










Автор: Давыдов А.А. Игнатов А.И. Сазонов В.В.
Теги: физика математика прикладная математика
Год: 2006




Текст
Ордена Ленина
ИНСТИТУТ ПРИКЛАДНОЙ МАТЕМАТрда
имени М.В, Келдыша
Российской академии наук
А.И. Игнатов, А.А. Давыдов, В.В. Сазонов
ПРИМЕНЕНИЕ РЕАКТИВНЫХ
ДВИГАТЕЛЕЙ ДЛЯ УПРАВЛЕНИЯ
ПОСТУПАТЕЛЬНЫМ ДВИЖЕНИЕМ КА
ОДНОВРЕМЕННО С РАЗГРУЗКОЙ
КИНЕТИЧЕСКОГО МОМЕНТА
ЭЛЕКТРОМЕХАНИЧЕСКИХ
РОССИЙСКАЯ АКАДЕМИЯ НАУК
Ордена Ленина
ИНСТИТУТ ПРИКЛАДНОЙ МАТЕМАТИКИ
им. М.В.Кел дыша
А.А. Давыдов, А.И. Игнатов, В.В. Сазонов
ПРИМЕНЕНИЕ РЕАКТИВНЫХ ДВИГАТЕЛЕЙ ДЛЯ
УПРАВЛЕНИЯ ПОСТУПАТЕЛЬНЫМ ДВИЖЕНИЕМ КА
ОДНОВРЕМЕННО С РАЗГРУЗКОЙ КИНЕТИЧЕСКОГО МОМЕНТА
ЭЛЕКТРОМЕХАНИЧЕСКИХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ
Москва - 2006
Аннотация
Рассмотрена система управления движением КА, состоящая из восьми
реактивных двигателей. Векторы тяг двигателей расположены центрально
симметрично относительно центра масс КА и симметрично относительно ко-
ординатных плоскостей некоторой системы координат с началом в этом цен-
тре масс. Исследована возможность применения такой системы для формиро-
вания заданного импульса силы одновременно с разгрузкой кинетического
момента электромеханических исполнительных органов КА. Получены соот-
ношения, позволяющие оптимизировать параметры систем такого рода и ре-
жимы их функционирования.
А.А. Davydov, A.I. Ignatov, V.V. Sazonov. The use of jet engines for
control of spacecraft orbital motion simultaneously with dumping angular
momentum of its electromechanical actuators. We consider a system of eight jet
engines that is meant to control a spacecraft motion. Tractive forces of the engines
have a central symmetry with respect to the spacecraft mass center and have bilat-
eral symmetries with respect to coordinate planes of some frame whose origin is in
this center. We investigate the feasibility of such a system to form a prescribed
force impulse simultaneously with dumping the angular momentum of spacecraft
electromechanical actuators. We derive the formulas that enable optimizing the sys-
tem parameters and modes of its operations.
3
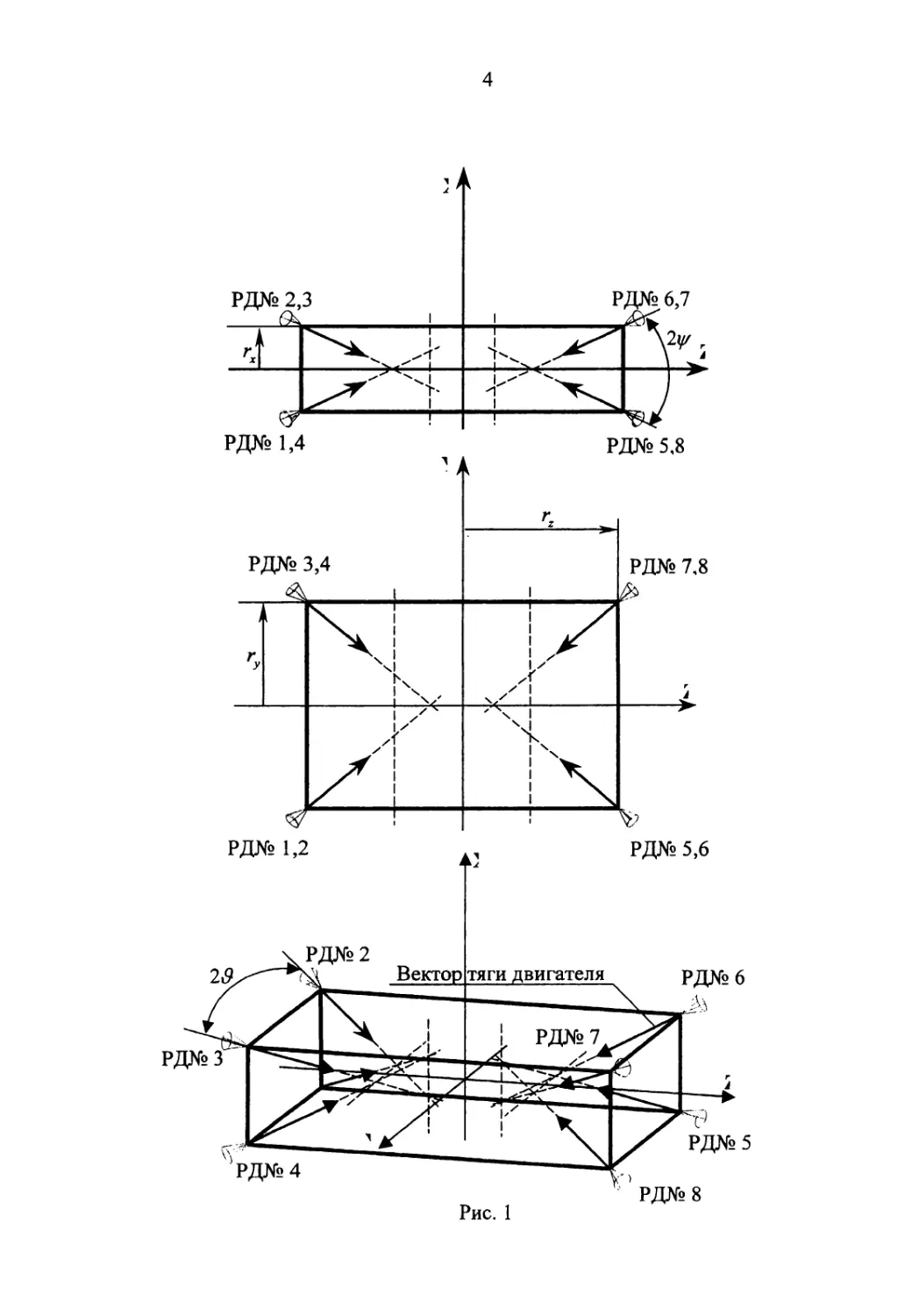
Существуют схемы управления космическим аппаратом (КА), в кото-
рых управление линейным и угловым движением КА осуществляется с по-
мощью реактивных двигателей (РД) с направленными под углом к осям свя-
занной с центром масс КА системы координат и смещенными относительно
центра масс КА линиями действия тяг (см. рис. 1). Подобная схема установки
РД отличается возможностью создания векторов силы и момента произволь-
ной ориентации относительно центра масс КА при использовании сравни-
тельно малого числа реактивных двигателей (8 двигателей).
На КА с длительным сроком функционирования управление угловым
движением целесообразно организовать с помощью электромеханических ис-
полнительных органы (ЭМИО) - двигателей-маховиков (ДМ) или силовых
гироскопов (ГД), что обеспечивает экономию рабочего тела, используемого
для обеспечения управления линейным движением КА с помощью реактив-
ных двигателей. Управление угловым движением КА с помощью ЭМИО ос-
новано на перераспределении кинетического момента между КА и группой
исполнительных органов (ДМ или ГД), установленных на КА. В процессе ра-
боты таким исполнительным органов требуется периодическая разгрузка,
чтобы собственный кинмомент ЭМИО, накопленный в процессе управления,
не превышал определённого порога. Разгрузка осуществляется путём созда-
ния реактивными двигателями внешнего момента заданной величины и на-
правления.
В данной работе рассматривается возможность применения симметрич-
ной схемы установки реактивных двигателей для формирования вектора си-
лы, приложенного к центру масс КА для коррекции его орбитального движе-
ния (далее корректирующего импульса) и одновременно с этим разгрузки
ЭМИО, установленных на космическом аппарате путём создания импульса
момента (кинмомента) заданной величины.
Схема установки реактивных двигателей представлена на рис. 1. Здесь
XYZ - связанная с центром масс КА система координат; РД№1.. .8 - реактив-
ные двигатели; углы установки двигателей; rx,ry,rz- координаты двига-
телей. Ориентация вектора тяги РД относительно системы координат XYZ
задаётся двумя поворотами (см. рис. 2). Первый поворот на угол у/ - вокруг
оси Ya; Второй поворот на угол <9- вокруг оси Zd. Здесь XdYdZa- система ко-
ординат, связанная с РД, направление действия силы тяги двигателя Р - по
оси Xd; вектор силы тяги, создаваемой РД: Р = [Рх,Ру,Р2].
р =|p|cos^cos«9, Ру =|P|sin!9, Pz = -|P|sin^cos«9. (1)
4
Рис. 1
5
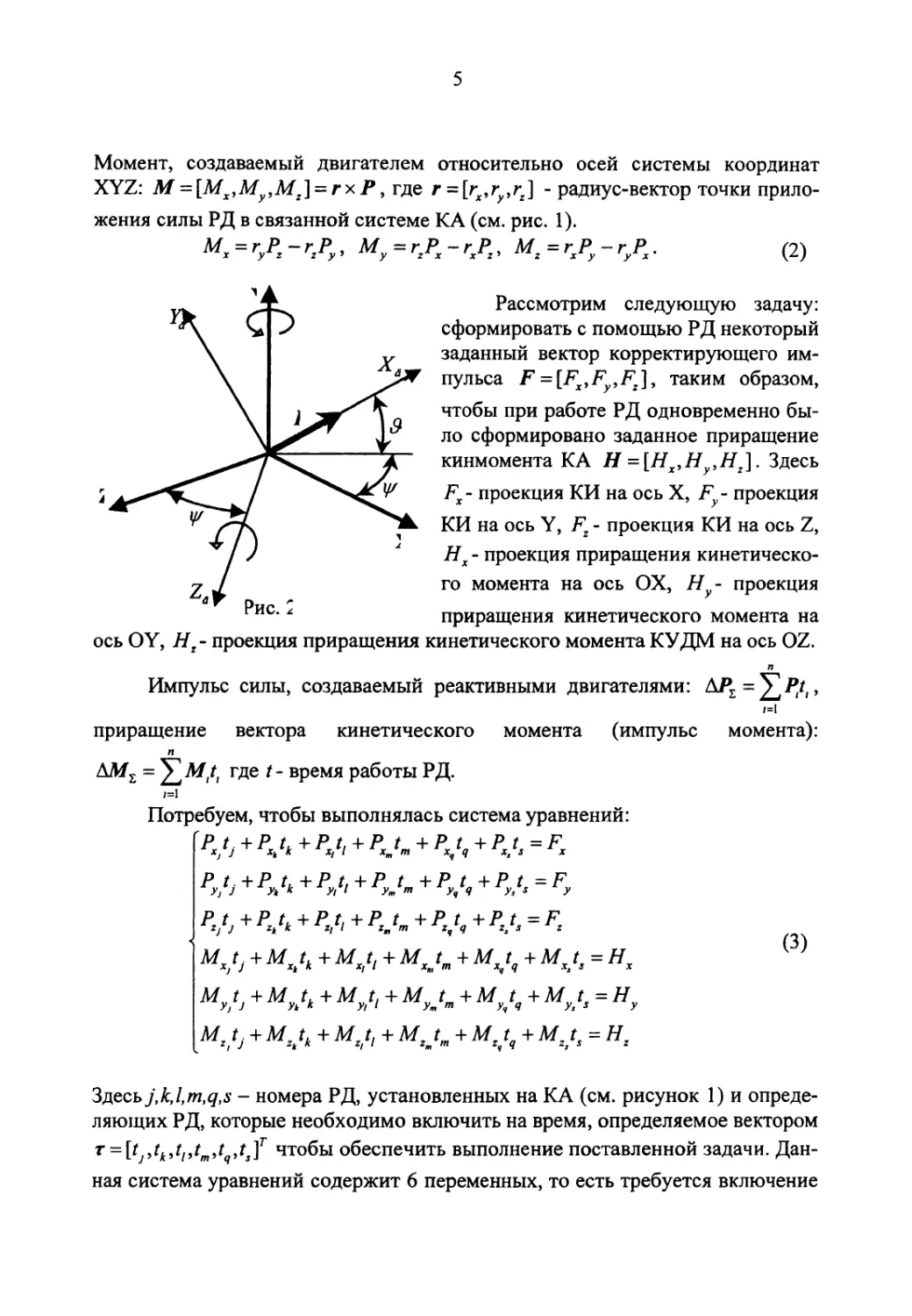
Момент, создаваемый двигателем относительно осей системы координат
XYZ: М = [Мх,Му,М2] = г*Р, где г = [гх,гу,г2] - радиус-вектор точки прило-
жения силы РД в связанной системе КА (см. рис. 1).
Рассмотрим следующую задачу:
сформировать с помощью РД некоторый
заданный вектор корректирующего им-
пульса F = [Fx,Fy,F2], таким образом,
чтобы при работе РД одновременно бы-
ло сформировано заданное приращение
кинмомента КА Н = [НХ,НУ,Н2\- Здесь
Fx- проекция КИ на ось X, F - проекция
КИ на ось Y, Fz - проекция КИ на ось Z,
Нх - проекция приращения кинетическо-
го момента на ось ОХ, //у- проекция
приращения кинетического момента на
ось OY, проекция приращения кинетического момента КУ ДМ на ось OZ.
Импульс силы, создаваемый реактивными двигателями:
i=i
приращение вектора кинетического момента (импульс момента):
п
где t - время работы РД.
/=1
Потребуем, чтобы выполнялась система уравнений:
ЛЛ+р^ + Л// + ЛЛ + Л/, + =F,
Pytj + РуЛ + Ру*1 + Pyjm+ Fy*q +Ру^~ Fy
Р, t, +PItl + P, t, + P, t+ Pt t + P,t = F
Zj J zk * Zl ‘ Zn m Zq Q Z3 s z
' + Mxtk + Mxt, + MxJn + M,tt + M,t, = Hx (3)
ЧЛ+ЧЛ + ЧЛ+муЛ+ЧЛ+ЧЛ=НУ
Mxtj + wztk + Mxt, + Mzjm + Mzt4 + Mxt, = Hz
Здесь - номера РД, установленных на КА (см. рисунок 1) и опреде-
ляющих РД, которые необходимо включить на время, определяемое вектором
г = чт°бЬ1 обеспечить выполнение поставленной задачи. Дан-
ная система уравнений содержит 6 переменных, то есть требуется включение
6
6 реактивных двигателей. Искомой величиной является вектор т. Решение
системы в матричном виде: т = A~XF (4)
Здесь F = [Fx,FyiFziHx,HyyHz] - вектор, состоящий из компонент заданных век-
торов корректирующего импульса и приращения кинетического момента КА;
р pyj р. РЛ р. Ру, р>. Ру. Р>, V Ру. - матрица, характеризующая силы и моменты, создаваемые выбранной группой из 6 РД.
р р р Р Р2 i - обозначает сочетание номеров
А' = 2J 2ч j, к, 1, m,q,s двигателей, таких, что:
мх мг мх Мх* мхч МХ'
хк х1
МУ, МУ. МУ. МУя МУ. ( j.kd.m.q.s = !...« J ’ (5)
ч, Мх. мг._ \J*k*l*m*q*s
Для и=8 существует 28 сочетаний j,ktl,mtqfsf удовлетворяющих условиям (5).
Можно утверждать, что задача формирования заданного импульса силы
одновременно с заданным приращением кинетического момента решена, если
для заданного вектора F существует такое сочетание j,k,l,m,q,s, для которого
решение (4) системы (3) даёт вектор т, все компоненты которого неотрица-
тельны. То есть сохраняется физический смысл компонент вектора т, опре-
деляющих время работы соответствующих реактивных двигателей.
Предположим, что схема установки РД на КА симметрична относи-
тельно центра масс КА. То есть модули проекций сил и моментов РД на свя-
занные оси КА одинаковы для всех РД (что может быть обеспечено конструк-
тивно):
Это обеспечивается равенством с точностью до знака углов установки и
координат точек приложения сил РД. Зададим значения углов установки и
координат точек приложения сил РД для схемы на рис. 1. В таблице 1 -
углы установки f-го РД, ха> координаты установки z-го РД.
Таблица 1.
№РД у*.
1 1 & -гх ~гу ~г2
2 1 1 | & гх ~ГУ ~Г2
3 1 1 м | -& гх ГУ ~Г2
4 7U у/ 2 -9 -гх ГУ ~Г2
7
Таблица 1 (продолжение).
№РД •Я хЛ
5 1 1 # ~Гх ~гу Гг
6 1 1 & Гх ~гу Г2
7 1 ю 1 -# Гх ГУ Гх
8 1 1 ю 1 -# ~Гх ГУ Гг
В системе (3) разделим обе части уравнения на величину |Р| модуля тя- ги РД, получим в матричном виде: 4г = Г,где Д=А (6)
Введём обозначения:
|Р |Р I |Р
Л = tjl = cosi/cosi9, B = T^r = sini9, С = т-£- = sini/cos#,
|р F |р| |р
£)_k!£j = ~ sinu/cosi9-rsin#, £ = -L-r = rcos 1/cos #-r sin 1/cos#, (7)
|P| y |P|
F _ _ r sin# _ r cost/cos#.
|P| X
где |P|- модуль тяги РД; Px, Py, Pz, Mx, My, Mz есть величины, рассчитанные
по соотношениям (1) и (2) с для заданных величин #, \у, гх, гу, г2. Величины
A,BtC,D,E,F не зависят от характеристик конкретных РД и характеризуют-
ся только углами установки и координатами РД.
Матрицы Д для различных вариантов сочетаний номеров j,k,l,m,q,s
можно представит! > ввиде произведения диагональной матрицы S на & 1атрицу
7V, элементами которой являются +1 и -1.
А 0 0 0 0 О' '+1 -1 -1 +1 +1 -1
0 В 0 0 0 0 +1 +1 -1 -1 +1 +1
0 0 С 0 0 0 +1 +1 +1 +1 -1 -1
Д = SNt, где 5 = > -^1 =
0 0 0 D 0 0 -1 -1 +1 +1 +1 +1
0 0 0 0 Е 0 -1 +1 +1 -1 +1 -1
О 0 0 0 0 F +1 -1 +1 -1 +1 -1
Матрица S определяется параметрами установки РД, матрица N\ опре-
деляется сочетанием номеров включаемых РД.
8
Определитель матрицы Д: det Д = det S det N., где det 5 = ABCDEF,
det АГ =±128 в зависимости от сочетания РД. Таким образом, для 16 вариан-
тов сочетаний £>е7(Д) = Dt или Det{Al) = -Dt\ для 12 вариантов £>е/(Д) = 0,
Здесь Dt = 128ABCDEF. То есть для 16 вариантов сочетаний номеров РД из
28 возможных можно записать аналитическое выражение для матрицы Д"1 и
рассмотреть условия неотрицательности компонент вектора г.
Рассмотрим далее матрицу Д = Д для группы РД с номерами 1,2,3,4,5,6 и
запишем выражения для решения системы (6), то есть компонент вектора т.
В этом случае: = Найдём матрицу Д’1. Воспользуе А -А -А А А —А В В -В -В В В С С С С -С -С -D -D D D D D -ЕЕ Е -Е Е -Е F -F F -F F -F мся соотношением: Д'1 =(SNX )-' = n-'s -1 >
где S’1 = Для pi 'а-' 0 0 0 0 0 ‘ 0 В-' 0 0 0 0 0 0 С'1 0 0 0 0 0 0 D~' 0 0 0 0 0 0 Е~‘ 0 0 0 0 0 0 F~'_ осматриваемой матрицы: й,"1 = 4 0 0 -А'1 А4 "0 +1+1 0 0+1+10 -1 0 +1 +1 +1 0 +1 +1 +1 +1 0 +1 -1 +1 0 +1 В"1 С’1 0 В’1 С’1 0 0 С’1 О*1 0 С~' D' -1 +Г +1 -1 0 +1 0 -1 . +1 0 -1 0 -Е-' F Е~' -F 0 F 0 -F -Г -1 -I -1 •
Выражения для компонент вектора т: л A F н Нг . F F, 4г, = — + — ч— .4т, = —- + — •4- А~‘ . -А-' . В’1 0 D~' В'' 0 D' F F l 4г -_л + £1_ Е~' 0 -Е~1 0 -
В С Е F А FFHH F С Fv D F н н.. 1 В С . F F Е F ’ (8)
4г4 =- i + -++-+£- L. 4Г =_£• + -—^-4 — + —^. ,4т6 =—- + — ч х У_
4 С D F 5 А В D Е 6 АВ D Е
Здесь Fx,Fy,Fz,Hх,Ну,Нг- компоненты вектора F (см. выражения 6).
9
Из условия неотрицательности компонент вектора т имеем систему нера-
венств:
А &у Fy Нх Й2 Fz Нх
А Е ~ В D’ A F ~ С D’
Л.
С
(9)
Е F
В
Положим Hx=Hy=Hz=Q, то есть потребуем, чтобы кинетический
момент КА не изменился в процессе формирования корректирующего им-
пульса.
В этом
случае неравенства (9) записывается в виде:
F F
— > —или, учитывая выражения (1) и (7):
В С
COS \f/ 1 1 11
А В ’
А С’
&Lf,
sin^/
Последнее неравенство в системе (10), учитывая положительность углов <9 и
у/, автоматически получается из первых двух неравенств. Таким образом, в
пространстве направлений векторов корректирующего импульса область, в
которой выполняются неравенства (10), ограничена 4 плоскостями (см. рису-
нок 3), положение которых определяется геометрией схемы установки РД.
| cosiH „ ( 1
Углы между плоскостями равны: а - 2arctg\-— , р = 2arctg\--- .
k J \.tg<F)
Для оценки суммарного огневого времени просуммируем уравнения (8).
Суммарное огневое время равно
(Ю)
0
ТЕ = . Данное выражение
можно представить, как скаляр-
ное произведение двух векторов
Гв=Г,-а, где tx=[Fx,Fy,Fz],
а = [0,—,—]. В выражение для
В С
величины ГЕ не входит состав-
ляющая Fx и для заданного век-
тора Zj, компоненты которого
удовлетворяют условиям (10)
огневое время уменьшается с
увеличением составляющей Fx
за счёт соответствующего
уменьшения Fy ир#$. ректор определяется первыми тремя компонентами
вектора F - величиной заданного корректирующего импульса, а вектор а-
геометрическими характеристиками схемы управления. Скалярное произве-
10
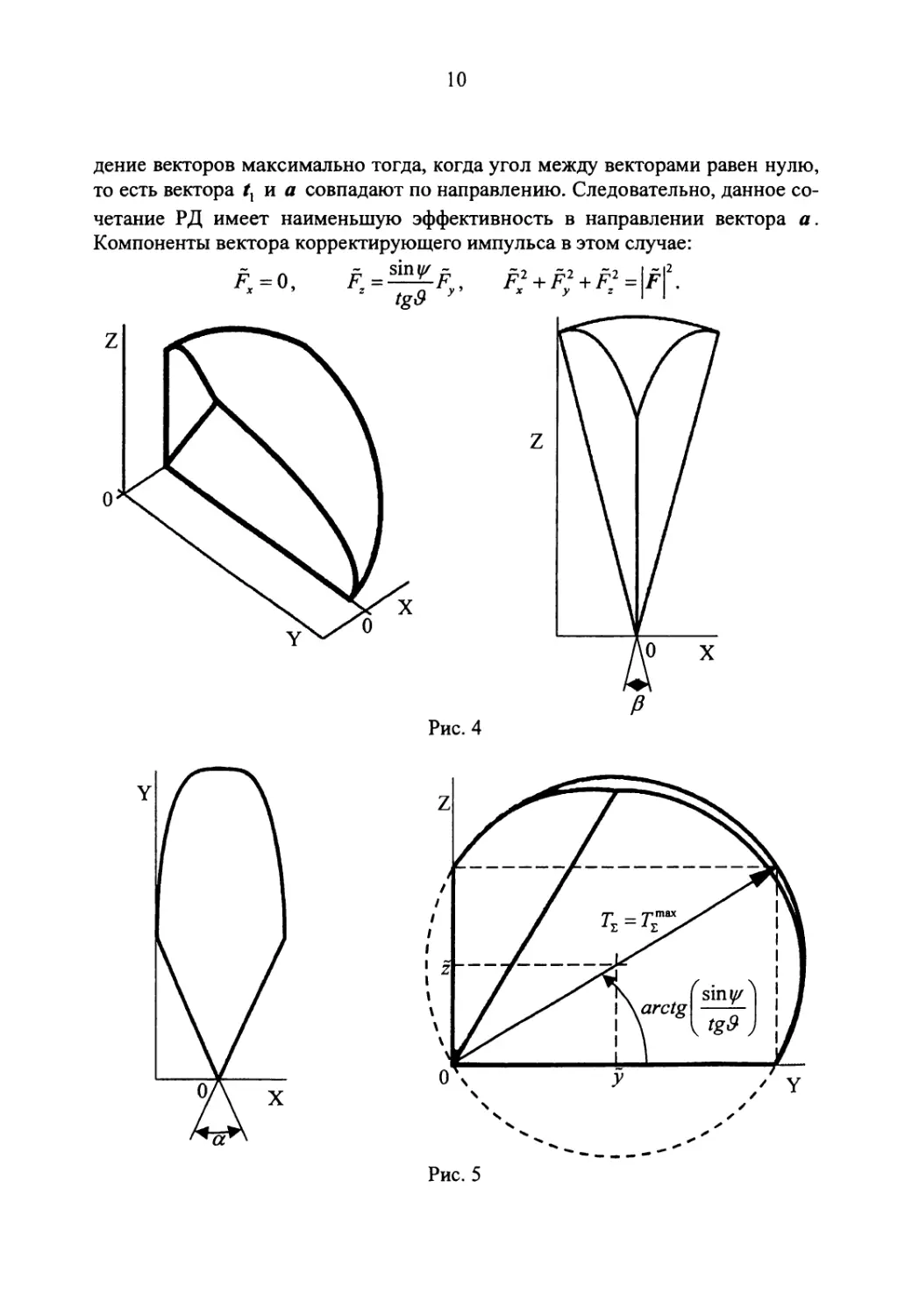
дение векторов максимально тогда, когда угол между векторами равен нулю,
то есть вектора и а совпадают по направлению. Следовательно, данное со-
четание РД имеет наименьшую эффективность в направлении вектора а.
Компоненты вектора корректирующего импульса в этом случае:
Рис. 5
11
В пространстве направлений вектора корректирующего импульса,
имеющего модуль |f| можно построить область значений суммарного огне-
вого времени, образованную векторами, направление которых совпадает с
направлением корректирующего импульса, а модуль равен суммарному огне-
вому времени РД. Такая область представляет собой часть сферы (см. рис. 4 и
5) диаметром, равным максимальному огневому времени:
2|f|
7Lmax=-------*—!------г, координаты центра которой равны:
(sin <9 + sin у/ cos i9)
|Fpg.9 liNsin^
y = -—*—‘z= 1 1----------------. Часть сферы отсекается плоскостями, изо-
(tg,9 + sin у/) (tg& + sin у/)
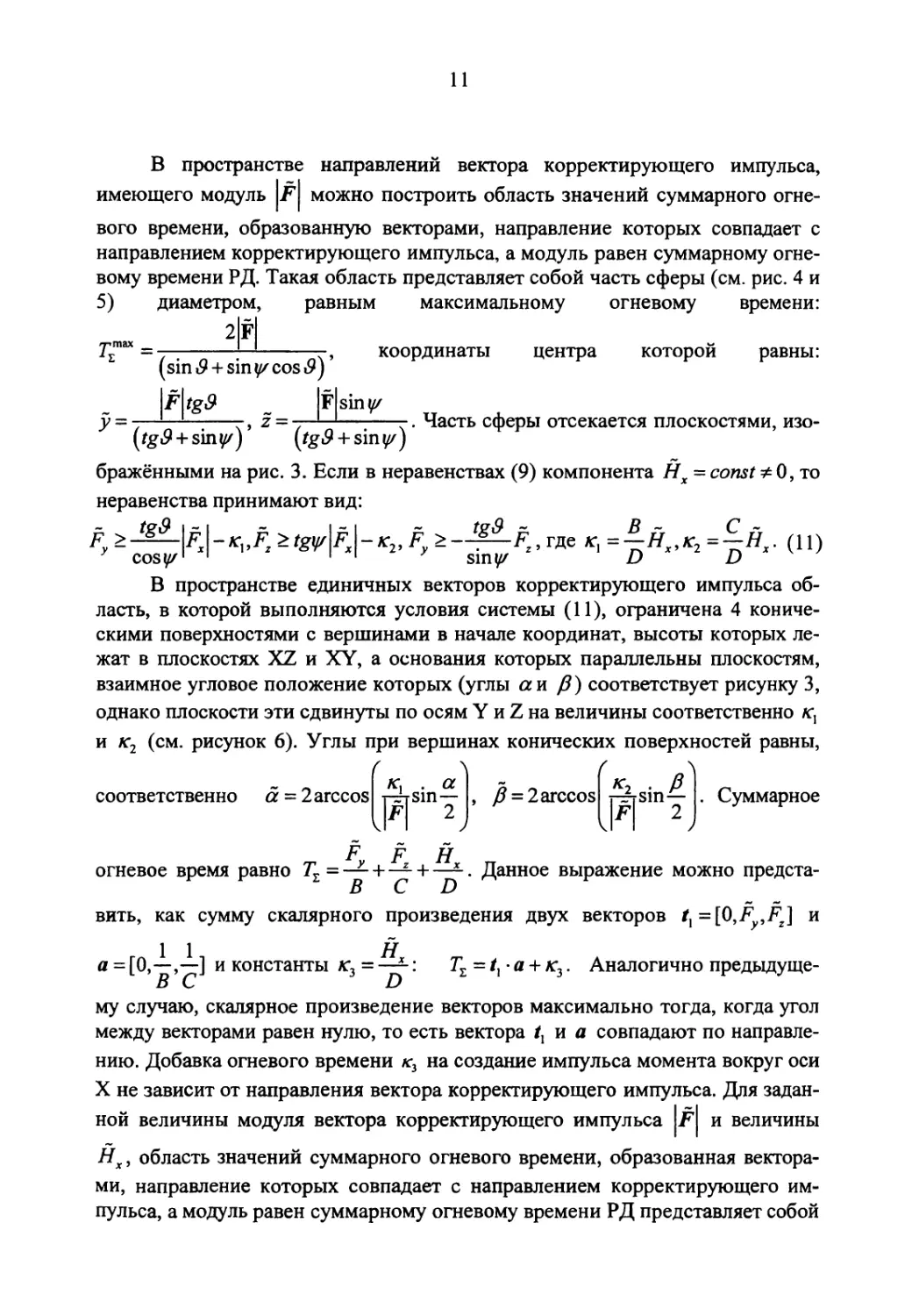
бражёнными на рис. 3. Если в неравенствах (9) компонента Нх = const ф 0, то
неравенства принимают вид:
>--^-#2,где кх=^-Нх,к2=^-Нх. (11)
У COS^1 1 II' sin^ £) £)
В пространстве единичных векторов корректирующего импульса об-
ласть, в которой выполняются условия системы (11), ограничена 4 кониче-
скими поверхностями с вершинами в начале координат, высоты которых ле-
жат в плоскостях XZ и XY, а основания которых параллельны плоскостям,
взаимное угловое положение которых (углы а и Д) соответствует рисунку 3,
однако плоскости эти сдвинуты по осям У и Z на величины соответственно
и к2 (см. рисунок 6). Углы при вершинах конических поверхностей равны,
к2 .
nnsm-y . Суммарное
соответственно а - 2arccos
. а
гЛ Sin —
Р = 2arccos
огневое время равно . Данное выражение можно предста-
вить, как сумму скалярного произведения двух векторов t} = [0,#y,FJ и
11 Н
а = [0,—,—] и константы лг3 = —-: • а + лг3. Аналогично предыдуще-
В С D
му случаю, скалярное произведение векторов максимально тогда, когда угол
между векторами равен нулю, то есть вектора tx и а совпадают по направле-
нию. Добавка огневого времени на создание импульса момента вокруг оси
X не зависит от направления вектора корректирующего импульса. Для задан-
ной величины модуля вектора корректирующего импульса |f| и величины
Нх, область значений суммарного огневого времени, образованная вектора-
ми, направление которых совпадает с направлением корректирующего им-
пульса, а модуль равен суммарному огневому времени РД представляет собой
12
фигуру, образованную суммой двух сфер: сферы радиуса (огневое время на
создание импульса момента Нх) с центром в начале координат, и сферы, ана-
логичной изображённой на рис. 5, диаметром, равным максимальному огне-
2|г|
вому времени на корректирующий импульс: Г£тах =---------!—!----, коор-
(sin«9 + sin^cosi9)
|f|^ __ |f| sinj/
динаты центра которой равны: у = -—В * * 11-г, —--------------?• ФигУРа
((gi9 + sin^) (rgi9 + sin^)
ограничена четырьмя описанными выше коническими поверхностями, а так-
же, при некоторых значениях кг, и кг, плоскостью, определяемой третьим не-
равенством выражения (И) (см. рисунки 7,8). Эта плоскость перпендикуляр-
на направлению, в котором достигается максимальное значение потребного
огневого времени 7"zmax = 7J'
Z
Рис. 6
Плоскости, параллельные основаниям
конических поверхностей.
Если в неравенствах (9)
положить Нх =0, Hy,Hz*Q, то
неравенства принимают вид:
F +к}
cosy/ х 1
Fz > tS^F, -к-2|>
(12)
sin^ f
---— F .
tg& y
Здесь к{=---------2----.----Н
(rzcos^ -r^siny/j
sin у/ &
(rxtg$-ry cos
sini/
K, ----—к. -K.
3 1 2
В пространстве единичных векторов корректирующего импульса об-
ласть, в которой выполняются неравенства (12), ограничена 4 коническими
поверхностями с вершинами в начале координат, высоты которых лежат в
плоскостях XZ и XY, а основания которых параллельны плоскостям, взаим-
ное угловое положение которых (углы а и 0) соответствует рисунку 3, одна-
ко плоскости эти сдвинуты по оси X на величины соответственно и лг2 (см.
13
рисунок 9). Углы при вершинах конических поверхностей равны, соответст-
венно а = 2arccos
= 2arccos
Рис. 8
Данная область также, при определённых значениях лг3, ограничена полу-
плоскостью, определяемой третьим неравенством выражения (12). Плоскость,
определяющая эту полуплоскость, перпендикулярна плоскости YZ, наклонена
I sini/ |
под углом / = arctg\ —— к плоскости XY и смещена от начала координат
k )
на величину к3 по оси Y (см. рисунки 10,11).
14
Суммарное огневое время равно, как и в первом случае Tz =
. Поэтому
В
С
область значений суммарного огневого времени также ограничена сферой
диаметра
Z
о
Рис. 9
Плоскости, параллельные основаниям
конических поверхностей.
плоскостью,
max ________I I_____
(sin «9 +sin cos «9) ’
координаты центра которой равны:
|/’|/(gi9 _ |F|sin^
(/gi9 + sin^)’ (/g^ + sin^)
Часть сферы отсекается 4 коническими
поверхностями и
изображёнными на рис. 9.
Проанализировав
образом остальные 15
сочетаний РД, можно сделать выводы:
При отсутствии необходимости
разгрузки гиромеханических исполни-
тельных органов (то есть
Нх= Ну= Hz=0), из 16 вариантов
подобным
вариантов
сочетаний РД необходимы 12. При этом пространство направлений векторов
корректирующего импульса делится 6-ю плоскостями (см. рисунок 14) на 12
частей. Уравнения плоскостей:
F = , F2 = ±^|Л|, Я = ±-^-Fz
cosy/' 1 11 sin^
На рис. 12 цифрами обозначены сочетания РД, которые дают неотрицатель-
ные решения уравнений (4). При этом рабочие области всех 12 групп не пере-
секаются и между ними нет пустых областей, в которых система (4) не имеет
неотрицательных решений. Таким образом схема управления, состоящая из 8-
ми РД обеспечивает возможность выдачи корректирующего импульса, произ-
вольно ориентированного в связанной с КА системе координат, сохраняя при
этом исходное (до начала КИ) состояние комплекса двигателей-маховиков
(или гиродинов). При наличии ненулевых Hx,Hy,Hz данные 6 плоскостей
подвергаются смещению на величины, пропорциональные Hx,Hy,Hz. При
этом также рабочие области различных групп РД не пересекаются и не обра-
зуют пустых областей. В зависимости от соотношения величин корректи-
рующего импульса и импульса момента появляются области значений КИ, в
15
которых задействуются 4 группы, не используемые в случае отсутствия им-
пульсов моментов. На рис. 13 приведён пример, когда наряду с КИ обеспечи-
ваются заданные ненулевые приращения кинмомента КА.
Область, характеризующая суммарное огневое время, потребное на
проведение КИ и возможную разгрузку ДМ или ГД в зависимости от
направления КИ, состоит из набора фигур, описанных выше (см. рис.
4,5,7,8,10,11). Пример такой области приведён на рис. 14. Если в направлении
единичного вектора корректирующего импульса отложить величину,
обратную суммарному огневому времени, получим область
характеризующую возможности данной схемы управления по
располагаемому (при данном запасе рабочего тела) суммарному
корректирующему импульсу при наличии того или иного потребного
16
потребного момента импульса на разгрузку исполнительных органов за время
службы КА. Например, если Нх= Ну = Н2=Ъ, то такая область приобретает
форму, показанную на рис. 15. Допустим, в процессе эксплуатации, КА под-
вергается некоторым внешним возмущающим моментам и необходима пе-
риодическая разгрузка исполнительных органов КА некоторым характерным
значением импульса момента. В этом случае область располагаемых значений
суммарного корректирующего импульса может выглядеть, например, как
показано на рис. 16.
Рис. 14
Исследуя и анализируя эту область, можно скорректировать схему
управления КА с учётом характерных особенностей данного КА по разгрузке
исполнительных органов.
17
18
Определим условия, по которым можно найти для заданного вектора F
нужное сочетание РД.
Введём обозначения:
Рх=^= £1 .Чя II II 5=a=ki
х А РхГ ” в р. 2 С И’
У (13)
Н н - н ~ н н
м=-=- м =—у- = - У м=^=—^.
х D М, у Е Му z F Mz
Данные величины имеют размерность времени. Определим так же соот-
ношения:
4=Р,+Му, в,=л-ч> с, = Л-^, Ч=Р,+РУ,
A,=Py+Mx, в2=Л-Я. с2=м,-Я- D2=MX + My,
А!=Рг~М!, \=Pz+Mx, в3=л+л/г( В4 = Рг-ТЙх, С3=РХ+Д, СА=МХ-Мг, П=Р-Р, 3 / Г (14) da=mx+m„
А,=Ру + Рг с5 = ру-м2 Ds=Py + Mx
А.=М-МХ в6 = л7у+л?2 с6=р2+му D6=Py-My-
В таблице 2 с учётом подстановки матриц Д 1 в выражение (4) и выше-
приведённых соотношений (13) и (14) приведены выражения для компонент
вектора т и условия их неотрицательности для всех 16 вариантов сочетаний
РД. В таблице номером обозначены сочетания включаемых РД.
Таблица 2.
№ Условия неотрицательности Компоненты вектора 4т
1 (|4|<; 4)П(|4М)П(МЛ|) 7J = , Т2= As + А*, Т3 = — D3 4- D4, Т4 = С3 + С4, Т5 = D.+ D2, Т6 = —С, + С2
2 (4>|4|)П(с3>|с4|)П(|с5|<с6) = С3 — С4, Т2= А5 + А6, Т3 = —В5 4- В6, 7^ = С3 + С4, Т5 = D} + D2, Г8 = С, - С2
3 (4<^4|)п(д<Нд|)п(|д|<п6) 7] = , T2 = — D3 — D4, T3= —D3 + D4, 7^ = — B5 — B6, T6= — Cj + C2, Tj = —D} — D2
4 (Ц|<-4)П(|^|<в4)П(в5<-|в6|) 7j = C3 — C4, T2 = — D3 — D4, T3= —B5 + B6, ^4 = ~^5 ~ ^6 ’ ^7 = ~E\ *" ^2 » ^8 = ^*i “ ^2
5 7] = ylj — , T2 = —Cj — C2, T3 = —D3 + D4, 7^ = B5 4- B6, T6 = —Cj 4- C2, T9 = — C3 — C4
6 (|с1|<-с2)п(|с;|<-с4)Г1(|в5|<в6) jjr4 и и + i bo Q> O' 11 11 1 1 л Л II II i, 1 + o?0
7 (д,>|А|)П(Л^|Л|)П(с5>|с6|) 7] — D| D2, T2 — A$ 4- A^, T4 — C3 4- C4, 7^ = D] 4- Z)2, T6= B5— B6, T%= D3 — D4
19
Таблица 2 (продолжение).
№ Условия неотрицательности Компоненты вектора 4т
8 (|q|<-^)n(|^|<-D4)n(|B5|<-B6) т; = z>j - D2, т2 = — d3 - р4 , т4 = -в5 - В6, ^6 = ^5 “ ^6 ’ ^7 = ~^\ “ ^2 ’ ^8 = ^3 “ ^4
9 (|д|<в2)п(|л,|<-л)П(в5>|в6|) т; = d, - d2 , тг=-с, - с2, т5 = bs + в6, Т6 = В5 - В6, Т7 = — С3 - С4, Т* = D3 - D4
10 (|с,|$с2)п(|о3|<п4)п(|лк-А) 71=4-4, T3=-D3 + D4, Tt=C,+C2, 7^ = D3 + P4, T6 = —Q + C2, T7 = —A$ — Ab
11 (С,£|С2|)П(В3ф4|)П(С5^-|С6|) T{—C3 — C4, T3 = —Bs + B6, T4 = Cj + C2, = Z)3 + D4, Tj = -A5 — A6i T9 = C} — C2
12 T{ = D} — D2, T4 = Cj + C2, T5 = D3 + D4, 7^ = B5 — B6, Tj = — A$ — A6, Ts = D3 — D4
13 (|D1|<JD2)n(|C5|^c4)n(|4|^A) 7^ = j = ~Z\ + ^2 ’ ^4 = ^3 ^4 ’ 7^ = Dj + D2, T6 = —C3 + C4, Г8 = — A$ + A6
14 (д^-|д|)П(^^-|в4|)п(Д<Ча|) T2 = ~T)3 — D4, T3 = — D} + D2, T4 = -B5 — B6, Г6 = -C3 + C4, T7 = - Д - D2, T8 = -A5 + A6
15 (A^|)n(c3<Hc4|)ndA|s-A) ^2 = “ ^2 > ^3 ~ + T)2 , T5 = B5 + B6, ^6 = ~~Сз + £4 » ^7 = “^3 ~ ^4 ’ ^8 = + ^6
16 (|Д|^-й1)Л(|'В>|^-А)П(4^-Ы) 7^ = —Pj 4- P2, T4 = C| 4- C2, T5 = P3 4- P4, ^6 = ~~^3 ^4 ’ ^7 = ~ = ~^5 + ^6
По этим зависимостям, для заданного вектора F = [Fx,Fy,Fz,Hx,Hy,Hz\
можно выбрать пригодную группу из 6 РД и определить время работы каждо-
го РД в группе. Соответствие номеров сочетаний и номеров РД, показанных
на рис. 1, приведено в таблице 3.
Таблица 3.
№ i j k 1 M n № i j k 1 m n
1 1 2 3 4 5 6 9 1 2 5 6 7 8
2 1 2 3 4 5 8 10 1 3 4 5 6 7
3 1 2 3 4 6 7 11 1 3 4 5 7 8
4 1 2 3 4 7 8 12 1 4 5 6 7 8
5 1 2 3 5 6 7 13 2 3 4 5 6 8
6 1 2 3 5 7 8 14 2 3 4 6 7 8
7 1 2 4 5 6 8 15 2 3 5 6 7 8
8 1 2 4 6 7 8 16 3 4 5 6 7 8
20
Литература
1. Гантмахер Ф. Р. Теория матриц. М., Наука, 1966.
2. Белецкий В. В. Движение искусственного спутника относительно
центра масс. М., Наука, 1965.
3. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических
аппаратов. М., Наука, 1974.
Подписано в печать 28.11.2006г. Заказ № 117.
055(02)2 Формат бумаги 60X90 1/16. Тираж 59 экз.
(С) Отпечатано в Институте прикладной математики РАН
Москва, Миусская пл. 4
Все авторские права на настоящее издание принадлежат
Институту прикладной математики им. М.В.Келдыша РАН.
Ссылки на издание рекомендуется делать по следующей
форме: и.о., фамилия, название, препринт Института
прикладной математики им. М.В.Келдыша РАН, год, номер.
Адрес: Россия 125047, Москва А-47, Миусская пл. дом 4,
Институт прикладной математики им. М.В.Келдыша РАН.
Редакционно-издательская группа.
Publication and distribution rights for this preprint are
reserved by the Keldysh Institute for Applied Mathematics,
Russia Academy of Sciences.
The references should be typed by the following form:
Initials, name, title, preprint, Inst. Appl. Mathem., Russia
Academy of Sciences, year, N(number).
Distribution. The preprints of the Keldysh Institute for
Applied Mathematics, the Russia Academy of Sciences are sold in
the bookstores “Aqadernkniga”, Moscow and are distributed by the
Russia Academy of Sciences Library as an exchange.
Address: Russia, 125047, Moscow A-47, Miusskaya Sq. 4,
the Keldysh Institute for Applied Mathematics, Russia Acad, of Sci,
Information Bureau.