




















































































































































Автор: Сазонов В.В. Барбашова Т.Ф.
Теги: динамика кинетика механика небесная механика
ISBN: 978-5-19-011292-4
Год: 2018




Текст
В. В. Сазонов
Т. Ф. Барбашова
ЛЕКЦИИ
ПО МЕХАНИКЕ
КОСМИЧЕСКОГО
• • • • •
В. В. Сазонов
Т. Ф. Барбашова
ЛЕКЦИИ
ПО МЕХАНИКЕ
КОСМИЧЕСКОГО
ПОЛЕТА
Специальный курс
1мгу;
ИЗДАТЕЛЬСТВО МОСКОВСКОГО УНИВЕРСИТЕТА
2018
УДК 531.39
ББК 22.2
С14
Сазонов В. В., Барбашова Т. Ф.
С14 Лекции по механике космического полета. Специальный
курс / В. В. Сазонов, Т. Ф. Барбашова. — М.: Издательство
Московского университета, 2018. — 152 с.
ISBN 978-5-19-011292-4
Специальный курс «Механика космического полета» содер-
жит изложение некоторых задач и методов прикладной небесной
механики, которые, с одной стороны, находят широкое примене-
ние в космической баллистике, а с другой стороны, тесно связаны
с задачами и методами классической небесной механики и меха-
ники твердого тела.
Курс рассчитан на два семестра и предназначен для студентов
3 курса естественно-научных факультетов университетов.
УДК 531.39
ББК 22.2
Учебное издание
Сазонов Виктор Васильевич, Барбашова Татьяна Федоровна
ЛЕКЦИИ ПО МЕХАНИКЕ КОСМИЧЕСКОГО ПОЛЕТА
Специальный курс
Публикуется в авторской редакции. Оформление обложки Ю. Н. Симоненко.
Подписано в печать 25.05.2018 г. Формат 60x90/16. Бумага офсетная. Усл. печ. л. 9,5. Уч.-изд. л. 8,0.
Тираж 100 экз. Изд. №11111. Заказ №3383
Издательство Московского университета. 119991, Москва, ГСП-1, Ленинские горы, д. 1, стр. 15
(ул. Академика Хохлова, 11). Тел.: (495) 939-32-91; e-mail: secretary@msupress.com
Отдел реализации. Тел.: (495) 939-33-23; e-mail: zakaz@msupress.com
Сайт Издательства МГУ: http:#msupress.com
Отпечатано в соответствии с предоставленными материалами
в ООО «Красногорский полиграфический комбинат».
115093, г. Москва, Партийный переулок, д. 1, корп. 58, стр. 3, пом. 7
ISBN 978-5-19-011292-4
© В. В. Сазонов, Т. Ф. Барбашова, 2018
Оглавление
Предисловие 5
Глава 1 Задача Кеплера 6
1.1. Задача двух тел. Первые интегралы...................... 6
1.2. Следствия из первых интегралов. Траектории............. 9
1.2.1. Интеграл кинетического момента................... 9
1.2.2. Интеграл Лапласа.................................10
1.2.3. Интеграл энергии.................................12
1.2.4. Параметризация траекторий........................13
1.3. Закон движения ........................................16
1.3.1. Эллиптическое движение...........................16
1.3.2. Гиперболическое движение.........................18
1.3.3. Параболическое движение..........................19
1.4. Скорость точки.........................................19
1.5. Положение траектории в пространстве ...................20
1.6. Задача Ламберта........................................24
1.6.1. Постановка задачи................................24
1.6.2. Род траектории...................................25
1.6.3. Формула Ламберта.................................28
1.6.4. Построение траекторий ...........................31
1.7. Вычисление изохронных производных......................33
1.8. Пролет по гиперболической траектории мимо притягивающего
центра......................................................37
Глава 2 Метод игнорирования возмущений 41
2.1. Ограниченная задача трех тел...........................41
2.2. Сфера действия.........................................42
2.3. Расчет пролета через сферу действия. Метод точечной сфе-
ры действия ................................................45
2.4. Периодические решения ограниченной задачи трех тел.....46
2.5. Оптимизация параметров пертурбационного маневра........53
Глава 3 Полет космического аппарата с солнечным па-
русом 64
3.1. Сила светового давления ...............................64
3.2. Уравнения движения космического аппарата с солнечным па-
русом ......................................................65
3.3. Спиральные траектории..................................67
3.4. Геоцентрический разгон космического аппарата...........70
Глава 4 Исследование уравнений возмущенного движения 77
4.1. Уравнения в оскулирующих элементах.....................77
4.1.1. Метод вариации произвольных постоянных...........77
4.1.2. Возмущенная задача Кеплера.......................78
4
Оглавление
4.1.3. Вывод уравнений в оскулирующих элементах.............79
4.1.4. Возмущающая функция..................................85
4.1.5. Метод усреднения ....................................91
4.2. Спутниковая задача трех тел ...............................96
4.2.1. Усреднение уравнений в оскулирующих элементах ... 96
4.2.2. Стационарные решения................................101
4.2.3. Границы изменения постоянных первых интегралов . . 102
4.2.4. Анализ фазовых кривых...............................103
4.2.5. Граничные случаи....................................106
4.3. Силовая функция гравитационного взаимодействия двух тел . .110
4.4. Гравитационное поле на поверхности Земли..................112
4.5. Влияние сжатия Земли на эволюцию орбиты спутника......115
4.6. Влияние сопротивления атмосферы на эволюцию орбиты спут-
ника ......................................................118
4.6.1. Усредненные уравнения в оскулирующих элементах . . .118
4.6.2. Время существования спутника........................121
4.6.3. Некоторые общие закономерности эволюции.............122
4.6.4. Эволюция орбиты ....................................123
4.6.5. Определение плотности атмосферы по торможению
спутника.............................................126
4.6.6. Вычисление интегралов...............................127
Глава 5 Движение спутника относительно его центра масс 129
5.1. Уравнения движения трехосного спутника....................129
5.2. Положения равновесия спутника на круговой орбите и их
устойчивость..............................................133
5.3. Уравнения движения осесимметричного спутника на круговой
орбите .................................................. 135
5.4. Стационарные вращения осесимметричного спутника и их
устойчивость..............................................138
5.5. Движение осесимметричного спутника с большой угловой ско-
ростью под действием гравитационного момента..............143
5.5.1. Усреднение по Волосову..............................143
5.5.2. Применение метода Волосова в задаче о движении спут-
ника с большой угловой скоростью.....................144
Литература 149
Предметный указатель 151
Предисловие
Специальный курс «Механика космического полета» рассчитан на два се-
местра и предназначен для студентов 3 курса студентов естествен но-научных
факультетов университетов. Он содержит изложение некоторых задач и ме-
тодов прикладной небесной механики, которые, с одной стороны, находят
широкое применение в космической баллистике, а с другой стороны, тесно
связаны с задачами и методами классической небесной механики и механики
твердого тела.
Данный курс задуман как первое ознакомление студентов с предметом,
поэтому все математические выкладки, которыми насыщена небесная меха-
ника, проведены с большой подробностью. По существу в курсе детально
разобраны некоторые вопросы из книг Д. Е. Охоцимского и Ю. Г. Сихарулид-
зе «Основы механики космического полета» [17] и В. В. Белецкого «Движение
искусственного спутника относительно центра масс» [4]. Эти книги авторы
рекомендуют студентам для более глубокого изучения прикладной небесной
механики. Весьма полезной также будет литература, представленная в конце
книги.
6
Глава 1. Задача Кеплера
Глава 1
Задача Кеплера
1.1. Задача двух тел. Первые интегралы
Рассмотрим движение двух материальных точек, притягивающихся по за-
кону Ньютона. Эти точки и их массы будем обозначать через тп\ и тп^. Пусть
в некоторой инерциальной системе отсчета Oxyz точка ттгг задается радиус-
вектором Vi (г = 1,2). Уравнения движения точек в этой системе записыва-
ются в виде
777117712 (Г1 - Г2) .. 7WW (Г2 ~ Г1)
min =---------:---------, m2r2 =----------------------. (1.1)
|Г1-Г2| |Г2- П|
Здесь 7 — универсальная гравитационная постоянная, точка над буквой
означает дифференцирование по времени t:
dry .. d2ri
r' = W =
В уравнениях (1.1) сделаем замену переменных (ri,r2) н-> (г, JR):
_ 7711Г1 + 7772r2
Г = Г 2 — 7*1, R = --------------,
7711 + ТП2
R — радиус-вектор центра масс С точек (см. рис. 1.1). Имеем
7W .. 77711 | |
7*1 = --— Г, Г2 =-------г, Г = 7* ,
рО рО 1
................. 7 (™1 + ТП2) ” 7711Г1 + 7712Г2
г = т*2 - Г1 =---------z-----г, R =-------------------= 0.
Г6 ТЩ + ТП2
О
Рис. 1.1.
Геометрический
смысл замены
переменных.
Введем обозначение /а = 7 (ttii + ттг2) и запишем уравне-
ния (1.1) в новых переменных
аг -
г =-----р R = 0.
Это два независимых векторных уравнения. Общее ре-
шение второго уравнения имеет вид
R = Rq + vot,
где Rq, vq — произвольные постоянные (не зависящие от
времени) векторы. Полученное решение означает, что центр
масс системы точек 77ii и ттг2 движется прямолинейно и равномерно. Этот
факт — следствие замкнутости системы (внешние силы отсутствуют) и тео-
ремы об изменении количества движения.
Ниже будем рассматривать только первое уравнение, описывающее от-
носительное движение точек. Задачу отыскания и исследования общего ре-
1.1. Задача двух тел. Первые интегралы
7
шения этого уравнения будем называть задачей Кеплера. В небесной ме-
ханике обычно точка 1 — планета, точка 2 — спутник, причем 7721^7722,
7721 + 7722^7721, 77711. В этом случае р — гравитационный параметр пла-
неты.
Уравнение относительного движения точек
совпадает с уравнением движения точки единичной массы с радиус-векто-
ром г в поле неподвижного притягивающего центра с потенциальной энер-
гией
п = -^.
г
В самом деле,
r2 = r-r => rdr = r-dr => г dr = xdx + ydy + zdz,
откуда
dr x dr у dr z dr r
dx r' dy r' dz r dr r'
Далее
<ЭП dH dr fi r fir
dr dr dr r2 r r3 ’
и уравнение (1.2) принимает вид
<ЭП
dr'
Действующая на новую (фиктивную) точку сила центральна и потенци-
альна, поэтому уравнение (1.2) допускает два первых интеграла: интеграл
кинетического момента относительно притягивающего центра
г х г = с, с = const (1.3)
и интеграл энергии
г2 — — = /г, — const, (1.4)
то есть производные по времени этих интегралов, вычисленные в силу урав-
нения (1.2), равны нулю. В рассматриваемой задаче существует еще один
первый интеграл — интеграл Лапласа
г х с — — = f. (1.5)
Вектор f называется вектором Лапласа. Прямая, проходящая через притя-
гивающий центр и параллельная вектору Лапласа, называется линией апсид.
Докажем, что вектор f действительно является первым интегралом уравне-
ния (1.2). Используя соотношения
8
Глава 1. Задача Кеплера
получим
Таким образом, в данной задаче найдены один скалярный и два векторных
первых интеграла, что соответствует семи скалярным первым интегралам.
Все они не зависят явно от времени. По известной теореме из курса обык-
новенных дифференциальных уравнений автономная система шестого по-
рядка может иметь не более пяти независимых первых интегралов, не со-
держащих время [21]. Следовательно, между найденными интегралами су-
ществуют по меньшей мере две связи. Получим первую связь. Поскольку
г • с — г • (г х г) = О, из (1.5) имеем
f • с = (г х с) • с — — (г • с) = 0.
Равенство
\f |2 = (г X с)2 + д2 - ^(г X с) • г
с учетом соотношений
(г х с)2= |г|2|с|2 — (г • с)2 = \г|2|с|2, (г X с) • Г = С' (г X г) = с- с = |с|2
дает вторую связь
|f I2 = HVI2 + м2 - ~ т) + = ,с|г'1 +
Введем обозначения f = |/|, с= |с|. Тогда вторая связь запишется так
/2 = he2 + д2. (1.6)
Задача 1.1. Доказать, что
. 9(с,/Л) ,
rank -----— = 5.
ецг, V)
Решение. Вследствие соотношения (1.6) достаточно доказать, что
^(с,/) .
rank —------ = 5.
d(r, V)
Рассмотрим линейную систему dc = 0, df = 0 относительно dr и dv. Соглас-
но (1.3) и (1.5) она имеет вид
(1.7)
т , ^dr иг (г - dr) „
dr х v + г х dv = 0, dv х с--------1----------= 0. (1.8)
Матрица этой системы совпадает с матрицей Якоби в соотношении (1.7). Си-
стема (1.8) имеет шестой порядок, поэтому ранг ее матрицы равен 6 минус
число ее линейно независимых решений. Чтобы установить это число, доста-
точно найти общее решение системы (1.8).
1.2. Следствия из первых интегралов. Траектории
9
Из первого уравнения системы (1.8) находим
О = v • {dr х v + г х dv) = v^dr^Cv) + v • (г х dv) =
= — {г х v) • dv = — с • dv
с dv = 0.
Второе уравнение дает
и\г х {г х dr)]
dv х с Н-------з------- = 0 =>
0 = с х {dv х с + [г х (г х dr)]} =
= с х {dv х с) + х [г х (г х dr)]} =
= c2dv - - (г х dr)^ ~^{rx dr)^c^rX'()=
= c2dv - ^[(г * с) dr] dv = ^[(rxc)-dr].
Подставив последнее соотношение в первое уравнение системы (1.8), имеем
dr xv = 0. Следовательно, dr = av, где а — некоторое число. Подстановка
этого соотношения в полученное выражение для dv дает
dv = (г х с) • v = (г х v) • с = -се—.
rpO L4 7 J rpO Lx ' J
Число ol можно выбирать произвольно, поэтому общее решение системы (1.8)
зависит от одной произвольной постоянной. Значит, ранг матрицы этой си-
стемы равен 5.
Из утверждения этой задачи следует, что найденные интегралы содержат
полную систему первых интегралов уравнения (1.2).
1.2. Следствия из первых интегралов. Траектории
Выясним геометрический смысл первых интегралов. Движение точки бу-
дем рассматривать в декартовой системе координат с началом в притягива-
ющем центре.
1.2.1. Интеграл кинетического момента. Из интеграла (1.3) следует
с-г = 0, с-г = 0. (1.9)
Если с ф 0, то движение точки происходит в плоскости, проходящей через
начало координат и перпендикулярной вектору с.
Введем систему координат Oxyz, направив ось Oz по вектору су^О.
В этой системе г = {х, у, z), с = (0,0, с), с > 0. Из (1.9) получаем z = 0, z = 0.
Координатная запись векторной формулы (1.3) сводится к скалярному соот-
ношению
с — ху — ху.
(1-10)
10
Глава 1. Задача Кеплера
Введем в плоскости Оху полярные координаты г и ср:
х = г cos ср, у = г sin <р, f i 1П
х = г cos<£ — гф sin ip, у = г sin ip + тф cos <р. v ‘ 7
Тогда ху — ху = г2ф. В полярных координатах соотношение (1.10) принимает
вид
г2ф = с. (1-12)
Площадь сектора кривой г = г(<^), заключенного между лучами <р = <р\
и (р = (р2, выражается интегралом
IУ г2(99) dtp,
<^1
что позволяет дать геометрическую интерпретацию интеграла кинетического
момента. Пусть S(t) — площадь сектора, заметаемого радиус-вектором
точки, начиная от некоторого фиксированного луча, выходящего из начала
координат, например, от оси Ох. Из соотношений
dtp = ф dty dS = I г2 dtp = S dt
следует
2S = г2ф = с.
Величина S называется векториальной скоростью точки. Существование ин-
теграла кинетического момента означает, что эта скорость постоянна. Это
обстоятельство объясняет другое название интеграла (1.3) — интеграл пло-
щадей. Можно записать
5 = lc(<-io), (1.13)
где to — момент пересечения точкой указанного выше фиксированного лу-
ча. В таком виде этот интеграл был открыт экспериментально Кеплером из
анализа движения Марса вокруг Солнца. Формулу (1.13) называют вторым
законом Кеплера.
Задача 1.2. Доказать, что при с = 0 движение точки происходит по не-
изменной прямой, проходящей через начало координат. Другие интегралы не
использовать.
1.2.2. Интеграл Лапласа. Интеграл Лапласа (1.5) позволяет найти
траекторию точки. При с=0 из него следует
г *
r = --f,
V
то есть движение прямолинейно. Траектория точки расположена на луче,
выходящем из начала координат.
Ниже, если не оговорено особо, предполагается, что с^О. В плоскости,
перпендикулярной вектору с кинетического момента, введем полярную си-
стему координат с полюсом в притягивающем центре и основным направле-
1.2. Следствия из первых интегралов. Траектории
11
нием (полярной осью) /. Векторы г и f лежат в этой плоскости. Полярный
радиус во введенной системе координат г = |г |, полярный угол обозначим че-
рез v (см. рис. 1.2). Направление отсчета угла v согласовано с вектором с1/
Этот угол называется истинной аномалией.
Рис. 1.2. Полярная (г, v) и декартова системы координат.
Получим уравнение траектории точки в полярных координатах. Умножив
интеграл Лапласа скалярно на г, имеем
/• х ц(г-г) __ ______________________________
г • (г х с)--------= f r => с • (г X Г) — /1Г = f • г =>
г
с2 — цг = f г => с2 — /1Г = fr cos V =>
r =______Т =_______________________Р-___. (1.14)
1 + (///i) cos v 1 + е cos v
Здесь р — фокальный параметр, е — эксцентриситет траектории:
с2 f
р=-, е = —. (1.15)
М р
Траектория точки представляет собой коническое сечение с фокусом в при-
тягивающем центре. В случае е < 1 траектория — эллипс. Это утверждение
о форме траектории составляет первый закон Кеплера, который также был
открыт экспериментально. В случае е > 1 траектория — гипербола, в слу-
чае е = 1 — парабола. Случай с = 0, когда траектория лежит на прямой, был
рассмотрен выше.
При f Ф 0 удобно ввести согласованную с полярной системой коор-
динат (г, z/) декартову систему координат O^pt* (см. рис. 1.2), в которой
с=(0,0, с), с > 0; / = (/,0,0), / > 0. Орты осей Op, О£, OQ этой системы
обозначим соответственно Р, Q, R.
Р = -е, R = ~, Q = RxP (116)
f с
Траектория расположена в плоскости О£р. Пусть
r = £P + pQ (1.17)
^Это означает, что положительное направление отсчета угла I/ — против часовой стрелки, если смотреть
из конца вектора с.
12
Глава 1. Задача Кеплера
Полярные и декартовы координаты точки связаны соотношениями
£ = rcosz/, 77 = г sin/л (1-18)
Уравнение (1-14) — уравнение траектории в полярных координатах.
1.2.3. Интеграл энергии. Значение этого интеграла определяет тип
траектории. Согласно (1.6) и (1.15)
е = h = (1.19)
V /I2 р
Для рассмотренных выше случаев имеем
1) е<1 <=> Л<0 — эллипс;
2) е > 1 <=> h > 0 — гипербола;
3) е = 1 <=> h = 0 — парабола.
Из интеграла энергии следует, что при фиксированном значении г вели-
чина h определяется модулем скорости v = |г|:
h = v------.
г
Значение h = 0 реализуется при
V = г>п(г) =
Величина vn(r) называется местной параболической скоростью. При
v < vn(r) орбита, проходящая через точку с данным значением г, представля-
ет собой эллипс. При v > vn(r) орбита — гипербола, при v = vn(r) — парабола.
Если v > vn(r), то h > 0 и можно определить параметр
— скорость на бесконечности, или гиперболический избыток скорости. При
г—>оо имеем
На круговой орбите е = 0, г = р = а, с= у/рр и из интеграла энергии сле-
дует
р р р V р
Величина
называется местной круговой скоростью.
Пусть mi — шаровая планета радиуса R, — спутник этой планеты,
Тогда vK(R} — первая космическая скорость (скорость
спутника при движении по круговой орбите радиуса Я), vn(R) — вторая кос-
мическая скорость (минимальная начальная скорость спутника на поверхно-
1.2. Следствия из первых интегралов. Траектории
13
сти планеты, позволяющая уйти на бесконечность). Эти скорости не зависят
от ГП2-
Задача 1.3. Вычислить первую и вторую космические скорости для Зем-
ли, приняв ц = 396600 км3/с2, R = 6378 км.
Местная параболическая скорость на орбите Земли вокруг Солнца (орбита
считается круговой) называется третьей космической скоростью. Найти ее,
приняв р = 132 .7-109 км3/с2, Я= 1.5 • 108 км.
1.2.4. Параметризация траекторий. Использование истинной анома-
лии позволяет задать траекторию любого типа. Однако чтобы найти зависи-
мость положения точки на траектории от времени, удобно использовать пара-
метризации, связанные с типом траектории. Способ их введения определяет-
ся каноническим видом уравнения траектории. Преобразуем уравнение (1.14)
к каноническому виду в разных случаях. С учетом (1.18) имеем
r = p — ercosz/ => г = р — е£ => £2 + р2 = (р — е£)2.
Пусть е/ 1. Тогда последнее уравнение можно преобразовать так:
у 1 — е2 )
(1-еЧе+гЬ) +,;2=гЬ' (г21)
Возможны два случая.
1) При е<1 уравнение (1.21) представим в виде
V 1-е27 + f У
( Р \ ( Р V а2 Ь2 ~ ’
V-e2/ - е2/
а = Р 2, Ь = Р — = ау/1 - е2, = - ер = -ае. (1.22)
1-е2 ^/1 _е2 1-е2
В этом случае уравнение (1.21) приводится к кано-
ническому виду уравнения эллипса с большой полу-
осью а, малой полуосью b и центром в точке £ = £,с>
р = 0 (см. рис. 1.3). Как траектория движения эл-
липс имеет две характерные точки: перицентр (точ-
ка 7Г, ближайшая к притягивающему центру) и апо-
центр (точка а, наиболее удаленная от него). В пе-
Рис. 1.3. Эллипс (е<1).
рицентре
р
и — 0, г — г^ — --------= al — е),
1 + е v 7
в апоцентре
р
и = 7г, г = га = -------= а(1 + е).
1 — е
14
Глава 1. Задача Кеплера
Заметим, что
Рис. 1.4. Углы и и Е.
Лг + Га = 2а.
Помимо параметризации с помощью истинной
аномалии эллипс допускает еще одну:
£ —£c = acosE, T] = bsmE, Ее (—оо,оо).
Тогда
£ = a(cosE — е), т) = ау/1 — e2sin/Г. (1.23)
Параметр Е называется эксцентрической аномали-
ей. Его геометрический смысл представлен на рис. 1.4. Согласно (1.23) имеем
г2 = £2 + т?2 = а2(1 — е cos 2?)2 => r = a(l — ecosE}.
Отсюда с учетом (1.18) получим связь между и и Е
£ cosE — e . г) \/1 — е2 sin Е
cos и = - =--------—, sm и = - =----------—
г 1 — е cos Е г 1 — е cos Е
(1-24)
(1-25)
Задача 1.4. Вывести формулу
/у /1 + е Е
tg2 = v~tgT
и выразить, sin/?, cosE через sinzy, cosz/.
2) При e> 1 уравнение (1.21) представим в виде
(с ер >
V е2-1?
/ \ 2
/ Р \
\ е2 — 1)
9
2?_______ = 1
\ 2 1
Р \
(е-ес)2 /?2
а2 Ъ2
= 1,
(1.26)
Рис. 1.5. Гипербола (е > 1)
£ = Г cos
ер
----Г = ае-
ez — 1
Итак, уравнение (1.21) приводится к каноническому
уравнению гиперболы с действительной полуосью а,
мнимой полуосью Ъ и центром в точке £ = £с, 77 = 0.
Гипербола имеет две ветви, но траектория точки —
ветвь, лежащая в полуплоскости £ < £с (см. рис. 1.5).
В самом деле,
pcosz/ 1 р(1 + ecosz/) — р
1 + е cos v е 1 + е cos v
Р Р <Р Р < Р Р{е — 1) ре
е е(1 + е cos z/) е е(1 + е) 1 + е е2 — 1 < е2 — 1 С
1.2. Следствия из первых интегралов. Траектории
15
Как траектория движения гипербола имеет одну характерную точку — пе-
рицентр. Это точка, ближайшая к притягивающему центру (левому фокусу).
В перицентре
Р
1 + е
v = 0, г = Гтг
= а(е — 1).
Гипербола имеет две асимптоты:
1^±? = 0.
а о
Асимптотическим направлениям отвечают значения истинной анома-
лии, определяемые уравнением 1 + еcos v = 0. Его решения z/ = ±z/*, где
z/* =7г — arccos(l/e). При z/—>±(z/* —0) точка стремится к асимптоте
Г!= Ъ /а-
Другая параметризация гиперболы:
£ —= —achF, T/ = 6shF, Fe (—00,00) =>
£ = а(е — ch F), р = ау/ е2 — 1 sh F
Отсюда, используя тождество ch2 F — sh2 F = 1, имеем
г2 = £2 + т}2 = a2(echF — I)2, г — a(echF — 1).
Связь между v и F дается соотношениями
£ е — chF . р у/е2 — IshF
cos у = - = —— ---- sm и — - =-------—-—-—.
г е ch F — 1 г е ch г — 1
Заметим, что согласно (1.19)
. М(е2 - 1)
/г =--------,
Р
и поэтому
в случае эллипса р = а(1 — е2), h = — —,
а
в случае гиперболы р = а(е2 — 1), h = —.
(1-27)
(1-28)
Задача 1.5. Вывести формулу
v /е + 1 F
tS2 = V — "Ч'
3) Пусть теперь е = 1. В этом случае уравне-
ние (1.14) траектории принимает вид
rf = Р2 - 2р£ ==> т?2 = - 2р (^ - 0.
Это парабола с осью О£ и вершиной в точке С с ко-
ординатами (см. рис. 1.6)
= |, Г)с = 0.
Рис. 1.6. Парабола
(е = 1).
16
Глава 1. Задача Кеплера
_ V . х _
Примем z— tg- (универсальная тригонометрическая подстановка). То-
гда
, 9
1 -tg 2
1 — z2 tg <2z
COS V — ------77
1 + tg22
r = P = P = P(1 + tff2-V р(1 + г2)
1 + cos v 2 cos2 - 2 \ 2 J 2 ’
p(l-z2) .
= rcosv =--------, г/ = r smz/ = pz, z6(—oo,+oo).
1.3. Закон движения
1.3.1. Эллиптическое движение. Интеграл кинетического момента в
переменных г, и с учетом соотношений (1.12) и (1.15) имеет вид
r2z> = у/р/р.
Отсюда
л/ДД АД”/1 х2 АД”
z/ = —у = а/-^ (1 + ecosz/)2, J^dt = ——-------
г2 у р6 у р6 (1 + ecosz/)2
Обозначим через т момент прохождения точки через перицентр орбиты: при
t = т выполнено и = 0. Интегрируя последнее дифференциальное соотноше-
ние — слева на отрезке [т, t], справа на отрезке [0, z/], — получим зависимость
v = v(t):
.Д(<-т)=/п * (1-29)
у р3 J (1 + ecosv)2 v
о
Нетрудно видеть, что v(r) = 0. Вычисление интеграла справа выполняется
по-разному в случаях е < 1, е = 1 и е> 1. При этом используются введенные
выше параметризации эллипса, гиперболы и параболы.
При е < 1 сделаем замену v i-+ Е. Дифференцируя первую формулу (1.25)
и учитывая вторую формулу, получаем
dz/ _ (1 — e2)sinE dv \/1 — е2
SmZ/ dE (1 — ecosE)2 dE 1 — ecosE
Тот же результат получается дифференцированием второй формулы (1.25).
Далее имеем
dv у/1 — е2 dE 1 (1 — е cos Е) dE
(1 + ecosz/)2 1 —ecosE1 / cosE-e\2 (1 - e2)3/2
1 + -------F
\ 1 — e cos E J
1.3. Закон движения
17
Подставим это выражение в (1.29). Согласно (1.28) для эллипса р = а(1 — е2),
поэтому
-----1 . [(l-ecosG) dG = . / (t - г) ==>
(1 _ е2)3/2 J V а3(1 ~ е )
v ' о
Е — esin£? = \ (t — т).
Величины
= Е — е sin Е
п
(1-31)
называются средним движением и средней аномалией соответственно. Ис-
пользуя их, результат интегрирования запишем в виде
Е —e sin Е = М, M = n(t — r). (1-32)
Первое соотношение (1.32), рассматриваемое как уравнение относительной,
называется уравнением Кеплера. Поскольку
= 1 — ecosE > 0, (1.33)
dE
это уравнение имеет единственный корень Е = Е(М,е). Он удовлетворяет
соотношению
Е(М + 2тг, е) = Е(М, е) + 2тг.
Отыскание корня может быть выполнено несколькими способами,
а) Простые итерации. Уравнение Кеплера записывается в виде
Е = М + е sin Е
и строится последовательность
{еЛ : Eq = М, Ек+1 = М+ esinEk (к = 0,1,...).
I J k=Q
Поскольку
d(M + esmE)
—----—------- = ecosE G (- 1,1),
dE
эта последовательность сходится к Е(М, в).
б) Уравнение Кеплера можно решать методом Ньютона.
в) При малых е функция Е(М, е) может быть представлена в виде ряда
по целым степеням е:
Е(М, е) = М + esinM + ...
Задача 1.6. Вычислить еще два члена этого ряда. Получить аналогич-
ные разложения для z/, cos v и sin v. Доказать формулу
Е(М + 7г, е) = 7г + Е(М, — е).
Функции (см. (1.23))
£ = a(cosE — е), ц = а\/1 — e2sin£?
периодически зависят от Е и, следовательно, от М с периодом 2тг. Действи-
тельно, положим Т = 2тг/п, тогда согласно (1.32)
M(t + Г) = M(t) + 27Г
18
Глава 1. Задача Кеплера
и функции
£ = a{cos Е е] — е},
р = aVe2 - 1 sinF[M(£), е]
представляют собой Т-периодические функции t. Следовательно, эллиптиче-
ское движение является периодическим с периодом Т. По этой причине п еще
называют орбитальной частотой.
При mi m2 из соотношения
2тг 2тга3/2
— = 2тг\ - = .
п V М ут(т1 + т2)
(1-34)
следует, что период Т практически не зависит от m2. Пусть вокруг притя-
гивающего центра двигаются две материальные точки с исчезающе малыми
массами по эллиптическим орбитам с большими полуосями ai, а2 и периода-
ми 71, Т2. Тогда
7? _ Т22 _ 4тг2_
al а% 7ml ‘
Формула Т2 ~ а3 выражает третий закон Кеплера, который первоначально
был установлен экспериментально.
1.3.2. Гиперболическое движение. При е>1 делаем замену и F
и согласно (1.27) имеем
е — chF . du (е2 — l)shF
C°SZ/= echF-1 SmZ/dF = (echF-1)2
du _ \/е2 — 1
dF е ch F — Г
du
Выражение для можно
получить и дифференцируя формулу
sinz/ =
л/е2 - 1 shF
е ch F — 1
Далее находим
du \/е2 — 1 dF 1 (е ch F — 1) dF
(1 + ecosz/)2 echF-1 / e-chF\2 (e2 - 1)3//2
Подставляя это соотношение в (1.29), получаем
F
\P^t-r) =-------/'(echH-l)dH
\Р3 (е2 - 1)3/2 J V ’
з 1)3ft~T) = eshF-F => ^(i-т) = eshF-F. (1.35)
1.4. Скорость точки
19
Поскольку
d(eshF-F) , r. , „
---—---- = echF — 1 > 0,
dF
уравнение (1.35) имеет единственный корень F = F(t). Подставляя его в фор-
мулы £ = £(F), r} = r)(F)^ получаем закон движения точки.
1.3.3. Параболическое движение. В случае е = 1 в интеграле уравне-
ния (1.29) сделаем подстановку z= tg(i//2). Имеем
dz 1 1 + tg2(z//2) 1 + z2
du 2cos2(z//2) 2
du du
(1 + cosz/)2 4cos4(z//2)
Тогда уравнение (1.29) примет вид
______ z
^-T)=u^dz=z-+
, 2dz
du =-------
2 1 + z2
(1 + z2)3dz 1 + z2 .
2(1 + ++) =^TdZ-
Z3
б"
Z3
“3
о
Последнее уравнение при любом t имеет единственное решение, так
— г + — =1+г2>0.
az \ 3 /
Задача 1.7. Найти закон движения точки в случае, когда траектория
принадлежит прямой.
как
Задача 1.8. Показать, что все решения уравнения (1-29) могут быть по-
лучены из общего эллиптического или общего гиперболического решения.
Указание. Выше эллиптическое и гиперболическое решения параметри-
зовывались параметрами а, е и т, причем параметр а имел в них разный
смысл. Взять в качестве параметров р, h и т. В эллиптическом случае поло-
жить Е = V—hs, в гиперболическом F = y/hs (s — новая независимая пере-
/ ph
менная вместо t). В обоих решениях е— а /1 + —. Использовать формулы
_______________ V М
y—h = ivh (h > 0), cos2£ = ch:r, sinzx = ishx.
1.4. Скорость точки
Приведем выражения для вектора скорости г в системе координат О£р,
а также в полярных координатах г, и. Начнем с последних. Используем ло-
кальный базис в полярной системе координат (см. (1.16)):
ег = — = Р cos и + Q sin и, еи = = — Р sin и + Q cos и.
г du
Имеют место соотношения
г = Рщ + Qv^ = ervr + euvu, vr = r, vu = ru,
= £ = vr cos и — vy sin Z7, = f) = vr sin и + vy cos u.
20
Глава 1. Задача Кеплера
Интеграл кинетического момента r2z> = у/Др дает
Полученные формулы справедливы для любого типа движения.
(1.36)
Задача 1.9. Получить выражения для vr, vv, v7] в эллиптическом дви-
жении в функции Е и в гиперболическом — в функции F. В последнем случае
найти значения компонент скорости при >±оо и выразить их через Vqq.
Задача 1.10. Построить годограф вектора скорости.
1.5. Положение траектории в пространстве
Положение орбиты точки в пространстве характеризуется векторами с
и f или, что то же самое, положением в пространстве системы коорди-
нат О£т](. Положение этой системы относительно некоторой заданной си-
стемы Oxyz, начало которой также находится в притягивающем центре, бу-
дем задавать принятыми в динамике твердого тела углами Эйлера — углами
прецессии, нутации и собственного вращения. В небесной механике эти уг-
лы называются долготой восходящего узла, наклонением {наклоном) орби-
ты и аргументом широты перицентра соответственно. Они обозначаются
через Q, i и ш (см. рис. 1.7).
Углы Эйлера применительно к данной задаче определяются следующим
образом. Прямая L = Оху П называется линией узлов. Точка орбиты,
в которой движущаяся материальная точка переходит из полупространства
z < 0 в полупространство z > 0, называется восходящим узлом орбиты и обо-
значается через Г2. Точка орбиты, в которой совершается обратный переход,
называется нисходяшщм узлом орбиты и обозначается через 7J. Вектор Ofi
1.5. Положение траектории в пространстве
21
задает положительное направление на прямой L (точки О, 12, СТ принадле-
жат прямой L). Угол между осью Ох и вектором 0$ обозначается через Q:
Q = /(Ox, OQY Он отсчитывается от оси Ох, направление его отсчета со-
гласовано с осью Oz. Угол (jJ = 2(<эД О£) отсчитывается от вектора
направление отсчета согласовано с осью О(. Угол i = /(Oz, OQ отсчитыва-
ется от оси Oz, направление отсчета согласовано с вектором 0$ (см. рис. 1.7).
По своему смыслу i е (0, тг).
Рис. 1.7. Часть орбиты, расположенная в области z 0.
Эквивалентный способ введения углов Q, i, со — преобразование си-
стемы Oxyz в систему О£т£ тремя последовательными поворотами систе-
мы Oxyz\ 1) на угол Q вокруг оси Oz; 2) на угол г вокруг новой оси Ох, сов-
падающей с прямой L; 3) на угол со вокруг новой оси Oz, полученной двумя
первыми поворотами и совпадающей с осью О£. Эти три поворота перево-
дят систему Oxyz в систему О£т](. Такой способ введения углов позволяет
представить формулы перехода от системы О£т£ к системе Oxyz следующим
образом
/cosQ — sinQ 0\ /1 0 0 \ / cos ио — sincj 0\ /£
?/ = I sinQ cosQ 0 II 0 cos г — sin г I sincj coscj 0 II т]
z I \ 0 0 11 \0 sin г cos i I \ 0 0 11 \С
Задача 1.11. Перемножить матрицы в последнем соотношении.
Пусть в системе Oxyz орты Р, Q, R системы О£т£ имеют вид
Р = (Рх, Ру, Pz), Q = (Qx, Qy, Qz), R= (Rx, Ry, Rz).
Тогда формулы перехода от системы О£т]£ к системе Oxyz можно предста-
вить в виде
/Рх Qx Рх\ /
У I = I Ру Qy Ру I I Л I •
zj \PZ Qz RZJ
(1-37)
22
Глава 1. Задача Кеплера
Элементы матрицы перехода в (1.37) выражаются через введенные углы по
формулам
Рх = cos Q cos со — sin Q cos i sin cj,
Py = sin Q cos co + cos Q cos i sin cj,
P^ = sinisin(j,
Rx =
Qx = ~ cos Q sin co — sin Q cos i cos сщ
Qy = — sin Q sin co + cos Q cos i cos сщ
Qz= sini coscj,
(1.38)
sinQ sin г,
Ry = — cosQ sin г,
Rz = cos г.
Общее решение задачи о движении материальной точки в поле притяги-
вающего центра (задачи Кеплера) можно записать в виде
= £Рх И- 'qQx^ у = £РУ “Ь yQy) % — £PZ 4" yQzi
с . Р (1.39)
Е = г cos 1л т] = г sm v. г =--------, 7
1 + е cos и
х = щРх + v^Qx) У = v^Py + vvQy, z = V{PZ +
v
ve = -./^smi/, vr)=. /^(e + cosi/), .l^(t-r)= ( —dx-------------
\j p V P V P6 J (1 + ecosx)2
о
Решение зависит от шести параметров р, е, г, Q, г, сщ которые называ-
ются кеплеровыми элементами орбиты. Элементы р и е характеризуют
форму орбиты; т служит для задания закона движения по орбите; Q, i и со
задают положение орбиты в пространстве.
Выписанное решение универсально. Оно справедливо для орбит всех ти-
пов. В случае эллиптического движения удобнее использовать другие выра-
жения для £, ту,
£ = a(cosE-e), р = а\/1 - e2sinE', (1.40)
/ц sin Е М(1 — е2) cos Е
V а 1 — е cos Е" Vri V а 1 — е cos Е'
Е —e sin Е = М, M = n(t — r), п = (1-41)
Параметрами этого решения являются а, е, г, Q, г, со. Очень часто вместо т
используют параметр М(to) = Мо, где to — некоторый заданный момент вре-
мени (эпоха). Тогда согласно (1.41) М = Mq + n(t — to). В этом случае па-
раметрами являются а, е, Mq, Q, г, со. Параметры а и Мо также называют
кеплеровыми элементами орбиты.
Задача 1.12. Выписать формулы гиперболического и параболического
движения с использованием переменных F и z.
Задача 1.13. Пусть заданы to, r(to) = ^о и r(t0) = v0. Найти элементы
орбиты, считая движение эллиптическим.
1.5. Положение траектории в пространстве
23
Решение. Вычисляем постоянные первых интегралов
7i = Vq-—, Го = |г0|, C = roxvo, С=|с|,
Го
f = V0X с- — , /=|/|.
Го
Согласно (1.28), (1.16) и (1.23)
а = — у (h < 0), е = —,
h ц
Р = £ R=~, Q = RxP,
f с
го • Р = a(cosEo — е), го • Q = ayl — е2 sin Eq,
где Eq = E(t0). Отсюда находим
гр ГО'Р , . „ rQ Q
cos Eq =------he, sm Eq = —. .
a ay/1 - e2
Из этих соотношений получаем Eq и Mq = Eq — e sin Eq. Затем в соответствии
с (1.38) вычисляем
г = arccosT?2 (по смыслу г е (0, тг));
Qz . Pz
coscj = -—, smcj = -—, откуда находим си;
sm г sm г
cosQ =-----—, sinQ = ——, откуда находим Q.
sin i sm г
Далее определяем т:
,, , . , , M m 2л
Mq 4- п(т — to) = кк, A; e Z => т =-------- 4- Iq 4- kT, T = —.
n n
Задача 1.14. Найти время Iq прохождения точкой через восходящий
узел орбиты.
Решение. Угол
и = и 4- ш (1.42)
называется аргументом широты материальной точки. В восходящем узле
uq = 2irk (А; е Z), то есть t/p 4- oj = 2тгА;. Тогда
cos z/p = coscj, sint/p = — sincj.
Поэтому
_ cos co -he . _ — e2 sin cj
cos Ea = —---------, sm E^ =------—---------,
1 4- e cos oj 1 + e cos w
откуда получаем Ep(mod2тг). Из соотношения
Mq 4- n(ta - to) = Eq - e sin Eq
находим ^p(modT):
Eq - esinEQ- Mq
42 = to 4----------------•
n
24
Глава 1. Задача Кеплера
Приведем еще один способ представления координат х, у, z в общем ре-
шении задачи Кеплера. В нем используется аргумент широты и = и + ш дви-
жущейся точки. Согласно (1.39) и (1.38) имеем
х = r(Px cos v + Qx sin l/) = r [(cos Q cos w —
— sin Q cos i sin cj) cos v — (cos Q sin w + sin Q cos i cos cj) sin l/] =
= r [cos Q(cos ш cos v — sin w sin l/) — sin Q cos z(sin ш cos у +
+ cos w sin l/)] = r (cos Q cos и — sin Q cos i sin u).
Аналогично
у = r(Py cost/ + Q^sint/) = r(sinQcos?i + cos Q cos i sin u), ,
z — r(Pz cos v + Q2sinL/) = rsinzsintL. ' ’ '
1.6. Задача Ламберта
1.6.1. Постановка задачи. Пусть заданы два условия r(^) = ri,
rfa) — r2 (£i < £2), которым должно удовлетворять решение уравнения (1.2).
Задача состоит в том, чтобы найти это решение, т. е. в инерциальной системе
координат Oxyz, где = (^, Ук, %к) (А: = 1,2), построить соответствующую
этому решению орбиту. Эта задача называется задачей Ламберта. При ее ре-
шении предполагается, что тип орбиты известен. Тогда задача разбивается на
три подзадачи, соответствующие трем типам орбиты. Ограничимся решением
в случае эллиптической орбиты при условии, что векторы г\ и г% не кол-
линеарны. Ниже будут введены дополнительные ограничения и допущения.
Поскольку векторы ri, г <2 лежат в плоскости орбиты, то
Г1 х Г2 = ± R |ri х г2|.
Покажем, что знак в этой формуле связан с угловой дальностью перелета
Al/ = l/2 — ^1, ^k = ^{tk), к= 1,2. В самом деле,
гк = rk (Р cos vk + Q sin vk), rk = |rfc | =>
r 1 X Г2 = ^1^2 (P x Q) (cos Pi sin 1/2 ~ 8Ш Pl COS P2) = sin Др.
Сделаем следующие допущения.
1) Известно направление движения. Тогда направление орта R определе-
но: если поместить начало орта R в точку О и смотреть из конца орта, то
Рис. 1.8. Направление орта R.
движение из точки Р± (p£\=ri) в точку Р2 (О^2=г2) происходит против
часовой стрелки (см. рис. 1.8). Соотношения
R • (г 1 х r2) = rir2 sin Al/, г! • r2 = пг2 cos Al/
задают Al/ (mod 2тг).
1.6. Задача Ламберта
25
2) Будем считать, что Al/6 (0,2тг). В этом случае Al/ вычисляется един-
ственным образом.
Пусть R = (Rx, Ry, Rz) в системе Oxyz. В соответствии с (1.38)
Rx = sin Q sin i, Ry = — cos Q sin i, Rz = cos i.
Поскольку гб(О,7г), отсюда получаем
i = arccos Rz, cos Q = —sin Q =
sin i sm г
Тем самым найдены элементы орбиты г и Q.
Положив Vk + — ик (А; = 1,2), согласно (1.43) и (1.44) имеем
хк — ^(cosQcosua;—sinQcosisinufc), ук = rfc(sinQcosufc+cosQcosisinufc),
Zk = гк sin i sin uk, xk cos Q 4- yk sin Q = тд cos uk,
Zk Xk cos Q + yk sin Q
sm Uk =------, cos Uk =-----------------.
sm i rk
Отсюда находим uk (fc = 1,2). Напомним, что Al/ = и2 — щ.
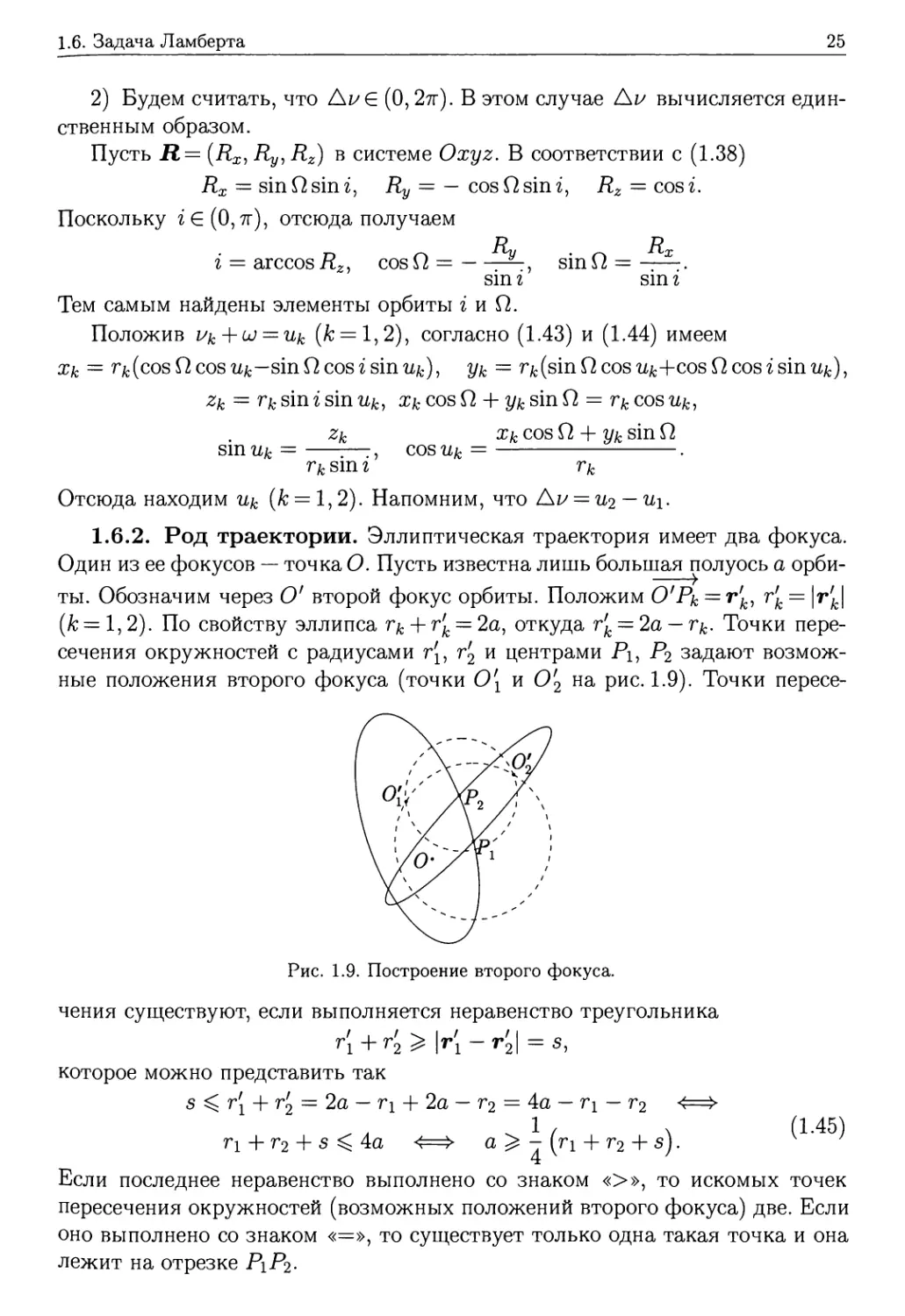
1.6.2. Род траектории. Эллиптическая траектория имеет два фокуса.
Один из ее фокусов — точка О. Пусть известна лишь большая полуось а орби-
ты. Обозначим через О' второй фокус орбиты. Положим О'Рк = г'к, г'к = \г'к\
(А = 1,2). По свойству эллипса гк + г'к = 2а, откуда гк = 2а — гк. Точки пере-
сечения окружностей с радиусами г{, г2 и центрами Pi, Р2 задают возмож-
ные положения второго фокуса (точки О'х и 0'2 на рис. 1.9). Точки пересе-
Рис. 1.9. Построение второго фокуса.
чения существуют, если выполняется неравенство треугольника
r'i + > |ri - г'2\ = S,
которое можно представить так
s < + г2 = 2а — Г1 + 2а — г2 = 4а — т\ — г2 <=>
1 z х (1.45)
И + r2 + s 4а а - (и + г2 + $).
Если последнее неравенство выполнено со знаком «>», то искомых точек
пересечения окружностей (возможных положений второго фокуса) две. Если
оно выполнено со знаком «—», то существует только одна такая точка и она
лежит на отрезке Р\Р2-
26
Глава 1. Задача Кеплера
Возможные траектории перелета при 4а > п + Г2 + s показаны на
рис. 1.10. Левый рисунок отвечает случаю Al/ < тг, правый — случаю Al/ > тг.
X
Рис. 1.10. Траектории перелета а) при Az/<tt, б) при Аг/>тг.
В каждом случае существуют две траектории перелета, принадлежащие раз-
ным эллипсам. У одного из них второй фокус лежит вне эллиптического
сегмента, ограниченного отрезком Р1Р2 и траекторией перелета. У другого
эллипса второй фокус лежит внутри этого сегмента. В первом случае траек-
тория перелета называется траекторией первого рода, во втором случае —
траекторией второго рода.
При 4а = Г1 + Г2 + s возможные траектории перелета
^-£2 принадлежат одному эллипсу. Одна его дуга является тра-
екторией перелета в случае Al/ < тг, вторая дуга — траекто-
Г / ; 4 рия перелета в случае Al/ > тг. Обе эти траектории называ-
\ ются граничными (см. рис. 1.11).
Опишем эти геометрические факты формально. В плос-
Рис. 1.11. кости орбиты введем систему координат OXY. Напри-
Граничные мер, можно задать орты ex = (cos Q, sin Q, 0), еу = R х ex
траектории. осей и Qy Пусть в этой системе координат
О'=(Х,У), rk = (Xk,Yk) (fc = 1,2).
Система уравнений, определяющая положения второго фокуса О', имеет вид
(Х-Х1)2 + (У-У1)2 = (2а-п)2,
(X — Х2)2 + (У — У2)2 = (2а —г2)2.
(1-46)
Второе уравнение преобразуем так
[(X - Xi) - (Х2 - Xi)]2 + [(У - Ух) - (У2 - у)]2 = (2а - г2)2,
(X - Хх)2 + (У - Ух)2 + (Х2 - Хх)2 + (У2 - Ух)2-
(2а—и)2 s2
-2[(Х-Хх)(Х2-Х1) + (У-У1)(У2-У1)] = (2а-г2)2,
(Х-Хх)(Х2-Х1) + (У-У1)(У2-У1) = 5.2+(2а-пЩ (2а-г2)
1.6. Задача Ламберта
27
Сделаем линейную замену неизвестных (X,У) (х, А):
Х-Х1 = х(Х2-Х1)-А(У2-У), У-У = х(У2-У)+А(Х2-Х1).
Определитель этой системы уравнений
: у,1 Xg? |=(* Х1)!+y)i=“2 > °-
Левая часть первого уравнения системы (1.46) принимает вид
(X - Хг)2 + (У - У)2 = х2[(Х2 - Xi)2 + (У2 - У)2] +
+ А2 [(Х2 - Хх)2 + (У2 - У)2] = (А2 + х2)з2,
поэтому первое уравнение записывается так
(А2 + x2)s2 = (2а — ri)2. (1-47)
Преобразуем левую часть второго уравнения системы (1.46):
(Х-Х1)(Х2-Х1) + (У-У)(У2-У) = х[(Х2-Х1)2 + (У2-У)2]=хз2.
Тогда оно приводится к виду
s2 + (2а — ri)2— (2а — r2)2 s2 + г2 — + 4а(г2 — и)
Х=------------2?----------- =* *-----------------2?-----------
Из (1.47) получаем
д2 = (2а - и)2 _^= (2а ~ И - хз)(2а - и + хз)
S2 S2 ’ \ )
Сомножители в числителе преобразуются к виду
з2 + г2 — г2 У 4а(г2 - Г1)
2а — п — xs = 2а — п-------------------------=
2s
_ 4a(s + и - r2) + rj - (s + и)2 _ (s + и - r2)(4a - s - п - г2)
2s 2s
(s + r2-ri)(4a + s-ri-r2)
2a - и + xs =---------------------------.
2s
Последнее соотношение получается либо непосредственными вычислениями,
либо заменой s — s в предыдущем соотношении. Подставляя полученные
выражения в (1.48), находим
А2 = — (s 4- и - r2)(4a - s - и - r2)(s + r2 - n)(4a + s - n - r2). (1.49)
Здесь s + ri — r2 > 0, s + r2 — ri > 0 — неравенства треугольника для треуголь-
ника OPiP2; неравенство 4a — s — n — r2^0 получено выше (см. (1.45));
4a + s — ri — r2 = 4a — s — ri — r2 + 2s 2s > 0 в силу предыдущего неравен-
ства и условия s > 0. Таким образом, А2 0.
Рассмотрим определители
Они представляют собой удвоенные площади треугольников О Pi Р2 и O'PiP2
со знаками. Вычислим D'. Используя замену (X, У) (х, А), а затем вычи-
тая первый столбец из второго, имеем
-х(Х2-Х1)+А(У2-У1)
-х(У2-У!) -А(Х2-Х!)
Х2-Х!
У2-У1
28
Глава 1. Задача Кеплера
При 4а — s — и — Г2 > 0 уравнение (1.49) для А имеет два различных корня
Al = — А2 / 0. Поэтому определители £>', задающие положения вторых фоку-
сов, равны по модулю и имеют противоположные знаки.
Пусть ориентация системы координат ОХУ соответствует направле-
нию движения материальной точки, то есть ey — Rxex> Тогда sgnZ) =
sgn sin Al/. Знаки определителей D и D' устанавливаются в соответствии
с ориентацией осей ОХ и OY. На рис. 1.10а Z)>0, D' >0 для фокуса О'ъ
D' < 0 для фокуса О2. На рис. 1.106 D < 0, D' < 0 для фокуса О'ъ D' > 0 для
фокуса О2.
Если ориентация системы координат OXY соответствует направлению
движения точки, то траектория первого рода принадлежит эллипсу, второй
фокус которого имеет D' > 0. Траектория второго рода принадлежит эллип-
су, второй фокус которого имеет D' < 0. На рис. 1.10а и 1.106 траектории
первого рода имеют Df > 0, а траектории второго рода имеют D' < 0. Связь
рода траектории со знаком D' более подробно рассмотрена ниже.
1.6.3. Формула Ламберта. Время перелета между точками Р\ и
согласно (1.31) должно удовлетворять соотношению
п(^2 — ^1) — Е^ — esinE2 — E*i + е sin Ер
Преобразуем разность
• г-i - г? о Ei + Е2 . Е2 — Ei
sm Е2 — sm Ei = 2 cos------sm----------= 2 cos x sm g,
где
Ei 4- Eo Eo — E\
E2 = x + g, Ei=x-g, x =-------------, g =---------. (1.50)
Введем угол h e (0, тг):
cos/i = ecosi: (e < 1) => h = arccos(ecosx). (1-31)
Имеем
n(^2 — = 2g — 2e cost: sin g = 2(g — cos h sin g). (1.52)
Далее
rk = a(l — ecosEfc) (k = 1,2), п + Г2 = a[2 — e(cosEi + COSE2)],
cos Ei + cos E2 = cos(x — g) + cos(x + g) = 2 cos x cos g,
П + = 2a(l — e cost: cos g) = 2a(l — cos h cos g).
Воспользовавшись выражениями (1.23) для декартовых координат £, д
векторов rfc, находим
8 = |г2 - Г1| = -С1)2+(% -??1)2,
£2 — £1 = a(cos Е2 — cos ЕД = — 2а sin х sin д,
т]2 — gi = — e2(sinE2 — sin ЕД = 2ад/1 — е2 cos х sin д.
1.6. Задача Ламберта
29
Отсюда
s2 = 4а2 sin2 д [sin2 х 4- (1 — е2) cos2 х] = 4а2 sin2 д (1 — е2 cos2 х) =
= 4а2 sin2 д (1 — cos2 h) = 4а2 sin2 д sin2 h.
Поскольку h G (0, тг), то sin h > 0. Учитывая монотонность функции Е(у) = Е
и ее свойство Е(и + 2тг) = Е(у) + 2тг (см. (1.26)), получаем
Д1/G (0,2тг) => (Е2 — Ei) G (0,2тг) => #Е(0,тг) => sing > 0.
Таким образом, s = 2аsinдsin h. Используя полученные выражения для
П + г2 и s, находим
Г1 + г2 + s = 2а(1 — cos h cos д) 4- 2а sin д sin h =
= 2а[1 — cos(g + h)] = 4asin2
h
Г1 + r2 — s = 2a(l — cos hcosg — sing sin/г) = 4asin2 —-—.
Положим e = g + h, 6 = h — g. Тогда последние равенства примут вид
. о £ Г1 + г2 4- s . 2 8 Г1 + г2 - s
Sln х =----------------------;----, sm х —--------1----
2 4a 2 4a
(1.53)
Далее
е — 6 1 е + 8
У 2 ’ 2
поэтому (1.52) преобразуется к виду
/ ч о (£ — б е + 6 .
n(t2 - й) = 2 ( —---------cos —— sm
X £ £
Соотношение
е = д + h, 8 = h — д.
е - 6\ .
= е — о — sm е + sm о.
n(t2 — й) = £ — 8 — sin е 4- sin 6
называется формулой Ламберта. Опишем способ вычисления правой
этой формулы. Так как д, (0, тг), имеем
| = 9±^е(0л)
2 2 v ’ 7
Определим знак
соотношения
• 2 у
г sm — = г
2
части
0.
. £ л 8 h — g / ТГ ТГ\ 8
=> sm - > 0, - = —-— G — —, — => cos -
2 ’ 2 2 V 2 27 2
sin-. Используя (1.24) и (1.25), получаем следующие
1 —cost/ а , cosE — е\
-------= -(l-ecosE)l - -------- =
2------2 v ' \ 1 — ecosE/
а Е
= -(14- е)(1 - cosE) = а(1 4- e)sin2 —,
9 и 1 + cos v а, п\cosE —е\
г cos - = г-----= - (1 — е cos Е) 1 4- ;--- =
2 2 2 V 7\ 1 —ecosE/
= | (1 — е)(1 4- cosE) = а(1 — е) cos2
Углы и и Е принадлежат одному и тому же отрезку [тг/с, тг(/с 4-1)], &GZ.
гг L/ Е ГтгА; 7г(/с 4- 1)1 „
Поэтому -, — принадлежат одному и тому же отрезку —,--- . Сле-
30
Глава 1. Задача Кеплера
и Е v Е
довательно, cos — и cos у, а также sin — и smy имеют одинаковые знаки.
Тогда полученные соотношения записываются так
Г и ГТл---------V Е
y/r cos - = у а(1 — е)cos
£
2
2
Далее
______ Az/ . z/2 — z/}--,-/ z/2 . z/2 . vi\
у/rir2 cos —— = v пг2 cos —-— = v ri r21 cos — cos — + sm — sm — I =
£--------------------------------------------------------& \ £ s
(Л \ i (Л i A •
= a(l — e) cos — cos — + a(l + e) sm — sm — =
E% — Ei E% + E\
= a cos-----------ae cos---------,
2 2
откуда с учетом соотношений (1.50) и (1.51) получаем
/-------- . д + h h — д . е . 5
У/Г1Г2 cos —— = a(cos д — cos a) = 2a sm —-— cos —-— = 2a sm - sm -.
5
Отсюда следует, что знак cos-^- совпадает со знаком sm-, поскольку
sin->0. Иными словами, если Az/<?r, то sin->0, а если Az/>?r, то
sin | < 0. Это можно записать так
. 5
sgn sm - = sgn sm Az/,
. <5
то есть знак sin - определяется угловой дальностью перелета.
5 £ / 7Г\
Определим знак cos-. Если д = то г = /гб(0,7г) => - Е ^0, —J =>
cos | > 0. При достаточно малом д имеем по-прежнему cos | > 0. Соотноше-
ние cos - = 0 влечет sm - = 1 => ---------= 1. Отсюда следует, что вто-
2 2 4а
рой фокус лежит на отрезке PiP2. Свяжем знак cos- с Р°Д°М траектории.
Преобразуем формулу (1.49) для А с учетом (1.53)
д2 = 7“г(5 + Г1 ~ Г2) (s + г2 - Г1) (1 - sin21) (1 - sin2 =
X £ / \ и/
4а / \ n <s п
= ^(з + П-r2)(s + r2-rjcos -cos -.
Напомним, что D! = Аз2. Знак cos| неизвестен, поэтому
з + и - г2) (з + г2 - и) cos | cos |.
Вычислим знак Df в некоторых случаях. Положим Ei=tt — а, Е2 = тг + се,
а > 0. Тогда
х = тг, д = a, cos/г = е cos7r = — е, h = arccos(— е) = тг — arccose,
D'
1.6. Задача Ламберта
31
Р1Р2 лежит левее
Е,
Е2
Рис. 1.12. Траектория
второго рода.
_ г 7г а — arccos е
е = д + п, = а + 'к — arccos е, - = — Н---------.
е 7г
Если а> arccosе, то - >—. В этом случае отрезок Р1Р2 лежит правее
точки О' (см. рис. 1.12). Траектория представляет собой траекторию второго
€ 7V
рода и D <0. Если а < arccos е, то отРезок
точки О', D' > 0 и траектория является траекторией
первого рода.
Определитель D > 0 при 99 < тг — arccos е и D < О
при 99 > тг — arccos е. В первом случае sin Az/ >0, во
втором sin Az/ < 0, то есть sgn А = sgn sin Az/. Пусть
положения точек Pi и Р2 на эллипсе меняются незави-
симо друг от друга. Если при этом изменении положе-
ние отрезка Р1Р2 меняется так, что он не пересекает
точку О', то полученные выше знаки сохраняются.
В случае, представленном на рис. 1.12, имеем
D' = 2а У (s + и - г2) (з + г2 - n) cos | cos |.
Напомним, что cos | > 0 всегда. Для траектории 1-го
е
ектории 2-го рода cos - < 0.
€
рода cos - > 0, для тра-
1.6.4. Построение траекторий. Введем углы бОб(0,7г), (О,тг),
положив __________ ___________________
. £0 /ri + r2 + s . Jo /Г1 + Г2- s
2 V 4a 2 V 4a
Будем считать, что еу = R х е%. Рассмотрим возможные ситуации.
а) Эллиптический сегмент — сегмент, ограниченный отрезком Р1Р2 и тра-
екторией
б)
а)
Рис. 1.13. Траектории 1-го рода а) Дг/<тг, D > О, D'
перелета, — не содержит фокусов (см. рис. 1.13а). В этом случае
Az/ < 7г, cos | > 0, sin | > О, е = £q, 6 = Sq
и формула Ламберта принимает вид
п(*2 - ti) = ёо - sinso - (Jo - sin Jo)-
0.
€ = £0,
32
Глава 1. Задача Кеплера
б) Эллиптический сегмент содержит первый фокус — притягивающий
центр — и не содержит второго фокуса (см. рис. 1.136). Тогда
Az/ > тг,
COS - > 0, sin - < 0, £ = Eq.
5 = -5q
и формула Ламберта имеет вид
n(t2 - й) = £0 - sins0 + (до - sind0).
В промежуточном случае Az/ = тг (sin Az/ = 0) имеем
sin у = 0, 6 = 6q = 0.
Подходят оба вида формулы Ламберта (для случаев а) и б)).
в) Эллиптический сегмент содержит второй фокус и не содержит первого
Рис. 1.14. Траектории 2-го рода в) Az/ < тг, D > О, D' < 0, г) Az/ > тг, D <0, D' < 0.
(см. рис. 1.14в). Тогда
S А £ £0ее
Az/< тг, cos-<0, sm->0, - = тг—о = Oq.
' 2 2 2 2 ’
Формула Ламберта записывается следующим образом
^(^2 — й) = 2тг — £о + sineo — (до — sin до).
г) Эллиптический сегмент содержит оба фокуса:
А £ А • 5 А £ £0 , с
Az/ > тг, cos - < 0, sm - < 0, - = тг — —, о = - до
’ 2 2’2 2 ’
(см. рис. 1.14 г). Формула Ламберта в этом случае:
n(t2 - *1) = 2тг - е0 + sine0 + (до - sind0).
Полученные формулы можно записать так:
— траектории 1-го рода nfa — й) = £о — sineo Т (до — sin до),
— траектории 2-го рода n(t2 — ti) = 2тг — £q + sin^o =F (до — sin до).
Знак «—» берется при Az/<tt, знак «+» при Az/>tt. При этом Az/ G (0,2тг).
Можно сказать, что знак обратен sgn sin Az/.
1.7. Вычисление изохронных производных
33
Л
О'
а) Р2
б)
Рис. 1.15. Граничные
траектории: а) Аг/ < тг,
Граничные траектории получаются как предельный случай из случаев а),
б), в), г). Второй фокус лежит на отрезке Р]_Р% (см. рис. 1.15):
. е .5 . Л
sm - = 1, е = тг, sgn sm - = sgn sm Az/,
Az/ < тг => 5 = =>
nfa - ti) = тг - (Jo - sin<5o),
Az/ > 7Г => 5 = — (So =>
nfa - ti) = 7Г + ((So - sin (So).
По заданным значениям ri, Г2, a, t2 — t\ и роду тра-
ектории (знаку £>') строим функцию
У (a) =n(t2 — t\) — (б — sins) + ((S — sinJ).
Решая уравнение /(а) = 0, находим а и попутно s, 5, д и h. Вычислив
разность
£/2 — Е\ Е2 Т Е\
Г2~ г i = ae(cos Е± — cos Е2) = 2ае sin —-— sin —-— = 2ае sin д sin х,
получаем
. г2 - и
esnH = -—'—.
2а sm д
С другой стороны, ecos£= cos h. Из этих двух уравнений находим е и х.
По х и д определяем Е\ и Е2, далее вычисляем z/i, z/2, cv = и\ — z/i = U2 — z/2
и Mi = M{t\) = E\ — e sin E\.
2 род
гиперболическая
) граничная
1 род______
эллиптическая х
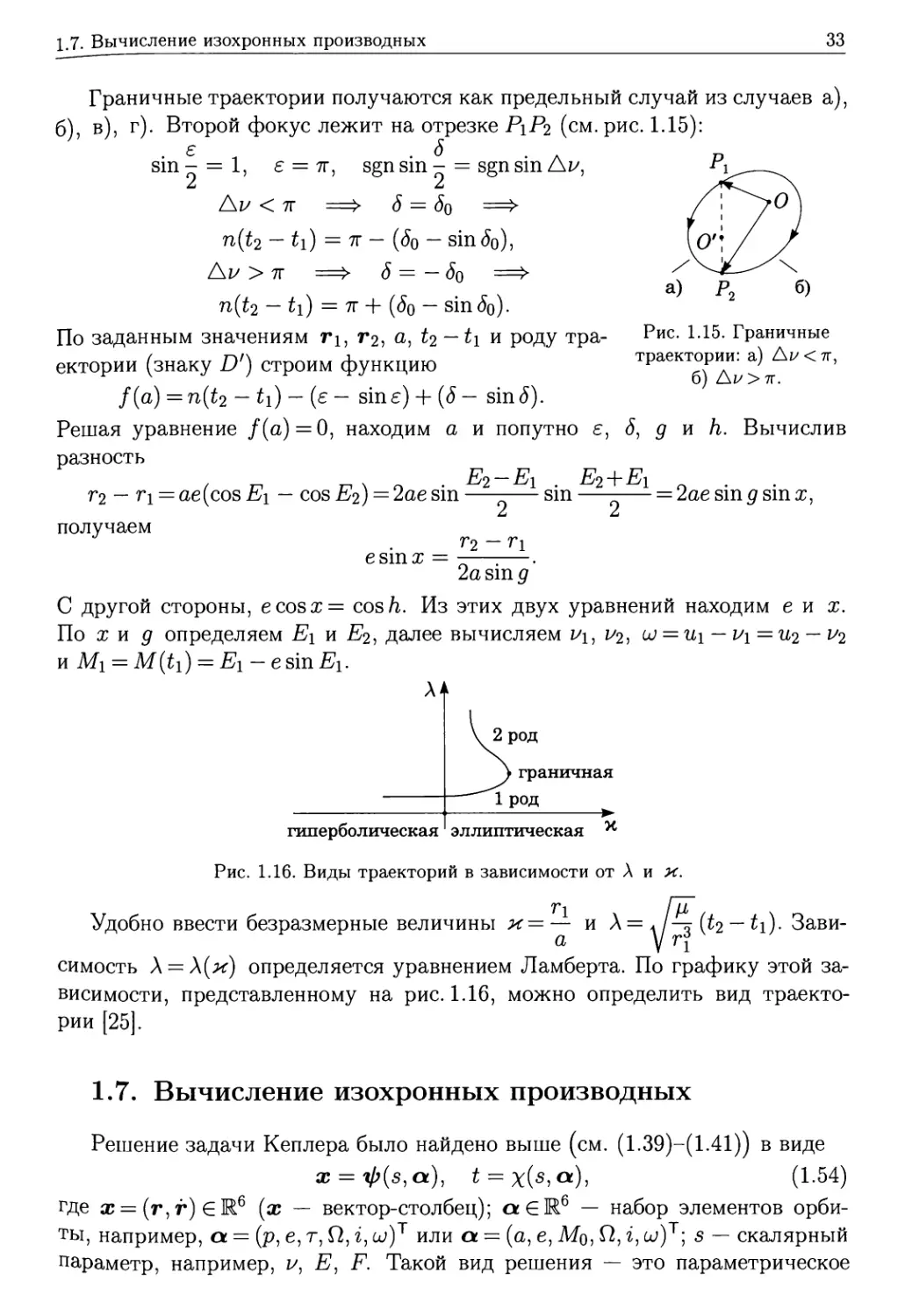
Рис. 1.16. Виды траекторий в зависимости от А и х.
Удобно ввести безразмерные величины х = — и А= (^2 — ^1)- Зави-
а у rf
симость Л = А(х) определяется уравнением Ламберта. По графику этой за-
висимости, представленному на рис. 1.16, можно определить вид траекто-
рии [25].
1.7. Вычисление изохронных производных
Решение задачи Кеплера было найдено выше (см. (1.39)—(1.41)) в виде
х = ot\ t = y(s, a), (1-54)
где ж=(г,г)е16 (ж — вектор-столбец); arf — набор элементов орби-
ты, например, ot = (р, е, т, Q, г, cj)t или at = (a, е, Mo, Q, г, cj)t; s — скалярный
параметр, например, z/, Е1, F. Такой вид решения — это параметрическое
34
Глава 1. Задача Кеплера
представление зависимости х = ip(t,a). Заметим, что
Xs — G R — скаляр, Ха = — Е R6 — вектор-строка,
os да
ф3 = Е R6 — вектор-столбец, фа = — (6 х 6)-матрица.
тт dip(t,a)
Найдем матрицу <ра =———, которая называется матрицей изохронных
производных. Чтобы от функций х = 'ф(з,а), t = y(s,a) перейти к функ-
ции y>(t,а), обратим зависимость t = x(s1a):
s = f(t,a); t = x(f(t,a),a), s = /(*(£, a), a).
^X
Это можно сделать, так как ys(s, а) = — >0 во всех рассмотренных выше
ds
параметризациях. Имеем
х = a), a) = <p(t, a),
¥>a(*,a) = (^efa + ^a)| „ .
(1.55)
Поскольку
о
0 = ^x(f(t,a),a) =b(f(i,a),a
находим
Ха(/(*,«),«) = _ 1
ys(/(t,a),a) xsXa'
Здесь и далее полагаем s = f(t, a). Тогда согласно (1.55)
ipa(t, ос) = -фа~ — ^sXa-
Xs
Эту формулу можно получить, используя более прозрачные и традиционные
рассуждения. Рассмотрим соотношения в дифференциалах
dx = ф3 ds + ^ada, dt = Xsds + X&da.
Отсюда
ds = — dt —— Xada, dx = ф3 (— dt---------Xada ) + ^ada.
Xs Xs \Xs Xs /
Чтобы выписать изохронные производные, положим dt = 0 (отсюда происхо-
дит термин «изохронный»). Тогда
dx = — ФзХа ) da.
В соответствии с (1.55) при dt = O имеем dx = <padoc, поэтому
‘Ра = 'Фа-^'Ф^а,
Xs
что совпадает с ранее полученным результатом.
1.7. Вычисление изохронных производных
35
Непосредственно из (1.54), полагая dt = O, находим
Xs ds + Xadct = 0 => ds = — — Xadoc,
Xs
dx = ^Sds + = 'ф3 I---dot I + ^adot = 1^фа----'ФзХа I dot.
\ Xs / \ Xs /
Применим последний способ в задаче Кеплера. Решение этой задачи пред-
ставим в векторном виде в системе координат Oxyz:
г = £Р + rjQ, г = v = v^P + v^Q.
Здесь Р и Q зависят только от Q, г, ад а £, ту, — только от а, е, Mq
или р, е, т. Имеем
dr = Р d£ + Q dp + £ dP + р dQ,
dv = Р dv^ + Q dv^ + dP + dQ.
Используя углы Q, i и uj (см. рис. 1.7), запишем угловую скорость w си-
стемы О£р^ относительно системы Oxyz
. di n .
w = ku + ei— + Rw>
dt
где к — орт оси Oz: fc = (0,0,1); еь = (cos Q, sinQ, 0) — орт линии узлов,
направленный из точки О в восходящий узел орбиты; R = (Rx, Ry, Rz). Ком-
поненты векторов указаны в системе Oxyz. Вектор dO бесконечно малого
поворота имеет вид
d6 = wdt = kd£l + ebdi + Rdw.
По формуле Пуассона
(1.56)
(1-57)
Q = w х Q
dP = d0 x P,
dQ = d0 x Q.
(1.58)
Преобразуем сумму £ dP + р dQ:
£dP + pdQ = £ (cZ0 x P) + p(dO x Q) = dO x (£P + pQ) = dexr,
тогда согласно (1.56)
dr = P cZ£ + Q dp + dO x r.
(1.59)
Аналогично
dv = Р dv^ + Q dvrj + dO х v.
dr _
77=. = fc X Г,
du
dv _
ж = к x v,
du
В силу независимости £, ту, от Q, г, ш получаем
dr
_=eLxr,
di
dv
-di=eLXV>
dr n
— ^Rxr,
duj
dv _
— = Rx v.
daj
36
Глава 1. Задача Кеплера
Докажем первую формулу. Положим c/Q О, а дифференциалы осталь-
ных элементов равными нулю. Тогда согласно (1.57) dO = kd£l. Поэтому
в силу независимости £, г) от Q в соответствии с (1.59) имеем
От*
dr = -— c/Q = dO х г = (к х г) c/Q.
ди v 7
Отсюда получаем первую формулу. Остальные доказываются таким же об-
разом.
Далее
= (^\Р+(^ЛО (^1\Р+(^ЛО
да \да) \да}4, да \да) \daj4'
Аналогичные формулы справедливы для производных по е, Mq. Здесь и ниже
изохронные производные заключаются в круглые скобки. Это обозначение
необходимо в случае производных по а, е, Mq. Например,
/д£\ _ д^а.е.Е) д^а.е.Е) дЕ
да + дЕ да'
Из соотношения £ = cz(cos Е — е) следует
с/£ = (cosE — е) da — a de — asinE dE. (1.60)
Аналогичные формулы имеют место для с/т/, dv^ и dv^. Кроме того,
Е — е sin Е = Mq + n(t — to) =>
(1 — е cos Е) dE — sin Ede = dMo + (t — to) dn. (1-61)
Из первой формулы (1.31) находим
п2а3 = /а => 2 In п + 3 In а = In (i =>
2dn 3da 1 Зтг 1
-----1 = 0 =Ф dn = da.
па--------------------------2а
Запишем соотношение (1.61) при dt = O с учетом последнего равенства
(1 — е cos Е) dE — sin Е de = dMo — da
2а
дЕ\ 3n(t — to) 3>n(t — to)
да) 2cz(l — ecosE) 2r
dE\_ sinE / дЕ\_ 1 a
де) 1 —ecosE” \дМо) 1 —ecosE r‘
1.8. Пролет по гиперболе мимо притягивающего центра
37
Тогда согласно (1.60) имеем
. „(0Е\ in(t - t0) sin Е
\да ) 2(1-ecosE)
/ЯП . т^дЕХ / sin2# \
\оеJ \де J у 1 —ecosE/
( (%\ ‘ A a sin Е
\дМ$) aSm \дМ$) 1 —ecosE*
Задача 1.15. Вычислить изохронные производные для ту, v^.
1.8. Пролет по гиперболической траектории мимо при-
тягивающего центра
Найдем изменение скорости точки при пролете мимо притягивающего
центра по гиперболе, то есть связь между voo= lim v(t) и vf = lim v(t).
' t—> -oo t—>+oo
Согласно (1.36) имеем
/М • /М/ \
^ = - J - smVrj = у — (е + cos v).
Моменты t = ± oo отвечают условию
1
e
*_ ./^ e2 ~ 1
v V p e
(1-62)
cos Vi
1 + е cos z/* = 0
Моменту t = — oo отвечает
sinz/* = - a/1 -
V ez
моменту t = + oo отвечает
- 1 /м(е2 ~ Г
e V P
Пусть
? eV
Согласно (1.20)
L 1 .
sm м. \/1----г => v, = -
V e2 5
= v^P + v~Q, v'oo = v^P + v^Q, тогда
M(e2 - 1) _ /7 e2 - 1 +
1 /Це2 - 1)
eV p
= - v( , vX = vv
(1.63)
e
поэтому
~ Vi
e
vv = vv
e
(1-64)
Отсюда
i-n; = o,
V,
l+<
Значит, векторы и направлены по асимптотам гиперболы.
38
Глава 1. Задача Кеплера
Введем базис {i,j,fc}:
i = |(P + Q\/e2- 1), j = |(-Р\/е2 - 1 + Q), k = R
Рис. 1.17. Пролет мимо планеты по гиперболе.
Этот базис ортонормированный, причем voo = vooi. С базисом свяжем систе-
му координат Oxyz следующим образом. Ось Ох образует с осью О^ угол 7
(см. рис. 1.17). Поскольку
г = Pcos7 + Qsin7, j = —Psin7 + Qcos7,
имеем
1 . Ve2 - 1
cos 7 = -, sm 7 =--------.
e e
Отсюда
P = i cos 7 — j sin 7, v± = =F Voo cos y,
Q = г sin 7 + j cos 7, v± = VqqSh^.
Для произвольного вектора a = axi + ayj = a^P + a^Q получаем
( ax = COS7 + sin7, ( = ax cos 7 — ay sin 7,
I ay = — a,£ sin 7 + ал cos 7, | ал = ax sin 7 + ay cos 7.
e
e2 - 1
sin2 7
Пусть = vxi + vyj- Тогда согласно (1.62), (1.63) и (1.64)
+ + 4- . ^оо 1 . ^оо у/с
vZ = vT cos 7 + С sm 7 =----------• - -I------
x 1 Г) I e e e
1 \ e2 — 2
= У00-----5— = - ^oo COS 27,
cos2 7
4- 4- • .4- ^00 A/c”
Vy = —v^ sm 7 + v^ cos 7 =---------
1
e
e
Voo на угол
= ------5----- = Voo Sin 27.
e2
Таким образом, вектор v'^ повернут относительно вектора
7Г — 27.
В этой задаче эксцентриситет е не очень удобный параметр. Чтобы заме-
нить его, интеграл площадей представим в виде
Г X V = (foo^fc,
1.8. Пролет по гиперболе мимо притягивающего центра
39
где d =-----прицельное расстояние. Это новый параметр, который обычно
^оо
используется вместо е. Учитывая, что согласно (1.6)
/2 = м2 + c2h = М2 + (Vood)2t4 = М2 +
в соответствии с (1.15) получаем
/ _ VM2 + <^2 _ I v^d2
e \ J. r n
M M V M2
и, следовательно,
Ve2 - 1 =
M
Тогда
+ _ M2 _ ^oo(^<i2 - M2)
Uo°’^ C^ + M2
M2
+ ^d = 2vLlJ-d
Vy (v™d2 лЛ v^dt + n2'
ju2 +1;
Задача попадания точки в планету. Пусть в притягивающем цен-
тре находится сферическая планета радиуса R и центр планеты совпадает
с точкой О. Найдем условие попадания точки в планету, а также рассто-
яние от точки О до перицентра траектории. Обозначим вектор скорости и
радиус-вектор точки в перицентре через и r^, = IvJ, rn = IrJ. Учиты-
вая равенство tv1^ = 0, запишем интеграл энергии и интеграл площадей
2 2
Von =
Отсюда
V(X)d
ОО 2
' 7Г
-д + \/(I2 + v^d2
2p
vLr2 + 2МГ,г - V^d2 = 0,
v^d2
^(Vli2 + v^d2 + ц)
a----
= d
/е2 - 1 J /е - 1
------= d а /-----
е + 1 V е + 1
При [1'^v^d имеем
d2.
” 2p
Если rn R, точка попадет в планету, если rn > R, она пролетит мимо.
40
Глава 1. Задача Кеплера
Найдем условие попадания точки в переднюю полусферу планеты (см.
рис. 1.18). Истинная аномалия и* точки попадания при попадании в перед-
нюю полусферу удовлетворяет неравенству
7Г _
— — + 7. В предельном случае
Рис. 1.18. Попадание
точки в переднюю
полусферу планеты.
2
cos i/* = sin 7 =
(flood)2
я=——=-^.
1 + е cos i/* 1 + е sm 7 1 + у,
= fl^d2 fl^d2
Л М + <Л
// I 1 I I
\ M /
7» 2 zj2
Если Я> °°-- ^,то
наоборот. Поскольку
flood2 = v^d/p =
р. + t£,d 1 + v^d/p
условие попадания можно записать так
d\/e2 - 1
it > --------------------------------Т-
попадание в переднюю часть полусферы произойдет, и
Задача 1.16. Выразить Voq и v'^ через постоянные первых интегра-
лов с, f и h.
Решение. Учитывая, что f2 = р2 + с2/г, имеем
, ^оо/ D , / ГЪ-------7 V?2 - Л2 с\/л
^оо = —(-Р + V е2 -IQ), е = -, V е2 - 1 =-------------=------,
е /1 Z2 Z2
= A p = i Q =
f cf
Отсюда
, /1\/Л / f cVh cxf\ h(c x /) — fiVhf
Vco = 7ГГ 7 + J = T2 '
Аналогично находим
h(c x /) + pVhf
2.1. Ограниченная задача трех тел
41
Глава 2
Метод игнорирования возмущений
2.1. Ограниченная задача трех тел.
Рассмотрим движение трех точек с массами mi, m2 и т, притягиваю-
щихся по закону Ньютона. Будем предполагать, что mi m2 и масса т ис-
чезающе мала по сравнению с массами mi, m2. Иными словами, точка т не
влияет на движение точек mi и m2.
Пусть ri, г2, г — радиус-векторы точек mi, m2, m в некоторой инерци-
альной системе отсчета. Уравнения движения точек имеют вид
777117712 (Г1 — Г2) .. 777717772 (Г2 ~ 7*1)
miTi =-----------------3--, ТП2Г2 =----------------3-----,
|Г1-Г2| 17*2 -7*11
77771777(7* —77) 7m2m(r — 7*2)
тг =-------------~--------------------о—,
|г — Г1|3 \г — Г2\
откуда, разделив на массы, получаем
7пг2 (г, - г2) .. 7ml (г2 - и)
7*1 =------------~—, Г 2 =-----------------о—,
|П-Г2| |г2-п| ,21х
.. _ 7ml (г — 7*1) 77772 (г — т*2) '
|г-Г1|3 |г-г2|3
Положим
R = Г2 — 7*1, Р1 = Г — Г1, р2 = Г ~~ Г2-
Тогда
Р1 - р2 = 7*2 - 7*1 = Н, рх = R + р2, р2 = Р1- R.
Вычитая первое уравнение системы (2.1) из второго, получим уравнение
для R (ср. (1.2))
7Ь+та)
|Л|3 v 7
Положим, что решение этого уравнения является эллиптическим. Будем счи-
тать его заданным.
Вычитая первое уравнение системы (2.1) из последнего, получим уравне-
ние относительно Р1:
7ml / R — pi R \
P1 = ~^P1 + ym2\\R-P1\3~Wj’
а вычитая второе уравнение системы (2.1) из последнего, получим уравнение
относительно р2:
77772 / R
д+р2
|Д + Р2|3
42
Глава 2. Метод игнорирования возмущений
Введем гравитационные параметры точек mi и m2'. /11 =7^1, /i2 = 7m2. Кро-
ме того, обозначим pi = IpJ, р2 — |р2|> -Н= |Л|. Движение точки т можно
описать одним из двух уравнений
/11 / R — pi R\
= “ 7з + 1 ip _ р |з ~ рз /’
Р1 \|Л P1I Л / /о п\
Р2 (R R + P2 А 1 }
р2- ^p2+^R3 \R+P2p)-
Последние два уравнения эквивалентны — связаны преобразованием
Pi = В + р2,
где R — решение уравнения (2.2). Форма уравнений для рг и ръ а также тот
факт, что первый член в правой части каждого из этих уравнений существен-
но больше второго при pj R (J' = 1, 2), наводят на способ их приближенного
интегрирования. Пространство разбивается на две области. В одной из них,
содержащей точку mi, рассматривается уравнение
•• _
Pi - “ ~з
Pi
в другой, содержащей точку m2, — уравнение
.. _ Р2
Р2 — — ~з Р2
Р2
Внутри каждой области движение точки описывается формулами задачи
Кеплера (см. (1.39), (1.40)). На границе областей формулы сшиваются с по-
мощью соотношений р2 = Pi~ R, Р2 = Pi~ К- Этот способ тем точнее, чем
т2 т2 тт
меньше отношение —. В практических задачах всегда —<С1. Например,
mi mi
m тт m2 1 тт m2 .
если mi — Земля, m2 — Луна, то — = -—При —1 область, содер-
mi 81.3 mi
жащая точку т2, оказывается весьма малой. Здесь возможны дальнейшие
упрощения при сшивке.
2.2. Сфера действия
Рассмотрим один из возможных способов разбиения пространства на ука-
. т2
занные выше области в случае — 1. Уравнения движения точки т запи-
mi
шем в виде
Pj=9j + ^j, 9j = ~^Pj О’= 1,2),
Pj
( R — Pi R\ ( p2 R\
wi = М2(|Я-Р1|3 ~ Я3) =-М2(р1 + Яз)’
/ R R + P2 \
W2 = M1VR3 “ |Я + р2|3/
2.2. Сфера действия
43
Члены gj будем называть главными, члены Wj — возмущающими. Пусть
в некоторой точке пространства
Тогда в окрестности этой точки уравнение р2 = д2 в некотором смысле ближе
к уравнению р2 = #2 + ^2, чем уравнение Pi=g± к эквивалентному уравне-
нию рх= gx+w\ (относительная величина возмущающего члена меньше).
Такую точку отнесем к области, содержащей точку в которой надо
использовать уравнение р2 = д2 Область, в которой выполняется неравен-
ство (2.4), будем называть сферой действия точки т2 и обозначать СД(т2)-
Внутри СД(т2) рассматривается уравнение р2 = д2, вне СД(т2) — уравне-
ние Pi = <71- Такой способ описания движения точки т называется методом
игнорирования возмущений (ИВ).
Найдем границу СД(т2), которая задается уравнением
|w2| = |wi|
l<Z2l Ь11 ’
Его явная форма имеет вид
Ш1 .2
Рч
т2
R + p2 R т->1п ( Л |2 р2 , R
|Я + р2|з В? + р*2 В?
Возведя это соотношение в квадрат, получим
4 f 1_______1_____2Я - (Я + р2) А _
р2 \В* + |Л + р2|4 " B3\R + p2|3 ) ~
— (т<2\ (Тр I n2 I о о п \2( —I— 1 -к
- \^) (R +P2 + 2R-P1) + +
(2-5)
р2
Пусть р — угол между векторами R и р2. Rp2 = Rp2 cos </?; е = —. П pe-
ri
образуем сначала правую часть уравнения (2.5)
Я2 + р2 + 2R • р2 = R2 + e2R2 + ZeR2 cos р =
= 7?2 (1 + е2 + 2s cos 99) = 7?2 (1 + 0(e)),
1 1 2R • р2 1 1 2Rp2 cos р
Л4 + + В*р1 = Я4 + + Т?3р2 =
= Я + № + 2^c“v) = g t1 +? + = й + О(е!»'
Преобразованная правая часть уравнения (2.5) записывается в виде
\4
7721)
0(1 + о(Е))= (^)41(1 + 0(е)).
44
Глава 2. Метод игнорирования возмущений
Для левой части уравнения (2.5) имеем
1 1 2R • (Л + р2) _
Я* 1 * * 4 + |.Н + р2|4 “ ЛЗ|Д + р2|3 ~
_ IД + р2|4 + Я4 - 2Я| Д + р2|(Я2 + Д • р2) _
R*\R + p2\*
_ Я4(1 + 2s cos 99 + s2)2 + Я4 — 22?4(1 + scos99)(1 + 2s cos 99 + s2)1/2
7?4(1 + 2s cos 99 + s2)2
= “^4 (1 + ^(s)) 1 + 4s cos99 + 2s2 + 4s2 cos2 99 + O(s)3 + 1 —
y^ + 0(£)3) =
1 . .Г
“ Я4 ' - [
. . / £2 £2COS^G?
—2(1 + е cos 99) I 1 + е cos 99 + ——
1 F2
= ^4 (1 + 0(e)) (е2 + Зе2 cos2 р + О(е3)) = (1 + 3 cos2 <р) (1 + 0(e)).
Таким образом, левая часть уравнения (2.5) преобразуется к виду
+ 3cos2 99) (1 + O(s)) = s6 * 8 *(l + 3cos2 99) (1 + O(s)).
Приравнивая преобразованные левую и правую части, получим
s6(l + 3 cos2 </>)(1 + O(s)) = “4 С1 + ^С^))
/ \4 / \2/5 .
s10 _ (m2 \ 1 £ _ [ m2 \ 1
” l + 3cos2^ “ \mj (1+ 3cos2(^)1/10’
Граница СД(т2) изображена на рис. 2.1. При 99 = 0 имеем
\ 2/5 , / \ 2/5
7721 у 41/10 \т1/
£ £min
Рис. 2.1. Граница сферы
действия точки m2.
Пусть, к примеру, mi
7 = 66180 км. Если mi
/ = 925000 км.
7Г
при (р = -
/ \ 2/5
_ _ ( m2 V
— £щах — I I
\Ш1 /
В силу этих соотношений принимают, что
СД(т2) — сфера с центром в точке т2 и радиуса
I = sR. где
/ \ 2/5
1т2\
8 = ----
\Ш1 /
— Земля, т2 — Луна, тогда R = 384400 км,
— Солнце, т2 — Земля, то R= 150000000 км,
2.3. Расчет пролета через сферу действия
45
2.3. Расчет пролета через сферу действия. Метод
точечной сферы действия
Движение точки т вне СД/ттт^) задано функцией Pi(t) — решением урав-
нения Pi=gi- Кроме того, известно движение точки относительно точ-
ки mi, задаваемое функцией R(t) — решением уравнения
Ь (я + Мг) „
R В? R
Функции Pi(t) и R(i) задаются формулами задачи Кеплера (см. (1.39),
(1.40)). Используя эти формулы, находим р2(^) = P1W ~ R(t).
Пусть I — радиус СД(ттт,2). Момент времени ti входа точки т в СД(ттт,2)
определяется соотношениями
Р2(*1) = Р2(*1) ’ Р2^1) < О-
По значениям р2(^1) и находим постоянные /г, с и f в интегралах
задачи Кеплера для притягивающего центра т^. Затем вычисляем
п ^2 f
h М2
Движение точки т внутри СД(т77,2) задается формулами
7’ ° = -
Р2 = &Р + T1Q, Р2 = ^Р + V„Q,
£ = а(е — ch F), 77 = ау/1 — e2sh F,
__ Айг sh F _ М2(е2 - 1J chF
V' V а е ch F — Г V,] V а е ch F — Г
eshF-F=V/i'(f-T)-
Здесь т определяется равенством
т = fl + - eshFi),
причем согласно (2.6)
shfl = chF! = е- Р'р2^\ Fi = ln(shFi+chFi).
av е1 - 1 а
Покажем, что F\ < 0. Действительно,
sgnFi = sgn shFj = sgn (Q • p2(ii)),
(с X P) c z 4 C-(/XP2)
Q P2 = 2-P2 = -• P X P2)= —
f X p2=(p2y-c)y.p2 = c(p2 p2)-p2j^p^°= c(j)2 p2).
46
Глава 2. Метод игнорирования возмущений
Согласно определению ti
Q Р2 Д) = j Рг(*1) • Рг(й) < о
и, значит, Fi < 0.
Момент ^2 выхода точки т из СД(т2) вследствие симметрии задачи опре-
деляется условием F2 = — Fi. При этом — 2т — ti (fa — т = т — tj, а зна-
чения р2(^) и р2(^) рассчитываются по формулам (2.6). Затем находим
Pi(fa) = ^2(^2) + R(fa) и = Pzifa) + Й^)- По этим величинам опреде-
ляется функция Pi(t) при t>^2-
Метод ИВ допускает дальнейшее упрощение. Например, можно положить
= = то есть сжать СД(т2) в точку а условие для ско-
ростей свести к соотношению
|Р1(й + 0) - Й(й)| = |pi(^i - 0) - ВД|.
Направление вектора Pi(ti + 0) — R(ti) при этом, вообще говоря, может быть
произвольным. Такой вариант метода ИВ называется методом точечной
сферы действия (ТСД).
Условие применимости метода ИВ состоит в том, что постоянная h ин-
теграла энергии должна быть значимо больше нуля. Это нужно для того,
чтобы пройти промежуточную область и сферу действия точки m2 за малое
время, что позволяет не накапливать возмущения.
2.4. Периодические решения ограниченной задачи
трех тел
В качестве примера применения методов ИВ и ТСД рассмотрим вычис-
ление периодических решений ограниченной задачи трех тел.
Задачу отыскания периодических решений поставим следующим образом.
Будем считать, что точка m2 движется вокруг точки mi по круговой орбите:
|Л| = R = const, Rx R = (ajQR2k,
wo = & = cons^ 1^1 = 1- (2-7)
Введем две системы координат: «неподвижную» miXYz и подвиж-
ную mixyz. Начала обеих систем находятся в точке mi, их оси miz сов-
падают. Направления осей miX, miY и miz неизменны в абсолютном про-
странстве, причем ось miz имеет своим ортом к. Ось mix направлена по
вектору R. Запишем формулы перехода от системы mixyz к системе miXYz
X = х cos wot — у sin Y = x sin wot + у cos wot.
Здесь без ограничения общности предполагается, что в момент£ = 0 ось mix
совпадает с осью miX.
2.4. Периодические решения ограниченной задачи трех тел
47
Ограничимся изучением движений точки т в плоскости m^XY = т^ху.
Покажем, что такие движения существуют. Согласно (2.3)
*= +(‘
Здесь использовано равенство k-R = 0. Полученное уравнение является
линейным дифференциальным уравнением второго порядка относительно
£ = к • Если в некоторый момент времени £ = 0, £ = 0, то £ = 0. Поскольку
С = • Pi) = к • рх,
условие «£ = 0, £ = 0 в некоторый момент времени» означает, что в этот
момент точка т и ее скорость относительно точки mi лежат в плоско-
сти rriiXY. Если это условие выполняется, то к • рх = 0.
Так как рх = р2 + R и в системе mixyz вектор R= (R, 0,0), то для плос-
ких движений в этой системе
Pi = 0), р2 = (ж2,у,0), xi = R + x2.
Векторные уравнения для рг и р2 запишем в скалярной форме. Подвижная
система mixyz имеет угловую скорость поэтому производные в непо-
движной и подвижной системах координат связаны следующим образом
^1=^ + w°(fc х Р1)’
.. Р~\ f -я dp-\ \ 9, / \
Pi = -^ + 2ш0| fc х ) +ЦА: х (fc х Р1),
(2-8)
Отсюда
Pi = - 2шоУ - wfci, у + 2woii - <^оУ, о)
и уравнение для рг принимает вид
о . 2 Mi^i , (R-Xi 1 \
Xi - 2CJO2/ - Ч)т1 =--3“ + М2 ---з----~Бч ’
Р1 \ Рч /
, О . 2 Р1У РчУ
у + 2ш0Х1-ш0у =-------з----г,
Р1 Рч
Pl = Vx2i + у2, р2 = V(xi - 7?)2 + у2 = |Я - P1I
или в более компактной форме
Xi - 2cjq2/ +
у + 2cjq^i +
pi , м2 2А _ (R 1 А
^ + ^—«4 = о.
Pl Р2 J
(2-9)
48
Глава 2. Метод игнорирования возмущений
Аналогично можно получить уравнения для р2
о • . />2 , Ml 2А ( 1
Хг 2к>оу + I з + з Wo I х2 — Ml 1 р2 лЗ ) ’
< У2 P1 ' P'J (2.10)
2/ + 2woi2 +(^з+^з — wo ) 2/ = 0,
V \Рч Р\ )
Ml = у/(х2 + R)2 + y2, р2 = \/х22 + у2.
Системы (2.9) и (2.10) эквивалентны. По-прежнему полагаем — <С1. В этом
7721
случае уравнения (2.10) рассматриваются только в СД(тп2). В остальной ча-
сти плоскости mixy рассматриваются уравнения (2.9).
Утверждение. Системы уравнений (2.9) и (2.10) инвариантны относи-
тельно преобразования ti—> — t, у\-> — у. В случае системы (2.9) это означа-
ет следующее: если xi(f), y(t) — решение системы (2.9), то x^\t) = a?i(— t),
y^(t) = — y(— t) также является решением этой системы. Аналогичное свой-
ство имеет место и для системы (2.10). Отсюда следует, что решения,
ДЛЯ которых ±i(0) = 0, 7/(0) = 0, удовлетворяют соотношениям Xi(— t) = Xi(t),
y(-t) = -y(t) (г =1,2).
Доказательство. Положим
z(1)(f) = х(-1), y(1)(t) = - у(-t).
Здесь и ниже индекс i для простоты опускается. Как было отмечено выше,
x^(t), y^(t) — также решение этих уравнений. Кроме того,
а7^\0) = х(0), x^\t) = — ±(— t) => ±^(0) = — ±(0) = 0 = ±(0),
у(1)(0) = - j/(0) = 0 = г/(0), yW(t) = у(-1) => ?/(1)(0) = 2/(0).
Оба решения удовлетворяют одним и тем же начальным условиям. Поэтому
в силу единственности решения они совпадают, что и требовалось доказать.
Поскольку уравнения движения точки т автономны (не содержат явно
время), доказанное свойство можно переформулировать так. Пусть г — неко-
торое число и ±(т) =0, у(т) = 0. Тогда
х(-1 + т) = x(t + т), у(-1 + т) = - y(t + т).
Поясним геометрический смысл этого свойства. Если в момент т точка тп
лежит на оси mix, а ее скорость (касательная к траектории) перпендику-
лярна этой оси, то траектория точки симметрична относительно оси тщх в
плоскости mixy.
Утверждение. Пусть Т>0 — некоторое число и решение x(t), y(t) си-
стемы (2.9) (или системы (2.10)) удовлетворяет условиям
ДО) = ±(у) = 0, 2/(0) = 2/(^) = 0.
Тогда это решение периодическое с периодом Т.
2.4. Периодические решения ограниченной задачи трех тел
49
Доказательство. Пусть решение рассматриваемой краевой задачи по-
строено на отрезке 0 х ^Т/2. Из утверждения, доказанного выше, сле-
дует, что с помощью соотношений х(— t) = x(t), у(— t) = — y(t) его можно
продолжить на отрезок —Т/2 х 0 как решение системы (2.9). Такая воз-
можность обусловлена выполнением заданных краевых условий в точке t = 0.
В силу выполнения тех же условий в точке t = T/2 для продолженного ре-
шения имеем
Здесь использованы четность функции x(t) и нечетность функции y(f).
Последние соотношения будем рассматривать как периодические краевые
условия для системы (2.9). Продолжим функции x(f), y(t) на всю действи-
тельную ось периодически с периодом Т. Вследствие найденных периодиче-
ских краевых условий такое продолжение будет решением системы (2.9), что
и требовалось доказать.
Такие периодические решения называются симметричными. Их траекто-
рии в плоскости TTiixy симметричны относительно оси тщх.
Приведем способ отыскания симметричных решений. Будем искать пери-
одические решения методом ИВ. В СД(т2) рассматривается система (2.10)
при Д1 = 0 и ее решения с начальными условиями ±2(0) = 0, р(0) = 0. Эти
решения обозначим х^^), y^\t)- Они представляют собой решения задачи
Кеплера, записанные в других переменных. Ограничимся гиперболическими
решениями с перицентром внутри СД(т2). Для таких решений уравнение
p2(t) = I имеет два корня £ц2 = ± А (А > 0), так как в силу симметрии тра-
ектории pz(—t) = p2^t). Кроме того, для таких решений при t = 0
р2 Р2 = ХЧХ2 + УУ = 0.
Иными словами, линия апсид рассматриваемых решений совпадает с
осью TTLirz: для момента t = 0. Эти решения можно параметризовать ТП2-
центрическими элементами Р2,
Вне СД(т2) рассматривается система (2.9) при /12 —0 и ее решения
x^\t), y^\t) с начальными условиями ±Д0) = 0, р(0) = 0. Будем считать,
что эти решения достигают СД(тг). С учетом (2.8) при t = 0
dp.
Pi P1 = Pl -~dj- = + УУ =0
и, следовательно, линия апсид этих решений совпадает с осью ттцх для
момента t = 0. Рассматриваемые решения можно параметризовать тп-^-
центрическими элементами pi, ер
50
Глава 2. Метод игнорирования возмущений
Решения x^\t), y^\t) и x^\t), y^2\t) в силу автономности обеих систем
допускают произвольные сдвиги по t. Момент t = 0, при котором у = 0, в ре-
шении x^(t), y^(t) перенесем в точку t = T/<2. Сшивка решений на границе
СД(m2) осуществляется условиями
+ Рг(_ А),
/Т \ . /Т \ (211)
Pi \ 2 ~ Д = Щ ~ Д + РА~ А)-
Здесь Pi = (ojW (t), yW (t), 0), pj = (x® (t), y® (f), 0) в системе mixyz. В ка-
честве основной шкалы времени используется шкала решения x^(t\ y^(t).
Из первого выписанного условия имеем
Ж(11)(Г_д)=42)(-Д) + Я, 2/(1)(Г_д)=2/(2)(_д). (2.12)
Второе условие означает, что
dpy . х . х don . х
-Г- + CJo(fc х Pl) — х -R) Н----77" + х р27-
at at
Здесь аргументы левой и правой частей те же, что в (2.11). Отсюда
= х (- Pi + R + Р2) = 0
at at
или в скалярной форме
=42’(-Л), W?
= у{2\- Д).
(2-13)
Итак, получено четыре скалярных уравнения (2.12) и (2.13) для определения
четырех неизвестных pi, щ, Р2, е2- Величина Л — функция Р2, 62, а Т — до-
полнительный параметр. Периодические решения обычно строят в функции
периода.
777,2
Пусть------> 0, тогда I —> 0 и
7721
^22\—Л) -> 0, т/2\—Л) —> 0.
Из условий сшивки (2.12) следует
=R, у(1)(д-°) =°-
т т
Решение ^^(t), y^\t) естественно рассматривать на интервале — — < t < —
В силу симметрии
Л*)
xi
»(,|(-у + °)=0,
+ 0) = -0), 71 f -) “ " ) =
2.4. Периодические решения ограниченной задачи трех тел
51
Пусть функции y^\t) — решение системы (2.9) при /12 = 0 — за-
даны на отрезке 0^^^Т/2 и удовлетворяют соотношениям
^(О) = 0, (д) = R, з/(1)(0) = ут = 0.
Продолжим их сначала с помощью соотношений четности-нечетности на от-
резок —772^2^0, а затем Т-периодически на всю действительную ось.
Получим решение системы (2.9) с разрывами производной з^1^) в точках
tk = Т/2 4- 7rfc, к = 0, ±1, ±2,... Разрывы имеют первый род, причем
7 +о)=- 4° 7 - °) •
Функции гг^7) и y^\t) в точках непрерывны, а на всей действительной
оси кусочно-гладкие. В точках tk масса т имеет как бы соударения с мас-
сой m2, упруго отскакивая от нее. Это похоже на идеальный отскок шарика
от плоскости. Такие решения называются решениями-отрезками [6].
Решение-отрезок построено при m2 = 0. Фактически получаем набор ре-
шений задачи Кеплера, но решение-отрезок в рамках этой задачи смысла не
имеет. Оно имеет смысл только как предельное решение задачи трех тел с
близким пролетом одного из них.
Построение решений-отрезков удобно проводить в системе m^XYz^ хотя
в этой системе рассматриваемые решения, вообще говоря, не являются пери-
одическими. Краевые условия
±(0) = 0, 7/(0) = 0,
означают, что при t = 0 точка т
в системе myXYz находится
на пря-
мой mim2 и эта прямая в тот момент совпадает с
линией апсид ее 7711-центрической траектории. При
t = T/2 точка 771 совпадает сточкой 77i2.
Пример. Рассмотрим построение решения-
отрезка в простейшем случае (см. рис. 2.2). Под-
летная траектория Л0Л1 может иметь любой тип.
Пусть для определенности она эллиптическая. По-
лагаем /12 = 0- Условия совпадения точек т и m2
при t = Т/2 выражаются равенством (все углы счи-
таются положительными)
coqT fT\ , ч
-9- + Z/ V ) = 7Г(1 + 2/с)>
к
Здесь и — истинная аномалия точки т, выраженная через
(2-14)
Е. Величина Е
должна удовлетворять соотношениям
Е — esinЕ = Я = а(1 — ecosE). (2.15)
Уравнения (2.14), (2.15) служат для определения а и е, период Т — па-
раметр. Покажем, что эта система задает однопараметрическое семейство
52
Глава 2. Метод игнорирования возмущений
решений-отрезков. Из (2.7) и (2.15) имеем
wo(i-ec°s^)3/2=уэ
и поэтому
Е — е sin Е _ ljqT
(1 — ecosE)3/2 2
В уравнении (2.14) положим А; = 0 и будем искать его решение, в котором
7г/2 < v < тг, Е ~ 0, е ~ 1. Тогда в соответствии с (1.25)
. л/1 - е2 sin Е
и = тг — arcsin---------—-
1 — е cos Е
и уравнение (2.14) примет вид
Е — е sin Е . \/1 — е2 sin Е
(1-ecosE)3/2 = arCSm 1-ecosE ‘
Введем обозначение х = д/1 — е2. Так как е^ 1, то
х2
(2.16)
х « 0 и, значит,
е = — х2
Разложив в ряды по е и Е, получим
/ ™2
1 — ecosE^l — ( 1-
\ 2
Е — е sin Е ~ Е —
х2 4- Е2
2 ’
Е ( 2 Е2
— | аг 4----
2 V 3
Используя эти разложения, имеем
Е - е sin Е _ 23/2Е (х2 4- Е2/3) _ л/2Е (х2 4- Е2/3)
(1-ecosE)3/2 ~ 2 (о;2 + Е2)3/2 ” (о;2 + Е2)3/2 ’
\/1 — е2 sin Е ~ 2хЕ
1 — е cos Е х2 4- Е2 ’
Приравняем разложения левой и правой частей уравнения (2.16):
х/2Е (х2 + Е2/3) . 2хЕ
(я2 +£2)3/2 ~^CSmx2 + E2-
Вид этого соотношения подсказывает, что решение уравнения (2.16)
искать в виде ряда Е = по;(1 4- CiX2 + С2Х6 + ...). Подставив этот ряд
и приравняв главные члены в левой и правой частях, получим
\/2п(14- п2/3) . 2п
---------= arcsin —-—г.
(1 + п2)3/2 1 + п2
следует
в (2.16)
(2-17)
2.5. Оптимизация параметров пертурбационного маневра
53
Левая и правая части этого равенства — функции переменной п, изоб-
раженные на рис. 2.3. Обе они достигают максимума при п = 1. Максимум
левой части равен 2/3, а правой тг/2. При п—>ос функция в левой части
стремится к л/2/3, а в правой к 0. Значит, графики функций пересекаются и
система уравнений (2.14), (2.15) имеет решение.
Приведем приближенное решение уравне-
ния (2.17)
л/2п(1 + п2/3) ~ 2п
(1+п2)3/2 ~1+п2’
откуда
п4—12п2—9 = 0 => п2 = 6+3\/5 => п ~ 3.56.
Для этого значения п имеем
2п
1 + п2
0.52,
arcsin0.52 « 31.3°
Задача. Пусть положение точки на под-
летной траектории задается соотношением
р(^)-^ = тг(1 + 2Л), Лей,
а также уравнениями (2.15). Показать, что они за-
дают другие семейства однопараметрических пе-
риодических решений (см. рис. 2.4).
2.5. Оптимизация параметров пертурбационного ма-
невра
Пусть имеется двухпараметрическое семейство движений массы т, вхо-
дящих в СД(т2): а,/3), а, /3 — скалярные параметры. В этом случае
говорят, что имеется пучок входных траекторий. На выходе из СД(т2) этот
пучок преобразуется в другой пучок с теми же параметрами. Предположим,
что из выходного пучка нужно выбрать траекторию, доставляющую мак-
симум некоторой числовой характеристике F. Эта характеристика является
функцией параметров пучка: F = F(a,P). Введем понятие картинной плос-
кости, которое позволяет найти maxF(a,/3), используя наглядные геомет-
рические образы, и проанализировать окрестность экстремума.
Картинная плоскость вводится следующим образом. Положим
р2(*> а, Р) = Pi(t, а, р) - R(t\
Пусть ^i = ^i(а, Р) — корень уравнения />2(£) = ^ удовлетворяющий условию
р2(^1) * Рг(^1) < 0. По векторам p2(^i) и рассчитываем постоянные пер-
54
Глава 2. Метод игнорирования возмущений
вых интегралов задачи Кеплера для притягивающего центра m2: h = (3),
с = с(а,(3\ f = (3). Далее вычисляем
/с f
Р = —, Rq = -, Q = Ro х Р, е2 = —,
/ С /12
г = -(Р + <М1-1Г j = -(Q~ Ру/4 ~ 1) ,
е2 \ / е2 \ /
• / ч v — (v • г) • г
v = R(ti). ei = . , е2 = г х ci,
y/|v|2 — (v • г)2
d = хх = — d(j • ei), Х2 = -d(j • е2).
Vh
Плоскость m2eie2 называется картинной. Траектория, проходящая через
СД(т2), задается на этой плоскости точкой (rri,rr2). Введенная картинная
плоскость определяется векторами г и v, поэтому разным траекториям пуч-
ка отвечают, вообще говоря, разные плоскости. Однако обычно в представ-
ляющей интерес области изменения параметров а и /3 векторы г и v можно
считать неизменными, а определяемые ими системы координат m2eie2 совпа-
дающими. Иными словами, изображающие точки разных траекторий можно
считать принадлежащими одной и той же плоскости m2eie2.
Траектории, проходящие через СД(т2), параметризуются также па-
раметрами Xi и ж2, поэтому функцию F можно представить в виде
F(a, /3) = Fi(£i, я2). Если линии уровня функции РДяц, я2) имеют достаточно
простой вид, то максимизацию функции F можно выполнить приближенно
и геометрически наглядно, рассмотрев отображение плоскости (а,/3) в плос-
кость (ж1,ж2).
Рис. 2.5. Система координат ггцХУz.
Как пример рассмотрим максимизацию модуля mi-центрической скоро-
сти после выхода из СД(т2). Воспользуемся введенной выше системой ко-
ординат myXYz (см. рис. 2.5). Орбита точки т2 в этой системе представля-
ет собой окружность Х2 + У2 = В2, z = 0. Пучок траекторий будем считать
2.5. Оптимизация параметров пертурбационного маневра
55
кеплеровыми эллипсами, линии апсид которых лежат в плоскости m^Y z.
В качестве параметров траекторий будем использовать расстояния в пе-
рицентре и га в апоцентре, а также углы cpf и срс, задающие компоненты
с
ортов Р и Rq = - в системе тп^ХУ z:
с
Р = (0, — cos (pf, — sin (pf), Rq = (sin^c, — cos sinewy, cos <pc cos (pf).
Положение и скорость точки тп будем задавать эксцентрической анома-
лией Е. Для pi(E) и pi(E) существуют выражения (см. (1.39), (1.40)),
в которых
Pi = a(cos Е — ei)P + а\/1 - е2 sin EQ,
Гщ sin ЕР — \/1 — е? cos Е — Q
pi = ~h----------------------------------- (2-18)
Пусть точка т, двигаясь по орбите с параметрами ra, <pf и <рс, входит
в СД(т2) в точке с эксцентрической аномалией Е. Условие входа выражается
соотношениями
Р2 — I, Р2 ' Р% < 0.
Выше первое из этих соотношений рассматривалось как уравнение, определя-
ющее момент входа в СД(т2). Теперь рассмотрим его как уравнение для R.
Имеем
Р2 = I <=> \pi - R\ = I <=> р\ - • R+ R2 = I2 <=>
P1-R=^(p2 + R2-l2) =х. (2.19)
Кроме того, вектор R должен удовлетворять уравнениям
k-R = 0, R R = R2, (2.20)
где к — орт оси m^z. Будем искать решение системы уравнений (2.19) и (2.20)
в виде
R = арх -г Рк + 7(pi х fc).
Подстановка этого выражения в первое уравнение (2.20) дает
a(fc • р,) + /3 = 0 => ^ = -a(fc-p1)
и тогда
R = арх — а[к • pjfc + х fc) =
= a[pi - (fc • pjfc] +7(^1 х fc) = afc x (pi x fc) +7(pi x fc).
Подставив последнее выражение для R в (2.19), получим
арх • [fc х (pi х fc)] = х => ck|Pi х fc|2 = х => a = ——
|Pi x fc|
56
Глава 2. Метод игнорирования возмущений
Подставим то же выражение для R во второе уравнение (2.20). С учетом
ортогональности векторов ру х к и к х (fc х pj и соотношения
|Р1 X fc| = |fc X (Р1 X fc)|
находим
(a2+72)|p1x fc|2 = /?2 => —z|P1x fc|2+72|p1x Лг|2 = /?2 =>
|P1X fc|
2_ 1 \ _ y/^IpjXfcp-X2
|P1X fc| \ |P1X fc| / |P1X fc|
Знак выбирается из условия
р2 • Р2 < 0 <=> (pi — R) • (pi — R) < 0, R = шок х R.
Для некоторых значений параметров Е, га, <рс подкоренное выраже-
ние неотрицательно. Например, при <pf = <рс = 0 с учетом (2.19) имеем
Ру • к = 0, |pi х fc|2 = р2, R2|pi x fc|2 — x2 = T?2p2 — (Л • p^2 > 0.
Последнее неравенство при R x py 0 становится строгим. Найденное ре-
шение дает положение точки на ее орбите, для которого вход точки т
в СД(т2) осуществляется в заданной точке траектории. Задание этой точки
входа полностью определяет пролет точки т через СД(т2).
Решение системы уравнений (2.19) и (2.20) представляет собой 5-ти па-
раметрическое семейство пролетных траекторий. Построение такого семей-
ства проводилось для упрощенной системы Земля—Луна: точка mi — Земля,
точка m2 — Луна, точка т — космический аппарат (КА), R = 384000 км,
/ = 66000 км, — = 81.3.
т2
Траектории, попадающие в Луну, имеют периселений где
vl = 1740 км — радиус Луны, которая считается шаром. Периселений р2,7г
и прицельная дальность d связаны формулой
.2 2 , 2М2/Э2,тг
d =Р2,. + —^2 —
иоо
(см. задачу на стр. 39). Кроме того, d2 = х2 4- х2, Введем так называ-
емый полный эффективный радиус Луны
Dl=
2.5. Оптимизация параметров пертурбационного маневра
57
Траекториям, попадающим в Луну, на картинной плоскости отвечают точки
круга xl + x%^D2L.
Описанный пересчет параметров Е, r^, rQ, 99/, tpc в параметры, опреде-
ляющие сближение КА с Луной, и последующее вычисление координат про-
летной траектории в соответствующей картинной плоскости задают функции
X! = Х1(Е, Г„, ra, Ре), ^2 = Х2(Е, Г„, Га, (fif, рс).
Рис. 2.6. (ff = 2°, (рс = 0, = 50 тыс. км, ra = const.
Рассмотрим двухпараметрические пучки пролетных траекторий с пара-
метрами Е и га при фиксированных значениях величин <^, <^с. Такой
выбор параметров позволяет, например, исследовать пертурбационный ма-
невр в задаче геоцентрического разгона КА с солнечным парусом. Эта задача
рассмотрена ниже.
58
Глава 2. Метод игнорирования возмущений
Примеры представления в картинной плоскости двухпараметрического
пучка пролетных траекторий с параметрами Е и га в случае га = 50 тыс. км
и некоторых значений (pj и р>с приведены на рис. 2.6-2.11. На этих рисунках
изображены семейства кривых ra = const (кривые 1) для значений га в пре-
делах от 350 до 450 тыс. км с шагом 5 тыс. км и семейства кривых Е = const
(кривые 2) для допустимых соотношениями (2.19), (2.20) значений Е с ша-
гом 5° и 350 га 450 тыс. км.
Рис. 2.7. 99/ = 2°, 99с = 0, гп = 50 тыс. км, Е = const.
На рисунках помимо кривых ra = const и Е= const, визуализирующих
отображение (ra, Е) (^,77), указана окружность, внутренность которой за-
штрихована. Точки заштрихованного круга отвечают траекториям, попадаю-
щим в Луну. Как видно из рисунков, не всякий пучок пролетных траекторий
позволяет достичь поверхности Луны или пролететь достаточно близко от ее
поверхности.
2.5. Оптимизация параметров пертурбационного маневра
59
Некоторые примеры отображения (rQ, Е) ь-> (£, rf) имеют особенности типа
складки или сборки [1]. Кривые складок могут служить границами достижи-
Рис. 2.8. (ff = 2°, <рс= 10°, = 50 тыс. км, ra = const.
мых областей картинной плоскости — областей, точкам которых отвечают
пролетные траектории КА, реализуемые при каких-либо значениях га и Е.
На кривых складок выполнено равенство
дга
дт]
дга
д(,
дЕ
дт]
дЕ
= 0.
(2-21)
60
Глава 2. Метод игнорирования возмущений
Эти кривые строились следующим образом. Сначала методом продолжения
по параметру находилась последовательность точек плоскости (rQ, Е), лежа-
Рис. 2.9. tpf = 2°, tpc = 10°, гп = 50 тыс. км, Е = const.
щих на кривой (2.21), затем эти точки пересчитывались в точки картинной
плоскости. Частные производные в (2.21) находились численным дифферен-
цированием с использованием симметричных разностей.
Как показал анализ большого числа вариантов расчетов, при малых
значениях угла </?с недостижимая область картинной плоскости (область,
где кривые 1 и 2 отсутствуют), как правило, увеличивается с увеличени-
ем угла (ff. Это объясняется тем, что при малых значениях угла</?с КА может
2.5. Оптимизация параметров пертурбационного маневра
61
входить в сферу действия Луны лишь в относительно небольшой области ее
передней полусферы. В случае значений ipc > 30° рассматриваемое отображе-
ние, как правило, особенностей не имеет (см. рис. 2.10-2.11).
Визуализация отображения (ra, Е) (£, ту) с помощью сетки координат-
ных кривых ra = const и Е = const в картинной плоскости позволяет решить
ряд задач оптимизации параметров пертурбационного маневра КА для раз-
личных критериев качества. Достаточно построить на этой сетке линии уров-
ня соответствующих функций.
В качестве числовой характеристики F, которую будем максимизировать
на пролетных траекториях, возьмем mi-центрическую скорость на выходе
из СД(т2). Эта скорость вычисляется в предположении, что СД(т2) стянута
62
Глава 2. Метод игнорирования возмущений
в точку. Даже в случае Земля—Луна такой подход дает приемлемую точ-
ность. Имеем
/Г
F = K+v|, v=wofcx-R, v^ = ^(-P + Q\/e2-l). (2.22)
Рис. 2.11. tpf = 2°, tpc = 30°, rn = 50 тыс. км, Е = const.
После преобразований первое из этих соотношений перейдет в соотношение
__________________________ 2
/ М2А/1 - А2\ 2 - Л
I ^-Л)Г 2-^-А)2’ (2.23)
/ 2 2 2
А=Г^; = p у V=H
VV^ VV^ 2^00
2.5. Оптимизация параметров пертурбационного маневра
63
Это уравнение окружности. Итак, линии уровня F(x\,X2) = const в плос-
кости (^1,^2) суть окружности. Анализ расположения кривых ra= const
и Е= const относительно окружностей F(x\^X2) = const позволяет выбрать
оптимальные параметры пролетной траектории. Примеры и результаты оп-
тимизации приведены в [22].
Как можно видеть из рис. 2.6-2.7, ни одна из представленных на
этих рисунках траекторий не попадает в Луну. Для семейств траекторий
на рис. 2.8-2.9 и 2.10-2.11 падение КА на Луну возможно.
Пусть для пучка пролетных траекторий с фиксированными значениями
параметров г^, </?с, достаточно большая, в частности, содержащая окруж-
ность (2.23), окрестность точки £ = т] = 0 картинной плоскости лежит в до-
стижимой области. Тогда в этой окрестности можно разрешить соотноше-
ния (2.18) относительно Е и га и максимизировать функцию F.
Задача 2.1. Вывести уравнение окружности (2.23).
64
Глава 3. Полет космического аппарата солнечным парусом
Рис. 3.1. Зеркало.
Глава 3
Полет космического аппарата с
солнечным парусом
3.1. Сила светового давления
Рассмотрим плоскую зеркальную пластинку, освещенную Солнцем,
и выделим на ней элементарную площадку. Пусть з — направление на
Солнце; da — площадь элементарной площадки; п — нормаль к площадке
(см. рис. 3.1); Е — плотность световой энергии, то есть
энергия фотонов, приходящаяся на единицу объема све-
тового потока, падающего на пластинку в направле-
нии —s. Количество движения фотонов, находящихся в
единице объема, равно
Ез
Р=------,
с
где с — скорость света. Напомним, что масса фотона равна нулю. На площад-
ку da за время dt приходят фотоны из объема dV=(n-s) cda dt. Положим
n • s > 0. Суммарное количество движения этих фотонов есть
dP = pdV = — Е(п • s) s dadt.
При зеркальном отражении угол падения равен углу отражения, и все попав-
шие на площадку фотоны уходят от нее в направлении
sf = 2n(n • s) — 8,
унося суммарное количество движения
dP' = — s'dV = Е\2п(п • s) — s] (n • s) dadt.
Сила dF, действующая на площадку da co стороны светового потока, свя-
зана с указанными количествами движения соотношением
dP-dPf = dFdt.
Отсюда
dF = — 2Е(п - s)2Tida. (3.1)
Размерность Е равна [Е] = Н/м2, то есть размерности давления.
Световая энергия, прошедшая через площадку da за время dt, равна
(S-ri)dadt, (3.2)
где S — плотность потока световой энергии.
Плотность Е световой энергии связана с плотностью S потока све-
товой энергии соотношением E=\S\/c. Действительно, световая энергия,
3.2. Уравнения движения космического аппарата с солнечным парусом
65
прошедшая через площадку da за время dt, сосредоточена в объеме
(S-n)
dV = cdadt и, следовательно, равна
E(S-n)
EdV = Y 7 с da dt. (3.3)
1^1
Приравнивая выражения (3.2) и (3.3), получаем
E(S-n) , х ISI
—j-gj—- cdadt = (S • n) da dt => E = —.
Для точечного источника света имеем 4тгг25' = 4тгго5Ь, поэтому
/ \ 2 / \ 2
S = S0(-) Е = Ео(—\ ,
\Г J \г/
где г и го — радиусы сфер, в центре которых находится источник света;
S' и Sq — модули плотностей потока световой энергии на поверхности
этих сфер; Е и Eq — соответствующие плотности энергии (см. рис. 3.2).
Удобно трактовать величину 2Е как световое давление, действующее
на плоское идеальное зеркало, расположенное перпенди- --------
кулярно световым лучам. Считая, что точечный источ- Д
ник света Солнце, обозначим pQ = 2Е. Тогда соотноше- I ( )
ние (3.1) можно записать в виде у V W I
dF = - (п • s) 2n da.
Напомним, здесь n-s>0. На орбите Земли Е = р&/2 = л m
л пл -.гч-6 тт / 2 Рис. 3-2- Точечный
4.64- Ю Н/м . источник света.
Рассмотрим случай плоского двухстороннего зеркала
площади а (имеется ввиду площадь одной стороны). Отметим одну из сторон
и под нормалью п будем понимать внешнюю нормаль к этой отмеченной
стороне. В этом случае сила светового давления, действующая на зеркало,
может быть записана следующим образом
F = — росг|п • s| (п • s)n.
Это выражение не меняется при замене ш—> —п, поэтому под нормалью п
здесь можно понимать нормаль к любой стороне зеркала.
3.2. Уравнения движения космического аппарата с
солнечным парусом
Уравнения движения космического аппарата (КА) с солнечным парусом
записываются по-разному при решении разных задач. При анализе гелиоцен-
трических перелетов нужно учитывать зависимость от гелиоцентрическо-
го расстояния КА. При исследовании траекторий КА внутри сферы действия
Земли, например, траекторий полета к Луне, можно принятьр®= const.
Сначала рассмотрим несколько задач, относящихся к гелиоцентрическим
перелетам. Уравнения движения КА запишем с учетом только сил притяже-
66
Глава 3. Полет космического аппарата солнечным парусом
ния Солнца и светового давления с его стороны
/IT pQ(J . I/ х о Ло\ г
г =-----х----n-s(n-s)n, Pq=p о — , з = ——. (3.4)
г6 тп 1 । \ / \г/ г
Здесь г — гелиоцентрический радиус-вектор КА; у — гравитационный па-
раметр Солнца; р® — давление света на плоское идеальное зеркало, распо-
ложенное перпендикулярно солнечным лучам на расстоянии го от Солнца;
тп — масса КА. Эти уравнения можно представить так
г = —-у 4 |п • г|(п • г)п. (3.5)
г6 тг 1 1
Здесь ti можно считать произвольной функцией времени — управлением, при
этом |n| = 1. Этой функцией будем распоряжаться по своему усмотрению, в
частности, задавать ее в виде n = n(r, г, f).
Утверждение. Уравнение (3.5) допускает решение, лежащее в неизмен-
ной плоскости k-r = 0 (fc 0 — произвольный постоянный вектор), если вы-
полняется тождество к • n(f) = 0 и к • r(fo) = 0, к • r(f0) = 0 в некоторый мо-
мент ^о-
Доказательство. Умножим уравнение (3.5) скалярно на вектор к
'к = 'к^= ~ + ^г\п'г\(п'г^п' кУ
Отсюда и из сделанных допущений получаем задачу Коши:
4г (fe-r)=-4 (*•»•)> (fc’r)| = 0> 4(fe’r) =°-
dtz v 7 г6 v 7 7 \t=t0 dtx 7 t=t
Эта задача имеет только тривиальное решение к • г = 0.
Далее в этом пункте ограничимся рассмотрением только плоских реше-
ний. В плоскости к-г = 0 введем декартовы координаты (х,у) (напомним,
что система Оху инерциальна) и связанные с ними полярные координа-
ты (г, (/?): x = rcosp, у = г sine/?, г = |г|. Начало координат — Солнце. В ло-
кальном базисе {ег,еД полярной системы координат
г = rer, г = гег 4- гфе^ = uer 4- ve^,
v
и = Г, V = гф => г = и, ф = -. (3.6)
г
Учитывая соотношения
dCf , dC(n ,
= ~dT = -ver’
запишем левую часть уравнения (3.5) в базисе {ег, еД
г = йег 4- ve^ 4- иёг 4- = (й — уф) ег 4- (у 4- иф) =
(О \ / \
V \ ( ии\
й----ег 4- м) 4---е<р.
г J \ г J
Угол между векторами г и п обозначим 0. Направление отсчета этого угла
совпадает с направлением отсчета угла </?. Тогда
п = cos вег 4- sin ве^.
3.3. Спиральные траектории
67
Используя угол 0, преобразуем правую часть уравнения (3.5)
_ cos0|cos0l (cos0er + sin0e<J.
г6 mr 1 1
Приравняем векторные компоненты в левой и правой частях (3.5)
2
V М 9Л| Л1
и-------=---7 + COS2 0 COS0 ,
г г2 rz 1 1 (з 7)
uv ре . . Л| v ’ 7
v Ч--= — cos 0 sin 0|cos 0|,
£ =
рт
При 0 = тг/2 (солнечный парус развернут ребром к Солнцу) уравнения
движения КА принимают вид
2
V . V и UV
г = и, ф — -, и =-----------х, V =-----.
т* т т
При 0 = 0 (n = з) уравнения движения КА записываются в виде
v . v2 /1(1 — е) . uv
Г = и, Ф = -, и —-------------5---, V =-------.
у-» гр рЛ р
В обоих случаях получены уравнения кеплерова движения, но с разными
гравитационными параметрами.
Рассмотрим влияние светового давления Солнца на пылинку. Такие пы-
линки в большом количестве порождаются кометами. Пусть пылинка пред-
ставляет собой однородный шарик радиуса р. Масса пылинки т~р3, пло-
щадь сг~р2. Следовательно, а/т^\/р—>оо при р—>0. Тогда значение е
может превысить 1, при этом /1(1 — е) <0. Поэтому пылинки малого радиуса
отталкиваются Солнцем. Это явление наблюдается в кометных хвостах.
Задача 3.1. КА массы т = 500 кг движется по круговой орбите. Сол-
нечный парус площади а = 104 м2 развернут ребром к Солнцу. В некоторый
момент времени парус разворачивают нормалью к Солнцу. Как изменится ор-
бита КА? Найти элементы новой орбиты. Сделать оценки для орбиты Земли
(начальная орбита КА).
3.3. Спиральные траектории
Будем рассматривать траектории при в = const. Положим
£ = /i(e cos2 0| cos0| — 1), т/ = /16 cos 0sin0\ cos0| (3.8)
и перейдем к новой независимой переменной р. С учетом (3.6) имеем
du du dp du v dv dv dp dv v
dt dp dt dp r ’ dt dp dt dp r ’
поэтому уравнения (3.7) принимают вид
du Е dv ту _ . — = 7J + —, — = -71+—. 3.9 dp rv dp rv
68
Глава 3. Полет космического аппарата солнечным парусом
Из (3.6) получаем
dr dr dt и .
— = ~г ~т~ — “ г- (3.10)
dp dt dp v
Пусть
и = a(r) cos се, v = a(r) since, се = const. (3.11)
Тогда (3.10) записывается так
-у—— г ctg се. (3.12)
dip
Решение этого уравнения имеет вид
г = roexp(</2ctga), r0 = r|^=0. (3.13)
Полученная траектория — логарифмическая спираль. Функцию а(г) и зна-
чения углов се, 0 нужно выбрать из условия выполнения уравнений (3.9).
Согласно (3.11) и (3.12) находим
du da dr da da cos2 a
— = — — COS CE = — r ctg CE COS CE = r---:---,
dip dr dp dr dr since
dv da dr , da . da
— = — — Sina-—-rctgCESinCE = r— COSCE.
dp dr dp dr dr
Используя эти соотношения, преобразуем уравнения (3.9)
da cos2 се . £ da ri
г—----:--= a sin се -|-;-, г— cos се = — a cos се -|-:--.
dr since га sin се dr г asm а
Умножим первое из этих уравнений на since, а второе на — cos се:
o = « + l-Actgtl (314)
аг аг г
Далее умножим первое уравнение на cos се, а второе на since:
da (cos3 се \ £ ctg& + V
г— —--------Н sin се cos се =-------- =>
dr у sin се / аг
da cos се (cos2 се + sin2 се) £ ctg се + т]
dr sin се аг
da _ tg се(£ ctg се + 77) da2 _ 2(£ + ту tg се)
dr г2 dr г2
Отсюда в силу (3.14) имеем
£ — ту ctg се 2(£ Н-ту tg се) _ . Л х
----^- = —-г2 - => -£ = Ty(ctgce + 2tgce) =>
_ cos2 се + 2 sin2 се ту sin се cos се
- £ = т]----;--------- => - =-------------5—.
sin се cos се £ 1 + sin се
Подставляя сюда выражения для £ и ту из (3.8), получаем условие реализа-
ции спиральной траектории:
scos0sin0| cos#| _ sin се cos се
1 — scos20| cos#| 1 +sin2 се
Исследуем решения этого уравнения, рассматривая его как уравнение от-
носительно се, в котором в — параметр и е<С1. Для определенности поло-
3.3. Спиральные траектории
69
Г 7Г ТГ!
жим # € , — j. Поскольку # = const, это предположение не ограничивает
общности (замена #«—> #Н-тг не меняет уравнения).
При £ = 0 имеем sin се cos се = 0. Корни a = 7rk, ktZ (г> = 0) отвечают
т. , 7Г
движению по лучу (р = const и не представляют интереса. Корни се = ± — +
7г/с, fecZ (u = 0) отвечают круговым орбитам. В качестве порождающего
. 7Г __ 7Г .
корня для корней при е 0 возьмем се = —. Положим се = — + Асе и разло-
жим левую и правую части уравнения (3.15) в ряд по е и Асе соответственно.
Получим
2е sin 0 cos2 0 = — Асе.
В этом случае ctgCE « — Асе = с sin# cos2# и согласно (3.13)
г & го ехр sin # cos2 #).
По спирали можно лететь как от Солнца (при sin # > 0), так и к Солнцу (при
= 0.
Вычислим экстремальные значения коэффициента /3= sin # cos2 # при <р
в экспоненте. Для этого приравняем к нулю его производную:
3^ = 0 => cos3# — 2 sin2# cos# = 0 => cos #(1 — 3sin2 #)
dv
Найдем корни этого уравнения:
a) cos# = 0, парус развернут ребром к Солнцу и не влияет на
ние КА;
б) sin2#=- 0 = #ц2 = ± arcsin —= ~ ±35.26°, эти корни дают
3 уЗ
мальные значения коэффициента /3:
1 / । \ 2
max /3 = sin #i (1 — sin2 #i) = —= I 1-7= I = —7= ~ 0.385,
x/3\ х/З/ 3x/3
движе-
экстре-
-0.385.
1 / 1 \ 2
min 0 = sin #2 (1 - sin2 #2) =-7= I 1--7= I =------7=
k J x/3\ х/З/ Зх/З
Зависимость положения КА на спиральной траектории от времени опре-
деляется уравнением г = и. Согласно (3.11) и (3.14) имеем
If] ctgCE - £
и = \ ---------- COS СЕ :
V г
(полагаем cos се > 0). Отсюда
се — £) = const
^- = J- y/rdr = y/Ndt,
dt V r
| r3/2 = \/Nt + const, x/77(t - to) = | |r3/2(t) - Го/2], r0 = r(t0).
о и L J
Задача 3.2. KA массы m = 500 кг с солнечным парусом площади
а = 104 м2 движется по спиральной траектории, для которой в= arcsin—^.
Найти время между пересечением им орбит Земли и Марса, Венеры и Земли.
70
Глава 3. Полет космического аппарата солнечным парусом
3.4. Геоцентрический разгон космического аппарата
Пусть КА движется в сфере действия Земли. Запишем уравнения его дви-
жения в виде (см. (3.4))
zzr । I/ ч Рп67
г =------- + д — а\п • s in • s)n, а = = const > 0,
г6 т
где д — возмущающее гравитационное ускорение, вызываемое несферично-
стью Земли, а также притяжением Луны и Солнца; p°Q — значение на
орбите Земли. Зависимостью силы светового давления от г пренебрегаем.
Будем строить закон управления парусом, обеспечивающий выход КА из
сферы действия Земли за время, близкое к минимальному. Полагаем, что та-
кой закон реализуется при быстрейшем увеличении полной геоцентрической
энергии КА в невозмущенном движении
1 2 / •\
h = v-----(v = r)
г
от отрицательного начального значения до значения, близкого к нулю. Вбли-
зи Земли и мало отличающийся от оптимального разгон КА может
быть получен при законе управления парусом п = п(£), максимизирующем
в каждый момент времени производную
h = 2v • (</ — а \п • s|(n • s)n) = 2v • д — 2а\п • s|(n • s)(n • v).
Такой закон управления называется локально-оптимальным [16]. По суще-
ству надо минимизировать выражение
X = \п • s|(n • s)(n • v).
Очевидно, что minx достигается при n6s©v. Положим
V 8 — (d * s)s
ei = -, е2 =-------,
v 0 - (ex • s)2
si = s-ei, 32 = s e2 = — V1 — Sp n = cosflei + sin0e2.
Тогда
S = Siei + S2C2, n-v = vcos0, n • s = si cos# + S2 sin#
и, следовательно,
X = ^COS#|Si COS# 4- S2 sin#|(si COS# + $2 sin#).
Экстремальные значения x определяются из уравнения — = 0. Учитывая
t dv
равенство (ж|ж|) = 2|ж|, имеем
— = 0 <=> 0 = 2cos#|si cos# 4- S2 sin#|(— si sin# 4- s2 cos#) —
dv
— sin#|Si cos# 4- S2sin#|(si cos# 4- S2sin#).
Таким образом, возможны два случая:
a) |si cos# + s2 sin#| = 0 => n-s = 0 => x = 0 — не подходит, так как
соответствующее стационарное значение не является экстремумом.
3.4. Геоцентрический разгон космического аппарата
71
б) 2 cos 0(— si sin 0 4- $2 cos 0) — sin 0(si cos 0 4- S2 sin 0) = 0, откуда
— 2$i cos 0 sin 0 4- 2s2 cos2 0 — si sin 0 cos 0 — sin2 0 = 0 =>
s2 sin2 0 4- 3$i sin 0 cos 0 - 2s2 cos2 0 = 0 =>
s2 tg2 0 4- 3si tg 0 - 2s2 = 0.
Решения этого уравнения записываются так
- 3$i ± \/9s2 4- 8^2 - 3$i ± \/8 4- s2
tg ^1,2 =-------z----------=-----------------•
2^2 2$2
Выразим х через tg 0
х = ^cos20| cos0||s2 tg0 4~ Si|(s2tg0 4- Si) => sgn^ = sgn(s2tg0 4- Si).
При 0 = 0i получаем
3 1 /~ о Si 4- 8 4~ s ?
s2 tg0i + Si = - - Si - - v 8 + sf + Si =------------1 < 0,
а при 0 = 02
n 3 1 r~ 2 — 4~ \/ 8 4~ s2
<$2 tg 02 4- Si = — - Si 4- - V 8 4- <$! 4- <$i =----> 0.
Поскольку функция x минимизируется, подходит первый корень. Выражение
для «оптимального» ускорения светового давления имеет вид
ао = — а\п • s|(n • s)n =
= — a cos2 0i | cos 0i 11 s2 tg 0i 4- si|(s2 tg0i 4- Si)(ei 4- tg0ie2).
Приведем некоторые результаты расчета разгонных траекторий, получен-
ные в [22]. Уравнения движения КА записывались в геоцентрической системе
координат Oxyz с началом в центре масс Земли и плоскостью Оху, совпа-
дающей с плоскостью экватора. Оси Ох и Oz направлены соответственно в
точку весеннего равноденствия и Северный полюс. Эта система считалась
инерциальной.
Движения Луны и Солнца рассчитывались по приближенным формулам
с точностью до нескольких угловых минут [14]. Затенение солнечного паруса
Землей не учитывалось. В расчетах принималось А — 2-104 м2, т = 500 кг,
ро = 4.64-10-6 Н/м2. Рассматривались две стартовые орбиты, обе круговые
с радиусом 50 тыс. км и восходящим узлом на положительной полуоси Ох.
Первая орбита имела наклонение 51.6°, вторая 28.5°. Разгон с обеих орбит
начинался в момент 06:12:11 UTC 12.10.1992.
Описанный выше закон управления парусом обеспечивал достаточно
быстрое увеличение высоты апогея орбиты при почти постоянном значении
высоты перигея. Выход КА на геоцентрическую сферу радиуса 390 тыс. км
(это немного больше среднего геоцентрического расстояния Луны) для пер-
вой стартовой орбиты составил 118.9 суток и произошел на 41 витке раз-
гонной траектории, для второй стартовой орбиты этот выход произошел на
40 витке и занял 113.3 суток. Выход за пределы сферы действия Земли по
первой разгонной траектории произошел на 43 витке через 169.7 суток по-
72
Глава 3. Полет космического аппарата солнечным парусом
лета, для второй разгонной траектории это событие произошло на 42 витке
через 164.6 суток после старта.
Пертурбационный маневр позволяет заметно сократить время выхода за
пределы сферы действия Земли. Выполнение пертурбационного маневра в
данной задаче обусловлено следующим свойством разгонных траекторий.
Для обеих траекторий линия апсид оскулирующего эллипса оказывается
близкой к плоскости эклиптики и, следовательно, к плоскости орбиты Луны.
Угол между линией апсид и плоскостью орбиты Луны в момент выхода КА
на геоцентрическую сферу радиуса 390 тыс. км составил 9.03° для первой
траектории и 2.94° для второй траектории. В силу этого свойства пролет КА
вблизи Луны можно обеспечить фазированием его движения с движением
Луны.
Фазирование достигается следующим образом. В момент времени ti за
несколько витков до выхода КА вдоль опорной траектории за орбиту Луны
тяга паруса выключается — его плоскость располагается параллельно солнеч-
ным лучам, что дает п • s = 0. В течение некоторого времени с момента до
момента ^2 КА совершает пассивный полет при п • s = 0. В момент вос-
станавливается прежний локально-оптимальный закон управления парусом.
Моменты времени t\ и £2 можно находить из условия пролета Луны на требу-
емом расстоянии, из условия выполнения вблизи Луны пертурбационного ма-
невра, обеспечивающего наибольшую полную геоцентрическую энергию КА
после сближения или из каких-либо иных условий.
Рассмотрим максимизацию полной геоцентрической энергии КА. Обозна-
чим через £отг = £о?г(йД2) наименьший корень уравения |г(£)| = |гь(£)|. Вве-
дем обозначения
р = НМ - гНМ> и = ®(М - vL, vL = rL(t^,
, 1 I |2 Mi . Р^Р
aL = pxu, hL = - |w|2 - —, fL = и x <rL -
2hL(fL xcrL + pLy/2hlfL)
Pl + 2h,L\tTL\2
и определим функцию
0
|VL + w2|
= <
при |p| > Род,
при |р| < Дед-
Механический смысл этой функции и введенных обозначений следующий:
сг^, f l ~ кинетический момент, полная энергия и вектор Лапласа селе-
ноцентрического движения КА в момент времени Jo*-; и2 — оскулирующая
на момент селеноцентрическая скорость КА на бесконечности после про-
лета Луны (предполагается, что /г-z, > 0); F(£i,£2) — модуль геоцентрической
скорости КА после вылета из сферы действия Луны, рассчитанный в предпо-
ложении, что эта сфера точечная (см. раздел 2.3); рсд = 66 тыс. км — радиус
сферы действия Луны. Найденная в рамках такого предположения полная
3.4. Геоцентрический разгон космического аппарата
73
геоцентрическая энергия КА после его сближения с Луной составляет
/i' = F2(t1,t2)-/z|r(Mr1- (3.16)
Поскольку |г(^07т)| слабо зависит от и ^2, при максимизации h! по этим
величинам последнее слагаемое в (3.16) можно отбросить. В результате мак-
симизация h! по t\ и сводится к максимизации F(ti,t2)-
Найти оптимальные значения £i, t% и проанализировать пролетные се-
леноцентрические траектории удобно с помощью картинной плоскости (см.
раздел 2.5). В рассматриваемой задаче такие траектории образуют двухпара-
метрическое семейство (с параметрами £i, £2) и имеют близкие скорости входа
в сферу действия Луны. В такой ситуации применение картинной плоскости
весьма удобно.
Напомним основные соотношения, относящиеся к этой плоскости и способ
представления траекторий на ней. Рассмотрим траекторию КА, попадающую
в сферу действия Луны и по формулам, выписанным выше, найдем для нее
значения первых интегралов селеноцентрического движения сг^, /£, По-
лагаем hi > 0. Отвечающая этим значениям селеноцентрическая скорость КА
на бесконечности до пролета Луны имеет вид
_ _ 2hL(fL x<tl-
U1 P-L + 2hL\tr L|2
Введем правую декартову селеноцентрическую систему координат с ба-
зисом
U1
е( 1«1Г
е Уь-е^-Уь)
( ^У^-^-УьУ'
X е^.
Плоскость L£rj — картинная плоскость, и рассматриваемая траектория на
ней изображается точкой (d^, d^), где
= </(е^ • е^), d'q — с?(е^ * е^), d — ^<2^ ’
- е2 Л 1 /1, х ал |Л|
d е |/L| е \fL х сгьГ fiL '
Здесь е — эксцентриситет селеноцентрической траектории, х = 0,
d— y/d^ 4- — прицельная дальность.
Введенные таким образом картинные плоскости и системы координат на
них определяются векторами V£, и, вообще говоря, различны для различ-
ных траекторий КА из рассматриваемого двухпараметрического семейства.
Однако в представляющей интерес области изменения параметров эти
векторы можно приближенно считать неизменными, а определяемые ими си-
стемы координат — совпадающими.
Траекториям, попадающим в Луну, то есть имеющим селеноцентрическое
расстояние в периселении меньше радиуса Луны Rl~ 1740 км, отвечают
74
Глава 3. Полет космического аппарата солнечным парусом
точки картинной плоскости, лежащие внутри окружности
4 + <j; = di, dl = (злу;
V lwl|
Величина Dl называется полным эффективным радиусом Луны. Для функ-
ции (ср. (2.22)) F{d^,dT1) = \Vl + U2I справедлива формула
F2 = |Vl|2 + |«i|2-
_ 9, , , (м! - ^21ш|4)(У£ ес) + 2^|M1|\/|VL|2 - (V L • ее)2
1 11 м1 + </2Ы4
Линии уровня этой функции в картинной плоскости представляют собой
окружности, центры которых расположены на прямой dT] = 0 в точках с ко-
ординатой d^ зависящей от фиксированного значения F. Для рассматривае-
мого семейства пролетных траекторий
d^ = d^ = d^ti^tz). (3.18)
Если в достаточно большой, в частности, содержащей окружность (3.17)
окрестности точки d^ = dT] = O картинной плоскости соотношения (3.18) мож-
но разрешить относительно ti и £2, то максимизация F по ti и t% сводится к
максимизации F по d^ d^ и выполняется тривиально.
Рис. 3.3.
В качестве примера проведем максимизацию F для разгонной траек-
тории 1. На рис. 3.3 в картинной плоскости изображено семейство тра-
екторий, задаваемое в переменных ti, £2 уравнением t\ = const с шагом
по ii в 2 сут. На рисунке указаны только те отрезки кривых, на кото-
3.4. Геоцентрический разгон космического аппарата
75
рых F > 0. Точкам этих отрезков отвечают траектории КА, попадающие
в сферу действия Луны. Рассматриваемое семейство пролетных траекто-
рий характеризуется средними значениями параметров |tii| = 0.70 км/с и
( l • Cr)
— । = — 0,79. Разброс этих параметров не превышает 15% от указан-
1^1
ных величин, причем в окрестности окружности (3.17) этот разброс составля-
ет 1-2%. Отвечающие указанным средним значениям окружность (3.17) ра-
диуса Z?z, = 6120 км и окружности F= const также изображены на рис. 3.3.
Внутренность окружности (3.17) заштрихована, а окружности F = const на-
несены штриховыми линиями. Как следует из результатов вычисления яко-
3(^,(L)
биана j. и расположения кривых ti = const на рис. 3.3, существует
окрестность точки = 0, которая содержит окружность (3.17) и в кото-
d ТЫС.КМ
т
Рис. 3.4.
рой соотношения (3.18) обратимы. В этой окрестности максимизация F по
и ^2 эквивалентна максимизации F по d^ и d^. Анализ линий уровня функ-
ции F и простой расчет показывают, что max F'(d^ d^) = 1.796 км/с дости-
^Дт)
гается в точке d^ = — 3374 км, dT] = 0. Найденная точка максимума F лежит
внутри окружности (3.17) (напомним, что = 6120 км). Если же учесть
ограничение непопадания в Луну, то max Ff(d^ d^) = 1.750 км/с. Он достига-
^Дп
ется в точке d^ = — Dl, d^ = 0.
76
Глава 3. Полет космического аппарата солнечным парусом
Приведем теперь результаты максимизации jF(£i,£2) для разгонной тра-
ектории 2. На рис. 3.4 в картинной плоскости изображено семейство кривых
ti = const. Соответствующие этим кривым пролетные траектории характери-
("У^ ’
зуются средними значениями параметров |ui| = 0.51 км/с и v -— = — 0.99
с разбросом по |ui| около 15%. Окружности (3.17) и F'(£i, £2) = const для ука-
занных средних значений также приведены на рис. 3.4. Окружность (3.17)
имеет радиус Dl = 8788 км и ее внутренность на рисунке заштрихована,
окружности F'(£i,£2) = const нанесены штриховыми линиями. Как следует
из рис. 3.4, варьирование и £2 не позволяет КА пролететь около Луны
на расстоянии, меньшем некоторого предельного значения. Иными словами,
существует окрестность точки ^ = ^ = 0, в которой соотношения (3.18) не
разрешимы относительно t± и t2.
Такое поведение семейства пролетных траекторий в случае второй опор-
ной орбиты объясняется тем, что, несмотря на малое отклонение оскулирую-
щей линии апсид этой орбиты от плоскости орбиты Луны, угол между линией
апсид и линией пересечения плоскостей орбит КА и Луны в момент^ состав-
ляет около 20°. Это обстоятельство и не позволяет КА вблизи оскулирующего
апогея приблизиться к Луне на произвольно малое расстояние.
Полученные результаты оптимизации пертурбационного маневра являют-
ся приближенными, поскольку каждая пролетная траектория исследуемых
семейств характеризуется индивидуальными значениями |ui| и | Уь|. Деталь-
ные расчеты показывают, что описанные результаты являются достаточно
точными [22].
4.1. Уравнения в оскулирующих элементах
77
Глава 4
Исследование уравнений возмущенного
движения
4.1. Уравнения в оскулирующих элементах
4.1.1. Метод вариации произвольных постоянных. Рассмотрим
систему уравнений
X = /о(ж, t) + ё/1(ж, t), X € Rn
с малым параметром ecR. При е = 0 эта система переходит в систему
ж = которая называется порождающей. Предположим, что общее
решение порождающей системы известно:
х = ip(t, a), rank= п> (4.1)
где a 6 Rn — вектор произвольных постоянных. В исходной системе сделаем
замену переменных х н-> а согласно (4.1). Имеем
d(p(t,d) d<p(t,a) .
* = —+ да а =
Поскольку ip(t, d) — решение порождающей системы, то
—
Следовательно,
d<Pgaa^ О' = (*»(*> «)><).
a = eF(a,t), (4.2)
где
Система (4.2) по ряду причин удобнее исходной. Например, ее можно доста-
точно эффективно приближенно интегрировать методом последовательных
приближений Пикара.
Замечание. Если одна из компонент вектора а, например ai, являет-
ся первым интегралом порождающей системы, то уравнение для а\ можно
получить иначе. Пусть
а1=9(х,() и gZtl+| = 0.
С учетом последнего из этих равенств имеем
dg . дд dg ( . . ч dg dg . . dg .
6X1 = л-х + = о-+ £/1) + = => ai =
dx dt dx dt dx dx
78
Глава 4. Исследование уравнений возмущенного движения
4.1.2. Возмущенная задача Кеплера. Применим с небольшими изме-
нениями схему, описанную в п. 4.1.1, к решению возмущенной задачи Кепле-
ра — решению системы уравнений
цг / х 1 1 М
r = v, v =------ + w(r,v,t), |w| —.
Здесь w — возмущающее ускорение.
В этом случае схема, похожая на вышеописанную, реализуется следую-
щим образом. Порождающая система автономна, и ее решение задается в
параметрической форме:
я? = Ф($,а), n(a)t + /3 = Ф(з, а), /3, seR1, а е R5, sei6,
<ЭФ . . (дФ <ЭФ\ п _
—— Ф 0, rank ——, —— 1=0, а.р — const,
ds \ds да J
где с — параметр, а, /3 — произвольные постоянные. При этом
ds J
ЭФ
(4-3)
Имеем
аФ . г а* = э75 = /»(ф>- эГ = " S = п
дФ -1 ЭФ
1 ) п = /0(Ф)
ds yds у ds
В возмущенной системе сделаем замену переменных
х (а,7) : ® = Ф(з,а), 7 = Ф(в, а).
(4-4)
ЭФ . дФ . _ z _. _ ЭФ . <ЭФ .
ж = -^-5 + —а = /0(Ф) + s/i, 7 = — s + —а.
os да. ds да
.г
Умножим первое из этих соотношений на -7—
ds
дФ .ЭФ ЭФЭФ . ЭФ
аГа7+а7аГ“ = /"(ф)а7 + £ЛаГ
Отсюда, учитывая (4.4) и второе соотношение (4.5), получим
дФ А ЭФ . \ ЭФ дФ . дФ ЭФ
17 - OL + -x-д-OL = n— 4-e/i— =>
ds у да J ds да ds ds
ЭФ .
ds
(4-5)
<ЭФ
д^°
дФ
ds
дФ л дФ
+ л- = h
ds да
Ее матрица не вырождена, и решение можно представить в виде
£ = Bih, ту = B2h,
где Bi — (1 х б)-матрица, В2 — (5 х б)-матрица. Тогда
ЭФ ЭФ
у-п-—ct = s — а = eB2/i = =>
/<ЭФ ЭФ \
7 = n(a) + s — B2fi + —B1fi = n(a) + er(a,^,t)
\ OOL OS J
Рассмотрим систему
4.1. Уравнения в оскулирующих элементах
79
или окончательно
dt = 7, t), 7 = n(a) 4- еГ(а, 7, t). (4.6)
Ниже будем рассматривать эллиптическое движение, для которого
а = {а или р, е, fi, z,cj}, 7 = 7И, s = v(E).
Переменные а или р, е, Q, г, cu, Af, используемые при исследовании возму-
щенного движения, называются оскулирующими элементами орбиты.
4.1.3. Вывод уравнений в оскулирующих элементах. Рассмотрим
уравнения возмущенного движения (4.3). Сначала запишем их в специаль-
ной скалярной форме. Введем орбитальную систему координат. Ее начало —
Г Г XV
движущаяся материальная точка, орты — ег = —, R = -—-—|, еи = К х ег.
Другие обозначения ортов: = еГу = ер, ei = ед. Положение орбитальной
системы относительно исходной инерциальной системы Oxyz зададим углами
Эйлера Q, г, и. Согласно кинематическим уравнениям Эйлера проекции уг-
ловой скорости cu = (jjTer 4- 4- urCr орбитальной системы записываются
так
• . • C/Z • . C/Z • . • /л
= iZsmz smw4-— coszz, = SIsmг cos и—-sinu, cjr = \l cosz4-?z. (4./J
dt dt
Скалярные переменные системы (4.3): r, vr, fi, z, и. При этом r = rer,
v = vrer + v„e„. Более короткая запись векторов г, v, си в орбитальной си-
стеме координат имеет вид
г = (г, 0, 0), v = (vr, 0), cu = (cUr, CJp, CJr).
Производную по времени вектора относительно орбитальной системы будем
обозначать символом Например,
dr dr
— = r = v = —iuxr.
dt dt
В результате получим
= (r, 0, 0), cu x r = dt UJr r 0 R LOr 0 = (0, WrT, -Wyr),
r = Vr, UJrT = Vy, — = 0 = n UR = —, Шу = 0. r
Найдем cjr. Второе из уравнений движения (4.3) представим следующим об-
разом
— 4- cu х v =------------ 4- w, w = Ser 4- Teu 4- WR, (4.8)
dt r6
dv
dt
(yT, 0), cu x v =
er
Шг
vr
Cp R,
0 ^R
vu 0
= (-OJRVy, CJRVr, UrVy),
80
Глава 4. Исследование уравнений возмущенного движения
откуда
vr - lorvv = - 4 + S, vv + шцуг = Т, = W. (4.9)
Из последнего уравнения следует
W
О)р —
Теперь найдем Q, —, и. Умножив первое уравнение (4.7) на smzz, а второе
at
на cos tz и сложив их, имеем
Q sin г = (jjr sin и
wr sin и _ W sin и
sin г vu sin i '
(4.Ю)
Умножение первого уравнения (4.7) на costz, а второго на — sintz дает
di W cos и
— = (jjr cos и = --------------
at vu
(4-11)
Из третьего уравнения (4.7) находим
• . vv W sin и cos i
и = (jJr — cos г —------------------
r sm i
Таким образом, получили систему
9
Vy /Z ~ VrVu
r = Vr, Vr =-------+ S, V„ ------------------1- T,
• W sin и di W cos и . vu W sin и cos i
ft = —, -v. =-----------------, и =---------------——
Vv sm г dt vu r vu sm г
(4-12)
При S = T = W = 0 эти уравнения имеют решение
r = ---------, vr= A/^esinz/, Vv = (1 + ecosz/) = ^-^, (4.13)
1 + ecosz/ у p у p r
и = ш + и, n(t - t) = (1 - e2)3/2 f -----—----~2=M,
J (1 + ecosz/J
p, e, z, oj, ft, т — постоянные.
Реализуем описанную в п. 4.1.2 программу преобразования уравнений воз-
мущенной задачи Кеплера. Перейдем от переменных г, vr, vu^ ft, z, и к пере-
менным р, е, Q, z, cj, М. Уравнения (4.10) и (4.11) для Q и z имеют требуемый
вид (см. (4.6)). Чтобы получить общепринятую форму этих уравнений, нуж-
но вместо Vv подставить в них У/zp/r:
rW sin и di rW cos и
У/zpsinz’ dt yfpjp
Уравнение для p получим из интеграла rvu = yfjdp (см. замечание на стр. 77).
Учитывая (4.12), имеем
rvv + ri}v = vrvv - vrvu + rT = ~. - => р = 2. -гТ.
2\ р 2 V Р V М
4.1. Уравнения в оскулирующих элементах
81
Из уравнения для vr (см. (4.12)) получаем
71 . pp p ~
— ei7 cos 17 = —--------------------- + S,
tjj fpo tpZ
- sin 17 + z> a — e cos v +
+-^(1 + ecosi7)2 — -^(1 + ecosi7)3 = S
p2 p2
M • • /М •
— e sm 17 + e A / — sm v +
p6 у p
/М
+ А / — е cos 17
V р
Уравнение для дает
z> —
+ ecos i7)2
= S.
(4-14)
+ е cos г/
cos 17 — Z7 а / — е sm и
- Д-еsin+ ecosi/)2 + T
p2
— esm 17
+ е cos г/
COS 17 —
Z7 —
,2
(4.15)
= т.
Умножив соотношение (4.14) на cosi7, a (4.15) на — sini7 и складывая их,
получим уравнение для и\
e
S cos 17 — T sin 17 =
+ ecos i7)2
+ e cos 17
= S cos 17 — T sin i7 —
sm 17,
smz7 =
rT ( r
= S cos v — T sin v---sin 17 = S cos v — T sin 1/ [ 1 + -
p \ p
z>
+ e cos 17
S cos i7 — T sin i7 I 1 + - )
\ Р/.
или согласно (1.14)
cos 17 — Т sin 17 ( 1 + - )
\ PJ\
(4.16)
— 9 1
r2 e
Умножив соотношение (4.14) на sini7, a (4.15) на cosi7 и сложив их, полу-
чим уравнение для е:
S sin 17 + T cos 17 = e
= e
82
Глава 4. Исследование уравнений возмущенного движения
е
г \ ге
1 + - cos и Ч---
Р) Р.
ё = | S sin v + Т
Так как согласно (1.25)
cos v + - (е + cos и) = cos v + 6 C°S У- — cos v + cos E,
p 1 + e cos v
то последнее уравнение можно записать в другой форме
ё = [S sin v + T(cos v + cos E)].
Получим уравнение для cu. Из третьего уравнения (4.7) имеем
А • А \/АФ А
и = — \ l cos г =-\l cos г = —---SI cos г =
= + ecosz/)2 ~ ^cosz.
С другой стороны,
и поэтому
CU =
г \
1 + - sin v — S cos I/
Pj
— Qcosz,
rW .
---— smuctgz.
VW
Получим уравнение для M. В соответствии с (1.32)
М = (1 - е cos Е)Ё-ёsin Е. (4.17)
Для вычисления Е и ё используем первую формулу (1.25), из которой сле-
дует
UJ =
1 + - I sin v — S cos I/
Р/
(—EsinE — ё)(1 — ecosE) — (cosE — e)(eEsinE — ecosE)
— v sm v —------------------------------—т;--------------------
(1 — ecos E)2
После преобразований находим
(- Ё sin E — ё) (1 - e cos E) - (cos E - e)(eE sin E - ё cos E) =
= — Ё sin E(1 — e2) — ё sin2 E.
Тогда, в соответствии co второй формулой (1.25), имеем
. д/1 — е2 sin Е _ EsinE(l - е2) + ёзт2 Е
1 - ecosE (1 - ecosE)2
Ёд/1 — е2 ёзшЕ
У 1-ecosE ' 0 _ e2(i _ ecosE)
z>(l-ecosE)2 ёзшЕ(1 - ecosE)
E(1 - ecosE) = ----
а/1 _ е2
1 — е2
4.1. Уравнения в оскулирующих элементах
83
Подставим полученное выражение в (4.17)
• z>(l — е cos Е)2 ё sin Е(1 — ecosE) . „
М = ——.. ----------;------------ - е sm Е.
1-е2
С учетом (1.22) и (1.24) находим
1 —ecosE1 а(1 —ecosE) г
1 — е2 а(1 — е2) р
и согласно (1.23)
. rsinz/ г г------------2 •
sm Е = —.-----= - V1 — е sm и.
- е2 Р
Таким образом,
•_ z/(l~ ecosE)2 . . (г \г г--------у
М —------.---------esmrl - + 1 ) -V 1 — е2.
0-е2 )Р
Учитывая (1.22) и (1.24), получаем
(1-ecosE)2 _ г2 г2(1 — е2)2 г2(1 — е2)3?/2
0 — е2 а20 — е2 р20 — е2 Р2
откуда
0Ф (1 — е cos Е)2 0ф г2(1 — е2)3?/2 ///(1 — е2)3 ПГ
г2, 0 _ е2 г2 р2 у р3 у а3
Тогда согласно (4.16)
z/(l —ecosE)2 ПГ г2(1 — е2)3?/2 1 [р Г/ г\
----. — = --------о-----Scosv - Tsmz/ I 1 + - I .
0 - e2 Va P \ P/i
Итак,
Преобразуем это соотношение, записав его с учетом (1.31) так
М = п + ктТ + ksS. (4.18)
Для кт имеем
84
Глава 4. Исследование уравнений возмущенного движения
Поскольку
/ r\ re 1 — е2 г г eft / г\ те
11 + -) COS У 4--1-------=-------+ + 1 + - ) cos V + L —
\ р J р е р ер /р \ р / /Р
1 11^ (4.19)
г 1 + е cos у 1 1 + е cos и р 7
= cos г/ Ч---------= cos у + - =---------= —,
ре е е те
то
кт = — \/1 — е2л г^-- ( 1 + - ) sin v. (4.20)
V Ле \ р)
Выпишем соотношение для ks
(1 — е2)3/2 Грт2 г---2г(л^г\ [Р • 2
ks =------ч/--cos у - v 1 - е2 - 1 + - ч / - sin у
е V РР Р \ PJ V Р
. о 1 — е2 г
sin у-------------cos V
е р
Упростим выражение в квадратных скобках
ч г Л 2 ( г
14-----1 + - ) cos2 у — —
р / \ре
т\
- cos у -I--
р/ ре
ет \
— cos у =
Р )
Р \
г ет
= 14-----1---cos у —
Р Р
где согласно (4.19) сумма в квадратных скобках равна p/те. Поэтому послед-
нее выражение преобразуется к виду
r(l + ecosz/) р Р
1 4-------------------cos у = 2-----cos у
те те
COS 17,
и, следовательно,
ks = — \/1 - е2 х + - (2 — — cos у} . (4.21)
у р р \ те /
Подставляя выражения для кт и ks из (4.20) и (4.21) в (4.18), получаем
уравнение для М
р
2Sr \/1 — е2 кр л т\ .
М = п-------= 4----------ч — S cos у — Т I 1 + - I sin у .
VW е у// [ \ Р) .
Выведем уравнение для а. С одной стороны, в соответствии с (1.28)
a az
с другой стороны, согласно (1.4)
2р
h = 2vrvr + Zvt/Vy + f.
4.1. Уравнения в оскулирующих элементах
85
Подставляя сюда выражения для т)г, г из (4.12), имеем
h = 2vr 4 + s) + 2vv(- — + T\ + ^vr = 2(yrS + vvT).
Тогда с учетом (4.13) получаем
а = —h = (yrS + [5е sin и + Т(1 + ecosz/)],
Л / а5 / . Тр\ 2 / _ . Тр
а — eSsm v Ч--=-------, eSsm v 4--------
V//(l-e2)\ r) _e2\ r
Соотношения, полученные выше, представляют собой уравнения в оску-
лирующих элементах:
ё = | S sin v + Т
2Sr л/Г
М = п----— Ч----
УДО
rW sin и
2 ( п • тр\
или а = —. eS sm z/ Ч--,
nVl - е2 \ г J
г\ те] 1
1 Ч- - cos z/ Ч-г ,
PJ Р\)
S cos v — Т 1 + - I sin и ,
\ Р) J
(4.22)
р = 2
di rW cos и
dt
sin и — S cos v
Со =
rW .
-----= sm и ctg г.
VW
4.1.4. Возмущающая функция. Пусть возмущающее ускорение
(см. (4.3)) потенциально:
dU
где U(г) — возмущающая функция. Выразим функцию U через элементы
орбиты а, е, М, Q, г, ш и найдем ее частные производные по элементам.
Имеем
dU dU dr dr dU dU dr dr
da dr da W da de dr de W de
(4.23)
и т. д. Учитывая (1.56)—(1.59), (1.40), (1.41) запишем дифференциалы
dr = Р d£ Ч- Q dp Ч- dO х г, dO = к dQ Ч- еь di Ч- R dw =>
dr = Р d£ Ч- Q dp Ч- (к х г) dQ Ч- (eL х r)di + (7? х г) duj, (4.24)
d^ = (cos Е — е) da — a sin Е dE — a de,
dp = \/1-е2 sin Е da Ч- а\/1 — е2 cos Е dE-ав sin Е de,
V1 — е2
/ х dM smEde
dM = (1 — ecosE) dE — smEde => dE = ------------- + ------=.
v 7 1 - e cos E 1 - e cos E
86
Глава 4. Исследование уравнений возмущенного движения
Если считать, что £ = £(а, е, 7И), т] = 7](а,е, М), то
_ - . 7 . / dM sin Е de \ 1
а£ = (cos Е — е ) da — a sin Е ------— Н----------— — a de =
\ 1 - е cos Е 1 - е cos Е J
/ г-. 4 7 asinE / sin2E \ 1
= (cos Е — e)da------------- dM — а II Н----------- de,
1 — е cos Е у 1 — е cos Е)
л Гл--------2 • гл . Гл-------2 г ( dM < sinEde \
а/п = V1 “ sin Е da + а V1 — е2 cos Е ----------- + --------
\ 1 — е cos Е 1 — е cos Е J
ay 1 — е2 cos Е ,, ж
----------—-dM +
1 — е cos Е
aesinE 7 г--------- . _ 7
—, - de = v 1 — sin Е da +
Г----- . / cos Е
+ a\/l-e2sinE -----------
\ 1 — е cos Е 1 — е2
е
Так как
cos Е е cos Е — е
1 —ecosE 1 — е2 (1 — е cos Е)(1 — е2) ’
то с учетом (1.25)
дт]
да
, г---------- . „ , ay 1 — e2cosE asmЕcosi7
tin = у 1 — е2 sin Е da Н---------— dM Н-----de.
1 - е cos Е y/i _ е2
Из (4.23), учитывая (1.17), получаем
— = w • Р— + Q— = (w • Р) —
да V да 4 да) 1 } да
причем вектор w в соответствии с (4.8) имеет вид
w = Ser + Теу + WR.
Поскольку
er = Р cos г/ + Q sin г/, е„ = — Р sin v + Q cos 17,
Р = er cos 17 — е„ sin 17, Q = er sin v + cos v
(см.рис. 1.2), скалярные произведения w P, w-Q записываются так
w • P = S(er • P) + T(e„ • P) = S cos v — T sin 17,
w • Q = S(er • Q) + • Q) = S'sin v + T cosi7.
Поэтому, используя выписанные выражения для дифференциалов, находим
dU
— = (S cos 17 — Т sin 17) (cos Е — е) + (Ssin v + Т cos 17) д/1 — е2 sin Е —
= S [cos i7(cos Е — е) + sin v sin E\/l — е2] +
+ Т[— sin Z7(cos Е — е) + cos Z7sin Е у 1 — е2] =
т-,\ I cosE —е . sin Еу/1 — е2\
= Ь (1 — е cos Е) cos и --------— + sin и------------- +
4 7 у 1 - е cos Е 1 - е cos Е J
cost/
sin v
4.1. Уравнения в оскулирующих элементах
87
+ Т(1 — ecos#)
cos Е — е sm Е\/1 — е2
— sm и --------— + cos v —--------—-
1 — е cos Е 1 — е cos Е
Аналогично
cos г/
Qr
= S(l-ecosE) = —.
ди ,
^ = (w-P)^ + (w-Q)^
sin г/
, го . \ (. sm2Е \ , . .amEwsv
= -a(ScosI/ — Тsini/ Ц-- + Ssinz/ + Tcosz/J--- ..„— =
v l-ecos#/ v 7 х/1-ё2
(cos v sin2 E sin E sin v cos v \
— cos v-----— 4---.... - -— +
1 — e cos E _ e2 /
I sin v sin2 E
+ aT sin v + --------------
\ 1 — e cos E
sin E cos2 v \
^/1 — e2 /
Упростим сумму в первой скобке, учитывая (1.25),
cos v sin2 Е cos v sin2 Е
— cos v------------— + ---------— = — COS V.
1 — e cos E 1 — e cos E
Сумма во второй скобке с учетом (1.25) равна
sin z/sin2# sin#(cos# — е)2
sm к + -------- Ч---.. - ------------
1 - ecos# ^/1 -е2(1 - ecos#)2
sinvsin2# ^/1 - е2 sin# (cos# —е)2
smz/ + i _ ecos£; 1 — e cos# (1 — e2)(l — ecos#)
= sin v 1 +
sin г/
sin2# (cos# —e)2
1 — ecos# + (1 — e2)(l — ecos#)_
1 + e2 cos2 # — 2e cos #
= sm v 1 +
(1 - e2)(l - ecos#)
r
/ 1 — e cos #
= sm i/ 14----------5—
\ 1 — e2
Таким образом,
dU
de
= sin z/ 1 + - .
\ p)
Далее
-7— — a — S cos v + T sin v 1 + -
de [ \ Р/.
dU z d^
dM~^W'dM
m . \ a sin#
= — (Scos v — 1 smi/] ---
1 - e cos #
cos v sin # \/l — e2 sin v cos #
dr]
dM
+ (Ssinz/ + T cosz/)
a\/l — e2 cos#
1 — e cos #
= aS । ,
\ 1 — e cos #
1 — e cos #
88
Глава 4. Исследование уравнений возмущенного движения
(sin is sin E v 1 — e2 cos v cos E \
i--------f + r— •
1 — e cos E 1 — e cos E I
Преобразуем выражение в первой скобке
(cos Е — е) sin Е (1 — е2) sin Е cos Е esinE^l — е cos Е)
(1 — ecos£?)2 (1 —ecosE1)2 (1 —ecosE)2
е sin Е е sin is
1 — е cos Е ^/i _ е2
Выражение во второй скобке приводится к виду
\/1 — е2 sin2 Е у/1 — е2 cos E(cos Е — е)
(1 — ecosE)2
\/1 — е2(1 — е cos Е)
(1 — ecosE)2
В результате
(1 — ecos Е)2
\/1 — е2 р
1 — е cos Е r^/i _ е2
dU _ a
dM ~ у/1-е2
С учетом (4.24) имеем
dU dr x , / x
^ = w—= w(«!xr) = k.(rxw),
dU dr / _ x / x
—— = w • — = w • (R x r) = R • (r x w)
dus dw
dU dr
di di
Поскольку
' тр\
eb sm is Н-.
г /
= w • (еь х г) = еь • (г х w).
Г X W =
S
О
т
R
О
W
= — rW + RrT =
= — rW (— P sin is + Q costs) +rTR = rW (P sin is — Q cos is) + rTR
(см. рис. 1.2), то
04
О
Рис. 4.1. Вектор cl.
д-И = гТ
дш
Вектор к — орт оси Од, поэтому
к- Р = Pz, к Q = QZ
к • R = R.
и, следовательно,
к = PZP + QZQ + RZR.
Кроме того,
еь = P cos w — Q sin w
(см. рис. 1.7 и 4.1). Тогда согласно (1.38) и (1.42)
= rW (Pz sin is -Qz cos is) + rTRz =
4.1. Уравнения в оскулирующих элементах
89
= rW sin i (sin cj sin I/ — cos w cost/) + rT cos i = r (T cos i — W sin i cos u).
— cos и
Далее имеем
dU
di
= rW (sin v cos uj + cos v sin cu) = rW sin u.
Соберем вместе все полученные частные производные функции U
dU _ да Sr а ’ (4-25)
dU _ де / г \ а — S cos v Ч- Т sin и 1 + - \ Р). (4.26)
dU _ дМ “ а / . Тр\ - , eb sin и Ч , V1 — е2 \ г J (4-27)
dU _ да ~ r(T cos i — W sin i cos u), (4.28)
dU _ дг rW sinu, (4.29)
dU _ да> rT. (4.30)
Возмущающая функция U(r) — функция трех независимых переменных,
поэтому между выписанными частными производными есть три зависимости.
Действительно, первые три из них выражаются через S и Т, а последние
три — через Т и W. Это дает две зависимости. Кроме того, Т выражается
через первые три производные и через последние три производные. Отсюда
можно получить третью зависимость. Поэтому дальнейшие преобразования
уравнений в оскулирующих элементах можно выполнить разными способами.
Ниже используется общепринятый подход.
Запишем уравнения в оскулирующих элементах (см. (4.22)), используя
\/1 -е2 dU
а дМ’
эти производные.
Уравнение для а. Из (4.27) имеем
о • ТР
eb sin v Ч--------------------=
т
поэтому
. _ 2 \/1 - с2 dU 2 dU
пу/1 — е2 а па dM
Уравнение для Q. Используя (4.29), получаем
y/~jap sin г di
или с учетом (1.28) и (1.31)
Q - 1 1 9U_ _ 1 dU
Уда(1 - е2) sin г дг па2 уД — е2 sin i di ’
90
Глава 4. Исследование уравнений возмущенного движения
Уравнение для г. Из (4.28) и (4.30) имеем
dU ди • tiz • •
—— = —— cos г — rW smzcosu =>
д\1 дш
и/ 1 (ди ди\
rW cos и = -—: cos г — —- .
sm г у дш о\1 J
Тогда по аналогии с выводом уравнения для Q получаем
di 1 1 (dU . dU\
__ —---------------. ------------- I _cos z — — I
dt д//ш(1 — е2) sin i у дш 5Q/
1 (dU . dU\
=-----------------------/ - I cos z - — .
па2 у/1 — е2 sin i У да? dSl /
Уравнение для е. Из (4.27) находим
. 1 ( д/1 - е2 dU
5 sin z/ = - -----
е \ а дМ
Подставим это выражение в уравнение для е
— + т(1
ае дМ ег у
Тр
г
— е2 dU
г\ Тге
+ - cos и Н----
р) Р
ё
преобразуем сумму коэффициентов при Т
re р (r\ г ( \ Р
--------Н 1 + - cos if = cos и + - (cos и + е) =
р ег у р J р ег
cosz/ + e 1 + ecosz/ 1 — е2 (1 —е2)г
= cos V + ----------------=--------Тл----г =-----------
1 + ecosz/ е e(l + ecosz/J ре
Учитывая (4.30), получаем
ё = + а/1 - е2 ди _ (1 - е2) гТ =
у р ае дМ ре
[р \/1 — е2 dU (1 — е2) dU
V р ае дМ ре дш
'а(1 - е2) / \/1 — е2 dU 1 dU
р \ ае дМ ае дш
fal-e2ldU 1 duAl-e^dU 1 dU
V р ае \дМ _ е2 дш ) пеа2 удМ ^/1 - е2 дш
Уравнение для М. С учетом (4.25) и (4.26) имеем
2 ди У1-е2 /а(1 - е2) 1 / dU\
М = п----— а-^- + ------\------------ -х- ) =
у/ца да е V /х а \ де J
2 dU 1-е2 dU
= Ti-
na да пеа2 де ’
4.1. Уравнения в оскулирующих элементах
91
Уравнение для Используя (4.26) и (4.29), находим
[р 1 dU ctg г dU /а(1 — е2) 1 dU ctg г dU
(jj = 4 /----—-----------= А /-------------— ---- -- =
V /л еа де у//лр di V /л еа де у/ш(1 — е2) дг
_ д/1 - е2 dU ctg г dU д/1 - е2 /1 dU ctg i dU\
na2e de na2\/l — e2 na<2 \e де 1 — e2 di J
Выпишем полученные уравнения
. _ 2 dU
па dM"
. 1 - е2 (dU 1 ди\
g = ----- I--------7===L I
пеа2 \дМ _ е2 ди I ’
2 dU 1-е2 dU
М = п----------------Гл-’
па да пеа1 де
й - 1 dU (4'31)
па2\/1 — е2 sin г
di _ 1 (dU . _ dU\
dt па2\/1 — е2 sin г \дш ddj
д/1 - е2 /1 dU ctgi dU\
Ш па2 \е де 1 — е2 di J '
Эти уравнения представляют собой уравнения в оскулирующих элементах в
случае потенциального возмущающего ускорения.
4.1.5. Метод усреднения. Поясним смысл оскулирующих элементов
на простом примере. Рассмотрим скалярное дифференциальное уравнение
второго порядка
х + or# = ef(x, х, t).
Здесь f(x, x,t + 2?r) =f(x, x,t), cu = const, e= const, > 0, |s| 1. Запишем
его в виде системы:
Р = 2/5 (4.32")
\ у =—ш2х + ef(x,x,t).
При s = 0 решение этой системы имеет вид
х = асозгр, у = — acusin^, (4.33)
где = u)t + а, а= const, а = const. Иными словами, а = 0, гр — а).
В системе (4.32) сделаем замену переменных х, у н-> (а, ^) по форму-
лам (4.33). Имеем
х = у => a cos -0 — агр sin гр = — aw sin гр =>
асозгр — афр — simp = 0,
у = — cu2rr+ б/(гг, ±, t) => — duj sin^ — агрш cos гр = — cj2a cos гр + ef =>
dsin + а(гр — cj) созгр = —
92
Глава 4. Исследование уравнений возмущенного движения
Система (4.32) в новых переменных записывается так
{dcos^ — а(^ — о>) sin^ = О,
dsin^ + а(ф — cj) cos'ip = — —f(acos'ip) — acvsin^, t).
(jj
Разрешим полученные соотношения относительно а и ф — а>
а = — — f (acos'ip, — acvsin^, t) sin'ip = eFi(a, ф, £),
< . u £ (4.34)
ф = ш------f (acos'ip, — au> sin ф, t) cos'ip = ш + sF2(a, ф, t).
v (л)
Способ приближенного решения этой системы при |е| <С 1 заключается в сле-
дующем. Положим
2% 2%
Д (а) = / / F^a> *) dt = Г 2)
О о
(в этом состоит усреднение) и рассмотрим систему
а = eFi(a), ф = а> + sF2(a).
При выполнении некоторых условий решение новой системы представляет
изменение переменных а, ф с ошибкой 0(e) на интервале времени Д£~£-1.
Одно из этих условий состоит в том, что ш должно быть иррациональным
числом. Это так называемое условие отсутствия резонанса.
Пример. Уравнение Ван-дер-Поля
х + х = е(1 — bx2)x, Ъ > 0, е > 0.
Уравнение автономно, си = 1, f(x, х) = (1 — Ьх2)х. В переменных а, ф имеем
f(a cos ф, — asin^) = — (1 — ba2 cos2 ф) a sin ф,
Fi(a,^ = —/(acos^, — asin^) sin^ = (1 — ba2 cos2 ф) a sin2 ф,
П}(а,ф) = — f(acosф, —asinф) cosф = (1 — ba2 cos2 ф) a sin ф cos ф.
Введем обозначение
2%
W)} = 7^ У g^d^.
О
Поскольку
/ . 9 , \ /1 — cos 2ф \ 1
/ = 2'
(sin2 ф cos2 ф} = ^(sin2?^) = ^(1 —cosф) =
то
2% 2%
Fi = -р- [ = 2- Al - ba2 cos2 ф) a sin2
Z7T J Z7T J 2 О
О О
2% 2%
F2 = — / Р1(а,ф) дф = — / (1 — ba2cos2'0)asin'0cos'0d'0 = О,
27Г J 27Г J
о о
4.1. Уравнения в оскулирующих элементах
93
и система (4.34) в данном случае принимает вид
• £а Л ba2\ i 1
Полученная система существенно проще уравнения Ван-дер-Поля.
Опишем общую схему. Пусть дана система
(4.35)
где ж, X eRn, у, Y eRm, seR1, |б| 1, вектор-функции X и Y периоди-
чески зависят от каждой компоненты вектора у с периодом 2тг. Будем искать
замену переменных (ж, у) н-> (£, ту) вида
х = £ + еи(£, у = т] + ev(£, ту),
где вектор-функции u, v периодически зависят от каждой компоненты век-
тора ту с периодом 2тг. Потребуем, чтобы эта система переводила исходную
систему в систему
г е = £А(^) + ои,
1 ^=це)+^)+т
При |е| 1 переменные у, ту — быстрые переменные, а переменные ж, £ —
медленные. В преобразованной системе медленные переменные отделены от
быстрых.
При замене переменных левые части исходных уравнений преобразуются
следующим образом
х = ( + е—аГ~( + е^Г’,=
= £[ак, + ^^"(<)] +0(£l’’
dv(g,Tj) ± .
= «({)+ c [b(S) + »(«)] + O(e
Правые части исходных уравнений принимают вид
еХ(х, у, 0) = еХ(£, т/, 0) + О<£2),
Приравнивая левые и правые части полученных соотношений и отбрасывая
члены O(s2), получаем
(4.36)
94
Глава 4. Исследование уравнений возмущенного движения
Представим вектор-функции X(£,?j,0), К(^, ту, 0) в виде рядов Фурье:
-*(£, т},0) =У2вр(ОехР(гРП), V(C,TJ,O) = ^2bp(C)exp(.ipi7).
р р
Здесь р— (pi,.. .рт) — вектор-строка, компоненты которой суть целые чис-
ла: Pj Е Z (J = 1,... т). Первое уравнение (4.36) записывается так
— w = а0(£) - А(£) + 52 °р(£) ехр(грт?).
Р7^0
Решение этого уравнения относительно и должно быть 2тг-периодическим по
каждой компоненте вектора Т]. Если неравенство р^О влечет неравенство
ры 0 при любом £, то формальное искомое решение можно взять в виде
«(£,п) = + 52гтЖ ехр(*рт?)’ = а°^-
Функция U(£) произвольна. Проблему резонансов, когда некоторые
ра>(£) ~0, обсудим ниже. Во многих задачах эта проблема не возникает.
Второе уравнение (4.36) решается аналогично
тр ш = Ьо($) - В(£) + 52 6р($) exp(iprj) +
dri
+ (и(£) + 52 ap^f\ ’
В(£) = bo(€) + Щ), г>(£, г?) = V(£) + £ ехр(грп)-
С7Ж P^lsJ
Функция V произвольна. Ввиду произвола в выборе функций С7, V решение
не единственно.
Как правило, преобразованные уравнения
е = гл«) + о(£2),
,7 = ^)+£в(е) + о(£2)
рассматривают на интервале t — £q~£-1, полагая s>0. Приведем сообра-
жения о точности преобразованных уравнений. Ошибка первого уравне-
ния O(s2) дает на рассматриваемом интервале в определении £ ошибку по-
рядка
A^^W) = О(е).
Тогда ошибка второго уравнения, обусловленная ошибкой, содержащейся
в о; (ж), составляет 0(e). Эта ошибка дает ошибку в определении Т] порядка
— to) — s-1^^1) = 0(1).
В таком случае ж, у надо представлять в виде
Ж = С + еГ7(С,7/), у = 7],
4.1. Уравнения в оскулирующих элементах
95
где £ н т] определяются уравнениями
£ = еА(£), 17 = «(£).
Погрешность определения х составляет 0(e), погрешность определения у
имеет порядок 0(1). При этом
2% 2%
О Ov
т раз
Условие р / 0 => рш 0 называется условием отсутствия резонанса.
Проблему резонанса разберем на простом примере. Дана система
X = еХ(х,у1,у2,е), Vt = + eYi[x,yi,y2,e) (г = 1,2),
где х GR"; yi, У2 GR1. Пусть в области изменения х выполнено условие ре-
зонанса:
Р&^х) + р°2Ш2(х) « 0.
Здесь pl и Р2 — целые числа, р% 0. Очевидно, что при любом фиксирован-
ном х таких чисел существует счетное множество. Здесь важно, что величина
|Р1| + 1^21 достаточно мала, чтобы условие резонанса было выполнено в до-
статочно большой области изменения £. В исходной системе сделаем замену
переменной у% н-> xn+i по формуле
Р1
У2 = - — У1 +ГГп+1-
Рч
После замены исходная система перейдет в систему
X = еХ(х,у1,-^у1 + хп+1, е) ,
Р2
Яп+1 = -4[P1W1(«) +Р2^2(Я:)] + 4(Р1У1 +Р2У2),
Р2 Р2
У1 =W1(®)+ еУ1(®,У1,-^У1+ жп+1,е).
Р2
Пусть 1[Р1и;1(ж) +P2cj2(®)] = О(е). Запишем систему в виде
х = еХ(х, уи е), ух = сщ(ж) + £?1(®, У1, е),
где х= (x,rrn+i) — новая медленная переменная.
Правые части новой системы периодически зависят от у\ с периодом 27г/?2-
Можно применить вышеописанную схему. При этом усредненное уравнение
имеет вид
2%Р2
о
96
Глава 4. Исследование уравнений возмущенного движения
4.2. Спутниковая задача трех тел
4.2.1. Усреднение уравнений в оскулирующих элементах. Рас-
смотрим ограниченную круговую задачу трех материальных точек (трех
тел), см. п. 2.1. Точку mi будем считать Солнцем, точку m2 — планетой, точ-
ку т — спутником планеты. Изменим обозначения: р2 ь-> Р, R^r. Уравне-
ния движения спутника запишем в виде
- = _ р<2р + ( L _ г + р
? р3 |г + р|3/
(см. второе уравнение (2.3)). Это уравнение можно представить следующим
образом
р2р dU ТТ (гр 1 \
Р — > U — pi I —з—I- -j—j—г j.
р6 др \ г6 |г + р|/
Здесь U — «силовая» функция возмущающего ускорения. Будем считать, что
р<^г при всех t и m2 mi. Исследуем свойства движения точки т. Вос-
пользуемся методом возмущений и уравнениями в оскулирующих элементах.
Получим приближенное выражение для U в случае р<^г. Используя форму-
лу
(1 + х)а = 1 + ах + а(а<2 1)
находим с учетом квадратичных членов
------= [г2 4- п\ -I- л21-1/2 = - (1 -I- 2
2
Г4
ДА т-р 1 м2 з £(гр)
г у г2 2 г2 8
Следовательно,
у г 2
2\ -1/2
Т^Р Г 1
r2 + r2 J
1 гр 3 (г-р)2 1 р2
г г3 2 г3 2 г3
1 мЧ = Mi Mi_ / 3Чр)2 _ 2^
2 г3/ т 2г3 у г2 Р J
Введем «инерциальную» систему координат mixyz, оси которой сохраня-
ют неизменное направление в абсолютном пространстве. В этой системе
Г = r(cos?z, siniz, 0), и = CJq, г = const, CJq = (pi + р2) Г-3 ~ Р1Г-3,
тогда
гJ ~ СЦг-р)2 _ Д
2 \ г2 Р )'
Для невозмущенного движения точки т имеем
P = £,P + riQ, Р = (Px,Py,Pz), Q = (Qx,Qy,Qz),
£ = a(cosE — е), р = ау/1 — e2sinP,
р2 = £2 + rj2 = a2(l — ecosE)2, г • р = £(Р г) + p(Q г),
(г • р)2 = £2(Р • г)2 + r]2(Q г)2 + 2£??(Р • r)(Q • г).
(4.37)
(4.38)
4.2. Спутниковая задача трех тел
97
В уравнениях (4.31) для оскулирующих элементов имеются две быстрые пе-
ременные Мии. Эту систему надо дополнить уравнением й = cjq- Тогда она
примет вид системы (4.35), где х = (а, е, Q, г, lj)t, у = (М, и)у.
Правые части уравнений в оскулирующих элементах представля-
ют собой линейные комбинации частных производных силовой функ-
ции U = U(x, М,и) по элементам орбиты. Коэффициенты комбинаций за-
висят только от медленных переменных. В таком случае при интегрировании
нужно учесть следующие соотношения
27Г
/ dM = U^х' 271-’~ U(х’ 0’= О’
о
и 2тг и 2тг
У У dMdu = -^jj UdMdu.
0 0 0 0
Здесь М — средняя аномалия движения спутника в отсутствии возмущений,
то есть dM = (1 — ecosЕ) dE. Таким образом, усреднение уравнений в оску-
лирующих элементах по движению точек тп\ и тп^ (двукратное усреднение)
сводится к усреднению силовой функции U:
2тг 2тг
m = ^/ / vdudM-
о о
Выполним усреднение функции р2, учитывая (4.38):
2тг 2тг 2тг
(р2) = у* У а2(1 — ecos E)2dudM = j\l — е cos Е)3 dE =
оо о
2тг
a2 f ( Зе2\
= —- / (1 — Зе cos Е + Зе2 cos2 Е — е3 cos3 Е) dE = а2 ( 1 + — ).
2тг J \ 2 /
о
Введем обозначения •
2тг 2тг
/(•) du, {-)м = 4- /(•)(1 - ecosE) dE,
2тт J 2л J
о о
(•> = (<->Х = = {F(u)\{G(M))m.
Далее имеем
((- PT) = • r)2)u +
98
Глава 4. Исследование уравнений возмущенного движения
где
/. \ Л / 2\ а2(1 — е2) / . о гп/1 гпч 7гп а2(1 — е:
(^)м=0> О? )м =-----------J sm Е(1 — еcosE)dE=------—
О
Е — е)2(1 — е cos Е) dE =
= — ( cos2 Е — 2е cos Е + е2 — е cos3 Е + 2е2 cos2 Е — е3 cos Е) dE =
2тг J — ----------
О 2/1 \ /1 \
= ( - + е2 + е2 ] 2тг = а2 [ - + 2е2 ).
2тг у 2 J \2 J
Поскольку
Р • г = r(Px cos и + Ру sin u), Q • г = r(Qx cosu + Qy sin и),
учитывая (1.38), находим
((р • r)2)u = j г2(Р2 + Р2) = 1 г2 (1 - Р2) = 1 г2 (1 - sin2 w sin2 i),
((Q’r)2k = ^r2(Q2x + Q2y) = ф2(1 -Q2) = |’Л1 — cos2 w sin2 г).
Собирая все вместе, в соответствии с (4.38) получим
((г • р)2) = г2а2 + 2е2^ (1 — sin2 со sin2 i
+ ^r2a2(l — е2)(1 — cos2 со sin2 г) =
= 2 + Зе2 — (1 — е2) sin2 г — 5е2 sin2
4
Таким образом, согласно (4.37) имеем
/С7> = ^Г^
х ' 2 [4
2 Л Зе2\"
~а (1 + TJ
Вычислим частные производные
d(U) _ 3cjga2e
• ) • 2 •
sin со sin г
- a2 (2+3e2— (1 — e2) sin2 i — 5e2 sin2 co sin2 г) —
’ 1 / )2 Г
= 2+3e2-
' 8
3(1 — e2) sin2 i — 15e2 sin2 cj sin2 i
(4.39)
(1 + sin2 i — 5 sin2 cj sin2 г),
de
d{U) 342a2
di
e<E)
dco 4 v о±±± ’ dM
Используя эти производные и уравнения (4.31), получим уравнения в оску-
лирующих элементах с усредненной силовой функцией
sin г cosz(l — е2 + 5е2 sin2cj),
15се>о<7,2е2 . 2 . .
------------sin г sin со cos со / = 0.
4.2. Спутниковая задача трех тел
99
Уравнение для a
д 2 d{U}
na dM
Уравнение для e
- _ ^-e2 d(U) _
nea2 3(jJ
15 о Л 2 • 2 • •
ne = — cuq e\ 1 — e sm zsmcucoscu.
а = const.
\/l — e2 15cjntz2e2 . 2. .
------ -------7---- Sin $ Sin Cd COS Cd,
nea1 4
= 0
Уравнение для i
di ctgz d(U} ctgz 15сУщ2е2 . 9. .
— =--------. ' =--------. ----;--sin zsmcucoscu,
dt na2y/l — e2 na2yl — e2 4
di 15 силе2
n— =----------. ____sin г cos г sin cu cos cu.
dt 4 T'i _e2
Уравнение для Q
1
n =_________‘
na2 \/l — e2 sin i di
1 3cJnCZ2 . . . ✓ 2 r 2 • 2 \
------. ---------у— smzcoszll — e + 5e sin on,
тш2\/1 - e2 sin г 4
• 15 cjncosz /9.9 1 — e2\
nQ = —---------; e sin2 a> H---------— .
4 5 J
Уравнение для cd
ctgi d(u) x/l-e2 d{U)
na2y/l - e2 di nea2 de
ctff i 3cdnd2 . , n 2 . 2 \
=------. — —7— sin г cos г (1 - e + 5e sin cj) +
na2Vl - e2 4
Vl — e2 3wna2e . . r • 2 • 2-\
H-----------y--(1 + sin21 — 5sin cj sin г) =
nea2 4 v
= —[cos2 i (1 - e2+5e2 sin2 cu) + (l-e2)(l+sin2 i - 5 sin2 cj sin2 г) J,
nd) = [(e2 - sin2 г) sin2 cj + | (1 - e2)].
4 7 5 v 'J
В этой системе уравнений а — параметр. Введем еще один параметр
15 cjn
х = —----.
4 п
100
Глава 4. Исследование уравнений возмущенного движения
Тогда полученная система принимает вид
’ . 9 . .
Sin ZSinCJCOSCJ,
sin i cos i sin co cos lj,
1 - e2\
2-2 । e 1
! SIH CO 4------- I ,
5 J
s2 — sin2 i) sin2 co + ;
ё = хе\/1 — е2
di е2
— х — S
dt \/1 — е2
< xcosi / .
Q = \/1 — е2 \
х Г/
со = —/ -- (е
\/1 - е2 I-
(4.40)
Эти уравнения имеют два первых интеграла: (С7) и (1 — е2) cos2 г. Проверим
д(и) д(и)
это. Так как г), / = ——-
дМ
1)
d(U) х/1 - е2 d{U} t d(U)
де
d{U) Г
дш
— — 0 (CM- (4-39)), с учетом (4.31) имеем
d(U) d(U). . d{U)di d(U)
dt de di dt dco
____________ctg г d(U) +
nea2 duo di na2\/l — e2 dco
к(У'1 . 0|
ctg?
na2\/l -е2 di ' пеа2 де
2) -y-kl — e2)cos2zl = — 2eecos2z — 2(1 — е2) cos г sin г =
dt L J dt
2 Vl-e2 dlU} . 2Ч . . ctgг d(U) п
пеа1 dco 4 7 тш2у 1 — е2
Согласно (4.39) постоянство ([/) означает постоянство выражения
2 + Зе2 — 3(1 — е2) sin2 г — 15 е2 sin2 ио sin2 г =
= 2 + Зе2 — 3 + Зе2 + 3(1 — е2) cos2 г — 15 е2 sin2 ио sin2 г =
/2 \
= — 1 + 3(1 — е2) cos2 г + 15 е21 - — sin2 ио sin2 г ).
у 5 J
Так как 3(1 — е2) cos2 г = const, то е2| - — sin2 со sin2 г ) =const. Положим
у 5 /
/2 \
с = (1 — е2) cos2 г, h = е2 ( - — sin2 со sin2 г ). (4.41)
\5 J
В усредненной системе (4.40) уравнение для Q отделяется, а автономные
уравнения для е, со, i допускают два первых интеграла, не зависящих от
времени. Следовательно, усредненная система интегрируема. Такое интегри-
рование впервые было выполнено М. Л. Лидовым [13]. Ниже излагаются неко-
торые его результаты.
• 2 • 2 •
— sin CO sin I
4.2. Спутниковая задача трех тел
101
4.2.2. Стационарные решения. При ге(О,тг), ее (0,1) стационар-
ные решения уравнений (4.40) относительно е, lj, i определяются соотно-
шениями
2
cos си = 0 (sin2 си = 1), (е2 — sin2 г) sin2со + - (1 — е2) = 0.
о
Последнее соотношение запишем так
е2 — 1 + cos2 г + | (1 - е2) = 0 => cos2 г = | (1 - е2).
5 5
Следовательно, для стационарных решений cos2 i < 3/5. Найдем границы из-
менения постоянных первых интегралов на стационарных решениях. С уче-
том (4.41) имеем
Выписанные соотношения параметрически (с параметром cos2 г) задают
кривую в плоскости (ft, с). Получим уравнение этой кривой:
4 . __ 2 • /Зс
с = - cos г => cos г = у —,
5ft / /5с\2 / 5ft /5с
=> у-т + Уз=1
Кривая стационарных решений симметрична относительно прямой c + ft = 0
(см. рис. 4.2).
В окрестности точки (ft = 0, с = 3/5) получаем
Следовательно, кривая стационарных решений касается оси ординат в точке
(0,3/5) и в силу симметрии — оси абсцисс в точке (—3/5,0).
102
Глава 4. Исследование уравнений возмущенного движения
4.2.3. Границы изменения постоянных первых интегралов. Так
как ге(О,тг), ее (0,1), то
с = (1 — е2) cos2 i е [0,1). (4.43)
Для простоты будем писать нестрогие неравенства и считать, что с е [0,1].
В соответствии с (4.41) получаем
, 2<2 • 2 . 2 Л / 2 2 2 Л С \ 2 , \ fAAAX
h = е21 - — sm2 си sin2 г - е2 = - 1--------- (1 — с) (4.44)
\5 J 5 5 \ cos2 г/5х 7
(см. рис. 4.2). Равенство здесь имеет место при sin2 г = 0.
Рис. 4.2. Области I и II допустимых значений h и с.
Вычислим оценку снизу
(4.45)
Положим х = cos2г. Согласно (4.43) же [с, 1]. Рассмотрим функцию
Зс
/(ж)=ж + —. Чтобы получить оценку снизу для /i, найдем минимум этой
5х
функции на отрезке [с, 1]. Приравняем к нулю производную /(ж):
г,/ \ п 1 Зс _______ [Зс
/М = о « 1 = ^
Рассмотрим сначала случай
/Зс 3
I» = VT>C =*
Тогда минимум /(ж) достигается при ж = жо, то есть при cos2z =
гласно (4.45)
и со-
Пусть теперь Жо < с. В этом случае ж > с > 3/5. При этих значениях ж функ-
ция /(ж) возрастает и ее минимум достигается на левой границе отрез-
4.2. Спутниковая задача трех тел
103
ка [с, 1]. Следовательно, при с > 3/5 минимальное значение h достигается при
cos2 i = с и в соответствии с (4.45) имеем h 0. Области I и II допустимых
значений Лис представлены на рис. 4.2.
4.2.4. Анализ фазовых кривых. Используя соотношения (4.41), вы-
9
разим е
• 2 9 •
и sm со через coszz
(1 — е2) cos2 i = с
(4.46)
9/2 . п . 9 .
е----sm со sm г
\5
е2 = 1 -
cos2 г
1 С А (.2 • 2 •
1----—------sm со sm г
cos2 г / \ 5
. 2 • 2 •
sm со sm г = -
5
Л cos2г 9 (2 — 5Л) cos2z — 2с
—--------- => sm = —г-----------------------—-----г-.
coszz — с 5(1 — cos2 г) (cos2 г — с)
Используем обозначение х = cos2 г, с х 1 (см. (4.46)). Тогда
42 = 1--, = g ~ ~ 2fv (4.47)
х 5(1 — х)(х — с)
Графики зависимостей sin2 си и 1 — е2 от х представлены на рис. 4.3. Заме-
тим, что
sin2 со = 0
X = Xq =
2с
2-5h'
(4.48)
Должно выполняться неравенство Т поэтому
2с
——^1 (2 - 5Л 0) =>
2 — 5Л
2с 2 — 5Л =>
/i^|(i-c).
Это неравенство выполнено в областях I и II (см.
рис. 4.2). Для неравенства с^з?о имеем
с =^> 2 - 5Л 2 =>
2 — 5Л
Л^О.
Это неравенство выполнено в области I.
При sin2 ш = 1 имеем
5(1 — х)(х — с) = (2 — 5h)x — 2с <=>
5я2 — (5с + 5Л + 3)х + Зс = 0.
Рис. 4.3. Зависимости
• 9 ч 9
sin cj и 1 — е от х для
Вычислим дискриминант этого квадратного уравнения различных h.
D = (5с + 5Л + З)2 — 60с =
Заметим, что D 0 в областях I и II, причем D = 0 на кривой стационарных
(4.49)
104
Глава 4. Исследование уравнений возмущенного движения
решений. Решения уравнения имеют вид
5/1 + 5с + 3 — у/d 5/1 + 5с + 3 + y/D
(4.50)
х' =--------10-------’ "2 =-------------10---•
Из вида зависимости sin2 ш от х следует, что в области I
. . 2с . _1
ХО
Проверим, например, что #2^1- Согласно (4.50) получаем
х2 1 <=> 5/1 + 5с + 3 + VD 10 <=> VD 7 - 5/1 - 5с.
Так как 7 — 5/1 — 5с > 0 в областях 1,11, отсюда имеем в этих областях
(3 + 5/1 + 5с)2 - 60с (7 - 5/1 - 5с)2
9
(3 + 5/1 + 5с)2 — (7 — 5/1 — 5с)2 60с <=> h < -(1 - с).
5
Покажем, что Ху с в области I, где /1^0. Используя (4.50), имеем
5/i + 5c + 3 - VD г-
-------—---------с <=> 5/1 — 5с + 3 y/D.
Последнее неравенство выполнено, поскольку
(5/1 - 5с + З)2 < (5/1 + 5с + З)2 - 60с <=>
60с < (5/1 + 5с + З)2 - (5/1 - 5с + З)2 <=>
60с < 10с( 10/1 + 6) <=> /1^0.
Аналогично для области I доказывается неравенство с^^2-
10с < 5/1 + 5с + 3 + VD <=> 5с - 5/1 - 3 < VD.
Отсюда следует /1^0. Фактически доказано, что 15/1 — 5с + 3| VD в обла-
сти I.
В области I имеем То ^2- По теореме Виета
Зс с 5 5/i + 5c + 3 — VD . .
£1^2 = -г- =--------т--------, 4.51
5 Х2 о б
откуда в соответствии с (4.46) получаем 62 — 1--= 1 — й#1- Для е2 Д°лж-
Х2 О
НО ВЫПОЛНЯТЬСЯ 0 С2 1) поэтому должно выполняться
5 3
0 < 1 - -XI 1 <=> 0^2?1^-.
о о
Левая часть последнего двойного неравенства следует из того, что с 0,
Х2 с и теоремы Виета. Докажем, что в области I, где /1^ 0, выполняется
и вторая часть неравенства:
3 5/i + 5c + 3-^D 3 с о/ /7^
С й <=> -------------гт;----------С - <=> 5/1 + 5с — 3 < VD.
5 10 5
В том случае, когда 5/i + 5с — 3 < 0, последнее неравенство выполнено. Если
же 5h + 5с — 3 0, оно с учетом (4.49) эквивалентно неравенству
(5/i + 5с - З)2 (5с + 5/i + З)2 - 60с
60с 6(10/i + 10с) 0 h.
4.2. Спутниковая задача трех тел
105
В соответствии с (4.46) и (4.48) имеем
2 । с j с(2 — 5/i) 5h
61 х0 2с 2 ‘
Отсюда следует, что 0^е2^1, поскольку 0^ h 2/5 в области I. Таким
образом, х € [#о, #2], е е [ei, 62] в области I.
Проекция фазовой кривой системы (4.40) на плоскость (ж, 1 — е2) —
это не вся дуга кривой х(1 — е2) = с, содержащаяся в прямоугольнике
{сх 1, 0^1 — е2^1},а только ее часть, на которой в соотношении (4.47)
f(x) 1. Покажем, что эта часть дуги проходится многократно в обоих на-
правлениях. Для этого вычислим sgn си. Согласно (4.40) и (4.46)
sgn ей = sgn sin2cu(e2 — sin2г) + -(1 — e2) =
= sgn sin2cu(cos2z + e2 — 1) + -(1 — e2) =
L 5 J
= sgn [sin2 w (cos2 i-^7) + 2c, .].
L \ cos21/ 5cos2iJ
С учетом (4.47) выражение в квадратных скобках записывается так
(2 - 5h)x -2с / с\ 2с _ 2с(1 - х)(х - с) + (ж2 - с) [(2 - 5h)x - 2с]
5(1 — х)(х — с) \ х) Ьх 5х(1 — х)(х — с)
Преобразуем числитель полученной дроби
2сх — — 2сх2 + 2с2х + (2 - 5h)x3 — 2сх2 — (2 - §К)сх + %? =
= х [(2 - 5/i)x2 - 4сх + c(5/i + 2с)]
и, следовательно,
sgn cj = sgn [(2 — bh)x2 — 4сх + c(5/i + 2с)].
Рассмотрим квадратное уравнение
(2 - 5/i)z2 - 4cz + c(5/i + 2с) = 0. (4.52)
Его дискриминант равен
г 2 п
D' = 4с2 — c(5/i + 2с)(2 — 5/i) = 2bhc\h — -(1 — с) ,
L 5 J
Df 0 в области I (см. рис. 4.2). В этой области 2 — 5/i 0. Тогда (2 — 5h)x2 —
4сх + c(5/i + 2с) > 0, а значит, и ш > 0 для ее внутренних точек. Стало быть,
в области I функция си(/) монотонно возрастает и поэтому sin2 си принимает
значения от 0 до 1, переменная х — значения от х$ до переменная е —
значения от ei до С2-
Докажем, что с х± х^ 1 в области II. Неравенство х^ 1 доказано
выше. Покажем, используя (4.50), что с^Хр
, __ 5/z + 5с + 3 — VD _________
с С Xi <=> с -------------—------ <=> VD 5/i — 5с + 3.
В области II выполняется c^/i + 3/5 (см. рис. 4.2), поэтому последнее нера-
венство с учетом (4.49) эквивалентно цепочке неравенств
(5c + 5/i + 3)2-60c^(5/i-5c + 3)2 <=> (Ю/i + 6)Юс 60с <=> h 0.
Полученные неравенства верны в области II и, стало быть, c^#i.
106
Глава 4. Исследование уравнений возмущенного движения
Докажем, что х2
3
5
3
х2 25Л + 25с+15 + 5\/^ 30 <=> VD 3 - 5Л - 5с.
5
Поскольку 3 — 5Л — 5с 0 в области II, последнее неравенство с учетом (4.49)
эквивалентно неравенствам
(5с + 5/i + З)2 - 60с (5/г + 5с - З)2 <=> 6(10/i + Юс) 60с h 0.
Экстремальные значения ei, ег согласно (4.46) определяются соотноше-
НИЯМИ
9 о 2 -1
е2 = 1_йа:1’ е1 = 1--я:2.
О о
Таким образом, 0 е2 1.
cj<0 • с2»>0
в)
Рис. 4.4. Зависимости
sin2 LJ, LJ и сс от X.
Вычислим границы изменения со в области II.
Зависимость sin2 со от х задается соотношени-
ем (4.47) и представлена на рис. 4.4 а. В области II
sin2 си е [sin2 и*, 1]. В соответствии с (4.47)
d sin2 со _ Q
dx
(2 — 5/г) [х(1 + с) — с — х2] —
- [(2 - 5h)x - 2с] [(1 + с) - 2х] = 0 =>
(2 — bh)x2 — 4сх + с(5Л + 2с) = 0.
Полученное уравнение совпадает с (4.52). Внутри об-
ласти II его дискриминант D' > 0. Обозначим че-
рез ж* корень этого уравнения на интервале (a?i, х^).
Очевидно, о>| =0 (см. рис. 4.4 в), откуда согласно
(4.40) и (4.47)“
• 2 2с
Sin =
Проекция фазовой кривой на плоскость (х, со) приве-
дена на рис. 4.46.
В области II переменная х принимает значения от
Xi до переменная е — значения от ei до е2.
4.2.5. Граничные случаи. Выпишем уравнения (4.40) для границ об-
ластей I и II.
1) Для отрезка АВ (см. рис. 4.2) в соответствии с (4.44) имеем
2
h = -(l-c) => sin2z = 0.
5
4.2. Спутниковая задача трех тел
107
Поэтому уравнения (4.40) принимают вид
ё = 0,
Т= °’
< А Х f 2 • 2 1 — е2\
Q = =F ——.е sin ш Ч-----— ,
0 - е2 \ 5 J
. УС Г 9 . 9 2 z 9Ч1
и = —-е sm си + -(1 — е ) .
( л/Г7?1 'J
При г = 0 положим s = + Тогда
\/1 — е2 5 5
При i = тг положим г = Q — со. В этом случае имеем
ё = -|\/1 — е2.
О
В обоих случаях s — угол между осью Ох и линией апсид (вектором Лапла-
са). Порознь углы Q и со не имеют смысла (см. рис. 1.7).
2) На отрезке ЕВ с учетом (4.41) выполняются равенства
с = 0 =Ф> cos г = 0.
Следовательно,
ё = усе\1 — e2sincucoscu,
(4.53)
Эти уравнения имеют первый интеграл
Действительно,
Используя первый интеграл, можно построить проекцию траектории на плос-
кость (си, е). Найдем особые точки функции е = е(си), определяемые равен-
ством sin2 со = 2/5, откуда получим
cos 2cu = 1 — 2 sin2 со = =Ф> со = ± arccos + як, к е Z.
5 2 5
108
Глава 4. Исследование уравнений возмущенного движения
Выпишем четыре корня
arccos | « 39.23°,
2 5
0^2 — ~ ^1, Ц = 7Г — , оД = + 7Г.
Согласно первому уравнению системы (4.53) имеем
/ 7Г\ / 37Г\
если си е (J), — J U ^7г, — J, то е > 0,
/тг \ /Зтг .
если со е , 7Tj U , 2ttJ , то е < 0.
Согласно третьему уравнению системы (4.53) получаем
то со > 0,
то ио < 0.
если со е (^2,^1) С (ол^оД),
если со G (tJi,^) U (си^, 2тг + о^),
Рис. 4.5. Проекция траектории на плоскость (си,е).
Фазовый портрет системы (4.53) показан на рис. 4.5. В данном слу-
чае (г = тг/2) при любых начальных условиях, исключая со = со^ mod 2тг и
со = со% шоб2тг, в ходе эволюции орбиты спутника ее эксцентриситет дости-
гает значения е=1. Поскольку а= const, орбита становится близкой к от-
резку, один из концов которого совпадает с притягивающим центром. Если
притягивающий центр — сфера ненулевого радиуса, то со временем проис-
ходит столкновение спутника с ним. Такое столкновение происходит и при
достаточно малых cos2 г > 0.
3) На отрезке О А выполнено /г = 0, поэтому согласно (4.41)
2/2 . 2 • 2 •
е-------sin со sin г
\ 5
(4.54)
а) Для части DA отрезка ОА с учетом (4.41) имеем
3 2• 3 .2.2
с > - => cos г с > - => sin г < - =>
5 5 5
2 .2 . 2 • 2 . 2 . „
---sin со sm г >-sin г > 0,
5 5
откуда в соответствии с (4.54) следует е = 0. В этом случае уравнение для со
теряет смысл, хотя формально его можно исследовать. Из (4.41) получаем
4.2. Спутниковая задача трех тел
109
о •
cos г — с и уравнения записываются так
е
di
dt
0,
0,
А Х
U =------cos г,
5
/2 .о . о \
со = х--------sm со sm г > 0.
у 5 /
Здесь со и Q — постоянные величины.
б) На части DO отрезка О А, где с ^3/5, можно принять е^О. Тогда
согласно (4.54) имеем
• 2
sm со = —-х- — —--------
5sm2z 5(1 — х)
2
где х с (см. рис. 4.6). Следовательно, sin со Z
В соответствии с (4.40) получаем
Со — * [~sin2gj(cos2z — 1 + е2) + -(1 — е2
2с _
Ьх
(4.55)
0 _ е2 [5(1 - я) \
_ 2х(х — с)
- —==---------0.
\/1 — е2(1 — х)
Отсюда следует уравнение с5 = /(си), так как
2
sin2cj = ——-причем функция /(и) имеет
0(1 X )
сомножитель
Рис. 4.6. Зависимость sin2 и
от х на отрезке DO.
2
2
Л 2
х — с = 1 — с-—
\ 5 sm со
Поэтому получаем
2
2
/н = 0 =
Корни этого уравнения на отрезке [0, тг] записываются так
. , 1 1 — 5с
(Ji = arcsm А / —--- = - arccos -----002 = тг - со±,
у 5(1 -с) 2 5(1 - с)
при этом со —> cui, когда t —> — 00, и со —> СО2У когда t —> 00.
Первый интеграл (4.41) в данном случае дает
/~ с /5(1 — с) sin2cj — 2
е~ 1 / 1---— \ --------9--------*
V х V 5 sin со — 2
(4.56)
по
Глава 4. Исследование уравнений возмущенного движения
График этой зависимости представлен на рис. 4.7.
Iе
^тах
7Г— 7Г
Рис. 4.7. Зависимость е от w на отрезке DO.
Максимальное значение е = етах при cj 6 [0, тг] равно
/3 — 5с
&тах —
7Г
и достигается в точке си = —. В этом случае согласно (4.55)
• 2 •
sm г = -
5
При е = emin = 0 выполняется
2- 3
cos г = -
5
• 2
sm ш = Тй-------V
5(1 - с)
(см. (4.56)), откуда с учетом (4.55) получаем
sin2 i = 1 — с => cos2 г = с.
Таким образом, при си 6 [0, тг] имеем
2 з
с $ cos г С -.
5
Следовательно, значения i изменяются в следующих пределах
arccos
г arccos ус или
г тг — arccos
О
2
3
4.3. Силовая функция гравитационного взаимодей-
ствия двух тел
Рассмотрим два тела, одно из которых материальная точка или однород-
ный шар массы М, а второе тело произвольно. В центр масс О второго те-
ла поместим начало связанной с этим телом системы координат
Второе тело представим в виде совокупности материальных точек, имеющих
массы ти и радиус-векторы ru = (я^, я^з) (^ = 1,2,...). Компоненты
векторов здесь и ниже указаны в системе Ох^х^х^. Пусть R — радиус-вектор
центра масс первого тела, R= |Н|. Силовая функция гравитационного взаи-
модействия этих тел имеет вид
ТТ —
4.3. Силовая функция гравитационного взаимодействия двух тел
111
В случае |rj \R\ (у = 1,2,...) это выражение можно заменить более про-
стой приближенной формулой. По аналогии с предыдущим параграфом име-
ем
I = £ Г. _ 2(-R-r„) г„ rv
R R2 R2
£
R
R • г у 3(Л • Гу)1
R2 Я4
^rv-rv
2 R2
Отбросив в последнем соотношении не выписанные члены, примем
3 fM у—\ 2 fм \
+ 2 -^z2m^R-r^ - ^з22т^г-'г^-
V V
Введем обозначения
= (71,72,7з), 71 + 72 + 7з = !, 52 = М''
V
М' — масса второго тела. В силу выбора начала координат
52 т»Ту = О-
В результате получаем
ТТ fMM' 3 fM Л v- fM V- -Л 2
— 2 "дз” / . 'КЪ / , mvXviX»j — ^3 / , mu / , Xyi-
i,j=l и и i=l
Обозначим через компоненты тензора инерции второго тела в системе
координат Озца^з:
з
Aj = 5 f5 •
и 1=1
Имеем
з з
/и+122 + /зз = 52 52 - xli)= 2 52 52 т"х11-
1=1 и 1=1 и
С учетом последнего равенства получаем
з 1 3
TTlyXyiXyj = lij + 6ij ТПуХ^ = lij + — 6ij 1ц ------
V 1=1 V 1=1
3 3 1 3 3 1 3 3
53 muxui^vj — ~ 53 ^>7гТ7 + 2 53 53 = 2 53 ~~ 53 ^0’7г7г
i,j=l и i,j=l к=1 1=1 1=1 ij=l
Подставим полученные соотношения в выражение для U
ТТ fMM' 3fM^T 3^fMT _fM^r _
u R 2 R3 /ч7г7? + 4 R3 11 4Я3 Iu
i,j=l 1=1 1=1
112
Глава 4. Исследование уравнений возмущенного движения
/мм' з fM Л т /м Л т
~ R 2 R3 + 27?з
i,j=l Z=1
Будем считать, что система координат Ох^х^х^ образована главными цен-
тральными осями инерции второго тела. В этом случае \\Iij\\ = diag(7i,72, 7з)«
Тогда
тт fMM' 3fM, 2 т 2 т 2Ч fM ,т т . (А гГ7Ч
и = —-------2 ТдГ (^i + -^272 + Мз) + + Тг + Л) • (4.57)
Предположим, что второе тело имеет ось материальной симметрии. При-
мем эту ось за ось Ох\. Тогда I2 = h и поэтому
1-71
= ^-^[3(Л-Ш + 3/г-Л-2/2] =
= ^-^^(3^7
Обозначим через а' характерный размер второго тела. Например, если это
тело — эллипсоид вращения с осью симметрии Oxi, то а' — экваториальный
радиус тела. Положим
7 _
Л ” М'а'2 ’
тогда
fMM' Г (а'\2
1 — J2 I )
я
3 1
Здесь Р2(я) = - я2 — - — полином Лежандра степени 2.
Последняя формула получена для второго тела малых размеров. Одна-
ко специфика гравитационного поля Земли такова, что эту формулу можно
использовать для приближенного описания гравитационного поля Земли с
учетом ее сжатия. В этом случае первое тело (притягивающий центр) — КА,
второе тело — Земля.
Для Земли а' = 6378.14 км, J2 = 0.0010827, fMf = 398.6 • 1012 м3/с2.
4.4. Гравитационное поле на поверхности Земли
Введенную в предыдущем разделе систему координат обозначим Oxyz,
где Х\ — г, х^ = х^ хз = у. Пусть Земля вращается с угловой скоростью со
вокруг оси Oz. Если точка (первое тело) неподвижна относительно системы
координат Oxyz, ее силовая функция представляется в виде
~ = fMM P2(sin0) +^-ш2Я2 cos2 0.
It |_ \^/ J
4.4. Гравитационное поле на поверхности Земли
113
Здесь в — астрономическая широта точки, последнее слагаемое — силовая
функция центробежной силы. Будем считать, что на поверхности Земли сило-
вая функция постоянна: U = Со = const. В частности, при R = a!, 0 = 0 имеем
fMM'( J2 “2а'3\
+ Т + 2fM') = °'
В этом случае поверхность Земли задается уравнением
fMM' Г Za'\2 3sin26>—11
R
2
1,т 2r)2 2n fMM'
+-Mu)2R2 cos2 9 =---—
2 а'
/ J2 и2 а'3 \
1 + —H--— ,
V 2 2/M'/
преобразуя которое, получим
“Е 1 — Л
JLL
a'\23sin20— 1 cj2/?3
r) 2 + 2/M'
_n
Введем параметр q = f (для Земли q = 3.45 -10 ). Тогда
af\2 1 — 3sin20 1
— I ---------4” — Q — I 1
RJ 2 2 \a'J
2л"1 1 А Л (Л,3\
cos т4
— 1 + Л
JLL
’ 1 1 /
cos2 в = — ( 1 +
а' \
Л + Q
2
откуда
, T fa'\2 1 — 3sin2# 1 (R\3
Я 1 + ЛЫ 2 +29ЫС°
a' j Л + g
Полученное уравнение задает так называемый сфероид, или эллипсоид Кле-
ро. На поверхности Земли R/a’^A, величины q и малы, поэтому
(x = g(x,e), £z(l,0) = l, ж(е) = 1 + е;г + ... «#(1,е))
1 - + ^(1 - 3sin2#) + Ros2 9 = 1 - ^A±isin20.
cl 2 2 2 2
Примем
— = 1— asin20, a — => R = a'(l — asin20), Л = (4.58)
a' 2 3
Выясним смысл а. Рассмотрим эллипсоид вращения с осью симметрии Oz\
^ + 4 = 1, = £ =
/2 ,/2 ’ \ / ’
а о
z2 = R2 sin2 9,
х2 у2 = R2 cos2
R2
cos2 9
R = a'
cos2 9 +
sin2# I 1/Z2
(i^.
а -b'
а ’
sin2 9
a'2(l-£2).
= 1,
a'(cos29 + sin29 + 2esin2# + ...) ^2 =
= a'(l + 2ssin2# + ...) ^2= a'(l — esin2# + ...).
a! - b’
Следовательно, a = £, то есть a =----f—. Параметр а называется сжати-
a 1
ем эллипсоида. Он определяется геодезическими средствами. При а =
298.25
114
Глава 4. Исследование уравнений возмущенного движения
ЭЛЛИПСОИД
x2 + y2 z2 =
a'2 a'2(l — a)2
приблизительно соответствует фигуре Земли.
Компоненты силы, действующей на точку, в сферических координатах Я,
0, (/?, связанных с декартовыми соотношениями
х = R cos в cos (/?, у = R cos в sin (/?,
в базисе {ед, е^, е^} даются формулами
_ _ ди 1 ди
9R~ dR’ 9e~Rd9’ 9v~
(a'\2 1 — 3sin2#
1 + 3J2^
\ -O'
z = RsmO,
fMM1
R
fMM’;
1 dR
Я cos# dip’
/ D \ 3 "I
q (R\ 2л
~; cos # ,
2 2 \af J J
2 / \ з -i
(1 — 3sin2— q( —f ) cos2# ,
Здесь дд, gey — компоненты ускорения свободного падения в сферических
координатах. Отсюда в первом приближении по и q получаем
In 1-1ВД-
Ы R2
dU
dR
R2
3J2 (о!\ о • 2 л\ (2 л
(1-3sm cos е *
На поверхности Земли при R = а'(1 — a sin2 #) имеем
1 + ~^(1 ~ 3sin2#) — q 4- Qsin2# ;
3*^2 ~ 2q f 9J2 \ . 2 л 1 о • 2 л
— ------I —----q I sin # + 2а sin # =
3J2 Q 3q 972^ . 2 л
~2~ 2 + (2cv + <?~ ТГ111 9 ’
fM'/ п . 2
g ~ (1 4- 2а sin2
а '
fM'
~ /2 1
a L
= ^[1 +
а'2 L +
С учетом (4.58)
9Л 9 2а — q 5q
2а + <7 - —- = 2а + q — - —— = —-а
L/ Li О Lj
и, следовательно,
9
Отсюда имеем
fM'
/2
a L
3<7 (5q \ . 2 л
+ —— a sm2 в .
2 V 2 /
<9 = 0
9 = 9э =
3£
2
4.5. Влияние сжатия Земли на эволюцию орбиты
115
Положив /3 = —— а, получаем
д = рэ(1 + /3sin2 в).
Существуют более точные формулы, коэффициенты которых время от вре-
мени уточняются. Формула 1967 года:
д = 9.780319(1 + 0.00530240sin2 0 - 0.00000585sin2 26») м/с2.
4.5. Влияние сжатия Земли на эволюцию орбиты спут-
ника
Гравитационное поле с силовой функцией
1L у Tt J у IL J
называется нормальным гравитационным полем Земли. Обозначим, как
обычно, /1 = fMf. Рассмотрим возмущающую функцию
/1 J2a'2 / 3z2 1\
Я3 \2№ ~ 2
Поскольку для спутника на эллиптической орбите
dv (1 + ecosz/)2
dM = (i _ е2)3/2
(см. п. 1.3.1), имеем
v,
' ' 2тг J 2,7V J (1 + ecosz/)2
о о
где
ТТ 3 7 '2 _1_ 1 7 '2 1
С, = -2'‘Л“
= 1 <1 + 7^3 - 3- <1 + 7^3 (Р. „з „ + Q. з!п
2 р3 2 р3
Используя соотношения
(1 _ 2\3/2 2Г
((1 + ecosz/)3)=--------- / (1 + ecosz/) dv = (1 — е2)3^2,
о
((1 + ecosz/)3(P2 cosz/+ Qz sin z/)2) =
(i_e2)3/2 2;
=--------- / (1 + e cos z/) (P2 cos v + Qz sin z/)2 dv =
116
Глава 4. Исследование уравнений возмущенного движения
2тг
получаем
в2)1'2 . 2 .
-Т----sm г
3 . 2 Л
2 Sm У ’
•2 •
(l-e2f/2 f
= --------— / (l + ecosz/)(P2cos2z/ 4- Q|sin2z/ + 2P2Q2 cosz/sinz/)dz/ =
о
= | (1 - e2)3/2(Д2 + Q2) = | (1 - e2)3/2 sin2 i,
/ тЛ 1 T ,2(l-e2)3/2 3 ,
{U)=-fiJ2a --------3-------nJ2a
или, учитывая равенство p = а(1 — e2),
(U}= 1_____mJ2Q'2_fl -
? 2 a3 *(l - e2)3/2
Выпишем частные производные
d(U) 3 nJ2a>2 . . .
=--------------57Z sin г cos г,
дг 2 а3(1 _ е2)3/2
д( U) _ nJ2a'2 ( 3 . 2\( 3\ (-2е)
де 2а3 \ 2 Sm J \ 2/ (1 _ е2)5/2 “
3uJ2a,2e / 3 . о д
2а3(1 - е2)5/2 V 2 J
д(и') 3 , 3 гд
За 2««(l-e’)3«V 2ЯП*Л
Используя эти производные и уравнения (4.31), получим уравнения в оску-
лирующих элементах с усредненной силовой функцией Имеем
di
а = 0, ё = О,
1
Далее
Q = 1 (_ мЛа'2
па2\/1 — е2 sin г \ 2/ а3(1 — е2)3^2
откуда с учетом соотношения
V
3
sm г cos г =-------------cos г,
2па5(1 — е2)2
П
а2
получаем
_ 3 nJ2a>2
3 nJ<2 (а'\2
—о cos г =----------о — cos г.
2а2(1 —е2)2 2 (1-е2)2 \aj
Найдем производную ш. Согласно (4.31) имеем
(1 — е2)1/2 /1 S/j^a^e / 3 . 2 \
па2 уе 2а3(1 — е2)5/2 ' 2 '
ctg г З/^а'2 . . Д
Н-----------------тут- sm г cos г =
1 - е2 2а3(1 - е2)3/2 J
4.5. Влияние сжатия Земли на эволюцию орбиты
117
3 р^а!2 А 3 . л Л 3 /iJ2a,2cos2i
=-----—------2 1 - х sm2 г +- —--------=
2 па5(1 — е2) \ 2 / 2 па5(1 — е2)
3 nJ2a'2 / 2. , 3 . 2 Л 3 nJ2 /а'\2/5 2- 1
—-----------о cos г + 1 — - sm г =--------— - cos г — -
2а2(1-е2р 2 ) 2 (1-е2)2 \ a J \2 2
или окончательно
3 nJ2 fa'\2 f 2- Л
4 (1—е2)2\а/ \ J
Вычислим производную М
2 3fiJ2a’2 / 3 . 2 д
М = п Ч------------------т— (1 - - sin2 г) -
па 2а4(1 - е2)3/2 V 2 7
1 — е2 3u,J2a>2e / 3 . 2 д
--------------------1 — ~ sm г =
пеа2 2а3(1 — е2)5^2 '2 /
3uJ2a'2 (л 3 . о д 3uJ2a'2 / 3 . 2 .
= п-\---------------тут 1 - - sin г-------------ттт 1 - - sin г
па5(1 - е2)3/2 V 2 J 2na5(l - е2)3/2 V 2
3 nJ2 /а'\2 / 3 . 2 д
= П Н-----------ттт — 1 - - sin г I
2 (1 _ е2)3/2 \aj \ 2 )
nJ2
и в результате
2
(3 cos2 i
3 п^2
М = п Н----------
4(1- е2)3/2
Орбита эволюционирует так, что е= const, i= const, а= const,
Q, cu, M постоянны. В случае г = 51.6° и круговой орбиты с высо-
той 400 км (Международная космическая станция) имеем Q = —5.9°/сут,
с5 = 4.3°/сут. Если г 6 (0,90°), то Q < 0 (см. рис. 4.8).
Этот эффект называется регрессией узла.
При г = 90° имеем Q = 0. Можно подобрать накло-
нение и высоту круговой орбиты так, чтобы обеспечить
О = 0.9856°/сут. Тогда будет обеспечена синхрониза-
ция прецессии орбиты с годовым движением Солнца.
Для орбиты с высотой 300 км синхронизация достига-
ется при г = 97°, для орбиты с высотой 1000 км г = 99°.
Такие орбиты называются гелиосинхронными.
При
i= arccosf ±—= ] имеем cj = O. Эти два зна-
\ х/57
называются критическими: ii = arccos ( —] = 63.43°, г2 =7г — ii =
\ у 5 /
При гб(г1,г2) выполняется неравенство со < 0. Значение i = ii ис-
чения i
116.57°.
пользуется для орбит спутников связи и мониторинга поверхности Земли
(спутники ’’Молния” и др.). Эти орбиты имеют период около 12 часов, высоту
апогея около 40 тыс. км и высоту перигея около 500 км, i = 62.8 — 65.5°. Пара-
118
Глава 4. Исследование уравнений возмущенного движения
метры орбиты выбираются так, чтобы синхронизировать движение спутника
с вращением Земли. Три спутника связи ’’Молния” обеспечивали связь за-
падных районов СССР с Дальним Востоком. Каждый спутник обспечивал
связь в течение более 8 часов, находясь в окрестности апогея.
Драконический период — время полета между последовательными про-
хождениями через восходящий узел орбиты: от и — 2'кк до и = 2тг(к +1),
к Е
Аномалистический период — время полета между последовательными
прохождениями через перигей орбиты: от М = 2тгк до М = 2тг(к + 1), к 6 Z.
Сидерический период Тсид определяется для любого момента времени t
как минимальный положительный корень уравнения
[r(t + Дид) - г(<)] • r(t) = О,
где r(t) — закон движения КА.
Оскулирующий период TQCK также определяется для любого момента вре-
мени t:
[о?
ТОск =
где а — оскулирующая большая полуось.
Задача 4.1. Исследовать орбиты при г = 0. Рассмотреть случай круго-
вых орбит при i = 0.
4.6. Влияние сопротивления атмосферы на эволюцию
орбиты спутника
4.6.1. Усредненные уравнения в оскулирующих элементах.
Обычно предполагают, что возмущающее ускорение, создаваемое сопротив-
лением атмосферы, имеет вид [17]
w = — cp\v\v.
Здесь р — плотность набегающего на спутник аэродинамического потока,
v — скорость спутника относительно поверхности Земли, с — положительная
постоянная (баллистический коэффициент). Эта формула обоснована, если
атмосфера вращается вместе с Землей, спутник имеет форму сферы и его
абсолютная угловая скорость мала. Примем дополнительные упрощающие
предположения. Будем считать, что атмосфера неподвижна в абсолютном
пространстве (для низко летящих спутников ошибка в задании скорости не
превосходит 1/16), и примем упрощенное выражение для р\
( г-го\
р = роехр1----— у
4.6. Влияние сопротивления атмосферы на эволюцию орбиты
119
где ро — плотность атмосферы при r = ro, Н — так называемая высота одно-
родной атмосферы. В таком случае
— е sm z/, —
V
w = Ser + Твр, S = — cpvvr, Т = — cpvvu.
Приведенное выражение для w не допускает силовой функции. Поэтому при-
ходится использовать первый вариант уравнений в оскулирующих элементах
(см. (4.22))
Р =
ё
(j
2Sr р
п----— + —
М =
' _ г \ ге
1 + - cos z/ Н-> ,
k Pj Pi)
(r\
1 + - sin z/ ,
Р/
(4.59)
sin I/ — S cos z/ ,
0, Q = 0.
di
dt
Здесь учтено, что W = 0. Последние два уравнения (4.59) означают, что плос-
кость орбиты неизменна в абсолютном пространстве.
Усредним правые части уравнений (4.59) по средней аномалии. Восполь-
зуемся соотношением
27Г
,2?/2 2;
(4.60)
2тг J 2тг J (1 + ecosz/)2’
о 0
Положим A = \/l + 2ecosz/ + e2. С учетом (4.9) запишем
p = — 2 л/—---------ср — 4(1 + ecosz/) = — 2сру/~йрА.
V p 1 + e cos z/ p
Выполняя усреднение, находим
— (1 “ e2)3/2 Г pAdv
p = - Z^p—^ J (1 + ecosi/)i.
0
Чтобы получить усредненное уравнение для tu, преобразуем правую часть
четвертого уравнения (4.59). Учитывая явный вид S и Т, имеем
/ г\ / 1 \
Т 1 + - sin z/ — S cos z/ = Т [ 1-1----------sin v — S cos z/ =
\ Р/ \ 1 + e cos z/ J
(2 + ecosz/) sinz/ / 4 z 4
= -----------------( — pcvvA — cos ( — pcvvr) =
1 + e cos z/ x x
120
Глава 4. Исследование уравнений возмущенного движения
= — cpv
(2 4-е cos z/) sin v
i i
1 4- е cos v
cos v vr
p. (2 + ecosz/) smz/ , 4
= — cp—A ----------------(1 4- e cos V) — e sm v cos v
p 1 4- e cos v 4 7
cppA , . ______ 2c/i . .
=--------(2 sm v 4- e_co&4>^snri/ — e_sm-z^co^l/) =-p A sm v.
P P
Поэтому
1 Ip ( 2cp л . \ 2c Ip
w = —-------pAsmv =----------d-pAsmv
e у M \ P J e у P
и после усреднения правой части
2с //7(1-е2)3/2 f Asm и du
Ш еур 2тг J ? (1 4- ecosz/)2’
о
(4-61)
Плотность атмосферы запишем в виде
Го - Г Го —Г к г^ — г г^ — г
р = Ро ехр —— = Ро ехр —— ехр —— = р„ ехр ——
11 11 £1 £1
Го-гк
где р% = ро ехр —
н
р
——. Поскольку
Р
то
р ре 1 — cos v
р — р —-----------—______—_________________
14-е cos и 1 + е 1 + е 1 4- е cos и ’
х х / er% 1 - cos v \
р = piJ\v), F z/) = exp - — —------------- .
\ Н 1 4- е cos и)
(4-62)
Таким образом, под интегралом в (4.61) стоит нечетная 2тг-периодическая
функция и, следовательно, ш = 0. Это означает, что линия апсид орбиты оста-
ется неизменной.
Чтобы получить уравнение для е, преобразуем правую часть соответству-
ющего соотношения в (4.59)
г \ ге
1 4- - cos v 4---
р/ р
1 \
S sin v 4- Т
= S sin v 4- Т
= — с
1 е
--------- COS V 4- ;----------
14-е cos v ) 14-е cos v
_ (2 4-е cos z/) cos z/4-е
= S'sin v + Т --------------------=
14-е cos v
. / n 2cosz/ 4- ecos2 v 4- e ,
1 ( e sm v 4--------------------(1 4- e cos v
\ 14- e cos v 4
2c/i z \
=--------pAfcosz/ 4- e).
В результате получаем
ё =
---pA(cosz/ 4- е) = — 2с
cos v + е)
4.6. Влияние сопротивления атмосферы на эволюцию орбиты
121
и после усреднения
„ (1 - е2)3/2 f X(cosp + e)
е = —2с,/----------- / ---------^dv. (4.63)
Vp 2тг J r(l + ecosi/)2 v 7
о
4.6.2. Время существования спутника. Из (4.60), (4.63) имеем
^ = -^ = Ф(е,р), (4.64)
dp pip
где
2% 2тг
Г ч A(cosz/ + е) Г А
1е = / F г/ Р--------dv, 1Р = / F И 7------------dv.
J (1 + е cos v)2 Р J (1 + е cos v)2
о о
Уравнение (4.64) не содержит параметров спутника.
Из уравнения (4.60) получаем
Гтг ~ Г0
dr тгехр——
— =---------------——г^ = Ф(е,р), т = cpot. (4.65)
dp у^/р(1-е2)3/2
Правая часть этого уравнения не зависит от баллистического коэффициен-
та спутника. Следовательно, от этого коэффициента не зависит траектория
усредненных уравнений в плоскости (р, е). Однако скорость движения по тра-
ектории от баллистического коэффициента зависит.
Интегрируя уравнения (4.64) и (4.65) и вычисляя вдоль решения величины
р т
г7Г = ---, t = —, можно определить время существования спутника 18 .
1 + е сро
Считается, что спутник не может существовать при < г* = (140 + 6378) км.
М
Введем число оборотов спутника на орбите N = —. Согласно (1.31) и
Z7T
(1.32) находим
^ = ±М = ±П=± /Е=± /М (1 - е2)3/2
dt 2тг 2тг 2тг у а3 2тг у Р Р
Отсюда с учетом (4.65) получаем
2/0 г^-го т\-го
dN= dNd^ = _± /р(1-е2)3/2 ^ехр—ехр —
СР° dt dp 2тгур Р у/рр 1р(1 - е2)3/2 2р2/р
Примерный вид траекторий (4.64) представлен
на рис. 4.9. Траектории изображены до пересече-
ния с прямой р = г*(1 + е). В работе [18] была сос-
тавлена таблица, с помощью которой можно опре-
делить время существования спутника по значени-
ям ha, hn и с.
122
Глава 4. Исследование уравнений возмущенного движения
4.6.3. Некоторые общие закономерности эволюции. Используя
соотношения
Гтг = -г—, Га = -------, (4.66)
1 + е 1-е
найдем производные и га:
Г =-1_________PL- = _ 2с^-~^3/2 Z P-dV - +
’ 1 + е (1 + е)1 2 2тг(1 + е) J (1 + ecosp)2
О
__(1 — е2)3 */2 /* pA(cos v + е) dv
+ 2С^ 2»(1 + еГ J (1+ес»^ =
О
__(1 — е2)3/2 /* рА(1 — cos z/) dv
= -2Сл/^2^1 + е)2 J (i + ecosz/)2 ’
о
p рё .— (1 — e2)3/2 Г pAdv
Га 1 — e + (1 — e)2 c 2тг(1 — e) J (1 + e cos v)2
о
o /____(1 — e2)3/2 f pA(cos v + e) dv
~ 2Cy/№ 2тг(1 - e)2 J (1 + ecosz/)2 =
о
— (1 — e2)3/2 f pA(l + cos v) dv
= -2cVw2%(1_e)2 J (1 + ecosz/)2 •
0
Для плотности атмосферы выше было получено выражение
г/ \ ev \ / егтг 1 - cos v \
р = PttFIv), F(v) = exp —— --------------
v 7 v 7 \ H 1 + ecosz//
(cm. (4.62)). Удобно ввести параметр /3 = ^- и считать его не за-
__ di
висящим от е. При г^~6400 км, 0.01- 0.02 имеем г^е~100 км,
Н ~ 20-50 км, /3~2-5. Для низкоорбитальных спутников примем е = 0 и
F(y)= exp [—/3(1— cos г/)]. Тогда
1 ,— (1 — e2)3/2 Г (1 — cosz/) д/1 + 2e cos z/ + e2 1
= --ср^уД^ - - F(v}----------—---------72-------dv^
тг (1 + e)2 J (1 + ecosz/)2
о
7Г
~ — — cpn Д1р У*(1 — cos exP [— ^(1 — cos ^)]
о
1 /—(1 - e2)3/2 [ (1 + cos z/) \/l + 2e cos z/ + e2
ra = -~ cpir уДр —------72 / F(v)-------— ------------------dv
тг 2тг(1 — e)z J (1 + ecosz/)2
о
4.6. Влияние сопротивления атмосферы на эволюцию орбиты
123
— — cp^y/Jlp у*(1 + cos z/) ехр[—/3(1 — cosz/)] dv.
где Р = —-.
п
О
Из графиков видно (см. рис. 4.10), что 1^1 |rQ|, Лг < 0, < 0- Перигей
убывает гораздо слабее апогея. Вычисление при /3 —> + оо и е<С1 дает (см.
п. 4.6.6)
2 .— 1 /2тг . 1 .— /2тт т\ 1 (А
(4.67)
4.6.4. Эволюция орбиты. Вычисление интегралов, необходимых в
данном и следующем пунктах, приведено в п. 4.6.6
1. Найдем зависимость е от г%. Вычислим производные ё и гп. Соглас-
но (4.63) в рамках принятых допущений имеем
7Г
ё^ ехр[—/3(1 — cos i/)] cos vdv ~
о
оо .__ ____________
сз_2££, Д _2эд & Д
тг V Р J \ 2 ) \ 2 ) 7гу 2р/3 V тгр/З
о
или
ё«-ср^/Г/Д- (4.68)
V Р V тгр
Выше было получено
(4ю)
(см. (4.67)). Тогда
de _ ё ~ _ 2е г^- 2е
dr„ ____1 ГТ Р Н р ~ Н'
124
Глава 4. Исследование уравнений возмущенного движения
Интегрируем полученное дифференциальное уравнение:
de 2е ______________________ 0 Г2(г;г-г°)
— = — => е = е ехр------------
аГтг Н
где ^ = ^(6°). Поскольку гп убывает, е тоже убывает. Орбита стремится к
круговой. Этот вывод совпадает с выводом, сделанным выше на основании
анализа и га. Более точный анализ дает
н
. I ' а • а 1
sgn е = sgn т-------I •
\Лг W
2. Пусть орбита почти круговая. Запишем уравнения движения спутника
в полярных координатах
. 2 Р'
Г — гф =------2 — cpvr.
гф + 2гф = — сръгф.
(4.70)
vv = гф).
{ г - Го
р = pQ expl----—
При с = 0 выписанные уравнения допускают стационарное решение
//Г
Г = const, Ф = 4 = const.
Из интеграла энергии
1 -2 . 2-2 2/1
h = г + г ф--------
г
М
г
находим значение h на этом решении:
С другой стороны, при С ф 0
h = 2rr + 2ггф2 + 2г2 фф + г =
г2
= 2г(гф2 — — cpvr) + 2гф(— гф — сругф) + 2ггф2 + ^-г =
— 2r2cpv — — 2cpvr2(
= — 2cpv(r2 + г2ф2) = — 2cpv\
На стационарном решении
h = ^г,
и, следовательно,
V3 = г3ф3 = г'
4г = -2с^/,
г2 г у г
откуда
г = — 2сруфрт = — 2сроу/рг ехр
го - г
Н
(4-71)
4.6. Влияние сопротивления атмосферы на эволюцию орбиты
125
Полученное уравнение интегрируется, но решение имеет сложный вид. Урав-
нение можно упростить, положив \/pr = у/рг^. Тогда
г = - 2срох/я'о exp I Г° Г
\ н
Рис. 4.11.
ехр ( Г ~VQ ] dr = — 2сроу/рго dt =>
у H J
(r-r0\ 2cp0y/fjF0
exp ( —д— ) = 1--------p------H - *о),
где r0 = r(t0).
Отсюда получаем (см. рис. 4.11)
Н
^~to- Zcpo^Wo '
Это число — оценка времени существования спут-
ника сверху. На самом деле г меняется в очень уз-
г*
ком диапазоне: г* г г0, где — > 0.9 и даже 0.95.
П)
Значение г* определяется из равенства г*(1 + е)=р. Для спутника Земли
г* = (140 + 6378) км.
Этот анализ можно провести более формально. Будем искать частное се-
мейство решений уравнений (4.70) в виде
ф = Uo(r) + cJ7i(r) + c2J72(r) + ... = U(r, с),
где
г = cRi(r) + c2R2(r) + ... = cR(r, c), UQ =
Тогда
v = \A2 + г2ф2 = \/ c2R2 + r2U2 = r(UQ(r) + cC7i(r) + ...),
dr dR . 9 ^dR 9 dRi dR2 dRi \
r = — = c-—r = c2R—~ = c2Rr —+ c3[Ri + R2 —+ ...
dt dr dr dr \ dr dr J
Первое уравнение (4.70) принимает вид
с2 R — rU2 = — — c2pvR.
dr rz
Подставляя в это уравнение выписанные функции и приравнивая коэффици-
енты при одинаковых степенях с, получаем
0) - tUq = -£, 1) - ZrUolh = 0,
2) ^R1-r(2UoU2 + U^) = -prUoR1,... п) 2U0Un = ...
dr
где многоточием обозначены члены, содержащие Uq,. .. Un_\, J?i,... Rn-v Да-
лее
.. du dU . dU dUQ dUQ „ dUr
u = —- = -~r = cR-~ = cRi + cz J?2 + Ri -j-
dt dr dr dr \ dr dr
126
Глава 4. Исследование уравнений возмущенного движения
Аналогично для второго уравнения (4.70) имеем
/ dU \
R\ r— + 2U] = -pvrU,
\ dr J
1) /г/г^ + 21/о) =-pr2u^,
\ dr )
2) R2(r^ + 2U0} +R1(r^- + 2U1'} = -
\ dr J \ dr J
2pr2U0Ui,
n) Rn(r^ + 2U0
\ dr
Решая эту цепочку уравнений, находим
Uo = Ui = О, R1 = - 2р^/рг,
Отсюда получаем уравнение (ср. (4.71))
г = — 2сру/рг + ...
Т?2 = 0 и т. д.
4.6.5. Определение плотности атмосферы по торможению спут-
ника. Согласно (1.34) выражение для оскулирующего периода имеет вид
m /оз” / рз
Т = 2тг\ — = 2тг\ ------о =
V р V д(1 - е2)3
2тг 17 7 У 1 2тг
УдУ\1 + е/ уД _ е)3 УМ (1-е)3/2’
Отсюда
. _, 3 3 ( Т 3 ( Гтг ё
1пТ=-1пгя--1п(1-е)+ const =^> - = - — + ——
£ X \ / <д- ± С
(4.72)
(4.73)
Г
Полагая г^~р и е~0, оценим — и ё. Согласно (4.69) и (4.68) имеем
^7Г
Пг ~ _ ср^ Гр7р 1 = СРя / Р . ~ _ Г2р7
гп /3 V2тт(3 р /3 у 2тг(3р' 6 тг^р
Отсюда получаем
Д_ = 1 / v F&p = 1 1
ёгя- /3 у 2тг/3р V 2/1 2/3
Стало быть, основной вклад в (4.73) дает второе слагаемое и, значит,
• 3^. 3^ Г2р~
~ ~ ~~ X ^сРтг\/ТБ“-
2 2 у flP
В соответствии с (4.72) при г^^р и е~0 имеем
4.6. Влияние сопротивления атмосферы на эволюцию орбиты
127
т
ern ep
и поэтому с учетом равенства р = —— ~ — находим
Н Н
/2^Я
р = — Зсрп\1----р = — Зс
V ре
С другой стороны, поскольку
dN _ d (M\ n _ 1
dt dt\2ir J 2тг T ’
то
. _ dT dN _ 1 dT _ dlnT
“ dN dt ~ T dN~ dN '
Следовательно,
dN
Из этого соотношения следует приближенная формула
г— 1 dinТ I е 1 din Т Г~ё
dN у2тгр~ —3 dN e< '
_ d In T 1 . — Г77
Вычисляя ——— ~ In 1 yv+1 — InTx и г^-, можно оценить ср^у/ ri для каждого
dN
витка спутника, то есть для достаточно большого числа точек перигея.. Такие
оценки впервые были выполнены М. Л. Лидовым [12].
128
Глава 4. Исследование уравнений возмущенного движения
оо 1 f 2 ( . = 2 J " 0 7Г /(1 + cos z/) ехр[— /3(1 — cosz/)] < 0 Л 1 Г _ 1 1 ГтГ _ 1 /27 " 4^V7’ 2 oo du /12 —— 1 exp 1 — \ du ~ 0 пренебрегаем 7Г /27Г
2 V/3/2
Из этих соотношений следует Гтг 1 п /о т — ~ -> 0 при р -э oo, Z2 ~ Га 4^ dlnT р = dN = . . Г /2^ <-1 /2^1 6cr42V7’2e^V7] dlnT - - dN rn UH 3cVhV2^; 112тг 1 рк 407’ 1W2V7’ rflnT dN = /2тгН Г H] 1 V er% |_ г^_ - _1 /_1_ dInT 3 у 27ГГ7Т dN
5.1. Уравнения движения трехосного спутника
129
Глава 5
Движение спутника относительно его
центра масс
5.1. Уравнения движения трехосного спутника
Далее предполагается, что планета — материальный шар со сферически
симметричным распределением масс. Масса планеты М, масса спутника т
ит<^М. Центр масс спутника движется вокруг центра планеты по кеплеро-
вой эллиптической орбите. Размеры спутника пренебрежимо малы по срав-
нению с расстоянием перицентра орбиты.
Уравнения движения спутника относительно его центра масс запишем
в орбитальной системе координат ОАдХ^з- Ее начало находится в центре
масс спутника, орты Ei осей OXi имеют вид
Ei = — Р sin v + Q cos v = ер, Е% = -В, Е% = Р cos v + Q sin v = er.
Систему координат, образованную главными центральными осями инер-
ции спутника, который будем считать твердым телом, обозначим
Cj — орты осей Oxi. Выпишем формулы перехода от этой системы координат
к орбитальной и обратно
з з
Xi — Xj •> Xj — XiQij. (5.1)
j=l г=1
Эти формулы записываются также в виде таблицы
Т1 ^2 хз
хг «11 «12 «13
х2 «21 «22 «23
Х3 «31 «32 «33
Из определения ортов Ei следуют соотношения
Ei = — (Pcosi/ + Q sin v) v — — vE%, E% = 0,
Ё3 = (— Psini/ + Qcosz/)z> = vEi.
з
Пусть cu = — абсолютная угловая скорость системы коорди-
i=i
нат От1Т2^з, то есть спутника. Локальной производной (производной в си-
стеме ОХ1Х2Х3) вектор-функции a(t) = a,i(t)ei по времени называется вектор
da .
— = \а^.
г=1
130
Глава 5. Движение спутника относительно его центра масс
Абсолютная производная вектор-функции a(t) имеет вид
da \ da
л =Е(».<=- + “«)= й+ “х“-
Здесь использована формула Пуассона ёг=шхег. Производные Ei вычис-
ляются по формулам
dEi dEo dEa
—----(- tu x E-[ = — uE^ —---(- ш x E% — 0, —----P и x E% =
dt dt dt
Записав эти равенства в скалярной форме, получим кинематические уравне-
з
ния Пуассона для Ei. Учитывая, что Ei = (СР- с формулами перехо-
;=1
да), получаем
dll + ^2«13 — ^3«12 — — ^«31 >
«12 + С^3«11 — ^1«13 = — ^«32,
«13 + CU16X12 — Щ2«11 — — ^«335
(121 + ^2 «23 — С«3«22 — 0,
«22 + С«3«21 — «Ц«23 — 0,
«23 + «Д«22 — С«2«21 — О)
• . • (5-2)
«31 + ^2«33 — ^3«32 = ^«11,
«32 + С^3«31 — «>1«33 — ^«12,
«33 + CU16X32 — Щ2«31 — *>«13-
Матрица ||«vllij=i ортогональна, поэтому ее элементы удовлетворяют
соотношениям
з з
^ik^jk = ^ki^kj ~ ^iji
к=1 к=1
которые являются интегральными для выписанных кинематических уравне-
ний. Так как det||aij|| = 1, выполнены и следующие соотношения
«21 = «32«13 - «33«12,
«22 = «33«11 — «31«135
«23 — «31«12 — «32«11-
Это скалярная форма равенства Е2 = E% х Ei. Круговой перестановкой по-
лучаются аналогичные соотношения для Е^ и Е\.
Пусть Ц — моменты инерции спутника относительно осей Ох^
з
М = ^^Мгег — главный момент относительно центра масс внешних сил, при-
г=1
ложенных к спутнику. Запишем динамические уравнения Эйлера для спут-
ника
Дсщ + (/3 — I2) Щ2^3 = Afi,
^2^2 + (Л — /з)^з^1 = А?2, (5.3)
-^3^3 + (Л — А) ^1^2 = Мз-
5.1. Уравнения движения трехосного спутника
131
Если заданы функции Mj = Mj(aik,t\ то выписанные кинематические и ди-
намические уравнения Эйлера образуют замкнутую систему дифференци-
альных уравнений. Ниже будем рассматривать движение спутника под дей-
ствием только гравитационного момента. Силовая функция спутника в гра-
витационном поле сферически симметричной планеты согласно (4.57) имеет
вид
U = ~ 2 + + /з“зз) (5.4)
(слагаемые в соотношении (4.57), не зависящие от ориентации спутника, опу-
щены). Найдем выражения для Mi через производные силовой функции U.
Замечание о возможных перемещениях. Пусть Гк =rk(qi, • • • Qn, t)
(к = 1,2,... N) — радиус-векторы материальных точек, образующих
голономную систему; qi — обобщенные координаты системы. За-
дать движение системы означает задать вектор-функцию времени
q(t) = (^i(t),... ^n(t)) = <p(t) Е Rn. Скорости точек системы в этом дви-
жении записываются так
дгк дгк , .
= + (fc = i, 2,... 2V).
Зафиксируем произвольную точку q°GRn и момент Рассмотрим множе-
ство движений q = cp(t), для которых cp(to) = Q0, и дифференциалы этих
выражений dr к = rk(to)dt:
, A drk(q°,to) drk(q°,to)
drk= у-------5-----dqi +---------dt, dqi = qi(t0) dt.
<dqi ut
Поскольку ф(^о) произвольны, dqi также произвольны. Векторы
dri, dr• • dr^ образуют в R37V линейное многообразие. Эти векторы
называются действительными перемещениями системы (в точке д° в
момент to). Линейное подпространство в R37V, сдвиг которого порождает
линейное многообразие действительных перемещений, называется подпро-
странством возможных перемещений. Это подпространство образовано
векторами
Векторы дгк — возможные перемещения точек системы.
К определению этих векторов можно подойти иначе. Рассмотрим два про-
извольных движения q = <p(t), q = <p'(t), у>(£о) = У^о) = Q0- Им отвечают
действительные перемещения dr к и dr'k, разности которых 5г к = drfk — dr к —
возможные перемещения. В виде таких разностей можно представить все воз-
можные перемещения.
Представим спутник в виде совокупности материальных точек с радиус-
векторами г к (к = 1,2,... N). Радиус-векторы запишем в виде
Гк = го + Рк
132
Глава 5. Движение спутника относительно его центра масс
Здесь Го — радиус-вектор центра масс О спутника; рк — векторы, фиксиро-
ванные в теле спутника. Скорости точек имеют вид
гк — Го + х Рк, ш — угловая скорость спутника.
Рассмотрим два произвольных вращательных движения спутника. В этих
движениях
drk = rodt + (vdt х рк, drk = rodt + u'dt x pk,
причем вектор Го один и тот же в обоих выражениях. Следовательно,
Srk = (ш' -u)dt X рк.
Вектор бср = (о?' — (v)dt произволен. С его помощью представим вектор 5г к
в виде
5гк = 5<рх рк.
Работа сил Fk, действующих на точки спутника, на виртуальных переме-
щениях точек равна
SA = ^FkSrk = ^Fk (Sep х рк) = (^рк х Ffc) • Sep = М0 • Sep.
к к к
При наличии силовой функции U
Fk = ^, SA = yFkSrk = yJ^Srk = SU.
дгк дгк
к к
На двух различных действительных движениях спутника согласно (5.2)
имеем
da^i + (а>2СЙ)азз - (с^з^)а32 = vdtan,
daf31 + (ajf2dt)a^ — (uJ3dt)a^2 = vdtan
da^i = da3i — da^i = — (oj2 ~ ^2)^«зз + (^з — cv^dta^ =>
Ja3i = аз2(5(^з — азз<5(^2-
Аналогично находим
<5(232 = (2зз<5(^1 — (231(5(^3, (5(233 = (231(5(^2 — «32<fyl-
Поскольку U = а32, азъ), с учетом этих соотношений получаем
з
М\5(р\ + М2 6ф2 + А/з<5(^з = 5U = —---(5(2зг =
“ daZi
г=1
(dU dU \ (dU dU \
= I о-----«33 — о----«32 <5(^1 + ----<231 — ----(2зз 0^2 +
\дау2 да33 ) \да^ da^i J
(dU dU V
+ I д— «32 — д— <231 0923.
\0*<2з1 €7(232 )
Отсюда в соответствии с (5.4)
ди ди
Ml — ------<233 — -----<232 = -у (23 — 72)«32«33,
<Э(232 дазз г6
ди ди ТХ
М2 = о-----а31 — о-----а33 = -у (21 — 23)1233(231,
да^ дам. г6
ди ди ТХ
М% — ------(232 — -----(231 = -V (22 — А)«31 «32-
<Эаз1 <Э(2з2 г3
(5.5)
5.2. Положения равновесия спутника на круговой орбите
133
Эти соотношения нужно подставить в динамические уравнения Эйле-
ра (5.3). Ниже будем рассматривать случай круговой орбиты, для которого
z> = n = tJo7 -^ = п2 = Тогда уравнения движения (5.2) и (5.3) принимают
вид г
&11 + ^2^13 — ^3^12 — “
&21 + ^2^23 — ^3^22 = О,
&31 + ^2^33 — ^3^32 = ^0^11,
ZitJi + (/3 — /2) ^2^3 = 3cjg (/3 — /2)^32^33-
Остальные уравнения получаются круговой перестановкой чисел 1, 2, 3. Для
сокращения записи векторы ^2, -^з в системе координат Ояця^з обозна-
чим через а = (ац,Л12,«13), /3 = (а2ь ^22, ^2з), 7 = (азьа32,азз)- Введем мат-
рицу I = diag(7i, /2,/з). Тогда уравнения движения записываются в вектор-
ном виде
dt + ы х ol = — cjq7> /3 + ш х /3 = 0, 7 + w х 7 = (5.6)
Iw + х Iw = 3cjq(7 х /7). (5.7)
Здесь точка над переменной означает дифференцирование в подвижной си-
стеме координат Ояця^з- Полученные уравнения допускают обобщенный ин-
теграл энергии
1 — 3 —
Я = - /ш) - ш0(/3 • 1ш) + - ш£(7 • /7). (5.8)
Покажем, что функция Н — первый интеграл:
Я = w — сс>о(/3 • Iw) — с^о(/3 • Iw) + 3cjq(7 • J7) =
= и • [— о? х + 3cJq(7 х /7)] + cjq(^ х /3) • lev —
— (jJq/3 • [— ш х lev + 3cjq(7 х /7)] + 3cJq(- о? х 7 + cj0«) • -Г7 =
= 3cjq о? • (7 х /7) + cjq(^ х /3) • lev + cjq/3 • (о; х lev) —
- З^о 0 • (7 х Ъ) - Зшо(^ х 7) • ?7 + Зшо(« ’ Ъ) =
= —
- З^р к(0 х 7)^/7 - З^НТ^ТН 3wq(« • Ъ) = О-
а
5.2. Положения равновесия спутника на круговой
орбите и их устойчивость
В связанной со спутником системе координат для положений равнове-
сия спутника относительно орбитальной системы выполняются равенства
ot= const, /3= const, 7= const, откуда согласно (5.6) получаем o;=cjo/3,
с5=0. Следовательно, положения равновесия спутника с учетом (5.7) опреде-
ляются уравнениями
/3 х 1/3 = 3(7 х /7), 7 • 7 = 1, /3 • /3 = 1, 7 • /3 = 0.
134
Глава 5. Движение спутника относительно его центра масс
Умножим первое уравнение скалярно на а, /3, 7
1) а • (/3 х 1/3) = За • (7 х /7) =>
(а х /3) • 7/3 = - 3(7 х а) • /7 => 7 • 1/3 = - 3/3 • /7 =>
4(7 • 1(3) = 0 => у • 7/3 = {3 • 1у = О,
2) /3 Д^х 7/3)^= 3/3 х ?7) =>
_ о _ _
(/3 х 7) • I7 = 0 =Ж а • 1у = 7 • lot = О,
з) 7 • (/3 X ?/3) = 3 J • (7^х Ъ)„ =>
О
(/3 х 7) • 7/3 = О => a I/3= (3-Iot = 0.
Отсюда следует
/3 • lot = 0, 7 • lot = 0 => lot = aot,
7-7/3 = О, а-7/3 = О 10 = Ь0,
а • /7 = 0, /3 • /7 = 0 => 1у = су.
Полученные соотношения означают, что а, /3, 7 — орты главных централь-
ных осей инерции спутника. Эти оси в положениях равновесия спутника сов-
падают с осями орбитальной системы координат. Всего существуют 6 • 4 = 24
положения равновесия.
Достаточные условия устойчивости таких положений равновесия мож-
но получить, используя обобщенный интеграл энергии (5.8) в качестве
функции Ляпунова. В интеграле сделаем замену переменных ш = ojq/З + £,
£ = (£ь$2,£з):
н = I Же • ip) + же^) +1 ($ • w -
- ^о(/3 • ?/3) - ЖеЖ%) + | ^о(т • Ъ) =>
'-же• г?) + |^о(т• Ъ).
Рассмотрим четыре положения равновесия
7о = (О,О,±1), /30 = (0,±1,0), а0 =/30 х 7о.
Знаки в 70 и /30 выбираются независимо. Положим
а22 = 1 “ а21 — а23> а33 = 1 ““ а32 “ а31> (5-9)
тогда
1 , ,2 о, ,2
Н = 1(е • П)-^1Ж+^2+1Ж)+^^а11+12а12+13а13)^
1 - ш2
= 2 [^1а21 + ^2(1 - ^21 “ а2з) + ^3^2з] +
+ [л^31 + ^2^32 + ^з(1 - &32 “ а31)] — (3^3 “ Л) + V,
5.3. Уравнения движения осесимметричного спутника
135
где
V = - (^ • ?€) + ^ [(/2 - Л)4 + (/2 - /3)4] +
о, ,2
+ [(Л “ ^3)^31 + (^2 - ^3)^32] 7
причем V — тоже первый интеграл.
Уравнение (5.6) для ортов /3, 7 и уравнение (5.7) запишем следующим
образом
/3 + ы х /3 = 0, 7 + tv х 7 = cjq(/3 х 7), Iw + ы х 1ш = 3cjg(7 х /7).
Сделаем в этих уравнениях замену uji = + & и неизвестными перемен-
ными будем считать а2г, & (г = 1,2,3).. Исключим а/22 и азз с помо-
щью соотношений (5.9). Получим систему уравнений относительно перемен-
ных х = (£1, £2, Сз, <^21, <^23, азь &32)Т- Эта система имеет стационарное решение
ж = 0 и первый интеграл V = V(x).
Условия положительной определенности квадратичной формы V выра-
жаются неравенствами
' Л > 0, 72 > 0, 73 > о
< I2 — Д > 0, 72 — 7з > 0 => Л > Л > /3 > 0.
71 - 73 > 0, I2 — /з > 0
Физический смысл полученных неравенств заключается в следующем. В
устойчивом положении равновесия ось минимального момента инерции спут-
ника должна быть направлена по радиус-вектору его центра масс, ось мак-
симального момента инерции должна совпадать с нормалью к плоскости ор-
биты.
Задача 5.1. Показать, что достаточные условия устойчивости решения
70 = (±1,0,0), /30 = (0, ±1,0) даются неравенствами I2 > /3 > Л > 0.
5.3. Уравнения движения осесимметричного спутника
на круговой орбите
Пусть 72 = 7з. Тогда выражение для кинетического момента спутника
К = 1ы в системе координат Ояця^з можно представить в виде
К = IiCJiei + 72CJ2e2 + 73^363 =
= 71CJ1C1 + 72(tJiei + cj2£2 + ^з^з) - 72tJiei = (5.10)
= 72o> + (7i - 72)(o> • ei)eb
Аналогично
T7 = 727 + (7i — 7г)(7 • ei)ei = I2E3 + (7i - 72)(7£з • ei)ei.
Правые части полученных равенств — векторы, имеющие смысл в любой
системе координат, а не только в системе Ох]%2хз-
136
Глава 5. Движение спутника относительно его центра масс
Выпишем гравитационный момент, действующий на спутник в случае кру-
говой орбиты (см. (5.5)):
М = (7 х ?7) = Зш02 (Л - /2)(7 • ei)(7 X ei) = _
= 3cJq (Д — /2)(-Е'3 • ех)(.Ез х ei).
Согласно теореме об изменении кинетического момента спутника в его дви-
жении относительно центра масс К = М. Уравнение Пуассона для орта ei
имеет вид ё1 =о> х ер Запишем эти соотношения в орбитальной системе ко-
ординат ОА4Х2Х3. Локальную производную вектора по времени в этой си-
стеме будем обозначать d/dt. Абсолютная угловая скорость орбитальной си-
стемы равна cjo-^2- Имеем
+ wo(^2 X К') = 3w2 (Л - /2)(^з • ei)(^3 X е1), (5.12)
c/ei z .
—7— + cjo(-^2 x ei) x ep
dt
Поскольку
К x ei = Z2(a> x ej + (Д - /2)(a> • ex) (ex x ej = I2(w x ei),
=0
находим
d&i / „ x 1 / T .
— + ш0(£?2 X ex) = — (K x ei).
dt 12
(5.13)
Пусть К = K1E1 + K2E2 + K3E3.
(cm. (5.1)), to
Так как er = оц Ai + 021A2 + 031A3
E2 x К =
E,
0
Ki
e2
1
K2
Я3
О
К3
= K^Ei — KiEs,
Е3 х ei = — a2iEi + оц1?2, E3 • ei = 031,
Кx ei = (/С2оз1 — #3021)^1+ (А3О11 — Кга31)Е2 + (А4О21 — К2ац)Е3.
Подставив эти соотношения в (5.12) и (5.13), получаем
Ki + uqK3 = — 3cjq(7i — /2)^31021,
< К2 = 3cjq(7i — /2)^31011, (5-14)
k A3 — cjqATi = 0;
Оц + (J0O31 = А2О31 — A3O21 А
^21 = А3О11 — AiO3i / ч 1г <5-15)
^31 — ^11 — Kja2j — К2ац h
Это уравнения движения оси динамической симметрии Oxi спутника и из-
менения вектора кинетического момента.
5.3. Уравнения движения осесимметричного спутника
137
Выпишем первые интегралы уравнений (5.14), (5.15).
1. Интегральное соотношение Пуассона
61*61 = 1 => Gii + <121 + ^31 = 1- (5.16)
2. Проекция кинетического момента на ось динамической симметрии Oxi
сохраняется:
К • ei = TiQ, Q = const.
В самом деле, с учетом (5.12) и (5.13)
d, \ dK
dei
dt
= — Z>(^2 X К) • 61 + (Z1 — /2) (2^3 • ^1)^3 X ^1) * el —
1 ' '
- v(E2 x ei) • К + - (К x ei) • К = О
h "-------------------------v-----'
=0
или в скалярной форме
/G&11 + /^2^21 + ^3а31 — /1^*
3. Обобщенный интеграл энергии
+ К% + Kl 3 2/г . 2
-----—---------ujqK2 + - с^о (А - /2)^31 = const.
Действительно, согласно (5.14) получаем
KiKi + К2К2 + К3^з +
— 3cjq(Zi — /2)^31^21^1 + 3cjq (/1 — /2)аз1ац/<2 — 0.
(5*17)
(5.18)
С учетом (5.15) находим
- — (/<f + Т<2 + 7<з) = 3cjq(/i — /2)031(^11/^2 — 021/С1) =
— 3cJq(/i — /2)^031 (— 031 + CJqOh) =>
- — [/cf + /С2 + К% + 3cJq(/i — /2)/2&з1] = 3cJq(/i — /2)/2Оз1Оц.
2 ас
Отсюда в соответствии со вторым уравнением (5.14) имеем
- — [Ку + /С2 + /^з + 3cjq(/i — /2)^03^ — ujqI2K2 = 0 =>
d ГК12 + К22 + /<з2 т, 3 2/г г ч 2 1 п
57--------^0/^2 + X ^о(/1 _ /2)^31 — 0-
ас zi2 z
Задача 5.2. Вывести (5.18) из обобщенного интеграла энергии для трех-
осного спутника, учитывая соотношение 12 = /3 и наличие первого интегра-
ла (5.17).
138
Глава 5. Движение спутника относительно его центра масс
5.4. Стационарные вращения осесимметричного спут-
ника и их устойчивость
Стационарные решения системы (5.14), (5.15) Ki= const, ац = const
(г = 1, 2,3) определяются уравнениями
с^о^з = - 3cJq(/i — /2)^31^21,
О = 3cjq(/i — /2)^31(211,
— = О,
^2^31 ~ ^За21
< ^31= -----J-------, (5.19)
Q _ A3 (2 ц — АГ1<231
I2
К1П21 — ^2^11
- 1 = ------7-------,
-*2
из которых следует аз1Пц = 0 и К\ = 0.
1. Пусть ац = 0, (121 — sin (2з1 = cosc^. Из первого и четвертого урав-
нений системы (5.19) имеем
Аз = — Зо>о(Л — h) sin cos (^, К2 cos ср — sin <р = /2^0 cos ср =>
[К2 + Зо>о(Л - Л) sin2 <р - /2^о] cos <р = 0.
Рассмотрим два случая.
la) cos^ = 0 => <231 = 0, <221 = il, A3 = 0, К2 — любое. Удобно счи-
тать параметром стационарных решений не К2 а постоянную Q в интеграле
К • е1 = Д Q. Тогда А2 — (см. (5.17)). Полученное стационарное реше-
ние
Ai = К3 = 0, К2 — i ДГ2, (2ц = (231 = 0, (221 = i 1
называется цилиндрической прецессией (см. рис. 5.1 а).
а) б) в)
Рис. 5.1. Виды прецессий а) цилиндрическая, б) коническая, в) гиперболоидальная.
16) К2 = — Зсио(Л — h) sin2 (^. Здесь ср произвольно. Таким образом,
получено однопараметрическое семейство решений
А1 = 0, К2 = — Зо>о(Л— h) sin2 tp + Аз = — 3cjq(A— h) sin cos
5.4. Стационарные вращения осесимметричного спутника
139
ап = 0, &2i = sine/?, &з1 = cos<p, <р — любое,
которое называется конической прецессией (см. рис. 5.1 б).
Если это семейство параметризовать постоянной интеграла (5.17), полу-
чим
TiQ = cjq [h — 3(71 — /2) sin2 (/?] sin ср — 3cjq(7i — /2) sin ср cos2 ср =>
ЛП = Чяпу(4/2-ЗЛ) =^- 8!"«’=„о(4/‘_3/1)-
Отсюда следует, что если /2, то даже при сравнительно большом отно-
Qi
шении — угол <р мал по абсолютной величине.
2. аз1 = 0, ац= cos<p, &2i — sine/?. Из первого уравнения системы (5.14),
(5.15) следует 7Сз = 0. Остальные ее уравнения, кроме последнего, тривиаль-
но выполняются. Из последнего уравнения имеем
— COS ср = — К2 COS ср => (ТО — I2W0) cos ср = 0.
Возможны два варианта.
2а) cosip = 0 => ац = 0, a2i = ±l (см.случай la).
26) К2 = /2^0, ¥> — любое, то есть получаем однопараметрическое семей-
ство решений
Ki = К3 = 0, K2 = h^, an=cos<p, a2i = sin<p, аз1 = 0, ср — любое,
называемое гиперболоидалъной прецессией (см. рис. 5.1 в). Используя первый
интеграл (5.17), находим
т • т о < .
/2^0 sm(/? = 7i$2 => sm(/? = -—.
72^0
Исследование устойчивости найденных стационарных решений, а также
их интерпретация основаны на следующих теоремах [И].
Теорема 1. Пусть система дифференциальных уравнений
х = х е (5.20)
допускает независимые первые интегралы 77(х), gi(x) (г=1,...т,
тп^п — 2). Тогда если Xq — невырожденная стационарная точка функ-
ции Н(х) при условии gi(x) = Ci (г = 1,...т), то xq — стационарное ре-
шение системы (5.20).
Поясним термин невырожденная стационарная точка. Положим
х = (“) , и е Rm, V е Rn-m, |gu| 0.
Рассмотрим задачу 77(u, v) —> extr при условии g(u, v)=0. Последнее со-
u,v
отношение разрешим относительно и: u = h(v) и перейдем к задаче на без-
условный экстремум 77(v) = 77[h(v), v] —> extr. Отыскание такого экстре-
мума сводится к решению уравнения Hv — 0. Его можно переписать в виде
Huhv + Hv = 0 и, так как hg = - g~xgv, в виде - Hug~xgv + Hv = 0. Обозна-
чим А = - Нид~\ Тогда Hv + Xgv = 0 и Ни + Хди = 0, то есть Нх + Хдх = 0.
140
Глава 5. Движение спутника относительно его центра масс
Характер экстремума H(v) иногда можно определить, рассматривая d2H.
Задача называется невырожденной, если |HV2 ^0|. В такой задаче характер
экстремума определяется типом квадратичной формы d2H. Вводится функ-
ция L = Н + Хд. Тогда условия экстремума принимают вид Lx = 0, Lx = 0.
Доказывается, что
d2H = (dx)TLxz dx при условии gxdx = 0.
Невырожденность означает, что система Ьхъу = 0, дху — 0 имеет единствен-
ное решение у = 0.
Доказательство теоремы 1. Составим функцию
L(a?, А) = Н(х) + А [д(ж) — с], А = (Ai,... Аш) — вектор-строка.
Заметим, что
уЬ. = о =» V —Л + —^ = 0
dxiJ г dxj dxiJ г dxi dxj
fLx2 + Lxfx = 0. (5.21)
Пусть (жо, Ao) — решение экстремальной задачи:
dL(x0, Ао) = дЦх0, Ао) =
дх ~ ’ дХ
Функция L*(®) = L(x, Ао) — первый интеграл системы (5.20) поэтому с уче-
том (5.21) получаем
L*x(x)f(x) = 0 L*xtf + fx(L*xf = 0.
Поскольку
дЬ*(хй) _ dL(x0,X0) _
дх дх
ТО
d2L*(x0) .
= о-
п г\ / \
Кроме того, —/ = 0, а значит, и —-------/(а?0) = 0- Таким образом, в силу
ох ох
невырожденности экстремальной задачи /(«о) — 0-
Теорема 2. Пусть система (5.20) допускает первые интегралы Н(х) и
Qi{x) (г = 1,... m, т < п — 1). Пусть х = <р(с) — точка невырожденного ми-
нимума (максимума) Н(х) при условии д(х) = с, причем функция <р(с)
непрерывна. Тогда х = — устойчивое стационарное решение систе-
мы (5.20). Доказательство см. [И].
Применим эти теоремы к задаче о нахождении стационарных вращений
осесимметричного спутника в случае В соответствии с (5.16)—(5.18)
имеем
к2 + к2 + к23 3 2, }2
Н --------21~2-------°К2 + 2 ° Г1 ~ 12> 31 ’ (5.22)
51 = Kia-ц + А72а21 + К3а31, Э2 = + a2i + a3i-
5.4. Стационарные вращения осесимметричного спутника
141
Функция L в данном случае имеет вид
L = Н + — IiQ) + — (#2 — 1)-
Из условий экстремальности
dL dL ч dL dL
7^ = 0, 7^ = 0 (* = 1>2,3), = 7Г = 0
oKi иац ил ufi
получаем
КГ Г. к2 .
— h /Шц — 0, — h /ld2i — kJ() — 0? "7 н /1(113 — 0,
h h h
/i/Ci + Adn — 0, /1-^2 T Ad2i — 0,
/i/Сз + А&31 + 3(Jq(Ii — /2)d3i = 0,
(5.23)
(5.24)
91 = IiQ, g2 = 1.
Отсюда находим
Ki = — K2 = — /i/2d2i + /2^0, K3 = — (5.25)
Тогда
I1Q = /Cidn + /^2^21 + ^31 — — ^Ьа11 ~ А^2&21 + ^2^0^21 — /1^2 d^
и, следовательно,
Z1Q = — /1Z2 + -^2^0^21-
Соотношения (5.24) дают
— /i2l2dn + Adn — 0, — /12^2d2i + /1/2^0 H- Ad2i — 0,
3(Jq(Ii — I2)d3i — /i2/2d3i + Ad3i = 0.
В результате получили следующую систему
(A —/i2l2)dn =0,
(А — д? I2) d2i + /1/2^0 — 0,
< [А - /i2I2 + 3cj2(Ii - I2)] a3i = 0, (5.26)
— /1I2 + -^2^od21 =
dn + d21 + d31 — 1.
Рассмотрим два случая.
1. А —/12/2 —0- Тогда из системы (5.26) следует /1 = 0, А = 0, d3i = 0.
Поэтому с учетом (5.25) имеем
Ki = К3 = 0, К2 =
<121 = 7^-, <111 = ±л/1 - 41-
12^0
При этом должно выполняться неравенство |d2i| < 1. Соответствующее этому
решению движение спутника есть гиперболоидальная прецессия.
2. А — /12/2 ф 0. В этом случае dn = 0 и, следовательно, К\ = 0. Возможны
два варианта.
142
Глава 5. Движение спутника относительно его центра масс
h
2 — h)
2а) Л — д2h + 3c<Jq(Zi — h) = 0. Тогда
_ /z72cj0 _ Vh
a21~ A-m2/2" 3wo(Ii-/2)’
tq J; .ЗА(Л-/2)П
1 M 72(472 - ЗД) ’
I2 ЗЛ(Л-/2)П= ЛП
“21 3w0(A-/2) J2(472-37i) ^0(472-3/1)’
|a2i| < 1, а31 = ±л/1-а|1.
Соответствующее движение спутника — коническая прецессия.
26) &з1 = 0. Тогда /<з = 0, a2i = 0 и с учетом (5.17)
ZC2a2i = 7XQ => К2 = ± IiQ.
Полученное решение соответствует цилиндрической прецессии.
Для исследования устойчивости полученных стационарных решений вы-
пишем d2L. Согласно (5.22) и (5.23) имеем
л = <ен+^д1 + ± +
2 12
+ 3c<Jq (Zi — 72)(7a3i)2 + 2/z(c?/Cic?an + dK2da2i + dK^da^i) +
+ Л[(с?ац)2 + (da2i)2 + (бйз1)2] =
— -—-—-—h 2/zc?/Cic?(Zii + А(с?ац)2 + -—-—-—I- 2[idK2da2i + A(c/a-2i)2 +
72 h
+ -——h 2/idK^da^i + [Л + 3cJq(7i — I2)] (б/&з1)2.
^2
Будем обозначать стационарное решение символом °. Рассмотрим случай
конической прецессии:
= 0, = 0, ^21^^21 Т a^ida^i = 0,
7^26/0-21 Н- ТС^с/о-з! + 0-216/7^2 Т d^ydK^ — 0.
Отсюда следует, что da^, dK^ выражаются через da2i и dK2; dan, da2n dK\,
dK2 произвольны.
В данном случае Л + 3cuq(7i — 7г) =/z272, поэтому
-——h 2//(/7Сз(/аз1 + [Л + 3cjq(7i — 12)] (б/&з1)2 —
_ (d7C3)2 _l2t/j \2_ (^з + ^hda^i)2
— —т-----h 2//(/7Сз(/аз1 + /z hyda^i) —-------------------0.
h h
Положительная определенность членов cdKi и dan (необходимое условие
положительной определенности d2L) имеет место при выполнении условия
А - zz272 = 3cj2(72 - Л)
h h
1
тг
д Л
О
0.
5.5. Движение спутника с большой угловой скоростью
143
(5-27)
(5.28)
При выполнении этого неравенства имеет место также положительная опре-
деленность членов с (IK2 и с?а21- Следовательно, это достаточное условие
устойчивости рассматриваемого стационарного решения.
Задача 5.3. Получить достаточные условия устойчивости для случаев
цилиндрической и гиперболоидальной прецессии.
5.5. Движение осесимметричного спутника с большой
угловой скоростью под действием гравитационно-
го момента
Запишем в абсолютной системе координат теорему об изменении кинети-
ческого момента спутника в его движении относительно центра масс и урав-
нение Пуассона для орта ei (ср. (5.12) и (5.13))
К = 3cjo(Ii — • ei)(i?3 х еД,
К х ei
61 = 12 '
Эти уравнения допускают первый интеграл
К • ei = IiQ, Q = const
и интегральное соотношение • ei = 1. Будем рассматривать движения спут-
ника с большим собственным кинетическим моментом. Эти движения близ-
ки к регулярной прецессии Эйлера осесимметричного твердого тела, и при
их изучении гравитационный момент можно рассматривать как малое возму-
щение. Для приближенного интегрирования уравнений (5.27), (5.28) в такой
ситуации воспользуемся методом усреднения. А именно, усредним эти урав-
нения по регулярной прецессии Эйлера, считая положение спутника на ор-
бите неизменным. Замена точных уравнений усредненными допустима, если
за период прецессии кинетический момент спутника практически не меняет-
ся. Вариант метода усреднения, используемый в данной задаче, разработан
В. М. Волосовым [7].
5.5.1. Усреднение по Волосову. Рассмотрим систему обыкновенных
дифференциальных уравнений
ж = гХ(х,у),
у = Y0(x,y) +eY1(x,y),
где х е Rn, у € е 6 R1 — малый параметр, X, Yq, Yi — гладкие функ-
ции своих аргументов.
При е = 0 имеем х = const и в системе у = Yq(x, у) можно считать х па-
раметром. Предположим, что общее решение этой системы известно и имеет
вид у = ip(t + ^С)Х), где to и с£1тЧ — постоянные интегрирования, ко-
144
Глава 5. Движение спутника относительно его центра масс
торые считаются известными. Если предел
т
lim — / X [ж, tp(t + to,с, ®)1 dt
Т—>+оо Т J
о
существует и не зависит от с (от to он очевидно не зависит), то обозначим
его Х(х). Система х = еХ(х) описывает изменение х в решениях исход-
ной системы с ошибкой 0(e) на интервалах времени At~l/s. Это экспе-
риментальный факт, строгое доказательство этого утверждения отсутствует,
но общие соображения и его успешные применения в конкретных задачах
позволяют надеяться, что в ряде случаев оно справедливо.
Модифицируем описанную конструкцию для задачи о движении спутника
с большой угловой скоростью. Пусть в системе
х = Fq(x) + eFr(x)
невозмущенная система x = Fq(x) допускает векторный первый инте-
грал U(x): №
—— F$(x) = 0, dimC7 dim® — 1.
дх
Положим w = U(x). Продифференцируем w в силу исходной системы:
dU Гтп , ч жп / м dU „ ( .
W = — [Fo(®) + eFi(®)] = s — Fi(®).
дх L J дх
Пусть известно общее решение невозмущенной системы х = <p(t + to, с),
dim с = dim х — 1, с и to — постоянные интегрирования, w = w(c). Возможно,
в качестве некоторых компонент с можно взять некоторые компоненты w.
Вычислим т
W= lim 1 f^-F^x) dt.
T^+ооТ J дх rr=^(t+t0,c)
Если этот предел существует, то, вообще говоря, он зависит от с: W = W(c).
Предположим, что W = W(w). Тогда система w = eW(w) описывает изме-
нение функций w = U(x) вдоль решений исходной системы с точностью 0(e)
на интервалах времени At~ 1/е.
5.5.2. Применение метода Волосова в задаче о движении спут-
ника с большой угловой скоростью. В системе (5.27), (5.28) малым па-
раметром будем считать cuq. При cuq = 0 эта система имеет дополнительный
первый интеграл К = const и интегрируема. Если К = \К\ >0, то ее реше-
ние описывает регулярную прецессию Эйлера. Приведем формулы этого ре-
шения. Введем ортонормированный базис
К ei — (ei • Э1) Э1 Э1 х ei
Э1 = — , Э2 = —====, Эз = Э1 X Э2 = 7 =
К - (ei • Э1)2 л/1 - (в! • Э1)2
Орт Э1 сохраняет неизменное направление в пространстве и, поскольку
(К-е.) . . - п
61 • Э1 =-—— = const, образует постоянный угол с ортом вр Орты э2 и эз
5.5. Движение спутника с большой угловой скоростью
145
вращаются вокруг Э1 с постоянной угловой скоростью ц}р = — Последнее
h
утверждение следует из соотношений
ei К х ei К(Э1 х еД
э2 — —/ = ----/ - - = ----г- = ^пЭз,
л/1 - (ei -Э1)2 12 а/1 - (ei • Э1)2 12 у/1 - (ei • Э1)2
Эз = Э1 X Э2 = Шр(Э1 х э3) = -шрэ2.
Величина ojp — угловая скорость прецессии.
В качестве векторного интеграла U системы (5.27), (5.28) при cjq = 0 при-
мем К и К • ei: w = (К, К • еД. Усредним правую часть уравнения (5.27)
для w. Операцию усреднения некоторой функции A(t) по регулярной пре-
цессии Эйлера будем обозначать угловыми скобками с индексом 1: (А)Р По-
скольку вектор Е3 при усреднении считается неизменным, имеет место соот-
ношение
(М), = 3Ч2(Л - 12) [Е3 х ((Е3 • С1) е^].
Дальнейшие вычисления основаны на равенствах
Ез = (Ез • эД Э1 + (Ез • Э2) Э2 + (Е3 • эз) эз,
— [(Ез • Эз) Э2] = [(Ез • эз) эз — (Е3 • Э2) Э2] •
Первое из них — следствие ортонормированности базиса {Э1, Э2, Эз}. При вы-
воде второго следует учесть, что в данном случае Е3 = 0 (при усреднении по
регулярной прецессии положение спутника на орбите неизменно) и восполь-
зоваться полученными выражениями для Э2, Э3.
Усредним эти равенства по регулярной прецессии Эйлера с учетом соот-
/ dA\ „
ношения ( —— ) = 0. Получим
\ dt 12
-^3 — (^3 ’ 91) Э1 = ((Е3 • Э2) 32^ + {(Е3 • Эз) Эз)р
о = {(Е3 ‘ Э2) — {(Е3 • эз) эз)р
откуда следует
{(Ез • э2) э2)1 — {(Е3 • э3) эз)1 — - .
Так как ei = С1Э1 + С2Э2, щ = ei • Э1, = \/1 — с^, то
((-^3 ’ е1) 61^ = с[((Ез • Э1) Э1)т + С1С2^(Ез • Э2) 9i)T +
+ С1С2((-Е?3 • 91) 92^ + ^((-Ез • 9г) 32^ =
= С1(.Е?3'Э1)Э1 + СуС^^Ез' (32)2) 31+ С1С2(^3’91) (32)2+ С^^Ез -92)32)г
Имеем также (эг^ = — си'^Эз^ = 0, поэтому
с2
{(Ез • ei) ei)T = с1(Ез • эД Э1 + [Е3 — (Е3 • эД Э1] =
146
Глава 5. Движение спутника относительно его центра масс
1 2 _ 2с? - Со , ч 1 - С? _ ЗС} - 1
— 2 с2^з Н-------(Ез • Э1) Э1 = —-—Ез Ч------— (Ез • Э1) Эр
Окончательно получаем
= 3Ч2(Л-^2) (3с2 _ 1)(£,3. Э1)(я3 X Э1).
Усредненное уравнение, описывающее изменение кинетического момента
спутника, имеет вид
dK = 3^(11-4) [3(е1. Э1)2 _ (£,з. Э1)(£,з х Э1) (5 зо)
Покажем, что (К)1 = 0. В соответствии с (5.27) и (5.28) имеем
КК = К К = Зш02(Л - /2)(Яз • е1) [К-(Е3 х еО] =
= -Зу02(Л - /2)(Яз • е^[Еэ-(К х С1)] =
= — 3wq(7i — /2)/2(^з • в1)(£?з • ё1).
При усреднении по прецессии Эйлера вектор Ез считается неизменным, по-
этому
• Зи>о(Л - hjh d 2
К=---------2К----dt(E3'ei}
и, следовательно, {К)1=0.
Ввиду того, что согласно (5.29) К • ei= const — первый интеграл уравне-
ний (5.27), (5.28), получаем
х . c!(ei-3i) (ei-3i)k
JC(ei • Э1) = const, -±—---= - ---------.
at К
Усредняя правую часть последнего соотношения по регулярной прецессии Эй-
лера, получаем ei • Э1 = const. С учетом сделанных замечаний усредненное
уравнение (5.30) запишем в виде
Э1 = Зш°(21/ [3(ei • Эз)2 - 1] (Е3 • Э1)(Бз х Э1) (5.31)
и величины К и Ci • Э1 будем считать параметрами, характеризующими пре-
цессию, по которой выполнялось усреднение.
Условие применимости уравнения (5.31) — изменение кинетического мо-
_ _ г | 2тг
мента К за период прецессии Эйлера Tv = — должно быть намного мень-
сор
ше К. Имеем (ср. (5.27))
\K(t + tp) - K(t)| Зш2|л - z2| тр = б7ГЧ)Ш - /2| к
2 К2
Последнее неравенство выражает искомое условие применимости.
5.5. Движение спутника с большой угловой скоростью
147
К уравнению (5.31) следует добавить уравнения
-Е71 — —CJqEs, Е3 — CJqE]^
выражающие тот факт, что орты Ei и Ез вращаются с орбитальной угловой
скоростью cjq вокруг неизменного орта E%-
Получили замкнутую систему. Оценим изменение орта Э1 за орбитальный
период То = —. Имеем
cjo
i_ (t + T} „ z.xi < 3w0Vi - 1г\ 2тг _ 37гш0|Л-/2|
|3!(t + То) - 31(t)| ----- - -----------•
Если Зтгс^о 1———г, то орты Ei и Ез движутся существенно быстрее ор-
та Эр В этом случае усредним правую часть уравнения (5.31) по орбиталь-
ному движению, считая вектор Э1 неизменным. Такое усреднение будем обо-
значать угловыми скобками с индексом 2. Усреднение дает
Э1 = _3^,-Л)[3(^^-.][Э1><((Е3.Э1)Ч] (5 32)
Вычисление {(Ез • Э1)^?з^ выполняется по описанной выше схеме. Справед-
ливы соотношения 2
— ^Ei (Е3 • Э1)] = Ei (Е3 • Э1) + Ei (Ё3 • Э1) =
= о?о (Ei • 91) — Е3(Ез • Э1)],
Э1 = (Э1 • Ei^Ei + (Э1 • Ez)Ez + (Э1 • Ез^Ез.
Усреднение по орбитальному движению с учетом постоянства орта Е%
дает
О — (^1(^1 • э1))2 — (^з(^з • э1))2’
Э1 — (э1 • Ez)Ez = {Ei(Ei • Э1))2 + (Ез(Ез • Э1))2.
Отсюда
(Ei(Ei • Э1))2 = (Ез(Ез • Э1))2 = - [, — (э1 • £?2)£?2],
Э1 х (Ез(Ез • Э1))2 = — - (э1 • Е2) (э1 х Е%).
Подставляя последнее соотношение в (5.32), получим
_ 3^(Л — Л)[3(е1 -Э1)2- 1]
Э1 -----------—------------(Э1 • Е2) (Э1 х ь2).
Согласно этому уравнению вектор Э1 совершает движение по конусу с
осью Е2. Действительно,
(Е2 • Э1) = Е2 • Э1 = 0 => Е2 • Э1 = const.
at 7
148
Глава 5. Движение спутника относительно его центра масс
Выписанное уравнение можно представить в виде Э1 =о>*х Э1, где
что соответствует движению по круговой орбите с постоянной угловой ско-
ростью.
Пример. Влияние Луны на вращение Земли. В этом случае ei • Э1 = 1.
Свяжем с Луной орты Е2, Е3 и Е^ = Е2 х Е3, как показано на рис. 5.2. Век-
тор Е3 направлен от Луны к Земле, а вектор Е2 перпендикулярен плоскости
орбиты Луны, причем
= — сид-Е/з, Ё3 = luq.E/1,
где cjo — угловая скорость Луны в ее движении по круговой орбите вокруг
E2l Земли. В этом случае гравитационный момент, действу-
Л ющий на Землю со стороны Луны, равен
Мд = 3cjq(Zi — h)(E3 • ei)(£?3 х ei).
| Здесь ei — орт оси вращения Земли.
\ ^ / Аналогичным образом учитывается влияние Солнца
/ на вращательное движение Земли. В результате можно
получить систему дифференциальных уравнений, опи-
Рис. 5.2. сывающую прецессию земной оси под действием Луны
и Солнца. Эту систему можно усреднить по стационарному вращению Земли
вокруг своей оси (частный случай регулярной прецессии Эйлера).
Литература
[1] Арнольд В. И. Теория катастроф. М.: Наука, 1990, 128 с.
[2] Балк М. Б., Демин В. Г., Куницын А. Л. Сборник задач по небесной ме-
ханике. М.: Наука, 1972, 336 с.
[3] Белецкий В. В.. Движение искусственного спутника относительно центра
масс в гравитационном поле. М.: Изд-во МГУ, 1975, 308 с.
[4] Белецкий В. В. Движение искусственного спутника относительно центра
масс. М.: Наука, 1965, 416 с.
[5] Белецкий В. В.. Очерки о движении космических тел. М.: Наука, 1977,
430 с.
[6] Брюно А. Д. Ограниченная задача трех тел. М.: Наука, 1990, 283 с.
[7] Волосов В. М., Моргунов Б. И. Метод осреднения в теории нелинейных
колебательных систем. М.: Изд-во МГУ, 1971, 508 с.
[8] Демин В. Г. Движение искусственного спутника в нецентральном поле
тяготения. М.: Наука, 1968, 352 с.
[9] Дубошин Г. Н. Небесная механика. Основные задачи и методы. М.: Нау-
ка, 1975, 799 с.
[10] Егоров В. А. Пространственная задача достижения Луны. М.: Наука,
1965, 224 с.
[11] Карапетян А. В. Устойчивость стационарных движений. М.: Едиториал
УРСС, 1998, 168 с.
[12] Лидов М. Л. Определение плотности атмосферы по наблюдаемому тор-
можению первых искусственных спутников Земли. // Сб. Искусственные
спутники Земли, 1958, №1, с. 9-20.
[13] Лидов М. Л. Эволюция орбит искусственных спутников планет под дей-
ствием гравитационных возмущений внешних тел. // Сб. Искусственные
спутники Земли, 1961, №8, с. 5-45.
[14] Меёс Ж. Астрономические формулы для калькуляторов. М.: Мир, 1968,
223 с.
[15] Моисеев Н. Н. Асимптотические методы нелинейной механики. М.: Нау-
ка, 1969, 378 с.
[16] Моисеев Н. Н. Численные методы в теории оптимальных систем. М.: На-
ука, 1971, 424 с.
[17] Охоцимский Д. Е., Сихарулидзе Ю. Г. Основы механики космического
полета. М.: Наука, 1990, 448 с.
[18] Охоцимский Д. Е., Энеев Т. М., Таратынова Г. П. Определение времени
существования искусственного спутника Земли и исследование вековых
возмущений его орбиты. Успехи физических наук, 1957, т. 63, №1, с. 33-50
150
Литература
[19] Поляхова Е. Н. Космический полет с солнечным парусом. М.: Наука,
1986, 304 с.
[20] Поляхова Е. Н., Вьюга А. А., Титов В. Б. Орбитальный космический по-
лет в задачах с подробными решениями и в числах. М.: URSS, 2016, 256 с.
[21] Понтрягин Л. С. Обыкновенные дифференциальные уравнения. М.: На-
ука, 1974, 331 с.
[22] Смирнов В. В., Егоров В. А., Сазонов В. В. Оптимизация параметров
пертурбационного маневра космического аппарата в сфере действия Лу-
ны. Космические исследования, 1995, т. 33, №3, с. 298-306.
[23] Субботин М. Ф. Введение в теоретическую астрономию. М.: Наука, 1965,
800 с.
[24] Штерн Т. Введение в небесную механику. М.: Мир, 1964, 242 с.
[25] Эльясберг П. Е. Введение в теорию полета искусственных спутников Зем-
ли. М.: Наука, 1965, 540 с.
Предметный указатель
Аномалия
— истинная, 11
— средняя,17
— эксцентрическая, 14
Апоцентр, 13
Аргумент широты
— перицентра, 20
— точки, 23
Вектор Лапласа, 7
Возмущающее ускорение, 78
Гиперболический избыток скоро-
сти, 12
Гравитационный параметр плане-
ты, 7
Долгота восходящего узла, 20
Задача
— Кеплера, 7
— Ламберта, 24
Закон Кеплера
— второй, 10
— первый, 11
— третий, 18
Закон управления локально-
оптимальный, 70
Интеграл
— кинетического момента, 7
— Лапласа, 7
— площадей, 10
— энергии, 7
Картинная плоскость, 54
Кеплеровы элементы орбиты, 22
Линия
— апсид, 7
— узлов, 20
Матрица изохронных производных,
34
Метод
— игнорирования возмущений, 43
— точечной сферы действия, 46
Наклонение орбиты, 20
Нормальное гравитационное поле
Земли,115
Орбита гелиосинхронная, 117
Орбитальная частота, 18
Оскулирующие элементы, 79
Перемещение
— возможное, 131
— действительное, 131
Перицентр, 13
Период
— аномалистический, 118
— драконический, 118
— оскулирующий, 118
— сидерический, 118
Подпространство возможных пере-
мещений, 131
Порождающая система, 77
Прецессия
— гиперболоидальная, 139
— коническая, 139
— цилиндрическая, 138
Прицельное расстояние, 39
Регрессия узла, 117
Решение-отрезок, 51
Сжатие эллипсоида, 113
Симметричное решение, 49
Скорость
— вторая космическая, 13
— местная круговая, 12
— местная параболическая, 12
— первая космическая, 13
— секториальная,10
— третья космическая, 13
Среднее движение, 17
Сфера действия, 43
Сфероид, 113
Траектория
— второго рода, 26
— граничная, 26
— первого рода, 26
152
Предметный указатель
Универсальная гравитационная по-
стоянная, 6
Уравнение
— Ван-дер-Поля, 92
— Кеплера, 17
Условие
— отсутствия резонанса, 92, 95
— резонанса, 95
Узел орбиты
— восходящий, 20
— нисходящий, 20
Фокальный параметр, 11
Формула Ламберта, 29
Эксцентриситет, 11
Эллипсоид Клеро, 113