













































































Автор: Бернюков А.К.
Теги: электротехника информационные технологии обработка информации учебное пособие
ISBN: 5-89368-142-8
Год: 2002




Текст
Министерство образования Российской Федерации
Владимирский государственный университет
А.К. Бернюков
ДИСКРЕТНАЯ И ЦИФРОВАЯ
ОБРАБОТКА ИНФОРМАЦИИ
НЕ1ЕНЕ I ТЕОРИЮ I НЕКОТОРЫЕ ПНМЖЕШ
hilau itcthg
Рекомендовано
Министерством образования Российской Федерации
в качестве учебного пособия для студентов высших учебных заведений,
обучающихся по специальностям
«Радиотехника», «Проектирование и технология радиоэлектронных средств
«Радиофизика и электроника», «Бытовая радиоэлектронная аппаратура»
2-е издание, стереотипное
.Л--’2,*< .-»h i-' ,
Владимир 2002
УДК 621.372.542:621.396,96(075.8)
Б51
Рецензенты:
Доктор технических наук, профессор, заведующий кафедрой радиосистем Санкт-
Петербургского государственного электротехнического университета
В. И. Ипатов
Доктор технических наук, профессор Института радиотехники и электроники РАН
Г. А. Андреев
Доктор технических наук, профессор Московского авиационного института
В. И. Бакалов
Кандидат технических наук, доцент Московского авиационного института
В.А.Хачикян
К* -
Печатается по решению редакционно-издательского совета
Владимирского государственного университета
Бернюков А.К.
Б51 Дискретная и цифровая обработка информации. Введение в теорию и некото-
рые приложения: Учеб. пособие.2-е изд., стереотип. /Владим. гос. ун-т. Влади-
мир, 2002.160 с.
ISBN 5-89368-142-8
Включены материалы по теории дискретной и цифровой обработки сшналов н
информационных системах. Представлен аппарат Z-преобразования и дискрегною
преобразования Фурье. Рассмотрены вопросы линейной и нелинейной (гомоморф
ной) фильтрации. На основе информационной общности различных радиоэлектрон-
ных систем указаны приложения цифровой обработки сигналов (системы дискре! не-
го спектрального анализа, цифровое распознавание образов, цифровой радиоггрисм,
обработка биоэлектрических сигналов и другие задачи). Пособие является ичцхм и-
ческим дополнением к одноименному практикуму, изданному автором в 1997г.
Предназначено для студентов специальностей 200700 - радиотехника, 071500 -
радиофизика и электроника, 200800 - проектирование и технология радиоэлск i
ровных средств, 201500 - бытовая радиоэлектронная аппаратура, 190600 - инже-
нерное дело в медико-биологической практике.
Ил. 179. Библиохр.: 43 назв.
УЦК 621.372.542:621.396.96(075.8)
ISBN 5-89368-142-8
С) Владимирский государственный
университет, 1999
© Бернюков А.К., 1999
ПРЕДИСЛОВИЕ
П 1ШШ ИЗДАНИИ
Второе издание учебного пособия «Дискретная и цифровая
обработка информации. Введение в теорию и некоторые приложения» .^
обусловлено следующими обстоятельствами.
Во-первых, за период, прошедший после первого издания пособия.
расширился круг специальностей и специализаций, в которых вопросы,
связанные с цифровой обработкой информации, имеют существенное
значение. Так, данный материал включён в учебные планы подготовки
магистров по направлениям «Радиотехника» (552500) и «Проектирование и
технология радиоэлектронных средств» (551100). Цифровые методы
доминируют при обработке радиолокационной и радионавигационной
информации и поэтому включены в программу нового курса
«Аэрокосмические радионавигационные системы», читаемого слушателям
магистратуры кафедры радиотехники и радиосистем. Усилены вопросы
вой обработки биоэлектрических сигналов, представленные в учебном
плане специальности 190600 - инженерное дело в медико-биологической
практике. Эти обстоятельства, естественно, расширили круг пользователей
данного учебного пособия и потребовали увеличения тиража и обновления
части материала. Так, в программу курса «Дискретная и цифровая обработка
информации» введены новые лабораторные работы, посвященные
распознаванию образов, гомоморфной фильтрации сигналов с зеркальными
отражениями в канале распространения, генерированию на ЭВМ случайных
процессов с заданными частотными свойствами и другим вопросам, не
отраженным в первом издании пособия.
Специфика дисциплины «Цифровая обработка информации» (ЦОИ)
по сложности и насыщенноеги математическим аппаратом потребовала для
обеспечения качественного обучения использования современных
информационных технологий. Для реализации этой задачи был создан учебно
методический комплекс автоматизированного обучения и контроля
«Дискретная и цифровая обработка информации» на базе электронного
(компьютерного) учебника. Применение такого комплекса позволяет
обеспечить интенсивное и качественное обучение прогрессивным
фронтально-циклическим методом; повысить эффективность аудиторной и
самостоятельной работы путем дифференциации и индивидуализации
’’“’••““’’‘’“’HHiilliHllllHlinilllllllllll з
обучения; оперативно обновлять учебную информацию заменой устаревшей
на файлах персональной ЭВМ на новую, соответствующую современным
достижениям науки и техники; освободить в максимальной степени
преподавателя и студента от рутинной работы; преодолеть проблему
тиражирования учебных материалов (в 2001 г. переиздан с использованием
файлов программного модуля практикум по данной дисциплине);
организовать дистанционное обучение студентов заочной формы обучения.
Основной частью учебно-методического комплекса является
программный модуль автоматизированного обучения и контроля, решающий
следующие задачи: формирование электронного списка обучаемых с
персональным кодированием, исключающим дублирование ответов;
проведение в диалоговом режиме с персональной ЭВМ (ПЭВМ) тестирования
обучаемых, автоматическое оценивание знаний обучаемых по пятибалльной
системе и накопление индивидуального рейтинга.
Методически программный модуль автоматизированного обучения
и контроля используется следующим образом. В начале семестра
преподаватель формирует электронный список учебной группы для
последующего рейтингового контроля. Для этого каждый студент получает
персональный шифр, допускающий его в соответствующую директорию
программного модуля. Итог самотестирования по теме занятия в диалоговом
режиме с ПВЭМ будет автоматически оцениваться по пятибалльной системе,
причем оценка появляется на экране монитора и заносится в электронный
список. Преподаватель автономно может открыть электронный список в любое
время и при необходимости познакомить с ним студента, а затем принять
решение о дополнительных занятиях, консультациях и т.п.
Процесс автоматизированного обучения и контроля проводится
следующим образом. Изучаемый материал разбит на дозы информации,
снабженные вопросами и набором ответов, один из которых верен. Ответ
обучаемого (правильный или неправильный) определяет возможность
перехода к следующей дозе информации либо необходимость
принудительного возвращения к началу программы, в которой указаны
разделы электронного учебника, требующие дополнительной проработки.
Таким образом, достигаются две цели: нахождение правильного решения по
изучаемому вопросу и закрепление пройденного материала за счёт
многократного повторного прохождения программы. У студентов повышается
интерес к занятиям (большие возможности проявления личной инициативы)
и достигается возможность автоматизированного приема экзаменов и зачетов.
Студенты, успешно прошедшие автоматизированные обучение и контроль,
как правило, показывают на финише 100%-ную абсолютную и высокую
качественную успеваемость, а неуспевающие легко отсеиваются.
В новом издании учебного пособия значительные изменения и
4 ||||||||11111Н11Н1И1Н»Н11ншни<«м......
дополнения внесены в файлы КОМПЬЮТЕРНОГО УЧЕБНИКА, являющегося
электронной версией учебного пособия, приложенной к тексту. Новые
обучающие и контролирующие программы записаны в программный
комплекс автоматизированного обучения и контроля DIGIT, также
прилагаемый к пособию, что позволяет достаточно эффективно использовать
как старую, так и новую версии пособия для студентов разных форм обучения.
В процессе развития научных исследований и учебного процесса
по направлению «Цифровая обработка информации» по федеральной целевой
программе «Интеграция» на факультете радиофизики, электроники и
медицинской техники Владимирского государственного университета была
создана научная молодежная школа, в задачи которой входят:
- привлечение талантливой молодежи к фундаментальным
исследованиям в области теории и практики ЦОИ (в областях радиосистем,
медицины и экологии, техники миллиметровых волн, волоконно-оптических
систем);
- организация учебно-исследовательского процесса на
многоуровневой основе лицей - вуз - аспирантура - докторантура;
- организация системы семинаров, научно-технических конференций,
курсов для обмена опытом в различных отраслях использования ЦОИ;
- разработка, создание и обновление компьютерной обучающей
среды (локальной сети ЭВМ, программного комплекса ЦОИ для
дистанционного автоматизированного обучения и контроля).
Автор выражает искреннюю благодарность коллегам и студентам
факультета радиофизики, электроники и медицинской техники, в том числе и
слушателям научной молодежной школы «Цифровая обработка
информации», оказавшим помощь в подготовке второго издания.
............“""hhiiiiiiiiiiiiihiiiiiiiiiiii 5
СПИСОК УСЛОВНЫХ СОКРАЩЕНИЙ
АЦП(ЦАП) аналого-цифровой (цифро-аналоговый) преобразователь
АЧХ(ФЧХ) амплитудная (фазовая) частотная характеристика
БП бортовой приемник
БПФ быстрое преобразование Фурье
БПФВ быстрое преобразование Фурье с прореживанием
по времени
БПФЧ быстрое преобразование Фурье с прореживанием
по частоте
БЭС биоэлектрическая система
ВИМ время-импульсная модуляция
ДЛФ дискретный линейный фильтр
ДПФ дискретное преобразование Фурье
ДП дискретная последовательность
ИХ (ПХ, ЧХ, импульсная (переходная, частотная, дискретная передаточная)
ДПХ) характеристика
КПА (КЛА) кусочно-постоянная (кусочно-линейная) аппроксимация
КФ (АКФ, ВКФ) корреляционная (авто-, взаимно-) функция
ЛС линейная свертка
МП микропроцессор
ОЗУ оперативное запоминающее устройство
ОДПФ обратное дискретное преобразование Фурье
ПК персональный компьютер
ПС периодическая свертка
ПФ полосовой фильтр
РЭС радиоэлектронная система
РПРУ радиоприемное устройство
РПДУ радиопередающее устройство
РМ радиомаяк
РФ (НФ) рекурсивный (не рекурсивный) фильтр
ФНЧ (ФВЧ) фильтр нижних (верхних) частот
ЦОС (ЦОИ) цифровая обработка сигналов (информации)
ЦФ (АФ) цифровой (аналоговый) фильтр
ЭВУ(М) электронно-вычислительное устройство (машина)
В IIIIIIIIIIIIIIIIHHIIHHIHHiiiiuhm.....
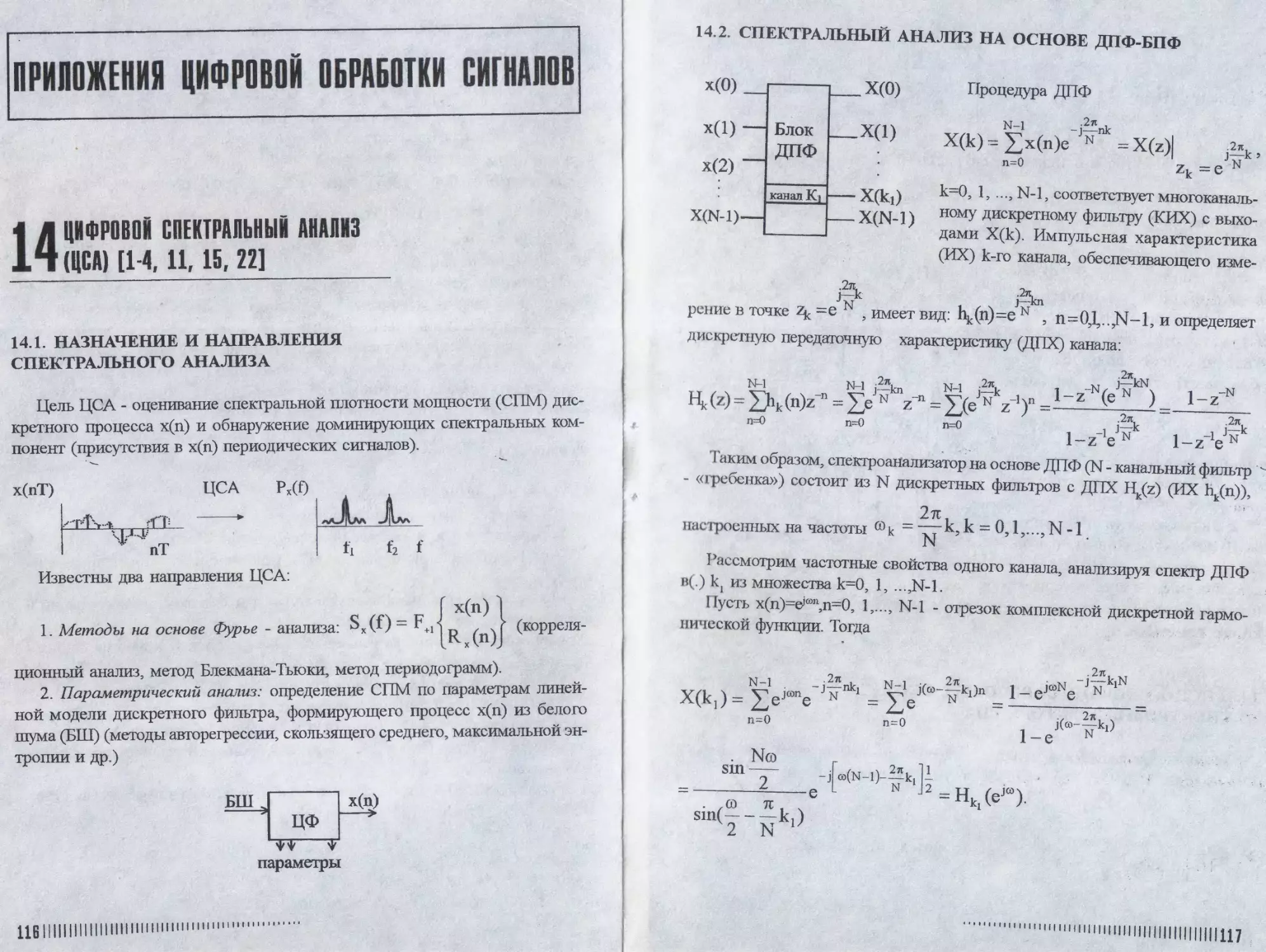
ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ ЦОС
1.1. ИСТОЧНИКИ РАЗВИТИЯ ДИСКРЕТНОЙ
И ЦИФРОВОЙ ОБРАБОТКИ. ПРЕИМУЩЕСТВА
И ОБЛАСТИ ИСПОЛЬЗОВАНИЯ
Источниками развития ЦОС являются:
- успехи математики. алгебра логики и теория цифровых автома-
тов; принципы и структуры ЭВМ (процессор, память, устройство вво-
да/вывода и управления, программирование, микропрограммирование);
быстрые алгоритмы преобразования Фурье; структуры и алгоритмы
управляющих ЭВМ - основа персональных компьютеров и т.п.;
- достижения технологии электронной и в значительной мере полу-
проводниковой техники: транзистор (1948г.), интегральная микросхема
(1958г ), микропроцессор (1971г.), персональный компьютер (1981г.).
Появление фазированных антенных решеток в радиотехнике продви-
нуло цифровую обработку сигналов в этой отрасли.
Указанные факторы обуславливают следующие преимущества ЦОС:
- неограниченную потенциальную точность, определяемую числом
разрядов цифровых устройств;
- повышенную помехоустойчивость в связи с бинарным представле-
нием информации;
- высокую стабильность, широкие динамический и частотный диа-
пазоны цифровых фильтров.
- функциональную гибкость и универсальность программно-аппа-
ратных реализаций цифровых устройств
Многочисленные преимущества и области использования ЦОС (от
детских игрушек до космических систем) можно свести к двум основ-
ным направлениям.
..... 11,11 hi ши ни । 1 ИНН! Ill пищ у
Многофункциональные системы (интегрированные радионавигаци-
онные, радиолокационные и связные комплексы, цифровое телевиде-
ние и голография, аппаратура медицинской электроники, систем ы циф-
ровой телекоммуникации (сотовая, пейджерная связь), системы муль-
тимедиа и т.п.).
Системы с высочайшим качеством обработки информации в реаль-
ном времени (высокоточная радиолокация и радионавигация, досто-
верная телеметрия, скоростная многоканальная связь, высококачествен-
ное воспроизведение звука и изображения).
Система ЦОС - комбинация ЭВМ (ЭВУ) с периферийными устрой-
ствами (аппаратная часть HARDWARE) и программного обеспечения
(SOFTWARE).
Общие функции, выполняемые системой ЦОС:
- управление источниками входных сигналов, включая магнитофон
при воспроизведении реализаций исследуемых процессов;
- преобразование непрерывных процессов в цифровые для дальней-
шей обработки и регистрации;
- создание архива данных и работа с библиотекой программ;
- обработка данных по принятым алгоритмам;
- визуальное, графическое и текстовое отображение результатов обра-
ботки (документирование, интерактивный режим работы, диалог с ЭВМ).
1.2. СТРУКТУРА АППАРАТНОЙ ЧАСТИ СИСТЕМЫ ЦОС
Основа материальной части системы ЦОС - ЭВМ (персональная
(ПЭВМ), бортовая, специализированная и т.д.) или ЭВУ (например, на
микропроцессорном комплекте). В составе периферии - внешние уст-
ройства (ВУ): аналого-цифровой преобразователь непрерывных сигна-
лов от датчиков (например, биомедицинских) в цифровой код устрой-
ства визуального (УВО) (монитор, дисплей), графического и буквенно-
цифрового (принтер) отображений.
Информация, обрабатываемая на ЭВМ, включает данные и програм-
мы обработки.
Обмен информацией между ЭВМ (процессором, оперативным запо-
минающим устройством (ОЗУ)) и ВУ (ввод-вывод) проводится через
адаптеры (контроллеры) и интерфейсы по многоразрядным шинам дан-
ных, команд и адресов.
Возможен ввод данных и управление с клавиатуры персональной
ЭВМ, магнитофона (записи реализаций анализируемых процессов) и с
экрана с помощью «мыши».
8 ............................................
Данные после обработки на ЭВМ поступают на файлы внешних за-
поминающих устройств (ВЗУ), в локальную вычислительную сеть (ЛВС)
или образуют архив на магнитных дисках и магнитной ленте, на перфо-
картах и других бумажных носителях. Оперативная информация отра-
жается на экране дисплея. Сигналы после цифровой обработки могут
управлять механизмами следящих систем летательных аппаратов, стан-
ков и т.д.
Эволюция микроЭВМ:
- в 1968 г. выпущен первый компьютер на интегральных микросхе-
мах (фирма BURROUGHS);
- в 1973 г. создан 8-битовый МП INTEL-8008, далее усовершенство-
вался для микрркомпьютерной индустрии;
- 1981 год - рождение персонального компьютера IBM PC ставшего
стандартом для 90% всех производящихся в мире компьютеров (16-раз-
рядный МП (INTEL-8008) - 1 Мбайт памяти).
Микропроцессоры современных ПЭВМ:
- 80-е годы: IBM PC (XT) Intel 8088: тактовая частота FT=8-10 МГц, объем
ОЗУ - 640 Кбайт; IBM PC (AT) Intel 80286: F=16-25 Мгц, ОЗУ > 1Мбайт;
- 1989-91 гг.: Intel 80386: FT=25-40 МГц; Intel 80486: FT=33-66 МГц, -
- 1993 г.: Pentium: быстродействие 166*10б оп/с, ОЗУ от 1 Мбайт до 4
Гбайт.
- 1996 г.: Суперкомпьютер «Deep Blue» (версия RSV/6000SP), обыграв-
ший чемпиона мира по шахматам Г. Каспарова, выполняет 100-200 млрд,
ходов за 3 секунды благодаря параллельной работе 256 процессоров.
ЭВМ всех поколений отвечают принципам, сформулированным Дж.
фон Нейманом в 1945 г.
1.3. ИЕРАРХИЯ УРОВНЕЙ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
Операционная система (ОС) - набор обобщенных программ, действу-
ющих под контролем главной программы. Например, MS DOS
(Microsoft) (доминирует в компьютерах IBM PC), RAFOS, UNIX и др.
Функции ОС:
- ввод данных в ЭВМ и вывод информации на стандартные перифе-
рийные устройства;
- работа с библиотеками программ;
- загрузка программ;
- тесты диагностики, обнаружение и сигнализация ошибок;
................... xiiiiiiiiiiiiiiiiiiiiiiiiiiii 9
- организация диалога с пользователем, управление ресурсами ком-
пьютера, поиск места на дискетах.
Процедурно-ориентированный алгоритмический язык (АЯ) высоко-
го уровня - язык компиляторов для реализации требуемой обработки с
использованием стандартного пакета программ'. PASCAL, FORTRAN
BASIC и др.
Машинно-ориентированный АЯ низкого уровня для упрощения
процесса программирования инвариантно к аппаратным средствам -
АССЕМБЛЕР, АВТОКОД.
Машинные коды, в которых работает ЭВМ, - не используются про-
граммистом, так как не гарантируют безошибочного программирования.
Z МЕСТО ЦИФРОВОЙ Н ДИСКРЕТНОЙ ОБРАБОТКИ СИГНАЛОВ
В РАДИОЭЛЕКТРОННЫХ СИСТЕМАХ [6 -8,111-13]
Исходя из концепции информационной общности, структуру совре-
менной радиоэлектронной системы (РЭС) можно представить как соче-
тание радиопередающего (РПДУ), радиоприемного (РПРУ) устройств и
радиоканала. В РПДУ происходит формирование и модуляция сигналов,
в РПРУ - демодуляция сигналов и принятие |кч пений (распознавание сиг-
налов, обнаружение, различение с помехой, оценивание параметров).
Назначение ЦОС - качественная обработка информации с помощью
средств электронно-вычислительной техники Традиционно цифровая
обработка проводилась в видеочасти РЭС.
и цифровой обработки (несущая частота)
и цифровой обработки
В современных радиосистемах имеется тенденция к ЦОС на радио-
или промежуточной частотах, где большая информативность сигналов.
10 .....................................
2.1. СТРУКТУРА ОБОБЩЕННОЙ РЭС С ЦИФРОВОЙ
ОБРАБОТКОЙ СИГНАЛОВ
Вх. недр,
сигнал
Блок дискретной
обработки
Аналого-цифровой ।
преобразователь
Блок цифровой
обработки
В радио-
канал
И Дискре-
тизатор
х(пТ)
Кван-
тизатор
Цифровое
Н кодирующее
устройство
|Код
От датчиков
физических
процессов,
абонентов
телефонных
станций
и других
источников
feool
С,е[0,1]
ОбсспечЬнис много-
канальной обработки,
дискретная фильт-
рация I
Цифровая
фильтрация,
помехоусточ и вое
кодирование, генерирование
сложных сигналов
Цифровые сигналы
Дискретные сигналы
Непрерывные сигналы
Преобразования сигналов на передающей стороне показаны на ри-
сунке; дискретизация непрерывного сигнала, квантование по уровню,
кодирование и далее модуляция сигнала несущей частоты f0, излучае-
мого в радиоканал. Преобразования на приемной стороне обратны: де-
модуляция принятого радиосигнала, цифровое декодирование, цифро-
аналоговое преобразование и фильтрация непрерывного сигнала.
Итак, в современных РЭС проводится обработка как непрерывных,
гак и дискретных и цифровых сигналов.
НЕПРЕРЫВНЫЕ (аналоговые, континуальные) сигналы - непрерыв-
ны по времени t и по уровню х (At-»O, Дх->0).
............... Ц
ДИСКРЕТНЫЕ сигналы (дискретные последовательности (ДИ), решёт-
чатые функции, временные ряды) непрерывны по уровню х (Ах-Я)) и диск-
ретны (счетны) по времениn= t/T =0, 1, 2, , со, где 1-1/2 - интер-
вал дискретизации сигнала с максимальной частотой Fmw в спектре
ЦИФРОВЫЕ (квантованные) сигналы дискретны по времени и = 1/Т =
= 0, 1, 2, ... и дискретны (квантованы) и оцифрованы по уровням х' (пТ)=
= ih, i=0, 1, ..., М-1, h - шаг квантования.
Квантованный по уровню сигнал оцифровывается и кодируется в
какой-либо системе исчисления, например в двоичной:
XnKB^{Qp,Qp.p...,Q1}n, Q.6[0,l], р - число разрядов двоичного ряда.
При квантовании по уровню возникает ошибка Л±=х(пТ)-хк"(пТ),
имеющая случайный характер - шум квантования.
2.2. ПРИМЕРЫ РЭС (СВЯЗНОЙ, РАДИОЛОКАЦИОННОЙ
И РАДИОНАВИГАЦИОННОЙ) С ЦИФРОВОЙ ОБРАБОТКОЙ
ИНФОРМАЦИИ
1. Система многоканальной связи (передающая часть )
Сигналы отправителей сообщений (ОС) многоканально через ап-
паратуру уплотнения (АУ) преобразуются в многоканальном АЦП в
12 ......................................
цифровой код (в системах помехоустойчивого кодирования) и после
многоступенчатой модуляции (AM, АИМ, КИМ, ЧИМ, ВИМ, ДИМ,
...) модулируют (AM, ЧМ, ФМ) несущую частоту f передатчика и через
антенно-фидерный тракт (АФТ) направляются в радиоканал (РК). На
приемной стороне - многоступенчатая демодуляция, декодирование, раз-
деление каналов и подача сигналов к потребителям.
2. Система радионавигации
Роль передающей стороны выполняет радиомаяк (РМ), излучающий
кодированный (КД) сигнал, несущий информацию о местонахождении
корабля, самолета в пространстве. Бортовой приемник (БП) выполняет
демодуляцию ВЧ сигнала, декодирование (ДК) цифровой информации
с целью определения координат и отображения в навигационном инди-
каторе (НИ).
3. Радиолокационная система
В радиолокационных системах передающая и приемная стороны объе-
динены в составе одной радиолокационной станции (РЛС), которая из-
лучает кодированный ВЧ сигнал (например, радиоимпульс с модуляци-
ей фазы кодом Баркера), зондирующий пространство. Отраженный от
цели, сигнал несет информацию о её координатах (D, ср, 0, Н). Антенный
коммутатор (АК) коммутирует режимы «приём-передача». ЦОС на пе-
редающей стороне - формирование и кодирование сигналов для повы-
шения помехоустойчивости, на приёмной - первичная (поиск, обнаруже-
ние, различение и оценивание сигналов и их параметров), вторичная (вос-
становление траектории по дискретизованным данным) и последующая
обработка (комплексирование информации от нескольких источников).
Тенденция современных радиосистем - перемещение основных про-
цедур обработки в цифровую часть РЭС с использованием микропро-
цессоров и микроЭВМ.
............. । IIHIIIIIIIIIIIIIIIHII ШИ 13
ТЕОРИЯ ДИСКРЕТНЫХ ПРЕОБРАЗОВАНИЙ СИГНАЛОВ
ДИСКРЕТНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ (ДП)
[1-9,14,15,18]
3.1. ДИСКРЕТИЗАЦИЯ СИГНАЛОВ
Дискретизация сигналов - первый этап обработки сигналов в цифровых и
дискретных системах - представляет модуляцию.
x(t) ------ хт(0
импульсной несущей 8(t-nT)=
оо, t — n Г
O,t*nT
5(t-nT)
непрерывным сигналом x(t).
Таким образом, дискретизированный сигнал имеет вид:
xT(t) = Т ± x(ty>(t -nT) = Т £ х(пТЖ -пТ) = {х(пТ)},
П=-00 п=-«
где {х(пТ)} - выборки x(t) с периодом Т,
площадью х(пТ) и длительностью, равной
нулю в дискретные моменты времени n=t/
Т—— оо ,...,0,1,2,..., оо ;Т - шаг дискретиза-
ции F=l/T- циклическая частота дискретиза-
ции.
Полагая Т= 1 с, имеем Xj,(t)= {х(пТ)}={х(п)} -
дискретную последовательность (решетча-
тую функцию, временной ряд) как n-ю вы-
14 ......................и"'"......
борку непрерывного сигнала x(t), подвергнутого дискретизации. Число выбо-
;юк {х(п)} неограниченно, на чем основана время-импульсная модуляция (ВИМ).
Дискретизация физических процессов может быть искусственной (много-
канальная время-импульсная телефония, телеметрия) и естественной (радио-
юкационные сигналы, корпускулярные излучения и т.п.).
Пример: сигналы на выходе приемника обзорной РЛС, сканирую-
щей пространство со скоростью Qck=2^/Tck, периодические пачки от-
ражённых от цели импульсов с интервалом Т= 2Dmax / с.
t-^(r)/QCK
-2D I с
тск
Естественный вид сигнала говорит о том, что это ДП, причём Тск и Т. -
2D /
1 к*риоды естественной дискретизации ( At = Т к, AtD = Т, > тах/ , с-3*108м/
с).
При цифровой обработке сигналов применяют искусственную дискрети-
зацию в пределах одного периода зондирования Т\ , причём
At = Nmax N iax- максимальное число счётных импульсов, оценива-
ющее максимальную дальность, Т= А/ - период искусственной дискретиза-
ции.
...........IIIIIIIIIIIIIIIIIIIHIII| £5
3.2. ТИПОВЫЕ ДП
Единичный импульс
8(п)
х, (п) = <?(п) =
(п-п0) (п-п0)
1,п = 0(по)
О,п*О(по)
1 6(п-п0)
- >---4---
- аналог 5 -импульса
|S(t)
"о
SCt-to)
^(t) =
Г1/t,t -> 0(to)
,O,t*O(t„)
4—i—।—I
4----1--Ч----Ь
Единичная ступенька
to
о
^(п)^ 1(п) =
(Й-Пр) (й-Пр)
1,П>О(По)
0,п<0(по)
]jn)| ....
- аналог единичного скачка
.... п0
1(0 =
(‘-У
Комплексная дискретная экспонента
Ж___
(cos (У()П +jsin (i){ II)
* ft14-ep»n-е(<т° + j®o)n_„o-0nJ®«n_pO-on
л I Ро=А+Ч
/ ч,- / \ IT М Jar8X(n) Pot
XRe(n)4_JXim(n)==lX(n) Iе ~аНаЛ0Г Х(0 ~ © •
Таким образом, в общем случае комплексная ДП может быть
ставлена четырьмя компонентами:
прец
l)xRe(n) = e’"”cos®0n,
2)xta(n) = e”nsin<a0n.
(ортогогнальные) компоненты
j - квадратурные
wjoftnv
21
3) |Хз(п)|= 2 (п) + хto2(п) = е""" - модуль ДП.
аналог |x(t)|= VxR«!(t) + xto2(t) = е""‘.
При о0<0 ДП затухает, при с( >0 нарастает,
при о0=0 | х3 (ri) |= 1.
< I* (п) |
а0<0
Г-т-Л.....
О 1 2 3. ...п
1,^0(/0)
0,/<0(,0).
О 1 2
*Re(«)
п
IB .......................................
4)argx(n) = arctg
xI,„(n)
XR.(n)
= arctg
sin<yon '
C0S6tfon j
= 6У0П
-аргумент ДП (аналог argx(t) — 6?ot).
Дискретный гармонический сигнал (следует из х3(п) при so=O):
х 4 (nT) = A sm(a>0 пТ’ + <р0) = A sin(
G?oto
О
= A sin(
2/г
;П0Т) = Asin(
где с?0
2тг 2я р ,
— =------— - дискретная частота,
То NT с
2я
---По
NT 0
n0 - дискретная фаза.
A N,=8, <о0|=те4>, <р01~0
N
При Т-1с дискретная частота условно измеряется в радианах.
Действительная дискретная степенная функция (действительная дис-
кретная экспонента):
x5(n)=an=s(e,na)‘1 (следует из х3(п) при <оо =0).
Указанные сигналы могут быть основой создания сигналов произ-
вольной формы. Так, например, дискретный прямоугольный импульс
из N отсчётов определяется как x6(n)=l(n)-l(n-N).
3.3. ОБЩИЕ ХАРАКТЕРИСТИКИ ДП.
ВЕКТОРНОЕ ПРЕДСТАВЛЕНИЕ
ДП конечной длины N:
(0) (N-1)
x(n),N1<n<N2,N = N2-N1,
x(n) = ^(ne[N„N2JMHn = N„N2)
0, n<N15n>N2.
..........,’""<iiiiiiiiiiiiiiiiiiiii|||j|||j|||| и
Энергия и мощность ДП соответственно равны :
N-l 1 N-1
Е = £|х(п)|2, Р = E/N = -£|х(п)|2
п=0 1N п=0
Е и Р- аналоги энергии и мощности ступенчатого сигнала
Взаимная энергия двух ДП х(п) и у(п)
N-1
Е„ =£х(п)у‘(п),
п=0
где *- знак комплексного сопряжения.
N-1
Две ДП ортогональны, если Е = Vx(n)y*(n) = 0 (взаимная энер-
п=0
N-1 N-1 N-1
гия равна 0) или ]Г| х(п) + у(п) |2 = ]Г| x(n) |2 +2Jy(n) |2 (энергия и мощ-
п=0 п=0 п=0
ность ортогональных сигналов аддитивны).
ДП является N- периодической, если
xN(n) = х(п) = £х(п + Nm), m=0, ±1, ±2,..
Произвольная ДП вычисляется по правилу
|7),n ?*к,
1,п = к.
к.
х(п)
x(n) = X Х(к)д(п - к), 6(п - к)
к =-оо
ДПК как упорядоченный набор чисел (уровней отсчетов) x(n)=[xG, х
Xjj J может быть представлена N-мерным числовым вектором в виде
столбца или строки N-размерности:
Хо
т т
-N- мерный вектор-столбец, X = [х 0Xr .X N. j ] вектор-строка.
N-1 J
транспонирование
X* - вектор, элементы которого комплексно-сопряжены с элемента-
ми вектора X (соответствует комплексно-сопряженной ДП/
Два вектора X и Y равны, если равны их компоненты: х =у. для всех
ie[0, N-1]
18 lllllllllllllllllliiiiiiiiiiiiiHiii................
Умножение вектора на скаляр «с» сХ=Хс
СХ0
СХ]
cxn-i
эквивалентно усилению ДП в с раз.
Сумма векторов X+Y=Y+X =
ХО +У0
Х1 +У1
- также вектор
_XN-1 +YN-1
(эквивалентна суммированию двух ДП).
Скалярное произведение jspyx векторов X и Y - также скаляр:
N-1
(X,Y)= ]Гхпу п - эквивалентно взаимной энергии двух ДП.
Для ортогональных ДП (X,Y)=0.
Длина вектора, или его норма: ||Х||=У(Х, Х)=ЛИ хп Г , определяет-
ся по обобщенной теореме Пифагора.
Векторное представление ДП удобно для подготовки расчетов на ЭВМ,
так как обеспечивает компактную запись ДП больших размерностей.
3.4. АНАЛИТИЧЕСКОЕ ОПИСАНИЕ СИГНАЛОВ
В КОМПЛЕКСНОЙ ПЛОСКОСТИ р=[ст; jo]
3.4.1. Описание непрерывных сигналов в р-плоскости
l(t)
ЛС
Н(р)
x(t)
............."""'IHIHIIIIIIIIIIIIIIIIIIIIII 19
Уравнение свободных колебаний x(t), формируемых линейной системой
(ЛС) с сосредоточенными параметрами после первоначального возбужде-
ния сигналом 1 (t), имеет вид :
(1)
где {A.}i=0,l,...q - константы, связанные с параметрами системы (1С, R).
Преобразуем (1) по Лапласу:
AqpqX(p) + A<J_1p4-1X(p) + ... +ААрХ(р) + А0Х(р) = 0,откуда находится
характеристическое уравнение
А,р’ + Aq-iP’-1 +... + А,Р + А„ = 0.
(2)
q
Решение (1) имеет вид: x(t) = 22akePk‘ • l(t), t > 0,
I k=l
где p = <Tk + j(Vk- корни характеристического уравнения (2), они же
полюсы операторного коэффициента передачи Н(р) (полюсы изображе-
сС
ния по Лапласу сигнала Х(р) ~ L+1 {x(t)} = Jx(t)e^dt); КОНС1ШГГЫ.
о
Преобразование йо Лапласу от (3) имеет вид
q
x(t) = XakePl‘ • l(t)
k=l
q я
>x(p) = x-^~
k-iP-Pk
(4.)
Пример:
Уравнение вынужденных колебаний:
24/ 7 dt dt dt dt
U2(p) = pxUj(p)-pxU2(p),x = RC .
Уравнение свободных колебаний при U1(t)=0:
+ U2(t) = О, 4 =т, А„ = l-^q>U2(p) + U2(p) = 0;
dt
20 lllllllllllllIllliiiiniiiiiiiiHiiiMM...........
рт+1=0 - характеристическое уравнение. Отсюда рг = —, и согласно (3)
U2(t) = le“1>p'T.
Так как Н(р) =
U2 (Р) „ Р?
Uj(p) 1 + рт’
единственный
полюс р^-1/т расположен на действительной оси плоскости р.
В общем случае расположение полюсов Х(р) в плоскости p=a+j®
определяет вид сигнала x(t) (как набор комплексных экспонент):
3.4.2. Описание дискретных сигналов в р-плоскости
Дискретизуем элементарную экспоненту в (3) х. (t) = a. cP1J :
x„ (t) = Т£ atep-V(t -пТ) = Tak [<5(t) + e"‘T^(t - Т) + e2p‘T<J(t - 2Т) + ...]
п=0
Преобразуем xkT(t)no Лапласу, учитывая, что
r+1[^(t-nT)] = e-’T,ZJ^(t)] = l:
Х„(р) = Та J1 + еРк1е’р т + e2PkTe‘2p т +...]
Так а.Т
1 _ е₽,ге'’ т ~ 1 - е1Рк‘р,т
Найдем координаты полюсов X (р):
]-е(р‘-р,т=0; e(Pk"p>Tkj”2'= 1; (pt-р)Т + jm2^ = О
2д" . 2^г
р - рк + jm —- = рк + JHifl, fl = —— -2kF - круговая частота дискре-
тизации, т=0,
±1, ±2,...
..............1....."IIIIIIIIIIIIIIIIIIIIIIIIIH 21
Таким образом, полюсы дискретизованного сигнала хкГ(0 повтори к>гся на
мнимой оси плоскости р с периодом О. = 2л / Т .
По расположению повторяющихся полюсов р дискретизованного
сигнала можно определить число отсчетов за период параметрической
части \(nT)=eCknTsin(coknT) как N=Tk/T=(27t/©k)’(Q/27t)=Q/G)k .
Изображение по Лапласу полного дискретизованного сигнала
оо оо q оо Q
хт (t) = T£X(t)<y(t - nT) = TEE xk (t)5(t - nT) =TEEaleK l<*(t пТ)
n=0 п=0. к=1 п=0к=1
имеет вид:
4 а Т а Т а Т а I
Хт(Р) = L+1[XT(t)] = 22 (рк-Р)т ~ л (рг-р)т + 7 (р2-р)т + •••+ ,
к*1 1 — С 1 — V 1 “ с 1 с
СО со ?7Г ( 5 )
= S Х(р + jmQ) = 22 х(р + jm—-)jn = 0,±1,±2,...,
m=-co 1
где Х(р) = L+1[x(t)] = Jx(t)e ptdt = + *’*
o. k=iP~Pk P-Pi P“P2
P - Pq
(P Ppi ) * (P — Po2 )**'
(P-P1)-(P-P2)-
изображение по Лапласу непрерывного сигна-
ла (3) с полюсами рр р2,
...и нулями рор р02, ...
Таким образом, конфигурации полюсов и нулей
полного дискретизованного сигнала xr(t) повторяют
с периодом □ вдоль мнимой ОСИ ПЛОСКОСТИ Р=(У-I jeo
конфигурации нулей и полюсов непрерывного
сигнала x(t).
В общем случае отображение сигналов в плоскости p-c+jco и обратно
проводится с помощью прямого и обратного дискретных преобразований
Лапласа:
LD+1[x(nT)] = Х(р) = Ех(пТ)е-рпТ - аналог Х(р) = Jx(t)e’ptdt, t > 0; (6)
n=0 О
LD-i[Х(р)] = x(nT) = i f X(p)e₽nTdp- аналог x(t) - — fX(p)eptdp (7)
27lJ 2;ij
22 IIIIIIIIIIIIIIIIIHI'IIIllHimmi.i............
3.5. ОТОБРАЖЕНИЕ ДП В ЧАСТОТНОЙ ОБЛАСТИ.
СПЕКТРЫ ДП
Если p=j<D, сг=О, преобразование Лапласа описывает частотный «об-
раз»- спектр дискретизованного сигнала хт(1)={х(пТ)}:
оо
Хт(е'»’) = Хт(р)
p = j®,c = O
= SX[j(o + mn)L <1 = 271/1,111 = 0,±1,±2,..,
Ш--00
t
где X(j(D) = Jx(t)e J<utdt - спектр сигнала x(t).
о
Таким образом, спектр ДП x7(t) - частотный образ XT(eJ®) - является
непрерывной функцией частоты, описывающей спектр непрерывного сиг-
нала периодически повторяющейся по оси частот с перио-
дом П=2л/Т. Иначе говоря, спектр дискретизованного сигнала - беско- <
печная сумма «копий» спектра непрерывного сигнала периодически по-
вторяющихся по оси частот.
Эффект наложения спектров при дискретизации
....23
Если при дискретизации сигнала x(t) с граничной частотой Fm=Qm / 2тс
выбран шаг T<l/2Fm (Qm < я/ Т ), эффект «размножения» спектра рекре-
тизованного сигнала не препятствует восстановлению x(t) по Д11 х r( 0= {х(п Г)}
с помощью фильтра низких частот (ФНЧ) с граничной частотой
Fm <| Рф1Н |< яЛ = П/2.
Если T>l/2Fm (Qm >тг/Т) шаг дискретизации недостаточно мял, в
спектре ДП возникает эффект наложения. Восстановление x(t) по \ it)
становится невозможным, то есть дискретизация сигнала приводит к
необратимым потерям информации.
Таким образом, восстановление непрерывного сигнала по дискрети-
зованному без потерь информации возможно, если шаг дискретизации
отвечает требованиям теоремы Котельникова (Найквиста) - теоремы
отсчетов T<l/2Fm , где Fm - граничная частота спектра сигнала x(t).
В общем случае комплексный спектр ДП х(п) находится по Ирш илу:
со
Х(е'“) = F+1{x(nT)} = yX(nT)e-JBnT = XRe(e>)4 )
П=-О0
=| X(cJ(y)| е^агёХ^ -’-аналог спектру непрерывного сигнала
оо
X(jco) = F+1{x(t)} = Jx(t)e"-’®tdt , F+1{.} - прямое преобр<1зованис Фурье,
—00
00
где
XRe(eJ<°)= Е x(nT)cOS®llT
П--О0
оо
хь, (eJ“) = - E x(nT) sin “nI
n=-00
квадратурные компопен! и
спектра
Амплитудный спектр |X(eJ<u) |= д/Х*е(е,ет) 4-ХИ1 (с10’) .
Фазовый спектр
X (е)а 1
argX(eJC') = arctg—--
XRe(eJtt>)
N-1
Для ДП конечной длины Х(е>“)= ^x(nT)e~j£SnT
п=0
Видно, что все спектры дискретизованного сигнала описываются
непрерывными и периодическими функциями частоты to.
24 |||||||111111111111111|111п|"11...................
Пример. Спектр дискретного прямоугольного импульса с числом
отсчётов N
x(n)
-jeon
x(n) = A,n = O,N-1,
1-(cosoN- jsincoN) _
COS
, . . 2sin ---+ j2sin —
1 - cos оз N + jsmcobi _ 2 2
l-cos® + jsino 2sin2 — + j2sin—cos —
sin
.. coN . .
j(cos-------j sm
®N
-<»N
-1-y
e 2
sm —
(0 . . Gk
j(cos-----jsm—)
sm —
co
cdN
SUl~y“ -j^(N-l)
-----=— e 2
sm—
coN
(N -1),| X(ejm) |
! =NA.
max *
Видно, что спектр дискретизованного имлульса непрерывен по оси
e
..............."'"iiiiiiiiiiiiiiiiiiiiiiiiiiiiii 25
Сравним спектр ХСе1®) дискретизованного сигнала х(пТ) со спектром X (jco)
непрерывного прямоугольного импульса x(t) с длительностью tu.
X(j<o) = Atu
sm(—-
otu
; А1и-площадь импульса
Фурье: x(n) = Е.{Х(е'г’)} = — [X(eJ'")eJ"’"dw
2л _J„
3.6. Z-ПРЕОБРАЗОВАНИЕ
3.6.1. Общие сведения
z-преобразование - основной аппарат описания дискретных и циф-
ровых сигналов и систем - играет ту же роль, что и преобразование Лап-
ласа для непрерывных сигналов и систем, а именно, сведение разностных
(в аналоге - дифференциальных) уравнений к алгебраическим. Вводит-
ся переменная z=epT, p==o+jo, отражающая цикличность при дискрет-
ных преобразованиях, благодаря чему трансцендентные функции пре-
вращаются в рациональные.
z =eFiT =e(<7l+j®i>T =eGiTej{°iT =
- e°iT coscOjT + je0*1 sinc^T = ziRe + jziIm;
ziRe =ea’T coscojTiZj^ = ea‘T sinojjT.
28 IIIIIIIHIIIIIIIiHIIIIIIIIHiHHimnn.........
В полярных координатах:
I z« 1= 7zHm + z?Re = eClT; arg Zj = arctg^2- = <о,Т ± m2 л = (p,, m = 0,1,2,...
ziRe
Отображение из плоскости p в плоскость z
Ф<0, (Oi<a/F
в) г)
а) начало координат плоскости р отображается в точку на вещественной
оси zRe=l, (2^=0) плоскости z;
б) любая точка на мнимой оси плоскости р в пределах -j7c/T^jcoi<j7t/T
отображается на единичную (о~0) окружность плоскости z. При дви-
жении pi вдоль мнимой оси jw в интервале (-joo, joo) соответствующая
точка z описывает оо число окружностей с радиусом 1 (а-0). Один обо-
рот совершается в пределах +2л/Ф=ю.+О;
в) однозначное отображение плоскости р в плоскость z существует
только для полосы p-плоскости ± jn/T, то есть внутри полосы левая по-
луплоскость отображается внутрь единичного круга. Все параллельные
полосы (периодические конфигурации полюсов при дискретизации сиг-
нала с периодом T=2n/Q) отображаются внутри того же круга;
г) правая полуплоскость р (зона неустойчивых сигналов и систем)
отображается на всю плоскость z вне единичного круга.
3.6.2. Место дискретных сигналов в плоскости z
Полюсы на положительной действительной оси (<р1 =0) соответству-
ют дискретизованным действительным экспонентам.
х,(пТ)
zi:l zr |=е°1Т =!(<?! =0);
т — т Т — (V = (Н
0 1 21'
х2(пТ)
О Т 2Т
пТ
Хз(пТ)
О Т 2Т
Полюсы на отрицательной действительной оси (ф;=л) соответству-
ют дискретизованным гармоническим сигналам с двумя отчетами за пе-
риод (Т=2Т).
z4:|z4 |=1(с4 =0);ф4 =со4Т = тс;®4 =
T - 2T;N =11 = —= 2; N=2
ч ' гтт
т
z5:|zs |<1(ст5 <О);ср5 = <b5T = k;i
т.
Х4(пТ):*—
: 2 Т пТ
7VIZ61> 1(о6 > 0); <р6 = и 6Т = я;
Полюсы на положительной мнимой оси (ф=к/2) соответствуют дис-
кретизованным гармоническим сигналам с четырьмя отсчетами за пе-
риод (Т=4Т).
z7: | z7 |= 1(сг7 = 0);<р7 = ® 7Т = —;
28 ....................................
zs:|zg |<1(о8 <0);<р8 = и8Т = -;.
'T' l^r
03 8 - ;;r ~ T’^8 ~ 4T; N=4
2T 4
z9:!z9 |>l(a9 >O);cp9 = co9T = y;<
тс Cl m
®9= — = — ,T9=4T; n=4
2T 4
x8(nT)'
Общие выводы:
- Модуль | zt |= еП1Т показывает изменение амплитуды ДП за пери-
од дискретизации Т.
- Угол ср^со.Т в z-плоскости характеризует фазовый сдвиг за период
дискретизации Т. По величине ф. можно судить о числе отсчетов N за
период Т дискретизованного гармонического сигнала:
Полный оборот вектора z. за один период дискретизации (ф.=2я) со-
ответствует частоте дискретизации ® =£1=2 я/Т.
Величина Z-1 — е-Рт определяет задержку на период дискретизации Т.
Следует заметить, что z-значение полюсов описывает только характер
сигнала (без учета его начальных параметров). Точное z-отображение ДП-
в рамках аналитических прямого и обратного z-преобразований.
3.7. ВЫЧИСЛЕНИЕ Z-ОБРАЗОВ ТИПОВЫХ ДП
Прямое z-преобразование в общем случае имеет вид:
оо 00
X(z) = z+1[x(nT)] = 2Lx(nT)z п аналог Хт(р)= ^x(nT)e~pnT ,
п=0 п=0
где х(пТ) - общий член, входящий в ряд в виде геометрической про-
грессии.
....................i'liiiiiiiiliiiiiiiiilliiiiiHi 29
T£ I Illi Illi I III пи пи । in in । и । hi 111 «I । и । ,
„ f_g = 2<Tnz ‘o - °z ‘
J/of+ v
1 +J/COSOOZ3- 7Z
c«
j/wUISZ
(x w-3 ~ ZX x w3 - z)
x xW-
X’lffif 3Z +
xM-9 “ 7
x*<of9-zlfz
2
u-
X^rouf-3 —г3
A ~
xM-9Z ~ zz
3 = (z) 9X J?®UUTS = (in) 9 X
oo
I^COUf J |
I(W?,D)3= z‘,nzfx4<9SO0 ^3= zoz‘o= IOZ
* I( W- Io® ~ Z)(iflraf + =1о)э - z)
(l’l®S001,o3-z)z
(z) SX <- x’rou SOO ln,Do = (1U) sx Him I
• f- = z“z‘f = luz‘o = г‘т °Z - z) = (Z)SX (fr = n) Ц-и. = l51® ис1| I
—
। Hutu и । ни и 11 ни и II Illi III I III I III I) OE
( rW-3 “ ZX1МЭ ~ z)
Z)S 0
(j/1© SOO-2)2
f3]- Z = (z)sX<- l^usoo = (lu)?x
JI 00
0<s
U ...Z I 0
I>B>0
<
u-
z„<Z =(Z)*’X
00
t=uz co=°z
0>u<0
= (u) v x
w3Pzl=1,z‘0=Oz
"'I
‘ t 31 co = ’M/
э — atf J
o=u
9^ =(z)£x*“ ’l®f+ *£>=
00
ЛИЧ9 = («) £x
U z I 0
I
u—
Z I 0
0=u
ziZ =(z)z
do
0>u<0
u-
O=U
ziZ =(z)
00
0 u‘ol
o = uSi
= (u)g = (u)'x
ZSIUTI _
z2 -2ZCOS71+ 1
T 2T
4 —T—
z -sm—
.Л .71
(z-e 2)(z-e 2
>
ill. 2
Zni=j
2о1==0, zm.2=+j
Если ДП задана отчетами (например {х(п)}={0,1;2,3;-1}, то X(z) нахо-
дится в виде полинома по убывающим степеням z (z-1 =е’ pl ), то ecu, в
данном примере X(z) = 0.1 + 2.3z 1 — z 2.
3.8. СВОЙСТВА Z-ПРЕОБРАЗОВАНИЯ
Линейность: .
Доказательство: x(n) = ax.(n) + bx_(n) -> X(z) = aX.(z) 4 ЬХ ,(zj
X Xr 1
X(z) = f;[ax1(n) + bx2(n)]z"n = XaXi(n)z n + £bx2(n)z л=аХ,(/.н bX2(z)
n=0 n=0 n=0
Теорема сдвига: X1 (n) - x(n - m) -> z mX(z) = Xj (z)
Доказательство:
оо oo x
X[x(n-m)]Z-n= X x(n)z—" = £x(n)z ‘"z " =X(z)z
n=0 n=-m n=0
Теорема о комплексной свертке:
x(n) = Х1(П) - х2 (n) X(z) = A J X, (V)X2 (%)V-'dV,
x 2jgJc - v
где с - замкнутый контур в комплексной V-плоскости, охватывающей все
особенности функции X. (V)X_ (zZV)V'1.
JL <**
32 |||||||111111111111|111НП1111"Н1нт.........
3.9. ОБРАТНОЕ Z-ПРЕОБРАЗОВАНИЕ
И СПОСОБЫ ЕГО ВЫЧИСЛЕНИЯ
х(пТ ) =
—jX(Z)zn~'dz =
2”ГС
{X(z)} - аналог
х(пТ) =
1 О+]Я
— Хт (p)epnTdp = LD4[XT(p)]
2я/ „
где С - замкнутый контур в z-плоскости, охватывающей все особенности
функции X(z)zn‘1
Существует несколько способов вычисления обратного '/.-преобразова-
ния:
1. Если интеграл (*) не расходящийся, то
где F(z)=X(z)zn l, zr(/2), zp/o - все не равные друг другу полюсы функции
F(z); /к-кратность полюса zk, причем 01=1 и d0(p(z)/dz°=cp(z). Здес^требуется
вычисление полюсов функции X(z)z111.
2. х(пТ) =
1 Г dnX(z~')
n! dzn
На практике используют более простые способы вычисления z-преобра-
зования.
Xk(Z) =
3. X(z) разбивается на составляющие вида
z _ z
z-ePfcT z - e(°k+J<T)T ’
для которых
npk Т п(ст + jg> )T L
х (nT) = e ~ =е k k ,n>О,су<0,moecTbX(z) = 2Xk(z)
k = i
и x(nT) = £xk(nT).
k=l
.................................. 33
Пример:
X(z) ----x(n)= ? Запишем-----------------------= a-1-- + —.
(z-l)(z-0.5) (z-l)(z-0.5) z-1 z-0.5
Домножим обе части z-1 и положив z=l, получим at=2. Аналогично дом-
ножив на (z-0,5) при z=0,5 получим: а2= -2. Тогда
0,5z2 0.5z(-2) _ z
z-1 z-0.5 z-1
x(n) = l(n) - 0.5n = 1 - e'"0’5”
,n > 0
4. Метод деления многочлена на многочлен
Если X(z)=
М-1
О B(z)
циональная функция (отношение полиномов), то деление полинома-
числителя на полином-знаменатель приводит изображение X(z) к виду
ряда по отрицательным степеням z, где каждый член ряда соотвстству-
ет одному из отсчетов сигнала.
Пример: X(z)=(5z5+3z4+2)/(2z5+2z3+l).
5z5+3z*+2 2z5+2z3+1
5z'+5z3+5/2 5/2+(3/2)z J-(5/2)z 2
_3z4-5z'’-1/2
3z4 +3z2+(3/2)z~'
-5z3 -3z2-1/2-(3/2)z1
-5z3-5zl—(5/2)z’2
На каждом шаге деления в част-
ном появляется очередной член ряда
по возрастающим отрицательным
степеням z, а эта форма записи /.-пре-
образования легко переводи гея в сиг-
нал х(п).
-3z2+5z,-l/2-(3/2)z',+(5/2)z'2 В
Здесь {x(n)}=J|;|;_L
1 I
В общем случае деление бесконечно. В частных случаях многочлен дели г-
ся на цело. Так бывает, когда все полюсы (корни знаменателя) скомнснсиро-
ванны нулями (корнями числителя), т.е. когда изображение X(z) нс имеет по-
люсов.
Недостатки метода:
I) в результате получаем только численные значения {х(п)}, а не ана-
литическую запись { х(пТ)};
2) ухудшение точности с ростом номеров отсчетов из-за неизбежных
округлений в ходе вычислений.
Разновидность «длинного деления»- числитель и знаменатель при-
водятся к форме, содержащей степени от z*1 (z°, г1 ,г‘2 , ..).
34 llllllllllllllinillllHHiiiii'i"".......*.....
J
Пример: X(z) = ----—----——,
(z - l)(z - 0.2)
2 Ji i
X(z) _______£______— £________£________________1________
z2-1.2z + 0.2 z-2 z2-1.2z + 0.2 1-1.2z-1 +0.2z"2
l-lt2z'l+0.2z~2
1.2z1 -0.2z'2
1-1.2Z1 +Q.2z'2_____
l+i^z-’+l^z^+l^z'3
1.2Z’1 -1.44z*2 +0.24z3
1,24z’2 -0.24z3
1.24z'2-1.488z'3 +0.24z4
U4_8z±t0,24z:4
X(z)=l+1.2z‘1 +1.24z'2 +1.248Z'3, то есть x(n)={l;1.2;1.24;1.248}.
.......... "iiiiiiiiiiiiiiiiHiiiiiiiИЦ| 35
4 ДИСКРЕТНОЕ ПРЕОБРАЗОВАНИЕ
ФУРЬЕ (ДПФ) [1-4,14-15]
4.1. ОПРЕДЕЛЕНИЕ ДПФ И ОДПФ. СВОЙСТВА ОПЕРА ГОРА WN
При расчетах на ЭВМ дискретизация проводится как во временной,
так и в частотной областях. В связи с этим для ДП конечной длины х(п),
n=t/Te[0,N-l] и X(k), k=co/A©G[O,N-l] используется пара дискретных
преобразований Фурье по времени п и по частоте к:
N-1
прямое ДПФ ДП x(n): Х(к) = F+1{x(n)} = ^x(n)W? , 0- к N I;
n=0
обратное ДПФ ДП Х(к): x(n) = F1{X(k)} = —YXfkJW/. O k N-1;
N k=0
j2/r
где WN =e N - оператор ДПФ; n, к - равноудаленные отсчеты но вре-
мени и частоте.
Размерности (объемы) массивов ДП{х(п)} и спектра {X (к)} одинако-
вы и равны N. Пара ДПФ - ОДПФ аналогична парс прсобра юваний
Фурье дискретизованного сигнала:
X(eJ") = F41{x(nT)} = ^х(пТ)е'’“'т, где ej“T =ej“ - опер,.......... Фурье;
П=-со
x(nT) = F1{X(eJ")} = — fX(eJ")ej“Td(y
2^j Д
36 ....................................
Таким образом, спектр ДПФ-коэффициенты {Х(к)} - является выборками в
точках ®k=kA®, k=0,1,2,..., N-1 из непрерывного периодического спектра X(ej®)
дискретизованного сигнала {х(пТ)}. Спектр Х(^®) - периодическое повторение
непрерывного спектра X(j©) непрерывного сигнала x(t).
Выбор шага дискретизации по частоте определяется условием:
2Q 2 я 2 Q Q
Q =-------— =------=------= —
1"°" N N Т N 2 N "°"
.. О F 1
Отсюда размерность ДПФ : in =------=------~.
до п до п до п
Необходимо N>10 для того, чтобы спектрограмма была наглядной.
. 2zr
Свойства оператора WN =ехр(—j )
1. Базисные функции в разложении ДПФ(ОДПФ) ортогональ-
ны то есть: р N, если (к-1)=0 или кратно N;
=
п=0
1— 0 в остальных случаях.
2. W*N = 1, W^2m+1)N/2 = -1,W£m+1)N/4 = -1 W^4m+3)N/4 = +j,m = 0+1,±2?...
3. WNm = (W™ ) - комплексное сопряжение.
4. WJ+mN =W" = W^(modN),m = 0,±l,±25... - N периодичность.
Периодичность коэффициентов ДПФ и ОДПФ
Пусть дискретный сигнал xT(t) = {х(пТ)}=х(п) ограничен временем
t=0, Т, ..., (N-l)T. Тогда можно определить его непрерывный и перио-
дический спектр Х(е,<а) и дискретный спектр ДПФ Х(к). И та, и другая
функции периодичны по частоте: Х(е jm) с периодом Q=2tt/T, Х(к) с пе-
риодом N.
Действительно, если 1X1=0,±1, ±2,..., то:
X(k + mN)= £X(n)WS(k+n,N> = Xx(n)W^W“’N = s'x(n)W? =X(k),
n-0 n=0 n=0
Если применить теперь обратное преобразование Фурье (ОПФ),
то X (ej®) образует действительный исходный сигнал х(п), а ОДПФ опреде-
................................. 37
лит периодически продолженную последовательность х(п) = x(n + mN),
m=O,±l ,±2,..., повторяющуюся через N отсчетов.
О 1 2 3 4 N п
О 1 2 3 4 N k -2 -1 0 1 2 3 4 N 6 7 8 9 2N п
Действительно, при т=0,±1, ±2,...
x(n +mN) = — £X(k)WN(n+mN)k
yX(k)WN,,kWNm>’"’1
(n).
Таким образом, коэффициенты ДПФ Х(к) периодичны по частоте, а
коэффициенты ОДПФ х(п) - периодичны по времени.
О некоторых трансформациях дискретного спектра Х(к)
Х|(п)
(Ок=к1Дсо|
ki
со
Пусть дискретному сигналу {х(пТ)} соответствует массив чисел {х(п)| объе-
мом N. Коэффициенты Х(к) - ряд линий, вписанных в непрерывный спектр
X(eJ“) дискретизованного сигнала в точках ®fc-kQ/N, так как A(jo=£2/N=2jr/NT.
Образуем новый массив большего объема N^N, дополнив исходный нулевы-
ми отсчетами. Физически сигнал xT(t)={x(nT)} не изменится, следовательно,
Х(о’®) также останется прежним. Коэффициенты X (к) будут другими Линии
{Хх(к)} опять-таки вписаны в X(ej®); но более часто (если
38 llllllllllllllliniliiiiiiiiiiiiiiHK..............
Как видим, с помощью ДПФ можно вычислить значения спектра X(ej®) не
только в точках cok=kQ/N, но ив любых других точках. Достаточно дополнить
заданный массив нулевыми отсчетами.
Таким образом, коэффициенты {X(k)},k==0,l,...,N-l являются выбор-
ками непрерывного спектра X(eJW) дискретизованного сигнала {х(пТ)}.
Число выборок не ограничено.
4.2. ОРГАНИЗАЦИЯ ВЫЧИСЛИТЕЛЬНОГО ПРОЦЕССА ДПФ
Рассмотрим пример ручного вычисления 4-точечного ДПФ и
ОДПФ (N=4).
ДПФ:
з -i^n-0 -jl±o-o -J—1-0 -j—20 -j—3-0
X(0) = £x(n)e 4 = x(0)e 4 +x(l)e 4 +x(2)e 4 + x(3)e 4 =
n-0
= x(0) + x(l) + x(2)+x(3);
3 -2яг .2я -2/rn _-2яГ0 1 —21
X(l) = Хх(п)е"т”1 = x(0)e + x(l)e"4 + x(2)e"4 + x(3)e“J 4 =
n-0
= x(0)-jx(l)-x(2) + jx(3);
ч Тя 2я ‘ ,2я
3 _ j—.——i—-0'2 i—Г 2 * • 2-2 _J—3'2
X(2) = 2x(n)e ' =x(0)e ' +x(l)e 4 +x(2)e 4 +x(3)e 4 =
n=0
= X(O)-X(1)+X(2)-X(3);
Q 1я ,2я
3 _i_n.3 —о-З -i—13 -J—2-3 -j—3-3
X(3) = £x(n)e 4 =x(0)e 4 +x(l)e 4 +x(2)e 4 +x(3)e 4 =
n=0
= x(0) + jx(l) - x(2) - jx(3).
При N=4 и x(n)=l, ne[0,3] X(0)=4. X(l)=X(2)=X(3)=0
x(n)
ДПФ
I И I Л
0 12 3 n
X(k)
x(n)
ОДПФ
J_____I_____L
X
ОДПФ:
3 j^o-к j—0-0 j—0-1 j—0-2 j^0-3
4x(0) = £Х(к)е 4 =X(0)e 4 +X(l)e 4 +X(2)e 4 +X(3)e 4 =
k=0
= X(0)+X(l) + X(2)+X(3);
................................ 39
з j—l-к j—10 j—1-1 J—1-2 j 1-3
4x(l) = £Х(к)е 4 = x(0)e 4 + X(l)e 4 + X(2)e 4 + X(3)e 4 =
к-0
= X(0) + jX(l)-X(2)-jX(3);
□ 271 .2л ,2лл. -2л 2л
3 i 2 *к i—2*0 i 2*1 i 2*2 i—2 *3
4x(2) = £Х(к)е 4 = X(0)e 4 + X(l)e'4 + X(2)e 4 + X(3)e 4
k=0
= X(0) - X(l) + X(2) - X(3);
3 j~3-K j—30 j— 31 j— 3-2 j‘n31
4x(3) = ^Х(к)е 4 =x(0)e 4 +X(l)e 4 +X(2)e 4 +X(3)e 4 =
k=0
= X(0)-jX(l)-X(2) + jX(3).
Структура вычислителя ДПФ (N—4)
x(0),
x(l),
x(2),
x(3).
40 IIIIIIIIIIIIIIIIllHiiiiiiii'"""................
Анализ вычислений показывает, что:
1) в образовании одного k-го отсчета Х(к) участвуют все N времен-
ных отсчетов {х(п)};
2) весь спектр {Х(к)}, k€[0,N-l] требует выполнения N2 процедур
комплексных умножений и сложений;
3) увеличение N вызывает сужение диапазона анализируемых час-
тот, так как между n-м и (п-1)-м входными отсчетами необходимо ус-
петь проделать все N комплексных умножений и сложений. С ростом N
требуется увеличить интервал временной дискретизации Т и, как след-
ствие, снизить F <1/2Т;
шах 5
4) реализация вычисления ДПФ аппаратным способом нецелесооб-
разна из-за сложности электронной схемы. Поэтому процедуры ДПФ -
ОДПФ реализуются в виде программ на ЭВМ.
Блок-схема дуального алгоритма ДПФ - ОДПФ
N-1
Главный оператор А(к) = £a(n)W*,k = 0,l,...,N-l используется для
п=0
вычисления ДПФ и ОДПФ.
..................... HIIIIIIIIIIIIIIIIIIIIIIH 41
РежимДПФ:
Вход: a(n)=x(n), n=0, 1, N-l - временные отсчеты;
Выход: А(к)=Х(к), к=0, 1, N-1 - частотные отсчеты.
Режим ОДПФ:
Вход: а(0)=Х(0), a(n)=X(N-k), к=1, 2, ..., N-1 - спектральные отсчеты;
Выход: A(k)=Nx(n), n=0, 1, N-1 - временные отсчеты.
Это следует из анализа к-го коэффициента ДПФ:
Х(к) = x(0)fF“ + х(1)Ж“ + х(2)Ж“ +... + x(N -=
= x(O)W°k + x(N - + x(W - 2)^~2)t +... + x(l)FF;‘ =
= х(0)Г“ + x(N - V)W^W-'k + x(N - 2)W^W~U +... + x(l)^^m =
= x(0)(7“ + x(N - l)r;“ +... + х(1)Ж/"-1)Л
k____________________________________J
форма ОДПФ без N
Таким образом, для получения ОДПФ массива {Х(кД необходимо
все Х(к), кроме Х(0), поменять местами: Х(1) с X(N-1), Х(2) с X(N-2), ...,
провести вычисления, а затем сумму домножитъ на N
4.3. МАТРИЧНАЯ И ВЕКТОРНАЯ ФОРМЫ
ЗАПИСИ ДПФ (ОДПФ)
к, n-const,v
if, к - const
WNO-WNK~I)O
w;1 wj... wiN-1)f
w^2 w22...w^’)2
wnk
.....VVN ••••
W•' w^’1}... W^'1 )(N‘')
W00 vylO
WN VVN
W“'
w®
вход
ж
X(l)
x(2)
\ ВЫХОД
' X(O).
X(l)
X(2)
X(N-l)
; или Xk=xnWN
WN=[Wj = W^(modN)] ,n,k = 0,l,...,N-l- матрица коэффициентов W>?;
Xk=[X(O), X(l), ..., X(N-1)]T, xn=[x(O), x(l), x(N-l)]T-N - мерные векторы.
Векторная форма компактна (используется разработчиком средств
ЦОС), матричная - определяет место данных в памяти ЭВМ.
42, ......................"пи.......................
n
ОДПФ: N
->ki, n-const
w00 W01 w0(N4)
WN WN ... WN
W"10 W41 W'1(N4)
VVN VVN VVN
—yy-nk
yrr-(N-i)O тт17-(К-1)1 \rr-(N-l)(N-l)
VVN VVN •”VVN
ВХОД
Х(0)7П\\(0)
X(l)
x(N-l)
m M
или xn=—Xkw-’
П N K N’
- матрица, обратная к WN: = WjT^1110^)]
4.4. ОСНОВНЫЕ СВОЙСТВА ДПФ
1. Линейность: ax(n)+by(n)->aX(k)+jbY(k), a, b - const.
Доказательство:
N-1 N-1
= a^x(n)WNA + bVy('n)W* = aX(k) + bY(k).
n=0 n-0
N-1
^{ax(n) + by(n)}WbA
n=0
2^ Сдвиг.
2.1. Сдвиг во времени:
x(n-m) ->W^X(k)
jДоказательство:
N 1 N-m-1
У x(n -m)W* = ^x(n)W'”™)k = WNmk^x(n)W* = WN"*X(k).
и 0 n=-m n-0
Таким образом, при сдвиге х(п) на m отсчетов амплитудный спектр не
изменяется (инвариантен к сдвигу), а изменяется только фазовый.
2.2. Сдвиг коэффициентов Фурье: W^xfa) —> X(k -m) .
N-1 N-1
Доказательство: X{WN™x(n)}W* = 2>(n)Wr4'” = X(k - m)
n=0 n=0
N-1 0 N-1
2.3. x(-n)-> X(-k): Sx(-n)W*= Jx(n)W^ =^x(n)WN"k =X(-k).
n=0 n=-(N-l) n-0
3. Комплексная сопряженность (свойство симметрии).
3.1. x(n) -> X(k)= X* (-k) или
(действительная ДП)
Хк. (к) = ХЕе (-к) = XRe (N - к)
(к) = -Xfc (-к) = -Xfc (N - к)
...............""iniiiiiiiiiiiiiiiiiiiniiiiiii 4з
Доказательство:
N-l N-l N-l
X(k) = £ x(n)W;“ ={£x'(n)W-T = {£x(n)W;"k}- = X*(-k).
n-0 n-0 n-0
3.2.
x(n)-»X(k)=-X*(~k) или
(мнимая ДТП
XEe(k) = -XRe(-k) = -XR.(N -k)
Xta(k) = XIm(-k) = X,m(N-k)
Доказательство:
N-l N-l N-l
X(k) = SxOOW* = (Zx-fnJW^T = {X[-x(n)]W/ }• = -X-(-k)
n-0 n-0 n-0
Из пп. 3.1. и 3.2. следует, что для действительной и мнимой х(п) размера
N достаточно вычислить коэффициенты только для ke[0, N/2] (для чет-
ных N) или для ke[0, (NH )/2] (для нечетных 7V).
N-l N-1
3.3. x+(n) - >X’(-k): £ X ♦ (п)\МД = {£ x(n)W *} * = X * (-к)
n-0 n-0
4. Свойства свертки - изучаются далее.
4.5. РАЗНОВИДНОСТИ ДИСКРЕТНЫХ СПЕКТРОВ ДП
Спектр вещественной ДП - комплексная функция:
X(k) = £ x(n)W”k
n-0
= XR.(k) + jXta(k)=|X(k)|e«x«,
WN = е J="N,
где XEe(k) = £x(n)cos
n=0
2тг
¥
ilk - вещественная часть Х(к)
n-1 ,
XIm (к) = — £ x(n) sin—пк - мнимая часть Х(к)
n=o N
XIm(k) .
ад
1. Амплитудный спектр ДП х(п), n-0, 1, ..., N-1.
S„(k) =| Х(к) |= Л/хДк) + Х,;(к), к = ОД,.N -1.
Амплитудный спектр Sx(k) - функция четная относительно середины
интервала задания (0 или N/2) (т.к. XRe(k)=XRe(-k), Sx(N/2-k)=Sx(N/2+k))
и инвариантная к сдвигу:
x(n)->X(k)->Sx(k);
x(n-m)->W^X(k)->Sx(k)5TaKKaK| WNnik |=1.
44 || IHIIIIIIIIIIIIIIIIIH Hl ни । hi । ни •..........
2. Фазовый спектр ДП:
Т (k) = arg Х(к) = arctg
ХДк)
XRe(k)’
к 0,1,..N -1 _ фуНКцИЯ нечетная
относительно середины интервала задания (0 или N/2), инвариантная к
умножению на константу (x(n)-->KPx(k) и ax(n)->vPx(k), a=const).
3. Спектр мощности ДП x(n), n=0, 1, N-1.
Рх (k) Н Х(к) |2 = S2 (к), к = 0,1,..., N -1.
Рх(к) - функция четная относительно середины интервала задания, ин-
вариантная к сдвигу, так как при сдвиге х(п) изменяется только фазовый
спектр, а спектр X(k)|2=Px(k), k=0, 1, N-l неизменен.
Спектр мощности характеризует мощность спектральных компонент
Х(к), так как согласно теореме Парсеваля, энергия сигнала в частотной
области равна энергии во временной области:
N-l 1 N4 N4 1 *
Е„ =2 Ф) Г =Д= =rTS ЭДГ -аналогЦ =2 x(nl)|: =ЕШ =— /| W’)|2 dt»
n=0 Nk=O п=0
Пример:
х(п)=1, пе[О, 3],X(k) = j 4’k Еп=Е|х(п)|2 = 4, Ек = ~ £ ]х(к)р=4
[О-, к = 1,3 а=о 4-S
Поскольку в спектрах Sx(k>,Px(k) и ^(к) независимыми являются
N/2 компонент (например X(k), к=0, 1, N/2 для четных N или Х(к),
к=1,..,5 (N+l)/2 для нечетных N), достаточно вычислить N/2 независи-
мых компонент спектра.
’'•’’•"•'"'•'hhihiiiiiiihiiiiihiiiiiiiiiiiii 4g
4.6. СВЯЗЬ ДПФ И ^ПРЕОБРАЗОВАНИЯ
Рассмотрим N точек на единичной окружности z- плоскости с ин-
тервалом ср =2tt/N. В точке zk=eJ(2WN)k на единичной окружности (|zk|=l,
z-образ ДП имеет вид:
X(z)
N-1
N-1 -i—nk
= Ш « =X(k)
n=0
Таким образом, коэффициенты ДПФ Х(к) являются оценками /-пре-
образования ДП конечной длины в N точках на единичной окружности
z-плоскости, равноотстоящих с интервалом ф^2я/ЬГ, что соответствует
В произвольной гонке
дискретности частот с интервалом
находится на единичной окружности z-плоскости.
Иначе говоря, спектр ДП
46 IIIIIIIIIIIIIIIIIIIIIIIIIHIIIIIIlHli.m..........
4.7. ОБОБЩЕНИЕ ОТОБРАЖЕНИИ СИГНАЛОВ
В КООРДИНАТАХ пТ, о, р, z, к
1. Временные описания
x(t) = £аьелЧ*)
t=i
х(пТ)
x(nT)=Т Ё £ ab e"“T6(t - пТ)
2. Отображение в комплексной плоскости р[о, j со]
Xtp)=fx(t)e-wdt->Xr<p)=Xx(nT)e-'-T= j^+jnfi),Q=2fl:/T, m=0,l,2,.-
О n=0 m=-cc>
q a . Ч Я T
Для (*): X(p)=£-—н>Хт(р)=У > p=pt ±jafl
fc=i(p-pk) k=il-ew*w
3. Частотные образы сигналов (спектры)
Спектр непрерыв- Спектр дискретизованного Спектр ДПФ ДПх(п):
ного сигнала x(t): сигнала х (пТ): (выборка из Хт(е,<й))
....."""'""IIIIIIIIIIIIIIIIIIIIIIIIIIIIIII 47
co \
X(j co) = F+1[x(t)] = J x(t)e’J<,Jtdt - спектр непрерывного сигнала:
О
X(eJ“) = Fit[x(nT)] = tx(nT)e— = £x[j(«< + infi)], ()•£;
n=0 m=-«>
m = 0, ± 1, ± 2,... - спектр дискретизованного сигнала:
N-1
X(k) = J x(n) W* = X(k + mN), m = 0,±l+2,... - спектр Д11Ф;
n~0
Q 2тг
— =---m
N NT
4. Отображение в плоскости z=epT, p“o+j©.
X(z)
X(z) = fx(n)z"“ =|X(z)|eJ“»xw, X(zt) = X(k), zk =e,,‘l =|Zk |c'"r/k ,
n-0
<pk=k<p1=k
2л
фь 2лк
®ic = —=----
T NT
4.8. БЫСТРОЕ ПРЕОБРАЗОВАНИЕ ФУРЬЕ (БПФ)
Для ускорения вычислений ДПФ в 1965 г. Дж. М. Кули, Дж. Тюки
опубликовали алгоритмы быстрого преобразования Фурье, основан-
ные на разбиении N-периодической ДП на более короткие секции и сни-
жении размерности локальных ДПФ. «БПФ - не новое преобразование,
а способ вычисления ДПФ» (Коутер).
4.8.1. БПФ с прореживанием по времени (БПФВ)
Пусть N=2V, v- целое число. Разложим ДП х(п), пе[0, N-1], на четные
и нечетные отсчеты:
48 IIIIIIIIIIIIIIIIIIIIIIIHIIIHH'lliiHm..-.......
0 1 2 3 4 5 6... N-1 n
x(2r)
xN(n>^2(n)+xN/2(n)=x(n=2r)+x(n=2r4-l)
четн. n нечетн. n
Тогда X(k) = ^x(n)Wf = 5>,W“ +
n=0 n- нечетн
r‘ r1
+ £x(n)W^ = £x(2r)W“ + £x(2r + l)W£M)k =
п-четн. r=0 r=0
Г1 Г1
- Xx(2r)(W^)'k + ^x(2r + l)(W’)'kWk.
r=0 r=0
. 2g
Так как W’ = e 1,1,1 = Wn,2,to X(k) =
N N
-1 ---------------1
= £x(2r)W*2 + W^x(2r + 1)W*2
r=0 r-0
= G(k) + W*H(k), meG(k)nH(k)-N/
2 точечные ДПФ четных и нечетных отсчетов. Каждая из сумм G(k) и Н(к)
требует вычисления к от 0 до (N/2)-l, хотя к е [0, N-1 ].
Пример: Вычисление ДПФ при N=8.
X(0)=g(0)+w;h(0)
x(1)=g(1)+w;h(d
X(2)=G(2)+W’H(2)
X(3)=G(3)+W’H(3)
X(4)=G(4)+ Wn4H(4)=G(0)+ W^H(O)
X(5)=G(5)+ W’H(5) =G(1)+ w;H(1)
X(6)=G(6)+ W‘H(6) =G(2)+ Wn‘H(2)
X(7)=G(7)+ WN7H(7) =G(3)+ w;h(3)?
периодичность по к (N=4)
Видно, что в данном случае вычислительные затраты составляют:
2
комплексных умножений и
комплексных сложений (для
N/2-точечных ДПФ G(k) и H(k)), N комплексных умножений (W1^ H(k))
.........’""""iiiiiiiiilillllllllllllllllllll 49
и N комплексных сложений (G(k)+WkN H(k)). Считая умножение самой мед-
ленной операцией, оцениваем длительность выполнения БПФ числом комп-
лексных умножений:
€бпф
«[N + 2|jJ ]t0 « №t0 = tw,
где t0- длительность выполнения одной операции умножения
Процесс прореживания по времени можно продолжить, так как N/2
- четное число. Каждое N/2- точечное ДПФ вычисляется в виде суммы
двух N74 - точечных ДПФ.
Н-1 !Ц
Qk)==^g(rX =£g(W+tg(2i+=Ь(21Ж+w;£g(2i+Dwj.
F=0 2 1=0 j 1=0 2 4 2 ' " 4
- 1 JL-1
Аналогично H(k) = £h(21)W“4 + W‘,2£h(21 + l)W,J„,
1=0 1=0
Разбиение х(п) продолжается до тех пор, пока не дойдем до 14/2=2
(двухточечное ДПФ). Граф двухточечного ДПФ («бабочка») имеет вид
х(0)о—------х(0) + W°/4x(4) « х(0) + х(4)
^4)о/—\ x(0) + Wi„,x(4) = x(0)-x(4)
wi,4 = w‘=w;,,!=-i
Базовая операция БПФВ включает в
себя одно комплексное умножение и два
комплексных сложения. Всего этапов
БПФВ L=log2N (в данном случае три).
На каждом этапе БПФВ выполняется N/2
базовых операций (в данном примере че-
50 || | III HI 11 Illi in । и и шт 11111111 < • । к •........
тыре).Таким образом, на выполнение БПФВ требуется N/2 • log2N комплекс-
ных умножений.
Полный граф восьмиточечного БПФВ (N=8)
При вычислении БПФВ для получения естественного порядка сле-
дования выходов ДП X(k): X(O),X(1),...X(N-1) необходимо перетасовать
входные отсчеты х(п) по закону двоичной инверсии кода индексов п.
Пестесгв Пестсств.двоичн. “ двоичн. инверсн. Й-треб.
0 1 2 3 4 5 6 7 ООО 001 010 011 100 101 110 111 000 100 010 110 001 101 он Н1 0 4 2 6 1 5 3
х(0) х( 1) х(2) х(3) х(4) х(5) х(6) х(7)
I I
х(0) х(4) х(2) х(6) х( 1) х(5) х(3) х(7)
.....""‘"""niiniiiiiiiiillliilliilliiliiiii л
Число разрядов кода п. равно L=log2N. Перестановку х(п) производят с за-
мещением, меняя в парах числа с прямыми и двоично-инверсными номера-
ми и используя лишь одну вспомогательную ячейку памяти.
Блок схема программы двоично-инверсного счетчика Рейдера.
Пример : (N=8)
4.8.2. БПФ с прореживанием по частоте (БПФЧ)
Входная ДП х(п), п-0, ..., N-1, N=:2V, о - целое число, разбиваемся на две
равные части с естественным порядком следования индексов Тогда
N, N 1
2 1 N-1 2 1 N72-1 . N.
X(k)= Zx(n)WNЛ+Xx(n)W^^x(n)WN"l + Уx(n + ^)W;,,^) =
n=0 n_N n=0 л=о 2
2
n=0
x(n) + WN 2x
k=0, 1,..., N-1
Nk .2л- Nk
С учетом W,? = e ' : -c' 4Ws
T
переписываем
52 IIIIIIIIIIIIIIIIIIIIHIIIIiiiiihhh..............
Х(к) раздельно для чётных и нечётных к:
п=0
пк
N ?
2
п=0
Представим предыдущие формулы в виде:
N-i
2
X(2k)=^x1(n)W^ , к=0, 1
2
П-0
Г1
X(2k+l)=£x2(n)W^, к=0, 1,..
2
п=0
где xx(n)=x(n)+x п + —
N , N
— -1 (~ - точечное ДПФ чётных к)
п=0, ...
N
• 7
N
’ 7
N
7
N
7
N
7 ’ ’ ’ 7
( N) ЛЛГ
xQ(n)=[x(n)-x п + — ] W
Z гч I
N
П —Л
. т, п 0, ... ,
Таким образом, N-точечное ДПФ Х(к) последовательности х(п) на
первом этапе БПФ сводится к вычислению двух-точечных ДПФ
Х(2к) и Х(2к+1) для последовательностей хх(п) и х2(п), п=0, ... ,
соответственно.
Описанная процедура повторяется в течение L=log N этапов. Пос-
ледний этап - двухточечное БПФ.
Базовая операция БПФЧ («бабочка») требует выполнения одного
[А(к)-В(к)] WNk
А(к)+В(к)
.......’‘"""""'iiiiiiiiiiiiilllllllllllllllll 53
Граф БПФЧ при N=8
комплексного умножения и двух комплексных сложений.
Полный алгоритм БПФЧ выполняется за L=log2N этапов, на каждом из
которых выполняется N/2 базовых операций.
При естественном порядке индексов х(п) на входе вычислите ля на
выходе имеем двоично-инверсный порядок Х(к), так как поэтапно вы-
числяются Х(2к) (чётные) и Х(2к+1) ( нечётные). Однако это не является
препятствием к практическому использованию БПФЧ, так как выходы
могут быть расположены в пространстве в естественном порядке.
4.9. ОЦЕНКА ВЫИГРЫША БПФ
ПО ВЫЧИСЛИТЕЛЬНЫМ ЗАТРАТАМ
Вычислительные затраты БПФВ и БПФЧ одинаковы, так как вы-
полняются за L=log2N этапов и каждый этап содержит — базовых
операций.
Каждая базовая операция требует выполнения одного комплексно-
го умножения и двух комплексных сложений. Таким образом для вы-
N. хт
полнения БПФ требуется примерно —log2 N комплексных умножений и
54 llinillllllllllliiiiiiiiiiiifH'iiiHM..-........
N log 2 N комплексных сложений. Оговорку примерно нужно понимать в том
смысле, что на первом этапе БПФ вообще не требуется умножений. Кроме
N
того, при значениях W ° = 1 и WN2 = -1 так же отсутствует необходимость
в умножении. Итак, tEno
где t0 - длительность используемой элементарной операции.
Прямое же ДПФ требует N2 комплексных умножений и N(N-1) ком-
плексных сложений на всем интервале к = О, N — 1 множества частот.
Выигрыш БПФ по отношению к ДПФ оценивается сравнением наи-
более трудоёмких операций комплексного умножения:
Так, при N = 210 1024 выигрыш БПФ у « 200 (два порядка).
ПРОЦЕДУРЫ СВЕРТКИ
И КОРРЕЛЯЦИИ [1-4, 7,18,20]
5.1. ПРОЦЕДУРЫ ДИСКРЕТНОЙ СВЕРТКИ
Сверткой описываются многие преобразования сигналов во времен-
t
ной области. Например xBbIX(t) = Jx(t)h(t - г)<1т, где h(t) — импульс-
0
ный отклик фильтра, радиотракта, видеоканала и т.п. В процессе ЦОС
...............""""IIIIIIIIIIIIIIIIIIIIIIIIH 55
5.1.1. Периодическая свертка (ПС)
ПС двух N-периодических ДП х (n)=x(n(modN)) и у (n)=y(n(modN))
называется процедура:
g(n) = x(n)®y(n) =
rN-l
£*(m)y(n - m),
m=0
N-l
£x(n-m)y(m).
jn=0
! Х(П) X(D)
0 N 2N n
При вычислении свертки одна из ДП реверсируется (изменяет на-
правление изменения на противоположное).
ПС периодична с периодом N:
N-l N-1
g(n + pN)= ^x(m)y(n-m)= £x(m)y(n +pN-m) = g(n), p = O,d l,±2,...
m-0 m=0
ПС всегда имеет не более N ненулевых значений.
Способы вычисления ПС (на примере N=4).
1. Аналитический:
g(0) = Xx(m)y(0 - m) =х(0)у(0) + х(1)у(-1) + х(2)у(-2) + х(3 )у(-3) =
= х(0)у(0)+х(1)у(3)+х(2)у(2)+х(3)у( I);
g(l)= £x(m)y(l-m) = х(0)у(1) + х(1)у(0) + х(2)у(-1) + х(3)у(-2) =
= х(0)у( 1) + х( 1 )у(0)+ х(2)у(3)+х(3)у(2);
g(2) = f x(m)y(2-m) = х(0)у(2) + х(1)у(1) + х(2)у(0) + х(3)у(-1) =
= х(0)у(2) + х( 1 )у( 1) + х(2)у(0)+х(3)у(3);
g(3) = Е х(т)у(3 - т) - х(0)у(3) + х(1)у(2) + х(2)у(1) + х(3)у(0).
т=0
2. Матричный и векторный:
g„=[g(O)> g(l), •••> g(N- 1)]т; yn.m=[y(O), y(N-l), y(N-2), у(1)]т- вектор стол-
бцы.
БВ IlillllllllllllllHIIIIIIIHIIllHiiim...........
g(l)
x(l) x(2) x(3) x(0)
x(2) x(3) x(0) x(l)
x(3) x(0) x(l) x(2)
Матрица N*N
y(0)
y(3)
y(2)
y(l)
ИЛИ
gn=XNNytt-m
3. Графический:
4. Вычисление ПС с помощью ДПФ
Пусть x(n)=x(n(modN)), y(n)-y(n(modN)) - N-периодические ДП, имею-
N-l N-1
щие спектры X(k) - x(n)W“k и Y(k) = X y(n)соответственно.
п-0 п-0
Тогда ПС вычисляется по схеме:
g(n) = F, [G(k)] = 1 g Х(к)Y(k)V/Д = 1 g G(k)W/ , где G(k)=X(k)Y(k)
11ри реализации ДПФ в виде БПФ эта процедура
{x(n)}N —>{X(k)}N
(y(n)}N —>{Y(k)}N -4.
{G(k)}-^^{g(n)}
носит название: быстрая свертка в частотной области.
Таким образом, свертка временных ДП эквивалентна умножению
их коэффициентов ДПФ (спектров).
Примеры
х(п)= у(п)=
fl,0<n^N-l
[О при n(0, n)N -1
—> X(k) = Y(k) = y'l •
n~0
JN, k = 0
[ 0, k Ф 0
.............'"""‘iiiiiiiiiiiiiiiiiiiiiiiiiiiii 57
G(k) = X(k)Y(k) =
N2,k=0
0,k^0
оДДф-^п) = 1 YN2W^1* = N,0 < n < N-1
Nk=0
Графическая интерпретация ПС
N-точечная свертка gN(n)=x(n)®y(n) 2Н-точечная свертка g2bi(n) x(n)@y(n)
x(n)
0 1 2 3 N
У(п) 1___________
-1-L___J-1-,-1-1-H
0123N567 2N
У(п)
Ш1
y(O-tn)
|f-1 и---------If-••y<0'n"
-3 -2 -1 0 1 2 3 N 5 6 7 2N
II
y(l-m)
111 IJ III.
y(2-m)
6 7 2N
-^fy(2-in)
2N
y(3-m)
+-
y(3-m)
4----------
y(4-m)
N-1
gN(n)=Jx(m)y(n-m)
m=0
2N-1
g2N(n)= £x(m)y(n - m)
m«0
n
n
Общие правила
1. Вычисление ПС ведется на интервале [О, N-1].
58 ......................................
2. При сдвиге y(n-m) часть отсчетов выходит из интервала [О, N-1 ]. С дру-
гой стороны, входят такие же отсчеты: y(-m)- y(-m+N).
3. При вычислении 2Ы-точечной свертки ДП{х(п)} и {у(п)} дополня-
ются нулями до размерности 2N, чтобы создать предохранительные
интервалы для ПС g9M(n)=:x(n) ®у(п)
5.1.2. Линейная свертка (ЛС)
Пусть две ДП имеют разную длину (Nx и N2 отсчетов):
{х(п)}=х(0), х(1), x(Nrl), {у(п)}=у(0), у(1), y(N2-l).
Линейной (апериодической) сверткой называется процедура:
g(n) = S
п
У x(m)y (n - ш)
ш=0
п
2>(п - in)y(m)
ш=0
= х(п) ® у(п)
Пример: {x(n))={x(0), х(1), х(2)}, N =3; {y(n)}={y(0), у(1)}, N =2.
х(п)1. . .
....— * * — I
0 1 2 3 4 п
У(п)И 1
-----1—।—(—।—।----
0 1 2 3 4 п
if 1 y(0-m)
—।—।—।—।—।—------
-10 12 3 n
т T , , y(l m>
0 12 3 n
g(0) = £x(m)y(° - m) = x(0)y(0)
g(l) = £х(т)у(1- m) = x(0)y(l) + x(l)y(0)
m=*0
g(2) = Xx(m)y(2-m) = x(0)y(2)+ x(l)y(l) + x(2)y(0) =
= x(l)y(i)+x(2)y(0)
g(3) = £ x(m)y(3 - m) = x(0)y(3) + x(l)y(2) + x(2)y(l) +
+ x(3)y(0) = x(2)y(l)
Nt+N2-i=4
............"""""IIIIIIIIIIIIIIIIIIIIIIIIIIII 5g
Отличие ЛС от ПС:
1. Верхний предел суммирования п, а не N-1;
2. В ПС при любом п отсчеты {у(п)} умножаются на отсчеты {х(п)},
в ЛС при некоторых п отсчеты х(п) или у(п) умножаются на «нулевые»
отсчеты;
3. ЛС имеет не более L-N+N-1 ненулевых отсчетов ( в ПС не более N).
Вычисление ЛС с помощью ПС
Имеем две ДП: {x(n)}, ne[0, N£-l] и {y(n)}, ne[0, N2-lJ разных длин
(Np N2). Образуем новые ДП длиной L, дополнив исходные нулевыми
отсчетами:
у(п) =
y(n),0<n<N2 -1
О, N,<n<L-l
Найдем ПС, так как x(n) = x(n(mod L)) и у(n) = y(n(mod L)) перио-
дичны с периодом L.
L-1
Xx(m)y(n - m) = g(n)
g(n) =
m=0
L-l
У'х(п - m)y(m) = g(n)
jn=-0
На практике для вычисления ЛС указанным способом используется
алгоритм быстрой свертки в частотной области:
{x(n)}Ni {x(n)}L _J™+{X(k)} G(k)
{у(п)}к, -> {y(n)}L -™MY(k)} Л
>OBnO-{g(n)} = {g(n)}.
Вычисление сверток с помощью z-преобразования
Если ЛС g(n) = x(m)y(n - m) = x(n) ® y(n) - свертка ДП x(n) и y(n), то
Л1=-00
00
G(z)= Xg(n)z-"
П——00
00
= X Ex(m)y(n~m)z
n=”00 Lni=-00
оо
00 00
-"= £x(m)Ey(n-m)z-n
m=-oo n=-oo
60 ....................................
= X(z)Y(z).
Вычисляя X(z), Y(z) и G(z), определяем g(n) =——fG(z)zn ]dz или
другими способами вычисления обратного z-преобразования.
Пример:
x(n) = l(n) -> X(z) = £1 • z n = ----q-
n=0 1 - Z ‘
00 1
y(n) - an • l(n) -> Y(z) = anz~n = -----—
n=o 1-az
G(z) = X(z)Y(z) =
k^l/O-a),
k2 = a/(a-l).
5.2. ПРОЦЕДУРЫ КОРРЕЛЯЦИИ.
ЭНЕРГЕТИЧЕСКИЕ СПЕКТРЫ
Корреляционные функции (КФ) характеризуют степень взаимосвя-
зи между соседними значениями двух процессов - взаимно-корреляцион-
ные функции (ВКФ) или одного процесса - автокорреляционные функции
(АКФ). Тенденция КФ, как правило, убывание при сдвиге от начала от-
счета, так как степень связи отсчетов сигнала, по мере их удаления друг
от друга, убывает.
Дискретная АКФ N-периодической ДП х(п) определяется как
1 N-1
Rxx(n) =— x(m)x (m±n), n = 0? 1,..., N - 1 - значения дискрет-
N m=o
ного временного сдвига, m=0, 1,..., N-1 — текущее дискретное время.
.......","l"l""iiiiilllllll||||||||||||||||| gi
RJn) - аналог АКФ непрерывного сигнала x(t)
1 Тс
RXx(T) ~ — J x(t)x (t ± T)dt, где непрерывное время t соот-
Тс->со Тс 0
ветствует дискретному т, а непрерывный сдвиг ±т аналогичен дискрет-
ному сдвигу ±п, (+) - сдвиг в сторону опережения (-) - в сторону запаз-
дывания.
Пример:
ix(t)~x(m)
х(1И)
АКФ детерм инированпоз < сиг-
нала ) характсриз\ е i сте-
пень связи процесса x(t)^x(ni ) со
своей копией x(t+x)~x(m+n), сдвш iy-
той на интервал т ~ п по оси време-
нит.
Величина
x(t)x(t+T)~x(m)x(m+n)
Rxx(0) = ^- fx2(t)dt= |-
i г *L I (
С —00 (
определяет отношение энергии сиг
нала Эх к его длительности Т то
есть мощность сигнала.
'2
Отличие КФ от свертки в том, что последовательность x(m+n) не реверси-
руется по времени т, а только сдвигается на величину ±п вперед или на зад.
КФ N-периодической ДП может быть записана в векторной и Mai । ичиой
формах.
Векторная и матричная формы АКФ
где .^=[1^(0), RJ1), ...,RXX(N-1)]TS хп=[х(0),х(1), ...,х(Л-1)]т-М-мерныевек-
ПриМ=4
Rxx(0)/Zx(0) х(1) х(2) х(3)
[R^QfT^FxCO) х(1) х(2}
4х(2) х(3) х(0) х(1)
х(1)
х(2;
. В общем виде Rxx-/N хп,
Кхх(З)
х(1) х(2) х(3) х(0)
llllllllllllllllllll
iiiiiiiiiiiiiiimii
iiliiliiiiiiii
О
2 0
торы, xNN - квадратная матрица N-N отсчетов х(т), сдвигаемых на пе [О, N-1 ].
Энергетический спектр (ЭС)
62 lilllllllllllllllllllllHiiiiiiiiiiii"".-.........
ЭС вычисляется как ДПФ от АКФ N-периодической ДП:
Рхх (к) = 2' R хх (n) w;;k,
п=0
к = О, 1, ..., N -1 - отсчеты дискретной час-
тоты к.
ЭС - точная выборка из непрерывного энергетического спектра Рхх(со)
2л 2л
сигнала x(t)=x(nT) на частотах co^kQ^k——, — - дискретность спек-
тра по частоте, k-0, 1, N-1. Иначе говоря, Рхх(к)~ Р*х(®)=|Х(е’®)|2/Тс опре-
деляет мощность к-й спектральной компоненты частоты ©k=kQr
АКФ и ЭС образуют пару:
ЭС: к = 0,1,...,М-1-ДПФ,
1 3C:P„(k)=|X(k)|2=SR»(n)W^ к-0,1,..„N-1-ДПФ, ’Д11®’
к п=0
являющуюся аналогом соотношений, используемых при классическом
спектральном анализе:
ЭС: Р^со) =|Х(» 2 Z =fRxx(x)e?)“tdT -ПФ,
< с ~°°
AKO:Rxx(T) = ^-Jpxx(®)eJ0I1dffl -ОПФ.
Для двух N-периодических ДП {х(п)} и {у(п)} вычисляются взаимные энер-
гетические спектры (ВЭС) и взаимные корреляционные функции (ВКФ):
ВЭС: Р (k) = X(k)Y’(k) = X’(k)Y(k) = ^Rxy(n)Wxk - ДПФ,
n=0
ВКФ: Rxy(n) = ^- Xx(m)y*(m±n) = J- 2 x(m±n)y*(m) = ^-x (k)WNIlk
Nm=0 Nm.o N k=0
- ОДПФ.
Сопоставление спектров сигналов с их корреляцией
Чем шире энергетический спектр, тем уже интервал корреляции, то
есть широкополосные процессы слабо коррелированны.
Примеры:
Для апериодических случайных процессов анализ ведется по реализаци-
......1,,,"""""»1Н!111|||||||||||||||||||||| 63
ям х (t) - отрезкам определенной длины ТсГ АКФ R^/т) отрезка х (t) позволяет
Р хх(®)
ОПФ
Rxx(T)
Рхх(О)
2.
о
белый шум
Рхх(о)
ОПФ
©о=2я/То
монохроматический сигнал
О СО] ©о ©2
узкополосный процесс
О т
ОПФ у
Rxx(t)
оценить интервал корреляции 2тк. Спектр Pxjd(co)=|Xi(jo))|2/Tc реализа1фих((),
найденый по R (т)неадекватен спектру всего процесса x(t), так как реализа-
ция не представляет весь процесс. Необходимо усреднение спектров, найден-
ных по реализациям, число которых I, то есть «•
1 I
Рхх(® ) = 7 22 Pxxi .
1 i=0
1
64 IIIIIIIIIIIIIIIIIllliiniiiiHi'i"................
6
ДИСКРЕТНЫЕ СЛУЧАЙНЫЕ
ПРОЦЕССЫ [2, 3, G, 9,16]
6.1. СТАТИСТИЧЕСКИЕ ОПИСАНИЯ ДИСКРЕТНЫХ
СЛУЧАЙНЫХ ПРОЦЕССОВ
Дискретный случайный процесс (ДСП) (случайный временной ряд,
случайная решетчатая функция) - индексированное семейство случай-
ных величин {хД или {х(пТ)}. ДСП является выборкой из непрерывно-
го случайного процесса x(t). Случайность хг проявляется и по времени
п, и по ансамблю х.
случайность
реализация случ.процесса
х(0
по ансамблю * t
о
случайность во времени
Отрезок ДСП конечной дли-
ны N (длительности Тс) называ-
ется реализацией случайного
процесса x(t)~x(n)
6.1.1. Законы распределения вероятностей ДСП
Интегральный закон распределения веро-
ятностей (функция распределения)
F, (Хп,п) = Р[х <ХД -вероятность того, что
случайная величина хп не превосходит значе-
ния X .
п
Дифференциальный закон распре деления
(плотность вероятностей)
Очевидно, что
Fx.(xn>n)= /wx (xn,n)dxn
— ОО
Функции распределения вероятностей дис-
кретных случайных процессов непрерывны.
.....“"""""""iiiiiiiiillllllllllllllЩИ В5
6.1.2. Основные свойства функций распределения
1. lim F (X ,п) = Рх (—оо,п) = Р[Х < -со] = О
X —>—ОО п
п
(невозможное событие).
2.
Л
(достоверное событие).
3- Рх [Хп1 < Х„ < Xn2] = F [Xn2] - F [Хп1 ] - вероятность того, что
П " п
величина хп не выходит за пределы интервала [Хп2, Хп1].
> 4. Если Fx (Хп+к,П + к) = Fx (Xn?n), ДСП является стационарным.
В общем случае Fx (Xn?n) и Wx (Xn?n) - зависят от времени и
>> ‘ fi А
ДСП нестационарны.
5. ДСП, для которых статистические характеристики совпадают при
усреднении по времени и ансамблю, называются эргодическими.
m
Двумерный закон распределения, характеризу-
ющий взаимную зависимость двух случайных ве-
личин хпи хт, описывается'функцией совместного
распределения вероятностей:
Fx х ?гп) вер.[хп <Хп?х <Х ].
n ’ m
Совместная плотность вероятностей двух непрерывных величин хп, хт
— [с* ^хи,хю (Xn,n5Xm?m)]/aXn^m .
Для статистически независимых величин
Fx,x (Xn>n,Xra,m) Fx (Xn,n)-F(Xm?m).
Для стационарного случайного процесса все функции вероятностей не
зависят от сдвига начала отсчета по времени и двумерное распределение :
Fxn+fcJxm+k O^n+k > В- + Хга +k, m + k) Fx^ x^
(Xn,n,Xm,m).
6.2. ЧИСЛОВЫЕ ХАРАКТЕРИСТИКИ
ДИСКРЕТНЫХ СЛУЧАЙНЫХ ПРОЦЕССОВ
Начальные моменты - характеризуют положение кривой распреде-
ления wx относительно координатной оси.
66 .....
Центральные моменты - характеризуют от-
клонение кривой Wx от среднего значения (цен-
тра тяжести).
Определим некоторые моменты для стацио-
нарных и эргодических процессов (для которых
статистические характеристики совпадают при
усреднении по времени и ансамблю)
Математическое ожидание (МО) (среднее) - первый начальный момент
т1х
00
—00
1 N-1 Л
(xn,n)dxn = lim ~£x(n) = lim ты.,
N->oo N n=() N-хю
A 1 N-1
где mix = — /7х(п) " выборочное среднее - оценка МО по реализации
N п=0
случайной ДП из N отсчетов.
Средний квадрат - второй начальный момент
оо
т2х - Е[х^] = J x^wXn (xn,n)dxn - эквивалентен средней мощности ДП.
—оо
Дисперсия (средний квадрат отклонений) - второй центральный момент.
Dx.=M2Xi=<=E[(xn-mK)2] =
П XI А П
00
Хп-Ч11 x.)2w (xn,n)dxn
А Л
—оо
Из (*) и (**) и, так как среднее значение равно сумме средних и сред-
нее от средних равно ему же, следует
Оценкой дисперсии реализации ДП из N отсчетов является выбороч-
ная дисперсия
Dx. =<т2 =^-^[x(n)-mix.]2,
N п=о
Л ! N4
где mix =—Ух(п) - выборочное среднее.
N п=0
Величина ах
А
называется среднеквадратическим отклонени-
ем (СКО) и является оценкой величины СТ .
..........."""’""iitiiiiiiiiiiiiiiiiiiiiiiH б}
В общем случае т. , т_ , М„ являются функциями времени и гю-
IXn 2Xn 2ХП
стоянии только для стационарных процессов.
Автокорреляционная функция (АКФ) дискретного случайного процесса
ОО 00
Rxx(n,m) = E[xn -xm*] = j Jxnxm *wx x (Xn,n,Xm,m)dXndX1„
—00 —00
является мерой зависимости между соседними отсчетами (п,ш) случай-
ной дискретной последовательности. Так например, АКФ статистичес-
ки независимого «белого» шума описывается 5- функцией нулевой дли-
тельности. АКФ- в общем случае двумерная ДП.
Взаимно корреляционная функция (ВКФ)
ОО 00
Rxy(n,m) = E[xn -ym*] = j Jxnym *wx _y_(Xn,n,Ym,m)d\ndY„,
— 00 —00
Функции авто- и взаимной ковариации соответственно ощ>едсляютея как
Гх.: (п,ш) = Е[(хп - ш1х )(х„-т1х )’] = R,:i; (п,т) - т]х т1х
пт пт
гху (п,т) =Е[(хп - т 1х )(у -т]уп1)"] = Rxy (п,т) - т1х т1у .
Примеры:
1. Нормальное распределение ДСП (гауссовское) - характерно для
многих реальных случайных процессов (в том числе и шума в радио-
тракте) w „ =п
На расстоянии Зег от моды х = а плотность вероятности составит
0.004, а площадь под кривой wx в полосе а±3сг составит 99.7% от об-
п
щей площади.
68 IIIIIIIIIIIIIIIIIIIIIIIHII'1""""......"......
Ф(-) - интегральная функция Лапласа
(интеграл вероятностей):
Ф(-х)=1-Ф(х), Ф(оо)=1, ф(-оо)=0, Ф(0)=1/2
2. Релеевское распределение
По закону Релея распреде-
лен случайный процесс на вы-
ходе детектора радиоприемно-
го устройства.
Хп
3. Равномерное распределение
-h/2 О h/2 х
-, l\|<h/2
Равномерное распределение описывает случайную ошибку кванто-
вания по уровню дискретных сигналов.
.........""........ohiiiiiiiiiiiiiiiiiiiiiiiiiii В9
КВАНТОВАНИЕ СИГНАЛОВ
7.1.ОПРВДЕЛЕНИЕ ПРОЦВДУРЫ КВАНТОВАНИЯ
«
Для обработки сигналов на ЦВМ проводят их квантование с после-
дующим кодированием. Дискретизованный сигнал xT(t)={x(nT)} с не-
прерывным распределением амплитуд wXn квантуется (дискретизиру-
ется) по уровню с шагом h и «привязывается» к оцифрованной дискрет-
ной шкале из М уровней.
Таким образом х £в (пТ) = kh, к = 0,1,..М ~1.
В общем случае дискретному случайному процессу Xj.=x(nT) с непре-
рывным распределением FXn(Xn,n) или wx (Хп,п) сопоставляется дру-
гой квантованный дискретный случайный процесс (xj^(nT)} с распре-
делением
Fxk Jxk,k) = P[x = xk]„ = £ wXk0(xk,k)= £Pk
XeXk X=Xk ’
*k+l
где Pk =w (xk,k)= Jw (X„,n)dX„,k = 0,l,...,M-l
xk
- плотность вероятности квантованной случайной величины .
78
72. РЕАЛИЗАЦИЯ КВАНТОВАНИЯ.
ОШИБКИ КВАНТОВАНИЯ
Квантование проводится нелинейным элементом - квантизатором,
амплитудная характеристика которого xkb=f(xT) при равномерном кван-
товании (h=const) - линейно-ступенчатая (рис. «а»).Видно, что входно-
му сигналу хт(пТ) в любой точке интервала hk~xT(k+1)-xTJt соответствует
одно значение х^+1 .
Обычно xk =(хТк + хТ/к+1))/2,т.е. выходные уровни квантизатора
берутся в середине интервала
fXTk’XTMl'
Нелинейная характеристика кван-
тизатора состоит из двух частей : ли-
нейной хл=хт(у=45°) (рис. «б») и кусоч-
но-линейной (рис. «в») Дх(пТ)=хккв(пТ)-
-хт(пТ).
Случайная величина Дх(пТ) назы-
вается ошибкой (шумом) квантования.
Шум квантования, искажающий сиг-
нал, аппроксимируется нормальным
случайным процессом. Максимальное
значение ошибки (Дхт= ±3(7^). При
увеличении числа уровней квантова-
ния (М —> оо) шум квантования стано-
вится всё менее коррелированным, т.е.
приближается к белому шуму с равно-
мерным законом распределения и нуле-
вым средним:
w(Ax)=<
1/h, |Дх|<Ь/2
О, | Ax|>h/2
w(Ax)
Максимальная ошибка квантования Дхт =±“/
тт гл 2 h
Дисперсия шума квантования DAx = су У = —-, а среднеквадратичес-
12
кая ошибка (СКО) Пдх — ^ / 2л/3
7.3. ВЫБОР ЧИСЛА УРОВНЕЙ КВАНТОВАНИЯ
Увеличение числа уровней квантования (М —> оо, h -> 0) приближает
квантованный сигнал xkE(nT) к неквантованному сигналу хт (t) =х(пТ),
но за счет усложнения процедур и расширения полосы системы обра-
ботки. Поэтому применяют квантование с приемлемым М.
Для регулярных сигналов М = (xmax -xmin)/Д\ол,где Дхдо11 -допу-
стимая ошибка квантования (х^ может определяться дисперсией шума).
В радиолокации (в устройствах принятия решения о наличии сигна-
ла в шумах), когда измерительный аспект отсутствует, используют би-
нарное квантование (М=2).
При квантовании случайных процессов рассматривается не сама ог-
раниченная по времени реализация x.(t), j=0,l,2,.. а плотность вероят-
ностей статистически независимых амплитуд дискретизованного сиг-
нала w , являющаяся непрерывной и гладкой функцией от х(пТ) с простран-
ственным спектром, ограниченным в полосе 0<f <F max
W(jfnp) = F+1[w
]= jwx(xn,n)e j2’rf”pX"dxn .
np max
Поэтому согласно теореме отсчетов функцию wx можно дискретизовать
с шагом h<l/2F .
Такой подход предполагает восстановление не самого случайного
процесса x(t) или xT(t),a плотности распределения вероятности и число-
вых характеристик-моментов ш)хп, m2xn, М2да , Rxx(n,m).
72 IIIIIIIIIIIIIIIHIIIH1IIHH.....................
8
ВОССТАНОВЛЕНИЕ ДИСКРЕТИЗОВАННЫХ
СИГНАЛОВ [3,18]
8.1. ОБЩИЕ СВЕДЕНИЯ
Качество и достоверность восстановленной по дискретизованному сиг-
налу информации связаны с величиной шага дискретизации Т. Недостаточная
величина Т приводит к необратимым потерями информации, а дискретизация
с избыточной частотой F=l/T бесполезна и технически неоправдана. Приведен-
ный рисунок иллюстрирует принцип восстановления функции <р (t) изменения
угловой координаты самолета по данным, полученным на выходе обзорной
РЛС с периодом Т л =2к/О.„.
* 002 003
В общем случае процедура восстановления сигнала связана с прохожде-
нием выборок {х(пТ)} через некий аналоговый интерполирующий (восста-
I [авливаютций) фильтр и образованием на выходе сигнала x(t), близкого к
x(t). Степень близости x(t) и x(t) оценивается ошибкой аппроксимации Да,
определяемой:
- при равномерной сходимости как
Да =|x(t)-x(t) |,t е [О,ТС],
- при среднеквадратической сходимости как
Е[д2а ]= ;r /wt) - x(t) I2 dt,t e [O,TC ]
*c 0
Равномерная сходимость требует близости x(t) и x(t) в любой точке
интервала анализа [O,TJ, среднеквадратическая (сходимость в среднем)
- на всем интервале [0,Т ], в то время как в отдельных точках может быть
сильное отличие x(t) от x(t).
...."""Hinn...... 73
8.2. ВОССТАНОВЛЕНИЕ СИГНАЛОВ С ПОМОЩЬЮ
ФИЛЬТРА НИЗКИХ ЧАСТОТ (ФНЧ)
ФНЧ
5(t-nT)
xjt)
ФпО“пТ)
Известно, что реакция идеального ФНЧ с
граничной частотой Fm на задержанные 8 -
импульсы описывается функциями Котельни-
кова:
8(t-nT)-»<pn(t-пТ) =
sin£lm(t-nT)
Q„,(t-nT)
= sin c[2TtFnl (t - nT)].
При подаче на вход дискретизованного сигнала
оо
хт (t) = Т У^х(пТ)5(1 — пТ) = {х(пТ)} на выходе ФНЧ возникает сиг-
П=“ОО
нал оценки x(t), причем
ОО со /
x(t)-»x(t)= £ x(nT)(pn(t-nT) = ^x(nT)sinc[27tFni(t-nr)J
П~—°о П.— -00
В точках t = nT x(t) = хт (t) = x(t) (точ-
ное значение), в паузах - возникает ошибка ап-
проксимации Да. Если спектр сигнала x(t) огра-
ничен частотой F , безошибочное восстанов-
Иг
ление функциями Котельникова (x(t) = x(t)) достигается при шаге дискре-
тизации Т <
Fm. В противном случае эффект наложения спектров препят-
ствует корректному восстановлению сигнала. На практике длительность сиг-
нала ограничена величиной Тс , т.е. база дискретизованного сигнала
N > Т /Т — Т„ 2Fm . Значит аппроксимирующий ряд ограничен и оценка
О / С Ait
N-l
непрерывного сигнала x(t) = ^х(нТ)(рп (t — nT) является приближени-
п-0
ем к x(t) и в равномерном или среднеквадратическом смыслах. В точках диск-
ретизации x(t) = x(t) и ошибка восстановления отсутствует.
74 Illlllllllllllllllll4|ll|i"1"""..............
Практически отраничение сигнала по времени определяется интервалом
анализа, по частоте - полосой устройства обработки.
В настоящее время для восстановления сигналов данным способом исполь-
зуют другие базисы ортогональных функций (Уолша, Хаара, и т.д.).
8.3. ВОССТАНОВЛЕНИЕ СИГНАЛОВ
ИНТЕРПОЛИРУЮЩИМИ ОПЕРАТОРАМИ
ДП пропускается через интерполирующий фильтр
(ИФ), реализующий кусочно-постояную (КПА) или кусоч-
но-линейную (КЛА) аппроксимации.
Кусочно-постоянная аппроксимация реализуется ин-
терполирующим фильтром нулевого порядка. Оператор
интерполяции xHo(t)=x(nT),nT<t<(n+l)T, импульсная харак-
теристика фильтра НИфо(Х)= 1,0<t<T.
Шаг дискретизации Т при заданной ошибке апп-
роксимации Аа ограничен максимальной скорос-
тью сигнала I x(t)| : Т< Д /1 х (t) .
КПА наиболее проста в технической реализации (с помощью ЦАП). но не
обеспечивает достаточную точность при восстановлении сигналов, содержа-
щих производные высоких порядков.
Кусочно-линейная аппроксимация реализуется фильтром-интерполятором
(экстраполятором) 1-го порядка
x(t)
(n-l)T nT (n+l)T t
Интерполяция в точку пТ:
trp
__ Т) I
хн1 (t) = x[(n - J) 1J + — (x(nT) - x[(n - 1)T]}, (n - 1)T < t < nT
Экстраполяция в точку (п+1 )Т:
хэ1 (t) = х(пТ) + --+Т{х(пТ) - х[(п - 1)Т]}, пТ < t < (п + 1)Т
В случае КЛА максимальная ошибка восстановления определяется
второй производной сигнала Да max= {|x(t)|maxT2}/8, откуда следует выбор
.........'""""iiiiiiiiiiihiiiiiiiiiiiiiiiiii
шага дискретизации Т < 78Aamax / |x(t) |тах .
В общем случае ошибку интерполяции Л (t) - (нестационарный случай-
И
ный процесс с усредненной КФ R A (т) = — | RA (t,T)dl) можно рассмат-
Т о
ривать как выходной сигнал схемы:
Au(t) = x(t)-x(t)
-ИФ^ x(t)
8.4. ДИСКРЕТИЗАЦИЯМ ВОССТАНОВЛЕНИЕ
СЛУЧАЙНЫХ ПРОЦЕССОВ
8.4.1. Как известно, ограниченью во времени реализации случайных про-
цессов x(t),t е Т обладают неограничен-
ным спектром (Fm —> оо). I Гоэтому правило
теоремы Котельникова для выбора шага дис-
кретизации не подходит (Т — > О’) Не годит-
ся использование КПА и КЛА, так как неиз-
вестны производные случайного процесса
xT(t). В то же время ограниченность интерва-
ла корреляции тк случайного npoi i,ecca созда-
ет возможность выбора шага дискретизации
по правилу Т<2тк. В этом случае база си. нала хт(1) N > Т /Т = Т /2тк рав-
на числу некоррелированных элементов шума.
Восстановление дискретизованного случайного процесса.
Оператор интерполяции xn(t) = <
и
О в остальных случаях
76 |||||111111111111ПП11111И11Н1"1..............
где
RxxM
ОО 00
= f Jxtxi+tw(xtxt+t)dxtdxl+T
— оо —оо
оо
J x(t)x(t + x)dt
—CO
При этом дисперсия ошибки восстановления
Дх по критерию СКО равна
1 р
Идх = аДх = f I х(0 - ХИ (t) I dt > причем
p 0
T
2
(О*, L™ = (oL Lin = 1- — i R™(t.)dr
v Д’ /Hill ' ДК /Ml '-p . HP,<* '
1 b
В приближённых расчетах
E-(fl <D“’-=(6т-1),12й’
8.4.2. Выбор длительности импульсов дискретизации t
Й|11Г1ГтгГЙ1 t
Идеальные импульсы дискретизации имеют нулевую длительность (t >
0) и равномерный и бесконечный по частоте спектр S И). Выбор длительно-
сти реальных импульсов должен гарантировать равномерность спектра в
пределах полосы обработки (например, полосы ФНЧ), то есть Fm
или t «---------. При этом импульс дискретизации условно считается б -
ад р
m
импульсом.
......."""""niiiiiiiiiiiiiiiiiiiiiiiiiiiui 77
ДИСКРЕТНАЯ И ЦИФРОВАЯ ФИЛЬТРАЦИЯ
9 ОБЩИЕ СВЕДЕНИЯ О ДИСКРЕТНЫХ
ЛИНЕЙНЫХ СИСТЕМАХ [14, 18, 19, 34, 35]
9.1. СОПОСТАВЛЕНИЕ ДИСКРЕТНЫХ
И НЕПРЕРЫВНЫХ СИСТЕМ ФИЛЬТРАЦИИ
В понятие система входят: электрическая цепь, радиоканал, фильтр, уси-
литель, коррелятор, спектроанализатор.
Непрерывные линейные системы (НЛС).
1. Описывающие дифференциальные уравнения (при внешнем воздей-
ствии XM(t)):
dqx(t)
q
dq Ax(t)
q-l
...^^- + Aox(t) = x (t)
dtq 4 dt4"1 dt BH ’
где t - непрерывное время, A - константы, характеризующие параметры си-
стемы (цепи).
2. Элементы НЛС:
u(t)=Ri(t)
, u(t)
, ч т di(t)
.W.L--U
u(t)
u(t)=— Ji(t)dt
co
Элементы L и С совместно c R являются время-задающими и определя-
ют временные и частотные свойства непрерывных линейных систем.
Дискретные линейные системы (ДЛС)
1. Описывающие разностные уравнения:
78 ||||||llllllllllliiiiiii|lll,ll‘""1""...........
AqAqx(n) + Aq^jA4 1x(n)+...+А1Д1х(п) + Aox(n) = xBH(n),
где n=t/T - дискретное время; At - константы, связанные с параметрами ДПС;
Дкх(п) - разность к-го порядка (аналог
производной
dkx(t)
dtk
dx(t)
Так, Д1х(п)=х(п+1)~х(п) ~ ,
dt
Д2х(п)=Д1х(п+1)-Д1х(п)=х(п+2)-х(п+1)-х(п+1)+х(п)=
d2x(t)
=х(п+2)-2х(п+1)+х(п)--------—,
dt2
k v к!
Дкх(п)=Дк'1х(п+1)-Дк'1х(п)= S (_1) v |(к _ |Х(П + к “ v).
Пример:
А2х(п) = Е(-1)' + 2 - V)=(-1)" —А~х(п+2) +
и=о И(2-н)! 0!(2- и)!
+ (-1)1 —— • х(п + 2 -1) + (-1)2--— х(п+2 - 2)=х(п+2) - 2x(n+1)+х(п)
1!(2-1)! 21(2-2)!
2 ' )лементы ДЛС (видны из анализа разностных уравнений):
♦
Умножитель на
коэффициент ОС;
xw>Ix(n)=ai Хг.х(п)
Хвх1(п)
Хвх2(п)
^вмп(в)
ХВых(п )
Хвх(п)
Хцых(а)
Сумматор
Элемент задержки на
интервал дискретизации Т
m
ХПых(п)=ХХох. <п)
i=i 1
Хлтлх(Л )—Хпх(П“ 1)
......*......"""4IIIIIIIIIIIIIIIIIIIIIIIHIII 79
9.2. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ДИСКРЕТНЫХ
ЛИНЕЙНЫХ ФИЛЬТРОВ (ДЛФ)
АЛГОРИТМ ФУНКЦИОНИРОВАНИЯ
Общие сведения
Дискретные фильтры (ДФ) линейны, если:
1. Удовлетворяют принципу суперпозиции, то есть
y(n) = L[ax! (n) + bx2(n)] = aL[xj (n)] + bL[x2(n)] = ay j (n) + by 2(n), а и
b - константы; L [•] - линейный оператор (усиление, дифференцирование,
интегрирование).
Если а и b не зависят от п, то ДЛФ - фильтр с постоянными параметра-
ми, если a(n), Ь(п) зависят от времени п, то ДЛФ - с переменными парамет-
рами, а если а и b зависят от х(п), то есть от входного сигнала, ДЛФ - нели-
нейный.
2. ДЛФ инвариантен к сдвигу: х(п)—>у(п) или x(n-k )~>y(n-k)
Основные характеристики ДЛФ
1. Импульсная характеристика (ИХ) h(n) или
h(nT), n=0, 1, 2, ... - реакция ДЛФ на единичный
импульс S(n)=l, n-0. ИХ характеризует поведение
ДЛФ во временной области. ИХ ДЛФ может быть
x(n) h(n)
---> ДЛФ
результатом дискретизации с шагом Т импульсной характеристики h(t) не-
прерывного фильтра.
пТ
2. Переходная характеристика (ИХ): Н(пТ) = j h(q)d£. - реакция ДЛФ
О
на единичный скачок 1(пТ).
3. Системная функция (СФ) (операторный коэффициент передачи) - ха-
рактеристика передачи ДЛФ в плоскости p=o+j®:
Н(р) = = L+1 [h(nT)] = th(nT)e ‘;"r ;
-Х(р) n=o
1 tr+j00
h(nT) = L_1[H(p)] = -L |H(p)epnTdp
(J— joo
4. Частотная характеристика (ЧХ) - характеризует коэффициент пере-
дачи ДЛФ в частотной области.
80 IIIIIIIIIHIIIIIIIIIIIIIIIIHII.....................
00
= F+,[h(nT)]=^h(nT)e-JfflnT.
n=0
h(nT) = F JW05)] = — [ H(ejto)ejanTd®
> 2k j
4 — CO у
5. Дискретная передаточная характеристика (ДПХ) в плоскости Z=epT.
H(z) = IS = z+>[h(n)] = fXn)z’”;
X(z) n=0
h(n) = Z_1[H(z)] = -F jH(z)zn-'dz
|z|=l
OO
Поскольку любая ДП x(n) — ^2x(m)fSn ~ m), а ДЛФ инвариантен к
m=-ao
сдвигу, отклик ДЛФ на произвольное воздействие х(п) определяется линей-
ной сверткой x(n) с h(n)
оо оо
у(п) = x(m)h(n - m) = У h(m)x(n - m) = x(n) ® h(n)
m=“oo m~-oo
Отсюда видно, что в состав ДЛФ входят сумматор, умножители и эле-
менты задержки.
Если х(п) имеет длину N точек, a h(n) - М, то выходной сигнал ДЛФ
II
y(n) = ^x(k)h(n-k),
k=0
имеет N+M-1 точек.
Примеры:
1) Х1(п)=8(п)={1, 0, 0, ...^ДЛФ^у/п^пНИ,,, hr h2,...) - ИХ.
2) х2(п)=1(п)={1, 1,1, }_^ДЛФ—»У2(п)=Н(п)=(Н Н Н ...} - ПХ.
** Хт V А
3)
x3(n)=l(n)-l(n-N)=
f l,n = 0,l,...,N-l
[О в остальных случаях
- дискретный прямоугольный импульс.
Рассмотрим прохождение ДП х (п) через ДЛФ с ИХ h(n)-an, п=0, 1,..., М-1;
а<1.
.......""""""KHHIIIIIIIIIIIIIIIIIIIIIII 81
linn
0 12
n
y(n)= Ex(k)h(n-k)
n=-2: y(-2)= £ x(k)h(-2 - k) = 0
h(-2-k)
n
h(-l-k)
h(0-k)
h(2-k)
n=-l: y(-l)= Xx(k)h(-l-k)*=0,
n=0: y(0)= £ x(k)h(0 - k) - x(0)li(0),
n = 2: y(2) = ^x(k)h(2-k) = x(0)h(2) i
+ x(l)h(l) + x(2)h(0),
h(N-l-k) h(0)
N-1
n = N-l: y(N-l) = 2^x(k)h(N-l-k)~
k=O
= x(0)h(N -1) + x(l)h(N - 2) +... + x(N - l)h(0),
n=N+M-l:
y(N + M -1) = x(N -l)h(M -1).
(N+M-l)
82 Illllllllllllllllll^ll,ll,,l,l"....................
9.3. СОЕДИНЕНИЯ ДЛФ И НЕКОТОРЫЕ ИХ СВОЙСТВА
Ьцаралл.(n)==hi(n)+h2(n);
паралл
=H,(z)H2(z);
X(z)
Y(z)
X(z)
= H,(z)+H2(z);
паралл.
Соединение с обратной связью:
H(z)ot. = =--------------
X(z) l-H|(z)H2(z)
1) ДЛФ физически реализуем, если 11 (n) =
h(n),n > 0
0,n <0
то есть ДЛФ
вырабатывает сигнал на выходе у(п), не опережающий входной;
ос
2) ДЛФ устойчив, если V| h(n) |< со
П=-<»
то есть ограниченный входной
сигнал [x(n)|<Xmax создает ограниченный выходной сигнал
00
У(п) < Хтах Eh(n);
П=-00
3) ДЛФ КИХ - фильтр с конечной по длительности ИХ, ДЛФ БИХ-
фильтр с бесконечной ИХ.
9.4. ОСНОВНЫЕ СТРУКТУРЫ ДЛФ
Тип ДЛФ (ЦФ) определяется алгоритмом работы, описываемым сбот-
ветвующим разностным уравнением. Распространены следующие структу-
ры ДЛФ.
..............."""IIIIIIIIIIIIIIIIIIIIIIIIUII 83
Рекурсивный фильтр (РФ) (ДЛФ с за-
паздывающей обратной связью):
М-1 L-1
у(п)= X akx(n-k) + £bky(n-k)
к=0 к=1
РФ - это ДФ с конечной (КИХ) или бес-
конечной импульсной характеристикой
(БИХ). Сигналы х(п) и у(п) могут быть как
вещественными, так и комплексными.
Нерекурсивный фильтр (НФ) (ДЛФ без
обратной связи):
М-1
У(п)= £akx(n-k) =h , ()
k=0
НФ - это фильтр с конечной импу п»сной
характеристикой (КИХ) (М д оо )
Любой ДЛФ может быть реализован аппаратным (специализированное
цифровое вычислительное утройство СЦВУ), программным (цифровой
фильтр на базе ЭВМ) и аппаратно-программным (микропро! i,eccopiioe вы-
числительное устройство) методами
Преимущества ДФ перед аналоговыми фильтрами:
1. Температурная и временная стабильность.
2. Отсутствие проблем согласования звеньев.
3. Широкие динамический и частотный диапазоны, включая ультра - НЧ.
4. Простота регулировки частотной характеристики (изменением коэф-
фициентов ак, Ьк)
5. Программно-аппаратная реализация и управление программой или
таблицей коэффициентов.
6. Широкие возможности реализации адаптивных ДЛФ и ДЛФ с пере-
менными параметрами.
84 llllllllllllllllllHiiiiiiiii'i1""".............
4 П НЕРЕКУРСИВНЫЕ (ТРАНСВЕРСАЛЬНЫЕ)
1U ФИЛЬТРЫ (НФ) [1-4, 18-20]
10.1. ХАРАКТЕРИСТИКИ НФ
Разностное уравнение НФ:
М-1
У(п) - S hkx(n ~ • При работе в ре-
к=0
альном времени НФ вырабатывает на вы-
ходе сигнал:
оо
{у(пТ)}=Т £y(nT)5(t-nT) =
п=0
=h0T f XnT)S(t-nT)+h]T^x[(n-l)T])8(t-nT)+h2Tf;x[(n-2)T]8(t-n'D+...
n=0 n=l n=2
Am-iT" X4(n-M+l)T]5(t-n1)]
n=M-l
Преобразуем по Лапласу:
L {y(nT)} = T Y(p) = h0TX(p) + 1цТХ(р)е-Рт + h2TX(p)e-2PT +..Л
+ThM_1X(p)e-(M-1>PT = X(p)TtSIhke-kPT ,
k=0
где X(p)=L+1{x(nT)}, L+1{S(t-kT)}= e-k*T, p = о + jeo, (M -1) - порядок НФ
(равен числу элементов задержки).
Отсюда находится системная функция (СФ) (операторный коэффици-
ент передачи) НФ:
Ннф(р)=|~ = s'hke^PT = x'h11e'lt(₽’jmD)Tjn = 2*/T.m = 0+Ш...
Нф Х(р) к=0 к=0
Видно, что ННф(р) в комплексной плоскости р = <т +j<y обладает
только нулями, определяемыми из соотношения:
М-1
Н„ф(Ро^= Z hke“k(PorjmQ)I = 0, m =0+1+2,... .
k = 0
.....“'"""""iniiiiiiiiiiiiiiiiiiiiiiiiii 85
Конфигурации нулей повторяются вдоль мнимой оси с периодом Q =
Дискретная передаточная характеристика НФ
М-1
ДПХ: FL (z)=Y(z)/X(z)= 2 hkz"k, z = ерТ = е(Р~>тП)т
к=0
обладает и полюсами и нулями в плоскости z.
Н (р) и НДф(г) определяют импульсную характеристику НФ:
ИХ: h(nT) =
cr+joo
|HHa>(p)epnTdp,
сг -joo
f HHa>(z)zn-1dz
И=1
?
НФ - это ДЛФ КИХ (М^ °0)(фильтр с конечной импульсной характери-
стикой).
Частотная характеристика НФ
ЧХ: IL.(e ' FL. (P)|p=j(D,cr=O
ТМА X(eJ ) ”Ф J
Амплитудно-частотная характеристика
АЧХ: ^(e)|=Н„ф(ffl) = ^HRe+Hta,
Фазо-частотная характеристика
ФЧХ: argH^ (eJ®) = q>H»=arctg^-,
HRe
М-1 М-1
где HRe(eJ<0) = ^hk cosk(® - mQ)T, Hhn (eJa) = -^hk sink(co -mQ)T,
k=0 k=0
m = 0,±l,...
86 ...................Il""1"............
Видно, что частотные характеристики НФ непрерывны по оси частот и
повторяются с периодом Q=2ti/T.
Групповая задержка сигнала:
t j (со ) = d<рИф (<у) / da> = const, если фазочастотная характеристика
Фь,.(®) - линейна.
Преимущества НФ:
1. Физическая реализуемость (всегда).
00
2 Потенциально абсолютная устойчивость ( Slh(m)l < оо) - НФ КИХ.
щ=-<»
3. Линейная ФЧХ при произвольной АЧХ (постоянство групповой за-
держки в диапазоне частот).
4. Проще, чем в РФ, минимизируются шумы округления.
Недостаток НФ:
1. Проигрыш по объёму оборудования (вычислений) при реализации
фильтров высокой избирательности (требуется длинная ИХ).
10.2. НФ 1-ГО ПОРЯДКА И ЕГО ПРИМЕНЕНИЕ
Из схемы НФ1 следует, что
y(n)=hox(n)+hxx(n-l) или y(n)-y(n-l)=hox(n)+
+h1x(n-l)-y(n-l).
Отсюда уравнение НФ1:
A1y(n)+y(n-l)=hox(n)+h1 х(п-1) - разностное уравне-
ние 1-го порядка.
СФ: ^0,)= Xhke-k»T =h0 +hie-pT =h0 +h1e-(|,-JraD)T,Q = ^Jm = 0>±lJ.
k=0 1
Координаты нулей: e(p0 jniQ^T
Иначе: ea«TeJ(®»-m^)T =
ho
или e°°T [cos(© о - mQ)T + j sin(co q - mQ)T] = (-1 + jO)
h0
.................‘""iiiiiiiiiiiiiiiiiiiiiiiiiii gj
что ребует h j < h q (о q < 0) для
11 о
Тогда е 0 = — и оф = —In
h0 Т
обеспечения устойчивости НФ1.
ЕслиИ0 >0, то cos(®q -mQ)T = -1, т.е.(®д -тП)Т = и и нули СФ и
Если h0>0, hjO, tocos((D q — mO)T = 1, т.е.(со g — mO)T = 0 и нули
СФ и ЧХ приходятся на частоты со0 = mQ - m —, m=0, ± 1?±2?...
ЧХ: Ь^ф1(е»®)= h0 + hje = h0 + hi cos(<y - mQ)T - jh] sin (/у - mQ)T
АЧХ:ННф1(^) = ннф1
(e ) = д/liQ +hi +2h0h1cos(6» - mQ) J
TT„ z x . h, sin(<y - mQ)T
ФЧХ: <рНФ1(о) = -arctg------1------------------
h0 + hj cos(ty - m£2)T
ДПХ: ^(Z) = £hkz-b =h„ +h1Z-‘ = , z„, = 0, Z01 = -h
k=0 z h 0
1'НФ1(пТ) = Л fHHOi(z)zn-1dz = h05(nT) +h]8[(n - 1)T|
2%J |z|=l
Рассмотрим частные случаи:
1. h0=l, h^l (НФ1-режекторный фильтр)
НнФ1 (e-j®) = 1 + e~X<»“mQ)T -1 + cos(<y - mQ)T - jsin(<y - mQ)T.
Ннф1 (co) = V2[l + cos(®-mn)T] = J2
. 4 sin((D -mQ)T
<₽НФ1 (®) = -arctg----------—-;
1 + cos( u) - mi 2)1
4eh>i(z) +z 1 ~’ Z()1 1’ Zni~0’
z
88 .........
"J 0 0,5 (d/Q
Фильтр режекгирует компоненты спектра сигнала на частотах —,
I: г ‘ '
2. h( -I, h —1 (НФ1 - дифферетщиатор,
Н ЫФ1 (eJ“) = 1 - е"’(Т°,Т = 1 - cos(® - mQ)T + jsin(® - ;пЩт.
Н,„,ф(со) = 72[l-cos(® - mS2)T] = /2 • 2sin2 1110)1
<P, Ф (®) = arctg
sin((D - mQ)T
1 - cos(® - mQ)T
Z
0 0,5 to/Q
zr =1. z .-0.
01 ' Hl
Схема дискретного дифференциатора имеет вид:
у(п)~ Дх/At—Лх/Т—>
->dx/dt при Т-->0
у(п)==х(п)-х(п-1)=2^х(п.) - разностное уравнение 1-го порядка - отражает
скорость процесса х(п) или производную ---------------.
Примеры цг фровогр .дифференцирования ДП:
• 4 , »
<пНпН1.0,0,~),
уСп>={1, -1.0,0,...}
ИХдаф: h(n)=8(n)-8(n-l)
........."""""||||||||||||1||||||||||||!||ц 8д
6) x(n)
У(п)
n
в) x(n) 3
У(п)
11 1 b 4 56
О 1 2 "i f П
n
n
x(n)~{I, 1, 1, 1,0,0, ...}4(n)-l(n-N),
y(n>{l, 0,0,0, -1,0,0,...}
x(n)={0,1,2,3,2,1,0,...}
y(n)={0,1,1,1,-1,-1,-1,0,0,...}
Из анализа следует, что цифровой дифференциатор подавляет частоты
0, Q, 2Q,..., Г2=2я/Т, то есть может выполнять функции режекторного фильтра.
10.3. НФ 2-ГО ПОРЯДКА И ЕГО ПРИМЕНЕНИЕ
y(n)Hi^(n)+hXn-l)+liXI1‘2) ‘ разностное уравнение 2-го порядка
Двукратный полюс znl 2=0 не оказывает влияния на Hm2(z).
j
Интересен случай, когда h0=h2~l, |hj<2:
Здесь |z012|-1, поэтому комплексно-сопряженные нули расположены на
. л—ЛЧ
окружности единичного радиуса, то есть z0| 2 ~е До =0), угол
ВО HIIIIIIIIIIIIHIIIIHIhiiiihiiihuhu-.......
Ф012=±со0Т определяется величиной h,. Изменяя hp перемещаем нули по
единичной окружности плоскости z, что эквивалентно перемещению нуля
АЧХ по оси частот
ш0Т = 45°.
В радиолокации используется режим фильтрации, когда h,=-2
{фильтр двухкратной черезпериодной компенсации)-.
j’fw)~x(n)-2x(n-l)+x(n-2)=A2x(n) (вторая разность).
Осуществляя двухкратную череспериодную компенсацию, фильтр 2-го
порядка является режекторным с характеристиками:
СФ:ННФ2(р) = fhte-kpT = 1-2е“₽т +е-2₽т =(1-е*₽т
к=0
)(1-е*рТ)
= НЙ(р)-НЙ(р).
ЧХ:Ннф2(е>
ТТ диф / ja> а тт ДИф z j® ч
пНФ1(е ) пНФПе Л
) = (l-e-j“T
)(1 е »
Таким образом, НФ2 реализуется каскадным соединением двух НФ1-
дифференциаторов.
АЧХ: Н НФ2(е>) = Ннф2(со) = (о>) • = 4 sin
- тд
т=±0,1,2,...
...."'""•"HiHiiiiiiiiHlllllllllllHIII Bl
О 0,5 1 (й/Q
Фильтр ВТ
жив
го порядка обладает
бесконечно большим затуханием на
частотах ci)0-mQ, m-±0,1,2, и обладает
лучшими режекторными свойствами,
чем НФ1. Однако расширеная область
режекции приводит к неравномерной
АЧХ в полосе пропускания.
И РЕКУРСИВНЫЕ ФИЛЬТРЫ (РФ)
[14,11-281
11.1. ХАРАКТЕРИСТИКИ РФ
В РФ введена запаздывающая обрат-
ная связь, благодаря чему разностное
уравнение имеет вид:
М-1 L-1
y(n)= i>i{X(n-k) + i;bky(n-k)
k=0 k~l
Видно, что в формировании у(п) уча-
ствуют не только входные отсчеты х(п),
но и ранее полученные выходные y(n-k).
Соответственно имеем:
СО 00 оо
{у(пТ)} =Т X y(nT)0(t-nT)=aoT £ x(nT)6(t-n’r)+aiTl>[(n-l)T]5(t-nT)
п=0 п=0 п-1
+...+ам_!Т X 4(n-M + l)5(t-nT) + birSs((n-l)T]8(t-nT)+..
00
•+bL_iT Sy[(n-L + l)]5(t-riT).
n=L-l
82 |||||||11П111ПН111И111111ипн11Н111м.......
СФ: 1Мр>
Преобразуя по Лапласу и сокращая Т, получим
Y(p) = a0X(p) + a1X(p)e“pT + ... + ам„1Х(р)е-(М“,>рТ + b,Y(p)e~pT + b2Y(p)e“2pT +..
.. + bI_,Y(p)e~<M,pT = Х(р)Ха:,е крТ +Y(p)£bke,pT
к=0 к=1
Отсюда находится системная функция РФ:
М-1 М-1
V'a г>~кРТ Q d-k(p-jmQ)T
Y(p)_
Х(р)
2 л
— г у
k=0 _ k=0
1-^Ьке’‘(р^)Т
Видно, что СФ РФ в плоскости р[о, jo] обладает не только нулями,
определяемыми из условия
М-1
jw
Тй
11рф((£>)
k(Poi jmI2)T _ q > но и полюсами
1), периодически повторяющие
РФ
мися вдоль мнимой оси плоскости р с периодом Q=2tt/T
Нрфф) при р = jco. о - 0 определяет частотные харак-
теристики РФ:
М-1 М-1
Zake-jtoT Уаке-д’(ю-тО>т
ГТ Z-Y _.Ь-Р _ Ь-1-..
1-Lbke'jk(m"mn)T ’
1-Sbke-Jtor
k=l
АЧХ : Нм,(<о)=|Нрф(е‘")| и ФЧХ: Фм>(<о) = argНрф (eJffi),
которые периодически повторяются вдоль оси частоты с периодом Q - 2л/Т
ДПХ:^^
имеет нули и полюсы в плоскости Z
..........'н"”'”|||||11111Н|||||||||||||||||| 83
™ . Z ,[H(z)] = — .[H(z)zn“1dz
ИХ: hpO(n)= -n- v 7J 2л X или
। QO
WnT)=F ДЩе'»)] = — f da .
2л J
— 00
РФ может быть как ДЛФ КИХ, так и ДЛФ БИХ.
аМ
-П О Q
Преимущества РФ перед НФ:
1. РФ любого порядка содержит меньше элементов памяти, чем НФ г/ри
одинаковых ИХ.
2. РФ обеспечивает более резкую отсечку АНХ и большую равномерность
её в заданной полосе частот (большую прямоугольность АЧХ), чем НФ.
Недостатки РФ:
1. РФ накапливает ошибки задания а*., bk и х при циркуляции сигнала ио
цепи обратной связи.
2. РФ может самовозбудиться (если полюсы Нрф(р) будут в правой полу-
плоскости р (вне круга |z|=l)).
11.2. РФ 1-ГО ПОРЯДКА И ЕГО ПРИМЕНЕНИЕ
РФ1 реализует уравнение y(n)=x(n)+by(n-l).
Сравнивая с
М-1 L-1
y(n)= £akx(n-k) + Zbky(n-k),
k=0 k=0
имеем: a0=l, ^=0, k>0, bo=O (РФ\ b{=b, bk=0, k 1
Из схемы РФ1 следует, что
СФ: Н,.ф| (р) =
Sake-k₽T
k=0
1- Sbke-k₽T
k=l
ар 1
l-be-PT l-be-<P-JmQ>T
94 ..................................
Координаты полюсов Нрф(р): 1-be (Pni jmO)T = 0илие(Рп1 ’’mQ)T =b.
Отсюда еСп1ТеЛ®пГП1С^Т = b или
еСТп iT [ cos(g) п j - mQ)T + j sin(co n j - mQ)T ] = b (1 + jO) •
Так как е П1
= b, TO(Jni=—ln|bj и условие устойчивости РФ1
oi < 0 достигается при | b |< 1.
11ри b>() cos(© ni- m£l)T = 1, (®<ni-m£l)T = 0, о П1=mQ, ш = 0,±1,±2,... .
При b<0 cos[Mni-mQ)T = -L (<onj-m0)T =
ЧХ: Ь1рФ1(е^® ) _Нрф1 (Р)|р j® । _fee-j(®-mQ)T
= 1 /[1 - b cos(® - m£T)T) + jb sin(co - mQ)T].
ATX: (e> )| = —=
д/1 + b2 -2bcos(© -m£2)T
rbuv-. bsin(co -mfl)T
ф 1X- ФРФ1 (®) = -arctg----------------•
1 - b cos((D - mQ)T
ДПХ: Нрф1 (z) j” ^,z=0, z=b.
1 - bz z. и
НрфДсо), b>0
Ннф1 (co), b<0
0 0,5 co/Q
...............""'"iiiiiiiiiiiiiiiiiiiiiiiiiiii g5
Примеры фильтрации с помощью РФ1
1) х(п)=0,1,1,1,...—> у(п) - ПХ
п
х(п)
Уг(п)
У(п)
О,
О
О
О
3
1
l+b(l+b)
4________
1
l+b(l+b)
l+b(l+b(l+b))
у(п)
2) х(п>1,ОД... ->у(п) - ИХ
При Ь=1 РФ1 - идеальный дискретный интегратор.
н„„(р) = 1/(1-е“рТ ), Hm(Z)=l/(l - ZOI = 0, = I.
Zj X
11.3. РФ 2-ГО ПОРЯДКА И ЕГО ПРИМЕНЕНИЕ
х(п) РФ НФ у(п) ДПХ:
2 2
a(z) = ^akz'k,P(z) = 1/(1 -]Tbkz~k).
k=0 k=0
96 |||||||||||11111Ш1111111П11НПН11И..........
'у Hi Но
Из уравнения z0 ч—- z0 -I------= 0 определяются нули ДПХ :
ао а0
1 / а1 \2 а2 тт / \
j------_ корни полинома числителя Нр. 9(z).
4 а0 а0
О ——
Из zf — b, zn — b? =0 находятся полюсы ДПХ
В общем случае нули z012 и полюсы zni 2 ДПХ РФ2 - комплексно сопря-
женные пары, то есть
При заданном положении нулей и полюсов
(г^пр Ф01.П1) построение АЧХ проводят по черте-
жу, измеряя Roi и RIh на соответствующих часто-
тах Фп, ^Г^'-
••••••••••....""'iiiiiiiiiiiiiiiiiiiHiiiiiiiiii g7
Логарифмическая /ИХ: Нрф2(а))0Б = 2O[lgao + 21g Ro — 21g Rn].
В частности, при а. =1, a,~a9-0; b <0 и
V А Лв Л*
Z01 — Z02 ~ 0>Znl,2 ~
• — j- g-^j^a^
При 0)пТ 90 fZ/^2 —Л"п ^РФ2С®) I — г**
71 + 2r;cos2QnT + r1f
АЧХ любого РФ выравнивается в полосе прозрачности благодаря кас-
кадному соединению НФ [a(z)] и РФ [p(z)]: Нрф2(®)=а(©)-Р(го)
Р(ф) (см. исходную каноническую схему РФ2).
Обобщенная структура РФ2 (биквадратный блок) является основой по-
строения более сложных цифровых фильтров.
98 .....................................
1 П МЕТОДЫ ПРОЕКТИРОВАНИЯ ДИСКРЕТНЫХ
14 И ЦИФРОВЫХ ФИЛЬТРОВ [1-4,13]
Цифровой фильтр (ЦФ) - реализация дискретного фильтра (ДФ) про-
граммным (на ЭВМ) или аппаратным (в виде СЦВУ) методами.
12.1. ЭТАПЫ ПРОЕКТИРОВАНИЯ ЦФ
1. Задание требуемых свойств фильтра (обычно идеализированных ЧХ
или ДПХ) - формирование целевой функции.
Типовые идеализированные АЧХДФ и ЦФ:
Фильтр нижних частот (ФНЧ)
О
д
f ~ со / 2л
Фильтр верхних частот (ФВЧ)
О
Fh
/4 I
и I
_______1
Гд
Полосовой фильтр (ПФ)
I------------------------1
I I
I I
H3(f)x=i
о FH
A В A Д *
Режекторный фильтр (РФ)
I
I
I
I
1, при f<FH, FB < f < Ffl.
0 Fh
д
................................ gg
Для исключения эффекта наложения ЧХ выбор частоты дискретизации
F =1/Т ограничен условием Рд> 4FB.
Требуемая ЧХ не обязательно удовлетворяет требованиям физической
реализуемости. Фильтры с идеальными характеристиками построить невоз-
можно. К идеализированным характеристикам лишь можно приблизиться.
2. Аппроксимация заданных требований на основе физически реализуе-
мых фильтров (в том числе с характеристиками Баттерворта, Чебышева, Яко-
би).
3. Реализация ЦФ на основе арифметики с ограниченной точностью (при
H(f)
Идеализированная АЧХ
АЧХ прототипа
программном методе) или элементов с заданными погрешностями (при ап-
паратном методе). При этом возникают реализационные погрешности -
арифметические при реализации фильтра на ЭВМ и инструментальные в
фильтре на основе СЦВУ
4. Проверка соответствия ЦФ заданным требованиям, оценка качества
ДФ(ЦФ) по точности, быстродействию и затратам (вычислительным или
аппаратурным).
12.2. ПРОЕКТИРОВАНИЕ НЕРЕКУРСИВНЫХ ФИЛЬТРОВ КИХ
12.2.1. Метод взвешивания с использованием временных «окон»
1. Задается идеализированная ЧХ Н (eJa>) - целевая функция.
2. Вычисляется идеализированная ИХ, отсчёты которой являются коэф-
фициентами фильтра НФ-КИХ.
hT (n) = F J [Нх (eJ“)] = -— (e^e^dco.
-я
Определенная таким образом ИХ h.(n) физически не реализуема, так как
це [-оо, оо] и есть отсчёты отрицательного времени h,r(-n).
3. Идеальная ИХ взвешивается «окном» конечной длины w(n):
h(n) = hT (n)w(n),
w(n) =
w(n), n e [0, N-1];
0, n<0, n>N-l.
«Окно» управляет сходимостью ряда, определяющего оценку ЧХ
1001111111111ПП11111111ННнп1Н11и........
H(ej“) = У h(n)e~J™ = У‘hT(n)w(n)ej“”
n=0 n=0
так, чтобы минимизировать пульсации и переходные полосы H(eJ“).
4. Рассчитывается аппроксимация идеальной ЧХ на основе требуемой
ЧХ и ЧХ «окна»
H(eJK1)
=2- fHT(ejfe)W|eJ'" e']dH,i;te W(eJ“) =
—7t
^w(n)e J“lI1-4X «окна».
5. Оценивается качество ЧХ по критериям минимизации равномерной
ошибки s = HT(eJ<0) -H(eJ“)
или среднеквадратической
Пример: проектирование ФНЧ с использованием прямоугольного «окна».
2. hT(n)=F 1[hT(ej®)]=sin(nQjn)/nQm - идеальная ИХ ФНЧ
hr(n)w(n)
ч
к
3. Взвешиваем ИХ прямоугольным окном h(n) = hT (n)w (n),
w(n)=
и сдвигаем h(n) в область положительного
дискретного времени п>0
h(n)/
i
W*>
71
4. Аппроксимация ЧХ: Нлфнч(е’“)=1/27С J )W [е^-0)]б®,
-71
где ЧХ: Wn (е’»>= £w(n)c l“l = £ le J",n
п=0 п=0
j®N
-----— е
sin(—)
5. Прямоугольное окно обеспечивает наилучшую среднеквадратическую
(СКВ) аппроксимацию при заданной ошибке
2
7C
82, =1/2тс I
фнч J
-л
T ФНЧ
Взвешивание прямоугольным окном позволяет реализовать наименьшую
переходную полосу, но при этом имеет место наибольший уровень боковых
лепестков АЧХ фильтра.
Общие требования к «окнам»
1. Для уменьшения неравномерности и пульсаций АЧХ необходимо плав-
ное нарастание окна в начале и плавное спадание в конце, что обеспечит
менее резкое усечение ряда
H(ej“) = £hT(n)w(n) e’j“” -> HT(eJ")
n-0
При этом сглаживаются лепестки пульсаций при некотором расширении
главного лепестка ЧХ «окна» и сопутствующем увеличении СКВ ошибки.
Поэтому более приемлемым критерием аппроксимации является минимум
максимальной ошибки аппроксимации
ПИП
max
2. Минимум ширины главного лепестка ЧХ «окна»
чатое окно.
(А® -> 0) - иголь-
102 Hlllllllllllllllllliiiiiii11 .....................
N N
3. Малый уровень боковых лепе-
стков (дибл 0) и их сильное убы-
вание при ® —> ти.
4. Минимальная длина «окна»
(Ыф), что обеспечивает минимум
вычислительных процедур.
1,2 и 4 противоречивы (с умень-
шением N растёт До , уровень боковых лепестков не уменьшается, а изме-
няется лишь их частота).
Типы и характеристики некоторых «окон».
иэартлета
гХэмминга
• >>. Блэкмана
Из сравнения характеристик «окон»
видно, что высокое подавление боковых
лепестков сопровождается увеличением
переходных полос.
()кно
w(n)=
Ьартлета
j Хэмминга
i Блэкмана
1, 0<n<N-l
2n/(N-l), 0<n<(N-l)/2
<2-2n/(N-l), (N-l)/2<n<(N-l)
0.54-0.46cos2raV(N-l), 0< n <N-1
0.42-0.5cos[2nn/(N-1)4-0.08
cos[4tcN/(N-1)], 0< n < N -1
"ампл.
боков.
леггестк.
-13 дБ
-25дБ
-41дБ
-57дБ
шир. пер. полос ; min затух. j в полосе не пропуску
4rc/N -21дБ
8tt/N -25дБ
8 л/N -53дБ • 1 1
12n/N -74дБ j
влияние типа «окна» и его длины на логарифмические АЧХ ФНЧ.
Прямоугольное «окно »
« окно » Бартлета
....",,,"""""""iiiiiillllll||||||||||||||| юз
201g H(ej<0)
« Окно » Хэмминга
12.2.2. Метод частотной выборки
Известно, что /ИХ дискретного фильтра, подлежащего реализации, не-
прерывна и периодична по оси частот. Она может быть задана на основе
АЧХ аналогового фильтра-прототипа. Для синтеза дискретного фильтра ис-
пользуются N отсчетов АЧХ прототипа в дискретных точках - частотная вы-
борка {H(k)}? k=0,N-l. Определяется оценка ИХ как ОДПФ от Н(к):
h(n) =
neO.N-l
Далее находятся реальные характеристики ДФ:
ДПХ: H(z) = h(n)z” ,
n=0
H(eJ“)
J©
-j©n
1 N-l N-l ,2£k 1 N-l 1.(1-e N e
4lH(kjV|eJN e-JT= 1 ZH(k)Ly_^__?
N k=0 n=0 N k=0 . JT7k _
I йадно, что оценка ЧХ H(cJC°) совпадает с Нт(е^®) на частотах выборки
I l(k), к=0,1 ,...,N-1 и отличается от идеальной ЧХ конечной ошибкой в проме-
жутках, то есть Н(е’®) интерполирует HT(eJW) по отсчетам Н(к)
Гак как процедура ДПФ является гребенчатым фильтром с «зубцами гре-
бенки» конечной ширины, выборка ДПФ {Н(к)}^ является своего рода мно-
гоканальным окном в частотной области.
12.3. ПРОЕКТИРОВАНИЕ РЕКУРСИВНЫХ ФИЛЬТРОВ БИХ [1-4]
12.3.1. Метод инвариантности импульсных характеристик
11снользуется хорошо разработанная теория аналоговых фильтров (АФ),
кморые являются прототипами дискретных фильтров. В качестве отсчетов
ИХ ДФ (ЦФ) используются значения ИХ АФ, то есть h .(nT^h^t)^.
I аким образом ИХ ЦФ и ИХ АФ в моменты t=nT инвариантны
)тапы проектирования:
1. В соответствии с назначением ДФ (ЦФ) выбирается из известного
набора (каталога) характеристика прототипа, например, системная функция
н.(р)-
2. СФ На(р) раскладывается на элементарные дроби
Y(p) q
Н,(р) = ——= £CJ(p-P|J,где полюс Н(р). Этовозмож-
Х(р) k=l
но, так как для физически реализуемых АФ На(р)=А(р)/В(р) - дробно-раци-
ональная функция.
3. Определяется ИХ АФ:
.....•....•"'"""hiiiiiiiiiiiiiiiiiiiiii щи ms
ha (t) = L_, [Ha (p)] = £Ске’“ • l(t), Kt) = Г t < 0
k”—l. *•
4. Находится ИХ ДФ дискретизацией ИХ АФ:
= ^CkePinTl(nT)
h(nT) = ha(t)
5. Находится ДПХ фильтра, по которой составляется схема ДФ:
q оо
—n /~ркТ
со 00
H(z) = £h(nT)z“n
n=0
п=0\к=1
q , _ . Q (
Р1Д
Пример:
2 1 1
1), 2) Ня (р) = -----—------— =------г-------7
aVF7 (р + 1)(р + 3) р + 1 Р + 3
3)ha(t) = e ll-e“3t;
4) h(nT) = е ”т - e’3nT;
на, дб
Достоинства метода инвариантности:
1. Устойчивый АФ преобразуется в устойчивый ДФ (ЦФ) (полюсы На(р)
из левой полуплоскости р переносятся внутрь единичного круга Z).
2. Метод инвариантности ИХ сохраняет в ДФ фазовые и амплитудные
характеристики аналогового фильтра.
Недостаток : Возможны искажения частотных характеристик, вызван-
ные эффектом наложения при периодическом повторении ЧХ:
H(ej“)= f Ha[j(® + m^)]>nl-o,±l+2,...
т=-оо *
< >слабление эффекта наложения достигается либо уменьшением Т (Q воз-
растает), либо-сокращением полосы А®. Поэтому метод инвариантности
пригоден для расчета узкополосных ДФ и ЦФ.
12.3.2. Метод билинейного преобразования (Метод инвариантных час-
тотных характеристик)
Метод основан на преобразовании СФ аналогового прототипа На(р) в ДПХ
дискретного фильтра H(z) заменой переменной:
Переменная р = —Inz обычного z-преобразования не годится для пере-
хода На(р) —> H(z), так как приводит к иррациональной характеристике
I I(z), не реализуемой в ДФ.
Поскольку z —
........"""""IIIIIIIIIIIIIIIIIIIIIIIIIIIIH07
QT = arctg
+ arctg
CO
2
Билинейное (дробно-рациональное) конформное преобразование пред-
полагает взаимно-однозначное отображение:
- левой полуплоскости р внутрь единич-
ного круга |zj<l (сг<0 );
- правой полуплоскости р в область |z|>l
(<т >0);
- мнимой оси + j® плоскости р на окруж-
ность |z|=l (о-=0 ) (один обход окружности
|z|=l соответствует всей оси ±j®) точки
± j оо плоскости р отображены в точки ±ти
я
круга, так как arctg ± оо = ± •— ).
’2 оТ 2 ПТ
При <з- 0 и |z|=l 12 = —arctg-или ® = —tg-----.
Т 2 Т 2
Видно, что связь между шкалами «аналоговой» со и дискретной «цифро
вой» Q частот нелинейная (но однозначная и монотонная) Таким образом
при переходе от со к Q относительное расположение частот сохрани с к -.я по
масштаб их деформируется.
|Ha(jto)|
-2л -л 0 п 2л QT
В области Q<0,3/T зависимость & =f(Q) близка к линейной и искажения
незначительны. В области высоких частот шкала частот дискретного фильт-
ра деформируется и АЧХ и ФЧХ искажаются.
При билинейном отображении связь между АФ и ДФ
H(z) = Ha(p) при р =
108111111111111Н1111111111"||Н|Цно.|<.....
- простое алгебраическое отображение в отличие от бесконечной суммы
Н(е>)= £ Ha[j(®+m^)]
m=-oo 1
при методе инвариантности.
Достоинства метода билинейного преобразования:
1. Устойчивый АФ преобразуется в устойчивый ДФ.
2. H(z) является физически реализуемой функцией, так как билинейное
преобразование не меняет дробно-рациональной функции На(р) и отноше-
ния порядков числителя и знаменателя.
3. Отсутствуют искажения, связанные с эффектом наложения ЧХ, харак-
терные для инвариантности.
Недостаток: Эффект деформации шкалы частот, обусловленный нели-
нейным характером связи Q и со.
I П РЕАЛИЗАЦИОННЫЕ ОСОБЕННОСТИ
1U ЦИФРОВЫХ ФИЛЬТРОВ
13.1. СТРУКТУРА СИСТЕМЫ С ЦИФРОВОЙ ФИЛЬТРАЦИЕЙ
В общем случае сигнал на вход системы обработки поступает в аналого-
вой форме x(t). Выходной сигнал y(t) также может быть непрерывным. Та-
ким образом, в системе дискретной (цифровой) фильтрации должны быть
АЦП и ЦАП.
Дискретный фильтр с характеристикой
М-1 К L-1 , А
H(z)=£akz“k/ 1-Ebkz
k=0 / \ k=l )
отрабатывает разностное уравнение
у(п) = Xakx(n-k) + ybky(n-k).
k=0 k=l
......."""""iiiiiiiiiiiiiiiiiiiiijiiiiiiKjg
Цифровой фильтр преобразует n-разрядные коды {Qie[0,l]}, i=
значений сигналов х, у, и коэффициентов bk. Поэтому преобразование
x(t) -» {x(nT)j -> {х"(“)) -»(Qi}« -> {Q.)у = F{Qi}, -> {у“(к)} -> {у(пТ)} -> y(t)
4 V --- . . ..... ——у - — ——. ..г». ..
t дискретизация t цифровая фильтрация ЦАП
ч квантование,
АЦП
информации в ЦФ образует последовательность этапов:
x(t) —>(х(пТ))
аналоге-дискретное
преобразование
(у(пТ)) = F(x(nT))
дискретная фильтрация
У(0,
дискретно-аналоговое
преобразование
В чисто дискретном фильтре ДФ этапы преобразований:
Отсюда вытекает структурная схема системы цифровой фильтрации:
Числовые значения (коды) коэффициентов ак ,Ь заносятся в блок весо-
вых коэффициентов (БВК), а необходимые константы в арифметико-логи-
ческое устройство (АЛУ) процессора ЦФ. Необходимое число дискретных
знамений {х(п)} в кеде { Q}x, Q .е[0,1 ] записывается в оперативное запоми-
нающее устройство (ОЗУ) процессора по командам из устройства управле-
ния (УУ). В памяти процессора хранятся не только данные, но и програм-
мы. УУ управляет аналого-цифровым преобразователем, состоящим из им-
пульсного модулятора (ИМ) и квантизатора (КВ), а также засылает в АЛУ
коды соответствующих коэффициентов а. ,Ь. и синхронизирует работу всех
110IIIIIIIIIIIIIIIIIIIIIIIIIIIIIHHIHI...........
блоков.
В арифметико-логическом устройстве происходит преобразование (филь-
трация) кодированных значений сигналов {QJ в код выходного сигнала
{QJy=F {QJX При необходимости коды выходного сигнала {Q.} могут быть
преобразованы в непрерывные сигналы y(t) с помощью ЦАП. АЦП и ЦАП
являются внешними устройствами (ВУ) по отношению к процессору.
Таким образом, аппаратная реализация ЦФ представляет собой по сути микро
ЭВМ или специализированное ВУ, построенное в соответствии с принципами
Джона фон Неймана и состоящее из АЛУ, УУ, ЗУ и ВУ
Программный метод реализации ЦФ предполагает, что в распоряжении
исследователя имеется ПЭВМ. Поэтому по окончании синтеза алгоритма
I [Ф разработчик должен решить задачу программирования фильтра (после-
довательная, параллельная, прямая формы) с учетом особенностей исполь-
зуемой ЭВМ и провести исследование его характеристик.
Комбинированный метод предполагает реализацию ЦФ аппаратно-про-
граммным методом в виде микропроцессорного вычислительного устрой-
ства (МПВУ). Здесь учитываются особенности микропроцессорного комп-
лекта (МПК) (архитектура, программирование).
13.2. ПОГРЕШНОСТИ ЦИФРОВЫХ ФИЛЬТРОВ
Методические (алгоритмические) погрешности аппроксимации
Да(пТ) =| у(иТ) | -1 уа(пТ) | или &.„„% = “ЮО ,
У ном
где у(пТ) - сигнал на выходе идеального фильтра (недостижим), Уа(пТ) -
сигнал на выходе аналогового фильтра - прототипа, апроксимирующего иде-
альный фильтр (его АЧХ).
Основные типы аппроксимации АЧХ (на примере ФНЧ).
I. Фильтр Баттерворта с максимально гладкой АЧХ в полосе пропус-
кания и задерживания
............"""'HiiiiiiiilllllllllllHIHIIlll
Характеристика пропускания (АЧХ) Н (f) = 1 / JI + (f /fn)2n ,
n =1,2,3,... Характеристика затухания a^f) = -201g H^f), [0,fn] - полоса
пропускания, [f3, оо) - полоса задерживания, ( fn, fj - переходная полоса,
2Fmax - частота дискретизации.
Допуски на АЧХ и характеристику затухания :
ДНП - максимально допустимая неравномерность АЧХ в полосе пропус-
кания (часто рассматривают величину
АНз - максимально допустимое отклонение АЧХ от нуля на частоте за-
держивания;
Да - верхняя граница рабочего затухания в полосе пропускания,
а0 - нижняя граница затухания в полосе задерживания.
2. Фильтр Чебышева 1 (пульсации заданного уровня и одинаковой ампли-
туды в полосе пропускания и гладкая АЧХ в полосе задерживания).
Н 2 (f) = 1 /71 + e2Tn2(f/fn), Tn (f/f п ) » 2 (f/f п ) n „ П - порядок филь-
тра, £<1 задает уровень пульсаций в полосе пропускания.
Крутизна спада АЧХ фильтра Чебышева 1 больше, чем у фильтра Бат-
терворта такого же порядка.
3. Фильтр Чебышева 2 (пульсации заданного уровня в полосе задержи-
вания)
4. Элиптический фильтр Якоби-Золотарева-Кауэра (пульсации задан-
ного уровня в полосе пропускания и задерживания)
В общем случае затраты на реализацию фильтра Баттерворта больше,
чем на фильтр Якоби.
Вычислительные погрешности
1. Ошибка (шум) квантования во входных регистрах х(пТ) и регистрах
коэффициэнтов и bk.
Оценки значений сигнала и коэффициентов
х(пТ) = x(nT)[l + Sx(nT)]3 8Х
-Гх _ число разрядов регистров х,
ак = ак G ± )Лк =Ьк(1±5ь), \ь - Л,ь-число разрядов коэф-
фициентов aj, и Ьк.
Разрядность регистров: rx а b =]log, М[, где М = « Х-— -чис-
Ах =11 h
ю уровней квантования с шагом h.
Обычно гх а Ь <16, поэтому 5xab < J/16 «1.5 10~5(< 1.5-10“3%).
✓
11ри равномерном законе распределения шума квантования
A„„]ax =h/2,D =< = h2/12,a = h/2V3.
2 Ошибка (шум) округления
При поразрядном умножении хд., Ьк с последующим суммированием
разрядность регистра произведения гпр~гх+га>ь- Оценка произведения
Отсюда видно, что требуются увели-
ченная разрядность последующих устройств цифрового тракта и вычисле-
ния с двойной точностью, что, как правило, нецелесообразно.. Для сокраще-
ния объема оборудования и вычислительных затрат идут на округление чи-
сел х,а,Ь и произведения П отбрасыванием младших разрядов. Возникает
ошибка -шум округления Ах с тем же законом распределения, что и ошиб-
ка квантования.
...’"""""""1111111111111111111Г111111ЦЩЗ
A2
Дисперсия ошибки округления D0Kp = ст2кр = —
При аппаратной реализации ЦФ оцениваются инструментальные по-
грешности, связанные с качеством технологического исполнения отдель-
ных элементов фильтра.
13.3. РЕАЛИЗАЦИОННЫЕ КРИТЕРИИ КАЧЕСТВА ЦФ.
БЫСТРОДЕЙСТВИЕ ЦФ
Качество (производительность) ЦФ оценивается по двум критериям:
быстродействию и объему аппаратурных затрат. Эти критерии взаимо-
связаны.
Объем аппаратурных затрат оценивается в основном объемом оператив-
ной памяти, необходимой для хранения коэффициентов фильтра и выполне-
ния арифметических и логических операций, требуемых для реализации ал-
горитма ЦФ.
Быстродействие ЦФ определяется задержкой сигнала при прохожде-
нии через фильтр, за период дискретизации Т, в течение которого обрабаты-
вается очередная выборка входного сигнала х(пТ).
Величина t в основном определяется вре-
менем выполнения операции умножения двух
операндов {aJcx(nT)} и числом операций ум-
М-1
ножения (£акх[(п-к)Т]).
к=0
Поэтому число операций умножения - основной критерий быстродействия
и, как следствие, качества ЦФ.
Оценим предельное быстродействие ЦФ. Пусть число разрядов кода
выборки х(пТ) равно г, число умножений N ~ М, где М - порядок фильт-
ра(в вычислении одного значения у(п) участвуют все х(п)), длительность
такта Т . Длительность такта должна быть не меньше времени выполнения
любой из операций: сдвига, сложения, умножения. Тогда время вычисления
одной выборки y(nT) = ]Гакх[(п-к)Т] будет равно >NrT0 и, следова-
к=0
тельно, максимальная частота работы фильтра кЦфт^=1Лш1=1/№Т0. При ра-
боте в реальном времени необходимо, чтобы t < Т ,то есть максимальная
114IIIIIIIIIIIIIIIIIIHIII"11""""""'.........
частота РЦфтах, определяющая быстродействие фильтра должна превышать
частоту дискретизации Рд - 1 / Т
F =l/t »1/NrT >F = 1/Т > 2F
где F max- частотные возможности фильтра,
Fcmax- полоса спектра сигнала.
N=1000,r=10, Т0=1мкс—> РЦфтах < 1/(103-10’10б)=100Гц
№50, г=10, Т =1мкс-> РЦФтах < 1/(50*10*10'б)=2000Гц.
Видно, что повышение быстродействия ЦФ требует увеличения объе-
ма оборудования.
11а практике порядок фильтра М достигает многих сотен, что определяет
объем оборудования и частота РЦфтах может оказаться недостаточной для
использования ЦФ в реальном масштабе времени.
Гак, в системах связи частота дискретизации Рд=8 кГц, в звукотехнике
Гд=40-48 кГц, в системах обработки изображений F =14 мГц и фильтр дол-
жен обладать предельным быстродействием РЦфтах>Р , чтобы ^<1. Необ-
ходимо учесть, что число разрядов данных (определяющее точность ЦФ)
различно в разных областях применения (в технике связи г=8, в цифровой
жукотехнике г=14...1б).
Пути повышения быстродействия ЦФ
1. Совершенствование микроэлектронной базы.
2. Архитектурные и алгоритмические приёмы:
- цифровые фильтры на основе ПЗУ (произведений и сумм произведе-
ний);
- разделение функций (РФ-архитектура), распараллеливание операций и
выполнение их на сопроцессорах;
- конвейерная обработка решаемых задач (разбиение задачи на подзада-
чи, локальное решение их и объединение результатов).
3. Использование перспективных процессоров ЦОС, например:
- TMS 32010 (n-МОП технология, площадь кристалла 30мм2, разряд-
ность команд-16, Р =1Вт; операция умножения 16-разрядных операндов
выполняется за один цикл в 200 нс, то есть производительность процессора
- 5млн операций/с;
- FMS 320С (ЗО-ЗЗмлн операций/с как в сложных универсальных супер
ЭВМ).
.......... "’"iiiiillllllllllllllllllllims
ПРИЛОЖЕНИЯ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ
1 Д ЦИФРОВОЙ СПЕКТРАЛЬНЫЙ АНАЛИЗ
14 (ЦСА) [1-4,11, 15, 22]
14.1. НАЗНАЧЕНИЕ И НАПРАВЛЕНИЯ
СПЕКТРАЛЬНОГО АНАЛИЗА
Цель ЦСА - оценивание спектральной плотности мощности (СПМ) дис-
кретного процесса х(п) и обнаружение доминирующих спектральных ком-
понент (присутствия в х(п) периодических сигналов).
х(пТ)
Px(D
ЦСА
Известны два направления ЦСА:
1. Методы на основе Фурье - анализа:
(корреля-
ционный анализ, метод Блекмана-Тыоки, метод периодограмм).
2. Параметрический анализ: определение СПМ по параметрам линей-
ной модели дискретного фильтра, формирующего процесс х(п) из белого
шума (БШ) (методы авторегрессии, скользящего среднего, максимальной эн-
тропии и др.)
БШ
х(н)
параметры
14.2. СПЕКТРАЛЬНЫЙ АНАЛИЗ НА ОСНОВЕ ДПФ-БПФ
Процедура ДПФ
х(0) ---------
х(1) — Блок
ДПФ
х(2) “
канал К|
X(N-l)—
Х(0)
Х(1)
V
♦
X(kt)
X(N-1)
N-l -j^nk
X(k)-^x(n)e N =X(z)| j2^kJ
n=o zk = e N
k=0,1, ..., N-l, соответствует многоканаль-
ному дискретному фильтру (КИХ) с выхо-
дами Х(к). Импульсная характеристика
(ИХ) k-го канала, обеспечивающего изме-
.2л, .2л.
j-Дп
рение в точке =е 141 , имеет вид: nk(n)=e N , n=0,1, и определяет
дискретную передаточную характеристику (ДПХ) канала:
N-l N-l j—kn N-l й
K (Z) = £hk (n)z-n = Ее N z" = E(e N z’1)
n=0 п=Ю n-0
I аким образом, спектроанализатор на основе ДПФ (N - канальный фильтр
- «гребенка») состоит из N дискретных фильтров с ДПХ H.(z) (ИХ Ь.(п)),
нас (роенных на частоты
k,k = 0,l>.-,N-1
Рассмотрим частотные свойства одного канала, анализируя спектр ДПФ
в(.) kj из множества k=0, 1, ...,N-1.
11усть x(n)=e>®n,n=0, 1,..., N-l - отрезок комплексной дискретной гармо-
нической функции. Тогда
N-l -jZ^nk
X(k1)=ZeJG’ne N
n=0
n=0
= Hkl(eJM).
......"""""""пнищ ini IIIIIIIIIIIIIIIIH17
. No
sm--
. zo лк
sin(-------
эквивалентна АЧХ
полосового фильтра kj-канала с центральной частотой cok
2л -
TTki
Видно, что АЧХ имеет центральный и боковые лепестки конечной ши-
рины (рис. «а»).
Выводы:
1. Алгоритм ДПФ- БПФ по-
зволяет вычислять N спектраль-
ных составляющих ДП (k=0, 1,...,
N-1).Поэтому он эквивалентен
«гребенке» из N фильтров (рис.
«б»), настроенных на частоты
2л ------------
со k = (—-)k,k = 0,N -1 .На рис.
«б» показана АЧХ «гребенки»
для N=8 (изображены лишь глав-
ные лепестки |Нк(е’®)|).
2. Лепестковость АЧХ фильт-
ра ДПФ обуславливает невысо-
кое разрешение по частоте и ис-
кажения оценки спектра, связан-
ные с эффектами «растекания» сг
ки его помехами.
по диапазону часто!' и маскиров-
14.3. ИСПОЛЬЗОВАНИЕ «ВЕСОВЫХ ОКОН»
В СПЕКТРОАНАЛИЗАТОРЕ ДПФ
Уменьшение лепестковости АЧХ «гребенки» достигается взвешива-
нием входной ДП х(п) временным «окном» конечной длины
то есть xw(n)=x(n)w(n).
118111111111111111111111111111Н"||"......•.......
Оценка спектра взвешенной ДП определяется как
Хф(е^®)= 2Lw(n)x(n)e'Jon или
П~~оо
N-1
(*)Xffl(eJ“) = — fX(ej®)w[ej(“'e)]d0, где W(e’“) = У w(n;e -
2ti m n-1
-л n----
2
спектр «окна» (преобразование Фурье эквивалентно свертке двух ПФ в
частотной области).
Эффект растекания спектра
Рассмотрим особенности С А при использовании прямоугольного окна
Пусть x(n)-eJtt3°n- дискретное гармоническое колебание со спектром
X(eJCO)=d(cD-<B0), состоящим из одной спектральной линии
о(®-®0) = <
О,® ф соо
|Х(е>)|
5(й)-соо),
фо
X(ei<0)W[ej(f0°’“)j
Видно, что оценка спектра
|Xw(eJ °)| на частоте со0 и спектр
X(eJ®) гармонического сигнала соот-
ветствуют друг другу.
Из-за лепестковости АЧХ фильт-
ра ДПФ и конечной ширины главно-
го лепестка возникают согласно (*)
.......""""""iiiiiiilllliiilliiiiiiiiiiiimg
CQO (О
XCeHWfe^^j
0o 0
X(eiffl)W[ej(<°2"to)j
C0q ®2 (0
©о
(0
оценки спектра на частотах top ®2 и дру-
гих, отличные от нуля, в то время как
спектр входного сигнала на этих часто-
тах имеет нулевое значение. Таким об-
разом, спектральная линия сигнала
(энергия сигнала) «размывается» по ди-
апазону частот в соответствии с весом
«окна» на соответствующей частоте. В
этом и состоит эффект «растекания»
спектра по диапазону анализируемых
частот.
Растекание спектра снижает разре-
шающую способность спектрального
анализа.
Эффект маскировки спектра.
Наличие во входной ДП
х(п) мешающих компонент на
частотах со ф со(1 и шума со
спектральной плотностью
G(co) искажает оценку спектра
X(eJ“°) на частоте ю0, так как
определенный интеграл (*) ра-
вен площади подынтеграль-
ной функции X(&’o)\\/'[eJ<vfAj ^]-
Таким образом, усечение
реализации х(п) прямоуголь-
ным окном (например, вклю-
чение и выключение анализа-
тора) приводит к
1) появлению на выходе
спектроанализатора компо-
нент на частотах, где входной
1201ПШПН1НННН111Н1п<1 .............
сигнал отсутствует за счет «растекания» спектра в соответствии с АЧХ
«окна»;
2) искажению оценки спектра на конкретной частоте за счет проса-
чивания компонент других сигналов и шумов;
Отсюда видно, что прямоугольное окно не обеспечивает высокое
качество спектроанализатора.
Требования к временному «окну» спектроанализатора
1. Спектр «окна» W(eJG)) должен иметь как можно
более узкий главный лепесток (А® —> 0). В идеале не-
обходимо W(eJ®) = 5(®) (игольчатое «окно»).
2. Боковые лепестки в спектре «окна» должны быть минимальные
(Дибл->о).
Сужение главного лепестка спектра «окна» достигается увеличени-
ем его длины N. Однако при этом возрастают вычислительные затраты
на анализ и не уменьшается уровень боковых лепестков (изменяется
лишь их частота). Снижение уровня боковых лепестков обеспечивается
оптимизацией формы «окна» (необходимы плавное нарастание внача-
ле и плавный спад в конце).
«Окно» Кайзера удовлетворяет условиям спектрального анализа,
так как имеет минимальную энергию за пределами основного лепест-
ка спектра:
w(n) = I0[rax 1 - ] /1о(ла),О < п < 10(х) = £[^-]к -
V N/2 2 £о к!
модифицированная функция Бесселя первого рода нулевого порядка.
rr 1 m 1, тт А®
Параметр ла =-Т скта-AF0KHa=-NT-----.
2 2л
14.4. ЭТАПЫ СПЕКТРАЛЬНОГО АНАЛИЗА
НА ОСНОВЕ ДПФ-БПФ
1. Выбирается тип «окна» w(n) (по
справочнику).
2. Рассчитывается интервал наблюде-
ния ® =k0/Af, где Af - разрешающая спо-
собность по частоте, к0 - коэффициент, оп-
ределяемый видом «окна» (берется из
справочника). Видно, что для обеспечения высокой разрешающей спо-
собности необходимо увеличивать время анализа.
3. Определяется число отсчетов реализации xr(n): N=[®r/T], где Т -
период дискретизации (T<l/2Fm илиТ<2тк). Желательно иметь N=2‘ для
реализации ДПФ, что достигается дополнением ДП нулями.
N-l -j^nk
4. Рассчитывается спектр ДПФ-БПФ Xr (k) = ^xr(n)w(n)e N
п=0
k=O,l,...,N-l.
5. Вычисляется периодограмма (характеристика спектральной плот-
ности ДП, взвешенной «окнрм»):
N-l N-1
Ir(k) =|Xr(k)|2 /2^w2(n),k = 0,1,..,,N -1;2Lw2(n) - энергия «окна».
п=0 п=0
1 М
6. Спектральная плотность ДП Р (f. )==—=
М Г=1
в"* к
2и
к
NT
частота ДПФ.
Оценка Px(fk) является случайной Дисперсия этой оценки умень-
шается с ростом количества усредняемых периодограмм Ir0<)/=l,...Jvl.
14.5. АСПЕКТЫ ТЕХНИЧЕСКОЙ РЕАЛИЗАЦИИ
ЦИФРОВЫХ СПЕКТРОАНАЛИЗАТОРОВ
Основные характеристики, определяющие способ организации
ЦСА-БПФ:
- диапазон анализируемых частот (число каналов СА);
- разрешающая способность ЦСА по частоте.
Известны два режима цифрового спектрального анализа:
1. «Скачущее» БПФ (скачущее «окно») - применяют тогда, когда на-
1221111111111Н11111111111П,|Н|1н"|",и«-......
чало и конец реализации х(п) определены. При «скачущем» БПФ мо-
жет возникнуть эффект наложения спектров, так как периодические со-
вокупности дискретных отсчетов вызывают периодизацию спектров.
Можно уменьшить эффект наложения перекрытием БПФ. (при пере-
крытии 4:1 эффект наложения значительно ослабляется) и взвешивани-
ем «окнами», позволяющем уменьшить боковые лепестки.
_ IБПФ2____________
----------БПФМ L- .
(здесь шаг скачка равен размеру БПФ N,
перекрытие фрагментов БПФ отсутствует)
ГСТГФТП
ГБПФ2 L----
• —J БПФЗ L--
( перекрытие 4:1)
2 «Скользящее» БПФ (скользящее «окно») используется, когда не
определены начало и конец реализации х(п). «Скользящее» БПФ - пре-
дел «скачущего» с перекрытием до 1 шага дискретизации.
_______ п
------1 БПФ £=—----
Хк(п1
Техническая реализация ЦСА-БПФ сводится к устройствам либо па-
раллельного (большие затраты оборудования), либо последовательного
( необходимы эргодичность и стационарность исследуемых процессов)
анализа.
.........""""""Ullin пицц IIIIIIIIIHII123
Примеры реализации ЦСА
1. Обобщенная схема анализатора спектра ( режим «скачущее окно»)
Буферное ЗУ
ьГ.
=Я Коммутатор _____________
ПЦ Буферное ЗУ
режим БПФ
(скачущее, скачущее
с перекрытием)
х(п)
TUj-------|x(n)*w(n)
гЗ * Мп
1/(0)
рг(1)
на N отсчетов
ЗУ весовых
коэф-ов w(n)
роцессор
БПФ
Ч>Ж-1)
Реализация х(п), начало и конец которой известны, предварительно
записывается в буферное ЗУ, добавляются нули до размерности N, за-
дается режим БПФ, исключающий эффект наложения спектра, затем
проводится «оконное» взвешивание и. вычисление N точечного БПФ.
Во втором буферном ЗУ проводится запись следующей реализации.
2. Анализатор спектра на основе «гребенки» фильтров (режим «сколь
зящее окно»).
ДПХ одного k-го канала ЦСА-ДПФ
Hk <z> = 1 Л, = Hkl (Z) • Hk2 (z), к = 0-1;
1 J—К
1-z *e N
Hkl(z)=l-zN - ДПХ режекторного фильтра-компенсатора
Hk2(z) =
1 - z’X ’
k = 0,1,.,.,N — 1 - ДПХ фильтра
резонатора.
Схема анализатора состоит из последовательного соединения режек-
торного НФ-компенсатора Hkl(z) и цепи из параллельного соединения
N резонаторов на частотах
2тс
NT
k, к = 0,1,...N-1,
в виде РФ
с за-
паздывающей обратной связью - N фильтров «гребенки».
«Гребенка» фильтров эквивалентна сколъзягцему ДПФ. Каждый
вновь поступивший отсчет через N тактов исключается из обработки
фильтром-компенсатором Hkl(z). чем и обеспечивается скользящее ДПФ.
На каждый входной отсчет появляется соответствующий выходной от-
счет (умножения (N) в процедуре ДПФ параллельны, а суммирования
по п последовательны)
Hk2(z)
Гребенка фильтров эффективнее прямого скользящего ДПФ-БПФ.
При прямом БПФ выполняется
log2 N базовых операций (комплек-
сных умножений). При использовании гребенки фильтров производит-
ся N комплексных умножений на каждый отсчет. Поэтому весь спектр
{X(k)}, ke[0,N-l] вычисляется за N тактов.
14.6. МОДЕЛИ ДИСКРЕТНОГО СПЕКТРАЛЬНОГО АНАЛИЗА.
I i А РАМЕТРИЧЕСКОЕ ОЦЕНИВАНИЕ
( пектральная плотность временного ряда х(п) с корреляционной
1 тослсдовательиостью гх(п)=Е {x(n+m)x*(m)}
00
sx (е) = £ rx (n)e’JG)n , причем rx(-n)=rx(n) и -тс < со < л •
(1)
1 я
I < свою очередь гх (п) = -- JSx(eJ“)eJ“"d<B. (2)
2 л 4
В (1) и (2) не имеет значения, что оценивать: гх(п) или Sx(e’w). Обычно
х(п)=х(1),х(2x(N) - ДП длиной N (выборка объемом N). (3)
......’......"'""1'111111111111111111111111111125
На основе рациональной модели, зависящей от конечного числа па-
раметров можно аппроксимировать, в принципе, бесконечный ряд (1):
Sx(ejm) =
a0 + a1e-)ffl+... + aqe-MB
l + b]e)'‘+... + be~JI’“
.L
(4)
Если N > p + q +1 (объем выборки), то с помощью результатов на-
блюдения (3) можно определить значения параметров модели (4), то есть
провести параметрическое оценивание.
При спектральном параметрическом оценивании используются мо-
дели скользящего усреднения (СУ), авторегрессионные модели (АР) и
авторегрессионные модели скользящего усреднения (АРСУ).
СУ-модели
q
Временной ряд СУ: x(n) = ^aks(n — к) ?
к=0
(5)
где {е(п)} - возбуждающий нормированный белый шум, - порождается
линейным нерекурсивным фильтром. Автокорреляционная функция ДП
СУ находится из уравнений Юла-Уокера:
к=0
в остальных случаях.
(6)
Спектральная модель СУ порядка q (СУ(д)):
С помощью факторизации можно эквивалентно представить (7) как
SCy(eJ“) =| а012 П(1 - z0ke-j“)(l- z^), (8)
k=l
где zok - нули полинома A (z).
Таким образом, модель СУ является чисто нулевой, причем нули мо-
дели образуют комплексно сопряженные пары. Если спектр Scy(ejco) име-
ет резко выраженные провалы на частотах сок, то это соответствует рас-
положению нулей zok=e3<0ok вблизи единичной окружности плоскости z.
Поэтому использование СУ-моделей наиболее эффективно для спек-
тров с ярко выраженными провалами на частотах <ок, но с отсутствием
пиков. При наличии пиков требуется добавление большого количества
нулей, то есть увеличение порядка СУ-модели.
12В11111111111П11П1111111'|Н1,,"|нн...........
Из (7) следует, что SC5<ej(0)= ]ГСпе JC0n, где Q =2Хак-«> -q<n<q. (9)
n=-q
Видно, что оценка спектральной плотности Блэкмана-Тьюки
Q
$х(е]С°)~ S w(n)^(n)e Jffln является частным случаем оценки СУ.
n=-q
I Р-модели
Временной ряд {х(п)} называется авторегрессионным (АР) порядка
р- АР(р), если он порождается рекурсивным соотношением
(n) + Sbkx(n - к) = Ьое(п).
к=1
Согласно уравнению Юла-Уокера корреляционная последователь-
ность процесса АР(р)
r«(n) + ^bkrx(n-k) = Ila»l ,п 0
к=1 [ 0,П > 1 .
(11)
Спектральная модель АР(р) представлена в виде
Я О
-j2<a
-JP<B
2
я2
— / • , \ 2
(12)
После факторизации полинома В (e’w) имеем
, .<йч_ а0
(13)
где рк- полюсы S^e*®) - образуют комплексно-сопряженные пары. Та-
кие модели называют чистополюсными. Они хорошо подходят для мо-
делирования спектров с ярковыраженными пиками (окрестности полю-
сов). Если в моделируемом спектре есть провалы, их также можно вос-
произвести при помощи АР-модели, но за счет добавления дополни-
тельных полюсов (то есть повышения порядка АР-модели).
Таким образом, АР-модели более экономичны, если есть основания
полагать (по основании предварительных исследований по методу Блек-
мана-Тьюки), что в оцениваемом спектре есть чётко выраженные пики,
и нецелесообразны, если есть провалы.
На основании АР-модели строится перспективный метод спектраль-
ного оценивания Берга - метод максимальной энтропии (ММЭ).
АРСУ-модели
Временной ряд АРСУ: x(n) + j^bkx(n - к) - ^аке(п - к) -
к=1 к=о
(14)
- рекуррентное соотношение. Задача (как и для СУ и АР)- подобрать
такие значения а и bk, которые обеспечивают наилучшее согласование
с заданными значениями коэффициентов автокорреляции гх(0), гх(1),..,
г (s). Критерий согласования - уравнения Юла-Уокера. Для n>q уравне-
ния Юла-Уокера упрощаются:
(модель каузальная).
k=0
В частотной области АРСУ модель описывается выражением
а„+а1е'го+... + ае^
V Л Т.
l + b1e-J“+... + bpe'JP“
(15)
объединяющим СУ и АР
модели.
Эквивалентно, после факторизации, имеем
k=l
q
(16)
k=l
Видно, что модель АРСУ имеет q нулей и р полюсов и поэтому бо-
лее адекватно описывает моделируемые спектры, чем её частные слу-
чаи - СУ-модель (без полюсов) и АР-модель (без нулей).
128IIIIIIIIIIHIIIIIIIIII1H'”11"""""".......
1 Г ЦИФРОВОЙ РАДИОПРИЕМ
1 и СИГНАЛОВ [18,43]
15.1. СПЕЦИФИКА ЦИФРОВОЙ
ОБРАБОТКИ РАДИОСИГНАЛОВ
Тенденция развития цифровой обработки сигналов в радиотехнике
- перемещение цифровых процедур из видео в радиотракт (высокочас-
тотную часть(ВЧ) приемника).
Пример: Эволюция бортовых устройств радионавигационных сис-
тем (Pl IC).
11ервоначально(60-е годы) информация о навигационных парамет-
рах извлекалась из видеосигнала после детектора в радиоприёмном ус-
тройстве (РПРУ) с использованием специализированного вычислитель-
ного устройства (СВУ) и бортовой ЭВМ (рис.«а»), В СВУ решались за-
дачи первичной обработки (обнаружение сигнала, разрешение с помеха-
ми и оценивание его параметров).
Бортовая ЭВМ рассчитывала навигационные параметры (вторичная
обработка).
Бортовая
Дет.
а) (ВЧ)
ЭВМ
раметры
Дет.
(ВЧ)
б)
МПВУ
(ВЧ)
Быстрод.
АЦП
Поколение РИС 70-х годов на борту включало микро ЭВМ (МЭВМ),
решавшую задачи первичной и вторичной обработки (рис. «б»),
В бортовых подсистемах РНС 80-90-х годов (рис. «в») все задачи
обработки сигналов и оценивания параметров возложены на микро-
процессорное вычислительное устройство (МПВУ), сопряженное с
.............'’""iiiiiiiiilllllllllllllllHIHZS
быстродействующим АЦП, преобразующим сигналы усилителя проме-
жуточной частоты (УПЧ) в цифровую форму.
Возникает проблема дискретизации и квантования высокочастотно-
го сигнала.
Варианты решения:
1. Выбор частоты дискретизации по теореме Котельникова
АЧХ УПЧ
физически не реализуем, так как f0 - десятки и сотни МГц, и требует сверхвы-
сокочастотного АЦП. Кроме того, импульс дискретизации должен быть
сверхкоротким (t <O.l[l/(fo+Fmax)] - единицы и доли наносекунд).
2. Возможен выбор F >2Fmax для узкополосного сигнала (AFc=2Fmax«f0).
Тогда одна из копий спектра дискретизованного сигнала попадает в
полосу УПЧ. Необходим запас по F >2Fmax, чтобы исключить наложе-
ние смежных полос (спектров) и соответствующий этому стробоскопи-
ческий эффект.
АЧХ УПЧ
Такой способ дискретизации использовался в цифровых РНС длин-
новолнового диапазона. Возникали трудности при реализации уст-
ройств выборки и хранения и АЦП, когда f0+Fmax- единицы и десятки
МГц, a 2Finax- десятки кГц.
3. Использование низкочастотной дискретизации при квадратурной
обработке сигналов.
15.2. ЦИФРОВАЯ КВАДРАТУРНАЯ ОБРАБОТКА СИГНАЛОВ
Сигнал на выходе линейной части РПРУ (УПЧ) в смеси с помехой:
U(t) = S(t) + N(t) = Es (t)cos[(to0 ± AQ)t±p8(t)- ®s] + EN(t)cos[0ot-^N(t)-®N],(1)
где S(t) и N(t) - узкополосные (Af«f0) сигнал и помеха;
Es(t), <ps(t), AQ- законы амплитудной (AM), фазовой (ФМ) модуляции и
частотные (доплеровские) сдвиги (или частотная (ЧМ) модуляция сигнала);
EN(t), TN(t) - огибающая и текущая фаза помехи;
О ®N - начальные фазы сигнала и помехи.
13011111111Ш11111111П11111П'|нн1«<'...........
В общем случае (1) преобразуется к виду:
U(t) - E(t)cos[a>0t ~^(t) -0] = E(t)cos6y0tcos[^(t) + 0] +
+ E(t) sin €yot sin[^(t) + 0] = A(t) cos <yot + B(t) sin d)ot, (2)
где A(t) = E(t)cos[^(t) + 0], B(t) = E(t)sin[^(t) + 0]-квадратурные
компоненты аналитического сигнала U(t) = E(t)eJG?ot с комплексной оги-
бающей E(t) = A(t) + j B(t) =| E(t) | ejargE(t),
arg E(t) = arctg = ^(t) + 0 и модулем | E(t) 1= ^A2(t) +B?(t).
A(t)
При цифровой обработке U(t) аналого-цифровому преобразованию
подвергаются сравнительно низкочастотные процессы
E(t),<Ht),A(t),B(t)H<o(t) = ^-
at
15.3. СТРУКТУРА ЦИФРОВОГО
РАДИОПРИЕМНОГО УСТРОЙСТВА
B(t) = E(t)sin[<|>(t) + 0]
......’"""""""IIIIIIIIIIIIIIIIIIIIIIIIIIII131
Колебание промежуточной частоты (ПЧ) с помощью гетеродина
(Гет. f^f^) и фазовращателя (ФВ) на я/2 расщепляется на две квадра-
турные компоненты A(t) и B(t), выделяемые фильтрами НЧ с гранич-
ной частотой Fmax. Частота дискретизации в каждом канале F >FmaV
Требование теоремы Котельникова (F >2Fmax) выполняется, так как дис-
кретизация в обоих каналах проводится одновременно.
Квадратурный прием сохраняет фазовые соотношения интерфери-
рующих сигналов (уничтожаемые классическим детектированием), что
эквивалентно обработке на высокой частоте сигнала.
Основными параметрами цифровой части РПРУ является число уров-
ней квантования и разрядов. Число уровней квантования М^ЦЦ^-Ц^)/
/(AU-Umin)=d-l, d=Umaif/UTnin - динамический диапазон. Число разрядов
АЦП: г =]log2M[=log2d. Число децибел динамического диапазона на
201gd
разряд у «------« 6 дб/разряд. Поскольку дисперсия шума квантова-
log2d
ния на выходе АЦП РДТщ = сТдцп = AU2 /12, АЦП увеличивает шум
РПРУ на 8,5% .
Функции процессора цифрового РПРУ:
1. Вычисление | E(t) |= A2(t) + В2(t) и argE(t) = arctg[B(t) / A(t)]
для дальнейшей корректной обработки сигнала.
2. Поиск, распознавание и обнаружение сигнала
3. Узкополосная фильтрация (различение сигналов, оценивание па-
раметров).
4. Спектральный анализ и, если необходимо, преобразование по
частоте.
5. Вторичная обработка (восстановление траекторий в радиолока-
ции, объединение данных и т.п.).
132IIIIIIIIIIIIIIIIIIIHIHHIIIII.................
4 П ЦИФРОВОЕ РАСПОЗНАВАНИЕ
10 ОБРАЗОВ [И, 15,31,38]
16.1. АЛГОРИТМЫ И КРИТЕРИИ
КАЧЕСТВА РАСПОЗНАВАНИЯ
Образ любого объекта характеризуется совокупностью d признаков:
человек (рост, масса, одежда, пол), автомобиль (цвет, марка, габаритные
размеры), РЛ отражения (полоса частот, положение максимума спектра).
Таким образом. Z =[z1,z2,...,zd] - вектор образа, компоненты которо-
го / j e[l,d] характеризуют d признаков объекта.
Распознавание образа - причисление его к одному из / классов
7. C,,i =1,1 на основе сравнения с усредненными опытными данными
IX i=i j] из «словаря» распознаваемых образов.
Критерий распознавания - минимум евклидова расстояния между
классифицируемым образом Z и эталоном - средним образом Z, i-ro
ь.2 =
к iacca определенным по опытным данным
----2
>=mm.
чго жвивалентно максимуму дискриминантной функции для I классов
___ I — 2
gl(Z)=Z1TZ--|Zi|| =w,z -®i = max,i =1,2,...L,
() геюда следует, что процедуре распознавания предшествует обуче-
ние классификатора - вычисление по опытным данным весов W± и поро-
. -ок классификатора (составление «словаря» образов распознаваемых
объектов):
признаки
V ( =Zi = ZibZi2,...Zid]=[w(l,w12,.
КЛОССЫ W, = Z2 = [Z2I, Z22,...Z2dj=[w2|,W22,...,W2(J];
W, =Zi =[zii,Zi2,...Zid]=[w„,w12,...,wld];
e(=-Zt
2
.........""""111111111111111111111111111133
Классификатор по входным данным Z=[zp...,zd] вычисляет 1 дискри-
минантных функций g. (Z) , i = 1,1 и причисляет образ Z к i0-My классу,
для которого gi0(Z)=max:
Z[zis..,za]=><
g1(Z>w11z1 +W12Z2 +...+wldzd -0J
g2(Z)= w2Iz, + w22Z2 +...+-w2dzd -®2
gi(Z>wilZl +W12Z2 +...+widzd -0,
g1(Z)=w11z1 + w12Z2 +...+wldzd -0t
g10(Z)=max-»ZeCi0
16.2. СТРУКТУРА, РЕАЛИЗУЮЩАЯ
ПРОЦЕДУРУ РАСПОЗНАВАНИЯ
Г
[x(t)]
ЕП
Дискре- [хкв(п)]
тизация "
Ортого-
Х(0
„р нальное
преобр-е
Выбор
признаков
(понижение
aZ'
—--J » I ,
m=1 ,M x(n)->X(k) x(N4]размерности)J ;z^| i
I ;d<N
' поиск информативых признаков J (
Вычис-
ление
&(Z),
Принятие
решении
»-riiax
'i=1,!; j=l,d
Дискретизация совместно с квантованием и кодированием обеспе-
чивает цифровую обработку сегментов входных реализаций [x(t)]m, m=0,
1,...,М, отражающих распознаваемые процессы.
Ортогональное преобразование {x(n))-»{X(k)} выявляет наиболее ин-
формативное отображение распознаваемых образов (например, в час-
тотной области). Обычно размерность {х(п)} и {Х(к)} одинакова (N).
Блок понижения размерности предназначен для выбора наиболее
информативных признаков (d<N) и упрощения реализации устройства.
Вычисление дискриминантных функций g£(Z), i=l,Z; 1 - число классов
распознаваемых образов, на основе признаков неизвестного образа Z и
опытных данных {W„}, Qj и принятие решения ZeC.o при gi0(Z)=max (на-
ходится на основе сравнения gd(Z) с порогом 0=0,5 ||ZJ|2, i=l,l) прово-
дится в соответствующих блоках.
134IIIIIII1IIIIIIIIIIIIIIH4IHI..................
16.3. КЛАССИФИКАЦИЯ ДВУМЕРНЫХ ОБРАЗОВ
Этот случай является весьма распространенным в радиолокации и
радионавигации. В частности, используется для классификации стохас-
тических (нерегулярных) отражений радиоволн от объектов с распре-
деленной структурой (подстилающей поверхности суши и моря, метео-
образований, стай птиц и насекомых). Известно, что двумерные спект-
ральные характеристики таких отражений весьма информативны и при-
годны для надежного распознавания.
Примеры спектральных характеристик радиолокационных отраже-
ний в сантиметровом диапазоне:
Земля Земля и метеообразования Метеообразования Стаи птиц
Исследования показывают, что доплеровские смещения частот от-
носительно несущей, вызванные движением'микрокомпонентов объек-
тов, находятся в пределах 0 - 320 Гц (0 - земля, спокойное море; 320 -
метеообразования, птицы, насекомые) с положением максимума спект-
ров на частотах f =0 - 160 Гц.
Двумерный вектор образов отражений Z=[z=Af, z =f ] содержит в
качестве признаков ширину полосы Af=zx и положение максимума f =2^
то есть d=2.
Распознавание ведется в пределах 3-х - 5-ти классов (/=3 - 5).
Следует заметить, что биоэлектрические сигналы (БЭС), характери-
зующие состояние живых организмов, в том числе и человека, имеют
аналогичную природу - низкочастотны, узкополосны.
Согласно теории распознавания, система классификации двумерных
образов включает в себя АЦП непрерывных сигналов, цифровой спект-
ральный анализатор (ЦСА) - устройство ортогонального преобразова-
ния, вычислитель двумерных признаков (ВДП) A f и fm, цифровой фильтр
(ЦФ) вычисления дискриминантных функций g/Z), i=l,Z; Z=[Af,fm] и
устройство поиска g]fl(Z)=max, то есть устройство принятия решения о
принадлежности неизвестного образа к определенному классу C.o(ZgC.o).
......."""""""IIIIIIIIIIIHIIIIIIIIIIIIIU135
Классификатор двумерных образов в пределах трех классов (1-3).
Sx(k)~Sx(f)
Cto
gl (Z)=W lAf7-l+W ifttiZj-® 1,
g2(Z)=W2Af21+W2fmZ2-®2,
g3(Z>W3AfZl+W3finZr®3
КИЯ
iiniii
функции
Численная иллюстрация (в относительных единицах) [6]:
Обучающие
множества
10
1
,W2 = Z2 =
,w3=z3 =
8
0.4
Отсюда: Wj = Zj —
= 82 +0.42 = 64.16
Дискриминантные g1(Z)=-2z1+3z2-6.5
функции: gjZ)=6z.+5.6z -33.68
g3(Z)=8z1+0.4z2-32.08
13BIIIIIIIIIIUIHIIHIHIihhhihhi...........
Образ Z[4,7] e C2, так как
2
=min
П НЕЛИНЕЙНАЯ (ГОМОМОРФНАЯ) ФИЛЬТРАЦИЯ
МНОГОЛУЧЕВЫХ СИГНАЛОВ [12, 17, 36, 37]
17.1. ПРИРОДА И ОПИСАНИЕ
МНОГОЛУЧЕВОГО СИГНАЛА [8, 10, 12, 13]
Аддитивная смесь сигнала S(t) с его задержанными копиями p.S(t-t),
p.-коэффициент отражения"сигнала радиомаяка (РМ) от i-ro местного
предмета МП. t - задержка i-ro отраженного сигнала, возникает при
распространении сигнала радиопередатчика (например радиомаяка си-
стем навигации) по разным путям из-за отражений на трассе распрост-
ранения от каких-либо объектов - местных предметов (МП) (в радиона-
вигации, связи на УКВ и т.п.).
Зеркальные отражения вызывает радиоканал с импульсным откли-
ком (ИО) h(t) = 5(t) + p15(t-t1)+p28(t-t2) + ...+pMS(t-tM) =
м
=LPi8<t-ti),p=i, t=o
i=0
С учетом фильтрующего свойства 5 - функции:
00
j f (х)5(х - х0 )dx = f (х0) можно считать, что многолучевой сигнал
—оо
x(t) = S(t) ® h(t) является сверткой основного сигнала S(t) и импульс-
ного отклика h(t) канала распространения.
При цифровой обработке в дискретном времени n=t/T=0,l,2,...
ЦОС м
x(t) -> x(n) = S(n) + £pjS(n -nJ = S(n)®h(n);
i=l
............""""iiiiiiiiiiiilllllllllllllllllia}
ЦОС
hft> -> h<nj =8<n> + p15fn-n1>+p25<n-n2> + ...+pM8<n-nMJ =,
м
= EPi8<n-ni>’ Po=1’ no=O
i=0
Частотная характеристика многолучевого канала находится по спек-
тру ИО:
.2л . .2л _ ,2л _
, ч -1—n.k -j—n2k -J—пмк
--->H(k) = Ftl{h(n)}=l + P1e N +р2е N +... + рме N =
хл .2л ,
М _j—ц.к qj
= У Р1е N ,k = — = 0,1,2,... - дискретная частота
i-o A®
Следует заметить, что рассмотренные модели не учитывают влия-
ния шумов, что правомерно для ряда приложений ЦОС.
17.2. РАЗДЕЛЕНИЕ СИГНАЛА И ОТРАЖЕНИЙ
НЕЛИНЕЙНОЙ (ГОМОМОРФНОЙ) ФИЛЬТРАЦИЕЙ
Последовательность процедур
x(n) =S(n)® h(n)-^-»X(k) =S(k) • H(k)-!^n| X(k) I=ln| S(k) I +ln| H(k) |->
—^~>x(m) = S(m) + h(m), образует кепстр - некоторое отображе-
t' П1П
ние многолучевого сигнала в новом дискретном времени ш=— =0,1/,...
Соответственно кепстры основного сигнала и импульсного отклика
канала
S(m) = F ! {In | S(k) |} = 1 П1п I S(k) |]WNmk;
JN k=0
h(m) F i {In | H(k) I) = 1 E|ln | H(k) UW^”* .
N k=0
Пример: Сигнал двухлучевой с одним (М=1) «несильным» (р <1) от-
ражением
x(t) = S(t) + S(t - Ц ) —цос—>х(п) = S(n) + p!S(n - П!) = S(n) ® h(n);
h(t) = 6(t) + pa8(t - Ц )—ЦОС ->h(n) = 8(n) + p^n — rij);
Н(®) = 1 + P1e-J"1
ЦОС
-j—П]к -j—nik
1пН(к) = ln(l + P1e N )«р,е N
-tPi£ N + -р,е N
Кепстр видеосмеси x(n) = S(n) + pjS(n ~ nJ = S(n) ® h(n) со спек-
тром
.2л
Х'(к) = S(k) • Н(к) = S(k)(l + Р1е N ) определяется как С.” ]
x(m)=F4 [ln| Х(к) |]=F, [In | S(k) | +ln | Н(к) |] = S(m)+F, [ln| Н(к) |]» S(m) +
P18(m - n,) - |p[8(m - 2n,) + |PJ§(m - Зп,) -...
Видно, что кепстр двухлучевого сигнала содержит кепстр основно-
го сигнала S(m) (определяется формой S(n)) и 6 - образные «пики» в
точках дискретного времени m=np2n ,3п, и т.д., соответствующие кеп-
стру отражения (или кепстру импульсного отклика двухлучевого кяна-
ла
17.3. СТРУКТУРА И ВОЗМОЖНОСТИ ОБРАБОТКИ
НА ОСНОВЕ АНАЛИЗА КЕПСТРОВ
Структурная схема анализатора кепестра
x(m) — S(m) + h(m)
......."""’"‘"""IIIIIIIIIIIIIIIIIIIIIIIIH39
Задачи, решаемые на основе анализа кепстра:
1. Обнаружение отражения в смеси (по критерию - более одного пе-
ресечения порога О функцией кепстра х(т) ). (рис. «а»).
2. Разрешение сигнала и отражения (по гтубинс провала Д).
3. Оценка параметров отражения (уровня pt и задержки t3~гц).
4. Компенсация отражения по схеме (рис. «б»):
х(ш
Достоинства гомоморфной обработки:
1. Инвариантность к форме сигнала (с точки зрения задачи разре-
шения).
2. Цифровая реализация (в частности, на ЭВМ програмным методом).
Недос, патки:
1. Сильная зависимость кепстра от шумов.
2. Реализация на видеочастотах.
1 П ЦИФРОВАЯ ОБРАБОТКА БИОЭЛЕКТРИЧЕСКИХ
10 СИГНАЛОВ (БЭС) [23 30, 37 42]
18.1.ПОСТАНОВКА ЗАДАЧИ. СПЕЦИФИКА БЭС
В настоящее время наблюдается бурное развитие биомедицинской
электроники и компьютерных методов в медицине [23-26, 27, 28]. Наря-
ду с совершенствованием биоэлектрических датчиков, несущих инфор-
мацию о характере функционирования различных органов человека и
всего организма в целом, накоплением компьютерного банка данных и
140П1111111И1П1111111111"111""""...........
развитием программно-аппаратных средств диагностики болезней и их
лечения, весьма актуально направление, связанное с применением мето-
дов и средств цифровой обработки биоэлектрических сигналов (БЭС).
Качественная обработка БЭС в виде электрокардиограмм (ЭКГ) сердца,
реограмм (РЭГ) сосудов, электроэнцефалограмм (ЭЭГ) головного моз-
га, доступная лишь цифровым методам, позволяет судить о нормальном
состоянии организма или его патологических изменениях. На рис. 1 в
качестве примера представлена электрокардиограмма сердца.
Рис.1 Дискретизация и квантование ЭКГ
Характерными особенностями БЭС [23-25] являются:
- наличие регулярной (периодической) и случайной составляющих
(например, в ЭКГ сердца (рис.1) регулярная волна Р-деполяризация (воз-
буждение) предсердий; QRS-деполяризация миокард желудочков; Т-
рсполяризация желудочков и нерегулярные промежуточные состояния);
- узкополосностъ и низкочастотность (доли герц - десятки килогерц);
- нестационарность, связанная с изменением биологической актив-
ности организма с течением времени и внешних условий;
- априорная неопределенность, относящаяся как к параметрам БЭС
- длительности характерных этапов, амплитудам пиков, средним значе-
ниям, дисперсиям (параметрическая неопределенность), так и к БЭС в
целом и их плотностям вероятностей (непараметрическая неопределен-
ность), проявляющаяся в экстремальных ситуациях, в режиме клини-
ческой смерти, в неблагоприятных условиях обследования пациентов
........'""""""HiiiillIIIIIIIIIIIIIIIIIIIIMl
(например, в военно-полевых условиях, в условиях транспортировки
больного и т. п.);
- значительные динамический диапазон (20-40 дБ) и соотношение
сигнал/шум (более 10 дБ);
- ограниченная длина обрабатываемых реализаций БЭС.
К основным задачам обработки БЭС следует отнести:
- регистрацию БЭС с высокой точностью и параллельно от несколь-
ких датчиков;
- ввод данных о БЭС в ЭВМ для последующей автоматизированной
обработки;
- выявление (распознавание) характерных эволюций сигналов;
- анализ БЭС на фоне внешних помех.
Цифровые процедуры обработки обеспечивают минимальную по-
грешность обработки (доли %), высокую достоверность выходных ре-
зультатов, значительную помехоустойчивость и функциональную гиб-
кость программно-аппаратной (микропроцессорной) реализации.
Указанные задачи обусловливают следующие этапы цифровой обра-
ботки БЭС:
- аналого-цифровое преобразование, предшествующее собственно
цифровым процедурам;
- ортогональные преобразования для выявления характерных при-
знаков БЭС вне их временных описаний;
- сжатие данных для экономии вычислительных затрат при обработ-
ке на ЭВМ;
- распознавание сигналов и помех;
- оценка характерных параметров БЭС (амплитудных, временных,
частотных).
Рассмотрим подробнее эти этапы.
18.2. АНАЛОГО-ЦИФРОВОЕ ПРЕОБРАЗОВАНИЕ Б И
На аналого-цифровой преобразователь (АЦП) от датчиков посту-
пают реализации БЭС x.(t)={x(nT)}., где j - номер реализации, н (/
/Тд=0,1,2,... время, дискретизированное с периодом Td=const. АЦП со-
здает сегменты данных (r-разрядных двоичных слов) X .=[хр х2, ..., хп, ....
XjJ; xn=[arar ...ar..aj, а~=[0Д], поступающие в ЭВМ. Поскольку БЭС низ
кочастотны (максимальная частота спектра ЭКГ F от долей Гц до
единиц кГц), приемлемая частота дискретизации определяется с неко-
торым запасом по теореме отсчетов как Fd>2Fmax«l-10 кГц. Это соот-
ветствует периоду дискретизации Td«l/Fd«0.1-l мс. Количество дискрс-
тов в обрабатываемой реализации обычно не превышает L=150-500.
Число тактов в пределах одного периода дискретизации определяет раз-
решающую способность анализа и обычно равно NT=10-20, откуда дли-
тельность такта Т =10-100 мкс.
т
Выходными параметрами АЦП, определяющими выбор способа его
реализации, являются объем выборки в пределах одной реализации БЭС
N=LNT=5-103-l-104, скорость преобразования (близка к Fd=l-10 кГц),
тактовая частота Ft«1/Tt>104-105 Гц и точность, влияющая на разряд-
ность АЦП.
Дисперсия ошибки квантования АЦП соизмерима с уровнем дрей-
2
фов и погрешностей датчиков (ох «100 мВ2). При равномерном рас-
кв
пределении плотности вероятности шумов квантования величину шага
квантования можно определить по формуле hx = 2л/3ох = 3,46сх [5].
Число уровней квантования М=Х /X =100 при X =1В и X . =10 мВ,
*r max nun г max nun 5
что соответствует динамическому диапазону АЦП d=201gM«40 дБ. Чис-
ло разрядов регистра входных данных должно быть не менее
r>]log2M[=(7-8) для обеспечения погрешности уАЦП< 1%.
Для достижения значений указанных параметров целесообразно ис-
пользовать чисто аппаратный АЦП с поразрядным уравновешиванием на
базе серийных микросхем К133ИР17 (регистр последовательных при-
ближений), К572ПАГБ (ЦА1Г) и 140УД8Б (компаратор).
18.3. ОРТОГОНАЛЬНЫЕ ПРЕОБРАЗОВАНИЯ
БЭС В РАЗЛИЧНЫХ БАЗИСАХ
Реализации БЭС, описываемые временными функциями x.(t), не все-
гда несут полную информацию о их характерных особенностях, исполь-
зуемых при распознавании и идентификации сигналов. Известно пред-
с । явление сигналов x(t) в виде функционального ряда
со
40= xck<pk(t),te[t1;t2], (1)
k=0 4
где {<pk(t)} - некоторая базисная система ортогональных функций (под-
читающихся условию J <рк (1)ф£ (t)dt — 0, к ^i), Ск - постоянные коэф-
1 Ч
фициетггы, зависящие от вида {(pk(t)}. Это позволяет выявить дополнитель-
ные признаки, не выраженные в ЭКГ, ЭЭГ, РЭГ и т.п. Так, спектральное
......"'"""""•||||||||||||||||||||||||||Щ4з
представление БЭС (в базисе Фурье) позволяет распознавать их по по-
ложению максимума спектра на частотной оси и ширине полосы Раз-
ложение БЭС по ортогональным функциям Уолша, Хаара и г. п. приво-
дит к экономии вычислительных затрат при сжатии данных.
При цифровой обработке сигналов чаще используются ортогональ-
ные преобразования в базисах дискретного представления Фурье, дис-
кретное косинусное преобразование, функции Уолша-Адамара, Хаара
и др. [6]. Для этих функций разработаны эффективные быстрые алго-
ритмы расчета на ЭВМ, а их дискретный характер соответствует циф-
ровой микроэлектронной элементной базе, включая сигнальные про-
цессоры.
Рассмотрим наиболее характерные для цифровой обработки функ-
циональные преобразования.
1. Дискретное преобразование Фурье
Прямые (ДПФ) и обратные (ОДПФ) дискретные преобразования
Фурье описываются парой:
ДПФ: X(k) = Xx(n)W^,k = 0,1,.,,N -1;
n=0
ОДПФ: x(n) = l^X(k)WtJnk,H = 0,1,..„N -1;
N k=0
где пик- дискретные время и частота соответственно,
—j 2 л* 'У'тг
W* = е N = cos—-пк — jsin—— пк, - комплексная дискретная экс-
понента, N - размерность ДПФ, J “
На рис. 2, а показаны графики функции sin—п при N=8 и 16.
N
Расчет спектров ДПФ проводится с помощью быстрых алгоритмов
БПФ-ОБПФ с прореживанием по времени и частоте . Комплексные спек-
тры ДПФ (БПФ) весьма информативны, так как являются выборками
00
из спектров непрерывных сигналов X(jco) = fx(t)e JC0,dt и отработа-
о
ны для практического использования в виде подпрограмм персональ-
ных ЭВМ .
2. Преобразование Уолша-Адамара.
Это преобразование широко применяется при цифровой обработке
сигналов, так как может быть выполнено с использованием только сло-
144IIIIIHI ..................................
жений и вычитаний, а весьма трудоемкая процедура комплексного ум-
ножения, характерная для ДПФ-ОДПФ, в силу специфики функций
Уолша Wrli2 rk(t)=Wa(t)=±l, a - число, у которого в двоичном разложе-
нии в разрядах г,, г, г. единицы, а в остальных - нули, отсутствует.
JI X 1L
Wo(t)=Wo,ooo(t)
t
1
WKt^Wp.woCt)
_______0.5 t
j—
W2(t>Wo,ow(t)
0,5
W3(t)=WOjio(t)
2 л
Рис.2 Функции sin—-и (а) и Уолша (б)
Функция x(t), нормированная к интервалу te[O,l], представляется в
виде ряда ортогональных функций Уолша
x(t)=fcaWa(t),
a=0
где Wa(t)=W r2> (t) - функция Уолша порядка rk и ранга к, причем по-
рядком является максимальный номер разряда rk, в котором двоичное
разложение а имеет единицу, а рангом - количество к двоичных разря-
дов, где а имеет единицу.
На рис. 2, б показаны графики функций W (t) при a — 0,3, t е[0,1].
........"""‘"""IIIIHIIIIIIIIIIIIIIIIIIUI145
Для упрощения вычислений функций Уолша вводят дополнительную
функцию {a,t}, причем {ос, t} = О, если количество разрядов, в которых
ос и t имеют единицы, четное и {a, t} = 1 - в противном случае.
Тогда значение функции Уолша при t=t0 находится согласно выра-
жению Wa (t0 ) = (— i){a,t° J.
Таким образом, вычисление функций Уолша Wa(t0) сводится к опре-
делению числа разрядов, где а и t0 имеют единицы. Эта операция явля-
ется комбинацией логического умножения и подсчета четности единиц
в числе.
Ряд Фурье в базисе Уолша {Woc(t)} для функции x(t) можно предста-
вить в виде:
x(t) = £CaWa(t) = ZCa(-l)!a-t!, Ca =fX(t)(-l)<a’,}dt.
{a} {a} 0
Если аргумент функции x(t) представлен в виде двоичного кода (г раз-
рядов), x(t) аппроксимируется кусочно-постоянной функцией
7
В этом случае вычисляется значение функции x(t) в точках t = — и
процедура вычисления коэффициентов Фурье по Уолшу упрощается:
18.4. СЖАТИЕ ДАННЫХ
Сегменты X. данных на выходе АЦП, отражающие в дискретной
форме реализации БЭС, содержат N двоичных слов. Как правило, эта
величина является избыточной для отображения полной информации,
необходимой для анализа состояния пациента. Для уменьшения коли-
чества избыточной информации без потерь качества цифровой обра-
ботки применяют сжатие данных.
Сжатием называют такое ортогональное преобразование Т сигнала
X в подмножество Y
Y=TXT или X=TTY, где Хт=[х1 х2 ..., xj, Y^fy, у^ ..., yj, Г^Ф^Фз, Фк1,
..................""""........
N
или X = у1ф1 + у2Ф2 +... + yNq>N = £y1<Pi,
i=l
при котором можно получить оценку X при меньшей размерности Y (M<N):
Л м n
Х(М) = , Ц - константы,
i=l i=M+l
Л М N N
с погрешностью ДХ=X - Х(М) = X - £у 1<Р1 - £ Ь,ф, = Ж-Ш-
i=l i=M+l i=M+l
Обычно вычисляется среднеквадратическая ошибка (СКО)
N N N
Е(м) = е{||дх2||} = е{£ £(yi-b1xyj-bj)<p^j}= £е{(у,-ь()2},
t=M+l J--M+1 i~M+l
। де || • || и Е[ • ] - символы евклидового расстояния и математического
ожидания соответственно.
Выбором оптимальных cpi и b достигается минимум е(М).
В |6] показано что при тождественном преобразовании (ТП) ЭКГ
(X ►! >Y^T“’->X ) вся энергия сигнала содержится в 128 коэффици-
елтах X (отсчетах ЭКГ), в то время как при использовании ортогональ-
ных дискретных косинусных преобразований (ДКП) (разновидность
ДПФ) и Карунена-Лоэва (ПКЛ) достаточно 45 коэффициентов (с дис-
персией ошибки менее 0,001). Таким образом, сжатие данных без поте-
пи качества оценки можно провести в соотношении 3:1 (рис.З).
18.5. РАСПОЗНАВАНИЕ И КЛАССИФИКАЦИЯ БЭС
Ври распознавании БЭС из N-мерных входных данных Х=[х1 х2 ...,
xN] путем ортогонального преобразования формируются векторы об-
ра <ов Z=[z2 z2 ..., zj с числом признаков z., j=l,d меньшей размерности
(d<N). Процедура распознавания сводится к сравнению неизвестного
образа Z с совокупностью «средних» образов Zi=[z1,z2,...,zd], i = ^^при-
надлежащих 1 классам и взятых из «словаря» распознавания, получен-
ного на основе априорных (в частности, опытных) данных. Критерий
распознавания - минимум квадрата евклидова расстояния
D2 H|Z-Zj IlMZIl2 -2{ZтZ-0,5IIZ, II2},
что соответствует максимуму дискриминантной функции
gi(Z)=ZiZ-0,5||Z||2,i = U
Этот критерий модифицируется [31] в равнозначный к особенностям
всех I классов критерий отношения меж- и внутриклассовых дисперсий
__ ( , "> « ? —9 __ ____ и9
Н = ПЬ;Л =c?i Ellnii-mjll2, (*)
i=l j=l
где /-число классов распознаваемых сигналов,
щ. — математическое ожидание i-ro вектора-образа, получаемого из ис-
ходного Z=[z1 z2 zj некоторым нелинейным отображением, задавае-
мым системой функцией
м
Zk=Ft(zr..zd), k=l,d; = (М -1)ч£|| F(zil...zjd)j -m, ||2
j=l
- внутриклассовая дисперсия, М - объем обучающей выборки.
Ма
IIHI
аный эксперимент с моделями БЭС трех классов в полосе час-
тот 0,05-160 Гц показал достижимость данного критерия до уровня 200,
что свидетельствует об уверенной классификации.
Рис.З Сжатие данных при различных
ортогональных преобразованиях
Рис.4 Характеристики обнаружения БЭС
18.6. АНАЛИЗ БЭС НА ФОНЕ ШУМОВЫХ ПОМЕХ
В экстремальных ситуациях анализ БЭС ведется на фоне внешних
помех - вибраций при транспортировке больных, низкочастотных дрей-
фов аппаратуры, шумов от различных источников (линий электропере-
дач, систем зажигания автомобилей), радио и акустических помех в бо-
евых условиях и т. п.
Не стационарность самих БЭС и априорная неопределенность вне-
шних помех исключают использование классических методов оптималь-
ного приема [32] - байесовских, максимального правдоподобия и т.п.,
основанных на достаточном количестве априорных данных (плотностей
вероятности, моментов и т. д.) Необходимо в указанных условиях исполь-
зовать правила принятия решений либо инвариантные к статике помех,
либо адаптивные к изменяющимся помеховым ситуациям. Среди таких
методов перспективны для обработки БЭС на фоне шумов непараметри-
ческое обнаружение сигналов и адаптивная компенсация помех.
Непараметрические алгоритмы малочувствительны к изменениям
характеристик сигналов и помех, включая хаотические импульсные. Им
не требуется время адаптации к помехе, так как они не формируют оце-
нок параметров, определяющих форму распределения помехи. Кроме
того, они нечувствительны к нелинейным преобразованиям в датчике и
! [риемнике.
Для узкополосных БЭС предпочтительны ранговые непараметричес-
кис алгоритмы, одним из которых является двухвыборочный тест Вил-
коксона (Манна-Уитни)
n n m да l?xi —Ун5
SR = Lij = z Zh(xj -yjj) > ©r, h(x, -Уу) =
i=l i=l j=l нет
где г. - ранг отсчета х. из сигнального сегмента данных Х=[хх ..., хД в
вариационно^ ряду, составленном из отсчетов сигнальной и опорной
выборки Y=[y1 ..., уп], взятой из анализируемого пространства, Ь(х4—уЛ
индикатор инверсий, ®г - порог обнаружения БЭС.
Оценка качества алгоритма на коротких нестационарных реализаци-
ях БЭС требует специального исследования. В [33] представлены резуль-
та । ы статистических испытаний на ЭВМ модели непараметрического
обнаружителя при различных соотношениях сигнал/шум q на коротких
(нс более 8 дискретов) нестационарных выборках. Анализ графиков на
рис.4 показывает, что наиболее сильное влияние отношения сигнал/шум
q на вероятность обнаружения D имеет место в диапазоне q=0,5-3 (-6-9
дБ), а уверенное обнаружение (с вероятностью D->1) достигается при
q>2-3 (6-9 дБ) при уровне ложных тревог F=0,006-0,12. В расчете на воз-
можные эволюции сигнала в обрабатываемых сегментах требуется запас
по отношению сигнал/шум q>q =6-10 дБ при F=0,006-0,12 и целесооб-
разно применение интегратора на выходе обнаружителя.
Адаптивная компенсация тюълвх. (АДКП) обеспечивается устройством,
на основном входе которого действует смесь сигнала с шумовой помехой
S(t)+N(t), формирующим выходной сигнал s(t)=S(t)+N(t)-y(t), который
имеет наилучшее в среднеквадратическом смысле приближение к полез-
ному сигналу S(t), то есть в котором минимизирована (в идеале до нуля)
мощность помехи. Сигнал компенсации y(t) формируется адаптивным
.............."""‘iiiiiiiiiiiiiiiiiii|||||||||i4g
фильтром (АДФ) в составе системы АДКИ, на вход которого (опорный
вход компенсатора) поступает помеха Nt(t), коррелированная с N(t)3 но
не коррелированная с сигналом. Таким образом, e2(t)=S2(t)+[N(t)-
-y(t)]2+2S(t)[N(t)-y(t)], откуда среднеквадратическая ошибка с учетом не-
коррелированности S(t) и N(t), E[E2]=E[S2]+E[(N-y)]2+2E[S(N-y)] =
=E[S2]+E[(N-y)2].
АДФ компенсатора перестраивается так, чтобы минимизировать
средний квадрат ошибки s(t) до уровня Enuii[s2]=E[S2]+ Ешп[(Ы-у)2]—> E[S2].
В [34] подробно рассмотрены алгоритм АДКП Уидроу-Хопфа и струк-
туры адаптивного фильтра с перестраиваемыми в дискретном времени п
коэффициентами {Wn}. Характеристики АДКП показывают перспектив-
ность использования таких устройств для фильтрации БЭС на фоне помех.
18.7. ОБРАБОТКА БЭС НА ФОНЕ ОТРАЖЕНИЙ
В ряде случаев (многолучевое распространение БЭС по каналу свя-
зи датчиков с устройствами обработки и ЭВМ, анализ речевого сигна-
ла с реверберациями, некоторые электрофизиологические исследования)
анализируемый БЭС сопровождается суммой М перекрывающихся за-
держанных копий (отражений) C(n), i=l,M основного сигнала, то есть
м м
x(n) = S(n) + SQCn) = S(n) + SptS(n - Hi)
i=l i=l
где - коэффициент отражения, (Kn^n. <...<nM - локальные задерж-
ки отражений в дискретном времени п.
Многолучевой сигнал х(п) эквивалентно представляется в виде свер-
тки полезного сигнала S(n) с импульсным откликом (ИО) h(n) капала
<XJ
распространения (формирования) х(п) = S(n) ® h(n)~ £S(i)h(n-i)
i=—оо
ИО канала с М зеркальными отражениями
м
h(n) = 8(п) + рДп - 1ц) + р28(п - п2) +... + рм8(п - пм ) = £р;8(п -nJ,
i=0
где 5(п) - единичный импульс, р0=1;
соответствует его частотной характеристике
.2л . 2эт
-1—nik -j—
H(k)=F+1{h(n)}=l + p1e N +р2е N
150||||lllllllliiiiiiiiiiii".......................
где к=©/Аю - к-я дискретная частота в процедуре дискретного преобра-
зования Фурье F+1{ • } размерности N.
Задача обнаружения сигнала S(n) и разрешения его с отражениями
(в общем случае неочевидными), а также оценки их параметров решает-
ся по схеме нелинейной (гомоморфной) фильтрации [17]:
x(n)=S(n)®h(n) ДПФ(БПФ) > X(k)=S(k)H(k) ---------J3g_>
ln|X(k)|=ln|S(k)|+ln|H(k)| ОДПФ(ОБПФ) ) .(m) = + £(m),
где S(m) = F Jin | S(k) |} = — ^lnS(k)WNmk,
с анализом в новом дис-
кретном времени m кепстра отражений
h(m) = F Jin | H(k) |} = 1 £ln | H(k)| ,
Nk=0
в к о го ром выявляются их параметры - уровни (коэффициенты отраже-
нии р j I .M ) и задержки it, i = l,M .
Рассмотрим случай, когда x(n)=S(n)®h(n)=S(n)+p1S(n-n1).
В этом случае кепстр смеси определяется выражением
Mini F JIn X(k)} - F_J {InI S(k)I +ln I H(k) 1} = §(m) + F.JlnH(k)} =
S(m) i ppSdn-iij)—p^m - 2n}) + — piS(m-3^)-...
Видно, что в оценке x(m) двухлучевого сигнала на фоне кепстра полез-
ною сигнала S(m) локализуется 5-образные импульсы кепстра ИО h(m) с
«адержками пр 2пр Зпр ... и интенсивностью, определяемой уровнем коэф-
фицисша офажения рг Это позволяет на основе гомоморфной фильтрации
peni.ni, следующие задачи:
обнаружить факт наличия неочевидного отражения (по более, чем
о (ному пересечению кепстром х(ш) порога 0с);
разрешить сигнал S(n) и отражение Бф-гц) по глубине провала в
кепстре х(ш);
оценить параметры отражения (уровень и задержку);
- организовать компенсацию отражения, воссоздав его «образ»
c(n) = p1S(n-n1) на основе знания параметров, то есть
S(n) « х(п) - c(n) = x(n) - pjS(n - гц );
........•""""""IIIIIIIIIIIIIIIIIIIIIIIIIIH151
- восстановить сигнал S(n) после режекции кепстра h(m) и обратно-
го гомоморфного преобразования.
- следует заметить, что сильная чувствительность кепстров к шумам
ограничивает применение гомоморфной обработки отношениями сигнал/
шум не менее 20-30 дБ [36]. Поэтому перспективным представляется комп-
лексное применение адаптивной компенсации ( для подавления шумов) и
анализаторов кепстра (для обнаружения отражения, разрешения с сигна-
лом и устранения отрицательного влияния сигналоподобной помехи).
Структурная организация комплексов цифровой обработки БЭС с ис-
пользованием персональных ЭВМ и микропроцессоров рассмотрена в [27].
18.8. ВЫВОДЫ
1. Цифровая обработка БЭС перспективна, так как позволяет обес-
печить высокое качество (точность и достоверность результатов ана-
лиза) и многофункциональность устройств обработки при программных
и программно-аппаратных реализациях на ЭВМ или микропроцессор-
ных комплектах.
2. Характер БЭС (узкополосность и низкочастотность) позволяют
использовать наиболее-простые аналого-цифровые преобразователи (с
поразрядным уравновешиванием и на основе единичных приращений),
в том числе и серийные микросхемы АЦП.
3. Наиболее характерные для обработки БЭС цифровые процедуры:
- ортогональные преобразования в дискретных базисах Фурье, Уол-
ша, Хаара и т.п. для целей спектрального анализа, сжатия данных и
распознавания;
- сжатие данных для экономии вычислительных затрат при цифро-
вой обработке;
- цифровое распознавание и классификация БЭС по критерию мак-
симума отношения меж- и внутриклассовых дисперсий признаков рас-
познаваемых образов;
- непараметрическое обнаружение БЭС и адаптивная компенсация
внешних помех.
- гомоморфная фильтрация на базе анализаторов кепстров в целях
обработки БЭС на фоне отражений.
По некоторым оценкам применение этих процедур позволяет клас-
сифицировать и идентифицировать БЭС с вероятностью, близкой к еди-
нице, и ложных тревогах менее 10% при наличии шумовых и сигнало-
подобных помех на коротких нестационарных выборках при соотно-
шениях сигнал/шум не менее 10-20 дБ.
IBZIllllllllinillllliiiiiiii'iniiiinim.........
ЗАКЛЮЧЕНИЕ
В настоящем учебном пособии, рассчитанном на студентов радио-
технических специальностей университета, рассмотрены вопросы те-
ории дискретной и цифровой обработки информации и ее использо-
вания на практике. Изложены сведения по дискретным сигналам, их
с пектрально-корреляционному анализу, аспекты проектирования циф-
ровых фильтров. Рассмотрены некоторые актуальные приложения
цифровой обработки информации в радиотехнических и медико-био-
логических системах. Акцент сделан на задачи распознавания сигна-
лов л инейной и нелинейной обработки многолучевых сигналов в ус-
ловиях воздействия стохастических и зеркальных помех. Библиогра-
фический список содержит фундаментальные издания и научные ста-
тьи. отражающие специфику применений цифровой обработки сигна-
юв в конкретных областях.
Ма териал настоящего пособия совместно с одноименными практи-
кумами может служить основой для самостоятельного изучения пред-
мета и дальнейшей глубокой проработки методов цифровой обработ-
ки и i вj) < >рм ации в инженерной практике.
В то же время ряд вопросов данного направления науки и техники
(оп тимальная обработка сигналов в цифровых устройствах, информа-
ционные технологии обучения и контроля, мультимедийные системы и
др ) в пособии не рассмотрены ввиду ограничения объема издания.
Именно это побуждает автора на продолжение работы по исследова-
нию и публикации научного и учебного материала в этой весьма перс-
пек । ивной области науки и техники.
.....••"'"'"""IIHIIIIIIIIIIIIIIIIIIIIIIIIIU53
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
(С10110Й
1. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов: Пер.
с англ. /Под. ред. Ю.Н. Александрова.- М.:Мир, 1978-848 с.
2. Оппенгейм А,В., Шафер Р.В. Цифровая обработка сигналов: Пер. с англ.
/Под.ред. С.Я.Шаца.- М.: Связь, 1979. - 416 с.
3. Гольденберг Л.М., Матюшкин Б.Д., Поляк М.Н. Цифровая обработка
сигналов: Справ. - М.: Радио и связь, 1985. - 312 с.
4. Кузенков В.Д. Методы и устройства цифровой обработки сигналов. - Куй-
бышев: КУАИ, 1988. - 96 с.
5. Бернюков А.К. Дискретная и цифровая обработка информации: Введение в
теорию и некоторые приложения. Учеб, пособие для вузов / Владам, гос. ун-т,- Вла-
димир, 1999. - 159 с.
6. Ахмед Н., Рао К.Р. Ортогональные преобразования при обработке циф-
ровых сигналов: Пер. с англ. / Под. ред. И.Б. Фоменко.-М.:Связь, 1980. -240 с.
7. Бернюков А.К. Дискретная и цифровая обработка радиотехнической информа-
ции: Пракгикум/Владим. гос. техн, ун-т.- Владимир, 2001. - 82 с.
8. Обоснование цифровых структур радиотехнических систем: Учеб, посо-
бие/ Владам, политехи, ин-т; А.К. Бернюков, А.П.Галкин. Владимир, 1985.-80 с.
9. Быков В.В. Цифровое моделирование в статической радиотехнике.- М.:
Сов. радио, 1971. - 38 с.
ДОНОННИТЕПЬНЫЙ
10. Бернюков А. К. Цифровая обработка сигнала международной системы посад-
ки самолетов// Радаотехника.-1981.-Т.36.-К9.- С.26-29.
11. Бернюков А.К. Распознавание помех при радионавигации и посадке самолетов/
/ Радиоэлектроника, Изв. вузов-1986.-Т.29.- N7.- С.54-59.
12. Бернюков А.К. Микропроцессорная функционально - адаптивная обработка
сигналов систем радионавигации и посадки самолетов в бортовой подсистеме И Радио-
техника.-1988.- N9.- С.78-83.
154||||||||П11111111111НН11П1"ИН.т....
13. Бернюков А.К. Функционально - адаптивная обработка информации в борто-
вых устройствах радиосистем навигации и посадки самолетов // Электронное модели-
рование.-1991.- T.13.-N2.- С. 8-13.
14. Кузенков В.Д. Дискретное преобразование Фурье: Метод, указания/ КУАИ
.- Куйбышев, 1986. - 36 с.
15. Богуславчик Е.Н., Поспелова Н.П. Проектирование и моделирование борто-
вых радиолокационных систем: Метод, указания/ МАИ.- М.,1985.-80с.
16. Бобнев М.П. Генерирование случайных процессов. -М.: Энергия, 1970.-
240 с.
17. Архипов Е.А., Бернюков А.К. Гомоморфная фильтрация для разреше-
ния радионавигационных сигналов и переотражений И Радиотехника. - 1986. -
№ 11.-С.83-86.
18. Гоноровский Н.С. Радиотехнические цепи и сигналы: Учеб, для вузов.-
4-е изд. псрераб. и доп.- М.: Радио и связь, 1986 - 512 с.
19. Мизин И.А., Матвеев А.А. Цифровые фильтры (анализ, синтез, реализа-
ция с использованием ЭВМ).-М.: Связь, 1979.-240 с.
20. Цифровая обработка информации/ В ладим, политехи, ин-т; Сост.: А.К.
Бернюков, Е.А. Архипов. Владимир, 1990.-40 с.
21. A.K.Bernjukov. Digital Signal Processing. Introduction. Compendium/
University college of Falun/ Borlmigc-School of Engineering, Sweden, apr. 1994.
22. Кэдзоу А. Спектральное оценивание // ТИИЭР.-1982, Т.70, с. 256-293.
23. Кулаичев А.П., Каплан А.Я. Системы компьютерного анализа биоэлек-
тричсских сигналов // Мир. ПК, N8, 1994.-С. 132-137.
24. Шальдах М. Элекгрокардиотерапия.- СПб.; 1992.-256с.
25. Ньюмен М.Р., Лю Чжунь Чунь. Биомедицинские датчики для инвазив-
ных измерений // ТИИЭР, Т. 76, N9, 1988.
26. Щукин С.И. Аппараты и системы для электромагнитной терапии и ак-
гивной диагностики // Биомедицинская техника: Вести. МГУ. Сер. Приборост-
роение.- М.: 1993, N4.- С.9-24.
27. Бернюков А.К., Сушкова Л.Т. Автоматизированный комплекс цифро-
вой обработки биомедицинской информации.// Вести, новых медицинских тех-
нологий: -1996.- Т.З.-С.83-86.
28. Кузьмин В.Г., Орлов И.Я., Шкелев Г.И., Кузнецов С.В. Измерительно-
вычислительный комплекс для оценки физического состояния человека // Ра-
диоэлектроника в медицинской диагностике (оценка функций и состояния орга-
низма) // Междунар. конф.: Материалы.-М.: РНТО РЭС им. А.С. Попова, Рос.
акад. мед. наук, Рос. Акад, последипломного образования, Ин-т радиотехники
и электроники РАН, Рос. секция IEEE.
29. Second-Generation TMS 320. User’s Guide. Texas Instruments, 1987.
30. Бернюков А.К. Построение цифровых вычислителей для физико-хими-
ческого анализа // Сб. науч. тр. “Молодые ученые и исследователи - производ-
ству”. Выл. 2.-Владимир, 1972.-С.35-42,
31. Бернюков А.К., Исакевич В.В. Дискриминантный анализ в задачах рас-
познавания помех радионавигационными системами // Межвуз. сб. науч. тр.
МАИ,- М.: МАИ, 1988.-С. 81-85.
....‘’"""‘'‘"'HHiiiliillllllHlIlllllllllllSS
32. Тихонов В.И. Оптимальный прием сигналов.- М.: Радио и связь 1983,-
320 с.
33. Бернюков А.К., Егоров А.А. Моделирование на ЭВМ ря (ионавиг щи-
онного приемника с ранговым обнаружителем // Межвуз. сб. науч. гр.-Рязань:
РРТИ, 1990 .-С.55-60.
34. Уидроу Б., Стирнз С. Адаптивная обработка сигналов: Пер. с англ.-М.:
Сов. радио, 1989.-440с.
35. А.К. Bernjukov, L.T. Sushkova. Application of Inverse-Homomorphic
Fietering in Tasks of Bioelectrical Signal Processing // The 1-st International
Conference “Digital Signal Processing and Its Application”: Proc., Moscow, Russian,
Vol. II-E-119.
36. Архипов E.A., Бернюков А.К. Анализ возможностей кепстральной об-
работки многолучевых сигналов при наличии ограничений // Вопросы радио-
электроники.-Сер. ОВР.-1983. Вып. 3.-С.110-113.
37. Бернюков А.К., Сушкова Л.Т. Цифровая обработка биоэлектрических
сигналов// Материалы 2-й междунар. науч. техн. конф. “Физика и радиоэлект-
роника в медицине и биотехнологии”.- Владимир, ВлГУ.-1996.-С.16-39.
38. Бернюков А.К., Сушкова Л.Т. Распознавание биоэлектрических сигна-
лов // Зарубежная радиоэлектроника.-! 996 .-№ 12-С.47-75.
39. Бернюков А.К., Сушкова Л.Т. Структурная организация системы циф-
ровой обработки биомедицинской информации.// Науч, сессия, посвященная
Г ню Радио. Материалы. М.:-РНТО РЕС им. А.С. Попова.-1996.-С.93-95.
40. Бернюков А.К., Сушкова Л.Т. Метод^максимальной энтропии в задачах
спектрального анализа биоэлектрических сигналов // Науч, сессия, посвящен-
ная Дню Радио. Материалы. М.:-РНТО РЕС им. А.С. Нопова.-1997.-С. 171-173.
41. Бернюков А.К., Сушкова Л.Т. Современные подходы к обработке био-
электрических сигналов// Вторая междунар. конф. “Ра то э ЛС1 тропика в меди-
цинской диагностики: оценка функций и состояния организмов” :Материалы-
М.-РНТО РЭС им. Попова.М.-1997.-С.123-128.
42. Бернюков А.К., Сушкова Л.Т. Особенности cnei грального анализа био-
медицинских сигналов// Материалы междунар. науч. гон. конф. “Конверсия,
приборостроение, рынок”. - ВлГУ.-1997.-С.206-210.
43. Литюк В.И. Автоматизированное проектирование цифровых фильтров
на базе микропроцессорной техники. Учеб, пособие / Таганрогский радиотехн.
ин-т.- Таганрог, 1987.- 80с.
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ ..............................................3
сШь >К УСЛОВНЫХ СОКРАЩЕНИЙ ...............................6
ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ ЦОС............................ 7
1. Особенности и средства цифровой обработки сигналов .7
' 2. Место цифровой и дискретной обработки сигналов
радио лектронных системах............................... 10
ТЕОРИЯ ДИСКРЕТНЫХ
ПРЕОБРАЗОВАНИЙ СИГНАЛОВ................................. 14
3. Дискретные последовательности ( Щ) ............... 14
4. Дискретное преобразование Фурье (ДПФ)............. 36
5. Процедуры свертки и корреляции ................... 55
6. Дискретные случайные процессы..................... 65
7. Квантование сигналов ..............................70
8. Восстановление дискретизованных сигналов...........73
ДИСКРЕТНАЯ И ЦИФРОВАЯ ФИЛЬТРАЦИЯ........................ 78
9. Общие сведения о дискретных линейных системах......78
10. Нерекурсивные (трансверсальные) фильтры (НФ) .....85
11. Рекурсивные фильтры (РФ)......................... 92
12. Методы проектирования дискретных
и цифровых фильтров.................................. 99
13. Реализационные особенности цифровых фильтров ... 109
ПРИЛОЖЕНИЯ ЦИФРОВОЙ
ОБРАБОТКИ СИГНАЛОВ ............................. 116
14. Цифровой спектральный анализ (ЦСА) ....... 116
15. Цифровой радиоприем сигналов ............. 129
16. Цифровое распознавание образов ........... 133
17. Нелинейная (гомоморфная) фильтрация
многолучевых сигналов ........................ 137
18. Цифровая обработка
биоэлектрических сигналов (БЭС)............... 140
ЗАКЛЮЧЕНИЕ ..................................... 153
БИБЛИОГРАФИЧЕСКИЙ СПИСОК ....................... 154