2
Д1
ОБ
схемой такой
структуры будет схема на
рис. 3.14, б. Барьерная
емкость Сг перехода
между слоями базы и
коллектора,
показанного В виде ДИОДа Д1у Рис. 3.14. Интегральный конденсатор
является основной, а
емкость С2 перехода коллектор — подложка (диод Д2) —
паразитной. Такой конденсатор однополярный, т. е. потенциал точки А
должен быть всегда выше потенциала точки Б. В этих условиях
t диоды Д1 и Д2 всегда закрыты. Сопротивление R на этом рисунке —
' объемное сопротивление тела полупроводника. С2 и С2
определяются по формуле барьерной емкости р-я-перехода (3.18).
§ 3.7. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ИМПУЛЬСНОГО ТРАНСФОРМАТОРА
Трансформаторы испольауют в импульсных системах
элементов ЭВМ в дискретном исполнении, в схемах записи и
воспроизведения запоминающих устройств, в схемах сопряжения
аналоговой и цифровой аппаратуры и т. п. Эквивалентная малосигнальная
Рис. 3.15. Эквивалентные схемы двухобмоточного транс»
форматора
схема трансформатора, показанная на рис. 3.15, а, не годится для
анализа схем в режиме большого сигнала, так как она
несправедлива для постоянных составляющих токов и напряжений.
Для большей простоты изложения будем рассматривать модель
двухобмоточного трансформатора. Введем обозначения: L^ —
индуктивность обмотки трансформатора, принятой за первичную;
Lsl и L$2 — индуктивности рассеяния первичной и вторичной
обмоток; п = W2/Wx — коэффициент трансформации; Wx и W2 —
количества витков первичной и вторичной обмоток. На рис. 3.15, а
через L'S2 и R'H обозначены индуктивность Ls2 и сопротивление
нагрузки, приведенные в первичную обмотку; Rm — сопротив-
79
ление потерь на гистерезис. Представим трансформатор
эквивалентной схемой (рис. 3.15, б), для которой справедливы уравнения:
diUUydt^Ui-U^ (3.49)
d(Ls2Is2)/dt = U2 + nUll; (3.50)
d^I^/dt^U^ (3.51)
1* = 1*-и»/Ят-пи, (3.52)
где индексы \i, si, s2 у символов U и / служат для обозначения
падения напряжения и тока через ветви соответственно L^, Lsl
и Ls2\ иг и U2 — разности потенциалов между выводами
соответственно первичной и вторичной обмоток. Индуктивности L^, Lbl
и L52 нелинейны из-за нелинейности характеристик магнитного
материала сердечника трансформатора, причем они зависят от
величины намагничивающих ампер-витков 1^г и начального
магнитного состояния сердечника. Обычно нелинейность Lsl и
Ls2 проявляется значительно слабее, чем нелинейность L^, и
поэтому индуктивности рассеяния можно считать постоянными
величинами. Если не учитывать наличие гистерезиса у кривой L^ =
= f (I^Wi), то эту зависимость можно аппроксимировать
выражением [4]
L^a + b/dl^l + c), (3.53)
где а, 6, с — коэффициенты аппроксимации. Подставляя (3.53)
в (3.51), получаем
и» = [а + bc/(\ № | + с)*] (dl^dt). (3.54)
Если ввести обозначение L = а + Ьс/(\ 1^г | + с)2, то вместо
(3.54) можно записать U^ = L (dljdf).
Таким образом, математическая модель двухобмоточного
трансформатора есть система трех дифференциальных уравнений:
dlsl/dt = (1/1д) {Ux - Uj; dls2ldt = (1/L52) (U2 + nUJ; •
dlvJdt^iimU^
где U» = RnT (Isl — /p, — nls2), L = a + bcl{\ 1^г \ + cf,
причем /51, Is2 и /p, относятся к переменным состояния, a L51, L52,
/?пт, д, а, 6, с и W7! — к параметрам модели.
Аналогичным путем можно получить модели трансформаторов
с числом обмоток более двух. Так, в математической модели трех-
обмоточного трансформатора появляется дополнительное к уже
записанным дифференциальное уравнение dls3/dt = (l/Ls3)(U3 +
+ /^[/ц), где Is3— ток третьей обмотки; Ls3 — индуктивность
рассеяния третьей обмотки; пг — коэффициент трансформации от
первой обмотки к третьей обмотке (присвоение обмоткам названий
«первая», «вторая» — произвольно). В формуле для 1^ появляется
дополнительное слагаемое, равное — пг1&ъ.
80
§ 3.8. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДЛИННОЙ ЛИНИИ
Щ £,ф ф^ и*
Любые два полюса электрической цепи, соединенные
проводником, можно рассматривать как короткозамкнутые только тогда,
когда длина проводника / много меньше скорости
распространения электромагнитной волны вдоль проводника (фазовой скорости),
умноженной на длительность изучаемого переходного процесса Т.
В противном случае начинает сказываться задержка
распространения волны (могут появиться отраженные волны, приводящие
к искажениям формы сигналов). Чтобы учесть эти явления при
анализе схем, нужно проводники с длиной, превышающей
некоторое определенное для данного Т значение, рассматривать как
длинные линии.
Отсюда возникает необходи- a) aR aL 5) р $)
мость создания моделей
длинных линий,
отвечающих общим
требованиям, предъявляемым к
моделям компонентов Рис 3.16. Эквивалентные схемы линии связи-
для машинного анализа. ,
^ _ - а — распределенная; о — схема входа линии; в —
С7ЛеКТрИЧеСКИе ПрО- схема выхода линии
цессы в двухпроводной
длинной линии описцваются системой дифференциальных
уравнений в частных производных, называемых телеграфными
уравнениями:
L (dl/dt) + IR + dU/dx = 0; С (dU/dt) + GU + dl/дх = 0, (3.55)
где L, С, R и G — соответственно индуктивность, емкость,
последовательное сопротивление и проводимость изоляции между
проводниками, приходящиеся на единицу длины линии; U = U (t, х) —
разность потенциалов между проводниками; / = /(/, х) — ток
в линии.
Если линию с распределенными параметрами представить как
цепочку, состоящую из звеньев (рис. 3.16, а) с сосредоточенными
параметрами AL = LAx, АС = С Ах, AR = RAx и AG = GAxy
то описанием процессов в такой цепочке будет система 2N
обыкновенных дифференциальных уравнений, где N — количество звеньев.
Такая математическая модель длинной линии применима для линий
без потерь, с потерями, однородных и неоднородных. Однако
экономичность такой модели крайне низка.
При анализе схем ЭВМ может возникнуть необходимость
рассматривать как длинную линию соединение выхода одной схемы
со входом другой. При этом такую линию можно считать
однородной. Кроме того, потери в данных линиях малы и главный интерес
представляет учет задержки сигнала и искажений, вносимых
отраженными волнами. Поэтому допустимо рассматривать соединения
схем как линии без потерь. В этих условиях можно получить
значительно более экономичную модель длинной линии с простой
эквивалентной схемой линии, показанной на рис. 3.16, б, в.
81
Уравнения (3.55) при R = 0 и G = О принимают вид:
L (dl/dt) + dU/dx = О; С (5(7/50 + dl/dx = 0. (3.56)
Добавим к (3.56) уравнение, являющееся выражением для
фазовой скорости:
dx/dt=l/Y"LC. (3.57)
Уравнение (3.57) позволяет исключить из (3.56) одну из
независимых переменных, например х. Подставляя dx из (3.57) в одно
из уравнений (3.56), имеем
p(dI/dt)+dU/dt = 0, (3.58)
где р = У L/C — волновое сопротивление. Интегрируя (3.58) от t
до (t + 4д)> гДе 4д = Hidxldt) = /]/LC — время задержки,
получаем
U{t + tw l)-U(t, 0) = -р[/(/ + /8д, l)~I(t, 0)]9 (3.59)
где в круглых скобках записываются значения аргументов t и ху
причем если в момент времени / было х = 0, то в момент (t + 4Д)
будет х = /. Уравнение (3.59) можно переписать в виде
г/(*+*зд. i)=-pi(t+ts„ i)+E2(t, о).
Этому уравнению можно поставить в соответствие
эквивалентную схему (рис. 3.16, в), имитирующую выход длинной линии.
Действительно, в этой схеме выходное напряжение U2 (t + /зд) =
= U (t + <3д» 0 есть сумма падения напряжения на сопротивлении р
от протекания тока /2 (t + 4Д) = / (* + 4д> ^ и напряжения
источника Е2= U (t, 0) + р/ (t, 0).
Так как линия одинаково проводит в обе стороны, то вход
линии можно представить эквивалентной схемой рис. 3.16, б,
аналогичной схеме рис. 3.16, в. Схеме на рис. 3.16, б соответствует
уравнение Иг (t + 4Д) = — p/i (t + 4Д) + Еи где Ux (t + /зд) =
= U(t+tw 0); Л (* + *8Д) = ' (* + *8Д. 0); Е± = U (t9 I) +
+ p/ (/, 0-
Следовательно,
E2 = U1(t) + PI1(f)\ £i = i/2(0+p/2(0- (3.60)
Итак, математической моделью однородной линии передачи
без потерь являются уравнения
и* (t + U = - р/2 (t+*зд) + £2; £Л (* + 4д) = - p/i (*+4Д)+£i,
(3.61)
где £2 и ^i определяются по (3.60).
В алгоритме, реализующем эту модель, нужно предусмотреть
запоминание пар значений Uu 1г и 1/2, /2 на отрезке U, ^ + /зд1,
что позволит вычислить Е2 и Е19 а следовательно, и напряжения на
концах линии в. любой момент времени (t + /зд).
ГЛАВА 4
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЭЛЕКТРОННЫХ СХЕМ
Ранее было дано определение математической модели схемы
(ММС) как системы уравнений, описывающей электрические
процессы в схеме и представленной в форме, допускающей
непосредственное применение выбранного численного метода решения.
Поэтому, прежде чем рассматривать методы моделирования схем,
необходимо установить, какие требования к форме представления
уравнений предъявляют используемые численные методы анализа.
§ 4.1. ОБЩАЯ ХАРАКТЕРИСТИКА МЕТОДОВ ПОЛУЧЕНИЯ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ СХЕМ
Анализ работы элемента ЭВМ включает в себя два вида
процессов: статический и переходный. Во многих случаях результаты
статического анализа получаются в процессе анализа переходных
процессов. Поэтому рассмотрение методов моделирования схем
следует вести в первую очередь применительно к задачам анализа
переходных процессов. В этих задачах, математическим описанием
процессов в электрических схемах с сосредоточенными параметрами
является система обыкновенных дифференциальных уравнений.
Именно к таким схемам сводятся электронные схемы с помощью
эквивалентных схем компонентов (см, гл. 3).
Большинство численных методов решения систем
обыкновенных дифференциальных уравнений требует представления системы
в форме Коши, т. е. в форме, когда производные переменных
состояния явно выражены через переменные состояния и
независимую переменную — время t:
dV/dt = i(V9 t), (4.1)
где V — вектор переменных состояния.
Существуют также численные методы, не требующие
представления системьГ дифференциальных уравнений в форме Коши. Для
них ММС имеет вид
F(V, V, *} = 0, ([4.2)
где V = dV/dt.
При статическом анализе V = 0 и отсутствуют меняющиеся во
времени внешние сигналы, поэтому ММС принимает'форму
f(V)=0. (4.3)
Основное внимание уделим методам получения ММС в форме
(4.1), так как форма (4.2) используется реже, а форма (4.3) —
частный случай сЬормы (4.1).
83
- К моделям схем, как и к моделям компонентов, предъявляются
требования точности и экономичности. Однако при моделировании
схем вопросы точности менее актуальны. Так, если
эквивалентные схемы компонентов заданы, то общая эквивалентная схема
представляет собой схему, состоящую из сопротивлений R,
емкостей С, индуктивностей L, источников напряжения Е и источников
тока J. Для математического описания подобных схем можно
использовать методы, развитые в теории электрических цепей. При
применении этих методов можно обойтись без принятия каких-
либо упрощающих допущений. Поэтому не только теоретически,
но и практически потери точности при моделировании схем можно
избежать, если не рассматривать зависимости погрешностей
округления от формы ММС. Однако полностью проблема поиска
способов наилучшего удовлетворения противоречивых требований
точности и экономичности не снимается. Так, экономичность моделей,
выражаемая затратами машинного времени Гм, существенно
зависит от окончательной формы ММС. Как будет показано ниже,
матричные ММС существенно уступают по экономичности ММС,
полученным топологическим методом. Но топологические методы
менее универсальны и при определенных условиях для их
применения нужно в исходную эквивалентную схему вводить некоторые
дополнительные ветви. Ввод таких ветвей в той или иной мере
искажает процессы в схеме и обусловливает увеличение общих
погрешностей анализа.
При оценке эффективности метода получения ММС нужно обра^
щать внимание также на: а) возможность алгоритмизаций метода
и, следовательно, автоматического получения ММС с помощью
ЭВМ; б) затраты машинных времени Гм и памяти Ям на
реализацию алгоритмов автоматического получения ММС, они должны
быть по возможности минимальными; в) универсальность
метода, т. е. его применимость к любым схемам рассматриваемого
класса.
Процесс получения ММС начинается с составления
эквивалентной схемы, отличающейся от принципиальной схемы прежде всего
тем, что условные обозначения сложных компонентов заменяются
их эквивалентными схемами, состоящими из R, С, L, Е, I. Кроме
того^ в эквивалентную схему включают ветви паразитных емкостей
(реже включают ветви паразитных индуктивностей и
сопротивлений), если таковые не относятся к эквивалентным схемам
компонентов.
Обозначим в полученной эквивалентной R, С, L, £, /-схеме
количество ветвей через а, а количество узлов — через р.
Характеризовать сложность схемы будем величиной а. Трудоемкость
неавтоматического получения уравнений ММС тем больше, чем
сложнее схема. Естественно предположить, что и при
автоматическом получении ММС затраты Тм и Ям растут с увеличением
сложности схемы. Поэтому эквивалентные схемы компонентов
желательно представлять таким образом, чтобы в них было минимально
возможное количество ветвей.
84
к
Одну и ту же модель компонента можно представить
эквивалентными схемами с различным .количеством ветвей (см. гл. 3).
Например, в модели транзистора ПАЭС вместо двух ветвей /п,
и /п2 источников тока переноса носителей через базу в
эквивалентной схеме рис. 3.4, б была изображена одна ветвь /г = /п, — /п,-
Можно пойти дальше по пути сокращения ветвей.
Продемонстрируем это на примере эквивалентной схемы диода (см. рис. 3.3).
Объединим ветви Ry и /д в одну ветвь, которую обозначим, как
ветвь источника тока /акт = /д + U/Ry. В схеме остаются только
три ветви: гб, С и /акт. Далее можно
исключить и ветвь /акт, если для емко- х)
сти С вместо соотношения (4.4)
использовать соотношение (4.5):
Л/с/* = //С; (4.4) l^A-o IAS**
dUc/dt = (I-IaKJ)/C (4.5) JL^
Тогда эквивалентная схема диода
принимает вид, изображенный на рис. Рис* 4*1- Сокращенные эк-
л л -г- вивалентные схемы
4.1, а. Такую эквивалентную схему
будем называть сокращенной. Полная
и сокращенная эквивалентные схемы эквивалентны друг другу,
потому что соответствующее им математическое описание инден-
тично; сокращение же числа ветвей упрощает задачу получения
ММС.
При анализе вычисление значений С и /акт производится в
заранее составленной подпрограмме, справедливой для всех диодов
схемы. Во вновь составляемой программе для конкретной схемы
будут реализованы уравнения ММС, полученные на основе
сокращенной эквивалентной схемы. В этой программе вычисляется ток /
через диод. Далее производится обращение к подпрограмме диода,
в которой по известному в данный момент значению переменной
состояния Uc вычисляются С и /акт, и перед обращением к
подпрограмме интегрирования вычисляется производная dUc/dt па
(4.5). Следовательно, сокращение числа ветвей возможно, поскольку
возможна реализация выражений для вычисления С и /акт в
подпрограмме, что в свою очередь возможно, так как и С и /акт являются
для любого диода в любой схеме функциями одной и той же
переменной состояния — напряжения на переходе данного диода.
Поэтому нельзя, например, сократить число ветвей, изображающих
объемное сопротивление тела базы или коллектора в эквивалентной
схеме транзистора, поскольку напряжения на этих сопротивлениях
зависят не только от напряжений на переходах данного транзистора,
но и от некоторых других переменных состояния схемы, которые
в каждой новой схеме иные.
Аналогично получаются сокращенные эквивалентные схемы
для транзисторов. На рис. 4.1, б изображена схема при
представлении транзистора моделью ПАЭС. Емкости Сэ и Ск в схеме
описываются уравнениями (3.34), причем Сэ, Ск, /акт.э и /акт.к являются
85
функциями только напряжений на лереходах £/э и UK и
вычисляются в подпрограмме транзистора по (3.31) -г- (3.34).
Дальнейшее рассмотрение моделирования схем будем вести
в предположении, что используются сокращенные эквивалентные
схемы компонентов, при этом скорости изменения напряжений
на емкостях переходов определяются по (4.5), а пода понимается
количество ветвей в сокращенной эквивалентной схеме.
§ 4.2. ТОПОЛОГИЧЕСКАЯ МАТРИЦА КОНТУРОВ И СЕЧЕНИЙ
В методах получения ММС важна топологическая матрица
контуров и сечений, называемая М-матрицей. Эта матрица
содержит в себе полную информацию о структуре эквивалентной схемы.
Рис. 4.2. Инвертор
Строки М-матрицы в закодированном виде отображают уравнения
закона напряжений Кирхгофа для особым образом выбранных
контуров схемы, а столбцы М-матрицы — уравнения закона токов
Кирхгофа для сечений схемы. Особый выбор контуров и сечений
преследует цель максимально упростить получение ММС в форме
(4.1) на основе сформированной М-матрицы. Такой выбор
тождествен выбору нормального дерева графы схемы и разделению
множества ветвей схемы В — {Въ В2, ..., Ва} на подмножества ре-'
бер Р и хорд X. При этом используются некоторые простейшие
понятия теории графов. Рассмотрим схему инвертора, изображенную
на рис. 4.2, а. Эквивалентная схема инвертора, где транзистор
представлен схемой на рис. 4.1, б, дана на рис. 4.2, б, ее графом
будем называть ту же эквивалентную схему, но без указания*
условных обозначений компонентов в ветвях. Граф для схемы на
рис. 4.2, а имеет вид, изображенный на рис. 4.2, в (стрелками на
рис. 4.2, б, в показаны выбранные положительные направления
токов, узлы пронумерованы от 1 до 5). Следует отметить, что для
емкостей р-/г-переходов положительные направления должны быть
от р- к /г-области. Для остальных ветвей токи могут направляться
произвольно. Нужно помнить, что если в процессе анализа ток
какой-либо ветви примет отрицательное значение, то это означает
несовпадение направления реального тока с принятым"4
положите
тельным направлением. Положительное значение напряжения
какой-либо ветви говорит о том, что ток положителен и в ветви течет
от конца ветви с более положительным потенциалом.
Любое подмножество множества ветвей графа называют
подграфом. Связный граф — граф, обладающий следующими
свойствами: любой узел графа связан с любым другим узлом посредством
ветвей данного графа (например, граф на рис. 4.2, в). Несвязный
подграф — подграф, образованный, например, ветвями Съ Rl9
С3, С±.
Деревом связного графа называют любую совокупность из р — 1
ветвей (где р — количество узлов (вершин) графа), не
образующую ни одного замкнутого контура. Другими словами, дерево
является связным подграфом из р — 1 ветвей и р узлов. Ветви дерева
называют ребрами, а ветви графа, не вошедшие в дерево, —
хордами. В любом графе можно выделить более чем одно дерево. В
задачах получения ММС будем называть нормальным деревом такое,
в которое ветви графа включаются со следующим приоритетом:
сначала ветви £, затем ветви С и далее ветви R, L, /. В примере
инвертора нормальное дерево графа выделено на рис. 4.2, в
жирными линиями. При этом подмножества ребер и хорд следующие:
Р = {£,, Е29 Е31 С19 С2, С8, С4}; X = {Rl9 R29 R3y /?4f Rb]. Выбором
нормального дерева определены контуры и сечения схемы, для
которых составляются уравнения по законам Кирхгофа.
Количество таких контуров равно количеству хорд пх, а количество
сечений — количеству ребер п?. Очередной i-й контур образуется
путем подключения i-й *хорды к дереву и называется контуром
i-й хорды.
Сечением j-го ребра называют совокупность ветвей,
пересекаемых замкнутой линией (линией сечения) при выполнении
следующих условий: 1) любая ветвь может пересекаться не более одного
раза; 2) в сечение должно входить единственное /-е ребро. Такие
сечения часто называют главными сечениями (на рис. 4.2, в
пунктирными линиями показаны пр главных сечений графа).
Для схемы, изображенной на рис. 4.2, а, уравнения по закону
Кирхгофа для пх контуров и пр сечений соответственно будут:
URl=UCt; URm=-Ucx+UEu-Ue.; URu=^UCa-UEt;
Ur< =-UCt-Uс -UE9; URs=-Uc2 + UCz -Uc<;
Ict = — Ы1+ Irz + /д«; Ic2 = lRj+lRb; /03 = Ir* — Ir* *
Ic4 = iRt; /ei = Ir3 ; Ie% = — Ir2 \ Ie3 = Ir% + Ir* .
Запись уравнений (4.6) в матричной форме следующая:
Ux = -MUp, (4.8)
>
где Ux и Up — соответственно векторы напряжений хорд и ребер,
М — матрица контуров и сечений.
М-матрица имеет порядок пх X пр, ее столбцы соответствуют
ребрам, а строки — хордам. В примере схемы инвертора М-матрица
может быть записана в форме табл. 4.1.
(4.6>
(4.7)
87
Запись уравнений (4.7) в матричной форме следующая:
1р = А1х> (4,9)
где 1р и 1х — векторы токов ребер и хорд соответственно. Для
инвертора рис. 4.2 матрица А есть табл. 4.2.
Jab лица 4 2
Tab лица 4./
*1
*г
*j
%
*5
Ct
-1
+1
0
+1
0
с2
0
0
+1
0
+1
Оз
0
0
0
+1
-1
^
0
0
0
0
+/
5
0
0
+1
0
0
^
0
-/
0*
0
0
Ез
0
+/
0
+/
0
Ci
с2
Сз
с.
ь
h
Ез
*i
-1
0
0
0
0
0
0
R2
+/
0
0
0
0
-1
+1
«3
0
+г
0
0
+1
0
0
R*
+ f
0
+1
0
0
0
+ 1
*5
0
+1 I
-1
+1
0
о
0 i
i
Между матрицами Ми А существует связь А = М', где М' —
транспонированная М-матрица. Тогда (4.9) переписывается
следующим образом:
1Р = М'1Х. (4.10)
В основе методов получения ММС, излагаемых ниже, лежат
уравнения (4.8) и (4.10) в сочетании с уравнениями ветвей:
Ij^R-HJ*; (4.11)
Ir = r-4Jr; (4.12)
ис = С-Ч1с-1актс); (4.13)
U5 = S-4b>-IaKTs); (4.14)
Il^L^Vl; (4.15)
1г = Г"1иг. (4.16)
Здесь и ниже используется следующая система обозначений:
1К — вектор токов ветвей природы К\ 1)к — вектор напряжений
ветвей природы К\ U# и \к — векторы производных \}к и \к по
времени; ветви могут быть следующей природы: К — С —
емкостное ребро, К — S — емкостная хорда, К — R — резистивная
хорда, К — г — резистивное ребро, К — L — индуктивная хорда,
К — Г — индуктивное ребро, К — Е — ребро источника
напряжения, К — J — хорда источника тока.
В (4.11) -г- (4.16) R1 и г"1 — диагональные матрицы проводимо-
стей соответственно резистивных хорд и ребер; С-1 и S"1 —
диагональные матрицы обратных величин емкостей соответственно
емкостных ребер и хорд; L"1 и Г"1 — диагональные матрицы обратных
величин индуктивностей соответственно индуктивных хорд и
ребер. Уравнения (4.11) и (4.12) выражают закон Ома, (4.13) и (4.14) —
$8
м =
MSr
MRr
Mir
My,
Msr
Msr
Mir
M/f
(4.17)
матричная форма записи (4.5); (4.15) и (4.16) — матричная форма
записи выражений для индуктивного напряжения: UL = L (dljdt).
На рис. 4.2, в оказались ветви следующей природы: Е — ребра
источников напряжения, С — емкостные ребра и R — резистив-
ные хорды. В соответствии с природой ветвей М-матрица примера
может быть разбита на две подматрицы: М = ЦМ^М^с ||, где
М#я — подматрица, отображающая топологические связи между
хордами R и ребрами Е\ MRC — подматрица, отображающая связи
между хордами R и ребрами С. В общем случае М-матрица состоит
из 16 подматриц, в обозначениях которых индексы указывают,
между какими ветвями подматрица отображает топологические
связи:
М5£ М5С
При записи (4.17) предполагается, что в схеме нет контуров,
состоящих только из источников напряжения, и сечений, состоящих
только из источников тока. Эти предположения всегда
оправдываются в реальных схемах. Если М-матрица составляется на основе
нормального дерева, то подматрицы Msr, №Sr, №Rr всегда нулевые.
М-матрицу в виде (4.17) и уравнения (4.8) и (4.10) -т- (4.16)
используют в матричном варианте получения ММС (см § 4.3).
Алгоритмы как ручного, так и автоматического выбора нормального
дерева и построения М-матрицы излагаются в § 4.4, 4.5.
§ 4.3. МАТРИЧНЫЙ ВАРИАНТ МЕТОДА ПЕРЕМЕННЫХ СОСТОЯНИЯ
Преобразуем (4.8) и (4.10) -г- (4.16) таким образом, чтобы
получить желаемый результат — систему дифференциальных уравнений
схемы в 'форме Коши (4.1).
Случай отсутствия неправильных размещений. Рассмотрим
наиболее простой частный случай структуры эквивалентной схемы,
когда подматрицы М5£, М5С, MRn MLr> Муг — нулевые. Такую
структуру называют схемой без неправильных размещений ветвей
или схемой без вырождений ветвей. Если же MSE Ф 0 или М$с Ф 0,
то говорят о наличии в схеме неправильно размещенных
(вырожденных) емкостных ветвей. Топологическая интерпретация
ненулевой подматрицы MSE или М5с следующая: в схеме имеются контуры,
состоящие только из ветвей источников напряжения и емкостных
или только емкостных. Так, в схеме на рис. 4.2, б при неучете
объемного сопротивления тела коллектора Rb образуется емкостной
контур С3 — С4 — С2, что приводит к попаданию в число хорд
емкостной ветви С2 и к М5с ф 0 в М-матрице этой схемы (см. табл. 4.4),
т. е. ветвь С2 стала ветвью природы S. Случай MLr ф 0 или М/г Ф 0
имеет место тогда, когда в схеме есть индуктивные сечения, т. е.
когда к какому-либо узлу схемы подходят ветви либо только
источников тока и индуктивностей, либо только индуктивносгей. Тогда
89
неизбежно какая-либо индуктивная ветвь попадает в число ребер,
т. е. станет ветвью природы Г, и может быть названа индуктивной
неправильно размещенной ветвью. Случай MRr ф 0 имеет место
тогда, когда в схеме есть узлы, к которым не подключено ни одной
емкостной ветви или ветви источников напряжения и в то же время
подключено более одной резистивной ветви. Так, в схеме на
рис. 4.5, б имеются резистивные неправильные размещения, так как
к узлам 3 и 8 подходят только резистивные ветви, вследствие чего
ветви Ri и R2 попали в дерево и стали ветвями природы г. Примером
схемы без неправильных размещений ветвей является схема на
рис. 4.2, б.
Итак, пусть неправильные размещения в схеме отсутствуют.
Тогда (4.8) с учетом (4.17) можно записать в виде трех матричных
уравнений:
U* = - (MREl]E + MRCVc); (4.18)
Vl = - fcU£ + MICUc + MIrUr); (4.19)
U/= - (My£U£ + MycUc + MyrUr) (4.20)
{при этом учитывается, что подматрицы М5г, РЛ$е и М#г всегда
нулевые).
Уравнение (4.10) записывается в виде:
lE^rtRElR + tiLEh + rtjEh; (4.21)
1с = М^с1* + М1с11 + М'л:1/; (4.22)
1г = М1г11 + М'/г1/. (4.23)
Подставим в (4.22) выражение (4.11), а затем (4.18). В
результате получим 1С = — M^cR"1 (Ще^е + Мяс^с) + M[cIl + Mjch-
Подставим в (4.19) вектор Ur из (4.12), а затем вектор \г из (4.23).
Находим ML = — №LEUE + MLCUC + MLrr (M/rIL + tfjrh)].
Используя (4.13) и (4.15), получаем конечный результат — ММС
в виде системы дифференциальных уравнений в форме Коши:
йс = С-* [- M^cR-1 (MREVE + MRCVC) + Mlcli + Mfjch- i.„c];
h = - L"1 [mLEUE + MLCUC + MLrr (m{rlL + М',г1 Л ]• (4.24)
Действительно, Uc и II вместе представляют собой вектор
переменных состояния V, U^ и 1у являются векторами постоянных или
зависящих от времени t источников напряжения и тока. Вектор
|актС зависит только от вектора Uc. Следовательно, в (4.24)
производные переменных состояния зависят только от переменных
состояния и независимой переменной /, т. е. получена система (4.1).
Уравнения (4.20) и (4.21) при нахождении ММС в виде (4.24)
не использовались. Действительно, значения 1Е и Ur не нужны для
интегрирования системы (4.24). Однако векторы 1Е и Uy нужно
вычислять в тех случаях, когда требуется определить временную
зависимость мощности Р, потребляемой от источников, так как Р =
00
Общий случай. Этот случай более сложен, поскольку
вычисление Uc и I/. требует помимо выполнения операций умножения
матриц на векторы, как это было в (4.24), также решения систем
линейных алгебраических уравнений.
Не рассматривая вычисление 1^ и Ur, запишем уравнения (4.8)
и (4.10) с учетом (4.17) в виде:
U5 = - (mSEVE + MSCVC); (4.25)
U* = - (MREUE + MRCVC + MRrUr); (4.26>
Ui = -(M^U£ + MLCUc + MirUr + MLrUr); (4.27)
Ic^M'sch + MbclR + MLch + M'jch; (4.28)"
\r = mUr + MLiz; + Mfjrhl (4.29)
Ir = MLrIi + MyrI/. (4.30)
Исключим из этих уравнений переменные Ur, lry Ц$, Is, Ur
и Ir, появившиеся из-за неправильных размещений. Подставим
в f(4.29) lR из (4.11), а затем U# из (4.26). Заменим также \г на Ur
по (4.12). Тогда имеем г"1^ = — M^R"1 (MREVE + mRCVc +
+ MRr\Jr) + MlAl + MjrIy. Представим полученное матричное
уравнение в виде следующей системы алгебраических уравнений:
ArUr = Br, (4.31)
A^r^ + M^R-W/^, (4.32)
Вг = - M'*rR-* (Mj^lfc + MrCUc) + Mirh + М'/г17. (4.33)
Правая часть (4.31) зависит только от переменных состояния
Uc, h и переменных UE (/) и 1у (/).
Исключим теперь Ur-и 1г. Дифференцируя (4.30), заменяя lL
на UL по (4.15), а 1Г на Ur по (4,16), имеем гггиг = M^L"1^ +
+ МугЪ- Подставляя сюда UL из (4.27), приходим к следующей-
системе алгебраических уравнений:
Агиг = Вг, (4.34>
где
Ar = r-1 + M/LrL-4Vlir, (4.35>
вг = - mirL-1 mLEuE+mLCuc+mLrvr)+m'jrij. (4.36>
Наконец, исключим Us и 15. Дифференцируя (4.25) и
используя (4.13), (4.14) и (4.28), получим
А515 = В5, (4.37>
где
As^S-i + MscC-m'sc, (4.38)
В5 = - NIseVe - MscCr^MlcIi + M'JCI/ —
-M^cR-MM^U^ + M^Uc + M^U,) -1№С] + ^и (4.39>
91
С учетом того, что Vry Ur и \$ выражены с помощью (4.31),
(4.34) и (4.37) через Uc, 1ь ИЕ и 1у, из (4.28) и (4.27) приходим к
следующей системе дифференциальных уравнений:
Ос = С"1 [М'5С15 - M^cR"1 №REUE + MrcVc + MM + }
+ M[cIi + M'ycI/-I„Tcl; (4.40)
I = - L"1 (MLEUE + MLCl}c + MLrUr + MirUr). J
Итак, (4.40) в сочетании с (4.31), (4.34) и (4.37) представляют
собой ММС в матричной форме в общем случае.
При вычислении правых частей (4.40) на очередном шаге
численного интегрирования известны значения переменных состояния
Uc и \L и значение времени t. Последовательность вычислений будет
следующей:
1. Вычисляются зависящие от времени векторы U^, Iy, ()Е и Iy
в соответствии с заданными формулами, определяющими форму
входных сигналов (обычно \)Е и \j и их производные определяются
в подпрограммах входных сигналов).
2. Вычисляются матрица Аг по (4.32) и вектор Вг по (4.33).
3. Решается система линейных алгебраических уравнений
(4.31), порядок которой равен количеству резистивных
неправильных размещений пг.
4. Вычисляются матрица Аг по (4.35) и вектор Ъг по (4.36).
5. Решается система линейных алгебраических уравнений (4.34),
порядок которой равен количеству индуктивных неправильных
размещений пг.
6. Производятся обращения к подпрограммам нелинейных
компонентов, где по известному Uc вычисляются компоненты векторов
1актС, 1акт5 И Матриц С И S.
7. Вычисляются матрица As по (4.38) и вектор В5 по (4.39).
8. Решается система линейных алгебраических уравнений (4.37),
порядок которой равен количеству емкостных неправильных
размещений ns.
9. Вычисляются правые части системы дифференциальных
уравнений (4.40).
10. Производится обращение к подпрограмме интегрирования, где
в соответствии с выбранным численным методом определяются новые
значения переменных состояния Uc и lL, а также новое значение
времени L
Далее происходит переход к новому шагу интегрирования, на
котором повторяется указанная последовательность вычислений.
Оценка матричного варианта получения ММС. Прежде всего
нужно отметить универсальность матричного варианта.
Действительно метод применим к схемам с любыми неправильными
размещениями ветвей Однако у ММС в матричной форме имеются и
недостатки: большие затраты машинного времени Ты и памяти /7М при
анализе. Выполним приближенную количественную оценку Тм и Ям.
При анализе переходных процессов Гм з^писит от быстродействия
ЭВМ, количества шагов интегрирования и количества операций
92
над числами на одном шаге интегрирования, поэтому
T«={tzNz + tyNy)UIy (4.41)
где tz — время исполнения короткой операции типа сложения,
/ — то же, длинной операции типа умножения; Nz и Ny —
соответственно количество коротких и длинных операций, выполняемых
на одном шаге, Ш — количество шагов интегрирования. Упростим
(4.41), приняв соотношение NJNy равным четырем, что типично
для задач численного анализа. Тогда
TM = (ty + 4tz)NyIII. (4.42)
Величина Ny зависит от вида ММС и количества &ш ч
вычислений правых частей (4.40) на одном шаге, а Ш зависит только от
выбранного метода численного интегрирования. Поэтому оценкой
экономичности ММС является величина Ny. Формула для точного
подсчета Ny для матричной ММС оказывается слишком громоздкой,
поскольку А/у зависит от большого числа факторов: количества
ветвей различной природы пк, где К е {£, С, R, L, S, г, Г, J};
количества операций типа умножения Ny, подп, выполняемых в
подпрограммах. Однако для схем определенного класса обычно отношения
пк/а (где а — общее количество ветвей в сокращенной эквивалентной
схеме) имеют сравнительно небольшой разброс относительно
средних значений. Средние значения пк/а получим из табл. 4.3, где
приведены сведения для нескольких переключательных схем на
биполярных компонентах различной сложности. В этой таблице пр_п —
количество р-я-переходов, а пм — количество ненулевых элементов
в М-матрице.
Таблица 4.3
Р-Т о ыадоытшо циа с* y^AjCтл
ПсШМспийапис СлШШ
Ждущий мультивибратор
Сложный инвертор
Триггер низкочастотный
Триггер «Элемент-2»
Цепь из трех схем «Тропа»
Ждущий мультивибратор
«Элемент-2»
Цепь из трех схем «Посол»
Интегральный вариант схемы
ТЛЭС
Схема ТТЛ
Схема ТЛЭС с реальной
нагрузкой
JK-триггер на ТЛЭС
JK-триггер на ТТЛ
Средние значения nk/a
22
28
28
33
33
37
39
39
42
54
163
234
—
ПС
а
0,41
0,43
0,47
0,24
0,36
0,38
0,41
0,39
0,48
0,46
0,47
0,47
0,42
nR
а
0,50
0,36
0,39
0,55
0,36
0,46
0,44
0,39
0,36
0,46
! 0,46
0,44
0,43
nS+nr
а
0,11
0,07
0,06
0,09
0,11
0,05
0,13
0,10
—
0,04
0,06
0,07
пЕ
а
0,09
0,11
0,07
0,15
0,18
0,08
0,10
0,10
0,07
0,07
0,03
0,02
0,08
V".
а
0,23
0,39
0,21
0,18
0,36
0,30
0,28
0,39
0,43
0,33
0,39
0,39
0,32
пт
а
1,91
1,53
1,82
1,58
1,42
1,81
1,36
1,57
! 1,43
1,33
1,29
1,64
1,56
93
Известно, что при умножении матрицы порядка п X m на вектор
порядка т X 1 требуется выполнить пт операций умножения.
Для решения системы линейных алгебраических уравнений порядка
п наиболее экономным методом Гаусса требуемое количество
операций умножения примерно равно п3/3.. Тогда, прослеживая
последовательность вычислений на одном шаге интегрирования и
учитывая данные табл. 4.3, получим следующую формулу для
приближенной оценки Ny:
Ny9±(U2 + 0,0066 • а) а26п. ч. (4.43)
Далее будет видно, что топологический метод сканирования
М-матрицы позволяет получить значительно более экономичную
ММС.
Затраты памяти при применении матричной ММС определяются
главным образом порядками матриц, фигурирующих в (4.31),
(4.34), (4.37) и (4.40). Так как для хранения матрицы порядка
п X т требуется пт ячеек памяти, то получаем следующую
приближенную формулу
Ям^ 0,63а2+ Япр, (4.44)
где Япр — количество ячеек памяти, занимаемых программой
вычислений.
§ 4.4. МЕТОД СКАНИРОВАНИЯ М-МАТРИЦЫ ДЛЯ ПОЛУЧЕНИЯ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ СХЕМ
Из схемы инвертора, представленной на рис. 4.2, видно, что
имеются значительные резервы повышения экономичности ММС,.
заключающиеся в малом количестве ненулевых элементов в
матрицах параметров и топологической М-матрице. Матрицы с большим
процентом нулевых элементов называют разреженными. При
умножении разреженной матрицы на вектор количество операций может
быть уменьшено, если исключить операции над числами, одно из
которых равно нулю. Так как ненулевые элементы М-матрицы
могут принимать только значения +1 или —1, то можно вообще
исключить операции умножения при выполнении операций над
подматрицами М-матрицы.
Математические модели схем, в которых количество операций
над числами сводится к минимально возможной величине, получают
с помощью метода сканирования М-матрицы. В отличие от
матричных ММС в них вычисления проводят по формулам,
представляющим собой развернутую запись матричных выражений. При этом
отпадает необходимость в хранении М-матрицы, поскольку сведения
о схеме, содержавшиеся в ней, перенесены в программу вычислений.
Метод сканирования М-матрицы чрезвычайно прост при
применении к схемам без неправильных размещений. При этом нужно
записать (4.24) в развернутом виде и запрограммировать полученные
выражения. При наличии неправильных размещений возникает
вопрос, как записать в нематричной форме формулы для вычисления
94
компонент векторов I5, Ur и Мг. В общем случае такие формулы
настолько сложны, что их практическая реализация нереальна.
Поэтому в рамках метода сканирования М-матрицы накладывают
определенные ограничения на топологию эквивалентной схемы.
Выясним, к чему сводятся эти ограничения.
Известно, что если в системе линейных алгебраических уравнений
АХ = В (4.45)
матрица А — блочно-диагональная, то (4.45) можно представить
как р не связанных между собой систем уравнений с порядками qt
(при этом р ,— количество подматриц, расположенных вдоль
диагонали матрицы A, a qt — порядок 1-й подматрицы). Блочно-диаго-
нальная матрица может быть, например, такой:
II #11 #12 0 0 |
#21 #22 О О
О 0 а33 О Г
I 0 0 0 аи ||
В этой матрице р = 3, а подматрицы, расположенные вдоль
диагонали,
#11 #12 |. м и „
И #21 #22 [I
имеют порядки qx = 2, q2 = q3 = 1. Связь между порядком п
матрицы А и величинами р и qt устанавливается формулой
n=j]qi. (4.46)
; = i
Очевидно, что решить р систем порядка qt значительно проще,
чем одну систему порядка тц определяемого по (4.46). Большая
простота заключается как в уменьшении объема вычислений, так
и в легкости получения формул, которые в явном виде выражают
решение X через В и элементы матрицы А. Именно последнее из
указанных обстоятельств и должно использоваться при наложении
ограничений на топологию эквивалентной схемы при применении метода
сканирования М-матрицы.
Матрицы А5, Аг и Аг имеют блочно-диагональную
структуру, при применении к ним (4.46) п будет количество
неправильно размещенных ветвей, р — количество групп этих ветвей,
qi — порядок 1-й группы. Определим понятия группы неправильно
размещенных ветвей и их порядков. Начнем с матрицы As. Если
какие-либо две емкостные хорды при подключении к дереву
образуют контуры, в которые входит хотя бы одно общее ребро, то такие
контуры и такие хорды будем называть связанными. Разделим все
емкостные хорды на группы таким образом, чтобы в одной группе
95
а)
J г
*з
2 5 3 ТЧ 4 .^ 1
—Гг 1 1—1
были только взаимно связанные хорды. Количество емкостных хорд
в группе назовем порядком группы или порядком входящих в группу
хорд. При порядке qt = 1 неправильно размещенная ветвь является
несвязанной.
На рис. 4.3, а показана электрическая схема, в которой можно
обнаружить емкостные контуры Сх — С2 — С3, Сх — С2 — С4 — С5 и
С6 — С7 — С8. Граф этой схемы, на котором выделено нормальное
дерево, показан на рис. 4.3, б. В контуры хорд С3 и С5 входят общие
ребра Сг и С2, поэтому хорды С3 и С5 образуют группу неправильных
размещений второго порядка. Хорда С8 в этом примере является
несвязанным неправильным размещением. Поэтому матрица А5 —
блочно^диагональная матрица порядка 3x3, одна диагональная
подматрица — квадратная матрица
второго порядка, а другая —
первого порядка.
Индуктивные неправильные
размещения будут связанными,
если в сечения индуктивных
ребер входят общие хорды. Так же
определяются связанные резистив-
ные неправильные размещения.
Определение групп и их порядков
для индуктивных и резистивных
ребер в остальном не отличается
от случая емкостных хорд. Так,
в схеме на рис. 4.5, б и ее графе на
рис. 4.5, в имеются два резистив-
йых ребра Rx и R2. В сечение
первого из них входят хорды R3 я #5,
а в сечение ребра R2 входят хорды 7?4 и R6. Отсутствие общих ребер
говорит о том, что ребра R± и R2 не связаны и, следовательно,
матрица Аг в этом примере будет диагональной матрицей.
Достаточно простые формулы, явно выражающие компоненты
векторов Ur, lir и ls через переменные состояния и параметры
независимых источников, получаются при диагональных матрицах
Аг, Аг и А5, т. е. при порядках неправильных размещений, равных
единице. Поэтому в большинстве программ, использующих метод
сканирования М-матрицы, допускается анализ схемы только при
несвязанных неправильных размещениях. Конечно, путем
усложнения программ можно несколько снизить степень этого ограничения
и сделать допустимым анализ схем, например при qt = 2. Однако
полностью ограничение не снимается и это недостаток метода
сканирования М-матрицы. Ограничение может быть снято только в
случае, если согласиться с полным представлением в памяти машины
матриц As, Аг и Аг и решением на каждом шаге систем
алгебраических уравнений (4.31), (4.34) и (4.37).
На практике включением в эквивалентную схему
дополнительных ветвей соответствующей природы всегда можно понизить
порядки неправильных размещений до допустимой величины, однако это
Рис. 4.3. Электрическая схема с
неправильными размещениями
96
может снизить точность анализа или привести к увеличению
количества шагов интегрирования (см. гл. 5). Именно в этом на практике
заключается недостаток метода сканирования М-матрицы.
Рассмотрим на конкретных примерах получение ММС методом
сканирования М-матрицы, а также методику формирования М-матрицы при
неавтоматическом составлении уравнений.
Пример. Задана принципиальная схема инвертора (см. рис. 4.2, а).
Включая в дерево последовательно сначала ветви источников напряжения, а затем
емкостей, получим нормальное дерево, показанное жирными линиями на
рис. 4.2, в. М-матрица, приведенная в табл. 4.1, получается следующим образом.
v Хорды поочередно подключают к дереву. При подключении t-й хорды образуется
контур, дающий сведения для заполнения строки этой хорды в М-матрице. Начнем
с хорды #!. В контур этой хорды вошло ребро Сх. Поэтому в строке, помеченной
#lf записывается единица на пересечении со столбцом, помеченным Сг. Если
направления токов хорды и ребра совпадают, записывается + 1, если не совпадают,
записывается —1. Так, направления токов хорды Rb и ребер С2 и С4 в контуре
хорды #5-совпаДают> поэтому в строке Rb на пересечении со столбцами С2 и С4
в табл. 4.1 записаны +1.
После получения М-матрицы приступаем к записи уравнений ММС. Сначала
сканированием М-матрицы по строкам получаем уравнения для напряжений
резистивных хорд в таком виде: «напряжение i-й хорды равно алгебраической
сумме напряжений тех ребер, для столбцов которых в строке i-й хорды были
записаны единицы, причем знаки слагаемых должны быть противоположны
знакам единиц в матрице М». Для первой строки табл. 4.1
Vrx = VCi. (4.47а)
Сканируя остальные строки, получаем:
UR=-UCi+UE-UE- UR=-Uc-UEi; \
uR=-uCl-uc-uE- uR=-uc,+uc-ucJ (- >
что, естественно, совпадает с (4.6).
В соответствии cv законом Ома преобразуем резистивные напряжения (4.47)
в токи:
Сканируя далее М-матрицу по столбцам, записываем уравнения емкостных токов.
Ток /-го ребра равен алгебраической сумме токов тех хорд, в строках которых
были записаны единицы на пересечении со столбцом /-го ребра. Знаки слагаемых
и единиц jyi-матрицы при этом совпадают. В данном примере для столбца С*
имеем
IC1 ==—IRl + IR2 + IR^ (4.49а)
Продолжая сканирование столбцов, записываем уравнения остальных емкостных
токов:
'с-ч+Ч; 'с,='*.-'*.; ч=Ч. 4-<49б>
что совпадает с (4.7).
Теперь, если разделить емкостные токи ребер на емкости этих ребер,
получаем производные емкостных напряжений:
UCl = (/с, -'«rC,)/Ci, Uc=(ICt -*,„сд/С, и т. д., (4.50)
причем /акт у Ф 0 только для емкостей переходов С3 и С4.
Уравнения (4.47)—(4.50) и представляют собой ММС. Действительно, если
выполнять вычисления по (4.47)—(4.50) в той последовательности, как эти
уравнения записаны, то, имея значения переменных состояния Uclf Uc2, Uc3f t/c4
и напряжений источников для некоторого момента t, вычисляем значения
производных переменных состояния, что и требуется для выполнения одного шага
97
численного интегрирования *. В начале шага подсчитываются- активные токи
и емкости переходов, что возможно, поскольку известны значения переменных
состояния.
Пример. Задана принципиальная схема инвертора (см. рис. 4.2, а), но в
отличие от предыдущего случая принято решение не учитывать в эквивалентной
схеме транзистора объемное сопротивление тела коллектора г'к (на практике при
использовании бездрейфовых
транзисторов г'к обычно не учитывают, так
как оно близко к нулю). Тогда из
эквивалентной схемы на рис. 4.2, б
нужно исключить ветвь R5, а это
приводит к емкостному неправильному
размещению из-за наличия контура
Q — Сз — Q» состоящего только из
емкостей. Граф эквивалентной схемы для
этого случая представлен на рис. 4.4.
Выбираем нормальное дерево,
включив в ребра ветви Еъ Еъ £3> Cl9
С3, С4. Очевидно, что вместо любой
Ъз двух ветвей емкостей С3 и С4
можно было бы включить в дерево
емкостную ветвь С2. Практически это не
оказало бы какого-либо влияния на сложность ММС и трудоемкость вычислений при
анализе. М-матрица, составленная ца основе рис. 4.4, представлена в табл. 4.4.
Теперь М-матрица наряду с Mrc и Mrc имеет ненулевую подматрицу Msc.
Подматрицы Msc, Mrc и Mre в табл. 4.4 отделены друг от друга.
Сканирование М-матрицы по строкам дает уравнения закона напряжений
Кирхгофа:
Рис. 4.4. Граф схемы
инвертора при неучете сопротивления тела
коллектора
исг
и*.
UR,
UR.
= UC,~
= -Uc
— "с,
= -"с,
uct;
+vE,
+uCi
-"c3-
"*,=
~ив.;
-uEl;
~ue3.
■uct\ |
(4.51)
Сканирование по столбцам позволяет
получить уравнения закона токов Кирхгофа
для главных сечений:
Сз С*
ТаЬлица 4.4
Е. Е, £.,
'с, —'*, + '«,
0
-1
\ +1
0
+1
-/
0
0
+1
+1
+/
0
0
-1
0
0
0
0
+1
0
0
0
-1
0
0
0 I
0
+1
0
+1
Наличие в графе емкостной хорды С2 привело к тому, что в отличие от
аналогичных уравнений (4.49) предыдущего примера емкостные токи выражены не
только через резистивные токи, но и через ток емкостной хорды /с2. Вычислить
/с2 можно, используя первое уравнение из (4.51), которое переписывают в виде
Uс =UC —Uc Беря соотношение UC=(I—/акт)/С, получаем
(4.53)
1С2/С2 — (JC, ~/актС3)/С3~(/С4""/актС4)/С4-
Подставляя в (4.53) I с и /с из (4.52) и разрешая полученное выражение
относительно /
с.»
имеем
Vb + 'R-ta
гС.)/С8 + (/*, + 'актС4)/С4
Jc.- 1/С2+1/С3+1/С4 • (4-54)
Получение ММС закончено. Вычисление производных переме-нных
состояния О с , О с и О с должно выполняться в следующей последовательности:
вычисляем резистивные напряжения по (4.51), по ним в соответствии с законом
* Здесь имеется в виду использование метода интегрирования с /гп. ч = 1,
т. е. с однократным вычислением правых частей (4.1) на одном шаге.
98
Ома находим резистивные токи, далее определяем ток емкостной хорды по (4.54),
после чего используем (4.52) для подсчета емкостных токов, а по'ним и
производных переменных состояния. Очевидно, что в самом начале должны также быть
вычислены активные токи и емкости р-я-переходов по уравнениям модели
транзистора.
Рис. 4.5. Схема с резистивными неправильными раз*
мещениями:
а —. принципиальная схема; б — сокращенная
эквивалентная схема; в — граф схемы; г — резистивный граф ч
Го5лица 4.5
С<
Rf R2 £у Е2
. Пример. Получить ММС в случае резистивных неправильных размещений.
NПусть дана принципиальная схема (рис. 4.5, а). Заменяя транзистор и диоды
их сокращенными эквивалентными схемами, получаем эквивалентную схему
(рис. 4.5, б). Этой схеме соответствует граф на рис. 4.5, в, на котором выбранное
нормальное дерево выделено жирными линиями. Узлы на рис. 4.5, б, в
пронумерованы от 1 до 10,
положительные направления токов
взяты произвольно, за
исключением направлений токов для
ветвей емкостей переходов, где ток
направлен от р- к д-области.
В графе оказались две
неправильно размещенных
резистивных ветви (в ребра попали
Ri и Яг)- Эти два неправильных
размещения не связаны.
Действительно, на рис. 4.5, г показан
резистивный граф,
образованный коротким замыканием всех ветвей, кроме резистивных. Количество
неправильных размещений равно двум, так как в резистивном графе три узла;
порядки этих неправильных размещений равны единице, поскольку в каждой
группе контуров на рис. 4.5, г два узла. М-матрица получается в форме
табл. 4.5 и включает .в себя три ненулевые подматрицы М#с, М#г и М/?я
(в табл. 4.5 отделены друг от друга).
Уравнения закона напряжений Кирхгофа получают сканированием М-мат-
рицы по строкам:
"3
0
о
+1
\-1
0
0
0
+1
+1
0
а
0
0
+1
0
0
-1
0
+1
0
0
-1
0
-1
0
+1
0
+1
+1
0
-1
0
'1
-1
0 |
о
-UC.+UR-UE.+U£
'R,-
VRt = -Vc4+UR~UE,+UE3
uCt-uRl+uEi
Ur. = Vc,-Uc.
+ Vr,-Ue
'■)
(4.55)
99
Уравнения законов токов Кирхгофа получают сканированием М-матрицы
по столбцам:
С-1 Rb R^l ^2 "в' ^3 *\з»
Наличие резистивных ребер привело к появлению в правых частях (4.55)
резистивных напряжений URt и Ur2. Необходимо выразить эти напряжения
через переменные состояния и напряжения независимых источников. Для этого
можно использовать два последних уравнения из (4.56), переписав их в виде:
UrJRi = — URJR3 + VRjRb\ Ur2/R2 = — UrJRi — UrJRq. Подставляя сюда
значения Ur3, Ur4, Ur6 и Ur9 из (4.55) и разрешая получающиеся выражения
относительно Vr1 и Ur2, находим формулы для вычисления напряжений
резистивных ребер:
„ -("С. -Ve2 + UE3)/Rs+(- UCt + ^Е2)/*5 , ]
Rt l/Rr + VRs+l/Rt ' I
„ . -(^c4 -UEl + ues)/*4-(Uc, -Uc-VEl)/*. I
R> l/Rt+l/Rt+l/Rs . • J
Таким образом, на одном шаге численного интегрирования после того как
определены напряжения источников, зависящие только от времени, а также
активные токи и емкости переходов, вычисления производим в следующей
последовательности: определяем напряжения резистивных ребер по (4.57) и хорд по
(4.55), от них по закону Ома переходим к резистивным токам, далее по (4.56)
определяем емкостные тони и вычисляем производные переменных состояния.
Оценка метода сканирования М-матрицы. Перейдем к оценке
экономичности ММС, полученной сканированием М-матрицы. Будем,
как и в случае матричной ММС, характеризовать экономичность
количеством операций типа умножения JVy, выполняемых при
однократном вычислении правых частей системы дифференциальных
уравнений (4.1). При отсутствии неправильных размещений
операции типа умножения выполняются только при определении вектора
1я по формулам закона Ома (4.48) и при определении векторов
Uc по формулам типа (4.50) и lL по. формулам типа \L = UJL.
Следовательно, количество операций типа умножения на одном
шаге с учетом количества операций #подп, выполняемых в
подпрограммах, равно Ny = (nR + nc + nL + Л/подп) &п> ч, где nR, пс
и nL — количества ветвей соответственно резистивных, емкостных
и индуктивных; kn. ч — количество вычислений lL и Uc на одном
шаге.
Для биполярных интегральных схем с учетом данных табл. 4.3
Ny приближенно оценивается так: Ny ^ (0,87а + Мподп) £п# ч.
При наличии неправильных размещений Ny возрастает. Как
видно из (4.54) и (4.57), к Ny нужно добавить примерно 6ян> р,
где ян.р — количество неправильно размещенных ветвей.
Окончательно
Ny 9* (0,9а + 6ян.р + Nnom) кПяЧ. (4.58)
Затраты памяти 77м при применении метода сканирования
М-матрицы существенно меньше, чем при использовании матричных
методов. Теперь при анализе в памяти машины не нужно хранить М-мат-
рицу, так как все сведения, заключавшиеся в ней, перенесены в ма-
(4.56)
100
шинную программу. Поэтому в памяти хранятся массивы:
параметров компонентов (ПК); значений переменных состояния и их
производных, соответствующие k последним шагам (где k = 1—4, что
определяется применяемым методом численного интегрирования);
подпрограммы компонентов, входных
сигналов, численного
интегрирования и др.; машинная
программа (МП), реализующая формулы
ММС. Записать Ям в виде
лаконичной формулы можно лишь для
частных случаев моделей
компонентов, методов интегрирования и
класса схем.
Определим Ям для тех же
условий, что и (4.58): рассматриваются
биполярные интегральные схемы,
в качестве модели транзистора
используется модель программы
ПАЭС, k = 1. Тогда
. Ям^10,5сс + Япр, (4.59)
где Япр — объем памяти,
отводимый под программу вычислений;
его можно принять равным 1000.
На рис. 4.6 показаны графики
зависимостей (4.43), (4.44), (4.58)
и (4.59) при. условии, что Nnom =
= 7,7а, пн> р = 0,08а, Ап. ч = 1,
Япр = 100Q, т. е. (4.58) имеет вид
ЛГу=1,4а + #П0ДП^9,1а. (4.58а)
Кривые на рис. 4.6 подтверждают преимущества применения
метода сканирования М-матрицы.
§ 4.5. ОСОБЕННОСТИ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
РАЗВЕТВЛЕННЫХ СХЕМ
В любой радиоэлектронной аппаратуре используют каскадное
включение электронных схем, т. е. каждая схема, рассматриваемая
как один каскад, воспринимает сигналы от одной или нескольких
схем предыдущих каскадов и передает усиленные или
преобразованные сигналы на одну или несколько схем следующих каскадов.
В полной мере это относится и к ЭВМ, где применяют сравнительно
небольшую номенклатуру элементов, т. е. схемы-нагрузки и схемы-
источники сигнала для данной конкретной схемы часто одинаковы.
Количество схем-источников сигнала называют коэффициентом
объединения по входу, а количество схем-нагрузок — коэффициентом
нагружения. Объединяющее название для этих коэффициентов —
300 ос
Рис. 4.6. Зависимости количества
арифметических операций и затрат
машинной памяти от сложности
схемы при использовании ММС,
полученных по матричному методу
(кривая 1) и методу сканирования
М-матрицы (кривая 2)
101
коэффициенты разветвления n-t. Схему, состоящую из нескольких
каскадов, при щ > 1 называют разветвленной .схемой. Анализ
элементов ЭВМ представляет наибольший интерес в условиях,
максимально приближенных к реальным условиям работы, т. е. в
условиях реальных nt. Поэтому необходимо иметь способы
моделирования разветвленных схем.
Прямой и наиболее точный способ моделирования разветвленных
схем — получение ММС по вышеописанным методам для полной
схемы, в которой каждая из щ схем представлена полностью. Однако
сложность схемы, выражаемая количеством ветвей, быстро растет
с увеличением я,-, хсоответственно растут и требования к емкости
памяти и затраты машинного времени при анализе. Для ряда
элементов ЭВМ щ могут составлять десятки, и тогда от применения
прямого способа надо отказываться. Кроме того, при прямом способе
довольно трудно менять значения коэффициентов щ в процессе
анализа.
Наиболее простой, но наименее точный способ моделирования
разветвленных схем — имитация схем-источников и схем-нагрузок
максимально простыми схемами. Схема-источник может быть
представлена как источник напряжения с последовательно включенным
сопротивлением, а схема-нагрузка заменена линейной 7?С-схемой.
Параметры этих схем связываются с щ и тем самым создается
возможность легкого изменения щ при анализе. Вследствие своей
простоты этот метод нашел практическое применение, но точность
анализа при его применении невысока.
Наиболее предпочтителен метод моделирования разветвленных
схем, применимый в тех случаях, когда значения щ заметно больше
количества схем разных типов в разветвленной цепи. Группа
одинаковых схем, находящихся в одинаковых режимах возбуждения
по входу, представляется лишь одной схемой, называемой
подсхемой разветвленной цепи. При такой замене нарушается только закон
токов Кирхгофа для узлов соединения подсхем. Чтобы
ликвидировать это нарушение, в уравнения, составленные по закону токов
Кирхгофа для таких узлов, вводятся множители, равные
коэффициентам разветвления. Отличие упрощенной схемы от полной схемы
заключается лишь в том, что все схемы, замененные одной
подсхемой, считают одинаковыми. Это допущение отрицательно
сказывается на точности лишь статистического анализа, поскольку оно
равносильно допущению о наличии тесной корреляционной связи
между одноименными параметрами с коэффициентами корреляции,,
равными единице.
Пример. Пусть задана разветвленная схема (рис. 4.7, а), где каждый
прямоугольник есть элемент с принципиальной схемой, изображенной на рис. 4.7, б.
Анализируемой схемой является схема Л, количество схем-нагрузок равно nBv
количество схем-источников, на входы которых поступает сигнал, равно пВу
а количество схем-источников баз возбуждения по входу равно пг%
Заменим все пБ схем одной подсхемой Б, все пв схем — подсхемой В и все
пг схем — подсхемой Г. В результате получаем принципиальную электрическую*
«хему (рис. 4.7, в), для которой и нужно получить ММС с вводом в соответсгвую-
102
щие уравнения законов тока Кирхгофа коэффициентов пБ, пви пг. Для большей
общности введем также коэффициент разветвления пд подсхемы Л, который по
условию равен единице.
Для получения ММС применим метод сканирования М-матрицы. На рис-4.8, а
представлена сокращенная эквивалентная схема, а на рис. 4.8, б — ее граф с
выделенным жирными линиями нормальным деревом. Емкости С17, С18 и С10 на
эквивалентной схеме — паразитные. М-матрица получается в виде таблицы
(табл. 4.6), в которой вместо нулей оставлены пустые клетки.
Каждая ветвь эквивалентной схемы принадлежит какой-то конкретной
подсхеме с конкретным щ, который можно назвать коэффициентом разветвления
данной ветви. В данном примере лишь ветви источников напряжения не отнесены
к какой-либо конкретной подсхеме. Это допустимо тогда, когда не требуется
вычислять токи через источники. В противном'случае следовало бы ветвь Ux отнести
Рис. 4.7, Разветвленная схема
к подсхеме В, ветвь U2 — к подсхеме Г, а ветвь Е поместить в отдельную от
подсхем Л, Б, В и Г подсхему, например подсхему Д. Запишем внизу каждого
столбца М-матрицы в табл. 4.6 коэффициент разветвления соответствующего
ребра, а справа каждой строки — коэффициент разветвления каждой хорды.
Так, ребро Cj принадлежит подсхеме В и поэтому в низу столбца записан
коэффициент пв.
Сканирование М-матрицы по строкам производится так же, как и в нераз-
ветвленных схемах. Отличия появляются лишь при сканировании столбцов.
При этом ток каждой ветви должен умножаться на коэффициент разветвления
ветви. Следовательно, для первого столбца получаем пв1сх = пвЫг — пв1и12
или, так как ветви Съ Rt и R12 принадлежат к одной подсхеме, выражение для
/с, остается таким же, как и в неразветвленной схеме: 1сх = /я, — Ir12. Но,
например, уравнение для тока /с17 получается в виде па1сХ1 = nBlRin + nrlR17 —
— nAlRe -f- паЫ&, или в более удобной форме /с17 = lRb — Ir9 + (пв/па)Ыы-\-
+ (ПГ/ПА) lR17.
Таким образом, получено обобщение метода сканирования М-матрицы на
случай разветвленных схем. Здесь получение ММС происходит, как и ранее,
но в процессе сканирования по столбцам при записи уравнения тока ребра нужно
ток каждой хорды, если хорда и ребро относятся к разным подсхемам, умножить
на отношение коэффициентов разветвления хорды и ребра. Иллюстрацией этого
.правила являются приведенные выше выражения для токов Ict и /с17.
103
5?
со
О
я
я
2
§
в
2
ч
ч.
jU^wloioUjCOU CD L. JO J- J* ^ «r U5 IQ lQ
с: С: ^ с: с: c; с: с с; c: c: £; t: c: t^C: с: C:
I
J1
«3>
J?
^a
I' I I I I I I I I I I I I I I I I !
t I I I I I i i i I i i j i i
N| |T| 111 I ч *1* 1'Iч I I 4*"l 1ч+ 1
I I I I I I I I I [ I I I [ I I+ |T[
ГУ T
. h" Г* 1 1 1 1 j I 1 I
I I I I I |T| 11111111111
I j I l*!^! 1 1 1 1 1 1 1 1 И I 1 I
u т т I 1 I 1 1
I I I I I 1 I I I I I I I i I I I I+
J I J J I I I \ I I 1 I 1 ' I '
III
I I I I |T| i i i i i i i i I [+\ I
I I I I I [ I I I I I I I |T|T| I [
I I I I I I I I I I I I I I I I I I I
4 гч
I I I I I I I I I I I [T| I I I I I
I I I I I I I [ I |+"| jT| 11111
I I I I I I I I I [ |T| I I I [ i I
I I I I- I I I I |T| |t| 111111
1 1 1 1 1 j I и 1 1 l i 1 1 1 1 1
I +1 I I I I I |тI I I I I I I 1 I I
I, I I I I I 1 +1 I I 1 I I I I I I I ■
+1 I I I I I ITI
«?
«?
«?
ce <*: ос ос се ос cc QcCcctQcctQccecececcceQc
В матричном варианте метода переменных состояния учет коэффициентов
разветвления будет выполнен, если исходное уравнение закона токов Кирхгофа
(4.10) записать в виде || пр || 1р = М' || пх || 1х, где || пр || и || пх || — диагональные
матрицы коэффициентов разветвления соответственно ребер и хорд.
§ 4.6. АЛГОРИТМЫ АВТОМАТИЧЕСКОГО СОСТАВЛЕНИЯ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ СХЕМ
При анализе схем на ЭВМ возможны два подхода к получению
их математических моделей:
1) вывод уравнений ММС вручную по изложенной в § 4.4 и 4.5
методике сканирования М-матрицы с последующей реализацией этих
уравнений в программе, записываемой на каком-либо языке
программирования;
2) автоматическое составление машинной программы (МП)
вычисления правых частей (4.1) по лаконичному описанию схемы,
заданному ЭВМ в определенной форме.
Автоматическое составление МП имеет для пользователя ряд
бесспорных преимуществ: значительно сокращается время на
подготовку задач анализа к решению на ЭВМ; уменьшается вероятность
ошибок в подготовительном процессе; от инженера требуются менее
полные знания особенностей программирования и т. п. Поэтому
в современных программах анализа, рассчитанных на
многократное использование, как правило, реализуются алгоритмы
автоматического составления ММС. Программы многократного
использования часто называют универсальными. Далее будем использовать
этот термин только в тех случаях, когда нужно подчеркнуть, что
данная программа является программой многократного, а не
разового пользования.
Однако знание методики ручного составления уравнений-иногда
может оказаться не только полезным, но и необходимым. Дело в том,
что любая из универсальных программ анализа имеет ограничения.
Попытка обойти эти ограничения часто означает столь значительную
переделку программы, что, оказывается, более просто создать новую
программу, чем переделывать старую. Примерами подобных
ограничений могут быть недопустимость связанных неправильных
размещений и недопустимость использования моделей компонентов,
не входящих в число реализованных в программе, и т. д. Если
имеющиеся в распоряжении инженера универсальные программы
неприменимы для анализа некоторой схемы, то может потребоваться
составление вручную разовой программы.
Перейдем к рассмотрению алгоритмов автоматического
составления ММС. Эти алгоритмы должны осуществлять процедуры:
а) выбора нормального дерева; б) формирования М-матрицы; в)
составления МП для вычисления правых частей уравнений (4.1).
Входной язык программы анализа. Исходное описание схемы
при автоматическом составлении ММС выполняется, на специальном
языке, называемом входным языком. Входной язык включает в себя
алфавит (систему допустимых символов) и правила формирования
из этих символов предложений, описывающих любую схему в рамках
106
оговоренных ограничений. Будем считать, что исходным является
описание на входном языке эквивалентной схемы, состоящей из
Е, С, R, L, Л ветвей. К таким эквивалентным схемам, как показано
ранее, сводятся принципиальные схемы, если компоненты можно
представить сокращенными эквивалентными схемами.
Исчерпывающие сведения о конфигурации схемы представляют
собой список ветвей, причем каждая строка — предложение
списка — включает обозначение природы ветви и обозначения узлов,
между которыми эта ветвь включена. Условимся считать, что
обозначениями природы ветви' являются символы £", С, R, L, J'. Узлы
эквивалентной схемы должны быть пронумерованы и обозначением
узла является его номер. Назовем список ветвей формуляром Ф,
который можно представить как множество строк <Pt:
Ф={Ф19 Фа, .-.» Фт}>
а каждую строку Фь в свою очередь, — как множество, состоящее
из четырех элементов:
0t = {KBh Hh Уlh У2;}, (4.60)
где KBt может принимать значения £, С, R, L или У; Я£ — номер
ветви; У1г- и У2£ — номера узлов, между которыми включена ветвь
с номером #ь причем положительное направление тока в /-й ветви
выбрано от У1/ к У2г.
Указание в Фг номера ветви не является обязательным для
автоматического составления ММС, однако для удобства отождествления
человеком строки списка с определенной ветвью эквивалентной
схемы запись Ht желательна. В более общем случае, когда речь
может идти об автоматическом получении ММС и для разветвленных
цепей, в (4.60) нужно добавить еще элемент HCt — номер подсхемы,
к которой принадлежит i-я ветвь. Наличие HCt никак не влияет
н& содержание алгоритмов выбора нормального дерева и
формирования М-матрицы, но должно проявиться"при формировании
машинной программы, в которой появятся дополнительные команды
умножения и деления токов хорд на коэффициенты разветвления. Ниже
при рассмотрении алгоритмов выбора нормального дерева и
формирования М-матрицы элемент НС; ради большей простоты
изложения не будет включаться в (4.60).
Пример формуляра для эквивалентной схемы (см., рис. 4.2, б)
следующий:
£, 1, 7, 8 С, 4, 5, 4
Е, 2, 3, 8 R, 1, 2, 1
£, 3, 1, 8 #,-2, 3, 2
С, 1, 2, 1 R, 3, 6, 7
С, 2, 8, 6 /?, 4, 4, 2
С, 3, 8, 4 Я, 5, 6, 5
Здесь номера Ht совпадают с нумерацией ветвей в схеме на
рис. 4.2, б.
107
Алгоритм выбора нормального дерева. При пояснении алгоритма
выбора нормального дерева введем процедуру замыкания узлов
ветви. Если замкнуть узлы t-й ветви, то количество узлов в схеме
уменьшается на единицу, причем исключаемым узлом должен быть
или У1Ь или У2,-. Пусть в процедуре замыкания узлов всегда
исключается узел, указанный вторым, т. е. узел У2/. Тогда алгоритм
замыкания узлов i-й ветви можно записать как оператор цикла по
параметру /, причем / поочередно принимает значения от 1 до а (где а —
количество ветвей схемы) с шагом, равным единице. При каждом
значении / выполняются следующие операторы:
если У1у=У2г-, то У1/ принимает значение y\t;
если У2/ = У2/, то V2^ принимает значение У1*.
Если воспользоваться правилами варианта для публикаций
языка АЛ ГОЛ-60, то этот алгоритм будет записан в виде:
for / : = X step 1 until ос do
begin if УЬ=У2; then УЬ:==У1/;
if У2; = У2г then У2/: = У1^
end
Цель.исполнения алгоритма выбора нормального дерева — в
формировании двух множеств: множества ребер Р и множества хорд X.
Отнесение ветвей к одному из множеств Р или X называют
классификацией ветвей.
Окончательно сформулированный алгоритм выбора
нормального дерева следующий:
1) осуществляется просмотр ветвей формуляра в следующей
последовательности: сначала ветви £, затем ветви С и далее ветви
R9 L, «/;
2) если очередная просматриваемая ветвь еще не
классифицирована, то осуществляется замыкание ее узлов, при этом ветвь
включается в множество ребер, а все остальные
неклассифицированные ветви, у которых узлы оказываются одинаковыми, т. е. У17- =
= У2у, относятся к хордам.
По окончании исполнения алгоритма все ветви оказываются
классифицированными, множества Р и X сформированными.
Условимся, что элементы множеств Р и X сохраняют структуру (4.60).
Продемонстрируем исполнение данного алгоритма применительно
к схеме, изображенной на рис. 4.5, б.
В табл. 4.7, где сведены результаты исполнения алгоритма выбора
нормального дерева, каждая колонка показывает вид формуляра
после классификации очередной ветви. В крайней левой колонке
изображен исходный вид формуляра. Поскольку при классификации
ветвей могут изменяться только элементы У17- и У2у строк
формуляра, то во всех колонках таблицы, кроме крайней левой,
показываются только значения У1у и У2у. Ветвь, у которой в данном
цикле замыкаются узлы, помечается в соответствующей колонке
символом Р (эту ветвь в данном цикле относят к ребрам).Ле ветви,
у которых в каком-либо цикле узлы У1; и У2У- станут одинаковыми,
108
в последующих циклах не просматриваются (эти ветви относят
к хордам). В первом цикле замыкаются узлы у ветви Еи поэтому
в первой колонке в строке Е, 1, 9,10 стоит символ Р. Во всех
остальных строках первой колонки записаны узлы ветвей, но с заменой
значений 10 на 9, так как из схемы узел 10 исключается. Во втором
цикле к ребрам относится ветвь £2, при этом исключается узел 9
и т. д. В восьмом цикле классифицируются не только ветвь Rly
относимая к ребрам, но и ветви R3 и Rb, относимые к хордам. В итоге
получаем следующие множества ребер и хорд:
Р=\Ь1у £2, Е$, Ql> ^2» Сз, С4, Ai, А2|>
Х = {аз> А4> А5> ^бЬ
Множество ребер (4.61), определяющее выбранное нормальное
дерево, совпадает с множеством ребер, полученным для той же
схемы в § 4.5.
Таблица 4.7
Исходный вид
формуляра
Е, 1, 9, 10
Е, 2, 4, 10
£, 3, 1, 10
С, 1, 5, 10
С, 2, 5, 7
С, 3, 1, 2
С, 4, 1, 6
R, 1, 4, 3
#, 2, 9, 8
Я, 3, 2, 3
Я, 4, 6, 8
Я, 4, 3, 5
Я, 6, 7, 8
Значения У\. и У2^. после просмотра очередной ветви
1
Р
4,9
1,9
5,9
5,7
1,2
1,6
4,3
9,8
2,3
6,8
3,5
7,8
2
Р
1,4
5,4
' 5,7
1,2
1,6
4,3
4,8
2,3
6,8
3,5
7,8
3
Р
5,1
5,7
1,2
1,6
1,3
1,8
2,3
6,8
3,5
7,8
4
Р
5,7
5,2
5,6
5,3
5,8
2,3
6,8
3,5
7,8
5
Р
5,2
5,6
5,3
5,8
2,3
6,8
3,5
5,8
6
Р
5,6
5,3
5,8
5,3
6,8
3,5
5,8
7
Р
5,3
5,8
5,3
5,8
3,5
5,8
8
Р
5,8
5,5
5,8
5,5
5,8
9
Р
5,5
5,5
Алгоритм формирования М-матрицы. Прежде чем
формулировать алгоритм формирования М-матрицы, нужно рассмотреть
формы представления этой матрицы в ЭВМ. Очевидно, что для
матричного варианта метода переменных состояния необходимо иметь
в памяти машины полную М-матрицу с отображением всех ее
элементов, причем под каждый элемент должна быть отведена
отдельная ячейка памяти. В рамках метода сканирования М-матрицы такое
представление не обязательно и, следовательно, можно представлять
М-матрицу в значительно более компактной форме. Одна из таких
компактных форм — изображение М-матрицы в виде множества М,
элементы которого отображают только ненулевые элементы матрицы.
Поскольку доля ненулевых элементов мала, то требования к емкости
оперативной памяти существенно снижаются.
(4.61)
109
Пусть каждый элемент множества М занимает одну ячейку
памяти и отображает один ненулевой элемент М-матрицы в форме
Mkq = {3Hkq, KXk, HXk, КРд, HPq}y (4.62)
где k — номер строки; q — номер столбца М-матрицы; 3Hkq — знак
единицы, находящейся на пересечении k-и строки и q-ro столбца,
причем для +1 3Hkq= О, а для —1 3Hkq= 1; KXk и HXk
обозначают природу и номер хорды k-и строки матрицы, КРд и HPq
обозначают природу и номер ребра q-ro столбца.
Алгоритм формирования М-матрицы может быть реализован
в одном из двух вариантов. Первый из них основан на включении
очередной хорды в множество ребер. Получившееся расширенное
множество ребер обозначим PP. При этом нужно найти признак,
по которому можно отличить ребра, вошедшие в образовавшийся
контур, от ребер, не вошедших в него. Достаточное условие того,
что ребро не вошло в контур, — изолированность одного из узлов
ребра. Под изолированностью узла понимают наличие лишь одной
ветви, подходящей к узлу, из числа ветвей множества PP. Поскольку
этот признак не является необходимым, то алгоритм выделения
контура k-й хорды можно представить состоящим из
многократного повторения оператора цикла, в котором просматриваются все
элементы множества PP. Элементы этого множества имеют
структуру PPj = {KBj, HJy У1у, У2у}. Если номер узла, равный У1у
или У2у,, не повторяется в других элементах множества РР, то это
и будет признаком изолированности данного узла. Поэтому все
ветви с изолированными узлами исключаются из множества PP.
Оператор дикла поиска изолированных узлов и исключения
соответствующих ребер из множества РР повторяется до тех пЪр, пока
имеются изолированные узлы. В итоге оставшиеся'элементы
множества РР и представляют собой ветви контура &-й хорды. Тогда
в множество М добавляется группа элементов, соответствующих
k-й строке М-матрицы с координатами столбцов, определяемыми
по оставшимся элементам массива PP. После этого восстанавливается
массив Р и начинается формирование элементов Mkq при новом
значении k.
Если в первом варианте алгоритма осуществляется
формирование М-матрицы на основе контуров хорд, то во втором варианте
очередная группа элементов множества М образуется при
рассмотрении сечений эквивалентной схемы. Второй вариант несколько
экономичнее по затратам машинного времени. Здесь ищутся
изолированные узлы в массиве Р. Пусть найденный изолированный узел
имеет номер У d и относится к q-щ ребру. Тогда осуществляется
процедура замыкания узлов q-ro ребра, причем и из массива Р, и из
массива X исключается узел Уа. Очевидно, что в сечение q-ro ребра
войдут те и только те хорды, которые были подключены к узлу Уа.
Следовательно, в множество М добавляется группа элементов,
соответствующих q-му столбцу М-матрицы, с координатами строк,
определяемыми по элементам xk массива X с признаками У1/г = Уа
или У2к = Уа. 3Hkq = 1, если исключаемый узел Уd фигурировал
ПО
00
ю
CQ
о
4
СО
1 >»
х
Я
Я
X
а
со
о
0.
К
ч
°
со
S
к
К
ж
4
*
о
5
3
СЗ
ь
Д
4
>»
со
0)
Си
о>
00
ю
г^
«о
те
СО
см
си
СО
ь
§
1
S
Ъ£
о
о
О
О
а$
О
05
о
05
о
аГ
о
оэ4
о
~
О
~
U4
1
1
1
1
1
1
|
*С
О'
п<~
о
rh4
о
'-"*
ч*
<м
сц
1
1
1
1
*с
о
т—Н
о
-г
о
—~
о
*-*
о
*"•
_j*
со
cq
1
1
Ъ£
О
о
ю~
о
—^
ю
о
ю
о
1С
о
irf*
о
*""*
ю
*-.
CJ
1
1
1
X
Г-
ю4
1"*-
. ю4
г—
ю4
t^-
ю
см
о
[
1
1
1
I
1
1
1
1
*с
(N
со
О
Г
1
1
1
1
1
«
со
СО
со
со
_JT
■*
О
1
1
1
1
1
1
1
1
X
со
со
^
*-1
ос
1
Ъ4
00
аз
00
сГ
00
оГ
00
00
of
00
of
00
о>
см
ОС
О
о"
о
о~
о
©
о
о4
*
о
о4
' о
*~^
«—•
*
о
*
^1
*
00^
со
oj
со
ос
*
о
о4
*
о
00
сГ
00
о
*
00
о4
*
00^
»—г
00
СО"
оо
со"
00
со"
00
со
^
ос
о
о
о
о4
*
о
о4
ю
о
ю
о
ю
о"
*
ю
о4
*
ю
со
ю
00
ю
о^
*
о
о4
*
О)
о
*
00
о4
*
00
ю4
00
г^
00
г^
00
00
00
00
г^-
со
ос
ос
о
tf
ео
UJ
<J
ос
о9
5 ач
So о
*&§
-о w
о и, а
си о ь
а> о >,
а н о-у
о я 5
Ш
и в Xky ивР? одинаково на месте первого или второго узла, т. е.
при У\к = У\д или У2к = У2д. В противном случае 3Hkq = 0.
Этапы исполнения алгоритма формирования М-матрицы
применительно к схеме, изображенной на рис. 4.5, б, для которой выше
были получены массивы Р и X, представлены в табл. 4.8.
В левой колонке таблицы отдельно выписаны элементы множеств
Р и X. В каждой из последующих колонок даны результаты
исключения очередного изолированного узла. Посмотрим, как получаются
эти результаты для узла 2. Поочередно, начиная с первого, узлы
проверяют на изолированность. Узел 1 не изолированный, так как
к нему подключено более одной ветви множества Р (ветви Е3 и С4,
что непосредственно видно из табл. 4.8). Но уже узел 2 оказывается
изолированным, поскольку к нему подключена только одна ветвь С3.
В табл. 4:8 это отмечено символом К в строке С3.Теперь исполняется
процедура исключения узла 2 для элементов множества X. Здесь
узел 2 встречается только в строке Rs. Поэтому значение У 1#3
меняется со значения 2 на значение 1, так как у исключаемого ребра
С3 было У1Сз = 1. При этом в М-матрице на пересечении столбца С3
и строки R3 записывается единица. Эта единица имеет знак плюс,
поскольку исключаемый узел 2 в ФСз и в Ф^3 занимал разное
положение: в ФСз было У2Сз = 2, а в <PRs — У1^3 = 2.
Далее циклы повторяются, причем исключенные ребра, больше
не фигурируют в массиве Р, что отражено в табл. 4.8 прочерками.
Так, во втором цикле будет обнаружено, что изолированным
является узел 3. Его исключение приводит к смене значений У2#3
и У 1я6 в массиве хорд. Хорды, у которых происходит смена значений
У1у или У2у, помечены в табл. 4.8 звездочками. М-матрицу можно
отождествить с совокупностью строк хорд таблицы, если вместо
звездочек поставить единицы с соответствующими знаками, а в
остальных местах записать нули. В этом нетрудно убедиться,
сопоставляя табл. 4.5 и 4.8.
При машинном исполнении этого алгоритма будет сформирован
массив М ненулевых элементов М-матрицы в форме (4.62). Первым
элементом этого массива в рассматриваемом примере окажется
0, R, 3, С, 3, что означает +1 на пересечении строки R3 и столбца
С3» После второго цикла в массив М добавляются 1, R, 3, R, 1;
0, R, 5, R, 1 и т. д.
Алгоритмы формирования машинной программы.
Формирование МП будем рассматривать применительно к методу сканирования
М-матрицы. При этом используем сведения, заключенные в
множестве М. Каждый элемент этого множества Mkq порождает в МП
группу команд. Так, при отсутствии неправильных размещений
Mkq порождает одну команду сложения или вычитания напряжений
и одну команду для сложения токов по законам Кирхгофа. Кроме
того, для каждых значений координат строки (KXk, HXk) и столбца
(KPq, НРд) формируется по одной команде деления на величину
сопротивления, емкости или индуктивности. Неправильно
размещенные ветви вызывают появление ряда дополнительных команд
(см. § 4.6).
112
В общем случае автоматическое составление машинных программ
можно осуществлять интерпретацией или компиляцией. При
интерпретации в рассматриваемой задаче массив М из элементов Mkq
в процессе анализа схемы хранится в памяти ЭВМ. Каждый элемент
Mkq или некоторую совокупность элементов Mkq можно
рассматривать как макрокоманду на выполнение указанных выше простых
команд. Поскольку токи и напряжения при анализе должны
вычисляться многократно, то и эти макрокоманды должны исполняться
многократно. В зависимости от значений KXk и КРд макрокоманды
разделяют на несколько типов. Каждому типу макрокоманд
соответствует определенный набор машинных команд. Такие наборы команд
составляются заранее и оформляются в виде подпрограмм.
Адресные части машинных команд представляют в условной форме,
поскольку истинные адреса токов, напряжений и параметров ветвей
будут различны при исполнении макрокоманд одного и того же типа.
Тогда исполнение макрокоманды означает определение ее типа,
вызов соответствующей этому типу подпрограммы, формирование
истинных адресных частей команд по сведениям, заключенным в Mkqj
и исполнение подпрограммы. Интерпретирующие программы
занимают меньший объем памяти, чем скомпилированные программы,
но их исполнение требует большего машинного времени. Поэтому
алгоритм формирования МП должен быть алгоритмом компиляции.
Скомпилированная МП представляет собой совокупность машинных
команд с истинными адресными частями, составленную перед
собственно анализом схемы. В ней каждой арифметической операции
для вычисления правых частей (4.1) соответствует своя команда.
Необходимость хранения массива' М в памяти машины
непосредственно при анализе отпадает.
§ 4.7. ОСОБЕННОСТИ ПОЛУЧЕНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
В ВИДЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ,
НЕ РАЗРЕШЕННЫХ ОТНОСИТЕЛЬНО ПРОИЗВОДНЫХ
Систему дифференциальных уравнений вида (4.2), т. е. не
разрешенных относительно производных, иногда называют алгебраической
системой дифференциальных уравнений или системой алгебро-
дифференциальных уравнений. Для такой системы простор в выборе
метода решения сужается (здесь применимы только методы,
относящиеся к группе неявных методов численного интегрирования),
однако расширяются возможности выбора метода получения ММС
в виде системы (4.2).
Если для получения системы в форме Коши требовалось
применение метода переменных состояния, то для системы алгебро-диффе-
ренциальных уравнений более удобен метод узловых потенциалов.
Рассмотрим особенности применения этого метода для получения
ММС в форме (4.2).
Исходное топологическое уравнение здесь — уравнение первого
закона Кирхгофа, которое в матричной форме представим как
А1 = 0, (4.63)
113
где I — вектор токрв ветвей, А — матрица «узел — ветвь», отражающая
связи между узлами и ветвями схемы. Ее порядок ({5 — 1)ха (где
а — количество ветвей, а р — количество узлов). Для каждого
узла, за исключением одного, принимаемого за базовый, в матрице
отводится одна строка, а для каждой ветви — один столбец. В
столбце записывается +1 на пересечении со строкой узла, в который
втекает ток данной ветви, и —1 на пересечении со строкой узла, из
которого ток вытекает. Так, для схемы на рис. 4.5, б матрица А
принимает вид таблицы (табл. 4.9), если за базовый узел принять
узел 10.
Таблица 4.9
Номера
узлов
1
2
3
4
5
6
7
8
9
с,
— 1
с2
—1
+ 1
с,
— 1
+ 1
с4
—1
+1
*1
+1
—1
R2
+1
—1
Дз
—1
+1
R*
—1
+ 1
#6
—1
+ 1
#в
—1
+ 1
Ei
+ 1
Е2
+ 1
Е3
+ 1
В методе узловых потенциалов не требуется разделять ветви
на ребра и хорды. Компонентные уравнения для пассивных ветвей
имеют вид:
Ic = CUc; (4.64)
I« = R-4J*; (4.65)
Ii = L-4Jt, (4.66)
где Ic, Ir, h\ Uc» Ur» Vl — векторы токов и напряжений
соответственно ветвей емкостных, резистивных и индуктивных; С, R, L —
диагональные матрицы емкостей, сопротивлений и индуктивностей.
Одна из особенностей метода — недопустимость наличия в схеме
идеальных источников напряжения. Реальный источник
напряжения преобразуется в источник тока, зашунтированный внутренним
сопротивлением. Следовательно, к компонентным уравнениям нужно
добавить уравнение для источников тока, которые могут зависеть
от напряжений и времени:
Iy = i|)(U, U, 0, (4.67)
где I/ — векторктоков источников тока; U и U — векторы
напряжений ветвей и их производных.
Источники тока /акт, фигурирующие в математической модели
транзистора, могут учитываться либо в (4.67), либо в (4.64), в
последнем случае уравнение для емкостей имеет вид
Ic = CUc + IaKT.
114
Переход от напряжений ветвей к узловым потенциалам, вектор
которых обозначим <р, производится с помощью соотношения
Ц= —А'<р. (4.68)
Подстановка компонентных уравнений в исходное
топологическое уравнение (4.63) с учетом (4.68) приводит к получению
искомой ММС. При отсутствии в схеме индуктивностей (4.63) имеет вид
Aclc + Atfb? + Ayl/ = 0, где матрица А представлена в виде
трех подматриц А = | Ас А#А/1|, причем Ас есть подматрица
«узел — емкостная ветвь»; подматрица А# — «узел — резистивная
ветвь», а подматрица Ау — «узел — ветвь источника тока».
Подстановка (4.64) и (4.65) дает систему алгебро-дифференциальных
уравнений
АсСА'Сф + AtfR-^q) - Ajh (q>, <р, t) = 0, (4.69)
решением которой будут зависимости узловых потенциалов от
времени. С помощью (4.68) этот результат легко преобразуется в
напряжения ветвей.
ГЛАВА 5
МЕТОДЫ АНАЛИЗА ЭЛЕМЕНТОВ ЭВМ
Цель анализа электронной схемы — получение информации
о ее выходных параметрах и характеристиках. Задачи анализа
разделяют на задачи одновариантного анализа (анализа работы
схемы) и задачи многовариантного анализа. В случае элементов ЭВМ
определение выходных параметров при заданных внутренних и
внешних параметрах осуществляется с помощью одновариантного
.анализа переходных процессов и статического. В данной главе
рассматриваются методы решения задач одновариантного анализа. При
выборе методов решения для реализации в универсальных
программах анализа необходимо обеспечить выполнение следующих
основных требований: а) применимость метода к анализу любой схемы
из оговоренного класса схем; б) погрешности решения не должны
превышать допустимых; в) затраты машинного времени при
соблюдении двух первых требований должны быть минимальными.
Требования к точности методов анализа электронных схем
довольно умеренные, поскольку бессмысленно добиваться существенно
более высокой точности численного решения уравнений, чем
точность отображения этими уравнениями реальных процессов в схеме.
§ 5.1. СОБСТВЕННЫЕ ЗНАЧЕНИЯ МАТРИЦ И ПОСТОЯННЫЕ
ВРЕМЕНИ ЭЛЕКТРОННЫХ СХЕМ
Инженеры-схемотехники широко используют понятие
постоянной времени при анализе электронных схем. При этом постоянные
времени характеризуют скор.ость перезаряда реактивностей, т. е.
являются величинами, определяющими инерционные свойства
схемы. Обычно при качественном анализе или ориентировочных ручных
расчетах инженер стремится так упростить задачу, чтобы
анализируемая эквивалентная схема была линейной и в ней
присутствовало не более одного — двух реактивных компонентов. Если удается
оставить в эквивалентной схеме лишь один реактивный компонент,
то математическая модель такой схемы есть дифференциальное
уравнение первого порядка. Переходная характеристика схемы,
являющаяся решением дифференциального уравнения при идеальном
скачке напряжения (тока) на входе, есть экспоненциальная
функция времени: иВЪ1Х (t) = аг + а2 ехр (—//т), где ивых (t) — падение
напряжения (или ток); аи а2 — постоянные величины,
определяемые начальными условиями и амплитудой входного скачка;
т — постоянная времени схемы.
В случае /?С-схемыт = RC, а L^-схемыт = L1R, где С или L —
емкость или индуктивность реактивного компонента, R — эквива-
116
лентное сопротивление, через которое перезаряжается реактивность.
При этом инженер подсчитывает величину постоянной времени как
произведение RC или отношение L/R, не прибегая к составлению
й решению дифференциального уравнения. В случае схем с более
чем одной реактивностью столь простое определение постоянных
времени, уже не представляется возможным. Более того, понятие
постоянной времени может потерять физический смысл.
При машинном анализе схем понятие постоянной времени
является не менее важным, чем при качественном анализе и
ориентировочных ручных вычислениях. Здесь это понятие используют не
столько для оценки инерционных свойств схемы, сколько для оценки
эффективности применения тех или иных численных методов при
анализе электронных схем.
Понятие постоянных времени схемы тесно связано с понятием
собственных значений матрицы, .составленной из коэффициентов,
уравнений ММС.
Обозначим определитель некоторой квадратной матрицы А
через det (А). Собственными значениями матрицы А будут корни
следующего уравнения, называемого характеристическим
уравнением матрицы А:
det (А - XI) = 0, (5.1)
где I — единичная матрица.
Множество собственных значений матрицы можно представить
как вектор собственных значений А = (Хг Д2, ..., 5tm), где т —
порядок матрицы А. Иначе это множество называется спектром
матрицы.
Пусть имеем линейную схему, математическая модель которой
есть система линейных дифференциальных уравнений
dV/d* = AV + B, (5.2)
где элементы матрицы А — постоянные величины; В — вектора
элементы которого могут быть постоянными величинами или
функциями времени.
Уравнение (5.1) при этом — характеристическое уравнение
схемы. Собственные значения Xk матрицы А можно представить как
комплексные величины:
Xk = Re(Kk) + ilm(h), (5.3)
где i = y—1.
Если Im (hk) Ф О при некоторых ky то в схеме будет иметь место
колебательный характер перезаряда реактивностей, при Im (Xk) =
= 0 (для всех k) и отсутствии колебаний на входах схемы характер»
перезаряда реактивностей — апериодический.
Понятие постоянных времени вводится для случая, когда
Im (Xk) = 0 для всех k = 1, 2, ..., m, что наиболее типично для
переключательных схем ЭВМ, где колебательный характер перезаряда
реактивностей встречается сравнительно редко. Постоянной вре-
117
мени тк будем называть величину
тЛ = —1ДЛ. (5.4)
Для нелинейных схем постоянные времени определяются также
по (5.4), но в качестве Хк используют собственные значения матрицы
Якоби. Пусть математическая модель нелинейной схемы есть
следующая система уравнений: dV/dt = F (V, t), где F (V, t) — вектор-
функция правых частей, F (V, t) = (Д (V, t), /2 (V, t), ..., fm (V, t),
а V = (vu v2, ..., vm) — вектор переменных состояния.
Матрицей Якоби называют матрицу W:
df1/dv1 df1/dv2 ... dft/dvm II
dfz/dv! df2ldvi... df2/dvm ,, ,,
dfjdvx dfjdv2 ... dfm/dvm \\
Собственные значения матрицы Якоби определяют как корни
характеристического уравнения det (W — XI) = 0. Компоненты
матрицы (5.5) у нелинейных схем непостоянны, а следовательно,
переменными оказываются й величины Xk и %k. Определение
собственных значений матриц имеет первостепенное значение при
решении задаче связанных с анализом устойчивости схем. Действительно,
необходимым и достаточным условием устойчивости схемы является
Re(A*)<0 (5.6)
для всех k = 1, 2, ..., m. Поэтому при анализе устойчивых схем
все постоянные времени в соответствии с (5.4) будут
положительными величинами. В дальнейшем, если нет специальной оговорки,
предполагается, что условие (5.6) выполняется.
Среди постоянных времени схемы особую роль играют
минимальная Tmin и максимальная ттах постоянные времени: Tmin = min xk\
Топах = HiaX T/f.
Отношение tmax к xm-m будем называть числом обусловленности
схемы Ц:
Ц = ^max/Tmin*
Далее будет показано, что от разброса постоянных времени (или
от числа обусловленности Ц) существенно зависит эффективность
применения ряда численных методов канализу данной конкретной
•схемы. Поэтому возникает задача оценки числа обусловленности.
Эта оценка нужна для правильного выбора метода анализа и,
следовательно, предшествует машинному анализу схемы. Попытки
точно вычислить постоянные времени нецелесообразны по
следующим причинам: 1) процедура вычисления собственных значений
матриц довольно трудоемка и требует больших затрат машинного
времени; 2) собственные значения матрицы Якоби непостоянны;
3) при выборе метода анализа достаточно иметь довольно грубую
оценку числа обусловленности. В связи с этим инженер, использую-
W:
dvi
118
щий в своей практике машинные методы анализа, должен уметь
по заданной схеме ориентировочно оценивать постоянные времени
Ттах И Tmin.
Рассмотрим способы, используемые для оценки ттах и Tmin
(рассмотрение будем вести применительно к RC-схемш, поскольку
таковыми оказывается большинство эквивалентных схем элементов
ЭВМ).
При определении xmin необходимо выделить емкости схемы, па
предположению, влияющие на образование минимальных величин
в спектре матрицы Якоби. К таким емкостям относят малые емкости
и в первую очередь те из них, перезаряд которых осуществляется
через малые сопротивления. Так, в случае биполярных
интегральных схем к таким емкостям относят барьерные емкости
переходов транзисторов и емкости изолирующего p-n-перехода. При
большом количестве компонентов не следует рассматривать все такие
емкости, поскольку цепи перезаряда емкостей переходов
однотипных компонентов обычно идентичны. После выделения двух-трех
емкостей для каждой из них проделывается следующая процедура.
Все емкости, кроме рассматриваемой, замыкают накоротко. После
этого образуется простая RC-цепь, в которой нетрудно подсчитать
эквивалентное сопротивление цепи перезаряда емкости, а
следовательно, и постоянную времени. В качестве Tmin принимают
наименьшую из постоянных времени, подсчитанных для нескольких
выделенных емкостей.
Аналогично оценивается ттах. Отличия здесь состоят лишь в том,
что выделяются наибольшие емкости, перезаряжающиеся череа
наибольшие сопротивления, и вместо замыкания ветвей всех
емкостей, кроме ветви рассматриваемой емкости, осуществляется
размыкание ветвей. В качестве ттах принимается максимальная из
величин, подсчитанных таким образом для двух-трех выделенных
емкостей.
Полученные таким образом оценки rmin и ттах будут
ориентировочными. Посмотрим на конкретных простых примерах RC-схем,
насколько такие оценки могут расходиться с истинными ттах и Tmin.
Пример 1. Дана схема (рис. 5.1, а). Пусть /?х = 2 кОм, R2~ 1 кОм, R3 1=
= 1 кОм, С1= С2 = 1 нФ. Есть основания предполагать, что Tmin связана
с С2, а ттах — с Cv Подсчитываем xmin, замкнув накоротко ветвь Сх:
тт1п-С2(Я2||Я3) = 0,5мкс,
где R2 II #з — величина сопротивления параллельно соединенных ветвей R2 и R3.
Подсчитаем ттах, для чего разомкнем ветвь С2:
^max=Cl[^i||(«2 + i?3)] = 1 мкс-
Теперь найдем более точные значения постоянных времени. ММС будет
следующая система уравнений:
dUcjdt=(l/C1) [~UCi (l/^+l/R^-UcjR^E/R,];
dUcJdt=(\/C2) i-UCi/Ra-Uc, 0/R2+l/Ra) + E/R9],
где Ucx и Uc2 — падения напряжения в ветвях Сх и С2 соответственно.
113
Матрица А коэффициентов этой системы при заданных численных значениях
параметров будет
-1,5 —1,0||
■1,0 —2,0
А =
det
= 0
Характеристическое уравнение
II—1,5 —Я,
|1 —1,0
или (—1,5 — Л,) - (— 2 — Л) — 1 = 0.
Собственные значения: Хг= — 0,72; Х2 = — 2,78 и постоянные времени*
тш1п = 0,36 мкс; ттах= 1,39 мкс.
1,0
-2,0-
5) *' в[ Д гИя
Рис. 5.1. Схемы для оценки достоянных времени
= 0,25 мкс, ттах =,
Пример 2. То же, что и в примере 1, только Сг = 4 нФ, а С2 = 0,5 нФ.
Тогда ориентировочная оценка xmin и ттах дает: xmin
4 мкс. Матрица А теперь принимает вид
1-0,375 -0,250
|-2,0 -4,0
А =
Ее собственные значения: Хг «*—0,24 и Х2 « —4,13. Следовательно, более
точные значения постоянных времени: xmin = 0,24 мкс и ттах = 4,17 мкс.
Пример 3. Дана схема (рис. 5.1, б). Пусть R± = 10 кОм, R2 = 0,1 кОм,
d = 1 нФ, С2 = 1 нФ. Здесь с равным основанием величину xmin можно связывать
как с емкостью Съ так и с емкостью С2. Замкнем ветвь С2, получим для Сг
^min = Cl(«lll«2)^Cl/?2 = 0'1 МКС-
Практически то же значение Tmin получили бы, если бы замкнули ветвь
€1 и подсчитали т для емкости С2.
При подсчете ттах разомкнем ветвь Сх. Получим ттах = С2 (#х + R2) ^
~ С*#1 = Ю МКС.
Практически то же значение ттах было бы получено при размыкании ветви С2.
Теперь определим ттах и tmin через собственные значения. Математическая
модель схемы, представленной на рис. 5.1,6,
dUCi/dt=(l/Cj [-UCi (VRi+l/RJ + UcJRb + E/RJ;
dUcJdt=(\/C2)[UCi/R2-UcJR2].
Матрица А коэффициентов:
11—10,1 +10,0П
|+10,0 —10,01
Характеристическое уравнение схемы будет X2 + 20, IX + 1 = 0. Его корни:
Ях » — 20,05; %2 « 0,05, а постоянные времени: xmin = 0,05 мкс; tmax = 20 мкс
Пример 4. Рассмотрим схему, показанную на рис. 5.1, в. Ее математическая
модель представляет собой систему пяти обыкновенных дифференциальных
уравнений. Численные значения параметров следующие: Сх = 2000 пФ, С2 = 1,5 пФ,
С3 = 1 пФ, С4 = 5пФ, С5 = 500пФ, Rt = R2 = R3 =#4 = 1 кОм, Rb = 0,1 кОм,
R6 = 0,5 кОм.
А =
120
Применяя указанный выше прием приближенной оценки постоянных времени,
находим Tmin> связанные с С2, С3 и С4. Эти оценки соответственно равны 0,36,
0 25 и 0,46 не. Принимаем Tmin = 0,25 не.
Находим оценки ттах, связанные с Сг и С5. Получаем 750 и 2690 не.
Принимаем ттах = 2690 не и подсчитываем Ц = 1,08 • 104.
Для схемы, изображенной на рис. 5.1, в, при подсчете точных значений
постоянных времени получили: Tmin = 0,174 не, ттах = 4100 не и Д = 2,36-10*.
Приведенные примеры подтверждают, что с помощью указанного
выше приема значения Tmin и ттах находятся довольно приближенно.
Однако часто требуется определить только порядок числа
обусловленности. Поэтому целесообразно говорить о нахождении лишь
порядка постоянных времени и числа обусловленности, если не
прибегать к вычислению собственных значений матрицы. Но из примера 2
видно, что в частных случаях точность ориентировочной оценки
Ттах и Tmin может быть довольно высокой, например, при наличии
в схеме одной емкости, для которой постоянная времени при
ориентировочной оценке оказывается значительно меньше постоянных
времени других емкостей, и при наличии другой емкости, для
которой постоянная времени будет значительно превышать постоянные
времени, подсчитанные для остальных емкостей. Именно такой и
была ситуация в примере 2. В этой ситуации максимальное и
минимальное собственные значения матрицы "А оказываются, близкими
по величине к максимальному и минимальному диагональным
элементам этой матрицы.
Следует обратить внимание также на следующее обстоятельство,
связанное с примером 3. Опытный инженер, оценивая ттах, не стал
бы буквально следовать указанной выше процедуре
ориентировочной оценки. Учитывая малость R2f он пренебрег бы именно этим
сопротивлением и получил бы ттах = (Сх + С2) Rx = 20 мке, что
практически совпадает с точной оценкой.
§ 5.2. ОБЩИЕ СВЕДЕНИЯ О МЕТОДАХ АНАЛИЗА СТАТИЧЕСКИХ
СОСТОЯНИЙ ЭЛЕМЕНТОВ ЭВМ
Статическое состояние электронной схемы описывается
системой алгебраических и трансцендентных уравнений и поэтому
статический анализ схемы на ЭВМ сводится к численному решению такой
системы.
В предыдущей главе были рассмотрены способы получения
математических моделей схем. Для статики система уравнений схемы
будет иметь вид:
fiivi, v2t ..., vm) = Gf
Ufa, v2, ..., vm)=0;
fm(v±, v2y ..., 0m)=O,
или в векторной форме
F(V)=0. (5.7)
121
Задача анализа статики не имеет практического смысла для
автоколебательных схем. Интерес представляют схемы, не являющиеся
автогенераторами колебаний, т. е. схемы, для которых решение
системы (5.7) существуем Для большинства схем система (5.7)
имеет единственное решение. Лишь для триггерных схем имеет место
неоднозначность решения (однако на практике обычно требуется
получить любое из двух возможных решений).
Рассматривая далее методы статического анализа электронных
схем, будем предполагать, что решение системы (5.7) существует
и является единственным.
Численные методы решения системы (5.7) — итерационные
методы. Их сущность заключается в выполнении ряда
последовательных приближений — итераций. На очередной k-й итерации имеется
некоторое приближение V(*_1) к точному решению V* и производится
уточнение этого приближения путем вычисления поправки ДУ(/г)
к значению V(ft-1). Тогда к началу (k + 1)-й итерации имеем
приближение Vik) = V(A_1) + AV(A;), которое должно быть лучшим
приближением, чем V(/*_1).
Существующие итерационные методы решения системы (5.7)
отличаются друг от друга способом вычисления поправки AV(A).
Основное требование к методу — обеспечение сходимости
итерационной последовательности V{k) к точному решению V*, т. е. lim V(/*> =
fc-юо
= V*. Поэтому важным вопросом, требующим выяснения при
выборе метода для анализа статических состояний схем, является
вопрос об условиях сходимости. После того как установлен факт
сходимости, нужно выяснить, какова скорость сходимости, так как от
нее зависят затраты машинного времени на решение задачи
статического анализа электронной схемы. Скорость сходимости обычно
оценивается количеством итераций, за которое достигается заданная
е-окрестность точки V* решения. Точка V* может быть получена
только при бесконечно большом количестве итераций. Практически
вычисления нужно прекращать на некоторой n-й итерации. При этом
будет получено приближенное решение V(/l).
Рассмотрение условий, при выполнении которых нужно прекращать
итерационный процесс, требует пояснения некоторых понятий из функционального
анализа. Эти понятия используют и при изложении ряда других вопросов,
связанных с анализом и оптимизацией электронных схем.
Множество значений вектора V = (vlt v2, ... , vm) называют пространством
параметров, каждое значение вектора V есть точка в пространстве параметров,
компоненты vx, v2, ... , vm являются координатами пространства, а количество
координат т есть размерность пространства. Пространство параметров
является метрическим пространством, т. е. пространством, в котором тем или
иным способом вводится понятие расстояния между точками. На практике обычно
используют один из следующих способов определения расстояния между
некоторыми точками Vx и V2.
Способ 1. Кубическая метрика приводит к пространству, в котором
расстояние между точками Vx и V2, обозначаемое pm (Vb V2), определяется по формуле
Ptz(Vi, V2)= max \vu — v2i\, (5.8)
1 < i < m
где юц и -v2i — *"e ординаты точек Vj и V2.
.122
Расстояние между точкой Уг и началом координат есть норма вектора Vx.
Норму вектора V далее будем обозначать [V]. В соответствии с (5.8) при
кубической метрике имеем норму
[V]=pm(V, 0)= max | о, |.
1 ^ i ^ т
которую называют равномерной нормой или т-нормой.
Способ 2. Октаэдрическая метрика приводит к пространству, в котором,
расстояние между точками Vx и V2 определяют по формуле
т
Ps(Vi, V2)=2 l°i/-°2*|.
1=1
m
а норма вектора V есть норма [V] = ^] |у;|, -называемая s-нормой.
i=\
Способ 3. Шаровая метрика определяет евклидово пространство с расстоянием!
р (\lt V2) между точками Vx и V2:
P/(Vi, V2) = l/ 2 (vu-VtiY
и нормой вектора [V] —Л/ 2 vi» называем°й евклидовой нормой или /-яод-1-
* ; = i
мой.
Поскольку разность векторов Vx и V2 есть вектор, то расстояние между двумя
точками Ух и V2 есть норма [Ух — V2] вектора Vx — V2.
Подмножество точек V пространства параметров, удовлетворяющих условию»
[V — V0] < 8, где s > 0, называют г-окрестностью точки V0 и обозначают Se(V0).
Приближенное решение V{n) желательно получить с наперед
заданной точностью е, т. е. V(rt) должно принадлежать е-окрестности
точного решения V*. К сожалению, точка V* неизвестна, что не
позволяет вычислить норму вектора V(/2) — V* и определить,
выполняется ли условие V(rt) £ Se (V*).
В связи с этим на практике достигнутую k процессе итераций
точность обычно оценивают по норме вектора поправок [AVU)] или
по норме вектора невязок [F (V{k))]. Очевидно, что при V(*} ->- V*
имеем [AVU)] ->0 и [F (V{k))] ->0. При высокой скорости
сходимости поправка на (k + 1)-й итерации будет заметно меньше по
абсолютной величине, чем поправка на k-й итерации, и в этих
условиях принимают допущение [AVU)] ^ [V (*}— V*], откуда еле-
^дует, что вычисления нужно прекращать при выполнении условия
[AV(A)] < е, где s — заданная точность решения.
Наиболее часто используемыми методами решения системы (5.7)
при статическом анализе электронных схем являются метод простой
итерации и метод Ньютона. Несколько реже находят применение
методы минимизации, которые применяют после того, как исходная
задача решения системы (5.7) будет сформулирована как
экстремальная задача. Такая формулировка требует образования функции
вектора V, называемой целевой функцией, которая будет иметь
минимум в точке V*, являющейся решением системы (5.7).
Определение экстремума, т. е. точки V*, осуществляется методами поиска
экстремума (см. гл. 8). Целевая функция <р (V) при решении си-
12а
стемы (5.7) методами минимизации обычно представляет собой сумму
т
квадратов невязок cp(V) = 2 \ft (V)]2. Очевидно, что минимум ср (V)
; = i
равен 0 и достигается в точке V*, где все невязки равны нулю.
§ 5.3. МЕТОД ПРОСТЫХ ИТЕРАЦИЙ
Простые итерации выполняют по формуле
V(*> = W(k-i) + H{k)p (уиг-D^ (5.9)
где Н(*} — диагональная матрица с коэффициентами А<*> на
диагонали (/= 1, 2, ..., т). Эту матрицу, подобно другим
диагональным матрицам, можно обозначать так: Н(/г) = diag {h^\ h&\ ..., Ык)).
Другими словами, поправка AV{k) для уточнения /-го корня на
k-н итерации подсчитывается по формуле Av{f = ft<*y\(V(*_1)).
Сходимость простых итераций к решению V* наблюдается не
при любых значениях матрицы Н (от значений Н зависит также
скорость сходимости).
Сходимость метода простых итераций. Выясним условия
сходимости. Для этого рассмотрим более простой для исследования
случай линейной системы алгебраических уравнений, т. е. систему
(5.7) представим в виде
F(V) = AV + B = 0, (5.10)
где А — постоянная матрица; В — постоянный вектор.
Пока неизвестны причины, по которым коэффициенты h&)
целесообразно брать разными для разных уравнений и для разных
итераций, будем считать, что Ык) одинаковы, т. е. ft<f> = ft<*> = ... =
= ft<*> = h для всех k = 1, 2, ..., п и А"> = № = ... = ft(»> = h
fTl J J 1
для всех / = 1, 2, .;., т. Тогда (5.9) с учетом (5.10) переписывается
в виде
У<*> = У1*-« + А(АУ**-" + В). (5.11)
Для начала итерационного процесса должна быть выбрана
некоторая исходная точка в пространстве параметров, т. е. начальное
приближение V(0) к искомому решению. Тогда последовательные
итерации дадут:
VU> = V<°> + A (AV<°> + В) = (I + АА) V(0) + АВ;
V(2) = v(1' + ft(AV(1) + B) = (I+/iA)V(1) + ftB =
= (I + AA)2 V<°> + (I + AA) AB + AB;
\W = v<2> +h (AV<2> + B) = (I + AA)8 V<°> + A{(I + AA)2 +
+ (1+АА) + 1}В, •
где I — единичная матрица.
На k-й итерации имеем V<*> = (I + AA)<«V«» + h {(I + AA)M +
+ (I + AA)*"2 + ... + (1 + AA) + 1} B.
124
Последовательность значений V{b) будет сходящейся к решению
системы (5.10), если сходится степенной матричный ряд
2 (1 + ЛА)*. (5.12)
Покажем, при каких условиях сходимость имеет место. Для
этого воспользуемся известным в теории матриц преобразованием
подобия:
I + /lA = Tdiag{l+/i^1, 1+ЛЛа, ..., l+hkm}T-\
где Т — некоторая преобразующая матрица, Т1 — матрица,
обратная матрице Т, Xj — /-е собственное значение матрицы А. Нетрудно
видеть, что (I + hkf = Т [diag {1 + Ккъ 1 + АЛ,,..., 1 +
+ ят}р т1 = т diag {(1 + ад, (л + ад, ..., (1 + Kkmf\ г1.
Поэтому и для k-и степени матрицы (I + ЛА) можно записать:
(I + hkf = т diag {(1 + ад, (1 + ад, ..., (1 + hKm)k}T-\
Сходимость ряда (5.12) будет иметь место при сходимости
матричного ряда:
оо
2 diag{(1+АЛ0М1+ **,)*, ..-, О+АА*,)*}. (5.13)
В свою очередь, ряд (5.13) сходится, если сходятся т степенных
рядов:
оо
2 (1+ЛЯ/)*, /=1,2,..., т. (5.14)
Условием сходимости таких рядов будет следующее:
I 1+ЛЯ/К1. (5.15)
Если %j — действительные числа, то с учетом (5.4) условие (5.15)
переписывается в виде
|1-А/ту|<1, (5.16)
где т;- — /-я постоянная времени схемы.
Выше было сказано, что при статическом анализе целесообразно
иметь в виду только устойчивые схемы, т. е. схемы, у которых все
постоянные времени — положительные величины. Тогда условие
(5.10) принимает вид 0 <с {hlij) < 2 для всех / = 1, 2, ..., т, или
Окончательно
h = c1xminy 0<d<2. (5.17)
Скорость сходимости определяется тем, насколько быстро
убывают члены ряда (5.12), или, что то же самое, члены рядов (5.14)
с ростом k. Наименьшая скорость сходимости будет у того ряда из т
рядов (5.14), у которого окажется наиболее близкой к единице
величина (1 + hKj) = [1 —сг (тт1п/ту)]. Очевидно, что это будет иметь
место при /, при котором т,- = ттах. Следовательно, скорость схо-
125
димости итерационного процесса определяется величиной
С\ (Tmin/tmax) = £]/Д,
где Ц — число обусловленности схемы, причем Ц^ 1.
Таким образом, чем больше Ц, тем меньше скорость сходимости,
тем больше количество итераций, требующихся для получения
решения с заданной точностью, тем больше затраты машинного
времени.
В более общем случае, когда собственные значения Xj матрицы А
могут быть и комплексными величинами, условие (5.15) принимает
вид | 1 + h [Re (XJ) + i Im (X/)] | < 1 и, следовательно,
параметр h должен выбираться в соответствии с неравенством
О < А < - 2 Re (*,)/{[Re {Xj)f + [Im (Xf)f} (5.18)
для всех /= 1, 2, ..., т. Отсюда, в частности, следует, что при
| Im (Xj) | ^> | Re (Xj) | величина h и скорость сходимости будут
малыми.
Условие выбора h в виде (5.17) было получено для линейных
схем. Если в г-окрестности 58 (V{k)) точки W{k), такой, что [ А\Щ <8,
справедлива линеаризация уравнений математической модели схемы,
то можно условие (5.17) распространить и на нелинейные задачи.
При этом xmin определяется на основе собственных значений
матрицы Якоби. Поскольку xmin здесь меняется на каждой итерации,
то при h = const в условии (5.17) фигурирует Tmin, определяемая
как тга1п = min min xf\ Это обстоятельство может привести
к значению А, заниженному на большинстве итераций, т. е. к
заниженной скорости сходимости по сравнению с максимально
возможной. Поэтому для повышения скорости сходимости целесообразно
величину h менять от итерации к итерации. К сожалению,
обоснованный выбор h из условия h{k) < 2тт}п требует вычисления тт1п
на каждой итерации. Но, как было сказано ранее, попытки
вычислять Tmin приведут к резкому росту затрат машинного времени.
Поэтому на практике используют иные алгоритмы для выбора h{k).
Эти алгоритмы аналогичны тем, которые используют при
автоматическом выборе шага интегрирования системы дифференциальных
уравнений (см. § 5.10).
Повышение скорости сходимости. Рассмотрим возможности
увеличения скорости сходимости простых итераций с помощью
выбора различных hj для разных уравнений системы (5.7).
Представим hi в виде hj = hpj. Тогда матрица Н из (5.9) есть
Н = АР, (5.19)
где Р = diag {pl9 р2, ..., рт}.
Применив формулу простой итерации с учетом (5.19) к системе
линейных уравнений (5.10), имеем V<*> = V^ + h (PAV^ +
+ PB), где PA = А1 и PB = В1. Тогда все ранее полученные
соотношения для выбора h и оценки скорости сходимости сохраняют
силу с той разницей, что в эти соотношений должны входить соб-
126
ственные значения матрицы А1. Но число обусловленности
матрицы А1 соответствующим выбором коэффициентов pj часто можно
сделать меньшим по сравнению с числом обусловленности
матрицы А. В этом и заключаются возможности увеличения скорости
сходимости метода простой итерации. Проблема состоит лишь
в том, каким образом выбирать ру-, чтобы уменьшить Ц, в условиях,
когда от вычисления собственных значений матрицы приходится
отказываться. Здесь может помочь физическая интерпретация задачи
и способ ориентировочной оценки постоянных времени (см. § 5.1).
Рассмотрим частный случай /?С-схем, в которых отсутствуют
емкостные неправильные размещения при получении уравнений ММС.
Тогда уравнения системы (5.7) имеют форму fj (vly v2f ..., vm) =
= (1/Cy) Ij (vlf v2l ..., vm) = 0, где Cf — /-я емкость; // — ток через
емкость Cj.
Умножение /-го уравнения системы (5.7) на pj равносильно
уменьшению емкости С; в pj раз. Очевидно, что такое умножение
не может изменить решения задачи V*. Используя способы
ориентировочной оценки постоянных времени, в ряде задач можно, так
выбрать pj, что постоянные времени перезаряда емкостей Cjlpj будут
иметь меньший разброс, чем постоянные времени перезаряда
емкостей Cj в исходной схеме. Тем самым уменьшается число обуслов- '
ленности Ц.
Таким образом, практическое применение метода простых
итераций означает изменение величин емкостей и индуктивностей в схеме
и выполнение простых итераций с одинаковой для всех уравнений'
величиной h.
Для пояснения процедуры изменения емкостей с целью повышения скорости
сходимости простых итераций обратимся к примерам, рассмотренным в § 5.1.
В примере 2 § 5.1 ориентировочно подсчитано xmin = 0,25 мкс, ттах = 4 мкс
и, следовательно, Ц — 16 (истинное значение Д было 17,4). Нетрудно видеть,
что Д можно уменьшить или увеличивая С2, или уменьшая Сх. Увеличим,
например, С2 так, чтобы ориентировочная- оценка постоянной времени перезаряда
этой емкости стала равной 4 мкс. Простой подсчет дает при этом С2 = 8 нФ.
Для определения получающегося Д подсчитаем собственные значения матрицы
коэффициентов и получим Кг — — 18,5 и ^2 = — 3,5, откуда Д = 5,3, т. е
действительно удалось уменьшить Д.
Пример 1 показывает, что в задаче примера 2 можно еще заметнее
уменьшить Д. В примере 1 в отличие от примера 2 емкости Сх и С2 были
одинаковыми, что дало Д = 3,96. Чтобы найти минимум Д, варьируя значения емкостей,
нужно вычислять собственные значения матриц. На практике определение
минимума Д не является обязательным, достаточно лишь существенно уменьшить
Д, что вполне по силам инженеру, имеющему некоторый опыт решения задач
анализа схем на ЭВМ.
Пример 3 иллюстрирует ситуации, когда значение Д может быть большим
и его не удается заметно уменьшить варьированием значений емкостей. Здесь
Д = 400 и разброс "постоянных времени обусловлен не разбросом значений
емкостей, а разбросом значений сопротивлений. Изменять же величины
сопротивлений, как правило, нельзя, так как это повлечет за собой изменение решения
задачи V*, что недопустимо.
Определим порядок величины п, где п — требуемое количество
итераций для получения решения с относительной точностью е.
Для этого примем допущение, что порядо^к m-нормы вектора попра-
127
вок ДУ(Л) совпадает с порядком величины (1 — cxIU)k V(o), т. е.
при k = п должно выполниться условие (1 — с1/Ц)п ^ е.
Принимая сг = 1, получим
flS*[lge/lg(l--l/ZO]. (5.20)
Ниже приведены минимальные значения п9 подсчитанные по
(5.20), при некоторых конкретных значениях 8 и Ц:
Ц... МО1 МО2 Ы03
е ... 1 • 10~3-М . 10-5 1.10-з-М . 10-§ 1.10"34- 1 • 1(Г5
и... 66 -Ь109 683 4-1138 7500 -Ь 12 500
Эти данные наглядно показывают рост трудоемкости
вычислений с увеличением числа обусловленности. Количество требуемых
итераций примерно на порядок больше числа обусловленности.
§ 5.4. МЕТОД НЬЮТОНА
Итерационная формула метода Ньютона в применении к
решению системы (5.7) имеет вид
VU) = у(*-1>-| W(*-,>|f"1 F(V<*-«), (5.21)
где || W(fe_1)|| ~1 — матрица, обратная матрице Якоби,
подсчитанная на k-и итерации, т. е. в точке V**"1*. Решение системы, как и
ранее, обозначим V* = (и*, и*, ... , v%).
Покажем, как может быть получена формула (5.21). Разложим
функцию fj (vly v2, ... , vm) в /-м уравнении системы (5.7) в ряд
Тейлора в окрестностях точки V* и сохраним в этом разложении
только члены первого порядка малости:
~ (5.22)
где df^-v/dvi — значение производной dfjldvt в точке V(ft_1); Да<*) =
= v\ — vikll)-
Система т уравнений, каждое^из которых представлено в виде
(5.22), в матричной форме может быть записана как F (V(ft_1)) +
+ w^AVW = 0.
Отсюда сразу же получается формула для подсчета вектора
поправок:
ду<*> = —1| W<*-x> Ц-1 F (V^), (5.23)
а следовательно, и формула (5.21).
В случае линейной системы уравнений разложение (5.22) будет
точным и поэтому поправка (5.23) к исходному значению V(0) сразу
же дает искомое решение V*, т. е. в этом случае решение достигается
за одну итерацию. В нелинейных задачах, для которых и
предназначен метод Ньютона, пренебрежение членами второго и выше по-
128
рядка малости в разложении в ряд Тейлора приводит к тому, что
поправка, вычисленная по (5.23), не дает точного решения V*,
а позволяет найти лишь новое приближение \{,i) к этому решению.
Отсюда и получается итерационная последовательность V(fe) =
^ у(А-1) + ДУ(Ю; k= 1, 2, ... .
Условия, при которых последовательность ньютоновских
приближений сходится к решению V*, выражаются довольно, сложно
[19]. Во всяком случае инженер при подготовке задачи анализа
электронной схемы к решению на ЭВМ не сможет воспользоваться
этими условиями для априорного определения факта сходимости и
скорости сходимости.
Поэтому не будем приводить
строгую математическую
формулировку этих
условий. Однако показать на
частных примерах, что
сходимость в методе
Ньютона обеспечивается не
всегда, довольно просто.
Отметим при этом
некоторые факторы, управляя
которыми инженер может
повысить априорную
вероятность сходимости.
Рассмотрим рис. 5.2, а,
где изображена некоторая
зависимость / (X).
Решением уравнения f (X) = О,
очевидно, будет X*. Пусть
в качестве исходного
приближения корня выбрано
значение X (0). В
соответствии с методом Ньютона кривая / (X) заменяется касательной
к / (X) в точке Х(0). Далее ищется корень линейного уравнения.
Другими словами, вместо точки пересечения оси абсцисс с кривой
/ (X) ищется точка пересечения оси абсцисс с касательной к / (X)
в точке Х(0). Найденная точка на рис. 5.2, а обозначена Х<х>.
Продолжая далее ньютоновские итерации, можно получить точки
Х(2), Х.(3), Х(4). Как видим, итерационный процесс расходится.
На рис. 5.2, б изображен участок кривой / (X) (той же, что и
на рис. 5.2, а), но здесь в более крупном масштабе показана
окрестность точки X*. Из рис. 5.2, а, б видно, что если исходная точка Х(0>
будет выбрана ближе к точке X*, то последовательность
ньютоновских итераций сходится. Эта особенность характерна и для системы
уравнений (5.7):
Итак, можно отметить, что на успех решения задачи методом
Ньютона можно надеяться с тем большим основанием, чем в
меньшей окрестности точного решения V* выбрана исходная
точка V(0).
Рис.
5.2. Иллюстрация ньютоновских ите*
раций:
а — процесс вычислений расходится; б — процесс
вычислений сходится
»?9
Из рис. 5.2, а, б видно, что на успех решения задачи влияет
степень нелинейности кривой / (X), оцениваемая величиной f" (X).
Действительно, если /" (X) = О повсюду на интервале, где может
выбираться Х(0), имеем линейную задачу и для вычисления X*
достаточно одной итерации. И в многомерном случае системы
уравнений (5.7) можно достичь успеха с тем большим основанием, чем
меньше нелинейность функций /у, т. е. чем меньше вторые
производные функций fj по своим аргументам в рассматриваемой области.
Скорость сходимости в методе Ньютона, если сходимость имеет
место, значительно выше, чем в методе простой итерации, что видно,
например, из частного случая линейной задачи. В методе Ньютона
скорость сходимости не определяется числом обусловленности, как
это было при простых итерациях.
Способы повышения вероятности сходимости. При реализации
любого метода в программах, предназначенных для анализа
различных схем, необходима уверенность, что решение будет достигнуто
во всех случаях или, по крайней мере, в подавляющем большинстве
случаев. Поэтому необходимо использование приемов, повышающих
вероятность сходимости ньютоновских итераций. Рассмотрим те из
них, которые чаще других применяют на практике.
Прежде всего можно добиться цели, если начинать ньютоновские
итерации от некоторой исходной точки VHCX, расположенной в
малой окрестности точки V*. Поскольку точка V* неизвестна, то
гарантировать правильный выбор VHCX при подготовке задачи к решению
нельзя. Определение VHCX должно производиться с помощью какой-
либо вычислительной процедуры. В качестве такой процедуры
можно использовать простые итерации.
Алгоритм совместного использования методов Ньютона и
простых итераций кратко можно описать следующим образом. Пусть
заданы некоторые целые числа Ыг и N2. В заданной начальной
точке. V(0) делается попытка достичь цели с помощью не более
чем Nx ньютоновских итераций. ВозможньГследующие варианты.
Если выполнится условие
[ду(*)]<8, (5.24)
где ДУ(Л) — вектор поправок на k-и из Nx итераций, а е —
заданная точность решения, то цель достигнута и вычисления
прекращаются. Если какой-либо элемент вектора \{k) окажется вне
допустимого заранее оговоренного интервала, то это отождествляется
с фактом расходимости задачи и происходит возвращение в точку V(0),
после чего применяются простые итерации. То же самое будет
сделано, если условие (5.24) не выполнится ни на одной из N±
ньютоновских итераций. После выполнения N2 простых итераций
вместо V(0) будет получена новая точка VHCX, в которой вновь делается
попытка достичь успеха с помощью ньютоновских итераций, как
это было в точке V(0), т. е. процесс повторяется до тех пор, пока
в каком-либо цикле не выполнится условие (5.24).
Совместное использование методов простых и ньютоновских
итераций часто позволяет получить решение заданной точности
130
с меньшими затратами машинного времени, чем при использовании
только простых итераций. Однако при больших числах
обусловленности эти затраты все-таки оказываются большими, сложность
описанного алгоритма обусловливает и сложность программы анализа.
Другой прием улучшения сходимости связан с введением
положительного множителя h < 1 в формулу (5.21):
V<*> = vi*-i> -А|| W(*-x> If-1 F (Vе*-1)). (5.25)
При этом перемещение из точки V(/Kl) в пространстве параметров
на каждой итерации происходит на меньшее расстояние. То, что
при этом вероятность сходимости может повыситься, видно из
рис. 5.2, а, если к показанной функции / (X) при начальной точке
Х(0) применить формулу (5.25) с достаточно малым h. Здесь
вызывает затруднение выбор величины й, поскольку при заниженных й
заметно уменьшается скорость сходимости, а при завышенных й —
вероятность сходимости.
Следующие два приема улучшения сходимости вытекают из
физической сущности задачи статического анализа электронных
схем. В первом из них рекомендуется начинать итерации из нулевой
начальной точки, т. е. из точки vx = 0, v2 = 0, ... , vm = 0. При
этом значения напряжений источников питания должны быть взяты
в несколько раз меньшими по сравнению с действительными. После
того как выполнится условие (5.24), напряжения увеличивают и
повторяют решение. Эту процедуру продолжают до тех пор, пока
не будет получено решение при номинальных значениях питающих
напряжений. Очевидно, что здесь могут возникнуть затруднения
при выборе тнага изменения питающих напряжений аналогично
затруднениям с выбором й в предыдущем способе.
Модифицированный метод Ньютона. Все описанные приемы,
повышая вероятность сходимости, увеличивают затраты машинного
времени по сравнению с обычным методом Ньютона. От этого
недостатка свободен модифицированный метод Ньютона, который
ориентирован на применение в задачах анализа схем с биполярными
компонентами. Нелинейность этих задач обусловлена
нелинейностью ВАХ р-/г-переходов. Такие ВАХ являются экспоненциальными
функциями:
IR = IT{exp[U/(myT)]-l}. (5.26)
Эти функции входят в уравнения ММС (5.7) и могут привести
к большим значениям вторых производных /у по vt и, следовательно,
вызвать расходимость итерационного процесса. Кроме того, в
процессе итераций даже сравнительно небольшие положительные
поправки. Шк) к напряжениям р-д-переходов могут вызвать резкий
рост экспоненциальных функций; в результате произойдет
переполнение разрядной сетки машины и продолжение вычислений
оказывается невозможным.
Пример 1. Пусть диод Д имеет следующие значения параметров: /Т =
= 10~4 мА, тфт = 0,033 В (рис. 5.3, а). Остальные параметры схемы имеют
значения: Е = 5 В, R +/*б = 1 кОи, где гб ~"~ объемное сопротивление тела
131
базы диода. Математическая модель схемы на рис. 5.3, а есть следующее
дифференциальное уравнение:
dU/dt = (\/c){(E-U)/(R + r6)-JTexp[U/(mq>T)]+IT}9
где U — падение напряжения на р-я-переходе; С — емкость перехода.
В статическом режиме эта модель преобразуется в трансцендентное урав
нение:
f(U) = (E-U)/(R+r6) -/rexp [U/(nupT)] + IT=0.
После подстановки численных значений параметров имеем
f(U) = 5-/7- Ю-*ехр ({//0,033) + 10-4 = о.
Пусть в качестве исходной точки выбрана точка Ul0) == 0,2 В. Производная
f (U) по V1 (это и есть матрица Якоби в этой одномерной задаче) в точке Ul0)
df/dU = — 1 —(10-4/0,033) ехр (0,2/0,033) 9ё —2,2 мА/В.
Вычисляем невязку в точке U{0i = 0,2 В:
/(£7(0>) = (5 —0,2)/1— 0,04 = 4,76 мА.
Новое значение напряжения на переходе U{1) получаем по (5.21):
tfci) = {усо> _ (df^/dU)-1 f (U(0)) = 0,2 + 4,76/2,2 = 2,36 В.
На следующей итерации потребуется вычислить значение
ехр [£/<17(/жрг)]=ехр [2,36/0,033] =е71'5 ^ 1 • lO3*.
Но в большинстве ЭВМ максимально допустимым числом является 1 • 1019,
следовательно, произойдет переполнение разрядной сетки.
Идею модификации метода Ньютона можно пояснить с помощью
рис. 5.3, б, на котором изображена ВАХ р-д-перехода и обозначены
начальная точка £/(0), точка
£/(1), получающаяся при первой
итерации обычным методом
Ньютона, и точка £/(1),
соответствующая итерации по
модифицированному методу. На
рассматриваемой ньютоновской
итерации решение нелинейной задачи
заменяется решением
линеаризованной задачи, в которой
нелинейная характеристика /д (U)
представляется прямой Л£,
касательной к кривой /д (U) в
точке (/(0). В обычном методе
Ньютона ток /д в точке £/(1)
на следующей итерации определяется в результате подстановки £/(1)
в уравнение ВАХ (5.26), что и вызвало переполнение разрядной
сетки машины в примере 1. В модифицированном методе Ньютона
ток /д на следующей итерации, который обозначим /д , определяется
как результат подстановки Ьг(1) в уравнение прямой ЛБ:
I4> = W+(dr£>/dU) (^(1,-^'П =/i0, + [(/J?, + /r)/(m9r)] Ai7ai,
где Д?7*(1) — поправка, вычисленная по (5.23) обычного метода
Ньютона. Как видно из рис. 5,3, б, току /д1' соответствует напряже-
Я'
h
т 10)
19
,s
,
AJY \
YUW ит фГц
Рис. 5.3. Иллюстрация применения
метода Ньютона для статического
анализа:
а г- схема примера; б — вольт-амперная
характеристика диода
132
ние £/(1\ которое получается после подстановки /(д в уравнение
ВАХ:
i/<*' = mq>rln (/^7/г+1)=тфг1п{[1+Аг/(17(тфг)]ехр[[/(0,/(тфГ)]}.
Окончательно имеем
(/(1) = £/(0) + Д(/(1)э
что совпадает с формулой обычного метода Ньютона, но поправка
Д£/(1) определяется иначе:
Д(/(1) = шфГ In [1 + Д^Дтфт)]. (5.27)
Пример 2. Возвратимся к примеру 1 и продолжим решение
модифицированным методом Ньютона. На первой итерации Д£/(1) = 2,16 В, Поэтому
Utl} =0,2 + 0,033 In (1+2,16/0,033) ^0,338 В.
На второй итерации:
df^/dU = — 1 —(10-4/0,033) ехр (0,338/0,033) ^-86 мА/В;
/([/(1>) = 5-0,338-10-4ехр (0,338/0,033)== 1,85 мА;
Д(7<2>=—(_ 1/86). 1,85 = 0,0215 В;
AU<*> = 0,033 In (1+0,0215/0,033) ^ 0,0166 В;
£/<2)=о,338+0,0166 = 0,3546 В.
На третьей итерации невязка оказывается / (U(2)) ^ 0,031 мА, а поправка AUi3)
будет составлять около 0,0002 В. Если выбрать 8 = 0001 В, то условие ^5.24)
выполняется и, следовательно, вычисленное за три итерации значение корня
составляет около 0,3548 В.
Итерационную процедуру, выражаемую формулой (5.27) и
поясняемую рис. 5.3, б, целесообразно применять только на
прямой ветви ВАХ р-я-перехода,_т. е. при и{к~г) + tSU^k) > 0 и при
положительных поправках AU^k\
Алгоритм решения системы (5.7) методом Ньютона можно
выразить следующим образом:
а) к началу очередной &-й итерации известен вектор V(*_1);
вычисляется матрица Якоби W(AKL) в точке V(/ra) (алгоритмы
вычисления матрицы Якоби рассматриваются в § 5.5);
б) вычисляется вектор невязок F (У(/г_1));
в) решается система линейных алгебраических уравнений
Wt/e_1)AV(ft) = —F (У(/Ь1)), в результате становится извесгаым
вектор AV^};
г) в обычном методе Ньютона вектор AV(fe) отождествляется
с вектором поправок A V(ft) и непосредственно используется для
подсчета вектора V<*> = V(fe-1} + AV(*>.
В модифицированном методе Ньютона вектор AV(ft)
преобразуется в вектор поправок АУ(/г) по формуле
Да<*) = ДгК*) (5.28)
или
Avf = m<pr ki [1 + A3f>/(/nq>r)]. (5.2Э)
133
Формула (5.29) используется только для тех переменных
состояния, которые являются напряжениями p-n-переходов, и только
тогда, когда выполняются условия v&jl) + А^ > 0 и AvW > 0.
Во всех остальных случаях используется формула (5.28). Далее
подсчитывается V(A) = V(ft_1) + AV(fe);
д) проверяется условие [AV(/?)] < е. Если оно выполняется, то
вычисления прекращаются и за решение задачи принимается
вектор V{k). Если условие не выполняется, то происходит переход к
новой (k + 1)-й итерации, т. е. переход к выполнению оператора «а»в
§ 5.5. ВЫЧИСЛЕНИЕ МАТРИЦЫ ЯКОБИ
Методы вычисления матрицы Якоб и. Вычисление матрицы
Якоби требуется не только при решении системы нелинейных
алгебраических и трансцендентных уравнений методом Ньютона, но и
при решении систем обыкновенных дифференциальных уравнений
с анализом переходных процессов методами неявного
интегрирования, о которых будет сказано в следующих параграфах. Эту систему
дифференциальных уравнений запишем в виде
dV/df = V = F(V, 0- (5.30)
Матрица Якоби этой системы
W = |&v/di>,||. (5.31)
Система алгебраических и трансцендентных уравнений для
статического анализа схем может получаться из (5.30) приравниванием
нулю элементов вектора V, и тогда матрица Якоби при статическом
анализе ничем не отличается от матрицы Якоби при анализе
переходных процессов. В частных случаях при переходе от системы (5.30)
к системе алгебраических и трансцендентных уравнений возможны
некоторые изменения правых частей системы (5.30). Например,
в RC-схемах без емкостных неправильных размещений компоненты
вектора правых частей имеют вид /у (V, /) = (1/Су) Ij (V, /), где
lj (V, t) — ток через емкость Су. Тогда при статическое анализе
можно умножить правые части системы (5.30) на величины Cj и,
следовательно, исключить величины Cj из формулировки задачи.
В этом случае матрица Якоби будет отличаться от матрицы,
определяемой как (5.31). Рассмотрим вычисление матрицы Якоби в
виде (5.31), справедливом для задач как статического анализа, так
и анализа переходных процессов.
В общем случае схем с любыми нелинейными компонентами и
любыми моделями компонентов для вычисления матрицы Якоби
можно использовать метод анализа чувствительности,
заключающийся в замене производных отношениями приращений: dvjldvi ^
д^ Avj/Avi. Тогда, давая поочередно малые приращения Av(
переменным состояния -и вычисляя при этом отклонения невязок А/у =
= At',-, получим элементы матрицы Якоби как отношения этих
приращений. Однако необходимость поочередного изменения перемен-
134
№lx состояния выливается в выполнение (т + 1)-го варианта
вычисления невязок (т — количество переменных состояния). Так как
матрицу Якоби нужно при анализе вычислять многократно, то
затраты машинного времени могут оказаться чрезмерно большими.
Часто на практике матрицу Якоби можно вычислять более
экономно. Но при этом должны быть заранее известны модели
нелинейных компонентов и, следовательно, все нелинейные функции,
входящие в правые части системы (5.30). Тогда можно получить
аналитические формулы для вычисления элементов матрицы Якоби и эти
формулы рассматривать как составные части математических
моделей нелинейных компонентов/Матрица Якоби будет представлять
собой сумму двух матриц W1 и W2 (W1 — постоянная матрица,
не изменяющаяся от итерации к итерации). Элементы матрицы W1
зависят только от параметров линейных компонентов. Очевидно,
что матрица W1 должна подсчитываться лишь один раз перед первой
итерацией. Матрица W2 целиком определяется характером нели-
нейностей в моделях компонентов, ее элементы изменяются от
итерации к итерации и должны подсчитываться по формулам, входящим
в модели компонентов.
Вычисление матрицы Якоби в частном случае транзисторно-диодных схем.
Рассмотрим, как можно получить эти формулы в наиболее важном частном случае
схем, в которых нелинейными компонентами могут быть только биполярные
транзисторы и диоды. В качестве моделей транзистора и диода будем
использовать модели, изложенные в § 3.2, 3.3. В этих условиях в эквивалентной схеме
ветви емкостей р-/г-переходов не могут быть неправильно размещенными,
поскольку с ветвями других емкостей они связаны через ветви сопротивлений тел
базы и коллектора. Тогда уравнения системы (5.30) можно разделить на^
нелинейные и линейные уравнения. Каждое нелинейное уравнение есть уравнение
р-л-перехода вида (3.30), т. е.
^//=(1/С/)(//-/акт/), (5.32)
где / = 1, 2, ... , п\ п — количество р-я-переходов.
Емкость С/ есть функция только одной переменной состояния Uf
с/-Сбо 1%/(%~и/)]п + Мт(Рт)] 'гехР [иД™Рт)], (5-33>
г
где Сбо, Фо» п> т> тФг и 1т — параметры'р-л-перехода, соответствующего /-му
уравнению; /акту — функция только двух переменных состояния Uj и Uj+1
, 1где Uj+1 — падение напряжения на коллекторном (эмиттерном) переходе
транзистора, если 0/ — падение напряжения на эмиттерном (коллекторном) переходе].
Для определенности условимся считать, что U,- — падение напряжения
на эмиттерном переходе. Тогда
'.«/=<*+!> !п iexP [<У(«Фл)]- Ц-
-BJT% {ехр [ит1{тчТк)]-\} + и^ь, (5.34)
где В, Вн, Ry.& — параметры транзистора.
В случае диодов В = £и = 0 и /аКт/ становится функцией только Uj, Ток
/у может быть функцией любых переменных состояния схемы, но является
линейной функцией вида
If=wlflU1 + w\f2Ui+... + wlJmUm, (5.35)
rjifiwlfi — постоянные коэффициенты; Ui — переменные состояния, i = I, 2,
... , m.
Каждое линейное уравнение системы (5.30) есть уравнение перезаряда
постоянной емкости и его можно представить также в виде линейной функции пере-
135
менных состояния: Of = wl^Ui + w\;2U2 + ... + ^l/mf/w, где / = n + 1,
/i + 2, ... , m.
Представим /-ю строку матрицы Якоби в виде
щ\_
Щ Щ дО; dOj dOj\
dUi) \dViy dU2"'" dUf' dUf+1'""dUm
При / > n, т. е. для строк, соответствующих линейным уравнениям, (5.36)
принимает вид
' Щ \
-gg-.J = (wl/l9 ш1/2, ...,wlJm).
При / < п элементы строки (5.36) определяются дифференцированием (5.32)
по Ut. Используя (3.31) — (3.34) и (5.35), получим при i =£ / и i Ф (/+ 1)
dU} dOj
-ЩЛ = (\/Cf)wlfi. При i = j получим -^j-=(l/C/)[a;l// + ^2/y], где
«йуу--{[(В+1)/(тф^][/ввД + /Гв] + 1//?Уш9 +
+ (Щ) КБ/(Фоэ-^/) + Сдиф/(тфГэ)] [/;-/aKT/]}. (5.37)
Здесь СБ и Сдиф—соответственно барьерная и диффузионная емкости
перехода; /э д, СБ и С ф — функции Up вычисляются по формулам, которые
входят в модель компонента (см; гл. 3).
При i = j + 1 получим dOf/dUf+i = (1/С/) (ш1/,у+1 + ш2/,7-+1), где
Аналогичные формулы для вычисления элементов матрицы W2 получаются,
если рассматривать коллекторный переход вместо эмиттерного, а для диода в этих
формулах достаточно принять В = Ви = 0. Итак, для всех элементов строки
матрицы Якоби, соответствующей уравнению р-я-перехода, можно использовать
формулу Wfi = (1/Су) (wlji + w2ji), но при i =£ j и i =/= j + 1 считать w2yt- = 0.
Для строк, соответствующих линейным уравнениям, справедлива формула
Wfi = ш1//+ йу277, где также w2fi= 0. Отсюда приходим к матричной форме
записи:
W = W3(W1 + W2), (5.39)
||C_1 Oil
где W3 = L —матрица обратных величин емкостей.
Здесь С-1 — диагональная подматрица порядка п X я, имеющая на
диагонали элементы, равные 1/С, I — единичная подматрица порядка (т — п) X
X (т — /г). Матрица W2 — сильно разреженная, ее ненулевые элементы заново
вычисляются на каждой новой итерации по (5.37) и (5.38). Матрица W1
вычисляется лишь перед первой итерацией и в дальнейшем не изменяется. Для ее
вычисления можно применять следующие способы:
Способ 1. Допустимо согласиться на использование метода анализа
чувствительности, поясненного в начале параграфа, в связи с однократностью вычисления
W1. Очевидно, что, применяя этот метод к математической модели схемы, получим
значения элементов матрицы Якоби W в исходной точке. В этой же точке нетрудно
подсчитать матрицы W3 и W2. Тогда из (5.39) находим матрицу W1.
Способ 2. Вычисление матрицы W1 в процессе получения математической
модели схемы по матричному варианту метода переменных состояния. В частном
случае отсутствия неправильных размещений воспользуемся формулой (4.24),
приняв в ней 1актС = 0, а в матрице С емкости всех р-д-переходов единичными.
Получим вместо матрицы С новую матрицу, которую обозначим С. Тем самым
из (4.24) будут исключены все нелинейности. Для простоты будем рассматривать
только RC-схемы, т. е. Iz = 0. Тогда (4.24) принимает вид Ос = С-1 (— MaCR х
MrcVc - M^R-W^U^ + M/Cl>
136
После исключения всех нелинейностей при единичных емкостях р-я-перехо-
дов Uc связано с Uc уравнением Uc = Wl -Uc+ В, где В — постоянный вектор.
Следовательно, матрица W1 выражается через матрицу контуров и сечений и
параметры линейных компонентов следующим образом:
wi=-c-iMkcR-iMi?c.
При наличии неправильных размещений матрицу W1 можно подсчитать,
используя (4.32)-(4.40).
Вычисление матрицы узловых проводимостей. Если в качестве
ММС принята не система дифференциальных уравнений (5.30)
в форме Коши, а система алгебро-дифференциальных. уравнений
(4.69), то матрицей Якоби будет матрица узловых проводимостей.
Элементы этой матрицы dlj/dyi суть частные производные токов
в узлах по узловым потенциалам.
При решении задачи анализа статики <р = 0 и матрица узловых
проводимостей находится непосредственно из (4.69), так при
R = const получим
где Wy — матрица частных производных токов зависимых
источников по узловым потенциалам.
При решении задачи анализа переходных процессов
компонентные уравнения для емкостей (4.64) и индуктивностей (4.66)
заменяются разностными уравнениями в соответствии с выбранной
формулой численного интегрирования. В простейшем случае: 1С,л+1 =
= сдис/дг = С (ис>л+1 - ис,я)/д*, АЦ/Д/ = (Iw - 1Ьл)/Д* =
= L 1Ui,„+1, где ися+i, Ui,n+i, Il,»h — значения переменных на
данном этапе (шаге) вычислительного процесса; UCm и h,n — их
значения на предыдущем этапе.
Искомыми являются значения переменных (п + 1)-го шага,
а значения переменных п-то шага уже известны. Поэтому при
формировании ММС можно каждую компоненту вектора 1с,„+1, равную
току в 1-й ветви, представить как алгебраическую сумму токов
источника тока, равного CiUc,Jkt, и ветви с проводимостью С//Д/,
где С/ и U'c,n — емкость и напряжение 1-й ветви. Аналогично
можно поступить с индуктивными ветвями. Тогда, рассматривая
случай схем без индуктивностей, матрицу узловых проводимостей
при С = const и R = const можно представить в виде
W = (1/Д0 АсСА'с + A* R-iA£ - A/W7.
В случае схем на биполярных компонентах матрица С
непостоянна, так как емкость каждого р-/г-перехода С/ (где / — номер
ветэи) зависит от напряжения £//. Тогда в выражении для
матрицы W появляется дополнительное слагаемое, которое в
матричном виде представляется как (1/Д0 Ас diag (U)(dC/dU) А'с, где
diag (U) — диагональная матрица напряжений емкостных ветвей.
Это слагаемое можно рассматривать как матрицу узловых
проводимостей для схемы, в которой разомкнуты все ветви, кроме вет-
137
вей р-я-переходов, а проводимости оставшихся ветвей gc =*
= (1/Д/) Ui (dCi/dUi), где Ut — напряжение на емкости /-й ветви
на (п + 1)-м шаге вычислительного процесса.
Вычисление матрицы W необязательно требует
предварительного определения матриц Ас, С, А^, R, А/. Гораздо экономичнее
следующая процедура вычисления матрицы W.
Поочередно просматриваются все ветви схемы. Пусть очередная
ветвь включена между узлами с номерами i и / и является
независимой, т. е. ее проводимость постоянна. Тогда проводимость ветви •
прибавляется к элементам Wih Wih Wjj и Wji матрицы. То же самое
справедливо и в отношении ветвей емкостей р-я-переходов, если под
проводимостью такой ветви с номером I понимать величину
(1/Д*)[С,+ UtWt/dUi)].
Если рассматривается источник тока, зависящего от потенциала
некоторого узла с номером 6, т. е. от срЛ, то происходит
соответствующее добавление в элементы Wik и Wjk матрицы. После просмотра
всех ветвей матрица W оказывается сформированной. Этот алгоритм
выполняется с меньшими затратами времени и дает более точные
результаты, чем алгоритм формирования матрицы Якоби методом
приращений.
§ 5.6. СРАВНИТЕЛЬНАЯ ОЦЕНКА МЕТОДОВ НЬЮТОНА И ПРОСТЫХ
ИТЕРАЦИЙ ПРИ ИХ ИСПОЛЬЗОВАНИИ ДЛЯ СТАТИЧЕСКОГО
АНАЛИЗА ЭЛЕКТРОННЫХ СХЕМ
Выше говорилось о том, что скорость сходимости ньютоновских
итераций значительно выше, чем простых итераций. Однако на
основании лишь этого факта преждевременно делать вывод, что
затраты машинного времени при использовании метода Ньютона
будут меньше во всех случаях. Действительно, затраты машинного
времени определяются по (4.42): Ти о^ (ty + Atc)NyLUy где Ш в
задачах статического анализа — количество итераций. Несмотря на
то что Ш при применении метода Ньютона значительно меньше,
однако количество операций умножения Ny на одной итерации
больше, чем в методе простых итераций.
Оценим Ny для обоих сравниваемых методов. Для метода
простых итераций при получении системы уравнений (5.7) методом
сканирования М-матрицы справедлива оценка (4.58а): Ny ^ 1,4а +
+ А/подп, где а — количество ветвей в эквивалентной схеме; Мподп —
количество операций умножения в подпрограммах. Будем считать,
как и ранее, Nuom ^ 7,7 а, тогда Ny = 9,1 а.
На каждой итерации заметные затраты времени приходятся
только на вычисление невязок /у (V). В методе Ньютона кроме
подсчета невязок на каждой итерации требуется решать систему
линейных алгебраических уравнений, вычислять непостоянные элементы
матрицы Якоби.
Из методов .решения линейных алгебраических уравнений
наиболее экономен метод Гаусса, характеризуемый количеством операций
умножения N± ^ т3/3, где т — порядок системы. Если восполь-
138
зоваться данными табл. 4.3, то т = пс = 0,42 а. Величина Nt
вн0Сит основной вклад в общее количество операций умножения Ny
при достаточно больших а, поэтому количество операций
умножения N2 при вычислении матрицы Якоби можно определить
достаточно приближенно. Будем считать, что N2 увеличивает Nnom
примерно вдвое. Тогда для метода
Ньютона
1 Nyg^ 17а + 0,032а3.
Для метода простых итераций
Ш примерно на' порядок больше
числа обусловленности Ц.
Поэтому при простых итерациях
Ти^91(1у + ЩаЦ. (5.40)
В методе Ньютона Ш зависит
от правильного выбора начального
приближения V(0) и в
большинстве практических задач находится
в диапазоне 2 -*- 30. Возьмем Ш =
= 16, получим
Тм^ I6a(ty + 4tc) (17 +0,032а2).
(5.41)
Приравнивая (5.40) и (5.41), в
координатах If и а найдем
уравнение границы, разделяющей
области предпочтительного
применения методов Ньютона и простых
итераций с точки зрения затрат
машинного времени (рис. 5.4, а, где / — Гм меньше для метода
Ньютона; // — Тм меньше для метода простых итераций). Так как
типичными значениями Ц для переключательных схем ЭВМ
являются 1-102—1 -104, то из рис. 5.4„ а видно, что метод Ньютона
даст решение с заметно меньшими затратами машинного времени
в случаях схем умеренной сложности с а < (150 -т- 200).
Теперь сравним эти методы с точки зрения затрат машинной
памяти. Для метода простых итераций "справедлива оценка (4.59):
Ям ^ 10,5 а + 1000. В случае метода Ньютона основные затраты
памяти приходятся на хранение матрицы Якоби, порядок которой
m X m. Эта матрица формируется путем прибавления к элементам
матрицы W1 рассчитываемых в подпрограммах элементов
матрицы W2. Следовательно, необходимо предусмотреть также
определенный объем памяти для хранения матрицы W1. Можно построить
программу анализа таким образом, что в памяти будут храниться
только ненулевые элементы матрицы W1. В среднем для
электронных схем характерно наличие в каждой строке матрицы Якоби
около шести ненулевых элементов. Тогда при m = 0,42 а
Лм^ 10,5а + 1000 + m2 + 6т = 0,21а2 + 13,3а + 1000. (5.42)
8-W3, 16-W3 24'103Я
Рис. 5.4. Сравнение методов
Ньютона и простых итераций:
а — области предпочтительного
применения методов с позиций трудоемкости
вычислений; б — предел сложности
анализируемых схйм в зависимости от
'" объема оперативной памяти
139
Обозначим объем оперативной памяти используемой ЭВМ через Я.
Полагая в (4.59) и (5.42) J7M равным Я, получим максимально
допустимое количество ветвей схтах, так как /7М (атах) = Я- Графики
зависимостей атах от Я для сравниваемых методов приведены на
рис. 5.4, б, где 1 — простые итерации; 2 — метод Ньютона. Из
этого рисунка видно, что для машин с малым объемом оперативной
памяти в (4 и- 8)-103 ячеек метод Ньютона в отличие от метода
простых итераций приводит к заметному ограничению сложности
анализируемых схем.
В методе простых итераций легче выполнить условия
сходимости, чем в методе Ньютона.
Подводя общий итог, нужно сказать, что в комплексе программ
проектирования желательно иметь программы анализа как по методу
Ньютона, так и по методу простых итераций. При этом первую
программу следует рассматривать как основную и прибегать к помощи
второй программы только при невозможности получить решение
с помощью первой.
§ 5.7. ОБЩИЕ СВЕДЕНИЯ О МЕТОДАХ АНАЛИЗА ПЕРЕХОДНЫХ
ПРОЦЕССОВ В ЭЛЕМЕНТАХ ЭВМ
Анализ переходных процессов сводится к численному решению
системы обыкновенных дифференциальных уравнений в форме (4.1)
или (4.2). Перед началом интегрирования должен быть задан
вектор начальных условий V(^(o)) = V(0). Результатом интегрирования
будет зависимость от времени вектора переменных состояния V (t)y
а результатами анализа, по которым инженер судит о свойствах
схемы, — вектор выходных параметров Y и зависимости от времени
некоторых напряжений и токов, не обязательно входящих в V (t).
Обозначим вектор интересующих инженера напряжений и
токов через UBblx (/). Обычно элементами вектора UBbIX (t) являются
напряжения и токи каких-либо ветвей эквивалентной схемы. Как
было показано выше, в процессе вычисления правых частей (4.1)
определяются напряжения и токи всех ветвей. Если же в UBbIX (t)
входят разности потенциалов каких-либо пар узлов, не соединенных
единственной ветвью, то необходимо в число уравнений ММС ввести
выражения для определения таких величин. Простейшим приемом,
обеспечивающим автоматическое формирование в ММС подобных
выражений, является включение в эквивалентную схему резистив-
ных ветвей, соединяющих непосредственно пары узлов, разность
потенциалов которых входит в вектор UBbIX (/). Поскольку величины
сопротивлений этих ветвей могут быть взяты достаточно большими,
например превышающими сопротивление изоляции, то такие
дополнительные ветви не будут вносить погрешности в результаты
анализа.
Большинство выходных параметров схем является
функционалами зависимостей элементов вектора UBbIX от t. Правила
определения Y по UBbIX (0 для определенного класса схем известны заранее
и могут быть оформлены в виде некоторого стандартного алгоритма.
НО
Перейдем к рассмотрению численных методов интегрирования
системы обыкновенных дифференциальных уравнений.
Пусть эта система задана в форме Коши:
dV/dt = F(V, t) (5.43)
и известен вектор начальных условий V (0) = V(o). Требуется
найти V (t) на интервале [0, Т]. Решение V (/) существует и является
единственным, если правые части fj (V, t) уравнений (5.43)
непрерывны в рассматриваемой области и удовлетворяют условию
Липшица:
т
l//(v,0-//(n.0l^^2!oi-Tiil,
i = l
где N— положительная константа; V= (vly v2> ... , vm); j = 1,
2, ... , m\ m — поряДок , системы (5.43). Рассмотренные ранее
модели компонентов электронных схем и методы получения ММС
позволяют сделать заключение, что условия существования и
единственности решения задачи Коши при анализе переходных
процессов электронных схем соблюдаются.
Методы численного интегрирования системы (5.43) можно
назвать пошаговыми методами, поскольку решение получается как
результат выполнения серии шагов по оси независимого
переменного /. При этом интервал [0, 71 разбивается на ряд участков
0 — t{1\ t{1) — /(2), ... , t{n~1] — t{n\ т. е. непрерывный интервал
[0, Т] заменяется дискретным множеством точек №\ Расстояние
между соседними точками этого множества есть величина шага
интегрирования h. Очередной (k + 1)-й шаг интегрирования заключается
в вычислении V(^+1>), причем V(^>), V (*<»)), ... , V (*<*>) уже
вычислены в результате предшествующих шагов.
Формулы, по которым находят \т(^/е+1>), составляют сущность
метода интегрирования. Эти формулы получаются в результате
замены производных vj по t отношениями конечных разностей,
т. е. исходные дифференциальные уравнения аппроксимируются
разностными уравнениями. Решение разностных уравнений будет
лишь приближенно соответствовать точному решению
дифференциальных уравнений. Приближенное решение U (/) получается
в форме таблицы. Каждая строчка этой таблицы содержит
результаты очередного k-то шага, а именно: t{k\ и&\ и&\ ... , и<£>.
Введем обозначения: v&) = vf (№), ФХ = и. (#*>). Значения
производных Vj и щ по t в точке № будем обозначать fj (W>, t{k)) =
= dvW/dt и /**> = fj(li{k\ tik)) = duWIdt. При этом начальные
значения переменных будут v')\ и!)\ f°\ обычно удобно полагать
№ = 0.
Явные методы. Формулы численного интегрирования разных
методов могут получаться различными способами, но в большинстве
случаев в их основе лежит разложение Vj (t) в ряд Тейлора в окрест-
UL
ностях некоторой точки tik):
dv<P 1 dV*>
1 d<*'4*>
fell dfi* ,v ;
^1 1 dW
= »f + У — -+Г V + 0, (ft*1+1), (5.44)
где 0, (hkl+1) — остаточный член формулы Тейлора. Если в (5.44)
сохранить только члены до порядка малости k\ включительно,
а производные выразить через конечные разности, то получим
приближенное представление v^+1\ которое следует обозначить
через а(*.+1):^
uf+\) = u(k) + f(k)h + -L Vffh+ ... +^kl-]ff)h, (5.45)
где Vrf(k) — восходящая разность порядка г, причем V/Ф =
= f{k) _ f(k-i)^ v2p) = v/<*> — V/^-1) = /<*> — 2f&-V + p-2> и т. д.
Запишем (5.45) в лаконичной форме:
а<* + 1> = а<*) + А 2 ^/Л+1-°. (5.46)
Формулу (5.46) можно рассматривать как обобщение формул
большой группы разностных методов. Эту группу методов называют
группой явных методов по той причине, что искомое значение иФ+и
на очередном (k + 1)-м шаге интегрирования выражено явно через
уже известные значения щ- и /у, полученные на предыдущих шагах.
Величину k\ называют порядком формулы интегрирования.
Коэффициенты щ не обязательно определяются из (5.45). Их можно
определить следующим образом. По имеющимся значениям f(*\
Р-1), ... , f^+i-*1) строится некоторый интерполяционный
полином Р; (t), который аппроксимирует ff (/), поэтому вместо
i;№+i) —у<*)= \ ff(t)dt используют uf+l> — uf= $ P,(t)dt.
Так как Pf (t) линейно выражается через /*, ff-l\ ... , /*+*—Л1,
то после интегрирования приходим к формуле (5.46).
Неявные методы. Группу неявных формул можно получить
также на основе разложения bj (f) в ряд Тейлора, но в отличие от
(5.44) записать его в следующей форме:
^ 1 dV(fe+1)
v. (f(**i> - Л) = Uy (/(л+i)) + J h ('(Л) - '(M1))'' + О; (A*1+1>
i= 1
142
Тогда, поступая, как и при получении (5.46), придем к формуле
U(k+i)^u(k) + h ^ 6/f+2"°, (5.47)
i= 1
особенность которой — наличие в правой части члена b-J^+x) =
= bJj(V{k+1\ /(ft+1)). Следовательно, (5.47) есть неявная
относительно искомой величины а^1* формула. Вычислить значения uS.k+v
в неявных методах намного сложнее, чем в явных. Действительно,
т уравнений (5.47) представляют собой систему алгебраических и
трансцендентных уравнений с неизвестным вектором U(*+1). Эту
систему нужно решать на каждом шаге численного интегрирования.
Однако большая трудоемкость вычислений на одном шаге неявного
интегрирования еще не означает, что общая трудоемкость
численного интегрирования неявными методами будет больше. Для этого
рассмотрим рис. 5.5, на котором показаны приблизительные
зависимости погрешностей численного
решения е в зависимости от величины
шага h.
Характерная особенность явных *
методов 1 — резкий рост
погрешности 8 при достижении величиной h
некоторого значения hmax\ это
связано с потерей устойчивости
численного интегрирования, выражающейся hmQX h
в том, что рассчитываемые точки 0 _. е 0
г Рис. 5.5. Зависимость погреш-
интегральных кривых на последова- ности численНого интегрирова-
тельных шагах испытывают колебания Ния дифференциальных уравне-
вокруг истинных кривых со шее воз- ний от величины шага
растающей амплитудой. В конечном
счете эти колебания приведут к переполнению разрядной сетки
машины. В большинстве неявных методов 2 неустойчивости не
наблюдается, поэтому здесь имеет место более плавный рост
погрешности с увеличением шага h. Если, например, допустимая
погрешность elt то из ряс. 5.5 следует, что неявные методы 2 позволяют
интегрировать систему дифференциальных уравнений с большими А,
чем явные методы 1.
Для использования явных методов необходимо представление
системы дифференциальных уравнений в форме Коши. ММС любой
схемы элемента ЭВМ можно получить в такой форме (см. гл. 4).
Однако при неправильных размещениях ветвей высокого порядка
применение экономичного метода сканирования М-матрицы
сопровождается введением в эквивалентную схему дополнительных
ветвей, что может отрицательно сказаться на точности решения. Если
же не устранять неправильные размещения с помощью таких
дополнительных ветвей, то потребуется на каждом шаге интегрирования
решать системы алгебраических уравнений (4.31), (4.37).
В неявных методах решение системы алгебраических и
трансцендентных уравнений на каждом шаге требуется вне зависимости от
143
того, имеются ли в схеме неправильные размещения или нет. Можно
так организовать вычислительный процесс, что наличие
неправильных размещений не потребует увеличения объема вычислений.
Поэтбму проблема неправильных размещений при использовании
неявных методов теряет свою остроту. Более того, методы неявного
интегрирования можно применять и к системам дифференциальных
уравнений, представленных в форме (4.2), т. е. к системе уравнений,
не разрешенной относительно вектора производных. Это
обстоятельство позволяет использовать для получения ММС не только
алгоритмы метода переменных состояния, но и алгоритмы,
основанные на традиционных методах теории цепей (например, методе
узловых потенциалов).
Расчет начальных условий. Рассмотрим расчет вектора
начальных условий V(0). В тех случаях, когда к моменту /(0), т. е. к
моменту начала анализа переходного процесса, в схеме имело место
установившееся статическое состояние, вектор V(0) — результат
статического анализа схемы. Следовательно, для расчета начальных
условий можно применять какой-либо из методов статического
анализа схем. Ниже будет показано, что формула простых
итераций (5.9) в частном случае одинаковых hj совпадает с формулой
метода Эйлера для интегрирования дифференциальных уравнений.
Следовательно, программы анализа переходных процессов, в
которых реализован метод Эйлера, являются одновременно и
программами статического анализа по методу простых итераций. Анализ
статики и переходных процессов при этом производят с помощью
одинаковых алгоритмов на основе одной и той же ММС. Очевидно,
что при статическом анализе входные напряжения и токи должны
быть постоянными, а вектор переменных состояния в исходной
точке VHCX может быть взят в достаточной мере произвольно. Чаще
выбирают VHCX = 0, тогда итерационная последовательность есть
последовательность точек расчетных кривых переходного процесса,
возникающего в схеме при включении питания.
Если в программе анализа переходных процессов реализован
неявный метод интегрирования, то в ней, следовательно, реализован
и какой-либо метод решения систем алгебраических и
трансцендентных уравнений. Обычно в качестве такого метода выбирают метод
Ньютона. Следовательно, в этом случае программа анализа
переходных процессов будет также и программой статического анализа.
Нетрудно прийти к выводу, что любой метод численного
интегрирования системы дифференциальных уравнений можно
рассматривать и как метод статического анализа, поскольку решение
системы дифференциальных уравнений U (t) отображает зависимость V
от t на всем отрезке интегрирования, в том числе и на тех участках
этого отрезка, где состояние схемы можно считать статическим.
Правда, применение методов численного интегрирования для стат
тического анализа обычно приводит к повышенным затратам
машинного времени, поскольку эти методы не дают столь же быстрой
сходимости, как методы, специально ориентированные на решение
алгебраических и трансцендентных уравнений. Но для расчета
144
начальных условий методы численного интегрирования более
универсальны. Действительно, на предельных частотах повторения
входных импульсов к моменту прихода на вход схемы очередного
импульса переходные процессы в схеме от предыдущего возбуждения
еще не закончились и вектор начальных условий V(o) не совпадает
с результатом статического анализа. В такой ситуации расчет век-^
тора V(0) не может быть произведен иначе, как с помощью методов'
анализа переходных процессов, т. е. методов численного
интегрирования системы дифференциальных уравнений.
Шаг интегрирования. Затраты машинного времени и точность
интегрирования во многом зависят от величины шага
интегрирования h. Чем больше шаг Л, тем меньше общее количество шагов
интегрирования Ш, а следовательно, и меньше затраты машинного
времени, но тем ниже точность аппроксимации дифференциальных
уравнений разностными и тем хуже точность интегрирования.
Отсюда следует, что существует некоторое оптимальное значение ft,
при котором минимизируются затраты машинного времени при
условии, что заданная точность выдерживается. Это оптимальное
значение ft оказывается различным на разных участках отрезка
интегрирования как вследствие нелинейности самих дифференциальных
уравнений, так и вследствие нелинейности зависимостей
переменных состояния от времени. Отсюда возникает целесообразность
автоматического выбора величины шага ft в процессе интегрирования.
Алгоритмы, по которым производят выбор шага ft, будут
рассмотрены в § 5.8, 5.10.
§ 5.8. МЕТОДЫ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ СИСТЕМ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Методы явного интегрирования
Метод Эйлера. Пусть система обыкновенных
дифференциальных уравнений представлена з форме Коши: dV/dt = F (V, /).
Формула метода Эйлера есть формула первого порядка,
получающаяся из (5.46) при £1 = 1:
uf^) = uf + hff\ (5.48)
Точность метода Эйлера сравнительно невелика, так как £1 = 1,
однако можно показать, что при ft ->0 приближенное решение щ (t)
сходится к точному решению vf (t) и, следовательно, выбирая
достаточно малую величину шага ft, можно получить как угодно
высокую точность, если, конечно, не учитывать такой источник
погрешностей, как ошибки округления.
Метод Адаме а. Из формул более высокого порядка
находит применение формула метода Адамса:
uf+ О = uf + ft [ff) + (1/2) V/(*> + (5/12) V>ff) +
+ (3/8) V»/}*> + (251/720) VV}*>], (5.49)
где VF(ft) — вектор, компонентами которого являются разности
145
Порядок этой формулы k\ = 5. Преимущество метода Адамса
по сравнению с методом Эйлера — более высокая точность
интегрирования. Однако этот метод имеет и следующие недостатки: для
применения (5.49) на k-u шаге нужно уже иметь вычисленные
значения fj на пяти предыдущих шагах (следовательно, пять первых
шагов интегрирования должны быть выполнены по какому-либо
другому методу, причем точность этого другого-метода должна быть
не ниже точности метода Адамса); применение метода Адамса требует
непрерывности производных vj по t до порядка k\ включительно.
Это условие может не соблюдаться в моменты времени /, в которые
входные для анализируемой схемы сигналы UBX (f) являются не-
дифференцируемыми функциями, времени. Эти недостатки метода
Адамса заставляют отказаться от его применения в задачах анализа
электронных схем.
Метод Рунге — Кутта. Большую популярность при
машинных вычислениях приобрел метод Рунге — Кутта. В этом
методе для получения иФ+1) не требуются значения ^ и /у на шагах,
предшествовавших &-му шагу. Порядок метода может быть сделан
большим, а именно k\ = 4, за счет вычисления правых частей fj
при некоторых промежуточных для данного шага значениях
аргументов. Так называемая чётырехточечная вычислительная схема
Рунге — Кутта, соответствующая £1 = 4, выражается следующими
формулами: U^> = U<*> + (l/6)(Ki + 2К2 + 2К3 + К4), где Кх =
= F (U<*>, /<*>); Ка = F (U<*> + 0,5 Ki, № + 0,5 ft); К3 = F (U<*>+
+ 0,5 K2, *<*> + 0,5 Л); К4 = F (U<*> + К3, № + ft).
В методе Рунге — Кутта достигается высокая точность
интегрирования и в то же время устраняются недостатки, присущие
методу Адамса. Однако при этом объем вычислений растет* Обозначим
через k2 количество вычислений правых частей системы
дифференциальных уравнений на одном шаге численного интегрирования.
Тогда для методов Эйлера и Адамса k2 = 1, а в четырехточечной
схеме метода Рунге — Кутта k2 = 4, что обусловливает в четыре
раза больший объем вычислений на одном шаге в методе Рунге —
Кутта.
Контроль погрешности интегрирования.
Точность интегрирования по любому из методов зависит от величины
шага ft (величину шага ft желательно иметь переменной). Из
алгоритмов автоматического выбора шага наиболее удобны те, в
которых ft выбирают из условия непревышения получающейся
погрешностью некоторой заданной величины. Погрешность, возникающую
на одном шаге интегрирования, можно отождествлять с нормой
вектора, составленного из остаточных членов 07 в разложении (5.44).
Однако точная оценка Оу невозможна. Поэтому должны
использоваться какие-либо способы приближенной оценки погрешности
или, другими словами, способы контроля получающейся
погрешности.
В рамках методов Эйлера и Рунге — Кутта погрешность £-го
шага можно оценивать нормой [Ul (t{k)) — U2 (№)], где Ul (t{k)) —
вектор переменных состояния; вычисленный при величине шага hSk\
146
a U2 (t{k)) — то же, при величине шага 2h^k). Если эта норма
окажется больше некоторой заданной величины е, то нужно уменьшить
шаг вдвое и повторить расчет вектора переменных состояния для
момента t{k\ Если [Ul (t{k)) — U2 (tw)] < be, где b —
положительная константа, меньшая единицы, то шаг увеличивается вдвое
и Ш (t{k+1)) определяется при шаге h{k+1) = 2hSk\ a U2 (tik+1)) —
при шаге Шк). И, наконец, если [Ul (t{k)) — U2 (t{k))] находится
в интервале [fee, е], то величина шага сохраняется прежней. Однако
подобный контроль погрешности связан с заметным увеличением
машинного времени и потому трудно согласиться с его применением
на практике при анализе электронных схем.
Более экономно контроль погрешности осуществляется в методах
прогноза и коррекции, где имеются предсказывающая и
корректирующая формулы. По предсказывающей формуле вычисляют
ориентировочное значение вектора переменных состояния U(fe+1).
Далее рассчитывают вектор правых частей F (U(*+1) t{k+1)) и
используют его при подсчете вектора и(Л+1) по корректирующей формуле
jjU+i) и принимают в качестве вектора переменных состояния на
(k + 1)-м шаге. Контроль пргрешности здесь легко осуществляют
путем сопоставления [U(fe+1) — U(*+1)] с заданной величиной е.
Простейший среди методов прогноза и коррекции^— метод
трапеций, в котором для прогноза используют формулу Эйлера: U(fe+1) =
= и(*} + h{k) F (U(A), /(/г)), а коррекцию производят по формуле
трапеций: U<fe+1> = U<*> + (1/2) А<*> [F (Ц<*>, /<*>) + F (1Я+1>, Ц**1))).
Методы неявного интегрирования
Неявный метод Эйлера. Среди неявных формул
интегрирования системы дифференциальных уравнений в форме Коши
простейшей является формула первого порядка:
U<*+i> = U<*> + fcF (U<*+D, /(*+«), (5.50)
называемая неявной формулой Эйлера.
Рассмотрим алгоритм вычисления U(*+1) на (k + 1)-м шаге
интегрирования. Обозначим вектор неизвестных U(fe+1) через Z, известный
вектор UU) — через Д, a t{k+1) обозначим т. Тогда (5:50) можно записать
в. виде:
<p(Z)=Z-fl-ftF(Z, т) = 0. (5.51)
Систему (5.51) целесообразно решать методом Ньютона, выбирая
в качестве начального приближения Z(o) вектор Д. На каждой
ньютоновской итерации выполняются следующие операторы:
а) вычисляется матрица Якоби W(w) системы уравнений (5.51),
связанная с матрицей Якоби W(w) исходной системы дифферент
циальных уравнений следующей зависимостью:
Wn) = || дф/ZdZ, 1=1- AW^,
где I — единичная матрица; п — номер итерации;
б) вычисляется вектор невязок <р (Z(n))i
147
в) решается система линейных алгебраических уравнений:
\уи>Дг(/г+1) = — Ф (Z<">),
где Дг(/г+1) — поправка к вектору решения на данной итерации;
г) вычисляется новое значение вектора Z:
ZU+i) = ZU)^ZU+i).
д) если [AZ(/l+1)] меньше некоторой заданной величины, то Z(/z+1>
принимают как U(fe+1) и происходит переход к новому шагу
интегрирования, иначе продолжаются ньютоновские итерации.
Неявное интегрирование систем алгебро-
дифференциальных уравнений. При
использовании неявных методов более предпочтительной оказывается форма
ММС в виде системы алгебро-дифференциальных уравнений
Ф(У, V, 0=0, (5.52)
где Ф (V, V, /) — вектор-функция с элементами Ф{ (V, V, t)\ V —
вектор переменных состояния либо вектор узловых потенциалов.
Рассмотрим общий подход к применению неявных формул
любого порядка к интегрированию этой системы. Формула
интегрирования (5.47) порядка точности k\ представляет собой выражение,
устанавливающее связь между векторами U (*+1) и U(*+1),
приближенно равными значениям V и V на (k + 1)-м шаге. Действительно,
в (5.47) все остальные величины, кроме uf+l) и fi*+l) = u{k+1), к
началу (k + 1)-го шага уже вычислены. Следовательно, подставляя
yU+i) из (5.47) вместо V в (5.52) и заменяя V на U(*+1), получим
систему алгебраических уравнений, в которой неизвестные величины —
элементы вектора U(*+1):
Ф(1Я+1\ 0=0. (5.53)
Решение этой системы, требующееся на каждом шаге
интегрирования, аналогично решению системы (5.51). Так, обозначая искомый
вектор U{k+1) через Z, а момент времени t{k+1) — через т и применяя
метод Ньютона, приходим к итерационной формуле
Z(iw-i) = z(»> —1| W^>И"1 Ф (Z<«>, т), (5.54)
где W(/*} — матрица Якоби на n-й итерации.
Если в качестве вектора V в (5.52) используется вектор
узловых потенциалов, то W будет матрицей узловых проводимостей,
алгоритм'вычисления которой был рассмотрен в § 5.5.
На практике часто применяют методы прогноза и коррекции,
в которых прогноз осуществляют по какой-либо формуле явного
интегрирования, а коррекцию — по неявной формуле. Итерации
при решении системы (5.53) в процессе коррекции начинают со
значения U(ft+1), полученного в результате прогноза. Очевидно, что
количество итераций зависит от величины шага интегрирования h.
С целью экономии машинного времени часто выгоднее уменьшать
шаг и получать меньшее число итераций, чем работать с большими
148
тагами. Поэтому иногда пользуются алгоритмами, в которых
выполняется лишь одна ньютоновская итерация. Точность решения
при этом обеспечивается автоматическим выбором шага
интегрирования h на основе сопоставления результатов прогноза и коррекции.
§ 5.9. УСТОЙЧИВОСТЬ ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
При рассмотрении метода простых итераций было установлено,
что сходимость итерационной последовательности имеет место только
при выполнении условия (5.15). Нетрудно показать, что
неравенство (5.15) является также и условием устойчивости численного
интегрирования системы дифференциальных уравнений по методу
Эйлера при h = const. Действительно, формула простых итераций
(5.9) при одинаковых диагональных коэффициентах hf в матрице H{k)
совпадает с формулой метода Эйлера (5.48). Следовательно, вывод
условия (5.15), выполненный в § 5.3, полностью применим и к методу
Эйлера. Расходимость простых итераций при невыполнении (5.15)
отождествляется с неустойчивостью численного интегрирования
методом Эйлера. Неустойчивость вычислительного процесса
характерна не только для метода Эйлера, но и для любого метода явного
интегрирования. Поэтому нужно выяснить условия устойчивости
вообще для явных методов, частным случаем которых будет (5.15).
Для этого потребуются некоторые дополнительные сведения из
теории матриц.
Будем использовать матричную экспоненциальную функцию еА>
где А — квадратная матрица.г Понятие матричных элементарных
функций связывается с понятием элементарных функций от
скалярного аргумента через посредство одинаковости формул
разложения этих функций в степенные ряды. Так, матричная функция еА
определяется как
оо
eA = i + A + ^-A2 + -l-A3+... = 2-irA"- <5-55)
п = 0
где I — единичная матрица того же порядка, что и матрица А.
В.теории матриц доказывается, что если В = f (А), где В и
А — квадратные матрицы, а функция f (А) — дифференцируемая
функция, то собственные значения ^В/ матрицы В связаны с
собственными значениями А,А/ матрицы А той же функциональной
зависимостью: ЯВ/ = f (А>а/). Например, собственные значения матрицы
а А" будут ak\v аА£2, аА,£3 и т. д.
Условия устойчивости интегрирования получим для случая
однородной системы линейных дифференциальных уравнений
dV/dt = AVy (5.56)
которую требуется решить при векторе начальных условий V(0).
Решение системы представляется в виде
V(0=eA'V<0'. (5.57)
149
Для пояснения этого введем некоторый вспомогательный век*
тор X, связанный с вектором V соотношением
V = eA'X. (5.58)
Дифференцируя (5.57), получаем
dt dt ^ >*Т* dt •
Так как ^(е^-Ж <1 + А' + ЖА' + -5-А,+ -)в
= A(I + A^-^-A2 + -^A3+...) = Ae^, то.
■£- = АеА'Х + еА* «- = AV + eA* «-. (5.59)
Отсюда, в частности, видно, что для матричных функций
справедливы те же правила дифференцирования, что и длл функций
скалярного аргумента. Сопоставляя (5.56) и (5.59), видим, что
еА' (dX/dt) = 0, откуда dX/dt = 0иХ = const.
Из (5.58) находим, что V<°> = V (0) = X и V (t) = eA'V^<». Это
и требовалось доказать. ч
Формула явного интегрирования порядка k\ вытекает из (5.44):
ь\
U(*+i) = \j(k) _^_ у _ _— дг\ Определяя производные V по / на
основе (5.56) и (5.57), получаем формулу явного интегрирования в
форме U<*+1> = U<*> + (AeAtik)h + -— A2eA'(*> + ... + Ц- A^e^U*** -
= (l + M + f-A»+...+^A«)u(«
Выражая U(fe+1) через' U(0) = V(o), имеем
U(*+D = [l + AA + ^J- A2+ ... +^-A^+1U(o). (5.60)
Введем в рассмотрение матрицу В= У — ft'А'. Тогда (5.60)
переписывается в виде U(/H4) = Bft+1U(o). Для получения условия
устойчивости поступаем так же, как в § 5.3 при выводе условия (5.15),
т. е. используем преобразование подобия для матрицы В:
В=ТВ diag {A,biДв2>... Двт JTb1, где Тв —преобразующая матрица.
Для матрицы Bk+1 это преобразование будет Bfe+1 = Тв diag {У$1,
Я^1, ... ,Л^} Т-1 и последовательность шагов численного
интегрирования сходится к решению системы (5.56) V* = 0, если
A^t1 ->-0 при k -^оо для всех / = 1, 2, ... , т. Собственные
значения ^в/ связаны с собственными значениями АА/ матрицы А
соотноси
шением ЯВ/ = У--^-Л'Аа/, и условие устойчивости записывается
150
р видеПт
k-+co
Г Л1
1
1т-К
если для всех / имеет место неравенство
п+1
= О для всех /. Это условие выполняетсяг
k\
№,
i = 0
<1. (5.61)
Условие устойчивости (5.61) получено на примере однородной
системы линейных дифференциальных уравнений, поскольку здесь
его вывод оказывается менее громоздким. При.рассмотрении
неоднородной системы условие (5.61) не изменилось бы. В случае систем
нелинейных уравнений условие (5.61) становится приближенным,
при этом роль собственных значений ХА / играют собственные
значения матрицы Якоби. Итак, получено условие устойчивости числек-
ного интегрирования по явным формулам при h = const, более
общее, чем (5.15). Оно справедливо для формул любого порядка k\
и для случая комплексных собственных значений ХА}-. В частном
случае действительных собственных значений и метода порядка
k\ = 1 общее условие (5.61) легко можно преобразовать в условие
(5.15): | 1 + hXAf | < 1 или, беря вместо А,А/ величину — 1/ттш,
получить О < h < 2Tmin.
Практическая ценность условия (5.61) в том, что оно позволяет
связать максимально допустимую величину шага h с минимальной
постоянной времени схемы для разных методов, что дает
возможность сравнивать методы явного интегрирования между собой по
затратам машинного времени (см. § 5.11).
Среди неявных формул интегрирования есть такие, для которых
всегда имеет место устойчивость вычислительного процесса,
например неявная формула Эйлера, которая в применении к решению
линейной системы (5.56) имеет вид
U(ft+i) = u(*)-HAU(*+1>,
или
U(*+i) = (J -ftAJ-HJW = {(l-hA)-1}^1 U(0>.
По-прежнему будем использовать преобразование подобия:
I —AA = TAdiag{l—йА,аь 1—АЛа2, ...» 1—кХАтуТА\
Для произведения некоторых квадратных матриц С, Д и F
справедливо соотношение (CflF)"1 = F'V^C-1. Исходя из этого
получаем
д-МГ-Т^т^. T-i-v...T=i5-}Tj.
а для (k + 1)-й степени этой матрицы
151
Численное интегрирование устойчиво, если lim
fe-vOO
для всех /=1,2, ... , т, т. е. если
1
\k+i
1 —ЛЯ
'А/У
= 0
1
1-hX
а/
<1.
(5.62)
Так как рассматриваются схемы без самовозбуждения, для которых
Ке (ЛА/) < 0, то из (5.62) следует, что устойчивость численного
интегрирования сохраняется при любых h > 0, что и требовалось
доказать.
Пример. Покажем, что при невыполнении условия (5.15) численное
интегрирование явным методом Эйлера приводит к неустойчивости. Математическая
модель схемы на рис. 5.6
есть дифференциальное
уравнение
а)
dVc/dt=(E-Vc)/(RC), (5.63) vc, U,
где Vc — падение
напряжения на емкости С; V(g} = 0.
На рис. 5.7 показаны
точное решение Vc
уравнения (5.63) и ломаные прямые,
отрезки которых соединяют
точки приближенного
решения Uc (t{k)). Из рис. 5.7,6
видно, что при xmin < /i<
< 2тт1п возникают
затухающие колебания точек Uc(tik))
Ф'
h=0,6Z
№L
5)
Et—r-^
h = f,57
в)
"с
E
"71
/Vе
Jo
' \h= 2,25т
i i л /i i i \ i /
\ 1Ь
Рис. 5.6. #С-схема
Рис. 5.7. Результаты численного решения
дифференциального уравнения -RC-схемы:
а — при h < т; б — при
h > 2т
; < h < 2т; в — при
min*
вокруг кривой Vc (t). При h = 2тт}п эти колебания становятся незатухающими.
Рис. 5.7, в демонстрирует расходимость последовательности точек Uc (t{k)) при
h > 2.Tmin.
В общем случае системы дифференциальных уравнений сохраняется
указанный характер ломаных прямых Uс {t).
152
§ 5.Ю. АВТОМАТИЧЕСКИЙ ВЫБОР ШАГА ИНТЕГРИРОВАНИЯ СИСТЕМЫ
ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Как отмечалось выше, выбор величины шага интегрирования h
должен обеспечить минимальные затраты машинного времени Гм
при сохранении заданной точности решения.
Под погрешностью метода интегрирования в задачах анализа
электронных схем целесообразно понимать погрешность
определения выходных параметров в заданной математической модели схемы
при использовании рассматриваемого метода. Эта погрешность
непосредственно связана с накопленной за много шагов погрешностью
вычисления переменных состояния. К сожалению, существующие
способы оценки накопленной погрешности интегрирования дают
завышенные результаты и потому не имеют практической ценности.
Поэтому выбор шага интегрирования /г, обеспечивающий требуемую
точность, не может быть выполнен априори. Погрешность,
допущенная на одном шаге (локальная погрешность), оценивается более
просто. При практическом решении задач удается управлять только
локальной погрешностью.' Поэтому под заданной погрешностью
решения следует понимать величину максимально допустимой
локальной погрешности е. Связь между е и погрешностью определения,
выходных параметров определенного класса схем имеет
статистический характер и может быть установлена в процессе накопления
практического опыта решения задач.
Локальные погрешности разных шагов при h = const обычно
оказываются неодинаковыми. Так, при анализе схемы на временных
отрезках с быстрыми изменениями переменных состояния
погрешности значительно больше, чем на отрезках, где состояние схемы
приближается к статическому. Следовательно, минимизация затрат
машинного времени достигается только в условиях переменного
шага h.
Ранее были рассмотрены способы оценки локальной погрешности.
Результаты сопоставления получающихся погрешностей с
заданной позволяют предпринять действия по изменению величины
шага h. В ряде алгоритмов автоматического выбора шага h (см.
§ 5.8) результаты очередного шага интегрирования аннулируются,
если погрешность превысила заданную. Более эффективны с точки
зрения затрат машинного времени алгоритмы с сохранением
результатов любого шага. Здесь величина следующего шага h{k+1) —
функция величины предыдущего шага h[k):
А(*+1) = А(*)(8/[8р])*> (5.64)
где е — заданная погрешность; [8р3 — норма допущенной
локальной погрешности; б — величина, зависящая от порядка численного
метода.
Алгоритмы автоматического выбора шага й, основанные на
формулах типа (5.64), наиболее эффективны при использовании
неявных методов численного интегрирования дифференциальных
уравнений.
153
В явных методах резкий рост погрешности возникает при
нарушении условий устойчивости и происходит обычно при величинах
шага А, при которых в неявных методах погрешность была бы много
меньше допустимой. Это обстоятельство позволяет утверждать, что
если бы удалось расширить область устойчивости явного
интегрирования, то появилась бы возможность увеличения шага А при
сохранении заданной точности.
Условие устойчивости интегрирования при переменном шаге.
Область устойчивости явного интегрирования при A = const
определяется неравенством (5.61) или в частном случае метода первого
порядка точности k\ = 1 неравенством (5.15).
Покажем, что при переменном А область устойчивости
действительно расширяется. Для этого получим условие устойчивости
численного решения системы уравнений (5.56) при предположении,
что все шаги интегрирования разделены на серии, состоящие из
двух последовательных шагов. Величина первого шага серии есть Ах,
а второго А2. Для простоты вывода примем также, что используется
метод первого порядка. Тогда формула, аналогичная формуле (5.60),
принимает вид U(fe) = {(I + AXA)(I + A2A)}°'5/JU(0). Далее
поступаем так же, как и при выводе (5.61), в итоге приходим к условию
устойчивости в виде следующего неравенства:
|(1+АЛ-)(1+^/)|<1, (5.65)
где Xj £ Л, Л — спектр собственных значений матрицы А
коэффициентов в системе (5.56).
В более общем Случае следует рассматривать серии, состоящие
из / шагов, причем на различных шагах можно использовать
методы разного порядка точности k\d. Тогда обобщенное условие
устойчивости
1 * kxd
П 2, (WA'!
d = 1 / = 0
<1. (5.66)
Возможности ускорения интегрирования при переменном шаге.
При A = const и k\ = 1 величина шага интегрирования не должна
превышать 2Tmin. При А Ф const в методе первого порядка с двух-
шаговыми сериями, т. е. при k\x = k\2 = 1, средняя величина
шага Аср может быть значительно больше 2Tmin.
' Выясним, каковы возможности увеличения шага Аср и какими
при этом должны быть величины отдельных шагов Ах и Л2, опираясь
на условие (5.65). Оптимальными значениями шагов hx и А2 будут
такие, при которых минимизируются затраты машинного времени
или, другими словами, максимизируется средняя величина шага
hcp = 0,5 (hi + h2). Оптимальные значения шагов hY и h2 —
результат решения следующей экстремальной задачи:
найти
А?р= max Аср,
(ht, А2)£б
где целевая функция
АСр = 0>5(А1 + А2), (5.67)
154
а допустимая область G задается неравенствами (5.65) / = 1,2,... , п,
п — порядок системы дифференциальных уравнений.
Введем обозначение bj = %m\Jxf и с учетом (5.4) представим
неравенства (5.65) в виде:
(1 -fti/Tmin) (1 - Vtmin) ^- 1; (5.68)
(1 - Ai/Tmin) (1 -Vbnin) ^ 1; (5.69)
(1 - bAftmln) (1 - &A/Tmin) S* - 1J (5.70)
(1 — 6A/^min) (1 -bsh2/Tmin) < 1, (5.71)
где s ^ [1 : n], и предполагается, что в (5.70) и (5.71) используется
fts=7^= 1, приводящее к наибольшему сужению допустимой области.
Так как целевая функция линейна относительно управляемых
параметров, то экстремум достигается на границе допустимой области.
На рис. 5.8, а заштрихована допустимая область, а ее границы
соответствуют условиям (5.68) — (5.71), преобразованным в равенства.
Из рис. 5.8, а видно, что точкой экстремума должна быть точка Э
пересечения границ (5.69) и (5.70), т.*е. оптимальные значения hx
и h2 определяются из решения системы уравнений
(1 — ftx/Tmin) (1 — h2/Tm\n) = 1
(1 — Ml/Tmin) (1 — bsh2/Tmin) = ~
которое дает координаты оптимальной точки Э
\]
(5.72)
. _ 1 + ^1-26,(1-»,) , .
При ЭТОМ
bs(\-bs)
\-Vl-2bs{\-bs)
«*2— т. 71 ~ ^min*
(5.73)
ft*p ~~ bs (1 —bs) Xmin* ^'7^
На рис. 5.8, б представлена зависимость величины h*p от
величины bs. Отсюда видно, что даже "при наиболее неблагоприятном
спектре матрицы Якоби, т. е. при bs =?= 0,5, имеется двукратный
выигрыш в затратах машинного времени по сравнению с методами,
основанными на выполнении условия устойчивости (5.15). При более
благоприятных спектрах матрицы Якоби величина шага Л*Р может в
десятки — сотни раз превышать минимальную постоянную времени
схемы' что дает снижение затрат машинного времени на одии-два
порядка по сравнению с явными хметодами при h = const.
Рассмотренные ранее способы автоматического выбора шага
интегрирования и, в частности, способы, основанные на формуле
(5.64), не используют возможности увеличения /гср, вытекающие
из обобщенного условия устойчивости. Так, при kl = 1 в этих
способах /гср редко превышает 2Tmin. Для использования
возможностей увеличения hcpy вытекающих из обобщенного условия
устойчивости, необходимо располагать алгоритмами, в которых h± и h2
155
оказывались бы близкими к оптимальным значениям (5.73). Для
этого нужно прежде всего располагать средствами оценки xmin
в процессе интегрирования.
Алгоритм ускоренного численного интегрирования. Алгоритм
ускоренного численного интегрирования был разработан и приме-
нен в программе анализа
электронных схем ПАШ.
В этом алгоритме
используют двухшаговые серии с
k\x = k\2 = 1. На первом
шаге величину hx выбирают по
формуле -
/г1 = М1/(М2 + Я1), (5.75)
где Мj и М2 — некоторые
задаваемые константы; HI — т-
норма вектора производных
переменных состояния на данном
шаге.
Величина Мг практически
является постоянным шагом
дискретизации (при обычно
выполняющемся условии, что
Н\ ^> М2), но не по оси
времени, как было бы при h = const,
а по оси наиболее быстро
изменяющейся переменной
состояния. Действительно, при
использовании (5.75) приращение
названной переменной
состояния |Д£//| = h-Jil « Мг. Все остальные переменные состояния
изменяются менее чем на Мг. Следовательно, локальная
погрешность вычисления переменных состояния не может превысить Мг.
Отсюда следует, что уменьшение М± приводит к увеличению
точности интегрирования, но за счет увеличения числа шагов на
отрезках, где наблюдаются заметные изменения переменных состояния.
Практический опыт анализа электронных схем на биполярных
компонентах показывает, что величину Мг целесообразно выбирать
в диапазоне 0,0025—0,01, если размерности переменных состояния
суть вольты или миллиамперы. От величины М2 зависит
максимально возможный шаг интегрирования йтах. Действительно,
при Я1 = 0
hmax = M1/M2. (5.76)
Величиной hmax можно задаться (например, принять Атах =
= 0,01 Гкон, где Ткон — отрезок интегрирования). Тогда из (5.76)
определяется величина М2.
Если шаг, выбранный по (5.75), оказывается больше 2xmin,
то возникает тенденция к неустойчивости. Эта тенденция будет
Рис. 5.8. Область устойчивости
численного интегрирования (а) и
зависимость величины среднего шага от
характера спектра матрицы Якоби (б)
156
выражена в появлении ложных колебаний в приближенном
решении U(t)y т. е. производные некоторых переменных состояния
будут иметь разные знаки на соседних шагах. Если окажется, что
sign (/'/' = sign Of (5.77)
для всех /, где OJ и Olf — производные /-й переменной
состояния на первом и втором шагах серии, то величина второго шага h2
также выбирается по (5.75). Такая ситуация возникает, если еще
до появления неустойчивости погрешность интегрирования
достигает заданного уровня. Однако на большей части отрезка
интегрирования погрешность достигает предельно допустимых значений
в условиях возникновения тенденции к неустойчивости.
Следовательно, при этом появляются ложные колебания и условие (5.77)
выполняется не для всех /. Именно в этой ситуации и необходимо
выбрать величину h2 таким образом, чтобы погасить тенденцию
к неустойчивости, т. е. выбрать h2 в соответствии с (5.73). Для
этого и необходимо вычислить Tmin.
Поскольку ложные колебания незатухающие (но наличие
ложных колебаний допустимо, поскольку их амплитуда ограничена
величиной Мг), то соотношение между hx и h2 будет соответствовать
границе области устойчивости, выражаемой условием (5.69),
преобразованным в равенство
(1 - /ix/Tmin) (1 - ft2/Tmin) = 1. (5.78)
Заменяя значения hx и h2 значениями #1 и #2 в соответствии
с (5.75), находим xmin (здесь #2 — m-норма вектора производных
переменных состояния на втором* шаге серии): 1— (hx + h2)l%m\n +
+ ftiV^min ■= 1 ИЛИ
ттт - Мг/(2М2 + #1 + #2). (5.79)
Из (5.73) следует, что оптимальное значение h2 должно быть'
близким к rmin. Поэтому принимаем h2 — М1/(2М2 + #1 + Н2).
Тогда величина шага hx автоматически становится близкой к
значению, определяемому по (5.73), а средняя величина шага — к
значению, определяемому по (5.74).
§ 5.11. ВЫБОР ЧИСЛЕННОГО МЕТОДА ДЛЯ АНАЛИЗА
ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЭЛЕМЕНТАХ ЭВМ
При выборе численного метода для анализа переходных
процессов возникают следующие два основных вопроса: каким
методам отдать предпочтение (явным или неявным); методкакого порядка
точности в выбранной группе даст лучшие результаты. Критерием
выбора является экономичность метода, выражаемая затратами
машинных времени Тк и памяти Ям, при обеспечении заданной
точности решения.
Сравним между собой явные и неявные методы по показателям
Тм и Ям. Для определенности выполним сравнение методов первого
порядка точности. Общая формула для затрат машинного времени
157
при реализации любого многошагового вычислительного процесса
где ti — время исполнения операции типа i\ Nt — количество
операций типа / на одном шаге; D — количество типов операций;
Щ — количество шагов.
Примем допущения: 1) любая операция относится либо к группе
коротких операций (типа сложения), либо к группе длинных
операций (типа умножения); 2) отношение количества коротких
операций Nz к количеству длинных операций Ny равно четырем. Тогда
приходим к формуле (4.42): 7М = (fy + 4fc) Ny Ш, где tc и ty —
соответственно времена исполнения короткой и длинной операций.
Значения Ny и Ш различны в явных и неявных методах.
На величину Ny помимо особенностей алгоритмов явного или
неявного интегрирования влияют: а) топологические особенности
и сложность анализируемой схемы; б) особенности используемых
математических моделей компонентов; в) форма представления
математической модели схемы, определяемая методом ее получения;
г) количество вычислений правых частей системы
дифференциальных уравнений Ш на одном шаге в явных методах или количество
ньютоновских итераций для решения системы алгебраических и
трансцендентных уравнений на однбм шаге неявного
интегрирования системы дифференциальных уравнений.
Затраты машинных времени и памяти при применении явных
методов. Топологические особенности анализируемой схемы при
применении явных методов интегрирования характеризуются
количествами ветвей определенной физической природы,
неправильных размещений и их порядками, ненулевых элементов в
топологической матрице контуров и сечений М, отнесенным к показателю
сложности схемы а или пр_п (здесь а — количество ветвей в
сокращенной эквивалентной схеме, а пр__л — количество р-/г-переходов).
Топологические особенности класса переключательных
электронных схем на биполярных компонентах характеризуются данными
табл. 4.3.
х В случае применения неявных методов интегрирования к
топологическим особенностям анализируемой схемы относят также
процент ненулевых элементов в матрице Якоби, т. е. степень
разреженности матрицы Якоби.
Как было показано в гл. 4, наиболее экономичный метод
моделирования электронных схем — метод сканирования М-матрицы.
Подразумевая его применение, а также применениеч моделей
транзистора и диода ПАЭС и учитывая £2=1, получаем, что для явных
методов величина Ny определяется по (4.58а) : Afy^9,la, а
количество шагов в явных методах Ш = Ткоя/1гс?у где Ткон — отрезок
интегрирования. v
Для оценки hcp можно использовать (5.74), задавшись
типичными значениями bs. Для сложных схем вероятность появления
158
в спектре матрицы Якоби составляющих, дающих близкие к 0,5
значения bSy довольно велика. Поэтому примем наиболее
неблагоприятное значение bs = 0,5. Тогда /icp g^ 4Tmin. Учитывая, что на
отрезках . быстрого изменения переменных состояния величина /icp
оказывается меньше, чем величина 2Tmin, эту оценку следует
видоизменить, приняв й,.р ^ 3Tmin. Тогда Ш ^ 0,337KOH/Tmin. Для
явных методов интегрирования затраты машинного времени и
машинной памяти Ям соответственно:
Тм ^ (/у + 4/с) 3aTK0H/Tmin; (5.80)
Ям^ 10,5a+ Япр.
Затраты машинных времени и памяти при применении неявных
методов. В неявных методах интегрирования Ny= (Nyl+Ny2+Ny3) g,
где Nyl — количество операций типа умножения для вычисления
невязок ф (Z) системы уравнений (5.51); Ny2 — то же, для
вычисления элементов матрицы Якоби W(w) системы уравнений(5.51); NyS —
то же, для решения системы линейных алгебраических уравнений
^in)AZ(n+i) = _ ф (2Ы) (5.81)
на очередной ньютоновской итерации; g — усредненное количество
итераций.
Необходимость указанных вычислений непосредственно следует
из алгоритма неявного интегрирования, изложенного в § 5.8.
Оценим Nyl, Л/у2, Ny3 и g. Nyl практически совпадает с Ny в
явных методах, т. е. оценивается по (4.58а). Матрица Якоби в общем
случае определяется методом приращений, т. е. для ее вычисления
нужно п раз вычислить правые части системы дифференциальных
уравнений. Тогда Ny2 = 9,lna, где п — порядок системы. Если же
принимается ограничение, заключающееся в недопустимости в схеме
неправильных размещений, то становятся заранее известными
места расположения переменных элементов матрицы Якоби и
формулы для их вычисления. Приблизительно в этом случае iVy2 ^
^ 13пр-п + пспр_п и с учетом данных табл. 4.3
Ny2^ (4,2 + 0,13a) а. (5.82)
Система (5.81) решается методом Гаусса, при Этом Ny3
оценивается по формуле Ny3 = 0,333я3 + 2п2.
Учитывая данные табл. 4.3 и что п ^ nc, Ny3 = 0,025a3 +
4- 0,35a2. Исходя из опытных данных, можно принять g = 2.
Таким образом, при использовании для Ny2 оценки (5.82)
Ny = 27a + 0,96a2 + 0,05a3. (5.83)
Ограничение на величину шага в неявных методах связано
только с требованиями непревыщения заданной локальной
погрешности е. Можно показать, что при этом
кон ь\ О- 1 / г—*—
ш= \ У тр+ж* (5-84)
159
где [VU1+1)] — m-норма вектора (k\ + 1)-х производных
переменных состояния. Исходя из (5.84) и опытных данных, получаем,
что при анализе реакции схемы на одиночный импульс Ш
составляет десятки — сотни. Примем Ш = 300. Тогда для неявных
методов формулы прогноза затрат машинного времени и машинной
памяти соответственно:
Ты ^ (/у + Щ (27а + 0,96а2 + 0,05а3) 300; (5.85)
Ям^Ям1 + Ям2 + Ям3,
где Ям1 — количество ячеек оперативной памяти для хранения
массивов токов, напряжений ветвей
и невязок системы (5.51); Ям2—то
же, для хранения матрицы Якоби;
Ям3 — то же, на реализацию
решения системы (5.81). Приближенная
оценка имеет вид Ям оё 0,38а2 +
+ 10,5а + Япр.
Сравнение явных и неявных
методов. Приравнивая (5.80) и (5.85),
получаем уравнение границы между
областями предпочтительного
применения явных и неявных методов в
координатах «разброс постоянных
времени TK0Jxm\n — сложность
схемы а»: Гкон/тщш = 2700 + 96а + 5а2.
Эти области представлены на рис.
5.9, а. На рис. 5.9, б показаны
зависимости Ям от сложности схемы.
Из результатов сравнения можно
сделать следующие выводы.
А. Применение неявных методов
интегрирования с использованием
стандартных процедур решения
системы алгебраических уравнений (5.81)
приводит к резкому увеличению
затрат Ты и Ям с ростом сложности
схем. Применение явных методов
интегрирования приводит к линейной
зависимости 7М и Ям от сложности схемы. В этих условиях чем
сложнее схема, тем выше вероятность того, что явные методы
позволят получить решение с меньшими временными затратами. Для
схем умеренной сложности явные методы обеспечивают меньшие
затраты Ты при разбросах постоянных времени, составляющих
менее 1 -104.
Б. При использовании явных методов интегрирования заметно
меньшими оказываются затраты Ям. Так, для ЭВМ с объемом
оперативной памяти в (4—8) «103 ячеек реализация неявных методов
нецелесообразна.
5) 10 20 50 100 200 500 ос
ЛМ{
28000
20000
12000
4-000
20 50 100 200 500 ос
1
Рис. 5.9. Сравнение явных и
неявных методов решения
дифференциальных уравнений:
а — области предпочтительного
применения методов; б — зависимости
затрат машинной памяти от
сложности схемы; / — Тм меньше при
неявных методах: // — 7М
меньше при явных методах; /.—
неявные методы; 2 — явные методы
160
В. Основная причина больших Тм и Ям при неявном
интегрировании — большая трудоемкость решения системы алгебраических
уравнений (5.81) и необходимость в процессе решения хранить
в оперативной памяти матрицу Якоби высокого порядка. Затраты
Tw и Ям можно уменьшить и тем самым расширить область
предпочтительного применения неявных методов, если отказаться от
использования стандартных процедур решения линейных
алгебраических уравнений в пользу специальных процедур, учитывающих
особенности математических моделей электронных схем.
Метод разреженных матриц. Рассмотрим возможности
сокращения Ти и Ям при применении неявных методов интегрирования,
обусловливаемые тем, что матрица Якоби в системе уравнений ММС
сильно разрежена. Аналогично тому, как учет разреженности
топологической М-матрицы позволил существенно повысить
эффективность применения явных методов, оперирование с разреженной
матрицей Якоби в процессе решения системы (5.81) методом Гаусса
может столь же существенно повысить эффективность применения
неявных методов интегрирования. Эти возможности реализуются
в методе организации вычислений — методе разреженных матриц.
Эффективность применения этого метода существенно зависит
от особенностей структуры матрицы Якоби, характеризуемой
степенью разреженности, т. е. долей нулевых элементов, и порядком,
в каком расположены ее строки и столбцы. Степень разреженности
5 матрицы Якоби в ММС реальных электронных схем обычно растет
с увеличением сложности схемы. Значения 5 для нескольких
реальных схем различной сложности приведены в табл. 5.1.
Таблица 5.1
Тип схемы
Простой инвертор
Ждущий мультивибратор
Триггер на двух транзисторах
Импульсный генератор
Цепь из трех схем «Посол»
Токовый ключ
Количество
ветвей
11
22
33
37
39
54
Количество
узлов
7
11
13
17
22
29
S, %
11
15
25
52
78
82
Количество ненулевых элементов в матрице не постоянно и
увеличивается в процессе решения системы уравнений по методу
Гаусса, что очевидно из рассмотрения алгоритмов этого метода.
Алгоритм метода Гаусса состоит из прямого и обратного хода.
При прямом ходе матрица Якоби превращается в треугольную.
Прямой ход включает в себя т — 1 шагов, где т — порядок матрицы.
На каждом шаге порядок системы уравнений уменьшается на
единицу путем исключения из системы одного уравнения и одной
неизвестной. Это исключение осуществляется записью очередного
исключаемого уравнения с номером i в явном виде относительно
очередной исключаемой переменной xt и последующей подстановкой
полученного выражения во все еще не исключенные уравнения.
161
Если по окончании исключений составить систему из
преобразованных уравнений, то матрица этой системы будет треугольной.
Обратный ход сводится к последовательному вычислению неизвестных,
начиная с последней из них. Действительно, в последнем т-и
уравнении после т — 1 исключений остается лишь одна неизвестная хт.
Это означает, что хт вычисляется без каких-либо трудностей.
Подстановка вычисленного хт в (т — 1)-е уравнение, где фигурируют
только хт-г и хт, определяет хт-х и т. д. вплоть до определения хг.
Формула, по которой пересчитываются коэффициенты
уравнений (элементы матрицы) при исключении &-го уравнения, имеет вид
a\f = «?Г1 -a&~Hkrl)ta%Tl)> (5.86)
где af)—элемент матрицы после k-vo исключения; aSk77l)—тот же
элемент до k-vo исключения, причем i > k.
Рассмотрение (5.86) позволяет объяснить возможное увеличение
числа ненулевых элементов в матрице во время исключений. Так,
если я^т.1* = 0, то af) может оказаться ненулевым. Для этого нужно,
чтобы а^1) и а^р были отличны от нуля.
Из (5.86) также видно, что на очередном шаге для каждого /-го
уравнения требуется выполнение одной операции деления a^Va^0,
а для каждого коэффициента во всех еще не исключенных
уравнениях — выполнение операции умножения на oSk~)K Это
обстоятельство и приводит к оценке количества операций типа
умножения в т3/3, требующихся для решения системы уравнений т-го
порядка. Однако если хотя бы один из сомножителей а&—1) или
aikZP Равен нулю, то вычислять коэффициент af) не требуется, так
как он сохраняет свое прежнее значение a^-rjK Если учитывать эту
возможность, то количество операций типа умножения станет тем
меньше т3/3, чем больше в матрице нулевых элементов. При этом
нулевыми элементами нужно считать только те элементы, которые
были нулевыми в исходной матрице и остаются нулевыми в процессе
исключений.
Таким образом, следует различать исходную и итоговую
разреженность матрицы. В табл. 5.1 приведены оценки исходной
разреженности. Итоговая разреженность, как правило, оказывается
меньше и зависит от порядка расположения строк и столбцов в
матрице. Для иллюстрации влияния расположения строк и
столбцов на итоговую разреженность рассмотрим пример приведенной
на рис. 5.10 принципиальной схемы токового ключа. Сокращенная
эквивалентная схема токового ключа показана на рис. 5.11. „Если
для этой схемы составить систему дифференциальных уравнений
в форме Коши, то будет получена матрица Якоби со структурой,
показанной на рис. 5.12, а (на этом рисунке ненулевые элементы
отмечены крестиками). Поскольку каждая строка матрицы
соответствует очередному уравнению, а каждое уравнение, в свою
очередь, описывает процесс перезаряда очередной емкости, то строки
матрицы, представленной на рис. 5.12, а, обозначены номерами
162
емкостей, имеющихся в схеме на рис. 5.11. Аналогично
пронумерованы и столбцы. Применение метода Гаусса к решению системы
уравнений с такой матрицей Якоби приводит к существенному
уменьшению итоговой разреженности матрицы по сравнению с
исходной разреженностью. Так, на рис. 5.12, а точками показаны
1 Исследуемая схема
Рис. 5.10. Принципиальная схема токового ключа
те элементы матрицы, которые, будучи нулевыми в исходном
состоянии, стали ненулевыми в процессе исключений. Если оценка 5
исходной разреженности составляла 82%, то она же для итоговой
разреженности равна лишь 52%.
LLJ \
Рис. 5.11. Эквивалентная схема токового ключа
Меняя расположение строк и столбцов в матрице Якоби, можно
получить различные значения оценки S итоговой разреженности
при одинаковой исходной разреженности. На рис. 5.12, б показана
та же матрица Якоби, что и на рис. 5.12, а, но с измененным
порядком расположения строк и столбцов, что видно из рассмотрения
номеров строк их столбцов, соответствующих номерам емкостей
на рис. 5.11. Применение гауссовых исключений приводит к
появлению лршь одной пары дополнительных ненулевых элементов,
как это видно из рис. 5.12, б. Следовательно, исходная и итоговая
разреженности практически совпадают.
163
Таким образом, есть некоторый оптимальный порядок
расположения строк и столбцов в матрице Якоби, при котором
максимизируется итоговая
а) 1 з 5 7 9 11 13 15 п 19 21 23 25 разреженность. Сущест-
' 2 4 6 8 10 12 /4 16 18.20 22 2* ву^щт алг0рИТмы
упорядочения матрицы
позволяют получить
итоговую разреженность,
близкую к
оптимальной. В этих алгоритмах
могут использоваться
различные признаки,
по которым судят об
оптимальности
упорядочения. Простейший из
них требует такого
порядка, при котором
строки с меньшим
числом ненулевых
элементов в исходной матрице
располагаются выше
строк с большим
числом таких элементов.
Алгоритмы
оптимального
упорядочения, применяемые после
того, как матрица
Якоби уже сформирована,
сложны и
малоэффективны. Гораздо удобнее
применять алгоритмы
перенумерации ветвей
или узлов. , Если,
например, в схеме
бокового ключа (см. рис.
5.11) вместо имеющейся
нумерации емкостей
применить такую
нумерацию, как на рис.
5.12, б, т. е. ветвь 7
обозначить /, ветвь /10
обозначить 2 и т. д.,
то дальнейшее
применение алгоритмов автоматического формирования ММС приведет
к структуре матрицы Якоби, близкой к оптимальной.
Процесс гауссовых исключений учетом разреженности матрицы
Якоби может быть осуществлен по алгоритму, который для
краткости записи представим на языке АЛГОЛ-60. Алгоритм прямого
хода процедуры Гаусса, т. е. алгоритм преобразования матрицы W
1
2
Л
4
Ъ
6
7
8
У
10
И
12
и
/4
1Ь
18
17
18
19
20
21
22
26
24
?5
S)
7
10
12
20
22
23
и
15
17
.3
9
11
/4
16
18
' 19
21
24
/
25
4
5
Р
• Л
6
+
+
-Ь
+
+
+
+
+
+
9
•
+
•
+
+
+
+
+
О
•
•
•
+
•
+
+
+
+-
+
+
•
•
•
•
•
О
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
•
•
+
+
+
+
+
•
о
+
+
+•
•
•
+
+
+
■1-
•
+
+
•
•
•
•
•
•
■1-
•
•
+
+
•
•
•
•
•
•
+
+
•
•
+
+
•
•
•
•
+
•
•
•
+
+
•
•
•
•
+
+
•
•
•
•
+
+
•
•
+
+
•
•
•
•
+
+
•
•
+
+
•
•
•
•
•
•
+
+
+
+
•
•
•
•
•
•
+
+
+
•
в
•
•
в
•
•
•
+
+
+
+
+
+
+
+
е
+
+
•
•
•
•
+
4-
•
+
+
•
•
•
•
+
+
•
Ч-
+
•
•
+
•
+
+
е
•
+
•
©
•
+
+
+
•
•
•
+
+
+
+
•
+
+
+
• 1
е|
• 1
е
+
7 12 22 13 17 9 /4 18 21 1 4 2 6
10 20 23 15 8 11 16 19 24 25 5 3
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
.
+
+
+
+
+
+
+
+
+
+
+
+1
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
•
+
+
+
+
+
•
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
±
Рис. 5.12. Матрица Якоби
164
б треугольную матрицу, с учетом того, что в памяти ЭВМ отводятся
ячейки только для ненулевых элементов в преобразованной матрице,
можно представить следующим образом. Пусть В = {Ь1У 62, ..., Ьр}у
где р — количество ценулевых элементов, bt — номер столбца
/-го ненулевого элемента; А = {%, а2, ..., ат+1}> т — порядок
матрицы W, ak равно порядковому номеру i элемента Ьи являющегося
первым в k-й строке. Массивы А и В содержат сведения о структуре
матрицы W. Пусть далее в массиве W хранятся только ненулевые
элементы матрицы Якоби. Алгоритм имеет вид:
for к : = 1 step 1 until т— 1 do
begin а\ :=A[k]; а2 : = Л [Jfe+1] — 1;
for i:*=al step 1 until a2 do
if B[i)=k then
begin D:=>W[i]; o3: = i + l;
go to L2 end;
L2: for i:=k+l step 1 until m do
begin а4: = ЛИ; аЪ :=A [i+ 1] — 1;
for /: = a4 step'l until a5 do
if £[/]=£ then
begin E: = W [j]/D;
for / : = a3 step 1 until a2 do
begin a6 :=£[/];
for p : = a4 step 1 until a5 do
if a6 = B[p] then
begin ^[p]: = ^M-£xlF [/];
go to LI
end;
LI : end
end end end.
Оценка эффективности учета разреженности матриц в неявных
методах. Перейдем к оценке эффективности метода разреженных
матриц при неявном интегрировании системы дифференциальных
уравнений. Для сопоставимости с ранее полученными
результатами (5.80) и (5.85) будем полагать, что используются метод
интегрирования первого порядка точности и модель транзистора типа
ПАЭС. Примем также, что для формирования ММС используется
метод узловых потенциалов, т. е. матрицей Якоби является матрица
узловых проводимостей. Прежде всего нужно оценить количества
арифметических операций типа умножения iVyl, Ny2 и Ny3 (здесь
Nyl характеризует трудоемкость вычисления невязок, Ny2 — то же,
элементов матрицы Якоби, а Ny3 относится к решению системы
линейных алгебраических уравнений методом Гаусса). Очевидно, что
ЛГу1, Ny2 и А/уз зависят не только от особенностей алгоритмов
формирования и решения уравнений, но и от особенностей ММС
конкретных схем. Поэтому для получения нужных оценок следует
ориентироваться на некоторую типичную для схем элементов ЭВМ
ситуацию. В качестве такой типичной ситуации примем следующую:
а) исходная и итоговая разреженности матрицы Якоби совпадают
вследствие применения алгоритмов оптимального упорядочения;
б) количество ненулевых элементов в матрице Якоби
пропорционально первой степени (3 (где |5 — количество узлов), причем коэффи-
165
циент пропорциональности аг примем равным 5; в) количество
ненулевых элементов а2, расположенных справа от диагонали в
матрице Якоби в каждой строке, примерно постоянно, что также
объясняется применением алгоритмов оптимального упорядочения.
Тогда при аг = 5 имеем а2 = 2.
Выражение для невязок системы решаемых уравнений
получаем из (4.69) заменой <р на <р в соответствии с формулой
интегрирования ф(Л+1) = ф(/г) + /гф(л+1). Тогда вектор невязок яр (ф(л+1>) =
= (AcCA'c/ft + A^R^Ay ф(л+1) — Ajla (ф<Л+1>, /<»+i>) — AcCA'c«p<»VA.
Для подсчета первого слагаемого этого выражения требуется агх
х(р— 1) операций умножения; для подсчета второго слагаемого,
осуществляемого с помощью подпрограмм нелинейных
компонентов, требуется Nnom операций; для подсчета третьего слагаемого —
вновь ах (Р — 1) операций умножения, так как порядок
фигурирующих в выражении матриц есть (Р — 1) X (р — 1).
Примем Nn0RU = 7,7а, включив в эту оценку не только
операции умножения-деления, выполняемые в подпрограммах
компонентов, но и выполняемые в большинстве других подпрограмм, что
позволит в дальнейшем не учитывать трудоемкость вычислений
в этих других подпрограммах. Для переключательных схем
характерно Р « 0,55а. Тогда Nyl ^ 2а2Р + 7,7а = 24р.
При определении матрицы Якоби потребуется пс операций
деления емкостей на шаг интегрирования, а для подсчета членов
с производными зависимых источников тока и производными
емкостей переходов 11лр-я длинных операций. С учетом данных в табл. 4.3
Ny2 = nc + 11Лр-я^7,1р.
При исполнении прямого хода процедуры исключений по Гауссу
выполняется приблизительно а2т делений и на каждое деление
приходится а2 + 1 умножений. При обратном ходе требуется т
делений и а2т умножений. Здесь т = (Р — 1) && р — порядок
системы уравнений. Следовательно, NyS = а2т (а2 + 2) + т (а2 +
+ i)^np.
На одной ньютоновской итерации в методе разреженных матриц
получается Ny = Nyl + Ny2 + Ny3 я« 42p я^ 23a.
С учетом среднего числа ньютоновских итераций g = 2
TM = tfy + 4/c)46a300. (5.87)
Таким образом, использование метода разреженных матриц при
неявном интегрировании приводит к линейной зависимости затрат
машинного времени от сложности схемы. Сопоставляя (5.80) и
(5.87), получаем новую оценку области предпочтительного
применения неявных методов:
(7WTmin)>4600. (5.88)
Граница между областями предпочтительного применения явных
и неявных методов теперь занимает положение, показанное на рис.
5.9, а пунктирной линией.
166
Оценка (5.87) является довольно приближенной вследствие
ряда принятых допущений. Кроме того, реализация алгоритмов
метода разреженных матриц сопряжена с необходимостью
выполнения большого числа логических операций. Это, возможно,
приведет к отношению числа коротких и длинных операций,
превышающему четыре. Следовательно, граница предпочтительного
применения явных методов, представленная на рис. 5.9, а, сдвинется
вверх.
Затраты памяти при учете разреженности матриц также заметно
уменьшаются, но остаются больше, чем при применении явных
методов интегрирования.
Рекомендации по выбору метода интегрирования.
Окончательный результат сравнения явных и неявных методов интегрирования
сводится , к следующим рекомендациям.
1. При создании программ анализа для ЭВМ с объемом
оперативной памяти до 8-Ю3 ячеек предпочтение следует отдать явным
методам интегрирования, так как в этих условиях неявные методы
не позволят анализировать достаточно сложные схемы.
, 2. Для ЭВМ с объемом памяти более 8-103 ячеек программы
анализа, реализующие неявные методы, более универсальны и
применимы к широкому классу электронных схем. Однако в отношении
анализа схем элементов ЭВМ в ряде случаев более эффективны
явные методы интегрирования. Это связано с тем, что для
математических моделей схем этого класса типичные значения Ткон/тт1п
находятся в районе границы между областями предпочтительного
применения явных и неявных методов интегрирования. Поэтому
в программах анализа элементов ЭВМ целесообразна реализация
как явных, так и неявных методов.
3. Реализация неявных методов целесообразна в сочетании
с методом разреженных матриц.
Выбор формул интегрирования того или иного порядка
точности при явных методах должен быть решен в пользу формул
низкого порядка, так как использование формул высокого порядка
в условиях, когда величина шага h превышает xmin, не приводит
'к уменьшению погрешностей расчета, но увеличивает затраты Гм
, и Ям. Исключение составляет''л ишь случай анализа схем,, у которых
собстственные значения матрицы Якоби Xj оказываются
комплексными и при этом мнимые части %f заметно превышают
действительные. Для этих сх^м, как это следует из полученных ранее условий
устойчивости, методы низкого порядка не дают удовлетворительных
результатов. Но для схем элементов ЭВМ появление комплексных
собственных значений Xj не типично.
При неявных методах интегрирования использование методов
высокого порядка хотя и приводит к росту трудоемкости
вычислений на одном шаге, но этот рост может сопровождаться
увеличением шага интегрирования. В связи с этим часто применяют
алгоритмы неявного интегрирования, в которых автоматически
изменяется не только шаг, но и порядок формулы интегрирования в
процессе анализа переходных процессов.
167
§ 5.12/ОПРЕДЕЛЕНИЕ ВЫХОДНЫХ ПАРАМЕТРОВ
Большинство выходных параметров переключательных
электронных схем может быть определено непосредственно по зависимости
выходного напряжения 0ВЫХ от времени, полученной в результате
анализа переходных процессов. По графику 1/вых (t) легко можно
выяснить, каковы длительности задержек и фронтов перепадов
напряжения, высокий и низкий уровни выходного напряжения.
Однако в ряде случаев автоматическое вычисление выходных
параметров по UBblx(t) удобно, а при выполнении многовариантных
видов анализа и оптимизации—просто необходимо. Такое
автоматическое определение выходных параметров осуществляется по
достаточно простым алгоритмам. Так, при определении амплитуд
импульсов, длительностей задержек и фронтов достаточно иметь таблицу
со значениями £/вых и временем t на последовательных шагах
интегрирования. Но поскольку для хранения такой таблицы
потребовался бы слишком большой объем памяти, используют
следующий алгоритм:
1. Перед началом интегрирования присваивают нулевые
значения переменным: 4д.ф — длительность задержки фронта; /ф —
длительность фронта; 4д.с — длительность задержки спада; tz —
длительность спада; 0т — амплитуда импульса.
2. После расчета начальных условий становится известным
начальный уровень выходного напряжения U0.
3. Параметры/зд.ф и/ф определяются на уровнях 0,1 и 0,9 не от
значения Umy как это принято, а от значения Umm\n —
минимально допустимой по техническим требованиям амплитуды
выходного импульса. Замена Um на Umm\n необходима, поскольку при
определении *3д.ф значение Um еще неизвестно. На каждом шаге
интегрирования проверяется условие
*/Вых(0-^<0,Штт1„ (5.89)
и если оно выполняется, то 4д.ф увеличивается на величину шага
h интегрирования: t зд.ф: = /3д.ф + Л.
4. Если условие (5.89) не выполняется, но выполняется
условие ивых (t) — U0 < 0,9[/mmin, то /ф увеличивается *ф : = *ф + h.
5. Для определения амплитуды импульса на каждом шаге
интегрирования выполняется оператор: если Um <С £/вых, то Um : =
= ^вых- Так же определяются максимальные напряжения на
переходах полупроводниковых приборов. Определение этих
максимальных напряжений входит в задачу анализа, если требуется
определить соответствие режимов работы приборов в схеме техническим
условиям на применение этих приборов.
Аналогично происходит определение и параметров 4д.с и tz.
Для этого в исходных данных нужно лишь указать значение tuy
начиная с которого производится отсчет задержки. Обычно tu
связывается с задаваемыми параметрами входного импульса.
Сложнее решается вопрос определения таких выходных
параметров, как порог срабатывания ждущих релаксационных схем
168
и допустимые уровни помехи потенциальных логических схем.
Для их вычисления недостаточно однократного решения уравнений
ммс.
Порог срабатывания (или минимальная амплитуда запускаю-
щегр схему импульса) в экспериментах определяется плавным
увеличением амплитуды UmBX входного сигнала и фиксацией того
значения амплитуды, при котором схема перебрасывается. При
машинном анализе требуется воспроизвести условия такого
эксперимента, но, конечно, с заменой плавного изменения амплитуды
итвх на дискретное. Тогда, обнаружив при очередном значении
итъКу что схема сработала, получают значение порога срабатывания
с погрешностью, не превышающей шага изменения 0твх.
Многократное решение системы дифференциальных уравнений при
разных UmBX заметно увеличивает затраты машинного времени.
Поэтому обычно стараются определять UmBX каким-либо косвенным
путем. Большую пользу при этом может оказать установление
факта тесной корреляционной связи между порогом срабатывания
и каким-либо другим параметром, определяемым с помощью одно-
вариантного анализа.
Допустимые уровни, помехи обычно находят по передаточным
характеристикам. Ряд точек передаточной характеристики
определяется в результате статического анализа схемы. Здесь для
сокращения затрат машинного времени нужно использовать алгоритмы,
позволяющие сократить количество рассчитываемых точек до
минимума.
ГЛАВА 6
МНОГОВАРИАНТНЫЙ АНАЛИЗ
В процессе проектирования электронной схемы, как правило,
необходимо многократное определение ее выходных параметров
при целенаправленных изменениях внутренних и внешних
параметров между вариантами анализа переходных процессов или
статических состояний. Алгоритмы межвариантных модификаций и
обработки результатов многих вариантов, применяемые при
проектировании различных схем, разрабатывают заранее и реализуют
в универсальных программах анализа. Эти алгоритмы относят
к типовым алгоритмам многовариантного анализа. Примерами
типовых задач многовариантного анализа являются анализы
чувствительности и статический. Наряду с этим существует
необходимость проведения межвариантных модификаций параметров по
алгоритмам пользователя. Эти алгоритмы просты и разнообразны.
Поэтому алгоритмы нетиповых задач многовариантного анализа
не реализуются в программах анализа, но во входных языках
программ предусматриваются директивы межвариантных
модификаций. Составление соответствующего перечня директив и их
исполнение на ЭВМ позволяет решать возникающие нетиповые задачи.
§ 6.1. АНАЛИЗ ЧУВСТВИТЕЛЬНОСТИ
Важность анализа чувствительности в процессе проектирования
электронных схем очевидна из перечня задач, для решения
которых используют результаты этого анализа. К таким задачам прежде
всего относят выбор направлений поиска в процессе оптимизации
параметров компонентов. Оценка стабильности выходных
параметров при воздействии на схему дестабилизирующих факторов
qk сводится к расчету степени влияния изменений qk на #,, т. е. коэф-
фициентев чувствительности. Выбор режимов для проведения
испытаний, режимов наихудшего случая при статическом анализе
схем и допусков на параметры компонентов — задачи, включающие
в себя анализ чувствительности.
Степень влияния конкретного внутреннего параметра на
конкретный выходной параметр может быть различна. При отработке
схем с точки зрения статических состояний, переходных процессов
и допусков на изменения выходных сигналов нужно уметь выбрать
внутренний параметр, изменения которого наиболее сильно влияют
на улучшение не удовлетворяющих разработчика выходных
параметров. Но изменение одного внутреннего параметра может повлечь
за собой изменение нескольких выходных параметров. При этом
улучшение одного из выходных параметров может сопровождаться
170
ухудшением одного или нескольких других параметров. Поэтому
отработка принципиальных схем должна базироваться на четкой
информации о том, как количественно связаны выходные параметры
с внутренними и внешними параметрами.
Теория чувствительности охватывает совокупность методов олре-
деления степени влияния одних параметров на другие и
использования этих данных для расчетов схем.
Количественная оценка отклонений выходных параметров за
счет изменений внутренних и внешних параметров может быть
проведена на основе соотношения
y? = f(Xi, -.., xi9 ..., хп; ql9 ..., qk9 ..., qm), (6.1)
показывающего зависимость /-го выходного параметра yj от
внутренних и внешних параметров. Если зависимость (6.1) известна,
то, воспользовавшись разложением в ряд Тейлора с точностью до
первых членов, получим
т
+ ^ df^'-'Xl У'•"•** Ят) AgA. (6.2)
Для практических применений более удобны безразмерные
относительные величины, т. е.
л п
*У1 _ "V dfl*l> "' **' — ' хп> Яъ — » Як* ••> Ят) х
Xjo Але/
/(*;о> •••» xio> •••> хпо* Яю* •••> to» •••> Ято) xio
У/о ^ дх{
i= 1
X
dqk X
+ 2
6=1
w 2*0 Afffe ч /g Q\
f (s10,..., %,..., xn0; q10f..., qko> •-- > Ято) to
В (6.3) выходные, внутренние и внешние параметры
представлены в виде безразмерных относительных величин б#/ = A*/y/r/;0;
6xi = Axi/Xi0\ aqk = Aqk/qk0. Коэффициенты, стоящие перед
абсолютными Axt и Aqk и относительными ох* и aqk отклонениями,
характеризуют степень влияния отклонений соответствующего
параметра xt или qk на изменение /-го выходного параметра.
Величины Aji9 Ajk и Bjiy Bjk называют соответственно
абсолютными и относительными коэффициентами чувствительности.
Например, Вц — относительный коэффициент чувствительности /-го
171
выходного параметра от *-го внутреннего параметра:
л д!(хъ ..., xh ..., хп\ дъ ..., qk> ♦ .., дт) . /ft лч
Л/< = ^ ' (6'4>
Afk- щ , (6.4a)
D -—A ^£2 • (f\ C\
/7 ji f(Xl0, ..., %), .-., Xn0; <7l0> ...» <7fc0> • •> Qmo) ' K '
Bfk = AikT7 ^ ■—4. (6.5a)
i\xWf'9 Xfa,...t xn0; q10, ... , qko* ••• > Qmo)
Точность определения коэффициентов чувствительности зависит
от вида функциональной зависимости (6.1). Использование
выражения (6.2) предполагает линейную аппроксимацию зависимости (6.1)
в окрестностях точек, соответствующих номинальным значениям
внутренних и внешних параметров. Чем ближе зависимость (6.1)
к линейной и чем меньше величины отклонений параметров Длг^
и Aqky тем выше точность аппроксимации (6.2).
Для отыскания численных значений коэффициентов
чувствительности применяют методы: аналитический, преобразованных
цепей, экспериментальный статистический.
Аналитический метод. Этот метод предполагает, что
функциональная зависимость (6.1) найдена в виде аналитического
(формульного) выражения. Для отыскания величин коэффициентов
чувствительности используют зависимости (6.4) — (6.5а).
Пример. Дана схема инвертора (рис, 6.1) со следующими параметрами:
транзистор типа П16, диод Д типа Д9Е, Яг= 1,8 кОм, R2 = 6,2 кОм, R3 = 39 кОм,
RK = 0,5 кОм, Ек= — 12 В, Еси = + 12 В. Коэффициент усиления транзистора
В = 40, постоянная времени емкости эмиттерного перехода т = 1 мкс.
Найти коэффициенты влияния параметров схемы на длительность фронта
включения.
В исходном состоянии на вход схемы поступает положительное напряжение,
достаточное для закрывания транзистора. В момент времени t = 0 на входе
появляется отрицательный перепад напряжения, песле которого диод Д оказывается
закрытым. Процесс перехода транзистора из закрытого состояния в насыщенное
зависит от тока базы, определяемого величинами резисторов Rlt R2, R3. Считая
фронт тока базы идеальным, а также пренебрегая обратным током закрытого
диода Д и остаточным напряжением базы в насыщенном режиме для выходного
параметра tф [2], можно записать:
*ф = т1п[/б1/(/б1 + /кн/В)],
где /кн = EK/RK = 12/0,5 = 24 mA — ток насыщения; 1^г = EK/(Ri + R2) —
— ECJR3= 12(1,8 + 6,2) —12/(39) = 1,2 mA.
Согласно (6.4) и (6.4а) коэффициенты чувствительности будут иметь вид:
Щ , hi д*ф д I. hi
i41=-T^-=ln-7 ;——: ^2=-^- = т-^г( In
дх hi-hJB ' * дБ дВ \ /б1-Лш/Д
#Ф д Л hi \ я Яф д ( hi
А*=-дгат-яв- 1п г. i ,р ; д4=-^=^ яп-Ип
dRx ~ дЯг V hi-hu/B /' "4 ~ dR2 dR2 \ 1б1-1кш/В
а/ф д I /б1 \ д1ф д I /б1
Аь = -^Г-=Т-^Г- 1П -г F—77T И /le=377- = T377-Un
dR3 dR3 \l" hi-hJB /' "6 dRK dRK \ I6l-IKK/Bi
Ыф _ д I /б1 \ dt^
дЕк ~% дЕк уп I6l-IKU/B I '» Ае~ д£см -
" xii hi \
д£См V" hi — ha/B/'
= T-^-(ln
172
Общее отклонение параметра ^ф от номинального значения Д^, = ЛхАт +
+ Л2ЛЯ + A3ARX + Л4Д#2 + AbAR3 + A6ARK + Л7Д£К + Л8Д£СМ.
Установление вида аналитической зависимости (6.1) выходного
параметра от внутренних- и внешних параметров связано с
введением ряда упрощений.
Доказательство допустимости принятых
упрощений часто требует сложных
аналитических исследований и
вычислений. Поэтому аналитический метод
определения коэффициентов
чувствительности целесообразно принять
лишь для очень простых схем.
Метод преобразованных цепей.
Основу этого метода составляет
замена рассматриваемой цепи,
содержащей, например, сопротивление R±
с отклонением ARt (рис. 6.2, а),
другой преобразованной цепью (рис. 6.2, б). В преобразованной
цепи полюса источника напряжения £/вх замыкаются между
собой, а вместо* погрешности ARX включается источник напряжения
AUxt. Величина напряжения AURl
Рис. 6.1. Пример схемы для
анализа чувствительности
AUR1=(I + AI)ARU
(6.6)
При малых величинах AR± и А/
где / — номинальное значение токи, протекающего через
сопротивление Ri, А/ — отклонение тока от номинального значения.
их произведение является
величиной второго
порядка малости. Поэтому
(6.6) примет вид
Д£/я1 = /Л#1. (6.6а)
В преобразованной
цепи (рис. 6.2, б) на
выходных полюсах
выделится напряжение
AUBblx = q>gf/CdAUgf, (6.7)
Рис. 6.2. Исходная (а) и преобразованная (б)
цепи
где (pgf/cd — коэффициент передачи напряжения от полюсов gf
к полюсам cd для преобразованной цепи.
Из (6.7), принимая AUgf = IAR± и / = Uef/Rly получим
Д£/вых = (VRJ Ue^gflcdAR1 = UBX (l/RJ (Uef/UBX) <pgf/cdARlt г*е
Uef/йвх = Wabief — коэффициент передачи входного сигнала к
полюсам ef. Отсюда
А^вых ^Рвх^аЬ/ef^gf/cd (A#l/#l).
(6.8)
Из теории четырехполюсников известно, что (d<p/dR1) = (1/Яг) х
X <pabie№f/cd* Поэтому из (6.7) и (6.8) следует,что А/7ВЫХ = (dtp/dR^ X
X ARXUBX. Таким образом, отклонение выходного сигнала за счет
173
погрешности A/?x можно найти, определив аналитически или
экспериментально коэффициенты передачи уаьм и <р#/«*.
Метод преобразованных цепей сокращает трудоемкость
отыскания коэффициентов чувствительности. Но его можно использовать
лишь для линейных и квазилинейных цепей, поскольку он основан
на использовании принципа суперпозиции, правомерного только
для линейных схем.
Методы аналитический и преобразованных цепей основаны на
линейной аппроксимации зависимости выходного параметра от
внутреннего или внешнего параметра. При этом
аппроксимирующая прямая в сечении я-мерного пространства проходит через точку,
'imin *Lo *1тах *i *imin ho *1т1п *1
Рис. 6.3. Способы аппроксимации зависимости у = ft (xi):
а — касательной, проходящей через точку номинальных
значений (/) и наилучшим линейным приближением {2); б — секущей,
яроходящей через граничные точки (3) и через точку
номинальных значений и граничную точку (4)
определяемую номинальными значениями внутренних параметров.
Угол ее наклона определяется - производной зависимости t/j =
= /i (*i) в указанной точке (рис, 6.3, а, прямая 1). В реальных
схемах зависимость yj = fx (xt) может иметь такой вид, что
погрешности бтах станут значительно меньше, если в качестве
аппроксимирующей использовать прямую 2 (рис. 6.3, а), являющуюся
наилучшим линейным приближением функции tjj = f± (xt) в
рассматриваемом диапазоне изменений параметра xt.
О погрешностях, присущих аналитическому методу
определения коэффициентов влияния, можно судить по следующему. Для
схемы инвертора, приведенной на рис. 6.1, были определены
коэффициенты чувствительности внутренних параметров и источников
питания на отклонения длительностей переднего /$ и заднего /J
фронтов, а также времени рассасывания *рас неосновных носителей
транзистора. Приближенные величины отклонений выходных
параметров Д#Уприбл, рассчитанные по <6.2), приведены в табл. 6.1
(расчеты проводились для двух вариантов допусков: в первом варианте
отклонения внутренних параметров лежали в пределах 5-т-10%,
во втором —в пределах 10ч-20%). Отклонения параметров были
также определены путем многовариантного расчета на ЭВМ, а затем
проверены экспериментально. Полученные при этом величины
отклонений Аг//ТОЧн названы точными.
174
Таблица 6.1
_
Обозначение
параметров
Д47точн' мкс
Д^/прибл' мкс
8, %
Отклонения
А*/ < Ю%
4
0,042
0,031
—26,2
рас
—0,102
—0,015
85,2
, 'ф
—0,064
—0,092
—43,8
параметров
Ьх. < 20%
*
—0,076
—0,099
—30,3
t
рас
—0,024
0,140
680
Ъ
—0,288
—0,213
26
В таблице приведены также значения относительной
погрешности, рассчитанной по формуле:
8,- = (Д*/£прибл - Ду/тачн)/АУ/гочн. (6-9)
Анализ полученных результатов показывает, что для
сравнительно простой переключательной схемы инвертора даже при
малых отклонениях внутренних параметров расчеты по (6.2) дают
недопустимо большие погрешности, достигающие 680%. Одна из
основных причин столь больших погрешностей — нелинейность
функциональной зависимости (6.1), присущая большинству схем,
работающих в переключательных режимах. Более высокую точность
линейной аппроксимации обеспечивает наилучшее линейное
приближение, которое может быть получено при применении
статистических методов.
Экспериментальный статистический метод. В основе этого метода
лежит определение отклонений выходных параметров электронных
схем при помощи корреляционного анализа, применение которого
предполагает проведение серии экспериментальных измерений
выходного параметра при смене комплектующих деталей и
приборов или многовариантный анализ схемы на ЭВМ. Практически
эксперимент выливается в изготовление опытной партии
элементов (50—100 шт.). Для каждого образца проводят возможно более
точные измерения параметров комплектующих деталей и приборов.
У изготовленных образцов измеряют величины выходных
параметров. После проведения достаточно большого количества опытов
производят статистическую обработку результатов измерений с
целью определения коэффициентов корреляции между выходными и
внутренними (или внешними) параметрами:
N
2 &Я-Мх)<дм-Му)
Oi-TTzrr — 5^ • (6-10>
где N — количество проведенных опытов; п £ {1, 2, ..., Щ—
номера опытов; xin — значение внутреннего или внешнего параметра
в п-м опыте; Мх — математическое ожидание внутреннего или
внешнего параметра; у;п — п-е значение выходного параметра;
175
My — математическое ожидание выходного параметра; ох и ру —
среднеквадратичные отклонения соответствующих параметров.
При ограниченном количестве опытов математические ожидания
и среднеквадратичные отклонения определяются как
выборочные средние, т. е.
N
п = \
N
п = \
N
й=АГ=т2(*'л~'М*)'; (6ЛЗ)
п=\
N
Связь между параметрами тем сильнее, чем ближе величина
коэффициента корреляции к± 1, и тем слабее, чем ближе она к 0.
Уравнение линейной корреляционной связи параметров описывают
уравнением регрессии xt на yj, т. е.
yj -Му = г)л (xt — Мх), (6.15)
где yj — частное математическое ожидание величины #,-,
соответствующее заданному математическому ожиданию параметра xt\
%/ = fjiGyjlGxi — выборочное значение коэффициента регрессии.
Коэффициент регрессии г)у/ при линейной корреляционной связи
является абсолютным коэффициентом чувствительности *:
Aji = dyj/dXi = чл = rjiOyj/Gxi. (6.16)
Частное среднеквадратичное отклонение параметра yj около
частного математического ожидания при нормальном законе
распределения
Oy^CyVT^Ffc (6.17)
Получение представительных значений коэффициентов
корреляции требует, чтобы количество опытов было достаточно
большим. При нормальном законе распределения рценка
представительности полученных значений коэффициентов корреляции может
быть получена исходя из следующих положений.
При очень больших N, охватывающих все возможные
сочетания параметров, коэффициет корреляции становится равным г0.
Ограничение количества испытаний N приводит к тому, что
выборочная величина коэффициента корреляции г отличается от вели-
* При этом предполагается, что корреляционные связи между внутренними
параметрами отсутствуют.
176
чины гв. При этом г — случайная величина. Ее математическое
ожидание г0, а среднеквадратичное отклонение приближенно опи,-
сывается соотношением
аг = (1_г2)/]/лГП. (6.18)
Выборочное значение г близко к г0 и с вероятностью не хуже 0,9
значение г лежит в следующих пределах:
r = r0±3(Tr. (6.19)
Если Зогг <[ г, то количество опытов можно считать достаточно
представительным.
При малых значениях г реальность корреляционной связи
оценивают сравнением г с аг. Если
| г\/ог = | г | yTV-T" ^3, (6.20)
то г можно считать значащим и связь реальной. При
| г \/ar = \r\ VW^l < 3 (6.20а)
считают отклонение г от нуля случайным и реальность
корреляционной связи сомнительна. Уточнение вопроса о реальности
корреляционной связи может ,быть получено за счет увеличения
количества опытов, но необходимость в последнем возникает лишь в тех
случаях, если соответствующий коэффициент чувствительности
достаточно велик и отклонения выходного параметра AyJ( за счет
коэффициента чувствительности Afi имеют существенный вес
в суммарном отклонении Дг/у. На практике обычно значения
коэффициентов корреляции, которые необходимо ' учитывать, не
превышают величины 0,4-^-0,3, что соответствует количеству
необходимых опытов (N = 50—100).
Таким образом, статистическая обработка результатов
экспериментов дает возможность определить коэффициенты
чувствительности Aji и одновременно провести статистическую оценку точности
линейной аппроксимации.
Следует отметить, что корреляционный анализ обеспечивает
наилучшее статистическое приближение аппроксимирующей
прямой 2 к функции t/j = ft (xt) (рис. 6.3, а). Кроме того,
экспериментальный статистический метод автоматически учитывает взаимные
корреляционные связи между внутренними параметрами.
Взаимные корреляционные связи возможны между параметрами
комплектующих приборов, диодов и транзисторов, поскольку
некоторые отклонения физических размеров приводят к одновременному
изменению нескольких электрических параметров этих приборов.
Например, изменение толщины базы транзистора вызывает
одновременное изменение таких внутренних параметров, как
коэффициент усиления В и постоянная времени т. Количество взаимных
.корреляционных связей между внутренними параметрами
возрастает в интегральных схемах. При интегральной технологии
отклонения в режимах отдельных технологических операций обычно
177
приводят к одновременным изменениям параметров р-я-переходов
транзисторов, сопротивлений и т. п.
При нелинейных корреляционных зависимостях вместо
коэффициентов корреляции можно воспользоваться корреляционным
отношением и аппроксимацией связи одним из простых
аналитических выражений.
Но применение корреляционного анализа на основе
экспериментальных данных требует больших затрат средств и времени. Кроме
того, погрешности измерений, неизбежные при экспериментальных
исследованиях, могут существенно исказить результаты
(последнее особенно относится к схемам с малым временем переключений).
Учет взаимных связей внутренних параметров при
аналитических методах расчета возможен в том случае, если в (6.2) не
отбрасывать члены, содержащие смешанные производные. Трудоемкость
вычислений при этом существенно возрастает.
§ 6.2. МАШИННЫЕ МЕТОДЫ АНАЛИЗА ЧУВСТВИТЕЛЬНОСТИ
Применение ЭВМ позволяет проводить расчеты параметров
выходных сигналов при заданных величинах внутренних и
внешних параметров. Это дает возможность использовать различные
алгоритмы расчета ^коэффициентов чувствительности.
Метод приращений. Наиболее простой алгоритм расчета
коэффициентов чувствительности основан на возможности изменения
одного из внутренних (внешних) параметров при номинальных
значениях остальных. При этом (6.1) примет вид
yj = f(x10i *20> •••> *U •••» Xnol QlOy ?20> •••> Qmo)i (6.21)
где Xi — изменяемый параметр.
Придавая изменяемому параметру значения xim-m и ximax>
соответствующие пределам изменений этого параметра, и проведя
расчеты выходных параметров, легко найти значения
коэффициентов чувствительности Ajt из соотношения
• А]1 = Uj \Xi max) — // (Xi min)]/(#£ max — *£ min]> (6.22)
где / e {1, 2, ..., /} и i ^{1, 2, ..., n} — соответственно номера
выходного и внутреннего параметров. (При этом предполагается,
что корреляционные связи между внутренними параметрами
отсутствуют). Общее количество коэффициентов чувствительности,
очевидно, составит I (п + т). Для их отыскания потребуется 2 (п +
+ т) просчетов параметров выходного сигнала.
Основные недостатки метода приращений — большое
количество просчетов выходных параметров, что связано с значительными
затратами машинного времени, а также невысокой точностью
линейной аппроксимации. При использовании метода приращений
аппроксимирующая прямая занимает положение 3 (рис. 6.3, б),
обусловливающее погрешности того же порядка, что и
аналитический метод.
178
Количество вариантов просчета параметров выходного сигнала
можно сократить до величины (п + т + 1), если в (6.22) вместо
Ximin использовать значения xi0 и qk0. Аппроксимирующая прямая
при этом займет положение 4 (рис. 6.3, б), что может привести к еще
большим погрешностям в определении коэффициентов
чувствительности.
Для схем, содержащих большое количество компонентов, удобно
пользоваться матричными формами записи. В этом случае
результатом решения задачи анализа чувствительности является матрица
коэффициентов чувствительности А или В:
А = 1^/^11; В = 1Л/Ляом/уУн0111, (6.23)
где xiKoM и #уном — номинальные значения параметров компонентов
и выходных параметров.
Согласно (6.22) метод приращений предполагает, что (6.23)
вычисляется приближенно, т. е.
АНДЫ|||1/Д*г|, (6.24)
где ||1/Ах*|| — диагональная матрица.
При односторонних приращениях относительно номинальных
значений алгоритм этого метода сводится к следующему.
1. Задают вектор номинальных значений Хном = (#1ном, ...,
^ном> ...>*лном) и затем проводят одновариантный анализ схемы,
в результате получают вектор YH0M = (r/lH0M, ..., yJn0Mi ..., *//ном).
2. Проводят п вариантов анализа схемы, в каждом из которых
получает приращение Axt один из внутренних параметров xiuou.
При очередном варианте анализа будет получен вектор выходных
параметров Y = (#1ном + Aylh ..., у fm + AyJh ... , yiH0M +
+ Ауп), где AyJt — отклонение /-го выходного параметра за счет
приращения i-ro внутреннего параметра.
При известных отклонениях внутреннего и выходного
параметров легко определить элемент матрицы чувствительности: Ал =
= (l/Axi) (у;Ч — #/hoJ- После п вариантов анализа матрица
коэффициентов чувствительности может быть записана в виде
Ацу ^12> • • •» А^и • • • э А1п
| ^21» ^22» • у 5 ^2Ь • •• » Ачп В
А и* А,2,
, Afu ..., А
in
An, Ai2, ..., Ацу ..., Aln
Д#п. Д#12. • • • > &ylh ..., Дг/1Л|| 1/Д^х, 0,
A#21> A^22> •• • > АУ2b • • • > Ay2n
Д#д> &yi2> :.., Ayfh ..., &yfn
0,
0, 1/Д*а» •••» 0,
0, 0, .J., 1/А,.,
0, 0, .!., 0
., о
., о
., 1/Д*я
(6.25)
179
Таким образом, матрица коэффициентов чувствительности имеет
размерность / X /г, а для ее вычисления требуется (п + 1)-й
вариант анализа (без учета внешних параметров).
Точное определение коэффициента чувствительности можно
повысить, применив квадратичную аппроксимацию. Однако
математический аппарат при этом усложнится настолько, что станет
практически неприемлемым. Из рассмотренных выше способов
линейной аппроксимации наибольшей точностью обладает способ
наилучшего линейного приближения. Но этот способ является
и наиболее трудоемким.
Универсальность, простота реализации и малые затраты
машинной памяти обеспечили методу приращений широкое
распространение. Но методу присущи и существенные недостатки — большие
затраты машинного времени и сравнительно невысокая точность
определения коэффициентов чувствительности.
Методы анализа чувствительности, основанные на
интегрировании дополнительных систем дифференциальных уравнений.
Большая точность и меньшая трудоемкость вычисления коэффициентов
чувствительности по сравнению с методом приращений достигается
при использовании прямого и вариационного методбв, основанных
на решении дополнительных систем дифференциальных уравнений.
Но эти методы менее универсальны, так как применимы при расчете
чувствительности лишь выходных параметров-функционалов.
В прямом методе коэффициенты чувствительности AJ{ = dt/j/dxt
определяются на основе предварительного вычисления матрицы Z,
элементами которой являются частные производные переменных
состояния по параметрам компонентов. В вариационном методе
предварительно вычисляется сопряженный вектор переменных
состояния ф.
Пусть математическая модель схемы представлена системой
дифференциальных уравнений
V=F(V, X, t), (6.26)
где V = (vXi v2, ..., vq) — вектор переменных состояния, X =
= (*i> х2> •••» хп) — вектор параметров компонентов. Эту систему
можно переписать в виде
; = F(v + V0, X, 0, (6.26а)
где V0 — вектор начальных условий, v = V — V0. Дифференцируя
(6.26а) по X, имеем^- = -^- (~ + -^-J + -g^-- Обозначим матрицу
порядка q х п с элементами dvp (t)ldxi через Z = dv/dX. Так как
dv/dX = -^-(dv/dX) = Z1 то
Выражение (6.27) есть матричная форма записи п систем
линейных дифференциальных уравнений q-ro порядка с переменными
180
коэффициентами, причем матрицы Якоби у них одинаковы и
совпадают с матрицей Якоби исходной системы (6.26). Эти особенности
существенно сокращают затраты машинного времени на
интегрирование уравнений. Начальные условия для (6.27) Z (0) = 0,
матрица dV0/dX определяется из результатов статического
анализа схемы, когда' V = F (V0, X) = 0: ^dV0 + -^cdX = 0 и
-~£- = — (-gy-) -дуг. Следует отметить, что если в качестве начальных
условий принять Z (0) = <3V0/dX, то Z имеет смысл матрицы дМ/дХ
и (6.27) запишется в виде
*=ж2+ж- <6-27а>
Прямой метод. Этот метод анализа чувствительности
предусматривает сравнительно несложные правила преобразования
элементов матрицы Z в коэффициенты чувствительности А^ Пусть
выходной параметр — функционал yj — есть определенный
интеграл
т
кон
у,= \ B[V(X,t),X,t]dt (6.28)
о
при Гкон= const. В вариационном исчислении используется
понятие вариации функционала, аналогичное понятию дифференциала
функции. Вариация (6.28) есть
т
кон
%= 5 (жбу+жбХ)^' <6-29>
о
ИЛИ
Т
кон
6«,= 5 {-J5-(8v + 6Ve) + -J|-6x}dft (6.29а)
о
где дб/dV и <Э8/дХ — векторы-строки. После деления (6.29) на 6Х
имеем
-ч K.UM
дУ С ( дв 7 _1_ аб \///
Таким образом, прямой метод требует выполнения следующих
этапов:
1) производится анализ статического состояния схемы,
вычисляются вектор V0 и матрица dV0/<5X начальных условий;
2) одновременно интегрируются исходная система
дифференциальных уравнений (6.26), п систем дополнительных уравнений
(6.27а) и подсчитываются m х п 'интегралов, где m — количества
выходных параметров.
181
Вариационный метод. Используя для оператора
дифференцирования матрицы порядка q X q обозначение S
S =
d/dt О . О
О d/dt • О
О 0 d/dt
перепишем (6.27) в виде SZ —-^ Z = -^- -~ + -^, откуда имеем
Введем обозначение
и будем называть *ф сопряженным вектором переменных состоя-
ду,-
ния. Здесь -ф — вектор-строка. Разделим (6.29а) на 6Х: -^- =
т
кон
= \ j-^y- (z + -^-) + -gg-| Л и подставим сюда Z из (6.30). Тогда
дХ ~ ) Y*\dV дХ ^ дХ ) ^ dV дХ ^ дХ ) *'•
Выражение (6.31) представляет собой сопряженную систему
дифференциальных уравнений:
Из (6.32), в частности, следует, что i|? = hj> — -^-J f-^-j , поэтому
ду;-1дХ можно переписать в следующей форме:
т
Л кон
% С ( ; fdF \-i aF dV0 ае / aF W д¥ д\9 ,
%___ С L'h/ar\-i aF av0 ае /аг\-
ах ~~ j tv\ avУ av ax av \av)
av ax
6х
, , aF . ae av0 , ae i ,, ~ / aF \-i aF
+ *Ж + 1у"ЯГ + Ж[Л- Так как (wj Ж есть единич"
г
агл- av0 г»он / aF аа \
ная матрица, то Ж-=={1|)(ГК0Н)-^(0)}^-+ ^ ^_+_Jd/.
В теории оптимального управления доказывается, что if (ГК011) =
= 0, если Гкон = const. Поэтому окончательно
dyj ~ *«»
ах
m
av„ с ( ж ае \
- + <°>S+ $ (*ж + -аг)Л- <6-33)
Особенностью задачи анализа чувствительности ч вариационным
методом является то, что для сопряженной системы (6.32) известны
не начальные условия, а я|э (Гкон). Поэтому алгоритм
вариационного метода включает в себя следующие процедуры:
1) производится анализ статического состояния схемы,
определяются начальные условия V0 для основной системы и матрица
3V0/dX;
2) интегрируется основная система (6.26), при этом необходимо
запоминание значений матрицы Якоби dF/dV на каждом шаге
интегрирования;
3) интегрируется сопряженная система (6.32) в «обратном»
времени от t = Гкон до t = 0;
4) по (6.33) подсчитываются коэффициенты чувствительности
выходных параметров.
Недостатком вариационного метода является необходимость
запоминания большого количества информации в процессе
вычислений, и, следовательно, метод пригоден для реализации только
на ЭВМ с большой емкостью оперативной памяти.
Анализ температурной стабильности. Анализ чувствительности
возможен постольку, поскольку в машинной программе анализа
реализованы алгоритмы, позволяющие вычислять выходные
параметры схем при вариациях параметров всех исследуемых
влияющих факторов» Действительно, уравнения ММС в сочетаний с
алгоритмами определения выходных параметров и алгоритмами
вычисления входных напряжений (токов) отражают связи выходных
параметров со всеми параметрами компонентов и с такими внешними
параметрами, как напряжения источников питания, параметры
входных сигналов и нагрузки, включая коэффициенты разветвления по
входу и выходу. Рассмотрим, как в ММС учитывается температура f
окружающей для схемы среды. Анализ температурной стабильности
электронных схем — важная составная часть процесса
проектирования. Проверка работоспособности схем во всем допустимом
температурном диапазоне при экспериментальных методах
проектирования приводит к большим материальным и временным затратам.
Машинные методы, обеспечивая легкость моделирования различных
температурных условий, в значительной мере снижают эти затраты.
Для учета температуры параметры всех компонентов
рассматривают как функции Температурные зависимости параметров
устанавливаются с помощью эмпирического или физического подхода
и могут быть реализованы Как в отдельной подпрограмме, так и
в подпрограммах компонентов. Для большинства параметров
компонентов возможна линеаризация их температурных зависимостей:
Xt (О = xt (20° С) [1 + ТК< (t° - 20° С)], (6.34)
где xt (f) и Xt (20° С) — значения xt при температурах f и 20° С
соответственно; ТК* — температурный коэффициент параметра xt.
Чаще используют более точную кусочно-линейную
аппроксимацию xt (t°) с разделением температурного диапазона на два
участка, граница между которыми f = 20° С. Тогда справедлива фор-
183
мула (6.34), но на этих участках используются разные температур,
ные коэффициенты: минусовой ТК?, плюсовой TKf. Формулу (6.34)
обычно принимают для параметров пассивных компонентов и тех
параметров транзисторов и диодов, которые не имеют резко
выраженной нелинейной зависимости от t. К таким параметрам относят
барьерные емкости переходов, объемные сопротивления тел базы
и коллектора, температурные потенциалы и постоянные времени
переходов. Для тепловых токов и коэффициентов В и Ви усиления
тока целесообразно использовать экспоненциальные зависимости
от температуры: х{ (f) = xt (20° С) {1 +а, exp [(f—20°Q/TKJ— а,},
где аь и ТК/ — коэффициенты аппроксимации.
§ 6.3. МЕТОДЫ ОЦЕНКИ РАБОТОСПОСОБНОСТИ СХЕМ
Параметры выходных сигналов элементов ЭВМ имеют
отклонения от своих номинальных значений вследствие воздействия
дестабилизирующих факторов — изменений внутренних и внешних
параметров. Степень влияния отклонений этих параметров на
выходные параметры можно определить при помощи коэффициентов
влияния. Изменение каждого из выходных параметров определяется
совокупностью отклонений внутренних и внешних параметров.
В общем случае как величины отклонений внутренних параметров,
так и величины отклонений коэффициентов влияния имеют
широкие диапазоны значений. Задача состоит в том, чтобы при известных
пределах изменений внутренних и внешних параметров найти
диапазоны изменений параметров выходных сигналов. Путем
сопоставления диапазонов изменений параметров выходных сигналов
с требованиями технического задания на элемент можно сделать
заключение о приемлемости данного варианта принципиальной
схемы. .
Условия, при которых протекает технологический процесс
изготовления электронных приборов, не остаются неизменными
во времени. Колебания температуры и влажности окружающей
среды, неодинаковость характеристик исходного сырья,
непостоянство параметров технологического оборудования — таков неполный
перечень причин, приводящих к производственным погрешностям
параметров компонетов, т. е. к их разбросу относительно средних
значений как внутри отдельных партий изготовляемых приборов,
так и между экземплярами приборов разных партий. Поэтому
параметры компонентов — случайные величины. Выходные параметры
схем — также случайные величины, поскольку являются
неслучайными функциями случайных аргументов — параметров
компонентов. Следовательно, при серийном изготовлении схем
у разных экземпляров технические требования к выходным
параметрам будут-выполняться в разной степени, т. е. выполнение
технических требований происходит с той или иной вероятностью.
Если эта вероятность мала, то мал процент выхода годных схем,
являющийся основным показателем важного свойства
разработанной схемы, называемого серийнопригодностью. Малый процент
184
выхода годных изделий приводит к существенному увеличению
себестоимости продукции.
Основная цель статистического анализа схемы — получение
информации о распределении выходных параметров, на основе
которой определяется вероятность выполнения технических
требований и устанавливается необходимость принятия мер по
улучшению серийнопригодности. Исходная информация для
статистического анализа — сведения о распределениях параметров
компонентов.
Метод наихудшего случая. При использовании этого метода
не надо определять законы распределения выходных параметров
и оценивать их основные числовые характеристики (математическое
ожидание и среднеквадратическое отклонение), не надо определять
и вероятность выполнения заданных технических требований,
необходимо лишь вычислить значения выходных параметров в
наихудших случаях. Наихудшим случаем для некоторого выходного
параметра yj называется случай, когда значения всех параметров
компонентов xt и внешних условий qk самые неблагоприятные с точки
зрения выполнения заданного технического требования. Эти
отклонения носят случайный характер. В большинстве случаев
отклонения имеют нормальный закон распределения. При этом
максимальные отклонения регламентируются допусками, соответствующими
трехсигмовым интервалам.
В реальной схеме, собранной из исправных дискретных
компонентов, отклонения внутренних параметров от номинальных
значений могут иметь любые значения, лежащие в пределах допусков.
При отработке принципиальных схем отклонения внутренних
параметров целесообразно рассматривать как случайные величины,
каждая из которых характеризуется своим законом распределения
или его числовыми характеристиками.
Диапазоны изменений внешних параметров указывают в ТЗ
исходя из условий эксплуатации и требований функциональной
взаимозаменяемости. Элемент должен сохранять
работоспособность при любых значениях внешних параметров, предусмотренных
ТЗ. Для того чтобы сократить трудоемкость процесса отработки
принципиальных схем, целесообразно проводить анализ для таких
сочетаний величин внешних параметров, при которых схема
оказывается в наиболее неблагоприятных условиях. Одно или несколько
сочетаний внешних параметров, соответствующих наиболее
неблагоприятным условиям сохранения параметров выходных сигналов
в заданных пределах, соответствуют тяжелым (граничным) режимам
работы схемы. В практике тяжелые режимы обычно соответствуют
граничным значениям внешних параметров [например,
максимальной температуре, максимальному или минимальному значению
питающего напряжения, максимальному или минимальному
количеству элементов, подключенных к выходу (входу), и т. п.].
Таким образом, задача оценки работоспособности схемы по
значениям выходных параметров сводится к отысканию пределов
их изменений за счет отклонений внутренних параметров при
185
постоянных значениях внешних параметров. Значения внешних
параметров выбирают так, чтобы создать для схемы тяжелый
(граничный) режим.
Воздействие на схему некоторых внешних параметров
проявляется в том, что происходят изменения номинальных значений
внутренних параметров. Законы распределения отклонений для
последних, как правило, остаются неизменными. Поэтому задача
отыскания пределов изменений выходных параметров за счет
отклонений внутренних параметров имеет общий характер. Принципы
ее решения в равной степени пригодны как для номинальных
режимов, так и для тяжелых. Поэтому в дальнейшем будут рассмотрены
методы оценки выходных параметров при номинальных значениях
внешних параметров.
Метод наихудшего случая основан на предположении о том,
что все отклонения внутренних параметров максимальны, т. е.
соответствуют границам поля допуска. При этом максимальные
отклонения имеют направления, максимизирующие или
минимизирующие выходной параметр. Считая, что зависимость выходных
параметров от входных линейна и отклонения параметров от
номинальных значений малы, получим:
1) для абсолютного отклонения выходного параметра
п
&У; max = 2 l^/A*i max|, (6.35)
i=l
где Af/ymax и Aximax — максимальные отклонения /-го выходного
параметра и i-ro внутреннего параметра соответственно; i = {1,
2, ..., п] — номер внутреннего параметра;
2) для относительного отклонения выходного параметра
п
6#/тах= 2 \BJi^Xi тах\у (6.36)
t = l
где б^/утах и бл:£тах — максимальные относительные отклонения
/-го выходного параметра и /-го внутреннего параметра
соответственно.
Абсолютные и относительные коэффициенты влияния можно
найти одним из методов, рассмотренных выше. Допуски на
параметры комплектующих деталей и приборов указывают в виде
двусторонних отклонений от номинального" значения. Поэтому
величины Альтах и влётах представляют собой половину поля допуска
/-го внутреннего параметра, измеренного в абсолютных или
относительных величинах. При линейном характере зависимости между
выходными и внутренними параметрами величины AyJmax и 8yjmax
представляют собой половину поля разброса выходного параметра
в абсолютных или относительных величинах.
Поля допусков внутренних параметров характеризуют точность
изготовления компонентов схемы, достигаемую в процессе
производства. Для подавляющего большинства компонентов схем откло-
186
нения параметров от номинальных значений могут быть
представлены случайными величинами с нормальным законом распределения.
При этом номинальное значение параметра соответствует
математическому ожиданию, а половина поля допуска — трехсигмовому
интервалу случайной величины.
Выходной параметр — случайная величина с нормальным
законом распределения. Его номинальному значению соответствует
математическое ожидание случайной величины. Однако границы
выходного параметра, полученные методом наихудшего случая,
не соответствуют трехсигмовому интервалу этой величины; они
значительно шире.
Границы разброса выходного параметра, получаемые при
помощи выражений (6.35), (6.36), сравнивают с максимально и
минимально допустимыми значениями этого параметра,
регламентируемыми требованиями ТЗ, т. е. с величинами yj (T3)max и у;- (ТЗ) ппп.
Схема считается удовлетворяющей ТЗ, если
У} max = У/0 + &У/ max ^ Uj (T3)max; #/min = У/0 — Д^тах ^ У) (T3)min
(6.37)
для всех выходных параметров, т. е. / е {1, 2, ..., т}.
При применении метода наихудшего случая условия (6.37)
приводят к неоправданно жестким требованиям в отношении
допусков внутренних параметров.
Недостаток метода наихудшего случая в том, что вероятность
возникновения сочетаний параметров, близких к наихудшим
случаям, практически равна нулю и оценка рассеяния выходного
параметра оказывается сильно завышенной. Поэтому применение метода
наихудшего случая обычно приводит к рекомендациям,
экономически невыгодным и технически трудно реализуемым. Часто
считают, что при выпуске схем, рассчитанных по методу наихудшего
случая, вероятность брака равна нулю и отсутствует необходимость
выходного контроля схем по электрическим параметрам. Однако
это было бы справедливым только при условии, что предельно
допустимые значения параметров компонентов выдерживаются
строго. На самом ,деле заводы-изготовители полупроводниковых
приборов гарантируют предельные производственные погрешности
далеко не для всех параметров.
Метод наихудшего случая находит применение в практике
проектирования главным образом благодаря сравнительной простоте его
реализации и малому объему требуемой исходной информации.
Однако целесообразность, а в целом ряде случаев и необходимость
получения более точных и полных оценок работоспособности схем
привели к применению вероятностных методов.
Метод квадратичного сложения. Отклонения входных и
выходных параметров от номинальных значений можно рассматривать
как величины случайные. В тоже время линейная аппроксимация
связи между параметрами позволяет для отыскания отклонений
выходного параметра использовать правила сложения случайных
187
величин. Согласно (6.2) отклонение Ау;- = Aj1Ax1 + Aj2Ax2 +
+ ... + AjiAxt + ... + AjnAxn. Случайная величина Axt обычно
центрирована, так как измерение отклонений производится от
номинальных значений, соответствующих математическим
ожиданиям. Разброс величины Axt характеризуется дисперсией Dxi или
среднеквадратичным отклонением oxi = Y^xu Произведение
постоянного коэффициента Ап на случайную величину Ахь — также
величина случайная. Дисперсия этой случайной величины D;i =
= A)tDxi. Если случайные величины Лу7А^ статистически
независимы, то дисперсия выходного параметра Ауу может быть найдена
как дисперсия суммы случайных величин, т. е.
^/=2^=11^. (6.38)
t = l i=\
Среднеквадратичное отклонение выходного параметра находят
ло правилам квадратичного суммирования:
ош=УЩ= Л/ J] A)t<&. (6.39)
У i — \
Метод квадратичного суммирования учитывает то, что
появление максимальных (минимальных) отклонений у всех внутренних
параметров одновременно практически невероятно.
При нормальном законе распределения отклонений выходных
' параметров величина AyJmax определяется трехсигмовым
интервалом: Ayj max = 3oyJ = 3 VA)igIi + ... +A%o2xi + ... + A ]n<jxn.
Схема считается удовлетворяющей ТЗ, если полученные значения
Ayjmax соответствуют условиям (6.37) для всех выходных
параметров /е J1, 2, ..., т\. Некоторые из внутренних параметров
могут быть статистически зависимыми (например, параметры
p-n-переходов). Корреляционные связи между внутренними
параметрами зависят от метода изготовления электронной схемы. При
интегральной технологии изготовления степень корреляции между
внутренними параметрами обычно увеличивается, поскольку
отклонения технологических режимов приводят к одновременному
увеличению (уменьшению) сопротивлений резисторов, параметров
p-ft-переходов и т. д. При наличии корреляционных связей между
внутренними параметрами хг и xs среднеквадратичное отклонение
выходного параметра
<% = "M/i<&+ ... +<r*/s+ ... +А)по%хп* (6.40)
где
ojts = VA)ie%i + A%ols + 2rlsGxloxsA;lA/s, '(6.41)
здесь ris — коэффициент корреляции.
Метод квадратичного сложения, учитывая вероятности
появления отклонений внутренних параметров, позволяет учесть также
и корреляционные связи между внутренними параметрами. При
188
этом расчетные допуски на параметры компонентов получаются
менее жесткими, чем при применении метода наихудшего случая.
Трудоемкость расчетов при использовании методов наихудшего
случая и квадратичного сложения почти одинакова. Наиболее
трудоемкими являются расчеты коэффициентов влияния.
При большом количестве параметров, имеющих взаимные
корреляционные связи, удобно пользоваться матричными способами
записи. Корреляционные связи между внутренними параметрами
в этом случае могут быть представлены корреляционной матрицей
*R =
1 ^12> • •• 9 Г in
^21, 1, . . . , /*2/г
1
(6.42)
При линейной аппроксимации (6.2) отклонение
п
Ьу/=Жд&/дхй)Ах1, (6.43)
где dtjjldxi — частная производная, найденная без учета
корреляционных связей.
Частную производную dtfjldxi можно рассматривать как
масштабный множитель случайной величины Axiy т. е. Ах[ = (dyj/dx^Axt.
Тогда среднеквадратичное отклонение величины Ах\ будет о\ =
= (dt/j/dXi) ah Согласно (6.43) величина Ayj является суммой
случайных величин Ax'i. Поэтому величина О; может быть найдена из
соотношения
'дхя
*п || Я ||
dyj
-2а. а.
dyj
»• >
дУ] 1
•' дхя °п |
(6.44)
В этом выражении первый член представляет собой
вектор-строку, а последний — вектор-столбец (транспонированная вектор-
строка).
§ 6.4. ПОСТАНОВКА ЗАДАЧИ СТАТИСТИЧЕСКОГО АНАЛИЗА
ЭЛЕМЕНТОВ НА ЭВМ
Метод статистического анализа элементов на ЭВМ имеет много
общего с экспериментальными статистическими методами в
расчетных соотношениях, применяемых для обработки выходных
параметров. Основное различие этих методов заключается в способах
задания случайных значений внутренним параметрам схемы.
При экспериментальном исследовании образцов схем,
построенных на дискретных компонентах, корреляционные связи
существуют в основном между внутренними параметрами, относящимися
к комплектующим приборам (диодам, транзисторам). Их учитывают
автоматически при изготовлении образцов схем. Если, например,
189
параметр т транзистора имеет корреляционную связь с параметром
5, то при установке в экспериментальные схемы разных образцов
транзисторов и измерении их параметров эта связь будет учтена,
так как транзистор представляет собой единый прибор. При
машинных методах статистического анализа схем корреляционные связи
между внутренними параметрами необходимо учитывать при
задании набора значений внутренних параметров очередного варианта
расчета параметров выходных сигналов. Исходные данные для
статистической обработки требуют проведения N вариантов расчета
выходных параметров. Для каждого из вариантов необходим набор
значений внутренних параметров xif представляющих собой
случайные величины. Законы, распределения случайных величин должны
соответствовать законам распределения внутренних параметров
как по форме, так и по числовым характеристикам. Количество
вариантов расчета, необходимое для получения достаточно
достоверных результатов, будет значительно ббльшим, чем при
использовании метода приращений. Поэтому применение статистического
метода целесообразно в тех случаях, когда результаты
многовариантного анализа используют и для других целей.
Многовариантный статистический анализ схемы возможен при
наличии сведений о законах распределения и взаимных
корреляционных связях внутренних параметров. Эти сведения можно
получить путем достаточно большого количества измерений
параметров изготовленных дискретных или интегральных
компонентов. При идентичной технологии и условиях производства
статистические сведения о параметрах компонентов могут быть
распространены на обширные группы схем, построенных на этих
компонентах.
, Зависимости (6.2),. как правило, нелинейны. Поэтому
применение (6.39) и (6.44) допустимо лишь при условии достаточной
малости Axt. В рамках аналитического вероятностного метода трудно
получить ответ на вопрос о том, какие kxt можно считать достаточно
малыми. Казалось бы, что этот вопрос легко решить, оценивая
члены второго порядка в разложении (6.2) в ряд Тейлора. Однако
такая оцецка практически возможна лишь в случаях, когда
зависимость (6.2) задана в аналитическом виде. Чаще инженер не имеет
.аналитических выражений и получает коэффициенты влияния
с помощью экспериментальных методов анализа чувствительности.
Чтобы показать, какими могут быть погрешности применения (6.2)
к анализу нелинейных электронных схем, были определены
выходные параметры схемы инвертора для двух вариантов, различавшихся
значениями X = (х19 х2, ..., хп). В каждом варианте анализ
проводился на основе нелинейной математической модели схемы в виде
системы дифференциальных уравнений, полученной по методу
сканирования М-матрицы, и упрощенной линейной математической
модели в виде (6.2), полученной после анализа чувствительности
схемы методом приращений (см. §6.1). При случайном задании X
в пределах 20-процентных отклонений от Хном = (хг ном, х2ном, ...,
.•••э*яном) получены расхождения Ayj = yj — yjHOU в нелинейной
190
и линейной моделях, достигающие для некоторых yj сотен
процентов.
Следовательно, линеаризация (6.2) — главный и решающий
недостаток аналитического вероятностного метода. Кроме того,
в этом методе оценка вероятности выполнения условий
работоспособности просто решается лишь при допущении о том, что законы
распределения выходных параметров нормальные. Тогда, например,
вероятность Р выполнения условия работоспособности типа yj <
< TTj определяется так: Р (yj < TTj) = Ф [(TTj — Mj)/ojl +
+ 0,5, где Ф — функция Лапласа (интеграл вероятностей).
Как можно видеть на примерах моделирования и одновариант-
ного анализа, машинное проектирование требует пересмотра основ
расчетных методов, поскольку методы, ориентированные на ручные
вычисления, как правило, не обеспечивают необходимой точности
и имеют заметные ограничения на области их применения. Очевидно,
что по указанным выше причинам основу статистического анализа
нелинейных электронных схем на ЭВМ не могут составить
аналитические вероятностные методы.
Отказ от линеаризации ММС означает, что связь yj с хь и qk
дается системой дифференциальных (4.1) или алгебраических (4.3)
уравнений. Таким образом, основным методом статистического
анализа схем, должен быть метод Монте—Карло (метод
статистических испытаний), а аналитические вероятностные методы могут
применяться только как вспомогательные.
Постановка задачи статистического анализа электронных схем
на ЭВМ рождает, например, такие проблемы: 1) повышение
точности и полноты исходных статистических сведений о параметрах
компонентов; 2) реализация метода Монте—Карло на ЭВМ.
Сложность решения первой из этих проблем обусловливается
большим объемом необходимых исходных статистических сведений,
неодинаковостью законов распределения разнотипных параметров
компонентов, нестабильностью числовых характеристик этих
распределений в процессе производства. В случае интегральных схем
объем исходной информации значительно возрастает из-за
возникновения заметнцх корреляционных связей между параметрами всех
компонентов, расположенных на единой подложке. Теснота
корреляционной связи зависит от характера размещения компонентов
на подложке, и, следовательно, матрица вторых моментов
распределения /г-мерного случайного вектора параметров компонентов
не может стать известной до выполнения этапа проектирования
топологических схем. Получение статистических сведений о параметрах
компонентов происходит путем измерения параметров у партии
приборов. Естественно, что ранее накопленные сведения широко
используют при расчетах новых схем, если технология изготовления и
условия отбраковки компонентов остаются неизменными. В противном
случае необходимо заново выполнить измерения и произвести
обработку результатов этих измерений.
Схема вычислений при использовании метода Монте—Карло
довольно проста и включает в себя следующие процедуры:
191
1. Реализация случайного вектора X, т. е. выработка
случайных значений параметров компонентов xt в соответствии с их
законами распределения.
2. Одновариантный анализ схемы при полученной реализации X
(при этом определяется реализация вектора выходных
параметров Y).
3. Обработка результатов выполненного испытания.
4. Если I ^ N, то переход к оператору 1 (здесь / — номер
следующего испытания, N — заданное количество испытаний).
5. Обработка результатов N испытаний.
Специфичными для статистического анализа являются
алгоритмы процедур 1, 3 и 5. Наряду с разработкой этих алгоритмов
необходимо решить вопросы, связанные с определением значений
внешних параметров qk в процессе статистических испытаний,
выбором количества испытаний N и построением алгоритмов
статистической обработки результатов измерения параметров компонентов.
Различие между внутренними и внешними параметрами при
статистическом анализе проявляется прежде всего в том, что,
внутренние параметры xt — случайные величины, законы распределения
которых принципиально могут быть известны при проектировании
схемы, а внешние параметры qk не могут рассматриваться как
случайные величины с заданными законами распределения.
Действительно, экземпляр схемы при конкретных значениях х{ должен
быть признан негодным, если он не удовлетворяет техническим
требованиям хотя бы на узких участках оговоренных в ТЗ диапазонов
изменения внешних параметров. Отсюда очевидно, что если влияние
разброса Xi на рассеяние t/j целесообразно исследовать
вероятностными методами, то влияние нестабильности qk необходимо учитывать
по методу наихудшего случая.
Таким образом, указанная выше схема вычислений по методу
Монте—Карло должна быть дополнена предварительной
процедурой определения тяжелых режимов. В тяжелом режиме все
внутренние параметры имеют номинальные значения, т. е. xt =
— **ном> а внешние параметры выбраны из условий наихудшего
для некоторого t/j случая. Очевидно, что количество тяжелых
режимов не превышает количества га условий работоспособности и может
быть заметно меньше т при совпадении тяжелых режимов
нескольких выходных параметров. Определяют тяжелые режимы путем
анализа чувствительности выхрдных параметров к изменениям
внешних параметров. При этом предполагают монотонность
зависимостей уj от
доопределение числа N необходимых испытаний является важным
вопросом, так как от N зависят затраты машинного времени и
погрешности анализа. Приемлемые затраты машинного времени для
общего случая назвать трудно, поскольку они зависят от наличия
ресурсов машинного времени, стоимости одного часа использования
ЭВМ и допустимых материальных и временных затрат на
проектирование. На практике приемлемые затраты измеряют единицами—
десятками часов работы ЭВМ среднего быстродействия, что приво-
192
дит для большинства схем к значениям N в диапазоне 50 -*- 200.
Поэтому задача сводится к выяснению погрешностей результатов
статистического анализа при заданном N.
Используя способы оценки погрешностей метода Монте—Карло,
указанные, например, в [7], можно подсчитать, что с
доверительной вероятностью у = 0,9 -ч- 0,95 погрешность оценки
математического ожидания выходного параметра будет находиться в
пределах примерно ± (12 -г- 24)%, а погрешность оценки
среднеквадратичного отклонения — приблизительно в пределах dz (10 -*- 23)%
от величины выборочного среднеквадратичного отклонения, если
N = 50 + 200.
Один из способов сокращения машинного времени —
использование нелинейной ММС при выполнении первого этапа
статистических испытаний с N < 200 и переход к упрощенной линейной
модели на втором этапе испытаний. Коэффициенты Ауг в (6.2) можно
определить в процессе первого этапа по способу, описываемому ниже.
В конце первого этапа производят проверку точности линейной
модели. Тогда испытания на втором этапе потребуют намного
меньших затрат машинного,времени, чем испытания на первом этапе,
и число N необходимых испытаний можно существенно увеличить.
Конечно, такой способ сокращения машинного времени применим
только в случае, если результаты проверки точности линейной
модели положительны.
При большом количестве неодинаковых тяжелых режимов
статистический анализ должен производиться многократно.
Статистический анализ в целом ряде отображающих точек (ОТ)
пространства параметров компонентов (имеется в виду, что оси координат
пространства соответствуют номинальным значениям параметров
компонентов) требуется также при реализации некоторых
алгоритмов оптимизации электронных схем. При использовании ЭВМ
среднего быстродействия и нелинейных ММС в виде систем
дифференциальных уравнений многократная непосредственная реализация
метода Монте—Карло невозможна. Использование ММС в виде
явных зависимостей Y от X решает проблему в частных случаях,
когда такие зависимости могут быть получены и достаточно точно
характеризуют схему. Приемлемыми будут затраты машинного
времени и в том случае, если статистический анализ касается только
статических выходных параметров сравнительно несложных схем,
т. е. когда ММС есть система алгебраических и трансцендентных
уравнений, решаемая методом Ньютона. Однако для общего случая
необходимо изыскание способов ускорения статистических
испытаний. Один из таких способов основан на идее использования
информации о рассеянии Y и информации о чувствительности Y к
изменениям X, полученной в процессе статистического анализа методом
Монте—Карло в одной ОТ, для упрощения статистического анализа
в других ОТ.
Пусть 8j и 7/ — разные характеристики рассеяния одного и того
же выходного параметра в пространстве параметров компонентов
(отношение б;- к у/ будет более стабильным, чем сами харак-
193
теристики ёу и yj) и ёу более точно характеризует рассеяние, но
оценка ёу требует большего объема вычислений, чем -уу. Тогда в
некоторой отображающей точке / рассчитываются ё</> и у{р и
определяется коэффициент ру>= ЬФ/уУ). В любой другой отображающей
точке г вычисляется только у<0у поскольку при допущении (5<^ =
= р<0 оценка &г) получается по формуле
6Г = Р}°ТГ- (6.45)
В качестве ёу удобно иметь величину ёу = у^ — #/н<ш» гДе Ugj —
g-процентиль распределения у/, ygJ находится в исходной ОТ по
методу Монте-Карло.
Под уу можно понимать величину
V/ = У] (Хном ± ААХтах) — #;ном>
где уу (Хн(ш ± &АХтах) — значение */у, найденное при отклонении
всех xt от номинальных значений на kkxim2iX в сторону,
определяемую по правилам наихудшего случая (здесь 0 <с k ^ 1, Альтах—
половина поля допуска параметра xt). Для определения уу, если
считать, что все т выходных параметров имеют одностороннее
ограничение по ТЗ, требуется т вариантов анализа работы схемы, т. е.
заметно меньше, чем при статистическом анализе по методу Монте—
Карло. При этом необходимо также принять допущение sign Aj4 =
= const во всех отображающих точках, так как отклонение xt
на величины kAximax производится исходя из знания знаков
коэффициентов влияния, определенных в начальной 1-й точке.
Из допущений Ру = const и sign Ajt = const важнее первое.
Приближенная оценка погрешности, обусловливаемой применением
(6.45), может быть выполнена, если справедлива линеаризация
зависимости (6.2) и параметры компонентов являются независимыми
случайными величинами, распределенными по нормальному закону.
Тогда ёу = ууном 1/ 2 (В}&)2 (где Bjt — относительный коэффй-
циент влияния xt на gj) и ёг- = (xig — *;H0M)/^H0M (где xig — квантиль
порядка g распределения xt). * Обозначим ау£ = |5уД-| и кп =
в
= а„/ max ап. Из (6.36) Yy = #yH0M Y ау7, тогда
h = ]f 2 «bjt ап = ]/1 Ц 2 bi (6-46)
Минимум Ру при заданном п достигается при одинаковых aib
т. е. при kji = 1 для всех i (при этом Ру = 1/ ]Аг).
Формула (6.46) позволяет оценить Ру для разных ОТ, если
известны коэффициенты влияния в этих точках. Априорная оценка
величины и стабильности ру может быть выполнена только при нали-
194
чии достаточно подробных статистических сведений о характере
изменений Bjt в пространстве параметров компонентов для того или
иного класса электронных схем. В настоящее время имеющихся
сведений недостаточно, чтобы указать пределы возможных
погрешностей при применении формулы (6.45), однако варьирование kri
в представляющихся разумными пределах при использовании
формулы (6.46) позволяет надеяться на приемлемую точность
рассмотренного способа ускорения статистических испытаний. Это
предположение, в частности, подкрепляется примером схемы инвертора,
состоящего из одного транзистора и шести пассивных компонентов,
в котором для пяти различных ОТ производился расчет бу для
четырех выходных параметров как методом Монте—Карло, так и по
приближенной формуле (6.45). Значения координат в пяти точках
варьировались в пределах приблизительно +150 ч 60% от средних
значений, при этом максимальная погрешность определения. б;-
по (6.45) составила 26%.
§ 6.5. АЛГОРИТМЫ СТАТИСТИЧЕСКОГО АНАЛИЗА
Рассмотрим основные алгоритмы статистического анализа
электронных схем по методу Монте—Карло.
Сложность алгоритма выработки псевдослучайных значений
параметров компонентов xt обусловливается разнообразием законов
распределения и коррелированностью хг. При этом целесообразно
разделение алгоритма на два блока. Первый блок исполняется при
обработке результатов измерений параметров, его назначение —
вычисление параметров преобразования X = X (Z) и определение
числовых характеристик д-мерного случайного вектора Z, имеющего
нормальное распределение (здесь X — n-мерный случайный вектор
параметров компонентов). Второй блок реализуется непосредственно
в программе статистического анализа, его назначение — выработка
псевдослучайных значений нормально распределенных элементов
вектора Z с последующим их пересчетом в значения элементов
вектора X.
Определение составляющих нормально распределенного вектора.
Пусть хиг — непрерывные случайные величины, связанные взаимно
однозначным соотношением г = z (х), имеющие плотности
распределения фг и ух соответственно, причем ф* (г) = [1/(ог]/~2п)] ехрх
х [—0,5 (г— Mz)la% где Mz и gz — математическое ожидание и
среднеквадратичное отклонение величины г. Тогда [18]
Ф* (г) dz = ф* [х (г)] dx. (6.47)
xk+i
Далее запишем $ \x(x)dxp&Wk fe+i — xk) = ANk/N, где
ANk и Wk — число попаданий и частота попадания в &-й интервал
гистограммы при измерении параметра х на партии компонентов из
195
2 (*k+l)
N штук. Но ' $ 4>z(^)dz = 0(uk+1) — 0 (uk), где Ф — интеграл
вероятностей,
uk = [z(xk)-Mz]/oz. (6.48)
Поэтому Ф (иЛ+1) — Ф (uk) = Wk (xk+1— хк).
Отсюда алгоритм вычисления функции г (х) в табулированном
виде будет следующий:
1. Задаемся Mz = 0, о2 = 1; положим Ф (и0) = —0,5.
2. Начало цикла по параметру k с начальным значением k = 1.
3. Вычисляем
Ф ("*) = W* (** - **-i) - Ф («*-!). (6.49)
4. По таблице интеграла вероятностей определяем zk = uk.
5. Конец цикла.
а)
AN
NaB
0,03V
ому н
0,01
Ьь.
75 55 /tf /J5^ в -J -2 -/ 0 / 2 J Z
Рис. 6.4. Статистические характеристики транзистора П415Б:
а — гистограмма В; б — гистограмма Z\ в — зависимость Z (В)
Проиллюстрируем применение этого алгоритма к получению
параметров преобразования г (В) (где В — коэффициент усиления
транзистора типа П415Б по току, гистограмма которого по
результатам измерений на партии из 50 шт. представлена на рис. 6.4, а).
Результаты вычислений сведем в табл. 6.2.
Таблица 6.2
Номер
интервала
0
1
2
3
4
5
6
7
Bk
75
85
95
105
115
125
135
145
ANk
0
10
11
13
7
4
3
2
Чч)
—0,50
—0,30
—0,08
0,18
0,32
0,40
0,46
0,50
uk = *k
—3,00
—0,84
—0,20
0,47
0,92
1,28
1,75
3,00
График зависимости z (В) и гистограмма параметра г
представлены на рис. 6.4, в, б соответственно. Табл. 6.2 позволяет определить
параметры прямого z (В) и обратного В (г) преобразований. Этот
296
вопрос решается наиболее просто, если принять решение о кусочно-
линейной аппроксимации этих зависимостей.
Задание взаимно коррелированных параметров. Задание
случайных значений взаимозависимым параметрам следует
производить в соответствии с их условными распределениями.
Математическое ожидание условного распределения величины z, имеющей
корреляционную зависимость от л;, определяют на основании
уравнений регрессии г по х. В случае линейной корреляции уравнение
регрессии z по х имеет вид
М2усл = MZ + rzx (ов/ах) (х- Мх), (6.50)
где М2 и Мх — математические ожидания безусловных
распределений, gz и Gx — среднеквадратичные отклонения безусловных
распределений; rzx — коэффициент корреляции величин г и х\
Мгусл —математическое ожидание условного распределения
величины 2.
Это уравнение может быть применено и в случае нелинейных
корреляционных зависимостей между внутренними параметрами.
Имеющиеся в настоящее время статистические сведения о взаимной
связи параметров транзисторов и диодов свидетельствуют о
допустимости линейной аппроксимации без существенных погрешностей
в результатах моделирования. Функция (6.50) является наилучшим
линейным приближением к функции регрессии в смысле минимума
среднеквадратичного отклонения величины z от линейной функции.
При наличии нескольких коррелированных между собой
случайных величин математические ожидания и среднеквадратичные
отклонения условных распределений определяют по аналогичным
формулам. Например, при наличии трех случайных взаимно
коррелированных величин х, у у z уравнение регрессии yuoxuz будет иметь вид
Мтл = Му + ах{х-Мх) + Ья(г-Мж), (6.51)
где ах = 1(гху — ryzrxz)/(l — rxz)] (оу/ох), bz = [(ryz — rxyrxz) (1 —
— г*хг)] (ву/ое).
Среднеквадратичное отклонение условного распределения
величины у
<%сл = Vol (1 - rly) (1 - r\z). (6.52)
Задание случайных значений параметрам, имеющим нормальное
распределение и взаимно коррелированных между собой, при
машинных вычислениях проводят в следующей последовательности.
1. Вырабатывается N + k реализаций нормированной
нормально распределенной псевдослучайной величины ии и2у ..., щу
...» u>N+k (где & — количество параметров, связанных
корреляционной связью). Для этого используют способ, сводящийся к
суммированию равномерно распределенных и взаимно независимых
случайных величин. Равномерно распределенные случайные величины |/
целесообразно получать при помощи программ псевдослучайных
чисел, имеющихся в библиотеках стандартных подпрограмм ЭВМ.
197
Согласно центральной предельной теореме сумма 21/ имеет распре-
деление, быстро приближающееся к нормальному с увеличением
количества слагаемых га. Величины щ являются реализациями
нормально распределенной нормированной случайной величины, если
(6.53)
и1 = [2Ь-Щ К
/=1
где Mi = га/2; о^ = ]/га/12.
Практически достаточно, чтобы га = 5:
щ-.
= 1/2,4^2 I/-2.6).
(6.54)
Если параметр л;г- — независимая случайная величина с
нормальным законом распределения, имеющая математическое ожидание Мг
и среднеквадратичное отклонение оху то его случайные значения
находят из соотношения
хй = Мх + охщ. (6.55)
2. Если среди внутренних параметров имеются взаимно
коррелированные параметры, то для отыскания их случайных значений
необходимо использовать корреляционную матрицу. При наличии
взаимно коррелированных внутренних параметров с
математическими ожидглиями Ми М2, ..., Mi корреляционная матрица
вторых моментов имеет вид
All» Al2> ••• > Ai/
А21» А22> • •• > А21
К
(6.56)
Кп, Kt2> ...» Кц
где Kij = Kjh т. е. матрица симметричная.
В качестве исходных данных для реализации / взаимно
коррелированных значений внутренних параметров удобно использовать
последовательность некоррелированных нормально распределенные
нормированных случайных чисел щ, математическое ожидание
которых равно нулю, а дисперсия — единице. В этом случае взаимно
коррелированные нормированные значения внутренних параметров:
хЬ = сциг; xh = с13иг + с23и2 + с33и3; \
* , * ...if (6-57)
xti = c12u1 + c22u2; xfi = cuu1+ ... +cfluf+ ... +сищ, J
где xft — 1-е центрированное значение /-го параметра из
совокупности внутренних взаимно коррелированных параметров.
Коэффициенты Cji можно определить из уравнений вида
Кп = сису + c2lc2J + ... + сисф (6.58)
где / ^ I, т. е. су = О при / > /.
198
Например, для 1 = 6 уравнения имеют вид:
Klb = CUC15'>
^25 = С12С15 + ^22^25»
К35 = С13С15 + ^23^25 + С32РзЪу
^45 = CUCU + ^24^25 + ^34^35 + С44С45^
^бб==С15+С15Н~С15Ч~С45 + С55»
К16=спси; ( (6.59)
%2Ь = С12С16 Н~ ^22^26»
. Д36 = С13С16 + £23С26 + £33С36>
#34 = С13^14 + С23^24 + ^33C34J #46 = CUCIQ + ^24С26 + С34С36 + С44^46»
/С44 = Cf х+ С|4 + С§4 + С|4; /Сб6 = ^15^16 + ^25^26 + ^35^36 + С45^46 + С5ЬСЬв>
^66==С1бН_С2в"ГС:3 0~ГС4в"Т"С5в~ГСвв- J
Из уравнений (6.59) можно получить следующие значения
коэффициентов:
#23 == ^12С13 + С23С22>
#33 S=C1S~T C2Z \ С33>
#14 == С11С14>
#24 = С12С14 + ^22^24^
С1% = Кц/с1г;
€22 = У #22—С12>
^13 == #1з/си;
С23 = (#23 ~ ^12^1з)/^22;
сзз — V #зз — с!з — с!з»
^14=^14/^115
С24 — (#24 — С12С14)/^22J
<?34 = (#34 — ^13^14 — С23<?24)/4
С44 = У #44— С14—С§4
^in = ^Ci5Mi;
^25 = (#25 — С12,С1ъУС2,2>
Г2 *
°34>
С35 = (#35 — С13С15 — С23С2б)/е335
С45 — ( #45 — С14С15 — С24с25 "~ С34СЗб)/^445
СЪ5 = У #55 С15 — С\ь С\ь С45>
C16 = ^Cl6/Cll>
С26 = (#26 — С12С1б)/С22^
#36— С13С16— С23С26 .
сзе = ;
^22
__ #46 — g14g16 — g24C26 — g34C36 .
С44
Л #56 — С15С16 — С25С26 — С35С36 — g45g46
сб6_
СЪЬ
С66== г #6^— С*
С4б
^16 '
г2 —-г2 г2 г2
°26 ''Зв Чб °5
(6.60)
При шести взаимно коррелированных внутренних параметрах
необходимо получить шесть последовательных значений случайной
некоррелированной величины ul9 щу ..., и6. Подставив эти значения
и величины cji в соотношения (6,57), получим первые шесть
случайных взаимно коррелированных значений величин х*. Сохраняя
значения коэффициентов и меняя наборы величин ulf и2у ...,^6,
можно получить необходимое количество вариантов х*. Случайные
величины х* — центрированные. Необходимые для последующих
расчетов нецентрированные значения внутренних параметров
определяют из соотношений:
Хц = Мг + хЪ; 1
x2i = M2 + xfa
Xu^Mi+xh J
(6.61)
где Mlf ..., Mi — математические ожидания соответствующих
величин.
Таким образом, задание случайных значений внутренним
параметрам схемы производится созданием последовательностей центри-
199
рованных и нормированных случайных чисел, распределенных по
нормальному закону. Для независимых внутренних параметров
необходимо лишь учесть математические ожидания и дисперсии
соответствующих внутренних параметров.
При взаимной корреляции между некоторыми из параметров
следует последовательность случайных чисел обработать при помощи
корреляционной матрицы (на практике количество взаимно
коррелированных внутренних параметров обычно не превосходит 5—6,
а чаще 2—3). Здесь будем полагать, что ЭВМ дает возможность для
заданного варианта внутренних параметров вычислить значения
выходных сигналов с достаточной точностью.
Определение числовых характеристик распределения выходных
параметров. Для автоматического анализа выходных сигналов
необходимо иметь унифицированную систему выходных параметров,
отражающих с количественной стороны основные
характеристики сигналов. Для импульсных схем усилительного и
релаксационного типа можно рекомендовать следующую систему выходных
параметров: /ЗД1 — время задержки переднего фронта выходного
импульса; t% — длительность переднего фронта; Ц> — длительность заднего
фронта; /зд2 — время задержки заднего фронта относительно
переднего фронта входного сигнала; U (0) — уровень выходного
напряжения перед началом переходного процесса (импульса); Ai/BbIX —
амплитуда выходного сигнала; UBxm-m — минимальная амплитуда
входного сигнала, при которой обеспечивается амплитуда сигнала
на выходе, соответствующая нижней границе ТУ; Unommax —
максимальная амплитуда помехи, при которой помеха на выходе не
превзойдет норм ТУ.
Иногда формы выходных сигналов характеризуют другими
системами выходных параметров, в состав которых могут, например,
входить длительность выходного импульса, высокий и низкий уровни
выходных напряжений и т. п. Однако эти параметры легко могут
быть выражены через вышеуказанные.
Определение численных значений выходных параметров
целесообразно проводить так, чтобы иметь малые затраты машинного
времени и не перегружать запоминающие устройства ЭВМ.
Измерения длительностей переднего и заднего фронтов принято
производить на уровнях 0,1 и 0,9 от амплитуды выходного импульса.
Реализация этих условий при машинных расчетах вызывает ряд
затруднений, так как фиксация уровней измерений оказывается
невозможной до получения Д£/вых.
Вычисление длительности по окончании переднего фронта
требует хранения в запоминающих устройствах большого количества
информации о всех шагах расчета переходного процесса. В связи
с этим определение длительностей передних фронтов лучше
производить на уровнях 0,1 и 0,9 от постоянной для данной схемы
величины f/BbIxmin, в качестве которой может быть использовано
минимально допустимое по ТУ значение амплитуды выходного сигнала.
Определение длительности заднего фронта по общепринятой
методике затруднений не вызывает.
200
К выходным параметрам ждущих релаксационных схем относят
также чувствительность к запуску, которая во многих случаях может-
определяться косвенным способом, так как между этим параметром
и временем задержки 4Д1 существует связь, близкая к
функциональной. Тогда числовые характеристики чувствительности к
запуску вычисляют по характеристикам распределения времени задержки
4д1- В результате N вариантов расчета электронной схемы (метод
Монте—Карло) получают ряд значений выходных параметров уъ
#2> •••» yjy •••» Ут- Обработка результатов расчетов заключается
в определении числовых характеристик совместного распределения
выходных параметров:
фО0 = Ф(#1, У*>
Уп
-. Ут).
(6.62)
Случайные отклонения каждого из выходных параметров
от своего номинального значения определяются совокупностью
довольно большого количества случайных отклонений внутренних
параметров. При этом максимально возможное по ТУ отклонение
любого внутреннего параметра изменяет выходной параметр не более
чем на величину среднеквадратичного отклонения. Поэтому
центральная предельная теорема позволяет считать совместный закон
распределения обобщенного /г-мерного вектора нормальным.
Составляющие этого вектора также имеют распределения, описываемые
нормальным законом.
Если считать, что совместное распределение и распределения
составляющих подчиняются нормальному закону распределения, то
определение числовых характеристик совместного распределения
можно проводить в следующей последовательности.
Отыскание числовых характеристик распределений
составляющих и в первую очередь следующих характеристик: а) выборочные
средние значения параметров Myj\ б) оценки среднеквадратичных
отклонений <%; в) выборочные коэффициенты взаимной корреляции
между выходными параметрами rjk\ г) выборочные коэффициенты
корреляции между выходными и внутренними параметрами гух.
Вычисления выборочных значений числовых характеристик
распределений целесообразно производить при помощи следующих
выражений:
N
t = l
Л/-1 L У}1 N-1 1Пи
г=1
N
<^/ =
1УП
(6.63)
(6.64)
rik =
1
VyjGyk
1
N-\
2 УыУц—jiZIT MvkMvi
Гух —"
*yiPxl
N
N
ZT 2 Xayji ~~ Л^Г M*iMvJ
i=i
(6.65)
(6.66)
291
где i — номер варианта моделирования; /, k — номера выходных
параметров; / — номер внутреннего параметра.
При таких формах расчетных соотношений отпадает
необходимость хранить в памяти ЭВМ большие массивы чисел — случайные
значения выходных и внутренних параметров по всем N
реализациям. После каждого моделирования теперь достаточно ограничиться
N N N N
вычислением сумм^У/ь 2 #& 2 УпУм\ 2 хиУп- В памяти ЭВМ
i=l i = 1 i = l i = 1
в этом случае будут храниться указанные суммы, максимальное
количество которых q = 2т (п + 1), где тип — соответственно
количество выходных и внутренних параметров.
Количество N вариантов расчета зависит от требуемой точности
и достоверности оценки вероятности нахождения обобщенного
вектора в пределах допусковой области. Точность и достоверность
числовых характеристик нормальных распределений связаны
следующими приближенными соотношениями:
uMf = ZMj<yyf/VN9 (6.67)
где еМ; — доверительный интервал в определении математического
ожидания; ZMj — квантиль, соответствующая доверительной
вероятности Рт\ oyj — среднеквадратичное отклонение;
вд/ = ZDfoyfV2/(N-l), (6.68)
где eDj — доверительный интервал в определении дисперсии, ZDj —
квантиль, соответствующая доверительной вероятности Рт.
Выражения (6.67) и (6.68) дают возможность оценить допустимое
количество вариантов расчетов при заданной точности и
достоверности. Зависимость точности и достоверности определения
совместной плотности распределения выходных параметров зависит от
степени корреляционной связи между последними. Однако наиболее
неблагоприятным является такой случай, когда выходные параметры
взаимно независимы. Общая достоверность оценки числовых
характеристик совместного распределения взаимно независимых
параметров будет
Р0 = р1р2...рт, (6.69)
где Ръ Р2, ..., Рт — надежности оценок числовых характеристик
составляющих законов распределения.
Полагая Рх = Р2 = ... = Рту получим
Pm = VPo, (6.70)
где т — количество выходных параметров.
По величинам Рт нетрудно найти соответствующие им значения
квантилей нормального распределения ZMj и ZDJi входящие в (6.67)
и (6.68). Доверительные интервалы &Mj и sDJ назначаются в
соответствии с требуемой точностью определения обобщенного вектора
и точностью исходных данных. Можно считать, что значения гм/
202
и eDj определяются точностью измерения внутренних параметров
схемы. Обычно точность измерений внутренних параметров схемы
в лучших случаях составляет величины порядка ± 2 ч- 3% от их
номинальных значений. В евязи с этим назначать доверительные
интервалы sMJ и eD/ более точно не имеет смысла.
По заданным надежности и точности определения числовых
характеристик частных законов распределения при помощи (6.67)
и (6.68) отыскивается необходимое количество вариантов расчета.
На практике можно ограничиться оценками по (6.67). Тогда
количество вариантов расчета переходных процессов
N = [ZMf(oyf/sMJ)]*. (6.71)
Однако заранее определить количество вариантов расчета
невозможно, так как величины Myj и oyj неизвестны. Поэтому
целесообразно вначале провести некоторое количество Nx вариантов расчета
и только после этого осуществлять оценку по (6.71). Если
полученное значение N больше Nly то расчеты продолжаются; если же N
меньше Nl9 то заданная точность и достоверность обеспечены.
Пример. После iVx = 100 вариантов расчета переходных процессов в схеме
инвертора получены следующие оценки для числовых характеристик выходных
параметров:
Мг (*здг) = 0,5. 10-6 с, а! = 0,15. Юге с;
М2(ф = 1,1. 10-е с, о2 = 0,2.10-б с;
Мг (*ф) = 1,5- 10-6 Cj ог3 = 0,2. 10-6 с;
М4 ('Зд2)= Ю • Ю-* с> а4= 1,3 • 10-е С;
М5(£/(0)) = 0,1 В, а5 = 0,01 В;
М6(Д£/ВЫХ)=14,9 В,. аб = 2,8 В.
Проверить, обеспечена ли точность определения числовых характеристик
частных распределений, если доверительные интервалы составляют е* = ± 3%
от Myj, а общая достоверность должна быть не менее Р0 = 0,90.
Так как количество выходных параметров т = 6, то согласно (6.70)
достоверность определения числовых характеристик каждого из частных
распределений Рт = >/0,90 = 0,981. Этой достоверности соответствует квантиль
нормального распределения Zm = 2,33.
Расчеты необходимого количества вариантов N, проведенные согласно (6.71)
для каждого из частных законов распределения, даны в табл. 6.3. Из таблицы
следует, что по всем выходным параметрам, кроме первого, достоверность
обеспечена. Для первого выходного параметра Nt < N. Поэтому выбор вариантов
и расчеты должны быть продолжены. Для того чтобы не делать анализ точности
после каждого из вариантов расчета, целесообразно анализ N проводить первый
раз после Nt = 20 -г- 10, а затем через каждые 5 -s- 10 вариантов..
Таблица 6.3
Номера
групп
1
2
3
4
5
6
Myi
0,5-10-6
1,Ы0-б
1,5 - Ю-6
10-10-6
0,1
14,9
6v/
0,15-10-6
0,2. 10-е
0,2 • 10-6
1,3 - ю-6
0,02
2,8
eAfy = 28*%
0,03-10-6
0,066 - ю-6
0,09-10-6
0,6 - ю-6
0,006
0,895
zMjiS>yjl^Mj)
11,6
7,2
5,2
15,2
7,8
7,3
N
135
52
27
27
61
53
203
После того как достигнута необходимая точность определения
числовых характеристик распределений при заданной достоверности,
необходимо провести оценку значимости полученных коэффициентов
корреляции. Для этого следует воспользоваться выражениями
(6.20) и (6.20а). Связь можно считать существенной, если (| г \/or) ^
^3, где ог = (1 — г2)/ У N — 1. В случае, если (| г \1ог) < 3,
связь можно считать несущественной и принимать коэффициент
корреляции равным нулю.
Таким образом, после проведения N вариантов расчетов будут
определены достаточно достоверные значения математических
ожиданий, среднеквадратических отклонений и корреляционная
матрица выходных параметров.
Полученные числовые характеристики безусловных
распределений выходных параметров дают возможность описать закон их
совместного распределения с учетом корреляционных связей.
Плотность совместного распределения находят так:
X ехр
<P(Y) =
1
2|К|
^11»
#21»
Ктъ
Y2mnm
#12»
/С22»
#т2»
К|
#im»
#2т>
Алия»
X
(01-Mi)
(Ут-Мт)
Q/i-Mi)> (#2-М2),..., (ут — Мт)9 0
(6.72)
где j К I — определитель корреляционной матрицы
К| =
^Cll» Kizy • • • > Kim
А21> А22» ••• > К 2т
Aml> Am2> • • • » A»i
Kij=K;i = rij(jiof.
Например, при т = 3 плотность совместного распределения
1
Ф (#1, У2> Ув) '•
Х(
:Х
2no1(52oz V2n (1—rf2 — Г\з —rl3 + /*12Г13Г23 '
:eXp{"" 2а|а1а1(1-;|2-г?з-г1з + 2г12г13г2з) X
X [alal (1 - rl3) (*/x - Mx)2 + ala§ (1 - rh) (y2 - M2)2 +
+ afai (1 - rh) (Уз - MI)2 - 2<Аого% (r12 - r13/-23) (yx - Mx) (*/2 - M2) —
— 2^(7^3 (r13 - r12r23) (уг - Mx) (y3 -M3)-
— 2a2a2a3 (r23 - r12r13) (#2 - M2) (y3 - M3)]}. (6.73)
Если в какой-либо /-й строке (столбце) определителя все
коэффициенты корреляции, кроме /(#, равны нулю, то это означает, что /-й
выходной параметр не зависит от остальных параметров. При этом
204
(6.72) может быть записано в измененной форме:
1
X ехр
{-
Ф(¥) =
#21»
2|К|
У~2тят | К |
••• » ^lm> ,
...» Лгт»
X
(Уг—М2)
(У1-М1),...,(ут-Мт), О
X
X
1 \(yj-Mjn
i = m 4- 1 ' '
(6.74)
/=m+l
где m — количество взаимно коррелированных выходных
параметров; п — т — количество независимых выходных параметров.
§ 6.6. ОБЩАЯ ОЦЕНКА СХЕМЫ ПО КРИТЕРИЮ СХЕМНОЙ НАДЕЖНОСТИ
Общую количественную оценку надежности электронной схемы
рассматривают как вероятность того, что обобщенный случайный
вектор, характеризующий совокупность выходных параметров,
не выйдет за пределы допусковой области. Полученные выражения
плотности совместного распределения выходных параметров и
численные значения границ допусковой области дают возможность
получить общую оценку надежности при помощи выражения
X
{-
21 К I
у1ъ У<2,Ъ
ут у2н
К И, К12»
А21> А 22»
1
I Vzmnm | к
ПН
••• > Kim>
• • • > *\2m>
-ехр х
foi-Afx)
(Уг
dym
Ami» Ага2> ...» A mm» (Ут — Мт)
-Mi), (У2-М2),..., (Ут-Мт), О
*7н
) dyx
+
/ = m + l
(6.75)
где п — общее количество выходных параметров; т — количество
выходных параметров, связанных существенными корреляционными
связями; | К| — определитель m-го порядка матрицы
коэффициентов корреляции (эту матрицу получают из общей корреляционной
матрицы п-то порядка путем исключения параметров, взаимные
корреляционные связи которых несущественны); */,н, yiB — нижняя
и верхняя границы допусковой области по каждому из выходных
параметров.
На практике количество выходных параметров, имеющих
существенные взаимные корреляционные связи, обычно не превышает
m = 4 •*■ 6. Но и при этом кратность интегрирования в первой части
205
выражения (6.75) довольно высока и требует больших затрат
машинного времени. Если коэффициенты корреляции некоторых
выходных параметров невелики, т. е. не превышают значений 0,3 -*- 0,4,
то ими можно прейебречь. При этом погрешность в определении
надежности соизмерима с погрешностями, определяемыми
неточностью параметров плотности совместного распределения.
Неучтенные слабые корреляционные связи несколько ухудшают общую
оценку надежности, т. е. уменьшают вероятность Р. Точность
и достоверность оценки общей надежности схемы зависит от точности
и надежности определения параметров плотности совместного
распределения выходных параметров. Точность и достоверность
последних зависит от точности и достоверности отыскания законов
распределения внутренних параметров, а также от количества вариантов
расчета выходных параметров. Практически, если выдержаны
условия, приведенные выше, погрешность в определении вероятности Р
не превышает десятых долей процента при достоверности 0,90 -*-
0,95. Столь высокая точность определения Р обусловливается
тем, что сами значения Р оказываются весьма близкими к единице.
Для определения верхнего и нижнего значения вероятности Р
могут быть использованы точностные характеристики параметров
плотности совместного распределения. В (6.67) -5- (6.68) для этой
цели необходимо брать N, равное количеству фактически
проведенных вариантов расчета переходных процессов в исследуемой схеме,
что, очевидно, несколько повысит общее значение достоверности.
Рассмотренная методика расчета надежности по вероятности
выхода обобщенного случайного вектора за пределы допусковой
области дает возможность при создании и отработке электронных
схем выявить наиболее критичные выходные параметры. Это в свою
очередь открывает путь для целенаправленной доработки или
корректировки схемы.
§ 6.7. УЧЕТ СТАРЕНИЯ КОМПЛЕКТУЮЩИХ ДЕТАЛЕЙ И ПРИБОРОВ
Оценки надежности, рассмотренные выше, проводились с учетом
таких дестабилизирующих факторов, как производственный разброс
параметров комплектующих деталей и отклонения внешних
параметров. Однако этим не исчерпывается все многообразие причин,
которые могут привести к отказам.
Один из важных дестабилизирующих факторов — изменение
параметров комплектующих деталей во времени вследствие
естественных процессов старения или износа. Поэтому при
проектировании электронных схем повышенной надежности стараются все
выходные параметры выдержать с довольно большими запасами.
Вследствие этого вероятность выхода обобщенного вектора
выходных параметров за пределы допусковой области становится
настолько малой, что по ней становится невозможно судить о том, насколько
удачно многомерная рабочая область расположена внутри
допусковой области. Перемещения рабочей области внутри допусковой
в этом случае практически не изменяют значения общей вероятности.
206
Это объясняется, в частности, тем, что кривая нормального
распределения при отклонениях параметров, превышающих (2,5 -г- 3) сг,
имеет весьма пологий характер. В этих случаях оценку надежности
схемы по выходным параметрам целесообразно производить при
помощи коэффициента запаса, под которым понимают минимальную
^степень удаления математических ожиданий выходных параметров
от границ допусковой области при наиболее неблагоприятных
сочетаниях внешних параметров. Количественно степень удаления
математических ожиданий выходных параметров от границ допусковой
области удобно измерять не в абсолютных величинах, а количеством
среднеквадратических отклонений или трехсигмовых интервалов,
принимаемых в качестве практической границы поля рассеивания
при нормальном законе распределения.
В этом случае степень удаления математических ожиданий от
границ допусковой области по каждому из выходных параметров может
быть оценена частными коэффициентами запаса:
kf= \yfT?-M/T\/3of, (6.76)
где #/гр — граница допусковой области по /-му параметру; MjT —
математическое ожидание /-го выходного параметра в тяжелом
режиме; Gj — среднеквадратическое отклонение безусловного
распределения /-го выходного параметра.
Рассмотрим некоторые свойства частных коэффициентов запаса.
Измерение коэффициентов запаса количеством трехсигмовых
интервалов дает возможность получить количественную оценку степени
удаленности математического ожидания выходного параметра,
учитывающую его дисперсию. Так как дисперсия до некоторой
степени характеризует стабильность выходного параметра, то можно
.считать, что при постоянном коэффициенте запаса абсолютное
значение разности (у/гр — М/т) пропорционально нестабильности этого
параметра.
Для того чтобы рабочая многомерная область, ограничиваемая
трехсигмовой границей, находилась в пределах допусковой области,
необходимо, чтобы любой из коэффициентов запаса удовлетворял
условию
J kf^l. (6.77)
Чем больше частные коэффициенты запаса, тем большую степень
надежности можно ожидать от схемы.
Процессы старения приводят к изменениям как номинальных
значений параметров комплектующих деталей и приборов, так и их
дисперсий. Различия в скоростях изменений этих величин и в
степени их влияния на выходные параметры приводят обычно к тому,
что выходные параметры имеют различную стабильность. Иначе,
говоря, скорости и направления изменений выходных параметров
электронных схем за счет старения комплектующих деталей и
приборов неодинаковы. Поэтому при определении и оценке значений
коэффициентов запаса каждого и? выходных параметров необходимо
учитывать скорости изменения их математических ожиданий и
дисперсий за счет старения комплектующих деталей приборов.
207
Пусть изменения математических ожиданий и
среднеквадратичных отклонений за счет старения вызывают изменения
коэффициентов запаса со скоростями Vkj = dkf/dt. В первом приближении
можно считать, что эти скорости за все время работы элемента
постоянны. Если скорости изменения коэффициентов запаса найдены,
то оценка надежности схемы может быть проведена на основе
следующих соображений.
Наилучшими с точки зрения долговечности элемента считают
такие коэффициенты запаса Щ, величины которых пропорциональны
скоростям изменений соответствующих коэффициентов во времени:
wA£k»\%V^)V» (6.78)
Соотношением (6.78) следует пользоваться в тех случаях, когда
все скорости изменения коэффициентов запаса отрицательны, т. е.
коэффициенты запаса с течением времени уменьшаются.
Если некоторые из коэффициентов запаса положительны, т. е.
стечением времени увеличиваются, то их лучшими первоначальными
значениями будут к* = 1. При этом (6.78) примет вид
щ
п — т \ In — т
2 £/о-mj/ ^ Vkj
Vkh 1Фи (6.79)
где т — количество параметров, имеющих положительные значения
скорости Vki\ i — текущий номер таких параметров.
Оценкой качества проектирования электронной схемы с точки
зрения сохранения надежности в течение максимального времени
будет обобщенный показатель качества
Q=2(*/o--*/)2- (6.80)
Схема наиболее полно удовлетворяет требованиям
долговечности, если величина Q минимальна или равна нулю. При отработке
схем изменения номинальных значений или допусков отдельных
комплектующих деталей или приборов приводят к изменениям
величин kj, а следовательно, и величин Q. В качестве критериев для
оценки целесообразности того или иного изменения следует принять
одновременное удовлетворение условий: ч
*s= S fcyo-*max; Q= % (^-£f)2->min. (6.81)
Знание коэффициентов запаса и скоростей их изменения дает
возможность оценить долговечность или ресурс схемы. Если оценки
проводят в нескольких тяжелых режимах, то условия (6.81) должны
быть распространены на каждый из них. Целесообразность того или
иного изменения в схеме оценивается для всех тяжелых режимов.
208
Влияние процессов старения на выходные параметры элементов.
Изменения выходных параметров электронных схем во времени при
неизменных внешних параметрах предопределяются постепенным
изменением внутренних параметров, вызываемым старением
комплектующих деталей и приборов.
Под старением понимают долговременные необратимые процессы
изменения параметров комплектующих деталей и приборов.
Старение деталей и приборов электронных схем носит характер
случайных процессов, зависящих от физико-химических свойств веществ,
технологии их изготовления, электрических режимов,
климатических условий эксплуатации, наличия химически активных сред и т. п.
Определение типичных характеристик старения различных деталей
и материалов — цель многих экспериментальных исследований.
Но в настоящее время имеется очень мало информации о случайных
процессах изменения параметров электродеталей и приборов, так
как эти параметры могут быть измерены лишь в редкие моменты их
эксплуатации. Поэтому на практике приходится ограничиваться
весьма приближенными описаниями этих процессов. Имеющиеся
сведения об электродеталях и приборах позволяют считать, что
процессы старения в них могут с достаточной для практики
достоверностью описываться полюсными линейными случайными
функциями. Возможность линейной аппроксимации процессов старения
подтверждается и рядом экспериментальных характеристик
старения конденсаторов, сопротивлений, транзисторов. Нужно также
учитывать, что для^большинства элементов вычислительных машин
и устройств сроки морального старения обычно значительно меньше
сроков физического износа. В связи чс этим изменения параметров
оказываются малыми, что делает линеаризацию еще более
обоснованной.
При описании процесса старения внутреннего параметра
полюсной функцией зависимость этого параметра от времени имеет вид
*(/)=*о + С(*-*о), (6-82)
где х0 — значение параметра в полюсе; t0 — момент времени,
соответствующий полюсу; С — скорость изменения случайной величины;
t — текущее время.
Полюс — условная точка, в которой среднеквадратичное
отклонение близко к нулю. Этой точке обычно соответствует
отрицательное время /0.
Сечение случайной функции при t= О должно соответствовать
закону распределения параметра х в новой, только что
изготовленной партии деталей или приборов. Уравнение (6.82) записано в
канонической форме, так как случайные свойства процесса здесь
описываются случайной величиной С.
Считая случайную функцию х (f) распределенной нормально,
можно ее характеризовать функциями математического ожидания
и среднеквадратического отклонения:
M(t) = x0 + CM(t-t0); (6.83)
a(/) = Co(*-f0). (6.84)
209
где См и Са — скорости изменения математического ожидания
и среднеквадратического отклонения. Для полюсного линейного
случайного процесса эти скорости считают величинами
постоянными. Определить численные значения скоростей См, CG, а также
величин х0 и t0 можно по результатам двух достаточно удаленных
по времени измерений.
Пример. Измерения значений 215 сопротивлений ВС2 — 7,5 кОм,
установленных в инверторах 4И-1 машины «Урал-2», в начале эксплуатации дали
следующие числовые характеристики нормального распределения: М (0) = 7,45,
о (0) — 0,45. Те же сопротивления, измеренные через 5000 ч эксплуатации, имели
характеристики распределения: М (t) = 7,31, a (t) = 0,74.
Подставляя эти значения в (6.83), (6.84), найдем: 7,45 = х + См (0 — ^0);
7,31 = *0 + См (5000 — to); 0,45 = Са (0 — *0); 0,74 = Са (5000 — *ь). Из
Уравнений получим: CG= 0,58-10"4 кОм/ч, С^ = — 0,28* 10"4 кОм/ч', t0 = — 7760 ч,
Хо = 7 $7 к^м.
При известных законах изменения математического ожидания
и среднеквадратического отклонения можно найти закон изменения
плотности вероятности во времени:
ф (Х /) - 1 ехр {\-х-хо+См(*-'о)]2\ (6 85>
ф V* *> - cG(t-to) VSi р I 2С^ (t-t0y /• (b-85>
Это выражение дает возможность получить плотность
распределения параметра для любого момента времени. Используя числовые
характеристики распределений, даваемые (6.83) и (6.84) в два
момента времени, в качестве исходных данных для задания случайных
значений внутренним параметрам, получим два множества значений
выходных параметров электронной схемы. Определив числовые
характеристики распределений выходных параметров для моментов
времени t=0nt=t1n приняв, что случайный процесс изменения
выходных параметров линеен, можно найти скорости изменения
коэффициентов запаса kj каждого из выходных параметров.
Поскольку расчеты надежности с учетом старения параметров
комплектующих деталей и приборов часто не проводят из-за
отсутствия статистических сведений о скоростях этих процессов, то можно
пользоваться приближенными оценками. Дело в том, что новые
типы деталей и приборов принимают в производство только в тех
случаях, если они имеют достаточно стабильные параметры. Для
большинства комплектующих электродеталей мерой стабильности
может служить допуск, указываемый заводом-изготовителем. Можно
считать, что среднее время между моментом изготовления и
установкой деталей в ту или иную электронную схему не превышает
1000 ч. Если изготовитель гарантирует, что практически все
поставляемые детали находятся в поле допуска, то изменение параметров
за время доставки и хранения не превзойдет указанных допусков.
Например, для постоянных сопротивлений типов ВС, МЛТ, ОМЛТ,
УЛМ, УЛИ заводы-изготовители гарантируют сохранность
номинальных значений в пределах допуска 10%. В то же время в пределах
допуска 5% гарантируют сохранность только 66% поставляемых
210
сопротивлений. Исходя из этого, для оценок параметров закона
старения указанных сопротивлений можно положить, что за время
порядка 1000 ч изменение параметров сопротивлений указанных
типов не.превзойдет 10% от их номинального значения. Чтобы иметь
возможность провести разделение скоростей старения
математических ожиданий и среднеквадратических отклонений, как
показывают проведенные до настоящего времени исследования, можно
положить, что Со = (2 -*• 3)СМ- Аналогичные выводы можно
сделать и для бумажных, стерофлексных и керамических
конденсаторов. Несколько хуже стабильность параметров транзисторов и
полупроводниковых диодов. За 1000 ч изменения их параметров могут
достигать 25 -н 30%.
Использование комплектующих деталей и приборов в
электрических режимах, близких к предельным, увеличивает скорость их
старения. Поэтому для большинства электронных схем
вычислительных машин рекомендуется электрическую нагрузку устанавли-
* вать не свыше 0,5 + 0,7 от предельно допустимой.
Таким образом, даже при отсутствии достаточно точных сведений
о процессах старения комплектующих деталей и приборов можно
дать оценку их стабильности по данным ТУ. Это, в свою очередь,
позволяет проводить оценку коэффициентов запаса выходных
параметров и в конечном итоге качества проектируемой схемы.
§ 6.8. РАСЧЕТЫ НАДЕЖНОСТИ МОДУЛЕЙ ТИПА «ТРОПА»
ПРИ ВОЗДЕЙСТВИИ ДЕСТАБИЛИЗИРУЮЩИХ ФАКТОРОВ
В состав системы элементов «Тропа» входят унифицированные модули МД-1
и МД-2, имеющие идентичную принципиальную схему и отличающиеся друг от
друга допустимыми коэффициентами разветвления и объединения. Эти модули
являются элементами потенциального типа, изготовляемыми в виде гибридных
пленочно-транзисторных схем.
Имеется ряд вариантов конструкции модулей, различающихся количеством
схем, монтируемых в одном корпусе. Необходимые для построения
вычислительных машин логические схемы строят путем соответствующих соединений модулей
МД-1 и МД-2 между собой. При этом должны учитываться допустимые значения
коэффициентов разветвления и объединения. Анализ различных сочетаний
модулей показал, что наиболее неблагоприятные условия для значений выходных
параметров возникают в том случае, если модуль МД-1 работает на модуль МД-2,
который в свою очередь нагружается восемью модулями МД-1. В цепях связи
модулей МД-1 и МД-2 учитывают паразитные емкости по 10 пФ±10%'. Выходная
емкость зависит от количества объединяемых модулей и количества разветвлений,
т. е. Свых = 2,5т + 10 (в рассматриваемом случае т = 8, т. е. Свых = 2,5-8 +
+ 10 = 30 пФ). В модулях используют Микротранзисторы 2Т319А и 2Т319Б.
Многовариантный анализ схемы в номинальном режиме, а также в тяжелых
режимах, соответствующих температурам +70° и —60 °С, и для каждого из
режимов не менее 100 вариантов переходных процессов, при изменениях
внутренних параметров по методу Монте — Карло, в соответствии с числовыми
характеристиками их распределений показал следующее.
Входной сигнал положительной полярности транецеидальной формы в
соответствии с ТУ имел характеристики: низший уровень UK= U (0) = 0,5 В;
высший уровень UB= U (0) + MJ = 0,85 В; фронт нарастания t^ = 0,04 мкс;
фронт среза /г = 0,04 мкс (расчет выходных параметров проводился для модуля
МД-1).
В качестве основных выходных параметров были выбраны параметры:
+ — время задержки фронта нарастания относительно фронта нарастания вход-
211
ного сигнала. Время задержки выходного сигнала измеряется по уровню 0,1
от ^вых min» ^вкл — время включения схемы, измеряемое как время нарастания
выходного сигнала до уровня 0,9 от UBblx min, не; А(/ — перепад выходного
напряжения, мВ; tBblKJ1 — время выключения, измеряемое как время спада
выходного напряжения до уровня 0,ШВЫХ тах, не; £- — время задержки фронта
среза относительно фронта среза входного сигнала, не. Выходной еигнал
измерялся по уровню 0,9 ивых max; UH — низший уровень выходного напряжения,
соответствующий отсутствию импульса на входе, мВ. Эта система- выходных
параметров наиболее полно характеризует такие свойства схемы, как надежность
переключения и время распространения сигнала в цепочке модулей.
Многовариантный анализ проводился на машине «М-220» при помощи системы
программ ПАЭС. При анализе подсчитывались величины, необходимые для
построения гистограмм распределения, а также числовые характеристики
распределений, т. е. математические ожидания, среднеквадрэтические
отклонения и коэффициенты взаимной корреляции выходных параметров. Для
отыскания тяжелых режимов в соответствии с рассмотренной выше методикой были
проведены расчеты схемы при номинальных значениях внутренних параметров и
изменениях одного из внешних параметров.
В соответствии с ТУ на модули в качестве номинального по внешним
параметрам режима был принят режим, при котором Ек = 4 В, *е = 20° С, т = 4,
параметры входного сигнала *JC = 0,03 мке, ^с = 0,03 мке, tv = 0,37 мке,
UHC,= 0,15 В, UBC = 0,85 В. Для того чтобы упростить вычисления, вместо
выходных параметров сигналов tBKJl и tBblKJl использовались длительности фронтов
выходных сигналов t£ и t^f от которых прямо зависит время включения и
выключения.
Таблица 6.4
Режимы
Номинальный режим
(HP)
HP £к = 4,4,
кроме Ек = 3,66
HP m = 2,
кроме m — S
HP t°= —60° С,
кроме *°=+70°C
HP ^ = 0,02,
кроме *фС = 0,1
HP *фс = 0>02,
кроме *фС = 0,1
HP (/„с = 0,3,
кроме Uне = 0,05
HP /Увс = 1,0,
кроме (Увс = 0,7
Параметры
'зд
51,31
51,04
51,52
70,01
37,50
51,38
32,41
47,87
73,45
51,31
51,31
49,76
52,04
51,34
51,34
4
22,86
20,90
25,80
32,30
17,86
22,86
23,26
22,86
28,86
22,86
22,86
22,86
22,86
22,14
22,86
АС/
753
773
733
771
719
753
766
753
753
753
753
753
753
753
753
%
24,46
25,47
23,46
19,36
29,54
24,32
19,16
24,45
24,45
24,46
24,86
24,45
24,44
30,45
24,16
*зд
22,75
22,05
23,59
22,74
22,72
22,70
21,55
22,88
22,86
21,43
32,01
27,20
21,32
34,08
13,11-
"н
40
70
10
0
42
4
60
40
40
40
40
40
40
50
40
Результаты расчета крайних режимов приведены в табл. 6.4. В строках
«режим» здесь указываются пределы отклонений от номинальных режимов (HP)
одного из внешних параметров. Из таблицы видно, что некоторые из отклонений
212
превышают предельно допустимые. Это сделано для более четкого выяснения
коэффициентов влияния. С помощью этой таблицы строится табл. 6.5 тяжелых
режимов, при этом малые отклонения параметров не учитываются, т. е. для них
степень влияния считается близкой к нулю. Из табл. 6.4 и 6.5 видно, что
уменьшение Ек приводит к ухудшению всех параметров, кроме tz и U .
Внешние параметры
£к
т
п
t*
фс
Г*
*&
Рве
*зд
—
+
+
+
0
—
0
Выходные
4
—
+
+
+
0
0
—
AU
+
—
+
+
0
0
0
0
т<
аблица 6.5
параметры
<Ф
+
+
—
0
+
0
+
*зд
0
—
—
0
+
+
+
"н
+
+
—
+
0
0
0
+
Однако степень влияния Ек на эти параметры невелика. Поэтому для
тяжелого режима следует брать минимальное Ек.
Из нескольких режимов, выделенных по данным таблиц, один соответствует
следующим предельным величинам внешних параметров: Ек = 3,66 В, т — 8,
f = + 70° С, ^с = 0,1 мкс, ^ = 0,1 мкс, ияс = 0,3 В, UBC = 0,6 В. Для
этого тяжелого режима провели многовариантный анализ с изменением
внутренних параметров по методу Монте — Карло и после 107 вариантов моделирования
получили числовые характеристики распределений выходных параметров.
Для выходных параметров вычислялись моменты взаимной корреляции.
Матрица корреляционных моментов Kyj,yk приведена в табл. 6.6. При ее
расчетах не учитывались слабые связи, носящие случайный характер. Среди шести
выходных параметров схемы не оказалось ни одного, который можно было бы
считать независимым.
Таблица 6.6
Параметры
С
ъ
Д£/
ГФ
Г
зд
U*
*зд
3,0976
5,3259
12,038
19,414
0
39,494
4
5,3259
207,55
566,75
141,29
126,54
235,17
ДС/
12,038
566,75
3249,0
227,04
173,17
0
<Ф
19,414
141,29
227,04
938,81
93,084
781,32
'зд
0
126,54
173,17
93,084
117,72
166,01
^н
39,494
235,17
0
781,32
166,01
2601,0
Значение определителя, составленного из корреляционных моментов,
получили следующее:
I #11» ^12» • • • » ^16 |
^21» ^22» ••• » ^2
|К1 =
Кв1» #6!
• > Кб!
= 2231,1552.104
213
Скалярные произведения составляющих векторов находили так:
3,0976 5,3259 12,038 19,414 0 39,494 (*зд — 18,4б)
5,3259 207,69 566,75 141,29 126,64 235,17 (*ВКл—69,97)
12,038 566,75 3249,0 227,07 173,17 0 (— &U+539)
19,414 141,29 227,04 938,81 93,084 781,32 (*вык—90,96)
0 126,64 173,17 93,084 117,72 166,01 (* —58,93)
39,494 235,17 0 781,32 166,01 2601,0 (I/'u—113)
(4Д-18,46) (*вкл-69,97) (-ДС/ + 539) (*вьпГ-90.9б) (fo- 58,93) (£/н- ИЗ) 0
Для отыскания вектора А необходимо 36-кратное вычисление определителей
пятого порядка. Однако вследствие симметрии определителя относительно
главной диагонали количество вычисляемых определителей пятого порядка может
быть сокращено до 21. Для сокращения записей необходимо ввести обозначения:
гг = *£д- 18,46; z2 = tBKji - 69,97; z3 = - АУ + 539; 24 = tBm - 90,96; г5 =
= /- —58,93; z = UH — ИЗ. При раскрытии определителя обычно
придерживались такого правила обозначения миноров: минор, соответствующий
вычеркнутой строке i и вычеркнутому столбцу /, обозначается ац (например, при
вычеркнутой строке / и столбце 3 минор обозначается а13). При принятых обозначениях
-после раскрытия определителя с учетом atj = а# (i ф j) получили:
A (zt) = anzl + a22z\ . + a33z\ + auz\ + abbz\ + auz\ —
— Ld-^Z^Z2 -J— ZCC\3Z\Z3 — ZCLi qZ-\Z^ —j— ZCL-^Z^Z^ — ZOL-^qZiZq —■
— 2d23Z2Z3 + 2a2422Z4 — 2a25Z225 "Г 2#2fi222e —
— 2a3^z3z^ -\- 2a35z3z5 — 2a3QZ3zQ —
— 2a45z^z5-f-2a4624Z6 —
— 2a56z526.
Значения миноров, подсчитанные ЭВМ, следующие:
au= 1108,85-10Ю; а22= 127,024-10ю; а33 = 2,76717 . 10ю;
а44=3,41880- 10Ю; а55= 119,367 . 10ю; аб6 = 1,46185 . 10™;
а12 = а21 = 124,960. 10Ю; а13 = а31 = 10,8577 . 10™; а14 = а41 = 11,6586 . 10™;
а15=а51= 143,459- 10Ю; а1б = аб1= 11,1926- 10ю;
а23 = а32 = 15,8726. 10"; а24=а42 = 0,0455114. 10ю; а25 = а52= 109,833 • 10ю;
а2Г) = а62 = —2,71433-10Ю;
я34=а43 = 0,176934. 10Ю; а35 = а53 = 12,3940.. 10"; азв = а63 = — 0,532385 . 10Ю;
а45 = я54= 1,84180- 10™; а40 = аб4 = —0,773551 • 10"; а56 = аб5 = —0,687124- 10™.
Таким образом, плотность совместного распределения выходных параметров
/ ч 1 Г A(z*) 1
Ф (^я^,/^ ... «^ ехР '
8зх3 |/2231,155- 10Ю к [ 2.2231,155- 10" J *
Для определения вероятности нахождения выходных параметров в пределах
допусковой области необходимо провести шестикратное интегрирование
плотности ф (zi) в пределах, предусмотренных ТУ на значения выходных параметров.
ТУ модулей МД-1 предусматривают следующие ограничения на выходные
параметры: время задержки фронта нарастания ^+д — не более 30 не; время
переднего фронта tl — не более 70 не; время задержки среза г~д — не более 90 не;
время среза t~z — не более 100 не; низкий уровень напряжения U — не более
300 и не менее 100 мВ, высокий уровень напряжения UB — не менее 700 и не более
1000 мВ. При этой системе выходных параметров в явной форме заданы лишь
границы для трех параметров £+д, /~д и ^н- Остальные ограничения требуют
пересчета: Д£/, = Un — U = 700 — 300 = 400 мВ; t rn = £_ + t± =
г гр в н вкл. гр зд ф
= 30 + 70 = 100 нс, tBblKt гр = г~д + ?ф = 90 + 100 = 190 не. Для получения
214
положительных знаков в матрице1 корреляционных моментов параметр AUrp
взят с отрицательным знаком, т. е. ограничением на амплитуду выходного
сигнала будет — Д£/гр = — 400 мВ.
В целях исключения из рабочей области заведомо невозможных значений
назначаются вторые границы выходных параметров. Для временных параметров
такой границей могут служить нулевые значения, а для высокого уровня
выходного напряжения верхний предел определяется коллекторной нагрузкой и
максимально возможным значением входного импеданса модуля МД-2. Эта граница
равна 2 В. Вторая граница для низкого уровня выходного напряжения 100 мВ.
Тогда границами допусковой области будут: ^д — 0 -т- 30 не; tBKji — 0 -f- 100 не;
*-д — 0 ч- 90 не; tBbm — 0 ч- 190 не; UH— 100 -*- 300 мВ; &U — 400 -^- 990 мВ.
Для введенных выше переменных zi границы таковы: zlH = — 18,46 не,
иZib = 11,54 не; z2H = — 65,97 не и z2B = 34,03 не; z3H = 139 мВ иг3в = — 451 мВ;
г4Н = — 90,96 (—150) не и z4B = 99,06 не; гбн = — 58,93 не и z5B = 31,07 не;
г6н = — 213 мВ и гбв = 187 мВ.
Параметр tBbm (г4) имеет усеченный нормальный закон распределения, так
как у него М < За. Для того чтобы не вводить поправочных коэффициентов,
можно допустить получение отрицательных значений tBbIK. Вследствие этого
нижняя граница z4 будет продлена до —150 не.
Для определения вероятности нахождения многомерного случайного вектора
в пределах допусковой области необходимо шестикратное интегрирование
совместной плотности распределения:
2бВ 25В 21В
Р= \ dzs \ dzb ... \ — рхр A (zi) dz;,
J J J V2W|K| L IK| J
26H 25H 21H
где A (zi) — сумма квадратов г% с соответствующими коэффициентами и сумма"
парных произведений zizj, имеющих свои коэффициенты.
Интегралы такого рода, к сожалению, не могут быть выражены при помощи
элементарных функций. Численное шестикратное интегрирование с необходимой
степенью точности даже при применении современных ЭВМ требует очень больших
затрат времени. Если, например, вычисление двукратного интеграла с точностью
0,1% требует 1,5 -г- 2 ч машинного времени ЭВМ «Минск-2», то трехкратное
интегрирование с той же точностью требует 12 -f- 15 ч машинного времени той же
машины. Поэтому для вычисления вероятности Р лучше использовать метод
статистических испытаний. Шестикратное- интегрирование, необходимое для
вычисления вероятности Р, можно заменить определением среднего значения
подынтегральной функции, ограниченной допусковой областью: Р = vM, где
М — оценка математического ожидания подынтегральной функции; v — объем
шестимерного параллелепипеда, изображающего допусковую область: v =
б
s?= ТС (г*'в —Zi^' Оценку математического ожидания подынтегральной функции
t = i
находят статистическим методом, т. е. путем многократного выбора случайных
значений подынтегральной функции и определением их среднего
арифметического. Для того чтобы обеспечить выбор случайных значений подынтегральной
функции с равной вероятностью, для каждой точки шестимерной допусковой
области используют следующие приемы. При помощи датчика случайных или
псевдослучайных чисел, распределенных равномерно в диапазоне 0 -*- 1,
вырабатывают шесть следующих друг за другом случайных чисел 5i -=- Se- Для
согласования с допусковой областью эти числа приводят в соответствие с переменными
гг -*- г6, т. е. считают, что zx = (zlB — ziH) Ь; г2 = (z2B — z2H) £2; г6 = (z6B — z6H)
Неполученную совокупность значений zx -*■ г6 можно рассматривать как координаты
случайной точки, находящейся в пределах допусковой области. Закон
распределения такого рода точек в пределах допусковой области равномерный. Значения
z± -г- z6 дают возможность вычислить случайное значение подынтегральной
функции ф (г,-). Повторяя выборки по шесть случайных чисел достаточно большое
количество раз, находят оценку математического ожидания подынтегральной
215
N
функции в виде М=— У ф (г/)/, где N — количество реализаций; / — номер оче-
б
редной реализации. Тогда оценкой искомого интеграла будет Р ^(l/N) ТТ (г,в —
1=1
N
— 2ш) 2 Ф (**)/• ^Ри достаточно большом количестве реализаций N может
/=1
быть получено достаточно точное значение вероятности Р. После N = 15 000
реализаций была получена вероятность Р = 0,9823. Оценка точности показала,
что с достоверностью не ниже 0,95 точность определения вероятности не хуже
0,005, что вполне достаточно для практических расчетов.
Несколько проще можно рассчитать вероятность путем непосредственного
статистического моделирования случайного вектора. Поскольку подынтегральная
функция представляет собой нормально распределенный случайный вектор
с взаимно коррелированными составляющими, то вычисление вероятности Р
может быть сведено к многократному моделированию реализаций этого вектора
в соответствии с числовыми характеристиками распределений составляющих и
корреляционными связями. Если случайный вектор, полученный в результате
очередной реализации, находится в пределах допусковой области, то исход
реализации считается благоприятным. Выход случайного вектора за пределы
допусковой области — событие неблагоприятное. При достаточно большом
количестве реализаций отношение количества благоприятных исходов к общему
количеству реализаций является достаточно хорошей оценкой вероятности Р,
т е. Р = LIN, где L — количество благоприятных исходов; N — общее
количество реализаций.
Точность вычисления вероятности Р зависит от количества реализаций N.
Для оценки необходимого количества реализаций можно воспользоваться
следующими соображениями. Искомая вероятность Р является генеральным
математическим ожиданием величины L/N. Разница между выборочным значением L/N
и Р представляет собой погрешность б = | L/N — Р |. На основании неравенства
Чебышева можно считать, что для нормального закона распределения б = | L/N —
— Р |<3 VР (Р — 1)/N. Верхняя граница относительной ошибки при этом
не превысит величины d = б/Р < "|ЛР (Р—1)/ЛЛ Отсюда следует, что
количество реализаций, необходимое для получения относительной погрешности не свыше
d, составит N = 9 (\ — P)/(Pd2). Например, для Р = 0,99 и относительной
погрешности 0,001 (0,1%) требуется N = 9100 «* 10 000 реализаций.
При вычислениях интегралов связь между точностью и количеством
необходимых реализаций не зависит от сложности подынтегральных функций и
кратности интегралов, что является преимуществом метода Монте — Карло по
сравнению с квадратурными численными методами. Для получения реализаций
многомерного случайного вектора выходных параметров можно воспользоваться
методикой, изложенной выше.
При помощи матрицы К вторых корреляционных моментов & соответствии
с (6.60) сп = 1,760; с1а = 3,028; с22 = 6,840; с13 = 11,030; с23 = 0; с33 = 22,440;
си = 14,089; С24 = 38,758; с34 = 7,659; с1Ъ = 11,872; с25 = 41,232; сзъ = — 3,523;
с45 = — 4,249; сц = — 14,882; см = 8,989; си = 27,314; с2б = 0,339; с36 = 4,329;
с4б = — 2,035; с66 = 39,071.
Взаимно коррелированные центрированные величины гх -г- гб были
вычислены при помощи программы выработки псевдослучайных чисел. Для каждой
реализации случайного вектора вырабатывалась очередная группа
псевдослучайных чисел иг -5- ы6, распределенных по нормальному закону, с нулевым
математическим ожиданием и дисперсией, равной единице. Величины zi
вычислялись по формулам:
2l=^ll"l» 22 = C12tti-T-C22«2i 2з = С13Н1 + 6,2зИ2 + £ззИз»
24 = С14И1 + С24Ц2 + CMU3 + С44И4; Z5 = ClbUt + C25U2 + C3bU3 + С45«4 + СЬъЧ\
*б = £16^1 + ^2б"2 + ^36^3 + С4б"4 + СьцЩ + Св$Мв.
£16
При каждой реализации проводилась проверка, находится ли каждая из
составляющих zi в пределах гг-в -f- гг«н; если хотя бы одна из составляющих
многомерного вектора выходила за пределы допусковой области, то исход реализации
считался неблагоприятным; если же все составляющие оказывались в пределах
допусковой области, то исход считался благоприятным. После проведения N =
= 55 000 случайных реализаций было получено количество благоприятных и
неблагоприятных исходов соответственно L = 54 098 и N — L = 912. Тогда
Р = LIN = 0,98342. Это значение вероятности довольно велико и получено
в наиболее тяжелом режиме. В реальных схемах одновременное присутствие ;
граничных значений температуры, напряжения питания и наихудшего входного
сигнала весьма маловероятно. Время моделирования на ЭВМ «Минск-2» составила
& 70 мин. Верхняя граница относительной погрешности в определении
вероятности Р была d = 3 У~Р (Р — l)/N = 0,0016 (такая погрешность вполне
допустима для практических расчетов).
Для сравнения проведем оценку вероятности Р в предположении, что
взаимная корреляция выходных параметров отсутствует. В этом случае вместо
шестикратного интеграла будем иметь произведение шести определенных интегралов:
б
P*=JJ [$o(W<**) —фо(г*н/<г*)]» где Ф0 — функция распределения, подсчи-
£= 1
Z/G
тайная при помощи преобразования Лапласа Ф0 (—) = -~— \ е""22/(2а^ dz.
—оо
Для выходных параметров модуля МД-1 в соответствии с ранее принятыми
обозначениями величины:
Р1 = Ф0 (6,54/1,76)-Ф0 (18,46/1,76) = 1 - 1 +1 = 1,000;
Р2 = Ф0 (34,03/14,41)-Ф0(65,97/14,41) = 0,9909- 1 + 1 =0,9909;
рэ= ф0 (4,51/57) — Фе (139/57) = — 1 +1 + 0,9927 = 0,9927;
Р4=Фе (99,06/30,64) —Ф0 (150/30,64) = 0,9994- 1 +1 =0,9994;
Р5 = Фе (31,07/10,85)-Ф0 (58,93/10,85) = 0,9979- 1 + 1 =0,9979;
р6 = ф0 (187/51)-Ф0 (213/51) = 0,9999-1 +1 =0,9999.
Общая вероятность того, что многомерный случайный вектор с
некоррелированными параметрами находится в пределах допусковой области, равна Р* =
= РгРъРзРьРьРв = 0,9819. При сравнении этого результата со значением,
полученным с учетом корреляционных связей, видно, что они отличаются, но не очень
сильно. Это связано с тем, что сами значения вероятностей достаточно велики.
Поэтому для элементов, имеющих малые вероятности выхода за пределы
допусковой области, значения Р*, рассчитанные без учета взаимной корреляции, могут
быть использованы в качестве оценки, величина которой заведомо хуже
действительных значений: Р* < Р. Расчеты вероятности Р* проще, чем расчеты с учетом
корреляционных связей. Поэтому лучше вначале проводить расчеты величины
Р* и лишь при получении удовлетворительных результатов — более точные
расчеты с учетом корреляционных связей.
ГЛАВА 7
ПРОГРАММЫ АНАЛИЗА ПЕРЕКЛЮЧАТЕЛЬНЫХ
ЭЛЕКТРОННЫХ СХЕМ
Рассмотрим основные характеристики, особенности структуры
и способы использования программ анализа, универсальных в том
смысле, что они ориентированы на многократное применение к
анализу различных схем определенного класса. Способы составления
программ разового пользования для анализа одной конкретной схемы
рассматривать не будем по следующим причинам. Во-первых, такие
программы составляют и используют крайне редко (в ситуациях,
когда необходимо выполнить машинный анализ схемы, не
удовлетворяющей условиям применения имеющихся универсальных программ,
или в ситуациях, когда необходимо проверить некоторые новые
методы и алгоритмы анализа). Во-вторых, для составления таких
программ достаточно знания методов и алгоритмов анализа и основ
программирования.
Универсальные программы анализа обычно наиболее сложные
среди программ решения различных задач проектирования
электронных схем. О сложности и трудоемкости разработки программ
анализа говорит пример программы CIRCAL-2, которая создавалась
коллективом специалистов в течение пяти лет [1]. Действительно,
рассмотренные ранее вопросы моделирования компонентов и схем,
методы решения задач анализа, а т^кже необходимость выражения
исходной и выходной информации о схеме в удобной для инженера
форме — все это говорит о том, что взгляд на программы анализа
как на сложные системы математического обеспечения ЭВМ вполне
оправдан.
§ 7.1. ТРЕБОВАНИЯ К ПРОГРАММАМ АНАЛИЗА И ИХ ХАРАКТЕРИСТИКИ
Характеристики программ анализа.
Ориентация программы анализа ^н а класс
электронных схем. При рассмотрении вопросов
моделирования компонентов и схем, методов их анализа говорилось о том,
что модель и метод являются в одних случаях удачными, в других
случаях неудачными. Наиболее ярко связь принятых при разработке
программ решений с возможностями программ видна из
сопоставления явных и неявных методов интегрирования (см. § 5.11).
Следовательно, любая конкретная программа имеет более или менее ярко
выраженную ориентацию на определенный класс схем. Различают
классы схем, для анализа которых данная программа неудобна, но
принципиально применима, и классы схем, анализ которых вообще
невозможен с помощью данной программы. Так, с помощью про-
218
грамм, ориентированных на переключательные схемы ЭВМ и
реализующих явные методы интегрирования, принципиально можно
анализировать переходные процессы в схемах с большим разбросом
постоянных времени, хотя это и приводит к большим затратам
машинного времени. Однако такие программы неприменимы для
анализа частотных характеристик малосигнальных усилителей»
Программы анализа малосигнальных схем, использующие
математические методы теорий линейных цепей, не могут применяться
к анализу нелинейных схем, т. е. практически любых электронных
схем, работающих в режиме большого сигнала.
Различные классы схем характеризуются разными системами
выходных параметров. Например, выходные параметры
переключательной схемы ЭВМ имеют совершенно другой смысл, чем
выходные параметры стабилизатора напряжения, и, следовательно,
должны определяться по другим алгоритмам. Это обстоятельство также
накладывает отпечаток на рассматриваемую характеристик
названную здесь ориентацией программы. Возможности программы
зависят также от того, модели каких компонентов реализованы
в программе.
Таким образом, для правильного указания ориентации
программы нужно уметь классифицировать электронные схемы с
позиций особенностей их машинного анализа. Эту классификацию
производят по следующим признакам: а) вид анализа работы схемы,
с помощью которого определяются основные выходные параметры
и характеристики; б) величина разброса постоянных времени схемы;
в) перечень характерных для данного класса схем компонентов;
г) правила определения функционалов переменных состояния,
являющихся выходными параметрами. Чем уже класс схем, анализ
которых возможен с помощью данной программы, тем более
узкоспециализированной является данная программа. Следовательно,
ориентация программы свидетельствует о степени ее
универсальности (программы с большей степенью универсальности
представляют и большую ценность для пользователя). Однако, если
универсальность достигается за счет ухудшения других характеристик,
предпочтение следует отдать набору отдельных
узкоспециализированных программ, позволяющих с меньшими затратами достичь
конечной цели.
Задачи, решаемые с помощью программы
анализа. Степень универсальности программы характеризуется
не только ограничением типов анализируемых схем, но и
ограничением круга задач, решаемых для указанных схем. Выше приводилась
классификация задач анализа. Сведения о программе были бы
неполными, если не указать, какие виды анализа выполнимы с помощью
данной программы.
Тип ЭВМ, на которой реализуется програм-
м а. Принципиально возможно создание программы анализа,
полностью записанной на универсальном алгоритмическом языке
и поэтому не связанной с особенностями системы команд и общей
системы математического обеспечения конкретной ЭВМ. Но такие
219
программы неэкономичны по затратам машинных времени и памяти.
Поэтому используемые в практике программы жестко связаны
с ЭВМ конкретного типа.
Удобство входного языка программы.
Входная информация для программ анализа включает в себя
сведения о схеме и указания о выполнении определенных задач анализа.
Совокупность правил записи этой информации в виде,
воспринимаемом машиной, и используемых при этом символов составляет
входной язык программы. Чем ближе входной язык по своему
алфавиту и синтаксису подходит к обычно используемым при
программировании языкам, тем проще программа анализа. Однако
универсальные алгоритмические языки, а тем более языки типа
автокодов и машинные, не имеют изобразительных средств для
лаконичного описания входной информации о схеме в привычной для
инженера форме. Поскольку одно из очевидных требований к
программе — максимальная простота ее применения, то в
универсальных программах должны использоваться специальные
входные языки.
Специфичность входной информации о конфигурации схемы в том,
что ее первоначальная форма — графическая. Поэтому наиболее
удобный способ связи с ЭВМ — связь через специальное устройство
ввода графической информации, например вводное устройство
на основе электронно-лучевой трубки со световым пером. При его
использовании инженер зарисовывает принципиальную или
эквивалентную схему на экране трубки и с помощью кнопок пульта
задает вид анализа. Эта информация частично аппаратурным,
частично программным путем преобразуется в промежуточную
числовую форму, после чего исполняется программа анализа.
Современные ЭВМ пока не оснащаются подобными устройствами ввода,
кроме того, только для преобразования исходной формы
информации в промежуточную требуется довольно сложное программное
обеспечение. Поэтому в программах анализа, как правило,
используются входные языки, требующие от инженера записи исходной
информации в буквенно-цифровом виде. Примером правил входного
языка при записи информации о схеме служат правила записи
формуляра, принятые при описании алгоритмов автоматического
получения ММС в § 4.6. В виде отдельных предложений могут
записываться и указания для выполнения определенного вида анализа,
сведения об используемых моделях компонентов, регламентация
вывода результатов анализа и т. п. (см. § 7.2).
Удобство входного языка складывается из целого ряда
элементов. Например, язык со средствами описания компонентов
принципиальных схем без предварительного их представления
эквивалентными схемами более удобен, чем язык с описанием только £, С, Ry
L, J ветвей. Буквенно-цифровая форма записи предложений более
удобна по сравнению с цифровой формой записи и т. п. Поэтому
удобство входного языка трудно оценить по одному-двум .критериям.
Описание входного языка должно входить в инструкцию по
пользованию программой, составляя основную ее часть.
220*
Содержание и форма выходной
информации. Содержание выходной информации определяется видами
анализа, выполняемыми с помощью программы. При одном и том же
виде анализа выходная информация может быть более или менее
полной. Например, в некоторых программах анализе из ЭВМ могут
выводиться только зависимости от времени напряжений или токов
ветвей. В других программах к этой информации добавляются также
значения выходных параметров.
Менее удобны программы, в которых переходные или частотные
характеристики выводятся на печать только в виде численных
значений координат ряда точек этих характеристик. Более удобны
программы, в которых эти характеристики могут выводиться как
в форме таблиц, так и в форме графиков. Возможности быстрой
оценки результатов анализа еще более повышаются, если
рассчитанные характеристики визуально наблюдаются на экране
индикатора специализированного устройства вывода.
Ограничения на сложность схем. Поскольку
емкость оперативной памяти ЭВМ ограничена, то имеются
ограничения и на сложность анализируемых схем. В том случае, если
сложность схем выражается количеством ветвей а и узлов (J, то
необходимо указывать, относятся ли приводимые значения а и р к
принципиальной, полной эквивалентной или сокращенной эквивалентной
схемам. Четкое определение ветви имеет место для схем с
двухполюсными компонентами, поэтому оценку количества ветвей а лучше
приводить для эквивалентной схемы. Однако в этом случае а
становится также характеристикой сложности не только
принципиальной схемы, но и сложности используемых в программе моделей
компонентов. Поэтому находят применение и другие оценки сложности
схем. Например, сложность биполярных интегральных схем удобнее
всего характеризовать количеством p-n-переходов пр_Л.
Другие ограничения. К ограничениям, присущим
программам анализа, относят также максимальное количество
источников входных напряжений и токов; максимально допустимое
количество выходов схемы, для которых рассчитываются значения
выходных параметров, ограничения на форму входных напряжений
и токов. Ряд ограничений вводят для улучшения других
характеристик программ (например, недопустимость связанных неправильных
размещений ветвей в эквивалентной схеме).
Все ограничения должны быть перечислены в документации
на программу.
Затраты машинного времени. Затраты
машинного времени Тм при анализе переходных процессов и
многовариантных видах анализа значительны. Это затрудняет оперативную оценку
предлагаемых схем, часто заставляет отказываться от
исчерпывающего анализа, т. е. выполнять на ЭВМ недостаточное число
вариантов и т. п. Наибольшие затраты машинного времени Гм оказываются
при анализе сложных схем.
Затраты машинного времени Ты зависят не только от особенностей
используемых моделей компонентов и методов анализа, но и от осо-
221
бенностей их программной реализации. Программистам известно,
что один и тот же алгоритм можно выразить в виде разных программ,
причем соответственно будут различаться и затраты машинного
времени. Например, алгоритм, записанный в виде алгольной
программы, обычно исполняется в несколько раз дольше, чем тот же
алгоритм, реализованный в программе на языке автокода. Поэтому
для характеристики затрат машинного времени Ты недостаточно
знания зависимостей (5.80) для выбранных численного метода и
моделей компонентов. Нужны также экспериментальные оценки затрат
машинного времени Тм для данной программы, полученные в
нескольких тестовых примерах. -Для более полной оценки Тм
желательно, чтобы схемы тестовых примеров отличались друг от друга
с точки прений факторов, влияющих на Ты (например, сложности
схемы и разброса постоянных времени).
Точность анализа. Точность результатов анализа
обычно существенно зависит от свойств выбранных моделей и
методов решения и мало зависит от особенностей их программной
реализации. Характеризуя программу, нужно указать, какие модели
компонентов и методы анализа в ней реализованы. Инженер, имеющий
достаточный опыт машинного анализа, может по этим сведениям
дать ориентировочный прогноз точности анализа конкретной схемы.
§ 7.2. ВХОДНЫЕ ЯЗЫКИ ПРОГРАММ АНАЛИЗА
Чтобы получить максимально возможные удобства пользования
программой, необходимо удовлетворение требований высокой
степени универсальности программы, малых затрат машинного
времени, удобства входного языка (см. § 7.1). '
Перед решением задачи анализа ЭВМ должна быть задана
информация о том, какая схема анализируется и какой вид анализа
должен быть выполнен. Следовательно, во входном языке необходимо
иметь средства для описания конфигурации схемы, численных
значений параметров и указаний о виде анализа.
Наиболее специфична для задач анализа электронных схем
информация о конфигурации схемы, первоначально имеющая
графическую форму. Эту информацию можно легко преобразовать
в буквенно-цифровую форму, воспринимаемую любой ЭВМ. Для
этого сведения о конфигурации схемы нужно представить в виде
списка компонентов принципиальной схемы или списка ветвей
эквивалентной схемы с указанием электрических связей между
компонентами или ветвями (например, список-формуляр ветвей эквивалентной
схемы, рассмотренной в § 4.6). Подобным же образом выражаются
сведения о конфигурации схемы и в большинстве реальных
программ анализа.
Рассмотрим способ описания схемы, принятый в программе АКИМ,
разработанной для ЭВМ «Минск-22». В этой программе список компонентов называют
оператором «ТОПОЛОГИЯ». Каждая строка Ф в этом списке соответствует од-
222
ному компоненту принципиальной схемы и имеет форму Ф; = {щ — природа
компонента; Ni — номер компонента; Р^ — тип компонента; 7л, 7/2» ••• » Уш —
номинальные значения параметров; Уй, Уй, ... , Уы — узлы, к которым
подключены выводы компонента}.
В качестве at используют символы: R — резистор; С — конденсатор; L —
индуктивность; TN — транзистор; Д — диод.
Тип компонента р,- используют в строках транзисторов и диодов. Указание
типа транзистора или диода исключает необходимость записи в строке
номинальных значений параметров 7л — Уш- Это происходит потому, что в программе
АКИМ имеется библиотека параметров транзисторов и диодов, хранящаяся на
магнитной ленте. В этой библиотеке каждому возможному в программе значению
Р соответствует список значений параметров (библиотека может постоянно
пополняться).
Для компонентов другой природы не указывается Рг, но указываются 7л —
— Уш- в случае пассивных компонентов R, С, L и постоянных источников т =
= 1, т. е. указывается значение единственного параметра. В случае источников4
напряжения или тока,
зависящих от времени,
перечисляются в заранее
оговоренной последовательности па-
• раметры этих источников.
Эти параметры однозначно
определяют зависимость
напряжения или тока от
времени.
Список узлов У( состоит
из двух номеров узлов, если
0i есть строка
двухполюсника, и из трех номеров,
если 0i есть строка
транзистора, являющегося трехпо-
люсником.
Выход схемы,
представляющий собой пару узлов,
отождествляется с
компонентом схемы. Для него а =
= OUTPUT, в качестве Р указывается природа выводимой на печать величины —
напряжение, ток или мощность, а далее записываются или обозначение ветви,
или пара узлов, ток или напряжение которой (между которыми) требуется
печатать. r J
Ниже приведен пример записи исходной информации о схеме и виде анализа
.для программы АКИМ применительно к принципиальной схеме, изображенной
на рис. 7.1. Здесь при описании компонентов в операторе «ТОПОЛОГИЯ» не
указаны численные значения параметров, поскольку в программе АКИМ ввод
численных значений параметров, набитых на перфоленту, возможен также с
помощью отдельного оператора «ВВОД». В данном примере это оператор под
номером 04 листа 01. В строках диодов (строки 01 и 02 листа 02) указаны типы
диодов — А238 и А238Р, а в строках транзисторов (строки 03—06 листа 02) — типы
транзисторов А479. Символы Э, К и В в этих строках означают «эмиттер»
«коллектор» и «база». В строке 07 второго листа описан источник входного
трапецеидального напряжения. Здесь а = INPUT, N = 1, Р = TRAP, Уп = 1, у,. = ю
Далее в строке приводятся численные значения параметров
трапецеидального импульса. Оператор «ТОПОЛОГИЯ» заканчивается описанием выходов
схемы.
Строка 05 листа 01, строки 13—16 листа 02 и строки 01—03 листа 03 —
операторы универсального алгоритмического языка АКИ. Оператор «ПЕРЕЙТИ 125»
здесь означает переход в начало программы расчета начальных условий и
переходного процесса. Оператор «ВЫПОЛНИТЬ 127» производит печать значений
переменных, указанных в строках OUTPUT оператора «ТОПОЛОГИЯ».
Оператор «ВЫПОЛНИТЬ 126» есть команда обращения к блоку автоматически
составленной программы, реализующей решение уравнений ММС.
Принципиальная схема сложного
инвертора
223
Лист 01 03 TNI (А479 Э-8 5-К В-4),
04 TN2 (А479 Э-7 6-К В-5),
01 модель сложного инвертора 05 TN3 (А479 Э-9 6-К В-7)
02 РАСЧЕТ ПЕРЕХОДНОГО ПРОЦЕССА и 06 TN4 (А479 Э-10 11-К В-8)
03 ПЕРЕДАТОЧНОЙ ХАРАКТЕРИСТИКИ X 07 INPUT 1 TRAP (1-10 5 0 0
04 1. ВВОД #1, да, /?3, #4, /?5, 0,005, 0 03 0,005)
Я6..С1, С2, СЗ, £1 X 08 OUTPUT 1 (UC2
05 ПЕРЕЙТИ 125 X 09 OUTPUT 2 (UR2
06 ТОПОЛОГИЯ Ю OUTPUT 3 (UC3
07 £1 (2-3), И OUTPUT 4 U R5),
08 R2 (5-3), 12 OUTPUT 5 (U CI) X
09 /?3 (6-3), 13 ВЫПОЛНИТЬ 127 X
10 R4 (10-4), 14 2. ВЫПОЛНИТЬ 126 X
И Я5 (10-8), 15 ПОВТОРИТЬ 2Т = 0 (0) (0,08) X
12 ^6 (11-9), 16 ВЫПОЛНИТЬ 127 X
13 С\ (10-9),
14 С2 (2-3),
15 СЗ (10-4), Лист 03
16 Е\ (3-10),
Лист 02 01 ПОВТОРИТЬ 2 UW/l/ = 0 (0,05)
(5,0) X
01 Д1 (А238 А-2 К-1), 02 КОНЕЦ X
02 Д2 (А238Р А-2 К-4), 03 НАЧАЛО 1 X
В других программах используют аналогичные правила записи
сведений о схеме. Отличия могут быть в следующем:
1. Может описываться не принципиальная, а эквивалентная
схема, что принято в таких программах, как ПА1, CIRCAL-2, ЕСАР
и др. С одной стороны, это менее удобно, поскольку требует от
инженера предварительной зарисовки эквивалентной схемы, более
громоздкой, чем принципиальная. Но с другой стороны, позволяет
конструировать пользователю программой свои эквивалентные
схемы компонентов и, следовательно, использовать не только одну
жестко фиксированную в программе модель компонента каждого
типа. В некоторых программах для компонентов одинаковой
природы может применяться не одна, а несколько моделей, уже
реализованных в программе. Тогда сохраняются правила, аналогичные
правилам программы АКИМ, но в строке описания нелинейного
компонента добавляется элемент, указывающий номер модели этого
компонента, используемый при анализе.
2. Численные значения параметров компонентов необязательно
указывать в строках Ф^. Прежде всего это относится к программам
многовариантного анализа, где конфигурация схемы остается
неизменной во всех вариантах, а численные значения параметров
меняются. В программе АКИМ в операторе «ТОПОЛОГИЯ»
записываются значения параметров лишь первого варианта, а затем эти
значения меняются с помощью специальных макрокоманд. В ряде
других программ численные значения параметров компонентов
представляют собой отдельный массив, последовательность
значений параметров в котором согласуется с последовательностью
перечисления компонентов в списке-формуляре.
Для того чтобы одновариантный анализ стал возможным, нужно
указать значения управляющих (режимных) параметров. К
управляющим параметрам относят отрезок интегрирования Т\ требуе-
224
мую точность статического анализа е; константы автоматического
выбора шага интегрирования; временной шаг вывода токов и
напряжений ветвей из ЭВМ А/печ и т. п. Эти значения указываются в
соответствующих макрокомандах или строках Фь но могут быть
сконцентрированы и в отдельном числовом массиве. В первом случае
значения Т и констант выбора шага интегрирования указываются
в макрокоманде, задающей одновариантный анализ переходных
процессов. В этой макрокоманде дается также номер подпрограммы
интегрирования, в которой реализован выбранный численный метод.
Значение А/печ можно указать в строке формуляра с а = OUTPUT
или, как это сделано в программе АКИМ, задать с помощью обычных
операторов универсального алгоязыка.
Как видно из вышеизложенного, значения большинства
внешних параметров указываются так же, как значения параметров
компонентов (напряжения входных источников и питания,
параметры нагрузки). Температуру окружающей среды обычно относят
к управляющим параметрам. При анализе разветвленных схем
к внешним параметрам вместо сопротивлений и емкостей нагрузки
относят коэффициенты разветвлений. При этом (см. § 4.5) всю
принципиальную схему разбивают на подсхемы и любой компонент или
ветвь относят к одной определенной подсхеме. Тогда, как это
сделано в программе ПА1, в строке формуляра Фг- появляется элемент,
указывающий номер подсхемы, к которой относится i - я ветвь.
В отдельном числовом массиве перечисляются численные значения
коэффициентов разветвления, причем порядок расположения этих
значений согласуется с нумерацией подсхем.
Вид анализа указывается с помощью специальных макрокоманд,
называемых также операторами или директивами. Для каждого
возможного вида анализа во входном языке устанавливаются
правила записи таких макрокоманд. Например, в программе АКИМ
это операторы «ПЕРЕЙТИ 125», «ВЫПОЛНИТЬ 126» и т. п. В
программе АСАМС-Ф, разработанной для ЭВМ «GE-415», указанием
на анализ переходного процесса служит макрокоманда:
FROM t0; tK; h\ (список начальных условий);
PRECISION; (список констант, определяющих
автоматическое изменение шага).
Анализ чувствительности выполняется по макрокоманде FFUN.
В этой макрокоманде указывают выходные параметры yj,
чувствительность которых исследуется, список параметров компонентов xt
и величины Дхг- — отклонения указанных параметров компонентов
в каждом варианте анализа чувствительности.
Кроме видов многовариантного анализа по заранее известным и
реализованным в программе алгоритмам обычно всегда
предусматривают возможность многократного анализа по алгоритмам
пользователя. Для этого во входном языке обычно имеются следующие
средства.
1. В специальной макрокоманде модификации параметров
перечисляются модифицируемые параметры и новые численные значе-
225
ния этих параметров для очередного варианта. Фактически такая
макрокоманда является приказом на выполнение одного варианта
и поэтому в исходных данных обычно фигурирует несколько таких
макрокоманд. Тем самым можно выполнить многовариантный
анализ по сравнительно простым алгоритмам модификации
параметров. Новые значения параметров должны быть рассчитаны
пользователем. ♦
2. Во входном языке может быть набор макрокоманд, по
которым указанные параметры компонентов будут автоматически
изменяться от варианта к варианту по тому или иному правилу.
Входные языки существующих программ, несмотря на
наличие многих общих черт и правил, отличаются друг от друга. Это
объясняется тем, что машинное проектирование электронных схем
переживает еще период своего становления и нескольких лет
практического использования машинных методов оказалось недостаточно
для обобщения накопленного опыта р создания на его основе
наилучшего варианта входного языка. Кроме того, требования к
программам анализа, а следовательно, и требования к входным языкам
не являются незыблемыми (они меняются по мере прогресса как
электронной техники, так и вычислительной техники).
Непосредственное использование таких языков, как АЛГОЛ-60 и ФОРТРАН,
в программах анализа невозможно, поскольку эти языки
ориентированы на описание алгоритмов решения задач численного анализа
и не имеют средств для описания специфической входной
информации о конфигурации схемы. Однако вместо создания полностью
оригинального входного языка программы можно говорить о
расширении возможностей имеющихся универсальных алгоритмических
языков с точки зрения задач проектирования электронных схем.
Тогда в число операторов универсального алгоритмического языка
нужно добавить такой оператор, как оператор «ТОПОЛОГИЯ»
программы АКИМ, и соответственно добавить блоки трансляции этого
оператора в имеющиеся трансляторы с универсального
алгоритмического языка. Эти дополнительные блоки должны по
алгоритмам получения ММС создавать машинную программу вычисления
правых частей системы дифференциальных уравнений или
вычисления невязок системы алгебраических уравнений. Использование
универсальных алгоритмических языков в указанном смысле
может оказаться удобным, так как позволяет при модификациях
параметров пользоваться обычными правилами универсального
языка, облегчает стыковку программы анализа с другими
программами, записанными на алгоритмическом языке. Именно такой
принцип использования алгоритмического языка АКИ и положен в
основу программы АКИМ, где наряду со специфичными
операторами могут использоваться и операторы языка АКИ. Программа
анализе становится частью общего транслятора с
алгоритмического языка и, следовательно, как и транслятор, записывается
на машинном языке, т. е. разработчик программы пользуется
машинным языком, а инженер, использующий программу, будет
иметь дело уже юлько с расширенным универсальным алгоязыком.
226
Для облегчения разработки программ анализа иногда
применяют универсальный алгоритмический язык не в указанном смысле,
а как язык, на котором записывается сама программа анализа,
т. е. алгоритмы получения уравнений ММС и их численного
решения. Однако при этом автоматически составляемые машинные
программы менее эффективны по затратам машинного времени.
Особенно неудачен в этом отношении язык АЛГОЛ-60,
повышающий затраты машинного времени в несколько раз. Язык ФОРТРАН
более экономичен и потому находит применение при разработке
программ анализа (например, на языке ФОРТРАН записана
программа АСАМС-Ф).
§ 7.3. СТРУКТУРА ПРОГРАММ АНАЛИЗА
Программа анализа —наиболее сложная программа в системе
математического обеспечения задач проектирования электронных
схем — должна на основе исходных данных, выраженных на
входном языке, привести к получению окончательных численных
результатов (токов, напряжений, мощностей ветвей в функции
времени, значений выходных параметров, их гистограмм или
чувствительности к изменениям тех или иных факторов и т. п.).
Весь процесс переработки информации, ведущий от исходных
данных к окончательным результатам, состоит из двух основных
этапов — этапов трансляции и счета. На этапе трансляции
автоматически создается машинная программа, реализующая
алгоритмы одновариантных и многовариантных видов анализа (название
«трансляция» связано с тем, что исходная информация со
входного языка-транслируется в алгоритмы численного анализа,
выраженные на машинном языке). Трансляция осуществляется
специальной программирующей программой (транслятором ПП),
являющейся основной составной частью программы анализа. На этапе
счета осуществляется собственно анализ схемы по программе,
составленной на этапе трансляции. Эту программу будем называть
машинной программой анализа МПА (МПА есть результат
исполнения ПП). Для выяснения структуры МПА достаточно установить,
из каких процедур состоит вычислительный процесс при анализе
и какова последовательность исполнения этих процедур.
Структура же МПА в свою очередь определяет структуру транслятора ПП.
Вычислительный процесс при решении задач анализа можно
представить так, как показано на рис. 7.2—7.4. На этих рисунках
отмечены лишь основные блоки, присущие программам различных
видов многовариантного анализа. Так, обязательно изменение тех
или иных параметров, что отражено в блоке «Модификация
параметров». Часто новые значения параметров зависят от результатов
предыдущих вариантов, например при оптимизации схемы
(оптимизация схемы может рассматриваться как разновидность
многовариантного анализа, поскольку требует выполнения ряда
вариантов анализа работы схемы). При статистическом анализе новые
значения модифицируемых параметров не связаны с предыдущими
227
значениями. Следовательно, блок «Обработка результатов
очередного вйрианта» в одних случаях вырабатывает критерии, по
которым нужно выбирать правила модификации параметров, а в других
случаях непосредственно оправдывает свое название. Так, при
статистическом анализе под блоком «Обработка результатов
очередного варианта» следует понимать программу накопления
статистических сумм (см. § 6.5). В блоке «Модификация параметров»
при статистическом анализе задаются новые случайные значения
Начало счета
Расчет ориентировочуых\
начальных, условий
Корректировка на чаль А
ных условий
Расчет переходного
процесса
6<А/
"С
Да
Нет
Программа од новари-
антного анализа
Программа многова -
риантного анализа
Модификация
параметров
т
Обработка
результатов очередного вари-
анта
ж
Обработка результа\
тов N вариантов
Конец счета
Рис. 7.2. Укрупненная блок-схема вычислительного
процесса при анализе электронных схем
параметрам компонентов, а блок «Обработка результатов N
вариантов» служит для подсчета числовых характеристик
распределений выходных параметров, данных для построения гистограмм
и т. п, При анализе чувствительности модификация параметров
заключается в задании малых приращений параметрам
компонентов, после каждого /-го варианта подсчитываются коэффициенты
влияния очередного внутреннего параметра на выходные параметры.
Наконец, под блоком «Модификация параметров» можно
подразумевать простое обновление группы параметров по приказу,
записанному на входном языке, при этом остальные блоки,
указанные в программе многовариантного анализа на рис. 7.2, могут
отсутствовать.
В структуре программы одновариантного анализа наиболее
сложный блок — блок «Расчет правых частей системы
дифференциальных уравнений» (рис. 7.4). Этот блок фактически и представ-
228
ляет ту машинную программу, которая составляется по алгоритмам
автоматического получения ММС, изложенным в § 4.6. Эти
алгоритмы воплощены в транс-
На чало анализа
ммс И-
Выполняется ли
условие окончания
расчета
ориентировочных началь
ных условий 1
Да
Нет
ММС
Из программы
многовариантного
анализа
Выполняется ли
условие окончание
корректировки
начальных условий!
\Нет\
j До
i
ляторе ПП. Полученный блок
расчета правых частей
занимает значительный объем
памяти и с его помощью
вычисляют значения токов и
напряжений всех ветвей схемы
на каждом шаге численного
интегрирования. Очевидно,
что блок расчета правых
частей будет иным для каждой
новой схемы. Остальные
блоки программы одновариант-
ного анализа неизменны при
анализе большой группы
схем. Поэтому эти блоки
оформляют в виде
стандартных подпрограмм, которые в
своей совокупности
составляют библиотеку подпрограмм
(БП). В БП включают
подпрограммы, реализующие:
модели нелинейных
компонентов; различные численные
методы анализа; вычисление
входных напряжений и токов
как функций времени;
определение выходных
параметров; вычисление
элементарных функций;
редактирование результатов анализа
перед их выводом на печать
и т. п.
БП вместе с транслятором
ПП и библиотекой
параметров компонентов составляют
собственно программу
анализа, разрабатываемую
специалистами по машинному
проектированию электронных
схем. Состав БП в разных
программах различен и тем
шире, чем более
универсальна программа.
В каждом конкретном случае используют лишь часть
имеющихся подпрограмм, что зависит от особенностей схемы и целей
анализа. Следовательно, транслятор ПП должен на основе исходных
Подпрограмма
входных сигналов
л
ммс
Подпрограмма
выходных параметров]
t>tn
Нет
JL
Да
Ъпеч*= ^печЛ
Нет
Ь>Т
Да
Подпрограмма
печати токов
и напряжений
Печать выходных
параметров
т
Вых
Рис. 7.3. Блок-схема вычислений
одновариантном анализе
при
229
данных, выраженных на входном языке, выбрать из БП нужные
подпрограммы, разместить их в оперативной памяти машины и
скомпилировать программу, задающую последовательность
обращений к каждой из вызванных подпрограмм. Эта функция
транслятора ПП — вторая после уже рассмотренной функции
составления программы блока «Расчет правых частей системы
дифференциальных уравнений». Команды обращения к подпрограммам
нелинейных компонентов размещают в блоке ММС (рис. 7.4), а команды
обращения к другим подпрограммам составляют ведущую
программу. Если на рис. 7.3 блоки подпрограмм заменить командами
обращения к этим подпрограммам, а блок ММС — командой
обращения к подпрограмме интегрирования, то Можно получить блок-схему
ведущей программы:
Рассмотрим последовательность вычислений, задаваемую
ведущей программой при анализе переходных процессов. Перед
собственно анализом переходных
процессов необходимо
рассчитать начальные / условия,
что целесообразно
осуществлять- в два этапа. Сначала
вычисляются
ориентировочные начальные условия. Эта
вычисление при
многовариантном анализе выполняют
лишь перед первым
вариантом. При расчете
ориентировочных начальных условий
значения параметров
компонентов и внешних условий
соответствуют первому варианту анализа. Очевидно, что после
модификации параметров во всех последующих вариантах эти начальные
условия должны быть скорректированы, что и объясняет их
название — «ориентировочные». Перед первым вариантом расчет
начальных условий обычно начинают из исходной точки, в которой все
переменные состояния имеют нулевые значения. Корректировку же
начальных условий начинают из точки пространства переменных
состояния, соответствующей ориентировочным начальным условиям.
Как правило, такая точка оказывается ближе к точке начальных
условий каждого варианта, чем нулевая точка. Поэтому для
корректировки начальных условий требуется меньше шагов
интегрирования или итераций, чем на расчет ориентировочных начальных
условий, что может существенно снизить общие затраты
машинного времени при многовариантном анализе. Так, если расчет
начальных условий производится путем численного
интегрирования дифференциальных уравнений явными методами, то
затраты времени на вычисление ориентировочных начальных
условий составляют 50 -*- 100% от времени расчета переходного
процесса, а корректировка начальных условий занимает только
5—20%.
1 Йу
|вх
1 Подпрограмма
интегрирования
1
«-н
Вых
1
7
Подпрограмма
нелинейных
компонентов
▼
Расчет прабы к
частей системы]
дифференциальных уравнений |
Рис. 7.4. Блок-схема программы ММС
230
Условием окончания расчета начальных условий может быть
или выполнение неравенства / > Гну (где Тиу задается
инженером и относится к управляющим параметрам), или выполнение
неравенства [ДУ(Л)]<£ (где е — заданная максимально
допустимая погрешность расчета установившегося режима; [А Vм] — норма
вектора поправок на &-й итерации расчета начальных условий
каким-либо итерационным методом).
При собственно анализе переходных процессов на каждом
- шаге интегрирования необходимо вычислить значения входных
для схемы напряжений и токов, затем с помощью блока «MMQ»
осуществить очередной шаг интегрирования и обратиться к
подпрограмме, где результаты этого очередного шага используются
для подсчета значений выходных параметров. Именно такая
последовательность вычислений и отражена на рис. 7.3. Вывод из ЭВМ
зависимостей токов, напряжений и мощностей ветвей от времени
выполняется в табулированном виде. Шагов интегрирования может
быть больше нескольких тысяч, а в выводимой таблице достаточно
иметь несколько десятков узловых точек. Поэтому вывод на печать
организуется с шагом таблицы ti ^> h (где К — величина шага
интегрирования), что и отражено на рис. 7.3. Одновариантный анализ
заканчивается, когда текущее время t превысит заданную величину
отрезка интегрирования Т.
Указанная на рис. 7.2 и 7.3 структура машинной программы
анализа типовая, хотя в отдельных программах имеются те или
иные отступления от этой структуры.
Таким образом, программа анализа включает в себя три
главные составные части —транслятор ПП, библиотеку-подпрограмм и
библиотеку численных значений параметров нелинейных
компонентов (обычно транзисторов и диодов). В библиотеку подпрограмм
входят как подпрограммы, используемые при одновариантном
анализе, так и блоки программ многовариантного анализа.
Результат исполнения программы ПП — машинная программа МПА,
включающая в себя ведущую программу, блок «ММС»,
реализующий уравнения математической модели схемы, и совокупность
необходимых подпрограмм. Счет по МПА дает окончательные
результаты анализа.
§ 7.4. КРАТКИЙ ОБЗОР ХАРАКТЕРИСТИК ПРОГРАММ АНАЛИЗА
' ПЕРЕКЛЮЧАТЕЛЬНЫХ ЭЛЕКТРОННЫХ СХЕМ
Универсальные программы анализа нелинейных электронных
схем были созданы в первой половине 60-х годов. Программы,
разработанные в США в 60-х годах, типичными представителями
которых были программы NET.-1 и ЕСАР, относят к программам
первого поколения. Их отличительная особенность — использование
явных методов численного интегрирования системы обыкновенных
дифференциальных уравнений, получение этих уравнений с
помощью матричного варианта метода переменных состояния,
ограниченные возможности выполнения многовариантных видов анализа.
231
Следствием неучета свойства разреженности матриц, что присуще
матричным методам, были большие затраты машинных времени
и памяти. А это, в свою очередь, приводило к необходимости
использования только мощных вычислительных машин и накладывало
заметные ограничения на сложность анализируемых схем.
Программы, разработанные в США в начале 70-х годов, относят
к программам второго поколения. В них сделан упор на
применение неявных методов численного интегрирования и алгоритмов,
учитывающих разреженность матриц в математических моделях
схем. Расширены возможности программ за счет реализации в них
методов многовариантного анализа, усовершенствованы входные
языки и форма выходной информации.
В большинстве программ, разработанных в СССР, в том числе
и в программах 60-х" годов, использованы топологические
варианты метода переменных состояния. Учет разреженности
топологических и компонентных матриц обусловил преимущества этих
программ по таким важнейшим показателям, как затраты
машинного времени и памяти. В результате применение методов машин-
ног® проектирования оказалось возможным в организациях,
оснащенных вычислительными машинами с невысоким быстродействием
и малой емкостью оперативной памяти в (4—8) к.
Ниже приводятся основные сведения о некоторых программах
анализа переключательных электронных схем, разработанных в
СССР до 1972 г. (табл. 7.1). Все рассматриваемые программы
ориентированы на схемы, состоящие из биполярных
полупроводниковых приборов и пассивных компонентов (резисторов, конденсаторов
и катушек индуктивностей).
Первая отечественная программа ПАЭС была разработана в
1964 г. для ЭВМ «Урал-2», а в 1965 г. она была переписана на
машинный язык ЭВМ «М-220». По сравнению с программами,
разработанными позднее, ее существенный недостаток в неавтоматическом
формировании блока «ММС». От инженера, использующего ПАЭС,
требовались знания основ программирования, системы команд
ЭВМ «М-220». Необходимость получения уравнений ММС и записи
программного блока «ММС» вручную увеличивало время на
подготовку исходной информации и вероятность появления ошибок
в составляемой программе. Преимущества программы ПАЭС
заключались в том, что в библиотеке подпрограмм ПАЭС имелись
подпрограммы, реализующие алгоритмы статистического анализа схем,
удельные затраты памяти Яуд были сравнительно малыми, что
позволяло при емкости памяти в 4 к (где к = 1024 ячейки)
анализировать схемы, насчитывающие до 20 транзисторов (здесь и
в табл. 7.2 под Яуд понимается отношение требуемой емкости
оперативной памяти Ям к максимальной сложности схем у,
выражаемой количеством электронно-дырочных переходов в компонентах
схемы, т. е. Яуд = njy). Затраты времени Тм на анализ переходных
процессов сравнительно невелики. Малые значения Яуд и Гм
обусловливались применением метода сканирования М-матрицы
для моделирования схем, что, кроме того, упрощало и делало
232
вполне посильной процедуру ручного вывода уравнений ММС.
Эти положительные стороны и отсутствие в течение
продолжительного времени конкурирующих программ обеспечили ПАЭС довольно
широкое распространение в организациях, разрабатывающих
электронные схемы.
Таблица 7.1
Название
программы
ПАЭС
ПАЭС-1
АКИМ
АСАМС-Ф
СПАЭЛ
ПА1
Год
разработки
1964
1968
1969
1971
1971
1972
Тип ЭВМ и Лм
«М-220», 4к *
«М-220», 8к *
«Минск-22»,
4К *
«GE-415», 16к *
«БЭСМ-6»,
32к*
«М-220», 4к *
Метод анализа
переходных
процессов
Явный
(Эйлера)
Явный 2-го
порядка
Явный
(Эйлера)
Неявные
методы
Явный
(прогноз по
Эйлеру, коррекция
по формуле
трапеций)
Явный
ускоренный
.Метод
анализа статических
режимов
Простые
итерации
То же
«
Методы
минимизации
Метод
Ньютона
Простые
итерации
Виды
многовариантного анализа
Анализ
чувствительности
Статистический
анализ
Межвариантные
модификации
Анализ
чувствительности
Межвариантные
модификации
Любые
межвариантные
модификации на
языке АКИ
Анализ
чувствительности
Межвариаит-
ные
модификации
То же
Межвариантные
модификации.
* к= 1024 ячейки.
Естественно, что при создании программы ПАЭС-1 усилия были
направлены прежде всего на автоматизацию получения уравнений
ММС. В ПАЭС-1 и во всех последующих программах информация
о схеме задается на входном языке в виде списка-формуляра
ветвей и программный блой «ММС» формируется автоматически.
Для программы ПАЭС-1 была разработана оригинальная модель
транзистора (см. §3.3). Характерной особенностью ПАЭС-1 является
высокая трчность анализа переходных процессов, правда,
достигаемая за счет увеличения затрат машинных времени и памяти.
Входной язык этой программы еще недостаточно удобен, процедура
подготовки колоды перфокарт довольно громоздка.
233
Программа АКИМ обладает лаконичным и удобным входным
языком, основные особенности которого рассмотрены в § 7.2. Кроме
того, входной язык программы АКИМ включен, как составная часть,
в алгоритмический язык АКИ, что расширяет возможности
реализации разнообразных межвариантных модификаций параметров.
Реализуя на языке АКИ те или иные алгоритмы, можно выполнять
многовариантный анализ схем типа анализа чувствительности,
анализ по методам планирования эксперимента, моделирование
граничных испытаний и т. п.
Язык программы АСАМС-Ф близок по своим особенностям к языку
АКИМ, программа обладает более обширным набором подпрограмм
численных методов решения задач динамического и статического
анализа.
Программа СПАЭЛ, записанная на автокоде БЭСМ-6, имеет
более богатую библиотеку подпрограмм с моделями компонентов,
чем предыдущие программы. Так, в ней реализованы модели Эбер-
са — Молла и Линвилла для транзистора, имеется подпрограмма
линии связи, что важно для анализа схем элементов ЭВМ,
работающих друг на друга. Эта библиотека может пополняться новыми
подпрограммами по мере необходимости.
Программа ПА1 создана для анализа многокомпонентных схем.
Многие схемы с обратными связями не могут быть расчленены
на более простые подсхемы с целью анализа по частям. В то же время
эти схемы (например, интегральные J — К-триггеры) часто состоят
из более чем 20 транзисторов, что превышает предельные
возможности уже рассмотренных программ. В ПА1 величина у повышена
до 100 р-я-переходов. Существенное улучшение величины Яуд
в программе ПА1 достигнуто за счет использования экономичных
алгоритмов получения ММС по методу сканирования М-матрицы
и рационального построения всех блоков программы.
При разработке рассмотренных выше программ особое внимание
уделялось уменьшению затрат машинного времени, поскольку
эти программы, за исключением программы СПАЭЛ, базируются
на использовании ЭВМ невысокого быстродействия. Получающиеся
значения Тм в среднем близки к значениям, определяемым по
(5.80): Гм = 3 (ty + 4/с) TK<ma/%m[n. Удельная трудоемкость
вычислений Э = БТы/у (где Б—быстродействие ЭВМ) для тестовой
схемы переключателя тока составляет приблизительно (0,3 -*-
-*- 1,0)-10е операций на переход.
Остальные характеристики программ и используемые в них
методы анализа и модели транзистора указаны в табл. 7.1 и 7.2.
Отмеченный в табл. 7.1 вид многовариантного анализа под
названием «Межвариантные модификации» означает задание тем или
иным параметрам численных значений, записанных инженером
во входной информации. Приведенный в этих таблицах список
программ не является исчерпывающим. В нем приведены сведения
лишь о тех программах, которые нашли широкое практическое
применение. Кроме того, созданы и другие программы. Так, известны
программы, ориентированные на анализ схем с МДП-транзисторами,
234
программы, предназначенные только для статического анализа
схем и расчета их передаточных характеристик (например,
программа ПА2).
Таблица 7.2
Название
программы
ПАЭС
ПАЭС-1
АКИМ
АСАМС-Ф
СПАЭЛ
ПА1
Модель
транзистора
Модель ПАЭС
Модель ПАЭС-1
Модель ПАЭС
Модель Лин-
вилла
Модели Эбер-
са — Молл а и
Линвилла
Модель ПАЭС
Максимальная
сложность схем
20
транзисторов
16
транзисторов
8 транзисторов
"20
транзисторов
20
транзисторов
50
транзисторов
яуд
100
250
250
400
800
40
Ограничения
на порядок
неправильных
размещений р
Отсутствуют, но при
р^2
подготовка
задач
неудобна
р = 0
Р=1
р = 0
р = 0
Р = 1
Другие
отличительные
особенности
Уравнения и
программный
блок ММС
составляются
вручную
Входной язык
является
расширенным
языком АКИ
Написана на
языке
ФОРТРАН
В рассмотренных выше программах (за исключением программы
АСАМС-Ф) применены явные методы интегрирования. Это
объясняется как предпочтительностью явных методов в случае анализа
переключательных схем с умеренным разбросом постоянных
времени, так и большей сложностью алгоритмов неявного
интегрирования. Для реализации последних нужны ЭВМ с большим
объемом оперативной памяти, чем у наиболее распространенных в
60-е годы машин «М-220» и «Минск-22».
Вновь создаваемые программы, естественно, должны
превосходить существующие программы по многим параметрам. Основой
этого должна послужить более совершенная техническая база—
вычислительные машины с большим объемом памяти, более
высоким быстродействием и более совершенными средствами общего
математического обеспечения.
§ 7.5. ПРИМЕРЫ МАШИННОГО АНАЛИЗА ЭЛЕМЕНТОВ ЭВМ
Машинное проектирование электронных схем иногда называют
автоматическим проектированием. Это название было бы справедливым, если бы
вычислительная машина без вмешательства человека решала все задачи проектирования,
т. е., например, получив исходные данные T3, выдавала бы полный комплект
масок для изготовления ;фотошаблонов. Однако такая степень автоматизации
пока невозможна,"так как еще не найдены алгоритмы, по которым можно было
235
бы синтезировать нелинейные электронные схемы в достаточно общем случае,
и нет комплексов программ, способных решать все многообразие задач
проектирования.
Имеющиеся программы анализа используют в оперативном режиме, когда
трудоемкие вычисления выполняет машина, но на тех или иных промежуточных
этапах оценку результатов этих вычислений и принятие решения осуществляет
человек. В/гаком автоматизированном процессе проектирования удачно сочетаются
вычислительные возможности машин и творческие способности человека.
Рассмотрим пример использования программы анализа в оперативном режиме.
Требуется разработать схему интегрального J—К-триггера на базе элементов
транзисторной логики со связанными эмиттерами ТЛЭС, т. е. переключателей
тока. Задача заключается в получении принципиальной схемы и номинальных
значений параметров пассивных компонентов при известных параметрах
транзисторов.
Первый этап решения поставленной задачи — разработка логической схемы
триггера. Поскольку здесь интерес представляют только вопросы использования
программ анализа принципиальных электрических схем, то, не рассматривая
подробно методики синтеза логи-
C=i
&
Иг
ъ
я
&.
ч<
X
"ппгР
Рис
7.5. Логическая схема J
гера на элементах ИЛИ -
- К-триг-
НЕ
ческой структуры и
принципиальной электрической схемы, приведем
результаты этого этапа. Так как
элементы ТЛЭС являются элементами
ИЛИ—НЕ, то логическая схема
триггера может быть получена в
виде, представленном на рис. 7.5.
В соответствии с логической
схемой синтезируется принципиальная
электрическая схема, изображенная
на рис. 7.6. В этих схемах можно
различить две бистабильные ячей- ■
ки. Одна из них, являющаяся^
основной, имеет выходы Qt и Qx и
характеризует состояние триггера,
а другая — вспомогательная биста-
бильная ячейка с выходами Q2 и
Q2 — управляет основной ячейкой.
При отсутствии на входе С тактового импульса, т. е. при С— О, состояние
основной ячейки противоположно состоянию вспомогательной, т. е. (?х = Q2. При
наличии тактового импульса, т. е. при С= 1, основная ячейка отключена от
вспомогательной, а сигналы на входах J и К могут воздействовать на
вспомогательную ячейку. Так, при С = Ь J = 1, К = 0, получается <?2 = 0 и после
снятия тактового импульса Qx = Q2 = 1. При С = 1, К = 1, / = 0 получается
(?2= 1 и впоследствии триггер будет в нулевом состоянии. Т. е. подача сигнала
только на один из входов («/ или К) приводит к установлению триггера или в
единичное (J = 1) или нулевое (К = I) состояние. Подача сигналов одновременно
на входы J и /С, т. е. / = К = С = 1, изменяет состояние вспомогательной
ячейки на противоположное, а после снятия тактового импульса
противоположным первоначальному будет и состояние основной ячейки.
Каждый элемент ИЛИ—НЕ в принципиальной схеме представляется схемой
элемента ТЛЭС, например элемент ИЛИ—НЕ с выходом Qx состоит из
транзисторов Т3, Т4, Т10 и Т8. В схеме на рис. 7.6 добавлен транзистор Г9, дающий схеме
ИЛИ—НЕ дополнительный вход для сброса триггера. В правом плече основной
ячейки в схеме установлен транзистор 7f2, дающий дополнительный вход
предварительной установки триггера.
Логическая функция И реализуется подключением входов схемы И к базам
последовательно включенных транзисторов, при этом ток в коллекторных цепях
потечет только при наличии высоких уровней на базах всех транзисторов. Так,
схема И, имеющая вход /, образуется транзисторами Г30, Т2д и Т21. При
последовательном включении транзисторов высокие уровни на базах, открывающие
транзисторы, не могут быть одинаковыми. Для согласования этих уровней служат
диоды, имеющиеся в схеме рис. 7.6, а также транзистор 7\ (рис. 7.8).
236
Ориентировочный расчет сопротивлений резисторов, исходящий из
требований обеспечения статических состояний триггера, несложен, поскольку при этом
можно не бояться ошибок. Допущенные здесь ошибки будут выявлены при
последующем машинном анализе и, следовательно, не приведут к серьезным
последствиям.
Рис. 7.6. Исходная принципиальная схема J—К-триггера
Итак, получен исходный вариант принципиальной схемы и выбраны исходные
номинальные значения сопротивлений. Теперь можно приступить к машинному
анализу исходного варианта.
Схема, изображенная на рис. 7.6, довольно сложная — в ней 25 транзисторов.
Поэтому ее анализ выполнялся с помощью программы ПА1. При этом зарисовали
сокращенную эквивалентную схему триггера и пронумеровали все ее узлы.
Далее на входном языке этой программы записали список-формуляр ветвей и
числовые массивы параметров компонентов, режимных параметров и параметров
входных импульсов для входов У, К и С. Бланки с записью исходных данных
237
t, НС
передали на перфорацию. После получения колоды перфокарт был выполнен
анализ переходного процесса в схеме на ЭВМ «М-222». Для этого потребовались
28 мин машинного времени. Часть полученных результатов анализа представлена
в виде зависимостей выходных напряжений от времени на рис. 7.7, а. На этом
же рисунке пунктирными линиями показана форма заданных импульсов на
входах.
Исходный вариант схемы оказался неудовлетворительным. Из рис. 7»7, а
видно, что основная ячейка не переключается. Причина этого — недостаточная
величина тока через резистор Ru после
снятия тактового импульса. После
уменьшения сопротивления этого
резистора новый вариант анализа дал
результаты, показанные на рис. 7.7, б.
Из рисунка видно, что обе ячейки
переключаются* но при этом еще
сильнее стала проявляться помеха,
накладывающаяся на низкий уровень
выходного напряжения при наличии
тактового импульса. Чтобы устранить эту
помеху, изменили принципиальную
схему — добавили транзисторы Т2, Т7,
Т15 и T1S (рис. 7.8). Кроме того, в
целях повышения быстродействия схемы
уменьшили номинальные значения
сопротивлений у большинства
резисторов. После соответствующих
изменений в исходных данных очередной
вариант анализа переходного процесса
дал результаты, показанные на рис.
7.7, в. Из рисунка видно, что низкий
уровень выходных напряжений стал
стабильным и уменьшилось время
переключения. Следовательно, вариант
принципиальной схемы, изображенной
на рис. 7.8, вполне приемлем.
Таким образом, программа одно-
вариантного анализа оказывает
неоценимую помощь инженеру при
проектировании ИС. В столь сложной
схеме, каковой является схема J—К-триг-
гера (рис. 7.8), ручными методами
невозможно даже приближенно
рассчитать длительности задержек и фронтов
и установить, переключается схема
или нет.
Экспериментальные методы
анализа также не могут заменить машинных
расчетных методов, особенно если речь идет об ИС Как показывает практика,
макетирование ИС с помощью дискретных компонентов даёт результаты, сильно
отличающиеся от имеющих место в действительности. Заметные различия между
выходными динамическими параметрами ^удут и при их измерении на реальной
ИС и на ее физическом макете, в котором используют набор интегральных
компонентов на отдельных кристаллах. Многократное же изготовление
экспериментальных вариантов ИС на единой подложке в процессе проектирования сильно
увеличивает материальные и временные затраты на разработку ИС. Сказанное
подтверждается, в частности, примером схемы переключателя тока, аналогичной
схеме, изображенной на рис. 8.15. Для этой схемы были получены зависимости
задержки распространения t3R.cp сигнала от емкости нагрузки Сн: 1)
экспериментально на физическом макете, собранном на тестовых интегральных
компонентах, 2) путем машинного анализа с помощью программы ПАЭС, 3)
экспериментально на самой ИС после ее изготовления. Эти зависимости представлены
2
в)
\5и
! i
!
Iе'
L
Ji__
[/^^
Xj—Л-^
-i'r=4l3_
цг
1, .1 1.
/?о
. /~Q\
S/
*\ Q9
—Ъ=0,
.1 . 1
40
Рис.
60
^80
100 t, не
7.7, Результаты анализа
J — К-триггера:
а — исходный вариант; б —
промежуточной вариант; в — окончательный вариант
238
на рис. 7.9, откуда видно, что машинный анализ дает более достоверные
результаты, чем макетирование при разработке ИС.
К приведенному выше примеру проектирования схемы J—К-триггера
необходимы следующие пояснения. Роль инженера, принимающего решения по
изменению значений параметров компонентов по результатам очередных вариантов,
Рис. 7.8. Окончательная принципиальная схема J — К-триггера
могла бы выполнять и программа оптимизации. Примеры использования
программы оптимизации даны в следующей главе. От инженера в этом случае
требуется принимать решения, только касающиеся изменений в конфигурации
принципиальной схемы не после очередного варианта анализа, а после серий
вариантов, являющихся шагами поиска экстремума. Однако для такого увеличения
степени автоматизации проектирования нужно: 1) иметь программу оптимизации,
применимую в данном конкретном случае, 2) располагать достаточным машинным
временем. Оптимальные значения параметров компонентов достигаются по
программе оптимизации после десятков — сотен вариантов анализа. Использование
239
ъзд.ср
программы одновариантного анализа в оперативном режиме взаимодействия
с ЭВМ хотя и не гарантирует получения оптимального результата, но может
дать приемлемое решение после меньшего количества вариантов.
Обычно после получения приемлемого варианта принципиальной схемы
требуется провести более тщательный анализ, для того чтобы выяснить,
удовлетворяются ли требования ТЗ в условиях воздействия дестабилизирующих
факторов и при учете разброса параметров компонентов. Рассмотрим пример
такого более тщательного анализа применительно к схеме триггера,
изображенной на рис. 7.10, которая характеризуется следующими выходными параметрами:
^зд.ф и ^зд.с — длительности задержек
фронта и спада; t<$ и tc — длительности
фронта и спада; Um вых — амплитуда
перепада напряжения на выходе; £/пор —
порог срабатывания, определяемый как
минимальная амплитуда UmBX входного
импульса, приводящая к опрокидыванию
триггера, при этом длительность фронта
входного импульса фиксирована.
Вначале с помощью программы ПАЭС
было исследовано влияние внешних
параметров на выходные параметры
схемы. Один вариант анализа переходного
процесса занял менее одной минуты
машинного времени. Результаты
исследования приведены в табл. 7.3. Здесь под
номинальным режимом понимают режим,
когда внешние параметры имеют
следующие значения: напряжения питания
Ек = — 10 В, £см = 10 В, частота
входных импульсов / = 0,5 МГц;
сопротивление и емкость нагрузки RH = 4,3 кОм, Сн = 200 пФ, амплитуда и длительность
фронта входного импульса UmBX — — 5 В и /фВХ==0,3 мкс, температура
окружающей среды f = 20 °С. Во всех строках таблицы, кроме первой, указаны те
значения внешних параметров, которые отличались от номинальных значений.
Проведенный анализ позволил установить, что технические требования к
выходным параметрам удовлетворяются при любых допустимых по ТЗ значениях
внешних параметров.
Таблица 7.3
ю\
6
1
1
ф
I- -1 1
^
J 1
#
*z
1 1 I
10 30 50 СН1пФ
Рис. 7.9. Зависимость задержки
распространения в схеме
переключателя тока от емкости нагрузки:
/ — макетирование; 2 — машинный
анализ; 3 — эксперимент
Условия анализа
Номинальный режим
/<200 кГц
Ек = — 11 В
£а.= Н В
сн = о
Лн = 1° м°м
Г= +70°С
t° = — 60 °с
* -., МКС
зд.ф»
0,20
0,12
0,20
1 0,21
! 0,18
0,16
0,18
0,24
'зд.с мкс
0,23
0,15
0,23
0,24
0,19
| 0,20
0,20
0,26
tfA, МКС
ф'
0,048
0,046
0,050
0,049
0,024
0,055
0,035
1 0,056
*с, мкс
0,33
0,33
0,27
0,36
0,15
0,28
0,32
I 0,34
^твых' В
7,54
7,59
8,28
7,50
7,55
9,13
7,47
7,52
пор»
3,07
1,93
3,15
3,36
2,83
2,51
2,94
3,48
Статистический анализ схемы для определения процента выхода годных
схем выполнялся также по программе ПАЭС, при этом предполагалось, что
резисторы имеют 10%-ный допуск на величину сопротивления. Поскольку внешние
параметры при статистическом анализе должны выбираться в соответствии с методом
наихудшего случая, то по данным табл. 7.3 нетрудно составить табл. 7.4 и в ней
указать, какими (максимальными или минимальными по ТЗ) должны быть
значения тех или иных внешних параметров в наихудшем режиме для каждого пара-
240
оВых
метра, кроме параметров £3д,ф и t3a,Cl для которых в ТЗ не были заданы
ограничения. На выходной параметр Unop Дано двустороннее ограничение, поэтому
в табл. 7.4 этот параметр заменен двумя —чувствительностью к запуску Unopl
и помехоустойчивостью [/пор 2- Очевидно, что наихудшие режимы для Unop х и
£Люр 2 различны.
Из табл. 7.3 и 7.4 видно, что наихудший режим 2 представляет наибольший
интерес, так как именно в этом режиме велика опасность получения заметного
процента брака.
Статистический анализ (ПО испытаний)
схемы триггера по методу
Монте — Карло в режиме 2
(см. табл. 7.4) позволил
получить гистограммы
выходных параметров, часть из
которых приведена на рис.
7.11.
Строгое определение
параметра [7пор требует при
каждом статистическом
испытании выполнения
нескольких вариантов
анализа переходных процессов
при разных амплитудах
входного импульса. Это
потребовало бы слишком много
машинного времени. В
данном случае удалось устано- рис> 7.10. Принципиальная схема низкочастот-
вить, что [/пор тесно связано ного триггера
с параметром t^. ф. Так, по
данным табл/ 7.3, можно
построить график зависимости £/пор от /Зд.ф и аппроксимировать эту
зависимость линейной функцией:
*/пор = 0.28-|-14,1*зд.ф.
(7.1)
где (/пор получается в вольтах, если t3R. ф выражено в микросекундах.
Формула (7.1) справедлива, если £3д.ф определяется при UmBX= —5 В
и £ф.вх = 0,3 мкс. Следовательно, гистограмма для £3д.ф> показанная на
рис. 7.11, б, может быть перестроена в гистограмму параметра Unop.
Результаты статистического анализа позволили сделать вывод, что
невыполнение технических требований возможно только для параметра tc (рис. 7.11, а),
и предсказать ожидаемый процент брака. Для снижения вероятности брака нужно
или увеличить значение технических требований для параметра tc, или выбрать
более жесткие допуски на те параметры пассивных компонентов, коэффициенты
влияния которых на параметр tc значительны по абсолютной величине. В качестве
коэффициентов влияния можно использовать относительные коэффициенты
регрессии, получаемые в процессе статистического анализа.
Таблица 7.4
. Выходные
параметры
'ф
к
^твх
^nopl
и ПОр2
Внешние параметры
|£к1
min
min
—
~
•Есм
max
max
max
min
t°
min
min
—
min
max
f
max
max
max
min
ф.вх
—
—
max
min
Ян
max
min
min
min
max
CH
max
max
max
max
min
Номер
наихудшего
режима
2
1
1
1
3
241
В случаях, когда по тем или иным причинам при проектировании схемы
не использовалась программа оптимизации, можно с помощью программы анализа
приближенно оценить, насколько близки полученные значения параметров
компонентов к оптимальным. Для этого нужно использовать такой вид многоваоиант-
а)
п
30
20
10
\\1~
б)
п
20
10
п
Jill
1 п
Ilk-
в)
П
30
20 V
10
IV
0,4-2 0,46 0,50 tc, мкс 0,230 0,246 0,262 Ьздф,мкс 36 52 ' 68 Ьф,НС
Рис. 7.11. Гистограммы выходных параметров триггера:
а _ условия работоспособности / < 0,5 мкс; б — условия работоспособности не
оговорены; в— условия работоспособности— *ф< 100 не
ного анализа, как граничные испытания. При граничных испытаниях выбираются
некоторые сечения пространства, координаты в котором — внешние параметры
и параметры компонентов. В этих сечениях с помощью машинного анализа
определяются по нескольким
5) точкам границы области ра-
/?к, к Ом ботоспособности, т. е. той
области, в которой
условия рабопоспособности
выполняются; в полученных
сечениях отмечаются точки,
соответствующие
номинальным значениям координат.
Если эти номинальные
точки оказываются в области
работоспособности близко к
центру сечений или во
всяком случае вдали от границ
области, то принятые
номинальные значения считаются
близкими к оптимальным.
В качестве примера
рассмотрим проведение анализа
по методу граничных
испытаний для схемы триггера,
изображенной на рис. 7.10.
Пусть выбрано сечение
пространства параметров
плоскостью, проходящей через
номинальную точку
параллельно координатной
плоскости RK, 0, Ек. Тогда,
чтобы получить в этом сечении границы области работоспособности, нужно
поступать следующим образом. ;
Задаемся шагом дискретизации по параметру Ек. Было принято решение
изменять Ек в пределах —8ч—12 В с шагом в 1 В. И при каждом значении Ек
выполнять несколько вариантов анализа, различающихся значениями параметра RK.
Здесь также можно задаться равномерным шагом дискретизации, но лучше
проводить анализ в оперативном режиме, задавая новое значение только после
Рис. 7.12. Сечения области работоспособности
триггера
242
получения результатов предыдущего варианта. В последнем случае, естественно,
можно сделать шаг дискретизации переменным, что ускорит приближение к
границам области работоспособности, определение которых и является целью анализа.
Именно в таком оперативном режиме и были получены графики, представленные
ur< п** т.
Рис. 7.13. Принципиальная схема ТТЛ
на рис. 7.12, где заштрихованы сечения области работоспособности схемы триггера
при выборе различных пар координат. Границы области устанавливались по
невыполнению условия работоспособности того выходного параметра,
обозначение которого проставлено на рисунках у соответствующей границы. На рис. 7.12, а,
в, г по оси абсцисс отложены значения
напряжения Ек, на рис. 7.12, б —
значения коэффициента усиления
транзисторов по току В, на рис. 7.12, в —
по оси ординат — значения
ускоряющих емкостей С. Точка А в этих
сечениях — номинальная точка. При
необходимости можно сделать
перевыбор номинальных значений
параметров компонентов. График на рис.
7.12, гчпозволяет оценить
максимальную частоту входных импульсов при
колебаниях Ек.
Следует отметить, что граничные
испытания, требуя выполнения
большого количества вариантов анализа,
не дают полной информации об
области работоспособности и не позволяют
с уверенностью указать оптимальные
значения параметров компонентов.
Поэтому от проведения граничных
испытаний машинными методами обычно
отказываются прежде всего в тех
случаях, когда возможно
использование программы оптимизации.
Машинные методы дают
возможность получать ценные результаты не
только применительно к конкретной
схеме, проектируемой в данный момент, но и к более или менее широкой
группе схем. В качестве примера рассмотрим результаты исследования
влияния геометрических размеров активных компонентов на быстродействие
микромощных интегральных схем ТТЛ [25]. Исследования проводились
применительно к схеме, изображенной на рис. 7.13, на рисунке дана не только
принципиальная схема ТТЛ, но указаны также паразитные емкости,
обусловливаемые изоляцией компонентов с помощью обратно смещенного р-п-
зд- р,нс
110
40
0,5
1,0
1,5 Р,мВт
Рис. 7.14. Результаты анализа схемы
ТТЛ с помощью программы ПАЭС
243
перехода, и схема на транзисторе Ть и диодах Д2> Д3, имитирующая
нагрузку. При заданной конфигурации транзистора на полупроводниковой
подложке геометрические размеры транзистора можно характеризовать одним
параметром — допуском на совмещение Я. Практически Я есть минимально
допустимое расстояние между двумя линиями на фотошаблонах. Между Я и
площадями переходов существует однозначная зависимость и, следовательно, зная
удельную емкость перехода для данной базовой технологии, можно определить
полные емкости переходов при любых Я.
Рис. 7.15. Принципиальная схема интегрального вентиля
Результаты, полученные с помощью программы ПАЭС, представлены на
рис. 7.14. Расчеты проводились при трех различных значениях Я: кривые /
получены при Я = 3,3 мкм, кривые 2 и 3 — при Я = 5 мкм и Я = 10 мкм
соответственно. Из рис. 7.14, а видно, как изменяется характер переходного
процесса в схеме при увеличении Я, а рис. 7.14, б показывает, что влияние Я на время
задержки распространения сигнала /Зд.р тем существеннее, чем меньше средняя
мощность рассеяния Р схемы. Эти
tsq.p * ис выводы справедливы по отношению
1 к размерам транзисторов Т2> Т3 и
/2 L Т± схемы ТТЛ. В то же время
емкость эмиттерного перехода СЭб
многоэмиттерного транзистора
иначе, влияет на быстродействие
схемы. Так, для схем с малыми Р при
их переключении импульсами с
крутыми фронтами увеличение
емкости СЭб приводит к
уменьшению t*n.n. Это можно объяснить
ИЛИ
50 100 150 в мВт
Рис. 7.16. Зависимость задержки
распространения от мощности рассеивания
в схеме вентиля
■зд.р-
тем, что с ростом Сэб
увеличивается ток перезаряда емкости С3 (см.
рис. 7.13) и быстрее включается
транзистор Т2.
Рассмотрим результаты
подробного исследования с помощью
программы ПАЭС интегрального
вентиля, схема которого показана на рис. 7.15. Анализировались номинальный
вариант схемы с Rx = 0,27 кОм, R2 = 0,3 кОм, R3— 1,2 кОм, /?4 = 2 кОм
и мощный вариант — Ri = 0,14 кОм, R2 = 0,155 кОм, R3 — 0,585 кОм,
#4 = 0,5 кОм. Основные этапы исследования и их результаты заключались
в следующем:
1. По рассчитанной передаточной характеристике были определены
статические выходные параметры и уровни выходных напряжений, соответствующие
полному переключению схемы нагрузки.
2. По рассчитанной формирующей характеристике *ф#вых = f (^ф.Вх) были
определены параметры входного испытательного импульса для последующего
машинного анализа. Был сделан вывод, что схема обладает хорошими
формирующими свойствами, так как варьирование длительностей фронтов входного
импульса в достаточно широких пределах мало сказывалось на длительностях
244
фронтов выходного импульса, вызывая, главным образом, изменение
длительностей задержек.
3. Расчет зависимостей длительностей задержек и фронтов от емкости
нагрузки Сн позволил установить, как меняется быстродействие схемы при
изменении коэффициента нагружения. С ростом Сн практически не меняются tl на
обоих выходах схемы. Значения ^ф близки к минимальным значениям 4,5 не на
выходе НЕ—ИЛИ и 2,2 не на выходе ИЛИ при Сн = 20 пФ, но при Сн = 100 пФ
они достигают соответственно 11 и 10,7 не. В мощном варианте влияние Сн на
быстродействие схемы менее заметно.
4. Варьирование числа входов, на которые подается переключающий
импульс, показало, что длительности задержек и фронтов на выходе НЕ—ИЛИ почти
линейно увеличиваются с ростом коэффициента объединения по входу, на
выходе ИЛИ практически не изменяются.
5. Получены зависимости задержки распространения £3д.р от мощности
рассеяния Р, показанные на рис. 7.16, для номинального варианта схемы при
Сн = 20 пФ и коэффициенте объединения по входу, равном трем. При малых Р
величины ^зд.р определяются в основном постоянными времени пассивных
компонентов, а при больших Р — постоянными времени транзисторов, что и обуслов.-
ливает характер зависимостей, изображенных на рис. 7.16.
ГЛАВА 8
ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ЭЛЕКТРОННЫХ СХЕМ
Оптимизация параметров занимает важное место в процессе
проектирования электронных схем. Действительно, анализ может
дать ответы на вопросы, насколько хороша схема, в какой мере
она удовлетворяет заданным техническим требованиям. При этом
схема должна быть уже известна, включая значения всех ее
параметров. Но как выбрать эти значения? Как их изменить, чтобы
добиться наилучшего удовлетворения требований ТЗ? Ответы
на эти вопросы получают в процессе оптимизации.
Значения параметров компонентов, полученные в результате
расчета, необязательно являются оптимальными. Многие
немашинные методики расчета преследуют цель так выбрать параметры
компонентов, чтобы выполнялись технические требования в
номинальном режиме или в наихудших случаях. Такие немашинные
методики имеют ряд недостатков. Отметим основные из них:
1. Для большинства схем точность расчетных формул хуже
желаемого уровня, несмотря на то что получение таких формул
представляет собой длительную и кропотливую работу, требующую
от инженера глубокого проникновения в сущность протекающих
в схеме процессов, умения давать сравнительную оценку различным
влияющим факторам для принятия неизбежных упрощений. Поэтому
требуется дальнейшая корректировка параметров в процессе
экспериментального анализа и, следовательно, остается открытым вопрос
о том, как изменять параметры компонентов.
2. Полученные результаты, как правило, не являются
оптимальными, поскольку ставится задача обеспечить лишь
выполнение технических требований, а не добиться максимальной степени
их выполнения. Кроме того, в немашинных расчетах часто
учитывают технические требования лишь на некоторые основные
выходные' параметры.
Таким образом, следует различать просто расчет значений
параметров компонентов и расчет оптимальных значений параметров
компонентов, который и является оптимизацией электронной схемы.
Постановка и решение задачи оптимизации электронной схемы
в достаточно общем случае стала возможной лишь в рамках
машинного проектирования.
Проблема оптимизации имеет два важнейших аспекта. Первый
из них заключается в формулировке критерия оптимальности.
Действительно, утверждение «объект оптимален» всегда требует
дополнения — с какой точки зрения, по какому критерию. Можно
по-разному формулировать цели расчета ив зависимости от этого
получать различные решения задачи оптимизации. Формулировку
.246
критерия оптимальности всегда производят исходя из конкретной
физической сущности задачи. Второй аспект проблемы заключается
в выборе методов и алгоритмов решения задачи оптимизации па
выбранному критерию.
§ 8.1. КРИТЕРИЙ ОПТИМИЗАЦИИ И ЦЕЛЕВАЯ ФУНКЦИЯ
Выясним, что является исходными данными и результатами
решения задачи оптимизации электронной схемы. Цель заключается
в создании схемы, наилучшим образом удовлетворяющей
требованиям ТЗ. Обычно эти требования предъявляются к выходным
параметрам схемы, называются техническими требованиями и
могут бытЬ представлены в виде вектора ТТ. В ТЗ указывают
также диапазоны возможных изменений внешних параметров,
в которых должны выполняться указанные технические требования.
Другими словами, схема должна быть такой, чтобы при любых
допустимых значениях внешних параметров выполнялись условия,
работоспособности, которые в зависимости от смысла выходного
параметра у;- могут иметь одну из следующих форм:
yj<TTj, (8.1)
yj>TTj, (8.2)
yj^TTjdzAyj. (8.3)
В отдельных случаях в ТЗ может задаваться желаемый вид
какой-либо характеристики схемы. Тогда вместо того или иного
tjj и соответствующего ему TTj имеют некоторое напряжение (ток)
схемы и соответствующую ему заданную функциональную
зависимость от какого-либо аргумента. Примером может служить
задание желаемого вида частотной характеристики усилителя или
фильтра. Однако указание в ТЗ желаемых характеристик нетипично
для переключательных схем, поэтому будем считать, что требования
к схеме выражены условиями (8.1) -г- (8.3), где TTj — конкретные
численные значения. Кроме того, при задании требований к схеме
в виде желаемых характеристик последние можно представить
как некоторую совокупность значений ординат при фиксированных
значениях аргумента и рассматривать эти ординаты как технические
требования, т. е. и в этом случае можно прийти к форме условий
работоспособности (8.1), (8.2) или (8.3).
Отсюда следует, что критерий оптимальности должен быть
связан с условиями работоспособности. Математическая
формулировка критерия оптимальности обычно представляет собой некоторую
функцию аргументов (называемых управляемыми параметрами)
такую, что она достигает экстремальных значений в оптимальных
ситуациях. Подобная функция дает количественную оценку
степени достижения поставленной цели и потому называется целевой
функцией F. При оптимизации электронных схем достигают
наибольшей степени выполнения условий работоспособности путем
варьирования параметров компонентов. Именно эти параметры
247
и будут управляемыми. Обычно к управляемым параметрам, вектор
которых обозначим W, относится лишь часть параметров
компонентов, поскольку другая часть оказывается известной. Так,
известны параметры транзисторов и диодов, если предварительно
выбраны их типы, а управляемыми параметрами при этом будут
сопротивления резисторов, емкости конденсаторов. Тогда решение
задачи оптимизации будет заключаться в определении вектора W *,
при котором целевая функция F (W) достигает экстремального
значения — максимума или минимума в зависимости от
конкретного смысла F. Область возможных значений параметров
компонентов обычно ограничена, так как не все значения W могут быть
реализованы в конкретных схемах. Например, сопротивления
и емкости не могут быть отрицательными, в ИС на эти параметры
должны быть наложены ограничения и сверху, поскольку большие
значения сопротивлений и емкостей ведут к росту площади,
занимаемой резистором или конденсатором на кристалле ИС.
Следовательно, экстремум целевой функции ищется в ограниченной области
пространства управляемых параметров.
Рассмотрим, как формулируется целевая функция F (W) в
задачах оптимизации электронных схем. Качественное определение
критерия оптимизации дадим как максимальную степень
выполнения заданных условий работоспособности. Пусть выбрана
количественная оценка степени выполнения каждого условия
работоспособности и для /гго условия обозначим эту оценку Sj. Будем
считать, что Sj тем больше, чем выше степень выполнения /-го
условия работрспособности, и Sj — величина безразмерная.
Формулирование целевой функции осложняется тем, что любая
электронная схема характеризуется не одним, а несколькими
выходными параметрами, имеющими различный физический смысл. По
этой причине задачу оптимизации электронной схемы часто
называют многокритериальной, имея в виду наличие нескольких
критериев Sj. Для таких многокритериальных задач чаще всего
целевую функцию образуют как некоторую функцию ср (S) вектора
оценок S, где S — функция управляемых параметров.
Наиболее простая формулировка ср (S) дается как сумма
оценок S/ с весовыми коэффициентами а,-:
т
4>(S)=2aA(W), (8.4)
где т — количество условий работоспособности.
Но использование целевой функции в виде (8.4) неудобно из-за
необходимости подбора весовых коэффициентов aj. На рис. 8.1
показаны кривые оценок sly s2 и s3, являющихся функциями одного
аргумента W, изображена также кривая ф (S), определяемая по
(8.4) при ах = #2 = а3 — 1. Максимум ф (S) достигается при wly
являющимся решением задачи. Но при этом степень выполнения
^третьего условия работоспособности крайне невысокая, поскольку
s3 имеет малое значение. На практике это может означать, что тех-
248
ническое требование к выходному параметру у3 не выполняется,,
хотя по отношению к уг получена высокая степень выполнения
условия работоспособности. Очевидно," что с физической точки
зрения параметр w1 не оптимален. Гораздо больше оснований
считать оптимальным значение параметра до2, так как ПРИ этом
достигается максимум самой худшей оценки Sj. В определенной
мере исправить положение можно было бы, задавая увеличенное
значение а3 в (8.4). Однако для правильного задания aj надо иметь
полную информацию о поведении Sj в пространстве управляемых
параметров. Получение такой информации — задача более сложная,,
чем решение самой оптимальной
задачи. Следовательно, объективное
задание весовых коэффициентов
практически невозможно и от
применения (8.4) нужно отказаться.
Использование иного вида
формульных зависимостей ср от S, чем
(8.4), в частных случаях может
привести к успеху. Для интегральных
логических схем часто применяют
следующую целевую функцию:
4 = Pt3JLJMJ,
Рис. 8.1. Функции оценок s7- и
(8.5) целевая функция (8.4)
где Р — мощность рассеяния схемы; 4д.Р — задержка
распространения сигнала; А(/пом — запас помехоустойчивости.
При оптимизации функция (8.5) минимизируется. Однако она
справедлива для ограниченного круга схем, поскольку в ней
учитываются лишь три выходных параметра и не отражены значения
технических требований.к выходным параметрам. Поэтому
оптимизация по (8.5) будет приводить к одним и тем же результатам вне
зависимости от того, требуется ли, например, высокое
быстродействие схемы или нет.
В программах оптимизации, предназначенных для расчета
широкого круга электронных схем, желательна реализация более
универсальной целевой функции, вид которой не изменяется при
переходе к оптимизации новой схемы. В этом случае отпадает
необходимость каждый раз заново формулировать целевую функцию.
Существование такой более универсальной целевой функции
вытекает из ранее рассмотренного примера (см. рис. 8.1). Этой
функцией является минимальная из оценок s;-:
F(W)= min sy(W),
/€=[l:m]
(8.6)
где /с [1 : m] означает, что значения / — числа натурального*
ряда в интервале [1, т]. Эту функцию будем называть функцией
минимума. При оптимизации схемы ищется такой вектор W *,
который обеспечивает максимум функции минимума в допусти-
249
мой области пространства управляемых параметров, т. е. .
F(W*)= max min s,(W). (8.7)
WeWA/e[l:m]
Другими словами, количественное выражение критерия
оптимальности дает возможность назвать его максиминным критерием.
В примере на рис. 8.1 использование максиминного критерия
даст решение задачи W * = w2. Пока отождествление этого
результата с оптимальным не вызывает возражений, но для
окончательных суждений необходимо конкретизировать понятие оценки S;-,
которая должна характеризовать степень выполнения /-го условия
работоспособности'. Учитывая, что параметры компонентов и, как
следствие, выходные параметры суть случайные величины, отметим,
что условия работоспособности для проектируемой схемы могут
выполняться не абсолютно, а лишь с тод или иной вероятностью.
Желательно, чтобы критерий оптимальности учитывал разброс
параметров. Отсюда непосредственно вытекает предложение
использовать в качестве вектора оценок S вектор вероятностей Р
выполнения условий работоспособности схемы. Однако внимательное
рассмотрение этого предложения заставляет отказаться от него
по следующим причинам:
1. Большая трудоемкость вычисления вектора Р. Действительно,
вектор Р определяется в процессе статистического анализа схемы
методом Монте — Карло, а, как показано в гл. 6, такой анализ
требует больших затрат машинного времени. При оптимизации
необходимо многократное вычисление целевой, функции, т. е.
многократный статистический анализ, что выполнять практически
нецелесообразно, а иногда и просто невозможно.
2. Нечувствительность целевой функции к изменениям
значений управляемых параметров в- некоторых подобластях
пространства Wfl. Как будет показано далее, вычислительные алгоритмы
задачи оптимизации требуют выполнения ряда последовательных
шагов поиска экстремума в пространстве управляемых параметров.
Для очередного шага, заключающегося в изменении управляемых
параметров, необходимо иметь те или иные сведения о направлении
шага' и достигнутом успехе в результате данного шага. Не
рассматривая вопрос выбора направления шага, отметим, что контроль
правильности выбираемого направления поиска осуществляется
путем сопоставления значений целевой функции до и после
очередного шага. Увеличение F свидетельствует о правильности
сделанного шага, если ищется максимум F. Поэтому в пределах области
\УД целевая функция должна меняться при переходе от одной точки
области к другой, т.' е. иметь отличную от нуля чувствительность
к изменениям управляемых параметров. Этому требованию функция
Р (W) удовлетворяет не во всей области \УД. Можно выделить
подобласти в области \УД, такие, в которых некоторые из
вычисленных вероятностей pj равны нулю или все вычисленные вероятности
Pj равны единице. Поэтому в этих подобластях исчезают ориентиры,
по которым можно вести поиск. Если исходная или две последова-
250
тельные промежуточные точки окажутся в этих подобластях, то
продолжение поиска невозможно. Поэтому надо искать другие
выражения для оценок Sj. Для большей краткости будем вести
рассмотрение применительно к условию работоспособности вида
(8.1), а в дальнейшем обобщим результаты и на случаи (8.2) и (8.3).
В качестве оценки степени выполнения условия (8.1) возьмем
разность TTj — у; ном, где у;- ном — номинальное значение /-го
выходного параметра. Далее эту оценку сделаем безразмерной
величиной для ее сопоставимости с оценками выполнения других
условий работоспособности.
Нормировку оценок часто производят путем деления на ТТ/
или умножения на некоторые весовые коэффициенты. Однако
в обоих случаях в постановке задачи сохраняется определенная»
доля субъективизма, кроме того, получаемое количественное
выражение критерия оптимальности не отражает случайного характера
параметров схемы. Более удачна нормировка оценок с учетом
разброса параметров:
Si = (TTj-yJu<M)/6j, {8.8)
где бу — величина, характеризующая разброс /-го выходного
параметра. Например, в частном случае нормального
распределения параметра yj под б;- можно понимать утроенное
среднеквадратичное отклонение. Тогда оценка (8.8) приобретает вполне
определенный смысл:" sj равно количеству трехсигмовых допусков на
/-й выходной параметр, укладывающихся в интервал lyJIi0m TTj\.
Указанное смысловое содержание оценки (8.8) соответствует целям
рассматриваемой задачи оптимизации электронной схемы. В самом
деле, необходимо было добиться максимальной вероятности
выполнения условий работоспособности и сделать ^сопоставимыми оценки
Sj разных выходных параметров. Максимизация минимальной из
оценок Sj повышает вероятность выполнения того из условий
работоспособности, которое характеризуется в данный момент
наименьшей вероятностью выполнения. В подобластях, где эта вероятность
практически равна нулю, движение происходит в направлении
подобластей, где эта вероятность будет увеличиваться. Равенство*
двух или более оценок Sj означает (при одинаковых законах
распределения выходных параметров) одинаковость вероятностей
выполнения соответствующих условий работоспособности, что
свидетельствует 6 сопоставимости оценок (8.8) разных выходных
параметров.
Однако, чтобы окончательно признать удачность выражения
(8.8) для оценки степени выполнения /-го условия
работоспособности, нужно ответить на следующие вопросы: 1. Как вычислять
(или задавать) величины бу? 2. Как быть с оценками s, в случае
условий работоспособности вида (8.2) и (8.3)?
1. Обычно вычисление 8^ осуществляют в процессе
статистического анализа схемы, но выполнение статистического анализа
методом Монте — Карло на каждом шаге поиска практически
невозможно. Преимущества оценки (8.8) по сравнению с вероят-
251
ностью выполнения /-го условия работоспособности заключаются
в том, что величина бу, как правило, более стабильна в пределах
области ШД, чем величина /?у, и, кроме того, бу может определяться
не только на основе вычисленных гистограмм выходных параметров.
Следствие первого из указанных преимуществ — возможность
расчета бу не на каждом шаге поиска, а следствие второго
преимущества — возможность определения бу не только по методу Монте —
Карло, но и с помощью менее трудоемкого метода наихудшего
случая. При этом бу определяется как допуск /-го выходного
параметра в наихудшем случае. Все это резко снижает затраты
машинного времени.
Определение Sj в виде (8.8) оставляет также инженеру широкие
возможности для компромиссного выбора между трудоемкостью
и точностью вычислений. В одном крайнем Случае можно вообще
отказаться от статистического анализа схемы в процессе
оптимизации, задавая величины бу как исходные данные на основе
априорных представлений о разбросе выходных параметров. Тогда
величины бу становятся весовыми коэффициентами, однако в
рамках рассматриваемого подхода этим весовым коэффициентам
придан определенный физический смысл, что существенно помогает
инженеру при задании численных значений бу. Если в
распоряжении инженера имеется программа оптимизации с встроенной в нее
программой статистического анализа, то инженер может принять
решение о выполнении на некоторых шагах оптимизации
статистического анализа (или методом Монте — Карло, или методом
наихудшего случая) для корректировки значений бу. Одно из
целесообразных построений вычислительной процедуры —
предварительное задание значений бу как исходных данных, поиск максимума
целевой функции при бу = const, выполнение статистического
анализа с целью определения реальных бЛ сопоставление заданных
и рассчитанных б/ и при высокой степени их расхождения
повторение процедуры оптимизации со скорректированными б/ из точки,
достигнутой на первом этапе оптимизации.
2. Изменим (8.8) с целью расширения возможностей программ
оптимизации, в которых используется максиминный критерий.
При использовании прежнего выражения (8.8) алгоритм
оптимизации приведет к максимальному увеличению минимальной оценки
вне зависимости от того, какому выходному параметру
соответствует минимальная оценка. На практике часто встречаются схемы,
выходные параметры которых целесообразно разделить на две
группы. К первой группе относят параметры, для которых
желательно получение максимально возможных оценок Sj. Для этих
параметров не всегда можно заранее указать окончательные
значения технических требований. Ко второй группе относят
выходные параметры, для которых можно указать достаточно точные
значения TTf и, как следствие, при оптимизации необходимо достичь
выполнения этих технических требований и в то же время не
обязательно стремиться к их перевыполнению. Примеры параметров
первой и второй групп будут даны в § 8.6.
252
Учесть наличие выходных параметров указанных двух групп
можно следующим изменением выражения (8.8):
г, = af [(TTj-0,но-)/6у - П, (8.9)
где aj — вспомогательный коэффициент, z;- — запас /-го выходного
параметра (запас работоспособности).
Отнесение /-го выходного параметра к первой группе
соответствует заданию aj = 1, а ко второй группе aj ^> 1, причем
практически а,; выбирают в интервале [5, 501. Влияние о/ на величину
запаса проявляется следующим образом. Отметим, что zj = 0
при у/Ном = TTj — бу, т. е. при нахождении номинального
значения выходного параметра в области работоспособности с
отстоянием от границы этой области точно на величину бу. zj > 0, если
заданное значение TTj перевыполняется больше чем на величину
б/, если TTj не выполняется с допуском бу, то Zj < 0. Тогда большие
значения щ способствуют тому, что при з,- <С 0 минимальным, как
правило, будет запас какого-либо параметра второй группы. Тем
самым в первую очередь обеспечивается выполнение технических
требований на параметры второй группы. Действительно, из (8.9)
У] ном = TTj — 6/(1 + Zj/dj) И ПрИ бОЛЬШИХ Яу
yf*o*^TTj-6j, ' (8.10)
что и требуется получить. При Zj > 0 минимальным, как правило,
будет запас какого-либо параметра первой группы. Тем самым
алгоритм приведет к максимально возможному улучшению
параметров первой группы, а значения параметров второй группы
окажутся по-прежнему вблизи значений, определяемых (8.10).
Любые отличия в формуле запасов для параметров с условиями
работоспособности вида (8.2) и (8.3) от (8.9) нежелательны,
поскольку это усложнит подготовку исходной информации для
решения задачи на ЭВМ. Целесообразнее изменить сами условия (8.2)
и (8.3), приведя их к виду (8.1). В случае (8.2) это осуществляется
простым изменением знаков у параметра */уном и соответствующего
ему TTj. В случае (8.3) нетрудно перейти к неравенствам
yj<TTj + byj; \
Ъ<-ТТ/ + Ау„) (8Л1)
имеющим вид (8.1). Каждому параметру с условием
работоспособности (8.3) будут теперь соответствовать два запаса. Примеры
задания значений 7Ту, бу и о,- для различных по своему смыслу
выходных параметров даны в § 8.6.
Рассмотрим другие варианты выбора целевой функции,
применяемые иногда на практике. В одном из вариантов в качестве
целевой функции выбирают зависимость одного наиболее важного
выходного параметра от параметров компонентов, входящих в вектор W.
Условия работоспособности всех остальных выходных параметров
рассматривают как ограничения задачи. При решении задачи в такой
постановке вначале должны быть удовлетворены все ограничения
253
(конечно, если множество решений, где выполняются условия
работоспособности, не пустое), а затем производят максимизацию или
минимизацию целевой функции. Недостаток такой постановки
оптимальной задачи — в необходимости выделения только одного,
наиболее важного, выходного параметра. Подобная постановка
входит как частный случай в рамки задачи с максиминным
критерием: к первой группе выходных параметров, для которых в (8.9)
dj = 1, относится один наиболее важный выходной параметр, а все
остальные параметры относятся ко второй группе, для которых
Другой вариант удобен в случаях, когда по ТЗ требуется
обеспечить Определенный вид переходной характеристики схемы.
Здесь- переходная характеристика задается в виде идеального
перепада напряжения и, следовательно, оптимизация должна привести
к получению схемы с максимальным быстродействием. В этом
варианте образуется нормированная разность желаемой и достигнутой
переходных характеристик h (t) и должен минимизироваться опре-
т
деленный интеграл вида / = $А (0 dt, где Т больше длительности
о
переключения схемы.
§ 8.2. ОБЩИЕ СВЕДЕНИЯ О МЕТОДАХ ПОИСКА ЭКСТРЕМУМА
ЦЕЛЕВОЙ ФУНКЦИИ
Для решения экстремальных задач в настоящее время
разработано большое количество методов, появились самостоятельные
математические дисциплины, призванные удовлетворить
практические потребности в постановке и решении эТих задач. Так, наряду
с методами исследования функций на экстремум,
существовавшими в классическом анализе и применяемыми при аналитическом
задании исследуемых функций, и с вариационным исчислением,
используемым при нахождении экстремумов функционалов в виде
определенных интегралов, появилось линейное, нелинейное,
динамическое программирование и др. Столь пристальное внимание и
интерес, проявляемый к экстремальным задачам, объясняется как их
практической важностью, так и значительными трудностями,
встречающимися при решении многих из них. В настоящее время нет
методов настолько универсальных, что их применение к любой
экстремальной задаче заведомо приведет к решению с приемлемой
точностью и приемлемыми затратами машинного времени. Поэтому
выбор метода поиска экстремума подразумевает предварительное
исследование характера целевой функции и ограничений, если
таковые имеются. Подобное исследование поможет дать наиболее
подходящий для данных условий метод оптимизации.
Задача выбора метода оптимизации параметров электронных
схем должна решаться с учетом особенностей применяемых целевых
функций. Ранее были рассмотрены возможные целевые функции
и в результате установлено, что одна из наиболее универсальных
254
и соответствующих физической сущности задач оптимизации
параметров электронных схем — функция минимума. Поэтому основное
внимание далее обращается на изучение особенностей функций
минимума и выбор метода поиска их экстремумов.
Область работоспособности. Поясним ряд понятий,
используемых при описании методов поиска экстремума. Пространством
управляемых параметров WF1 называется множество точек (векторов)
W£ WIT, таких, что W = (wu w2, ..., wn), где п — количество
управляемых параметров; i = 1, 2, ..., /г, wt — i-я координата
пространства.
Величину п называют размерностью пространства
управляемых параметров. Это пространство /г-мерное евклидово, т. е.
в нем расстояние между двумя любыми точками А = (ах, а2, ..., ап)
и В = (bl9 b2J ..., bn) определяется по формуле р/(А—Я) =
В пространстве Wn можно выделить область определения
целевой функции, т. е. подмножество точек множества WI1, для которых
определено выражение целевой функции F (W). Например, для
целевых функций, имеющих в правой части выражения типа Yf (W),
областью определения будет подмножество точек WOczWn, в
которых выполняется условие / (W) ^ 0. В дальнейшем, •если нет
специальных оговорок, не будем делать различий между
множествами Wn и WO, т. е. будем считать, что области определения упо:
минаемых функций совпадают с множеством WI1. В пространстве
WF1 можно выделить также область, в которой выполняются все
имеющиеся ограничения и все заданные условия
работоспособности. Такую область называют областью работоспособности.
При учете разброса параметров требуется уточнить понятие области
работоспособности, а именно к ней будем относить
подмножество точек пространства управляемых параметров, в которых
min, 2/^=0. Обозначим область работоспособности WP.
/€=[l:m]
Тогда приведенное выше определение области работоспособности
можно записать в лаконичной форме:
WP = |W| min z,(W)^0, <£K(W)^0, Л e= [1 : p]l,
1 l/e[l:m] j
где Фк (W) ^ 0 — k-e ограничение; p — количество
ограничений.
Линий равного уровня. Как правило, функции запасов (8.9) —
однозначные функции своих аргументов и поэтому каждой точке
области определения соответствует одно определенное значение
каждого запаса работоспособности и, следовательно, одно значение
целевой функции. Множества значений sf и F (W) = min s,-
/€=[l:m]
называют при п = 2 поверхностями, а при п ^> 2 —
гиперповерхностями отклика запасов работоспособности и целевой функции.
При изложении вопросов, связанных с поиском экстремума, полезно
255
использовать графическое изображение поверхностей отклика и
траектории движения от исходной точки к экстремальной в
пространстве управляемых параметров, получающейся в результате
ряда последовательных шагов поиска. Однако графические
иллюстрации подобного рода возможны лишь при п ^ 2. При этом
поверхность отклика какой-либо функции изображают в виде совокупности
линий равного уровня. Линия равного уровня — множество точек
пространства WI1, в которых рассматриваемая функция имеет
одинаковые значения, равные заданной величине. Например, на
рис. 8.2 изображены линии равного уровня некоторой целевой
функции F, соответствующие значениям F = Fly F2i F3j F4.
При n = 3 линии равного уровня становятся поверхностями,
а при п > 3 — гиперповерхностями равного уровня.
Графическое изображение линий равного уровня возможно и при п > 2,
если использовать сечения я-мерного пространства двумерной
плоскостью. Линии равного уровня получают при
ъг91 [1 г. этом как линии пересечения
гиперповерхностей равного уровня и двумерной плоскости.
Типы экстремумов. Необходимые условия
экстремума функции F (W) формулируются
как равенства нулю ее частных производных
первого порядка по всем аргументам:
щ dFldw1 = dF/dw2 = ... = dF/dwn = 0. (8.12)
Рис. 8.2. Линии рав- Точки пространства WI1, в которых вы-
ного уровня полняются необходимые условия экстремума,
называют стационарными точками.
Стационарная точка W * будет экстремальной, если можно указать такое
число е > 0, что в 8-окрестности стационарной точки везде AF =
= F (W) — F (W *) имеет одинаковый знак, за исключением самой
точки W *, где AF = 0. е-окрестность точки W* обозначается
S& (W *) и определяется следующим образом: 58 (W *) =
= {W | [W — W *1 < е}. При этом если в е-окрестности AF > 0,
то W * — точка минимума, а при AF < 0 — точка максимума.
Функции, имеющие максимум (минимум) в единственной точке
пространства WI1, называют одноэкстремальными или
унимодальными, в противном случае имеем многоэкстремальную или мульти-
модальную функцию. В случае многоэкстремальных функций
используют понятия глобального и локальных экстремумов, причем
точкой глобального максимума будет такая экстремальная точка,
в которой целевая функция имеет большее значение, чем,в точках
всех остальных максимумов. Аналогично определяют глобальный
и локальный минимумы.
Поиск глобального экстремума — значительно более сложная
задача, чем поиск какого-либо из локальных экстремумов.
Поскольку при проектировании схем, как и в большинстве других
практических задач, желательно найти именно глобальный экстремум,
то одно- или многоэкстремальность целевой функции — важная
ее характеристика, влияющая на выбор метода и алгоритма поиска
256
FfFfF^
экстремума и во многом определяющая успех решения задачи
оптимизации.
Задачи поиска экстремума во всей области WI1, т. е. при
отсутствии ограничений, называют задачами безусловной оптимизации,
а найденные при этом экстремумы — безусловными, В
практических задачах область поиска ограничена, найденное экстремальное
значение целевой функции при наличии ограничений может не
совпадать с ее безусловным экстремумом. В этих условиях говорят
о задачах условной оптимизации
и об условных экстремумах.
Гребни целевой функции.
Важным свойством целевых функций
является наличие или отсутствие
гребней (оврагов) на их
гиперповерхностях отклика. Наличие
гребней при максимизации (или
оврагов при минимизации)
целевой функции может значительно
затруднить поиск, сделать его
неэффективным. О наличии гребней
на поверхности отклика функции
или просто гребней функции
говорят в случаях функций,
подобных той, что изображена с
помощью линий равного уровня
на рис. 8.3, где пунктирная линия — линия гребня.
Направление, касательное к линии гребня, обозначим gx, а направление,
совпадающее с нормалью к линии гребня, —g2. Определим
производную функции F (W) по направлению g в точке Wa:
dF (Wa)/3g = lim {[F (We - ag) - F (We)]/a}; (8.13)
где g — единичный вектор, т. e. [g] = 1.
Если предел (8.13) конечный, то функцию F (W) называют
дифференцируемой в точке Wa по направлению g. Эта производная
связана с частными производными функции F по параметрам Wt
соотношением
Рис. 8.3. Линии равного уровня
и гребень целевой функции
3/73g=2 (dF/dwt)gl,
(8.14)
где gi — проекции единичного вектора g на координатные оси.
Отметим следующие отличительные признаки гребня: изменение
знака производной функции по направлению^ и малое по
абсолютной величине значение производной по направлению gx по
сравнению со значениями производной вдоль направления g2 на
склонах гребня. В общем случае n-мерного пространства признак
гребня — одновременное наличие направлений, вдоль которых
функция меняется сильно и производная функции меняет свой
знак, и направлений, вдоль которых функция меняется слабо.
257
Требования к методам поиска экстремума. Применение методов
поисковой оптимизации при машинном проектировании
электронных схем объясняется отсутствием аналитического задания целевой
функции. Действительно, вид функции F (W) неизвестен и
значение этой функции в какой-либо точке Wa может быть вычислено
только через посредство решения системы дифференциальных и
алгебраических уравнений, составляющих математическую модель
схемы. Следовательно, методы классического анализа для
исследования функции F (W) на экстремум неприменимы и необходимо
выполнение серии шагов поиска. Оптимизация начинается в
условиях, когда выбрана некоторая исходная точка в пространстве
управляемых параметров. Выбор этой точки может быть
результатом прикидочного расчета схемы вручную по тем или иным
приближенным формулам. Исходная точка может быть задана и
произвольно с учетом лишь ограничений, накладываемых на параметры
компонентов. В этой точке W1 вычисляется значение целевой
функции F (W1)'. Шаг поиска заключается в задании некоторых
приращений tswt управляемым параметрам, в результате из точки W1
приходим в некоторую точку W2 = {хю\г + Дм>1, wl2 + Доу2, ...,
..., wln + Awn).
Правила выбора приращений tSwt составляют основу стратегии
поиска и оказываются различными в разных методах поиска
экстремума. В точке W2 также вычисляется значение целевой функции
F (W2). Если F (W2) больше, чем F (W1), то сделанный шаг
улучшает схему и можно считать, что выбран путь к искомому
максимуму (точка W2 принимается, т. е. очередной шаг поиска будет
сделан уже из точки W2, и т. д.).
К методу поиска экстремума предъявляют следующие
требования:
1. Траектория поиска должна заканчиваться в заданной е-ок-
рестности экстремальной точки Se (W *), т. е. метод должен
обеспечивать нахождение экстремума с заданной точностью.
2. Затраты машинного времени на поиск экстремума при
выполнении первого требования должны быть минимальными.
Затраты машинного времени Гм при решении задачи
оптимизации параметров электронной схемы прямо пропорциональны
количеству шагов поиска пх и количеству обращений к процедуре
решения уравнений ММС на одном шаге поиска п2. Произведение
ппт = пхп2 называют потерями на поиск. Итак, должен быть выбран
метод поиска экстремума, который обеспечивает решение задачи
с заданной точностью при минимальных потерях на поиск. Такому
выбору должно предшествовать исследование особенностей целевой
функции.
Особенности функции минимума. Обозначим функцию
минимального запаса работоспособности Z0:
Z0(W)= min z,(W). (8.15)
/€=[l;m]
Выходные параметры электронных схем являются
непрерывными и дифференцируемыми функциями параметров компонен-
258
тов во всей области их определения по всем направлениям. Отсюда
следует, что и запасы Zj — также непрерывные и
дифференцируемые функции, поскольку в процессе поиска обычно принимают
8,- = const. Гиперповерхность отклика функции Z0 имеет ярко
выраженный гребневой характер. Гребни Z0 легко обнаружить.
Так, на рис. 8.4, а показаны
линии равного уровня трех
запасов работоспособности гъ
z2 и z3, являющихся
функциями аргументов wx и до2, т- е-
рассматривается двумерное
пространство управляемых
параметров. Очевидно, что
гребни функции Z0 — линии
пересечения поверхностей
отклика запасов
работоспособности. Будем обозначать
линию гребня, образовавшуюся
вследствие пересечения
поверхностей отклика запасов
zt и 2j9 в виде Г (zh zj).
Однако не любую линию
пересечения и не любой ее участок
следует относить к гребню.
Не оговаривая пока всех
условий принадлежности
участка линии пересечения s* и sj
к гребню, отметим лишь, что
к Г (zb zj) относятся только
участки, где zt имеет
минимальные значения среди
значений вцех запасов, не считая z,, поскольку zt = Zj. На рис. 8.4, а
последовательностями точек показаны гребни целевой функции
Г (zu z2), Г (zlf z3) и Г (z2, z3).
Рассмотрим подробнее линию Г (zlf z3). Слева от этой линии, т. е.
на левом склоне гребня, минимальные значения имеет функция zl9
следовательно, Z0 = zx\ на правом склоне гребня Z0 = z3. Линия
гребня «повышается» в направлении снизу вверх рисунка и в
точке Э, имеем «вершину горы» — максимум функции Z0. Здесь
пересекаются линии всех трех гребней. Если продолжить линию
z-l = z3 выше точки Э, то это продолжение уже не составляет
гребешь, поскольку точки линии zx = z3 не буДут принадлежать
поверхности отклика целевой функции Z0. Поверхность отклика Z0 выше
точки Э образуется поверхностью отклика запаса z2.
Еще более отчетливо гребни поверхности отклика функции Z0
можно показать с помощью рисунков, подобных рис. 8.4, б.
Добавим к пространству управляемых параметров координату запасов z,
назовем это пространство расширенным и произведем его сечение
некоторой плоскостью, параллельной осям координат z и w± и про-
Рис. 8.4. Иллюстрация гребней функции
минимума
259
ходящей через точку Ах (рис. 8.4, а). Результат такого сечения и
показан на рис. 8.4, б. Теперь хорошо видно, что при w1 < А2
имеем Z0 = ги при wL > Л2 имеем Z0 = z3, а в точке гребня гх =
= z3. Сечения, аналогичные сечению, изображенному на рис. 8.4, б,
могут быть выполнены и в общем случае n-мерного пространства
управляемых параметров, что существенно облегчает рассмотрение
процесса поиска максимума функции Z0.
Приведенное выше определение гребня в общем случае и в
случае функции минимума Z0 не претендует на какую-либо строгость.
Уточнение понятия гребня целесообразно сделать после
рассмотрения тех вычислительных трудностей, которые вызывает наличие
гребней на гиперповерхностях отклика целевых функций. В
настоящий же момент достаточно сделанных качественных пояснений
понятия гребня.
Не зная заранее характера функций запасов zf (W), невозможно
предсказать унимодальность или многоэкстремальность функции
Z0. По этому поводу можно сделать лишь следующие
замечания:
1. Можно показать [13], что достаточным условием
унимодальности функции минимума является вогнутость функций запасов
Zj (W). Однако знание этого условия не помогает на практике,
поскольку проектировщик схемы не может установить, являются
ли функции Zj (W) вогнутыми.
2. Практика решения задач оптимизации переключательных
электронных схем по максиминному критерию показывает, что
случаи многоэкстремальных - функций Z0 довольно редки. Поэтому
алгоритмы оптимизации по максиминному критерию допустимо
разрабатывать как алгоритмы поиска локального максимума Z0,
который с большой вероятностью окажется и глобальным
максимумом.
§ 8.3. ОБЗОР МЕТОДОВ ПОИСКА ЭКСТРЕМУМА
Задачу оптимизации параметров электронной схемы по
максиминному критерию формулируют следующим образом: необходимо
найти вектор W * такой, что
Z0(W*)= max min z,(W),
WGWfl/e[l:m]
где область ШД определяется системой неравенств:
WHi^Wi^WBh (8.16)
i = 1, 2, ..., п\ WHt и WBt — соответственно минимально и
максимально допустимые значения i-vo управляемого параметра; z
определяется по (8.9); т — количество условий работоспособности
приведенных к виду (8.1).
260
Ранее было показано, что в ряде случаев формулировка задачи
может быть и иной: требуется найти вектор W * такой, что
F(W*)= max F (Щ или F(W*)= min F(W), (8.17)
w e \уд we wa
где область \¥Д определяется ограничениями:
MW)^0, (8.18)
где /г = 1, 2, ..., р (р — количество ограничений).
Среди ограничений возможны ограничения типа равенств:
/K(W) = 0, (8.19)
При этом функции zj (W), F (W) и fK (W) — в общем случае
нелинейные функции своих аргументов и отсутствует их
аналитическое представление.
Методы решения задач, сформулированных подобным образом,
составляют предмет нелинейного программирования.
Методы нелинейного программирования делят на методы
нулевого, первого и второго порядка в зависимости от того, какая
информация используется для определения направления поиска.
В методах нулевого порядка не требуется вычисление производных
целевой функции по управляемым параметрам. В методах первого
и второго порядков нужно вычислять соответственно первые и
вторые производные. Наиболее известные методы нулевого
порядка — методы Гаусса — Зайделя, Розенброка и случайного поиска,
методы первого порядка — методы градиента, наискорейшего спуска,
сопряженных градиентов и проекции вектора градиента, методы
второго порядка — разновидности метода Ньютона. Все эти методы,
за исключением метода проекции вектора градиента, разработаны
как методы безусловной оптимизации. Их применение в задачах
с ограничениями становится возможным после сведения задач
условной оптимизации к задачам безусловной оптимизации. Для
такого преобразования задач применяют методы штрафных функций.
Сущность любого метода оптимизации определяется прежде
всего идеями, на основе которых выбирается направление поиска
на очередном шаге. Кроме того, при алгоритмической реализации
методов важное значение имеют вопросы выбора величины шага и
определения ситуации, в которой достигнута достаточно малая
окрестность экстремальной точки-и, следовательно, поиск нужно
прекращать.
Рассмотрим вначале методы с наиболее очевидным идейным
содержанием, к которым относятся методы градиента,
наискорейшего спуска, релаксации, Гаусса — Зайделя, случайные и Ньютона.
Метод градиента. В этом методе шаги поиска осуществляются
в направлении наибольшего возрастания целевой функции, т. е.в
направлении вектора градиента. Градиент функции F (W) есть вектор
gradF (W) = (dF/dwl9 dF/dw2l ..., dF/dwn), * (8.20)
* Функция минимума Z0 (W) не дифференцируема в точках гребня. При
применении методов первого и второго порядков для поиска ее максимума
необходимо в качестве производных функции минимума использовать производные
одного из запасов z;(W), образовавших гребень.
261
где dFldwi — проекция вектора градиента на i-ю координатную
ось.
Частные производные в (8.20) — размерные величины, что
делает неопределенным' сравнение величины производных при их
неодинаковой размерности. Выше рассматривался вопрос о
нормировке целевых функций, поэтому значения F (W) будем считать
безразмерными. Нормировку частных производных в (8.20)
наиболее часто выполняют умножением dFldw'i на wly тогда имеем
bi=-0—Wi и вместо (8.20) получаем
gradF(W) = B = (6lf 62, .... Ья).
(8.21)
Стратегия поиска при градиентном методе заключается в
определении вектора (8.21) в точке \УЛ, получающейся как результат
k шагов поиска и в выполнении очередного (k + 1)-го шага.
Значения управляемых параметров для (k + 1)-й точки при этом
определяются по формуле
witk+1 = witk + h\bitk
®t,k,
(8.22)
где h — величина шага; i = 1, 2, ..., п.
На рис. 8.5 дан пример двумерного пространства с
определенной в нем целевой функцией F (W), показанной на рисунке в виде
линий равного уровня. Там же
дана траектория поиска,
получающаяся при использовании
метода градиента. Для лучшего
понимания особенностей
рассматриваемых методов при
графических иллюстрациях будем
считать, что переменные wt
являются безразмерными и не
требуется их нормировка. Тогда
легко пояснить, как получается
траектория градиентного поиска
на рис. 8.5: вектор градиента
направлен по нормали к линии
равного уровня в каждой точке
W*, поэтому, выбрав некоторую
величину шага /г, из исходной
точки ИТ последовательно попадаем в точки /, 2, 3 и т. д.,
расположенные на траектории градиентного поиска (на рис. 8.5
сплошная линия). После десятого шага поиск приводит в
окрестности экстремальной точки Э. Дальнейший поиск при той же
величине шага h приведет к «рысканию» вблизи точки Э.
Из примера видно, что необходимо иметь критерий прекращения
поиска и что от величины шага зависит вид траектории. Причем
уменьшение h способствует попаданию в е-окрестность точки Э
Рис. 8.5. Траектории поиска методом
градиента (сплошная линия) и
методом наискорейшего спуска
(пунктирная линия)
262
при меньших е, но при этом увеличивается количество шагов, т. е.
растут потери на поиск. Чтобы повысить точность решения без
заметного увеличения количества шагов, обычно применяют
стратегию поиска с переменным шагом h.
Один из возможных алгоритмов изменения h и определения
момента прекращения поиска заключается в следующем. Поиск
происходит с некоторым постоянным первоначально заданным h
до тех пор, пока выполняется условие F (\У/г+1) > F (W*). При
невыполнении этого условия величина шага делится пополам и
поиск возобновляется. Вычисления продолжаются до тех пор,
пока в результате ряда делений величины шага пополам не
выполнится условие h < /*min, где hm-m — заданное минимальное
значение шага.
Метод градиента является методом поиска локального
экстремума. Если гиперповерхность отклика целевой функции не имеет
гребневого характера, то для метода характерно малое количество
шагов поиска пъ так как все шаги производятся в направлении
наибольшего возрастания целевой функции. Однако цена каждого
шага довольно велика. Действительно, для определения
направления поиска здесь в каждой точке W^, необходимо вычислять частные
производные dF/dwh т. е. выполнять анализ чувствительности
целевой функции к изменениям управляемых параметров. Поскольку
количество таких параметров п, то на каждом шаге необходимо
п + 1 раз решать уравнения ММС, т. е. п2 = п + 1. Общие потери
на поиск япт = пх (п + 1).
Метод наискорейшего спуска. Стремление уменьшить объем
вычислений на одном шаге привело к появлению метода
наискорейшего спуска. Стратегия поиска в этом методе близка к
стратегии поиска градиентного метода. Отличия заключаются в том, что
анализ чувствительности с целью определения градиентного
направления выполняется не на всех шагах поиска, а лишь в исходной
точке и в тех точках Wb в которых значения целевой функции
меньше, чем в предыдущих точках V/k-i- Это означает, что (k +
+ 1)-й шаг по-прежнему выполняется по (8.22), но при этом
используется вектор градиента В, определенный не обязательно в точке
W/,, а возможно, в некоторой более ранней точке траектории.
На рис. 8.5 траектория поиска по методу наискорейшего спуска
из исходной точки ИТс шагом h показана пунктирной линией.
Из рисунка видно, что количество шагов пг возросло по сравнению
с количеством шагов п± градиентного метода. Средняя величина
п2 уменьшается и тем заметнее, чем больше размерность п задачи.
Метод релаксации и метод Гаусса — Зайделя. При
использовании метода релаксации траектория поиска представляет собой
ломаную линию, отрезки которой параллельны осям координат.
В исходной точке выполняется анализ чувствительности и
направление движения выбирается вдоль той координатной оси wh по
которой частная производная максимальна по абсолютной величине.
(k + 1)-й шаг заключается в задании приращения /Swt только
одному 1-му управляемому параметру, причем Awt = h sign (dF/dWf).
263
Движение вдоль оси wt продолжается до тех пор, пока наблюдается
рост целевой функции. В противном случае вновь вычисляются
частные производные F по всем переменным wh кроме wh
выбирается направление движения вдоль оси, по которой вычисленная
производная максимальна по абсолютной величине, и т. д.
Разновидность релаксационного метода — метод Гаусса — Зай-
деля, в котором отказываются от анализа чувствительности ради
уменьшения п2 и выбор очередности осей, вдоль которых
происходит движение, произволен.
Методы случайного поиска. Рассмотренные выше методы
относятся к детерминированным, так как их характерная особенность —
одинаковость траектории поиска при любых повторениях решения
с теми же исходными данными. В противоположность
детерминированному поиску в методах случайного поиска исходные данные
не предопределяют траекторию движения в пространстве WF1.
Основная идея метода случайного поиска — направление поиска
в каждой промежуточной точке траектории определяется случайно.
Пусть в ЭВМ программным путем можно вырабатывать
псевдослучайные числа аь равномерно распределенные в интервале
[—1, +1]. Будем рассматривать совокупность п чисел et как вектор
Е = (еъ е2, ..., еп), где п — размерность пространства управляемых
параметров; et = at- / 1 / ^] а|. В этих условиях вектор Е —
единичный случайный вектор [Е] = 1. Очередной (k + 1)-й шаг поиска
заключается в вычислении координат вектора W по формуле
Wiyk+1 = witk+ heitk^ wiiky где h — шаг поиска; eiM1 — i-я
координата вектора Е на (k + 1)-м шаге. Далее, как и во многих
других методах, сопоставляются значения целевой функции в
точках Wa+1 и Wft и, если F (WA+1) > F (Wfe), точка W^+j
принимается, т. е. очередной шаг будет сделан из нее. Иначе точка W*+1
отвергается и будет предпринята попытка продвинуться из точки W^
путем выбора1 нового случайного направления. Критерием
прекращения поиска обычно служит неудачность L попыток продвинуться
из точки Wfcj где L задается.
Метод Ньютона. Выражение необходимых условий экстремума
в виде (8.12) представляет собой систему алгебраических и
трансцендентных уравнений, решение которой дает координаты
экстремальной точки. Применение для решения метода Ньютона требует
вычисления матрицы Якоби системы (8.12). Очевидно, что этой
матрицей является матрица вторых частных производных целевой
функции по управляемым параметрам, носящая название матрицы
Гессе. В большинстве практических случаев вычисление матрицы
Гессе — чрезмерно трудоемкая процедура. По этой причине метод
Ньютона не получил применения в задачах оптимизации
электронных схем.
Трудности поиска экстремума гребневых функций. Недостатки
рассмотренных методов при применении их к задачам оптимизации
электронных схем следующие. Выше показано, что целевая функ-
264
ЪТо
5 4 3 2 t 0-1
*
\
ция минимума ZO (W) имеет гребневой характер, а именно в этих
условиях использование рассмотренных методов или вообще не
позволяет прийти в заданные окрестности локального экстремума,
или будут чрезмерно большие потери на поиск. При этом возникает
вопрос — если целевая функция ZO (W) имеет неудобный
гребневой характер, то не лучше ли отказаться от максиминного критерия
и использовать целевые функции другого типа? Отвечая на него,,
нужно прежде всего отметить, что в постановке задачи оптимизации
в виде соотношений (8.17), 2я
(8.18) и (8.19) наличие
ограничений приводит примерно к
таким же трудностям, что и
наличие гребней на
гиперповерхности отклика целевой функции
ZO (W). Попытка избавиться от
ограничений (8.18) и (8.19)
путем соответствующего подбора
< целевой функции, например в
виде (8.5), сразу приводит к ее
гребневому характеру.
Следовательно, гребни являются не
следствием применения
максиминного критерия, а вытекают
из физической сущности
задачи. Рис. 8.6 иллюстрирует
неэффективность применения
методов градиента и релаксации к поиску экстремума гребневых
целевых функций. Здесь показаны пунктирные линии равного уровня
двух запасов работоспособности гх и z2 в двумерном
пространстве управляемых параметров.
Градиентный метод приведет к поиску экстремума по
траектории, имеющей заметный зигзагообразный характер. Пусть поиск
начинается из точки А0. В этой точке значения запасов гг = 4, 1,
г2 = —1,9. Следовательно, Z0 = г2 = —1,9. Движение
происходит в направлении вектора градиента целевой функции, т. е. в
направлении нормали к линии равного уровня функции г2. После
первого шага приходим в точку Аи где z± = 4,0, z2 = —0,7, и
поэтому Z0 по-прежнему отождествляется с z2. Но уже четвертый
шаг приводит в точку, лежащую на противоположной стороне
гребня Г*(г1у z2), где ZO = zx = 2,1. Новый шаг выполняется
в направлении нормали к линии равного уровня zx и т. д. Налицо-
замедленное продвижение к цели, почти «топтание на месте», т. е.
велики потери на поиск.
Метод наискорейшего спуска не улучшает положения, а
практически вырождается в такой ситуации в обычный градиентный
метод.
Метод релаксации также даст зигзагообразную траекторию
поиска после попадания в малую окрестность гребня. Отрезки
ломаной линии, составляющие траекторию, параллельны осям
щ
Рис. 8.6. Иллюстрация поиска,
экстремума функции минимума
265
координат. Если на каком-либо шаге поиска попадаем точно на
гребень, то возможно вообще прекращение поиска при условии,
что ни в одном из возможных направлений не будет улучшения
целевой функции.
К неудовлетворительным результатам приводит применение и
методов случайного поиска экстремума в случае гребневых
функций. Вероятность выбора направления, на котором целевая функция
улучшается, в малых окрестностях точек гребней довольно мала
и будет тем меньше, чем уже гребень, круче его склоны, чем выше
размерность решаемой задачи. Следовательно, после попадания
в окрестности гребня случайный поиск обычно прекращается,
т. е. не приводит к желаемой цели.
Методы, ориентированные на применение в гребневых
ситуациях. Одним из наиболее известных методов поиска экстремума
у функций, имеющих гребни, является метод оврагов *.
Основная идея этого метода заключается в 'следующем. Вначале поиск
осуществляется одним из методов, описанных выше. После выхода
на гребень, точнее в точку Аъ принадлежащую малой окрестности
некоторой точки гребня, задается новая точка, на некотором
расстоянии от точки Аг. Из этой точки также происходит подъем на
гребень, пусть при этом попадаем в точку Л2, принадлежащую
малой окрестности другой точки гребня. Далее выполняется
«овражный» шаг, т. е. перемещение на величину h по прямой,
соединяющей точки Аг и Л2, в направлении возрастания целевой функции.
В связи с нелинейностью гребней такой шаг уводит в сторону от
гребня, поэтому производим вновь подъем на гребень, получаем
точку Л3, делаем новый овражный шаг л т. д.
Метод оврагов не всегда приводит к получению
удовлетворительных результатов. Во-первых, остаются выше желаемого уровня
потери на поиск, особенно при заметной нелинейности гребней.
Во-вторых, гребни представляют собой линии только для
двумерного пространства управляемых параметров. Для /г-мерных
пространств гребни — гиперповерхности. В такой ситуации движение
при овражном шаге по прямой, соединяющей точки Ak и ЛЛ+1,
необязательно есть движение в наилучшем направлении. Поэтому
метод оврагов может вообще не привести к цели.
Среди методов нулевого порядка наиболее приспособленным
к поиску экстремумов в гребневых ситуациях является метод
Розенброка. Этот метод развит на основе метода Гаусса — Зай-
деля. Нетрудно установить, что в двумерных задачах, когда линия
гребня параллельна одной из координатных осей, метод Гаусса —
Зайделя быстро приводит к цели, так как движение вдоль этой оси
есть движение по кратчайшему пути к экстремуму — вдоль гребня.
Идея метода Розенброка заключается в повороте координатных
осей в процессе поиска на основе информации, полученной на
предыдущих шагах. Координатные оси поворачиваются так, что дви-
* Метод получил свое название в связи' с применением в задачах
минимизации. При поиске максимумов его следовало бы именовать методом гребней.
266
жение вдоль них оказывается движением вдоль гиперповерхности
гребня. Однако в методе Розенброка возникают трудности с
выбором величины шага поиска.
Наилучшее направление поиска — направление,
принадлежащее гиперплоскости, касательной к гиперповерхности гребня,
на котором наблюдается наибольший рост целевой функции.
Практически реализуемые возможности определения такого
направления существуют только при максиминной постановке задачи
оптимизации. Эти возможности используются в рамках метода
проекции вектора градиента.
Поиск условных экстремумов. Рассмотренные выше методы
безусловной оптимизации применимы и для поиска условных
экстремумов после сведения задачи условной оптимизации к
безусловной с помощью методов штрафных функций. В методах
штрафных функций целевая функция F (W) преобразуется в некоторую
новую функцию Ф (W) такую, что ее значения резко убывают
(в случае поиска максимума) за пределами области ШД, а в области
\МД совпадают со значениями F (W). При этом поиск экстремума
Ф (W) каким-либо из описанных методов будет прежде всего
приводить в допустимую область, .после чего ищется безусловный
экстремум Ф (W), совпадающий с условным экстремумом F (W).
Другим распространенным методом поиска условного экстремума
является метод проекции вектора градиента, наиболее удобный
при решении задач с ограничениями типа равенств (см. § 8.4).
§ 8.4. МЕТОД ОПТИМИЗАЦИИ ПАРАМЕТРОВ ЭЛЕКТРОННЫХ СХЕМ
ПО МАКСИМИННОМУ КРИТЕРИЮ
Гребень функции минимума Z0. Ранее говорилось, что гребни
функции Z0 получаются как результат пересечения
гиперповерхностей отклика запасов работоспособности. Множество точек
пространства управляемых параметров, которым соответствуют точки
пересечения гиперповерхностей отклика запасов zp и гд,
обозначим через П (гр, гд):
•Л'(2Р, *,)HW|2p = z,}. (8.23)
Также говорилось, что не любая точка множества П (zpy zq)
является точкой гребня Г (гр, zg).
Пусть R (W) — множество индексов тех запасов г,, при которых
Zj равно Z0:
R (W) = {/ €= [1 : т] | г, = Z0}. (8.24)
Тогда первым условием принадлежности точки Wa гребню
Г (zp, гд) будет р е= R (We) и q^R (We).
Чтобы сформулировать второе условие принадлежности точки
W„ гребню Г (zp, zq), введем понятие производной функции
минимума Z0 по направлению g в точке Wa:
3Z0(Wa)/<?g= min (<9z,(Wa)/c>g). (8.25)
/€E*(WJ
267
Это позволит рассматривать функцию минимума как
дифференцируемую в любой точке пространства WI1 по любому направлению,
в том числе и в точках, принадлежащих множеству П (zp, zq)y
если, конечно, дифференцируемыми в рассматриваемой точке
являются функции запасов z,. Без определения (8.25) функцию Z0
надо было бы считать недифференцируемой, например в точке А2
(см. рис. 8.4, б).
Обозначим множество всех возможных направлений
пространства wn в точке УМа <= П (zp, zq) через G (Wa), а множество всех
направлений, касательных к гиперповерхности пересечения
гиперповерхностей запасов zp и zqy — через
' ^ Gpg (Wa). Тогда второе условие принадлеж-
'zq ности точки W^ гребню Г (zp, zq) будет
dZ0(Wa)/dgr- max (3Z0(W«)/dg),
*eG(w«) (8.26)
grGEGp,(Wa).
При выполнении этого условия выбор
Чи Ч направления поиска gr приведет к макси-
Рис. 8.7. Сечение расши- мальному увеличению целевой функции
ренного пространства уп- при заданной достаточно малой величине
равляемых параметров шага поиска. Но на склонах гребня
градиентное направление не совпадает с
направлением поиска gr. Следовательно, применяя, например, метод
градиента, очередной шаг выполняется в ином, чем gr,
направлении — не в наилучшем направлении. Отсюда и зигзагообраз-
ность траектории поиска (см. рис. 8.6), т. е. трудности,
обусловливаемые гребневым характером целевой функции.
Если условие (8.26) не выполняется, то в некотором
направлении gH проекции сечения- расширенного пространства
управляемых параметров на координатные плоскости такие, как показана
на рис. 8.7. При этом зигзагообразное движение отсутствует,
траектория поиска на рис. 8.7 направлена слева направо. Наличие
П (Zp, zq) в такой ситуации не приводит к вычислительным
трудностям, поэтому точку Wa нет смысла отождествлять сточкой гребня.
Итак, гребнем запасов zp и zq является множество Г (zp, zq):
Г(гр, z,) = {W|Zp(W) = z,(W), peR(W),
dZO/dgr = max (dZQ/dg), gr e= Gpq}. (8.27)
Это выражение справедливо и для более сложных гребней,
образованных пересечением гиперповерхностей более чем двух
запасов работоспособности. Так, если гребень образуют три запаса
Zp, zqy zt, то гребень Г (zpy zq, zt) назовем гребнем трех запасов и
определим его как
Г (Zp, zq9 zt) = {W | zp (W) = zq (W) = zt (W),
pe/J(W), dZO/dgr = max (dZO/dg), gr e= Gpqt\ ,
268
где Gpqt — множество всевозможных направлений, касательных
к гиперповерхности пересечения гиперповерхностей] запасов zpj
ZgWZtb точке W. В практических задачах могут встречаться гребни п
и менее запасов (например, k запасов). Гребень (п + 1)-го запаса
вырождается обычно в единственную точку. Гребень k запасов будем
называть гребнем (k — 1)-го порядка.
Определение гребня в виде (8.27) специфично для функции
минимума и не может быть применено в общем случае, в частности,
к гребню функции, показанной на рис. 8.3. Специфичность гребней
функции минимума проявляется прежде всего в том, что может быть
сформулировано уравнение гиперповерхности гребня:
^к (W) = zp (W) - zg (W) = 0, (8.28)
где k = 1, 2, ..., п\ (п\—порядок гребня). Так, для гребня
Г (z2, z3, г5> z8) уравнения я|^ (W) запишутся в виде?
l>i(W) = 2a-*8 = 0; 4>2(W) = za-*e = 0;
Ы>*0 = г2-г8 = 0. (8.29)
Наличие (8.29) позволяет рассматривать задачу оптимизации
электронной схемы по максиминному критерию как задачу поиска
экстремума целевой функции при наличии ограничений типа (8.28).
Формулировка этой задачи отличается от обычной формулировки
тем, что ограничения типа равенств должны учитываться только
тогда, когда траектория поиска пересечет соответствующий гребень,
т. е. количество ограничений не постоянно, а изменяется в процессе
поиска экстремума.
Преимущество формулировки задачи оптимизации по
максиминному критерию как задачи поиска максимума функции ZO (W)
при наличии ограничений tyk (W) = 0 в следующем. Для решения
задач с ограничениями типа равенств имеется эффективный метод
поиска экстремума — метод проекции вектора градиента. При
использовании этого метода каждая точка Wb получающаяся как
результат &-го шага, удовлетворяет уравнениям ограничений (8.28).
А это значит, что все точки W^ траектории принадлежат гребню.
Следовательно, траектория поиска не имеет зигзагообразный вид.
Так, в случае гребня Г (zu z2), показанного на рис. 8.6,
траектория поиска представляет собой кусочно-линейную аппроксимацию
линии гребня Г (zb z2). Очевидно, что при одной и той же величине
шага h получают существенно более быстрое продвижение к цели,
чем при применении градиентного метода.
Метод проекции вектора градиента. Пусть требуется найти
вектор W* такой, что f(W*)= max F(W), где область \УД
определяется п\ ограничениями типа равенств if>fe (W) = О,
k = 1, 2, ..., п\. Поиск осуществляется в два этапа: сначала
производится подъем на гиперповерхность ограничений, затем ищется
экстремум в области \УД. В случае если F (W) есть функция
минимума Z0, то первый этап представляет собой движение по какому-
либо методу поиска безусловного экс1ремума, например по методу
269
градиента. Второй этап наступает после того, как траектория поиска
пересечет какой-либо гребень (см. § 8.5). Он заключается в
последовательном выполнении пар шагов. Первый шаг в каждой паре —
шаг в сторону гиперповерхности ограничений, т. е. в сторону гребня,
имеющий цель попасть в возможно меньшую окрестность некоторой
точки гребня Wa. Направлением этого шага является нормаль
к гиперповерхности гребня. Второй шаг — шаг вдоль гребня в
направлении проекции вектора градиента целевой функции на
гиперповерхность ограничений.
Пусть шаг в сторону гребня происходит из некоторой точки W,
при этом нормальное направление к гиперповерхности
ограничений обозначим у, а точку на гребне, в которую приводит шаг в
сторону гребня, W". Используя разложение в ряд Тейлора функций-
ограничений г|эй (W) и пренебрегая в этом разложении членами
второго и выше порядка малостц, имеем:
% (W") ^ (W) + 2 ^Р Да>< = 0;
i=\
Ф»1 (W") ^nl(W) + 2 Щ£р-^ = о,
1=1
(8.30)
где п — размерность йространства управляемых параметров.
Для нормировки переменных каждый член под знаком суммы
в (8.30) можно представить в виде ^^ * Wi/S.Wi/Wi = dkfi8wh
где dkii = Widtyk/dwh a bwt = Awt/Wi — относительное
приращение i-ro управляемого параметра при шаге в сторону гребня.
Следовательно, осуществлен переход от пространства WF1 к
нормированному пространству управляемых параметров.
В матричной форме (8.30) записывается так:
MW')|| + D||81^|| = 0,
(8.31)
где |)\|?л (W) || — вектор-функция ограничений с элементами^ (W),
D =
dit i> dlf 2, ...» #i, n
&п1, 1» U-nl, 2> • • • » &nly n
|| SWt || —вектор-столбец с элементами 6wt.
Очевидно, что задача заключается в определении || 8Wt ||, а
вектор || % (W) || и матрица D могут быть вычислены в исходной для
данного шага точке W с использованием имеющихся уравнений
математической модели схемы. При определении || bWt || будем
учитывать, что направление вектора || §W\ || должно совпадать
с направлением у.
Элементы любого вектора с направлением у и, следовательно,
вектора И'бЯР* || в нормированном пространстве могут быть описаны
270
в виде:
6tt«i = di, i<7i + ^2, i?2 + • • • + dnl>1qnl;
8wn = dlt nqi + d2% пЯъ + • -. + d«i, «?«i.
В матричной форме (8.32) принимают вид
[6117,1 = 041, (8.33)
где Q — вектор-столбец с элементами qk\ D' —
транспонированная матрица D.
Справедливость (8.32) и (8.33) можно доказать следующим
образом. Пусть имеется ограничение % (W) = 0. Тогда вектор
grad [ifo (W)] = (dltl, dlf2, ..., dltH) лежит на направлении нормали
к гиперповерхности ^ (W) = 0 в точке W. Обозначим какой-
либо вектор, лежащий в гиперплоскости, касательной к
гиперповерхности пересечения гиперповерхностей всех
функций-ограничений, через А = (аъ сц, ..., ап). Векторы grad [tyk (W)]
ортогональны вектору А, а поскольку скалярное произведение
ортогональных векторов равно нулю, то
di,ia1 + dlf2a2+ ... + dltnan = 0; \
(8.34)
dni, i^i + dnlt 2а2 + ... + dnltnan = 0. J
Умножив каждое из этих уравнений на qk и затем сложив их,,
находим:
(di, iq± + d2t tq2 + ... + dnlt гдп1) аг +
+ (di, 2qi + d2i 2q2+ ...+ dnl% 2qnl) a2 +
+ ... + (dlt nQi + d2t nq2 + ... + dnlt nqni)an = 0. (8.35)
Величины в круглых скобках уравнения (8.35) были обозначены
при записи (8.32) как 6wh следовательно, bw^ + 8w2a2 + ... +
+ 8ы),га1г '= 0, т. е. получили равенство нулю скалярного
произведения векторов || 8Wt\\ и А. Это означает, что вектор || 8Wt ||
с элементами, определяемыми по (8.32), направлен действительнр
по нормали к гиперповерхности ограничений, что и требовалось
доказать.
Если бы величины qk в (8.32) выбирались произвольно, то в итоге
получались бы векторы произвольной длины, лежащие на
направлении у. Но необходима такая длина вектора,,которая равна
расстоянию от точки W до точки W" в нормированном пространстве.
Вектор Q получим, подставив (8.33) в (8.31): || % (W) || + DD'Q = 0,
находим
Q = -(DD<)-1||l>ikW')||. (8.36)
Окончательно формулу для определения относительных
приращений управляемых параметров при шаге в сторону гребня
определяем подстановкой (8.36) в (8.33):
|| 6Wt I = - D' (DDOii^ (W) ||. (8.37)
(8.32)
271
Это выражение получено в условиях линеаризации функций
ограничений, поскольку использовалось разложение функци
ypk (W) в ряд Тейлора с сохранением только членов первого порядка
малости. Поэтому шаг по (8.37) может и не привести в заданные
окрестности гребня. В связи с этим после первого шага в сторону
гребня необходимо проверить, в какой мере выполняются
ограничения, а при превышении [tyk (W)] в полученной точке некоторой
заданной величины надо сделать повторный шаг в сторону гребня.
Определим формулу для приращений управляемых параметров
при шаге вдоль гребня. Выше было введено обозначение А для
любого вектора, лежащего в гиперплоскости, касательной к
гиперповерхности гребня, и получены выражения (8.34), которые
запишем в виде
2 <**.А = 0. (8.38)
i = \
Шаг вдоль гребня должен быть произведен вдоль направления
такого вектора А, на котором будет получен максимальный прирост
целевой функции. Запишем в соответствии с (8.14) выражение
производной целевой функции F (W) в направлении вектора А, [А] = 1,
в нормированном пространстве:
п
dF/dA = 2 (dF/dWi)Wiah • (8.39)
где dF/dA — проекция вектора градиента целевой функции на
направление вектора А.
Теперь задача заключается в определении вектора А* такого,
что dF/dA* = max (dF/dA), где Аг — множество векторов, лежа-
А 6 Аг
щих в касательной гиперплоскости гребня. При решении этой
промежуточной задачи в качестве целевой функции возьмем
функцию (8.39) (ограничениями будут уравнения (8.38), з.
управляемыми параметрами щ). Воспользуемся методом неопределенных
множителей Лагранжа, где нахождение условного экстремума
функции (8.39) заменяется определением безусловного экстремума
новой функции Ф (А, А,), причем Ф (А, к) есть сумма целевой
функции и функций-ограничений, умноженных на множители
Лагранжа Xk:
Ф(А, Я)= 2 М*+ 2^2 4,^ + Jl- 2 *?Ь
i = \ k=l i = \ \ i=\ I
[здесь использовано ранее введенное обозначение bt = (dF/dwt) wt].
Дополнительно к ограничениям (8.38) в выражении функции Ф
учитывается ограничение
i>?=i. (8-4°)
t=i
Если не ввести этого ограничения, то задача становится
неопределенной. Действительно, ищем компоненты вектора а* с направ-
272
лением вектора А* и должны оговорить длину этого вектора.
Ограничение (8.40) означает, что определяется вектор единичной длины.
Применяя необходимые условия экстремума, приравняем нулю
частные производные функции Ф (А, к) по ее аргументам, тогда
получаем следующую систему уравнений:
дф/даг = Ьг + Mi, 1 + М2,1 + .. • + Kidni, 1- 2М* = 0;
дФ/дап = bn + Mi, n + M2, n + • -. + Kidni, n - 2M* = 0;
ЗФ/dXt = rflt xaf + dlt 2a% + ... + dlt naZ = 0;
дФ/дКг = d/ii, ifl* + d«i. 2^2 + ... + dni, na% = 0;
<эф/<эя0 = 1- J] («f)2=o,
где at — компоненты искомого вектора А*.
Используя первые п уравнений этой системы, выражаем а*
через неизвестные Xk и известные компоненты вектора В и
матрицы D:
^ = (^+2Мй,/)/(2Я0). (8.41)
Теперь достаточно определить Xk, чтобы решить задачу. Для
этого подставим (8.41) в уравнения дФ/дХк == 0. Получаем систему
п\ уравнений с неизвестными Xk:
Ci, 1^1 + ch 2^2 + • • • + clt nlXnl = e±\ j
<?2,1^1 + c2,2^2 ~b • • • + ^2, m^m = еъ 1 /g 42)
£/z 1,1^1 + £/il,2^2 + . • • + Onl% nl^nl = ^пЪ )
n
причем коэффициенты этой системы ckf t = 2 *fef * ^/. *> *л =
i = l
n
=—2 &*d*> **
Коэффициенты скл — элементы матрицы С, которая есть
произведение DD', а вектор Е правых частей системы (8.42) Е = — DB.
Тогда систему (8f42) можно записать в матричной форме, как
DIXA. = — DB, где А — вектор-столбец множителей Лагранжа.
Отсюда
А = — (DDO^DB. (8.43)
Осталось получить лишь удобную форму записи для вектора А*,
определяемого с помощью (8.41) и (8.43). Умножим все элементы
вектора А* на 2Х0 (что допустимо, поскольку необязательно иметь
единичный вектор А*) и запишем (8.41) в матричной форме: А* =»
= В+ 1УЛ. Подставляя в это выражение Л из (8.43), получаем иско-
273
мый результат:
А* = В - D' (DDO1 DB. (8.44)
Итак, определено направление наибольшего возрастания
целевой функции при движении по гребню. Из определения гребня
(8.27) следует, что это направление наилучшее и среди всех
возможных направлений поиска в окрестностях гребня. Шаг в этом
направлении может быть осуществлен следующим образом:
bwi = hat у %(aj)\ (8.45)
или
8wt = haf/ max |а*|, (8.46)
i'G[l ;m]
где h — величина шага поиска.
При использовании (8.45) каждый шаг поиска приводит к
перемещению в нормированном пространстве управляемых параметров
всегда на одно и то же расстояние, равное h. В случае
использования (8.46) управляемый параметр, наиболее сильно влияющий
на целевую функцию, всегда изменится на (100/i)%, а остальные
управляемые параметры изменятся меньше чем на (100/i)%.
Наряду с методом проекции вектора градиента к максимизации
функции минимума могут быть применены и некоторые другие
методы [13].
§ 8.5. АЛГОРИТМ И ПРОГРАММА ОПТИМИЗАЦИИ СХЕМ
ПО МАКСИМИННОМУ КРИТЕРИЮ
Метод проекции вектора градиента дает формулы (8.37), (8.44)
и (8.46) для осуществления шагов поиска экстремума функции
минимума Z0 в окрестностях гребней этой функции. Однако одних
этих формул еще недостаточно для построения алгоритма поиска.
В алгоритме должны найти отражение следующие вопросы,
определяющие наравне с (8.37), (8.44) и (8.46) стратегию поиска: 1. По
какому методу осуществляется поиск до попадания в окрестности
какого-либо гребня? 2. Что служит признаком попадания в
окрестности гребня? 3. Как производится идентификация гребней, т. е.
определяются запасы, образовавшие гребень? 4. Каким образом
учитываются ограничения (8.16), определяющие допустимую
область? 5. Как выбирается величина шага поиска и что служит
признаком прекращения поиска?
Дадим ответы на поставленные вопросы в условиях, когда поиск
осуществляется при б/= const. Поиск до попадания в
окрестности какого-либо гребня называют локальным поиском. Для выбора
метода локального поиска нужно иметь некоторые сведения о
характере функций Zj (W). Характер функций Zj (W) повторяет характер
функций выходных параметров у; (W). Функции же yj (W), как
правило, не имеют овражного характера. Поэтому для локального
274
поиска целесообразно выбрать метод наискорейшего спуска, как
обеспечивающий выход в окрестности гребня с малыми потерями
на поиск.
Введем в алгоритм поиска процедуры model, qual, sens и step.
В процедуре model реализуется математическая модель схемы.
Исходные данные для процедуры model — параметры компонентов,
в том числе и управляемые параметры, а результат исполнения
процедуры — значения выходных параметров. Процедура model
представляет собой программу анализа работы схемы. Процедура
qual служит для вычисления значений запасов работоспособности
по (8.9). Кроме того, в процедуре qual определяется минимальное
из этих значений, отождествляемое со значением целевой функции.
Наконец, в этой процедуре определяются значения целочисленных
величин NA и NC (NA — индекс минимального запаса
работоспособности на данном шаге, a NC — то же, на предыдущем шаге).
Вычисление частных производных выходных параметров у;- по
управляемым параметрам wt производится в процедуре sens, т. е.
процедура sens представляет собой программу анализа
чувствительности. На основе этих частных производных вычисляется
матрица В1 производных запасов Zj по wii
В1 = ||dzjldwi || = |- (а,/6,) (dyj/dwt ||). (8.47)
Процедура step реализует формулу для приращений управляг
емых параметров на очередном шаге локального поиска. Эта
формула может быть или формулой (8.22), или представлена в виде
bWi = (bihWi)l max | 6*|, (8.48)
ie[l:n]
причем в случае (8.48) наиболее сильно влияющий на целевую
функцию управляемый параметр изменяется в пределах шага
на (100/i)%. Перед вычислением Awt должны быть определены
значения Ьи являющиеся нормированными частными производными
целевой функции по управляемым параметрам. Величина bt
определяется в процедуре step по формуле
bi = blNAiiwh (8.49)
где blNAtU — компоненты (ЛМ)-й строки матрицы В1.
Тогда' алгоритм локального поиска можно представить в виде
блок-схемы (рис. 8.8), на котором МА — значение целевой функции
на данном шаге, а МС — то же, на предыдущем. Из рис. 8.8 видно,
что анализ чувствительности с помощью процедуры sens в
соответствии с методом наискорейшего спуска выполняется не на
каждом шаге поиска, а лишь в случае МА ^ МС, т. е. при
прекращении роста целевой функции. При этом необходимо также
выполнение условия NA = NC, поскольку только при этом имеет место
локальный поиск. Выполнение условия NA Ф NC означает, что
произошла смена индекса у минимального запаса
работоспособности, т. е. траектория поиска прошла через подмножество
275
n(zNA, zNC)> Тот факт, что при этом пересекается некоторый гребень,
в алгоритме отождествляется с выполнением условия
МА^МС,
(8.50)
L
<
model
"Т
sens
Е
-►I aual
model | { step
Да
MA>MC
Hem
Стоп
н
£
Да
\NA=NC |
Возврат В
предыдущую
точи у
как это видно из рис. 8.8.
Таким образом, при МА ^ МС и NA Ф NC начинает
исполняться следующий блок алгоритма — блок идентификации гребней.
В нем должны быть определены индексы запасов работоспособности,
образовавшие гребень. То, что этими индексами будут необязательно
индексы NA и NC, иллюстрируется рис. 8.9, где прказана проекция
сечения расширенного
0*. пространства
управляемых параметров на
одну • из координатных
плоскостей при шаге
поиска из точки W* в
точку W* t1. В данной
ситуации NA = 3,NC =
= 1, т.е. NA Ф NC и,
кроме того, МА < МС.
Следовательно,
выполнены условия, по
которым судят о пересече-,
нии гребня траекторией?
поиска. Однако вывод о
том, что пересечен
гребень Г (zlf z3), неверен,
так как в точке W6 е
е П (zx, z3) индексы 1
и 3 не принадлежат
множеству R (W&),
определенному (8.24).
Действительно, R (W&) = {2}. Точка Wc е П (z2, z3) также не является
точкой гребня Г (z2, z3), поскольку из рис. 8.9 видно
невыполнение условия (8.26). Точкой гребня будет WflGf (zx, z2).
Действительно, R(Wa)={l, 2}. Точная проверка условия (8.26)
принадлежности точки Wa гребню в алгоритме не представляется
возможной и заменяется проверкой условий, вытекающих из
геометрических представлений рис. 8.9. Поясним эти условия.
Обозначим значения запасов в предыдущей точке W(Aj) через
zCjy а в последующей точке W*+1 через zAj. Через две точки (W(*\
zCj) и (W^j*1, zA.) проведем по прямой линии для каждого из
запасов (именно такие прямые и показаны на рис. 8.9). Далее нужно
все прямые разделить на две группы: к первой отнести
возрастающие прямые Zj (W*), а ко второй — убывающие. Затем надо найти
точки пересечения каждой возрастающей ^прямой с каждой из
убывающих. Та точка пересечения, в которой значение запаса окажется
наименьшим, и будет относиться к искомому гребню, а индексы
Вых. из блока
локального поиска
Рис. 8.8. Блок-схема алгоритма
поиска
локального
276
Вх
запасов, давших эту точку, образуют множество R. Блок-схема
описанного алгоритма, представлена на рис. 8.10. Здесь во внешнем
цикле по параметру i производится выделение возрастающих
прямых и для каждой выделенной прямой во внутреннем цикле по
параметру / определяются
убывающие прямые. При этом оп- \1
ределяется ордината точки пе- ▼
ресечения прямых по формуле
Zp = (zAt zCj — zAj zd)/(zAi —
— zCj — zAj + zCj). Далее, если
очередное значение Zp окажется
меньше, чем значение Zr, то Zr
Zr:^W10
Начало цикла
по параметру I
присваивается значение Zp. Так
.как первоначальное значение Zr
принимается заведомо большим,
чем реальные значения запасов
в практических задачах, то Zr
представляет собой наименьшую
ординату точек пересечения
убывающих и возрастающих
прямых, исследованных на текущий
момент. Одновременно с любой
корректировкой Zr
запоминаются в виде N1 и N2 значения
индексов запасов, давших са-
Рис. 8.9. Возможная ситуация при
идентификации гребней
До
i
r-J zCi^zAi
Нет
Начало цикла
по параметру J
До
zC; <zAt
+ Нет
\ Вычисление ZD
W
ZD>Zr
Нет
\zr:*Zp\
j—\N1:^I, N2^j\
Конец цикла no J
Конец цикла no I
—\
Вь/х
Рис. 8.10. Блок-схема алгоритма
идентификации гребней
мую «низкую» точку пересечения возрастающих и убывающих
прямых. После исполнения алгоритма блок-схемы (см. рис. 8.8)
N1 и N2 и будут составлять множество R. Тем самым гребень
определен и дальнейший поиск пойдет по этому гребню методом
проекции вектора градиента.
Описание алгоритма идентификации гребней дано применительно
к гребням первого порядка. Этот же алгоритм с некоторыми
добавлениями служит и для идентификации гребней более высоких
порядков. Происходит это после того, как очередная точка траек-
277
тории поиска после подъема на гребень характеризуется меньшим
значением целевой функции, чем предыдущая точка гребня. Если
при этом значение NA равно значению какого-либо элемента
множества R, то это означает, что траектория поиска прошла через
окрестность локального экстремума и тогда нужно или продолжить
поиск с уменьшенным вдвое шагом, или прекратить вычисления.
Если же NA имеет значение, отличное от значения любого из
элементов множества R, то должно произойти или увеличение порядка
гребня, или смена гребня, вдоль которого производится поиск. В
обоих случаях исполняется алгоритм, блок-схема которого дана на
рис. 8.10, и определяются значения Л/1 и N2. Если Л/1 (или N2)
совпадает с каким-либо значением из R, а N2 (N1) не совпадает,
то значение N2 (Л/1) включается в множество R, т. е.
происходит увеличение порядка гребня. Если же ни Л/1, ни N2 не
встречаются в множестве R, то это множество заново формируется
из значений N\ и N2, т. е. дальнейший поиск пойдет по новому
гребню.
Ограничения (8.16) WHt <Z.Wi < WBt в алгоритме можно
учесть следующим образом. Для определенности будем говорить
о неравенствах
WHi<wh (8.51)
поскольку учет верхних границ аналогичен. Если в очередной
точке поиска не выполняется какое-либо из неравенств (8.51), то
принимают wt = WHU а частным производным запасов zj по
параметру Wt принудительно присваивают пренебрежимо малые
значения (истинные значения, уменьшенные на несколько порядков).
Следовательно, параметр wt практически исключается из условий
задачи на всех тех шагах, где имеется тенденция к выходу wt за
границы допустимой области. Если же на каком-то шаге возникнет
тенденция к продвижению по оси wt внутрь допустимой области,
то такое продвижение, хотя и крайне незначительное, вследствие
малого значения частной производной целевой функции по wt
имеет место. Но после этого неравенство (8.51) уже будет выполнено
и, следовательно, автоматически восстановятся истинные значения
производных запасов по wt. Указанный прием учета ограничений
(8.51) удобен тем, что не позволяет выйти за границы допустимой
области и в то же время не приводит к застреванию траектории на
ее границах.
Блоки определения шага в сторону гребня и шага вдоль
гребня, реализующие метод проекции вектора градиента, показаны
на рис. 8.11 и 8.12 соответственно. Значения функций г|^
определяют по (8.28) через значения запасов. Компоненты матрицы D
вычисляют по формулам dkyi = wt (blNAj — b\rJ), где b\NAyi
и ЫЛ£ — компоненты матрицы В1, рассчитываемой в процедуре
sens, причем rsR. При попадании в окрестность гребня,
определяемую неравенством
|t|)(W)|max<£1(|M^| + l), (8.52)
278
подъем на гребень считается законченным. Здесь Ег — некоторая
константа, относящаяся к числу исходных данных (обычно Ег =
= 0,05 -т- 0,2). Если условие (8.52) после шага в сторону гребня
не выполняется, то необходимо скорректировать значения частных
производных запасов по управляемым параметрам (для чего
производится обращение к процедуре sens) и повторить шаг подъема
sens
Да
От блока ибентисрц-
'нации гребней
I
Вычисление (f(W)
От блока шага
вдоль гребня
Вычисление
матрицы В Вь
Решение системы
ВВь(3^-(р(\л/)
Шаг в сторону
гребня 9М=В*£1
uai |
I Вычисление <p(W)
К блоку определения
конца поиска
Рис. 8.11. Блок-схема алгоритма подъема на
гребень
От блока
определения конца поиска
\
Вычисление
матрицы ВВЬ
▼
{Решение системы]
[_ВВЬЛ=-ВВ \
▼
Вычисление 1
+ ^
Шаг вдоль гребня
1 по (8.46) \
▼
qual
J
К блоку шага в
сторону гребня
Рис. 8.12. Блок-схема
алгоритма движения вдоль
гребня
на гребень. Таким образом, анализ чувствительности в
рассматриваемом алгоритме выполняется не на каждом шаге поиска, а лишь
на шагах неудачного подъема на гребень. Такое использование
идей метода наискорейшего спуска в рамках метода проекции
вектора градиента позволяет уменьшить потери на поиск.
Последний блок алгоритма — блок определения конца поиска —
описан выше, когда рассматривался вопрос идентификации
гребней выше первого порядка. Здесь нужно лишь отметить, что в числе
исходных данных задаются значения шага hmax и hm-m. Поиск
начинается с шагом ftmax, в блоке определения конца поиска этот шаг
279
при соответствующих условиях уменьшается; вычисления
прекратятся тогда, когда значение текущего шага h станет меньше hm-m.
Программа, реализующая алгоритм оптимизации электронных
схем по максиминному критерию и названная программой РПК
(расчета параметров компонентов), требует задания в качестве
исходных данных значений технических требований к выходным
параметрам ТТу, допусков 8у, вспомогательных коэффициентов о,
(см. формулу запаса), верхних и нижних границ управляемых
параметров WBi и WHt, а также величин hmaXi hm\n и Ег. Имеются
варианты этой программы на алгоритмических языках АЛГОЛ-60
и АКИ. Процедура model должна составляться для каждой новой
схемы заново. В составе комплекса программ проектирования
программы анализа и оптимизации должны легко стыковаться друг
с другом, тогда роль процедуры model будет выполнять уже
имеющаяся программа анализа.
Оптимизация в условиях непостоянства внешних параметров.
Основные внешние параметры — температура окружающей среды,
напряжения источников питания, коэффициенты нагружения,
параметры входных сигналов и нагрузки. Возникает вопрос: .при каких
значениях этих параметров проводить анализ схемы для
вычисления целевой функции?
Параметры входных сигналов и нагрузки должны быть
переменными. Действительно, логические элементы ЭВМ обычно работают
в условиях, когда их входы и выходы связаны с аналогичными
логическими элементами. Оптимизируя схему, изменяем тем самым
параметры компонентов, а значит, и параметры ее выходных
импульсов и входное сопротивление. В соответствии с этими
изменениями должны меняться и параметры входных импульсов, и
параметры нагрузки у оптимизируемой схемы. Поэтому математическая
модель схемы в процедуре model должна быть моделью элемента,
нагруженного на N таких же элементов (N — коэффициент
нагружения). Изменяя параметры, являющиеся управляемыми, в
собственно оптимизируемой схеме, необходимо изменять те же
параметры и в схемах-нагрузках. Пусть в некоторой точке W(/?) был
получен выходной импульс, характеризующийся набором
параметров. Тогда на очередном (k + 1)-м шаге поиска нужно этот набор
использовать в качестве параметров входного импульса.
Теперь перейдем к вопросу учета таких внешних параметров,
как температура Т> напряжения источников питания Е,
коэффициенты нагружения N. В ТЗ оговариваются допустимые диапазоны
изменения этих параметров, а анализ работы схемы в процедуре
model выполняется при определенном значении каждого из них.
Какими же следует брать эти значения? Возможны два способа
решения этого вопроса. В первом способе при анализе используют
номинальные значения внешних параметров и/считают, что
нестабильность Г, Е и N учитывается в допусках бу, задаваемых
инженером или рассчитываемых методом наихудшего случая.
Наименьшие потери на поиск будут при задании 6, в качестве исходных
данных. Однако возникают трудности в априорном задании зна-
280
чений бу, близких к реальным. Правда, в распоряжении инженера
остается, как и ранее, возможность на некоторых шагах поиска
произвести расчет б; методом наихудшего случая и
скорректировать устаревшие значения бу. Другой способ заключается в том, что,
как и при статистическом анализе методом Монте — Карло,
сначала определяются тяжелые по внешним параметрам режимы
работы схемы, а далее на каждом шаге поиска анализ работы схемы
осуществляется не в единственном номинальном режиме, а во всех
тяжелых режимах. При этом в (8.9) при вычислении запаса /-го
выходного параметра подставляют значение #/ном, полученное
в тяжелом для /-го выходного параметра режиме. В этом случае
допуски бу учитывают только разброс параметров компонентов
и , их ' априорное задание облегчается. Однако потери на поиск
возрастают в т1 раз, где т1 — количество тяжелых режимов.
Проще обстоит дело в тех частных случаях, когда удается
математическую модель схемы представить в виде совокупности явных
зависимостей t/j от внешних и внутренних параметров. Тогда в
model реализуются эти зависимости с подставленными в них
наихудшими для данного выходного параметра значениями внешних
параметров.
§ 8.6. ПРИМЕРЫ ОПТИМИЗАЦИИ ПЕРЕКЛЮЧАТЕЛЬНЫХ
ЭЛЕКТРОННЫХ СХЕМ
Цель приводимых ниже примеров — пояснить задание исходных данных
при решении задачи оптимизации с помощью программы РПК, реализующей
максиминный критерий, показать
возможности метода и алгоритма
поиска экстремума,
проиллюстрировать особенности траекторий
поиска и получающихся решений.
Пример 1. Пусть требуется
рассчитать оптимальные значения
параметров резисторов в ИС ТТЛ*
принципиальная схема которой
изображена на рис. 8.13.
Расчет толькр параметров
резисторов диктуется тем, что в
данном случае базовая технология
изготовления схемы и типовая кон-
фигурация транзисторов Тг — Т4
и диода Д уже заданы, а
следовательно, заданы и все их
параметры.
Пусть в ТЗ указаны следующие условия работоспособности схемы ТТЛ:
N > 20; Л6'Пом > 0,8 В; Р < 20 мВт; *3д.р < 15 нс> гДе N — коэффициент
нагружения; А£/Пом—допустимый уровень помехи в логическом состоянии 0;
Р — средняя потребляемая схемой мощность; £3д.р — задержка
распространения сигнала.
Управляемыми параметрами являются Rlt R2t R3 и /?4- Данная схема
достаточно хорошо изучена и для нее приведены в работе [23] явные зависимости
параметров N, А£/пом, Р и ^зд.р от параметров компонентов и внешних условий.
Поэтому для упрощения решения задачи воспользуемся математической моделью
схемы, приведенной в [23]. Эта модель после подстановки в формулы значений
iнеуправляемых параметров и наихудших значений внешних параметров пред-
Рис. 8.13. Схема ТТЛ
281
ставляется в виде зависимостей:
# = 2,1 {2,45 + #i [3,95/(Яа + 0,011)- 1/Д4]};
Д£/Пом = 0,9-0,031п#4;
р= 19/^+10,8/(^ + 0,017);
*зд.р = 0,55 + 0fiS7R2/Rn +
+ УЩ (6 — 0,079W)2 + (0,69-0,0024NR2/RX)(5,7+0,15N) RtR2-
-0,5 Г
Я2(3+0,079^)-8
1 — 0,134/?2 - 0,136/?2//?4 — 0,026NR2/Rl
1_0,134#2 + 6,9/(8 + 3#3)
—R2 (4,9 + 0,055^)1.
Эти формулы справедливы лишь в случаях, когда транзистор Т2 при
нахождении схемы в логическом состоянии 1 открыт до насыщения. Поэтому в
математическую модель схемы нужно ввести также формулу S = 8,55 R2/Rlt где
S — степень насыщения транзистора Т2.
Теперь S будет рассматриваться как один из выходных параметров.
Для S условие работоспособности сформулируем в виде S > 1,5.
Далее необходимо выбрать допустимую область поиска, задавшись
верхними и нижними границами управляемых параметров. В данном примере
выберем допустимую область следующей: 0,5 кОм < Rx < 10 кОм; 0,5 кОм < R2 <
< 10 кОм; 0,05 кОм < R3 < 1 кОм; 0,1 кОм < #4 < 2 кОм.
Перепишем условия работоспособности, приведя их к виду (8.1): — N < —20;
—Д^пом < — 0>8 В; Р < 20 мВт, г3д.Р < 15 не; —S < —1,5.
Таблица 8.1
Выходные
параметры
тт
6
а
N
—20
4
1
ДС/пом
-0,8 В
0,04 В
1
р
20 мВт
4 мВт
1
t
зд.р
15 не
3 не
1
S
-1,5
0,3
10
Таким образом, технические требования TTj принимают значения,
указанные в табл. 8.1. В этой же таблице приводятся значения допусков 6у и
вспомогательных коэффициентов aj. Значения 6у для большинства параметров взяты
равными 20% от 7Ту, за исключением 6/ для параметра Л[/Пом> который, по
предположению, должен иметь меньший разброс (см. формулу для Л£/Пом в модели
схемы). При выборе значений aj все выходные пдраметры, кроме 5, были
отнесены к первой группе, т. е. к группе параметров, для которых желательна
максимально возможная степень выполнения условий работоспособности. Поэтому
для них взято aj = 1. Параметр S —типичный представитель параметров
второй группы. Действительно, транзистор Т2 рбязательно должен входить в
насыщение, но заметное перевыполнение условия работоспособности параметра S
нецелесообразно. Поэтому для него выбрано aj = 10.
Формулирование исходных данных заканчиваем выбором hmax =0,2; hmlr==
= 0,1; Ег= 0,1, а также исходной точки поиска. В данном случае поиск
экстремума проводился многократно из разных исходных точек. При этом
преследовалась двоякая цель. Во-первых, желательно было проверить, сходится ли
решение во всех вариантах к одной и той же точке. Если да, то с вероятностью тем
большей, чем больше выполнялось вариантов поиска, можно утверждать, что
задача одноэкстремальная. Если нет, то в качестве решения будет принят тот
из локальных экстремумов, в котором достигнуто наибольшее значение целевой
функции. Во-вторых, желательно было проверить, насколько велика окрестность
282
точки экстремума, в которой заканчиваются траектории поиска, т. е. какова
точность решения. О величине этой окрестности можно приближенно судить по
разностям управляемых параметров, получающихся как решение в разных
вариантах. Далее записывается процедура model.
В рассматриваемом примере использовался вариант программы РПК,
выраженный на алгоритмическом языке АКИ, поэтому также на языке АКИ
была записана и процедура model. После перфорации программного блока и
исходных данных выполнялось решение задачи на ЭВМ.
Таблица 8.2
ас
S2
1
2
3
4
5
Координаты исходной точки
WHCX. кОм
Ri
8,12
2,25
8,45
1,26
2,56
Rz
4,20
7,61
4,48
6,83
4,81
R*
0,18
0,35
0,82
0,34
0,23
Я*
1,46
1,87
1,24
1,45
0,36
Координаты конечной точки
W *, кОм
*i
4,49
4,49
4,49
4,49
4,49
Rz
0,95
0,95
0,95
0,95
0,95
R*
0,05
0,05
0,05
0,05
0,05
*4
0,48
0,48
0,48
0,48
0,48
ZQ(W*)
0,140
0,140
0,140
0,140
0,140
nt
62
79
86
84
101
п3
6
6
8
7
10
В табл. 8.2 приводятся основные результаты оптимизации схемы ТТЛ в пяти
вариантах, различающихся значениями управляемых параметров в исходной
точке поиска. Здесь даны координаты исходной точки WHCX и конечной точки W *
траектории поиска, значение целевой функции Z0 в точке W *, а также потери
на поиск пг и п3у где п3 — количество шагов, на которых производился анализ
чувствительности.
Значения выходных параметров схемы в точке W * составили: N = 24,6;
A£Aiom = 0,g2 В; Р — 15,4 мВт; г3д.Р = Н,6 не; S = 1,8.
Поиск в каждом варианте быстро приводил в окрестности какого-либо
гребня, далее порядок гребня возрастал, и точка W * найдена на гребне третьего
порядка, образованном пересечением гиперповерхностей запасов параметров N,
Р, *зд.р и 5-
Результаты решения позволяют сделать следующие выводы:
1. При заданных технических требованиях область работоспособности схемы
ТТЛ существует, о чем свидетельствует положительное значение целевой
функции в оптимальной тбчке.
2. Сходимость поиска во всех пяти вариантах к одному и тому же
экстремуму позволяет сделать достаточно обоснованное предположение об одноэкстре*-
мальном характере целевой функции Z0 для схемы ТТЛ.
3. Значение R3 в оптимальной точке оказалось равным заданной нижней
границе. Такой результат и следовало ожидать, поскольку R3 влияет только
на один выходной параметр £зд.р, причем с уменьшением R3 запас параметра
/зд.р возрастает. Качественное рассмотрение процессов в схеме не противоречит
этому результату, так как резистор R3 ставится в схему лишь для ограничения
тока в коллекторной цепи транзистора T3l а требование ограничить ток не
отражено в использбванной ММС.
4. Получено решение с не менее чем двумя верными значащими цифрами,
о чем свидетельствуют данные табл. 8.2. Столь высокая точность решения
несколько неожиданна, если учесть, что поиск в окрестностях экстремума
выполнялся с шагом /i=0,l. По-видимому, подобный результат — следствие
специфического характера целевой функции данного примера в окрестностях точки^\У*.
5. Потери на поиск можно признать сравнительно небольшими. Общее
количество обращений к процедуре model составляет в каждом варианте ппт =
= пг + пп3 = пг+ 4л3, гДе п — количество управляемых параметров.
Следовательно, /гпт находилось в диапазоне 86—141 в выполненных пяти вариантах.
283
Пример 2. Требуется оптимизировать параметры схемы ждущего
мультивибратора, представленной на рис. 8.14. Типы транзисторов и диода уже выбраны
и поэтому к управляемым параметрам относят сопротивления резисторов Rt — RQ
и емкость конденсатора С. Условия работоспособности заданы в форме: Um >
> 10,8 В; *и = ,500 ± 5 мкс; tB < 375 мкс; Р < 150 мВт; Кт < 0,075; Sx > 1,2;
S2 > 1,2; Uorz > 0>5 В, где Um— амплитуда выходного импульса; tn—его
длительность, tB — время восстановления, Р — потребляемая схемой мощность,
К
■ температурная
S1 — степень
[К LK m [К LR
о-15В
нестабильность длительности импульса,
насыщения транзистора Тг в устойчивом
состоянии схемы; S2 — степень
насыщения транзистора Г2 в квазиустойчивом
состоянии; U0TC — запирающее
транзистор Т2 напряжение в устойчивом
состоянии схемы.
В качестве математической модели
схемы можно использовать систему
дифференциальных уравнений или
совокупность явных зависимостей выходных
параметров от управляемых. В первом
случае для определения К? требуется
выполнение двух вариантов анализа
работы схемы, несколько вариантов
анализа может потребоваться для
определения tB, если предварительно не будет
найдена какая-либо однозначная
зависимость tB от того или иного напряжения
схемы в некоторый момент времени. Во втором случае необходимо иметь
удовлетворительные по точности формулы для выходных параметров. Для рассматри-
Рис. 8.14. Схема ждущегр
мультивибратора
ваемой схемы такие формулы имеются [36]:
Um=\5-U's
к"
5[/?в + /?1/?8/(^1 + Лз)]С1п[(30-Г/э-^ + 0,01^)/(15 + 0,01/?в
*в=4С[я,+я1да/(/?1+Я8)];
Р = 225 [ 1/(Д4 + ЯБ) + (875 - Ш875Я!) + *и/(875Я2)];
Si = 20R1/R6, S2 = 20 (R2R5 - R3Rd/[R* (R8 +R5)l;
-иэ)];
где иэ
300+ Яб '
= [ 1 б/?8 Wi+RM/lRiRs+R3 Wi+«e)l;
15
: 1 + [«A (Rs+/г6)]/[ЯА № + «Л *
Единицы измерения: вольты, микросекунды, милливатты, килоомы, нанофа-
рады.
Особенность данного примера — задание условия работоспособности для
параметра ^и в виде равенства. В соответствии с рекомендациями § 8.1
представим это равенство в виде неравенств tnl < 505 мкс, —tm < —495 мкс. Введем
в рассмотрение вместо одного параметра £и два параметра £и1 и *и2,
определяемые по одной и той же формуле.
Далее выбираем значения величин бу и ау, которые вместе со значениями
TTj приведены в табл. 8.3.
Для параметров /щ и £и2 необходимо выбирать 6 < Д£„ = 5 мкс, а также
а!> 1. В противном случае два параметра tHl и £и2 могут образовать гребень,
в любой точке которого целевая функция будет иметь постоянное значение.
Очевидно, что в таких условиях продолжение поиска будет невозможно.
Например, если бы для £и1 и £н2 было выбрано 6 = 10 мкс и а = 1, то при
значении tHl = /И2 = 500 мкс получили бы значение запасов в точках гребня: г =
= (505 — 500)/Ю — 1 = —0,5 и, следовательно, Z0 в окончательной точке не
могло бы превысить —0,5,
284
Таблица 8.3
Выходные
параметры
ТТ
а
а
Um
—10,8
В
1,2 В
1
'й
505
МКС
4 мкс
100
*И2
—495
МКС
4 мкс
100
'в
375'
мкс
25 мкс
1
р
150
мВт
15 мВт
1
«$!
—1,2
0,3
50
s2
-1,2
0,3
50
"отс
—0,5
В
0,1В
50
Kf
0,075
0,005
1
Таблица 8.4
Управляемые
параметры
WH
WB
Ru кОм
0,4
10,0
R2, кОм
0,4
10,0
#3, кОм
0,05
2,0
Rif кОм
5,0
50,0
Rb, кОм
0,1
10,0
/?в, кОм
5,0
100,0
С, нФ
4 5,0
100,0
В табл. 8.4 даны максимальные WBi и минимальные WHi значения
управляемых параметров, определяющие допустимую область. Выбираем также Лтах=
= 0,1, /гт1п = 0,05 и £i = 0,l.
Результаты оптимизации схемы ждущего мультивибратора следующие.
Поиск из трех различных исходных точек WHCX привел в окрестности
экстремальной точки W * с потерями на поиск пг и п3 (табл. 8.5).
Таблица 8.5
«3
а. *
п §
р
Ж СО
1
2
3
Координаты исходной точки
W„c*
S
4,5
4,3
3,3
СИ
8,7
3,4
2,5
1,8
0,9
1,3
^
50
32
14
2
2,1
0,5
6,1
31
33
58
е
34
89
54
Координаты конечной точки W*
2,59
2,58
2,58
**
3,61
3,65
3,67
.S
0,85
0,73
0,71
-35
«Й
5,1
5,0
5,0
1,4
1,2
1,2
«Й
34,7
34,5
34,5
22,0
22,0
22,0
216
222
217
в
62
51
102
Значения выходных параметров в трех вариантах поиска оказались: Vm =
= 11,1-4- 11,6 В; *и = 499 мкс; tB = 372 ч- 373 мкс; Р = 105 -*- 107 мВт; S't =
= 52 = 1,50; Umc = 0,60 В; КТ == 0,0743 ч- 0,0747, а значение целевой
функции Z0 (W *) = -(0,89 -5- 0,94).
В отличие от примера 1 здесь получены отрицательные значения целевой
функции в оптимальной точке. Это означает, что при заданных технических
требованиях у схемы отсутствует область работоспособности. Следовательно, нужно
или изменить сам вид принципиальной схемы, т. е. возвратиться к этапу синтеза
конфигурации схемы, или изменить технические требования к выходным
параметрам, если это возможно. В последнем случае желательно, чтобы результаты
оптимизации содержали бы в себе сведения о tom,v на какие выходные параметры
нужно изменить технические требования, чтобы появилась непустая область
работоспособности. Такие сведения суть сведения о параметрах, образовавших
гребень в оптимальной точке. В данном примере точка W * лежит на гребне,
образованном запасами параметров Um, tB и К Т. Следовательно, нужно сделать
менее жесткими технические требования на те или иные из указанных трех
выходных параметров.
285
Пример 3. Рассмотрим подготовку исходных данных, процесс оптимизации
и его результаты для схемы токового ключа, показанной на рис. 8.15 (здесь
£i = — Ы5 В, Е2 = —5 В). В отличие от предыдущих примеров здесь
использовалась математическая модель схемы в виде системы дифференциальных
уравнений. Интегрирование этой системы позволяет получить такие выходные
параметры схемы, как г3д.Р — задержка распространения сигнала, UB — верхний
уровень выходного напряжения, Д[/вых — перепад напряжения на выходе.
Вых
НЕ-ИЛИ
Вых
ИЛИ
Рис. 8.15. ч Схема токового ключа
Параметры UU(m (0) и Unou (1) — допустимые уровни помехи в логических
состояниях 0 и 1 — можно было бы найти в процессе анализа передаточной
характеристики, полученной путем решения системы алгебраических и
трансцендентных уравнений. Однако в данном случае для Un(m (0) и Un0M (1) имеются
достаточно точные явные зависимости от параметров компонентов [3], которые и
включим в ММС:
U
U„
1(0) = 0,5/1В/(Д+1)^1~тф7,1п (MKf);
в(1) = 0,5/1В/(В + 1)/г1-тфг1п(Л1//(/)э
где /х —ток через R3 в состоянии 1, тцт —температурный потенциал эмиттер-
ного перехода транзистора; М — коэффициент объединения по входу ИЛИ;
К,
= —1
/Лв
2mqT(B + \)
1 +
V^
4m<pr(B + l)
'Л*
Кроме названных будем учитывать также такие выходные параметры, как
Р — мощность, рассеиваемая схемой, /С/ — коэффициент, отражающий
неравномерность тока через R3. Для них будем'использовать следующие формулы 13]:
0,5Е2£
(/i + /o)
O^iVi , 2£2£;
Rt(B + l)
*4
В+1
*J = 'i/'o, '
где /0 — ток через R3 в состоянии схемы 0.
Ток /0 определяют решением следующего трансцендентного уравнения:
:^[£^т^1п7^+Т)]-
Ток /х находят по формуле
/
/0 + ^[£2-^Х—Ф.'П 7^%+Т)}
В табл. 8.6 представлены значения TTj, бу и aj для всех выходных параметров,
причем знаки 7Т/ в таблице уже учитывают приведение всех условий
работоспособности к виду (8.1). Численные значения ау выбраны так, чтобы добиться
максимального быстродействия схемы при соблюдении заданных ограничений
на основные выходные параметры.
286
Параметры транзисторов заданы, поэтому к управляемым параметрам
относятся сопротивления резисторов Rlf R3, R4. Сопротивление R2 не относится
к управляемым, поскольку связано с сопротивлением Ri функциональной
зависимостью R2== ^iRv
Рис. 8.16. Иллюстрация процесса поиска экстремума
целевой функции Z0 для схемы токового ключа
Допустимую область зададим, ограничив все сопротивления сверху
значением 10 кОм, а снизу 0,05 кОм. На рис. 8.16 показан процесс поиска экстремума
из исходной точки Rx = 0,98 кОм, R3 = 3,67 кОм, /?4 ='3,4 кОм. Здесь даны
значения запасов на последовательных шагах с номерами к. В исходной точке
125 Ь,нс
Рис. 8.17. Кривые переходного процесса в схеме токо*
вого ключа в исходной и оптимальной точках;
/ - ип
2 - С/в
минимальным оказался запас Zi. Однако уже на втором шаге пересекается
гребень Г (гь г3) и дальнейший поиск до 26-го шага происходит в пределах этого
гребня. При этом целевая функция увеличивается с —11,2 до —0,6. Далее
порядок гребня увеличивается на единицу и поиск после 26-го шага идет уже по
гребню Г (zl9 z3, гб), на котором в итоге на 46-м шаге и будет найден экстремум.
Из рис. 8.16 видно, что при шаге вдоль гребня значения запасов, образовавших
гребень, расходятся, что является следствием нелинейности задачи, однако
следующий шаг подъема на гребень делает эти значения практически одинаковыми.
287
Таблица 8.6
Выходные
параметры
тт
6
/7
^ Рзд.р)
8 не
0,95 не
1
Л ("в)
—4,14 В
0,1 в
50
У* (А"вых)
—0,7 В
0,05 В
10
Ко>>)
У
-—0,15 В
0,05 В
50
Уь
Спом^)
-р,2 В
0,05 В
50
ч% (Р)
40 мВт
5 мВт
sa
* (*/)
1,25
i 0,05
50
Итоговые результаты оптимизации схемы токового ключа приведены
в табл. 8.7. Расчетная форма выходного напряжения при включении и
выключении схемы в исходной и оптимальной точках изображена на рис. 8.17. Там же
приведена и форма входных импульсов в этих точках В данном случае при
интегрировании системы дифференциальных уравнений в точке W * в качестве
параметров входного импульса принимались параметры выходного импульса
в наилучшей из предыдущих точек,
Таблица 8.7
Номер
варианта
поиска
1
2
3
Координаты исходной
точки W кОм
Д|
0,82
0,36
0,98
Я,
1,89
1,66
3,67
*4
0,86
1,55
3,40
Координаты
оптимальной точки W*, кОм
*i
0,229
0,229
0,230
Дз
1,08
1,08
1,09
я4
2,01
2,00
1,99
Z0 (Whcx)
—188,8
—0,221
—11,2
Z0 (W*)
0,703
0,702
0,696
ni
43
32
46
пч
14
18
14
Таким образом, ни в одном из рассмотренных примеров не обнаружено
многоэкстремальности целевой функции. Во всех выполненных вариантах
наблюдалась сходимость поиска к экстремальной точке со сравнительно малыми
потерями на поиск.
ПРИЛОЖЕНИЯ
Приложение 1
ПРОГРАММЫ АНАЛИЗА НЕЛИНЕЙНЫХ ЭЛЕКТРОННЫХ
СХЕМ ПА1 И ПА1М *
Назначение и характеристики программы ПА1
1. Программа ПА1 написана для ЭВМ «М-220», «БЭСМ-4», «М-222». Она
имеется в двух вариантах:
а) на языке АВТОКОД ИПМ; требует использования двух
лентопротяжных механизмов и МОЗУ на 8192 слова (применяется] совместно с операционной
системой ОС4-220 и транслятором ТА1М);
б) на машинном языке; требует использования транслятора ТА1М, одного
лентопротяжного механизма и МОЗУ на 4096 слов.
2. Программа ПА1 предназначена для анализа нелинейных электронных
схем с преимущественной ориентацией на переключательные электронные схемы,
имеющие умеренный разброс постоянных времени в диапазоне до 1 • Ю5.
Особенность программы — возможность анализа сложных многокомпонентных
электронных схем.
3. С помощью программы ПА1 выполняют анализ переходных процессов и
статических состояний схем.
4. Программа ПА1 применима при соблюдении следующих условий и
ограничений:
а) допустимые типы компонентов в схеме — биполярные транзисторы (в том
числе, многоэмиттерные транзисторы), полупроводниковые импульсные,
выпрямительные и высокочастотные диоды, стабилитроны, резисторы, конденсаторы,
катушки индуктивности;
б) напряжения входных источников могут быть постоянными,
синусоидальными функциями времени и иметь импульсную трапецеидальную форму (частные
случаи трапецеидальных импульсов — треугольные, пилообразные,
прямоугольные);
в) максимальная сложность анализируемых схем, выражаемая количеством
электронно-дырочных переходов, составляет 100, что соответствует .250 ветвям
в сокращенной эквивалентной схеме **. Максимальное количество входных
источников с зависимым от времени напряжением равно пяти. Максимальное
количество выходов схемы, для которых автоматически подсчитываются параметры
выходных импульсов, равно четырем;
г) в эквивалентной схеме не должны допускаться: связанные неправильные
размещения ветвей (связанные емкостные контуры, связанные резистивные
сечения и связанные индуктивные сечения), контуры, в которых наряду с
источниками напряжения имеются только емкости; сечения, в которых наряду с
источниками тока есть только индуктивности.
5. Анализ работы схем при различных значениях температуры должен
быть реализован заданием в качестве исходных данных значений параметров
компонентов, соответствующих требуемой температуре.
* В разработке программ помимо авторов настоящей книги принимали
участие Б. К. Аристов, Д. 3. Джурунтаев, Д. М. Жук, С. Р. Иванов, В. Я. Ха-
ртов.
** Сокращенной эквивалентной схемой называют схему, в которой
транзисторы и диоды представлены своими сокращенными эквивалентными схемами.
В сокращенной эквивалентной схеме двухпереходного транзистора имеются
четыре ветви — ветви емкостей переходов и объемных сопротивлений тел базы
и коллектора. В сокращенной эквивалентной схеме диода имеются две ветви —
емкость перехода и сопротивление базы.
289
6. Ориентировочный прогноз затрат машинного времени на анализ схемы
с помощью ПА1 на ЭВМ «М-222» может быть выполнен по формуле Тм^ 1,8-10~5
а ^кон/тт1п' где Тк — затраты машинного времени, мин; а — количество
ветвей в сокращенной эквивалентной схеме; Ткон — отрезок интегрирования, мкс;
Tmift — ориентировочная оценка минимальной постоянной схемы, мкс.
В табл. П 1.1 приведены затраты машинного времени при анализе
нескольких конкретных схем.
Таблица П1.1
Наименование схемы
Сложный инвертор
Цепь из трех схем «Тропа»
Цепь из трех схем «Посол»
Интегральный токовый ключ
Схема ТТЛ
J — /С-триггер на базе
ТЛЭС
«/'—К = триггер на базе
ТТЛ
а
28
33
39
39
42
163
234
^KOH^min
2300
3100
5700
5000
6400
8700
26000
7М, мин
3,5
2,5
3,0
3,0
• 5,2
28
240
Входной язык программы ПА1 и инструкция
по ее использованию
1. К исходным данным относят такие массивы: а) формуляр (Ф), в котором
отображается информация о структуре эквивалентной схемы; б) массив
параметров компонентов (ПК); в) массив режимных параметров (ПР); г)
вспомогательный блок В Б. *
2. Для составления формуляра (Ф) нужно проделать следующие
процедуры:
а) по принципиальной схеме составить эквивалентную схему в соответствии
с такими правилами:
любой р-/г-переход изображать в виде емкости перехода;
биполярный интегральный транзистор изображать в виде двух емкостей
эмиттерного и коллекторного р-/г-переходов, объемных сопротивлений тел базы
и коллектора и емкости изолирующего р-я-перехода;
полупроводниковый диод изображать в виде емкости перехода и объемного
сопротивления тела базы;
полупроводниковый стабилитрон представлять с помощью двух диодов и
источника постоянного напряжения;
многоэмиттерный транзистор представлять как совокупность k
транзисторных структур (k — количество эмиттеров);
резисторы, конденсаторы и катушки индуктивности изображать так же,
как на принципиальной схеме;
между некоторыми парами узлов (где это необходимо) включать
паразитные емкости;
представить п одинаковых подсхем одной подсхемой с указанием величины п
в исходных данных * (см. дополнение 1);
при наличии в эквивалентной схеме связанных неправильных размещений
устранить их путем включения дополнительных резистивных ветвей в
емкостные контуры или индуктивные сечения или емкостных ветвей в резистивные
сечения (см. дополнение 3);
* Выполняют в случае разветвленной схемы, т. е. такой, в которой есть
несколько однотипных подсхем, находящихся в одинаковых условиях
возбуждения по входу и работающих на общую нагрузку.
290
б) произвести нумерацию узлов эквивалентной схемы (номера /-узлов —
числа натурального ряда в восьмеричной системе счисления: /=1, 2, 3, 4, 5, 6,
7, 10, 11, ..., N—1, N, где N — количество узлов);
в) проставить . направления токов в ветвях, принятые за положительные.
Выбор положительных направлений токов произволен для всех ветвей, за
исключением:
ветвей р-л-переходов, где положительное направление принимается от р-об-
ласти к п-области;
ветвей, падения напряжений (токи) которых рассматриваются как
выходные, где положительное направление должно совпадать с истинным
направлением переменной составляющей тока.
3. Формуляр (Ф) должен представлять собой список ветвей, каждой ветви
должна соответствовать одна строка формуляра:
а) каждая строка формуляра Ф/ должна иметь следующий вид: Ф; =
= {П1Е-, П2Ь ПЗ,-, КФ$, НФ/, HQ, yif, У21*}, где П1^ —- признак выходной ветви;
П2; — признак печати тока i-й ветви; ПЗ,- — признак печати напряжения i'-й
ветви; КФг- — код компонента; НФ^ — номер ветви; HQ — номер подсхемы
в эквивалентной схеме, к которой относится i-я ветвь; У1*, У2^ — номера узлов,
между которыми включена г-я ветвь;
б) строку Фг- можно, рассматривать как одно машинное слово, при этом
распределение разрядов должно быть следующим:
i/
Номера разрядов 45 44 43 42—37 36—25 24—22 21—13 12—1
Элемент строки Ф;... П1£ П2£ ПЗ, КФ; НФ; HQ У1* У2/
Элементы строки Ф( могут иметь следующие значения: если ветвь
рассматривается как выходная, то Ш/ = 1, иначе П1/ = 0; если в процессе анализа
нужно выводить на печать с шагом печати А^печ значения тока через t'-ю ветвь,
то П2* = 1, иначе П2,- = 0, если нужно выводить значения падения напряжения
на /-й ветви, то ПЗ* = 1, иначе ПЗг- = 0.
Коды компонентов КФ; имеют следующие значения:
Природа ветви КФ;
Источники напряжения:
постоянного 10
трапецеидального И
синусоидального 12
Емкости переходов 21
Остальные емкости 20
Сопротивления 30
Индуктивности 40
Источники постоянного тока 50
Номера ветвей НФ^ — числа натурального ряда в восьмеричной системе
счисления, НФ = {1, 2, 3, ..., п}, где п — количество ветвей в эквивалентной
схеме. Правила заполнения колонки НФ в формуляре даны в п.„г".
HQ — числа натурального ряда в восьмеричной системе НС= {0, 1,2, . ., г},
где z < 7;
Y\i и У2£- — номера узлов, между которыми включена i-я ветвь, причем
ток ветви течет от узла У1$ к узлу У^-;
в) строки формуляра должны записываться в следующей
последовательности: источники напряжения, емкости переходов, остальные емкости,
сопротивления, индуктивности, источники тока. Внутри групп ветвей одинаковой
природы расположение строк произвольное, за исключением строк переходов
с КФ/ = 21; здесь сначала записываются строки всех переходов транзисторов,
затем строки диодов (строка коллекторного перехода какого-либо транзистора
должна непосредственно следовать за строкой эмиттерного перехода того же
транзистора);
г) строки формуляра должны нумероваться в восьмеричной системе
последовательно, начиная с первой строки, имеющей КФ; = 21; последними нуме-
291
руются строки источников напряжения, записанные в начале формуляра
(номера строк записываются в колонке НФ).
Пример. Записать строку формуляра для ветви сопротивления в неразвет-
вленной схеме, имеющей НФ/ = 16, в которой ток течет от узла 5 к узлу 37,
ветвь является выходной и, кроме того, требуется вывести на печать значения
падения напряжения на этой ветви (пример дан применительно к бланку
машинной программы «М-220»):
КОП Al А2 A3.
5 30^ 0016 0005 0037
д) формуляр (Ф) кроме п строк описания ветвей должен иметь еще три
строки, записываемые в его конце^ (п + 1)-я строка обязательно должна быть
нулевой, в (п + 2)-й строке в разрядах второго ^адреса А2 записывается
количество транзисторов q\, а в (я + 3)-й строке — количество диодов q2 (q\ и q2 —
числа, представленные в восьмеричной системе счисления).
4. Массив (ПК) должен содержать значения параметров-компонентов,
последовательность расположения которых определяется номерами НФ/ ветвей
в формуляре:
а) в начале массива должны перечисляться параметры р-/г-переходов, т. е.
параметры ветвей, имеющих КФ; = 21. Для этих параметров отводится 8 X
X (2 X q\ + q2) ячеек. Эта часть массива ПК состоит из восьми подгрупп,
последовательность которых следующая:
Номер подгруппы Параметр перехода
1
2
3
4
5
6
7
8
Активные токи /акт и емкости С переходов вычисляются в процессе
исполнения программы, поэтому численные значения параметров подгрупп 7 и 8 при
вводе целесообразно принять нулевыми. Для диодов значения параметров
подгруппы 5 также нулевые;
б) в каждой подгруппе последовательность расположения параметров
переходов должна быть такой же, какова последовательность перечисления строк
переходов в формуляре;
в) после восьми подгрупп параметров переходов в массиве ПК должны
записываться параметры остальных ветвей в той последовательности, в какой
были, пронумерованы строки в формуляре (вначале записываются емкости
ветвей с КФ/ = 20„ затем проводимости резистивных ветвей, индуктивности, токи
источников тока, напряжения источников напряжения. Следует отметить, что
в ПК фигурируют не сопротивления, а проводимости резистивных ветвей,
имеющих КФ; — 30. В случае наличия источников напряжений, зависящих от
времени, в ПК должны указываться начальные значения этих напряжений).
5. Массив режимных параметров (ПР) должен состоять из массивов Т,
ВНП и ВЫХ:
а) в массиве Т указываются следующие параметры:
шаг вывода на печать токов и напряжений Д/Печ>
длительность переходного процесса TK0Yi (отрезок интегрирования);
свободная ячейка с нулевым содержимым;
константа выбора шага интегрирования Мг (обычно Мг ~ 0,005);
константа выбора шага М2 = M1l^tmax (где Д/тах «* 0,01 Ткон—
максимально возможная величина шага интегрирования);
Тепловые токи /т, мА
Барьерные емкости СБ, пФ
Температурные потенциалы тфт, В
Постоянные времени т, нс
Коэффициенты усиления тока, В
Сопротивления утечки R , кОм
Активные токи /акт, мА
Емкости переходов С, пФ-
292
время расчета начальных условий Тн.у1;
время корректировки начальных условий T„.v2;
коэффициенты разветвления * подсхем, на которые разделена эквивалентная
схема (под коэффициенты разветвления отводится восемь ячеек);
б) массив ВНП включает в себя значения параметров входных импульсов
и должен располагаться непосредственно за массивом Т.
Под массив ВНП отводится 30 ячеек памяти. Массив ВНП должен состоять
из / подгрупп (/ < 5). Каждая подгруппа в случае входных импульсов
трапецеидальной формы должна включать в себя шесть параметров, в случае
синусоидальной формы — три параметра и обслуживать один вход схемы.
Последовательность расположения параметров в каждой подгруппе для трапецеидального
импульса должна быть следующей: амплитуда импульса Um\ начальный уровень
напряжения U0\ длительность переднего фронта на уровнях 0 и 1 от Um\
длительность вершины; длительность заднего фронта на уровнях 0 и 1 от Um;
длительность задержки переднего фронта (значение U0 должно быть продублировано
в массиве ПК в ячейке, отводимой под напряжение данного источника).
Подгруппа параметров синусоидальных сигналов должна включать в себя
следующие параметры: амплитуду напряжения Um; частоту со; начальную фазу ср0.
Последовательность расположения подгрупп в массиве должна соответствовать
последовательности перечисления ветвей входных источников в формуляре;
в) массив ВЫХ является массивом выходных параметров схемы и
заполняется в процессе исполнения программы. Однако для ка'ждого выхода в массиве
ВЫХ нужно указать значения Umln и t t которые задают правила определения
выходных параметров и относятся к исходным данным. Между массивами Т
и ВЫХ должно оставаться 30 ячеек, занимаемых массивом ВНП. Массив ВЫХ
состоит из d подгрупп по восемь чисел каждая ,{d < 4). Первая ячейка массива
ВЫХ остается незанятой, а далее последовательно располагаются подгруппы,
каждая из которых соответствует одному выходу схемы. В начале подгруппы
должны указываться- значения c7min и tK, остальные шесть ячеек должны быть
заняты выходными параметрами. Длительность переднего фронта
выходного импульса определяется на уровнях 0, 1 и 0,9 от Um{n, а
длительность задержки заднего фронта определяется как интервал времени между
моментом tn и моментом, когда выходное напряжение изменится на величину
0,9 от UmBblx(Vтвых — амплитуда выходного импульса). Последовательность
расположения подгрупп в массиве ВЫХ должна соответствовать
последовательности расположения ветвей с Ш^ = 1 в формуляре.
6. Вспомогательный блок ВБ — программный блок и его структура заранее
не определяется. В этом блоке на машинном языке может быть записана любая
дополнительная программа, расширяющая возможности программы ПА1. В
частности, блок ВБ может представлять собой программы расчета коэффициентов
влияния, реализующие методы планирования эксперимента, компоновки
массива ПК для многотранзисторных схем из библиотечных параметров
транзисторов и диодов и т. д. Блок В Б должен быть расположен в МОЗУ, начиная с
ячейки 6630, и не должен превышать 350 команд (350 — восьмеричное число). Для
использования возможностей, связанных с массивом ВБ, необходимы
определенные знания о структуре программы ПА1 (см. дополнение 4). Если блок ВБ
не используется, то он должен быть заменен в колоде вводимых перфокарт
одним числом, равным нулю.
7. Выходная информация в программе ПА1 включает в себя таблицу токов
и напряжений ветвей и список значений выходных параметров:
а) при расчете начальных условий на отрезке Тн.у1 и при анализе
переходных процессов на отрезке Ткои должна производиться печать токов и
напряжений ветвей, у которых признаки П2/ и ПЗг- соответственно равны 1, через про-
* В случае неразветвленных схем вслед за Гн.у2 нужно записать восемь
нулей. В случае разветвленных схем, состоящих из k^S подсхем, коэффициенты
разветвления указываются в первых k ячейках из названных восьми, причем
последовательность записи коэффициентов разветвления должна соответствовать
принятой нумерации подсхем.
293
межутки времени, равные с точностью до шага интегрирования шагу печати
б) максимальное количество печатаемых токов и напряжений равно 30,
количество печатаемых чисел на каждом шаге — Р + 1 (Р — число, кратное
трем). Если, например, признаки П2,- и ПЗ; отличны от нуля у четырех ветвей
в формуляре, то будут печататься четыре запланированных числа, затем два
нуля и последнее число означает текущее время. Порядок печатаемых токов и
напряжений соответствует порядку расположения ветвей с П2; = 1 и ПЗ,- = 1
в формуляре;
в) по окончании расчета переходного процесса печатается столько
подгрупп массива ВЫХ, сколько ветвей с признаком П1/ = 1 было указано в
формуляре. В каждой подгруппе расположение параметров должно быть
следующее: Umln; tu\ длительность задержки переднего фронта; длительность переднего
фронта; амплитуда выходного импульса; длительность заднего фронта;
длительность задержки заднего фронта; начальный уровень выходного напряжения.
Перед первой подгруппой массива ВЫХ должно печататься число, .равное
выполненному количеству шагов интегрирования;
г) при наличии в эквивалентной схеме связанных неправильных
размещений или контуров, состоящих только из источников напряжения и емкостей,
программа ПА1 должна прекращать работу. Далее должна происходить печать
строки М-матрицы с неправильно размещенной ветвью и переход к исполнению
следующей за программой ПА1 программы (или останов по адресу 5450).
8. Колода перфокарт при использовании программы ПА1 в варианте на
машинном языке должна состоять из следующих массивов перфокарт: программы
ПА1; формуляра Ф; массива ПК; массива ПР; массива ВБ. Каждый массив
должен заканчиваться картой с признаком контрольной суммы и двумя чистыми
картами. В начале колоды необходимо поместить карту ввода программы ПА1
в МОЗУ и передачи управления в начало программы (ячейка 4772).
9. Колода перфокарт для работы с программой ПА1 в варианте на языке
АВТОКОД с использованием операционной системы должна составляться
следующим образом:
а) первой картой должна быть универсальная карта ввода (УКВ) и второй —
карта с шифром. Последняя подкладывается вслед за УКВ и имеет вид
077 3377 1477 0177
777 0000 0000 0000
077 3377 1477 0177КЕ*
Далее должна подкладываться карта вызова предзагрузчика
0001 050 0020 0001 4375
0002 070 4300 0001 0000
0002 056 0000 4352 0000
216 4320 4354 4375КБ
УКВ вызывает в ячейки 00000 — 07770 МБ-0 ИС-2. Так как 0С4—220 эту
часть МБ-0 не использует, то УКВ можно подложить один раз перед первой
работой. ПА1 использует ИС-2, которая должна находиться на МБ-0 в ячейках
00000 — 07770. В связи с тем что ТА1М имеется не во всех организациях, можно
воспользоваться имеющейся ИС-2, для этого надо заменить команды вызова и
настройки ИС-2 в МОЗУ;
б) при первом пуске программы ПА1 необходимо завести теки с
названиями ПА1СР и ПА1РД. В теку ПА1СР переписывается с карт программа на
автокоде, а в теку ПА1РД — модуль загрузки. Директивы при первом пуске
программы необходимо расположить в следующем порядке:
(РАБОТА <СИСТЕК>, <ПА1СР>, <ПА1ДР>,
<ТЕКА <ПА1ДР>
<ТЕКА <ПА1СР>
(РАСПРЕД СИ-ПФК СР-(ПА1СР>, ДР-<ПА1ДР>,
(ПЕРЕЙИСЬ СИ
* КЕ — признак контрольной суммы.
294
За этой директивой должна подкладываться программа ПА? в варианте
на автокоде, а затем следуют директивы:
(ПЕРЕПИСЬ СР
(АВТОКОД ДР, ДОК
Происходит ввод программы ПА1, записанной на автокоде, перепись ее
в теку ПА1СР, трансляция программы с выдачей документа на АЦПУ и запись
модуля загрузки в теку ПА1ДР
Последняя директива —
(ЗАГРУЗИТЬ 1
По этой директиве должна происходить загрузка в МОЗУ1 готовой
программы;
в) если в теке ПА1ДР имеется модуль загрузки ПА1, то работу надо
организовать следующим образом:
УКВ с шифром;
карта вызова предзагрузчика;
РАБОТА <ПА1ДР>
РАСПРЕД ДИ-<ПА1ДР>
ЗАГРУЗИТЬ 1
г) при желании можно получить распечатку программы, тогда вместо
набора директив пункта (в) используется набор:
УКВ с шифром;
карта вызова предзагрузчика;
(РАБОТА <СИСТЕК} <ПА1СР>
(РАСПРЕД СИ-<ПА1СР>
(ПЕРЕПИСЬ СИ
(АВТОКОД ДОК
(ЗАГРУЗИТЬ 1
д) после инструкции ЗАГРУЗИТЬ надо подкладывать перфокарты
следующих массивов: Ф, ПК, ПР, В Б. Между каждой парой массивов нужно иметь карту
с признаком контрольной суммы и две чистые карты.
Отличия программы ПАШ от программы ПА1
1. В программе ПАШ реализован более экономичный по затратам
машинного времени алгоритм численного интегрирования системы дифференциальных
уравнений, чем в программе ПА1, и расширены возможности программы за счет
включения в перечень допустимых компонентов в анализируемых схемах также
двух- и трехобмоточных трансформаторов. Программа ПА1М имеется в
варианте на машинном языке ЭВМ «М-220», «М-222», «БЭСМ-4».
2. Назначение, характеристики, входной язык и инструкция по
использованию программы ПА1 сохраняют свою силу и для программы ПА1М со
следующими добавлениями:
а) допускается анализ схем с двухобмоточными трансформаторами (ДОТ)
и трехобмоточными трансформаторами (ТОТ);
б) в эквивалентной схеме трансформатор представляется сокращенной
эквивалентной схемой, где каждая обмотка изображается с помощью только
одной индуктивной ветви, физический смысл которой — индуктивность рас-
,сеяния обмотки;
в) описание ДОТ в формуляре дается с помощью трех последовательных
строк следующего вида:
Ok = {Tllkt П2Ь ПЗЬ 41, НФ*, НС*, 0, 0},
Ф*+1 = {Пи+1, П2л+1> mk+1, 41, НФ*+1, НС*+1, а, Ь},
Ф*+2 = {Пи+2, П2*+2, ПЗ*+2, 41, НФ*+2, НС*+2> с, d}y
где кодом ветвей ДОТ в формуляре является 41; а и b — номера узлов подклю-
чения обмотки, принятой за первичную; cad — то же, обмотки, принятой за
295
вторичную (присвоение обмоткам названий «первичная» и «вторичная»
произвольно). Значения Ш/, П2;, ПЗ/, НФ/, HQ записываются в соответствии с общими
правилами заполнения формуляра в программе ПА1. При этом строка Ф/г
соответствует индуктивности намагничивания ДОТ,' не отображаемой в
сокращенной эквивалентной схеме, а строки Ф^+1 и Ф^+2 — индуктивностям рассеяния
первичной и вторичной обмоток;
г) описание ТОТ в формуляре аналогично описанию ДОТ, за исключением
следующего: 1) описание занимает четыре строки (четвертая строка соответствует
индуктивности рассеяния третьей обмотки); 2) код каждой ветви равен'42;
д) массив ПК в программе ПА1М состоит из подмассивов: ПК1 и ПК2.
Подмассив ПК1 заполняется по таким же правилам, что и массив ПК в программе
ПА1. При этом в программе ПК1 на местах, соответствующих индуктивностям
рассеяния, записываются значения индуктивностей рассеяния обмоток. На
местах, соответствующих индуктивностям намагничивания, записываются нули.
Подмассив ПК2 записывается непосредственно за массивом ПК1 и состоит из /
групп (/ — количество трансформаторов в анализируемой схеме). Каждая группа
соответствует одному трансформатору. В группе для ДОТ указываются шесть
параметров в следующей последовательности: RnT — активное сопротивление
потерь в материале сердечника; я, Ь и с — коэффициенты аппроксимации
зависимости индуктивности намагничивания от намагничивающих ампер-витков;
W-l — число витков первичной обмотки; пг — коэффициент трансформации от
первичной обмотки ко вторичной. В группе для ТОТ указываются семь
параметров в последовательности: RnT, а, Ь, с, Wly пъ /г2, где щ — коэффициент
трансформации от первичной обмотки к третьей. Группы записываются
непосредственно друг за другом в той же последовательности, в какой трансформаторы
описаны в формуляре. При формирований колоды перфокарт подмассивы ПК1
и ПК2 образуют один общий массив ПК;
е) для схем с трансформаторами вводится ограничение, заключающееся
в недопустимости индуктивных неправильных размещений.
Структура программы ПА1 и реализованные
в ней методы и алгоритмы
1. Основу программы ПА1 составляют три основных бЛока:
программирующая программа ПП; библиотека подпрограмм БП; ведущая программа ВП.
2. Блок ПП служит для автоматического формирования машинной
программы анализа МПА по данным о структуре схемы, содержащимся в формуляре
Ф. В МПА как анализ статических состояний схемы, так и анализ переходных
процессов осуществляется путем численного интегрирования системы
обыкновенных дифференциальных уравнений. Основу МПА составляет блок
вычисления правых частей этих уравнений БПЧ.
3. Блок ПП выполняет следующие процедуры: ,выбор нормального дерева
графа схемы; формирование матрицы контуров и сечений М в компактной
координатной форме; преобразование М-матрицы в машинную программу — блок
БПЧ; настройку ведущей программы и подпрограмм на анализ конкретной
схемы.
Для автоматического получения блока БПЧ в блоке ПП используется метод
сканирования М-матрицы.
4. В состав блока БП входят следующие оснобные подпрограммы:
подпрограмма транзистора ПТ; подпрограмма диода ПД; подпрограмма численного
интегрирования системы дифференциальных уравнений ИНТ; подпрограмма
входных сигналов трапецеидальной формы (ТРАП); подпрограмма входных
сигналов синусоидальной формы (СИН); подпрограмма определения входных
параметров (ПВП); подпрограмма трансформатора (в программе ПАШ).
5. В подпрограмме ИНТ реализован явный метод численного интегрирования
дифференциальных уравнений с автоматическим выбором шага, относящийся
к методам первого порядка точности. Используемый метод позволяет вести
интегрирование с шагом, средняя величина которого, как правило, значительно
превышает минимальную постоянную времени схемы, и обеспечивает
устойчивость вычислительного процесса. Алгоритм подпрограммы ИНТ в программе
296
ПА1М следующий:
begin real HI, Я2, HM, Ml М2\
integer i; array Fl, F2, V [1 : q]\
comment: #1 и #2 — соответственно новое и старое значения величины шага
интегрирования; НМ — максимальное по абсолютной величине значение среди
производных переменных состояния; Ml и М2 — константы выбора шага; F1
и F2 — массивы производных переменных состояния соответственно на
текущем и предыдущем шагах интегрирования; V — массив переменных состояния;
t и q — соответственно время и порядок системы дифференциальных уравнений:
procedure £1;
begin reaf DEL;
for / : = 1 stei) 1 until q do
begin DEL \ = \f sign (Fl [/]) =
sign (F2[i]) then HI xF\[i]
else Я2 x £1 [i] X £2 [i] / (£2 W —Fl [/]);
V[i]: = V[i] + DEL
end;
procedure £2;
begin
model (Fl);
comment: процедура model есть блок вычисления правых частей системы
дифференциальных уравнений, значения которых составляют массив £1;
НМ : = 0;
for i : = 1 step 1 until q do
if abs (Fl [i])->HM then HM : = abs (Fl [i]);
HI : = Mlj(M2 + HM)
end;
£1;
£2;
£1;
£0: £2;
for i: = 1 step 1 until q do
F2[/]: = Flffi
Я2: = #1
end.
Обращение к подпрограмме ИНТ производится из ведущей программы,
причем при выполнении первого шага обращение организуется к оператору,
помеченному меткой L0.
6. В подпрограммах ПТ и ПД реализованы математические модели
транзистора и диода, разработанные для программы ПАЭС и называемые моделями
П АЭС.
7 Ведущая программа включает в себя команды ввода исходных данных,
их перевода в двоичную систему,» обращения к подпрограммам ИНТ, ТРАП,-
СИН, ПВП, к подпрограмме печати, а также обеспечивает необходимую
последовательность вычислений: расчет начальных условий в течение времени Тн. у1,
их корректировку в течение времени Гн. у2 и анализ переходных процессов в
течение времени Ткон.
Дополнение 1
ПРИМЕРЫ ПОДГОТОВКИ ЗАДАЧ К РЕШЕНИЮ
С ПОМОЩЬЮ ПРОГРАММЫ ПА1
1. Пример. Составление эквивалентной схемы и формуляра для нераз-
ветвленной цепи (принципиальная схема И—НЕ приведена на рис. Д1.1).
2. По принципиальной схеме составляется эквивалентная схема,
изображенная на рис. Д1.2. Транзисторы и диоды заменены своими сокращенными
эквивалентными схемами, причем объемные сопротивления тел коллекторов не
297
учитываются, а последовательно включенные диоды Д3 и Д4 рассматриваются
как один диод при соответствующем пересчете их параметров.,Между узлом 21
и корпусом в эквивалентной схеме включается паразитная емкость С13. Неучет
сопротивления тела коллектора транзистора Т4 и паразитных емкостей в узлах 7
Рис. Д1.1, Принципиальная схема тестового примера
и // связан с желанием иметь в примере емкостные и рёзистивные неправильные
размещения для проверки правильности большинства блоков программы.
Поскольку выходной импульс должен иметь отрицательную полярность, то
направление тока в выходной ветви С12 принято от корпуса к узлу 17.
Рис. Д1.2. Эквивалентная схема тестового примера
3. По эквивалентной схеме составляется формуляр в следующем виде
(см. стр 300).
Как видно из формуляра, принято решение на оба входа схемы подавать
трапецеидальные импульсы, выводить на печать с шагом А^печ значения входных
и выходного напряжений, а также падений напряжений на сопротивлениях
4. Выбираются и записываются в бланк значения параметров
компонентов. В табл. Д1.1 приведены эти значения и последовательность их
расположения для рассматриваемого примера.
5. Значения параметров массива Т приведены в табл. Д1.2
Таблица Д1.2
Н 02 25000000 ДгпеЧ) мкс Н 03 99999999 М2
Н 00 17000000 Ткою мкс Н 01 99999999 Тн vl, мкс
+ —00 00000000 х — Н 01 70000000 Ти ' мко
-|—02 50000000 Мг +—00 00000000 п0
298
Ч—09
Н 07
Ч 09
+-07
Н 09
Н 07
Ч 09
Н 07
Ч 09
Ч—09
Ч—09
Ч—02
Ч—02
Ч—02
Ч—02
Ч 02
Ч—02
Ч 02
Ч—02
Ч—02
Ч 02
Ч 02
+ -01
+ -01
+ -01
+-01
Ч—01
+-01
Ч 01
Ч 01
Ч—01
Ч—01
+ -01
+ -01
Ч—01
Ч—01
Ч—01
+-01
+ -01
+ -01
+ -01
Ч—01
+ -01
+ -01
+ +02
Ч—01
+ +02
+ -01
+ +02
+ -01
+ +02
Ч—01
ч—00
ч—00
Ч—00
22000000
17000000
22000000
17000000
22000000
17000000
22000000
17000000
90000000
90000000
90000000
34000000 1
40000000
34000000
40000000
34000000
40000000
34000000
40000000
90000000
90000000
45000000
33000000
36000000
33000000
36000000
33000000
36000000
33000000
36000000
34000000
34009000
68000000
20000000 1
62000000
20000000
62000000
20000000
62000000
20000000
62000000
60000000 *
60000000
ЗС0Э0000 ,
66000000
99999999
66000000
99999999
66000000
99999999
66000000
99999999
00000000
00000000
00000000
Таблица Д1.1
+ ■
> /т, мА
Сб> нФ
тфт, В
> Т, MKG
} В
+ +06
+ ■
+ +06
+ +06
+■
+ +06
+■
+ +06
ч~
+■
-06
-06
-Об
■06
06
■Об
ч—00
+-00
Ч 00
н—00
ч—00
Ч—00
ч—00
ч—00
ч—00
ч—00
Ч—00
ч—оо
Ч—00
ч—00
Ч—00
ч—00
Ч—00
+ —00
Ч 00
Ч—00
ч—00
Ч—00
Ч—01
Ч—02
ч—00
ч-+оо
++01
Ч 00
+ +01
-02
-02
+■
+■
+■
ч-
+ +02
+ +01
+ +01
+ +01
-01
-01
10000000
10000000
10000000
10000000
10000000
10000000
10000000
10000000
20000000
20000000
20000000 j
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
00000000
оооооооо.
00000000
00000000
00000000
Ry, кОм
^с
Ч—01
Ч—01
15000000
30000000
33000000
69500000
66700000
14300000
10000000
20000000
20000000
10000000
83300000
83300000
83300000
83300000
50000000
99999999
99999999
С12, нФ
С13, нФ
Rl~i, ком-1
R2"1, ком-1
R3""1, ком-1
R4"1, ком-1
R5"1, ком 1
R6"1, ком-1
R7"1, ком-1
R8"1, ком-1
R9"1, ком-1
R10"1, ком"1
Rll-i, ком-1
R12-1, ком""1
Е1, В
Е2, В
ЕЗ,В
а) параметры входных импульсов (массив ВНП) выбраны одинаковыми
для обоих входов и соответствуют форме входного напряжения, приведенной на
рис. Д1.3;
ВО 80 100 120 140 t,HC
Рис. Д1.3. Результаты анализа переходных
процессов:
/ — входное напряжение (Е2 и Ez); 2 —
напряжение на R2', 3 — напряжение на Ru 4 —
выходное напряжение (на Си)
КОП
Примечание
О
о
о
о
о
о
о
о
о
о
о
5
о
1
1
о
о
1
о
о
о
о
о
о
о
о
о
о
10 0032 0001 0004 Е1 1
И 0033 0002 0004 Е2 2— вход,
печать U
11 0034 0003 0004 ЕЗ , 3-вход,
печать V
21 0001 0010 0012 С1 1
21 0002 0010 ООП С2 2
21 0003 0013 0015 СЗ 3
21 0004 0013 0014 С4 4
21 0005 0016 0017 С5 5
21 0006' 0016 0014 Сб 6
21 0007 0022 0004 С7 7
21 0010 0022 0017 СЯ 8
21 ООН 0007 0005 С9 9
21 0012 0007 0006 СЮ 10
21 0013 0007 0020 СП 11
20 0014 0004 0017 С12 12-выход,
печать U
20 0015 0021 0004 С13 13
30 0016 0001 0007 R1 1 — печать U
30 0017 0001 ООП R2 2
30 0020 0001 0014 R3 3
30 0021 0021 0004 R4 4
30 0022 0012 0004 R5 5-печать U
30 0023 0005 0002 R6 6
30 0024 0006 0003 R7 7
30 0025 0020 0021 R8 8
30 0026 0021 0010 R 9 9
30 0027 ООП 0013 #10 10
30 0030 0015 0015 #11 11
30 0031 0012 0022 #12 12
00 х 0 0 0 —нулевая строчка
00' 0000 0004 0000 q\—количество транзисторов
00 0000 0003 0000 q2 — количество диодов
300
б) параметры массива ВЫХ выбраны следующими: Um[n = 4 В; £и = 35 не.
6. Перфорируются исходные данные. Массив ВНП следует непосредственно
за массивом Т, а между параметром «длительность задержки переднего фронта»
массива ВНП и параметром Umln массива ВЫХ необходимо на перфокартах
иметь 19 нулей [под ВНП отведены 30 ячеек, a Umin помещается в ячейку ВЫХ +
+ 1, поэтому 30—2 • (количество ячеек одного входа) + 1 = 19 ячеек].
7. Ввод программы.
8. На рис. Д1.3 представлены рассчитанные зависимости падений
напряжения на Rlf R2 и С12 от времени при анализе переходных процессов на отрезке
Рис. Д1.4. Принципиальная схема элемента с
непосредственными связями (а), схема соединений
элементов (б), эквивалентная схема (в)
интегрирования в 170 не. Значения выходных параметров составили: £3д1 =
«= 4,93 не; tb = 2,47 не; Цвых т = 4,29 В; tc = 50,82 не; t3Jl2 = 63,20 не; UBblx0 =
= 4,32 В.
9. Пример. Составление эквивалентной схемы и формуляра для
разветвленной цепи.
10. На рис. Д1.4, а приведена принципиальная' схема элемента
транзисторной логики с непосредственными связями, а на рис. Д.1. 4, б — схема
соединения элементов, подлежащая анализу. При этом возбуждение подается на входы
па элементов, а пб элементов невозбуждены. Нагрузка состоит из т
элементов.
11. Принципиальная схема на рис. Д. 1.4, б заменяется эквивалентной
схемой на рис. Д1.4, в, где имеются три подсхемы. Подсхема А с номером НСа = 0
заменяет па входных элементов. Каждая ветвь подсхемы Л имеет коэффициент
разветвления, равный па. Подсхемы Б и В имеют номера соответственно 1 и 2
и заменяют пб входных и т выходных элементов. В эквивалентной схеме на
301
рис. Д1.4, в емкость С± — паразитная, а ветви R10f Rn и С14 имитируют нагрузку
на подсхему В. Выходные параметры — параметры импульса в узле 9
относительно корпуса.
12. Формуляр для схемы на рис. Д1.4, в записывают следующим
образом:
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
5
0
2
0
0
0
0
2
2
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
коп
10
10
11
2L
21
21
21
21
21
21
21
21
21
21
21
21
20
30
30
30
30
30
30
30
30
30
30
30
30
30
30
30
30
30
30
30
30
00
00
00
А
0043
0044
0045
0001
0002
0003
0004
0005
0006
0007
0010
ООП
0012
0013
0014
0015
0016
0017
0020
0021
0022
0023
0024
0025
0026
0027
0030
0031
0032
0033
0034
0035
0036
0037
0040
0041
0042
0000
0000
0000
Б
0002
ООП
0003
0004
0004
0010
0010
С013
1013
1016
1016
2020
2020
2023
2023
2026
2017
0002
0003
0002
1002
1011
1002
2002
2017
2002
2002
2025
0006
0006
0017
1014
1014
1017
2022
2022
2025
0000
0006
0001
в
0001
0001
0001
0001
0005
0001
0007
0001
0012
0001
0015
0001
0021
ООП
0024
0001
0001
0003
0004
0006
ООП
0013
0014
0017
0020
0022
0025
0026
0005
0010
0007
0012
0016
0015
0021
0023
0024
0000
0000
0000
Примечание •
Е1
ЕЗ
Е2
С2
СЗ
С4
С5
С6
С7
С8
С9
СЮ
СИ
С12
С13
С14
С1
R1
R2
R3
R4
R5
R6
R7
R8
R9
R10
R11
R12
R13
R14
R15
R16
R17
R18
R19
R20
362
Дополнение 2
Типичные значения параметров транзисторов,
используемых в модели транзистора ПАЭС
Для германиевых маломощных транзисторов тепловой ток коллекторного
перехода /т, к = 1 • 10~3 — 1 • 10~4 мА; для кремниевых маломощных /т. к = 1 X
X 10"*— 1 • 10~12 мА. Тепловой ток эмиттерного перехода /т#э должен быть на
порядок меньше теплового тока коллекторного перехода /т#к.
Температурные потенциалы тфт.э и mcpT. к для германиевых переходов равны
0,025 — 0,032 В, для кремниевых — на 20—30% больше.
Барьерные емкости переходов С$э и С$к для низкочастотных
(бездрейфовых) транзисторов находятся в диапазоне 30 -г- 60 пФ, для высокочастотных
(дрейфовых) транзисторов — 1 — 12 пФ.
Коэффициент усиления тока В нужно измерить на постоянном токе.
Инверсный коэффициент усиления Ви у бездрейфовых транзисторов составляет
1 -т- 5, у дрейфовых 0,01 -*•* 0,5.
Постоянная времени % эмиттерного перехода определяется через граничные
частоты / или fB по формуле т = (В + 1)/(2я/ )= \/(2nfB).
Постоянная времени коллекторного перехода ти у бездрейфовых
транзисторов немного меньше т (до 20%), у дрейфовых транзисторов в 2—6 раз больше т.
Сопротивления утечки переходов Ry,B и Ry,K находятся в диапазоне от
сотен килоом до десятков мегаом.
Объемное сопротивление тела базы г$ = (0,02 — 0,2) кОм, объемное
сопротивление тела коллектора г'к у бездрейфовых транзисторов ' не учитывается,
у дрейфовых г£ = (0,01—0,05) кОм.
Дополнение 3
Устранение неправильных размещений ветвей
в эквивалентных схемах при использовании
программы ПА1
В списке ограничений на применение программ анализа электронных схем
часто присутствует ограничение, заключающееся в недопустимости в
анализируемой схеме любых неправильных или связанных неправильных размещений
ветвей. В связи с этим возникает задача выявления и устранения
неправильных размещений ветвей при подготовке задач анализа к решению. Ниже даются
необходимые определения и описывается процедура выявления и устранения
неправильных размещений.
Общие определения
Г. Емкостной граф образуется из графа эквивалентной схемы, если в графе
схемы разомкнуть все ветви, за исключением ветвей емкостных и ветвей
источников напряжения (рис. Д3.1). На рис. Д3.1, а изображена принципиальная
электрическая схема, на рис. Д3.1, б — граф этой схемы, на рис. Д3.1, в —
емкостной граф.
2. Резистивный граф образуется из графа эквивалентной схемы при
размыкании в последней ветвей индуктивных и источников тока и замыкания накоротко
ветвей емкостных и источников напряжения. На рис. ДЗ. 1, г изображен
резистивный граф схемы, изображенной на рис. Д3.1, а. При замыкании ветвей ряд
узлов схемы объединяется в один узел, называемый обобщенным узлом. Так,
узлы схемы на рис. Д3.1, а е номерами 1, 4, 5, 6 и 7 образовали в резистивном
графе (рис. Д3.1, г) один обобщенный узел, а узлы 9, 10, 11, 12 и 13 —другой
обобщенный узел. Узлы 2 и 8 в отдельности также можно рассматривать как
обобщенные узлы. Узлы, к которым на резистивном графе подключена
единственная ветвь, называют пустыми узлами (на рис. Д3.1, г узел 3 — пустой узел),
ветви, начинающиеся и кончающиеся в одном и том же обобщенном узле, называют
петлями. При изображении резистивного графа петли не учитывают.
3. Индуктивный граф образуется из графа эквивалентной схемы при
замыкании всех ветвей, кроме ветвей индуктивных и источников тока.
4. Дерево графа — любая совокупность ветвей, образующая связный
подграф без замкнутых контуров и охватывающая все узлы графа. В нормальное
303
дерево ветви включаются со следующим приоритетом: сначала ветви источников
напряжения, затем ветви емкостные, резистивные и индуктивные. На рис. ДЗ. 1, б,
в, г деревья выделены жирными линиями. Ветви нормального дерева называют
ребрами, ветви, не вошедшие в дерево, — хордами. '
5. Сеченые ребра — совокупность ветвей, пересекаемых замкнутой линией
(линией сечения) при выполнении следующих 'условий: а) каждая ветвь может
пересекаться не более одного
«2 Zf ^ 8 П8
^—^^Ш
IH^HI-i/J
раза; б) среди ребер
пересекается только одно данное ребро.
На рис. ДЗ. 1, г линии сечения
показаны пунктирными
линиями, в сечение ребра R5,
например, входят ветви R5, R7f R8
и RG.
6. Контур хорды —
совокупность ветвей, входящих в
контур, образуемый при
подключении к дереву
рассматриваемой хорды. На рис. ДЗ. 1, в,
например, контур хорды С10 об-
ветвями С1(
Св
неправильное
отождествля-
хордой (на-
Д3.1 С4, С7
разуется
иСб.
7. Емкостное
размещение (HP)
ется с емкостной
пример, • на рис.
и С10).
. 8. Резистивное
неправильное размещение (HP) —
резистивное ребро, в сечении
которого имеется хотя бы одна ре-
зистивная хорда (например, в
схеме на рис. Д3.1 Rlf R±, Rb).
Однако резистивное ребро R3
не является неправильным
размещением, поскольку в его
сечении нет резистивных хорд,
как это следует из рис.ДЗ. 1, б
или Д3.1, г.
9. Индуктивное
неправильное размещение (HP) —
индуктивное ребро.
10. Связанные неправильные
размещения: емкостные HP
называют связанными, если в
контура двух или более емкостных
хорд входят общие ребра. На рис. Д3.1, в ветвь Q — несвязанное HP, а ветви
С7 и С10 — связанные HP, так как в контура хорд С7 и Сго входят общие ребра
С5 и С6; резистивные HP — связанные, если в сечения двух или более
резистивных ребер входят общие резистивные хорды. На рис. ДЗ. 1у г ребро Rt -—
несвязанное резистивное HP, а ребра #4 и #5 — связанные резистивные НР„
поскольку в сечении ребер /?4 и Rb входят общие резистивные хорды #7 и R8.
Индуктивные связанные HP — индуктивные ребра, в сечения которых входят
общие хорды.
9,W,ffJ2,f3
Рис. Д3.1. Принципиальная схема (а), ее
граф и нормальное дерево (б), емкостные
контуры (в) и резистивные сечения (г)
Способы устранения неправильных размещений (HP)
1. Устранение емкостного HP заключается во включении в контур
емкостной хорды резистивнрй ветви с сопротивлением R.
1 2. Резистивное HP устраняется включением в резистивное сечение
дополнительной емкостной ветви с емкостью С. Такое включение вызываете рези-
304
стивном графе объединение двух обобщенных узлов, т. е. ликвидацию^ одного
обобщенного узла.
3. Индуктивное HP устраняется включением в сечение индуктивного ребра
дополнительной резистивной ветви с сопротивлением г.
4, Выбор величин R, С и г осуществляется исходя из компромиссного
удовлетворения противоречивых требований точности и малых затрат машинного
времени. Слишком большие величины С и R или малые величины г ухудшают
точность анализа, а слишком малые величины С и R или большие величины г
приводят к росту времени решения из-за уменьшения минимальной постоянной
времени схемы. Рекомендуется предварительно выполнять приближенную.оценку
минимальной постоянной времени xmin и выбирать такие значения С, R и г,
чтобы вновь вводимые ветви образовывали цепи перезаряда реактивностей с
постоянными времени, близкими к выполненной оценке tmin.
Методика выявления неправильных размещений HP
и устранения связанных неправильных размещений
Один из способов выявления, связанных неправильных размещений —
построение емкостного, резистивного и индуктивного графов с применением к
последним положений пункта п. 10 (см. стр. 304). Недостаток этого способа —
громоздкость графических построений.
Ниже рассматривается другой более экономный способ выявления и
устранения неправильных размещений:
1. Зарисовывается эквивалентная схема.
2. Жирными линиями или ярким цветом выделяются на эквивалентной схеме
ветви емкостные и источники напряжения. Каждая группа выделенных ветвей
(группу образуют выделенные ветви, непосредственно соединяющиеся друг с
другом через общие для них узлы) есть обобщенный узел.
, 3. Узлы схемы нумеруются, причем всем узлам, входящим в один
обобщенный* узел, присваивается один и тот же номер. В дальнейшем под узлами схемы
понимаются обобщенные узлы. В случае схем с индуктивностями возможно
появление в схеме пустых узлов. Пустые узлы не нумеруются, а ветви,
подходящие к пустым узлам, вычеркиваются и в дальнейшем не рассматриваются.
Признаком пустого узла является подход к нему единственной резистивной ветви
и одной или более'ветвей индуктивных и источников тока. Во избежание ошибок
следует помнить, что все выделенные ветви, подключенные к узлу «корпус» и
к узлам заземленных источников, образуют одну группу и, следовательно, один
обобщенный узел.
4. Выполняется анализ групп выделенных ветвей на наличие в них
замкнутых контуров (замкнутые контура означают наличие емкостных неправильных
размещений). Недопустимая ситуация при применении программы ПА1
—наличие в контуре источников напряжения. При отсутствии источников
напряжения необходимо выявить связанные емкостные HP среди выделенных ветвей в
соответствии с определением п. 10 (см. стр. 304).
5. Обнаруженные недопустимые емкостные HP устраняются в соответствии
с п. 1 (см. стр. 304).
6. Дальнейшие процедуры связаны с поиском и устранением резистивных
HP, выявление которых обычно вызывает наибольшие трудности.
Индуктивные HP в реальных схемах встречаются сравнительно редко из-за малого
количества индуктивных ветвей. В случае большого количества индуктивных ветвей
рекомендуется способ построения индуктивного графа.
7. Выделяется базовый обобщенный узел (в качестве базового рекомендуется
выбирать обобщенный узел, связанный с узлом «корпус»).
8. Если в схеме оказался единственный обобщенный узел, то в
эквивалентной схеме нет резистивных и индуктивных неправильных размещений.
9. Если в схеме имеется несколько обобщенных узлов, то производится
анализ связей обобщенных узлов друг с другом. Рассматриваются связи только
посредством резистивных ветвей. При этом поочередно анализируются все узлы,
за исключением базового. Если очередной узел связан резистивными ветвями
305
не более чем с одним узлом, то такая ситуация отождествляется с наличием
несвязанного неправильного размещения. Если очередной узел соединен резистив-
ными ветвями с более чем одним обобщенным узлом, то такая ситуация
отождествляется с наличием в^ схеме связанных HP. Тем самым выполнено обнаружение
связанных HP.
10. Обнаруженное связанное HP устраняется путем включения емкостной
ветви между: а) очередным рассматриваемым узлом и одним из узлов, с кото-
Рис. Д3.2. Принципиальная (а) и эквивалентная (б) схемы
примера
рыми связан очередной узел, б) или двумя узлами, с которыми соединен
очередной рассматриваемый узел.
11. Устранение HP вызывает объединение двух обобщенных узлов, что
отражается на эквивалентной схеме заменой старого номера одного из узлов
новым. Вводимые ветви также отмечаются на схеме. Включение дополнительной
ветви между двумя обобщенными узлами может быть выполнено неоднозначно,
т. е. по усмотрению пользователя программой ветвь включается между теми
или иными узлами исходной эквивалентной схемы, входящими в
рассматриваемые обобщенные узлы.
12. Процедура анализа связей и объединения обобщенных узлов
продолжается до тех пор, пока в схеме не останется связанных резистивных HP.
306
Пример применения методики обнаружения
и устранения связанных неправильных размещений
1. На рис. Д3.2, а представлена принципиальная, а на рис. Д3.2, б —
эквивалентная схема примера. Ветви на рис. Д3.2, б, показанные пунктиром,
в первоначальном варианте схемы отсутствуют. Они вводятся в процессе
устранения неправильных размещений.
2. На рис. Д3.2, б выделяются жирными линиями ветви емкостные и
источников напряжения. Обобщенные узлы схемы нумеруются (на рис. Д3.2, б
номера узлов проставлены в кружках).
3. Отсутствие среди выделенных ветвей замкнутых контуров означает
отсутствие в схеме емкостных HP.
4. В качестве базового узла выбирается узел 1.
5. Наличие в схеме 11 обобщенных узлов означает наличие в схеме 10 ре-
зистивных неправильных размещений.
6. Анализируется узел 2. Как видно из рис. Д3.2, б, он связан резистив-
ными ветвями с узлами 1, 3 и 4, что означает наличие связанных резистивных
HP. Включаем емкостную ветвь Сг между узлами 1 и 4 и емкостную ветвь С2
между узлами 1 и 2. Это приводит к замене номеров узлов 2 и 4 на номер 1 (на
рис. Д3.2, б рядом со старыми номерами записаны новые). Тем самым
ликвидированы узел 2 и связанные с ним HP.
7. Анализируется узел 3. Он связан с узлами / и 6, что означает наличие
связанного HP. Включаем емкостную ветвь С3 между узлами 1 и 6. Происходит
объединение узлов 1 и 6 с ликвидацией узла 6. Теперь узел 3 связан резистив-
ными ветвями с единственным узлом /, что означает наличие несвязанного HP.
8. Анализируется узел 5. Он связан с узлами 1 и 7. Объединяем узлы /
и 7 с ликвидацией узла 7 с помощью дополнительной ветви С4.
9. Анализируется узел 8. С ним связаны узлы 1 и 9. Включаем ветвь Сб,
ликвидируя узел 9 и соответствующее связанное HP.
10. Анализируется узел 10. Он связан с узлами 1 и 11 Включаем ветвь С&,
ликвидируя узел 10 и соответствующее связанное HP.
11. Анализируется узел 11. Он связан только с узлом 1, что означает
отсутствие связанного резистивного HP.
12. Процедура устранения связанных резистивных HP закончена.
Введены шесть дополнительных емкостных ветвей. В эквивалентной схеме остались
обобщенные узлы /, 3, 5, 8 и 11, т. е. четыре небазовых узла, связанных каждый
с единственным узлом /. Это означает, что в схеме остались четыре несвязанных
резистивных ИР, что и требуется при подготовке задачи к решению с помощью
программы ПА1.
Дополнение 4
Структура автоматически составляемой программы МПА
1. Состав библиотеки подпрограмм ПА1 следующий:
ТРАП — подпрограмма входных трапецеидальных импульсов; СИН —
подпрограмма входных синусоидальных сигналов; ПВП — подпрограмма
выходных параметров; ПТ — подпрограмма биполярного транзистора; ПД —
подпрограмма диода; ИНТ — подпрограмма интегрирования системы
дифференциальных уравнений; ПЕЧАТЬ — подпрограмма печати токов и напряжений
ветвей.
2. Принятые обозначения программных и числовых массивов следующие:
а) программные массивы: ВП — ведущая программа; МП — машинная
программа, состоящая из четырех частей (МП1 — команды обращения к
подпрограммам входных сигналов, МП2 — команды обращения к подпрограммам
нелинейных компонентов, МПЗ — команды вычисления токов и напряжений
ветвей, МП4 — команды обращения к ПВП); БП4 — часть машинной программы
МП, состоящая из МП2, МПЗ и МП4 (при расчете начальных условий
используется БП4, а при анализе переходных процессов — МП); ПП —
программирующая программа, служащая для составления МП и настройки ВП и БП при
анализе конкретной схемы; В Б — вспомогательный блок, служащий для
размещения любых дополнительных программ, расширяющих возможности про-
307
граммы ПА1, МПА — машинная программа анализа, включающая МП и
настроенные ВП и БП;
б) числовые массивы: РЯ — массив рабочих ячеек; К — массив констант,
формируемый ПП; ПК — массив параметров компонентов; ТН — массив токов
и напряжений ветвей; ПР — массив режимных параметров, включающий масЛ
сивы X, ВНП и ВЫХ; Т — массивы управляющих'параметров; ВНП — массив
параметров входных сигналов; ЁЫХ — массив выходных параметров; ОНУ —
массив ориентировочных начальных условий.
3. Содержимое массива Т:
Адрес
ячейки
6506
6507
6510 *
6511
6512
6513
6514
6515
6516
6517
6520—6527
Содержимое
Текущее время t
Шаг интегрирования h
Время печати ^печ
Шаг печати Д/Печ
Отрезок интегрирования при анализе переходных процессов Ткон
Резервная ячейка
Константа интегрирования Щ
Константа интегрирования М2
Время расчета начальных условий Гн.у1
Время корректировки начальных условий Тн.у2
Массив коэффициентов разветвления щ
Содержимое массива К
Адрес
3370
3372
3374
3375
3376
3400
3401
3403
3404
Содержимое ячейки
коп
0
0
0
0
0
0
0
- 0
0
А
0
0
0
0
0
0
0
0
0
Б
пр-п
0
0
0
0
0
Лм
а—1
пу— 1
в
0
Лком
пс
nR
nL
а
0
0
0
Примечание
п п — количество р-/г-переходов
Яком — количество команд в МП
пс — количество емкостей
nR — количество сопротивлений
nL — количество индуктивностей
а — количество ветвей
пт — количество ненулевых элементов в М-
матрице
Пу — количество узлов
4. Структура ведущей программы (ВП). После того как закончится
составление МПА, в программе ПА1 автоматически передается управление в начало
ведущей программы (адрес 3233). Далее ВП выполняет^ следующие операторы
(в дальнейшем машинный адрес первой команды оператора рассматривается как
метка этого оператора):
3233: Очистка ячеек массивов ПК и ПР
3236: Ввод числовых массивов ПК и ПР, перевод введенных чисел в двоичную
систему счисления с помощью подпрограммы СП42 из .ИС2
3243: Ввод программного массива В Б
3244: Передача управления в начало блока В Б. Если блок ВБ не используется
(в колоде перфокарт ВБ был представлен одним числом, равным нулю),
то произойдет возврат в ячейку 3245 ведущей программы. В противном
случае управление вычислительным процессом принимает на себя
программа ВБ
3245: Пересылка напряжений и токов источников из массива ПК в массив ТН
3253: Печать первых ПО чисел массива ПК с помощью СП-1041 из ИС2
^08
3255: Печать массива Т
3257: Обращение к ИНТ в ячейку 2716 с возвратом в ячейку 3260 (этот оператор
имеется только в программе ПАШ)
3260: Если t^TH.yl, то переход к оператору 3266
3262: Обращение к БП4'в случае программы ПА1 или к ИНТ в ячейку 2713
в случае программы ПАШ с возвратом в ячейку 3263
3263: Если t ^ tne4, то переход к подпрограмме 'печати токов и напряжений
с возвратом из подпрограммы в ячейку 3260 (в подпрограмме печати, в
частности, произойдет tne4: = tne4 + А^печ)
3266: Запоминание ориентировочных начальных условий (ОНУ) на МБ, при
этом в ОНУ входят массивы ТН и ПР
3270: Очистка ячейки с временем печати, т. е. tne4 = 0
3271: Восстановление ориентировочных начальных условий, т. е. перепись
с МБ в МОЗУ массивов ТН и ПР
3273: Очистка ячейки текущего времени, т. е. t: = 0
3274: Если t^Tu.y2* то переход к оператору 3277
3276: Обращение к БП4 в случае программы ПА1 или к ИНТ в ячейку 2713
в случае программы ПАШ с возвратом в ячейку 3274
3277: t: = tne4 : = 0
3301: Пересылка значений выходных напряжений в ячейки массива ВЫХ,
предназначенные для хранения начальных уровней выходных напряжений
3306: Обращение к блоку МП в случае программы ПА1 или к подпрограмме
ИНТ в ячейку 2703 в случае программы ПАШ с возвратом в ячейку 3307
3307: Обращение к подпрограмме выходных параметров с возвратом в ячейку
3310
3310: Если t^ tne4y то переход к подпрограмме печати, иначе переход к
оператору 3313
3313: Если t < Гкон, то переход к оператору 3306, иначе переход к оператору
3315
3315: Печать массива ВЫХ с помощью СП-1041 из ИС2
3317: Останов (конец программы ПА1)
5. Распределение памяти при исполнении программы МПА:
Адреса МОЗУ Массив
0001—0027 Рабочие ячейки
0030—2237 МП
2240—2427 Массив правых частей предыдущего шага F2 (в программе ПАШ)
2430—2453 РЯ
2454—2643 Массив правых частей текущего шага F1 (в программе ПАШ)
2644—2700 Резервные ячейки для дополнительно составляемых подпрограмм
2701—3001 Подпрограмма интегрирования ИНТ (в программе ПАШ)
3002—3032 Подпрограмма экспоненциальной функции
3033—3052 ТРАП
3053—3060 СИН
3061—3112 ПВП
3113—3146 ПТ
3147—3162 ПД
3163—3232 Подпрограмма интегрирования в программе ПА1 и подпрограммы
трансформатора в программе ПАШ
3233—3317 ВП
3320—3347 ПЕЧАТЬ
3350—3361 Логические шкалы, управляющие печатью токов и напряжений
ветвей
3362—3367 Вспомогательные константы
3370—3410 Константы, формируемые в ПП (массив К)
3411—5521 ПК
5522—6505 ТН
6506—6527 Т
6530—6565 ВНП
6566—6626 ВЫХ
309
6630—7177 В Б
7200—7777 ИС2 (интерпретирующая система)
6. Структура массивов ПК и ТН. Структура массива ПК описана в основном
тексте инструкции. Массив ПК вводится с перфокарт, последовательность
расположения параметров в ПК при исполнении программы ПА1 не изменяется.
Массив ТН состоит из двух частей: массива токов и массива напряжений.
Последовательность расположения как токов, так и напряжений в ТН
определяется номерами ветвей в формуляре (например, адрес тока ветви с номером НВе-
равен НВГ- + 5521 — значения адресов везде в тексте даются в восьмеричной
системе счисления). Адрес напряжения ветви с номером НВ, равен НВ; + 5521 +
+ а (где а — количество ветвей в сокращенной эквивалентной схеме —
количество строк в формуляре).
Дополнение 5
Организация и использование библиотеки параметров компонентов
в программах ПА1 и ПА1М
Библиотека параметров компонентов (БПК) представляет собой машинный
носитель информации с записанными на нем номинальными значениями
параметров транзисторов и диодов. В БПК целесообразно хранить параметры тех
типов транзисторов и диодов, которые, по предположению пользователя
программой, могут найти применение во многих схемах, подвергающихся анализу на ЭВМ.
Содержимое БПК по мере необходимости может изменяться и пополняться.
Программа ПА1 (ПАШ) может применяться как с использованием БПК, так и
без ее использования. Основной текст инструкции дан применительно к случаю
неиспользования БПК. Ниже излагаются дополнения к основному тексту
инструкции в случае использования БПК:
1. В качестве машинного носителя для БПК в программе ПА1 (ПАШ)
приняты перфокарты. Для каждого типа транзистора или диода в БПК
отводится одна перфокарта. В случае транзистора на перфокарту заносятся
номинальные значения 12 параметров транзистора в следующей последовательности:
/т.э, Сбэ, ^Фт.э, т> #> /?уэ, /т.к, Сбк, /жрт.к, ти, Би, RW.K. В случае диода на
перфокарту заносятся номинальные значения шести параметров диода в
последовательности: /т, Сб, тфт, т, 0, Ry.
Для удобства пользования на перфокартах делают графические пометки,
обозначающие тип транзистора или диода. Принятые в БПК размерности
параметров становятся обязательными и при формировании небиблиотечных
массивов.
2. Массив ПК при использовании БПК формируется следующим образом.
В начале массива подкладывается q1 перфокарт из БПК с параметрами
транзисторов, далее q2 перфокарт из БПК с параметрами диодов (где q± и q2 —
количество соответственно транзисторов и диодов в анализируемой ;схеме).
Очередность перфокарт в массиве должна соответствовать порядку 'рписания
транзисторов и диодов в формуляре. Вслед за последней перфокартой с параметрами
диода (или транзистора при q2 = 0) подкладывается q3 перфокарт е параметрами
линейных емкостей, резисторов, катушек индуктивностей, источников тока и
напряжения и трансформаторов. Эти q3 перфокарт подготавливаются так же,
как и в случае неиспользования БПК. При наличии в анализируемой схеме
нескольких однотипных транзисторов или диодов соответствующие карты из БПК
размножаются.
3. На место блока В Б в формируемой колоде перфокарт должна быть
помещена программа КОМП перекомпоновки массива ПК. Текст программы КОМП
следующий:
6630
6631
6632
6633
6634
6635
6636
6637
0
0
0
0
0
0
0
0
56
00
00
00
00
00
00
00
0000
0000
0006
0001
0000
0000
3403
2430
6645
0000
0000
0000
0001
0000
0000
0000
2431
0000
0000
0000
0000
0001
• 2430
0030
6657-
6660
6661
6662
6663
6664
6665
6666
0
0
1
0
0
0
1
0
00
13
12
00
52
16
40
52
0000
2434
0005
0000
0000
6665
2432
0000
0000
6633
6652
0000
0000
6641
6664
0000
0000
2434
0001
2430
0000
6644
0001
0000
310
6640 0 00 0000 0000 0000
6641 0 13 6637 2431 6642
6642 0 00 0000 0000 0000
6643 0 13 2431 6635 2431
6644 0 00 0000 0000 0000
6645 0 00 0000 0000 2434
6646 0 33 3333 6634 2432
6647 0 50 0015 0020 2237
6650 0 70 0030 0000 2435
6651 0 52 0000 0000 0000
6652 0 13 6636 2434 6640
6653 4 52 0000 0000 6657
6654 0 13 6640 6632 6640
6655 0 16 6656 6640 6644
6656 1 40 2432 6654 0001
6667 0 16 6670 6641 6644
6670 1 40 2432 6667 0001
6671 0 33 3371 3370 2433
6672 0 33 2433 6634 2433
6673 0 52 0000 0000 0000
6674 0 13 6640 6633 6640
6675 0 16 6676 6640 6644
6676 1 40 2433 6674 0001
6677 0 52 0000 0000 0000
6700 5 00 0030 0000 3411
6701 1 12 2110 6700 0001
6702 0 50 ООП 0020 2237
6703 0 70 0030 6702 0000
6704 0 56 0000 6631 0000
Программа КОМП формирует структуру ПК, принятую в программе ПА1,
после чего передает управление в ведущую программу.
4. Использование БПК и программы КОМП заметно .упрощает подготовку
задач анализа-многотранзисторных схем к решению на ЭВМ за счет резкого
сокращения количества параметров компонентов, значения которых требуется
записывать в бланках массива ПК.
Дополнение 6
Анализ с помощью программы ПАШ схем с источником
входного сигнала произвольной формы
1. В программе ПАШ реализована возможность анализа схем, в которых
напряжение одного из источников — произвольная функция времени U =
= F(t). Для F(t) используют кусочно-линейную аппроксимацию и сведения о
F(t) представляют в форме таблицы с координатами узловых точек Ui, ti.
Количества узловых точек L не ограничивается. Шаг таблицы (^+1 — tj) произволен.
2. Описание ветви источника напряжения произвольной формы в
формуляре аналогично описанию других ветвей, за тем исключением, что для такого
источника используется код ветви КФ=13.
3. Таблица узловых точек отображается на перфокартах с помощью N
массивов, располагаемых в колоде вводимых карт "после массива В Б. Каждый
массив должен заканчиваться признаком контрольной суммы и двумя чистыми
перфокартами. В каждом из N массивов отображаются координаты не более
чем 96 точек. При L ^ 96 достаточно одного массива.
4. Каждый из N массивов состоит из двух частей. В первой части
располагаются значения Ui, а во второй части — значения ti в порядке возрастания
номеров i, причем должно быть tf+1 > fy. Вторая часть каждого из N массивов
на перфокартах должна начинаться с адресного кода, равного 7040. Абсцисса
последней точки TL должна превосходить заданное значение отрезка
интегрирования Ткон.
5. Ввод первого из N массивов осуществляется с помощью блока В Б. Для
этого на место блока В Б должна быть помещена следующая программа:
6630 0 56 0000 6632 0000
6631 0 00 0000 0000 0000
6632 0 30 6700 6633 0000
6633 0 16 6634 7501 7610
6634 0 52 6700 0042 7177
6635 0 56 0000 6631 0000
Ввод остальных массивов выполняется специальной подпрограммой,
имеющейся в программе ПА1М. Таблица узловых точек располагается в ячейках
памяти с адресами от 6700 до 7177,
311
Дополнение 7
02700
1
2
3
4
5
6
7
02710
1
2
3
4
5
6
7
02720
1
2
3
4
5
6
7
02730
1
2
3
4
5
6
7
02740
1
2
3
4
5
6
7
02750
1
2
3
4
5
6
7
02760
1
2
3
4
5
6
7
02770
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
5
1
0
0
0
0
7
1
0
7
1
0
0
2
0
0
1
0
0
0
0
4
4
0
0
2
0
6
2
2
0
3
1
0
4
4
0
0
2
0
6
2
00
56
16
16
,16
00
16
16
16
01
56
16
16
16
16
52
00
40
00
00
16
52
04
40
52
.04
40
00
52
03
76
02
40
01
04
00
52
55
55
15
76
05
56
02
05
05
04
01
40
52
55
55
15
76
05
56
02
05
0000
0000
2703
2704
2705
6507
2707
2710
2711
0023
0000
2714
2715
2716
2717
0000
2454
0022
6507
0000
2725
0000
5522
3405
0000
5522
0022
0000
0000
2436
0000
2436
0022
2436
6514
0000
0000
2454
2240
2431
0000
6507
0000
2240
2437
2432
2432
2431
3405
0000
2454
2240
2431
0000
6507
0000
2240
2437
Текст программы ПАШ
0000
3274
2744
0030
2725
0000
2744
0030
2725
6507
2717
2744
2724
2744
2724
0000
0000
2720
0000
0000
0030
0000
5522
2726
0000
5522
2731
0000
0000
2454
2740
2431
2735
6515
2436
0000
0000
3001
3001
2432
2753
2454
2757
2454
2454
2240
2431
5522
2745
0000
3001
3001
2432
2770
2454
2774
2454
2454
0000
6507
3000
0030
2743
0023
3000
0030
2743
0023
0000
3000
2743
3000
2743
0000
2240
0001
2437
0000
0030
0000
2454
0001
0000
2454
0001
2436
0000
2431
0000
2436
0001
2436
6507
0000
0000
2431
2432
0000
0000
2431
0000
2431
2432
2432
2431
5522
0001
0000
2431
2'432
0000
0000
2431
0000
2431
2432
02772
3
4
5
6
7
03000
1
2
3
4
5
6
7
03010
1
2
3
4
5
6
7
03020
1
2
3
4
5
6
7
03030
1
2
3
4
5
6
7
03040
1
2
3
4
5
6
7
03050
1
2
3
4
5
6
7
03060
1
2
3
2
0
3
1
0
0
0
2
0
0
4
0
0
0
0
0
0
0
0
2
1
0
1
0
0
0
3
0
0
0
0
1
1
2
0
2
0
2
4
2
0
0
2
2
2
0
2
0
3
2
2
0
0
2
0
2
0
2
05
04
01
40
01
01
00
00
00
00
52
04
42
76
02
06
02
54
05
01
12
05
12
26
00
00
44
56
63
70
75
01
СО
02
36
02
36
02
36
02
76
05
04
05
01
00
04
56
•01
05
01
16
00
05
00
02
76
05
2432
2432
2431
0022
6506
6566
0000
0000
0000
0000
0000
0017
3024
0000
3024
7171
0002
0144
0001
0001
0004
0001
0007
0003
0000
0000
0000
4731
7065
7537
5427
4000
5427
6506
0000
0015
0000
0016
0000
0016
0000
3052
0016
0015
0017
0000
0015
0000
4000
6506
0001
3056
0001
0001
0000
6506
0000
3111
2240
2431
5522
2762
6507
3367
0000
ООСО
0371
0307
0000
3032
0002
3022
0003
0004
0004
0003
0002
3025
3014
0001
3017
-0001
0000
0000
0000
2533
7432
6757
1027
0000
1027
0005
3046
0002
3050
0003
3046
0004
3046
0016
0004
0000
0001
0000
0002
ЗС45
0000
0001
0002
7501
0005
0000
0000
6567
3077
6566
2432
2431
5522
0001
6506
6566
0000
0000
0000
0000
3022
0002
0003
0001
0004
0000
0002
0003
0001
0001
0001
0001
0001
0001
0000
оооо
0100
3736
0003
7702
6710
0000
7575
0015
0017
001S
0000
0016
0017
0016
0017
0016
0015
0017
0001
0000
0015
0000
0000
0001
0001
7610
0001
0001
0000
0014
0000
0014
312
03064
5
6
7
03070
1
2
2
4
5
6
7
03100
1
2
3
4
5
6
7
03110
1
2
3
4
5
6
7
03120
1
2
3
4
5
6
7
03130
1
2
3
4
5
6
7
€3140
1
2
3
4
5
6
7
03150
1
2
3
4
5
6
7
0
0
5
2
0
1
2
0
0
5
0
2
0
0
2
0
0
5
0
5
0
0
1
0
0
6
0
0
2
2
2
3
6
0
0,
2
2
2
3
2
2
0
0
2
6
1
0
2
б
1
0
0
6
0
0
2
2
2
3
6
02
76
01
02
36
56
05
02
76
01
56
05
02
36
05
02
76
01
56
01
00
75
00
00
00
04
76
16
05
05
04
01
04
76
16
05
05
04
01
05
05
02
01
02
04
01
02
02
04
01
00
00
04
76
16
05
05
04
01
04
0002
0000
6570
0002
0000
0002
3112
0002
0000
6571
0000
3112
0014
0000
3111
0014
0000
6573
0000
6574
0000
6314
7146
0000
0000
5522
0000
3120
0001
0005
0006
0006
5523
0000
3127
0001
0007
0010
0010
0005
0007
ООП
0005
0005
5522
0005
0007
0007
5523
0007
0000
0000
5522
0000
3153
0001
0005
0006
С006
5522
0014
3072
0023
6572
3110
3110
6566
0014
3067
0023
3067
6572
0002
3107
6572
0002
3110
0023
3110
0023
0000
6314
3146
0000
0000
3411
3123
3004
3411
3411
3411
3411
3412
3132
3004
3412
3412
3412
3412
3411
3412
0001
ООП
3411
3411
0012
ООП
3412
3412
0012
0000
0000
3411
3156
3004
3411
3411
3411
3411
3411
0014
0000
6570
0014
0000
6572
0014
0014
0000
6571
0000
0014
0014
0000
0014
0014
0000
6573
0000
6574
0000
6315
3147
0005
0007
0017
0006
30?3
0005
0006
0006
3411
0017
0010
3023
0007
0010
0010
3412
ООП
0001
ООП
0005
0005
0012
3411
0007
0007
0012
3412
0000
0005
0017
0006
3023
0005
0006
0006
3411
0012
03160
1
2
3
4
5
6
7
03170
1
2
3
4
5
6
7
03200
1
2
3
4
5
6
7
03210
1
2
3
4
5
6
7
03220
1
2
3
4
. 5
6
7
3230
1
2
3
4
5
6
7
03240
1
2
3
4
5
6
7
03250
1
2
3
0
3
0
2
0
0
4
2
0
2
0
6
0
4
4
0
2
0
0
2
0
4
0
4
0
5
0
2
0
6
6
0
0
4
0
1
0
0
0
0
4
0
0
0
1
1
0
0
0
0
0
0
0
0
5
1
0
5
1
0
01
02
00
05
02
02
05
05
55
01
05
05
04
01
05
00
05
02
02
05
02
05
16
05
00
77
52
02
76
02
02
04
05
01
56
12
30
16
52
56
52
00
56
52
00
12
30
00
30
16
52
30
16
52
00
40
52
00
40
16
0005
0005
0000
0003
0002
0016
0000
0001
3211
0015
0015
0002
0016
0001
0005
0000
0003
0002
0016
0004
0015
0000
3207
0006
0000
7777
0000
6506
0000
6701
7041
2431
2431
6701
0000
0136
6700
3226
6700
3233
0000
0000
0000
0000
0000
3243
3411
0000
6511
3242"
.3411
6630
3245
0000
5522
3377
0000
5522
3373
3254
Продолжи
0012
3411
0000
0005
0001
0015
0015
0004
0015
0003
0015
0003
0015
0015
0005
0000
0005
0001
0015
0006
0016
0015
3167
0005
0000
7777
0000
7041
3223
6700
7040
2432
2430
2430
3230
3213
3225
7501
0042
3232
0000
0000
3212
0000
0000
3234
3237
0000
3241
7501
0042
3244
6630
0000
0000
3246
0000
0000
3251
7501
0005
3411
0000
0015
0016
0015
0005
0015
0015
0015
0015
0016
0015
0010
0006
0000
0015
0016
0015
0016
0015
0005
3177 ■
0007
0000
7777
0000
2430
0000
2431
2432
2431
2430
0001
0000
0001
0000
7610
7177
3212
3212
0000
0000
0000
3411
0001
0000
0000
0000
7610
6654
0000
6631
0000
5522
0001
0000
5522
0001
7610
03254
5
6
7
03260
1
2
3
4
5
6
7
03270
. 1
2
3
4
5
6
7
03300
* 1
2
3
4
5
6
7
03310
1
2
3
4
5
6
7
03320
1
2
3
4
5
6
7
03330
1
2
3
4
5
6
7
03340
1
2
3
4
5
6
7
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
4
0
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
72
16
72
16
02
76
16
02
36
56
50
70
00
50
70
56
02
76
16
00
00
00
00
00
00
00
16
16
02
36
00
02
36
16
72
50
01
00
52
00
52
55
54
54
13
16
00
12
00
13
50
70
13
40
16
75
13
00
70
00
3411
3256
6506
3260
6506
0000
3263
6506
0000
0000
0015
5522
0000
ООП
5522
0000
6506
0000
3274
0000
0000
0000
0000
0000
0000
0000
3307
3310
6506
0000
0000
6506
0000
3316
6566
1034
6510
0000
0000
3350
0000
2446
0064
0130
3363
3332
0000
0002
0000
3364
0000
2431
2447
3402
3343
6506
3366
0000
2444
0000
1041
7501
1041
2716
6516
3266
2713
6510
3260
3260
0020
0000
0000
0020
3271
2701
6517
3277
2713
0000
0000
0000
0000
0000
0000
0000
2702
0030
6510
3313
0000
6512
3306
7501
1041
6401
6511
0000
0000
0000
0000
3362
2446
2430
2430
7501
0000
3325
0000
2447
0000
0000
3365
3323
7501
0010
2447
0000
0000
0000
3567
7610
6520
2723
0000
0000
2723
0000
0000
0000
6626
2430
6510
6626
0000
6506
0000
0000
2723
6506
6510
0000
0000
0000
0000
0000
2723
0030
0000
0000
0000
0000
0000
7610
6566
0000
6510
2447
0000
2446
3334
2430
2446
2430
3332
7610
0000
0001
0000
3336
0000
0000
2447
0001
7610
2444
3345
0000
0000
0000
03350
1
2
3
4
5
6
7
03360
1
2
3
4
5
6
7
04770
1
2
3
4
5
6
7
05000
1
2
3
4
5
6
7
05010
1
2
3
4
5
6
7
05020
1
2
3
4
5
6
7
05030
1
2
3
4
5
6
7
05040
1
2
3
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
0
0
1
1
0
1
1
0
4
0
0
4
0
0
5
0
1
0
1
0
4
1
0
0
0
2
1
3
5
1
0
6
4
4
0
0
0
4
4
0
00
00
00
00
00
00
00
00
00
00
00
75
50
00
50
01
00
00
50
70
30
52
00
12
52
00
12
52
55
36
00
52
-15
76
13
53
12
00
40
52
13
12
33
54
52
55
54
55
13
40
52
15
36
00
13
00
13
52
, 15
76
0000
0000
оооо
0000
0000
0000
0000
0000
0000
0000
0000
0000
2300
0000
2100
4000
0000
0000
0010
7500
3411
0000
0000
2647
0000
0000
0014
0000
3411
0000
6375
0000
2430
0000
0000
2431
3377
0000
3002
0000
3373
0004
3400
0114
0000
6403
0064
6404
3411
3403
0000
0030
0422
0030
6406
0000
2440
0000
0030
0000
Продолжение
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0010
0000
0003
0000
0000
0000
0000
0000
0000
4775
0000
0000
4776
0000
0000
5001
0000
6402
5017
0000
3373
2431
5013
6376
6375
5010
0000
5004
0000
3400
5020
6376
3403
0000
3411
2430
3411
6405
5025
0000
0422
5053
0000
2440
0000
6376
0000
2432
5045
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
7777
2431
2433
0000
2444
0000
0000
0000
7770
0000
0000
0000
0030
0001
0000
3370
0001
0000
2430
0000
2431
5015
0000
0000
0000
2431
0001
0000
0001
0000
3400
0001
3403
3403
0000
2430
0030
0422
3411
0001
0000
0000
2432
2433
5037
0000
2440
5051
0000
0000
314
05044
5
6
7
05050
1
2
3
4
5
6
7
05060
1
2
3
4
5
6
7
€5070
1
2
3
4
5
6
7
05100
1
2
3
4
5
6
7
05110
1
2
3
4
5
6
7
€5120
1
2
3
4
5
6
7
05130
1
2
3
4
5
6
7
1
4
0
1
1
0
0
0
0
0
1
0
2
1
3
1
0
0
4
0
0
4
4
0
1
0
5
0
1
0
0
0
4
4
0
4
0
4
0
0
1
0
0
1
1
0
0
4
0
0
1
0
5
0
4
0
4
4
4
4
00
15
76
00
40
00
56
13
00
13
40
52
55
54
55
40
56
52
00
15
36
52
15
36
40
56
75
00
40
77
52
00
52
55
36
15
36
15
76
13
40
00
13
00
40
00
52
15
36
13
40
56
33
52
55
36
15
36
15
36
2433
0422
0000
2433
3403
0000
0000
6407
0000
2441
3403
0000
6403
0064
6404
3403
0000
0000
1014
2430
6376
ОООС
3411
0000
3403
0000
3411
0000
3003
0000
0000
0000
0000
3411
0000
0030
0000
0422
0000
2430
3403
0000
2431
2430
3404
6376
0000
1634
0000
2430
3404
0000
1634
0000
3411
0000
0030
0422
0422
0030
0000
2432
5050
0000
5042
0000
5056
2441
0000
6376
5033
0000
3411
2430
3411
5060
6673
0000
0000
0000
5102
0000
2430
5076
5072
5077
6410
0000
5066
0000
0000
0000
0000
6410
5114
2431
5113
2431
5114
6376
5105
0000
6376
0000
5103
0000
0000
6376
5130
6376
5123
5204
6376
0000
6410
5140
2430
5142
2430
5143
0030
0000
0000
0422
0001
0000
0000
5054
0000
2441
0001
0000
2430
0030
0422
0001
2434
0000
2430
0000
2431
5077
0000
0000
0001
0000
,3411
0000
0001
0000
0000
2430
5115
0000
0000
0000
OQOO
0000
0000
2430
0001
0000
2431
1634
0001
2430
0000
0000
0000
2430
0001
2437
1634
0000
0000
2433
0000
2431
0000
2431
05140
1
2
3
4
5
6
7
05150
1
2
3
4
5
6
7
05160
1
2
3
4
5
6
7
05170
1
2
3
4
5
6
7
05200
1
2
3
4
5
6
7
05210
1
2
3
4
5
6
7
€5220
1
2
3
4
5
6
7
05230
1
2
3
1
0
4
4
0
I
1
0
0
0
0
0
2
0
0
4
0
6
0
4
0
4
0
1
1.
0
2
0
2
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
2
0
0
0
4
0
0
40
77
56
00
00
00
00
13
54
75
75
00
55
54
52
55
76
15
36
15
36
15
76
56
00
15
55
75
55
54
75
13
00
13
40
56
33
54
52
56
15
36
15
76
13
13
00
56
13
13
00
54
13
55
54
13
75
52
13
00
3403
0000
0030
0422
6411
0000
0000
6412
0130
6413
2436
0000
6414
0056
0000
3411
0000
0030
0000
0030
2433
0422
0000
2431
2431
2433
6415
2442
6416
0053
2442
6417
0000
2443
3403
0000
2443
0114
0000
0000
2434
0000
2434
0000
6423
2444
6425
0000
' 6423
2444
6427
0130
2446
6430
0050
2434
6431
0000
6432
0000
П родолжение
5132
0000
5145
0000
0000
0000
0000
2431
2434
2434
2435
0000
3411
2437
0000
6410
5202
0422
5202
2432
5Г70
2432
5202
5172
0000
6411
3411
2437
3411
2450
2450
2443
0000
6376
5157
5121
6376'
3400
0000
6703
6421
5220
6422
5237
2444
6424
0000
5223
2444
6426
0000
2437
2434
3411
2434
3400
2434
0000
2437
0000
0001
0000
2432
2432
2433
0422
0030
2434
2435
2436
5153
0000
2437
2437
0000
0000
0000
0000
0000
0000
2434
0000
0000
0422
0030
2434
2442
2442
2450
2450
2442
5200
0000
2443
0001
0000
3372
3407
0000
0000
0000
0000
0000
0000
2445
2444
2446
0000
2445
2444
2446
2434
2446
2434
2434
2434
2447
5236
5233
0000
315
05234
5
6
7
05240
1
2
3
4
5
6
7
05250
1
2
3
4
5
6
7
05260
1
2
3
4
5
6
7
05270
1
2
3
•4
5
6
7
05300
1
2
3
4
5
6
7
05310
1
2
3
4
5
6
7
05320
1
2
3
4
5
6
7
0
1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
13
12
00
40
54
13
00
13
13
13
54
00
54
00
00
00
16
13
77
54
00
00
16
13
54
33
13
33
56
33
36
52
13
75
13
13
54
13
13
13
40
00
54
54
13
13
13
13
13
13
13
13
13
13
13
13
13
13
13
13
2437
0002
0000
3403
0114
2724
0000
6433
2430
6435
0101
6436
0077
2434
6437
оооо
5255
6440
0000
0114
3370
6441
5263
2430
0103
2431
6442
6443
0000
2434
3370
0000
6444'
5273
2437
2442
0130
6445
2441
2437
2434
0000
0114
0130
3115
3124
3140
3144
3150
3157
3123
3132
3156
3370
3115
3122
3124
3131
3150
3155
6376
5232
0000
5207
2437
2431
0000
3407
6434
2430
0000
ЮООО
12430
0000
0000
0000
5271
2431
0000
6376
0000
0000
5271
3370
3370
3370
2431
3371
5306
6434
5305
0000
2437
2442
6376
2445
2437
2437
2443
6376
5274
0000
3372
3400
3410
3410
3410
3410
3410
3410
3370
3370
3370
3370
2431
2431
2431
2431
2431
2431
2437
0001
0000
0001
2431
2724
0000
2430
2431
5246
2430
2445
2434
0020'
2441
2442
5305
5256
0000
2445
2434
2441
5305
3370
2431
2431
3371
3371
0000
2434
0021
0000
5275
0030
2437
2442
2443
5302
0030
2437
0001
0000
3401
3410
3115
3124
3140
3144
3150
3157
3123
3132
3156
2431
3115
3122
3124
3131
3150
3155
05330
1
2
3
4
5
6
7
05340
1
2
3
4
5
6
7
05350
1
2
3
4
5
6
7
05360
1
2
3
4
5
6
7
05370
1
2
3
4
5
6
7
05400
1
2
,3
4
5
6
7
05410
1
2
3
4
5
6
7
05420
1
2
3
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
0
0
4
4
0
0
6
4
13
13
13
13
13
13
13
13
13
13
13
13
54
13
13
13
13
54
13
13
13
54
13
13
33
76
00
00
13
33
54
33
76
00
00
54
33
13
13
33
13
54
13
13
13
33
00
00
54
54
52
55
15
76
55
55
15
36
52
55
2431
3121
3130
3154
2431
3133
3134
2431
3140
3144
3157
2431
0064
3141
3145
3161
2431
0064
3123
3132
3156
0114
2761
2730
3374
0000
6446
6447
3374
0022
0114
3376
0000
6450
6451
0114
3371
2774
2774
2731
3375
0130
2731
2757
2757
2726
0000
0000
0114
0114
0000
4006
2430
0000
4006
4006
2432
0000
0000
4006
Продолжение
3370
2431
2431
2431
3370
2431
2431
3370
2431
2431
2431
3370
2431
2432
2432
2432
3370
2431
2432
2432
2432
3374
2430
2430
6376
5364
0000
0000
3376
6376
0022
6376
5373
0000
0000
3375
2430
3375
2430
2432
3400
2430
2430
3400
3407
3371
0000
0000
3405
.3406
0000
6402
6452
5431
6453
6416
6454
5446
0001
6453
2431
3121
3130
3154
2431
3133
3134
2431
3140
3144
3157
2431
2432
3141
3145
3161
2431
2432
3125
3132
3156
2430
2761
2730
3405
0000
2725
2744
0022
0022
0022
3406
0000
2730
2761
2430
2432
2774
2774
2731
2430
2430
2731
2757'
2757
2726
0000
0000
3405
3406
0000
2430
0000
0000
2431
2432
0000
обоо
5430
2432
05424
5
6
7
05430
1
2
3
4
5
6
7
05440
1
2
3
4
5
6
7
05450
1
2
3
4
5
6
7
05460
1
2
3
4
5
&
7
05470
1
2
3
4
5
е-
7
05500
1
2
3
4
5
6
7
05510
1
2
3
4
5
6
7
0
0
0
1
0
1
0
4
0
0
0
0
0
4
6
4
0
0
0
0
0
1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
0
0
4
0
0
4
0
0
4
4
0
0
2
0
4
0
0
3
0
0
1
15
76
56
40
00
40
52
55
15
36
15
36
56
55
52
55
15
76
50
70
77
40
00
40
13
13
13
13
13
13
54
1-3
54
33
54
13
33
52
55
15
76
55
15
36
55
54
13
52
55
15
76
55
76
55
15
36
75
16
54
40
2431
0000
0000
3401
0000
3401
0000
4006
2430
0000
2430
0000
0000
4006
0000
4006
2431
0000
2500
2431
0000
3401
0000
3401
3374
2430
3246
2430
2431
3251
0130
3246
0114
3246
0130
3251
3251
0000
4006
2430
0000
4006
2433
0000
4006
0050
2436
0000
4006
2431
0000
6463
0000
4006
2434
0000
6463
5516
0130
3401
2432
5427
5446
5423
0000
5413
0000
6455
6456
5441
6457
5441
5453
6414
0001
6414
2432
5451
0000
0000
0000
5443
0000
5433
3375
3376
2430
3377
3400
2432
2430
2430
3371
2433
2431
2431
2433
0000
6460
6461
5531
6416
6462
5531
6430
2431
3400
0000
6430
2433
5517
4006
5517
6416
6462
5517
4006
5727
2432
5504
0000
0000
0000
0001
0000
0001
0000
2430
0000
0000
0000
0000
0000
2431
5452
2432
оооо •
0000
2432
oboo
0000
0001
0000
0001
2430
2430
3246
2431
2432
3251
2430
3246
2433
3246
2431
3251
3251
0000
2430
0000
0000
2433
0000
2446
2431
2436
2432
5530
2433
0000
0000
0000
0000
2434
0000
0000
4006
5742
2446
0001
05520
1
2
3
4
5
6
7
05530
1
2
3
4
5
6
7
05540
1
2
3
4
5
6
7
05550
1
2
3
4
5
6
7
05560
1
2
3
4
5
6
7
05570
1
2
3
4
5
6
7
05600
1
2
3
4
5
6
7
05610
1
2
3
0
0
0
0
0
0
0
0
0
1
0
4
0
0
4
0
0
0
0
0
0
0
4
4
0
0
3
4
0
4
0
0
0
0
0
0
0
0
4
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
00
75
75
54
33
13
75
13
00
40
52
55
15
76
55
54
54
54
^33
13
75
13
52
55
15
76
75
55
54
55
15
76
33
16
00
13
77
13
55
76
00
75
00
16
00
75
13
00
13
00
40
13
75
13
77
13
54
13
13
13
6464
2440
2440
0114
2441
6465
2441
2437
0000
3401
0000
4006
2430
0000
4006
0072
0114
0122
2434
6470
6376
2437
0000
4006
2431
0000
6463
4006
0064
4006
2430
0000
2435
5562
6426
6471
0000
2437
4006
6472
6473
2446
2435
5574
6426
2440
6474
0000
2437
2434
3401"
2432
6475
6476
0000
2437
0114
6477
2440
6500
Продолжение
0000
-2446
2436
2436
3371
2437
2440
6376
0000
5472
0000
6466
6462
5617
6467
2431
3371
2431
2442
2437
2443
6376
0000
6467
2433
5602
4006
6430
2435
6402
6461
5566
3371
5670
0000
2437
0000
6376
6411
5571
0000
2440
0000
5670
0000
.2435
2437
0000
6376
0000
5547
3400
2442
2437
0000
6376
2442
2443
2442
2437
2440
2440
2440
2441
2441
5526
0030
2437
0000
0001
0000
2430
0000
2446
2431
2432
2442
2434
2443
5544
0030
2437
5616
2433
0000
0000
4006
2435
2435
2430
0000
0000
2430
5707
2430
5564
0000
2437
0000
2440
2440
2440
2430
5707
2435
2440
5577
0000
2437
2446
0001
2442
2440
5606
0000
2437
2442
2440
2440
5614
317
05614
5
б
7
05620
1
2
3
4
5
6
7
05630
1
2
3
4
5
6
7
05640
1
2
3
4
5
6
7
05650
1
2
3
4
5
6
7
05660
1
2
3
4
5
6
7
05670
1
2
3
4
5
6
7
05700
1
2
3
4
5
6
7
0
0
0
1
0
4
0
0
4
0
0
4
0
0
0
0
0
4
0
0
4
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
1
3
0
0
0
4
0
4
0
0
0
0
0
0
0
0
0
0
0
0
0
00
13
00
40
52
55
15
76
55
15
76
55
54
13
54
54
33
55
54
13
55
76
00
75
75
13
00
13
75
75
13
77
13
40
56
01
04
01
05
01
01
04
00
04
55
54
55
15
36
54
13
54
13
00
13
75
13
00
13
00
0000
2437
0000
3401
0000
4006
2430
0000
4006
2430
0000
4006
0050
2434
0130
0114
2435
4006
0106
2433
4006
6503
6504
2440
2440
6500
0000
2437
6477
2440
6505
0000
2437
3401
0000
0001
3367
0001
0002
4000
4000
3367
0000
0004
4006
0075
4006
2450
0000
0130
6510
0114
6511
0000
2437
6512
6513
0000
2437
0000
0000
6376
0000
5533
0000
6501
6461
5655
6416
6462
5655
6430
2431
3400
2432
2434
3371,
6502
2433
3467
6411
5643
0000
2431
2433
2437
0000
6376
2431
2435
2437
0000
6376
5621
5743
0000
0000
0002
0000
0000
0000
0000
0003
0001
6506
2450
6507
2451
5710
2451
2451
2450
2437
0000
6376
2430
2437
0000
6376
0000
0000
2437
0000
0001
0000
2430
0000
0000
2430
0000
0000
2431
2434
2432
2431
2435
2435
2433
2433
2433
0000
2440
2440
2440
2440
5646
0000
2437
2440
2440
5653
0000
2437
0001
0000
0001
0002
0001
0003
0000
0000
0001
0004
0000
2450
2450
2451
0000
0000
2451
2451
2450
5701
0000
2437
2451
5705
0000
2437
0000
05710
1
2
3
4
5
6
7
05720
1
2
3
4
5
6
7
05730
1
2
3
4
5
6
7
05740
1
2
3
4
5
6
7
05750
1
2
3
4
5
6
7
05760
1
2
3
4
5
6
7
05770
i
2
3
4
5
6
7
06000
1
2
3
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
0
0
4
0
0
0
0
0
0
0
0
0
4
0
0
4
0
0
4
0
0
4
3
0
0
2
0
4
0
0
5
4
0
4
0
0
0
0
0
0
0
0
0
0
13
00
13
75
13
00
16
00
13
00
13
13
77
13
00
55
54
13
55
76
00
75
75
13
00
13
00
52
55
15
76
55
15
36
55
54
54
52
55
15
76
55
76
55
15
36
75
55
54
55
76
00
75
00
16
00
75
13
77
13
5707
0000
6514
0000
2437
6436
5717
6426
6515,
0000
2437
6516
0000
2437
0000
4006
0106
2435
4006
6373
6472
2446
2440
6500
0000
2437
0000
0000
4006
2430
0000
4006
2434
0000
4006
0122
0072
0000
4006
2431
0000
6521
0000
4006
2434
0000
4006
4006
0064
4006
6472
6473
2446
2435
5777
6426
2435
6474
0000
2437
Продолжение
6434
0000
2437
0000
6376
0000
5670
0000
2437
0000
6376
2437
0000
6376
0000
6502
2435
3407
6411
5735
0000
2440
2435
2437
0000
6376
0000
0000
6517
6520
6022
6402
6452
6022
6467
2431
2431
0000
6502
2433
6005
4006
6005
6501
6452
6005
6521
6430
2435
6411
5774
0000
2440
0000
5670
0000
2440
2437
0000
6376
5711
0000
5713
0000
2437
2430
5707
2430
5721
0000
2437
5724
0000
2437
0000
2435
2435
2435
0000
2440
2440
2440
2440
5740
0000
2437
0000
0000
2430
0000
0000
2434
0000
2446
2431
2445
2432
6006
2433
0000
0000
0000
0000
2434
0000
0000
4006
2435
2435
0000
2440
2440
2440
2430
5707
2435
2440
6002
0000
2437
06004
5
6
7
06010
1
2
3
4
5
6
7
06020
1
2
3
4
5
6
7
06030
1
2
3
4
5
6
7
06040
1
2
3
4
5
6
7
06050
1
2
3
4
5
6
7
06060
1
2
3
4
5
6
7
06070
1
2
3
4
5
6
7
0
1
0
4
0
0
0
0
0
0
0
0
0
0
1
0
4
0
0
4
0
0
0
0
0
0
4
4
0
0
4
0
0
5
0
4
0
0
0
0
0
0
0
1
0
2
0
0
0
0
0
0
0
0
0
0
1
0
4
0
00
40
00
55
15
76
54
33
33
75
75
13'
•77
13
40
52
55
15
76
55
54
54
33
13
77
13
52
55
15
76
55
54
33
75
16
55
76
00
75
13
77
13
00
40
00
55
36
33
54
75
75
16
00
16
75
16
40
52
55
15
2445
3401
0000
4006
2434
0000
0106
2431
2431
6472
2440
6474
0000
2437
3401
0000
4006
2430
0000
4006
0050
0064
2442
6526
0000
2437
0000
4006
2431
0000
4006
0106
2435
4006
6047
4006
6473
6472
2440
6527
0000
2437
6530
3401
0000
6532
0000
2443
0114
6712
2440
6070
6713
6072
5667
6074
3401
0000
4006
2430
0000
5756
0000
6522
6523
6022
•2431
3371
3370
2431
2445
2437
0000
6376
5744
0000
6524
6525
6074
6430
2431
2431
3371
2437
0000
6376
0000
6430
2433
6057
6502
2435
3371
6521
5712
6411
6052
0000
2446
2437
0000
6376
0000
6037
0000
4006
6072
3370
2447
2440
2443
6607
0000
6607
2432
6607
6024
0000
6416
6520
2446
0001
0000
2434
0000
0000
2431
2431
2431
2440
2440
6020
0000
2437
0001
0000
2430
0000
2446
2431
2432
2442
2443
6034
0000
2437
6060
2433
0000
0000
2435
2435
2430
4006
5726
0000
2440
2440
2440
6054
0000
2437
2446
0001
0000
0000
0000
2447
2440
2440
2433
6612
2433
6612
2433
6612
0001
0000
2430
0000
06100
1
2
3
4
5
6
7
06110
1
2
3
4
5
6
7
06120
1
2
3
4
5
6
7
06130
1
2
3
4
5
6
7
06140
1
2
3
4
5
6
7
06150
1
2
3
4
5
6
7
06160
1
2
3
4
■ 5
6
7
06170
1
2
3
0
4
0
0
4
4
0
0
0
4
0
0
0
0
0
0
0
0
0
0
1
0s
0
0
4
0
0
4
0
0
0
4
4
0
0
4
0
0
4
0
5
0
0
1
0
1
0
4
0
0
4
0
0
0
0
0
0
0
4
4
76
55
15
76
55
55
54
54
54
55
76
00
75
00
16
00
75
13
00
13
40
52
56
52
55
15
76
55
13
54
00
52
55
15
76
55
15
36
55
76
75
16
00
40
00
40
52
55
15
76
55
54
33
13
77
13
54
13
52
55
0000
4006
2430
0000
4006
4006
0122
0072
0064
4006
6472
6473
2440
2432
6117
6426
2440
6534
0000
2437
3401
0000
0000
0000
4006
2430
0000
4006
2431
0050
0000
0000
4006
2431
0000
4006
2434
0000
4006
0000
4006
6152
2444
3401
0000
3401
0000
4006
2430
0000
4006
0106
2442
6526
0000
2437
0072
2432
0000
4006
6124
6501
6525
6124
6502
6430
2431
2431
2432
6411
6114
0000
2433
0000
5670
0000
2432
2437
0000
6376
6076
0000
6556
0000
6460
6535
6155
6430
3410
2444
0000
0000
6430
2433
6153
6416
6536
6153
6463
6153
6463
5727
0000
6140
0000
6130
Q000
6466
6536
6221
6502
2431
3371
2437
0000
6376
2431
3400
0000
6502
0000
2430-
0000
0000
2431
2432
2433
2431
2432
0000
2440
2440
2440
2430
5707
2432
2440
6122
0000
2437
0001
0000
0000
0000
2480
0000
0000
2431
2444
2432,
2446
6154
2433
0000
0000
2434
0000
0000
0000
0000
4006
5742
2446
0001
0000
0001
0000
2430
0000
2446
2431
2442
2443
6166
0000
2437
2432
2432
6215
2433
06174 0 15 2431 2433 0000
5 0 76 0000 6214 0000
6 4 55 4006 6430 2435
7 5 75 4006 6463 4006
06200 0 54 0064 2435 2435
1 0 33 2435 3371 2430
2 0 13 2435 3407 2435
3 0 16 6204 5712 5726
4 4 55 4006 6411 0000
5 0 76 6472 6207 2440
6 0 00 6473 0000 2440
7 0 75 2440 2446 2440
06210 0 13 6527 2437 6211
1 0 77 0000 0000 0000
2 0 13 2437 6376 2437
3 0 00 6530 0000 2446
4 1 40 3401 '6173 0001
5 0 00 0000 0000 0000
6 0 13 6531 2437 6217
7 0 77 0000 0000 0000
06220 0 13 2437 6376 2437
1 1 40 3401 6157 0001
2 0 52 0000 0000 0000
3 4 55 4006 6416 2430
4 0 15 2430 6536 0000
5 0 76 0000 6247 0000
6 4 55 4006 6501 2430
7 0 15 2430 6535 0000
06230 0 76 0000 6247 0000
1 4 55 4006 6430 2431
2 4 55 4006 6502 2432
3 0 13 2431 3410 2433
4 0 54 0050 2433 2431
5 0 54 0106 2432 2432
6 0 13 2432 3407 2432
7 4 55 4006 6411 0000
06240 0 76 6473 6242 2440
1 0 00 6472 0000 2440
2 0 75 2440 2433 2440
3 0 75 2440 2432 2440
4 0 13 6534 2437 6245
5 0 77 0000 0000 0000
6 0 13 2437 6376 2437
7 1 40 3401 6223 0001
06250 0 33 -6443 3371 2431
1 0 13 2431 3407 2431
2 0 52 0000 0000 0000
3 4 55 3411 6420 2432
4 0 15 2432 6561 0000
& 0 36 0000 6645 0000
6 0 56 0000 6600 0000
7 0 13 2437 6376 2437
06260 0 54 0114 2437 2431
1 0 13 3307 2431 3307
2 0 00 0000 0000 2431
3 0 00 0000 0000 2432
4 0 52 0000 0000 0000
5 4 55 3411 6463 0000
6 0 36 0000 6313 0000
7 4 55 3411 6430 2433
Продолжение
06270 0 13 2433 3410 2433
1 0 13 6540 2432 2431
2 0 13 6541 2431 6273
3 0 00 0000 0000 ОООО4
4 0, 13 2431 6376 2431
5 0 75 6542 2433 2435
6 0 54 0114 2434 2436
7 0 75 2435 2436 2440
06300 0 54 0114 2432 2435
1 0 13 6543 2435 2441
2 0 54' 0130 2437 2435
3 0 13 6544- 2435 2442
4 4 52 0000 0000 6311
5 0 13 6545 2437 6306
6 0 00 0000 0000 0000
7 0 13 2437 6376 2437
06310 1 12 0002 6305 0001
1 0 00 0000 0000 0000
2 0 13 2432 6546 2432
3 1 40 3403 6265 0001
4 0 13 3316 Й32 3316
5 0 13 3307 2437 3307
6 0 33 3377 6376 3377
7 0 76 2437 6321 3372
06320 0 00 6547 0000 3245
1 0 33 3373 6376 3373
2 0 76 0000 6324 2446
3 0 00. 6550 0000 3250
4 0 54 0114 3373 3373
5 0 54 0114 3377 3377
6 0 00 0000 0000 2433
7 0 00 0000 0000 2434
06330 4 52 0000 0000 0000
1 0 55 3411 6430 2431
2 0 36 0000 6343 0000
3 4 55 3411 6521 0000
4 0 36 0000 6336 0000
5 4 16 6336 6356 6373
6 0 55 3411 6411 0000
7 0 36 0000 6342 0000
Ш40 0 13 2431 3410 2431
1 -0 16 6342 6356 6373
2 1 12 0371 6331 0001
3 0 15 2433 0000 0000
4 0 36 0000 6347 0000
5 0 00 0000 0000 2431
6 0 16 6343 6356 6373
7 0 33 2434 6376 2434
06350 0 54 0114 2434 3402
1 0 50 2500 0000 0650
2 0 70 0030 0000 0000
3 0 50 2500 0000 4002
4 0 70 3113 0000 0000
5 0 56 0000 3233 0000
6 0 54 0064 2446 2446
7 0 75 2446 2431 2446
0636о 0 13 2433 6376 2433
1 ,0 15 2433 6551 0000
• 2 0 76 0000 6371 0000
8 0 00 0000 0000 2433
320
06364 0 13 6552 2434 6365
5 0 00 0000 0000 0000
6 0 00 6553 0000 3265
7 0 00 6554 0000 3312
06370 0 13 2434 6376 2434
1 0 15 2434 6555 0000
2 0 36 0000 6347 0000
3 0- 00 0000 0000 0000
4 0 16 0031 3*163 3231
5 0 10 0000 0000 0000
6 0 00 0000 0000 0001
7 1 00 0000 0000 0000
06400 0 56 0000 4772 0000
1 0 00 0000 0000 0000
2 0 70 0000 0000 0000
3 0 00 0000 0777 0000
4 0 00 0000 0000 0777
5 0 00 5521 0000 0000
6 4 75 3411 0000 1014
7 4 75 3411 0000 1324
06410 0 00 0000 0000 4000
1 1 00 0000 0000 0000
2 0 00 0000 0000 1633
3 0 33 0000 6376 0000
4 0 77 7777 7000 0000
5 0 77 7777 0000 0000
6 0 00 0000 7000 0000
7 0 75 2442 2434 4006
06420 0 77 0000 0000 0000
1 0 11 0000 0000 0000
2 0 12 0000 0000 0000
3 0 52 0000 6530 0000
4 0 00 0000 0003 0000
5 0 16 0032 3053 3060
6 0 00 0000 0006 0000
7 0 16 0032 3033 3047
06430 0 00 7777' 0000 0000
1 0 00 0001 0000 0000
2 4 00 2445 0000 0030
3 0 00 0000 3412 0000
' 4 0 00 0000 0001 0000
5 0 54 0101 0000 2430
6 0 00 0000 0002 0000
7 0 16 0031 3113 '3146
06440 0 13 0000 0000 3370
1 0 16 0031 3147 3162
2 0 00 0000 3411 0000
3 0 00 0000 5522 0000
4 0 75 5273 2442 0030
5 0 13 2441 2443 0030
6 0 56 0000 2730 0000
7 0 56 0000 2761 0000
06450 0 56 0000 2733 0000
1 0 56 0000 2776 0000
2 0 20 0000 0000 0000
3 0 70 0000 7777 7700
4 0 00 0000 1000 0000
5 0 70 0000 7000 0000
6 0 30 0000 3000 0000
7 О 4Э 0000 4000 0000
Продолжение
06460 4 70 0000 0000 0000
1 0 30 0000 0000 0000
2 0 00 0000 3000 0000
3 4 00 0000 0000 0000
4 0 05 0000 0000 0000
5 0 75 2441 2440 0030
6 4 00 0000 7000 0000
7 0 00 0000 0077 7700
06470 0 75 6376 2443 0030
1 0 75 5657 2430 0030
2 0 02 0000 0000 0000
3 0 01 0000 0000 0000
4 0 75 2440 2432 0030
5 0 04 0000 0001 0000
6 0 75 2440 2434 0030
7 0 05 0000 0000 0000
06500 0 75 2440 2432 0030
1 0 70 0000 0000 0000
2 0 00 0000 0077 7700
3 0 01 0000 0000 0000
4 0 02 0000 0000 0000
5 0 75 2440 2434 0030
6 0 00 0000 0000 0070
7 0 00 0000 0000 0007
06510 0 04 6520 6520 0006
1 0 13 2451 2450 0030
2 0 05 0006 0000 0006
3 0 00 2451 0000 0030
4 0 75 5660 2430 0030
5 0 75 5661 2430 0030
6 0 75 5662 2435 0030
7 2 00 0000 7000 0000
06520 0 00 0000 2000 0000
1 2 00 0000 0000 0000-
2 0 00 0000 0700 0000
3 0 00 0000 0100 0000
4 2 70 0000 0000 0000
5 0 20 0000 0000 0000
6 0 15 5665 2443 0030
7 0 75 5666 2440 0030
06530 0 00 0004 0000 0000
1 0 75 5667 2432 0030
2 0 01 0000 0000 0000
3 0 02 0000 0000 0000
4 0 75 2440 2431 0030
5 0 40 0000 0000 0000
6 0 00 0000 4000 0000
7 0 13 6374 2430 0030
06540 0 00 0000 0000 6576
1 0 75 2433 2434 3301
2 0 02 0000 0000 0002
3 0 52 0000 0001 0000
4 0 16 0033 3061 3110
5 4 00 2440 0000 0030s
6 0 00 0000 0000 0010
7 0 56 0000 3250 0000
06550 0 56 0000 3253 0000
1 0 00 0000 0000 0003
2 0 00 2446 0000 3350
3 0 16 3260 3320 3347
32Г
06554
5
6
7
06560
1
2
3
4
5
6
7
06570
1
2
3
4
5
6
7
06600
1
2
3
4
5
6
7
06610
1
2
3
4
5
6
,7
06620
1
2
3
4
5
6
7
06630
1
2
3
4
5
0
0
3
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
0
0
0
0
4
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
16
00
55
40
56
41
42
00
00
52
16
00
00
02
01
16
00
01
77
00
15
36
40
13
13
13
56
13
00
13
00
55
75
16
13
16
13
16
00
16
54
33
54
75
16
13
54
75
16
75
3313
0000
6576
3401
0000
0000
0000
2433
0001
0000
0031
0010
0005
0000
0000
0031
0000
0000
7777
0000
2432
0000
3403
2724
2703
2707
0000
6563
0000
2437
0000
3411
6376
6616
2433
6620
2433
6622
0000
6624
0064
2434
0064
6567
6631
2432
0050
6570
6635
2435
3320
0000
4006
4 6556
6127
0000
0000
0000
0000
0000
3163
0000
0000
0005
0006
3200
0007
0007
7777
0000
6562
6656
6253
2437
2437
2437
6267
2437
0000
6376
0000
6430
2432
6607
6564
6607
6564
6607
0000
6607
2432
3371
2433
2433
6607
3410
2434
2435
6607
2434
3347
0012
4006
0001
0000
0000
0000
0030
0001
0000
3177
0000
0000'
0000
0000
3210
0000
0000
7777
0000
0000
0000
0001 '
2724
2703
2707
0000
6610
0000
2437
0000
2432
2433
6612
2433
6612
2433
6612
0000
6612
2434
2433
2433
2433
6612
2434
2435
2433
6612
2435
06636
7
06640
1
2
3
4
5
'6
7
06650
1
2
3
4
5
6
7
06660
1
2
3
4
5
6
7
06670
1
2
3
4
5
6
7
06700
1
2
3
4
5
6
7
06710
1
2
3
4
5
6
7
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
2
0
4
1
0
0
0
4
0
0
0
0
0
0
0
0
0
0
0
0
13
75
16
13
75
16
00
16
75
16
54
13
13
16
12
77
16
16
75
16
54
13
13
16
13
75
16
12
77
52
33
76
00
12
33
54
56
55
15
76
00
56
13
16
04
01
00
00
00
00
6564
2435
6641
2435
2435
6644
0000
6646
6565
6650
0130
6566
2431
6654
0400
0000
6657
6660
6565
6662
0130
6573
2431
6666
2435
2433
6671
0400
0000
0000
2434
0000
0030
0763
2434
0114
0000
3411
2434
0000
6711
0000
0000
0032
0000
0004
0000
0000
0000
0000
Продолжение
2435
6571
6607
6564
6572
6607
0000
6613
2431
6607
2437
2434
6426
6623
6253
0000
6613
6620
2431
6607
2437
2434
6574
6623
6564
6575
6607
6253
0000
0000
0030
6677
0000
6674
6376
2434
5065
6420
6710
5210
0000
5223
0000
3212
0000
0003
0000
0000
0000
0000
2435
2433
6612
2435
2433
6612
0000
6622
2433
6612
2434
2433
2431
6644
0003
0000
6622
6622
2433
6612
2434
2433
2431
6644
2433
2433
6612
0004
0000
0000
0000
0000
2434
0001
2434
3404
2434
2434
0000
0000
2446
2445
0000
3231
0003
0004
0000
0000
0000
0000
Приложение 2
Многовариантный анализ электронных схем
с помощью системы программ ПАШ и ПП2
Основной текст описания программы анализа электронных схем ПА1 (ПАШ)
содержит сведения о входном языке, алгоритмах и правилах подготовки к
решению задач одновариантного анализа электронных схем, т. е. задач
однократного решения уравнений математической модели схемы при заданных
значениях параметров компонентов^ режимных и внешних параметров. Для
322
осуществления многовариантного анализа разработаны входной язык
многовариантного анализа и транслятор ПП2 с этого языка для программы ПАШ.
Ниже излагаются необходимые сведения о применении программы ПАШ и
транслятора ПП2 для многовариантного анализа электронных схем.
Исходная информация, подготавливаемая пользователем
1. Исходными данными при решении задач анализа являются:
а) описание конфигурации сокращенной эквивалентной схемы в виде
формуляра Ф;
б) исходные численные значения параметров, задаваемые с помощью
массивов ПК и ПР;
в) описание вариантов анализа с помощью формуляра директив ФД;
г) численные значения модифицируемых параметров, задаваемые с помощью
не менее чем N массивов ИЗМ; (N — количество вариантов анализа).
2. Директивы, входящие в ФД, могут быть двух типов:
а) директивы анализа — приказы на выполнение очередного варианта
анализа;
б) директивы модификаций — указания на изменение значений тех или
иных параметров в массивах ПК или ПР.
Каждая директива представляет собой одно машинное слово и занимает
одну ячейку памяти.
Структура директивы следующая: ФДГ- = {Пг-, КДь Аь Бь Вг}.
Распределение разрядов под элементы директивы:
Номера разрядов 45—43 42—37 36—25 24—13" 12—1
Элемент директивы П; КДГ- А; Б,- В;
3. ФД состоит из N групп директив, следующих непосредственно друг за
другом. Первая директива каждой группы — директива анализа, последующие
директивы группы — директивы модификаций. Вариант анализа, заданный
первой директивой группы, будет выполнен при измененных в соответствии
с последующими директивами группы значениях параметров. Внесенные
в данном варианте изменения параметров сохраняются и в следующем
варианте, исключая такие ситуации:
в следующем варианте имеется директива на изменение того же параметра;
если данный вариант анализа выполняется по директиве с КД = 51, а
следующий вариант Йо директиве с КД^51.
4. Общее количество директив в ФД не должно превышать 192. При
нарушении этого ограничения происходит останов по адресу 1256. Количество
директив модификаций в каждой группе директив произвольное в тгределах от 0 до
191 включительно. Если в ФД ошибочно указан КД, не принадлежащий списку
оговоренных ниже значений КД, то происходит останов по адресу 1657.
Максимальное количество чисел, вводимых с помощью массива ИЗМ^ в очередном
варианте анализа, не должно превышать 632. Последнее ограничение не касается
массивов ИЗМ/ при обновлении всего массива ПК с помощью директивы с
КД = 07. Имеется также ограничение на общее количество команд в
автоматически составляемой программе многовариантного анализа. Если это
ограничение окажется нарушенным (не исключается возможность такого нарушения и
при количестве директив в ФД, меньшем 192), то произойдет останов по адресу 1356.
Директивы анализа
1. Директивы анализа отличаются друг от друга значениями КД. Все
остальные элементы (П;, Аг-, Б/, Вг-,) имеют нулевые значения/
2. Варианты анализа по директивам с разными КД различаются способом
задания начальных условий для интегрирования системы дифференциальных
уравнений и интервалами, на которых производится интегрирование. При одно-
вариантном анализе интегрирование системы «дифференциальных уравнений
возможно на интервалах: v
а) расчета ориентировочных начальных условий (ОНУ) длительностью
Тн.у1 (в конце интервала производится запоминание рассчитанных ОНУ с
возможностью их использования в следующих вариантах анализа);
323
б) корректировки ОНУ длительностью Гн.у2;
в) расчета переходного процесса длительностью Ткон;
• г) продолжения расчета переходного процесса, начиная с некоторого
момента времени t = Тг и кончая моментом времени t = Ткон.
В табл. П2.1 перечислены возможные директивы анализа.
Таблица П2.1
кд
40
41
42
50
51
77
Начальные условия
Нулевые
Ранее рассчитанные ОНУ
Ввод с перфокарт начальных
условий, задаваемых пользователем
Ранее рассчитанные ОНУ
Значения переменных • состояния
в момент времени Тг = ТК(т
предыдущего варианта
Интегрирование выполняется
на интервалах
[°. TH.yl] [0. Тн.у2] [°. Ткон] [Т.. Ткон]
Да- - - -
Да - - -
- Да Да —
- - - Да
3. Типичные ситуации, в которых рекомендуется применять те или иные
директивы анализа, следующие:
а) директива с КД — 40:
в качестве директивы первого варианта анализа;
при модификациях параметров компонентов, приводящих к существенному
изменению начальных условий. Например, при изменениях в два и более раз
параметров компонентов (не считая емкостей и индуктивностей, так как
изменение этих параметров не приводит к изменению начальных условий), при
изменениях температуры (при этом существенно меняются такие параметры
полупроводниковых приборов, как тепловые токи и температурные потенциалы
переходов, а следовательно, и начальные условия);
б) директива с КД =41:
при анализе схем с медленно перезаряжающимися реактивностями,
например с емкостями разделительными, развязывающих фильтров и т. п.; в целях
уменьшения затрат машинного времени на расчет начальных условий, значения
параметров таких реактивных компонентов берутся фиктивными, значительно
меньшими реальных, что позволяет уменьшить Тн.у1 (в последующем варианте
анализа по директиве с КД = 50 восстанавливаются реальные значения этих
параметров);
после выполнения нескольких вариантов анализа, приведших в своей
совокупности к заметным изменениям параметров компонентов и, следовательно,,
к заметным отличиям имеющихся ОНУ от реальных.
В рассмотренных ситуациях возможно использование и директивы с КД = 40:
в) директива с КД = 42:
в случаях сравнительно несложных схем, когда начальные условия могут
быть определены иными средствами, чем с помощью программы ПА1М.
Директива с КД = 42 отнесена к директивам анализа условно, так как ее выполнение
сводится только к записи заданных начальных условий в память ЭВМ. После
этой директивы в ФД должна следовать директива анализа, т. е. одновременно
с вводом начальных условий какие-либо другие модификации не производятся;
г) директива с КД =50 — основная директива, служащая для
выполнения анализа переходных процессов (производится также корректировка
ориентировочных начальных условий);
д) директива с КД = 51:
для осуществления изменений параметров компонентов во время выполнения
анализа переходного процесса. Например, при анализе динамических свойств
стабилизаторов напряжения требуется изменить сопротивление нагрузки в неко-
324
торый момент времени 7\. Иногда требуется имитировать действие ключа в
момент времени 7\ Ф 0; при этом используют сначала директиву с КД = 50 при
Т'кон^ Тъ а затем директиву с КД= 51 в сочетании с директивой увеличение
параметра ТК011;
при исследовании реакции схемы на серию входных импульсов. При этом
для анализа переходных процессов при подаче на вход первого импульса
используется директива с КД = 5Ь, а для анализа схемы при ее возбуждении каждым
из последующих импульсов — директивы с КД = 51 в сочетании с директивами
модификаций, изменяющими время задержки входного импульса и параметр
Ткон. Таким путем удается отобразить в математической модели любую как
периодическую, так и непериодическую последовательность входных импульсов;
при желании получать таблицу выводимых из ЭВМ токов и напряжений
с разными шагами печати на различных участках переходного процесса
применяют директивы с КД = 51 в сочетании с директивами, изменяющими
значения А/Печ и Ткон;
е) директива с КД = 77 отнесена к директивам анализа условно. Это
директива окончания многовариантного анализа и должна стоять в конце ФД.
Директивы модификаций
1. Модификация от одного до трех параметров пассивных компонентов,
описываемых в формуляре Ф строками с КФ £ {10, 20, 30, 40, 50}, производится-
с помощью директивы
0 01 НФ/ НФ/ НФ*,
где НФ,-, НФ/, НФЛ — номера ветвей в формуляре Ф, у которых изменяется
параметр. Если один или два из элементов А, Б и В директивы равны нулю,,
то модифицируются соответственно два или один параметр.
2. Модификация параметров у группы пассивных компонентов с КФ £ {10,
20, 30, 40, 50}, начиная с параметра ветви с НФ = НФнач и кончая параметром^
ветви- с НФ = НФК0Н, производится с помощью директивы
0 02 НФнач НФК0Н 0000
3. Модификация от одного до трех параметров массива Т производится'
с помощью директивы
0 03 НП* НП/ нп*,
где НП;, НПу, НПд, — номера изменяемых параметров, причем если ©дин или
два из элементов А, Б, В директивы равны нулю, то изменяются, естественно,
два или один параметр. Номера параметров массива Т приведены ниже *:
Параметр Мпеч Ткон Щ Щ TH.yi Тн.у2
НП . . . 0001 0002 0004 0005 0006 0007
Коэффициент
разветвления . . . 0010 -ь 0017
4. Модификация одноименных параметров у группы р-/г-переходов,
имеющих КФ = 21, производится с помощью директивы
0 04 НФнач НФК0Н НП,
где НФнач и НФК0Н — начальный и конечный номера ветвей р-я-переходов-
в Ф; НП — номер модифицируемого параметра. Соответствие между НП и
параметрами переходов следующее:
Параметр .... /т С$ тщ т В /?у
НП ....... 0001 0002 0003 0004 0005 0006
* С помощью директивы с КД = 03 можно модифицировать также параметры
массивов ВНП и ВЫХ. При этом номера НП для параметров ВНП начинаются
с 0020, а для параметров ВЫХ —с 0057 в соответствии с их расположением в
МОЗУ.
32S
5. Модификация 12 параметров одного транзистора осуществляется с помо-
шью директивы
О 05 НФЭ 0000 0000,
где НФЭ — номер ветви емкости эмиттерного перехода транзистора в Ф.
Изменяются все параметры транзистора, за исключением объемных сопротивлений тел
базы и коллектора.
6. Модификация всех параметров полупроводникового диода, за
исключением объемного сопротивления тела базы, выполняется с помощью директивы
0 06 НФД 0000 0000,
где НФД — номер ветви емкости перехода диода.
7. Одновременное обновление всего массива ПК осуществляется по
директиве
0 07 0000 0000 0000.
" Этой директивой удобно пользоваться для анализа схемы при новом
значении температуры, поскольку при этом изменяется большинство параметров
компонентов.
8. Модификация всех шести параметров одного источника входного
трапецеидального импульса осуществляется по директиве
0 11 НИ Ю000 0000,
где НИ — порядковый номер источника. Источникам присваиваются номера от
0001 до 0005 в той последовательности, в какой они описаны в формуляре Ф.
При применении директивы с КД= 11 необходимо,|чтобы в формуляре Ф источники
-с КФ=П были описаны раньше, чем источники с КФ=12.
Структура массивов значений модифицируемых параметров
1. Каждой группе директив, состоящей из директивы анализа и одной или
более директив модификаций, соответствует отдельный массив значений
модифицируемых параметров ИЗМГ\ При наличии в группе единственной директивы
(директивы с КД£{40, 41, 50, 51}) ,т. е. при отсутствии директив модификаций,
массив ИЗМ; должен состоять из одного числа, равного нулю, а при наличии
единственной директивы с КД=42 массив ИЗМг- должен представлять собой
массив вводимых начальных условий.
2. Группе директив при наличии в ней директивы с КД=07 соответствуют
два числовых массива. Первый массив организуется по общим правилам,
излагаемым в п. 3 и 4 без учета директивы с КД=07, второй массив соответствует
директиве с КД=07 и имеет такую же структуру, как массив ПК при одновариантном
анализе.
3. Каждой директиве модификаций в массиве ИЗМ; соответствует / чисел,
записываемых в следующей последовательности: при КД=01 в ИЗМ/
записывается столько чисел, сколько отличных от нуля номеров ветвей фигурирует в
директиве, причем вначале указывается новое значение параметра для ветви
с НФг- записанным на месте А, затем для ветви с НФ/ на месте Б и затем для
ветви с НФ^ на месте В. При КД = 02 / = НФК0Н — НФнач + 1 и новые значения
параметров ветвей записываются в порядке возрастания номеров ветвей; при
КД = 03 количество чисел / и последовательность их расположения такие же,
как и при КД = 01; при КД = 04 заполнение ИЗМ, производится так же, как
и при КД = 02; при КД = 05 и КД = 06 новые значения параметров
записываются так, как показано на стр. 325, причем при КД = 05 сначала записываются
значения шести параметров эмиттерного перехода, а затем коллекторного
перехода. Такая последовательность аналогична принятой в БПК; при КД=11
I = 6 и новые значения параметров записываются так же, к'ак в массиве ВНП.
4. Все группы по / чисел, образующие очередной массив ИЗМ,,
записываются в той последовательности, в какой записаны соответствующие им
директивы модификаций в ФД.
5. Массив начальных условий при использовании директивы с КД = 42
должен включать в себя: а) токи индуктивных ветвей; б) токи источников тока;
326
в) р чисел, равных нулю, где р — количество источников напряжения; г) напря-
жения емкостных ветвей. Последовательность записи токов и напряжений внутри
указанных групп должна соответствовать порядку перечисления ветвей в
формуляре Ф.
Компоновка колоды перфокарт при многовариантном
анализе и выводимая из ЭВМ информация
1. Дополнительно к массивам, составляющим колоду перфокарт при одно-
вариантном анализе, подкладываются массивы:
а) программный, содержащий программу ПП2;
б) содержащий формуляр директив ФД;
в) N + М массивов ИЗМ, (где N — количество директив анализа, а М —*
количество директив с КД = 07 в ФД).
Каждый массив должен заканчиваться картой с признаком контрольной
суммы и двумя чистыми картами.
2. На место блока В Б подкладываются перфокарты массива, состоящего
из двух частей. Первая часть массива ВБ представляет собой или программу
КОМП, если используется БПК, или в
противном случае эта часть состоит из. одной
перфокарты с командой
0 56 0000 6704 0000
Вторая часть блока ВБ представляет собой
программу перехода к многовариантному
анализу. На перфокартах эта программа
набивается начиная с признака ввода по адресу в
ячейку 6704.
3. Перед первым вариантом анализа из
ЭВМ ^выводятся массивы:
а) первые 424 команды скомпилированной
машинной программы одновариантного
анализа МП;
б) настроенные подпрограммы транзистора,
диода, трансформатора, входного напряжения
произвольной формы, настроенная ведущая
программа ВП, массив ЛШ, массив К и 253
ячейки массива Ф;
в) программа ПП2;
г) формуляр директив ФД;
д) скомпилированная программа
многовариантного анализа МОД.
Печать большинства из указанных массивов
полезна только в период освоения программы-
и требуется для выявления возможных при этом ошибок. После ввода
программы ' в эксплуатацию целесообразно ликвидировать команды печати
массивов МП, ПП2 и МОД. Для этого нужно заменить нулями команды печати
в ячейках: 6351 программы ПАШ, 1236, 1237, 1576 и 1577 программы ПП2.
Во втором из перечисленных выше массивов целесообразно сохранить печать
только массивов К и Ф. Для этого нужно изменить команды в ячейках 6352—6354
программы ПАШ. Должно быть:
6352 0 13 6353 3400 6353
6353 0 50 2500 0000 3414
6354 0 70 3370 0000 0000
4. В каждом варианте многовариантного анализа на печать выводятся
результаты, указанные в п. 7 (см. стр. 293) основного текста описания
программы. Кроме того, на печать выводятся первые ПО чисел массива ПК и первые
семь чисел массива Т.
Рис. П2.1. Принципиальная
(а) и эквивалентная (б)
схемы, примера
327
Пример подготовки к решению задачи
многовариантного анализа электронной схемы
1. Принципиальная схема примера приведена на рис. П2.1, а, а
эквивалентная схема — на рис. П2.1, б. В табл. П2.2, П2.3, П2.4 и П2.5 даны соответственно
формуляр Ф, значения параметров массива ПК для первого варианта -анализа,
значения первых семи параметров массива ПР.
Таблица П2.2
О 10 ООП 0003 0001 Е1
0 10 0012 0004 0001 Е2
1 11 0013 0002 0001 ЦЗ
1 21 0001 0001 0006 С1
1 21 0002 0007 0006 С2
1 20 0003 0005 0002 СЗ
0 30 0004 0005 0002 R1
0 30 0005 0004 0005 R2
0 30 0006 0007 0003 R3
5 30'0007 0007 0001 R4
2 30 0010 0006 0005 R5
0 00 0000 0000 0000 —
0 00 0000 0001 0000 —
0 00 0000 0000 0000 -
Н—09 10000000
Н—08 50000000
+ +01 80000000
+ +02 10000000
Н—01 30000000
Н—01 30000000
+ +02 50000000
+ +03 20000000
+ +02 40000000
Н—01 99999999
+ +05 10000000
+ +05 10000000
Н—00 00000000
_|—оо 00000000
Н—00 00000000
Н 00 00000000
+ +02 40000000
Н 00 33300000
Таблица П2.3
+ -00 12500000
+ +01 20000000
Н 00 20000000
+ +02 10000000
Ь01 50000000
+ +01 36000000
01 49999999
Таблица П2. 4
+ +02 10000000
+ +03 60000000
Н—00 00000000
Н—01 10000000^
Н—02 20000000
+ +03 50000000
+ +03 10000000
Массив ВНП содержит следующие значения параметров входного импульса:
Um = —5В, U0 = 0,05В, U = 5 не, f,
верш '
295 не, tc = 5нс, £3д = 0.
2. Необходимо реализовать следующие варианты анализа:
а) расчет начальных условий (вариант 1) при исходных значениях параметров.
Для этого в формуляр директив (табл. П2.5) записывается директива
0 40 0000 0000 0000,
а первый из массивов модифицируемых параметров ИЗМ! должен содержать
один ноль;
Таблица П2.5
0
0
0
0
0
0
0
0
0
0
40
50
50
01
50
01
03
40
04
03
0000
0000
0000
0006
0000
0006
0001
0000-
0001
0006
0000
0000
0000
0000
0000
0007
0002
0000
0002
0007
0000
0000
0000
0000
0000
0003
0000
0000
0001
0000
0
0
0
0
0
0
0
0,
0
50
11
01
41
05
50
51
03
11
0000
0001
0012
0000
0001
0000
0000
0002
0001
0000
0000
0000
0000
0000
0000
0000
0000
00Q0
0000
0000
0000 .
0000
0000
0000
0000^
0000
0000
0
0
0
0
о-
0
0
0
0
40
07
03
50
50
03
02
77
00
0000
0000
0002
0000
0000
0007
0004
0000
0000
0000
0000
0001
0000
0000
0000
0010
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
б) анализ переходных процессов при исходных значениях параметров
(вариант 2). В ФД записывается директива
0 50 0000 0000 0000,
а массив ИЗМ2 содержит один ноль;
328
в) анализ переходных процессов при увеличенном значении R3 до 1 кОм
(вариант 3). В ФД записываются директивы:
О 50 0000 0000 0000
0 01 0006 0000 0000,
так как номер ветви R3 в формуляре равен 0006. Массив ИЗМ3 представляет собой
одно число, равное 1;
г) анализ переходных процессов при R3 = 0,5 кОм, но при
модифицированных значениях параметров: R5 = 4 кОм, С3 = 100 пФ, Atne4 = 25 не и Ткои =
=700 не (вариант 4). В ФД записываются директивы:
. 0 50 0000 0000 0000
0 01 0006 0007 0003
0 03 0001 0002 0000
Массив ИЗМ4 включает следующие числа:
+ +01 2—1/R3
+ +00 25—1/R5
+ +03 1—СЗ
+ +02 25-Дгпеч
+ +03 7-ГК0Н;
д) рассчитываются начальные условия, т. е. выполняется, анализ статики
при измененных значениях тепловых токов транзистора (директива с КД = 04
при НП = 0001) и новых значениях Гн.ух и Тя,у2 (вариант 5). Массив ИЗМ5:
+ -04 1-/т.э
+ -03 5-/т.к
+ +03 3-Гн.ух
+ +03 2-Гн.у2
/СЕ;
е) анализ переходных процессов при новых значениях напряжения Е2 и
параметров входного импульса (вариант 6). Массив ИЗМ6 включает в себя семь чисел,
расположенных в следующем порядке: Um, U0, ^ф, /Верш, ^с> ^зд> Е2\
ж) изменяются все 12 параметров транзистора и принято решение
произвести новый расчет начальных условий, начиная с уже имеющихся значений
начальных условий (вариант 7). В качестве массива ИЗМ7 используется перфокарта
из БПК с новыми значениями параметров транзистора (в данном случае новые /
значения тепловых токов должны быть меньше прежних, иначе следовало бы
применить директиву не с КД = 41, а с КД = 40);
з) анализ переходных процессов при модифицированных в предыдущем
варианте параметрах транзистора (вариант 8). Массив ИЗМ8 содержит один нуль;
и) 'продолжение предыдущего варианта (вариант 9). В совокупности
варианты 8 и 9 предназначены для исследования реакции схемы на последовательность
двух входных импульсов с разными параметрами. Массив ИЗМ9 включает в себя
новое значение Гкон, большее прежнего значения Гкон, значения шести
параметров второго испытательного импульса;
к) полностью обновляется массив ПК и изменяются значения А^печ и ^кон
(вариант 10). Этому варианту соответствуют массивы ИЗМ10, ИЗМИ. Сначала
в колоду перфокарт подкладывается массив ИЗМ10, включающий в себя новые
значения А^печ и Ткои, затем массив ИЗМи, имеющий такую же структуру,
как и массив ПК в табл. П2.3. Этот вариант служит для расчета начальных
условий, а вариант 11 — для анализа переходных процессов с указанными
изменениями. При этом массив ИЗМ12 должен содержать один нуль;
л) анализ переходных процессов при модификации параметров 'всех пяти
проводимостей и параметра Т^.уъ (вариант 12).
32&
Программы ПП2 и ВБ при многовариантном анализе
1. Текст программы ВБ:
Адрес
6630
А
6704
05
06
07
6710
11
12
13
14
15
16
17
-6720
21
22
23
24
25
26
27
Команда
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
56
50
70
56
50
70
00
16
00
00
50
70
00
16
16
30
56
50
70
00
00
0000
6704
0015
0030
6755
ООН
0030
0
6713
0000
6713
ООП
0030
0
6715
6715
1236
0000
ООП
5522
0000
0000
6704
ИЗО
0000
6722
ИЗО
6707
0
3257
0000
0000
3350
6715
0
3266
3306
6723
1236
0020
6724
0000
0000
0000
2237
2430
0025 '
2237
0000
0
3270
6510
3270
1237
0000
0
3317
3317
0000
О024
6626
0000
6506
6510
Адрес
6730
31
32
33
34
35
36
37
6740
41
I 42
43
44
45
46
47
6750
51
52
53
54
55
56
57
6760
61
Команда
0
0
1
1
0
0
0
0
0
0
0
0
0
0
1 0
о
0
0
0
о
0
0
0
0
0
0
00
52
00
12
00
50
70
00
30
16
52
00
30
16
52
00
30
16
52
00
00
00
42
16
56
16
0
0000
0000
0766
0
0015
5522
0
0000
6742
0000
0
1240
6746
1240
0
3411
6752
3411
0
0000
1240
0000
6760
6761
3260
0
0000
0000
6732
0
0020
0000
0
6741
7501
0042
0
6745
7501
0042
0
6751
7501
0042
0
0000
0000
0000
3245
6707
2716
0
0000
5522
0001
0
6626
2430
0
0000
7610
6505
0
0
7310
2237
0
0000
7610
5521
0
0030
0000
0000
3257
3257
2723
Примечание. В случае использования ВПК первую часть программы В Б
-составляет программа КОМП.
-составляет программа КОМП.
Текст программы ПП2 приведен в табл. П2.6.
•6
7
01240
1
2
3
4
5
6
7
01250
1
2
. 3
4
5
6
7
01260
1
0
0
0
0
0
0
0
0
0
0
0
4
0
0
1
0
0
0
0
0
50
70
00
00
30
13
13
54
13
13
52
15
36
13
12
77
33
54
13
50
2500
1236
6756
0000
1740
3374
0002
0130
6740
6742
0000
1740
0001
0001
0277
0000
0027
0114
1261
2500
0000
0000
0000
0000
1243
3375
1604
0002
0002
0002
0000
0000
1662
1241
1251
0000
1241
0027
0001
0000
1700
0000
0026
0001
0000
0002
0002
0002
6740
6742
0000
0000
0027
0001
0001
0000
0027
0027
1261
1740
2
3
4
5
4 6
7
01270
1
2
3
4
5
6
7
01300
1
2
3
4
5
0
0
4
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
70
52
55
73
36
15
76
15
36
54
13
16
15
76
54
13
16
15
36
15
Таблица
1740
0000
1740
2430
0000
6756
0000
2430^
0000
0130
1611
1276
2430
0000
0130
1612
1317
2430
0000
2430
0000
0000
1606
1607
1367
0026
1324
1610
1317
0024
2431
1350
1607
1303
0024
2431
1350
6756
1312
1613
П2.6
0000
0000
2430
0000
0000
0000
0000
0000
0000
2431
2431
1355
0000
0000
2431
2431
1355
0000
0000
0000
330
6
7
01310
1
2
3
4
5
6
7
01320
1
2
3
4
5
6
7
01330
1
01332
3
4
5
6
7
01340
1
2
3
4
5
6
7
01350
1
2
3
4
5
6
7
01360
1
2
3
4
5
6
7
01370
1
2
3
4
5
6
7
01400
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
0
0
0
4
0
0
4
0
0
0
0
0
0
0
0
0
36
15
36
56
54
13
16
13
16
54
13
16
00
56
15
36
15
36
15
36
15
36
77
00
16
00
16
00
16
54
13
16
56
00
13
00
13
33
36
00
77
15
76
55
36
54
16
55
36
16
55
36
54
16
56
33
13
54
13
16
0000
2430
0000
0000
0130
1615
1315
1616
1322
0130
1617
1322
2430
6755
0026
0000
0026
0000
0026
0000
0026
0000
0000
1620
1343
1621
1343
1622
1343
0130
1623
1346
6756
2431
1347
0000
0024
1624
0000
0000
0000
2430
0000
1740
0000
0064
1365
1740
0000
1370
1740
0000
0114
1374
0000
1630
0002
0064
2431
1402
1317
1614
1317
1655
0024
2432
1350
2432
1350
0024
2431
1350
0000
1575
1607
1335
1614
1335
1613
1337
1610
1341
0000
0000
1350
0000
1350
0000
1350
0024
2431
1350
1271
0000
0024
0000
1241
0024
1356
0000
0000
1625
1406
1626
1365
0001
1375
1627
1370
1375
1636
1374
0001
1376
1575
3371
0001
2431
0025
1403
0000
0000
0000
0000
2432
2431
1355
2431
1355
2431
2431
1355
0026
0025
0000
0000
0000
0000
0000
0000
0000
0000
0000
2431
1355
2431
1355
2431
1355
2431
2431
1355
0026
0030
1351
0000
0024
0000
0000
0000
0000
0000
0000
0001
0000
0001
1402
0001
0000
1402
0001
0000
0001
1402
0000
0002
2431
2431
2431
1355
2
3
4
5
6
7
01410
1
2
3
4
5
6
7
01420
1
2
3
4
5
01426
7
01430
1
2
3
4
5
6
7
01440
1
2
3
4
5
6
7
01450
1
2
3
4
5
6
7
01460
1
2
3
4
5
6
7
01470
1
2
3
4
5
Продолжение ,
0
0
0
0
0
0
4
0
4
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
0
0
0
4
0
0
0
4
0
0
0
0
0
0
0
0
0
0
0
4
0
0
0
0
0
4
0
0
0
0
0
0
0
00
13
56
00
15
76
55
54
55
33
00
16
33
13
54
13
75
16
54
13
75
54
13
16
15
76
55
36
54
16
55
36
54
16
55
36
16
56
13
75
16
00
15
76
00
16
55
33
36
13
56
33
55
13
54
13
54
13
75
16
0000
0025
0000
0000
2430
0000
1740
0064
1740
0002
1263
1416
1630
0002
0064
2431
1633
1424
0114
0025
0004
0114
2431
1575
2430
0000
1740
0000
0050
1440
1740
0000
0064
1444
1740
0000
1447
0000
0001
2431
1453
0000
2430
0000
1263
1460
1740
0001
0000
0002
0000
0002
1740
0001
0064
0003
0064
2431
1633
1476
табл.
0000
1631
1350
0000
1632
1432
1626.
0001
1627
0001
0000
1350
337Г
0001
2431
0025
2431
1403
0003
0004
1634
0024
0005
1350
1635
1454
1626
1440
0001
1450
1627
1445
0001
1450
1636
1447
1450
1575
1637
0025
1403
0000
1640
1506
0000
1350
1636
1241
1465
3370
1461
3370
1626
1641
0003
0002
0003
0025
2431
1403
П2.&
0000
0025
0000
0000
0000
0000
0001
0001
0002
0003
2431
1355
0002
2431
2431
2431
2431
1355
0004
0025
2431
0005
2431
1355
0000
0000
0001
0000
0001
1453
0001
0000
0001
1453.
0001
0000
1453
0000
2431
2431
1355
0000
0000
0002
2431
1355
0001
0001
0000
0002
0000
0002
0001
0003
0003
0003
2431
2431
2431
1355
33i
Продолжение табл. П2.6
6
7
01500
1
2
3
4
5
6
7
01510
- 1
2
3
4
5
6
7
•01520
1
01522
3
4
5
6
7
01530
1
2
3
4
5
6
7
01540
1
2
3
4
5
6
7
01550
1
2
3
4
5
6
7
01560
1
2
3
4
5
6
7
01570
4
0
0
0
0
0
0
0
0
0
4
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
4
0
0
0
0
0
0
0
0
0
0
0^
4
0
0
0
0
0
0
0
0
0
0
0
0
55
54
33
13
54
13
13
16
15
76
55
16
13
16
56
00
16
75
13
54
75
16
13
54
13
16
54
13
16
13
00
00
15
76'
55
16
56
15
76
54
13
16
15
76
00
16
,55
33
36
713
56
33
54
13
00
00
75
13
16
1740
0114
0002
0025
0114
1634
2431
1575
2430
0000
1740
1512
0004
1514
0000
1263
1517
1643
1641
0050
2431
1524
1644
0130
2431
1530
0114
1645
1533
0025
0000
0000
'2430
0000
1740
1542
0000
2430
0000
0130
1651
1575
2430
0000
1263
1554
1740
0001
0000
0002
0000
0002
0050
0002
0000
0000
1633
,2431
1571
1627
0002
0001
ОООГ
0024
0005
0001
1350
1642
1536
1626
1515
1631
1515
1575
0000
1350
0025
0004
0001
0001
1350
0024
0024
0001
1350
0024
0001
1350
1646
0000
0000
1647
1543
1626
1515
1575
1650
1550
0024
0001
1350
1652
1311
0000
1350
1626
1631
1561
1646
1555
1646
0002
1653
0000
0000
0002
0025
1350
0002
0002
0001
0025
0005
2431
2431
1355
0000
0000
0004
1534
0004
1534
0000
2431
1355
2431
0001
0001
2431
1355
2431
0001
2431
1355
0001
2431
1355 '
0025
0000
0000
0000
0000
0004
1534
0000
оооо
0000
0001
2431
1355
0000
0002
2431
1355
0001
0001
0000
0002
0000
0002
0002
0002
0000
0000
2431
2431
1355
1
2
3
4
5
6
7,
01600
1
2
3
4
5
6
7
01610
1
2
3
4
5
01616
7
01620
1
2
3
4
5
6
7
01630
1
2
3
4
5
6
7
01640
01641
2
3.
4
5
6
7
01650
1
2
3
4
5
6
7
01660
1
2
3
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
5
1
0
0'
0
0
0
0
4
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
0
54
13
16
13
40
50
70
00
50
70
56
00
00
77
40
51
16
16
50
41
16
16
16
00
00
00
16
00
01
00
00
00
00
02
00
12
03
00
00
04
00
05
00
13
12
00
06
07
16
11
00
12
15
36
77
00
16
54
16
0114
1654
1574
0025
0027
2500
0030
0000
0015
0030
0000
0000
0000
0000
0000
0000
0031
0031
0000
0000
0031
0032
0031
0000
6720
6721
0031
0000
0000
0777
0000
0000
0001
0000
0000
0000
0000
0000
0000
0000
3410
0000
0000
0027
0005
0006
0000
0000
0031
0000
0000
0005
2430
0000
0000
1657
1322
0064
1256
0024
0001
1350
1646
1264
0000
0000
0000
3350
1601
0030
0000
0277
0000
0000
0000
6724
6731 ,
0000
0000
6740
6735
6744
0000
0000
0000
6757
0000
0000
0000
0777
5521
0000
0000
0000
0027
0000
0000
0000
0000
0000
0000
0000
6631
0026
0000
0000
0000
6750
0000
0000
0027
1657
1660
0000
оооо
1350
3370
6735
0001
2431
1355
0025
0001
0337
0000
0000
1237
0000
0000
5522
0000
0000
0000
0000
6730
6734
0000
0000
6743
6737
6747
6711
6611
6711
6717
1207
0000
0000
0000
0000
0000
0000
ооод
0001
0000
0777
6510
0000
0000
0000
0000
0027
0001
0000
0000
0000
6753
0000
6530
0001
0000
0000
0000
2431
1355
6631
6737
ЛИТЕРАТУРА
1. Автоматизация проектирования. ТВ ТИИЭР, № 1, 1972.
2. Автоматизированная система анализа моделей схем на языке ФОРТРАН
<АСАМС-Ф). РИО ЛГУ им. П. Стучки. Рига, 1972.
3. Анализ и расчет интегральных схем. Под. ред. Линна Д., Мей-
ера И. и Гамильтона Д., ч. 1 и 2. «Мир», 1969.
4. Белов Б. И., Норенков И. П. Расчет электронных схем на
ЭЦВМ, «Машиностроение», 1971.
5. Болтянский В. Г. Математические методы' оптимального
управления «Наука», 1969.
6. Бояринов А. И., Кафаров В. В. Методы оптимизации в
химической технологии «Химия», 1969.
7. Б у с л е н к о И. П. [и др.]. Метод статистических испытаний (метод
Монте-Карло). Под ред. Шнейдера Ю. А. Физматгиз, 1962.
8. Валиев К. А., Кармазинский А. Н., Королев М. А.
Цифровые интегральные схемы на МДП-транзисторах. «Советское радио», 1971.
9. В а с и л ь е в Б. В., Козлов Б. А., Т к а ч е н к а Л. Г,
Надежность и эффективность радиоэлектронных' устройств. «Советское радио»,
1964.
10. В е н т ц е л ь Е, С. Теория вероятностей/ Физматгиз, 1962.
11. Голенко Д. И. Моделирование и статистический анализ
псевдослучайных чисел на ЭВМ. «Наука», 1965.
12. Г о р и н ш т е й н А. М. Численное решение задач радиотехники
и техники связи на ЭЦВМ. «Связь», 1972.
13. Демьянов В. Ф., Малоземов В. Н. Введение в мини-
макс. «Наука», 1972.
14. Дунин-Барковский И.. В., Смирнов Н. В. Теория
вероятностей и математическая статистика в технике. Гостехиздат, 1955.
15. Д ь я ч е н к о В. Ф. Основные понятия вычислительной математики.
«Наука», 1972.
16. И л ь и н В. Н. Машинное проектирование электронных схем.
«Энергия», 1972.
17. К а л а х а н Д. Методы-машинного расчета электронных схем. «Мир»,
1971.
18. Корн Г., Корн Т. Справочник по математике для научных
работников и инженеров. «Наука», 1968.
19. Крылов В. И., Бобков В. В., Монастырный П. И.
Вычислительные методы высшей математики, т. 1. Минск, «Вышэйшая школа»,
1972.
20. К у Е., Рорер Р. Применение метода переменных,
характеризующих состояние, к анализу цепей. ТИИЭР, т. 58, 1965, № 7.
21. Машинное проектирование. ТВ ТИИЭР, 1967, № 11.
22. Машинный расчет интегральных схем* Под ред. Герсковица Г.
«Мир», 1971.
23. Микроэлектроника. Сборник статей под ред. Л у к и н а Ф. В., вып. 3.
«Советское радио»,1 19б9.
24. Микроэлектроника. Сборник статей под ред. Лукина Ф. В., вып. 4.
«Советское радио», 1971.
25. Микроэлектроника. Сборник статей под ред. Лукина Ф. В., вып. 5.
«Советское радио», 1972.
26. Н а у м о в Ю. Е. Интегральные логические схемы. «Советское
радио», 1970.
27. Норенков И. П., Иванов С. Р., Мулярчик С. Г.
Алгоритм расчета электронных схем на ЦВМ. «Известия вузов СССР.
Радиоэлектроника», 1972, № 3.
333
28. Н о р е н к о в И. П., Иванов С. Р. Методы машинного
проектирования электронных схем. МВТУ им. Н. Э. Баумана, 1972.
29. Н о р е н к о в И. П. Метод сканирования М-матрицы для
моделирования сложных интегральных схем. «Известия вузов СССР.
Радиоэлектроника», 1973, № 6
30. Павлов А. Н., Панферов В. П. Эквивалентная схема
транзистора. «Электронная техника», сер. VI, вып. 5, 1971.
31. П у х о в Г. Е. Методы анализа и синтеза квазианалоговых
электронных цепей. Киев, «Наукова думка», 1967.
32. Расчет электрических допусков радиоэлектронной аппаратуры. Под.
ред. Гусева В. П. и Фомина А. В. «Советское радио», 1963.
33. Р е з а Ф., Сил и С. Современный анализ электрических цепей
«Энергия», 1964.
34. С и г о р с к и й В. П., Петренко А. И. Алгоритмы анализа
электронных схем. Киев, «Техника», 1970.
35. С т е п а н е н к о И. П. Основы теории транзисторов и
транзисторных схем. Госэнергоиздат, 1963/
36. Т и ш е н к о А. М. [и др.]. Расчет и проектирование импульсных
устройств на транзисторах. Под ред. Ш т е р к а М. Д. «Советское радио»,
1964.
37. Ч у н а е в В'. С. [и др.]. Машинный анализ элементов и линий
связи узлов ЭВМ. М., ИТМ и ВТ, 1971.
38. Ш т е р н Л. Основы проектирования интегральных схем. «Энергия»»
1973.
ОГЛАВЛЕНИЕ
Введение 3
Глава 1. Особенности элементов ЭВМ 3
§ 1.1. Особенности работы элементов в составе ЭВМ .... 5
§ 1.2. Размерная и функциональная взаимозаменяемость 9
§ 1.3. Основные требования к электрическим параметрам
элементов ЭВМ 11
§ 1.4. Точность и надежность электронных
переключательных схем 20
Глава 2. Задачи проектирования электронных схем элементов ЭВМ и
методы их решения 23
§ 2.1. Классификация параметров электронных схем
элементов ЭВМ 23
§ 2.2. Процесс проектирования электронных схем элементов
ЭВМ , 29
§ 2.3. Методы проектирования электронных схем элементов
ЭВМ 36
§ 2.4. Требования к математическим моделям, методам и
алгоритмам, используемым при машинном
проектировании электронных схем элементов ЭВМ 42
Глава 3. Математические модели компонентов в элементах ЭВМ. ... 46
§ 3.1. Классификация математических моделей компонентов
и их параметров - 46
§ 3.2. Математические модели полупроводниковых диодов * 51
§ 3.3. Математические модели биполярных транзисторов 60
§ 3.4. Особенности моделей интегральных биполярных
транзисторов 68
§ 3.5. Математические модели МДП-транзисторов 73
§ 3.6. Математические модели интегральных пассивных
компонентов 77
§ 3.7. Математическая модель импульсного трансформатора 79
§ 3.8. Математическая модель длинной линии 81
Глава 4. Математические модели электронных схем 83
§ 4.1. Общая характеристика методов получения
математических моделей схем 83
§ 4.2. Топологическая матрица контуров и сечений 86
§ 4.3. Матричный вариант метода переменных состояния 89
§ 4.4. Метод сканирования М-матрицы для получения
математических моделей схем 94
§ 4.5. Особенности математических моделей разветвленных
схем 101
§ 4.6. Алгоритмы автоматического составления
математических моделей схем 106
§ 4.7. Особенности получения математических моделей схем
в виде системы дифференциальных уравнений, не
разрешенных относительно производных 113
Глава 5. Методы анализа элементов ЭВМ 116
§ 5.1. Собственные значения матриц и постоянные времени
электронных схем 116
§ 5.2. Общие сведения о методах анализа статических
состояний элементов ЭВМ , 121
33*
§ 5.3. Метод простых итераций »,.... 124
§ 5.4. Метод Ньютона 128 ,
§ 5.5. Вычисление матрицы Якоби 134
§ 5.6. Сравнительная оценка методов Ньютона и простых
итераций при их использовании для статического анализа
электронных схем 138
§ 5.7. Общие сведения о методах анализа переходных
процессов в элементах ЭВМ 140
§ 5.8. Методы численного интегрирования систем
дифференциальных уравнений 145
§ 5.9. Устойчивость численного интегрирования 149
§ 5.10. Автоматический выбор шага интегрирования системы
дифференциальных уравнений 153
§ 5.11. Выбор численного метода для анализа переходных
процессов в элементах ЭВМ 157
§ 5.12. Определение выходных параметров 168
Глава 6. Многовариантный анализ 170
§ 6.1. Анализ чувствительности 170
§ 6.2. Машинные методы анализа чувствительности 178
§ 6.3. Методы оценки работоспособности схем 184
§ 6.4. Постановка задачи статистического анализа элементов
на ЭВМ 189
§ 6.5. Алгоритмы статистического анализа 195
§ 6.6. Общая оценка схемы по критерию схемной надежности 205
§ 6.7. Учет старения комплектующих деталей* и приборов 206
§ 6.8. Расчеты надежности модулей типа «Тропа» при
воздействии дестабилизирующих факторов 211
Глава 7. Программы анализа переключательных электронных схем . . 218
§ 7.1. Требования к программам анализа и их
характеристики ' 218
§ 7.2. Входные языки программ анализа 222
§ 7.3. Структура программ анализа 227
§ 7.4. Краткий обзор характеристик программ анализа
переключательных электронных схем /. . . . 231
§ 7.5. Примеры машинного анализа элементов ЭВМ .... 235
Глава 8. Оптимизация параметров электронных схем * 246
§ 8.1. Критерий оптимизации я целевая функция 247
§ 8.2. Общие сведения о методах поиска экстремума целев©й
функции 254
§ 8.3. Обзор методов поиска экстремума 260
§ 8.4. Метод (оптимизации параметров электронных схем
по максиминному критерию 267
§ 8.5. Алгоритм и программа .оптимизации схем по
максиминному критерию 274
§ 8.6. Примеры оптимизации переключательных
электронных схем 281
Приложение 1 289
Дополнение 1 • . 297
Дополнение 2 303
Дополнение 3 < 303
Дополнение 4 307
Дополнение 5 . . . 310
Дополнение 6 311
Дополнение 7 312
Приложение 2 322
Литература 333'
336