




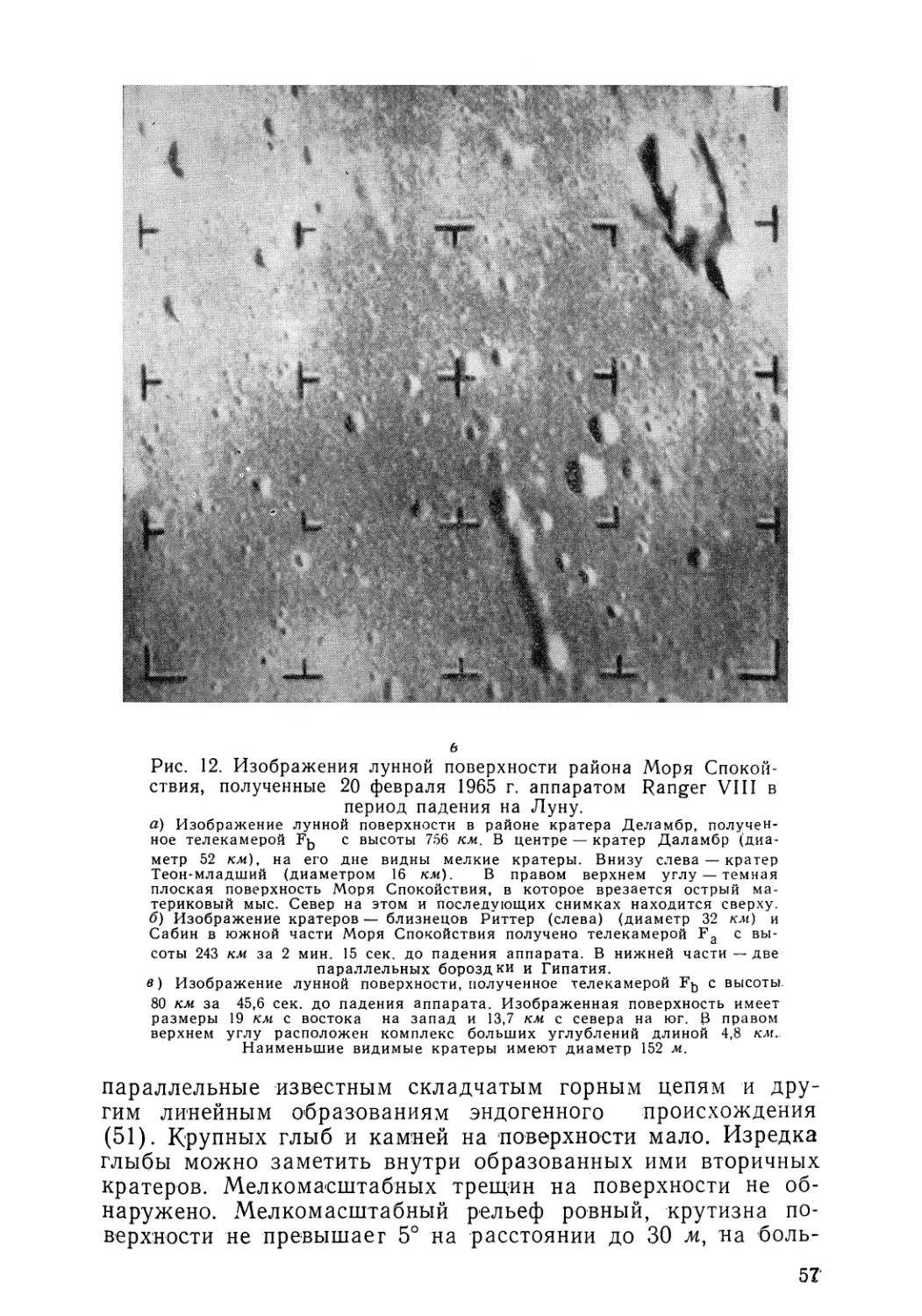
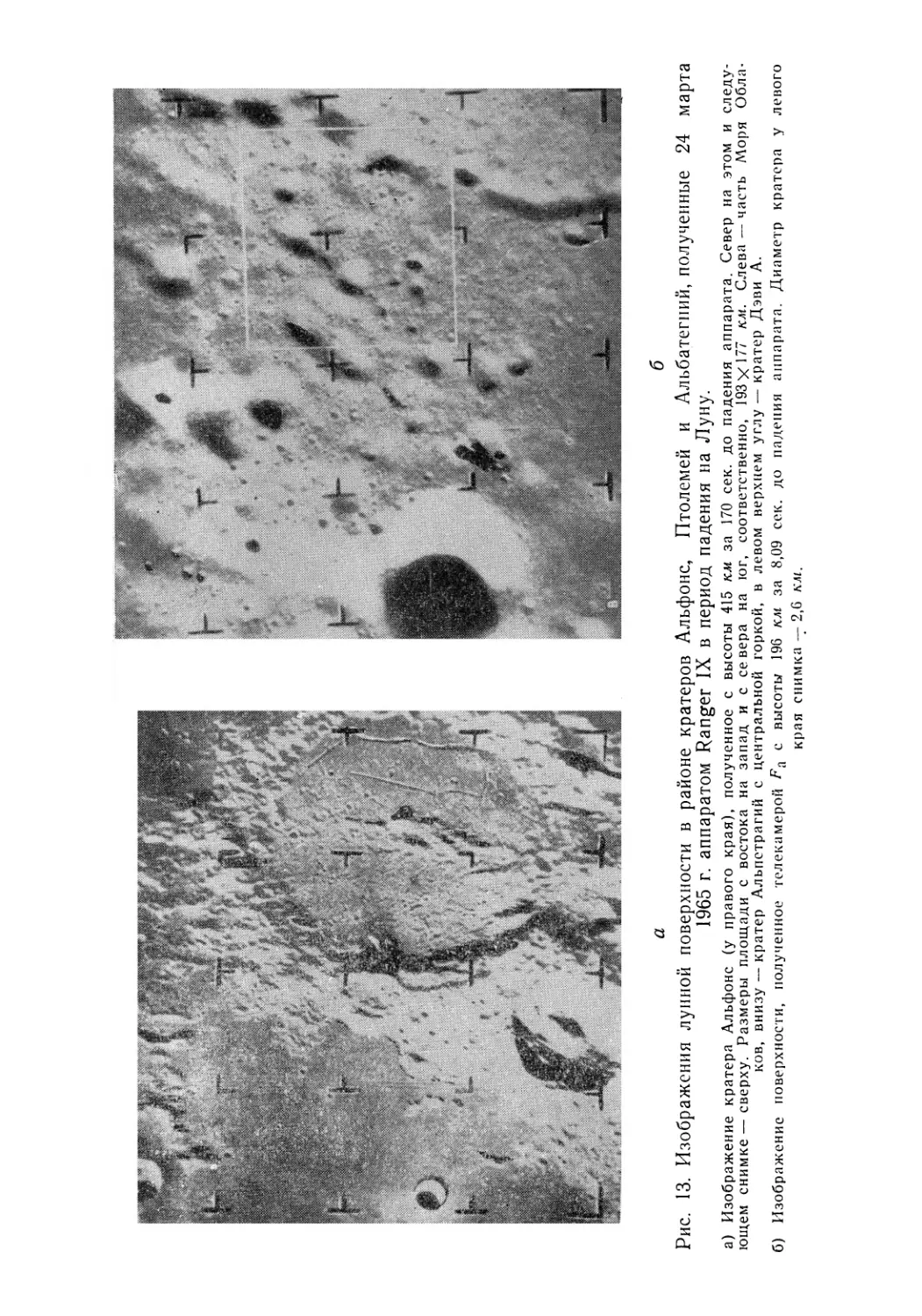



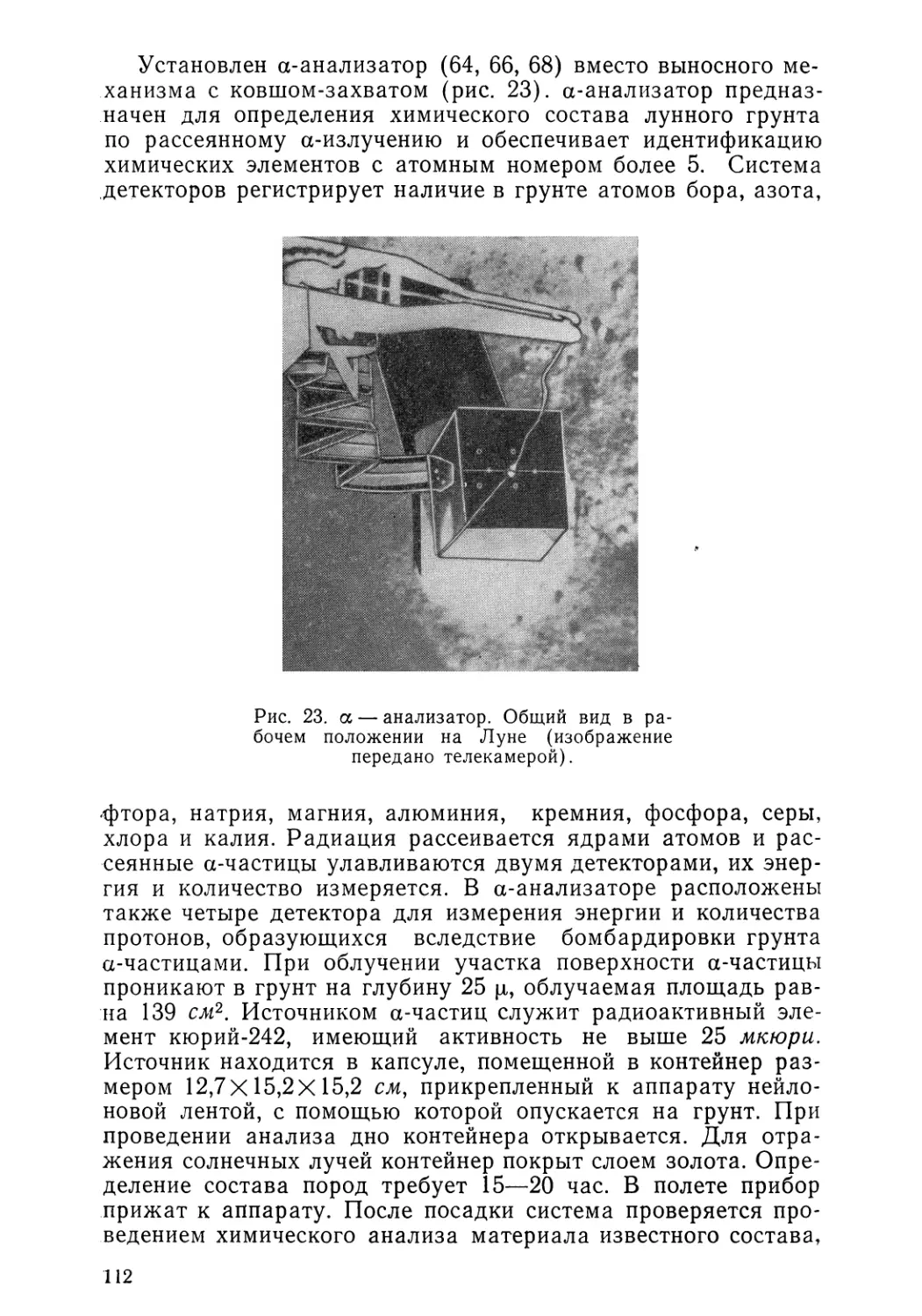








Текст
ГОСУДАРСТВЕННЫЙ КОМИТЕТ СОВЕТА МИНИСТРОВ СССР ПО НАУКЕ И ТЕХНИКЕ
АКАДЕМИЯ НАУК СОЮЗА СОВЕТСКИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИК
ВСЕСОЮЗНЫЙ ИНСТИТУТ НАУЧНОЙ И ТЕХНИЧЕСКОЙ ИНФОРМАЦИИ
ИТОГИ НАУКИ
СЕРИЯ
главный РЕДАКторпрофессор К. Ф. Огородников зам. главного редактора канд. физ.-мат. наук И. С. Щербина-Самойлова УЧЕНЫЙ СЕКРЕТАРЬ РЕДАКЦИОННОЙ КОЛЛЕГИИ
канд. физ.-мат. наук Л. Н. Радлова
ЧЛЕНЫ РЕДАКЦИОННОЙ КОЛЛЕГИИ:
профессор Т. А. Агекян, академик В. А. Амбарцумян, член-корр. АН СССР М. С. Зверев, профессор А. А. Изотов-, канд. техн. наук. А. В. Кандрашков>, профессор М. Д. Коншин, канд. физ.-мат. наук П. Г. Куликов с кий, профессор Д. Я. Мартинов, докт. физ.-мат. наук А. Г. Малевич, член-корр. АН СССР О. А. Мельников, член-корр. АН СССР М. С. Молоденский, член-корр. АН СССР Э. Р. Мустелъ,
докт. техн, наук Л. П. Пеллинен, член-корр. АН СССР В. В. Соболев, докт. физ.-мат. наук Г. А. Чеботарев, член-корр. АН СССР И. С. Шкловский
МОСКВА 197 1
ИТОГИ НАУКИ
ИССЛЕДОВАНИЕ КОСМИЧЕСКОГО ПРОСТРАНСТВА
1969
А. В. Баевский
Космические автоматические аппараты США для изучения Луны и окололунного пространства (1958—1968 гг.)
МОСКВА 1971
Настоящий выпуск «Итоги науки», серия «Космонавтика» содержит статью «Космические автоматические аппараты США для изучения Луны и окололунного пространства. (1958— 1968 гг.)». В статье освещены этапы и основные научно-технические результаты осуществления 10-летней программы (1958— 1968 гг.) изучения Луны автоматическими аппаратами США. Каждая глава посвящена одной из программ изучения Луны и окололунного пространства. Приведены данные о ходе осуществления программ. В конце каждой главы дана библиография.
Ответственный редактор канд. техн, наук К. А. Гильзин
СОДЕРЖАНИЕ стр.
I. Изучение Луны и окололунного пространства по программе Pioneer.................................................7.
1. Программа создания космических аппаратов Pioneer . . 7
2. Экспериментальный космический аппарат.................7
3. Космический аппарат Pioneer I 9
4. Космический аппарат Pioneer II................... . 9
5. Космический аппарат Pioneer III.................. . 9
6. Космический аппарат Pioneer IV..................... 10
7. Космический аппарат Pioneer V (Atlas-Able 4). . . . 11
8. Космический аппарат Pioneer VI (Atlas-Able 5А). ... 12
9. Космический аппарат Pioneer VI (Atlas-Able 5В) .... 17
10. Некоторые итоги программы Pioneer....................17
Библиография . . . 18
II. Изучение окололунного пространства по программе спутников-зондов . ....................................20
Спутник Explorer X . . 20
Библиография . . . 22
III. Изучение Луны по программе Ranger......................23
1. Программа создания космических аппаратов Ranger . . 23
2. Космический аппарат Ranger I.........................25
3. Космический аппарат Ranger II........................30
4. Космический аппарат Ranger III.......................31
5. Космический аппарат Ranger IV........................41
6. Космический аппарат Ranger V.........................41
7. Космический аппарат Ranger VI (Ranger А) .... 42
8. Космический аппарат Ranger VII (Ranger В) .... 48
9. Космический аппарат Ranger VIII (Ranger С) .... 50
10. Космический аппарат Ranger IX (Ranger D) .... 52
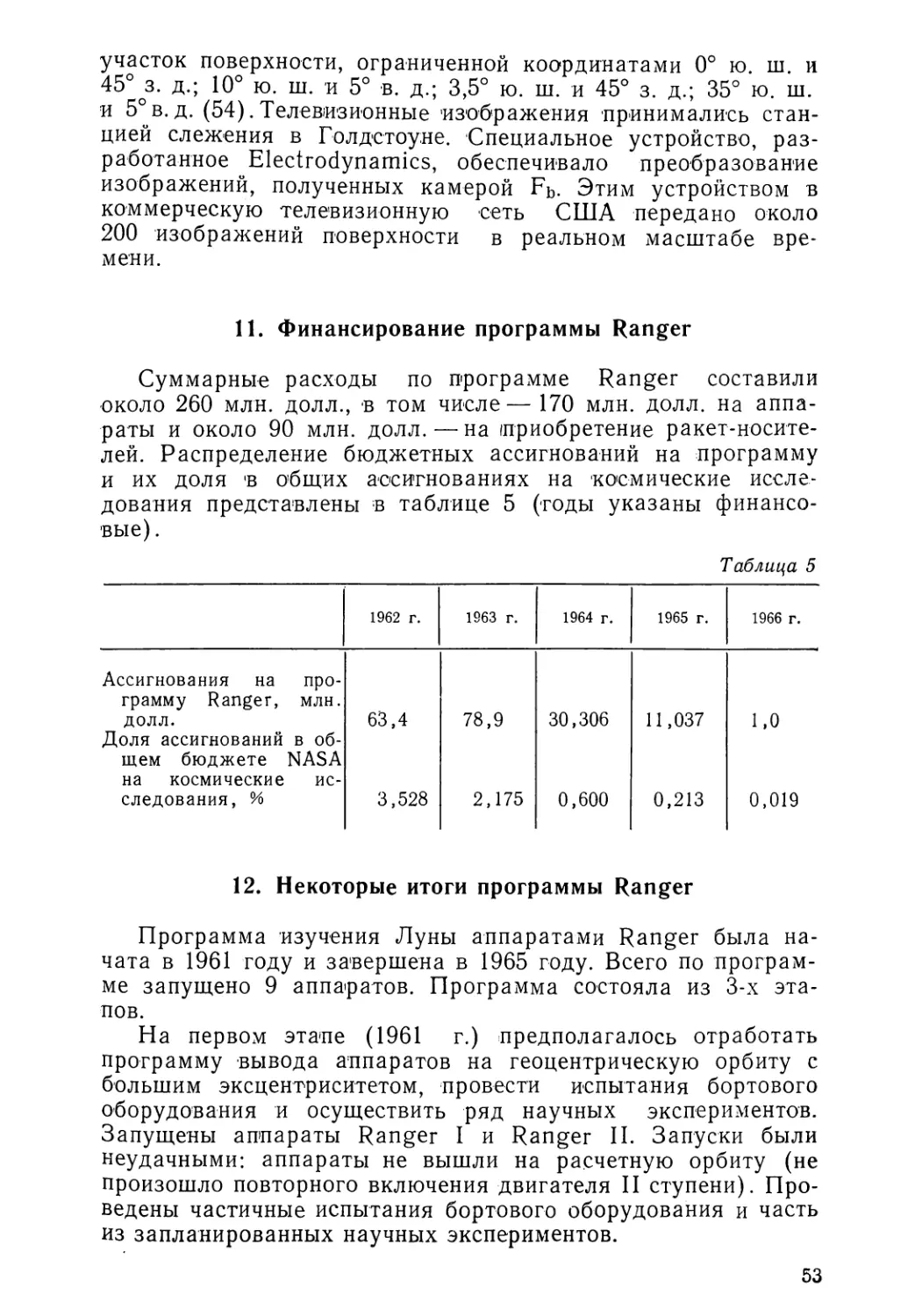
11. Финансирование программы Ranger......................53
12. Некоторые итоги программы Ranger.....................53
Библиография . . . ........................ 59
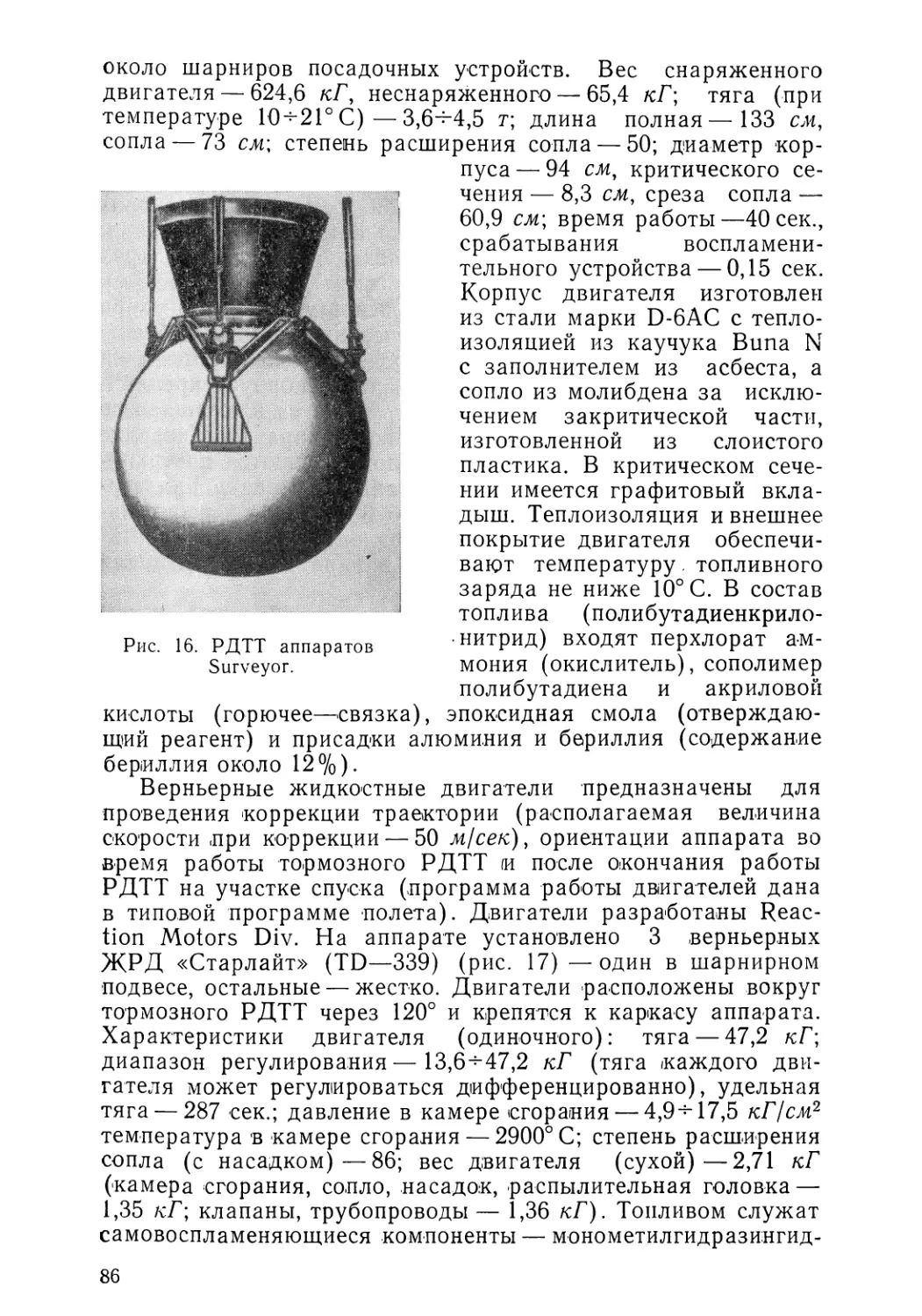
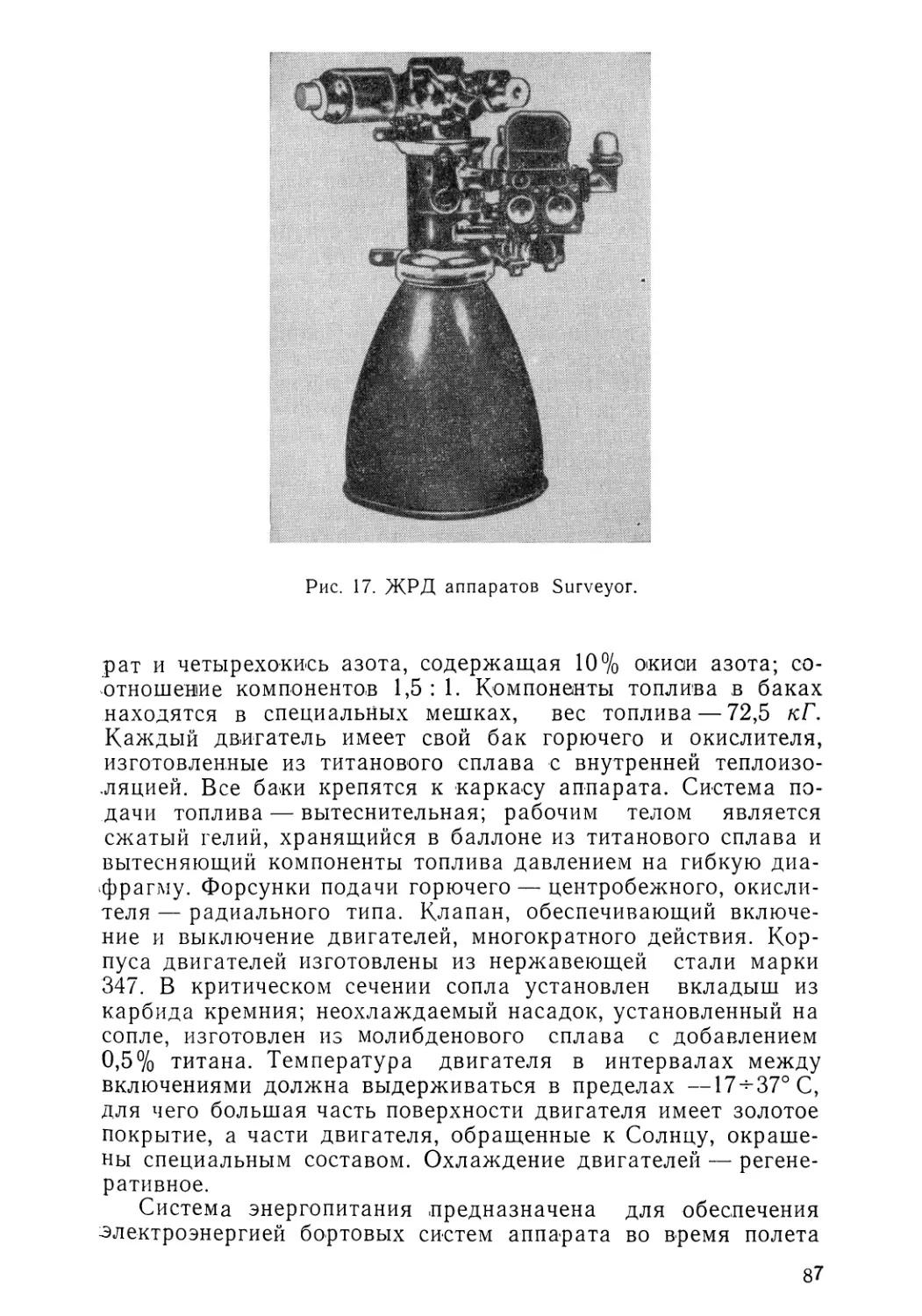
IV. Изучение Луны по программе Surveyor....................61
1. Программа создания космических аппаратов Surveyor . . 61
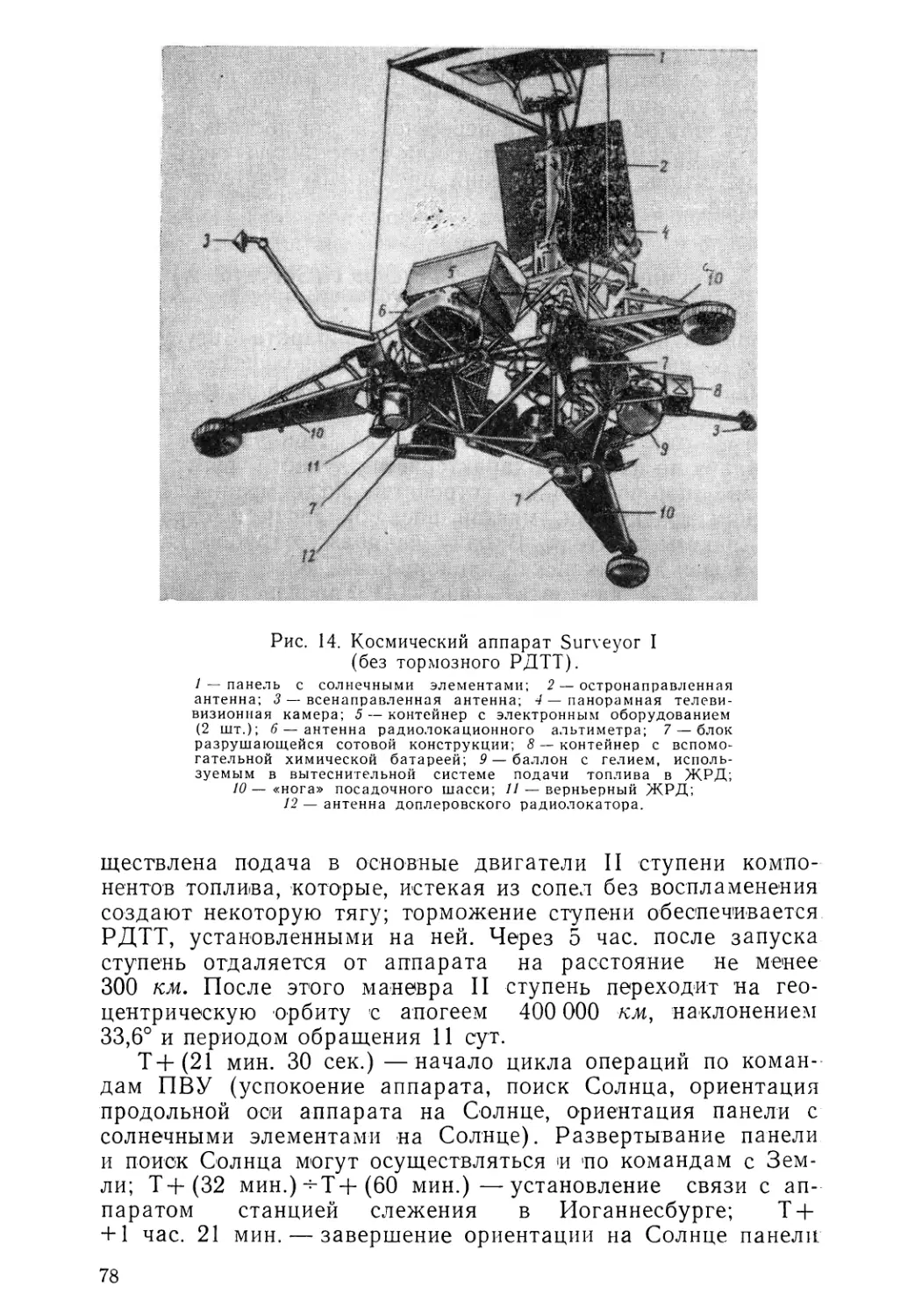
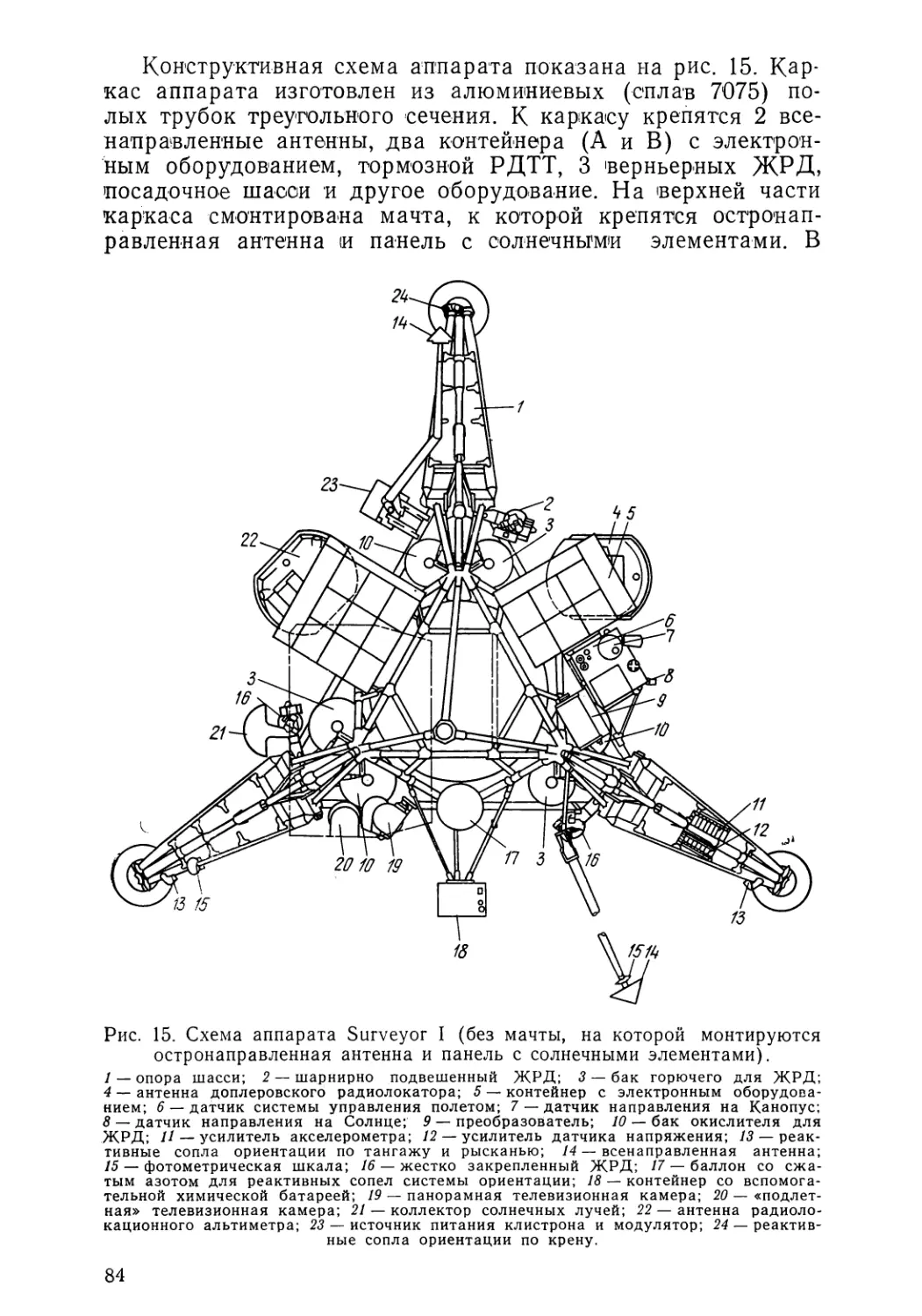
2. Космический аппарат Surveyor I (Surveyor А) ... 77
3. Космический аппарат Surveyor II (Surveyor В) ... 95
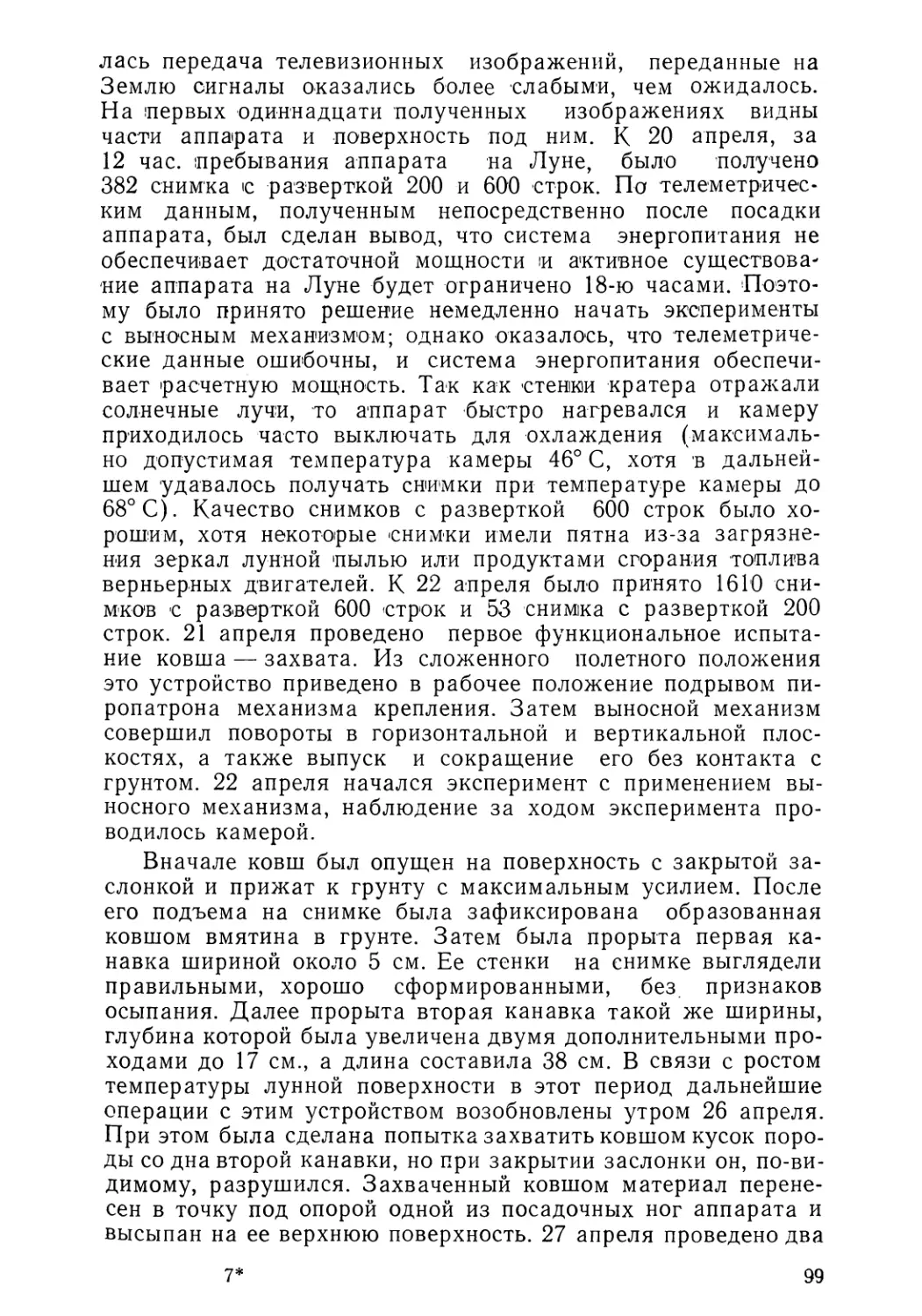
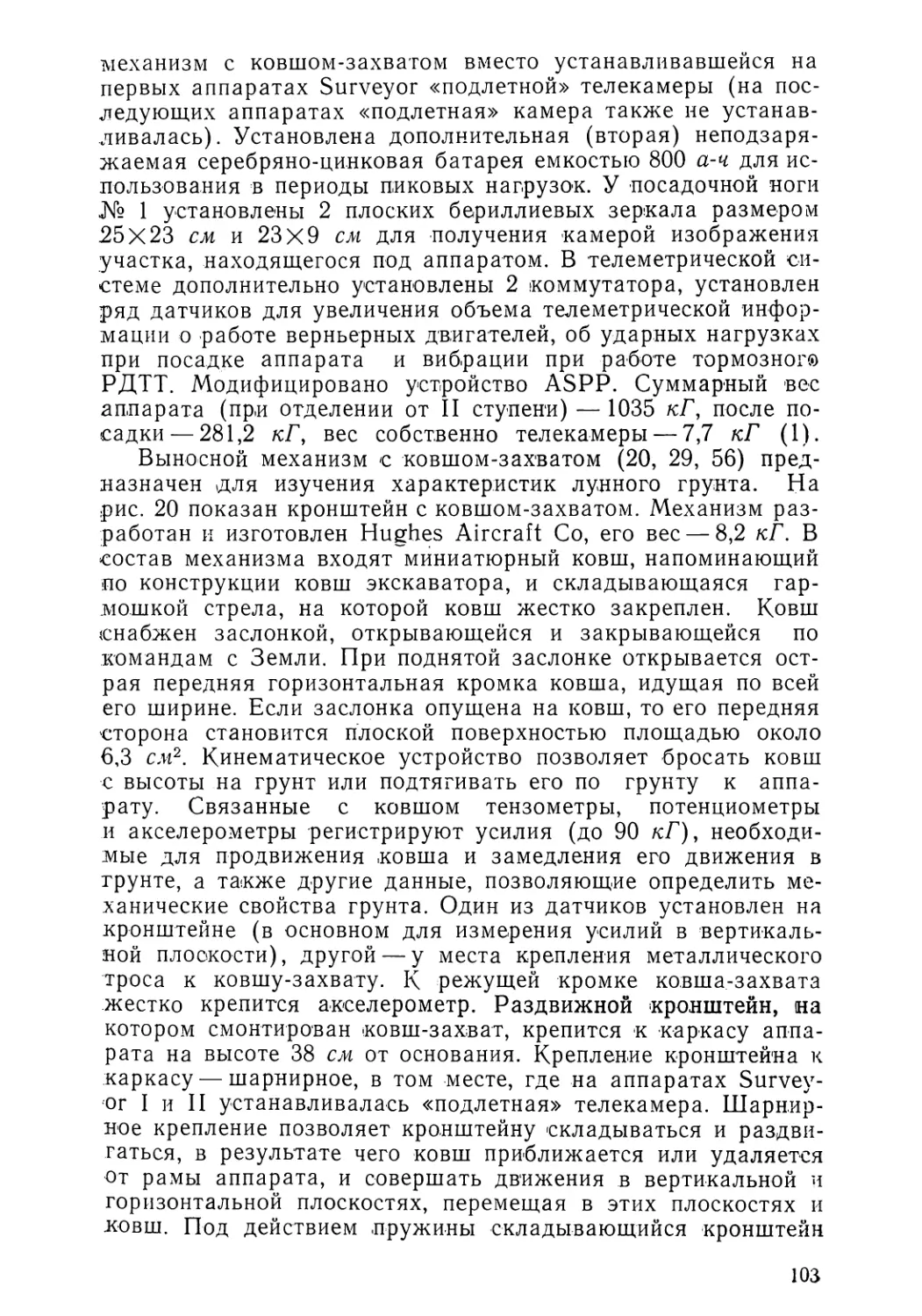
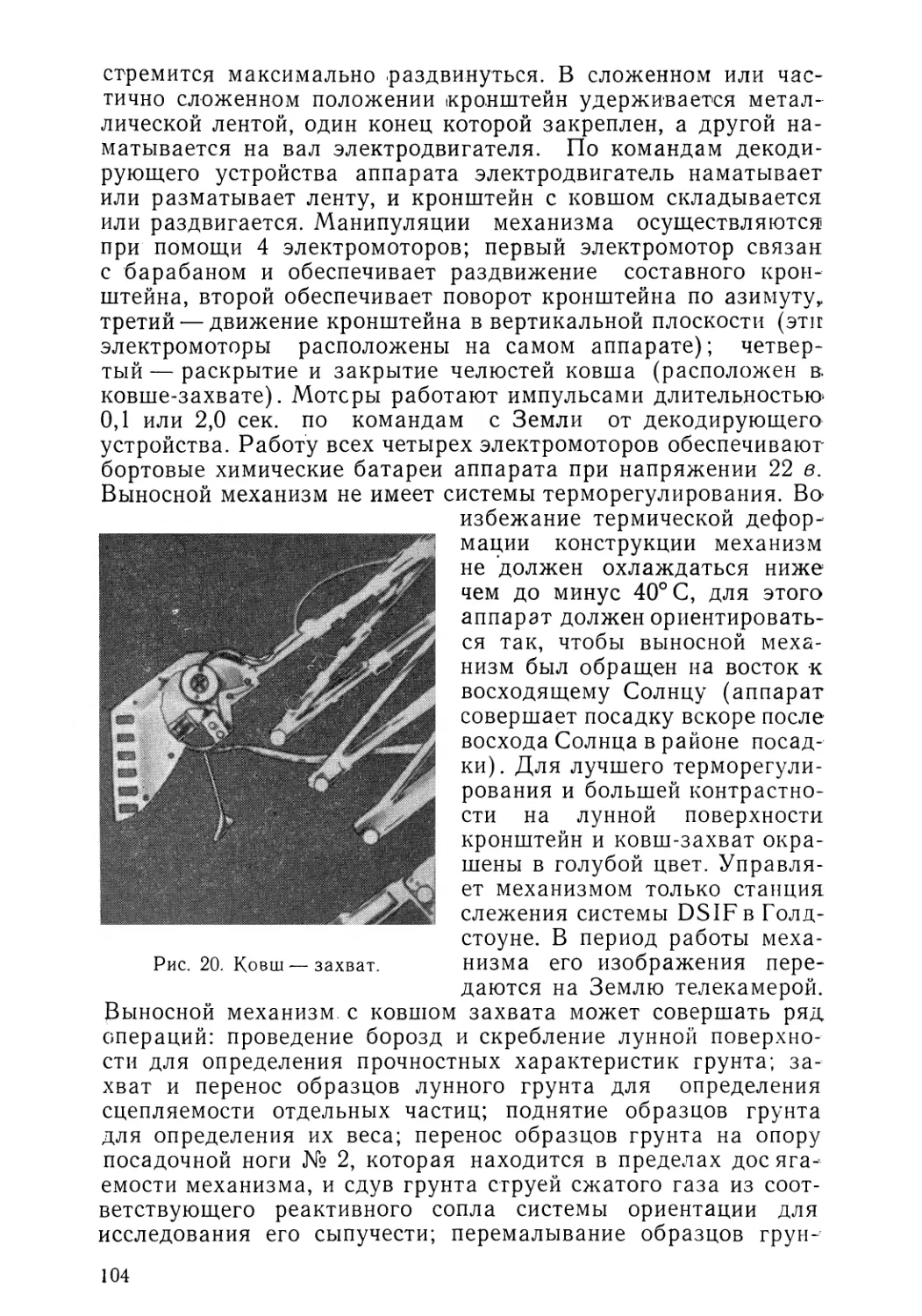
4. Космический аппарат Surveyor III (Surveyor С) ... 97
5. Космический аппарат Surveyor IV (Surveyor D) 106
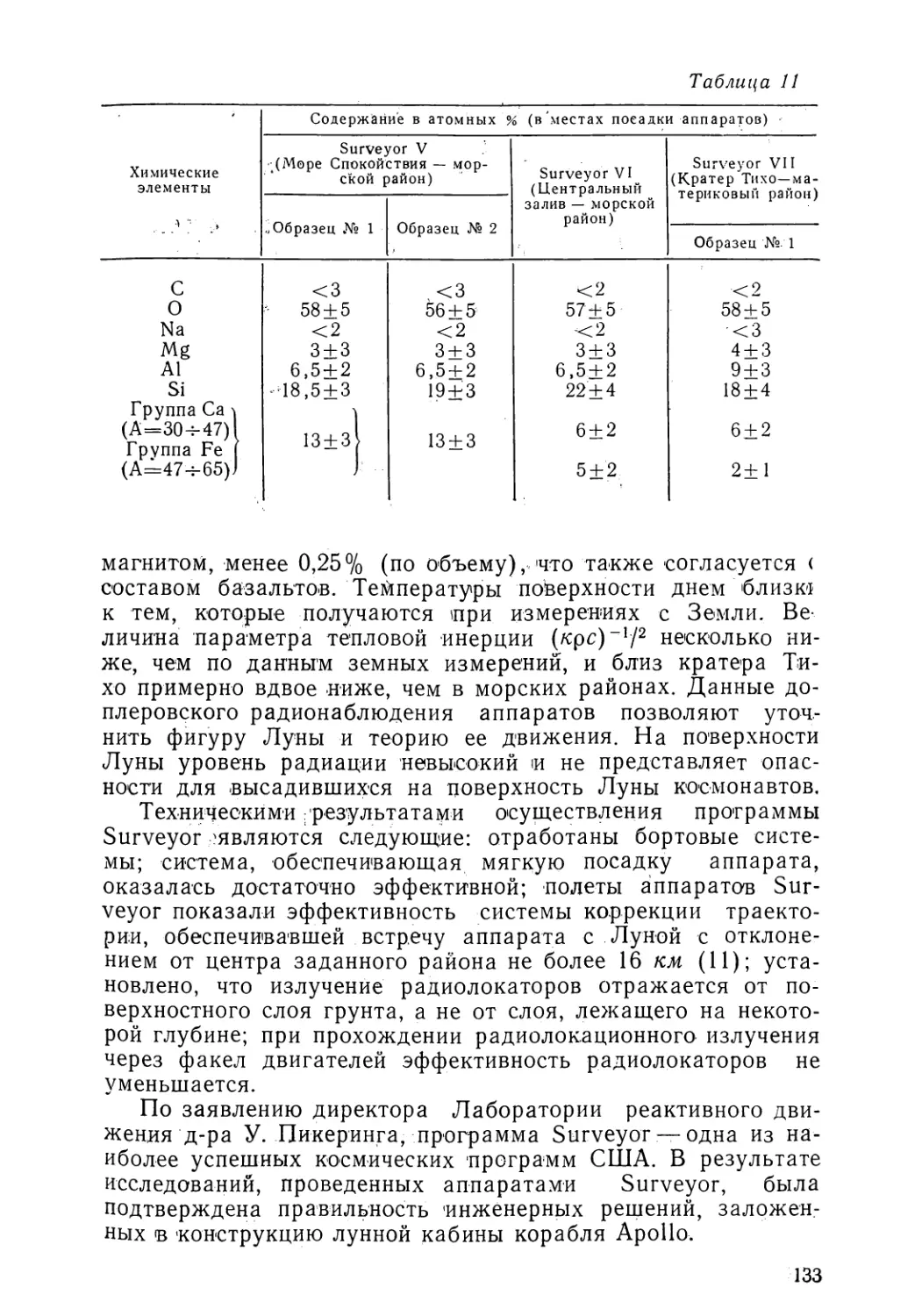
6. Космический аппарат Surveyor V (Surveyor Е) 107
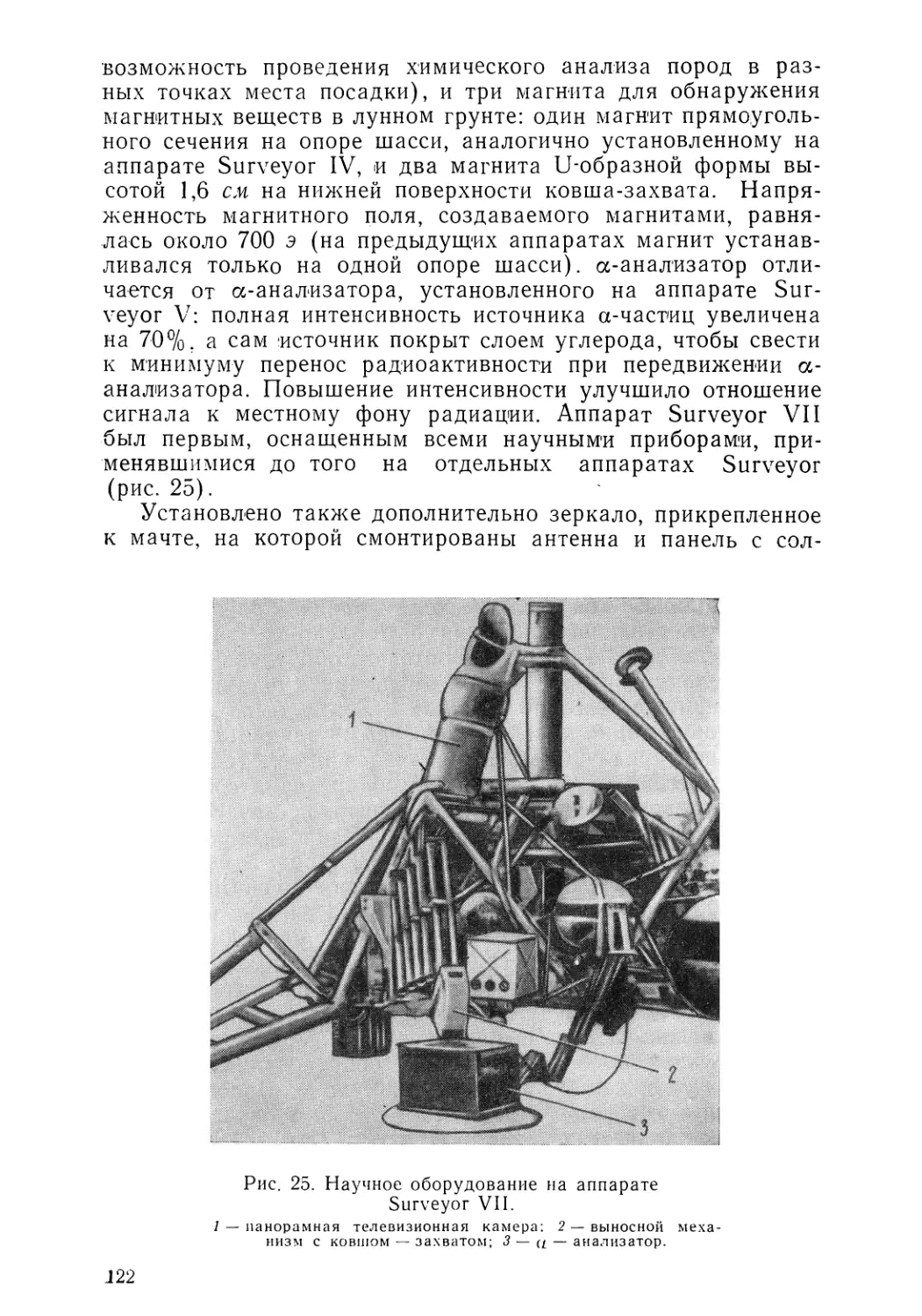
7. Космический аппарат Surveyor VI (Surveyor F) . . .114
8. Космический аппарат Surveyor VII (Surveyor G) . . .118
9. Финансирование программы Surveyor...................123
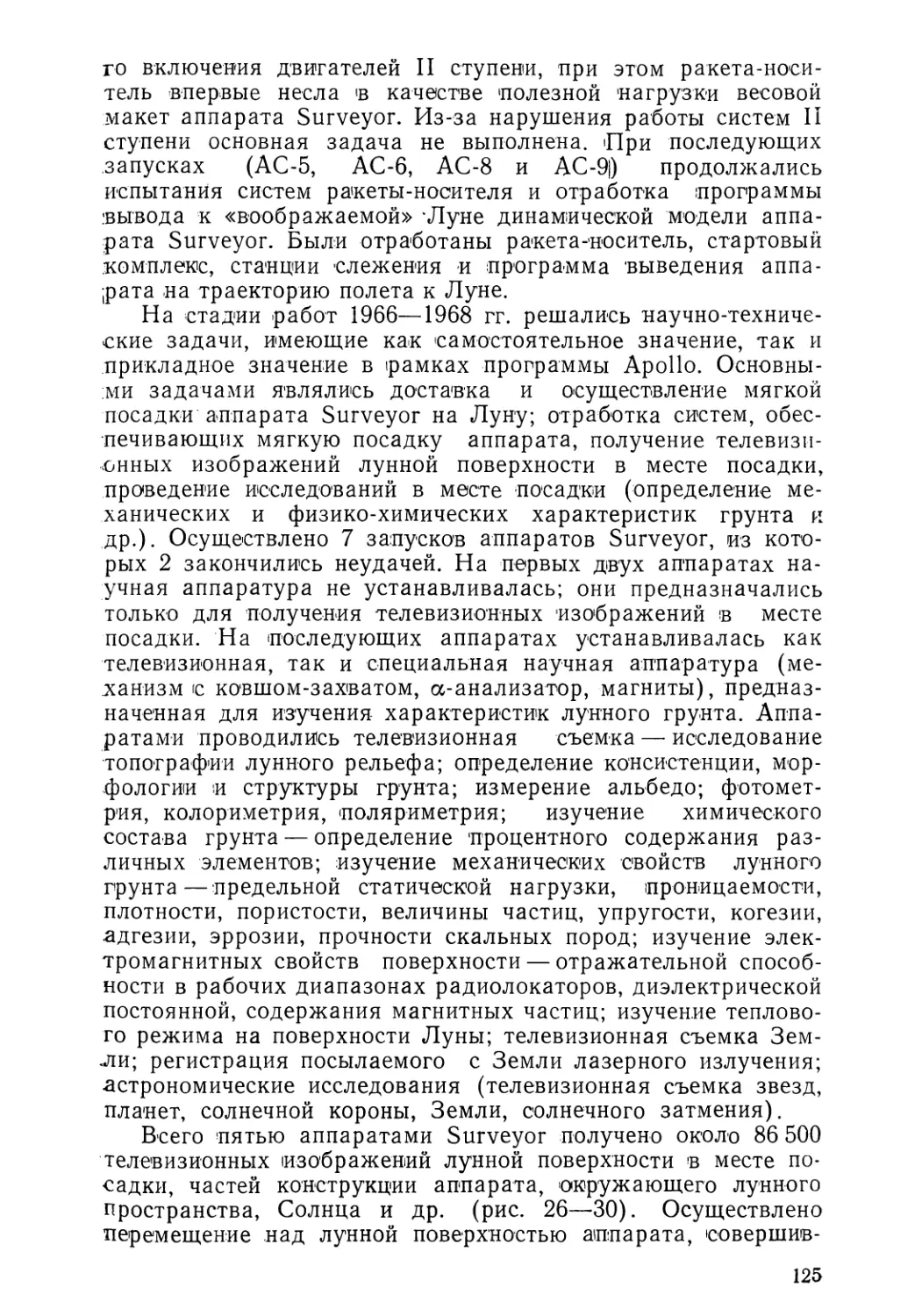
10. Некоторые итоги программы Surveyor..................124
Библиография . . . 134
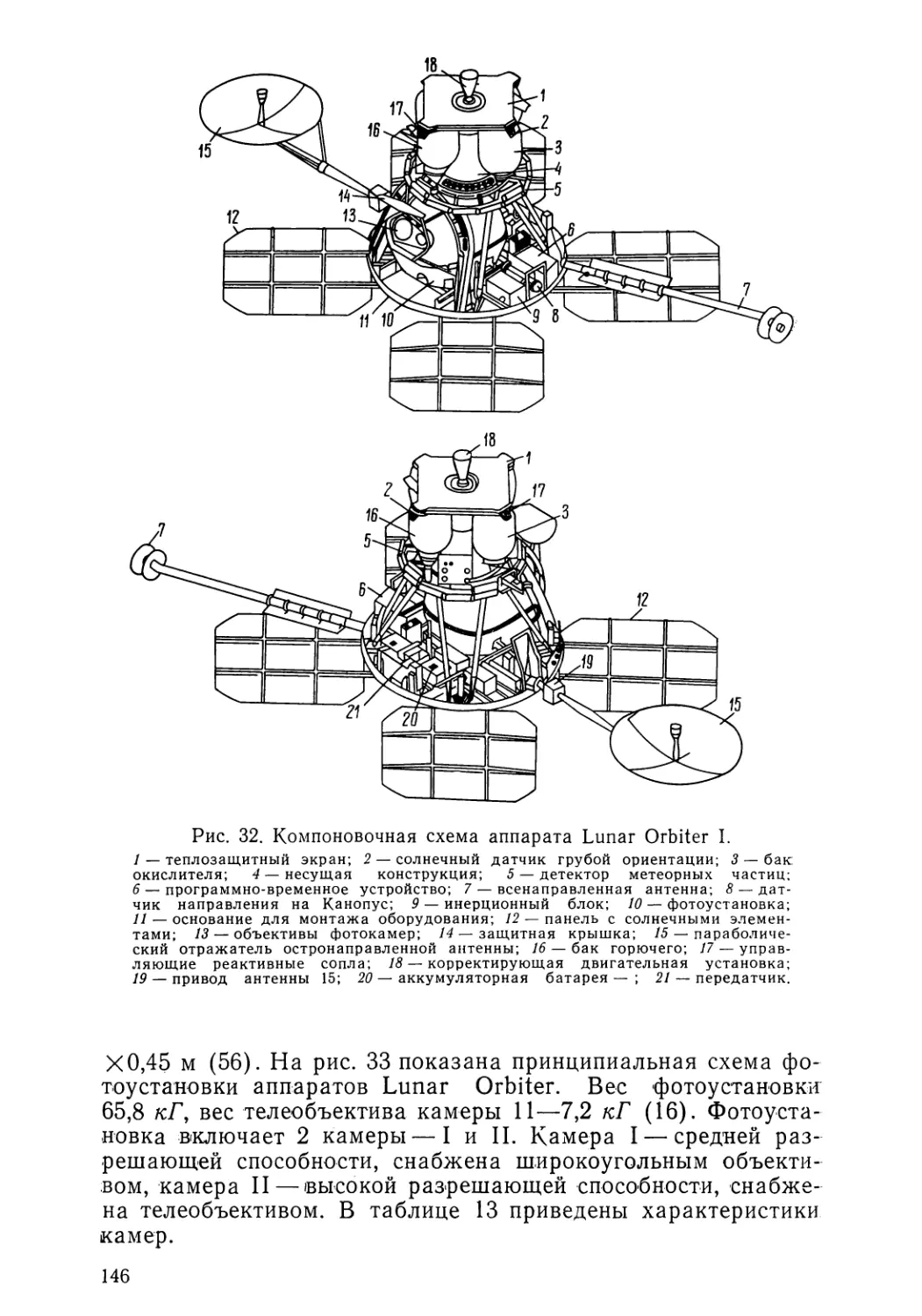
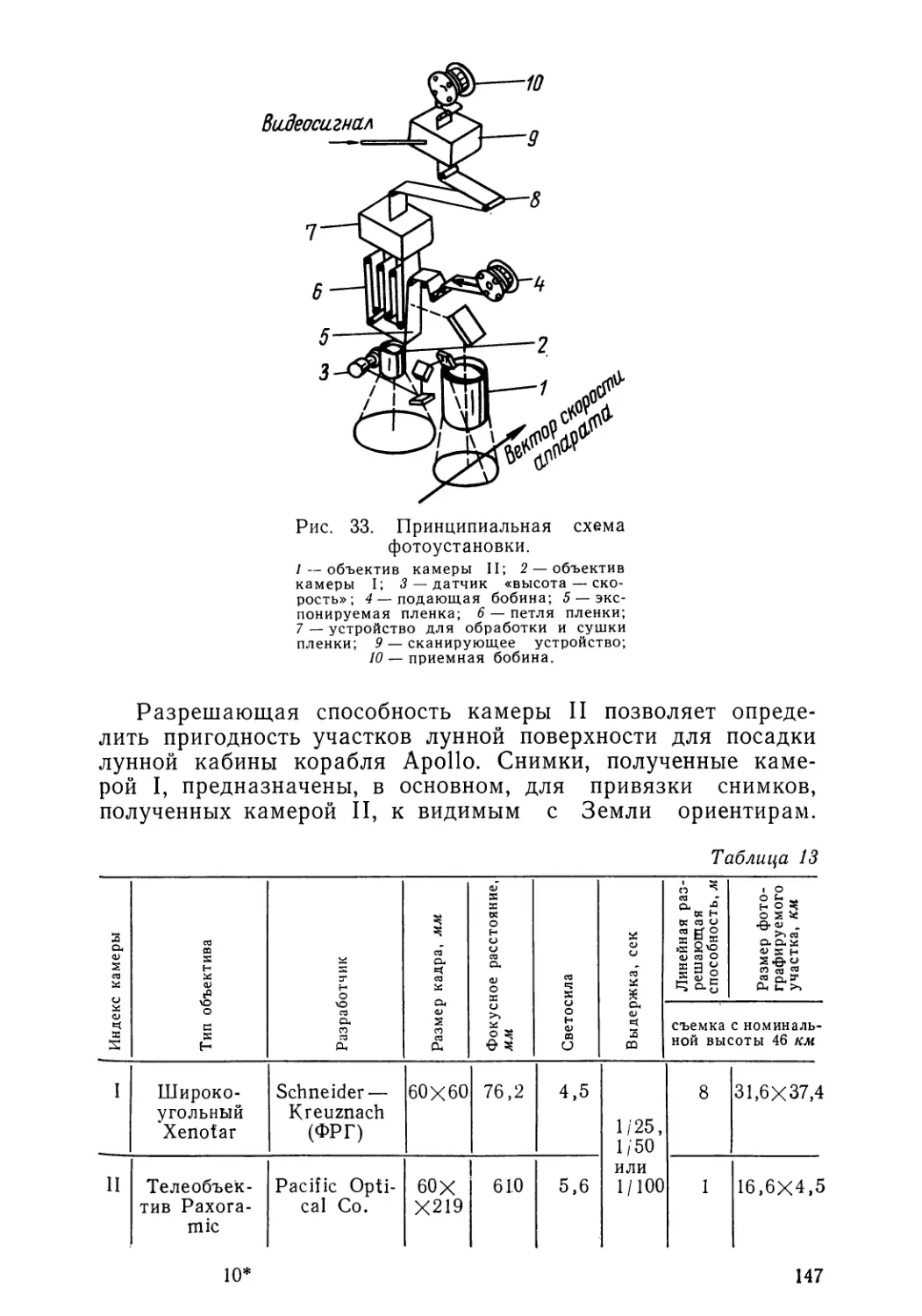
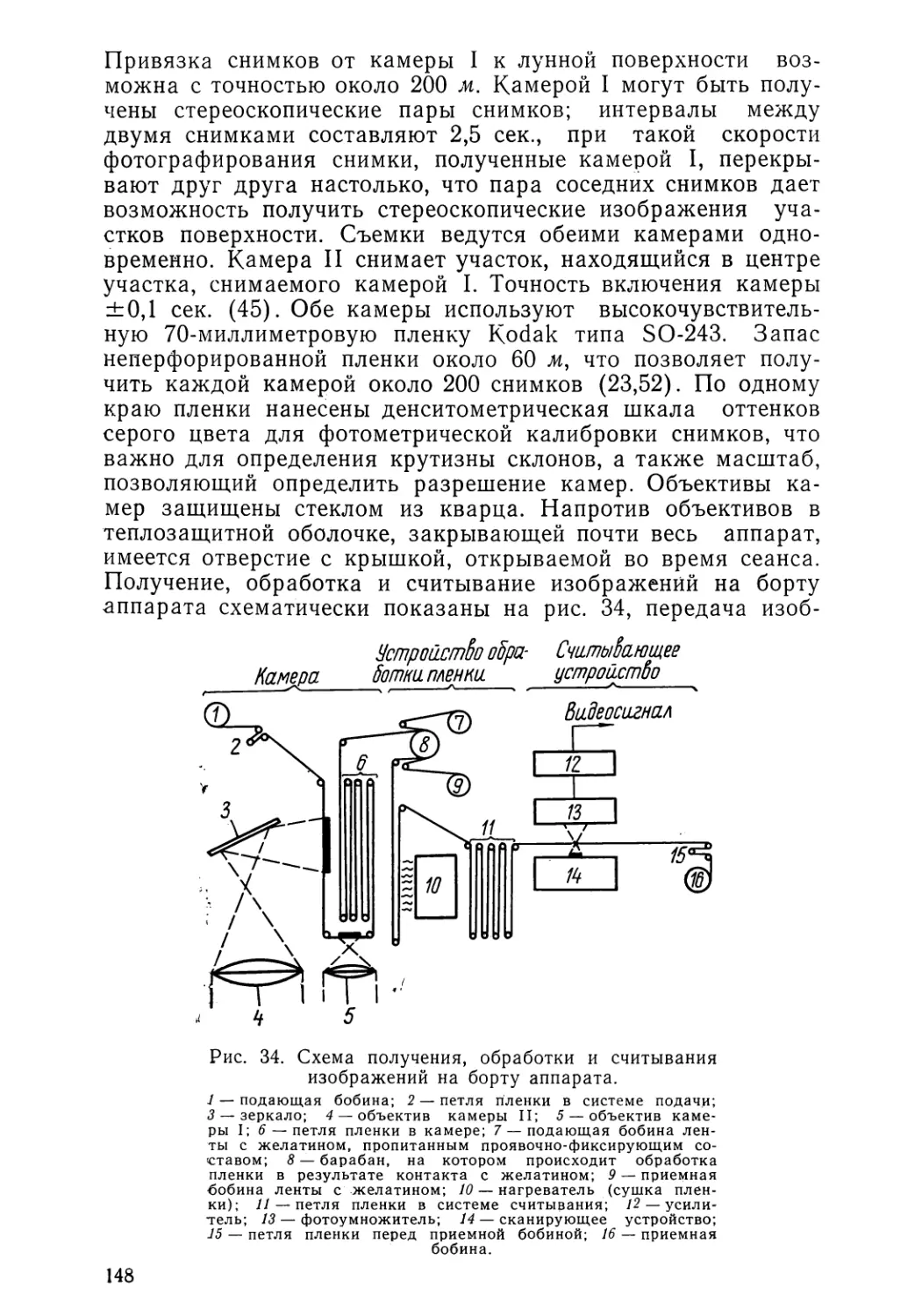
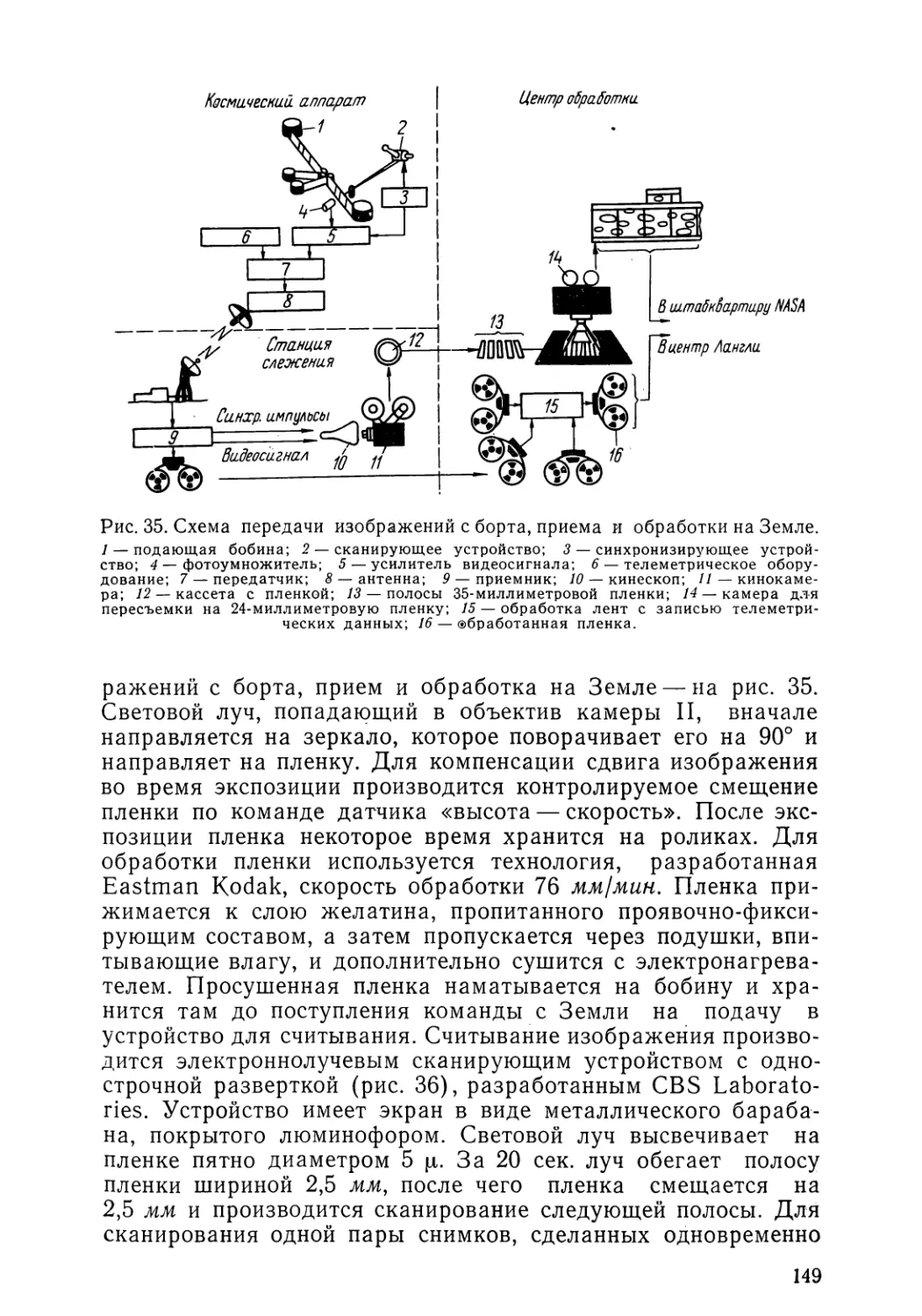
V. Изучение Луны и окололунного пространства по программе Lunar Orbiter.................................................137
1. Программа создания космических аппаратов Lunar Orbiter 137
2. Космический аппарат Lunar Orbiter I (Lunar Orbiter A) 139
3. Космический аппарат Lunar Orbiter II (Lunar Orbiter B) 154
4. Космический аппарат Lunar Orbiter III (Lunar Orbiter C) 159
5. Космический аппарат Lunar Orbiter IV (Lunar Orbiter D) 161
6. Космический аппарат Lunar Orbiter V (Lunar Orbiter E) 164
7. Финансирование программы Lunar Orbiter..................169
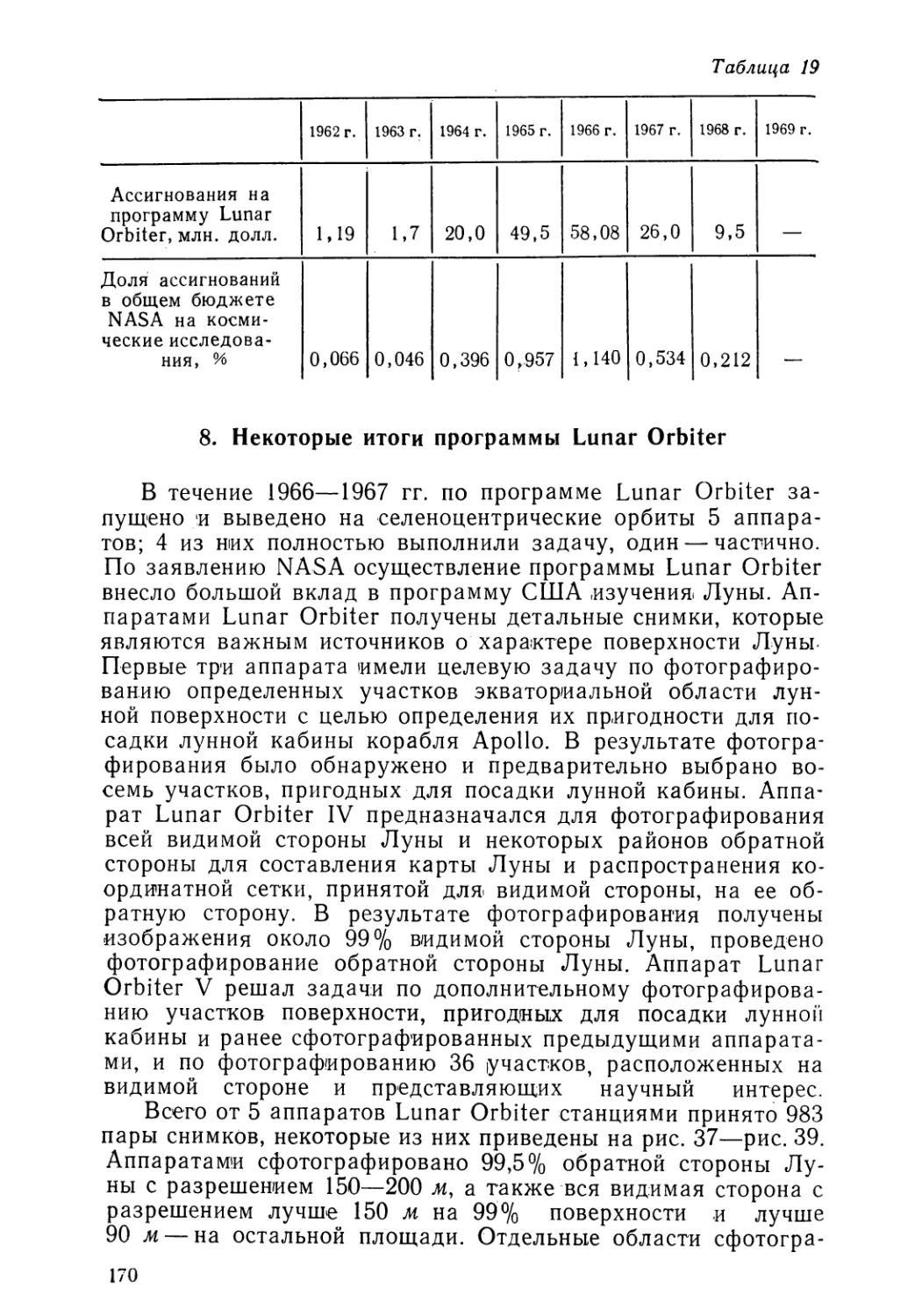
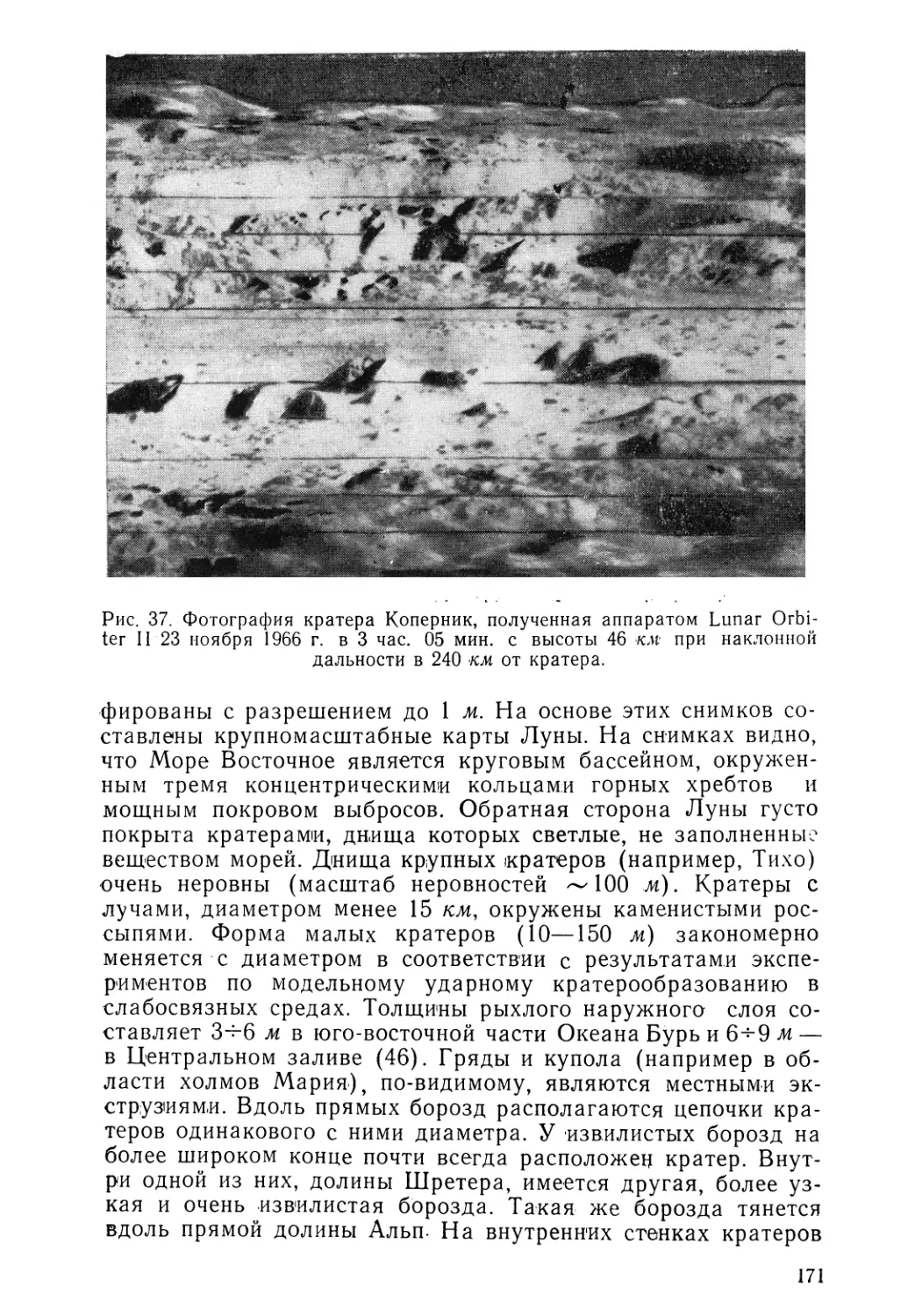
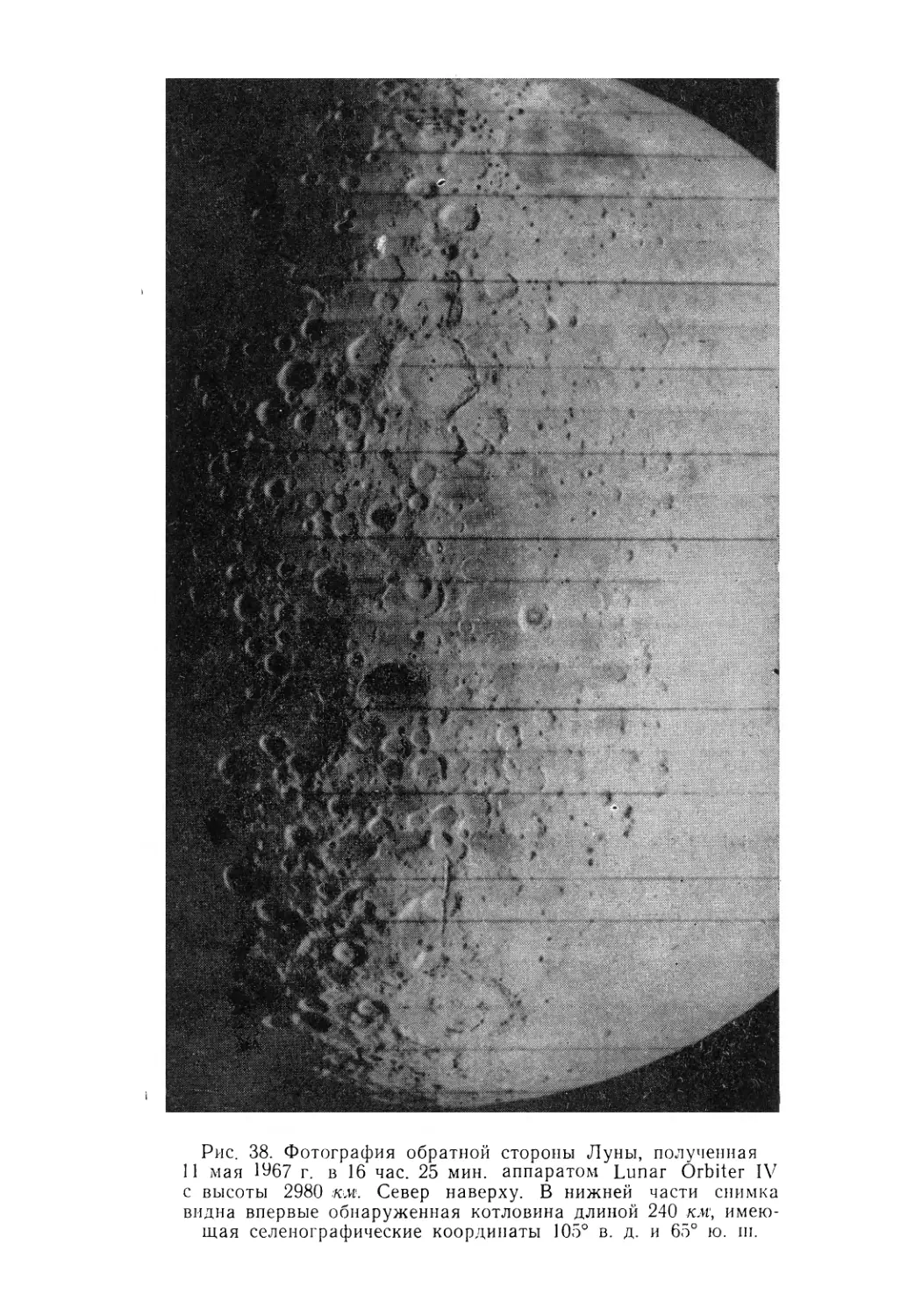
8. Некоторые итоги программы Lunar Orbiter.................170
Библиография . . . 178
VI. Изучение Луны и окололунного пространства по программе Lunar Explorer..........................................181
1. Программа создания космических аппаратов Lunar Explorer 181
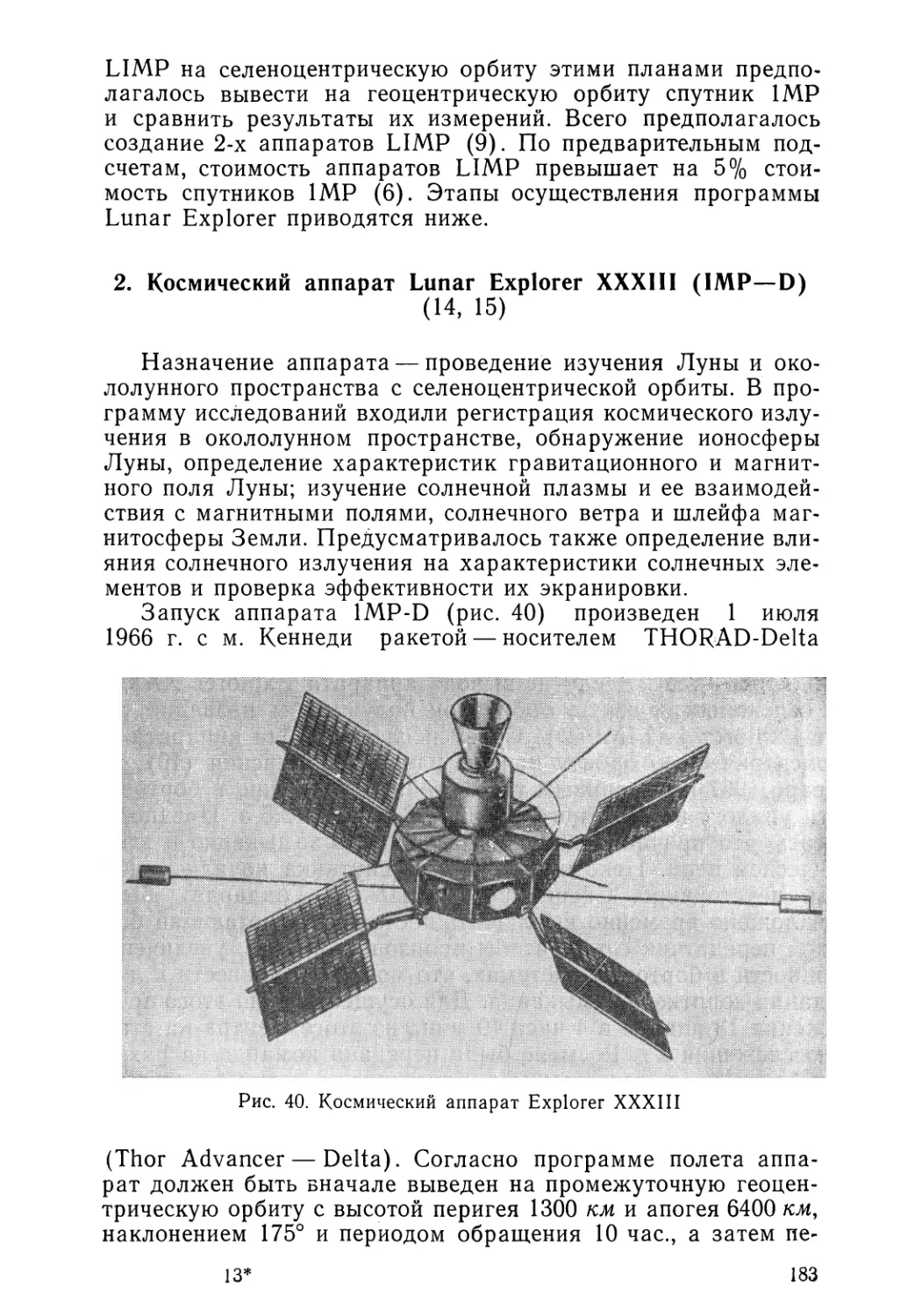
2. Космический аппарат Lunar Explorer XXXIII (IMP-D) . 183
3. Космический аппарат Lunar Explorer II (LIMP-E) . 185
4. Некоторые итоги программы Lunar Explorer...............190
Библиография . . . 191
Выводы.........................................................193
I. ИЗУЧЕНИЕ ЛУНЫ И ОКОЛОЛУННОГО ПРОСТРАНСТВА ПО ПРОГРАММЕ PIONEER
1. Программа создания космических аппаратов Pioneer
Разработка планов создания аппаратов Pioneer началась в конце 1957 г. — начале 1958 г. Работы по программе /проводились под руководством NASA (Национальное управление по аэронавтике и исследованию космического пространства). Планами предусматривалось изучение Луны и окололунного пространства с пролетной траектории и с селеноцентрической орбиты, межпланетного пространства, отработка бортовых систем. Этапы выполнения программы Pioneer приводятся ниже.
2. Экспериментальный космический аппарат (1—5, 7)*
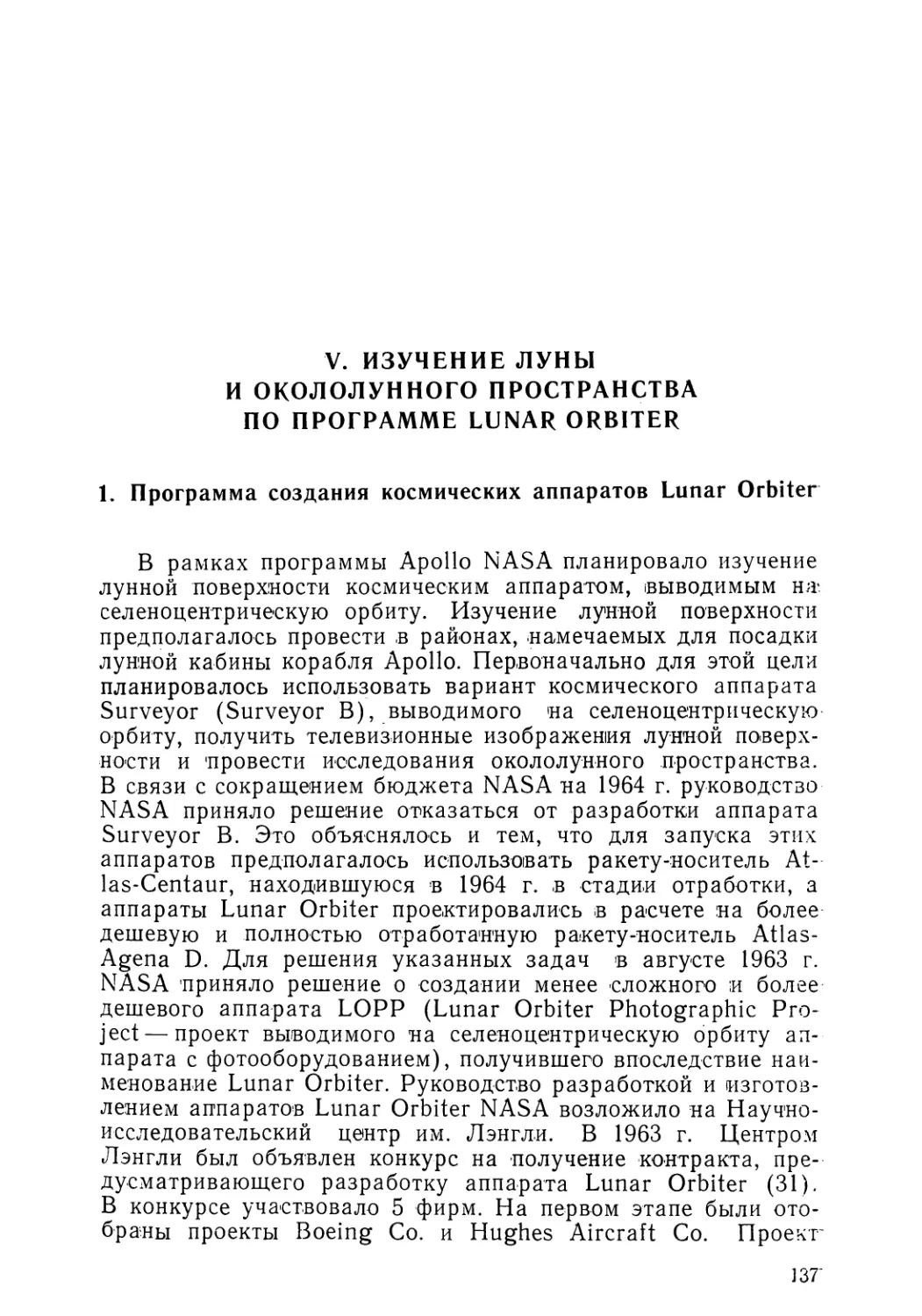
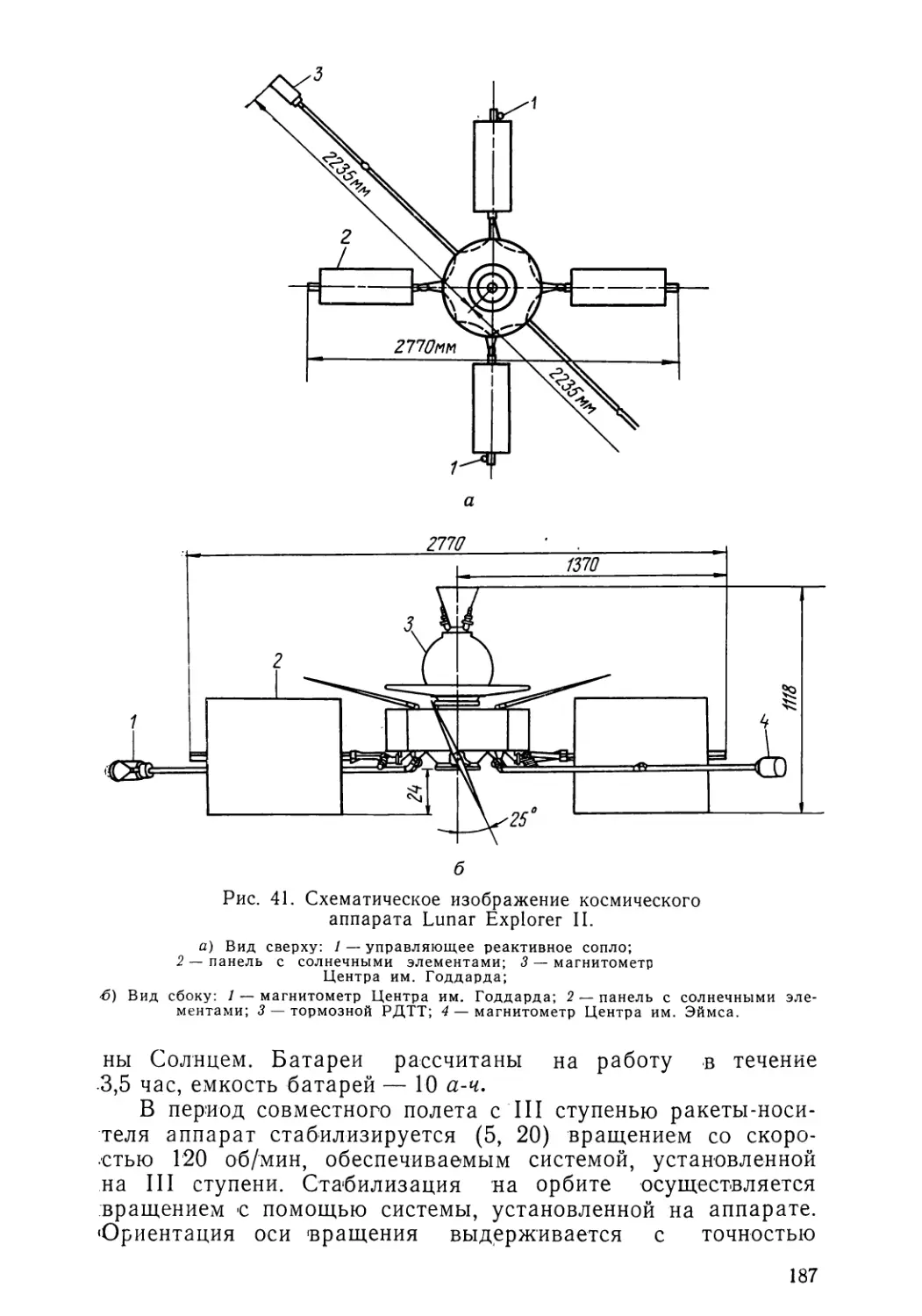
Запускам космических аппаратов Pioneer предшествовал запуск экспериментального космического аппарата, который специального названия не получил, но имел обозначение Project Able 1. Основная цель запуска — доставка в район Луны космического аппарата и получение телевизионных изображений обратной стороны Луны. Аппарат предназначался так же для измерения космической радиации и напряженности магнитного поля Земли и в пространстве между Землей и Луной, обнаружения магнитного поля Луны и регистрации микрометеорных частиц. Запуск аппарата (рис. 1) произведен 17 августа 1958 г. со стартового комплекса м. Канаверал (с 1963 г. — м. Кеннеди), входящего в состав Атлантического
* Цифры в скобках соответствуют номерам литературных источников библиографии, приведенной в конце каждой главы.
7
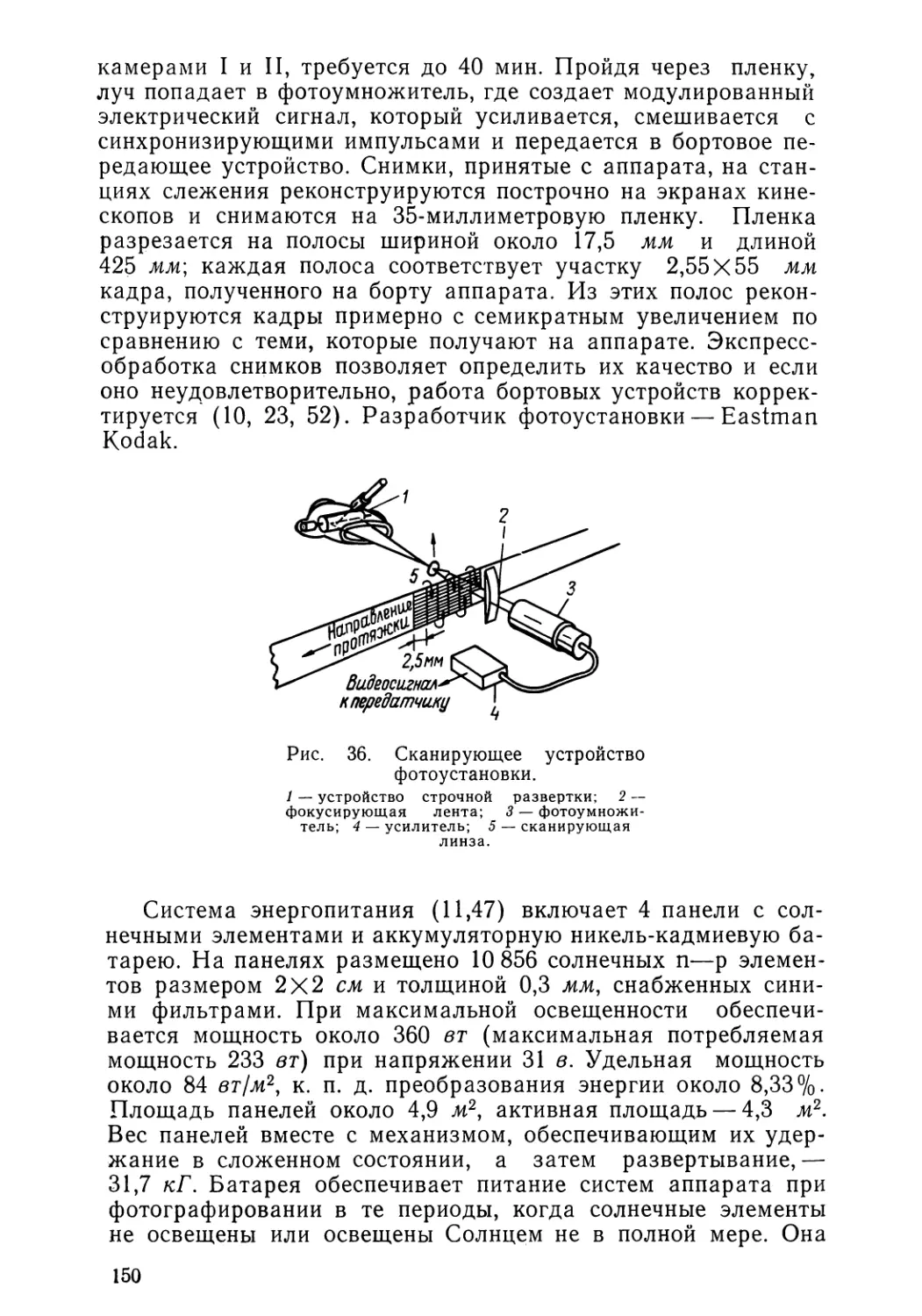
конусов, сложенных
Рис. 1. Экспериментальный космический аппарат.
ракетного испытательного полигона (с 1963 г. — Восточный испытательный полигон]) ракетой-носителем Thor-Able. Через 77 сек после старта из-за неисправности I ступени ракета-носитель взорвалась на высоте 16 км.
Суммарный вес аппарата — 37,9 кГ, в т. ч. корпуса с тормозным РДТТ — 20 кГ, бортового оборудования—17,9 кГ.
Аппарат имеет форму двух усеченных большими основаниями с цилиндрической проставкой между ними. Высота аппарата — 76,2 см, диаметр большего основания — 73,6 см. Корпус изготовлен из стекловолокна. Система связи включает две штыревые антенны и два передатчика с рабочей частотой 108,06 Мгц и 108,09 Мгц и мощностью 300 мет и 1 вт, соответственно; второй передатчик имеет пиковую мощность на выходе 50 вт. Первый передатчик предназначен для передачи телеметрических данных, второй — телевизионных изображений обратной стороны Луны. Система энергопитания — на химических батареях.
Ионизационная камера [предназначена для измерения суммарной космической радиации в диапазоне 0,5-И О6 рент-ген/час. Камера представляет собой цилиндрический алюминиевый сосуд объемом 43 см3, заполненный чистым аргоном под давлением 13,6 атм при температуре 20° С. Камера всенаправленного действия, разработана Университетом штата Айова и Лабораторией космической техники. Магнитометры (Зшт.) предназначены для измерения напряженности магнитного поля Земли и в пространстве между Земле?! и Луной, а также обнаружения магнитного поля Луны. Рассчитаны на измерение напряженности в диапазоне 10~5-^-2-10-2 э. Разработаны Лабораторией космической техники. Детектор микроме-теорных частиц предназначен для регистрации микрометеор-ных частиц. Имеет два пороговых уровня чувствительностью' 1,5ХЮ”4 гем/сек и 0,5Х10-2 гсм/сек и площадь чувствительной поверхности 0,038 м2. Разработан Кембриджской научно-исследовательской лабораторией ВВС. Сканирующая телевизионная установка предназначена для получения телевизионных изображений обратной стороны Луны. Разработана Испытательной станцией Управления вооружения ВВС.
Головная организация по разработке аппарата — Лаборатория космической техники при участии Управления перспек
8
тивного планирования научно-исследовательских работ Министерства обороны.
3. Космический аппарат Pioneer I (1—5, 7)
Цель запуска и назначение —как у'экспериментального аппарата. Программа исследований предусматривала решение задач в рамках МГГ. Запуск аппарата произведен 11 октября 1958 г. с м. Канаверал ракетой-носителем Thor-Able. Расчетная скорость не была обеспечена, аппарат не вышел на траекторию полета к Луне и 12 октября упал <в южной части Тихого океана. Максимальное удаление от Земли— 113 830 км. После отделения от ракеты-носителя аппарат получил обозначение по международной системе 1958 т]. Конструкция, состав служебного оборудования и научной аппаратуры — как у экспериментального аппарата. Вес аппарата — 34,2 кГ.
Основные организации-разработчики те же, что и у экспериментального аппарата, программа исследований разработана ВВС США и Лабораторией космической техники.
4. Космический аппарат Pioneer II (1—5, 7)
Цель запуска и назначение — как у экспериментального аппарата, программа исследований предусматривала решение задач в -рамках МГГ. Запуск аппарата произведен 8 ноября 1958 г. с м. Канаверал ракетой-носителем Thor-Able. В результате неисправности III ступени ракеты-носителя (не включилась двигательная установка) аппарат не вьгшел на траекторию полета к Луне, вернулся в атмосферу и 8 ноября упал в Атлантический океан недалеко от Африки. Максимальное удаление от Земли — 1550 км.
Конструкция, состав служебного оборудования и научной, аппаратуры — как у экспериментального аппарата, за исключением сканирующей телевизионной установки, разработанной Лабораторией космической техники; в состав научной аппаратуры дополнительно включен пропорциональный счетчик.. Суммарный вес аппарата — 39,2 кГ, в т. ч. бортового оборудования—16,0 кГ. Основные организации-разработчики аппарата, за исключением телевизионной установки, те же, чго> и у экспериментального аппарата.
5. Космический аппарат Pioneer III (8, 10)
Основная цель запуска — доставка аппарата на Луну. Аппарат предназначался также для изучения радиации во внешней зоне радиационного пояса. Запуск аппарата (рис. 2) про-
9
изведен 6 декабря 1958 г. с м. Канаверал. Ракета-носитель Juno II не обеспечила расчетную скорость, аппарат не вышел на траекторию полета к Луне. 7 декабря вернулся в атмосферу и сгорел. Максимальное удаление от Земли 102 320 км. После отделения от ракеты-носителя аппарат получил обозначение по международной системе 1958 0.
Суммарный вес аппарата — 5,9 кГ. Аппарат имеет форму конуса высотой 58,4 см и диаметром основания 25 см. Корпус изготовлен из стекловолокна и покрыт золотой пленкой.
Система связи включает (10) передатчик мощностью 180 мет и рабочей частотой 960,05 Мгц. Антенной служит позолоченный корпус аппарата. Система энергопитания — на химических батареях.
В состав научной аппаратуры входят 2 счетчика Гейгера-Мюллера различных типов для измерения радиации во внутренней зоне радиационного пояса. Счетчики предназначены для из-
аппарат Pioneer III мерения интенсивности и протя-(на подставке). женности поясов радиации и ре-
гистрации электронов, протонов, рентгеновских и гамма-лучей. Счетчиком первого типа служит трубка Гейгера—Мюллера типа Anton 302 со средней защитой 1,0 г!см2 на более, чем 80% поверхности трубки, при минимальной защите 0,67 г!см2. диетчик второго типа предназначен для разрешения неоднозначных измерений, получаемых при измерениях счетчиком первого типа. Им служит трубка Гейгера—Мюллера типа Anton 213 с защитой приблизительно такой же, как у счетчика первого типа. Оба счетчика разработаны Университетом штата Айова.
Головная организация по разработке аппарата — Лаборатория реактивного движения, программа научных исследований разработана NASA.
6- Космический аппарат Pioneer IV (8, 10)
Цель запуска и назначение — как у аппарата Pioneer III. Запуск аппарата произведен 3 марта 1959 г. с м. Канаверал 10
ракетой-носителем Juno II. После выхода на траекторию полета к Луне аппарат получил обозначение по международной системе 1959 v. 4 марта аппарат достиг района Луны и прошел от нее на расстоянии 60 050 км (расчетное значение — -32 000 км). Из-за отклонения от зоны пролета не включился фотоэлектрический датчик спускового механизма устройства фотографирования Луны, и оно не было -испытано. Связь с аппаратом поддерживалась в течение 82 час. до расстояния 655 300 км от Земли. При дальнейшем движении аппарат вышел на гелиоцентрическую орбиту с перигельным расстоянием 147,1 млн. км, афелийным расстоянием 173,6 млн. км, наклонением к плоскости эклиптики 0,127° и периодом обращения 406,9 сут. Время существования аппарата — неограниченное. В результате исследований получены данные о космической радиации.
Конструкция, состав слубежного оборудования и научной аппаратуры — как у аппарата Pioneer III, с некоторыми изменениями. Счетчик второго типа снабжен дополнительной защитой: цилиндром из свинца с закрытым сверху дном, закрывающим счетчик сверху, и внутренним цилиндром из нержавеющей стали. Свинцовый цилиндр обеспечил защиту 4,0 г/см2, цилиндр из нержавеющей стали — 0,6 г/см2. Вес аппарата — 6,1 кГ.
Основные организации-разработчики аппарата те же, что и для аппарата Pioneer III.
7. Космический аппарат Pioneer V (Atlas-Able 4) (1—5, 7)
Основная цель запуска — вывод аппарата на селеноцентрическую орбиту. Аппарат предназначался для исследования окололунного пространства, получения телевизионных изображений Луны, изучения космических лучей, измерения напряженности 'магнитного поля Земли и в пространстве -между Землей и Луной, обнаружения магнитного поля Луны, регистрации микрометеорных частиц, изучения проблем радиосвязи на больших расстояниях.
Запуск аппарата Pioneer V (рис. 3) произведен 26 ноября 1959 г. с м. Канаверал ракетой-носителем Atlas-Able с РДТТ ABL-248 в качестве III ступени. На 45-й сек. преждевременно отделился носовой обтекатель, прикрывавший аппарат, и под воздействием аэродинамических сил III ступень с аппаратом оторвалась от ракеты-носителя и упала в Атлантический океан около Африки. Причина отделения обтекателя — сохранение в пространстве под обтекателем давления 1 атм. Для устранения этого явления при последующих запусках аппаратов Pioneer VI в обтекателе просверливалось отверстие.
11
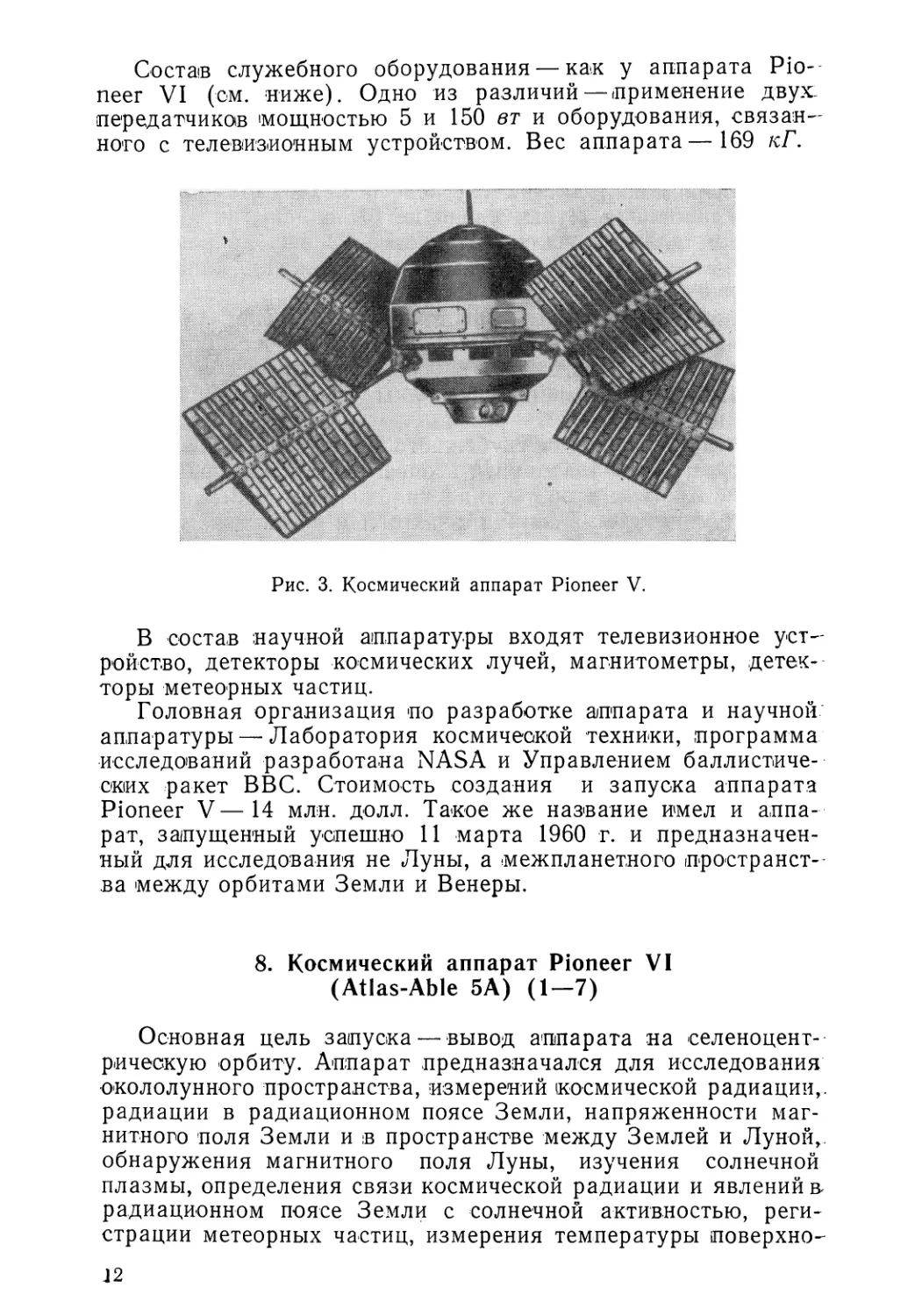
Состав служебного оборудования — как у аппарата Pioneer VI (см. ниже). Одно из различий — применение двух: передатчиков 'мощностью 5 и 150 вт и оборудования, связанного с телевизионным устройством. Вес аппарата—169 кГ.
Рис. 3. Космический аппарат Pioneer V.
В состав научной аппаратуры входят телевизионное устройство, детекторы космических лучей, магнитометры, детекторы метеорных частиц.
Головная организация по разработке аппарата и научной аппаратуры — Лаборатория космической техники, программа исследований разработана NASA и Управлением баллистических ракет ВВС. Стоимость создания и запуска аппарата Pioneer V—14 млн. долл. Такое же название имел и аппарат, запущенный успешно 11 марта 1960 г. и предназначенный для исследования не Луны, а межпланетного пространства между орбитами Земли и Венеры.
8. Космический аппарат Pioneer VI (Atlas-Able 5А) (1—7)
Основная цель запуска — вывод аппарата на селеноцентрическую орбиту. Аппарат предназначался для исследования окололунного пространства, измерений космической радиации,, радиации в радиационном поясе Земли, напряженности магнитного поля Земли и в пространстве между Землей и Луной,, обнаружения магнитного поля Луны, изучения солнечной плазмы, определения связи космической радиации и явлений в^ радиационном поясе Земли с солнечной активностью, регистрации метеорных частиц, измерения температуры поверхно-
12
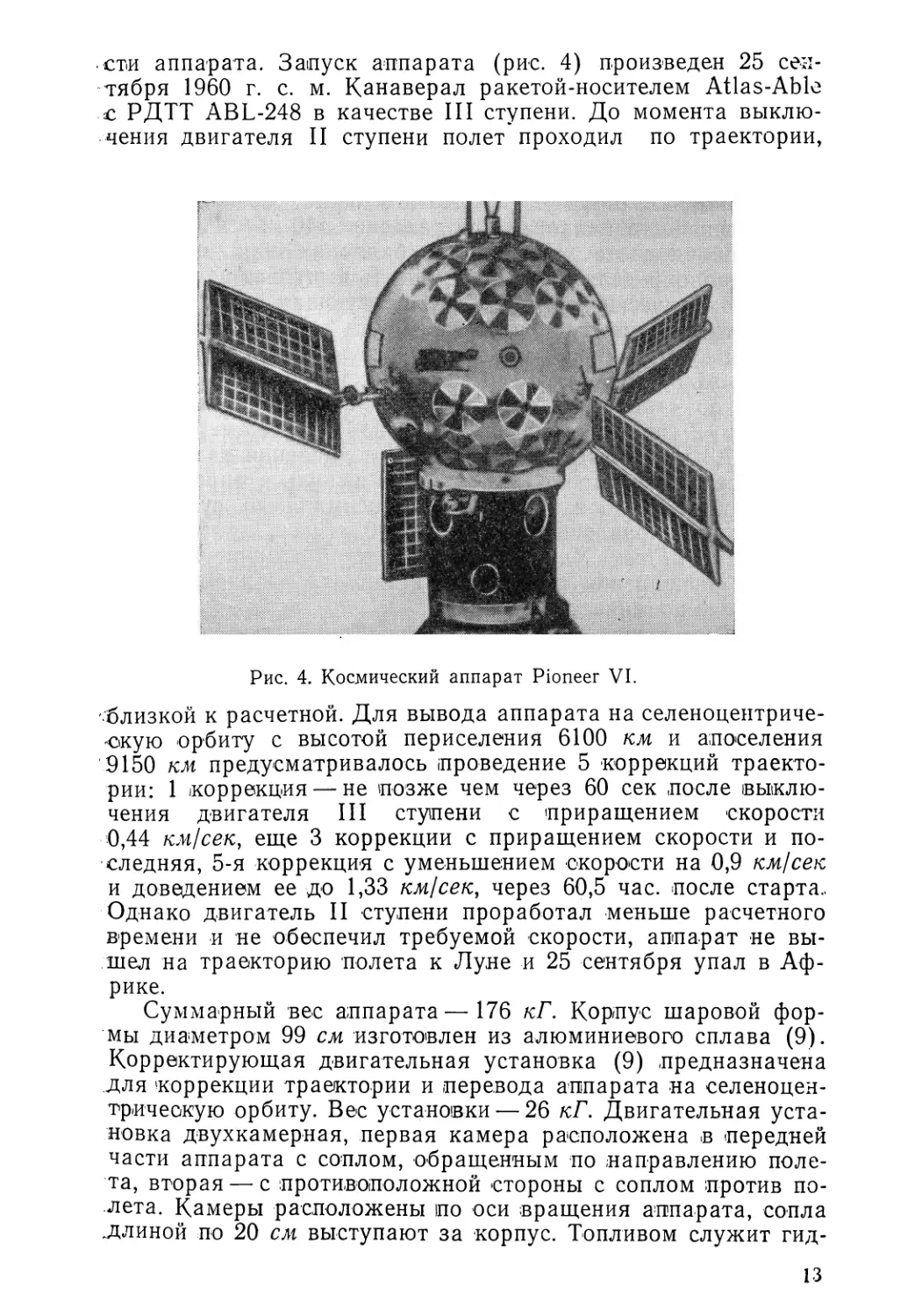
• ctiH аппарата. Запуск аппарата (рис. 4) произведен 25 сентября 1960 г. с. м. Канаверал ракетой-носителем Atlas-Able с РДТТ ABL-248 в качестве III ступени. До момента выключения двигателя II ступени полет проходил по траектории,
Рис. 4. Космический аппарат Pioneer VI.
близкой к расчетной. Для вывода аппарата на селеноцентрическую орбиту с высотой периселения 6100 км и апоселения 9150 км предусматривалось (Проведение 5 коррекций траектории: 1 (коррекция — не позже чем через 60 сек после выключения двигателя III ступени с приращением скорости 0,44 км] сек, еще 3 коррекции с приращением скорости и последняя, 5-я коррекция с уменьшением скорости на 0,9 км!сек и доведением ее до 1,33 км!сек, через 60,5 час. после старта.. Однако двигатель II ступени проработал меньше расчетного времени и не обеспечил требуемой скорости, аппарат не вышел на траекторию полета к Луне и 25 сентября упал в Африке.
Суммарный вес аппарата—176 кГ. Корпус шаровой формы диаметром 99 см изготовлен из алюминиевого сплава (9). Корректирующая двигательная установка (9) предназначена для 'коррекции траектории и перевода аппарата на селеноцентрическую орбиту. Вес установки — 26 кГ. Двигательная установка двухкамерная, первая камера расположена в передней части аппарата с соплом, обращенным по направлению полета, вторая — с противоположной стороны с соплом против полета. Камеры расположены по оси вращения аппарата, сопла .длиной по 20 см выступают за корпус. Топливом служит гид
13
разин (вес 80 кГ), хранящийся в сферическом баке при начальном давлении 28,5 кГ/см2. Для 'воспламенения в камеры двигательной установки подается четырехокись азота, образующая с гидразином самовоспламеняющуюся смесь; четы-рехогкись азота хранится в 6 бачках объемом по 8 см3, катализатором служит окись аммония. Система подачи топлива — вытеснительная с помощью сжатого азота, хранящегося в двух сферических баллонах при давлении 140 кГ/см2. По мере расходования азота давление в баллонах понижается и в устройство, определяющее длительность импульса при коррекции, автоматически вводится соответствующая поправка. Для подачи топлива в условиях невесомости аппарату придается с помощью 10 микроракетных двигателей вращение вокруг продольной оси, а горловины заборных трубопроводов расположены по «экватору» бака. К первой камере топливо подается по 2 трубопроводам, ко второй — по 4. Камеры имеют тягу от 7,3 до 11,3 кГ в зависимости от давления наддува бака с гидразином. Продолжительность импульса определяется потребной величиной коррекции, максимальный суммарный импульс в направлении полета — 3400 кГ1сек, против полета— 12 200 кГ1сек. Удельная тяга каждой камеры 230 сек. Степень расширения сопел — 50. Установка разработана Лабораторией космической техники.
Система связи включает 2 передатчика мощностью по 1,5 вт с рабочей частотой 378,2 Мгц, 2 приемника и 4 алюминиевые дипольные антенны. В системе терморегулирования (9) использованы активные и пассивные средства. В нескольких местах снаружи корпуса нанесено темное покрытие, прикрываемое четырехлопастными створами белого цвета. При понижении температуры внутри корпуса до минимально допустимого уровня, темные участки открываются и поглощают тепло, при повышении температуры до максимально допустимой эти участки прикрываются лопастями и тепло излучается в пространство.
Система энергопитания имеет химические никель-кадмиевые батареи и солнечные элементы (1800 шт.), расположенные на 4-х панелях.
Телескопы тройных совпадений (2 шт.) предназначены для изучения космической радиации высокой и низкой энергий в межпланетном пространстве, именно — определения типа и энергии космических частиц (протонов, электронов, альфа-частиц и более тяжелых частиц), изучения рентгеновских лучей и тормозного излучения. Каждый телескоп состоит из 7 пропорциональных счетчиков в виде пакета трубок — 6 трубок расположены по кольцу вокруг седьмой, центральной трубки; оба телескопа имеют свинцовую защиту 5 Г1см2 вокруг пакета счетчиков. Телескоп для частиц высокой энергии имеет счетчики из меди диаметром 12,6 мм, длиной 76,2 мм
14
и толщиной стенок 0,71 мм; этим телескопом предполагалось регистрировать протоны с энергией £>75 Мэв, электроны с энергией £>13 Мэв и (центральным счетчиком) тормозное излучение с энергией £>200 кэв. АГелескоп для частиц низкой энергии, имеет счетчики из стали -с толщиной стенок 2,0 ± ±0,1 мм и -свинцовой защитой на половине длины счетчиков; этим телескопом предполагалось регистрировать протоны с энергией £>10 Мэв и электроны с энергией £>0,5 Мэв. Поле зрения телескопов более 180°, их общий вес — 4,1 кГ, энергопотребление— 0,5 вт. Телескопы разработаны Университетом г. Чикаго.
Ионизационная камера интегрирующего типа, объединенная со счетчиком Гейгера, предназначена для изучения космической радиации. Камера разработана Калифорнийским технологическим институтом и Лабораторией реактивного движения и подобна камере, установленной на аппарате Ranger I, галогенный счетчик Гейгера с трубкой типа Anton 302, разработанный Университетом штата Айова, аналогичен счетчику, устанавливавшемуся на аппарате Pioneer IV. Объединенная аппаратура разработана Университетом штата Миннесота. Ионизационная камера предназначена для изучения радиации в космическом пространстве вне атмосферы Земли. Предполагалась регистрация протонов с энергией £> >10 Мэв, альфа-частиц с энергией £>40 Мэв и электронов с энергией £>0,5 Мэв. Точность измерений ± (0,5-Н) %. Камера всенаправленного действия. Энергопотребление — 4— 10 мет. Описание счетчика Гейгера приведено выше для аппарата Pioneer IV Магнитометр такой же, как на экспериментальном аппарате.
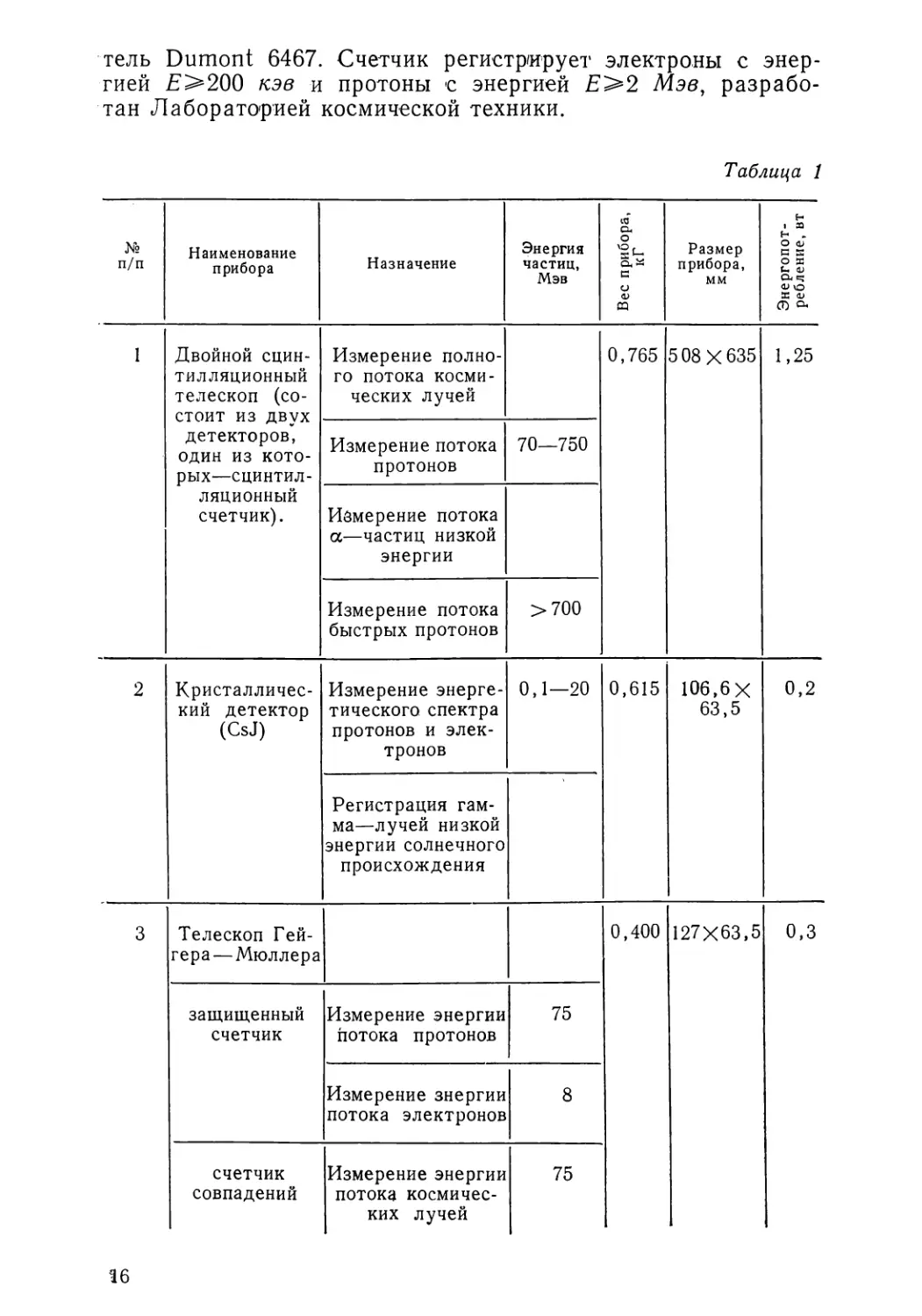
Аппаратура для изучения космических лучей, разработанная Центром космических полетов им. Годдарда, предназначена для изучения природы космических лучей, их вариаций вне магнитного поля Земли, связи солнечной активности с интенсивностью космических лучей, механизма 11-летнего-цикла солнечной активности. В таблице 1 приведены характеристики аппаратуры.
Детектор микрометеоритов предназначен для определения плотности потока микрометеоров по траектории полета аппарата и на селеноцентрической орбите. Разработан Центром космических полетов им. Годдарда. Аппаратура для измерения температуры и изучения состояния поверхности аппарата разработана Центром космических полетов-им. Годдарда.
Сцинтилляционный счетчик предназначен для регистрации первичных электронов и протонов низкой энергии, он состоит из пластикового сцинтиллятора диаметром около 25 мм и толщиной стенок 6,3 мм, вмонтированного в фотоумножи
15
тель Dumont 6467. Счетчик регистрирует электроны с энергией Е>200 кэв и протоны с энергией Е>2 Мэв, разработан Лабораторией космической техники.
Таблица 1
№ п/п Наименование прибора Назначение Энергия частиц, Мэв Вес прибора, к Г Размер прибора, мм Энергопотребление, ВТ
1 Двойной СЦИНТИЛЛЯЦИОННЫЙ телескоп (состоит из двух детекторов, один из которых—сцинтилляционный счетчик). Измерение полного потока космических лучей 0,765 5 08X635 1,25
Измерение потока протонов 70—750
Измерение потока а—частиц низкой энергии
Измерение потока быстрых протонов >700
2 Кристаллический детектор (CsJ) Измерение энергетического спектра протонов и электронов 0,1—20 0,615 106.6Х 63,5 0,2
Регистрация гамма—лучей низкой энергии солнечного происхождения
3 Телескоп Гейгера— Мюллера 0,400 127X63,5 0,3
защищенный счетчик Измерение энергии потока протонов 75
Измерение энергии потока электронов 8
счетчик совпадений Измерение энергии потока космических лучей 75
16
Анализатор протонов (плазменный зонд) предназначен для измерения потока протонов низкой энергии, их спектра, концентрации протонов в солнечной плазме при солнечных вспышках, изучения заряженных частиц в космосе и в радиационном поясе в период солнечной активности. Анализатором регистрируются протоны с энергией Е = 0,2—20 кэв с точностью ±5%, угловое разрешение 20°, энергопотребление— 145 Мет; разработан Научно-исследовательским центром им. Эймса.
Головные организации по разработке аппарата — Центр космических полетов им. Годдарда и Лаборатория космической техники, по разработке программы исследований — NASA и Центр космических полетов им. Годдарда.
9. Космический аппарат Pioneer VI (Atlas-Able 5В) (1—5, 7)
Цель запуска и назначение — как у предыдущего аппарата. Запуск аппарата произведен 15 декабря 1960 г. с м. Канаверал ракетой-носителем Atlas—Able с РДТТ ABL-248 в качестве III ступени. На 68-й сек. после старта на высоте 13 км из-за преждевременного -включения двигателя II ступени ракета-носитель взорвалась.
Конструкция, состав служебного оборудования и научной аппаратуры — как у предыдущего аппарата, отличием является лишь установленный на аппарате дополнительно детектор протонов низкой энергии. Вес аппарата — 176 кГ.
Основные организации-разработчики аппарата — те же, что и для предыдущего аппарата.
10. Некоторые итоги программы Pioneer
В течение 1958—1960 гг. в рамках программы исследования Луны произведено 8 запусков аппаратов Pioneer. Все они своих задач не выполнили. Программа состояла из 2-х этапов. На первом этапе (1958—1959 гг.) предполагалось провести исследования межпланетного пространства на траектории полета к Луне и в окололунном пространстве; основной задачей этапа была доставка аппарата в район Луны и получение телевизионных изображений лунной поверхности. На этом этапе произведено 5 запусков, оказавшихся неудачными из-за неисправности ракеты-носителя. Ввиду этого было принято решение отказаться от ракеты-носителя Thor-Able и использовать ракету-носитель Juno II. Поскольку эта ракета менее мощная, чем Thor-Able, то был разработан новый аппарат, в 6 раз меньшего веса, что сузило круг
2-6157
17
решаемых задач. Последующие два аппарата (Pioneer III и Pioneer IV) (предназначались для полета в район Луны, испытания бортовых систем и проведения ограниченного числа исследований по изучению радиации во внешней зоне радиационного пояса и на траектории полета. Запуск аппарата Pioneer III окончился неудачей из-за неисправности ракеты-носителя, аппарат Pioneer IV был доставлен в район Луны, но из-за неточного выведения на траекторию полета прошел на чрезмерно большом расстоянии от Луны, что не позволило провести запланированные испытания бортовых систем. Получены неокторые данные о космической радиации.
Вторым этапом программы (1959—1960 гг.) предусматривался вывод аппарата на 'селеноцентрическую орбиту и. проведение исследований в окололунном пространстве и в; межпланетном пространстве по траектории полета. На этом этапе произведено 3 запуска с использованием ракеты-носителя Atlas-Able с дополнительной III ступенью, что позволило увеличить вес аппарата. Запуски также окончились неудачей из-за неисправности ракеты-носителя.
В январе 1967 г. с использованием аппарата Pioneer VII (предназначен для исследования межпланетного, пространства, запущен 17 августа 1966 г. и выведен на гелиоцентрическую орбиту), проведен эксперимент по обнаружению следов атмосферы Луны. Проведение эксперимента было, приурочено к моменту частичного радиозахода аппарата за Луну. 45-метровым радиотелескопом Станфордского университета на аппарат были посланы сигналы на двух частотах,, затем ретранслированные им и принятые станцией слежения в Тидбинбилла (Австралия). С технической стороны эксперимент прошел успешно.
Библиография
1. Chester М. Rockets and spacecraft of the world. New Jork, Norton,. 1964, 206 p. p., 1966, 6.62.2*
2. Cortringht E. M. Automated spacecraft of the United States. «Proc. 5th Internat. Sympos. Space Technol. and Sci., Tokyo, 1963», Tokyo, AGNE Corp., 1964, 9—24 1966, 12.62.53
3. Gattland K. N. Spacecraft and boosters, London, Iliffe, 1964, 264 p. p.
4. Haviland R. P. Handbook of Satellites and space Vehicles. S. I. van Nostrand Co., 1965, XYI, 457 p. p.
5. Le GalleyDonaldP. Introduction-programs for the conquest of space «Space Phvs.» New Jork—London—Sydney, John Wiley and sons, Inc.. 1964, 1—42'. 1965, 7.62.128.
* В конце каждого библиографического описания дана ссылка на номер соответствующего реферата в РЖ.
18
6. Lunar satellite. «Aeroplane and Astronaut.», 1960, 99, № 2560, 638—639.
7. Nicks O. W. Space-sciences-lunar and planetary exploration. «Proc. Conf. Space—Age Plann., 3rd Nat. Conf. Peaceful Uses Space, Chicago, 1963.», Washington, D. C., NASA, 1963, 27—36. 1965, 10.62.102
8. Pickering W. H. History of the Juno cluster system. «Astronaut. Engng. and Sci.», New York—Toronto—London, McGraw—Hill Book Go., Inc., 1963, 203—214. 1965, 7.62.69
9. Pioneer VI designed for Moon orbit. «Aviat. Week and Space Technol.», 1960, 73, l№ 11, 56—57, 59. 1962, 1.51.670
10. S h u к 1 a S. Problems of space communication. «Univ. Roorkee Res. J.», 1965, 8, № 3—4, Part. 4, 1—8.
2*
II. ИЗУЧЕНИЕ ОКОЛОЛУННОГО ПРОСТРАНСТВА ПО ПРОГРАММЕ СПУТНИКОВ-ЗОНДОВ
В программе NASA по изучению окололунного пространства предусматривалось создание спутников-зондов, получивших обозначение Р-14 (P-Probe-зонд). К этой серии отнесен спутник Explorer X.
Спутник Explorer X (1—3)
Назначение спутника — измерение физических параметров окололунного пространства со стороны, обращенной к Земле, и некоторых характеристик космического пространства. Предусматривалось осуществить измерение характеристик магнитного поля Луны и регистрацию протонов в солнечной плазме.
Запуск спутника Explorer X произведен 25 марта 1961 г. с. м. Канаверал ракетой-носителем Thor-Delta, спутник выведен на орбиту с высотой перигея 221 км и апогея 181 000 км; наклонением 33° и периодом обращения 83 час. 33 мин. По международной системе спутник получил обозначение 1961 х. Информация со спутника принималась в течение 64 час., в т. ч. в течение 20,5 час. после прохождения апогея. Прием информации и слежение осуществлялись станциями в Голдстоуне, на полигоне Вумера и радиоастрономической обсерваторией Джодрелл-Бэнк. 28 марта 1961 г. связь со спутником прекратилась. Проведенные исследования позволили обнаружить на расстоянии более 100 тыс. км от Земли магнитное поле напряженностью свыше 2-10_5 э.
В корпусе спутника цилиндрической формы диаметром 49,2 см размещается служебное оборудование и часть научной аппаратуры. К корпусу прикреплена опорная труба из фибергласса, на вершине которой смонтирована электрически заряженная сфера с установленным внутри магнито
20
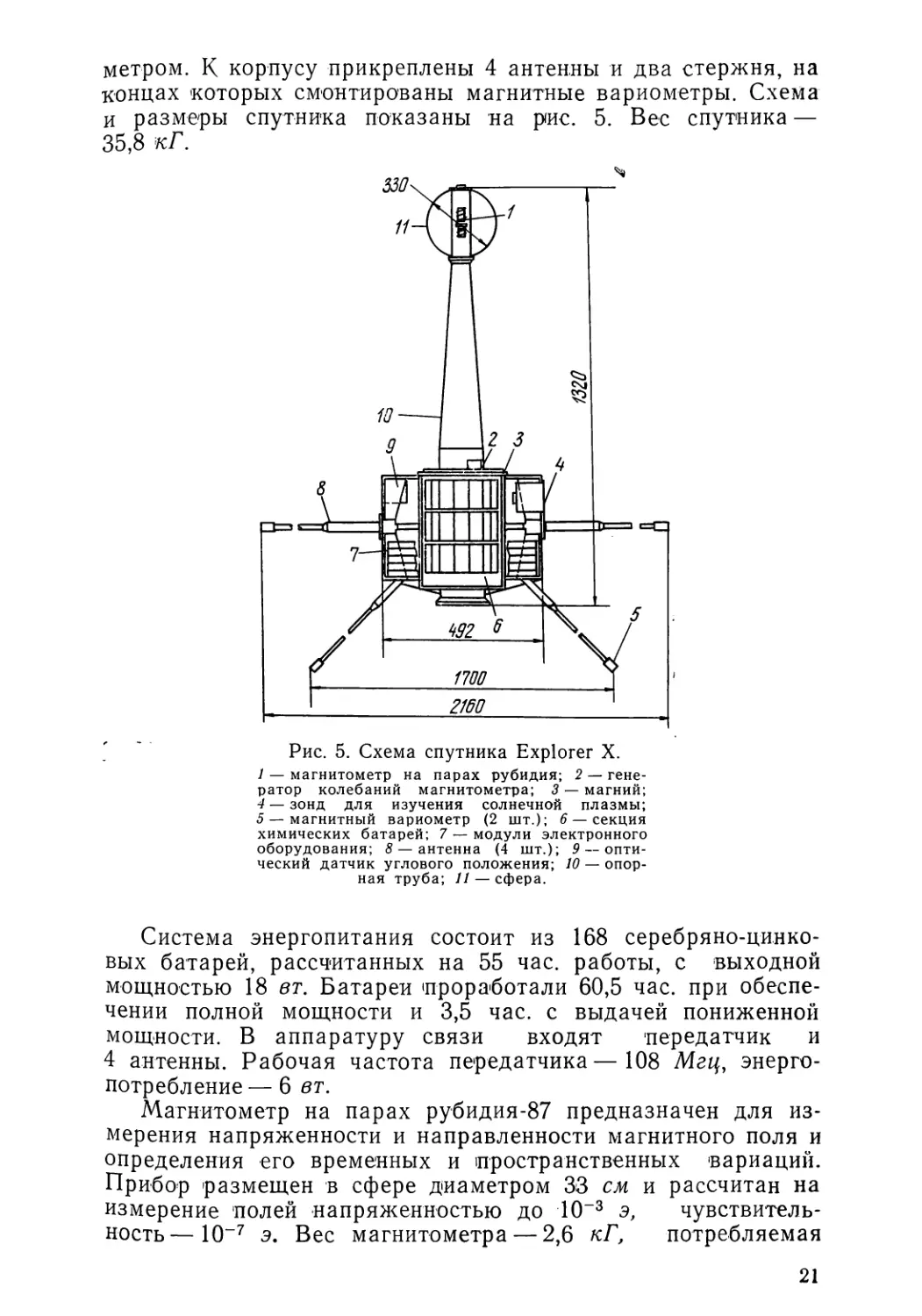
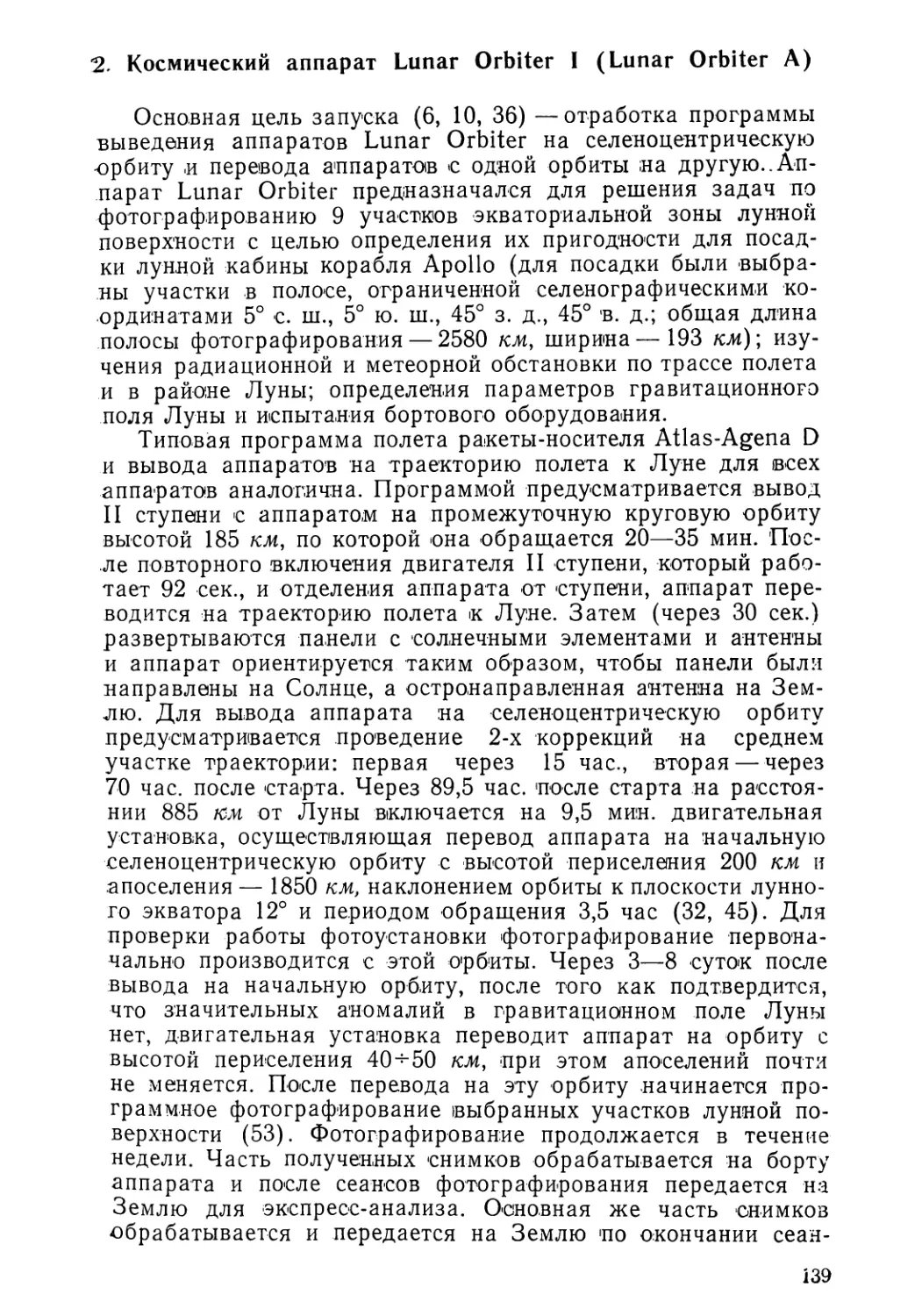
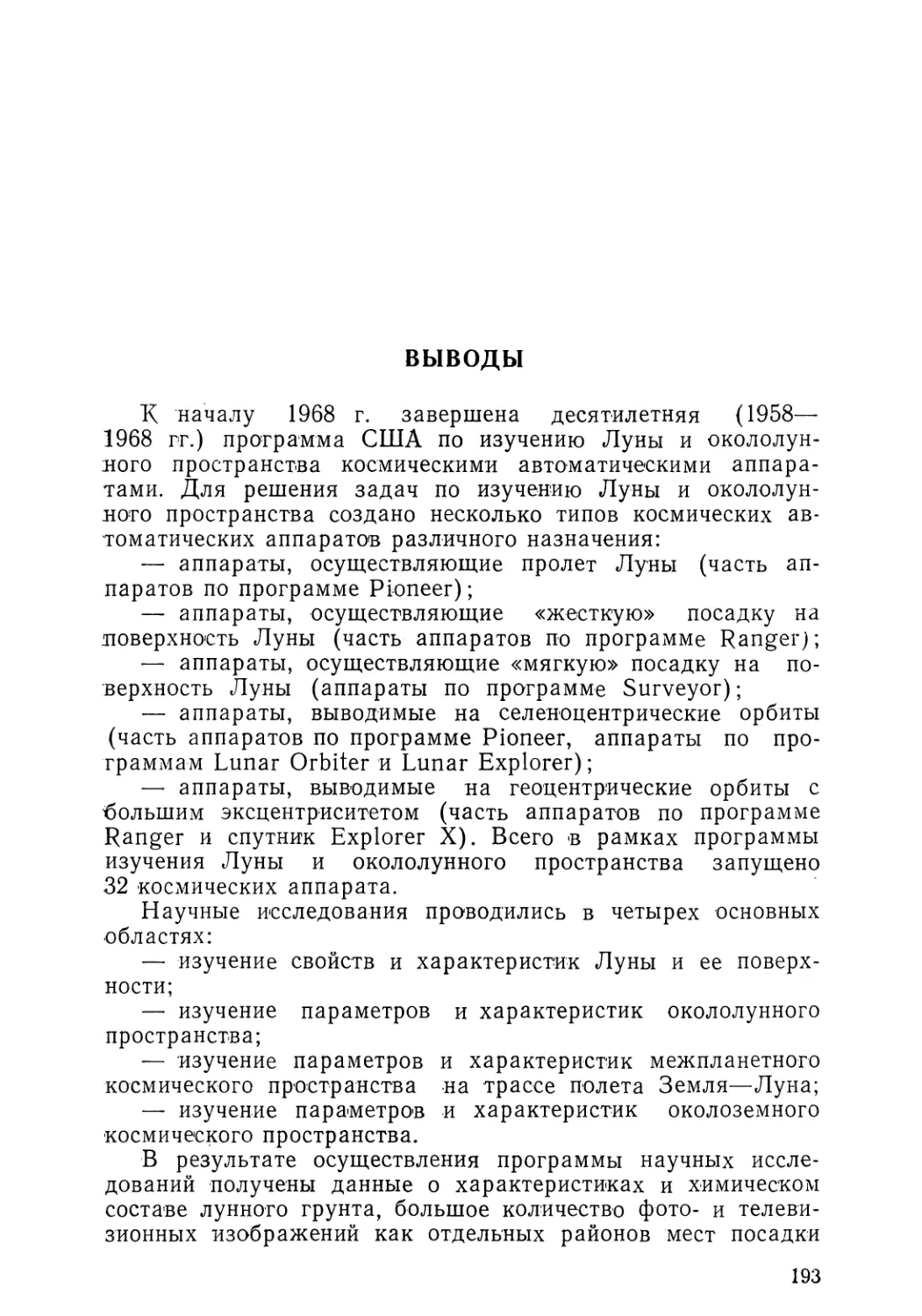
метром. К корпусу прикреплены 4 антенны и два стержня, на концах которых смонтированы магнитные вариометры. Схема и размеры спутника показаны на рис. 5. Вес спутника — 35,8 кГ.
Рис. 5. Схема спутника Explorer X.
1 — магнитометр на парах рубидия; 2 — генератор колебаний магнитометра; 3 — магний; 4 — зонд для изучения солнечной плазмы;
5 — магнитный вариометр (2 шт.); 6 — секция химических батарей; 7 — модули электронного оборудования; 8 — антенна (4 шт.); 9 — оптический датчик углового положения; 10 — опорная труба; 11 — сфера.
Система энергопитания состоит из 168 серебряно-цинко-вых батарей, рассчитанных на 55 час. работы, с выходной мощностью 18 вт. Батареи проработали 60,5 час. при обеспечении полной мощности и 3,5 час. с выдачей пониженной мощности. В аппаратуру связи входят передатчик и 4 антенны. Рабочая частота передатчика—108 Мгц, энергопотребление — 6 вт.
Магнитометр на парах рубидия-87 предназначен для измерения напряженности и направленности магнитного поля и определения его временных и пространственных вариаций. Прибор размещен в сфере диаметром 33 см и рассчитан на измерение полей напряженностью до 10-3 э, чувствительность— 10-7 э. Вес магнитометра — 2,6 кГ, потребляемая
21
мощность — 4,1 вт. Разработан под руководством Центра космических полетов им. Годдарда.
Магнитные вариометры (2 шт.) предназначены для 'измерения напряженности и направленности межпланетного магнитного поля в пространстве между Землей и Луной. Каждый вариометр состоит из 3 датчиков, измеряющих компоненты магнитного поля по трем направлениям в диапазоне 10“4-^ -И0~2 а, точность измерений ±10-4 э. Энергопотребление каждого вариометра 405 мет. Вариометры разработаны Университетом штата Нью-Гэмпшир.
Зонд для изучения солнечной плазмы (ловушка Фарадея) ‘предназначен для определения скорости тепловых протонов в солнечной плазме с энергией Е=120—2500 эв на расстояниях 10—15 земных радиусов в течение 60 часов. Чувствительный детектор зонда установлен в корпусе спутника, угол обзора его около 1 стерадиана, энергопотребление— 0,4 вт. Зонд разработан Массачусетским технологическим институтом.
Библиография
1. Astrolog. «Flight Internat.», 1962, 82, №2861, 783
2. Explorer X findings. «Missiles and Rockets», il961, 8, № 14, 11
3. P-14 ready for deep space debut. «Missiles and Rockets», 1961, 8, № 13, 17
III. ИЗУЧЕНИЕ ЛУНЫ ПО ПРОГРАММЕ RANGER
1. Программа создания космических аппаратов Ranger
В 1959 г. NASA был разработан и 21 декабря 1959 г. принят план дальнейшего изучения Луны, предусматривавший создание аппаратов Ranger («Странник»). Руководство работами (по программе Ranger до 1963 г. осуществлялось Лабораторией реактивного движения Калифорнийского политехнического института, работавшей .по контрактам NASA. В марте 1963 г. был заключен контракт NASA с фирмой Northrop Corp., сначала некоторое время работавшей совместно с Лабораторией реактивного движения, а затем ставшей головной по разработке и изготовлению аппаратов Ranger (19).
Изучение Луны по программе Ranger планировалось в несколько последовательных этапов. На первом этапе предполагались запуски аппаратов с фотоустановкой для получения снимков лунной поверхности до момента падения аппарата на Луну. На втором этапе (весна 1961 г.) —доставка аппарата к Луне и отделение от него на расстоянии около 30— 40 км от Луны контейнера с научным оборудованием; установленным на контейнере тормозным двигателем скорость падения должна была снижаться до 150 м!сек. Предполагалось создание аппарата весом 360 кГ, в т. ч. приборный контейнер 45 кГ (без тормозного двигателя) и тормозной двигатель — 90 кГ. В контейнере устанавливаются сейсмометр, приборы для измерения температуры и телевизионная камера для получения изображений лунной поверхности перед падением. Амортизатором при падении контейнера служит разрушающаяся сотовая конструкция. Были заключены контракты NASA на изготовление контейнера — с Ford Motor, тормозного двигателя — с Thiokol Chemical Corp., сейсмографа— с Колумбийским университетом и Калифорнийским политехническим институтом (18). В дальнейшем планы были изменены и принято решение о запуске нескольких аппаратов Ranger
23
на геоцентрическую орбиту для (проверки надежности и работоспособности бортовой аппаратуры и проведения научных исследований. Этот этап должен был стать подготовительным перед целевыми запусками аппаратов к Луне в 1961 г. с помощью ракет-носителей Atlas-Agena В. Предполагалось создание аппаратов весом 320—360 кГ, снабженных панелями с солнечными элементами (площадью 1,8 >н2), обеспечивающими мощность 10 вт и химическими батареями весом 54,5 кГ, емкостью 7 квт-ч при 35 час. непрерывной работы. Связная аппаратура включает два передатчика мощностью 0,25 и 3 вт, работающие в диапазоне от 1000 до 2300 Мгц. На аппарате устанавливаются магнитомер, ионизационная камера, анализатор корпускулярного излучения Солнца и детектор излучения La. Предусматривался запуск аналогичных аппаратов Ranger I и Ranger II на геоцентрическую орбиту с большим эксцентриситетом (высота перигея несколько сот километров, апогея — около 1 млн. км). Обращаясь по такой орбите аппарат совершит 1—2 оборота продолжительностью около 2 месяцев каждый. Одна из основных задач запусков — испытания системы ориентации. По программе полета, после сброса носового обтекателя, прикрывающего аппарат на активном участке полета ракеты-носителя, раскрываются панели с солнечными элементами и аппарат беспорядочно кувыркается. После ориентации на Солнце аппарат продолжает вращаться вокруг оси, направленной на Солнце, пока параболическая антенна не будет ориентирована на Землю. Исполнительными органами системы служат реактивные сопла, работающие на сжатом азоте. Работоспособность системы рассчитана на 60—100 суток.
Второй этап нового плана предусматривал доставку4 аппаратами Ranger III^-V на поверхность Луны приборного контейнера весом 44 кГ. В приборном контейнере из бальзового дерева размещается оборудование весом до 25 кГ, в т. ч. сейсмометр, два акселерометра, источники питания, передатчик с усилителем, направленная антенна, устройство регулирования температуры. Предполагалось использовать уже отработанную систему ориентации, а в системе энергопитания — другие химические батареи, весом 16 кГ, при времени непрерывной работы—10 час. Общая мощность источников электроэнергии должна была равняться 160 вт при суммарном весе 65 кГ. В середине 1961 г. фирма Ford Motor провела испытания приборного контейнера весом 136 кГ в барокамере при температуре до —195° С. Система термостатирования контейнера должна в этих условиях обеспечивать температуру внутри контейнера +24° С. Всего измененным планом предполагалось создание и запуск 5 аппаратов. После запуска аппарата Ranger I было принято решение о создании и запуске дополнительно еще 4 аппаратов (Ranger VI-^IX) с установ
24
кой вместо приборного контейнера телевизионной системы,, разработанной Radio Corporation of America, с целью получения телевизионных изображений лунной поверхности перед, падением аппарата, важных для разработки пилотируемого корабля для полета к Луне. Этапы выполнения программы Ranger приводятся ниже.
2. Космический аппарат Ranger I (29, 44)
Основная цель запуска — отработка программы вывода аппаратов Ranger на геоцентрическую «орбиту с большим эксцентриситетом и испытания бортового оборудования. Предполагалось провести также изучение распределения нейтрального водорода в геокороне, частиц низкой энергии в солнечной плазме, космической радиации, рентгеновского излучения Солнца, регистрацию метеорных частиц и излучения La, измерение напряженности земного и межпланетного магнитных, полей, определение величины трения между различными металлами в условиях космического вакуума. Запуск аппарата Ranger I был произведен 23 августа 1961 г. с м. Канаверал ракетой-носителем Atlas-Agena В. Полет ракеты-носителя до момента повторного включения двигателя II ступени проходил по программе близкой к расчетной. После выхода II ступени с аппаратом на промежуточную круговую орбиту (160 км) и повторной работы двигателя II ступени программой предусматривалось отделение аппарата пружинным устройством от II ступени, разворот ее на 180°, включение тормозных РДТТ и перевод II ступени на более низкую орбиту, чем орбита аппарата./Вывод II ступени с аппаратом на промежуточную1 орбиту и торможение ее планировались для отработки техники запуска аппаратов Ranger, предназначенных для достижения Луны. Разворот II ступени осуществляется для того, чтобы оптические датчики системы ориентации аппарата не реагировали на солнечное излучение, отраженное от ступени. Торможение II ступени необходимо для того, чтобы нестери-лизованная ступень не упала на Луну. Повторное включение двигателя II ступени осуществить не удалось и аппарат вышел на нерасчетную орбиту с параметрами (в скобках указаны расчетные значения): высота перигея 179 км (60000 км),. апогея 446 км (1102850 км), наклонение 32,9°,^период обращения 90,64 мин (58 сут). По международной системе аппарат Ranger I получил обозначение 1961 ф I. 30 августа 1961 г. аппарат вошел в плотные слои атмосферы и сгорел. В целом запуск аппарата Ranger I считается неудачным, т. к. не удалось осуществить повторное включение двигателя II ступени. Проведены испытания бортовых систем и часть из запланированных научных экспериментов. Система ориентации работала нормально и обеспечивала направленность продольной оси:
25.
аппарата на Солнце, кроме периодов, когда аппарат находился в тени Земли. В связи с выходом аппарата на нерасчетную орбиту некоторые приборы (магнитометр, электростатический анализатор, детектор излучения La, сканирующий телескоп не смогли нормально работать (24).
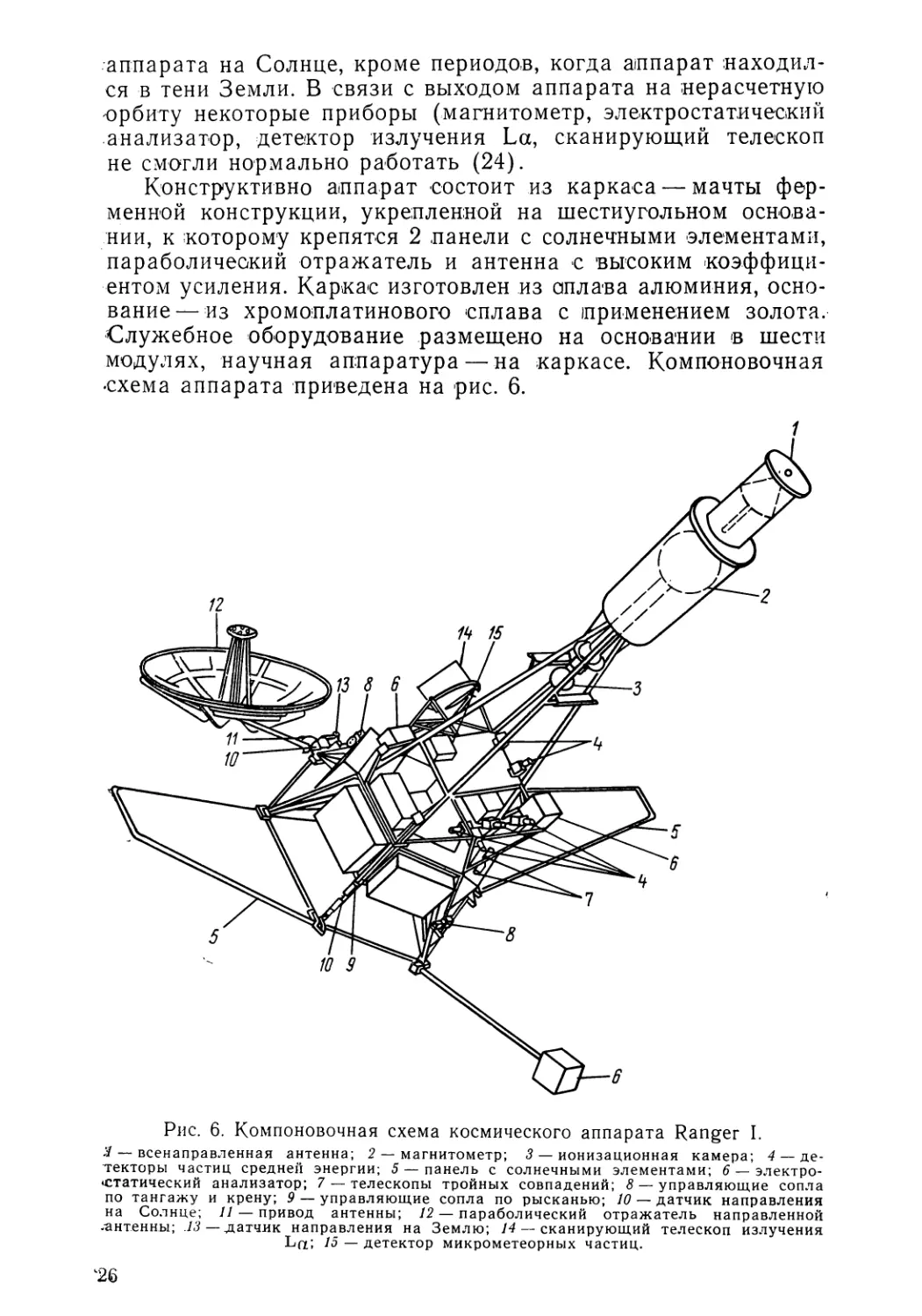
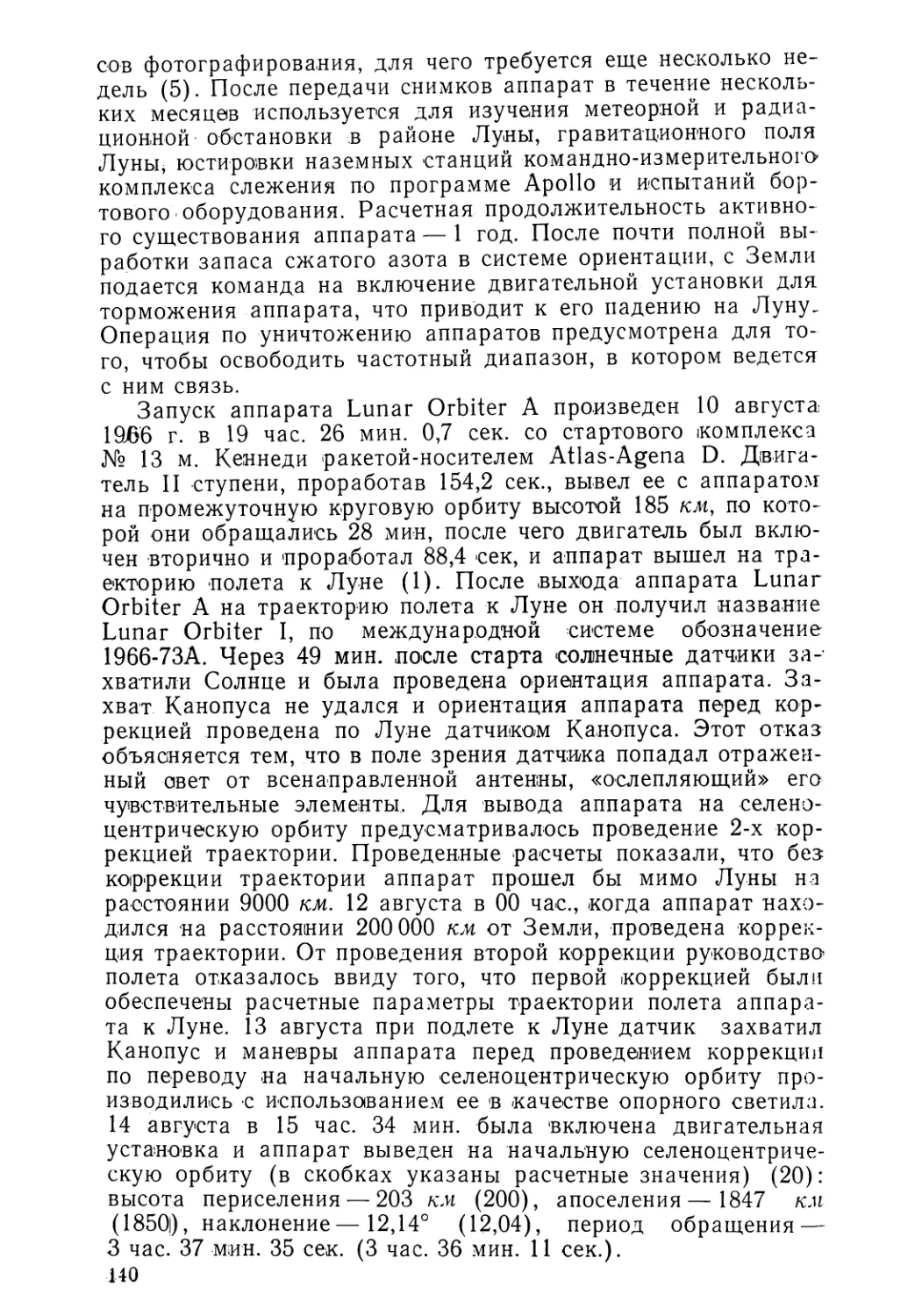
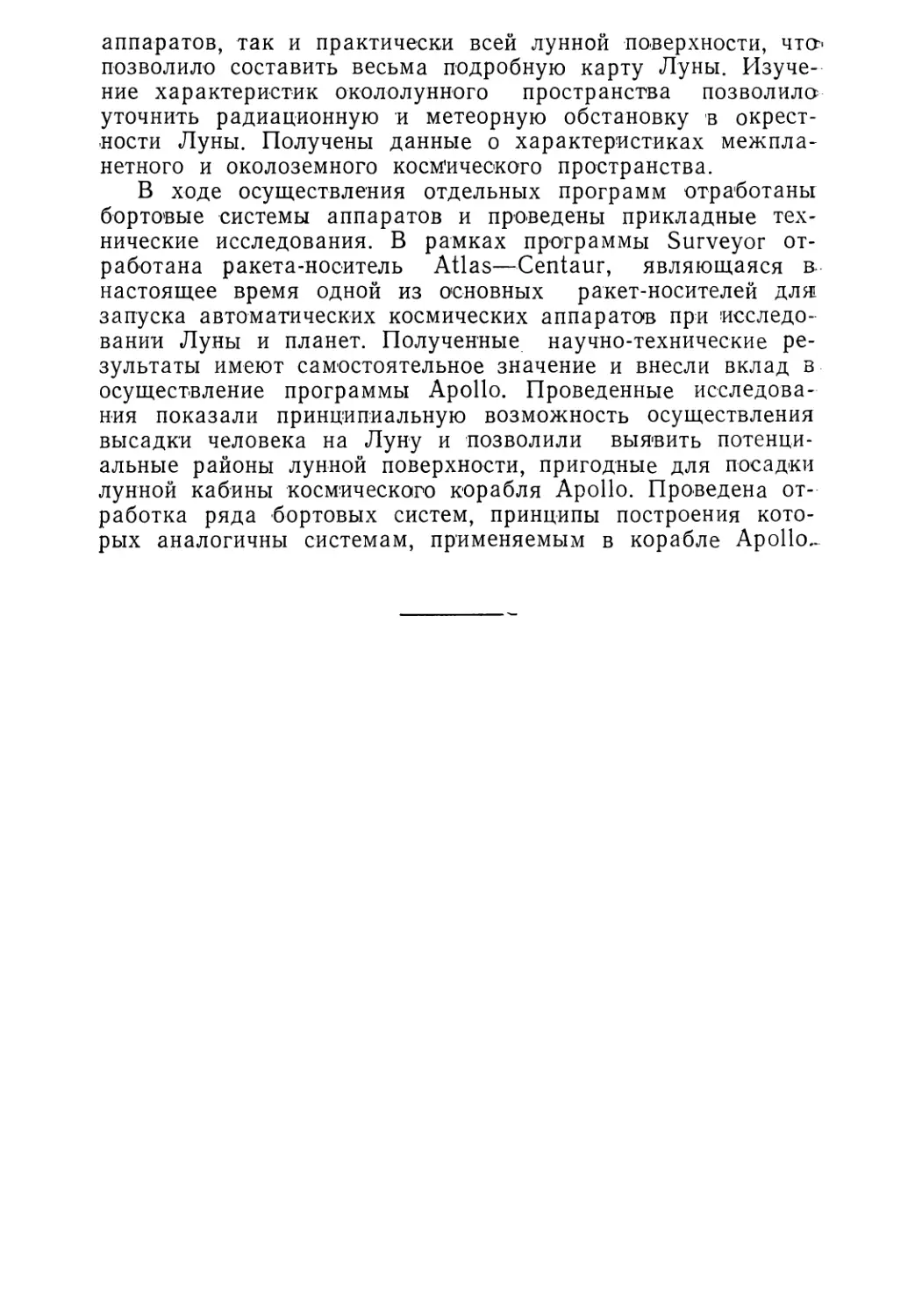
Конструктивно аппарат состоит из каркаса — мачты ферменной конструкции, укрепленной на шестиугольном основании, к которому крепятся 2 панели с солнечными элементами, параболический отражатель и антенна с высоким коэффициентом усиления. Каркас изготовлен из сплава алюминия, основание— из хромоплатинового сплава с применением золота. Служебное оборудование размещено на основании в шести модулях, научная аппаратура — на каркасе. Компоновочная схема аппарата приведена на рис. 6.
Рис. 6. Компоновочная схема космического аппарата Ranger I.
^ — всенаправленная антенна; 2 — магнитометр; 3 — ионизационная камера; 4 — детекторы частиц средней энергии; 5 — панель с солнечными элементами; 6 — электростатический анализатор; 7 — телескопы тройных совпадений; 8 — управляющие сопла по тангажу и крену; 9 — управляющие сопла по рысканью; 10 — датчик направления на Солнце; 11 — привод антенны; 12 — параболический отражатель направленной -антенны; .13—датчик направления на Землю; 14— сканирующий телескоп излучения Lfi; 15 — детектор микрометеорных частиц.
Суммарный вес аппарата — 306 кГ, в т. ч. корпус— 108 кГ, научные приборы — 40 кГ, электронное оборудование — ПО кГ. Диаметр описанной окружности вокруг основания аппарата— 1,52 м, высота — 4,0 ж, максимальный размах при откинутых панелях с солнечными элементами — 5,18 м.
Система ориентации включает 6 датчиков направления на Солнце на фотоэлементах из селенида свинца для ориентации аппарата в плоскости тангажа и рыскания, 3 датчика направления на Землю на фотоумножителях для ориентации аппарата в плоскости крена и ориентации направленной антенны и 10 управляющих реактивных сопел, работающих на сжатом азоте. Запас азота 1,1 кГ хранится в сферическом баллоне диаметром 21 см под давлением 210 ата. Система обеспечит вает ориентацию аппарата относительно Солнца с точностью ±0,5°, направленной антенны на Землю — с точностью ±2°. Датчики направления на Землю и Солнце и управляющие реактивные сопла размещены в нижней части основания аппарата.
Система энергопитания включает 2 панели общей площадью 1,8 м2 с 8680 солнечными элементами мощностью 150 вт. Вес панелей с солнечными элементами — 23 кГ. Основная серебряно-цинковая батарея имеет вес 57 кГ и мощность 9 квт-час. В случае отказа солнечных элементов, научные приборы и служебное оборудование переключаются на питание от батареи, обеспечивающей их работу в течение 2 сут.
Система связи включает 2 передатчика, всенаправленную и направленную антенны. Первый передатчик имеет мощность 0,25 вт, питание обеспечивается серебряно-цинковой батареей, рассчитан на работу в течение 7 суток; телеметрическая информация передается этим передатчиком через направленную антенну. Мощность второго передатчика — 3 вт, питание обеспечивается вначале от основной серебряно-цинковой батареи, затем от солнечных элементов; информация передается этим передатчиком через всенаправленную антенну до выхода аппарата на орбиту, а затем — через направленную антенну. Оба передатчика имеют рабочую частоту 960 Мгц. Направленная антенна с параболическим отражателем диаметром 1,2 м с высоким коэффициентом усиления постоянно направлена на Землю. Параболический отражатель и антенна с высоким коэффициентом усиления, смонтированы на штанге, укрепленной на основании аппарата, а всенаправленная антенна с низким коэффициентом усиления — в верхней части каркаса. До отделения аппарата от II ступени вся информация передается телеметрической системой, установленной на II ступени.
Система терморегулирования пассивного типа. Тепловой режим обеспечивается окраской отдельных участков конструкции в белый цвет, покрытием золотой пленкой и полировкой алюминиевого каркаса.
27
Временное устройство обеспечивает включение научных приборов, передатчиков и другого оборудования и начинает работать за 3 мин до старта. Устройство рассчитано на выдачу в течение всего полета 10 различных команд, причем каждая команда подается по отдельному каналу с отдельным, релейным устройством.
Сканирующий телескоп ^излучения La предназначен для сканирования поверхности Земли в диапазоне длин волн 1050—1350 А и изучения нейтрального водорода в геокороне на длине 1216 А. С помощью этой аппаратуры предполагалось-получить изображение Земли в ультрафиолетовых лучах. Аппаратура включает параболический отражатель с ионизационной /камерой в его фокусе, помещенные в цилиндр без верхнего днища, который является защитой от радиации. Аппаратура смонтирована в карданной системе, позволяющей телескопу осуществлять сканирование в двух взаимно-перпендикулярных плоскостях; повороты осуществляются моторами.. Аппаратура установлена на основании аппарата, угол зрения, телескопа — 0,5°. Общий вес аппаратуры — 6,8 кГ, энергопотребление— 1,4 вт. Оборудование разработано Научно-исследовательской лабораторией ВМС и Лабораторией реактивного движения.
Магнитометр предназначен для измерения напряженности и определения направленности магнитного поля, а также его временных и пространственных вариаций. Магнитометр на парах рубидия-87 помещен в центре сферы диаметром 33 смг изготовленной из фибергласса и установленной на мачте, укрепленной на основании аппарата. Сфера размещена в цилиндре, укрепленном в верхней части ферменной конструкции каркаса (под антенной с низким коэффициентом^усиления). Подобный магнитометр был установлен на спутнике Explorer X (см. гл. II).
Электростатический анализатор (детектор, корпускулярного излучения Солнца) предназначен для измерения энергии протонов и электронов низкой энергии в солнечной плазме (в функции знака заряда и энергии на единицу заряда) и определения направления их движения. На аппарате установлено-6 анализаторов по шести перпендикулярным направлениям, часть из них —на основании аппарата, а часть вынесена на штанге, укрепленной к основанию аппарата. Анализаторами предполагалась регистрация электронов с энергией £=13,7^--И10 эв и протонов с энергией Е= 13,7-^-5490 эв; они рассчитаны на регистрацию потока частиц в диапазоне 8,бХ104-^ -*8,6X1011 см~2 сект1. Каждый анализатор имеет угол обзора 15°. Суммарный вес анализаторов—15 кГ, энергопотребление— 2,74 вт. Анализаторы разработаны Лабораторией реактивного движения.
28
Детекторы частиц средней энергии 'предназначены для регистрации протонов и электронов в солнечной плазме и измерения вызываемой ими радиации в диапазоне энергий от нескольких (сотен эв до нескольких кэв. На аппарате установлено 6 различных детекторов, расположенных в средней части каркаса. Общий вес детекторов—1,7 кГ, энергопотребление— 0,16 вт. Детекторы (4 шт.) на кристалле CdS, один из которых имеет отклоняющий магнит, собраны в пары и отклонены на 45° от направления на Солнце; детектором с отклоняющим магнитом регистрируются протоны с энергией £>400 эв и электроны с энергией £>500 кэв. угловое разрешение 10~2 стерад. три других детектора регистрируют протоны с энергией £>100 эв и электроны с энергией £>35 кэв. угловое разрешение одного из них 10_3-^5X10~2 стерад. двух других—10-2 стерад. Счетчик Гейгера-Мюллера типа Anton 213 с открытым нижним концом предназначен для регистрации протонов с энергией £<0,5 Мэв и электронов с энергией £<35 кэв\ эти детекторы разработаны Университетом штата Айова.
6-й детектор с поверхностным запорным слоем из золота, .легированного кремнием, состоит из двух тонких кремниевых дисков, покрытых золотом и расположенных один за другим. Протоны с энергией 0,5 Л4эв<Е<5 Мэв доходят до верхнего диска и вызывают поток ионов, достаточный для их регистрации, протоны с 5 Л4эв<Е<10 Мэв проходят верхний диск и регистрируются вторым диском, протоны с Е>10 Мэв проходят через оба диска и не регистрируются; это значение и является верхним пределом энергии частиц, регистрируемых детектором, электроны этим детектором не регистрируются. Детектор разработан Университетом г. Чикаго.
Телескопы тройных совпадений (2 шт.) расположены в нижней части каркаса; аналогичные телескопы были' установлены на аппарате Pioneer VI, запущенном 25 сентября 1960 г. (см. гл. I, раздел 8|). Ионизационная камера предназначена для изучения первичной радиации и радиации в космическом пространстве вне атмосферы Земли; аналогичная камера была также установлена на аппарате Pioneer VI.
Детектор микрометеоритных частиц предназначен для измерения потоков микрометеоров в функции энергии, импульса и направления движения этих частиц. Детектор состоит из двух частей — чувствительного элемента, при ударе частиц дающего световую «вспышку», и кристаллического элемента. «Вспыхивающий» элемент измеряет кинетическую энергию частиц, а кристаллический — импульс, массу, скорость и энергию частиц. «Вспыхивающий» элемент имеет порог регистрации энергии, равный 10-2 эре. и обеспечивает регистрацию в минуту 3 ударов высокой энергии, 7 ударов средней энергии или 31 удара с энергией сверх порога. Кристаллический эле
29
мент имеет порог регистрации 10~4 Г см)сек. Вес детектора — 1,6 кГ, потребляемая энергия — 0,2 вт. Детектор установлен в средней части каркаса, разработан Центром космических полетов им. Годдарда.
Сцинтилляционные счетчики рентгеновского излучения Солнца (2 шт.) предназначены для регистрации малых вариаций рентгеновских лучей низкой энергии солнечного происхождения при солнечных вспышках. Каждый прибор состоит из двух сцинтилляционных детекторов, чувствительная поверхность которых направлена на Солнце; 6 светонепроницаемых окон на фасаде каждого детектора обеспечивают защиту от микрометеорных частиц, а рентгеновские лучи проходят через них. Счетчики рассчитаны на регистрацию рентгеновских лучей с энергией Е=\—20 кэв, их угловое разрешение — 2 л, вес счетчиков — 5,5 кГ, энергопотребление — 2 вт. Счетчики разработаны Лос-Аламосской научной лабораторией совместно с Sandia Corp.
Динамометры предназначены для измерения трения между различными ’металлами в условиях космического вакуума. Образцы металлов, имеющие форму дисков, смонтированы на валу, приводимом в движение электромотором; при его вращении они трутся о неподвижные образцы полусферической формы. Всего должно было испытываться 80 различных комбинаций металлов.
Стерилизация аппарата не предусматривалась. Слежение за аппаратом осуществлялось станциями системы DSIF (Deep' Space Instrumentation Facility—приборное оборудование для дальнего космоса) в Голдстоуне, Крюгерсдорпе и Айленд-Лагун, а на первом участке полета также мобильной станцией, расположенной рядом со станцией в Крюгерсдорпе. Мобильная станция имеет более широкий луч направленности (10° вместо Г) и большую скорость сканирования (10 град/сек вместо 1 град/сек), чем станции системы DSIF. Станции системы имели в тот период антенны с отражателем диаметром 26 ж, а мобильная станция — 3 м. О системе DSIF см. гл. IV, раздел 2. Головная организация по разработке аппарата и программы исследований — Лаборатория реактивного движения.
3. Космический аппарат Ranger II
Цель запуска и назначение аппарата — как у аппарата Ranger I. Запуск аппарата произведен 18 ноября 1961 с м. Канаверал ракетой-носителем Atlas-Agena В. Полет ракеты-носителя до момента повторного включения двигателя II ступени проходил по программе, близкой к расчетной (программа полета аппарата аналогична программе для аппарата
зо
Ranger I). Неисправность 'системы стабилизации привела кг вращению II ступени, что препятствовало поступлению топлива в двигатель II ступени и повторно включить его не удалось. Аппарат вышел на нерасчетную орбиту с параметрами (в скобках указаны расчетные значения): высота перигея 150 км (60000 км), апогея 242 км (1102850 км), наклонение 33°,34, /период обращения 88,28 мин (58 сут). По международной системе аппарат Ranger II получил обозначение 1961 аб. 20 ноября, совершив несколько оборотов, аппарат вошел в плотные слои атмосферы и разрушился (31).
Конструкция, состав служебного оборудования и научной аппаратуры аппарата — как у аппарата Ranger I. Отличием комплекта научной аппаратуры является установка в составе детектора частиц средней энергии дополнительного счетчика Гейгера —Мюллера для изучения радиации в области энергии от нескольких кэв до нескольких Мэв. Детектором служит счетчик Гейгера — Мюллера типа Anton 112 в виде тонкостенного цилиндра из титана с защитой 30 мг/см2; им регистрируются протоны с энергией Е>3 Мэв и электроны с энергией Е>200 Мэв в конусе с углом около 10°. Энергопотребление детектора — 0,16 вт. Разработчик детектора — Университет шт. Айова. Суммарный вес аппарата — 306 кГ. Аппарат стерилизацию не проходил.
4. Космический аппарат Ranger III (3, 10, 12, 34, 36, 49, 55)
Аппарат предназначен для получения телевизионных изображений лунной поверхности при подлете к Луне, регистрации сейсмических колебаний поверхности Луны и у-излучения на траектории полета, определения концентрации радиоактивных элементов в лунных породах по у-излучению, изучения характеристик поверхности Луны и характера отражения сигналов радиолокационного альтиметра от поверхности Луны. Приборный контейнер предполагалось доставить в район Океана Бурь и проводить исследования в течение 30 суток. Как показали расчеты, вероятность успешной доставки приборного контейнера на Луну с помощью аппаратов Ranger составляет 40—60%.
Запуск аппарата Ranger III (рис. 7) произведен 26 января 1962 г. с м. Канаверал ракетой-носителем Atlas-Agena В. Полет ракеты-носителя до момента окончания повторного периода работы двигателя II ступени проходил по программе близкой к расчетной. Двигатель II ступени при повторном включении работал больше расчетного времени и в конце активного участка аппарату была сообщена скорость 11,1 км)сек, превышающая расчетную на 0,2 км!сек, что не-могло быть скомпенсировано корректирующей двигательной:
31
установкой. По сигналу станции слежения системы DSIF в Голдстоуне при приближении аппарата -к Луне телевизионная камера была направлена на Луну и (включена. Недостаточно
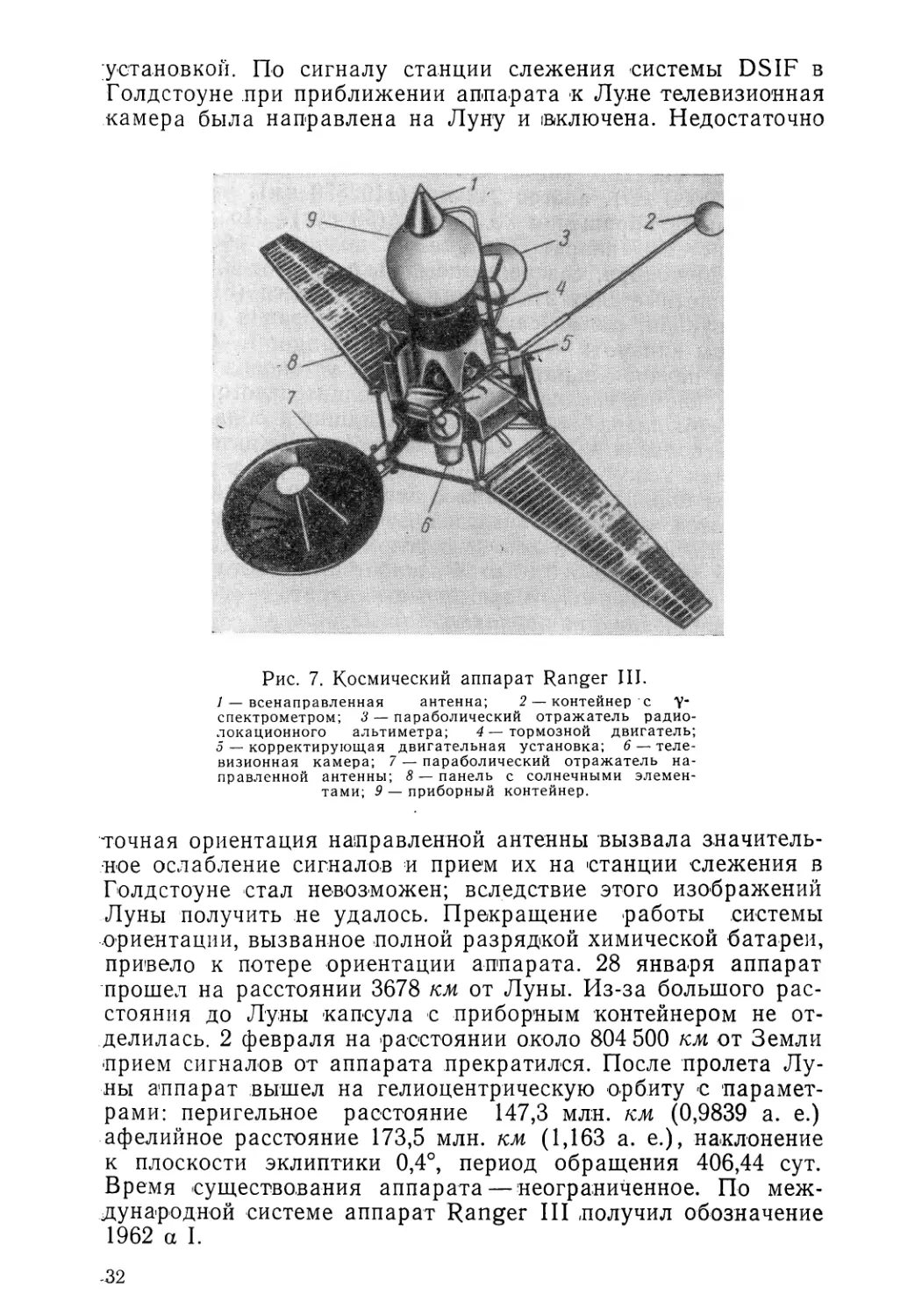
Рис. 7. Космический аппарат Ranger III.
/ — всенаправленная антенна; 2 — контейнер с у-спектрометром; 3 — параболический отражатель радиолокационного альтиметра; 4 — тормозной двигатель; 5 — корректирующая двигательная установка; 6 — телевизионная камера; 7 — параболический отражатель направленной антенны; 8 — панель с солнечными элементами; 9 — приборный контейнер.
точная ориентация направленной антенны вызвала значительное ослабление сигналов и прием их на станции слежения в Голдстоуне стал невозможен; вследствие этого изображений Луны получить не удалось. Прекращение работы системы ориентации, вызванное полной разрядкой химической батареи, привело к потере ориентации аппарата. 28 января аппарат прошел на расстоянии 3678 км от Луны. Из-за большого расстояния до Луны -капсула с приборным контейнером не отделилась. 2 февраля на расстоянии около 804 500 км от Земли прием сигналов от аппарата прекратился. После пролета Луны аппарат вышел на гелиоцентрическую орбиту с параметрами: перигельное расстояние 147,3 млн. км (0,9839 а. е.) афелийное расстояние 173,5 млн. км (1,163 а. е.), наклонение к плоскости эклиптики 0,4°, период обращения 406,44 сут. Время существования аппарата — неограниченное. По международной системе аппарат Ranger III получил обозначение 1962 а I.
-32
Ниже приводится расчетная программа полета аппарата. Т—момент старта; Г+1500 сек. — отделение аппарата от II ступени, включение программного и телеметрического оборудования (до отделения аппарата используется телеметрическое оборудование на II ступени), разворот II ступени на 180°; Г+1800 сек. — откидывание направленной антенны и панелей с солнечными элементами; Г+1980 сек.—включение системы ориентации; Т + 3,5 час. — ориентация направленной антенны на Землю; Г+4 час. — включение у —спектрометра; Г+16 час — подача с Земли команды на включение корректирующей двигательной установки. Перед включением направленная антенна прижимается к корпусу аппарата во избежание 'повреждения ее истекающими газами, бортовая аппаратура переключается на всенаправленную антенну, после окончания коррекции аппарат ориентируется относительно Солнца; ;Г+18,5 час — переключение аппаратуры на направленную ‘"антенну, выдвижение телескопической консоли с у-спектрометром пневматическим устройством. Начиная с этого момента телеметрические сигналы от у-спектрометра передаются каждые 8 минут. Гк — момент падения незаторможенного аппарата (без приборного контейнера) на Луну; Гк — 65 мин (расстояние до Луны — 7300 км)—ориентация аппарата т. о., чтобы телекамера была направлена на Луну. После ориентации солнечные элементы не освещены Солнцем и бортовая аппаратура переключается на питание от химической батареи. Всенаправленная антенна отводится в сторону, откидывается кронштейн с радиолокационным альтиметром; Гк — 40 мин. (расстояние до Луны — 3840 км) —начало работы телекамеры, которая автоматическим устройством вклю< чается каждые 13 сек. и передает изображения каждые 10 сек. Периоды (3 сек.), когда камера выключена, используются для передачи сигналов от радиолокационного альтиметра и у-спектрометра (сигналы от у-спектрометра с этого момента передаются каждые 52 сек.); Гк — 8,1 сек. (расстояние до Луны — 21340 м) —начало работы автоматической системы, обеспечивающей отделение от аппарата капсулы с приборным контейнером и тормозным двигателем. Отделение капсулы с контейнером и тормозным двигателем происходит после срабатывания разрывных болтов. Отделившийся контейнер стабилизируется вращением со скоростью 300 об/мин тремя реактивными соплами. Затем включается тормозной двигатель, который, снизив скорость падения контейнера до 0 (на расстоянии 330 м от поверхности Луны), отделяется. Расчетная скорость падения контейнера не более 70 м/сек (4).
Конструктивно аппарат имеет много общего с аппаратом .Ranger I, но с постановкой новых задач в его конструкцию внесены изменения. Вместо каркаса ферменной конструкции на основании аппарата установлена капсула с приборным
3—6157 33
контейнером с научной аппаратурой и служебным и вспомогательным оборудованием, обеспечивающим отделение капсулы от аппарата и прилунение контейнера. В верхней части контейнера установлена всенаправленная антенна, на боковой поверхности основания смонтирована телевизионная камера. Суммарный вес аппарата — 330 кГ, в т. ч. каркаса — 36 кГ. Диаметр описанной окружности вокруг основания аппарата— 1,52 ж, высота — 3,12 ж, максимальный размах при откинутых панелях с солнечными элементами — 5,18 м.
Система энергопитания включает 2 панели общей площадью 1,8 м2 с 8680 солнечными элементами мощностью 150 вт, вес панелей—19 кГ. Серебряно-цинковая батарея мощностью около 1000 вт-ч весит 11 кГ. Серебряно-кад-миевые батареи (6 шт.) расположены в приборном контейнере.
Радиолокационный альтиметр предназначен для выдачи команд на отделение капсулы от аппарата и включение тормозного двигателя; по характеру отражения радиолокационных импульсов предполагалось провести изучение характеристик лунной поверхности. Альтиметр с антенной, параболическим отражателем и химическими батареями, обеспечивающими его питание, установлен на откидывающемся кронштейне в нижней части капсулы. Приемником сигналов служил гетеродин, излучателем— клистрон. Длительность импульсов— 2 реек., частота повторения — 500—600 имп/сек; на выходе из магнетрона передатчика импульс имеет мощность от 150 до 400 вт. Частота излучения — 9400 Мгц, ширина полосы частот приемника—12—16 Мгц, диапазон шумов приемника— 11—12 дб. Ширина диаграммы направленности антенны альтиметра—12°. Вес альтиметра — 2,95 кГ, антенны с отражателем — 5 кГ. Команды на отделение капсулы и включение тормозного двигателя подаются на высотах от 19’ до 25 км от поверхности Луны. Измерения альтиметром производятся до момента контакта капсулы с лунной поверхностью. Площадь лунной поверхности, облучаемая альтиметром, равна 153 км2. Альтиметр разработан Лабораторией реактивного движения.
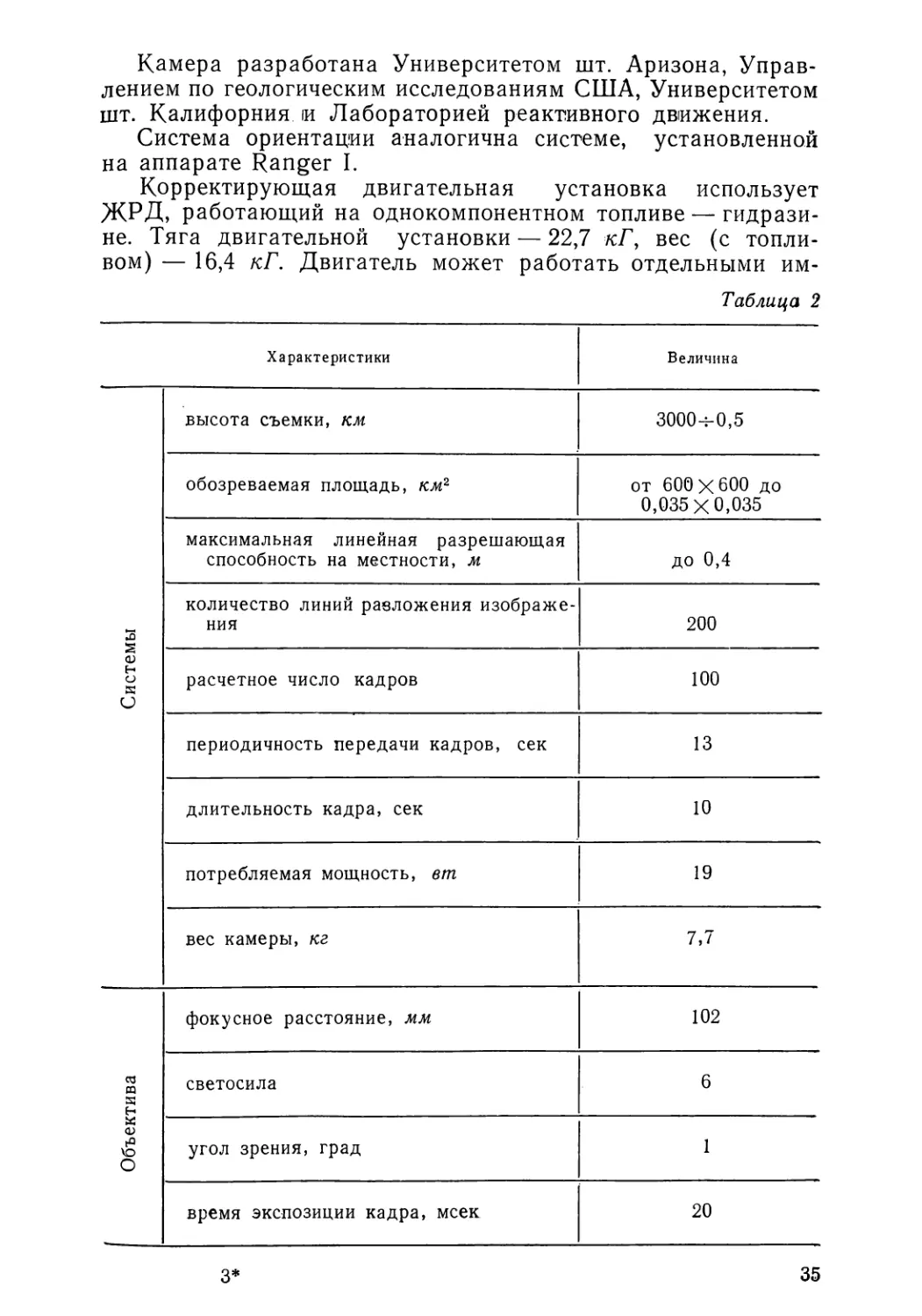
Телевизионная камера предназначена для получения изображений лунной поверхности района прилунения капсулы в; период ее спуска. Оптика камеры изготовлена из плавленного' кварца и представляет собой астрономический телескоп системы Кассегрена с первичным вогнутым параболическим зеркалом и вторичным выпуклым гиперболическим зеркалом. В камере применено электростатическое отклоняющее устройство и фокусированный видикон, со специальной мишенью с поверхностью из сурмянистой серы со скоростной стирающей способностью. В таблице 2 приведены характеристики телевизионной системы.
34
Камера разработана Университетом шт. Аризона, Управлением по геологическим исследованиям США, Университетом шт. Калифорния и Лабораторией реактивного движения.
Система ориентации аналогична системе, установленной на аппарате Ranger I.
Корректирующая двигательная установка использует ЖРД, работающий на однокомпонентном топливе — гидразине. Тяга двигательной установки — 22,7 кГ, вес (с топливом) — 16,4 кГ. Двигатель может работать отдельными им-
Таблица 2
Характеристики Величина
Системы высота съемки, км 3000-0,5
обозреваемая площадь, км2 от 600 X 600 до 0,035X0,035
максимальная линейная разрешающая способность на местности, м до 0,4
количество линий разложения изображения 200
расчетное число кадров 100
периодичность передачи кадров, сек 13
длительность кадра, сек 10
потребляемая мощность, вт 19
вес камеры, кг 7,7
Объектива фокусное расстояние, мм 102
светосила 6
угол зрения, град 1
время экспозиции кадра, мсек 20
3*
35
Продолжение табл. 2
Характеристики Величина
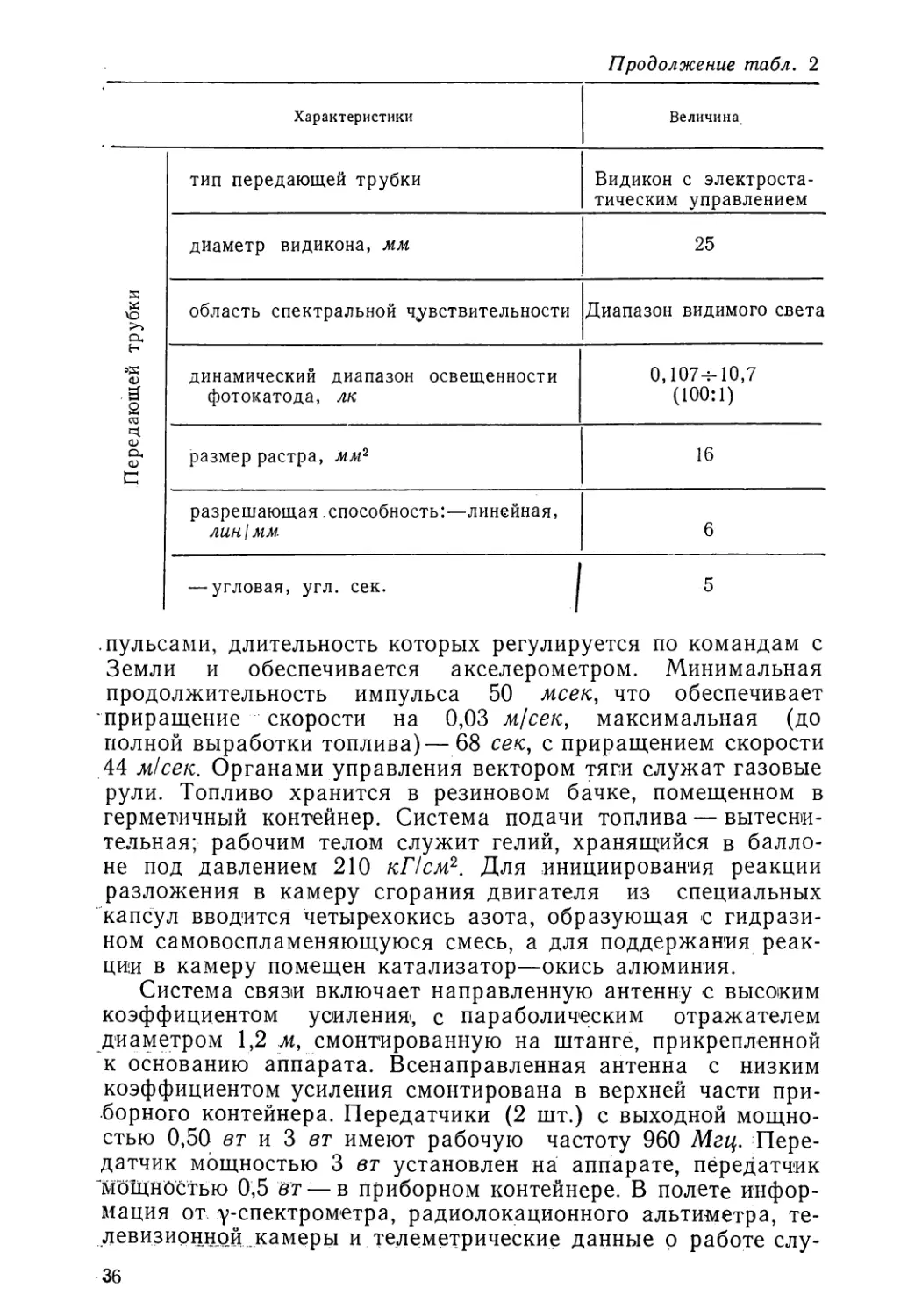
Передающей трубки тип передающей трубки Видикон с электростатическим управлением
диаметр видикона, мм 25
область спектральной чувствительности Диапазон видимого света
динамический диапазон освещенности фотокатода, лк 0,1074-10,7 (100:1)
размер растра, мм2 16
разрешающая способность:—линейная, лин 1 мм. 6
— угловая, угл. сек. 1 5
.пульсами, длительность которых регулируется по командам с Земли и обеспечивается акселерометром. Минимальная продолжительность импульса 50 мсек, что обеспечивает приращение скорости на 0,03 м/сек, максимальная (до полной выработки топлива)—68 сек, с приращением скорости 44 м!сек. Органами управления вектором тяги служат газовые рули. Топливо хранится в резиновом бачке, помещенном в герметичный контейнер. Система подачи топлива — вытеснительная; рабочим телом служит гелий, хранящийся в баллоне под давлением 210 кПсм2. Для инициирования реакции разложения в камеру сгорания двигателя из специальных капсул вводится четырехокись азота, образующая с гидразином самовоспламеняющуюся смесь, а для поддержания реакции в камеру помещен катализатор—окись алюминия.
Система связи включает направленную антенну с высоким коэффициентом усиления, с параболическим отражателем диаметром 1,2 м, смонтированную на штанге, прикрепленной к основанию аппарата. Всенаправленная антенна с низким коэффициентом усиления смонтирована в верхней части приборного контейнера. Передатчики (2 шт.) с выходной мощностью 0,50 вт и 3 вт имеют рабочую частоту 960 Мгц. Передатчик мощностью 3 вт установлен на аппарате, передатчик “мощностью 0,5 вт — в приборном контейнере. В полете информация от у-спектрометра, радиолокационного альтиметра, телевизионной камеры и телеметрические данные о работе слу
36
жебного оборудования передаются передатчиком, установленным на аппарате, с частотной модуляцией поднесущих и несущих частот направленной и всенаправленной антеннами. Энергопитание передатчика обеспечивается серебряно-цинко-выми батареями и солнечными элементами. Информация от сейсмометра передается передатчиком, установленным в приборном контейнере, с частотной модуляцией поднесущих и фазовой модуляцией несущей частоты через всенаправленную антенну. Энергопитание передатчика обеспечивается серебря-но-кадмиевыми батареями. Электронное оборудование включает цифровое счетно-решающее программное устройство на транзисторах и гироплатформу. Вес антенн с электронным оборудованием —49 кГ.
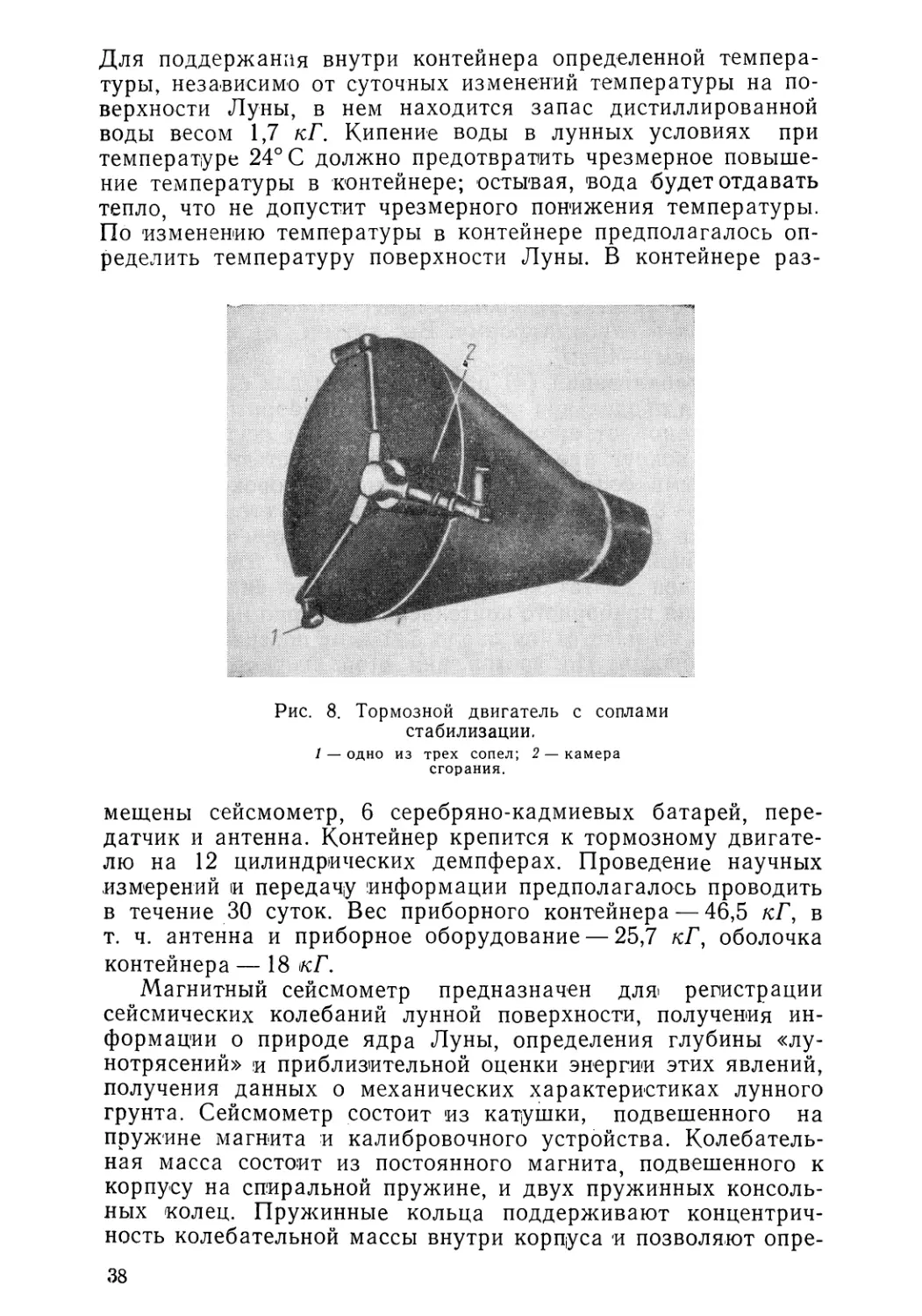
Сопла стабилизации (4) предназначены для стабилизации относительно продольной оси капсулы с приборным контейнером, отделяемой от аппарата. Стабилизация осуществляется вращением вокруг продольной оси со скоростью 300 об/мин 3 реактивными соплами, работающими на пороховых газах. Тяга сопел — 9 кГ, их вес—1,0 кГ. Камеры сгорания сопел размещены в сопле тормозного двигателя и при его включении реактивной струей сопла отбрасываются. Твердотопливный тормозной двигатель предназначен для снижения скорости падения приборного контейнера примерно на 2,8 км/сек, обеспечивая на расстоянии около 330 м от поверхности Луны нулевую скорость. По достижении этой скорости двигатель отделяется от приборного контейнера. Расчетная продолжительность работы двигателя — 10 сек. Топливо—смесевое. Двигатель изготовлен из стеклопластика «спиралой» методом намотки, стенки камеры сгорания имеют термоизоляцию из фенольной пластмассы, армированной нейлоном. Тормозной двигатель находится в отбрасываемом посеребренном кожухе из пластика (сбрасывается часть кожуха, прикрывающая сопло двигателя). Вес двигателя 98 кГ, длина — 80 см, диаметр— 46 см. Двигатель разработан Hercules Powder. Тормозной двигатель с соплами стабилизации показан на рис. 8.
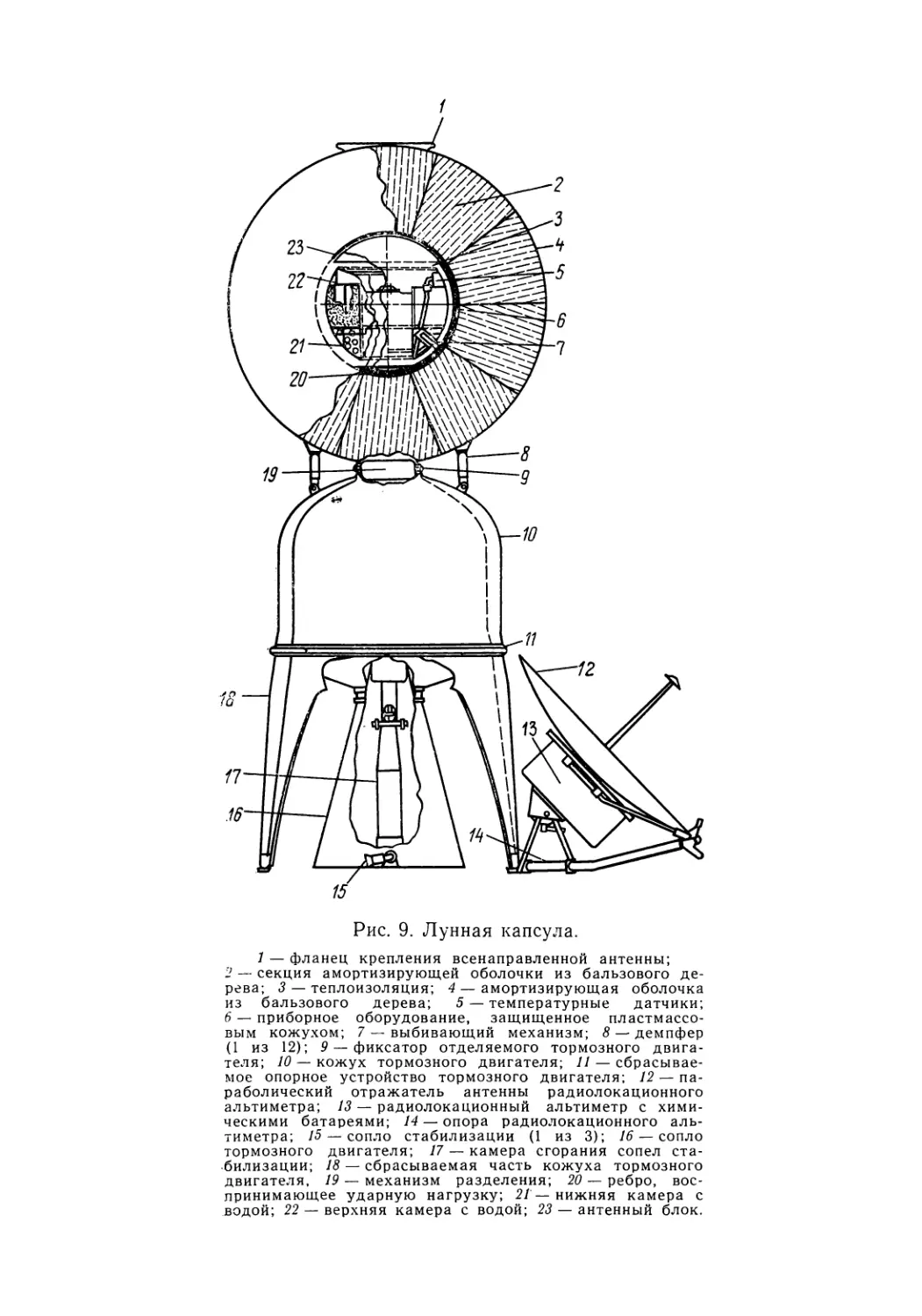
Лунная капсула и приборный контейнер (4). Приборный контейнер разработан Aeronautics (отделение Ford Motor). Схема лунной 'капсулы представлена на рис. 9. Контейнер сферической формы диаметром 30,5 см помещен в амортизирующую радиопрозрачную оболочку из бальзового дерева диаметром 63,5 см, пространство между контейнером и оболочкой заполнено маслом. Плавающий в масле контейнер примерно через 20 мин после удара о поверхность Луны устанавливается неподвижно внутри оболочки антенной вверх (центр тяжести контейнера лежит на 1,2 см ниже геометрического центра шара). Для того, чтобы масло не демпфировало толчков, регистрируемых сейсмометром, пиропатронами выбиваются из оболочки 2 заглушки и масло вытекает.
37
Для поддержания внутри контейнера определенной температуры, независимо от суточных изменений температуры на поверхности Луны, в нем находится запас дистиллированной воды весом 1,7 кГ. Кипение воды в лунных условиях при температуре 24° С должно предотвратить чрезмерное повышение температуры в контейнере; остывая, вода будет отдавать тепло, что не допустит чрезмерного понижения температуры. По изменению температуры в контейнере предполагалось определить температуру поверхности Луны. В контейнере раз-
Рис. 8. Тормозной двигатель с соплами стабилизации.
/ — одно из трех сопел; 2 — камера сгорания.
мещены сейсмометр, 6 серебряно-кадмиевых батарей, передатчик и антенна. Контейнер крепится к тормозному двигателю на 12 цилиндрических демпферах. Проведение научных измерений и передачу информации предполагалось проводить в течение 30 суток. Вес приборного контейнера — 46,5 кГ, в т. ч. антенна и приборное оборудование — 25,7 кГ, оболочка контейнера — 18 кГ.
Магнитный сейсмометр предназначен для регистрации сейсмических колебаний лунной поверхности, получения информации о природе ядра Луны, определения глубины «лу-нотрясений» и приблизительной оценки энергии этих явлений, получения данных о механических характеристиках лунного грунта. Сейсмометр состоит из кадушки, подвешенного на пружине магнита и калибровочного устройства. Колебательная масса состоит из постоянного магнита, подвешенного к корпусу на спиральной пружине, и двух пружинных консольных колец. Пружинные кольца поддерживают концентричность колебательной массы внутри корпуса и позволяют опре-
38
1
Рис. 9. Лунная капсула.
1 — фланец крепления всенаправленной антенны;
2 — секция амортизирующей оболочки из бальзового дерева; 3 — теплоизоляция; 4 — амортизирующая оболочка из бальзового дерева; 5 — температурные датчики; 6 — приборное оборудование, защищенное пластмассовым кожухом; 7 — выбивающий механизм; 8 — демпфер (1 из 12); 9 — фиксатор отделяемого тормозного двигателя; 10 — кожух тормозного двигателя; 11 — сбрасываемое опорное устройство тормозного двигателя; 12 — параболический отражатель антенны радиолокационного альтиметра; 13 — радиолокационный альтиметр с химическими батареями; 14 — опора радиолокационного альтиметра; 15 — сопло стабилизации (1 из 3); 16 — сопло тормозного двигателя; 17 — камера сгорания сопел стабилизации; 18 — сбрасываемая часть кожуха тормозного двигателя, 19 — механизм разделения; 20 — ребро, воспринимающее ударную нагрузку; 21 — нижняя камера с водой; 22 — верхняя камера с водой; 23 — антенный блок.
делить любое наклонение продольных осей в пределах от О до 90°. При ударе контейнера о поверхность Луны сейсмометр занимает вертикальное положение. Энергопотребление сейсмометра — 48 мет при напряжении 6 в. Вес сейсмометра, заполненного демпфирующей жидкостью, 3,63 кГ, без жидкости— 3,30 кГ, вес колебательной массы—1,7 кГ. Сейсмометр представляет собой цилиндр диаметром 121 мм и высотой 133 мм, он разработан Сейсмической лабораторией Калифорнийского технологического института и Колумбийским Университетом.
у-спектрометр предназначен для получения информации о-природе и составе лунной поверхности и сравнение спектров у-лучей лунных пород и у-лучей не лунного происхождения с целью определить концентрацию радиоактивных пород, слагающих поверхность Луны. Спектрометр состоит из детектора, высоковольтного источника тока и высокоимпульсного-анализатора. В детекторе применены 2 сцинтиллятора—поливиниловый пластиковый с толщиной стенок около 3,1 мм и с кристаллом CsI, помещенный внутрь пластикового. Пластиковым сцинтиллятором разделяются у-лучи и заряженные частицы; сигналы от сцинтилляторов передаются на фотоэлемент. у-спектрометром регистрируются у-кванты с энергией в диапазоне 0^-0,6 Мэв и (НЗ Мэв при точности измерения 12%. Детектор имеет всенаправленное действие. Энергопотребление спектрометра — менее 2 вт, вес — 5,5 кГ, высота — 25 см, объем—13,1 дм3. Измерения предполагалось начать через 4 часа после старта ракеты-носителя и проводить до-момента достижения аппаратом высоты 25 км над лунной поверхностью, прибор рассчитан на работу в течение 65 час. Спектрометр размещен в алюминиевом контейнере сферической формы, смонтированном на раздвижной телескопической антенне длиной 1,83 м, прикрепленной к основанию аппарата. Спектрометр разработан Лабораторией реактивного движения, Калифорнийским университетом и Лос-Аламосской научной лабораторией.
Аппарат Ranger III проходил термическую и предстартовую стерилизацию. Термическая стерилизация проводилась в течение 24 час при температуре 125° С. Наземная мобильная установка для предстартовой стерилизации спроектирована и изготовлена по контракту Лаборатории реактивного движения Lockheed Aircraft Corp., стерилизация проводилась в течение нескольких часов газообразной смесью окиси этилена и фреона-12, которая подавалась в носовой отсек ракеты-носителя, находящейся на пусковой установке.
Основные организации — разработчики аппарата Ranger III те же, что и аппарата Ranger I, а также Aeronautics Div. Стоимость контрактов по разработке и изготовлению аппарата 13 млн. долл.
40
5- Космический аппарат Ranger IV (6, 35, 37)
Назначение аппарата такое же, как у аппарата Ranger III. Запуск аппарата произведен 23 апреля 1962 г. со стартового комплекса № 13 м. Канаверал ракетой-носителем Atlas—Age-па В. Полет ракеты-носителя проходил по программе, близкой к расчетной. Вскоре после запуска вышла из строя бортовая радиоаппаратура, за исключением небольшого радиопередатчика, и аппарат не смог отрабатывать подаваемые с Земли команды. Получение телевизионных изображений поверхности Луны и отделение приборного контейнера осуществить не удалось. По международной системе аппарат Ranger IV получил обозначение 1962 ц I. 26 апреля аппарат упал на невидимую сторону Луны в точке с селенографическими координатами 130° 42' з. д. и 15° 30' ю. ш. (расчетное значение). Продолжительность полета аппарата — 63 час. 57 мин. Конструкция, состав служебного оборудования и научных приборов аппарата — как у аппарата Ranger III. Суммарный вес аппарата — 331,1 кГ. Аппарат проходил термическую и предстартовую стерилизацию.
6. Космический аппарат Ranger V (22)
Назначение аппарата такое же, как у аппарата Ranger III. Запуск аппарата произведен 18 октября 1962 г. с м. Канаверал ракетой-носителем Atlas—Agena В. Полет ракеты-носителя проходил почти в полном соответствии с программой. По международной системе аппарат получил обозначение 1962 рт]1. В полете отказали солнечные элементы и питание оборудования было переключено на химическую батарею. Через 4 часа после полной разрядки химической батареи функционирование оборудования прекратилось. До разрядки химической батареи получены данные о у-лучах. 20 октября 1962 г. аппарат прошел мимо Луны на расстоянии около 725 км и вышел на гелиоцентрическую орбиту с верительным расстоянием 142,1 млн. км, афельным расстоянием 159,8 млн. км, наклонением к плоскости эклиптики* 0,44°, периодом об-ращения 370,22 сут. Время существования: аппарата — неограниченное.
Конструкция, состав бортового оборудования и научных приборов аппарата — как у аппарата Ranger III. Суммарный: вес аппарата — 343 кГ. Аппарат проходил термическую и предстартовую стерилизацию. Возможные причины, привет дшие к отказу солнечных элементов: воздействие искусственного пояса радиации, возникшего в результате высотного» ядерного взрыва, проведенного США 9 июля 1962 г. (тротиловый эквивалент заряда—1,4 Мгт, высота взрыва 1000 км-,.
41<
увеличение показаний счетчика радиации в 100 раз); отказ системы ориентации панелей с солнечными элементами; механические повреждения солнечных элементов. По заявлению NASA выход из строя оборудования аппаратов Ranger Ш-rV объясняется тем, что при термической стерилизации аппаратов оборудование было повреждено. На это указывают следующие факторы (27): оборудование нестерилизован-ных аппаратов Ranger I, II работало исправно; оборудование нестерилизованного аппарата Mariner II (изучение Венеры), аналогичное оборудованию аппаратов Ranger, также в основном работало исправно; при наземных испытаниях стерилизованных аппаратов Ranger зарегистрировано 9 отказов оборудования, нестерилизованных — 3. В связи с этим NASA приняло решение добиться отмены требования стерилизации аппаратов, запускаемых на Луну. Дальнейшие запуски аппаратов Ranger решено было прекратить до выяснения экспертной комиссией причин неудачного запуска аппарата Ranger V и выяснения, нет ли в конструкции аппаратов Ranger принципиальных пороков. Анализ показал, что таких пороков нет, но некоторые элементы нуждаются в усовершенствовании, в основном, с целью повышения надежности. На основании этих выводов, NASA приняло решение модифицировать некоторые элементы конструкции аппарата, а затем подвергнуть его всесторонним испытаниям на надежность. Общие затраты на разработку, изготовление и запуски аппаратов Ranger I-fV к середине 1963 г. составили более 200 млн. долл., на создание и запуск аппарата Ranger V — 15 млн. долл. 132)
7. Космический аппарат Ranger VI (Ranger А) (условное обозначение аппарата Р—53)
Назначение аппарата (рис. 10)—получение телевизионных изображений поверхности Луны перед падением на нее. Запуск аппарата произведен 30 января 1964 г. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas—Age-па В. Полет ракеты-носителя и аппарата проходил по программе, близкой к расчетной. После выхода на траекторию полета >к Луне аппарат Ranger А получил название Ranger VI, а по международной системе обозначение 1964—07А. Через 15 час. после старта была включена на 66 сек. двигательная установка для коррекции траектории (без коррекции аппарат прошел бы на расстоянии 960 км от Луны), что обеспечило приращение скорости на 41 м1сек,. Перед включением двигательной установки аппарат по команде с Земли был ориентирован поворотами по крену на 12° и тангажу на 71°. За 15 мин. до падения аппарата на Луну со
42
станции слежения системы DSIF в Голдстоуне была подана команда на включение телевизионных камер для их прогрева. Полученный на Земле телеметрический сигнал показал, что команда была принята, однако никаких телевизионных изображений с аппарата не поступило. 2 февраля аппарат упал на Луну к востоку от Моря Спокойствия в 23° от терминатора в точке с селенографическими координатами :9°24/ с. ш. и 21°30z в. д. менее чем в 30 км от расчетной
Рис. 10. Космический аппарат Ranger VI.
точки (8,5° с. ш. и 21,0° в. д.). Наблюдение за падением аппарата вели 32 обсерватории, однако ни одной из них не удалось зарегистрировать ожидаемого пылевого облака. Полет аппарата 'продолжался 63 час. 35 мин. (1,21,23).
Серия аппаратов Ranger VI4-IX относится к модели Block III и составляет третий этап программы (8). По конструкции и составу бортового оборудования аппараты этой серии и Ranger Шн-V имеют много общего. Основное отличие: на аппаратах Ranger VI4-IX вместо капсулы и приборного контейнера с тормозным двигателем установлены 2 комплекта телевизионных камер с автономными источниками питания, временными и программными устройствами. Кроме того, корпуса аппаратов Ranger VI4-IX изготовлены из магниевого сплава; бортовые устройства аппаратов, управляющие работой связного оборудования, как правило, дублированы или предусмотрена возможность управления работой связного оборудования по командам с Земли; установлены более совершенная корректирующая двигательная
43
установка, дублирующий ’комплект управляющих реактивных сопел с 'баллоном сжатого азота и вторая химическая батарея емкостью 1200 вт-час; изменена форма панелей с солнечными элементами, что позволило без увеличения веса разместить большее число солнечных элементов и увеличить мощность со 150 до 175 вт.
Оборудование размещено в шести модулях по периметру аппарата: модуль I — центральное счетно-решающее и программное устройства, командная система; модуль II — передатчик и приемник; модуль III — кодирующее устройство; модуль — IV — элементы системы стабилизации и ориентации; модуль V — серебряно-цинковая батарея; модуль VI — аппаратура системы электропитания.
Аппараты Ranger VI-НХ не проходили стерилизацию.. Суммарный вес аппарата — 364,7 к1\ в т. ч. конструкции — 41,4 кГ. Диаметр окружности, описанной вокруг основания, аппарата — 1,52 м, высота при сложенной антенне — 2,51 мг при развернутой антенне — 3,12 м, максимальный размах при откинутых панелях с солнечными элементами — 5,18 м.
Корректирующая двигательная установка (50) аналогична* ранее применявшейся на аппаратах Ranger III-HZ, но увеличены минимальное и максимальное приращение скорости (с 0,03 м/сек до 0,1 м/сек и с 44 м/сек до 58 м/сек), увеличена максимальная продолжительность работы с 68 сек. до 98,5 сек. Эти изменения дают возможность проведения коррекции при отклонении от расчетной траектории до 9600 км. Длительность импульса обеспечивается временным устройством, а на аппаратах Ranger III-^-V она обеспечивалась акселерометром. Вес установки — 20,6 кГ.
Система ориентации (16,33|) включает 6 датчиков направления на Солнце на фотоэлементах из селенида свинца, обеспечивающих ориентацию аппарата в плоскости тангажа и. рысканья. Датчики (3 шт.) направления на Землю обеспечивают ориентацию аппарата в плоскости крена и ориентацию направленной антенны. Угол обзора датчиков направления на Землю на аппарате Ranger VI меньше, чем на предыдущих аппаратах. Это позволяет уменьшить вероятность захвата Солнца вместо Земли, запускать аппарат при менее благоприятном расположении Солнца, Земли и Луны. Ранее благоприятный период для запуска составлял 4 суток, после установки новых датчиков — 7—8 суток в месяц. В систему входят 3 гироскопа и 2 комплекта по 6 управляющих реактивных сопел, работающих на сжатом азоте. Каждый комплект сопел имеет свой баллон со сжатым азотом. Вес системы ориентации и автопилота — 26,8 кГ. Разработчик аппаратуры системы — Nortronics.
Система связи (50) для передачи телевизионных изображений использует 2 передатчика мощностью по 60 вт, с час
44
тотой 959,52 Мгц и 950,05 Мгц для камер типа F и Р, соответственно. Полоса передачи — 200 кгц, вид модуляции — ЧМ. Для приема команд и передачи телеметрической информации применен 8-канальный приемоответчик мощностью 3 вт и частотой 960,58 Мгц. Скорость передачи данных — 3500 бит!сек, метод модуляции — АИМ — ФМ. Установлены направленная антенна с высоким коэффициентом усиления (18 дб) (разработчик Barry Controls) и всенаправленная антенна с низким коэффициентом усиления. Вес связного оборудования—17,6 кГ, кодирующего устройства — 9,2 кГ, счетно-решающего и программного устройств — 4,3 кГ. Телеметрическая информация поступает от датчиков, измеряющих 200 различных параметров, в том числе характеризующие состояние и работу телевизионного оборудования (15 параметров до включения и 105 во время работы •камер).
Система энергопитания (50) включает 2 панели общей площадью 2,267 м2 с 9792 солнечными элементами, обеспечивающими мощность 240 вт, и 2 серебряно-цинковые батареи емкостью по 1200 вт-час, рассчитанные на 9 часов работы и обеспечивающие напряжение 26,5 в. Батареи предназначены для обеспечения электроэнергией систем аппарата на участке выведения до раскрытия панелей и при выполнении маневров на среднем и конечном участках траектории, когда панели не ориентированы на Солнце. Одна батарея может обеспечить потребность в электроэнергии для совершения маневров на среднем и конечном участках. Вес системы энергопитания — 55,9 кГ. Разработчики: солнечных элементов — Heliotek Div. и Textron Electronics, защитного покрытия элементов — Optical Coating Laboratory., панелей— Ryan Aeronautical Co. и Aerospace Div.
6 телевизионных 'камер (16,45,48) предназначены для получения телевизионных изображений лунной поверхности, разработаны Astro—Electronics и Radio Corporation of America. Для частичного перекрытия изображений оптические оси камер расположены под небольшим углом друг к другу. Камеры скомплектованы в 2 независимых комплекта, со своим передатчиком и серебряно-цинковой батарей, состоящей из 22 элементов, обеспечивающих питание камеры в течение 1 часа. В первый комплект входят 2 камеры типа F (Full—scan — полное сканирование): Fa —с широким углом обзора и Fb — с узким углом. Каждая камера работает сеансами продолжительностью 2,56 сек, затем в течение 2,56 сек подготавливается к следующему сеансу. Пока одна из камер производит съемку и передает изображения, вторая подготавливается к работе. Считывание изображений осуществляется за 2,24 сек. Изображения от камер первого комплекта поступают непрерывно. Несущая частота передатчика
45
первого комплекта равна 959,52 Мгц. Изображение в кадре имеет размеры 11,17X11,17 мм.
Во второй комплект входят 4 камеры типа Р (Partial— scan—частичное сканирование): Р2 и Р4 — с широким углом: обзора, Pi и Р3 — с узким углом. Камеры предназначены для получения изображения центральной части того участка поверхности Луны, который попадает в кадр камеры типа F. Каждая камера второго комплекта работает сеансами продолжительностью 0,2 сек, затем в течение 0,6 сек подготавливается к следующему сеансу. Пока одна камера производит съемку и передает изображения, остальные 3 камеры находятся в разной степени готовности. Время считывания изображений — 360 миллисекунд. Изображения от камер второго комплекта также /поступают непрерывно. Несущая частота передатчика второго комплекта 960,05 Мгц. Изображение в кадре имеет размеры 2,79x2,79 мм. Кадры обеих типов камер имеют отношение высоты к ширине 1:1. Камеры Fa, Р3 и Р4 рассчитаны на получение изображений при освещенности от 215 до 7000 лк, а камеры Fb, Pi и Р2 — от 860 до 29063 лк; освещенность лунной поверхности принималась равной от 215 до 29063 лк. В таблице 3 приведены характеристики телекамер.
Таблица 3
Тип и индекс камеры Угол зрения, град Фокусное расстояние, мм Светосила Длительность экспозиции, сек Линейная разрешающая способность передающей трубки, лин/мм Количество линий разложения изображений
F а 25 25 1:0,95 1/200 -31 800
b 8,4 76 1:2 1/200 -31 800
Р 1; 3 2,1 76 1:2 1/500 -31 200
2; 4 6,3 25 1:0,95 1/500 -31 200
Передающей трубкой является видикон с электростатическим управлением. Ширина полосы пропускания видикона обеих, камер — 200 кгц. Диаметр видикона — 25 мм. Камеры помещены в отсек, закрытый кожухом, имеющий форму усеченного конуса высотой 151 см и диаметром оснований 61 см и 42 см. Программой предусматривалось включение обоих, комплектов камер за 15 мин до падения аппарата на Луну. Пять минут требуется на разогрев аппаратуры, за 10 мин до падения начинается съемка, которая прекращается за 2,5 сек до падения. В момент начала съемки аппарат
46
находится на расстоянии 1450 юи от Луны, имея скорость. 2,3 км/сек. В момент прекращения съемки аппарат находится на расстоянии 535 м от Луны (2). В таблице 4 приведены расчетные характеристики съемки.
Таблица 4 (11>
Тип и индекс камеры Площадь поверхности Луны в кадре при съемке Линейная разрешающая способность камер на местности при съемке с миним. расстояния, м Характеристики обозреваемого участка Число кадров (расчетное)
с максим. расстояния, км2 с миним. расстояния, м2 координаты длина, км
F а 390 000 9 000 000 0,9 вдоль экватора от 20° с. ш. до 20° ю. ш. 2400 117 117 714; 714 714; 714 всего 3090
b 43 500 1 300 000 0,9
Р 1; з 2 720 390 0,9
2; 4 24 600 3 520 0,9
Изображения должны были приниматься станцией слежения системы DSIF в Голдстоуне с помощью двух антенн с отражателем диаметром 26 ж, записываться на магнитную, ленту и одновременно сниматься с экрана приемной телевизионной трубки на 35-миллиметровую пленку. Для записи изображений от камер типа F потребовалось бы 4,8 м пленки, от камер типа Р—15 м. Предусмотрены три независимых системы включения телекамер: автоматическая, от часов и по команде с Земли. Вес телекамер и связанного с ними оборудования—172,8 кГ, в т. ч. собственно телекамеры — 17,2 кГ, видеокомбинатор — 1,3 кГ, электронное оборудование телекамер — 22,1 кГ, программное устройство — 6,3 кГ, батареи (2 шт.) —39,1 кГ, передатчик и связанное с ним оборудование— 31,8 кГ, элементы конструкции и различные детали — 55,0 кГ.
Для расследования причин отказа телевизионного оборудования была создана специальная комиссия NASA, которая пришла к выводу, что. наиболее вероятной причиной было включение камер на атмосферном участке полета. Самопроизвольное включение произошло вследствие накопления заряда статического электричества или интенсивной вибрации, вызвавшей замыкание контакта реле в системе включения камер. Точно установить, произошло это включение или нет, не удалось. Косвенным подтверждением служит
47
не предусмотренное программой включение через 2,5 мин после старта телеметрической аппаратуры, связанной с камерами; аппаратура проработала 67 сек. и выключилась. Предполагают, что при этом включились также и камеры, в результате чего произошло короткое замыкание в их электрической цепи, рассчитанной на работу в вакууме. Однако при предусмотренном программой включении телеметрической аппаратуры на 47 мин. полета переданная на Землю информация свидетельствовала о нормальном состоянии камер. В отчете комиссии содержатся замечания о конструкции и программе испытаний аппарата Ranger VI: комплекты камер не были полностью независимыми и имели некоторые общие элементы; телевизионное оборудование неоправдано сложно; изоляция электрических цепей недостаточна; конструкция аппарата не позволяла провести всеобъемлющую предстартовую подготовку; не проведены испытания направ-.ленной антенны в сочетании с передатчиками; не проведена проверка ряда систем непосредственно перед стартом (проверка не проводилась во избежание возможного повреждения аппарата). Телевизионное оборудование проверялось последний раз за 12 суток до старта. Для предотвращения самопроизвольного включения камер были предложены следующие мероприятия: проведение наземных испытаний .для определения опасности накопления заряда статического электричества; установка блокирующего устройства, предотвращающего включение камер до отделения аппарата от ракеты-носителя; обеспечение дополнительной изоляции электрооборудования.
8. Космический аппарат Ranger VII (Ranger В) (условное обозначение аппарата Р-*54)
Назначение аппарата такое же, как и аппарата Ranger VI. Запуск аппарата произведен 28 июля 1964 г. в 16 час. 50 мин. 08 сек. (здесь и далее время по Гринвичу) со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas—Age-па В (расчетное время — 16 час. 50 мин.). Полет ракеты-носителя и аппарата проходил по траектории, близкой к расчетной. После выхода на траекторию полета к Луне аппарат Ranger В. получил название Ranger VII, а по международной системе обозначение 1964—41А. 29 июля в период с 8 час. 54 мин. по 8 час. 58 мин. со станции слежения в Голдстоуне в программное устройство аппарата была введена команда на выполнение маневра коррекции траектории; без коррекции аппарат бы упал на невидимую сторону Луны. Выбранное место падения аппарата по наблюдениям с Зем
48
ли было наиболее ровным и пригодным для посадки лунной кабины корабля Apollo. Район падения аппарата представлял эллипс 480X80 км (в дальнейшем, при сближении с Луной, его размеры'были уточнены и составили 80X8 км). В 9 час. 40 мин. началась подготовка к проведению маневра. Передатчик аппарата был переключен с направленной антенны на 'всенаправленную, а направленная антенна убрана, чтобы избежать ее повреждения при работе двигательной установки.
В период проведения коррекции аппарат находился на расстоянии 160 000 км от Земли. Перед включением двигательной установки аппарат совершил поворот по крену на 5,6° и по тангажу на 86,8°. Установка проработала 50 сек, сообщив приращение скорости 30 м/сек. 31 июля в 13 час. 08 мин. 39 сек. были включены камеры типа F, а в 13 час. 12 мин. 08 сек. — камеры типа Р. В этот момент аппарат находился на расстоянии 1800 км от Луны. В 13 час. 25 мин. 49 сек. аппарат упал на Луну в районе Моря Облаков в точке с селенографическими координатами Ю^в7 ю. ш. и 20°367 з. д., в 13 км от расчетной точки падения (11° ю. ш. и 21° з. д.). Падение аппарата предполагалось сфотографировать телескопом на базе ВВС Патрик (шт. Флорида), но из-за его неисправности этого сделать не удалось (41,53). Впоследствии аппаратом Lunar Orbiter II был сфотографирован участок падения аппарата Ranger VII. Американские ученые считают, что на одном из полученных снимков им удалось обнаружить кратер, образовавшийся при падении аппарата (20). Обработка данных внешнетраекторных измерений при полете аппаратов Ranger VI и Ranger VII позволила на порядок повысить точ* ность определения массы Луны и рассчитать с точностью до ±20 м разницу по долготе между станциями системы DSIF (40). Температура внутри аппарата поддерживалась в диапазоне (27-^32)° С с точностью до нескольких градусов.
Конструкция и состав бортового оборудования аппарата такие же, как у аппарата Ranger VI. Часть аппаратуры подверглась модификации (25): сокращено с 5 мин. до 1 мин. 20 сек. время, потребное для прогрева камер, что позволило увеличить длительность их работы и получить на 25% больше изображений поверхности Луны, чем планировалось при запуске аппарата Ranger VI; дополнительно установлены датчики, измеряющие силу тока, вырабатываемого батареями; для предотвращения случайного включения телевизионного оборудования на атмосферном участке полета установлены фильтры, исключающие самопроизвольное срабатывание командной системы камер под воздействием заряда статического электричества; установлено блокирующее устройство, предотвращающее включение временного механизма (механизм предназначен для автоматического включения камер в том
4—6157
49
случае, если их не удастся включить по команде с Земли) до отделения аппарата от ракеты-носителя. Временной механизм подсоединяется'К командной системе через 32 часа после его включения; введены изменения в телеметрическую систему, в частности, увеличено с 15 до 90 число параметров телевизионной системы, измеряемых во время разогрева камер. В период подготовки к полету аппарат, доставленный на м. Кеннеди,, был разобран и телевизионное оборудование было возвращено изготовителю для модернизации с учетом полета аппарата Ranger VI. Предполетные испытания аппарата проводились в более жестких условиях, чем аппарата Ranger VI: вибрационные, термические и вакуумные испытания велись одновременно, амплитуда колебаний при вибрационных испытаниях была увеличена вдвое. Суммарный вес аппарата — 365,6 кг (46)
Всего получено 4316 телевизионных изображений лунной поверхности (39). Первое изображение получено камерой типа F с расстояния 1800 км от Луны за 13 мин. до падения аппарата. В кадре находится участок поверхности размером 480X640 км. Последнее изображение получено камерой типа Р с расстояния 300 м за 0,12 сек. до падения аппарата. В кадре находится участок поверхности размером 30X18 м (53). Съемка продолжалась около 17 мин, во время съемки вектор* скорости аппарата составлял с местной вертикалью 12°, с оптической осью телевизионной системы — 23,7°, высота Солнца над лунным горизонтом — 22,5° (41). На станции слежения в Голдстоуне полученные с аппарата сигналы поступали в телевизионный приемник, с экрана которого фотографировались на 35-миллиметровую пленку. Сигналы также записывались, на магнитную ленту.
Стоимость изготовления и запуска аппарата, включая, стоимость ракеты-носителя, — 28 млн. долл.
9. Космический аппарат Ranger VIII (Ranger С) (14, 17, 42)
(условное обозначение аппарата Р-55)
Назначение аппарата такое же, как у аппарата Ranger VII. Запуск аппарата произведен 17 февраля 1965 г. в 17 час. 05 мин. 01 сек. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas—Agena В. Полет ракеты-носителя и аппарата проходил по программе, близкой к расчетной. После выхода на траекторию полета к Луне аппарат Ranger С получил название Ranger VIII, а по международной системе обозначение 1965—10А. 18 февраля, в 10 час, когда аппарат-находился на расстоянии 160 000 км от Земли, проведена кор-50
рекция траектории. Перед включением двигательной установки аппарат совершил поворот по крену на 11,6° и по тангажу на 151,8°. Корректирующая установка проработала 59 сек., сообщив приращение скорости 36,2 м/сек (без коррекции аппарат прошел бы на расстоянии 1830 км от Луны). Коррекция траектории, включая маневры по тангажу и рысканью, проведена за 12 мин. 20 февраля 'в 9 час. 57 мин. аппарат упал на Луну в районе Моря Спокойствия в точке с селенографическими координатами 2°43' с. ш. и 24°38' в. д., в 23 км от расчетной точки падения (3° с. ш. и 24° в. д.). Аппарат находился в полете 64 час. 51 мин. 59 сек. (15). В ноябре 1967 г. аппаратом Lunar Orbiter II получены изображения района падения аппарата; на одном из снимков, по мнению американских ученых, удалось обнаружить кратер, образовавшийся при падении.
Конструкция и состав бортового оборудования аппарата (30,43) такие же, как у аппаратов Ranger VI и Ranger VII, за исключением части аппаратуры, подвергшейся модификации: камеры Р—1 и Р—4 снабжены усовершенствования видиконами, сила тока на выходе усовершенствованного видикона 2х ХЮ-8 а (ранее—1Х10-8 а), линейная разрешающая способность— 39 лин/мм; разрешающая способность камер с новыми видиконами на местности — 0,45 м; все камеры откалиброваны в расчете на яркость от 21,5 до 18 300 лк; мощность усилителя в бортовом передатчике повышена с 6 до 8-НО вт; сокращено число контактов кабельной сети и улучшена ее изоляция; увеличена чувствительность телеметрических передатчиков, регистрирующих разрядку батарей, которые питают камеры и связанное с ними оборудование. Суммарный вес аппарата — 366,9 кг.
Первоначально камеры предполагалось включить за 13 мин. до падения аппарата, но затем было принято решение включить их за 23 мин. с целью получения большего числа телевизионных изображений. Всего получено 7137 изображений, охватывающих поверхность площадью 2 374 000 км2. Первые изображения получены с высоты 2450 км, последние — с нескольких сот метров над поверхностью Луны. Во время съемки вектор скорости аппарата составлял с местной вертикалью угол 41,7°, а оптическая ось камеры была отклонена от вектора скорости на 14°. По рекомендации специалистов Научно-исследовательского центра разработки пилотируемых космических кораблей участок падения аппарата выбран с таким расчетом, чтобы во время съемки высота Солнца над лунным горизонтом составляла менее 10°, что позволяет по тени на склонах кратеров выявить кратеры с крутизной склонов более 10°. Это важно для определения участков посадки аппарата Surveyor и лунной кабины корабля Apollo, которые могут совершать посадку на склоны крутизной не более 15°.
4*
51
10. Космический аппарат Ranger IX (Ranger D) (условное обозначение аппарата Р-56)
Назначение аппарата такое же, как у аппарата Ranger VIII. Запуск аппарата произведен 21 марта 1965 г. в 21 час 37 мин. 02 -сек. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas-Agena В. Полет ракеты-носителя и аппарата проходил по программе, близкой к расчетной. После выхода на траекторию полета к Луне аппарат Ranger D получил название Ranger IX, а по международной системе обозначение 1965—23А. 23 марта в 12 час. 03 мин., когда аппарат находился на расстоянии 280 000 км от Земли, проведена коррекция траектории полета (без коррекции аппарат достиг бы Луны в точке с селенографическими координатами 4,1° с. ш. и 2,3° з. д., в 520 км от рассчетной точки падения). 24 марта в 14 час. 08 мин. 20,06 сек. аппарат упал на Луну в районе кратера Альфонса в точке с селенографическими координатами 12°58' ю. ш. и 2°22' з. д. в 4,5 км от расчетной точки падения (13° ю. ш. и 2,5° з. д.) и в 290 км от линии терминатора. Аппарат находился в полете 64 час. 31 мин. 18 сек. (26,28,56).
Конструкция и состав бортового оборудования аппарата такое же, как у аппарата Ranger VIII, кроме камер, снабженных усовершенствованными видиконами. Применение более чувствительного материала в видиконах повысило силу электрического сигнала вдвое, до 4Х*10”8 а. Линейная разрешающая способность — 59 лин!мм, разрешающая способность на местности — 0,25 м. Камеры откалиброваны на получение снимков при яркости от 323 до 16150 лк. Количество линий разложения изображения для камер типа F—1152, для камер типа Р—300 (13, 28, 47). Суммарный вес аппарата — 366,9 кГ (54).
Всего получено 5814 телевизионных изображений поверхности Луны (5). При сближении с Луной аппарат ориентирован так, чтобы центральная ось камер совпадала с вектором скорости, что позволило избежать «смазывания» изображения (на предыдущих аппаратах такой ориентации не производилось). Для такой ориентации аппарат совершил маневры по тангажу на +5,2°, затем по крену на (—16,3°) и снова по тангажу на (—20,5°). Разогрев телевизионной системы начался за 20 мин. 07 сек., а включение системы на полную мощность — за 18 мин. 47 сек. до падения аппарата. Камеры начали работать за 17,5 мин. до падения, когда расстояние до поверхности Луны составляло 2360 км, а съемка прекратилась за 0,2 сек. до падения аппарата, когда до поверхности оставалось 610 м (13). В период работы камер вектор скорости составлял с местной вертикалью 25,1°, высота Солнца в месте падения аппарата—10°. Камеры сняли 52
участок поверхности, ограниченной координатами 0° ю. ш. и 45° з. д.; 10° ю. ш. и 5° в. д.; 3,5° ю. ш. и 45° з. д.; 35° ю. ш. и 5°в.д. (54). Телевизионные изображения принимались станцией слежения в Голдстоуне. Специальное устройство, разработанное Electrodynamics, обеспечивало преобразование изображений, полученных камерой Fb. Этим устройством в коммерческую телевизионную сеть США передано около 200 изображений поверхности в реальном масштабе времени.
11. Финансирование программы Ranger
Суммарные расходы по программе Ranger составили около 260 млн. долл., в том числе— 170 млн. долл, на аппараты и около 90 млн. долл. — на приобретение ракет-носителей. Распределение бюджетных ассигнований на программу и их доля 'в общих ассигнованиях на космические исследования представлены в таблице 5 (годы указаны финансовые) .
Таблица 5
1962 г. 1963 г. 1964 г. 1965 г. 1966 г.
Ассигнования на программу Ranger, млн. долл. 63,4 78,9 30,306 11,037 1,0
Доля ассигнований в общем бюджете NASA на космические исследования, % 3,528 2,175 0,600 0,213 0,019
12. Некоторые итоги программы Ranger
Программа изучения Луны аппаратами Ranger была начата в 1961 году и завершена в 1965 году. Всего по программе запущено 9 аппаратов. Программа состояла из 3-х этапов.
На первом этапе (1961 г.) предполагалось отработать
программу вывода аппаратов на геоцентрическую орбиту с большим эксцентриситетом, провести испытания бортового оборудования и осуществить ряд научных экспериментов. Запущены аппараты Ranger I и Ranger II. Запуски были неудачными: аппараты не вышли на расчетную орбиту (не произошло повторного включения двигателя II ступени). Проведены частичные испытания бортового оборудования и часть из запланированных научных экспериментов.
53
На втором этапе (1962 г.) предполагалось получить телевизионные изображения поверхности Луны .перед падением аппарата и доставить на поверхность Луны приборный контейнер для проведения научных экспериментов. Запущены аппараты Ranger III, Ranger IV и Ranger V. Ни один из аппаратов не выполнил своей задачи, поверхности Луны достиг только аппарат Ranger IV, но телевизионных изображений получить не удалось. Два других аппарата, не достигнув Луны, вышли на гелиоцентрические орбиты. Неудачи аппаратов Ranger на этом этапе американские ученые объяснили воздействием на бортовое оборудование повышенной температуры, которой подвергались аппараты при термической стерилизации.
На третьем этапе (1964—1965 гг.) предполагалось получить телевизионные изображения поверхности Луны перед падением аппарата. Установка научной аппаратуры на аппаратах этого этапа не предусматривалась. Запущены аппараты Ranger VI4-IX. Тремя последними из них получено и передано на Землю более 17200 изображений поверхности Луны. Часть снимков представлена на рис. 11—13. Аппарат Ranger VI достиг Луны, но получить изображения не удалось. Впервые получены изображения лунной поверхности с близкого расстояния (до 300 м). Каких-либо новых типов образований не обнаружено. Основной особенностью рельефа являются кратеры, наличие которых прослежено вплоть до диаметров 1 м. Выяснено, что последовательность кратеров является непрерывной, вплоть до самых малых образований. Кратеры разделяются на два типа: первичные — с резко выраженными краями, чашеобразные, и вторичные, относительно менее глубокие, со сложными очертаниями, образованные выбросами из первичных кратеров (52). Число первичных кратеров с уменьшением диаметра вдвое возрастает ~в 4 раза. Вторичные кратеры концентрируются преимущественно на расстоянии до 3 диаметров от первичных, размеры их в 10—20 раз меньше, чем первичных. Количество их растет с уменьшением диаметра быстрее, чем первичных, особенно оно велико на лучах крупных кратеров (106 на 1 км2 на луче кратера Тихо). -По-видимому лучи образованы выбросами из крупных кратеров (38). Новым типом кратеров являются так называемые кратеры-конусы (димпл-кратеры), по-видимому, обязанные своим происхождением проседанию грунта в подповерхностные пустоты. Такова же, вероятно, природа и неглубоких депрессий на поверхности. На дне кратера Альфонс воронки и депрессии проседания занимают 90% форм рельефа (9). Внутри кратера Альфонс вокруг мелких кратеров заметны черные ореолы, по-видимому, следы вулканической деятельности. Во всех изученных участках многочисленны линейные цепочки кратеров, а также груды,
54
а б
Рис. 11. Изображения лунной поверхности района Моря Облаков, полученные 31 июля 1964 г. аппаратом Ranger VII в период падения на Луну.
а) Изображение района кратера Герике, полученное телекамерой Кв с высоты 750 км. В верхнем правом углу — кратер Герике (диаметр 60 км). Наименьшие видимые кратеры имеют диаметр 240 м. Север на этом и следующем снимке находится сверху, восток — справа, б) Часть снимка, сделанная телекамерой Fflc высоты 4,8 км за 2,3 сек до падения аппарата, охватывает поверхность шириной 2,6 км. У левого края расположен кратер диаметром 92 м, на дне которого видны горные пики. Наименьшие видимые кратеры имеют диаметр 9 м и глубину 3 м
a
б
6
Рис. 12. Изображения лунной поверхности района Моря Спокойствия, полученные 20 февраля 1965 г. аппаратом Ranger VIII в период падения на Луну.
а) Изображение лунной поверхности в районе кратера Деламбр, полученное телекамерой с высоты 756 км. В центре — кратер Даламбр (диаметр 52 км), на его дне видны мелкие кратеры. Внизу слева — кратер Теон-младший (диаметром 16 км). В правом верхнем углу — темная плоская поверхность Моря Спокойствия, в которое врезается острый материковый мыс. Север на этом и последующих снимках находится сверху.
б) Изображение кратеров — близнецов Риттер (слева) (диаметр 32 км) и Сабин в южной части Моря Спокойствия получено телекамерой Fa с высоты 243 км за 2 мин. 15 сек. до падения аппарата. В нижней части — две параллельных бороздки и Гипатия.
в) Изображение лунной поверхности, полученное телекамерой F^ с высоты.
80 км за 45,6 сек. до падения аппарата. Изображенная поверхность имеет размеры 19 км с востока на запад и 13,7 км с севера на юг. В правом верхнем углу расположен комплекс больших углублений длиной 4,8 км.
Наименьшие видимые кратеры имеют диаметр 152 м.
параллельные известным складчатым горным цепям и другим линейным образованиям эндогенного происхождения (51). Крупных глыб и камней на поверхности мало. Изредка глыбы можно заметить внутри образованных ими вторичных кратеров. Мелкомасштабных трещин на поверхности не обнаружено. Мелкомасштабный рельеф ровный, крутизна поверхности не превышает 5° на расстоянии до 30 ж, на боль-
57
a
б
Рис. 13. Изображения лунной поверхности в районе кратеров Альфонс, Птолемей и Альбатегний, полученные 24 марта 1965 г. аппаратом Ranger IX в период падения на Луну.
а) Изображение кратера Альфонс (у правого края), полученное с высоты 415 км за 170 сек. до падения аппарата. Север на этом и следующем снимке—сверху. Размеры площади с востока на запад и с севера на юг, соответственно, 193 у 177 км. Слева — часть ЛАоря Облаков, внизу — кратер Альпстрагий с центральной горкой, в левом верхнем углу — кратер Дэви А.
б) Изображение поверхности, полученное телекамерой Fa с высоты 196 км за 8,09 сек. до падения аппарата. Диаметр кратера у левого края снимка — 2,6 км.
ших расстояниях она еще меньше. Поверхность покрыта, ino-видимому, слоем рыхлого мелкодисперсного вещества, толщина которого, вероятно, не менее 5 м (7). Анализ полученных снимков позволил сделать предположение, что грунт может выдержать нагрузку до 10 кг/см2, и выявить участки поверхности, пригодные для посадки лунной кабины корабля Apollo. По результатам внешнетраекторных измерений удалось на порядок повысить точность определения массы Луны.
Библиография
1. Biasi V. de. Another failure, another board. «Space/Aeronaut.», 1964, 41, №2, 37
2. В u b b M. High hopes for lunar photos ride on Ranger VI launch. «Electron. News», 1964, 9, № 414, 12
3. Clark E. Ranger 3 flight stirs reliability question. «Aviat. Week and Space Technol.», 1962, 76, №6, 30—32 1962, 10.51.549
4. First details of Ranger Ills lunar instruments. «Missiles and Rockets», 1961, 9, № 12, 92—93
5. Flight to Alphonsus. «Flight Internal.», 1965, 87, №2928, 650—651,
1966, 1.62.85
‘6. Further Ranger 4 data. «Interavia Air Letter», 1962, №4978, 5
7. J a f f e L. D. Lunar dust depth in Mare Cognitum. .«I. Geophys. Res.», 1966, 71, 1095—1103, 1966, 8.62.214
8. Koi cum E. H. Three Ranger Hard—landing flights eliminated; four others delayed. «Aviat. Week and Space Tachnol.», 1963, 79, № 5, 17—18.
9. Ku i p e г G. P. Lunar results from Ranger 7 to 9. «Sky and Teleskope», 1965, 29, №5, 293—308
10. L a Fond C h. D. Ranger to provide real moon close-up. «Missiles and Rockets», 1962, 10, №5, 32—33, 1961, 7.51.731
11. Launch of Ranger lunar impact spacecraft. «Interavia Air Letter», 1964, №5421, 6.
12. Lunar surface data is goal of Ranger 3. «Aviat. Week and Space Technol.», 1962, 76, №4, 37—38
13. Lunar TV via Rangers. «Flight Internal.», 1965, 87, №2925, 506, 1965,
12.62.70
14. Lyt tieton R. A., Stubbs P. Ranger VIII’s Moon pictures. «New Scientist», 1965, 25, №432, 487—490, 1966, 3.62.249
15. Mid—course change puts Ranger in target. «Aviat. Week and Space Technol.», L965, 82, № 8, 34, 1965, 12.62.67
16. NASA, IPL seek cause of Ranger failure. «Aviat. Week and Space Technol.», 1964, 80, №6, 22—25, 1964, 11.62.52
17. NASA preparing for Ranger IX next month; Ranger VIII returns 7162 photos. «Missile/Space Daily», 1965, 11, №37, 323—324 1965, 12.62.68
18. NASA cpurs lunar impact program. «Missiles and Rockets», I960, 6, № 18,
15, 1961, 1.51.503
19. Northrop Ranger responsibility. «Interavia Air Letter», 1963, №5200,
2—3.
20. Orbiter 2 photos used to identify Ranger 8 crater. «Aviat. Week and Space Technol.», 1967, 86, №4, 30—31, 1967, 8.62.223
21. Pay Rex. IPL looks for answer to Ranger VI malfunction. «Missiles and Rockets», 1964, 14, №6, 16.
22. Projected launch of Ranger 5. «Interavia Air Letter», 1962, №5098, 5—6.
23. Race to Moon. «Electron. News», 1964, 9, №415, 13, 1964, 11.62.43
24. Ranger backup shot set for October. «Missiles and Rockets», 1961, 9, №9, 10
25. Ranger Block III extensively modified. «Missile/Space Daily», 1964, 8, № 16, 105, 105A, 1965, 5.62.94
59
26. Ranger IX expected to show whether Moon has active volcanos. «Missile/ /Space Daily», 1965, 12, № 17, 129—130, 1966, 1.62.84
27. Ranger failures possibility due to sterilization. «Interavia Air Letter»; 1963, №5161, 6
28. Ranger IX gives best accuracy, resolution; seen aiding Surveyor. «Missi le/Space Daily», 1965, 12, №20, 154, 1966, 1.62.273
29. Ranger 1 is most sophisticated U. S. spacecraft. «Missile and Rockets» 196-1, 9, №5, 14—15.
30. Ranger 8 launch. «Interavia Air Letter», 1965, №5689, 5—6
31. Ranger 2 launch fails. «Interavia Air Letter», 1961, №4871, 5.
32. Ranger launch still slipping. «Missiles and Rockets», 1963, 13, № 10, 9
33. Ranger lunar hard lander. «Missiles and Rockets», 1963, 13, № 15, 60—62 1964, 8.62.71
34. Ranger 3 lunar probe programme details. «Interavia Air Letter», 1962, №4914, 4—6
35. Ranger 4 Moon crash. «Interavia Air Letter», 1962, №4980, 2—3.
36. Ranger III: most complicated and procusing. «Missiles and Rockets»,. 1962, 10, №4, 18.
37. Ranger 4 only a partial success. «Interavia Air Letter», 1962, №4977, 5.
38. Ranger VII—photographic mission to the Moon. COSPAR Inform. Bull, 1965, № 22, 52—74.
39. Ranger 7 photographs Moon. «Flight Internat.», 1964, 86, №2891, 229.
40. Ranger pinpoints DSIF stations. «Missiles and Rockets», 1965, 16, №'12, 23.
41. Ranger VII proves Apollo feasibility. «Missiles and Rockets», 1964, 15, № 6, 16—18, 21—22, 24, 1965, 4.62.74
42. Rangers 8, 9 readied for flights to Moon. «Aviat. Week and Space Technol.», 1965, 82, №7, 52, 1965, 12.62.102
43. Ranger 8’s sharper eyes. «Electronics», 1965, 38, №4, 50-
44. Ranger shot postponed. «Missiles and Rockets», 1961, 9, №6, 10.
45. Ranger shot set this month. «Interavia Air Letter», 1964, №5419, 6.
46. Ranger 7 specifications. «Interavia Air Letter», 1964, №5552, 6.
47. Bubb M. If all goes well-6 cameras will provide 4000—7000 photos. «Electron. News», 1965, 10; №481, 38.
48. Strasser J. A. The Moon: we look before we leap. «Electronics», 1964,.
37, №4, 14—15. 1964, 10.62.51
49. Synchronized Ranger TV cameras to photograph lunar impact area. «Aviat. Week and Space Technol.», 1962, 76, № 2, 29.
50. The high cost of exploring the Moon: Saturn SA—5 and Ranger 6. «Interavia», 1964, 19, № 3, 293.
51. The Ranger lunar missions. COSPAR Inform. Bull., 1965, №26, 69—90, 1966, 4.62.236
52. Urey H. C. Observations of the Ranger photographs. «The nature oi the-lunar surface»., John Hopkins Press, 1966, 3—21.
53. Watkins H. D. Ranger photos boost cofidenoe in Apollo. «Aviait. Week and Space Technol.» 1964, 81, №6, 19—23, 1965, 3.51.446
54. Watkins H. D. Surveyor unit permits live TV broadcast from Ranger 9. «Aviat. Week and Space Technol.», 1965, 82, № 13, 26—27, 1966,
2.62.112
55. Wilks B. Documentation error lost Ranger III photos. «Missiles and Rockets», 1962, 10, №8, 33
56. W i 1 к s W. E. Apollo crater landing seen possible. «Missiles and Rockets», 1965, 16, № 13, 26, 28—29, 1965, 12.62.403
IV. ИЗУЧЕНИЕ ЛУНЫ ПО ПРОГРАММЕ SURVEYOR
1. Программа создания космических аппаратов Surveyor.
Программа Surveyor («Наблюдатель», «Топограф») явилась следующим этапом в изучении Луны за программой Ranger. Ею предусматривалось создание аппарата для мягкой посадки на Луну и проведения исследований лунной поверхности как в рамках программы Apollo, так и в научных целях. В 1960 г. по заданию NASA Лабораторией по изучению технических проблем межпланетных полетов совместно с Лабораторией космической техники, McDonnel Aircraft Corp., North American Aviation и Hughes Aircraft Co. были начаты работы по созданию космического аппарата для мягкой посадки и исследования лунной поверхности (18). Общее руководство этими работами, а затем и разработкой аппарата осуществлялось Лабораторией реактивного движения. Руководство работами по программе в целом осуществлялось Управлением научных и прикладных космических исследований NASA. Первоначально предполагалось, что в начале 1961 г. NASA выберет один из представленных фирмами — разработчиками проектов для дальнейшей проработки. Первые запуски аппаратов Surveyor ракетами-носителями Atlas — Centaur были запланированы на 1963— 1964 гг., всего в период 1963—1965 гг. предполагались запуски 7 аппаратов. Техническим заданием предусматривалось создать аппарат весом около 1000 кГ при весе научной аппаратуры 45 кГ. На поверхность Луны предполагалось доставить приборный контейнер весом около 360 кГ (18). Система посадки должна была обеспечить посадку аппарата со скоростью 4 м!сек.
В декабре 1960 г. Лаборатории реактивного движения вышеуказанными организациями были представлены проекты
61
аппарата по программе Surveyor. После их рассмотрения, руководство NASA выбрало для дальнейших проработок проект Hughes Aircraft Со., назначенной головной организацией по разработке и изготовлению аппаратов, получивших название Surveyor. Контракт NASA с Hughes Aircraft Со. заключен в марте 1961 г. По проекту аппарат после отделения от ракеты-носителя имеет вес 1100 к1\ в т. ч.: конструкция, связное оборудование и система терморегулирования — 230 кГ\ научные приборы и телевизионное оборудование — 90-Н35 кГ; приборный контейнер, доставляемый на поверхность Луны,— 340 кГ. В качестве источника электроэнергии предусматривалось использование химических батарей, подзаряжаемых солнечными элементами. Одновременно прорабатывался вариант системы электропитания с применением термоэлектрического генератора с радиоактивным изотопом Cm242 мощностью 30 вт [32]. Программой полета аппарата предусматривалось проведение коррекции траектории с помощью верньерных двигателей — трех ЖРД с тягой, регулируемой в диапазоне от 13,6 до 48,5 кг, работающих на мо-нометилгидразине и четырехокиси азота. Предполагалось, применить вытеснительную подачу топлива и регенеративное охлаждение двигателей. Предварительный контракт Hughes Aircraft Со. на разработку и изготовление двигателей заклю: чен в 1961 г. с Thiokol Chemical Corp. Торможение аппарата на участке посадки на Луну предполагалось обеспечить бортовым РДТТ, стабилизацию и управление на всех, участках полета — ЖРД и управляющими реактивными соплами.
Для изучения лунной поверхности на аппарате предусматривалось установить следующее научное оборудование' (4,8,65).
Четыре телекамеры для получения изображений лунной поверхности и наблюдения за работой бортового оборудования. Камеры включаются до посадки аппарата на Луну, непосредственно после включения обозреваемая площадь поверхности составляет около 40 000 кж2, а разрешающая способность— до 0,33 км. После посадки аппарата предполагалось объективы 3-х камер направить вверх, а объективы, четвертой — вниз, для наблюдения за работой бурильной установки. При съемке на поверхности Луны 3 камеры, направленные объективами вверх, имеют круговой обзор в горизонтальной плоскости, обеспечиваемой системой зеркал,, а четвертая — угол обзора в 65° в вертикальной плоскости. Камеры снабжены 3 сменными объективами: широкоугольным., телеобъективом и объективом с высокой разрешающей способностью; при фокусировке оптической системы обеспечивается их разрешающая способность 4, 1 и 0,2 мм, соответственно. Предполагалось получить стереоскопические изоб
62
ражения лунной поверхности и (провести фотометрические,, колориметрические и поляриметрические исследования.
Приборы для измерения температуры у поверхности Луны, которые в диапазоне 120—400° К при скорости изменения, температуры до 3° К/мин. не должны иметь погрешность больше 1°К. Они располагаются на высоте 1,2 м от поверх-' ности. Измерения температуры предполагалось производить несколько раз в течение лунного дня и ночи для определения скорости остывания поверхности.
Приборы для измерения скорости звука в лунных породах рассчитаны на измерение скорости от 100 до 7500 м!сек.. Звуковые колебания предполагалось создавать зарядами взрывчатых веществ, подрываемых на некотором расстоянии, от аппарата.
Акселерометры для изучения механических характеристик, лунного грунта монтируются в «снаряды» конической и полусферической формы, сбрасываемые на поверхность с небольшой высоты; по показаниям акселерометров определяется скорость движения «снарядов» через поверхностный слой. Полученные данные предполагалось сравнивать с показаниями аналогичных «снарядов», сбрасываемых на различные: почвы Земли.
Прибор для определения прочности лунного грунта. Это* определение предполагалось проводить двумя пластинами различных размеров, вдавливаемыми в грунт, путем измерения скорости их углубления в зависимости от силы давления.
Буровая установка предназначалась для бурения и извлечения пробоотборником образцов лунного грунта из скважины диаметром 5 см и глубиной до 1,5 м. Образцы лунного’ грунта подвергаются химическому анализу на аппарате, результаты анализа передаются на Землю.
Зонд для изучения подпочвенного слоя предполагалось опустить в пробуренную бурильным устройством скважину, с измерениями на различной глубине через каждые 15 сек.
Сейсмометр для проведения сейсмических исследований на поверхности Луны регистрирует сдвиги грунта в 1 ц, при этом создается напряжение от 25 до 50 мв.
Оборудование для отбора проб лунного грунта предназначено для отбора, размельчения и подачи проб в рентгеновский дифрактометр для минералогического анализа.
Приборы для проведения анализа образцов лунных пород: рентгеновский спектрометр для определения по наведенному рентгеновскому излучению процентного содержания в образце Al, Fe, К, Са, Mg, Мп, Na, Ni, S, Ti, С, Cr, -'(рассчитан на проведение анализа 20 образцов); рентгеновский дифрактометр для облучения 'рентгеновскими лучами образца породы и регистрации наведенного у-излучения счетчиком Гейгера — Мюллера (излучение сравнивается с наведенным
63-
•^-излучением известных минералов и делается вывод о наличии в лунных породах тех или иных минералов); газовый хроматограф для анализа проб газов и органических соединений в породах, слагающих лунную поверхность.
Приборы для измерения атмосферного давления и определения газового состава атмосферы, рассчитанные на измерение давления атмосферы в диапазоне 10-7-‘-10-14 мм рт. ст. Магнитометр для обнаружения магнитного поля Луны. Телескоп с высокой разрешающей способностью. Прибор для изучения магнитных свойств лунных пород. Прибор для определения энергетического спектра космических частиц, достигающих поверхности Луны. Прибор для регистрации протонов с энергией Е> 10 Мэв, а-частиц с энергией Е>40 Мэв и электронов с энергией Е>0,5 Мэв. Прибор (микрофон) для определения массы, скорости и направления полета частиц, выбиваемых из лунных пород метеорными телами. Регистрация этих частиц и их изучение необходимо для выяснения опасности для космонавтов на Луне, воздействия на объективы оптической аппаратуры, зеркала и солнечные элементы аппаратов, совершивших посадку на Луну. Контракт в размере 257,5 тыс. долл, на разработку и изготовление прибора NASA заключило с Научно-исследовательским центром космических полетов им. Маршалла.
Согласно предварительным проработкам стоимость создания аппарата Surveyor по этому проекту оценивалась в 50 млн. долл.
В ходе дальнейших работ выяснилось, что первые, а, возможно, и последующие образцы ракеты-носителя Atlas — Centaur, создававшейся в то время, не смогут вывести на траекторию полета к Луне аппарат весом 1100 кГ. В связи с этИхМ проект аппарата был пересмотрен и вес уменьшен до 952 кГ при весе, доставляемом на поверхность Луны, 270 кГ. Этот аппарат получил обозначение Surveyor А. Впоследствии, модель аппарата Surveyor А весом 950-^-970 кГ получила наименование Block I, а модель весом 1130-41270 кГ— Block II.
В марте 1964 г. Лаборатория реактивного движения объявила конкурс на разработку тормозного РДТТ, а вскоре с Atlantic Research Corp, и Thiokol Chemical Corp, был заключен параллельный контракт. По условиям контракта Atlantic Research Corp, должна была провести испытания 2 двигателей, a Thiokol Chemical Corp. — одного. К апрелю 1965 г. Atlantic Research Corp, провела испытания первого двигателя, который при весе топливного заряда 450 кГ проработал 40 сек. При осмотре двигателя после испытаний существенной эрозии сопла не было обнаружено. К марту 1965 г. Thiokol Chemical Corp, на базе ВВС Эдвардс успешно про
•64
ведены огневые испытания РДТТ, 'который проработал 35 сек. Топливо содержало 12% присадки бериллия (23). По результатам испытаний контракт Лаборатории реактивного движения на разработку и изготовление тормозных РДТТ для аппаратов Surveyor получила Thiokol Chemical Corp.
По контракту Hughes Aircraft Corp, верньерные ЖРД разрабатывались Reaction Motors, Div. (отделением Thiokol Chemical Corp.). Проектом предусматривалось регенеративное охлаждение и регулирование тяги в диапазоне от 29 до 100%. При отработке возникли трудности с обеспечением регенеративного охлаждения и разработкой системы регулирования тяги. В связи с задержкой работ Лаборатория реактивного движения заключила в 1963 г. параллельный контракт на разработку подобного двигателя с Лабораторией космической техники на сумму 345 тыс. долл. По контракту ЖРД должны иметь тягу 63,5 кГ и допускать регулирование тяги в диапазоне от 10 до 100%, обеспечиваемое форсунками с регулируемым проходным сечением. Возможность регулирования тяги в таком большом диапазоне должно было сделать двигатель Лаборатории космической техники более экономичным, чем двигатель Reaction Motors, Div. В гидроприводах управления двигателем предусматривалось использование одного из компонентов топлива, а не специальной гидравлической жидкости. Охлаждение предполагалось обеспечить за счет уноса разрушающегося покрытия. Огневые испытания двигателя должны были быть проведены до конца 1963 г. В ходе дальнейших работ (в конце 1963 г.) контракт Лаборатории реактивного движения с Лабораторией реактивной техники был продолжен на сумму 645 тыс. долл. Предусматривалось, в частности, увеличение тяги до 82 кГ и обеспечение регулирования ее в диапазоне от 9 до 82 кГ. В течение 1963 г. Лабораторией реактивной техники проводились огневые испытания двигателя, в ходе которых он трижды включался и проработал в общей сложности 330 сек. По результатахМ работ Лаборатории реактивной техники NASA в 1964 г. предполагало разорвать контратк с Reaction Motors, Div., несмотря на то, что ею к 1963 г. было израсходовано на разработку двигателя около 8 млн. долл. Однако, в ходе дальнейших испытаний Reaction Motors., Div., удалось устранить недостатки, и NASA приняло решение использовать этот двигатель для установки на аппарате Surveyor А модели Block I, а для более тяжелой модели Block II использовать двигатель Reaction Motors, Div. или Лаборатории реактивной техники.
Прорабатывались варианты системы энергопитания, использующей радиоизотопные источники (13). Martin Со. проводила работы по созданию радиоизотопного термоэлектрического генератора весом 13 кГ и мощностью 26 вт. Уста
5-6157
65
новка получила название SNAP-11 (Space Nuclear Auxiliary Power — вспомогательный ядерный источник для космических аппаратов). Экспериментальный вариант SNAP-И был передан Лаборатории реактивного движения; в нем для нагрева рабочего тела использовался не изотоп, а электрический нагреватель. Первую установку с радиоизотопом фирма должна была передать Лаборатории реактивного движения в феврале 1966 г. Общая стоимость разработки SNAP-11, по: предварительным оценкам, равнялась 1,5 млн. долл. Первоначальными планами NASA предполагалось установить SNAP-11 на аппарате Surveyor А модели Block I, однако, в дальнейшем было принято решение использовать в системе электропитания аппаратов Surveyor А химические батареи и солнечные элементы. Комиссией по атомной энергии (Atomic Energy Commission — АЕС) были заключены параллельные контракты с General Electric Со. и RCA на сумму 64,5 тыс. долл, и 69 тыс. долл., соответственно, предусматривавшие изучение возможности создания радиоизотопной, энергетической установки на Ри238 для аппарата Surveyor модели Block II. Контрактами предусматривалось создание установки весом не более 13,6 кГ, длиной 61 см, диаметром 25 см, обеспечивающей мощность 45—50 вт при напряжении 28 в и продолжительности работы 1 год. В 1965 г. в связи с отказом NASA от разработки аппарата Surveyor А модели Block II эти работы были прекращены.
Для запусков аппаратов Surveyor была разработана типовая программа полета. Ниже приводится вариант с выводом на промежуточную орбиту (7,20). После окончания работы двигателей I ступени ракеты-носителя и ее отделения включаются двигатели II ступени, которые выводят ступень с аппаратом на промежуточную круговую орбиту высотой 160 км, по которой она обращается 25 мин., затем производится повторное включение двигателей II ступени и ступень с аппаратом переходит на траекторию полета к Луне. По команде станции слежения в Крюгерсдорпе после окончания работы двигателей, аппарат отделяется от ступени, развертываются посадочная тренога и всенаправленная антенна и производится ориентация аппарата относительно Солнца и Канопуса. Солнечный датчик, по которому аппарат ориентируется на Солнце, выдает сигналы на электромотор, поворачивающий панели с солнечными элементами на Солнце. Через 15—20 час. после запуска, когда аппарат находится в поле зрения станции слежения в Голдстоуне, проводится коррекция траектории верньерными ЖРД (предусмотрено проведение нескольких коррекций), а затем аппарат снова ориентируется по Солнцу и Канопусу. На 3 сутки полета (на расстоянии 1600 км от Луны) начинается цикл операций,, обеспечивающий посадку аппарата.
66
I этап. Расстояние аппарата до Луны — от 1600 до 84 км; скорость аппарата относительно Луны — от 2500 до 2620 м/сек. Реактивными управляющими соплами аппарат ориентируется так, чтобы его продольная ось, по которой размещен тормозной РДТТ, совместилась с вектором скорости. На расстоянии 250 км от Луны по команде с Земли включается радиолокатор AMR, измеряющий расстояние до Луны. Далее все операции осуществляются автоматически. На расстоянии 95 км от Луны AMR подает 'команду на программно-временное устройство (ПВУ), по команде которого через определенные промежутки времени (временные уставки закладываются на борт по командам с Земли) включается ЖРД (обеспечивают ориентацию аппарата во время работы РДТТ и торможение аппарата после выключения РДТТ), РДТТ (обеспечивает гашение скорости), •радиовысотометр и доплеровский датчик скорости. В случае неудачно проведенной коррекции траектории на этом этапе посадки предусмотрено включение «подлетной» телекамеры.
II этап. Расстояние аппарата от Луны — от 84 до 12 км; скорость аппарата относительно Луны — от 2620 до 119± ±38 м/сек. На высоте 84 км последовательно включаются ЖРД и РДТТ. AMR устанавливается перед соплом РДТТ и после включения РДТТ отбрасывается истекающей струей газов (с этого момента работа ЖРД и РДТТ осуществляется по командам от ПВУ).
III этап. Расстояние аппарата от поверхности Луны — от 12 км до 12 м; скорость аппарата относительно Луны — от 119±38 м/сек до 1,5 м/сек. РДТТ работает 40 сек, снижая скорость падения до 15-И2 м/сек, и прекращает работу на высоте 10 км. По достижении фиксированной скорости снижения на расстоянии 8 км от поверхности Луны РДТТ сбрасывается по команде ПВУ от сигнала инерционного выключателя. Дальнейшее торможение и ориентация аппарата обеспечивается непрерывно работающими ЖРД. Работа ЖРД в этот период вначале обеспечивается по командам от ПВУ, а затем, после того, как радиолокационный альтиметр и допплеровский радиолокатор (RADVS) начинают получать устойчивые отраженные сигналы от поверхности Луны, по командам от этих устройств. Расстояние до Луны в этот момент 4 км, а скорость — 0,1 км/сек.
IV этап. Расстояние аппарата от поверхности Луны — от 12 до 4 м; скорость аппарата относительно Луны постоянна— 1,5 м/сек. Спуск аппарата с постоянной скоростью обеспечивается работой ЖРД, которые на расстоянии 4,2 м до поверхности Луны выключаются.
V этап. Расстояние аппарата до поверхности Луны — от 4 до 0 м\ скорость аппарата относительно Луны — от 1,5 до
5:
67
5 м!сек. В течение 2 сек аппарат совершает свободное падение. Расчетная скорость посадки аппарата в момент удара о поверхность не должна превышать 4 м!сек, а отклонение продольной оси аппарата от вертикали — не более 5°. В момент посадки перегрузки не должны быть более 20, хотя бортовое оборудование проектировалось на перегрузки до 100. Время полета аппарата от старта до момента посадки — около 66 час.
Для наземных испытаний и отработки бортовых систем Hughes Aircraft Со. создала натурный макет, модель и экспериментальный образец аппарата Surveyor А. Натурный макет предназначался для определения способности аппарата совершать посадку на горизонтальную и наклонную поверхности разной структуры. Для имитации веса аппарата к каркасу макета прикреплялись стальные пластины, а для имитации лунного тяготения использовались противовесы, компенсировавшие 5/6 веса. Падение макета на поверхность, имитирующую скалистую или пылевую структуру грунта, осуществлялось при различных значениях вертикальной и горизонтальной составляющих вектора скорости. Для имитации пылевой поверхности применялись древесные стружки и тальк, для определения устойчивости макета поверхность, имитирующая лунный грунт, устанавливалась под различными углами (до 25°) к горизонту, для имитации свободного падения после выключения верньерных двигателей макет сбрасывался с высоты 4,5 м. Поверхность, на которую сбрасывался макет, имела наклон для того, чтобы 2 опоры находились выше третьей и вся нагрузка приходилась на третью ногу. Макет при этих испытаниях не опрокидывался (55, 62, 72).
Модель аппарата предназначалась для испытания системы, обеспечивающей посадку на Луну, в том числе системы наведения и управления, и снабжалась верньерными двигателями, радиолокаторами, аппаратурой инерциальной системы и соответствующим электронным оборудованием. Испытания проводились с 1964 г. на базе ВВС Холломан (шт. Нью-Мексико), на полигоне White Sands Proving Ground (Ракетный испытательный полигон Уайт Сэндс). Программой испытаний предполагалось провести сбрасывания модели, поднятой на воздушном шаре или аэростате на высоту 300—500 м. Модель снабжалась небольшим парашютом, обеспечивающим ее стабилизацию при падении. При достижении скорости падения 24,5 к!сек предполагалось, включить систему ориентации, а затем верньерные двигатели, которые должны снизить скорость падения до 1,5—3,0 м!сек. Во время падения модели до высоты 150—180 м система управления и наведения должна работать в том режиме, который необходим для обеспечения посадки аппарата на Луну. На высоте 150—180 м предполагалось раскрыть большой парашют для смягчения удара при
68
посадке. Намечалось провести 8 таких испытаний. При дальнейших испытаниях, когда модель не оснащается парашютом и скорость составит около 6 м/сек, для смягчения удара при посадке предполагалось применить пневматические амортизаторы. Предполагалось провести дополнительно 2 испытания, при которых не будет использоваться посадочный парашют, а модель аппарата совершит посадку с помощью верньерных двигателей, работающих по командам системы наведения и управления. Модель аппарата, предназначавшаяся для испытаний системы управления верньерными двигателями, получила обозначение Т—2. В 1964 г. на полигоне Уайт Сэндс проведены 2 испытания этой системы, при которых модель аппарата сбрасывалась с аэростата. Они были неудачными из-за некачественного изготовления моделей и плохой подготовки испытаний Hughes Aircraft Со. Испытания этой системы продолжены в 1965 г. В ноябре 1965 г. проведены первые успешные летные испытания элементов системы, обеспечивающих мягкую посадку на Луну. Для этих испытаний модель аппарата подвешивалась к аэростату, который поднимался на высоту 420 м. После подъема аэростата были включены бортовой допплеровский радиолокатор, установленный на модели, и другое оборудование системы управления и 3 верньерных двигателя. Затем модель отделилась от аэростата и на высоте 150 м был раскрыт парашют, обеспечивший её посадку. После проведения этих испытаний высказывались опасения, что радиолокационные устройства, устанавливаемые на аппарате, не смогут правильно измерять расстояние до поверхности Луны потому, что по некоторым данным лунная поверхность может иметь сравнительно толстый слой радиопрозрачного материала и излучение радиолокатора будет отражаться не от поверхности Луны, а от твердых пород, залегающих на некоторой глубине. Испытания радиолокатора и допплеровского датчика скорости проводились с использованием вертолета. Радиолокатор и датчик скорости работали во время спуска вертолета с высоты 1800 м до 6 м. Первые испытания посадочной системы (без тормозного РДТТ) начались в ноябре 1965 г. Вес модели, предназначенной для этих испытаний, составлял около J 00 кг. При первых испытаниях в ноябре 1965 г. и феврале 1966 г. модель сбрасывалась с высоты 420 м, на высоте 150 м выключались работавшие до этого момента верньерные двигатели и развертывался посадочный парашют (55, 62, 72). В мае 1966 г. продолжены испытания посадочной системы; модель весом 102 кГ была сброшена с высоты 300 м, при достижении скорости 16,8 м/сек были включены верньерные двигатели, которые снизили ее до 1,5 м/сек. Спуск продолжался в течение 36 сек и впервые был осуществлен без применения парашютов. Программой проведения наземных испытаний предполагалось экспериментальный образец аппарата доста
69
вить на станцию слежения системы DSIF в Голдстоуне и провести испытания бортового оборудования, которое работает по сигналам этой станции. Дальнейшими испытаниями на базе Холломан предусматривалось изучение возможности затухания сигналов бортовых радиолокаторов при прохождении их сквозь факел верньерных двигателей. Испытание носового обтекателя, прикрывающего аппарат Surveyor А во время прохождения ракеты-носителя через плотные слои атмосферы, проводились на стенде комплекса CSTS Astronautics.
В качестве первой ступени ракеты-носителя Atlas-Centaur использовалась ранее созданная ракета Atlas, а второй ступенью должна была служить ракета Centaur, разрабатывавшаяся под руководством Научно-исследовательского центра космических полетов им. Маршалла. Все запуски ракет-носителей Atlas-Centaur по программе Surveyor осуществлялись со стартовых комплексов №№ 36А и 36В м. Кеннеди, созданных специально для этой программы. Отработка экспериментальных образцов ракеты-носителя Atlas-Centaur началась в 1962 г. Первый запуск (АС-1) экспериментальной ракеты-носителя Atlas-Centaur произведен 8 мая 1963 г. После неудачного запуска АС-1 решением NASA руководство работами по ракете Centaur было возложено на Научно-исследовательский центр им. Льюиса ввиду того, что Центр Маршалла был в основном занят разработкой ракеты-носителя Saturn. В связи с важностью программы Surveyor в 1963 г. решением правительства работы по ракете-носителю Atlas-Centaur были отнесены к категории «самых первоочередных работ». Для обнаружения возможных неисправностей систем ракеты-носителя NASA и Центром Льюиса было принято решение проводить до старта полную комплексную проверку ракеты-носителя на специальном стенде Astronautics в г. Сан-Диего. После запуска АС-1 в конструкцию ракеты-носителя были внесены существенные усовершенствования и проведены длительные, продолжительностью 14 месяцев, наземные испытания отдельных узлов и ракеты-носителя в целом. Запуски экспериментальной ракеты-носителя Atlas-Centaur АС-2 и АС-3 состоялись, соответственно, 27 ноября 1963 г. и 30 июля 1964 г. Программой запусков предусматривалось проведение испытаний стартового комплекса, бортовых систем и ракеты-носителя в целом. Запуск экспериментальной ракеты-носителя Atlas-Centaur АС-4 состоялся 11 декабря 1964 г. Программой испытаний предусматривались те же задачи, что и при запуске АС-3, а также ряд дополнительных испытаний бортовых систем, в частности, повторного включения двигательной установки II ступени и системы, с помощью которой совершается пространственный маневр II ступени. Полезной нагрузкой являлся макет аппарата Surveyor, который имитировал его весовые и вибрационные характеристики. В полете не была осу
70
ществлена ориентация и стабилизация II ступени, повторное включение двигательной установки осуществить не удалось.
Параллельно с разработкой аппарата Surveyor А в 1961— 1962 гг. проводились работы по созданию аппарата Surveyor В для вывода на селеноцентрическую орбиту и получения снимков лунной поверхности. В связи с недостатком средств разработка аппарата Surveyor В в 1963 г. была прекращена и аппараты Surveyor А моделей Block I и Block II стали называться Surveyor. Первоначально NASA планировало начиная с 1963 г. по 1966 г. осуществить запуск 17 аппаратов Surveyor: 7 экспериментальных аппаратов модели Block 1 и 10 отработанных аппаратов модели Block II. Планами NASA предусматривалось в период МГСС (1964—1965 гг.) осуществить запуск 2 аппаратов Surveyor. Расходы на разработку всех этих аппаратов, изготовление и запуски должны были составить около 620 млн. долл. В начале 1964 г. срок запуска первого экспериментального аппарата Surveyor модели Block I был перенесен на II квартал 1965 г. Этот аппарат предназначался для проведения испытания бортовых систем. Три последующих аппарата, предназначавшихся для изучения Луны, предполагалось запустить с 3-месячными интервалами. Первые телевизионные изображения лунной поверхности планировалось получить при запуске 5-го аппарата в середине 1966 г. Против этого плана возражали конструкторы, проектировавшие лунную кабину корабля Apollo^ для которых получение изображений и характеристик лунной поверхности позволило бы на ранней стадии проектирования лунной кабины учесть реальные условия при посадке. Поэтому было выдвинуто предложение о получении изображений при запусках первых четырех аппаратов. Были изменены и сроки запуска отработанных аппаратов Surveyor модели Block II (эту модель предполагали оснастить самоходным устройством, а запуски ее начать с 1967 г.). В связи с сокращением Конгрессом в середине 1964 г. бюджетных ассигнований NASA на 1965 финансовый год руководство NASA пересмотрело программу запусков аппаратов Surveyor (26). Новой программой предусматривалось сокращение числа запусков отработанных аппаратов модели Block I с 7 до 5. Первые 3 аппарата предназначались для испытания бортовых систем, обеспечивающих мягкую посадку. Их предполагалось оснастить телекамерой для получения изображений лунной поверхности в период посадки аппарата, научную аппаратуру устанавливать не предполагалось.
После запуска АС-4 в январе 1965 г. был вновь уточнен план дальнейших запусков: для отработки ракеты-носителя Atlas-Centaur предполагалось осуществить 4 запуска (АС— 5^-АС—8), отработку бортовых систем экспериментального аппарата Surveyor модели Block I — при 3 запусках (АС—9-^
71
^-АС—11), доставку на Луну отработанных аппаратов Surveyor модели Block II начать с запуска АС-12, но не ранее, чем в 1966 г. К началу 1965 г. ассигнования, погребные на реализацию программы Surveyor, стали оцениваться в размере 760 млн. долл., причем уже было израсходовано около; 531 млн. долл. (6). Однако этот план был скорректирован и утверждена новая программа запусков (42). В марте 1965 г. предполагалось осуществить запуск АС-5 -с макетом аппарата в качестве ’полезной нагрузки и продолжить отработку бортовых систем ракеты-носителя. В июне 1965 г. планировалось осуществить запуск АС-6 с теми же задачами, что и при запуске АС-5, и закончить этап обработки ракеты-носителя Atlas-Centaur. В сентябре-октябре 1965 г. предусматривалось осуществить запуск АС-7 и доставить на Луну первый экспериментальный аппарат Surveyor модели Block I для получения телевизионных изображений лунной 'поверхности и отработки системы, обеспечивающей мягкую посадку аппарата.
К августу 1965 г. были завершены виброиспытания экспериментального аппарата Surveyor и начались испытания в барокамере. В ходе испытаний ошибочно было использовано напряжение, превышающее допустимое, и ряд транзи-стеров и диодов был поврежден, что задержало окончание испытаний. Необходимость в проведении дополнительных .испытаний заставила отложить запуск АС-7 на декабрь 1965 г. Запуск АС-5 произведен 2 марта 1965 г. В результате самопроизвольного прекращения работы двигателей I ступени ракета-носитель взорвалась через 2 секунды после включения двигателей и был поврежден пусковой стол стартового комплекса № 36А. Полезной нагрузкой являлся динамический макет аппарата Surveyor. После ряда неудачных запусков ракеты-носителя Atlas — Centaur Комитет Палаты Представителей по научным вопросам и астронавтике рекомендовал в 1965 г. руководству NASA рассмотреть возможность использования для запусков аппаратов Surveyor ракету-носитель Titan ШС (9). В связи с отставанием отработки ракеты-носителя Atlas—Centaur Конгресс включил в бюджет NASA на 1965 ф. г. ассигнования в размере 10 млн. долл, на приспособление ракеты-носителя Titan IIIC для запусков аппаратов Surveyor. В июле 1965 г. из-за сокращений бюджетных ассигнований руководство NASA рассмотрело вопрос о создании отработанного аппарата Surveyor модели Block II, оснащенного самоходным устройством, и приняло решение прекратить эти работы (22). Запуск АС-6 произведен 11 августа 1965 г. со стартового комплекса № 36В. Полезной нагрузкой являлась динамическая модель аппарата Surveyor. Задачи запуска были выполнены. По результатам запусков. АС-14-АС-6 руководством NASA ракета-носитель Atlas-Cen
72
taur признана отработанной. Однако для отработки бортовых систем впоследствии произведено еще 2 запуска (АС-8 и АС-9).
В конце 1965 г. была уточнена программа запусков аппаратов Surveyor. Предполагалось осуществить запуск 10 экспериментальных аппаратов модели Block I и отработанных аппаратов модели Block II, которые получили название Surveyor A, Surveyor В, . . ., Surveyor I и Surveyor J, запускам этих аппаратов было присвоено обозначение «SC» (Surveyor-Centaur), SC-1 до SC-10. Запуск SC-1 первого экспериментального аппарата Surveyor А согласно этой программе: был намечен на февраль 1966 г., но ввиду отставания проведения наземных испытаний аппарата Surveyor А запуск был перенесен на май 1966 г. Всего предполагалось провести 7 испытаний, в частности, испытания в термобарокамере, причем некоторые испытания — в течение 66 час. Экспериментальные аппараты Surveoyr А, В, С и D модели Block I должны были иметь вес не более 1020 кГ. Программок! предусматривалось получить телевизионные изображения поверхности Луны и провести отработку бортовых систем аппарата. Установка научных приборов на этих аппаратах не предусматривалась. С 1967 г. уточненной программок! предусматривалось начать запуск аппаратов Surveyor Е, F и G модели Block II весом по 1020 кГ, в том числе научных приборов — 52 кГ. Предполагалось провести изучение Луны и получить детальные телевизионные изображения лунной поверхности. На каждом из аппаратов предполагалось установить (7, 20): 3 телевизионные камеры для получения изображений лунной поверхности, причем объектив одной из камер предполагалось-направить вертикально вниз, а две другие использовать для направленной съемки с использованием системы зеркал; блок приборов для исследования динамики посадки аппарата,, включающий 9 тензометров, 3 линейных акселерометра, 3 скоростных гироскопа, 6 индикаторов соприкосновения с поверхностью, 3 индикатора положения амортизирующих опор на посадочных ногах аппарата, с их помощью предполагалось определить ускорения, скорости, смещение осей аппарата при ударе о поверхность, прочность и сопротивление грунта на сдвиг, глубину проникновения аппарата :в грунт; устройство для изучения механических свойств лунного грунта. Устанавливаемый акустический детектор метеорных частиц и частиц, лунного грунта, выбиваемых метеорными телами, позволяет регистрировать частицы с импульсом до 10-5 дин/сек. Предусматривалось измерить число, массу, скорость частиц и определять траекторию их полета. С помощью устройства для: анализа проб лунного грунта по рассеянному а-излучению,. создаваемому радиоактивным источником, входящим в него,, предполагалось обеспечить идентификацию химических эле
73
ментов с атомным номером более 5. Устанавливаемый сейсмометр предназначен для регистрации сейсмической обстановки на Луне (определение числа, мощности и пространственного распределения естественных сейсмических колебаний). Сейсмометр регистрирует колебания поверхности с частотой от 0,05 до 10 гц и вертикальное смещение до 10“3 мк при частоте 1 гц и позволяет регистрировать падение метеорных частиц в районе радиусом 160 км от места посадки аппарата.
После завершения запусков этой серии предполагалось • осуществить запуски аппаратов Surveyor Н, I и J модели Block II весом по 1110 кГ для продолжения изучения лунной поверхности. В начале 1966 г. произошло новое изменение программы Surveyor из-за сокращения бюджета NASA на 1966 ф. г. По новой 'программе был сокращен объем исследований, предполагавшихся осуществить с помощью аппаратов Surveyor Е, F, G модели Block II, что повлекло за собой уменьшение числа приборов, устанавливаемых на этих аппаратах: вместо 3 телевизионных камер и 5 комплектов научного оборудования на каждом аппарате предполагалось установить 1 камеру и один неполный комплект научного оборудования (блок приборов для исследования динамики посадки аппарата). Такое изменение программы не позволило разрабатывать аппараты Surveyor А модели Block II весом 1020 кГ. Запуски 4 экспериментальных аппаратов Surveyor А, В, С, D модели Block I, согласно измененной программе, должны были быть закончены до конца 1967 г., а отработанных аппаратов Surveyor Н, I и J модели Block II весом 1110-4-1130 кГ—начаться во второй половине 1968 г. На отработанных аппаратах предполагалось установить 3 телекамеры (2 для получения панорамных изображений и одна, с объективом, направленным вниз, для получения детальных снимков) и научные приборы. Несмотря на сокращение объема исследований американские ученые предполагали с помощью экспериментальных аппаратов Surveyor получить необходимые данные о лунном грунте (73;). Датчики напряжения, устанавливаемые на опорах шасси, могут дать некоторые сведения о прочности грунта. Панорамная телекамера может дать сведения о рельефе. Если в поле зрения камеры попадает опора шасси, то по степени ее погружения в грунт можно судить о его прочности. Разрешающая способность камеры при съемке объектов, находящихся на переднем плане, достаточна для того, чтобы отличить лавовые породы от сцементированной или несцементированной пыли, колориметрические исследования могут быть проведены с помощью сменных цветных светофильтров. Радиолокационные устройства, используемые в системе посадки, могут дать сведения об отражательной способности грунта и о глубине залегания слоя, отражающего радиолокационное излучение. При помощи тем
74
пературных датчиков можно получить сведения о температурных условиях на поверхности Луны.
В дальнейшем осуществление программы Surveyor проходило по несколько измененному плану. 7 апреля 1966 г. произведен запуск седьмой экспериментальной ракеты-носителя Atlas-Centaur, получившей обозначение АС-8. По первоначальным планам седьмую ракету-носитель предполагалось использовать для доставки первого экспериментального аппарата Surveyor на Луну, но позже было принято решение использовать ее для вывода макета аппарата Surveyor на геоцентрическую орбиту.
При проведении наземных испытаний аппарата Survey-юг А были обнаружены неисправности, часть из которых устранена в ходе подготовки к запуску, устранение некоторых из них повлекло за собой изменение состава бортового оборудования и программы полета. В частности, электромоторы и привод устройства ASPP (Antenna/Solar Pannel Positioner — устройство для установки антенны и панели с солнечными элементами), обеспечивающего ориентацию панели с солнечными элементами на Солнце, а направленной антенны — на Землю, не работали при температуре ниже —100° С; согласно расчетам, в полете это устройство будет •охлаждаться до температуры —106° С. Было принято решение не проводить его модификацию, а изменить программу полета при запуске SC-1: не использовать направленную антенну до посадки аппарата, зафиксировать ее параллельно мачте, на которой она монтируется (это необходимо для предотвращения смещения центра тяжести аппарата, что важно в момент посадки), а устройство ASPP, пока оно не охладится, включить сразу после отделения аппарата от ракеты-носителя для установки панели с солнечными элементами перпендикулярно продольной оси аппарата; после завершения этой операции устройство выключается. Для последующих аппаратов Surveyor было разработано устройство ASPP, работавшее при температуре —143° С. Другой неисправностью было то, что при низкой температуре электродвигатель, поворачивающий зеркало «подлетной» телекамеры, срабатывал только после многократного повторения команд. Вначале было принято решение не устанавливать на .аппарате Surveyor «подлетную» камеру. Это решение мотивировалось тем, что для ее нормальной работы направленная антенна должна быть обращена к Земле, а уверенности в том, что это удастся сделать не было, а также тем, что передача телевизионных изображений, полученных ею, заставит делать перерывы в передаче телеметрической информации на участке подлета и посадки. Однако, все же было решено установить на этом аппарате «подлетную» камеру, но включение ее предусматривалось только в том случае, если аппа
75
рат вследствие неудачной коррекции пройдет мимо Луны. Испытания обнаружили также, что при работе верньерных ЖРД возникает вибрация, которая может помешать нормальной работе радиолокационных устройств в системе, обеспечивающей посадку аппарата. Высказывались также опасения, что могут возникнуть трудности с получением информации от блока приборов для исследования посадки аппарата. Передача этой информации производится в момент посадки, когда шумы и вибрации могут ослабить сигнал бортового передатчика. Для преодоления этого предполагалось, принять меры по своевременному вводу в эксплуатацию антенны с отражателем диаметром 64 м на станции слежения системы DSIF в Голдстоуне.
После успешного запуска SC-1 программа Surveyor вновь была уточнена (24) и принято решение сократить число запусков экспериментальных аппаратов, а научные приборы устанавливать такие же, как на аппарате Surveyor Е (запуск S'C-5), а не как на аппарате Surveyor Н (запуск SC-8). 26 октября 1966 г. произведен последний запуск (АС-9) экспериментальной ракеты-носителя Atlas-Centaur. Полезной нагрузкой был весовой макет аппарата Surveyor.
В конце 1966 г. NASA приняло решение отказаться от создания 3 отработанных аппаратов Surveyor модели Block II (Surveyor Н, I и J) для изучения потенциальных мест посадки лунной кабины корабля Apollo, мотивированное тем, что они не могут быть созданы достаточно быстро,, чтобы обеспечить получение необходимых данных, которые можно было бы использовать при проектировании лунной кабины. Кроме того, изучение потенциальных мест посадки лунной кабины возможно провести в достаточном объеме 5 экспериментальными аппаратами Surveyor C-^Surveyo'r G. Сокращение числа запусков позволило сократить расходы на программу примерно на 100 млн. долл.
Запуск SC-3 экспериментального аппарата Surveyor С был задержан примерно на 2 месяца из-за того, что при наземных испытаниях был обнаружен ряд неполадок в бортовых системах, в результате чего аппарат был демонтирован, а неисправные системы отправлены для устранения обнаруженных дефектов фирмам-изготовителям. После успешного запуска аппарата и получения данных о характеристиках лунной поверхности американскими учеными было< высказано мнение, что оставшиеся 4 аппарата Surveyor D4--т-Surveyor G целесообразно использовать не для изучения сравнительно ровных районов Луны, с точки зрения определения возможности посадки лунной кабины, а для изучения весьма пересеченных и интересных в научном отношении районов. Аппарат Surveyor D целесообразно было бы использовать для посадки в районе Центрального залива, где
76
аппаратами Lunar Orbiter были обнаружены пересеченные участки местности. Первоначально в этот район предполагали доставить аппарат Surveyor С, но после того, как стало ясно, что этот район весьма пересечен и для доставки лунной кабины не приемлем, его направили в восточную часть Океана Бурь. Этапы осуществления программы Surveyor приведены ниже.
2. Космический аппарат Surveyor I (Surveyor А)
Основная цель запуска — доставка аппарата Surveyor на Луну с осуществлением мягкой посадки, получение телевизионных изображений лунной поверхности в районе посадки и отработка систем аппарата. При этом запуске продолжалась отработка систем ракеты-носителя. При запуске решались задачи по изучению характеристик лунного грунта по погружению опор посадочного устройства; по испытаниям систем коррекции траектории, мягкой посадки, связи и отработки систем ракеты-носителя. В одну из полых трубок каркаса был помещен американский национальный флаг.
Запуск SC-1 аппарата (рис. 14) произведен 30 мая 1966 г. в 14 час. 41 мин. 09 сек. (расчетное время — 14 час. 41 мин.), со стартового комплекса № 36А м. Кеннеди ракетой-носителем Atlas-Centaur АС-10. Азимут запуска — 102,3°. «Окном» для запуска 30 мая было время с 14 час. 39 мин. до 15 час. 27 мин. Комплекс № 36А восстановлен после разрушения в результате взрыва ракеты-носителя при запуске АС-5 2 марта 1965 г., затраты на восстановление комплекса составили около 2 млн. долл. Полет ракеты-носителя и аппарата проходил по программе близкой к расчетной. Вывод аппарата на траекторию полета к Луне производился по программе, несколько отличной от штатной: не предусматривался повторный запуск двигателей II ступени, а аппарат выводился непосредственно на траекторию полета к Луне. Ниже приведена программа полета при запуске от момента выключения основных двигателей II ступени (в скобках указано расчетное время): Т — момент старта; Т +11 мин. 55 сек. — развертывание посадочного шасси аппарата; Т + + 12 мин. 05 сек. — подача команд на развертывание стержней, несущих всенаправленные антенны (один из стержней не развернулся), и переключение передатчиков на работу при полной мощности (10 вт вместо 0,1 вт)\ Т + + 12 мин. 31,1 сек. (12 мин. 31 сек.) —отделение аппарата от II ступени. После выхода аппарата Surveyor А на траекторию полета к Луне он получил название Surveyor I, а по международной системе —обозначение 1966—45А. После того как II ступень совершила разворот на 180°, была осу-
77
Рис. 14. Космический аппарат Surveyor I (без тормозного РДТТ).
/ — панель с солнечными элементами; 2 — остронаправленная антенна; 3 — всенаправленная антенна; 4 — панорамная телеви-визиониая камера; 5 — контейнер с электронным оборудованием (2 шт.); 6 — антенна радиолокационного альтиметра; 7 — блок разрушающейся сотовой конструкции; 8 — контейнер с вспомогательной химической батареей; 9 — баллон с гелием, используемым в вытеснительной системе подачи топлива в ЖРД;
10 — «нога» посадочного шасси; // — верньерный ЖРД;
12 — антенна доплеровского радиолокатора.
ществлена подача в основные двигатели II ступени компонентов топлива, которые, истекая из сопел без воспламенения создают некоторую тягу; торможение ступени обеспечивается РДТТ, установленными на ней. Через 5 час. после запуска ступень отдаляется от аппарата на расстояние не менее 300 км. После этого маневра II ступень переходит на геоцентрическую орбиту с апогеем 400 000 км, наклонением 33,6° и периодом обращения 11 сут.
Т+ (21 мин. 30 сек.) —начало цикла операций по командам ПВУ (успокоение аппарата, поиск Солнца, ориентация продольной оси аппарата на Солнце, ориентация панели с солнечными элементами на Солнце). Развертывание панели и поиск Солнца могут осуществляться и по командам с Земли; Т+(32 мин.)-^-Т+(60 мин.)—установление связи с аппаратом станцией слежения в Иоганнесбурге; Т + + 1 час. 21 мин. — завершение ориентации на Солнце панели
78
с солнечными элементами; Т+4 час 29 мин (6 час) —захват датчиком звезды Канопус. Поиск Канопуса может осуществляться 2 способами; по первому способу аппарат вращается со скоростью 0,5 гр а д/сек, при захвате какой-либо звезды, на Землю поступает сигнал о ее яркости и осуществляется сверка с эталоном; другой способ предусматривает вращение аппарата на 360°, регистрацию всех звезд, яркость которых находится в диапазоне чувствительности датчика и сравнение, полученной карты неба с контрольной.
Без коррекции траектории аппарат достиг бы поверхности Луны в точке, находящейся в 400 км к юго-западу от расчетной точки (3,25° ю. ш. и 43,83° з. д.). Потребная величина корректирующей скорости для компенсации промаха и обеспечения требуемой продолжительности полета составляла 6,4 м/сек, а только для 'компенсации промаха — 3,8 м!сек. 31 мая была проведена коррекция траектории. В период ее проведения аппарат находился на расстоянии 156 000 км. от Земли и был в зоне видимости станции слежения в Голдстоуне. Двигатели были включены в 6 час. 45 мин. и проработали 20,75 сек (расчетная продолжительность 20,65 сек),, обеспечив приращение скорости 20,3 м/сек. Коррекция проведена с таким расчетом, чтобы аппарат опустился в 32 км от первоначально намеченной точки. Новая расчетная точка посадки имела селенографические координаты 2,3° ю. ш. и 43,85° з. д. 31 мая в 7 час 03 мин аппарат вновь был ориентирован по Солнцу и Канопусу. Операции, обеспечивающие посадку на Луну, начались на 34 мин. до расчетного времени включения тормозного РДТТ. Аппарат совершил разворот по крену на 89,3°, затем по рысканию на 59,92° и снова по крену на 94,2°, в результате чего продольная ось аппарата была совмещена с вектором скорости. Маневры завершились за 29 мин. до расчетного времени включения РДТТ. При посадке аппарата РДТТ и ЖРД работали по расчетной программе. Направление вектора тяги РДТТ отличалось от расчетного на 0,3° (допустимое отклонение 1°), а вектор тяги проходил в 0,5 мм от центра масс (допустимое отклонение 4,5 мм). В момент прекращения работы РДТТ скорость аппарата относительно Луны равнялась 131,7 м/сек (расчетная скорость 119±33 м/сек (40). Вертикальная составляющая скорости при посадке аппарата равнялась примерно 3,3 м!сек (74), а горизонтальная составляющая была очень мала (расчетное значение вертикальной составляющей скорости — не более 6 м/сек, горизонтальной — не более 2,2 м/сек). При сближении аппарата с Луной угол между вектором скорости и местной вертикалью составлял 6° (предельный угол сближения для аппаратов Surveyor равен 45°) (63). 2 июня в 6 час. 17 мин. 37 сек. аппарат совершил посадку в Океане Бурь в точке с селенографическими координатами
79-
TTV ю. ш. и 43°13z з. д. в 14 км от новой расчетной точки посадки.
Опоры шасси аппарата коснулись поверхности с интервалами 0,01 сек, нагрузки на опоры составили 610, 730 и 520 кг, соответственно (21). При первом касании аппарата нагрузка на грунт составила 0,56 кГ1см2, -после успокоения аппарата — 0,035 кГ1см2 (19). Площадка, на которую сел аппарат, почти параллельна лунному горизонту (уклон не более 1—2°). Первой коснулась поверхности Луны опора 2, затем 1 и 3. Нагрузки при посадке соответствовали тем, которые были рассчитаны по результатам сбросов макета аппарата на имитированный лунный грунт. После первого касания аппарат подскочил на 6 см и опустился через 1 сек., причем опоры погрузились в грунт на 2,5 см (24, 57j). Не развернувшийся в полете стержень с одной из всенаправленных .антенн при ударе аппарата развернулся, и антенна в дальнейшем использовалась для связи. В полете связь с аппаратом осуществлялась через одну всенаправленную антенну, на аппарат было послано около 300 прямых команд. Полет аппарата от момента старта ракеты-носителя и до посадки продолжался 63 час. 36 мин. 28 сек. (25,53).
После посадки были выключены радиолокационный альтиметр, доплеровский радиолокатор и датчики напряжения на посадочных ногах и принята телеметрическая информация, показавшая исправность бортовых систем. После проверки панорамной телекамеры началась передача на Землю изображений лунной поверхности и деталей аппарата с разверткой 200 строк. Передача изображений производилась через всенаправленную антенну (высота Солнца над горизонтом в момент начала съемки — 28°). Было получено около десятка изображений опор посадочного устройства, участка лунной поверхности около аппарата и горизонта. В непосредственной близости от аппарата видны камни высотой 1,5 м и длиной до 2 м. Перед запуском аппарата зеркало, панорамной телекамеры было установлено в такое положение, чтобы получить изображение одной из опор посадочного устройства. Расстояние от камеры до опоры составляло 2,4 м. При съемке в кадре фиксируется участок поверхности размером 0,3X0,3 м. Объектив камеры перед запуском аппарата был установлен на минимальное фокусное расстояние. Съемка производилась через нейтральный светофильтр (73). Первые снимки были переданы в телевизионную сеть США и через связной спутник Early Bird в телевизионную сеть Западной Европы (57). После передачи изображений была проведена ориентация панели с солнечными элементами на Солнце (в дальнейшем положение панели относительно Солн-:ца корректировалось один раз в сутки), а остронаправлен-1ной антенны — на Землю.
30
Через 3 час. 15 мин. после посадки аппарат был подготовлен для передачи изображений с разверткой 600 строк с помощью остронаправленной антенны. Скорость передачи этих снимков составляла 4400 двоичных единиц в сек. Мощность принимаемого на Земле сигнала составляла 101,7 дб!вт (25). Со 2 по 8 июня ежедневно, в те периоды (в течение 9—10 час. в сутки), когда аппарат находился в зоне видимости комплекса «Пионер» в Голдстоуне, проводилась передача телевизионных изображений с разверткой 600 строк, в остальное время поступала только телеметрическая информация, принимавшаяся станциями в Крюгерсдорпе и Тидбин-билле (74). В каждом сеансе станция в Голдстоуне в течение 45 мин. принимала изображения, затем оборудование аппарата во избежание перегрева выключалось на 20—30 мин., после чего начиналась передача телеметрической информации, затем цикл возобновлялся. 4 июня для изучения воздействия истекающих газов на грунт 7 раз включена одна из пар управляющих реактивных сопел системы ориентации, расположенная на опоре № 2. Сопла находятся на расстоянии около 20 см от поверхности и направлены вниз под углом 72° от вертикали. Сопла работали импульсами по 20 мсек с интервалами между включениями *в 30 мсек, длительность одного из импульсов составила 1 сек. Общее время работы — 4,5 сек. Сопла развивали тягу 0,014 кГ. Съемка этого эксперимента производилась камерой. Снимки, сделанные до и после включения сопел, различий не имеют. Это позволило предположить, что работа сопел не привела к образованию пылевого облака (77). К 5 июня на Землю было передано 2503 изображения. В тот же день поворотное зеркало камеры было ориентировано на Сириус и после ряда попыток были получены его снимки, предназначенные для точного определения места посадки аппарата (77). 8 и 9 июня передача изображений не производилась —был период лунного полудня, и высокая температура поверхности препятствовала нормальной работе оборудования (кроме того, решено предоставить отдых персоналу, обеспечивающему прием и обработку снимков — выяснилась его неподготовленность к обработке большого количества поступающей информации) (75). До 8 июня получено 4000 изображений, часть из них через цветные фильтры, которые реконструировались на Земле в цветные снимки. Позже получены изображения Канопуса и Юпитера (33), получить телевизионные изображения Земли не удалось.
12 июня отказал потенциометр, проработавший около 100 час. (расчетное время — 25 час.), входящий в систему определения угла возвышения камеры (75). 14 июня в 15 час. 39 мин. через место посадки прошел лунный терминатор. На телевизионных изображениях, переданных во вре
6—6157
81
мя и после захода Солнца (съемка производилась в отраженном свете Земли) видны звезды, Солнце, его корона, тень аппарата длиной до 30 м. 14 июня в 16 час. 18 мин. передача изображений прекратилась с наступлением ночи -в районе посадки аппарата. С начала съемки до этого момента получено 10 338 телевизионных изображений, с момента посадки на аппарат подано около 10 000 команд. Вероятность возобновления работы аппарата по окончании лунной ночи руководителями полета оценивалась в 25% (52). Перед, прекращением связи панель с солнечными элементами была ориентирована так, чтобы прямые солнечные лучи на нее упали примерно 6 июля, т. е. в лунный полдень, через 7 дней (29 июня) после восхода Солнца над местом посадки. Это было сделано, чтобы основная батарея и электрические цепи успели прогреться примерно до —23° С прежде, чем начнется подзарядка батареи, иначе вследствие нагрева могли возникнуть неисправности в электрической системе. Первоначально во избежание повреждения бортового оборудования было решено не делать попытки войти в связь с аппаратом до наступления лунного полудня, позже было принято решение войти в связь с аппаратом, не дожидаясь, пока он разогреется на Солнце, чтобы получить температурные и другие характеристики сразу же после восхода Солнца. 16 июня в 20 час. 30 мин. получены последние телеметрические данные: температура на поверхности панели с солнечными элементами (—173°С), в контейнере А (+'1,7° С), в контейнере В (—'17,8° С), основной батареи ( + 1,1° С). После этого сеанса все оборудование было выключено за исключением 2-х приемников. Оставшейся в основной батарее емкости (около 100 а-ч) было достаточно для питания приемников до 6 июля. 29 нюня, после восхода Солнца над местом посадки, была сделана первая попытка войти в связь с аппаратом, но попытка оказалась неудачной. 30 июня эта попытка, была повторена, но также оказалась неудачной. 6 июля в 12 час. 29 'мин. в период лунного полудня с аппаратом удалось установить связь. В момент установления связи в контейнере А была температура —6,6° С, в контейнере В + 15,5° С. Проверка показала, что бортовые системы работали удовлетворительно, однако мощность, обеспечиваемая солнечными элементами, была на 12% ниже номинальной (24). 7 июля от панорамной камеры была получена серия из 38 снимков. 9 июля температура основной батареи достигла 54° С (максимальная допустимая температура основной, батареи 60° С), однако перегрев батареи удалось предотвратить. Был проведен эксперимент по включению одного из верньерных двигателей и наблюдению степени воздействия истекающих газов на состояние грунта. После проведения эксперимента следов воздействия не было обнаружено. За.
82
второй лунный день с 7 до 13 июля получено 812 телевизионных изображений, в их числе изображения Сириуса и Ка-нопуса. Общее время работы аппарата, в течение которого принимались его сигналы до 13 июля, составило 612 час. 14 июля перед заходом Солнца сделана попытка получить изображение солнечной короны, однако при передаче девятого изображения связь с аппаратом внезапно прекратилась, вероятно из-за резкого падения напряжения основной батареи (после захода Солнца прекратилась ее подзарядка). Всего с начала съемки до этого момента от аппарата было получено 11 150 изображений (54): 23 имеют развертку 200 строк (14 изображений, полученных 2 июля, и неполных 9 изображений солнечной короны, полученных 14 июля), остальные имеют развертку 600 строк (14).
На одном из последних снимков видны разбитые пластинки зеркального стекла, которым облицованы контейнеры. За время полета и функционирования аппарата на Луне с Земли было подано более 100 000 управляющих команд (37). В конце июля все работы, связанные с аппаратом Surveyor I, были прекращены. 8 октября связь с аппаратом Surveyor I, удалось снова восстановить. Аппарат выполнил посланные команды и передал телеметрическую информацию; бортовое оборудование было исправно, за исключением основной батареи, которая не подзаряжалась солнечными элементами. Питание бортового оборудования обеспечивалось вспомогательной батареей. Сигналы, принимавшиеся на Земле, были очень слабыми. С 8 по 12 октября проведено более 5 'полных и несколько неполных сеансов связи. Телевизионные изображения получить не удалось из-за высокого уровня шумов. 12 октября в районе посадки аппарата наступила ночь и связь прекратилась. В ноябре 1966 г. на короткий промежуток времени удалось установить связь с аппаратом, а 9 января 1967 г.— еще раз, последний. Связь установили станции в Тидбинбилле и Крюгерсдорпе, однако уровень принимаемого сигнала был очень низким. Сеанс связи продолжался около 12 час. Попытки включить телекамеру не делались. 15—20 февраля 1967 г. участок посадки аппарата Surveyor I был сфотографирован аппаратом Lunar Orbiter III. На снимках удалось обнаружить аппарат Surveyor I в виде белого пятна и отбрасываемую им тень.
Суммарный вес аппарата (10,73) . при отделении от II ступени — 995 кГ, после посадки на Луну (вес земной) — 281,2 кГ, в т. ч. каркас аппарата — около 27 кГ (ферма 10,5 кЛ|), крепление оборудования на каркасе—10,4 кГ. Высота аппарата при сложенном шасси — 3,05 ж, диаметр окружности, проходящей через опоры развернутого пос а доч--ного шасси,— 4,27 я.
6!
83
Конструктивная схема аппарата показана на рис. 15. Каркас аппарата изготовлен из алюминиевых (сплав 7075) полых трубок треугольного сечения. К каркасу крепятся 2 всенаправленные антенны, два контейнера (А и В) с электронным оборудованием, тормозной РДТТ, 3 верньерных ЖРД, посадочное шасси и другое оборудование. На верхней части каркаса смонтирована мачта, к которой крепятся остронаправленная антенна и панель с солнечными элементами. В
Рис. 15. Схема аппарата Surveyor I (без мачты, на которой монтируются остронаправленная антенна и панель с солнечными элементами).
/ — опора шасси; 2 — шарнирно подвешенный ЖРД; 3 — бак горючего для ЖРД; 4 — антенна доплеровского радиолокатора; 5 — контейнер с электронным оборудованием; 6 — датчик системы управления полетом; 7 — датчик направления на Канопус; 8 — датчик направления на Солнце; 9 — преобразователь; 10 — бак окислителя для ЖРД; // — усилитель акселерометра; 12 — усилитель датчика напряжения; 13 — реактивные сопла ориентации по тангажу и рысканью; 14 — всенаправленная антенна; 15 — фотометрическая шкала; 16 — жестко закрепленный ЖРД; 17 — баллон со сжатым азотом для реактивных сопел системы ориентации; 18 — контейнер со вспомогательной химической батареей; 19 — панорамная телевизионная камера; 20 — «подлетная» телевизионная камера; 21 — коллектор солнечных лучей; 22 — антенна радиолокационного альтиметра; 23 — источник питания клистрона и модулятор; 24 — реактивные сопла ориентации по крену.
84
контейнере А размещены 2 приемника, 2 передатчика, основная батарея и различное оборудование системы электропитания, в контейнере В — декодирующее устройство и другое оборудование командной системы. Оборудование в контейнерах смонтировано на панелях сотовой конструкции. Посадочное шасси имеет 3 ноги, изготовленные из алюминиевого листового сплава 7075 толщиной 1 мм с опорами диаметром 20 см сотовой конструкции из алюминиевого сплава. Посадочные опоры шарнирно соединены с корпусом в трех нижних углах основания. Ноги снабжены гидравлическими амортизаторами самолетного типа, гасящими энергию удара при посадке аппарата, и телескопическими тягами, обеспечивающими развертывание шасси после вывода аппарата на траекторию полета. К углам нижней части корпуса крепятся блоки разрушающейся сотовой конструкции из алюминиевого сплава, обеспечивающие амортизацию удара при посадке (при прогибе ног в момент удара блоки касаются поверхности). Конструкция аппарата рассчитана на посадку при вертикальной составляющей скорости до 6 м/сек и горизонтальной составляющей до 2,2 м/сек, на склоны крутизной до 15° и при отклонении продольной оси аппарата от вертикали до 10°.
Электрическое соединение со II ступенью ракеты-носителя осуществляется через 51 штырьковый разъем, установленный в нижней части корпуса между двумя посадочными опорами (разъем состыковывается после установки аппарата на ракету-носитель). До момента отделения аппарата через этот разъем проходят команды от программного механизма, установленного на II ступени, а в аварийных ситуациях могут подаваться команды с наземного пульта управления. Через него проходит также цепь питания от наземных источ-, ников питания и цепь предстартового контроля. На аппарате используются 29 пиротехнических устройств, в частности, в замках посадочных опор, в силовых приводах, в системе сброса тормозного двигателя, воспламенителе тормозного двигателя. Некоторые из пиротехнических устройств срабатывают по командам от программного механизма, установленного на II ступени (до разделения аппарата), другие — по командам с Земли. На аппарате установлено 24 датчика для измерения нагрузки на элементы конструкции аппарата в момент посадки.
Тормозной твердотопливный двигатель предназначен для торможения аппарата при посадке на Луну (программа работы двигателя дана в типовой программе полета). На аппарате установлен двигатель марки ТЕ-364-1 (рис. 16), разработанный Reaction Motors Div. Двигатель шаровой формы установлен по оси аппарата в центре тяжести и крепится взрывными болтами к корпусу в 3 точках, расположенных
85
Рис. 16. РДТТ аппаратов Surveyor.
около шарниров посадочных устройств. Вес снаряженного двигателя — 624,6 кГ, неснаряженного — 65,4 кГ; тяга (при температуре 10^-21° С)—3,6-^-4,5 т; длина полная—133 см, сопла — 73 см\ степень расширения сопла — 50; диаметр корпуса — 94 см, критического сечения — 8,3 см, среза сопла — 60,9 см\ время работы—40 сек., срабатывания воспламенительного устройства — 0,15 сек. Корпус двигателя изготовлен из стали марки D-6AC с теплоизоляцией из каучука Buna N с заполнителем из асбеста, а сопло из молибдена за исключением закритической части, изготовленной из слоистого пластика. В критическом сечении имеется графитовый вкладыш. Теплоизоляция и внешнее покрытие двигателя обеспечивают температуру. топливного заряда не ниже 10° С. В состав топлива (полибутадиенкрило-• нитрид) входят перхлорат аммония (окислитель), сополимер полибутадиена и акриловой
кислоты (горючее—связка), эпоксидная смола (отверждающий реагент) и присадки алюминия и бериллия (содержание бериллия около 12%).
Верньерные жидкостные двигатели предназначены для проведения коррекции траектории (располагаемая величина скорости .при коррекции — 50 м!сек), ориентации аппарата во время работы тормозного РДТТ и после окончания работы РДТТ на участке спуска (программа работы двигателей дана в типовой программе полета). Двигатели разработаны Reaction Motors Div. На аппарате установлено 3 верньерных ЖРД «Старлайт» (TD—339) (рис. 17)—один в шарнирном подвесе, остальные — жестко. Двигатели расположены вокруг тормозного РДТТ через 120° и крепятся к каркасу аппарата. Характеристики двигателя (одиночного): тяга — 47,2 кГ\ диапазон регулирования—13,6^-47,2 кГ (тяга каждого двигателя может регулироваться дифференцированно), удельная тяга — 287 сек.; давление в камере сгорания — 4,9^-17,5 кГ1см2 температура в камере сгорания — 2900° С; степень расширения сопла (с насадком)—86; вес двигателя (сухой)—2,71 кГ (камера сгорания, сопло, насадок, распылительная головка — 1,35 кГ; клапаны, трубопроводы— 1,36 кГ). Топливом служат самовоспламеняющиеся компоненты — монометилгидразингид-
86
Рис. 17. ЖРД аппаратов Surveyor.
рат и четырехокись азота, содержащая 10% окиси азота; соотношение компонентов 1,5 : 1. Компоненты топлива в баках находятся в специальных мешках, вес топлива — 72,5 кГ. Каждый двигатель имеет свой бак горючего и окислителя, изготовленные из титанового сплава с внутренней теплоизоляцией. Все баки крепятся к каркасу аппарата. Система подачи топлива — вытеснительная; рабочим телом является сжатый гелий, хранящийся в баллоне из титанового сплава и вытесняющий компоненты топлива давлением на гибкую диафрагму. Форсунки подачи горючего — центробежного, окислителя — радиального типа. Клапан, обеспечивающий включение и выключение двигателей, многократного действия. Корпуса двигателей изготовлены из нержавеющей стали марки 347. В критическом сечении сопла установлен вкладыш из карбида кремния; неохлаждаемый насадок, установленный на сопле, изготовлен из молибденового сплава с добавлением 0,5% титана. Температура двигателя в интервалах между включениями должна выдерживаться в пределах —17+-37° С, для чего большая часть поверхности двигателя имеет золотое покрытие, а части двигателя, обращенные к Солнцу, окрашены специальным составом. Охлаждение двигателей — регенеративное.
Система энергопитания предназначена для обеспечения электроэнергией бортовых систем аппарата во время полета
87
и .в период функционирования во время лунного дня. Расчетная минимальная продолжительность работы системы — 30 земных суток (приблизительно одни лунные сутки), максимальная— 90 земных -суток. Рабочее напряжение систем аппарата— 29 в. Панель «с солнечными элементами площадью' 0,84 ж2 несет 3960 солнечных п—р элементов, покрытых тонкими листами зеркального стекла; размер элемента 1,2Х Х1,2 см, толщина — 0,45 мм. Элементы сгруппированы в 792 отдельные -секции и соединены по последовательно-параллельной схеме, исключающей возможность обесточивания систем при выходе из строя одного элемента. Максимальная мощность в полете при полном освещении Солнцем — 89 вт, на Луне при температуре 60° С — не менее 77 вт, а при температуре 115° С — не менее 57 вт. Удельная мощность — 120,7 вт!кГ, к. п. д. преобразования энергии — 8,2%. Панель сотовой конструкции изготовлена из алюминиевого сплава, ориентация ее на Солнце обеспечивается устройством ASPP с точностью до нескольких градусов. Вес панели -с солнечными элементами и ASPP — 4,8 кГ. Панель с солнечными элементами расположена в верхней части аппарата на специальной штанге. При старте панель сложена и раскрывается после выведения аппарата на траекторию полета. Основная химическая серебряно-цинковая батарея обеспечивает энергопитание систем аппарата до ориентации на Солнце панели с солнечными элементами, а также в те периоды, когда необходима пиковая мощность. Батарея состоит из 14 серебрянэ-цинковых элементов, подзаряжаемых солнечными элементами. Емкость батареи 3800 а-ч при разрядном токе 1,0 а, обеспечиваемое напряжение — 22 в в диапазоне температур от 4 до 60° С. Вспомогательная серебряно-цинковая батарея предназначена для использования в те периоды, когда необходима пиковая мощность, она не подзаряжается от солнечных элементов, размещена в герметичном контейнере, изготовленном из магния, емкость батареи 800-И000 а-ч. Регулятор зарядного тока батареи и регулятор повышения напряжения предназначены для регулирования работы системы энергопитания. Регулятор зарядного тока батареи соединяет панель с солнечными элементами с основной батареей, обеспечивая передачу энергии в количестве, необходимом для полной зарядки батареи, и поддерживая на выходе батареи постоянное напряжение. В регуляторе имеются чувствительные и логические цепи, которые автоматически включают подзарядку батареи, когда напряжение на клеммах батареи падает ниже 27 в. На вход регулятора повышения напряжения подводится постоянный ток напряжением 17—22,5 в от солнечных элементов, основной батареи или от обоих источников одновременно. На выходе регулятора поддерживается напряжение 29 в, которое подводится к трем главным силовым линиям
88
аппарата. Эти три линии питают все оборудование аппарата,, кроме нерегулируемой линии напряжением 22 в, которая обеспечивает .питание нагревателей, переключателей, силовых приводов, электронных цепей, не требующих для нормальной работы регулировки напряжения или имеющих свой собственный регулятор.
Радио- и телеметрическое оборудование (71) предназначено для связи с наземными станциями слежения, получения и преобразования телеметрической информации о работе бортовых систем и телевизионных изображений к виду, удобному для передачи, и передачи этой информации, а также для дешифровки команд, поступающих на борт. 2 приемника (один запасной) работают в диапазоне S (2200—3950 Мгц) и могут подключаться на любую из 2-х всенаправленных антенн. 2 передатчика (один запасной) могут подключаться на. любую из 3 антенн, установленных на аппарате. Несущая частота передатчиков — 2295 Мгц, мощность — 0,1 или 10 вт.. При мощности 0,1 вт передатчики работают до отделения аппарата от ракеты-носителя, а затем переходят на работу при мощности 10 вт. Метод модуляции КИМ—ЧМ или КИМ—ФМ. (передатчик мощностью 0,1 вт), КИМ—ЧМ или ЧМ (передатчик мощностью 10 вт); 2 всенаправленные антенны имеют низкий коэффициент усиления, через них ведется прием команд, с Земли и передача на Землю телеметрической информации. При передаче телевизионных изображений с использованием всенаправленной антенны обеспечивается развертка изображений в 200 строк. Всенаправленные антенны — конические,, шарнирно крепятся на стержнях длиной 1,4 м, развертываются после вывода аппарата на траекторию полета выталкивателями, работающими от пиропатрона, и выводятся в рабочее положение торсионными пружинами. Многодипольная широкополосная плоская остронаправленная антенна с большим коэффициентом усиления используется для передачи телевизионных изображений, обеспечивая развертку изображений в 600 строк. Ориентация антенны на Землю, как и панелей с солнечными элементами на Солнце, обеспечивается устройством ASPP. Декодирующее устройство командной радиолинии рассчитано на обработку 256 команд в обоих направлениях (команды типа «включено — выключено»), а также команд, управляющих временным интервалом работы системы. Любая команда проверяется в центральном блоке декодирования команд; если структура команд неправильна, то команда не проходит, а сигнал отправляется обратно на Землю. Факт приема команды подтверждается передачей соответствующего сигнала на Землю; после этого команда поступает в блок декодирующего устройства, где переводится из двоичного кода в форму, удобную для выполнения соответствующей команды. Телеметрическая система обеспечивает передачу'
89’
данных о 200 различных параметрах; скорость передачи — 17,2; 137,5; 500; 1100 (при использовании всенаправленной антенны) и 4400 бадеек, (при использовании остронаправленной антенны). Получение большинства телеметрических данных (температура, напряжение, сила тока, давление и т. п.) обеспечивается блоком обработки телеметрии или вспомогательным блоком обработки сигнала. Ни один из 200 регулируемых телеметрических параметров не передается непрерывно; в блоке обработки телеметрических сигналов имеются 4 переключателя, с помощью которых можно последовательно передавать определенные сигналы. Использование переключателей определяется видом и количеством информации, которую нужно передавать на разных этапах работы системы. Каждый из переключателей может быть включен в работу в любое время. После блока обработки телеметрических параметров коммутированные сигналы аналого-цифровым преобразователем переводятся с центрального блока обработки сигналов в десятичную систему и затем поступают на вход передатчика. Телевизионные сигналы поступают на вход передатчика в том случае, если передатчик работает на полную мощность. Для получения информации о работе оборудования установлены датчики температуры, тензодатчики для оценки реакции верньерного двигателя на команды системы управления, датчики ударной нагрузки в момент посадки аппарата, акселерометры для измерения вибрации элементов конструкции. Вспомогательный блок обработки телеметрических сигналов снабжен двумя дополнительными телеметрическими коммутаторами. Процесс обработки информации происходит таким же образом, как и в блоке обработки телеметрических сигналов.
Система управления полетом и ориентации аппарата (7,20). Первоначально аппарат Surveyor после выхода на траекторию полета предполагали ориентировать относительно Солнца по командам наземных станций слежения системы DSIF. Расчеты показали, что для захвата аппарата станцией слежения может потребоваться до 60 мин., а за это время у неориентированного относительно Солнца аппарата может нарушиться тепловой режим. Поэтому было принято решение использовать автономную систему ориентации относительно Солнца, вторым опорным светилом выбрана звезда Канопус (а Киля). Преимуществом ориентации по Солнцу и Канопу-су является возможность надежного определения положения аппарата при его запуске в полнолуние. Запуск в полнолуние важен для работы телекамеры, так как в этом случае будут получаться изображения хорошо освещенной поверхности. Если аппарат ориентировать по Солнцу и Земле (как аппарат Ranger), то при запуске в полнолуние угол между направлением ня Солнце и направлением на Землю будет слишком
.90
мал для обеспечения надежной ориентации. Основной солнечный датчик состоит из 5 фотоэлементов на CdS, в системе используется также вспомогательный солнечный датчик. Перед захватом Канопуса производится захват Солнца. Реактивные сопла разворачивают аппарат таким образом, чтобы датчик Канопуса был направлен на звезду, при этом ось крена аппарата остается неподвижной. Блок электронного оборудования включает цифровой программный механизм, коммутационное и переключающее устройства, логический преобразователь и преобразователь вида регистрации данных для радиовысотомера и доплеровского радиолокатора. Поступающая от датчиков информация проходит через логическую цепь в блоке электронного оборудования управления полетом, где по этой информации вырабатываются сигналы, управляющие работой реактивных сопел, тормозного и верньерных двигателей. От датчиков Солнца в блок поступает информация об освещенности их чувствительных элементов, на основании этой информации в блоке вырабатываются сигналы на включение соответствующих реактивных сопел и такой разворот аппарата, чтобы датчики были направлены на Солнце. Инерциальный блок используется для управления полетом, если для выполнения коррекции и осуществления посадки не могут быть использованы оптические датчики; переключение на инерциальный блок—автоматическое, блок использует три гироскопа и акселерометр. Сигналы с гироскопов, проходя через блок электронного оборудования управления полетом, включают соответствующие реактивные сопла, изменяющие или поддерживающие требуемое положение аппарата. На этапе посадки аппарата инерциальный блок управляет работой верньерных двигателей, изменением их тяги по каналам курса и тангажа и поворотом двигателя по каналу крена. Величиной суммарной тяги двигателей управляет акселерометр. Разработчик аппаратуры инерциальной системы ориентации — Кеаг-fott Div. Доплеровский радиолокатор (AMR-Altitude/Marking Radar — радиолокатор, регистрирующий высоту), предназначен для измерения расстояния до Луны на подлетном участке и выдачи сигналов на бортовые устройства; программа работы радиолокатора дана в типовой программе. Разработчик радиолокатора Ryan Aeronautical Со. Радиолокационный альтиметр (радиовысотомер) предназначен для измерения расстояния до Луны после прекращения работы радиолокатора AMR. Доплеровский радиолокатор (доплеровский датчик скорости) начинает работать, как и альтиметр, после включения РДТТ. Радиолокационный альтиметр в сочетании с доплеровским радиолокатором получил обозначение RADVS (Radar Altimeter and Doppler Velosity System — система радиолокационного альтиметра и доплеровского измерителя скорости). Разработчик RADVS — Ryan Aeronautical Со. Параболичес
91
кие антенны радиолокационного альтиметра и доплеровского* радиолокатора излучают по два луча каждая. Лучи 1, 2 и 3 могут излучаться по вертикали или по направлению скорости полета, луч 4 обеспечивает измерение высоты над поверхностью или наклонной дальности. Лучи 1, 2, 3 используют эффект Доплера, дают информацию о скорости снижения. Данные о высоте и скорости снижения поступают в блок гироскопов и логическую схему, где вырабатывается сигнал управле-
Рис. 18. Панорамная телевизионная камера.
i — кожух; 2 — электродвигатель для поворота зеркала 7 по азимуту; 3 — объектив с изменяемым фокусным расстоянием; 4— потенциометр; 5—затвор; 6—преобразователь; 7 — зеркало; 8 — устройство для поворота зеркала по углу места; 9 — диск со светофильтрами; 10 — потенциометр; 11 — видикон; /2 — радиатор видикона; 13 — электрический разъем.
ния верньерными двигателями. Управляющие реактивные сопла обеспечивают управление положением аппарата с момента отделения от II ступени ракеты — носителя до включения тормозного двигателя. 3 пары сопел размещены попарно (противоположно направлены) на концах посадочных опор; тяга каждой пары сопел по 14 г. У каждой пары сопел имеется свой селено-идный клапан включения. Одна пара сопел управляет движением аппарата в горизонтальной плоскости, сообщая аппарату вращательное движение, две другие пары— по каналам тангажа и курса. Рабочим телом служит сжатый азот весом 2 кГ, размещенный в сферическом баллоне.
Телевизионное оборудование предназначено для получения телевизионных изображений лунной поверхности в районе посадки. Панорамная телевизионная камера (7, 20) (рис. 18) предназначена для получения изображений после посадки аппарата на поверхность Луны.. камеры обеспечивается подвиж-
зеркалом, горизонтальное — поворотом Шаг поворота зеркала 3°±0,°1—по? высоте.
Вертикальное сканирование ным эллиптическим головки камеры. Шаг поворота зеркала азимуту и 2°,48'±0°,1 — по высоте. При наклонах зеркала и поворотах его в поле зрения камеры попадает часть посадочной опоры аппарата и другие элементы конструкции.
92
Расстояние камеры до посадочной опоры составляет 2,4 м. Наводка на резкость от 1,2 м до со осуществляется по командам с Земли. Установка диафрагмы производится по командам с Земли или автоматически в зависимости от уровня освещенности. Фокусное расстояние переменное и может регулироваться, диафрагма может изменяться от 4 до 22. Разработчик объективов с изменяемым фокусным расстоянием— Bell and Howell Со. Шторка затвора расположена в фокальной плоскости. При необходимости по командам с Земли можно обеспечивать любую длительность экспозиции. При •слишком большой освещенности (при изменении площади обзора камеры, угла поворота зеркала или величины диафрагмы высоты Солнца) блокирующее устройство по команде через чувствительный элемент препятствует открытию затвора. Этот же чувствительный элемент управляет автоматической установкой диафрагмы; по команде с Земли действие чувствительного элемента может быть заблокировано. В таблице 6 приведены характеристики панорамной телекамеры.
Таблица 6
Характеристики
Разрешающая СкяниппваниР
Величина
25 2 19 6Д4 (+40) -
100 0,5 6,3 25,4 -(—60)
360
от 1,2 до со
150
Камера снабжена нейтральным и 3-цветными (красный, синий, зеленый) светофильтрами, смена которых осуществляется по командам с Земли. Камера может обеспечивать получение удовлетворительных изображений при освещенности 2 лк. Передающей трубкой является видикон с электростатической фокусировкой и магнитным отклонением.
В таблице 7 приведены режимы передачи телевизионных изображений.
Камера имеет три режима работы. При работе в первом режиме (изображения с разверткой 600 строк) камера работает с периодом 3,6 сек. В течение 1 сек. происходит считывание; 0,2 сек. используется для экспозиции (одновременно передается телеметрическая информация о положении зеркала и о температуре окружающей среды); 2,4 сек. используются для подготовки фотокатода видикона и записи следующего кадра. Во втором режиме (изображения с разверткой .200 строк) камера работает с периодом 60,8 сек. Третий ре-
93
Таблица 7'
Передача изображений через антенну Скорость передачи изображений, дв. ед. в сек. Время
остронаправленную всенаправленную
развертка, строк полоса видеосигнала, кгц периодичность получения изображений, сек. развертка, строк полоса видеосигнала, кгц периодичность получения изображений, сек. передачи одного снимка, сек. между передачей 2 снимков, сек.
600 220 3,6 200 1,2 60,8 4400 1,1 2,5
жим используется при съемках звездного неба и поверхности Луны, освещенных светом, отраженным от Земли. При этом видикон работает в режиме накопления. «Подлетная» телевизионная камера предназначалась для получения изображений лунной поверхности на участке подлета аппарата к Луне. Включение камеры предусматривалось только в том случае, если аппарат вследствие неудачной коррекции пройдет мимо Луны (на аппарате Surveyor I «подлетная» камера не включалась).
Система терморегулирования (7,20) обеспечивает поддержание заданного температурного режима бортовых систем аппарата. Терморегулирование оборудования, установленного в контейнерах А и В и вне их, осуществляется активными и пассивными средствами. В контейнере А температура должна поддерживаться в пределах 4^-52° С, система терморегулирования контейнера весит 11,3 кГ. В контейнере В температура должна поддерживаться в пределах —184--^+52° С, система терморегулирования контейнера весит 8,2 кГ. Толщина внешней стенки контейнеров, изготовленных, из алюминиевых сплавов, равна 0,5 мм. Между внешней и внутренней стенками обоих контейнеров проложена теплоизоляция из 75 листов майлара с алюминиевым покрытием; толщина одного слоя 6 ц, общая толщина около 25 мм. Снаружи контейнеры облицованы пластинками зеркального стекла. При падении температуры ниже указанного предела включаются установленные в контейнерах нагреватели, при повышении температуры полни, на которых смонтировано оборудование, подключаются к радиаторам, отводящим тепло. В обоих контейнерах имеются датчики температуры, показания которых по телеметрическим каналам передаются на Землю, и блоки нагревателей для поддержания температуры в заданных пределах. В контейнерах установлены термовыключатели, которые в случае повышения температуры более 52° С автоматически срабатывают и отводят часть тепловой, энергии к радиатору; в контейнере А установлено 9, в контейнере В — 6 термовыключателей. Для обогрева оборудо
94
вания используется около 3 вт мощности системы электропитания. Терморегулирование оборудования, не заключенного-в контейнерах, обеспечивается его окраской или полировкой. Цвет аппарата — белый.
Слежение и связь с аппаратами Surveyor осуществлялась-станциями системы DSIF. В сеть станций системы DSIF входили: комплекс «Пионер» в Голдстоуне, включающий 2 станции с антеннами, имеющими отражатели диаметром 64 и 26 м; станция «Марс» в Голдстоуне с диаметром отражателя антенны — 64 ж, использовавшаяся как вспомогательная к комплексу «Пионер»; станция в Робледо-де-Чавела: (Испания, в 46 км к северо-западу от Мадрида) с диаметром отражателя антенны 26 ж; станция в Крюгерсдорпе (ЮАР, в 32 км к западу от г. Иоганнеобург) с диаметром отражателя антенны 26 м\ станция в Айленд — Лагун (Австралия, полигон Вумера) с диаметром отражателя антенны 26 м; станция в Тидбинбилла (Австралия, близ г. Канберра) с диаметром отражателя антенны 26 м. Станции системы DSIF имеют передающую частоту 2110-^2120 Мгц,. приемную — 2290-^2300 Мгц. Станции образуют пары, разнесенные примерно на 120° по долготе с некоторым перекрытием углом обзора, что дает возможность непрерывной связи с аппаратом, причем он находится одновременно в пределах 'видимости 2 станций одной пары. Руководство работой станций, управление аппаратами и все необходимые расчеты проводились координационно-вычислительным центром SFOF (Space Flight Operations Facility — Центр по обслуживанию космических полетов) в г. Пасадене (шт. Калифорния), созданным и подчиненным Лаборатории реактивного движения. В задачи SFOF входят контроль работы бортовых систем, определение параметров траектории полета, расчет уставок для маневров и ’контроль их выполнения, прием научной информации, управление работой научных приборов. В 'соответствии с назначением SFOF персонал КВЦ. был разбит на баллистическую, телеметрическую и группу управления. В отдельные моменты в слежении и управлении аппаратом участвовало до 300 человек. Телеметрические данные от аппаратов поступали на 'станции по 500 каналам. Центр SFOF имеет, в частности, аппаратуру для реконструкции телевизионных изображений, передаваемых построчно, и аппаратуру для их экспресс-анализа. (75)
3. Космический аппарат Surveyor II (Surveyor В)
Цель запуска и назначение аппарата такие же как у аппарата Surveyor I. Запуск SC-2 аппарата произведен 20 сентября 1966 г. в 12 час. 32 мин. (расчетное время —
95
11 час. 56 мин.) со стартового комплекса № 36 В м. Кеннеди ракетой — носителем Atlas-Centaur АС-7. Азимут запуска— 114,4°. «Окном» для запуска 20 сентября было время с 11 час. 56 мин. до 12 час. 33 мин. Полет ракеты-носителя проходил по программе, близкой к расчетной. Аппарат был выведен непосредственно на траекторию полета к Луне без предварительного 'вывода на промежуточную орбиту. После выхода аппарата Surveyor В на траекторию полета к Луне он получил название Surveyor II, по международной системе обозначение 1966—84А. Согласно расчетам, проведенным после вывода аппарата на траекторию полета, ‘без коррекции траектории он достиг бы Луны в 141 км от расчетной точки. Потребная 'величина корректирующей скорости для компенсации промаха и обеспечения продолжительности полета составляла 1,2 м!сек, только для компенсации промаха — также 1,2 м!сек, Перед проведением коррекции аппарат был ориентирован поворотами по крену на 75° и по рысканию на Г10°. Через 16 час, после запуска, когда аппарат находился на расстоянии 163 000 км от Зем-,ли, была предпринята попытка 'провести коррекцию траектории (предусматривалось включение 3 ЖРД на 9,8 сек. для уменьшения скорости на 9,6 м!сек)\ один из двигателей (№ 3) не включился и аппарат начал беспорядочно вращаться со скоростью 60—70 об/мин. Попытка стабилизировать аппарат соплами системы ориентации окончились неудачей. Через 2 часа после первой попытки была дважды подана команда на включение двигателей, однако двигатель № 3 снова не запустился (включением всех двигателей на 2 сек предполагали стабилизировать аппарат). В условиях беспорядочного вращения аппарата панель с солнечными элементами потеряла ориентацию на Солнце и для питания бортового оборудования были включены химические бате-реи. Позже проведено еще 5 включений верньерных двигателей длительностью по 0,5 сек с интервалами 5 мин., но двигатель № 3 ни разу не включился. Всего было предпринято 38 попыток включить 3 двигателя, но при этих попытках двигатель № 3 ни разу не срабатывал. Многочисленные включения увеличили скорость вращения аппарата до 136—146 об/мин. 22 сентября в 9 час. 36 мин. ЗОсек. с целью стабилизации аппарата был включен тормозной РДТТ, который снизил скорость вращения аппарата до 116 об/мин, а через 30 сек после включения РДТТ связь с аппаратом была потеряна. 23 сентября в 3 час. 18 мин. аппарат упал на Луну в районе, расположенном к юго-востоку от кратера Коперник (координаты точки падения: 5°30' с. ш. и 12° з. д.). Полет аппарата от 'момента старта ракеты-носителя и до падения на Луну продолжался 62 час. 46 мин. (16,60)
.96
Расчетная программа выведения аппарата на траекторию полета к Луне, проведения коррекции и посадки на поверхности Луны аналогичны программам для аппарата Surveyor I (2). Аппарат должен был совершить посадку >в районе Центрального залива в точке с селенографическими координатами 0,00° и 0,67° з. д., примерно *в 1200 км к востоку от места посадки аппарата Surveyor I. Для обеспечения посадки в этом районе аппарат должен сближаться с Луной при угле между вектором скорости и местной вертикалью, равном 23°. Этот район является пятым из девяти, сфотографированных аппаратом Lunar Orbiter I (61). Через несколько часов после посадки и передачи панорамной телекамерой первых изображений с разверткой 200 строк должны были включиться ЖРД для перемещения аппарата над поверхностью на 30 см. Предусматривалось проведение съемки панорамной камерой места посадки аппарата, передача телевизионных изображений с разверткой 600 строк или повторное включение ЖРД с целью нового перемещения аппарата над поверхностью Луны.
Конструкция и состав бортового оборудования аппарата такие же, как у аппарата Surveyor I. (2). Суммарный вес аппарата (при отделении от II ступени) —999,7 кГ, при падении на Луну — 292,1 кг. (15).
4. Космический аппарат Surveyor HI (Surveyor С)
Основная цель запуска (56) —доставка аппарата на Луну с осуществлением мягкой посдаки, получение телеви* знойных изображений в районе посадки и определение характеристик лунного грунта с помощью специального устройства. При этом запуске продолжалась отработка систем ракеты-носителя и бортовых систем аппарата. Запуск SC-3 аппарата произведен 17 апреля 1967 г. в 7 час. 05 мин., со стартового комплекса № 36В м. Кеннеди ракетой-носителем Atlas—Centaur АС-12. Это был первый запуск ракеты-носителя Atlas—Centaur с аппаратом Surveyor со стартового комплекса № 36В и первый запуск, произведенный ночью (2 час. 05 мин. по местному времени). Азимут запуска — 100,81°. Полет ракеты-носителя проходил по программе, близкой к расчетной. При запуске программой полета предусматривалось проведение, впервые при запусках аппаратов Surveyor, повторного включения двигателей II ступени. Согласно программе II ступень с аппаратом вышла на круговую орбиту высотой 166 км и обращалась по ней 22 мин, после повторного включения двигателей она вместе с аппаратом перешла на траекторию полета к Луне. В 7 час. 40 мин. аппарат отделился от II ступени. После выхода аппарата Sur
7—6157
97
veyor С на траекторию полета к Луне он получил название Surveyor III, по международной системе обозначение 1967— 35А. В 16 час. 30 мин. была завершена ориентация аппарата по Солнцу и Канопусу. 18 апреля в 5 час., когда аппарат находился на расстоянии 187 000 км от Земли, была осуществлена коррекция траектории. Верньерные двигатели проработали 4,3 сек, обеспечив расчетное приращение скорости 3,57 м)сек. Без коррекции аппарат достиг бы Луны в 468 км. от расчетной точки в восточной части Океана Бурь. Потребная корректирующая скорость для компенсации промаха и обеспечения требуемой продолжительности полета составила 6,1 м!сек, только для компенсации промаха — 3,9 м!сек. 20 апреля в 0 час. 04 мин. 17 сек. аппарат совершил посадку в пограничном районе Моря Познанного и Океана Бурь, в точке с селенографическими координатами 2°56' ю. ш. и 23°20' з. д. в 3,8 км от расчетной точки (3,33° ю. ш. и 23°17л з. д.). Место посадки аппарата находится в 610 км к востоку от места посадки аппарата Surveyor I. Полет аппарата от момента старта ракеты — носителя до посадки на Луну продолжался 64 час. 59 мин. 17 сек. (1,56). Вектор скорости аппарата при сближении с Луной составлял угол 25,6° с местной вертикалью, а скорость в момент контакта с поверхностью Луны равнялась 2,1 м!'сек. Верньерные двигатели, выключаемые по сигналу радиолокационного альтиметра на высоте 4,2 м от поверхности Луны, не выключились.. Вероятной причиной этого явилось то, что луч радиолокационного альтиметра попал на породы лунного грунта с отражающей способностью значительно более высокой, чем ожидалось. Луч многократно отразился от поверхности и в результате поступления противоречивых сигналов логика аппарата начала работать в нерасчетном режиме и заставила, сработать устройство для размыкания цепи радиолокационного альтиметра. В результате этого аппарат дважды подскочил, прежде чем установился на поверхности Луны. Двигатели были выключены по команде с Земли при повторном подскоке. Высота первого подскока— 10,7 м, горизонтальная составляющая скорости в верхней точке — 0,3 м)сек, высота второго подскока — 4,3 м, 'горизонтальная составляющая скорости в верхней точке при втором подскоке — 0,3 м!сек,. расстояние между первой и второй точками касания Луны — 8,5 м. Аппарат опустился на внутренний восточный склон кратера диаметром 195 м и глубиной 15 м с углом наклона места посадки 14,7° примерно на середине длины склона кратера. В дальнейшем погружение аппарата в грунт не зарегистрировано (50, 51).
После посадки аппарата произведена ориентация остро-направленной антенны на Землю, а панели с солнечными элементами — на Солнце. Через 60 мин. после посадки нача
98
лась передача телевизионных изображений, переданные на Землю сигналы оказались более слабыми, чем ожидалось. На (первых одиннадцати полученных изображениях видны части аппарата и поверхность под ним. К 20 апреля, за 12 час. пребывания аппарата на Луне, было получено 382 снимка с разверткой 200 и 600 строк. По телеметрическим данным, полученным непосредственно после посадки аппарата, был сделан вывод, что система энергопитания не обеспечивает достаточной мощности и активное существование аппарата на Луне будет ограничено 18-ю часами. Поэтому было принято решение немедленно начать эксперименты с выносным механизмом; однако оказалось, что телеметрические данные ошибочны, и система энергопитания обеспечивает расчетную мощность. Так как стенки кратера отражали солнечные лучи, то аппарат быстро нагревался и камеру приходилось часто выключать для охлаждения (максимально допустимая температура камеры 46° С, хотя в дальнейшем удавалось получать снимки при температуре камеры до 68° С). Качество снимков с разверткой 600 строк было хорошим, хотя некоторые снимки имели пятна из-за загрязнения зеркал лунной пылью или продуктами сгорания топлива верньерных двигателей. К 22 апреля было принято 1610 снимков с разверткой 600 строк и 53 снимка с разверткой 200 строк. 21 апреля проведено первое функциональное испытание ковша — захвата. Из сложенного полетного положения это устройство приведено в рабочее положение подрывом пиропатрона механизма крепления. Затем выносной механизм совершил повороты в горизонтальной и вертикальной плоскостях, а также выпуск и сокращение его без контакта с грунтом. 22 апреля начался эксперимент с применением выносного механизма, наблюдение за ходом эксперимента проводилось камерой.
Вначале ковш был опущен на поверхность с закрытой заслонкой и прижат к грунту с максимальным усилием. После его подъема на снимке была зафиксирована образованная ковшом вмятина в грунте. Затем была прорыта первая канавка шириной около 5 см. Ее стенки на снимке выглядели правильными, хорошо сформированными, без. признаков осыпания. Далее прорыта вторая канавка такой же ширины, глубина которой была увеличена двумя дополнительными проходами до 17 см., а длина составила 38 см. В связи с ростом температуры лунной поверхности в этот период дальнейшие операции с этим устройством возобновлены утром 26 апреля. При этом была сделана попытка захватить ковшом кусок породы со дна второй канавки, но при закрытии заслонки он, по-видимому, разрушился. Захваченный ковшом материал перенесен в точку под опорой одной из посадочных ног аппарата и высыпан на ее верхнюю поверхность. 27 апреля проведено два
7* 99
дополнительных испытания несущей способности грунта и выкопана третья канавка вблизи одной из посадочных ног аппарата. Во время последней операции сделано 26 снимков, по одному снимку после каждого из 26 двухсекундных ходов сокращения выносного механизма, которые составили один полный ход прорытия канавки. 28 апреля ковшом был захвачен небольшой кусок породы, перенесен в район над опорой посадочной ноги аппарата, на которую ранее было высыпано некоторое количество грунта, а затем сброшен. Далее осуществлены операции по расширению третьей канавки и проведено еще одно определение несущей способности грунта. 29 апреля шесть раз определялась ударная несущая способность грунта — удары по грунту ковшом с закрытой заслонкой. Получены снимки следов этих воздействий. 30 апреля осуществлены три статических и четыре динамических определения несущей способности грунта. 1 мая ковшом поднят небольшой камень и с использованием красного, голубого и зеленого фильтров телекамерой получены его снимки. Затем осуществлено три дополнительных прохода по второй канавке и четыре динамических эксперимента со сбросом на грунт ковша с открытой заслонкой. 2 мая выкопана четвертая канавка и осуществлено три ударных сбрасывания — два с открытой и одно с закрытой заслонкой. Всего ковшом-захватом проделано 4 канавки: 1-я имела глубины 7,5 еж, длину — 38 см\ 2-я — глубину 17 см, длину — 38 см-, 3-я — глубину 19 см, длину — 60 см-, 4-я — глубину 12,7 см, длину — 25 см.
Проведено 6 экспериментов по определению статистической и 17 экспериментов по определению динамической несущей способности грунта. Всего в ходе работы с выносным механизмом с Земли подано 5879 команд, устройство функционировало в течение 18 час. 22 мин. За время работы выполнено 1898 различных движений. Суммарное время работы мотора ковша составило 42 сек., мотора разворота по азимуту— 27 сек., мотора подъема —5 мин. 56 сек., мотора сокращения выносного механизма — 23 мин. 48 сек. При проведении эксперимента с ковшом-захватом было обнаружено, что на какое-то время вышел из строя прибор управления объективом камеры по азимуту. В связи с этим пришлось установить ковш-захват в такое положение, чтобы он попал в объектив камеры вместо того, чтобы перемещать камеру так, чтобы ковш-захват оказался в ее поле зрения. Однако позднее прибор управления по азимуту начал действовать снова. 2 мая эксперименты с выносным ковшом-захватом закончились, т. к. тень от аппарата стала затруднять наблюдение за проведением экспериментов. То обстоятельство, что аппарат совершил посадку на склоне кратера и его вертикальная ось оказалась под углом 14,7° к вертикали, значительно расширило сферу действия камеры. Это дало возможность 24 апреля полу
100
чить картину солнечного затмения, при котором солнечный диск закрывается Землей (с Земли это явление наблюдается как затмение Луны) - (50). 30 апреля получены изображения Земли, имевшей серповидную форму. Без наклона камеры, вызванного условиями посадки, захват ею Земли был бы невозможен. На снимках, зафиксировавших солнечное затмение, Земля представляется темным кругом, обрамленным ореолом, в котором оранжевые тона переходят в бледно-фиолетовые. Полученное цветное изображение серповидной Земли имеет зеленовато-голубоватый вид. В этот же период были получены изображения Венеры, звездного неба и окружающей местности для оценки освещенности поверхности Луны в период солнечного затмения. Температура в кратере, где прилунился аппарат, в период затмения упала до —98° С. 3 мая, в 21 час. 55 мин., переданы последние телевизионные изображения лунной поверхности перед наступлением лунной ночи в районе посадки. На изображениях видна тень аппарата, достигающая стенки кратера. Всего до наступления лунной ночи было получено 6319 телевизионных изображений. Запланированная съемка солнечной короны при заходе Солнца за край кратера не была проведена из-за опасения заедания механизмов при низкой температуре. Не была проведена передача цветных изображений Земли в первой четверти, т. к. запас энергии в батареях упал до 14 а-ч (минимальный гарантийный запас энергии, необходимый для прогрева оборудования аппарата в период лунной ночи и обеспечения выхода аппарата на связь после этого периода). Перед наступлением лунной ночи зеркало камеры было повернуто на восток и вниз, а панель с солнечными элементами повернута ребром к востоку, во избежание термического удара и внезапного повышения мощности при восходе Солнца. Все бортовые системы аппарата, кроме командного приемника и нагревателей в отсеках электронного оборудования, были выключены (35). 17 мая в районе посадки аппарата начался лунный день, однако все попытки войти в связь до наступления второго ночного периода окончились неудачей. 1 июня в районе посадки аппарата вновь наступила лунная ночь и попытки войти в связь с аппаратом были прекращены.
19 ноября 1969 г. космонавты А. Бин и Ч. Конрад в лунной кабине корабля Apollo XII совершили посадку в 45 м от кратера, на склоне которого находится аппарат Surveyor III. Расстояние от лунной кабины до аппарата — около 200 я. Космонавты во время второго выхода из лунной кабины спустились в кратер, приблизились к аппарату, произвели фотографирование окружающей местности, аппарата, взяли образцы грунта. Снимки и анализы грунта будут сравниваться с полученными аппаратом с помощью телекамеры и ковша-захвата. Космонавт Ч. Конрад с помощью ножниц произвел
101
демонтаж -с аппарата некоторых деталей: телекамеры (рис. 19), кусков алюминиевой трубки каркаса и электрического кабеля, зеркальной облицовки контейнера с электронным оборудованием и ковша-захвата. Отмечается, что трубка и теплоизоляция кабеля очень хрупки. Демонтаж кабеля представляет интерес в связи с тем, что перед стартом аппарата на нем была определена популяция микроорганизмов, аналогичное измерение после возвращения корабля на Землю даст возможность установить степень выживаемости микроорганизмов в лунных условиях. Космонавты отмечали, что
Рис. 19. Демонтаж телекамеры аппарата Surveyor III космонавтом Ч. Конрадом.
грунт на склоне кратера прочный, несыпучий, следы опор шасси на грунте и борозды, оставшиеся после работы ковша-захвата, не подверглись эррозии, отмечено изменение цвета аппарата — первоначально белый, он стал бурым. Вес демонтированных деталей по результатам взвешивания на Луне — 6,8 кГ. Все детали будут исследоваться для определения степени влияния лунных условий, в частности, в Лаборатории реактивного движения определяется работоспособность телекамеры. Карантин деталей закончился 16 января 1970 г.
Конструкция и состав бортового оборудования аппарата (34,57|) почти такие же, как у аппарата Surveyor I. В конструкцию аппарата внесены лишь некоторые изменения. Для изучения характеристик лунного грунта установлен выносной
102
механизм с ковшом-захватом вместо устанавливавшейся на первых аппаратах Surveyor «подлетной» телекамеры (на последующих аппаратах «подлетная» камера также не устанавливалась). Установлена дополнительная (вторая) неподзаря-жаемая серебряно-цинковая батарея емкостью 800 а-ч для использования в периоды пиковых нагрузок. У посадочной ноги № 1 установлены 2 плоских бериллиевых зеркала размером 25x23 см и 23x9 см для получения камерой изображения участка, находящегося под аппаратом. В телеметрической системе дополнительно установлены 2 коммутатора, установлен ряд датчиков для увеличения объема телеметрической информации о работе верньерных двигателей, об ударных нагрузках при посадке аппарата и вибрации при работе тормозного РДТТ. Модифицировано устройство ASPP. Суммарный вес аппарата (при отделении от II ступени) — 1035 кГ, после посадки— 281,2 кГ, вес собственно телекамеры — 7,7 кГ (1).
Выносной механизм с ковшом-захватом (20, 29, 56) предназначен для изучения характеристик лунного грунта. На рис. 20 показан кронштейн с ковшом-захватом. Механизм разработан и изготовлен Hughes Aircraft Со, его вес — 8,2 кГ. В состав механизма входят миниатюрный ковш, напоминающий по конструкции ковш экскаватора, и складывающаяся гармошкой стрела, на которой ковш жестко закреплен. Ковш снабжен заслонкой, открывающейся и закрывающейся по командам с Земли. При поднятой заслонке открывается острая передняя горизонтальная кромка ковша, идущая по всей его ширине. Если заслонка опущена на ковш, то его передняя сторона становится плоской поверхностью площадью около 6,3 см2. Кинематическое устройство позволяет бросать ковш с высоты на грунт или подтягивать его по грунту к аппарату. Связанные с ковшом тензометры, потенциометры и акселерометры регистрируют усилия (до 90 кГ), необходимые для продвижения ковша и замедления его движения в грунте, а также другие данные, позволяющие определить механические свойства грунта. Один из датчиков установлен на кронштейне (в основном для измерения усилий в вертикальной плоскости), другой — у места крепления металлического троса к ковшу-захвату. К режущей кромке ковша-захвата жестко крепится акселерометр. Раздвижной кронштейн, на котором смонтирован ковш-захват, крепится к каркасу аппарата на высоте 38 см от основания. Крепление кронштейна к каркасу — шарнирное, в том месте, где на аппаратах Surveyor I и II устанавливалась «подлетная» телекамера. Шарнирное крепление позволяет кронштейну складываться и раздвигаться, в результате чего ковш приближается или удаляется от рамы аппарата, и совершать движения в вертикальной и горизонтальной плоскостях, перемещая в этих плоскостях и ковш. Под действием пружины складывающийся кронштейн
103
стремится максимально раздвинуться. В сложенном или частично сложенном положении кронштейн удерживается металлической лентой, один конец которой закреплен, а другой наматывается на вал электродвигателя. По командам декодирующего устройства аппарата электродвигатель наматывает или разматывает ленту, и кронштейн с ковшом складывается или раздвигается. Манипуляции механизма осуществляются при помощи 4 электромоторов; первый электромотор связан с барабаном и обеспечивает раздвижение составного кронштейна, второй обеспечивает поворот кронштейна по азимуту, третий — движение кронштейна в вертикальной плоскости (эти электромоторы расположены на самом аппарате); четвертый — раскрытие и закрытие челюстей ковша (расположен в. ковше-захвате). Мотсры работают импульсами длительностью 0,1 или 2,0 сек. по командам с Земли от декодирующего устройства. Работу всех четырех электромоторов обеспечивают бортовые химические батареи аппарата при напряжении 22 в. Выносной механизм не имеет системы терморегулирования. Во-избежание термической деформации конструкции механизм не должен охлаждаться ниже чем до минус 40° С, для этого аппарат должен ориентироваться так, чтобы выносной механизм был обращен на восток к восходящему Солнцу (аппарат совершает посадку вскоре после восхода Солнца в районе посадки). Для лучшего терморегулирования и большей контрастности на лунной поверхности кронштейн и ковш-захват окрашены в голубой цвет. Управляет механизмом только станция слежения системы DSIF в Голдстоуне. В период работы меха-
Рис. 20. Ковш— захват. низма его изображения передаются на Землю телекамерой. Выносной механизм, с ковшом захвата может совершать ряд операций: проведение борозд и скребление лунной поверхности для определения прочностных характеристик грунта; захват и перенос образцов лунного грунта для определения сцепляемости отдельных частиц; поднятие образцов грунта для определения их веса; перенос образцов грунта на опору посадочной ноги № 2, которая находится в пределах досягаемости механизма, и сдув грунта струей сжатого газа из соответствующего реактивного сопла системы ориентации для исследования его сыпучести; перемалывание образцов грун
104
та челюстями ковша-захвата (сила сжатия челюстей 3,6 кГ); дробление грунта и образцов грунта, перенесенного на опору посадочной ноги № 2, ударами ковша-захвата (сила удара 3,2 кГ); рытье канавок длиной до 63,5 см, шириной до 30,5 см и глубиной до 46 см. Схема возможных перемещений выносного механизма с ковшом-захватом показана на рис. 21; максимальный вынос ковша — 163 см, угол поворота кронштейна по азимуту—112° (длина дуги поворота около 3 ж), площадь лунной поверхности, охватываемая выносным механизмом — 2,23 м2, угол подъема; кронштейна в вертикальной плоскости — 54°, высота подъема ковша-захвата над поверхностью (принимается горизонтальной)— 101 см, глубина опускания ковша-захвата в грунт — 46 см. Входное отверстие ковша — 5X10 см. Объем ковша — около 15 см3.
Общие расходы на создание, запуск и обеспечение полета: аппарата Surveyor III составили 80 млн. долл.
Рис. 21. Схема возможных перемещений ковша — захвата (пунктиром обведен участок, где может производиться рытье грунта).
IQS'.
5. Космический аппарат Surveyor IV (Surveyor D)
Назначение аппарата такое же, как у аппарата Surveyor III. Дополнительная задача — установление наличия магнитных веществ в лунном грунте. Запуск SC-4 аппарата произведен 14 июля 1967 г. в 11 час. 53 мин. со стартового комплекса № 36А м. Кеннеди ракетой-носителем Atlas-Centaur АС-11. Азимут запуска—103,8°. Полет ракеты-носителя и вывод аппарата на траекторию полета к Луне проходил по программе близкой к расчетной. При запуске повторного включения двигателей II ступени не предусматривалось и аппарат не выводился на промежуточную орбиту, а был непосредственно выведен на траекторию полета к Луне. После выхода аппарата Surveyor D на траекторию полета к Луне он получил название Surveyor IV, по международной системе обозначение 1967 — 68А. 16 июля в 2 час. 30 мин. проведена коррекция траектории; без коррекции аппарат достиг бы Луны в 174 км от расчетной точки. Потребная корректирующая скорость для компенсации промаха и обеспечения требуемой продолжительности полета составила 2,0 м!сек, а только для компенсации промаха—1,5 м!сек. При движении по скорректированной траектории аппарат должен был совершить посадку на Луну 17 июля в 2 час. 05 мин. На подлетном участке торможение аппарата должно было осуществляться по типовой для аппаратов Surveyor программе. Тормозной РДТТ включился' в расчетное время, но за 2 сек. до прекращения работы связь с аппаратом прервалась. Все попытки установить связь с аппаратом после расчетного времени посадки окончились неудачей. Предполагаемая причина неудачной посадки — взрыв РДТТ на последних секундах работы. Координаты места падения аппарата: 0°26' с. ш. и 1°20х з. д. (Центральный залив). Полет аппарата от момента старта ракеты-носителя и до падения аппарата на Луну продолжался около 62 час. 12 мин. Аппарат должен был совершить посадку в Центральном заливе в точке с селенографическими координатами 0,58° с. ш. и 0,83° з. д.
Конструкция и состав бортового оборудования аппарата почти такие же, как у аппарата Surveyor III. Суммарный вес аппарата (при отделении от II ступени) — 1035 кГ, при падении на Луну — 376 кГ. Для установления наличия в лунном грунте магнитных веществ и по результатам предыдущих запусков в конструкцию аппарата внесены некоторые изменения. На посадочных опорах установлено 2 стержня, один из них — магнит, другой — из немагнитного материала. Оба стержня находятся в поле зрения камеры и по передаваемым изображениям можно судить о наличии магнитных веществ в грунте. Во избежание ситуации, возникшей при посадке аппарата Surveyor III, когда при многократном отражении от 106
.поверхности Луны луча радиолокационного альтиметра не выключились верньерные ЖРД, было отключено устройство для размыкания цепи альтиметра при сближении аппарата с .Луной.
6. Космический аппарат Surveyor V (Surveyor Е)
Назначение аппарата (69) — осуществление мягкой посадки на поверхность Луны, проведение научных исследований и решение задач по определению химического состава .лунного грунта, получение телевизионных изображений поверхности Луны в районе посадки и продолжение изучения радиоотражающих, механических и тепловых свойств поверхности Луны. Запуск SC-5 аппарата произведен 8 сентября 1967 г. в 7 час. 57 мин. со стартового комплекса № 36В м. Кеннеди усовершенствованной ракетой-носителем Atlas-Centaur АС-13 (увеличена емкость топливных баков I ступени и повышена суммарная тяга двигателей этой ступени). Азимут запуска 79,5°. «Окно» для запуска было в пределах •от 8 сентября до 13 сентября включительно; 8 сентября «окно» для запуска было с 6 час. 39 мин. до 8 час. 30 мин. Полет ракеты-носителя и вывод аппарата на траекторию полета к Луне проходил по программе, близкой к расчетной; вывод аппарата на траекторию полета к Луне осуществлен при повторном включении двигателей II ступени, выведшей аппарат предварительно на промежуточную орбиту, а затем на траекторию полета к Луне. Аппарат совершал полет по промежуточной орбите в течение 7 мин. После выхода аппарата Surveyor Е на траекторию полета к Луне он получил название Suveyor V, по международной системе обозначение 1967-84А. Без коррекции аппарат достиг бы Луны в 47 км от расчетной точки. Потребная корректирующая скорость для компенсации промаха и обеспечения требуемой продолжительности полета составила 1,2 м!сек, а только для компенсации промаха — 0,6 м!сек. 9 сентября в 1 час. 45 мин., когда аппарат находился на расстоянии 160 000 км от Земли, проведена коррекция траектории полета. Верньерные ЖРД проработали 6 сек. Сразу же после проведения коррекции датчик давления в основном баллоне со сжатым гелием в вытеснительной системе подачи топлива в верньерные двигатели показал, что давление упало до 210 кГ1см2 и продолжало падать (начальное давление в баллоне равнялось 365,6 кГ1см2), Падение давления объяснялось тем, что через неплотно закрывшийся клапан редуктора происходило просачивание гелия в магистраль и далее в топливные баки, а из них он вытекал наружу через предохранительные клапаны, которые автоматически открываются, когда давление в баке превышает 58,4 кГ!см2. Утечка
107
гелия поставила под угрозу осуществление мягкой посадки аппарата на Луну, т. к. не было уверенности в том, что ЖРД. включатся на участке спуска. В связи с этим было решено произвести 3 дополнительных кратковременных включения ЖРД в расчете на то, что клапан редуктора закроется после «встряхивания» аппарата. После проведения днем 9 сентября включений, клапан не закрылся; некоторый расход гелия привел к тому, что просачивание его сократилось, а падение давления в основном баллоне составляло около 0,42 кГ!см2 в минуту. Позже, когда давление в основном баллоне и магистралях упало до 56 кГ1см2, предохранительные клапаны закрылись, и стравливание гелия за борт прекратилось. Были проведены расчеты и испытания, чтобы определить, достаточно ли это давление для обеспечения работы ЖРД при мягкой посадке аппарата на Луну. Испытания проводились с использованием аппарата Surveyor F, который в это время находился на мысе Кеннеди и подготавливался к запуску, намеченному на ноябрь 1967 г.; использовались также две модели аппарата Surveyor. Испытания показали, что при давлении 56 кГ1см2 мягкую посадку обеспечить можно, но необходимо-изменить программу полета. Имелось два мнения о проведении дальнейших работ с аппаратом: перевести аппарат тормозным РДТТ на геоцентрическую орбиту, не пересекающуюся с Луной, ввиду того, что вероятно, не удастся обеспечить мягкую посадку аппарата на Луну из-за недостаточного давления гелия в основном баллоне, или осуществить мягкую посадку аппарата на Луну, обеспечив точное срабатывание ЖРД на участке посадки, изменив программу дальнейшего' полета аппарата. Было принято решение попытаться осуществить мягкую посадку аппарата. Включение ЖРД днем 9 сентября привело к тому, что аппарат отклонился от расчетной траектории. Чтобы вернуть аппарат на расчетную траекторию и сбросить излишки топлива, произведено еще 3 дополнительных включения ЖРД: первое — для израсходования излишков топлива и снижения веса аппарата до величины, предусмотренной новой программой полета, второе и третье — для дополнительной коррекции траектории полета и израсходования излишков топлива. После проведения этих включений (последнее произошло примерно за сутки до встречи аппарата с Луной) проведены траектории измерения и рассчитана новая программа полета с учетом того, что после значительной утечки гелия возможная продолжительность работы ЖРД стала существенно меньше, чем предусматривалось штатной программой. Первоначально новая программа полета предусматривала, что РДТТ прекращает -работу на расстоянии 0,6 км от Луны; если учесть, что отклонение в длительности работы РДТТ на 1 сек. приводит к изменению расстояния от Луны на 2,7 км, то при такой программе отклонение мо
J08
мента прекращения работы РДТТ на десятые доли секунды могло привести к тому, что встреча аппарата с Луной произойдет при работающем РДТТ, что привело -бы к разрушению аппарата. В связи с этим изыскивались возможности максимально продлить работу ЖРД, чтобы окончание работы РДТТ произошло на большем расстоянии от Луны. Испытания и расчеты показали возможность увеличения количества топлива, которое могут использовать ЖРД, с 25,8 до 40,8 кГ без угрозы неустойчивого горения в двигателях (испытания показали, что неустойчивое горение в ЖРД возникает при падении давления гелия в вытеснительной системе подачи до 38,7 кГ/см2). После этих испытаний и расчетов была составлена программа полета, предусматривавшая, что окончание работы РДТТ происходит на расстоянии 1,34 км от Луны. При составлении этой программы возникла проблема выбора момента включения радиолокационных приборов RADVS, управляющих работой ЖРД после окончания работы РДТТ. Эти приборы включаются автоматически при подрыве взрывных болтов, которыми крепится РДТТ к раме аппарата. Однако по новой программе полета РДТТ прекращал работу слишком близко от Луны, и эти приборы могли не успеть получить устойчивый отраженный сигнал. Было принято решение подорвать взрывные болты, крепящие РДТТ, до окончания его работы; в этом случае радиолокационные приборы включались бы на достаточном расстоянии от Луны. Проведенные эксперименты на модели показали, что если •будут подорваны взрывные болты, крепящие РДТТ, он будет удерживаться на месте под действием собственной тяги, а по •окончании работы отделится. Новая программа была введена .•в ПВУ. По новой программе .полета аппарат должен был совершить посадку на Луну 11 сентября в 0 час 46 мин. в точке с селенографическими координатами 1,45° с. ш. и 23,25° в. д. 11 сентября в 00 час. 44 мин. 38 сек. в соответствии с новой программой радиолокатор AMR на расстоянии около 95 км от Луны выдал команду на включение ЖРД и РДТТ. Двигатели включились через предусмотренный новой программой интервал времени 12,5 сек. В момент включения двигателей аппарат находился на расстоянии 45,7 км (76) от Луны. За 2 сек. до окончания работы РДТТ были подорваны взрывные болты и включились радиолокационные приборы RADVS. РДТТ прекратил работу на расстоянии 1,34 км от Луны, скорость падения аппарата в этот момент составляла 26,8 м!сек. С этого момента управление работой ЖРД, остаток топлива для которых составлял 13 кГ, стало осуществляться по командам радиолокационного альтиметра и доплеровского радиолокатора, которые были включены непосредственно перед прекращением работы РДТТ. ЖРД продолжали работать до того момента, когда расстояние до поверхности Луны со
109
кратилось до 4,2 м. 11 сентября в 00 час. 46 мин. 46 сек. аппарат совершил мягкую посадку на Луну в Море Спокойствия? в точке с селенографическими координатами Г25' с. ш. и 23°11' в. д., расположенной в 29 км от расчетной точки. Полет аппарата от момента старта ракеты-носителя и до момента посадки продолжался 64 час. 49 мин. 38 сек. (3,31). Аппарат совершил посадку на склон холма крутизной около 20э. Вертикальная составляющая скорости в момент (контакта аппарата с поверхностью составляла 3,6 м!сек. Коснувшись поверхности, аппарат имел небольшую боковую составляющую-скорости, вследствие чего произошло смещение его на некоторое расстояние, о чем свидетельствуют следы, оставленные опорами шасси аппарата. После посадки аппарата давление в баллоне с гелием составляло примерно 39,1 кПсм2. (По первоначальной программе, рассчитанной перед запуском, аппарат должен был совершить посадку на юге Моря Спокойствия в точке с селенографическими координатами 1° с. ш. и 24° в. д. Этот район расположен в восточной части зоны, выбранной для посадки лунной кабины корабля Apollo и в 58 км к юго-западу от места падения аппарата Ranger VIII).
Через 75 мин. после посадки началась передача на Землю телевизионных изображений с разверткой 200 и 600 строк. 11 сентября в 15 час. 35 мин. началось изучение химического* состава лунного грунта а-анализатором (31). 12—13 сентября. 3 раза были включены ЖРД для выяснения, не будут ли при работе двигательной установки лунной кабины корабля. Apollo образовываться воронки в грунте и не поднимается ли: облако пыли, которое может затруднить ее посадку и взлет. Двигатели включались не на полную тягу: при первом включении тяга каждого двигателя составляла 7,7 кГ, при втором— 9 кГ, при третьем—12,2 кГ. Продолжительность работы двигателей при каждом включении составляла 0,2 сек. (3,10). 17 сентября в районе посадки аппарата наступил лунный полдень, и во избежание перегрева оборудование аппарата было временно выключено. В период с 18—24 сентября, бортовое оборудование функционировало до момента наступления лунной ночи в районе посадки. 24 сентября получено несколько снимков, сделанных после захода Солнца при свете* Земли, а также снимки солнечной короны. С момента посадки аппарата на Луну и до 24 сентября было получено и передано' на Землю 18006 телевизионных изображений лунной поверхности и окружающего пространства. С наступлением ночи связь с аппаратом прекратилась. 15 октября, после восхода Солнца в районе посадки, связь с аппаратом возобновилась. По показаниям телеметрии все оборудование аппарата было в исправности. 16 октября была подана команда на возобновление передачи телевизионных изображений. Они имели очень низкое качество по-видимому из-за того, что в условиях низ
110
кой температуры во время лунной ночи произошло повреждение камеры. 29 октября в районе посадки аппарата наступила лунная ночь и связь с аппаратом прекратилась. 10 ноября в начале наступления лунного дня в районе посадки была сделана попытка возобновить связь с аппаратом. Эта и. несколько последующих попыток не увенчались успехом.
Рис. 22. Космический аппарат Surveyor V.
1 — панель с солнечными элементами; 2 — панорамная телевизионная камера; 3 — контейнер с электронным оборудованием; 4 — электронное оборудование а- анализатора; 5 — датчик направления на Канопус; 6 — всенаправленная антенна; 7 — опора посадочного шасси; 8 — ЖРД; 9 — баллон с гелием вытеснительной системы подачи топлива в ЖРД; 10 — а — анализатор; 11 — бал-
лон со сжатым азотом для реактивных сопел системы ориентации; 12 — блок разрушающейся сотовой конструкции; 13 — баки с окислителем и горючим для ЖРД; 14 — радиолокационный альтиметр и доплеровский радиолокатор; 15 — остронаправленная антенна.
14 декабря вновь удалось установить связь с аппаратом и был проведен эксперимент по приему сигналов от одновременно находящихся на Луне аппаратов Surveyor V и Surveyor VI (об этом эксперименте см. раздел 7 настоящей главы).
Конструкция и состав бортового оборудования аппарата Surveyor V (рис. 22) почти такие же, как у аппарата Surveyor III. Для определения химического состава лунного грунта и по результатам предыдущих запусков в конструкцию аппарата внесены некоторые изменения.
111
Установлен a-анализатор (64, 66, 68) вместо выносного механизма с ковшом-захватом (рис. 23). a-анализатор предназначен для определения химического состава лунного грунта по рассеянному a-излучению и обеспечивает идентификацию химических элементов с атомным номером более 5. Система детекторов регистрирует наличие в грунте атомов бора, азота,
Рис. 23. a — анализатор. Общий вид в рабочем положении на Луне (изображение передано телекамерой).
фтора, натрия, магния, алюминия, кремния, фосфора, серы, хлора и калия. Радиация рассеивается ядрами атомов и рассеянные a-частицы улавливаются двумя детекторами, их энергия и количество измеряется. В a-анализаторе расположены также четыре детектора для измерения энергии и количества протонов, образующихся вследствие бомбардировки грунта a-частицами. При облучении участка поверхности а-частицы проникают в грунт на глубину 25 ц, облучаемая площадь равна 139 см2. Источником a-частиц служит радиоактивный элемент кюрий-242, имеющий активность не выше 25 мкюри. Источник находится в капсуле, помещенной в контейнер размером 12,7X15,2X15,2 см, прикрепленный к аппарату нейлоновой лентой, с помощью которой опускается на грунт. При проведении анализа дно контейнера открывается. Для отражения солнечных лучей контейнер покрыт слоем золота. Определение состава пород требует 15—20 час. В полете прибор прижат к аппарату. После посадки система проверяется проведением химического анализа материала известного состава,
112
находящегося на борту аппарата. Затем прибор частично опускается для проведения базовых измерений, после чего на нейлоновой ленте опускается до контакта с лунной поверхностью. Прибор состоит из двух блоков: измерительной головки, опускаемой на лунную поверхность, и электронно-решающего блока. В измерительную головку входят радиоактивный источник а-частиц, детекторы а-частиц и протонов, электронное устройство и нагреватель. Электронный блок состоит из логических схем дешифратора команд, источника питания и логических схем, необходимых для преобразования различных величин в сигналы для передачи. Электронный блок находится в специальном терморегулируемом отсеке аппарата. Каждое слово двоичного кода содержит девять двоичных единиц, одна из которых — синхронизирующая, семь — несущие сигнал и одна — для проверки четности. Прибор крепится к аппарату кронштейном и скобой, проверка проводится без перевода его в рабочее положение. При подготовке к работе чувствительная головка опускается на поверхность на нейлоновой ленте, прикрепленной к болту с кольцом. Лента намотана на цилиндр с приводом, который раскручивается под действием силы тяжести чувствительной головки и опускает ее на поверхность в несколько приемов. При частичном опускании головки разматывание ленты предотвращает запирающий механизм; частичное опускание происходит за счет вытягивания ленты. Для полного опускания головки запирающий механизм освобождается подрывом пиропатрона по командам с Земли. Общий вес измерительной головки, электронного блока и опускающего устройства— 12,7 кГ.
Установлены выпуклые, а не плоские зеркала, увеличившие площадь обзора телекамеры под аппаратом. Зеркала имеют размеры 25x23 см и 8X24 см. Меньшее зеркало установлено таким образом, чтобы обеспечить наблюдение за а-ана-лизатором (41). На одной из посадочных опор посадочного шасси вертикально установлен магнит, имеющий форму прямоугольного параллелепипеда размером 51X13X3 мм для обнаружения магнитных веществ в лунном грунте и контрольный (ненамагниченный) стержень тех же размеров (рис. 24). Магнит и немагнитный стержни установлены так, что попадают в поле зрения камеры. Магнит изготовлен из железо-никелево-кобальтово-алюминиевого сплава, контрольный немагнитный стержень — из сплава железа, никеля и кобальта с низкой магнитной проницаемостью. Оба стержня привинчены к монтажной скобе, прикрепленной к опоре. Вес всего устройства 62 Г. Стержни и скоба окрашены в тусклый светло-синий цвет для контраста с темным лунным веществом (31).
Применена усовершенствованная панель с солнечными элементами. Вес панели 3,76 кГ, размеры 1,12X0,76 м (пло
8—6К7
113
щадь — 0,85 м2). Солнечные элементы размером по 10Х20Х Х0,46 мм смонтированы только на одной стороне панели на слоистой подложке толщиной 12,7 мм из алюминиевого сплава с сотовым наполнителем. Номинальная выходная мощность солнечных элементов 22 вт на 1 кГ веса панели. Усовершен-
Рис. 24. Магнит и контрольный стержень на опоре шасси.
1 — амортизатор ударных нагрузок; 2 — нога шасси; 3 — контрольный стержень; 4 — магнит; 5 — скоба для монтажа магнита и контрольного стержня.
ствованная панель с солнечными элементами обеспечивает выходную мощность до 85 вт при температуре 60° С и не менее 60,5 вт при температуре 120° С. Телевизионная камера снабжена поляризационным светофильтром, который облегчает определение типа пород на поверхности Луны. Суммарный вес аппарата при отделении от II ступени— 1005 кГ, после посадки— 279,4 кГ (69).
Стоимость запуска и обеспечения полета аппарата составила 60 млн. долл. (31).
7- Космический аппарат Surveyor VI (Surveyor F)
Назначение аппарата такое же, как для аппарата Surveyor V. Запуск SC-6 аппарата произведен 7 ноября 1967 г. в 7 час. 39 мин. со стартового комплекса № 36В м. Кеннеди ракетой-носителем Atlas-Centaur АС-14. Азимут запуска — 83°. Полет ракеты-носителя и вывод аппарата на траекторию полета к Луне проходил по программе, близкой к расчетной. Вывод аппарата на траекторию полета к Луне был осуществлен при повторном включении двигателей II ступени, выведшей аппарат предварительно на промежуточную орбиту, а затем на траекторию полета к Луне. Аппарат обращался по промежуточной орбите в течение 13 мин. После выхода аппарата:
114
Surveyor F на траекторию полета к Луне он получил название Surveyor VI, по международной системе обозначение 1967—112А. После отделения от II ступени аппарат был ориентирован по Солнцу и Канопусу (захват Канопуса произошел в 15 час. 00 мин.). 8 ноября в 2 час. 00 мин., когда аппарат находился на расстоянии 173 300 км от Земли, была проведена коррекция траектории полета; верньерные ЖРД проработали 10,3 сек. Без коррекции аппарат достиг бы Луны в 126 км от расчетной точки посадки (аппарат должен был совершить посадку в районе радиусом 30 км с центром в точке с селенографическими координатами 0,42° с. ш. и 1,33° з. д. Потребная корректирующая скорость для компенсации промаха и обеспечения требуемой продолжительности полета составила 2,2 м/сек, только для компенсации промаха—1,4 м/сек. 10 ноября в 01 час. 01 мин. аппарат совершил посадку в районе Центрального залива в точке с селенографическими координатами 0°28' с. ш. и Г29' з. д. Точка посадки находится в 5 км от центра расчетного района прилунения и в 9 км от места падения аппарата Surveyor IV. Скорость аппарата в момент посадки равнялась 4,4 м/сек. При сближении с Луной вектор скорости аппарата составлял угол около 25° с местной вертикалью. Полет аппарата от момента старта ракеты-носителя и до момента посадки продолжался 65 час. 22 мин. (43, 58).
Через 50 мин. после посадки началась передача телевизионных изображений. 11 ноября началось определение химического состава лунного грунта a-анализатором: вначале непрерывно, а спустя 18,5 час. — с интервалами 30 мин. в связи с тем, что «-анализатор стал нагреваться Солнцем, высоко поднявшимся над горизонтом. 13 ноября, когда в районе посадки Солнце поднялось на 40° над горизонтом и температура аппарата начала повышаться, временно были прекращены передача телевизионных изображений и определение химического состава грунта, a-анализатор в общей сложности проработал около 27 час. В период с 10 по 13 ноября до прекращения работы аппаратуры было получено около 6000 телевизионных изображений лунной поверхности. 14 ноября, когда температура на поверхности Луны достигла 120° С, температура a-анализатора приблизилась к критической величине, в то время как температура остального оборудования оставалась в допустимых пределах. Некоторые элементы конструкции, когда Солнце находилось в зените, нагревались до 130°, однако ЖРД в этот период остыли (их затеняла панель с солнечными элементами и остронаправленная антенна). К 17 ноября, до момента проведения эксперимента по перемещению аппарата над лунной поверхностью, на Землю было передано около 14 500 телевизионных изображений. 17 ноября проведен эксперимент по перемещению аппарата над лунной поверхностью,
8* Г15
В 10 час. 32 мин. по команде с Земли были включены ЖРД, которые проработали 2,5 сек при общей тяге 68 кГ. Аппарат оторвался от лунной поверхности, поднялся на высоту 3 м и опустился на расстоянии 2,4 м от места первоначальной посадки. В полете аппарат находился 8,5 сек. В 11 час. 07 мин. снова началась передача телевизионных изображений. Эксперимент по перемещению аппарата предназначался (30, 38) для исследования проблем посадки и старта с Луны, в частности, воздействия истекающей струи на лунный грунт, получения телевизионных изображений следов, оставленных на грунте посадочными опорами аппарата в месте первоначальной посадки, и стереоскопических изображений элементов поверхности (производится съемка одних и тех же элементов поверхности под разными углами). Съемка с двух точек позволяет повысить точность определения расстояния между элементами рельефа поверхности, попавшим в кадр. Часть этих задач увязана с изучением проблемы посадки и старта с Луны лунной кабины корабля Apollo. Эксперимент по перемещению аппарата прошел успешно. На изображениях, переданных после проведения эксперимента, видно место первоначальной посадки аппарата, в частности, следы, посадочных опор и воздействия на грунт истекающей струи ЖРД при их включении для проведения этого эксперимента. Включение и работа двигателей не привели к выбросу из лунной поверхности значительного количества грунта. Удалось уточнить расстояние между аппаратом и различными деталями поверхности в месте посадки съемкой их под разными углами. После перемещения и посадки аппарата a-анализатор оказался на грунте в перевернутом положении; средств для установки a-анализатора в нормальное положение на аппарате не предусмотрено. Ввиду того, что перевернутый прибор нельзя было использовать для анализа грунта, с его помощью началась регистрация космических излучений. Эксперимент по перемещению аппарата позволил сделать выводы (30, 38) о том, что во время работы двигательной установки лунной кабины корабля Apollo при посадке и старте с Луны, по-видимому, не будут возникать помехи проведению визуальных наблюдений и наблюдений с помощью оптической аппаратуры и что вымывание грунта истекающей струей двигателей и выброс его опорами шасси при посадке, по-видимому, не приведет к осаждению частиц грунта на корпусе кабины. После перемещения аппарата Surveyor VI частицы грунта были обнаружены на фотометрической шкале, смонтированной на стержне, несущем одну из всенаправленных антенн аппарата. По-видимому, шкала, находящаяся на некотором расстоянии от корпуса и на высоте 1,2 м над поверхностью Луны, оказалась на пути частиц грунта, выброшенных опорами посадочного шасси аппарата при вторичной посадке. Конструкция лунной кабины кораб
116
ля Apollo не имеет подобных выступающих элементов. Частицы грунта, выброшенные из поверхности при работе двигателей, были обнаружены также на магнитном стержне, причем немагнитные стержни на соседних посадочных ногах остались чистыми. Воздействие истекающей струи на грунт не приводит к образованию глубоких кратеров. Глубина кратеров, возникших в результате работы ЖРД аппарата Surveyor VI при его перемещении, не превышает нескольких сантиметров, так же как и глубина следов, оставленных опорами на месте первоначальной посадки. После выполнения эксперимента аппарата по перемещению на Землю было передано около 15 000 изображений лунной поверхности, в том числе изображения следов воздействия струи двигателя на грунт при первой посадке и при взлете. На основе изображений, полученных с двух различных точек, специалисты NASA получили трехмерные стереоскопические изображения лунного рельефа, а с помощью фотограмметрических методов были изготовлены детальные топографические карты района посадки аппарата. Специалисты NASA рассматривали вопрос о возможности перемещения 24 ноября аппарата на расстояние до 300 м на склон близлежащего кратера. Этот эксперимент предназначался для решения задач по исследованию проблем посадки и старта с Луны, испытанию радиолокационного оборудования, обеспечивающего мягкую посадку и получению крупноплановых изображений больших камней, находящихся на склоне указанного кратера. Расчеты показали, что запас топлива недостаточен для проведения такого эксперимента. Отказ от его проведения был мотивирован руководителями программы тем, что остаток топлива мог обеспечить перемещение аппарата на небольшое расстояние, в пределах которого не было достаточно интересных элементов рельефа (на расстоянии до 300 м не наблюдалось топографических условий, сколько-нибудь отличающихся от места посадки), а также тем, что руководители программы Apollo обратились с просьбой продолжить съемку (при различном возвышении Солнца над горизонтом) следов, которые оставлены в грунте истекающей струей ЖРД при первом перемещении аппарата. С момента посадки и до 24 ноября на Землю передано 30 027 телевизионных изображений. Некоторые из снимков использовались для уточнения местонахождения аппарата путем сравнения со снимками Центрального залива, ранее полученными аппаратом Lunar Orbiter IV. 14 декабря была установлена связь с находящимися на Луне аппаратами Surveyor V и Surveyor VI. Эксперимент имел целью уточнить характер либрации Луны. Расстояние между аппаратами составляет около 640 км.
Конструкция и состав бортового оборудования аппарата такие же, как у аппарата Surveyor V. Вес аппарата при отделении от II ступени— 1008 кГ, после посадки — 297,6 кГ (68).
117
8. Космический аппарат Surveyor VII (Surveyor G)
Назначение аппарата — осуществление посадки на Луну, получение телевизионных изображений поверхности Луны в районе посадки и определение характеристик лунного грунта, в т. ч. химического состава и содержания магнитных веществ. В отличие от предыдущих аппаратов Surveyor VII предназначался не для исследований в потенциальных районах посадки лунной кабины корабля Apollo, а для исследований в научных целях вне этих районов. Первоначальными планами посадка аппарата предусматривалась в районах кратеров Коперник, Фра Мауро, Гиппарх, Тихо. Интерес к материковым районам этих кратеров вызван тем, что предыдущие аппараты Surveyor исследовали лунную поверхность только в морских районах экваториальной зоны. Окончательно был выбран кратер Тихо, поскольку по сравнению с остальными тремя районами он дальше отстоит от лунного экватора, вдоль которого располагается зона, выбранная для посадки лунной кабины, и посадка в этом районе позволяет вести съемку при существенно ином угле падения солнечных лучей. Поверхность в непосредственной близости от кратера Тихо отличается крайней неровностью. Исследование выброшенных из кратера пород представляет большой научный интерес, т. к. эти породы в значительно меньшей степени засорены обломками метеоритов.
Запуск SC-7 аппарата произведен 7 января 1968 г. ' в 6 час. 30 мин, со стартового комплекса № 36В м. Кеннеди ракетой-носителем Atlas—Centaur АС-15. Азимут запуска — 102,9°. «Окном» для запуска в этот день был период с 5 час. 43 мин. до 8 час. 12 мин. Полет ракеты-носителя и вывод аппарата на траекторию полета к Луне проходил по программе, близкой к расчетной. Вывод аппарата на траекторию полета к Луне был осуществлен при повторном включении двигателей II ступени, выведшей аппарат предварительно на промежуточную орбиту, а затем на траекторию полета к Луне. Аппарат обращался по промежуточной орбите в течение 22 мин. После выхода аппарата Surveyor G на траекторию полета к Луне он получил название Surveyor VII, по международной системе обозначение 1968—01А. 7 января в 23 час. 30 мин. была проведена коррекция траектории, ЖРД работали в течение 11,35 сек. Без коррекции аппарат достиг бы Луны в 41 км к северу от расчетной точки посадки. Потребная корректирующая скорость для компенсации промаха и обеспечения требуемой продолжительности полета составила 1,2 м!сек, а только для компенсации промаха — 0,3 м!сек.
Программой предусматривалось проведение второй коррекции через 20 час. после первой, однако первая коррекция была успешной и от второй отказались. 10 января в 00 час. 24 мин., когда аппарат находился на расстоянии 1600 км от Луны и
118
сближался с ней под углом 36° к местной вертикали, начался цикл автоматических операций, обеспечивающих посадку. В 01 час. 02 мин. по команде радиолокатора AMR были включены ЖРД и РДТТ, который проработал 40 сек. 10 января в 01 час. 05 мин. аппарат совершил посадку в точке с селенографическими координатами 40°53' ю. ш. и 11°22' з. д., в .2,5 км от расчетной точки и в 25,6 км. к северу от кратера Тихо. Скорость аппарата в момент контакта с поверхностью составляла 3,3 м!сек. Опоры -шасси коснулись грунта почти одновременно (с интервалами .50 мсек), нагрузка на опоры составляла 748, 644 и 771 кГ.
Одна из опор оказалась в непосредственной близости от камня высотой 20 см, но даже если бы она попала на него, то, согласно расчетам, аппарат не опрокинулся бы. Аппарат находился на грунте с отклонением от вертикальной оси на 3°, видимый горизонт для камеры составлял 29 км. (44). Полет .аппарата от момента старта ракеты-носителя до посадки на .Луну продолжался 66 час. 35 мин. (39). Расчетный район посадки представлял собой круг диаметром 20 км с селенографическими координатами центра 40,87° ю. ш. и 11,37° з. д. При запусках предыдущих аппаратов район посадки выбирался с диаметром большим в три раза, уменьшение района посадки аппарата Surveyor VII объясняется тем, что вблизи кратера Тихо местность очень пересеченная. Вероятность успешной посадки в этом районе оценивалась в 40—50%. Выбрать столь ограниченный район позволило то, что предыдущие полеты показали высокую надежность системы коррекции. На случай неудачи при коррекции был предусмотрен запасной район посадки у кратера Фра Мауро с координатами 5° ю. ш. и 13° з. д.
После посадки была произведена проверка работоспособности бортовых систем, а через 42 мин. сделаны первые снимки лунной поверхности с разверткой в 200 строк. Затем были установлены в рабочее положение панель с солнечными элементами и остронаправленная антенна и началась передача снимков с разверткой 600 строк, были переданы снимки звездного неба и Земли. С помощью светофильтров исследовалась поляризация света отраженного сигнала поверхностью Земли, а затем поверхностью Луны (59). Позже начались эксперименты с использованием ковша-захвата. Была вырыта канавка глубиной 0,3 м и собран в кучу грунт для последующего исследования его a-анализатором. При работе ковша-захвата в двух случаях твердый подпочвенный слой препятствовал углублению канавки. Один кусок породы удалось расколоть ударом ковша. На магнитах, установленных на ковше-захвате, было обнаружено некоторое количество магнитных материалов.
119
Примерно через 8 час после посадки был включен а-ана-лизатор. Первые две операции по анализу образца с известным химическим составом и определению локального фона радиации были проведены удовлетворительно. Калибровка анализатора управляемым электронным датчиком импульсов показала, что анализатор функционировал нормально. Попытка опустить на грунт a-анализатор не удалась из-за заедания нейлоновой ленты, на которой подвешен контейнер с этим прибором. Неисправность удалось устранить тем, что ковш-захват захватил за кромку прибора и начал тянуть его вниз. 12 января эта операция увенчалась успехом — а-анализатор был опущен на грунт и начато проведение исследований грунта. За этими операциями наблюдали с помощью телекамеры. Исследование первого образца грунта (сравнительно ровный участок неповрежденной поверхности) начат в этот же день.. Интенсивность рассеяния частиц от этого образца, а также телевизионные изображения показали, что расстояние от приемника излучений до образца больше стандартного. Для накопления данных от этого образца потребовалось в общей сложности 27,4 часа. Эксперимент проводился в течение 9 суток (до 20 января), причем из-за интенсивного нагрева взошедшего Солнца его пришлось прервать на 6 суток. Начиная с 12 января, когда Солнце поднялось уже высоко над горизонтом, в работе телекамеры стали делать 20—30-минутные перерывы после каждых 20 мин. работы, что предотвращало ее перегрев. Чтобы камера не нагревалась Солнцем и во время интервалов в работе, ее затеняли остронаправленной антенной, а перед каждым новым сеансом передачи телевизионных снимков антенну снова направляли на Землю (28) 20 января произведен эксперимент по облучению аппарата лучом лазера с Земли с регистрацией этого луча телекамерой аппарата (12). Цель эксперимента — изучение проблем лазерной связи, в частности, определение оптимальных условий освещенности на Земле и на Луне, точности нацеливания луча, посылаемого с Земли, изучение влияния земной атмосферы и Солнца на прохождение лазерных лучей. В этом эксперименте использовались шесть телескопов, оборудованных лазерными источниками излучения: 2 телескопа на западном побережье и 4 — на восточном побережье США. На западном побережье использовался 60-дюймовый телескоп обсерватории Китт Пик (шт. Аризона) в сочетании с газовым (на аргоне) лазером с мощностью излучения 4 вт, и 24-дюймовый телескоп-рефлектор обсерватории Тейбл Маунтин в сочетании с лазером с мощностью излучения 2 вт. Оба луча были зарегистрированы телекамерой аппарата Surveyor VII, причем луч лазера от 24-дюймового телескопа регистрировался как более яркое пятно на поверхности Земли. Лучи от телескопов,
120
расположенных на восточном побережье, на снимках не был^ видны.
21 января a-анализатором начато проведение исследовг ний второго образца лунной породы: головка приемника из лучений была передвинута на камень размером 5X6 см. Этот камень был виден на полученных, телевизионных изображениях до начала этой операции, так как он несколько ярче окружающих его предметов. Время накопления данных от этого образца составило 10,3 час. 22 января началось проведение исследований третьего образца лунной породы: головка приемника излучений была передвинута к разрытой в первые часы после посадки аппарата площадке. Проведенные измерения и полученные телевизионные изображения показали, что исследуемый образец состоит, по крайней мере частично, из материала, который находился под верхним слоем грунта. Данные от этого образца собирались в течение 7 часов ДО' момента захода Солнца. 23 января в 6 час. в районе посадки аппарата наступила первая лунная ночь. После съемки солнечной короны оборудование аппарата было выключено и включены нагреватели. До этого момента камерой было получено около 21 000 изображений лунной поверхности в месте посадки, окружающего пространства и др. (36). 12 февраля, через несколько суток после восхода Солнца в районе посадки аппарата станцией слежения в Робледо-де-Чавела была подана команда на включение бортового оборудования, в том числе телекамеры. Через 56 сек. от аппарата поступил ответный сигнал после чего по команде с Земли была несколько изменена ориентация панели с солнечными элементами, чтобы ускорить подзарядку батарей, и начался прием телеметрической информации от датчиков, контролирующих состояние и: работу бортового оборудования. 13 февраля началась передача телевизионных изображений. Было дополнительно получено около 40 снимков с разверткой 200 строк. В связи с неисправностью батарей и системы сканирования снимков с разверткой 600 строк получить не удалось. За период лунной ночи одна из стоек шасси осела и аппарат наклонился на 8°,. что позволило произвести снимки тех же участков под другим углом. До наступления следующей лунной ночи (20 февраля) в период 13—20 февраля проведены эксперименты с: помощью ковша-захвата и «-анализатора.
Конструкция и состав бортового оборудования аппарата: почти такие же, как у аппарата Surveyor V. Дополнительно установлены выносной механизм с ковшом-захватом для изучения механических свойств грунта, аналогичный устанавливавшемуся на аппарате Surveyor III (выносным механизмом с ковшом-захватом возможно проведение операций по опре-' делению физико-механических характеристик грунта и перенесение a-анализатора с одного места на другое, что дает:’
12 Г
возможность проведения химического анализа пород в разных точках места посадки), и три магнита для обнаружения магнитных веществ в лунном грунте: один магнит прямоугольного сечения на опоре шасси, аналогично установленному на аппарате Surveyor IV, и два магнита U-образной формы высотой 1,6 см на нижней поверхности ковша-захвата. Напряженность магнитного поля, создаваемого магнитами, равнялась около 700 э (на предыдущих аппаратах магнит устанавливался только на одной опоре шасси), a-анализатор отличается от сс-анализатора, установленного на аппарате Surveyor V: полная интенсивность источника а-частиц увеличена на 70%. а сам источник покрыт слоем углерода, чтобы свести к минимуму перенос радиоактивности при передвижении а-анализатора. Повышение интенсивности улучшило отношение сигнала к местному фону радиации. Аппарат Surveyor VII был первым, оснащенным всеми научными приборами, применявшимися до того на отдельных аппаратах Surveyor (рис. 25).
Установлено также дополнительно зеркало, прикрепленное к мачте, на которой смонтированы антенна и панель с сол-
Рис. 25. Научное оборудование на аппарате Surveyor VII.
/ — панорамная телевизионная камера; 2 — выносной механизм с ковшом — захватом; 3 — а — анализатор.
J22
печными элементами. С помощью этого зеркала были получены стереоскопические пары снимков: один и тот же участок поверхности снимался сначала непосредственно, а потом снималось его отражение в зеркале. На поверхности аппарата имелось семь «пятен» с высокой отражательной способностью, дающих возможность по изменению блеска регистрировать осаждение на поверхности аппарата различных веществ (11). Суммарный вес (17) аппарата при отделении от II ступени — 1038 к1\ после посадки на Луну — 288,9 кГ.
После аварийных полетов аппаратов Ranger III-^V, подвергавшихся термической стерилизации, что, как полагают, послужило причиной их аварий, было принято решение не проводить стерилизацию аппаратов, запускаемых для изучения Луны. Аппараты Surveyor в связи с этим не подвергались стерилизации. Небезынтересны данные по присутствию микроорганизмов на этих аппаратах. Наличие микроорганизмов на
Таблица 8
Наименование аппарата Общая популяция микроорганизмов
Surveyor I 5-Ю5
Surveyor II 2-Ю8
Surveyor III 5-106
Surveyor IV 3-106
Surveyor V 9-Ю6
Surveyor VI 9-Ю6
самом аппарате при старте определялось путем экстраполяции результатов, полученных при взятии микробиологических проб на отдельных участках корпуса, а также проб воздуха вокруг аппарата. Была внесена поправка +20% на возможное перенесение микроорганизмов на аппарат с переходника и с головного оттекателя. Данные (10) по популяции микроорганизмов на аппаратах Surveyor на старте приведены в таблице 8.
9. Финансирование программы Surveyor
По предварительным расчетам, стоимость работ по программе Surveyor оценивалась в 496 млн. долл, к началу 1965 г. расходы составили 531 млн. долл. Для изготовления 7 аппаратов Surveyor Лабораторией реактивного движения был заключен контракт в размере 70 млн. долл, с Hughes Aircraft Со. Стоимость создания, обеспечения запуска и полета 7 экспериментальных аппаратов Surveyor составила 563 млн. долл., в т. ч. 3-х отработанных аппаратов — 155 млн. долл. Суммарные расходы на программу Surveyor составили около 750 млн. долл. В таблице 9 приведены рас-
123
Таблица &
1962 г. 1963 г. 1964 г. 1965 г. 1966 г. 1967 г. 1968 г, 1969 г..
Ассигнования на программу Surveyor, млн. долл. 73,9 60,0 70,704 81,814 111,6 79,942 35,6 —
Доля ассигнований в общем бюджете NASA на космические исследования, % 4,112 1,654 1,401 1,583 2,190 1,644 0,797
пределение бюджетных ассигнований на программу Surveyor и их доля от общих ассигнований NASA на космические исследования (годы указаны финансовые).
10. Некоторые итоги программы Surveyor
Программа Surveyor имела своей основной целью отработку систем, обеспечивающих мягкую посадку аппарата, получение телевизионных изображений лунной поверхности, изучение физико-химических характеристик грунта в районе посадки. Программа Surveyor начата в 1960 г. и закончена в 1968 г. К стадии работ 1962—1966 гг. примыкала программа создания и отработки специально 'созданной для запусков аппаратов Surveyor ракеты-носителя Atlas-Centaur. Программой предусматривалось решение ряда новых технических проблем: 'проведение испытаний двигательной установки,, работающей на жидких кислороде и водороде, осуществление повторного включения двигателя. Осуществлено 8 запусков (АС-1 АС-6, АС-8 и АС-9) экспериментальной ракеты-носителя Atlas-Centaur. Были проведены испытания ракеты-носителя и отработка программы вывода аппаратов Surveyor на траекторию полета к Луне, для чего использовались модели аппарата Surveyor. Запуски АС-1У АС-2 и АС-3 предназначались только для отработки сис-стем ракеты-носителя. Повторного включения двигателей II ступени не производилось, но отрабатывались системы повторного запуска двигателей, наземного комплекса, станции слежения. Первый запуск (АС-1) закончился неудачно. Запуск АС-2 прошел успешно, а АС-3 — частично успешно, причем при запуске АС-2 впервые осуществлена работа двигателя на жидких кислороде и водороде. Проведенные запуски позволили отработать ряд бортовых систем. Основной задачей запуска АС-4 была отработка повторно-
124
го включения двигателей II ступени, при этом ракета-носитель впервые несла в качестве полезной нагрузки весовой макет аппарата Surveyor. Из-за нарушения работы систем II ступени основная задача не выполнена. При последующих запусках (АС-5, АС-6, АС-8 и АС-9|) продолжались
испытания систем ракеты-носителя и отработка программы вывода к «воображаемой» *Луне динамической модели аппарата Surveyor. Были отработаны ракета-носитель, стартовый комплекс, станции слежения и программа выведения аппарата на траекторию полета к Луне.
На стадии работ 1966—1968 гг. решались научно-технические задачи, имеющие как самостоятельное значение, так и прикладное значение в рамках программы Apollo. Основными задачами являлись доставка и осуществление мягкой посадки аппарата Surveyor на Луну; отработка систем, обеспечивающих мягкую посадку аппарата, получение телевизионных изображений лунной поверхности в месте посадки, проведение исследований в месте посадки (определение механических и физико-химических характеристик грунта и др.). Осуществлено 7 запусков аппаратов Surveyor, из которых 2 закончились неудачей. На первых двух аппаратах научная аппаратура не устанавливалась; они предназначались только для получения телевизионных изображений в месте посадки. На последующих аппаратах устанавливалась как телевизионная, так и специальная научная аппаратура (механизм с ковшом-захватом, a-анализатор, магниты), предназначенная для изучения характеристик лунного грунта. Аппаратами проводились телевизионная съемка — исследование топографии лунного рельефа; определение консистенции, морфологии и структуры грунта; измерение альбедо; фотометрия, колориметрия, поляриметрия; изучение химического состава грунта — определение процентного содержания различных элементов; изучение механических свойств лунного грунта —предельной статической нагрузки, проницаемости, плотности, пористости, величины частиц, упругости, когезии, адгезии, эррозии, прочности скальных пород; изучение электромагнитных свойств поверхности — отражательной способности в рабочих диапазонах радиолокаторов, диэлектрической постоянной, содержания магнитных частиц; изучение теплового режима на поверхности Луны; телевизионная съемка Земли; регистрация посылаемого с Земли лазерного излучения; астрономические исследования (телевизионная съемка звезд, планет, солнечной короны, Земли, солнечного затмения).
Всего пятью аппаратами Surveyor получено около 86 500 телевизионных изображений лунной поверхности в месте посадки, частей конструкции аппарата, окружающего лунного пространства, Солнца и др. (рис. 26—30). Осуществлено перемещение над лунной поверхностью аппарата, совершив-
125
Рис. 26. Места посадки аппаратов Surveyor (прямоугольник ограничивает зону, выбравшую для посадки лунной кабины корабля Apollo)
шего посадку на «Луну; в ходе этого эксперимента решались экспериментальные вопросы взлета >и посадки аппаратов на Луну, исследовалось воздействие истекающих струй двигателей на лунный тгрунт. Проведен эксперимент по уточнению либрации Луны, осуществленный при одновременном установлении связи с аппаратами Surveyor V и Surveyor VI. Исследования аппаратами Surveyor проводились в районах, являвшихся потенциальными местами посадки лунной кабины корабля Apollo (Океан Бурь, Море Спокойствия, Центральный Залив) „ и >в районе, представляющим научный интерес (район 'кратера Тихо).
Изучение характеристик лунного грунта позволили американским ученым сделать 'следующие предварительные выводы (45—49). 'Прочность грунта достаточна для того, чтобы лунная кабина корабля Apollo при посадке не погрузилась в него. Прочность поверхностного слоя такова, что космонавты, вышедшие на лунную поверхность, могут передвигаться без опасения провалиться. Толстого слоя мелкой пыли, в которой космонавты могли бы провалиться, не обнаружено. Космонавты, выгшедш'ие на поверхность Луны, будут создавать нагрузку на грунт около 0,035 кг/ou2, т. е. примерно такую же, как и аппараты Surveyor после успокоения. Однако самый верхний слой грунта сравнительно непрочен.
126
и космонавты, по-видимому, будут оставлять неглубокие следы. Глубина следов, возможно, будет достигать 2—3 см. Результаты изучения механических и физических характеристик лунного грунта приведены в таблице 10 (5). Величина адгезии с металлом, 'краской, стеклом, использованными в конструкции аппаратов, меньше, чем величина 'когезии (~10-2 н/см2 для наружного слоя). Установлено, что лунная поверхность сложена преимущественно мелкодисперсным слабосвязанным материалом с диаметром частиц менее 1 мм, среди 'Которого встречаются и более крупные агломераты, а также отдельные камни. Глубина этого слоя различна; она меньше на валах кратеров и больше на их дне. Под рыхлым слоем находится более связное и более плотное вещество, хотя и оно, по-видимому, пористое или состоит из отдельных фрагментов. По-
Рис. 27. Изображение лунной поверхности к юго-востоку от места посадки аппарата Surveyor I. Справа на переднем плане кусок породы высотой 15 см и 30 см длиной, вверху слева — небольшой кратер (белое пятно рядом с кратером — отражение солнечного блика внутри телекамеры).
127
Рис. 28. Изображение опоры одной из трех посадочных ног аппарата Surveyor I. Вокруг опоры углубление в грунте, образовавшееся при посадке аппарата. Белая поперечная полоса — конструктивный элемент аппарата.
верхность покрыта большим числом 'кратеров размером от нескольких см и более. Характер поверхности в разных участках очень 'сходен, особенно близки друг другу по всем характеристикам 4 изученных морских участка. Судя по скоплению вещества у верхней части камней, лежащих на склонах, происходит сползание вещества под действием термических или сейсмических возмущений. По структуре лунный грунт сравним с утрамбованным влажным песком, хотя и является сухим. Основной причиной этого является его текстура, но впечатление усугубляется тем, что поверхностный слой грунта намного светлее по окраске, чем нижележащие породы, как влажный песок, высушенный Солнцем. Изучение изображений показало, что в результате неизвестных процессов частицы грунта покрыты глянцевитым налетом, условно названным «лунным лаком». Камни, лежащие на мелкораздробленном веществе или погруженные в него, разнообразны по размеру, форме и текстуре. Цвет их серый, большинство их светлее основной части грунта (альбедо 14— 122%), но некоторые темнее. Поляризация света, отражен -
128
Рис. 29. Мозаика лунной поверхности к северо-востоку от места посадки аппарата Surveyor VII. Лунный горизонт в средней части снимка находится на расстоянии 13 км. Камень на переднем плане имеет высоту 60 см, а кратер, расположенный сзади справа от него, — диаметр. 1,5 м и находится на расстоянии 5,4 м от телекамеры.
Рис. 30. Мозаика лунной поверхности, полученная телекамерой аппарата Surveyor VII. На снимке видны выносной механизм с ковшом-захватом в один из моментов работы, борозды и канавки в лунном грунте, оставшиеся после его работы, в левой части снимка — а-анализатор.
9—6157
Характеристики Численное значение
Предельная статическая нагрузка поверхностный слой (до глубины 3 мм) <0,007 кГ1см2
на глубине 2,5 см 0,21 кГ1см2
на глубине 5,0 см 0,56 кГ1см2
усредненные данные 0,35 кГ1см2
Плотность грунта поверхностный слой 0, 72 4-1,2 г 1см3
на глубине 5,0 см 1,6 г 1см3
Пористость грунта поверхностный слой 604-70%
на глубине 5,0 см 404-50%
Размер частиц 24-60 мк
Скорость распространения поверхностных волн поперечных на глубине 10 см 15-ь30 м1сек
продольных 304-90 М1се$
Таблица 10
Примечание
Определено по следам, оставленным осколками по-род при выбросе.
Определено по следам, оставленным на грунте разрушающимися амортизирующими конструкциями аппарата.
Определено по следам, оставленным на грунте опорами шасси.
Отмечается дальнейший рост с глубиной
Максимум частиц имеет размер 10 р
Прочность грунта на глубине 1 мм
на глубине 5 см
Когезия частиц на глубине нескольких см
Угол внутреннего трения на глубине ~5 см
Проницаемость грунта для газов на глубине менее 25 см
Альбедо невозмущенного мелкораздробленного поверхностный слой
вещества на глубине 1 мм
Отражательная способность поверхности для радиоволн Х = 2ч-3 см.
Диэлектрическая постоянная
0,1 hIcm2 ~ 5 hIcm2 Градиент роста прочности с глубиной на 1 см— 1 н!смг
~0,05 hIcm2 Поверхностный слой (~1 мм) очень слабосвязанный.
354-40°
/14-7/«10-8 см21 сек- атм
~8% Морской район
~ 13% Материковый район
~6% Морской район
~ 10% I Материковый район
0,04 + 0,01 Морской район
0,08 Материковый район
2,2 + 0,2 | Морской район
3,3 Материковый район
ного от камней при углах фазы ~120°, составляет 30%. Плотность одного из разбитых камней в материковой области измерена и равна 2,8±0,4 а/сти3, прочность одного из разбитых камней не превышает 200 н!см?. Крупные камни концентрируются преимущественно близ валов кратеров на расстоянии до Г радиуса кратера, и частично внутри кратеров. С увеличением глубины грунт имеет более темный цвет, преобладающим цветом является серый, в т. ч. и поверхностного слоя (11). Характер поляризации близок к известному по наземным наблюдениям. Одно из изображений лунной поверхности, полученной телекамерой аппарата Surveyor VI после того, как он совершил маневр по перемещению, показывает, что грунт, несколько взрыхленный при работе двигателя, имеет более темную окраску, чем поверхностный слой. Выдвинуто предположение, что это объясняется обратимым обесцвечиванием поверхностного слоя под воздействием коротковолнового излучения Солнца. Слегка красноватая окраска лунной поверхности, возможно, определяется ионами трехвалентного железа. Под воздействием солнечной радиации соединения Fe+3 превращаются в соединения Fe+2, что приводит к видимому обесцвечиванию пород. Поскольку, грунт, отброшенный ковшом-захватом аппаратов Surveyor III и VII, не проявил никаких признаков посветления в течение около полутора десятка дней, было сделано предположение, что постоянная времени реакции обесцвечивания должна быть минимум 1 год. На основании данных, полученных аппаратами Surveyor, сделаны выводы, что светлый слой имеет толщину в несколько частиц, а участки поверхности комков лунного грунта, которые все время находятся в тени, име--ют более темную окраску, чем участки, подвергающиеся облучению солнечным светом. При этом химический состав светлого поверхностного слоя такой же, как и у более темных подстилающих слоев. При воздействии струй истекающих газов реактивных сопел и двигателя в грунте не образовалось глубоких кратеров и воронок, но было отмечено небольшое облачко пыли, поднятой с поверхности. Глубина образовавшихся при работе двигателя кратеров не превышает нескольких сантиметров. Выброса лунного грунта при посадке аппаратов и вымывания его при работе двигателей не было отмечено. Исследования «-анализаторов позволили определить химический состав и процентное содержание элементов в различных по характеру поверхности местах посадки аппаратов. В таблице 11 приведены результаты исследований а'-анализатором для различных образцов пород (5,27).
Состав пород близок к составу базальта; содержание Fe относительно велико в морских участках и мало в материковой области. Содержание свободного железа, собираемого
132
Таблица И
Химические элементы Содержание в атомных % (в местах посадки аппаратов)
Surveyor V (Море Спокойствия — морской район) Surveyor VI (Центральный залив — морской район) Surveyor VII (Кратер Тихо—материковый район)
..Образец № 1 Образец № 2
Образец №• 1
С <3 <3 <2 <2
О 58 ±5 56 ±5 57 ±5 58±5
Na <2 <2 <2 <3
Mg 3±3 3±3 3±3 4±3
Al 6,5±2 6,5 + 2 6,5 + 2 9±3
Si 48,5±3 19 + 3 22 ±4 18±4
Группа Ca \
(A=30+47)l Группа Fe | 1з±з| 13±3 6±2 6±2
(A=47+65)l 5±2 2±1
магнитом, менее 0,25% (по объему), что также согласуется < составом базальтов. Температуры поверхности днем близк! к тем, которые получаются при измерениях с Земли. Величина параметра тепловой инерции (крс)-1/2 несколько ниже, чем по данным земных измерений, и близ кратера Тихо примерно вдвое ниже, чем в морских районах. Данные доплеровского радионаблюдения аппаратов позволяют уточнить фигуру Луны и теорию ее движения. На поверхности Луны уровень радиации невысокий и не представляет опасности для высадившихся на поверхность Луны космонавтов.
Техническими 'результатами осуществления программы Surveyor ^являются следующие: отработаны бортовые системы; система, обеспечивающая мягкую посадку аппарата, оказалась достаточно эффективной; полеты аппаратов Surveyor показали эффективность системы коррекции траектории, обеспечивавшей встречу аппарата с Луной с отклонением от центра заданного района не более 16 км (11); установлено, что излучение радиолокаторов отражается от поверхностного слоя грунта, а не от слоя, лежащего на некоторой глубине; при прохождении радиолокационного излучения через факел двигателей эффективность радиолокаторов не уменьшается.
По заявлению директора Лаборатории реактивного движения д-ра У. Пикеринга, программа Surveyor — одна из наиболее успешных космических программ США. В результате исследований, проведенных аппаратами Surveyor, была подтверждена правильность инженерных решений, заложенных в конструкцию лунной кабины корабля Apollo.
133
Библиография
1. Apollo role seen for next four Surveyors. «Technol. Week», 1967, 20, № 17, 1'9, 1967, 12.62.87
2. Attempt may be made to move Surveyor В after it lands on lunar surface. «Mussile/Space Daily», 1966, 21, № 9, 58, 1967, 6.62.94
3. A vernier engine... «Flight Internat.», 1967, 92, № 3055, 542.
4. В e 1 ler W. Twelve Surveyors now planned for Moon exsploration. «Missiles and Rockets», 1962, 10, № 23, 48, 21—22 24—25, 1963, 4.51.647
5. Cortright E. M. Man’s progress toward the Moon. «Report presented at the Eighth International Technical and Scientific Congress on Space, Roma, Italy, April, 1968.»
6. Heather M. D. Voyager to avoid Surveyor errors. «Missiles and Rockets», 1965, 16, № 111, 15
7. Dobriner R. I-st Surveyor launch slips in to early 1966. «Electron. Design», 1965, 13, № 23, 6—9
8. D u 1 b e r g e r L. H. Well-logging technique to probe Moon. «Electronics», 1962, 35, № 23, 28—29, 1963, 1.51.631
9. House seeks Titan III C for Surveyor. «Missiles and Rockets», 1965, 16, № 19, 7
10. Hughes vernier engines. «Interavia Air Letter», 1967, № 6352, 6.
H. Hunter G. S. Last Surveyor to study lunar highlands. «Aviat. Week and Space Technol.», 1967, 87, № 26, 49—41, 1968, 6.62.145
12. Hunter G. S. Surveyor recives earth laser beams. «Aviat. Week and Space Technol.», .1968, 88, № 5, 27, 1968, 8.62.80
13. Isotope power for lunar rover. «Missiles and Rockets», 1964, 15, № 2, 27
14. IPL abandons Surveyor photo attempts. «Aviat. Week and Space Technol.», 1966, 85, № 3, 21, 28, 1967, 1.62.52
15. Ladnorg U. Surveyor 3. «Flugwelt—Internat.», 1967, 19, № 10, 699— 701, 1968, 3.62.64
16. Last-ditch attempt to salvage Surveyor. .«Missilie/Spaoe Daily», 1966, 21, № 15, 99
17. Launch activity. Surveyor 7. «Aerospaice Technol.», 1968, 21, № 15, 12
18. Lunar and planetary projects U. S. A. «Interavia Air Letter», 1960, № 4604, 1—2
19. Lunar surface can support Apollo LEM. «Technol. Week», 1966, 18, № 25, 17, 1966, 11.62.389
20. Mason J. F., Wallace W. B. Surveyor program under attack. «Electronics», '1965, 38, № 23, 155—158, 1160—161, 163, 1966, 4.62.166
21. Moon landing measurements. «I. Environmental Sci.», 1966, 9, № 6, 20— 21, 1967, 6.62.57
22. NASA drops roving vehicle for Surveyor. «Interavia Air Letter», 1965, № 5797, 3
23. News digest. «Aviat. Week and Space Technol.», 1965, 82, № 16, 37
24. N о r m у 1 e W. J. Surveyor success to alter future flights. «Aviat. Week and Space Technol.», 1966, 85, № 2, 94—96, 1966, 12.62.126
25. Pay R. Surveyor program leapfrogs ahead. «Missiles and Rockets», 1966, 18, № 23, 14—16, 1966, 11.62.66
26. Ranger shows no changes needed in Surveyor design. «Missiles and Rockets», Ii964, 15, № 11, 73—76
27. Scientists study data linking Earth, Moon. «Aviat. Week and Space Technol.», 1967, 87, № 15, 29—30, 1968, 3.62.229
28. Scoop nudges Surveyor’s soil analyzer to lunar surface. «Aviat. Week and Space Technol.», 1968, 88, № 4, 22—23, 1968. 7.62.252
29. Scott R. F. Soil mechanics surface sampler experiment for Surveyor. «J. Geophys. Res.», 1967, 72, № 2, 827—830, 1967, 8.62.400
30. Soil test indicates clear vision for astronauts in lunar landing. «Aviat. Week and Space Technol.», 1967, 87, № 22, 23. 1968, 6.62.209
31. Stone J.- Surveyor 5 lunar chemistry data studied. «Aviat. Week and Space Technol.», 1967, 87, № 12, 28—29, 1968, 6.62.205
134
32. Stone I. Surveyor lunar space-craft has varied approaches. «Aviat. Week and Space Technol.», 1961, 74, № 5, 50—51, 53, 55—56, 1962, 6.51.610
33. Surveyor 1 and Gemini GT—9. «Interavia», 11966, 21, № 7, 993, 1966, 11.62.85
34. Surveyor 3 described. «Flight Internat», 1967, 91, № 3033, 679—680, 1967, 9.62.145
35. Surveyor 3 enters lunar night. «Aviat. Week and Space Technol.», 1967, 86, № 19, 27, 1967, 11.62.62
36. Surveyor 7 findings. «Flight Internat.», 1968,93, №3079, 387, 1968,8.62.218
37. Surveyor: first test mission. «Space World», 1966, NC—7—33, .12—20,
1967, 2.62.45
38. Surveyor 6 «hopscotch». «Flight Internat.», 1967, 92, № 3064, 924.
1968, 5.62.72
39. Surveyor 7 investigates lunar highlands. «Aviat. Week and Space Technol.», 1968, 88, № 3, 32—33. 1968, 7.62.104
40. Surveyor landing close to nominal. «Missile/Space Dailv», 1966, 20, № 42, 302
41. Surveyor E (5) launched. «Interavia Air Letter», 1967, № 6334, 5
42. Surveyor lunar transfer maneuver tests slated for AC-5; 6. «Missile/Spiace Daily», 1965, 11, № 6, 41—42. 1965, 10.62.118
43. Surveyor 6 maneuver. «Aviat. Week and Space Technol.», 1967, 87, № 20, 31
44. Surveyor may be chosen for planetary lander role. «Aerospace Technol.», 1968, 21, № 16, 17. 1968, 9.62.158
45. Surveyor I mission report. Part II. Scientific data and results. «Techn. rep., 1966, 32—1023, JPL, Calif. Inst, Techn., Pasadena, Calif.»
46. Surveyor III mission report. Part II. Scientific results. «Techn. rep., 1967, 32—bli77, JPL, Calif. Inst. Techn., Pasadena, Calif.»
47. Surveyor V mission report. Part II. Science results. «Techn. rep., 1967, 32—1246, JPL, Calif. Inst. Techn., Pasadena, Calif.»
48. Surveyor VI mission report. Part II. Science results. «Techn. rep., 1968, 32—1262, JPL. Calif. Inst. Techn. Pasadena, Calif.»
49. Surveyor VII mission report. Part II. Science results. «Techn. rep., 1968, 32—<1264, JPL, Calif. - Inst. Techn., Pasadena, Calif.»
50. Surveyor’s Moon. «Sci. News», 1967, 91, № 22, 517—518, 1967, 12.62.245
51. Surveyor 3 on the Moon. «Sky and Telescope», 1967, 33, № 6, 361—363,
1967, 12.65.85
52. Surveyor photographs lunar sunset; faces extreme cold. «Missile/Space Daily», 1966, 19, № 32, 250, 1966, 12.62.62
53. Surveyor’s pictures bolster LEM plans. «Aviat. Week and Space Technol.», 1966, 84, № '23, 27—29, 1967, 1.62.51
54. Surveyor progress and plans for Surveyor 2 and 3. «Flight Internat.», 1966, 90, № 2993, 11)6—117
55. Surveyor retro rockets tested. «Interavia Air Letter», 1966, № 5936, 5
56. Surveyor 3 sends lunar surface photos. «Aviat. Week and Space Technol.», 1967, 86, № 17, 30—31, 1967, 10.62.63
57. Surveyor soft lands on Moon. «Flight Internat.», 1966, 89, № 2987, 983—
985. 1966, 11.62.65
58. Surveyor 6 soft lands on Moon. «Interavia Air Letter», 1967, № 6379, 4,
1968, 4.62.72
59. Surveyor 7 soft lands on the Moon. «Interavia Air Letter», 1968, № 6419.
8, 1968, 6.62.76
•60. Surveyor team iesorts to engineering tests as hopes for lunar landing die. «Missile/Space Daily», 1966, 21, № 16, 106
61. Surveyor В this week. «Flight Internat.», 4966, 91, № 3002, 533, 1967, 1.62.54
'•62. Surveyor throttleable engines successfuly tested via radar command. «Missile/Space Daily», 1966, 17, № 23, 185
63. Surveyor В to attempt second Moon landing. «Interavia Air Letter», 1966, № 6085, 5
135
G4., Surveyor. 5 to test Moon’s .surface composition. «Sky and Telescope», 1967. 34, № 4, 217—218
65. Surveyor. usefulndss is questioned, ' «Missiles and Rockets», 1962, 10, № 25, 9
66. The fifth Surveyor lunar exploration. «Interavia», 1967, 22, № 10, 1478
67. The perfect Surveyor mission... «Electronics», 1968, 41, № 1, 165
68. The . surface of the Moon. «New Scientist», 4967, 36, № 566, 77—78r 1968, 4.62.217
69. The Surveyor mission. «Flight Internal.», 1967, 92, № 3054, 500—501„ 1968, 3.62.65 . v
70. T u г к e v i c h A. L., et al. Chemical analysis of the Moon at the Surveyor VII landing site: preliminary results. «Science», 1968, 162, № 3849, 117— 118, 1969, 2.62.206
71. Us rroonshot is good busines. «Electron. Weekly», 1966, № 301, 5
72. U. S. soft landing test. «Flight Internal.», 1966, 89, № 2971, 283
73. Watkins H. D.. First Surveyor ready for limited mission. «Aviat. Week and Space Technol.», 1966, 84, № 1;3, 79, 82—84, 87-^88, 1966, 11.62.64
74. Watkins H. D. Lunar rocks loom us hazard to Apollo. «Aviat. Week and Space Technol.», 11966, 84, № 24, 26—30
75. Watkins H. D. Surveyor 1 prompts confidence, caution. «Aviat. Week and Space Technol.», 1966, 84, № 26, 60—61, 64, 67—69, 72, 1967, 2.62.48
76. W a 11 s R. N., J r. How Surveyor 5 was saved. «Sky and Telescope», 1967, 34, № 5, 305-4307. 1968, 4.62.68
77. Watts R. N., Jr. Pictures from the Moon. «Sky and Telescope», 1966>
32, № 1, 16—20, 1966, 11.62.67
V. ИЗУЧЕНИЕ ЛУНЫ И ОКОЛОЛУННОГО ПРОСТРАНСТВА ПО ПРОГРАММЕ LUNAR ORBITER
1. Программа создания космических аппаратов Lunar Orbiter
В рамках программы Apollo NASA планировало изучение лунной поверхности космическим аппаратом, (выводимым на* селеноцентрическую орбиту. Изучение лунной поверхности предполагалось провести .в районах, намечаемых для посадки лунной кабины корабля Apollo. Первоначально для этой цели планировалось использовать вариант космического аппарата Surveyor (Surveyor В), выводимого на селеноцентрическую орбиту, получить телевизионные изображения лунной поверхности и провести исследования окололунного пространства. В связи с сокращением бюджета NASA на 1964 г. руководство NASA приняло решение отказаться от разработки аппарата Surveyor В. Это объяснялось и тем, что для запуска этих аппаратов предполагалось использовать ракету-носитель Atlas-Centaur, находившуюся в 1964 г. в стадии отработки, а аппараты Lunar Orbiter проектировались в расчете на более дешевую и полностью отработанную ракету-носитель Atlas-Agena D. Для решения указанных задач в августе 1963 г. NASA приняло решение о создании менее сложного и более дешевого аппарата LOPP (Lunar Orbiter Photographic Project— проект выводимого на селеноцентрическую орбиту аппарата с фотооборудованием), получившего впоследствие наименование Lunar Orbiter. Руководство разработкой и изготовлением аппаратов Lunar Orbiter NASA возложило на Научно-исследовательский центр им. Лэнгли. В 1963 г. Центром Лэнгли был объявлен конкурс на получение контракта, предусматривающего разработку аппарата Lunar Orbiter (31). В конкурсе участвовало 5 фирм. На первом этапе были отобраны проекты Boeing Со. и Hughes Aircraft Со. Проект'
137'
Boeing Co. предусматривал создание аппарата с ориентацией по трем осям, а проект Hughes-Aircraft Со. — аппарата, стабилизируемого вращением. В результате рассмотрения проектов был заключен контракт в размере 60 млн. долл, с Boeing Со., хотя стоимость его реализации была почти вдвое больше. Такой выбор объясняется тем, что в проекте Boeing Со. предусматривались более эффективные меры по обеспечению надежности аппарата и обеспечивалась более точная ориентация аппаратов, основным назначением которых является фотографирование лунной поверхности (2). Контрактом предусматривалось, что за каждый успешный запуск фирма 'будет дополнительно получать 5,3 млн. долл. Предполагалось создание 10 летных образцов, но впоследствии принято решение изготовить 8 образцов: три экспериментальных аппарата для наземных испытаний и 5 летных аппаратов (9). Изготовление экспериментальных образцов началось в сентябре 1964 г. на заводе Boeing Со. в г. Сиэтле, а летных образцов — во второй половине 1965 г. В 1964 г. число сотрудников Boeing Со., участвовавших в разработке аппарата, достигло 1200 человек, в том числе 800 человек, освобожденных от всех прочих работ. При проектировании аппарата Lunar Orbiter выбиралось бортовое оборудование, проверенное в полете или в ходе длительных наземных испытаний. Система энергопитания, включающая солнечные элементы и никелькадмиевые батареи, успешно использовалась на спутниках Relay, TIROS и космическом аппарате Ranger. Аппарат и комплектующие системы проходили длительные наземные испытания. В ноябре 1965 г. изготовлен первый экспериментальный образец аппарата для наземных испытаний, которые предусматривали имитацию теплового режима при полете аппарата к Луне и обращении по селеноцентрической орбите. В январе 1966 г. в Центре космических исследований Boeing Со. начались испытания экспериментального образца в термобарокамере высотой 15,2 м. В камере создавался вакуум, соответствующий высоте 180 км, и температуры в диапазоне от минус 149° до плюс 12ГС. Испытания продолжались около трех недель, изучалась работоспособность системы фотографирования— было осуществлено фотографирование, обработка пленки и передача изображений. Испытания корректирующего двигателя проводились в имитированных высотных условиях на испытательной станции Boeing Со. в г. Тьюлалип. Для перевозки аппаратов Lunar Orbiter с завода в г. Сиэтле на м. Кеннеди использовались специальные фургоны, в которых аппараты размещаются на амортизирующем подвесе, снабженные системой кондиционирования, обеспечивающей заданную температуру и влажность. Стоимость пяти фургонов— около 236 тыс. долл. Этапы осуществления программы приведены ниже.
4 38
2. Космический аппарат Lunar Orbiter I (Lunar Orbiter A)
Основная цель запуска (6, 10, 36) —отработка программы выведения аппаратов Lunar Orbiter на селеноцентрическую -орбиту и перевода аппаратов »с одной орбиты на другую..Аппарат Lunar Orbiter предназначался для решения задач по фотографированию 9 участков экваториальной зоны лунной поверхности с целью определения их пригодности для посадки лунной кабины корабля Apollo (для посадки были выбраны участки в полосе, ограниченной селенографическими координатами 5° с. ш., 5° ю. ш., 45° з. д., 45° в. д.; общая длина полосы фотографирования — 2580 км, ширина—193 км)\ изучения радиационной и метеорной обстановки по трассе полета и в районе Луны; определения параметров гравитационного поля Луны и испытания бортового оборудования.
Типовая программа полета ракеты-носителя Atlas-Agena D и вывода аппаратов на траекторию полета к Луне для всех аппаратов аналогична. Программой предусматривается вывод II ступени с аппаратом на промежуточную круговую орбиту высотой 185 км, по которой она обращается 20—35 мин. 'После повторного включения двигателя II ступени, который работает 92 сек., и отделения аппарата от ступени, аппарат переводится на траекторию полета к Луне. Затем (через 30 сек.) развертываются панели с солнечными элементами и антенны и аппарат ориентируется таким образом, чтобы панели были направлены на Солнце, а остронаправленная антенна на Землю. Для вывода аппарата на селеноцентрическую орбиту предусматривается проведение 2-х коррекций на среднем участке траектории: первая через 15 час., вторая —через 70 час. после старта. Через 89,5 час. после старта на расстоянии 885 км от Луны включается на 9,5 мин. двигательная установка, осуществляющая перевод аппарата на начальную селеноцентрическую орбиту с высотой периселения 200 км и апоселения — 1850 км, наклонением орбиты к плоскости лунного экватора 12° и периодом обращения 3,5 час (32, 45). Для проверки работы фотоустановки фотографирование первоначально производится с этой орбиты. Через 3—8 суток после вывода на начальную орбиту, после того как подтвердится, что значительных аномалий в гравитационном поле Луны нет, двигательная установка переводит аппарат на орбиту с высотой периселения 4СН50 км, при этом апоселений почти не меняется. После перевода на эту орбиту начинается программное фотографирование выбранных участков лунной поверхности (53). Фотографирование продолжается в течение недели. Часть полученных снимков обрабатывается на борту аппарата и после сеансов фотографирования передается на Землю для экспресс-анализа. Основная же часть снимков обрабатывается и передается на Землю по окончании сеан
139
сов фотографирования, для чего требуется еще несколько недель (5). После передачи снимков аппарат в течение нескольких месяцев используется для изучения метеорной и радиационной обстановки в районе Луны, гравитационного поля Луны, юстировки наземных станций командно-измерительного* комплекса слежения по программе Apollo и испытаний бортового оборудования. Расчетная продолжительность активного существования аппарата — 1 год. После почти полной выработки запаса сжатого азота в системе ориентации, с Земли подается команда на включение двигательной установки для торможения аппарата, что приводит к его падению на Луну. Операция по уничтожению аппаратов предусмотрена для того, чтобы освободить частотный диапазон, в котором ведется с ним связь.
Запуск аппарата Lunar Orbiter А произведен 10 августа 19136 г. в 19 час. 26 мин. 0,7 сек. со стартового (комплекса № 13 м. Кеннеди ракетой-носителем Atlas-Agena D. Двигатель II ступени, проработав 154,2 сек., вывел ее с аппаратом на промежуточную круговую орбиту высотой 185 км, по которой они обращались 28 мин, после чего двигатель был включен вторично и проработал 88,4 сек, и аппарат вышел на траекторию полета к Луне (1). После выхода аппарата Lunar Orbiter А на траекторию полета к Луне он получил название Lunar Orbiter I, по международной системе обозначение 1966-73А. Через 49 мин. после старта солнечные датчики захватили Солнце и была проведена ориентация аппарата. Захват Канопуса не удался и ориентация аппарата перед коррекцией проведена по Луне датчиком Канопуса. Этот отказ объясняется тем, что в поле зрения датчика попадал отраженный свет от всенаправленной антенны, «ослепляющий» его чувствительные элементы. Для вывода аппарата на селеноцентрическую орбиту предусматривалось проведение 2-х коррекцией траектории. Проведенные расчеты показали, что без коррекции траектории аппарат прошел бы мимо Луны на расстоянии 9000 км. 12 августа в 00 час., когда аппарат находился на расстоянии 200 000 км от Земли, проведена коррекция траектории. От проведения второй коррекции руководство полета отказалось ввиду того, что первой коррекцией были обеспечены расчетные параметры траектории полета аппарата к Луне. 13 августа при подлете к Луне датчик захватил Канопус и маневры аппарата перед проведением коррекции по переводу на начальную селеноцентрическую орбиту производились с использованием ее в качестве опорного светила. 14 августа в 15 час. 34 мин. была включена двигательная установка и аппарат выведен на начальную селеноцентрическую орбиту (в скобках указаны расчетные значения) (20): высота периселения — 203 км (200), апоселения — 1847 км (1850|), наклонение—12,14° (12,04), период обращения — 3 час. 37 мин. 35 сек. (3 час. 36 мин. 11 сек.).
140
15 августа, на 6-ом витке, для проверки бортового и на земного оборудования проведена пробная передача изображе ний, заложенных в фотоустановку на Земле. Пробный сеанс представлял собой 18-минутную передачу черных и серых то> нов, геометрических фигур и имитаций изображений Луны Переданные с аппарата сигналы были приняты станциями слежения в Голдстоуне и Робледо-де-Чавела. Во время пробного сеанса переданы 34 кадра пленки, которая была проявлена и обработана перед запуском, а затем помещена в фото-установку. Эти испытания прошли успешно. 18 августа в 15 час. 42 мин., на 26 витке, началось фотографирование полосы шириной 149 км, простиравшейся от 86° в. д. до 94° в. д. Перед сеансом фотографирования аппарат был ориентирован поворотами по крену на 3,6°, рысканию на 12,15° и тангажу на 8,1°. Повороты совершались со -скоростью 0,5 град/сек, а интервалы между маневрами 'равнялись 51,2 сек. Всего сделано 20 пар снимков, в т. ч. первый снимок обратной стороны Луны, которые передавались на Землю с 18 по 21 августа (27). Высота Солнца над горизонтом во время съемки составляла 20° (24). Съемка производилась в период прохождения аппаратом периселения. Изображения, полученные камерой 11, были смазаны из-за неисправности устройства, компенсирующего сдвиг изображения. 21 августа в 7 час 50 мин была включена двигательная установка и аппарат перешел на новую орбиту с высотой периселения 58 км, апоселения 1847 км и наклонением 12,32°. Перед включением двигательной установки аппарат был ориентирован поворотами по крену на 33,4° и по тангажу на 25,3° (45). Первоначальной программой предусматривалось фотографирование 10 участков поверхности Луны, но затем число участков было сокращено до 9. В таблице 12 приведены координаты участков, которые должны были быть сфотографированы в соответствии с первоначальной программой. Участки №№ 1—9 фотографируются с целью выяснения возможности посадки лунной кабины корабля Apollo, а участки №№ 3—10 — посадки аппаратов Surveyor. В дальнейшем программа фотографирования была изменена. Новой программой предусматривалось фотографирование участков №№ 1-^-7, а вместо участков №№ 8-Н0 были выбраны участок № 8.1 с центром в точке с координатами 3° ю. ш. и 36°3(У з. д. и участок № 9.1 с центром в точке с координатами 2°21/ ю. ш. и 43°22z з. д. Участок № 9.1 представлял также интерес в связи с тем, что на нем совершил посадку аппарат Surveyor I (6). На рис. 31 показаны районы лунной поверхности, выбранные для фотографирования аппаратом Lunar Orbiter I. По заявлению руководства NASA участок будет признан пригодным для посадки лунной кабины корабля Apollo, если в его пределах будут обнаружены площадки размером 7X7 км, имеющие наклон не более 7° и
141
Таблица 12
№№ участков Селенографические координаты центра участка Примечание
широта долгота
1 0°50' Ю. Ш. 42°20' в. д. Морской район, включает часть Моря Изобилия (один из районов посадки лунной кабины корабля Apollo)
2 0°10' ю. ш. 36°00' в. д. Плато вдоль западного побережья Моря Изобилия.
3 0°20' ю. ш. 24°50' в. д. Морской район, охватывает южную часть Моря Спокойствия.
4 0°00' 12°50' з. д. Плато на экваторе между кратерами Теон Старший и Годен.
5 0°25' ю. ш. 1°20' з. д. Морской район, охватывает южную часть Центрального залива
6 4°00' ю. ш. 2°50' з. д. Плато с кратерами Шпорер и Фламма-рион.
7 3°45' ю. ш. 22°45' з. д. Морской район, расположен в Океане: Бурь.
8 3°00' ю. ш- 36°30' з. д. Район в Океане Бурь.
9 3°15' ю. ш. 43°50' з. д. Район в Океане Бурь.
10 3°40' ю. ш. 50°05' з. д. Район в Океане Бурь.
не имеющие «ям» и «камней» с поперечными размерами более 2 ж и глубиной (высотой) более 0,5 ж (10). В полете аппарата Lunar Orbiter I были получены снимки камерой L
Рис. 31. Участки поверхности Луны, выбранные для фотографирования (участки обозначены арабскими цифрами; участок 8.1 —цифрой 8, участок 9.1 — цифрой 9). А — расчетная орбита аппарата Lunar Orbiter I; Б — район посадки лунной кабины корабля Apollo (5° с. ш., 5° ю. ш., 45° в. д., 45° з. д.). I — место посадки станции Луна-9; II — место падения станции Луна-8; III — место падения станции Луна-7; IV — место падения станции Луна-2; V — место падения аппарата Ranger VI; VI — место падения аппарата Ranger VIII; VII — место посадки аппарата Surveyor I; VIII — место падения аппарата Ranger VII; IX — место падения аппарата Ranger IX.
142
Привязка этих снимков к лунной поверхности возможна с-точностью около 200 м, т. к. точность определения положения аппарата в момент съемки—±30 м, а точность включения камеры—±0,1 сек. (45).
Фотографирование производилось вскоре после восхода Солнца в данном районе, чтобы по длине тени можно было, определить размеры мелких элементов рельефа. Каждый участок предполагалось 'сфотографировать 16 раз, а участок. № 9.1 — 32 раза. 22 августа с высоты 58 км сделано 2 серии снимков участков №№ 1 и 2. Из-за неисправности устройства для компенсации сдвига изображения снимки, сделанные камерой II, получились смазанными (при пробной съемке с высоты 1500 км без использования компенсирующего устройства снимки, сделанные камерой II, имели удовлетворительное качество). Каждая серия состояла из 32 снимков, полученных обеими камерами. В тот же день началась передача этих снимков на Землю. 23 и 24 августа были получены 2 снимка Земли с селеноцентрической орбиты, а 25 и 26 августа они переданы и приняты станцией в Робледо-де-Чавела. Полученные снимки являются первыми, на которых Земля зафиксирована в ее серповидной последней четверти. С помощью этих, фотографий возможно установить, как наличие атмосферы сказывается на терминаторе и насколько земной терминатор отличен от лунного, который из-за отсутствия на Луне атмосферы представляет собой очень четкую линию. Предполагаемая причина неисправности компенсирующего устройства — подавление посторонним сигналом сигнала, идущего в компенсирующее устройство от датчика «высота — скорость». Для устранения этого было принято решение перевести аппарат на орбиту с более низким переселением, что, как предполагалось, должно привести к увеличению силы сигнала от датчика «высота — скорость», а это должно подавить построенный сигнал. 25 августа в 17 час. 0,1 мин. была включена двигательная установка и аппарат перешел на более низкую орбиту с параметрами (в скобках указаны параметры до маневра): высота периселения 39,6 км (49), апоселения — 1818 км (1855), наклонение—12,32°, период обращения-— 3 час. 30 мин. Однако, съемка с меньшей высоты не привела к улучшению качества снимков, полученных от камеры II. В частности, не удалось получить снимки участка № 9.1 с разрешающей способностью, достаточной для того, чтобы различить аппарат Surveyor I и выяснить, имеются ли на сфотографированных участках «ямы» и «камни», которые могут препятствовать посадке лунной кабины Apollo. Всего получено 32 снимка участка № 9,1. К 26 августа аппарат принял с Земли 1917 команд и выполнил 108 различных маневров. Было получено 138 пар снимков, в том числе 2 снимка Земли и 15 снимков обратной стороны Луны, из них было передано
143.
22 пары снимков. 29 августа в 13 час. 23 мин. на 57 витке фотографирование было завершено. Всего от двух камер получено 212 пар снимков, охватывающих площадь около 5,2 млн. км2. Каждая пара снимков включает в себя снимок камер I и II. С низкой селеноцентрической орбиты отснято 9 участков поверхности Луны: 8 участков с целью оценки их пригодности для посадки лунной кабины корабля Apollo л девятый, на котором совершил посадку аппарат Surveyor I, для получения его изображения. К моменту завершения фотографирования аппаратом выполнено 2597 команд и совершено 176 маневров. Точность выполнения маневров была достаточно высокой, это объясняется тем, что уход гироскопов достигал 0,4 град/час (расчетная величина—1 град/час) (8). Из 9 участков поверхности, сфотографированных аппаратом, наиболее безопасным для посадки лунной кабины корабля Apollo является участок № 9.1. Этот участок имеет более ровную поверхность (14 кратеров на 1 км2), чем остальные 8 участков (17 кратеров на 1 км2)-, но и на этом участке имеются камни размером до 30 м, что делает его не очень пригодным для посадки лунной кабины (17). 16 сентября передача снимков на Землю завершилась.
Предполагалось, что аппарат Lunar Orbiter I, выведенный на орбиту с высотой периселения 39,6 км, будет обращаться вокруг Луны в течение 6 месяцев. До момента падения аппарата на Луну осуществлялось слежение за ним, производился прием телеметрической информации и данных от датчиков микрометеоров и радиации (8). За 8 недель полета (до 9 октября) вокруг Луны детекторы не зарегистрировали ни одного пробоя метеорным телом (45). 29 октября в 12 час 25 мин. произведена операция по уничтожению аппарата Lunar Orbiter I, чтобы его сигналы не мешали связи с аппаратом Lunar Orbiter В, запуск которого планировался на ноябрь 1966 г. По команде с Земли была включена двигательная установка, аппарат сошел с орбиты, а через 1 час 05 мин после включения двигательной установки упал на невидимую сторону Луны (40). Место падения имеет координаты: 6°42' с. ш. и 162° в. д. (расчетное значение). Всего до падения аппарат совершил 527 оборотов вокруг Луны. По заявлению представителей NASA основной задачи аппарат Lunar Orbiter I не выполнил. Однако американские астрономы считают, что аппаратом только за первые 7 дней обращения по селеноцентрической орбите получено и передано на Землю больше данных о Луне, чем было получено при наблюдении с Земли за последние 50 лет.
С использованием бортового передатчика проведена эксперименты по би-статической радиолокации поверхности Луны (метод радиолокационных исследований небесных тел, при котором передатчик устанавливается на космическом аппара
J44
те, а приемник—на Земле; если приемник и передатчик расположены на Земле, то метод радиолокации называется моно-статическим). Американские ученые считают, что метод бис-татической радиолокации открывает путь к двумерному методу картографирования Луны и планет. Это предполагается обеспечить следующим образом. Одна серия сигналов может передаваться с аппарата, отражаться от Луны (планеты) и приниматься на Земле. Другая группа сигналов может быть послана более мощным передатчиком с Земли, затем они, отразившись от Луны (планеты), будут приняты аппаратом и далее ретранслированы на Землю. Сигналы, посланные передатчиком аппарата Lunar Orbiter I и отраженные от поверхности Луны, приняты в то время, когда аппарат находился почти на экваториальной орбите над кратером Кастнер у восточного края лунного диска и приближался к своему периселению (около 40 км). По заявлению специалистов Стан-фордского университета, проводивших этот эксперимент, принятые сигналы были достаточной мощности.
Суммарный вес аппарата 386,9 кГ (56). Габбариты при сложенных антеннах и панелях с солнечными элементами: высота—1,68, поперечный размер — 1,52 ж, а при развернутых панелях с солнечными элементами и антеннах: поперечный размер — 5,61 м (по антеннам), 3,96 м (по панелям). На рис. 32 показана компоновочная схема аппарата Lunar Orbiter I. Основные конструкционные материалы корпуса — алюминиевые сплавы 7075 и 2219, некоторые элементы конструкции изготовлены из магниевого сплава, топливные баки — из титанового сплава, экран, защищающий оборудование от истекающей струи двигателя, многослойной конструкции — внешний слой из титанового сплава, средние слои — из стальной фольги (нержавеющая сталь 321), алюминиевой фольги, войлока и рефразила, внутренний слой— из алюминиевого сплава 7075(21). Теплозащитная оболочка, закрывающая почти весь аппарат, изготовлена из чередующихся слоев алю-минизированного майлара и дакроновой ткани. Корпус аппарата имеет форму усеченного конуса, верхние и нижние основания которого связаны трубчатыми распорками. К нижнему основанию на шарнирах крепятся 4 панели с солнечными элементами и две антенны, разворачиваемые в полете после сброса обтекателя. Аппарат на ракете-носителе помещен под обтекателем длиной 4,1 м и диаметром 1,68 м. Все служебное оборудование, кроме двигательной установки и оборудования системы ориентации, смонтировано на платформе в нижней части аппарата. Двигательная установка, оборудование системы ориентации и защитный экран крепятся к несущей конструкции в верхней части аппарата.
Фотоустановка и связанное с ней оборудование расположены в контейнере длиной 0,9 м эллипсообразного сечения 0,6 X
10—6157
145
18
Рис. 32. Компоновочная схема аппарата Lunar Orbiter I.
1 — теплозащитный экран; 2 — солнечный датчик грубой ориентации; 3 — бак окислителя; 4 — несущая конструкция; 5 — детектор метеорных частиц; 6 — программно-временное устройство; 7 — всенаправленная антенна; 8 — датчик направления на Канопус; 9 — инерционный блок; 10 — фотоустановка; 11 — основание для монтажа оборудования; 12 — панель с солнечными элементами; 13 — объективы фотокамер; 14 — защитная крышка; 15 — параболический отражатель остронаправленной антенны; 16 — бак горючего; 17 — управляющие реактивные сопла; 18 — корректирующая двигательная установка; 19 — привод антенны 15; 20 — аккумуляторная батарея — ; 21 — передатчик.
Х0,45 м (56). На рис. 33 показана принципиальная схема фотоустановки аппаратов Lunar Orbiter. Вес фотоустановки 65,8 кГ, вес телеобъектива камеры 11—7,2 кТ (16). Фотоустановка в<ключает 2 камеры—I и II. Камера I — средней разрешающей способности, снабжена широкоугольным объективом, камера II — высокой разрешающей способности, снабжена телеобъективом. В таблице 13 приведены характеристики камер.
146
10
Рис. 33. Принципиальная схема фотоустановки.
/ — объектив камеры II; 2 — объектив камеры I; 3 — датчик «высота — скорость»; 4 — подающая бобина; 5 — экспонируемая пленка; 6 — петля пленки; 7 — устройство для обработки и сушки пленки; 9 — сканирующее устройство;
10 — приемная бобина.
Разрешающая способность камеры II позволяет определить пригодность участков лунной поверхности для посадки лунной кабины корабля Apollo. Снимки, полученные камерой I, предназначены, в основном, для привязки снимков, полученных камерой II, к видимым с Земли ориентирам.
Таблица 13
Индекс камеры [ Тип объектива Разработчик Размер кадра, мм Фокусное расстояние, мм Светосила Выдержка, сек Линейная разрешающая способность, м Размер фотографируемого участка, км
съемка с номинальной высоты 46 км
I Широкоугольный Xenotar Schneider — Kreuznach (ФРГ) 60X60 76,2 4,5 1/25, 1/50 или 1/100 8 31,6X37,4
11 Телеобъектив Рахога-mic Pacific Optical Со. 60 X Х219 610 5,6 1 16,6X4,5
10*
147
Привязка снимков от камеры I к лунной поверхности возможна с точностью около 200 м. Камерой I могут быть получены стереоскопические пары снимков; интервалы между двумя снимками составляют 2,5 сек., при такой скорости фотографирования снимки, полученные камерой I, перекрывают друг друга настолько, что пара соседних снимков дает возможность получить стереоскопические изображения участков поверхности. Съемки ведутся обеими камерами одновременно. Камера II снимает участок, находящийся в центре участка, снимаемого камерой I. Точность включения камеры ±0,1 сек. (45). Обе камеры используют высокочувствительную 70-миллиметровую пленку Kodak типа SO-243. Запас неперфорированной пленки около 60 ж, что позволяет получить каждой камерой около 200 снимков (23,52). По одному краю пленки нанесены денситометрическая шкала оттенков серого цвета для фотометрической калибровки снимков, что важно для определения крутизны склонов, а также масштаб, позволяющий определить разрешение камер. Объективы камер защищены стеклом из кварца. Напротив объективов в теплозащитной оболочке, закрывающей почти весь аппарат, имеется отверстие с крышкой, открываемой во время сеанса. Получение, обработка и считывание изображений на борту аппарата схематически показаны на рис. 34, передача изоб-
УстройстВо оВра- Считывающее Камера Вотки, пленки. устройство
Рис. 34. Схема получения, обработки и считывания изображений на борту аппарата.
1 — подающая бобина; 2 — петля пленки в системе подачи; 3 — зеркало; 4 — объектив камеры II; 5 — объектив камеры I; 6 — петля пленки в камере; 7 — подающая бобина ленты с желатином, пропитанным проявочно-фиксирующим составом; 8 — барабан, на котором происходит обработка пленки в результате контакта с желатином; 9 — приемная бобина ленты с желатином; 10 — нагреватель (сушка пленки); 11— петля пленки в системе считывания; 12— усилитель; 13 — фотоумножитель; 14 — сканирующее устройство; 15 — петля пленки перед приемной бобиной; 16 — приемная бобина.
148
Рис. 35. Схема передачи изображений с борта, приема и обработки на Земле. / — подающая бобина; 2 — сканирующее устройство; 3 — синхронизирующее устройство; 4 — фотоумножитель; 5 — усилитель видеосигнала; 6 — телеметрическое оборудование; 7— передатчик; 8 — антенна; 9 — приемник; 10 — кинескоп; // — кинокамера; /2 — кассета с пленкой; 13 — полосы 35-миллиметровой пленки; 14 — камера для пересъемки на 24-миллиметровую пленку; 15 — обработка лент с записью телеметрических данных; 16 — обработанная пленка.
ражений с борта, прием и обработка на Земле — на рис. 35. Световой луч, попадающий в объектив камеры II, вначале направляется на зеркало, которое поворачивает его на 90° и направляет на пленку. Для компенсации сдвига изображения во время экспозиции производится контролируемое смещение пленки по команде датчика «высота — скорость». После экспозиции пленка некоторое время хранится на роликах. Для обработки пленки используется технология, разработанная Eastman Kodak, скорость обработки 76 мм/мин. Пленка прижимается к слою желатина, пропитанного проявочно-фикси-рующим составом, а затем пропускается через подушки, впитывающие влагу, и дополнительно сушится с электронагревателем. Просушенная пленка наматывается на бобину и хранится там до поступления команды с Земли на подачу в устройство для считывания. Считывание изображения производится электроннолучевым сканирующим устройством с однострочной разверткой (рис. 36), разработанным CBS Laboratories. Устройство имеет экран в виде металлического барабана, покрытого люминофором. Световой луч высвечивает на пленке пятно диаметром 5 ц. За 20 сек. луч обегает полосу пленки шириной 2,5 мм, после чего пленка смещается на 2,5 мм и производится сканирование следующей полосы. Для сканирования одной пары снимков, сделанных одновременно
149
камерами I и II, требуется до 40 мин. Пройдя через пленку, луч попадает в фотоумножитель, где создает модулированный электрический сигнал, который усиливается, смешивается с синхронизирующими импульсами и передается в бортовое передающее устройство. Снимки, принятые с аппарата, на станциях слежения реконструируются построчно на экранах кинескопов и снимаются на 35-миллиметровую пленку. Пленка разрезается на полосы шириной около 17,5 мм и длиной 425 мм\ каждая полоса соответствует участку 2,55x55 мм кадра, полученного на борту аппарата. Из этих полос реконструируются кадры примерно с семикратным увеличением по сравнению с теми, которые получают на аппарате. Экспресс-обработка снимков позволяет определить их качество и если оно неудовлетворительно, работа бортовых устройств корректируется (10, 23, 52). Разработчик фотоустановки — Eastman Kodak.
Рис. 36. Сканирующее устройство фотоустановки.
1 — устройство строчной развертки; 2 — фокусирующая лента; 3 — фотоумножитель; 4 — усилитель; 5 — сканирующая линза.
Система энергопитания (11,47) включает 4 панели с солнечными элементами и аккумуляторную никель-кадмиевую батарею. На панелях размещено 10 856 солнечных п—р элементов размером 2X2 см и толщиной 0,3 мм, снабженных синими фильтрами. При максимальной освещенности обеспечивается мощность около 360 вт (максимальная потребляемая мощность 233 вт) при напряжении 31 в. Удельная мощность около 84 вт/м2, к. п. д. преобразования энергии около 8,33%. Площадь панелей около 4,9 м2, активная площадь — 4,3 м2. Вес панелей вместе с механизмом, обеспечивающим их удержание в сложенном состоянии, а затем развертывание, — 31,7 кГ. Батарея обеспечивает питание систем аппарата при фотографировании в те периоды, когда солнечные элементы не освещены или освещены Солнцем не в полной мере. Она
150
состоит из 2 идентичных блоков по 10 никель-кадмиевых элементов в каждом, которые обеспечивают емкость 12 а-ч и напряжение 22-^31 в. Батарея подзаряжается от солнечных элементов. Вес батареи—13,6 кГ. Изготовитель — Astro-Electronics Div.
Оборудование системы ориентации и стабилизации (47) крепится к несущей части конструкции в верхней части аппарата. Инерциальный блок разработан Sperry Rand Corp, и Sperry Gyroscope Co. и обеспечивает ориентацию аппарата при коррекции траектории на среднем участке полета, торможении при переводе аппарата на начальную и конечную селеноцентрические орбиты, и в период фотографирования. На бериллиевой раме смонтированы 3 одностепенных скоростных поплавковых интегрирующих гироскопа типа SUG-100 длиной 7 см и диаметром 5 см, и один импульсный маятниковый интегрирующий акселерометр типа 16 PIP длиной 6,3 см и диаметром 4 см (50). Дрейф гироскопов в период фотографирования не более 0,3 град/час. Мощность, потребляемая инерциальным блоком, не более 30 вт, вес — 5,9 кГ, размеры—17,8Х X 25,4X17,8 см, блок содержит около 1500 деталей. Солнечные датчики служат: 8 — для грубой, 4 — для точной ориентации аппарата на Солнце. Четыре датчика грубой ориентации установлены по углам теплозащитного экрана, остальные— на днище аппарата. Разработчик датчиков — Ball Brothers Research Corp. Управляющие реактивные сопла (8 шт.) (9) в качестве рабочего тела используют сжатый азот (вес 6,6 кГ), хранящийся в титановом баллоне диаметром 380 мм под давлением 246 кГ/см2. Азот в сопло подается под давлением 1,33 кПсм2, тяга каждого сопла — 22,7 Г, они смонтированы в вершинах углов квадратного теплозащитного экрана. Сопла разработаны Sterer Engineering and Manufacturing Co. Датчик Канопуса обеспечивает ориентацию аппарата по этой звезде. Система ориентации может работать от ПВУ или по командам с Земли. Максимальная продолжительность непрерывной работы системы от ПВУ — 16 час., что обеспечивает работу в периоды, когда аппарат не управляется по командам с Земли (заход аппарата за Луну, выход из строя станции слежения и др.). Разработчики датчика — International Telephone and Telegraph и ITT Federal Laboratories. Система ориентации рассчитана на работу в 4-х режимах (10):
а) режим крейсерского полета — управляющие сопла работают по командам от солнечных датчиков и датчика Канопуса;
б) режим инерциальной стабилизации — управляющие сопла или система отклонения двигателя (рулевая машинка) работают по командам инерциального блока. В этом режиме система работает в случае потери ориентира в крейсерском полете и в период работы двигательной установки. Стабили
151
зация аппарата по крену и.тангажу (±0,2°) обеспечивается отклонением двигателя в шарнирном подвесе;
в) режим маневра — управляющие сопла работают по командам инерциального блока. Команды от двух гироскопов инерциального блока обеспечивают стабилизацию относительно соответствующих осей, а команды от третьего гироскопа обеспечивают маневр (поворот) относительно третьей оси;
г) режим фотографирования — управляющие сопла работают по командам инерциального блока. Стабилизация аппарата по крену и тангажу (±0,2°) обеспечивается аналогично режиму б), а по рысканью должно обеспечиваться нулевое смещение во избежание смазывания изображения.
Корректирующая двигательная установка (10,59) разработана и изготовлена Marquardt Corp. На аппаратах Lunar Orbiter применен ЖРД МА 109-ХАА. Двигательная установка осуществляет коррекцию на среднем участке траектории, торможение аппарата для перевода его на начальную селеноцентрическую орбиту и изменение этой орбиты. Установка обеспечивает выправление траектории, проходящей из-за ошибок при выведении на расстоянии 16 000 км от расчетной точки, лежащей вблизи Луны. Потребное приращение скорости при первой коррекции 55 м/сек при времени работы двигателя 40 сек. Суммарное приращение скорости при проведении 2 коррекций— 91,5 м/сек, изменение скорости для перевода на селеноцентрические орбиты — 915 м/сек, резерв — 91,5 м/сек. Характеристики двигательной установки: тяга — 45 кГ, удельная тяга — 275 сек., расход топлива — 0,164 кг/сек, запас топлива— 125 кГ, компоненты топлива — «аэрозин 50»* + четы-рехокись азота, вес двигательной установки—147 кГ, время непрерывной работы —730 сек, время работы в импульсном режиме от 1,0 сек до 10 мсек, ресурс—18 сут., обеспечиваемое суммарное изменение скорости— 1098 м/сек. Двигатель допускает не менее 5 включений, осуществляемых по команде интегрирующего акселерометра по достижении расчетного значения скорости. Двигатель установлен на шарнирном подвесе и крепится к несущей конструкции в верхней части аппарата. Топливо хранится в 4 баках (2 бака окислителя и 2 — горючего) для уменьшения смещения центра масс аппарата по мере расходования. Баки расположены на верхнем основании аппарата. Для предотвращения коррозии бака окислитель помещен в тефлоновый контейнер. Баки изготовлены из титанового сплава. Подача топлива обеспечивается вытеснительной системой рабочим телом служит сжатый азот (вес 1,8 кГ). Емкость для хранения азота общая с системой ориентации и стабилизации.
* Смесь (1:4) безводного гидразина с несимметричным диметил-гидразином.
152
Программно-временное устройство (49) служит для ввода в бортовое оборудование команд с Земли и используется во время полета аппарата над невидимой стороной Луны или в случае выхода из строя какой-либо станции слежения. В ПВУ может быть введена программа на 16 час. полета, емкость памяти ПВУ— 128 21-разрядных кодов. Вес ПВУ 7,2 кГ. Разработчик— Electronic Memories Corp.
Приемно-передающие устройства (10,47) предназначены для приема передаваемых с Земли команд и передачи телеметрической и научной информации. Передатчики (2 шт.) мощностью 0,5 и 10 вт служат для передачи видеосигналов (передатчик мощностью 10 вт) и телеметрических данных (передатчик мощностью 0,5 вт). Всенаправленная антенна, служащая для приема команд, траекторных измерений и передачи телеметрических данных, вынесена на стержне длиной 2,08 м. Остронаправленная антенна с параболическим отражателем служит для передачи изображений. Диаметр зеркала параболического отражателя 0,915 ж, ширина диаграммы направленности 10°, ширина полосы сигналов 0,25 Мгц. Отражатель антенны вынесен на стержне длиной 1,32 м и поворачивается шагами по 1°. Вес параболического отражателя 1,05 кГ. В период передачи изображений телеметрические данные передаются также остронаправленной антенной. В системе связи используется также командный приемник. Пропускная способность радиотехнического оборудования при приеме команд с Земли 20 бит/сек, при передаче телеметрических данных о работе бортовых систем и данных о радиационной и метеорной обстановке — 50 бит!сек,.
Система терморегулирования (47)—пассивного типа. Вся поверхность аппарата снабжена теплоизоляцией за исключением днища, через которое обеспечивается отвод тепла. Днище покрыто специальной белой краской S-13 (разработана Лабораторией реактивного движения) с высоким коэффициентом отражения. В верхней части аппарата установлен теплозащитный экран, снабженный изоляцией, который защищает конструкцию и оборудование аппарата от реактивной струи двигателя. Кроме того, большую часть аппарата защищает теплоизоляционная оболочка, изготовленная из чередующихся слоев алюминизированного майлара и дакроновой ткани. При полете аппарата к Луне под оболочкой поддерживается температура в пределах 4-^24° С, в период обращения по селеноцентрической орбите — 2^29° С.
Радиомаяк предназначен для определения параметров селеноцентрической орбиты, что позволяет изучать гравитационное поле Луны. Сцинтилляционные счетчики (дозиметры) (2 шт.) предназначены для изучения радиационной обстановки по трассе полета и в районе Луны. Конструктивно дозиметры входят в состав фотоустановки: один — для измерения до
153-
зы радиации, полученной неэкспонированной пленкой, второй— экспонированной, но не обработанной пленкой. Если доза приближается к критической, то вся оставшаяся пленка немедленно отснимается и обрабатывается. После окончания съемки и обработки пленки дозиметры используются для измерения радиации в окололунном пространстве (56). Один счетчик установлен рядом с подающей катушкой камеры, другой — на поверхности контейнера с фотооборудованием. Дозиметры разработаны Texas Instruments, Inc.
Детекторы метеорных частиц (20 шт.) предназначены для изучения метеорной обстановки по трассе полета и в районе Луны. Общая площадь поверхности детекторов 0,28 м2. Каждый детектор представляет собой тонкостенный, толщиной 25 ц, цилиндр из бериллиевой бронзы или германия, наполненный гелием. При пробое метеорной частицей цилиндра происходит утечка гелия, что регистрирует датчик, размещенный в цилиндре. Детекторы разработаны Центром им. Лэнгли. Параметры гравитационного поля Луны изучаются по эволюции орбиты аппарата. Средства наземных траекторных измерений, с помощью которых регистрируется эволюция орбиты, обеспечивают измерение расстояния до аппарата с точностью ±30 ж, а радиальной скорости с точностью ±0,3 м/сёк (10,26). Точность определения положения аппарата на селеноцентрической орбите— около 1 км (56).
Слежение и связь с аппаратами по программе Lunar Orbiter осуществлялись станциями системы DSIF (состав и функции системы см. гл. IV, раздел 2). Предварительная реконструкция снимков производилась в Лаборатории реактивного движения и в Центре им. Лэнгли, полная реконструкция — в Картографическом управлении Армии США, детальная обработка снимков велась селенологами NASA и других организаций. Фотографии потенциальных мест посадки лунной кабины корабля Apollo направлялись в Научно-исследовательский центр разработки пилотируемых кораблей (головной по созданию кораблей Apollo).
3. Космический аппарат Lunar Orbiter II (Lunar Orbiter В)
Цель запуска и назначение аппарата Lunar Orbiter II такие же, как и у аппарата Lunar Orbiter I, но для фотографирования было выбрано 13 участков видимой стороны Луны. Аппараты так же решали задачи по фотографированию обратной стороны Луны. Запуск аппарата Lunar Orbiter В произведен 6 ноября 1966 г. в 13 час. 21 мин. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas-Agena D.
>154
Полет ракеты-носителя проходил по программе, близкой к расчетной. В 23 час. 46 мин. произошло отделение II ступени ют аппарата. После выхода аппарата Lunar Orbiter В на траекторию полета к Луне он получил название Lunar Orbiter II, по международной системе обозначение 1966—100А. В соответствии с программой полета вначале были развернуты антенны, а через 30 сек. — панели с солнечными элементами. Вскоре после этого солнечные датчики аппарата захватили Солнце. 7 ноября в 20 час. 21 мин. звездным датчиком был осуществлен захват Канопуса. Для вывода аппарата на селеноцентрическую орбиту предусматривалось проведение 2 коррекций траектории; без коррекции траектории «промах» в картинной плоскости составил бы 3730 км. Ввиду большой точности вывода аппарата на траекторию, было принято решение провести только одну коррекцию. 8 ноября в 12 час. 20 мин. осуществлена первая попытка провести коррекцию, которая оказалась неудачной: через 30 сек. после подачи топлива в двигательную установку звездный датчик потерял Ка-нопус из-за отклонения аппарата от расчетного положения по крену. Коррекция осуществлена со второй попытки. В 16 час. датчик вновь захватил Канопус, а в 19 час. 15 мин. с Земли подана команда на разворот аппарата по крену на 41,9° и тангажу на 30,2е. В 19 час. 30 мин., когда аппарат находился на расстоянии 265 850 км от Земли, включена двигательная установка и проведена коррекция. 10 ноября в 20 час. 26 мин., когда аппарат находился на расстоянии 990 км от Луны, включена двигательная установка и аппарат вышел на начальную селеноцентрическую орбиту с высотой периселения 213 км, апоселения 1853 км, наклонением 12,2° и периодом обращения 3 час. 38 мин. 12 ноября для проверки бортового и наземного оборудования с аппарата были переданы контрольные снимки, заложенные в фотоустановку на Земле. Передача прошла успешно и снимки приняты станциями слежения системы DSIF в Голдстоуне и Робледо-де-Чавела. 15 ноября была включена .двигательная установка и аппарат вышел на конечную селеноцентрическую орбиту с параметрами (19): высота периселения 50 км, апоселения 1849 км, наклонение 11,88° и период обращения 3 час. 28 мин. Это включение произведено на 2 дня раньше запланированного срока с тем, чтобы до начала фотографирования провести больше сеансов траекторных измерений по уточнению параметров конечной орбиты.
15 ноября один из детекторов зарегистрировал столкновение с метеорной частицей. Ранее ни одним американским аппаратом не было зарегистрировано у Луны столкновения с метеорными частицами (35). 18 ноября, на 52 витке, начался сеанс фотографирования первого из намеченных участков. В дальнейшем станциями в Робледо-де-Чавела и Голдстоуне были получены снимки всех 13 намеченных участков. Всего по-
155
лучено 211 снимков от каждой камеры, был сфотографирован участок падения аппарата Ranger VIII; американские ученые считают, что на одном из полученных снимков им удалось обнаружить кратер, образовавшийся при падении этого аппарата (42). 6 декабря отказал бортовой передатчик мощностью 10 вт и передача снимков прекратилась, передача научной и телеметрической информации велась через второй передатчик. Полученные снимки позволили в дальнейшем выбрать 5 потенциальных районов, пригодных для посадки лунной кабины корабля Apollo. 8 декабря включением двигательной установки было увеличено наклонение орбиты до 17,5°. 14 апреля 1967 г. была включена двигательная установка и изменена высота орбиты. Этот маневр проведен с тем, чтобы химические батареи,, подзаряжающиеся от солнечных элементов, не разрядились в период 24 апреля 1967 г., когда произошло затмение Луны. Орбита была скорректирована таким образом, чтобы в период затмения панели с солнечными элементами не находились в тени более 1 часа. 24 июня для изменения высоты была включена двигательная установка. 11 октября произведена операция по уничтожению аппарата Lunar Orbiter II. По команде с Земли была включена двигательная установка и аппарат упал на невидимую сторону Луны в точке с селенографическими координатами 4° ю. ш. и 98° в. д. (расчетные значения). Уничтожение аппарата произведено в связи с тем,, что в системе ориентации почти полностью израсходован запас' сжатого азота, а также потому, что в период солнечного затмения 18 октября могла произойти полная разрядка химических батарей. Другая цель уничтожения аппарата—; освобождение частотных диапазонов, в которых осуществлялась с ним связь, для проведения работ при последующих запусках по программе Lunar Orbiter (18, 51).
Весовые и геометрические характеристики, конструкция, состав бортового оборудования и научной аппаратуры аппарата Lunar Orbiter II такие же, как у аппарата Lunar Orbiter I. Суммарный вес аппарата — 390,6 кГ. По результатам предыдущего полета в конструкцию аппарата были внесены изменения. Для окраски аппарата использован иной состав, обеспечивающий лучшее терморегулирование. Изменение окраски вызвано тем, что недостаточное терморегулирование аппарата Lunar Orbiter I заставляло в периоды между сеансами фотографирования ориентировать его так, чтобы угол между продольной осью и направлением на Солнце составлял 45°, иначе мог произойти перегрев электронной аппаратуры. Верхняя часть всенаправленной антенны, а также кромки и обратная сторона панелей с солнечными элементами окрашены черной матовой краской, чтобы предотвратить отражение от них солнечного света, создававшего помехи для работы звездного датчика на аппарате Lunar Orbiter L Mo-156
дифицировано устройство для компенсации сдвига изображения — установлены радиофильтры (44). Неисправность этого устройства привела к смазыванию изображений при работе камеры II аппарата Lunar Orbiter I. В системе электропитания использованы более совершенные транзисторы, чтобы исключить возможность короткого замыкания, имевшегося в системе электропитания аппарата Lunar Orbiter I.
Для фотографирования поверхности Луны было выбрано 13 участков в экваториальной части видимой стороны Луны. В таблице 14 приведены координаты участков лунной поверхности, планировавшихся для фотографирования (34,51). Фотографирование производилось с 18 по 25 ноября. Дополнительно к намеченным участкам были сфотографированы -(15): 20 ноября — часть обратной стороны Луны, фотографи-
Таблица 14
№№ участков Селенографические координаты центра участка Примечание
широта долгота
I 4°10' С. Ш. 36°55' в. д. Морской участок в восточной части Моря Спокойствия.
'2 2°45' с. ш. 34°00' в. д. Юго-восточная часть Моря Спокойствия. Аппаратом Lunar Orbiter I получены снимки со средней разрешающей способностью основной части этого участка.
3 4°20' с. ш. 21°20' в. д. Морской участок в западной части Моря Спокойствия.
4 4°45' с. ш. 15°45' в. д. Плоскогорье к северу от кратера Дионис.
5 2°36° с. ш. 24°48' в. д. Участок Моря Спокойствия, на который упал аппарат Ranger VIII. Обнаружение кратера, образовавшегося от удара аппарата, позволяет судить 0 прочности пород.
6 0°45' с. ш. 24°10' в. д. Западная часть участка № 3, сфотографированного аппаратом Lunar Orbiter I в южной части Моря Спокойствия. Один из самых ровных участков, сфотографированных аппаратом Lunar Orbiter I.
7 2°10' с. ш. 2°00' з. д. Северо-западная часть Центрального залива на границе моря и возвышенности.
157
продолжение табл. 14
№№ участков Селенографические координаты центра участка Примечание
широта долгота
8 0°05' С. Ш. 1°00' 3. Д. Центральная часть Центрального залива. Частично перекрывается участком, сфотографированным аппаратом Lunar Orbiter 1 (имел обозначение № 5).
9 Г00' с. ш. 13°00' 3. д. Район к западу от центрального заливав между двумя большими лучами, идущими от кратера Коперник.
10 3°28' с. ш. 27°10' з. д. Район к северу от кратера Лансберг.
11 0°05' ю. ш. 19°05' з. д. Участок частично перекрывается участком,, сфотографированным аппаратом Lunar Orbiter 1 (имел обозначение № 1).
12 2°25' с. ш. 34°40' з. д. Морской участок, покрытый лучами, расположен к юго-востоку от кратера Кеплер.
13 1°30' с. ш. 42°20' з. д. Участок примыкает с севера к участку, сфотографированному аппаратом Lunar Orbiter I (имел обозначение № 2).
рование производилось в момент нахождения аппарата в районе апоселения (1400 км)\ 23 ноября — кратер Коперник, фотографирование производилось в момент нахождения аппарата в районе периселения (46 км)\ 25 ноября — участок в Океане Бурь с центром в точке с селенографическими координатами 9° с. ш. и 53° з. д., фотографирование производилось в момент нахождения аппарата в районе периселения (50 км). Получены снимки и некоторых других участков, всего снято 30 участков лунной поверхности. Съемка этих участков производилась в основном для того, чтобы поддерживать в рабочем состоянии механизмы затворов и устройство для протяжки пленки, если периоды между съемками намеченных участков будут длительными. Всего получено 211 пар снимков из 212 запланированных. Передача снимков на Землю продолжалась до 6 декабря, когда отказал бортовой передатчик мощностью 10 вт. К этому времени было передано на Землю более 97% (206 пар) полученных снимков. Не удалось передать часть снимков участка №1>.
158
самого восточного из всех отснятых участков. Изображения принимались на станциях слежения системы DSIF <в Голдстоуне и в Робледо-де-Чавела. В результате анализа снимков было выбрано 5 потенциально пригодных районов для посадки лунной кабины корабля Apollo.
4. Космический аппарат Lunar Orbiter III (Lunar Orbiter C)
Назначение аппарата такое же, как для аппарата Lunar Orbiter I, но для фотографирования было выбрано 12 участков видимой стороны Луны (3). Запуск аппарата произведен 5 февраля 1967 г. в 01 час. 17 мин. 01 сек. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas-Agena D. Полет ракеты-носителя проходил по программе» близкой к расчетной. После выхода аппарата Lunar Orbiter С на траекторию полета к Луне он получил название Lunar Orbiter III, по международной системе обозначение 1967—08А. Без коррекции траектории «промах» аппарата относительно расчетной точки перехода на селеноцентрическую орбиту составил бы 2000 км. 6 февраля в 15 час. произведена коррекция траектории; от проведения второй коррекции руководство полета решило отказаться, ввиду большой точности вывода аппарата на траекторию полета. 8 февраля в 21 час. 54 мин., когда аппарат находился на расстоянии 800 км от Луны, была включена двигательная установка и аппарат вышел на начальную селеноцентрическую орбиту с высотой периселения 215 км, апоселения 1790 км, наклонением 20,93° и периодом обращения 3 час. 35 мин. 12 февраля в 18 час. 13 мин. снова включена двигательная установка, которая перевела аппарат на конечную (для фотографирования) селеноцентрическую орбиту с параметрами (в скобках указаны расчетные значения!) (3): высота периселения 55 км. (45 км), апоселения 1844 км (1850 км), наклонение 20,93° и период обращения 3 час. 29 мин. ^февраля в 10 час. на 44 витке началось фотографирование лунной поверхности. В первом сеансе фотографирования каждая камера сделала по 32 снимка, часть этих изображений в этот день спустя 3 часа после начала фотографирования была передана на Землю. Первые снимки приняты станцией в Робледо-де-Чавела, а следующие снимки — станцией в Голдстоуне. 16 февраля аппаратом получены снимки 5 из 12 основных участков потенциальных мест посадки лунной кабины корабля Apollo. 23 февраля в 2 часа 14 мин. фотографирование было закончено. Каждая из 2 камер сделала по 211 пар снимков. Последнюю, 212 пару снимков, получить не удалось из-за неисправности системы протяжки пленки в сканирующем устройстве. До 2 марта, несмотря на эту неис
159
правность, удавалось принимать полученные снимки, 3 марта очередная попытка принять снимки окончилась неудачей. В связи с этой неисправностью на Землю удалось передать 182 пары снимков, в том числе все снимки шести участков, лежащих к западу от 20° в. д. 11 апреля была проведена коррекция орбиты для того, чтобы в период лунного затмения 24 апреля панели с солнечными элементами, питавшие химические батареи, не находились в тени более 1 часа. Аппарат перешел на орбиту с высотой периселения 140 км и апоселения 1823 км. 16 июля с целью изменения высоты включена двигательная установка 31 августа в 19 час. 39 мин. по команде с Земли была включена двигательная установка, которая перевела аппарат на селеноцентрическую орбиту с высотой периселения 143 км, апоселе^ ния 315 км, наклонением 21° и периодом обращения 2 час. 11 мин. Этот маневр осуществлен для проведения работ в плане программы Apollo — аппарат использован для юстировки наземных станций командно-измерительного комплекса (аппарат переведен на орбиту, близкую к расчетной круговой селеноцентрической орбите корабля Apollo высотой 150 км). 9 октября произведена операция по уничтожению аппарата: по команде с Земли включена двигательная установка и аппарат упал на невидимую сторону Луны в точке с селенографическими координатами: 14°36' с. ш. и 91°42' з. д. (расчетные значения). Уничтожение аппарата произведено в связи с тем, что в системе ориентации почти полностью израсходован запас сжатого азота, а также потому, что в период лунного затмения 18 октября могла произойти полная разрядка химических батарей. Другая цель уничтожения аппарата — освобождение частотных диапазонов, в которых осуще-ставлялась с ним связь, для проведения работ при последующих запусках по программе Lunar Orbiter.
Весовые и геометрические характеристики, конструкция, состав бортового оборудования и научной аппаратуры аппарата Lunar Orbiter III такие же, как и у Lunar Orbiter IL Суммарный вес аппарата — 385,6 кГ. Для фотографирования поверхности Луны было выбрано 12 участков в экваториальной части видимой стороны Луны, расположенных между Морем Плодородия и Океаном Бурь и ограниченных координатами 5° с. ш., 5° ю. ш., 45° в. д., 45° з. д. Ширина полосы фотографирования — около 300 км, а длина—около 2735 км. 10 из намеченных для фотографирования участков ранее были сфотографированы аппаратами Lunar Orbiter I и Lunar Orbiter II (3, 38). Фотографирование началось 15 февраля и закончилось 23 февраля. Всего сделано 211 пар снимков (запланировано 212 пар), из которых 182 пары были переданы на Землю. Анализ снимков лунной поверхности позволил сделать вывод, что 8 из 12 сфотографированных участ
160
ков могут быть использованы для посадки лунной кабины корабля Apollo. Сфотографирован также участок, где совершил посадку аппарат Surveyor I. На полученных снимках удалось обнаружить аппарат в виде белого пятна и отбрасываемую им тень (41). В результате анализа снимков лунной поверхности, полученных аппаратами Lunar Orbiter I-HII, было выбрано 8 участков вдоль лунного экватора, пригодных для посадки лунной кабины корабля Apollo. (48). В таблице 15 приведены эти участки.
Таблица 15
№ участка Выбранные участки Селенографические координаты центра участка
1. Юго-восточная часть Моря Спокойствия к востоку от кратера Маскелайн (самый ровный участок из выбранных) 2° С.Ш., 32° в.д,
2. Юго-западная часть Моря Спокойствия у места падения аппарата Ranger VIII 0° 45' с.ш., 23° в.д.
3. Юго-западная часть Центрального залива 0° 05' с.ш., 1° з.д.
4. К юго-востоку от кратера Коперник 0° 05' ю.ш., 19° з.д.
5. Океан Бурь к юго-западу от кратера Кеплер 1° с.ш., 41° з.д.
6. К юго-востоку от кратера Лансберг 3° ю.ш., 25° з. д.
7. Океан Бурь к юго-востоку от места посадки аппарата Surveyor 1 3° ю.ш., 37° з.д.
8. Океан Бурь у места посадки аппарата Surveyor I 2° ю.ш., 43° з.д.
Всего аппаратами Lunar Orbiter I, II и III сфотографировано около 30% поверхности Луны, в том числе (58): 0,25%—потенциальные места посадки лунной кабины корабля Apollo; 4%—различные районы видимой стороны Луны, вблизи от потенциальных мест посадки; 25% — различные районы обратной стороны Луны.
5. Космический аппарат Lunar Orbiter IV (Lunar Orbiter D)
Назначение аппарата — фотографирование с полярной селеноцентрической орбиты всей видимой стороны Луны и некоторых районов обратной стороны для составления карты Луны и распространения координатной сетки, принятой для
11—6157 161
видимой стороны Луны, на ее обратную «сторону, а также для решения задач, аналогичных задачам аппарата Lunar Orbiter I. Определение мест, пригодных для посадки лунной кабины корабля Apollo, в задачи аппарата не входило..
Запуск аппарата Lunar Orbiter D произведен 4 мая 1967 г. в 22 час. 25 мин. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas—Agena D. Полет ракеты-носителя проходил по программе, близкой к расчетной.. После выхода аппарата Lunar Orbiter D на траекторию полета к Луне он получил название Lunar Orbiter IV, по международной системе обозначение 1967—41А. 5 мая была проведена коррекция траектории. От проведения второй коррекции руководство полета решило отказаться ввиду того, что первой коррекцией были обеспечены параметры траектории полета аппарата к Луне. 8 мая 'была включена двигательная установка и в 15 час. 17 мин. 09 сек. аппарат вышел на селеноцентрическую орбиту с параметрами (58) (в скобках указаны расчетные значения): высота периселения 2705 км (2665), апоселения 6034 км (6280), наклонение 85,48°, период обращения 12 час. 01 мин.
11 мая по команде со станции слежения в Голдстоуне начался сеанс фотографирования, а после получения первых 20 снимков была произведена передача их на Землю. 26 мая фотографирование прекратилось из-за неполадок в системе обработки пленки. К 1 июня передача снимков завершилась —всего было передано 163 пары снимков. Фотографированием охвачено около 99% поверхости Луны с разрешением на порядок большим, чем обеспечивается телескопами при наблюдении с Земли. Аппаратом впервые получены снимки полярных районов Луны, сделанные почти вертикально. Эти снимки позволили, в частности, обнаружить новые элементы рельефа, например, «канал» длиной в 24 км и шириной в 8 км. Фотографирование восточного полушария позволило распространить координатную сетку, принятую для видимой стороны Луны, на обратную сторону. Снимки обратной стороны, полученные аппаратом, охватывают около 60% этой стороны. Съемка лунной поверхности аппаратом позволила выбрать районы, которые подлежали фотографированию с более высоким разрешением аппаратом Lunar Orbiter Е. К 1 июня было было зарегистрировано 2 столкновения с 'метеорными частицами. Всего к 1 июня по командам с Земли аппарат совершил 670 маневров и выполнил 7067 команд. По окончании передачи снимков аппарат предполагали использовать еще примерно в течение 5 месяцев для изучения радиационной и метеорной обстановки и характеристик гравитационного поля Луны. Для определения возможного влияния аномалий гравитационного поля Луны на; орбиту аппарата Lunar Orbiter Е аппарат Lunar Orbiter IV
Г62
предполагали перевести на более низкую, близкую к расчетной орбите аппарата Lunar Orbiter Е, -и с этой целью предполагалось уменьшить -высоту периселения аппарата до 100 юи, а апоселения — до 3000 км. 5 июня с целью перевода аппарата -на орбиту с меньшей высотой периселения была включена двигательная установка. 8 июня был осуществлен маневр по переводу аппарата на орбиту с меньшей высотой апоселения (39). 24 июля связь с аппаратом была потеряна, 6 октября аппарат упал на Луну под действием гравитационных сил.
Весовые и геометрические характеристики, конструкция, состав бортового оборудования и научной аппаратуры аппарата такие же, как у аппарата Lunar Orbiter I. Вес аппарата— 390,1 кГ (14). По результатам предыдущих полетов в конструкцию аппарата были внесены некоторые изменения: увеличен запас сжатого азота в системе ориентации и стабилизации аппарата и вытеснения топлива до 7,3 кГ; увеличено давление в баллоне со сжатым азотом до 288 кГ1см2\ для обеспечения температурного режима аппарата, обращавшегося по более высокой селеноцентрической орбите и освещенного Солнцем в течение более продолжительного времени, чем предыдущие аппараты, в днище аппарата вкраплены 458 кусочков зеркального стекла размером по 2,5X2,5 см.
Фотографирование поверхности Луны. При съемке с расчетной полярной селеноцентрической орбиты предполагалось для 80% видимой стороны Луны обеспечить разрешение на местности 60 .м, что примерно на порядок превышает разрешение, обеспечиваемое телескопами при наблюдении с Земли. Для полярных областей видимой стороны Луны разрешение должно быть несколько меньше, а при съемке обратной стороны Луны — 120 м (21). Всего предполагалось получить 212 пар снимков. Камера II при съемке в районе периселения охватывает участок поверхности Луны размером 200X900 км, а камера 1 —2000X2000 км. Программой фотографирования предусматривалось получение снимков интересных с научной точки зрения районов Луны для того, чтобы аппаратом Lunar Orbiter Е получить снимки этих районов с большим разрешением (39). Фотографирование началось 11 мая (22). Первые снимки имели хорошее качество,, однако последующие оказались передержанными. Причиной этого была неисправность механизма, регулирующего движение крышки, защищающей объективы камер от попадания прямых солнечных лучей и от переохлаждения. Этот механизм после получения первых кадров отказал, и крышка осталась в таком положении, что объективы были полностью открыты. Отказ механизма произошел из-за перегрева, так как при обращении по полярной селеноцентрической орбите аппарат был все время освещен Солнцем. Вследствие того;
11
163
Ито объективы не были закрыты, работа фотоустановки была нарушена, т. к. на них падали прямые солнечные лучи, что вызывало передержку, а также из-за охлаждения объективов ниже точки росы. Из-за охлаждения на объективах стали конденсироваться пары проявочно-фиксирующего состава, что привело к запотеванию объективов и ухудшению качества снимков. Для предотвращения запотевания объективов был включен электронагреватель в системе сушки пленки, а для предотвращения попадания на объективы прямых солнечных лучей применялась специально разработанная программа ориентации аппарата. Позже удалось частично исправить механизм, регулирующий движение крышки, и обеспечить частичное закрытие объективов. Эти меры обеспечили получение -с 18 мая снимков более хорошего качества. До 18 мая была получена 101 пара снимков, из которых около 1/3 была с дефектом. Часть этих снимков была реставрирована с помощью фотохимического процесса с программным управлением (33). Некоторые районы, снимки которых имели дефекты, впоследствии были пересняты. 26 мая съемку пришлось прекратить из-за отказа одного из переключателей в системе обработки пленки. К 1 июня была завершена передача снимков на Землю. Всего на Земле получено 163 пары снимков, охватывающих 99% поверхности видимой стороны Луны.
6, Космический аппарат Lunar Orbiter V (Lunar Orbiter E)
Назначение аппарата (И, 12, 57)—повторное фотографирование 5 из 8 участков лунной поверхности, которые по фотографиям, сделанным предыдущими аппаратами Lunar Orbiter, признаны потенциально пригодными для посадки лунной кабины корабля Apollo; фотографирование 36 участков, расположенных на видимой стороне Луны и представляющих научный интерес, в частности, кратеров Коперник, Аристрах, Гиппарх и Тихо, Моря Спокойствия, а также кратера Альфонс, где, по наблюдениям с Земли, обнаружено выделение газов; фотографирование невидимой стороны Луны, в основном, области между 104° и 143° з. д., которая не сфотографирована предыдущими аппаратами Lunar Orbiter, и высокоширотных, в частности, полярных областей Луны, которые по площади составляют около 40% всей поверхности обратной стороны Луны; фотографирование освещенного Солнцем полушария Земли; использование для юстировки оборудования наземных станций слежения по программе Apollo и для тренировки персонала этих станций; проверка алгоритмов и программ, составленных для счетно-вычислительных машин, на которых обрабатываются траекторные изменения по программе Apollo.
164
Аппарат Lunar Orbiter V предназначался также для решения задач, аналогичных задачам аппарата Lunar Orbiter I.
Запуск аппарата Lunar Orbiter Е произведен 1 августа 1967 г. в 22 часа 33 мин. со стартового комплекса № 13 м. Кеннеди ракетой-носителем Atlas — Agena D. Полет ракеты-носителя проходил по программе, близкой к расчетной. После выхода аппарата Lunar Orbiter Е на траекторию полета к Луне он получил название Lunar Orbiter V, по международной системе обозначение 1967—75А. 3 августа в 11 час., когда аппарат находился на расстоянии 165 000 км от Луны, проведена коррекция траектории и аппарат выведен в точку окололунного пространства, отстоящую от расчетной на 11 км. От проведения второй коррекции руководство полета решило отказаться ввиду достаточной точности выведения аппарата на траекторию полета. 5 августа в 15 час. 52 мин. была включена двигательная установка и аппарат вышел на начальную селеноцентрическую орбиту с параметрами (в скобках указаны расчетные значения): высота периселения — 196 км (200), апоселения — 6050 км (6000), наклонение — 85° (85), период обращения — 8 час. (8 час. 11 мин.).
6 августа в 10 час. началось фотографирование, а в 12 час. первые 12 пар снимков приняты на Земле станциями в Голдстоуне и Робледо-де-Чавела. Фотографирование с этой орбиты было окончено 7 августа. 8 августа в 8 час. 43 мин. была включена двигательная установка и аппарат перешел на промежуточную селеноцентрическую орбиту с параметрами (в скобках указаны расчетные значения): высота периселения— 101 км (100), апоселения— 1498 км (1495), наклонение— 85° (85), период обращения — 3 час. (3 час. 11 мин.). 8 августа с этой орбиты произведено фотографирование освещенного Солнцем полушария Земли с расстояния 345 600 км от Земли. 9 августа для изменения высоты орбиты была включена двигательная установка; И августа полученный снимок был передан на Землю. На снимке видна территория между 14° з. д. и 136° в. д. (43). Многие области Земли не были покрыты облаками и получились на снимке достаточно четко. В последующие 10 суток были сделаны снимки намеченных районов невидимой стороны Луны. 18 августа съемка была закончена, а передача снимков на Землю завершилась в начале сентября; всего получено 212 пар снимков. 10 октября по команде с Земли аппарат совершил маневр с целью увеличения высоты апоселения, чтобы в период солнечного затмения, 18 октября, аппарат в течение меньшего времени находился в тени и не произошло полной разрядки химических батарей. Для осуществления маневра, когда аппарат находился вблизи периселения, была включена двигательная установка и аппарат
165
перешел на новую селеноцентрическую орбиту с большей высотой апоселения и с периодом обращения 3 час. 35 мин. Это было 27-е включение двигательной установки аппарата (37). 21 января 1968 г. было произведено фотографирование с Земли аппарата при помощи 61-дюймового телескопа Университета шт. Аризона. Для фотографирования аппарата необходимо, чтобы солнечное излучение, отраженное панелями с солнечными элементами и днищем аппарата, падало на Землю. Общая площадь отражающей поверхности — панели с солнечными элементами и днища с вкраплениями зеркального стекла — эквивалентна зеркалу площадью 0,8 м2. Согласно расчетам, если бы отражающая поверхность была идеально плоской, то аппарат был бы виден как звезда 6-ой величины, в действительности он был виден как звезда 12-е- 15-ой величины. Отраженное от аппарата излучение может быть зафиксировано на Земле в том случае, если ось тангажа или ось рысканья аппарата перпендикулярна плоскости, проходящей через Землю, аппарат и Солнце. В период проведения фотографирования угол «Земля—аппарат— Солнце» составлял 74,6°. 21 января на аппарат переданы сигналы управления по телеметрическому каналу, а в 11 час. 50 мин. аппарат был ориентирован по тангажу на 96° и по рысканью на 37°. Заданное положение осей аппарата поддерживалось инерциальной системой — уход гироскопа крена составлял 0,7°, гироскопа тангажа 0,5° и гироскопа рысканья— 1,0° в час. 1При заданной ориентации угловые размеры отраженного в сторону Земли солнечного луча составляли 4°, 1 а у Земли диаметр луча достигал 30 000 км. В 12 час. 03 мин. 27 сек. начался сеанс фотографирования; в 12 час. 15 мин. ось луча, согласно расчетам, прошла через станцию слежения в Голдстоуне, причем ошибка в расчетах не.; превышала 15'. В период фотографирования с 12 час. 24 мин. по 13 час. 01 мин. для облегчения съемки на аппарат была подана команда, в результате чего он «покачивался» при движении по орбите относительно осей тангажа и рысканья. При этом покачивании отраженный от аппарата солнечный луч сканировал Землю. Съемка производилась на пластинки Eastman 4Х через желтый фильтр, длительность экспозиции составляла 5 или 10 сек. Всего получено 89 кадров, первый в 12 час. 20 мин. 30 сек., последний — в 13 час. 28 мин. 50 сек., из них 52 кадра — с изображением аппарата. За период съемки аппарат прошел над Луной из района северного полюса в район экватора, в 13 час. 18 мин. 05 >сек. аппарат прошел апоселений. При этом он находился на высоте 2023 км над Луной на угловом расстоянии 9х от лунного лимба, период обращения — 3 час. 45 мин. 18 сек. Изображения получились несколько смазанными из-за углового перемещения аппарата. Полученные снимки аппарата в
166
сочетании с данными траекторных измерений позволяют уточнить положение центра масс Луны (7). До конца января 1968 г. аппарат передавал данные о метеорной и радиационной обстановке, использовался для юстировки средств командно-измерительного комплекса по программе Apollo и уточнения параметров гравитационного поля Луны. 31 января произведена операция по уничтожению аппарата; по команде -с Земли была включена двигательная установка в момент, когда аппарат находился вблизи апоселения на высоте 2030 км. Когда аппарат приблизился к периселению, он под действием силы притяжения в 7 час. 58 мин. 05 сек. 31 января упал в экваториальной части видимой стороны Луны на западном ее краю, на одном из участков, выбранных для посадки лунной кабины корабля Apollo. Место падения аппарата имеет координаты 0° с. ш. и 70° з. д. (расчетные значения). Одной из причин уничтожения аппарата было то, что в системе ориентации почти полностью израсходован запас сжатого азота. Уничтожение аппарата Lunar Orbiter и падение их на участках лунной поверхности, выбранных для посадки лунной кабины корабля Apollo, предусматривалось с целью использовать обломки аппаратов в будущем в качестве ориентиров для космонавтов при посадке лунной кабины корабля Apollo и предпринять в будущем поиски обломков, чтобы исследовать длительное воздействие на них вакуума, радиации и метеорных частиц. До момента уничтожения аппарат совершил более '2000 оборотов вокруг Луны.
Весовые и геометрические характеристики, конструкция, состав бортового оборудования и научной аппаратуры аппарата такие же, как у аппарата Lunar Orbiter I. Вес аппарата — 391 кГ. С учетом опыта, полученного при полете аппарата Lunar Orbiter IV, в конструкцию и оборудование аппарата Lunar Orbiter V были внесены некоторые изменения. Дополнительно установлен датчик, регистрирующий закрытие крышки в теплозащитной оболочке, закрывающей объективы камер; приняты конструктивные меры, уменьшающие возможность попадания солнечных лучей на объективы камер в случае отказа механизма закрытия крышки; упрощена блокировка переключателей в системе подачи пленки в считывающее устройство (это изменение введено в связи с тем, что на аппарате Lunar Orbiter IV вследствие ошибочного сигнала сработала блокировка переключателя и подача пленки в считывающее устройство прекратилась); для лучшего теплоотвода число кусочков зеркального стекла, вкрапленных в днище, увеличено с 458 до 530; некоторые участки поверхности аппарата покрыты краской, препятствующей появлению солнечных бликов, которые могут помешать нормальной работе датчика Канопуса; дополнительно
167
установлено устройство, обеспечивающее повышение напряжения от аккумуляторных батарей до 31 в тогда, когда панели с солнечными элементами освещены Солнцем не в полной мере, а бортовое оборудование работает в основном от аккумуляторной батареи. Такое положение возникает каждый раз, когда аппарат в период фотографирования изменяет ориентацию по команде устройства, обеспечивающего компенсацию сдвига изображения (11).
После аварийных полетов аппаратов Ranger III+V, которые подвергались термической стерилизации, что, как полагают, послужило причиной аварии, было принято решение не проводить стерилизацию аппаратов, запускаемых для исследования Луны. Аппараты Lunar Orbiter в связи с этим не подвергались стерилизации. Небезинтересны данные по присутствию микроорганизмов на этих аппаратах. Наличие микроорганизмов на самом аппарате при старте определялось путем экстраполяции результатов, полученных при взятии микробиологических проб на отдельных участках корпуса, а также проб воздуха вокруг аппарата. Была внесена поправка + 20% на возможное перенесение микроорганизмов на аппарат с переходника и с головного обтекателя. Данные по •популяции микроорганизмов на аппаратах Lunar Orbiter при старте приведены в таблице 16 (54).
Таблица 16.
Наименование аппарата Общая популяция микроарганизмов В том числе популяция спор, устойчивых к высоким температурам
Lunar Orbiter I 5 • 104
Lunar Orbiter II 7.106
Lunar Orbiter Ш 2-106 9-Ю4
Lunar Orbiter IV 2 • 106 1-Ю4
Lunar Orbiter V 2-107 2,4-104
Получены все запланированные 212 пар фотоснимков лунной поверхности: около 20%—потенциальные места посадки лунной кабины корабля Apollo и аппаратов Surveyor, остальные участки — интересные в научном отношении или оставшиеся неотснятыми предыдущими аппаратами Lunar Orbiter на. невидимой стороне Луны (12). Фотографирование лунной поверхности производилось с трех различных селеноцентрических орбит. Периселений всех орбит находился над экватором на видимой стороне Луны. Параметры расчетных орбит, с которых производилось фотографирование приведены в таблице 17.
Помимо вертикальной съемки производилась также и наклонная съемка, причем одни и те же участки фотографиро-
.168
Таблица 17
Орбита Высота периселения, км Высота апоселения, км Наклонение, град. Период обращения
Начальная 200 5950 85 8 час. 11 мин.
Промежуточная -100 5950 85 8 час. 03 мин.
Конечная — 100 1495 85 3 час. 11 мин.
Таблица 18 (II)
Индекс камеры Широта, на которой находится аппарат во время съемки, град Разрешение, м Размеры участка лунной поверхности в кадре, км
1 0 15 68X80
30 36 105 х 120
60 76 225 X 265
II 0 1,8 8X27
30 4,5 13X48
60 9 24 X П5
вались с разных точек орбиты. Потенциальные участки посадки лунной кабины фотографировались под таким углом, как их должны видеть космонавты корабля Apollo. При этом также фотографировались элементы поверхности Луны при подлете к участку для использования их космонавтами в качестве ориентиров. Производилось фотографирование в положении, когда оптическая ось камер параллельна направлению солнечных лучей, что дало возможность провести съемку при неблагоприятных условиях освещенности лунной поверхности. В таблице 18 приведены расчетные характеристики вертикальной съемки видимой стороны Луны.
7. Финансирование программы Lunar Orbiter
Суммарные расходы по программе Lunar Orbiter составили около 207,3 млн. долл., в том числе—около 167 млн. долл, на аппараты и 40 млн. долл, на приобретение ракет — носителей. Распределение бюджетных ассигнований на программу и их доля от общих ассигнований NASA на космические исследования представлены в таблице 19 (годы указаны финансовые); общая сумма расходов на 50% превысила запланированную первоначально (25).
12—6157
169
Таблица 19
1962 г. 1963 г. 1964 г. 1965 г. 1966 г. 1967 г. 1968 г. 1969 г.
Ассигнования на программу Lunar Orbiter, млн. долл. 1,19 1,7 20,0 49,5 58,08 26,0 9,5 —
Доля ассигнований в общем бюджете NASA на космические исследования, % 0,066 0,046 0,396 0,957 {,140 0,534 0,212 —
8. Некоторые итоги программы Lunar Orbiter
В течение 1966—1967 гг. по программе Lunar Orbiter запущено и выведено на селеноцентрические орбиты 5 аппаратов; 4 из них полностью выполнили задачу, один — частично. По заявлению NASA осуществление программы Lunar Orbiter внесло большой вклад в программу США изучения Луны. Аппаратами Lunar Orbiter получены детальные снимки, которые являются важным источников о характере поверхности Луны-Первые три аппарата имели целевую задачу по фотографированию определенных участков экваториальной области лунной поверхности с целью определения их пригодности для посадки лунной кабины корабля Apollo. В результате фотографирования было обнаружено и предварительно выбрано восемь участков, пригодных для посадки лунной кабины. Аппарат Lunar Orbiter IV предназначался для фотографирования всей видимой стороны Луны и некоторых районов обратной стороны для составления карты Луны и распространения координатной сетки, принятой для видимой стороны, на ее обратную сторону. В результате фотографирования получены изображения около 99% видимой стороны Луны, проведено фотографирование обратной стороны Луны. Аппарат Lunar Orbiter V решал задачи по дополнительному фотографированию участков поверхности, пригодных для посадки лунной кабины и ранее сфотографированных предыдущими аппаратами, и по фотографированию 36 участков, расположенных на видимой стороне и представляющих научный интерес.
Всего от 5 аппаратов Lunar Orbiter станциями принято 983 пары снимков, некоторые из них приведены на рис. 37—рис. 39. Аппаратами сфотографировано 99,5% обратной стороны Луны с разрешением 150—200 м, а также вся видимая сторона с разрешением лучше 150 м на 99% поверхности и лучше 90 м — на остальной площади. Отдельные области сфотогра-170
Рис. 37. Фотография кратера Коперник, полученная аппаратом Lunar Orbiter II 23 ноября 1966 г. в 3 час. 05 мин. с высоты 46 км при наклонной дальности в 240 км от кратера.
фированы с разрешением до 1 м. На основе этих снимков составлены крупномасштабные карты Луны. На снимках видно, что Море Восточное является круговым бассейном, окруженным тремя концентрическими кольцами горных хребтов и мощным покровом выбросов. Обратная сторона Луны густо покрыта кратерами, днища которых светлые, не заполненные веществом морей. Днища крупных кратеров (например, Тихо) очень неровны (масштаб неровностей ~100 м). Кратеры с лучами, диаметром менее 15 км, окружены каменистыми россыпями. Форма малых кратеров (10—150 ж) закономерно меняется с диаметром в соответствии с результатами экспериментов по модельному ударному кратерообразованию в слабосвязных средах. Толщины рыхлого наружного слоя составляет 3-^6 м в юго-восточной части Океана Бурь и 6-^9 м— в Центральном заливе (46). Гряды и купола (например в области холмов Мария), по-видимому, являются местными экструзиями. Вдоль прямых борозд располагаются цепочки кратеров одинакового с ними диаметра. У извилистых борозд на более широком конце почти всегда расположен кратер. Внутри одной из них, долины Шретера, имеется другая, более узкая и очень извилистая борозда. Такая же борозда тянется вдоль прямой долины Альп- На внутренних стенках кратеров
171
Рис. 38. Фотография обратной стороны Луны, полученная
11 мая 1967 г. в 16 час. 25 мин. аппаратом Lunar Orbiter IV с высоты 2980 км. Север наверху. В нижней части снимка видна впервые обнаруженная котловина длиной 240 км, имеющая селенографические координаты 105° в. д. и 65° ю. ш.
заметны следы осыпей, скатывания отдельных камней. Анализ их дает прочность поверхностного слоя 30± 10 н!см2 на глубине 75 см (4). Радиоотражения сигналов аппаратов от лунной поверхности позволили установить наличие областей с повышенной отражательной способностью близ восточного лимба (55).
Магнитосфера и пояс захваченной радиации у Луны отсутствуют. Анализ гравитационного поля. Луны (по измере-
Рис. 39. Изображение кратера Тихо (диаметр 85 км), полученное 14 августа 1967 г. камерой со средним разрешением, установленной на аппарате Lunar Orbiter V с высоты 200 км. Юг наверху.
ниям параметров орбит) показал, что Луна по плотности почти однородна. Выявлена асимметрия Луны в направлении север—юг, означающая, что форма Луны грушеобразная со вздутием у южного полюса (13). Установлено, что величина гравитационного поля Луны составляет приблизительно 1/6 величины гравитационного поля Земли, а также, что оно име-
17а
^ет сильную третью зональную гармонику, что объясняется не-сферичностью Луны (28). Анализ траекторных измерений космического аппарата Lunar Orbiter V, а также Lunar Orbiter III, который обращался вокруг Луны по низкой орбите, позволили обнаружить образования повышенной плотности близ центров круговых морей на ее видимой стороне — моря Дождей, Ясности, Кризисов, Нектара, Влажности, Восточного, а также в области Центрального Залива и Залива Зноя, моря Краевого, в районе близ центра обратной стороны Луны и других. Для анализа использовались результаты измерения -скорости аппарата допплеровским методом за 10-дневный период в августе 1967 г., когда эти измерения производились непрерывно, т- к. аппарат передавал на Землю фотографии лунной поверхности. При прохождении над морями круговой формы скорость аппарата увеличивалась, при прохождении аппарата над другими морями, которые не имеют правильной формы, ускорения были незначительными. Средняя высота прохождения аппарата над областью Центрального Залива и Залива Зноя составляла 210 км, а орбитальная скорость в периселении (высота 99 км) —2,01 км!сек. Изменения скорости составляли около 0,43 м)сек\ размеры аномалий составляют около 100 км. Эти аномалии могут быть объяснены расположением под центрами этих областей на некоторой глубине больших избыточных масс. Так, для Моря Дождей величина такой массы (в предположении, что глубина залегания ее 50 км) равна 2-Ю-6 лунной массы. Эти объекты получили названия масконов (mass concentrations) (30). Обнаружен ряд других, меньших положительных и отрицательных аномалий силы тяжести.
Метеорная обстановка у Луны не представляет опасности для космонавтов. На всех аппаратах Lunar Orbiter 100 детекторов метеорных частиц зарегистрировали 18 пробоев. Уровень радиации в окрестности Луны не представляет опасности для космонавтов. Наиболее высокий уровень радиации при солнечной вспышке зарегистрирован аппаратом Lunar Orbiter I (11).
Одной из задач программы Lunar Orbiter являлось измерение дальности до аппаратов с точностью ±10 м. Эти измерения необходимы, в частности, для уточнения эфемерид Луны. При старых значениях эфемерид среднеквадратичная разность между измеренной и расчетной дальностью составляла около 800 м, а максимальная разность — около 1700 м. При внесении поправок в эфемериды среднеквадратичная разность уменьшается примерно до НО м. Для аппарата Lunar Orbiter II получена максимальная разность между измеренной и расчетной дальностью в 64 м, причем, эту величину объясняют не столько неточностью расчета или измерения дальности, ^сколько несферичностью Луны (29).
174
Аппарат Номер включения двигательной установки Цель включения
Lunar Orbiter 1 1 Коррекция траектории полета к Луне
2 Вывод на начальную селеноцентрическую орбиту
3 Перевод на новую орбиту
4 Перевод на новую орбиту
5 Торможение с целью уничтожения аппарата
Lunar Orbiter II 1 Коррекция траектории полета к Луне
2 Вывод на начальную селеноцентрическую орбиту
3 Перевод на новую орбиту
4 Изменение наклонения орбиты
Таблица 20
Дата включения Вр между датой запуска и датой включения, сут. емя между двумя последовательными включениями, сут. Расход топлива, кг Время работы двигательной установки Изменение скорости, лЦсек Средняя тяга, кг
12 августа 1966 г. 2 — 5,3 37 сек. 37,8 46,1
14 августа 1966 г. 4 2 97 9 мин. 49 сек. 790 45,9
21 августа 1966 г. 11 7 4,2 24 сек. 40,15 51,6
25 августа 1966 г. 15 4 0,5 3 сек. 5,4 51,6
29 октября 1966 г. 81 66 18,2 1 мин. 30 сек. 169,0 49,5
8 ноября 1966 г. 2 — 3,0 18,5 сек. 21,1 45,9
10 ноября 1966 г. 4 2 101 ~10 мин. 829,7 45,8
15 ноября 1966 г. 9 5 2,9 17,5 сек. 28,1 46,5
8 декабря 1966 г. 32 23 10 100 45,2
продолжение табл. 20
Аппарат Номер включения двигательной установки Цель включения Дата включения Время Расход топлива, кг Время работы двигательной установки Изменение скорости, м/сек Средняя тяга, кг
между датой запуска и датой включения, сут. между двумя последовательными включениями, сут.
5 Изменение высоты орбиты 14 апреля 1967 г. 159 127 0,5 3 сек. 5,5 46,8
6 Изменение высоты орбиты 24 июня 1967 г. 231 72 0,8 8,0 46,6
7 Торможение с целью уничтожения аппарата 11 сентября 1967 г. 340 109 7,0 61,5 45,6
Lunar Orbiter III 1 Коррекция траектории полета к Луне 6 февраля 1967 г. 2 — 0,7 4,4 сек. 5,1 46,5
2 Вывод на начальную селеноцентрическую орбиту " 8 февраля 1967 г. 4 2 88,9 9 мин. 1 сек. 704,3 45,4
3 Перевод на новую орбиту 12 февраля 1967 г. 8 4 5,5 34 сек. 50,7 45,4
4 Изменение высоты орбиты 11 апреля 1967 г. 66 58 0,6 5,5 46,7
5 Изменение высоты орбиты 16 июля 1967 г. 165 96 1,5 14,4 52,0
6 Перевод на новую орбиту 31 августа 1967 г. 211 46 20,2 2 мин. 5,5 сек. 198,3 44,0
7 Торможение с целью уничтожения аппарата 9 октября 1967 г. 250 39 5,1 52,6 44,2
Lunar Orbiter IV 1 Коррекция траектории полета к Луне
Lunar Orbiter IV 2 Вывод на начальную селеноцентрическую орбиту
3 Перевод на орбиту с меньшей высотой периселения
4 Перевод на орбиту с меньшей высотой апоселения
Lunar Orbiter V 1 Коррекция траектории полета к Луне
2 Вывод на начальную селеноцентрическую орбиту
3 Перевод на новую орбиту
4 Изменение высоты орбиты
5 Изменение высоты орбиты
6 Торможение с целью уничтожения аппарата
5 мая 1967 г. 1 — 8,7 53 сек. 60,8 45,4
8 мая 1967 г. 4 3 82,4 8 мин. 24 сек. 659,6 45,4
5 июня 1967 г. 32 28 19,6 186,7 46,0
8 июня 1967 г. 35 3 7,1 70,5 45,4
* , 3 августа 1967 г. 2 — 4,3 29,7 45,3
5 августа 1967 г. 4 2 82,5 643 45,9
8 августа 1967 г. 7 3 1,8 2 мин. 16,0 46,1
9 августа 1967 г. 8 1 25,2 233,7 45,3
10 октября 1967 г. 71 63 6,8 41 сек. 67,5 45, 9
31 января 1 1968 г. । 185 114 18,9 сек. 28,6
Аппараты Lunar Orbiter использовались для решения ряда, технических задач по программе Apollo (юстировка оборудования наземных станций слежения) за кораблем Apollo и др.). Осуществление программы Lunar Orbiter позволило отработать программу вывода аппаратов на селеноцентрическую орбиту, управления аппаратом по переводу с одной орбиты на другую. Был отработан ряд бортовых систем при их длительном функционировании в условиях космического полета. В полетах 5 аппаратов отмечено не более 18 отказов при общей продолжительности функционирования около 120 000 элементов примерно в течение 4400 час. Так, например, в ходе выполнения программы Lunar Orbiter была отработана двигательная установка аппаратов, обеспечивающая как коррекцию траектории на среднем участке полета, так и выполнение маневров по выводу и переводу аппаратов на различные селеноцентрические орбиты. В таблице 20 приведены некоторые сведения, характеризующие работу двигательной установки аппаратов Lunar Orbiter. Двигательная установка оказалась работоспособной после 340 суток (аппарат Lunar Orbiter II) нахождения в условиях космического полета. Максимальное время между двумя последовательными включениями двигательной установки равнялось 127 суткам (тот же аппарат).
Библиография
1. Alexander G. Orbiter launched toward moon ito photograph nine-Apollo sites. «Aviat. Week and Space Technol.», 1966, 85, №7, 34^
1967, 2.62.109
2. Boeing gets $ 60-million Lunar Orbiter award. «Missiles and Rockets», 1964, 14, №<1, 13
3. Cameras on Orbiter 3 scan Apollo, Surveyor landing sites. «Aviat. Week and Space Technol.», 1967, 86, № 8, 25
4. E g g 1 e s t о n J. M. et al, Lunar «rolling stones.», «Protogrammetric Eng.», 1968, 34, 246—255
5. F i n k D. E. Planners alter Lunar Orbiter trajectory. «Aviat. Week anc Space Technol.», 1965, 83, № 14, 49, 51, 53, 1966, 5.62.167
6. First Lunar Orbiter clears tests in route to TV mission. «Technol. Week» 1966, 19, № 5, 14—15, 1967, 1.62.62
7. First photographs from earth of a lunar satellite. «Sky and Telescope», 1968, 35, № 4, 220—221, 1968, 9.62.144
8. First scientific results of Lunar Orbiter: the Moon mayL/e pear shaped. «Missile/Space Daily», 1966, 20, №41,294—295, 1967, 1.52.237
9. Ge tier M. Lunar Orbiter up for design review to meet delivery date in mi'd-’65. «Missiles and Rockets», 1964, 15, № 17, 35—37, 1965, 6=62.170/
10. Heiberg R. J. The lunar Orbiter program. «Raumfahrtforschung», 10, № 3, 130—137, 1966, 12.62.65
11. Hunter G. S. Orbiter sends back pictures of Moon’s «equatorial gap». «Aviat. Week and Space Technol.», 1967, 87, № 7, 28—30, 1968, 1.62.72 12. Last Orbiter launch. «Flight Internat.», 1967, 92, №30*48, 238, 1968,
3.62.68
13. Lor ell J., Sjogren W. L., Lunar gravity: preliminary estimates from Lunar Orbiter., «Science», 1968, 159, 625—627
178
14. Lunar 4 in Moon orbit. «Interavia Air Letter», 1967, № 6249, 10—11„ 1967, 10.62.58
15. Lunar land scape: the dramatic photograph of part. .. «Flight Internal.», 1966, 91, №3013, 998—999
16. Lunar Orbiter 1. «Interavia», 1966, 21, №9, 1264—1265, 1967, 2.62.51
17. Lunar Orbiter finds «dynamic» Moon still in geological evolution. «Mis-sile/Space Daily», 1966, 21, №27, 186—187, 1967, 3.62.187
18. Lunar Orbiter 2 high quality photograph. «Interavia Air Letter», 1966, №6134, 8
19. Lunar Orbiter 2 in low orbit. «Interavia Air Letter», 1966, №61311, 6
20. Lunar Orbiter in Moon orbit. «Interavia Air Letter», 1966, №6064, 5„ 1966, 12.51.472
21. Lunar Orbiter 4 photo transmission disturbed. «Interavia Air Letter», 1967, №6253, 5, 1967, 12.62.82
22. Lunar Orbiter started picture transmission. «Interavia Air Letter», 1967,. № 6252, 4, 1967, 10.62.60
23. Lunar Orbiter stresses photo mission. «Aviat. Week and Space Technol.», 1964, 80, №21, 69, 73, 1965, 5.62.166
24. Lunar Orbiter successfully transmits forst photos. «Missile/Space Daily», 1966, 20, № 35, 248—249, 1967, 1.62.58
25. Lunar Orbiter team landed for effort as program is ended. «Aerospace Technol.», 1967, 21, №6, 18, 1968, 4.62.73
26. Lunar Orbiter to check moon’s gravity for Apollo manned mission. «Missile/Space Daily», 4966, 19, № 38, 295, 1967, 4.62.39
27. M i 11 e r B. Lunar Orbiter 1 begins photo mission. «Aviat. Week and. Space Technol.», 1966, 85, № 8, 20—21, 1967, 2.62.54
28. Mondsatellit Lunar Orbiter. «Flugwelt—Internal», 1966, 18, № 10, 804— 805, 1967, 2.62.52
29. Mulholland J. D., S j ogren W. L Lunar Orbiter ranging data: initial results. «Science», 1967, 155, №3758, 74—76, 1967, 10.52.237
30. Muller P. M., Sjogren W. L., Mascons: lunar mass concentrations.. «Science», 1968, 61, 680—684
31. NASA calls for LOPP proposals. «Interavia Air Letter», 1963, №5320, 3—4
32. NASA may put Lunar Orbiter in lower trajectory around Moon. «Missile/Space Daily», 1966, 20, №39, 277—278, 1967, 1.62.59
33. NASA solving camera system problems on Orbiter 4. «Aviat. Week and Space Technol.», 1967, 86, №21, 20—211, 1967, 12.62.121
34. New Lunar Orbiter assigned 13 picture photo target areas. «Technol. Week», 1966, 19, № 19, 17, 1967, 5.62.52
35. Next stop-the Moon. «Electron. Weeklv», 1966, № 326, 10
36. N о r m у 1 e W. J. Lunar Orbiter flight revised by Surveyor. «Aviat. Week and Space Technol.», 1966, 85, № 6, 30, 1967, 4.62.42
37. Normyle William J. Orbiters studied for planetary missions. «Aviat. Week and Spase Technol.», 1967, 87, №7, 30—32, 1968, 5.62.138
38. Orbiter 3 achieves initial lunar orbit. «Aviat. Week and Space Technol.», 1967, 86, № 7, 40—41, 1967, 7.62.53
39. Orbiter 4 completes task. «Flight Internal.», 1967, 91, №3040, 1000, 1967, 12.62.83
40. Orbiter 2 orbits Moon. «Flight Internal.», 1966, 91, №3010, 852, 1967,
4.62.46
41. Orbiter 3 photos pinpoint Surveyor 1 location. «Aviat. Week and Space Technol.», 1967, 86, № 12, 25
42. Orbiter 2 photos used to identify Ranger 8 crater. «Aviat. Week and Space Technol », 1967, 86, №4, 30—31, 1967, 8.62.223
43. Orbiter returns photo of nearly full Earth. «Aviat. Week and Space Tec-chnol.», 1967, 87, № 8, 17
44. Orbiter 2 starts journey around the Moon. «Aviat. Week and Space Technol.», 1966, 85, № 20, 34, 1967, 5.62.49
179-
45. Pay R. Lunar Orbiter reports safe atmosphere. «Technol. Week», 1966, 19, № 9, 20, 23—25, 1967, 4.62.43
46. Q u a i d e W. L., О b e r b e с к V. R. Thickness determinations of the lunar surface lager from lunar impact craters, «J. Geophys. Res.», 1968, 73, 5247—5270
47. Results of Lunar Orbiter photo mission. «Space World», 1967, D—9—45, 16—22, 28—31, 1968, 6.62.79
48. Robertson J. NASA selectes 8 sites on Moon for Apollo landing targets. «Electron. News», 1967, 12, № 595, 10, 1967, 9.62.152
49. Spacecraft flight programmer. «Astronaut, and Aeronaut.», 1965, 3, №7, 1.22.
50. Sperry rand to build IRU for Lunar Orbiter. «Missile/Space Daily», 1964, 9, № 39, 286, 1965, 9.62.372
51. S tone I. Dual cameras map lunar landing sites. «Aviat. Week and Space Technol.», 1966, 85, №22, 34—36, 1967, 6.62.170
52. Strasser J. A. 26 steps to the Moon. «Electronics», 1964, 37, №49, 93—94, 1965, 6.62.165
53. Towards lunar orbit. «Flight Internal.», 1966, 91, №2995, 203—204,
1967, 4.62.45
54. Turkevich A. L., et al. Chemical analysis of the Moon at the Surveyor VII landing site: preliminary results. «Science», 1968, 162, №3849, 117—118, 1969, 2.62.206
55. Tyler G. L. et al. Bistatic-radar detection of lunar scattering centers with Lunar Orbiter 1. «Science», 1967, 157, 193—195
56. Watkins H. D. Lunar Orbiter nears final configuration. «Aviat, Week and Space Technol.», 1965, 82, №5, 42—43, 46, 49, 1966, 1.62.175
57. Watts R. N., J r. New circumlunar probe. «Sky and Telescope», 1967, 34, № 3, 456—157, 1968, 2.62.78
58. Watts R. N., Jr. Photographs by Lunar Orbiter 4. «Sky and Telescope», 1967, 34, № 1, 27—31, 1968, 1.62.251
.'5 9. W ii 1 к s W. E. Marquardt sees $2—billion market for control rockets. «Aerospace Technol.», 1967, 21, №6, 44, 46, 48, 1968, 4.62.320
VI. ИЗУЧЕНИЕ ЛУНЫ И ОКОЛОЛУННОГО ПРОСТРАНСТВА ПО ПРОГРАММЕ LUNAR EXPLORER
1. Программа создания космических аппаратов Lunar Explorer
Программой NASA по изучению межпланетного и окололунного пространства предполагалось создание космического аппарата, выводимого на селеноцентрическую орбиту с большим эксцентриситетом. Для сокращения сроков разработки и обеспечения минимальной стоимости аппарата в 1963 г. было принято решение о создании аппарата на основе ранее созданного спутника IMP (Interplanetary Monitoring Platform — платформа для наблюдения межпланетного пространства), предназначенного для исследования околоземного космического пространства. Исследовательский спутник IMP относит* ся к спутникам Explorer серии S—74 (9). Космический аппарат, предназначенный для вывода на селеноцентрическую орбиту, с большим эксцентриситетом, получил названия: А1МР-Anchored Interplanetary Monitoring Platform (т. e. поставленная «на якорь» платформа для наблюдения межпланетного пространства), LIMP — Lunar Interplanetary Monitoring Platform (лунная платформа для наблюдения межпланетного пространства), LAIMP — Lunar Anchored Interplanetary Monitoring Platform— (поставленная «на якорь» лунная платформа для наблюдения межпланетного пространства). Головной организацией по разработке и созданию этих аппаратов был назначен Центр космических полетов им. Годдарда, а организацией, ответственной за изготовление и сборку аппаратов,— Westinghouse Electric Corp. (6). Аппараты LIMP предназначены для решения следующих задач (6): измерения напряженности межпланетного магнитного поля, для чего аппараты, выводимые на селеноцентрические орбиты с большим эксцентриситетом, должны производить измерения в области межпланетного пространства, где влияние магнитного поля Зем-
13—6157
181
ли на межпланетное магнитное поле становится несущественным (такое влияние неизбежно сказывается на результатам измерений межпланетного магнитного поля, проводимых спутниками с геоцентрических орбит); обнаружения магнитного* поля Луны; изучения высокоэнергетичных частиц в солнечном и галактическом излучениях, проводимые в периоды пребывания аппарата в «тени» Луны; регистрации метеорных частиц в окололунном пространстве, а также частиц, выбиваемых метеоритами из лунного грунта, что имеет большое значение для осуществления программы Apollo; исследования взаимодействия солнечной плазмы и магнитных полей, именно, изучения магнитосферы Земли в зоне, где в результате взаимодействия магнитных полей Земли и Солнца установившийся поток идущих от Солнца частиц переходит в турбулентный. Ранее выведенный на геоцентрическую орбиту спутник Explorer XVIII проходит эту зону только 1 раз в год, тогда как аппарат LIMP, обращаясь по селеноцентрической орбите, проходит через нее ежемесячно (цель этого исследования — установление степени влияния магнитных полей и, в частности, магнитного поля Луны, на достижение солнечной плазмой поверхности Луны, что может определить степень опасности солнечной радиации для космонавтов на Луне); определение параметров гравитационного поля и распределения массы Луны, ПО' замерам возмущений орбиты аппарата, регистрируемых системой внешнетраекторных измерений, имеющей погрешность при определении дальности 200 ж, скорости — 2 м/сек. Результаты этих исследований используются при осуществлении программы Apollo (6). Согласно первоначальному проекту вес аппарата — 82 кГ, в том числе корпус и бортовое оборудование— 38,2 кГ, научные приборы—11,8 кГ, бортовой РДТТ — 32,0 кГ (6,9). Для обеспечения температурного режима приборов селеноцентрическая орбита выбирается таким образом,, чтобы пребывание аппарата в тени Луны не превышало 1 часа, что позволяет обеспечить их работу в течение 6 месяцев. Для работы приборов в течение более продолжительного времени на аппарате необходимо устанавливать активные средства терморегулирования, например, жалюзи и створки по типу устанавливавшихся на аппарате Pioneer VI (6). Вопрос об установке активных средств на аппарате LIMP изучался рядом фирм.
Для запуска аппаратов LIMP выбрана ракета-носитель THORAD—Delta. Аппараты LIMP предполагалось выводить и селеноцентрическую орбиту (5) с высотой периселения 500-Н500 км, апоселения 3000^-10 000 км и наклонением 75° (в начале предполагалось выводить аппараты LIMP на круговую селеноцентрическую орбиту высотой —30 000 км). Первоначальными планами запуск первого аппарата LIMP намечался на начало 1966 г. Одновременно с запуском аппарата 182
LIMP на селеноцентрическую орбиту этими планами предполагалось вывести на геоцентрическую орбиту спутник IMP и сравнить результаты их измерений. Всего предполагалось создание 2-х аппаратов LIMP (9). По предварительным подсчетам, стоимость аппаратов LIMP превышает на 5% стоимость спутников IMP (6). Этапы осуществления программы Lunar Explorer приводятся ниже.
2. Космический аппарат Lunar Explorer XXXIII (IMP—D) (14, 15)
Назначение аппарата — проведение изучения Луны и окололунного пространства с селеноцентрической орбиты. В программу исследований входили регистрация космического излучения в окололунном пространстве, обнаружение ионосферы Луны, определение характеристик гравитационного и магнитного поля Луны; изучение солнечной плазмы и ее взаимодействия с магнитными полями, солнечного ветра и шлейфа магнитосферы Земли. Предусматривалось также определение влияния солнечного излучения на характеристики солнечных элементов и проверка эффективности их экранировки.
Запуск аппарата 1MP-D (рис. 40) произведен 1 июля 1966 г. с м. Кеннеди ракетой — носителем THORAD-Delta
Рис. 40. Космический аппарат Explorer XXXIII
(Thor Advancer — Delta). Согласно программе полета аппарат должен быть вначале выведен на промежуточную геоцентрическую орбиту с высотой перигея 1300 км и апогея 6400 км, наклонением 175° и периодом обращения 10 час., а затем пе-
13*
183
реведен на селеноцентрическую орбиту с высотой периселения 1480 км и апоселения 7410 км. Вывод аппарата на селеноцентрическую орбиту предполагалось осуществить без коррекции траектории на среднем участке полета.
Полет ракеты-носителя на активном участке проходил с отклонением от программы: вследствие нерасчетной продолжительности работы двигателя II ступени аппарату была сообщена скорость (после разделения II и III ступеней) на 9 м/сек больше расчетной, а вследствие нерасчетного режима работы двигателя III ступени аппарат имел скорость после отделения от III ступени на 21,3 м/сек больше расчетной. Такое превышение скорости не могло быть скомпенсировано тормозным РДТТ, и перевод аппарата на селеноцентрическую орбиту стал невозможен. Установленные на аппарате приборы не рассчитаны на проведение измерений при полете по геоцентрической орбите, поэтому руководством полета было принято решение осуществить с помощью РДТТ перевод аппарата на геоцентрическую орбиту с большим эксцентриситетом подобную тем орбитам, на которые выводятся спутники серии IMP. После срабатывания РДТТ аппарат был переведен на геоцентрическую орбиту с высотой перигея 30 532 км и апогея 494 230 км, наклонением 29,0°, периодом обращения 13 сут. 12 час. 48 мин. Предполагаемое время существования аппарата >106 лет. После выхода на эту орбиту аппарат получил название Explorer XXXIII, по международной системе обозначение 1966—58А. В случае вывода аппарата Explorer XXXIII на селеноцентрическую орбиту он получил бы название Lunar Explorer I (LIMP-D). Сразу после перевода аппарата на геоцентрическую орбиту начаты научные измерения (10). В январе 1967 г. по данным телеметрии напряжение в бортовой сети упало с нормального уровня 18,3 в до 13,5 в. Предполагалось, что причиной этого было короткое замыкание в электрической цепи. Некоторые системы спутника начали работать неустойчиво. Специалистами Центра Годдарда было предложено временно выключить постоянно работающий бортовой передатчик с тем, чтобы произошло резкое увеличение мощности в бортовых системах, что могло бы привести к ликвидации короткого замыкания. Для осуществления этого предложения 13 января в 4 часа 40 мин., из этого Центра на станцию слежения в г. Росмене была передана команда на разворот спутника и выключение передатчика, а затем со станции команды были посланы на борт спутника. Через 40 мин. после включения передатчика данные телеметрической системы показали, что напряжение в сети достигло нормального уровня. В период проведения этой операции аппарат находился на расстоянии 406 900 км от Земли.
Конструкция аппарата, состав служебного оборудования и научной аппаратуры (II) аппарата Explorer XXXIII в 184
основном такие же, как у аппарата Lunar Explorer II (см. раздел 3 настоящей главы). Вес аппарата на геоцентрической орбите — 93,4 кГ, в том числе научной аппаратуры — 9 кГ (вес земной).
3. Космический аппарат Lunar Explorer II (LIMP-E) (Explorer XXXV, IMP-E)
Назначение аппарата (3,20) Lunar Explorer II такое же, как у аппарата Explorer XXXIII. Дополнительная задача — регистрация метеорных частиц в окололунном пространстве. Запуск аппарата произведен 19 июля 1967 г. в 14 час. 19 мин. со стартового комплекса № 17 м. Кеннеди ракетой-носителем THORAD—Delta. Согласно программе полета аппарат первоначально должен быть выведен на промежуточную геоцентрическую орбиту с высотой перигея 320 км и апогея 450 000 км. Полет ракеты носителя проходил по программе, близкой к расчетной. После выхода аппарата IMP-Е на геоцентрическую орбиту он получил название Explorer XXXV, по международной системе обозначение 1967—70А. Ниже приводится программа полета ракеты-носителя THORAD— Delta с аппаратом IiMP-E: Т —момент старта;
Т+1361 сек. — окончание работы РДТТ III ступени;
Т+1390 сек. — начало работы устройства (грузики на тросах) для уменьшения скорости вращения III ступени с аппаратом (развертывание панелей с солнечными элементами и стержней с приборами позволяет снизить скорость вращения III ступени с аппаратом до 25 об/мин);
Т+1405 сек. — развертывание панелей с солнечными элементами;
Т+ 1415 сек. — откидывание стержней с магнитометрами; Т-Н1445 сек. — отделение III ступени.
Аппарат был выведен на геоцентрическую орбиту с большим эксцентриситетом, двигаясь по которой примерно через 70 час достиг района Луны. 22 июля, в 9 час. 19 мин., когда аппарат находился на расстоянии 6600 км от Луны, был включен по команде со станции слежения в г. Росмене РДТТ, который, проработав 23 сек., вывел аппарат на селеноцентрическую орбиту с высотой периселения 764 км, апоселения 7889 км и периодом обращения 11,5 час.
После вывода аппарата Explorer XXXV на селеноцентрическую орбиту он получил название Lunar Explorer II (LIMP-E). Расчетная продолжительность активного существования аппарата —1 тод. Через 2 часа после прекращения работы РДТТ он и теплозащитный экран были отделены от аппарата (5,20). Аппарат Lunar Explorer II — первый аме
185
риканский аппарат, выведенный на селеноцентрическую орбиту без проведения коррекции траектории на участке полета к Луне.
Конструкция аппарата (3, 5, 20) и состав служебного оборудования в основном такие же, 'как у аппарата Explorer XXXIII (IMP—D). Аппараты серии Lunar Explorer по конструкции и составу служебного оборудования в основном подобны спутникам серии IMP, выводимым на геоцентрические орбиты. Отличие в том, что на аппаратах Lunar Explorer в верхней части корпуса устанавливается тормозной РДТТ, осуществляющий перевод аппарата на селеноцентрическую орбиту. Корпус аппарата представляет собой восьмигранную призму, разделенную на 8 отсеков (А-?Н). В отсеках расположено служебное оборудование и научная аппаратура, кроме двух магнитометров на 2-х стержнях, прикрепленных к корпусу аппарата. К корпусу крепятся также 4 панели с солнечными элементами, он изготовлен из немагнитных материалов с применением алюминиевых и магниевых сплавов и нержавеющей стали, что позволило уменьшить собственное магнитное поле аппарата. Компоновочная схема аппарата представлена на рис. 41.
Суммарный вес на траектории полета к Луне — 104,3 кГ, на селеноцентрической орбите — 68 кГ (вес земной). Максимальный поперечный размер — 71 см, высота—18 см. Размах панелей с солнечными элементами — 2,77 м, размах стержней с укрепленными на них магнитометрами — 4,47 м.
Система энергопитания (5, 20) состоит из 4 панелей с солнечными элементами и серебряно-кадмиевых батарей. Панели с солнечными элементами смонтированы на штанагах, прикрепленных к корпусу аппарата. Для аппаратов LIMP, выводимых на селеноцентрическую орбиту, Центром Годдарда разработаны усовершенствованные панели с солнечными элементами. Основой панели служит алюминиевая сотовая конструкция с диаметром ячеек 6,3 мм и толщиной 0,017 мм. К этой конструкции сверху крепятся 2 стеклопластиковые пластины толщиной по 0,037 мм, пропитанные эпоксидной смолой служащие изолятором. На внешней пластине крепится серебрянная сетка, являющаяся проводником. Использование сетки вместо обычных проводов предотвращает возникновение паразитных магнитных полей. К внешней пластине клеем RTV-40 крепятся солнечные элементы. Провода, крепящие солнечные элементы с серебряной сеткой, проходят через стеклопластиковые пластины. На 4 панелях смонтировано 7680 солнечных кремниевых п—р элементов размером 1Х2сл1, обеспечивающие мощность 38 вт при удельной мощности 16,2 вт!кг или 104 вт/ж2 (7). Серебряно-кадмие-вые батареи обеспечивают работу систем аппарата в те периоды, когда панели с солнечными элементами не освеще-
186
3
a
Рис. 41. Схематическое изображение космического аппарата Lunar Explorer II.
а) Вид сверху: 1 — управляющее реактивное сопло;
2 — панель с солнечными элементами; 3 — магнитометр Центра им. Годдарда;
6) Вид сбоку: 1 — магнитометр Центра им. Годдарда; 2 — панель с солнечными элементами; 3 — тормозной РДТТ; 4 — магнитометр Центра им. Эймса.
ны Солнцем. Батареи рассчитаны на работу в течение •3,5 час, емкость батарей — ГО а-ч.
В период совместного полета с III ступенью ракеты-носителя аппарат стабилизируется (5, 20) вращением со скоростью 120 об/мин, обеспечиваемым системой, установленной на III ступени. Стабилизация на орбите осуществляется вращением с помощью системы, установленной на аппарате. ‘Ориентация оси вращения выдерживается с точностью
187
±0,5°. В системе используются оптические датчики направления на Луну (или Землю), исполнительными органами служат управляющие реактивные сопла, расположенные на концах 2 взаимно противоположных панелей с солнечными элементами. Рабочее тело — сжатый фреон—12 (3). На аппарате Explorer XXXIII исполнительными органами служат 4 микродвигателя, разработанные Rocket Research Corp, и использующие сублимирующее твердое топливо, тягой по 4,5 Г, Изменение положения оси вращения может проводиться по командам с Земли.
Система связи (11) использует передатчик с мощностью на выходе 7 вт и рабочей частотой 136, ПО Мгц и четыре дипольные антенны (на аппарате Explorer XXXIII установлен передатчик с частотой 136,02 Мгц). Тормозной РДТТ (ТЕ-М-458) (11), обеспечивающий перевод аппарата с геоцентрической на селеноцентрическую орбиту, аналогичен двигателю, разработанному для связного спутника SYNCOM.. Двигатель от корпуса отделяется экраном, защищающим приборы от нагрева истекающими газами во время его работы. Экран прозрачен для солнечных лучей, так как солнечный нагрев необходим для обеспечения расчетного температурного режима (для детектора космических лучей и и кодирующего устройства телеметрической системы). После: прекращения работы РДТТ он и экран сбрасываются. Двигатель установлен в верхней части корпуса. Вес РДТТ — 36,3 кГ, тяга — 372 кГ, продолжительность работы — 22 сек.
Из 2 трехосных магнитометров (3, 4, 21) один предназначен для измерения напряженности магнитных полей в диапазоне 10-6-^6,4 • 10-4 э. Он смонтирован на одном из 2 стержней длиной 224 см, укрепленных на корпусе аппарата, разработан Центром им. Годдарда; второй магнитометр предназначен для измерения полной напряженности магнитных полей в диапазоне 2-10~6—2-Ю-3 э и изучения взаимодействия солнечной плазмы и магнитного поля. Магнитометр смонтирован на втором стержне длиной 224 см, укрепленном на корпусе аппарата, разработан Научно-исследовательским центром им. Эймса. Установка магнитометров вне корпуса аппарата позволяет предохранить их от воздействия собственного магнитного поля аппарата.
Ионизационная камера (3, 4, 21) в состав которой входит несколько детекторов энергетических частиц, расположена в отсеке G. Камера предназначена для регистрации протонов с энергией Е> 12 Мэв и электронов в космических лучах солнечного происхождения, высокоэнергичных частиц в хвосте магнитосферы Земли и в космических лучах галактического происхождения. Счетчики Гейгера—Мюллера (3, 4, 21) (3 шт.), которые входят в комплект детекторов частиц высоких энергий, расположены в отсеке Н. Они регистрируют электроны с
188
энергией Е>40 кэв, частицы низкой энергии в космических лучах солнечного происхождения и фотоны в рентгеновской области солнечного излучения на длине волны до Х=14 А. Комплект детекторов энергетических частиц (3, 4, 21) проводит регистрацию электронов и ионов низкой энергии в окололунном пространстве, у поверхности Луны и во фронте возможного скачка уплотнения около Луны. Детекторы плазмы (3, 4, 21) (2 шт.) предназначены для изучения солнечной плазмы в окололунном пространстве; имеют угол обзора 68° и размещены в отсеке D, разработаны Массачусетским технологическим институтом. Детекторы метеорных частиц (3, 4, 21) размещены в отсеке А и имеют направленное и всенаправленное действие; предназначены для регистрации, определения количества движения, кинетической энергии и скорости метеорных частиц в окололунном пространстве и рассчитаны на регистрацию частиц, имеющих скорость от 1,5 до 50 км!сек и массу от 10“13 до 10~9 Г, Направленный детектор имеет угол обзора 40°. Оба типа детекторов разработаны Университетом Темпла (17).
Проведение исследований по обнаружению ионосферы Луны и изучению ее влияния на прохождение радиосигналов было запланировано с помощью радиотехнического оборудования, установленного на аппарате (3). Исследования по изучению гравитационного поля Луны осуществлены по измерениям эволюции селеноцентрической орбиты аппарата (3). С помощью установленных на аппарате экспериментальных солнечных элементов были запланированы эксперименты по исследованию влияния солнечного излучения на характеристики солнечных элементов и проверка эффективности их экранировки. Солнечные элементы объединены в 4 группы по 16 элементов: 1-я группа не имела экранировки, 2-я группа имела стеклянный экран толщиной 25 мк, 3-я группа имела экран из спеченой двуокиси кремния толщиной 150 ц и 4-я группа имела экран толщиной 150 ц.
После аварийных полетов аппаратов Ranger III^-V, которые подвергались термической стерилизации, что, как полагают, послужило причиной их аварии, было принято решение не проводить стерилизацию аппаратов, запускаемых для изучения Луны. В связи с этим аппараты по программе Lunar Explorer не подвергались стерилизации. Небезынтересны данные по присутствию микроорганизмов на этих аппаратах. Наличие микроорганизмов на самом аппарате при старте определялось путем экстраполяции результатов, полученных при взятии микробиологических проб на отдельных участках корпуса, а также проб воздуха вокруг аппарата. Была внесена поправка +20% (кроме Explorer XXXIII) на возможное перенесение микроорганизмов на аппарат с переходника и головного обтекателя. Данные по популяции микроорганизмов^
189-
на аппаратах серии Lunar Explorer при старте приведены в
таблице 21 (22). Таблица 21
Наименование аппарата Общая популяция микроорганизмов
Explorer XXXIII 8Х Ю4
.Lunar Explorer 11 (Explorer XXXV) 7Х W3
4. Некоторые итоги программы Lunar Explorer
В течение 1966—1967 гг. по программе запущено 2 аппарата, из которых один выполнил целевую задачу. Впервые в практике полетов американских аппаратов к Луне был реализован выход аппарата на селеноцентрическую орбиту без проведения коррекции на среднем участке траектории. Бортовые системы обоих аппаратов работали в основном без отказов. Неисправность систем ракеты-носителя явилась причиной невыполнения программы полета первого аппарата этой серии. Аппаратом Explorer XXXIII проведены исследования в околоземном пространстве при полете по орбите с большим эксцентриситетом. Установлено, что шлейф магнитосферы Земли простирается за орбиту Луны более чем на 120 000 км. Каждый месяц, примерно в течение 3—4 суток, Луна проходит через шлейф магнитосферы Земли, что обеспечивает некоторую защиту Луны от потока частиц высоких энергий, возникающих при вспышках на Солнце. Эти суточные периоды являются наиболее безопасными с точки зрения радиационной опасности для высадки космонавтов на Луну. Произведена регистрация фронта ударной волны, распространявшейся от Солнца после вспышки. Аппаратом Lunar Explorer II проведены исследования Луны и окололунного пространства. Основные научные результаты относятся к взаимодействию Луны с солнечным ветром и электромагнитным свойствам Луны (1, 2, 5, 8, 12, 13, 16, 18—20). Магнитное поле на лунной поверхности имеет напряженность менее 4-10-5 э, а относительная магнитная проницаемость тела Луны не более 1,8. Наличие слабого магнитного поля свидетельствует об отсутствии проводящих слоев у поверхности и в недрах. У Луны не обнаружено ионосферы, она не имеет радиационных поясов, что подтверждается наличием слабого магнитного поля. Электропроводность Луны менее 10-6 ом~х1м в верхнем 100 км слое или еще ниже в случае более тонкого изолирующего слоя (10~7 ом~х!м для верхних 10 км). Глубинные слои Луны имеют сравнительно низкую температуру не выше 980° С. Солнечный ветер достигает поверхности Луны, поскольку от-
190
•сутствует фронт ударной волны (как перед Землей), что подтверждает отсутствие у Луны сильного магнитного поля. Позади Луны имеется «теневой» конус протяженностью более 160 000 км, свободный от солнечного ветра. Лунной магнитосферы и шлейфа не обнаружено.
Луна в целом представляет собой однородное тело. Однако, в связи с неодинаковой отражательной способностью отдельных районов лунных морей сделано заключение, что поверхность состоит из различных геологических пород. Возможно, что неравномерное отражение является результатом неодинаковой структуры отдельных пород. Слой грунта на поверхности морей тоньше, чем в гористых районах. Этот вывод •сделан на основе исследований, проведенных с помощью би-статической радиолокационной станции, использующей передатчик и приемник, находящиеся в различных местах: передатчиком служил аппарат Lunar Explorer II, а приемником — 150-футовая радиоантенна Станфордского университета. Сигналы, отраженные от лунной поверхности, несут информацию о диэлектрической постоянной лунного вещества, которая прямо связана с твердостью вещества, отражающего радиоволны. Диэлектрическая постоянная в районе лунных морей на одну треть больше, чем в материковых районах Луны. В •случае с Луной, чем выше диэлектрическая постоянная, свойственная отражающему участку, тем, по-видимому, ближе к поверхности располагаются твердые породы. Диэлектрическая постоянная для глубин от 25 см до многих метров составляет 3,0 ±0,2, причем в этом интервале глубин отсутствуют резкие •скачки диэлектрической постоянной (23). При прохождении через шлейф магнитосферы Земли у Луны не было обнаружено заметного наведенного магнитного поля.
Библиография
1. Behannon К. W. Intrinsic magnetic properties of the lunar body, «J. Geophys. Res.», 1968, 73, 7257—7268
2. Colburn D. S. et al., Diamagnetic solar-wind -cavity discovered behind Moon, «Science», 4967, 158, 1040—1042
3. Explorer 35 around the Moon. «Flight Internat.», 1967, 92, №3047, 196— 197. 1968, 3.62.70
4. Explorer 35 orbiting with 7 experiments. «Aviat. Week and Space Technol.»,. 1967, 87, № 4, 29
'5. Explorer XXXV orbits Moon. «Space World», 1968, E—1—49, 22—25.
•6 . Fink D. E. Lunar IMP experiments to be selected. «Aviat. Week and Space Technol.», 1964, 80, №20, 71, 74. 1965, 6.62.148
‘7 . Hibben R. D. Improved solar cells planned for IMP—D. «Aviat. Week and Space Technol.», 1965, 83, №4, 53, 55, 59—60
8. H о 11 we g J. V., Interaction of the solar wind with the Moon and formation of a lunar limb shock wave. «J. Geophys. Res.», 1968, 73, 7269— 7276
9. Industry observer. «Aviat. Week and Space Techmol.», 1963, 79, №24, 23
191
10. LA1MP too fast for lunar orbit. «Aviat. Week and Space Technol.», 1966', 85, № 2, 33.
11. Launch of AIMP Moon satellite. «Interavia Air Letter», 1966, №6034, 6.
12. Lin R. P., Observations of lunar shadowing of energetic particles. «J.. Geophys. Res.», 1968, 73, 3066—3071.
13. Lyon E. F. et al, Explorer 35 plasma measuremets in the vicinity of the Moon. «J. Geophys. Res.», 1967, 72, 6113—6117.
14. Moon-orbit shot settles for ellipse around the Earth. «Mach. Design». 1966, 38, № 17, 14—15
15. Moon orbiting Explorer (AIMP). «Space World», 1966, NC-9, 37—39.
16. Ness N. F. Recent results from Lunar Explorer 35. «Report presented at Conference on the physics of the Moon and planets», Киев, 1968.
17. Next AIMP launch planned for end of year. «Missile/Space Daily», 11966,. 20, №3, 17
18. S о nett С. P. et al, The intrinsic magnetic field of the Moon. «J. Geophys. Res.», 1967, 72, 5503—5507
19. Traylor H. E. et al, Measurements of the perturbed-interplanetary magnetic field in the lunar wake. «J. Geophys. Res.», 1968, 73, 6723—6735
20. Theory reinforced Moon is lifeless. «Aviat. Week and Space Technol.», 1968, 88, № 2, 52
21. TruppPh. Heavy work load planned for Moon monitor platform. «Electron. News», 4965, 10, № 522, 5. 1967, 1.62.114
22. Turkevich A. L., et al, Chemical analysis of the Moon at the Surveyor VII landing site: preliminary results. «Science», 1968, 162, № 3849, 117—118. 1969, 2.62.206
23. T у 1 e r G. L. Oblique — scattering radar reflectivity of the lunar Surface: preliminary results from Explorer 35. «J. Geophys. Res.», 1968, 73, 7609—7620
выводы
К началу 1968 г. завершена десятилетняя (1958— 1968 гг.) программа США по изучению Луны и окололунного пространства космическими автоматическими аппаратами. Для решения задач по изучению Луны и окололунного пространства создано несколько типов космических автоматических аппаратов различного назначения:
— аппараты, осуществляющие пролет Луны (часть аппаратов по программе Pioneer);
— аппараты, осуществляющие «жесткую» посадку на поверхность Луны (часть аппаратов по программе Ranger);
— аппараты, осуществляющие «мягкую» посадку на поверхность Луны (аппараты по программе Surveyor);
— аппараты, выводимые на селеноцентрические орбиты (часть аппаратов по программе Pioneer, аппараты по программам Lunar Orbiter и Lunar Explorer);
— аппараты, выводимые на геоцентрические орбиты с большим эксцентриситетом (часть аппаратов по программе Ranger и спутник Explorer X). Всего в рамках программы изучения Луны и окололунного пространства запущено 32 космических аппарата.
Научные исследования проводились в четырех основных областях:
— изучение свойств и характеристик Луны и ее поверхности;
— изучение параметров и характеристик окололунного пространства;
— изучение параметров и характеристик межпланетного космического пространства на трассе полета Земля—Луна;
— изучение параметров и характеристик околоземного космического пространства.
В результате осуществления программы научных исследований получены данные о характеристиках и химическом составе лунного грунта, большое количество фото- и телевизионных изображений как отдельных районов мест посадки
193
аппаратов, так и практически всей лунной поверхности, чтсг-позволило составить весьма подробную карту Луны. Изучение характеристик окололунного пространства позволило уточнить радиационную и метеорную обстановку в окрестности Луны. Получены данные о характеристиках межпланетного и околоземного космического пространства.
В ходе осуществления отдельных программ отработаны бортовые системы аппаратов и проведены прикладные технические исследования. В рамках программы Surveyor отработана ракета-носитель Atlas—Centaur, являющаяся в-настоящее время одной из основных ракет-носителей для! запуска автоматических космических аппаратов при исследовании Луны и планет. Полученные научно-технические результаты имеют самостоятельное значение и внесли вклад в осуществление программы Apollo. Проведенные исследования показали принципиальную возможность осуществления высадки человека на Луну и позволили выявить потенциальные районы лунной поверхности, пригодные для посадки лунной кабины космического корабля Apollo. Проведена отработка ряда бортовых систем, принципы построения которых аналогичны системам, применяемым в корабле Apollo..
Технический редактор М. С. Лазарева
Т-06024 от 26/111-1971 Формат бумаги 60X90716 Тираж 600 экз..
Печ. л. 12.25 Уч.-изд. л. 11,99 Цена 1 р. 40 к. Заказ 6157
Производственно-издательский комбинат ВИНИТИ, Люберцы, Октябрьский проспект, 403