















































































































































































































Автор: Куркин В.И. Козинцов Б.С.
Теги: инженерное дело техника в целом радиотехнические материалы и изделия радиотехника радиоэлектронные аппараты
ISBN: 5-06-001228-X
Год: 1988




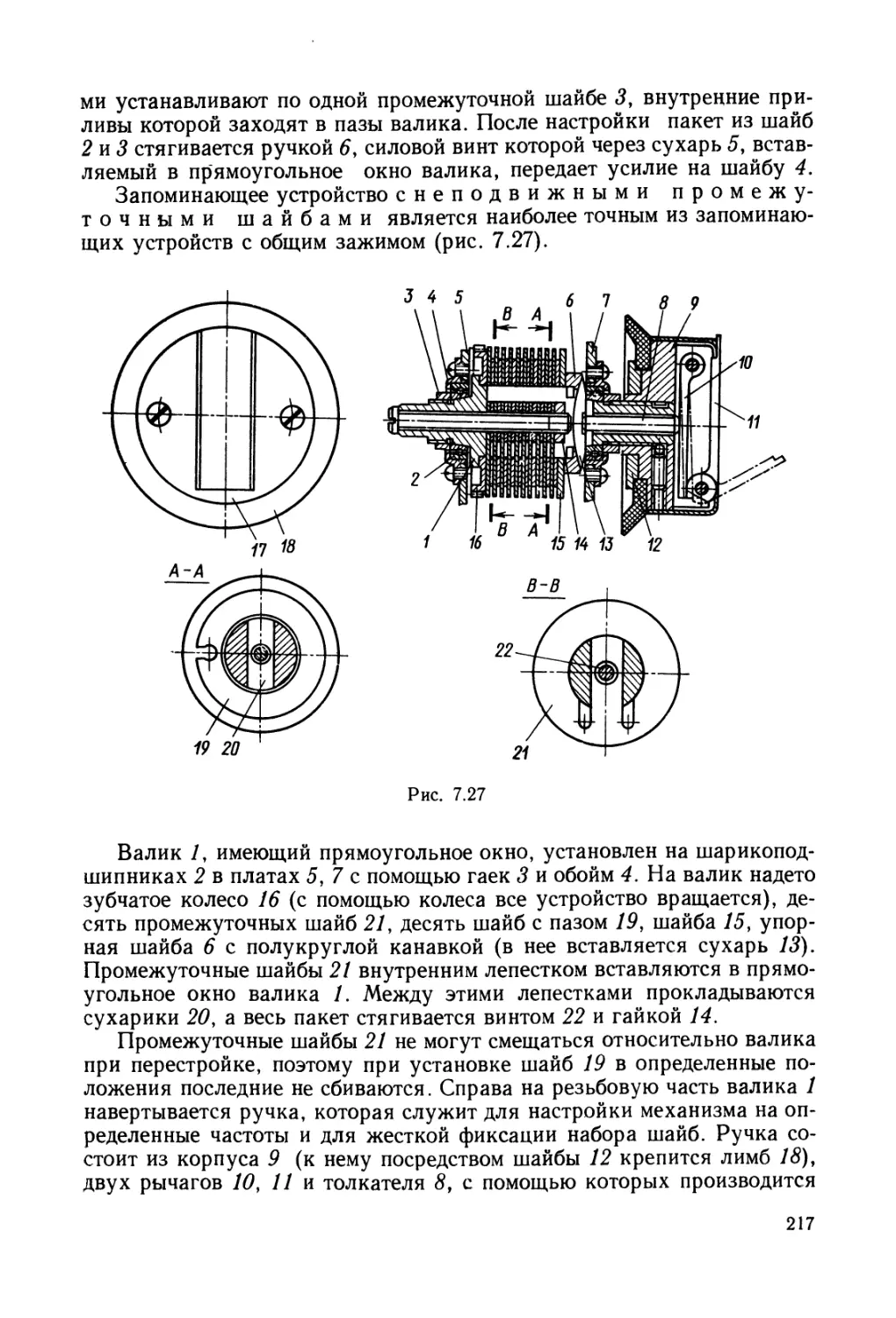
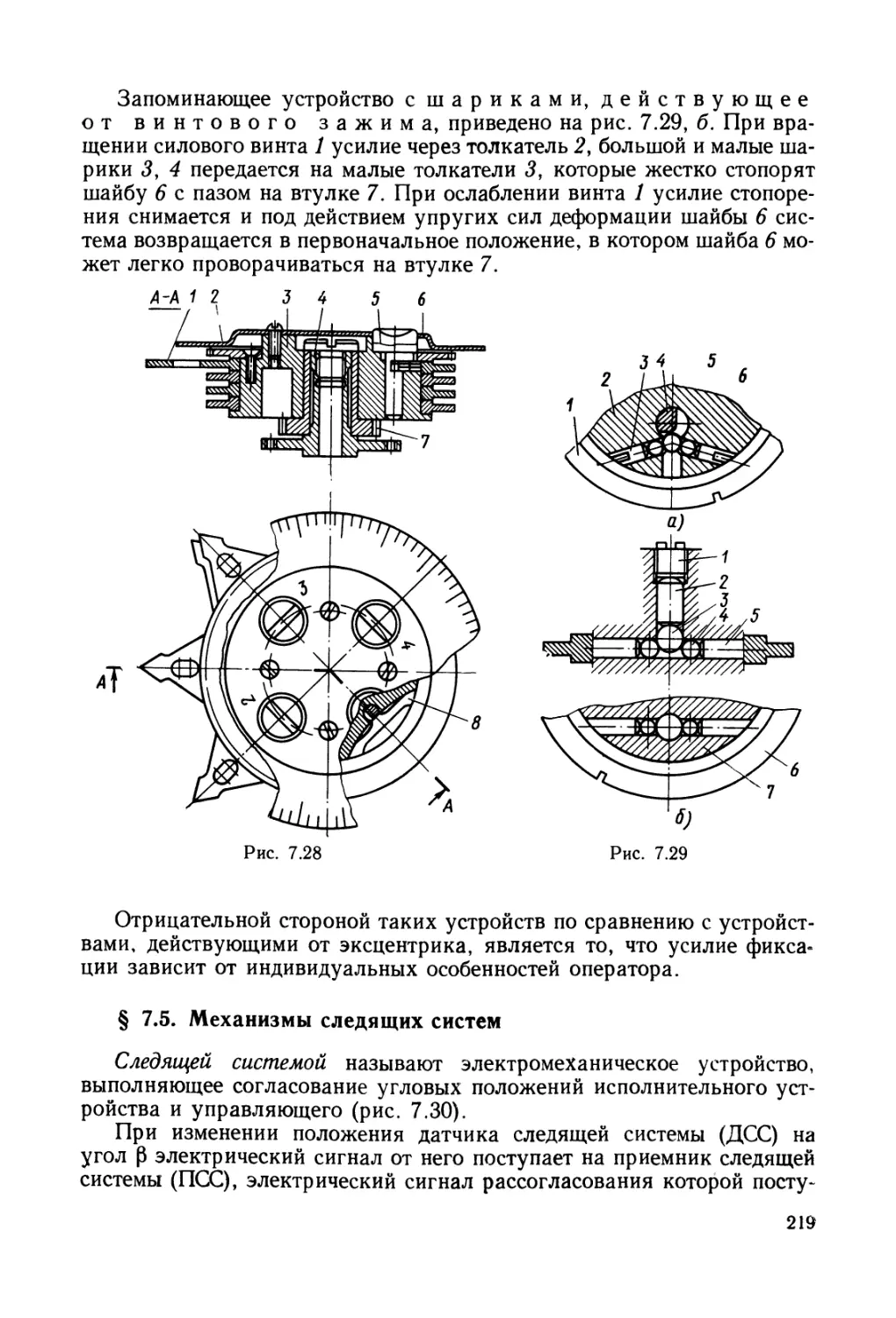
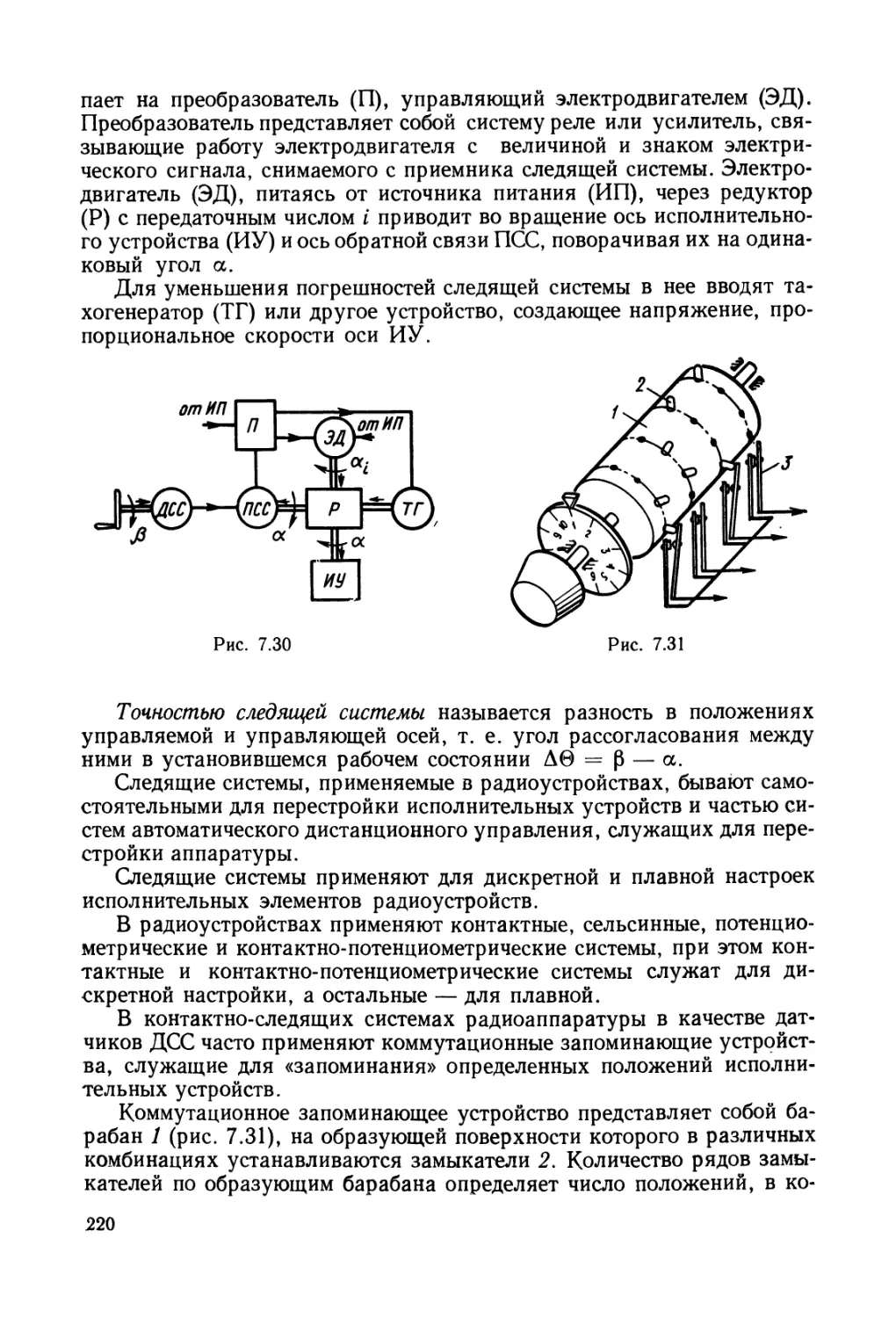
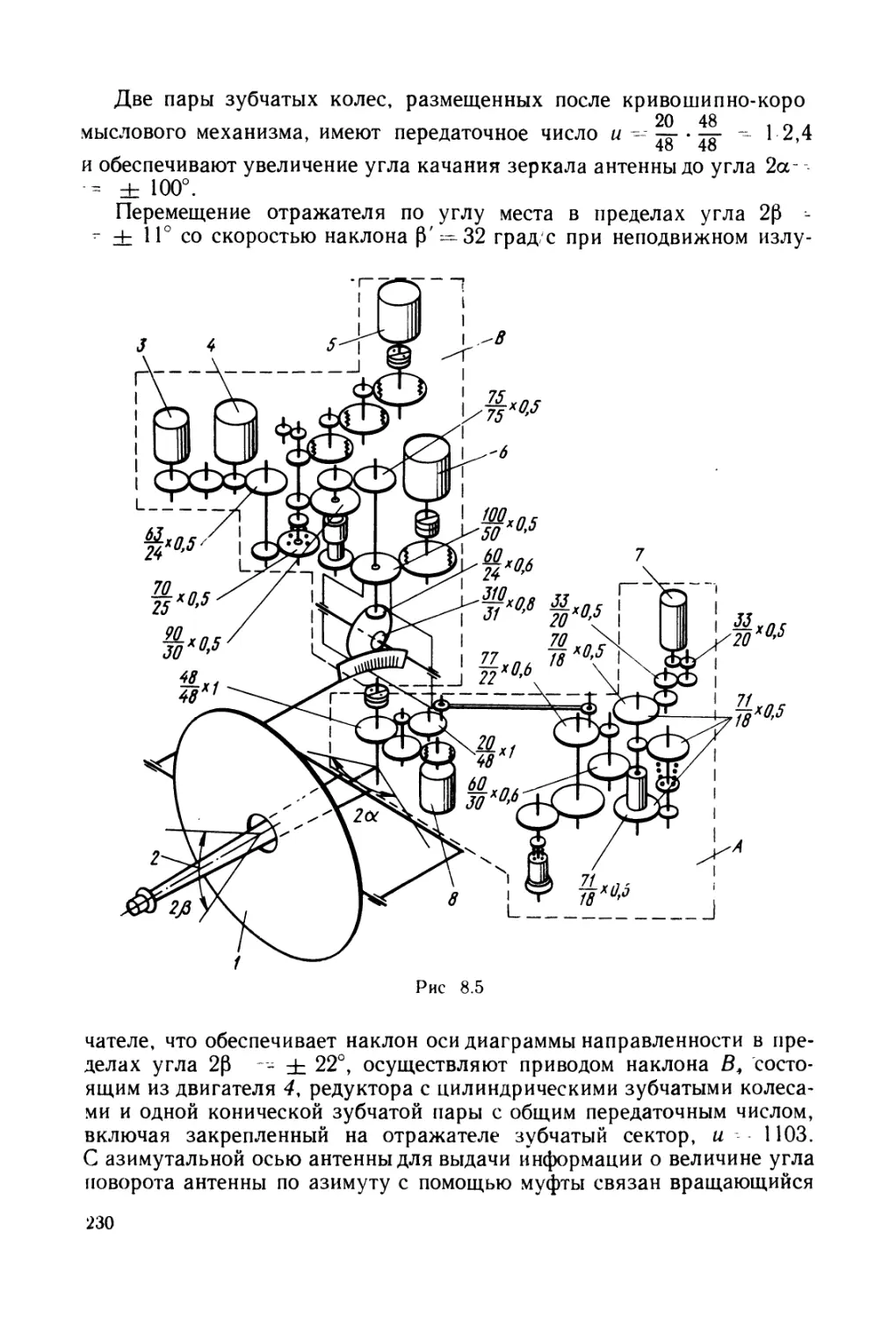
Текст
КИН, Б.С.К03ИНЦ0В
ж
В. И. Куркин, Б. С. Козин нов Детали механизмов радиоустройств
ИЗДАНИЕ ТРЕТЬЕ, ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено Министерством
радиотехнической промышленности СССР
в качестве учебного пособия
для учащихся средних специальных учебных заведений радиотехнических специальностей
МОСКВА «ВЫСШАЯ ШКОЛА» 1988
Scan AAW
ББК 32.843 К 93
УДК 62.396.69
Рецензент — преподаватель В. Д. Потоцкий (Жигулевский радиотехнический техникум)
Куркин В. И., Козинцов Б. С.
К 93 Детали механизмов радиоустройств: Учеб, пособие для учащихся радиотехн. спец, техникумов. — 3-е изд., перераб. и доп. — М.: Высш. шк„ 1988. — 256 с.: ил.
ISBN 5-06—001228—X
В книге изложены основы теории механизмов, применяемых в радиоустройствах. Третье издание (2-е — в 1975 г.) переработано и дополнено новым материалом: приведены новые сведения по записывающим механизмам н механизмам следящих и антенных систем, дистанционной настройки и управления: рассмотрены вопросы надежности. методы и средства конструирования механических систем радиоустройств.
2402020000 (4308000000)—217 001(01)—88
135 — (св . план для сред, спец. учеб, заведений) 88
ББК 32.843
6Ф2.13
ISBN 5-06—001228—X
В Издательство «Высшая школа», 1975 Издательство «Высшая школа», 1988, с изменениями
ПРЕДИСЛОВИЕ
В основных направлениях перестройки высшего и среднего специального образования в стране, утвержденных ЦК КПСС и Советом Министров СССР, перед средними специальными учебными заведениями, готовящими радиотехников, поставлены задачи коренного улучшения профессиональной и мировоззренческой подготовки специалистов, что, в свою очередь, вызывает необходимость создания учебников и учебных пособий, соответствующих современным требованиям социально-экономического и научно-технического прогресса.
Данная книга является учебным пособием для учащихся техникумов по одному из профилирующих предметов «Основы технической механики и детали механизмов радиоустройств» для специальностей «Радиоаппаратостроение» и «Радиолокационные устройства».
Цель книги — помочь учащимся овладеть знаниями, необходимыми для расчета и конструирования механических устройств или элементов, используемых в современных радиотехнических системах.
В настоящем учебном пособии более подробно по сравнению с предыдущим изданием с учетом специфики радиоаппаратостроения рассмотрены детали и элементы механизмов радиоустройств, механизмы настройки и управления, механизмы антенных систем и записывающие устройства.
Авторы выражают глубокую признательность рецензенту за весьма полезные советы и замечания, сделанные при рецензировании рукописи.
Отзывы и пожелания по книге следует направлять по адресу: 101430, Москва, ГСП-4, ул. Неглинная, 29/14, издательство «Высшая школа».
Авторы
ЧАСТЬ ПЕРВАЯ
ОБЩИЕ СВЕДЕНИЯ
О МЕХАНИЗМАХ РАДИОУСТРОИСТВ
ГЛАВА 1
ОСНОВЫ ТЕОРИИ МЕХАНИЗМОВ
§ 1.1. Структура и классификация механизмов
Задачи теории механизмов. Основной задачей теории механизмов является разработка общих методов расчета для всех видов механизмов.
В соответствии с этой задачей теория механизмов занимается: структурой механизмов, где изучается их строение; кинематикой механизмов, где изучаются зависимости между перемещениями, скоростями и ускорениями образующих их звеньев (без учета действующих на них сил), идинамикой механизмов, где изучается движение звеньев, составляющих механизм (с учетом действующих на них сил). При этом считают, что звенья, образующие механизм, абсолютно жесткие.
Основные определения. Механизмом называют искусственно созданную систему тел, предназначенную для преобразования механического движения одного или нескольких тел в движение других тел. Так, например, в механизме радиотехнического прибора (рис. 1.1) вращательное движение ротора электродвигателя /, имеющего скорость Юр преобразуется во вращательное движение шпинделя 5, имеющего значительно меньшую скорость со5. Это преобразование происходит посредством зубчатой передали, состоящей из колес 2, 3 и 6.
Твердые тела, составляющие механизм, называют звеньями. Звено может состоять из нескольких соединенных неподвижно друг с другом частей — деталей. Деталью называют часть механизма или машины, изготовляемую без применения сборочных операций. На рис. 1.1 зубчатое колесо 2 и ротор электродвигателя 1 представляют собой одно звено.
Механизмы состоят из одного или нискольких подвижных звеньев и одного неподвижного звена. Неподвижное звено называют стойкой. В механизме радиотехнического прибора неподвижным звеном (стойкой) является корпус, состоящий из деталей 4, 7 — //и скрепляющих их винтов.
Звенья, составляющие механизм, подвижно соединены между собой. Совокупность двух звеньев, имеющих ограниченное относительное движение, называют кинематической парой. В механизме (рис. 1.1) кинематическими парами являются следующие соединения: ротор и статор электродвигателя, зубчатые колеса 2 и 5, 3 и 6\ валы зубчатых колес 3 и 6 с корпусом; шпиндель 5 с зубчатым колесом 6 (это соединение допускает поступательное движение шпинделя 5 относительно зубчатого колеса 6).
Кинематические пары делят на низшие и высшие в зависимости от числа связей, накладываемых на относительное движение соединяемых ими звеньев. Низшие пары накладывают две связи на движение звена в плоскости, высшие — одну.
Поверхности, линии или точки, по которым происходит контакт в кинематических парах, называют элементами кинематических пар. В данном механизме элементом высшей кинематической пары в зацеплении зубчатых колес является линия контакта рабочих поверхностей зубьев, элементом низшей поступательной кинематической пары звеньев 5 и 6 — цили ндр и ческ ие повер х ности.
Систему звеньев, образующих между собой кинематические пары, называют кинематической цепью. Механизм может состоять из одной или нескольких кинематических цепей. В рассматриваемом механизме радиотехнического прибора две кинематические цепи. Первая состоит из подвижных звеньев 2, 5, 6 и неподвижного звена (корпуса), а вторая — из звеньев 5 и 6. В этом случае звено 6 рассматривают как неподвижное, так как вращение его происходит в плоскости, перпендикулярной оси поступательного движения звена 5. Первая кинематическая цепь предназначена для вращения выходного звена (шпинделя 5) с требуемой угловой скоростью со5, вторая — для сообщения ему поступательного движения. Двигателем цепи является соленоид, состоящий из якоря 13. шпинделя 5 и катушки 12. закрепленной в корпусе.
В зависимости от назначения, звенья механизма подразделяют на входные, выходные и соединительные.
Входным называют звено, которому сообщается преобразуемое движение. Выходным — звено, совершающее движение, для выполнения которого предназначен механизм. В динамике механизмов применяют термины «ведущее» и «ведомое» звенья. Ведущее — звено, которому сообщают положительную работу, ведомое — звено, которому со
общают отрицательную работу приложенные к ним внешние силы. На ведущее звено силы действуют по направлению скорости, на ведомое — против направления скорости.
В первой кинематической цепи механизма радиотехнического прибора входным звеном является зубчатое колесо 2, соединительным — зубчатое колесо 3, выходным — зубчатое колесо 6 со шпинделем 5, которые вращаются благодаря шпонке как одно целое. Во второй кинематической цепи, состоящей из двух звеньев, подвижное звено — шпиндель 5 — соединяет в себе функции входного и выходного звеньев. Неподвижное (в плоскости поступательного движения) — колесо 6, отверстие в ступице которого служит направляющей для поступательного движения шпинделя 5, имеющего два независимых движения: вращательное и поступательное.
По различию в расположении траекторий движения звеньев механизмы делят на пространственные и плоские. В пространственных механизмах траекториями движения звеньев являются пространственные или плоские кривые, расположенные в непараллельных плоскостях, а в плоских механизмах — в одной или нескольких параллельных плоскостях.
Механизм радиотехнического прибора (настроечной головки) — пространственный механизм, так как движение его звеньев происходит во взаимно перпендикулярных плоскостях (плоскость вращения перпендикулярна плоскости поступательного движения).
Механизмы могут быть самостоятельными сборочными единицами, а могут входить в состав более сложных изделий — машин. Машиной называют искусственное устройство, предназначенное для облегчения физического и умственного труда человека.
Структура механизмов. Каждый механизм состоит из звеньев, соединенных друг с другом кинематическими парами. Рассмотрим, как влияет соединение звеньев различными кинематическими парами на их движение, когда оно происходит водной плоскости. Для упрощения построения введем условные обозначения, приведенные в табл. 1.1. Каждое звено (рис. 1.2, а), не входящее в кинематические пары, при движении в одной плоскости имеет три степени свободы (IF = 3): поступательное движение относительно осей х и у, вращательное в плоскости уОх. Система, состоящая из двух свободных звеньев имеет шесть степеней свободы (W -3-2 6) и т. д. Если два звена соеди-
нить низшей кинематической парой, допускающей только их относительное вращение в плоскости (рис. 1.2, б), то такая кинематическая цепь будет иметь четыре степени свободы (IF 6 — 2 — 4), так как соединение звеньев низшей парой наложило две связи. Кинематическая цепь, состоящая из трех звеньев (рис. 1.2, в), соединенных друг с другом двумя низшими кинематическими парами, будет иметь пять степеней свободы (IF 3-3—2*2 == 5), так как дае низшие кинематические пары наложили на движение звеньев четыре связи.
Таблица 1.1
Число степеней свободы И Ф га S SgJ я 2® о о 5 s 2 « 2 я Е к ЭГ х S.S Название кинематической пары Рисунок Условное обозначение
1 5 Поступательная
1 5 Вращательная ||к
1 5 Винтовая
2 4 Цилиндрическая
2 4 Сферическая с пальцем
3 3 Сферическая
Продолжение табл. 1.1
Звенья могут соединяться низшими кинематическими парами, допускающими только относительное поступательное движение (рис. 1.3). В плоских кинематических цепях используются и высшие кинематические пары (накладывают одно условие связи). На рис. 1.4 приведено схематичное изображение двух звеньев, соединенных высшей кинематической парой, в которой звецо 2 может перемещаться поступательно относительно звена 1 и «катиться» по нему. В механизме настроечной головки такие кинематические пары образуют зацепления зубчатых колес, где зубья колес «катятся» и скользят друг по другу.
Выведем уравнение для определения числа степеней свободы плоских кинематических цепей. Для подвижных звеньев на плоскости, не соединенных кинематическими парами, общее число степеней свободы W = Зп, где п — число подвижных звеньев.
Если эти звенья соединены друг с другом различными кинематическими парами, то число степеней свободы
W=3n — 2p—q, (1.1)
где р — число низших кинематических пар (накладывают два условия связи); q — число высших кинематических пар (накладывают одно условие связи).
Пример 1.1. Определить число степеней свободы механизма настроечной головки (см. рис. 1.1).
Решение. Механизм состоит из двух плоских кинематических цепей, расположенных во взаимно перпендикулярных плоскостях. Первая кинематическая цепь состоит из трех подвижных звеньев: ротора электродвигателя с зубчатым колесом 2, зубчатого колеса 3 и зубчатого колеса 6 со шпинделем 5. Число низших кинематических пар равно трем (вращательные пары, соединяющие перечисленные звенья с корпусом). Число высших кинематических пар равно двум (зацепление зубьев колес 2 и 3, 3 и 6). Следовательно, п = 3, р = 3, q = 2, откуда Wr — Зп — 2р — q = 3,3—2,3—2= 1.
n*2,p*Q,q*0
х а) х
Рис. 1.2
nsJ; р=2; q=0
Wt2*f;W2-J;Wx-1
А
Вторая кинематическая цепь состоит из одного подвижного звена — шпинделя 5, соединенного низшей поступательной парой с колесом 6, т. е. п — 1, р = 1, q — 0. В этом случае W2= Зп — 2р — q = 3,1 — 2,1 — 0 = 1. Общее число степеней свободы W = + IFa = 1 + 1 = 2.
Механизм, имеющий одну степень свободы (рис. 1.5, а), можно представить как соединение ведущего звена, имеющего также одну сте-
Рис. 1.3
Рис. 1.4
В Ws5
пень свободы (рис. 1.5, б), и кинематической цепи с нулевой степенью свободы относительно системы, к которой она присоединена (рис. 1.5,в). Такую кинематическую цепь называют структурной группой. Простейшая структурная группа состоит из двух звеньев, входящих в три низшие кинематические пары. Применение высшей кинематической пары (рис. 1.6) дает возможность получить механизм с W = 1, состоящий из двух подвижных звеньев: ведущего и ведомого.
Для получения механизма с двумя степенями свободы (рис. 1.7, а) структурную группу присоединяют к двум ведущим звеньям (рис. 1.7, б). Сложные механизмы (рис. 1.8, а) получают путем присоединения к простым механизмам различных структурных групп (рис. 1.8, б).
п=3;р=4; q=0t
n=2'tp=3't q=0,W=0
Классификация механизмов. Для упрощения выбора типа механизма их удобно классифицировать по функциональному признаку (изданы справочные пособия, где собрано и классифицировано по функциональному признаку большое число механизмов, например «Механизмы» под ред. И.И. Артоболевского).
В зависимости от выполняемых функций механизмы делят на следующие группы:
Рис. 1.7
— механизмы передач с постоянной угловой скоростью вращения ведомого звена (зубчатые, червячные, ременные и др.);
— механизмы передач со ступенчатым изменением угловой скорости ведомого звена (коробки передач, ступенчатые ременные и цепные);
— механизмы передач с плавным изменением угловой скорости ведомого звена (гидравлические и электрические передачи, фрикционные вариаторы и др.);
— механизмы с периодическим реверсивным и нереверсивным изменением угловой скорости ведомого звена (кулисные, четырехшарнирные, зубчато-рычажные, кулачковые и др.);
— механизмы с прерывистым движением ведомого звена (мальтийские кресты, храповые, кулачковые и др.);
— предохранительные механизмы (от перегрузок и сверхпредельных скоростей). К ним относятся предохранительные, центробежные и обгонные муфты;
— дифференциальные механизмы, суммирующие движения двух независимых двигателей или передающие движение от одного двигателя на два ведомых звена.
Для разработки общих методов кинематического и динамического расчетов механизмов необходимо их классифицировать по структурному признаку, т. е. в зависимости от сочетания в них количества звеньев, числа и вида кинематических пар.
§ 1.2. Основы кинематики механизмов
Задачей кинематического расчета является нахождение зависимостей между положениями входного (ведущего) звена механизма и положениями, скоростями и ускорениями выходного (ведомого) звена (без учета сил, действующих на звенья механизма и их масс):
в случае вращательного движения входного (ведущего) и выходного (ведомого) звеньев
фп=ф(ф1), 1
Шп=«(ф1). М
8п=е(ф1); J
в случае вращательного движения входного (ведущего) звена и поступательного движения выходного (ведомого) звена
8п=«(ф1).
0п=»(ф1).
ап=а(ф1). .
(1.3)
Здесь фх — угол, определяющий положение входного (ведущего) звена; фп, sn, con, vn, еп, ап—соответственно угловые или линейные перемещения, скорости и ускорения выходного (ведомого) звена. При поступательном движении входного (ведущего) звена в (1.2) и (1.3) фх следует заменить на sr
Если известна зависимость между положениями выходного (ведомого) и входного (ведущего) звеньев фп = ф (фх) или sn s (фх), то зависимость между скоростью выходного (ведомого) и положением входного (ведущего) звеньев можно получить, дифференцируя по времени эти уравнения. По правилу дифференцирования сложной функции имеем = con; = (dx, или окончательно
d/ d(px dt 1 dt dt n
(0n = (dl^-. (1.4)
d<p,
d“n _₽ 1 —* •
dt
Вторичное дифференцирование по времени дает зависимость между ускорением выходного (ведомого) звена и положением входного (ведущего)
d<on ы d2 Фп dtp, dtp» dto, df 1 dqj* d/ d(p, d/
Окончательно
dtp? dq)x
В случае равномерного движения входного висимость фл = ф (ф^ можно заменить: фп = dq?ndt и f„ = (12фп d/2.
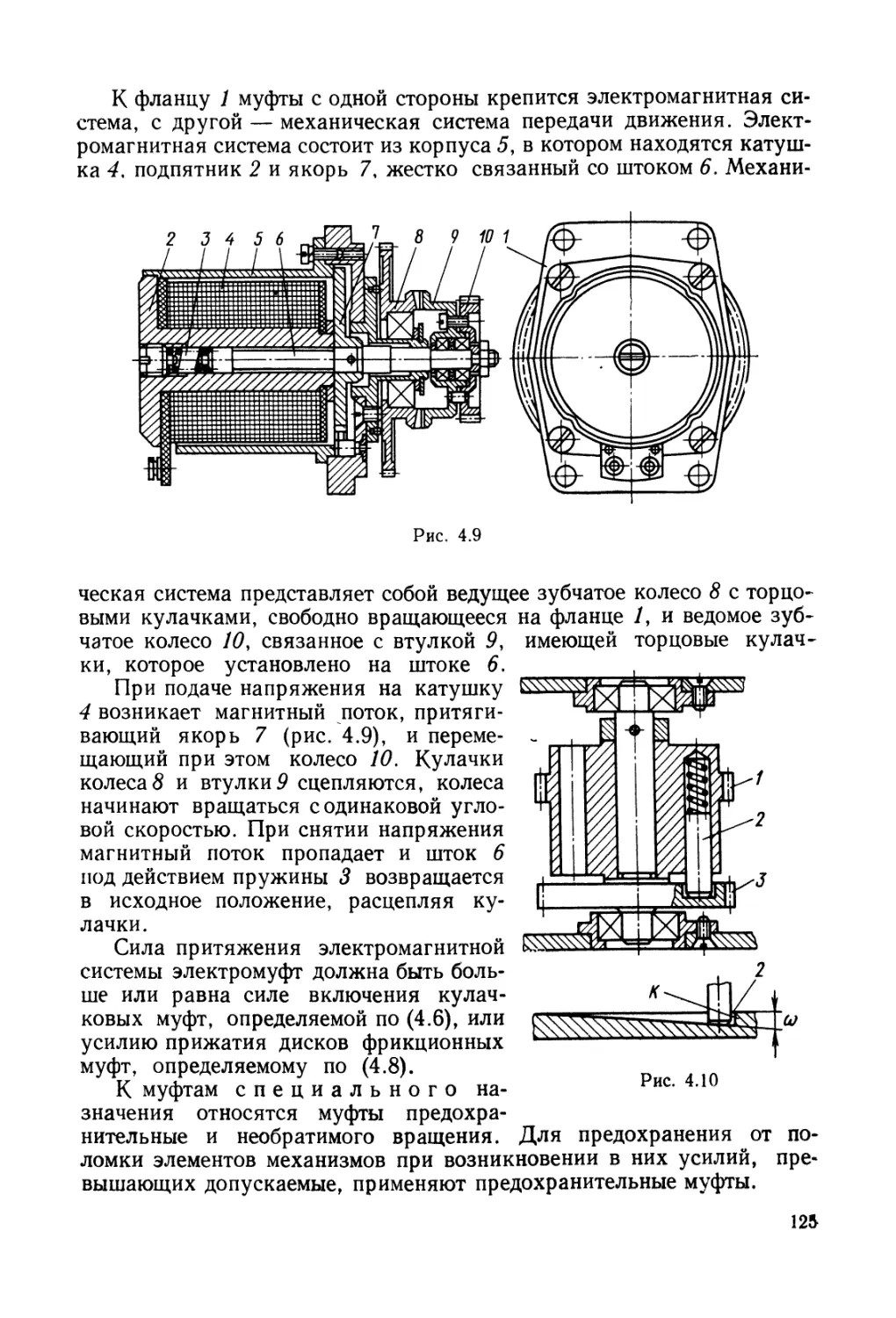
Аналогично запишем и ходного (ведомого) звена:
(1.5)
(ведущего) звена за-Ф (t). Тогда со„ =
для случая поступательного движения вы-
din
V„ - (О, -2- ; d<pi n - /л2 d2$n ап-_ • dtp2
(1.6)
(1.7)
В случае равномерного движения входного (ведущего) звена vn dsn/df, ап = d2 sn/d/2.
Уравнение фп = ф (фх), являющееся исходным для получения остальных зависимостей кинематического расчета, называют передаточной функцией.
При проектировании во многих случаях используют закон изменения ускорения. Тогда зависимости между скоростями и перемещениями выходного (ведомого) и входного (ведущего) звеньев можно получить интегрированием заданного закона ускорения.
Отношение скоростей звеньев механизма называют передаточным отношением:
hn=®1/(Dn. (1.8)
Из (1.4) и (1.6) получаем
im -=<o1/<On = d<Pi/d<Pn. iin =®!/un = d<pi/dsn.
Отсюда следует, что передаточное отношение является функцией положения входного (ведущего) звена.
Кинематический расчет механизмов можно вести аналитическим или графическим методом. Аналитический метод более точен, дает возможность применить ЭВМ. Для предварительных расчетов более удобным является графический метод, так как для многих механизмов уравнения получаются громоздкими.
Рассмотрим применение различных методов расчета на примере аксиального кривошипно-ползунного механизма (рис. 1.9, а).
Аналитический метод. Выражение передаточной функции s = — s ((f) можно получить следующим образом. За начало отсчета примем крайнее правое положение ползуна Со. Расстояние АС = г + I (кривошип и шатун лежат на одной прямой). Перемещение ползуна при повороте кривошипа на угол ф
s=x(r-H /) —(гсояф + Zcosy)
или
S = r(l — СО8ф)+ /(1—COS у).
В полученное выражение входит угол у, являющийся функцией угла ф. Зависимость между этими углами получим, выражая длину перпендикуляра, опущенного из точки В на ось направляющей ползуна. через углы ф и у: BD г sin ф, BD = / sin у.
Приравнивая правые части написанных уравнений, получим I sin у ----- г sin ф, откуда sin у = (r/l) sin ф.
Значение cos у находим через sin у:
cos у = У 1 — sin2 у = [ 1 — (г/I)2 sin2 ф]1 '2.
Полученное выражение разложим в ряд по формуле бинома Ньютона:
h / Г \2 . 2 I1/2 - 1 / г V . О 1 /г V . 4
1 Sin2 ф I =3 1----------( 81П2Ф---------- 81П4ф —...
L \ I / J 2 \ I ! 8 \ I /
Для практических расчетов при г//< 1/3 можно ограничиться двумя членами ряда. Тогда cos у = 1 — 1 )2 sin3 ф.
Подставляя cos у в исходное уравнение, определим s = г (1 — - cos ф) + I {1 - [1 - * sin2 ф] }.
После преобразований окончательное значение передаточной функции примет вид
s « г( 1 —coscp
t-—r— sin2 q>
Выражение для определения скорости перемещения ползуна найдем по формуле v = cod*S/dcp.
Значение производной dsMq получим, дифференцируя по переменной <р передаточную функцию:
ds;dcp = г (sin ф [г - (2/)] 2 sin ф cos ф}; 2 sin ф cos ф — sin 2ф;
с!$;с1ф ~r {sin ф - -1r/(2Z)] sin 2ф}.
Подставляя ds/dcp в исходное уравнение для скорости, получим v «car {sin ф + [г/(21)] sin 2ф}.
Выражение для определения ускорения перемещения ползуна найдем по формуле а = со2 , где d2s/dq>2 — г [cos ф + (г//) cos 2ф].
Подставляя б2з/дф2 в исходное уравнение для ускорения, получим а « cd2 г [cos ф + 070 cos 2ф].
Можно определить также скорость и ускорение ползуна для полного цикла, подставив в полученные выражения значения угла ф = 0ч-4-2л.
Метод кинематических диаграмм. Этот метод позволяет получить графическим построением диаграммы (графики) передаточной функции, аналогов скоростей и ускорений: s = s (ф); ds/бф = s' (ф); <12$Мф2 = s" (ф).
Аналог ds/бф = s' (ф) отличается от выражения для скорости постоянным множителем со, а аналог (125/(1ф2 = s" (ф)—от выражения для ускорения постоянным множителем со2. Поэтому график ds/бф = = s' (ф) называют графиком аналогов скоростей, а график (12$/с1ф2 = = s" (ф) — графиком аналогов ускорений.
Для построения графика передаточной функции s = s (ф) нужно построить планы положений механизма (схемы механизма, соответствующие различным положениям кривошипа). Для этого в масштабе = 1дв!АВ (Iab —размер звена, м; АВ — длина отрезка, изображающего на чертеже это звено, мм) вычерчивается кинематическая схема механизма. Далее окружность (рис. 1.9/Чх), описываемую точкой В, делят на равное число частей, например 12. Начало отсчета — — Во должно соответствовать крайнему положению ползуна. Из каждой точки (Во, Вп В2, Вз, ..., Вп) циркулем делаем засечки на оси движения ползуна дугой радиусом ВС. Найденные точки (Со. Q, С2, Сз, ..., Сп) определяют положение шарнира С, соответствующее отмеченным положениям кривошипа.
Построение графика перемещений начинаем с проведения осей координат: по оси абсцисс откладываем отрезок L, соответствующий (в масштабе = 2n/L, рад/мм) полному обороту кривошипа АВ, и делим его на то же число частей, что и окружность, описываемую точкой В. Из точек Вх, В2, В 3,В^ и т.д., отмеченных на оси абсцисс, параллельно оси ординат откладываем соответственно отрезки СОСХ, С0С2, С0С з, Со С4 и т. д. Соединив концы отрезков плавной кривой, получим график передаточной функции s = s (ф). При таком способе построения масштаб по оси ординат равен масштабу чертежа механизма
Графики аналогов скоростей и ускорений получают графическим дифференцированием (рис. 1.9, б). В тех случаях, когда исходным является график ускорений или аналога ускорений, графики скоростей и перемещений можно получить графическим интегрированием.
Метод планов. Для построения планов скоростей и ускорений надо построить планы положений механизма, как было сказано выше. Затем проводим структурный анализ механизма: кривошипно-ползунный механизм образован присоединением к кривошипу ] (W — 1) структурной группы (W — 0), состоящей из шатуна 2 и ползуна 3, соединенных шарниром С. Шатун соединен шарниром В с кривошипом, скорость которого задана (ив = со/ АВ). Ползун соединен поступательной кинематической парой с неподвижной направляющей. Неизвестную скорость точки С можно найти, составив векторные уравнения значений ее скорости перемещения. Исходя из условия, что С принадлежит шатуну, ее движение можно рассматривать как переносное (вместе с точкой В) и относительное (относительно В), т. е. vc = v в +vc в-Считая, что С принадлежит ползуну, ее движение можно рассматривать как переносное (вместе с направляющей) и относительное по направляющей, т. е. vc = Vcx + vccx- В данном случае направляющая неподвижна (yCjc — 0), поэтому vc — vcc , где Сх — точка направляющей х — х, совпадающая в рассматриваемый момент с точкой С ползуна.
Приравнивая правые части написанных векторных уравнений, получим
vB + vCB = vcc X
Данное уравнение решается построением плана скоростей (рис. 1.9, в) для положения механизма, изображенного сплошными линиями, так как вектор скорости vB известен по величине (vB = Ав) и направлению (перпендикулярен направлению ЛВ), а векторы vCB и и Уссх известны по направлению (vCB перпендикулярен СВ, a vCCx параллелен направляющей х — х).
Построение плана скоростей следует начинать с вектора v в, изображающий его отрезок pb проводим из произвольной точки р (полюс плана скоростей):
pb = v/iiv,
где — масштаб плана скоростей, м-с-1/мм.
Если отрезок pb взять равным отрезку,изображающему на чертеже кривошип (в масштабе р;), то
VAB lAB lAB ,,
Ив=,—_ = ——_=Ю1_----------.--=(0гр.г.
Pb АВ 1ДВ/1Ч
Направление отрезка pb перпендикулярно направлению АВ. Затем через точку b проводим вектор относительной скорости vCB (перпендикулярно направлению ВС) до пересечения с вектором относительной скорости vccx> проведенного через точку р параллельно направляющей х — х. Точка с пересечения этих векторов является концом вектора vc. Скорость vc определяют из уравнения vc = (рс)-
Получив значения скорости точки С для всех 12 положений, строим график vc = v (ф).
Для ускорения перемещения точки С получим следующие векторные уравнения:
+ &СВ 4" &св
— точка С принадлежит шатуну;
Ис = ^Сх + ^ССХ + аССх*
— точка С принадлежит ползуну.
В этих уравнениях ав — ускорение точки В, при равномерном вращении кривошипа ав = а" = VbHab\ асв vcbHbc — нормальное ускорение точки С относительно В (направлено параллельно ВС от точки С кВ); а^в — тангенциальное ускорение точки С относительно В (а*в неизвестно по величине, направлено перпендикулярно ВС); аСх— ускорение направляющей (ас* — 0, так как направляющая неподвижна); akCCx =~- 2охисс*— кориолисово ускорение ползуна (направляющая неподвижна, (ох == О и а*с* = 0); агССх — относительное ускорение ползуна агсс неизвестно по величине, направлено параллельно направляющей х—х).
Приравнивая правые части уравнений для ускорения точки С, запишем
&в &св 4~ &св ~ ^сс> х
В полученном уравнении два вектора ав и а£в известны по величине и направлению, а два других а^в и а£с* — только по направлению, поэтому его можно решить, построив план ускорений (рис. 1.9, г).
Построение плана ускорений следует начинать с вектора ав, изображая его отрезком лб, проведенным из произвольной точки л (полюс плана ускорений):
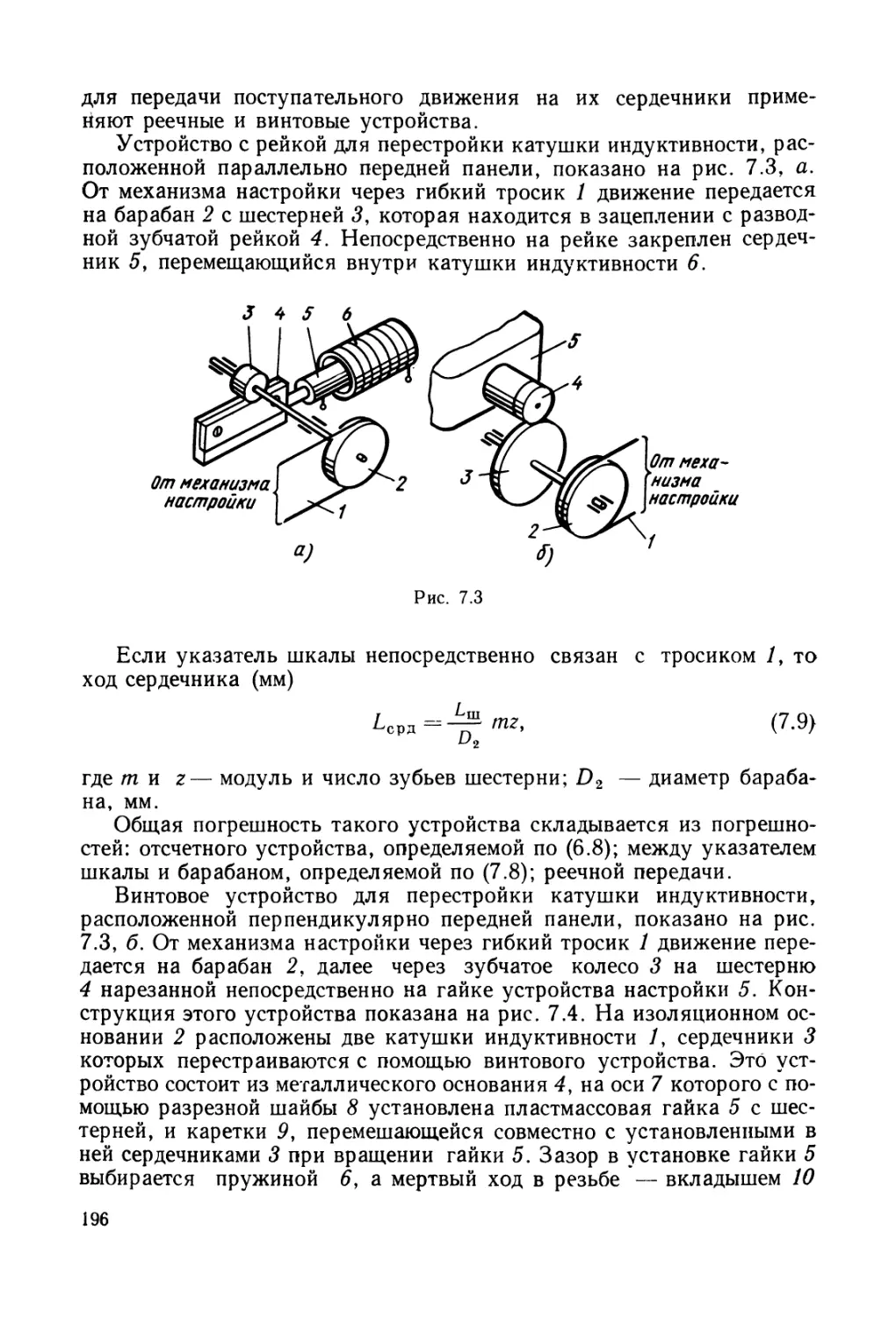
лЬ-=ав/ца.
Если принять отрезок лЬ равным отрезку, изображающему на чертеже кривошип, то
„ _ ав VB^AB to^AB^AB 2..
Цд — ———— — — (0 Ц/.
лЬ АВ АВ
Ускорение ав направлено (при равномерном вращении кривошипа) параллельно АВ от точки В к точке А. Далее, через точку b проводим прямую, параллельную ВС, и откладываем на ней отрезок Ьп, представляющий вектор а/?в : Ьп = апсв1\аа.
Ускорение а£в направлено от точки С к точке В. Затем через точку п проводим прямую, перпендикулярную направлению ВС, до пересечения (точка С) с прямой, проведенной через точку л, параллельно направляющей х — х. Отрезок лс представляет вектор ьгССх = ас (ускорение точки С), величина ас = (лс). Отрезок пс представляет
вектор а^в.
Получив значения ускорения точки С ддя всех 12 положений, можно построить график ас = я(ф). Методы кинематических диаграмм и планов следует применять, когда надо получить характер изменений и приближенные значения скоростей и ускорений.
§ 1.3. Основы динамики механизмов
Главной задачей динамического расчета механизмов является определение закона движения его ведущего звена <рх = Ф (0 или Sj — s (0 в зависимости от сил и моментов от сил, действующих на звенья механизма, масс звеньев и их моментов инерции. Зная закон движения ведущего звена и передаточную функцию, можно определить закон движения ведомого звена, сравнить его с заданным и при необходимости внести соответствующие изменения в конструкцию. При динамическом расчете обычно определяют давления в кинематических парах, коэффициент полезного действия, характеризующий степень использования затрачиваемой энергии и, если необходимо, коэффициент неравномерности хода механизма в установившемся движении.
Силы, действующие на звенья механизма. К ведомому звену механизма приложены сила или момент полезных (производственных) сопротивлений, действующих по определенному закону, который зависит от технологического процесса, выполняемого механизмом. К ведущему звену приложены движущая сила или момент, которые создают положительную работу; полезные и вредные сопротивления — отрицательную. Характер изменения движущих сил (моментов) и сил (моментов) полезных сопротивлений в основном определяют закон движения звеньев механизма.
Для точного расчета необходимо учитывать силы и моменты от сил тяжести и инерции, значения которых будут известны, если конструкция механизма уже разработана (при предварительных расчетах силами тяжести и инерции пренебрегают или задаются их значениями).
В результате действия перечисленных сил в кинематических парах возникают нормальные давления и, как следствие, силы трения. Нормальные давления не создают работы, так как их направление перпендикулярно направлению относительного перемещения звеньев в кинематических парах. Силы трения производят работу, которая преобразуется в теплоту, рассеивающуюся в окружающую среду, и поэтому являются силами вредного сопротивления.
В зависимости от вида двигателя и выполняемой полезной работы движущие моменты (силы) и моменты (силы) полезных сопротивлений
могут зависеть от одного или нескольких кинематических параметров: пути, скорости, времени [Т = f (ср); Т = f (со); Т = f (t\9 Т = = f (ср, со)].Такие зависимости называют механическими характеристиками.
Силы трения возникают в элементах кинематических пар (на поверхностях или в точках соприкосновения звеньев). Различают два вида трения: трение скольжения и трение качения. В зависимости от степени разделения трущихся поверхностей смазкой трение скольжения подразделяют на граничное, полужидкостное и жидкостное. При граничном трении на трущихся поверхностях имеется тонкая масляная пленка (не более 0,1 мкм). При жидкостном трении трущиеся поверхности полностью разделены слоем смазки, при полужидкостном имеет место одновременно граничное и жидкостное трение.
В случае трения скольжения силу трения принято определять по формуле
КскМскРп, (1-9)
где — сила трения, с которой одно из трущихся тел действует на другое; /ск — коэффициент трения скольжения; Fn — сила нормального давления на трущихся поверхностях.
Равнодействующая сил Fn/CK и Л/Ск — сила — наклонена под углом р к силе нормального давления Fn. Угол р называют углом трения (feu = tg р).
В тех случаях, когда трущиеся поверхности разделены телами качения, надо учитывать сопротивление, возникающее при перекатывании, — силу трения качения Ff . Работа силы трения качения расходуется на деформацию контактирующих тел:
FfKMKFn, (1.10)
где /к — относительный коэффициент трения качения, который имеет значительно меньшее значение, чем коэффициент трения скольжения (в случае твердых металлических поверхностей) при полужидкостном режиме трения. Коэффициенты трения определяют экспериментально путем замера значений силы (момента) трения в кинематической паре и действующей на нее нагрузки.
Основные виды уравнений движения. Для решения главной задачи динамического расчета—определения закона движения звеньев механизма по заданным законам изменения моментов (сил) движущих и сопротивлений — следует рассматривать не отдельный механизм, а машинный агрегат, представляющий собой кинематическую цепь, состоящую из механизмов двигателя, передаточного механизма и технологической машины.
Рассмотрим простейший машинный агрегат, состоящий из одного подвижного звена — ротора двигателя, соединенного непосредственно с ротором технологической машины (твердое тело, вращающееся
вокруг неподвижной оси). Примерами такого машинного агрегата являются электродвигатель, соединенный с центробежным насосом или вентилятором, турбина, соединенная с генератором, и т. п.
Как известно из теоретической механики, уравнение движения в этом случае можно записать в виде
J — ^T, (1.
dZ
где J — момент инерции вращающегося тела (звена) относительно оси вращения; Т — разность моментов движущего и сопротивлений относительно оси вращения: Т = Тд — Тс.
Моменты движущие Тд и сопротивлений Тс могут быть функциями перемещения угла ф, скорости w или времени t.
Рассмотрим случай, когда моменты движущий и сопротивления являются функциями перемещения:
j (1.12)
а/
Для решения уравнения (1.12) его левую часть умножим и разделим на дф: J Л"д(ф) — Тс (ф). Отсюда имеем J со d со
Ф& <р£
т 1Тд«р) — Тс (cp)i dzp; J f codw -- { I7\ (<р) 7\. (ij1)] d<p. Ин-
СОо фо
тегрируя, получим
О)?- -0)2 7"
j |Гд((р) _Tc(<p)]dq>. (1.13)
Фо
Выражение (1.13) — уравнение движения механизма машинного агрегата в форме уравнения кинетической энергии.
Из уравнения (1.13) получим
г~П
(Ф)-Т(. (ф)|дф ]со§. (1.14)
Зная со со (ф), можно определить время движения машинного аг-tk. Фб dtp
регата: со ёфёЛ Тогда бф б/ со (ф), откуда ( d/ -- j ----------- .
К Фо Мф)
После интегрирования найдем
1 я
Г (Ъ.
Фо
где t — t (ф), откуда ф •- ф (/).
Приведение масс и моментов инерции. Для определения закона движения звеньев механизмов сложного машинного агрегата с одной степенью свободы удобно воспользоваться методом приведения масс и сил, при котором сложный механизм заменяют эквивалентным ему простым, имеющим одно подвижное звено — звено приведения. Звеном приведения удобно выбирать ведущее звено, так как обычно надо находить движущий момент (силу) при заданном моменте (силе) полезного сопротивления. Полученное решение переносят на исходную систему. Приведение масс делают из условия равенства суммы кинетических энергий звеньев исходного механизма и кинетической энергии звена приведения:
i — n
2 Et = EB, (1.16)
< = i
i = n
где 2 Ei — сумма кинетических энергий всех звеньев механизма; 1= 1
Еп — кинетическая энергия звена приведения.
Кинетическая энергия звена, совершающего плоскопараллельное движение, определяется уравнением
Ji 0)? Ш; V?
2 2
(1.17)
где Ji — момент инерции звена i относительно оси, проходящей через центр тяжести; — угловая скорость звена г, — скорость центра тяжести звена i.
При поступательном движении кинетическая энергия звена приведения определяется уравнением
En = (mav*)/2-, (1.18)
при вращательном движении — уравнением
En = (Jn^n)/2, (1.19)
где тп — приведенная масса механизма; — скорость звена приведения; /п— приведенный момент инерции механизма относительно оси вращения звена приведения; соп — угловая скорость звена приведения.
Подставляя Е, и Еп в (1.16), находим
i = n 21 i = 1 ( (D? rrtiV? \ mn № + (1-20) \ /
i~n ( 2 .• 1 \ 0)? • ГП; V2{ \ 0)2 2 <L21>
= 1 X
Решая уравнения (1.20) и (1.21) относительно тп и получим выражения для определения приведенной массы и приведенного момента инерции:
Т+М—Г|; <Е22>
L \ / \ t’n / J
^=2 N—У+М—Л- о-23*
~t L \ ®п / \ ®п / J
Приведенной массой называют условную массу, имеющую скорость звена приведения и обладающую в каждом рассматриваемом положении кинетической энергией исходного механизма. Приведенным моментом инерции называют момент инерции фиктивного твердого тела, вращающегося вокруг неподвижной оси с угловой скоростью звена приведения и обладающего в каждом рассматриваемом положении кинетической энергией исходного механизма.
Из (1.22) и (1.23) следует, что приведенная масса и приведенный момент инерции зависят от квадрата отношения скоростей. Следовательно, эти величины являются переменными, зависящими от положения механизма, когда передаточные отношения кинематических цепей механизма постоянны, приведенный момент инерции и приведенная масса также постоянны.
Приведение сил и моментов пар сил. Приведение сил и моментов пар сил производят из условия равенства суммы элементарных работ всех сил и моментов, действующих на звенья исходного механизма и элементарной работы приведенной силы или приведенного момента, действующего на звено приведения. При расчете элементарные работы сил и моментов заменяют мощностями. Это можно выразить уравнением
'v (1.24)
где 2 Pi — сумма мощностей сил и моментов, действующих на звенья исходного механизма; Рп — мощность приведенной силы или приведенного момента.
Если звено приведения движется поступательно, то все силы и моменты. действующие на звенья механизма, удобно приводить к силе В этом случае
Fп
где F d -- приведенная сила; - скорость звена приведения.
Если звено приведения вращается, то все силы и моменты, действующие на звенья механизма удобно приводить к моменту. Тогда
Р = Тп <оп,
где Тп — приведенный момент; <ои — угловая скорость звена приведения.
В общем случае на каждое звено механизма могут действовать сила и момент
Pi = Ti <0j + Ft Vi cos (1.25)
где Ti — момент, действующий на звено i; — угловая скорость звена i; Fi — сила, действующая на звено /; — скорость центра тяже-
сти звена i; — угол между направлениями силы и скорости.
Подставляя и Рп в (1.24), находим
2 (Ti(di+FiVi cos = Fnvn\ (1.26)
i = 1
i — n
2 tbcosyi) = Tn(On. . (1.27)
Решая уравнения (1.26) и (1.27) относительно Fn и Ти, получим выражения для определения приведенной силы и приведенного момента:
cos
(1.28)
(1.29)
Приведенной силой называют условную силу, приложенную к звену приведения, элементарная работа которой в каждом рассматриваемом положении равна сумме элементарных работ сил и моментов, действующих на звенья исходного механизма.
Приведенным моментом называют условный момент, приложенный к вращающемуся звену приведения, элементарная работа которого в каждом рассматриваемом положении равна сумме элементарных работ сил и моментов, действующих на звенья исходного механизма.
Из (1.28) и (1.29) видно, что приведенная сила и приведенный момент зависят от сил и моментов, действующих на звенья исходного механизма, а также от отношения скоростей (от передаточных отношений между отдельными звеньями исходного механизма и звеном приведения).
В результате введения понятий приведенной массы, приведенного момента инерции, приведенной силы и приведенного момента уравне
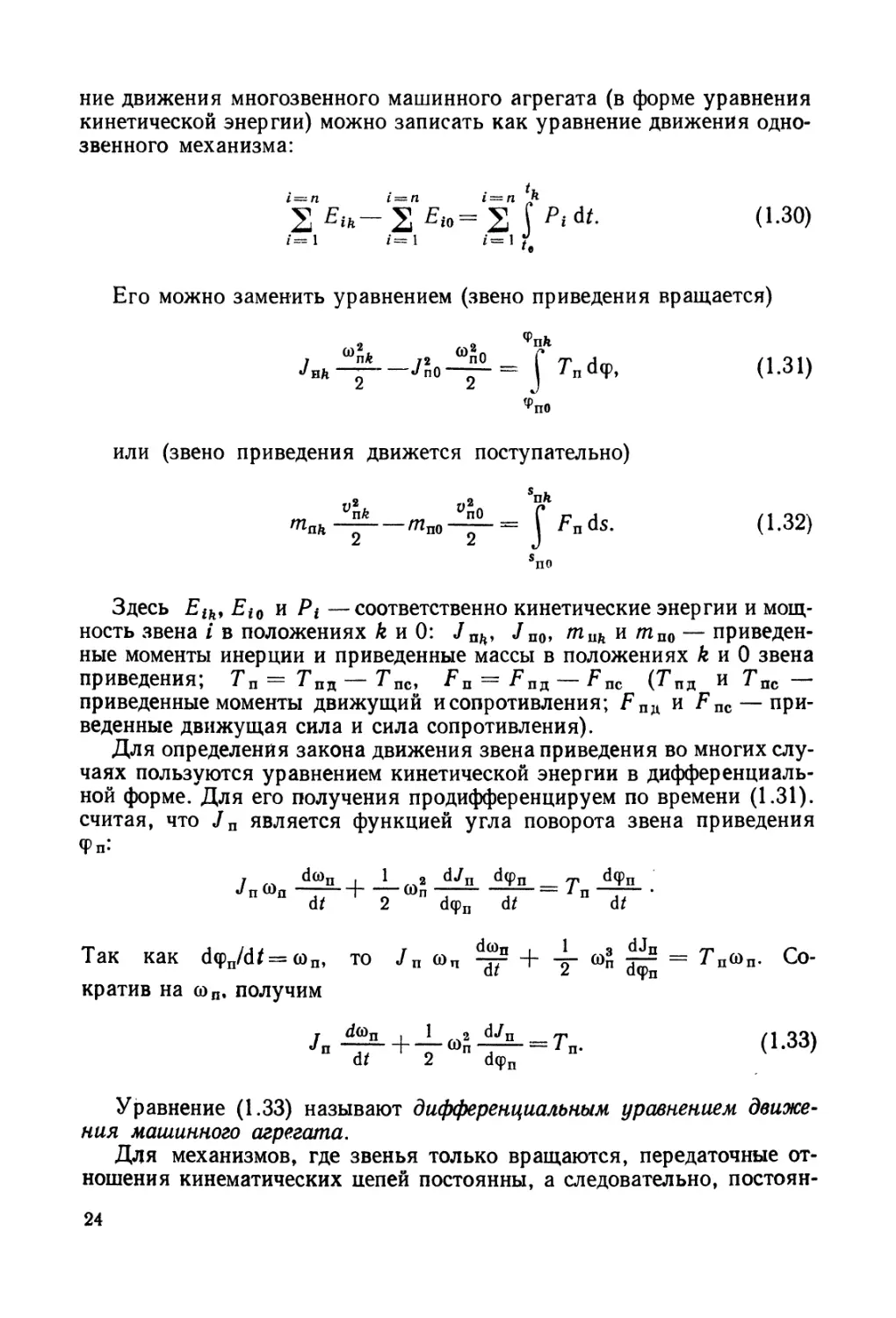
ние движения многозвенного машинного агрегата (в форме уравнения кинетической энергии) можно записать как уравнение движения однозвенного механизма:
1~п i — n i = n Ь
2 ^-2 Pi At. (1.зо)
i=\ z=]/e
Его можно заменить уравнением (звено приведения вращается)
7 72 ton0 Г /р J
Jяк " JпО “ I Тп Оф,
%0
или (звено приведения движется поступательно)
mah -------^nO —~ ” J Pn ds.
sno
(1.31)
(1.32)
Здесь Elh, Et0 и Pi —соответственно кинетические энергии и мощность звена / в положениях k и 0: J nh, Jп0, muh и пгП0 — приведенные моменты инерции и приведенные массы в положениях k и 0 звена приведения; Тп = ТПд Тпс, Fц — Fпд F Пс (Тпд и ТдС
приведенные моменты движущий и сопротивления; Гпд и Гпс — приведенные движущая сила и сила сопротивления).
Для определения закона движения звена приведения во многих случаях пользуются уравнением кинетической энергии в дифференциальной форме. Для его получения продифференцируем по времени (1.31). считая, что jn является функцией угла поворота звена приведения ф п*
j dcon । 1 2 dJn d(pn _71 d(pn
+7Wn^;i; 1п~-
Так как d<pn/d/=o)n, то Jn <»п 7ПГ = Тп<оп- Со-
Gt z офп
кратив на £оп. получим
/n^-+v“n4^ = Tn- <L33)
(1/ 2 d(pn
Уравнение (1.33) называют дифференциальным уравнением движения машинного агрегата.
Для механизмов, где звенья только вращаются, передаточные отношения кинематических цепей постоянны, а следовательно, постоян
ны их приведенные моменты инерции и (1.31) и (1.33) запишутся следующим образом:
2 _ 2
п0 = J 7'п (фи) dtp; (1.34)
<₽по
/п-^-=Т„. (1.35)
at
Эти уравнения соответственно совпадают с (1.13) и (1.11), написан
е. ее значения
ными для тела, совершающего вращательное движение.
Стадии движения машинного агрегата. В работе каждого машинного агрегата можно выделить три стадии движения: разгон, установившееся движение и выбег (рис. 1.10). В стадии р а з г о-н а работа движущих сил больше работы сил сопротивления. За счет этой разности работ скорость звеньев меняется от нуля до номинального значения. В стадии установившегося движения в зависимости от соотношения сил (моментов) движущих и сил (моментов) сопротивления скорость звеньев постоянна или изменяется циклически,
определенный промежуток времени — цикл. Из этого следует, что за время цикла приращение кинетической энергии равно нулю (работа сил движущих равна работе сил сопротивления).
Величину колебания скорости в стадии установившегося движения характеризуют коэффициентом неравномерности хода
6 -- ((Omax wmin)/^cp» (1.36)
т.
где соср (согпах +<от1п)/2 — средняя скорость, которую принимают за номинальную скорость в установившемся режиме работы.
Допускаемый коэффициент неравномерности хода [61 для многих машин задается. В этом случае при динамическом расчете необходимо проверить условие 6 < [6].
Для машинных агрегатов, имеющих постоянный приведенный момент инерции, коэффициент неравномерности хода вычисляют по формуле, полученной из (1.34) и (1.36), написанных для отрезка пути или времени, соответствующего изменению скорости от максимального значения до минимального:
» wn max wn min •'п
(₽wn max
J 7’п (ф) 4ф.
min
(1.37)
Умножим числитель и знаменатель (1.36) на значение <оср, которое заменим в числителе <оср = (<отах + <от1п)/2:
g___^тах ^mln ^тахЧ" tomin __ ^тах ^mjn
(0ср 2(dcp “wcp
ИЛИ
(^max : 6(i)Cp •
Подставив 6g)2cp в (1.37) вместо (<o2max — <o2inln)/2, получим
Ф“п max
Jn6(O2p— Tn(q))d(p,
min откуда
Фйп max
rn(<P)d(p
Из (1.38) следует, что в тех случаях, когда условие 6 < 161 не выполняется, нужно увеличивать значение J п (ставить маховик). Л^аховик будет иметь меньшую массу, если его установить на вал, имеющий большую частоту вращения.
В стадии выбега работа движущих сил (момента) равна нулю (двигатель отключен) и действуют только силы сопротивления. Соответственно скорость звеньев меняется от номинального значения до нуля.
Определение давлений в кинематических парах плоских механизмов. Давления в кинематических парах механизма удобно определять кинетостатическим расчетом, применяя принцип Даламбера. Согласно этому принципу, равновесие звеньев рассматривается под действием приложенных к ним внешних сил и сил инерции. В этом случае для определения давлений в кинематических парах можно применить уравнения статики ZFX = 0; %Fy -= 0; ST ^0 Для звена, совершающего плоскопараллельное движение, все элементарные силы инерции могут быть сведены к одной силе инерции Ти — главному вектору сил инерции, приложенному к центру масс звена, и к главному моменту сил инерции Ти (рис. 1.11).
Силу инерции (направлена противоположно ускорению центра масс) определяют по формуле
Л, = та,, где т — масса звена; as — ускорение центра масс звена.
Момент сил инерции (направлен противоположно угловому ускорению) находят из уравнения
где Js — момент инерции звена относительно оси, проходящей через центр масс и перпендикулярной плоскости движения звена; е — угловое ускорение звена.
При кинетостатическом расчете, так же как и при кинематическом, механизм делят на ведущее звено и присоединенные к нему структурные группы. Если звенья механизма входят только в низшие пары, то условие статической определимости структурной группы должно удовлетворять уравнению 2р - Зп (число неизвестных равно числу уравнений), где р — число низших пар, п — число подвижных звеньев.
Для каждого звена группы, совершающей плоскопараллельное движение, можно составить три уравнения равновесия: сумма проекций сил на ось х равна нулю, сумма проекций сил на ось у равна нулю, и сумма моментов сил относительно F
оси перпендикулярной плоскости \ Л”
движения равна нулю. Число неиз- \ г * ь
вестных равно 2р, так как каждая -44-—ДЛ. гД/У—
низшая кинематическая пара накла- * -А
дывает два условия связи.
Если рассматривать равновесие *** каждого звена отдельно, то в общем случае число неизвестных больше Рис- 111
числа уравнений (для одного звена можно написать три уравнения равновесия, а число неизвестных, когда звено входит в две низшие пары, равно четырем).
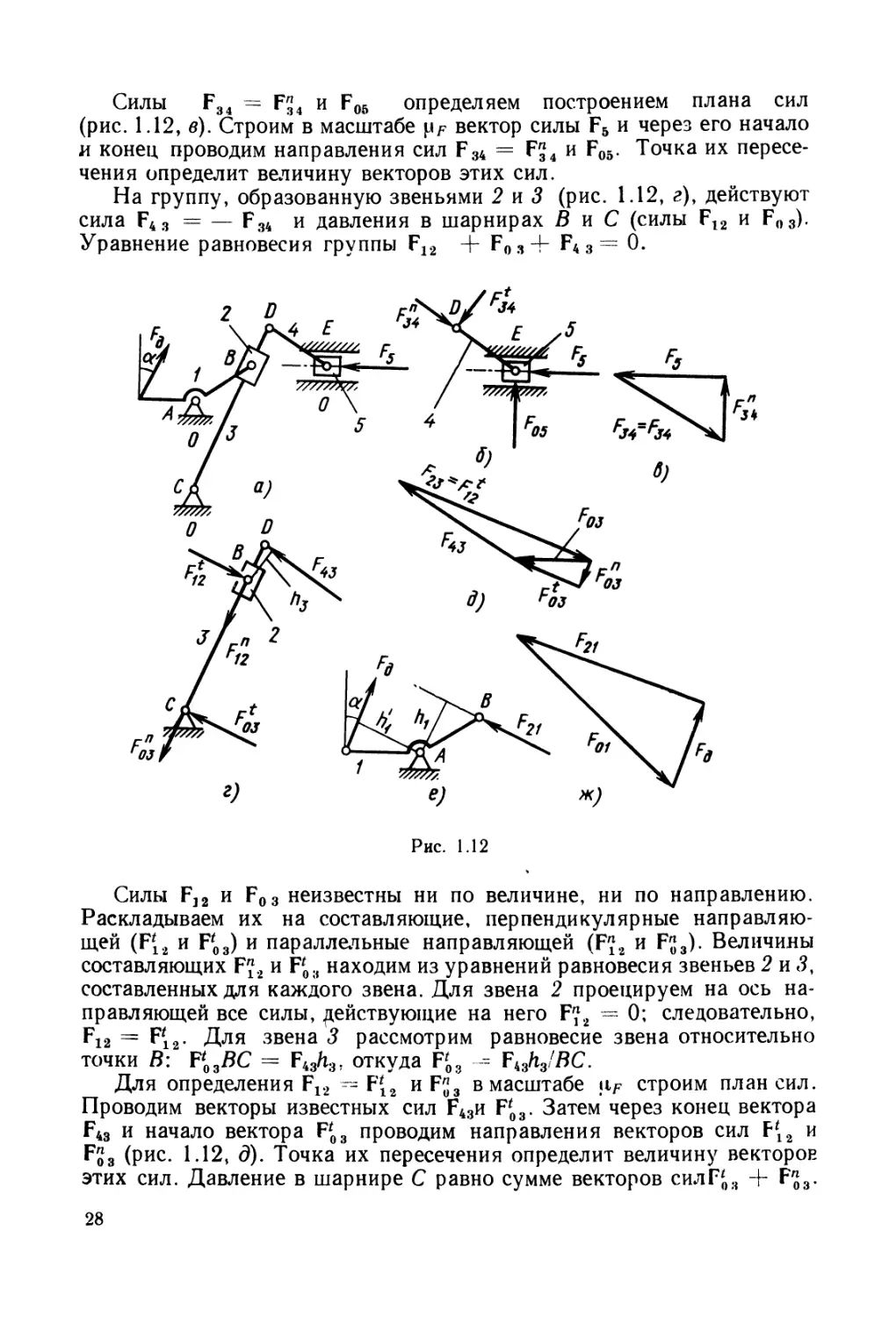
На рис. 1.12 приведен пример определения давлений в кинематических парах многозвенного механизма методом планов сил. Механизм состоит из ведущего звена (кривошип /) и двух последовательно присоединенных структурных групп, каждая из которых состоит из двух звеньев. Первую группу образуют ползун 2 и кулиса 3, вторую—шатун 4 и ползун 5. К ведомому звену механизма (ползун 5) приложена сила полезного сопротивления F5, а к кривошипу 1 — неизвестная движущая сила Ед. Силы инерции в данном случае не учитывают, так как массы звеньев незначительны (рис. 1.12, а).
Расчет начинаем со второй группы (рис. 1.12, б), в которую входит звено <5, нагруженное заданной силой полезного сопротивления. Отсоединяем вторую группу от механизма. К шарниру D прикладываем неизвестные по величине составляющие давления звена 3 на звено 4: F*4 в направлении, перпендикулярном DE. и Fj4 по направлению DE. Давление направляющей Е()5 на ползун 5 направлено перпендикулярно ей.
Напишем уравнение равновесия группы:
F«4+r34 + F5 + FO5-0.
Силы Fj4, Fz34 и Fo,5 известны только по направлению. Силу Р34 найдем, рассматривая равновесие звена 4 относительно шарнира Е : : Р34 DE = 0; следовательно, Р34 = 0.
Силы F34 — F"4 и F05 определяем построением плана сил (рис. 1.12, в). Строим в масштабе pF вектор силы F5 и через его начало и конец проводим направления сил F34 = Fj4 и Fo5. Точка их пересечения определит величину векторов этих сил.
На группу, образованную звеньями 2 и 3 (рис. 1.12, г), действуют сила F43 = — F34 и давления в шарнирах В и С (силы F12 и F03). Уравнение равновесия группы F12 + F03+ F43 — 0.
Рис. 1.12
Силы F32 и F03 неизвестны ни по величине, ни по направлению. Раскладываем их на составляющие, перпендикулярные направляющей (F*2 и F03) и параллельные направляющей (F“2 и F£3). Величины составляющих FJ2 и F03 находим из уравнений равновесия звеньев 2 и 3, составленных для каждого звена. Для звена 2 проецируем на ось направляющей все силы, действующие на него Р*2 = 0; следовательно, F12 = F12- Для звена 3 рассмотрим равновесие звена относительно точки В: Р03ВС = F43/i3j откуда F'O3 -•= F43h3/BC.
Для определения F12 Р12 и Fj3 в масштабе jiF строим план сил.
Проводим векторы известных сил Р4зи F'o3. Затем через конец вектора F43 и начало вектора Р03 проводим направления векторов сил Р12 и Fj3 (рис. 1.12, д). Точка их пересечения определит величину векторов этих сил. Давление в шарнире С равно сумме векторов силР{)3 + F"3.
Движущую силу Рд найдем из уравнения равновесия кривошипа относительно точки А (рис. 1.12, е): — ^21^*
Величина и направление давления в шарнире А зависят от способа передачи движения кривошипу. Если движение передается парами сил (моментом), то F0] — F21. При передаче движения сосредото-
ченной силой, например зубчатой передачей, давление находим, построив план сил по уравнению равновесия кривошипа (рис. 1.12, ж) F0I + F21 •+' Рд 0 (направление вектора Ед зависит от расположения зубчатых колес в передаче двигатель — кривошип).
Механические критерии качественной оценки механизмов. Качество механизмов принято оценивать по соотношению работ движущих сил, сил полезных и вредных сопротивлений. Для этого рассматривают период установившегося движения, так как при разгоне часть работы движущих сил расходуется на приращение кинетической энергии механизма, а при выбеге работа движущих сил равна нулю.
В период установившегося движения
— ^пс “Ь ^вс» (1.39)
где А д — работа движущих сил; Лпс — работа сил полезных сопротивлений, для преодоления которых создана машина; Лвс — работа сил вредных сопротивлений, затрачиваемая на преодоления сил трения в кинематических парах и сопротивления среды.
Разделив левую и правую части уравнения (1.39) на Лд. получим
^псМц + АЪС1АЛ =1. (1-40)
Отношение А Пс/Л называют коэффициентом полезного действия (КПД), а Лвс/Лд = ф — коэффициентом потерь.
Из (1.40) следует, что ц г ф = 1. Следовательно, чем больше КПД, тем меньше коэффициент потерь. В идеальном случае, когда вредные сопротивления отсутствуют, ц1. Если при установившемся движении изменение кинетической энергии незначительно, то отношение работ может быть заменено отношением мощностей ц ~ РПс^д* Ф ^вс
При проектировании новых механизмов необходимо уметь определять предполагаемый КПД расчетным путем в зависимости от схемы соединения отдельных механизмов между собой и от значения их КПД (эти данные имеются в соответствующих справочниках).
Отдельные механизмы, образующие сложный механизм, могут быть соединены последовательно, параллельно или иметь смешанный характер соединения. На рис. 1.13 показана схема последователь н о г о соединения механизмов. Для каждого механизма значение КПД определяется уравнениями
ц1“Р1/Рд; ц2 — Р2/Р1*» Нз ~ ^з/^2’•••> Лп ^п/^п-1*
Перемножая почленно эти равенства, получим тиЛгЛз • • Лп -= Рп/Рд.
Рис. 1.13
Отношение Рп1Р& Лд// представляет собой КПД сложного механизма
Лдп ~ Hi ЧгИз»---» Пн- (1-41)
Таким образом, при последовательном соединении механизмов общий КПД равен произведению КПД отдельных механизмов.
На рис. 1.14 показана схема параллельного соединения отдельных механизмов. Как правило, задаются мощность полезного сопротивления РН|С и КПД tj,- каждого механизма. Общий КПД такой системы
I = п I -- п
п 2 P,11C/S Р;д.
i1 i— 1
Мощность движущих сил каждого механизма Р,д можно выразить через мощность полезных сопротивлений и КПД Р,д PiucJ^i-
Подставляя Р/д в исходное уравнение, находим
n-'i" ^пс / Vn(Pinc/ni). (1-42)
В случае смешанного соединения сначала подсчитывают КПД отдельных групп механизмов, соединенных последовательно и параллельно, а затем общий КПД по уравнению, соответствующему виду соединения групп друг с другом.
, Пример 1.2. Подобрать электродвигатель, определить передаточное отношение редуктора, время разгона и величину ускорения при разгоне азимутального привода наземной радиолокационной антенны 1 (рис. 1.15). Заданы наибольший ветровой момент сопротивления вращения антенны Тс — 66,5 Н м, момент инерции антенны относительно ее оси вращения JА = 2,98 кг-м2, скорость вращения антенны в установившемся режиме со4 -- 6,3 рад/с (п - 60 об/мин). Редуктор зубчатый. Суточный коэффициент использования равен 0,6.
Решение. 1. Мощность электродвигателя 2
Рд = Рпс/т) = Тс о)л/т] =66,5-6,3/0,9 = 470 Вт.
По полученному значению мощности выбираем по каталогу закрытый обдуваемый асинхронный электродвигатель 4А71В6УЗ. Основные данные электродвигателя- номинальная мощность Рн — 0,55 кВт; номинальная скорость вращения <он 95 рад/с (пн — 960 об/мин), номинальный момент Тн ~ 5,8 Н-м; начальный момент То = 12 Н-м; максимальный момент Ттах -- 13,7 Н-м; маховой момент ротора GD2 — 81 • 10~4 кг-м2; момент инерции ротора Jp — GD2> /4 ~ 0,002 кг-м2.
2. Передаточное отношение редуктора
ip = (0н/<*>л = 95/6,3 ~ 15.
Рис. 1.14
Рис. 1.15
Такое передаточное отношение можно осуществить двухступенчатым зубчатым редуктором (т) « 0,9).
3. Для определения времени разгона удобно воспользоваться уравнением кинетической энергии в дифференциальной форме. Заменим двигатель, редуктор и антенну одним вращающимся звеном — звеном приведения, имеющим приведенный момент инерции (Jn) и находящимся под действием приведенного момента (Тп - Тпд — Тпс). Интегрирование этого уравнения сразу определит искомую величину.
Звеном приведения выбираем ротор электродвигателя, поэтому Тпд Тд. Окончательно уравнение движения запишем в следующем виде:
d со _
*^п ^пс’
d t
откуда dZ ——-----—dco;
' Д ' ПС
Для упрощения расчетов момент электродвигателя Тд считаем постоянным в течение всего времени разгона:
ТД-(ТО4 ГП1ах)/2 ~ (12+13,7) 2-12,85 [Н-м].
Конструкция редуктора неизвестна, поэтому на основании анализа аналогичных конструкций примем приведенный момент инерции зубчатых колес и валов редуктора равным 0,5 момента инерции ротора. Приведенный момент инерции всего привода
~ A0,5Jp4+4((ол/щн)2 - 0,002 + 0,5-0,002 +
4 2,98 (6,3 95)2 = 16,25-10“ 3 кг.м2.
Приведенный момент сопротивления (с учетом вредных сопротивлений)
6,3 1 л л т,
66,5-----------4,9 Н-м.
95 0,9
Подставляем полученные значения Jn, Гд и Тпс в уравнение движения:
16,25-10~3 / ----------- 95 — 0,195 с.
р 12,85—4,9
4. Угловое ускорение, при разгоне (среднее) звена приведения: ер = сон/(р — — 95/0,195 — 486 рад/с2 — ротора электродвигателя; ел = о>л//р ~ 6,3/0,195= = 33 рад/с2 — антенны.
Пример 1.3. Определить коэффициент неравномерности хода азимутального привода наземной радиолокационной антенны в установившемся режиме, когда момент сопротивления Тс — То (1 + 0,5 sin ф), где То — начальный момент
сопротивления, ф — угол поворота антенны. Движущий момент (Тд) в установившемся режиме принять постоянным. Все остальные данные взять из примера 2.
Решение. 1. Коэффициент неравномерности хода находим по (1.38)
Фа
J [Гд (ф)-Тс(<р)] dq>
----------
*^П Юср
Величины приведенного момента инерции и средней угловой скорости звена приведения в установившемся режиме (соср = = сон) известны из примера 1.2. Для определения разности работ движущего момента и момента сопротивления при повороте антенны от положения фх, где (о = comax, до положения ф2, где со ~ (omin, строим графики движущего момента Тд (ф) и приведенного момента сопротивлений Тпс(ф).
Движущий момент на валу антенны находим из условия равенства работ движущего момента и момента сопротивлений за цикл. Переменная часть мо-
мента сопротивлений зависит от sin ф, цикл в установившемся режиме будет соответствовать периоду sin ф = 2л:
2 л
Гд 2л = | Тс (ф) d ф; о
2 л
Тд2л=( То (1 4-0,5 sin ф) d ф = То 2л4-0,5Т01—cos п ~Т0 2л. 0
Следовательно, Тд — То. При ф — л/2 sin ф = 1 и момент сопротивления имеет максимальное значение (ГСтах ~ 66,5 Нм) {см. прим 1.2|:
ГС тах = (1+О,5.1)То = 1,5То,
откуда
ТО = ТС тах/1,5=66.5/1,5 = 44,4 Н-м.
Графики Тд (ф) и Тс (ф) приведены на рис. 1.16, а, из которого следует, что угловые скорости сотах и соответствуют точке пересечения графиков
Тд (ф) и Тс(ф). В конце участка избыточной отрицательной работы находится точка, соответствующая o)min, а в конце участка избыточной положительной работы — точка, соответствующая (огнах. График со = (ф) показан на
рис. 1.16, б.
Разность работ движущего момента и момента сопротивления на отрезке от Ф1 ~ 0 до (р2 — я
<₽2 л
] Гд (Ч>)— Тс (<р)1 d <р = J [То— Л (1+0,5 sin <р» d ф =
Ф1 о
= Т0 л — 70 л —О,5То|— cos <p|q = —Т0 = 44,4 Н-м.
Подставляя полученное значение разности работ в исходное уравнение, найдем
<₽2
у [Т’д (Ф) — тс (ф)] d(p
Ai 16,25-10“ 3 • 952
Если полученное значение коэффициента неравномерности больше допускаемого, то на ведущий (быстроходный) вал привода следует установить маховик. Для определения момента инерции маховика уравнение (1.38) надо решить относительно 7П, подставив в него допускаемое значение коэффициента неравномерности.
§ 1.4. Основы теории точности механизмов
Основные понятия. Точность механизма характеризуется отклонениями (погрешностями) движения его ведомого звена от заданного закона. Чем больше погрешность, тем менее точен механизм.
Для отличия зависимости, реально воспроизводимой механизмом, от теоретической сравнивают законы движения действительного и идеального, так называемого теоретического механизма. Теорети-
ческий механизм не содержит неточностей в размерах, конфигурации звеньев и точно воспроизводит заданный закон движения.
Основными характеристиками точности механизмов являются ошибка положения, ошибка перемещения и мертвый ход.
Ошибкой положения действительного и теоретического механизмов называется разность в по
ложениях их ведомых звеньев при одинаковых положениях ведущих. Для кривошипно-ползунного механизма (рис. 1.17) ошибка положения AS = S' — S. Положения ведомых звеньев теоретического (точка В) и действительного (точка В') механизмов различны, так как при изготовлении размеры О А' и А'В' были увеличены по
сравнению с теоретическими.
Под ошибкой перемещения понимают разность перемещений ведомых звеньев действительного и теоретического механизмов при одинаковых перемещениях их ведущих звеньев. На рис. 1.18 показан ранее рассмот
ренный механизм с погрешностями звеньев Аг и AZ при перемещении его из положения I в положение 2, характеризуемые углами и ф2. Точка В теоретического механизма из положения Вх переместится на величину Sn в точку В2, а точка В действительного механизма — из В! в Bi, переместившись на S'n. Ошибка перемещения механизма А/п -= Sn — Sn. Ее можно представить и как разность ошибок положения механизма в точках 1 и 2: ASn = AS] — AS2.
Мертвый ход является перемещением, вызванным изменением направления сил, приложенных к ведомому звену, при неподвижном ведущем звене механизма. Иначе мертвый ход можно определить как от-
ставание ведомого звена, возникающее при реверсировании движения будущего. Он появляется из-за наличия зазоров в кинематических парах и соединениях, а также упругих деформаций звеньев.
Точность передаточного отношения характеризуется величиной А/ = i Д — iT, где / д и iT — действительное и теоретическое передаточные отношения.
Ошибка положения ведомого звена. Приведенные ранее ошибки определялись при одинаковом положении ведущих звеньев действительного и теоретического механизмов, что является допущением. Поэтому вводят еще понятия ошибок положения и перемещения ведомого звена механизма, под которыми понимают разницу положений и перемещений ведомых звеньев действительного и теоретического механизмов, происходящую из-за неточности действительного механизма и погрешности положения его ведущего звена. На рис. 1.19 определяется погрешность положения ведомого звена механизма ASBM = S' — S.
Причины появления ошибок механизма. Отклонения от теоретических законов движения звеньев действительных механизмов происходят по следующим причинам: технологическим, схематическим, эксплуатационным и температурным.
Технологические ошибки. Источниками этих ошибок являются неточности станков, деформации системы станок — приспособление — инструмент — деталь, неоднородность материала детали, неточность сборки.
Схематические ошибки. Часто стремление воспроизвести теоретический закон движения звеньев механизма приводит к сложной кинематической схеме. Выполнение этой схемы приводит к значительным погрешностям. Поэтому при конструировании механизма применяют обычно более простую схему, приближенно воспроизводящую заданный закон движения. Простота конструкции повышает точность такого механизма, и она оказывается, выше, чем у механизма с точной, но сложной схемой.
Ошибка схемы механизма ASCX как источник погрешности может быть определена разностью перемещений ведомых звеньев механизмов, изготовленных по упрощенной схеме и по точной: ASCX = 5Д — ST.
Рис. 1.20
Например, для преобразования поступательного движения ведущего звена во вращательное движение ведомого могут быть использованы зубчато-реечная передача (рис. 1.20, а) или синусный механизм (рис. 1.20, 6). Зависимость между перемещениями рейки S и углом поворота колеса фк — линейная (прямая 1 на рис. 1.20, в): фк = S/r.
Для синусного механизма угол поворота ведомого звена (кривая 2 на рис. 1.20, в) <рс — arcsin (S/l).
Погрешность схемы, вносимая такой заменой, при одинаковом перемещении ведущего звена S и г = /
д<Рсх = <Рк—Ч'С = (5//) — arcsin (S/l).
При малых значениях S ошибка схемы Афс х может оказаться несущественной, в то время как технологически второй механизм проще.
Эксплуатационные ошибки. При работе механизмов основными причинами погрешностей являются влияние сил и изменение размеров и формы звеньев в зависимости от длительности эксплуатации. Действие сил приводит к ошибкам, вызванным деформацией. При износе трущихся поверхностей изменяется характер сопряжения деталей, в результате чего появляются перекосы, увеличиваются зазоры и мертвый ход.
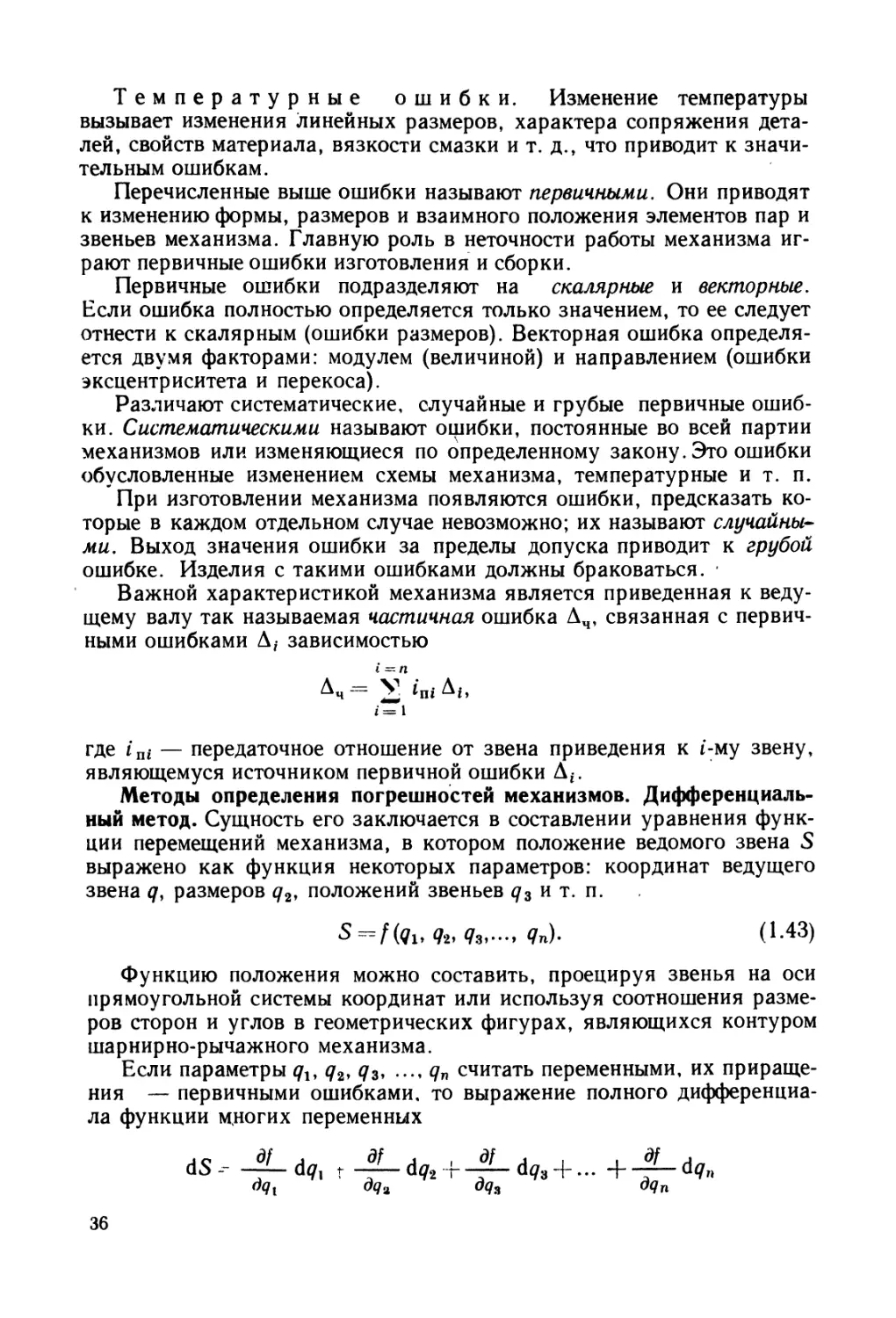
Температурные ошибки. Изменение температуры вызывает изменения линейных размеров, характера сопряжения деталей, свойств материала, вязкости смазки и т. д., что приводит к значительным ошибкам.
Перечисленные выше ошибки называют первичными. Они приводят к изменению формы, размеров и взаимного положения элементов пар и звеньев механизма. Главную роль в неточности работы механизма играют первичные ошибки изготовления и сборки.
Первичные ошибки подразделяют на скалярные и векторные. Если ошибка полностью определяется только значением, то ее следует отнести к скалярным (ошибки размеров). Векторная ошибка определяется двумя факторами: модулем (величиной) и направлением (ошибки эксцентриситета и перекоса).
Различают систематические, случайные и грубые первичные ошибки. Систематическими называют ошибки, постоянные во всей партии механизмов или изменяющиеся по определенному закону. Это ошибки обусловленные изменением схемы механизма, температурные и т. п.
При изготовлении механизма появляются ошибки, предсказать которые в каждом отдельном случае невозможно; их называют случайными. Выход значения ошибки за пределы допуска приводит к грубой ошибке. Изделия с такими ошибками должны браковаться.
Важной характеристикой механизма является приведенная к ведущему валу так называемая частичная ошибка Лч, связанная с первичными ошибками Д| зависимостью
л,- у" .-„,4,,
i = 1
где ini — передаточное отношение от звена приведения к t-му звену, являющемуся источником первичной ошибки Af.
Методы определения погрешностей механизмов. Дифференциальный метод. Сущность его заключается в составлении уравнения функции перемещений механизма, в котором положение ведомого звена S выражено как функция некоторых параметров: координат ведущего звена q, размеров q2, положений звеньев q3 и т. п.
s f (Q1, q3.... qn). (1-43)
Функцию положения можно составить, проецируя звенья на оси прямоугольной системы координат или используя соотношения размеров сторон и углов в геометрических фигурах, являющихся контуром шарнирно-рычажного механизма.
Если параметры q^ q2, q3, ..., qn считать переменными, их приращения — первичными ошибками, то выражение полного дифференциала функции многих переменных
dS- t JLdqi + JLdq3 + ... + ~^~dqn
d<?t dq2 aq3 dqn
можно представить как ошибку положения механизма, являющуюся суммой частных погрешностей (знаки дифференциала заменяем знаком ошибок):
AS = +^L + -н...+Д^, (1.44)
д<71 ^2 д<7з
где А^, Aq\2, Д<7з, ..., &qn — первичные ошибки параметров дг, q2.
...»
Частная погрешность определяется значением первичной ошибки \q параметра и коэффициента влияния (частной производной функции по параметру df/dq).
Дифференциальный метод позволяет определять погрешность механизма, если имеется функциональная зависимость между положением
ведомого звена и параметрами, содержащими ошибки. Недостатком дифференциального метода является то, что в нем не учитываются первичные ошибки параметров, не вошедшие в функциональную зависимость положения механизма.
Пример 1.4. Найти погрешность положения AS звена 3 кривошипно-пол-
Рис. 1.21
зунного механизма, определяемого ко-
ординатой S (рис. 1.21). Погрешность Д5 возникает из-за ошибок в размерах: звена / (Дг), звена 2 (Д/), эксцентриситета (Дй). Положение ведущего звена, определяемое углом ф, соответствует заданному.
Решение. Для получения функции положения механизма спроецируем его (контур) на оси координат х и у:
г cos (р + / cos р — S, I г sin <р Ц-h - - I sin р. I
(1-45)
Продифференцируем эти уравнения по параметрам г, /, Л, Р и, перейдя к конечным приращениям параметров, получим
cos Дг j cos рД/ — / sin рДр Д5, (1.46}
sin фДг 4- ДЯ - sin рД/ +1 cos РДр. (1.46')
Погрешность угла Др является неизвестной величиной, возникшей из-за перечисленных первичных ошибок. Из (1.46)' найдем
Др’-
sin фДг — sin рД/ г ДЯ / cos Р
Подставив ДР в (1.46), найдем погрешность положения механизма, выраженную через заданные величины (значение угла р в зависимости от ф получим из уравнения проекций контура механизма на ось у):
АС, А , о. , , . о sin фДг—Sin рд/-Г-ДЛ cos (<р 4 0)
AS==cos фДг-f-cos РД / — I sin р------------------- -------------Дг г
Y н / cos р cos р
4- —Ц- Д/-^РДЯ. (1.47)
COS р
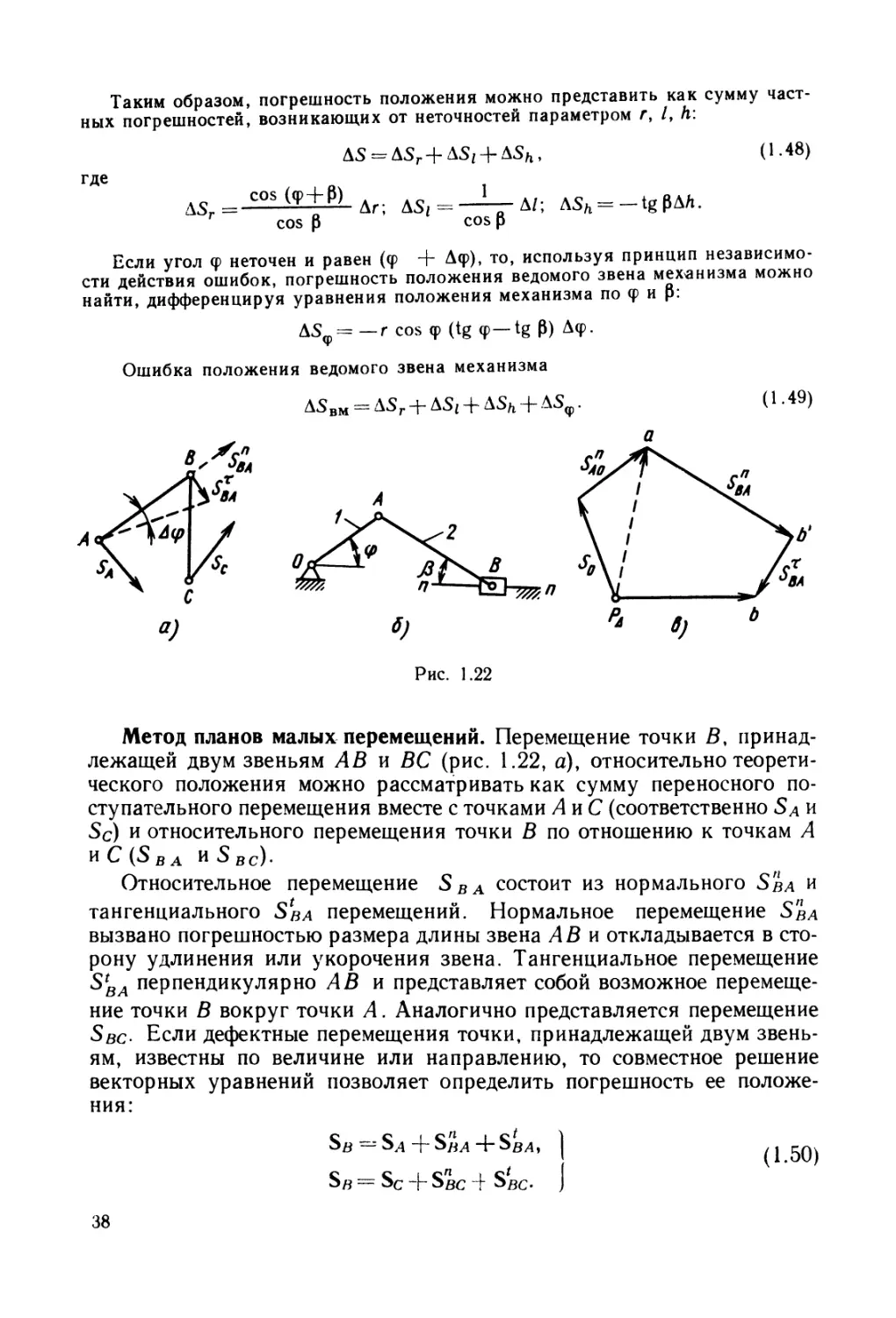
Таким образом, погрешность положения можно представить как сумму частных погрешностей, возникающих от неточностей параметром г, /, h\
\S = \Sr + \Sl + \Sh, (1.48)
где
= cos (<p+.g) ц ASh = _tgpAA.
r cos Р cos Р
Если угол ф неточен и равен (ф 4- Дф), то, используя принцип независимости действия ошибок, погрешность положения ведомого звена механизма можно найти, дифференцируя уравнения положения механизма по ф и р:
Д$ф = —г cos <р (tg qp— tg 0) Дф.
Ошибка положения ведомого звена механизма
Метод планов малых перемещений. Перемещение точки В, принадлежащей двум звеньям АВ и ВС (рис. 1.22, а), относительно теоретического положения можно рассматривать как сумму переносного поступательного перемещения вместе с точками АиС (соответственно Sa и Sc) и относительного перемещения точки В по отношению к точкам А и С (S в а и S вс).
Относительное перемещение SBa состоит из нормального Sba и тангенциального Sba перемещений. Нормальное перемещение Sba вызвано погрешностью размера длины звена АВ и откладывается в сторону удлинения или укорочения звена. Тангенциальное перемещение перпендикулярно АВ и представляет собой возможное перемещение точки В вокруг точки А. Аналогично представляется перемещение Sbc- Если дефектные перемещения точки, принадлежащей двум звеньям, известны по величине или направлению, то совместное решение векторных уравнений позволяет определить погрешность ее положения:
S# — Sa + S/м+ Sba, j (150)
Sb = Sc + Sbc 4 Sbc- j
При построении плана малых перемещений удобно за начало отсчета ошибок рд принять положение элементов стойки, с которыми соединяется ведомое звено (шарнир или направляющая).
На рис. 1.22, б показано построение плана малых перемещений для кривошипно-ползунного механизма. Положение направляющей и — п принимаем за теоретическое и связываем с ним систему координат. Предположив, что центр вращения О кривошипа 1 смещен относительно теоретического положения на величину So, перемещение точки А от своего теоретического положения представим в виде
Sa = So + Sao = So + Sao H~ Sao.
В соответствии с написанным уравнением к вектору So на плане прибавим вектор Sao, параллельный АО. Считая, что положение ведущего звена ОА характеризуется заданным углом <р, получим тангенциальное перемещение Sao 0 (в других случаях оно может быть определено как Sao - Аф/ Ао и отложено на плане). Отрезок рд а на плане выражает абсолютное перемещение точки А механизма (рис. 1.22, в).
Перемещение точки В определим по (1.45). Увеличение длины шатуна АВ отложим в виде вектора Sb а параллельно АВ. Точка В механизма может лежать только на линии п — и. положение которой будем считать совпадающим с теоретическим. Для соблюдения этого условия необходимо довернуть шатун АВ. На плане перпендикулярно Sb а проводим отрезок S*BA до пересечения с направлением движения ползуна В. Отрезок рьЬ на плане является ошибкой положения ползуна В.
Для определения угловых ошибок положения звеньев соответствующие тангенциальные перемещения точек в относительном смещении нужно разделить на длину звеньев (например, в повороте шатуна 2 ошибка будет Ар Sba'IabY
ГЛАВА 2
ПЕРЕДАТОЧНЫЕ МЕХАНИЗМЫ
§ 2.1. Фрикционные механизмы
Фрикционными называют механизмы (передачи), передающие движение посредством сил трения, возникающих между звеньями при наличии нормального давления в точках контакта. Такие передачи применяют для преобразования вращательного движения с одной скоростью во вращательное с другим значением скорости или в поступательное движение.
Существует два вида фрикционных передач: непосредственного контакта и с использованием гибкой связи — ременные передачи. Оба
вида передач имеют конструкции с постоянным или переменным передаточным отношением, они дешевы в изготовлении, работают без шума. Их недостатки: большие габариты, малая нагрузочная способность, наличие скольжения,что не позволяет их использовать в приводах, где передаточные отношения должны иметь строго постоянную величину.
Фрикционные механизмы непосредственного контакта. На рис. 2.1 приведены схемы фрикционных передач непосредственного контакта, имеющие постоянное передаточное отношение. На рис. 2.1, а сила нормального давления Fn создается пружинами и приложена к
подвижным опорам катка 2. На рис. 2.1, б сжимающая катки сила Fn создается пружиной (сила Fnl), сила Fn2 — реакция опор. На рис. 2.1, в нормальное давление Fn на торцовых поверхностях катков создается силами упругости половин 2' и 2" катка 2.
Механизмы этого вида применяют в конструкциях лентопротяжных устройств, а также в конструкциях верньеров. Одним из достоинств фрикционных передач является возможность бесступенчатого изменения передаточного отношения. Такие механизмы называют вариаторами (рис. 2.2).
Кинематический расчет. Передаточное отношение механизма находят из условия равенства окружных скоростей в точках контакта = v2, Vi = v2 = g)2D2/2; (DjOi =- co2Z)2, откуда f12 (or
'co2 D2!Dx. С учетом упругого и кинематического скольжений
(2-1)
i - D*
12 0,(1-8) ’
где D± и D2 — диаметры катков; 8 — коэффициент скольжения (8 — 0,001 4- 0,003).
Для механизмов с коническими катками (рис. 2.1, б) передаточное отношение удобно выразить через углы между общей образующей и осями вращения катков
• _ ^срг 2ОР sin 62 _ sin д2
12 DCpi 20Р sin 6г sin б!
или с учетом скольжения
. sin 62
112 — ~-------—Г
(1 —е) sin о
Если 6i + 62 = л/2, то sin 6i = cos 62 и тогда
*12 = tg 62/(1 — е).
(2-2)
(2.3)
Кинематической характеристикой вариатора является диапазон регулирования
D Юатах /*12 min *12 max (2 4)
C02mln ^х/^гтах *12 min
ЕСЛИ ii2mlm l/*12max> TO
П_____ *12 max ;2
— —----------= *12 max-
’/<12 max
(2-5)
Такие вариаторы называют симметричными. Угловую скорость их ведущего вала определяют по заданным значениям максимальной и минимальной скоростей ведомого вала:
(£>1 у (02 max (02 min.
(2.6)
Существует два способа изменения передаточного отношения. При первом (рис. 2.2, а, б) радиус ведущего катка гх постоянный, а радиус ведомого г2 — переменный. Для таких схем
• __ ®1 _ Г2тах . • _ ®1 _ Г2Ш1П
*12 max — Г » *12 mln 7i Г ♦
®2 min ®2тах ri U е)
£) =. 112 т ах ~ г2 max (2 7)
*12 min r2min
При втором (рис. 2.2, в, г) изменяются одновременно радиусы ведущего и ведомого катков. Тогда
Г2Ш1П
; ___ _________ r2max ; __ W
*12 max-----------Z1 ч > *12 min е ~ Z1 v,
<B2mln riminU—8) ®2max rimaxU 8)
*12 max r2 max ri max (2 8)
*12min r2min ri min
В этих вариаторах, как видно из (2.7) и (2.8), диапазон регулиройа-ния больше.
Силовой расчет. Окружная сила, которой может быть нагружена фрикционная передача, должна быть меньше силы трения, возникающей в зоне контакта: Ft < Ff; Ff — fFn; Ft <. fFn, откуда
Fn>Ftlf,
где f — коэффициент трения; Fn — сила нормального давления в зоне контакта.
Из-за непостоянства коэффициента трения при определении силы, с которой надо сжать катки, в расчетное уравнение вводят коэффициент запаса Р = 1,25-4-2, тогда
Fn = ^Ft/f. (2-9)
Сила, действующая на подшипники и валы фрикционной передачи с цилиндрическими катками,
FR = VFf + F*n. (2.10)
Прочностной расчет. При работе фрикционных передач их рабочие поверхности многократно находятся под нагрузкой, от чего они могут разрушаться. Для предотвращения этого явления необходимо, чтобы контактные напряжения на рабочих поверхностях катков ан, определяемые по формуле Герца, не превышали допускаемых [ан1:
ан = 0,4181Z Рг»(^+1)3£пр [<Тя] (2.11)
V ftya *12 а3
Решив (2.11) относительно межцентрового расстояния, получим выражение удобное для проектного расчета передачи
а 0,56 (i12 + 1) 1 /----^2^-------, (2.12)
где а — межцентровое расстояние, мм; Т2 — вращающий момент на ведомом катке, Н-мм; £пр — приведенный модуль упругости, МПа; [о>/] — допускаемое контактное напряжение катков (минимальное), МПа.
Прочность катков из мягких материалов (фибры, дерева, резины) проверяют по условию q < [q]. Значения [а#] и [q] приведены в табл. 2.1.
Таблица 2.1
Материал катков Условия работы Коэффициент трения Допускаемые контактные напряжения МПа Допускаемая погонная нагрузка [</1, Н/мм
Сталь по стали В масле 0,05 (2,5—3,0)
НВ
То же Всухую 0,1—0,15 (1,5—2,0) HR —
Фибра по стали или по » 0,15—0.20 25—45
чугуну
Прессованная бумага по » 0,25—0,40 100—120 30—60
чугуну
Текстолит по стали или 0,20—0,25 100—120 25—45
по чугуну 5—10
Дерево по чугуну 0,40—0,50 100—120
Специальная резина по » 0,50—0,75 100—120 2,5—5
чугуну
Фрикционные передачи с гибкой связью. Фрикционные передачи с гибкой связью — ременные передачи (рис. 2.3, а) — широко применя
ют в лентопротяжных механизмах. Гибкую связь обеспечивают ремни (пассики), надеваемые на шкивы с предварительным натягом. Ремни имеют плоский, клиновой или круглый профили (рис. 2.3, б). Кинематические зависимости для ременных передач такие же, как и для фрикционных непосредственного контакта.
Силовой расчет. Когда ременная передача не нагружена, натяжение обеих ветвей ремня одинаково и равно усилию предварительного натяжения:
7*о =
где о0 — напряжение в ремне от предварительного натяжения, для
о)
Рис. 2.3
кинематических передач (лентопротяжных, настройки и т. п.) сг0 — = 0,5 1 МПа, для силовых передач а0 = 1,2 4- 1,5 МПа; S — пло-
щадь поперечного сечения ремня.
В нагруженных передачах усилия натяжения в ветвях ремня перераспределяются: в ведущей ветви усилие становится больше (F1 = = Fq + АГ), в ведомой — меньше (F2 = FQ — АГ). Передаваемое окружное усилие равно разности натяжений ведущей и ведомой ветвей ремня: Ft = Fr — F2. Сумма натяжений ведущей и ведомой ветвей не меняется и равна
F1 -f- F 2= 2F 0.
Зависимость между усилиями ведущей и ведомой ветвей определяется по формуле Эйлера:
Л = Г2е^ (2.13)
где е — основание натурального логарифма; f — коэффициент трения между ремнем и шкивом; — угол обхвата ремнем меньшего шкива, = 180° — 60 ~~D1 град.
Формула Эйлера справедлива для случаев, когда скольжение происходит по всей дуге обхвата (в механизмах тяговых шайб и в ленточных тормозах). В ременных передачах скольжение происходит только на части дуги обхвата и подбор ремня производится по данным, полученным при испытании нагрузочной способности ремней. Определение размеров элементов ременной передачи и подбор ремня подробно изложен в ГОСТ 23821—79 (плоскоременные) и ГОСТ 1284.3—80 (клиноременные).
Нагрузка на валы и подшипники ременной передачи (рис. 2.3, а)
FB (Л + F2) cos р = 2F0 cos р. (2.14)
Передачи без проскальзывания. Если угол поворота большего шкива меньше 360°. то в качестве гибкой связи можно применять стальную ленту, жестко соединенную со шкивами. Такая передача осуществляет точное без проскальзывания перемещение ведомого шкива. Для устранения проскальзывания в передачах с гибкой связью используют также зубчатые ремни (рис. 2.3, в), параметры которых регламентированы отраслевым стандартом (ОСТ 3805114).
§ 2.2. Зубчатые механизмы
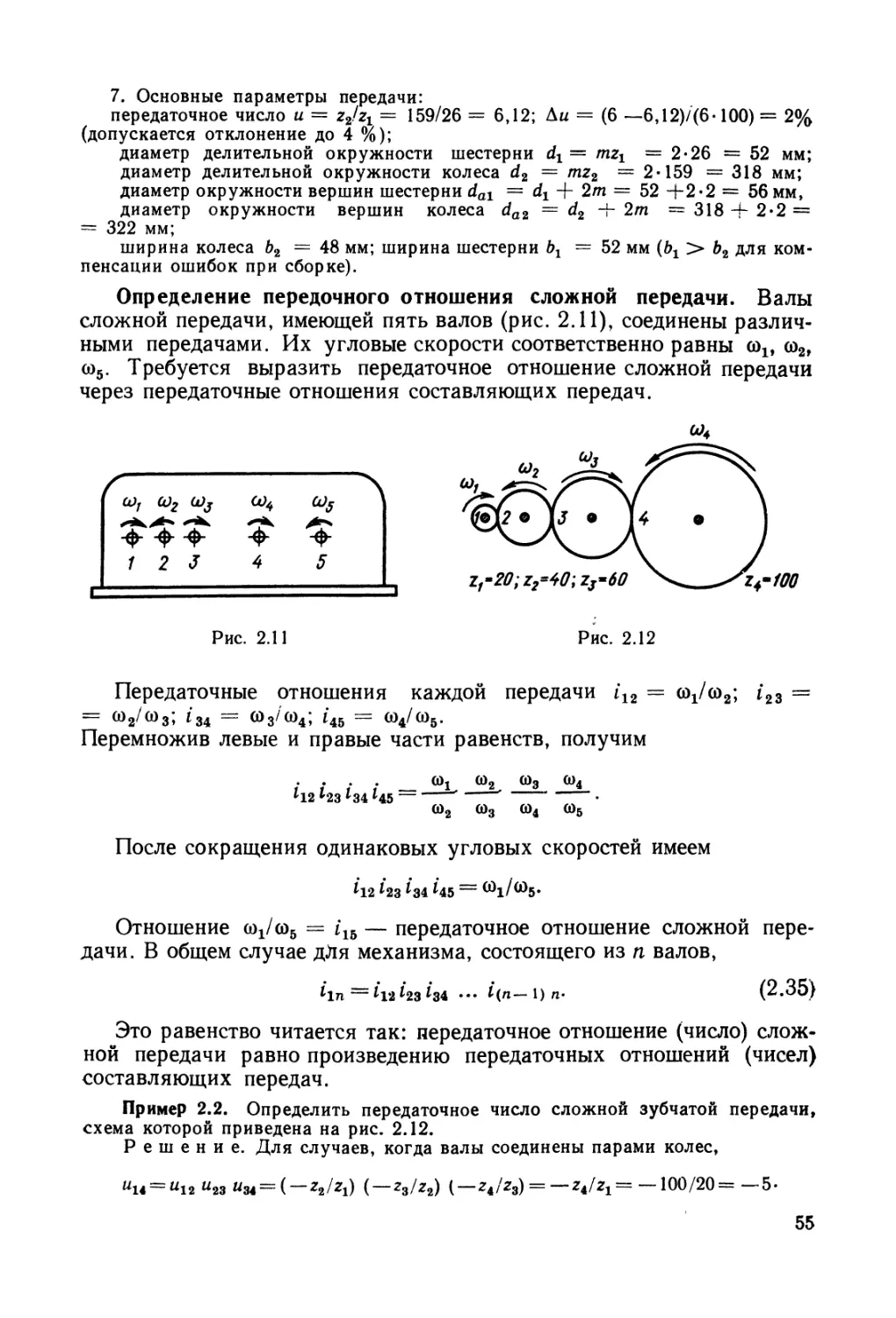
Если на рабочих поверхностях фрикционных катков сделать чередующиеся выступы и впадины, равно отстоящие друг от друга так, чтобы выступы (зубья) одного входили во впадины другого, получим зубчатый механизм (передачу), состоящую из двух зубчатых колес и стойки. Меньшее из двух зубчатых колес, находящихся в зацеплении, называют шестерней, большее — ко лесом.
В зубчатых механизмах передача вращения от одного колеса к другому осуществляется за счет передачи усилий в точках контакта боковых поверхностей зубьев. Рассчитав соответствующим образом число зубьев шестерни и колеса, а также профили зубьев (кривые, ограничивающие их боковые поверхности), получим механизм (передачу), работающий с заданным передаточным отношением без проскальзывания.
Рис. 2.4
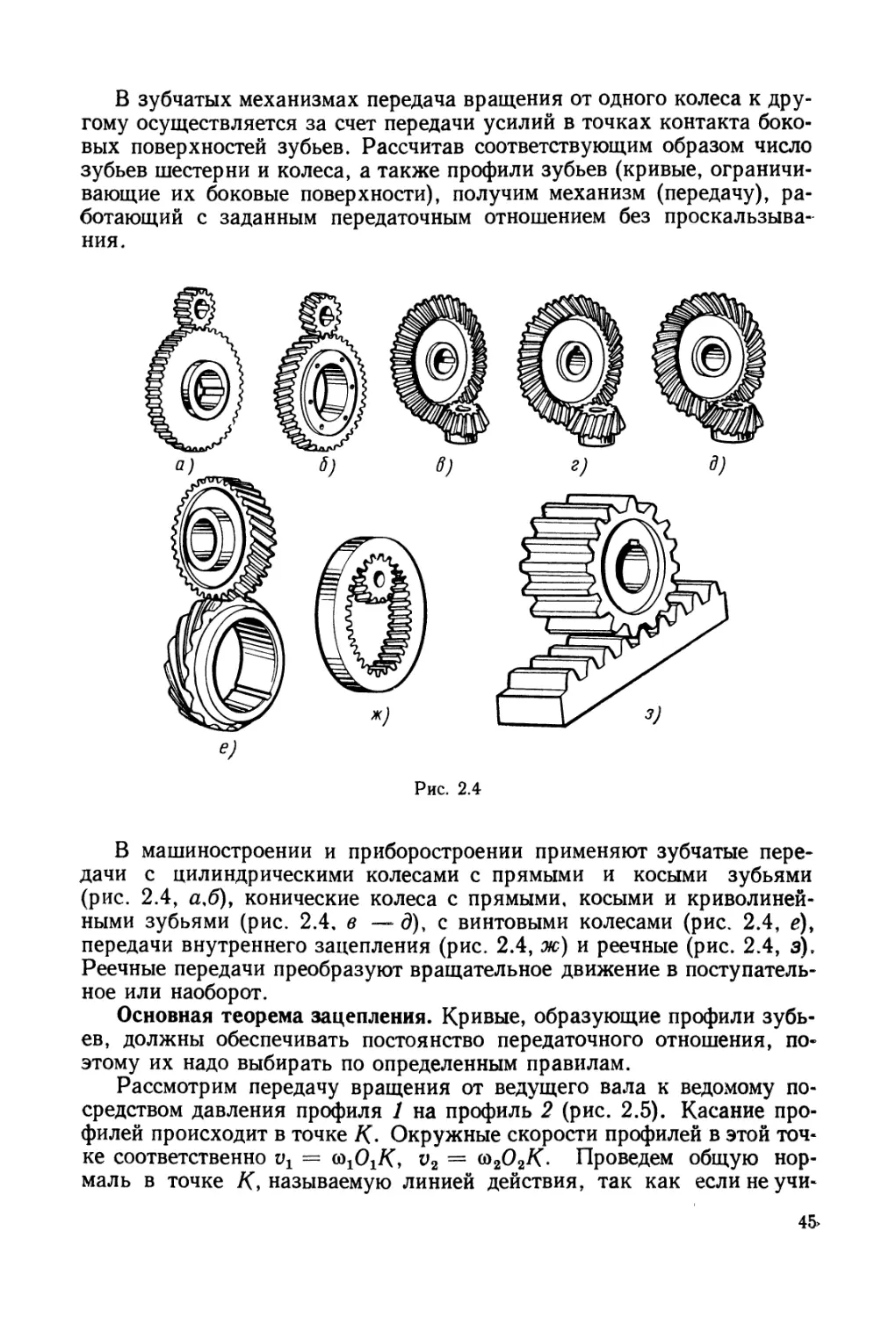
В машиностроении и приборостроении применяют зубчатые передачи с цилиндрическими колесами с прямыми и косыми зубьями (рис. 2.4, а,6), конические колеса с прямыми, косыми и криволинейными зубьями (рис. 2.4. в — д). с винтовыми колесами (рис. 2.4, е). передачи внутреннего зацепления (рис. 2.4, ж) и реечные (рис. 2.4, з). Реечные передачи преобразуют вращательное движение в поступательное или наоборот.
Основная теорема зацепления. Кривые, образующие профили зубьев, должны обеспечивать постоянство передаточного отношения, поэтому их надо выбирать по определенным правилам.
Рассмотрим передачу вращения от ведущего вала к ведомому посредством давления профиля 1 на профиль 2 (рис. 2.5). Касание профилей происходит в точке К. Окружные скорости профилей в этой точке соответственно v2 = (д2О2К- Проведем общую нор-
маль в точке К, называемую линией действия, так как еслинеучи-
тывать сил трения в точке контакта, то направление силы давления профилей друг на друга совпадает с общей нормалью в точке контакта. Точку пересечения линии действия с линией центров обозначим П. Передача может работать только в случае отсутствия размыкания или внедрения профилей. Это условие обеспечивается равенством проекций окружных скоростей профилей в точке К на линию действия n — n: vnl = vn2.
Опустим на линию действия из центров О± и 02 перпендикуляры и O2N2. Углы и N2O2K будут соответственно равны углам а1 и а2, образованным векторами окружных скоростей и у2сли-
Рис. 2.5
нией действия. Эти углы называют углами давления.
Из рис. 2.5 видно, что
t»ni -г и1 cos -= Ох К cos ал — = G>1 ^1 Wf,
vn2 '= v2 cos а2 = со2 О2 К cos а2 = — со2 О2 А 2.
Приравнивая ип1 иип2, находим tt>i 01N1 = о)2 02 N2, откуда
о>1/о)2 = 02 N2/01
Из подобия треугольников 0iA\/7 и O2Af2/7 следует, что O2/V2/ /0^1 = 02ПЮхП. Учитывая это равенство, окончательно получим
0)1/о)2 —- 02 П / 01П.
(2.15)
Равенство (2.15) выражает основную теорему зацепления: линия действия одного профиля на другой делит линию центров на части,обратно пропорциональные их угловым скоростям.
Точку П называют полюсом зацепления.
Профили 1 и 2 выбирают такими, чтобы при любом положении точки контакта линия действия п — п пересекала линию центров 0г 02 в одной и той же точке, в этом случае передаточное отношение i12 будет постоянным:
ц2 = w1/o)2 = 02 ПЮг П = const.
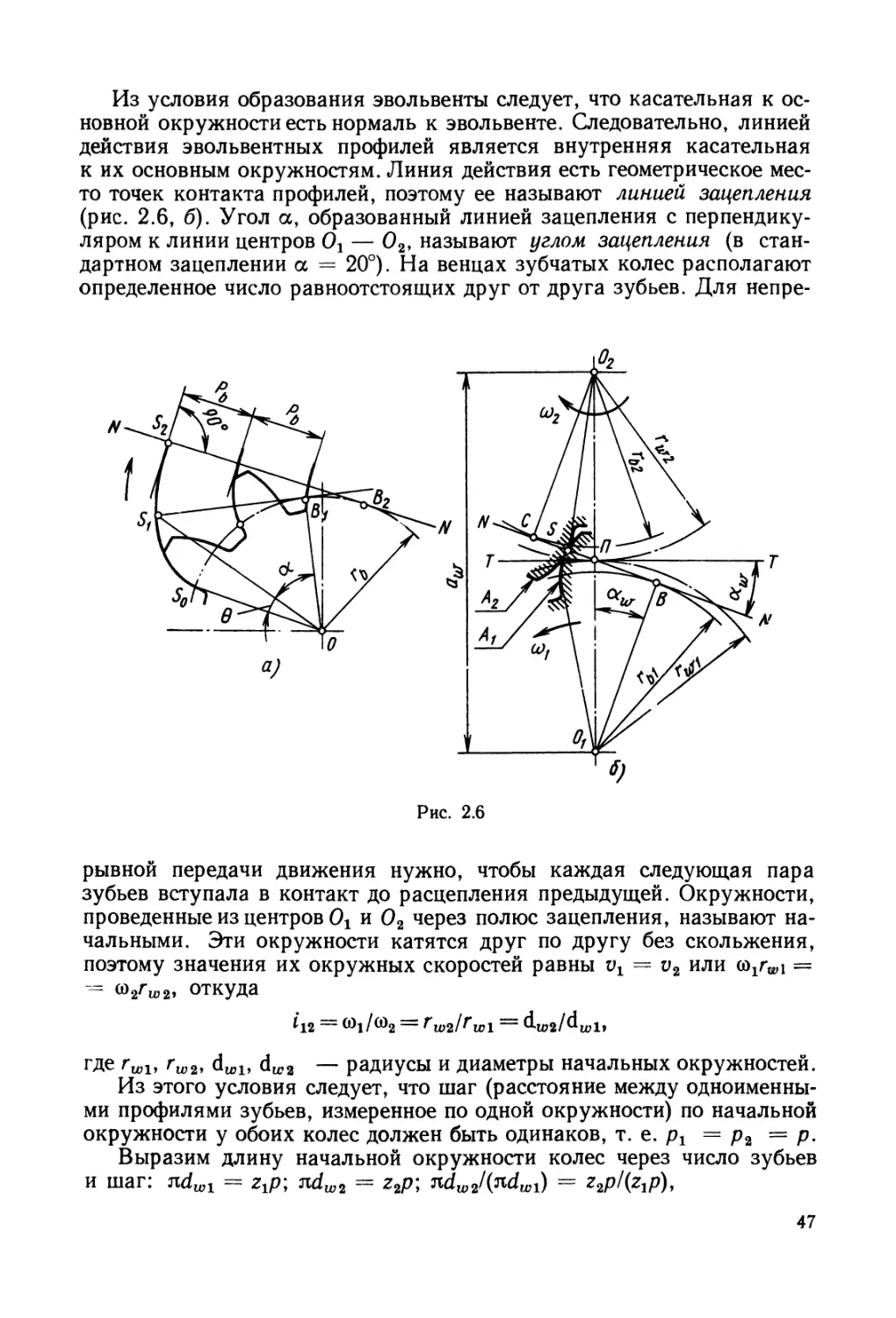
Зубчатые механизмы с круглыми колесами имеют постоянное передаточное отношение. Этому условию лучше других удовлетворяют профили, образованные эвольвентами — кривыми, описываемыми любой точкой прямой, катящейся без скольжения по окружности (рис. 2.6,а). Параметрические уравнения эвольвенты имеют вид
г = r0/cosa; 0 = tga—a, (2.16)
где r0 — радиус основной к окружности (по которой катится прямая); a — угол давления, 0 — эвольвентный угол; tg a — a — инвалюта угла a.
Из условия образования эвольвенты следует, что касательная к основной окружности есть нормаль к эвольвенте. Следовательно, линией действия эвольвентных профилей является внутренняя касательная к их основным окружностям. Линия действия есть геометрическое место точек контакта профилей, поэтому ее называют линией зацепления (рис. 2.6, б). Угол а, образованный линией зацепления с перпендикуляром к линии центров О2 — 02, называют углом зацепления (в стандартном зацеплении а = 20°). На венцах зубчатых колес располагают определенное число равноотстоящих друг от друга зубьев. Для непре-
Рис. 2.6
рывной передачи движения нужно, чтобы каждая следующая пара зубьев вступала в контакт до расцепления предыдущей. Окружности, проведенные из центров Ох и О2 через полюс зацепления, называют начальными. Эти окружности катятся друг по другу без скольжения, поэтому значения их окружных скоростей равны их = v2 или i = откуда
г12 “ оэх/со2 = rw2/rwX ~
где rwl, rw2, dwl, dw2 — радиусы и диаметры начальных окружностей. Из этого условия следует, что шаг (расстояние между одноименными профилями зубьев, измеренное по одной окружности) по начальной окружности у обоих колес должен быть одинаков, т. е. рА = р2 = р.
Выразим длину начальной окружности колес через число зубьев и шаг: jtdwl = zrp', ndw2 = z2p\ ndw2l(ndwl) = г2р1^р),
-откуда
4*12 —^wil^wl
(2.17)
Следовательно, передаточное отношение зубчатой передачи равно отношению числа зубьев ведомого колеса к числу зубьев ведущего колеса. Если z2 > zb то отношение называют передаточным числом и обозначают и:
u^Zz/z^ (2.18)
Шаг по любой окружности колеса
pi = ndilz. (2.19)
Если di — рациональное число, шаг будет выражен иррациональным числом (так как входит число л), что неудобно для стандартизации. Для того чтобы избавиться от иррациональности, левую и правую части (2.18) разделим на л:
pi/n = jtdi/(zn).
Обозначив Pi/л = /пь получим гщ = djz.
Величина модуля — рациональное число.
У колес, находящихся в зацеплении, модуль по начальным окружностям должен быть одинаков.
Для обеспечения взаимозаменяемости зубчатых колес и стандартизации зуборезного инструмента модуль и размеры зубьев, выраженные через модуль, регламентированы ГОСТом.
Зубчатые колеса с эвольвентным профилем зубьев обычно нарезают методом обката червячными фрезами, зубья которых в сечении, нормальном к винтовой линии фрезы, имеют прямобочный трапецеидальный профиль (рис. 2.7). В этом сечении шаг фрезы р, а следовательно, и модуль т постоянны для всех ее диаметров.
Начальную окружность зубчатого колеса, нарезаемого методом обката, называют делительной. Ее диаметр определяют из условия равенства шагов по делительной окружности зубчатого колеса и инструмента. Длина делительной окружности
nd = zp = znm, откуда
d = zm, (2.20)
где z — число зубьев нарезаемого колеса; р, т — шаг и модуль инструмента.
При нарезании колеса, зубья которого имеют стандартные пропорции, его делительная окружность должна катиться по средней линии профиля инструмента. При зацеплении таких колес делительные окружности совпадают с начальными и межцентровое расстояние колес, находящихся в зацеплении,
aw=a = (d1 + d2)/2. (2.21)
. Если зубья надо сделать толще, то инструмент отодвигают от центра заготовки, такое смещение инструмента называют положительным. Если зубья надо сделать тоньше— придвигают к центру заготовки, такое смещение называют отрицательным. Положительное смещение делают также для устранения подрезания зуборезным инструментом ножек зубьев, когда число зубьев z < 17. Колеса, нарезанные со смещением, применяют в тех случаях, когда зубчатую передачу надо встроить в заданное межцентровое расстояние, не равное полусумме диаметров делительных окружностей колес.
Геометрический расчет. Основные параметры зубчатых колес и передачи определяют по модулю и числу зубьев колес.
Для цилиндрических прямозубых колес диаметр делительной окружности
d — mz.
Для колес наружного зацепления, нарезанных без смещения зуборезного инструмента, когда делительная окружность колеса катится без скольжения по средней линии профиля инструмента, диаметр окружности вершин зубьев (рис. 2.8)
da = d + 2т = mz + 2т = т (z + 2); (2.22)
диаметр окружности впадин
dj — d—2,5m = mz — 2,5т т (z—2,5); (2.23)
межцентровое расстояние а = (d± + d2)/2. Выражая диаметры делительных окружностей через модуль и число зубьев, получим
a==0,5/n(z1 + z2). (2.24)
Толщина зуба по делительной окружности (без учета бокового зазора)
sz = пт12. (2.25)
Силовой и прочностной расчеты*. Давление между рабочими поверхностями зубьев передается по общей нормали к их профилям (рис. 2.9, а). Если к ведомому колесу 2 приложен момент сопротивления Т2, то условная сосредоточенная сила давления зуба шестерни 1 на зуб колеса 2
FnU = T2/rb2 = T2/(r2 cos а).
Так как действие равно противодействию, то сила давления зуба колеса 2 на зуб шестерни 1
Fn21— Fnl2j Fn21—F П12 — F П-
Рис. 2.8
Необходимый вращающий момент на ведущем валу (без учета потерь)
Т
Ту = Fn cos а =--------— rx cos а,
ra cos а откуда
7*2 Г1/Г2 = ^2^1/^2j T^-T^U. (2.26)
С учетом потерь (т]12 = 0,96 4- 0,98) получим
(ur]12). (2.27)
* Силовой и прочностной расчеты рассматриваются только для наиболее распространенных в приборостроении прямозубых колес.
Для удобства расчетов силу Fn раскладываем на две составляющие: окружную
Ft=Fn cos а и радиальную
Fr = Fn sin а или Fr = Fttg а.
Рис. 2.9
При проектировании передач обычно задают значение Т2 и по нему определяют
Ft—2T2/d2. (2.28)
Если задан движущий момент Т1Г то
Ft = 2T1/d1. (2.29)
Из схем нагружения (рис. 2.9, б и 2.10) следует, что зубья надо рас
считывать на изгиб (как консольную балку) и на прочность рабочих поверхностей. При расчете зубьев по напряжению изгиба сжимающее радиальное усилие обычно не учитывают и рассматривают наиболее опасный случай, когда вся нагрузка приходится на один зуб и приложена к его вершине. Так как все размеры зуба определяются модулем, выражаем плечо силы h и толщину зуба у корня s через модуль: h = сг/п и s = с2т.
Напряжение изгиба у корня зуба aF = MF/WF.
Изгибающий момент MF = Fth = Р^т.
Момент сопротивления изгибу
W _ bs2 _ b(c2m)2 F 6 6
где b — ширина венца зубчатого колеса; q и с2 — коэффициенты пропорциональности .
Подставляя MF и Wf в исходное уравнение, получим
SFfCi т Ft 6с.
Of —-------~---------.
6 (с2 /и)2 Ьт
Величину bejel называют коэффициентом формы зуба и обозначают YF- Значение YF определяют по таблицам или графикам в зависимости от числа зубьев и коэффициента смещения инструмента.
Величину нагрузки умножают на коэффициент Лрг=1,1 4- 1,5, учитывающий дополнительные динамические нагрузки в зацеплении, и коэффициент у =14-2, учитывающий абразивный износ (истирание) зубьев. Для закрытых передач, работающих в условиях обильной смазки, у = 1. Окончательно
. (2.30)
Ьт
В правильно спроектированных передачах рабочее напряжение изгиба должно быть меньше или равно допускаемому: oF < I^fL
При расчете на усталость
п°
(2.31) PfI
где aF llmb — предел выносливости при отнулевом цикле нагружения;
kpi — коэффициент долговечности: при НВ < 350 feFZ= т/ 4‘.19..6 , г Мц
1<^f/ < 2,08; 7V4 — число циклов нагружений; [SF] — коэффициент запаса прочности, учитывающий свойства материала колес и способ получения заготовки.
Для вывода формулы проектного расчета сделаем преобразования:
Ft = 2T2/(mz2); b = т,
где 3 4- 20 — коэффициент ширины (в приборах = 3-4- 5).
Подставляя Ft и b в (2.30) и решая его относительно модуля, получим
' ^Fv YF
Фт г2 [ар]
(2.32)
Расчет на прочность рабочих поверхностей зубьев ведется по преобразованной формуле Герца:
он = 436 \/ < [о„]. (2.33)
V d2 b
Выражая ширину зубчатого венца b через aw и коэффициент ширины зубчатого венца : b = фаа, заменяя d2 межосевым расстояни-ем d2 = , получим формулу для проектного расчета прямозубых
передач:
3 / Т2kH
]/ , 9rV• (2.34)
V Ца^^н]
В (2.33) и (2.34) приняты следующие размерности: aw — межосевое расстояние, мм; Т2— вращающий момент на ведомом валу, Н-мм; d2 — диаметр делительной окружности ведомого колеса, мм; b — рабочая ширина колеса, мм; оя, [<37/1 — рабочее и допускаемое контактные напряжения, МПа.
Знак «+» ставится при наружном зацеплении, знак «—»—при внутреннем.
Допускаемое контактное напряжение [оя! определяют по формуле
[дя1
Здесь онншь — предел контактной выносливости при базовом числе циклов, для улучшенных и нормализованных сталей онцть = = (2НВ + 70), МПа; kHL — коэффициент долговечности, если число циклов нагружения каждого зуба больше базового, то kHL = 1. Когда число циклов нагружения меньше базового, то kHL вычисляют по формуле
Ьнь— у7N но/NНЕ-
При НВ С 350 (нормализация или улучшение) kHL < 2,6; при НВ > 350 kHL < 1,8; [S//J 1,2 4- 1,3 — коэффициент безопас-
ности.
Все зубчатые передачи следует рассчитывать на прочность по напряжению изгиба. Для открытых передач определяют значение модуля, а для закрытых передач, где модуль определяют из геометрических соотношений, находят рабочее напряжение изгиба и сравнивают его с допускаемым, т. е. делают проверочный расчет.
По контактному напряжению рассчитывают только закрытые зубчатые передачи, работающие в условиях обильной смазки зацепления. Открытые передачи не рассчитывают по контактному напряжению, так как износ рабочих поверхностей зубьев опережает по времени возникновение усталостного выкрашивания.
Пример 2.1. Определить основные параметры закрытой прямозубой цилиндрической передачи наружного зацепления по следующим данным: вращающий момент на ведомом валу Т2 = 269,5 Н-м; частота вращения ведомого вала п2 = — 160 об/мин; частота вращения ведущего вала пг = 960 об/мин; направление нагрузки — постоянное; срок эксплуатации — длительный.
Решение. Для закрытой зубчатой передачи межосевое расстояние определяем из условия прочности рабочих поверхностей зубьев.
1. Для колеса и шестерни выбираем сталь 40Х с твердостью 240НВ для ко-
леса и 270НВ для шестерни. Допускаемое контактное напряжение [ая] ="7о^Х Ptfl
X k„, = — • 1 = 460 МПа, aHlim h = 2НВ + 70 = 2-240+70 = 550 МПа; ПLt | 2 Л111П I/
(= 1. так как срок эксплуатации — длительный.
2. Межосевое расстояние из условия прочности рабочих поверхностей зубьев найдем по (2.34):
/ Т k
аш > 49,5 («+1)1/ --------------=49,5 (6+1) X
V % “2
Z f 269,5-103-1,1
Х |/ 0,25 • 62-4602 = 185 мм>
где и — ni/n2 = 960/160 = 6; kH = 1,1 (колеса расположены симметрично); фа = 0,25 (согласно рекомендованным значениям).
3. Величину модуля передачи находим из геометрических соотношений, задаваясь суммой зубьев колеса и шестерни z2 + = 185:
2aw 2-185
m —---------— ------— 2.
г2~1~г1 185
Ближайшее значение по ГОСТ 9563—60 равно 2.
4. Окончательное значение межосевого расстояния при ш — 2
aw= 0,5m (z2 + zT) =0,5-2-185= 185 мм.
5. Число зубьев шестерни и колеса
zi — (z2 + г1)/(м + 0 = 185/(6+1) ~26; г2 = (г2+<г1)—Zj = 185—26= 159.
6. Расчет зубьев на прочность по напряжению изгиба (2.30). Определим напряжение изгиба у корня зуба шестерни, так как при одинаковых материалах оно будет больше, чем у зуба колеса, из-за большего значения коэффициента формы зуба:
где Yp = 3,88 и kPv = 1,2 (по справочным данным); у = 1 (передача закрытая); Fi ~ 2 T2ld2 — 2 • 269,5-103/(2-159) = 1695 Н. Допускаемое напряжение из-
гиба [aF] = F im b kFL = —— • 1 = 278 МПа, b = фаа = 0,25-185 = 46,3 мм; [SF] 1,75
по справочным данным, = 1,8НВ — 1,8 • 270 = 486 МПа, [SF] =
= 1,75; принимаем b ~~ 48 мм.
Расчет показал, что рабочее напряжение изгиба меньше допускаемого; следо-
вательно, полученное значение модуля оставляем.
7. Основные параметры передачи:
передаточное число и = z2lzx = 159/26 = 6,12; Au = (6 —6,12)/(6-100) = 2% (допускается отклонение до 4 %);
диаметр делительной окружности шестерни dt = mzr = 2-26 = 52 мм; диаметр делительной окружности колеса d2 = mz2 = 2-159 = 318 мм; диаметр окружности вершин шестерни dal = dr + 2т = 52 +2-2 = 56 мм, диаметр окружности вершин колеса da2 = d2 Н- 2т = 318 + 2-2 = = 322 мм;
ширина колеса Ь2 = 48 мм; ширина шестерни Ьг = 52 мм (Ьг > Ь2 для компенсации ошибок при сборке).
Определение передочного отношения сложной передачи. Валы сложной передачи, имеющей пять валов (рис. 2.11), соединены различными передачами. Их угловые скорости соответственно равны со2, со5. Требуется выразить передаточное отношение сложной передачи через передаточные отношения составляющих передач.
Рис. 2.11
Рис. 2.12
Передаточные отношения каждой передачи /12 = (Oj/co/, i23 = = со2/со3; i34 = со3/(о4; i45 = со4/(о5.
Перемножив левые и правые части равенств, получим
. . . . (0^ (02 (03 й)4
*12 *23 *34 *45 -' ’ •
(02 (03 <04 (05
После сокращения одинаковых угловых скоростей имеем
*12 *23 *34 *45 — ®1/
Отношение со1/со5 = /15— передаточное отношение сложной передачи. В общем случае дЛя механизма, состоящего из п валов,
*1п = *12 *23 *34 ••• *(Л— 1) п- (2.35)
Это равенство читается так: передаточное отношение (число) сложной передачи равно произведению передаточных отношений (чисел) составляющих передач.
Пример 2.2. Определить передаточное число сложной зубчатой передачи, схема которой приведена на рис. 2.12.
Решение. Для случаев, когда валы соединены парами колес,
Ц14 = и12 и23 Нз4=( —^/Zj) ( — z3/z2) (—z4/z3) = —z4/z1=—100/20=—5-
Передаточное число внешнего зацепления имеет знак «—» , так как оно меняет направление вращения.
В рассмотренном примере передаточное отношение сложной передачи зависит только от числа зубьев крайних колес (/ и 4), поэтому колеса 2 и 3 называют паразитными (они меняют только направление вращения).
Пример 2.3. Определить передаточное число сложной зубчатой передачи по схеме рис. 2.13.
Решение.
^14~W12 W23 Zi/Zl) ( ^3/^2) (Zb'Z3'}~
= z3 zJ(Zi z3,) = 50-100/(32*24) =6,51.
Планетарные передачи. Кроме механизмов (передач) с колесами, вращающимися относительно неподвижных осей, в радиоустройствах применяют зубчатые и фрикционные передачи, у которых оси некото
Рис. 2.14
рых колес — сателлитов — закреплены на вращающемся звене (водиле). Водило обозначают буквой Н. Сателлиты, как планеты, участвуют в двух вращениях: вокруг своей оси и вокруг неподвижной оси, которую называют центральной. Сателлиты входят в зацепление с колесами, имеющими общую геометрическую ось с водилом, поэтому их называют центральными.
На рис. 2.14 изображена кинематическая схема планетарной передачи с наружным и внутренним зацеплением, имеющая две степени свободы (W — Зм — 2р — q = 3-4 — 2 • 4 — 2 — 2). Центральное колесо 1 называют солнечным, колесо 2—сателлитом, так как оно вращается вокруг неподвижной центральной оси и вокруг своей подвижной оси, закрепленной на водиле. Центральное колесо 3 с внутренними зубьями называют корончатым.
Для устранения дебаланса и увеличения нагрузочной способности передачи в них устанавливают, как правило, несколько сателлитов, расположенных на водиле на равных расстояниях друг от друга.
Для определения передаточного отношения планетарной передачи ее условно преобразуют в простую, остановив водило. Для этого всему механизму сообщают угловую скорость (—(о#), после чего водило остановится: cog = <оя + (—(Он) = 0. Колесо 1 будет иметь угловую
скорость ю* = o)r — соя; колесо 2 — со^ = со2 — co^; колесо
3 _ «я 0)з _
Передаточное отношение преобразованной передачи равно отношению угловых скоростей первого и последнего колес:
*7з = <0^/(0^ =(«! — <оя)/(со3 — сон). (2.36)
Левая часть (2.36) равна произведению передаточных чисел ступеней, составляющих передачу:
^3=wi3=^i2U23=(—г2/21) (z3/z2)= — Zg/Zp
В правую часть (2.36) входят угловые скорости (Oi, (о3 и соя- Если заданы любые две из них, то, зная числа зубьев колес, можно найти третью.
Планетарные передачи с двумя степенями свободы применяют в приборах; где угол поворота ведомого звена является функцией углов поворота двух ведущих звеньев, а также в приводах повышенной надежности, имеющих два
двигателя (рис. 2.15).
Если в передаче, выполненной по схеме рис. 2.14, колесо3 сделать неподвижным (о)3 = 0), то получим планетарную передачу с одной степенью свободы (W = Зп — 2р — q = 3-3 — 2-3 — 2=1). Формула (2.36) в этом случае примет вид
(о<3) — col?)
—-----------=, 1
(0(13)
•(Я) = 1-----= 1 - tV/);
О—coil* *
п п
= (—2г/Zi) (z3/z2) = — Z3/Zlt
где со*3’ и <о^) — угловые скорости колеса 1 и водила Н при останов-ленном колесе 3.
В этом уравнении при заданных числах зубьев колес неизвестным является член (передаточное отношение планетарной передачи от колеса 1 к водилу Н при остановленном колесе 3). Решая полученное уравнение относительно Л3н, найдем
= 1 -г" = 1 — (—
В общем случае для любого планетарного механизма, имеющего одну степень свободы и состоящего из п колес, имеем
fffl- <2-37»
где д ш — передаточное отношение планетарного механизма (передачи) от ведущего колеса 1 к водилу //при неподвижном колессе и; i!\n —
передаточное отношение преобразованной передачи (при остановленном водиле) от ведущего колеса 1 к колесу п.
Если значение цп будет близким к единице (рис. 2.16, а), например = 0,9999 Zi = 100, z2 = 99, = 100, z3 = 101,
то
l-fe/zj(z3/z2>)= 1 —(99/100)(101/100) =0,0001.
Если водило сделать ведущим, а колесо 1 — ведомым, то
= 1/Лн = 1/0,0001 = 10000.
Передачи, выполненные по схеме рис. 2.16, а, обладают большими кинематическими возможностями, но имеют низкий КПД.
Большие передаточные отношения имеют также передачи, выполненные по схеме рис. 2.16, б. При ведущем водиле, ведомом сателлите 2 и неподвижном центральном колесе 1
1н2 = Шн = 1/(1 —t") = 1/( 1 — гх/г2) = —zjfa—zj.
Если Zi — z2 = 1, то /нг’ = — z2.
Такие передачи можно выполнить, нарезая колеса с большими коэффициентами смещения инструмента. Кроме того, для передачи вращения с сателлита 2 на ведомый вал, имеющий центральную ось, надо применять специальные механизмы или гибкий валик.
При кинематическом расчете фрикционных планетарных механизмов (передач) числа зубьев в формулах следует заменять соответствующими диаметрами катков.
На рис. 2.17 показан механизм настройки с планетарной фрикционной передачей. Ручка точной настройки 1 на левом конце имеет центральный шарик, который пружина П прижимает к шарикам сателлитам 2, закрепленным в водиле (обойме) Н. Ручка грубой настройки непосредственно связана с водилом Н. Шарики-сателлиты 2 катятся по
внутренней поверхности втулки 3, увлекая за собой водило Н. Передаточное отношение такой передачи = 1 + ^3/^1 (обычно бывает в пределах от 4 до 10).
Условия выбора чисел зубьев соосных и многопоточных передач. 1. Планетарные передачи, состоящие из трех (и более) колес, соосны. Например, в передаче на рис. 2.14 межосевое расстояние колес 1 и 2 равно межосевому расстоянию колес 2 и 5, т. е. awl2 = aw23. Для передач с колесами, нарезанными без смещения,
аШ12 = Ди = 0,5m (z, + z2); aw23 = а23 = 0,5m (z3—z2), откуда
zi + z2 = z3—z2; z3—z1 = 2z2; z2 = (z3—z^!2. (2.38)
Рис. 2.17
2. Если планетарная передача имеет несколько сателлитов, то вхождение их в зацепление с колесами 1 и 3 определяется условием
(zi + z3)/nc = fe, (2.39) где k — любое целое число; пс — число сателлитов.
3. Число сателлитов, при котором вершины их зубьев не касаются друг друга, определяется условием соседства
(Zi + 22)sin— >z2 + 2. (2.40)
пс
Пример 2.4. Определить частоту вращения водила планетарной передачи (см. рис. 2.15), имеющей два электродвигателя с тормозами, для трех случаев: а) работает электродвигатель Л, электродвигатель Б заторможен; б) работает электродвигатель Б, электродвигатель А заторможен; в) одновременно работают электродвигатели А и Б.
Частоты вращений электродвигателей А и Б равны пА = пБ — 960 об/мин.
Числа зубьев колес: гг == 26, z2 = 37. z3- 100, г3, ~ 125, z4 ~ 20 Решение, а) Передаточное отношение от электродвигателя А к водилу Н при заторможенном электродвигателе Б
1ЛЯ 'и43' 1ЗН“
знак «—» показывает, что шестерня 4 и водило Н вращаются в противоположных направлениях.
Частота вращения водила в этом случае
пн ‘ " *ля^96°/(от7’89)=^ ~”122 об/мин.
б) Передаточное отношение от электродвигателя Б к водилу Н при заторможенном электродвигателе А
4=Л’)=1_(_А'|=1+А = 1+^-=4,85.
БН ш \ z1) zY 26
Частота вращения водила для этого случая
== nrJ = 960/4,85=198 об/мин.
в) Частота вращения водила при совместной работе электродвигателей А к Б. В этом случае передача является дифференциалом и на водиле суммируются частоты вращений электродвигателей Ли Б. Если двигатели вращаются в противо= положных направлениях, то
пн=—(”"пя) + пя= 122+ 198 = 320 об/мин.
Пример 2.5. Определить числа зубьев колес механизма вращения самолетной щелевой антенны (рис. 2.18, а), состоящего из электродвигателя /, двух планетар-пых передач 2 и 3, конической передачи 4 и цилиндрической передачи 5—6
Антенна 7 прикреплена к валу зубчатого сектора 6, частота вращения антенны пв = 24 об/мин. Частота вращения электродвигателя пх = 8000 об/мин.
Решение. 1. Общее передаточное отношение механизма
i 1б = nJriQ = 8000/24=334.
Полученное значение равно произведению передаточных отношений отдельных передач, составляющих механизм:
*16 *2 *3 *4 * *56 — *2 *3 UА * **56 ,
где i2 и /3 — передаточные отношения планетарных передач; — передаточное число конической передачи; н56 — передаточное число цилиндрической передачи.
Исходя из удобства компоновки механизма принимаем 12 ~ 1’3, **4 “ 1 и 5.
2. Передаточное отношение двух планетарных передач
*2 *з ™ *1в'(**4z**5в) —334.(1-5) ж 67;
одной планетарной передачи
*2 ™ *з ~ V ^8,2.
3. Подбор чисел зубьев планетарной передачи (рис. 2.18, б). По (2.37), передаточное отношение - 1 4 (z-j/zJ, откуда
г3/?1 - 8,2-Ь- 7,2; z3 =7,2гг.
Из условия отсутствия подрезания зубьев принимаем zt — 20, тогда z3 =» = 7,2-20 = 144.
Из условия соосности передачи определяем число зубьев сателлита (2.38);
z2 = (z3 - Zi) /2 = (144—20) /2 = 62.
Число сателлитов определяем из условия вхождения зубьев в зацепления (2.39):
(zi + z3) /пс = (20 + 144) /пс = К.
Число сателлитов может быть равно 2 или 4. Оптимальное число сателлитов 3. Для установки трех саттелитов принимаем zx = 22; z3 = 146, тогда
(2i + z3) /пс = (22 + 146) /3 = 56.
Число зубьев сателлитов и передаточное отношение при новых значениях zr и zs z2 = (z3 — Zi)/2 = (146—22)/2 = 62 (осталось без изменения); ~
1 + Zg/zji = 1 + 146/2 = 7,64; Аг = 8,28 100 = 7 %, что больше
допускаемых 4%.
Для восстановления заданного передаточного отношения механизма опреде« ляем новое значение передаточного отношения цилиндрической передачи:
/и =---=------------—------= 5,72.
г2г3г4 7,64-7,64-1
По условию соседства проверяем возможность установки трех сателлитов по (2.40):
(2i + z2) sin— > z2-f-2; (22 + 62) sin -7- > 62 + 2; 73 > 64. nc 3
Условие соседства выполняется, поэтому принимаем пс = 3.
4. Колеса конической передачи 4 имеют равные числа зубьев, так как и4~1. Принимаем z4 — z4, = 20.
5. Цилиндрическая передача. Принимаем число зубьев шестерни 5 z5 — 20» число зубьев колеса z6 — z5 гг5б — 20-5,72 = 114 (в передаче используют не все колесо, а только часть— зубчатый сектор).
Особенности прочностного расчета планетарных передач. 1. В планетарных передачах, где есть внешнее и внутреннее зацепления, рассчитывается на прочность только внешнее зацепление.
2. Число циклов нагружения зубьев определяют, считая водило остановленным (для передач, выполненных по схемам рис. 2.14, 2.15, 2.18, б): п” — nW; п” - nf/^2; п” - — №.
3. Многопоточность передач (число сателлитов) учитывают, деля вращающий момент на приведенное число сателлитов: пс — kctiCi где kc = 0,7 4- 0,8 — коэффициент, учитывающий неравномерность распределения нагрузки между сателлитами.
Напряжение изгиба у корня зуба определяется по формуле
2Л kFvYF
oF=-------------
bmd^ п'с
Межосевое расстояние для передач со стальными колесами (z2 > zx)
3 /~ k т
awlz > 49,5 (Ы12 ±1)1/ ------я 1 i2 -. (2.42)
V “и 'h [°я] «с
(2.41)
В (2.41) и (2.42) 7\ — вращающий момент на солнечном колесе; ui2 ~ г21г1 — передаточное число между солнечным колесом и сателлитом; awl2 — межосевое расстояние между солнечным колесом и сателлитом (рис. 2.18, б).
Волновые передачи. Общие сведения и кинематический расчет. Волновая передача (рис. 2.19) представляет собой планетарную передачу по рис. 2.16, б, в которой оба колеса центральные (одно из колес жесткое, и другое — гибкое). Зацепление зубьев или контакт фрикционных катков осуществляется за счет упругой деформации (распора) гибкого колеса генератором деформации й, при вращении которого
Рис. 2.19
происходят перемещение точек контакта и поворот не закрепленного в корпусе колеса. Таким образом, генератор деформации в волновой передаче выполняет те же функции, что и водило в планетарной. Гибкое колесо представляет собою гибкую цилиндрическую оболочку, на которой имеется зубчатый венец.
Фрикционная волновая передача с неподвижным электромагнитным генератором деформации (рис. 2.20) была запатентована в СССР в 1947 г. А. И. Москвитиным. Зубчатая волновая передача запатентована в США в 1959 г. Массером.
Зубчатые волновые передачи получили распространение в приводах систем управления, так как по сравнению с планетарными имеют большие КПД, точность и меньший мертвый ход. Последние два свойства объясняются тем, что в зацеплении одновременно находится до 30 % зубьев. Передача по рис. 2.19, а позволяет передавать вращение в герметизированное пространство, потому что не требует отверстия в стенке для прохода вала. Конструкция мотор-редуктора с такой передачей приведена на рис. 2.21. На рис. 2.22 представлена конструкция мотор-редуктора по схеме рис. 2.19, б.
Рис. 2.20
Порядок Вкл. ПОЛЮСОВ
Генераторы деформации делают роликовые (рис. 2.23, а — в), дисковые (рис. 2.23, г) и кулачковые (рис. 2.23, д). Наиболее совершенны кулачковые генераторы с гибким шарикоподшипником, они обеспечивают деформацию гибкого колеса по заданному закону и малые потери на трение.
Конструкция гибкого колеса в виде цилиндрической оболочки приведена на рис. 2.24, а, соединение ее с ведомым валом или корпусом
Рис. 2.22
производится шлицевым соединением. Конструкция гибкого колеса в виде стакана показана на рис. 2.24, б, соединение его с ведомым валом делают болтами или сваркой. Конструкция неподвижного гибкого колеса, применяемая для передачи вращения в герметизированное пространство, приведена на рис. 2.24, в.
Передаточное отношение волновых передач определяют по тем же формулам, что и для планетарных передач с ведущим водилом (водило Н заменено генератором деформации h.).
Передаточное отношение передачи по рис. 2.19. а (ведущее звено-генератор деформации, ведомое — жесткое колесо 2, неподвижное — гибкое колесо /)
№ (2.43)
Разность z2 — должна быть кратна числу волн деформации (обычно их две и z2 — z} — 2).
Передаточное отношение передачи по рис. 2.19. б (ведущее звено — генератор деформации, ведомое — гибкое колесо 1, неподвижное — жесткое колесо 2)
= —Zi/(z2—Z1). (2.44)
Величину передаточного отношения волновых передач по схемам рис. 2.19 рекомендуется выбирать в пределах 60—300.
При расчете передаточного отношения фрикционных волновых передач числа зубьев в (2.43) и (2.44) следует заменять диаметрами соответствующих катков.
Порядок расчета волновых передач. При проведении проектного расчета волновых передач удобен следующий порядок.
1. Кинематический расчет. Число зубьев гибкого колеса zx =• ji (j — число волн деформации, i — передаточное отношение). Число зубьев жесткого колеса z2 z} Ч (z2 — zj. при стальных колесах целесообразно назначать j 2 и (z2 - z,) - 2.
2. Прочностной расчет. Для передач со стальными колесами предварительное значение делительного диаметра гибкого колеса удобно определять по формуле, полученной на основании обобщения данных выполненных волновых передач.
di = 1,66/т,
где d\ — предварительное значение делительного диаметра гибкого колеса, мм; Т — вращающий момент на ведомом (тихоходном) валу, Н-мм.
з Зак. 729
65
3. Предварительное значение модуля т' =d{/z1.
Значение модуля рекомендуется выбирать в пределах 0,5—1,5. Выбрав ближайшее большее значение модуля по стандарту, определяют окончательное значение делительного диаметра гибкого колеса:
d1 = /nz. (2.45)
4. Внутренний диаметр гибкого колеса
+ 3,5). (2.46)
Формула (2.46) получена с учетом применяемых коэффициентов смещения зуборезного инструмента, поэтому D > d1.
Если в передаче применен кулачковый генератор со стандартным гибким шарикоподшипником, то значение D выбирается равным ближайшему большему значению диаметра наружного кольца гибкого подшипника. Далее находят новое значение числа зубьев гибкого колеса ?! = Dim — 3,5 и его делительный диаметр dx тгх.
5. Коэффициенты смещения зуборезного инструмента.
Для гибкого колеса
Х1 = 3 +0,012!. (2.47)
Для жесткого колеса
х2 - х, - 1 + kw (1 + 5-10-5 kw z.l (2.48)
где kw = I-? 1,2 — коэффициент радиальной деформации.
6. Определение основных размеров передачи. Гибкое колесо. Диаметр окружности вершин зубьев
41 = 4 + 2 (х1 +0,4) т. (2.49)
Диаметр окружности впадин зубьев
df х = 4 + 2 (%i — 1,25) т. (2.50)
Жесткое колесо.
Диаметр окружности вершин зубьев
42 = 4 + 2(х2— 1)/п. (2.51)
Диаметр делительной окружности
4 ~ mz2.
Оценка точности зубчатой передачи. Допуски на изготовление зубчатых передач регламентируются соответствующими стандартами, где указаны допуски и отклонения на параметры зубчатого зацепления для 12 степеней точности. В радиоаппаратуре применяют 5—8 степеней точности.
Стандартом для каждой степени точности установлены нормы:
кинематической точности, плавности работы, полноты контакта зубьев
и величины бокового зазора в зацеплении.
Нормы кинематической точности определяют величину погрешности угла поворота зубчатого колеса за один поворот. Нормы плавности работы определяют погрешности, многократно повторяющиеся за один поворот колеса. Нормы контакта зубьев характеризуют полноту при-
легания рабочих поверхностей зубьев при работе передачи. Нормы бокового зазора определяют мертвый ход передачи с нерегулируемым межосевым расстоянием.
На работу радиоаппаратуры больше влияют кинематическая точность и боковой зазор передачи.
У гловая погрешность Дфк зубчатого колеса, вызванная кинематической погрешностью (угл. мин),
Дгрк== 6,88 —, (2.52) mz
где F'i — кинематическая погрешность колеса, мкм; tn и z — модуль и число зубьев колеса, мм.
Угловая погрешность, вызванная мертвым ходом пары колес (без учета зазоров в подшипниках), зависит от бокового зазора в зацеплении (угл. мин)
А%х=7,4-^, (2.53) mz
Рис. 2.25
где jn — вероятный максимальный зазор, мкм (значения jn указаны в приложении к ГОСТ 9178—81).
Суммарная угловая погрешность пары зубчатых колес
A'I’n = V Д^к1 +Д'Фкг + А'Йх- (2.54)
Мертвый ход ведомого вала замедляющей передачи
A'Pmxi ~ 2 А^мхк^1К> (2.55)
Uln
где uln — передаточное число от ведущего вала 1 к ведомому п; п — число валов передачи; Дфмхк— мертвый ход вала k, подсчитанный по (2.53); //1К — передаточное число от ведущего вала 1 к валу k.
Мертвый ход ведомого вала ускоряющей передачи и мертвый ход ведущего вала замедляющей
k = n
A^MXl 2 А^МХК ^1К’
6=2
(2.56)
Для устранения мертвого хода в передачах систем управления и
приборов применяют сдвоенные (основное и люфтовыбирающее) зуб-
чатые колеса (рис. 2.25, а, б). Основное колесо 1 закреплено на валу, а люфтовыбирающее 2 образует со ступицей подвижное соединение. Осевое смещение сдвоенных колес ограничивается шайбой или винтами. Пружина 3 (спиральная, растяжения или сжатия) установлена с предварительным натяжением (заводом), обеспечивающим выборку мертвого хода при действии заданного вращающего момента. Усилие предварительного натяжения пружины определяют по формуле
fnp = PT/(r'nnp), (2.57)
где Р = 1,5 4- 3 — коэффициент запаса; Т — вращающий момент на валу; г' — радиус закрепления концов пружин; ппр — число пружин.
Усилие пружины (завод) (рис. 2.26) создается поворотом подвиж
ного колеса относительно непод-
вижного при вводе сдвоенного колеса в зацепление. Величину деформации пружины определяют по формуле
ДЯ= (20 4-40)r'/z,
(2.58)
где г — число зубьев колеса.
Пружину подбирают или рассчитывают по значениям Fпр и Д/7. Применение сдвоенных колес значительно увеличивает потери на трение в передаче.
Для уменьшения мертвого хода в многоступенчатых передачах на основании сравнения (2.55) и (2.56) рекомендуется при разбивке общего передаточного отношения придерживаться правила
1/12 1/23 34 < ^(гс — 1) гс-
§ 2.3. Винтовые механизмы (передача винт — гайка)
Общие сведения. Кинематический расчет. В механизмах настройки и управления во многих случаях применяют передачу винт — гайка для преобразования вращательного движения в поступательное с большим передаточным отношением. При больших углах подъема винтовой линии (г|? > 12°) эту передачу можно применять и для преобразования
поступательного движения во вращательное.
На рис. 2.27 показан случай применения передачи винт — гайка в механизме винтового ограничителя, где винт /, приводимый во вращение зубчатым колесом 2, перемещает в направляющих гайку 3.
Передаточное отношение в случае преобразования вращательного движения в поступательное равно отношению скоростей угловой и поступательного движения:
_ со d(p/d/ d<p
*В->П - --'------------ --- .
va ds/dt ds
При равномерном движении dcp/ds = Дф/As = 2л/(Р?р); за один оборот Дф = 2л, AS = Pzp (Р — шаг резьбы, zp — число заходов резьбы).
Заменив отношение Дф/As на 2 n/(Pzp), получим
г’в^п = n/va = 2n/(Pzp). (2.59)
Обычно надо определить угловую скорость ведущего звена по заданной скорости поступательного движения ведомого, задаваясь шагом и числом заходов резьбы. Решая (2.59) относительно <о, получим
2 л 60 .Q
a=v------ или n=va-------, (2.60)
Pzp /^Zp
где со — угловая скорость, рад/с; va —скорость поступательного движения, мм/с; п —частота вращения, об/мин; р — шаг резьбы, мм.
Силовой расчет. Зависимость между моментом, приложенным к ведущему вращающемуся звену, и осевой силой, приложенной к ведомому звену, движущемуся поступательно, найдем из рис. 2.28. Здесь Fa — осевая сила, приложенная к гайке (полезная нагрузка); Fz — — окружная сила, приложенная к гайке и действующая по среднему диаметру резьбы (движущая сила); Fn — нормальная реакция, действующая со стороны винта на гайку; Fy — сила трения, действующая на гайку. Считая, что движение гайки 1 относительно винта 2 происходит равномерно, рассмотрим условие ее равновесия под действием приложенных к ней сил. Заменяя силы Fn и Fy их равнодействующей R
и проецируя все силы на оси х и у для случая, когда осевое перемещение гайки противоположно направлению действия силы Fo, найдем (рис. 2.28, а)
F, = R sin (ф + р); (2.61)
Fo = R cos (ф + р). (2.62)
Угол р между векторами сил Fn и Ff называют углом трения, а tg р = Ff!Fn называют коэффициентом трения и обозначают f.
Разделив (2.61) на (2.62), получим
F(/Fa = tg(ip + p),
откуда
Ft = Fa tg (ф + р). (2.63)
Вращающий момент
T=Ft A- = Fo^-tg(ip + p). (2.64)
Зависимость между усилиями в передаче, когда поступательное движение преобразуется во вращательное (осевое перемещение гайки совпадает с направлением силы Fa), можно рассмотреть на рис. 2.28, б. По сравнению с предыдущей схемой здесь изменилось только направление силы трения, поэтому угол между силой R и осью координат у будет равен разности углов и р. Следовательно,
F; = Fatg(t-p), (2.65)
T'~F'a A-tg(^-p). (2.66)
Из (2.65) и (2.66) следует, что при ф < р окружная сила и вращающий момент будут отрицательными (меняют свое направление), становятся силами движущими, а не силами полезного сопротивления. Таким образом, когда угол подъема резьбы ф меньше угла трения р, перемещение гайки под действием одной силы Fa (преобразование поступательного движения во вращательное) невозможно. Такие передачи называют самотормозящими,
В случае преобразования вращательного движения в поступательное передачу обычно делают самотормозящей, так как при этом отпадает необходимость применять тормоза при остановке передачи под нагрузкой.
б)
Рис. 2.29
Коэффициент полезного действия. Рассмотрим установившийся режим работы передачи и возьмем для определения КПД отношение полезной работы к затраченной за один оборот вращающегося звена.
В случае преобразования вращательного движения в поступательное
п ____
Fond2tgi|> tg -ф <2 67, ‘8W,+₽>'
В случае преобразования поступательного движения во вращательное
= (2.68) д; ГаРгр Fa Jr^tgip tgip
Если ф < р (самотормозящая пара), то КПД отрицателен, т. е. движение под действием только осевой силы Fa невозможно.
Нагрузочная способность передачи. Размеры передачи определяют из условия невыдавливания смазки между рабочими поверхностями резьбы винта и гайки
р = ——— nd2 hzB
(2.69)
где р и [р] — удельные (рабочее и допускаемое) давления между рабочими поверхностями резьбы; h — рабочая высота профиля резьбы (для трапецеидальной резьбы h 0,5 Р); zB Н/Р — число витков резьбы в гайке (zB = 5 4- 10); И — высота гайки.
Рис. 2.30
Для проектного расчета преобразуем (2.69):
---^г
Л2В[р]
(2.70)
По значениям среднего диаметра резьбы d2 и рабочей высоты профиля h подбирают стандартные параметры резьбы.
Тело винта и гайки рассчитывают на прочность в зависимости от вида нагрузки; кроме того, рассчитывают гайку на срез резьбы.
Конструктивные особенности передачи. В передачах винт—тайка применяют стандартные трапецеидальную (рис. 2.29, а) и треугольную (рис. 2.29. б) резьбы (треугольную только в малогабаритных передачах).
В механизмах отсчетных устройств и настройки, требующих повышенной точности, используют специальные гайки, состоящие из двух частей, что позволяет устранять зазоры в резьбе и мертвый ход относи-
Рис. 2.31
тельным перемещением частей гаек в осевом (рис. 2.30, а, б) или радиальном (рис. 2.30, в, г) направлениях.
Передача винт — гайка, конструкция которой приведена на рис.
2.31, позволяет получить за один оборот винта осевое перемещение
гайки 2, равное разности шагов винтовых пар:
As-P,- Р2,
где Р{ и Р2—шаги резьбы винтовых пар 1 и 2.
Для уменьшения потерь на трение винты делают стальными, а гайки — из бронзы, латуни или чугуна.
В настоящее время для ответственных на-
груженных передач при-
меняют винтовые пары качения, у которых рабочие поверхности резьбы винта и гайки разделены телами качения (шариками). Такие передачи (рис. 2.32) имеют КПД значительно выше, чем передачи с трением скольжения (0,9 — 0,95).
§ 2.4. Червячные механизмы
Общие сведения. Червячные механизмы (передачи) применяют как понижающие для преобразования вращательного движения во вращательное, когда оси ведущего и ведомого валов перекрещиваются (обычно угол перекрещивания 90°).
Элементами червячной передачи являются червяк; представляющий собой одноходовой или многоходовой винт, и косозубое колесо с
углом наклона зубьев, равным углу подъема винтовой линии на червяке (рис. 2.33).
Многоходовой червяк представим шестерней с винтовым зубом, червячную передачу можно рассматривать тогда как модификацию зубчатой (см. рис. 24, е). Если венец червячного колеса представить как половину гайки, свернутую в окружность, то червячную передачу можно
рассматривать как модификацию передачи винт—гайка.
Преимуществом червячной передачи перед зубчатой является возможность осу ществлени я бол ьши х передаточных чисел в одной паре (до 100 и более), а также плавность и бесшумность работы. Недостатками являются малая (по сравнению с зубчатой) нагрузочная способность, низкий КПД и необходимость применения антифрикционных бронз для венцов колес.
Червячные передачи делают с цилиндрическим (рис. 2.33, а) иглобоидным (рис. 2.33, б) червяками. Глобоидные по сравнению с цилиндрическими имеют большую нагрузочную способность, больший КПД и меньший мертвый ход. Цилиндрические червяки
нарезают архимедовы, конволютные и эвольвентные.
Архимедовы червяки имеют трапецеидальный прямолинейный профиль витка в плоскости, проходящей через ось червяка, конволютные— в сечении, перпендикулярном направлению винтовой линии, эвольвентные — в плоскости, касательной к основной окружности
червяка.
В зависимости от удобства компоновки передачи червяк располагают под колесом (рис. 2.34, а), над колесом (рис. 2.34, б) и сбоку от колеса (рис. 2.34, в).
Кинематический расчет. Передаточное отношение червячной передачи от червяка 1 к колесу 2
il2 = = d<p1/d<p2 = Дф1/А(р2.
(2.71)
Для случая равномерного движения можно брать любые соответствующие значения углов поворота червяка и колеса. Так, при одном обороте червяка (A<pj = 2л) колесо повернется на угол Аф2 = 2nzL/ /z2 (Zj — число заходов червяка, z2 — число зубьев колеса).
Подставляя Aq^ и Аср2 в (2.71), получим
Дф. 2л ,
*12 — —— — -----------------
Д(р2 2лг,/?2
По определению,
w~z2/Zi, (2.72)
где и — передаточное число червячной передачи.
В передачах, нарезаемых без смещения зуборезного инструмента г, Г, 2; 4, z2 = 28 -4- 80 (нижний предел определяется условием отсутствия подрезания ножек зубьев, верхний — заострением зубьев).
Геометрический расчет. В червячной передаче расчетным является осевой модуль червяка, равный торцовому модулю колеса.
Основные размеры червяка указаны на рис. 2.35: угол профиля витка 2а = 40°, шаг червяка р = л/n; ход витка р2 ргг\ делительный диаметр червяка
dx = qm, (2.73)
где q — коэффициент диаметра червяка (число модулей в делительном диаметре червяка), значения q и т и их сочетание следует выбирать по ГОСТ 2144—76;
делительный угол подъема винтовой линии витка
tg у pZ1 = pz* — = А. (2.74)
лс^ nqm nqm q
диаметр вершин витков dal = d1 + 2hal —m(q-\-2\, (2.75)
диаметр впадин витков
dfr = dx—2hfl = m(q— 2,4). (2.76)
Основные размеры венца червячного колеса определяют в среднем его сечении (рис. 2.36):
делительный диаметр
d2 = mz2; (2.77)
диаметр вершин зубьев
da2 = d2 + 2/n + 2хт; (2.78)
диаметр впадин зубьев
df2 =^d2—2,4/тг + 2х/тг; (2.79)
наибольший диаметр колеса
daM2-~-da2 + -^—-, (2.80)
Zi + 2
ширина венца колеса
при Zi = l; 2'^2 81) b2 < 0,67dnl при Zj = 4.
Межосевое расстояние передачи
о,с = 0,5/п (q +- z2) + тх. (2.82)
При заданном межосевом расстоянии а,г коэффициент смещения зуборезного инструмента
aw
0,5(<7 + z2).
(2.83)
т
По условию отсутствия подрезания и заострения зубьев,
— 1 1.
Силовой расчет. Для удобства расчета опор и валов червяка и колеса полное усилие в зацеплении раскладывают на три составляющие (рис. 2.37, а, б). Действие равно противодействию, поэтому окружная сила на колесе F/2 равна по величине и противоположна по направлению осевой силе на червяке Fttl; радиальная сила Fr2 ~ — Fz2tga, действующая на колесо, равна по величине и противоположна по направлению радиальной силе Frl, действующей на червяк; осевая сила Fo2, действующая на колесо, равна по величине и противоположна по направлению окружной силе на червяке Fn.
Окружные силы определяют по величинам соответствующих вращающих моментов и диаметров червяка и колеса:
F и —= 27\/d1; Fi2 —2T2/d2.
Зависимость между вращающими моментами определяют передаточным числом и КПД. При ведущем червяке
— Т2/(их\12).
(2.84)
Коэффициент полезного действия. Червячная передача является модификацией передачи винт — гайка, поэтому КПД может быть подсчитан по ранее выведенным формулам (2.67) и (2.68), в которые введен коэффициент kn^= 0,9 4-0,95, учитывающий потери в опорах и на
перемешивание масла, находящегося в ре-
дукторе.
При ведущем червяке
Т|12 —
tg? tg(y+p)
При ведущем колесе
tg (у—Р) tg у
(2.85)
(2.86)
Как видно из (2.86). такая передача может работать только при у >р (практически при у > 2р).
Прочностной расчет. Бронзовые или латунные зубья колес червячной передачи по форме и материалу менее прочны, чем витки червяка, изготовляемого обычно из стали, поэтому на прочность рассчитывают только зубья колес. Расчет закрытых и
Рис. 2.37
открытых червячных передач ведется на прочность рабочих поверхностей зубьев колеса (по контактным напряжениям) и на излом зуба (по напряжениям изгиба). Вывод расчетных формул аналогичен выводу для зубчатых передач.
Рабочее напряжение изгиба у корня зуба
аг=.0,7Ур/г-^-<[оЯ, b2m
(2.87)
Л л —
где YF — коэффициент формы зуба (определяется по таблицам справочников в зависимости от приведенного числа зубьев г'ч = = z2/cos3y); й = 1,0 4- 1,3 — коэффициент нагрузки; Fi2 — окружная сила на колесе; [о> I — допускаемое напряжение изгиба (определяют по справочникам).
При проектном расчете открытых передач определяют модуль
m
2YFkT2
г2</рр] '
(2.88)
Затем, выбрав по ГОСТ 2144—76 ближайшее большее значение модуля, согласованное с коэффициентом диаметра червяка, определяют размеры червяка, колеса и межосевое расстояние.
Контактное напряжение в зацеплении при стальном червяке и венце колеса, изготовленном из бронзы, латуни или чугуна,
Сн -^г\/ (2.89)
d2 V
где (ан! — допускаемое контактное напряжение ^определяют по справочникам).
При расчете закрытых передач из тех же материалов межосевое расстояние определяют по формуле
4- 1) 13/((Г^Гт)2/гТ2- <2-90)
\ q / J Я) |°н] ’
В (2.87) — (2.90) приняты следующие размерности:
Т2 — вращающий момент на колесе, Н-мм;
dj и d2 — делительные диаметры червяка и колеса, мм;
Ь2 — ширина колеса, мм;
m — модуль передачи, мм;
atv — межосевое расстояние, мм;
и [aFb и [он1 — рабочие и допускаемые напряжения, МПа.
После определения межосевого расстояния следует определить модуль:
z2).
Затем, приняв его ближайшее большее значение, согласованное с коэффициентом диаметра червяка (по ГОСТ 2144—76), проверяют напряжение изгиба у корня зуба и определяют межосевое расстояние, соответствующее принятым стандартным значениям m и q.
Конструктивные особенности. В целях экономии бронзы колеса червячных передач делают составными: венец — из бронзы или ее заменителей, а центр (диск и ступицу) — из чугуна. Соединение венца с центром осуществляют заливкой бронзы в форму с отлитым ранее центром, шпоночным или болтовым соединениями. Червяк, как правило, нарезают прямо на валу.
Лучшую антифрикционную пару образуют твердый стальной червяк (HRC 45 — 50) и венец из оловянистой бронзы.
Оценка точности червячной передачи. Допуски на червячные передачи регламентируются стандартами, которые распространяются на передачи с металлическими механически обработанными червяком и колесом. В стандартах даны допуски и отклонения для 12 степеней точности, в радиоаппаратуре применяют обычно 6 — 9 степеней точности.
Стандартами для каждой степени точности установлены нормы точности червяка, кинематической точности и плавности работы колеса, полноты контакта, точности монтажа и бокового зазора.
Показателями точности червяков являются накопленная погрешность осевого шага Ар, погрешность профиля 6/ и радиальное биение витков £в.
Мертвый ход червяка при неподвижном колесе (рад)
Ммхм- „ 2/п . - (2 91)
cos a sin у
Мертвый ход колеса при неподвижном червяке (рад)
ММх« = -г-^------- (2-92)
а2 cos a cos у
где /„ — боковой зазор, мм; а = 20° — угол зацепления (в передачах, нарезанных без смещения; dA и d2 — мм).
§ 2.5. Кулачковые механизмы
Общие сведения. Исполнительные элементы механизмов настройки и управления радиоаппаратуры в некоторых случаях должны перемещаться циклически по заданному закону движения. Такое движение проще всего осуществить с помощью кулачковых, механизмов.
Рис. 2.39
На рис. 2.38 — 2.41 показаны различные виды кулачковых механизмов, в которых ведомое звено перемещается поступательно или совершает качательное движение. Простейшие кулачковые механизмы состоят из стойки, кулачка /, толкателя 2 (ведомое звено движется поступательно) или коромысла (ведомое звено совершает качательное движение). Соединение кулачка с ведомым звеном (толкателем или коромыслом) образует высшую кинематическую пару. На конце ведомого звена для уменьшения потерь на трение в высшей кинематической паре устанавливают обычно ролик 3.
Применяют два вида замыкания высшей кинематической пары: силовой посредством пружины (рис. 2.38, 2,39, 2.41) и геометрический,
когда профиль кулачка сделан в виде паза, в который входит ролик кулачка (рис. 2.40).
Кулачок вращается с постоянной угловой скоростью, поэтому движение ведомого звена повторяется при каждом повороте кулачка. Время одного оборота кулачка называют циклом. Цикл движения толкателя или коромысла включает два типа интервалов: перемещения и остановы. Число интервалов каждого типа, их длительность и относитель-
ное расположение определяются заданным законом движения, воспроизведенным профилем кулачка.
Недостатком кулачковых механизмов является износ рабочих поверхностей при больших нагрузках, возникающих из-за применения для силового замы-
Рис. 2.40
кания пружин.
Проектирование кулачковых механизмов. В задачу проектирования кулачковых механизмов входят выбор типа механизма, определение его основных размеров и расчет профиля кулачка.
Применение пространственных механизмов (см. рис. 2.40, 2.41) позволяет получить меньшие габариты. По возможности следует выбирать механизмы с коромыслом, так как в них допускаются большие углы давления, что позволяет уменьшить габариты. Большое распространение получили плоские
механизмы с вращающимся кулачком и коромыслом (см. рис. 2.39).
Расчет профиля кулачка, При расчете профиля кулачка могут встретиться
два случая: задан закон рис 241
движения ведомого звена для всего цикла; задана цикловая диаграмма (циклограмма), где указаны состояние ве-
домого звена и соответствующие им углы поворота кулачка (табл. 2.2).
В первом случае следует сразу приступить к расчету профиля, а во втором надо сначала выбрать оптимальный закон движения ведомого
звена.
Механизм с вращающимся кулачком и коромыслом, закон движения коромысла задан Коромысло воспроизводит зависимость ф = ф (<р). Начальный радиус, вектор теоретического профиля (описываемого центром ролика) опре.
Таблица 2.2
Интервалы движения ведомого звена Удаление от центра кулачка Останов Приближение к центру кулачка Останов
Углы поворота кулачка Ф1 ф2 Фз Фч
Примечание. Ф14Ф2+Фз+Ф4 = 360°.
делим по заданным значениям межосевого расстояния и длины коромысла и его начальным положением (рис. 2.42).
г0 - У Л2 + /2-2Д/ cos К (2.93)
где А — межосевое расстояние; I — длина коромысла; ф0 — угол начального положения коромысла.
Текущий радиус-вектор теоретического профиля, определяемый углом ф/.
г, ]/7|2 4 /2 — 2Л/ cos фь (2.94)
ri И г0 (угол по профилю)
Угол между радиусами-векторами
для участка удаления коромысла от кулачка
а/ = Ф/ ± Р/ = Ф/ ± ^arcsin sin ф0 ) — arcsin sin фг. (2.95)
В (2.95) знак «4-» берется, когда при удалении коромысла от центра кулачка их направления вращения противоположны, а знак «—» — когда одинаковы.
Механизм с- вра ща ющимся кулачком и толкателем, закон движения толкателя s = s (ф) задан. Рассмотрим общий случай, когда ось толкателя не проходит через центр вращения кулачка.
В соответствии со схемой механизма (рис. 2.43) можно написать выражение для определения начального радиуса-вектора теоретического профиля
(2.96)
где s0 — минимальное расстояние от центра кулачка до конца толкателя; е — расстояние от центра вращения кулачка до оси толкателя.
Текущий радиус-вектор теоретического профиля, определяемый углом ОС/,
г,- = (2.97)
Угол по профилю
а, = <Pi ±Pi = ф> ±(arctg —— — arctg —V (2.98) \ г е !
В (2 98) знак «+» берется, когда угол между направлениями векторов скоростей толкателя и точки контакта на кулачке тупой, знак «—» — когда этот угол острый.
Рис. 2.43
Для центрального механизма при е = 0 (2.96) — (2.98) принима ют вид
Го «о; П sf; а, - (2.99)
Расчет профиля кулачка, когда задана только циклограмма механизма. В этом случае следует выбирать закон движения,соответствующий технологическому процессу, выполняемому механизмом. Например, для раскладчиков намотки необходима постоянная скорость прямого и обратного ходов (рис. 2.44, а). График перемещений раскладчика (рис.2.44, б) получим интегрируя график скоростей. Анализ графика скорости v = v (/) показывает, что скорость толкателя при изменении направления движения за малый промежуток времени (теоретически этот промежуток времени равен нулю) меняет свое значение на конечную величину. Такое явление называют жестким ударом.
Если выполняемый технологический процесс не требует определенных графиков скорости и перемещения, то закон движения выбирают таким, чтобы механизм не испытывал жестких ударов. Лучше дру-
гих этому условию отвечают законы изменения ускорения (аналогов ускорения) ведомого звена, соответствующие синусоиде или косинусоиде:
s" = a sin ф" a sin kq
(2.100)
или
s" = a cos fecp; ф" = a cos fecp.
(2.101)
Закон движения ведомого звена получим интегрируя дважды выражение, определяющее закон изменения ускорения (см. пример 2.6).
Силовой расчет. Порядок силового расчета для всех типов кулачковых механизмов одинаков, поэтому рассмотрим его на примере плоского механизма с вращающимся кулачком и толкателем (рис. 2.45)
На участке удаления толкателя от центра кулачка (рабочего перемещения), где нагрузки достигают максимальных значений, на толкатель (без учета сил трения) действуют сила давления кулачка F„, направленная по нормали к его профилю в точке контакта, сила полезного сопротивления F, направленная противоположно скорости толкателя, упругая сила пружины Fnp, осуществляющая силовое замыкание высшей
пары и имеющая одинаковое направление с силой F, и сила инерции FH, направленная противоположно ускорению толкателя.
Для перемещения толкателя по заданному закону необходимо, чтобы движущая сила в каждом положении механизма была равна силам сопротивления. Проецируя все действующие на толкатель силы на направление его движения, получим
Fn cosy =-F + F1Ip ±FH.
(2.102)
Из (2.102) определим силу Fn:
F FFпр ± cos у
(2.103)
где у — угол между направлением силы, действующей на толкатель, и его скоростью (угол давления).
Если cos у стремится к нулю, то Fn стремится к бесконечности. Следовательно, при больших значениях угла у для приведения толкателя в движение необходимо прикладывать к валу кулачка большие вращающие моменты, а при критических значениях угла у наступает самоторможение (заклинивание) механизма.
Отсутствие заклинивания обеспечивается условием (рис. 2.46)
igYmax- f([l+2k) ,
(2.104)
где утах — максимальный угол давления на участке удаления толкателя; I — длина направляющих толкателя; f — коэффициент трения в направляющих; k — выход толкателя из направляющих.
Из (2.104) следует, что для предупреждения заклинивания надо уменьшать коэффициент трения, выход
Рис. 2.47
толкателя из направляющих и увеличивать их длину.
Вращающий момент, нужный для приведения в движение механизма (рис. 2.45),
T = Fnh.
Подставляя Fn из (2.103) и Л = г sin у, получим
T=(F4 FnP±FH)rtgV.
(2.105)
Прочностной расчет. В высшей кинематической паре возникают контактные напряжения, определяемые случае контакта стальных цилиндрических
по формуле Герца. В поверхностей максимальное контактное напряжение (МПа)
ан max = 1881/ + (2.106)
у В \ ГР Pmin /
где Fnmax — максимальная сила давления кулачка на толкатель, Н; В — ширина кулачка, мм; гр — радиус ролика или минимальный радиус кривизны толкателя, мм; pmln — минимальный радиус кривизны профиля кулачка, мм.
Расчет на прочность остальных деталей кулачкового механизма зависит от его конструкции.
Конструктивные особенности. Формулы для определения теоретического профиля кулачка выведены с учетом того, что толкатель или коромысло заканчиваются острием. Контактные напряжения при такой конструкции были бы равны бесконечности. Для уменьшения потерь на трение и уменьшения контактных напряжений в высшей кинематической паре толкатель или коромысло имеют на конце ролик или грибовидную головку, контактирующие с кулачком (рис. 2.46, 2.47).
Введение ролика или грибовидной головки меняет профиль кулачка, он становится эквидистантным к теоретическому профилю. Экви
дистанту или практический профиль кулачка строят, проводя окружности радиусом ролика или грибовидной головки, центры которых расположены на теоретическом профиле. Огибающая к этим окружностям будет практическим профилем кулачка (см. рис. 2.45, 2.46). Радиус ролика или грибовидной головки должен быть меньше минимального радиуса кривизны теоретического профиля (гр < 0.7 pmin).
Пример 2.6. Рассчитать профиль кулачка для механиза с коромыслом по следующим данным:
— циклограмма механизма (табл. 2.3),
Таблица 2.3
Интервалы движения коромысла Удаление от центра кулачка Останов Приближение к центру кулачка Останов
Углы поворота кулачка Ф[ —90° Ф2 = 60° Ф3 = 90° Ф4=120°
— максимальный угол отклонения коромысла фтах Фо + 30°,
— начальный угол отклонения коромысла ф0 — 15°,
— длина коромысла / ~ 100 мм,
— межосевое расстояние А = 100 мм.
Решение. 1. Угловая скорость кулачка не задана, поэтому будем задаваться законом изменения аналога ускорения. Выбираем косинусоидальный закон изменения аналога ускорения коромысла для интервалов удаления и приближения, при котором, как видно из графика рис. 2.48, а, нет жестких ударов:
ф" — a cos /?(р
(аналог ускорения ф" = e/coj, где — угловая скорость кулачка).
2. После первого интегрирования получим
а
ф' = — sin k <р4-Сг, (2.107)
k
где Cj — постоянная интегрирования, определяемая из начальных условий: при угле поворота кулачка (р = 0° скорость коромысла и ее аналог ф' = 0.
Подставляя начальные значения ср и ф' в (2.107), получим Сг ~ 0. Закон изменения аналога скорости коромысла примет вид (рис. 2.48, 6)
а
ф' =----sin kq. (2.108)
k
3. После вторичного интегрирования получим
ф = —- — cos fap +-С2. (2.109)
где С2 — постоянная интегрирования, определяемая из начальных условий: при ф — 0 положение (угол поворота) коромысла ф = ф0.
Подставляя начальные значения ф и ф в (2.109), получим
фо-~(а/*2)+С2; С2 = ф0+(п/^).
Закон движения коромысла примет вид
t = cos *<р+фо +77= “-Т (1—COS Й<р)+фо. (2.110)
№ к*
4. Частоту цикла k определим из условия: при ф = л/4 аналог ускорения ф" — 0 (рис. 2.48, Ь), откуда
л a cos k — — 0.
4
л
Так как а #= 0, то cos ~ 0. л л , _
Следовательно, k^= откуда я— 2.
5. Амплитуду ускорения а найдем из (2.110): при угле поворота кулачка ф -- 90° угол поворота коромысла ф ~ фтах — Фо + 30° = 15э + 30° = 45°, откуда
а и
45°= —(l-cos 2-90°)+15° = — X
Х2+15° 15°: а =60° --л 3.
2
6. Окончательное выражение закона движения коромысла получим, подставив в уравнение (2.110) ф0 — л/12, k 2 и а - л'З:
л/3 л л
ф -------- (1— cos 2ф)Н-' — X
т 22 v 1 12 12
X (2—cos 2ф). (2.111)
7. Радиус-вектор кулачка определим по (2.93):
га==УАг+Р— 2А1 cosi|>e = J/ 100»+ 100»—2-100-100cosl5° = 26 мм
8. Радиусы-векторы, определяющие теоретический профиль кулачка в интервалах удаления и приближения, подсчитаем по (2.94) для семи точек:
Аа~Н/2—Al cos ф/ .
По (2.111) определим ф для семи значений угла ф (0,15, 30, 45, 60, 75, 90°).
9. Углы по профилю, определяющие положения соответствующих радиусов-векторов профиля, найдем по (2.95):
. / I \ / I
ai :~q>i + arcsin [ — sin ф01 — arcsin | — sin ф/ \ r0 / \ rt
Расчеты значений ф, г и а удобно вести по табл. 2.4.
Таблица 2.4
Номера точек 0 1 2 3 4 5 6
Ф 0° 15 30° 45° 60° 75° 90°
cos 2<р 1 0,866 0,5 0 —0,5 -0,866 —1
2—cos 2ф 1 1,134 1,5 2 2,5 2,866 3
л ф= — (2—cos2<p), рад 0,262 0,351 0,392 0,524 0,654 0,75 0,786
t 15 20°2' 22°27' 30 37°27' 43 45
cos ф 0,966 0,939 0,924 0,866 0,794 0,731 0,707
2А1 cosф, мм 19320 18780 18490 17320 15880 14620 14140
Л24~/2—2Л/со5ф, мм 680 1220 1520 2680 4120 5380 5860
г = ~ VЛ2+/2—2А1 cos ф, мм 26 34,9 39 51,8 64,1 73 76,5
l/r 3,84 2,86 2,56 1,93 1,56 1,37 1,31
sin ф 0,259 0,342 0,381 0,5 0,608 0,682 0,707
(//r) sin -ф 0,994 0,976 0,974 0,965 0,945 0,932 0,924
arcsin [(Z/r0) sin ф0] 83°44'
arcsin [(Z/r) sin ф] 83°44' 77°26' 76°55' 74°48' 70°55' 68°45' 67°31'
arcsin [(//r0) sin %] — — arcsin [(//r) sin -ф] 0 6° 18' 6° 49' 8° 56' 12°49' 14°59' 16°19'
a=(p+arcsin [(//rQ X 4-sin ф0] - arcsin [(Z/r) X X sin ip] 0 21°18' 36°49' 53°56' 72°49' 89°59' 106c13'
Примечание. Интервал удаления Ф1 = 90°.
При повороте кулачка на угол Ф2=60° коромысло должно оставаться неподвижным. Следовательно, радиус-вектор профиля кулачка будет постоянен на профильном угле а2 = 60° . При дальнейшем повороте кулачка на угол Ф3 — ~ 90° коромысло приближается к его центру. Радиусы-векторы при изменении угла ф на 15е имеют ту же величину, что и на интервале удаления Фг Соответствующие профильные углы будут другими, так как в интервале приближения за начало отсчета следует брать Максимальный угол отклонения коромысла ф3 —
-- Фтах “ + 30° = 15° 4 30е = 45°, 76,5 мм, arcsin (77 sin ф3) -
г о
[ 100 Л / I \
arcsin (---sin 45 = 67°31'. Величина arcsin — sin ф не изменяется, но
\ 76,5 / \г /
вписывается в таблицу интервалу приближения в обратном порядке (от 4очки 6 к точке 0).
Полученные значения профильных углов в интервале приближения сводим в табл. 2.5.
Таблица 2.5
Номера точек 0' 1' 2' 3' 4 ' 5' 6'
Ф 0 15° 30° 45е 60° 75° 90е
/ 1 Л arcsin —- sin ф0 ‘ / 67°31'
/ 1 . \ arcsin 1— sin ф 1 67°31' 68°45' 70°55' 74е48' 76°55' 77°26' 83°44'
arcsin sin фо j — \ r0 J Il \ — arcsin 1— sinif) j, 0 —1°14' —3°24' —7°17' —9°24' -9° 55' — 16° 13'
/ I a --- arcsin | — x Xsinifij — / I \ — arcsin 1— sin ф 1 0 13°46' 26°36' 37°43' 50°36' 60°05' 73°47'
Примечание. Участок приближения Ф3=90°. Последний участок циклограммы — останов коромысла; следовательно, величина радиус-вектора будет постоянной и а4=Ф4=120°.
Правильность расчетов проверяем условием
«1 + а* + «з + а4 = 360°:
106° 13' + 60° + 73°47' + 120° = 360°.
Построение теоретического профиля кулачка приведено на рис. 2.49.
Рис. 2.49
§ 2.6. Шарнирно-рычажные механизмы
Общие сведения. Шарнирно-рычажными называют механизмы, состоящие из звеньев-рычагов, соединенных низшими кинематическими парами (шарнирами). Такие механизмы могут быть пространственными и плоскими. Простейшие шарнирно-рычажные механизмы состоят из четырех звеньев, соединенных шарнирами: трех подвижных (ведущего и структурной группы, состоящей из двух звеньев) и неподвижного звена — стойки. Подвижное звено, соединенное со стойкой и вращающееся относительно нее, называют кривошипом, а звено, качающееся относительно стойки, — коромыслом. Звено, соединяющее подвижные звенья, соединенные кинематическими парами со стойкой, и совершающее сложное движение, называют шатуном; подвижную направляющую— кулисой\ звено, движущееся по направляющей,— — ползуном.
На рис. 2.50 приведены наиболее распространенные плоские четырехзвенные шарнирно-рычажные механизмы: кривошипно-ползунный механизм, применяемый для преобразования вращательного движения кривошипа в поступательное ползуна или поступательного дви-
жения ползуна во вращательное кривошипа (рис. 2.50, а); кулисный механизм, служащий для преобразования вращательного движения кривошипа в качательное кулисы или вращательного равномерного кривошипа во вращательное неравномерное кулисы (рис. 2.50, б); шарнирный четырехзвенник, преобразующий вращательное движение кривошипа в качательное или вращательное коромысла (рис. 2.50, в).
Шатуны шарнирно-рычажных механизмов используют также для получения движения по заданному закону или перемещения какой-либо еготочки по заданной траектории. Проектирование шарнирно-
Рис. 2.51
рычажных механизмов заключается в определении размеров звеньев, удовл етвор яющих поставленному заданию. По сравнению с кулачковыми эти механизмы обладают большей нагрузочной способностью, так как не имеют высших кинематических пар.
Ниже рассмотрены наиболее распространенные в машиностроении и приборостроении шарнирно-рычажные механизмы.
Кривошипно-ползунный механизм. Кривошипно-ползунный механизм, где ось направляющей
параллельна или совпадает с линией, соединяющей центры шарниров кривошипа и ползуна, называют аксиальным (рис. 2.51, а), если это условие не выполняется — дезаксиалъным (рис. 2.51, б).
Дезаксиальные механизмы при одинаковых с аксиальным размерами кривошипа и шатуна позволяют получить больший ход ползуна и меньшие углы давления при его рабочем ходе.
Кулисный механизм. Кулисные механизмы могут быть с качающейся кулисой (рис. 2.52, а), предназначенные для пре« образования вращательного движения кривошипа в качательное движение кулисы, и с вращающейся кулисой, используемые для преобразования равномерного вращательного движения кривошипа в неравномерное вращение кулисы.
Рис. 2.52
В первом случае длина кривошипа меньше расстояния между центрами шарниров, которыми кривошип и кулиса присоединены к стойке (r<Zb). Во втором — длина кривошипа больше этого расстояния (г >&).
Из рис. 2.52, а следует, что коэффициент изменения средней скорости качающейся кулисы
fe = Zi//2 — Ф1/Ф2 = (л—arccos X)/arccos X, (2.112)
где X = r/b.
Коэффициент изменения средней скорости вращающейся кулисы (рис. 2.52, б)
kf = -И— = — JT~~arccos(1//^) (2 113)
/2 Ф2 arccos (1/1)
Коэффициенты изменения средней скорости ведомого звена у кулисных механизмов выше, чем у других шарнирно-рычажных механизмов.
Угловые скорости и ускорение кулисы (со3 и 83) связаны с угловой скоростью кривошипа (<о3) зависимостями
r(6cos<p + r) (О о (D-i ' .
b2 + r2 + 2brcoscp ____ (о? rb (г2 — b2) sin <р 8~ (62+r2-|-2fercos <р)2
(2.114)
(2.115)
Из (2.114) и (2.115) следует, что при заданных значениях коэффициента изменения средней угловой скорости кулисы и ее максимальной или минимальной скоростей можно определить отношение rib = X и угловую скорость вращения кривошипа <вх.
Кулисные механизмы используют для получения некоторых тригонометрических зависимостей. Например, на рис. 2.53 приве-
дена кинематическая схема кулисного механизма, у которого перемещение кулисы х3 = rsin ср, скорость кулисы v3 = dx3/d( = г cos дД? = rtOj cos ср, ускорение кулисы а3 =
= do3/dt = —rojj sin ср + r cos <p^ ; a3 = —г (co? sin <p — ex cos <p). Такой механизм называют синусным или двойной кулисы.
Рис. 2.54
Шарнирный четырехзвенник. Существует три модификации этого механизма, отличающиеся друг от друга соотношениями длин звеньев: кривошипно-коромысловый, применяемый для преобразования вращательного движения кривошипа в качательное коромысла (рис. 2.54,а), двухкривошипный, преобразующий равномерное вращательное движение во вращательное неравномерное (рис. 2.54,6), и двухкоромысловый, преобразующий качательное движение в качательное (рис. 2.54, в).
Для того чтобы кривошип (звено АВ) в кривошипно-коромысловом
механизме, у которого г< а< К Ь. мог сделать полный оборот, механизм должен занять два крайних положения (рис. 2.54, а), что возможно при выполнении двух условий, определяющих эти положения:
(/—г)-±а>Ь и (I + г) +а>Ь
(если выполнено первое условие, то второе также выполняется). Следовательно, условием проворачиваемое™ кривошипа является следующее неравенство: I + а > b + г.
Кривошипно-коромысловый механизм применяют в приводе качания антенны.
Передаточная функция коромысла механизма (рис. 2.55) имеет следующий вид:
rsin® , Z 1/1— (Д—В cos ф)2 /П11С\
— Y + arcsin —у — -—, (2.116)
Vc + D COS ф ]/С4"^СО5ф
где А = * + а2~г2~ ; В = г~; С = г2 + ft2; D = 2rb.
* 21а ’ 1а
Угловую скорость коромысла CD определяют из условия равенства проекций скоростей точек В и С на направление ВС:
(2.117) a sin р
где а = л + ср — р — у, 0 = arccos (А — В cos ф).
Аналитический метод расчета передаточной функции удобно применять, когда расчет делают на ЭВМ. Для прикидочных расчетов обычно применяют метод планов или метод кинематических диаграмм. Метод планов рассмотрен в приведенном ниже примере расчета.
Пример 2.7. Определить закон изменения угловой скорости отражателя бортовой самолетной антенны (рис. 2.56) по углу места в зависимости от угла поворота кривошипа, закрепленного на ведомом валу редуктора. Привод состоит из мо-тор-редуктора 8, кривошипно-коромыслового механизма (кривошип /, шатун 2, коромысло 3), синусного механизма (коромысло 3, ползун 4, кулиса 5, представляющая собой кожух, насаженный подвижно на корпус привода вращения антенны 9) и дез аксиального ползунно-коромыслового механизма (ползун 5, шатун 6 и коромысло 7).
Таким образом, привод состоит из четырех последовательно соединенных механизмов, в которых ведомое звено предыдущего механизма является ведущим звеном последующего.
Решение. Расчет ведем методом планов.
1. Строим планы положений механизма (рис. 2.56, а).
2. Составляем векторные уравнения для построения планов скоростей шарнирно-рычажных механизмов.
Кривошипно-коромысловый механизм
’c,=vb+vc.b; vc,=vd+vcjd-
Так как vD = 0, то оСз = vCfD-, vCi = vCj = vc.
Приравнивая правые части уравнений, получим vb + vcb = vcd*
Уравнение можно решить, так как скорость точки В известна по величине и направлению, а относительные скорости vCB и vCD известны по направлению. Скорость точки Е находим из отношения vf!DE ~ vclDC, откуда
DE
Vr = vr — .
E c DC
Рис. 2.56
Синусный механизм
VB3==VB4 B5 + VB3 Bo’
скорость точки E3 известна по величине и направлению, а скорости ползуна 4 относительно кулисы 5 (v£ £ ) и кулисы 5 относительно неподвижной направляющей (v£5£0) известны по направлению. Строя план скоростей по этому уравнению, найдем скорость перемещения кулисы по направляющей v£6£o-
Ползунно-коромысловый механизм
VK<==vf + VK<F; vK7 = vAf + vK7Af-
Так как vM = 0, то vK? = = vK? = v*.
Приравнивая правые части уравнений, получим
vF + vKF=vKAf
Уравнение можно решить, так как скорость точки F найдена (она равна скорости перемещения кулисы по направляющей: vF = vEbE ), а относительные скорости v^F и v^M известны по направлению.
Планы скоростей, последовательно построенные по этим уравнениям, приведены на рис. 2.56, б для положения механизма, показанного сплошными линия
ми. Определяем угловую скорость отражателя по углу места для каждого положения:
VKM Цр (pfe) °”- lKM~ W (КМ)
По значениям угловой скорости можно построить график изменения угловой скорости отражателя в зависимости от угла поворота кривошипа /.
§ 2.7. Механизмы прерывистого движения
В системах настройки и управления применяют переключающие устройства с периодическими остановками определенной длительности. Для этих целей кроме кулачковых механизмов применяют мальтийские механизмы, храповые и механизмы с неполными зубчатыми колесами.
Рис. 2.57
Мальтийские механизмы. Различают два типа этих механизмов: с внешним (рис. 2.57, а) и внутренним (рис. 2.57, б)зацеп-лениями. Чаще применяют механизмы внешнего зацепления. На кривошипе 1 (рис. 2.57, а), закрепленном на ведущем валу механизма, установлена цевка В. На ведомом валу закреплен диск 2 с прорезями — мальтийский крест. Кривошип вращается с постоянной скоростью (оь цевка В входит в прорезь креста и, поворачиваясь на угол ф1р, поворачивает крест на угол ф2р, после чего выходит из прорези; крест останавливается, пока кривошип не повернется на угол 2л — ф1р.
Стопорение креста в неподвижном положении происходит посредством внутренних цилиндрических поверхностей Е на кресте, по которым в периоды остановок скользит наружная цилиндрическая поверхность D диска с вырезом для прохода крестовин. Диск закреплен на кривошипе I в определенном положении (рис. 2.57, а).
В механизме с внутренним зацеплением (рис. 2.57, 6) отношение угла поворота кривошипа ф!р к углу поворота креста ф2Р значительно больше, чем в механизме внешнего зацепления.
По кинематическим характеристикам мальтийские механизмы являются кулисными, имеющими несколько кулис. Каждая прорезь — кулиса. Мальтийскому механизму внешнего зацепления соответствует поворот кривошипа кулисного механизма на угол ф2 (см- Рис- 2.52,а),
механизму внутреннего зацепления — поворот на угол <рг
Механизмы мальтийских крестов внешнего зацепления могут иметь несколько кривошипов, ч'1 о позволяет получить равные (рис. 2.58, а) и неравные (рис. 2.58, б) интервалы остановов и перемещений за один оборот ведущего вала.
В момент входа цев-
V S) ки в паз креста не долж-
но быть удара, для это-Рис- 258 го направление окруж-
ной скорости центра цевки должно совпасть с осью прорези. Это условие будет соблюдаться, если угол ОрВОо будет равен л/2. Углы поворота кривошипа
1 и креста 2 при этом связаны зависимостью (см. рис. 2.57)
Ф1Р [ Фгр _ л ~ ~ 2 “Т
(2.118)
(здесь и дальше верхний знак для внешнего зацепления, нижний — для внутреннего).
Угол поворота креста ф2р = 2л/?2, где?2 — число прорезей креста. Подставляя <р2р в (2.118), получим
ф3 — л-------или ----. (2.119)
Время интервала поворота креста
/p=-2!L = 2L|^_2k (2.120)
(Di (оД г2 ]
Время интервала останова креста при одном кривошипе (zt — 1)
2л ф1р л z2 2 ~ -------------------- ’
(01 (Oj \ z2
(2.121)
Угловая скорость кривошипа, когда задано время останова (/0) и выбрано число прорезей на кресте (z2),
<0 (2.122)
4> \ Z2 /
Время кинематического цикла
~
Разделив левую и правую части на время цикла, получим
1=—4--^.
/ц
Отношение /р//ц называют коэффициентом цикла движения и обозначают k. Если (Oi = const, то
k = — = —р п.& =Л2 т 2 <11. (2.123)
/ц 2л 2лг2 2z2
При k -= 1 крест вращается непрерывно с переменной скоростью ОТ (02 — О ДО (О 2 — ^2гпях*
Из (2.123) следует, что при одном кривошипе (z 1) коэффициент k зависит только от числа прорезей z2. В механизме наружного зацепления число прорезей z2 >3; если z 2, то коэффициент цикла движения k — 0, что не может быть.
Из условия, что угол 0ЛВ02 = л/2, находим соотношение между радиусом кривошипа и межцентровым расстоянием (см. рис. 2.57):
r1=^Ol В = а sin ф2р = a sin — , (2.124)
а также между максимальным радиусом креста и межцентровым расстоянием:
фар л
Г2 шах — £1 COS — (I -COS .
2 z2
(2.125)
Радиус цевки находят из условия контактной прочности при максимальном ускорении креста.
Максимальная угловая скорость креста
sin л/^» zq 1
^2 max — — ; - . (2.126)
1 sin n/z2
Угловое ускорение креста в механизмах внешнего зацепления на границах интервала перемещений
е2 = ± (о? tg — . (2.127)
Z2
Внутри интервала ускорение меняет знак и имеет два максимума:
|е2тах|=Ао?, (2.128)
где А — коэффициент, зависящий от числа прорезей z2 (значения А приведены в табл. 2.6).
Таблица 2.6
*2 ф2Р, град А г2 ф2р, град А
Механизм мальтийского креста Механизм мальтийского креста
внешнего зацепления внутреннего зацепления
3 120 31,435 3 120 1,732
4 90 5,405 4 90 1,000
5 72 2,299 5 72 0,727
6 60 1,350 6 60 0,577
8 45 0,700 8 45 0,414
9 50 0,559 9 40 0,364
10 36 0,467 10 36 0,325
12 30 0,348 12 30 0,298
Графики изменения скорости и ускорения креста механизма наружного зацепления в зависимости от угла поворота кривошипа приведены на рис. 2.59, а. внутреннего зацепления — на рис. 2.59, б.
Храповые механизмы. Храповые механизмы позволяют получить прерывистые вращательное (рис. 2.60, а) и поступательное (рис. 2.60, б) движения.
Основные части храпового механизма — храповое колесо с зубьями специального профиля и собачки (ведущая и стопорная). Зацепление собачки и храповика может быть внешним (см. рис. 2.60—2.62)
и внутренним. Большее распространение получили механизмы с внешним зацеплением, так как они проще в изготовлении.
Модуль зацепления храпового механизма
Рис. 2.60
где D — наружный диаметр храпового колеса (выбирается по заданным габаритам механизма): z2 — число зубьев колеса.
Значения z2 выбирают в пределах 8 — 48. Величина модуля регламентирована СТ СЭВ 310—76.
Рис. 2.61
Число зубьев храпового колеса определяется по заданному углу поворота колеса за один ход ведущей собачки:
, ь 360°
Z<y — k ?
ф2
где kz — коэффициент кратности (kz = 14-5). Профили зубьев и основные относительные размеры зубьев и собачки приведены на рис. 2.61, а, б.
Рис. 2.62
Длина зуба храпового колеса определяется из условия допускаемой нагрузки на единицу его длины
Ob Т
(2.130)
D[q]'
где £д 1,2 4- 1,5 — коэффициент динамичности; Т — момент полезного со-
противления на колесе. Н-мм; D —наружный диаметр колеса, мм; 1^1 — допускаемое давление на единицу длины, Н/мм.
При твердости поверхности зубьев НВ 280—350 \q\ 250 Н/мм;
при НВ 400—500 [?1 - 400 Н/мм.
Для обеспечения надежной работы храпового механизма при любом положении в пространстве и в условиях вибрации собачки прижимают к колесу пружинами. Фиксация положения колеса во время останова производится обычно стопорной собачкой, установленной на корпусе механизма. На рис. 2.62 приведены конструкции стопорных собачек, прижимаемых к колесу пружинами.
Механизмы с неполными зубчатыми колесами. Механизмы этого
типа (рис. 2.63) состоят из з у б ч а но) и зубчатого колеса (ведомое звено). Такие механизмы по сравнению с мальтийскими име
ого сектора (ведущее зве-
Рис. 2.64
ют более широкие пределы значений коэффициента цикла движения. Недостатком механизма является наличие жесткого удара в момент начала движения.
Для стопорения ведомого колеса в период останова применяют запирающие дуги и секторы (рис. 2.64, и Б2). Для устранения жесткого удара на ведущий сектор и ведомое колесо устанавливают кулачки 1 и 2 (рис. 2.64). Профили кулачков обеспечивают плавное возрастание скорости ведомого колеса от о>2 ^0 до постоянного (о2 = (j^zJ /z2, где — полное число зубьев колеса 1, из которого вырезан зубчатый сектор с числом зубьев z\\ z2 — число зубьев колеса 2.
Угол поворота колеса 2 за один оборот сектора / состоит из трех слагаемых: угла поворота, соответствующего кромочному зацеплению на входе; угла поворота, соответствующего «правильному» зацеплению (точка контакта зубьев перемещается по линии зацепления); угла поворота, соответствующего кромочному зацеплению на выходе. Наличие кромочного зацепления объясняется тем, что последний зуб сектора находится в зацеплении с колесом, после того как точка контакта сойдет с линии зацепления.
Угол поворота колеса 2 за один оборот сектора 1
<р2-=(г' +k — 1)— , г.
(2.131)
где k — число зубьев колеса 2, которое можно расположить на дуге зацепления CD окружности вершин (см. рис. 2.63). Соответствующий этой дуге угол (для передач, нарезанных без смещения инструмента) определяют из уравнения
cos 202 — 1
(га + 2)
(2.132)
CD d(t2 202 z2 _________ 02
= ------ = ------------- ---- ----
p 2ndaa л
(k - целое число).
ЧАСТЬ ВТОРАЯ
ДЕТАЛИ, ЭЛЕМЕНТЫ И СОЕДИНЕНИЯ МЕХАНИЗМОВ РАДИОУСТРОИСТВ
ГЛАВА 3
ДЕТАЛИ МЕХАНИЗМОВ РАДИОУСТРОИСТВ
§ 3.1. Оси и валы
Общие сведения. Оси и валы предназначены для крепления вращающихся и качающихся деталей механизмов радиоустройств. Осью называют деталь, поддерживающую вращающиеся части механизма. валом — деталь, вращающуюся в опорах и предназначенную для передачи крутящих моментов.
Главным отличием оси от вала является то, что ось — это поддерживающая деталь, не участвующая в передаче механической энергии. При работе ось испытывает только деформацию изгиба, тогда как вал подвергается еще и деформации кручения. Вал всегда вращается, ось же может быть как вращающейся, так и неподвижной.
Конструктивно оси можно разделить на сплошные (рис. 3.1, а) и п о л ы е (рис. 3.1, б). Полыми оси делают для снижения массы, а также при необходимости пропускать через них валики или провода.
Валы различают по следующим признакам: по конструкции (жесткие и гибкие) и по нагрузкам (легко- и тяжелонагруженные).
Жесткие валы, так же как и оси, бывают сплошные (рис. 3.1, в) и полые (рис. 3.1, г).
Так как валы передают крутящие моменты, то они испытывают напряжение от совместного действия изгиба и кручения.
Легконагруженными валами считают такие, у которых крутящие моменты значительно больше изгибающих, а тяжел онагр уженными — такие, у которых крутящие и изгибающие моменты соизмеримы по величине.
Основным материалом осей и валов являются стали: качественные конструкционные углеродистые марок 20, 30, 40 и 50, инструментальные марок У8А, У10А, легированные марок 2X13. 4X13, 15Х, 20Х, 40ХН, ЗОХГСА и др. С целью упрочнения валы подвергают, как правило, термоулучшению. Для повышения износостойкости отдельных мест вала применяют упрочнение поверхности.
Для передачи вращения под любым углом применяют гибкие валы, состоящие из нескольких стальных плотно наложенных друг на друга проволочных слоев с чередующимся направлением навивки.
Оси и жесткие валы рассчитывают на прочность (иногда валы дополнительно рассчитывают на жесткость).
Расчет осей и валов на прочность. Оси круг-з——----------------------------------------
лого сечения рассчитывают на изгиб: d 10 1Л4/сги]. где d — диаметр оси, мм; М — изгибающий момент. Н-мм; [аи1 — допускаемое напряжение при изгибе, МПа.
Пустотелые оси или валы кольцевого сечения рассчитывают на из-3---------------------
гиб: d = "|/10Л4/{1 —£4)|<ти]. где d — наружный диаметр оси (вала); с = d0/'d — коэффициент, учитывающий толщину стенки пустотелой оси (d0 — диаметр отверстия оси).
При проектном расчете; когда неизвестны длина вала и изгибаю* щий момент, диаметр вала оценивают предварительно исходя из расчета только на кручение при пониженных допускаемых напряжениях:
з_________
d = KT/(0,2 ItJ),
(3.1)
где Т — крутящий момент, действующий в расчетном сечении вала; Гт] — допускаемое напряжение при кручении (для стальных валов Гт] = 20 МПа). Полученное значение диаметра округляют до ближайшего стандартного значения (мм) по ГОСТ 6636—69 (СТ СЭВ 514—77); 16, 17, 18, 19, 20, 21, 22, 24, 25, 26, 28, 30, 32, 34, 36. 38. 40.
Диаметр вала круглого сечения, работающего в условиях кручения и изгиба, определяют по формуле
d-V 32У(М2 + Т2) /(л [си]_1) , (3.2)
где М — суммарный изгибающий момент; Т — вращающий момент; loj-i — допускаемое напряжение при расчете на выносливость при изгибе.
Для вала и невращающих осей соответственно [аи]__ 1 - о-i Крн/([п] ^<т);
[аи]_ ! - 1,5о_ 1 Крн/([п] КД
Рис. 3.2
где O-j — предел выносливости при симметричном цикле напряжений (для валов из углеродистой стали о_3 «0,4 ов); Крн — коэффициент режима нагрузки (Дрн = 1 для валов и осей механических передач; Крн = 1,65 для передач с ручным приводом); [и] = 1.2 4-4- 2,5 — коэффициент запаса прочности по пределу выносливости; К. — эффективный коэффициент концентрации напряжений.
На статическую прочность валы рассчитывают по наибольшей возможной кратковременной нагрузке, повторяемость которой мала и не может вызвать усталостного разрушения.
Эквивалентное напряжение в точке наружного волокна при работе вала диаметром d в условиях изгиба и кручения о0ВВ—Каи + Зт2, где ои = М /Wn — наибольшее напряжение при изгибе моментом М (№и шР/32 — осевой момент
T/Wy — наибольшее напряжение р - 2№и = nd3/16 — полярный мо-
сопротивления сечения вала); т при кручении моментом Т (W мент сопротивления сечения вала).
Для валов диаметром d сплошного сечения V Ум2 + 0,75 Г2.
Коэффициент запаса прочности по пределу /оэкв (обычно пт~ 1,24-1,8).
Расчет валов на жесткость.
ния валов отрицательно влияют на работу связанных с ними соединений, подшипников, зубчатых колес, так как увеличивают концентрацию контактных напряжений и износ деталей, снижают точность механизмов.
Жесткость валов при изгибе оценивают прогибом / и углом 0 поворота сечения или оси вала (рис. 3.2). Условие жесткости вала имеет вид
f-Fa2b2/|3£Jx (a + b)]<^[f],
Оэкв = 132/ (мР)]х
текучести пт = от/
Упругие перемеще-
(3.3)
где f — прогиб в точке действия изгибающей силы F; tx, b — расстояние от точки приложения силы до каждой из опор; Е — модуль упругости материала оси или вала; Jx — осевой момент инерции сечения оси или вала; [/] — допускаемый прогиб.
Для валов в сечении под серединой колеса принимают 1/1 == (0,00024-4- 0,0003) I (где I — расстояние между опорами).
Угол поворота оси цапф 9 на опорах с подшипниками качения для цилиндрических роликоподшипников 0 < 0,0025 рад, для конических 9 < 0,0016 рад, для однорядных шарикоподшипников 9 < 0,005 рад; для сферических подшипников 9 С 0,05 рад. Угол наклона оси вала под зубчатыми колесами 9 < 0,001 рад.
При прочих равных условиях угол поворота оси вала и его прогиб зависят от расположения колеса относительно опор — консольного, симметричного, несимметричного. В этом случае прогиб и угол поворота упругой линии вала определяют методами сопротивления материалов.
Жесткость вала при кручении оценивают углом закручивания на единицу длины вала ср0 = T/(GJV) < [<p0L где Т — крутящий момент в расчетном сечении, Н-мм; G— модуль упругости и материала вала при сдвиге, МПа (для стали G2 = 8-104 МПа); Jp = nd4/32 — полярный момент инерции расчетного сечения, мм4, [ф01 — допускаемый угол закручивания, обычно принимают [ср0] = (5,0 4- 22)-10~6 рад/мм.
Расчет валов на усталость. Расчет валов на усталость выполняют как проверочный; он заключается в определении расчетных коэффициентов запаса прочности в опасном сечении. Для проверки на усталость используют формулу
П = Пх/]/~По + Пх [п], (3.4)
где Пб и пх — коэффициент запаса прочности соответственно по нормальным и касательным напряжениям:
По = в-\ /{(Ко оа/Ео) + Фа aj;
Пх = Т_ 1 /{Кх Т>а/Ъх + Фт Тт].
Здесь (J-i и T--L — пределы выносливости при изгибе и кручении с симметричным циклом; Ко и Кх — эффективные коэффициенты концентрации напряжений при изгибе и кручении; оа ита — амплитуды цикла напряжений; еа и ет — масштабные факторы; фа и фт — коэффициенты чувствительности к асимметрии цикла напряжений; ат и тт — средние напряжения цикла: crm = 0; оа = ои = M/WM; = = та = т/2 = 0,5 Т/1Гр, где №и и IFP — осевой и полярный моменты сопротивления сечения.
При расчетах валов на усталость принимают, что напряжения изгиба изменяются по симметричному циклу, а напряжения кручения —по отнулевому. Выбор отнулевого цикла для напряжения кручения основан на том, что большая часть валов передает переменные по значению, но постоянные по направлению вращающие моменты.
§ 3.2. Опоры скольжения и качения
В зависимости от вида трения опоры осей и валов разделяют на опоры с трением скольжения (опоры скольжения) и опоры стрением качения (опоры качения).Они обеспечивают возможность их вращения с заданной скоростью и передают нагрузки от
вращающих деталей на корпус механиеской системы. Точность действия и надежность работы механизмов во многом зависит от конструкций опор, величины и стабильности возникающего в них сопротивления вращению.
Рис. 3.3
Опоры скольжения. Такие опоры бывают цилиндрические, конические (с конической рабочей поверхностью), на центрах и шаровые.
Цилиндрические опоры состоят из схватываемой (цапфы) и охватывающей (втулки) деталей. Она воспринимает радиальные, а при наличии упоров — и осевые усилия, конструктивно являясь наиболее
простым типом опор (рис. 3.3, а — г). Точность направления движения и центрирования ввиду неизбежных зазоров невысока, момент трения по сравнению с опорами качения выше в 3—8 раз. Для стабильности момента трения при колебаниях температуры опоры работают без смазки. Для уменьшения момента трения и износа втулки изготовляют
из бронзы, латуни; в точных приборах применяют каменные опоры (рубин, агат). В механизмах радиоустройств бывают опоры с трением скольжения двух видов: с вращающейся цапфой (рис. 3.4, а) и с неподвижной (рис. 3.4, б). Такие опоры используют в отсчетных устройствах и механизмах настройки измерительных приборов, когда требова-
ния к точности и величине момента сопротивления вращению невысоки.
При расчете цилиндрической цапфы предполагают, что соприкосновение между цапфой и втулкой происходит по нижней образующей цапфы (поверхность а — а на рис. 3.5). Для предохранения валов от сдвига в продольном направлении предусматривают уступы, буртики (поверхность b — Ь) или скругленные концы валов, упирающиеся в плоскую деталь (поверхность с — с).
Расчет цилиндрической поверхности по удельному давлению
Рис. 3.5
производят:
(3.5)
и по удельной мощности, расходуемой на трение,
pv =
Frn 19100/
< [pa],
(3.6)
где Fr — сила, действующая на цапфу, Н; da, I — диаметр и длина цапфы, мм; п — частота вращения цапфы, об/мин; v — окружная скорость цапфы, м/с.
Допускаемые значения [р] и [ри] приведены в табл. 3.1.
Таблица 3.1
Материалы цапфы и втулки Допускаемые значения
1рЬ МПа (Н/мм2) [pvL ' МПа (м/с)
Сталь по: бронзе 4,00—6,00 2,00—4,00
латуни 3,00—5,00 1,50—3,00
фторопласту — 0,70
металлокерамике 1 0,67
углеграфиту 3,50 0,33
При работе опоры в условиях вибрации максимальное усилие, возникающее при соударении цапфы с подшипником,
Fr max = o,382d* omax л/~, (3.7)
r gl2
8,8 /а0-)-2'1/6Dg
где цтах = -—1^2 —— — относительная максимальная скорость
соударения цапфы с подшипником, мм/с; £ц— модуль упругости материала цапфы, МПа; g — ускорение силы тяжести; f — частота вибрации, Гц; а0 — амплитуда вибрации, мм; 6Р — радиальный зазор, мм; ав — коэффициент восстановления (ав ж 0,6).
Для расчета опоры Fmax подставляют в (3.5) и (3.6).
Расчет торцовой поверхности b — b при действии осевой силы производят из условия допустимого удельного давления:
р =-----------<[р], (3.8)
где dB и dQ — диаметры вала и отверстия, мм.
Торцовую поверхность, представляющую собой сферический конец цапфы, рассчитывают по формуле Герца:
з Г р
Он-0,6171/ ------------------<[ак], (3.9)
|/ (1,'Ец+1/£п)гг2
где он — контактные напряжения, возникающие в точке соприкосновения, МПа; £п —модуль упругости материала плоскости с — с. МПа; г — радиус закругления цапфы, мм.
Значение допускаемых контактных напряжений принимают: для пластичных материалов
(°н[ « (2 4-3) НВ;
для хрупких
[Он] « 8 НВ,
где НВ — твердость по Бринеллю.
Момент сил трения в цилиндрической опоре (Н-мм)
T/==0,64/£rd4, (3.10)
где f — коэффициент трения скольжения, значения которого даны в табл. 3.2.
Таблица 3.2
Материал вала Коэффициент трения скольжения для опор иэ
закаленной инструментальной стали латуни бронзы оловянистой
Конструкционная сталь 0,22—0,28 0,2—0.25 0,18—0,22
Закаленная хромоникелевая сталь 0,22—0,26 0,2—0,24 0,18—0,2
Дюралюминий 0,24—0.32 0,24—0,26 0,22—0,24
Примечание. Значения f даны для опор без смазки; при наличии смазки f может снизиться в 1,5—2 раза.
Из (3.10), следует, что момент трения зависит от коэффициента трения скольжения f и диаметра цапфы <1Ц. Однако при dn < 0,5 мм заметного снижения момента трения не происходит, поэтому диаметр цапфы обычно не снижают менее 0,5 мм.
Момент сил трения торцовой опоры (рис. 3.5, поверхность b — Ь)
Момент сил трения (Н-мм) в опоре, состоящей из сферического конца и плоскости с — с (рис. 3.5),
7> = 0,6fFap, (3.12)
где р — радиус площадки смятия; р = 0,88 У Fa (1/£ц + 1/£*п)-
Рис. 3.6
Рис. 3.7
Момент трения можно уменьшить, если заставить опору вибрировать. Из отношения момента сил трения при наличии вибраций Тъ к моменту сил трения при отсутствии вибрации Тоъ (рис. 3.6) от перегрузки G при различных частотах f видно, что: а) момент сил трения при небольших перегрузках уменьшается, а при значительных — увеличивается с ростом перегрузки; б) чем выше частота вибрации, тем меньше момент трения.
Конические опоры применяют в тех случаях, когда необходимо обеспечить точное центрирование оси или вала при износе деталей опор (рис. 3.7). Недостатки этих опор — большой момент трения и чувствительность к изменению температуры.
При расчете конических поверхностей необходимо проверять удельные давления на поверхности соприкосновения:
р =-----[Р] (3.13)
где [р] — допускаемые удельные давления, которые берут из табл» 3.1; d6 и dM — большой и малый диаметр опоры.
В конических опорах момент трения определяют по формулам: при действии осевого усилия Fa
2 sin ак
при действии радиального усилия Fr Fr dCXi Tf = 0,78f ........................(3.15)
cos aK
где dcp — средний диаметр опоры (dcp = (d6 + dM)/2; aK — половина угла конуса, град.
Рис. 3.8
Опоры на центрах (рис. 3.8, а) обеспечивают малый момент трения и хорошую соосность, их используют при малых нагрузках и скоростях. Опора состоит из центра с углом заострения 2a и втулки с углом зенковки 2(3 (2a = 60°, 2fJ = 90°). Центр и втулки при изготовлении опор из качественной стали подвергают термообработке до HRC 50 4- 60. Для уменьшения трения втулку изготовляют из бронзы или латуни. Шероховатость соприкасающихся поверхностей должна соответствовать 9—10-му классам. Регулируемая опора (рис. 3.8,6) позволяет не только изменять зазор в осевом направлении, но и производить центрирование оси путем изменения эксцентриситета опоры.
Момент трения при действии радиальной Fr и осевой Fa сил
Tf — 0,5fd(-+—(3.16) \ cos a sin a /
где Fr и Fa — радиальная и осевая силы, действующие на опору.
Ш а р о в ы е опоры состоят из цапфы со сферической и конической поверхностями и сферической втулки (рис. 3.9, а). Чем меньше угол конусности втулки, тем больше точность центрирования; обычно угол конусности втулки равен 45°.
Цапфу изготовляют заточкой конца вала по сфере, завальцовкой стального шарика в отверстие на конце цапфы или размещением шарика в конических выточках цапфы и втулки (рис. 3.9, б, в). Они подвержены, как и опоры на центрах, значительному износу, так как площадь соприкосновения в опорах мала.Поэтому шаровые опоры применяют при
малых скоростях и нагрузках, например в конденсаторах переменной емкости (рис. 3.10).
Момент трения при действии радиальной FT и осевой Fa сил
Tf^fFr±+fFa-i- ctg а.(3.17)
Опоры качения. Опоры качения имеют ряд преимуществ перед опорами скольжения: малый момент трения, малый износ, менее чувствительны к изменению температуры окружающей среды, обеспечивают высокую точность вращения.
В механизмах радиоустройств в качестве опор качения используют главным образом шарикоподшипники, характеризуемые малыми статическими и динамическими моментами трения, высокой нагрузочной способностью, возможностью работы при большой частоте вращения— до (100—i50)-103 об/мин, взаимозаменяемостью и малой стоимостью.
Рис. 3.10
В силовых конструкциях механизмов шарикоподшипники применяют из-за их высокой нагрузочной способности, а в кинематических — вследствие малых моментов трения и высокой точности центрирования.
Основными деталями подшипника являются (рис. 3.11, а) наружное 4 и внутреннее 1 кольца, тела качения 2 и сепаратор 3. Телами
качения могут быть шарики и ролики различной формы (цилиндрические, конические и бочкообразные). По форме применяемых тел качения подшипники делят на шариковые, роликовые и игольчатые. Шариковые подшипники по сравнению с роликовыми более быстроходны, менее чувствительны к перекосам осей колец, вызываемых угловыми деформациями валов и неточностями при сборке.
Роликовые подшипники более грузоподъемны, но имеют повышенный момент трения и чувствительны к перекосу осей колец (кроме сферических роликоподшипников).
Рис. 3.11
По характеру воспринимаемой нагрузки подшипники качения подразделяют на радиальные, радиально-упорные и упорные (рис. 3.11, а — и).
Размеры подшипников стандартизированы. Основными элементами стандартизации являются: d — внутренний диаметр; D — наружный диаметр; В — ширина; С — динамическая грузоподъемность. В справочниках также указывают: dUJ — диаметр шарика; z — число тел качения в ряду; а — номинальный угол контакта. Для роликовых подшипников, кроме того, необходимо знать диаметр роликов dp и эффективную длину зоны контакта ролика с кольцом /эф. По этим данным каждому типоразмеру подшипника присваивают в соответствии с ГОСТом условное цифровое обозначение (номер).
Радиальные шариковые подшипники наиболее просты и дешевы; они допускают перекосы осей колец до 0,25—0,5° и рассчитаны в основном на радиальную нагрузку, хотя могут воспринимать и осевую нагрузку. Самоустанавливающиеся шариковые и роликовые подшип
ники (сферические) допускают перекос оси до 2—3°. Применение игольчатых подшипников позволяет уменьшить габариты опоры по диамет-РУ-
В зависимости от нагрузочной способности при одинаковых внутренних диаметрах d подшипники качения изготовляют в нескольких габаритных сериях, из которых наиболее распространены сверхлегкая, особо легкая, легкая, средняя — широкая и тяжелая. В зависимости от точности, согласно ГОСТ 520—71, подшипники в порядке возрастания точности делят на классы 0; 6; 5; 4 и 2. Обычно применяют подшипники класса 0.
В механизмах РЭА подшипники повышенных классов точности применяют при необходимости снижения биения, получения малого момента трения, для высоких частот вращения.
Кольца подшипников и тела качения изготовляют из легированной стали марки ШХ15, сепараторы — из мягкой стали, латуни и пластмасс.
При малых габаритах подшипникового узла и небольших нагрузках применяют бессепараторные насыпные шарикоподшипники с различными формами чашки и цапфы. Точность центрирования при их использовании несколько ниже обычной и зависит от точности изготовления опорных поверхностей чашек, осей и шариков. Наиболее часто используют цилиндрическую, коническую и шаровую формы концов осей.
Использование насыпных подшипников позволяет уменьшить габариты подшипникового узла, снижая при этом его долговечность, Конструкция оси конденсатора переменной емкости с насыпным шарикоподшипником показана на рис. 3.10.
Различные варианты фиксации радиального подшипника на валу и в корпусе приведены на рис. 3.12, а—г. На валу подшипник крепят с помощью прижимной шайбы и винта (рис. 3.12, а), шлицевой гайки и отгибной контровочной шайбы (рис. 3.12, б), пружинным стопорным
кольцом (рис. 3.12, в, г). В корпусе подшипник закрепляют в специальном стакане с буртиком (рис. 3.12, а), с упором на буртик корпуса (рис. 3.12, б) или в стопорное кольцо (рис. 3.12, в) с фиксацией крышкой, а также двумя стопорными кольцами (рис. 3.12, г).
При закреплении вала с подшипниками в корпусе его свободное вращение без осевой «игры» обеспечивают созданием во время сборки осевого зазора Л ~ 0,05-~0,2 мм путем выбора определенной толщины регулировочных прокладок 1 (рис. 3.13, а). Одну опору можно крепить в корпусе (см. рис. 3.12, а — г), а другую — выполнить плавающей (рис. 3.13, б). Такая конструкция с длинным валом при колебании температуры исключает его заклинивание при удлинении вала от нагрева,
Рис. 3.13
а также устраняет температурные напряжения в нем. Компенсацию теплового удлинения оси на подшипниках качения, например в конструкции конденсатора переменной емкости, осуществляют креплением одного из подшипников на пружинящей плате или мембране 1 (рис. 3.14, а), допускающих упругое смещение при температурном удлинении оси, либо перемещением одного из подшипников и поджатием оси пластинчатой пружиной 1 (рис. 3.14, б). Для установки подшипников на валы и оси, не имеющие буртиков, применяют разрезные конические втулки 2 (рис, 3.14, а).
Для защиты подшипниковых узлов от загрязнения и удержания пластичной смазки применяют манжетные (рис. 3.15, а), фетровые (рис. 3.15, б) и лабиринтные (рис.3.15, в) конструкции контактных и бесконтактных уплотнений.
Посадка подшипников на вал и в корпус не должна создавать больших натягов, затрудняющих относительное вращение колец. Для правильной работы подшипников необходимо обеспечить соосность отверстий в корпусе, которая проще всего достигается их обработкой с одного установа.
Подбор подшипников качения. Основной причиной выхода из строя подшипников качения является выкрашивание рабочих поверхностей
колец и шариков. Методика подбора и проверки долговечности подшипников изложена в ГОСТ 18854—73 и 18855—73.
Под долговечностью подшипника понимают число оборотов (часов работы при заданной постоянной частоте вращения), которое подшипник должен осуществить до появления первых признаков усталости материала колец или тел качения.
Рис. 3.14
Для некоторых типов легконагруженных приборных шарикоподшипников усталостное выкрашивание не является «предельным состоянием» и их выбраковку производят после потери точности вращения в результате абразивного износа.
Проверка долговечности подшипника на усталостное разрушение состоит в сравнении его заданной долговечности L3 (млн. об) с действительной долговечностью L (млн. об): L > L3.
Заданная долговечность подшипника млн. об.
£ — QQnLh 3~ 106
(3.18)
где Lh — заданная долговечность, ч. При надежности Р 0,99 ресурс понижается с 1 до 0,21.
Действительная долговечность
L = (C/P)*, (3.19)
где С — динамическая грузоподъемность; Р — эквивалентная нагрузка; а — показатель степени (а = 3 при точечном, а = 10/3 при линейчатом контактах).
Под динамической грузоподъемностью подшипника понимают постоянную радиальную нагрузку, которую группа идентичных подшипников (с неподвижным наружным кольцом) сможет выдержать при числе оборотов внутреннего кольца, равном 1 млн.
Для каждого типоразмера подшипника динамическая грузоподъемность С указана в каталоге-справочнике «Подшипники качения».
Эквивалентной нагрузкой Р называют постоянную радиальную нагрузку, которая при приложении ее к подшипнику с вращающимся внутренним и неподвижным наружным кольцами обеспечивает подшипнику такую же долговечность,что и при действительных условиях его нагружения и вращения.
Для радиальных и радиально-упорных подшипников
P^(XVFr + YFa)K6Kt, (3.20)
где X и Y — коэффициенты радиальной и осевой нагрузок (указываются в каталоге в зависимости от типа подшипника); V — коэффициент вращения, зависящий от того, какое кольцо у подшипника вращается (при вращающемся внутреннем кольце V = 1, при наружном V -----= 1,2); Fr и Fa — радиальная и осевая силы, действующие на подшипник; /<б — коэффициент безопасности, учитывающий характер нагрузки (при спокойной работе Kq 1; при нагружении с умеренными толчками А/б 1,34-1,8; при ударном нагружении /<б 24-3);
Kt — температурный коэффициент (при t — 125° С Kt ~ 1; ПРИ - 1254-250° С Kt - 1,054- 1,4).
При определении расчетной осевой силы Fa учитывают дополнительные осевые силы F^ возникающие от радиальной силы Fr при а > 0. Силы Fr и Fa приложены в точке пересечения нормали к поверхности контакта с осью подшипника. Для шариковых радиальноупорных подшипников F'a eFr, где е — параметр осевого нагружения, выбираемый по каталогу-справочнику.
Тип подшипника для подшипникового узла (радиальный, радиально-упорный, упорный) выбирают в зависимости от действующих на него сил. При этом упорный подшипник берется в сочетании с радиальным. Для заданной долговечности подшипника Lh при известной частоте вращения п по (3.18) находят долговечность L3. Далее по (3.20) определяют эквивалентную нагрузку Р, после чего по (3.19) вычисляют расчетное значение Ср. Затем по Ср, предварительно выбрав внутренний диаметр подшипника d, подбирают по каталогу необходимый типоразмер подшипника из условия С > Ср.
§ 3.3. Направляющие для прямолинейного движения
Направляющими называют детали или устройства, обеспечивающие заданное относительное движение деталей механизма. В РЭА направляющие применяют в механизмах настройки для прямолинейного перемещения элемента настройки, например каретки с подстроечными штырями в индивидуальных катушках блока УКВ радиоприемника. Каретка перемещается по направляющей от винтовой пары, гайка кото-
Рис. 3.16
рой с помощью зубчатой передачи связана с ручкой настройки. По ви-
ду трения направляющие подразделяют на направляющие с трением скольжения и трением качения, а по форме рабочих поверхностей —
два направляющих стержня
Рис. 3.17
на цилиндрические и призматические.
Цилиндрические направляющие изготовляют без предохранения от проворачивания (рис. 3.16, а) и с предохранением. Для предохранения от проворачивания используют (рис. 3.16, б, г) и штифт (рис. 3.16, в). Для цилиндрических направляющих рекомендуют посадки с зазором.
В призматических направляющих форма призмы может быть прямоугольной, трапециевидной и треугольной.
Материалом для направляющих служат сталь марок 30, 40, У8А, а также чугун, бронза, латунь. Де
тали изготовляют по 6 — 8-му квалитету, шероховатость рабочих поверхностей — по 7—8-му классу; для точных направляющих применяют притирку.
Для снижения трения и увеличения долговечности используют направляющие с трением качения.
При конструировании направляющих следует исключать возможность их заклинивания вследствие перекоса. Для схемы, изображенной на рис. 3.17, при нагружении направляющей силой F, составляющей угол а с осью, отсутствие заклинивания от перекоса определяется неравенством Fa > Ff или
F cos а > (/?1+Я2) А
(3.21)
где /?! и 7?2 — реакции в опорах; f — коэффициент трения скольжения.
Из условия равновесия реакций в опорах имеем
= — F sin а J = — F sin а .
Для обеспечения движения необходимо, чтобы
tg а <--------, (3.22)
(2+*)/
где k = L/h.
Минимальный температурный зазор в направляющей
6t = D (1 ± аД/)—(1 ± ах Ы), (3.23)
где D — наименьший размер охватывающей детали; а и ах — ТК I материала сопрягаемых деталей; Д/ = t — t0 — разность температур окружающей среды t и /0, при которой были изготовлены направляющие (плюс при t > t0 и минус при t < /0); D± — наибольший размер охватываемой детали.
ГЛАВА 4
ЭЛЕМЕНТЫ МЕХАНИЗМОВ РАДИОУСТРОИСТВ
§ 4.1. Муфты
Муфтами называют устройства, которые служат для соединения концов валов и осей. Потребность соединения валов вызвана тем, что большинство механизмов радиоустройств компонуют из отдельных узлов. Применение муфт упрощает монтажные работы по сборке механизмов. Кроме того, использование муфт позволяет:
— компенсировать погрешности взаимного расположения геометрических осей валов, отклонения от идеального положения которых выражаются в несовпадении осей валов (несоосность), во взаимном перекосе осей, а также в виде осевого смещения (возможны также комбинированные погрешности);
— смягчить резкие колебания нагрузки и удары;
— управлять режимом вращения (отключение механизма при работающем двигателе, защита механизма от перегрузок и чрезмерно больших скоростей, передача момента только в одном направлении и др-)-
Применяемые в механизмах радиоустройств муфты делят на четыре группы: глухие; подвижные, сцепные и специального назначения.
Глухие муфты используют в тех случаях, когда необходимо соединить валики в одну жесткую линию. Для валиков, передающих незначительные крутящие моменты, применяют глухие втулочные муфты, соединяемые с валами с помощью штифтов (рис. 4.1, а). Расчет таких муфт сводится к расчету штифтов на срез (см. § 5.2). Для передачи 118
значительных крутящих моментов применяют втулочные глухие муфты со шпонками (рис. 4.1, б), расчет которых производят по формулам для расчета шпоночных соединений (см. § 5.2).
Подвижными называются такие муфты, которые допускают относительное смещение соединяемых валиков на Де (рис. 4.2, а), на угол Дф (рис. 4.2, б) или совместное смещение на Де и Дф (рис. 4.2, е).
В механизмах радиоустройств используют много видов подвижных муфт. Самыми распространенными являются поводковые без компенса-
а)
Рис. 4.1
ции мертвого хода, применяемые для соединения двух валиков при незначительном смещении их геометрических осей (рис. 4.3, а, б). Они просты по конструкции, но имеют большую погрешность в передаче угла поворота, которая зависит как от зазора Azn между пальцем 1 и пазом поводка 2, так и от значения Деп
несовпадения геометрических осей сопрягаемых валиков.
Угловая погрешность таких муфт (угл. мин) определяется из выражения
Дф = arctg -.Аг°+.Де° (sin ^-sin Ф1) , (4.1) гп
где фг и ф2 — значения углов, в пределах которых работает поводковая муфта; гп — радиус поводка.
В точных передачах, где не допускает-
ся наличие мертвого хода, применяют
различные поводковые муфты, мертвый ход в которых выбирают плоской или цилиндрической винтовой пружиной. Такие поводковые муфты нормально работают только при условии, если момент, создаваемый пружиной Тпр, больше рабочего момента Траб, требующегося на вращение ведущего валика. При таком условии они имеют незначительный упругий мертвый ход.
Муфты, в которых мертвый ход выбирают плоской пружиной /, показаны на рис. 4.4, а, с цилиндрической пружиной 1 — на рис. 4.4,6. В таких муфтах запас по передаваемому моменту рекомендуется брать в пределах для точных передач — не менее 2,5 раза; для обычных передач— не менее 1,25 раза, при этом угловая погрешности, вызван
ная упругим мертвым ходом, для муфт с плоской пружиной Дф « ~ (1 ±3)', для муфт с цилиндрической пружиной Дф « 2-4-5'.
Для передачи вращения между валиками, имеющими перекос осей до 2°30' и несоосности до ±0,7 мм, применяют мембранные муфты. Они осуществляют безлюфтовую передачу и передают равномерное вращение. Угловая погрешность Дф мембранных муфт, вызванная уп-
Рис. 4.3
ругим мертвым ходом, в зависимости от передаваемого момента лежит в пределах 1—10'. С уменьшением рабочего момента Траб упругий мертвый ход уменьшается. Так, при значениях отношения Тмем/ ^раб 4, где Тмем —максимальный момент, передаваемый мембранной муфтой, упругий мертвый ход муфты можно не учитывать.
Рис. 4.4
Существует несколько разновидностей мембранных муфт, в которых применяют мембраны кольцеобразной формы 1 (рис. 4.5, а), 5-образной формы 1 (рис. 4.5, б) и крестовидной — 1 (рис. 4.5, в).
Плавающие муфты тоже являются разновидностью подвижных муфт и допускают значительно большее, чем у поводковых муфт, относительное смещение геометрических осей соединяемых ею валиков. Теоретически такие муфты передают равномерное вращение.
Плавающие муфты (рис. 4.6, а) выполняют в виде двух дисков 1 с пазами, закрепленных на концах валиков, между которыми распола
гается крестовина 2. Угловую погрешность такой муфты определяют из выражения
Дф = arctg
2AzKp
R ’
(4.2)
где AzKp — зазор между крестовиной и пазами.
Принимая, что давление между элементами муфты пропорционально деформации смятия и распределяется по длине контакта по закону треугольника (рис. 4.6, б), момент которой можно передавать данной муфтой, может быть определен по формуле
Т = -~[р1 , (4.3)
1,8 '
где h — высота выступа крестовины, мм; R — радиус муфты, мм; [р]— допускаемое удельное давление для материала муфты (для закаленной стали [р] = 14,7 4- 29,7 МПа).
Сцепные муфты служат для сцепления и расцепления соединяемых валов. Они могут быть кулачковые, фрикционные и электромуфты.
Кулачковые состоят из двух полумуфт 1 и 2 (рис. 4.7, а), на торцовой поверхности которых имеются кулачки. Полумуфта 2 с шестерней свободно вращается на валу 5, а полумуфта 1 для отключения может перемещаться рычагом 4 на длину h.
Число кулачков зависит от передаваемого крутящего момента и времени включения муфты, определяемого временем поворота одной полумуфты относительно другой на величину шага кулачков, т. е. /в = 60/(nz), откуда
z = 60/(nQ, (4.4}
где z —число кулачков; и —частота вращения муфты, об/мин; tB — — время включения, с.
Кулачки имеют различный профиль. Треугольный профиль (рис. 4.7, б) применяют для передачи малых крутящих моментов, трапецеидальный (рис. 4.7, в) — для больших моментов.
Основным недостатком кулачковых муфт является то, что их нельзя включать на ходу при больших разностях угловых скоростей ведомого и ведущего валов.
Принимая, что нагрузка распределяется равномерно между всеми кулачками, момент (Н-мм)
T~S-^-z[oeu\, (4.5)
где S — площадь проекции поверхности кулачка на диаметральную плоскость, мм2; dcp — средний диаметр рабочей части кулачков, мм.
Сила включения муфты (Н)
+tg (<р+р) dcp I d
(4.6)
где f' — коэффициент трения муфты по валу; d — диаметр вала, мм; <р — угол профиля зубьев (рис. 4.7, б, в); р — угол трения на контактных поверхностях кулачков.
Фрикционные муфты передают крутящий момент от ведущей части муфты к ведомой за счет сил трения, возникающих на фрикционных поверхностях. Эти муфты допускают включение при любой разности угловых скоростей ведомого и ведущего валов и могут также работать как- предохранительные.
Фрикционные муфты в зависимости от вида соприкасающихся поверхностей бывают двух типов: дисковые и конусные.
Предохранительная фрикционная дисковая муфта (рис. 4.8, а) состоит из двух дисков: диск 5 жестко закреплен на валике 6, а диск 3
Рис. 4.8
может перемещаться вдоль валика 1. Под действием пружины 2 диск 3 прижимается к диску 5 и передает определенный крутящий момент. Для увеличения передаваемого момента к диску 5 крепится кольцо 4 из фрикционного материала. Принимая, что Оср = (Рц + D3)/2
(рис. 4.8, б) и DB/DH = 0,54-0,8, момент, который можно передать дисковой муфтой,
7' = -^f[p]ftDc2P1 (4.7)
где f — коэффициент трения между трущимися поверхностями (табл.
4.1); [р] — допускаемое удельное давление (табл. 4.2); b — ширина трущихся поверхностей, мм.
Таблица 4.1
Материал трущихся поверхностей муфты Коэффициент трения для муфт
без смазки со смазкой маслом с попаданием масла
Сталь по стали 0,18 и более 0,05—0,08 0,1
Сталь по бронзе 0,18 0,08 0,11
Бронза по бронзе 0,17 0,12 0,15
Сталь по асбестовой об-
кладке 0,25— 0,45 0,08 —
Сталь по фибре 0,2 0,12 0,17
Сталь по текстолиту 0,2 0,1 0,12
Таблица 4.2
Материал трущихся поверхностей муфты Допускаемые удельные давления для .муфт 1Р1, МПа
дисковых | конусных
Закаленная сталь по стали 0,39—0,59
Сталь по бронзе 0,39—0,49 0,59
Сталь по асбестовой обкладке 0,19—0,24 0,3
Сталь по фибре 0,34—0,39 —
Сталь по текстолиту 0,49—0,59 —
Усилие прижатия дисков (допускаемое)
[Q] - л [р] М)ср. (4.8)
При действии силы Q между трущимися поверхностями в конической муфте (рис. 4.8, в) возникают силы нормального давления N и трения /Л', при этом
Q- _2Л('Л!И. + Со5ф). (4.9)
Момент Т, который может передать конусная муфта, определяют по (4.7).
Электромуфта, в которой сцепление между зубчатыми колесами производится треугольными кулачками, показана на рис. 4.9.
К фланцу 1 муфты с одной стороны крепится электромагнитная система, с другой — механическая система передачи движения. Электромагнитная система состоит из корпуса 5, в котором находятся катушка 4, подпятник 2 и якорь 7, жестко связанный со штоком 6. Механи-
Рис. 4.9
ческая система представляет собой ведущее зубчатое колесо 8 с торцовыми кулачками, свободно вращающееся на фланце /, и ведомое зуб-
чатое колесо 10, связанное с втулкой 9, ки, которое установлено на штоке 6, При подаче напряжения на катушку 4 возникает магнитный поток, притягивающий якорь 7 (рис. 4.9), и перемещающий при этом колесо 10. Кулачки колеса8 и втулки 9 сцепляются, колеса начинают вращаться с одинаковой угловой скоростью. При снятии напряжения магнитный поток пропадает и шток 6 под действием пружины 3 возвращается в исходное положение, расцепляя кулачки.
Сила притяжения электромагнитной системы электромуфт должна быть больше или равна силе включения кулачковых муфт, определяемой по (4.6), или усилию прижатия дисков фрикционных муфт, определяемому по (4.8).
К муфтам специального на-
имеющей торцовые кулач-
Рис. 4.10
значения относятся муфты предохра-
нительные и необратимого вращения. Для предохранения от поломки элементов механизмов при возникновении в них усилий, превышающих допускаемые, применяют предохранительные муфты.
В качестве предохранительных муфт можно использовать сцепные кулачковые муфты с треугольным профилем и фрикционные муфты, которые описаны ранее.
Иногда для нормальной работы механизмов требуется, чтобы вращение от ведущего валика к ведомому производилось только в одном направлении и не могло передаваться в обратном. В этом случае применяют муфты необратимого вращения.
Муфта необратимого вращения с толкателем (рис. 4.10) состоит из валика с зубчатым колесом 5, на торце которого имеется расположенная по дуге окружности канавка с углом наклона со, и барабана 1 с зубчатым колесом, в отверстии которого находится толкатель 2. При вращении барабана / по часовой стрелке (если смотреть на муфту сверху) толкатель 2 захватывает колесо 3 за выступ К и ведет за собой. При вращении в обратную сторону толкатель будет проскакивать.
§ 4.2. Фиксаторы и ограничители
Фиксаторы. Фиксаторы предназначены для точной установки в заданном положении периодически поворачиваемых или перемещаемых звеньев, а также для предотвращения смещения последних в процессе
Рис. 4.11
эксплуатации. По степени фиксации они подразделяются на жесткие и упругие. Жесткие фиксаторы допускают изменение положения подвижного звена при принудительном перемещении фиксирующего элемента. Вупругих фиксаторах фиксирующий элемент выталки
вается автоматически под действием возросшего по сравнению с расчетным усилия, приложенного к фиксируемому звену.
Каждый фиксатор состоит из подвижного и фиксирующего элементов. Подвижным называют элемент фиксатора, непосредственно связанный с подвижным звеном. Подвижные элементы выполняют в виде делительных дисков, шайб с пазами (звездочек) или носиками различной конфигурации, зубчатых колес. Фиксирующим (стопором) называют элемент фиксатора, с помощью которого подвижный элемент устанавливается в определенное положение. Фиксирующие элементы представляют собой рычаги с носиками или пазами различной конфигура-
ции, штоки, ролики на рычагах и шарики. Фиксация такими элементами производится под действием пружин различной конструкции.
Наибольшее распространение в радиоаппаратуре получили фиксаторы для деталей с вращательным движением, имеющие пять вариантов конструктивного выполнения: с рычагом (рис. 4.11, а), со штоком (рис. 4.11, б), с шариком (рис. 4.11, в), с роликом на рычаге (рис. 4.11, г), с рычагом-пружиной (рис. 4.11, б).
О) У
Рис. 4.12
На рис. 4.12 показано схематическое устройство простого шарикового фиксатора. В плате 1 фиксатора высверлены отверстия (впадины), в которые при переключении под действием силы F цилиндрической пружины 4 заскакивает шарик 2. Для вывода шарика из фиксирующей впадины требуется приложить к нему со стороны подвижной детали 3 силу Qx при вертикальной составляющей Q2 > F- Если QJQ2 = = tg (а + р), то при Q2 = F
Qi-Ftg (а + р),
(4.Ю)
где F — сила давления пружины; а — угол впадины; р — угол трения.
Для выхода шарика из фиксирующей впадины необходимо, чтобы (а + р) < 90°, т. е. при р < 10° угол а < 80°. Обычно а = = 45 4- 50°.
Форма фиксирующего элемента и впадины влияет на быстродействие, точность и надежность фиксатора. Погрешность подвижного элемента фиксатора определяется погрешностями положения фиксирующих впадин и их геометрии.
Ограничители. Ограничители (стопоры) предназначены для ограничения перемещения или угла поворота звеньев механизма в заданных пределах. Такие устройства используют, например, в механизмах
настройки для ограничения перемещения элемента настройки в заданных пределах. Наиболее простой конструкцией ограничителя являются регулируемые упоры А и В, закрепленные на стержне 3 и ограничивающие перемещение поршня 4 в резонансной камере 5 волномера
Рис. 4.13
(рис. 4.13). Ручка настройки 1 посажена на винт 2. При вращении винта поршень перемещается вместе с гайкой 7; от вращения гайка удерживается направляющей 6.
5 4 3 2 1
Рис. 4.14
В качестве ограничителя может быть также использован винтовой -стопор (рис. 4.14), состоящий из винта 5, двух стопорных колец 4 и гайки 2, вращение которой предотвращается планкой 3. Гайка и кольца имеют торцовые выступы /, которые при перемещении гайки по винту в крайних положениях упираются в выступы стопорных колец.
Расстояние между плоскими поверхностями стопорных колец LY при перемещении гайки на расстояние L (мм)
L.=L + B + 2a9 (4.11)
где L — пР, мм; п — число оборотов винта; Р — шаг резьбы винта, мм; В, а — ширина гайки и высота ее выступов, мм.
Число оборотов п, шаг винта Р, ширина гайки В и высота выступов гайки а задаются конструктором.
А-А
Рис. 4.15
Стопор с кулачковыми шайбами показан на рис. 4.15. Кулачковые шайбы 2 сидят свободно на оси 4. Ведущая шайба 1 в виде кольца с выступом жестко закреплена на оси. Все кулачковые шайбы имеют выступы с углом р. При вращении оси с ведущей шайбой 1 каждый выступ предыдущей шайбы задевает за выступ последующей и заставляет ее вращаться. При стопорении последняя шайба своим зубом упирается в зуб кулачковой втулки 3. При числе оборотов п оси 4 до стопорения число шайб
2=_360я------| (4.12)
360—23
Обычно р = 30°. Тогда угол кулачка втулки 3 а = 300z + + 330 — 360 п. Точную регулировку стопора осуществляют при сборке путем соответствующей установки ведущей шайбы перед ее фиксацией.
§ 4.3. Пружины
Пружины широко применяют в различных контактных устройствах радиоаппаратов. Они обеспечивают необходимое контактное давление, перемещение контактов при коммутации цепей в механизмах, где пру
жину используют в качестве основной движущей силы. Кроме того, их применяют в качестве фиксаторов движения или аккумуляторов механической энергии, накапливаемой при медленном перемещении ручки оператора и преобразуемой в относительно быстрое перемещение определенной части механизма. Такие пружины необходимы в системе управления переключателей, в фиксаторах настройки и т. д.
По назначению пружины можно разделить на измерительные, служащие для создания противодействующих моментов и усилий в различных приборах; силовые, которые, используя ранее накопленную
энергию, приводят в движение, тормозят или фиксируют звенья механизмов; и пружины для упругих связей, заменяющие жесткое соединение между отдельными звеньями механизма.
По конструктивному признаку их подразделяют на винтовые, спиральные и плоские, а по виду деформации — на пружины растяжения, сжатия, кручения и работающие на изгиб.
Винтовые цилиндрические пружины бывают двух видов: растяжения — сжатия и кручения.
Пружины растяжения — сжатия нашли широкое применение в конструкциях радиоустройств. Они надежны в работе, несложны по конструкции, легко монтируются и занимают мало места. Пружины сжатия представлены на рис. 4.16, а и растяжения — на рис. 4.16, б.
Пружины кручения (рис. 4.17) монтируют таким образом, что прицеп 1 соединяется с неподвижной деталью 2, а на другой прицеп 5, соединенный с подвижной деталью 4, передается усилие F в направлении, перпендикулярном оси пружины. Под действием этого усилия пружина закручивается, а ее витки подвергаются изгибу от действия изгибающего момента М = Fa = QI (действием крутящего момента из-за малости угла подъема витков обычно пренебрегают).
Спиральная пружина (рис. 4.18) представляет собой навитую по спирали ленту, которая создает момент, действующий в плоскости, перпендикулярной оси пружины. Такие пружины обладают рядом преимуществ по сравнению с другими типами: занимают мало места; ма-
Рис. 4.17
Рис. 4.18
натяжения между деталями, а
тер и ал пружины нагружен равномерно по всей длине; обеспечивают значительный рабочий ход (6—7 оборотов заводной оси); удобны для создания непрерывного вращения оси, т. е. используются в качестве механического двигателя с достаточно высоким КПД 0,6—0,8. Спиральные пружины используют в качестве упругих элементов колебательных систем, для создания постоянного также для возвращения системы в исходное положение.
Простейшая плоская пружина имеет вид пластины прямоугольной формы (рис. 4.19). Плоские пружины применяют для создания движения или механического усилия при небольших перемещениях. В радиоустройствах их используют в качестве контактных пружин реле и переключателей, пру
жинящих щеток, а также когда требуются небольшие усилия и перемещения. Сечение таких пружин чаще всего прямоугольное. Недостатком прямой плоской пружины является то, что она имеет большую длину по сравнению с тем перемещением, которое обеспечивает.
§ 4.4. Элементы управления, контактные группы и переключатели
Элементы управления. К элементам управления (обслуживания) радиоаппаратурой, устанавливаемым на механизмах и пультах управления, относятся поворотные ручки, маховички и кнопки. При конст-
Таблица 4.3
Форма ручек Эскиз Материал Основные размеры, мм
Диаметр длина высота
Круглая с впадинами Пластмасса 20—50 — 16-30
ж 1 -PTI
МД г I
Круглая с накаткой 0 1 Металл 10—80 — ю-зо
руировании элементов управления необходимо придавать им такие формы, чтобы они соответствовали естественному положению рук.
В радиоаппаратуре применяют поворотные ручки различных видов и конфигураций. Наиболее удобными являются ручки круглой формы, на цилиндрической и конической поверхностях которых делаются скругленные выступы или впадины различных профилей. В радиоаппаратуре наиболее распространены пластмассовые ручки. Широко используют ручки типа «клювик»,заостренный носик является указателем положения, в котором находится исполнительное устройство.
Основные виды ручек, применяемых в радиоаппаратуре, показаны в табл. 4.3.
Ручки управления выбирают с учетом точности настройки, удобства работы и величины передаваемого момента. Точность настройки зависит от диаметра ручки: чем ручка большего диаметра, тем точнее можно с ее помощью настроить прибор.
Для захвата рукой удобны следующие ручки: а) захватываемая только двумя пальцами (большим и указательным или средним), должна иметь диаметр не более 10 мм, угол поворота ее за один перехват равен 180° и более; б) захватываемая тремя вытянутыми пальцами (большим, указательным и средним), должна иметь диаметр от 10 до 16 мм, угол поворота ее за один перехват составляет 100—120°; в) захватываемая тремя согнутыми пальцами (большим, указательным и средним), должна иметь диаметр 35—40 мм, угол поворота ее за один перехват составляет не более 80°; г) захватываемая всеми пальцами руки, должна иметь диаметр 50—80 мм; угол поворота ее за один перехват составляет приблизительно 90°.
Значения допускаемых моментов, которые можно приложить к различным ручкам, приведены в табл. 4.4. При проектировании механизмов значения моментов необходимо уменьшать в 5—10 раз, для механизмов точной настройки — в 15—20 раз.
Таблица 4.4
Форма Диаметр или длина ручки Величина допускаемого
ручки (при высоте 25 мм) момента, Н мм
12 590
20 785
25 981
Круглая 37 1470
50 2350
75 4510
30 1170
Типа 40 1670
«клювик» 50 2450
60 3920
Ручки на осях крепятся штифтами или винтами. Штифты обычно затрудняют разборку приборов, поэтому в радиоаппаратуре чаще всего применяется крепление ручек одним или двумя винтами.
Элементы управления, по внешнему виду аналогичные круглым ручкам с выступами или впадинами, но имеющие диаметр более 50 мм, называют маховичками, которые бывают двух видов: без рукояток и с рукоятками. Маховички без рукояток применяют в тех случаях, когда пределы их поворота составляют не более пяти оборотов. Они рассчитаны на захват пальцами рук или ладонью. Обычно диаметры их делают 50—100 мм. Маховички с рукоятками служат для непрерывного вращения, их применяют для удобства настройки радиоаппаратуры, когда валик надо повернуть на любое количество оборотов не перехватывая руки. Маховички для непрерывного вращения бывают сплошными и со спицами, с постоянной ручкой (рис. 4.20, а) и откидывающейся (рис. 4.20, б).
При конструировании маховичков с ручками необходимо соблюдать следующее правило: ручки должны легко вращаться на своих осях; длина их должна быть не менее 22 мм; откидывающиеся ручки должны четко и надежно фиксироваться в откинутом положении. Значения рекомендуемых усилий и скоростей вращения для маховичков указаны в табл. 4.5.
Таблица 4.5
Радиус расположения рукоятки, мм Рекомендуемые усилия на рукоятке, Н Максимальная частота вращения, об/с
до 1 1 мин | свыше 1 мин
оператор тренированный оператор нетренированный оператор тренированный оператор нетренированный
30 До 3 4—5 3—3.5 3—4 2—3
40 3—4,9 3—4 2—3 2,5—3.5 2—8,5
50 4,9—14,7 2,5—3,5 1,7—2,5 2—3 1,4—2
Кнопки применяют для прямолинейного перемещения деталей и для поворота рычагов. В радиоаппаратуре обычно используют нажимные кнопки, управляемые одним пальцем. Для того чтобы в процессе нажатия палец оператора не соскакивал с кнопки, рабочую поверхность их делают рифленой или с небольшим углублением. Круглые кнопки, приводящиеся в действие нажатием пальца, должны иметь диаметр 10 —25 мм. Иногда кнопки делают квадратными или прямоугольными. Кнопки, имеющие различные назначения, обычно окрашивают в различные цвета.
При проектировании устройств, действующих при нажатии кнопки одним пальцем, необходимо учитывать следующее: а) для часто употребляемых кнопок усилие нажатия должно быть 1,4—3,6 Н; б) для кнопок легкого типа усилие нажатия не более 4,9 Н; в) для кнопок тяжелого типа усилие нажатия 9,8—29 Н. Превышение указанных значений вызывает физическую усталость оператора.
Контактные группы и переключатели. В любой радиоаппаратуре применяют различные коммутационные устройства для включения, настройки и управления аппаратурой.
К коммутационным устройствам, применяемым в РЭА, относятся переключатели с ручной и механической перестройками, контактные группы. В зависимости от приложенных усилий переключатели бывают нажимные, перекидные и поворотные.
Рис. 4.20
К нажимным переключателям относятся различные кнопки и клавиши, работающие на включение, выключение или переключение. Например, при помощи кнопок и клавишей производят переключение диапазонов приемника, включение определенных станций, подключение звукоснимателя и т. п.
Кнопочные (клавишные) механизмы, имеющие обычно от 2 до 20 кнопок (клавиш), удобны в тех случаях, когда нажимая на кнопку
фиксируют ее положение, а нажимая на другую — автоматически сбрасывают нажатую ранее.
Принцип работы механизма кнопочного переключателя показан на рис. 4.21. При нажатии на кнопку переключателя планка 1 своим выступом приподнимает скобу 2, которая затем под действием пружины 3 попадает в вырез планки и остается в этом положении. Скоба 2 рас-
2
а)
Рис. 4.23
положена над всеми планками переключателя, поэтому при нажатии на любую из остальных кнопок переключателя, она снова приподнимается и освобождает ранее нажатую кнопку, которая под действием пружины 4 возвращается в исходное положение.
Конструктивно кнопочный механизм (рис. 4.22) представляет собой шестикнопочный переключатель, смонтированный на прямоугольной раме, к которой прикреплена плата с контактами. В конструкцию переключателя входит: 1 — рама кнопочного механизма; 2 — планка фиксатора; 3 — перемычка; 4 —выступ для ползуна с контактом; 5 — окно для зуба фиксатора; 6, 7 — кнопки; 8 — светом асса; 9 — выступ для передвижения — стержень; 13 — зуб планки
фиксатора; 14 — выступ для передвижения кулачка.
Стержень 12 имеет в средней своей части окна, через которые проходит общая планка 2, фиксирующая зубом 13 нажатую кнопку.
При нажатии на любую кнопку перемычка ее стержня воздействует на скос зуба планки фиксатора 13 и отодвигает планку 2 влево. Кнопка фиксируется в нужном положении зубом 13. При этом ползун
бл ан кер а;
10, 11 — пружины;
с контактом на выступе стержня 12 опустится вниз и замкнет нужную цепь канала настройки.
При нажатии на другую кнопку нажатая ранее освобождается и контакты, принадлежащие ей, размыкаются.
Перекидные переключатели (тумблеры) широко применяют в различной РЭА для включения аппаратуры и переключения различных режимов.
Поворотные бывают галетные и пакетные, выпускаемые с различным числом положений.
К коммутационным устройствам, перестраиваемым различными механизмами, относятся контактные группы и переключатели.
Контактные группы делятся на одно-или двухконтактные, реже многоконтактные. Эти группы бывают с нормально замкнутыми контактами, когда под действием силы происходит разрыв электрического контакта; с нормально разомкнутыми контактами, когда под действи
ем силы замыкается электрический контакт; с переключающимися контактами, когда под действием силы размыкается нижний электрический контакт и замыкается верхний.
Для получения контактного давления в контактных группах применяют следующие два варианта: а) пружина 1 заранее изгибается на величину f и после контактирования с ответным контактом 2 выпрямляется, создавая определенное контактное давление FK (рис. 4.23, а); б) пружина 3 имеет прямую форму и после контактирования с ответным контактом 4 изгибается на величину f, создавая определенное контактное давление FK (рис. 4.23, б).
Рис. 4.25
Переключатели с механической перестройкой представляют собой ответственные коммутационные устройства, которые должны удовлетворять следующим требованиям: иметь малый момент вращения, так как с увеличением его увеличивается мощность электродвигателя и растут масса и габариты механизма; выдерживать большое число переключений; иметь надежный контакт в течение всего срока службы.
Рассмотрим некоторые конструкции переключателей, применяемых в различных механизмах.
Для уменьшения износа рабочих контактов 2 и 3 (рис. 4.24) применено кольцо 5 с впадинами, по которому скользит стальной сухарь 1. Контакты 2 и 3 замыкаются только тогда, когда сухарь 1 опустится во впадину кольца 5. Съем тока с подвижного ползунка 4 происходит через кольцо 6.
На плате 3 (рис. 4.25) расположены 20 рабочих проволочных контактов 4 и четыре контакта 2, представляющих собой общий токосъем. На ползунке 1 закреплены два проволочных контакта 5, расположен
ных под углом к рабочим контактам.
На плате 1 (рис. 4.26) печатным способом нанесены 20 контактов / и кольцо II, по которому скользят проволочные контакты 2, закрепленные на ползунке 3.
Для механизмов дистанционной настройки, имеющих большое количество фиксированных положений (более 20), применяют переключатели с уменьшенным числом контактов. Такой переключатель на 66 положений показан на рис. 4.27. Он представляет собой фактически два переключателя. Первый переключатель состоит из контактного кольца 1 и шести секторов 5, расположенных на неподвижной плате 2. На под-
Рис. 4.26
вижной плате 4 размещен сдвоенный пружинный контакт 10, с помощью которого находится заданный сектор. Второй переключатель состоит из сектора 6 и одиннадцати контактов 7 и 8. расположенных в пределах одного сектора 5. На подвижной плате 4 находится
шесть пружинных контактов 9, с их помощью находится соответствующий контакт внутри сектора.
В соответствии с поданной командой механизм, приводящий в движение переключатель, останавливается тогда, когда контакт 10 замыкает заданный сектор, а контакт 9 — заданный контакт из одиннадцати, при этом коммутация происходит через соответствующее реле. Прдпайка внешних цепей производится к пистонам 3, они печатными проводниками соединяются с соответствующими секторами и контактами.
В механизмах также применяют различные стандартные микровыключатели, которые приводятся в действие рычагами и кулачкамие
ГЛАВА 5
СОЕДИНЕНИЯ В КОНСТРУКЦИЯХ
МЕХАНИЗМОВ РАДИОУСТРОЙСТВ.
НЕСУЩИЕ КОНСТРУКЦИИ
§ 5.1. Неразъемные соединения
Назначением механических соединений является обеспечение заданного пространственного расположения элементов конструкции и передача энергии (потенциальной или кинетической) от одной части конструкции к другой.
Соединения могут быть разделены на две группы: неразъемные и разъемные.
Неразъемными называют соединения, разъединение которых невозможно без разрушения соединяемых деталей или соединяющего материала. К ним относятся соединения склепыванием, развальцовкой, сваркой, пайкой, склеиванием, запрессовкой и др. Основные требования, которые предъявляют к этим видам, — прочность, точность, антикоррозионная стойкость, надежность, технологичность изготовления.
Заклепочные соединения осуществляют с помощью заклепок, а также выступов в виде цапф и лапок, выполняющих роль заклепок. Заклепки используют для соединения металлических деталей, металлических деталей с неметаллическими, деталей из легких и трудносвариваемых материалов.
В заклепочных соединениях применяют заклепки со сплошным стержнем (рис. 5.1, а — а), полупустотелые (рис. 5.1, д — ж) и пустотелые (рис. 5.1, з). В механизмах радиоустройств для крепления стоек, боковых стенок, зубчатых колес на валах используют соединение деталей путем расклепывания, развальцовки, кернения цапфы, а также с помощью изгиба краев лапки или ее расчеканки, загибки краев детали.
Заклепки со сплошным стержнем различают по форме головки (с полукруглой, потайной, полу потайной, плоской); их размеры и фор
ма регламентированы стандартом. Материалом для заклепок служат стали марок Ст2, СтЗ, 10, 15, алюминий и его сплавы, медь, латунь. Формирование головки заклепки осуществляют обжимкой, отверстия в деталях сверлят или продавливают.
По механическим свойствам соединяемых деталей различают соединения деталей из твердых и мягких (эластичных) материалов. Твердые соединения могут быть прочные (пластмассы) и хрупкие (стекло, керамика). Соединение прочных деталей из пластмасс осуществляют пустотелыми и полупустотелыми заклепками путем развальцовки стержня заклепки.
Детали из хрупких неметаллических материалов имеют в месте крепления механически усиленные места; для крепления используют полу-
Рис. 5.1
пустотелые, сплошные и трубчатые заклепки. Для соединения мягких и эластичных материалов (винипласт, полиэтилен, резина) необходимы большие площади головки, поэтому под заклепки ставят шайбы, прокладки. Клепка и развальцовка заклепок не должны сильно деформировать соединяемые детали.
Диаметр заклепки d для общей толщины склепываемых деталей 50бщ < Ю мм определяется из выражения d = 1 4- 0,5 5оСщ.
Размеры элементов заклепочного соединения можно определять из соотношений (рис. 5.2, а):
а) шаг заклепок по направлению действия силы Р t > 3d;
б) шаг заклепок в направлении, перпендикулярном действию силы Р, h > 4d;
в) расстояние от края по направлению действия силы Р tt > 2d;
г) расстояние от края в направлении, перпендикулярном действию силы Р, ts > 1,5 d.
Проверочный расчет заклепок производят по следующим формулам:
допускаемое усилие (Н) для односрезной заклепки при работе ее на срез (рис. 5.2, б)
[Р] = -^-[тср1; (5.1)
допускаемое усилие (Н) на разрыв стержня заклепки (рис. 5.2, в)
(5.2)
допускаемое усилие (Н) на смятие головки заклепки (рис. 5.2, в)
[P]=^(D2-d2)[oCM]; (5.3)
4
Рис. 5.2
усилие Рп, допускаемое на соединение, имеющее п заклепок, вычисляют в предположении, что все заклепки соединения нагружены равномерно:
Рп = Рп, (5.4)
где Р — усилие, действующее на одну заклепку;
если п заклепок расположено по окружности D3K и передает крутящий момент (рис. 5.2, г), то его определяют (Н-мм) из выражения
Т = -^/г£>8к[тср]. (5.5)
При соединении деталей с помощью выступов, функции заклепки выполняет выступ на одной из деталей, конец которого расклепывается или развальцовывается. Выступы могут быть круглыми (рис. 5.3, а — г), квадратными, коническими и призматическими (рис. 5.4).
Круглые выступы (цапфы) имеют осевую зенковку или отверстие, как в полупустотелых заклепках, а также заднюю заточку. В зависимости от этого изменяется и форма головки при расклепывании (потайная, полупотайная, полукруглая и плоская).
Для предохранения от проворачивания поверхность цапфы должна иметь накатку. Такое соедийение применяют для соединения металлических и неметаллических деталей.
Для получения минимального осевого биения при соединении цилиндрической детали с плоской деталью большего размера площадь касания по торцу увеличивают. Для соединения таких деталей кроме развальцовки применяют кернение или расчеканку.
Рис. 5.3
У плоской детали выступы в виде лапки имеют призматическую форму, получаемую штамповкой (рис. 5.4, а). Часто конструкцией предусматривается несколько выступов (рис. 5.4, б). Соединение деталей производят расклепыванием, расчеканкой или обжатием.
Соединение деталей с помощью местной деформации выступов производят путем крепления деталей чеканкой (рис. 5.5. а) или кернением
Расчеканить
Рис. 5.4
(рис. 5.5, б). Листовые пластины соединяют между собой путем загибания их краев (рис. 5.6, а), загибания или разведения лапок (рис. 5.6, б).
Сварные соединения. Сваркой получают неразъемные соединения путем установления межатомных связей между свариваемыми частями при их местном или общем нагреве, пластической деформации, а также при одновременном действии того и другого.
Согласно ГОСТ 19521—74, различают термическую, термомеханическую и механическую сварки. В радиоустройствах используют мно
гие виды сварки, но наиболее применяемы аргонодуговая, газовая, электронно-лучевая (термические), контактная и термокомпрессионная (термомеханические), холодная и ультразвуковая (механические).
В механизмах радиоустройств применяют сварные соединения при изготовлении корпусов, кожухов, стоек, шасси, панелей, каркасов,
Рис. 5.5
шкафов. Они отличаются хорошей технологичностью, а процесс сварки — высокой производительностью.
Одной из особенностей сварных соединений является их меньшая устойчивость при действии знакопеременной механической нагрузки, чем у клепаных соединений. Однако при статических нагрузках сварные соединения вследствие равномерного распределения нагрузки
Рис. 5.6
обычно прочнее клепаных. Они применяются не только как механические, но и как электрические.
Технологические процессы сварки хорошо поддаются автоматизации. Применение сварных соединений положительно влияет на экономичность конструкции, так как экономический эффект получается не только за счет высокой производительности изготовления этих соединений, но и за счет исключения заклепок, накладок и т. п.
Наряду с преимуществами сварные соединения обладают и рядом недостатков, к которым прежде всего следует отнести трудность контро-
ля их качества.
Особое значение для производства радиоустройств имеют те способы сварки, которые применяют для цветных, легких металлов и сплавов. Большое количество деталей радиоустройств, подлежащих соединению сваркой, имеют толщину в пределах от 3 мм до 1—2 мкм (металлические пленки). Поэтому в радиотехнической промышленности наибольшее распространение получила контактная электросварка. Почти
все ее разновидности находят применение: стыковая, точечная, роликовая, импульсная, с использованием ультразвука, конденсаторная и др.
Для крупногабаритных конструкций из алюминиевых сплавов и нержавеющей стали применяют аргонодуговую сварку, а для изделий из малоуглеродистых сталей—
Рис. 5.7
электродуговую и газовую
сварки. В последнее время находит применение сварка лучом лазера.
Рассмотрим прочностные зависимости для стыковой, тавровой, точечной сварки и сварки внахлестку, которые широко применяют в производстве радиоустройств.
Допускаемое усилие (Н) для стыкового соединения двух деталей, имеющих толщину S (рис. 5.7, а),
[P]=Sl [ар],
(5.6)
где I — длина шва, мм; [орГ — допускаемое напряжение сварного шва при растяжении или сжатии, МПа (табл. 5.1).
Таблица 5.1
Способы сварки Допускаемые напряжения
при растяжении [ор]', МПа при срезе [Тср]', МПа
Ручная 0,9 0,6
Автоматическая под слоем флюса; контактная стыковая с оплавлением 0,65
Точечная —— 0,5
Допускаемое усилие (Н) для таврового соединения (рис. 5,7, б) [Р] = //( sin 45° [тср]' = Q,11K [тсР], (5.7)
где К — размер катета сварного шва, мм; [тср1 — допускаемое напряжение сварного шва на срез, МПа (табл. 5.1).
Допускаемое усилие на односторонний шов при соединении деталей внахлестку (рис. 5.7, в) определяют по (5.7), а при двустороннем шве (рис. 5.7, г) — из выражения
[Р]=1,4/К[тсрГ. (5.8)
Прочность точечной сварки зависит от диаметра сварных точек dCT (рис. 5.7, д), размер которых для материала толщиной S < 2 мм определяют из выражения dCT = 1,5Smln + 2,5, где Smin — толщина более тонкой детали.
Допускаемое усилие (Н) на срез деталей, сваренных точечной сваркой,
nd.2 [Р1=-^Чтср]'п, (5.9)
где п — число сварных точек.
Размеры элементов конструкции для односрезных точек (две детали в пакете) берут из соотношений (см. рис. 5.2, a) t > 2,5 dCT и /4 > 2 dCT.
Сварные соединения деталей из листовых (пленочных) пластических масс с суммарной толщиной до 2 мм обычно выполняют без присадочных материалов.
Сущность процесса сварки термопластов состоит в том, что соединяемые детали (при сварке с использованием присадочного материала и присадочного прутка) нагревают до перехода их в вязкотекучее состояние и при сравнительно небольшом давлении соединяют между собой за счет межмолекулярных сил сцепления. Следовательно, при сварке термопластов в отличие от сварки металлов плавлением жидкой фазы не образуется. При высоких температурах термопласты начинают разлагаться, теряя при этом свои ценные качества — механическую прочность, химическую стойкость и т. п. Степень разложения зависит от температуры нагрева и времени ее действия. Иногда для замедления процесса разложения вводят специальные стабилизаторы. Сварке могут подвергаться только изделия из термопластичных материалов.
Сварку осуществляют несколькими способами: нагретым газом, с помощью нагревательного элемента, высокой частоты, трения и ультразвука.
Винипласт обычно сваривают нагретым воздухом при температуре 200 — 220° С (воздух в грелке 230—270° С). Повышенная температура воздуха позволяет увеличить скорость сварки и получить более прочные соединения. Однако превышение температуры (выше 270°С) приводит к разложению материала. Температура ниже 230° С не обеспечивает достаточной прочности соединения.
Сварные соединения из винипласта осуществляют встык, внахлестку, впритык и под углом.
Паяные соединения. Пайка представляет собой процесс соединения деталей при помощи расплавленного дополнительного материала — припоя.
В процесса пайки происходят взаимное растворение, диффузия расплавленного металла (припоя) и металла деталей, чем обеспечивается соединение, обладающее определенной механической прочностью, электропроводностью и герметичностью. Процесс пайки в отличие от сварки происходит при более низкой температуре, чем при плавлении соединяемых деталей. Однако температура припоя должна быть несколько выше точки его плавления. Это необходимо для получения требуемой подвижности припоя, обеспечивающей хорошее заполнение зазоров между деталями в швах или хорошее обтекание их поверхностей.
Соединение пайкой может быть обеспечено получением заданной чистоты поверхности соединяемых деталей.
Для предохранения поверхности соединяемых деталей от возможного окисления при повышенной температуре необходимы защитная среда или защитные флюсы.
Соединение металлических деталей пайкой производится при помощи припоя, который делят на два вида: мягкие с темпе
ратурой плавления до 400° С и твердые с температурой выше 400° С.
Прочность соединений, выполненных с применением мягких припоев, невысока, поэтому они на прочность не рассчитываются.
Допускаемые усилия (Н) на соединения, выполненные твердыми припоями, определяют так:
пайка внахлестку и ус — косой стык (рис. 5.8, а, б)
IP] — IL [ТСР/, (5.10)
где I — длина внахлестку, мм; L — ширина стыка, мм; [тсрГ — допускаемые напряжения на срез в паяном шве, МПа, зависящие в основном от применяемого припоя;
пайка внахлестку для трубчатого соединения (рис. 5.8, в)
[Р] = ш/т/т[тСрГ, (5.Н)
где dT и /т — диаметр и длина стыка трубы, мм.
Клеевые соединения применяют для соединения металлических и неметаллических материалов, в том числе и разнородных. По конструкции и расчету на прочность клеевые соединения подобны паяным. Для склеивания используют клеи БФ-2, БФ-4, БФ-6, ВС-101, ПЭФ-2/10 и др. Клей БФ-2, БФ-4, ПЭФ-2/10. ВС-101 вибростойки. Клей БФ-2 по сравнению с клеем БФ-4 более термостоек, но менее эластичен.
Допускаемое напряжение
[тср]кл =^в/^»
где тв — разрушающее напряжение при срезе. С учетом подвержен ности полимерных клеев процессу старения, а также существенной зависимости прочности от колебаний температуры и характеристик окружающей среды (радиация, влажность, газовый состав атмосферы) коэффициент запаса для клеевых соединений при статическом нагружении следует принимать п = 1,5 -т-3,0. Пределы прочности некоторых клеев, необходимые для определения допускаемых напряжений, приведены в табл. 5.2.
Таблица 5.2
Клей При температуре, °C
20 60 100
О в ~ тв, МПа
БФ-4, БФ-2 15 9 5
ПЭФ-2/10 20 16 10
Карбинольный 20 13 —
§ 5.2. Разъемные соединения
Разъемными называют соединения, допускающие многократную разборку и сборку соединения без повреждения его элементов. Любое разъемное соединение должно обеспечивать необходимую прочность и жесткость, а также сохранение взаимного расположения деталей при повторных сборках и разборках. Недостатком разъемных соединений является способность некоторых из них разъединяться при работе в условиях вибрации.
В радиоустройствах для механической связи между отдельными элементами конструкции применяют главным образом резьбовые, штифтовые и шпоночные соединения.
Резьбовые соединения — самые распространенные; их достоинства — простота и удобство сборки, взаимозаменяемость, широкая номенклатура крепежных резьбовых деталей, невысокая стоимость и др. Конструктивные формы крепежных резьбовых деталей разнообразны; наиболее типичные из них — болт с гайкой (рис. 5.9, а) и шпилька (рис. 5.9, б); возможно также соединение двух деталей винтом (рис. 5.9, в).
Резьбы подразделяют на крепежные и специальные. Крепежные резьбы применяют в крепежных резьбовых деталях, а специальные — в винтовых механизмах.
Крепежные резьбы имеют треугольный профиль со срезанной вершиной и скругленными впадинами. Это уменьшает концентрацию напряжений, повышает стойкость инструмента и предохраняет резьбу от повреждения. Крепежная резьба бывает метрической, дюймовой, цилиндрической и конической. Наибольшее применение имеет метрическая резьба (угол профиля а = 60°). Дюймовую крепежную резьбу применяют для замены деталей машин и приборов, импортированных
из стран, в которых принята дюймовая система мер. Коническая резьба в радиоустройствах имеет ограниченное применение.
К специальным резьбам относятся круглая, трапецеидальная и упорная.
Материал для болтов (винтов, шпилек) и гаек выбирают в зависимости от их назначения и условий работы. Для их изготовления используют конструкционные углеродистые и
Рис. 5.9
легированные стали; мелкие
винты делают из латуни и дюралюминия. Чтобы защитить поверхности винта и гайки от коррозии, придать им необходимый цвет, применяют цинкование, кадмирование и хромирование.
В радиоустройствах существует большое число резьбовых соединений, поэтому даже небольшой процент выхода их из строя снижает надежность конструкции. Одной из важных мер повышения надежности аппаратуры является предохранение резьбовых соединений от само-отвинчивания (стопорение).
Резьбовые соединения должны стопориться, несмотря на выполнение в винтовой паре условия самоторможения (ф < р); особенно сильное ослабление резьбовых соединений наблюдается при вибрационной нагрузке. Для стопорения используют запирающие элементы, осуществляют пластическое деформирование, ставят винты на краску и т. д.
Особое значение в радиотехнических конструкциях имеет предохранение винтов от выпадания. Для этого используют откидные болты, либо винты с дополнительными деталями, закрепляемыми на них (штифт, шайба). В соединении (рис. 5.10, а) предотвращение винта от выпадания осуществляется без использования дополнительных деталей. При относительно малой толщине стенки проходного отверстия иногда нарезают резьбу в ней (рис. 5.10, в). Если стенка детали с проходным отверстием тонкая и резьбу с крупным шагом в ней сделать нельзя, то на шейку винта насаживают разрезную шайбу (рис. 5.10, б).
При расчете резьбовых соединений на прочность возможны следующие варианты:
а) если предварительная затяжкарезьбового соединения при сборке отсутствует, то стержень болта (винта, шпильки) работает на растяжение; при этом уравнение прочности имеет вид
где dr — внутренний диаметр резьбы, мм; Р — внешнее осевое усилие, растягивающее винт, Н; [ор|—допускаемое напряжение на растяжение материала винта, МПа;
Рис. 5.10
б) если болт поставлен в отверстие без зазора (рис. 5.11, а), а соединяемые детали нагружены поперечной нагрузкой Р, то он рассчитывается на срез и смятие; при этом допускаемые усилия
[Р] = Я<Р[Тср] ; (5.13)
4
\P]=dl |acMlmin, (5.14)
где 1тСр], [TciJmin — допускаемые напряжения на срез (материала болта) и смятие (минимальное), МПа;
в) если болт поставлен в соединение с зазором As (рис. 5.11, б), то его затяжка должна создать нормальное усилие N, которое вызывало бы значительные силы трения между стягивающими деталями. В этом случае болт рассчитывают по (5.12), в которой вместо Р необходимо подставлять N = P/f, где Р — сила, действующая на болт, Н; f — коэффициент трения между деталями.
После того как по одной из указанных формул будет найден диаметр d или dlt то он округляется до ближайшего большего значения по ГОСТу на резьбу, из которого также находят значения всех других элементов резьбы.
Штифтовые соединения (рис. 5.12, а, б), применяют для точной фиксации взаимного положения соединяемых деталей, ограничения перемещения одной детали относительно другой, в качестве упоров, ограничителей вращения валиков и т. п. В радиоустройствах используют штифты малых диаметров 0,6—1,5 мм и в редких случаях более 1,5 мм.
Для жестких соединений наиболее подходящими являются цилиндрические штифты при условии, что их диаметры и диаметры отверстий выполнены с точностью, обеспечивающей посадку с необходимым натягом. Надежное соединение можно получить при использовании конических штифтов, позволяющих получить плотные безлюфтовые соединения.
Для соединений, не испытывающих больших усилий на срез, применяют простые трубчатые разрезные штифты. Диаметр отверстия для такого штифта должен быть на 15—20 % меньше наружного диа
Рис. 5.12
метра штифта. Трубчатые штифты изготовляют из пружинной листовой стали. Материалами для штифтов также служат стали марок 15, 45. У8.
Штифты удерживаются в соединении силами трения, создаваемыми упругими деформациями материала деталей. Надежность штифтового соединения определяется величиной натяга. Предохранение штифтов от выпадания осуществляют кернением или специальными пружинящими предохранительными кольцами, изготовляемыми из проволоки диаметром 0,5—0,8 мм (рис. 5.12).
Диаметр штифта рассчитывают из условий его работы на срез и смятие.
Если к детали 1 приложен крутящий момент Т (рис. 5.13, а), то диаметр штифта определяют:
из условия среза в двух плоскостях
d—1,131/ —-—, (5.15)
V D {тср]
из условия смятия d --------------------------£--------, (5.16)
(Dj — D) D JaCM]min
где и D — диаметры ступицы и вала.
Если на соединение действует осевое усилие Р (рис. 5.13. б), то диаметр штифта равен:
из условия среза в двух плоскостях
(5.17)
Рис. 5.13
из условия смятия d =----------------------------------------, (5.18)
(Bj—В) [<Тсм]тщ
где и В — размеры вилки и винта. При расчете конического штифта имеем = ^ср = (^ТН 4" ^Тл)/2»
где dTH и dTJI — диаметры тонкого и толстого концов штифта.
Шпоночное соединение, служащее для передачи крутящего момента, осуществляют при помощи специальной детали — шпонки, расположенной в пазах соединяемых деталей. Достоинства шпоночных соединений — простота, надежность конструкции; удобство сборки и разборки; невысокая стоимость. К недостаткам относят
ся ослабление сопрягаемых деталей из-за уменьшения их сечений пазами и концентрация напряжений в углах пазов.
В радиоустройствах применяют следующие типы шпонок: призматическая (рис. 5.14, а), воспринимающая давление боковыми гранями; сегментная (рис. 5.14, б), работающая аналогично призматической.
Расчет шпоночных соединений производят на срез и смятие:
[Т]-0,5/М) [тср]; (5.19)
[Т\ = 0,25lhD loCM]min, (5.20)
где (Г| — допускаемый крутящий момент, передаваемый соединением, Н-мм; /, b и h — длина, ширина и высота шпонки, мм; D — диаметр вала, мм.
§ 5.3. Несущие конструкции, корпуса и корпусные детали
Несущие конструкции предназначены для размещения электронной части радиоустройств и обеспечения ее функционирования в реальных условиях эксплуатации.
Использование несущих конструкций позволяет улучшить компоновку, теплоотвод, экранирование и заземление, а также повысить надежность и технологичность составных частей изделия в целом.
Радиоустройства могут компоноваться в виде узлов, блоков, приборов, стоек, шкафов (контейнеров) и в качестве самостоятельной системы, состоящей из нескольких стоек, пультов управления и т. д.
Под блоком понимают функционально и конструктивно законченную сборочную единицу, состоящую из ячеек, закрепленных в его несущей части. Блок, как правило, не имеет самостоятельного эксплуатационного назначения и является составной частью (модулем) модуля более высокого конструктивного уровня.
Прибором называют блок или систему блоков, имеющую самостоятельное назначение.
Стойка — законченная конструкция, в которую входят расположенные один над другим блоки, подчиненные определенному ряду типоразмеров, принятому для данной модульной иерархии.
Шкаф (контейнер) — разновидность стойки; отличается от нее отсутствием у входящих в него блоков лицевых панелей, органов управления, контроля и измерения; корпус шкафа обычно имеет на лицевой стороне сплошные дверцы.
Пульт управления — устройство с управляемыми блоками, узлами, информационными, контрольными, сигнальными элементами, имеющее форму, удобную для работы оператора. При унификации несущих конструкций пульт может быть разновидностью стойки.
Компоновочные схемы перечисленных видов радиоустройств и типы входящих в них несущих конструкций определяются их элементной базой.
При компоновке блоков приборной, бытовой, макетной и лабораторной радиоустройств с использованием дискретных электрорадиоэлементов (ЭРЭ), электровакуумных приборов, трансформаторов, электронно-лучевых трубок в качестве несущего элемента применяют шасси или каркас блока. Шасси представляет собой плоскую или объемно-панельную конструкцию, используемую для размещения дискретных ЭРЭ и других деталей узлов блока. Компоновочная схема плоского шасси / телевизора (рис. 5.15, а), которое откидывается относительно корпуса 3 поворотом на 90° в шарнирах А и В. Монтажные провода, расположенные на задней стенке шасси, закрывают задним кожухом 2,
Рис. 5.15
В данном случае шасси — это плата из гетинакса или стеклотекстолита, для повышения жесткости окантованная по краям металлической рамкой. Шасси изготовляют из легких алюминиевых или магниевых сплавов с помощью литья или штамповки. Компоновочная схема шасси (рис. 5.15, б) — в виде плоской панели 1 с отбортовкой; шасси с расположенными на нем деталями и узлами закрывают кожухом 2.
Добавляя к горизонтальной части шасси 1 панель 3, для присоединения которой применяют косынки 2 или плоскую стенку 4, получают компоновочную схему (рис. 5.15, в). Конструкция обеспечивает хорошую жесткость при размещении на шасси тяжелых дискретных узлов.
Компоновочная схема каркаса блока (рис. 5.15, г) образована двумя горизонтальными панелями /, передней 2 и задней 4, соединенными фасонными профилями 3. На рис. 5.15, д показана компоновочная схема каркаса блока, в которой соединение панелей 1 и 2 обеспечивается стержнями 3, располагаемыми по углам панелей. Компоновочная схе
ма каркаса блока, образованного панелью 1 с закрепленными на ней П-образными скобками 2 с платами 3, дана на рис. 5.15, е.
Применяемую в радиоустройствах систему типовых несущих конструкций можно представить схемой на рис. 5.16, а.
Первый уровень — в качестве конструкций используют бескаркасные и каркасные (рис. 5.16,6, в) конструкции ячеек; второй уровень— шасси и панели (рис. 5.16, г) блоков; третий уровень — корпуса и каркасы блоков, а четвертый уровень — каркасы стоек, шкафов и пультов.
Перечисленные виды несущих конструкций радиоустройств являются типовыми.
Корпуса механизмов служат для установки различных деталей, элементов кинематической и электрической схем; защиты различных деталей и элементов от воздействия окружающей среды (влаги, пыли, вредных газов, насекомых и др.); защиты от механических повреждений; закрепления механизмов в блоках или на различных объектах.
В зависимости от расположения и функционального назначения механизмы обычно выполняют как отдельные узлы, располагающиеся непосредственно в радиоустройствах, и как самостоятельные устройства.
В связи с этим и корпуса механизмов делят на две группы.
I. Корпуса, располагаемые внутри устройства. Они бывают пяти типов.
1. Самыми легкими и технологическими являются корпуса часового типа, один из которых показан на рис. 5.17. Платы 1 и 2 соединяются между собой колонками 3, которые с одной стороны развальцовываются на плате. Крепление корпуса к прибору производят винтами, которые ввертывают в резьбовые отверстия колонок 3.
2. В корпусах консольного типа подшипники располагаются внутри корпуса, а вращающиеся детали — консольно снаружи (рис. 5.18). В них двусторонняя расточка бобышек под подшипники должна производиться с большой точностью.
3. Корпуса полузакрытого типа представляют собой основание с колонками, на которые устанавливается штампованная плата (рис. 5.19). Литое основание придает жесткость всему корпусу, что позволяет крепить механизм за лапки основания. Корпуса рассмотренных ранее типов применяют в пылезащищенных устройствах.
4. Корпуса закрытого типа выполнены в виде коробки, закрывающейся с одной стороны платой (рис. 5.20). Их применяют обычно в пы-лезащищенных устройствах, имеющих большой срок службы без профилактического осмотра. В таких корпусах все подшипники закрываются крышками, а выходные концы валиков имеют уплотнители. Сами корпуса весьма жесткие, что дает возможность осуществлять их крепление за любую поверхность.
5. Основные элементы герметичных корпусов, которые необходимо уплотнять, — крышки, смотровые стекла, электрические вводы и подвижные соединения.
4-й уровень (каркасы стоек, шкафов, пультов)
5-й уровень (корпусы и каркасы блоков)
л
2-й уровень (шасси и панели)
1-й уровень (ячейки)
а) S)
Рис. 5.16
Крышки герметичных корпусов уплотняют резиновыми шнурами круглого, квадратного или прямоугольного сечения. Концы резиновых шнуров для склеивания «на ус», отрезаются под углом, при этом длина скоса берется равной трем диаметрам или толщинам шнура. Часто для корпусов с небольшим периметром уплотнения прессуют резиновые шнуры замкнутой формы. Примеры конструкций корпусов с резиновыми уплотнителями показаны на рис. 5.21.
Рис. 5.16 Продолжение
Смотровые стекла уплотняют при помощи резиновых прокладок (рис. 5.22, а, б) или герметиками (рис. 5.22, в).
Электрические вводы в герметичные корпуса обычно осуществляют сальниками для ввода кабелей, проходными стеклянными изоляторами и специальными герметизированными разъемами.
В отверстие сальника (рис. 5.23, а) вставляется герметичный кабель 1 с гладкой наружной изоляцией, затем вращением гайки 2 давление
Развальцевать
Рис. 5.18
через шайбу 3 передается на резиновый уплотнитель 4, который плотно обжимает кабель.
Стандартный проходной изолятор (рис. 5.23, б) впаивается в корпус механизма фланцем 1, а в трубочку 2—проводник. Если требуется ввести в корпус несколько проводников, то такие изоляторы занимают много места. Поэтому в малогабаритных механизмах обычно применяют многоштыревые проходные планки, в которых штырьки 1 (рис. 5.23, в) армированы в стеклянные изоляторы 2. Такие планки устанавливают в корпус двумя способами (см. рис. 5.22).
Рис. 5.20
Рис. 5.21
“ Герметичный корпус для механизма показан на рис. 5.24. Механизм (на рисунке не показан) устанавливают в корпусе 1 и крепят к приливам / винтами. Шкала механизма размещается перед смотровым стеклом 3, которое уплотняют резиновой прокладкой 2, притягиваемой накладкой 4 с помощью винтов 5. Задняя крышка 8 также уплотняется резиновой прокладкой 10, и притягивается к корпусу накладкой 7 винтами 6. Напряжение к механизму подается через штырьки 9, армированные в стеклянные изоляторы, непосредственно к крышке 8.
Подвижные соединения представляют собой: валики, имеющие вращательное движение; штоки, имеющие поступательное движение, с помощью которых передается движение в герметизированный объем или из него.
По степени уплотнения подвижные соединения делят на уплотнение с утечкой и абсолютно герметичные.
Для уплотнений с утечкой обычно применяют такие же сальники (см. рис. 5.23, а), где вместо кабеля 1 вставляется валик или шток.
Абсолютную герметизацию подвижных соединений обеспечивают применением сильфонов или мембран, которые изготовляют из металлов (стало, бронза, полутомпак) и неметаллов (резина, фторопласт).
Конструкция для передачи поступательного движения в герметичный объем с применением мембраны (рис. 5.25). Толкатель 2, припаянный к мембране /, получает движение от рычага 3 и передает его штоку 4, находящемуся в герметичном объеме.
И. Корпуса механизмов как самостоятельные устройства. К ним предъявляются такие же требования, как и к корпусам радиотехнических устройств, основными из которых являются:
— надежная защита механизма от климатических и механических воздействий, а также от случайных механических повреждений;
— отсутствие взаимных наводок между устройствами и устойчивая экранировка электромагнитных полей;
— надежное закрепление кабелей электрического монтажа;
— надежное крепление устройства непосредственно к фундаменту, мачтам и стойкам или на амортизаторах;
— удобство транспортировки устройства.
Обычно такие механизмы выполняют в пыле- и брызгозащищенных или герметичных корпусах.
Рис. 5.25
Пыле-и брызгозащищенный корпус устройства показан на рис. 5.26. Литой корпус 3, на котором непосредственно собирают механизм, крепится к передней панели 9 винтами, в которой имеется окно с отбортовкой, закрываемое крышкой 8 на петлях с помощью винтов. В крышку вварена точечной сваркой обечайка 7 для прокладки резинового шнура 6.
Кожух устройства состоит из дна /, боковинок 2 и обечайки 4, сваренных между собой точечной сваркой. В паз между деталями 2 и 4 вставлен резиновый шнур 5. После вставления устройства в кожух передняя панель к нему притягивается винтами. Устройство установлено на амортизаторах //, которые крепятся к кожуху через накладки 10
Уплотнение между кожухом, передней панелью и крышкой производится резиновыми шнурами 5 и 6, которые сжимаются под действием винтов, создавая достаточно хорошее уплотнение.
ЧАСТЬ ТРЕТЬЯ
МЕХАНИЗМЫ РАДИОУСТРОЙСТВ
ГЛАВА 6
ОТСЧЕТНЫЕ УСТРОЙСТВА
§ 6.1. Общие сведения
Отсчетным называют устройство, служащее для определения значений измеряемой величины визуальным наблюдением по положению указателя относительно штрихов шкалы.
По способу предъявления зрительной информации отсчетные устройства приборов и систем делят на шкальные и цифро-в ы е.
В шкальных отсчетных устройствах значения измеряемой величины представляют в виде относительного смещения шкалы и указателя. Шкальные отсчетные устройства обладают наглядностью изображения, что в ряде случаев является крайне важным, например при определении тенденции изменения параметра.
В цифровых отсчетных устройствах результаты отсчета представляют в виде десятичного числа. Цифровой отсчет удобен в тех случаях, когда необходимы высокая точность и быстрота считывания результатов измерений, при нем отсутствуют субъективные погрешности отсчета. Он дает возможность осуществлять автоматическую регистрацию результатов измерений и связь с информационной системой. С другой стороны, абстрактность предъявления информации в виде цифр затрудняет ее восприятие при большом числе непрерывно меняющихся параметров. Кроме того, устройства с цифровым отсчетом достаточно сложны и имеют относительно высокую стоимость.
Далее рассматриваются только шкальные механические отсчетные устройства.
Различают шкальные отсчетные устройства с круговой (дуговой) неподвижной шкалой 1 и подвижным указателем 2 (рис. 6.1, а), с круговой (дуговой) подвижной шкалой 1 и неподвижным указателем 2 (рис. 6.1, б), с прямолинейной неподвижной горизонтальной (вертикальной) шкалой 1 и подвижным указателем 2 (рис. 6.1, в), с прямолинейной подвижной горизонтальной (вертикальной) шкалой 1 и неподвижным указателем 2 (рис. 6.1, г).
Круговая шкала в большинстве случаев предпочтительнее дуговой, так как занимает минимальное пространство при заданной длине шка
лы. Вращательное движение способствует количественному и качественному считыванию данных. Место расположения неподвижного указателя выбирают в зависимости от удобства снятия отсчета и работы оператора. При подвижных шкалах возможен большой диапазон измерения величины, но при этом затруднена оценка направления отклонения указателя.
Широко распространены шкальные отсчетные устройства с дополнительными изображениями, имеющими сходство с объектами или факторами, положение и состояние параметров которых отсчитывают по
Рис. 6.1
шкале. Такие наглядные отсчетные устройства наиболее удобны для определения взаимного расположения объектов и ориентации их в пространстве (рис. 6.1, 5).
Путем комбинирования и объединения подвижных и неподвижных элементов одношкальное устройство может быть использовано для предъявления нескольких взаимосвязанных видов информации. Комбинированное отсчетное устройство выполнено в виде радиокомпаса (рис. 6.1, е), два указателя 1 и 2 которого наложены друг на друга на вращающемся циферблате 3, ориентирующемся на магнитный полюс земли. Магнитные пеленги на станции А и В считывают непосредственно по расположению соответствующих указателей относительно шкалы.
Отсчетные устройства применяют для решения следующих задач: считывания количественной информации, в этом случае оператора интересуют числовые значения, соответствующие величинам измеряемого параметра; считывания качественной информации, когда для операто
ра важны сведения об отклонении того или иного параметра исследуемого объекта от заданного значения; контрольного считывания, если оператору необходимо знать, работает система в установленных пределах или нет; установки регулируемого параметра на заданную величину; слежения за объектом, когда оператор производит прерывистое или непрерывное подрегулирование положения элементов отсчетного устройства для поддержания заданного значения регулируемой величины (компенсационный метод слежения) или следования за изображением подвижного объекта (слежение с преследованием).
Сравнительная оценка цифровых и шкальных отсчетных устройств в зависимости от назначения приведена в табл. 6.1.
Таблица 6.1
Назначение Отсчетные устройства
с подвижным указателем с подвижной шкалой цифровое
Для количест- Удовлетвори- Удовлетвори- Хорошее (тре-
венного считывания тельное тельное бует минимальной затраты времени на считывание при минимальной ошибке отсчета)
Для качествен- Хорошее (легко Плохое (трудно Плохое (трудно
ного и контроль- опознается изме- оценить величину оценить тенден-
ного считывания нение положения указателя) и направление отклонения указателя) цию изменения положения знака)
Для установки Хорошее (имеет- Удовлетвори- Хорошее (наи-
регулируемого ся простая взаи- тельное (связь более точный ме-
параметра мосвязь между смещением указателя и перемещением органа управления) между смещением указателя и перемещением органа управления недостаточно ясна) тод установки параметра)
Для слежения Хорошее (положение указателя легко управляется и визуально контролируется) Удовлетворительное (не обеспечивается лег- кость манипулирования) Плохое (имеет неясную связь с перемещением ручных органов управления)
Каждое отсчетное устройство состоит из шкалы и указателя.
Шкалой называют деталь с совокупностью отметок (штрихов), расположенных на прямой, дуге окружности или линии сложной формы с изображением у отметок ряда последовательных чисел, соответствующих значениям измеряемой величины. Шкалы обычно выполняют на плоской или цилиндрической поверхностях; по форме расположения отметок они могут быть круговыми (рис. 6.1, а, б), прямолинейными (рис. 6.1, в, г) и спиральными*
Расстояние между двумя соседними отметками шкалы называют длиной деления шкалы, а число единиц переменного параметра, соответствующее участку между двумя делениями, — ценой деления шкалы. Деталь, на которую нанесена шкала, называют циферблатом.
Указателем называют стрелку или индекс со штрихом, которые занимают определенное положение относительно делений шкалы, от
Рис. 6.2
мечая соответствующее значение измеряемой величины. Отсчетные
устройства с круговой или линейной шкалой имеют различные вари-
анты расположения указателей; прозрачный визир, перед шкалой; указатель, находящийся за прозрачной шкалой, и указатель, касающийся периферии шкалы. Три варианта расположения указателей для круговых шкал показаны на рис. 6.2, а — в.
Обычно указатели крепят винтами к корпусу механизма или к панели прибора, в котором применяют устройство (положение фиксируют штифтами).
Дисковый циферблат устанавливают на валике с помощью втулки с буртиком, которая крепится на нем винтом, штифтом или с помощью обжимки. Шкалу к втулке с буртиком крепят развальцовкой или винтами посредством специальной шайбы 1 (рис. 6.3), которая позволяет легко производить юстировку шкалы.
Способы крепления циферблатов шкал весьма разнообразны, зависят от применения отсчетного устройства и условий его использования. В любом случае необходимо предусматривать возможность смещения шкалы относительно указателя для регулирования начального положения отсчетного устройства.
В радиоустройствах, не испытывающих значительных ударных нагрузок, для крепления барабанного циферблата применяют установочные винты 2 (рис. 6.4, а), которые затягивают после установки шкалы 1 в требуемое положение.
находящийся
Рис. 6.3
В тех случаях, когда требуется быстрая перестановка шкалы на любое деление относительно индекса без поворота вала, применяют устройства с жесткой фиксацией барабана или фиксацией его на трении. При жесткой фиксации (рис. 6.4, б) движение от барабана 3 со шкалой
передается на вал 1 с помощью мелких зубьев 2, выполненных на торцовых поверхностях барабана и вала. При оттягивании барабана зубцы выходят из зацепления и шкала свободно поворачивается относительно вала. После установки шкалы в требуемое положение барабан отпускают и под действием пружины 4 зубья снова входят в зацепление. В конструкции с фиксацией трением (рис. 6.4, в) маховичок 4 жестко связан со шкальным барабаном 3 и с валом 5, который проходит через полую втулку 2, соединенную с исполнительным элементом.
Рис. 6.4
Связь барабана 3 с втулкой 2 осуществляется силами трения в коническом сопряжении, силовое замыкание которого обеспечивается пружиной 1. При оттягивании маховичка вправо шкальный барабан 3 отключается от втулки 2 и свободно поворачивается на требуемый угол.
В некоторых конструкциях отсчетных устройств необходимо ограничить угол поворота шкального барабана. Простотой и надежностью отличается ограничитель поворотов с кулачковыми шайбами 2 (рис.6.4,г), свободно вращающийся на ступице втулки 3, жестко соединенной с помощью штифта с валом 1. При вращении барабана 4 со шкалой палец 5 захватывает кулачок ближайшей к нему шайбы, которая захватывает вторую шайбу, вторая — третью и т. д. до тех пор, пока кулачок последней шайбы не упрется в неподвижный палец 6.
Спиральные шкалы применяют в тех случаях, когда круговые шка
лы при их разумных конструктивных размерах не обеспечивают требуемой точности измерения параметра во всем диапазоне его изменения.
По конструкции отсчетные устройства делят на две группы: одношкальные и многошкальные.
Использование одной шкалы позволяет производить прямой отсчет измеряемого параметра в линейной и угловой мере или непосредственно в единицах измеряемой величины, что является важным достоинством одношкальных отсчетных устройств. В силу ограниченных конструктивных размеров шкал одношкальные отсчетные устройства имеют невысокую точность измерения параметров, изменяющихся в больших диапазонах.
Многошкальные отсчетные устройства увеличивают длину шкалы, а следовательно, уменьшают цену деления, т. е. повышают точность отсчета измеряемого параметра.
Наиболее распространенными являются двухшкальные устройства со шкалами грубого и точного отсчетов. Увеличение масштаба шкалы обеспечивают за счет передаточного отношения между шкалами точного и грубого отсчетов. Определенное неудобство при пользовании многошкальными отсчетными устройствами состоит в том, что при измерении одной величины, оператору необходимо последовательно снимать отсчеты с нескольких шкал, что увеличивает время измерения величины.
Отсчетные устройства должны сочетать точность отсчета, четкость шкалы, возможность юстировки и индивидуальной градуировки.
Точность отсчета — это основное требование, предъявляемое к отсчетным устройствам, которое зависит от толщины штрихов, отметок, формы указателя, их взаимного расположения, параллакса и т. д.
Штрихи на шкалах делят на три вида: главные, обозначающие целые числа; средние, обозначающие х/2 или х/5 главного деления; малые, делящие главные на 5 или 10 частей.
Для шкал, применяемых в радиоаппаратуре, главные штрихи должны быть толще средних, а средние — толще малых. Для шкал, требующих высокой точности показаний, толщина штрихов должна быть одинаковой.
Толщину штрихов для шкал, применяемых в лабораторных приборах, берут 0,15 мм, для переносной радиоаппаратуры — 0,25 — —0,35 мм. Для больших шкал, наблюдаемых при удалении до двух метров, толщина штрихов 0,8—1 мм. В шкалах, наблюдаемых в лупу, толщина штрихов берется из расчета 0,15/Г, где Г — увеличение лупы«
Наименьшая величина длины деления шкалы ограничивается затруднительностью отсчета из-за сливаемости штрихов и обычно делается не менее 1 мм. Наилучшие результаты оценки долей делений получаются в том случае, если длины делений шкалы лежат в пределах 1—2,5 мм.
Длина штрихов зависит от величины наименьшего интервала шкалы и определяется по табл. 6.2.
Таблица 6.2
Величина наименьшей длины деления шкалы, мм Длина штрихов, мм
главного среднего малого
0,8—1,2 з,з 2,6 1,8
1,2—2,0 4,0 3,0 2,0
2,0—3,0 5,0 3,8 2,5
3,0—5,0 6,0 4,5 3,0
Законцовка стрелок и указателей должны быть простой, а толщина конца стрелки (острия) не должна быть более ширины малого штриха шкалы.
Параллакс — видимое смещение совмещаемых штрихов шкалы 1 и указателя 2 при смещении глаза наблюдателя от правильного положения А в точку В на h (рис. 6.5).
При этом погрешность отсчета
-- hS/ ^нв»
(6.1)
где 3 - расстояние между плоскостью шкалы и указателя; LHB — расстояние наилучшего видения (LHB = 250 мм).
Для расстояния наилучшего ви-
дения смещение глаза наблюдателя достигает 30 мм, тогда, согласно (6.1), погрешность отсчета
en = 30S/250-0,12S. (6.2)
Из (6.2) видно, что погрешность от параллакса зависит от расстояния 3, поэтому при проектировании отсчетных устройств необходимо стре
миться к его уменьшению.
Четкость шкалы — это совокупность ряда факторов: размеры буквенных и цифровых обозначений, фон шкалы и окраска штрихов, освещенность шкалы и др., —• обеспечивающих хорошую читаемость
шкалы и неутомляемость глаз оператора.
Шкалы в отсчетных устройствах обычно окрашивают в белый цвет, а штрихи и знаки — в черный или делают фон черным, а штрихи и знаки — белыми. Для меньшей утомляемости глаз оператора фон шкалы желательно делать бледно-желтым. Поверхность шкалы и указателя должна быть ровной и матовой, а штрихи — четкими. Размер цифр, букв и знаков должен иметь соотношение между высотой и шириной 3:2. Толщина линий этих знаков должна быть для черных линий на белом фоне х/7 высоты знака, для белых линий на черном фоне — 1/8 высоты знака.
При рассматривании невооруженным глазом шкалы, удаленной на расстояние не более 0,4 м, высота цифр должна быть равна полуторакратной величине интервала, но не менее 2 мм. При отсчете с расстояния более 0,4 м высота цифр должна быть увеличена. При отсчете с помощью лупы высота цифр должна быть равна 0,6—0,8, длины малого штриха.
Для шкал рекомендуется брать шрифты высотой 2; 2,5; 3; 4; 5; 6; 8 и 10 мм.
Возможность юстировки, т. е. поворота шкалы в пределах небольшого угла для совмещения начального или конечного штрихов шкалы, соответствующих крайнему положению исполнительного устройства, должна быть предусмотрена в отсчетных устройствах с использованием типовых шкал. В отрегулированном положении шкала закрепляется стопорным устройством.
Индивидуальная градуировка шкал применяется тогда, когда закономерность изменения параметра от угла поворота исполнительного устройства является индивидуальной для каждого экземпляра радиоприбора. При индивидуальной градуировке отсчетное устройство должно позволять наносить штрихи в собранном аппарате и временно удалять шкалу для дополнительного нанесения цифрых и буквенных обозначений.
В радиоаппаратуре применяют шкалы, изготовленные из металла, бумаги, пластмассы и стекла.
Толщина штриховых отметок зависит от способа их нанесения. Гравирование на металле позволяет получить штрихи толщиной 0,1 — —0,2 мм, а гравирование на пластмассе — 0,2—0,4 мм.Типографская печать обеспечивает толщину отметок не тоньше 0,2 мм, травление на стекле и металле — 0,2—0,3 мм. Фотографированием можно получить тонкие риски — до 0,003 мм.
Допуски на изготовление шкал механической обработкой приведены в табл. 6.3.
Таблица 6.3
Расстояния Класс точности шкал I Расстояния Класс точности . шкал
- 1 | 2-й | 3-й •-Й | 1 2-й 1 | З-й
Круговые шкалы (допуски Дфи, угл. мин) Линейные шкалы (допуски Д1ж, мм)
От риски к риске Между любыми рисками в пределах всей шкалы ±3 ±5 ±5 ±8 ±8 ±12 От риски к риске До 100 мм До 200 мм До 300 мм ±0,05 ±0,05 ±0,06 ±0,07 ±0,07 ±0,08 ±0,09 ±0,1 ±0,12 ±0,13 ±0,14 ±0,15
Допускаемые отклонения на расстоянии от риски к риске и между любыми рисками в пределах всей шкалы, получаемые печатанием, устанавливаются: ± 20' для круговых шкал; ±0,2 мм — для линейных шкал.
Настройка исполнительных элементов с помощью отсчетных устройств производится совмещением штрихов шкалы и указателя, а более точная — делением интервала между штрихами «на глаз» или по нониусу.
При совмещении штрихов шкалы и указателя сдвиги одного штриха относительно другого составляют b = 0,05-4-0,1 мм. Тогда погрешность от совмещения штрихов шкалы и указателя:
для круговых шкал (угл. мин)
дФс = arctg (26/DJ; (6.3)
для линейных шкал (мм)
А/с = 6, (6.3а)
где Дш — диаметр шкалы
При делении интервала «на глаз» погрешности отсчета зависят от толщины штриха и формы конца указателя, значения которых приведены в табл. 6.4. Тогда погрешность настройки делением интервала «на глаз»:
для круговых шкал (угл. мин)
Дфд = 60ц<ринт; (6.4)
для линейных шкал (мм)
А^д —Н^инт» (6.4а)
гДе Финт и ^инт — величина интервала; ц — коэффициент относительной погрешности (табл. 6.4).
При настройке по нониусу применяют шкалы, имеющие только равномерные деления. Точность отсчета устройств с нониусом принимается равной 1/п доли интервала, где и — число делений нониуса. Тогда погрешность при настройке по нониусу:
для круговых шкал (угл. мин)
Д<рн = 60<рият/п; (6.5)
для линейных шкал (мм)
А/н = /Инт/^* (6.5а)
Согласно (6.2), погрешность от параллакса для круговых шкал (угл. мин)
Дфп = arctg —— . (6.6)
Ь'Ш
Погрешность отсчета зависит от точности установки шкалы в радиоаппаратуре, которую обозначим Аф^ для круговых шкал, А/у для линейных шкал.
Таблица 6.4
Толщина отметок Форма конца указателя Погрешность отсчета Примечание
название вид в долях деления
Ножевидная с нитью 1/10 0,1 С зеркальным отсчетом
1/4 0,25 Без зеркального отсчета
Все отметки имеют одинаковую толщину, равную 0,1 мм Световой луч Копьевидная 1/10 1/4 1/3 0,1 0,25 0,33 С зеркальным отсчетом Без зеркального отсчета
Копьено-жевидная 1/3 0,33
Отметки различной толщины Вне зависимости от формы конца указателя — 1/2 1/3 0,5 0,33 При отсчете вблизи
Общая погрешность отсчетного устройства при настройке совмещением штрихов шкалы и указателя:
для круговых шкал (угл. мин)
А<₽2 - С = VДф? +Л<Р2п + Дфи2 +(1,14Д<ру)2; (6.7)
для линейных шкал (мм)
Д/s-c =/Д/? + /г + Д« + Д/|, (6.8)
где Д<ри, А/и — погрешности изготовления шкал (см. табл. 6.3).
В этих формулах принято, что все величины (кроме Д<ру) подчиняются закону нормального распределения, а Д<ру распределяется по кривой Максвелла.
Для определения общей погрешности отсчетного устройства, настройка которого производится делением интервала «на глаз» и по
нониусу, в (6.7) Афс заменяют на Д<рд или А<ри, определяемые по (6.4) и (6.5), а в (6.8) Д/с — на Д/д или Д/и, определяемые по (6.4 а) и (6.5а).
В радиоустройствах обычно применяют лупы, представляющие собой оптическую систему, состоящую из одной или нескольких линз.
Увеличение лупы Г определяют соотношением
r=tgy7tgy, (6.9)
где у, у' — углы, под которыми наблюдатель видит предмет не-
вооруженным глазом и через лупу.
Принимая расстояние «наилучшего видения» для невооруженного глаза £нв = 250 мм, а зрачок глаза расположен в заднем главном фокусе лупы, получим
Г = 250//', (6.10)
где f — заднее фокусное расстояние. Величина Г различных луп лежит в пределах от 2 до 40—50*.
На рис. 6.6 показана простая лин-
за, используемая в качестве лупы при условии, что зрачок глаза расположен в заднем главном фокусе F’, а предмет I — на расстоянии S < f.
В этом случае изображение Г увеличенное, но мнимое.
§ 6.2. Расчет шкал
Исходными данными для расчета шкал обычно являются: А —количество единиц или диапазон изменения параметра, АЛ — абсолютная погрешность измерений, допустимые геометрические размеры шкалы, условия использования отсчетного устройства.
Прямолинейные шкалы часто ограничивают допускаемой длиной £0. выбираемой или назначаемой по конструктивным соображениям. Их расчет выполняют в следующем порядке.
С учетом равной вероятности положительной и отрицательной погрешностей отсчета цену деления шкалы находят из условия a -- 2АЛ.
Число делений шкалы п — Ala = (26Л)-1, где 6Л — относительная погрешность отсчета.
Расчетная длина оцифрованной части шкалы L — nbn < Lo, при этом blt - допускаемая для данных условий использования длина деления шкалы.
При L >L0 расчетную длину шкалы можно уменьшить до L = ~ £0 изменением Ь„ и п. Однако уменьшение длины деления Ьо ограничено минимально возможным значением bmln для данных условий использования шкалы. При ba = bmiln дальнейшее уменьшение дли
ны шкалы связано с уменьшением числа делений п, что, в свою очередь, приводит к увеличению погрешности измерений. Следовательно, минимальную расчетную длину шкалы £т1п определяют максимально допустимая погрешность измерений 6Лтах и минимально возможная длина деления шкалы bmin.
В круговых (дуговых) дисковых шкалах отметки наносят в плоско-
сти шкалы в радиальном направлении перпендикулярно оси ее вращения. На цилиндрических шкалах отметки расположены на внешней цилиндрической поверхности бараба-
на в направлении, параллельном его оси.
Конструктивные размеры круговых шкал ограничивают углом поворота 0О или диаметром d0 диска или барабана. Цена деления шкалы а = — 2ДД, число делений шкалы
и —Л/а = (26Л)~1,
где Л — диапазон изменения измеряемого параметра; ДЛ и 6Л — абсолютная и относительная погрешности измерения параметра (6Л=ДЛ/Л).
Угол оцифровки круговой шкалы,
обычно равный углу ее поворота, 0 = Рп. где р — угловая цена деления шкалы (рис. 6.7). Диаметр ок-
ружности нанесения отметок шкалы d связан с углом ее поворота 6 со-
отношением
, 2Ьп
d —-----
в
При проектировании круговых шкал необходимо выполнять условие d < d0. При d > d0 уменьшение диаметра шкалы до d = d0 возможно за счет уменьшения Ь, п или увеличения угла 0. Однако для круговых шкал угол 0 ограничен условием 0тах = 2л. При 0О — — ®тах и Ьо = бт)п диаметр шкалы уменьшается с уменьшением числа делений шкалы л, но в этом случае увеличивается погрешность измерения параметра А. В результате оценку возможности использования круговых шкал для измерения параметров с минимальной абсолютной погрешностью можно проводить по соотношению
64 , — &m,n
amax °max
Дисковые спиральные шкалы выполняют в виде спирали Архимеда, нанесенной на торцовой поверхности циферблата. За исходные геометрические параметры принимают угол оцифровки (поворота) шкалы 0 > 2 л, допускаемый диаметр шкалы d0, шаг спирали равный расстоянию между соседними витками спирали (обычно t = 44-10 мм).
Расчет спиральных шкал производят в следующем порядке.
Цена деления шкалы а = 2 ДА, полное число делений шкалы
п = Л/а = (26Д)-'.
0
Число витков спирали k — > 1 и число делений на каждом вит-
ке
п 2лп л
nk = — =---- --------.
£ 6 06Л
Длина й-го витка спирали
Lh = 2nRh = 2nR0—tek,
где Rh Rn ~ Qh — уравнение спирали Архимеда; 2 Ro — допускаемый диаметр шкалы; 0ft — угол поворота k-ro витка.
Так как Lh — bknh, то длина деления bh на каждом витке
= -foR»~<efe = A (2nR0- te„) 6Л.
Tift л
При постоянных значениях i?0, nh и t длина деления шкалы Ьк уменьшается от внешних к внутренним виткам спирали и на каждом витке должно выполняться условие bk > Ьо. Если 0fe+1 > 0& и bk+1 > то для оценки возможности использования дисковой спиральной шкалы для измерения параметров с относительной погрешностью 6Л необходимо рассматривать длину деления шкалы bk и угол поворота 0Й для крайнего внутреннего витка. Тогда bh = bminf = 2л и
Mmin =------—--------.
2в(Лтах-/га1п)
При бЛШ1п>6Л спиральная шкала не обеспечивает требуемую погрешность измерения и для получения условия 6ЛШ1П = б Л необходимо увеличить диаметр шкалы d, угол ее поворота 0 (число витков k) или масштаб шкалы за счет использования многошкальных отсчетных устройств.
Для практических расчетов спираль Архимеда заменяют дугами полуокружностей с радиусами (рис. 6.8).
Яг=Яо—= 1; 2;...).
4
В этом случае полувитки очерчивают постоянными радиусами, длина шкалы на каждом полувитке
Li — 2nRt = л (2R0 ——'l ;
длина деления шкалы
bt = 2ш (2Р0 —yj 6Д;
2л1 ^2/?max— i
Цилиндрические спиральные шкалы обычно имеют вид винтовой линии, выполненной на наружной или внутренней поверхности цилиндрического барабана. При развертке поверхности барабана диаметром d на плоскость, винтовая линия шкалы совпадает с наклонной прямой, составляющей угол у с плоскостью, перпендикулярной оси барабана (рис. 6.9, а). Поворот барабана на угол 2л соответствует линейному осевому смещению указателя на величину, равную шагу винтовой линии.
Цена деления шкалы а = 2ДЛ, число делений шкалы п = А/а = (2М)-'.
Число витков винтовой линии k = —> 1, где пк — число делении на одном витке (обычно nk = 10, 50, 100). Длина шкалы L = nbQ и длина одного витка Lk = L/k = =nhbQ, где Ьо—допускаемая длина
деления шкалы. При заданном диаметре барабана dQ угол подъема винтовой линии у = arccos и шаг винтовой линии Р = лс!0 tg у. Осевое линейное перемещение указателя, соответствующее диапазону изменения параметра А, составляет I = Pk при полном угле поворота шкалы 0 = 2лk.
Наиболее распространенными являются цилиндрические спиральные шкалы, выполненные в виде винтовых канавок 1 на наружной поверхности барабана 2 (рис. 6.9, б). В отдельных конструкциях внутри полого барабана 1 выполняют спиральную канавку 2 с шагом, равным шагу наружной винтовой линии шкалы (рис. 6.9, в). В этом случае указатель неподвижен, а барабан со шкалой кроме вращения имеет и осевое перемещение.
В многошкальных отсчетных устройствах исходными конструктивными параметрами обычно являются L0T, дот, 0ОТ — допускаемые длина, диаметр и угол поворота шкалы точного отсчета; Lor, dor,
0ОГ — соответствующие параметры шкалы грубого отсчета. Расчет двухшкального отсчетного устройства проводят в такой последовательности.
Цену деления шкалы точного отсчета принимают равной ат = = 2ДЛ, так как погрешность измерения параметра всем отсчетным устройством определяется шкалой точного отсчета.
Общее число делений на двух шкалах
п = Л/ат (26Л)~1 = лт пг.
Число делений шкалы точного отсчета обычно принимают пт =10, 50, 100, а число делений шкалы грубого отсчета пг = п/пт. Цена деления шкалы грубого отсчета
аг = А/пг = ат пт.
Рис. 6.9
Расчетные параметры шкал:
Lr — пт Ьот L0T,
j __ 2ПТ j
Lr =s и, bor Lor,
j 2nr bor .
“г
где 60т, bor — соответственно допускаемая длина деления шкалы точного и грубого отсчетов.
При повороте шкалы точного отсчета на один полный оборот (0Т = = 2л) шкала грубого отсчета повернется на одно деление 0Г = 2л/ пг. Передаточное отношение между шкалами точного и грубого отсчетов
i — 0т/0, ~ пг
(лг — число делений шкалы грубого отсчета, которое укладывается в пределах угла 2л).
Следовательно, для увеличения масштаба шкалы в многошкальных отсчетных устройствах целесообразно использовать механизмы.
обеспечивающие большие передаточные отношения между валами, на которых крепят шкалы точного и грубого отсчетов. К таким механизмам относят винтовые, червячные, зубчатые простые и планетарные механизмы.
§ 6.3. Конструкции шкальных механических отсчетных устройств
Распространенная конструкция шкального механизма с подвижной круговой шкалой и неподвижным указателем 1 приведена на рис. 6.10, а. Зубчатое колесо 4 со шкалой 3 закреплено на втулке 2 шайбой 7. При необходимости введения поправки в угловое положение шкалы триб 5 сцепляют с колесом 4 кнопкой 6 и поворачивают на требуемый угол. На рис. 6.10, б
показана конструкция механизма для дискретного ввода и установки значения параметра при отсчете ее по круговой шкале. Угловое положение рукоятки /, вала 2, диска 3 и шкалы 10 фиксируется шариком 7, входящим в отверстие диска 3 под действием пружины 5, расположенной во втулке 6 и снижаемой винтом 4. Неподвижный указатель 9 закреплен на плите 8.
Конструкция отсчетного устройства с многооборотной спиральной дисковой шкалой показана на рис. 6.11. Шкала нанесена на прозрачном диске 5, закрепленном на втулке-шестерне 2, входящей в зацепление с колесом /, на котором закреплен
кулачок 7. Под действием пружины 4 к рабочей поверхности кулачка постоянно поджимается ролик 6, перемещающий рычаг 3 вокруг оси. На рычаге закреплены миниатюрная лампа накаливания 8 с конденсатором 9 для освещения шкалы и оптическая система 10, с ее помощью можно визуально наблюдать изображение шкалы.
Типовая конструкция отсчетного механизма с подвижным указателем и неподвижной линейной шкалой показана на рис. 6.12, а. Барабан 1 закреплен на оси, вращающейся в подшипниках качения кронштейна 2. На наружной поверхности барабанов выполнена винтовая канавка 4 прямоугольного профиля, в которую входит штырь 14 штыревого приспособления 5 каретки 6. Для удобства разборки
Рис. 6.11
кронштейн выполняют разборным со съемной стенкой 7. Каретка 6 перемещается по направляющим 9 на роликах 8. Пределы смещения каретки устанавливают ограничителем 3. К каретке 6 прикреплена стрелка 10, а отсчет выполняют по шкале 11. Для уменьшения трения в штыре выполняют проточки для насыпных подшипников 13, они удерживаются от выпадания втулкой 12. Для регулирования легкости вращения штыря используют гайку 15. Барабан получает вращение от источника движения, например электродвигателя, через соответствующую передачу и зубчатое колесо. Направление вращения барабана может быть реверсивным, шкала — линейной и нелинейной в зависимости от назначения измерительного прибора и отсчетного устройства.
Конструкция отсчетного механизма с неподвижным указателем и с подвижной спиральной цилиндрической шкалой показана на рис. 6.12, б. В опорах кронштейна 1 вращается шестерня 2, с которой сцепляется венец зубчатого колеса, выполненного на гайке 4. С гайкой 4 жестко связан барабан 6 со шкалой. При вращении шестерни 2 гайка 4 с барабаном вращается и одновременно поступательно перемещается вдоль оси винта 3. Отсчет
снимают по неподвижному указателю 5t закрепленному на кронштейне 1.
На рис. 6.13, а показана типовая конструкция винтового механизма со шкалами точного и грубого отсчетов. В торцовое отверстие винта 2 завальцован шарик /, выполняющий роль упора при контакте с торцовой поверхностью линейно перемещающегося узла приборного устройства. На наружной цилиндрической поверхности гайки 3 жестко за-
креплена втулка 4 с прямолинейной шкалой грубого отсчета, например миллиметровой шкалой с ценой деления 1 мм, и продольным штрихом-указателем, расположенным параллельно оси втулки. Часть длины резьбового отверстия гайки 3 выполнена в виде цанги, на которую навинчивается регулируемая гайка 8 для устранения мертвого хода в винтовой паре. Барабан 6 с круговой шкалой точного отсчета, имеющий, например, 100 делений с ценой деления 0,01 мм, закреплен на гильзе 5 с помощью резьбового кольца 7. Гильза 5 с барабаном 6 укреплена на цилиндрическом хвостовике винта 2 резьбовым кольцом 9. Нулевой штрих шкалы барабана 6 совмещают с продольным штрихом
Рис. 6.13
втулки 4, при этом отсчетный торец гильзы 5 должен совпадать с одним из штрихов шкалы на втулке 4. Для этого разъединяют винт 2 с гильзой 5, отвинчивая кольцо 9.
Конструкция винтового отсчетного механиз-м а (рис. 6.13, б), в котором винт 1 получает вращение от источника движения прибора через зубчатое колесо 2. При вращении винта по нему в осевом направлении перемещается гайка 5. В гайке выполнена шпоночная канавка, в нее входит штифт 3, исключающий возможность ее вращения. С винтом жестко связан барабан 4 со шкалой точного отсчета. Шкала грубого отсчета с продольным указателем выполнена на поверхности гайки 5.
Для получения малых линейных перемещений используют дифференциальные винтовые механизмы. Особенность таких механизмов состоит в том, что в линейном перемещении участвуют две винтовые пары разного шага, но одного направления (обе правые или левые). Резьбы могут быть выполнены на двух различных участках винта (последовательное их расположение) или на внутренней и наружной цилиндрических поверхностях одной втулки (параллельное расположение резьбовых участков).
При вращении барабана б со шкалой точного отсчета винт 7 с двумя последовательно расположенными резьбовыми участками (рис. 6.14, а) ввертывается в неподвижную гайку 5, с которой жестко соединена втулка 3 со шкалой грубого отсчета. За полный оборот винт 7 смещается вдоль оси на Рр При вращении винта подвижная гайка 4 навинчивается на винт и перемещается вдоль оси на Р2 в противоположном направлении. В результате ползун /, жестко связанный с подвижной гайкой 4, за один оборот винта получает перемещение Р Р± — Р2. Пружина 2 служит для выборки зазора в винтовых парах, а винт 8 не дает ползуну проворачиваться и обеспечивает ему только поступательное перемещение.
В дифференциальных винтовых механизмах с параллельно расположенными резьбовыми участками (рис. 6.14, б) винт 1 перемещается в неподвижной гайке 2 за один полный оборот на Рг Одновременно винт 1
служит гайкой для резьбового участка с шагом Р2. В результате ползун 3 получает суммарное осевое перемещение Р — Р2.
Максимальное перемещение ползуна
S-Si — S2,
где S2 — максимальные перемещения в резьбовых парах с шагами Р2 соответственно.
Рис. 6.14
Число оборотов винта равно числу делений шкалы грубого отсчета на неподвижной гайке:
q - пг - Sl(Px ~Р2) = (S1 -SJKPi - Р2).
Цена деления шкалы грубого отсчета аг Рх — Р2 и ее длина L,r -
При числе делений п.г цилиндрической шкалы точного отсчета цена ее деления
aT-(Pj— Р2) лт -аг/пт.
При выборе шагов резьбовых участков по СТ СЭВ 182—75 и 184—75 и оцифровке шкалы дифференциальных винтовых механизмов необходимо учитывать, что перемещение торца отсчетного барабана точной шкалы за один оборот винта по гайке с грубой шкалой равна шагу Рг резьбы на первом резьбовом участке. Поэтому для возможности использования обычных миллиметровых шкал с делениями 1,0 иди 0,5 мм
следует выбирать резьбы для первого участка дифференциального винта только с такими же шагами, при этом длина деления грубой шкалы Ьг = Рг. При любых значениях и сочетаниях шагов резьбовых участков цена деления линейной шкалы соответствует разности аг = - р, - рг.
Для удобства считывания показаний шкал и расчетов величин линейных перемещений прямолинейную шкалу на гайке и цилиндрическую шкалу на винте оцифровывают через 5 или 10 делений, а на поверхности шкал указывают цены их делений. Например, при Рх = 0,5 мм, Р2 — 0>35 мм цена деления прямолинейной грубой шкалы аг - 0,15 мм, а при 30 делениях на точной шкале барабана цена ее деления аг -- 0,005 мм (рис. 6.14, в). В отдельных случаях, когда разность Рх — Р2 кратна шагу на первом резьбовом участке целесообразно оцифровывать прямолинейную шкалу так, чтобы по ней непосредственно оценивать линейные перемещения. Например, при Рх — — Р2 0,25 мм и Р{ 1 мм каждый четвертый штрих на прямолинейной шкале можно обозначить цифрами, соответствующими перемещению. В этом случае при числе делений шкалы точного отсчета п,г ?= 25 цена ее деления а.г --- 0,001 мм.
Отсчетные устройства с червячными механизмами применяют для измерения угловых перемещений между валами или осями, скрещивающимися под углом 90°.
Передаточное число червячного механизма z2/z^ где zx — число заходов червяка; z2 — число зубьев червячного колеса. Для червячных механизмов отсчетных устройств zx = 14-3, при этом с увеличением числа заходов точность червячной передачи уменьшается. Для особо точных червячных механизмов применяют однозаходные червяки 1). Число зубьев червячного колеса рекомендуется принимать не менее 20, не кратное числу заходов червяка и не имеющее с ним общих множителей, что обеспечивает повышенную точность передачи вращательного движения от ведущего к ведомому звену.
В червячных механизмах возможно получение и до 500, а в некоторых специальных случаях — до 1000. Вращение червяка как ведущего звена осуществляют с помощью барабана (маховичка), на котором выполняют круговую шкалу точного отсчета (ШТО), а круговую дисковую шкалу грубого отсчета (ШГО) связывают с ведомым червячным колесом (рис. 6.15, а).
Типовая конструкция двухшкального отсчетного червячного механизма показана на рис. 6.15, б. Червяк 4 жестко связан со шкалой точного отсчета, нанесенной на барабане б, шкала грубого отсчета нанесена на червячном колесе 3. Мертвый ход в червячном механизме выбирают пружина 5, устраняющая зазоры в шаровой опоре червяка, и пружина 2, поджимающая червяк к червячному колесу. Винт 1 служит для регулирования усилия поджатия пружины 2.
Во многих случаях при установке шкалы в требуемое положение необходимо повернуть червячное колесо вместе со шкалой независимо от червяка. В таких отсчетных червячных механизмах используют вы
ключающиеся червяки (рис. 6.16, а). Выключение червяка 5 осуществляют поворотом эксцентриковой втулки 2 с помощью рычага-отводки 1 (положение // на рис. 6.16, б). После установки червячного колеса 4 в требуемое положение, рычаг 1 отпускают и возвратная пружина 6 поворачивает эксцентриковую втулку 2, возвращая червяк в исходное по-
Рис. 6.15
ложение /. Пружина 6 обеспечивает также постоянное поджатие червяка к червячному колесу, устраняя боковой зазор в зацепление, а осевой зазор выбирается пружинным подпятником 3. Для устранения заклинивания у выключающихся червяков, обеспечения легкости и свободы выхода червяка из зубьев червячного колеса применяют зацепле-
ние с углом профиля а = 30°. Высота витков червяка уменьшена до 2,18 модуля, но высота головки витков выполняется равной модулю зацепления т.
В особо точных отсчетных устройствах при ограниченных углах поворота червячного колеса или червячного сектора и связанных с ними вращающихся исполнительных элементов применяют червячные передачи, в которых червяк является одним из рабочих участков винта
(рис. 6.17). Винт 4 имеет два нарезанных участка: один резьбовой участок /в с шагом метрической резьбы Р, второй — /ч в виде червяка с числом заходов При вращении вокруг оси винт перемещается поступательно по резьбе кронштейна 3 и гладкий цилиндрический конец винта скользит по втулке опоры 5. На барабане 1 нанесена цилиндрическая круговая шкала точного отсчета, а на неподвижной втулке 2 выполнена линейная шкала грубого отсчета, при этом деления грубой шкалы соответствуют шагу резьбы Р. С червячным участком винта
сцепляется червячный сектор 6, при повороте которого растягивается зазоровыбирающая пружина 7. При вращении винта на один оборот червячный сектор имеет два угловых перемещения:
на угол <р1 от поступательного перемещения винта
<Р1 = Р 1г
и на угол (р2 от вращения червяка
ф2 — ntnZylr,
где г — радиус делительной окружности червячного колеса; т—модуль червячного зацепления.
При одинаковых направлениях винтовых линий резьбового и червячного участков (правом или левом) суммарный угол поворота сектора
Дф ~ ф2 — фг == (лтг3 — Р)!г.
Для поворота сектора на угол ф необходимое число оборотов винта
Д(Р л/nzj — Р
Длина линейной шкалы грубого отсчета Lr равна поступательному перемещению винта:
Lr = SB = qP.
Число зубьев червячного сектора
гс = 22-£-+(2-?4).
72
Рис. 6.18
Угол червячного сектора
<рс = 360zc/z2 > ф.
Отсчетные устройства с многоступенчатыми зубчатыми механизмами применяют для измерения угловых перемещений между параллельно установленными или пересекающимися валами и связанными с ними исполнительными элементами.
Передаточное число многоступенчатых зубчатых механизмов
Zn Za Za ^271
u = иг и2 и2. .. ип —- — — ...--------,
г1 z3 z5 z2n—1
где и19 и2, и3, ..., ип — передаточные числа отдельных ступеней; z2, z±, ze, ..., z2n — числа зубьев ведомых зубчатых колес; z19 z3, z5, ...
...,z2n-i —числа зубьев ведущих зубчатых колес. Одна пара зубчатых цилиндрических колес обеспечивает и < 12,5 (обычно принимают и < 7,5). Одна пара зубчатых конических колес дает и < 6,3. Обычно назначают и 3.
Шкалу грубого отсчета связывают с тихоходным валом механизма, а шкала точного отсчета может быть установлена на любом валу механизма в зависимости от передаточного отношения между шкалами точного и грубого отсчетов.
Типовая конструкция двухшкального отсчетного механизма с вращающимися шкалами показана на рис. 6.18. Шкала точного отсчета 1
получает вращение от конического колеса 3. Числа зубьев zx = 20, z2 = 120, z3 — 20, z4 = 200 обеспечивают передаточное число между шкалой точного отсчета и шкалой 2 грубого отсчета и = 60. Неподвижные указатели 4 закреплены на плите 5.
В конструкции отсчетного устройства с подвижными указателями и неподвижными шкалами (рис. 6.19) движение на указатели поступает через поводок 9, связанный с винтовым зубчатым колесом 8. Движение через валик 10 передается на подвижный указатель 1 точной шкалы 2. Движение от колеса 8 через второе винтовое зубчатое колесо 11 передается на червяк 6 и далее на червячное колесо 7, которое связано с указателем 4 шкалы грубого отсчета 5. Обе шкалы 2 и 5 неподвижно укреплены на плите 3.
Отсчетные устройства с планетарными механизмами применяют для измерения угловых перемещений между соосно установленными валами и связанными с ними исполнительными элементами. Планетарные
механизмы позволяют получить большие передаточные отношения при малых габаритах механизма.
На рис. 6.20, а показана кинематическая схема, а на рис. 6.20, б — конструкция планетарного отсчетного механизма с двумя дисковыми циферблатами. Движение от водила 2 (//) через планетарный механизм передается колесу zr. С водилом 2 (//) жестко связан диск шкалы точного отсчета 4. При вращении водила перемещается ось зубчатых шестерен-сателлитов г2 — zr. Шестерня z3 обкатывается по неподвижному
зубчатому колесу z4, закрепленному на корпусе. Шестерня г2 вращает колесо zx, с которым жестко связана шкала грубого отсчета 5. Показания на шкалах считываются через окно с указателем 3.
Передаточные отношения между звеньями такого механизма определяют по формуле
ЭД =—1_ = —!_
‘YA 1-^4
J £2.21 Z1 23
zizz
Z1 Z3 ” Z2 Zl
Шестерни z2 и z3 обычно выполняют с одинаковыми числами зубьев. Тогда при z2 = z3
^771 ~ ' ^4)*
В табл. 6.5 приведены типовые передаточные отношения 1/}} для некоторых чисел зубьев колес.
Таблица 6.5
Передачное отношени /(4) Я1 Число зубьев колеса
z4 2? = 2а 2»
35 72 20 70
29 60 20 58
59 60 20 59
При z2 = z3 одну пару зубчатых колес (zb z2 нли *<) необходимо нарезать со смещением инструмента или выполнять косозубой, чтобы выдержать одинаковые межосевые расстояния для обеих пар колес:
а = тп —-- 2 = т. —
2 1 2
где тп, mt — нормальный и торцовый модули зубчатых колес.
Рис. 6.21
Угол наклона зубьев колес
cos Р = mn/mi = (z3 + z^/fa + z.2).
Кинематическая схема и конструкция планетарного отсчетного механизма с двумя барабанными шкалами (рис. 6.21. а, б). Вращательное движение от рукоятки 1 передается ведущему барабану 2, водилу 4 (Я), шестерням-сателлитам z2 и z3 и выходному червяку 7, который передает движение на исполнительный элемент. Точная шкала 5 нанесена на барабане 2. Шестерня z3 обкатывается по неподвижному колесу z4, а шестерня z2 вращает колесо zp которым жестко связан стакан 3 со шкалой грубого отсчета
В тех случаях, когда двухшкальное отсчетное устройство в приемлемых размерах шкал не обеспечивает заданной погрешности измере-188
ния, применяют сдвоенный планетарный механизм с тремя шкалами (рис. 6.22). Шкала точного отсчета 1 (рис. 6.22, а) связана с водилом первого планетарного механизма. Его шестерня-сателлит z3 вращает зубчатое колесо г4, оно жестко связано с водилом Н2 второго плане-
тарного механизма и шкалой среднего отсчета 2. Шестерня-сателлит 2- вращает колесо z8 со шкалой грубого отсчета 3.
Передаточные отношения между звеньями первого планетарного механизма
= -1/(1—7() = 1 /[1
Передаточные отношения между звеньями второго планетарной? механизма
IL к z8 *в /J
В конструкции механизма входным является колесо 9, выполняющее роль водила Нг (рис. 6.22, б). На нем закреплены втулка со шкалой точного отсчета 1 и обойма 7 с шарикоподшипниками, в которых вращается вал 6. С валом жестко связаны шестерни-сателлиты z2 и и г3 первого планетарного механизма. Шестерня г2 обкатывается по неподвижному колесу а шестерня z3 вращает колесо z4, выполняющее роль водила Н2 второго планетарного механизма. На водиле Н2 жестко закреплена шкала среднего отсчета 2, С колесом z4 жестко связана обойма 5 с запрессованными в нее наружными кольцами шарикоподшипников, в которых вращается вал 4, несущий шестерни-сателлиты z6 и z7. Шестерня z6 обкатывается по неподвижному колесу z5, а шестерня z7 вращает колесо z8, на котором закреплена шкала грубого отсчета 3. Вал 8 неподвижен.
§ 6.4. Общие сведения о дискретно-аналоговых и цифровых отсчетных устройствах
Дискретно-а налоговые отсчетные устройства обладают повышенной информативностью, широкими возможностями представления информации за счет введения дополнительных признаков и разнообразия режимов работы. Они имеют множество отдельных дискретных указателей 3 в виде индикаторных элементов, положение ко-
торых строго определено конструкцией (рис. 6.23). Дискретные указатели могут иметь вид штрихов, точек ит. п., а характер их взаимного расположения определяет форму шкалы. Расстояние между центрами симметрии указателей равно шагу дискретности Ь, а общее число указателей определяет число дискретных состояний отсчетного устройства. Дискретные указатели могут быть активными, пассивными, для их построения используют различные физические принципы и явления. Включение дискретных указателей осуществляется схемой управления 2 с информационным входом 1. На основе отдельных дискретно-анало
говых отсчетных устройств могут быть построены многошкальные приборы, экраны, панели для отображения и представления многопараметрической информации.
Цифровые отсчетные устройства по способу воспроизведения цифр можно разделить на три группы.
1. Цифры выполняют цельными в виде заранее известной фигуры в соответствии с принятыми шрифтами (рис. 6.24, а). Такое изображение цифры является самым удобным и совершенным для визуального снятия отсчета.
2. Цифры синтезируют из отдельных полос-сегментов (рис.6.24, б, в). При различной комбинации светящихся сегментов на одном знакоместе
Рис. 6.24
получают изображения разных цифр. В большинстве случаев для воспроизведения арабских цифр от Одо 9 используют семь сегментов (см. рис. 6.24, б). Ё первую очередь это относится к цифровым отсчетным устройствам с небольшим объемом цифровой информации, а также к приборам и системам с редко сменяемой информацией. Однако при синтезировании цифр из семи сегментов наиболее вероятный сбой (случайное погасание или зажигание одного из сегментов) может привести к ошибочному считыванию информации, так как некоторые цифры легко образуются одна из другой. Например, при погашенном верхнем сегменте цифра 7 читается как 1, цифра 8 при погашенном верхнем правом сегменте становится цифрой 6 и т. д. Надежность цифрового устройства повышается с увеличением числа используемых сегментов. При использовании восьми сегментов (рис. 6.24, в) полностью исключается возможность образования одной цифры из другой при добавлении или отбрасывании одного из сегментов.
3. Цифры образуются из отдельных светящихся точек, составляющих матрицу (рис. 6.24, г). Для отображения цифровой информации достаточно 28 светоизлучающих точечных элементов, но в большинстве случаев применяют матрицу из 35элементов (7 х5), в которой обеспечивается достаточно хорошая конфигурация цифр и приблизительно со-
храняется рекомендуемое отношение высоты цифры к ее ширине (4/3). Матрицы обладают большей помехозащищенностью по сравнению с сегментной конфигурацией цифр, так как при одинаковой надежности светоизлучающих элементов цифры образуются большим их числом и, следовательно, существует меньшая вероятность ошибки в случае выхода из строя какого-либо элемента.
ГЛАВА 7
МЕХАНИЗМЫ НАСТРОЙКИ
§ 7.1. Общие сведения
Радиоустройства выполняют разнообразные функции. Механизмы настройки радиоустройств различают по назначению, принципу действия, конструктивному выполнению.
Механизмом настройки называют такое механическое либо электромеханическое устройство, с помощью которого вручную или от электродвигателя изменяется положение подвижных частей одного или нескольких исполнительных устройств.
Системой дистанционной настройки называют совокупность элект- • ромеханических устройств, обеспечивающих по команде оператора дистанционную настройку радиоаппарата на любую требуемую частоту.
Механизмом дистанционной настройки называют механизм, преобразующий электрические сигналы с пульта управления в соответствующие перемещения исполнительных устройств.
В современной радиоаппаратуре широко применяют механизмы ручной и дистанционной настройки, как фиксированной, так и плавной.
Механизмы фиксированной настройки бывают двух видов: с постоянной фиксацией, когда выбор определенных положений производится в процессе изготовления и не меняется в течение всего срока службы; с переменной фиксацией, когда производится настройка исполнительных устройств на любых частотах из всей сетки опорных частот и их фиксация на время, определяемое условиями эксплуатации радиоустройства.
Механизмы плавной настройки, часто называемые верньерными устройствами, применяют для плавного изменения параметров и исполнительных устройств в пределах всего диапазона рабочих частот радиоустройства.
Механизмы ручной настройки служат для точной настройки или перестройки исполнительных элементов радиоустройств вручную.
Применение в аппаратуре механизмов ручной настройки обеспечивает: точную настройку по отсчетным устройствам в пределах всего диапазона частот; точную перестройку аппарата на определенное количество заранее выбранных частот; фиксацию подвижных систем исполнительных устройств на время работы и т. п.
Механизмы ручной настройки широко применяют в радиоаппаратуре различного назначения: бытовой (приемники, телевизоры, магнитофоны), измерительной (стационарной, переносной) и для перестройки исполнительных устройств, имеющих вращательное или поступательное движение.
Системы и механизмы дистанционной настройки служат для управления радиоустройствами с пультов управления, находящихся на некотором расстоянии от самой аппаратуры.
Применение в радиоустройствах дистанционного управления дает возможность размещать аппаратуру в любом месте на объекте, использовать одну и ту же аппаратуру несколькими операторами. Кроме того, дистанционное устройство обеспечивает быстроту и простоту управления аппаратурой, большую точность настройки исполнительных устройств, позволяет централизовать управление несколькими видами аппаратуры с одного пульта.
Во всех системах дистанционной настройки применяют различные синхронно-следящие системы, которые служат в качестве самостоятельных устройств для дистанционной передачи синхронного движения и для передачи сигналов с пультов управления на механизмы дистанционной настройки.
Механизмы дистанционного управления широко применяют в стационарных радиоустройствах и радиоустройствах, устанавливаемых на различных подвижных объектах.
§ 7.2. Механизмы ручной настройки
Механизмы плавной настройки. Механизмы плавной настройки (верньеры) применяют для плавного изменения параметров исполнительного устройства. Они представляют собой замедляющую передачу, так как человек не может точно устанавливать вал исполнительного устройства в требуемое положение. Передаточное отношение между ручкой настройки и валом исполнительного устройства определяют из выражения
бОДфопер .
где Афопер — точность установки ручки настройки оператором, которая лежит в пределах 1 —1,5°; Д<риу — требуемая точность настройки исполнительного устройства, угл. мин.
По способу передачи движения от ручки настройки до исполнительного устройства механизмы бывают с гибкой связью, фрикционные, зубчатые, червячные и винтовые.
Механизмы настройки с гибкой связью широко применяют в бытовой радиоаппаратуре. Преимуществами их являются простота конструкции и возможность размещения исполнительных устройств в различных плоскостях, на любом расстоянии друг от друга.Такие механизмы передают вращательное движение на конденсаторы переменной емко-
сти, ферритовые антенны и поступательное движение на катушки индуктивности, указатели шкал. Недостатки этих механизмов — наличие упругого мертвого хода и проскальзывание.
В качестве гибкой связи применяют круглые тросики. Для их натяжения в разрыве гибкой связи вставляют пружины.
Кинематическая схема механизма настройки с гибкой связью показана на рис. 7.1. Вращение на барабан /, установленный на оси конденсатора переменной емкости 2, передается со шкива ручки настройки 3 с помощью тросика 4. Поступательное перемещение указателя 5 шкалы 6 производится от барабана 1 тем же тросиком 4, натянутым на ролики 7. Тросик 4 на барабане 1 и шкиве ручки 3 имеет по несколько витков.
Длина шкалы для данного механизма (мм)
Лш = 0,0174-^<оиу, (7.2) где /)бар — диаметр барабана, мм; соиу — рабочий угол поворота исполнительного устройства, град, вид
Lul^l,57D6ap. (7.3)
Число оборотов ручки для перестройки механизма в пределах всей шкалы
Ьш 0,0087Рбар ®иу л лло77* прч —— =---------------------- 0,00277щ)
(7.4)
где Зшк — диаметр шкива ручки настройки, мм; i — передаточное отношение между шкивом ручки и барабаном (I — £>6ap/dlUK)
Барабаны в таких механизмах имеют достаточно большие габариты. При длине шкалы 300 мм диаметр барабана будет £>бар 192 мм, что часто недопустимо по габаритам аппарата.
Кинематическая схема механизма настройки (рис. 7.2) позволяет уменьшить диаметр барабана. От шкива ручки настройки 1 движение тросиком 2 передается на барабан 3, а с него через зубчатые колеса 4, 5 — на конденсатор переменной емкости 6. Поступательное перемещение указателя 7, закрепленного непосредственно на тросике 2, который натянут на роликах 8 вдоль шкалы 9, происходит также от ручки 1. Тросик 2 на барабане 3 и шкиве ручки 1 имеет несколько витков.
Число оборотов барабана для перестройки конденсатора переменной емкости
__ ®иу *45
Пбар ~ 360
(7.5)
где *45 — передаточное отношение между зубчатыми колесами 4 и 5;
*4б = z5/z4, где г4 и г5 — число зубьев этих колес.
Длина шкалы для данного механизма
L3K
6
Рис. 7.2
Lm —^^бар ^бар* (7.6)
Подставляя в (7.6) ибар из (7.5), получим
Т'ш = 0,0087Z)6ap шиу *45. (7.7)
Сравнивая (7.2) и (7.7), видим, что в механизмах с промежуточными зубчатыми колесами диаметр барабана Обар при одинаковой длине шкалы будет меньше в число раз, равных *45.
Число оборотов ручки для перестройки механизма в пределах всей шкалы ирч = = ^бар
Подставляя в это выражение значения пбар, полученные из (7.6), и *, имеем прч = Ьш/(лб/шк), т. е. получаем такое же выражение, что и (7.4).
Следовательно, число оборотов ручки настройки не зависит от i зубчатых колес и его можно определять по (7.4).
Общая погрешность таких г а) погрешности отсчетного
б) погрешности между указателем шкалы и поворотом исполнительного устройства, вызванной упругим мертвым ходом тросика,
д<румх = arctg , (7.8)
^бар
где К — коэффициент, характеризующий изменение длины тросика в зависимости от тягового усилия, изменения температуры и т. д. (его значения 1,05 — 1,40); LH —длина тросика от указателя до точки заделки его на барабане;
в) погрешности зубчатых колес в механизме с промежуточными зубчатыми колесами.
В бытовой радиоаппаратуре катушки индуктивности обычно размещают параллельно или перпендикулярно передней панели, поэтому
из:
складывается [см. (6.8)];
для передачи поступательного движения на их сердечники применяют реечные и винтовые устройства.
Устройство с рейкой для перестройки катушки индуктивности, расположенной параллельно передней панели, показано на рис. 7.3, а. От механизма настройки через гибкий тросик 1 движение передается на барабан 2 с шестерней 3, которая находится в зацеплении с разводной зубчатой рейкой 4. Непосредственно на рейке закреплен сердечник 5, перемещающийся внутри катушки индуктивности 6.
Рис. 7.3
Если указатель шкалы непосредственно связан с тросиком /, то ход сердечника (мм)
Асрд=4гтг’ <7-9>
£7 2
где т и z— модуль и число зубьев шестерни; D2 — диаметр барабана, мм.
Общая погрешность такого устройства складывается из погрешностей: отсчетного устройства, определяемой по (6.8); между указателем шкалы и барабаном, определяемой по (7.8); реечной передачи.
Винтовое устройство для перестройки катушки индуктивности, расположенной перпендикулярно передней панели, показано на рис. 7.3, б. От механизма настройки через гибкий тросик 1 движение передается на барабан 2, далее через зубчатое колесо 3 на шестерню 4 нарезанной непосредственно на гайке устройства настройки 5. Конструкция этого устройства показана на рис. 7.4. На изоляционном основании 2 расположены две катушки индуктивности 1, сердечники 3 которых перестраиваются с помощью винтового устройства. Это устройство состоит из металлического основания 4, на оси 7 которого с помощью разрезной шайбы 8 установлена пластмассовая гайка 5 с шестерней, и каретки Р, перемещающейся совместно с установленными в ней сердечниками 3 при вращении гайки 5. Зазор в установке гайки 5 выбирается пружиной 6, а мертвый ход в резьбе — вкладышем 10
под действием пружины 11, при этом сопряжение каретки 9 и вкладыша 10 с гайкой 5 производится четырьмя резьбовыми приливами /. Если указатель шкалы непосредственно связан с тросиком, то ход сердечника (мм)
Л и 2
где u43 = z3/z4 — передаточное число между зубчатыми колесами 4 и <?; Р — шаг резьбы, мм; п — число ходов резьбы.
Рис. 7.5
Общая погрешность такого устройства складывается из погрешностей: отсчетного устройства, определяемой по (6.8); между указателем шкалы и барабаном, определяемой по (7.8); зубчатой и винтовой передач.
В радиоустройствах широко распространены фрикционные механизмы, в которых фрикционными элементами являются шарики и диски.
Фрикционные механизмы настройки обычно бывают двухскоростными. Настройка с помощью таких механизмов производится в два этапа: сначала исполнительные элементы устанавливаются ручкой грубой настройки. а затем более точно подстраиваются ручкой точной настройки.
В двухскоростном механизме настройки (рис. 7.5) ручкой грубой настройки 1 вращение передается непосредственно на исполнительное
устройство, соединенное с втулкой 6. При вращении ручки точной настройки 2 шарики 3 расклиниваются конусом 4 под действием пружины 7 и будут катиться по внутренней поверхности втулки 5, вращать ось 6, а с ней и исполнительное устройство.
Такой механизм работает по принципу фрикционной планетарной передачи, передаточное отношение которой
Г*21 : 1 “F 7)вт/б/в,
(7.П)
где Овт — диаметр втулки; — диаметр валика в месте контакта шариков с конусом.
Рис. 7.6
Большие передаточные отношения имеют фрикционные планетарные механизмы с дисками, конструкция одного из них показана на рис. 7.6. Ручкой грубой настройки 1 вращение через втулку 7, диски-сателлиты 2 и шайбу 3 передается на исполнительное устройство, соединенное с валом 4. При вращении ручки точной настройки 12 движение через втулку 10, диски-сателлиты 2 (которые будут катиться по втулке 7) и шайбу 3 передается на вал 4 с замедлением, определяемым по (7.11).
Замыкающие усилия в механизме создаются пружинами 8, 9 и 11. Для плавности хода применяют подшипники 5, зазоры в которых выбираются пружиной 6.
Такие фрикционные механизмы позволяют получить передаточное отношение i = 6-?8, но они значительно сложнее, чем фрикционные механизмы с шариками.
Зубчатые, червячные механизмы настройки обеспечивают стабиль-ное передаточное отношение и легкость вращения. При проектировании зубчатых механизмов передаточное отношение одной пары колес следует брать не более 5. Таким образом, зубчатые механизмы с замедлением в 200—400 раз должны иметь 4—5 пар зубчатых колес, каждая из которых имеет мертвый ход, а каждый валик — зазор в подшипниках. Следовательно, при проектировании таких механизмов необходимо обращать внимание на устранение мертвого хода и зазоров в подшипниках, иначе точная настройка будет затруднена.
Рис. 7.8
Рис. 7.7
Зубчатые механизмы бывают одно- и двухскоростные. Кинематическая схема односкоростного механизма показана на рис. 7.7. Вращение с ручки 7 через две пары зубчатых колес 6 и 5 передается на полумуфту 4, соединяемую с исполнительным элементом. Настройка механизма производится по шкале 1 относительно указателя 2. Между шкалой 1 и полумуфтой 4 для увеличения длины шкалы применена пара зубчатых колес 3.
Кинематическая схема двухскоростного механизма настройки показана на рис. 7.8. От ручки грубой настройки 10 вращение через зубчатые колеса 9 передается на полумуфту 6, соединяемую с исполнительным устройством. При этом фрикционная муфта 4, работающая под действием пружины 3, пробуксовывает. При вращении ручки точной настройки 11 движение через зубчатые пары 7 и 8 передается на фрикционную муфту 4. а далее на полумуфту 6. При этом ручка грубой настройки 1 будет поворачиваться в обратную сторону. Настройка механизма производится по шкале 1 относительно указателя 2. Для увеличения длины шкалы применена зубчатая пара 5.
Конструкция отдельных узлов двухскоростного механизма настройки — сдвоенной ручки и фрикциона — показана на рис. 7.9.
Ручка грубой настройки 3 (рис. 7.9, а) с запрессованной втулкой 4 плотно навинчена на ступицу зубчатого колеса 7, вращающегося в кронштейне 6. установленном на плате 5. Ручка точной настройки 1 крепится на валике 2, на котором располагается зубчатое колесо 8.
Зубчатое колесо 1 (рис. 7.9, б) закреплено на валике 2, колесо 4 сидит на нем свободно, но под действием пружины 6 зажато фрикционными шайбами 5, одна из которых прикреплена к шайбе 3, а другая— к фланцу валика 2. Между шайбами 5 и торцами колеса 4 возникает
трение, поэтому между колесами 1 и 4 будет передаваться крутящий мо-мент, величина его регулируется гайкой 7.
Одна червячная пара обеспечивает замедление до I ~ 100 и более, поэтому червячные механизмы более компактны, чем механизмы с зубчатыми колесами. Однако они требуют применения шкалы барабанного типа или введения конических зубчатых колес.
На рис. 7.10, а показана кинематическая схема червячного механизма настройки. От ручки 1 вращение через червячную передачу 6 передается на полумуфту 2. с помощью которой механизм соединен с исполнительным устройством. Настройка механизма производится по шкале барабанного типа 4 по указателю 5. Для увеличения длины шкалы применена зубчатая пара 3.
Для поступательного перемещения исполнительных устройств применяют механизмы с рейкой. На рис. 7.10, б показана кинематическая схема такого механизма. От ручки настройки / вращение через зубча
тые пары 7 и 2 передается на шестерню 6, которая перемещает рейку 5, соединенную с исполнительным устройством. Настройка механизма производится указателем 3 по шкале 4.
Механизмы фиксированной настройки. Механизмы с постоянной фиксацией. Для настройки и перестройки радиоустройств широко применяются различные переключатели, перемещаемые вручную. Во всех переключателях для четкой фиксации положений применяют фиксаторы различной конструкции.
Рис. 7.11
В радиоустройствах обычно применяются переключатели диапазонов барабанного типа, в широковещательных приемниках — переключатели диапазонов клавишного или кнопочного типа.
Переключатели диапазонов барабанного типа представляют собой барабан на 4—8 положений и более, в каждом из которых каскады соответствующего диапазона подключают к общей схеме радиоаппарата. Иногда для уменьшения момента вращения и повышения надежности контактов переключатели делают с отводом контактов. Тогда при переключении с одного положения на другое сначала отводятся контактные пружины от контактов барабана, затем производится поворот с малым моментом вращения, после чего контактные пружины снова подводят к контактам барабана.
Переключатель барабанного типа на восемь диапазонов показан на рис. 7.11. В корпусе 1 на валике 2 установлен барабан диапазонов, который переключается ручкой 3. Фиксация положений производится с
помощью фиксатора, состоящего из подвижного элемента 4, ролика 5 на рычаге 6 и пружины 7. Положения барабана указываются на шкале, состоящей из корпуса 8, в него вставляются сухарики 9 с соответствующими надписями. Барабан диапазонов состоит из шайбы 10 с прямоугольными отверстиями и диска 12 с отгибками. В отверстия шайбы 10 вставляются швеллеры 11, которые другим концом привертываются к отгибкам диска 12. На каждом швеллере 11 внутри барабана собирается каскад соответствующего диапазона (детали монтажа на рисунке не показаны), съем напряжения с него производится через полукруг-
Рис. 7.12
лые контакты 13 на общие шины, представляющие собой фасонные пружины 14, крепящиеся к корпусу колодкой 15 и винтами. Количество контактов 13 на швеллере каждого диапазона равно числу пружин 14.
Переключатели диапазонов клавишного, кнопочного типов состоят из двух частей: клавишного, кнопочного механизма и платы с каскадами по числу диапазонов. При нажатии клавиши или кнопки перемещается движок, контакты которого подключают каскад соответствующего диапазона к общим шинам радиоаппарата.
Переключатель кнопочного типа на восемь диапазонов показан на рис. 7.12. Кнопочный механизм представляет собой корпус /, в котором с зазором установлено восемь планок 2 с кнопками 3. Все кнопки показаны в свободном (сброшенном) положении (см. рис. 7.12).
При нажатии на кнопку 3 планка 2 перемещается на величину Н, при этом выступ I планки сначала приподнимает скобу 5, затем скоба опускается под действием пружины 4 и удерживает планку 2 за выступ
I во включенном положении. Если одна из кнопок была включена, то при нажатии другой кнопки в тот момент, когда скоба 5 приподнимается выступом / планки 2, ранее включенная кнопка будет сброшена под действием пружины 6.
К кнопочному механизму привертывается плата 7, на ней установлены радиодетали всех восьми диапазонов (эти детали на рис. 7.12 не показаны). В направляющей 8 располагают движки 9, соединенные с планками 2. При нажатии кнопки движок 9 будет перемещаться также на величину Н и с помощью контактных пружин 11 подключать контакты соответствующего каскада к общим шинам 10, которые далее под-
Рис. 7.13
несколькими по отсчетным обеспечиваю-
паиваются к схеме радиоаппарата.
Переключатели диапазонов клавишного или кнопочного типа имеют плоскую форму, хорошо компонуются в аппаратуре. Контакты их не имеют значительного износа, так как при нажатии кнопки работают только контакты данного диапазона.
Часто по условиям эксп-л у атации радиоаппар атуры
надо повторно устанавливать исполнительные устройства в одних и тех же положениях, например при ведении радиосвязи попеременно с корреспондентами. В таких случаях настройка аппарата устройствам неудобна, поэтому применяют механизмы,
щие беспоисковую повторную установку исполнительных устройств. Такие механизмы бывают с постоянной и с переменной фиксацией.
Механизмы с постоянной фиксацией бывают без подстройки и с подстройкой в узких пределах.
Наиболее простой механизм без подстройки (фиксатор) показан на рис. 4.11, а. Места расположения впадин на подвижном элементе /, соответствующие определенным положениям исполнительного устройства, определяют при конструировании по кривой зависимости изменения параметров исполнительного устройства от угла поворота его ротора.
Если закон изменения параметров исполнительного устройства прямо пропорционален углу поворота ротора, то в качестве механизма настройки можно применять фиксаторы (см. рис. 4.11, б, б).
Механизм фиксированной настройки для перестройки исполнительного устройства, имеющего поступательное перемещение, показан на рис. 7.13. На валике 4 установлены ручка /, подвижный элемент 9 фиксатора и ступенчатый кулачок 5. Положение валика фиксируется шариком 2, поджатым плоской пружиной 3. Одновременно к кулачку 5
пружиной 7 поджимается шток 8 исполнительного устройства, оканчивающийся роликом 6. При повороте ручки 1 на новое положение кулачок 5, имеющий ступени с шагом Я, перемещает шток на нужную величину.
При изготовлении исполнительного устройства, отдельных элементов схемы и самого механизма появляются погрешности, которые затрудняют точную совместимость положения исполнительного устройства с фиксирующими парами механизма. Поэтому в радиоустройствах применяют механизмы с подстройкой в узких пределах (рис. 7.14).
Рис. 7.14
На подвижном элементе 2 механизма установлены сухарики 1 по числу положений исполнительного устройства. При регулировке в заводских условиях сухарики 1 могут перемещаться в узких пределах, а затем фиксироваться винтами 3. Дальнейшая фиксация подвижного элемента на заранее настроенных положениях производится рычагом 4 под действием пружин 5.
Рассмотренные механизмы фиксированной настройки имеют опре деленные положения, которые им даны при изготовлении и не могут быть перестроены на новые. Однако условия эксплуатации ряда радиоаппаратов требуют периодической смены определенных параметров аппаратуры, т. е. нужно выбирать новые частоты из всего диапазона рабочих частот аппарата. Для этой цели применяют механизмы с переменной фиксацией, позволяющие из всего диапазона частот выбрать необходимые на данный период работы, затем зафиксировать эти положения, чтобы обеспечить беспоисковую повторную установку. Такие механизмы бывают с общими зажимами и индивидуальными.
Механизм с общим зажимом на пять фиксированных положений показан на рис. 7.15. В корпусе механизма на подшипниках скольже
ния 1 установлено запоминающее устройство с общим зажимом, показанное ниже на рис 7.26, фиксация шайб 6 производится рычагами 4, посаженными на оси 3, под действием пружин 5. Вращение на исполнительное устройство передается зубчатым колесом 7, заштифтован-ным на валике. К каждому рычагу 4 прикреплена шторка 9, закрашенное поле которой, закрывая круглое окошко в передней плате 8 механизма. показывает номер рычага (канала связи), фиксирующего запоминающее устройство в данный момент.
Рис. 7.15
Перестройка данного механизма на новые частоты производится следующим образом. Сначала механизм устанавливают в одно из положений, тогда нижний рычаг 4 западает в паз нижней шайбы 6. Затем отвертывают ручку 10, после чего валик 2 сможет проворачиваться в подшипниках 1. Валик совместно с исполнительным устройством устанавливается на новое положение (частоту) и снова стопорится ручкой 10. Таким же образом перестраивается запоминающее устройство и на других каналах.
Механизм с индивидуальными зажимами на четыре фиксированных положения показан на рис. 7.16. Он состоит из запоминающего устройства 5, приведенного ниже на рис. 7.28, и рычагов 2, фиксирующих
шайбы действием пружин 3. Для перестройки механизма на новые положения шайба 1 с носиком входит в паз рычага 2, затем поворотом стопора 7 освобождается. Ручкой настройки через зубчатое колесо 4 все устройство настраивают на новое положение по шкале 6. После этого шайба с носиком вновь стопорится на втулке стопором 7. Таким же образом перестраиваются и остальные шайбы 1.
Механизм на девять положений (1—9) для перестройки исполнительного устройства, имеющего поступательное движение, который по-
зволяет перестраивать частоту и подстраивать ее в узких пределах на каждом положении, показан на рис. 7.17. На оси 7 установлен барабан 2 с установочными винтами 3 по числу перестраиваемых положений. К винту 3, находящемуся в верхнем положении, под действием пружины 5 подходит шток 4 исполнительного устройства. Перестраивают барабан ручкой 1 через зубчатые колеса 10 и 11, а фиксируют его в определенных положениях шарик 9 действием пружины 8.
Установочными винтами можно менять параметры исполнительного устройства на каждом положении. Для стопорения винтов 3 установлена фибровая шайба 6, в которой нарезается неполная резьба.
§ 7.3. Механизмы дистанционной настройки
Механизмы дистанционной настройки предназначены для перестройки исполнительных устройств с круговым вращением (с ограничением угла поворота и без него), возвратно-поступательным движением и комбинированным (круговым и возвратно-поступательным).
Механизмы настройки для исполнительных элементов с круговым вращением. Такие механизмы бывают фиксированной настройки и плавной.
Механизмы фиксированной настройки делают с постоянной фиксацией (механизмы переключения диапазонов, дискретные) и с переменной (механизмы с подготовительным валиком).
Для плавной настройки на любую частоту из всей сетки опорных частот используют механизмы с электронно-механической системой настройки, двух- и односкоростные.
Рис. 7.18
Механизм переключения диапазонов применяют в радиоустройствах тля переключения диапазонов, а также для перестройки переключателей и других исполнительных устройств, имеющих от 3 до 12 фиксированных положений.
Электрокинематическая схема механизма, имеющего шесть фиксированных положений, приведена на рис. 7.18.
При установке задающего переключателя 8 пульта управления на любой из шести каналов с помощью ручки 7 напряжение через переключатель 5 подается на реле 6, замыкающее контакты з — и, л — м. включая электромагнит 9 и электродвигатель 3. Движение через систему зубчатых колес 4 подается на валик 13, который будет вращаться до тех пор, пока ротор переключателя 5 не разорвет цепь питания реле 6. Реле займет первоначальное положение, т. е. прекратится питание электродвигателя 3 и электромагнита 9. Рычаг 10 под действием пружины 11 войдет в паз диска 12 и точно зафиксирует валик 13 в новом положении, соответствующем включенному каналу. Вместе с вали
ком 13 через поводковую муфту 2 на новом канале остановится шкала переключателя диапазонов 1.
Дискретные механизмы применяют в радиоаппаратуре, имеющей дискретную сетку опорных частот. Они обычно имеют несколько десятков или сотен фиксированных положений, расположенных через равные промежутки. В механизмах, имеющих несколько десятков фиксированных положений, установку положений производят по зубчатому колесу, а в механизмах, имеющих несколько сотен положений, — от двух фиксаторов через дифференциал.
В устройствах с несколькими десятками фиксированных положений в качестве подвижного элемента фиксатора используют зубчатое колесо, так как разделить окружность на равные промежутки точнее всего можно на зуборезном станке. В таких колесах количество впадин между зубьями равно числу фиксированных положений или больше его.
Конструктивно дискретный механизм, имеющий несколько десятков положений, аналогичен механизму переключения диапазонов (рис. 7.18), где вместо диска с прорезями 12 установлено зубчатое колесо, а вместо следящего переключателя 5— переключатель на большое число положений, аналогичный рис. 4.27. Соответственно меняется схема коммутации с переключателем 8.
Механизм с подготовительным валиком (рис. 7.19) относится к механизмам с переменной фиксацией, позволяющей вручную настраивать радиоустройсгво на каждом канале на любую частоту из всей сетки опорных частот, а затем дистанционно переключать каналы на заране настроенные частоты.
При ручной настройке устанавливают любой канал (например /), при этом рычаг 11 под действием пружины 15 точно фиксирует соответствующую шайбу 16. Отпускают ручку 9 и конденсатор переменной емкости 3, соединенный с валиком механизма поводковой муфтой 2, с помощью ручки 12 устанавливают по шкале 13 на новую частоту. Затем ручку 9 снова затягивают.
При автоматическом переключении каналов напряжение через переключатель 10 подается на реле 8, замыкающее контакты з — и, л — м, включая электродвигатель 7 и электромуфгу 17. Движение через зубчатые колеса 6, большое колесо электромуфты 5, электромуфту 17 и колесо 18 передается на подготовительный валик Д, при вращении которого рычаги // под действием пружин 15 поочередно западают в пазы шайб 14 и опускаются носиком на поверхность шайб 16. Ранее запавший рычаг поднимается закругленным краем паза шайбы 14.
Вращение подготовительного валика А будет продолжаться до тех пор, пока ротор переключателя 10 не разорвет цепь питания реле 8. Валик А останавливается, а рычаг /1 соответствующего канала опустится на образующую шайбу 14. Реле 8 замкнет контакт и — к и через контактную группу 12 включит реле /, подающее напряжение на электродвигатель 7 и электромуфту 5. Движение через зубчатые колеса 6, электромуфту 5 и колесо 4 передается на запоминающее устройство Б, оно будет вращаться до тех пор, пока носик рычага 11 не западет в паз
6TZ 3Hd
z
шайбы 16. Рычаг 11 повернется и верхним концом нажмет на коромысло 20, (коромысло 20 возвращается в исходное положение пружиной 19), которое толкателем 21 разорвет контактную группу 22. Реле 1 встанет в первоначальное положение, т. е. прекратит питание электромуфты 5 и электродвигателя 7. Следовательно, конденсатор 3 займет свое положение, которое было дано ему при ручной настройке включенного канала.
Кинематическая схема механизма плавной настройки, имеющего грубую и точную настройку, показана на рис. 7.20. Во время грубой настройки движение от электродвигателя 1 через зубчатое колесо 18, колеса электромуфты 17, 5 и систему зубчатых колес 6 передается на
следящий переключатель 7, устанавливаемый в определенном секторе и одновременно с ним через колесо со шкивом 15 устанавливается конденсатор переменной емкости 16.
Затем начинает работать система точной настройки. От электродвигателя 2 точной настройки через зубчатые колеса 3 движение передается на электромуфту 4, она срабатывает и передает движение на зубчатое колесо 5, далее через колеса 6 — на конденсатор 16. После отключения схемы поиска механизм останавливается, занимая новое положение, соответствующее заданной частоте.
Движение на конденсатор переменной емкости 14 передается с помощью согласующего устройства, состоящего из двух шкивов 15, 9. соединенных между собой гибкой лентой /3; натяжение ее производится пружиной 8. Так как диаметры шкивов 15, 9 равны, то углы поворота конденсаторов 14, 16 будут одинаковы. В зависимости от угла поворота шкива 9 жестко соединенный с ним кулачок 10 дает определенное перемещение рычагу 12 с роликом 11, который, прогибая ленту 13, поворачивает шкив 9 и соединенный с ним конденсатор 14 на некоторый дополнительный угол. Это обеспечивает согласование между собой характеристик конденсаторов переменной емкости различных контуров.
Общий вид односкоростного механизма плавной настройки показан на рис. 7.21. Механизм собирается в корпусе, состоящем из основания
12
Рис. 7.21
1 и платы 2. Движение от электродвигателя 3 через пары люфтовыбирающих колес 4—5, 6 — 7, 8 — 10 передается на конденсатор переменной емкости 11, на оси которого установлены шкала 9 и кулачок 12, служащий для аварийного выключения системы в крайних положениях с помощью микрокнопки 13. Движение на тахогенератор 14 передается с зубчатого колеса 6 через люфтовыбирающее колесо 15. Питание на механизм подается через распаечную колодку 16.
Механизм настройки для исполнительных устройств с возвратно-поступательным движением. Любой механизм дистанционной настройки с круговым вращением можно легко превратить в механизм для возвратно-поступательной перестройки исполнительных устройств. Для
Рис. 7.22
этого вместо поводковой муфты в механизме с круговым вращением необходимо установить ступенчатый кулачок со штоком или зубчатое колесо с зубчатой рейкой для механизмов фиксированной настройки; плавный кулачок со штоком или зубчатое колесо с рейкой — для механизмов плавной настройки.
В механизмах с поступательным движением (рис.7.22) передача движения на исполнительное устройство производится через рычаги различной конструкции. Рычаг 1 (рис. 7.22, а), качающийся вокруг оси 2, под действием пружины 3 левым концом опирается на ступенчатый кулачок 4, а правым — передает движение на исполнительное устройство. Установка первоначального положения производится винтом 6, который стопорится винтом 5.
Для уменьшения износа трущихся поверхностей движение с кулачка 2 (рис. 7.22, б) на рычаг 1 передается через ролик 3. В этой конструкции шток исполнительного устройства имеет возвратную пружину, она с усилием Гшт давит на правый конец рычага 1.
В таких механизмах ход штока
/1шт = /г — а
Рис. 7.23 любое из девяти положений с
где h — приращение радиуса кулачка; а, b — плечи рычага.
Рассмотренные механизмы с рычагами применяют для перестройки исполнительных устройств, не требующих высокой точности перемещения. В тех случаях, когда необходима высокая точность установки исполнительного устройства во всех положениях, применяют механизм, показанный на рис. 7.22, в. На валике 5 закреплены четыре кулачка 4. имеющие различные радиусы /?, на каждый из которых опирается свой рычаг 3. Далее все рычаги через винты 2 жестко связаны с коромыслом /; оно непосредственно воздействует на шток исполнительного устройства, прижимающего своей пружиной коромысло с рычагами к кулачкам с усилием Ешт. Правые винты 2 служат для точной установки коромысла 1 на каждом положении, а левые — для жесткого стопорения рычагов 3 относительно коромысла.
Введение в механизм рычагов 3 и винтов 2 позволяет во время регулировки компенсировать погрешности отдельных элементов, что обеспечивает высокую точность настройки на каждом положении.
Механизм ручной настройки с установочными винтами, к которым подходит шток исполнительного устройства, показан на рис. 7.17. Если барабан 2 приводить в движение от электродвигателя и устанавливать
помощью контактной следящей системы, то получится механизм дистанционной настройки, установочные винты его позволяют перестраивать частоту и подстраивать ее в узких пределах на каждом положении.
Механизм переключения диапазонов, который имеет шесть фиксированных положений и перестраивает исполнительное устройство, соединенное с механизмом поводковой муфтой 2, показан на рис. 7.18. Если в этом механизме вместо поводковой муфты (исполнительного устройства) установить зубчатое колесо и зубчатую рейку, то получится механизм фиксированной настройки для перестройки исполнительного устройства, имеющего возвратно-поступательное движение.
Механизм плавной настройки с кулачком. На выходном валике механизма 1 (рис. 7.23, а) плавной настройки любого типа установлен кулачок 2. С ним сопрягается шток 4 исполнительного устройства 5 с роликом 3, ролик прижимается к кулачку под действием пружины штока. При повороте кулачка на некоторый угол шток будет перемещаться на определенную величину.
Применение кулачковых механизмов позволяет получать закон изменения параметров контура, отличающийся от закона перестройки выходного валика механизма.
На выходном валике механизма 1 (рис. 7.23, б) плавной настройки установлен кулачок 2, к которому под действием пружины 6 поджимается зубчатая рейка 4 с роликом 3; она легко перемещается в направляющих роликах 5. С рейкой 4 сопряжено зубчатое колесо 7, установленное непосредственно на валике исполнительного устройства 8. При повороте кулачка 2 на определенный угол рейка 4 переместится на некоторую величину и повернет зубчатое колесо 7, а с ним и валик исполнительного устройства на угол, отличающийся от угла поворота кулачка. Для устранения мертвого хода в зубчатой передаче применяются люфтовыбирающие рейки или колеса.
Комбинированные механизмы настройки. В радиоустройствах производится перестройка не одного, а сразу нескольких исполнительных
устройств, имеющих вращательное и возвратно-поступательное движения. Для перестройки такой аппаратуры применяют комбинированные механизмы настройки.
Такие механизмы обеспечивают круговое вращение, пропорциональное вращению выходного валика, передаваемое через кулачок и зубчатый сектор, через кулачок и реечную передачу, и возвратно-поступательное движение, передаваемое через дисковый и торцовый кулачки.
Кинематическая схема механизма настройки с указанными видами движения показана на рис. 7.24.
С механизма настройки Л приходящего в движение от электродвигателей грубой настройки 2 и точной настройки 3, движение передается на зубчатое колесо 6, с которым связаны промежуточные зубчатые колеса 5 и 7. Далее с колеса 5 через зубчатые колеса 25. 26 движение передается на конденсаторы переменной емкости 24, 27, имеющие одинаковые зависимости емкости от угла поворота ротора. От зубчатого колеса 5 движение через колеса 11, 12 передается на дисковый кулачок 16, к нему пружиной 22 через ролик 21 поджимается зубчатая рейка 23, передающая дижение на подстроечный конденсатор 17 через зубчатое колесо 18.
От зубчатого колеса 7 движение через колесо 8 передается на кулачки дисковый 13 и торцовый 9. К кулачку 13 пружиной 19 через ролик 14 поджимается зубчатый сектор 20, который через зубчатое колесо 15 приводит во вращение подстроенный конденсатор 10. При вращении торцовый кулачок 9 перемещает шток контура 4 переключения диапазонов.
Для ликвидации автоколебаний и повышения точности настройки обычно во всех звеньях таких устройств применяют люфтовыбирающие зубчатые колеса.
§ 7.4. Механические запоминающие устройства
В механизмах ручной и дистанционной настроек с переменной фиксацией применяют механические запоминающие устройства, служащие для «запоминания» определенных положений исполнительных устройств.
Запоминающие устройства в зависимости от способа стопорения перестраивающихся элементов бывают с общим и индивидуальным зажимами.
При стопорении общим зажимом происходит жесткое крепление сразу всех перестраивающихся элементов от одного силового винта или эксцентрика, при стопорении индивидуальным зажимом каждый перестраивающийся элемент стопорится самостоятельно.
Запоминающие устройства с общим зажимом имеют небольшие габариты, просты по конструкции, но имеют значительные погрешности при стопорении перестраивающихся элементов. Запоминающие устройства с индивидуальными зажимами имеют меньшую погрешность^
но большие габариты. Они более удобны при эксплуатации, так как перестройка одних элементов не влияет на соседние.
Запоминающие устройства с общим зажимом в зависимости от вида конструкции бывают с квадратным валиком; с валиком, имеющим два паза; с неподвижными промежуточными шайбами.
Запоминающее устройство с квадратным валиком показано на рис. 7.25. На квадратной части валика 1 установлены шесть шайб с пазом 2, восемнадцать шайб 3 с квадратным отверстием и пластмассовая ручка 4 с втулкой 7 Весь набор деталей стягивается пластмассовой ручкой 5 с резьбовой втулкой 6.
Рис. 7.26
Запоминающее устройство с валиком /, имеющим два лаза, показано на рис. 7.26. Для того чтобы при настройке и стопорении шайбы 2 с пазом не смешались в осевом направлении, между ни-216
ми устанавливают по одной промежуточной шайбе 5, внутренние приливы которой заходят в пазы валика. После настройки пакет из шайб 2 и 3 стягивается ручкой 6, силовой винт которой через сухарь 5, вставляемый в прямоугольное окно валика, передает усилие на шайбу 4. Запоминающее устройство снеподвижными промежуточными шайбами является наиболее точным из запоминающих устройств с общим зажимом (рис. 7.27).
Рис. 7.27
Валик /, имеющий прямоугольное окно, установлен на шарикоподшипниках 2 в платах 5, 7 с помощью гаек 3 и обойм 4. На валик надето зубчатое колесо 16 (с помощью колеса все устройство вращается), десять промежуточных шайб 21, десять шайб с пазом 19, шайба 15, упорная шайба 6 с полукруглой канавкой (в нее вставляется сухарь 13). Промежуточные шайбы 21 внутренним лепестком вставляются в прямоугольное окно валика 1. Между этими лепестками прокладываются сухарики 20, а весь пакет стягивается винтом 22 и гайкой 14.
Промежуточные шайбы 21 не могут смещаться относительно валика при перестройке, поэтому при установке шайб 19 в определенные положения последние не сбиваются. Справа на резьбовую часть валика 1 навертывается ручка, которая служит для настройки механизма на определенные частоты и для жесткой фиксации набора шайб. Ручка состоит из корпуса 9 (к нему посредством шайбы 12 крепится лимб 18), двух рычагов 10, 11 и толкателя 8, с помощью которых производится
фиксация шайб. Снаружи ручка закрывается колпачком 17. Штрих-пунктиром изображены рычаги 10, 11 в нерабочем состоянии, т. е. в тот момент, когда шайбы 19 освобождены и можно производить перестройку механизма. При нажатии на рычаг /7 он поворачивается вокруг оси и эксцентриком нажимает на рычаг 10, рычаг также поворачивается вокруг оси и нажимает на толкатель 8. Последний через сухарь 13, упорную шайбу 6, шайбу 15 нажимает на набор рабочих, промежуточных шайб и жестко стопорит их на валике 1.
Такое запоминающее устройство имеет три преимущества перед запоминающими устройствами с квадратным валиком и валиком с двумя пазами: а) промежуточные шайбы неподвижны, поэтому при перестройке и стопорении рабочие шайбы не влияют друг на друга; следовательно, угловая погрешность такого устройства практически равна нулю; б) стопорение в устройствах с промежуточными шайбами производится нажатием рычага, т. е. усилие передается по оси валика, что не сказывается на точности стопорения; в) время на стопорение в таких устройствах мало, так как не требуется вращать силовой винт.
Запоминающие устройства с индивидуальными зажимами в зависимости от способа стопорения перестраивающихся элементов бывают с пружинами, шариками, действующие от эксцентрикового или винтового зажима.
Запоминающее устройство с пружинами показано на рис. 7.28. На втулку 3, вращающуюся на оси 4, надето четыре шайбы 1 с клинообразными носиками. В пазах втулки 3 на уровне каждой шайбы находится по две стопорные пружины 8. При повороте стопора 5 на 90° паз-эксцентрик последнего нажимает на пружины и, изгибая их, жестко стопорит шайбы на втулке. Стопорение любой шайбы производится независимо друг от друга. На нижней части втулки 3 имеется зубчатое колесо 7, приводящее в движение исполнительное устройство, а сверху — шкала 6, позволяющая перестраивать механизм на новые положения, и зубчатое колесо 2, соединяемое с ручкой перестройки.
При повороте стопора в обратную сторону усилие стопорения снимается и шайба 1 может легко проворачиваться на втулке 3. Часто в таких устройствах применяют шайбы с пазами (шайбы 2, см. рис. 7.26) вместо шайбы с клинообразным носиком.
Запоминающее устройство с шариками, действующее от эксцентрикового зажима, конструктивно аналогично предыдущему устройству (рис. 7.28) и отличается лишь системой стопорения шайб на втулке. При повороте стопора 4 (рис. 7.29, а) на 90° полукруглый паз-эксцентрик через большой шарик 5 и малые шарики 6 будет давить на толкатели 3, которые жестко застопорят шайбу 1 с пазом на втулке.
При повороте стопора в обратную сторону усилие стопорения снимается и под действием упругих сил деформации шайбы 1 система возвращается в первоначальное положение, в котором эта шайба может легко проворачиваться на втулке.
Запоминающее устройство с шариками, действующее от винтового зажима, приведено на рис. 7.29, б. При вращении силового винта 1 усилие через толкатель 2, большой и малые шарики 3, 4 передается на малые толкатели 3, которые жестко стопорят шайбу 6 с пазом на втулке 7. При ослаблении винта 1 усилие стопорения снимается и под действием упругих сил деформации шайбы 6 система возвращается в первоначальное положение, в котором шайба 6 может легко проворачиваться на втулке 7.
Отрицательной стороной таких устройств по сравнению с устройствами, действующими от эксцентрика, является то, что усилие фиксации зависит от индивидуальных особенностей оператора.
§ 7.5. Механизмы следящих систем
Следящей системой называют электромеханическое устройство, выполняющее согласование угловых положений исполнительного устройства и управляющего (рис. 7.30).
При изменении положения датчика следящей системы (ДСС) на угол р электрический сигнал от него поступает на приемник следящей системы (ПСС), электрический сигнал рассогласования которой посту
пает на преобразователь (П), управляющий электродвигателем (ЭД). Преобразователь представляет собой систему реле или усилитель, связывающие работу электродвигателя с величиной и знаком электрического сигнала, снимаемого с приемника следящей системы. Электродвигатель (ЭД), питаясь от источника питания (ИП), через редуктор (Р) с передаточным числом i приводит во вращение ось исполнительного устройства (ИУ) и ось обратной связи ПСС, поворачивая их на одинаковый угол а.
Для уменьшения погрешностей следящей системы в нее вводят тахогенератор (ТГ) или другое устройство, создающее напряжение, пропорциональное скорости оси ИУ.
Рис. 7.30 Рис. 7.31
Точностью следящей системы называется разность в положениях управляемой и управляющей осей, т. е. угол рассогласования между ними в установившемся рабочем состоянии Д0 = р — а.
Следящие системы, применяемые в радиоустройствах, бывают самостоятельными для перестройки исполнительных устройств и частью систем автоматического дистанционного управления, служащих для перестройки аппаратуры.
Следящие системы применяют для дискретной и плавной настроек исполнительных элементов радиоустройств.
В радиоустройствах применяют контактные, сельсинные, потенциометрические и контактно-потенциометрические системы, при этом контактные и контактно-потенциометрические системы служат для дискретной настройки, а остальные — для плавной.
В контактно-следящих системах радиоаппаратуры в качестве датчиков ДСС часто применяют коммутационные запоминающие устройства, служащие для «запоминания» определенных положений исполнительных устройств.
Коммутационное запоминающее устройство представляет собой барабан 1 (рис. 7.31), на образующей поверхности которого в различных комбинациях устанавливаются замыкатели 2. Количество рядов замыкателей по образующим барабана определяет число положений, в ко-
торые может устанавливаться исполнительное устройство. Количество контактных групп 3 равно числу проводов, по ним передается команда на переключатель-приемник. Количество замыкателей 2 в каждом ряду, их распределение соответствуют закону замыканий и размыканий контактов при выборе положений приемного переключателя.
Б
Рис. 7.33
В зависимости от контактной системы, в которой их применяют, коммутационные запоминающие устройства бывают с числом контактных групп, равным числу положений исполнительного устройства, и с ограниченным числом контактных групп.
Одно из запоминающих устройств с числом контактных групп, равным числу положений исполнительного устройства, показано на рис. 7.32. На барабане 1 имеется десять пазов, в каждом из них расположено по одному замыкателю 3. Их можно перемещать вручную с помощью специального ключа вдоль паза и устанавливать в любое из десяти положений, в котором замыкатель фиксируется под действием пружины 2. В данном устройстве десять контактных групп 4\ следовательно, замыкатель 3 в каждом положении замыкает только одну контактную группу.
В запоминающих устройствах с ограниченным числом контактных групп замыкатели 1 (рис. 7.33) запол-
няют полностью все ряды и имеют
два положения: холостое I, толкатель утоплен; рабочее II, толкатель приподнят на величину h. В барабане замыкатели 1 удерживаются от выпадания в рабочем и холостом положениях планкой 2, планка при ручной настройке перемещается в пазу барабана, имеющего форму «ла-
Рис. 7.34
сточкина хвоста». Набор комбинаций замыкателей производится с помощью специального устройства набора.
Другое запоминающее устройство с ограниченным числом контактных групп показано на рис. 7.34. В корпусе 7 на шарикоподшипниках установлен барабан 5, на нем расположено 20 планок 13 с ^замыкателями 12 каждая. В контактной группе 11 имеется соответственно 12 контактных пар.
Барабан вращают вручную с помощью ручки 4, и в каждом положении он четко устанавливается фиксатором, состоящим из звездочки 6, шарика 8, действующего под действием пружины 9. Положение барабана (номер канала связи) определяют по шкале 2, которая подсвечивается лампочкой 1.
Рис. 7.35
Запоминающее устройство имеет стопорное устройство 3. Подключают устройство к пульту штепсельным разъемом 10.
Замыкатели имеют два положения: холостое / и рабочее II (рис. 7.35, а). Перестраивают их торцовым ключом вручную (рис. 7.35, б). При повороте ключа замыкатель /, скользя по наклонной плоскости планки 2, перемещается на Л, западает в поперечную канавку и фиксируется в ней пружиной 3.
Такое запоминающее устройство дает возможность устанавливать исполнительное устройство в N = 212 — 1 = 4095 положений или три исполнительных устройства в У = 24 — 1 = 15 положений.
Для удобства набора и чтения набираемых частот (положений) исполнительного устройства применяют десятичную систему отсчета, в которой по четырам проводам передается десять положений. Следовательно, с применением запоминающего устройства, показанного на рис. 7.34, можно набирать 10-10-10 = 1000 положений, т. е. 1000 различных частот.
ГЛАВА 8
МЕХАНИЗМЫ АНТЕННЫХ СИСТЕМ
§ 8.1. Общие сведения
Антенны могут быть стационарными (наземными) и устанавливаться на подвижных объектах: автомобилях, кораблях, самолетах, ракетах. Наземные антенны для уменьшения влияния потенциала Земли устанавливают на возвышенностях, башнях или кабинах.
Корабельные антенны выполняют все функции наземной, являясь одновременно важным средством навигации. Судовые антенны крепят на мачтах или палубах, что накладывает ограничения на их массу и размеры. На рис. 8.1 антенны дальней космической связи 1 размещены на верхней палубе, связные антенны 3 — на мачтах; навигационные — на штурманской рубке 2. Антенное устройство непрерывно подвергается воздействию ветра, солнца и воды.
Самолетные антенны размещают в носовой или хвостовой частях самолета, под фюзеляжем и защищают с помощью обтекателей (см. рис. 2.18). Такие антенны подвержены действию вибраций, ударов, а также изменению давления и температуры.
Антенный блок состоит из зеркала, конструкция которого зависит от диапазона длин волн, высокочастотной линии питания, основания с поддерживающими деталями, приводов и устройств, осуществляющих дистанционную передачу координат цели на экран индикаторного блока.
Для сантиметрового диапазона применяют антенну зеркального типа, она состоит из излучателя, являющегося оконечной нагрузкой линии передачи энергии от генератора СВЧ, и отражателя. Излучатель выполняют в виде рупора пирамидальной, секториальной
или конической формы, одного либо нескольких диполей, спиралей различной формы, а также щелевого типа.
Отражатели могут иметь одно (однозеркальные) и два (двухзеркальные) зеркала. Формы отражателей для типовых однозеркальных антенн могут быть в виде параболоида, параболического тора и сферы. Параболоидная форма отражателя является наиболее распространенной; остронаправленный отраженный луч создается помещенным в фокус отражателя излучателем. Применение дополнительного отражателя специального профиля позволяет получать веерную и косекансную диаграммы направленности. Обычно граничной кривой такого отражате-
Рис. 8.1
ля является окружность. Сферическая форма отражателя позволяет смещать диаграмму направленности при движении излучателя по концентрической дуге сканирования, а его форма в виде параболического тора обеспечивает линейное сканирование.
Линии передачи представляют собой жесткую коаксиальную линию или волновод; форма волновода может быть различной, а его длину выбирают с учетом наименьшего затухания. Волноводы изготовляют из меди, латуни, сплавов алюминия. Специальные вращающиеся волно-водные сочленения (рис. 8.2), входящие в линию, обеспечивают передачу электромагнитной энергии от неподвижных к подвижным частям антенны. Размеры элементов вращающегося сочленения зависят от длины волны X и должны выбираться так, чтобы в линии не возникало стоячих волн.
Отдельные отрезки волноводов соединяют с помощью фланцев дрос-<ельного типа. Последние имеют кольцевую канавку глубиной /, сог-
ласованную с длиной волны (I « V4) и предотвращающую утечку
энергии в месте соединения.
Влага внутри линии передачи увеличивает затухание, ведет к искрению, поэтому радиолокационную аппаратуру, работающую в ус-
ловиях значительного перепада температуры и давления, герметизируют, создавая внутри волновода избыточное давление.
Основание антенны должно обеспечивать размещение антенного привода, стабилизацию положения, амортизацию ударов и толчков. В зависимости от назначения антенны конструктивное решение оснований различно. Обычно
это литая конструкция из легких сплавов.
Привод антенны (обычно электромеханический) обеспечивает зеркалу при обзоре определенное движение.
Выбор типа привода зависит от назначения, ха-р а ктер исти к и р адиолока-ционной станции (РЛС), вида объекта, на котором ее устанавливают, степени стабилизации, допустимой массы, потребляемой мощ-
Рис. 8.2
ности и т. д.
В качестве передаточных механизмов в приводе могут использоваться зубчатые передачи различных видов. Червячные передачи ввиду низкого КПД и повышенного мертвого хода в настоящее время не ис-
пользуют.
Так как приводы антенн чаще работают в системе реверса и управляются вспомогательными механизмами, то к ним предъявляют требование ограничения мертвого хода, выполнение которого ведет к повышению точности получаемых результатов. Однако здесь следует учитывать работу привода в широком диапазоне рабочих температур, при различных материалах корпуса, деталей передачи, т. е. необходимо выполнение условия температурной компенсации.
В обзорных РЛС антенну используют для наблюдения за пространством в пределах заданной зоны. Привод такой РЛС состоит из программного устройства, а также раздельных, совмещенных приводов азимута, угла места и стабилизации основания.
Программное устройство при строчном обзоре осуществляет реверсирование антенны по азимуту и переход от одной строки к другой по углу места. Возможны различные виды программных устройств. В одном из них управление приводами азимута и угла места (реверсирование, переход от одной строки к другой) производят через фиксированные промежутки времени. Применяют электронные схемы реверса с
использованием электромагнитных порошковых муфт и переключателей реверса, срабатывающих в задаваемых крайних положениях антенны.
Основным требованием к приводам азимута и угла места является обеспечение необходимой скорости обзора, времени реверса. Электромеханический привод с реверсом за счет применения порошковых электромагнитных муфт обеспечивает реверсирование вращения выходного вала без изменения направления вращения двигателя путем переключения в крайних положениях антенны питания с одной муфты на другую, что улучшает условия работы двигателя.
Привод радиолокационной антенны снабжается двигателем с питанием непосредственно от сети и управлением от программного устройства через комплекс усилитель — двигатель. Выбор типа двигателя зависит от режима работы привода, вида питания. Первичные системы электроснабжения летательных аппаратов имеют преимущественно постоянный ток с напряжением 27 В, трехфазный переменный с напряжением 200/115 В и частотой 400 Гц. Во вторичных энергосистемах применяют сети трехфазного и однофазного переменного тока с напряжением 36, 115 В.
§ 8.2. Кинематические схемы приводов радиолокационных антенн
Кинематические схемы приводов антенного блока РЛС зависят от объекта, на котором РЛС устанавливается, режима, параметров его движения и ряда других требований.
В РЛС с механическим сканированием в приводах зеркала применяют зубчатые передачи, так как они имеют высокий КПД и обеспечивают меньшую погрешность мертвого хода. Для исключения влияния крена или наклона основания антенного блока при его установке на подвижных объектах используют систему стабилизации.
Кинематическая схема антенного блока самолетной РЛС РПСН-2. используемой в гражданской авиации, дана на рис. 8.3. Эту схему можно разделить на:
— схему привода зеркала по азимуту;
— схему привода зеркала по углу места;
— • схему привода системы стабилизации основания.
Привод азимута зеркала 2 обеспечивает обзор пространства в пределах угла а — + 90е с частотой пА 20 ± 3 цикл/мин. Перемещение зеркала происходит от двигателя азимута 1 через трехступенчатый редуктор 9 с передаточным числом ир = 61-63-91/(19-17-17) =• = 63,5. Закрепленная на выходном валу редуктора шестерня 4 = 20 зацепляется с сидящим на валу антенны зубчатым сектором z5 = 133. Реверсирование двигателя осуществляют переключателем реверса 5, установленным на корпусе антенны. Переключатель работает в зависимости от заданного угла азимута (± 90°). Двигатель азимутального вращения — асинхронный двухфазный переменного тока (U = 115 В,
Рис. 8.3
f -= 400 Гц) типа ЭМ-25 с номинальным моментом Тп = 78 Н-мм при п Дв 4000 об/мин.
Движение зеркала по углу места в пределах угла 0 ± 17° про-
исходит с помощью индукционного двигателя 3 переменного тока типа ДГ-ЗТВ ({/ = 36 В; f ~ 400 Гц) с лдв 5000 об/мин и Ти = 9 Н-мм, четырехступенчатого зубчатого цилиндрического редуктора 4, имеющего передаточное число и» ~ 145.
р 2г Z3 z4' 20-20-18-18
Закрепленная на выходном валу редуктора шестерня ?5 = 22 зацепляется с зубчатым сектором г6 = 230, установленным на оси вращения антенны по углу места. Передаточное число u56 — z§lz$ 230/ /22 = 10,4. При нормальных условиях скорость наклона зеркала по углу места 0' = 25 град/с, при перегрузках и пониженной температуре Р' = 15 град/с.
Стабилизацию основания антенны обеспечивают системами продольной и поперечной стабилизации. Продольную стабилизацию создают дополнительным поворотом антенны по углу места на величину наклона продольной оси, возникающей при эволюциях самолета. Этот поворот выполняют с помощью двигателя или редуктора наклона; сигнал на управляющую систему двигателя для его включения подают связанной с гировертикалью автопилота следящей системой, в которую входит потенциометрический датчик ПДР
Поперечную стабилизацию осуществляют поворотом поперечной оси антенны на угол крена с помощью двигателя 7, либо редуктора 8 сир 1703. В редукторе для предохранения двигателя и зацеплений от перегрузок имеется предохранительная фрикционная муфта (Фр. М). Управление двигателем производят с помощью связанной с гировертикалью автопилота следящей системы, в которую входит потенциометрический датчик ПД2.
Передачу азимута цели на индикаторы пилота и штурмана осуществляют блоком вращающихся трансформаторов (ВТ), кинематически связанных с осью вращения по азимуту безлюфтовой зубчатой передачей 6 с 1. Дистанционный поворот антенны по азимуту производят сельсинной дистанционной передачей путем поворота на соответствующий угол оси сельсина-датчика Дь расположенного в кабине штурмана и электрически связанного с сельсином-приемником ПР Он муфтой жестко соединен с осью вращения антенны по азимуту и при рассогласовании положения его оси с осью сельсина-датчика в момент ручной установки по шкале заданного угла поворота включает двигатель азимута; двигатель работает до момента отработки заданного значения угла.
Быстродействие антенны повышается при уменьшении приведенного момента инерции реверсируемых масс, а также использовании в схеме привода вала антенны нереверсируемого двигателя. При этом реверс выходного звена привода осуществляется схемой (рис. 8.4) с использованием двух порошковых муфт. От двигателя 1 вращение передается через многоступенчатый зубчатый редуктор с передаточным чис-
лом "р ’= ст£~ПГ 70 на выходной вал № 7 и да-
лее с шестерни zq на вал антенны с передаточным числом и zs/zi -= = 280/16. Реверсирование выходного вала редуктора обеспечивается переключением порошковых муфт Mt и М2. С валом № 6 двухступенчатой передачей связан соединенный с валом № 9 тахогенератор 2, входящий в систему обратной связи.
Для обеспечения реверса выходного вала привода без реверса двигателя используют также кривошипно-коромысловый механизм. Кинематическая схема антенного блока РЛС «Гроза», в котором в приводе
Рис. 8.4
азимута использован такой механизм, приведена на рис. 8.5. Она состоит из привода вращения зеркала антенны по азимуту (Л) и привода наклона отражателя по углу места (В); излучатель в этом случае оста
ется неподвижным.
Поворот зеркала по азимуту осуществляется при совместном вращении отражателя 1 с излучателем 2 в пределах угла 2а ±100° с помощью привода Д, состоящего из безреверсивного двигателя переменного тока 7 типа ДКИ-6-12ТВ (пдв - 6740 об/мин), семи пар цилиндрических зубчатых колес, кривошипно-коромыслового механизма и еще двух пар зубчатых колес. Передаточное число редуктора до криво-33-33.70-7Ь71-60.77 ши л но-коромыслового механизма 2о » 20 - Т8 -~18 18» з'б" 22
позволяет обеспечить скорость обзора 10 цикл/мин.
645
Две пары зубчатых колес, размещенных после кривошипно-коро мыслового механизма, имеют передаточное число u 1 2,4
и обеспечивают увеличение угла качания зеркала антенны до угла 2а-- ± 100°.
Перемещение отражателя по углу места в пределах угла 2р ± 11° со скоростью наклона Р' ^ 32 град/с при неподвижном излу-
Рис 8.5
чателе, что обеспечивает наклон оси диаграммы направленности в пределах угла 2р ± 22°, осуществляют приводом наклона В, состоящим из двигателя 4, редуктора с цилиндрическими зубчатыми колесами и одной конической зубчатой пары с общим передаточным числом, включая закрепленный на отражателе зубчатый сектор, и 1103. С азимутальной осью антенны для выдачи информации о величине угла поворота антенны по азимуту с помощью муфты связан вращающийся
трансформатор (ВТ) 8. Вращающийся трансформатор 6 служит для получения напряжения, амплитуда которого пропорциональна мгновенному значению требуемого угла наклона луча 0' в системе его косвенной стабилизации, определяемого по формуле
0' = у sin а—0 cos а,
где у — угол крена самолета; 0 — угол тангажа; а — азимутальный угол поворота зеркала. Выработку указанного напряжения осуществляют подачей на синусную обмотку вращающегося трансформатора 6 напряжения, пропорционального углу крена самолета, а на косинусную — углу тангажа. Углы крена и тангажа получают от самолетной гировертикали. Система косвенной стабилизации с помощью следящей системы, работающей от гировертикали, обеспечивает совмещение горизонтальной оси основания антенны с линией горизонта при наличии углов крена и тангажа самолета.
Вращающийся трансформатор 5, связанный с двигателем 4 системой передач, используют как датчик угла наклона зеркала антенны при его ручной отработке; тахогенератор (ТГ) 3 постоянного тока входит в систему обратной связи привода наклона по скорости.
§ 8.3. Конструкции приводов радиолокационных антенн
Конструкция антенного блока, выполненная по кинематической схеме (см. рис. 8.3), приведена на рис. 8.6. В фокусе алюминиевого отражателя / антенного блока находится излучатель. К основному зеркалу прикреплен второй отражатель в виде козырька для формирования ве-
Рис. 8.6
ерного луча. Отражатель I крепят к подзеркальнику 2, на котором размещен сектор, сцепляющийся с выходной шестерней редуктора наклона, приводимой во вращение двигателем 3. Своими концами подзеркальник крепят к кронштейну 10, на нем находится зубчатый сектор 4. зацепляющийся с выходной шестерней 5 редуктора азимута. Шестерня 5 приводится во вращение двигателем 8.
Корпус антенны 6 является несущей частью антенного блока; он имеет вид вилки и отлит из магниевого сплава МЛ5. Через концы вилок корпуса проходит ось вращения кронштейна с отражателем по ази-
муту, а сам корпус приводом стабилизации по крену может поворачиваться относительно горизонтальной оси на угол ±30° вокруг сектора, закрепленного на основании 7. На корпусе размещают редукторы наклона и стабилизации по крену, детали переключателя реверса, сервоусилители. Высокочастотный импульс подводится к излучателю зеркала антенны от приемопередающего блока с помощью волноводного тракта 9.
Герметичные вращающиеся волноводные соединения имеются по трем осям вращения антенны. Основание антенны крепят к корпусу самолета двумя стержнями, проходящими через ушки.
Конструкция редуктора азимута показана на рис. 8.7. Корпус редуктора изготовлен из магниевого сплава, шестерни — из легированной стали. Ограничения мертвого хода в пределах 10' достигают путем выполнения зубчатых передач с минимальным боковым зазором.
Для предохранения от перегрузок редуктор имеет предохранительную фрикционную муфту, отрегулированную на момент Тм = 1,2 Тн, где Тн — номинальный крутящий момент на валу.
Редуктор наклона (рис. 8.8) крепят на кронштейне антенны и его выходную шестерню сцепляют с зубчатым сектором, размещенным на подзеркальнике. Форма корпуса определена местом, отведенным для него в блоке. Редуктор имеет фрикционную предохранительную муфту и зубчатый стопор для ограничения качания зеркала в пределах угла места 2 0 — ± 17°. Шестерни редуктора выполнены из легированной стали.
Рис. 8.8
Конструкция механизма привода антенны, выполненного по кинематической схеме (см. рис. 8.4), показана на рис. 8.9 (обозначения те же). В этой конструкции использован двигатель постоянного тока типа Д-25А с частотой вращения /гдв 6000 об/мин и мощностью Р = 25 Вт. Корпус редуктора выполнен из литейного магниевого сплава.
Конструкции механизмов привода антенны РЛС «Гроза», показанные на рис. 8.10 и 8.11, выполнены по кинематической схеме (см. рис. 8.5).
Конструкция антенного блока (рис. 8.10) состоит из отражателя 3, излучателя 2, корпуса с редуктором азимута 11, редуктора наклона 10, герметизированного волноводного тракта 12 с вращателем плоскости поляризации и подмагничивающей обмоткой /. Отражатель 3 имеет
диаметр 760 мм (в уменьшенном варианте 560 мм) и состоит из двух поверхностей: параболической или специального профиля для формирования веерного луча типа «косеканс». Отражающая поверхность выполнена из металлизированной ткани. Отражатель закреплен на подзеркальнике 4, к которому прикреплен зубчатый сектор наклона 5. Основание 15 с закрепленными в нем фланцем 14 с кареткой 6, повора-
Рис. 8.9
чивается относительно оси азимута 1 — 1 через редуктор от двигателя 9. Хомут 13 обеспечивает крепление неподвижной части вращающегося волноводного сочленения.
Зубчатое цилиндрическое колесо 7 редуктора наклона, сидящее на одной оси с коническим колесом, зацепляется с зубчатым сектором. Редуктор наклона с двигателем 8, ВТ и ТГ закреплены на верхней плоскости корпуса блока 11.
Конструкция редуктора азимута, размещаемого в корпусе антенного блока, показана на рис. 8.11. Двигатель 3 через многоступенча-
8
Рис. 8.10
Рис. 8.11
тый редуктор передает вращение на коромысло 2 кривошипно-коромыслового механизма и далее через повышающую передачу на вал антенны /.
Фрикционная предохранительная муфта 4 отрегулирована на передачу крутящего момента Тм =1,2 TH. Материалами дисков являются бронза и сталь с HRC=40—50. Толщина дисков 1 мм, шероховатость соответствует 3-му классу. Корпус блока литой из магниевого сплава.
Особенностью конструкции редуктора наклона является дифференциал, обеспечивающий вращение отражателя по наклону с одновременным поворотом по азимуту за счет дополнительного обката в конической паре.
Отказ в РЛС «Гроза» от привода непосредственной стабилизации, замена ее косвенной, использование схемы с безреверсивным двигателем, уменьшение массы, момента инерции отражателя и ряда деталей позволили снизить массу антенного блока, одновременно повысив его технические характеристики.
§ 8.4. Выдвижные и разворачиваемые антенны для радиосвязи
В настоящее время основными конструкциями выдвижных антенн являются телескопические и шарнирные. Недостатки телескопических конструкций — наличие замкового соединения (на 18 м необходимо как минимум 2—3 соединения), которое ненадежно, особенно при низких и высоких температурах, пыли; сложность механизмов выдвижения секций антенны (в каждой секции свой механизм выдвижения): большая масса. Недостатки шарнирных конструкций — сложность механизмов выдвижения (на 18 м необходимо иметь как минимум 2—3 колена и столько же приводов); большие габариты, масса (в свернутом положении).
Разворачиваемыми антеннами являются штыревые с упруготрансформируемым элементом, баллистические, пневматические.
Штыревая антенна с выдвижным упруготрансформируемым элементом в виде упругой ленты с вогнутым профилем (наподобие рулетки) позволяет применить для привода один электродвигатель, а также создать самовыдвигающуюся конструкцию, в которой выдвижение будет осуществляться за счет упругих сил пружинящего профиля ленты, и получить малые габариты (в свернутом положении), массу.
В такой антенне лента из нержавеющей стали или бериллиевой бронзы обработана так, что в свободном состоянии она принимает форму трубки с полностью перекрывающимися краями, ось которой расположена вдоль ленты, что придает ей большую жесткость. В убранном положении уплощенная лента намотана на барабан и с помощью электродвигателя или специального механизма, вариант которого схематически изображен на рис. 8.12, может быть выдвинута на заданную длину. В настоящее время эти антенны применяют в основном для летательных аппаратов (космических и др.).
Баллистическая антенна основана на использовании динамического эффекта, возникающего при высокоскоростном продольном движении бесконечной (замкнутой) гибкой нити (провода), что позволяет осуществить подъем и устойчивый стационарный режим работы излучателя высотой в десятки метров.
Применение баллистических антенн позволяет создать простые по конструкции антенные устройства. Они обладают значительными преимуществами по сравнению с применяющимися в настоящее время антенными сооружениями.
Преимуществом баллистической антенны является также малое время ее развертывания и свертывания, измеряемое единицами минут.
Принципиальная схема баллистической антенны показана на рис. 8.13. Бесконечный трос 1 зажат между вращающимся шкивом 2 и прижимным роликом 3 катапульты 4, так что все его элементы последовательно получают вертикальную скорость. Выброшенные вверх элементы троса возвращаются обратно к катапульте (левая нисходящая ветвь). Шкив 2 приводится во вращение электродвигателем, установленным на основании катапульты 4.
Баллистическая антенна может быть использована как для стационарных систем связи, так и для подвижных (наземных и корабельных). На рис. 8.14 схематически показана баллистическая антенна, привод 3 которой установлен на вращающейся платформе 2, Система прижимного и приемного роликов позволяет изменять угол наклона излучателя / с целью изменения формы диаграммы направленности в вертикальной плоскости.
Созданию пневматических конструкций способствовало производство прочных и легких синтетических пленок и прорезиненных тканей.
Наполнение оболочки сжатым воздухом не требует длительного времени, так же быстро можно свернуть антенну, выпустив воздух из оболочки.
На рис. 8.15, а приведена схема конструкции пневматического вертикального излучателя. Из компрессора 1 сжатый воздух по трубе поступает в баллон 2, выполненный из гибкого, прочного и непроницаемого для воздуха материала. Снаружи баллона проложен металлический канатик 3, являющийся излучающей частью антенны. После наполнения баллона сжатым воздухом он устанавливается вертикально.
Далее требуется только поддержание в баллоне необходимого давления, что выполняется с помощью компрессора. Компрессор работает не непрерывно и включается по мере необходимости для поддержания заданного давления внутри оболочки по сигналу от датчика, контролирующего давление внутри баллона.
Свертывание пневматической антенны производится следующим образом: из баллона 1 откачивается воздух (рис. 8.15, б), одновременно на ось лебедки 3 наматывается трос 2. При этом вершина антенны следом за тросом постепенно втягивается в баллон, а затем на ось лебедки наматывается баллон до самого основания. При свертывании антенны давление в баллоне должно быть достаточным для устойчивого поддержания его в вертикальном положении.
Подъем антенны осуществляют в обратном порядке. При поступлении воздуха создается давление, заставляющее разворачиваться в вертикальном направлении баллон, намотанный на ось лебедки.
Рис. 8.15
На рис. 8.15, в приведена схема пневматической антенны, которая представляет собой вертикальный линейный излучатель высотой 20 м. Токоведущая часть антенны состоит из нескольких соединенных между -собой вертикальных проводов. При этом нижняя часть баллона выполняет функции опорного изолятора. Баллон изготовлен из прорезинен
ной синтетической ткани. Для наполнения баллона антенны сжатым воздухом, а также поддержания заданного рабочего давления внутри оболочки у основания антенны на стойке установлены воздуходувки и автоматическое устройство для регулирования давления воздуха в баллоне. Антенна предназначена для работы с передатчиками мощностью до 5 кВт и может работать в различных климатических условиях в диапазоне температур ± 40° С.
Толщина материала баллона и давление воздуха внутри него выбраны исходя из условия нормальной эксплуатации антенны при скорости ветра до 15 м/с. Диаметр баллона в основании составляет 1,2 м; на вершине — 0,3 м; толщина материала оболочки 0,5 мм. Избыточное давление воздуха в баллоне устанавливается 0,016 МПа, что обеспечивает устойчивость антенны при полной высоте 20 м и скорости * ветра до 15 м/с. Наполнение баллона антенны сжатым воздухом осуществляется за 6 мин.
Повышение прочности пневматической антенны (рис. 8.15, г) достигается заключением баллона 1 в металлическую сетку 2, закрепленную в основании 3 антенны. Применение металлической сетки улучшает электрические характеристики антенны, повышает ее устойчивость в вертикальном положении, но при этом значительно увеличивается масса и снижается гибкость оболочки антенны.
ГЛАВА 9
МЕХАНИЗМЫ ЗАПИСЫВАЮЩИХ УСТРОЙСТВ
§ 9.1. Общие сведения
Устройства записи содержат электронные элементы, однако их рабочие характеристики зависят от качества механических узлов, определяющих стабильность движения носителя записи, точности изготовления, установки магнитных головок (МГ) и т.д. Эти требования к механической части записывающих устройств являются основными; качество записи в значительной степени определяет скорость перемещения носителя или ее стабильность. При записи приняты следующие значения скоростей движения носителя: 381; 190,5; 95,3; 47,6; 23,8 мм/с. С повышением качества МГ и магнитной ленты (МЛ) скорость их перемещения может быть снижена. Для ускоренной перемотки скорость носителя выбирают в пределах 2000—8000 мм/с. Запись производят на одну или несколько дорожек. Перемещение носителя записи относительно МГ осуществляет лентопротяжный механизм (ЛПМ).
Перемещение ленты относительно МГ может происходить в режиме записи — воспроизведения с номинальной скоростью и в режиме ускоренного перемещения при поиске информации. По кинематике ЛПМ можно разделить на два типа: с перемещением ленты 1 относительно МГ 5 и 6 путем ее перемотки с одной катушки на другую (рис. 9.1, а) например с катушки 2 (подающий узел) на катушку 3 (приемный узел);
с бесконечной лентой (рис. 9.1, б), где катушки 3 и 2 отсутствуют. В обеих схемах ролики 4 являются направляющими.
ЛПМ, выполненный по схеме рис. 9.1, а, с приводом на одну из катушек при неизменном числе оборотов двигателя (вследствие изменения диаметра намотки) не может обеспечить постоянства скорости перемещения ленты относительно МГ. Для обеспечения постоянства скорости движения ленты применяют ЛПМ с разомкнутой петлей (рис. 9.1, в). Лента 1 приводится в движение ведущим роликом 5, к которому для лучшего сцепления лента прижимается прижимным роликом 4. Натяжение ленты до ведущего ролика осуществляет подающий узел 2, а на-
Рис. 9.1
мотку ленты выполняет приемный узел 5, или наоборот (при обратном движении ленты). Ролики 6 являются направляющими. Петля считается разомкнутой, потому что ведущий узел, обеспечивающий постоянство скорости движения ленты, воздействует только на один участок ленты, движущейся около МГ 7 и 8. На скорость перемещения ленты в ЛПМ с разомкнутой петлей влияют неравномерность вращения двигателя, погрешности передаточного механизма, деформация и колебания прижимного ролика, вытягивание ленты при ее натяжении, непостоянство силы трения в месте контакта ленты с роликом. Поэтому при использовании этой схемы в конструкции предусматривают ряд дополнительных элементов, стабилизующих скорость движения ленты.
В механизме с замкнутой петлей (рис. 9.1, г) ведущий узел, обеспечивающий движение ленты 1 с постоянной скоростью, выполнен в виде ведущего ролика S, двух прижимных роликов 4, 9 и обводного инерционного ролика 5. Ведущий узел воздействует на оба участка ленты, движущейся относительно МГ 6 и 7; подающий узел 2, приемный узел 3 обеспечивают подачу или намотку ленты.
Эффект замкнутой петли можно получить, используя два ведущих ролика 4, 7, имеющих между собой механическую связь (рис. 9.1, д). Основной особенностью механизма с замкнутой петлей является изолированность участка ленты 1 около МГ 5 и 6 от приемного или подающего узлов 2, 5, которые могут создавать неравномерность движения ленты. В механизме с «нулевой» петлей (рис. 9.1, е) МГ 5 и 6 прижимаются к ленте 1 в том месте, где она огибает ведущий ролик 7. Эта схема предусматривает два направляющих ролика 4 и 8, обеспечивающих правильную подачу ленты на ведущий ролик с подающего узла 2 либо с ведущего ролика на приемный узел 3.
Основными механическими узлами ЛПМ являются ведущий узел, боковые узлы подачи и намотки ленты, исполнительные устройства (двигатели, передаточные механизмы, тормозные устройства, электромагниты).
Для улучшения отдельных характеристик и расширения оперативных возможностей аппарата в зависимости от требований к нему в ЛПМ могут входить вспомогательные узлы (стабилизации движения носителя, стабилизации натяжения носителя, быстрого пуска, автоматики и программирования).
Кроме описанных типовых узлов в конструкции записывающего устройства могут быть узлы, контролирующие и регулирующие качество записи: датчики скорости, обрыва, натяжения ленты, программные механизмы и др.
Все узлы устройства магнитной записи находятся во взаимосвязи, определяемой кинематической схемой ЛПМ и режимами его работы. К основным режимам относятся режимы записи— воспроизведения, к вспомогательным — перемотки и поиска.
§ 9.2. Кинематические схемы лентопротяжных механизмов
Кинематическая схема бытовой одномоторной конструкции ЛПМ двухдорожечного магнитофона показана на рис. 9.2, где ведущий ролик (вал) 2 является продолжением вала двигателя 1. Узлы подмотки 16, обратной перемотки 9 одинаковы и выполнены с применением фрикционных электромагнитных муфт (см. рис. 9.6, б). Передачу движения на узлы 9 или 16 осуществляют с помощью пассиков через промежуточные шкивы /5, 10. Прижим ленты к ведущему валу 2 производят прижимным роликом 7, а к МГ нижней дорожки 5, 6 и верхней дорожки 8, 12 — роликами 4,3, 13, 14. Прижимный ролик 7 управляется электромагнитом 11.
Натяжение ленты в режиме запись — воспроизведение осуществляют за счет момента трения между подкассетником и шкивом при выключенных электромагнитных муфтах.
Схема одномоторной конструкции магнитофона (тип МС-61), применяемой на самолетах, без устройства воспроизведения записи показана на рис. 9.3. Движение ведущей кассеты 1 происходит от двигателя 4 через червячную передачу 3 с передаточным числом щ ,= z2lzA
г-- 64/2 == 32 и зубчатую передачу 2 с и.2 = Z3/Z2 77/28 — 2,75. Запись
ведут на носитель-проволоку 15 с помощью МГ 14. Стирание осуществляют МГ 13. Диаметр проволоки dnp - 0,05 мм. Необходимое натяжение проволоки силой 0,15—0,2 Н создается подтормаживанием ведомой кассеты 10 колодочным тормозом 11. Равномерную намотку проволоки на ведущую кассету осуществляют перемещением по направляющим 8 поводка с толкателем 7 при помощи кулачка 6, сидящего на валу 5. Вращение этого вала осуществляют червячной передачей с передаточным числом и3 z432/1 32 от приводного вала ведущей
Рис. 9.2
кассеты. Магнитофон имеет датчик обрыва 16\ обрыв проволоки вызывает обесточивание двигателя привода 4 и включение тормоза 9 электромагнитом 12.
Двигатель привода ведущей кассеты ДПМ-20-НЗ-09 с крутящим моментом Т„ 2Н-мм и лдв = 4500 об/мин имеет регулятор скорости. Скорость перемещения носителя записи vh 175 мм с.
Частота вращения кассеты при известной скорости ин перемещения носителя и среднем диаметре намотки на кассету (об мин)
п,. = 60ин/(лйк).
При 175 мм/с, Ок 90 мм частота вращения кассеты /?к
33 обмин. Тогда при лдк 3000-н6000 об/мин гдн,н 100 4-
-200.
Кинематическая схема ЛПМ (НМЛ) ЕС-5017 показана на рис. 9.4, где /,2 — приемная и подающая кассеты. Кассеты имеют самостоятельные приводы, состоящие из кассетных сериесных двигателей по-244
стоянного тока. Ведущий ролик <3 диаметром dp - 50 мм посажен на вал приводного двигателя (Рдв -- 90 Вт; /1ДВ 3000 об/мин; U
27 В).
Вакуумные колонки 8 и 9 создают необходимое усилие предварительного натяжения ленты 4 F{} 24-3 Н. Запись и считывание ин-
формации осуществляют с помощью МГ 5. Направляющие ролики 6,
Рис. 9.3
Рис. 9.4
11 и очистители 10, 7 дополняют тракт магнитной ленты. Привод ведущего ролика при записи и считывании информации обеспечивает скорость ленты fH 2 м/с, а при перемотке ленты 5 м/с.
§ 9.3. Конструкции механизмов записывающих устройств
Конструкция редуктора,используемая в приводе кассеты магнитофона, показана на рис. 9.5, где двигатель 2 закреплен в корпусе 3 накидной гайкой 4’, корпус отлит из алюминиевого сплава. Двухзаход-ный червяк 5 делают из стали. Червячное колесо 6 из текстолита имеет 64 зуба, модуль зацепления т 0,5 мм, затем движение передается на вал 1 посредством червячной передачи с передаточным числом и
- 38,1 38. модуль зацепления т 0,5 мм. Выходная шестерня 7 на валу 1 имеет 28 зубьев, модуль т 0,5 мм. Редуктор крепят к панели магнитофона с помощью опорной платы, имеющей четыре отверстия для крепежных винтов.
Ведущий узел должен обеспечивать стабильность скорости движения ленты, бесшумность и жесткость конструкции. В зависимости от способа передачи крутящего момента от двигателя на ведущий ролик различают ведущие узлы прямого и косвенного привода. В узле прямого привода ведущим является вал двигателя или посаженный на него веду-
Рис. 9.5
щий ролик; ротор такого двигателя выполняет функцию маховика. Узлы прямого привода отличаются простотой конструкции, но подшипники двигателя нагружаются усилием прижатия ленты и неравномерность вращения двигателя передается протягиваемой ленте, что является недостатком этой конструкции. В узлах косвенного привода ведущий ролик устанавливают на отдельных подшипниках; он приводится во вращение двигателем через передаточный механизм. Для стабилиза
ции вращения на ведущем вале устанавливают маховик. Прижатие ленты к ведущему ролику осуществляют прижимным роликом, управляемым электромагнитом. Обычно ведущий ролик выполняют стальным, а поверхность прижимного ролика делают обрезиненной. Для равномерного протягивания ленты ведущий ролик не должен иметь биения и дебаланса. Диаметр ведущего ролика берут исходя из скорости движения носителя ин (мм/с): d = 60vH /(лир), где пр — частота вращения ведущего ролика, об/мин.
Для повышения твердости ведущий ролик термически обрабатывают и хромируют; его поверхность должна иметь шероховатость не ниже 9-го класса. Допускаемый эксцентриситет ролика не более 1—3 мкм. Точность изготовления его рабочего диаметра определяют допуском на номинальное значение скорости протягивания ленты. Обычно в магнитофонах номинальное значение диаметра ведущего ролика составляет 10—15 мм. В накопителе на магнитной ленте (НМЛ) ЛПМ конструируют по схеме (см. рис. 9.1, е), где ведущий ролик посажен непосредственно на вал двигателя. Сила трения между лентой и ведущим роликом создается натяжением ленты с помощью вакуумных колонок (ЕС-5017). Поскольку коэффициент трения скольжения между прижимным роликом и лентой больше, чем между лентой и стальным ведущим валом, ленту протягивает прижимный ролик, вращаемый ведущим роликом, с которым он соприкасается за боковыми кромками ленты. Усилие прижима ролика к ведущему валу, необходимое для протягивания ленты с постоянной скоростью, зависит от силы сопротивления протягиванию и коэффициента трения скольжения.
Коэффициент запаса по сцеплению (против буксования) (3 = 24-3. Коэффициент трения скольжения выбирают в зависимости от материала фрикционной пары ведущий ролик — прижимный ролик.
Для надежного протягивания ленты диаметр прижимного ролика выбирают достаточно большим: dnp = 254-50 мм. Высота ролика h зависит от ширины ленты; для улучшения его сцепления с ведущим роликом для узкой ленты h = (1,54-2,5) Ь, а для широкой h = b + + (3 4- 5), где b — ширина ленты.
Поджим прижимного ролика осуществляют с помощью тяги, связанной с электромагнитом; ход тяги для уменьшения удара составляет 1—2 мм; отжатие ролика производят с помощью пружины.
Боковые (подкассетные) узлы ЛПМ служат для подмотки и подтормаживания ленты в режимах записи — воспроизведения и перемотки. В режимах записи — воспроизведения боковые узлы работают с переменной частотой вращения ввиду изменения диаметра намотки; изменение частоты вращения осуществляют за счет фрикционного или электромагнитного скольжения ведомого элемента относительно ведущего; на ведомые элементы устанавливают кассеты с лентой. Различают активные и пассивные боковые узлы.
Активный узел состоит из двигателя с мягкой механической характеристикой, тормозного устройства и подкассетника. Этот узел применяют в трехмоторных конструкциях ЛПМ магнитофона и в НМЛ.
Пассивный узел — это автоматическая сцепная муфта, ведущая часть которой имеет привод от ведущего двигателя. В конструкции этого узла используют управляемые фрикционные, обгонные муфты, обеспечивающие стабилизацию натяжения ленты и режим ее ускоренного движения. Фрикционная муфта (рис. 9.6, а) с автоматически варьируемой силой осевого давления Fri за счет изменения диаметра намотки
ленты состоит из ведущей 4 или ведомой 2 частей, связанных фрикционным кольцом из фетра 3. Заглушку с выступами 1 используют для установки кассеты. С помощью хвостовика 5 муфту крепят к несущей панели ЛПМ. Момент трения, создаваемый силой осевого давления Ffn Лр fFn /?ср-
Рис. 9.6
Электромагнитная фрикционная муфта (рис. 9.6, б) с ведущей частью 6, ведомой 4 и фрикционным кольцом 5 отличается от описанной ранее способом управления. При подаче на обмотку питания 3 стальное кольцо 1 подтягивается к резиновому кольцу 2, обеспечивая жесткую связь ведомой и ведущей частей.
Двигатели приводят во вращение ведущие узлы, протягивающие носитель записи, а также обеспечивают натяжение или ускоренную перемотку ленты. В зависимости от выполняемых функций к ним предъявляют различные требования. В механизмах магнитной записи применяют в основном асинхронные и синхронные двигатели переменного токае частотой вращения 1000—3000 об/мин, реже (в специальной аппаратуре) используют двигатели постоянного тока с частотой вращения 2000—6000 об/мин.
Двигатель ведущего ролика должен обладать жесткой механической характеристикой, т. е. частота его вращения при изменении нагрузки должна быть стабильна.
Двигатель с передачей движения на ведущий ролик гибкой связью выбирают с частотой вращения 1000—1500 об/мин, большие частоты вращения вызывают акустический шум и износ подшипников, а меньшие повышают неравномерность хода.
Минимальная мощность двигателя привода ведущего ролика
Р
Ч
где Тр — момент сил сопротивления вращению, приведенный к ведущему ролику, Н-м; сор — угловая скорость вращения ведущего ролика; k = 3 4- 5 — коэффициент надежности; т] — КПД передаточного механизма. Кассетные двигатели для постоянства натяжения ленты должны иметь мягкую механическую характеристику.
Передаточные механизмы предназначают для передачи движения от приводного двигателя на ведущий ролик, а в одномоторных конструкциях — на боковые узлы.
Такие механизмы должны обеспечивать стабильность передаточного отношения и вращающего момента, отсутствие вибраций остаточных деформаций упругих элементов. В ЛПМ применяют передачи гибкой связью и передачи зацеплением. Передачи гибкой связью достаточно компактны, бесшумны в работе, обеспечивают в одной паре передаточное отношение i = 15, однако им присуще скольжение. Их применяют для передачи движения от двигателя на ведущий ролик и боковые узлы. Угол обхвата ведущего ролика = 120-4-150°; для повышения угла обхвата меньшего шкива применяют натяжные или обводные ролики. Гибкую связь изготовляют из резины, различных сортов пластмасс или лавсана. Пластмассы и лавсан могут работать в широком диапазоне температур (от —60 до + 160 °C), имеют высокий предел прочности и толщину до 1 мм, вследствие чего могут применяться при диаметрах шкивов свыше 5 мм. Для повышения коэффициента трения скольжения их пропитывают специальным составом, что обеспечивает f = 0,25. Органы управления или станции управления имеют 5—7 исполнительных кнопок.
ГЛАВА 10.
НАДЕЖНОСТЬ И OCHORH ПРОЕКТИРОВАНИЯ МЕХАНИЧЕСКИХ СИСТЕМ
§ 10.1. Надежность механических систем
Основные определения. Под надежностью понимается свойство изделия выполнять заданные функции, сохраняя во времени значения эксплуатационных показателей в заданных пределах, соответствующих установленным режимам и условиям использования технического обслуживания, ремонта, хранения и транспортирования (ГОСТ 13377—75). В зависимости от назначения изделия и условий его эксплуатации, надежность, как следует из определения, включает четыре составляющих: безотказность, долговечность, ремонтопригодность и сохраняемость.
Безотказность — свойство изделия непрерывно сохранять работоспособность в течение некоторого времени или некоторой наработки.
Долговечность — свойство изделия сохранять работоспособность до наступления предельного состояния при установленной системе технического обслуживания и ремонта.
Ремонтнопригодность — свойство изделия, заключающееся в приспособленности к предупреждению и обнаружению причин возникновения отказов, повреждений и устранение их последствий путем проведения ремонта и технического обслуживания.
Сохраняемость — свойство изделия непрерывно сохранять исправное и работоспособное состояние в течение срока хранения и после него или при транспортировке.
Количественное описание надежности. Для того чтобы описать какую либо составляющую надежности, необходимо знать закон ее распределения — исчерпывающее описание любой случайной величины. Использование функций в инженерной практике неудобно, поэтому широкое применение нашли числовые показатели надежности. Наиболее широко используется математическое ожидание (статистическое среднее случайной величины): среднее время безотказной работы Г, средний срок восстановления Гв, среднее время сохраняемости Гс, средний срок службы Тсс и средний ре-сурс Тр.
Вероятность безотказной работы в период нормальной эксплуатации (X (t) = const)
Р(0 = е-Ч (10.1)
где X — интенсивность отказов в период нормальной эксплуатации. Среднее время безотказной работы
T-1/L (10.2)
Для большинства изделий (систем), элементы которых работают в условиях постоянства интенсивности отказов, вероятность безотказной работы определяют по формуле
п
п S \
1 = 1 , (10.3)
i = 1
где Pi — вероятность безотказной работы элемента /, отказ которого приводит к отказу всего изделия (системы); — интенсивность отказов всей системы.
Среднее время безотказной работы в этом случае
т = 1 / 2 к-
I i= 1
Значения Zi определяют по статистическим данным. Несоответствие условий эксплуатации нормальным учитывают коэффициентом нагрузки Л, равным отношению величин рабочей нагрузки к ее номинальному значению.
Расчет надежности механических систем в настоящее время основан на анализе напряжений в элементах изделия. Например, вероятность безотказной работы зубчатых колес определяют, как вероятность того, что действующие напряжения изгиба и контактные находятся ниже пределов усталости
Pf (Г) = Рр (eF < oF Hm); Ри (Т) Рн (&н < вн Пт)- (10.5)
При расчете полагают, что орцш и аншп подчинены нормальному закону распределения. В этом случае вероятность безотказной работы зубчатых колес определяют по формулам
Pf (T)=F
4 (°F lim ~~~gF) °F lim
Ph(T)=F
4 (°H Нш~°я) °H lim
(10.6)
где F — функция Лапласа.
Значения onim и oHiim определяют по справочным пособиям. Вероятность безотказной работы редуктора равна произведению вероятностей безотказной работы составляющих его колес.
Пути повышения надежности. Повышение надежности изделия (системы) обеспечивают при конструировании, изготовлении и эксплуатации. При конструировании это применение модульного (блочного) метода, позволяющего сократить время ремонта; выбор элементов, составляющих изделие, с минимальными значениями интенсивности отказов; применение резервирования элементов, при котором вероятность безотказной работы равна
Ррез-I- (1- P)k+i>
где Р — вероятность безотказной работы без резервирования, k— число резервных элементов.
Повышение надежности на этапе изготовления обеспечивают за счет улучшения технологии изготовления отдельных элементов изделия и его сборки. На этапе эксплуатации надежность обеспечивается строгим соблюдением нормального режима работы и сроков технического обслуживания.
§ 10.2. Методы и средства конструирования механических систем
Основным этапом работы при конструировании механической системы является задача выбора ее компоновки: модульной (функционально-узловой) или моноблочной. В основе модульного метода лежит выделение отдельных функций при анализе принципи
альной электрокинематической схемы изделия (системы) и конструирование для выполнения этих функций отдельных сборочных единиц—модулей.
Модульный метод конструирования в настоящее время нашел широкое применение при разработке РЭА. Компоновка электромеханических систем из отдельных модулей, представляющих собой законченные сборочные единицы, обеспечивает: возможность совершенствования системы путем изменения конструкции отдельных узлов; удобство сборки; удобство и быстроту ремонта (путем замены отдельных модулей); свободный доступ к отдельным частям конструкции при техническом обслуживании.
Модульный метод предполагает создание законченных элементов-модулей близких по габаритным размерам и имеющих унифицированные конструкции соединений друг с другом. Применение при конструировании электромеханических узлов РЭА модульного метода значительно сокращает время разработки и изготовления изделия, упрощает процесс конструирования.
Система электромеханических модулей представляет собой набор функциональных электромеханических узлов: редукторов и мультипликаторов, дифференциалов, муфт, ограничителей, установочных механизмов, стаканов для соединения в функциональный узел комплектующих изделий.
Основные этапы эскизного проектирования системы РЭА по модульному методу.
1. Расчет основных параметров системы.
2. Разработка функциональной схемы изделия (системы).
3. Составление принципиальной электрокинематической схемы.
4. Выделение из электрокинематической схемы отдельных функциональных сборочных единиц.
5. Подбор по каталогам модулей, соответствующих выделенным сборочным единицам.
6. Вычерчивание общего вида изделия по электрокинематической схеме и подобранным модулям.
Конструирование систем РЭА в виде моноблока представляет сложную задачу и требует большей затраты времени по сравнению с модульным методом. Моноблочный метод применяют при разработке макетных конструкций с возможно широким использованием готовых изделий, узлов и деталей.
Средства проектирования. Создание изделий на уровне лучших образцов в настоящее время затруднено без использования современных технических средств на базе ЭВМ. Только с помощью ЭВМ можно провести в короткое время синтез и анализ множества вариантов конструктивных решений для отыскания оптимального.
С поиском оптимального решения поставленной задачи конструктор сталкивается на всех этапах разработки — от поиска принципа действия до разработки рабочей документации. Определение с помощью ЭВМ оптимальных решений при проектировании зна
чительно сокращает время разработки конструкции и улучшает еег качество.
При этом необходимо помнить, что за человеком остаются такие виды работы, как постановка задачи, выбор параметров и их предельных значений, выбор критериев оптимизации, анализ результатов и разработка математической модели изделия (системы), которая должна быть создана для постановки задачи проектирования на ЭВМ.
Математическая модель должна в количественной форме описывать основные элементы проектируемого изделия, его параметры. Она позволяет заменить дорогостоящие и длительные эксперименты с опытными образцами, расчетами на ЭВМ с большим числом вариантов. Для этого достаточно ввести в ЭВМ различные значения геометрических параметров, материалов и других данных, входящих в математическую модель. По этим данным ЭВМ определит все требуемые характеристики изделия при различных значениях его параметров и укажет оптимальный вариант. В процессе проектирования математическая модель может совершенствоваться и уточняться.
Математические модели сложных технических систем представляют собой комплекс взаимосвязанных уравнений.
С помощью ЭВМ и связанного с ней графопостроителя возможно создание графических изображений. Таким образом создается система автоматизированного проектирования. В конструировании машинная графика является инструментом, позволяющим значительно сократить время создания чертежей и тем ускорить-весь процесс конструирования. В настоящее время машинная графика стала основным инструментом автоматизированного проектирования.
Л ИТЕРАТУРА
1. Артоболевский И. И. Теория механизмов. — М.: Наука, 1975. —775 с.
2. Баранов Г. Г. Курс теории механизмов и машин. — М.: Машиностроение, 1975. — 508 с.
3. Вопилкин Е. А. Расчет и конструирование механизмов приборов и систем. — М.: Высшая школа, 1980. — 463 с.
4. Иванов М. И. Волновые зубчатые передачи. — М.: Высшая школа, 1981. — 183 с.
5. Кудрявцев В. Н., Кирдяшев Ю. Н., Гинзбург Е. Г. и др. Планетарные передачи. Справочник. — Л.: Машиностроение, 1974. — 530 с.
6. Милосердии Ю. В., Семенов Б. Д., Крепко Ю. А. Расчет и конструирование механизмов приборов и установок. —М.: Машиностроение. 1985. — — 408 с.
7. Пименов А. И. Механизмы настройки РЭА. — М.: Высшая школа. 1977. — 222 с.
8 Рощин Г. И. Несущие конструкции и механизмы РЭА. — М.: Высшая школа, 1981. — 375 с.
9. Чернавский С. А., Снесарев Г. А., Козинцов Б. С. и др. Проектирование механических передач. — М.: Машиностроение, 1984. — 558 с.
10. Пименов А. И. Механизмы настройки — М.: Высшая школа, 1977. — — 221 с.
11. Романов М. Д., Константинов В. А., Покровский Н. А. Сборник задач по деталям машин. — М.: Машиностроение, 1984.— 240 с.
12. Матвеев В. И. Отсчетные устройства приборов и систем. — М.: Машиностроение. 1984. — 144 с.
13. Светлицкий В. А., Мирошник Р, А., Куркин В. И. Определение форм стационарного движения замкнутой гибкой нити при вращении вокруг вертикальной оси. — Прикладная механика АН УССР, 1985, № 5, с. 106—ПО.
14. Вершков М. В. Судовые антенны. — Л.: Судостроение, 1972. — 424 с
15. Резников Г. В. Антенны летательных аппаратов. — М.: Советское радио, 1967. — 416 с.
16. Пирогов А. А. О вращательном движении кольца гибкой нити в вязкой среде и гравитационном поле.—Сб. научных трудов ВЗЭИС, 1960, в. 2.
17. Милосердии Ю. В., Семенов Б. Д., Крепко Ю. А. Расчет и конструирование механизмов приборов и установок. — М.: Машиностроение, 1985.—408 с.
ОГЛАВЛЕНИЕ
Предисловие....................................................... 3
Часть первая Общие сведения о механизмах радиоустройств Глава 1. Основы теории механизмов............................. 4
§ 1.1. Структура и классификация механизмов................. 4
§ 1.2. Основы кинематики механизмов.........................11
§ 1.3. Основы динамики механизмов...........................18
§ 1.4. Основы теории точности механизмов....................33
Глава 2. Передаточные механизмы
§ 2.1. Фрикционные механизмы................................39
§ 2.2. Зубчатые механизмы...................................44
§ 2.3. Винтовые механизмы (передача винт — гайка)...........69
§ 2.4. Червячные механизмы..................................73
§ 2.5. Кулачковые механизмы.................................79
§ 2.6. Шарнирно-рычажные механизмы..........................89
§ 2.7. Механизмы прерывистого движения......................95
Часть вторая
Детали, элементы и соединения механизмов радиоустройств Глава 3. Детали механизмов радиоустройств.....................102
§ 3.1. Оси и валы..........................................102
§ 3.2. Опоры скольжения и качения..........................105
§ 3.3. Направляющие для прямолинейного движения............117
Глава 4. Элементы механизмов радиоустронств...................118
§ 4.1. Муфты...............................................118
§ 4.2. Фиксаторы и ограничители............................126
§ 4.3. Пружины.............................................129
§ 4.4. Элементы управления, контактные группы и переключатели 131
Глава 5. Соединения в конструкциях механизмов радиоустройств. Несущие конструкции...............................................140
§ 5.1 Неразъемные соединения...............................140
§ 5.2. Разъемные соединения................................148
§ 5.3. Несущие конструкции, корпуса и корпусные детали . . . .153
Часть третья
Механизмы радиоустройств Глава 6. Отсчетные устройства....................................162
§ 6.1. Общие сведения......................................162
§ 6.2. Расчет шкал.........................................172
§ 6.3. Конструкции шкальных механических отсчетных устройств 177
§ 6.4. Общие сведения о дискретно-аналоговых и цифровых отсчетных устройствах..........................................190
Глава 7. Механизмы настройки...................................192
§ 7.1. Общие сведения....................................192
§ 7.2. Механизмы ручной настройки........................193
§ 7.3. Механизмы дистанционной настройки.................206
§ 7.4. Механические запоминающие устройства..............215
§ 7.5. Механизмы следящих систем.........................219
Глава 8. Механизмы антенных систем.............................223
§ 8.1. Общие сведения....................'................ 223
§ 8.2. Кинематические схемы приводов радиолокационных антенн 226
§ 8.3. Конструкции приводов радиолокационных антенн..231
§ 8.4. Выдвижные и разворачиваемые антенны для радиосвязи . . . 237
Глава 9. Механизмы записывающих устройств......................241
§ 9.1. Общие сведения....................................241
§ 9.2. Кинематические схемы лентопротяжных механизмов . . 243
§ 9.3. Конструкции механизмов записывающих устройств . . . 245
Глава 10. Надежность и основы проектирования механических систем . 249
§ 10.1. Надежность механических систем.....................249
§ 10.2. Методы и средства конструирования механических систем
Литература.......................................................254
Учебное издание
Куркин Владимир Ильич,
Козинцов Борис Саулович
ДЕТАЛИ МЕХАНИЗМОВ РАДИОУСТРОЙСТВ
Зав. редакцией В. И. Трефилов
Редактор И. А. Исаева
Худ. редактор Т. М. Скворцова
Мл. редактор В. В. Пащенкова
Художник В. Н. Панферев
Технический редактор И. А. Балелина
Корректор Г. И. Кострикова
И Б № 6852
Изд. № ЭР- 453 Сдано в набор 20.10.87. Подл, в печать 26.02.88. Т-08634.
Формат 60X88l/i6 Бум. офс. № 2. Гарнитура литературная. Печать офсе
Объем 15.68 усл. печ. л. 15,68 усл. кр./отт. 14,57 уч. изд. л
Тираж 50 000 экз. Зак. № 729. Цена 65 коп.
Издательство «Высшая школа», 101430. Москва, ГСП-4, Неглинная ул., д. 29/14.
Московская типография № 4 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
129041, хМосква, Б. Переяславская ул., 46.
ббкоп