


















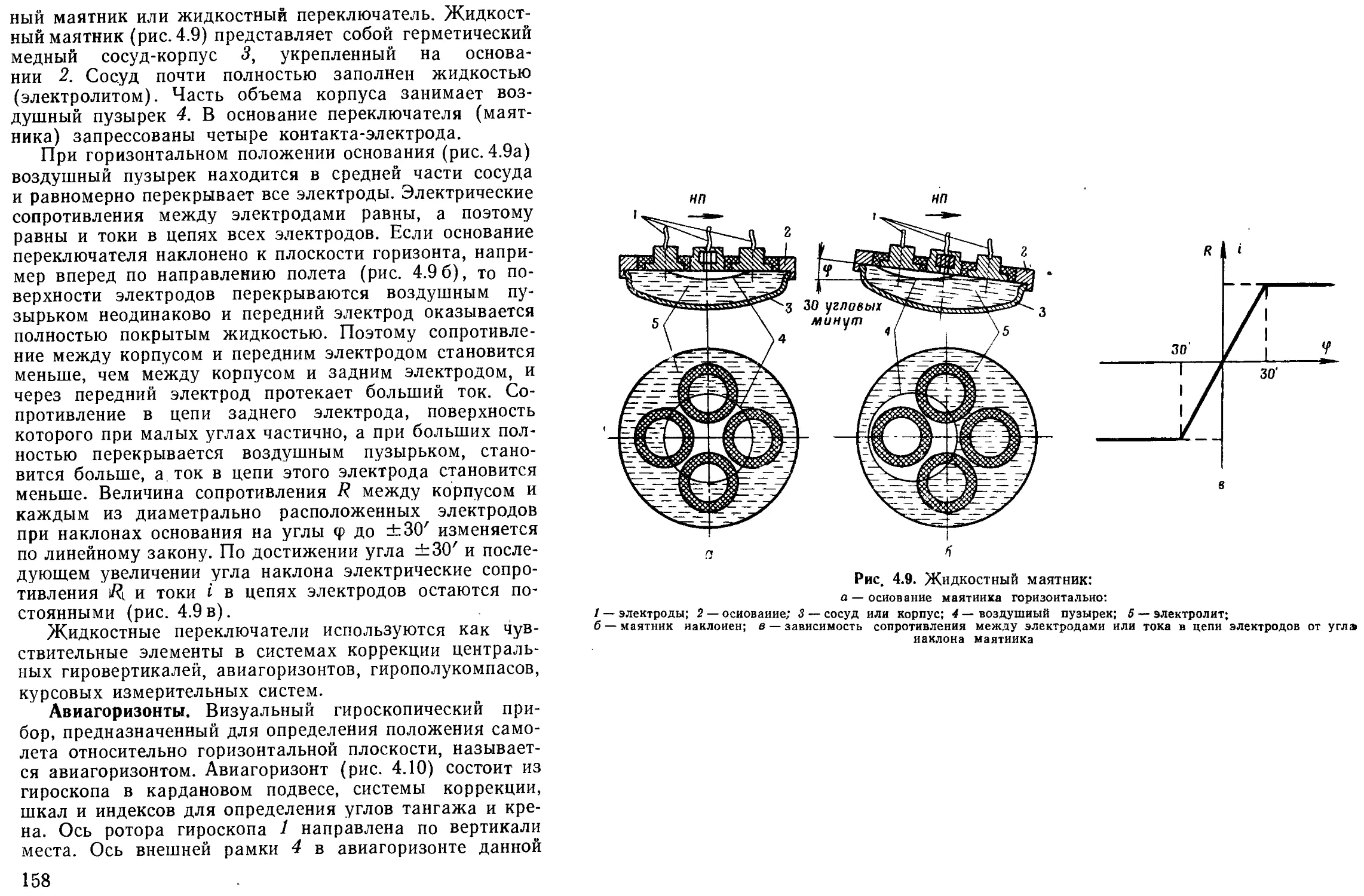


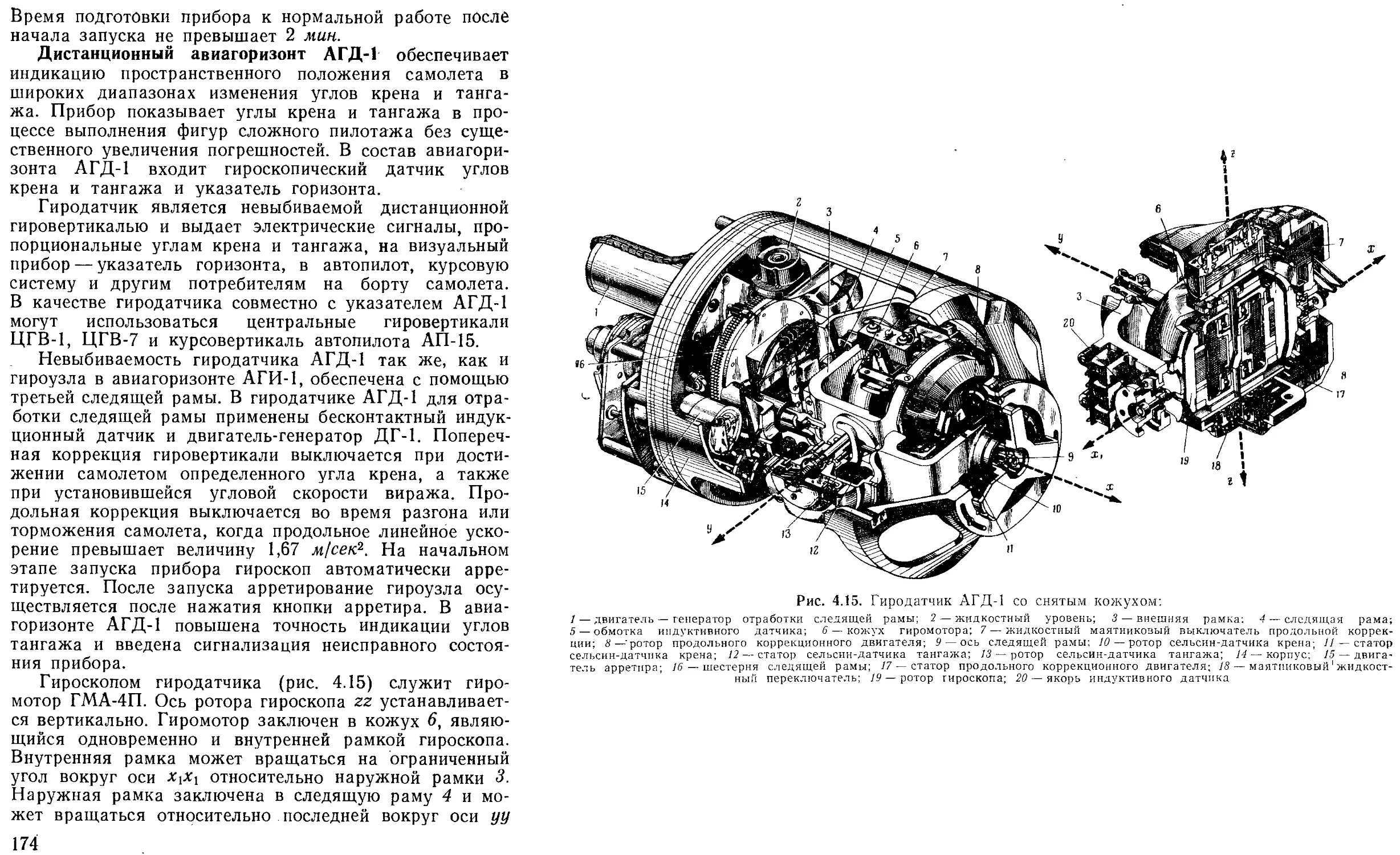

















Текст
Форум на
AVIA.RU
представляет
Учебник механика ВВС
Введение
Глава 1. Общие сведения об авиационных приборах и измерительных системах
§ 1. Назначение и классификация приборов и измерительных систем
§ 2. Принцип построения приборов и измерительных систем
§ 3. Погрешности авиационных приборов
§ 4. Условия работы приборов на самолете
§ 5. Размещение приборов на самолете
Глава 2. Анероидно-мембранные приборы
Стандартная атмосфера
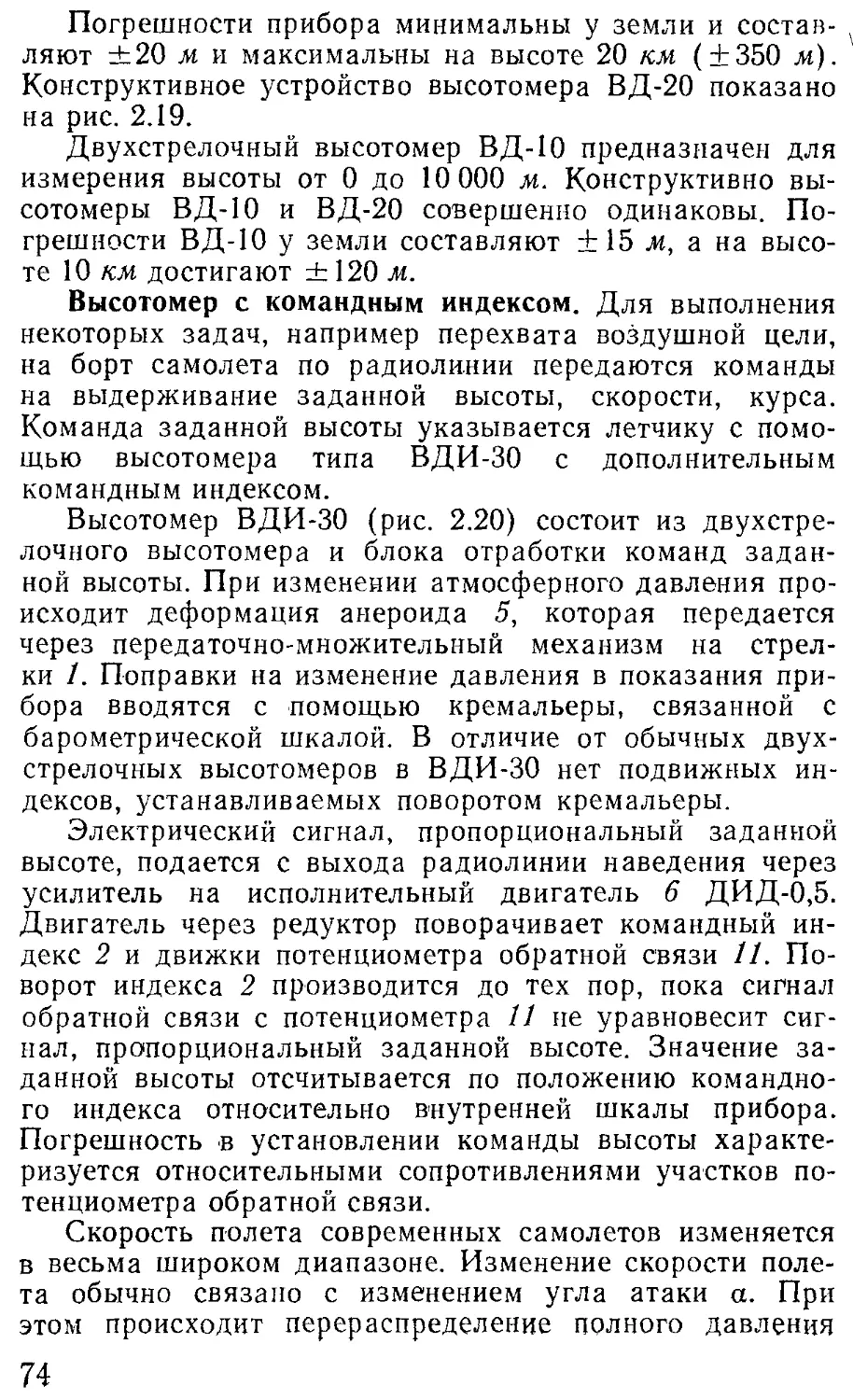
§ 2. Приемники воздушного давления
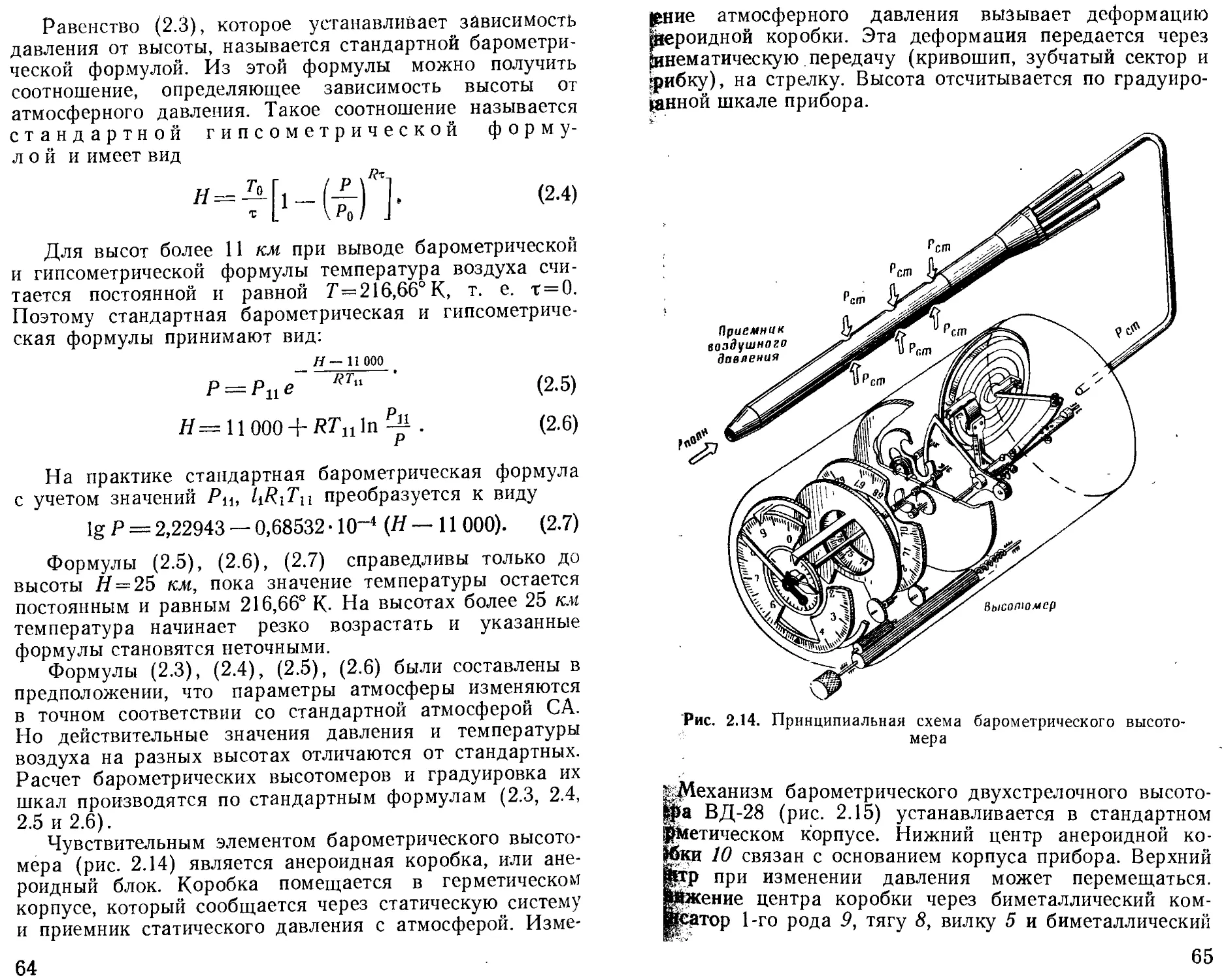
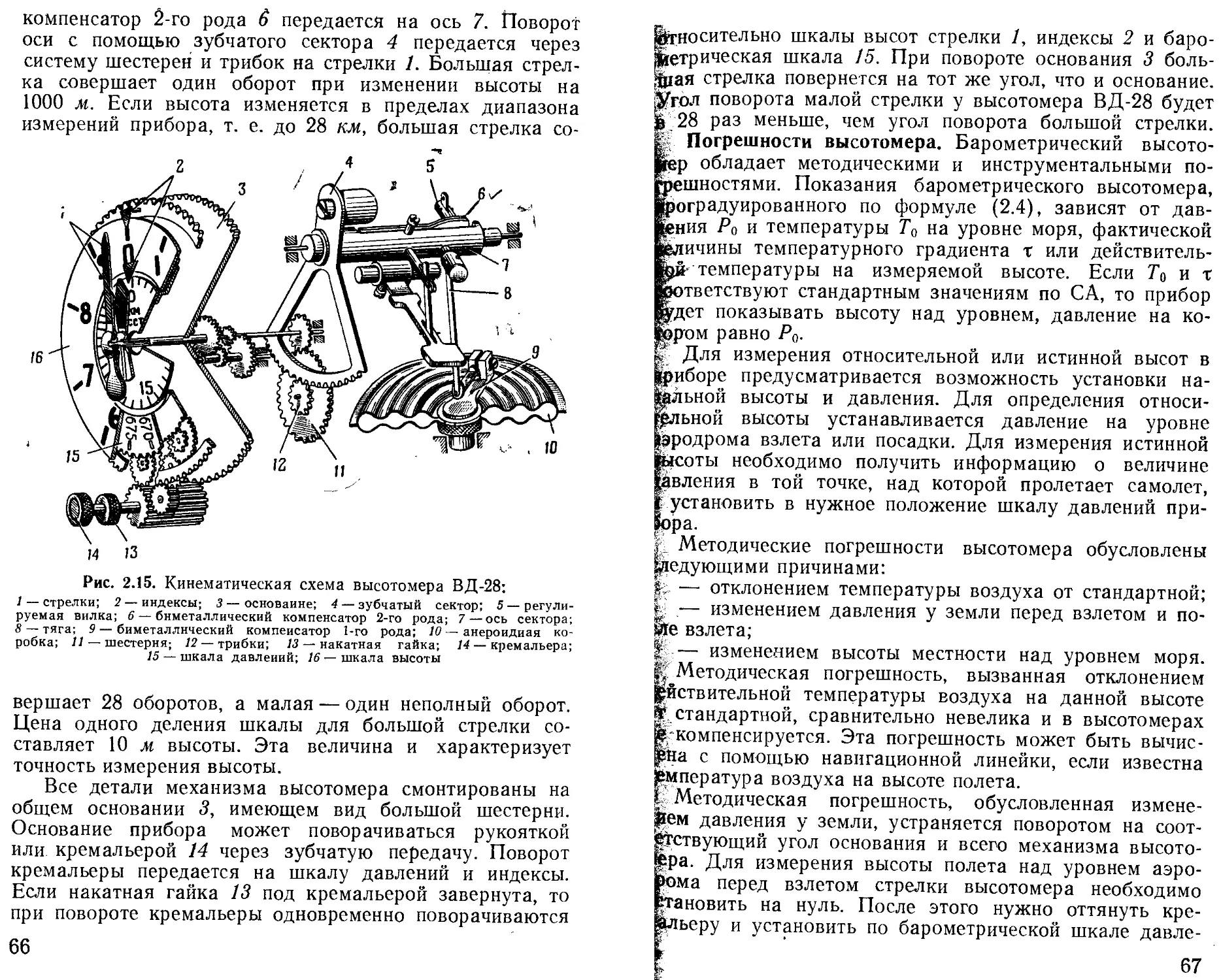
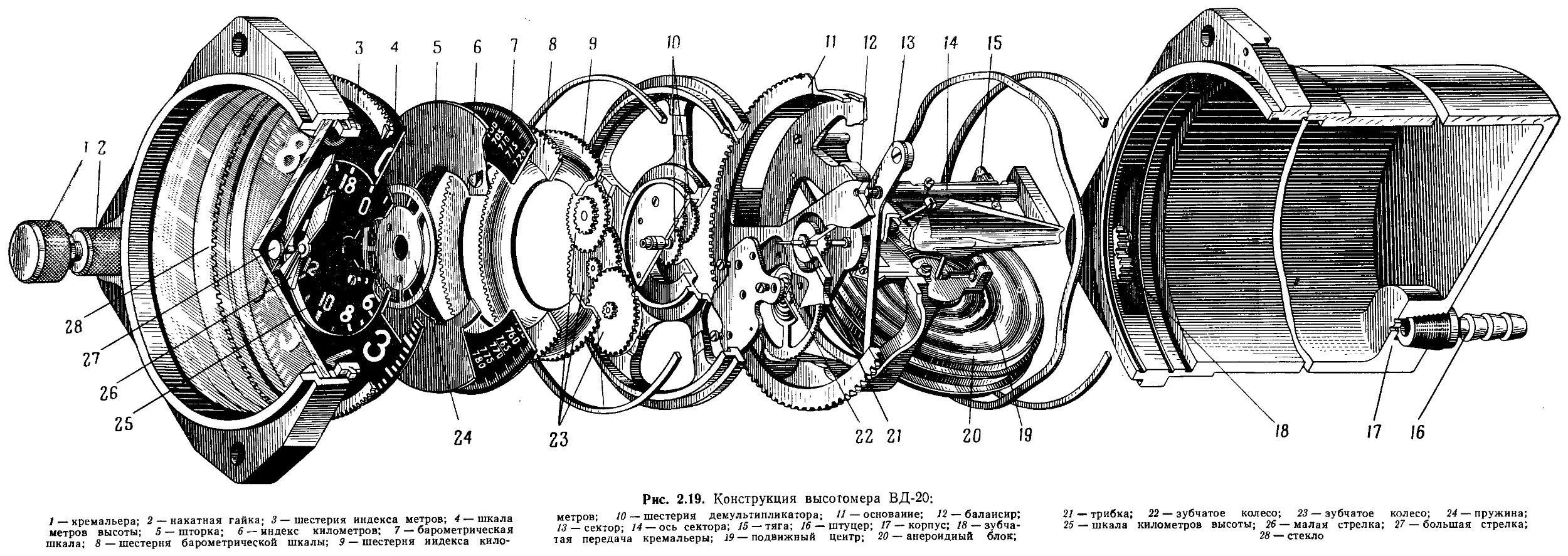
§ 3. Высотомеры
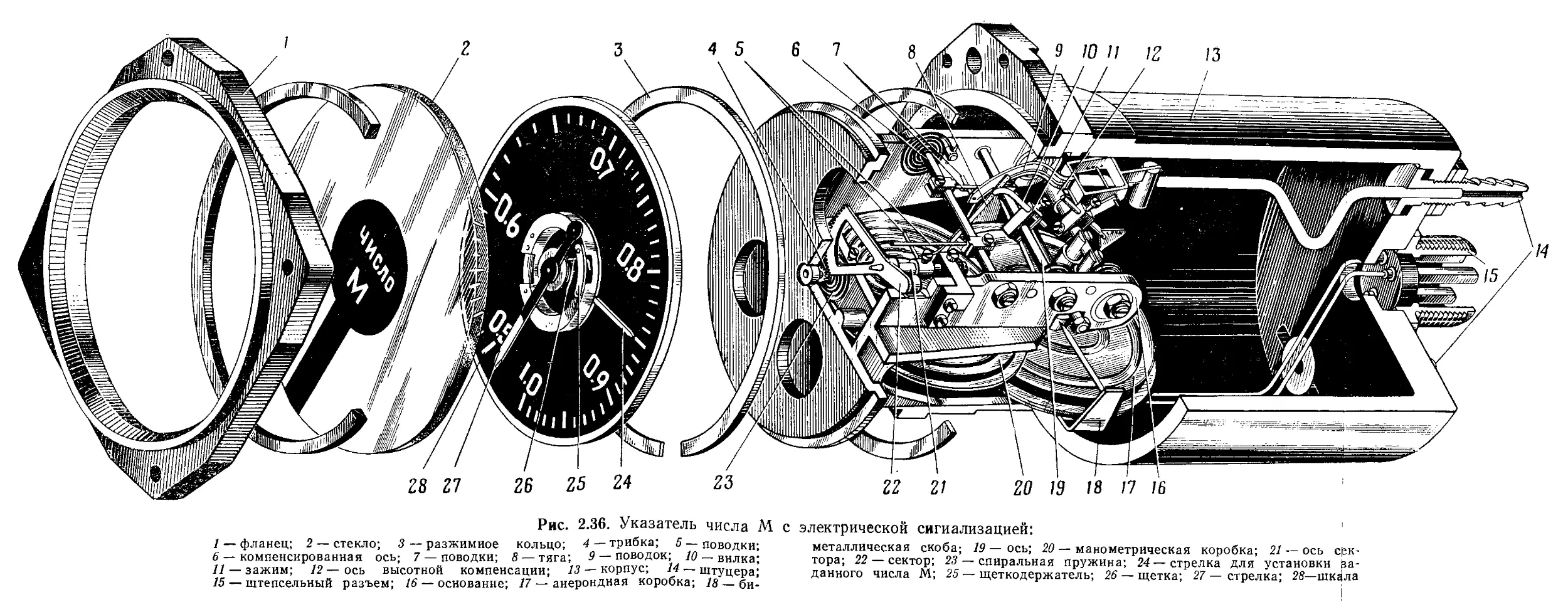
§ 4. Приборы для измерения скорости и числа М полета
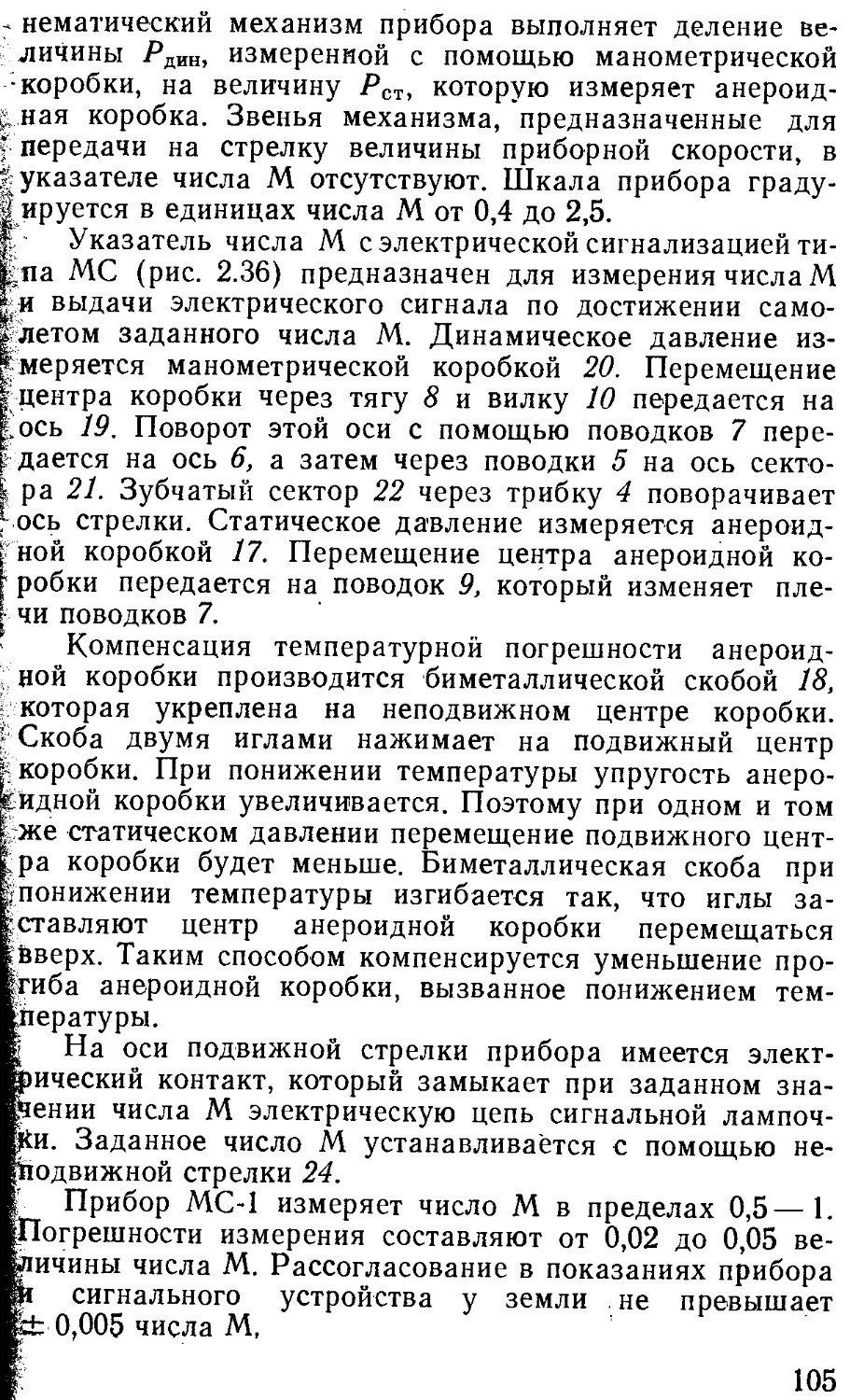
§ 5. Вариометры
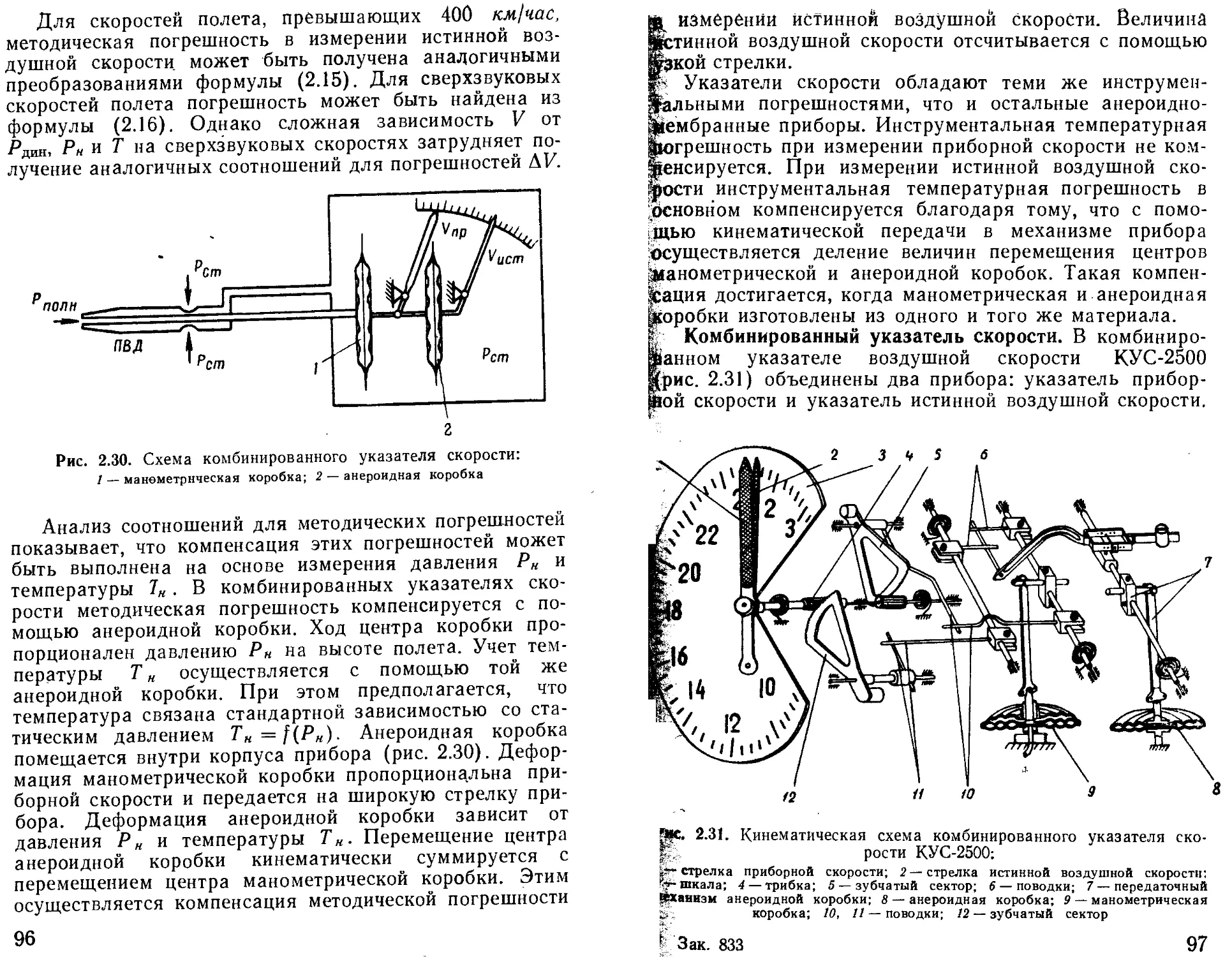
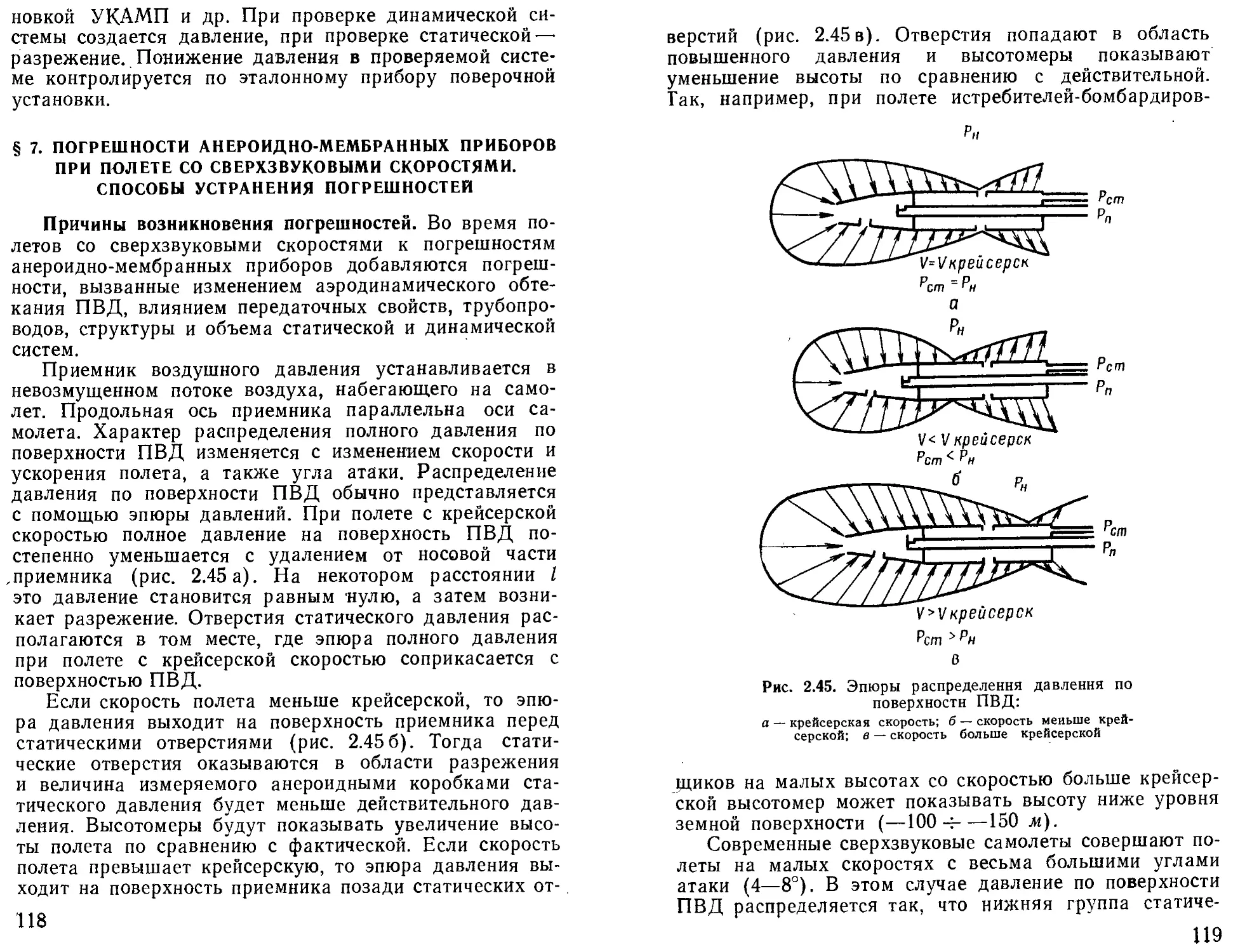
§ 7. Погрешности анероидно-мембранных приборов при полете со сверхзвуковыми
скоростями. Способы устранения погрешностей
Глава 3. Измерители углов атаки и скольжения. Акселерометры
§ 1. Датчики углов атаки и скольжения
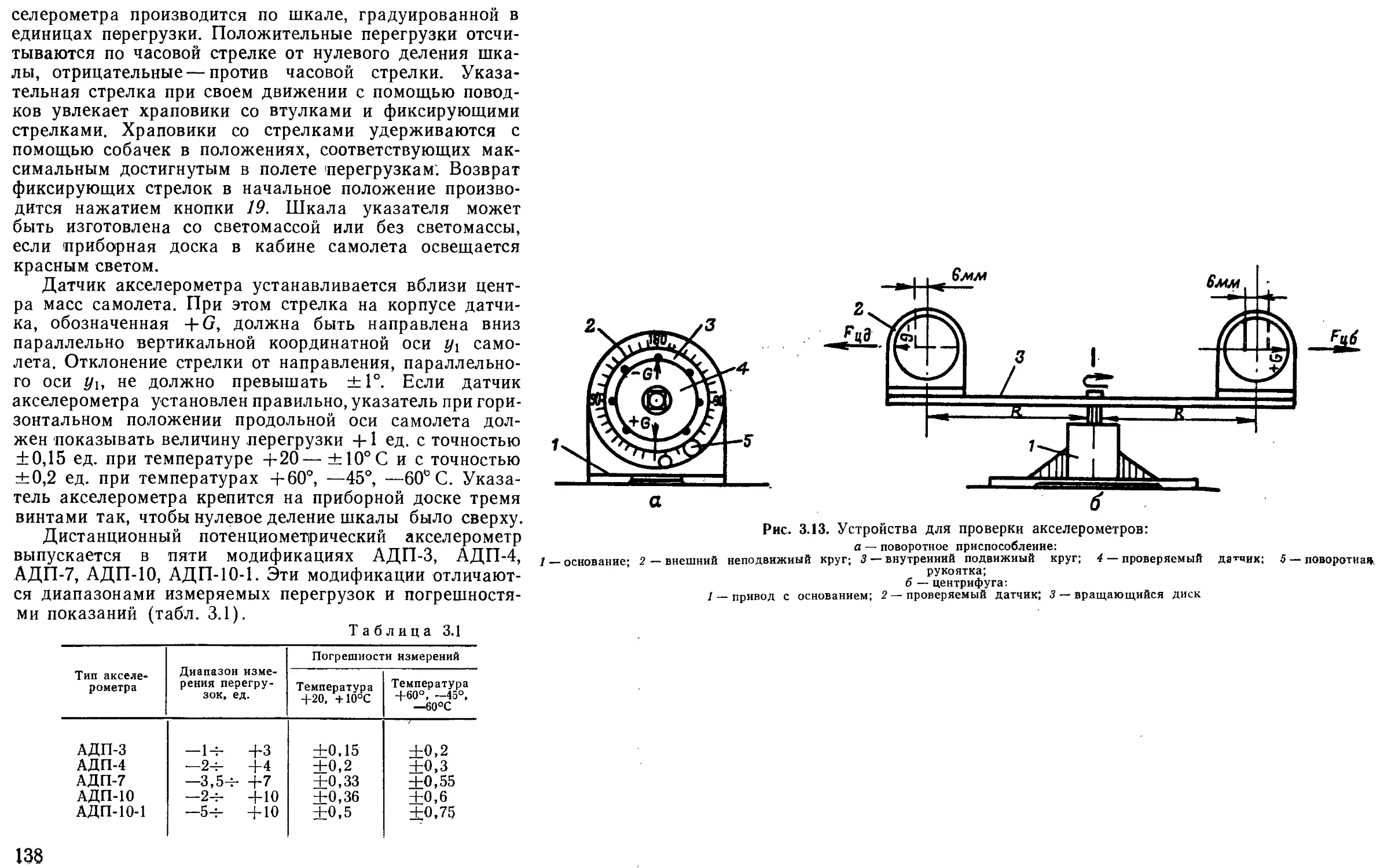
§ 2. Измерители ускорений
Глава 4. Гироскопические пилотажно-навигационные приборы
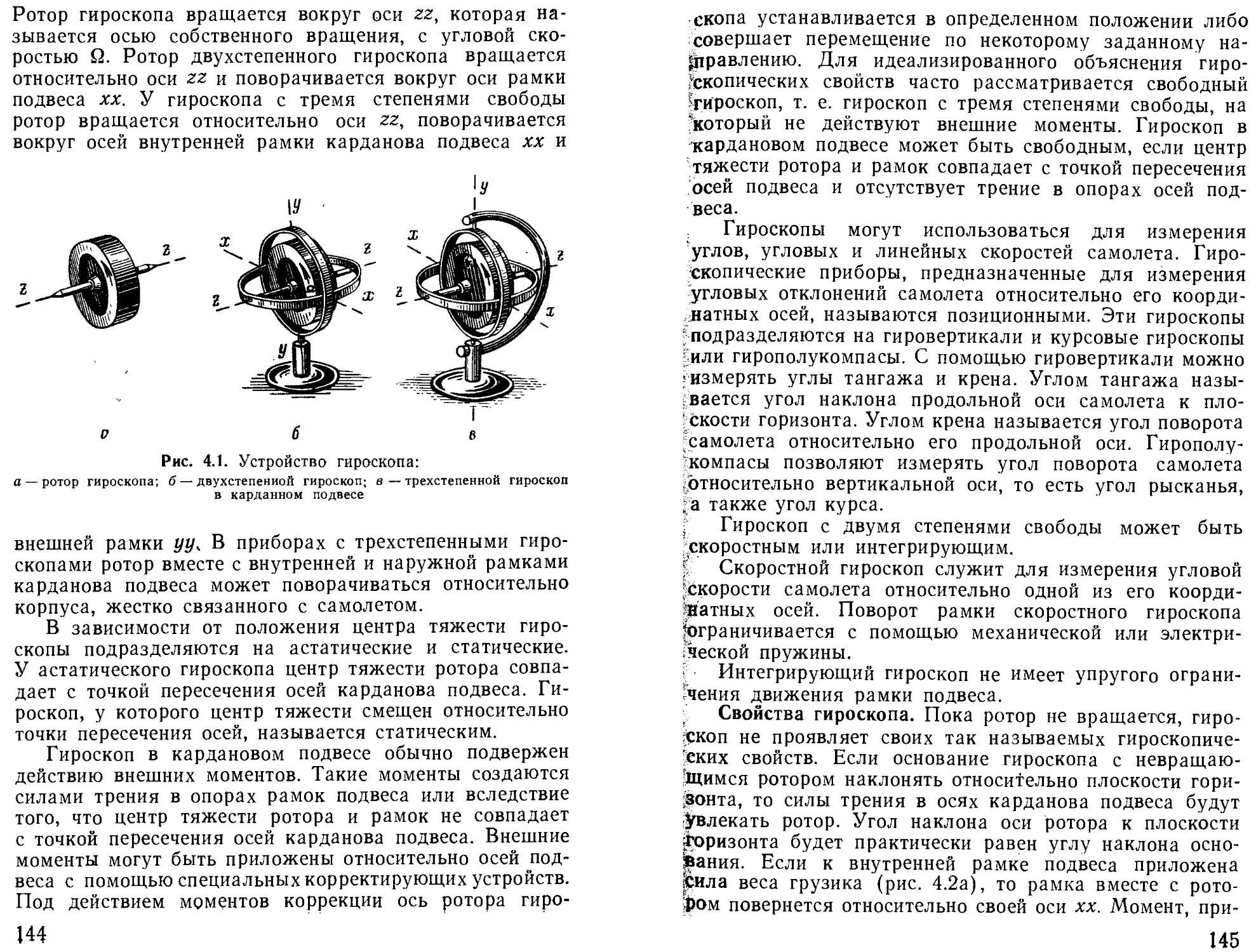
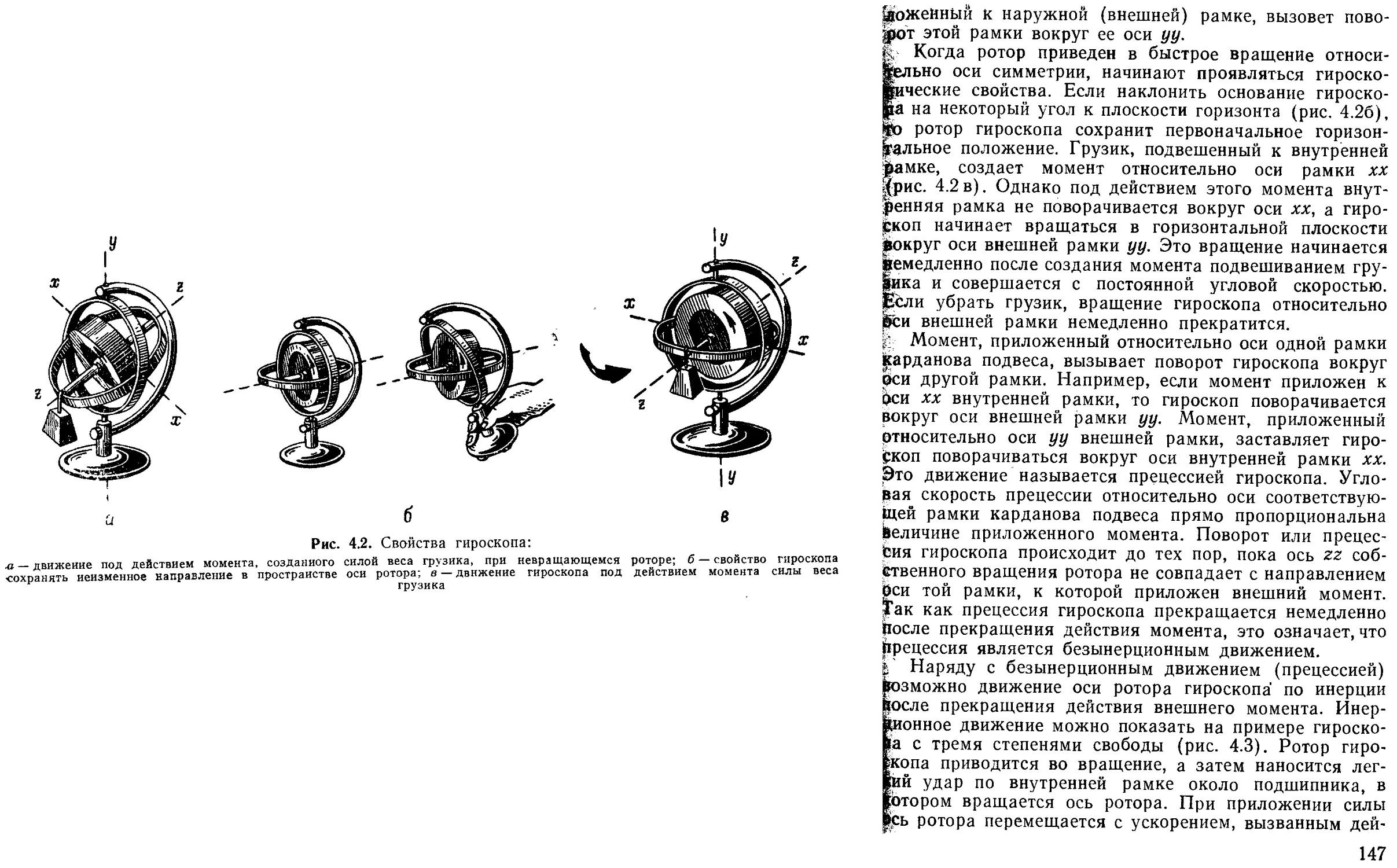
§ 1. Краткие основы теории гироскопов
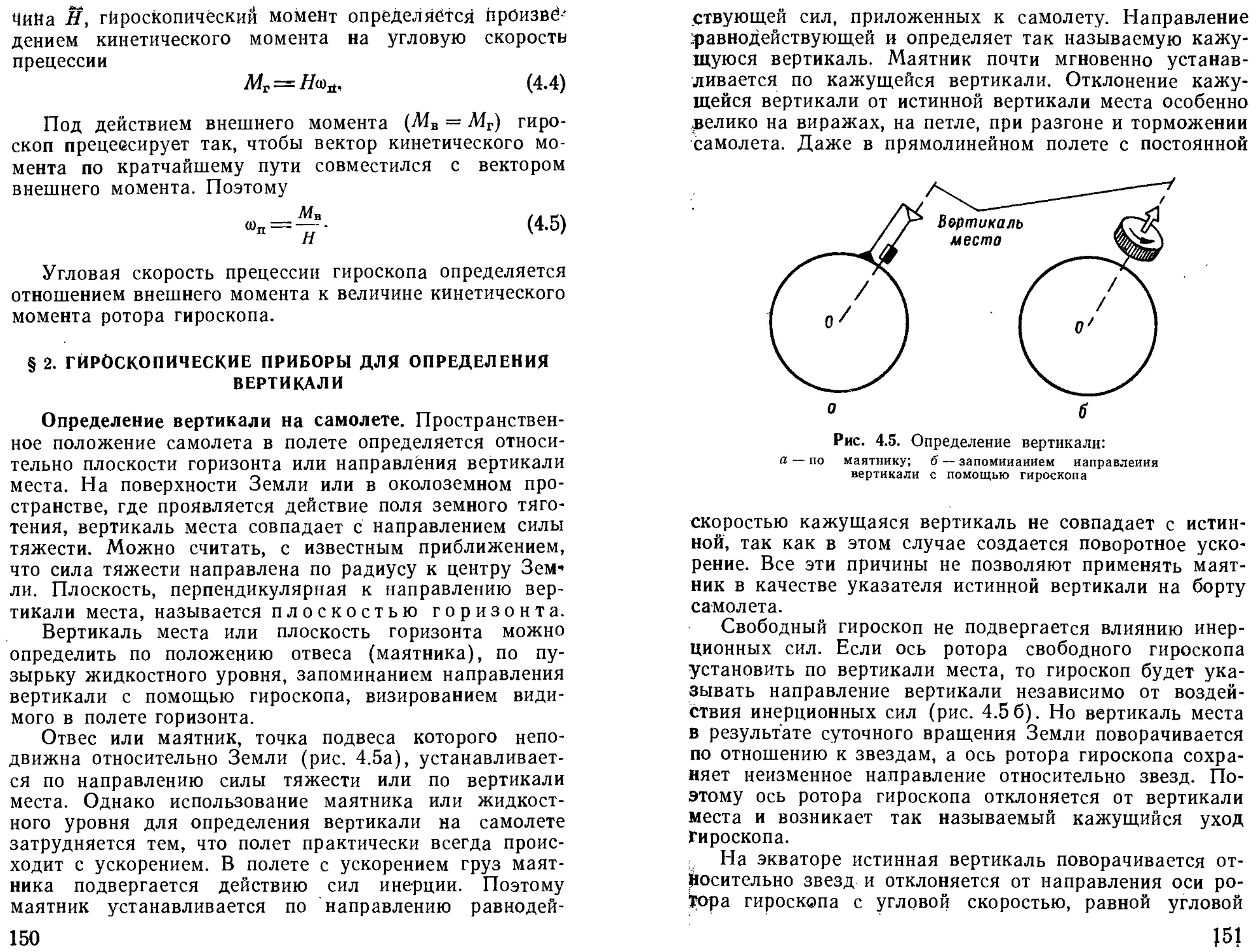
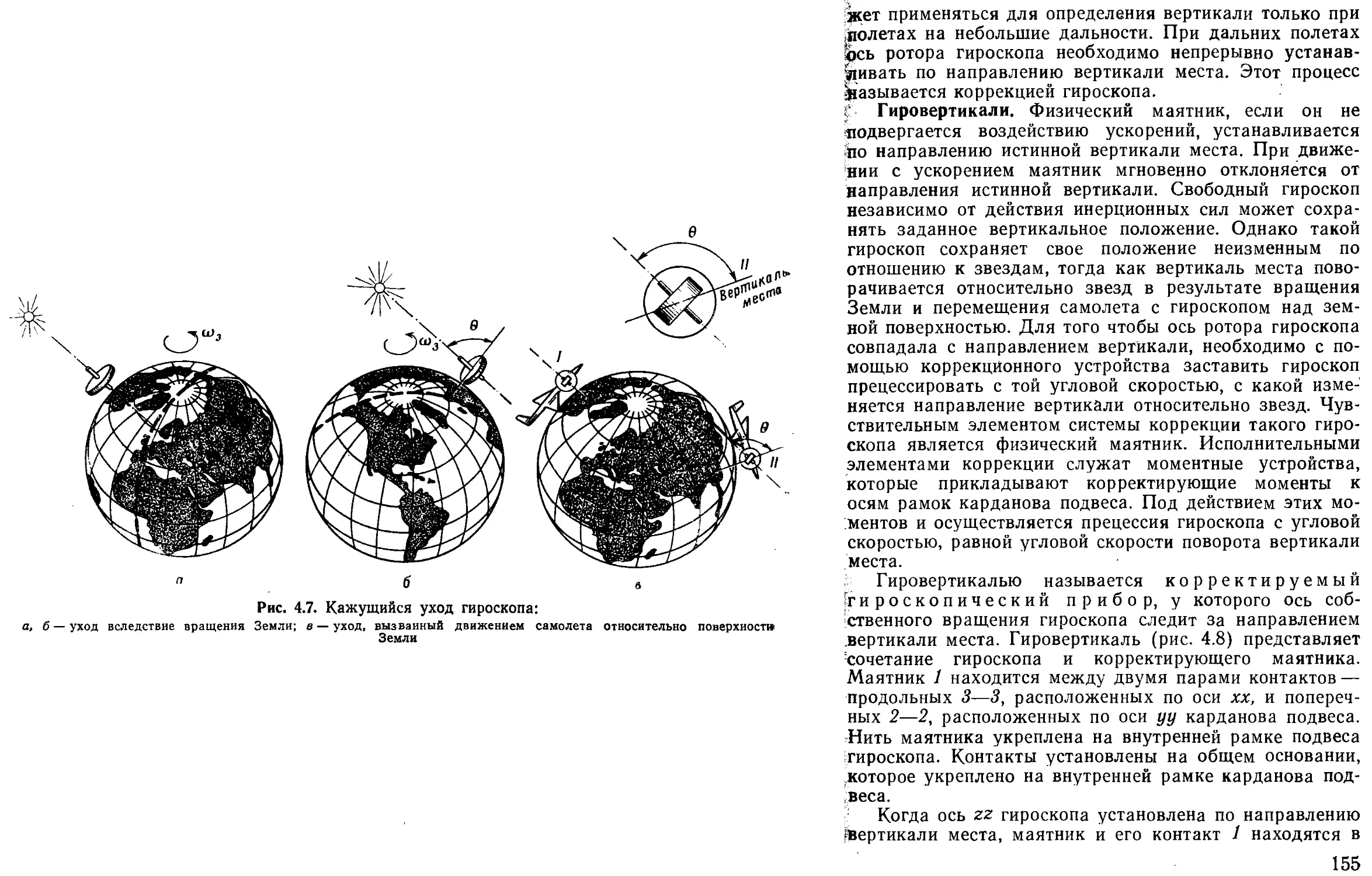
§ 2. Гироскопические приборы для определения вертикали
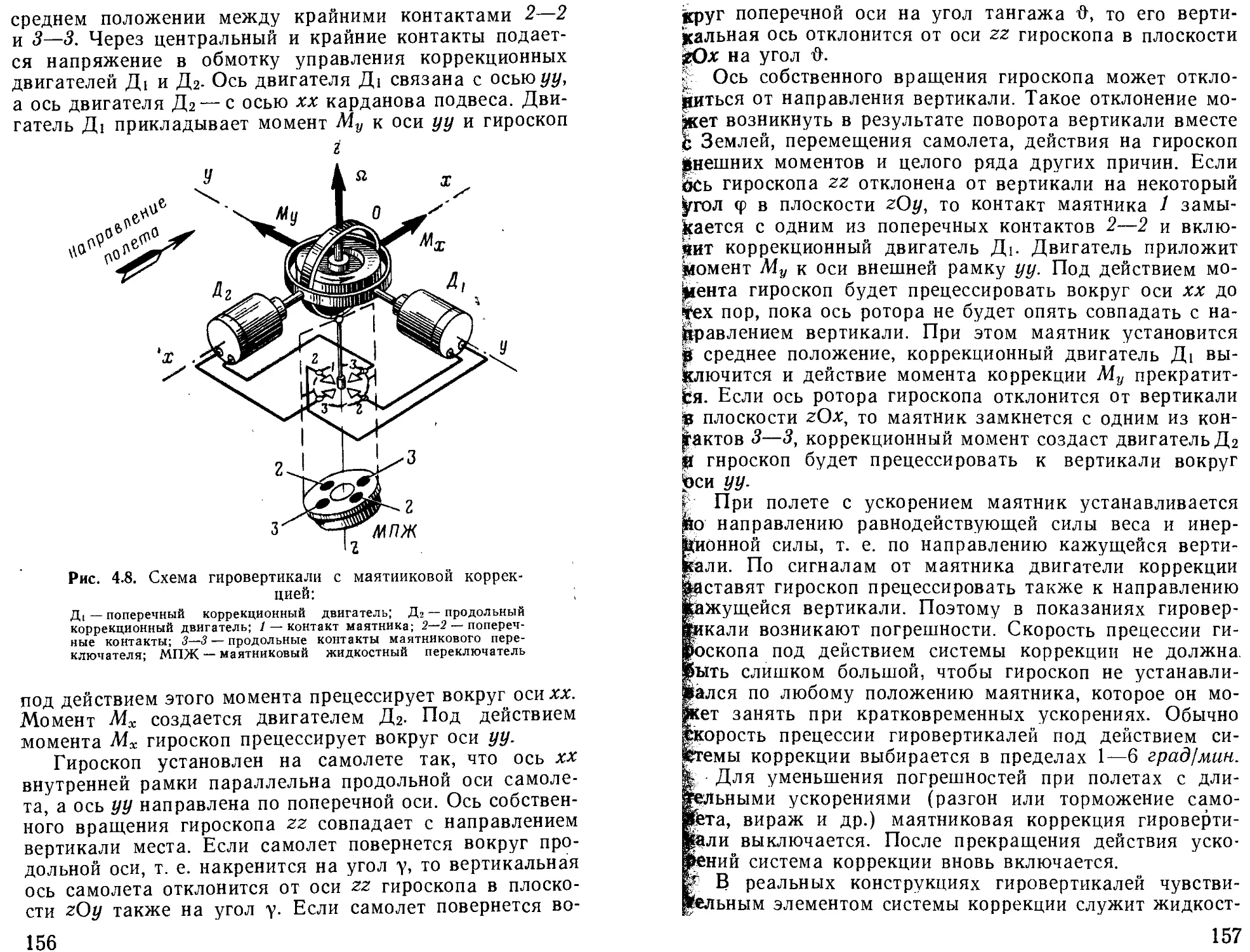
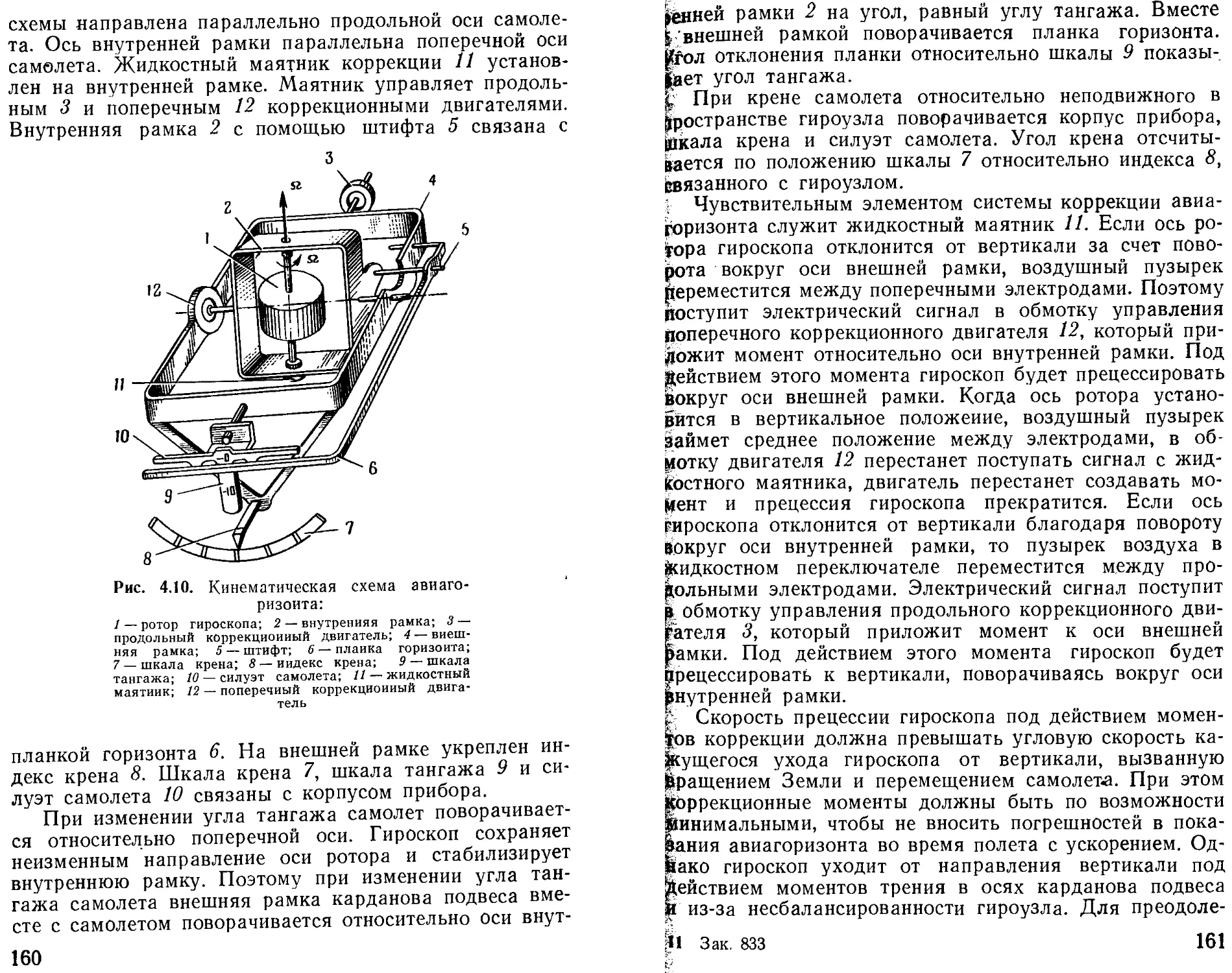
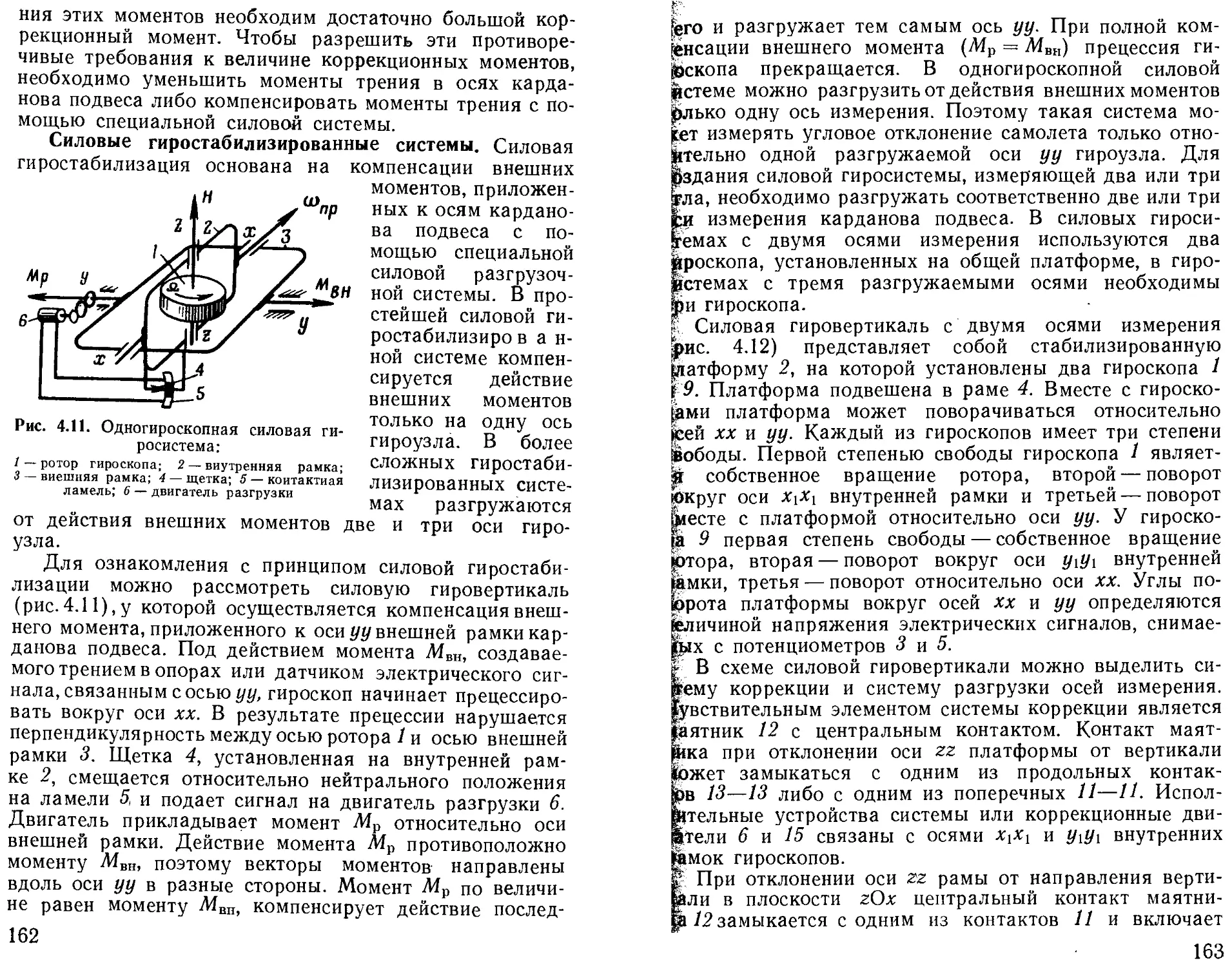
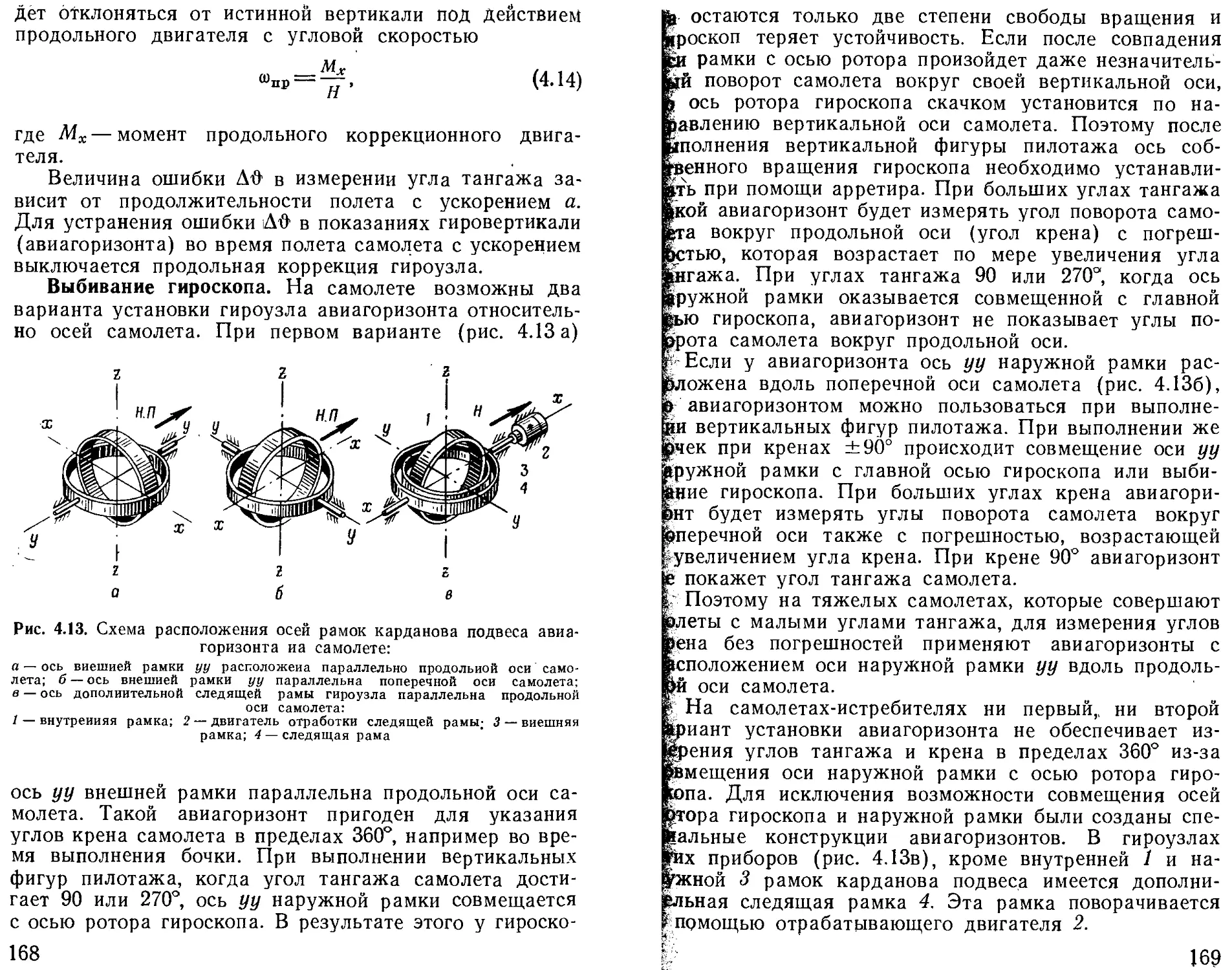
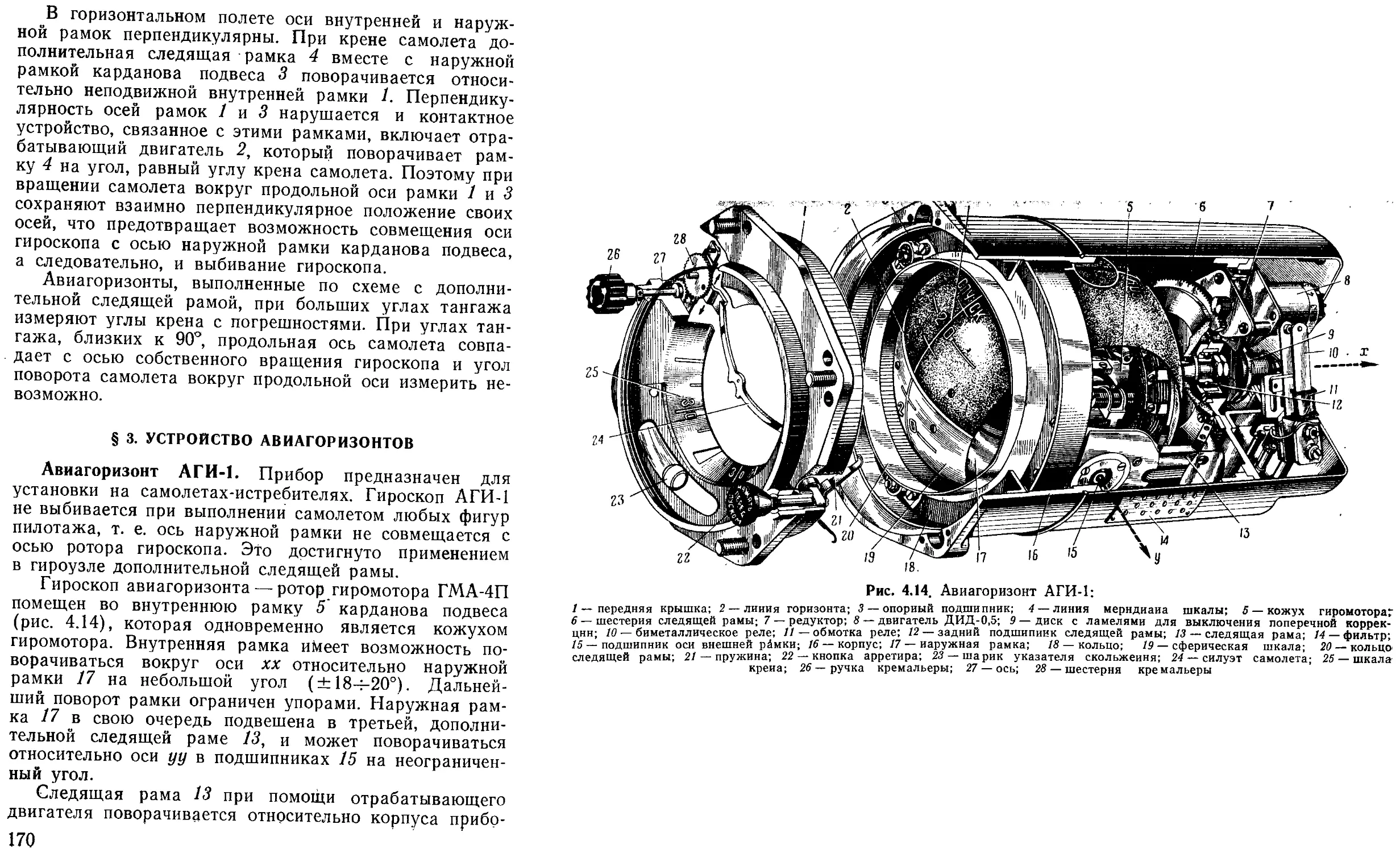
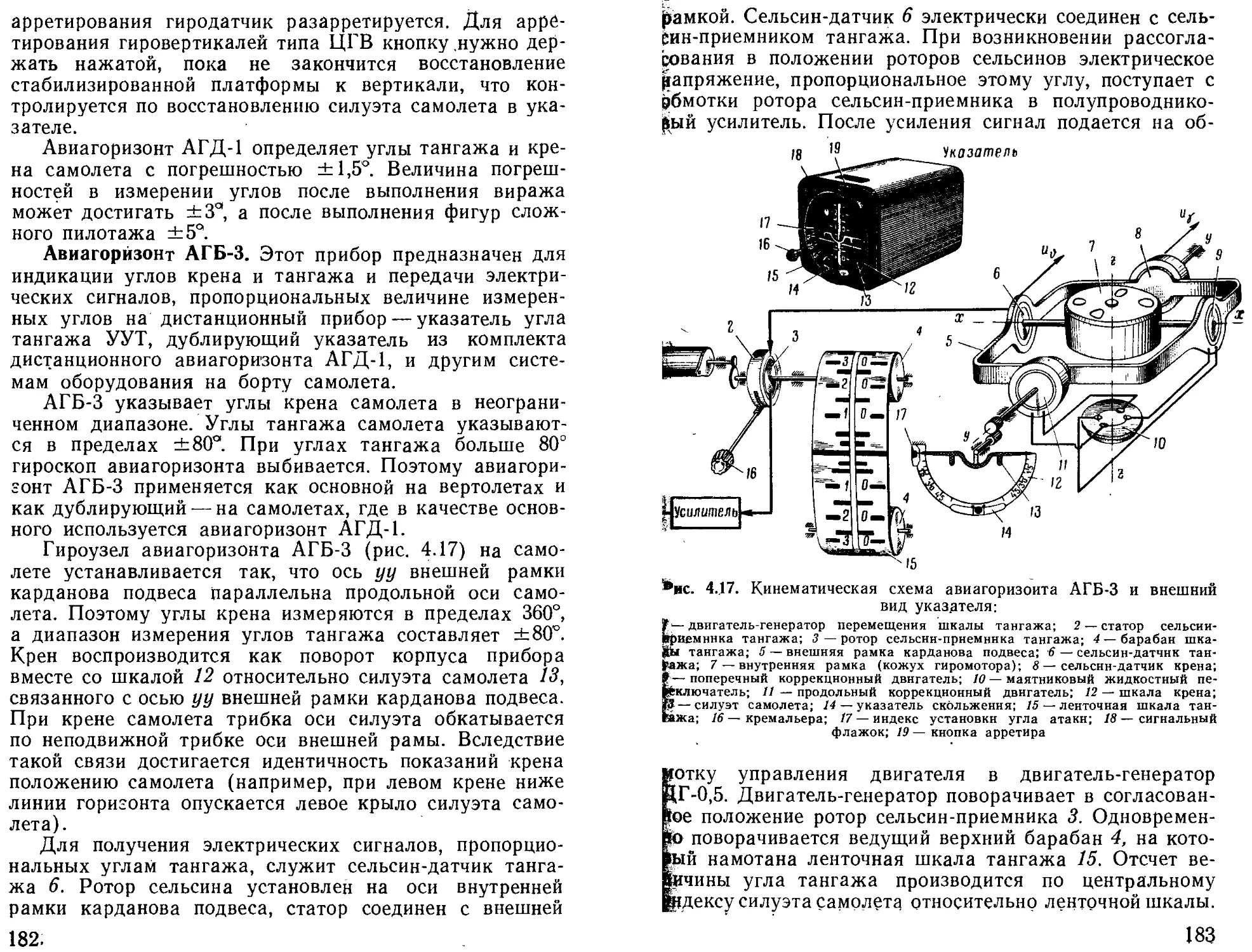
§ 3. Устройство авиагоризонтов
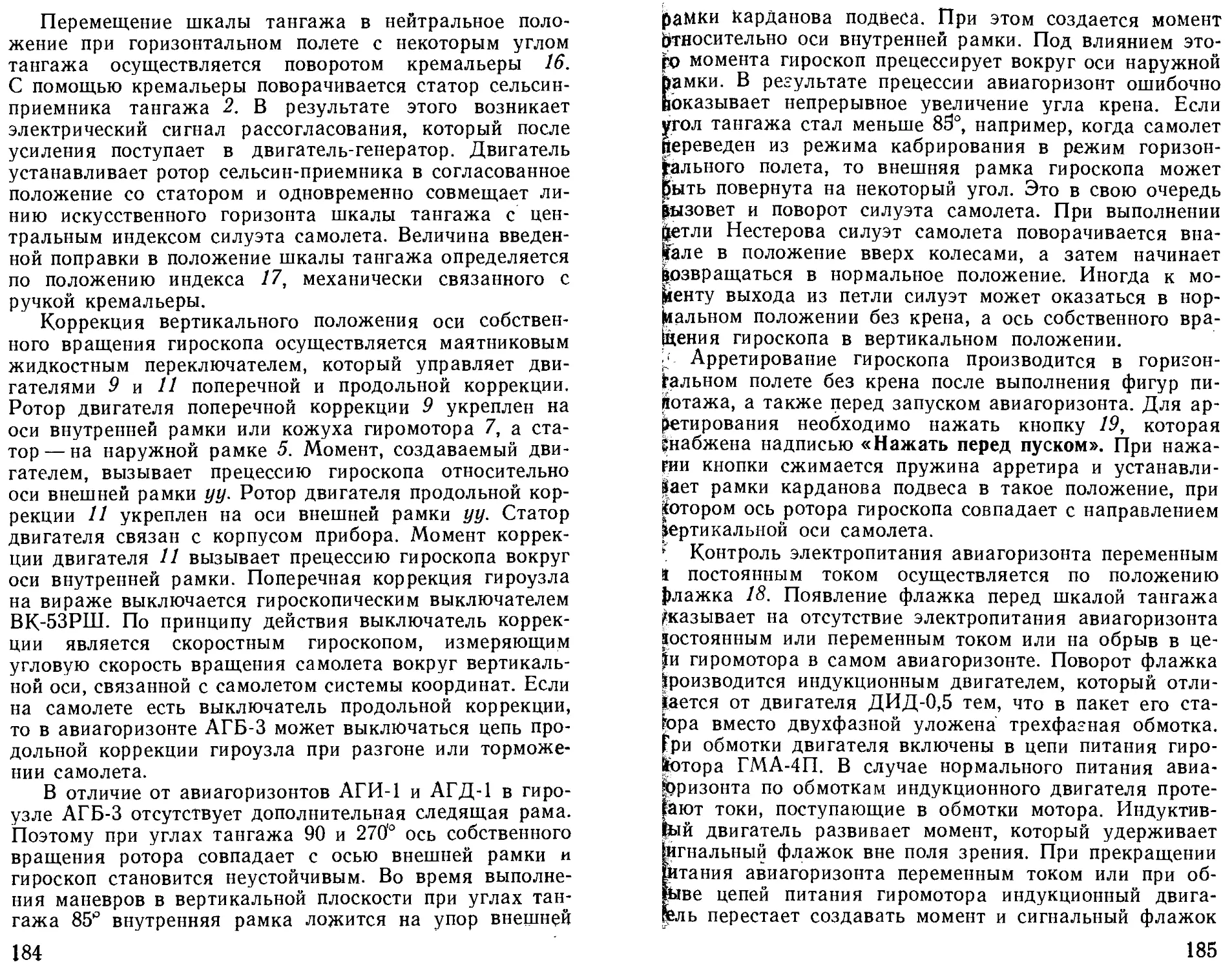
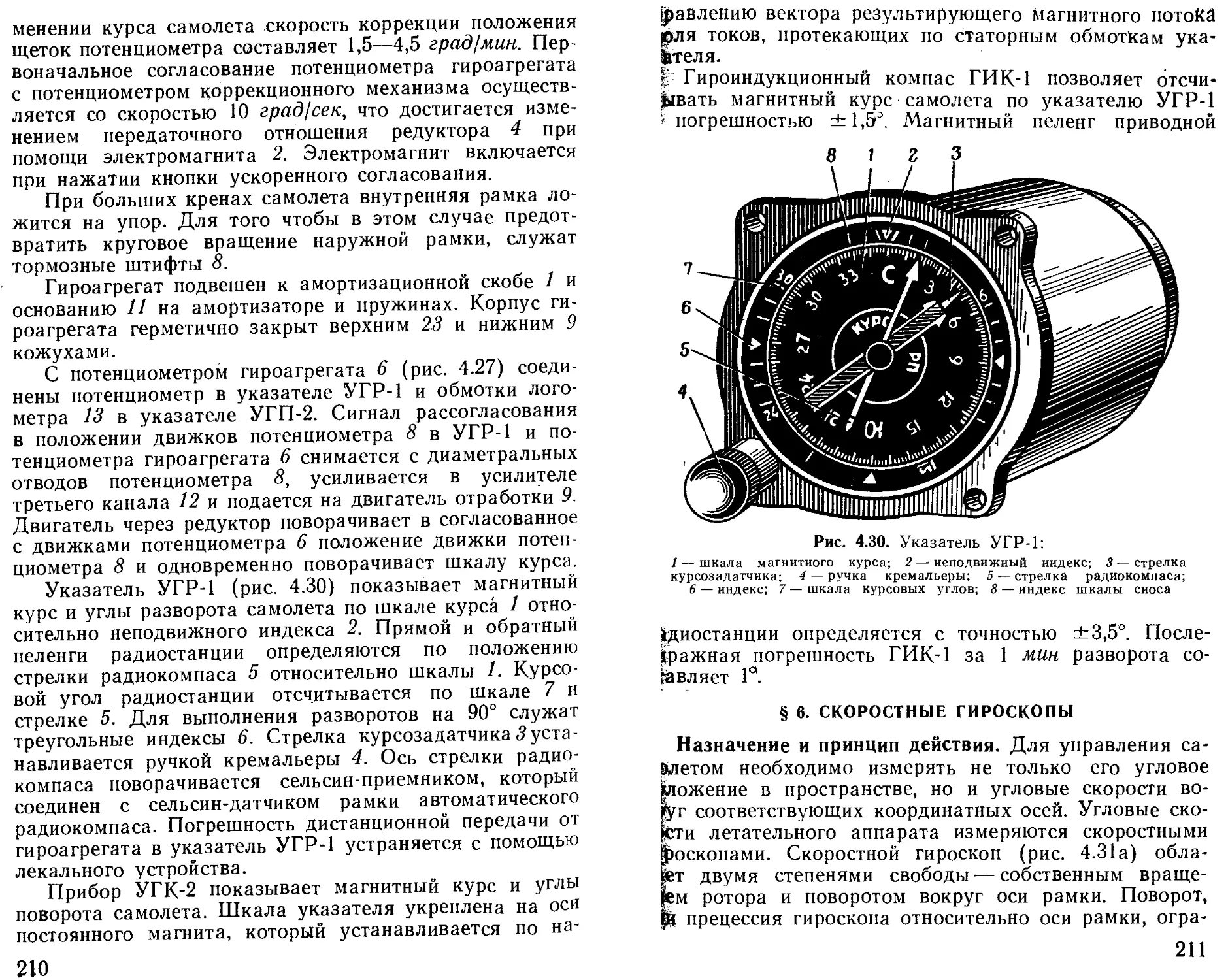
§ 4. Курсовые гироскопы
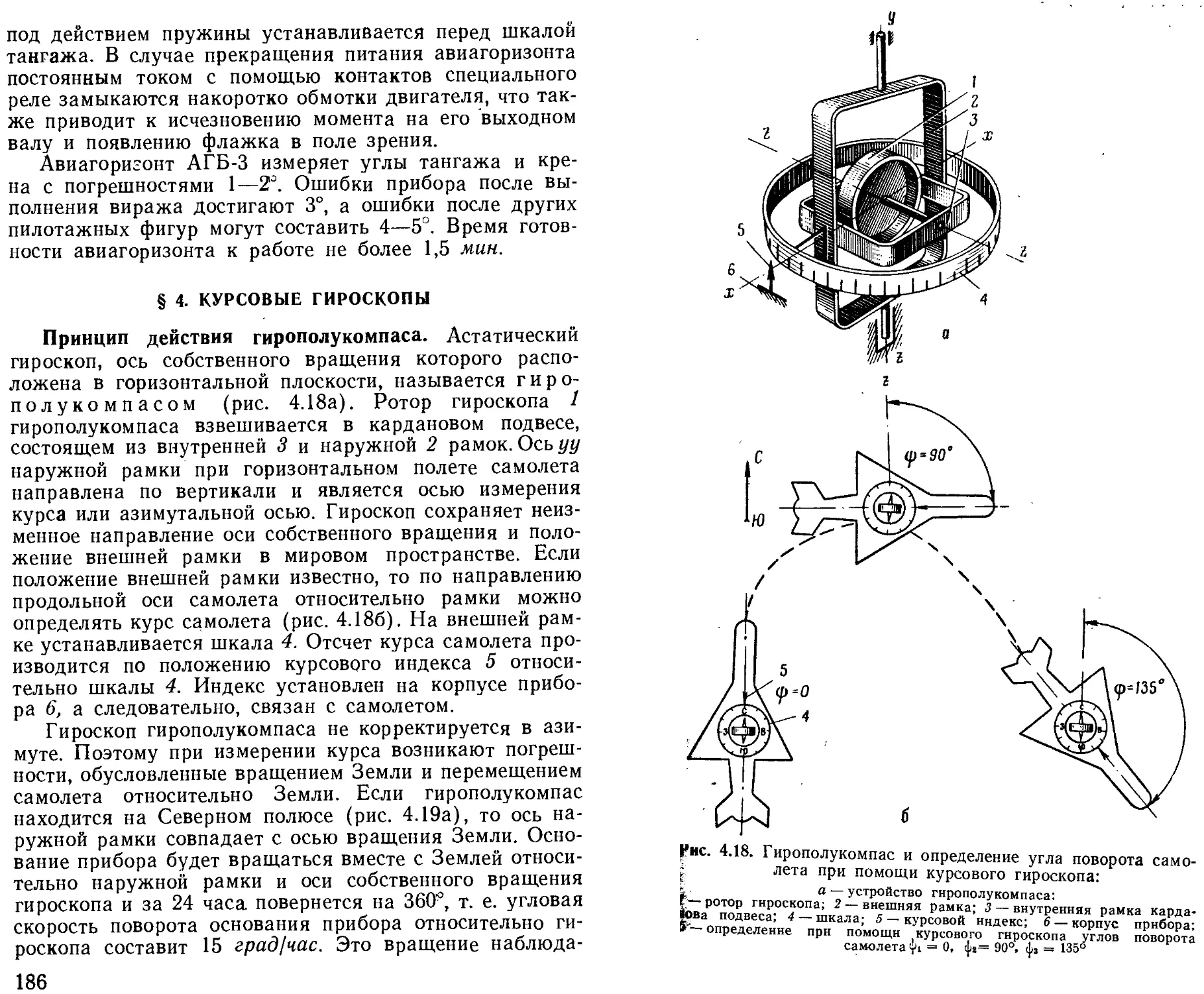
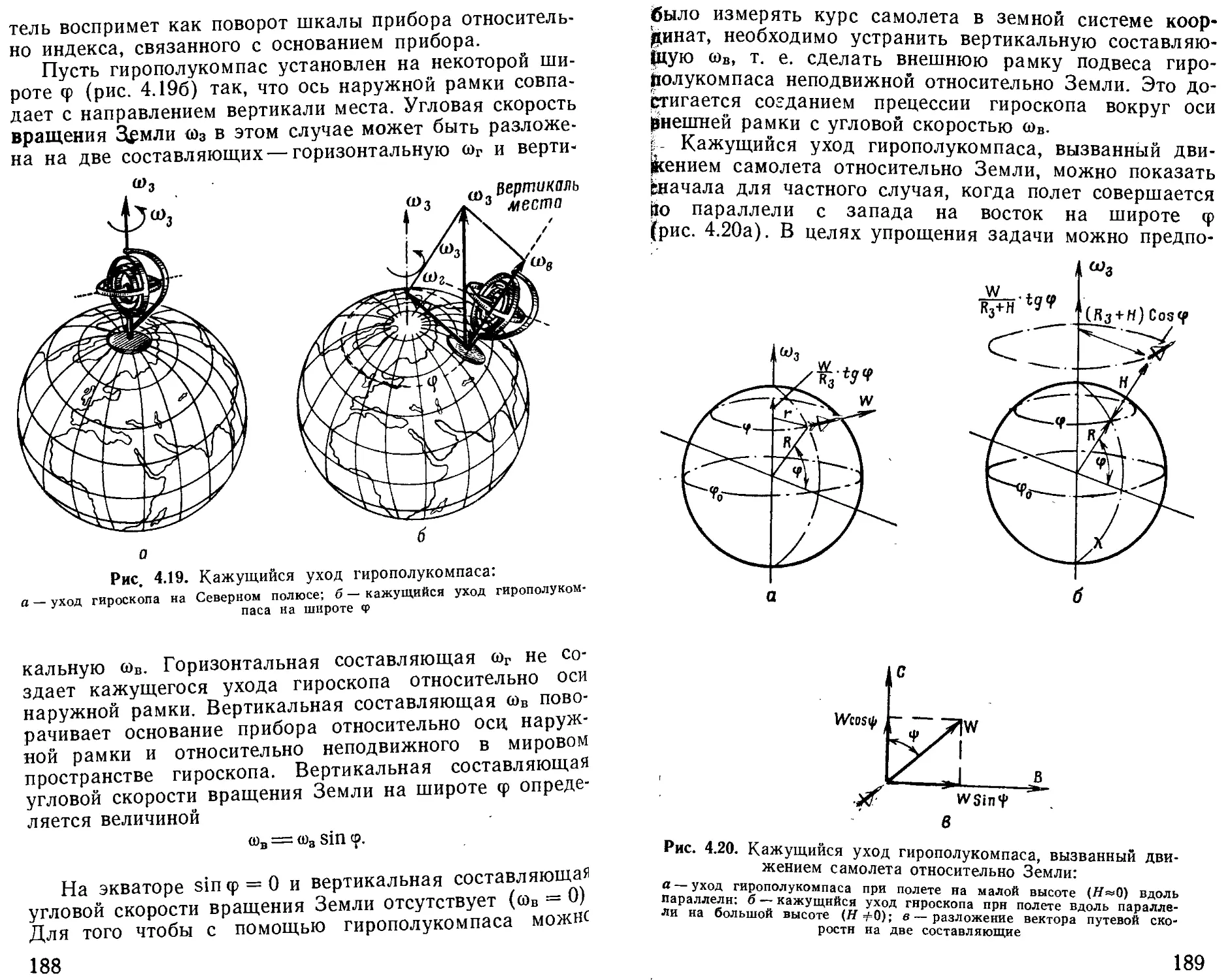
§ 5. Гирополукомпасы. Дистанционные гиромагнитные и гироиндукционные
компасы
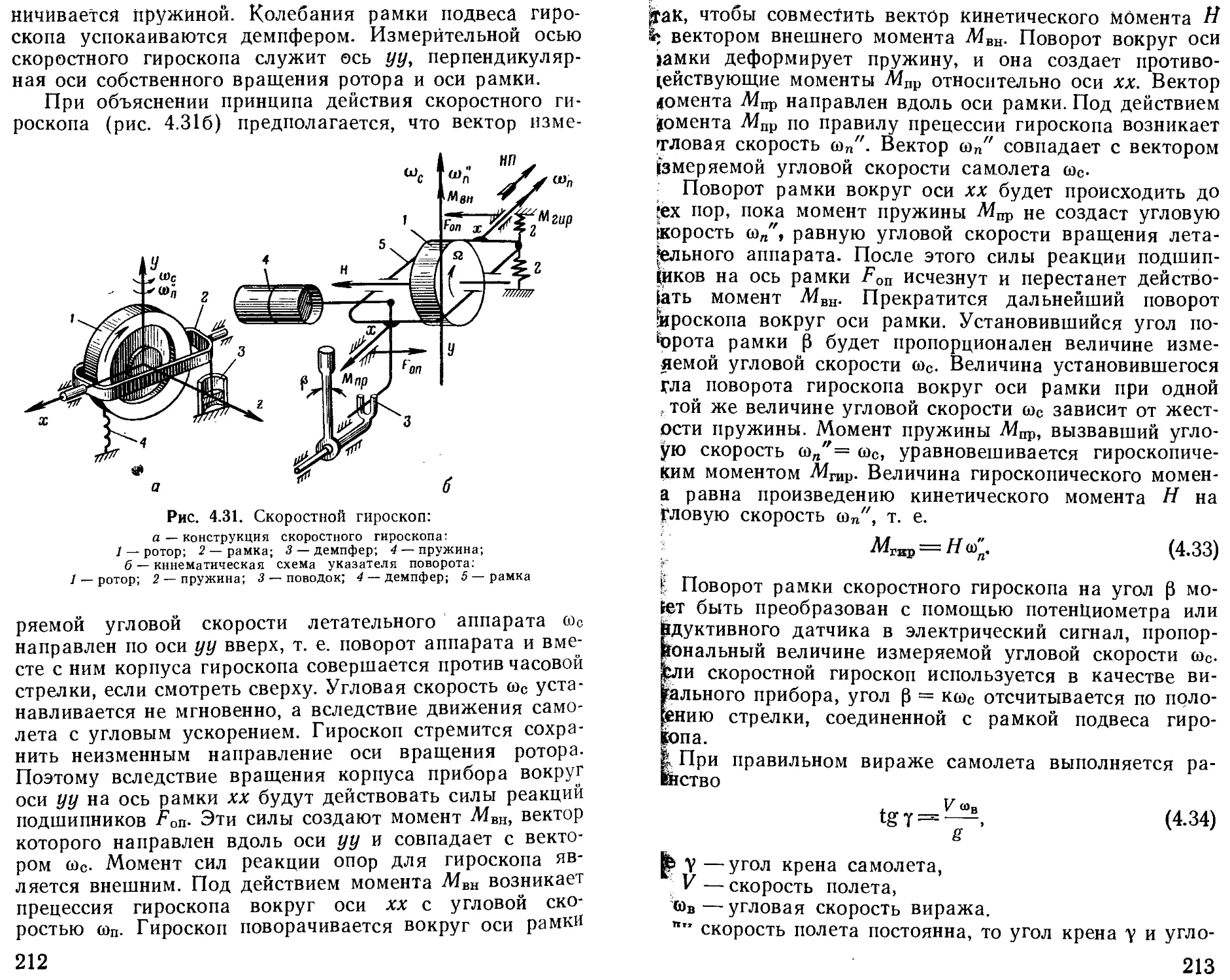
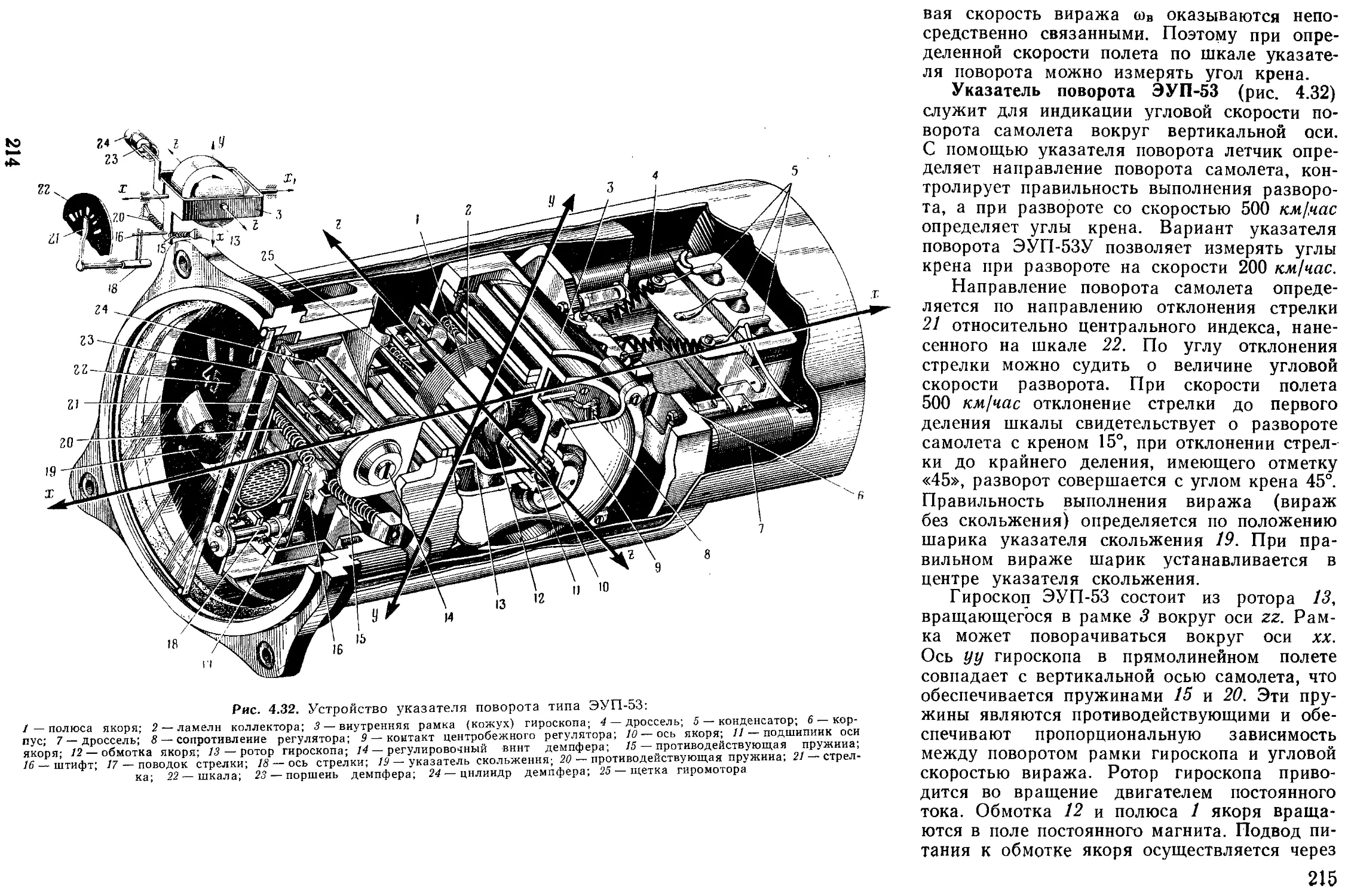
§ 6. Скоростные гироскопы
Глава 5. Приборы контроля работы авиационных двигателей и самолетных систем
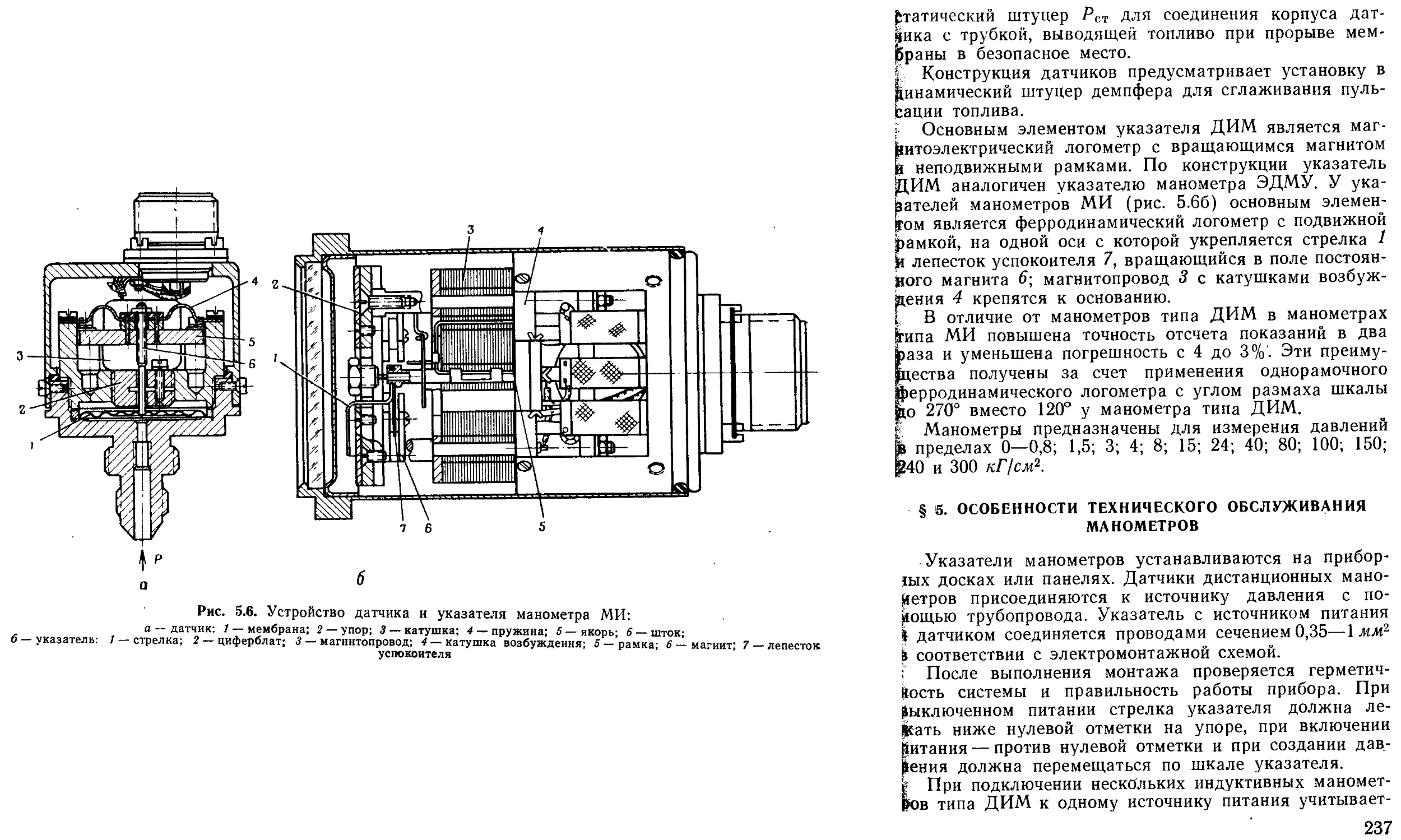
§ 1. Авиационные манометры
§ 2. Электрические дистанционные манометры типа ЭДМУ и ЭМ
§ 3. Дистанционные индуктивные унифицированные манометры типа ДИМ и МИ
§ 4. Устройство датчиков и указателей манометров ДИМ и МИ
§ 5. Особенности технического обслуживания манометров
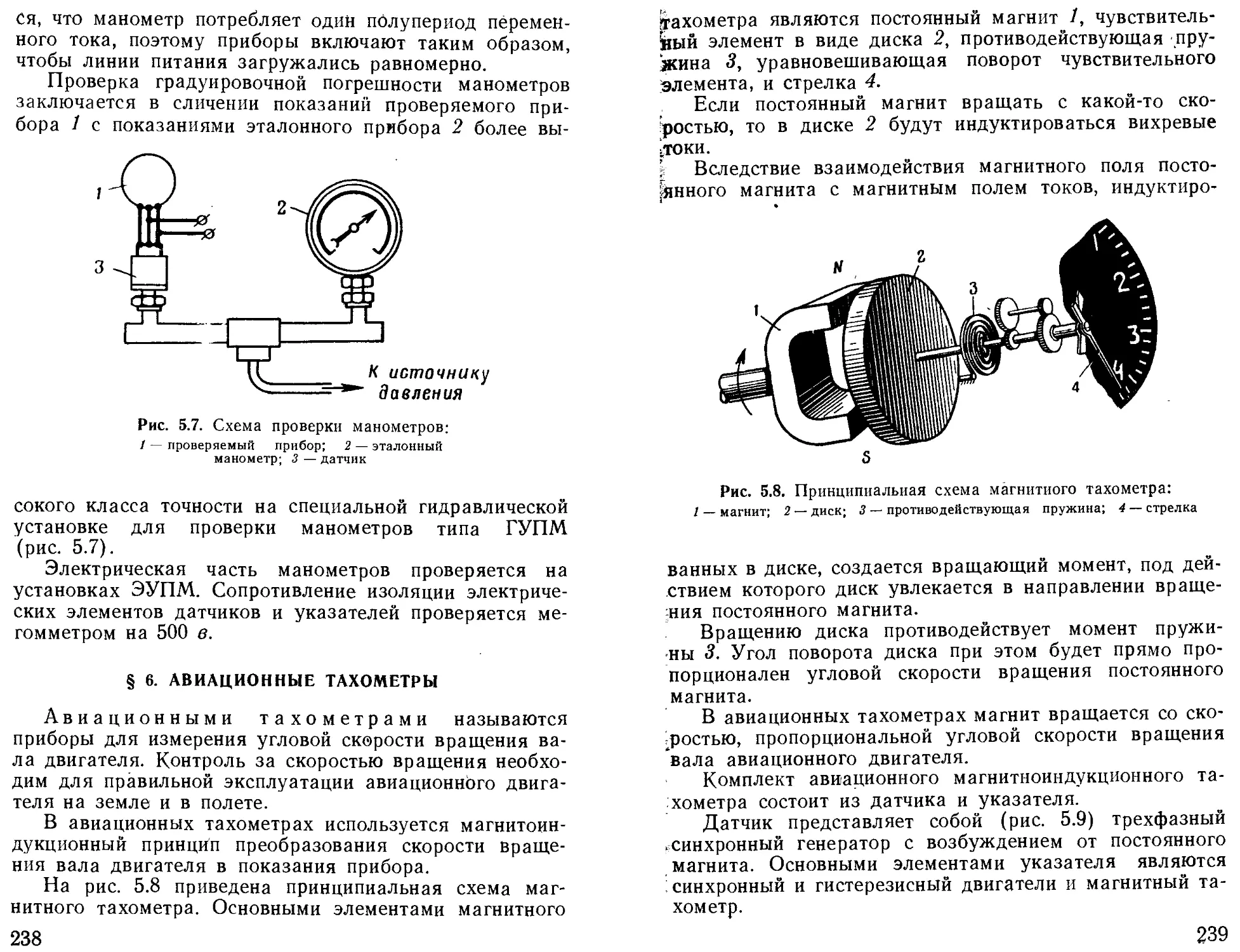
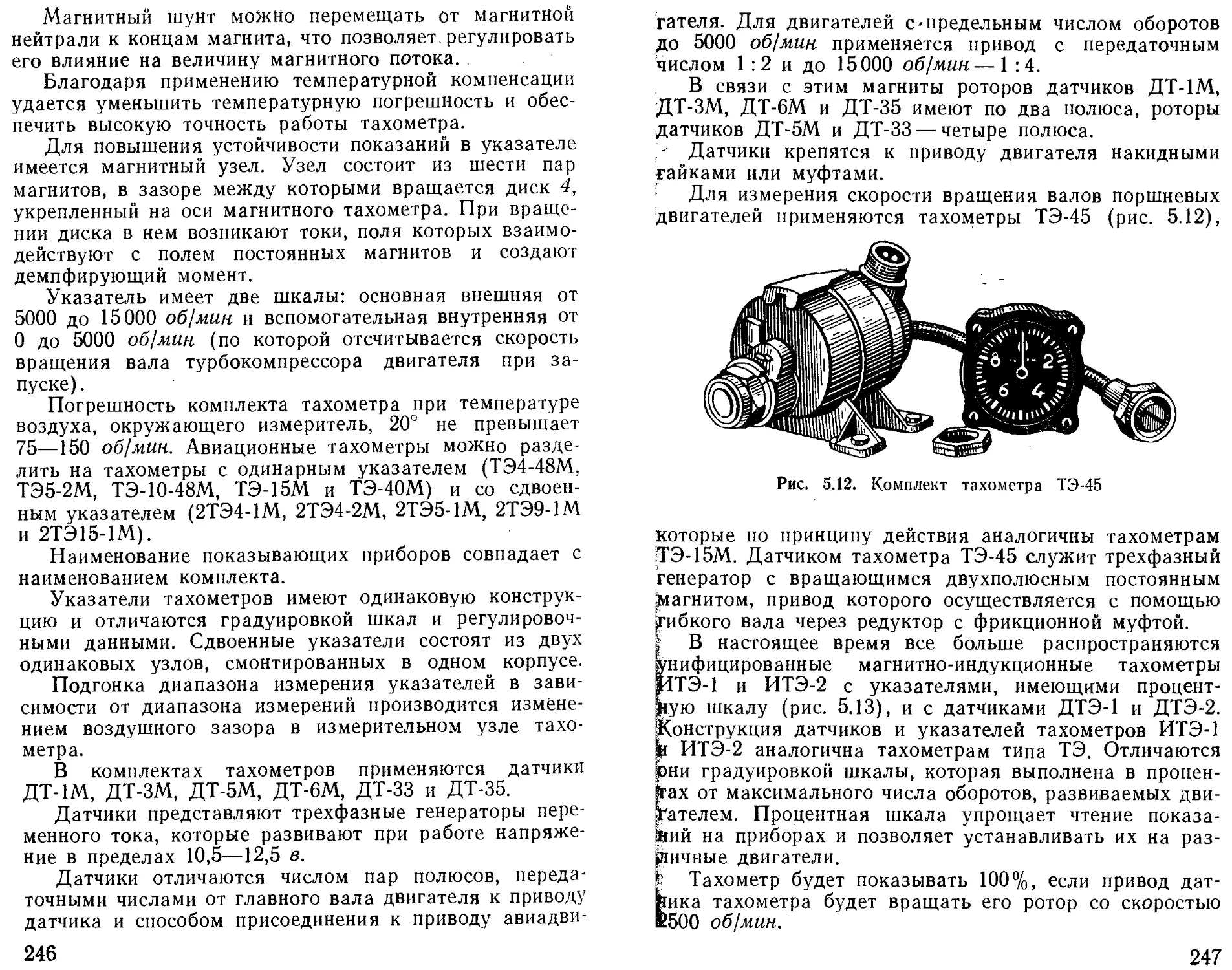
§ 6. Авиационные тахометры
§ 7. Особенности технического обслуживания тахометров
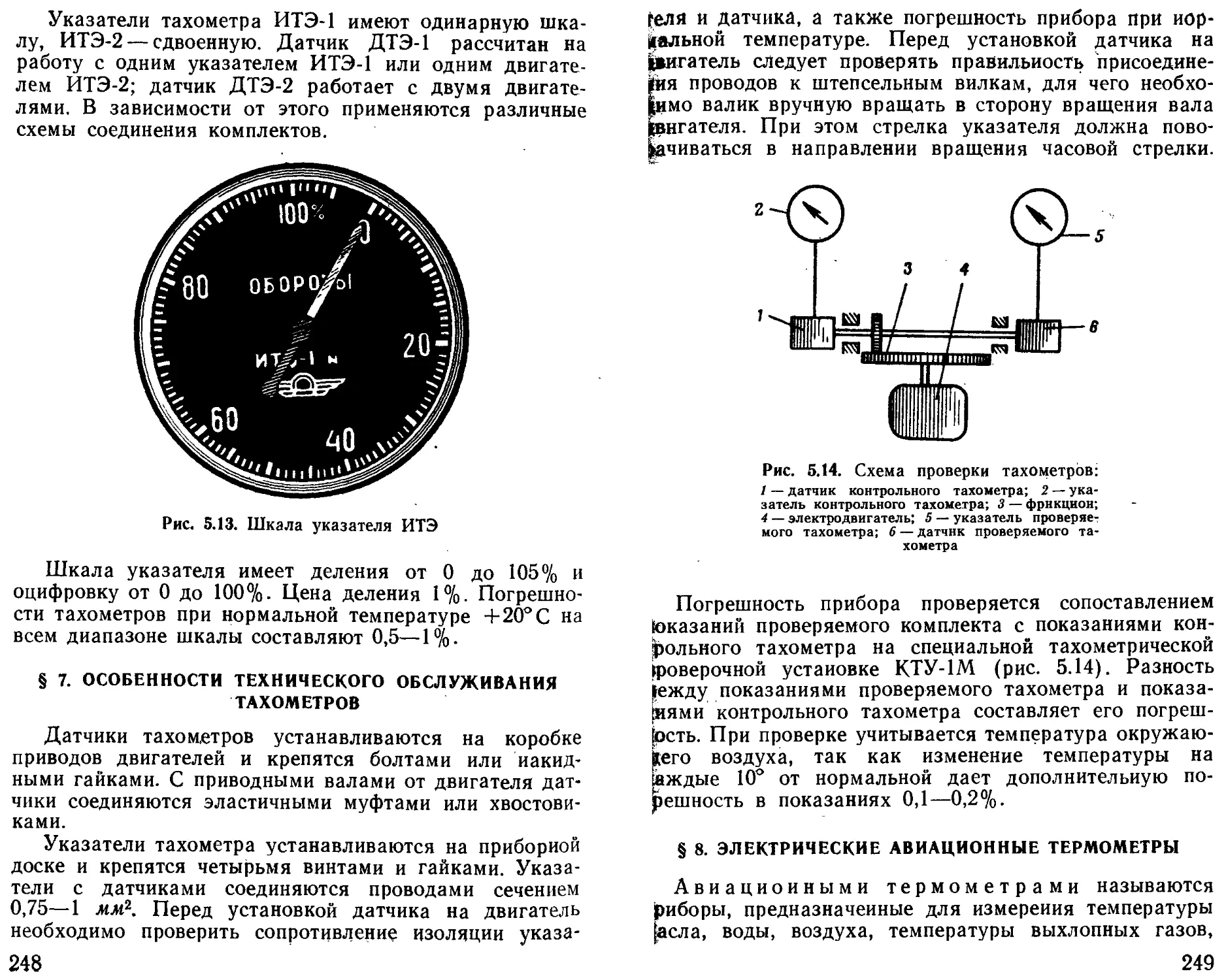
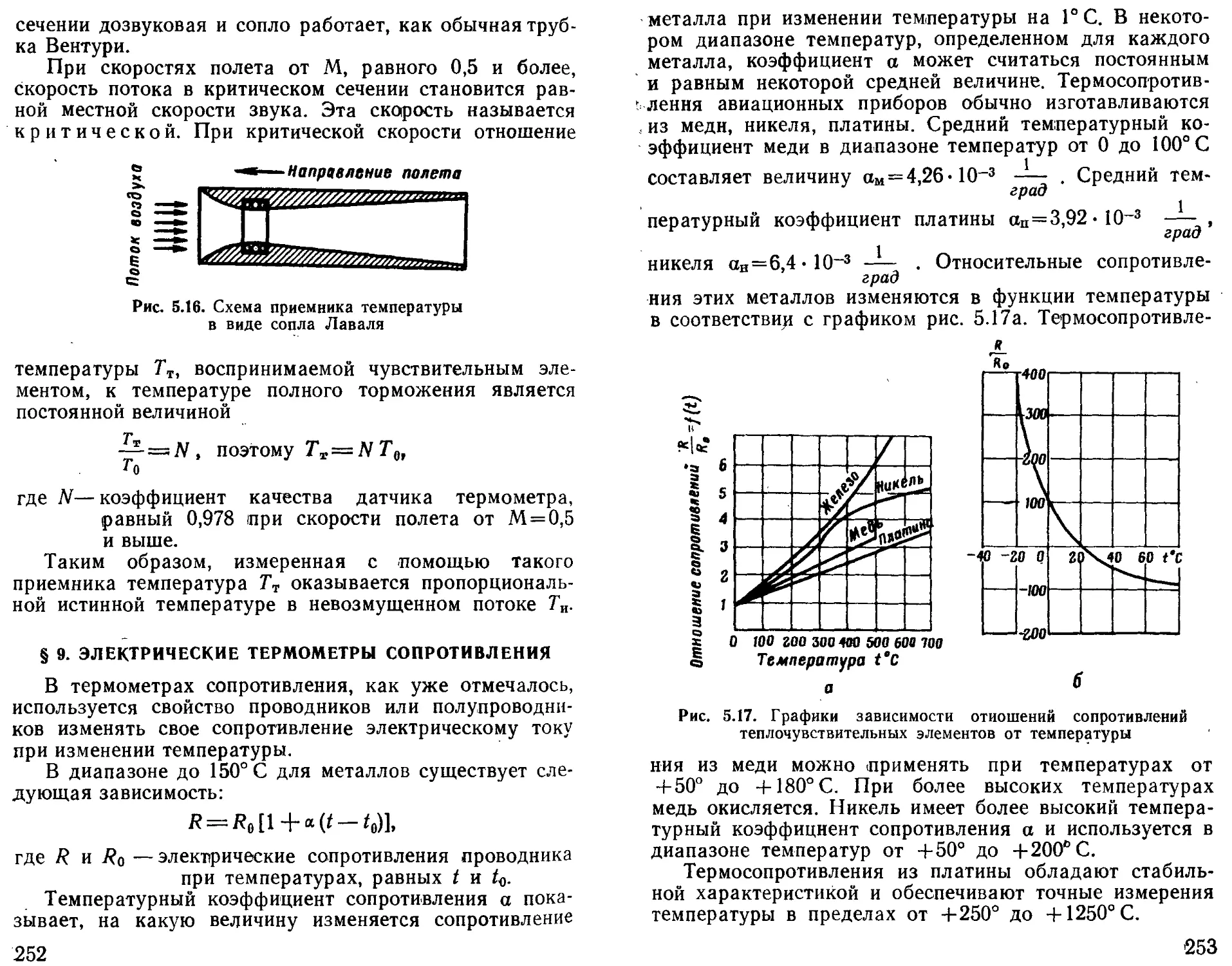
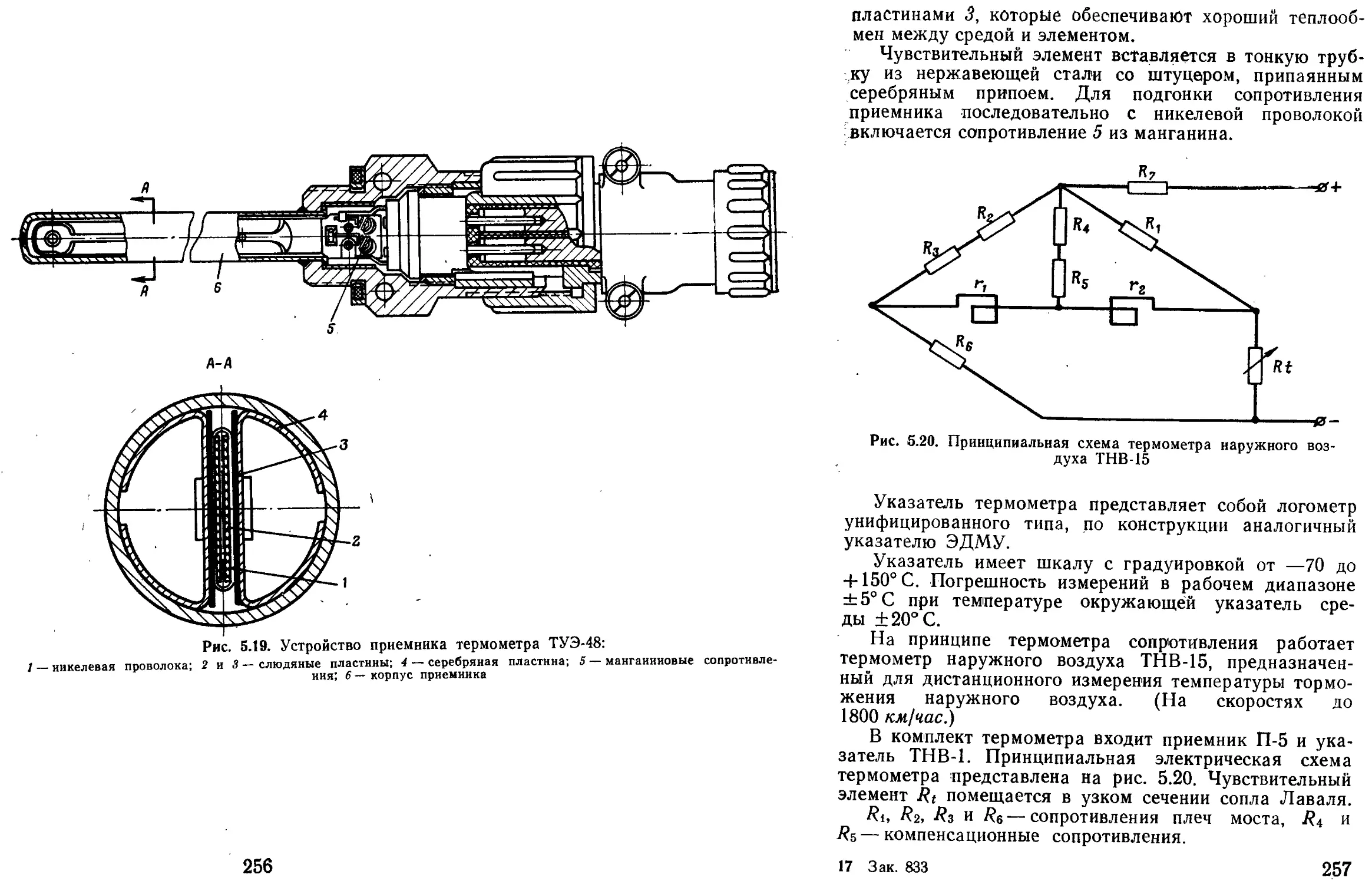
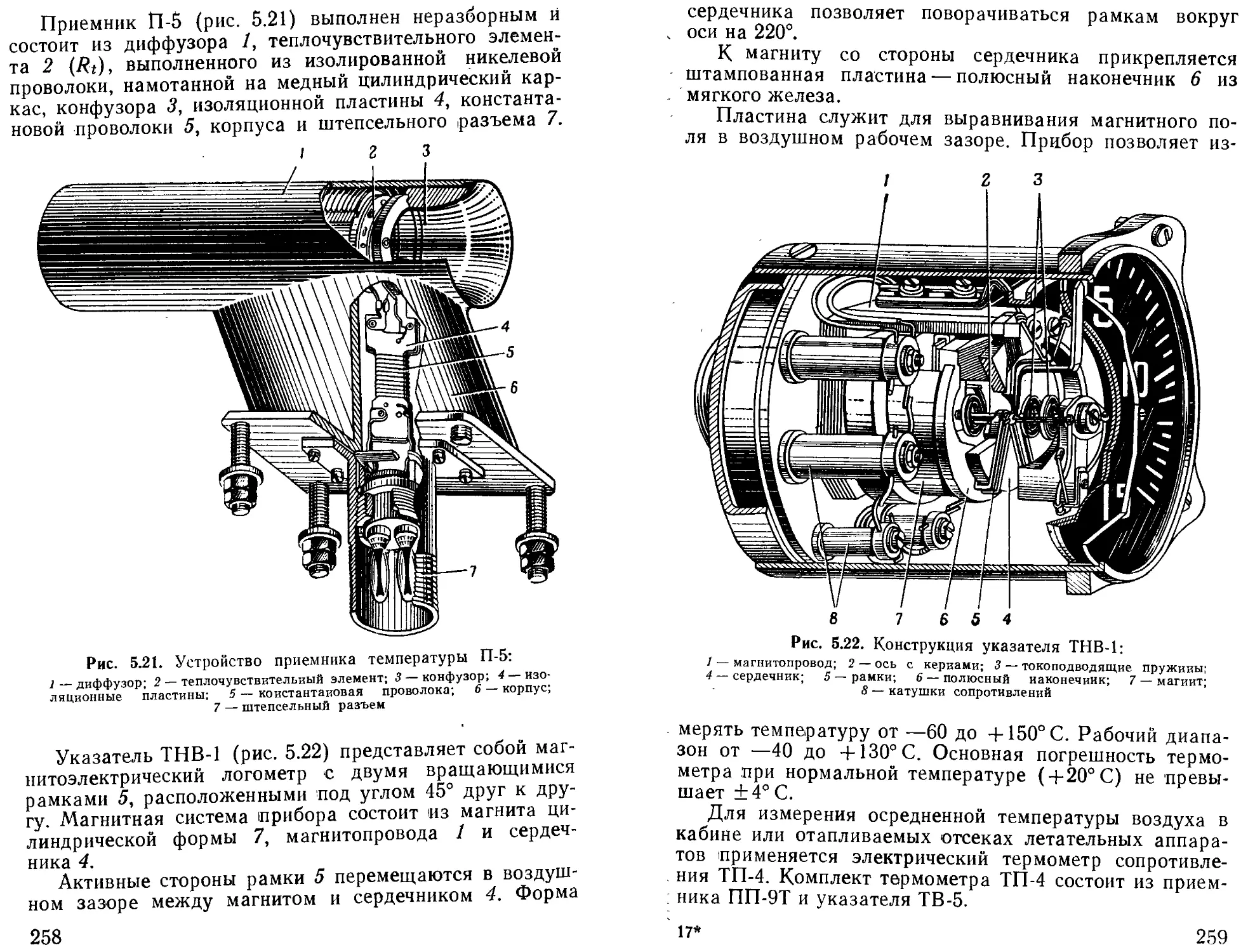
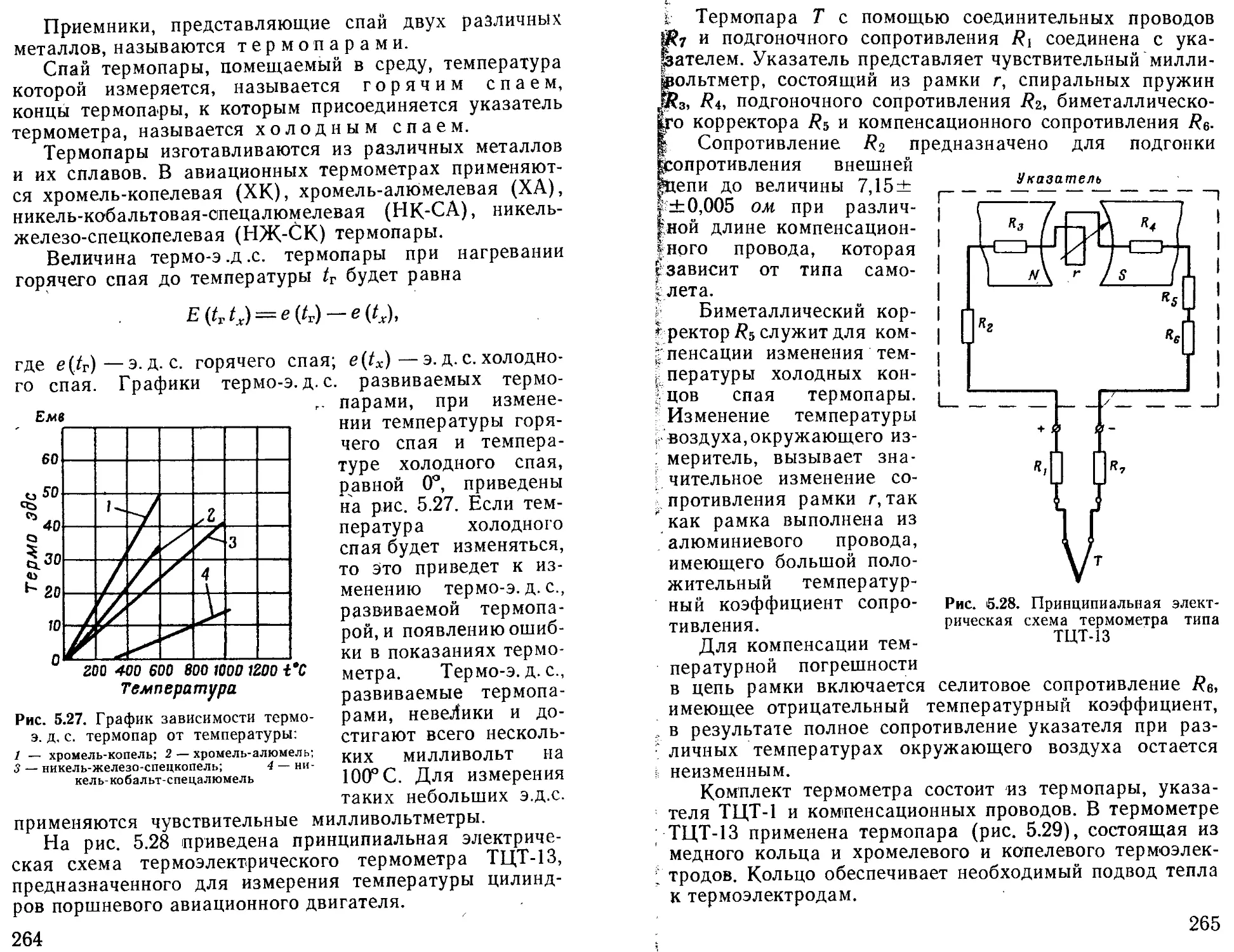
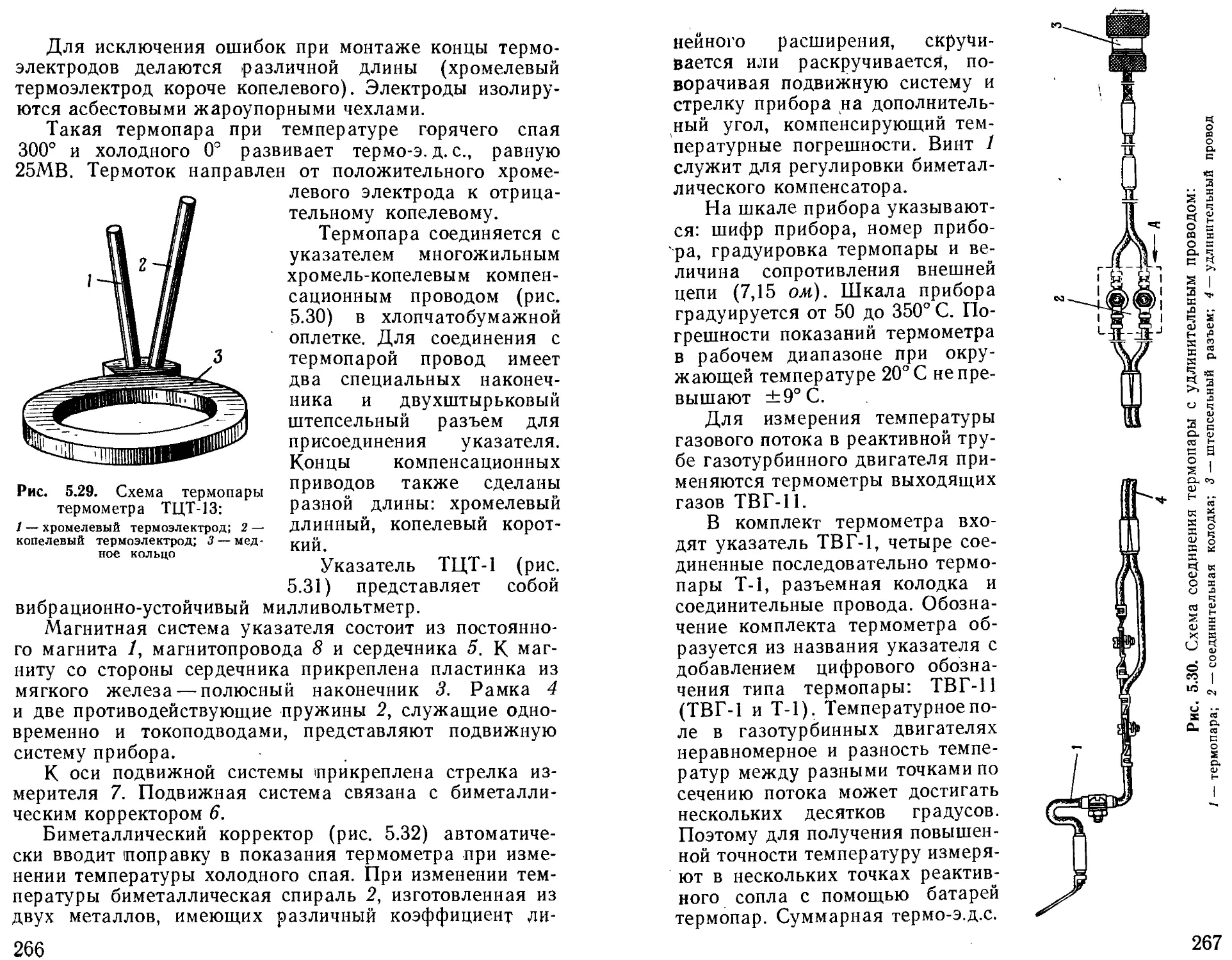
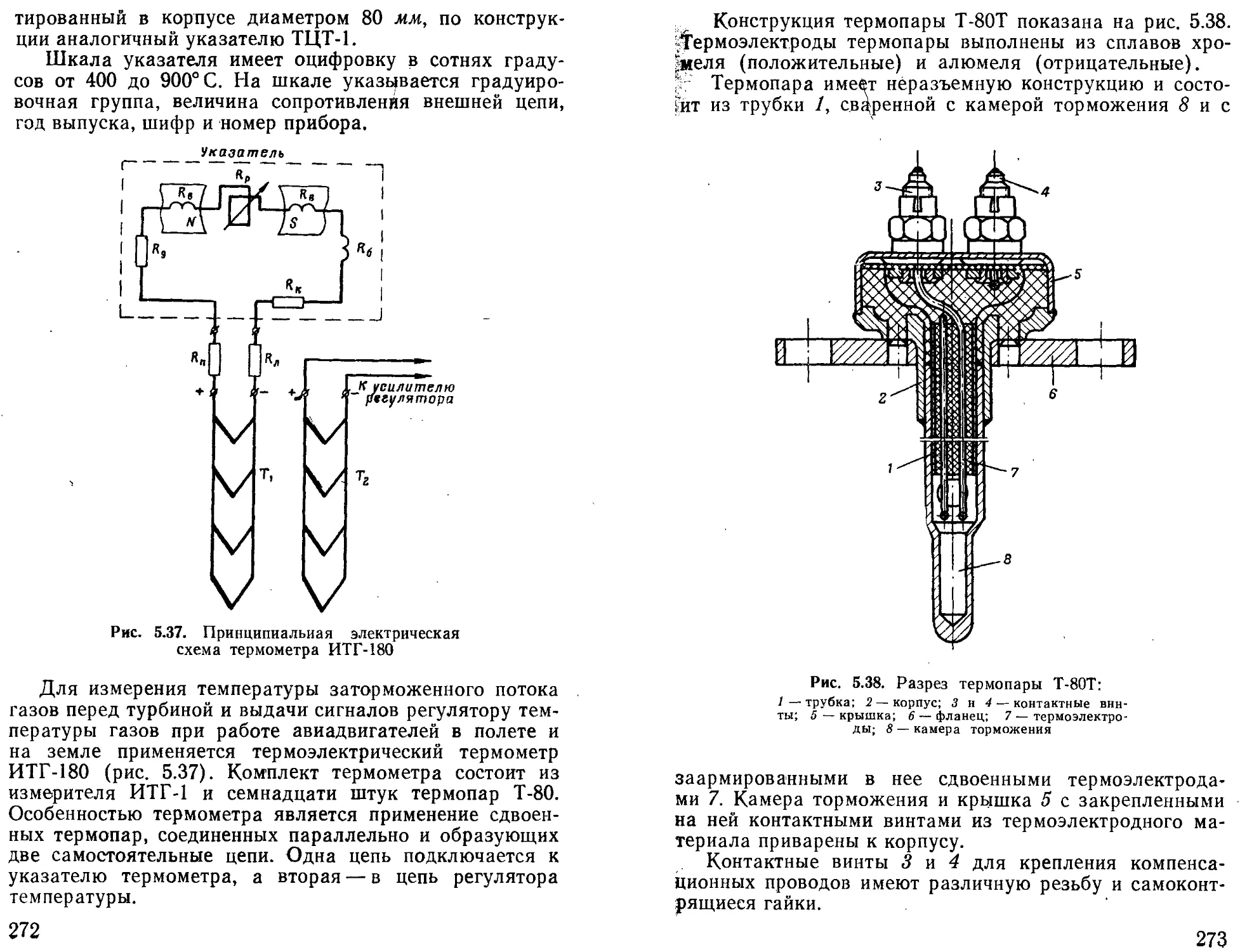
§ 8. Электрические авиационные термометры
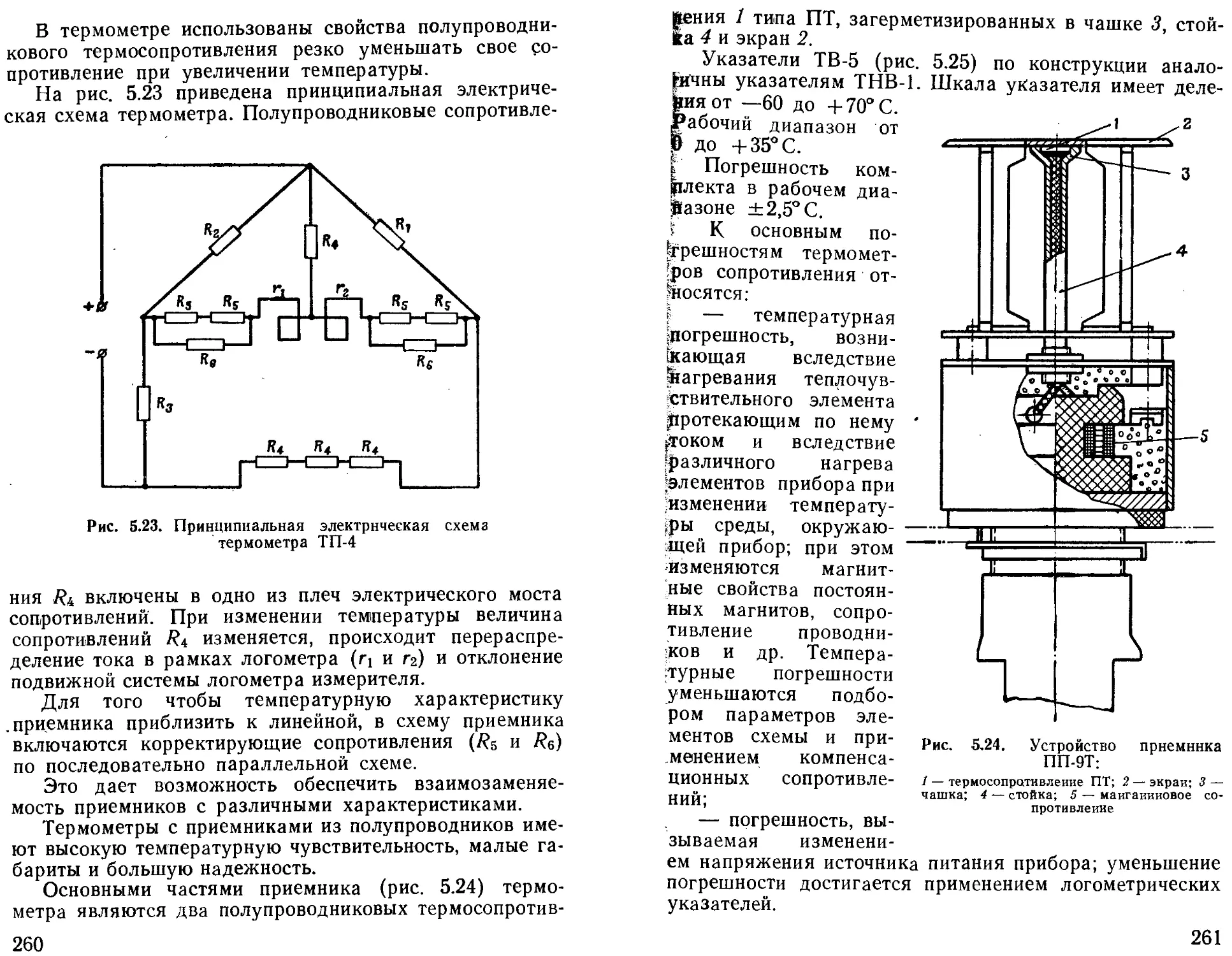
§ 9. Электрические термометры сопротивления
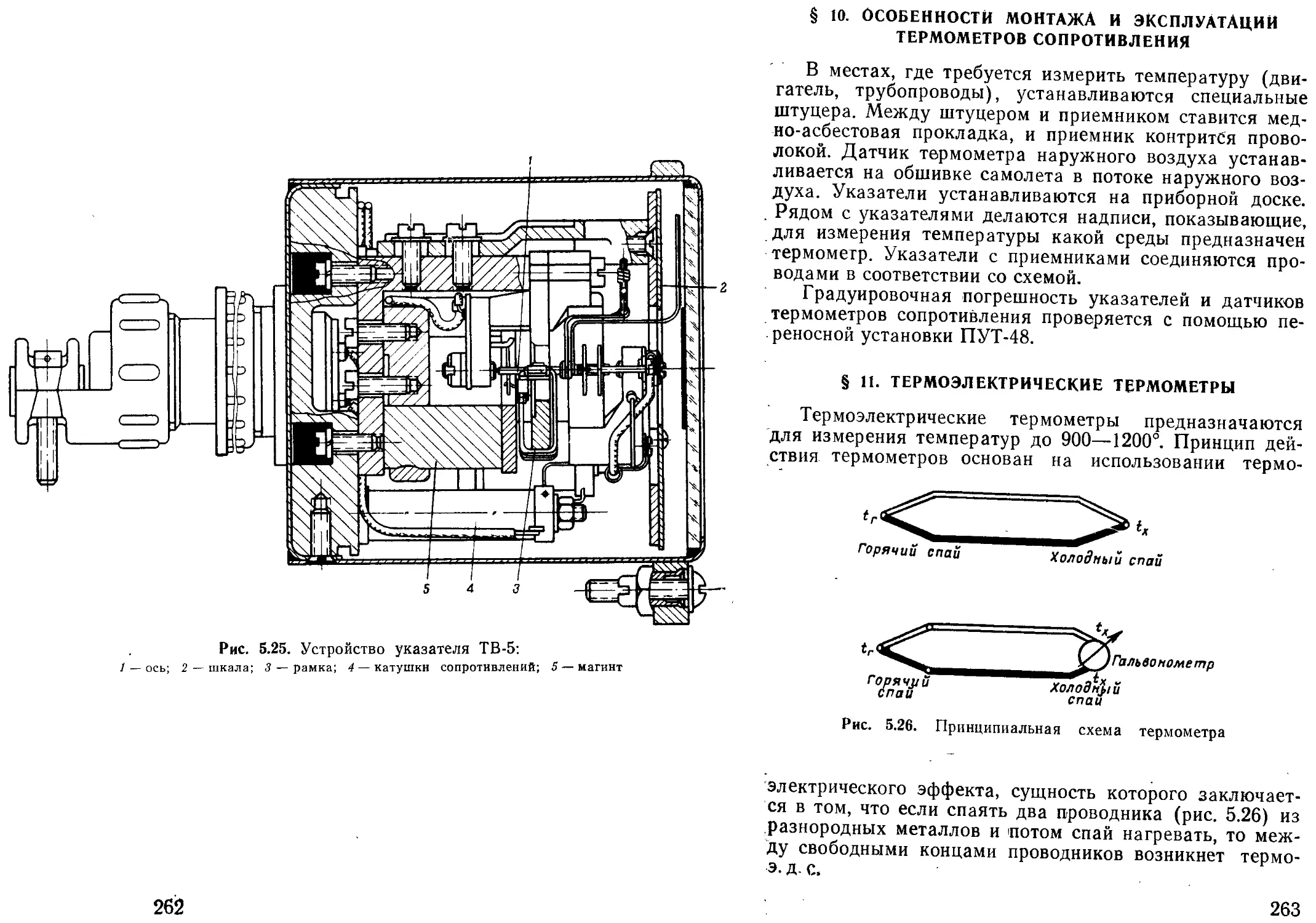
§ 10. Особенности монтажа и эксплуатации термометров сопротивления
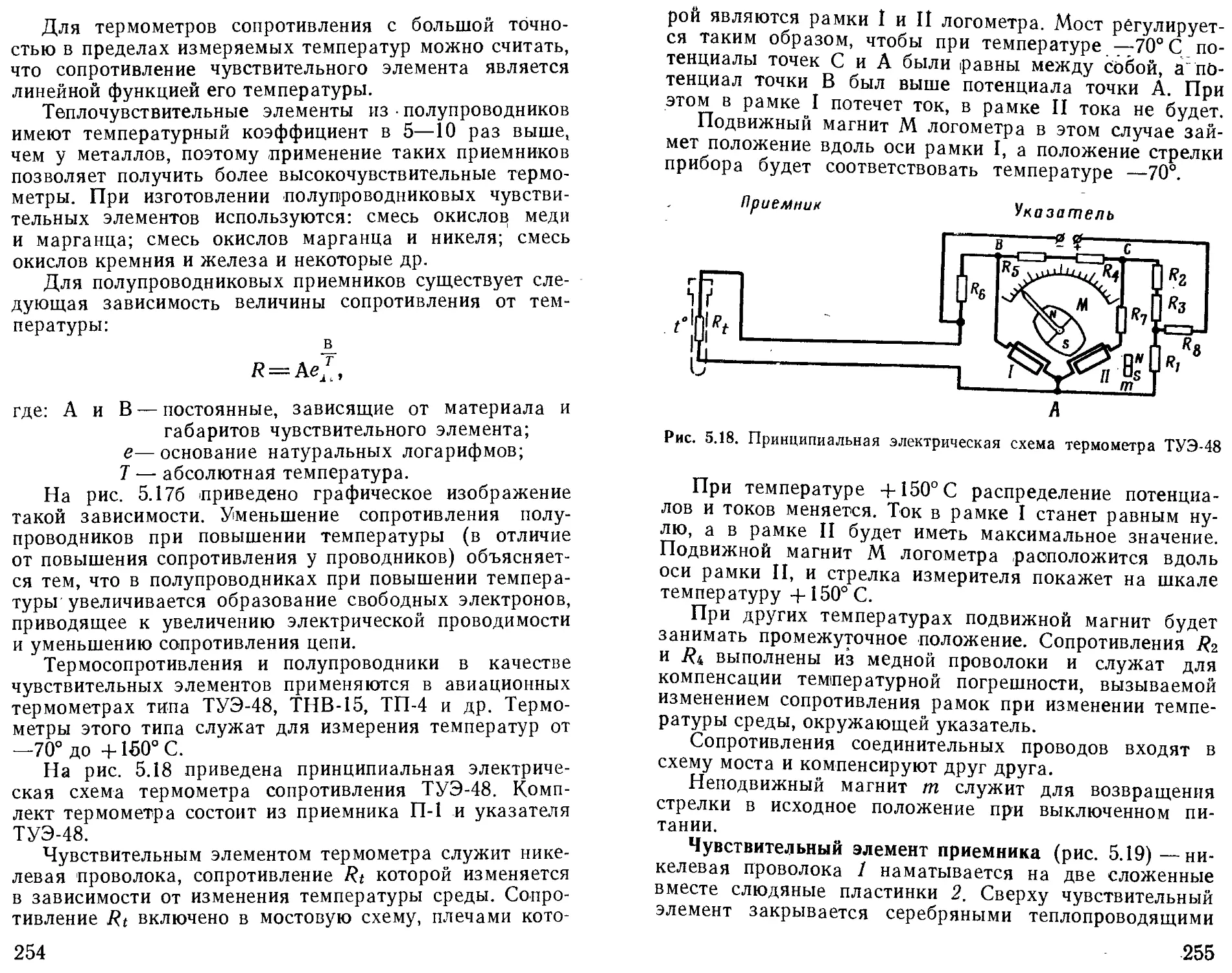
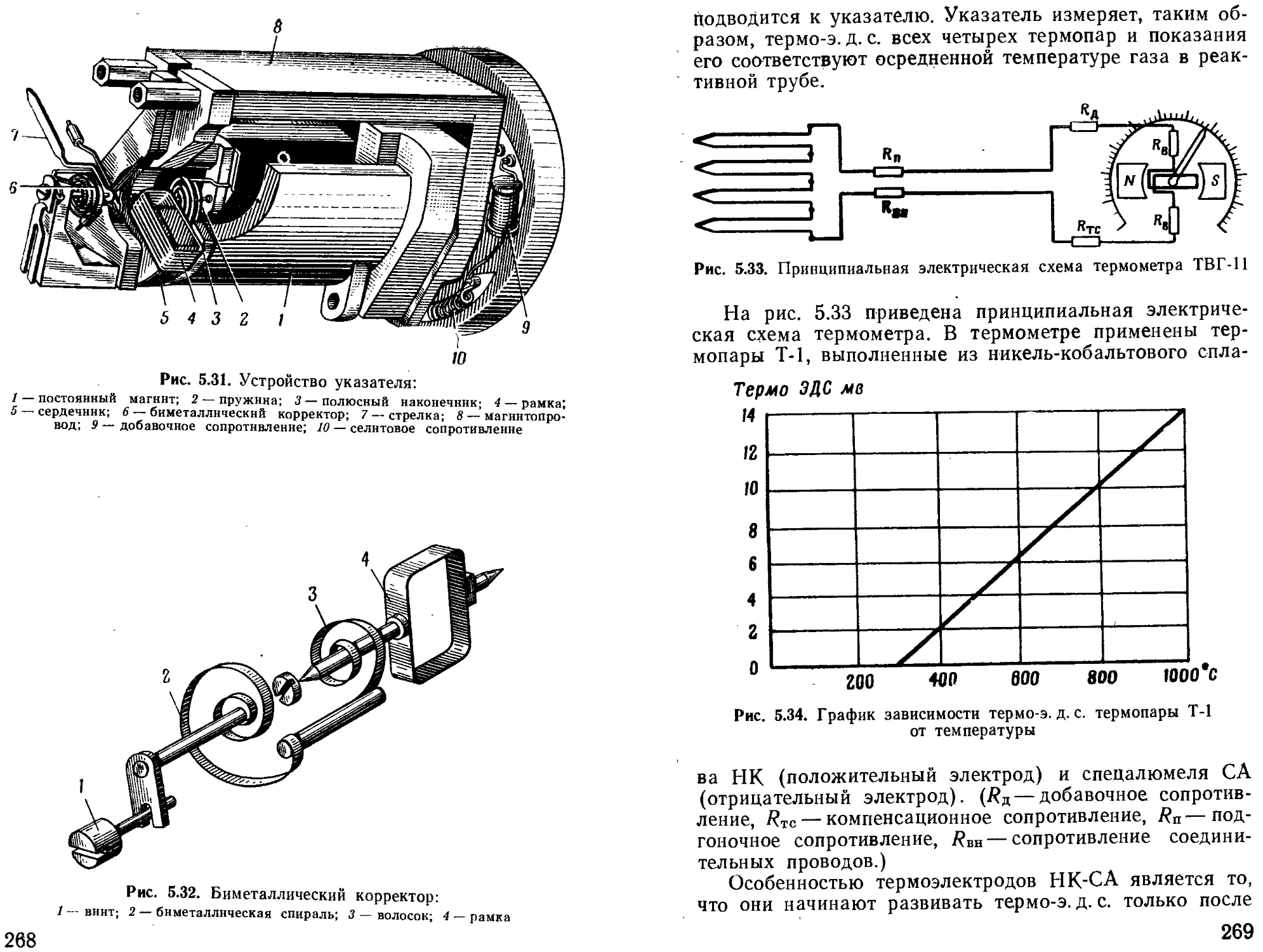
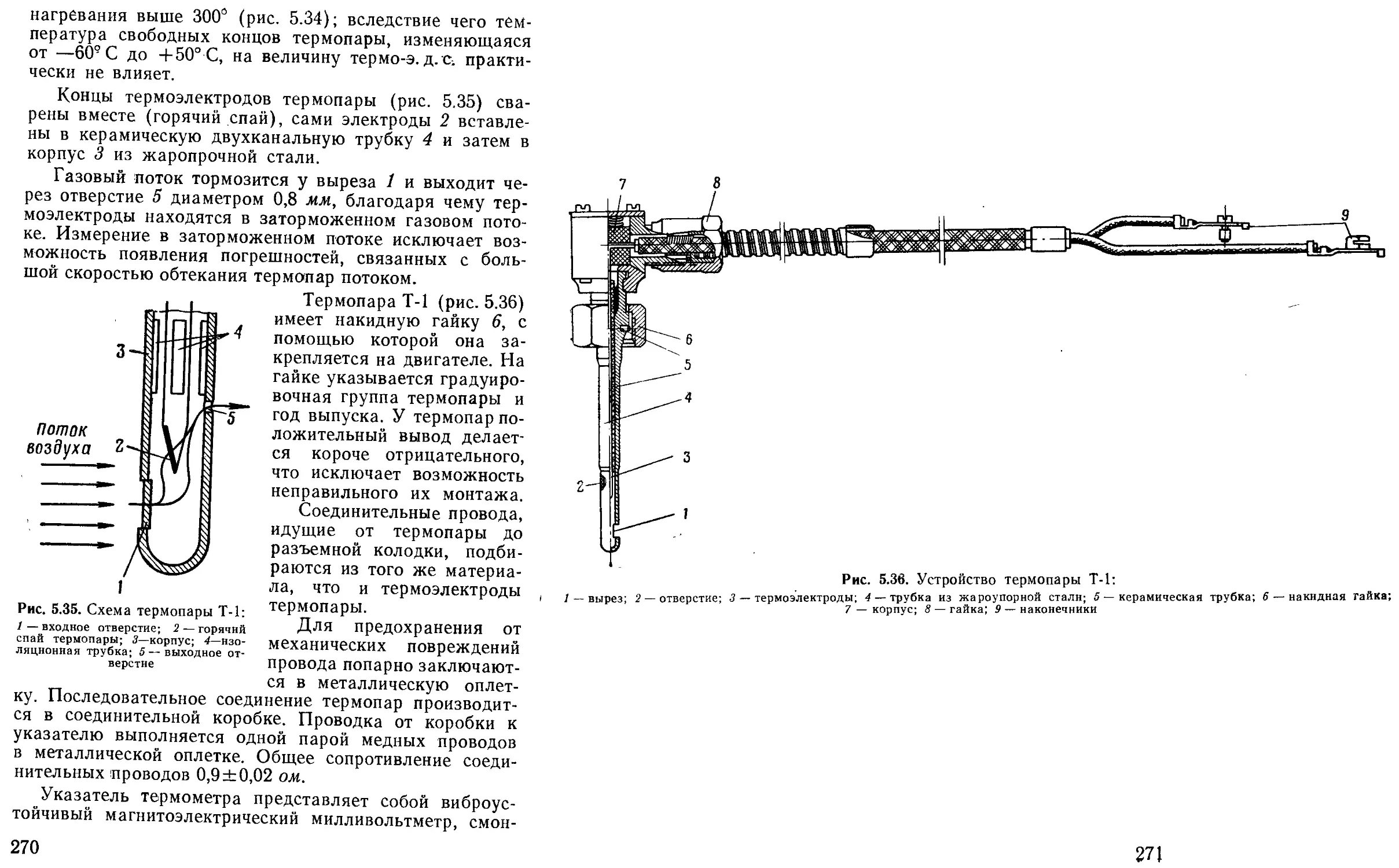
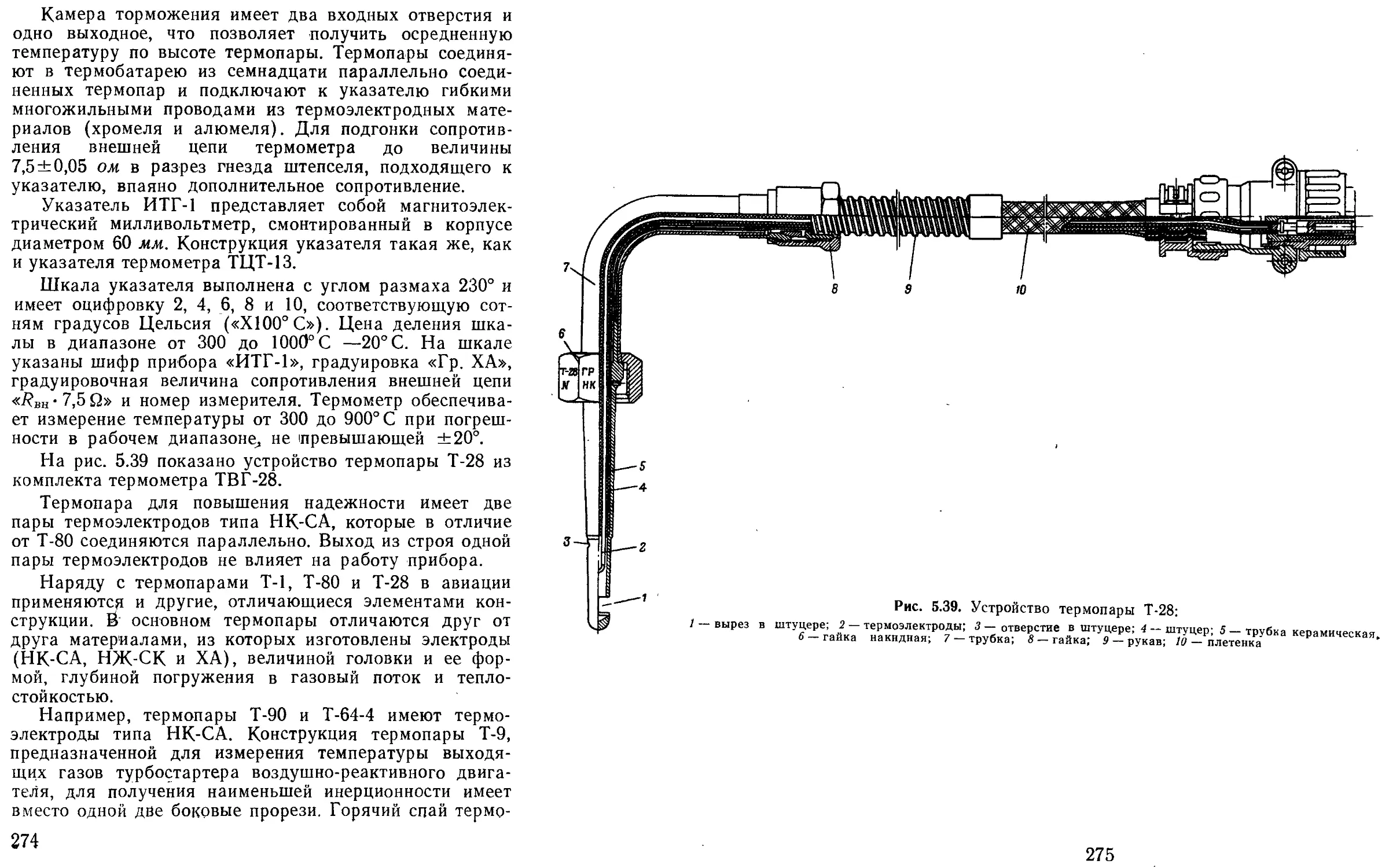
§11. Термоэлектрические термометры
§ 12. Погрешности термоэлектрических термометров
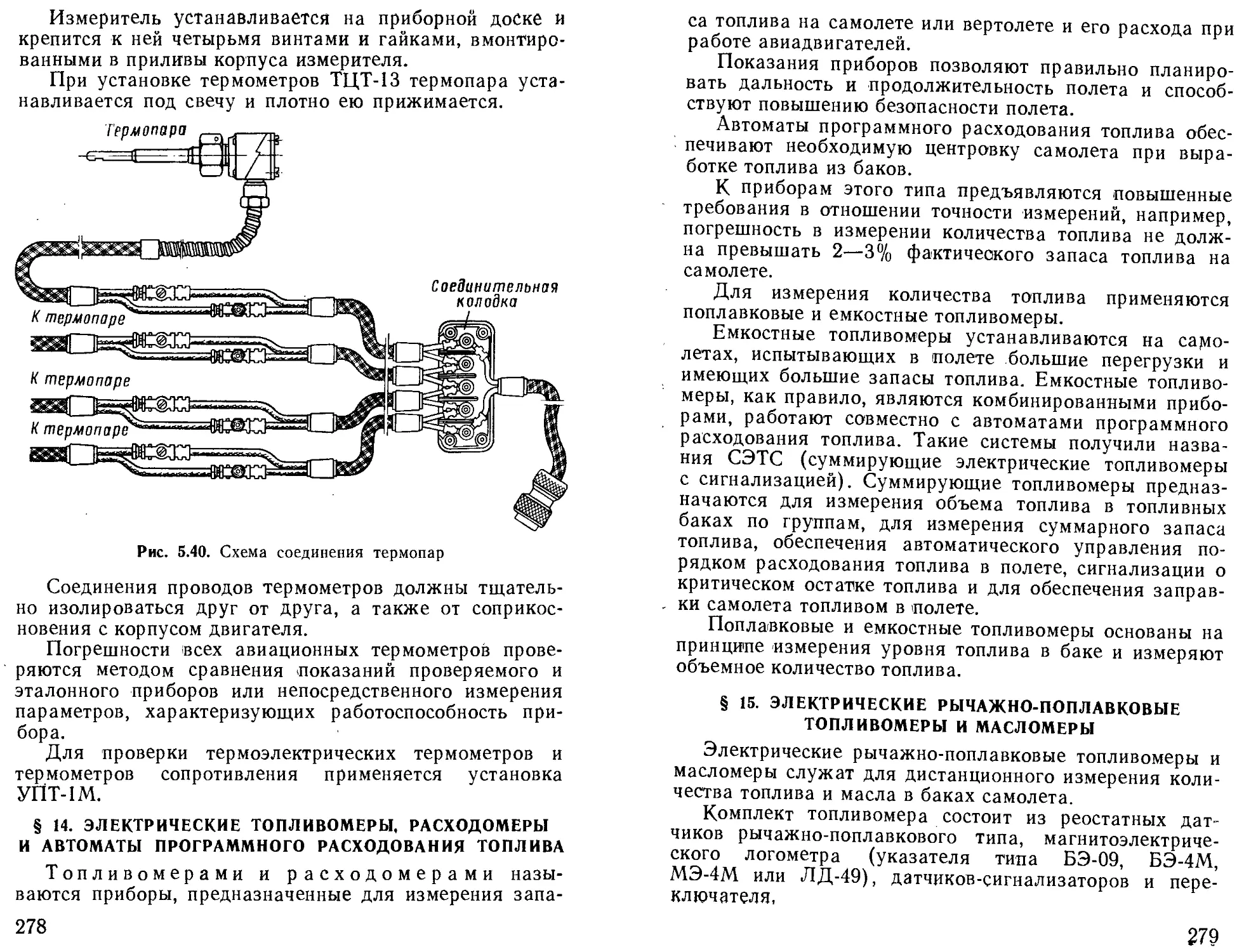
§ 13. Особенности монтажа и технического обслуживания термоэлектрических
термометров
§ 14. Электрические топливомеры, расходомеры и автоматы программного
расходования топлива
§ 15. Электрические рычажно-поплавковые топливомеры и масломеры
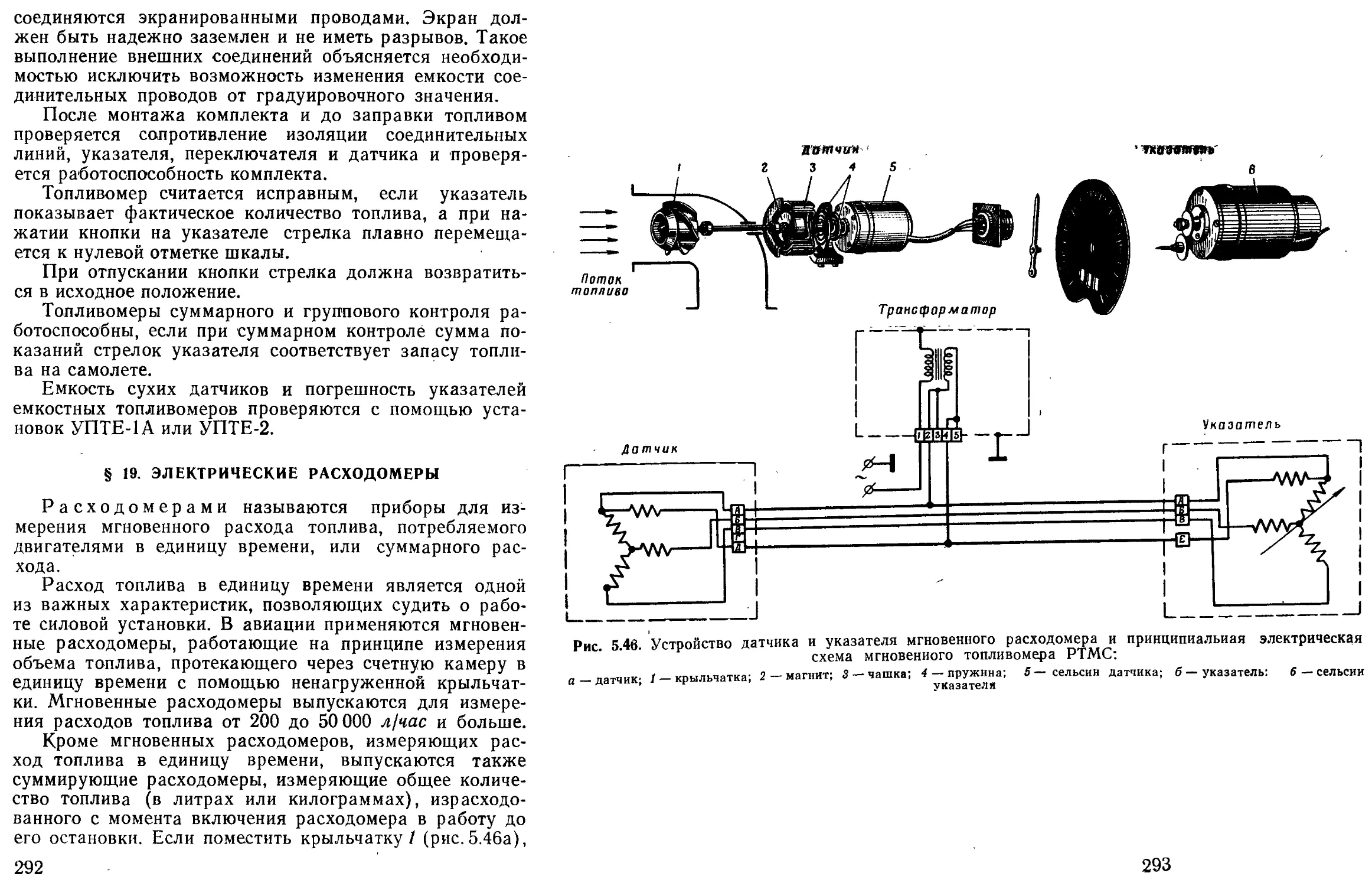
§ 19. Электрические расходомеры
§ 20. Погрешности расходомеров
§21. Особенности монтажа и технического обслуживания расходомеров
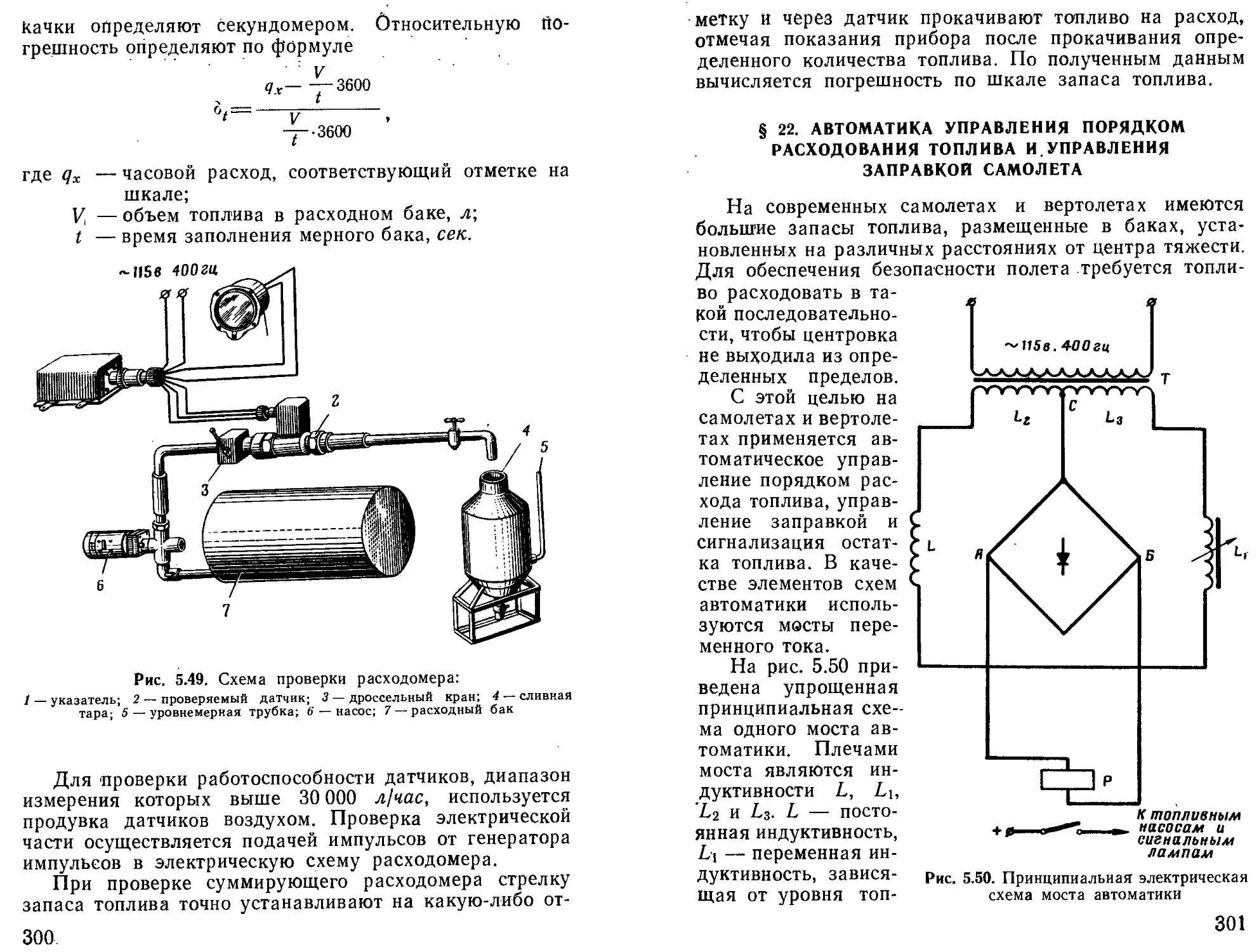
§ 22. Автоматика управления порядком расходования топлива и управления
заправкой самолета
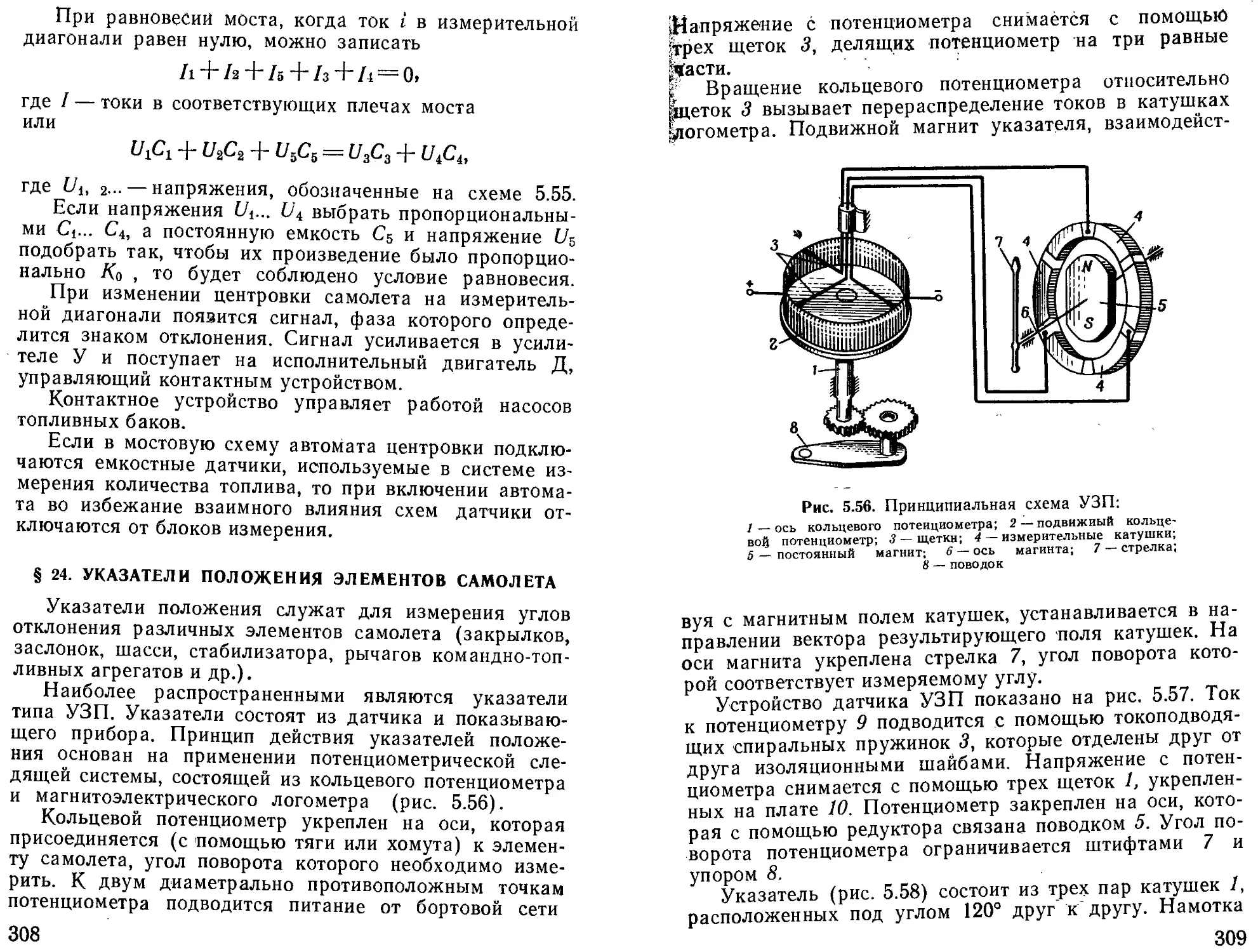
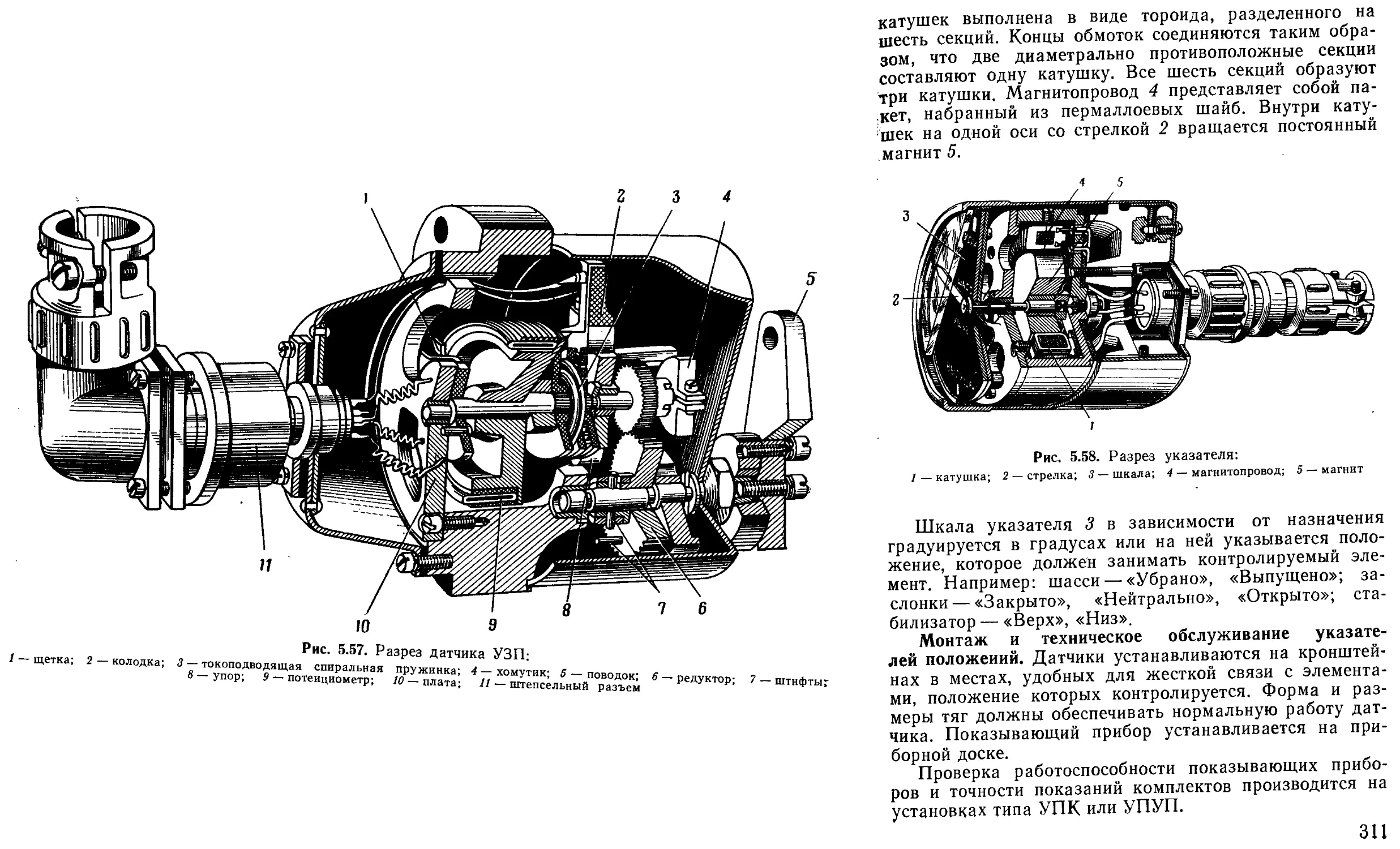
§ 24. Указатели положения элементов самолета
Глава 6. Кислородное оборудование
§ 3. Кислородные баллоны и кислородная бортовая арматура
Глава 7. Приборы обеспечения раскрытия парашютов и срабатывания механизмов
катапультных кресел
Литература
В Учебнике излагаются краткие основы теории и принцип дей-
ствия анероидно-мембранных приборов, измерителей углов атаки и
скольжения, измерителей линейных ускорений и перегрузок, гиро-
скопических пилотажно-навигационных приборов, приборов контроля
работы авиационных двигателей и самолетных систем, кислородного
оборудования и высотного спецснаряжения летчика. Изучение теоре-
тических вопросов служит базой для практического ознакомления с
устройством, конструкцией и основами эксплуатации типовых при-
боров из каждой группы оборудования.
Сложные измерительные системы, навигационные автоматы и си-
стемы автоматического управления самолетами и вертолетами будут
включены в отдельные учебники.
По своему содержанию и методике изложения учебник предназ-
начен для подготовки механиков по авиационному оборудованию.
Учебник написан авторским коллективом в составе: кандидатов
технических наук инженер-полковников КИРИЛЕНКО Ю. И., СЕ-
НИЛОВА Г. Н., инженер-полковника ГРИГОРЬЕВА Л. М., инженер-
подполковников КАЛАШНИКОВА А. В., СМИРНОВА К- С.
ВВЕДЕНИЕ
Боевые возможности и боевая эффективность само-
летов Военно-Воздушных Сил определяются не только
их высокими летно-тактическими данными, но зависят
в значительной степени от тактико-технических харак-
теристик авиационного оборудования.
В состав авиационного оборудования входят: обору-
дование электронной автоматики, приборное, электро- и
кислородное оборудование, высотное спецснаряжение,
средства фоторазведки и фотоконтроля. Составными
элементами электронной автоматики и приборного обо-
рудования являются автопилоты, демпферы, системы
измерения и автоматического управления выработкой
.топлива и центровкой самолета, полуавтоматические и
автоматические навигационные системы, астрономиче-
ские, гироскопические системы и координаторы,
пилотажно-навигационные приборы и приборы кон-
троля авиационного двигателя * и самолетных си-
стем, централизованные системы измерения аэродина-
мических параметров режима полета, бортовая кон-
трольно-регистрирующая аппаратура.
Авиационное оборудование обеспечивает измерение
и управление параметрами полета самолета или верто-
лета, режима работы авиадвигателей, бортовых само-
летных или вертолетных систем. Процесс измерения яв-
ляется по существу процессом сбора информации об
условиях полета. Эта информация должна быть досто-
верной, точной, исчерпывающе полной и наглядной.
Измерение параметров режима полета, работы авиадви-
1*
3
гателя и бортовых систем осуществляется с помощью
авиационных приборов и измерительных систем. Ото-
бражение информации на борту самолета или вертолета
производится при помощи шкал и стрелок приборов,
сигнальных табло, индексов, лампочек.
Авиационные приборы можно классифицировать по
видам измеряемых параметров или по принципу их дей-
ствия. В зависимости от вида измеряемых величин при-
боры подразделяются на пилотажно-навигационные,
приборы контроля авиадвигателя, приборы контроля
самолетных или вертолетных систем, приборы системы
жизнеобеспечения экипажа. По принципу действия при-
боры могут быть подразделены на анероидно-мембран-
ные, гироскопические, манометрические и др. Кроме
того, приборы часто классифицируются в зависимости от
измеряемых параметров на измерители высоты, скоро-
сти, углового положения, угловой скорости и т. д. При
изложении материала в данном Учебнике использована
классификация приборов как по видам измеряемых па-
раметров, так и по принципу действия. При рассмотре-
нии пилотажно-навигационных приборов применена
классификация по принципу действия: анероидно-мем-
бранные, гироскопические и т. п. Приборы контроля
авиадвигателей и бортовых систем объединены по виду
измеряемых параметров. Приборы системы жизнеобес-
печения также объединены по виду измеряемых пара-
метров (приборы кислородной системы и высотного
спецснаряжения летчика).
В каждой группе приборного и кислородного обору-
дования рассмотрены только наиболее распространен-
ные типовые приборы. При этом учтены изменения в
авиационном оборудовании, происшедшие за последнее
время.
4
Глава 1
ОБЩИЕ СВЕДЕНИЯ ОБ АВИАЦИОННЫХ
ПРИБОРАХ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМАХ
§ 1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ ПРИБОРОВ
И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ
Назначение авиационных приборов. Для управления
полетом необходимо получать информацию о положе-
нии самолета в пространстве, о величине и характере
изменения параметров полета, о режиме работы сило-
вой установки, топливной, гидравлической и других са-
молетных систем, а также о состоянии среды (атмосфе-
ры), в которой совершается полет. Измерение всех этих
параметров во время полета осуществляется с помощью
авиационных приборов и измерительных систем. Цель
Измерения состоит в сравнении контролируемого пара-
метра с определенной величиной этого же параметра,
Принятой за единицу.
Авиационный измерительный прибор — это устрой-
ство для прямого или косвенного сравнения измеряемой
Величины с единицей измерения. Отсчет показаний при-
боров производится по шкале с делениями. Делением
жкалы называется промежуток между двумя соседними
ЖМетками. Цена деления — это величина измеряемого
Параметра, которой соответствует одно деление шкалы,
рвущая величина измеряемого параметра определяется
прибором с некоторой ошибкой, погрешностью. Поэтому
Наказания приборов корректируются, исправляются с
йЬмощью механических, электрических и электромеха-
5
нических корректирующих устройств. Однако корректо-
ры, как правило, не устраняют полностью погрешности
в показаниях приборов; Характерной особенностью при-
бора является то, что он обеспечивает только визуаль-
ную информацию о величине контролируемого парамет-
ра и не выдает электрических сигналов другим прибо-
рам, системам и агрегатам самолетного оборудования.
Нередко один и тот же параметр измеряется с помощью
нескольких приборов, датчиков или сигнализаторов.
Измерительная система—это комплекс устройств
для единого, централизованного измерения одного или
нескольких параметров. Показания измерительных си-
стем корректируются с учетом максимального количе-
ства факторов с помощью сложных электрических и
электромеханических счетно-решающих устройств. По-
казания измерительных систем отличаются более высо-
кой точностью по сравнению с показаниями приборов.
Измерительная система обеспечивает информацией о ве-
личине контролируемых параметров указатели на при-
борных досках членов экипажа и выдает соответствую-
щие электрические сигналы всем приборам, системам и
агрегатам-потребителям информации о величине данно-
го параметра на борту самолета. Информация от пило-
тажно-навигационных измерительных систем передается
в автопилот, в систему полуавтоматического управле-
ния, в системы авиационного вооружения и управления
ракетными комплексами, в радиотехнические системы и
в другие объекты оборудования самолета. К измери-
тельным системам относятся централи скорости и вы-
соты, единые курсовые системы, гироцентрали.
‘ Классификация. Авиационные приборы и измери-
тельные системы классифицируются по назначению, ви-
ду измеряемого параметра, принципу действия, способу
представления информации.
По назначению приборы и измерительные системы
подразделяются на пилотажно-навигационные приборы
и системы, приборы контроля силовой установки (авиа-
двигателя, топливной и масляной систем), приборы кон-
троля действия агрегатов и систем самолета (системы
жизнеобеспечения, гидросистемы, пневматической си-
стемы и др.).
Пилотажно-навигационные приборы и измеритель-
6
йые системы представляют информацию о величине
следующих параметров:
— углов тангажа 0, крена у, рыскания ф;
— угловых скоростей самолета юу, <вг относи-
тельно трех координатных осей, связанных с самолетом;
— угла скольжения Р;
— курса самолета К;
— воздушной скорости: приборной Vnp и истинной
VhctJ
— числа М полета;
— линейных ускорений ах, ау, az в направлении трех
координатных осей;
— высоты полета Н;
— вертикальной скорости Vy;
— путевой скорости
— координат самолета (широты <р, долготы К или
расстояний Dx, Dy в условной прямоугольной системе).
Пилотажно-навигационные параметры определяются
с помощью гировертикали или авиагоризонта, гнрополу-
компаса, скоростных гироскопов, датчика угла скольже-
ния, магнитного, индукционного и астрокомпасов,
указателя скорости, указателя числа М, линейных акселе-
рометров, высотомера, вариометра, навигационных коор-
динаторов, индикаторов и вычислительных устройств.
Для централизованного определения пилотажно-нави-
гационных параметров используются единые курсовые
измерительные системы, гироцентрали, централи скоро-
сти и высоты.
Приборы контроля силовой установки измеряют:
. — угловую скорость вращения вала авиадвигате-
ля со или обороты п;
— температуру газов в газотурбинных двигателях;
— температуру и давление масла;
— давление, количество и расход топлива.
'Для контроля действия системы жизнеобеспечения
’экипажа измеряются температура, высота и перепад
Давления в герметической кабине, давление в кислород-
Чой системе, избыточное давление кислорода. Контроль
' гидро- и пневмосистем осуществляется по величине дав-
ления гидросмеси или соответственно сжатого воздуха.
В зависимости от измеряемой величины приборы под-
разделяются на измерители углов тангажа и крена
(гировертикали и авиагоризонты), измерители курса
7
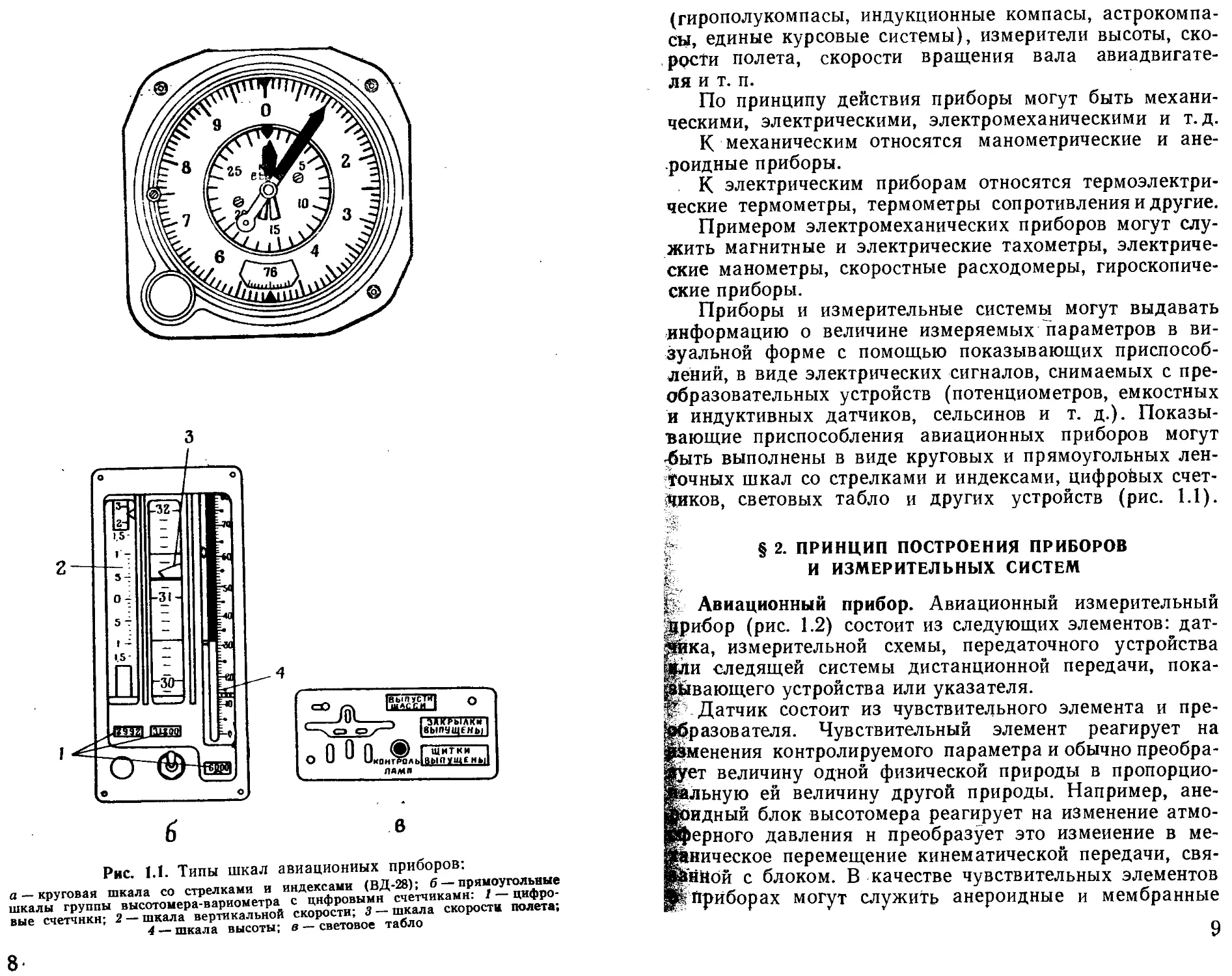
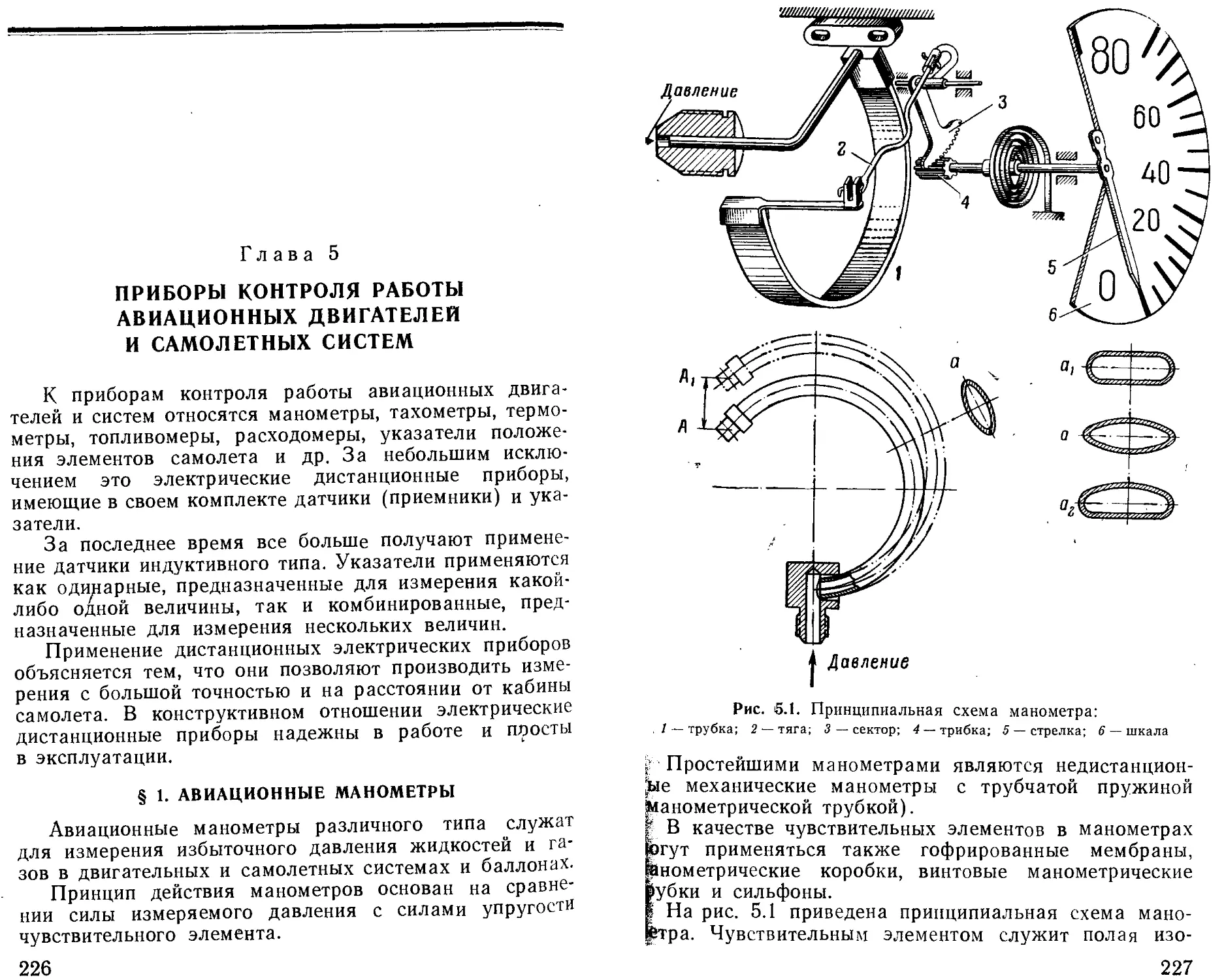
Рис. 1.1. Типы шкал авиационных приборов:
а-круговая шкала со стрелками и индексами (ВД-28); б — прямоугольные
шкалы группы высотомера-вариометра с цифровыми счетчиками. 1 цифро
вые счетчики; 2 — шкала вертикальной скорости; 3 — шкала скорости полета,
4 — шкала высоты; в — световое табло
8
(гирополукомпасы, индукционные компасы, астрокомпа-
сы, единые курсовые системы), измерители высоты, ско-
рости полета, скорости вращения вала авиадвигате-
ля и т. п.
По принципу действия приборы могут быть механи-
ческими, электрическими, электромеханическими и т.д.
К механическим относятся манометрические и ане-
роидные приборы.
. К электрическим приборам относятся термоэлектри-
ческие термометры, термометры сопротивления и другие.
Примером электромеханических приборов могут слу-
жить магнитные и электрические тахометры, электриче-
ские манометры, скоростные расходомеры, гироскопиче-
ские приборы.
Приборы и измерительные системы могут выдавать
информацию о величине измеряемых параметров в ви-
зуальной форме с помощью показывающих приспособ-
лений, в виде электрических сигналов, снимаемых с пре-
образовательных устройств (потенциометров, емкостных
й индуктивных датчиков, сельсинов и т. д.). Показы-
вающие приспособления авиационных приборов могут
•быть выполнены в виде круговых и прямоугольных лен-
точных шкал со стрелками и индексами, цифровых счет-
чиков, световых табло и других устройств (рис. 1.1).
§ 2. ПРИНЦИП ПОСТРОЕНИЯ ПРИБОРОВ
’ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ
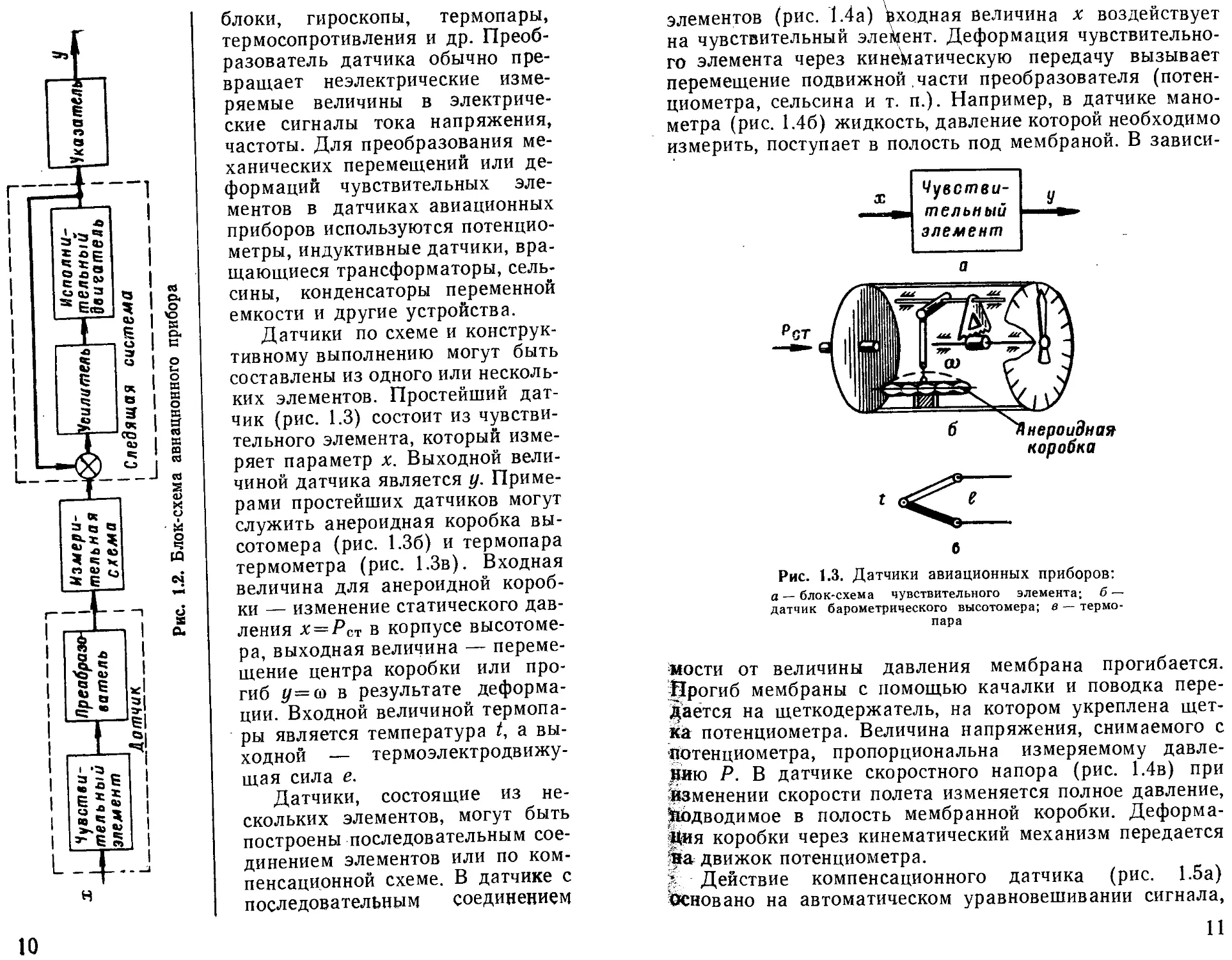
Авиационный прибор. Авиационный измерительный
прибор (рис. 1.2) состоит из следующих элементов: дат-
«йка, измерительной схемы, передаточного устройства
й|ли следящей системы дистанционной передачи, пока-
зывающего устройства или указателя.
v Датчик состоит из чувствительного элемента и пре-
образователя. Чувствительный элемент реагирует на
вменения контролируемого параметра и обычно преобра-
зует величину одной физической природы в пропорцио-
Иальную ей величину другой природы. Например, ане-
роидный блок высотомера реагирует на изменение атмо-
сферного давления н преобразует это изменение в ме-
Цаническое перемещение кинематической передачи, свя-
Кнйбй с блоком. В качестве чувствительных элементов
приборах могут служить анероидные и мембранные
9
н
блоки, гироскопы, термопары,
термосопротивления и др. Преоб-
разователь датчика обычно пре-
вращает неэлектрические изме-
ряемые величины в электриче-
ские сигналы тока напряжения,
частоты. Для преобразования ме-
ханических перемещений или де-
формаций чувствительных эле-
ментов в датчиках авиационных
приборов используются потенцио-
метры, индуктивные датчики, вра-
щающиеся трансформаторы, сель-
сины, конденсаторы переменной
емкости и другие устройства.
Датчики по схеме и конструк-
тивному выполнению могут быть
составлены из одного или несколь-
ких элементов. Простейший дат-
чик (рис. 1.3) состоит из чувстви-
тельного элемента, который изме-
ряет параметр х. Выходной вели-
чиной датчика является у. Приме-
рами простейших датчиков могут
служить анероидная коробка вы-
сотомера (рис. 1.36) и термопара
термометра (рис. 1.3в). Входная
величина для анероидной короб-
ки — изменение статического дав-
ления х = Рст в корпусе высотоме-
ра, выходная величина — переме-
щение центра коробки или про-
гиб у—& в результате деформа-
ции. Входной величиной термопа-
ры является температура t, а вы-
ходной — термоэлектродвижу-
щая сила е.
Датчики, состоящие из не-
скольких элементов, могут быть
построены последовательным сое-
динением элементов или по ком-
пенсационной схеме. В датчике с
последовательным соединением
10
элементов (рис. 1.4а) входная величина х воздействует
на чувствительный элемент. Деформация чувствительно-
го элемента через кинематическую передачу вызывает
перемещение подвижной части преобразователя (потен-
циометра, сельсина и т. п.). Например, в датчике мано-
метра (рис. 1.46) жидкость, давление которой необходимо
измерить, поступает в полость под мембраной. В зависи-
Vyecmei/-
злемент
б
Рис. 1.3. Датчики авиационных приборов:
а —блок-схема чувствительного элемента; б —
датчик барометрического высотомера; в — термо-
пара
Мости от величины давления мембрана прогибается.
Црогиб мембраны с помощью качалки и поводка пере-
дается на щеткодержатель, на котором укреплена щет-
ка потенциометра. Величина напряжения, снимаемого с
потенциометра, пропорциональна измеряемому давле-
нию Р. В датчике скоростного напора (рис. 1.4в) при
изменении скорости полета изменяется полное давление,
Подводимое в полость мембранной коробки. Деформа-
ция коробки через кинематический механизм передается
на движок потенциометра.
• Действие компенсационного датчика (рис. 1.5а)
Основано на автоматическом уравновешивании сигнала,
11
a
ческая
передача
тельный
элемент
часть пре-
образовал!.
Статор
преобра-
зователя
в
Рис. 1.4. Датчики дистанционных приборов:
а — блок-схема датчика; б — датчик манометра; в — дат-
чик скоростного напора
Рис. 1.5. Компенсационный датчик:
а — блок-схема датчика; б — кинематическая схема
высотного корректора:
/ — анероидный блок; 2 — потенциометр; 3 — муфта;
4 — редуктор; 5 — индуктивный датчик
пропорционального измеряемой величине, с помощью
отрабатывающей или следящей системы. Чувствитель-
ный элемент датчика через механическую передачу пе-
ремещает подвижную часть преобразователя. В резуль-
тате этого с преобразователя снимается сигнал, пропор-
циональный перемещению подвижного элемента, в
подается в усилитель. Усиленный сигнал рассогласования
приводит в действие исполнительный двигатель. Выход-
ной вал двигателя через редуктор перемещает стато[
12
13
преобразователя до тех пор, покаУигнал на входе уси-
лителя не станет равным нулю. Одновременно с этим
двигатель перемещает подвижный элемент выходного
преобразователя. Электрический/сигнал выходного пре-
образователя пропорционален Измеряемой величине х.
По компенсационной схеме построен высотный коррек-
тор (рис. 1.56). Анероидный блок высотного корректора
помещен в корпус, соединенный с датчиком статиче-
ского давления. Изменение высоты полета, а следова-
тельно, и изменение статического давления, вызывает
деформацию блока и поворот ротора индуктивного дат-
чика. Сигнал рассогласования с индуктивного датчика
после усиления поступает в двигатель. Исполнительный
двигатель через редуктор перемещает до согласованно-
го положения с ротором статор индуктивного датчика.
С выходным валом двигателя соединен дйижок потен-
циометра. Напряжение Uh с потенциометра пропорцио-
нально изменению высоты полета.
Характеристики датчиков. Свойства датчиков авиа-
ционных приборов можно определить зависимостью вы-
ходной величины у от входной х, чувствительностью,
статическими и динамическими погрешностями. Функ-
циональная зависимость выходной величины у от вход-
ной х обычно выражается графически. Эта зависимость
может быть линейной или пропорциональной и нели-
нейной.
График линейной зависимости выходной величины
от изменения входного измеряемого параметра пред-
ставляет прямую линию, проходящую через начало
координат (рис. 1.6а). Наклон прямой линии опреде-
ляется коэффициентом К. В каждой текущей точке
графика выходная величина равна произведению вход-
ной величины на коэффициент К, т. е. у=Кх. Коэффи-
циент пропорциональности К характеризует чувстви-
тельность датчика, т. е. степень влияния входной вели-
чины х на выходную у. Коэффициент К представляет
собой тангенс угла наклона графика Чем боль-
Дх
ше коэффициент К, тем больше угол наклона графика.
Это значит, что с увеличением К одному и тому же при-
ращению входного параметра Лац соответствует боль-
шая величина выходного сигнала At/i-
Практически линейную характеристику имеют очень
14
Рис. 1.6. Характеристики датчиков:
а — линейная зависимость выходной величины от
входного параметра; б — характеристика датчика с
зоной нечувствительности н ограниченной зоной ли-
нейности; в — нелинейная характеристика емкостного
датчику
15
немногие датчики. В большинстве/случаев линейная ха-
рактеристика получается в результате идеализации дей-
ствительной нелинейной характеристики. У реальных
датчиков характеристика y=f(^) является нелинейной
(рис. 1.66). Выходной сигнал/у таких датчиков появ-
ляется после достижения входной величиной некоторого
значения Дх или —Дх. Например, в высотном коррек-
торе следящая система начинает перемещать движок
выходного потенциометра после того, как статическое
давление Рст изменится на некоторую величину ДРСт-
У Земли величина ДРСТ соответствует изменению высо-
ты на 3—5 м. Таким образом, пока не произойдет изме-
нение давления на величину, большую ±ЛРСт, высотный
корректор не будет чувствовать изменения высоты по-
лета. Зона изменения входной величины от —Дхдо+Дх
называется зоной нечувствительности. После выхода
величины х за пределы этой зоны выходная величина у
будет изменяться пропорционально величине х, т. е. по
линейному закону. Такое изменение будет происходить
до тех пор, пока подвижная часть чувствительного эле-
мента не достигнет ограничивающих упоров. Иногда
упоры ограничивают перемещение подвижной части пре-
образователя (движка потенциометра, ротора сельсина
и т. п.). Диапазон изменения входного параметра х дат-
чика, в пределах которого выходная величина у изме-
няется по линейному закону от —г/л до+ул, называется
зоной линейности или диапазоном измерения дат-
чика.
Некоторые датчики авиационных приборов имеют
более сложную нелинейную характеристику y=f(x).
Примером может служить характеристика емкостного
датчика топливомера (рис. 1.6в). Емкость цилиндриче-
ского конденсатора С в зависимости от уровня топлива
в баке /гт изменяется по некоторой кривой. Вид этой
кривой определяется профилем бака.
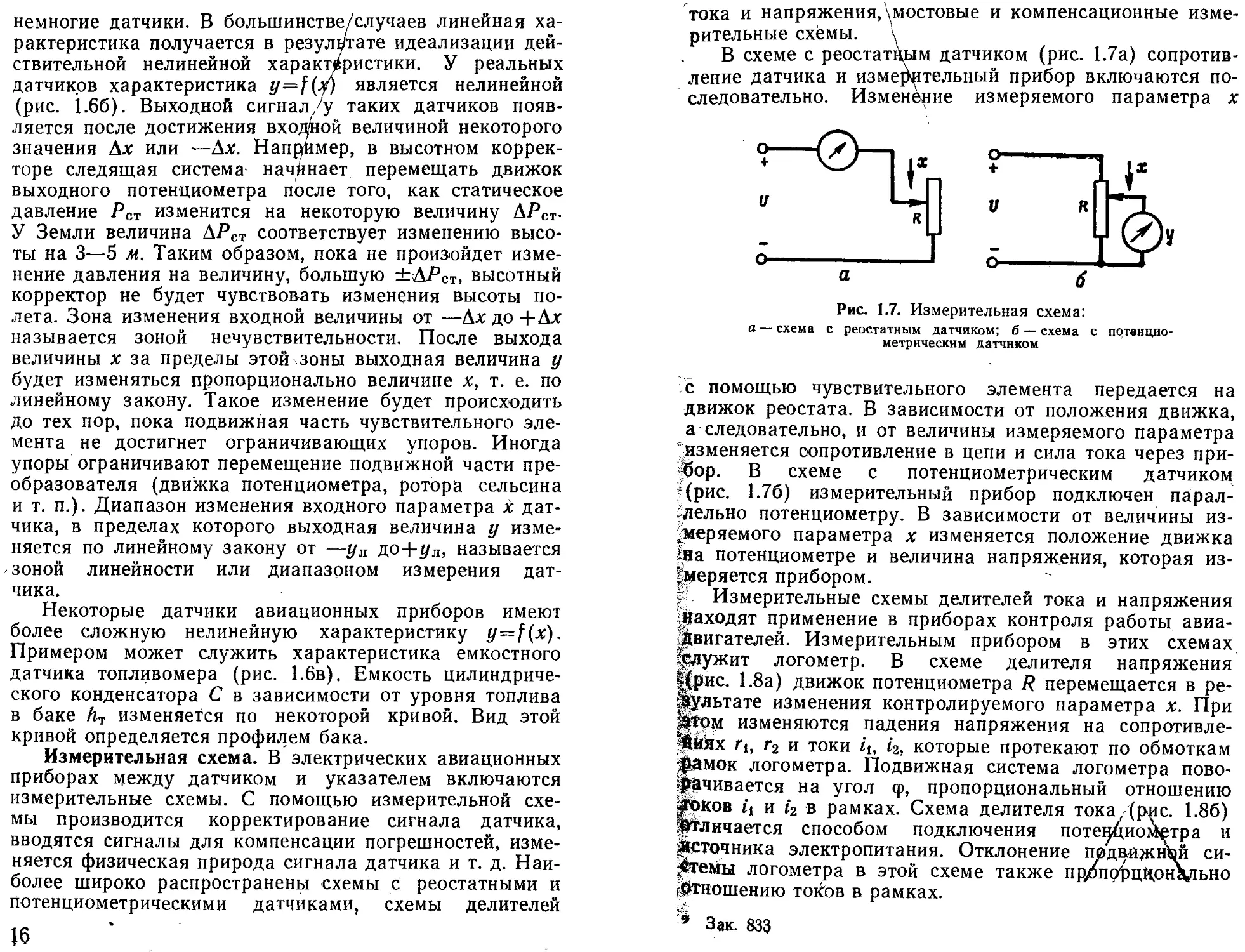
Измерительная схема. В электрических авиационных
приборах между датчиком и указателем включаются
измерительные схемы. С помощью измерительной схе-
мы производится корректирование сигнала датчика,
вводятся сигналы для компенсации погрешностей, изме-
няется физическая природа сигнала датчика и т. д. Наи-
более широко распространены схемы с реостатными и
потенциометрическими датчиками, схемы делителей
16
тока и напряжения,мостовые и компенсационные изме-
рительные схемы. \
В схеме с реостатным датчиком (рис. 1.7а) сопротив-
ление датчика и измерительный прибор включаются по-
следовательно. Изменение измеряемого параметра х
Рис. 1.7. Измерительная схема:
а — схема с реостатным датчиком; б — схема с потенцио-
метрическим датчиком
с помощью чувствительного элемента передается на
движок реостата. В зависимости от положения движка,
а следовательно, и от величины измеряемого параметра
изменяется сопротивление в цепи и сила тока через при-
бор. В схеме с потенциометрическим датчиком
?(рис. 1.76) измерительный прибор подключен парал-
лельно потенциометру. В зависимости от величины из-
меряемого параметра х изменяется положение движка
|ца потенциометре и величина напряжения, которая из-
меряется прибором.
Измерительные схемы делителей тока и напряжения
находят применение в приборах контроля работы авиа-
двигателей. Измерительным прибором в этих схемах
Служит логометр. В схеме делителя напряжения
Е(рис. 1.8а) движок потенциометра /? перемещается в ре-
зультате изменения контролируемого параметра х. При
этом изменяются падения напряжения на сопротивле-
ниях Г1, г2 и токи it, iz, которые протекают по обмоткам
рамок логометра. Подвижная система логометра пово-
рачивается на угол <jp, пропорциональный отношению
З'оков й и i2 в рамках. Схема делителя тока /(рис. 1.86)
/Отличается способом подключения потенциометра и
лсточника электропитания. Отклонение подвижней си-
^темы логометра в этой схеме также пр/5порцИонддьно
Отношению токов в рамках.
’ Зак. 833
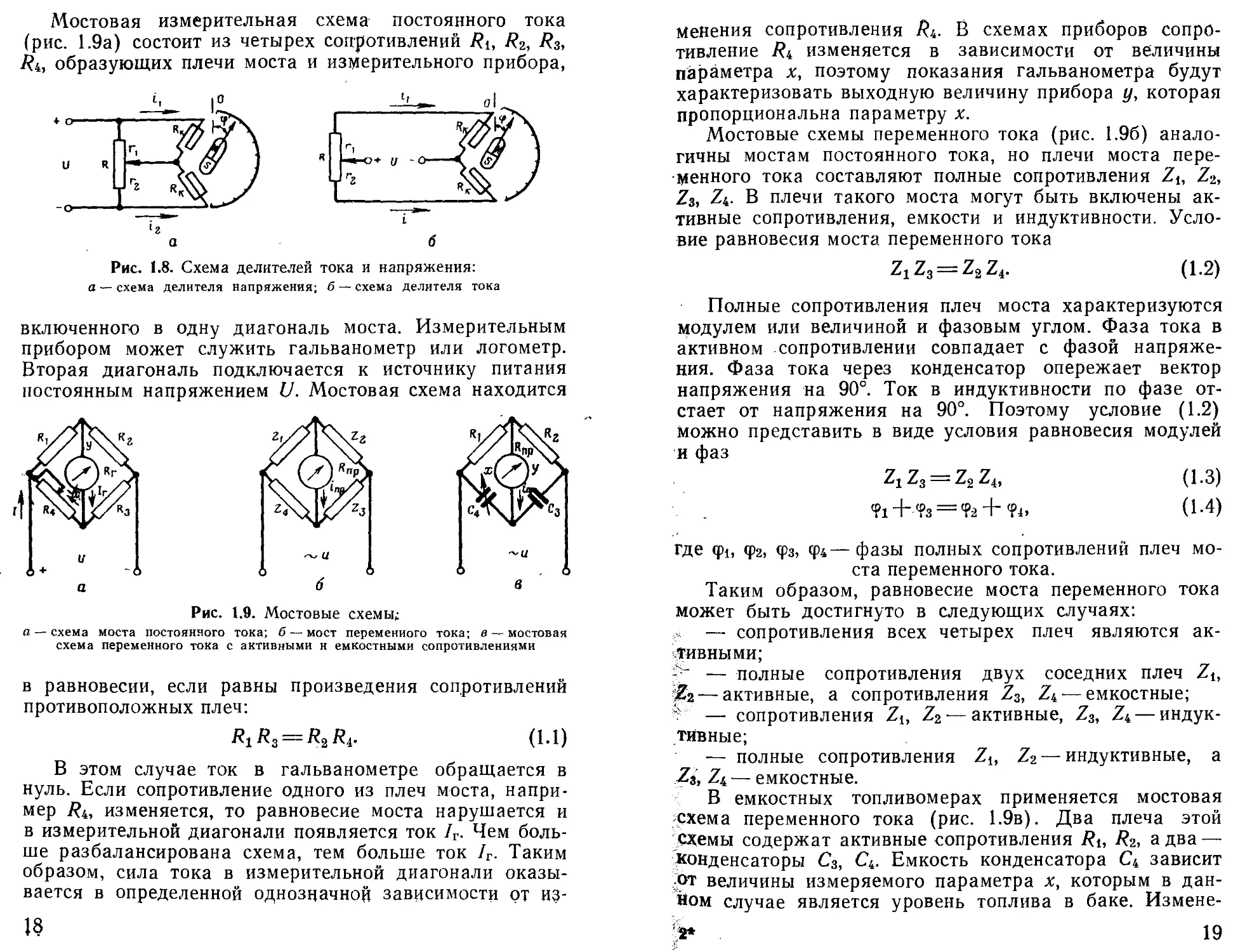
Мостовая измерительная схема постоянного тока
(рис. 1.9а) состоит из четырех сопротивлений /?2, Кз,
kt, образующих плечи моста и измерительного прибора,
it |0
12
а
Рис. 1.8. Схема делителей тока и напряжения:
а — схема делителя напряжения; б — схема делителя тока
включенного в одну диагональ моста. Измерительным
прибором может служить гальванометр или логометр.
Вторая диагональ подключается к источнику питания
постоянным напряжением U. Мостовая схема находится
Рис. 1.9. Мостовые схемы;
а — схема моста постоянного тока; б — мост переменного тока; в — мостовая
схема переменного тока с активными н емкостными сопротивлениями
в равновесии, если равны произведения сопротивлений
противоположных плеч:
^3 = ^2 ^4- (!•!)
В этом случае ток в гальванометре обращается в
нуль. Если сопротивление одного из плеч моста, напри-
мер /?4, изменяется, то равновесие моста нарушается и
в измерительной диагонали появляется ток /г. Чем боль-
ше разбалансирована схема, тем больше ток /г- Таким
образом, сила тока в измерительной диагонали оказы-
вается в определенной однозначной зависимости от из-
18
Менения сопротивления Rt- В схемах приборов сопро-
тивление /?4 изменяется в зависимости от величины
параметра х, поэтому показания гальванометра будут
характеризовать выходную величину прибора у, которая
пропорциональна параметру х.
Мостовые схемы переменного тока (рис. 1.96) анало-
гичны мостам постоянного тока, но плечи моста пере-
менного тока составляют полные сопротивления Zu Z2,
Z3, Zt. В плечи такого моста могут быть включены ак-
тивные сопротивления, емкости и индуктивности. Усло-
вие равновесия моста переменного тока
Z1Z3 = Z2Z4. (1.2)
Полные сопротивления плеч моста характеризуются
модулем или величиной и фазовым углом. Фаза тока в
активном сопротивлении совпадает с фазой напряже-
ния. Фаза тока через конденсатор опережает вектор
напряжения на 90°. Ток в индуктивности по фазе от-
стает от напряжения на 90°. Поэтому условие (1.2)
можно представить в виде условия равновесия модулей
и фаз
Z4 Z3 == Z2 Zb (1-3)
+ <?з = ?2 + (1-4)
где <jpi, фг, <рз, ф4—фазы полных сопротивлений плеч мо-
ста переменного тока.
Таким образом, равновесие моста переменного тока
может быть достигнуто в следующих случаях:
— сопротивления всех четырех плеч являются ак-
тивными;
- ~ — полные сопротивления двух соседних плеч Zb
^2 — активные, а сопротивления Z3, Z±— емкостные;
— сопротивления Zb Z3— активные, Z3, Z4— индук-
тивные;
— полные сопротивления Zb Z2— индуктивные, а
Zi, Z^ — емкостные.
В емкостных топливомерах применяется мостовая
схема переменного тока (рис. 1.9в). Два плеча этой
Схемы содержат активные сопротивления /?ь /?2, а два —
конденсаторы С3, С4. Емкость конденсатора С4 зависит
от величины измеряемого параметра х, которым в дан-
ном случае является уровень топлива в баке. Измене-
2* 19
ние емкости С4 вызывает разбалансировку мостовой
схемы, в результате чего в измерительной диагонали
возникает ток i. Отклонение стрелки прибора (выход-
ная величина у) пропорционально изменению емко-
сти С4.
Действие компенсационных измерительных схем ос-
новано на том, что измеряемую электродвижущую силу
или напряжение уравновешивают равным по величине
и противоположным по знаку или по фазе падением на-
пряжения. Компенсационные схемы могут уравновеши-
ваться вручную или автоматически. В авиационных при-
борах находят применение только автокомпенсационные
схемы, которые уравновешиваются с помощью следящих
систем с электродвигателями. Мостовая автокомпенса-
ционная схема (рис. 1.10) состоит из моста постоянного
Рис. 1.10. Мостовая автокомпенсационная схема
или переменного тока, усилителя и электродвигателя.
Чувствительный элемент, измеряющий входной пара-
метр х, связан с движком потенциометра J?t- Движок
потенциометра R2 через редуктор соединен с выходным
валом электродвигателя. Плечи моста составляются пе-
ременными сопротивлениями гь г2, Гз, г4. При этом все-
гда соблюдаются равенства r1+r2=/?i, r3 + ri=R2. Усло-
вие равновесия мостовой схемы
Г1Г3 = г2т4. (1.5)
При изменении входного параметра х мост разба-
лансируется и к его измерительной диагонали оказы-
вается приложенным напряжение рассогласования. Этот
сигнал поступает в усилитель, а затем на исполнитель-
ный двигатель. Двигатель через редуктор перемещает
движок потенциометра /?2 до тех пор, пока не будет
восстановлено равновесие мостовой схемы. Одновремен-
но
Й6 t Движком потенциометра #2 двигатель поворачивает
Стрелку прибора. Угол поворота стрелки <р пропорцио-
нален изменению входного параметра. .
Указатели приборов. Основными элементами указа-
телей являются шкала, стрелки, подвижные и неподвиж-
ные индексы. Отсчет измеряемого параметра в некото-
рых приборах производится цифровыми счетчиками.
Подвижная часть указателя (стрелка, индекс, барабан
счетчика и т. д.) в одних приборах поворачивается за
Свет деформации анероидной или манометрической ко-
робки. Например, поворот стрелок, высотомера совер-
шается упругими силами, возникающими при деформа-
ции блока анероидных коробок. Стрелки указателя
скорости поворачиваются вследствие деформации мано-
метрического чувствительного элемента. В других при-
борах подвижная часть указателя поворачивается с по-
мощью магнитоэлектрических гальванометров, логомет-
ров и исполнительных двигателей дистанционных сле-
дящих передач.
Измерительная система. В отличие от авиационного
прибора измерительная система обладает более обшир-
и датчики
Рис. 1.11. Блок-схема измерительной системы
№ми возможностями и характеризуется высокими точ-
^Стями измерений. В состав измерительной системы
ЙЙс. 1.11) входят несколько чувствительных элементов
^Датчиков, вычислительные или счетно-решающие уст-
Жйства, дистанционные передачи и указатели. Измери-
Цйьная система выдает информацию о величине изме-
Ймых параметров на визуальные приборы, в системы
^Стоматического и полуавтоматического управления,
21
радиотехническим устройствам, системам вооружения и
другим потребителям на борту самолета. Измеритель-
ные системы для определения выходной величины у ис-
пользуют обычно информацию о входных параметрах
*1, *2, х3 и т. д. Кроме информации о входных парамет-
рах в вычислительное устройство вводятся поправки и
исходные данные для расчетов. Таким образом, в изме-
рительной системе с помощью дополнительной инфор-
мации корректируется и уточняется величина измеряемо-
го параметра, которая в общем случае зависит от целого
ряда факторов. Например, для определения истинной
воздушной скорости в централи высоты и скорости
учитывается изменение статического давления и темпе-
ратуры окружающего воздуха. К измерительным систе-
мам относятся централи скорости и высоты, единые
курсовые системы, гироцентрали и др.
§ 3. ПОГРЕШНОСТИ АВИАЦИОННЫХ ПРИБОРОВ
Точности и погрешности измерений. Различают изме-
рения прямые и косвенные. При прямых измерениях
осуществляется непосредственное измерение нужного
параметра. Например, чувствительный элемент мано-
метра выполняет прямое измерение давления топлива,
гидросмеси, кислорода и т. п. Гировертикаль и авиаго-
ризонт производят прямые измерения углов крена и
тангажа самолета. При косвенных измерениях вместо
величины, подлежащей измерению, выполняется изме-
рение некоторой другой величины. Эта вторая величина
связана определенной функциональной зависимостью с.
измеряемой величиной. Так, атмосферное давление
функционально связано с высотой полета. В результате
измерения атмосферного давления можно определить
высоту. Косвенное измерение расхода топлива в расхо-
домерах выполняется измерением скорости вращения
крыльчатки, помещенной в поток топлива.
Точностью называется степень достоверно-
сти результата измерения, полученного
с помощью прибора или измерительной
системы. Для определения точности прибора его по-
казания сравниваются с величиной измеряемого пара-
метра, полученной от образцового или эталонного при-
бора.
22
Погрешностью измерения называется разность
между значением х измеряемой величи-
ны, определенным по показаниям прибо-
ра, и истинным значением
S X (1.6)
Погрешность может быть абсолютной и относи-
тельной.
Абсолютной погрешностью называется разность
х — хИст, выраженная в тех же единицах, что
и измеряемая величина. Абсолютная погреш-
ность указывает величину ошибки измерений, но не дает
возможности сравнить величину ошибки с измеряемой
величиной.
Относительной погрешностью называется отноше-
ние абсолютной погрешности к истинно-
му значению измеряемой величины
Относительная погрешность не имеет размерности и
выражается правильной десятичной дробью. Иногда эту
погрешность выражают в процентах
8отн=;Л-100%. (1.8)
В зависимости от причин возникновения погрешности
измерений делятся на систематические и случайные.
Кроме того, при снятии показаний приборов возможны
промахи, т. е. грубые погрешности, резко искажающие
результаты измерений.
Систематические погрешности зависят от определен-
ных известных факторов, подчиняются заранее извест-
ным закономерностям и могут быть компенсированы
«ли исключены из результатов измерений. Систематиче-
ские погрешности зависят от принятого метода измере-
ния, конструкции прибора, неточной установки чувстви-
тельного элемента прибора, действия внешних факто-
ров, поддающихся учету (влияние магнитных полей,
температуры и давления атмосферы, поля земного тяго-
тения и др.).
Систематические погрешности, обусловленные несо-
вершенством принятого метода измерения, называются
23
методическими. Эти погрешности проявляются при кос-
венных измерениях. Методические погрешности указа-
теля скорости объясняются отклонением плотности воз-
духа от расчетной, стандартной. Методические погреш-
ности термоэлектрического термометра возникают
вследствие изменения температуры холодного спая. Си-
стематические погрешности, зависящие от несовершен-
ства конструкции прибора и его элементов, называются
инструментальными. В свою очередь инструментальные
погрешности подразделяются на шкаловые, погрешности
трения, упругого последействия и гистерезиса, темпера-
турные, погрешности, вызванные влиянием электриче-
ского, магнитного и гравитационного полей. Инструмен-
тальные погрешности могут быть статическими и дина-
мическими. Статические погрешности возникают при
установившемся значении измеряемой величины. Дина-
мические погрешности возникают в процессе изменения
измеряемой величины.
Шкаловые погрешности приборов возникают в ре-
зультате неточной градуировки шкалы, ошибок в регу-
лировке кинематической передачи указателя, изменения
упругих свойств пружин в передаточном механизме. Эти
погрешности учитываются при проверке прибора и могут
быть устранены регулировкой кинематической переда-
чи. Обычно такая регулировка осуществляется с по-
мощью лекальных корректоров.
Погрешности трения вызываются сухим трением в
механизме прибора, главным образом в опорах и под-
шипниках. Погрешности трения у прибора, подвергаю-
щегося вибрации во время полета, меньше чем у при-
бора, работающего на земле при отсутствии вибрации.
Для уменьшения погрешностей трения необходимо
уменьшать вес подвижных частей прибора, взвешивать
подвижные элементы в жидкости для уменьшения дав-
ления на опоры, применять опоры и подшипники с ма-
лым трением.
Погрешность упругого последействия объясняется
остаточными деформациями упругих элементов прибо-
ров (мембранных и анероидных блоков, пружин и др.).
Упругий гистерезис состоит в том, что деформации
упругих элементов отстают от изменения приложенных
к этим элементам усилий.
Температурные погрешности обусловлены тем, что
24
при изменении температуры изменяются модуль упруго-
сти манометрических, анероидных блоков и пружин,
электрическое, сопротивление элементов схемы прибора,
магнитное сопротивление магнитопроводОв и т. Д. Для
'.-уменьшения температурной погрешности применяются
^Механические, термоэлектрические и термомагнитные
,Й>мпенсаторы.
* Погрешности от влияния электрического и магнитно-
го полей обычно устраняются с помощью экранировки
прибора или компенсацией действия постороннего поля
йййециально подобранным электрическим или магнит-
ным полем. Например, действие посторонних магнит-
|ых полей на магниты картушки компаса или на индук-
^адонный магниточувствительный элемент гироиндукци-
Зйяного компаса компенсируется полем постоянных
Магнитов,- Эти постоянные магниты являются основными
^элементами девиационного прибора.
" Случайные погрешности измерений возникают под
действием различных непостоянных, случайно изменяю-
щихся факторов, не имеющих постоянной закономерной
Йвязи с измеряемой величиной. Влияние случайных по-
грешностей на точность измерения определяется с по-
Цощью методов математической статистики и теории
вероятностей. Для этого необходимо произвести целый
|яд повторных измерений.
У Точно установить законы распределения случайных
бгрешностей довольно трудно. Опыт статистической
бработки результатов большого количества измерений
указывает, что случайные погрешности измерений ха-
Йктеризуются законом нормального распределения
м. =---!--.
5 о/2? /2о”
(1-9)
ц$е Ns — частота появления случайной погрешности;
fl В2 + 822 +...+ 82
<о = |/ ------------- —средняя квадратическая по-
грешность,
ЦЙ « — число измерений;
б — значение случайной погрешности;
/=2,718 — основание натуральных логарифмов.
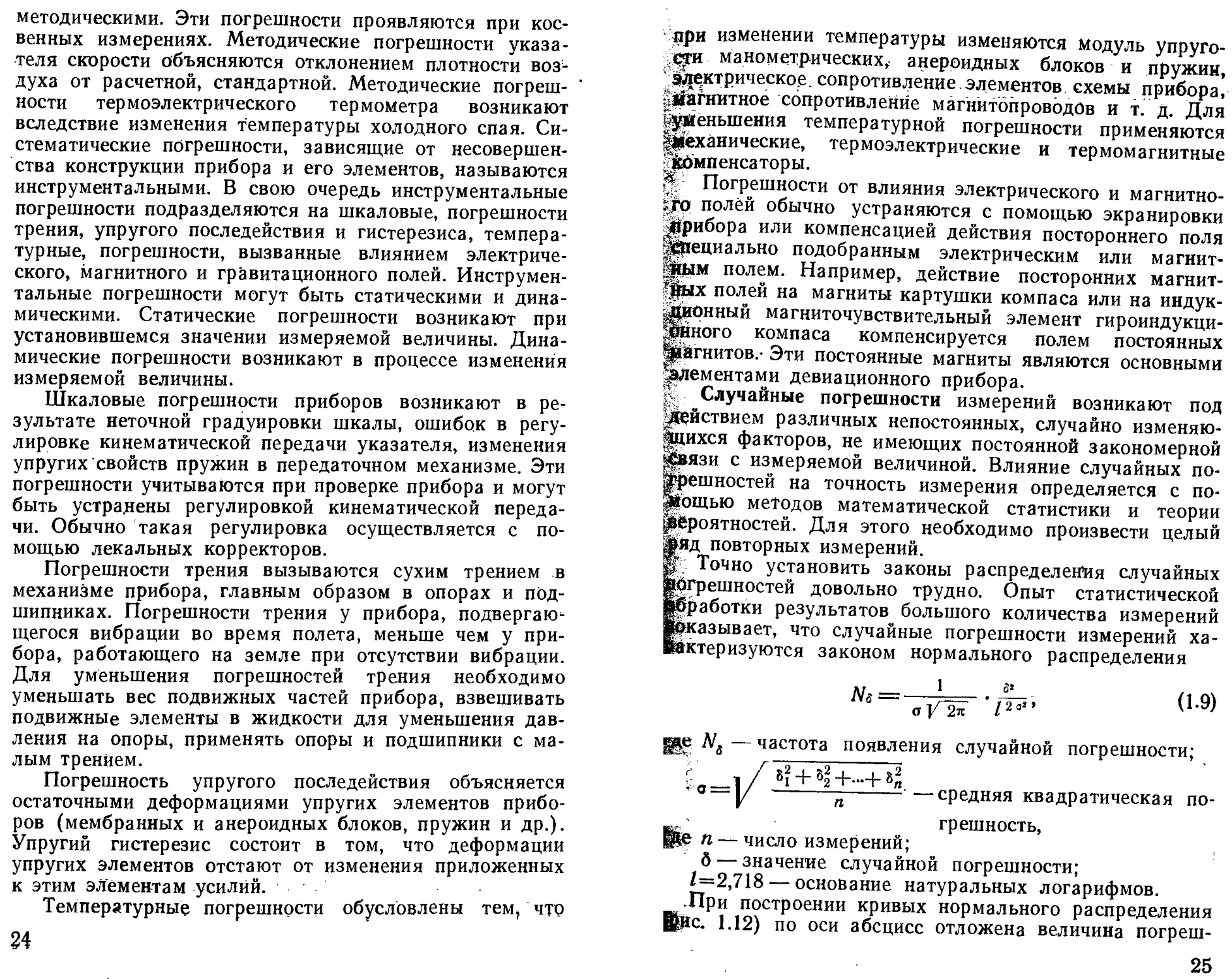
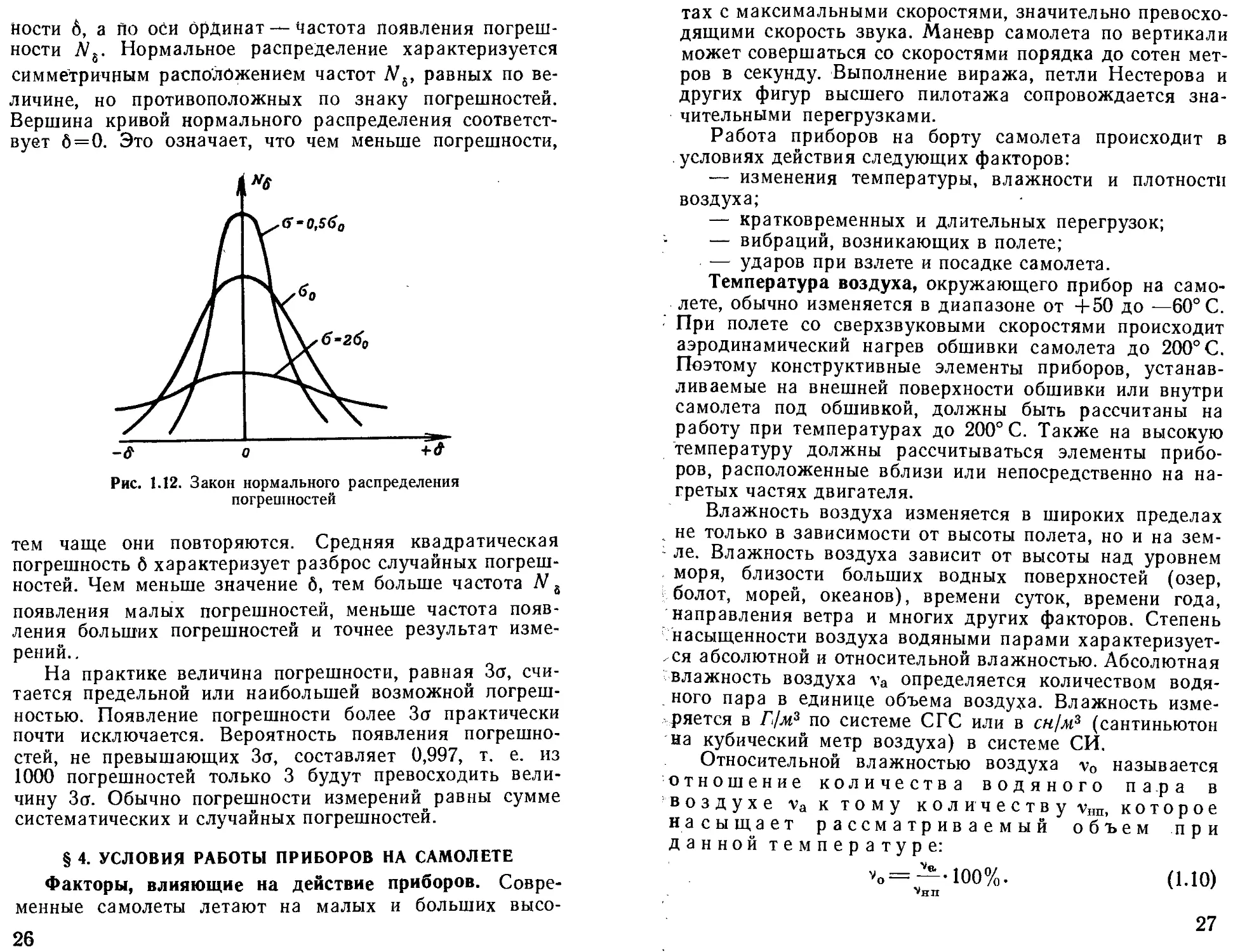
При построении кривых нормального распределения
Цис. 1.12) по оси абсцисс отложена величина погреш-
25
Пости 6, а По оси ординат — Частота появления погреш-
ности N{. Нормальное распределение характеризуется
симметричным расположением частот Nv равных по ве-
личине, но противоположных по знаку погрешностей.
Вершина кривой нормального распределения соответст-
вует 6=0. Это означает, что чем меньше погрешности,
Рис. 1.12. Закон нормального распределения
погрешностей
тем чаще они повторяются. Средняя квадратическая
погрешность 6 характеризует разброс случайных погреш-
ностей. Чем меньше значение 6, тем больше частота N &
появления малых погрешностей, меньше частота появ-
ления больших погрешностей и точнее результат изме-
рений..
На практике величина погрешности, равная 3<т, счи-
тается предельной или наибольшей возможной погреш-
ностью. Появление погрешности более 3<т практически
почти исключается. Вероятность появления погрешно-
стей, не превышающих Зет, составляет 0,997, т. е. из
1000 погрешностей только 3 будут превосходить вели-
чину 3<т. Обычно погрешности измерений равны сумме
систематических и случайных погрешностей.
§ 4. УСЛОВИЯ РАБОТЫ ПРИБОРОВ НА САМОЛЕТЕ
Факторы, влияющие на действие приборов. Совре-
менные самолеты летают на малых и больших высо-
26
тах с максимальными скоростями, значительно превосхо-
дящими скорость звука. Маневр самолета по вертикали
может совершаться со скоростями порядка до сотен мет-
ров в секунду. Выполнение виража, петли Нестерова и
других фигур высшего пилотажа сопровождается зна-
чительными перегрузками.
Работа приборов на борту самолета происходит в
условиях действия следующих факторов:
— изменения температуры, влажности и плотности
воздуха;
— кратковременных и длительных перегрузок;
— вибраций, возникающих в полете;
— ударов при взлете и посадке самолета.
Температура воздуха, окружающего прибор на само-
лете, обычно изменяется в диапазоне от +50 до —60° С.
При полете со сверхзвуковыми скоростями происходит
аэродинамический нагрев обшивки самолета до 200° С.
Поэтому конструктивные элементы приборов, устанав-
ливаемые на внешней поверхности обшивки или внутри
самолета под обшивкой, должны быть рассчитаны на
работу при температурах до 200° С. Также на высокую
температуру должны рассчитываться элементы прибо-
ров, расположенные вблизи или непосредственно на на-
гретых частях двигателя.
Влажность воздуха изменяется в широких пределах
. не только в зависимости от высоты полета, но и на зем-
: ле. Влажность воздуха зависит от высоты над уровнем
моря, близости больших водных поверхностей (озер,
болот, морей, океанов), времени суток, времени года,
направления ветра и многих других факторов. Степень
насыщенности воздуха водяными парами характеризует-
ся абсолютной и относительной влажностью. Абсолютная
влажность воздуха va определяется количеством водя-
ного пара в единице объема воздуха. Влажность изме-
ряется в Г/м3 по системе СГС или в сн/м3 (сантиньютон
на кубический метр воздуха) в системе СИ.
Относительной влажностью воздуха v0 называется
отношение количества водяного пара в
воздухе va к т о м у количеству vHn, которое
насыщает рассматриваемый объем при
данной температуре:
'100%. (1.10)
27
Когда воздух насыщен водяными парами, относитель-
ная влажность составляет 100%. Количество водяного
пара, насыщающего воздух, зависит от температуры.
Охлаждение влажного воздуха приводит к конденсации
влаги. Влажный воздух и капли воды, попадающие в
приборы, вызывают ускоренную коррозию их механи-
ческих узлов и электрических контактов, уменьшение
сопротивления изоляции электрических цепей. Для
уменьшения влияния влажности на детали и узлы при-
бора его корпус делается герметичным.
Плотность воздуха р — это отношение массы воздуха
к ее объему. В системе СИ плотность воздуха измеряет-
ся в кг/м3. Давление, а следовательно, и плотность воз-
духа по мере увеличения высоты уменьшаются. Напри-
мер, плотность воздуха у поверхности Земли (на уровне
моря) составляет 1,225 кг/м3, а на высоте 30 км плот-
ность воздуха 0,0179 кг/лг3. С уменьшением плотности
воздуха'ухудшается отвод тепла, от электрических эле-
ментов приборов, уменьшается электрическое сопротив-
ление воздушного зазора между электрическими кон-
тактами, возрастает опасность пробоя изоляции в элек-
трических цепях.
Перегрузки и вибрации. Во время выполнения само-
летом виража, петли, полупетли и- других маневров
возникают перегрузки, которые действуют также и на
приборы. Перегрузка определяется отношением ускоре-
ния самолета к ускорению силы тяжести и является без-
размерной величиной. В результате действия перегрузок
увеличивается трение в опорах, возрастают погрешности
из-за несбалансированности механизма прибора. Для
уменьшения влияния перегрузок механизм прибора
должен быть тщательно сбалансирован. Основным источ-
ником вибрации на самолете является двигатель. Вибра-
ция характеризуется величиной вибрационных перегру-
зок и частотой, которая измеряется в герцах. Герц — это
единица частоты, равная одному колебанию в секунду.
Частота вибраций на самолете может изменяться от
нескольких до 2000 гц. Вибрация оказывает некоторое
полезное влияние на приборы, например уменьшает
погрешности трения. Однако вредное воздействие виб-
рации на приборы значительно больше. Под действием
вибрации прибор в целом или отдельные его элементы
могут резко ухудшить свои характеристики, а иногда
28
даже подвергнуться полному или частичному разруше-
нию. Для защиты от вибрации конструкция прибора де-
вается виброустойчивой и вибропрочной.
IF' Для уменьшения вредного влияния вибрации многие
ЦЙриборы устанавливаются на амортизированные оено-
Ийния, платы и приборные доски. Некоторые приборы,
^пример скоростные гироскопы, нельзя устанавливать
Ид амортизаторах, так как это влияет на точность изме-
урёний этих приборов.
§ 5. РАЗМЕЩЕНИЕ ПРИБОРОВ НА САМОЛЁТЕ
Монтаж приборов и измерительных систем. Каждый
конструктивный элемент или блок прибора и измери-
тельной системы предназначен для выполнения вполне
пределенных задач или функций. Специфика этих задач
^йрределяет также и правила монтажа блока на само-
$ете. При установке приборов и измерительных систем
|£а самолете особое внимание уделяется размещению
Втчиков и указателей. Правильный выбор места уста-
вки и соблюдение технических условий монтажа дат-
чика обеспечивают необходимую точность измерений
контролируемого параметра. Датчики приборов уста-
|гавливаются так, чтобы их чувствительные элементы в
максимально возможной степени могли воспринимать
Изменения нужных параметров и не реагировали на
Воздействие посторонних факторов. Например, чувстви-
йтьный элемент высотомера должен воспринимать из-
рнения статического давления и не должен реагировать
t скорость и ускорение самолета. Скоростной гироскоп,
^едназначенный для измерения угловой скорости само-
|fa, должен быть точно ориентирован относительно
самолета. Ось измерения скоростного гироскопа
Егавливается параллельно самолетной оси, относи-
ю которой должна измеряться угловая скорость
ностью до 2°.
^Гироскопические датчики углов и угловых скоростей
йжны устанавливаться по возможности ближе к цент-
^‘тяжестн самолета. Оси измерения гироскопических
£<иков углов должны устанавливаться с высокой точ-
ЗГЬю параллельно соответствующим осям самолета,
яример, гиродатчик дистанционного авиагоризонта
^самолете-истребителе должен быть ориентирован по
Г 29
координатным осям самолета с точностью до 15 угловых
минут. Центральные гировертикали устанавливаются на
самолете с еще более высокой точностью.
Датчики приборов и измерительных систем не долж-
ны создавать помех нормальному функционированию
самолетных систем. Чувствительные элементы маномет-
ров не должны нарушать герметичность гидро-, пневмо-
или кислородной системы. Датчик скоростного расходо-
мера не должен мешать нормальному поступлению топ-
лива в двигатель.
Указатели авиационных приборов устанавливаются с
учетом следующих условий:
— максимальной точности и простоты представления
информации о параметрах режима полета, работы сило-
вой установки и самолетных систем;
— психофизиологических возможностей человека
воспринимать и оценивать информацию, поступающую
с указателей;
— согласованности размещения указателей с распо-
ложением органов управления самолетом, систем воору-
жения и радиотехнических устройств;
— задач, выполняемых каждым членом экипажа в
полете;
— простоты и удобства монтажа, демонтажа и ос-
мотра указателя.
На одноместных самолетах в кабине летчика на
приборной доске и пультах устанавливаются указатели
всех приборов. На многоместных самолетах около рабо-
чего места летчика устанавливаются пилотажно-нави-
гационные приборы, приборы контроля силовой установ-
ки, приборы системы жизнеобеспечения. В кабине
штурмана устанавливаются указатели навигационных
приборов и систем, а также контрольные прибора си-
стемы жизнеобеспечения. Если в состав экипажа входит
борттехник или бортинженер, то на приборной доске и
пультах перед его рабочим местом устанавливаются
приборы контроля силовой установки и самолетных
систем.
Системы индикации авиационных приборов. Нагляд-
ность представления информации и точность отсчета
величины измеряемого параметра в значительной степе-
ни зависят от системы индикации указателя. В авиаци-
онных приборах приняты условная и изобразительная
30
системы индикации. При условной или символической
системе индикации информация о величине измеряемого
- параметра представляется с помощью шкал, стрелок и
.индексов, которые не дают непосредственного представ-
ления о физической природе данного параметра. Напри-
мер, по шкале высотомера можно отсчитать с опреде-
ленной точностью высоту полета, но нельзя получить
наглядного представления об этой высоте, о положении
самолета над земной поверхностью. Сущность изобра-
зительной или наглядной индикации состоит в том, что
с помощью прибора воспроизводится или моделируется
.визуальная обстановка полета (положение самолета
относительно Земли, движение самолета по заданной
/траектории полета и т. д.).
Приборы с условной индикацией параметров можно
•Подразделить на следующие группы: приборы с точным
«Количественным отсчетом величины измеряемого пара-
метра, приборы с приближенной качественной оценкой
Параметра, приборы с обобщенной или интегральной
оценкой характеристик группы параметров, командные
приборы.
Приборы с количественным отсчетом параметра име-
jot шкалу, градуированную в единицах измерения. Эти
’приборы отсчитывают текущее значение параметра или
/Величину отклонения параметра от заданного значения.
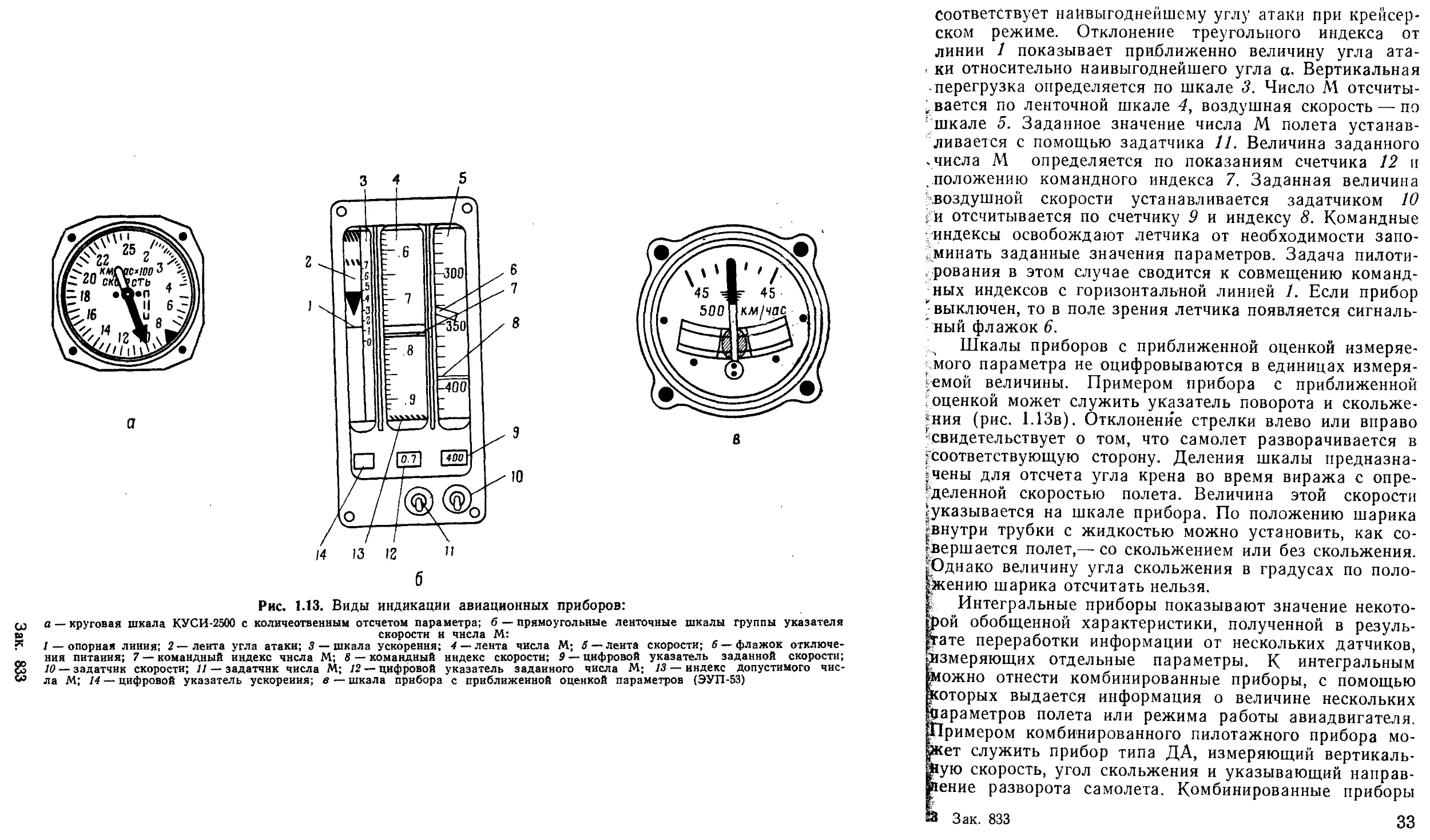
^Например, шкала комбинированного указателя скорости
командным индексом КУСИ-2500 градуируется в еди-
/Цицах скорости км/час (рис. 1.13а). С помощью тре-
угольного индекса задается истинная воздушная ско-
|рость полета, необходимая для перехвата воздушной
Цели (на рис. 800 км/час). По положению широкой
Цгрелки относительно шкалы отсчитывается приборная
скорость (1000 км/час). По узкой стрелке определяется
истинная воздушная скорость (1200 км/час). Отклоне-
ние скорости от заданного значения составляет
|Ю0 км/час.
%, Наряду с круговыми шкалами в приборах с количе-
ственным отсчетом параметра начинают внедряться лен-
точные шкалы. Примером прибора с ленточными шка-
|амп может служить указатель, по которому можно
гаределить скорость полета, число М, угол атаки, вер-
Вкальную перегрузку (рис. 1.136). Лента угла атаки 2
К имеет оцифровки. Опорная горизонтальная линия 1
31
a
Рис. 1.13. Виды индикации авиационных приборов:
ш а — круговая шкала КУСИ-2500 с количеотвенным отсчетом параметра; б — прямоугольные ленточные шкалы группы указателя
скорости и числа М:
w j — опорная линия*, 2—леита угла атаки; 3 — шкала ускорения; 4— лента числа М; 5 — леита скорости; 6 флажок отключе-
ния питания; 7 — командный индекс числа М; 8— командный индекс скорости; 9— цифровой указатель заданной скорости;
gj 10 — задатчик скорости; 11 — задатчик числа М; 12 — цифровой указатель заданного числа М; 13 — индекс допустимого чис-
v ла М; 14 — цифровой указатель ускорения; в — шкала прибора с приближенной оценкой параметров (ЭУП-53)
соответствует наивыгоднейшему углу атаки при крейсер-
ском режиме. Отклонение треугольного индекса от
линии 1 показывает приближенно величину угла ата-
. ки относительно наивыгоднейшего угла а. Вертикальная
-перегрузка определяется по шкале 3. Число М отсчиты-
вается по ленточной шкале 4, воздушная скорость — по
гшкале 5. Заданное значение числа М полета устанав-
ливается с помощью задатчика 11. Величина заданного
.числа М определяется по показаниям счетчика 12 и
положению командного индекса 7. Заданная величина
воздушной скорости устанавливается задатчиком 10
и отсчитывается по счетчику 9 и индексу 8. Командные
индексы освобождают летчика от необходимости запо-
минать заданные значения параметров. Задача пилоти-
рования в этом случае сводится к совмещению команд-
ных индексов с горизонтальной линией 1. Если прибор
"выключен, то в поле зрения летчика появляется сигналь-
'ный флажок 6.
Шкалы приборов с приближенной оценкой измеряе-
\мого параметра не оцифровываются в единицах измеря-
емой величины. Примером прибора с приближенной
‘ оценкой может служить указатель поворота и скольже-
ния (рис. МЗв). Отклонение стрелки влево или вправо
^свидетельствует о том, что самолет разворачивается в
[соответствующую сторону. Деления шкалы предназна-
чены для отсчета угла крена во время виража с опре-
деленной скоростью полета. Величина этой скорости
^-указывается на шкале прибора. По положению шарика
^внутри трубки с жидкостью можно установить, как со-
вершается полет,— со скольжением или без скольжения.
[Однако величину угла скольжения в градусах по поло-
жению шарика отсчитать нельзя.
| Интегральные приборы показывают значение некото-
рой обобщенной характеристики, полученной в резуль-
тате переработки информации от нескольких датчиков,
Измеряющих отдельные параметры. К интегральным
рюжно отнести комбинированные приборы, с помощью
|которых выдается информация о величине нескольких
Параметров полета или режима работы авиадвигателя.
^Примером комбинированного пилотажного прибора мо-
жет служить прибор типа ДА, измеряющий вертикаль-
ную скорость, угол скольжения и указывающий направ-
ление разворота самолета. Комбинированные приборы
Я Зак. 833 33
Рйс. 1.14. Пилотажный командный
прибор
контроля силовой установки самолета обычно измеряют
температуру и давление масла, а также давление топлива.
Командные приборы не измеряют величины отдель-
ных параметров режима полета и дают только непосред-
ственные указания или команды летчику о том, как он
должен отклонять органы управления для того, чтобы
выдерживался заданный режим полета. Сигнал команды
формируется в специальном счетно-решающем устрой-
стве в результате обработки информации от нескольких
датчиков. Структурный
состав команды опре-
деляется законом уп-
равления прибора, за-
висит от режима поле-
та и устанавливается
заранее. При управле-
нии самолетом по
командному прибору
(рис. 1.14) летчик дол-
жен удерживать
командные стрелки в
среднем положении.
Для этого с помощью
рулей он должен уста-
навливать строго опре-
деленные значения уг-
лов тангажа и крена.
В приборах с изо-
бразительной или наглядной индикацией местоположение
самолета может быть показано на карте местности с по-
мощью оптического или телевизионного проектора.
К приборам с изобразительной индикацией относятся так
называемые плановые навигационные приборы. По шка-
ле такого прибора можно определить положение само-
лета относительно траектории, курс и некоторые другие
параметры.
Размещение приборов на приборной доске. От рас-
положения приборов на приборной доске зависит полно-
та и точность информации о параметрах полета и режи-
ма работы силовой установки. Это в свою очередь влияет
на качество управления самолетом и двигателем, а так-
же на безопасность полета.
При размещении приборов учитывается общее коли-
34
^ttro контролируемых параметров, периодичность
контроля каждого параметра и среднее время, затрачи-
ваемое летчиком на отсчет показаний отдельных прибо-
йЬв. Строгий порядок в размещении приборов на при-
борной доске обусловлен увеличением количества прибо-
Ерв, необходимых для управления современным
Ййерхзвуковым самолетом, и уменьшением времени, ко-
торым располагает летчик для получения, обработки
Информации и принятия решения. Приборы на прибор-
ной доске летчика объединяются в определенные груп-
|вл, связанные общностью физической природы контро-
лируемых параметров. Приборная доска обычно состоит
центрального, левого и правого пультов (рис. 1.15).
Ййлотажно-навигационные приборы контролируют поло-
жение самолета в пространстве, курс, высоту, скорость
и другие быстро изменяющиеся параметры полета. Эта
информация необходима летчику для управления само-
летом на всех этапах полета. Поэтому пилотажно-на-
вигационные приборы помещаются в центральной и
Невой части приборной доски, куда направлен взгляд
Летчика при нормальном положении его головы. Цен-
тральное место на приборной доске занимает авиагори-
зонт. В непосредственной близости к нему устанавли-
ваются вариометр, высотомер, указатель скорости, ука-
затель поворота.
г Приборы контроля силовой установки измеряют па-
раметры, характеризующиеся определенным постоян-
ством. В полете летчик контролирует параметры силовой
гтановки периодически с интервалами времени 20—
ек. Поэтому приборы этой группы размещаются в
>едней и нижней части правого пульта приборной доски,
(а правом пульте установлены и приборы контроля са-
(Йетной электросети. Приборы системы жизнеобеспе-
чения размещаются в нижней части центрального и
ЙВого пультов приборной доски. На левом пульте
)ычно устанавливается прибор контроля загрузки
|ганов управления, указатель перегрузки, посадочный
Анализатор. На пультах приборной доски размещают-
I 'акже сигнальные табло и лампочки.
RfHa самолете с несколькими двигателями приборы
Шятроля авиадвигателей, измеряющие одинаковые па-
Ц'метры, размещаются на одной горизонтальной линии:
Цхометры в одном ряду, термометры выходящих га-
35
справа размещается группа указателя высоты и верти-
кальной скорости.
Крепление указателей приборов к приборным доскам.
Указатели приборов монтируются в корпусах, которые
защищают механические и электрические элементы при-
бора от атмосферных влияний и механических воздей-
ствий. Корпус указателя может быть цилиндрическим,
прямоугольным, квадратным. Цилиндрические корпусы
Рис. 1.17. Схема крепле-
ния приборов на прибор-
ной доске:
/—приборная доска; 2 —
фланец; 3 — разрезная са-
моконтрящаяся гайка; 4 —
корпус прибора
имеют стандартные размеры 40,
60, 80 мм. В ряде случаев корпу-
сы приборов могут иметь диаметр
более 80 мм. Для изготовления
корпусов указателей авиационных
приборов применяются алюминие-
вые сплавы и пластмассы. Для
крепления к приборной доске на
корпусе указателя делаются фла-
нец, один или несколько прили-
вов. Во фланец и в приливы за-
вальцовываются или запрессовы-
ваются самоконтрящиеся гайки
под винты. Через отверстия в
приборной доске винты крепле-
ния ввертываются в самоконтря-
щиеся гайки (рис. 1.17). Головки
винтов могут быть полукруглыми
или потайными.
Приборные доски, а также
указатели и другие конструктив-
ные элементы приборов, устанав-
ливаются на самолете с помощью
упругих подвесов, называемых
амортизаторами. Применение
амортизаторов уменьшает влияние на указатели прибо-
ров, вибраций и ударных перегрузок.
В авиации применяются резиновые, пружинные, пру-
жинно-резиновые и пружинно-фрикционные амортиза-
торы.
Резиновые амортизаторы типа АП (рис. 1.18а) име-
ют сравнительно небольшие размеры и до недавнего
времени были особенно широко распространены. Амор-
тизатор состоит из пластины 1, резины 2 и втулки 3.
Резина является одновременно пружиной и успокоите-
38
| колебаний. Эффект успокоения обеспечивается за
«Щ- большого внутреннего трения резины. С пониже-
ны окружающей температуры жесткость резины уве-
шивается. При низких температурах (—50ч—60° С)
инна становится настолько жесткой, что амортизатор
гкращает свое действие.
‘Пружинный амортизатор (рис. 1.186) состоит из
диндрической пружины 1 и резины 2. Такой амортиза-
Рис. 1.18. Амортизаторы:
а — резиновый амортизатор типа АП:
1 — пластина; 2 — резина; 3 — металлическая втулка;
б — пружинный амортизатор:
1 — пружина; 2—резина;
в — пружинно-резиновый амортизатор:
7—пружина; 2 — резина;
г — пружинно-фрикционный амортизатор:
1 — пружины; 2 — резиновое кольцо; 3 —* цилиндр
|рействует только при вполне определенной расчет-
|йагрузке. Демпфирование собственных колебаний у
амортизаторов очень мало и резина является
||йчителем амплитуды колебаний. В пружинно-ре-
$ых и пружинно-фрикционных амортизаторах
39
(рис. 1.18в, г) нагрузка воспринимается металлической
пружиной. Демпфирование колебаний в пружинно-ре-
зиновых амортизаторах осуществляется благодаря внут-
реннему трению резины. Колебания в пружинно-фрик-
ционных амортизаторах демпфируются силами сухого
трения между кольцом 2 и цилиндром 3.
Амортизаторы для установки приборов выбираются
с учетом величины нагрузки и статического прогиба
упругого элемента, необходимого коэффициента аморти-
зации, заданного периода собственных колебаний си-
стемы прибор — амортизатор и спектра частот перегру-
зок, пропускаемых амортизатором на прибор. Для
крепления приборов используются несколько амортиза-
торов, которые устанавливаются относительно центра
тяжести прибора так, чтобы нагрузка на все амортиза-
торы была одинаковой. При установке прибора или при-
борной доски на резиновый амортизатор типа АП необхо-
димо обращать внимание на то, чтобы нагрузка к амор-
тизатору прикладывалась со стороны надписи на резине.
Освещение приборных досок и приборов. Кабины,
приборные доски и приборы современных самолетов
при полете ночью и в условиях пониженной освещенно-
сти подсвечиваются ультрафиолетовыми лучами или
красным светом. Если кабина оборудована системой
подсвета ультрафиолетовыми лучами, то надписи на
приборной доске, на шкалах приборов, деления и циф-
ры шкал, стрелки и ручки управления покрываются све-
тящейся массой временного действия. Облучение ультра-
фиолетовыми лучами приборных досок и шкал приборов
производится с помощью осветительной арматуры
АРУФОШ-45 (рис. 1.19). Арматура состоит из корпуса 3
с кронштейном 4, лампы УФО-4А 1 и светофильтра 2.
Корпус арматуры устанавливается с помощью кронш-
тейнов на борту кабины, на ручке управления или на
колонке штурвала, обращенной в сторону приборной
доски. Арматура может быть повернута в нужном на-
правлении и закреплена с помощью фиксатора. Для
освещения кабин экипажа используются также лампы
белого света в арматуре КЛСРК-45 и выдвижные лампы
типа ВЛС.
Если кабина самолета подсвечивается красным све-
том, то надписи, шкалы, стрелки приборов, отметки на
ручках управления покрываются белой эмалью. Шкалы
40
I
Рис. 1.19. Осветительная арматура
АРУФОШ-45:
1 — лампа УФ0-4А; 2 — светофильтр; 3 — кор-
пус; 4 — кронштейн
Рис. 1.20. Щелевой светильник:
/ — корпус; 2 — электропровод; 3 — светофильтр; 4 —
лампа; 5 — откидная крышка
41
приборов подсвечиваются щелевыми светильниками.
Каждый светильник (рис. 1.20) состоит из панели, двух
лампочек и откидной крышки. Лампочки помещаются в
откидных патронах с красными светофильтрами. Панель
светильника через приборную доску крепится двумя
винтами к фланцу прибора. Надписи на приборной дос-
ке и пультах освещаются специальными светоблоками
с высокой и низкой арматурой. Светоблоки снабжены
красными светофильтрами.
Все надписи на приборной доске, левом и правом
пультах гравируются на пластинах органического стек-
ла. Торцевые части пластин покрыты сначала белой, а
затем черной краской для уменьшения потерь светового
потока. Позади пластины с надписью расположена за-
щитная панель из органического стекла, окрашенная в
черный цвет. Это позволяет читать надпись в дневных
условиях. Надписи подсвечиваются сбоку светильника-
ми с высокой и низкой арматурой. Светильник состоит
из непрозрачного колпачка, корпуса с красным свето-
фильтром и лампочки СМ-37.
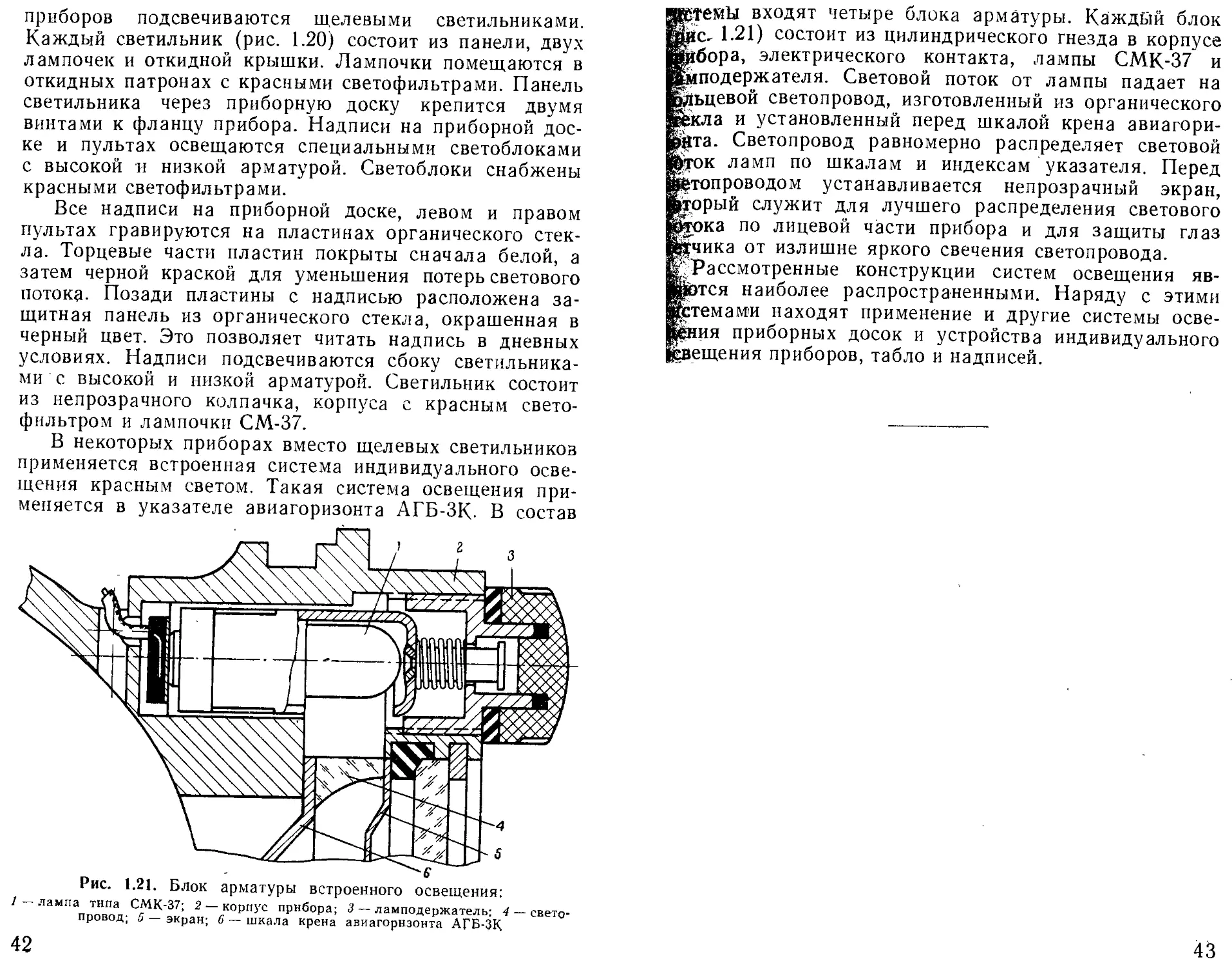
В некоторых приборах вместо щелевых светильников
применяется встроенная система индивидуального осве-
щения красным светом. Такая система освещения при-
меняется в указателе авиагоризонта АГБ-ЗК- В состав
Рис. 1.21. Блок арматуры встроенного освещения:
лампа типа СМК-37; 2 — корпус прибора; 3 — ламподержатель; 4 — свето-
провод; 5— экран; 6 — шкала крена авиагоризонта АГБ-ЗК
42
НКТемЫ входят четыре блока арматуры. Каждый блок
Ес. 1.21) состоит из цилиндрического гнезда в корпусе
В бора, электрического контакта, лампы СМК-37 и
подержателя. Световой поток от лампы падает на
б^ьцевой светопровод, изготовленный из органического
|екла и установленный перед шкалой крена авиагори-
ргга. Светопровод равномерно распределяет световой
Ьток ламп по шкалам и индексам указателя. Перед
йтопроводом устанавливается непрозрачный экран,
Цгорый служит для лучшего распределения светового
Вока по лицевой части прибора и для защиты глаз
чика от излишне яркого свечения светопровода.
К Рассмотренные конструкции систем освещения яв-
Ьэтся наиболее распространенными. Наряду с этими
Ктемами находят применение и другие системы осве-
рния приборных досок и устройства индивидуального
[£вещения приборов, табло и надписей.
43
Плотность воздуха р представляет отношение массы
воздуха к его объему и измеряется в килограммах на
кубический метр (кг/ж3). Единицей измерения плотности
воздуха до введения системы СИ была кг • сек2/ж4.
Единицы плотности связаны соотношением 1 кг!м-'=
= 0,102 кг • сек2/ж4.
Плотность воздуха на уровне моря р0 =
= 0,001225 г/сж3=0,125 кг-сек2/ж4.
Свойства воздуха характеризуются вязкостью, тепло-
проводностью, сжимаемостью, влажностью и др.
Стандартная атмосфера. Параметры атмосферы —
давление, температура, плотность на одной и той же
высоте не являются постоянными. Они зависят от време-
ни года, времени суток, широты места и других факто-
ров. При изменении высоты параметры атмосферы так-
же изменяются. Но эти изменения происходят не всегда
по одним и тем же законам. Колебания в изменении па-
раметров атмосферы создают существенные неудобства
и трудности при решении аэродинамических задач и
разработке анероидно-мембранных приборов. Поэтому
устанавливается некоторый средний закон изменения
параметров атмосферы, который соответствует условной
или стандартной атмосфере.
В нашей стране принята стандартная атмосфера
(СА), введенная по ГОСТ 4401—64. В таблицах СА
содержатся значения параметров воздуха на уровне мо-
ря и на различных высотах, полученные на основании
обработки среднегодовых измерений параметров воздуха
над областями средних широт северного полушария. Ну-
левой высотой в СА считается уровень моря, которому
соответствуют следующие нормальные атмосферные ус-
ловия:
— барометрическое давление воздуха Pq =
= 101,325 кг/ж2 = 10332,3 кг/ж2 = 760 жж рт. ст.-,
— температура воздуха Г=273,15°+15° = 288,15° К;
—• плотность воздуха р0= 1,225 кг)м?=
= 0,12492 кг • сек2/ж4.
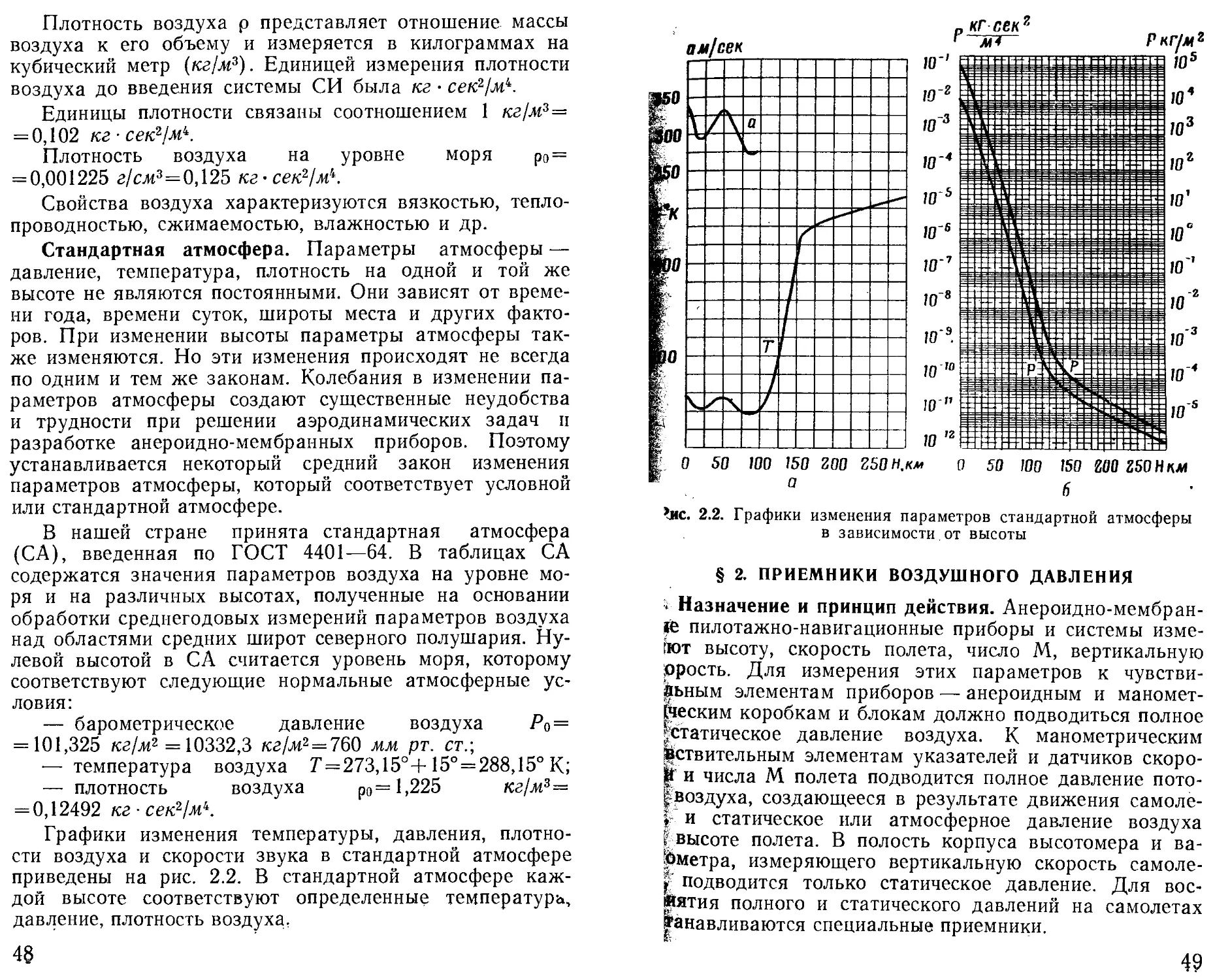
Графики изменения температуры, давления, плотно-
сти воздуха и скорости звука в стандартной атмосфере
приведены на рис. 2.2. В стандартной атмосфере каж-
дой высоте соответствуют определенные температура,
давление, плотность воздуха,
’лс. 2.2. Графики изменения параметров стандартной атмосферы
в зависимости от высоты
§ 2. ПРИЕМНИКИ ВОЗДУШНОГО ДАВЛЕНИЯ
< Назначение и принцип действия. Анероидно-мембран-
fe пилотажно-навигационные приборы и системы изме-
йот высоту, скорость полета, число М, вертикальную
ррость. Для измерения этих параметров к чувстви-
дьным элементам приборов — анероидным и маномет-
(ческим коробкам и блокам должно подводиться полное
^Статическое давление воздуха. К манометрическим
йствительным элементам указателей и датчиков скоро-
и числа М полета подводится полное давление пото-
|воздуха, создающееся в результате движения самоле-
и статическое или атмосферное давление воздуха
[' высоте полета. В полость корпуса высотомера и ва-
Ьметра, измеряющего вертикальную скорость самоле-
р подводится только статическое давление. Для вос-
йятия полного и статического давлений на самолетах
|анавливаются специальные приемники.
£
49
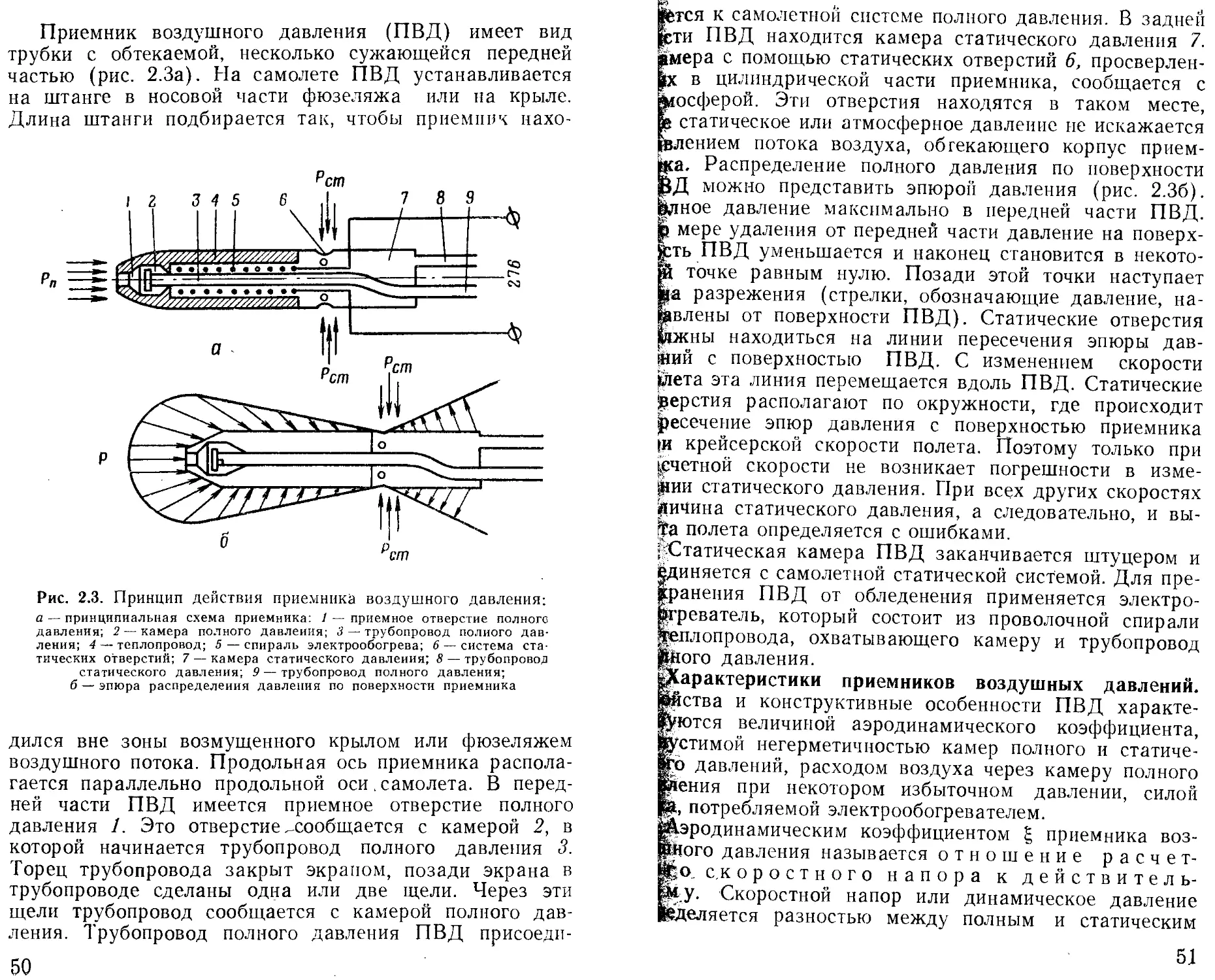
Приемник воздушного давления (ПВД) имеет вид
трубки с обтекаемой, несколько сужающейся передней
частью (рис. 2.3а). На самолете ПВД устанавливается
на штанге в носовой части фюзеляжа или на крыле.
Длина штанги подбирается так, чтобы приемник нахо-
Рис. 2.3. Принцип действия приемника воздушного давления:
а — принципиальная схема приемника: 1 — приемное отверстие полноте
давления; 2—камера полного давления; 3— трубопровод полного дав-
ления; 4 — теплопровод; 5 — спираль электрообогрева; 6 — система ста-
тических отверстий; 7 — камера статического давления; 8 — трубопровод
статического давления; 9— трубопровод полного давления;
б — эпюра распределения давления по поверхности приемника
дился вне зоны возмущенного крылом или фюзеляжем
воздушного потока. Продольная ось приемника распола-
гается параллельно продольной оси.самолета. В перед-
ней части ПВД имеется приемное отверстие полного
давления 1. Это отверстие . сообщается с камерой 2, в
которой начинается трубопровод полного давления 3.
Торец трубопровода закрыт экраном, позади экрана в
трубопроводе сделаны одна или две щели. Через эти
щели трубопровод сообщается с камерой полного дав-
ления. Трубопровод полного давления ПВД присоеди-
50
Eifercn к самолетной системе полного давления. В задней
йти ПВД находится камера статического давления 7.
«мера с помощью статических отверстий 6, просверлен-
в цилиндрической части приемника, сообщается с
осферой. Эти отверстия находятся в таком месте,
статическое или атмосферное давление не искажается
лением потока воздуха, обтекающего корпус прием-
ка. Распределение полного давления по поверхности
рД можно представить эпюрой давления (рис. 2.36).
^дное давление максимально в передней части ПВД.
мере удаления от передней части давление на поверх-
йсть ПВД уменьшается и наконец становится в некото-
>Й точке равным нулю. Позади этой точки наступает
|ца разрежения (стрелки, обозначающие давление, на-
гавлены от поверхности ПВД). Статические отверстия
Ецкны находиться на линии пересечения эпюры дав-
ний с поверхностью ПВД. С изменением скорости
йета эта линия перемещается вдоль ПВД. Статические
^ерстия располагают по окружности, где происходит
ресечение эпюр давления с поверхностью приемника
|и крейсерской скорости полета. Поэтому только при
(учетной скорости не возникает погрешности в изме-
ании статического давления. При всех других скоростях
^иЧина статического давления, а следовательно, и вы-
полета определяется с ошибками.
'Статическая камера ПВД заканчивается штуцером и
|диняется с самолетной статической системой. Для пре-
кранения ПВД от обледенения применяется электро-
Вгреватель, который состоит из проволочной спирали
Теплопровода, охватывающего камеру и трубопровод
1Його давления.
IХарактеристики приемников воздушных давлений.
1ства и конструктивные особенности ПВД характе-
чотся величиной аэродинамического коэффициента,
метимой негерметичностью камер полного и статиче-
о давлений, расходом воздуха через камеру полного
гёния при некотором избыточном давлении, силой
I, потребляемой электрообогревателем.
Шэродинамическим коэффициентом £ приемника воз-
рного давления называется отношение расчет-
Ко. с.коростного напора к д е й ств и тел ь-
»у. Скоростной напор или динамическое давление
Выделяется разностью между полным и статическим
51
давлением. Величина скоростного напора вычисляется по
формуле
где р — плотность воздуха;
V — скорость полета.
Различие между величиной расчетного и действи-
тельного скоростного напора объясняется тем, что воз-
душный поток при движении самолета не совпадает с
направлением продольной оси ПВД. Отклонение потока
от оси ПВД в вертикальной плоскости определяется уг-
лом атаки а, а в горизонтальной — углом скольжения р.
Кроме того, различие в величинах скоростных напоров
зависит от конструктивных особенностей ПВД и скоро-
сти полета. Величина аэродинамического коэффициен-
та g определяется при нулевых значениях углов атаки
и скольжения либо при изменении этих углов в некото-
рых ограниченных пределах. Конструкция приемника
воздушного давления зависит от скорости полета и схемы
питания анероидно-мембранных приборов, принятой на
самолете. В зависимости от скорости ПВД обычно под-
разделяются на дозвуковые и сверхзвуковые. По количе-
ству камер ПВД могут быть одно-, двух- и трехкамер-
ными.
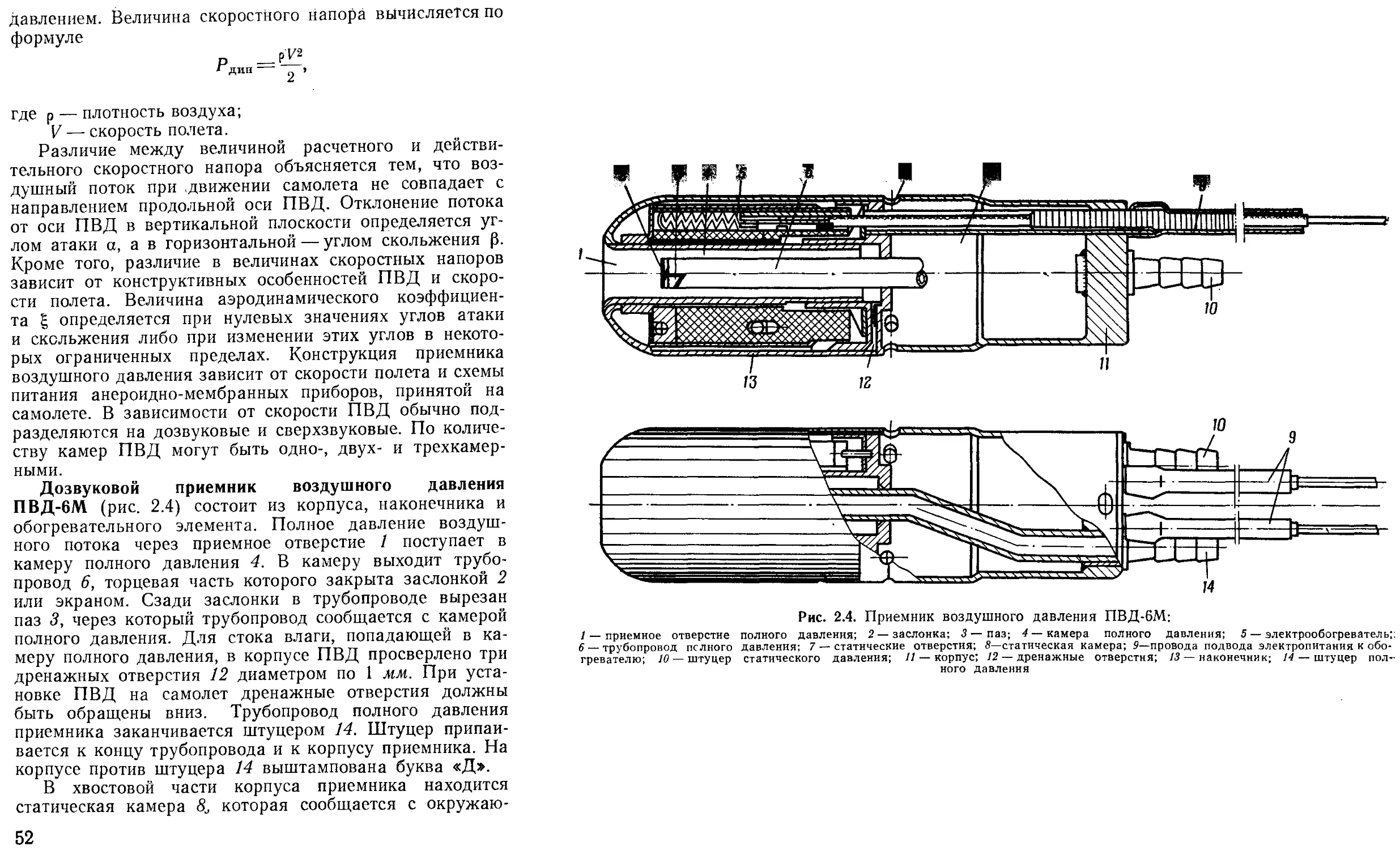
Дозвуковой приемник воздушного давления
ПВД-6М (рис. 2.4) состоит из корпуса, наконечника и
обогревательного элемента. Полное давление воздуш-
ного потока через приемное отверстие / поступает в
камеру полного давления 4. В камеру выходит трубо-
провод 6, торцевая часть которого закрыта заслонкой 2
или экраном. Сзади заслонки в трубопроводе вырезан
паз 3, через который трубопровод сообщается с камерой
полного давления. Для стока влаги, попадающей в ка-
меру полного давления, в корпусе ПВД просверлено три
дренажных отверстия 12 диаметром по 1 мм. При уста-
новке ПВД на самолет дренажные отверстия должны
быть обращены вниз. Трубопровод полного давления
приемника заканчивается штуцером 14. Штуцер припаи-
вается к концу трубопровода и к корпусу приемника. На
корпусе против штуцера 14 выштампована буква «Д».
В хвостовой части корпуса приемника находится
статическая камера <Х которая сообщается с окружаю-
52
Рис. 2.4. Приемник воздушного давления ПВД-6М:
/ — приемное отверстие полного давления; 2 —заслонка; 3—паз; -/—камера полного давления; 5 — электрообогреватель;:
6 — трубопровод полного давления; 7 — статические отверстия; 8—статическая камера; 9—провода подвода электропитания к обо-
гревателю; 10 — штуцер статического давления; // — корпус; /2 —дренажные отверстия; 13 — наконечник; 14 — штуцер пол-
ного давления
щей атмосферой через восемь отверстий 7 диаметром по
2,5 жж. В чяпнюю часть камепы впаян nrrvueo статиче-
ского да!
штампов;
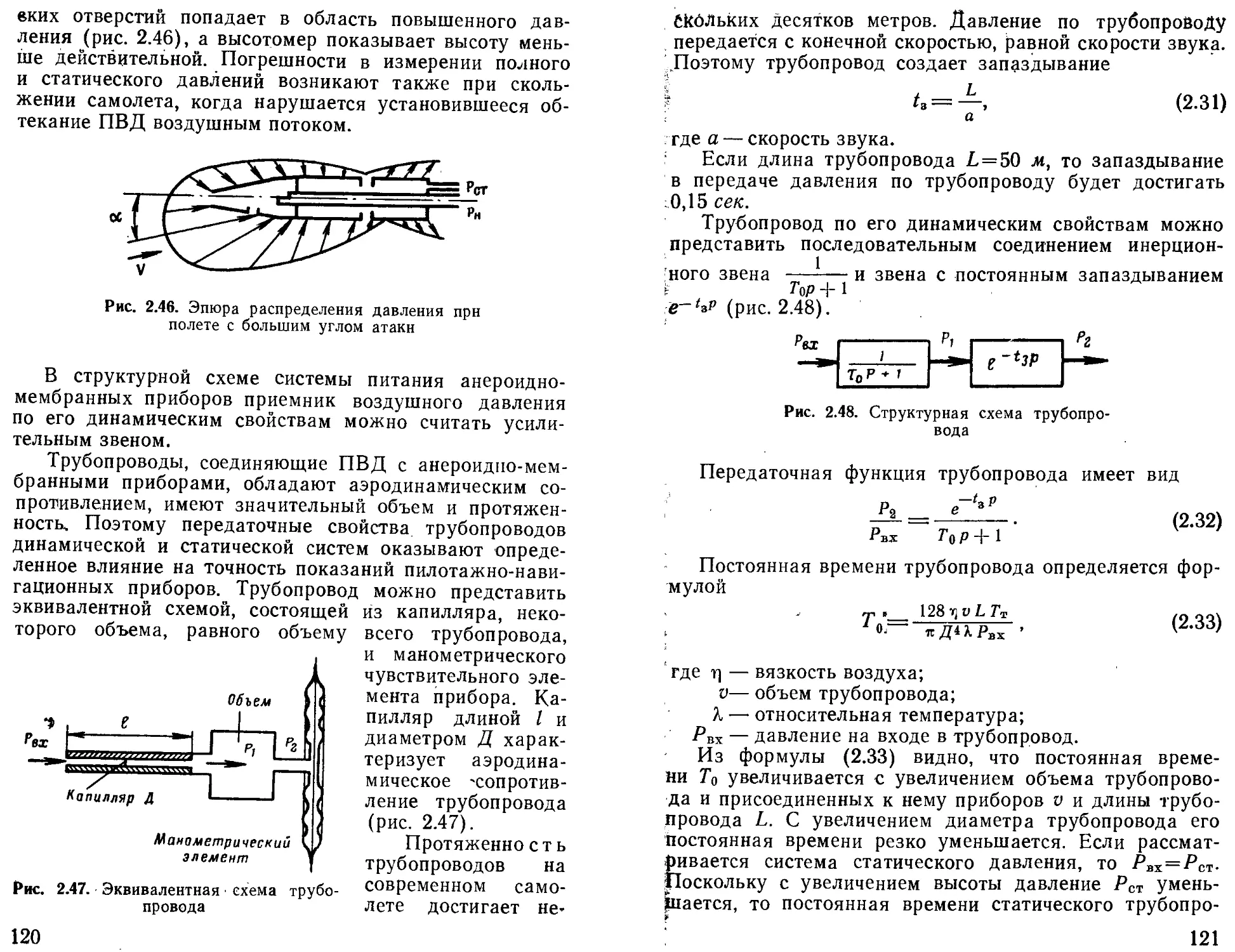
В пе
электроо!
камеру I
собой тр
ми пазад
нихромоЕ
ми 9 с бс
На к
конечник
проверки
наконечв
ника ни!
ции ПОЕ
поврежд
емника i
током, <
приема
счете пр
мембран
Свер
ляет соб
наконеч!
ку прип
провода
В средн
давлени:
камеру
рый спа
крыта з
вод соо(
влаги в
отверстЕ
Меж
проводо
гр св а тег
каркаса -_______________ _________ _ ________
нихромовая спираль 11. Концы спирали привариваются
к токоподводам, а последние припаиваются к наконечни-
кам токоподводящих проводов 15.
54
Статическая камера 12 приемника представляет со-
де кольцевую проточку в хвостовике 13. С атмосферой
Ьмера сообщается через две группы отверстий 17, диа-
метр каждого отверстия 1 мм. Через продольный канал
Ь в теле хвостовика статическая камера соединяется с
Трубопроводом статического давления 19.
t: Штуцеры трубопроводов и проводники подвода элек-
Ьэопитания к обогреву ПВД выводятся через отверстия
| дне приемника. Штуцер трубопровода статического
давления выводится через отверстие, обозначенное бук-
рой «С», трубопровод полного давления — через отвер-
стие с буквой «Д». На самолете приемник ПВД-5 монти-
Ьуется так, чтобы слово «Верх» на переходнике было
сверху, тогда дренажное отверстие камеры полного дав-
ления будет обращено вниз. Штуцеры «Д» и «С» прием-
ника присоединяются к самолетным системам полного
| статического давлений соответственно. Для присоеди-
нения ПВД к самолетным системам используются дюри-
рвые шланги с внутренним диаметром 4 мм и внешним
мм.
к Кроме приемников ПВД-5 и ПВД-6М, на самолетах
“^меняются приемники ПВД-4, ПВД-7, ПВД-9. При-
ник ПВД-4 рассчитан на дозвуковые скорости полета,
э конструкции он в основном подобен ПВД-5. В ПВД-5
отличие от ПВД-4 электрообогреватель приближен к
мере полного давления, снижена мощность электрообо-
звателя и уменьшена длина приемника. Приближение
огревателя к камере полного давления позволило улуч-
ггь ее обогрев и уменьшить опасность обледенения
^Приемник ПВД-7 рассчитан на сверхзвуковые скоро-
i полета и в отличие от ПВД-5 имеет одну камеру
|ного давления и две камеры статического давления.
[Приемник полного давления ППД-1 (рис. 2.6) пред-
|начен для приема полного давления воздушного по-
Й и не воспринимает отдельно атмосферное давление.
|Д-1 по конструкции является однокамерным. Прием-
11 состоит из наконечника 1, обтекаемого кожуха 3 и
Йнца 4. В передней части наконечника имеется прием-
отверстие, сообщающееся с камерой полного давле-
fc В камере просверлены четыре дренажных отвер-
Й 11 для стока влаги. Через трубопровод камера
иняется со штуцером 7, а затем с самолетной систе-
55
мой полного давления. Внутри наконечника помещается
обогревательный элемент 2, охватывающий трубопровод.
Подвод электропитания к обогревателю осуществляется
с помощью штепсельной вилки 5 и розетки 6. Наконеч-
ник, кожух и фланец приемника соединены путем сварки
и пайки. Поэтому конструкция приемника ППД-1 яв-
ляется неразборной. Приемник полного давления выпу-
скается в вариантах ППД-1 и ППД-1В. У приемника
ППД-1 штуцер полного давления прямой, у ППД-1В —
изогнутый.
Рис. 2.6. Приемник полного давления ППД-1:
1 — наконечник; 2 — обогревательный элемент; 3 — кожух; 4 — фланец;
5 — штепсельная вилка; 6 — розетка; 7 — прямой штуцер; 8 — угловой
штуцер; 9 — колпачок; 10 — крепежные отверстия; 11 — дренажные
отверстия
Приемник ППД-1 устанавливается на наружной по-
верхности обшивки фюзеляжа самолета. В месте уста-
новки приемника не должно быть скачков уплотнения,
завихрений и скосов потока воздуха. Место установки
приемника для каждого типа самолета определяется
опытным путем. Приемник полного давления ППД-1
является аварийным и подключается к системе полного
давления в случае выхода из строя основного приемника.
При работе аварийного приемника полного давления
для восприятия статического давления служит специаль-
56
^ай приемник (рис. 2.7). Такой приемник состоит ИЗ
Трубки, установленной напротив отверстия 1 в обшивке
Ьюзеляжа. Трубка проходит внутри обогревательного
^Демента 4. Обмотка элемента подключается к бортсети
достоянного тока вилкой 5 и розеткой 6. Место для
Йверстия приемника статического давления выбирается
||к, чтобы атмосферное давление не искажалось дав-
Рис. 2.7. Приемник статического давления:
/ — приемное отверстие; 2 — предохранительный колпачок; 3 — пру-
жина; 4 — обогревательный элемент; 5 — вилка; 6 — разъемная ро-
зетка; 7 — обшивка самолета
йением потока воздуха, обтекающего самолет в полете.
Н Особенности эксплуатации ПВД. Приемники воз-
ЙУшного давления всех типов монтируются на самолете
Каким образом, чтобы дренажные отверстия были обра-
щены вниз. На корпусе некоторых ПВД на переходнике
Шштамповывается обозначение «Верх», которое при
Правильной установке приемника должно быть сверху.
57
закрывается резиновой заглушкой (рис. 2.116). Перед
началом проверки краны 4 и 5 закрываются. Затем кра-
ном 4 в камере полного давления создается определен-
ное для данного типа ПВД избыточное давление и по
реометру определяется расход воздуха. Величина рас-
хода для каждого типа ПВД имеет определенное зна-
чение в пределах от 2 до 15 л/мин.
У приемника ППД-1 (ППД-1В) проверяется расход
воздуха через трубопровод полного давления, который
должен быть не менее 10 л!мин, и расход воздуха через
дренажные отверстия, который должен составлять от
2 до 15 л/мин. Схема проверки аналогична рис. 2.11а.
Для проверки силы тока, потребляемого электрообо-
гревательным элементом приемника, в цепь элемента
включаются амперметр и вольтметр постоянного тока
(рис. 2.12). Затем включается питание постоянным то-
3
Рис. 2.12. Схема проверки силы тока, потреб-
ляемого электрообогревателем:
1 — электрообогревательный элемент; 2 — вольтметр;
3 — амперметр
ком и через 1—2 мин производится отсчет показаний
амперметра. Измеренная сила тока сравнивается с до-
пустимой для данного типа ПВД.
Сопротивление изоляции между токоведущими про-
водами приемника и корпусом должно быть не менее
20 Мом. Для измерения сопротивления изоляции исполь-
зуется мегомметр с максимальным напряжением 500 в.
Проверка состояния электропроводов, приемных и дре-
нажных отверстий производится внешним осмотром.
На самолете приемники воздушного давления прове-
ряются совместно со статической и динамической систе-
мами с помощью контрольно-поверочной аппаратуры
КПА-ПВД.
§ 3. ВЫСОТОМЕРЫ
Измерение высоты. Приборы, используемые для из-
мерения высоты полета, называются высотомерами.
69
;мерение высоты производится барометрическим, ра-
^техническим, ионизационным, радиоактивным, опти-
*£ким-и другими методами.
; В авиации наибольшее распространение получил ба-
цлетрический метод измерения высоты. Этот метод
яован на измерении атмосферного давления, которое
|йкционально связано с высотой. Если измерять атмо-
Врное давление, то по известной функциональной за-
Вимости можно определить высоту полета. Барометри-
Ький метод применим для измерения высоты только
Лотных слоях атмосферы до 35—40 км. Барометриче-
Й высотомеры обладают сравнительно невысокой точ-
Тью измерений и поэтому не пригодны при полете на
юй высоте или при выполнении посадки. На борту
рлета могут быть измерены следующие высоты
L 2.13):
~ абсолютная — высота относительно уровня моря,
Давление 760 мм рт. ст. и температура 15,15° С;
— 'относительная — высота над некоторым опреде-
лим районом земной поверхности (над аэродромом
&а, местом посадки и т. п.) ;
*- истинная — высота полета над данной местностью.
1ринцип действия высотомера. Атмосферное давле-
|с увеличением высоты уменьшается. До высоты
|,1 ООО м давление уменьшается по закону
(2.3)
р = р<> 1-^я Г
Ро, То — давление и температура на уровне моря,
0065 град/м — температурный градиент, R — газо-
1бстоянная воздуха.
63
Равенство (2.3), которое устанавливает зависимость
давления от высоты, называется стандартной барометри-
ческой формулой. Из этой формулы можно получить
соотношение, определяющее зависимость высоты от
атмосферного давления. Такое соотношение называется
стандартной гипсометрической форму-
ле й и имеет вид
(24)
Ч \ро/ J
Для высот более 11 км при выводе барометрической
и гипсометрической формулы температура воздуха счи-
тается постоянной и равной 7=216,66° К, т. е. т = 0.
Поэтому стандартная барометрическая и гипсометриче-
ская формулы принимают вид:
_ Я — 11 000
Р — Рие RT" ' (2.5)
Я=11000 + ЯТя1п . (2.6)
На практике стандартная барометрическая формула
с учетом значений Рц, преобразуется к виду
lg Р = 2,22943 — 0,68532 • 10“4 (Я — 11 000). (2.7)
Формулы (2.5), (2.6), (2.7) справедливы только до
высоты Н = 25 км, пока значение температуры остается
постоянным и равным 216,66° К. На высотах более 25 км
температура начинает резко возрастать и указанные
формулы становятся неточными.
Формулы (2.3), (2.4), (2.5), (2.6) были составлены в
предположении, что параметры атмосферы изменяются
в точном соответствии со стандартной атмосферой СА.
Но действительные значения давления и температуры
воздуха на разных высотах отличаются от стандартных.
Расчет барометрических высотомеров и градуировка их
шкал производятся по стандартным формулам (2.3, 2.4,
2.5 и 2.6).
Чувствительным элементом барометрического высото-
мера (рис. 2.14) является анероидная коробка, или ане-
роидный блок. Коробка помещается в герметическом
корпусе, который сообщается через статическую систему
и приемник статического давления с атмосферой. Изме-
64
®ние атмосферного давления вызывает деформацию
яероидной коробки. Эта деформация передается через
кинематическую передачу (кривошип, зубчатый сектор и
(рибку), на стрелку. Высота отсчитывается по градуиро-
ванной шкале прибора.
Рис. 2.14. Принципиальная схема
мера
барометрического высото-
цМеханизм барометрического двухстрелочного высото-
|ра ВД-28 (рис. 2.15) устанавливается в стандартном
раетическом корпусе. Нижний центр анероидной ко-
И5ки 10 связан с основанием корпуса прибора. Верхний
Вир при изменении давления может перемещаться.
|Йакение центра коробки через биметаллический ком-
Цсатор 1-го рода 9, тягу 8, вилку 5 и биметаллический
65
компенсатор 2-го рода 6 передается на ось 7. Поворот
оси с помощью зубчатого сектора 4 передается через
систему шестерен и трибок на стрелки 1. Большая стрел-
ка совершает один оборот при изменении высоты на
1000 м. Если высота изменяется в пределах диапазона
измерений прибора, т. е. до 28 км, большая стрелка со-
14 13
Рис. 2.15. Кинематическая схема высотомера ВД-28:
1 — стрелки; 2—'Индексы; 3—основание; 4 — зубчатый сектор; 5 —регули-
руемая вилка; 6 — биметаллический компенсатор 2-го рода; 7 — ось сектора;
8 — тяга; 9— биметаллический компенсатор 1-го рода; 10—анероидная ко-
робка; 11 — шестерня; 12 — трибки; 13 — накатная гайка; 14 — кремальера;
15 — шкала давлений; 16 — шкала высоты
вершает 28 оборотов, а малая — один неполный оборот.
Цена одного деления шкалы для большой стрелки со-
ставляет 10 м высоты. Эта величина и характеризует
точность измерения высоты.
Все детали механизма высотомера смонтированы на
общем основании 3, имеющем вид большой шестерни.
Основание прибора может поворачиваться рукояткой
или кремальерой 14 через зубчатую передачу. Поворот
кремальеры передается на шкалу давлений и индексы.
Если накатная гайка 13 под кремальерой завернута, то
при повороте кремальеры одновременно поворачиваются
66
Ерносительно шкалы высот стрелки 1, индексы 2 и баро-
етрическая шкала 15. При повороте основания 3 боль-
[ая стрелка повернется на тот же угол, что и основание.
.Угол поворота малой стрелки у высотомера ВД-28 будет
6.28 раз меньше, чем угол поворота большой стрелки,
г Погрешности высотомера. Барометрический высото-
мер обладает методическими и инструментальными по-
грешностями. Показания барометрического высотомера,
проградуированного по формуле (2.4), зависят от дав-
ления Ро и температуры То на уровне моря, фактической
Едичины температурного градиента т или действитель-
Ей- температуры на измеряемой высоте. Если Тй и т
вответствуют стандартным значениям по СА, то прибор
Едет показывать высоту над уровнем, давление на ко-
тором равно Ро.
к' Для измерения относительной или истинной высот в
Приборе предусматривается возможность установки на-
йальной высоты и давления. Для определения относи-
гельной высоты устанавливается давление на уровне
Аэродрома взлета или посадки. Для измерения истинной
высоты необходимо получить информацию о величине
|авления в той точке, над которой пролетает самолет,
I установить в нужное положение шкалу давлений при-
fopa.
, Методические погрешности высотомера обусловлены
Следующими причинами:
js. — отклонением температуры воздуха от стандартной;
* — изменением давления у земли перед взлетом и по-
!Ле взлета;
| — изменением высоты местности над уровнем моря.
Методическая погрешность, вызванная отклонением
^йствительной температуры воздуха на данной высоте
стандартной, сравнительно невелика и в высотомерах
fe-компенсируется. Эта погрешность может быть вычис-
лена с помощью навигационной линейки, если известна
^мпература воздуха на высоте полета.
( Методическая погрешность, обусловленная измене-
рем давления у земли, устраняется поворотом на соот-
&Гствующий угол основания и всего механизма высото-
fepa. Для измерения высоты полета над уровнем аэро-
|>ома перед взлетом стрелки высотомера необходимо
ртановить на нуль. После этого нужно оттянуть кре-
Гьеру и установить по барометрической шкале давле-
67
ние у земли в данный момент времени. Теперь в полете
высотомер будет показывать высоту относительно аэро-
дрома. Если за время полета давление на уровне аэро-
дрома не изменилось, то после посадки стрелки высото-
мера будут стоять на нуле.
Очень часто, особенно при продолжительных полетах,
давление на аэродроме изменяется. В этом случае высо-
томер показывает высоту не относительно аэродрома, а
относительно некоторого уровня, давление на котором
равно давлению на аэродроме перед взлетом. Для того
чтобы устранить погрешность в определении относитель-
ной высоты, необходимо повернуть одновременно меха-
низм, стрелки и шкалу давлений. Поворот совершается
до тех пор, пока по барометрической шкале не будет
установлено новое давление на уровне аэродрома. Ана-
логично устраняется погрешность в измерении относи-
тельной высоты перед посадкой на другом аэродроме.
Перед заходом на посадку летчик должен получить по
радио информацию о давлении на аэродроме и устано-
вить эту величину по барометрической шкале. После
посадки на аэродроме стрелки высотомера будут стоять
против нулевых делений шкал.
По барометрической шкале высотомера можно уста-
навливать давление от 670 до 790 мм рт. ст. Давление
670 мм рт. ст. соответствует высоте 1100 м. В некоторых
случаях в горной местности высота аэродрома может
превышать 1100 м. Высота высокогорного аэродрома
устанавливается с помощью индексов, которые служат
как бы продолжением барометрической шкалы. Напри-
мер, если высота аэродрома 2350 м, то индекс внешней
шкалы поворачивается на два полных оборота и уста-
навливается на высоту 350 м. Индекс внутренней шкалы
устанавливается около деления, соответствующего высо-
те 2 км. Барометрическая шкала при этом будет закры-
та шторкой. Стрелки прибора перед взлетом устанавли-
ваются против нулевых делений шкалы высот.
При маршрутных полетах каждому самолету уста-
навливается определенный эшелон высоты. Это необхо-
димо для обеспечения безопасности полетов. Эшелон
заданной высоты отсчитывается относительно уровня с
давлением Л> = 760 мм рт. ст. После взлета на шкале
барометрического давления устанавливается Ро =
= 760 мм рт. ст. и производится набор высоты до тех
68
. пор, пока не будет достигнут заданный эшелон 3000,
. 4000, 5000 м и т. д.
Для устранения методической погрешности высото-
• мера при измерении истинной высоты необходимо уста-
навливать по барометрической шкале величину давле-
ния у земли в данной точке. Тогда высотомер будет
показывать относительную высоту над данной местно-
стью или истинную высоту полета. Непрерывный учет
давления у земли во время полета практически неосу-
ществим. Поэтому погрешность в измерении истинной
высоты может быть устранена с помощью карты, на
которой указаны превышения местности над уровнем
моря.
К инструментальным погрешностям высотомеров от-
носятся: температурные, трения, упругое последействие
и гистерезис, несбалансированность. Некоторые из этих
погрешностей устраняются технологическими путями,
т. е. улучшением качества изготовления деталей прибо-
ра и соответствующим выбором материалов. Для умень-
шения погрешностей трения улучшается качество изго-
товления трущихся деталей и подбираются материалы,
обладающие минимальными коэффициентами трения.
Упругое последействие и гистерезис уменьшаются выбо-
ром материала для анероидных коробок с необходимы-
ми характеристиками. Другие инструментальные
погрешности уменьшаются или компенсируются с помо-
щью специальных устройств. Погрешности несбаланси-
рованности уменьшаются с помощью балансиров. Инст-
рументальные температурные погрешности сводятся к
минимуму с помощью температурных компенсаторов.
Изменение температуры окружающей среды вызыва-
ет изменение модуля упругости материала анероидной
коробки и изменение линейных размеров деталей пере-
даточно-множительного механизма высотомера. Изме-
нение размеров деталей механизма создает сравнитель-
но небольшие температурные погрешности, которые
можно не компенсировать.
Увеличение или уменьшение модуля упругости ане-
роидной коробки уменьшает или увеличивает ее ход
при одинаковом перепаде давления и угол поворота
стрелки прибора. Таким образом, температурная по-
грешность высотомера сводится к изменению переда-
точного числа механизма. Поэтому компенсация темпе-
69
ратурной погрешности осуществляется противополож-
ным изменением передаточного отношения механизма
высотомера. При повышении температуры передаточное
отношение прибора следует уменьшать, при пониже-
нии — увеличивать.
В высотомерах применяются два рода температур-
ных компенсаторов, выполненных в виде биметалличе-
Рис. 2.16. Биметаллический компен-
сатор 1-го рода
ских пластин. Температурный компенсатор первого рода
(рис. 2.16) устанавливается на подвижном центре ане-
роидной коробки и устраняет влияние на чувствитель-
ный элемент температуры при неизменном давлении,
соответствующем нулю шкалы высоты.
Если температура понизится по сравнению с расчет-
ной, то упругость анероидной коробки увеличится и, не-
смотря на постоянное давление в полости прибора, ко-
робка расширится, а ее подвижный центр переместится
на расстояние w. Это перемещение создаст дополни-
тельный поворот стрелки на некоторый угол в сторону
увеличения высоты. Чтобы устранить погрешность в
измерении высоты, необходимо компенсировать переме-
щение центра коробки w.
Биметаллический компенсатор состоит из двух спа-
янных пластин. Одна пластина стальная, другая изго-
товлена из сплава инвар. При понижении температуры
компенсатор выгибается в сторону стальной пластинки,
обращенной к анероидному блоку. Конец компенсатора
в результате изгиба перемещается на расстояние w. По-
этому поводок, связанный со стрелкой, остается на мес-
70
te и стрелка прибора не показывает изменения высоты
полета. Если температура повысится, то перемещения
центра коробки и конца биметаллического компенсатора
будут совершаться в обратных направлениях. Темпе-
ратурный компенсатор первого рода устраняет погреш-
ность высотомера только при неизменном давлении.
Рис. 2.17. Действие температурного компенсатора 2-го рода:
а — кинематическая схема:
/ — зубчатый сектор; 2 — компенсатор 2-го рода; 3 — вилка; 4 — ось
сектора; 5 — толкатель; 6 — центр коробки; 7—анероидная коробка;
б — схема изменения передаточного числа при действии компенса-
тора 2-го рода
Погрешность, возникающую при одновременном из-
менении температуры и давления (высоты полета), уст-
раняет температурный компенсатор второго рода. Этот
компенсатор устанавливается на ведущей оси зубчатого
сектора (рис. 2.17). При увеличении температуры упру-
гость коробки становится меньшей и поэтому один и тот
же перепад давления АР вызывает различные переме-
щения центра коробки и изменяет передаточное число
механизма прибора. Биметаллический компенсатор вто-
рого рода под действием температуры выгибается в
направлении от оси сектора. Изгиб компенсатора увели-
чивает ведомое плечо I и уменьшает передаточное от-
ношение механизма прибора.
При уменьшении температуры с одновременным уве-
личением давления показания высотомера занижаются.
В этом случае биметаллический компенсатор выгнется
71
так, что ведомое плечо I уменьшится, а передаточное
число механизма увеличится и погрешность в показани-
ях высотомера будет устранена.
Модификации двухстрелочных высотомеров. Кроме
высотомера ВД-28 на самолетах устанавливаются двух-
стр'елочные высотомеры ВД-20, ВД-10 и др. Высотомер
ВД-20 измеряет относительную (барометрическую) вы-
соту полета до 20 000 м. Чувствительным элементом
ВД-20 (рис. 2.18) служит блок 14, состоящий из двух
анероидных коробок. Неподвижный центр блока кре-
пится к основанию механизма прибора. При изменении
высоты полета изменяется статическое давление в кор-
пусе прибора, блок анероидных коробок деформируется
и перемещается его подвижный центр 13. Это линейное
перемещение с помощью кинематического механизма
превращается в поворот большой стрелки 2. По положе-
нию этой стрелки относительно внешней шкалы 1 отсчи-
тывается высота от 0 до 1000 м. С помощью зубчатой
передачи демультипликатора 6 поворот оси большой
стрелки передается на малую стрелку 3. Угол поворота
малой стрелки в 20 раз меньше угла поворота большой
стрелки. При изменении высоты от 0 до 20 км большая
стрелка совершит двадцать оборотов вокруг своей оси,
а малая — только один неполный оборот. Температур-
ные погрешности высотомера устраняются с помощью
компенсаторов 1-го 12 и 2-го 9 родов.
Для установки стрелок на нулевое деление шкалы
основание механизма прибора поворачивается кремаль-
ерой 23. Если перед взлетом стрелки установлены на
нуль, то по барометрической шкале 17 можно опреде-
лить давление на аэродроме. В полете с помощью кре-
мальеры по барометрической шкале устанавливается
давление на уровне моря, на высоте аэродрома взлета,
аэродрома посадки и т. п. Высотомер измеряет высоту
относительно того уровня, атмосферное давление кото-
рого установлено по барометрической шкале. С кремаль-
ерой с помощью зубчатых переборов связаны два под-
вижных индекса. Индекс 5 указывает высоту в метрах
по внешней шкале 1, а индекс 4 — высоту в километрах
по внутренней шкале. По индексам устанавливается вы-
сота аэродрома над уровнем моря в том случае, если
аэродром находится в гористой местности и диапазона
давлений барометрической шкалы недостаточно.
Рис. 2.18. Кинематическая схема высотомера ВД-20:
1 — шкала; 2 — большая стрелка; 3 — малая стрелка; 4 — индекс километров высоты; 5 — индекс метров высоты- 6 — зубчатые
колеса демультипликатора; 7 — зубчатый сектор; «—противовес (балансир); 9 — биметаллический компенсатор второго рода-
70—ось; 11 — тяга; 12 — биметаллический компенсатор первого рода; /« — подвижный центр; 14 — анероидный блок; /5—триб-
ка; 16— зубчатое колесо; 17 — барометрическая шкала; /S — шестерия основания; 19 — шестерня индекса метров’ высоты;
20 — шестерня индекса километров; «/ — ведомая шестерня кремальеры; 22 —ведущая шестерня; 23 — кремальера
72
Рис. 2.19. Конструкция высотомера ВД-20:
/ — кремальера; 2 — накатная гайка; 3 — шестерня индекса метров; 4 — шкала
метров высоты; 5 — шторка; 6 — индекс километров; 7 — барометрическая
шкала; 8 — шестерня барометрической шкалы; 9 — шестерня индекса кило-
метров; 10 — шестерня демультипликатора; 11 — основание; 12 — балансир;
13 — сектор; 14 — ось сектора; 15 — тяга; 16 — штуцер; /7 —корпус; /« — зубча-
тая передача кремальеры; 19 — подвижный центр; 20 — анероидный блок;
21 — трибка; 22— зубчатое колесо; 23 — зубчатое колесо; 24 — пружина;
25— шкала километров высоты; 26—малая стрелка; 27 — большая стрелка;
28 — стекло
Погрешности прибора минимальны у земли и состав-
ляют ±20 м и максимальны на высоте 20 км (±350 м).
Конструктивное устройство высотомера ВД-20 показано
на рис. 2.19.
Двухстрелочный высотомер ВД-10 предназначен для
измерения высоты от 0 до 10 000 м. Конструктивно вы-
сотомеры ВД-10 и ВД-20 совершенно одинаковы. По-
грешности ВД-10 у земли составляют ±15 м, а на высо-
те 10 км достигают ± 120 м.
Высотомер с командным индексом. Для выполнения
некоторых задач, например перехвата воздушной цели,
на борт самолета по радиолинии передаются команды
на выдерживание заданной высоты, скорости, курса.
Команда заданной высоты указывается летчику с помо-
щью высотомера типа ВДИ-30 с дополнительным
командным индексом.
Высотомер ВДИ-30 (рис. 2.20) состоит из двухстре-
лочного высотомера и блока отработки команд задан-
ной высоты. При изменении атмосферного давления про-
исходит деформация анероида 5, которая передается
через передаточно-множительный механизм на стрел-
ки 1. Поправки на изменение давления в показания при-
бора вводятся с помощью кремальеры, связанной с
барометрической шкалой. В отличие от обычных двух-
стрелочных высотомеров в ВДИ-30 нет подвижных ин-
дексов, устанавливаемых поворотом кремальеры.
Электрический сигнал, пропорциональный заданной
высоте, подается с выхода радиолинии наведения через
усилитель на исполнительный двигатель 6 ДИД-0,5.
Двигатель через редуктор поворачивает командный ин-
декс 2 и движки потенциометра обратной связи 11. По-
ворот индекса 2 производится до тех пор, пока сигнал
обратной связи с потенциометра 11 не уравновесит сиг-
нал, пропорциональный заданной высоте. Значение за-
данной высоты отсчитывается по положению командно-
го индекса относительно внутренней шкалы прибора.
Погрешность в установлении команды высоты характе-
ризуется относительными сопротивлениями участков по-
тенциометра обратной связи.
Скорость полета современных самолетов изменяется
в весьма широком диапазоне. Изменение скорости поле-
та обычно связано с изменением угла атаки а. При
этом происходит перераспределение полного давления
74
манометров. Давление и разрежение регулируются воз-
душными кранами К.1, К2, КЗ.
Герметичность динамической системы высотомера
проверяется созданием определенного давления. После
достижения заданного давления магистраль от источ-
ника давления перекрывается и в течение 1 мин про-
изводится наблюдение за показаниями ртутно-водяного
манометра. При этом давление в динамической системе
должно оставаться неизменным.
Герметичность статической системы контролируется
одновременно с проверкой погрешностей высотомера на
отметке шкалы 1000 м. В статической системе высото-
мера создается разрежение, соответствующее высоте
1000 м. После этого кран в статической магистрали пе-
рекрывается и наблюдаются показания стрелки указа-
теля. За 30 сек отклонение стрелки от отметки 1000 ж
не должно превосходить 25 м.
Для проверки погрешностей в показаниях прибора
ручкой ввода давления Ро на счетчике указателя уста-
навливается значение давления 760 мм рт. ст. В ста-
тической системе создается разрежение, соответствую-
щее проверяемой высоте. Затем закрывается кран К1
в магистрали от источника разрежения и соединитель-
ный кран К2. С помощью крана КЗ в динамической си-
стеме создается давление, пропорциональное проверяе-
мым значениям скорости полета. Величина давления в
динамической системе контролируется по ртутно-водя-
ному манометру. Погрешность определяется разностью
между показаниями указателя и заданным по таблице
значением высоты. Разрежение на последней проверяе-
мой высоте выдерживается в течение 15 мин, после че-
го проверяется погрешность показаний при уменьшении
высоты. Одновременно с проверкой погрешностей опре-
деляются вариации показаний высотомера, которые
представляют разность между показаниями при увели-
чении и при уменьшении высоты.
Погрешность отключения вычислителя ВАП при до-
стижении самолетом скорости звука (М — 1) проверяет-
ся для высот, указанных в паспортной таблице высото-
мера. С помощью крана К1 в статической системе уста-
навливается разрежение, соответствующее проверяемой
высоте. После этого давление в динамической системе
увеличивается до значения, при котором М-реле отклю-
90
jer вычислитель ВАП. Давление в динамической си-
геме не должно превышать величины, эквивалентной
Величина давления проверяется по показаниям
Йтно-водяного манометра, оттарированного в чис-
М. Момент отключения вычислителя определяется
^'резкому изменению показаний прибора. В этот мо-
|т перекрывается кран К1 и отсчитываются показа-
ртутно-водяного манометра. Погрешность отключе-
' ВАП определяется разностью между фактическим
чением числа М, при котором произошло отключение,
Ьсла М — 1. Допустимые значения погрешности от-
Нения ВАП приведены в паспорте высотомера.
? ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ И ЧИСЛА М
ПОЛЕТА
измерение скорости полета. Скорость самолета мо-
кизмеряться относительно, воздушной среды и отно-
ёльно Земли. Полет самолета характеризуют истин-
воздушная, приборная и путевая скорости.
Истинной воздушной скоростью Уист называется
Ярость движения самолета относи-
ьно воздуха.
Приборной или индикаторной воздушной скоростью
^называется скорость полета у Земли при
ймальной плотности воздуха, для ко-
ки скоростной напор равен дейст-
?е л ь н о м у напору при полете на д а н-
|й высоте.
Шутевая скорость W— это скорость самолета отно-
Ььно Земли. По величине и направлению путевая
Йость определяется суммой векторов истинной воз-
Вйгой скорости и скорости ветра.
приборная скорость характеризует величину дейст-
рьного скоростного напора во время полета. От ве-
тлы скоростного напора зависят аэродинамические
К, действующие па самолет, характеристики устой-
Всти и управляемости. Информация о величине при-
вЬй скорости необходима летчику для пилотирования
Шетом. Информация о величинах истинной воздуш-
W путёвой скоростей необходима для решения задач
рлетовождения. Истинная воздушная и приборная
рости измеряются с помощью аэродинамических из-
ЁИтелей скорости.
91
Принцип действия аэродинамического измерителя
скорости. Аэродинамический метод основан на измере-
нии динамического давления (скоростного напора), соз-
даваемого встречным потоком воздуха. Давление потока
воздуха на летящий самолет называется полным дав-
лением. Полное давление равно сумме статического
и динамического давлений.
Рп == Рот “И РДИН- (2.10)
Аэродинамический измеритель воздушной скорости
(рис. 2.28) представляет собой дифференциальный ма-
Рис. 2.28. Схема указателя приборной скорости
нометр, измеряющий динамическое давление (скорост-
ной напор), равное разности полного и статического
давления. Чувствительным элементом прибора является
манометрическая коробка, помещенная внутри гермети-
ческого корпуса. Полость коробки соединена с приемни-
ком полного давления, а корпус прибора — с приемником
статического давления. Поскольку в полости ко-
робки давление равно полному давлению Рп, а в кор-
пусе прибора создается статическое давление, то на уп-
ругий элемент действует разность полного и статиче-
ского давлений, т. е. динамическое давление
Рдин==: Рп Рот- . (2.11
Это давление создается в результате торможения по1
тока встречного воздуха в приемнике полного да®
ления.
92
Величина динамического давления является функци-
ей скорости полета и определяется формулой
= <2Л2)
£ 2
Гер — плотность воздуха.
Величина /’дин, измеряемая манометрической короб-
цои, не точно равна -—. Это объясняется конструктив-
< 2
ЙЫми особенностями приемника воздушного давления и
влиянием положения приемника относительно воздуш-
ного потока. Эти факторы учитываются коэффициентом
|риемника воздушного давления g = 0,98— 1,02. С уче-
юм коэффициента ПВД величина динамического давле-
|ия равна
РдКЕГ = ;?у. (2.13)
В формуле (2.13) плотность р соответствует давле-
щю 760 мм рт. ст. и температуре 288,15° К. Угол пово-
рота стрелки прибора, связанной с манометрической ко-
робкой, является функцией скорости полета
(2.14)
Формула (2.14) справедлива для скоростей полета,
ве превышающих 400 км/час, когда можно не учитывать
Диабатическое сжатие воздуха в ПВД. Если скорость
Ьевышает 400 км/час, то необходимо учитывать сжи-
Демость воздуха (рис. 2.29). Для больших скоростей
Длета с учетом сжимаемости воздуха величина дина-
мического давления определяется по формуле
k
: ₽»-=р”’([В^1+1]и~1)’ <2Л5)
)где 7? —газовая постоянная;
г=1,4 —коэффициент, характеризующий адиабати-
ческий процесс;
Тн — температура воздуха в ' К на высоте Н.
| Величина /Дин по формуле (2.15), учитывающей сжи-
|1емость воздуха, больше /Дин, получаемого по фер-
уле (2.13) без учета сжимаемости воздуха.
93
Указатели приборной скорости градуируются по фор-
мулам (2.13), (2.15) и измеряют скоростной напор или
условную скорость, с которой самолет должен двигать-
ся у земли, чтобы скоростной напор был равен ско-
ростному напору на высоте полета. Шкала указателя
Рис. 2.29. Графики зависимости динамического
давления от скорости полета;
1 — без учета сжимаемости воздуха; 2 — с учетом сжи-
маемости воздуха
скорости градуируется при нормальной плотности воз-
духа р = 0,125 к~'сек* и температуре 7 = 288,15° К-
Формулы (2.13), (2.15) справедливы для дозвуко-
вых скоростей полета. В полете со сверхзвуковой ско-
ростью зависимость между динамическим давлением и
скоростью определяется формулой
Р —р Г. 1671/7 1 (2 16)
Гдин — гст а2 (71Л2 _ а2)2;5 j, (Z. I о;
где а — скорость звука.
Указатель, выполненный по схеме (рис. 2.30), изме-
ряет истинную воздушную скорость только при полете
94
йад уровнем моря, когда плотность воздуха й темпе-
ратура соответствуют нормальным, принятым в СА. Ког-
да плотность воздуха и температура на высоте полета
отличаются от значений, принятых в СА, в показаниях
прибора появляются методические погрешности.
Для определения истинной воздушной скорости не-
обходимо измерить температуру и давление на высоте
полета и ввести поправку в показания указателя при-
борной скорости. При малых скоростях полета, если
плотность и температура воздуха соответствуют нор-
мальным, приборная скорость равна истинной воздуш-
ной скорости и определяется по формуле -
; (2Л7)
На высоте Н, где плотность воздуха р«, истинная
воздушная скорость равна
(2-18)
Плотность воздуха зависит от давления и темпера-
дуры, поэтому
1. р ’ Р(> • р - _ р« . РО Р° (9
р°, tRT^ ’ RTH-' Р« Рн Т0
Если разделить Еи на Ко, то
j, v-vVt=v>V^-
Погрешность в определении истинной воздушной
скорости
? / />о Т„ \
ДУ = У„-У=У0 1/ -±-£--1 . (2.21)
\У Р«70 /
Методическая погрешность в определении истинной
воздушной скорости на некоторой высоте Н зависит от
^величины приборной скорости Ко, давления Рн и тем-
пературы воздуха Тк на высоте полета. Относительная
^етодическая погрешность может достигать зна-
чительных величин. Так, например, на высоте 10 км эта
Погрешность составляет 72 % •
95
Цля скоростей полета, превышающих 400 км)час,
методическая погрешность в измерении истинной воз-
душной скорости может быть получена аналогичными
преобразованиями формулы (2.15). Для сверхзвуковых
скоростей полета погрешность может быть найдена из
формулы (2.16). Однако сложная зависимость V от
Рдин, Рн и Т на сверхзвуковых скоростях затрудняет по-
лучение аналогичных соотношений для погрешностей ДИ
Рис. 2.30. Схема комбинированного указателя скорости:
/ — манометрическая коробка; 2 — анероидная коробка
Анализ соотношений для методических погрешностей
показывает, что компенсация этих погрешностей может
быть выполнена на основе измерения давления Рн и
температуры 1Н. В комбинированных указателях ско-
рости методическая погрешность компенсируется с по-
мощью анероидной коробки. Ход центра коробки про-
порционален давлению Рн на высоте полета. Учет тем-
пературы Тн осуществляется с помощью той же
анероидной коробки. При этом предполагается, что
температура связана стандартной зависимостью со ста-
тическим давлением TK=f(PH). Анероидная коробка
помещается внутри корпуса прибора (рис. 2.30). Дефор-
мация манометрической коробки пропорциональна при-
борной скорости и передается на широкую стрелку при-
бора. Деформация анероидной коробки зависит от
давления Рн и температуры Т№. Перемещение центра
анероидной коробки кинематически суммируется с
перемещением центра манометрической коробки. Этим
осуществляется компенсация методической погрешности
96
К измерении истинной воздушной скорости. Величина
Истинной воздушной скорости отсчитывается с помощью
кЗкой стрелки.
₽ Указатели скорости обладают теми же инструмен-
тальными погрешностями, что и остальные анероидно-
мембранные приборы. Инструментальная температурная
погрешность при измерении приборной скорости не ком-
пенсируется. При измерении истинной воздушной ско-
рости инструментальная температурная погрешность в
Основном компенсируется благодаря тому, что с помо-
щью кинематической передачи в механизме прибора
^Осуществляется деление величин перемещения центров
Манометрической и анероидной коробок. Такая компен-
сация достигается, когда манометрическая и анероидная
жоробки изготовлены из одного и того же материала.
Е Комбинированный указатель скорости. В комбиниро-
ванном указателе воздушной скорости КУС-2500
Црис. 2.31) объединены два прибора: указатель прибор-
рой скорости и указатель истинной воздушной скорости.
'йс- 2.31. Кинематическая схема комбинированного указателя ско-
Г рости КУС-2500;
а** стрелка приборной скорости; 2—стрелка истинной воздушной скорости:
Шкала; 4 — трибка; 5 — зубчатый сектор; 6—поводки; 7—передаточный
ЕфХаанзм анероидной коробки; 8 — анероидная коробка; 9— манометрическая
коробка; 10, 11 — поводки; 12— зубчатый сектор
г Зак. 833 97
Приборная скорость измеряется от 200 до 1600 км/час,
истинная воздушная скорость—от 400 до 2500 км/час.
Внутри корпуса прибора помещаются чувствитель-
ные элементы — манометрическая и анероидная короб-
ки. В полость корпуса подводится статическое давле-
ние, в полость манометрической коробки — полное дав-
ление от ПВД.
Манометрическая коробка 9 под действием разности
полного и статического давлений прогибается. Переме-
щение центра коробки через поводки 10 передается на
зубчатый сектор 5, а затем на ось широкой стрелки.
Поворот широкой стрелки пропорционален величине
приборной скорости. Кроме того, перемещение центра
манометрической коробки передается на поводки 6.
Анероидная коробка 8 деформируется при измене-
нии статического давления. Перемещение центра этой
коробки с помощью передаточного механизма 7, оси и
одного из поводков 6 передается на ось поводка 11,
а затем на ось зубчатого сектора 12. Сектор через триб-
ку 4 поворачивает узкую стрелку. Поворот узкой стрел-
ки пропорционален истинной воздушной скорости.
На самолетах используются также комбинирован-
ные указатели КУС-2000, КУС-1200 и др. Комбиниро-
ванный указатель скорости КУС-2000 (рис. 2.32) по
кинематической схеме и конструкции подобен прибору
КУС-2500. Прибор КУС-2000 измеряет приборную ско-
рость полета в диапазоне от 150 до 1600 км/час и ис-
тинную воздушную скорость от 350 до 2000 км/час.
Погрешности в измерении приборной скорости на отмет-
ках шкалы 200, 300, 400 км/час не превышают
±15 км/час, на отметках 1400, 1600 км/час не превосхо-
дят ± 25 км/час.
Комбинированный указатель скорости КУС-1200
(рис. 2.33) показывает приборную скорость от 150 до
1200 км/час и истинную воздушную скорость от 400 до
1200 км/час. В приборе КУС-1200 компенсация измене-
ния статического давления осуществляется блоком из
двух анероидных коробок. Блок коробок 9 укреплен на
компенсированной оси 8. К свободному центру блока
прикреплен конец скобы 10, являющейся продолжением
тяги 12. В тяге имеется прорезь, в которую входит
штифт 11, жестко связанный с осью 8. Длина ведомого
плеча для оси 8 определяется расстоянием от оси до
98
Рис. 2.32. Комбинированный указатель скорости КУС-2000:
/—фланец; 2— стекло; 3 —шкала; 4 —стрелка приборной скорости; 5—стрел-
ка истинной воздушной скорости; б —трибка; 7 — зубчатые секторы; 8 — ком-
пенсированная ось; 9 — поводки; 10 — переходная ось; 11 — ось высотной ком-
пенсации; 12 — корпус; 13 — динамический штуцер; 14 — статический штуцер:
15 — анероидная коробка; 16 — манометрическая коробка
потенциометров-задатчиков /?3i, R32 подают сигналы,
соответствующие проверяемым отметкам шкалы, и оп-
ределяют погрешность в установлении индекса. Сопро-
тивление изоляции электрических элементов проверяет-
ся мегомметром по отношению к корпусу прибора.
Указатели числа М. Число М— это отношение ис-
тинной воздушной скорости самолета к скорости звука
м=Иист^ (2.22)
а
Скорость звука на уровне моря по СА составляет
1224 км!час.
При скоростях полета, составляющих 0,6 — 0,7 ско-
рости звука, резко изменяется характер обтекания кры-
ла самолета воздухом. В результате этого происходят
значительные изменения коэффициентов подъемной си-
лы су и лобового сопротивления сх. При малых до-
звуковых скоростях полета коэффициенты су, сх и дру-
гие аэродинамические коэффициенты самолета зависят
от скоростного напора, о величине которого можно су-
дить по приборной скорости. В диапазоне малых чисел
М при постоянном угле атаки а коэффициенты cv и сх
остаются постоянными.
С приближением скорости полета к скорости звука
местные скорости обтекания крыла могут достигнуть
сверхзвуковых. Зоны местных сверхзвуковых скоростей
даже при незначительных изменениях числа М начинают
резко увеличиваться. Коэффициент су сначала возра-
стает, а затем по мере волнового кризиса под крылом
Су начинает падать. После выхода самолета на сверх-
звуковые скорости сх возрастает, а су — уменьшается.
Резкие изменения аэродинамических характеристик са-
молетов на скоростях полета, близких к скорости звука,
и на сверхзвуковых скоростях оказывают существенное
влияние на управляемость и устойчивость самолета. Для
правильного пилотирования самолета на этих скоростях
необходимо знать не только приборную скорость, но
и число М.
Для скоростей полета, меньших 400 км/час, истинная
воздушная скорость равна
VB0T=V„ (2.23)
1Q2
Скорость звука в воздухе зависит только от темпе-
ратуры воздуха и не зависит от давления
а==а^]/Г (2,24)
где а0—скорость звука при температуре Т3 = 273°К.
Поэтому число М равно
м= /2FE55Z. (225)
а «о I' Р йо у
Из формулы (2.25) видно, что число М не зависит
от температуры (в формулу входит постоянная темпера-
тура Т3). Для получения числа М величину Р™-„ необ-
ходимо корректировать только по давлению Рн ,
Если скорость полета меньше скорости звука, но
превышает 400 км!час, то связь между динамическим
давлением и числом М выражается формулой
Рдия = [(1 + 0,2 М2)3-5 — 1]. (2.26)
На сверхзвуковых скоростях эта зависимость опре-
деляется формулой
(2-27)
Формулы (2.25), (2.26), (2.27) показывают, что чис-
ло М является функцией отношения динамического дав-
ления Рдин к статическому давлению на высоте полета.
Для измерения числа М можно использовать указатель
истинной воздушной скорости с градуировкой шкалы в
Единицах числа М. Методическая температурная погреш-
ность в указателе числа М, как это следует из формулы
р(2.25), отсутствует. Инструментальная температурная
Погрешность компенсируется благодаря тому, что меха-
низм указателя числа М производит деление величины
^ода манометрической коробки на ход анероидной. Ко-
робки изготовляются из одного и того же материала,
Поэтому дополнительный ход каждой из них, вызванный
Изменением температуры, одинаков. При делении рав-
ные температурные ходы сокращаются.
Указатель числа М типа М-2,5 (рис. 2.35) по своему
устройству похож на указатель скорости КУС-2500. Ки-
103
Рис. 2.35. Кинематическая схема прибора М-2,5:
/_ стрелка; 2 —шкала; 3 — трибка; 4 — поводки; 5 — переходной рычаг; 6 —толкатель; 7 — анероидная ко-
робка; 8 — манометрическая коробка; 9—поводки; 10 — зубчатый сектор
Рис. 2.36. Указатель числа М с
1 — фланец; 2 — стекло; 3 — разжимное кольцо; 4 —трибка; 5 — поводки;
6 — компенсированная ось; 7 — поводки; 8— тяга; 9 — поводок;,10 — внлка;
11 — зажим; 12 — ось высотной компенсации; 13 — корпус; 14 — штуцера;
15— штепсельный разъем; 16 — основание; 17— анероидная короока; 18 — би-
электрической сигнализацией:
металлическая скоба; 19 — ось; 20 — манометрическая коробка; 21 — ось сек-
тора; 22 — сектор; 23 — спиральная пружина; 24 — стрелка для установки ра-
данного числа М; 25 — щеткодержатель; 26 — щетка; 27 — стрелка; 28—шкала
i
- нематический механизм прибора выполняет деление ве-
личины /’дин, измеренной с помощью манометрической
•коробки, на величину Рст, которую измеряет анероид-
ная коробка. Звенья механизма, предназначенные для
j передачи на стрелку величины приборной скорости, в
; указателе числа М отсутствуют. Шкала прибора граду-
3 ируется в единицах числа М от 0,4 до 2,5.
Указатель числа М с электрической сигнализацией ти-
па МС (рис. 2.36) предназначен для измерения числа М
и выдачи электрического сигнала по достижении само-
летом заданного числа М. Динамическое давление из-
меряется манометрической коробкой 20. Перемещение
центра коробки через тягу 8 и вилку 10 передается на
ось 19. Поворот этой оси с помощью поводков 7 пере-
дается на ось 6, а затем через поводки 5 на ось секто-
ра 21. Зубчатый сектор 22 через трибку 4 поворачивает
t ось стрелки. Статическое давление измеряется анероид-
Гной коробкой 17. Перемещение центра анероидной ко-
| робки передается на поводок 9, который изменяет пле-
чи поводков 7.
Компенсация температурной погрешности анероид-
ной коробки производится биметаллической скобой 18,
которая укреплена на неподвижном центре коробки.
: Скоба двумя иглами нажимает на подвижный центр
‘ коробки. При понижении температуры упругость анеро-
кидной коробки увеличивается. Поэтому при одном и том
F же статическом давлении перемещение подвижного цент-
tpa коробки будет меньше. Биметаллическая скоба при
.понижении температуры изгибается так, что иглы за-
гставляют центр анероидной коробки перемещаться
вверх. Таким способом компенсируется уменьшение про-
гиба анероидной коробки, вызванное понижением тем-
пературы.
На оси подвижной стрелки прибора имеется элект-
рический контакт, который замыкает при заданном зна-
чении числа М электрическую цепь сигнальной лампоч-
ки. Заданное число М устанавливается с помощью не-
подвижной стрелки 24.
’ Прибор МС-1 измеряет число М в пределах 0,5—1.
Погрешности измерения составляют от 0,02 до 0,05 ве-
личины числа М. Рассогласование в показаниях прибора
И сигнального устройства у земли не превышает
Lt 0,005 числа М,
105
На некоторых самолетах устанавливается комбиниро-
ванный указатель УИСМ-И со стрелками для измерения
истинной воздушной скорости и числа М.
Проверка указателей числа М производится по мето-
дике, принятой для комбинированных указателей ско-
рости, с использованием аналогичных поверочных уста-
новок.
§ 5. ВАРИОМЕТРЫ
Назначение и принцип действия. Вариометром назы-
вается прибор, предназначенный для из-
мерения вертикальной скорости само-
лета. Вариометр является одним из особо важных
Рис. 2.37. Принципиальная схема варио-
метра
пилотажных приборов. Измерение вертикальной скоро-
сти необходимо для сохранения высоты в горизонталь-
ном полете и выдерживания заданного режима набора
высоты или снижения. Вертикальную скорость можно
измерить различными методами. Наиболее распростра-
нен манометрический метод, который основан на изме-
рении атмосферного давления при изменении высоты и
линейной зависимости скорости воздуха в капилляре от
разности давлений на его концах.
Чувствительный элемент вариометра — манометриче-
ская коробка, которая помещается в корпусе (рис. 2.37).
Коробка соединяется трубопроводом со статической си-
стемой. Корпус прибора соединен со статической систе-
мой посредством капилляра. Коробка воспринимает
разность давлений в корпусе прибора и внутри коробки,
где давление равно атмосферному. Перемещение цент-
ра коробки через передаточно-множительный механизм
передается на стрелку. Если самолет совершает гори-
106
зонтальный полет, то давления внутри корпуса и в ко-
робке равны. При подъеме высота увеличивается,
атмосферное давление уменьшается. Внутри манометриче-
ской коробки практически без запаздывания устанавли-
вается давление, равное атмосферному. Воздух из кор-
пуса выходит через капилляр и давление внутри корпу-
са не успевает выравняться с атмосферным. Поэтому в
корпусе вариометра создается давление воздуха боль-
ше атмосферного. Это давление возрастает с увеличе-
нием скорости набора высоты и уменьшается с умень-
шением вертикальной скорости. Разность давлений в
корпусе и внутри коробки вызывает сжатие коробки.
Перемещение центра коробки передается на стрелку,
которая отклоняется вверх от нулевой отметки.
При снижении самолета давление в корпусе меньше,
чем в коробке, и коробка расширяется, а стрелка откло-
няется вниз от нулевого давления. После прекращения
набора высоты или снижения самолета давление в кор-
пусе сравнивается с атмосферным, центр коробки уста-
навливается в среднее положение, а стрелка — на нуле-
вую отметку.
Манометрическая коробка реагирует на перепад дав-
лений
ДР=РК — Р, (2.28)
где Рк — давление в корпусе прибора при постоянной
вертикальной скорости;
Р — давление в полости коробки.
Связь между перепадом давлений и вертикальной
^скоростью самолета Vy устанавливается формулой
I/ (Р-Р.) KR
ДР = РК-Р = ^ [1-е vy ], (2.29)
кк
где д = ---коэффициент, характеризующий
конструктивные особенности при-
бора;
Д — диаметр капилляра;
Тк —температура в корпусе вариометра;
т] — коэффициент вязкости воздуха в ка-
пилляре;
I —длина капилляра;
v—объем корпуса прибора;
107
ft — унйвёрсальная газовая посЮйййай;
Pt — нормальное давление у земли.
Перепад давлений, измеряемый манометрической ко-
робкой, определяется двумя слагаемыми. В формуле
Vu
(2.29) первое слагаемое — не является функцией вре-
KR
мени и характеризует установившееся значение перепа-
да АР, которое пропорционально вертикальной скоро-
.. _ Vy AP-Po)KR
сти Vy. Второе слагаемое — '----------переменно во
KR V у
времени, так как при возникновении вертикальной ско-
рости Vy непрерывно изменяется величина давления Р.
Таким образом, показания вариометра устанавливают-
ся при изменении вертикальной скорости с запаздыва-
нием. Величина запаздывания зависит от конструктив-
ных параметров вариометра, определяемых коэффици-
ентом К, и от величины измеряемой вертикальной
скорости.
Устройство вариометров. Характерной особенностью
многих современных вариометров является так называе-
мая затухающая шкала. Такая шкала растянута вблизи
нулевого деления и сжата на максимальных значениях
вертикальной скорости. По затухающей шкале можно
более точно отсчитывать малые значения вертикальной
скорости. Это особенно необходимо для стабилизации
горизонтального полета, когда летчик должен выдер-
живать стрелку высотомера на заданной высоте полета,
а стрелку вариометра на нуле.
Механизм вариометра с затухающей шкалой ВАР-300
(рис. 2.38) помещается внутри корпуса. Для уменьше-
ния температурных погрешностей корпус вариометра из-
готавливается из пластмассы с хорошими теплоизоля-
ционными свойствами. Полость корпуса через три ка-
пилляра сообщается со статической системой. Полость
манометрического блока соединена со статическим шту-
цером с помощью трубопровода.
Под действием перепада давлений манометрический
блок сжимается или расширяется. Перемещение центра
блока через передаточный механизм передается на ось
зубчатого сектора, который через трибку поворачивает
ось стрелки. Люфты в передаточном механизме варио-
метра устраняются двумя спиральными пружинами. За-
тухание шкалы создается с помощью специальной пру-
108
жины. Один конец пружины укреплен на оси зубчатого
сектора, а другой свободно перемещается в зазоре меж-
ду двумя упорами. Пока свободный конец пружины
перемещается между упорами, стрелка прибора пово-
рачивается в пределах растянутой части шкалы. По до-
стижении некоторой вертикальной скорости свободный
Рис. 2.38. Кинематическая схема вариометра ВАР-300:
/ — стрелка; 2 —шкала; 3 — спиральная пружина; 4 — зубчатый сектор; 5 —
спиральная пружина; 6 — пружина, обеспечивающая «затухание» шкаЛы;
7 — упоры; 5 —ось зубчатого сектора; 9 — толкатель; 10 — штуцер; // — капил-
ляры; 12 — манометрический блок; 13 — пластина; 14 — эксцентрик; 15 — зуб-
чатая передача; 16 — кремальера
конец пружины ложится на один из упоров и пружина
постепенно увеличивает противодействующий момент,
приложенный к оси зубчатого сектора. Под влиянием
этого момента и проявляется эффект сжатия шкалы.
В процессе эксплуатации вариометра начальное по-
ложение центра манометрического блока может смес-
титься. Это вызовет отклонение стрелки прибора от ну-
левого деления шкалы. Для установки стрелки на ну-
109
левое деление служит механизм, который состоит из
кремальеры, двух шестерен, эксцентрика и плоской пру-
жинящей пластины. В случае отклонения стрелки при-
бора от нуля при отсутствии вертикальной скорости не-
обходимо вывинтить головку кремальеры и поворачи-
вать ее до установки стрелки на нуль. Поворот головки
передается через шестерни на эксцентрик. При повороте
эксцентрика перемещается конец пружинящей пласти-
ны, на которой установлен манометрический блок. Одно-
Рис.
/ — шкала; 2 — стрелка;
6 — зубчатый сектор; 7 —
2.39. Вариометр ВАР-300:
Л , стекло; 4~ фланец; 5 — эксцентрический винт-
ТЬо СеКтор; 7 7-спиральная пружина; S-ось сектора; 9- пружина-'
"Ул: корпус 12 штуцер; 13 — ниппель с капиллярами; 14 — трубо-
провод,.15 стойка; 16 — упорный винт; /7 — блок манометрических коробок;
— трибка; 19-ось стрелки; 20 - эксцентрик; 21 - шестерня; 22 - юстиро-
вочный винт
по
временно с перемещением блока происходит поворот
стрелки.
Конструкция вариометра ВАР-300 показана на
рис. 2.39. Прибор измеряет вертикальную скорость в
диапазоне от 0 до 300 м/сек. Погрешность в измерении
вертикальной скорости вблизи нулевого деления шкалы
Рис. 2.40. Кинематическая схема вариометра ВАР-150:
/ — стрелка; 2 — рычаг; 3 — ось; 4 — балансир; 5 — поводок; 6—спиральная пру-
жина; 7 —тяга; 8 — капилляр; 9 — манометрическая коробка; 10 — трубопро-
вод; // — эксцентрик; 12 — поводок; 13 — зубчатое колесо; 14 — грибка}
15 — шкала
составляет + 1 -4- ± 3 м/сек. Погрешность на отметке
300 достигает ± 20 — ± 40 м/сек.
Наряду с ВАР-300 применяются вариометры ВАР-75,
ВАР-150 и др. Число в обозначении типа прибора ука-
зывает максимальную величину измеряемой вертикаль-
ной скорости. По устройству вариометры ВАР-75 и
ВАР-150 несколько отличаются от ВАР-300. На рис. 2.40
показана кинематическая схема вариометра ВАР-150.
1П
Чувствительным элементом в приборе служит маномет-
рическая коробка 9. Перемещение центра коробки пе-
редается через тягу 7, поводок 5, ось 3, рычаг 2,
поводок 12, зубчатое колесо 13 и трибку 14 на стрелку 1.
Установка стрелки прибора на нуль производится с
помощью эксцентрика И, который перемещает мано-
метрическую коробку.
Вариометр ВАР-150 измеряет вертикальную скорость
до 150 м/сек с погрешностями от ± 1 до ±20 м/сек.
Прибор ВАР-75 показывает вертикальную скорость до
75 м/сек с погрешностями от ± 0,5 до ± 10 м/сек.
Минимальные погрешности соответствуют началу шка-
лы, максимальные — крайним отметкам шкалы (75 или
150).
Погрешности вариометров. Методические погрешно-
сти вариометра зависят от конструктивных параметров
прибора. Основной методической погрешностью варио-
метра является запаздывание. Величина запаздывания
определяется конструктивными данными капилляра дли-
ной I и диаметром Д. Для уменьшения запаздывания
необходимо увеличить диаметр и уменьшить длину ка-
пилляра. Уменьшить запаздывание можно также умень-
шением объема корпуса прибора V. Таким образом,
уменьшение погрешности достигается увеличением па-
раметра К в формуле (2.29). Но увеличение К умень-
шает установившийся перепад давлений
ДРуот = ^ (2.зо)
ДА
Уменьшение установившегося перепада АРуСт тре-
бует использования манометрических коробок и блоков
повышенной чувствительности.
При выводе формулы вариометра (2.29), устанавли-
вающей зависимость между перепадом давления в кор-
пусе и в коробке и вертикальной скоростью, объем
корпуса v считался постоянным. Но деформация мано-
метрической коробки или блока изменяет• внутренний
объем корпуса прибора. Погрешность вследствие изме-
нения объема v зависит от величины вертикальной ско-
рости и сравнительно мала. Эта погрешность учитывает-
ся при градуировании шкалы вариометра.
Изменение температуры вызывает изменение коэф-
фициента вязкости воздуха т), проходящего через капил-
112
ляр. В результате этого изменяется параметр К, устано-
вившийся перепад давлений ЛРуСт и становится меньше
второе слагаемое в уравнении (2.29). Для уменьшения
температурной погрешности осуществляется частичная
теплоизоляция внутреннего объема корпуса вариометра.
Особенности эксплуатации вариометров. Как и все
анероидно-мембранные приборы, вариометр проверяется
на герметичность корпуса и на погрешность показаний.
Рис. 2.41. Схема установки для определения по-
грешностей показаний вариометра:
/ — проверяемый вариометр; 2 — бачок; 3 — ртутиый ба-
рометр; 4 — воздушный край; 5 — иаклоииый спиртовой
манометр; 6 — капилляр
Для определения герметичности в корпусе прибора соз-
дается определенное разрежение. Величина разрежения
контролируется по водяному манометру. После дости-
жения нужного разрежения делается выдержка в тече-
ние 1 мин для уравнивания давлений в корпусе и ко-
робке. Затем трубопровод от источника разрежения
перекрывается воздушным краном и производится на-
блюдение за показаниями водяного / манометра. За
I мин изменение показаний манометра не должно пре-
восходить 3 мм вод. ст.
; Для определения погрешности показаний вариомет-
ра необходимо собрать схему, в которую входят на-
клонный спиртовой манометр 5, ртутный барометр 3,
бачок 2 и воздушный кран 4 (рис. 2.41). Перед провер-
кой стрелка вариометра устанавливается на нулевое
Деление. Затем в приборе создается разрежение, соот-
Зак. 833 ИЗ
новкой УКАМП и др. При проверке динамической си-
стемы создается давление, при проверке статической —
разрежение. Понижение давления в проверяемой систе-
ме контролируется по эталонному прибору поверочной
установки.
§ 7. ПОГРЕШНОСТИ АНЕРОИДНО-МЕМБРАННЫХ ПРИБОРОВ
ПРИ ПОЛЕТЕ СО СВЕРХЗВУКОВЫМИ скоростями.
СПОСОБЫ УСТРАНЕНИЯ ПОГРЕШНОСТЕЙ
Причины возникновения погрешностей. Во время по-
летов со сверхзвуковыми скоростями к погрешностям
анероидно-мембранных приборов добавляются погреш-
ности, вызванные изменением аэродинамического обте-
кания ПВД, влиянием передаточных свойств, трубопро-
водов, структуры и объема статической и динамической
систем.
Приемник воздушного давления устанавливается в
невозмущенном потоке воздуха, набегающего на само-
лет. Продольная ось приемника параллельна оси са-
молета. Характер распределения полного давления по
поверхности ПВД изменяется с изменением скорости и
ускорения полета, а также угла атаки. Распределение
давления по поверхности ПВД обычно представляется
с помощью эпюры давлений. При полете с крейсерской
скоростью полное давление на поверхность ПВД по-
степенно уменьшается с удалением от носовой части
приемника (рис. 2.45 а). На некотором расстоянии I
это давление становится равным нулю, а затем возни-
кает разрежение. Отверстия статического давления рас-
полагаются в том месте, где эпюра полного давления
при полете с крейсерской скоростью соприкасается с
поверхностью ПВД.
Если скорость полета меньше крейсерской, то эпю-
ра давления выходит на поверхность приемника перед
статическими отверстиями (рис. 2.45 6). Тогда стати-
ческие отверстия оказываются в области разрежения
и величина измеряемого анероидными коробками ста-
тического давления будет меньше действительного дав-
ления. Высотомеры будут показывать увеличение высо-
ты полета по сравнению с фактической. Если скорость
полета превышает крейсерскую, то эпюра давления вы-
ходит на поверхность приемника позади статических от-
118
верстий (рис. 2.45в). Отверстия попадают в область
повышенного давления и высотомеры показывают
уменьшение высоты по сравнению с действительной.
Гак, например, при полете истребителей-бомбардиров-
Рис. 2.45. Эпюры распределения давления по
поверхности ПВД:
а — крейсерская скорость; б— скорость меньше крей-
серской; в — скорость больше крейсерской
щиков на малых высотах со скоростью больше крейсер-
ской высотомер может показывать высоту ниже уровня
земной поверхности (—100 ч 150 л).
Современные сверхзвуковые самолеты совершают по-
леты на малых скоростях с весьма большими углами
атаки (4—8°). В этом случае давление по поверхности
ПВД распределяется так, что нижняя группа статиче-
119
вких отверстий попадает в область повышенного дав-
ления (рис. 2.46), а высотомер показывает высоту мень-
ше действительной. Погрешности в измерении полного
и статического давлений возникают также при сколь-
жении самолета, когда нарушается установившееся об-
текание ПВД воздушным потоком.
Рис. 2.46. Эпюра распределения давления прн
полете с большим углом атаки
В структурной схеме системы питания анероидно-
мембранных приборов приемник воздушного давления
по его динамическим свойствам можно считать усили-
тельным звеном.
Трубопроводы, соединяющие ПВД с анероидно-мем-
бранными приборами, обладают аэродинамическим со-
противлением, имеют значительный объем и протяжен-
ность, Поэтому передаточные свойства трубопроводов
динамической и статической систем оказывают опреде-
ленное влияние на точность показаний пилотажно-нави-
гационных приборов. Трубопровод можно представить
эквивалентной схемой, состоящей из капилляра, неко-
торого объема, равного объему всего трубопровода,
Рис. 2.47. Эквивалентная схема трубо-
провода
и манометрического
чувствительного эле-
мента прибора. Ка-
пилляр длиной I и
диаметром Д харак-
теризует аэродина-
мическое 'сопротив-
ление трубопровода
(рис. 2.47).
Протяженно ст ь
трубопроводов на
современном само-
лете достигает не-
120
Скольких десятков метров. Давление по трубопроводу
передается с конечной скоростью, равной скорости звука.
Поэтому трубопровод создает запаздывание
I ta = —, (2.31)
а
где а — скорость звука.
Если длина трубопровода L = 50 м, то запаздывание
в передаче давления по трубопроводу будет достигать
0,15 сек.
Трубопровод по его динамическим свойствам можно
представить последовательным соединением инерцион-
ного звена —5— и звена с постоянным запаздыванием
i Тор + 1
(рис. 2.48).
Рис. 2.48. Структурная схема трубопро-
вода
Передаточная функция трубопровода имеет вид
Pjix То р + 1
Постоянная времени трубопровода определяется фор-
мулой
- гр в 128 т, v L Tip
' где т] — вязкость воздуха;
v— объем трубопровода;
Z — относительная температура;
Рпх — давление на входе в трубопровод.
Из формулы (2.33) видно, что постоянная време-
ни То увеличивается с увеличением объема трубопрово-
да и присоединенных к нему приборов v и длины трубо-
провода L. С увеличением диаметра трубопровода его
постоянная времени резко уменьшается. Если рассмат-
ривается система статического давления, то Рвх=РСт-
Поскольку с увеличением высоты давление РСт умень-
шается, то постоянная времени статического трубопро-
' 121
(2.32)
Айда возрастает. Следовательно, на больших высотах
увеличиваются запаздывания в показаниях анероидно-
мембранных приборов.
В показаниях высотомеров возникают существенные
погрешности при наборе самолетом высоты или сниже-
нии с вертикальной скоростью. При вертикальных ско-
ростях 100—200 м]сек погрешности в измерении высо-
ты могут достигать нескольких сот метров. Во время
полета с ускорением постоянная времени трубопроводов
динамического давления может достигнуть нескольких
секунд. Это в свою очередь вызовет погрешности в из-
мерении скорости до десятков метров в секунду.
Погрешности в показаниях анероидно-мембранных
приборов могут быть уменьшены следующими спосо-
бами:
— увеличением диаметров трубопроводов;
— уменьшением длины статической и динамической
проводки;
— сокращением объемов приборов и датчиков, при-
соединенных к системе ПВД;
— компенсацией погрешности с вычислением ее ве-
личины в зависимости от режима полета;
Последний способ применяется в электромеханиче-
ском высотомере УВИ-30, В некоторых приборах ком-
пенсируется средняя величина погрешности, полученная
в результате расчетов или опытным путем.
122
Глава 3
ИЗМЕРИТЕЛИ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ.
АКСЕЛЕРОМЕТРЫ
§ 1. ДАТЧИКИ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ
Назначение и принцип действия. Измерение углов
атаки и скольжения на самолете необходимо для рабо-
ты целого ряда систем, например автопилота, систем
вооружения, контура управления конусом и др.
В измерителях или датчиках углов атаки и скольже-
ния используется способность флюгерных поверхностей
устанавливаться по направлению потока воздуха, набе-
гающего на самолет (рис. 3.1). Если поток воздуха па-
раллелен продольной оси самолета, то флюгер угла
атаки устанавливается в нейтральное положение, при
этом хорда профиля флюгера параллельна продольной
оси (рис. 3.1а). При изменении направления потока,
т. е. при возникновении некоторого положительного угла
атаки а, симметричное обтекание флюгера нарушается.
В результате этого создается момент статической устой-
чивости флюгера Mza. Этот момент поворачивает флю-
гер на угол а и устанавливает его по направлению потока
воздуха (рис. 3.16). С осью флюгера связан дви-
жок потенциометра (рис. 3.1 в). Положение движка от-
носительно обмотки потенциометра зависит от величины
угла атаки а. Напряжение Uл, снимаемое с потенцио-
метра, пропорционально углу атаки а.
Для измерения углов скольжения используются флю-
геры, ось вращения которых параллельна плоскости
123
симметрии самолета. Флюгеры скольжения устанавли-
ваются по направлению потока воздуха под действием
момента статической устойчивости Му&.
Устройство датчика. Обычно датчик углов атаки и
скольжения укрепляется на штанге в носовой части фю-
зеляжа или на крыле. Длина штанги выбирается так,
Рис. 3.1. Принцип действия датчика угла атаки:
а — положение флюгера при а=0; б — положение флюгера при а>0; в — потен-
циометрический преобразователь датчика угла атаки
чтобы в полете датчик находился в зоне невозмущенно-
го потока. Конструктивно датчик углов аир объеди-
няется с приемником воздушного давления (рис. 3.2).
Флюгеры датчика имеют некоторую стреловидность и
статически балансируются относительно своей оси вра-
щения. Для защиты от обледенения механизм каждого
флюгера обогревается специальным нагревательным
элементом, питающимся. от бортсети самолета.
Рис. 3.2. Устройство датчика угла атаки и скольжения:
1 — приемник воздушного давления; 2 — флюгер скольжения; 3 — флюгер угла атаки; 4 — штуцеры стати-
ческого и полного давления; 5 — сопротивление; 6 — потенциометры; 7 — противовес; 8 — отверстие статиче-
ского давления; 9 — противовес; 10 — щеткодержатель
§ 2. ИЗМЕРИТЕЛИ УСКОРЕНИЙ
Принцип действия. Приборы, предназначенные для
измерения ускорений самолета, называются акселе-
рометрами. Наибольшее распространение получили
124
акселерометры для измерения линейных ускорений. Из-
мерение ускорений самолета необходимо для управле-
ния полетом по заданной траектории, определения ко-
ординат летательного аппарата в пространстве, предот-
вращения больших перегрузок, действующих на экипаж
и конструкцию самолета.
По своему устройству акселерометр представляет
маятник. В простейшем акселерометре (рис. 3.3) грузик
Рис. 3.3. Схема устройства акселеро-
метра
с массой т подвешен на пружинах внутри корпуса. Под
действием ускорений грузик может перемещаться вдоль
оси хх, которая называется измерительной. Пере-
мещаясь вдоль оси хх, грузик сжимает одну пружину
и растягивает другую. Подобно обычному маятнику гру-
зик акселерометра может колебаться. Для демпфиро-
вания колебаний подвижных элементов акселерометра
применяются демпферы. Перемещение подвижной части
акселерометра может быть передано на стрелку визу-
ального прибора или преобразовано в электрический
сигнал. В акселерометре, изображенном на рис. 3.3,
преобразователем является потенциометр.
Положение самолета и корпуса акселерометра в не-
подвижной системе координат можно определить коор-
динатами х, у и г. Пусть ось измерения акселерометра
направлена параллельно неподвижной оси х. При поле-
те с ускорением грузик акселерометра смещается отно-
сительно корпуса на расстояние х0. В неподвижной сис-
теме координат положение грузика или инерционной
массы определится суммой перемещения х0 относитель-
126
ЙО корпуса прибора и суммой перемещения ха вместе
с самолетом относительно неподвижной системы коор-
динат
х = ха + х0.
Поэтому ускорение грузика относительно неподвиж-
ной системы координат равно сумме переносного ахп и
относительно ах0 ускорений
O v- ОЛ-п Пд-Q. (3-1)
При движении грузика на него действует сила инер-
ции Еп, сила противодействующей пружины Fnp и сила
демпфера Ед. Сила инерции по второму закону Ньютона
определяется произведением массы грузика т на его
ускорение
Fa = тах. (3.2)
Сила противодействующей пружины пропорциональ-
на перемещению грузика относительно корпуса
F пр = сХц, (3.3)
где с — коэффициент жесткости пружины. Сила, разви-
ваемая демпфером, пропорциональна скорости Vo дви-
жения инерционной массы (грузика) относительно кор-
пуса прибора
F*=KnVa. (3.4)
Инерционная сила уравновешивается силами Рщ> и
FK, поэтому
” тах = — (сх0 + кдУ0). (3.5)
Если в формулу (3.5) подставить значение ускоре-
'.ния ах из формулы (3.1), то получится следующее урав-
нение акселерометра:
V о схй = nwxa. (3.6)
7 При полете самолета с постоянным переносным уско-
• рением ахп грузик деформирует пружину и устанавли-
вается на расстоянии х0 от нейтрального положения.
<Так как грузик после перемещения на расстояние хо
находится в неподвижном состоянии (если ускорение ахп
постоянно), относительная скорость Vo и ускорение ах0
равны нулю. Поэтому
сх0 = — та xlt. (3.7)
127
Из уравнения (3.7) определяется величина перемеще-
ния грузика при полете самолета с ускорением ахп
х0 = ~—-ахп. (3.8)
С
Если полет'совершается с постоянным линейным ус-
корением ажп, грузик акселерометра устанавливается в
равновесное положение на расстоянии х0 от нейтрали.
В состоянии равновесия сила упругой пружины сообща-
ет грузику ускорение, равное по величине переносному
ускорению самолета.
Методическая погрешность акселерометра. На само-
лет в полете (рис. 3.4) действует сила тяги двигате-
Рис. 3.4. Схема сил, действующих иа самолет в продольном
движении
ля Р, подъемная сила У, сила сопротивления X, сила
инерции таха, сила веса G. Сумма проекций этих сил на
продольную ось самолета определяется уравнением
таха ==Р — У cos а — X sin а — G sin 0П cos а. (3.9)
Из уравнения (3.9) величина ускорения в направле-
нии продольной оси самолета
Р Y X
ахп =---------cos а-----sin а — g sin 0П cos а. (3.10)
т т т
о G
Здесь— = g— ускорение силы тяжести.
т
Акселерометр, у которого ось измерения параллель-
на продольной оси самолета, измеряет составляющую
128
ускорения вдоль оси х самолета. Но перемещение гру-
зика хок не будет в точности пропорционально величи-
не аХп, полученной по формуле (3.10). Это объясняется
тем, что акселерометр реагирует на все ускорения, на-
правленные вдоль оси %] самолета, кроме ускорения
g sin 0П cos а.
Перемещение хок грузика акселерометра будет про-
порционально величине так называемого кажущегося
ускорения
«гК= —-----— cosa— — sin а. (3.11)
т т т «ГД
Разность между величинами кажущегося и действи-
тельного ускорений и составляет методическую погреш-
ность акселерометра.
Да = ах1е — ахП = g sin 0П cos а. (3.12)
Таким образом, методическая погрешность акселе-
рометра с инерционной массой обусловлена тем, что
такой акселерометр не реагирует на ускорение поля
земного тяготения.
Устройство акселерометров. Инерционный элемент
акселерометров может быть подвешен на направляющих
или на рычагах. В акселерометре (рис. 3.5) инерцион-
ный элемент подвешивается на плоских пружинах и
перемещается под действием инерционных сил вдоль оси
измерения без направляющих. Колебания инерционной
массы демпфируются воздушным демпфером. Цилиндр
демпфера высверлен в теле инерционного элемента.
С инерционной массой соединен потенциометр, который
перемещается вместе с массой относительно движка, ук-
репленного на корпусе прибора.
> Акселерометр с подвеской инерционного элемента на
рычаге можно схематически представить в виде маятни-
ка с противодействующей пружиной (рис. 3.6). Если
одновременно с инерционной силой, направленной по
оси измерения акселерометра тахп, действует сила
maza по взаимно перпендикулярной оси, то в показани-
ях прибора возникнет погрешность. Эта погрешность
обусловлена моментом силы maza относительно оси вра-
щения маятника. Момент силы таха стремится увели-
чить угол <рь а момент силы maza уменьшает угол <pi и
Создает тем самым погрешность А<р.
129
Рис. 3.5. Акселерометр с плоскими противодействующими пружи-
нами:
1 — инерционный элемент; 2 — плоские пружины; 3 — воздушный демпфер;
4 — потенциометр; 5 — двнжок потенциометра; 6 — токоподводы; 7 — наклад-
ки; 8 — корпус
Рис. 3.7. Схема акселерометра
с антипараллельными маятни-
ками
Рис. 3.6. Акселерометр с
рычажной подвеской
массы
130
Погрешность рычажного акселерометра можно ком-
пенсировать, если использовать два антипараллельных
Маятника, связанных зубчатыми секторами (рис. 3.7).
|1ри такой конструкции действия моментов сил maza,
Приложенных к верхнему и нижнему маятникам, взаим-
о компенсируются. Степень компенсации зависит от
Точности соблюдения равенства масс, длин плеч под-
веса и жесткостей пружин антипараллельных маятни-
ков.
г По схеме с антипараллельными маятниками постро-
ен акселерометр АМ-10 или указатель перегрузок
?(p ic. 3.8). Прибор измеряет перегрузки т]у, действующие
на самолет по направлению его вертикальной оси z/i.
Перегрузкой вообще называется величина, показываю-
щая, во сколько раз приложенная к самолету сила F
больше силы веса G:
« = -£-. (3.13)
Вертикальная перегрузка показывает, во сколько
фаз подъемная сила Y превосходит силу веса самоле-
та G, т. е.
- (3-14)
Сг
Перегрузка — величина безразмерная и измеряется
в безразмерных единицах.
Чувствительными элементами акселерометра АМ-10
Ыляются два маятника или две инерционных массы 10.
Пли возникновении вертикального ускорения маятники
ш ворачиваются на своих осях 9 до тех пор, пока мо-
менты противодействующих пружин 13 не уравновесят
^моменты инерционных сил маятников. Для компенсации
Погрешности от действия моментов сил maza, направлен-
ных по оси г, перпендикулярной оси измерения, маятни-
ки кинематически связаны с помощью зубчатых секто-
|»ов 11. Поворот маятников через зубчатый сектор 14 и
|<ибку 7 передается на указывающую стрелку 4. Угол
Юворота стрелки измеряется по шкале 5, градуирован-
ию в единицах перегрузки. Стрелка 4 при повороте от
Нейтрального положения передвигает одну из фиксирую-
щих стрелок 6. С помощью этих стрелок «запоминает-
!ji» максимальная величина действующей на самолет
131
Рис. 3.8. Кинематическая схема
/ — пружинное кольцо; 2 — стекло; 3 — прокладка; 4 — указывающая стрелка;
5 —шкала; 6 — фиксирующие стрелки; 7 —трибка; 8 — корпус; 9 — оси секто-
ров; /0 — инерционные массы; // — зубчатые секторы; 12 — стопорный винт;
указателя перегрузки типа АМ-10:
13 - противодействующие пружины; 14 - зубчатый сектор; /5 - пружина
° кнопка установки фиксирующих стрелок в нулевое положение; /7 — сек-
торы установки стрелок; 18 — шестерни с поводками
вертикальной перегрузки. Установка фиксирующих стре-
лок в нулевое положение производится кнопкой 16. При-
бор АМ-10 измеряет перегрузки по оси z/t самолета в
диапазоне —5----НО ед. По своему устройству АМ-10
является недистанционным прибором и устанавливается
на приборной доске самолета.
Акселерометры предназначаются для измерения ли-
нейных ускорений центра масс самолета. Если чувстви-
тельный элемент акселерометра установлен на некото-
ром расстоянии от центра масс, то прибор измеряет так-
же и ускорения, возникающие в результате вращения
самолета относительно его центра масс. Это вызывает
погрешность в показаниях акселерометра. Для устра-
нения погрешностей, обусловленных вращением самоле-
та относительно центра масс, чувствительный элемент
прибора должен устанавливаться по возможности бли-
же к центру масс. Технически эта задача решается с
помощью дистанционных акселерометров, состоящих из
датчика и указателя. Датчик помещается вблизи от цен-
тра масс самолета, а указатель—на приборной доске.
Дистанционный акселерометр АДП измеряет линей-
ные перегрузки, действующие на самолет в плоскости
симметрии по направлению вертикальной оси yi. В ком-
плект прибо|ра входят датчик ДП и указатель УП.
27я
Рис. 3.9. Электрокинематическая схема дистанционного акселеро-
метра АДП:
j _ потенциометр обратной связи; 2— редуктор; 3— исполнительный двига-
тель; 4 — груз; 5 — усилитель; 6 — шкала
132
Датчик и указатель соединены электрически между
£обой (рис. 3.9). Датчик акселерометра состоит из инер-
ционной массы или груза 4, противодействующих пру-
жин и двух потенциометрических преобразователей
> Рис. 3.10. Схема показаний акселерометра:
4*“ прямолинейный горизонтальный полет; б — полет с отрицательной пере-
ДО$кой (вход в пикирование); в — полет с положительной перегрузкой (вы-
fc ход из пикирования, петля Нестерова)
П1 и ПП2. Основными элементами указателя являются
Илитель 5, исполнительный двигатель 3, редуктор 2,
(тенциометр обратной связи 1, шкала 6, указательная
две фиксирующие стрелки.
Если самолет совершает прямолинейный горизон-
!Дьный полет (рис. 3.10а), инерционная сила Г, в плос-
рети симметрии отсутствует. Подъемная сила Y урав-
133
новешивает силу веса G. Величина перегрузки, дейст-
вующей на самолет в этом случае:
Груз в датчике смещен от среднего положения про-
порционально %=1, а стрелка указателя устанавлива-
ется против отметки шкалы +1 ед. Когда самолет вхо-
дит в пикирование (рис. 3.106), его центр масс переме-
щается по криволинейной траектории, которая обращена
выпуклостью вверх. При этом возникает центробежная
сила F{, направленная по радиусу кривизны траекто-
рии. Под действием этой силы груз в датчике переме-
щается вверх, а стрелка указателя отмечает отрица-
тельную перегрузку (в рассматриваемом примере
Пу = ~ Г
Во время выхода из пикирования центр масс само-
лета также двигается по криволинейной траектории
(рис. З.Юв). Но в этом случае центробежная сила Ft
направлена вниз. Груз датчика перемещается вниз, сжи-
мая нижнюю пружину и растягивая верхнюю. Указатель
акселерометра отмечает положительную перегрузку
(пу=2,5).
В электрическую схему дистанционного акселеромет-
ра (рис. 3.11) входят потенциометрические преобразова-
тели ПП1 и ПП2 датчика, потенциометр обратной связи
Пос, полупроводниковый усилитель, исполнительный
двигатель Д, трансформатор Тр, расположенные в кор-
пусе указателя. Движки потенциометров ПП1 и ПП2
жестко соединены с грузом. Потенциометр ПП2 может
служить датчиком электрического сигнала для автопи-
лота и для других систем оборудования на борту само-
лета. Потенциометр ПП1 соединен по мостовой схеме с
потенциометром обратной связи. На диагональ моста
а—b подается переменное напряжение 36 в 400 гц со
вторичной обмотки трансформатора.
Если перегрузка пу = 0, груз датчика и движок потен-
циометра ПП1 занимают среднее положение 1. При
этом, мостовая схема согласована и напряжение на из-
мерительной диагонали (между движками потенциомет-
ров ПП1 и Пос) отсутствует. Если перегрузка пу отри-
цательна (самолет входит в пикирование), то груз дат-
чика и движок ПП1 занимают положение 2 и мостовая
134
:Мй Оказывается разбалансированной. Напряжение
согласования с измерительной диагонали подается
вход усилителя, собранного на триоде Т -типа П4Г.
выхода усилителя сигнал рассогласования поступает
обмотку управления исполнительного двигателя Д
3.11. Принципиальная электрическая схема дистанционного
акселерометра
ia ДИД-0,5. Обмотка возбуждения двигателя подклю-
ча к клеммам вторичной обмотки трансформатора Тр.
помощью емкостей и С2 создается сдвиг по фазе
? между напряжениями на обмотках возбуждения и
Давления двигателя Д. Такой сдвиг необходим для
Здания вращающегося поля в двигателе.
^Через редуктор двигатель поворачивает движок по-
Цщометра до тех пор, пока не будет вновь сбаланси-
Йна мостовая схема. Одновременно с согласованием
Ежовой схемы двигатель поворачивает указательную
^лку прибора на. угол, пропорциональный величине
1еряемой перегрузки пу. При положительной величи-
'йерегрузки пу движок потенциометра ПП1 занимает
тожение 3 и двигатель поворачивает указательную
135
стрелку относительно шкалы в направлении положи-
тельных значений перегрузок.
Конструкция дистанционного акселерометра показа-
на на рис. 3.12. Датчик ДП помещен в герметизирован-
ный цилиндрический корпус 14. Чувствительный элемент
датчика — инерционная масса или груз 13 перемещает-
ся по двум направляющим 10. При движении вдоль на-
правляющих груз преодолевает силу противодействую-
щих пружин 11. Жесткость пружин подбирается в
зависимости от диапазона измерения датчика. Направля-
ющие стержни и пружины крепятся на основании дат-
чика. Рядом с направляющими к основанию приверты-
ваются винтами кронштейны 16 с потенциометрами.
Движки или щетки потенциометров 12 жестко закреп-
лены на грузе. С помощью гибких токоподводов 15
движки соединяются электрически с клеммами гермети-
ческого изолятора 25. Полость корпуса датчика запол-
няется жидкостью (маслом). Благодаря трению поверх-
ности груза о жидкость обеспечивается демпфирование
его колебаний. Для увеличения поверхности и повыше-
ния демпфирования на грузе укреплена скобка. Корпус
датчика герметически закрывается крышкой. На корпусе
датчика параллельно его оси измерения нанесены две
стрелки, направленные в противоположные стороны, и
обозначены — G и +G. Стрелки необходимы для пра-
вильной установки датчика на самолете.
Конструктивные элементы указателя помещаются
внутри корпуса 8. В передней части корпуса расположе-
на шкала, закрытая стеклом 9. В задней части корпуса
смонтирован полупроводниковый усилитель, понижаю-
щий трансформатор и исполнительный двигатель. Вы-
ходная ось двигателя через редуктор поворачивает ука-
зательную стрелку 18 и щеткодержатель со щеткой 1
потенциометра обратной связи 6. Между потенциомет-
ром обратной связи и шкалой установлен кинематиче-
ский механизм 7 фиксирующих стрелок 17. В состав
механизма входят два храповика, две собачки, две спи-
ральных возвратных пружины. Механизм фиксирующих
стрелок приводится в действие кнопкой 19. Ось кнопки
упирается в конус, который перемещает каретку 22.
Каретка выводит собачки из зацепления с храповиками
и спиральные пружины возвращают фиксирующие
стрелки в начальное положение. Отсчет показаний ак-
Рис. 3.12. Дистанционный потенциометрический акселерометр:
/ — щеткодержатель со щеткой; 2 — конденсатор; 3 — колодка; 4 — трансформатор; 5 — триод; 6 — потенцио-
метр обратной связи; 7 — кинематический механизм фиксирующих стрелок; 8 — корпус; 9 — стекло; 10 — на-
правляющая; 11— противодействующая пружина; 12 — движок потенциометра; 13 — груз; 14 — корпус; 15 — токо-
подвод; 16 — кронштейн с потенциометром; /7 — фиксирующая стрелка; 18 — указательная стрелка; 19 — кнопка
возврата фиксирующих стрелок; 20 — пружина каретки; 2/— гнездо оси кнопки; 22 —каретка; 23 — ось собачки;
24 — собачка; 25 — проходной герметический изолятор
136
селерометра производится по шкале, градуированной в
единицах перегрузки. Положительные перегрузки отсчи-
тываются по часовой стрелке от нулевого деления шка-
лы, отрицательные — против часовой стрелки. Указа-
тельная стрелка при своем движении с помощью повод-
ков увлекает храповики со втулками и фиксирующими
стрелками. Храповики со стрелками удерживаются с
помощью собачек в положениях, соответствующих мак-
симальным достигнутым в полете перегрузкам; Возврат
фиксирующих стрелок в начальное положение произво-
дится нажатием кнопки 19. Шкала указателя может
быть изготовлена со светомассой или без светомассы,
если приборная доска в кабине самолета освещается
красным светом.
Датчик акселерометра устанавливается вблизи цент-
ра масс самолета. При этом стрелка на корпусе датчи-
ка, обозначенная + G, должна быть направлена вниз
параллельно вертикальной координатной оси у\ само-
лета. Отклонение стрелки от направления, параллельно-
го оси z/i, не должно превышать ±1°. Если датчик
акселерометра установлен правильно, указатель при гори-
зонтальном положении продольной оси самолета дол-
жен показывать величину перегрузки +1 ед. с точностью
±0,15 ед. при температуре ±20— ±10°С и с точностью
±0,2 ед. при температурах +60°, —45°, —60° С. Указа-
тель акселерометра крепится на приборной доске тремя
винтами так, чтобы нулевое деление шкалы было сверху.
Дистанционный потенциометрический акселерометр
выпускается в пяти модификациях АДП-3, АДП-4,
АДП-7, АДП-10, АДП-10-1. Эти модификации отличают-
ся диапазонами измеряемых перегрузок и погрешностя-
ми показаний (табл. 3.1).
Таблица 3.1
а б
Рис. 3.13. Устройства для проверки акселерометров:
а — поворотное приспособление:
1 — основание- 2 — внешний неподвижный круг; 3 — внутренний подвижный круг; 4 — проверяемый датчик; 5 — поворотная.
’ рукоятка;
б — центрифуга:
;__привод с основанием; 2 — проверяемый датчик; 3 — вращающийся диск
Тип акселе- рометра Диапазон изме- рения перегру- зок, ед. Погрешности измерений
Температура +20, +10°С Температура +60°, —45°, —60°С
АДП-3 -14- +3 +0,15 +0,2
АДП-4 —24- +4 +0,2 +0,3
АДП-7 -3,5- +7 +0,33 +0,55
АДП-10 -24- +10 +0,36 +0,6
АДП-10-1 —54- + 10 ±0,5 ±0,75
138
Эксплуатация акселерометров типа АДП. В процес-
се эксплуатации проверка показаний акселерометра
производится через каждые три месяца. Для имитации
перегрузок до ± 1 ед. используется специальное пово-
ротное приспособление. Перегрузки более ±1 ед. соз-
даются с помощью центрифуги. Поворотное приспособ-
ление (рис. 3.13а) состоит из основания 1, внешнего
неподвижного круга 2, внутреннего подвижного круга 3
и поворотной рукоятки 5. Датчик акселерометра 4 кре-
пится на подвижный круг. Если необходимо проверить
показания акселерометра при положительных перегруз-
ках, датчик устанавливается на подвижный круг стрел-
кой + G вниз. С помощью рукоятки подвижный круг
устанавливается так, чтобы его средняя черта была
против нулевого деления шкалы, нанесенной на непод-
вижный круг. В этом случае прибор будет показывать
перегрузку +1 ед. Перемещение груза датчика проис-
ходит под действием силы реакции опоры, численно
равной силе веса G. Для проверки показаний прибора,
меньших единицы, подвижный круг с датчиком повора-
чивается последовательно на углы 30, 45, 60, 90°. При
повороте на угол 30° прибор будет показывать перегруз-
ку 0,87 ед., на угол 45° — перегрузку 0,707 ед., на
угол 60° — перегрузку 0,5 ед. При повороте датчика на
угол 9О'Э груз под действием пружин установится в
среднее положение и показания указателя будут нуле-
выми. Для проверки показаний акселерометра при от-
рицательных перегрузках датчик крепится на поворот-
ном круге так, чтобы стрелка — G была направлена
вниз. После этого круг также поворачивается на углы
30, 45, 60, 90р. Центрифуга для проверки акселеромет-
ров (рис. 3.136) состоит из привода 1, смонтированного
на основании, и вращающегося диска 3. В некоторых
центрифугах вместо диска установлена несущая балка.
Датчик проверяемого акселерометра устанавливается
на диск или балку центрифуги так, чтобы ось измере-
ния, обозначенная стрелками +G и —G, была парал-
лельна радиусу, проведенному из центра в точку уста-
новки датчика. Если проверяются показания прибора
при положительных перегрузках, то стрелка +G долж-
на быть направлена по. радиусу от центра вращения.
Для проверки прибора при отрицательных перегрузках
во внешнюю сторону от центра направлена стрелка
140
—G. При вращении диска с постоянной угловой ско-
ростью на груз датчика действует центробежная сила
Гцб = тЯ<о2, (3.15)
где т — масса груза;
R — расстояние от оси вращения диска центрифуги
до груза датчика;
<в —угловая скорость вращения диска.
С направлением силы ГЦб совпадает центробежное
ускорение
= (3.16)
Если изменять угловую скорость вращения диска ®
или величину радиуса R, то можно менять величину
центробежной силы Ец6 и центробежного ускорения /Цб.
Центробежная сила имитирует инерционную силу, при-
ложенную к грузу датчика. Величина измеряемой дат-
чиком перегрузки зависит от угловой скорости враще-
ния диска. Угловая скорость и перегрузка связаны для
акселерометров типа АДП при положительной перегруз-
ке соотношением
(3-17)
При отрицательной перегрузке
ш ~ V/? + 6 + «ДК ’
.Здесь со —угловая скорость вращения диска центрифу-
ги, рад)сек.;
п—величина перегрузки, ед.;
R — расстояние по радиусу от оси вращения ус-
тановки до оси симметрии датчика, мм;
AR —- перемещение центра тяжести датчика при
изменении перегрузки на одну единицу;
£ = 9810 ~~----ускорение земного тяготения.
се№
В знаменатель выражений (3.17), (3.18) входит рас-
стояние от центра тяжести датчика до оси симметрии.
Для датчиков акселерометров типа АДП это расстояние
равно 6 мм.
Величина перемещения центра тяжести датчика AR
зависит от жесткости противодействующих пружин. Эта
141
величина различна для разных типов датчиков. Значе-
ния Д/? для датчиков акселерометров типа АДП приве-
дены в табл. 3.2.
Таблица 3.2
Тип акселе- рометра Л/?, мм
АДП-З АДП-4 АДП-7 АДП-10 АДП-10-1 2,4 1,5 1,2 0,9 0,8
Если радиус составляет более 100 мм, то величи-
ну Д/? перемещения центра тяжести датчика при расче-
те угловой скорости вращения диска центрифуги мож-
но не учитывать. При постоянной величине радиуса R
перегрузка зависит только от скорости вращения цен-
трифуги.
На самолетах кроме визуальных указателей пере-
грузок и ускорений применяются сигнализаторы, кото-
рые выдают сигналы на изменение режима работы аг-
регатов и систем оборудования при определенной за-
данной перегрузке.
Глава 4
ГИРОСКОПИЧЕСКИЕ
ПИЛОТАЖНО-НАВИГАЦИОННЫЕ
ПРИБОРЫ
§ 1. КРАТКИЕ ОСНОВЫ ТЕОРИИ ГИРОСКОПОВ
Назначение и классификация гироскопов. Для руч-
ного и автоматического управления самолетом, а также
(для обеспечения действия навигационного оборудования
Й систем вооружения необходимо определять положе-
ние самолета относительно заданной траектории полета,
(углы и угловые скорости его поворота в пространстве.
Для измерения этих параметров на самолете исполь-
зуются гироскопы или гироскопические датчики.
Гироскопом называется тяжелое симметрич-
ное тело (ротор), быстро вращающееся
(относительно оси симметрии. Одна из точек
£ротора неподвижна и находится на оси симметрии
^(рис. 4,1а). Примером простейшего гироскопа является
^Волчок, который опирается концом оси на некоторую
(плоскость. При быстром вращении волчок сохраняет
’заданное вертикальное направление своей оси.
Для обеспечения гироскопу необходимых степеней
,свободы применяется карданов подвес, который может
состоять из одной внутренней или двух рамок — внут-
ренней и наружной. Гироскоп в кардановом подвесе с
одной рамкой называется двухстепенным (рис. 4.16).
Гироскоп в кардановом подвесе с двумя рамками имеет
три степени свободы и называется трехстепенным.
143
Ротор гироскопа вращается вокруг оси zz, которая на-
зывается осью собственного вращения, с угловой ско-
ростью й. Ротор двухстепенного гироскопа вращается
относительно оси zz и поворачивается вокруг оси рамки
подвеса хх. У гироскопа с тремя степенями свободы
ротор вращается относительно оси zz, поворачивается
вокруг осей внутренней рамки карданова подвеса хх и
Рис. 4.1. Устройство гироскопа:
а — ротор гироскопа; б — двухстепенной гироскоп; в — трехстепенной гироскоп
в карданном подвесе
внешней рамки уу, В приборах с трехстепенными гиро-
скопами ротор вместе с внутренней и наружной рамками
карданова подвеса может поворачиваться относительно
корпуса, жестко связанного с самолетом.
В зависимости от положения центра тяжести гиро-
скопы подразделяются на астатические и статические.
У астатического гироскопа центр тяжести ротора совпа-
дает с точкой пересечения осей карданова подвеса. Ги-
роскоп, у которого центр тяжести смещен относительно
точки пересечения осей, называется статическим.
Гироскоп в кардановом подвесе обычно подвержен
действию внешних моментов. Такие моменты создаются
силами трения в опорах рамок подвеса или вследствие
того, что центр тяжести ротора и рамок не совпадает
с точкой пересечения осей карданова подвеса. Внешние
моменты могут быть приложены относительно осей под-
веса с помощью специальных корректирующих устройств.
Под действием моментов коррекции ось ротора гиро-
144
-екопа устанавливается в определенном положении либо
совершает перемещение по некоторому заданному на-
правлению. Для идеализированного объяснения гиро-
скопических свойств часто рассматривается свободный
^гироскоп, т. е. гироскоп с тремя степенями свободы, на
^который не действуют внешние моменты. Гироскоп в
кардановом подвесе может быть свободным, если центр
тяжести ротора и рамок совпадает с точкой пересечения
осей подвеса и отсутствует трение в опорах осей под-
веса.
Гироскопы могут использоваться для измерения
’углов, угловых и линейных скоростей самолета. Гиро-
скопические приборы, предназначенные для измерения
угловых отклонений самолета относительно его коорди-
натных осей, называются позиционными. Эти гироскопы
подразделяются на гировертикали и курсовые гироскопы
или гирополукомпасы. С помощью гировертикали можно
^измерять углы тангажа и крена. Углом тангажа назы-
вается угол наклона продольной оси самолета к пло-
скости горизонта. Углом крена называется угол поворота
самолета относительно его продольной оси. Гирополу-
компасы позволяют измерять угол поворота самолета
относительно вертикальной оси, то есть угол рысканья,
.а также угол курса.
Гироскоп с двумя степенями свободы может быть
скоростным или интегрирующим.
Скоростной гироскоп служит для измерения угловой
скорости самолета относительно одной из его коорди-
натных осей. Поворот рамки скоростного гироскопа
‘ограничивается с помощью механической или электри-
ческой пружины.
Интегрирующий гироскоп не имеет упругого ограни-
чения движения рамки подвеса.
Свойства гироскопа. Пока ротор не вращается, гиро-
скоп не проявляет своих так называемых гироскопиче-
ских свойств. Если основание гироскопа с невращаю-
Ьцимся ротором наклонять относительно плоскости гори-
зонта, то силы трения в осях карданова подвеса будут
увлекать ротор. Угол наклона оси ротора к плоскости
^Горизонта будет практически равен углу наклона осно-
вания. Если к внутренней рамке подвеса приложена
Сила веса грузика (рис. 4.2а), то рамка вместе с рото-
ном повернется относительно своей оси хх. Момент, при-
145
Рис. 4.2. Свойства гироскопа:
а___движение под действием момента, созданного
сохранять неизменное направление в пространстве
силой веса грузика, при невращающемся
оси ротора; в — движение гироскопа под
грузика
роторе; б — свойство гироскопа
действием момента силы веса
множенный к наружной (внешней) рамке, вызовет пово-
ет этой рамки вокруг ее оси уу.
|| Когда ротор приведен в быстрое вращение относи-
тельно оси симметрии, начинают проявляться гироско-
вические свойства. Если наклонить основание гироско-
па на некоторый угол к плоскости горизонта (рис. 4.26),
ротор гироскопа сохранит первоначальное горизон-
тальное положение. Грузик, подвешенный к внутренней
Йамке, создает момент относительно оси рамки хх
|рис. 4.2в). Однако под действием этого момента внут-
ренняя рамка не поворачивается вокруг оси хх, а гиро-
скоп начинает вращаться в горизонтальной плоскости
рокруг оси внешней рамки уу. Это вращение начинается
Немедленно после создания момента подвешиванием гру-
|ика и совершается с постоянной угловой скоростью.
Вели убрать грузик, вращение гироскопа относительно
Ней внешней рамки немедленно прекратится.
Момент, приложенный относительно оси одной рамки
^арданова подвеса, вызывает поворот гироскопа вокруг
оси другой рамки. Например, если момент приложен к
оси хх внутренней рамки, то гироскоп поворачивается
вокруг оси внешней рамки уу. Момент, приложенный
(Относительно оси уу внешней рамки, заставляет гиро-
скоп поворачиваться вокруг оси внутренней рамки хх.
Это движение называется прецессией гироскопа. Угло-
вая скорость прецессии относительно оси соответствую-
щей рамки карданова подвеса прямо пропорциональна
Величине приложенного момента. Поворот или прецес-
сия гироскопа происходит до тех пор, пока ось zz соб-
ственного вращения ротора не совпадает с направлением
реи той рамки, к которой приложен внешний момент.
Так как прецессия гироскопа прекращается немедленно
после прекращения действия момента, это означает, что
Прецессия является безынерционным движением.
I' Наряду с безынерционным движением (прецессией)
возможно движение оси ротора гироскопа по инерции
после прекращения действия внешнего момента. Инер-
ционное движение можно показать на примере гироско-
|а с тремя степенями свободы (рис. 4.3). Ротор гиро-
скопа приводится во вращение, а затем наносится лег-
кий удар по внутренней рамке около подшипника, в
Котором вращается ось ротора. При приложении силы
|рь ротора перемещается с ускорением, вызванным дей-
147
ствием силы. После прекращения действия силы ось
ротора движется по инерции и описывает конус. Угол
раствора конуса зависит от силы удара. Движение гиро-
скопа по инерции носит колебательный характер. Коле-
бательное движение ротора гироскопа имеет небольшую
амплитуду и высокую частоту. Движение оси ротора по
инерции называется нута-
цией. Под действием трения в
подшипниках карданова подве-
са нутационные колебания ги-
роскопа быстро затухают.
Следовательно, гироскоп
способен сохранять неизмен-
ным по отношению к звездам
направление оси собственного
вращения, прецессировать при
воздействии внешних момен-
тов, совершать нутационные
колебания в результате изме-
нения величины и направления
внешних сил и моментов, при-
ложенных к гироскопу.
Под действием момента,
приложенного относительно оси внешней рамки, гиро-
скоп прецессирует вокруг оси внутренней рамки. Внеш-
ний момент уравновешивается инерционным моментом.
Момент, который препятствует повороту гироскопа в на-
правлении действия внешнего момента, обусловлен сила-
ми инерции от поворотных ускорений и называется гиро-
скопическим моментом. Этот момент по величине равен
внешнему моменту, но направлен в противоположную
сторону.
Способность гироскопа сохранять неизменное в про-
странстве направление оси собственного вращения зави-
сит от величины кинетического момента его ротора.
Угловая скорость вращения ротора гироскопа представ-
ляется вектором й. Положительное направление век-
тора угловой скорости выбирается_так, чтобы вращение
ротора со стороны конца вектора й происходило против
часовой стрелки. Направление вектора угловой скоро-
сти й можно определить по правилу буравчика
(рис. 4.4). Если расположить буравчик вдоль оси вра-
148
.ЩеНия и поворачивать его рукоятку по направлению
вращения ротора, то поступательное движение бурав-
чика покажет направление вектора угловой скорости £2
вращения ротора гироскопа.
Рис. 4.4. Правило определения направ-
ления вектора угловой скорости гиро-
скопа
Момент инерции Л ротора гироскопа относительно
оси вращения z определяется по формуле
= (4-1)
где т—масса ротора;
R — радиус ротора.
Гироскопический момент, уравновешивающий в ре-
зультате прецессии внешний момент, равен произведе-
нию момента инерции Л на угловую скорость вращения
ротора й и на угловую скорость прецессии соп, т. е.
Mv = Iz й<оп. (4.2)
Произведение момента инерции Л на угловую ско-
рость вращения ротора й называется кинетическим мо-
ментом гироскопа.
H = IZQ. (4.3)
Кинетический момент гироскопа Н — это момент ко-
личества движения^ ротора относительно его оси симмет-
рии zz. Вектор Н_ совпадает с направлением вектора
угловой скорости й. После того как определена вели-
149
ЧиНа Н, гироскопический момент определяется произве-
дением кинетического момента на угловую скорость
прецессии
Мг = Н<иа. (4.4)
Под действием внешнего момента (Л1В = Л1Г) гиро-
скоп прецеесирует так, чтобы вектор кинетического мо-
мента по кратчайшему пути совместился с вектором
внешнего момента. Поэтому
Угловая скорость прецессии гироскопа определяется
отношением внешнего момента к величине кинетического
момента ротора гироскопа.
§ 2. ГИРОСКОПИЧЕСКИЕ ПРИБОРЫ ДЛЯ ОПРЕДЕЛЕНИЯ
ВЕРТИКАЛИ
Определение вертикали на самолете. Пространствен-
ное положение самолета в полете определяется относи-
тельно плоскости горизонта или направления вертикали
места. На поверхности Земли или в околоземном про-
странстве, где проявляется действие поля земного тяго-
тения, вертикаль места совпадает с направлением силы
тяжести. Можно считать, с известным приближением,
что сила тяжести направлена по радиусу к центру ЗеМ'
ли. Плоскость, перпендикулярная к направлению вер-
тикали места, называется плоскостью горизонта.
Вертикаль места или плоскость горизонта можно
определить по положению отвеса (маятника), по пу-
зырьку жидкостного уровня, запоминанием направления
вертикали с помощью гироскопа, визированием види-
мого в полете горизонта.
Отвес или маятник, точка подвеса которого непо-
движна относительно Земли (рис. 4.5а), устанавливает-
ся по направлению силы тяжести или по вертикали
места. Однако использование маятника или жидкост-
ного уровня для определения вертикали на самолете
затрудняется тем, что полет практически всегда проис-
ходит с ускорением. В полете с ускорением груз маят-
ника подвергается действию сил инерции. Поэтому
маятник устанавливается по направлению равнодей-
150
ствующей сил, приложенных к самолету. Направление
равнодействующей и определяет так называемую кажу-
щуюся вертикаль. Маятник почти мгновенно устанав-
ливается по кажущейся вертикали. Отклонение кажу-
щейся вертикали от истинной вертикали места особенно
велико на виражах, на петле, при разгоне и торможении
самолета. Даже в прямолинейном полете с постоянной
Рис. 4.5. Определение вертикали:
а — по маятнику; б — запоминанием направления
вертикали с помощью гироскопа
скоростью кажущаяся вертикаль не совпадает с истин-
ной, так как в этом случае создается поворотное уско-
рение. Все эти причины не позволяют применять маят-
ник в качестве указателя истинной вертикали на борту
самолета.
Свободный гироскоп не подвергается влиянию инер-
ционных сил. Если ось ротора свободного гироскопа
установить по вертикали места, то гироскоп будет ука-
зывать направление вертикали независимо от воздей-
ствия инерционных сил (рис. 4.5 6). Но вертикаль места
в результате суточного вращения Земли поворачивается
по отношению к звездам, а ось ротора гироскопа сохра-
няет неизменное направление относительно звезд. По-
этому ось ротора гироскопа отклоняется от вертикали
места и возникает так называемый кажущийся уход
Гироскопа.
На экваторе истинная вертикаль поворачивается от-
носительно звезд и отклоняется от направления оси ро-
тора гироскопа с угловой скоростью, равной угловой
151
скорости вращения Земли: со0 = «3 = 0,25 град/м. В не-
которой точке А (рис. 4.6), координаты которой: долго-
та Л и широта <р, угловая скорость суточного вращения
Земли может быть разложена на горизонтальную со-
ставляющую сог и вертикальную сов:
<ог — ш3 cos <р, (4.6)
“в = “з sin <р.
Гироскоп в точке А установлен так, что ось враще-
ния ротора направлена по вертикали места и совпадает
Рис. 4.6. Отклонение вертикали места относительно
оси ротора свободного гироскопа, вызванное враще-
нием Земли и перемещением самолета
с вертикальной составляющей угловой скорости враще-
ния Земли <ов, а ось внешней рамки карданова подвеса
направлена параллельно вектору сог- Вследствие враще-
ния Земли вертикаль места будет отклоняться относи-
тельно оси внешней рамки свободного гироскопа с угло-
вой скоростью сог. Вертикальная составляющая угловой
скорости вращения Земли совпадает с направлением оси
ротора гироскопа и не изменяет относительного положе-
ния оси ротора и вертикали места.
Отклонение вертикали от направления оси гироско-
па возникает и при движении самолета относительно
152
Земли. Если полет совершается вдоль меридиана или
по дуге другого большого круга с путевой скоростью W,
то угловая скорость кажущегося ухода гироскопа от
вертикали будет равна
Вектор сое при полете по меридиану перпендикуля-
рен плоскости меридиана и векторам сог и сов- Если ось
внешней рамки карданова подвеса гироскопа параллель-
на продольной оси самолета, то кажущийся уход гиро-
скопа с угловой скоростью сое будет происходить отно-
сительно оси внутренней рамки. Это приведет к погреш-
ности в показаниях угла тангажа. Величина угла ft
будет изменяться с угловой скоростью со е = сос. Кажу-
щийся уход гироскопа с угловой скоростью сог будет
проявляться как изменение угла крена самолета с угло-
вой скоростью СОу = сог.
Наибольшая угловая скорость отклонения вертикали
места от направления оси ротора свободного гироскопа
создается при полете над экватором с запада на восток.
и>0 = «з + "О = "з + -Т——. (4.8)
Кз + П.
В этом случае свободный гироскоп покажет измене-
ние угла тангажа с угловой скоростью сое = со0.
Когда полет по дуге большого круга совершается с
некоторым курсом 4>, кажущийся уход гироскопа в пло-
скости симметрии самолета происходит с угловой ско-
ростью
«прод = ®8 COS ср sin 4- . (4.9)
Дз + п.
Кажущийся уход в поперечной плоскости, проходя-
щей через вертикальную ось у\ и поперечную ось Z\ са-
молета, происходит с угловой скоростью
“попер = “з COStp COS<}>. (4.10)
Кажущийся уход свободного гироскопа вследствие
вращения Земли и движения самолета показан на
рис. 4.7. При длительных полетах на большие дально-
сти кажущийся уход гироскопа может достигать весьма
значительных углов. Поэтому свободный гироскоп мо-
153
Рис. 4.7. Кажущийся уход гироскопа:
а, б — уход вследствие вращения Земли; в — уход, вызванный движением самолета относительно поверхности!
Земли
жет применяться для определения вертикали только при
Полетах на небольшие дальности. При дальних полетах
^сь ротора гироскопа необходимо непрерывно устанав-
ливать по направлению вертикали места. Этот процесс
называется коррекцией гироскопа.
£ Гировертикали. Физический маятник, если он не
подвергается воздействию ускорений, устанавливается
по направлению истинной вертикали места. При движе-
нии с ускорением маятник мгновенно отклоняется от
направления истинной вертикали. Свободный гироскоп
независимо от действия инерционных сил может сохра-
нять заданное вертикальное положение. Однако такой
гироскоп сохраняет свое положение неизменным по
отношению к звездам, тогда как вертикаль места пово-
рачивается относительно звезд в результате вращения
Земли и перемещения самолета с гироскопом над зем-
ной поверхностью. Для того чтобы ось ротора гироскопа
совпадала с направлением вертикали, необходимо с по-
мощью коррекционного устройства заставить гироскоп
прецессировать с той угловой скоростью, с какой изме-
няется направление вертикали относительно звезд. Чув-
ствительным элементом системы коррекции такого гиро-
скопа является физический маятник. Исполнительными
элементами коррекции служат моментные устройства,
которые прикладывают корректирующие моменты к
осям рамок карданова подвеса. Под действием этих мо-
ментов и осуществляется прецессия гироскопа с угловой
скоростью, равной угловой скорости поворота вертикали
места.
Гировертикалью называется корректируемый
^гироскопический прибор, у которого ось соб-
ственного вращения гироскопа следит за направлением
.вертикали места. Гировертикаль (рис. 4.8) представляет
-сочетание гироскопа и корректирующего маятника.
Маятник 1 находится между двумя парами контактов —
продольных 3—3, расположенных по оси хх, и попереч-
ных 2—2, расположенных по оси уу карданова подвеса.
Нить маятника укреплена на внутренней рамке подвеса
гироскопа. Контакты установлены на общем основании,
.которое укреплено на внутренней рамке карданова под-
веса.
Когда ось zz гироскопа установлена по направлению
^Вертикали места, маятник и его контакт 1 находятся в
155
среднем положении между крайними контактами 2—2
и 3—3. Через центральный и крайние контакты подает-
ся напряжение в обмотку управления коррекционных
двигателей Д1 и Д2. Ось двигателя Д; связана с осъюуу,
а ось двигателя Д2— с осью хх карданова подвеса. Дви-
гатель Д1 прикладывает момент Му к оси уу и гироскоп
г
Рис. 4.8. Схема гировертикали с маятниковой коррек-
цией:
Д[ — поперечный коррекционный двигатель; Д2 — продольный
коррекционный двигатель; / — контакт маятника; 2—2 — попереч-
ные контакты; 3—3 — продольные контакты маятникового пере-
ключателя; МПЖ — маятниковый жидкостный переключатель
под действием этого момента прецессирует вокруг осихх.
Момент Мх создается двигателем Д2. Под действием
момента Мх гироскоп прецессирует вокруг оси уу.
Гироскоп установлен на самолете так, что ось хх
внутренней рамки параллельна продольной оси самоле-
та, а ось уу направлена по поперечной оси. Ось собствен-
ного вращения гироскопа zz совпадает с направлением
вертикали места. Если самолет повернется вокруг про-
дольной оси, т. е. накренится на угол у, то вертикальная
ось самолета отклонится от оси zz гироскопа в плоско-
сти zOy также на угол у. Если самолет повернется во-
156
круг поперечной оси на угол тангажа •&, то его верти-
кальная ось отклонится от оси zz гироскопа в плоскости
Х)х на угол •&.
Ось собственного вращения гироскопа может откло-
ниться от направления вертикали. Такое отклонение мо-
^кет возникнуть в результате поворота вертикали вместе
| Землей, перемещения самолета, действия на гироскоп
|нешних моментов и целого ряда других причин. Если
&сь гироскопа zz отклонена от вертикали на некоторый
|ггол <р в плоскости zOy, то контакт маятника 1 замы-
вается с одним из поперечных контактов 2—2 и вклю-
чит коррекционный двигатель Дь Двигатель приложит
Момент Му к оси внешней рамку уу. Под действием мо-
мента гироскоп будет прецессировать вокруг оси хх до
£ех пор, пока ось ротора не будет опять совпадать с на-
правлением вертикали. При этом маятник установится
среднее положение, коррекционный двигатель Д1 вы-
ключится и действие момента коррекции Му прекратит-
ся. Если ось ротора гироскопа отклонится от вертикали
в плоскости zOx, то маятник замкнется с одним из кон-
тактов 3—3, коррекционный момент создаст двигатель Д2
И гироскоп будет прецессировать к вертикали вокруг
оси уу.
При полете с ускорением маятник устанавливается
ро направлению равнодействующей силы веса и инер-
I” Нонной силы, т. е. по направлению кажущейся верти-
али. По сигналам от маятника двигатели коррекции
вставят гироскоп прецессировать также к направлению
ажущейся вертикали. Поэтому в показаниях гировер-
икали возникают погрешности. Скорость прецессии ги-
оскопа под действием системы коррекции не должна,
ыть слишком большой, чтобы гироскоп не устанавли-
ался по любому положению маятника, которое он мо-
сет занять при кратковременных ускорениях. Обычно
корость прецессии гировертикалей под действием си-
темы коррекции выбирается в пределах 1—6 град/мин.
Ц Для уменьшения погрешностей при полетах с дли-
тельными ускорениями (разгон или торможение само-
Игта, вираж и др.) маятниковая коррекция гироверти-
Кали выключается. После прекращения действия уско-
рений система коррекции вновь включается.
К В реальных конструкциях гировертикалей чувстви-
тельным элементом системы коррекции служит жидкост-
157
ный маятник или жидкостный переключатель. Жидкост-
ный маятник (рис. 4.9) представляет собой герметический
медный сосуд-корпус 3, укрепленный на основа-
нии 2. Сосуд почти полностью заполнен жидкостью
(электролитом). Часть объема корпуса занимает воз-
душный пузырек 4. В основание переключателя (маят-
ника) запрессованы четыре контакта-электрода.
При горизонтальном положении основания (рис. 4.9а)
воздушный пузырек находится в средней части сосуда
и равномерно перекрывает все электроды. Электрические
сопротивления между электродами равны, а поэтому
равны и токи в цепях всех электродов. Если основание
переключателя наклонено к плоскости горизонта, напри-
мер вперед по направлению полета (рис. 4.9 6), то по-
верхности электродов перекрываются воздушным пу-
зырьком неодинаково и передний электрод оказывается
полностью покрытым жидкостью. Поэтому сопротивле-
ние между корпусом и передним электродом становится
меньше, чем между корпусом и задним электродом, и
через передний электрод протекает больший ток. Со-
противление в цепи заднего электрода, поверхность
которого при малых углах частично, а при больших пол-
ностью перекрывается воздушным пузырьком, стано-
вится больше, а ток в цепи этого электрода становится
меньше. Величина сопротивления R между корпусом и
каждым из диаметрально расположенных электродов
при наклонах основания на углы <р до ±30' изменяется
по линейному закону. По достижении угла ±30' и после-
дующем увеличении угла наклона электрические сопро-
тивления и токи i в цепях электродов остаются по-
стоянными (рис. 4.9в).
Жидкостные переключатели используются как чув-
ствительные элементы в системах коррекции централь-
ных гировертикалей, авиагоризонтов, гирополукомпасов,
курсовых измерительных систем.
Авиагоризонты. Визуальный гироскопический при-
бор, предназначенный для определения положения само-
лета относительно горизонтальной плоскости, называет-
ся авиагоризонтом. Авиагоризонт (рис. 4.10) состоит из
гироскопа в кардановом подвесе, системы коррекции,
шкал и индексов для определения углов тангажа и кре-
на. Ось ротора гироскопа 1 направлена по вертикали
места. Ось внешней рамки 4 в авиагоризонте данной
158
Рис. 4.9. Жидкостный маятник:
а—основание маятника горизонтально:
/ — электроды; 2 — основание; 3 — сосуд или корпус; 4 — воздушный пузырек; 5 — электролит*
о — маятник наклонен; в — зависимость сопротивления между электродами или тока в цепи’электродов от угл»
наклона маятника
схемы направлена параллельно продольной оси самоле-
та. Ось внутренней рамки параллельна поперечной оси
самолета. Жидкостный маятник коррекции 11 установ-
лен на внутренней рамке. Маятник управляет продоль-
ным 3 и поперечным 12 коррекционными двигателями.
Внутренняя рамка 2 с помощью штифта 5 связана с
Рис. 4.10. Кинематическая схема авиаго-
ризонта:
/ — ротор гироскопа; 2 — внутренняя рамка; 3 —
продольный коррекционный двигатель; 4 — внеш-
няя рамка; 5 — штифт; 6 — планка горизонта;
7 — шкала крена; 8 — индекс крена; 9 — шкала
тангажа; /0 — силуэт самолета; // — жидкостный
маятник; 12 — поперечный коррекционный двига-
тель
планкой горизонта 6. На внешней рамке укреплен ин-
декс крена 8. Шкала крена 7, шкала тангажа 9 и си-
луэт самолета 10 связаны с корпусом прибора.
При изменении угла тангажа самолет поворачивает-
ся относительно поперечной оси. Гироскоп сохраняет
неизменным направление оси ротора и стабилизирует
внутреннюю рамку. Поэтому при изменении угла тан-
гажа самолета внешняя рамка карданова подвеса вме-
сте с самолетом поворачивается относительно оси внут-
160
Ценней рамки 2 на угол, равный углу тангажа. Вместе
| внешней рамкой поворачивается планка горизонта,
gfcui отклонения планки относительно шкалы 9 показы-
вает угол тангажа.
При крене самолета относительно неподвижного в
пространстве гироузла поворачивается корпус прибора,
Айкала крена и силуэт самолета. Угол крена отсчиты-
вается по положению шкалы 7 относительно индекса <?,
Связанного с гироузлом.
i Чувствительным элементом системы коррекции авиа-
горизонта служит жидкостный маятник 11. Если ось ро-
тора гироскопа отклонится от вертикали за счет пово-
рота вокруг оси внешней рамки, воздушный пузырек
Переместится между поперечными электродами. Поэтому
Поступит электрический сигнал в обмотку управления
Поперечного коррекционного двигателя 12, который при-
ложит момент относительно оси внутренней рамки. Под
Действием этого момента гироскоп будет прецессировать
вокруг оси внешней рамки. Когда ось ротора устано-
вится в вертикальное положение, воздушный пузырек
Займет среднее положение между электродами, в об-
мотку двигателя 12 перестанет поступать сигнал с жид-
костного маятника, двигатель перестанет создавать мо-
мент и прецессия гироскопа прекратится. Если ось
Йроскопа отклонится от вертикали благодаря повороту
Вокруг оси внутренней рамки, то пузырек воздуха в
Жидкостном переключателе переместится между про-
дольными электродами. Электрический сигнал поступит
В обмотку управления продольного коррекционного дви-
гателя 3, который приложит момент к оси внешней
рамки. Под действием этого момента гироскоп будет
Прецессировать к вертикали, поворачиваясь вокруг оси
Внутренней рамки.
Скорость прецессии гироскопа под действием момен-
|ов коррекции должна превышать угловую скорость ка-
жущегося ухода гироскопа от вертикали, вызванную
^ращением Земли и перемещением самолета. При этом
коррекционные моменты должны быть по возможности
минимальными, чтобы не вносить погрешностей в пока-
зания авиагоризонта во время полета с ускорением. Од-
йако гироскоп уходит от направления вертикали под
действием моментов трения в осях карданова подвеса
и из-за несбалансированности гироузла. Для преодоле-
'11 Зак. 833 161
Рис. 4.11. Одногироскопная силовая ги-
росистема:
/ — ротор гироскопа; 2— внутренняя рамка;
3 — внешняя рамка; 4 — щетка; 5 — контактная
ламель; 6 — двигатель разгрузки
ния этих моментов необходим достаточно большой кор-
рекционный момент. Чтобы разрешить эти противоре-
чивые требования к величине коррекционных моментов,
необходимо уменьшить моменты трения в осях карда-
нова подвеса либо компенсировать моменты трения с по-
мощью специальной силовой системы.
Силовые гиростабилизированные системы. Силовая
гиростабилизация основана на компенсации внешних
моментов, приложен-
ных к осям кардано-
ва подвеса с по-
мощью специальной
силовой разгрузоч-
ной системы. В про-
стейшей силовой ги-
ростабилизиро в а н-
ной системе компен-
сируется действие
внешних моментов
только на одну ось
гироузла. В более
сложных гиростаби-
лизированных систе-
мах разгружаются
от действия внешних моментов две и три оси гиро-
узла.
Для ознакомления с принципом силовой гиростаби-
лизации можно рассмотреть силовую гировертикаль
(рис. 4.11), у которой осуществляется компенсация внеш-
него момента, приложенного к оси уу внешней рамки кар-
данова подвеса. Под действием момента Мвн, создавае-
мого трением в опорах или датчиком электрического сиг-
нала, связанным с осью уу, гироскоп начинает прецессиро-
вать вокруг оси хх. В результате прецессии нарушается
перпендикулярность между осью ротора 1 и осью внешней
рамки 3. Щетка 4, установленная на внутренней рам-
ке ?, смещается относительно нейтрального положения
на ламели 5 и подает сигнал на двигатель разгрузки 6.
Двигатель прикладывает момент Мр относительно оси
внешней рамки. Действие момента AfP противоположно
моменту AfBH, поэтому векторы моментов направлены
вдоль оси уу в разные стороны. Момент Мр по величи-
не равен моменту МВП( компенсирует действие послед-
162
fero и разгружает тем самым ось уу. При полной ком-
пенсации внешнего момента (Afp = Л4ВН) прецессия ги-
бскопа прекращается. В одногироскопной силовой
^стеме можно разгрузить от действия внешних моментов
^лько одну ось измерения. Поэтому такая система мо-
|ет измерять угловое отклонение самолета только отно-
йтельно одной разгружаемой оси уу гироузла. Для
издания силовой гиросистемы, измеряющей два или три
Бла, необходимо разгружать соответственно две или три
си измерения карданова подвеса. В силовых гироси-
Бемах с двумя осями измерения используются два
Йроскопа, установленных на общей платформе, в гиро-
истемах с тремя разгружаемыми осями необходимы
би гироскопа.
к. Силовая гировертикаль с двумя осями измерения
|>ис. 4.12) представляет собой стабилизированную
^атформу 2, на которой установлены два гироскопа 1
$9. Платформа подвешена в раме 4. Вместе с гироско-
пии платформа может поворачиваться относительно
Юей хх и уу. Каждый из гироскопов имеет три степени
Вободы. Первой степенью свободы гироскопа 1 являет-
«й собственное вращение ротора, второй — поворот
юкруг оси внутренней рамки и третьей — поворот
|йесте с платформой относительно оси уу. У гироско-
па 9 первая степень свободы — собственное вращение
|)тора, вторая — поворот вокруг оси у\У\ внутренней
В' мки, третья — поворот относительно оси хх. Углы по-
рота платформы вокруг осей хх и уу определяются
^личиной напряжения электрических сигналов, снимае-
плх с потенциометров 3 и 5.
t В схеме силовой гировертикали можно выделить си-
|ему коррекции и систему разгрузки осей измерения.
|увствительным элементом системы коррекции является
Ваятник 12 с центральным контактом. Контакт маят-
шка при отклонении оси zz платформы от вертикали
Вожет замыкаться с одним из продольных контак-
юв 13—13 либо с одним из поперечных 11—И. Испол-
ртельные устройства системы или коррекционные дви-
Йтели 6 и 15 связаны с осями х^ и t/it/i внутренних
ймок гироскопов.
В При отклонении оси zz рамы от направления верти-
рли в плоскости zOx центральный контакт маятни-
gh Л? замыкается с одним из контактов 11 и включает
163
Рис. 4.12. Силовая гировертикаль с двумя осями
измерения;
/ — гироскоп; 2 — стабилизированная платформа (рама);
3 — потенциометр-датчик тангажа; 4 — рама кардаиова под-
веса; 5 — потенциометр-датчик крена; 6, 15 — коррекцион-
ные двигатели; 7 — контакты разгрузки поперечной оси ги-
роплатформы; 8 — центральный контакт; 9 — гироскоп; 10 —
двигатель разгрузки поперечной осн; 11—11 — поперечные
контакты маятникового устройства; 12 — маятник; 13—13—
продольные контакты; 14 — двигатель разгрузки продольной
оси; 16 — контакты разгрузки продольной оси; 17—цент-
ральный контакт
164
коррекционный двигатель 15. Коррекционный двигатель
развивает момент относительно оси XiX{. Под действием
этого момента гироскоп 1 вместе с рамой 2 прецессирует
вокруг оси уу до тех пор, пока ось zz рамы не устано-
вится по направлению вертикали. При отклонении осиса
рамы 2 от вертикали в плоскости zOy центральный кон-
такт маятника замкнет один из контактов 13 и включит
коррекционный двигатель 6. В результате действия мо-
мента этого двигателя гироскоп 9 вместе с рамой 2 бу-
дет прецессировать вокруг оси хх до тех пор, пока
ось zz не установится по вертикали. Система коррекции
компенсирует уходы оси zz рамы 2 из-за суточного вра-
щения Земли и перемещения самолета над земной по-
верхностью.
Моменты сил трения подшипников осей хх и уу, а
Также моменты всех других сил, действующих относи-
тельно этих осей, например моменты сил трения щеток
потенциометрических датчиков 3, 5 или моменты несба-
лансированности рам 2 и 4, компенсируются системой
разгрузки. Если вокруг оси хх на раму 2 действует
внешняя сила, момент этой силы вызывает прецессию
гироскопа 9 вокруг оси у\у\. При этом контакт 8, укреп-
ленный на рамке гироскопа 9, замкнет один из контак-
тов 7, установленных на раме 2, и включит разгрузоч-
ный двигатель 10. Двигатель создаст момент относитель-
но оси хх, компенсируя тем самым момент внешней
силы.
Если на раму действует внешняя сила вокруг оси уу,
то возникает прецессия гироскопа 1 вокруг оси Х\Х\.
В результате прецессии гироскопа центральный кон-
такт 17 через один из крайних контактов 16 включит
разгрузочный двигатель 14. Момент, созданный двига-
телем, компенсирует внешний момент, приложенный к
реи уу.
Если силовую гировертикаль установить так, чтобы
ее ось уу совпадала с продольной осью самолета, то
угол тангажа О определится углом поворота рамы 4
карданова подвеса относительно рамы 2. Угол крена у
будет определяться углом поворота корпуса гироверти-
кали относительно оси рамы 4. Электрические сигналы,
пропорциональные углам тангажа и крена, снимаются
с помощью потенциометрических преобразователей 3 и
5. Эти сигналы выдаются на визуальные приборы — ука-
165
затели горизонта, в автопилот, курсовую систему, астро-
компас, в радиолокационные и радиотехнические си-
стемы.
Погрешности гировертикалей. При полете с ускоре-
ниями на маятник системы коррекции действуют инер-
ционные силы. Под действием этих сил маятник уста-
навливается по направлению кажущейся вертикали и
через коррекционные двигатели заставляет гироскоп пре-
цессировать к этой кажущейся вертикали. Влияние уско-
рений на показания гировертикалей проявляется на
вираже, при разгоне и торможении самолета.
При выполнении самолетом правильного виража с
креном у, с угловой скоростью <вв и радиусом /? возни-
кает центробежная сила инерции F4. Под действием
этой силы маятник коррекции отклонится от направле-
ния истинной вертикали на угол
т R о>?. R
у = arctg — — arctg-----= arctg------(4.11)
G mg g
Отклонение маятника от’истинной вертикали приве-
дет к включению поперечного коррекционного двига-
теля. Под действием момента этого двигателя гироскоп
будет прецессировать в направлении кажущейся верти-
кали. При этом верхний конец оси ротора будет откло-
няться внутрь виража в поперечной плоскости. По мере
поворота самолета поперечный наклон будет перехо-
дить в продольный. При повороте самолета на 90° весь
поперечный наклон гироскопа перейдет в продольный.
Затем продольный наклон будет переходить в попереч-
ный, но противоположного знака и т. д. За один полный
поворот самолета на 360° ось ротора гироскопа опишет
конус. При переходе поперечного наклона гироскопа в
продольный включается продольный коррекционный
двигатель и вызывает прецессию гироскопа в продоль-
ном направлении. Затем опять включается поперечный
коррекционный двигатель и т. д. Во время длительного
виража ось гироскопа устанавливается в некоторое рав-
новесное положение и гировертикаль показывает углы
крена и тангажа самолета со следующими погрешно-
стями:
Ml Mv
Дт=-----т'Тв; Д& = тт2--Тв, (4.12)
Я2Ш2
166
Afx, Му — моменты продольного и поперечного кор-
рекционных двигателей;
Н — кинетический момент гироскопа;
ув—установившийся на вираже крен самолета.
Погрешность в измерении угла крена больше, чем
^Грешность в измерении угла тангажа. Для исключе-
на погрешностей гировертикали от действия коррекции
t' вираже производится выключение двигателя попе-
ртой коррекции.
(Если в начальный момент виража ось ротора гиро-
Згтикали была вертикальна, то это положение она бу-
|г занимать' при выключенной поперечной коррекции
речение всего времени виража. При этом ошибки в
Йгазаниях гировертикали (авиагоризонта) будут от-
рствовать. Если же в момент начала виража ось гиро-
:опа авиагоризонта была отклонена от вертикали, то
|и выключении поперечной коррекции возникают по-
^ешности показаний, которые существенно зависят от
|ения в подшипниках осей карданова подвеса. Когда
|ь гироскопа отклонена от вертикали, во время виража
[^исходит вращение рамок карданова подвеса отно-
ггельно неподвижного в пространстве гироскопа. Это
|ащение сопровождается возникновением моментов сил
^ения подшипников. Если ротор гироскопа вращается
Йртив часовой стрелки, то при левом вираже моменты
трения подшипников вызывают прецессионное дви-
£ние оси гироскопа к направлению истинной верти-
(5ли. При выполнении правого виража эти моменты
Ьдят ось гироскопа от вертикали, погрешности гиро-
|>тикали (авиагоризонта) будут непрерывно возрас-
Вгь и могут превзойти погрешности при включенной
Ьеречной коррекции.
ВПолет самолета с ускорением или торможением вы-
дает отклонение маятника коррекционного устройства
Ьовертикали от направления истинной вертикали на
Бл
. Q L а а
Ди = arctg — % —,
g g
(4.13)
а — ускорение самолета.
;При полете с ускорением ось ротора гироскопа бу-
167
дет отклоняться от истинной вертикали под Действием
продольного двигателя с угловой скоростью
Мх
"нр— н
(4.14)
где Мх—момент продольного коррекционного двига-
теля.
Величина ошибки Aft в измерении угла тангажа за-
висит от продолжительности полета с ускорением а.
Для устранения ошибки АО в показаниях гировертикали
(авиагоризонта) во время полета самолета с ускорением
выключается продольная коррекция гироузла.
Выбивание гироскопа. На самолете возможны два
варианта установки гироузла авиагоризонта относитель-
но осей самолета. При первом варианте (рис. 4.13 а)
z 2 г
обе
Рис. 4.13. Схема расположения осей рамок карданова подвеса авиа-
горизонта иа самолете:
а — ось внешней рамки уу расположена параллельно продольной оси само-
лета; б —ось внешней рамки уу параллельна поперечной оси самолета;
в — ось дополнительной следящей рамы гироузла параллельна продольной
оси самолета:
1 — внутренняя рамка; 2 — двигатель отработки следящей рамы; 3 — внешняя
рамка; 4 — следящая рама
ось уу внешней рамки параллельна продольной оси са-
молета. Такой авиагоризонт пригоден для указания
углов крена самолета в пределах 360°, например во вре-
мя выполнения бочки. При выполнении вертикальных
фигур пилотажа, когда угол тангажа самолета дости-
гает 90 или 270°, ось уу наружной рамки совмещается
с осью ротора гироскопа. В результате этого у гироско-
168
IIостаются только две степени свободы вращения и
эскоп теряет устойчивость. Если после совпадения
рамки с осью ротора произойдет даже незначитель-
поворот самолета вокруг своей вертикальной оси,
ось ротора гироскопа скачком установится по на-
влению вертикальной оси самолета. Поэтому после
олнения вертикальной фигуры пилотажа ось соб-
;нного вращения гироскопа необходимо устанавли-
> при помощи арретира. При больших углах тангажа
эй авиагоризонт будет измерять угол поворота само-
1 вокруг продольной оси (угол крена) с погреш-
'ью, которая возрастает по мере увеличения угла
•ажа, При углах тангажа 90 или 270°, когда ось
/жной рамки оказывается совмещенной с главной
э гироскопа, авиагоризонт не показывает углы по-
эта самолета вокруг продольной оси.
1сли у авиагоризонта ось уу наружной рамки рас-
эжена вдоль поперечной оси самолета (рис. 4.136),
авиагоризонтом можно пользоваться при выполне-
вертикальных фигур пилотажа. При выполнении же
ж при кренах ±90° происходит совмещение оси уу
и^ужной рамки с главной осью гироскопа или выби-
Шние гироскопа. При больших углах крена авиагори-
рнт будет измерять углы поворота самолета вокруг
щечной оси также с погрешностью, возрастающей
сличением угла крена. При крене 90° авиагоризонт
юкажет угол тангажа самолета.
1оэтому на тяжелых самолетах, которые совершают
;ты с малыми углами тангажа, для измерения углов
ia без погрешностей применяют авиагоризонты с
изложением оси наружной рамки уу вдоль продоль-
оси самолета.
4а самолетах-истребителях ни первый,, ни второй
1ант установки авиагоризонта не обеспечивает из-
шия углов тангажа и крена в пределах 360° из-за
тещения оси наружной рамки с осью ротора гиро-
ia. Для исключения возможности совмещения осей
>ра гироскопа и наружной рамки были созданы спе-
эьные конструкции авиагоризонтов. В гироузлах
: приборов (рис. 4.13в), кроме внутренней 1 и на-
ной 3 рамок карданов а подвеса имеется дополни-
тельная следящая рамка 4. Эта рамка поворачивается
f помощью отрабатывающего двигателя 2.
169
В горизонтальном полете оси внутренней и наруж-
ной рамок перпендикулярны. При крене самолета до-
полнительная следящая рамка 4 вместе с наружной
рамкой карданова подвеса 3 поворачивается относи-
тельно неподвижной внутренней рамки 1. Перпендику-
лярность осей рамок 1 и 3 нарушается и контактное
устройство, связанное с этими рамками, включает отра-
батывающий двигатель 2, который поворачивает рам-
ку 4 на угол, равный углу крена самолета. Поэтому при
вращении самолета вокруг продольной оси рамки 1 и 3
сохраняют взаимно перпендикулярное положение своих
осей, что предотвращает возможность совмещения оси
гироскопа с осью наружной рамки карданова подвеса,
а следовательно, и выбивание гироскопа.
Авиагоризонты, выполненные по схеме с дополни-
тельной следящей рамой, при больших углах тангажа
измеряют углы крена с погрешностями. При углах тан-
гажа, близких к 90°, продольная ось самолета совпа-
дает с осью собственного вращения гироскопа и угол
поворота самолета вокруг продольной оси измерить не-
возможно.
§ 3. УСТРОЙСТВО АВИАГОРИЗОНТОВ
Авиагоризонт АГИ-1. Прибор предназначен для
установки на самолетах-истребителях. Гироскоп АГИ-1
не выбивается при выполнении самолетом любых фигур
пилотажа, т. е. ось наружной рамки не совмещается с
осью ротора гироскопа. Это достигнуто применением
в гироузле дополнительной следящей рамы.
Гироскоп авиагоризонта — ротор гиромотора ГМА-4П
помещен во внутреннюю рамку 5 карданова подвеса
(рис. 4.14), которая одновременно является кожухом
гиромотора. Внутренняя рамка имеет возможность по-
ворачиваться вокруг оси хх относительно наружной
рамки 17 на небольшой угол (±18-4-20°). Дальней-
ший поворот рамки ограничен упорами. Наружная рам-
ка 17 в свою очередь подвешена в третьей, дополни-
тельной следящей раме 13, и может поворачиваться
относительно оси уу в подшипниках 15 на неограничен-
ный угол.
Следящая рама 13 при помощи отрабатывающего
двигателя поворачивается относительно корпуса прибо-
170
Рис. 4.14.
гиромотораг
Авиагоризонт АГИ-1:
--------- 4 — ЛИНИЯ
мерндиаиа шкалы; 5 — кожух
/ — передняя ’
6 —шестерня х-— .
цнн; 10 — биметаллическое реле; 11
/5.2 подшипник оси внешней рймки; 16 ..
следящей рамы; 21 - пр'-'™рае'иа2.2 76™°руЧакааРРремальеры; 27-ось; 28 - шестерня кремальеры
крышка- 2-линия горизонта- 3-опорный подшипник; 4 - линия мерндиаиа шкалы; 6 - кожух гиромотора,
секшей рамы- 7 -редуктор; 8 - двигатель ДИД-0,5; 9 -диск с ламелями для выключения поперечной коррек-
следящей рам . Р ДУ, ₽ пеле- 12 — задний подшипник следящей рамы; 13 — следящая рама; 14 — фильтр,
Фаллическое реле; И- обмоткаРД1®; Ди за«™я ""ка. кольцо; И - сферическая шкала; 20 -кольцо
иы-°С2/-пружина; 22-кнопкаР арретира; 23 -шарик указателя скольжеиня; 24 - силуэт самолета; 25 шкала
Время подготовки прибора к нормальной работе после
начала запуска не превышает 2 мин.
Дистанционный авиагоризонт АГД-Г обеспечивает
индикацию пространственного положения самолета в
широких диапазонах изменения углов крена и танга-
жа. Прибор показывает углы крена и тангажа в про-
цессе выполнения фигур сложного пилотажа без суще-
ственного увеличения погрешностей. В состав авиагори-
зонта АГД-1 входит гироскопический датчик углов
крена и тангажа и указатель горизонта.
Гиродатчик является невыбиваемой дистанционной
гировертикалью и выдает электрические сигналы, про-
порциональные углам крена и тангажа, на визуальный
прибор — указатель горизонта, в автопилот, курсовую
систему и другим потребителям на борту самолета.
В качестве гиродатчика совместно с указателем АГД-1
могут использоваться центральные гировертикали
ЦГВ-1, ЦГВ-7 и курсовертикаль автопилота АП-15.
Невыбиваемость гиродатчика АГД-1 так же, как и
гироузла в авиагоризонте АГИ-1, обеспечена с помощью
третьей следящей рамы. В гиродатчике АГД-1 для отра-
ботки следящей рамы применены бесконтактный индук-
ционный датчик и двигатель-генератор ДГ-1. Попереч-
ная коррекция гировертикали выключается при дости-
жении самолетом определенного угла крена, а также
при установившейся угловой скорости виража. Про-
дольная коррекция выключается во время разгона или
торможения самолета, когда продольное линейное уско-
рение превышает величину 1,67 м/сек.2. На начальном
этапе запуска прибора гироскоп автоматически арре-
тируется. После запуска арретирование гироузла осу-
ществляется после нажатия кнопки арретира. В авиа-
горизонте АГД-1 повышена точность индикации углов
тангажа и введена сигнализация неисправного состоя-
ния прибора.
Гироскопом гиродатчика (рис. 4.15) служит гиро-
мотор ГМА-4П. Ось ротора гироскопа zz устанавливает-
ся вертикально. Гиромотор заключен в кожух 6, являю-
щийся одновременно и внутренней рамкой гироскопа.
Внутренняя рамка может вращаться на ограниченный
угол вокруг оси относительно наружной рамки 3.
Наружная рамка заключена в следящую раму 4 и мо-
жет вращаться относительно последней вокруг оси уу
174
Рис. 4.15. Гиродатчик АГД-1 со снятым кожухом:
1 — двигатель — генератор отработки следящей рамы; 2 — жидкостный уровень; 3 — внешняя рамка: 4 — следящая рама;
5 _ обмотка индуктивного датчика; 6 — кожух гиромотора; 7 — жидкостный маятниковый выключатель продольной коррек-
ции; 8 —’ротор продольного коррекционного двигателя; 9 — ось следящей рамы: 10 — ротор сельсин-датчика крена; // — статор
сельсин-датчика крена; /2 — статор сельсин-датчика тангажа; 13 — ротор сельсин-датчика тангажа; 14 — корпус; /5 — двига-
тель арретира; 16 — шестерня следящей рамы; 17 — статор продольного коррекционного двигателя; 18 — маятниковый1 жидкост-
ный переключатель; 19 — ротор гироскопа; 20 — якорь индуктивного датчика
на неограниченный угол. Следящая рама при помощи
двигатель-генератора 1 типа ДГ-1 поворачивается во-
круг оси хх на неограниченный угол. Ось хх следящей
рамы располагается по направлению продольной оси
самолета.
Невыбиваемость гиродатчика достигается сохране-
нием взаимно перпендикулярного положения осей гиро-
скопа zz и наружной рамки уу при помощи следящей
рамы. При крене самолета корпус гиродатчика вместе
со следящей рамой и наружной рамкой поворачивается
вокруг оси хх относительно неподвижного в простран-
стве гироскопа. Но совмещение осей уу наружной рамы
и оси zz гироскопа при этом предотвращается поворо-
том следящей рамы в направлении, противоположном
повороту корпуса гиродатчика и самолета. Этот поворот
осуществляется следящей системой, состоящей из ин-
дуктивного датчика, который управляет работой двига-
тель-генератора 1.
При крене самолета сердечник индуктивного дат-
чика, укрепленный на наружной рамке, поворачивается
относительно якоря 20, укрепленного на оси х{х{
внутренней рамки. При этом в сигнальных обмотках
индуктивного датчика создается электрический сигнал
определенной амплитуды и фазы. После усиления в полу-
проводниковом усилителе сигнал поступает в двигатель-
генератор 1. Двигатель-генератор через редуктор и ше-
стерню 16 поворачивает следящую раму и вместе с ней
внешнюю рамку карданова подвеса. Поворот происхо-
дит до тех пор, пока не будет восстановлена перпенди-
кулярность оси ротора гироскопа и оси уу наружной
рамки.
Система отработки должна поворачивать следящую
раму с угловой скоростью, превышающей максимально
возможные угловые скорости вращения самолета вокруг
продольной оси. При больших скоростях отработки ра-
мы возможны колебания из-за инерционности рамы и
конструктивных элементов гироузла, смонтированных
в раме. Для демпфирования, успокоения колебаний сле-
дящей рамы, система отработки охвачена кроме жесткой
еще и скоростной обратной связью. Сигнал скоростной
обратной связи вырабатывается генератором, установ-
ленным на одной оси с двигателем. Напряжение обрат-
ной связи, пропорциональное скорости вращения двига-
176
Сёль-генератора, подается на вход усилителя следящей
Системы. Фаза сигнала скоростной обратной связи про-
тивоположна фазе сигнала рассогласования с индуктив-
ного датчика.
It Вертикальное положение оси ротора гироскопа обес-
печивается с помощью системы коррекции. В состав
Ьйстемы коррекции входит маятниковый жидкостный
Переключатель 18, продольный и поперечный коррек-
ционные двигатели. Статор двигателя поперечной кор-
рекции укреплен на следящей раме, а ротор —на оси
Наружной рамки. При отклонении оси ротора гироскопа
йт вертикального положения в плоскости углов крена
Цоррекционный двигатель по сигналу от жидкостного
Переключателя прикладывает момент к оси уу наруж-
ной рамки. Под действием этого момента гироскоп пре-
Кессирует вокруг оси внутренней рамки до восстанов-
ления вертикального положения его оси собственного
вращения. Ротор 8 двигателя продольной коррекции
укреплен на оси внутренней рамки, а статор — на на-
ружной рамке. При отклонении гироскопа от вертикали
й продольной плоскости двигатель продольной коррек-
ции прикладывает момент относительно оси внут-
ренней рамки и заставляет гироскоп прецессировать к
вертикали поворотом вокруг оси внешней рамки уу.
f Для уменьшения погрешностей на вираже попереч-
ная коррекция гироскопа выключается с помощью кон-
тактного устройства при достижении самолетом крена
ЙО—12°. Кроме того, поперечная коррекция выключает-
ся выключателем коррекции ВК-53РШ при установив-
шейся угловой скорости разворота самолета 0,3 град[сек.
'Для уменьшения погрешностей от действия продольных
^ускорений, возникающих при разгоне или торможении
^Самолета, продольная коррекция гироузла при ускоре-
ниях более 1,67 м^сек? выключается маятниковым
^жидкостным выключателем 7. По принципу действия
-этот выключатель является маятниковым акселеро-
метром.
I Электрические сигналы, пропорциональные углам
|Крена и тангажа, в гиродатчике получаются с помощью
Сельсинов. Ротор Ю сельсин-датчика углов крена укреп-
лен на оси следящей рамы и вращается внутри стато-
ра И, связанного с корпусом прибора. Амплитуда на-
йтряжения сигнала сельсин-датчика крена пропорцио-
Д2 Зак. 833 177
нальна углу поворота корпуса прибора относительно
следящей рамы, т. е. углу крена самолета. Ротор 13
сельсин-датчика тангажа установлен на оси уу наруж-
ной рамки карданова подвеса, а статор 12— на следя-
щей раме. К каждому сельсин-датчику гироагрегата мо-
жет быть подключено до семи сельсин-приемников.
Перед включением гиродатчика рамки карданова
подвеса могут находиться в произвольных положениях,
при этом занимает произвольное положение и гироскоп.
Приведение рамок в рабочие положения и установление
оси собственного вращения гироскопа по направлению
вертикали под действием двигателей продольной и по-
перечной коррекции будет происходить в течение дли-
тельного времени.
Кроме того, при завалах внешней рамки относитель-
но оси уу на углы более 4—6° продольная коррекция
выключается маятниковым жидкостным выключате-
лем 7. Для быстрого приведения оси ротора гироскопа
в положение, близкое к вертикали, при включении гиро-
датчика автоматически осуществляется арретирование,
а затем разарретирование рамок карданова подвеса.
Если в полете произошло временное выключение
электропитания гиродатчика или обнаружены большие
ошибки в измерении углов тангажа и крена, необходи-
мо произвести повторный запуск авиагоризонта. Для
этого нужно нажать кнопку арретира на указателе. По-
сле этого автоматически совершается арретирование и
разарретирование рамок гироузла, а ось ротора гиро-
скопа устанавливается по направлению вертикальной
оси самолета. Поэтому повторный запуск авиагоризонта
производится только в горизонтальном полете, когда
вертикальная ось самолета отклонена от направления
вертикали на большой угол, равный углу атаки. При
повторном запуске АГД-1 угол тангажа самолета не
должен превышать 4°, иначе после арретирования про-
дольная коррекция может оказаться выключенной в те-
чение всего последующего времени полета.
Механизм арретира приводится в действие двигате-
лем 15. Вращение выходного вала двигателя преобра-
зуется в поступательное движение толкателей, которые
воздействуют на профилированные кулачки, связанные
с осями карданова подвеса гироскопа,
178
При углах тангажа 90 и 270° продольная ось само-
ета совпадает с направлением оси собственного вра-
щения гироскопа, поэтому авиагоризонт дает неопреде-
рнные показания угла крена. Практически неоп-
ределенность в измерении углов крена проявляется в
^апазонах углов тангажа 85—95° и 265—275°.
I Если гиродатчик установлен так, что ось хх следя-
щей рамы не совпадает с продольной осью самолета,
0 поворот самолета вокруг поперечной оси может быть
Изложен на две составляющих. Одна из них представ-
ляет поворот относительно оси хх следящей рамы, а дру-
ая — поворот вокруг оси уу. Составляющая поворота
ркруг оси уу вызывает отработку следящей рамы. Этот
рворот воспринимается сельсин-датчиком крена как
вменение угла крена самолета, хотя в действительно-
сти произошло только изменение угла тангажа. По этой
причине на самолетах, выполняющих полет с большими
ГЛами тангажа, установка гиродатчика по продольной
Си самолета должна осуществляться с точностью до
| угловых минут. Для самолетов, летающих с углами
ангажа менее 703, допустима установка гиродатчика
р продольной оси самолета с точностью до 1,5°. Для
Ьнтроля точности установки гиродатчика на самолете
^пользуется жидкостный уровень 2, укрепленный на
орпусе датчика.
Визуальный прибор — указатель горизонта АГД-1
рис. 4.16) выдает летчику информацию об углах крена
| тангажа самолета. Подвижные элементы указателя
ркала тангажа и силуэт самолета) приводятся в дви-
жение двумя следящими системами: тангажа и крена.
Электрический сигнал, пропорциональный величине
гла тангажа, поступает с сельсин-датчика, связанного
|осью внешней рамки карданова подвеса гиродатчика.
^ указателе помещаются сельсин-приемник 12, связан-
ый со шкалой тангажа 6, полупроводниковый усили-
ель и двигатель-генератор 13 отработки шкалы танга-
la. Сельсин-датчик крена, ротор которого связан с
£ью Следящей рамы в гиродатчике, выдает сигналы о
|*личине угла крена. В указателе горизонта установ-
|рны сельсин-приемник крена 15, усилитель, двигатель-
Йнератор 14 поворота силуэта самолета 7.
| При изменении угла тангажа самолета возникает
Йзница в положении ротора сельсин-датчика в гиро-
179
агрегате и ротора сельсйй-прйемйика в указателе, т. е.
появляется угол рассогласования. Электрический сиг-
нал, пропорциональный этому углу рассогласования, с
обмотки ротора сельсин-приемника поступает в усили-
тель, а затем подается на двигатель-генератор. Двига-
Рис. 4.16. Указатель авиагоризонта АГД-1:
1, 2 —усилители следящих систем креиа и таигажа; 3 — кнопка арретира;
4 сигнальная лампочка; 5 линия горизонта шкалы таигажа; 6—шкала
таигажа; 7 — силуэт самолета; 8 — центральный индекс силуэта; 9 — шкала
креиа; 10 — указатель скольжения; // — ручка кремальеры; 12 — сельсии-при-
емиик тангажа; 13 — двигатель-генератор отработки шкалы таигажа- 14 —
двигатель-генератор поворота силуэта самолета; /5 — сельсин-приемник ’ креиа
тель-генератор через редуктор поворачивает в согласо-
ванное положение ротор сельсин-приемника и шкалу
тангажа. Передаточное отношение редуктора от двига-
тель-генератора подобрано так, что угол поворота ро-
тора сельсин-приемника в указателе равен углу поворота
ротора сельсин-датчика тангажа в гироагрегате. Пере-
даточное число редуктора от двигатель-генератора на
шкалу тангажа меньше в 1,7 раза, чем передаточное
180
Отношение на ротор сельсина. Поэтому поворот шкалы
^ангажа в указателе производится на угол в 1,7 раза
Кольший, чем действительный угол тангажа. Благодаря
ртом у шкала получилась растянутой, а точность отсчета
йтлов тангажа повысилась.
| При изменении угла крена сигнал рассогласования
Поступает в следящую систему отработки силуэта само-
лета. Эта следящая система по своей схеме подобна
еледящей системе поворота шкалы тангажа. Максималь-
ная угловая скорость поворота силуэта самолета пре-
вышает 300 град!сек. Такая большая скорость необхо-
дима для того, чтобы изменения углов крена самолета
на указателе воспроизводились без запаздываний.
| Углы крена отсчитываются по положению конца кры-
ла силуэта самолета 7 относительно шкалы крена 9.
Углы тангажа определяются по шкале тангажа 6 отно-
сительно центрального индекса 8 силуэта самолета.
Горизонтальный полет самолета совершается с опре-
деленным углом атаки. Чем меньше воздушная ско-
рость, тем больше должен быть угол атаки. Для созда-
ния необходимого угла атаки должен быть установлен
р определенный угол тангажа. Но при этом централь-
ный индекс силуэта самолета будет наблюдаться выше
Щшии искусственного горизонта 5 шкалы тангажа. Для
Удобства пилотирования самолета в горизонтальном по-
мете линия искусственного горизонта может быть совме-
щена с самолетиком при помощи ручки кремальеры 11.
Цри повороте этой ручки происходит отработка шкалы
Йангажа на угол атаки самолета. Внесенная поправка
IrcasbiBaeTCH индексом центровки.
| В нижней части корпуса указателя размещён указа-
тель скольжения 10. При работе указателя с гиродат-
1ИКОМ АГД-1 в случае прекращения питания гиро-
атчика по постоянному току или при отсутствии
апряжения двух фаз переменного тока загорается
монтированная в указатель красная сигнальная лам-
очка 4. Эта лампочка загорается также, если гиродат-
ик находится в процессе арретирования. Для аррети-
ования гиродатчика АГД-1 служит кнопка арретира 3
надписью «Арретировать только в горизонтальном по-
мете». Гиродатчик АГД-1 арретируется кратковремен-
ным нажатием этой кнопки, после чего цикл арретиро-
вания совершается автоматически. После окончания
181
арретирования гиродатчик разарретируется. Для арре-
тирования гировертикалей типа ЦГВ кнопку .нужно дер-
жать нажатой, пока не закончится восстановление
стабилизированной платформы к вертикали, что кон-
тролируется по восстановлению силуэта самолета в ука-
зателе.
Авиагоризонт АГД-1 определяет углы тангажа и кре-
на самолета с погрешностью ±1,5°. Величина погреш-
ностей в измерении углов после выполнения виража
может достигать ±За, а после выполнения фигур слож-
ного пилотажа ±5°.
Авиагоризонт АГБ-3. Этот прибор предназначен для
индикации углов крена и тангажа и передачи электри-
ческих сигналов, пропорциональных величине измерен-
ных углов на дистанционный прибор — указатель угла
тангажа УУТ, дублирующий указатель из комплекта
дистанционного авиагоризонта АГД-1, и другим систе-
мам оборудования на борту самолета.
АГБ-3 указывает углы крена самолета в неограни-
ченном диапазоне. Углы тангажа самолета указывают-
ся в пределах ±80°. При углах тангажа больше 80°
гироскоп авиагоризонта выбивается. Поэтому авиагори-
зонт АГБ-3 применяется как основной на вертолетах и
как дублирующий—на самолетах, где в качестве основ-
ного используется авиагоризонт АГД-1.
Гироузел авиагоризонта АГБ-3 (рис. 4.17) на само-
лете устанавливается так, что ось уу внешней рамки
карданова подвеса параллельна продольной оси само-
лета. Поэтому углы крена измеряются в пределах 360°,
а диапазон измерения углов тангажа составляет +8010.
Крен воспроизводится как поворот корпуса прибора
вместе со шкалой 12 относительно силуэта самолета 13,
связанного с осью уу внешней рамки карданова подвеса.
При крене самолета трибка оси силуэта обкатывается
по неподвижной трибке оси внешней рамы. Вследствие
такой связи достигается идентичность показаний крена
положению самолета (например, при левом крене ниже
линии горизонта опускается левое крыло силуэта само-
лета).
Для получения электрических сигналов, пропорцио-
нальных углам тангажа, служит сельсин-датчик танга-
жа 6. Ротор сельсина установлен на оси внутренней
рамки карданова подвеса, статор соединен с внешней
182.
Дамкой. Сельсин-датчик 6 электрически соединен с сель-
йин-приемником тангажа. При возникновении рассогла-
сования в положении роторов сельсинов электрическое
Напряжение, пропорциональное этому углу, поступает с
рбмотки ротора сельсин-приемника в полупроводнико-
вый усилитель. После усиления сигнал подается на об-
**ис. 4.17. Кинематическая схема авиагоризонта АГБ-3 и внешний
вид указдтеля:
двигатель-генератор перемещения шкалы тангажа; 2 — статор сельсии-
рфиемннка тангажа; 3 — ротор сельсин-приемника тангажа; 4 — барабан шка-
тангажа; 5 — внешняя рамка карданова подвеса; 6 — сельсин-датчик тан-
гажа; 7 — внутренняя рамка (кожух гиромотора); 8—сельсин-датчик крена;
Г— поперечный коррекционный двигатель; 10 — маятниковый жидкостный пе-
выключатель; // — продольный коррекционный двигатель; /2 — шкала крена;
—силуэт самолета; 14 — указатель скольжения; 15 — ленточная шкала тан-
кажа; 16—кремальера; 17 — индекс установки угла атаки; 18—сигнальный
флажок; 19 — кнопка арретира
мотку управления двигателя в двигатель-генератор
ЙГ-0,5. Двигатель-генератор поворачивает в согласован-
ное положение ротор сельсин-приемника 3. Одновремен-
но поворачивается ведущий верхний барабан 4, на кото-
вый намотана ленточная шкала тангажа 15. Отсчет ве-
личины угла тангажа производится по центральному
(Йдексу силуэта самолета относительно ленточной шкалы.
183
Перемещение шкалы тангажа в нейтральное поло-
жение при горизонтальном полете с некоторым углом
тангажа осуществляется поворотом кремальеры 16.
С помощью кремальеры поворачивается статор сельсин-
приемника тангажа 2. В результате этого возникает
электрический сигнал рассогласования, который после
усиления поступает в двигатель-генератор. Двигатель
устанавливает ротор сельсин-приемника в согласованное
положение со статором и одновременно совмещает ли-
нию искусственного горизонта шкалы тангажа с цен-
тральным индексом силуэта самолета. Величина введен-
ной поправки в положение шкалы тангажа определяется
по положению индекса 17, механически связанного с
ручкой кремальеры.
Коррекция вертикального положения оси собствен-
ного вращения гироскопа осуществляется маятниковым
жидкостным переключателем, который управляет дви-
гателями 9 и И поперечной и продольной коррекции.
Ротор двигателя поперечной коррекции 9 укреплен на
оси внутренней рамки или кожуха гиромотора 7, а ста-
тор — на наружной рамке 5. Момент, создаваемый дви-
гателем, вызывает прецессию гироскопа относительно
оси внешней рамки уу. Ротор двигателя продольной кор-
рекции 11 укреплен на оси внешней рамки уу. Статор
двигателя связан с корпусом прибора. Момент коррек-
ции двигателя 11 вызывает прецессию гироскопа вокруг
оси внутренней рамки. Поперечная коррекция гироузла
на вираже выключается гироскопическим выключателем
ВК-53РШ. По принципу действия выключатель коррек-
ции является скоростным гироскопом, измеряющим
угловую скорость вращения самолета вокруг вертикаль-
ной оси, связанной с самолетом системы координат. Если
на самолете есть выключатель продольной коррекции,
то в авиагоризонте АГБ-3 может выключаться цепь про-
дольной коррекции гироузла при разгоне или торможе-
нии самолета.
В отличие от авиагоризонтов АГИ-1 и АГД-1 в гиро-
узле АГБ-3 отсутствует дополнительная следящая рама.
Поэтому при углах тангажа 90 и 270° ось собственного
вращения ротора совпадает с осью внешней рамки и
гироскоп становится неустойчивым. Во время выполне-
ния маневров в вертикальной плоскости при углах тан-
гажа 85р внутренняя рамка ложится на упор внешней
184
|5аМКи Карданова подвеса. При этом создается момент
Относительно оси внутренней рамки. Под влиянием это-
ГО момента гироскоп прецессирует вокруг оси наружной
Ьамки. В результате прецессии авиагоризонт ошибочно
Доказывает непрерывное увеличение угла крена. Если
угол тангажа стал меньше 85°, например, когда самолет
Переведен из режима кабрирования в режим горизон-
тального полета, то внешняя рамка гироскопа может
рыть повернута на некоторый угол. Это в свою очередь
вызовет и поворот силуэта самолета. При выполнении
дет л и Нестерова силуэт самолета поворачивается вна-
чале в положение вверх колесами, а затем начинает
возвращаться в нормальное положение. Иногда к мо-
менту выхода из петли силуэт может оказаться в нор-
мальном положении без крена, а ось собственного вра-
щения гироскопа в вертикальном положении.
Арретирование гироскопа производится в горизон-
тальном полете без крена после выполнения фигур пи-
котажа, а также перед запуском авиагоризонта. Для ар-
мирования необходимо нажать кнопку 19, которая
Снабжена надписью «Нажать перед пуском». При нажа-
рии кнопки сжимается пружина арретира и устанавли-
вает рамки карданова подвеса в такое положение, при
ротором ось ротора гироскопа совпадает с направлением
вертикальной оси самолета.
f Контроль электропитания авиагоризонта переменным
t постоянным током осуществляется по положению
флажка 18. Появление флажка перед шкалой тангажа
Указывает на отсутствие электропитания авиагоризонта
достоянным или переменным током или на обрыв в це-
}и гиромотора в самом авиагоризонте. Поворот флажка
производится индукционным двигателем, который отли-
вается от двигателя ДИД-0,5 тем, что в пакет его ста-
тора вместо двухфазной уложена трехфазная обмотка,
рри обмотки двигателя включены в цепи питания гиро-
Йбтора ГМА-4П. В случае нормального питания авиа-
Ьризонта по обмоткам индукционного двигателя проте-
кают токи, поступающие в обмотки мотора. Индуктив-
ный двигатель развивает момент, который удерживает
Йгнальный флажок вне поля зрения. При прекращении
Витания авиагоризонта переменным током или при об-
няве цепей питания гиромотора индукционный двига-
рль перестает создавать момент и сигнальный флажок
185
под действием пружины устанавливается перед шкалой
тангажа. В случае прекращения питания авиагоризонта
постоянным током с помощью контактов специального
реле замыкаются накоротко обмотки двигателя, что так-
же приводит к исчезновению момента на его выходном
валу и появлению флажка в поле зрения.
Авиагоризонт АГБ-3 измеряет углы тангажа и кре-
на с погрешностями 1—2°. Ошибки прибора после вы-
полнения виража достигают 3°, а ошибки после других
пилотажных фигур могут составить 4—5°. Время готов-
ности авиагоризонта к работе не более 1,5 мин.
§ 4. КУРСОВЫЕ ГИРОСКОПЫ
Принцип действия гирополукомпаса. Астатический
гироскоп, ось собственного вращения которого распо-
ложена в горизонтальной плоскости, называется гиро-
полукомпасом (рис. 4.18а). Ротор гироскопа 1
гирополукомпаса взвешивается в кардановом подвесе,
состоящем из внутренней 3 и наружной 2 рамок. Ось уу
наружной рамки при горизонтальном полете самолета
направлена по вертикали и является осью измерения
курса или азимутальной осью. Гироскоп сохраняет неиз-
менное направление оси собственного вращения и поло-
жение внешней рамки в мировом пространстве. Если
положение внешней рамки известно, то по направлению
продольной оси самолета относительно рамки можно
определять курс самолета (рис. 4.186). На внешней рам-
ке устанавливается шкала 4. Отсчет курса самолета про-
изводится по положению курсового индекса 5 относи-
тельно шкалы 4. Индекс установлен на корпусе прибо-
ра 6, а следовательно, связан с самолетом.
Гироскоп гирополукомпаса не корректируется в ази-
муте. Поэтому при измерении курса возникают погреш-
ности, обусловленные вращением Земли и перемещением
самолета относительно Земли. Если гирополукомпас
находится на Северном полюсе (рис. 4.19а), то ось на-
ружной рамки совпадает с осью вращения Земли. Осно-
вание прибора будет вращаться вместе с Землей относи-
тельно наружной рамки и оси собственного вращения
гироскопа и за 24 часа повернется на 360е, т. е. угловая
скорость поворота основания прибора относительно ги-
роскопа составит 15 град/час. Это вращение наблюда-
186
рис. 4.18. Гирополукомпас и определение угла поворота само-
лета при помощи курсового гироскопа:
к а — устройство гнрополукомпаса:
г— ротор гироскопа; 2 — внешняя рамка; 5 — внутренняя рамка карда-
ова подвеса; 4 — шкала; 5 — курсовой индекс; 6 — корпус прибора;
г— определение при помощи курсового гироскопа углов поворота
самолета =• 0, 90°» фа =» 135°
тель воспримет как поворот шкалы прибора относитель-
но индекса, связанного с основанием прибора.
Пусть гирополукомпас установлен на некоторой ши-
роте <р (рис. 4.196) так, что ось наружной рамки совпа-
дает с направлением вертикали места. Угловая скорость
вращения Земли (о3 в этом случае может быть разложе-
на на две составляющих — горизонтальную <ог и верти-
Рис, 4.19. Кажущийся уход гирополукомпаса:
а — уход гироскопа на Северном полюсе; б — кажущийся уход гирополуком-
паса на широте <р
кальную ©в. Горизонтальная составляющая <ог не со-
здает кажущегося ухода гироскопа относительно оси
наружной рамки. Вертикальная составляющая пово-
рачивает основание прибора относительно осн наруж-
ной рамки и относительно неподвижного в мировом
пространстве гироскопа. Вертикальная составляющая
угловой скорости вращения Земли на широте <р опреде-
ляется величиной
О)в = “a sin <р.
На экваторе sin <р = О и вертикальная составляющая
угловой скорости вращения Земли отсутствует (ив = 0)
Для того чтобы с помощью гирополукомпаса можнс
188
было измерять курс самолета в земной системе коор-
динат, необходимо устранить вертикальную составляю-
щую ив, т. е. сделать внешнюю рамку подвеса гиро-
ролукомпаса неподвижной относительно Земли. Это до-
стигается созданием прецессии гироскопа вокруг оси
рнешней рамки с угловой скоростью сов-
Кажущийся уход гирополукомпаса, вызванный дви-
жением самолета относительно Земли, можно показать
Сначала для частного случая, когда полет совершается
Йо параллели с запада на восток на широте <р
(рис. 4.20а). В целях упрощения задачи можно предпо-
Рис. 4.20. Кажущийся уход гирополукомпаса, вызванный дви-
жением самолета относительно Земли:
а — уход гирополукомпаса при полете на малой высоте (Я«0) вдоль
параллели: б — кажущийся уход гироскопа прн полете вдоль паралле-
ли на большой высоте (Я ^=0); в — разложение вектора путевой ско-
рости на две составляющие
189
ложить, что высота полета по сравнению с' радиусом
Земли мала, т е. Н ~ 0. Если полет происходит с пу-
тевой скоростью W, то угловая скорость поворота само-
лета вокруг оси вращения Земли составит величину
г Ra cos <р ’
(4-15)
где Кз — радиус Земли.
Для того чтобы спроектировать эту угловую скорость
на вертикаль, необходимо правую часть (4.15) умно-
жить на sintp, тогда
W
Юев ~ Ra
sin <₽ W,
----- = — tg ?•
COS ср R3
(4.16)
Если высотой полета по сравнению с величиной ра-
диуса Земли пренебрегать нельзя (рис. 4.206), то ра-
диус окружности, удаленной на расстояние Н от пло-
скости параллели на широте <р, будет равен
Л£=(Яз+#)sin<p.
Угловая скорость кажущегося ухода гирополуком-
паса, обусловленная вращением Земли и движением
самолета при Н ~ 0, определится суммой
<оов = ®в 4- “ев = -77 sin <? 4- -^-tg ?. (4.17)
и* ,О Аз
Угловая скорость кажущегося ухода гирополуком-
паса максимальна при полете в районе полюса, когда
<р = 90°, sin <р ~ 1, tg<p—>00. В случае учета высоты
полета Н угловая скорость кажущегося ухода гирополу-
компаса определится соотношением
“ов =777, sin 4- - W~ - tg <?• (4.18)
О/ ><J 1X8 ”1 “
Если на широте <р самолет летит не вдоль параллели,
когда курс может быть 90 или 270ю, а с некоторым про-
извольным курсом ф, то путевую скорость самолета
можно разложить на две составляющих в направлении
меридиана и вдоль параллели (рис. 4.20в). Составляю-
щая И7М вдоль меридиана не изменяет угловой скоро-
сти самолета относительно оси вращения Земли в дан-
ный момент. Составляющая Wn вдоль параллели со-
190
feer угловую скорость поворота самолета вокруг зем-
Й оси
_ _ HZn _ w sin 4>
®оп — — — ~ .
г ка cos <р К3 cos
Но при полете с курсом ф будет изменяться
места самолета. Угловая скорость изменения
►ставит величину
1ГИ IF cos Ф
(ич> = — =----—
Кз ^з
(4.19)
и широ-
широты
(4.20)
За время полета t самолет переместится в точку с
вротой
?t = ¥« 4- • 57,3 -6 (4.21)
где фо — широта точки вылета.
Если теперь подставить значения фг и <осп в форму-
(4.17) вместо ф и ©св, то угловая скорость кажуще-
Ья ухода гирополукомпаса определится формулой
“ов = 4- ®ои = — • Sin q>t 4------—• tg <f>t . (4.22)
bf * О /\3
Шри полете самолета с путевой скоростью W =
1000 км/час в направлении на восток (ф = 90°) на
|>оте Москвы (ф = 56°) кажущийся уход гирополу-
Йпаса через 30 мин полета достигает 6,5°. Если полет
|ет совершаться с курсом ф = 45я, то кажущийся уход
р"авит около 5°.
«Коррекция кажущегося ухода гирополукомпаса. Для
|пенсации ухода гироскопа относительно оси наруж-
I рамки необходимо приложить момент Л4КХ к оси
Йгренней рамки. Величина момента выбирается так,
бы угловая скорость прецессии гироскопа относи-
^но оси наружной рамки была равна угловой скоро-
Ькажущегося ухода гироскопа, вычисленной по фор-
мам (4.17), (4.18) или (4.22). В связи с тем что труд-
|учесть величину составляющей угловой скорости
рскопа ©св, вызванную движением самолета относи-
Ьно Земли, ее не компенсируют.
Нля компенсации кажущегося ухода вследствие вра-
ия Земли угловая скорость прецессии гироскопа
|рается равной о>в. Корректирующий момент в неко-
191
торых гирополукомпасах создается вследствие разбалан-
сировки внутренней рамки подвеса гироскопа. Разба-
лансировка достигается установкой на внутреннюю рам-
ку специальных грузов. Сила веса грузов создает
момент относительно оси внутренней рамки, а момент
вызывает прецессию гироскопа вокруг оси наружной
рамки. Но с помощью балансировки можно устранить
Рис. 4.21. Азимутальная коррекция гирополу-
компаса:
1 — ротор коррекционного двигателя; 2 — статор; 3 —
подстроечный потенциометр; 4 — широтный потен-
циометр
уход гирополукомпаса только на той широте, где произ-
водилась балансировка. На других широтах изменится
вертикальная составляющая угловой скорости вращения
Земли и опять возникнет уход гироскопа.
Устранение ухода гироскопа относительно оси на-
ружной рамки или ухода в азимуте называется ази-
мутальной коррекцией гирополукомпаса.
В большинстве современных гирополукомпасов момент
азимутальной коррекции создается с помощью электри-
ческого коррекционного двигателя (рис. 4.21). Ротор
двигателя 1 установлен на оси внутренней рамки кар-
данова подвеса, а статор 2 укреплен на наружной рам-
ке. Обмотка ротора питается переменным током фаз А
192
|В. Управляющие обмотки статора соединены с потОй-
Ьщметрами 3, 4 и питаются переменным током фаз В
I С. Амплитуда и направление токов в управляющих
рбмотках регулируются перемещением движков потен-
|иометров.
| С помощью широтного потенциометра 4 амплитуда
Ька в управляющих обмотках коррекционного двига-
^ля изменяется в зависимости от широты ср места само-
лета. Положение движка широтного потенциометра оп-
ределяется по шкале, градуированной в градусах ши-
Йты. При изменении широты места самолета движок
шротного потенциометра устанавливается вручную
®отив соответствующего деления шкалы. Подстроеч-
ный потенциометр 3 служит для устранения ухода гиро-
Ra в азимуте, вызванного разбалансировкой гиро-
коррекция горизонтального положения оси ротора
^роскопа. Отклонение оси собственного вращения гиро-
|опа от плоскости горизонта вызывается суточным вра-
щением Земли, движением самолета над земной поверх-
Ьстью, действием моментов трения относительно оси
аружной рамки. При отклонении оси ротора zz от пло-
|ости горизонта нарушается перпендикулярность осн
ВбственноГо вращения гироскопа к оси внешней рамки.
|сли самолет совершает полет от экватора вдоль мери-
Йана к Северному полюсу с путевой скоростью №м,
|щаружная рамка будет поворачиваться относительно
си внутренней рамки с угловой скоростью
Гм
= —.
R3
(4.23)
На Северном полюсе ось собственного вращения ги-
|скопа и ось наружной рамки совпадут. Гироскоп поте-
чет одну степень свободы и перестанет быть устойчивым,
^алогичная картина наблюдается и при полете само-
“та с произвольным курсом.
t Для того чтобы предотвратить совпадение осей рото-
| и наружной рамки, необходимо непрерывно поддер-
рвать горизонтальное положение оси собственного
(ащения гироскопа либо сохранять перпендикулярность
й zz к оси наружной рамки уу. Если система коррек-
|й стабилизирует горизонтальное положение оси zz
193
Гироскопа, то чувствительным элементом служит* маят-
никовый жидкостный переключатель. Двигатель коррек-
ции, которым управляет маятник, прикладывает момент
ЛТКук оси наружной рамки (рис. 4.22). При отклонении
оси ротора гироскопа от горизонтального положения
с жидкостного маятника поступает электрический сигнал
в обмотку управления
двигателя коррекции.
Под действием момента
коррекции Л4Ку гироскоп
Рис. 4.22. Коррекция горизонталь-
ного положения оси собственного
вращения гироскопа:
7 — ротор гироскопа; 2 — внутренняя
рамка; 3 — внешняя рамка; 4 — кор-
рекционный двигатель
прецессирует относитель-
но оси хх внутренней рам-
ки и возвращается к го-
ризонтальному положе-
нию. В некоторых конст-
рукциях гирополукомпа-
сов чувствительный эле-
мент горизонтальной кор-
рекции измеряет отклоне-
ние оси ротора гироскопа
от перпендикуляра к оси
внешней рамки уу. Таким
чувствительным элемен-
том может бйть ламель,
установленная на наруж-
ной рамке карданова под-
веса, и щетка, укреплен-
ная на оси внутренней
рамки. Если нарушается
перпендикулярность, щет-
ка смещается с централь-
ного изолированного про-
межутка и через одну из
токопроводящих ламелей подает электрический сигнал
в соответствующую обмотку коррекционного двигателя.
Двигатель создает постоянный по величине момент Л4КХ,
и гироскоп с постоянной угловой скоростью со к прецес-
сирует до восстановления перпендикулярности между
осями.
Карданная погрешность гирополукомпаса представ-
ляет собой разность между углом курса, измеряемым в
горизонтальной плоскости, и показаниями гирополуком-
паса при наклоне оси наружной рамки от вертикаль-
194
ого положения (рис.
£3). Карданная по-
четность возникает
|и наклонах оси на-
ужной рамки как по
|ену, так и по танга-
жу. Обычно угол тан-
|жа у самолетов бы-
9ет небольшим, а уг-
Ы крена могут дости-
>ть значительных ве-
тчин, например, во
|емя виража. Если
|молет накренен на
гол у, то гирополу-
Ьмпас измеряет курс
|к угол 4’1 поворота
1молета относительно
|и внешней рамки,
кйствительный курс
Ыеряется углом ф
|ворота самолета во-
fyr вертикали. Кар-
дная погрешность
фополукомпаса опре-
|йяется разностью
Рис. 4.23. Возникновение карданной
погрешности:
/ — внешняя рамка карданова подвеса; 2 —
ротор гироскопа; 3 — внутренняя рамка;
4 — шкала; 5 — курсовой индекс
= —<?!•
(4.24)
.Величина угла фь измеряемого прибором, может
рть получена из соотношений:
tg = tg ф- cosy, (4.25)
Ф1 = arctg(tgф cost). (4.26)
Отсюда карданная погрешность
Дф = ф — arctg (tg ф cos т). (4-27)
Из равенства (4.27) следует, что при полете без кре-
(у == 0) карданная погрешность отсутствует. При кре-
•У = 90° погрешность равна величине измеряемого кур-
МАф = ф). При постоянном угле крена карданная по-
гшность гирополукомпаса зависит от курса самолета.
I 195
На курсах 0, 90, 180, 270 и 360° (рис. 4.24) карданная
погрешность отсутствует. Карданная погрешность исче-
зает после вывода самолета из крена.
Для устранения карданной погрешности ось наруж-
ной рамки должна всегда находиться в вертикальном
положении. Это может быть достигнуто установкой ги-
рополукомпаса или курсового гироскопа на горизонталь-
но стабилизированную по углам # и у платформу. Плат-
форма должна сохранять горизонтальное положение не-
зависимо от положения самолета относительно Земли.
В показаниях гирополукомпасов возникают также
виражные погрешности. Эти погрешности вызываются
действием коррекции внутренней рамки карданова под-
веса. Величина виражной погрешности зависит от про-
196
должительности виража и интенсивности системы кор-
рекции. Если скорость прецессии гироскопа велика, то
величина виражной погрешности определяется прибли-
женным выражением
Дфв = ф — cos у • arctg (tg фх cos у). (4.28)
Поэтому скорость прецессии гироскопа под действием
системы коррекции выбирается не более 2—3 град/мин.
|1ри таких скоростях прецессии виражная погрешность
Иосле разворота на 360° не превышает 1—2°. По оконча-
нии виража виражная погрешность не исчезает и пока-
зания гирополукомпаса необходимо корректировать.
§ 5 ГИРОПОЛУКОМПАСЫ. ДИСТАНЦИОННЫЕ
ГИРОМАГНИТНЫЕ И ГИРОИНДУКЦИОННЫЕ КОМПАСЫ
Устройство гирополукомпаса. Гирополукомпас повы-
венной точности ГПК-52 предназначен для самолето-
юждения на любых широтах в северном полушарии, в
ом числе и в районе Северного полюса, где невозмож-
ю пользоваться магнитными компасами. С помощью
*ПК-52 можно совершать полет по заданной ортодро-
ши (кратчайшему расстоянию между двумя точками
ta земной поверхности) и выполнять точные развороты
1ри заходе на посадку. В варианте ГПК-52Ю гирополу-
)омпас применяется в южном полушарии. Гирополу-
Юмпас ГПК-52АП служит датчиком курса для визуаль-
ных указателей и датчиком угла рыскания для авто-
(илота АП-6Е.
s В комплект ГПК-52 входят датчик гирополукомпаса,
|ульт управления, указатели курса (рис. 4.25).
| Датчик гирополукомпаса состоит из гироскопа в кар-
гановом подвесе, систем азимутальной и горизонтальной
юррекции, механизма установки шкалы на заданный
Нуре и потенциометра — датчика курса.
к Гироскоп представляет собой массивный стальной
ютор, который приводится во вращение сдвоенным
Юехфазным асинхронным двигателем типа ГМА-25. Ось
юбственного вращения ротора расположена горизон-
g-льно. Момент инерции ротора относительно оси со-
Еавляет 10 Гем2. Скорость собственного вращения гиро-
Кбпа достигает 22 800—23 000 об/мин. При такой ско-
|Ьсти вращения кинетический момент ротора гироскопа
197
Рис. 4.25. Гирополукомпас ГПК-52:
1 — потенциометр-датчик курса; 2 — шкала курса; 3 — крепежное коль-
цо; 4— двигатель ДИД-0,5 для поворота шкалы; 5 — каркас потенцио-
метра; 6 — редуктор; 7 — груз биметаллической пластины; 8 — гайка;
9 — биметаллическая пластина; 10 — упор; 11 — маятниковый жидкост-
ный переключатель; 12 — ротор двигателя горизонтальной коррекции;
13 — статор двигателя; Я — нижнее основание корпуса; 15 — ось на-
ружной рамки подвеса гироскопа; 16 — статор двигателя азимутальной
коррекции; 17 — ротор двигателя; 18 — ось внутренней рамки; 19 — внут-
ренняя рамка (кожух) гироскопа; 20 — наружная рамка; 21 — аморти-
затор; 22 — ось наружной рамки; 23 — валик шкалы; 24 — рукоятка
задатчика курса; 25— шкала широтного потенциометра; 26 — крышка
поправочного потенциометра
198
вставляет 24 000 Г • сл • сек. Ротор гироскопа установлен
(О внутренней рамке 19. Ось рамки 18 опирается на под-
шипники, укрепленные в наружной рамке подвеса 20.
>сь наружной рамки 22 установлена на самолете парал-
лельно его вертикальной оси.
| В конструкции ГПК-52 для уменьшения разбалан-
рровки гироузла относительно оси внутренней рамки и
рвышения таким образом точности измерения курса
риняты специальные конструктивные меры для пред-
рвращения смещения центра тяжести гироскопа вдоль
zz. Шарикоподшипники, на которые опирается ось
рбственного вращения гироскопа, не имеют продоль-
ных осевых люфтов. Это достигается с помощью пру-
Ын, смещающих наружные кольца подшипников. Пру-
1ины затянуты гайками 8. Ротор и внутренняя рамка
кожух) гироскопа изготовлены из одного материала
Ьгали) и имеют одинаковый коэффициент температур-’
iero расширения. Незначительные смещения центра тя-
жести гироскопа, которые возникают при резком изме-
книи температуры, компенсируются прогибом биме-
1тической пластины 9. При изгибе пластины груз 7
вмещается вдоль оси zz и тем самым устраняет от-
нение центра тяжести гироскопа от точки пересече-
его осей. Угол поворота внутренней рамки вокруг
хх ограничивается в пределах ±50° упорной ско-
10. Ось наружной рамки 22 может вращаться отно-
!льно корпуса гиродатчика на 360°.
Система азимутальной коррекции гирополукомпаса
'оит из коррекционного двигателя, который прикла-
ает момент относительно оси внутренней рамки, ши-
1ого и поправочного потенциометров, установленных
пульте управления. Ротор коррекционного двигате-
17 установлен на оси внутренней рамки 18 гироскопа,
втор 16 укреплен на наружной рамке 20. Напряже-
ё на управляющие обмотки двигателя подается с ши-
гного и поправочного потенциометров. Установкой
(ротного потенциометра достигается создание коррек-
онного момента относительно оси хх, который Компен-
)ует кажущийся уход гироскопа вследствие вращения
Мл и.
На заводе, где изготовляется гирополукомпас, гиро-
й балансируется так, чтобы на широте места заво-
<Ро кажущийся уход отвращения Земли отсутствовал.
199
Для этого относительно оси внутренней рамки гироскопа
необходимо создать момент
МгФ(| = Ниа sin <р0. (4.29)
Для устранения ухода на любой другой широте <р не-
обходим момент
А4Л-Ф = И <е3 sin <о. (4.30)
Поэтому двигатель азимутальной коррекции должен
создавать момент, равный разности:
Мкор = — MXVt = Ниа (sin (р — sin !р0). (4.31)
Во время работы прибора может возникнуть неко-
торый разбаланс гироузла и уход гироскопа в азимуте.
Чтобы устранить этот уход вследствие разбаланса отно-
сительно оси внутренней рамки, необходимо приложить
коррекционный момент, компенсирующий момент раз-
баланса. Величина момента задается установкой по-
правочного потенциометра на пульте управления
ГПК-52.
Чувствительным элементом горизонтальной коррек-
ции гироскопа служит маятниковый жидкостный пере-
ключатель //, установленный снизу на кожухе гироско-
па. Ротор двигателя горизонтальной коррекции 12 уста-
новлен на оси наружной рамки, статор 13 укреплен в
корпусе прибора. При отклонении главной оси гироскопа
от горизонтального положения жидкостный переключа-
тель изменяет соотношение токов, протекающих по уп-
равляющим обмоткам коррекционного двигателя. Раз-
виваемый двигателем момент приложен к оси уу наруж-
ной рамки подвеса и вызывает прецессию внутренней
рамки, которая прекратится при возвращении главной
оси гироскопа в горизонтальное положение. Для умень-
шения виражной погрешности гирополукомпаса цепь
электропитания горизонтального коррекционного двига-
теля на вираже размыкается выключателем коррекции
ВК-53РБ (РШ). Выключение горизонтальной коррек-
ции обеспечивается при установившихся угловых скоро-
стях виража от 0,1 до 0,3 град/сек.
Механизм установки шкалы позволяет производить
дистанционный разворот шкалы 2 для согласования по-
казаний гирополукомпаса с показаниями магнитного
или астрономического компасов. Механизм состоит из
200
Двигателя 4 ДИД-0,5 и редуктора 6. Двигатель и редук-
тор укреплены на наружной рамке карданова подвеса.
Управление двигателем осуществляется рукояткой 24 на
Пульте. При этом двигатель через редуктор вращает ва-
Йик 23, на котором укреплена шкала 2. Валик шкалы
Проходит внутри полой оси 22 наружной рамки.
I Электрические сигналы, пропорциональные курсу са-
молета, получаются с помощью потенциометра-датчи-
ка Л собранного по трехпроводной схеме. Отводы об-
мотки потенциометра соединены с логометрическими
Указателями ПДК-49.
| Пульт управления ГПК-52 обеспечивает электропи-
тание прибора, позволяет устанавливать шкалу гиро-
|атчика на заданный курс и вводить сигналы для кор-
рекции азимутального положения гироскопа. Рукоятка
Поворота шкалы 24 может быть отклонена на малый и
большой углы (до упора). При установке рукоятки на
Малый угол шкала гирополукомпаса поворачивается с
Угловыми скоростями 25—100 град]мин. При отклоне-
рйи рукоятки до упора разворот шкалы происходит с
Угловой скоростью более 180 град)мин. Установкой ру-
коятки широтного потенциометра 25 на деление шка-
!лы, соответствующее широте места самолета, задается
|яомент азимутального коррекционного двигателя, про-
порциональный вертикальной составляющей <ов угловой
скорости вращения Земли на данной широте. Напря-
жения для компенсации односторонних уходов гироско-
па в азимуте устанавливаются поправочным потенцио-
метром.
। Гирополукомпас ГПК-52 измеряет курс самолета с
^Погрешностью, которая за 1 час полета не превышает 1°.
ЙКарданная погрешность при кренах до 10° может дости-
гать 2°, при кренах до 45' эта погрешность может со-
ставить 10°. Виражная погрешность гирополукомпаса не
Превышает 0,5°. Указатели ПДК-49 относительно шкалы
|'ирополукомпаса имеют погрешность до 2°.
i Показания гирополукомпаса в полете необходимо
ериодически корректировать, согласовывать с показа-
иями магнитного, индукционного или астрономического
омпасов. Сигналы коррекции ГПК-52 вводятся вруч-
ую поворотом шкалы. В более совершенных и точных
урсовых измерительных системах гирополукомпас кор-
201
ректируется в азимуте автоматически по показаниям
магнитного или индукционного чувствительного эле-
мента.
Дистанционный гиромагнитный компас ДГМК-3.
В комплект компаса ДГМК-3 (рис. 4.26) входят магнит-
ный датчик ПДК-3, гироагрегат ГУ-1, усилитель УМ и
указатели УГК-Г
Для коррекции показаний гирополукомпаса (гиро-
агрегата ГУ-1) в дистанционном гиромагнитном компасе
используется магнитный датчик ПДК-3. Магнитная си-
стема датчика состоит из двух постоянных магнитов,
укрепленных на подвижной картушке. С картушкой
соединены движки потенциометра 1, обмотка потенцио-
метра установлена на корпусе датчика. При изменении
курса обмотка потенциометра поворачивается вместе с
самолетом относительно движков, которые стабилизи-
руются постоянными магнитами картушки по направ-
лению магнитного поля Земли. Потенциометр 1 соеди-
нен по трехпроводной схеме с потенциометром 2 гиро-
агрегата.
Обмотка кольцевого потенциометра укреплена на оси
наружной рамки гирополукомпаса в гироагрегате ГУ-1.
Движки потенциометра установлены на плате, которая
может поворачиваться двигателем отработки 4 относи-
тельно потенциометра 2, стабилизированного в азимуте
гирополукомпасом. В случае ухода гироскопа в азимуте
вместе с гирополукомпасом поворачивается обмотка по-
тенциометра 2. Это создает рассогласование потенцио-
метрической дистанционной передачи. Электрический
сигнал, пропорциональный углу рассогласования, с диа-
метральных точек потенциометра 1 подается в усили-
тель 5, а затем в обмотку управления двигателя отра-
ботки 4 в гироагрегате. Двигатель поворачивает плату
с движками потенциометра 2 с угловой скоростью, рав-
ной скорости ухода гироскопа. Поэтому положение
движков потенциометра 2 относительно его центральных
отводов остается неизменным. Скорость коррекции, т. е.
скорость отработки движков потенциометра, выбирается
больше максимально возможной скорости ухода гиро-
скопа в азимуте. А эта скорость зависит от широты ме-
ста самолета (от величины вертикальной составляющей
угловой скорости вращения Земли) и от движения са-
молета относительно земной поверхности.
202
Магнитный датчик
Указатели УГК-1
Рис. 4.26. Принципиальная схема дистанционного гиромагнитного компаса ДГМК-3:
1 — потенциометр магнитного датчика; 2 — потенциометр гироагрегата; 3 — обмотки указателей; 4 — двигатель отработки
движков потенциометра гироагрегата; 5 — усилитель
С потенциометром Гироагрегата соединены обмотки
логометров визуальных приборов — указателей курса.
Если курс полета изменяется, то происходит поворот
потенциометра магнитного датчика относительно стаби-
лизированных картушкой движков и поворот движков
потенциометра гироагрегата относительно обмотки по-
тенциометра, стабилизированной гироскопом. Это вызо-
вет изменение соотношений токов в обмотках указате-
лей и повернет результирующий вектор магнитного
потока обмоток на угол поворота самолета по курсу.
Подвижные части (постоянные магниты) логометров
установятся по этому новому направлению вектора маг-
нитного потока, а стрелки приборов покажут измене-
ние курса самолета.
В процессе выполнения виража магнитный датчик
ПДК-3 выдает сигналы по курсу с большими погреш-
ностями. Эти погрешности воспроизводятся следящей си-
стемой и передаются на указатели. Для устранения
погрешностей в большинстве гиромагнитных и гироин-
дукционных датчиков коррекция гирополукомпаса во
время виражей и разворотов выключается.
Гироиндукционный компас ГИК-1 служит для ука-
зания магнитного курса и измерения углов разворота
самолета. При совместной работе с автоматическим ра-
диокомпасом ГИК-1 указывает прямой и обратный маг-
нитные пеленги приводной радиостанции и курсовые
углы радиостанции относительно самолета. В комплект
гироиндукционного компаса входят (рис. 4.27) индук-
ционный датчик ИД-2, коррекционный механизм КМ,
гироскопический агрегат Г-ЗМ, указатели УГР-1 и
УГК-2, усилитель У-6М.
Магниточувствительным элементом в гироиндукцион-
ном компасе служит индукционный датчик ИД-2. Для
изучения принципа действия индукционного датчика не-
обходимо рассмотреть простейший индукционный эле-
мент из двух пермаллоевых стержней, расположенных
параллельно (рис. 4.28). На каждом стержне помещена
катушка первичной обмотки <0], обмотки стержней со-
единены последовательно. Оба стержня вместе с обмот-
ками ®i охвачены общей вторичной обмоткой ®2- Ток
первичных обмоток создает в стержнях магнитные по-
токи 01, направленные встречно. Поэтому результирую-
щая э. д. с., наводимая потоками во вторичной обмотке,
Рис. 4.27. Принципиальная схема гироиидукциоииого компаса ГИК-1:
ИД-2 — индукционный датчик (первичные обмотки ие показаны); КМ—коррекционный механизм; Г-ЗМ — гироскопический aiре-
гат; УГР-1 — указатель; УГК-2 — указатель; У-6М — усилитель; / — индукционный чувствительный элемент; 2, 3 — статор и ро-
тор сельсии-приемника; 4 — отрабатывающий двигатель; 5 — потенциометрический датчик курса в коррекционном механизме;
6 — потенциометр гироагрегата; 7 — предохранитель; «—потенциометр в указателе УГР-1; 9 — отрабатывающий двигатель;
10, 11 — статор и ротор сельсин-приемника автоматического радиокомпаса; 12 — третий канал усилителя У-6М; 13 — обмотка
логометрического указателя УГК-2; 14 — отрабатывающий двигатель в гнроагрегате; 15 — контакты выключателя коррекции;
16 — второй канал усилителя; 17 — первый канал усилителя
204
равна нулю. Магниточувстрйтельный элемент находится
в магнитном поле Земли. Горизонтальную составляю-
щую магнитного поля можно разложить на составляю-
щую Ht вдоль стержней и Н2 перпендикулярно стерж-
ням. Магнитное поле Земли создает в стержнях магнит-
ный поток Ф3 одного направления. Величина потока Фз
6
Рис. 4.28. Схема индукционного магииточувствительиого элемента:
а — простейший индукционный элемент; б — соедниеине элементов треуголь-
ником
зависит от угла ф между горизонтальной составляющей
магнитного поля Земли и продольной осью стержней
Ф3 = КНХ = КН cos ф, (4.32)
где К — коэффициент пропорциональности.
Переменный ток й с частотой f в первичной обмот-
ке периодически намагничивает стержни и изменяет их
магнитную проницаемость. При максимальной величине
тока й стержни насыщаются, уменьшается их магнит-
ная проницаемость и уменьшается поток Ф3. При умень-
шении тока й магнитная проницаемость стержней уве-
личивается и достигает максимума. Соответственно ста-
новится максимальным и поток Ф3. За один период
изменения тока й два раза изменяется магнитная про-
ницаемость и поток Ф3. Таким образом, магнитный по-
ток Ф3 изменяется с двойной частотой 2f. Параметры
обмотки (Bi и стержней подбираются так, чтобы при из-
менении в некоторых пределах напряжения Vi, прикла-
дываемого к обмотке (Oi, стержни всегда были в насы-
щенном состоянии. Поэтому э. д. с. во вторичной об-
206
(отке наводится только пульсирующим магнитным
Йтоком Фз. Величина э. д. с. пропорциональна углу ip
1ежду направлением продольной оси стержней и гори-
рнтальной составляющей Н магнитного поля Зем-
: ж \
[И. Когда угол яр = - , э. д. с. с2 нравна нулю. При
= 0 э. д. с. во вторичной обмотке максимальна.
t Индукционные чувствительные элементы курсовых
©мерительных систем состоят из трех простейших
Цементов, соединенных в треугольник (рис. 4.286). Пер-
вичные обмотки соединены последовательно, вторич-
[Ые — в треугольник. Вершины треугольника 1 вторич-
[ых обмоток соединяются с обмотками статора сельсин-
[риемника 2 в коррекционном механизме.
Индукционный чувствительный элемент не устанав-
давается, как магнитная стрелка, по направлению маг-
штного поля Земли, а поворачивается вместе с лета-
тельным аппаратом относительно этого поля. Треуголь-
ник чувствительного элемента крепится в кардановом
юдвесе. Подвес позволяет чувствительному элементу
Сохранять горизонтальное положение при наклонах ле-
тательного аппарата.
; Напряжение сигнала, пропорциональное величине
юмпасного курса яр, статорных обмоток 2 сельсина кор-
рекционного механизма наводит в роторной обмотке
1апряжение, которое усиливается каналом 17 усилителя
7-6М и управляет работой двигателя 4, который через
редуктор устанавливает ротор сельсина в согласован-
ие положение с направлением вектора магнитного по-
рока обмоток статора 2. Одновременно двигатель отра-
батывает щетки потенциометрического датчика 5.
Коррекционный механизм имеет лекальное устрой-
ство, при помощи которого щетки потенциометра пово-
рачиваются на дополнительный угол. Благодаря этому
довороту устраняются девиация высших порядков и ста-
тические погрешности следящей системы. Угол поворота
Движков потенциометра 5 соответствует магнитному
курсу самолета. Сигнал потенциометрического датчи-
ка 5 коррекционного механизма корректирует положе-
ние щеток потенциометра 6 гироскопического агрегата
Г-3??-
Ъ. В гироагрегате Г-ЗМ потенциометр о укреплен на
Эси наружной рамки гироскопа. Три щетки установлены
Г 207
z
Рис, 4.29. Устройство гироагрегата Г-ЗМ:
/—амортизационная скоба; 2— электромагнит; 3 — двигатель ДИД-0,5;
4 — редуктор; 5 — ротор коррекционного двигателя; 6 — ось внутренней рамки;
7 — внутренняя рамка (кожух) гироскопа; 8— тормозной штнфт; 9 — нижний
кожух; 10— пружина; 11—основание; /2 — подшипник; 13 — наружная рамка;
14 — жидкостный маятниковый переключатель; 15 — корпус гироагрегата;
16— статор гиромотора; /7 — ротор гироскопа; 18 — статор коррекционного
двигателя; 19 — подшипник; 20 — шестерня; 21 — потенциометр; 22 —реле;
23 — верхний кожух
да плате, которую поворачивав^ двигатель отработки 14.
Сигнал рассогласования в потенциометрической следя-
щей системе снимается с центральных отводов потен-
циометра 5. Этот сигнал усиливается в усилителе вто-
рого канала 16 и управляет двигателем отработки 14.
Этот двигатель поворачивает плату с движками потен-
циометра 6 и тем самым корректирует уход гирополу-
Ьомпаса в азимуте.
I Гироскоп гироагрегата Г-ЗМ (рис. 4.29) состоит из
>отора 17, внутренней рамки карданова подвеса 7, на-
>ужной рамки 13. Ротором гироскопа служит коротко-
бамкнутый ротор трехфазного асинхронного гиромотора
ГМА-4П. Ротор вращается вокруг неподвижного стато-
ра 16. Момент инерции ротора 1,8 гем2. При угловой
жорости вращения 22 800—23 000 об/мин кинетический
ромеит ротора достигает 4000 Г см • сек.
; Внутренняя рамка 7 карданова подвеса вращается на
Ограниченный угол в подшипниках оси 6. Наружная
Оамка вращается на неограниченный угол относительно
(орпуса гироагрегата в подшипниках 19 и 12. На оси
(аружной рамки укреплен потенциометрический дат-
|»к-
1 Ось собственного вращения гироскопа удерживается
^горизонтальном положении при помощи жидкостного
Маятникового переключателя 14, управляющего работой
Рррекционного двигателя. Статор . 18 коррекционного
йигателя укреплен на корпусе гироагрегата 15, а ро-
рр 5 вращается вместе с наружной рамкой. Момент
рррекционного двигателя действует относительно оси
дружной рамки подвеса и вызывает прецессию гиро-
£опа относительно оси внутренней рамки. Для умень-
шения виражной погрешности во время разворота само-
зта в цепь основной обмотки коррекционного двигателя
Иючается балластное сопротивление. Этим умень-
ается величина коррекционного момента, а следова-
цьно, скорость прецессии гироскопа относительно оси
(утренней рамки. Балластное сопротивление включает-
|Гконтактами реле 22, которое срабатывает по сигналу
|ключателя коррекции.
БУходы главной оси гироскопа в азимуте компенси-
Ьэтся отработкой щеток потенциометра 21. Щетки
Юеплены на выходной шестерне 20 редуктора 4. Ше-
|рня вращается двигателем 3 типа ДИД-0,5. При из-
209
менении курса самолета скорость коррекции положения
щеток потенциометра составляет 1,5—4,5 град/мин. Пер-
воначальное согласование потенциометра гироагрегата
с потенциометром коррекционного механизма осуществ-
ляется со скоростью 10 zpadfceK, что достигается изме-
нением передаточного отношения редуктора 4 при
помощи электромагнита 2. Электромагнит включается
при нажатии кнопки ускоренного согласования.
При больших кренах самолета внутренняя рамка ло-
жится на упор. Для того чтобы в этом случае предот-
вратить круговое вращение наружной рамки, служат
тормозные штифты 8.
Гироагрегат подвешен к амортизационной скобе 1 и
основанию 11 на амортизаторе и пружинах. Корпус ги-
роагрегата герметично закрыт верхним 23 и нижним 9
кожухами.
С потенциометром гироагрегата 6 (рис. 4.27) соеди-
нены потенциометр в указателе УГР-1 и обмотки лого-
метра 13 в указателе УГП-2. Сигнал рассогласования
в положении движков потенциометра 8 в УГР-1 и по-
тенциометра гироагрегата 6 снимается с диаметральных
отводов потенциометра 8, усиливается в усилителе
третьего канала 12 и подается на двигатель отработки 9.
Двигатель через редуктор поворачивает в согласованное
с движками потенциометра 6 положение движки потен-
циометра 8 и одновременно поворачивает шкалу курса.
Указатель УГР-1 (рис. 4.30) показывает магнитный
курс и углы разворота самолета по шкале курса 1 отно-
сительно неподвижного индекса 2. Прямой и обратный
пеленги радиостанции определяются по положению
стрелки радиокомпаса 5 относительно шкалы 1. Курсо-
вой угол радиостанции отсчитывается по шкале 7 и
стрелке 5. Для выполнения разворотов на 90° служат
треугольные индексы 6. Стрелка курсозадатчика 3уста-
навливается ручкой кремальеры 4. Ось стрелки радио-
компаса поворачивается сельсин-приемником, который
соединен с сельсин-датчиком рамки автоматического
радиокомпаса. Погрешность дистанционной передачи от
гироагрегата в указатель УГР-1 устраняется с помощью
лекального устройства.
Прибор УГК-2 показывает магнитный курс и углы
поворота самолета. Шкала указателя укреплена на оси
постоянного магнита, который устанавливается по на-
210
Давлению вектора результирующего магнитного потока
рля токов, протекающих по статорным обмоткам ука-
Ьтеля.
Гироиндукционный компас ГИК-1 позволяет отсчи-
Ывать магнитный курс самолета по указателю УГР-1
погрешностью ±1,5°. Магнитный пеленг приводной
Рис. 4.30. Указатель УГР-1:
I — шкала магнитного курса; 2 — неподвижный индекс; 3 — стрелка
курсозадатчика; 4 — ручка кремальеры; 5 — стрелка радиокомпаса;
6 — индекс; 7 — шкала курсовых углов; 8 — индекс шкалы сноса
1диостанции определяется с точностью ±3,5°. После-
|ражная погрешность ГИК-1 за 1 мин разворота ос-
тавляет 1°.
§ 6. СКОРОСТНЫЕ ГИРОСКОПЫ
Назначение и принцип действия. Для управления са-
Вйетом необходимо измерять не только его угловое
вожение в пространстве, но и угловые скорости во-
1уг соответствующих координатных осей. Угловые ско-
сти летательного аппарата измеряются скоростными
|)оскопами. Скоростной гироскоп (рис. 4.31а) обла-
ет двумя степенями свободы — собственным враще-
|бм ротора и поворотом вокруг оси рамки. Поворот,
прецессия гироскопа относительно оси рамки, огра-
211
ничивается пружиной. Колебания рамки подвеса гиро-
скопа успокаиваются демпфером. Измерительной осью
скоростного гироскопа служит ось уу, перпендикуляр-
ная оси собственного вращения ротора и оси рамки.
При объяснении принципа действия скоростного ги-
роскопа (рис. 4.316) предполагается, что вектор изме-
Рис. 4.31. Скоростной гироскоп:
а — конструкция скоростного гироскопа:
1 — ротор; 2 — рамка; 3— демпфер; 4 — пружина;
б — кинематическая схема указателя поворота:
/ — ротор; 2 — пружина; 3— поводок; 4— демпфер; 5— рамка
ряемой угловой скорости летательного аппарата сос
направлен по оси уу вверх, т. е. поворот аппарата и вме-
сте с ним корпуса гироскопа совершается против часовой
стрелки, если смотреть сверху. Угловая скорость шс уста-
навливается не мгновенно, а вследствие движения само-
лета с угловым ускорением. Гироскоп стремится сохра-
нить неизменным направление оси вращения ротора.
Поэтому вследствие вращения корпуса прибора вокруг
оси уу на ось рамки хх будут действовать силы реакций
ПОДШИПНИКОВ Гоп. Эти СИЛЫ создают момент -Мбн, вектор
которого направлен вдоль оси уу и совпадает с векто-
ром (ос. Момент сил реакции опор для гироскопа яв-
ляется внешним. Под действием момента Л4ВН возникает
прецессия гироскопа вокруг оси хх с угловой ско-
ростью (Оп- Гироскоп поворачивается вокруг оси рамки
212
|taK, чтобы совместить вектОр кинетического момента Н
8; вектором внешнего момента Л1ВН. Поворот вокруг оси
»амки деформирует пружину, и она создает противо-
[.ействующие моменты Мпр относительно оси хх. Вектор
момента Л4пр направлен вдоль оси рамки. Под действием
момента Л1пр по правилу прецессии гироскопа возникает
тловая скорость ап". Вектор ап" совпадает с вектором
Измеряемой угловой скорости самолета шс-
Поворот рамки вокруг оси хх будет происходить до
ех пор, пока момент пружины Мпр не создаст угловую
корость равную угловой скорости вращения лета-
тельного аппарата. После этого силы реакции подшип-
ников на ось рамки Foa исчезнут и перестанет действо-
вать момент Мвн. Прекратится дальнейший поворот
Ьроскопа вокруг оси рамки. Установившийся угол по-
ворота рамки р будет пропорционален величине изме-
яемой угловой скорости шс. Величина установившегося
гла поворота гироскопа вокруг оси рамки при одной
. той же величине угловой скорости шс зависит от жест-
ости пружины. Момент пружины <Мпр, вызвавший угло-
ую скорость ып"— шс, уравновешивается гироскопиче-
ски моментом Мгир. Величина гироскопического момен-
а равна произведению кинетического момента Н на
Еловую скорость ып", т. е.
^гир == Н (4.33)
I Поворот рамки скоростного гироскопа на угол р мо-
бет быть преобразован с помощью потенциометра или
Вдуктивного датчика в электрический сигнал, пропор-
иональный величине измеряемой угловой скорости шс.
ЕЛИ скоростной гироскоп используется в качестве ви-
тального прибора, угол р = К(ос отсчитывается по поло-
юнию стрелки, соединенной с рамкой подвеса гиро-
Копа.
| При правильном вираже самолета выполняется ра-
Внство
tgT = —. (4-34)
g
|i Y —угол крена самолета,
V — скорость полета,
<»в—угловая скорость виража.
скорость полета постоянна, то угол крена у и угло-
213
to
Рис. 4.32. Устройство указателя поворота типа ЭУП-53:
ка; 22 —шкала; 23 — поршень демпфера; 24— цилиндр демпфера, 2а щетка гр р
вая скорость виража сов оказываются непо-
средственно связанными. Поэтому при опре-
деленной скорости полета по шкале указате-
ля поворота можно измерять угол крена.
Указатель поворота ЭУП-53 (рис. 4.32)
служит для индикации угловой скорости по-
ворота самолета вокруг вертикальной оси.
С помощью указателя поворота летчик опре-
деляет направление поворота самолета, кон-
тролирует правильность выполнения разворо-
та, а при развороте со скоростью 500 км/час
определяет углы крена. Вариант указателя
поворота ЭУП-53У позволяет измерять углы
крена при развороте на скорости 200 км/час.
Направление поворота самолета опреде-
ляется по направлению отклонения стрелки
21 относительно центрального индекса, нане-
сенного на шкале 22. По углу отклонения
стрелки можно судить о величине угловой
скорости разворота. При скорости полета
500 км/час отклонение стрелки до первого
деления шкалы свидетельствует о развороте
самолета с креном 15°, при отклонении стрел-
ки до крайнего деления, имеющего отметку
«45», разворот совершается с углом крена 45°.
Правильность выполнения виража (вираж
без скольжения) определяется по положению
шарика указателя скольжения 19. При пра-
вильном вираже шарик устанавливается в
центре указателя скольжения.
Гироскоп ЭУП-53 состоит из ротора 13,
вращающегося в рамке 3 вокруг оси zz. Рам-
ка может поворачиваться вокруг оси хх.
Ось уу гироскопа в прямолинейном полете
совпадает с вертикальной осью самолета, что
обеспечивается пружинами 15 и 20. Эти пру-
жины являются противодействующими и обе-
спечивают пропорциональную зависимость
между поворотом рамки гироскопа и угловой
скоростью виража. Ротор гироскопа приво-
дится во вращение двигателем постоянного
тока. Обмотка 12 и полюса 1 якоря враща-
ются в поле постоянного магнита. Подвод пи-
тания к обмотке якоря осуществляется через
215
коллектор, состоящий из ламелей 2 и графитовых ще-
ток 25. Ось якоря 10 вращается в подшипниках И ко-
жуха гироскопа 3, который одновременно является и
рамкой гироскопа.
Для обеспечения точности указания угловой скоро-
сти разворота и углов крена кинетический момент гиро-
скопа должен иметь строго определенную величину, т. е.
угловая скорость вращения гироскопа должна быть по-
стоянной.
Стабилизация угловой скорости вращения гироско-
па осуществляется центробежным регулятором. Контак-
ты регулятора 9 шунтируют балластное сопротивление.
При скорости вращения ротора более 6000 об/мин кон-
такты центробежного регулятора размыкаются и вклю-
чают в цепь обмотки якоря два балластных сопротив-
ления по 450 ом. Для подавления помех радиоприему
от работающего гиромотора в цепь питания якоря вклю-
чен фильтр, состоящий из дросселей 7 и 4, а также двух
конденсаторов 5.
Колебания гироузла указателя поворота демпфиру-
ются воздушным демпфером. Цилиндр демпфера 24
укреплен на корпусе прибора, а поршень 23 связан ки-
нематической передачей с внутренней рамкой гироскопа
и при поворотах рамки гироскопа вокруг оси хх пере-
мещается в цилиндре. Величина демпфирования может
регулироваться винтом 14, изменяющим сечение отвер-
стия, через которое протекает воздух при движении
поршня.
При возникновении угловой скорости самолета отно-
сительно оси уу рамка гироскопа поворачивается вокруг
оси хх на угол, пропорциональный величине угловой
скорости самолета. Поворот рамки с помощью штиф-
та 16 и поводка 17 передается на ось 18, на которой
укреплена стрелка 21. Поводковая передача обеспечи-
вает соответствие направления поворота стрелки прибо-
ра направлению разворота самолета и отклоняет стрел-
ку при повороте рамки гироскопа на вполне определен-
ный угол. Указатель поворота ЭУП-53 измеряет угол
крена при скорости полета 500 км/час с погрешностью
до ±1,5^. Минимальная угловая скорость, на которую
реагирует прибор, составляет 0,6 град/сек.
Комбинированный прибор ДА-200 предназначен для
указания направления поворота, выполнения правиль-
21<5
Mix виражей, определения углов крена при скорости по-
мета 500 км!час и вертикальной скорости самолета.
В случае потери летчиком пространственной ориенти-
ровки вывод самолета из сложного положения может
выть обеспечен по показаниям указателя поворота, ука-
зателя скольжения и вариометра. Совмещением стрел-
ки указателя поворота с нулевой отметкой предотвра-
тив. 4.33. Шкала комбинированного при-
бора ДА-200:
1 — нулевая отметка шкалы вариометра;
2 — шкала вариометра; 3 — стрелка варио-
метра; 4 — стрелка указателя поворота; 5 —
указатель скольжения; 6 — шкала указателя
поворота
дается вращение самолета вокруг вертикальной оси,
Становкой шарика указателя скольжения в центр
^траняется скольжение. Установкой стрелки вариомет-
ра на нулевую отметку устраняется потеря высоты.
t. Лицевая сторона ДА-200 (рис. 4.33) представляет
Ьбой сочетание шкалы вариометра 2 и указателя по-
грета 6. При развороте самолета на скорости 500 км/час
|о отклонению стрелки 4 относительно шкалы 6 можно
Йределить углы крена самолета 15, 30 и 45°. На шка-
|в 2 нанесены деления затухающей шкалы вариометра
217
С Дйайазбйом измерения ±200 м!сек. Отсчет вертикаль-
ной скорости самолета производится при помощи стрел-
ки вариометра 3. Указатель скольжения 5 состоит из
стеклянной трубки, заполненной жидкостью, и шарика.
Гироскоп в указателе ДА-200 приводится во вращение
асинхронным гиромотором.
Выключатели коррекции гироскопических приборов.
Для исключения погрешностей во время виража коррек-
ция горизонтального положения оси гироскопа гиропо-
лукомпаса и поперечная коррекция гировертикали дол-
жны выключаться. Для выключения коррекции может
быть использована информация об угловой скорости
виража. Приборами, которые измеряют угловую ско-
рость виража или разворота для выключения коррек-
ции, являются выключатели коррекции ВК-53РБ
(ВК-53РШ) и ВК-90. При возникновении угловой ско-
рости виража они обеспечивают выключение цепей пи-
тания коррекционных двигателей гирополукомпасов,
гировертикалей и других гироскопических приборов и
устройств на самолете. По принципу действия выклю-
чатели коррекции являются скоростными гироскопами.
Обычно при полете самолет может совершать случай-
ные колебания по курсу. Поэтому выключение систем
коррекции не должно происходить при возникновении
случайных угловых скоростей рыскания, которые дей-
ствуют в течение непродолжительного времени. Следо-
вательно, выключатели коррекции должны срабатывать
не в момент возникновения угловой скорости разворота,
а с задержкой по времени. Для исключения возмож-
ности включения коррекции во время разворота вклю-
чение коррекции гироприборов производится не сразу
после окончания виража, а с некоторой задержкой по
времени.
Выключатель коррекции ВК-53РБ. На рис. 4.34 по-
казано устройство выключателя коррекции ВК-53РБ,
разновидностью которого является выключатель кор-
рекции ВК-53РШ, отличающийся только конструкцией
штепсельного разъема.
Гироскоп ВК-53РБ приводится во вращение гиро-
мотором ГМА-4П, кожух 15 которого служит рамкой
гироскопа. Вертикальная ось гироскопа в выключате-
лях коррекции также установлена по направлению вер-
тикальной оси самолета. На рамке гироскопа укреп-
218
Рис. 4.34. Выключатель коррекции ВК-53РБ:
/ — крышка корпуса; 2 — конденсатор; 3 — корпус; 4 — подшипник; 5 — противодействующая пружина; 6 — ось внутренней рам-
ки- 7 _ щетки; 8 — контактное устройство; 9 — редуктор; 10 — потенциометр; // — коллектор диска; /2 — диск выключателя
коррекции; 13 — двигатель ДИД-0,5; 14 — ротор гироскопа; 15 — внутренняя рамка (кожух) гироскопа; 16 — стеклянный
изолятор; 17 — реле
лены щетки 7. При возникновении угловой скорости
виража рамка поворачивается вокруг своей оси 6 в под-
шипниках 4. При этом щетки 7 замыкают центральную
ламель контактного устройства 8 с одной из крайних
ламелей. Замыкание ламелей сопровождается подачей
напряжения на одну из управляющих обмоток двигате-
ля 13 типа ДИД-0,5. Двигатель начинает вращаться.
Направление вращения его выходного вала зависит от
того, с какой из крайних ламелей соединяется щетками 7
центральная ламель контактного устройства 8, т. е. от
направления виража. Двигатель через редуктор пово-
рачивает потенциометр 10 и диск выключателя 12. По
мере поворота потенциометра напряжение на его щет-
ках возрастает. Это- напряжение в противофазе подается
на вторую управляющую обмотку двигателя ДИД-0,5.
Поэтому скорость вращения вала двигателя уменьшает-
ся, а при повороте потенциометра на определенный угол
двигатель останавливается. К моменту остановки дви-
гателя диск выключателя 12 будет повернут в положе-
ние, при котором ламели диска замкнут контактные
щетки. В результате этого срабатывают реле 17 типа
РСМ-2 и РСМ-3. Нормально замкнутые контакты этих
реле в цепях коррекции гироскопических приборов
разомкнутся и коррекция выключится. Таким образом,
поворот диска выключателя на угол, при котором сра-
батывают реле, происходит не сразу, а спустя 5—15 сек,
что предотвращает выключение коррекции при возник-
новении кратковременных угловых скоростей поворота
самолета относительно вертикальной оси.
После прекращения разворота самолета рамка гиро-
скопа устанавливается пружинами 5 в нейтральное по-
ложение, при котором щетки 7 располагаются на сред-
ней ламели контактного устройства 8. Обмотка управ-
ления двигателя ДИД-0,5 обесточивается и магнитное
поле второй обмотки управления, которая получает на-
пряжение питания от щеток потенциометра 10, оказы-
вается нескомпенсированным. Двигатель начинает вра-
щаться в обратном направлении, возвращая потенцио-
метр в первоначальное положение, при котором исчезает
напряжение на его щетках. После этого двигатель оста-
навливается. Диск выключателя оказывается поверну-
тым в обратном направлении, а щетки диска распола-
гаются па ламелях, изолированных друг от друга. Об-
220
потки реле РСМ-2 и РСМ-3 обесточиваются, что сопро-
вождается замыканием контактов реле, вновь включаю-
щих коррекцию гироскопических приборов. Таким
образом, коррекция включается не сразу после прекра-
щения разворота, а через время, необходимое для отра-
5отки диска выключателя в первоначальное положение.
Для уменьшения помех радиоприему из-за искро-
збразования на щетках диска выключателя применен
контур, состоящий из конденсатора 2 и сопротивлений.
Выключатель коррекции выключает цепи систем кор-
зекции гироприборов при установившейся угловой ско-
рости более 0,3 град]сек. Задержка включения и выклю-
чения коррекции составляет от 5 до 15 сек. Прибор
ВК-53РБ при возникновении угловой скорости самолета
>тносительно вертикальной оси может выключать три
репи коррекции и включать одну.
Выключатель коррекции ВК-90. В рассмотренном
|ыше выключателе ВК-53РБ минимальная угловая ско-
рость, при которой выключается коррекция, не превы-
шает 0,3 град!сек, при меньших угловых окоростях вира-
жа коррекция может не выключиться. Кроме того, само-
лет может совершать на вираже колебания по курсу.
Если эти колебания происходят с угловой скоростью,
|ольшей 0,1—0,3 град)сек, и с периодом, меньшим вре-
мени задержки (менее 5—15 сек), то выключатель кор-
рекции ВК-53РБ может значительно увеличить время
Йдержки выключения коррекции или даже совсем не
^работать.
I Указанные недостатки ВК-53РБ устранены в выклю-
ателе коррекции ВК-90, который обеспечивает выклю-
ёние коррекции при угловых скоростях виража не бо-
ее 0,15 град/сек, в том числе и в случаях, когда само-
лет совершает колебания по курсу. Это достигнуто
спользованием более чувствительного гироскопа, при-
менением магнитной центрирующей пружины и элек-
ронного реле времени.
? Выключатель ВК-90 (рис. 4.35) состоит из гиродат-
йка, электронного реле времени, реле РЭС-10 и РЭС-7.
Скоростной гироскоп выключателя реагирует на угло-
|чо скорость вращения вокруг вертикальной оси уу и
Ьстоит из двухстепенного гироскопа, демпфера и маг-
Втной пружины. Гироскоп заключен в герметичный
Цплавок, заполненный водородом. Внутренняя полость
221
*Z7e
Рис. 4.35. Принципиальная электрокинематическая схема выключателя коррекции ВК-90:
1 — ось центрального контакта; 2 — магнитопровод; 3 — ярмо; 4 — рамка подвеса гироскопа; S — ротор гироскопа; 6 — лопатки
ротора демпфера; 7 — статор демпфера; 8 — щели; 9 — лопатки регулятора демпфера; 10 — сильфон; // — щели; /2 — магнит;
13 — обмотки подмагничивания
Йкродатчика заполнена лигроином, поэтому пбплайбК
Йвешен в жидкости и трение в подшипниках оси хх све-
дено к минимуму. Ротором 5 гироскопа является ротор
янхронного электродвигателя ГМС-0.2М, а рамкой 4 —
;ожух электродвигателя. На оси хх рамки укреплено
фмо 3. При повороте рамки ярмо вращается относи-
ельно намагниченных полюсов магнитопровода 2. По-
рому относительно оси хх возникает момент, пропор-
циональный углу поворота рамки. Магнитный поток
^агнитопровода создает постоянный магнит 12. Ярмо и
кагнитопровод образуют магнитную противодействую-
щую пружину. Регулировка характеристик магнитной
^/ужины производится при помощи обмоток 13 катушек
Гдмагничивания.
Колебания гироскопа гасятся гидравлическим демп-
^ром, который состоит из ротора с лопатками 6 и ста-
эра 7. В статоре имеются полости, сообщающиеся
ежду собой каналами-щелями 8 и 11. При колебаниях
амки гироскопа вокруг оси хх лопатки ротора перего-
яют заполняющий корпус лигроин из одной полости
: другую через щели. Благодаря вязкости лигроина,
ротекающего через каналы, и демпфируются колеба-
ия рамки. При изменении температуры вязкость лиг-
Оина меняется. Для поддержания необходимого демп-
фирования в этом случае проходное сечение щелей
^/ответственно изменяется при помощи лопаток 9 регу-
ятора демпфера. Перемещение лопаток 9 обеспечивает-
я сильфоном 10. При понижении температуры лигроина
язкость его увеличивается и сильфон, реагируя на из-
менение объема лигроина, увеличивает проходное сече-
те щелей, выдвигая лопатки 9.
р На поплавке, внутри которого размещен гироскоп,
Креплена ось 1 с центральным контактом Кь При воз-
ккновении угловой скорости вращения самолета рамка
Ьроскопа совершает поворот вокруг оси хх на угол,
ропорциональный угловой скорости вращения самоле-
Ч. Центральный контакт Ki замыкается с одним из бо-
>вых контактов, подавая сигнал о появлении угловой
юрости в схему электронного реле времени. Электрон-
ке реле времени состоит из ячеек RiCi задержки вре-
вни выключения коррекции и R2C2 задержки времени
ключения коррекции, а также из двух релейных уси-
|Телей, собранных на кремниевых полупроводниках.
J 223
Если угловая скорость разворота отсутствует, централь-
ный контакт Ki разомкнут, конденсатор Ci заряжен, а
конденсатор С2 разряжен, так как выход релейного уси-
лителя I замкнут. В связи с отсутствием потенциала на
обкладках конденсатора С2 выход релейного усилите-
ля II будет разомкнут, а обмотка реле РЭС-10 обесто-
чена, контакты Кг реле РЭС-10 разомкнуты, контак-
ты Кз реле РЭС-7 замкнуты.
В момент начала виража контакты Кь связанные с
рамкой гироскопа, замыкаются и конденсатор С2 разря-
жается, что приводит к размыканию выхода релейного
усилителя I. Конденсатор С2 при этом получает воз-
можность заряжаться через сопротивление Кг- По дости-
жении определенного напряжения на обкладках конден-
сатора С2 выход релейного усилителя II замыкается,
в связи с чем срабатывает реле РЭС-10, контакты Кг
которого в свою очередь вызывают срабатывание испол-
нительного реле РЭС-7, имеющего шесть пар нормально
замкнутых контактов Кз и одну пару — нормально
разомкнутых. Контакты Кз реле РЭС-7 включены после-
довательно в цепи коррекции гироскопических приборов
самолета. Срабатывание реле РЭС-7 приводит к размы-
канию контактов Кз и к выключению коррекции.
В зависимости от угловой скорости виража между
замыканием контакта Ki (начало виража) и срабаты-
ванием реле РЭС-7 (выключение коррекции) проходит
от 7 до 40 сек, что обеспечивает необходимую задержку
выключения коррекции. В момент прекращения виража
контакт Ki размыкается и происходит заряд конден-
сатора Ci через сопротивление Ri. По достижении опре-
деленной величины заряда выход релейного усилителя I
замыкается, что приводит к разряду конденсатора С2,
размыканию выхода релейного усилителя II, обесточи-
ванию реле РЭС-10, отпусканию реле РЭС-7, контакты
которого замыкаются и включают цепи коррекции.
Между прекращением разворота (размыканием контак-
та Ki) и включением контактами реле РЭС-7 цепей кор-
рекции также проходит время от 5 до 40 сек.
При разворотах, сопровождающихся колебаниями
самолета по курсу, контакт Ki размыкается на время,
меньшее времени заряда конденсатора Сь Поэтому кон-
денсатор Ci не успевает полностью зарядиться до напря-
жения, при котором сможет произойти замыкание вы-
224
Ьа релейного усилителя I; разряд конденсатора С2 не
вылечивается и коррекция не выключается.
|В отличие от ВК-53РБ в ВК-90 можно дистанционно
|к>рачивать рамку гироскопа относительно оси хх,
позволяет проверять все параметры ВК-90 без его
Йонтажа с самолета. Также обеспечена возможность
Дверки скорости вращения гироскопа.
IВыключатель коррекции ВК-90 выключает коррек-
гироблоков при угловой скорости самолета
|> град/сек. Время задержки отключения коррекции
Й угловой скорости 0,3 град/сек составляет от 7 до
ъсек. Время задержки включения коррекции при раз-
ротах без рыскания по курсу — от 5 до 15 сек, а при
^воротах с рысканием по курсу — от 5 до’40 сек.
Глава 5
ПРИБОРЫ КОНТРОЛЯ РАБОТЫ
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
И САМОЛЕТНЫХ СИСТЕМ
К приборам контроля работы авиационных двига-
телей и систем относятся манометры, тахометры, термо-
метры, топливомеры, расходомеры, указатели положе-
ния элементов самолета и др. За небольшим исклю-
чением это электрические дистанционные приборы,
имеющие в своем комплекте датчики (приемники) и ука-
затели.
За последнее время все больше получают примене-
ние датчики индуктивного типа. Указатели применяются
как одинарные, предназначенные для измерения какой-
либо одной величины, так и комбинированные, пред-
назначенные для измерения нескольких величин.
Применение дистанционных электрических приборов
объясняется тем, что они позволяют производить изме-
рения с большой точностью и на расстоянии от кабины
самолета. В конструктивном отношении электрические
дистанционные приборы надежны в работе и плосты
в эксплуатации.
§ 1. АВИАЦИОННЫЕ МАНОМЕТРЫ
Авиационные манометры различного типа служат
для измерения избыточного давления жидкостей и га-
зов в двигательных и самолетных системах и баллонах.
Принцип действия манометров основан на сравне-
нии силы измеряемого давления с силами упругости
чувствительного элемента.
226
80
Рис. 5.1. Принципиальная схема манометра:
/ — трубка; 2 —тяга; 3 — сектор; 4 —трибка; 5 — стрелка; 6 — шкала
I* Простейшими манометрами являются недистанцион-
)ые механические манометры с трубчатой пружиной
Ганометрической трубкой).
В качестве чувствительных элементов в манометрах
ргут применяться также гофрированные мембраны,
биометрические коробки, винтовые манометрические
рубки и сильфоны.
в На рис. 5.1 приведена принципиальная схема мано-
|йтра. Чувствительным элементом служит полая изо-
227
гнутая трубка (трубчатая пружина) 1 овального сече-
ния, один конец которой закреплен неподвижно.
Измеряемое давление внутрь трубки подводится со
стороны закрепленного конца через штуцер.
Под действием разности давления, действующего на
внешнюю и внутреннюю поверхности, трубка распрям-
ляется и ее свободный конец перемещается относитель-
но центра изгиба (положения А и Ai).
С помощью передаточного механизма, состоящего из
тяги 2, зубчатого сектора 3 и трибки 4, движение сво-
бодного конца трубки А передается на стрелку 5. Вели-
чина измеряемого давления определяется по шкале 6,
отградуированной в единицах давления.
Элементы манометра помещаются в корпус, со сто-
роны шкалы корпус закрывается стеклом.
Механические манометры выпускаются для измере-
ния давлений воздуха, гидросмесей, кислорода и др.
Манометры для измерения давления воздуха, например,
имеют индекс МВ (МВ-10, МВ-12, МВ-30, МВ-60, МВ-80,
МВ-100, МВ-250), для измерения давления гидросмеси
индекс МГ (МГ-80, МГ-100, МГ-160, МГ-250), для из-
мерения давления кислорода индекс МК (МК-14, МК-18,
МК-30, МК-250). Цифры после индекса обозначают
предельные давления в кГ/см2, на измерение которых
рассчитан манометр.
§ 2. ЭЛЕКТРИЧЕСКИЕ ДИСТАНЦИОННЫЕ МАНОМЕТРЫ
ТИПА ЭДМУ И ЭМ
Электрические манометры типа ЭДМУ и ЭМ служат
для измерения избыточного давления топлива или
масла.
Принципиальная схема манометра типа ЭДМУ при-
ведена на рис. 5.2а.
Схема прибора представляет электрический мост со-
противлений, в качестве измерителя в котором исполь-
зован логометр. Как известно, логометром называется
электрический измерительный прибор, предназначенный
для измерения отношения электрических токов.
К особенностям логометра относится то, что на пока-
зания прибора практически не влияет изменение напря-
жения источника тока, питающего схему. Логометры
как измерители находят широкое применение в кон-
228
струкциях авиационных приборов. В схеме ЭДМУ лого-
метр состоит из двух неподвижных рамок I и II, распо-
ложенных под углом 120° друг к другу и вращающегося
постоянного магнита М.
б
Рис. 5.2. Принципиальная схема манометров:
а — электрического дистанционного манометра унифицированного
ЭДМУ; б—электрического манометра ЭМ
Действие логометра основано на свойстве подвиж-
ного магнита М устанавливаться в направлении дей-
ствия магнитного поля, создаваемого рамками при про-
текании по ним электрического тока. Преимуществом
логометра с подвижным магнитом является возмож-
ность измерения отношения токов в большом диапазо-
не и отсутствие токоподводов к вращающейся части
измерителя.
При создании давления Р чувствительный элемент
Датчика перемещает через передаточный механизм щет-
229
В качестве чувствительного элемента датчиков при-
меняется манометрическая коробка или гофрированная
мембрана /. При увеличении давления мембрана изги-
бается и перемещает шток 9, который через переда-
точный механизм передвигает щетку 3 по потен-
циометру 2. Обратный ход механизма при уменьшении
давления обеспечивается возвратной пружиной 6.
Электропитание подводится к потенциометру датчика
через штепсельный разъем. На герметичном корпусе
датчика имеется два штуцера.
Статический штуцер 7 соединяет внутреннюю по-
лость корпуса со статическим давлением или противо-
давлением. Через динамический штуцер 11 подводится
измеряемое давление.
Подвижная система логометра указателя (рис. 5.36)
состоит из плоского железоникельалюминиевого магни-
та 2, закрепленного на оси. На этой же оси укреплена
стрелка прибора 5.
Подвижной магнит располагается внутри медного
успокоителя 1, в котором при колебаниях подвижной си-
стемы вознйкают вихревые токи, магнитное поле кото-
рых создает момент, тормозящий колебания системы.
Успокоитель охватывается прямоугольными рамками 3,
расположенными под углом в 120р друг к другу. Рамки
изготовлены из медной проволоки и имеют одинаковое
число витков.
Для защиты от внешних магнитных полей логометр
закрыт цилиндрическим экраном из пермаллоя. Угол по-
ворота стрелки логометра по шкале равен 120'°. Шкала
манометра ЭМ неравномерная.
Манометры ЭДМУ и ЭМ являются унифицирован-
ными приборами и выпускаются на различные пределы
измерений давлений. Унификация манометров заклю-
чается в применении одинаковых электрокинематиче-
ских схем и указателей, которые в манометрах на раз-
личные пределы измерений отличаются только градуи-
ровкой щкал.
Манометры выпускаются для измерений давлений в
пределах от 0 до 0,8; 1,5; 3; 4; 8; 15; 24; 40; 80; 100; 150;
240 и 300 кГ/см2.
Верхний предел давления в кГ)см2, на измерение
которого рассчитан манометр, указывается после сокра-
щенного наименования манометра. Например, в сокра-
232
щенном наименовании прибора ЭДМУ-15 цифра «15»
означает, что манометр рассчитан на измерение давле-
ний до 15 кГ]см2. Выпускаются манометры ЭДМУ со
сдвоенными указателями, тогда перед сокращенным
наименованием ставится цифра «2» (например,
2ЭДМУ-15).
Датчики и указатели соединяются между собой элек-
трической проводкой (до 15 м длиной).
У манометров, предназначенных для измерения дав-
лений до 3 кГ/см2, в качестве чувствительных элементов
применяются манометрические коробки, а для давлений
свыше 3 кГ/см2— гофрированные мембраны и маномет-
рические трубки.
Электрическим манометрам ЭДМУ и ЭМ свойствен-
ны инструментальные погрешности, возникающие из-за
несовершенства конструкции прибора и несовершенства
применяемых материалов. Основными инструментальны-
ми погрешностями манометров являются температур-
ные, вызываемые изменением электрического и магнит-
ного сопротивления элементов схемы при изменении
температуры.
§ 3. ДИСТАНЦИОННЫЕ ИНДУКТИВНЫЕ
УНИФИЦИРОВАННЫЕ МАНОМЕТРЫ ТИПА ДИМ И МИ
Манометры типа ДИМ и МИ, как и манометры типа
ЭДМУ и ЭМ, предназначаются для измерения избыточ-
ного давления жидкостей и газов.
В манометрах типа ДИМ и МИ применяются индук-
тивные датчики, которые не имеют трущихся частей,
что значительно повышает эксплуатационную надеж-
ность приборов.
j В связи с тем что в манометрах применены индук-
тивные датчики, для питания их требуется переменный
'ток.
; На рис. 5.4 приведена принципиальная схема мано-
гметра ДИМ. За исключением датчиков и питания схема
^прибора похожа на схему манометра ЭДМУ. Датчик
Эманометра в качестве чувствительного элемента имеет
^Металлическую гофрированную мембрану. Под воздей-
ствием избыточного давления мембрана прогибается и
^перемещает якорь 2, при этом изменяются зазоры в маг-
нитных цепях катушек L( и Ь2.
233
Изменение зазоров приводит к изменению индуктив-
ности катушек и перераспределению токов в рамках I
и II логометра указателя и к повороту постоянного маг-
нита М со стрелкой.
В связи с тем что указатель прибора требует для
питания постоянный ток, в схему включены два герма-
ниевых диода Д1 и Д2.
Указатель
/р
Рис. 5.4. Принципиальная схема работы манометра ДИМ
Принципиальная электрическая схема манометра МИ
приведена на рис. 5.5. В манометре МИ применен фер-
родинамический логометр, рассчитанный на питание
переменным током, поэтому ток в схеме не выпрямляет-
ся. Как и в манометре ДИМ, изменение измеряемого
давления Р приводит к изменению индуктивности ка-
тушек L! и Ь2, к перераспределению токов в схеме мо-
ста и изменению токов в катушке возбуждения Ь4 и
рамке L3 ферродинамического логометра.
Ток, проходя по катушке возбуждения, создает маг-
нитное поле. В результате взаимодействия этого поля
с магнитным полем рамки возникает момент, который
стремится повернуть рамку по часовой стрелке (рис. 5.5а).
Создаваемый момент будет пропорционален произ-
ведению тока в рамке L3 и тока в катушке возбужде-
ния Ь4, а также будет зависеть от положения рамки.
В то же время рамка будет стремиться занять такое
положение, при котором создаваемый ею поток будет
наибольшим, что приводит к появлению противодей-
ствующего момента, направленного против часовой
234
стрелки. В результате рамка отклонится на такой угол,
при котором действующий и противодействующий мо-
менты становятся равными. Изменение напряжения пи-
Рис. 5.5. Принципиальная схема манометра МИ
тания приводит к изменению тока как в рамке, так и в
катушке возбуждения, поэтому на показаниях логомет-
ра практически не сказывается.
§ 4. УСТРОЙСТВО ДАТЧИКОВ И УКАЗАТЕЛЕЙ МАНОМЕТРОВ
ДИМ И МИ
Датчики ДИМ и МИ (рис. 5.6а) выпускаются трех
типов: для давлений до 15 кГ/см2, до 100 кГ/см2 и до
300 кГ/см2. Чувствительным элементом датчиков до 15
и до 100 кГ1см2 служит мембрана, а у датчиков до
300 кГ/см2— грибковая мембранная коробка. Давление
подводится через штуцер в подмембранную полость.
Мембрана 1 под действием давления прогибается и пе-
ремещает шток 6 с якорем 5, изменяющим индуктив-
ность катушек 3. При уменьшении давления возвратная
пружина 4 перемещает якорь 5 в исходное положение.
Для обеспечения устойчивой работы датчиков при боль-
ших перегрузках служит упор 2, на который ложится
мембрана. У датчиков до 15 кГ1см2 на крышке имеется
235
р
б
б — указатель:
Рис. 5.6.
стоелкааТ2И-браН?а: 2 ~ упор: 3~ катушка; 4 - пружина; 5-"якорь; 6 - шток;
срелка, 2 циферблат; 3 - магннтопровод; 4 - катушка возбуждения; 5 -рамка; 6 - магнит; 7-лепесток
успокоителя
Устройство датчика
и указателя манометра МИ:
^татический штуцер Рст для соединения корпуса дат-
чика с трубкой, выводящей топливо при прорыве мем-
браны в безопасное место.
Конструкция датчиков предусматривает установку в
Динамический штуцер демпфера для сглаживания пуль-
сации топлива.
> Основным элементом указателя ДИМ является маг-
нитоэлектрический логометр с вращающимся магнитом
И неподвижными рамками. По конструкции указатель
^ЦИМ аналогичен указателю манометра ЭДМУ. У ука-
зателей манометров МИ (рис. 5.66) основным элемен-
том является ферродинамический логометр с подвижной
рамкой, на одной оси с которой укрепляется стрелка 1
й лепесток успокоителя 7, вращающийся в поле постоян-
ного магнита 6; магнитопровод 3 с катушками возбуж-
Гения 4 крепятся к основанию.
В отличие от манометров типа ДИМ в манометрах
Ьипа МИ повышена точность отсчета показаний в два
База и уменьшена погрешность с 4 до 3%'. Эти преиму-
щества получены за счет применения однорамочного
Ьерродинамического логометра с углом размаха шкалы
Ко 270° вместо 120° у манометра типа ДИМ.
Манометры предназначены для измерения давлений
Ь пределах 0—0,8; 1,5; 3; 4; 8; 15; 24; 40; 80; 100; 150;
Р40 и 300 кГ/см2.
§ 5. ОСОБЕННОСТИ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
МАНОМЕТРОВ
Указатели манометров устанавливаются на прибор-
ных досках или панелях. Датчики дистанционных мано-
метров присоединяются к источнику давления с по-
мощью трубопровода. Указатель с источником питания
I датчиком соединяется проводами сечением 0,35—1 мм2
к соответствии с электромонтажной схемой.
f После выполнения монтажа проверяется герметич-
ность системы и правильность работы прибора. При
выключенном питании стрелка указателя должна ле-
жать ниже нулевой отметки на упоре, при включении
Питания — против нулевой отметки и при создании дав-
вения должна перемещаться по шкале указателя.
| При подключении нескольких индуктивных маномет-
ров типа ДИМ к одному источнику питания учитывает-
237
Ся, что манометр потребляет один пйлупериод перемен-
ного тока, поэтому приборы включают таким образом,
чтобы линии питания загружались равномерно.
Проверка градуировочной погрешности манометров
заключается в сличении показаний проверяемого при-
бора 1 с показаниями эталонного прибора 2 более вы-
Рис. 5.7. Схема проверки манометров:
1 — проверяемый прибор; 2 — эталонный
манометр; <?—датчик
сокого класса точности на специальной гидравлической
установке для проверки манометров типа ГУПМ
(рис. 5.7).
Электрическая часть манометров проверяется на
установках ЭУПМ. Сопротивление изоляции электриче-
ских элементов датчиков и указателей проверяется ме-
гомметром на 500 в.
§ 6. АВИАЦИОННЫЕ ТАХОМЕТРЫ
Авиационными тахометрами называются
приборы для измерения угловой скорости вращения ва-
ла двигателя. Контроль за скоростью вращения необхо-
дим для правильной эксплуатации авиационного двига-
теля на земле и в полете.
В авиационных тахометрах используется магнитоин-
дукционный принцип преобразования скорости враще-
ния вала двигателя в показания прибора.
На рис. 5.8 приведена принципиальная схема маг-
нитного тахометра. Основными элементами магнитного
238
Тахометра являются постоянный магнит 1, чувствитель-
ный элемент в виде диска 2, противодействующая пру-
жина 3, уравновешивающая поворот чувствительного
Элемента, и стрелка 4.
Если постоянный магнит вращать с какой-то ско-
ростью, то в диске 2 будут индуктироваться вихревые
доки.
;; Вследствие взаимодействия магнитного поля посто-
янного магнита с магнитным полем токов, индуктиро-
Рис. 5.8. Принципиальная схема магнитного тахометра:
1 — магнит; 2 — диск; 3 — противодействующая пружина; 4 — стрелка
ванных в диске, создается вращающий момент, под дей-
ствием которого диск увлекается в направлении враще-
ния постоянного магнита.
Вращению диска противодействует момент пружи-
ны 3. Угол поворота диска при этом будет прямо про-
порционален угловой скорости вращения постоянного
магнита.
В авиационных тахометрах магнит вращается со ско-
ростью, пропорциональной угловой скорости вращения
вала авиационного двигателя.
Комплект авиационного магнитноиндукционного та-
хометра состоит из датчика и указателя.
Датчик представляет собой (рис. 5.9) трехфазный
.синхронный генератор с возбуждением от постоянного
магнита. Основными элементами указателя являются
синхронный и гистерезисный двигатели и магнитный та-
хометр.
239
Датчик
Указатель
п
Рис. 5.9. Принципиальные электрокинематическая и электрическая схемы тахометров;
а — принципиальная электрокинематическая схема; б — принципиальная электрическая схема тахометра с одинарным указа-
телем; в — принципиальная электрическая схема тахометра со сдвоенным указателем:
/ — ротор генератора датчика; 2 — обмотка статора генератора цатчика; 3 — обмотка статора двигателя указателя; 4 — ротор
цвигателя указателя; 5 — гистерезисные диски; 5 — магнитный рзел (муфта); 7 — чувствительный элемент (диск); 3 — противо-
действующая пружина (волосок); 9 — алюминиевый диск (диск демпфера); 10— магнитный узел; 11— стрелка; /2 — шкала;
13 — зубчатая передача
Постоянный магнит датчика 1 вращается от привода
авиационного двигателя и индуктирует ib статорной об-
мотке 2 генератора переменный ток с частотой, пропор-
циональной угловой скорости вращения вала двига-
теля.
Таким образом, датчик служит для преобразования
угловой скорости вращения вала авиадвигателя в трех-
фазный переменный ток, частота которого пропорцио-
нальна скорости вращения вала двигателя.
Ток датчика тахометра питает статорную обмотку 3
синхронного трехфазного двигателя указателя.
Ротор 4 двигателя указателя состоит из постоян-
ных крестообразных магнитов и гистерезисных дисков 5,
закрепленных на общем валу. На этом же валу укреп-
лен магнитный узел 6, состоящий из нескольких пар по-
стоянных магнитов, между полюсами которых вращается
чувствительный элемент — диск 7 магнитного тахометра.
Число оборотов вала двигателя указателя пропорцио-
нально частоте питающего тока, а следовательно, и чис-
лу оборотов вала авиационного двигателя. Шкала 12
указателя градуируется в оборотах в минуту.
Для повышения устойчивости показаний применяет-
ся демпфирование подвижной системы указателя. Узел
демпфирования состоит из постоянных магнитов 10,
укрепленных неподвижно, между полюсами которых
вращается алюминиевый диск 9, насаженный на ось чув-
ствительного элемента 7.
Демпфирование происходит за счет тормозящего мо-
мента, возникающего при вращении диска 9 в поле по-
стоянных магнитов. Гистерезисные диски 5 являются
ротором гистерезисного двигателя и служат для запуска
двигателя в асинхронном режиме.
При появлении в статоре <3 вращающегося перемен-
ного магнитного поля в гистерезисном диске возникнут
полюса намагничивания, которые будут следовать за
полюсами вращающегося магнитного поля с некоторым
отставанием. При взаимодействии магнитного поля ги-
стерезисного диска 5 и вращающегося поля статора 3
создается вращающий момент, увлекающий диск в на-
правлении вращения поля.
По мере увеличения индукции вращающегося маг-
нитного поля увеличивается индукция и вращающий
момент гистерезисного двигателя, под действием которо-
242
го ротор будет увеличивать угловую скорость вращения
до вхождения в синхронный режим с вращающимся
магнитным полем статора.
В дальнейшем синхронный и гистерезисный двига-
тели работают совместно, но поскольку магнитный по-
ток гистерезисного диска слабее поля постоянных маг-
нитов ротора 4, то по достижении синхронного режима
момент ротора в основном будет обеспечиваться за счет
момента постоянных магнитов. При этом полюсы по-
стоянных магнитов гистерезисных дисков вступают без
относительного смещения в магнитное сцепление с по-
люсами статора и ротор будет способен преодолевать
большие тормозные нагрузки, не выходя из режима
синхронной работы.
При резких увеличениях скорости вращения магнит-
ного поля статора возможен случай асинхронного ре-
жима работы двигателя указателя, когда полюсы по-
стоянных магнитов вращаются с некоторым отставанием
от полюсов поля статора.
В этом случае гистерезисный двигатель помогает ро-
тору следовать за магнитным полем статора и вводить
постоянные магниты ротора в синхронное вращение с
полем статора. Использование гистерезисного двигателя
для запуска позволяет получить необходимую величину
пускового момента при наименьших габаритах и весе
синхронного двигателя.
Магниты ротора 4 синхронного двигателя соединены
£ валом, на котором они насажены при помощи пружи-
ны, что позволяет им свободно поворачиваться на не-
который угол вслед за вращающимся полем и быстрее
^ходить в синхронный режим.
В отличие от одинарных в тахометрах со сдвоенным
измерителем (рис. 5.9в) демпфирование колебаний
магнитного тахометра обеспечивается за счет момента
прения зубчатой передачи 13.
Ь На рис. 5.10 показана конструкция тахометра
р-15М.
5 Датчик тахометра (рис. 5.10а) представляет собой
‘рехфазный генератор переменного тока с ротором 4 в
щде двухполюсного постоянного магнита. Ротор датчи-
Э соединяется с приводом при помощи муфты, состоящей
|з кожаной прокладки 1 и фланца 10 со штифтами И.
243
6 и 9 — крышки; 8 — ста-
Рис. 5.10. Устройство тахометра ТЭ-15М:
9_ вял- 4 — потоп" 5—смазка; 3 и 7 — шарикоподшипники;
а-датчик: /-кожаная прокладка; 2 - вал, 4 ^™%лваиец; п-штифты;
- f „^гкзттхга- 9_иткяпя- 3___магнитный узел; 4 — постоянные магниты; 5 диск
демпфера; 6 —пружина;
13 — гистерезисные
244
*отор 4 вращается в двух шарикоподшипниках 3 и 7,
становленных в крышках 6 и 9. Крышки соединяются
месте с помощью винтов.
Существуют датчики, которые соединяются с приво-
ем с помощью хвостовика. Статор 8 для уменьшения
отерь в нем от вихревых токов набран из пластин
рансформаторного железа толщиной 0,5 мм и имеет
пазов, в которые уложена двухслойная трехфазная
бмотка. Пластины статора изолированы друг от друга
реляционным клеем. Каждая фаза обмотки имеет че-
Ыре катушки, соединенные звездой. Датчик имеет
ртепсельиый разъем.
г Указатель (рис. 5.106) является магнитоиндукцион-
' из синхронного двигателя и
узел 17.
4
Рис. 5.11. Схема термо-
магнитного шунта:
1 — магннтопровод; 2 — диск
чувствительного элемента;
3 — термомагнитный шунт;
4 — постоянные магниты
ым прибором и состоит
(агентного тахометра.
b Статор 8 синхронного двигателя имеет трехфазную
б мотку 8, соединенную звездой. Крестовидные магниты
©тора 12 соединяются с валом с помощью пружи-
ны 14. На этом же валу укреплены диски 13 гисте-
резисного двигателя и магнитный
i Магнитный узел состоит из
£ух дисков с запрессованными
; них цилиндрическими постоян-
ными магнитами 15. В зазоре
|ежду магнитами вращается
иск 16 магнитного тахометра.
|а оси диска укреплена стрелка
Ьибора. Шкала прибора равно-
крная. Угловой размах шка-
540°.
| Температурная компенсация
| приборе осуществляется при-
Бнением термомагнитного шун-
| (рис. 5.11), представляющего
Йастину, изготовленную из ма-
|риала, сопротивление которого
Ьгнитному потоку при увеличе-
1и температуры увеличивается.
> С увеличением температуры
(еличивается сопротивление
|гнта и магнитный поток в маг-
ггопроводе 1 сохраняется без
щенений.
245
Магнитный шунт можно перемещать от магнитной
нейтрали к концам магнита, что позволяет, регулировать
его влияние на величину магнитного потока.
Благодаря применению температурной компенсации
удается уменьшить температурную погрешность и обес-
печить высокую точность работы тахометра.
Для повышения устойчивости показаний в указателе
имеется магнитный узел. Узел состоит из шести пар
магнитов, в зазоре между которыми вращается диск 4,
укрепленный на оси магнитного тахометра. При враще-
нии диска в нем возникают токи, поля которых взаимо-
действуют с полем постоянных магнитов и создают
демпфирующий момент.
Указатель имеет две шкалы: основная внешняя от
5000 до 15000 об!мин и вспомогательная внутренняя от
0 до 5000 об!мин (по которой отсчитывается скорость
вращения вала турбокомпрессора двигателя при за-
пуске) .
Погрешность комплекта тахометра при температуре
воздуха, окружающего измеритель, 20° не превышает
75—150 об/мин. Авиационные тахометры можно разде-
лить на тахометры с одинарным указателем (ТЭ4-48М,
ТЭ5-2М, ТЭ-10-48М, ТЭ-15М и ТЭ-40М) и со сдвоен-
ным указателем (2ТЭ4-1М, 2ТЭ4-2М, 2ТЭ5-1М, 2ТЭ9-1М
и 2ТЭ15-1М).
Наименование показывающих приборов совпадает с
наименованием комплекта.
Указатели тахометров имеют одинаковую конструк-
цию и отличаются градуировкой шкал и регулировоч-
ными данными. Сдвоенные указатели состоят из двух
одинаковых узлов, смонтированных в одном корпусе.
Подгонка диапазона измерения указателей в зави-
симости от диапазона измерений производится измене-
нием воздушного зазора в измерительном узле тахо-
метра.
В комплектах тахометров применяются датчики
ДТ-1М, ДТ-ЗМ, ДТ-5М, ДТ-6М, ДТ-33 и ДТ-35.
Датчики представляют трехфазные генераторы пере-
менного тока, которые развивают при работе напряже-
ние в пределах 10,5—12,5 в.
Датчики отличаются числом пар полюсов, переда-
точными числами от главного вала двигателя к приводу
датчика и способом присоединения к приводу авиадви-
246
гателя. Для двигателей с-предельным числом оборотов
до 5000 об/мин применяется привод с передаточным
числом 1 :2 и до 15000 об/мин—1 :4.
В связи с этим магниты роторов датчиков ДТ-1М,
ДТ-ЗМ, ДТ-6М и ДТ-35 имеют по два полюса, роторы
датчиков ДТ-5М и ДТ-33 — четыре полюса.
Датчики крепятся к приводу двигателя накидными
гайками или муфтами.
Для измерения скорости вращения валов поршневых
двигателей применяются тахометры ТЭ-45 (рис. 5.12),
Рис. 5.12. Комплект тахометра ТЭ-45
которые по принципу действия аналогичны тахометрам
ТЭ-15М. Датчиком тахометра ТЭ-45 служит трехфазный
генератор с вращающимся двухполюсным постоянным
^магнитом, привод которого осуществляется с помощью
Гибкого вала через редуктор с фрикционной муфтой.
I В настоящее время все больше распространяются
Унифицированные магнитно-индукционные тахометры
1ТГЭ-1 и ИТЭ-2 с указателями, имеющими процент-
ную шкалу (рис. 5.13), и с датчиками ДТЭ-1 и ДТЭ-2.
Конструкция датчиков и указателей тахометров ИТЭ-1
ц ИТЭ-2 аналогична тахометрам типа ТЭ. Отличаются
рни градуировкой шкалы, которая выполнена в процен-
Еах от максимального числа оборотов, развиваемых дви-
ателем. Процентная шкала упрощает чтение показа-
ий на приборах и позволяет устанавливать их на раз-
Гичные двигатели.
Тахометр будет показывать 100%, если привод дат-
чика тахометра будет вращать его ротор со скоростью
Е500 об/мин.
247
Указатели тахометра ИТЭ-1 имеют одинарную шка-
лу, ИТЭ-2 — сдвоенную. Датчик ДТЭ-1 рассчитан на
работу с одним указателем ИТЭ-1 или одним двигате-
лем ИТЭ-2; датчик ДТЭ-2 работает с двумя двигате-
лями, В зависимости от этого применяются различные
схемы соединения комплектов.
Рис. 5.13. Шкала указателя ИТЭ
Шкала указателя имеет деления от 0 до 105% и
оцифровку от 0 до 100%. Цена деления 1%. Погрешно-
сти тахометров при нормальной температуре +20° С на
всем диапазоне шкалы составляют 0,5—1%.
§ 7. ОСОБЕННОСТИ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
ТАХОМЕТРОВ
Датчики тахометров устанавливаются на коробке
приводов двигателей и крепятся болтами или накид-
ными гайками. С приводными валами от двигателя дат-
чики соединяются эластичными муфтами или хвостови-
ками.
Указатели тахометра устанавливаются на приборной
доске и крепятся четырьмя винтами и гайками. Указа-
тели с датчиками соединяются проводами сечением
0,75—1 мм2. Перед установкой датчика на двигатель
необходимо проверить сопротивление изоляции указа-
248
геля и датчика, а также погрешность прибора при нор-
мальной температуре. Перед установкой датчика на
Двигатель следует проверять правильность присоедине-
ния проводов к штепсельным вилкам, для чего необхо-
димо валик вручную вращать в сторону вращения вала
двигателя. При этом стрелка указателя должна пово-
рачиваться в направлении вращения часовой стрелки.
Рис. 5.14. Схема проверки тахометров:
1 — датчик контрольного тахометра; 2 — ука-
затель контрольного тахометра; 3 — фрикцион;
4 — электродвигатель; 5 —указатель проверяе-
мого тахометра; 6 — датчик проверяемого та-
хометра
Погрешность прибора проверяется сопоставлением
Оказаний проверяемого комплекта с показаниями кон-
сольного тахометра на специальной тахометрической
Поверочной установке КТУ-1М (рис. 5.14). Разность
1ежду показаниями проверяемого тахометра и показа-
Нями контрольного тахометра составляет его погреш-
ность. При проверке учитывается температура окружаю-
щего воздуха, так как изменение температуры на
каждые 10° от нормальной дает дополнительную по-
Сешность в показаниях 0,1—0,2%.
§ 8. ЭЛЕКТРИЧЕСКИЕ АВИАЦИОННЫЕ ТЕРМОМЕТРЫ
Авиационными термометрами называются
риборы, предназначенные для измерения температуры
[асла, воды, воздуха, температуры выхлопных газов,
249
температуры головок цилиндров поршневых авиадвига-
телей воздушного охлаждения, а также средней темпе-
ратуры газового потока в реактивном сопле газотурбин-
ных двигателёй.
Принцип действия термометров основан на примене-
нии специальных сопротивлений или термоэлектриче-
ских элементов, изменяющих свои характеристики при
изменении температуры среды, в которую они помеща-
ются. Такие сопротивления или термоэлектрические эле-
менты называются приемниками.
В зависимости от типа приемников авиационные
термометры разделяются на термометры сопротивления
и термоэлектрические термометры. Между приемником
и средой, температура которой измеряется, происходит
тепловой обмен путем конвекции, теплопроводности и
лучеиспускания.
Для того чтобы термометр давал правильные пока-
зания, температура теплочувствительного элемента дол-
жна совпадать с температурой среды, в которой нахо-
дится приемник.
В действительности всегда будут расхождения в тем-
пературах, зависящие от размера, материала, конструк-
ции теплочувствительного элемента, свойств среды и
характера теплообмена между приемником и окружаю-
щей средой, что приводит к искажению результатов
измерения.
При измерении температуры выходящих газов газо-
турбинных двигателей, протекающих со скоростью
350—400 м/сек и имеющих температуру 350—1000° С,
приходится учитывать дополнительное нагревание чув-
ствительного элемента из-за быстрого торможения и
адиабатического сжатия частиц газа, ударяющих о кор-
пус приемника.
Например, при скорости потока газа, равной
300 м/сек, приемник будет дополнительно нагреваться
на несколько десятков градусов (до 45°).
Точка на поверхности приемника, в которой поток
газа испытывает полное торможение и его скорость ста-
новится равной нулю, в аэродинамике называется
критической точкой. В критической точке темпе-
ратура газа будет наибольшей, так как в этой точке
вся кинетическая энергия газа полностью преобразует-
ся в тепловую энергию.
250
Температура газа в критической точке Го называет-
ся температурой полного торможения и равняется
То = Ти + Тл,
Цще Гн — истинная термодинамическая температура в
невозмущенном потоке;
Гд —динамическая температура, зависящая от ско-
рости набегающего потока.
В действительности из-за потерь тепла температура
|геплочувствительного элемента будет несколько меньше
Рис. 5.15. Схема приемника тем-
пературы:
/ — входное отверстие; 2 — трубка;
3 — выходное отверстие; 4 — тепло-
чувствительный элемент
температуры торможения
Го и больше истинной тем-
пературы в невозмущенном
^потоке Ти.
i, В авиационных термо-
метрах для правильного
суждения о температуре га-
|зового потока в реактивном
^двигателе измеряют темпе-
ратуру заторможенного по-
тока. Для этого теплочув-
йтвительный элемент 4 по-
мещают внутрь трубки 2
Чрис. 5.15), у которой вход-
|:ое отверстие 1 значитель-
:о больше выходного 3. Та-
ое устройство приемника позволяет измерять темпера-
уру газового потока с наименьшими динамическими
огрешностями.
Действительно, на поверхности входного окна поток
|ормозится и температура газа становится равной за-
торможенной.
F- Выходное отверстие создает течение газа внутри
Приемника, что уменьшает время, необходимое для на-
зревания горячего спая.
На принципе измерения температуры торможения
работают и термометры с датчиками в виде сопла Ла-
валя (рис. 5.16).
1 Такой датчик представляет собой трубку, которая
начале суживается, а в конце расширяется. Самое уз-
Еое сечение сопла называется критическим. При
[алой скорости полета скорость потока в критическом
251
сечении дозвуковая и сопло работает, как обычная труб-
ка Вентури.
При скоростях полета от М, равного 0,5 и более,
скорость потока в критическом сечении становится рав-
ной местной скорости звука. Эта скорость называется
критической. При критической скорости отношение
Направление полета
Рис. 5.16. Схема приемника температуры
в виде сопла Лаваля
температуры ТТ, воспринимаемой чувствительным эле-
ментом, к температуре полного торможения является
постоянной величиной
— =sN, поэтому Tt==NT9,
Тй
где N— коэффициент качества датчика термометра,
равный 0,978 при скорости полета от М = 0,5
и выше.
Таким образом, измеренная с помощью такого
приемника температура Тт оказывается пропорциональ-
ной истинной температуре в невозмущенном потоке Т„.
§ 9. ЭЛЕКТРИЧЕСКИЕ ТЕРМОМЕТРЫ СОПРОТИВЛЕНИЯ
В термометрах сопротивления, как уже отмечалось,
используется свойство проводников или полупроводни-
ков изменять свое сопротивление электрическому току
при изменении температуры.
В диапазоне до 150° С для металлов существует сле-
дующая зависимость:
Я = Я0[1+а(/-Q],
где R и J?o —электрические сопротивления проводника
при температурах, равных t и /о.
Температурный коэффициент сопротивления а пока-
зывает, на какую величину изменяется сопротивление
252
металла при изменении температуры на 1° С. В некото-
ром диапазоне температур, определенном для каждого
металла, коэффициент а может считаться постоянным
и равным некоторой средней величине. Термосопротив-
; лення авиационных приборов обычно изготавливаются
, из медн, никеля, платины. Средний температурный ко-
эффициент меди в диапазоне температур от 0 до 100° С
составляет величину ам = 4,26-10-3 --- . Средний тем-
град
пературный коэффициент платины ап=3,92-10~3 —>
никеля ан=6,4-10-3 . Относительные сопротивле-
град
ния этих металлов изменяются в функции температуры
в соответствие с графиком рис. 5.17а. Термосопротивле-
Рис. 5.17. Графики зависимости отношений сопротивлений
теплочувствительных элементов от температуры
б
ния из меди можно применять при температурах от
+ 50° до +180° С. При более высоких температурах
медь окисляется. Никель имеет более высокий темпера-
турный коэффициент сопротивления а и используется в
диапазоне температур от +50° до +200° С.
Термосопротивления из платины обладают стабиль-
ной характеристикой и обеспечивают точные измерения
температуры в пределах от +250° до +1250° С.
253
Для термометров сопротивления с большой точно-
стью в пределах измеряемых температур можно считать,
что сопротивление чувствительного элемента является
линейной функцией его температуры.
Теплочувствительные элементы из • полупроводников
имеют температурный коэффициент в 5—10 раз выше,
чем у металлов, поэтому применение таких приемников
позволяет получить более высокочувствительные термо-
метры. При изготовлении полупроводниковых чувстви-
тельных элементов используются: смесь окислов меди
и марганца; смесь окислов марганца и никеля; смесь
окислов кремния и железа и некоторые др.
Для полупроводниковых приемников существует сле-
дующая зависимость величины сопротивления от тем-
пературы:
в
Я = Ае/,
где: А и В — постоянные, зависящие от материала и
габаритов чувствительного элемента;
е— основание натуральных логарифмов;
Т — абсолютная температура.
На рис. 5.176 приведено графическое изображение
такой зависимости. Уменьшение сопротивления полу-
проводников при повышении температуры (в отличие
от повышения сопротивления у проводников) объясняет-
ся тем, что в полупроводниках при повышении темпера-
туры увеличивается образование свободных электронов,
приводящее к увеличению электрической проводимости
и уменьшению сопротивления цепи.
Термосопротивления и полупроводники в качестве
чувствительных элементов применяются в авиационных
термометрах типа ТУЭ-48, ТНВ-15, ТП-4 и др. Термо-
метры этого типа служат для измерения температур от
—70° до +150° С.
На рис. 5.18 приведена принципиальная электриче-
ская схема термометра сопротивления ТУЭ-48. Комп-
лект термометра состоит из приемника П-1 и указателя
ТУЭ-48.
Чувствительным элементом термометра служит нике-
левая проволока, сопротивление Rt которой изменяется
в зависимости от изменения температуры среды. Сопро-
тивление Rt включено в мостовую схему, плечами кото-
254
рой являются рамки I и П логометра. Мост регулирует-
ся таким образом, чтобы при температуре —70° С по-
тенциалы точек С и А были равны между собой, а по-
тенциал точки В был выше потенциала точки А. При
этом в рамке I потечет ток, в рамке II тока не будет.
Подвижный магнит М логометра в этом случае зай-
мет положение вдоль оси рамки I, а положение стрелки
прибора будет соответствовать температуре —70°.
Приемник
Указатель
Рис. 5.18. Принципиальная электрическая схема термометра ТУЭ-48
При температуре 4-150° С распределение потенциа-
лов и токов меняется. Ток в рамке I станет равным ну-
лю, а в рамке II будет иметь максимальное значение.
Подвижной магнит М логометра расположится вдоль
оси рамки II, и стрелка измерителя покажет на шкале
температуру -р150°С.
При других температурах подвижной магнит будет
занимать промежуточное положение. Сопротивления J?2
и Т?4 выполнены из медной проволоки и служат для
компенсации температурной погрешности, вызываемой
изменением сопротивления рамок при изменении темпе-
ратуры среды, окружающей указатель.
Сопротивления соединительных проводов входят в
схему моста и компенсируют друг друга.
Неподвижный магнит т служит для возвращения
стрелки в исходное положение при выключенном пи-
тании.
Чувствительный элемент приемника (рис. 5.19) —ни-
келевая проволока I наматывается на две сложенные
вместе слюдяные пластинки 2. Сверху чувствительный
элемент закрывается серебряными теплопроводящими
255
Рис 5.19. Устройство приемника термометра ТУЭ-48:
/- никелевая проволока; 2 и 3- —е, -^-сер^я пластина; 5 - манганиновые сопротивле-
пластинами 3, которые обеспечивают хороший теплооб-
мен между средой и элементом.
Чувствительный элемент вставляется в тонкую труб-
ку из нержавеющей стали со штуцером, припаянным
серебряным припоем. Для подгонки сопротивления
приемника последовательно с никелевой проволокой
включается сопротивление 5 из манганина.
Указатель термометра представляет собой логометр
унифицированного типа, по конструкции аналогичный
указателю ЭДМУ.
Указатель имеет шкалу с градуировкой от —70 до
4-150° С. Погрешность измерений в рабочем диапазоне
±5° С при температуре окружающей указатель сре-
ды ±20° С.
На принципе термометра сопротивления работает
термометр наружного воздуха ТНВ-15, предназначен-
ный для дистанционного измерения температуры тормо-
жения наружного воздуха. (На скоростях до
1800 км]час.)
В комплект термометра входит приемник П-5 и ука-
затель ТНВ-1. Принципиальная электрическая схема
термометра представлена на рис. 5.20. Чувствительный
элемент Rt помещается в узком сечении сопла Лаваля.
Z?i, /?2, Rs и /?6 — сопротивления плеч моста, Rt и
J?5 — компенсационные сопротивления.
256
17 Зак. 833
257
Приемник П-5 (рис. 5.21) выполнен неразборным И
состоит из диффузора 1, теплочувствительного элемен-
та 2 (Rt), выполненного из изолированной никелевой
проволоки, намотанной на медный цилиндрический кар-
кас, конфузора 3, изоляционной пластины 4, константа-
новой проволоки 5, корпуса и штепсельного разъема 7.
Рис. 5.21. Устройство приемника температуры П-5:
1 — диффузор; 2 — теплочувствительиый элемент; 3 — конфузор; 4 — изо-
ляционные пластины; 5 — константановая проволока; 6 — корпус;
7 — штепсельный разъем
Указатель ТНВ-1 (рис. 5.22) представляет собой маг-
нитоэлектрический логометр с двумя вращающимися
рамками 5, расположенными под углом 45° друг к дру-
гу. Магнитная система прибора состоит из магнита ци-
линдрической формы 7, магнитопровода 1 и сердеч-
ника 4.
Активные стороны рамки 5 перемещаются в воздуш-
ном зазоре между магнитом и сердечником 4. Форма
258
сердечника позволяет поворачиваться рамкам вокруг
оси на 220°.
К магниту со стороны сердечника прикрепляется
штампованная пластина — полюсный наконечник 6 из
мягкого железа.
Пластина служит для выравнивания магнитного по-
ля в воздушном рабочем зазоре. Прибор позволяет из-
/ Z 3
8 7 8 6 4
Рис. 5.22. Конструкция указателя ТНВ-1:
1 — магнитопровод; 2 — ось с кериами; 3 — токоподводящие пружииы;
4 — сердечник; 5 — рамки; 6 — полюсный иаконечиик; 7 — магнит;
8 — катушки сопротивлений
мерять температуру от —60 до +150° С. Рабочий диапа-
зон от —40 до +130° С. Основная погрешность термо-
метра при нормальной температуре (+20° С) не превы-
шает ±4° С.
Для измерения осредненной температуры воздуха в
кабине или отапливаемых отсеках летательных аппара-
тов применяется электрический термометр сопротивле-
ния ТП-4. Комплект термометра ТП-4 состоит из прием-
ника ПП-9Т и указателя ТВ-5.
17*
259
В термометре использованы свойства полупроводни-
кового термосопротивления резко уменьшать свое со-
противление при увеличении температуры.
На рис. 5.23 приведена принципиальная электриче-
ская схема термометра. Полупроводниковые сопротивле-
Рис. 5.23. Принципиальная электрическая схема
термометра ТП-4
ния включены в одно из плеч электрического моста
сопротивлений. При изменении температуры величина
сопротивлений /?4 изменяется, происходит перераспре-
деление тока в рамках логометра (и и гг) и отклонение
подвижной системы логометра измерителя.
Для того чтобы температурную характеристику
.приемника приблизить к линейной, в схему приемника
включаются корректирующие сопротивления (/?s и /?в)
по последовательно параллельной схеме.
Это дает возможность обеспечить взаимозаменяе-
мость приемников с различными характеристиками.
Термометры с приемниками из полупроводников име-
ют высокую температурную чувствительность, малые га-
бариты и большую надежность.
Основными частями приемника (рис. 5.24) термо-
метра являются два полупроводниковых термосопротив-
260
^ения 1 типа ПТ, загерметизированных в чашке 3, стой-
а 4 и экран 2.
Указатели ТВ-5 (рис. 5.25) по конструкции анало-
гичны указателям ТНВ-1. Шкала указателя имеет деле-
ния от —60 до +70° С.
Рабочий диапазон от
Р до +35° С.
L Погрешность ком-
плекта в рабочем диа-
5.24. Устройство приемника
ПП-9Т:
пазоне ±2,5° С.
> К основным по-
грешностям термомет-
ров сопротивления от-
носятся:
г — температурная
^погрешность, возни-
кающая вследствие
Нагревания теплочув-
ствителыюго элемента
Протекающим по нему '
докой? и вследствие
^различного нагрева
элементов прибора при
изменении температу-
ры среды, окружаю--------
щей прибор; при этом
-изменяются магнит-
ные свойства постоян-
ных магнитов, сопро-
тивление проводни-
ков и др. Темпера-
турные погрешности
уменьшаются подбо-
ром параметров эле-
ментов схемы и при- Рис
менением компенса-
ЦИОННЫХ сопротивле- 1 — термосопративлеиие ПТ; 2 — экран: 3 —
«. чашка; 4 — стойка; 5 — манганиновое со-
НИИ, противление
— погрешность, вы-
зываемая изменени-
ем напряжения источника питания прибора; уменьшение
погрешности достигается применением логометрических
указателей.
261
Рис. 5.25. Устройство указателя ТВ-5:
1 — ось; 2 — шкала; 3 — рамка; 4 — катушкн сопротивлений; 5 — магинт
262
§ ю. Особенности монтажа и эксплуатации
ТЕРМОМЕТРОВ СОПРОТИВЛЕНИЯ
В местах, где требуется измерить температуру (дви-
гатель, трубопроводы), устанавливаются специальные
штуцера. Между штуцером и приемником ставится мед-
но-асбестовая прокладка, и приемник контритСя прово-
локой. Датчик термометра наружного воздуха устанав-
ливается на обшивке самолета в потоке наружного воз-
духа. Указатели устанавливаются на приборной доске.
Рядом с указателями делаются надписи, показывающие,
для измерения температуры какой среды предназначен
термометр. Указатели с приемниками соединяются про-
водами в соответствии со схемой.
Градуировочная погрешность указателей и датчиков
термометров сопротивления проверяется с помощью пе-
реносной установки ПУТ-48.
§ 11. ТЕРМОЭЛЕКТРИЧЕСКИЕ ТЕРМОМЕТРЫ
Термоэлектрические термометры предназначаются
для измерения температур до 900—1200°. Принцип дей-
ствия термометров основан на использовании термо-
Горячий спай
Холодный спай
'Гальванометр
Горячий
спаи
Холодней
спаи
Рис. 5.26. Принципиальная схема термометра
электрического эффекта, сущность которого заключает-
ся в том, что если спаять два проводника (рис. 5.26) из
разнородных металлов и потом спай нагревать, то меж-
ду свободными концами проводников возникнет термо-
э. д. с.
263
Приемники, представляющие спай двух различных
металлов, называются термопарами.
Спай термопары, помещаемый в среду, температура
которой измеряется, называется горячим спаем,
концы термопары, к которым присоединяется указатель
термометра, называется холодным спаем.
Термопары изготавливаются из различных металлов
и их сплавов. В авиационных термометрах применяют-
ся хромель-копелевая (ХК), хромель-алюмелевая (ХА),
никель-кобальтовая-спецалюмелевая (НК-СА), никель-
железо-спецкопелевая (НЖ-СК) термопары.
Величина термо-э .д .с. термопары при нагревании
горячего спая до температуры tr будет равна
E{tvtx) — e{tv) — e(tx),
где е (/г)—э. д. с. горячего спая; е(/ж)—э. д. с. холодно-
го спая. Графики термо-э. д. с. развиваемых термо-
Температура
Рис. 5.27. График зависимости термо-
э. д. с. термопар от температуры:
I — хромель-копель; 2 — хромель-алюмель;
3 — никель-железо-спецкопель; 4 — ни-
кель- кобальт-спецалюмель
парами, при измене-
нии температуры горя-
чего спая и темпера-
туре холодного спая,
равной О'3, приведены
на рис. 5.27. Если тем-
пература холодного
спая будет изменяться,
то это приведет к из-
менению термо-э. д. с.,
развиваемой термопа-
рой, и появлению ошиб-
ки в показаниях термо-
метра. Термо-э. д. с.,
развиваемые термопа-
рами, невеЛики и до-
стигают всего несколь-
ких милливольт на
100° С. Для измерения
таких небольших э.д.с.
применяются чувствительные милливольтметры.
На рис. 5.28 приведена принципиальная электриче-
ская схема термоэлектрического термометра ТЦТ-13,
предназначенного для измерения температуры цилинд-
ров поршневого авиационного двигателя.
264
Рис. 5.28. Принципиальная элект-
рическая схема термометра типа
ТЦТ-13
t Термопара Т с помощью соединительных проводов
и подгоночного сопротивления Ri соединена с ука-
зателем. Указатель представляет чувствительный милли-
вольтметр, состоящий из рамки г, спиральных пружин
Жз> /?4, подгоночного сопротивления Д2, биметаллическо-
го корректора /?5 и компенсационного сопротивления R6.
I Сопротивление R2 предназначено для подгонки
сопротивления внешней
шепи до величины 7,15±
0,005 ом при различ-
|ной длине компенсацион-
•ного провода, которая
^зависит от типа само-
лета.
к Биметаллический кор-
г ректор R5 служит для ком-
< пенсации изменения тем-
пературы холодных кон-
цов спая термопары.
’ Изменение температуры
воздуха, окружающего из-
: меритель, вызывает зна-
чительное изменение со-
противления рамки г, так
" как рамка выполнена из
алюминиевого провода,
имеющего большой поло-
жительный температур-
ный коэффициент сопро-
тивления.
Для компенсации тем-
пературной погрешности
в цепь рамки включается
имеющее отрицательный температурный коэффициент,
.. в результате полное сопротивление указателя при раз-
личных температурах окружающего воздуха остается
неизменным.
Комплект термометра состоит из термопары, указа-
теля ТЦТ-1 и компенсационных проводов. В термометре
’ ТЦТ-13 применена термопара (рис. 5.29), состоящая из
медного кольца и хромелевого и копелевого термоэлек-
j; тродов. Кольцо обеспечивает необходимый подвод тепла
к термоэлектродам.
селитовое сопротивление /?е,
265
Для исключения ошибок при монтаже концы термо-
электродов делаются различной длины (хромелевый
термоэлектрод короче копелевого). Электроды изолиру-
ются асбестовыми жароупорными чехлами.
Такая термопара при температуре горячего спая
300° и холодного 0° развивает термо-э. д. с., равную
25МВ. Термоток направлен от положительного хроме-
цевого электрода к отрица-
тельному копелевому.
Термопара соединяется с
указателем многожильным
хромель-копелевым компен-
сационным проводом (рис.
5.30) в хлопчатобумажной
оплетке. Для соединения с
термопарой провод имеет
два специальных наконеч-
ника и двухштырьковый
штепсельный разъем для
присоединения указателя.
Концы компенсационных
приводов также сделаны
разной длины: хромелевый
длинный, копелевый корот-
кий.
Указатель ТЦТ-1 (рис.
5.31) представляет собой
Рис. 5.29. Схема термопары
термометра ТЦТ-13:
/ — хромелевый термоэлектрод; 2 —
копелевый термоэлектрод; 3 — мед-
ное кольцо
вибрационно-устойчивый милливольтметр.
Магнитная система указателя состоит из постоянно-
го магнита 1, магнитопровода 8 и сердечника 5. К маг-
ниту со стороны сердечника прикреплена пластинка из
мягкого железа — полюсный наконечник 3. Рамка 4
и две противодействующие пружины 2, служащие одно-
временно и токоподводами, представляют подвижную
систему прибора.
К оси подвижной системы прикреплена стрелка из-
мерителя 7. Подвижная система связана с биметалли-
ческим корректором 6.
Биметаллический корректор (рис. 5.32) автоматиче-
ски вводит поправку в показания термометра при изме-
нении температуры холодного спая. При изменении тем-
пературы биметаллическая спираль 2, изготовленная из
двух металлов, имеющих различный коэффициент ли-
266
нейного расширения, скручи-
вается или раскручивается, по-
ворачивая подвижную систему и
стрелку прибора на дополнитель-
ный угол, компенсирующий тем-
пературные погрешности. Винт 1
служит для регулировки биметал-
лического компенсатора.
На шкале прибора указывают-
ся: шифр прибора, номер прибо-
ра, градуировка термопары и ве-
личина сопротивления внешней
цепи (7,15 ом). Шкала прибора
градуируется от 50 до 350° С. По-
грешности показаний термометра
в рабочем диапазоне при окру-
жающей температуре 20° С не пре-
вышают ±9° С.
Для измерения температуры
газового потока в реактивной тру-
бе газотурбинного двигателя при-
меняются термометры выходящих
газов ТВГ-11.
В комплект термометра вхо-
дят указатель ТВГ-1, четыре сое-
диненные последовательно термо-
пары Т-1, разъемная колодка и
соединительные провода. Обозна-
чение комплекта термометра об-
разуется из названия указателя с
добавлением цифрового обозна-
чения типа термопары: ТВГ-11
(ТВГ-1 и Т-1). Температурное по-
ле в газотурбинных двигателях
неравномерное и разность темпе-
ратур между разными точками по
сечению потока может достигать
нескольких десятков градусов.
Поэтому для получения повышен-
ной точности температуру измеря-
ют в нескольких точках реактив-
ного сопла с помощью батарей
термопар. Суммарная термо-э.д.с.
Рис. 5.30. Схема соединения термопары с удлинительным проводом:
термопара; 2 — соединительная колодка; 3 — штепсельный разъем; 4 — удлинительный провод
267
Рис. 5.31.
Устройство указателя:
2-пружина; 3- полюсный наконечник; 4 -рамка’
воп Г’ f " ®нметалл,"!еск»й корректор; 7-стрелка; в - магнитол™-
вод, 9- добавочное сопротивление; 10 - селнтовое сопротивление ₽
Рис. 5.32. Биметаллический корректор:
1 ~ винт; 2-биметаллическая спираль; 3 - волосок; 4 - рамка
268
ЙодвоДится к указателю. Указатель измеряет, таким об-
разом, термо-э. д. с. всех четырех термопар и показания
его соответствуют осредненной температуре газа в реак-
тивной трубе.
Рис. 5.33. Принципиальная электрическая схема термометра ТВГ-11
На рис. 5.33 приведена принципиальная электриче-
ская схема термометра. В термометре применены тер-
мопары Т-1, выполненные из никель-кобальтового спла-
Рис. 5.34. График зависимости термо-э. д. с. термопары Т-1
от температуры
ва НК (положительный электрод) и спецалюмеля СА
(отрицательный электрод). (/?д — добавочное сопротив-
ление, /?тс — компенсационное сопротивление, /?п — под-
гоночное сопротивление, /?вн— сопротивление соедини-
тельных проводов.)
Особенностью термоэлектродов НК-СА является то,
что они начинают развивать термо-э. д. с. только после
269
нагревания выше 300° (рис. 5.34); вследствие чего тем-
пература свободных концов термопары, изменяющаяся
от —609С до +50° С, на величину термо-э. д.ь практи-
чески не влияет.
Концы термоэлектродов термопары (рис. 5.35) сва-
рены вместе (горячий спай), сами электроды 2 вставле-
ны в керамическую двухканальную трубку 4 и затем в
корпус 3 из жаропрочной стали.
Газовый поток тормозится у выреза 1 и выходит че-
рез отверстие 5 диаметром 0,8 мм, благодаря чему тер-
моэлектроды находятся в заторможенном газовом пото-
ке. Измерение в заторможенном потоке исключает воз-
можность появления погрешностей, связанных с боль-
шой скоростью обтекания термопар потоком.
Рис. 5.35. Схема термопары Т-1:
1 — входное отверстие; 2 — горячий
спай термопары; 5—корпус; 4—изо-
ляционная трубка; 5 — выходное от-
верстие
Термопара Т-1 (рис. 5.36)
имеет накидную гайку 6, с
помощью которой она за-
крепляется на двигателе. На
гайке указывается градуиро-
вочная группа термопары и
год выпуска. У термопар по-
ложительный вывод делает-
ся короче отрицательного,
что исключает возможность
неправильного их монтажа.
Соединительные провода,
идущие от термопары до
разъемной колодки, подби-
раются из того же материа-
ла, что и термоэлектроды
термопары.
Для предохранения от
механических повреждений
провода попарно заключают-
ся в металлическую оплет-
ку. Последовательное соединение термопар производит-
ся в соединительной коробке. Проводка от коробки к
указателю выполняется одной парой медных проводов
в металлической оплетке. Общее сопротивление соеди-
нительных проводов 0,9 ±0,02 ом.
Указатель термометра представляет собой виброус-
тойчивый магнитоэлектрический милливольтметр, смон-
270
3
1
Рис. 5.36. Устройство термопары Т-1:
;з; 2 — отверстие; 3 — термоэлектроды; 4 — трубка из жароупорной стали; 5 — керамическая трубка; 6 — накидная Тайка;
7 — корпус; 8 — гайка; 9 — наконечники
271
тированный в корпусе диаметром 80 мм, по конструк-
ции аналогичный указателю ТЦТ-1.
Шкала указателя имеет оцифровку в сотнях граду-
сов от 400 до 900° С. На шкале указывается градуиро-
вочная группа, величина сопротивления внешней цепи,
год выпуска, шифр и номер прибора.
Рис. 5.37. Принципиальная электрическая
схема термометра ИТГ-180
Для измерения температуры заторможенного потока
газов перед турбиной и выдачи сигналов регулятору тем-
пературы газов при работе авиадвигателей в полете и
на земле применяется термоэлектрический термометр
ИТГ-180 (рис. 5.37). Комплект термометра состоит из
измерителя ИТГ-1 и семнадцати штук термопар Т-80.
Особенностью термометра является применение сдвоен-
ных термопар, соединенных параллельно и образующих
две самостоятельные цепи. Одна цепь подключается к
указателю термометра, а вторая — в цепь регулятора
температуры.
272
Конструкция термопары Т-80Т показана на рис. 5.38.
“Термоэлектроды термопары выполнены из сплавов хро-
^меля (положительные) и алюмеля (отрицательные).
Jr Термопара имеет неразъемную конструкцию и состо-
ит из трубки 1, сверенной с камерой торможения S и с
Рис. 5.38. Разрез термопары Т-80Т:
/—трубка; 2— корпус; 3 и 4 — контактные вин-
ты; 5 — крышка; 6 — фланец; 7—термоэлектро-
ды; 8 — камера торможения
заармированными в нее сдвоенными термоэлектрода-
ми 7. Камера торможения и крышка 5 с закрепленными
на ней контактными винтами из термоэлектродного ма-
териала приварены к корпусу.
Контактные винты 3 и 4 для крепления компенса-
ционных проводов имеют различную резьбу и самоконт-
рящиеся гайки.
273
Камера торможения имеет два входных отверстия и
одно выходное, что позволяет получить осредненную
температуру по высоте термопары. Термопары соединя-
ют в термобатарею из семнадцати параллельно соеди-
ненных термопар и подключают к указателю гибкими
многожильными проводами из термоэлектродных мате-
риалов (хромеля и алюмеля). Для подгонки сопротив-
ления внешней цепи термометра до величины
7,5±0,05 ом в разрез гнезда штепселя, подходящего к
указателю, впаяно дополнительное сопротивление.
Указатель ИТГ-1 представляет собой магнитоэлек-
трический милливольтметр, смонтированный в корпусе
диаметром 60 мм. Конструкция указателя такая же, как
и указателя термометра ТЦТ-13.
Шкала указателя выполнена с углом размаха 230° и
имеет оцифровку 2, 4, 6, 8 и 10, соответствующую сот-
ням градусов Цельсия («Х100°С»), Цена деления шка-
лы в диапазоне от 300 до 1000° С —20° С. На шкале
указаны шифр прибора «ИТГ-1», градуировка «Гр. ХА»,
градуировочная величина сопротивления внешней цепи
«7?ВН-7,5Й» и номер измерителя. Термометр обеспечива-
ет измерение температуры от 300 до 900° С при погреш-
ности в рабочем диапазоне, не превышающей ±20°.
На рис. 5.39 показано устройство термопары Т-28 из
комплекта термометра ТВГ-28.
Термопара для повышения надежности имеет две
пары термоэлектродов типа НК-СА, которые в отличие
от Т-80 соединяются параллельно. Выход из строя одной
пары термоэлектродов не влияет на работу прибора.
Наряду с термопарами Т-1, Т-80 и Т-28 в авиации
применяются и другие, отличающиеся элементами кон-
струкции. В основном термопары отличаются друг от
друга материалами, из которых изготовлены электроды
(НК-СА, НЖ-СК и ХА), величиной головки и ее фор-
мой, глубиной погружения в газовый поток и тепло-
стойкостью.
Например, термопары Т-90 и Т-64-4 имеют термо-
электроды типа НК-СА. Конструкция термопары Т-9,
предназначенной для измерения температуры выходя-
щих газов турбостартера воздушно-реактивного двига-
теля, для получения наименьшей инерционности имеет
вместо одной две боковые прорези. Горячий спай термо-
274
6
г-я|гр
к
нк
3
5
2
Рис. 5.39. Устройство термопары Т-28:
/ — вырез в штуцере; 2 — термоэлектроды; 3— отверстие в штуцере; 4 — штуцер; 5 — трубка керамическая
6 гайка накидная; 7 — трубка; 8 — гайка; 9 — рукав; 10— плетенка *
275
пары (хромель-алюмель) находится непосредственно в
газовой среде и предохраняется от деформации жаро-
упорной трубкой.
§ 12. ПОГРЕШНОСТИ ТЕРМОЭЛЕКТРИЧЕСКИХ
ТЕРМОМЕТРОВ
Термоэлектрическим термометрам свойственны ме-
тодические погрешности из-за изменения температуры
холодного спая и паразитных термо-э. д. с.
Методические погрешности из-за изменения темпера-
туры холодного спая возникают из-за того, что темпера-
тура холодных концов термопар при градуировке при-
нимается равной стандартной, а в действительности она
может меняться в широких пределах. Погрешности из-
за изменения температуры холодных концов компенси-
руются применением биметаллических корректоров.
Если в цепях термопар применять проводку из раз-
нородных металлов, то могут возникнуть «паразитные»
термо-э. д. с. Погрешности от «паразитных» термо-э. д. с.
уменьшаются применением соединительных проводов,
изготовленных из металлов с характеристиками, близ-
кими к характеристикам термопар.
К инструментальным погрешностям термометров от-
носятся погрешности, возникающие вследствие измене-
ния параметров конструктивных элементов указателя и
электрических цепей, при изменении температуры и
влияния посторонних магнитных и электрических полей
на указатели. При этом могут изменяться магнитные
свойства постоянного магнита, упругость противодейст-
вующих пружин и т. д.
Для уменьшения погрешностей из-за влияния посто-
ронних электромагнитных полей в указателях термомет-
ров имеется специальный экран. Всем термометрам
присуща динамическая погрешность из-за запаздывания
в показаниях, так как для нагревания термоэлектродов
требуется какое-то время.
С динамическими погрешностями особенно приходит-
ся считаться при измерении температур в газотурбин-
ных двигателях, где эти температуры быстро нарастают
и быстро убывают.
Динамические погрешности зависят и от конструкции
термопар. Так, по конструктивным соображениям в
276
термопарах термоэлектроды помещаются в защитную
оболочку, при этом нагревание производится передачей
тепла через защитную оболочку, а также за счет тепло-
вого контакта между оболочкой и теплочувствительным
элементом. На величине динамической погрешности
также сказывается ухудшение интенсивности теплообме-
на в заторможенном потоке.
§ 13 ОСОБЕННОСТИ МОНТАЖА И ТЕХНИЧЕСКОГО
ОБСЛУЖИВАНИЯ ТЕРМОЭЛЕКТРИЧЕСКИХ ТЕРМОМЕТРОВ
Комплекты термометров типа ТВГ-11, как правило,
состоят из указателя и четырех термопар одной градуи-
ровки. Термопары различных групп градуировок отли-
чаются друг от друга величиной термо-э. д. с. Различные
группы градуировок'определяются сортом материала,
применяемого для изготовления термопар.
Комплектовать указатели одной группы градуировки
с термопарами другой группы градуировки не разре-
шается, так как при этом показания прибора будут не-
верными. Термопары устанавливаются в специальные
штуцера и закрепляются с помощью накидных гаек.
Необходимо следить за тем, чтобы штифт на термопаре
входил в прорезь штуцера, это обеспечивает правильное
положение отверстий термопары против газового пото-
ка. В процессе эксплуатации необходимо следить за
чистотой отверстий термопар, так как при засорении
отверстий возрастает инерционность термопары и по-
грешность из-за перехода тепла от газа внутри камеры
термопары к ее стенкам. Термопары соединяются в ба-
тареи с помощью удлинительных проводов в соедини-
тельной колодке (рис. 5.40).
Удлинительные провода могут быть изготовлены из
меди или из того же материала, что и электроды тер-
мопар;
От соединительной колодки к указателю идут два
провода, сечение и тип которых должны точно соответ-
ствовать схеме соединения прибора. Не допускается
самопроизвольное изменение длины проводов в комплек-
тах всех термоэлектрических термометров.
Соединительные провода подключаются к термопа-
ре с помощью наконечников или с помощью штепсель-
ных разъемов.
277
Измеритель устанавливается на приборной доске и
крепится к ней четырьмя винтами и гайками, вмонтиро-
ванными в приливы корпуса измерителя.
При установке термометров ТЦТ-13 термопара уста-
навливается под свечу и плотно ею прижимается.
Рис. 5.40. Схема соединения термопар
Соединения проводов термометров должны тщатель-
но изолироваться друг от друга, а также от соприкос-
новения с корпусом двигателя.
Погрешности всех авиационных термометров прове-
ряются методом сравнения показаний проверяемого и
эталонного приборов или непосредственного измерения
параметров, характеризующих работоспособность при-
бора.
Для проверки термоэлектрических термометров и
термометров сопротивления применяется установка
УПТ-1М.
§ 14. ЭЛЕКТРИЧЕСКИЕ ТОПЛИВОМЕРЫ. РАСХОДОМЕРЫ
И АВТОМАТЫ ПРОГРАММНОГО РАСХОДОВАНИЯ ТОПЛИВА
Топливомерами и расходомерами назы-
ваются приборы, предназначенные для измерения запа-
278
са топлива на самолете или вертолете и его расхода при
работе авиадвигателей.
Показания приборов позволяют правильно планиро-
вать дальность и продолжительность полета и способ-
ствуют повышению безопасности полета.
Автоматы программного расходования топлива обес-
печивают необходимую центровку самолета при выра-
ботке топлива из баков.
К приборам этого типа предъявляются повышенные
требования в отношении точности измерений, например,
погрешность в измерении количества топлива не долж-
на превышать 2—3% фактического запаса топлива на
самолете.
Для измерения количества топлива применяются
поплавковые и емкостные топливомеры.
Емкостные топливомеры устанавливаются на само-
летах, испытывающих в полете большие перегрузки и
имеющих большие запасы топлива. Емкостные топливо-
меры, как правило, являются комбинированными прибо-
рами, работают совместно с автоматами программного
расходования топлива. Такие системы получили назва-
ния СЭТС (суммирующие электрические топливомеры
с сигнализацией). Суммирующие топливомеры предназ-
начаются для измерения объема топлива в топливных
баках по группам, для измерения суммарного запаса
топлива, обеспечения автоматического управления по-
рядком расходования топлива в полете, сигнализации о
критическом остатке топлива и для обеспечения заправ-
ки самолета топливом в полете.
Поплавковые и емкостные топливомеры основаны на
принципе измерения уровня топлива в баке и измеряют
объемное количество топлива.
§ 15. ЭЛЕКТРИЧЕСКИЕ РЫЧАЖНО-ПОПЛАВКОВЫЕ
ТОПЛИВОМЕРЫ И МАСЛОМЕРЫ
Электрические рычажно-поплавковые топливомеры и
масломеры служат для дистанционного измерения коли-
чества топлива и масла в баках самолета.
Комплект топливомера состоит из реостатных дат-
чиков рычажно-поплавкового типа, магнитоэлектриче-
ского логометра (указателя типа БЭ-09, БЭ-4М,
МЭ-4М или ЛД-49), датчиков-сигнализаторов и пере-
ключателя,
279
соединяются экранированными проводами. Экран дол-
жен быть надежно заземлен и не иметь разрывов. Такое
выполнение внешних соединений объясняется необходи-
мостью исключить возможность изменения емкости сое-
динительных проводов от градуировочного значения.
После монтажа комплекта и до заправки топливом
проверяется сопротивление изоляции соединительных
линий, указателя, переключателя и датчика и проверя-
ется работоспособность комплекта.
Топливомер считается исправным, если указатель
показывает фактическое количество топлива, а при на-
жатии кнопки на указателе стрелка плавно перемеща-
ется к нулевой отметке шкалы.
При отпускании кнопки стрелка должна возвратить-
ся в исходное положение.
Топливомеры суммарного и группового контроля ра-
ботоспособны, если при суммарном контроле сумма по-
казаний стрелок указателя соответствует запасу топли-
ва на самолете.
Емкость сухих датчиков и погрешность указателей
емкостных топливомеров проверяются с помощью уста-
новок УПТЕ-1А или УПТЕ-2.
§ 19. ЭЛЕКТРИЧЕСКИЕ РАСХОДОМЕРЫ
Расходомерами называются приборы для из-
мерения мгновенного расхода топлива, потребляемого
двигателями в единицу времени, или суммарного рас-
хода.
Расход топлива в единицу времени является одной
из важных характеристик, позволяющих судить о рабо-
те силовой установки. В авиации применяются мгновен-
ные расходомеры, работающие на принципе измерения
объема топлива, протекающего через счетную камеру в
единицу времени с помощью ненагруженной крыльчат-
ки. Мгновенные расходомеры выпускаются для измере-
ния расходов топлива от 200 до 50 000 л[час и больше.
Кроме мгновенных расходомеров, измеряющих рас-
ход топлива в единицу времени, выпускаются также
суммирующие расходомеры, измеряющие общее количе-
ство топлива (в литрах или килограммах), израсходо-
ванного с момента включения расходомера в работу до
его остановки. Если поместить крыльчатку / (рис. 5.46а),
292
Литчи* TXfl3«WI»b
I г з 4 s в
Рис 5 46 Устройство датчика и указателя мгновенного расходомера и принципиальная электрическая
’ ’ ’ F схема мгновенного топливомера РТМС:
„ датчик- 1 -крыльчатка; 2 -магнит; 3 — чашка; 4- пружина; 5- сельсин датчика; б-указатель: б - сельсин
и ДсНЧИП, Н ГКЯЯЯТРЛЯ
293
свободно вращающуюся на оси в потоке топлива, с по-
стоянным сечением, то скорость вращения крыльчатки
в некотором диапазоне будет пропорциональна скорости
потока V.
n = KV,
где п — скорость вращения крыльчатки,
К — коэффициент пропорциональности.
Обозначив площадь сечения потока или трубопрово-
да буквой S, а мгновенный объемный расход топлива
через это сечение буквой W, найдем
у=Х
S
Подставляя это значение, находим п = К—.
S
Скорость вращения крыльчатки пропорциональна
мгновенному объемному расходу топлива W при посто-
янном сечении трубопровода S.
Шкала показывающего прибора расходомера градуи-
руется в единицах расхода (в литрах в час). В сумми-
рующих расходомерах количество израсходованного топ-
лива определяется измерением суммарного числа оборо-
тов крыльчатки за время его работы.
Для измерения суммарного расхода топлива прибор
снабжается дополнительным устройством в виде интег-
ратора, суммирующего мгновенные расходы топлива.
В качестве расходомеров, измеряющих суммарные рас-
ходы топлива, применяются суммирующие расходомеры
типа РТС и РТСУ (РТС-8, РТС-16, РТС-300, РТСУ-ЗОД
и др.) и комбинированные расходомеры для измерения
мгновенного и суммарного расхода топлива типа РТМС
(РТМС-1.2Б1, РТМС-1,8Б1 и др.).
Суммирующие и мгновенные расходомеры могут вы-
полняться в комбинации с емкостными топливомерами.
В таких приборах применяются комбинированные ука-
затели и датчики.
Для примера рассмотрим устройство и работу ком-
бинированного расходомера типа РТМС, объединяюще-
го мгновенный и суммирующий расходомеры топлива.
Мгновенный расходомер (рис. 5.46) состоит из дат-
чика, трансформатора и указателя.
Поток топлива, протекающий по датчику, приводит
во вращение крыльчатку 1. Крыльчатка 1 датчика при-
294
водит во вращение магнит 2, который индуктирует в
чашке 3 вихревые токи. Под действием момента, возни-
кающего при взаимодействии поля магнита ц поля от
вихревых токов в чашке, последняя поворачивается и
поворачивает ротор сельсин-датчика 5 на некоторый
угол. Вращению чашки противодействуют укрепленные
на ее оси пружины 4.
Угол поворота ротора сельсин-датчика отрабатыва-
ется ротором сельсина указателя 6, на оси которого
укреплена стрелка.
Рис. 5.47. Сигнализатор часового расхода
СЧР-54
Цепи сельсинов питаются напряжением 55 в, сни-
маемым со вторичной обмотки трансформатора ТПР-52,
на первичную обмотку которого подается переменное на-
пряжение 115 в 400 гц.
Для сигнализации заданного расхода топлива при-
меняются сигнализаторы часового расхода типа СЧР
(рис. 5.47). Чувствительным элементом сигнализатора
служит диск, находящийся в потоке топлива и откло-
няющийся под действием скоростного напора на угол,
пропорциональный величине расхода топлива.
По достижении заданного часового расхода происхо-
дит срабатывание микровыключателя, включающего
сигнальное устройство.
Суммарный топливомер состоит из датчика, преры-
вателя и указателя.
Принципиальная электрическая схема суммарного
топливомера показана на рис. 5.48. Основным элементом
схемы является мост переменного тока, плечами кото-
рого служат индуктивности Lz, L3 и Li.
295
Рис. 5.48. Устройство датчика, указателя и принципиальная электрическая схема
. суммарного топливомера РТМС:
а — датчик: / — крыльчатка; 2—сердечник; «3 — П-образный сердечник;
б — указатель: / — счетчик импульсов; 2 — электромагнитное реле; 3 — храповое колесо;
4 — редуктор; 5 — кремальера;
в — принципиальная электрическая схема: 4, 7', 8, 12, 13, 16—конденсаторы; 5 — индуктивности;
6— тиратрон; 9, 10, 11, 17, /Я — сопротивления; 14, /5 — германиевые дноды
296
Индуктивности Li и L2 помещаются в датчике, а £3
и ЬА — в прерывателе.
При протекании топлива через датчик во вращение
приводится крыльчатка 1 и связанный с ней стальной
сердечник 2, имеющий несимметричную форму.
При вращении сердечника будет изменяться магнит-
ный поток П-образного сердечника 3 индуктивно-импуль-
^сного устройства и индуктивность катушки £2- При
Этом нарушается равновесие моста и в его диагонали
появляется напряжение с частотой, равной частоте пи-
тающего напряжения 400 гц, амплитуда которого меня-
ется с частотой пропорционально скорости вращения
сердечника 2. В диагональ моста включен прерыватель,
состоящий из выпрямителя и тиратронного усилителя.
Выпрямитель собран по двухполупериодной схеме уд-
.воения напряжения и состоит из двух германиевых дво-
рцов 14 и 15 и двух конденсаторов 12 и 13. Схема удвое-
• ния напряжения работает таким образом, что при по-
ложительной полуволне напряжения один из диодов 14
оказывается проводящим и через него заряжается кон-
денсатор 12, при отрицательной полуволне другой ди-
од 15 оказывается проводящим и через него заряжается
конденсатор 13.
Таким образом, за один период переменного тока
оба конденсатора 12 и 13 будут заряжены до амплитуд-
ного значения напряжения.
Конденсаторы в схеме соединены между собой после-
довательно, в результате на сетку тиратрона подается
удвоенное напряжение.
! Для сглаживания выпрямленного напряжения, по-
дступающего на сетку тиратрона, применен фильтр, со-
стоящий из конденсатора 8 и сопротивления 9.
• Тиратронный усилитель работает таким образом, что,
'когда напряжение в диагонали моста равно нулю, на-
пряжение 48 в на аноде, которое подается с обмотки II
силового трансформатора, достаточно для зажигания
^тиратрона. При этом в анодной цепи его появляется
Сок и срабатывает электромагнитное реле ЭМ указателя.
Когда мост разбалансирован, на сетку тиратрона по-
ддается отрицательное напряжение, недостаточное для
его зажигания. Тиратрон оказывается запертым, анод-
ный ток в цепи тиратрона прекращается, и обмотка ре-
ле ЭМ указателя обесточивается.
297
Так как число оборотов сердечника 2, от положения
которого зависит балансировка моста, пролорционально
числу оборотов крыльчатки, то число срабатываний
электромагнитного реле ЭМ измерителя будет также
пропорционально числу оборотов крыльчатки, а следо-
вательно, суммарному расходу топлива.
Электромагнитное реле 2 (рис. 5.486) указателя,
срабатывая, поворачивает на один зубец храповое коле-
со 3, которое через редуктор 4 соединено со счетчиком
импульсов барабанного типа 1.
Счетчик показывает остаток топлива в баке (или
группе баков) самолета как разность между залитым
количеством топлива и количеством топлива, прошедше-
го через датчик топливомера.
Направление вращения счетных барабанчиков выби-
рается таким, чтобы установленное на счетчике число
единиц топлива при работе прибора не возрастало, а
уменьшалось.
Для быстрого разряда конденсатора 8 и ускорения
зажигания тиратрона прерывателя, что необходимо при
большой частоте поступления импульсов, применено со-
противление 10. Сопротивления 11, 17 и 18 предназна-
чены для ограничения среднего значения и амплитуды
Выпрямленного анодного тока тиратрона до допустимых
величин. Конденсатор 7 обеспечивает отвод переменной
составляющей анодного тока от электромагнита показы-
вающего прибора. Конденсаторы 4 к 16 служат для
уменьшения помех радиоприему.
Для установки счетчика на количество топлива, за-
литого в баки самолета, служит кремальера 5. Каж-
дый барабанчик оцифрован от 1 до 9. Цена деления
ведущего барабанчика у РТМСБ — 100 кГ, у РТМСБ-1—
10 кГ. (Буква «Б» обозначает, что указатель имеет ба-
рабанчиковый счетчик, показывающий запас топлива в
виде трехзначного числа.)
На шкале указателя имеются специальные вырезы
для считывания показаний счетчика.
§ 20. ПОГРЕШНОСТИ РАСХОДОМЕРОВ
Погрешности комплекта расходомера складываются
из погрешностей гидравлической и электрической час-
тей прибора.
298
Для расходомеров характерными являются ошибки
из-за изменения вязкости и плотности топлива.
Для существующих стандартных топлив Т-1, ТС;1
и др. вес одного и того же объема топлива или весовой
расход при одном и том же объемном расходе за счет
изменения плотности может изменяться до 15%.
При заливке в баки топлива другой марки с плот-
ностью, отличной от градуировочного значения, допол-
нительная погрешность измерения может достигать не-
скольких процентов (5% и более). Ошибки в измерениях
возникают и при изменении температуры топлива, так
как при этом изменяется его вязкость.
§ 21. ОСОБЕННОСТИ МОНТАЖА И ТЕХНИЧЕСКОГО
ОБСЛУЖИВАНИЯ РАСХОДОМЕРОВ
Датчик устанавливается в разрез трубопровода
стрелкой по направлению течения топлива. Патрубки
датчика соединяются с подводящей и отводящей труба-
ми дюритовыми шлангами. Указатель устанавливается
на приборной доске. Тиратронный прерыватель устанав-
ливается вертикально (штепсельным разъемом вниз).
Соединительные провода должны иметь сечение не
менее 0,5 мм2 и закрепляться по возможности жестко.
Провода, идущие от тиратронного прерывателя, экрани-
руются. Экран соединяется с корпусом самолета.
Перед полетом стрелка указателя устанавливается
на делении шкалы, соответствующем количеству залито-
го топлива, после чего переводной механизм пломби-
руется.
Проверка работоспособности расходомера произво-
дится на специальных проверочных установках ти-
па УПР. При проверке комплекта определяются гидрав-
лическое сопротивление датчика, погрешность указате-
ля и погрешность комплекта.
Погрешность показаний расходомера по шкале ча-
сового расхода может быть произведена на установке,
схема которой приведена на рис. 5.49. Датчик расходо-
мера устанавливается в разрезе трубопровода между
расходным баком и точно оттарированным баком.
Топливо насосом перекачивают из расходного бака
в мерный бак на разных режимах расхода. Время пере-
299
качки определяют секундомером. Относительную По-
грешность определяют по формуле
У
qx— —3600
°t~ у ,
— •3600
где qx — часовой расход, соответствующий отметке на
шкале;
V, — объем топлива в расходном баке, л;
t — время заполнения мерного бака, сек.
Рис. 5.49. Схема проверки расходомера:
/ _ указатель; 2 — проверяемый датчик; 3 — дроссельный кран; 4 — сливная
тара; 5 — уровнемерная трубка; 6 — насос; 7 — расходный бак
Для проверки работоспособности датчиков, диапазон
измерения которых выше 30 000 л/час, используется
продувка датчиков воздухом. Проверка электрической
части осуществляется подачей импульсов от генератора
импульсов в электрическую схему расходомера.
При проверке суммирующего расходомера стрелку
запаса топлива точно устанавливают на какую-либо от-
300
метку и через датчик прокачивают топливо на расход,
отмечая показания прибора после прокачивания опре-
деленного количества топлива. По полученным данным
вычисляется погрешность по шкале запаса топлива.
§ 22. АВТОМАТИКА УПРАВЛЕНИЯ ПОРЯДКОМ
РАСХОДОВАНИЯ ТОПЛИВА И.УПРАВЛЕНИЯ
ЗАПРАВКОЙ САМОЛЕТА
На современных самолетах и вертолетах имеются
большие запасы топлива, размещенные в баках, уста-
новленных на различных расстояниях от центра тяжести.
Для обеспечения безопасности полета требуется топли-
во расходовать в та-
кой последовательно-
сти, чтобы центровка
не выходила из опре-
деленных пределов.
С этой целью на
самолетах и вертоле-
тах применяется ав-
томатическое управ-
ление порядком рас-
хода топлива, управ-
ление заправкой и
сигнализация остат-
ка топлива. В каче-
стве элементов схем
автоматики исполь-
зуются мосты пере-
менного тока.
На рис. 5.50 при-
ведена упрощенная
принципиальная схе-
ма одного моста ав-
томатики. Плечами
моста являются ин-
дуктивности L, Li,
L2 и L3. L — посто-
янная индуктивность,
L\ — переменная ин-
дуктивность, завися- Рис. 5 до Принципиальная электрическая
Щая от уровня топ- схема моста автоматики
301
При равновесий моста, когда ток i в измерительной
диагонали равен нулю, можно записать
h + h + h + /з + Л — О,
где / — токи в соответствующих плечах моста
или
4- и2с2 + и5с5 = и3с3 4- и4с4,
где U4, 2... — напряжения, обозначенные на схеме 5.55.
Если напряжения СД... U4 выбрать пропорциональны-
ми С^.. С4, а постоянную емкость С5 и напряжение и$
подобрать так, чтобы их произведение было пропорцио-
нально Ло , то будет соблюдено условие равновесия.
При изменении центровки самолета на измеритель-
ной диагонали появится сигнал, фаза которого опреде-
лится знаком отклонения. Сигнал усиливается в усили-
теле У и поступает на исполнительный двигатель Д,
управляющий контактным устройством.
Контактное устройство управляет работой насосов
топливных баков.
Если в мостовую схему автомата центровки подклю-
чаются емкостные датчики, используемые в системе из-
мерения количества топлива, то при включении автома-
та во избежание взаимного влияния схем датчики от-
ключаются от блоков измерения.
§ 24. УКАЗАТЕЛИ ПОЛОЖЕНИЯ ЭЛЕМЕНТОВ САМОЛЕТА
Указатели положения служат для измерения углов
отклонения различных элементов самолета (закрылков,
заслонок, шасси, стабилизатора, рычагов командно-топ-
ливных агрегатов и др.).
Наиболее распространенными являются указатели
типа УЗП. Указатели состоят из датчика и показываю-
щего прибора. Принцип действия указателей положе-
ния основан на применении потенциометрической сле-
дящей системы, состоящей из кольцевого потенциометра
и магнитоэлектрического логометра (рис. 5.56).
Кольцевой потенциометр укреплен на оси, которая
присоединяется (с помощью тяги или хомута) к элемен-
ту самолета, угол поворота которого необходимо изме-
рить. К двум диаметрально противоположным точкам
потенциометра подводится питание от бортовой сети
308
Напряжение с потенциометра снимается с помощью
трех щеток 3, делящих потенциометр на три равные
части.
к Вращение кольцевого потенциометра относительно
йцеток 3 вызывает перераспределение токов в катушках
рогометра. Подвижной магнит указателя, взаимодейст-
Рис. 5.56. Принципиальная схема УЗП:
1 — ось кольцевого потенциометра; 2 — подвижный: кольце-
вой потенциометр; 3 — щетки; 4 — измерительные катушки;
5 — постоянный магнит; 6 — ось магинта; 7 — стрелка;
8 — поводок
вуя с магнитным полем катушек, устанавливается в на-
правлении вектора результирующего поля катушек. На
оси магнита укреплена стрелка 7, угол поворота кото-
рой соответствует измеряемому углу.
Устройство датчика УЗП показано на рис. 5.57. Ток
к потенциометру 9 подводится с помощью токоподводя-
щих спиральных пружинок 3, которые отделены друг от
друга изоляционными шайбами. Напряжение с потен-
циометра снимается с помощью трех щеток 1, укреплен-
ных на плате 10. Потенциометр закреплен на оси, кото-
рая с помощью редуктора связана поводком 5. Угол по-
ворота потенциометра ограничивается штифтами 7 и
упором 8.
Указатель (рис. 5.58) состоит из трех пар катушек 1,
расположенных под углом 120° друг’к другу. Намотка
309
катушек выполнена в виде тороида, разделенного на
шесть секций. Концы обмоток соединяются таким обра-
зом, что две диаметрально противоположные секции
составляют одну катушку. Все шесть секций образуют
три катушки. Магнитопровод 4 представляет собой па-
кет, набранный из пермаллоевых шайб. Внутри кату-
шек на одной оси со стрелкой 2 вращается постоянный
магнит 5.
Рис. 5.57. Разрез датчика УЗП:
7 — Штифты;-
щетка; 2 — колодка;
Рис. 5.58. Разрез указателя:
1 — катушка; 2 — стрелка; 3 — шкала; 4 — магнитопровод; 5 — магнит
Шкала указателя 3 в зависимости от назначения
градуируется в градусах или на ней указывается поло-
жение, которое должен занимать контролируемый эле-
мент. Например: шасси — «Убрано», «Выпущено»; за-
слонки— «Закрыто», «Нейтрально», «Открыто»; ста-
билизатор — «Верх», «Низ».
Монтаж и техническое обслуживание указате-
лей положений. Датчики устанавливаются на кронштей-
нах в местах, удобных для жесткой связи с элемента-
ми, положение которых контролируется. Форма и раз-
меры тяг должны обеспечивать нормальную работу дат-
чика. Показывающий прибор устанавливается на при-
борной доске.
Проверка работоспособности показывающих прибо-
ров и точности показаний комплектов производится на
установках типа УПК или УПУП.
311
методом глубокого охлаждения, может быть гарантиро-
вано поставщиком без проведения испытаний.
Кислород добывается способом сжижения атмосфер-
ного воздуха с последующим разделением его на со-
ставные части — азот и кислород.
Разделение жидкого воздуха на его главные состав-
ные части — азот и кислород — возможно благодаря
разным температурам кипения азота и кислорода.
Воздух, представляющий собой в основном смесь
азота и кислорода, переходит в жидкое состояние при
атмосферном давлении 760 мм рт. ст. при t = —194,4° С,
тогда как его основные части—азот и кислород — при
том же давлении имеют различные точки кипения: азот
кипит при t около —196° С, а кислород, как указывалось
выше, при t=—183° С.
Разница между точками кипения 13° С позволяет
разделить жидкий воздух на составляющие его газы.
§ 3. КИСЛОРОДНЫЕ БАЛЛОНЫ И КИСЛОРОДНАЯ
БОРТОВАЯ АРМАТУРА
Кислородные баллоны служат для хранения и транс-
портировки газообразного кислорода в сжатом виде.
В зависимости от давления, на которое они предназна-
чены, баллоны разделяются на баллоны высокого
(150 кГ)см2) давления и баллоны низкого (30 кГ1см2)
давления. По емкости различают баллоны малой емко-
сти (до 12 л) и большой емкости (более 12 л). По фор-
ме кислородные баллоны подразделяются на цилиндри-
ческие и шаровые. В самолетных кислородных системах
в основном применяются баллоны малой емкости. Бал-
лоны большой емкости (их называют аэродромные, или
промышленные) используются для транспортировки га-
зообразного кислорода.
Самолетные баллоны высокого давления имеют ци-
линдрическую форму (тип А) и шаровую (тип КБШ).
Для обозначения баллона рядом с типом ставится циф-
ра, характеризующая его емкость. Например, А-2 обо-
значает, что баллон цилиндрической формы водяной
емкостью 2 л; КБШ-4 — это кислородный баллон шаро-
вой формы водяной емкостью 4 л. Каждый шаровой
баллон имеет форму трех последовательно соединенных
шаров.
322
Самолетные тонкостенные баллоны водяной емкостью
|}6, 7,6 и ,1,8 л заполняются газообразным кислородом
до давления 30 кГ1см2 и обозначаются соответственно
|КБ-1, КБ-2 и КБ-3.
| В горловину баллона, имеющую коническую резьбу,
ввертывается на свинцовом глёте баллонный тройник
или вентиль.
р После изготовления, а также при периодических
проверках инспекцией котлонадзора баллоны подверга-
ется гидравлическому испытанию на прочность давле-
нием, в полтора раза превышающим рабочее давление.
F По окончании испытаний на баллонах около горло-
вины или расходно-наполнительного штуцера ставятся
Йслейма. Клейма являются паспортом баллона и обозна-
чают: тип баллона, порядковый номер баллона, ем-
кость в литрах, вес, пробное гидравлическое давление,
рабочее давление, дату изготовления и следующего ис-
пытания. Кроме этого, выбиваются клейма завода-из-
Ц’отовителя, ОТК завода и инспекции котлонадзора.
| Для предохранения наружной поверхности баллонов
рт коррозии и внешнего отличия от баллонов с другими
^газами они окрашиваются в голубой цвет масляной или
^эмалевой краской и на них наносится черными буквами
Надпись «Медицинский кислород». Поверхность балло-
'на, где выбиты клейма, покрывается бесцветным лаком
и обводится белилами.
I Все кислородные баллоны не реже одного раза в пять
;лет подлежат освидетельствованию, которое производит-
ься инспектором котлонадзора. Запрещается наполнять
( кислородом и использовать баллоны, у которых истек
гсрок периодического освидетельствования, не имеется
^.установленных клейм, неисправны вентили, поврежден
Вкорпус (трещины, сильная коррозия, заметное наруше-
|ние формы), окраска и надписи не соответствуют тре-
бованиям.
Е Кислородная бортовая арматура КАБ. Для кисло-
|родных систем высокого давления применяется арма-
рура КАБ-14, а для систем низкого давления — КАБ-16.
1 В кислородную бортовую арматуру входят следую-
&Щие основные узлы: бортовой и приборный вентили,
бортовой зарядный штуцер, тройники, крестовины, об-
£ ратные клапаны, трубопроводы.
Г/2-21*
323
В процессе эксплуатации кислородных масок КМ-32
необходимо контролировать затяжку гайки крепления
клапана выдоха, отсутствий отворачивания углового
штуцера клапана выдоха, Обращать внимание на плот-
ность затяжки штуцера большого байонетного замка,
смонтированного на гофрированном шланге маски (гер-
мошлема), состояние верхних точек крепления маски
к шлемофону.
Проверка составных частей комплектов кислородного
оборудования производится на стационарных провероч-
ных кислородных установках КУ-7 (КУ-5). Для провер-
ки кислородных приборов без демонтажа их с самолета
(вертолета) применяются переносные проверочные кис-
лородные установки КУ-8 (КУ-6).
Высокая химическая активность кислорода общеиз-
вестна, поэтому хранение его должно быть организова-
но в особых условиях, устраняющих соприкосновение
с легковоспламеняющимися и горюче-смазочными мате-
риалами. При соприкосновении сжатого газообразного
кислорода с минеральными или животными маслами и
прочими горючими веществами может произойти их са-
мовозгорание, принимающее часто характер взрыва.
Такие случаи наблюдались, например, когда трубопро-
вод или манометр, присоединенный к кислородному бал-
лону, содержал следы масла.
Первоначальным импульсом воспламенения может
явиться резкое повышение температуры вследствие
сжатия кислорода в трубопроводе при быстром откры-
вании вентиля.
Особую осторожность следует проявлять при обра-
щении с жидким кислородом, потому что он, попадая
на открытые части тела, вызывает тяжелые ожоги по-
крова тела.
Следует также опасаться насыщения кислородом
одежды обслуживающего персонала, так как он сильно
впитывается тканями.
Известны случаи, когда насыщенная кислородом
одежда вспыхивала при приближении .к открытому
огню, при загорании спички, при курении и т. д., при-
чиняя тяжелые ожоги телу.
Глава 7
ПРИБОРЫ ОБЕСПЕЧЕНИЯ РАСКРЫТИЯ
ПАРАШЮТОВ И СРАБАТЫВАНИЯ МЕХАНИЗМОВ
КАТАПУЛЬТНЫХ КРЕСЕЛ
Комбинированный автомат парашютный КАП-ЗП
(пылезащищенный) предназначен для раскрытия ранца
парашюта или другого устройства, открывающего пара-
шют, и используется как страхующее средство в тех слу-
чаях, когда парашютист по каким-либо причинам не
может сам раскрыть парашют с помощью вытяжного
кольца. Этот автомат может быть также использован
в качестве полуавтоматического устройства, обеспечи-
вающего раскрытие парашюта через заданный проме-
жуток времени или на заданной высоте.
КАП-ЗП по своим характеристикам, монтажу и пра-
вилам эксплуатации аналогичен прибору КАП-ЗМ и
полностью с ним взаимозаменяем.
КАП-ЗП является комбинированным прибором и со-
стоит из взаимно связанных между собой часового меха-
низма и анероидного устройства. Прибор КАП-ЗП при-
водится в действие выдергиванием гибкой шпильки.
При прыжках с высоты ниже установленной по шка-
ле высот прибора часовой механизм обеспечивает сра-
батывание вытяжного механизма (устройства), раскры-
вающего ранец парашюта или включающего другое
устройство, открывающее парашют, через промежуток
времени, заданный по шкале времени прибора.
25*
395
Если же высота выше установленной по шкале вы-
сот прибора, анероидное устройство (анероид) блоки-
рует (останавливает) часовой механизм и не дает ему
работать до тех пор, пока парашютист не достигнет вы-
соты, превышающей на 100 м заданную по шкале при-
бора. После этого часовой механизм доработает остав-
шиеся 0,8—1,2 сек и обеспечит открытие парашюта на
заданной высоте.
Часовой механизм представляет собой механизм с
несвободным анкерным ходом, т. е. таким ходом, у ко-
торого анкерная скоба в течение почти всего времени
колебания находится в соприкосновении с анкерным
колесом.
Работа анероида основана на принципе барометри-
ческого метода измерения высоты, т. е. на зависимости
между изменением атмосферного давления и упругой
деформацией анероида.
При увеличении высоты полета под действием умень-
шающегося атмосферного давления анероид расши-
ряется и, наоборот, при уменьшении высоты под дей-
ствием нарастающего атмосферного давления анероид
сжимается. Изменение атмосферного давления в зави-
симости от изменения высоты полета определяется при-
нятой таблицей стандартной атмосферы (СА).
Шкала высот прибора отградуирована по стандарт-
ной атмосфере (СА) с превышением на 100 м от значе-
ния, указанного по шкале, т. е. отметка «500» соответ-
ствует 600 м по СА, отметка «1000» —1100 м по С А
и т. д. Это превышение компенсирует потерю высоты
парашютистом за время от момента срабатывания ане-
роида до момента наполнения купола парашюта. Таким
образом, шкала высот прибора КАП-ЗМ характеризует
примерную высоту по СА, на которой раскрывается ку-
пол парашюта.
Кинематическая схема прибора приведена на
рис. 7.1.
Часовой механизм прибора приводится в действие
силовыми пружинами 21 вытяжного механизма. Сжа-
тые пружины через поршень 24 с роликом 22 давят на
собачку 23, шарнирно связанную с сектором 27. Сек-
тор 27, вращаясь на оси, приводит в действие зубчатую
передачу, состоящую из колес П, 13 и трибов 10,
12 и 14.
396
При работе часового механизма ось триба 12 вра-
щается по часовой стрелке (направление вращения зуб-
чатой передачи и рычагов на рис. 7.1 показано сплош-
ными стрелками), храповое колесо 4, жестко связанное
Выходная
палета
Рис. 7.1. Кинематическая схема прибора КАП-ЗП:
1—шкала времени; 2— стрелка; 3— собачка; 4— колесо храповое; 5 — колесо
анкерное; 6 — скоба анкерная; 7 — баланс; 8 — шпилька гибкая; 9 — упор гиб-
кой шпильки; 10 — триб; 11— колесо промежуточное; 12— триб промежуточ-
ного колеса; 13—колесо центральное; 14 — трнб центрального колеса; 15—винт;
16 — пружина сектора; 17 — пружина собачки; 18— приспособление; 19—трос;
20 — трубка направляющая; 21 — пружины силовые; 22 — ролик; 23 — собачка;
24 — поршень; 25 — ось удлиненная; 26 — рычаг ведущий; 27—сектор; 28—амор-
тизатор; 29 — колпачок; 30 — водило вертикальное; 31 — ось блокировочного
рычага; 32 — рычаг блокировочный; 33 — шкала высот; 34— анероид; 35—упор
анероида; 36 — втулка; 37 — колесо установочное; 38 — плата верхняя;
39 — плата нижняя; 40 — шестерня установочная; 41 — ключ; 42 — внзнр
с осью триба 12, одним из своих зубьев упирается в зуб
собачки 3 и увлекает за собой промежуточное коле-
со П, связанное с трибом 10 анкерного колеса 5. При
вращении анкерного колеса 5 каждый его зуб пооче-
397
редно подает импульсы на входную и выходную палеты
анкерной скобы 6, обеспечивая определенные периоды
колебания баланса 7. За каждое колебание баланса
анкерное колесо поворачивается точно на один зуб, и
его вращение происходит как бы скачками, совершае-
мыми через равные промежутки времени. Условно такое
вращение считается равномерным.
При повороте сектора 27 удлиненная ось 25 собач-
ки 23 надавливает на винт 15 ведущего рычага 26 и
поворачивает его относительно собственной оси. Ры-
чаг 26 при помощи вертикального водила 30 вращает
блокировочный рычаг 32, противоположный конец кото-
рого, дойдя до упора 35 анероида 34, застопорит весь
часовой механизм, если высота полета больше высоты,
установленной по шкале прибора, так как при этом
верхний срез упора 35 анероида 34 находится выше
верхней плоскости платы 38. По достижении заданной
высоты за счет сжатия анероида верхний срез упора 35
опустится и совпадет с верхней плоскостью платы 38,
освободив блокировочный рычаг, и часовой механизм
доработает оставшиеся 0,8—1,2 сек.
Шкала высот 33 связана с анероидом 34, и установка
ее деления относительно визира 42 осуществляется при
помощи ключа 41, который, вращая шестерню 40 и ко-
лесо 37, обеспечивает возвратно-поступательное переме-
щение втулки 36 с анероидом. Чем больше будет задана
высота по шкале, тем ниже опустится анероид 34, а
следовательно, и упор 35 относительно верхней пла-
ты 38.
При прыжках с высот ниже заданных по шкале при-
бора блокировочный рычаг свободно проходит над упо-
ром анероида и часовой механизм отрабатывает время,
установленное по шкале времени 1 прибора. Как только
часовой механизм отработает заданное время (стрел-
ка 2 пройдет нуль шкалы), ролик 22 выйдет из зацеп-
ления с собачкой 23, поршень 24 с тросом 19 под дав-
лением пружин 21 переместится вдоль направляющей
трубки 20. В результате этого перемещения трос 19 с
приспособлением 18 выдернет шпильки вытяжного тро-
са из конусов ранца парашюта или приведет в действие
другое устройство, открывающее парашют. Давление ро-
лика на собачку прекратится, и часовой механизм оста-
новится.
398
Остановившийся баланс 7 одной из палет анкерной
скобы 6 застопорит анкерное колесо 5 и связанное с ним
через триб 10 промежуточное колесо 11. Пружины 16 и
17 возвратят остальную зубчатую передачу и рычаги
в исходное положение. При этом храповое колесо 4 бу-
дет вращаться против часовой стрелки и скользить свои-
ми зубьями по зубьям собачек 3 (возвратное перемеще-
ние зубчатой передачи и рычагов на рис. 7.1 показано
пунктирными стрелками).
Чтобы прибор вновь подготовить к действию, нужно
застопорить баланс 7 гибкой шпилькой 8 и натянуть до
отказа трос. При этом ролик 22 поршня 24, нажимая на
собачку 23, повернет ее относительно своей оси и даст
свободно пройти поршню. Как только ролик поршня
переместится за край собачки, она под действием пру-
жины 17 возвратится в исходное.положение и застопо-
рит силовые пружины в сжатом состоянии.
Полуавтомат парашютный комбинированный
ППК-1П предназначен для введения в действие пара-
шютно-спасательной системы после катапультирования
через определенный промежуток времени на заданной
высоте.
Прибор изготавливается в пылезащищенном унифи-
цированном корпусе прибора КАП-ЗП в нескольких ва-
риантах. По принципу работы ППК-1П аналогичен
КАП-ЗП.
Диапазон работы по высоте от 1000 до 10 000 м; по
времени — от 0,4 до 1,5 сек. Прибор укомплектован спе-
циальной нерастягивающейся гибкой шпилькой. Ушко
этой шпильки для исключения возможности ее перепу-
тывания с серийной растягивающейся гибкой шпиль-
кой, применяемой в приборах КАП-ЗП и АД-ЗУ, окра-
шено в красный цвет и имеет отличительный выступ
высотой 3—4 мм у начала ушка. Применение растяги-
вающейся шпильки в приборе ППК-1П категорически
запрещено, так как это может привести к несрабаты-
ванию прибора.
Автомат АД-ЗУ устанавливается на катапультном
кресле и предназначен для включения различных меха-
низмов с заранее установленной на земле выдержкой
времени после выдергивания гибкой шпильки. По прин-
ципу действия и конструкции прибор АД-ЗУ аналогичен
прибору КАП-ЗП только с той разницей, что у него от-
399
Рис. 7.2. Принципиальная схема прибора КПА-4:
I - кронштейн со штуцерами; II - чувствительный элемент; III - узел связи; IV - силовой механизм- V - вытяжной меха
“ Л„ „Г.ВР„еМеНН0 механизм; / —сильфон манометрический; 2 - кронштейн; 3- стопор тормоза 7-тормоз 5“ планкГ
S-стопор узла связи; 7-скоба; в - ось планки; У— тяга; W-пружииа; //-упор; /2-стопор; /3, 14 - ^жнны; /5-кулаГ
чок, 1ь — фиксатор временного механизма
сутствует анероидное устройство. Для изуче-
ния принципа работы прибора и его кинема-
тической схемы можно пользоваться рис. 7.1,
исключив следующие позиции: 15, 25, 26 и с
30 по 42 включительно.
Катапультный парашютный автомат КПА-4
предназначен для автоматического введения в
действие механизмов парашютно-спасатель-
ной системы при катапультировании через
определенный промежуток времени, завися-
щий от скоростного напора в момент ката-
пультирования.
Катапультный парашютный автомат яв-
ляется комбинированным прибором и состоит
из следующих взаимно связанных между со-
бой узлов: чувствительного элемента II
(рис. 7.2), временного механизма VI, силового
механизма IV, узла связи III между чувстви-
тельным элементом и временным и силовым
механизмами, вытяжного механизма V и
кронштейна со штуцерами I.
На рис. 7.2 указана принципиальная схема
прибора во взведенном состоянии.
Полное давление Рполн=7>Ст + ^)дин из си-
стемы ПВД поступает во внутреннюю полость
манометрического сильфона 1, а статическое
давление Рст — в герметический корпус при-
бора. Под воздействием разности между пол-
d Ри2
ным и статическим давлениями РЛин ~ •
сильфон деформируется и через систему гяг
и шарниров перемещает кронштейн 2 относи-
тельно планки 5 на величину h. Тормоз 4
отжат от кронштейна 2 стопором тормоза 3,
а носик планки 5 отведен от кронштейна сто-
пором узла связи 6. На скоростях от нуля до
минимально допустимой скорости катапульти-
рования при пробеге или взлете самолета ве-
личина h практически равна нулю. При мак-
симальных скоростях полета она соответству-
ет максимальному значению.
При катапультировании от прибора отде-
ляется и остается на борту самолета кронш-
401
тейн со штуцерами. Специальные клапаны перекрывают
отверстия полного и статического давлений. Это делает-
ся для фиксации величины скоростного напора в силь-
фоне в момент катапультирования, а также для пре-
дотвращения засорения механизма.
Одновременно с отделением кронштейна со штуце-
рами происходит следующее:
— стопор 3 освобождает тормоз 4, который под воз-
действием своей пружины ложится на кронштейн 2 и
запирает его в положении, соответствующем моменту
катапультирования;
— стопор 6 освобождает скобу 7, которая под дей-
ствием пружины 10 через тягу 9 прижимает носик план-
ки 5 к кронштейну 2-
— фиксатор 16 выходит из зацепления, и под дей-
ствием пружины 14 временной механизм включается в
работу;
— одновременно с началом работы временного ме-
ханизма упор И под действием своей пружины начнет
следовать по образующей кулачка 15. При этом носик
планки 5 перемещается по кронштейну.
Когда носик планки 5 пройдет нижний торец крон-
штейна 2, произойдет поворот планки 5 относительно
оси 8 против часовой стрелки. Нижний конец скобы 7
выйдет из соприкосновения со стопором 12 и под дей-
ствием пружины 13 вытяжного механизма начнет рабо-
тать силовой механизм IV.
После отработки силового механизма сработает вы-
тяжное устройство и включит пироголовку отстрела
штанги, при помощи которой вводятся в действие вто-
рой стабилизирующий парашют и прибор ППК-1П.
В зависимости от скоростного напора, а следователь-
но, и величины h время срабатывания прибора изме-
няется от 0,1 до 2,0 сек. Проверка прибора производит-
ся на установке УКПА.
ЛИТЕРАТУРА
1. Боднер В. А. и др. Авиационные приборы, М., Оборонгнз,
1960.
2. Браславский Д. А. и др. Авиационные приборы. М., Ма-
шиностроение, 1964.
3. ГарибьянР. Б. иМарковН. Г. Анатомия и физиология.
Учпедгиз, 1963.
4. Денисов В. Г. и Лопатин Р. Н. Летчик и самолет.
Оборонгиз, 1962.
5. Добронравов О. Е. и Кириленко Ю. И. Основы
автоматического регулирования, автоматы и системы управления
летательных аппаратов. Машиностроение, 1965.
6. Колесов Г. П. Электрические авиационные приборы контро-
ля и автоматические регуляторы режима работы авиадвигателей-
Воениздат, 1960.
7. Ко мо цк ий Р. В., Ломейко Н. П., Олизаров В. В.,
Соловьев Л. Н., Ч а щ и н А. В. Авиационное оборудование и его
эксплуатация. Часть II. ВВИА им. проф. Н. Е. Жуковского, 1960.
8. Котик М. Г. и др. Летные испытания самолетов. М., Маши-
ностроение, 1965.
9. Лавников А. А. Авиационная медицина. Воениздат, 1961-
10. Плотникова В. А. Авиационные приборы и автоматы.
Часть II. ЛКВВИА им. А. Ф. Можайского, 1959.
11. Попков С- Л. Основы следящего электропривода. М.,
Обороигиз, 1958.
12. С и ф ф Э. Дж., Э м м е р и ч К. Л. Введение в гироскопию.
Перевод с английского. Машиностроение, 1965.