


















































































































































Текст
В. В. Глухов
И.М.Синдеев
М.М.Шемаханов
И РАДИО-
ЭЛЕКТРОННОЕ
ОБОРУДОВАНИЕ
ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
Издательство <' Транспорт»
В. В. ГЛУХОВ, И. М. СИНДЕЕВ, М. М. ШЕМАХАНОВ
АВИАЦИОННОЕ
И РАДИОЭЛЕКТРОННОЕ
ОБОРУДОВАНИЕ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Утверждено Управлением учебных заведений МГА СССР в качестве учебного
пособия для студентов высших учебных заведений гражданской авиации.
МОСКВА «ТРАНСПОРТ»
УДК 629.7.051+058.54(004) (075.8)
Глухов В. В., Синдеев И. М., Шемаханов М. М. Авиацион-
ное и радиоэлектронное оборудование летательных аппаратов:
Учеб, пособие для вузов. — М.: Транспорт, 1983, 144 с.
Рассмотрены теоретические основы, назначение, принцип дей-
ствия, устройство, особенности конструкции и вопросы эксплуа-
тации электрооборудования, приборов контроля силовых уста-
новок, пилотажно-навигационного оборудования и радиооборудо-
вания летательных аппаратов гражданской авиации.
Предназначено для студентов институтов гражданской авиа-
ции. Может быть использовано инженерно-техническими работни-
ками эксплуатационных подразделений.
Ил. 104, табл. 3, библиогр. 14 назв.
Введение и гл. 2 и 3 написаны В. В. Глуховым; гл. 1 —
И. М. Синдеевым, гл. 4 — М. М. Шемахановым.
Рецензенты: кафедра технической эксплуатации авиационно-
го оборудования КНИГА, канд. техн, наук С. Л. Белогородский
Зав. редакцией В. С. Захаров
Редактор Э. М. Федорова
Вячеслав Васильевич Глухов
Игорь Михайлович Синдеев
Михаил Михайлович Шемаханов
АВИАЦИОННОЕ И РАДИОЭЛЕКТРОННОЕ ОБОРУДОВАНИЕ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Обложка художника Е. Н. Волкова
Технический редактор М. А. Шуйская
Карректор-вычитчик С. М. Лобова
Корректор С. Н. Пафомова
И Б № 2503
Сдано в набор 25.11.82. Подписано в печать 30.05.83. Т-12445.
Формат 60X90716- Бум. тип. № 2. Гарнитура литературная. Высокая печать.
Уел. печ. л. 9,0. Усл. кр.-отт. 9,25. Уч.-изд. л. 9,66. Тираж 7000 экз. Заказ 455.
Цена 30 коп. Изд. № 1-4-4/17 № 1761
Ордена «Знак Почета» издательство «ТРАНСПОРТ»,
107174, Москва, Басманный туп., 6а
Московская типография № 19 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли,
107078, Москва, Каланчевский туп., 3/5
3606030000-207
Г 049(01)-83 2°7-83
© Издательство «Транспорт», 1983
ОТ АВТОРА
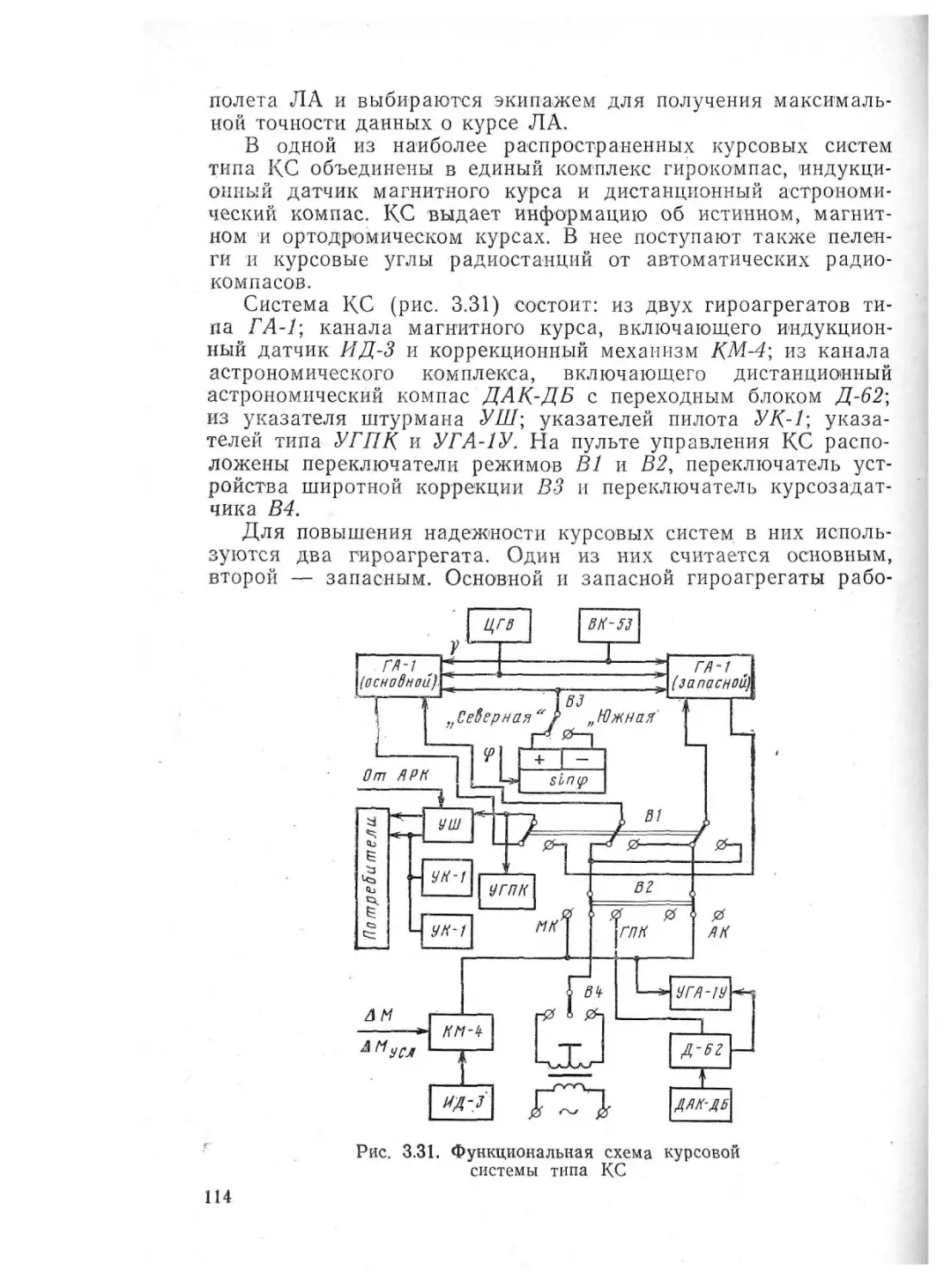
Современные летательные аппараты (ЛА) имеют сложные
и разнообразные комплексы авиационного и радиоэлектрон-
ного оборудования, которые позволяют выполнять все постав-
ленные задачи, возникающие при пилотировании ЛА прак-
тически в любых условиях, и обеспечивают безопасность
и регулярность полетов. Авиационное и радиоэлектронное
оборудование ЛА работает в тяжелых климатических услови-
ях при температуре окружающей среды от —60 до +60° С,
относительной влажности от 0 до 100% и плотности воздуха
от 1,225 у Земли до 0,018 кг/м3 на высоте около 30 км. Кроме
того, на работу бортового оборудования влияют механические
воздействия, которые изменяются в следующих пределах: ли-
нейные ускорения центра масс ЛА — до 5 g; вибрационные
линейные ускорения в местах крепления приборов — от еди-
ниц до нескольких тысяч герц по частоте и от единиц до не-
скольких десятков g по ускорению и т. д.
Изменение климатических условий отражается на работе
оборудования ЛА. Колебания температуры окружающей сре-
ды вызывают изменения сопротивления линий связи и пита-
ния, емкости аккумуляторных батарей, параметров радио-
электронных элементов, вязкости смазочных материалов, ли-
нейных параметров конструкций. Колебания плотности и
влажности среды влекут за собой ухудшение условий охлаж-
дения и коммутации в электрических машинах и агрегатах,
изменение изоляционных свойств воздуха, увеличение корро-
зии, уменьшение сопротивления изоляции, замерзание конден-
сата при низких температурах.
Механические воздействия в виде вибраций, перегрузок и
ударов приводят к разрушению элементов оборудования, об-
рыву электропроводов, нарушению электроизоляции и т. д.
В связи с этим к авиационному и радиоэлектронному обору-
дованию предъявляется ряд общих и специальных требований.
К ним относятся: минимальная масса, габариты и стоимость;
высокая надежность и безотказность функционирования си-
стем и их элементов в течение установленного для них ресур-
са; работоспособность оборудования и систем независимо от
положения в пространстве, возможных воздействий и условий
полета; максимальный уровень унификации и стандартизации
Г 3
систем, что позволяет их применять на различных типах ЛА;
высокое эксплуатационное совершенство, под которым подра-
зумевается минимальное количество настроек при замене бло-
ков, высокая контролепригодность и ремонтопригодность обо-
рудования, минимальное время подготовки к работе и т. д.
Удовлетворение перечисленных требований позволяет обес-
печить летно-технические характеристики ЛА и безопасность
полета.
Объем книги не позволяет достаточно подробно изложить
физические основы работы и схемы всех систем и агрегатов
авиационного оборудования. Поэтому преимущественное вни-
мание уделяется тем видам оборудования, которые обеспечи-
вают работу бортовых систем и агрегатов, эксплуатируемых
лнженерами-механиками авиационных технических баз.
ГЛАВА I. ЭЛЕКТРООБОРУДОВАНИЕ
1. КЛАССИФИКАЦИЯ ЭЛЕКТРООБОРУДОВАНИЯ
Электрооборудование летательных аппаратов в зависимо-
сти от назначения его отдельных элементов подразделяется
на систему электроснабжения и приемники (потребители)
электрической энергии.
Система электроснабжения представляет собой совокуп-
ность систем генерирования, преобразования и распределения
электрической энергии. Система генерирования состоит из ге-
нераторов постоянного и переменного токов и аппаратуры,
предназначенной для регулирования и защиты источников
энергии от ненормальных режимов. К элементам системы пре-
образования относятся выпрямители, трансформаторы, элект-
ромагнитные и статические преобразователи. Система распре-
деления состоит из электрической (бортовой) сети, включающей
различные провода и жгуты; коммутационную аппаратуру и
аппаратуру защиты сети; монтажное и установочное оборудо-
вание (разъемы, распределительные устройства); контроль-
но-измерительные приборы для наблюдения за режимом рабо-
ты системы электроснабжения.
К приемникам электрической энергии относятся: электропри-
вод (электрические двигатели и электромагниты, предназначен-
ные для управления исполнительными механизмами, агрегатами
и различными органами летательного аппарата); осветитель-
ное, светосигнальное, противообледенительное и обогреватель-
ное оборудование и др.
Системы электроснабжения современных самолетов состоят
из двух взаимосвязанных систем: первичной, генераторы ко-
торой приводятся во вращение от маршевых двигателей само-
лета или от автономной силовой установки, и вторичной, кото-
рая получает электрическую энергию посредством преобразо-
вания энергии первичной системы.
На самолетах используют два типа систем электроснабже-
ния, которым присваиваются наименования в соответствии с
видом первичной системы.
1. Система трехфазного первичного тока напряжением
200/115 В постоянной частоты 400 Гц. В качестве вторичной
системы используется система постоянного тока напряжением
27 В и система переменного тока 36 В, 400 Гц. Вторичная
система получает питание от первичной через трансформатор-
но-выпрямительные блоки.*
5
2. Система постоянного тока напряжением 27 В. Вторичной
системой служит трехфазная система переменного тока напря-
жением 220/115 В частотой 400 Гц и система 36 В, 400 Гц,
которая получает переменный ток от электромашинных или
статических преобразователей.
2. АВИАЦИОННЫЕ АККУМУЛЯТОРЫ
Электрическими аккумуляторами называются источники
электрической энергии многоразового действия. Активные ве-
щества, израсходованные в процессе протекания реакции, даю-
щей электрическую энергию, могут восстанавливаться при
пропускании через разряженный аккумулятор постоянного то-
ка от другого источника энергии в направлении, противопо-
ложном направлению разрядного тока.
На летательных аппаратах используют свинцовые аккуму-
ляторы с электрохимической системой Pb | H2SO4| РЬО2 (э.д. с.
2,1 В) и никель-кадмиевые Ni(OH)3|KOH|Cd (э. д. с. 1,36 В).
Для обозначения электрохимической системы принято между
двумя вертикальными чертами писать химическую формулу
электролита, а слева и справа — химические формулы актив-
ных веществ до разряда: справа отрицательного электрода^
слева положительного. Группу однотипных электрических ак-
кумуляторов, соединенных электрически и конструктивно для
получения электрического напряжения, называют аккумуля-
торной батареей.
По назначению аккумуляторные батареи разделяют на бор-
товые, предназначенные для использования на борту ЛА, и
аэродромные — при обслуживании ЛА. На самолетах дальних
и средних магистральных воздушных линий бортовые аккуму-
ляторные батареи выполняют роль аварийного источника
электрической энергии, обеспечивая кратковременное питание
наиболее важных потребителей от момента отказа основной
системы электроснабжения до перевода их на питание от ге-
нератора вспомогательной силовой установки. Аккумулятор-
ная батарея применяется и для запуска вспомогательной си-
ловой установки. На других ЛА бортовые аккумуляторные
батареи используются для питания электрических стартеров
и аппаратуры при автономном запуске авиационных двигате-
лей, потребителей при отказе основной системы электроснаб-
жения от момента отказа до посадки и для кратковременной
проверки работы электрооборудования на земле.
Свинцовые аккумуляторные батареи. В качестве бортовых
свинцовых аккумуляторных батарей используются следующие:
12А-30, 12САМ-28, 12САМ-55. В качестве аэродромных —
12АО-50, 12АО-52, 12АСА-140. Первые цифры в обозначении
указывают число аккумуляторов, соединенных последователь-
6
но, последние — номинальную емкость в ампер-часах. Буквы
в обозначении определяют вид, некоторые свойства и области
применения батареи: А — авиационная; САМ. — стартерная
авиационная моноблочная; АО — аэродромного обслуживания;
АС/Х — аэродромный стартерный аккумулятор.
Авиационная свинцовая аккумуляторная батарея состоит
из аккумуляторов, расположенных в ячейках эбонитового мо-
ноблока. К числу основных характеристик аккумулятора отно-
сятся.
1. Электродвижущая сила (э.д. с.), т. е. разность электрод-
ных потенциалов при размокнутой внешней цепи. Э.д.с. свинцо-
вого аккумулятора зависит от плотности и в малой степени от
температуры электролита. Значение э.д.с. при плотности элек-
тролита y=1,285 г/см3 и температуре 15° С равно 2,125 В. При
разряде аккумулятора плотность электролита и э. д. с. умень-
шаются. Когда э.д.с. достигает 1,82—1,85 В, аккумулятор счи-
тается разряженным.
2. Полное внутреннее сопротивление. У кислотных авиаци-
онных аккумуляторов оно весьма мало и составляет сотые или
даже тысячные доли Ома. Это позволяет получать от аккуму-
ляторов большие токи при сравнительно малых потерях внут-
ри аккумулятора.
3. Напряжение. В процессе разряда напряжение аккумуля-
тора изменяется. За среднее значение напряжения при разряде
номинальным током принимают 2 В (для аккумуляторной ба-
тареи соответственно 2X12 = 24 В). Аккумулятор можно разря-
жать до конечного напряжения 1,7 В.
4. Коэффициент отдачи аккумулятора по энергии. Он опре-
деляется отношением отдаваемой энергии к затрачиваемой
для его полного заряда.
5. Разрядная емкость Q — количество электричества, кото-
рое можно получить от аккумулятора при заданных значениях
температуры, разрядного тока и конечного разрядного напря-
жения. Разрядная емкость
(р
Q — i zp
6
где /р — ток разряда.
Емкость аккумулятора зависит от количества активных ве-
ществ, коэффициента их использования и температуры элек-
тролита. На коэффициент использования активных веществ
существенное влияние оказывают толщина и площадь пластин,
их пористость и режим разряда аккумулятора. При одинаковом
количестве активных веществ аккумулятор с тонкими пласти-
нами имеет большую разрядную емкость, чем с толстыми, так
как при этом электролит легче проникает в поры активных
7
Рис. 1.1. Зависимость емкости
Q от разрядного тока /р:
1 - 20 НКБН-25; 2 - 12 САМ-28
масс, а также омывает большее
количество активных веществ»
что обеспечивает лучшее их ис-
пользование. Поэтому чем порис-
тее активное вещество, тем боль-
шую емкость можно от него по-
лучить.
При разряде аккумулятора
токами, значительно превышаю-
щими номинальный, вследствие
отставания процесса диффузии
от процесса разряда, используют-
ся главным образом активные
вещества поверхностного слоя пластин. При разряде сульфат
свинца, образующийся на поверхности, препятствует проникно-
вению электролита в поры пластин, исключая глубоколежащие
слои активного вещества. Количество активного вещества, ис-
пользуемого в процессе разряда, уменьшается, что приводит к
уменьшению разрядной емкости (рис. 1. 1).
За номинальную емкость авиационных кислотных аккуму-
ляторов принимают емкость при 5-е-10-часовом режиме до на-
пряжения на зажимах элемента 1,7 В, при начальной плотно-
сти электролита 1,285 г/см3, при температуре +20°С. При
уменьшении температуры на ГС емкость аккумулятора умень-
шается на 1%. Учитывая столь большое влияние температуры
на емкость, аккумуляторные батареи на ЛА устанавливают в
утепленных или обогреваемых контейнерах.
6. Саморазряд — бесполезная потеря емкости, обусловлен-
ная протеканием химических процессов при разомкнутой внеш-
ней цепи. Количественно он оценивается уменьшением емкости
за сутки
^С=Г~~] 100. %,
L vi1 J
где Qi и (2г — емкости химического источника тока до и после хранения;
Т — продолжительность хранения в сутках.
Саморазряд увеличивается с повышением температуры. Он
считается нормальным, если не превышает 1 % в сутки или
30% в месяц. Учитывая это, аккумуляторы необходимо перио-
дически подзаряжать, если они длительное время находились
в бездействии. В противном случае пластины аккумулятора
могут засульфатироваться, т. е. произойдет практически необ-
ратимый переход мелкозернистого сульфата свинца в крупно-
зернистый (необратимая сульфатация) и аккумулятор выйдет
из строя.
7. Сохранность, срок службы. Допустимый срок хранения
свинцовых аккумуляторов в сухом виде не превышает 3 лет.
С электролитом хранить аккумуляторы можно только в заря-
женном состоянии во избежание вредной сульфатации. Для
восстановления емкости, утраченной в процессе саморазряда,
аккумулятор не реже 1 раза в месяц требуется подзаряжать.
Срок службы бортовых аккумуляторных батарей составля-
ет: для 12А-30 и 12САМ-28 — 2 года, для 12САМ-55 — 1,5 го-
да. К истечению срока службы емкость аккумуляторных бата-
рей снижается до 70—75%.
Никель-кадмиевые аккумуляторные батареи. В качестве
бортовых аккумуляторных батарей используются батареи типа
20 НКБН-25. Первые цифры в обозначении указывают число
аккумуляторов, соединенных последовательно, последние —
номинальную емкость в ампер-часах. Буквы в обозначении
соответствуют: НКБ — никель-кадмиевая батарея, Н — харак-
теризует технологическую особенность изготовления электро-
дов с пластинами, в которых активная масса намазывается
в виде пасты на металлическую решетку, а затем подпрессо-
вывается.
Э.д.с. никель-кадмиевого, только что заряженного аккуму-
лятора равна 1,45 В и спустя 120 ч после заряда, она снижа-
ется до 1,36—1,38 В. Э.д.с. этого аккумулятора практически
не зависит от температуры.
Полное внутреннее сопротивление никель-кадмиевого акку-
мулятора с намазными пластинами сравнимо по величине с
сопротивлением свинцовых аккумуляторов, что позволяет ис-
пользовать их также в стартерном режиме. Существенное вли-
яние на полное внутреннее сопротивление оказывает темпера-
тура электролита.
Среднее значение напряжения НКБН равно 26 В. Зависи-
мость разрядной емкости от разрядного тока батареи
20 НКБН-25 показана на рис. 1.1. В течение первых 15—
20 сут саморазряд составляет 1,5% в сутки, а затем уменьша-
ется до 0,5%. Гарантийный срок годности никель-кадмиевого
аккумулятора 2,5 года, в этот срок входят хранение, транспор-
тировка и работа его на самолете. Эксплуатационно-техничес-
кие характеристики свинцовых и никель-кадмиевых аккумуля-
торов приведены в табл. 1.1.
Таблица 1.1
Показатель Свинцовые Никель-кадмие- вые
Отдача по энергии 0,65—0,75 0,50
Срок службы, циклы 70—300 250—400
Саморазряд при нормальной температуре 4-20°С за месяц, % 20—30 15—20
9
3. АВИАЦИОННЫЕ ГЕНЕРАТОРЫ
Генераторы постоянного тока. Их мощность и количество
зависят от типа и назначения самолета. Генераторы приводят-
ся во вращение от маршевых двигателей и обеспечивают номи-
нальную мощность в диапазоне изменения частоты вращения
4000—9000 об/мин. Охлаждение генераторов осуществляется
путем продува через их корпус встречного потока воздуха. При
работе без продува генераторы могут отдавать только 30% от
номинальной мощности.
Самолетные генераторы представляют собой шестиполюсную
машину (рис. 1.2) параллельного возбуждения с шестью до-
полнительными полюсами. Обмотки основных полюсов соеди-
нены между собой последовательно. Один конец обмотки при-
соединен внутри генератора к щеткодержателю минусовых
щеток, а другой выведен к зажиму шунта Ш. Поле возбужде-
ния создается током в обмотках основных полюсов. Обмотка
дополнительных полюсов создает магнитное поле, которое час-
тично компенсирует реакцию якоря, т. е. влияние м.д.с..
якоря на м. д. с. обмотки возбуждения. Обмотки дополнитель-
ных полюсов соединены между собой и с обмоткой якоря по-
следовательно.
К числу основных характеристик генератора относится
внешняя характеристика возбуждения, устанавливающая зави-
симость напряжения генератора от тока возбуждения t/=
=/(/в) при неизменной частоте вращения n = const и постоян-
ном сопротивлении нагрузки 7?н = const (рис. 1.3).
Семейство этих характеристик позволяет установить диапа-
зон изменения тока возбуждения, необходимый для поддержа-
ния постоянства напряжения 1/н в пределах изменения частоты
вращения от птах и /п = 0 до Ппнп и /=/тах, и произвести выбор-
регулятора напряжения.
Внешняя характеристика
представляет собой зависимость-
(рис. 1.4, а) напряжения на зажи-
мах генератора U от тока на-
грузки I при неизменном сопро-
тивлении цепи возбуждения
А?в = const и постоянной частоте
вращения /z = const.
Снижение напряжения U
при увеличении тока нагрузки
обусловливается падением на -
пряжения в якоре и щеточном
Рис. 1.2. Электрическая схема внутрен»
них соединений самолетного генератора
постоянного тока
10
Рис, 1.3. Внешние характеристики возбуж-
дения:
1 ~~ лтах’ ^=0; 2 "'«min 1 max
Рис. 1.4. Внешние характеристики:
а — генератора; б — генератора с регулятором
напряжения
контакте, размагничивающим действием реакции якоря и
уменьшением тока возбуждения вследствие понижения напря-
жения на зажимах генератора. Увеличение тока нагрузки при
уменьшении сопротивления нагрузки происходит лишь до опре-
деленного, так называемого критического значения /кр.
Авиационные генераторы, как правило, работают с автома-
тическими регуляторами напряжения, которые поддерживают
напряжение постоянным в диапазоне от яШах, Лер до flmin,
./ = 0 (рис. 1.4, б).
Генераторы переменного тока, Современный генератор яв-
ляется трехфазной шестиполюсной синхронной машиной с вра-
щающимися выпрямителями, исключающими необходмость
применения скользящих контактов и щеток. Трехфазная рабо-
чая обмотка 3 генератора (рис. 1.5) соединена в звезду с выве-
денной силовой нейтралью. Для питания обмотки возбуждения 6
генератора используется генератор переменного тока с непо-
движной обмоткой возбуждения 2 и вращающимся якорем 5,
закрепленным на валу главного генератора. Переменный ток
возбудителя выпрямляется с помощью кремниевых выпрями-
телей. Обмотка возбуждения возбудителя питается выпрямлен-
ным напряжением от подвозбудителя Л представляющего со-
бой электрическую машину переменного тока с возбуждением
от постоянных магнитов 4, используемую одновременно для
питания непей защиты и регулирования.
Внешней характеристикой синхронного генератора называ-
ется зависимость напряжения на зажимах генератора U от тока
Рис. 1.5. Электрическая схема внутренних
соединений самолетного генератора пере-
менного тока
Рис. 1.6. Внешние характери-
стики синхронного генератора
якоря I при постоянных значениях тока возбуждения /в, час-
тоты вращения п и коэффициента мощности cos кр. Нарис. 1.6
приведены эти характеристики для различных значений п.
Снижение напряжения на зажимах генератора при увеличении
тока нагрузки обусловлено падением напряжения в якорной
обмотке и влиянием реакции якоря.
Ток установившегося короткого замыкания /к.з. в 3—4 раза
больше номинального тока. Для предотвращения опасных по-
следствий короткого замыкания предусматривается защита.
Привод генераторов переменного тока. Для получения ста-
бильной частоты генератора СТ, приводимого во вращение от
авиационного двигателя, между валом двигателя и генератора
устанавливается специальное устройство — привод постоянной
частоты вращения (ППЧВ).
Как правило, привод является дифференциальным (рис. 1.7).
На один вход дифференциального (суммирующего) редуктора
Р энергия поступает непосредственно с вала авиационного
12
Рис. 1.7. Структурная схема
дифференциального ППЧВ
двигателя АД, а на другой — от преобразователя энергии ПЭ.
выходной вал которого вращается с частотой Д/г. При этом, на
выходе редуктора:
пг — пал -Ь const,
где пг — частота вращения вала генератора; пад — частота вращения авиа-
ционного двигателя, приведенная к валу генератора.
В качестве преобразователя энергии используются турбо-
механические и гидравлические устройства.
Турбомеханический дифференциальный привод постоянной
частоты вращения (рис. 1.8) состоит из активной осевой тур-
бины 1, дифференциального редуктора 4 и системы регулиро-
вания. Стабильность частоты вращения генератора поддержива-
ется центробежным регулятором 3, чувствительный элемент ко-
торого приводится во вращение с частотой, пропорциональной
частоте вращения ротора генератора СГ.
При отклонении частоты вращения от заданного значения
регулятор поворачивает заслонку 2, стоящую на входе в тур-
бину, и изменяет расход воздуха, проходящего через нее. Воз-
дух отбирается от авиационного двигателя за одной из ступе-
ней компрессора. Поддержание постоянной частоты вращения
вала генератора, получающего основную долю мощности от
приводного вала двигателя, осуществляется подкруткой через
дифференциальный ре-
дуктор турбиной. В диа-
пазоне частот вращения
приводного вала от пт\п
ДО Птах (рис. 1.9) МОЩ-
НОСТЬ к валу генератора
подводится через диффе-
ренциальный редуктор от
двух источников: от при-
водного вала двигателя и
турбины. В диапазоне
частот от /г0 — /гтах тур-
бина работает в режиме
тормоза, вращаясь в об-
ратную сторону, хотя воз-
дух проходит через нее в
том же направлении, и
поглощает часть мощнос-
Рис. 1.8. Схема турбомеханического ППЧВ
ти от приводного вала.
13
Рис. 1.9. Структурная схема
гидромеханического ППЧВ
Рис. 1.10. Характеристики диф-
ференциального ППЧВ
Переход в режим тормоза проис-
ходит автоматически с помощью
регулятора частоты, воздействую-
щего на заслонку на входе в тур-
бину. При малых нагрузках на
генератор и при больших частотах
врашения, когда регулирующая
заслонка полностью закрыта,
сопротивление воздуха на вращаю-
щемся колесе турбины становится
слишком большим. Для того чтобы
на этом режиме уменьшить
момент сопротивления, на колесе
турбины установлено сегнерово
колесо 5 (см. рис. 1.8), к которому
подается воздух через клапан,
управляемый тем же регулятором
частоты.
Г идромеханические
циальные передачи
состоят из гидронасоса Г-Н, производительность которого можно
регулировать, и гидродвигателя Г-Д, Большая часть мощности
дифферен-
(рис. 1. 10)
передается на вал генератора непосредственно от авиационно-
го двигателя, а часть — через гидравлическую систему.
При малых частотах вращения вала авиационного двигате-
ля Пад гидродвигатель вращается с частотой Д/г так, что пг =
=пал-\-Ап. При больших частотах вращения вала авиационно-
го двигателя гидродвигатель переходит в режим гидронасоса,
его ротор изменяет направление вращения на обратное, /гг=
= /гад—Д/г, и часть мощности возвращается на вал авиацион-
ного двигателя обратно через гидравлическую передачу. К.п.д.
гидравлических приводов составляет 85—90%, а турбомехани-
ческих — 60—70%.
Наиболее совершенной конструкцией привода постоянной
частоты вращения является так называемый интегральный гид-
ромеханический дифференциальный привод, в котором генера-
тор и гидропривод выполняются как один совмещенный агре-
гат с общими подшипниками и системой масляного охлажде-
ния. Удельная масса таких приводов 0,8 кг/кВ-А.
4. РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ И ЗАЩИТА ГЕНЕРАТОРОВ
Изменения нагрузки и частоты вращения генераторов по-
стоянного тока приводят к отклонениям напряжения от уста-
новленного значения. Для генераторов переменного тока, час-
тота вращения которых поддерживается постоянной, отклоне-
ния напряжения обусловлены только изменением нагрузки. Для
14
поддержания напряжения в задан-
ных пределах используются регуля-
торы напряжения, которые, воз-
действуя на ток возбуждения гене-
ратора постоянного тока или ток
возбуждения возбудителя генерато-
ра переменного тока, стабилизиру-
ют напряжение при изменениях
нагрузки.
Угольные регуляторы напряже-
ния. Регулирование напряжения ге-
нераторов постоянного тока в боль-
шинстве случаев осуществляется с
помощью угольных регуляторов
напряжения, принцип действия ко-
Рис. 1.11. Принципиальная
схема угольного регулятора
напряжения
торых основан на изменении сопротивления г с угольного стол-
ба, набранного из тонких угольных шайб.
Сопротивление зависит от силы, сжимающей столб. С ее
увеличением (в пределах упругой деформации столба) сопро-
тивление столба уменьшается. Угольный столб гс (рис. 1.11)
включен последовательно с обмоткой возбуждения генератора
wB.
Регулирование напряжения угольным регулятором осущест-
вляется следующим образом. При отсутствии напряжения ге-
нератора угольный столб сжат пружиной П (сила пружины
уравновешивается только силой реакции столба) и сопротив-
ление его минимально. Следовательно, возбуждение генератора
происходит при минимальном сопротивлении цепи возбуждения.
По мере увеличения напряжения генератора увеличивается ток
в обмотке электромагнита w3. Электромагнитная сила также
возрастает и, оказываясь больше противодействующей механи-
ческой силы, вызывает перемещение якоря в направлении к
сердечнику электромагнита: при этом электромагнитная сила
еще более увеличивается. Давление якоря на угольный столб
уменьшается, сопротивление его растет, снижается ток возбуж-
дения и напряжение стремится к заданному значению, которое
соответствует равновесию сил, действующих на якорь.
При нарушении равновесия, например при увеличении на-
пряжения вследствие сброса нагрузки, якорь начинает двигать-
ся, перемещаясь в сторону сердечника электромагнита, сопро-
тивление угольного столба возрастает, ток возбуждения и на-
пряжение генератора уменьшаются. При эксплуатации настрой-
ка регулятора на заданное значение регулируемого напряже-
ния осуществляется с помощью регулируемого резистора /?р,
который выполняется в виде отдельного реостата и называется
выносным сопротивлением.
Регуляторы напряжения на магнитных усилителях. Они
используются для регулирования напряжения бесконтактных
15
трехфазных синхронных генераторов. Измерительное устройст-
во выполнено с электрическим эталоном по нелинейной мосто-
вой схеме с двумя стабилитронами (рис. 1.12). Питание изме-
рительного устройства осуществляется от понижающего транс-
форматора Тр1 и трехфазного двухполупериодного выпрямите-
ля В1.
На выходе измерительного устройства включена обмотка
управления шу1 входного однофазного магнитного усилителя
МУ1. Вторым выходным каскадом усилителя является трехфаз-
ный магнитный усилитель МУ2, нагрузкой которого служит
обмотка возбуждения возбудителя.
Каждый из магнитных усилителей выполнен с внутренней
положительной обратной связью. Питание их производится от
подвозбудителя генератора, частота которого 800 Гц. Выход-
ной каскад усилителя, помимо обмотки управления, имеет еще
обмотку смещения toCM, питание к которой подводится от трех-
фазного выпрямителя В2. Резистором R2, включенным последо-
Рпс. 1.12. Принципиальная схема регулятора напряжения на магнитных уси-
лителях
1'6
Рис. 1.13. Характеристики магнитных усилителей
вательно с обмоткой, устанавливается режим работы. М.д.с.
обмоток управления и смещения противоположны по знаку.
При увеличении напряжения на зажимах генератора м.д.с.
создаваемая обмоткой управления wy\ первого каскада
магнитного усилителя, увеличивается. Вследствие этого снижа-
ется ток, а следовательно, и м.д.с. Fy2 управляющей обмотки
второго каскада (рис. 1.13, а). При практически неизменной
м.д.с. обмотки смещения FCM рабочая точка второго магнитно-
го усилителя, положение которой определяется разностью м.д.с.
обмоток смещения и управления, сдвигается влево (рис. 1.13, и).
Ток в цепи возбуждения возбудителя £в.в. уменьшается, и напря-
жение генератора возвращается к первоначальному значению.
Транзисторные и тиристорные регуляторы напряжения. По-
явление полупроводниковых приборов, способных при работе
в ключевом режиме коммутировать большие мощности, при-
вело к использованию для регулирования напряжения авиаци-
онных генераторов транзисторных и тиристорных регуляторов.
В большинстве схем регуляторов напряжения на транзисторах
принципиальная схема оконечного каскада имеет вид, пред-
ставленный на рис. 1.14, а. Схемы регуляторов отличаются
друг от друга схемами управления импульсным элементом, роль
которого выполняет транзистор Т, включенный последовательно
с обмоткой возбуждения и работающий в режиме ключа.
Когда транзистор находится в закрытом состоянии, можно
считать, что сопротивление цепи эмиттер — коллектор весьма
велико — «ключ закрыт». Если транзистор работает в режиме
насыщения (находится в открытом еостояыил) — «ключ от-
крыт», то сопротивление весьма мало.
2—455 17
Рис. 1.14. Принципиальная схема оконеч-
ного каскада регулятора напряжения
Регулирование напряжения осуществляется путем измене-
ния среднего значения тока возбуждения воздействием на
скважность импульсов. При отклонении напряжения генерато-
ра от заданного значения, например, при его увеличении вре-
мя нахождения транзистора в открытом состоянии уменьшает-
ся, что приводит к снижению среднего значения тока возбужде-
ния возбудителя генератора, и напряжение генератора возвра-
щается к прежнему значению. При снижении напряжения
генератора время нахождения транзистора в открытом состоя-
нии увеличивается, средний ток возбуждения возбудителя и,
следовательно, напряжение генератора увеличиваются.
В схемах с тиристорным регулятором регулирование на-
пряжения генератора осуществляется путем воздействия на ток
возбуждения возбудителя и основано на принципе фазового
управления тиристорами: тиристоры, включенные в цепь сину-
соидального напряжения, периодически отпираются кратковре-
менными управляющими импульсами, синхронизированными
с напряжением питания. При изменении угла отпирания <р
(рис. 1.15) изменяется среднее значение выпрямленного напря-
жения, приложенного к обмотке возбуждения возбудителя.
Если напряжение генератора превышает номинальное зна-
чение, то угол отпирания тиристоров увеличивается, что при-
водит к снижению напряжения на обмотке возбуждения воз-
будителя и, следовательно, к уменьшению напряжения генера-
тора.
Защита систем электроснабжения. Отказы элементов систе-
мы электроснабжения приводят к возникновению ненормаль-
ных режимов. Для предотвращения последствий отказов в ра-
боте систехМ электроснабжения (СЭС) используется система
защиты, состоящая из ряда подсистем (аппаратов).
Исходя из наиболее вероятных ненормальных режимов
установлен перечень обязательных видов защиты систем элек-
троснабжения. В системах генерирования постоянного тока ис-
Рис. 1.15. Фазоимпульсное управ-
ление током возбуждения
пользуется защита от сниже-
ния напряжения, включения
генератора с неисправной по-
X лярностью, повышения напря-
Ъкения и от коротких замы-
каний.
В системах генерирования
переменного тока постоянной
18
частоты предусматривается
защита от: повышения и по-
нижения напряжения; повы-
шения и понижения часто-
ты; короткого замыкания
внутри генератора и на его
фидере; обратной мощности;
чрезмерного увеличения
момента на входном
Рис. 1.16. Структурная схема защиты
от повышения (понижения) напря-
жения
валу приводов постоянной
частоты вращения; обрыва
фаз; несимметрии напряже-
НИЙ И др.
Кроме того, защита должна предотвращать возможность
включения в бортовую сеть постоянного тока аэродромных
источников с обратной полярностью, а в бортовую сеть пере-
менного тока с неправильным чередованием фаз. Она должна
обладать селективностью (избирательностью), т. е. способно-
стью отключать при возникновении ненормального режима
в системе только тот элемент (канал генерирования, участок
сети), отказ которого вызвал этот режим. Так, если при пере-
возбуждении одного из параллельно работающих генераторов
неисправный генератор перегружается, то аппарат защиты
должен отключать неисправный генератор, оставляя исправ-
ный подключенным к бортовой сети.
Для уменьшения последствий опасных отказов, например
коротких замыканий, интервал времени от момента возникно-
вения ненормального режима до срабатывания соответствую-
щего вида защиты, необходимый для обнаружения отказа и
срабатывания защиты, должен быть минимально возможным.
В то же время для исключения ложных срабатываний защиты
время, необходимое для обнаружения возникновения ненор-
мального режима, должно быть достаточным, чтобы исключить
срабатывание защиты при протекании нормальных переходных
процессов, обусловленных коммутацией нагрузки.
В настоящее время схемы защиты выполняются на инте-
гральных элементах. В качестве примера рассмотрим схему
защиты от повышения (понижения) напряжения, которая
должна отключать неисправный генератор от шин центрально-
го распределительного устройства (ЦРУ) при напряжении в
точке регулирования выше (ниже) заданных значений.
В большинстве существующих аппаратов защиты сигнал о
возникновении неисправности вследствие чрезмерного повыше-
ния HU\ или чрезмерного понижения напряжения НЩ форми-
руется в соответствии с логической схемой, изображенной на
рис. 1.16.
Индивидуальные дискриминаторы Д при повышении напря-
жения U] в системе создают сигнал запрета Ди\ на срабаты-
2*
19
вание защиты по повышению напряжения того генератора,
нагрузка (ток или в СЭС переменного тока — реактивный ток)
которого меньше средней нагрузки (Д[/^ = 1, если /Ср>/1),
обеспечивая отключение защитой только перевозбужденного
генератора.
При чрезмерном понижении напряжения должен отклю-
чаться только недовозбужденный генератор и поэтому для за-
щиты генераторов от снижения напряжения других генерато-
ров, ток нагрузки которых больше среднего значения, дискри-
минатор подает сигнал запрета ДЩ (ДЩ = 1, если /Ср<Л)-
Для снятия сигналов запрета, создаваемых дискриминаторами,
при раздельной работе генераторов в структурную схему вво-
дится датчик Лпр, фиксирующий включение генераторов на па-
раллельную работу. Сигнал на отключение неисправного гене-
ратора (НЩ или НЩ) поступает на вход реле времени, на
выходе которого и формируется сигнал о возникновении неис-
правности, который после усиления воздействует на контактор,
отключающий генератор от бортовой сети.
Таким образом, формирование сигнала на выходе схемы
защиты от повышения напряжения
HU f = [U f (ди f КПр) V Ни | Г ,
а от понижения напряжения
HU\ = [U\(Ди |Кпр) V Ф Г2 ,
где Ti, т2 — время задержки.
Запись [ ]т, означает, что HU\ принимает значение,
равное 1, через промежуток времени тг-.
Защита генераторов и их фидеров от коротких замыканий.
При коротком замыкании в цепи якоря генератора или его фи-
дере генератор должен отключаться от сети без выдержки
времени. Для этой цели используют продольную дифференци-
альную защиту с уравновешенными напряжениями (рис. 1.17),
принцип действия которой основан на сравнении значений и
фаз токов в начале и в конце защищаемого участка (зоны за-
щиты).
Вторичные обмотки трансформаторов соединяются так, что-
бы в нормальных режимах и при
коротком замыкании (к. з.) вне
зоны защиты их э. д. с. были нап-
равлены встречно и ток через реле,
включенное последовательно в
цепь соединительных проводов, не
протекал.
При коротком замыкании в зоне
защиты э. д. с. трансформаторов
Рис. 1.17. Принципиальная схе-
ма дифференциальной продоль-
но-токовой защиты
20
складываются и под действием результирующей э.д.с. возни-
кает ток, вызывающий срабатывание реле Р /, которое воздейст-
вует на управляющие устройства, отключающие генератор от
сети и включающие автомат гашения поля. Защита трехфазных
генераторов устроена по такому же принципу.
5. СИСТЕМЫ РАСПРЕДЕЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
Классификация систем распределения электрической энер-
гии. Системой распределения электрической энергии называет-
ся совокупность устройств, передающих электрическую энер-
гию от системы генерирования к потребителям.
Элементами системы распределения электрической энергии
являются: электрическая сеть (провода, шины и т. п.); комму-
тационная аппаратура; аппаратура защиты сети; приборы
контроля качества электрической энергии (вольтметры, ампер-
метры, герцметры и т.п.); монтажно-установочное оборудова-
ние (сетевые и штепсельные разъемы, распределительные уст-
ройства и т.п.). Кроме того, к системе распределения относят
устройства, предназначенные для уменьшения помех при работе
радиотехнического и приборного оборудования, создаваемых
системой электроснабжения (фильтры, металлизация, электро-
статические стекатели и т. п.).
На всех ЛА электрическая энергия от источников сначала
подводится к шинам центральных распределительных устройств
(ЦРУ), а далее в зависимости от размеров и назначения ЛА,
принятой структуры системы электроснабжения и требований?
по надежности передается через промежуточные распредели-
тельные устройства (РУ) или непосредственно к потребителям.
По способу подключения источников к ЦРУ системы рас-
пределения электрической энергии принято подразделять на
централизованные и децентрализованные. В централизованных
системах все источники подключаются к шинам ЦРУ, от ко-
торых производится распределение электрической энергии к
потребителям. Такая система используется только на ЛА, имею-
щих один авиационный двигатель. Основной недостаток таких
систем состоит в том, что при коротком замыкании на шинах
ЦРУ прекращается питание всех потребителей.
В децентрализованных системах распределения источники
энергии подключаются к нескольким ЦРУ, от которых через
соответствующие распределительные устройства получают пи-
тание потребители. На современных ЛА система распределе-
ния, как правило, в соответствии со структурой системы элек-
троснабжения состоит не менее чем из двух электрически не-
зависимых каналов. Во всех вариантах децентрализованных
систем предусматривается резервирование питания потребите-
лей каналов: при отказе источника питания одного канала его
21?
ЦРУ автоматически подключается к источнику питания дру-
гого канала.
Одним из основных элементов системы распределения элек-
трической энергии является электрическая сеть. Непрерывное
увеличение числа и установленной мощности потребителей
электрической энергии на самолетах и вертолетах, растущие
требования к надежности их питания обусловили значительное
усложнение конфигурации электрических сетей, увеличение их
массы и протяженности проводов. Так, на самолетах Ил-86
протяженность проводов достигает 300 км, а их масса —
2600 кг.
Электрические сети летательных аппаратов классифициру-
ются по назначению, конфигурации, электрическим парамет-
рам распределяемой электрической энергии (роду тока и на-
пряжению), техническому исполнению. В зависимости от
назначения отдельных участков электрическую сеть подразде-
ляют на питательную, первичную и вторичную распределитель-
ные сети. Питательная сеть — часть электрической сети, пере-
дающая энергию от источников энергии до шин ЦРУ, включаю-
щая фидеры источников энергии, линии резервирования пита-
ния шин ЦРУ и линии, соединяющие генераторы на парал-
лельную работу. Первичная распределительная сеть связывает
шины РУ с шинами ЦРУ и включает также линии резервиро-
вания питания шин РУ. Вторичная распределительная сеть
обеспечивает питание потребителей электрической энергии не-
посредственно от шин РУ, а иногда и ЦРУ.
По конфигурации сети разделяют на разомкнутые и замкну-
тые. Разомкнутой сетью называется сеть, в которой каждое
РУ как при нормальной работе системы электроснабжения,
так и при возникновении отказов получает питание только от
одного ЦРУ (в нормальном режиме РУ получает питание от
одного ЦРУ, а при отказах источников питания РУ подключа-
ется к другому ЦРУ).
В свою очередь, разомкнутые сети делятся на радиальные,
магистральные и смешанные. Б разомкнутых радиальных сетях
все РУ подключаются к ЦРУ параллельно (рис. 1.18, а). Ра-
зомкнутые магистральные сети характеризуются тем, что в них
отдельные РУ соединяются последовательно (рис. 1.18, б).
Напряжение на шинах всех РУ различно, изменение нагрузки
Рис. 1.18. Принципиальная схема разомкнутой электрической сети:
а — радиальной; б — магистральной
22
одного РУ оказывает влияние на напряжение на шинах всех
остальных РУ. Безотказность магистральной сети ниже, чем
радиальной, ибо отказы одного РУ влияют на работу всех ос-
тальных.
В смешанных сетях РУ подключаются к ЦРУ как парал-
лельно, так и последовательно: РУ потребителей большой мощ-
ности и потребителей, работа которых влияет на безопасность
полета, соединяются по радиальной схеме, а менее ответствен-
ных потребителей — по магистральной.
Замкнутой сетью называется сеть, в которой отдельные РУ
при нормальной работе системы электроснабжения получают
питание от двух или более шин ЦРУ (двух или более незави-
симых источников).
По электрическим параметрам распределяемой электричес-
кой энергии (по роду тока и значению номинального напряже-
ния) классификация сетей соответствует классификации систем
электроснабжения. В первичных системах электроснабжения
используются сети трехфазного переменного тока напряжением
200/115 В постоянной частоты 400 Гц и постоянного тока низ-
кого напряжения 27 В. Во вторичных — в основном сети одно-
и трехфазного переменного тока (36 Ви 115 В) и сети посто-
янного тока 27 В.
Техническое исполнение сетей самолетов и вертолетов ха-
рактеризуется тем, что сеть каждого вида (за исключением
сети 36 В) должна быть соединена с корпусом летательного
аппарата: трехфазная сеть — силовой нейтралью, сеть посто-
янного тока — минусовым проводом, сеть однофазного тока —
одним из проводов.
Трехфазная сеть с нейтралью, соединенной с металлическим
корпусом летательного аппарата, позволяет включать потреби-
тели как на фазное (115 В), так и на линейное (200 В) на-
пряжение. Кроме того, такая система менее опасна для членов
экипажа, так как между любым проводом и корпусом будет
фазное, а не линейное напряжение.
Применение сетей постоянного и однофазного тока, в кото-
рых в качестве одного провода используется металлический
корпус летательного аппарата, позволяет на 35—40% (по срав-
нению с двухпроводной сетью) уменьшить массу сети и мон-
тажного оборудования и уменьшить почти вдвое потери напря-
жения вследствие того, что сопротивление корпуса весьма мало.
Ремонт, монтаж и техническое обслуживание однопроводных
сетей существенно проще, чем двухпроводных.
Для монтажа электрических сетей используются многожиль-
ные медные и алюминиевые провода. Медные провода изготов-
ляются сечением от 0,35 до 95 мм2. Однако провода сечением
более 95 мм2 не применяют из-за трудности их монтажа, а се-
чением менее 0,35 мм2 (для некоторых типов проводов —
0,2 мм2) — из-за их малой механической прочности. Алюми-
23
ниевые провода используются только больших сечений вслед-
ствие того, что провода малых сечений обладают невысокой
механической прочностью. Для удобства монтажа электричес-
кие провода группируются в жгуты, которые обычно прокла-
дываются в специальных коробах открытого или закрытого
типа. Жгуты крепятся к стенкам кабин или фюзеляжа специ-
альными хомутами.
Для управления потребителями (включения и выключения
их) используются разнообразные коммутационные аппараты,
которые разделяют на аппаратуру с прямым (ручным) управ-
лением (выключатели, переключатели, концевые выключатели,
кнопки) и с дистанционным (реле и контакторы).
Для предотвращения помех, возникающих при образовании
электрических разрядов между частями летательного аппара-
та, заряженными статическим электричеством, проводят метал-
лизацию, т. е. электрическое соединение всех металлических
частей между собой. Корпус самолета является одним из про-
водов в системах электроснабжения постоянного тока, и с ним
соединяется силовая нейтраль трехфазных систем переменного
тока. Металлизация применяется для выравнивания потенциала
различных частей летательного аппарата, заряжающихся во
время полета (особенно при полете в грозовых облаках).
Вместе с заземлением металлизация одновременно исполь-
зуется для отвода в землю электрического заряда от заряжен-
ного по отношению к земле летательного аппарата при посадке
или во время заправки топливом. Так, при заправке топливом
летательный аппарат будет заряжаться статическим электри-
чеством до значительного потенциала относительно земли, если
масса его не соединена с землей. В результате этого может
возникнуть искровой разряд, приводящий к пожару.
Электростатические заряды с корпуса отводятся в полете
специальными разрядниками, выполненными в виде очень тон-
кого острия (или метелочки из хлопчатобумажной ткани, про-
питанной парафином), которые устанавливаются в местах, наи-
более удаленных от радиоаппаратуры (на консолях крыла или
хвостового оперения).
Защита систем распределения электрической энергии. Для
отключения отдельных участков распределительной сети при
возникновении в них недопустимых перегрузок и коротких за-
мыканий используют максимально-токовую защиту. Она реаги-
рует на значение тока в защищаемой цепи и отключает повреж-
денный участок с определенной выдержкой времени. К аппа-
ратам защиты, построенным на этом принципе, относятся раз-
личные виды плавких предохранителей и тепловые автоматы.
Основной характеристикой аппаратов максимально-токовой за-
щиты является ампер-секундная характеристика, т. е. зависи-
мость времени срабатывания аппарата от тока (рис. 1.19).
Одна ветвь такой характеристики асимптотически приближает-
.24
Рис. 1.19. Амперсекундная характеристика
ся к оси абсцисс, а другая — к прямой, проведенной парал-
лельно оси ординат на расстоянии, равном значению так назы-
ваемого критического тока /Кр, т. е. минимального тока сраба-
тывания автомата защиты. За номинальное значение тока ап-
парата принимают несколько меньшее значение /h=^Zkp, k—
коэффициент запаса.
Предохранитель представляет собой короткий проводник
(плавкую вставку), заключенный в арматуру, который плавит-
ся и разрывает цепь при токе, превышающем критическое зна-
чение.
Тепловые автоматы защиты сети, используемые в системах
электроснабжения (АЗС и АЗР), выполняют как функции за-
щиты от перегрузок и короткого замыкания (автоматическое
отключение при ненормальных режимах), так и функции управ-
ления (ручное включение и выключение цепей при нормальных
режимах). Они являются аппаратами многоразового действия.
25
Принцип их действия основан на использовании деформации
(изгиба) при нагреве биметаллического элемента, состоящего
из двух жестко соединенных между собой металлических плас-
тин с различными температурными коэффициентами линейного
расширения.
В качестве металлов с большим коэффициентом линейного
расширения используются хромоникелевая и молибденовая
сталь, латунь, константан и др., а с малым — инвар (железо-
никелевый сплав).
Биметаллический элемент автоматов на номинальные токи
до 20 А включается последовательно с защищаемой цепью и
его нагрев осуществляется непосредственно всем током цепи.
При номинальных токах более 20 А используется шунт и на-
грев элемента происходит только частью тока цепи.
По виду кинематической связи биметаллической пластины
с контактами, размыкающими цепь, различают тепловые авто-
маты без свободного расцепления органа управления авто-
матом с контактной системой и автоматы со свободным расцеп-
лением.
Кинематическая схема автомата без свободного расцепления
позволяет повторно включить его даже при нагретом состоянии
биметаллической пластины. В автоматах со свободным расцеп-
лением (типа АЗР) после срабатывания нельзя при помощи
рукоятки замкнуть контакты до тех пор, пока не остынет би-
металлическая пластина.
Электрическая цепь в автомате АЗР (рис. 1.20) образована
биметаллической пластиной 11, нижними, связанными с пласти-
ной, и верхними контактами 1. Замыкание контактов происходит
при помощи рукоятки 4, которая вместе со штоком 3 образует
ломающийся рычаг. При замыкании рычаг 6 встает на защелку
7. Возвратная пружина при этом растянута. Демпферная пру-
жина 2 обеспечивает необходимое контактное давление. При
перегрузках и коротких замыканиях биметаллическая пластина
11 прогибается так, что ее конец давит на шток 10 защелки 7,
которая поворачивается вокруг оси и освобождает опору ры-
чага 6. Последний, выйдя из зацепления, под действием пружин
8 и 9 поворачивается по часовой стрелке. Одновременно конец
рычага 12 отойдет вправо, размыкая контакты. Удержать кон-
такты в замкнутом состоянии или вновь замкнуть их нажатием
на рукоятку до тех пор, пока биметаллическая пластина не при-
дет в исходное положение, невозможно.
Рычаг 7 механизма свободного расцепления под действием
биметаллической пластины переместится и расцепится с рыча-
гом 6, что не позволит рычажной рукоятке замкнуть контак-
ты 1.
При перемещении рукоятки рычаг 6 поворачивается во-
круг своей оси, но при этом пружина 8 не будет деформировать-
ся и нажимать на рычаг 12, замыкающий контакты.
26
6. АВИАЦИОННЫЙ ЭЛЕКТРОПРИВОД
Электроприводом называется система, конструктивно объе-
диненная с объектом управления (исполнительным механиз-
мом), состоящая из исполнительного двигателя (электродвига-
теля или электромагнита), преобразующего электрическую
энергию в механическую, устройства для передачи механичес-
кой энергии к объекту управления и управляющего устройства.
На летательных аппаратах электропривод используется для
приведения в действие стабилизатора, триммеров, закрылков,
тормозных устройств, посадочных фар, для вращения топлив-
ных насосов, запуска турбореактивных двигателей и в ряде
других случаев.
Электрические двигатели. Для приведения в действие испол-
нительных механизмов летательных аппаратов применяются
разнообразные типы электрических двигателей, различающиеся
по роду тока, принципу действия, мощности, режиму работы,
номинальной частоте вращения, конструктивным формам испол-
нения и способам охлаждения.
Двигатели в электроприводах обычно классифицируют по
виду механической характеристики со=<о(Л4д), свойства которой
выражают посредством понятия жесткость механической харак-
теристики:
8
|Д “ д и>
где Мд — вращающий момент двигателя; о — угловая скорость двигателя.
В соответствии со значением жесткости условно различают
три группы механических характеристик (рис. 1.21) электри-
ческих двигателей: с «абсолютной жесткой» рд = со характери-
стикой (прямая 1) — синхронный и гистерезисный двигатели:
с «жесткими» механическими характеристиками (кривая 2) —*
двигатели постоянного тока с независимым или параллельным
возбуждением, асинхронные двигате-
ли; с «мягкой» механической характе-
ристикой (кривая 3) — двигатели с
последовательным возбуждением.
На самолетах, оборудованных сис-
темами постоянного тока, наибольшее
распространение получили двигатели
последовательного возбуждения. Они
используются в тех случаях, когда
требуется большой пусковой момент
и нагрузка исполнительного меха-
низма резко меняется в процессе рабо-
ты. Эти двигатели используются в при-
водах органов управления самолетов
Рис. 1.21. Механические ха-
рактеристики электрических
двигателей
27
(рулей, триммеров, щитков и т. п.), механизмах управления
силовой установкой и т. п. Применение их в механизмах, мо-
мент нагрузки которых может достигать нулевого значения или
менять знак (приводы шасси, лебедки и др.), связано с допол-
нительными конструктивными или схемными усложнениями, так
как приходится предотвращать чрезмерное увеличение частоты
вращения двигателей последовательного возбуждения при сбро-
се нагрузки.
Двигатели параллельного возбуждения используются в тех
случаях, когда необходимо, чтобы частота вращения при изме-
нении нагрузки менялась в небольших пределах, когда не тре-
буется большого пускового момента и реверсирования — в при-
водах центробежных топливных насосов и аэрофотоаппаратов,
в системах запуска ТРД.
Двигатели смешанного возбуждения применяются в тех слу-1
чаях, когда требуется большой пусковой момент и большая
частота вращения (при холостом ходе), а также, когда при
большем диапазоне изменения нагрузки требуется относитель-'
но небольшое изменение частоты вращения в приводах гидрав-'
лических насосов шасси, топливоподкачивающих насосов и т. п. I
Для уменьшения габаритных размеров и массы авиацион-
ные электрические двигатели выполняются быстроходными. Их
максимальная частота вращения иногда достигает 24 000 об/мин.1
В то же время большинство самолетных исполнительных меха-
низмов требует привода с небольшой частотой вращения, дохо-|
дящей до нескольких оборотов в 1 мин. В ряде случаев испол-1
нательные механизмы должны поворачиваться лишь на некого-|
рый угол. Это означает, что для привода механизмов от высоко-;
скоростных двигателей необходимы редукторы с большими!
передаточными числами, понижающими частоту вращения и
одновременно увеличивающими момент вращения на валу ис-
полнительного механизма. Хотя с увеличением передаточного
отношения масса редуктора возрастает, все же электропривод
с высокоскоростным двигателем и большим редуктором оказы-
вается легче, чем электропривод с тихоходным двигателем и
небольшим редуктором.
На самолетах используются электрические двигатели по-
стоянного тока мощностью от долей ватта до нескольких кило-
ватт. В системах электроснабжения переменного тока как ста-1
бильной, так и нестабильной частоты чаще всего применяются I
асинхронные двигатели с номинальным напряжением 36, 115,1
208 В и номинальной частотой 400 Гц. Двигатели выполняются
с короткозамкнутой клеткой на роторе. При мощностях до
50 Вт двигатели имеют естественное охлаждение, при мощно-
стях 50—10 000 Вт охлаждение осуществляется самовентиля- J
цией.
Системы передачи механической энергии. Разнообразие ис-
полнительных механизмов, используемых на летательных аппа-
28
ратах, вызывает необходи-
мость применения различно-
го вида редукторов и преоб-
разователей вида движения.
Используются редукторы /
с зубчатыми, планетарны-
ми, червячными и винтовы-
ми передачами. Для полу-
чения высокого к. п. д. при-
меняются шариковые вин-Чр:
товые передачи, в которых
вместо трения скольжения
имеет место трение качения.
Муфты сцепления. Что-
бы исключить возможность
выбега электрического дви-
гателя после его отключе-
ния, используются муфты
сцепления, торможения и
комбинированные муфты
(муфты сцепления-тормо-
жения). Последние приме-
няются также в схемах им-
пульсного управления при-
водами.
В электромеханизмах
широко используются фрик-
ционные муфты сцепления
с электромагнитным управ-
лением (рис. 1.22). При по-
даче питания на обмотку 1
муфты электромагнитная
сила, преодолевая сопротивление лепестковых пружин 3, притя-
гивает якорь муфты к сердечнику 4. При этом вращающий мо-
мент передается от электрического двигателя сод к исполни-
тельному механизму <ои.м.. Диамагнитное кольцо 2 исключает
шунтирование магнитного потока сердечником 4.
Муфты торможения отличаются от муфт сцепления тем, что
при подаче питания на обмотку муфты происходит растормажи-
вание якоря электрического двигателя. При отключении пита-
ния якорь быстро затормаживается, вследствие чего исключа-
ется выбег.
Комбинированные муфты представляют собой сочетание
муфт сцепления и торможения.
Для предотвращения недопустимых перегрузок, возникаю-
щих в результате появления отказов и неисправностей в неко-
торых элементах электропривода или в самом исполнительном
механизме, используются саморегулирующиеся фрикционные
29
муфты (рис. 1.23). Входной вал связан с наружным стаканом
6. На его торце имеются полукруглые канавки, в которых на-
ходятся шарики 5. На них опирается внутренний стакан 4, име-
ющий на своем торце канавки углового профиля. Во внутрен-
ние шлицы стакана вставлены фрикционные диски 7 с наруж-
ными шлицами. Диски 8 с внутренними шлицами посажены на
шлицевой выходной вал 1.
Фрикционные диски изготовлены из углеродистой стали.
Диски, вставленные во внутренний стакан, кроме того, опрес-
сованы металлокерамикой. Обойма 2, на которую давят цилинд-
рические пружины 3, расположенные по окружности, прижимает
диски друг к другу.
Крутящий момент передается к внутреннему стакану через
шарики. Так как пазы стакана имеют скошенные стенки, то
возникает сила Лу, которая передается через обойму на пружи-
ны, сжимающие диски муфты. Действие силы FN. противопо-
ложно действию силы пружин Fnp. Так как FN = ko,cM^ где
^о.с. — коэффициент обратной связи, определяемый геометрией
муфты, то вращающий момент Л4Д = Л4Г, передаваемый выходно-
му валу при проскальзывании дисков,
Л1Т = k |tT (Fnp — Fл’) — ^ Гт пр ^о.с 7»4Л),
или
Л4Т = k |iT Fnp (1 k Z?0.c Гт) •
Значение ko,c выбирается так, что Лйо.сЦт?>1. Тогда
Л'1т~/?пр/йо.с., т. е. при проскальзывании дисков вращающий
момент, равный максимальному значению передаваемого фрик-
ционной муфтой момента, не зависит от коэффициента трения.
Классификация моментов (сил) сопротивления. Воздейст-
вие исполнительного механизма на привод, т. е. нагрузку при-
вода, характеризуется выражением момента сопротивления
(силы сопротивления) как функции положения, скорости и
ускорения при перемещении исполнительного механизма. Зави-
симости момента (силы) сопротивления от угловой (линейной)
скорости Л4с((о)[7?с = /7с(^)] называются статическими харак-
теристиками исполнительного механизма. На рис. 1.24 приве-
дены типичные статические характеристики механизмов, момент
сопротивления которых в основном обусловлен сухим, вязким
и вентиляторными моментами трения.
Уравнение движения электропривода. На рис. 1.25 показа-
на простейшая схема, состоящая из электрического двигателя
Л4, редуктора Р и исполнительного механизма ИМ.
Исполнительный механизм характеризуется моментом инер-
ции нагрузки 7'н, моментом сопротивления М'с и угловой ско-
ростью (д'. Редуктор имеет передаточное отношение г=to/со', а
потери в нем определяются моментом трения Мт.
30
Электрический двигатель в соответствии с механической ха-
рактеристикой обладает вращающим моментом Мд при угловой
скорости <о, а также моментом инерции /д.
Баланс мощностей при разгоне определяется равенством
со—Л4'сю' 4- /Итсо4-—-—
at
+ J н
Если /н = const, то, учитывая, что / = со7со=а7<х, запишем, что
d w
/Ид = Л4С 4- УИТ 4- (Л + 4) ~Т, ’
at
где Mc = Mc'li — момент сопротивления исполнительного механизма, приве-
денный к валу электрического двигателя; Jn—Jnli2— момент инерции, при-
веденный к валу электрического двигателя.
Управление двигателями постоянного тока. Управление ав-
томатизированными электроприводами может быть сведено к
выполнению ряда основных операций: пуску, торможению и
остановке привода, реверсированию, регулированию или стаби-
лизации частоты вращения и т. п. В подавляющем большинстве
случаев управление приводом осуществляется путем воздейст-
вия на электрический двигатель.
Статические свойства двигателей постоянного тока, как объ-
ектов управления, определяются семействами характеристик:
механических, т. е. зависимостями угловой скорости от раз-
виваемого двигателем вращающего момента со = (о(/Ид) при
различных постоянных значениях
управляющего воздействия х=const;
регулировочных со = со(х) при
/WA = const. Если пренебречь момен-
том сопротивления, обусловленным
внутренними механическими поте-
рями в электрическом двигателе,
то можно считать, что вращающий
момент двигателя Мд равен элект-
ромагнитному моменту Мэ. Если,
кроме того, пренебречь реакцией
якоря, то оба семейства характери-
стик определяются соотношением
ш = ((//См Ф) = [/Ид (/?я 4- /W] /(См Фр,
где U — напряжение, приложенное к цепи
якоря; См — конструктивный коэффициент
машины; Ф —магнитный поток, проходящий
через якорь; У?ДОб — добавочное сопротив-
ление в цепи якоря.
Рис. 1.24. Статические харак-
теристики исполнительных ме-
ханизмов:
1 — вентиляторный момент трения
Мс=ко)2; 2—вязкое трение Мс =
=к<о ; з — сухое трение Alc = const
Рис. 1.25. Структурная схема
электропривода
31
Рис. 1.26. Механические и регулировочные характеристики двигателей посто-
янного тока
Сопротивление обмотки якоря для двигателей последова-
тельного возбуждения
= R я Ч" >
где Rn'— собственно сопротивление цепи якоря; 7?в — сопротивление обмот-
ки возбуждения.
Анализ этого выражения показывает, что в качестве управ-
ляющих воздействий х можно использовать изменения добавоч-
ного сопротивления в цепи якоря 7?ДОб, магнитного потока Ф,
напряжения, приложенного к цепи якоря U. В зависимости от
характера изменения управляющих воздействий управление
может быть непрерывным или дискретным. Статические харак-
теристики (механические со = со(Л1д) и регулировочные =
= <о(х), где х=7?Доб; U двигателя постоянного тока с неза-
висимым возбуждением приведены на рис. 1.26.
При управлении электрическим двигателем путем измене-
ния /?доб жесткость механических характеристик изменяется
(рис. 1.26, а) и при /?Доб—^оо значение рд—*0. Рассматриваемый
метод характеризуется низкими энергетическими показателями,
поскольку так называемая мощность скольжения, выделяющая-
ся в виде тепловых потерь в цепи якоря, увеличивается с умень-
шением угловой скорости, причем потери в основном выделяют-
ся в добавочном сопротивлении, а не в обмотке якоря.
При управлении двигателем путем изменения напряжения
источника электрической энергии (так называемый генератор-
ный метод управления) жесткость механических характеристик
рд остается постоянной (рис. 1.26, б). Энергетические показа-
тели этого метода высоки, ибо потери скольжения не зависят
от угловой скорости. Реверсирование осуществляется путем из-
менения знака управляющего воздействия. Управление воздей-
ствием на магнитный поток возбуждения в авиационных при-
водах используется для управления мощными двигателями,
например стартер-генераторами для запуска газотурбинных
двигателей.
32
Механизмы повышенной надежности. Используя эти меха-
низмы и резервируя источники энергии, можно увеличить на-
дежность работы электропривода. Механизм состоит из двух
электрических двигателей с встроенными электромагнитным^
муфтами сцепления-торможения, редуктора и фрикционной
муфты. Электрические двигатели работают либо вместе, либо
раздельно независимо один от другого, но на общий выходной
вал редуктора. Одновременно с включением двигателей сраба-.
тывают муфты сцепления-торможения.
В редукторе можно выделить кинематические цепи, переда,
ющие движение выходному валу от верхнего и нижнего элек-
трических двигателей, и дифференциальную передачу, предназ-
наченную для суммирования частот вращения электрических
двигателей при их одновременной работе. Ручной привод ис-
пользуется для проворачивания выходного вала при монтаже
механизма на самолет. В качестве примеров применения меха-
низмов повышенной надежности можно привести механизмы
управления стабилизатором и закрылками на самолетах Ил-62
Ту-134, Ту-154.
Электропривод топливных насосов. На современных лета-
тельных аппаратах масса топлива составляет 50—70% от массы
самолета. Каждый авиационный двигатель имеет собственную
автономную магистраль, к которой подключены соответствую-
щие группы баков. Для повышения надежности работы топлив-
ной системы эти автономные группы объединены специальными
трубопроводами кольцевания, управление которыми осущест-
вляется электромагнитными кранами.
Сохранение центровки летательного аппарата по мере рас-
хода топлива достигается как размещением баков симметрич-
но относительно центра масс, так и определенной программой
выработки топлива.
В топливной системе используются подкачивающие, перека-
чивающие и пусковые топливные насосы с электроприводом.
Подкачивающие насосы предназначены для выработки топлива
из баков и подкачки его в топливную магистраль насоса высо-
кого давления авиационного двигателя. Типичная конструкция
топливоподкачивающего насоса, устанавливаемого внутри топ-
ливного бака, изображена на рис. 1.27.
Насосная часть агрегата представляет собой одноступенча-
тый центробежный насос. Топливо из бака через фильтр и ка-
налы в корпусе насоса поступает на вход в крыльчатку. Под
действием центробежных сил в рабочих каналах крыльчатки
давление топлива повышается. Из каналов крыльчатки топливо
попадает в направляющую полость, образованную в корпусе
насоса, с расширяющимся каналом, где скорость движения топ-
лива падает, а давление возрастает. Затем топливо поступает
в полость, образованную обтекателем, электрическим двигате-
лем и колпаком. Из этой полости, играющей роль сборника-
3—455 33
Рис. 1.27. Топливный подкачивающий насос, устанавливаемый внутри топ-
ливного бака.
/ — электрический двигатель; 2 — обтекатель; 3 — фильтр; 4 — топливный бак; 5 —
крыльчатка; 6 — корпус насоса; 7 — колпак
улитки, топливо направляется в выходной патрубок. Здесь про-
должает снижаться скорость движения топлива и увеличиваться
давление.
В рассматриваемых насосах используются электрические
двигатели, имеющие закрытую конструкцию. Охлаждение дви-
гателей осуществляется топливом, омывающим полость между
корпусом электродвигателя и колпаком.
Электрические двигатели топливных подкачивающих насо-
сов за счет изменения схемы включения обмоток возбуждения
могут работать в ослабленном, основном и форсированном ре-
жимах. Для обеспечения минимального изменения положения
центра масс летательного аппарата управление выработкой
топлива из баков осуществляется в определенной последова-
тельности. В подавляющем большинстве случаев основным ме-
тодом управления является программное управление выработ-
кой топлива. Система такого управления должна обеспечивать:
бесперебойную подачу топлива к авиационным двигателям
под давлением, достаточным для нормальной работы топливных
насосов, установленных на двигателях; автоматическое управле-
ние порядком расхода топлива из отдельных групп с заданной
последовательностью для каждого авиационного двигателя до
полной выработки топлива из групп; возможность перехода от
автоматического управления системой к ручному.
34
7. ЭЛЕКТРИФИЦИРОВАННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
СИЛОВЫМИ УСТАНОВКАМИ
Запуск газотурбинных двигателей (ГТД). Запуском двига-
теля называется процесс раскрутки ротора ГТД от состояния
покоя (запуск на земле) или режима авторотации (запуск в
полете) до режима малого газа, т. е. устойчивой работы двига-
теля с минимальной возможной мощностью (тягой). Для запус-
ка двигателя в наземных условиях необходимо от внешнего
источника энергии посредством пускового устройства (старте-
ра) осуществить раскрутку ротора двигателя до определенной
частоты вращения, подать в камеры сгорания необходимое ко-
личество топлива и произвести его воспламенение, обеспечив
выход двигателя на режим малого газа без тепловых и меха^
нических перегрузок.
Процесс запуска можно представить состоящим из трех
(рис. 1.28) этапов. На первом этапе (/) от со = 0 (раскрутка ро-
тора осуществляется только стартером без подачи топлива в ка-
меры сгорания) до пусковой частоты вращения coi, при которой
камерах сгорания создаются условия для надежного воспла-
менения и горения топлива и может начать работать турбина
двигателя,
d о)
Л4СТ = J —— -J-
где J — момент инерции всех вращающихся частей ГТД, приведенный к валу
стартера; 7ИСТ — момент пускового устройства (стартера); Мс — приведенный
к валу стартера момент сопротивления, включающий моменты, затрачивае-
мые на вращение компрессора (сжатие воздуха в компрессоре) и агрегатов
двигателя, иа преодоление сил трения в подшипниках, а для ТВД и на вра-
щение воздушного винта; со — угловая скорость вала стартера.
/Момент, необходимый для вращения агрегатов и преодоле-
ния трения в подшипниках, обычно не превышает 5% от момен-
та компрессора.
На втором этапе (//) от ац до со2 в
камеры сгорания подается топливо и
вступает в работу турбина. Раскрутка^
ротора двигателя до частоты враще-
ния со2(частоты вращения сопровожде-
нии производится совместно стартером
и турбиной
Л4дт ~Г Л4-
d со
=^ + ^с.
где Мт — момент турбины.
Стартер отключают при частоте
вращения <о2, когда избыточный мо -
мент турбины Mr = Мс имеет достаточ-
ное значение.
Рис. 1.28. Диаграмма изме-
нения моментов в процессе
запуска
3*
35
На третьем этапе запуска (III) от сог до «3 раскрутка ро-
тора двигателя осуществляется только за счет момента турбины
d й>
М
Запуск двигателя на земле обеспечивается системой запуска,
к которой относятся устройства: осуществляющие предвари-
тельную раскрутку ротора двигателя — стартеры, дозировку
подачи топлива и воспламенения горячей смеси в камерах сго-
рания; обеспечивающие устойчивую работу двигателя в про-
цессе запуска; создающие определенную последовательность
команд управления и автоматизирующие процесс запуска.
При эксплуатации летательных аппаратов в полете возмож-
но самовыключение двигателей. Оно сопровождается прекраще-
нием горения топлива в камерах сгорания и постепенным умень-
шением частоты вращения ротора двигателя — переходом на
установившийся режим авторотации.
Для восстановления работоспособности двигателя произво-
дится запуск его в полете без использования стартера, так
как путем изменения скорости полета можно получить такую
частоту авторотации, начиная с которой достигается вывод
двигателя на режим малого газа. Процесс запуска в полете
сводится только к воспламенению топливо-воздушной смеси и
к раскрутке ротора двигателя турбиной до частоты вращения
полетного малого газа.
Система управления запуском, кроме запуска на земле и
в полете, должна обеспечивать еще следующие эксплуатацион-
ные режимы: холодную прокрутку ротора двигателя (раскрут-
ку без подачи топлива и включения системы зажигания), кото-
рая производится после неудавшегося запуска или для запол-
нения маслосистемы после замены масла; ложный запуск
(имитация запуска с подачей топлива в камеры сгорания при
выключенной системе зажигания — при расконсервации или
консервации двигателя, а также при проверке герметичности
топливной системы).
Тип системы запуска определяется типом агрегата предва-
рительной раскрутки ротора двигателя (стартера). Наиболь-
шее распространение для запуска авиационных ГТД получили:
электрические системы запуска с электростартерами (в том
числе со стартер-генераторами); воздушные системы запуска
с воздушными турбостартерами, работающими на сжатом воз-
духе; турбокомпрессорные системы запуска с турбокомпрессор-
ными стартерами, работающими на топливе основного двига-
теля.
При выборе пускового устройства учитывается возможность
его многоцелевого использования: электрического стартера в
качестве генератора в энергосистеме; пусковой турбины в воз-
душно-турбинном приводе постоянной частоты вращения и др.
36
Управление процессом запуска сводится к заданию соот-
ветствующего режима работы системы запуска (запуск на зем-
ле, в полете, холодная прокрутка и др.) и к управлению пуско-
вым устройством, топливной системой, системой зажигания,
кислородной подпиткой, компрессором двигателя и реактивным
соплом. Управление можно осуществлять в функции времени
с коррекцией по частоте вращения стартера и авиационного
двигателя. При этом косвенно учитываются пусковые харак-
теристики и условия запуска. Если двигатель раньше, чем это
предусмотрено программой по времени, достигает установлен-
ного значения частоты вращения, то стартер отключается дат-
чиком частоты.
В ряде систем управление производится в функции частоты
вращения авиационного двигателя и стартера. Осуществляя
управление по частоте вращения, удается согласовать пуско-
вые характеристики ГТД и системы запуска, обеспечить запуск
из положения, когда его ротор еще вращается, что позволяет
сократить время запуска. Наилучшие результаты достигаются
при использовании комбинированного управления процессом
запуска: по частоте вращения и по времени.
Управление по частоте вращения способствует повышению
к.п.д. и обеспечивает оптимальный тепловой режим двигателя,
управление по времени обеспечивает реализацию режимов, на
которых турбина ГТД по существу не принимает участия в ра-
боте (холодная прокрутка, консервация).
Управление в функции времени осуществляется програм-
мным механизмом (автоматом времени) — электродвигателем
с редуктором, на валу которого укреплены кулачковые профи-
лированные диски, обеспечивающие в соответствующие момен-
ты времени размыкание или замыкание контактов микровы-
ключателей, воздействующих на промежуточные реле, которые,
в свою очередь, управляют исполнительными элементами. Уве-
личение надежности программных механизмов достигается за-
меной контактных устройств на бесконтактные: ’транзисторные
реле и интегральные схемы.
Коррекция программы по частоте вращения пускового уст-
ройства и авиационного двигателя производится центробежны-
ми выключателями или микровыключателями, которые сраба-
тывают под воздействием центробежного маятника топливного
насоса-регулятора при определенных частотах вращения тур-
бокомпрессора. Управление в функции частоты вращения вала
ГТД осуществляется специальной тахосигнальной аппаратурой.
Сигналы от тахогенераторов подводятся к группе промежуточ-
ных реле, осуществляющих необходимые переключения в соот-
ветствии с заданной программой работы.
Системы управления конструируются так, чтобы исключить
возможность неправильных действий экипажа при запуске дви-
гателя.
37
Электрические системы запуска. В качестве электрических
стартеров применяются: для запуска вспомогательных турбоге-
нераторных установок (ВСУ)—обычные самолетные стартер-
генераторы с постоянным передаточным отношением редуктора^
расположенного в приводе ГТД; для запуска маршевых двига-
телей — стартер-генераторы с дополнительными полюсами,
смешанным возбуждением в стартерном режиме и параллель-
ным в генераторном. Связь вала стартер-генератора с ротором
ГТД осуществляется через двухскоростной редуктор, установ-
ленный в коробке приводов двигателя или встроенный в стар-
тер-генератор.
Электрические системы запуска отличаются простотой кон-
струкции и управления, высокой эксплуатационной надеж-
ностью и удобством обслуживания. Операции запуска легко ав-
томатизируются. Основными недостатками электрических си-
стем запуска являются значительная масса стартеров, а также
необходимость применения на борту громоздких и тяжелых ак-
кумуляторных батарей. В зависимости от значения момента
инерции ротора ГТД и его пусковых характеристик время за-
пуска при использовании электрических систем составляет 35—
40 с, а число повторных запусков — 3—5.
Вследствие того что удельная масса электрических систем
запуска велика, они применяются для ГТД с тягой, не превы-
шающей 30 кН. Область наиболее эффективного их использо-
вания при питании от бортовых аккумуляторных батарей огра-
ничена мощностью пусковых устройств, не превышающей 10—
15 кВт.
При больших потребных мощностях пусковых устройств це-
лесоообразнее использовать в качестве источников питания бор-
товые турбогенераторные установки.
Воздушные системы запуска. Пусковым устройством в них
является воздушный турбостартер — воздушная турбина,
осевого или радиального типа, которая соединяется с валом:
двигателя через редуктор с большим передаточным отношени-
ем (г=15ч-30) и обгонную муфту. Турбина может работать как
на холодном, так и на подогретом (горячем) воздухе.
Источниками сжатого воздуха могут быть: аэродромные или
бортовые баллоны; аэродромные компрессорные установки;
вспомогательные силовые установки, размещаемые на борту
самолета.
Располагаемая мощность воздушных турбостартеров при
давлении на входе в турбостартер 250—400 кПа составляет
20—200 кВт, температура воздуха на входе 420—500 К, а рас-
ход воздуха 0,35—0,4 кг/с при мощности турбостартера 22—
30 кВт; 1,0—1,2 кг/с при мощности 90—ПО кВт. Удельная
масса воздушных турбостартеров составляет 0,13—0,25 кг/кВт
(меньшие значения соответствуют более мощным турбинам) s
38
Рис. 1.29. Функциональная схема системы запуска ГТД от ВСУ:
1 — аккумуляторная батарея; 2 —агрегат управления; 3 — стартер-генератор; 4 — редук-
тор; 5 — электромагнитный клапан подачи основного топлива; 6 — электромагнитный
клапан подачи пускового топлива; 7 — агрегат зажигания; 8 — пусковой воспламенитель;
9—ВСУ; /0 — автоматическая панель запуска ГТД; 11 — блок управления воздушного
стартера; /2 —заслонка; 13 — воздушная турбина; 14 — редуктор; 15 — центробежный
выключатель; 16 — топливный автомат запуска; 17 — агрегат зажигания; 18 — ГТД
а удельная масса системы запуска в целом при использовании
бортового источника энергии 1,2—1,8 кг/кВт.
Воздушные системы запуска отличаются высокой надежно-
стью. С их помощью можно осуществлять многократный авто-
номный запуск. Используются они на многодвигательных ле-
тательных аппаратах.
Взаимодействие агрегатов вспомогательной силовой установ-
ки ВСУ и ГТД в процессе запуска показано на рис. 1.29. ВСУ
представляет собой вспомогательный газотурбинный двигатель
с отбором сжатого воздуха за компрессором для питания воз-
душных стартеров. В полете ВСУ используется для привода
генератора, являющегося резервным источником электрической
энергии. На земле ВСУ запускается перед пуском основных
двигателей с помощью электрического стартер-генератора.
Управление процессом запуска ГТД воздушным стартером
осуществляется автоматически панелью запуска, электрические
•сигналы от которой поступают в соответствии с заданной про-
граммой. Основной элемент пусковой системы — воздушный
стартер. Он состоит из следующих узлов: блока управления П,
заслонки постоянного давления 12, турбины 13 и редуктора 14
с центробежным выключателем 15. Функции блока управления
сводятся к включению и отключению стартера, а также к уп-
равлению заслонкой, изменением положения которой поддержи-
вается давление воздуха на входе в стартер 300—330 кПа.
Высокочастотная воздушная турбина соединяется с валом
ГТД через двухступенчатый редуктор с храповой муфтой. Редук-
тор передает вращение и на центробежный выключатель, кото-
39
рый отключает стартер при достижении необходимой частоты:
вращения. Топливный автомат запуска 16 и агрегат зажигания
17 предназначены для автоматического регулирования подачи
топлива и его воспламенения в процессе запуска.
Запуск ГТД на земле от работающей ВСУ производится в
следующей последовательности. При нажатии на кнопку «За-
пуск» включаются панель запуска, агрегат зажигания ГТД и
открывается заслонка воздушного стартера. Панель запуска
осуществляет управление процессом в функции времени и час-
тоты вращения. В качестве реле времени используется бескон-
тактное реле. Коррекция по частоте вращения осуществляется
от тахогенератора. На многодвигательных самолетах часто от
ВСУ запускается только один двигатель, остальные маршевые
двигатели запускаются за счет отбора воздуха от работающего.
Особенности эксплуатации систем запуска. На процесс за-
пуска авиационного двигателя существенное влияние оказыва-
ют атмосферные условия. Наибольшие трудности возникают
при запуске двигателя при низких температурах наружного
воздуха: уменьшение вязкости масла приводит к увеличению
момента сопротивления компрессора, ухудшается распыл топ-
лива форсунками воспламенения. Кроме того, при уменьшении
температуры уменьшается емкость аккумуляторных батарей
(снижение температуры на один градус приводит к снижению
емкости на 1 —1,5%). Для повышения надежности запуска при
низких температурах рекомендуется заливать в двигатель по-
догретое масло.
Системы электрического зажигания. Для воспламенения
топливо-воздушной смеси в камерах сгорания ГТД в период
запуска на земле или при внезапном прекращении процесса го-
рения в полете предназначены системы зажигания. Наибольшее
распространение находят электрические системы зажигания,,
осуществляющие воспламенение горючей смеси за счет энергии,,
выделяющейся при электрическом разряде.
В соответствии с видом электрического разряда системы за-
жигания разделяют на следующие группы, в которых энергия,,
полученная от источника питания, используется:
для создания индуктивных разрядов на свече зажигания
(индуктивные);
для создания емкостных разрядов на свече зажигания (ем-
костные);
для создания индуктивных и емкостных разрядов в межэлек-
тродном промежутке одной и той же свечи зажигания (комби-
нированные) .
Кроме того, электрические системы зажигания разделяют на
низковольтные (2—4 кВ) и высоковольтные (10—12 кВ) си-
стемы. Основными элементами систем являются: преобразова-
тель напряжения (иногда его называют агрегатом системы
зажигания) и электрические свечи.
40
Свеча 3 является частью
.запального устройства (рис.
1.30), в состав которого вхо-
дят также пусковая форсун-
ка 1 и механизм, управляю-
щий подачей топлива
электромагнитный клапан 2
.Запальные устройства уста-
навливают только в не-
скольких камерах сгорания
ГТД. В остальные камеры
пламя передается по пламя-
передающим патрубкам, со-
единяющим между собой
полости горения всех камер.
При запуске двигателя
топливо поступает к пуско-
вой форсунке, которая рас-
пыляет его в газовом пото-
ке, набегающем через от-
верстия искрообразователь-
ной полости. Одновременно начинается образование электриче-
ского разряда, смесь воспламеняется и в виде факела движется
в камеру сгорания, поджигая основную струю топлива от ра-
бочих форсунок.
В системах зажигания ГТД используются три вида свечей:
искровые, в которых выделение энергии, необходимой для вос-
пламенения горючей смеси, происходит между электродами,
разделенными газовым промежутком; поверхностного разря-
да — полупроводиковые свечи, рабочая поверхность которых
‘Обладает полупроводниковыми свойствами; эрозионные — их
рабочая поверхность образована керамическим изолятором, ме-
таллизированным за счет эрозии материала электродов.
В высоковольтных индуктивных системах зажигания напря-
жение, необходимое для пробоя искрового промежутка свечи,
генерируется индукционной катушкой, преобразующей постоян-
ный ток низкого напряжения 27 В в импульсы высокого напря-
жения .(10—20 кВ).
Индукционная катушка (рис. 1.31) состоит из ферромагнит-
ного сердечника, на котором расположены две обмотки: пер-
вичная с числом витков ^1 = 1504-300 и вторичная w2 = 70004-
4-10 000. Параллельно контактам К электромеханического пре-
рывателя включен конденсатор С1 емкостью 0,2—0,4 мкФ, спо-
собствующий уменьшению искрообразования на контактах и
уменьшению их износа.
Принцип действия индукционной катушки состоит в следу-
ющем. При подключении катушки к источнику энергии в пер-
вичной цепи начинает нарастать ток. При некотором его зна-
41
Рис. 1.31. Принципиальная
схема индукционной катуш-
ки
Рис. 1.32. Принципиальная схема низ-
ковольтной системы зажигания с раз-
рядом вдоль поверхности полупро-
водника
чении (напряженности магнитного поля) электромагнитная
сила притяжения, действующая на якорь прерывателя, превы-
сит силу противодействующей пружины, и контакты прерыва-
теля начнут размыкаться. В этом случае ток в первичной цепи,,
а следовательно, и связанный с ним магнитный поток начнут
быстро уменьшаться. Во вторичной цепи катушки в этот период
будет наводиться значительная э.д.с., достаточная для пробоя
искрового промежутка свечи. После размыкания контактов пру-
жина возвратит контакты в исходное состояние и процесс по-
вторится. При пробое между электродами возникает искровой
разряд, воспламеняющий горючую смесь в камере сгорания.
Основными элементами низковольтной емкостной системы
зажигания с полупроводниковыми свечами (рис. 1.32) являют-
ся: индукционная катушка (Я/() с вторичным напряжением
2—3 кВ, накопительный конденсатор Сн емкостью в несколько-
микрофарад, блок выпрямителей Д, разрядник Р и резистор R.
Последовательностью импульсов напряжения индукционной
катушки накопительный конденсатор через выпрямитель заря-
жается до напряжения, необходимого для пробоя промежутка
между электродами разрядника Р. При пробое разрядника
накопительный конденсатор подключается к электродам свечи
Св с полупроводником, вдоль поверхности которого и образу-
ется разряд. Принципиальные схемы систем зажигания с эро-
зионными свечами не отличаются от схем, используемых в вы-
соковольтных системах зажигания.
8. ПРОТИВООБЛЕДЕНИТЕЛЬНЫЕ И ОБОГРЕВАТЕЛЬНЫЕ
УСТРОЙСТВА
Противообледенительная система ЛА состоит из сигнализа-
торов обледенения и оборудования, предназначенного для уда-
ления льда. Сигнализаторы обледенения используются для пре-
дупреждения экипажа ЛА о начале обледенения. При этом
включается противообледенительная система, оцениваются ус-
ловия полета и вырабатывается план дальнейших действий.
42
I
Сигнализаторы обледенения могут быть основаны на следу-
ющих принципах:
непосредственной регистрации образования слоя льда на
датчике. К их числу относятся: визуальные указатели обледе-
нения, пневматические и радиоизотопные сигнализаторы;
определения в атмосфере переохлажденных капель воды
или кристаллов льда при температуре ниже 0°С на основе из-
.мерения электрического сопротивления воды.
Защита ЛА от обледенения может быть достигнута двумя
способами: предотвращением возможности осаждения льда на
несущих поверхностях и искусственным (периодическим) уда-
лением уже образовавшегося льда.
При первом способе на защищаемых поверхностях поддер-
живается темпеоатура v>273 К (тепловые противообледените-
ли непрерывного обогрева) либо поверхности смачиваются не-
замерзающими жидкостями (спиртом, этиленгликолем) для
снижения сил сцепления льда с поверхностями (жидкостные
противообледенители). При втором способе необходимо осуще-
ствлять периодическое механическое взламывание льда (элек-
троимпульсные противообледенители).
Электрические тепловые противообледенительные элементы
выполняются из тонкой проволоки с высоким удельным сопро-
тивлением, запрессованной в стеклоткань. Электрические про-
тивообледенители состоят из нескольких пар секций, каждая
из которых включает несколько участков, т. е. ряд последова-
тельно соединенных между собой нагревательных элементов.
С помощью специального коммутатора секции поочередно под-
ключаются к источнику питания. При циклическом подводе
энергии удается достигнуть требуемого повышения температуры
при меньшей мощности источника, чем при непрерывном под-
воде энергии.
Наиболее экономичным способом разрушения льда, образо-
вавшегося на крыльях ЛА, является скалывание его под дей-
ствием кратковременных механических возмущений на обледе-
невшую поверхность, которые осуществляются с помощью элек-
тромагнитного поля, создаваемого специальными индукторами,
расположенными под обшивкой крыла ЛА. Индуктор представ-
ляет собой катушку медной проволоки в пластмассовом корпу-
се. При пропускании через индуктор импульса тока вокруг вит-
ка возникает электромагнитное поле, которое возбуждает
электрический ток в металле обшивки. Магнитное поле этого
тока, взаимодействуя с магнитным полем индуктора, создает
кратковременное механическое воздействие на обшивку. Дефор-
мация обшивки в точке воздействия не превышает 1 мм. Удар-
ная волна от точки воздействия, расходясь по обшивке, взламы-
вает лед и отделяет его от металла.
Мощность, потребляемая электроимпульсной системой, в де-
сятки раз меньше мощности, необходимой для питания нагре-
43
вательных элементов. Обогрев смотровых стекол кабин осущест-
вляется нагревательными элементами: тонкими проволоками,
из константана или нихрома или токопроводящей прозрачной
пленкой толщиной не более 10~6 см. Энергия к нагревательным
элементам подводится от специальных автоматов обогрева сте-
кол, позволяющих поддерживать температуру на поверхности
стекла в заданных пределах.
9. СВЕТОТЕХНИЧЕСКОЕ ОБОРУДОВАНИЕ
Светотехническое оборудование на летательных аппаратах,
устанавливается для освещения кабин и пассажирских салонов,,
световой сигнализации, освещения посадочной площадки и вы-
полнения подготовки к полетам в ночных условиях. В зависи-
мости от выполняемых функций светотехническое оборудование
можно разделить на внутреннее и внешнее. К внутреннему от-
носится освещение кабины экипажа, пассажирских салонов,,
бытовых, технических и багажных помещений. Для освещения
кабины экипажа применяют плафоны, боковые и настольные'
светильники заливающего света, а также местные светильники.
Для освещения кабины пилотов ранее использовался крас-
ный свет, способствующий лучшей темновой адаптации глаза,,
однако вследствие того, что при красном свете искажаются
кодовые цвета сигнальных ламп и затрудняется чтение полет-
ных карт, на новых магистральных самолетах установлены лам-
пы белого цвета.
Местное освещение используется для подсвета приборных
досок. Для этой цели применяются светильники, встроенные в
прибор, накладные или светильники в виде козырька над при-
борной доской.
Общее освещение пассажирских салонов состоит из главно-
го, дежурного, служебного и аварийного. Для главного осве-
щения пассажирских салонов используются плафоны с лампами
накаливания или люминесцентные лампы. Дежурное освещение-
составляет 30% от главного, его включают только на ночь. Слу-
жебное освещение составляет 10% от главного и необходимо
для работы экипажа ночью и на стоянке. Аварийное освещение
предназначено для освещения аварийных проходов, выходов и
знаков.
Питание аварийного освещения при отключении основ-
ных источников электрической энергии производится от специ-
альной аккумуляторной батареи.
К наружному освещению относятся аэронавигационные бор-
товые огни (БАНО) и хвостовой огонь (ХС), позволяющие
определить направление полета встречного самолета. Цвет
огней, их расположение и углы действия едины для всех лета-
тельных аппаратов. Углы действия в горизонтальной плоскости
44
указаны на рис. 1.33, в вер- \ i /
тикальной плоскости БАНО у/
видны под углом 180°, ХС— 1/л
140-И700.
Посадочно-рулежные фа-
ры служат для освещения __
взлетно-посадочной полосы
и рулежных дорожек при
взлете, посадке и рулении Рис. 1.33. Зоны излучения аэронавига-
по аэродрому в ночных ус- ди°нных огней в горизонтальной пло-
ЛОВИЯХ скости:
К. 3, Б — красный, зеленый, белый огонь
Посадочное освещение
помогает пилоту произвести оценку положения самолета по от-
ношению к взлетно-посадочной полосе и визуально определить
высоту полета, начиная с момента выравнивания. Для освеще-
ния пространства впереди и сбоку самолета при взлете, посадке
и рулении в ночное время используются посадочно-рулежные
выдвижные фары.
Лампа фары имеет две нити накаливания: рулежную —
длительного действия и посадочную — повторно-кратковремен-
ного действия (5 мин горения, 5 мин — перерыв).
Система внутренней сигнализации. Внутренняя световая
сигнализация предназначена для указания положения некото-
рых агрегатов летательного аппарата или состояния его систем:
сигнализации положения опор шасси, перенаддува и разгерме-
тизации салонов, невзлетного положения закрылков и пред-
крылков, положения стабилизатора, обледенения самолета.
Внутрикабинная сигнализация трехцветная: красный цвет
соответствует аварийному сигналу, желтый — предупреждаю-
щему (при нарушениях в системах, не ведущих к аварии), а
зеленый — уведомляющему (при нормальной работе). Цвето-
вые сигналы поступают на специальные световые табло. На са-
молетах используется также система сигнализации опасных
режимов с центральным сигнализатором, указывающим при
помощи вспышек центрального сигнала красного цвета на воз-
никновение опасного режима, а с помощью светящейся надпи-
си на табло — на характер этого режима.
Для предупреждения столкновения самолетов в воздухе и
для визуального наблюдения за летательными аппаратами дис-
петчерской службой ночью используют самолетные импульсные
маяки.
Они имеют две импульсные кварцевые лампы, закрытые
красными или белыми светильниками.
Лампы вспыхивают поочередно. Частота вспышек состав-
ляет 45±5 в 1 мин. Обычно на самолете устанавливают верх-
ний и нижний маяки.
Дальность их видимости в хороших метеоусловиях состав-
ляет 60 км.
45
ГЛАВА 2. ПРИБОРЫ КОНТРОЛЯ
СИЛОВЫХ УСТАНОВОК
1. ОСНОВНЫЕ ПАРАМЕТРЫ КОНТРОЛЯ
* Приборы контроля силовых установок предназначены для
измерения и индикации параметров, характеризующих режимы
работы силовых установок, управления и стабилизации этих
режимов и сигнализации аварийных состояний.
С помощью этих приборов экипаж ЛА получает необходи-
мую информацию о температуре и давлении жидкостей и газов
в различных системах силовых установок, об угловой скорости
вращения валов двигателя или газовой турбины, расходе в еди-
ницу времени, общем количестве топлива и распределении его
по бакам на борту ЛА и т. д.
Обобщенная структурная схема прибора контроля парамет-
ров силовых установок представлена на рис. 2.1. Входная не-
электрическая величина Х(/), которая измеряется прибором,
после преобразования, переработки и воспроизведения выдает-
ся в виде выходной физической величины У(t). Функциональ-
ную зависимость между ними в общем виде можно представить
как
Г (0 = F[z, Q, Л (0) ,
где F — требуемая функция преобразования, реализуемая прибором; Z — век-
тор внешних параметров, отражающих условия работы прибора (давление,
температура, влажность и т. д.); Q — вектор внутренних параметров прибора
(геометрические размеры элементов прибора;
t характеристики материалов, из которых изго-
товлены элементы; параметры физических
законов, на основе которых действует прибор
и т. д.).
Основные параметры, характеризу-
ющие режимы работы силовых уста-
Рпс. 2.1. Упрощенная схема новок, и их измерители приведены в
прибора табл. 2.1.
Таблица 2.1
Параметр Обозначение Применяемый измеритель
Частота вращения об/мин п Измеритель частоты враще-
Температура в двигателе, °C: ния (тахометр)
перед турбиной т * Термометры
за турбиной тч
масла гм
воздуха Тв
топлива Т т
46
Продолж. табл. 2.1
Параметр
Обозначение
Применяемый измеритель
Давление в двигателе, Па:
топлива
масла
за компрессором
в воздухозаборнике
Перепад давлений на турби-
не, Па
Отношение давления на вхо-
де в двигатель и за турбиной
двигателя
Расход топлива, кг/ч:
основного
форсажного
Количество топлива в баках:
объемное, м3
массовое, кг
Амплитуда вибрации, мм
Частота вибрации, Гц
Скорость вибрации, мм/с
р/
Рм
Рк
Рпр
fir
QT
Фф
Рт
Mr
&в
I*
Vb
Манометры
Дифманометр
Измеритель отношения дав-
лений
Расходомеры
Топливомеры
Измерители параметров виб-
рации
2. ПРИБОРЫ ИЗМЕРЕНИЯ ДАВЛЕНИЯ
Для определения режимов работы и состояния силовых ус-
тановок, систем наддува герметичных кабин, тормозных систем,
систем запуска авиадвигателей и других необходимо измерять
давления воздуха, газов, топлива и масел.
Основным прибором, измеряющим давление или разности
давлений, является манометр. Он называется манометром аб-
солютного давления, если определяет давление, отсчитываемое
от абсолютного нуля. Если за точку отсчета принято абсолют-
ное давление окружающей среды, то прибор, измеряющий по-
ложительное давление, называется манометром избыточного
давления, а отрицательное — вакуумметром. Манометр, изме-
ряющий положительное и отрицательное давление, называется
мановакуумметром. Если манометр измеряет разность двух
давлений, ни одно из которых не является абсолютным, то его
называют дифференциальным. В авиации наибольшее распро-
странение получили механические и электромеханические мано-
метры.
Механические манометры. В них используются методы изме-
рения давления, в которых силы измеряемого давления непо-
средственно сравниваются с весом столба жидкости, эталонного
груза или с силами упругих чувствительных элементов. Меха-
нические манометры, сконструированные на основе первых двух
методов, находят применение в стационарных условиях или
используются как контрольные при проверке и тарировке дру-
47
Рис. 2.2. Механический манова-
куумметр
Рис. 2.3. Электрическая схема ма-
нометра типа ЭДМУ
гих. При реализации третьего метода измерения давления в
качестве упругих чувствительных элементов (УЧЭ) использу-
ются мембраны, мембранные коробки, сильфоны и трубчатые
пружины. Их деформация зависит от значения измеряемого
давления.
В маиовакуумметре (рис. 2.2) в качестве УЧЭ применяются
манометрический и барометрический сильфоны 9 и 6. Топливо-
воздушная смесь, давление рк которой измеряется, подается в
сильфон 9. Сильфоном 6 измеряется давление ра, равное атмос-
ферному. Под действием разности давлений происходит переме-
щение штока 8, отклонение рычага 7, перемещение тяги 2,
поворот сектора /, вращение трибки 5 и стрелки 4 относитель-
но шкалы 3.
При измерении давления механическими манометрами воз-
никают методические, инструментальные и динамические по-
48
грешности. Методическая погрешность появляется за счет из-
менения абсолютного давления окружающей среды. Инструмен-
тальные погрешности возникают из-за наличия трения, люфтов
в опорах и шарнирах подвижных элементов, дебаланса подвиж-
ной системы, а также от изменения температуры окружающей
среды. Последнее вызывает изменение модуля упругости мате-
риала, из которого изготовлен УЧЭ, и геометрических размеров
деталей передаточного механизма. Уменьшение этой погрешно-
сти достигается с помощью биметаллических температурных
компенсаторов и подбором материалов, из которых изготавли-
вают УЧЭ.
Динамические погрешности обусловлены запаздыванием из-
мерений, которые зависят от параметров трубопровода, соеди-
няющего объект контроля с механическим манометром.
Электромеханические манометры. В этих манометрах силы
измеряемого давления преобразуются в перемещение УЧЭ, ко-
торые воздействуют на параметры измерительных электрических
схем (сопротивление /?, индуктивность L или емкость С). Пре-
образователь давления устанавливается непосредственно на
объекте контроля, что позволяет отказаться от соединительных
трубопроводов большой длины, избавиться от ряда погрешно-
стей, упростить монтаж и эксплуатацию манометров. В итоге
применение электромеханических манометров повышает надеж-
ность и точность измерений, сокращает затраты на монтаж и
эксплуатационное обслуживание.
Манометры типа ЭДМУ. Электрические дистанционные ма-
нометры унифицированного типа ЭДМУ имеют одинаковое уст-
ройство и элементы для всех диапазонов измеряемых давлений,
за исключением УЧЭ и градуировки шкалы. Принципиальная
электрическая схема приведена на рис. 2.3. Измеряемое давле-
ние ри подается в УЧЭ, который связан с щеткой ЕЗ потенцио-
метра В1 через передаточный механизм. Значения сопротивле-
ний Rx и Ry потенциометра преобразователя давления, меняю-
щиеся в зависимости от давления ри, образуют два плеча
мостовой схемы. Другими плечами мостовой схемы являются
резисторы R1 и R2. Рамки логометра LI, L2 и резистор 7?д
составляют измерительную диагональ моста. Общая точка со-
единения рамок подключена к полудиагоналн, состоящей из
резисторов R3 и R4. Они предназначены для компенсации тем-
пературных погрешностей, вызванных изменением сопротивле-
ния рамок логометра при колебаниях температуры окружающей
среды. Рамки логометров имеют одинаковое число витков, но
разные конструктивные размеры. Вследствие этого внутренняя
рамка имеет меньшее сопротивление. Для обеспечения симмет-
рии схемы в цепь внутренней рамки включено добавочное сопро-
тивление Rjx . При подключении к схеме напряжения питания
в случае Rx=Ry мостовая схема симметрична. Ток, протекаю-
щий по полудиагонали через резисторы R3 и R4, разветвляет-
•4—455 49
Рис. 2.4. Магнитоэлектрический логометр:
а — взаимное расположение магнита и обмоток логометра; б — векторная диаграмма
напряженности магнитного поля; в — конструкция:
/ — медный корпус магнитного успокоителя; 2 — подвижной магнит; 3 — внутренняя
рамка; '/ — неподвижный постоянный магнит; 5 — стрелка; 6 — подпятники; 7 — мостик;.
8 — экран из пермоллоя; 9 — ось; 10 — наружная рамка; // — керн
ся на два равных тока Ц и /2 рамок L1 и L2. При нарушении
равенства между Rx и Ry симметрия в схеме нарушается, вслед-
ствие чего нарушается и равенство токов. Токи /1 и проте-
кая по рамкам логометра, создают магнитные поля, характери-
зующиеся векторами напряженности (рис. 2.4, б):
Н\ = Д ш; =
где со — число витков каждой из рамок.
Подвижный магнит, на оси которого крепится стрелка, рас-
полагается по направлению вектора
Н = Н\ + Н2,
где И — вектор напряженности результирующего магнитного поля.
Из геометрических построений можно получить зависимость
угла отклонения подвижной стрелки ф от величины отношения
токов |=/i//2-
? (А/Лг) = arctg [sin ф/(ё 4- cos 7)].
Это выражение является статической характеристикой лого-
мера. На рис. 2.5 дана кинематическая схема преобразователя
давления. Измеряемое давление ри подается через штуцер 9
в полость преобразователя давления. Под действием рп проис-
ходит перемещение центра мембраны <?, толкателя 6, качалки 5,
рычага 3 и щеткодержателя 13. Пружина 4 возвращает рычаг
в исходное положение при уменьшении давления ри.
Конструкция логометра ЭДМУ (см. рис. 2.4, в) состоит из
подвижного магнита 2 и неподвижных рамок 3 и 10. Магнит 2
50
Рис. 2.5. Кинематическая схема
преобразователя давления:
1 — щеткодержатель; 2 — ось; 3 — ры-
чаг; 4 — возвратная пружина; 5 — ка-
чалка; 6 — толкатель: 7 — основание;
Я — гофрированная мембрана; 9 — шту-
цер; 10 — крышка; 11 — потенциометр:
12 — щетка; 13 — штепсельный разъем
и стрелка 5 крепятся к оси 9,
концы которой вставлены в под-
пятники 6. Медный корпус 1 маг-
нитного успокоителя использует-
ся для демпфирования колебаний
подвижной системы логометра.
Неподвижный магнит 4 возвра-
щает стрелку прибора в нулевое
положение при отключении нап-
ряжения питания.
Погрешности, вносимые в схе-
му измерения датчиком давления,
аналогичны погрешностям меха-
нических манометров. Погреш-
ности, вносимые электрической
схемой и указателем, возникают
при изменении температуры ок-
ружающей среды, при действии
на подвижную систему указателя сил трения, дебалаиса и люф-
гов, а также от магнитного гистерезиса в материале экрана и
подвижного магнита. Общая суммарная погрешность (±4 %) и
наличие ненадежного скользящего контракта являются недос-
татками манометров этого типа.
Манометры типа ЭМ являются приборами дифференциаль-
ного типа, измеряющими разность двух давлений. В качестве
УЧЭ применяются гофрированные мембраны, деформация ко-
торых преобразуется в электрическую величину с помощью
потенциометрического преобразователя. Указателем является
четырехрамочный логометр с подвижным магнитом (рис. 2.6).
Крайние точки потенциометра соединены накоротко, поэтому
он эквивалентен круговому потенциометру. Каждая секция по-
тенциометра соединена с
соответствующим отводом
рамки логометра. Напря-
жение питания ±27 В
±10% подается на щетку
потенциометричекого пре-
образователя и точку,
объединяющую все рамки
логометра. При переме-
щении щетки потенцио-
метра под действием сил
давления происходит пе-
рераспределение токов в
рамках логометра. В них
создаются магнитные по-
ля, характеризующиеся
векторами напряженно-
-4*
Рис. 2.6. Принципиальная электрическая
схема манометра типа ЭМ
51
сти. Подвижный магнит
четырехрамочного лого-
метра располагается по
направлению вектора на-
пряженности Н суммар-
ного магнитного поля.
Сопротивления R1 и R2
служат для регулиров-
ано. 2.7. Принципиальная электрическая ки ширины И равно-
схема манометра типа ДИМ мерности шкалы. Приме-
нение такой схемы дает возможность получить при малом пере-
мещении жесткого центра мембраны и щетки потенциометра
большие углы отклонения стрелки указателя (размах шкалы до-
стигает 270°). Это существенно повышает точность измерения
давления при прочих равных условиях. Вследствие симметрич-
ности схемы прибора на показания указателя не влияют ни из-
менение напряжения питания, ни сопротивления рамок при ко-
лебаниях температуры окружающей среды. Суммарная погреш-
ность прибора ±3%. Основными недостатками манометра типа
ЭМ являются наличие скользящего контакта и увеличенное чис-
ло соединительных проводов, что снижает надежность прибора»
увеличивает его массу и усложняет монтаж на борту ЛА.
Манометры типа ДИМ. Недостатки потенциометрических
преобразователей, связанные с износом потенциометра, нару-
шением контактов при вибрациях и колебаниях измеряемого*
давления, повышенных температурах, устранены в дистанцион-
ных индуктивных манометрах типа ДИМ. Это обеспечивается
применением дифференциального индуктивного преобразовате-
ля. Манометры этого типа применяются для измерения давле-
ния при повышенных температурах и значительных высокочас-
тотных помехах >(до 700 Гц). Принципиальная электрическая
схема манометра приведена на рис. 2.7. В качестве УЧЭ при-
меняются либо гофрированные мембраны, либо мембранные
коробки. Жесткий подвижный центр УЧЭ соединен с якорем
индуктивного преобразователя. Катушки индуктивного преоб-
разователя L1 и L2 совместно с резисторами R1 и R2 образуют
мостовую схему, которая работает на переменном токе 36 В
400 Гц. В диагональ мостовой схемы включены рамки логомет-
рического указателя. При измерении давления деформация УЧЭ
передается на якорь, который изменяет воздушный зазор в маг-
нитных цепях катушек 'Ll и L2. Это вызывает изменения индук-
тивности катушек и ведет к перераспределению токов в рамках
логометра. Так как логометр работает на постоянном токе, то-
в качестве выпрямителей в измерительную схему введены дио-
ды Д1 и Д2. Максимальные погрешности манометров типа
ДИМ составляют ±4%, размах шкалы указателя 120°.
Сигнализаторы давления. Они предназначены для выдачи
информации о наличии в системах силовых установок номи-
52
нальных или критических режимов.
УЧЭ 1 сигнализатора давления управ-
ляют работой контактов 4, 5, коммути-
рующих электрическую цепь (рис. 2.
8.) Сигнализатор давления 2 размыка-
ет электрическую цепь с помощью
упоров 3 и 6 при уменьшении разно-
сти давления Др = р2—Р\-
Измеритель отношения давлений
типа ИОД. Он предназначен для конт-
роля тяги двигателя по отношению
давлений
Рис. 2.8. принципиальная,
схема сигнализатора давле-
ния
т: = p2/plt
где pi — полное давление на входе в двига>
тель; р2 — давление за турбиной двигателя.
Схема прибора (рис. 2.9) состоит из датчика отношения
давлений (ДОД) и указателя отношения давлений (УОД). Она
является измерительной схемой компенсационного типа в отли-
чие от измерительных схем прямого преобразования. ДОД со-
стоит: из рабочего сильфона 17, в полость которого подается
давление р2; анероида /, реагирующего на изменение давления
Pi, подаваемого в корпус датчика; контактной системы 15, слу-
жащей для управления электродвигателем 13 через усилитель-
16-, потенциометра 2, фиксирующего отклонение рычага 18.
УОД. состоит: из усилителя 8; двигателя 10\ механизма об-
ратной связи, в который входят редуктор и потенциометр 72;
механизма указателя, включающего ходовой механизм, шка-
лу 4, механизм ленты 3 и возвратную пружину 7. Лампы Л\
и Л2 освещают шкалу указателя.
При изменении режима двигателя, а следовательно, и изме-
нении отношения давлений подвижный контакт контактной
системы 15, расположенной на рычаге 18, замкнется с верхним
или нижним неподвижным контактом, и электродвигатель 13
начнет поворачивать анероид, изменяя угол его наклона к ры-
чагу 18. При достижении равновесия приведенных сил сильфона
и анероида происходит размыкание контактов и двигатель от-
ключается. При этом с потенциометра 2 снимаются сигналы,
пропорциональные отношению давлений. Он включен в мосто-
вую измерительную схему указателя, содержащую потенцио-
метр обратной связи 12 и подгоночные сопротивления 11. При
разбалансе моста в диагонали возникает напряжение, которое
усиливается усилителем 8 и поступает на электродвигатель 10
указателя, который уравновешивает мостовую схему с помощью
потенциометрической обратной связи 12 и перемещает механизм
указателя с показывающей лентой 3. При этом на шкале 4
53
Рис. 2.9. Схема измерителя отношения давлений типа ИОД
указывается величина измеряемого отношения давлений. В слу-
чае отключения питания или выхода из строя элементов при-
бора лента возвращается за нижнюю отметку шкалы возврат-
ной пружиной 7. Подгоночные резисторы 11 позволяют произ-
вести регулировку размаха черно-белой границы ленты по шка-
ле указателя. Вращением кримальеры 6 перемещается гайка
со стрелкой 5 вдоль шкалы для отметки заранее установлен-
ного значения отношения давлений в точке контроля.
3. ПРИБОРЫ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ
Для получения максимальной энерговооруженности и эко-
номичности полета силовые установки ЛА работают с предель-
ной тепловой напряженностью. Вследствие этого на борту ЛА
необходимо измерять и контролировать температуру различных
сред и конструкций с высокой точностью. Так, на ЛА измеряют
•температуру газов в газотурбинных двигателях, масла в систе-
мах смазки, тепловоздушной смеси, окружающего воздуха, го-
ловок цилиндров поршневых двигателей и т. д.
Приборы для измерения температуры, применяемые в авиа-
ции, имеют чувствительные элементы (ЧЭ), которые непосред-
54
ственно приводятся в соприкосновение со средами или конст-
рукциями, температура которых измеряется. Передача тепла
ЧЭ происходит либо путем теплопроводности при измерении
температуры твердых тел, либо конвекции при изменении тем-
пературы жидких или газообразных сред. В качестве авиацион-
ных термометров наибольшее распространение нашли термо-
резисторные и термоэлектрические термометры дистанционного»
типа.
Терморезисторные термометры основаны на свойстве метал-
лических и полупроводниковых терморезисторов изменять свое
сопротивление в зависимости от температуры.
Для металлических терморезисторов зависимость сопротив-
ления /? от измеряемой температуры 0 в определенном интер-
вале значений является линейной функцией
= 4-а(0-Оо)]»
где 7?о — сопротивление терморезистора при температуре 0о; «— температур-
ный коэффициент сопротивления.
В качестве материалов, которые используются для изготов-
ления металлических терморезисторов, применяются химически
чистые металлы, так как они обладают большими значениями
а, стабильностью их в широком диапазоне температур, хорошей
воспроизводимостью свойств и стойкостью к внешним воздейст-
виям.
Значения температурных коэффициентов сопротивления а в
диапазоне температур от 0° до 100° С следующие
Металл............... Ni Al Си Ag Au Pl
a, град-i............ 0,0067 0,0044 0,0043 0,0041 0,004 0,0039
Для полупроводниковых терморезисторов (термисторов)
функция сопротивления R от температуры описывается нелиней-
ной зависимостью
/? = ЛеВ/Т,
где А, В — постоянные, характеризующие свойства материала термистора;
Т — температура, К.
Для изготовления термисторов применяются в основном
медномарганцевые и кобальтомарганцевые соединения. В авиа-
ционных терморезисторных термометрах в качестве термо- ЧЭ
наибольшее распространение получила никелевая проволока,
выдерживающая нагрев до 300° С. Ее недостатком является за-
висимость температурного коэффициента aNi от примесей в ме-
талле. Чтобы исключить этот недостаток и обеспечить взаимо-
заменяемость датчиков, последовательно обмотке из никелевой,
проволоки подключают дополнительные сопротивления 7?м из
материала с возможно малым температурным коэффициентом
ам, обычно из константана или манганина.
55
Рис. 2.10. Электрическая схема тер-
мометра типа ТУЭ
Рис. 2.11. Конструкция датчика тер-
мометра типа ТУЭ:
_0- 1 — корпус; 2 — прокладка; 3 — колодка;
+ 4 — гайка; 5 — штепсельный разъем; 6 —
спираль; 7 — стойка; 8 — никелевая прово-
лока; 9 — пластина; 10 — теплопроводящая
„л пластина
Термометр типа ТУЭ. Унифицированный электрический тер-
мометр сопротивления предназначен для измерения температу-
ры масла, воды и воздуха от —70 до 150° С. Комплект термо-
метра состоит из датчика, указателя и линии связи. Электри-
ческая схема прибора приведена на рис. 2.10. Терморезистор
Rt из никелевой проволоки включен в одно из плеч двойного
моста. В качестве указателя применен логометр с неподвижны-
ми рамками L1 и L2 и подвижным магнитом Е1. Одни концы
рамок логометра соединены в общую точку Л, другие — в мос-
товую схему через сопротивления температурной компенсации
R1 и R2 к точкам В и С. Параметры схемы рассчитаны так,
что при температуре, равной половине диапазона измерений,
потенциал точки А равен половине суммы потенциалов точек
В и С. В этом случае токи в рамках \L1 и L2 равны, ио проти-
воположны по направлению. Подвижный магнит под действием
магнитных полей рамок отклонится на угол, при котором
стрелка, закрепленная на оси магнита, установится по шкале
указателя в среднее положение. При изменении температуры
среды сопротивление терморезистора Rt и потенциал точки А
изменятся. Нарушится равенство токов в рамках. Стрелка лого-
56
метра покажет по шкале указателя новое значение темпера-
туры. Схема двойного моста, применяемая в ТУЭ, имеет значи-
тельно сниженные температурные погрешности и повышенную
чувствительность по сравнению со схемой, применяемой в
ЭДМУ. Конструктивно датчик состоит из теплочувствительного
элемента, корпуса 1 и штепсельного разъема 5 (рис. 2.11).
Теплочувствительный элемент представляет собой тонкую (d =
= 0,05 мм) никелевую проволоку S, намотанную на слюдяную
пластину 9. Для изоляции никелевую обмотку закрывают с обе-
их сторон так же слюдяными пластинами. Улучшению тепло-
обмена между никелевой проволокой и окружающей средой
служат теплопроводящие прокладки 10 из серебра. Материалом
для изготовления корпуса 1 служит нержавеющая сталь. В ка-
честве указателя применяется логометр, имеющий такое же
устройство, как и в ЭДМУ.
При измерении температуры с помощью терморезисторных
термометров возникают методические погрешности: за счет
передачи части тепла от терморезистора к месту его крепления
и конструкциям, имеющим меньшую температуру, чем темпе-
ратура измеряемой среды; от торможения датчиком потока
движущейся среды, при котором происходит переход в тепло
кинетической энергии движущейся среды; от нагрева терморе-
зистора протекающим по нему током.
Первую методическую погрешность уменьшают путем увели-
чения площади части датчика, погруженной в среду, и улуч-
шения теплоизоляции непогруженной части. Вторая погреш-
ность устраняется с помощью изменения конструкции датчи-
ков. Для скорости набегающего потока до 100 м/с применяются
конструкции, подобные рассмотренной. Торможение потока сре-
ды датчиком при таких скоростях не вызывает значительной
погрешности. Для измерения температуры среды, движущейся
с большими скоростями, корпус датчика конструируют так, что
ЧЭ располагается вдоль набегающего потока (рис. 2.12). Кор-
пус 2 датчика типа ТНВ для измерения температуры наружно-
го воздуха представляет собой сопло Лаваля, которое устанав-
ливается своей продольной осью вдоль вектора скорости набе-
гающего потока. Термочувствительный элемент 1 состоит из
изолированной никелевой пооволоки, намотанной на медный
каркас. Такая конструкция датчика при скорости ЛА, соответ-
ствующей М^0,5, обеспечивает в узком сечении сопла скорость
течения воздуха, равную скорости звука в этой среде. На осно-
ве знания температуры ЧЭ @т и числа М определяется темпе-
ратура невозмущенного потока среды
0 = 6Т/0,978 (1 - 0,2М2).
Третья методическая погрешность снижается подбором па-
раметров элементов измерительной схемы с целью уменьшения
тока /, проходящего через ЧЭ.
57
Рис. 2.12. Датчик термометра ти-
па ТНВ
Рис. 2.13. Схема термопары:
а — с одним спаем; б — с двумя спа
ями
Динамическая погрешность, которая свойственна терморе-
зисторным термометрам, объясняется тем, что датчик, обладая
определенной теплоемкостью, не может мгновенно реагировать
на изменение температуры среды, а делает это с конечной ско-
ростью, опрделяемой конструкцией датчика. Погрешности ука-
зателя подобны погрешностям логометра ЭДМУ. Общая сум-
марная погрешность термометров типа ТУЭ составляет ±3%.
Термоэлектрические термометры. Принцип их действия ос-
нован на термоэлектрическом эффекте возникновения термо-
электродвижущей силы (термо-э.д.с.) в термопаре при наличии
разности температур ее спаев. Термопара, которая является ЧЭ
термоэлектрического термометра, состоит из двух разнородных
проводников, соединенных между собой путем спайки, сварки
или оплавления (рис. 2.13).
Для термопары термо-э.д.с. равна алгебраической сумме
разностей потенциалов всех спаев. В термопаре, имеющей два
спая, термо-э.д.с.
£дв — (т’а ““^в) + (?в — Та)=
где фА и <рв — потенциалы проводников А и В соответственно; 0] — темпе-
ратура исследуемой среды или температура горячего спая; 02 — температура
окружающей среды или температура холодного спая.
Для многих металлов возможна аппроксимация предыдуще-
го выражения
^ав = (^i — »
где k — коэффициент пропорциональности, зависящий от материалов термо-
пары.
58
Если температура холодного спая равна нулю, то зависи-
мость термо-э.д.с. от температуры горячего спая £дв = £®1 при
02 = О.
В авиационных термоэлектрических термометрах наибольшее
применение нашли следующие термопары: хромель-копель
(Х-К), хромель-алюмель (Х-А), никель-кобальтовый сплав —
специальный алюмель (НК-СА) и железоникелевый сплав —
специальный копель (НЖ-СК). На рис. 2.14 представлены ста-
тические характеристики наиболее применяемых термопар
при температуре холодного спая, равной 0°С, из которых видно,,
что термопары НК-СА и НЖ-СК имеют зоны нечувствитель-
ности, т. е. возникновение термо-э.д.с. у них начинается только
при определенных температурах, для термопары НК-СА при
©1>300°С, для НЖ-СК при ®1>100°С. Благодаря этому свой-
ству в указанных термопарах колебания температуры окужаю-
щей среды от +60 до —60° С практически не оказывают влия-
ние на значение термо-э.д.с. Следовательно, термометры, по-
строенные на их основе, не имеют методической погрешности,
которую вносит изменение температуры холодного спая.
Для измерения температуры могут быть использованы как
отдельные термопары, так и термобатареи — соединения из
нескольких термопар. Термобатареи измеряют температуру в
различных точках среды и развивают термо-э.д.с., соответствую-
щую средней измеренной температуре. Типовая электрическая
схема авиационного термометра представлена на рис. 2.15. Она
относится к измерительным цепям прямого преобразования.
Для уменьшения числа
холодных спаев, являющих-
ся источниками паразитных
термо-э. д. с., в рассматрива-
емых схемах стремятся
уменьшить число разнород-
ных проводников. Поэтому
провода, соединяющие тер-
мопару и указатель, изго-
тавливают из тех же мате-
риалов, что и электроды
термопар. В тех случаях,
когда термопары состоят из
благородных металлов, на
изготовление проводов идут
материалы с термоэлектри-
ческими свойствами, подоб-
ными свойствам термопары.
Соединительные провода
для комплектов термопар
НС-СА и НЖ-СК изготав-
ливают из медного провода,
Рис. 2.14. Характеристики термопар:
1 — хромель-копель (X—К); 2 — железо-копель
(Ж—К); 3 — хромель-алюмель (X—А); 4 — же-
лезо-никель-спецкопель (НЖ—СК); 5—ни-
кель-кобальт-спецалюмель (НК—СА); 6—пла-
тина-платинороций (П—-ПР)
59
Рис. 2.15. Электрические схемы
авиационных термометров
так как медь в паре с этими
термопарами развивает малые
термо-э. д. с. при значительных
изменениях 02.
В качестве указателей ис-
пользуются магнитоэлектри-
ческие гальванометры.
Термометры типа ТВГ
(термоэлектрические термо-
метры выходящих газов) наш-
ли наибольшее применение в
гражданской авиации и слу-
жат для измерения усреднен-
ной температуры заторможен-
ного потока газов по сечению
сопла реактивного двигателя,
последовательно соединенные
Для этого применяют четыре
термопары НК-СА низкой чувствительности. Их суммарная тер-
мо-э. д. с. пропорциональна средней температуре газов, прохо-
дящих через сечение сопла. Электрическая схема ТВГ состоит
из медных соединительных проводов i/?BH, манганинового соп-
ротивления Rn, термосопротивления RTC, манганинового доба-
вочного сопротивления /?д и сопротивления рамки 7?р из мед-
ного провода.
Особенностью конструкции датчика термометра, представ-
ленного на рис. 2.16, является наличие в защитной трубке 3
тремопары 1 окна 2 большого размера для входа газов и окна
4 малого размера для выхода газов.
Такая конструкция обеспечивает измерение температуры по-
Т18±1,5
Рис. 2.16. Конструкция датчика термометра типа ТВГ
60
тока газов в заторможенном состоянии. По технологическим
причинам невозможно получить идентичные статические харак-
теристики всех изготавливаемых термопар. Поэтому термопары
разделяют по группам, объединяя в них термопары с одинако-
выми статическими характеристиками.
Соответственно каждой группе датчиков производится гра-
дуировка шкал указателей. Как датчики, так и указатели мар-
кируются согласно нормам групп. При эксплуатации не допу-
скается совместная установка датчиков и указателей, относя-
щихся к разным группам.
Указателями термометров типа ТВГ являются магнитоэлек-
трические гальванометры (рис. 2.17). Указатель состоит из
стержневого магнита 7 с наконечником южного полюса в виде
серповидной пластины 6 и наконечником северного полюса в
виде разрезанного кольца 3, связанного с полюсом магнитопро-
водом 8. В зазоре между наконечниками перемещается рамка
4, жестко связанная с осью /, к которой крепится стрелка Р, и
спиральные уравновешивающие пружины 2, 5 и 10. Такая конст-
рукция указателя обеспечивает угол отклонения стрелки до
230°. Поедел изменения термометра типа ТВГ 300—900° С.
Погрешность в основном диапазоне замеров 450—750° С не пре-
вышает ±15° С. Основным недостатком рассмотренного прибора
является наличие зоны нечувствительности от 0° до 300° С, ко-
торая затрудняет контроль температуры выходящих газов при
запуске авиационного двигателя. Этот недостаток устраняется
применением более чувствительных термопар типа НЖ-СК,
имеющих зону нечувствительности до 100° С. Следует также
учитывать динамическую погрешность термометра. Постоянная
Рис. 217. Принципиальная схема указателя термометра типа ТВГ
61
Рис. 2.18. Схема термометра ком-
пенсационного типа
Рис. 2.19. Кинематическая схема
чувствительного элемента магни-
тоиндукционного тахометра:
а—с полым цилиндром; б — с диском
времени прибора, на которую в основном влияет инерционность
датчика, составляет 2—3 с.
С появлением ЛА больших размеров и увеличением рассто-
яний между местами установки датчиков и указателей, а также
ужесточением требований к точности измерений широкое при-
менение получили термометры, основанные на компенсацион-
ном методе измерений (рис. 2.18).
Разность термо-э.д.с., снимаемая с термопар Г, и напряже-
ние компенсации, снимаемое с мостовой схемы, состоящей из
резисторов R1—R9, поступает на усилитель УС и двухфазный
индукционный реверсивный двигатель 2И. Последний через ре-
дукторы Р\ и Р2 перемещает стрелки указателя и изменяет со-
противление R6 до тех пор, пока напряжение мостовой схемы
не скомпенсирует термо-э.д.с., получаемой с термопар Т. Пита-
ние мостовой схемы осуществляется от выпрямителя, состоя-
62
щего из резисторов R13, R14, диода Д1, фильтрующей емкости
С1 и стабилитронов Д2—Д6.
При изменении температуры окружающей среды меняется
термо-э.д.с. термопар, но одновременно меняется и напряжение
диагонали мостовой схемы за счет изменения терморезистора
/?2, имеющего температуру холодного спая термопар. Парамет-
ры схемы подобраны так, что они полностью взаимно компен-
сируются. Таким образом, в измерительную цепь указателя
подается сигнал от термопар, соответствующий температуре их
горячих спаев. Ввиду особенностей компенсационного метода
измерений общие суммарные ошибки такого прибора будут
составлять ±10° С при диапазоне измерений 300—1000° С.
4. ПРИБОРЫ ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ
Одним из основных параметров, позволяющих определять
тягу двигателя, является частота вращения. Приборы, ее изме-
ряющие, называются тахометрами. Их применяют для измере-
ния частоты вращения вала поршневого авиадвигателя, ротора
компрессора турбореактивного двигателя, турбины газотурбин-
ного двигателя и т. д.
Благодаря простоте, надежности и малым габаритам наи-
большее распространение получили электрические магнитоин-
дукционные тахометры, которые устанавливаются практически
на всех ЛА. Диапазон измерения частоты вращения с помощью
этих приборов чрезвычайно широк: 400—4000 об/мин в поршне-
вом двигателе, 1000—20 000 об/мин в турбореактивном. Основ-
ным узлом магнитоиндукционных тахометров (рис. 2.19) явля-
ется чувствительный элемент. Они состоят из постоянных маг-
нитов 2, вращающихся с частотой и, равной или пропорцио-
нальной измеряемой частоте вращения, и токопроводящего по-
движного элемента 1, в котором вращающееся магнитное поле
наводит вихревые токи. Взаимодействие этих токов с вращаю-
щимся магнитным полем вызывает появление вращающего мо-
мента Л4вр, приложенного к подвижному элементу 1. При нали-
чии противодействующего момента Мпр, развиваемого спираль-
ной пружиной /7, подвижный элемент повернется на угол а, при
котором Л4Вр=Л4Пр.
В итоге угол поворота подвижного элемента а будет про-
порционален измеряемой частоте вращения вала двигателя п.
На ЛА применяются электрические магнитоиндукционные
тахометры типов ТЭ, указатели которых имеют шкалы, програ-
дуированные в оборотах в I мин, и ИТЭ, указатели которых
проградуированы в относительных единицах — процентах. Ком-
плект тахометра ИТЭ-1 состоит из датчика типа ДТЭ, указа-
теля и линии связи. Датчик тахометра является синхронным
генератором переменного тока переменной частоты (рис. 2.20).
63
Рис. 2.20. Элект -
рокинематическая
схема тахометра
Ротор датчика 1 выполнен в виде двух- или четырехполюсных
магнитов и приводится во вращение валом двигателя. Обмотки
статора датчика, соединенные в звезду, связаны с обмотками
статора 2 синхронного двигателя указателя. При вращении ро-
тора датчика в обмотках его статора возбуждается трехфазный
ток, частота которого пропорциональна частоте вращения вала
двигателя. Ток по трехпроводной линии связи подводится к об-
моткам статора двигателя указателя и образует вращающееся
магнитное поле, частота вращения которого пропорциональна
частоте токов в фазовых обмотках статора. Ротор двигателя
указателя конструктивно выполнен в виде двух крестообраз-
ных постоянных магнитов 4 и пакета гистерезисных дисков 3.
Постоянные магниты 4 соединены с валом указателя с по-
мощью пружины. Это дает возможность исключить в момент
раскрутки ротора массивный магнитный узел указателя. Диски
5, изготовленные из ферромагнитного сплава, позволяют раз-
вить необходимый вращающий момент для раскрутки ротора
до синхронной частоты вращения. Чувствительный элемент
прибора состоит из двух связанных дисков с запрессованными
в них постоянными магнитами 5 и токопроводящего подвижно-
го элемента 7. Диски посажены на одну ось с ротором двига-
теля указателя. Подвижной элемент 7 закреплен на оси стре-
лок указателя. К ней крепятся один конец противодействующей
пружины 8 и диск демпфера 9. При значительных колебаниях
стрелки в диске демпфера наводятся вихревые токи, которые,
взаимодействуя с магнитным полем постоянных магнитов 10
демпфера, способствуют затуханию колебаний подвижной си-
стемы указателя со стрелкой 11. Основные погрешности в тахо-
метре возникают в результате изменения электрического сопро-
тивления подвижного элемента, индукции в воздушном зазоре,
характеристик постоянных магнитов, параметров конструкции
чувствительного элемента, линейных размеров противодейству-
ющей пружины и модуля упругости ее материала от темпера-
туры окружающей среды. Подвижный элемент изготавливают
из материала с малым температурным коэффициентом. Осталь-
ные температурные изменения в приборе компенсируются с по-
мощью термомагнитного шунта 6, закрепленного на постоянных
магнитах 5. Основная инструментальная погрешность тахомет-
ра определяется трением в подшипниках подвижных узлов,
ошибками градуировки шкалы и составляет 1% при (20±5)°С.
64
Тахометр типа ИТЭ-2 отличается от ИТЭ-1 тем, что имеет
два датчика типа ДТЭ, каждый из которых связан со своим
валом двигателя и соответствующим чувствительным элемен-
том. Оба измерительных узла собраны в одном корпусе и име-
ют совмещенные оси указательных стрелок. Поскольку для пе-
редачи угла поворота подвижного элемента на ось стрелки
используются шестеренчатые пары, трение в которых способст-
вует быстрому затуханию колебаний подвижных систем, то в
измерительных узлах рассматриваемых указателей демпферы
отсутствуют.
При эксплуатации тахометров наиболее характерными не-
исправностями являются: размагничивание магнитов измери-
тельного узла и неправильное подключение фаз датчика и ука-
зателя. Если подключения выполнены правильно, то при про-
верочном проворачивании вала датчика в направлении враще-
ния его авиадвигателем стрелка указателя будет поворачивать-
ся по часовой стрелке.
5. ПРИБОРЫ ИЗМЕРЕНИЯ РАСХОДА ТОПЛИВА
Точное определение количества и расхода топлива, которое
потребляют двигатели ЛА, относится к важнейшим задачам,
решаемым во время полета. Их знание позволяет рассчитать
дальность и продолжительность полета, а также обеспечить
правильность центровки ЛА по мере выработки топлива.
Приборы, предназначенные для определения объемного или
массового количества топлива на ЛА, называются топливоме-
рами. Их применяют для измерения массы топлива в отдель-
ных баках, в группах баков и суммарного количества топлива
на борту ЛА. Совместно с топливомерами устанавливают авто-
маты управления последовательностью выработки и заправки
баков топливом. Они также обеспечивают автоматическое уп-
равление перекачкой топлива для поддержания центровки ЛА
в требуемых пределах. Такие объединенные системы называют
топливоизмерительными системами (ТИС).
Приборы, используемые для определения мгновенного (за
единицу времени) или суммарного (за время между запуском
и остановом двигателя) расхода топлива, называются расходо-
мерами. Мгновенный расход топлива является одним из основ-
ных параметров, определяющих тягу двигателя. Суммарный
расход топлива позволяет определять его запас во всей топлив-
ной системе ЛА во время полета.
Топливомеры. В авиации наибольшее применение получили
топливомеры, основанные на методе измерения уровня топлива
в баках. В зависимости от вида чувствительного элемента раз-
личают поплавковые или емкостные топливомеры. Принцип
действия поплавкового топливомера основан на определении
5-455 65
Рис. 2.21. Поплавковый топливомер:
а — датчик; б — принципиальная схема: / — основание; 2 — коромысло; 3 — поплавок;
4 — сильфон; 5, 7—рычаги; 6 — ось; 8 — движок потенциометра; 9 — потенциометр;
10 — передаточный механизм; // — контакт
уровня топлива с помощью поплавка, плавающего па его по-
верхности. Емкостный топливомер измеряет уровень топлива с
помощью установленного в баке конденсатора, значение емко-
сти которого зависит от уровня топлива и диэлектрических по-
стоянных топлива и газовой среды в свободной от топлива ча-
сти бака.
Поплавковые топливомеры. В качестве примера поплавково-
го топливомера рассмотрим электромеханический бензиномер
типа СБЭС (суммирующий бензиномер электрический с сигна-
лизацией остатка топлива). В комплект прибора входят: дат-
чики, размещенные в баках, указатель, переключатель, систе-
ма сигнализации и линия связи. Датчик (рис. 2.21, а) преобра-
зует перемещение поплавка 3 в зависимости от уровня топлива
с помощью передаточного механизма в перемещение щетки
потенциометра 9. Сильфон 4 обеспечивает герметизацию внут-
реннего пространства бака и подвижность передаточного меха-
низма. Потенциометр датчика включен (рис. 2.21, б) в измери-
тельную схему, подобную схеме манометра типа ЭДМУ. В бен-
зиномере типа СБЭС применен логометрический указатель с
подвижными рамками и неподвижным магнитом. Бензиномер
66
имеет один указатель на две группы баков. С помощью пере-
ключателя его можно подключить к левой или правой группе
баков, а также ко всем бакам, замеряя суммарное количество
топлива.
При критическом остатке топлива замыкается контакт
11 и в цепи сигнализации включается лампа. Для создания
указателя с равномерной шкалой каркас потенциометра профи-
лируют с учетом функциональной зависимости объема топлива
в баке от его уровня.
Методические ошибки поплавковых топливомеров определя-
ются ускорениями, действующими на поплавок при эволюциях
ЛА, стояночными углами ЛА и прогибом крыльев, в которых
находятся баки с f топливом, под действием аэродинамических
сил. Основная инструментальная погрешность топливомеров
является следствием изменения параметров электрической схе-
мы от температуры окружающей среды. Суммарная приведен-
ная погрешность поплавковых топливомеров достигает ±5% в
рабочем диапазоне шкалы. При эксплуатации поплавковых
топливомеров возможны следующие дефекты: нарушение гер-
метичности датчика, нарушение контакта между щеткой и по-
тенциометром, отказ системы сигнализации из-за разрегулиров-
ки или загрязнения контактов, деформация рычагов и потеря
плавучести поплавка из-за его разгерметизации. Вследствие
этого на ЛА широко применяются емкостные топливомеры, ко-
торым не свойственны перечисленные дефекты.
Емкостные топливомеры. На современных летательных ап-
паратах эти топливомеры нашли наибольшее применение.
Датчиком топливомера типа СПУТ (система программного
управления и измерения топлива) является размещенный в ба-
ке цилиндрический конденсатор, обкладками которого служит
набор коаксиально расположенных труб. Вследствие разных
диэлектрических постоянных топлива (вт=2) и газовой среды
в свободной от топлива части бака (82=1) емкость конденса-
тора
Сл.= ^4-К2Л,
где Ль /’Сз — постоянные коэффициенты, зависящие от параметров конструк-
ции датчика и диэлектрических постоянных топлива и газовой среды; h —
высота уровня топлива в баке.
Но из-за изменения площади поперечного сечения бака S
в зависимости от h прямой пропорциональности между массой
топлива ш и уровнем h не существует. Чтобы получить необхо-
димую зависимость Cx=f(m) и, как следствие, равномерную
шкалу указателя, проградуированную в массовых единицах,
профилируют обкладки датчиков в соответствии с изменением
S. Конструкции профилированных датчиков представлены на
рис. 2.22.
67
Рис. 2.22. Профилированный емкост-
ный датчик:
а—с изменением поверхности трубы; б —
с изменением диаметра трубы
Рис. 2.23. Принципиальная электриче-
ская схема топливомера типа СПУТ
Принцип действия измерительной части топливомера осно-
ван на измерении емкости с помощью схемы самобалансирую-
щегося моста / (рис. 2.23). Он состоит из датчиков Сх и С1,
постоянной емкости С2, резисторов Ri и R2, необходимых для
регулировки при нулевом количестве топлива, и резисторов /?3,
/?4, R5 и /?6. Конденсатор С1 предназначен для исключения
протекания постоянного тока через датчик в случае короткого
замыкания в усилителе А. Так как С1^>СХ, то емкость датчи-
ков определяется значением Сх. При сухих баках, изменяя со-
противление 2?1, добиваются установки стрелки указателя на
нулевой отметке шкалы. Начальное значение емкости датчика
или емкость сухого датчика СХ = С2, щетка занимает край-
нее верхнее положение, а /?3=R 1+ R2.
Если баки заполнены топливом, то с помощью сопротивле-
ния 7?5 стрелку указателя устанавливают на отметке шкалы,
соответствующей количеству топлива. При его выработке и
изменении Сх напряжение Ucd с измерительной диагонали cd
подается на усилитель А и двигатель М. Последний через ре-
дуктор, изменяя сопротивление R6, уравновешивает мост 1 и
перемещает стрелку указателя на угол а, который пропорцио-
нален Сх. Показание стрелки по шкале указателя определяет
количество оставшегося топлива в баке. Питание схемы осуще-
ствляется напряжением 115 В 400 Гц.
В современных топливомерах, которые градуируются в мас-
совых единицах, имеются устройства температурной компен-
68
сации. Они устраняют методическую погрешность, которая воз-
никает в топливомере из-за изменения плотности и диэлектри-
ческой постоянной при изменении температуры топлива. Такое
устройство представляет собой мост 2, плечами которого явля-
ются: компенсационный емкостный датчик С\, цепочка СЗ/?7
и вторичные обмотки w2 и w3 трансформатора Тр2. Датчик
состоящий из нескольких прямоугольных пластин, заключен-
ных в трубчатый корпус, помещается в нижнюю часть бака, из
которого топливо вырабатывается в последнюю очередь. Сле-
довательно, он всегда погружен в топливо и его емкость может
изменяться только вследствие изменения диэлектрической пос-
тоянной 8т. Мост 2 уравновешен при температуре +20°С, для
которой произведена тарировка схемы. Если при постоянном
количестве топлива в баках температура его изменится, то на
измерительной диагонали моста 1 появится напряжение UCd-
На измерительной диагонали моста 2 возникает напряжение
Uej=1Ucd, но противоположное по фазе. На входе усилителя А
они компенсируют друг друга и не вызывают изменения поло-
жения стрелки топливомера. Приращение емкости датчика Сх
при изменении температуры на один градус зависит от значе-
ния этой емкости, которая уменьшается с выработкой топлива.
Поэтому необходимо уменьшить напряжение компенсации Uef.
Это достигается изменением напряжения Uk в диагонали пита-
ния моста 2 с помощью потенциометра /?8, щетка которого
связана с двигателем М через редуктор.
С помощью рассмотренной схемы измеряется не только ко-
личество топлива в отдельных баках, но и суммарный запас
топлива в группах баков. Для этого с помощью переключателя
и коммутирующих реле изменяются сопротивления резисторов
—R3 и емкость конденсатора С2, а датчики, установленные
в баках, подключаются параллельно Сх.
Автоматы управления выработкой и заправкой топлива.
Для управления работой электрических насосов, которые осу-
ществляют программный расход и заправку баков топливом,
применяются автоматы управления выработкой и заправкой
топлива. Их работа обеспечивает правильную центровку ЛА.
Основным элементом автомата является индуктивный сиг-
нализатор уровня топлива, принципиальная схема которого
представлена на рис. 2.24. Он состоит из вертикально установ-
ленной в баке трубки, внутри которой скользит поплавок с фер-
ро-магнитным сердечником. На трубке укреплена цилиндричес-
кая катушка с индуктивностью L1. Поплавок изменяет свое
положение в зависимости от уровня топлива и вводит в катуш-
ку сердечник. Это приводит к резкому возрастанию индуктив-
ности катушки L1, которая является одним из плеч индуктив-
ного моста. Другими плечами моста являются индуктивность
катушки L2, значение которой не меняется, и индуктивности
вторичных обмоток wl и w3 трансформатора Т. При отсутствии
69
К насосам и сигнал?
ным лампам
Рис. 2.24. Принципиальная электри
ческая схема индуктивного сигнали-
затора уровня топлива
ренние обкладки емкостных /
сердечника в катушке L1 =£2,
мост сбалансирован и {7^ = 0.
Когда уровень топлива дости-
гает определенного значения,
сердечник входит в магнито-
провод, индуктивность резко
меняется, появляется напряже-
ние разбаланса моста, которое
приводит к срабатыванию вто-
ричного устройства ВУ. В ка-
честве ВУ используются элек-
тромагнитные, электронные или
полупроводниковые реле, кото-
рые обеспечивают включение
и выключение топливных насо-
сов. В качестве направляющих
труб часто используются внут-
тчиков топливомера, где распо-
лагаются по два-три датчика уровня со своими поплавками для
сигнализации верхнего и нижнего уровней, а также определен-
ного остатка топлива. Точность измерения этими датчиками
уровней топлива равна 2—10 мм.
ТИС свойственны методические погрешности, которые опре-
деляются: действием ускорений при эволюциях самолетов; из-
менением проводимости датчика и линии связи, соединяющей
датчик с измерительной схемой; неточным совпадением профи-
ля датчика с зависимостью Cx=f(m); недостаточной компен-
сацией температурных ошибок при изменении температуры.
Инструментальные погрешности топливомеров вследствие при-
менения компенсационного метода малы и ими можно прене-
бречь.
Основная приведенная погрешность СПУТ составляет
±4%. В настоящее время применяются системы управления и
измерения топлива типа СУИТ с высокочастотными мостовыми
схемами измерения емкости датчиков (частота питания моста
8—10 кГц). Они обладают более высокой точностью и надеж-
ностью в эксплуатации. Правильность функционирования ТИС
обеспечивают встроенные системы контроля.
Расходомеры. Принцип измерения мгновенного расхода топ-
лива основан на определении скорости потока, которая при за-
данном сечении трубопровода и плотности топлива пропорци-
ональна мгновенному расходу. Измерение скорости потока про-
изводится с помощью крыльчатки, расположенной в топливной
магистрали.
Измерение суммарного расхода топлива основано на под-
счете суммы последовательных электрических импульсов, час-
тота которых пропорциональна частоте вращения крыльчатки.
Одна из наиболее распространенных систем измерения расхода
70
топлива типа СИРТ предназначена для измерения мгновенного
(часового) расхода топлива каждым авиадвигателем и запаса
топлива во всей топливной системе ЛА.
В состав системы входят (рис. 2.25) датчики расхода
ДРТМС, датчик плотности ДП, преобразователь сигналов ПС,
указатели расхода УМРТ и указатель суммарного запаса топ-
лива УСЗТ.
Рассмотрим работу канала измерения мгновенного расхода
топлива, обслуживающего один двигатель. Топливо, протекая
через датчик расхода (рис. 2.26), приводит во вращение крыль-
чатку 6, частота вращения которой пропорциональна скорости
потока топлива. На оси крыльчатки крепится ротор в виде
постоянного шестиполюсного магнита 7. При вращении крыль-
чатки магнитное поле магнита индуктирует э.д.с. переменной
частоты в катушках, находящихся в корпусе статора 8. Э.д.с.
переменной частоты поступает на вход преобразователя часто-
ты в напряжение ПНЧ, где усиливается и преобразуется в по-
стоянное напряжение, пропорциональное частоте вращения
крыльчатки, а следовательно, мгновенному расходу в объемных
Рис. 2.25. Функциональная схема системы СИРТ
71
Рис. 2.26. Кинематическая схема дат-
чика расхода:
/ — шарикоподшипники; 2 — втулка со
стальным сердечником; 3 — магнитный
шунт; 4 — катушка постоянной индуктив-
ности; 5 — катушка переменной индуктив-
ности; 6 — крыльчатка; 7 -- постоянный
магнит; 8 — статор; 9 — червячная пере-
дача
единицах. Чтобы расход топлива, выраженный в объемных еди-
ницах, преобразовать в расход топлива, выраженный в массо-
вых единицах, необходима поправка на плотность топлива
qt = р Кг>
где Qt — массовый расход топлива, кг/ч; р — плотность топлива, кг/см3;
Ут — объемный расход, см3/ч.
Зависимость QT реализуется путем потенциометрического
умножения. На потенциометр R3a (см. рис. 2.25) подается на-
пряжение с ПЧН, пропорциональное расходу Ут. Движок по-
тенциометра R3a перемещается пропорционально изменению
р. В итоге напряжение Un3, снимаемое с щетки потенциометра,
будет пропорционально массовому расходу топлива QT.
Измерение плотности р осуществляется с помощью устрой-
ства, состоящего из датчика плотности ДП, блока отработки
плотности БОП и усилителя УСС 1. Датчик плотности пред-
ставляет собой плоский конденсатор, постоянно находящийся
в топливе, емкость которого меняется в зависимости от плот-
ности топлива. Он включен в схему измерительного моста, со-
стоящего из эталонного конденсатора С1 и резисторов Д8а,
Д9, ДЮ и Д13—Д16. Емкостный мост питается переменным
напряжением — 20 В 400 Гц. При изменении плотности проис-
ходит разбаланс моста и сигнал с измерительной диагонали,
усиленный усилителем УСС1, поступает на обмотку управления
двигателя Ml, ротор которого механически связан с движками
потенциометров R3a, R8a и со шкалой значений плотности,
вращающейся относительно неподвижной стрелки. Перемеще-
ние движков потенциометров R3a и R8a приводит мост в согла-
сованное состояние и вводит поправку в значение напряжения
С'нз. Это напряжение, пропорциональное QT, сравнивается с
С7ОП. Результат сравнения подается на усилитель УУС2, где
усиливается, и поступает на обмотку управления двигателя
М2. Двигатель перемещает стрелку указателя УМРТ и движок
потенциометра R9a, приводя схему в согласованное состояние.
72
Положение стрелки соответствует значению мгновенного рас-
хода топлива в массовых единицах.
При работе измерителя запаса топлива крыльчатка 6 через
червячную передачу 9 (см. рис. 2.26) вращает сердечник, ко-
торый является звеном в магнитной цепи катушки 5. Послед-
няя совместно с катушкой постоянной индуктивности 4 состав-
ляет схему индуктивного моста. Двумя другими плечами моста
являются вторичные обмотки трансформатора, находящегося
в преобразователе суммарного расхода (ПСР). Через опреде-
ленное число оборотов крыльчатки индуктивный мост выходит
из равновесия за счет изменения индуктивности катушки 5.
При этом в диагонали моста появляется сигнал переменного
тока частотой 400 Гц, модулированный частотой изменения ин-
дуктивности катушки 5. Эти сигналы (см. рис. 2.25) с трех
датчиков расхода поступают на вход ПСР, где происходит уси-
ление, формирование и распределение приходящих импульсов
в последовательность, пропорциональную сумме V1 + V2+V3,
где Vi (i=l, 2, 3) — объемный суммарный расход топлива на
каждый двигатель.
Указатель суммарного запаса топлива (УСЗТ) предназна-
чен для преобразования числа импульсов, поступающих с
ПСР в угловое перемещение стрелки указателя с учетом вне-
сения поправки на изменение плотности. Импульсы из ПСР
поступают на электромагнит двигателя типа ДРШ. Последний
через дифференциал перемещает стрелку указателя УСЗТ к
нулевому делению шкалы. Передаточное отношение дифферен-
циала выбирается таким, чтобы угол поворота стрелки указате-
ля был пропорционален суммарному расходу топлива с плот-
ностью р = 0,8 г/см3. Периодически, после каждых 500 кг израс-
ходованного топлива, вносится поправка на отклонение плот-
ности от расчетного значения.
Устройство внесения поправки состоит из двигателя М3,
электромагнитной муфты Эм1, микровыключателя ±Др, уста-
новленного на дифференциале, реле Р1, усилителя УССЗ и
элементов мостовой схемы. Резистор /?8б, расположенный в
блоке БОП, положение движка которого пропорционально те-
кущему значению р, и резистор /?5 образуют первый мост.
Элементами второго моста являются резисторы /?5, 7?2 и /?3.
При отключенном реле Р1, когда замкнуты его контакты 4 и 5,
УСС подсоединен в диагональ измерения первого моста и дви-
гатель М3 отрабатывает текущее р.
После выработки очередных 500 кг топлива замыкается
микровыключатель ±Др и происходит включение реле Р1. Его
контактами отключается тормозная I и подключается рабочая
II обмотки муфты Эм1. Одновременно другими контактами
происходит переключение входа усилителя УССЗ с диагонали
первого моста на диагональ второго. Второй мост имитирует
плотность р = 0,8 г/см3. Его регулировка осуществляется рези-
73
стором jR3. Так как движок потенциометра 7?5 находится в по-
ложении, пропорциональном текущему значению р, то при пе-
реключении на второй мост он будет перемещен в положение,
соответствующее р = 0,8 г/см3. Угловое перемещение движка
потенциометра /?5, равное разности между текущим и расчет-
ным значением плотности Др, передается на рабочую половину
муфты Эм1 и дифференциал. С помощью последнего вносится
поправка Др в угловое перемещение стрелки указателя. Мето-
дические погрешности, свойственные расходомерам, возникают
вследствие неполной коррекции изменения плотности топлива
и неравномерного распределения скорости потока топлива по
поперечному сечению трубы. Инструментальные погрешности
складываются из погрешностей датчика, измерительной схемы
и указателя. Наиболее существенны погрешности датчика, ко-
торые обусловлены трением в подшипниках, моментом жид-
костного сопротивления и наличием реакции преобразователей.
Суммарная приведенная погрешность по мгновенному расходу
и сумарному запасу топлива составляет ±4%. Наиболее час-
тые дефекты возникают из-за засоренности или износа под-
шипников крыльчатки датчика расхода.
6. ПРИБОРЫ КОНТРОЛЯ ВИБРАЦИЙ
Приборы контроля вибраций обеспечивают непрерывный
контроль скорости вибрации двигателя и выдают сигналы о
повышенной и опасной вибрации в случаях превышения ее зна-
чения выше установленной нормы. Появление вибрации, вне-
запно возникшей и возрастающей, указывает на дефекты в
двигателе. Такими дефектами могут быть разрушения приво-
дов авиадвигателей, дебаланс роторов компрессора, разруше-
ния лопаток турбины или компрессора и т. д. Раннее преду-
преждение дефектов в двигателе позволит экипажу предпри-
нять необходимые меры и избежать серьезных повреждений
двигателя и летных происшествий.
Вибрация конструкций авиадвигателя описывается уравне-
нием
5В = а& sin сов t,
se, ав — соответственно текущее значение и амплитуда виброперемещения;
— частота.
Основным параметром, характеризующим вибрацию, является
скорость вибрации vB — sa = cos wB t.
В авиационных виброметрах используется инерционный метод,
позволяющий измерить скорость вибрации объекта относитель-
но массы, упруго сочлененной с объектом.
В комплект аппаратуры контроля вибрации входят: датчи-
ки вибрации типа МВ, электронный блок БЭ, указатель виб-
роскорости типа ИВ, галетный переключатель и линия связи.
74
Датчик вибрации
(рис. 2.28) представляет
собой колебательную систе-
му, состоящую из инерцион-
ной массы /, связанной пру-
жинами 2 с корпусом 4.
Инерционной массой служит
постоянный магнит. Цилин-
дрические пружины обеспе-
чивают среднее положение
магнита относительно ка-
тушки 3. Под влиянием воз-
мущающей силы магнит бу-
дет перемещаться относи-
тельно катушки. При пересе-
чении витков катушки полем
постоянного магнита в ка-
тушке индуцируется э. д. с.,
которая пропорциональна
Рис. 2.27. Схема датчика вибрации
индукции магнитного потока, числу витков, средней длине витка
и скорости движения обмотки катушки относительно магнита.
На двигателе устанавливаются датчики: один на передней опо-
ре, второй — на задней. Электронный блок БЭ (рис. 2.28) состо-
ит из двух независимых идентичных каналов, каждый из которых
является усилителем с полосой пропускания 50—200 Гц, и обще-
го узла питания. Сигнал датчика усиливается, выпрямляется,
Рис. 2.28. Структурная схема аппаратуры контроля вибрации типа ИВ
75
подается на указатель и одновременно на ждущий мультивибра-
тор схемы сравнения. При достижении заданного уровня вибро-
скорости мультивибратор заставляет срабатывать электронное
реле Р, которое включает сигнальную лампу Л. Указатель ИВ
является микроамперметром магнитноэлектрической системы с
подвижной рамкой.
Основные погрешности авиационных виброметров определя-
ются несовпадением направления вибрации с осью датчика,
изменением магнитной индукции магнита за счет старения и
температурных изменений, наличием трения в подшипниках и
ошибками указателя. Основная погрешность измерителей виб-
рации не превышает ±10%.
ГЛАВА 3. ПИЛОТАЖНО-НАВИГАЦИОННЫЕ
ПРИБОРЫ И СИСТЕМЫ УПРАВЛЕНИЯ
1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
ПИЛОТАЖНО-НАВИГАЦИОННЫХ ПРИБОРОВ
Пилотажно-навигационные приборы и измерительные систе-
мы обеспечивают экипаж и технические средства управления
полетом информацией, необходимой для решения задач само-
летовождения. Под самолетовождением понимают комплекс
действий экипажа и работников наземных технических служб
движения, направленных на обеспечение наибольшей точности
выполнения полета ЛА по установленной трассе (маршруту)
и осуществление его посадки в заданное время. Поэтому для
решения задач самолетовождения необходимо определять, в
первую очередь, значения параметров, характеризующих полет
ЛА.
Полет ЛА как движение твердого тела в пространстве со-
стоит из поступательного движения центра масс ЛА по задан-
ной траектории и углового движения относительно центра масс.
Для описания траекторий полетов на небольшие расстоя-
ния, а также при взлете и посадке применяются местные си-
стемы координат (например, декартова прямоугольная система
координат OqXqYqZq (рис. 3.1). Для описания траекторий по-
летов на значительные расстояния в основном используются
географическая и ортодромическая системы координат, которые
предполагают сферическую модель Земли (рис. 3.2).
В каждый 1-ый момент времени положение центра массы
ЛА в декартовой системе координат будет определяться линей-
ными координатами: Н — высотой полета, L — пройденным
расстоянием и Z — боковым отклонением (рис. 3.1, а). В гео-
графической системе координат положение центра масс ЛА
определяется, кроме Н, широтой <р и долготой % полета, в орто-
76
Рис. 3.1. Прямоугольные системы координат:
а — земная; б — нормальная
дромической — Н — высотой, фОрт — ортодромической широ-
той и Хорт — ортодромической долготой. При построении мар-
шрутов самолетов используют частноортодромические системы
координат (рис. 3.1, б), начало которых совмещают с конечным
пунктом каждого участка полета. Связь между угловыми и ли-
нейными параметрами ортодромической системы координат для
определения места положения (МП) самолета следующая:
Зорт = [г. (/?з + Я)/180°] Хорт; Zopr = [к (R3 4- Н)/180°] Торт, (3.1)
где — радиус Земли.
За высоту полета Н принимают расстояние от некоторого
уровня, принятого за нуль, до ЛА, отсчитанное по вертикали.
В зависимости от выбранного уровня отсчета различают:
абсолютную высоту (/7абс), когда за начало отсчета прини-
мается уровень моря с параметрами стандартной атмосферы
(СА): давление Р = 760 мм рт. ст.= 101 325ПА, температура
Го = 288,15 К, плотность р0= 1,225 кг/м3, ускорение свободного
падения g0 = 9,80665 м/с2, скорость звука а = 340,294 м/с;
относительную высоту (//Отн), когда за начало отсчета при-
нимают уровень места взлета или посадки;
Рис. 3.2. Глобальные
системы координат:
а — геосферическая;
б — ортодромическая
77
'i
истинную высоту (Янст), отсчитываемую от той точки зем-
ной поверхности, над которой пролетает ЛА.
Все вышеперечисленные координаты и высота полета назы-
ваются параметрами положения самолета.
Угловое движение ЛА относительно центра масс определя-
ется угловыми координами (углами Эйлера) между двумя си-
стемами координат. Первая система координат ОХдУд 2д, оси
которой параллельны осям исходной системы 00Х0Уо20, связа-
ны с центром масс ЛА. Вторая система координат ОХУХ свя-
зана с ЛА (см. рис. 3.1): ось ОХ направлена вдоль продольной
оси ЛА, ось ОУ лежит в плоскости симметрии ЛА и перпенди-
кулярна ОХ, ось OZ перпендикулярна плоскости симметрии и
направлена в сторону правого крыла.
Угловые координаты ЛА определяются тремя последова-
тельными поворотами системы ОАд Уд 7д (рис. 3.1, б). Пер-
вый поворот производится на угол Дф относительно оси О Уд
до совпадения оси ОХд с проекцией ОХ на горизонтальную
плоскость ОХд Zд. Второй — на угол v относительно оси 02д'
до совпадения ОХ& с ОХ. Третий — на угол у относительно
оси ОХ до совпадения ОУд' с ОУ и 07д' с OZ. Угол Аф назы-
вается углом рыскания, 0- — углом тангажа, а у — углом
крена.
Одним из основных параметров движения ЛА является
курс — угол между проекцией продольной оси ЛА на горизон-
тальную плоскость и положительным направлением линии от-
счета, расположенной в этой плоскости.
При решении различных задач по самолетовождению за ли-
нию отсчета принимается географический Уи, магнитный zVM,
компасный Ук меридианы или ортодромия. Соответственно
различают следующие виды курсов (рис. 3.3): истинный— Чт,
магнитный — XFM, компасный Фк и ортодромический — Чго-
Отличие Тк от Тм определяется магнитной девиацией Дк, а от-
личие Ч7 от Тм — магнитным склонением Дм.
Для решения задач управления, стабилизации и навигации
необходимо на борту ЛА определять:
истинную воздушную скорость V — скорость движения ЛА
относительно воздушной среды:
индикаторную скорость Уи — условную скорость движения
ЛА на высоте // = 0, при которой создается скоростной напор,
равный фактическому при полете на заданной высоте;
путевую скорость У" — горизонтальную составляющую
скорости ЛА относительно Земли.
Истинная воздушная скорость V выражается также в чис-
лах М, равных отношению V к скорости звука в заданной сре-
де. Направление вектора скорости V обычно не совпадает с
продольной осью ЛА, т. е. с осью ОХ.
В связанной системе координат ОХУХ положение V харак-
теризуется: углом атаки а — между осью ОХ и проекцией век-
78
тора скорости V на плоскость ОХУ и углом скольжения р —
между вектором V и плоскостью ОХУ (рис. 3.4). Соотношение
между путевой скоростью Уп и истинной воздушной скоростью
V определяется из векторного треугольника скоростей
(рис. 3.5). Вектор Уп определяется горизонтальными состав-
ляющими векторов истинной воздушной скорости Уг и скоро-
сти ветра Wr. Векторный треугольник, составленный из Уг,
Уп и W называется навигационным треугольником скоростей.
Для решения задач управления и стабилизации необходимо
производить измерения угловых скоростей корпуса ЛА относи-
тельно осей связанной системы кординат сох, (oz и линей-
ных ускорений пх, пу, nz вдоль осей связанной системы коор-
динат OXyZ. Основные параметры, характеризующие режимы
полета ЛА, и их измерители сведены в табл. 3.1.
Таблица 3.1
Параметр Обозначение Применяемый измеритель
Углы, градус:
рыскания Дф Гирополукомпас, курсовая система
тангажа V Авиагоризонт, гировертикаль
крена V
курса Ф, фм, Фк, Гироиндукционный компас,
Скорость: Фо курсовая система, гирополу- компас, компас
истинная воздушная, км/ч V Измеритель скорости, систе- ма воздушных сигналов
индикаторная, км/ч Уи
отклонение от V задан- ной, км/ч ДУ Корректор скорости
79
Продолж. табл. 3.1
Параметр Обозначение Применяемый измеритель
ЧИСЛО М м Измеритель числа М, систе- ма воздушных сигналов
путевая, км/ч Vn Доплеровский измеритель скорости и угла скоса, инерци- онная система
вертикальная, м/с к Вариометр
Высоты, м:
абсолютная н Баровысотомер, система воз- душных сигналов
относительная //отп
истинная Нкст Радиовысотомер
отклонение от 11 заданной A/Y Корректор высоты
Пройденное расстояние, км L Навигационное вычислитель- ное устройство
Боковое отклонение, км Z
Широта, градус Ф
Долгота, градус % Датчик угла атаки
Угол атаки, градус а
» скольжения, градус Р > » скольжения
Угловая скорость, градус/с (Ох, СОу. (Oz » угловой скорости
Линейное ускорение, м/с2 Пх, Пу, пг Датчики линейных ускорений
Угол сноса, градус Рс Доплеровский измеритель скорости и угла сноса
В свою очередь, перечисленные пилотажно-навигационные
приборы и системы объединяют в следующие группы: аэромет-
рические (высотомеры, указатели скоростей полета, вариомет-
ры, системы воздушных сигналов, датчики углов атаки и
скольжения, корректоры высо-
ты); гироскопические (авиаго-
ризонты, гировертикали, дат-
чики угловых скоростей); кур-
совые (магнитные компасы, ги-
рополукомпасы, курсовые сис-
темы); навигационные (нави-
гационные вычислительные ус-
тройства, инерциальные систе-
мы) .
Рис. 3.5. Навигационный треуголь-
ник скоростей
2. АЭРОМЕТРИЧЕСКИЕ ПРИБОРЫ И СИСТЕМЫ
Высотомеры. Приборы, используемые для измерения высоты
Н полета ЛА, называются высотомерами. Измерение высоты
полета производится различными методами. Наибольшее рас-
пространение в авиации получили барометрический и радио-
технический методы. Барометрический метод основан на изме-
рении абсолютного атмосферного давления, которое уменьша-
80
егся с увеличением высоты. Радиотехнический метод использу-
ет свойства отражения электромагнитных волн от земной по-
верхности.
Знание на борту ЛА абсолютной высоты Н необходимо для
установления эшелонов полета на маршрутах, а также при ис-
пытании ЛА и их двигателей. Относительная высота /70Тн дол-
жна быть известна при взлете и посадке. Истинную высоту
Яист необходимо знать в каждый момент полета для обеспече-
ния его безопасности, а также выполнения требуемых работ
(аэрофотосъемка, сельскохозяйственные работы и т. д.).
Приборы, работающие на барометрическом методе, называ-
ются барометрическими высотомерами. Зависимость статичес-
кого давления р воздуха от высоты Н выражается как
(3.2)
где te=0,0065 К/м — температурный градиент высоты; /?уд =
= 287,053 Дж/(кг-К) — удельная газовая постоянная.
Выражение (3.2) устанавливает связь p=f(H) для СА.
Если его переписать как то получим так называемую
гипсометрическую формулу
(3.3)
Эти зависимости справедливы для высоты от 0 до 11 000 м,
так как в этом диапазоне температура воздуха Т линейно за-
висит от высоты.
Для больших высот (до 20000 м) температуру воздуха при-
нимают постоянной. Тогда барометрическая и гипсометричес-
кая формулы для высот, превышающих 11 000 м, имеют вид:
р = Рц е~ - Я,0ГЯулЛ1; (3.4)
где Ян=11 000 м, Тп=216,65 К; ри = 22 632 Па.
Эти зависимости показывают, что при известных PQ, TQ или
Рц, Гц, можно измерить высоту И в зависимости от давления
р. Расчет барометрических высотомеров и градуировка их
шкал производятся в соответствии с формулами (3.3) и (3.5).
Принципиальная схема барометрического высотомера пред-
ставлена на рис. 3.6. Чувствительным элементом, воспринима-
ющим атмосферное давление, является анероидная коробка 5.
Она помещена в герметичный корпус 3, который сообщается с
приемником статического давления, расположенного вне кор-
пуса ЛА. При подъеме на высоту давление в корпусе уменьша-
6—455 81
Рис. 3.6. Принципиальная схема ба-
рометрического высотомера:
1 — стрелка; 2 — шкала; 3 — корпус; 4 —
анероидная коробка; 5 — передаточно-мно-
жительный механизм
ется, подвижный центр анеро-
идной коробки перемещается и
через передаточный механизм
преобразуется в угол откло-
нения стрелки 1 относительно
неподвижной шкалы 2, програ-
дуированной в единицах вы-
соты.
Высотомер типа ВД (рис.
3.7). Чувствительным элемен-
том высотомера является блок
анероидных коробок, из кото-
рых выкачивается воздух до
остаточного давления
19,998 Па. В герметический
корпус подается статическое
давление. С увеличением высо-
ты полета ЛА атмосферное
давление уменьшается и ане-
роидные коробки 18 под дей-
ствием упругих сил расширяются. Перемещение подвижного
центра блока анероидных коробок передается через биметал-
лический компенсатор первого рода 17, тягу 14, биметалличе-
ский компенсатор второго рода 10, ось сектора 12, сектор 9,
зубчатые колеса, трибку на ось большой стрелки. Вращение
оси большой стрелки через зубчатые колеса 7, 22, 23 и 6 пере-
дается на вал малой стрелки. Малая стрелка 1 по внутренней
шкале указывает высоту в километрах, а большая 2 по наруж-
ной шкале — высоту в метрах. Статическая характеристика бло-
ка нероидных коробок и перемещение передаточно-множитель-
ного механизма (ПММ) реализуют зависимость (3.3).
Высотомеру как прибору косвенного измерения свойственны
методические ошибки. Основная методическая ошибка возни-
кает из-за изменения статического давления у Земли. Для
устранения этой погрешности весь механизм прибора вместе со
стрелками укреплен на поворотном основании и разворачива-
ется на соответствующий угол с помощью кремальеры 24 вме-
сте со шкалой барометрических давлений 25. Оцифровка этой
шкалы видна через вырез в боковой части шкалы прибора. При
нулевом положении стрелок высотомера шкала барометричес-
ких давлений показывает статическое давление в месте нахож-
дения ЛА. При установке шкалы барометрических давлений на
деление 760 мм рт. ст. стрелки высотомера покажут абсолют-
ную высоту ЛА.
Вторая методическая погрешность обусловлена изменением
закона распределения температуры Т столба воздуха. В суще-
ствующих конструкциях высотомеров она не компенсируется.
Ее значение определяется с помощью навигационной линейки
82
на основе знания фактической температуры воздуха на измеря-
емой высоте. Методическая погрешность, вызванная изменени-
ем рельефа местности, может быть определена лишь при нали-
чии информации о рельефе местности в точке нахождения ЛА.
К инструментальным погрешностям высотомеров относят-
ся: температурные, от трения, шкаловые, упругого последствия
и гистерезиса из-за неуравновешенности подвижных частей ме-
ханизма. Из них компенсируются лишь наиболее существен-
ные. Для компенсации погрешностей из-за неуравновешенности
механизма применяют балансиры. Максимальное влияние на
показание прибора оказывает изменение модуля упругости ма-
териала анероидной коробки, что приводит к изменению хода
подвижного центра чувствительного элемента. Компенсация
Рис. 3.7. Кинематическая схема высотомера типа ВД:
/, 2 — стрелки; 3—шкала; 4, 5— индексы; 6, 7, 22, 23 — зубчатые колеса; 8 — трнбка;
9 — сектор; 10 — компенсатор второго рода; // — вилка; /2 — ось сектора; 13, /5 — вил-
ки; 14, 16 — тяги; /7 — компенсатор первого рода; 18 — блок анероидных коробок; 19 —
подвижный центр; 20 — зубчатое колесо; 21 — трибка; 24 — кремальера; 25 — баромет-
рическая шкала
6‘ 83
Рис. 3.8. Функциональная схема высотоме-
ра типа УВИД
этой погрешности дости-
гается соответствующим
изменением передаточно-
го отношения ПММ за
счет температурных ком-
пенсаторов первого и вто-
рого рода, выполненных
из биметаллических пла-
стин (стали и инвара).
Погрешность прибора на
средних и больших высо-
тах при нормальной тем-
пературе не превышает
±2%.
Следует учитывать и аэродинамические ошибки, которые
возникают за счет завихрения и уплотнения встречного потока
воздуха перед приемниками воздушного давления ПВД. Это
приводит к искажению р, покупаемого в корпус прибора, и в
итоге к ошибкам при измерении высоты.
Эти ошибки определяются при испытаниях ЛА, суммируют-
ся с инструментальными погрешностями и сводятся в таблицу
эшелонов. При использовании на ЛА системы автоматического
управления необходимо получить электрический сигнал, про-
порциональный высоте полета. Поэтому широкое применение
находят электромеханические высотомеры, имеющие визуаль-
ный указатель и электрический преобразователь.
Электромеханический высотомер типа У ВИД. В его ком-
плект входят: указатель высоты, вычислитель аэродинамичес-
ких поправок (ВАП), М — реле и блок усилителей (рис. 3.8).
Статическое давление р±Др, где Ар — аэродинамическая
ошибка, подается от приемника воздушного давления на ане-
роидный блок ЧЭЗ. Перемещение его подвижного центра вос-
принимает якорь индукционного датчика ИД, который выдает
сигнал на усилитель УС и управляющую обмотку двигателя
М. Последний через редуктор с помощью кулачка, реализую-
щего зависимость (3.3), перемещает статор ИД в согласован-
ное положение с якорем. Таким образом, давление р±Др пре-
образуется в перемещение* стрелки И и показания счетчика вы-
соты. С помощью кремальеры f(ро) вводится значение стати-
ческого давления ро.
Так как результирующее отклонение якоря ИД пропорцио-
нально разности давлений ро—(р±Др), то показания относи-
тельной высоты //отн будут содержать аэродинамическую по-
грешность. Для ее компенсации используется вычислитель
аэродинамических погрешностей ВАП. Так как погрешности
зависят от угла атаки, скорости воздушного потока V и давле-
ния р на высоте полета, то приближенно поправка
д Р = И (р) /2 (Рдпн), (3.6)
84
где рдип = Рп—р — динамическое давление, рп — давление набегающего пото-
ка воздуха.
Вид функций fi(p) и /2(Р) определяется для каждого ЛА экс-
периментально. Эти функции формируют анероидные ЧЭ1 и
манометрические ЧЭ2 коробки и функциональные потенциомет-
ры. Используя принцип потенциометрического умножения, на
выходе ВАП получают зависимость (3.6). Выходное напряже-
ние ВАП через контакты 7<м подается на вход усилителя ука-
зателя высотомера. Вычитанием этого напряжения из напряже-
ния на выходе ИД исключается аэродинамическая погрешность
\р ПВД.
Вычислитель компенсирует аэродинамические погрешности
приемника при скорости полета М<1, при М>1 ВАП отклю-
чается с помощью М-реле.
Принципиальная схе-
ма указателя высотоме-
ра приведена на рис. 3. 9.
Давление р действует на
блок анероидных коробок
1. Перемещение его под-
вижного центра через
биметаллический компен-
сатор 2 передается на
якорь 3 ИД. Сигнал с
выхода ИД, суммируясь
с сигналом от ВАП, пос-
тупает через усилитель
УС на двигатель 5, кото-
рый связан со счетчиком
и через редуктор 6, чер-
вячную пару 7, кулачок 8
со статором 4.
Погрешности электро-
механических высотоме-
ров складываются из
погрешностей механичес-
кой и электрической час-
тей. Их возникновение и
методы компенсации име-
ют те же особенности,
что и у механических вы-
сотомеров. Но устране-
ние аэродинамических
погрешностей и точная
реализация зависимости
(3. 3) с помощью кулачка
8 приводят к меньшим
ошибкам при измерении
Рис. 3.9. Принципиальная схема высотоме-
ра типа УВИД:
/ — блок анероидных коробок; 2 — биметалличе-
ский компенсатор температурных погрешностей;
3 — якорь; 4 — статор; 5 — двигатель ДИД-0,5;
6 — редуктор; 7 — червячная пара; 8 — кулачок;
9 — винтовая пара; 10 — кулачок; 11 — пружина
Рис.
3.10. Принципиальная схема коррек-
тора высоты
85
высоты. Поэтому эти высотомеры могут применяться для вы-
держивания заданного эшелона по высоте полета.
Корректоры высоты. Применение этих приборов обусловле-
но необходимостью стабилизации полета ЛА относительно за-
данного эшелона. С помощью корректора обеспечивается полу-
чение электрического сигнала пропорционально отклонению
АЯ ЛА от заданной высоты для его использования в системе
автоматического управления.
Корректор высоты типа КВ (рис. 3.10). Его механизм поме-
щен в герметичный корпус прибора, куда подается статическое
давление р. С изменением высоты блок анероидных коробок
БАК с помощью ПММ перемещает сигнальную обмотку СО
индукционного датчика. В ней возникает напряжение, пропор-
циональное перемещению, которое усиливается усилителем и
выдается на управляющую обмотку двигателя М. Последний
через редуктор перемещает обмотку возбуждения ОВ датчика
в согласованное состояние с СО, когда напряжение UCO = Q.
Если корректор работает в режиме согласования, то электро-
магнитная муфта Эм отключена, движок потенциометра R
удерживается пружинами в среднем положении и сигнал Uh —
= 0. При достижении ЛА заданной высоты включается режим
коррекции, при этом срабатывает Эм и с потенциометра сни-
мается сигнал Uh , пропорциональный отклонению от задан-
ной высоты.
Указатели скоростей и чисел М полета. Наибольшее рас-
пространение в авиации для измерения скоростей получил аэ-
рометрический метод. Он основан на измерении скоростного
(динамического) напора воздушной среды. Знание V на борту
ЛА необходимо для решения навигационных задач и выбора
оптимальных характеристик этапов взлета и набора высоты.
Индикаторная скорость V характеризует фактический скоро-
стной напор и определяет минимальную безопасную скорость
полета ЛА, его устойчивость и управляемость в заданном ре-
жиме. Знание числа М также необходимо, так как с прибли-
жением скорости полета к М=1 происходит изменение аэроди-
намических характеристик и управляемости ЛА.
Принцип действия указателей скоростей основан на аэро-
метрическом методе.
Динамическое давление рдин и скорость полета V при усло-
вии полного торможения воздушного потока и его несжимае-
мости связаны функциональной зависимостью
V^V2(P^M. (3.7)
Для больших скоростей с учетом сжимаемости воздушного
потока
где k — показатель адиабаты; Т — температура в °К на высоте полета Н.
86
Рис. 3.11. Принципиальная схема указателя скорости
Если реализовать в приборе решение уравнения (3.8) отно-
сительно рдпн при р = ро и T = Tq, где ро и То взяты из СА, то
можно получить индикаторную скорость V и . Принципиальная
схема такого прибора приведена на рис. 3.11.
С помощью приемника полного давления 1 прибор воспри-
нимает рп, которое по трубопроводу 4 подается в полость мем-
бранной коробки 6. Через приемник статического давления
2 и трубопровод 3 статическое давление р поступает в корпус
прибора 5. В итоге перемещение подвижного центра мембран-
ной коробки будет пропорционально рп—р = рДНн. Полученное
перемещение воздействует через кривошипно-шатунный меха-
низм 7 и зубчатую передачу 3, 9 на стрелку указателя 10 и
по шкале 11 производится отсчет Ки .
Для того чтобы прибор определял истинную воздушную ско-
рость V, необходимо, согласно (3.8), учитывать изменение р и
Т. Для этого в механических указателях скорости используют
анероидные коробки. Перемещение их подвижных центров из-
меняет передаточное отношение ПММ прибора в зависимости
от р и Т.
Комбинированный указатель скорости типа КУС. Он состо-
ит из измерителей истинной воздушной и индикаторной скоро-
стей (рис. 3.12). Манометрический блок 23, деформируясь под
действием перепада рп—р, поворачивает ось 10 и далее с по-
мощью поводковой пары 24 и 26, зубчатого сектора 3 и трибки
27 перемещает стрелку индикаторной скорости 32. Одновремен-
но поворот оси 10 через поводки 9, 8 и 7 передается на ось 67
далее через поводки 25, 28 и зубчатый сектор 30 и трибку 2 —
на стрелку истинной воздушной скорости 1. Корректировка
передаточного отношения механизма в зависимости от измене-
ний р и Т производится анероидным блоком 20. Деформация
анероидного блока передается через кривошипно-шатунный
механизм 16, 17, 18 на ось 13 и с помощью тяги 15 перемещает
87
Рис. 3.12. Кинематическая схема комбинированного указателя скорости:
/ — стрелка истинной воздушной скорости; 2, 27 — трибки; 3, 30 — секторы; 4, 29 — оси;
5 — антилюфтовый волосок; 6 — ось компенсирования: 7, 8, 9 — поводки; 10 — промежу-
точная ось; 11 — поводок; 12— зажим; 13 — ось высотной компенсации; 14 — вилка; 15,
18 — тяги; 16 — зажим; 17, 21 — поводки; 19 — верхний жесткий центр; 20 — анероидный
блок; 22 — верхний жесткий центр; 23 — манометрический блок; 24, 25, 26, 28 — иовод-
ки; 31 — шкала; 32— стрелка индикаторной скорости
положение поводка 8, изменяя длины плеч ведущего 9 и ведо-
мого 7 поводков. Отсчет значений скоростей производится по
шкале 31.
Указатель числа М. Переписав зависимость (3.8) с учетом
того, что скорость звука a=V~kRyAT , получим:
Л4==
(3.9)
Из зависимости (3.9) ясно, что исходными данными для полу-
чения числа М являются только р и рдин. Передаточное отно-
шение ПММ указателя числа М корректируется только ио дав-
лению р. Кинематическая схема указателя числа М представ-
лена на рис. 3.13. Манометрический блок 21 при изменении
рп—р перемещает через центр 20 тягу 19, поводок 8, ось 7, по-
водки 6, 5, 4, 22, 24, ось 23, сектор 25, трибку 2, стрелку / от-
носительно шкалы 27. Корректировка передаточного отношения
механизма в зависимости от изменения р производится анеро-
идным блоком 17 через тягу 15, зажим 12, ось 10, тягу 11 и
поводок 5.
Методические погрешности указателей скорости обусловле-
ны несовпадением фактической плотности и температуры воз-
духа с расчетными данными, по которым тарируется шкала
38
указателя воздуха. Погрешности от несовпадения плотностей и
температур в показаниях указателя скорости рассчитываются
на навигационной линейке. Погрешности от сжимаемости учи-
тываются с помощью таблицы поправок при скоростях полета
более 400 км/ч. Аэродинамические ошибки возникают вследст-
вие искажения воздушного потока перед ПВД. Их определяют
при испытаниях ЛА, и также заносят в таблицу поправок. Ин-
струментальные погрешности указателей скорости и методы
их компенсации аналогичны погрешностям и методам компен-
сации высотомеров.
Вариометры. Для измерения вертикальной скорости полета
V’b применяется метод, основанный на дифференцировании
статического давления р.
Этот метод используется в указателях вертикальной скоро-
сти полета, называемых вариометрами (рис. 3.14).
В манометрическую коробку 7 поступает давление р. Во
внутреннюю полость корпуса 3 также подается давление р, но
через капилляр 4. При горизонтальном полете разность этих
давлений равна нулю. При появлении вертикальной скорости,
например при подъеме ЛА, давление в пневмопроводе 5 и вну-
три манометрической коробки падает. При этом в корпусе при-
бора давление будет выше, чем в манометрической коробке,
Рис. 3.13. Кинематическая схема указателя числа М:
/ — стрелка; 2 -• трибка; 3 — компенсационная ось; 4, 5, 6, 3, 22, 24 — иоводки: 7 —
промежуточная ось; 9, 12, 13 — зажимы; 10 — ось высотной компенсации; //, 15, 19 —
тяги; 14, 18, 26 — волоски; 16, 20 — жесткие центры; 17 — анероидный блок; 21 — мано-
метрический блок; 23 — ось
89
вследствие сопротивления течению воздуха в капилляре. При
Ив— const каждому значению будет соответствовать опре-
деленная разность давлений Дрв, измеряя которую мембранной
коробкой строят прибор, непосредственно отградуированный в
единицах вертикальной скорости.
Манометрическая коробка 9 вариометра типа ВАР
(рис. 3.15) воспринимает разность давлений и через тягу
6', ось 5, сектор 2 и трибку 1 перемещает стрелку 14 относи-
тельно шкалы 13. Отличительной особенностью данной схемы
является наличие пружины 4, с помощью которой шкала варио-
метра, предназначенного для измерений больших диапазонов
скоростей и увеличения чувствительности при измерении
малых значений Vb, делается неравномерной. При Vb>20 м/с
упругой силе мембранной коробки начнет противодействовать
упругая сила пружины 4, свободное перемещение которой огра-
ничено осями 3 или И.
Основной погрешностью вариометра является запаздывание
показаний при изменении Vb, что является динамической по-
грешностью прибора. Постоянная времени т на малых высотах
достигает нескольких секунд, на больших высотах она увели-
чивается за счет уменьшения вязкости воздуха. Следует учи-
тывать методическую температурную погрешность, которая воз-
никает вследствие разности температур внутри корпуса прибо-
ра и окружающей среды. Инструментальные погрешности
вариометров аналогичны инструментальным погрешностям вы-
сотомеров.
Датчики углов атаки и
скольжения. Для пилоти-
рования ЛА необходимо
измерять углы атаки а и
скольжения р. При превы-
шении их критических
значений возможны сры-
вы потока на крыле, поте-
ря устойчивости, свалива-
ние в штопор. Для изме-
рения аир используется
аэродинамический метод,
предусматривающий воз-
действие набегающего по-
тока воздуха на флюгер,
который является чувст-
вительным элементом
датчика и представляет
собой обтекаемое сим-
метричное тело, способное
вращаться относительно
оси 1 и устанавливаться
Рис. 3.14. Принципиальная схема варио-
метра:
/ — стрелка; 2 —шкала; 3 — корпус; 4 — капил-
ляр; 5 — пневмопровод; 6 — ПММ; 7 — маномет-
рическая коробка
90
Рис. 3.15. Кинематическая схема вариометра:
/ —трибка; 2 — сектор; 3, 5, // — оси; 4 —пружина; 6 — тяга; 7 — капилляры; 8 — тру-
бопровод; 9 — манометрическая коробка; 10—основание; 12 — зубчатое колесо; 13—
шкала; 14 — стрелка
вдоль набегающего потока (рис. 3. 16). Оси флюгеров 3 и 4
закреплены на штанге 2 ПВД и расположены перпендикулярно
цруг к другу. Угол поворота флюгера 3 пропорционален углу
скольжения, а 4 — углу атаки. С осями флюгеров связаны
щетки потенциометров. Электрические сигналы, снимаемые с
них, будут соответственно пропорциональны углам а и р.
Системы воздушных сигналов. Для значительного увеличе-
ния точности измерения скорости и высоты полета на ЛА на-
ряду с рассмотренными при-
борами измерения высоты и
скорости полета широко
применяются системы
воздушных сигналов
(СВС), где учитываются
факторы, которые
трудно реализовать в
отдельных приборах.
Рис. 3.16. Приемник воздушного давле-
ния с датчиками углов атаки и сколь-
жения
91
Рис. 3.17. Структурная схема системы типа СВС-ПН
Система воздушных сигналов представляет собой электро-
механическое счетно-решающее устройство аналогового типа,
предназначенное для одновременного измерения истинной воз-
душной скорости V, индикаторной скорости Уи . числа М. от-
носительной барометрической высоты 7/оти, абсолютной баро-
метрической высоты //бас, температуры наружного воздуха 7,
отклонений ДУ, ДЛ4, \Н от заданных значений У и , М и //,
снабжает этой информацией бортовые системы пилотирования
и навигации и имеет визуальные приборы, с помощью которых
производится фиксация указанных параметров. СВС получает
информацию от доплеровского измерителя скорости и сноса
(ДИСС), что позволяет на индикаторе СВС отсчитывать путе-
вую скорость Vп.
Исходной информацией в СВС для вычисления перечислен-
ных параметров служат: статическое давление р, полное дав-
ление рп и температура торможения Тт. В состав системы типа
СВС-ПН (рис. 3.17) входит вычислитель скорости, числа М и
высоты ВСМВ. На его входы подаются сигналы от датчиков
давлений р и рп, температуры Т т и указателя относительной
барометрической высоты УВО Н3. В основу работы вычисли-
теля положены следующие расчетные зависимости:
для скорости
-1 г---/ М \ 1/-----
V = 1/ k 7?уд [ : : --------- ] V Тт; (3.10)
\ V [(Л - 1)/2] ЛР + 1 )
для абсолютной высоты
T/a6c“(^VA <^ro)7'cp^ri ’
Р
(З.П)
92
для средней температуры воздуха
Тср (То -F Т) 2 для 11000 м; (3,12)
Тср = 71+ (То - Т \.)(Н\\ ,12Н) для Н> 11 000 м; (3.13)
ч для относительной барометрической высоты
^отн= ^абс Дз» (3.14
где Н3 — абсолютная барометрическая высота на уровне Земли, относитель-
но которой отсчитывается Яотн.
Для расчета скорости Vv\ и числа М используются соответ-
ственно зависимости (3.10) и (3.9). Отклонения от числа М,
скорости Уи и высоты Н вычисляются как: АМ = М—Мзд;
&Н = Н—НЗД, ДУИ =УИ— Уизд, где Мзд, Нзд, УИзД — задан-
ные значения. ВСМВ представляет собой бесконтактный ана-
логовый вычислитель, построенный на использовании диодных
функциональных преобразователей напряжения.
Вычислитель питается переменным током 115 В 400 Гц че-
рез фильтр Ф и постоянным током 27 В через блок питания
БП. С вычислителя сигналы поступают в БПНП (блок преоб-
разования напряжения потенциометрический), где преобразу-
ются в изменение соответствующих сопротивлений, и через
БПУ (блок питания и усиления) на указатели. Указатели отно-
сительной барометрической высоты У ВО, воздушной и путевой
скорости УСВПк, числа М снабжают экипаж визуальной ин-
формацией. С помощью переключателя на УСВПк возможна
индикация путевой скорости Vn от ДИСС.
3. ЭЛЕМЕНТЫ ТЕОРИИ ГИРОСКОПИЧЕСКИХ ПРИБОРОВ
Приборы и системы, основной частью которых служит гиро-
скоп, называются гироскопическими. Термин «гироскоп» полу-
чен от греческих слов «гирос» — вращение и «скопео» — на-
блюдаю. На ЛА с помощью гироприборов определяют направ-
ление меридиана и истинной вертикали, измеряют угловые
скорости и ускорения. Наиболее широкое применение получили
гироскопические приборы на базе быстровращающегося сим-
метричного гироскопа.
Быстровращающимся симметричным гироскопом называют
вращающееся вокруг оси симметрии с большой угловой ско-
ростью тело вращения (ротор), одна из точек которого (точка
О) неподвижна (рис. 3.18, а). Ось Z симметрии ротора 1 назы-
вают осью фигуры или осью ротора гироскопа.
В большинстве гироприборов для обеспечения свободы вра-
щения ротора гироскопа вокруг неподвижной точки О приме-
няют карданов подвес, который состоит из двух рамок 2 и 5.
Ротор гироскопа с большой угловой скоростью Sz вращается
93
Рис. 3.18. Кинематическая схема трехстепенного гироскопа
вокруг оси Z относительно внутренней рамки 2, которая может
поворачиваться вокруг оси X относительно рамки <3, а послед-
няя — вокруг оси У относительно основания 4, которым явля-
ется корпус прибора. В идеальном случае все три оси ХУ7, пе-
ресекаются в одной точке О, которая и является неподвижной
точкой при угловых перемещениях гироскопа.
Карданов подвес обеспечивает ротору гироскопа свободу
вращения относительно трех осей ХУ7, поэтому его называют
гироскопом с тремя степенями свободы или трехстепенным ги-
роскопом. Если центр масс гироскопа совпадает с точкой пе-
ресечения осей карданова подвеса, то такой гироскоп называет-
ся астатическим.
Все свойства гироскопа вытекают из законов Ньютона.
Для описания движения гироскопа используются векторные
зависимости, которые позволяют характеризовать движение
всей совокупности материальных частиц ротора гироскопа, обу-
словленного его собственным вращением. Вектор И называется
кинетическим моментом гироскопа. Он равен произведению
п
осевого момента инерции ротора /=2ад2 (m, — масса г-го
i
элемента ротора, а гх- — его расстояние до оси вращения) на
угловую скорость вращения ротора 2 . Направление вектора
Н совпадает с направлением вектора 2. Таким образом
Н = 1Ъ. (3.15)
Векторы Н и 2 принято направлять по оси вращения ротора
так, что если смотреть с их концов, то собственное вращение
ротора должно быть против часовой стрелки. Основными свой-
ствами трехстепенного гироскопа являются способность сохра-
нять неизменным положение оси вращения ротора гироскопа
в инерциальной системе координат, невосприимчивость к удар-
ным воздействиям и способность совершать прецессионное дви-
жение.
94
Если ось быстровращающегося гироскопа направить на оп-
ределенную точку инерциального пространства, то при угловых
движениях основания прибора в разных плоскостях (в том чис-
ле и при движении основания прибора вместе с вращением
Земли) ось ротора сохраняет заданное ей направление. При
ударе по какой-либо раме гироскопа возникают быстрозатуха-
ющие с малой амплитудой колебания оси ротора гироскопа.
Положение оси ротора в пространстве при этом практически не
изменяется. Если приложить усилие F к внутренней раме гиро-
скопа 2, создавая момент внешних сил относительно оси X, то
возникает вращение гироскопа вокруг оси У наружной рамы
3. При этом внутренняя рама 2 остается неподвижной. И, на-
оборот, действуя какой-либо силой F на наружную раму гиро-
скопа 3, создавая момент внешних сил относительно оси У,
происходит вращение гироскопа вокруг оси X, причем внешняя
рама 3 останется неподвижной. Таким образом, гироскоп под
действием внешних сил поворачивается не по направлению си-
лы, а в плоскости, перпендикулярной направлению этой силы.
Такое движение гироскопа под действием внешних сил назы-
вается прецессионным.
Свойства гироскопа.
1. Внешний момент Л4ВН, действующий на гироскоп, вызыва-
ет прецессию гироскопа с угловой скоростью
ю = ЛТвн/А/ sin 8,
где Н— вектор кинетического момента; 0 — угол между векторами Мвн и Н.
Применительно к гироскопу в кардановом подвесе это свой-
ство можно сформулировать так: внешний момент Л4ВН, дейст-
вующий вокруг оси вращения какой-либо из рамок карданова
подвеса, заставляет прецессировать ротор гироскопа вокруг оси
вращения другой рамки карданова подвеса со скоростью со.
Причем гироскоп прецессирует так, чтобы совместить вектор
Н с вектором Мвн по кратчайшему расстоянию (рис. 3.18, а").
Если угол 8 = 0, то вектор угловой скорости собственного
вращения ротора Q, а следовательно, и вектор кинетического
момента Н совместится с осью вращения наружной рамки. В
этом случае момент, действующий относительно оси наружной
рамы, будет направлен по оси собственного вращения ротора и,
следовательно, не будет вызывать прецессию. Случай, когда
ось собственного вращения совпадает с осью наружной рамки,
называют совмещением рамок. При этом гироскоп теряет одну
степень свободы и все свои свойства. Поэтому в конструкции
гироприборов предусматривают элементы, исключающие воз-
можность совмещения рамок.
Существенное влияние на поведение гироскопа оказывает
трение в осях карданова подвеса. Так, при наличии момента
трения /Итр в осях наружной рамки (рис. 3.18, а) на ротор ги-
95
роскопа будет действовать момент Л1ВН—Л4тр и скорость прецес-
сии
(ох = (Л1;.н — Л4тр)/А/ sin 0.
Прецессия внутренней рамки со скоростью сох обусловит
момент трения вокруг оси внутренней рамки Л1,р , что, в свою
очередь, вызовет прецессионное движение относительно оси на-
ружной рамки со скоростью
= л/тр v >н.
Как правило, трение является вредным в большинстве ги-
роприборов и приводит к инструментальным погрешностям,
поэтому при конструировании приборов стремятся его снизить
разными методами: применением встречающихся опор, гидро-
статической разгрузкой опор в поплавковых гироскопах, ис-
пользованием магнитных, электростатических, криогенных под-
весов, а также подвесов на торсионах и другими способами.
2. Если на гироскоп не действуют внешние моменты, то ось
ротора гироскопа сохраняет неизменным свое положение отно-
сительно инерциальной системы координат.
Инерциальными системами координат являются системы,
связанные с Солнцем и звездами. Система координат, связан-
ная с Землей, не является инерциальной из-за вращения Земли.
Следовательно, идеальный гироскоп, установленный на Земле
даже при отсутствии внешних моментов, не будет неподвижен
относительно земной системы координат. Это свойство, исполь-
зовал Л. Фуко для экспериментального доказательства враще-
ния Земли. Оно полностью применимо лишь к идеальному
гироскопу, так как из-за дебаланса (несовпадения центра масс
гироскопа с точкой пересечения осей карданова подвеса) и
моментов трения реальный гироскоп всегда отклоняется от пер-
воначального положения в инерциальном пространстве. Такое
отклонение называется уходом или дрейфом гироскопа.
3. Переносное вращение гироскопа вызывает появление ги-
роскопического момента 7ИГ, являющегося проявлением сил
инерции. Гироскопический момент всегда направлен так,
что стремится совместить вектор угловой скорости собственно-
го вращения ротора Q с вектором угловой скорости со перенос-
ного вращения. Это правило справедливо для любого направ-
ления угловых скоростей Q и со (рис. 3.18, б).
Гироскопический момент Alr является проявлением корио-
лисовых сил инерции, вызванных вращением ротора_ относи-
тельно двух взаимно перпендикулярных осей 7ИГ = //Хсо.
Прецессионное движение является переносным. Следова-
тельно, при появлении прецессии возникает гироскопический
момент Мг, численно равный, но противоположно направлен-
ный внешнему моменту /Ивн, вызвавшему прецессию, т. е. 7ИГ =
== —Л1Вн.
96
Рис. 3.19. Кинематическая схема двухстепенного гироскопа
Гироскопическим моментом объясняется отсутствие движе-
ния рамки гироскопа при приложении к ней внешнего момента.
Так как Мг=—7ИВН, то суммарный момент, действующий на рам-
ку, равен нулю.
Двухстепенный гироскоп в отличие от трехстепенного имеет
лишь раму подвеса 2 ротора 1 (рис. 3.19). Он имеет две степе-
ни свободы: относительно оси вращения Z и рамы X. Основное
свойство двухстепенного гироскопа заключается в следующем:
при вращении основания с угловой скоростью со^, направленной
перпендикулярно к первоначальному положению плоскости
внутренней рамы гироскопа, ротор вместе с ней совершает вра-
щение с постоянным ускорением относительно оси X в направ-
лении совмещения кинетического момента Н с вектором угло-
вой скорости вращения (oy.
Для лучшего проявления полезных свойств гироскопа стре-
мятся получить как можно большее значение кинетического
момента /7 за счет специальной конструкции гироскопа и ис-
пользования больших угловых скоростей собственного враще-
ния ротора. В авиационных приборах частота вращения рото-
ров достигает 24 000 об/мин.
Узел гироскопа, объединяющий в себе ротор и устройство,
создающее его вращение, называется гиромотором. В авиации
применяются электрические гиромоторы постоянного и перемен-
ного токов. Они выполняются по так называемой «обращен-
ной» схеме конструкции, т. е. статор располагается внутри ро-
тора, в результате чего при малых габаритах получают возмож-
но больший момент инерции ротора, а следовательно, и боль-
ший кинетический момент. В современных авиационных гиро-
7—455 97
скопических приборах ротор объединен с внутренней рамой в
единый конструктивный блок-гироузел. Наибольшее применение
в авиации получили трехфазные асинхронные гиромоторы.
4. ДАТЧИКИ УГЛОВЫХ СКОРОСТЕЙ
Датчики угловых скоростей (ДУС) применяются для изме-
рения направлений и угловых скоростей вращения ЛА относи-
тельно связанных осей. Они используются в качестве демпфи-
рующих гироскопов, сигнал от которых поступает в контур
управления ЛА для улучшения качества переходных процессов
управления и стабилизации, а также выключателей коррекции
различных приборов и систем.
Определяющим элементом ДУС (см. рис. 3.19) является
двухстепенный гироскоп. Из его основного свойства следует, что
он является чувствительным элементом угловой скорости осно-
вания прибора относительно оси ОУ. Для измерения угловой
скорости основания необходимо установить пружину 3 на оси
ОХ, которая создает уравновешивающий момент Л1г.
При этом вращение гироузла относительно оси ОХ при на-
личии угловой скорости основания соу происходит под действи-
ем гироскопического момента, направленного по оси ОХ,
Мг — /2 toy = Н toy.
Момент, создаваемый пружиной 3 при вращении гироузла,
Л4пр = — с рг,
где с — жесткость пружины; рг — угол поворота.
При некотором значении угла £* гироскопический момент,
обусловленный наличием угловой скорости со у , уравновесится
моментом, создаваемым пружиной. Тогда:
Мг — Л4Пр; 1
Н со* = -с₽* / ’
Отсюда угол поворота гироузла при постоянной угловой скоро-
сти вращения основания определяется как рг ~ — (Я/с)соу. Для
демпфирования колебаний гироузла в переходных режимах по
оси ОХ устанавливается демпфер 4.
С осью рамки соединена щетка потенциометра. Напряже-
ние, снимаемое с потенциометра, при повороте рамки будет
пропорционально угловой скорости соу. Изложенный принцип
действия датчиков угловых скоростей лежит в основе всех ДУС.
Однако их конструкции имеют определенные особенности. В ка-
честве примера конструкции ДУС рассмотрим поплавковый дат-
чик, входящий в блок демпфирующих гироскопов БДГ.
98
Поплавковый датчик ти-
па ДУС (рис. 3. 20) являет-
ся двухстепенным гироско-
пическим прибором. Его
гироузел выполнен в виде
герметичного поплавка 2, за-
полненного водородом для
уменьшения аэродинамичес-
кого сопротивления.
Это снижает потребляе-
мый ток гиромотора 3,
уменьшает время его разго-
на и температуру нагрева.
Гиромотор представляет со-
бой трехфазный асинхрон-
ный двигатель. Корпус дат-
чика (на рис. 3.20 не пока-
зан) заполняется специаль-
ной жидкостью, которая
взвешивает подвижную сис-
тему, уменьшая давление на
опоры, момент трения в
Рис. 3.20. Схема поплавкового ДУС:
1 — потенциометр; 2 — поплавок; 3 — гиромо-
тор; 4 — опора поплавка; 5 — пластинчатые
пружины; 6 — щетка потенциометра
опорах и увеличивая чувствительность поплавкового датчика ти-
па ДУС. Кроме того, жидкость охлаждает потенциометр, умень-
шает трение щеток о намотку потенциометра и исключает появ-
ление искры и нагара, увеличивая этим срок службы потенцио-
метра.
Методическая погрешность ДУС определяется в основном'
наличием крена у=т^О, т. е. отсутствием перпендикулярности
между осью измерения и плоскостью рамки гироузла. В этом
случае
= - Н<оу cos — Ио'у sin 7).
(3.17}
Следовательно, угловая скорость (оу разворота ЛА измеряется
датчиком угловых скоростей без ошибок только при у=0. Сог-
ласно выражению (3.17), методические погрешности при изме-
рении (оу возрастают с увеличением угла крена ЛА. Отсюда
общим правилом установки ДУС на ЛА является обеспечение
перпендикулярности линии вектора измеряемой угловой скоро-
сти к плоскости рамки гироскопа.
Инструментальные ошибки ДУС являются следствием неточ-
ности регулировки «электрического нуля», когда снимается сиг-
нал с потенциометра при неподвижном основании, дебаланса
прибора относительно выходной оси, гистерезиса пружины, а
также трения в осях подвеса рамы гироскопа. Возможны так-
же и динамические ошибки, которые определяются конструк-
тивными параметрами прибора.
7* 99
5. ПРИБОРЫ И ДАТЧИКИ УГЛОВ КРЕНА И ТАНГАЖА
Пилотирование ЛА в сложных метеоусловиях, ночью, без
видимости земли возможно только при наличии приборов, ука-
зывающих его положение относительно плоскости истинного го-
ризонта. Последняя перпендикулярна к истинной вертикали, на-
правление которой совпадает с направлением силы тяжести.
Отсюда возникает задача построения приборов, определяющих
истинную вертикаль, создания на их основе опорной системы
координат и измерения относительно нее осей углов тангажа и
крена.
Для определения направления вертикали применяют гиро-
скоп с тремя степенями свободы, используя его свойство сохра-
нять неизменным направление оси вращения ротора, и коррек-
тируют это направление с помощью физического маятника. Ги-
роскоп располагают так, что направление вращения ротора
гироскопа совпадает с вертикалью места (ось ОУЛ на рис. 3.21),
внешнюю ось карданова подвеса располагают по продольной
оси ЛА, а внутреннюю — по оси OZAt лежащей в горизонталь-
ной плоскости (рис. 3.21). При появлении угла тангажа О внеш-
няя ось подвеса поворачивается вместе с ЛА, а гироузел не
изменяет своего положения в пространстве. Вследствие этого
угол поворота наружной рамы относительно внутренней оси
карданова подвеса соответствует углу тангажа ЛА. При появ-
лении крена у вместе с ЛА поворачивается основание, на кото-
ром закреплен гироскоп. Наружная рама в этом случае непо-
движна, и угол поворота основания относительно наружной
рамы равен углу крена ЛА. Но из-за собственного вращения
Земли и перемещения ЛА вертикаль места будет отклоняться
•от направления вращения ротора гироскопа, неподвижного в
инерциальном пространстве. Вследствие этого трехстепенной
гироскоп может быть использован в качестве указателя верти-
Рис. 3.21. Определение углов крена и тангажа:
а — с помощью трехступенного гироскопа; б — на летательном аппарате
W0
Рис. 3.22. Принципиальная схема гировертикали и ее устройств
кали лишь в течение нескольких минут. Для нормальной рабо-
ты трехстепенного гироскопа как указателя вертикали в тече-
ние длительного времени с необходимой точностью следует
производить его корректировку с помощью физического маят-
ника, который при отсутствии ускорений устанавливается по
направлению истинной вертикали.
На рис. 3.22, а представлена принципиальная схема гиро-
вертикали с упрощенной схемой коррекции главной оси по на-
правлению вертикали места. В качестве чувствительного эле-
мента корректирующего устройства используют электролити-
ческие маятники. Конструкция однокоординатного жидкостного
маятникового датчика (/КМД) представлена на рис. 3.22, б. Он
представляет собой стеклянный баллон 1 с вваренными в него
электродами 3, 5 и 7. Баллон заполнен токопроводящим элек-
тролитом 2 так, что оставшийся воздушный пузырек 4 в гори-
зонтальном положении датчика примерно наполовину перекры-
вает электроды 3 и 7. Ось чувствительности датчика перпенди-
кулярна плоскости. На гироузле расположены два таких датчи-
ка (рис. 3.22,а). Ось чувствительности одного из них направле-
на параллельно оси ОХв, а другого — оси OZB. Каждый из них
соединен со своим исполнительным двигателем. Коррекционный
двигатель 8 (рис. 3.22, б) является двухфазным асинхронным
двигателем с двумя обмотками управления б, работающим в
заторможенном режиме. При вертикальном положении главной
оси гироскопа и, следовательно, горизонтальном положении
датчиков электрическое сопротивление между средним электро-
дом 5 и каждым из крайних электродов 3 и 7 одинаково. По
управляющим встречно включенным обмоткам 6 двигателя, к
которым подсоединены электроды маятника, протекают равные
по значениям токи. Двигатель 8 будет заторможен. При откло-
нении главной оси гироскопа от вертикали воздушный пузырек
сместится и сопротивление между крайними и центральными
101
/Г потребителям сигнала крена
Рис. 3,2.3. Кинематическая схема авиагоризонта типа АГБ
электродами изменится, в результате чего по управляющим об-
моткам двигателя потекут разные токи и двигатель создаст
момент, приложенный к оси подвеса гироузла.
Рассмотрим работу системы коррекции относительно какой-
либо оси (рис. 3.22, а). Предположим, что отклонение гироско-
па от горизонтальной плоскости произошло относительно оси
ОЛв. Тогда от датчика управляющий сигнал поступает на
двигатель. Последний создаст момент относительно оси под-
веса гироузла, и гироскоп начнет совершать прецессионное дви-
жение относительно оси подвеса наружной рамы, приводя свое
положение к горизонтальной плоскости. Аналогично осущест-
вляется коррекция при отклонении гироскопа от плоскости го-
ризонта относительно оси OZb.
Авиагоризонт типа АГБ. Он должен обеспечивать экипаж
визуальной индикацией положения ЛА относительно плоскости
истинного горизонта по углу крена и тангажа, а также выда-
вать электрические сигналы, пропорциональные углам крена и
тангажа внешним потребителям. Основными узлами авиагори-
зонта являются: трехстепенной гироскоп, система маятниковой
коррекции, указатель углов крена и тангажа, следящая система
передачи угла тангажа на указатель, устройства съема резуль-
татов измерений, арретирующее устройство (рис. 3.23). Трех-
степенной гироскоп состоит из гироузла и наружной рамы 11.
Ось подвеса наружной рамы направлена по продольной оси ЛА.
102
Вертикальное положение главной оси гироскопа удерживается
системой маятниковой коррекции, чувствительными элементами
которой являются однокоординатные жидкостные маятниковые
датчики 9, 10, а исполнительными элементами — коррекцион-
ные двигатели (7, 13). Принцип действия системы коррекции
аналогичен рассмотренной выше. При разворотах и ускорениях
ЛА возникают силы инерции, которые изменяют распределение
электролита в баллоне жидкостного маятника. В результате
воздушный пузырек перемещается и жидкостный датчик выда-
ет в систему коррекции ложный сигнал, который устанавливает
направление главной оси гироскопа вдоль «кажущейся» верти-
кали. Для устранения этой ошибки в авиагоризонтах применя-
ют соответствующие выключатели коррекции.
Индикация положения ЛА относительно плоскости горизон-
та осуществляется следующим образом. При появлении крена
корпус прибора вместе с ЛА поворачивается вокруг оси внеш-
ней рамы на угол крена. При этом стрелка (силуэт самолета)
3, связанная с осью наружной рамы гироскопа через трибки 14,
15, будет участвовать в двух движениях: переносном — вместе
с корпусом прибора на угол крена, и вращательном — на тот
же угол крена, так как подвижная трибка 14 обкатывает непо-
движную 15. В результате этих движений стрелка (силуэт са-
молета) поворачивается на двойной угол крена ЛА. Экипаж же
наблюдает угол крена по перемещению стрелки 3 относительно
шкалы 2 на естественный угол поворота по крену и в том же
направлении, что и крен ЛА. Углы тангажа определяются по
положению стрелки 3 относительно шкалы тангажа 1, которая
следует за углами тангажа ЛА благодаря следящей системе,
состоящей из сельсин-датчика 8, расположенного на внутрен-
ней оси карданового подвеса, сельсин-приемника 4, усилителя
6 и двигатель-генератора 5. Электрические сигналы, пропорцио-
нальные углам крена и тангажа, снимаются с сельсин-датчиков
12 и 8.
В ряде случаев повышенные требования к точности стабили-
зации и управления ЛА по углам крена и тангажа делают не-
эффективным использование авиагоризонтов. Так, с увеличени-
ем числа потребителей информации по крену и тангажу увели-
чивается число датчиков. В результате наличия существенных
нагрузочных моментов от датчиков, сил трения, дебаланса по
осям наружной и внутренней рам карданного подвеса уменьша-
ется статическая точность обычных авиагоризонтов. Увеличе-
ние эффективности системы коррекции для сохранения задан-
ной статической точности не приводит к желаемым результа-
там, так как «сильная» коррекция приводит к значительным
погрешностям при действии ускорений. Требованиям повышен-
ной статической точности при возможно меньших моментах си-
стемы коррекции удовлетворяют гировертикали, которые стро-
ятся с использованием силовой гироскопической стабилизации.
103
Рис. 3.24. Кинематическая схема гиро-
вертикали типа ЦГВ
Из них наибольшее рас-
пространение получили ги-
ровертикали ЦГВ и МГВ.
х Гировертикаль типа
ЦГВ. Центральная гидрос-
копическая вертикаль ЦГВ
предназначена для опреде-
ления положения ЛА в про-
странстве относительно ис-
тинной вертикали места.
Прибор является датчиком
углов тангажа и крена, ко-
торые выдают потребите-
лям электрические сигналы
постоянного и переменного
тока, пропорциональные уг-
лам отклонения ЛА от плос-
кости горизонта. Потреби-
телями сигналов являются
навигационные, пилотажные
радиолокационные системы, визуальные указатели и т. д. ЦГВ
представляют собой гидроскопическую систему с силовой стаби-
лизацией (рис. 3.24). Коррекция по вертикали осуществляется
от двухосного жидкостного маятникового датчика 10. Сигна-
лы, пропорциональные углам крена и тангажа, снимаются
с сельсин-датчиков 13 и 8, установленных по измерительным
осям X и Y, а также с потенциометрических датчиков углов
крена и тангажа 6 и 2.
Оси крена X н тангажа У направлены соответственно вдоль
продольной и поперечной осей ЛА. Кинетические моменты гиро-
скопов крена Н\ и тангажа Яг равны по величине и направле-
ны в противоположные стороны. Ось прецессии У1 гироскопа
крена направлена вдоль оси У, ось прецессии Х} гироскопа тан-
гажа — вдоль оси X. На корпусах гиромоторов 4 и 9 смонти-
рованы потенциометры 3 и 11, которые питаются переменным
током. Сигналы, снимаемые с щеток потенциометров 3 и 11, по-
даются на разгрузочные двигатели 7 и 1.
Коррекция гироплатформы относительно вертикали осущест-
вляется коррекционными двигателями 5 и 12, на управляющие
обмотки которых подается суммарный ток с соответствующей
пары контактов жидкостного датчика 10. На платформе за-
креплены два механических маятниковых переключателя П1 и
П2, оси подвеса которых направлены вдоль оси Z. Каждый
маятник работает только в одной плоскости и выдает сигналы
на разгрузочные двигатели 7 и 1 при арретировании и разгоне
гиромоторов, когда нормальная ось Z отклонена больше чем на
2° от вертикали. Гироплатформа может поворачиваться в на-
104
Рис. 3.25. Принципиальная схема одноосного»
гироскопического стабилизатора
ружной раме по тангажу
на угол ±70° и по крену
вместе с наружной рамой
на ±180°.
ЦГВ, называемая так-
же двухгироскопическим
узлом, представляет со-
бой двухосную гиростаби-
лизированную платформу
с двумя каналами стаби-
лизации: крена и тан-
гажа. Рассмотрим прин-
цип силовой гироскопи-
ческой стабилизации на
примере канала стабилизации ЦГВ по оси крена (рис. 3.25).
Наружная рама 1 должна быть стабилизирована относительно
оси X при воздействии возмущающих моментов по этой оси, т. е.
не должна поворачиваться под действием возмущающих мо-
ментов.
Гироскоп 6 помещен в кожух и вращается относительно оси
У на небольшие углы, ограниченные упорами. При этом с по-
тенциометра 5 снимается сигнал, пропорциональный угловому
перемещению гироскопа, и подается на разгрузочный электро-
двигатель 4. На оси X предусмотрен сельсин-датчик 7, сигнал
с которого пропорционален углу поворота наружной рамы отно-
сительно корпуса прибора. На наружной раме крепится жид-
костный маятниковый датчик <?, управляющий моментным дат-
чиком 2, закрепленным на наружной раме и создающим момент
относительно оси У.
Возмущающий момент Мх, возникающий по оси X, воздейст-
вует на гироскоп 6 через подшипники оси У. Под действием
момента Мх гироскоп начнет прецессировать относительно оси
У с угловой скоростью (o7J в сторону совмещения по кратчайше-
му расстоянию вектора кинетического момента Н с вектором
Л1Х. При этом возникает гироскопический момент Мг, направ-
ленный по оси X и в первое мгновение уравновешивающий воз-
мущающий момент Мх. Поворот гироскопа относительно осн У
на угол р вызовет появление на потенциометре 5 сигнала
(7 = Л1Р, где ki — крутизна характеристики потенциометра. Сиг-
нал U поступает на разгрузочный двигатель 4, который созда-
ет по осп X момент разгрузки Мр = к2и, где k2 — коэффициент
пропорциональности. Под действием разности моментов Ж—МР
гироскоп прецессирует с угловой скоростью
Шу = (Мх — М^Н cos ft.
Равенство моментов Л4Х=7ИР наступит тогда, когда при пре-
цессии гироскопа относительно оси У создается момент на элек-
105
гродвигателе 4, уравновешивающий возмущающий момент Мх.
В этом случае прецессия прекращается, а гироскоп оказывает-
ся отклоненным на угол р0 от нулевого положения.
При прекращении действия возмущающего момента гиро-
скоп возвращается в исходное положение под действием момен-
та разгрузочного двигателя с угловой скоростью <оу =
=—Л1р//7 cos р. Таким образом, происходит компенсация дей-
ствия возмущающих моментов по оси X. Наличие разгрузки по
двум осям X и У в схеме ЦГВ (см. рис. 3.24) обусловливает
неизменность положения в пространстве нормальной оси Z. Для
стабилизации оси Z по вертикали в приборе предусмотрена си-
стема коррекции, состоящая из жидкостного маятникового дат-
чика 10 и двух коррекционных электродвигателей 5 и /2, свя-
занных шарнирной передачей с осями гиромоторов 4 и 9.
Наличие силовой стабилизации вносит специфику в работу
системы маятниковой коррекции ЦГВ. Коррекция осуществля-
ется за счет приложения момента непосредственно к гироскопам
по осям, перпендикулярным осям стабилизации. Двухосный
жидкостный маятниковый датчик 10 в отличие от одноосного
имеет две пары электродов, расположенных в плоскостях XZ и
KZ. При горизонтальном положении жидкостного датчика сум-
марный сигнал с каждой пары контактов равен нулю.
При отклонении оси платформы Z от вертикали на угол а
(осуществляется поворот по крену вокруг оси X) с пары кон-
тактов жидкостного датчика, расположенных в плоскости YZ,
снимается суммарный сигнал, который подается на управляю-
щую обмотку коррекционного двигателя 5. Последний создает
момент Мк, приложенный к оси кожуха гиромотора 4. Прецес-
сируя под действием этого момента, гироскоп 4 через подшип-
ники оси У поворачивает гироплатформу вокруг оси X до тех
пор, пока сигнал, поступающий с жидкостного датчика, не
будет равен нулю. Коррекция по тангажу осуществляется ана-
логично.
Так' как чувствительным элементом системы коррекции в
приборе является жидкостный маятник, то при действии уско-
рений жидкость будет смещаться, меняя распределение токов
между контактами. В результате этого ось Z будет корректиро-
ваться в направлении равнодействующей силы тяжести и инер-
ционной силы, т. е. к «кажущейся» вертикали.
Для уменьшения указанной погрешности в ЦГВ предусмот-
рена возможность выключения поперечной и продольной кор-
рекции при действии ускорений с помощью специальных уст-
ройств, разрывающих цепь обмотки возбуждения коррекцион-
ных двигателей. Для быстрого приведения платформы к верти-
кали при запуске гироскопов в приборе предусмотрена система
ускоренного восстановления, состоящая из механических маятни-
ков и разгрузочных двигателей 7 и 1. Включение системы уско-
ренного восстановления осуществляется от кнопки «Арретир».
106
6. КУРСОВЫЕ ПРИБОРЫ И СИСТЕМЫ
Задача измерения или определения курса — одна из основ-
ных задач навигации, которую приходится решать в полете эки-
пажам ЛА. Измерение курса осуществляется магнитным, индук-
ционным, гироскопическим, гиромагнитным, гироиндукционным,
астрономическим и радиотехническим методами. Магнитный ме-
тод измерения курса основан на определении направления маг-
нитного меридиана с помощью взаимодействия постоянного
магнита и магнитного поля Земли. Индукционный метод бази-
руется на том, что магнитное поле Земли наводит в дросселе
с пермаллоевым сердечником электродвижущую силу, завися-
щую от угла между вектором напряженности магнитного поля
Земли и осью первичных обмоток дросселя. В гироскопическом
методе используется свойство свободного гироскопа сохранять
в пространстве направление главной оси вращения неизменным.
Но магнитному и индукционному методам свойственны зна-
чительные ошибки, возникающие из-за эволюций ЛА. Гироско-
пический метод также обладает погрешностями, возникающими
вследствие ухода гироскопа с течением времени от заданного
направления.
Поэтому широкое применение нашло комплексное исполь-
зование методов, позволяющих избавиться от недостатков и
ошибок, свойственных каждому из них при автономном приме-
нении. К ним относятся гиромагнитный и гироиндукционный ме-
тоды. Они основываются на том, что осуществляется коррекция
свободного гироскопа от магнитного или индукционного чувст-
вительного элемента с целью ориентирования его главной оси
в направлении магнитного меридиана.
Астрономический и радиотехнический методы определения
курса являются более точными, чем предыдущие. Астрономи-
ческий метод реализуется с помощью астрокомпаса пеленга-
цией небесных светил, а радиотехнический — с помощью при-
емных антенн ЛА пеленгацией передающих радиостанций,
положение которых известно с высокой точностью. Однако воз-
можности астрономического метода зависят от метеорологичес-
ких условий и видимости небесных светил, а радиотехническо-
го — от наличия и дальности радиостанций.
/Магнитный компас. Его чувствительным элементом, опреде-
ляющим направление магнитного меридиана, является свободно
подвешенный постоянный магнит, который располагается вдоль
магнитного меридиана.
Устройство авиационного магнитного компаса типа КИ при-
ведено на рис. 3.26. Картушка 9, которая опирается на подпят-
ник 4 с помощью шпиля 10, и два цилиндрических постоянных
магнита 5, закрепленных на картушке, образуют подвижную
магнитную систему компаса. Она помещается в герметичном
корпусе 3, заполненном вязкой прозрачной жидкостью. Удель-
107
Рис. 3.26. Магнитный компас ти-
па КИ:
1 — крышка; 2 — компенсационная ка-
мера; 3 — корпус; 4 — подпятник; 5 —
постоянные магниты; 6— курсовая
нить; 7 — колонка с амортизационной
пружиной; 8 — девиационное устрой-
ство; 9 — картушка; 10 — шпиль
ный вес жидкости подбирается
так, чтобы подвижная система за
счет выталкивающей силы жид-
кости оказывала минимальное
давление на подпятник 4. Кроме
того, жидкость обеспечивает
демпфирование колебаний кар-
тушки и уменьшает трение в опо-
ре. Для компенсации изменения
объема жидкости при температу-
рных колебаниях окружающей
среды служит компенсационная
камера. Отсчет показаний маг-
нитного курса ведется через стек-
ло по шкале картушки, разграду-
ированной от 0 до 360°, и курсо-
вой черте, установленной на кор-
пусе прибора.
Магнитный компас является
дублирующим прибором на ЛА
и используется в случае отказа основных компасов. Ему, как и
любому измерительному прибору, свойственны методические и
инструментальные ошибки, отличающие действительный магнит-
ный курс от показаний компаса КК (компасный курс). Их оп-
ределяют как суммарную девиацию: As =ЧГМ—Тк.
Методические погрешности магнитных компасов обусловле-
ны: магнитным склонением Дм и магнитной девиацией Дк, на-
клоном ЛА относительно подвижной системы МК и наклоном
подвижной системы компаса относительно плоскости горизонта.
Причиной возникновения магнитной девиации является дейст-
вие возмущающих полей, источниками которых являются раз-
личные ферромагнитные массы и электрооборудование лета-
тельного аппарата. Под их влиянием подвижная система откло-
няется от магнитного меридиана Земли на величину магнитной
девиации Дк.
К инструментальным относятся погрешности магнитных ком-
пасов, вызываемые силами трения в опорах, увлечением при
разворотах ЛА подвижной системы МК жидкостью, изменением
свойств жидкости от изменения температуры и др.
Индукционные датчики магнитного курса. В настоящее вре-
мя в курсовых системах высокую точность и стабильность по-
казаний обеспечивают широко применяемые индукционные дат-
чики магнитного курса, которые лишены многих недостатков
магнитного компаса. В частности, они не имеют подвижной си-
стемы, которая вызывает большие ошибки при эволюциях ЛА;
у них нет подвижных контактных элементов, механическая
прочность и надежность которых не удовлетворяют требовани-
ям, предъявляемым к современному пилотажно-навигационному
108
Рис. 3.27. Магнитные зонды и их
характеристики
Рис. 3.28. Принципиальная схема ин-
дукционного датчика курса типа ИД
и коррекционного механизма типа
КМ
оборудованию; они лишены погрешностей, связанных с влияни-
ем сил трения, увлечения и дебаланса.
Чувствительным элементом индукционного датчика являются
магнитные зонды. Магнитный зонд (рис. 3.27, а) состоит из
двух пермаллоевых сердечников 1 и 2, на каждом из которых
намотано соответственно по одной подмагничивающей обмотке
Wi и w2 и одной сигнальной и w4. Подмагничивающие об-
мотки Wi и W2 соединены последовательно и намотаны в проти-
вофазе так, что при подведении к ним переменного напряжения
^пит в сердечниках образуются магнитные поля, напряженности
которых Я1 и Н2 одинаковы и противоположны по направлению.
Сигнальные обмотки Шз и w4 соединены последовательно и на-
мотаны так, что э.д.с., возникающие в них, суммируются.
На выходе сигнальных обмоток возникает е% (t) (рис. 3.27,
б). Амплитуда (/) является функцией угла V между векто-
ром напряженности внешнего магнитного поля и осью магнит-
ного зонда, а ее частота равна удвоенной частоте питания об-
моток подмагничивания.
Применение такого магнитного зонда позволяет получить
высокую точность и стабильность показаний при значениях гори-
зонтальной составляющей напряженности магнитного поля Зем-
ли //=0,06 Э и выше. Непосредственное использование сигна-
лов магнитного зонда для определения курса невозможно в си-
лу того, что выходной сигнал = //BHcos Т зависит как от
ориентации зонда в магнитном поле Земли, так и от горизон-
тальной составляющей Н, имеющей значительный разброс зна-
чений.
Для построения индукционного датчика магнитного курса
используется схема, представленная на рис. 3.28. Чувствитель-
109
ный элемент датчика состоит из трех магнитных зондов, распо-
ложенных треугольником под углом 60° относительно друг дру-
га. Их подмагничивающие обмотки 2 соединены последователь-
но и питаются переменным напряжением.
Сигнальные обмотки 3 соединены в звезду и связаны трех-
проводной линией со статорной обмоткой 4 сельсин-трансфор-
матора. Токи, протекающие в обмотках статора, возбуждают в
нем результирующий магнитный поток ФСт, который фактически
определяет направление магнитного меридиана Земли и, в свою
очередь, индуцирует э.д.с. в обмотке ротора 5. Чем больше рас-
согласование системы «индукционный треугольник — сельсин —
трансформатор», тем большая э.д.с. индуцируется в обмотке
ротора.
Напряжение, снимаемое с обмотки ротора, усиливается уси-
лителем 6 и подастся в управляющую обмотку малоинерцион-
ного двигателя 7, который вращает ротор 5 сельсина в положе-
ние, при котором индуцируемая э.д.с. равна нулю. Все перечис-
ленные устройства составляют коррекционный механизм (КМ).
Таким образом, угол отработки ротора 5 сельсина будет соот-
ветствовать углу отклонения «индукционного треугольника» от-
носительно магнитного меридиана Земли независимо от величи-
ны напряженности магнитного поля Земля, воспринимаемой
магнитными зондами. При изменении курса на определенный
угол магнитный поток Фст также перемещается на тот же угол,,
а с ним при помощи электродвигателя следует и ротор сель-
сина.
Индукционный датчик магнитного курса состоит из индук-
тивного датчика типа ИД и коррекционного механизма КМ.
Датчик ИД (рис. 3.29) состоит из индукционного чувствитель-
ного элемента 4, карданной подвески 3, компенсационной каме-
ры 2, девиационного прибора /, корпуса 5 и крышки 6.
Для уменьшения погрешностей измерения магнитного курса
индукционный чувствительный элемент подвешивается в виде
маятника к двухстепенному кардановому подвесу и помещается
в жидкость. Карданов подвес датчика ИД-3 обеспечивает гори-
зонтальное положение зондов при наклонах корпуса датчика
до 15° с точностью до 0,5°. Устранение девиации осуществляет-
ся девиационным прибором Л расположенным на крышке 6. Он
содержит постоянные магниты, взаимное положение которых
можно изменять, компенсируя магнитную девиацию. Коррекци-
онный механизм КМ обеспечивает преобразование сигнала, по-
лученного от чувствительного элемента датчика, в угол поворо-
та ротора сельсин-трансформатора и выдает информацию о
магнитном курсе ЛА.
К методическим погрешностям ИД относятся: погрешность
магнитного склонения, которая учитывается введением поправ-
ки в КМ системы, и погрешность от магнитной девиации, кото-
рая компенсируется с помощью девиационного прибора. Инет-
ПО
1
Рис. 3.29. Конструкция индукционного датчика типа ИД
рументальными погрешностями индукционного датчика являют-
ся: погрешности, обусловленные влиянием изменения напряже-
ния и частоты питания, а также температуры окружающей
среды; производственно-технологические погрешности, приводя-
щие к нелинейностям характеристик.
Гирополукомпасы. Они широко используются для определе-
ния направления полета. У этого прибора нет избирательности
по отношению к меридиану, но установленный с помощью дру-
гого прибора он позволяет некоторое время выдерживать и из-
мерять курс с высокой точностью.
Теоретические исследования показали, что свободный гиро-
скоп, расположенный на ЛА, можно использовать в качестве
прибора, запоминающего направление на Земле, т. е. в качестве
датчика курса. Для этого необходимо собственную ось гироско-
па удерживать в горизонтальной плоскости и обеспечивать
прецессию в ней с угловой скоростью йз sin ср, но с обратным
знаком, где йз — угловая скорость вращения Земли, ср — ши-
рота места.
Первое свойство обеспечивается созданием момента относи-
тельно оси внешней рамки карданова подвеса, системой гори-
зонтальной коррекции, второе — созданием момента относи-
тельно внутренней рамки, системой широтной коррекции.
Гирополукомпасы используются как самостоятельные курсо-
вые приборы, а также в качестве датчиков курса в современных
курсовых системах и автопилотах. Электрокинематическая схе-
ма гирополукомпаса типа ГПК (рис. 3.30) состоит из гиродат-
чика 7, указателя УК-1 2 и пульта управления X
111
Рис. 3.30. Электрокинематическая схема гирополукомпаса
Ось ротора в горизонтальном положении удерживается с по-
мощью системы горизонтальной коррекции, состоящей из жид-
костного маятникового переключателя МП и электродвигателя
Л/г, создающего момент вокруг оси наружной рамы. При раз-
воротах цепь коррекции для исключения погрешностей отклю-
чается с помощью выключателя коррекции В К.
Компенсация составляющей йз sin ср скорости вращения
Земли обеспечивается системой широтной коррекции, состоящей
из мостовой схемы в пульте управления 3 и электродвигателя
МА. Момент, пропорциональный Йз sin ср, прикладывается к оси
внутренней рамки гироскопа. С помощью широтного потенцио-
метра R'j вводится широта местоположения самолета. Подстро-
ечным реостатом Rn регулируется скорость широтной коррек-
ции. Потенциометр RP служит для компенсации уходов гироуз-
ла. Шкала ГПК через редуктор двигателя Л1 ф связана
с наружной рамкой гироскопа. Потенциометр /?ф, щетки кото-
рого жестко крепятся к оси шкалы, обеспечивает съем сигнала,
пропорционального ортодромическому курсу, в указатель 2.
При нажатии кнопки на пульте управления двигатель Ж пово-
рачивает шкалу относительно оси наружной рамы гироскопов,
что позволяет осуществить начальную выставку прибора по сто-
яночному курсу. При контакте ключа с ламелями Л1 скорость
вращения шкалы мала, при контакте с Л2 — максимальна.
112
При измерении ортодромического курса методические по-
грешности ГПК могут появляться из-за отсутствия непрерыв-
ного ввода текущих значений ср в схему компенсации. Основной
методической погрешностью ГПК является карданная погреш-
ность, возникающая при тангажах и кренах ЛА. Эта погреш-
ность появляется из-за отклонения оси наружной рамы от
вертикали, относительно которой отсчитывается курс, и исчезает
при совпадении оси наружной рамы с вертикалью места. Для
компенсации карданных погрешностей необходима стабилиза-
ция наружной рамы ГПК относительно вертикали места.
Инструментальные погрешности ГПК обусловлены наличием
моментов трения в подшипниках гироузла, влиянием моментов
от тоководов, появлением несбалансированности гироузла отно-
сительно оси внутренней рамы при изменении температуры. Реа-
лизация гирополукомпасов с малыми уходами требует примене-
ния точных и безлюфтовых опор, токоподводов с минимальными
моментами сопротивления, регулировок и термокомпенсации.
Курсовые системы. Из всех рассмотренных ранее датчиков
курса ни один не может обеспечить точного измерения курса на
всех режимах полета «ЛА вследствие имеющихся у них недостат-
ков. В связи с этим на ЛА применяют одновременно несколько
датчиков курса, работающих на один указатель и имеющих
определенную взаимосвязь. Это позволяет использовать магнит-
ные компасы или индукционные датчики курса для устранения
ухода и корректировки гирополукомпаса и, в свою очередь, на
основе свойства устойчивости гирополукомпаса скомпенсировать
динамические погрешности магнитных компасов.
Такое объединение нескольких измерителей курса, работаю-
щих па один указатель для компенсации недостатков отдельных
измерителей, называется комплексированием. Построение курсо-
вых систем является реализацией идеи комплексирования.
В современных курсовых системах гироскопические датчики
комплексируются не только с магнитными, но и с астрономичес-
кими датчиками курса. Это позволяет максимально выявить
преимущества каждого метода измерения курса, добиваясь по-
лучения предельной точности его показаний на борту самолета
во время полета. Основным измерителем курса в курсовых си-
стемах служит гирополукомпас, выдающий потребителям орто-
дромическпй курс. Гироскопический датчик, как правило,
работает непрерывно, а остальные включаются в зависимости
от условий работы.
В связи с этим различают три режима работы курсовой
системы. Режим работы курсовой системы, в которой работает
только гироагрегат, называется режимом ГПК. Режимы ра-
боты курсовой системы, в которой ГПК работает совместно
с индукционным или астрономическим компасом, называются
соответственно режимами магнитной (МК) и астрономической
(АК) коррекции. Они определяются задачами и условиями
8—455 113
полета ЛА и выбираются экипажем для получения максималь-
ной точности данных о курсе ЛА.
В одной из наиболее распространенных курсовых систем
типа КС объединены в единый комплекс гирокомпас, индукци-
онный датчик магнитного курса и дистанционный астрономи-
ческий компас. КС выдает информацию об истинном, магнит-
ном и ортодромическом курсах. В нее поступают также пелен-
ги и курсовые углы радиостанций от автоматических радио-
компасов.
Система КС (рис. 3.31) состоит: из двух гироагрегатов ти-
па ГА-1; канала магнитного курса, включающего индукцион-
ный датчик ИД-3 и коррекционный механизм КМ-4; из канала
астрономического комплекса, включающего дистанционный
астрономический компас ДАК-ДБ с переходным блоком Д-62;
из указателя штурмана УШ; указателей пилота УД-1; указа-
телей типа УГПК и УГА-1У. На пульте управления КС распо-
ложены переключатели режимов В1 и В2, переключатель уст-
ройства широтной коррекции ВЗ и переключатель курсозадат-
чика В4.
Для повышения надежности курсовых систем в них исполь-
зуются два гироагрегата. Один из них считается основным,
второй — запасным. Основной и запасной гироагрегаты рабо-
Рис. 3.31. Функциональная схема курсовой
системы типа КС
114
тают одновременно, причем режим работы основного гиро-
агрегата определяется положением переключателя В2 на пуль-
ет управления. Потребителям сигналы курса выдаются основ-
ным гироагрегатом, а запасной гироагрегат служит для контро-
ля работы основного. Оба гироагрегата полностью взаимозаме-
няемы.
Сигнал для выставки начального курса поступает с пере-
ключателя курсозадатчика на пульте управления в систему
согласования, которая разворачивает датчик курса гироагре-
гата. Контроль выставки курса ведется по указателю штурма-
на УШ.
Режим ГПК. Перед включением режима ГПК производится
согласование гироагрегатов курсовой системы с индукционным
или астрономическим датчиком курса. После включения ре-
жима ГПК курсовая система стабилизирует согласованное
значение курса. Как и в гирополукомпасе, главная ось гироагре-
гата должна быть расположена горизонтально. Для этого ось
наружной рамы устанавливается вертикально, ось внутренней
рамы находится в горизонтальной плоскости. Вертикальное и
горизонтальное положение осей карданова подвеса гироскопа
обеспечивается системами горизонтальной коррекции и стаби-
лизации по крену. Система стабилизации по крену получает
информацию о у от ЦГВ и стабилизирует гироагрегат с по-
мощью дополнительной рамы.
Уход гироскопа от вращения Земли Q3 cos ср и воздействия
возмущающих моментов относительно оси внутренней рамы
компенсируется с помощью системы широтной коррекции, как
и в гироиолукомпасе, В этом режиме на указателе штурмана
УШ индицируется ортодромический курс, значения которого
транслируются от гироагрегата с помощью двухканальной сель-
синной следящей системы. Из УШ значения ортодромического
курса выдаются на указатели УК-1. Кроме этого, УШ индици-
рует курсовые углы и пеленги двух радиостанций относительно
ортодромической системы координат. Запасной гироагрегат при
работе КС в режиме ГПК корректируется сигналом магнитной
коррекции, выдаваемой КМ-4. Его работа аналогична работе ос-
новного гироагрегата в режиме МК и будет рассмотрена ниже.
Выходной сигнал запасного ГА-1 выдается на стрелку указате-
ля У ГА-1 У.
Режим МК. В этом режиме магнитным датчиком курса слу-
жит индукционный датчик ИД-3, сигналы которого отрабаты-
ваются коррекционным механизмом КМ-4. В его конструкции
используется механический корректор, с помощью которого
устраняются девиационные погрешности индукционного датчика
и инструментальные погрешности дистанционных передатчиков.
Из КМ-4 сигнал о магнитном курсе автоматически подается на
датчик курса гироагрегата ГА-1, с которого выдается гиромаг-
нитный курс. При учете магнитного склонения Дм курс гРм
8* 115
может быть преобразован в истинный или ортодромический
курс 4%. Широтная коррекция ГА-1 в режиме МК не применя-
ется, так как рассмотренная связь обеспечивает полную ком-
пенсацию ухода гироскопа под влиянием вращения Земли, раз-
баланса и других причин.
Режим А К, В режиме астрономической коррекции связь
астрономического датчика курса и гироагрегата осуществляет-
ся по схеме, аналогичной схеме связи в режиме МК. Отличие
заключается в том, что роль сельсин-датчика коррекционного
механизма будет выполнять сельсин в переходном блоке связи
Д-62 астрономического компаса типа ДАК-ДБ с курсовой си-
стемой.
При работе курсовых систем в режиме МК могут возникать
методические погрешности из-за воздействия ускорений на чув-
ствительный элемент и отклонения его от плоскости горизонта.
При взлете самолета с углами тангажа более 15° будет также
накапливаться дополнительная погрешность магнитного дат-
чика.
В режиме ГПК полная погрешность курсовых систем скла-
дывается: из ошибок начальной выставки курса, азимутального
ухода гироскопа, неточной компенсации вращения Земли, из-
менения ортодромического курса из-за бокового отклонения от
ортодромии и искажений сигнала в дистанционной передаче от
гироагрегата на указатели.
7.НАВИГАЦИОННЫЕ СИСТЕМЫ
Основной задачей навигации является непрерывное опреде-
ление фактического местоположения ЛА. Она решается с по-
мощью навигационных систем на основе получения информа-
ции от различных приборов и систем ЛА. В авиации наиболь-
шее распространение получили навигационные системы,
работающие по методу счисления пути, основанному на опреде-
Рис. 3.32. Навигационные параметры и их
составляющие
лении координат место-
положения интегрирова-
нием по времени состав-
ляющих путевой скорости
или ускорений ЛА. В за-
висимости от физических
принципов, положенных
в основу работы датчиков
исходных данных и их об-
работки, навигационные
системы, применяемые на
ЛА гражданской авиа-
ции, подразделяются на
воздушно - доплеровские,
инерциальные и комп-
116
лексные, объединяющие несколько информационных источ-
ников.
Вс^душно-доплеровские системы счисления пути. Для полу-
чения зависимостей, по которым решается задача счисления
пути, рассмотрим в условной прямоугольной системе координат
навигационные параметры и их составляющие (рис. 3.32). Ос-
новой для построения системы координат при счислении пути
служит главная ортодромия — часть дуги большого круга зем-
ного шара, соединяющая исходный (ИПМ) и конечный пункт
маршрута (КПМ). Учитывая, что точки маршрута лежат от
ортодромии на расстоянии не более 600 км, задача определения
текущих координат решается на плоскости в ортодромической
системе координат, где S — направление ортодромии, Z —
перпендикуляр к ней. Если начальные координаты ЛА в задан-
ной системе соответствовали 30 и Zo, то уравнения счисления
координат записываются как:
tz tz
S = SQ-\V„dt- Z = Z<>-\V^dt> (3.18)
G A
где V’nv, V„—проекции путевой скорости на оси Y и X; 6, — время
полета.
Если выразить значения УПу и V„x через составляющие про-
екции истинной воздушной скорости V и скорости ветра W, то
V„}, = Vcos (ф - ’h) + W cos (6 - <h) |
ИПд. = v sin (Ф — фА) -I- ir sin (3 — 'ift), J ’
где ф — угол курса, т. е. угол между направлением географического мери-
диана и продольной осью ЛА: — угол карты, т. е. угол между направ-
лением географического меридиана и направлением главной ортодромии; 6 —
угол между направлением географического меридиана и направлением ветра.
Из уравнений (3.19) ясно, что для получения КПу и КПг
необходимо знать значения истинной воздушной скорости V,
курс ЛА, скорость и направление ветра W. В основу построе-
ния функциональной схемы аэрометрической системы счисле-
ния пути (рис. 3.33, а) положены уравнения (3.19). Она состо-
ит из датчика воздушной скорости ДВС, датчика угла курса
ДУК, задатчика параметров ветра ЗПВ, вычислительного уст-
ройства В У, реализующего алгоритм определения УПу и Vnх
согласно (3.19), интегрирующего устройства ИУ, определяюще-
го текущие координаты Y и X по выражениям (3.18) и
устройство отображения УО, на котором наглядно выдается
экипажу информация о положении ЛА: расстояние до конечно-
го пункта маршрута (КПМ) — 5 и боковое уклонение — Z.
Если выразить Wy и непосредственно через Vn, то мож-
но записать:
Vnv - Vn cos (ф + Зс -fe); Vn = Vn sin (ф + фл), (3.20)
117
Pirc. 3.33. Функциональные схемы систем счисления пути:
а — аэрометрическая; б — доплеровская
Для реализации выражения (3.20) необходимо знать значения
путевей скорости Vn, угол сноса $с и углы курса Чг, Чч. Тогда
координаты У и X вычисляются с использованием информации
от доплеровского измерителя путевой скорости и угла сноса
ДИСС и датчика курса ДУК. На использовании зависимостей
(3.20) и информации от перечисленных выше датчиков стро-
ится функциональная схема доплеровской системы счисления
пути (рис. 3.33, б).
Каждая из рассмотренных выше навигационных систем име-
ет свои недостатки, которые ограничивают области их примене-
ния. Аэрометрические системы имеют низкую точность, так
как трудно учесть переменную скорость и направление ветра,
которые вводятся вручную. Доплеровские системы имеют боль-
шую точность, но недостаточную надежность, так как подвер-
жены влиянию условий полета и действию радиопомех. Пост-
роенные на их основе комплексные воздушно-доплеровские
системы счисления позволяют сохранить положительные сторо-
ны этих систем и устранить недостатки.
Навигационный комплекс состоит из совокупности систем^
объединенных навигационным вычислителем типа НВ (рис.
3.34), который получает информацию от ДИСС по двум кана-
лам: дискретному — о Vn и |3С в виде доплеровских частот
Л, аналоговому о Vn и |3. в виде напряжений постоян-
ного тока. От С ВС вычислитель получает информацию о V и
Н, Курсовая система КС выдает значения магнитного или орто-
дромического курса в зависимости от режима ее работы (ГПК
или МК) в блок раскладки скоростей НВ для получения состав-
ляющих Wy и Wx. В свою очередь, в КС от НВ выдаются зна-
чения заданного путевого угла ОЗПУ. Этот сигнал поступает
на указатель штурмана (УШ) для контроля. В систему автома-
тического управления САУ навигационный вычислитель выдает
сигналы бокового отклонения от линии заданного пути И, сиг-
налы скорости изменения бокового отклонения Z и ОЗПУ для
обеспечения автономного полета по заданному маршруту.
С пульта управления НВ предусмотрена также возможность
включения режима курсовой стабилизации САУ. Связь НВ с
118
Рис. 3.34. Схема связи систем навигационного комплекса
РСБН осуществляется по каналам азимута А и наклонной
дальности L для проведения коррекции счисления координат
по более точному радиотехническому методу.
Основные режимы работы НВ. Для повышения надежности
решений определение составляющих Vn v и Vnv ведется по двум
каналам: дискретному и аналоговому.
В дискретном канале определение УПу и УПх осуществля-
ется в блоке импульсного счисления на основе информации от
ДИСС по следующим зависимостям:
Vnv ^kFx cos (4/ — tyk) + k F2 cos (ф — 4- k Fx sin (ф — фА) —
-*F2sin (ф -фА); t
v = kFx sin (<p - фЛ) + kF. sin (ф — фА) — k Fx cos (ф - +
-4- k F2 cos (ф — ^k)t
где k — постоянный коэффициент, зависящий от параметров работы ДИСС.
Дискретный канал счисления является основным как наибо-
лее точный. Аналоговый канал используется как резервный.
В зависимости от характера информации он работает в режи-
мах: основном; «память» по запомненным параметрам ветра W
и 6; «память» по параметрам ветра, введенным вручную.
В основном режиме информация о Vn и £с поступает в НВ
в виде напряжений постоянного тока, который формирует на-
пряжения, пропорциональные 7Пу и УПх по зависимостям (3.21),
интегрирует их и выдает на средства отображения текущие Y
и X. Одновременно с этим от СВС вводится V, определяются
Vy и VXt формируются УПу, Vnx и 6, т. е. решается «навигаци-
119
онный» треугольник скоростей, и формируются параметры вет-
ра в памяти вычислителя.
В режиме «Память», когда отсутствуют Vn и (3 при отклю-
чении или отказе ДИСС, данные о Vn, и Vn, формируются по
последним «запомненным» параметрам ветра W и 6 и значени-
ям V, выдаваемым СВС. В режиме «память» счисление осу-
ществляется так же, как и в предыдущем случае, но по пара-
метрам ветра W и 6, введенным вручную. Интегрирование во
всех режимах осуществляется в общем канале.
Инерциальные системы счисления пути. Они работают по
методу, основанному на определении координат местоположе-
ния интегрированием по времени ускорений, действующих на
ЛА в процессе движения.
Основным элементом инерциальных систем является аксе-
лерометр, измеряющий линейные ускорения. В основном при-
меняются осевые и маятниковые акселерометры (рис. 3.35).
Чувствительным элементом служит инерционная масса 1, за-
крепленная двумя пружинами 3 в корпусе прибора. Ось ОХ
является осью чувствительности. Если ускорение равно нулю,,
то масса располагается в среднем положении. При наличии
ускорения Vvx ЛА, направленного по оси ОХ, масса перемеща-
ется до тех пор, пока сила инерции от действия ускорения не
уравновесится силой противодействия пружины. Перемещение
массы 1Х пропорционально действию ускорения. С помощью по-
тенциометра 4 перемещение массы 1Х преобразуется в электри-
Че<ч<ий сигнал Для успокоения колебаний инерционной
массы в переходном режиме в схеме имеется демпфер 2.
Принцип действия инерциальных систем счисления основан
на счислении пройденных ЛА расстояний S и Z вдоль исходных
осей координат X и У двойным интегрированием действующих
на ЛА ускорений Wy и за время полета t*
Рис 3.35. Схемы акселерометров:
U — и — маЯТппКОоЫе
120
Для этого на стабилизи-
рованной в горизонталь-
ной плоскости платформе
устанавливаются два ак-
селерометра, измеритель-
ные оси которых направ-
лены вдоль осей коорди-
нат А и У. Стабилизация
платформы производится
с помощью трехосного ги-
ростабилизатора с ис-
пользованием принципа
силовой гироскопической
стабилизации (рис. 3.36).
Г иростабилизированная
платформа 3 установлена
в кардаиовом подвесе,
Ут
Рис. 3.35. Кинематическая схема трехосно-
го гиростабилизатора
состоящем из наружной
./ и внутренней 2 рам. Она имеет три степени свободы относи-
тельно осей Хгп, УГп н Zrn. На гипроплатформе установлены три
двухстепенных гироскопа 4, 5, 6, на осях которых установлены
датчики прецессии 19, 17, 13. Сигналы с каждого датчика пос-
тупают на стабилизирующие двигатели И, 15, 20 и 16.
Работа каждой силовой системы стабилизации аналогична
системе стабилизации в ЦГВ. Трехосная силовая стабилизация
обеспечивает сохранение осей Xrn? Угп, Z™ гироплатформы не-
изменными в инерциальном пространстве. Положение осей гиро-
платформы можно изменять с помощью управляющих сигналов
на датчики моментов гироскопов 18, 14, 12. К гиростабилизи-
рованной платформе крепится платформа 8 с акселерометрами
9, 10. Положением акселерометров относительно платформы
можно управлять с помощью следящих систем блока 7. В зави-
симости от положений акселерометров по отношению к выбран-
ной системе координат используются различные алгоритмы
определения координат ЛА. Если оси акселерометра постоянно
ориентируются вдоль географической системы координат
где ось Ог]г направлена по вертикали места, a Ogr и
Осг — соответственно на север и восток, то возможно опре-
деление ф широты и X долготы расположения ЛА в текущий
момент полета по зависимостям (3.1). Реализация выражений
(3.22) и (3.1) производится вычислительным устройством, кото-
рое также вводит корректирующие сигналы, учитывающие по-
грешности вследствие вращения Земли, направления и скорости
полета ЛА.
Точность инерциальной системы зависит от точности аксе-
лерометров, дрейфа гиростабилизированной платформы, а так-
же погрешностей электронных и электромеханических элемен-
тов и вычислителей.
121
8. СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ
Большие скорости и требуемая высокая точность движения
по траекториям полета современных ЛА обеспечиваются систе-
мами автоматического управления полетом. Автоматизация
процесса управления ЛА направлена на повышение безопасно-
сти и регулярности полетов. В зависимости от степени автома-
тизации различают автоматизированные, полуавтоматические
или автоматические системы управления (СУ).
При использовании автоматизированных систем управления
пилот осуществляет ручное (штурвальное) управление ЛА, ко-
торый приобретает хорошие характеристики устойчивости и
управляемости за счет применения СУ. К таким системам отно-
сятся угловые демпферы и автоматы устойчивости.
При использовании полуавтоматических систем директорно-
го (командного) управления пилот управляет ЛА по показани-
ям приборов-индикаторов, которые освобождают его от слож-
ных логических и вычислительных операций по переработке
текущей информации, поступающей от отдельных датчиков и
приборов. Режим полуавтоматического управления полетом ЛА
характерен тем, что включение пилота в замкнутую систему
управления обеспечивает более высокую безопасность полета,
чем использование автоматической системы (рис. 3.37). Пилот
воспринимает информацию от визуальных приборов (ВП) и
средств отображения информации СОИ, получивших сигналы от
датчиков пилотажной информации ДПИ и вычислительных
устройств ВУ. Последние предназначены для формирования
интегральной информации о полете ЛА, используемой пилотом
для управления ЛА на таких сложных участках полета, как
заход на посадку. Интегральная информация выводится на пи-
лотажно-командный прибор (ПКП) и навигационно-плановый
прибор (ПНП). При самолетовождении пилот поддерживает
значения параметров интегральной информации в заданных
пределах, воздействуя на органы управления: рулевой привод
РП и сектор газа СГ. Весь контур управления работает как
следящая система, которая отрабатывает заданную траекторию-
полета. Функции управления полетом распределяются между
пилотом и системой управления с учетом характеристик пилота-
и возможностей системы.
При использовании автоматических систем управления фун-
кции управления положением центра масс (режим управления)
и угловыми движениями ЛА (режим стабилизации) принимает
на себя СУ. Такие системы называются автопилотами. Авто-
пилот представляет собой совокупность трех автоматических
систем, аналогичных по принципу действия и устройству. Каж-
дая из них воздействует на рулевой привод соответствующего-
органа управления (руля высоты, руля направления, элеронов).
В зависимости от органа управления, на который действует
122
автоматическая система, в автопилоте выделяют каналы руля
высоты, руля направления и элеронов. Канал автопилота
(рис. 3.38, а) состоит из гироприбора ГП, датчика угловой ско-
рости ДУС, задающего устройства ЗУ, сервопривода СП и уст-
ройства обнуления (УО). Гироприбор и датчик угловой скоро-
сти являются датчиками информации о текущих значениях
угловой координаты ср и ее производной ср. Задающее устрой-
ство выдает информацию о заданном значении угловой коорди-
нации <р3. Сервопривод преобразует электрические сигналы,
поступающие на его вход, в механические перемещения (ли-
нейные или угловые). Устройство обнуления введено для ликви-
дации сигналов на входе сервопривода перед включением авто-
пилота.
Сервопривод канала автопилота (рис. 3.38, б) представляет
собой электромеханическую следящую систему. Электрические
сигналы, поступающие в эту систему, суммируются на входе
суммирующего устройства СУ. Сигнал с выхода СУ посту-
пает па усилитель мощности УМ и далее на исполнительный
орган следящей системы — рулевую машину РМ. Механичес-
кое перемещение выходного звена рулевой машины преобразу-
ется в электрический сигнал и через цепь обратной связи
ЦОС подается па вход суммирующего устройства.
В сервоприводах сигналы постоянного тока суммируются
на входах магнитных усилителей или на операционных уси-
лителях постоянного тока, сигналы переменного тока чаще все-
го — на резисторах и потенциометрах. Выбор усилителя мощ-
ности для сервопривода определяется характеристиками сигна-
лов на выходе суммирующего устройства и типом используемой
рулевой машины, в качестве которой применяют электродвига-
123
тели постоянного и переменного тока и гидравлические серво-
усилители.
При включении автопилота информация о текущем значении:
регулируемой угловой координаты ср снимается с гироприбораг
сравнивается с заданным ее значением ф3, поступающим с за-
дающего устройства. Сигнал рассогласования подается на сер-
вопривод, который через рулевой привод воздействует на соот-
ветствующий орган управления. Орган управления отклоняет-
ся в таком направлении, чтобы вызванное им угловое движе-
ние самолета устранило рассогласование на входе сервоприво-
да. В этом случае текущее значение угловой координаты само-
лета становится равным заданному.
Канал автопилота работает в двух режимах: стабилизации
и управления. При реализации режима стабилизации автопилот
обеспечивает сохранение во времени заданного значения угло-
вой координаты. В режиме управления автопилот осуществляет
отслеживание по соответствующей угловой координате ее за-
данного значения, поступающего с задающего устройства, на-
пример с рукоятки или переключателя на пульте управления
автопилота.
Самолет и автопилот образуют замкнутую систему стаби-
лизации и управления. Характеристики движения системы «са-
молет — автопилот» определяются динамическими свойствами
самолета как объекта управления и законом управления авто-
пилота, который представляет собой уравнение, устанавливаю-
щее связь между отклонением органа управления самолета и
сигналами датчиков информации и задающих устройств. Для
канала автопилота, имеющего схему, показанную на рис. 3.38 а,
закон управления имеет вид
о (р) == /г-,п Wсп (р) 1Лгп V (р) 4* ^дус V Р T & *у тз (Р)]» (3 -23)*
ГДС /?ггь ^дус/ ^зу коэффициенты передачи гироприбора, датчика угловой
скорости к задающего устройства; tV'cnfp)— передаточная функция серво-
привода.
Закон управления вида (3.23) реализуется с помощью авто-
пилота АП-28Л1, устанавливаемого на самолете Ан-24. Он
предназначен для автоматической стабилизации и управления:
самолетом в полете. Автопилот АП-28Л1 автоматически выпол-
няет следующие функции: стабилизацию углового движения
самолета относительно центра масс; стабилизацию барометри-
ческой высоты полета; полет самолета по ортодромическому
или локсодромическому курсам; управление самолетом по курсу
и тангажу с пульта управления; доворот самолета по курсу
на углы до 120°; приведение самолета к горизонтальному по-
ложению; триммирование руля высоты.
При включении автопилота в режим стабилизации обеспе-
чивается продолжение маневра, который совершал самолет до-
его включения. При включении автопилота в режим приведе-
124
Рис. 3.39. Структурная схема автопилота АП-28Л1
ния к горизонту самолет автоматически выводится в горизон-
тальный прямолинейный полет.
Автопилот АП-28Л1 состоит из каналов элеронов, руля вы-
соты и руля направления, каждый из которых является само-
стоятельным, и причем они в процессе работы тесно взаимодей-
ствуют (рис. 3.39). В схему автопилота входят пульт управле-
ния /7У, авиагоризонт АГ Д-1, блок датчиков угловых скоростей
БДУС, корректор высоты КВ-11, гирополукомпас ГПК-52, гиро-
индукционный компас ГИК-1, фазочувствительные выпрямители
ФЧВ, задатчик курса ЗК-2, блок связи БС, магнитные усилите-
ли мощности МУМ, усилители напряжения УН, магнитные уси-
лители суммирующие МУС, устройства обнуления УО, фильтр
ФТ, рулевые машины РМ, блок триммирования БТ, триммерная
машина ТМ.
В каждом из каналов автопилота используются идентичные
сервоприводы. Суммирующим устройством сервопривода являет-
ся МУС, сигнал с выхода которого усиливается по напряжению
на УН переменного тока. Напряжение с УН выпрямляется на
ФЧВ и усиливается по мощности в МУМ и с его выхода посту-
пает в обмотку управления асинхронного двухфазного двигате-
ля рулевой машины, являющегося исполнительным устройством
автопилота. Кроме двигателя, в РМ установлены тахогенератор
и потенциометр обратной связи, соединенные с валом двигателя.
125
Сигнал с потенциометра обратной связи вводится на вход МУС,
реализуя тем самым жесткую обратную связь в сервоприводе.
Скоростная обратная связь в сервоприводе осуществляется вве-
дением на вход У/7 сигнала, снимаемого с тахогенератора.
Основными режимами работы автопилота являются режимы:
обнуления (согласования); стабилизации; управления; автома-
тического триммирования; приведения к горизонту; совмещенно-
го управления. На структурной схеме автопилота положения
контактов соответствуют режиму обнуления. Исполнительным
элементом механизма согласования является двухфазный асин-
хронный двигатель, перемещающий щетки потенциометра, сиг-
нал с которого поступает на вход МУС. Этот сигнал в режиме
обнуления компенсирует сигналы датчиков информации и потен-
циометра обратной связи.
При включении автопилота кнопкой «Включение АП», рас-
положенной на пульте управления, контакты 1 и 5 переключа-
ются, а 2 размыкается. Положение контактов 3 и 4 определя-
ется переключателем «ГИКТПК-Разворот» на пульте управле-
ния. В положении «ГПК» замыкается контакт 3. При этом ста-
билизируется заданный ортодромический курс. В положении
«ГИК» замыкается контакт 4 и самолет будет двигаться по
локсодромии. После включения автопилота обеспечивается ус-
тойчивость движения самолета относительно заданной траекто-
рии полета (режим стабилизации), а также управление самоле-
том в продольной и боковой плоскостях от задающих устройств
(пульт управления, задатчик курса). Законы управления авто-
пилотом в режиме стабилизации без учета динамических
свойств сервопривода в канале руля высоты имеют следующий
вид:
угла тангажа
ов (р) = k, [v (р) — vj (р) 4- ki р v (р)];
заданной барометрической высоты полета
% (р) = v (р) + k; р v (р) + kn [н (р) — н3 (р)].
Управление самолетом по тангажу осуществляется введени-
ем в сервопривод канала руля высоты линейно нарастающего
сигнала с помощью переключателя «Спуск — Подъем» на пуль-
те управления. При этом на обмотку управления двигателя
устройства обнуления поступает постоянное по амплитуде, но
различное по фазе (в зависимости от положения переключате-
ля) напряжение. Вал двигателя начинает вращаться с постоян-
ной частотой в направлении, соответствующем положению
переключателя, и с щеток потенциометра, связанного с ротором
двигателя, на магнитный усилитель поступает линейно нараста-
ющий управляющий сигнал.
126
Закон управления для канала руля высоты в режиме управ*
ления углом тангажа
(р) = kv [> (р) — V. (р)] -И kt> р V (р),
где = (1/р) >°з при ^<v3.
В тех случаях, когда необходимо выровнять самолет по кре-
ну и тангажу относительно горизонта, нажатием кнопки «Гори-
зонт» на пульте управления включается режим приведения к
горизонту. При этом от входов МУС сервоприводов каналов
руля высоты и элеронов отключаются управляющие сигналы и
автопилот под действием сигналов с гировертикали разворачи-
вает самолет по крену и тангажу до тех пор, пока сигналы с
гировертикали на входах МУС не станут равными нулю.
Особенностью автопилота АП-28Л1 является возможность
быстрого перехода с автоматического режима на ручное управ-
ление при нажатии кнопки совмещенного управления на штур-
вале. В этом случае размыкаются муфты рулевых машин «и пи-
лот может свободно управлять самолетом с помощью штурвала,
колонки и педалей.
ГЛАВА 4. РАДИОЭЛЕКТРОННОЕ
ОБОРУДОВАНИЕ
1. ОСНОВНЫЕ ЗАДАЧИ
Задачи самолетовождения и УВД решаются с помощью бор-
тового пилотажно-навигационного комплекса (БПНК), который
получает исходную информацию о параметрах полета от систе-
мы датчиков. Радиотехнические датчики наряду с электромеха-
ническими составляют информационную часть пилотажно-нави-
гационного комплекса.
Радиотехнические датчики БПНК можно подразделить на
радионавигационные, радиолокационные и радиосвязные. Их
обычно называют радиоэлектронным оборудованием. Бортовое
оборудование часто работает в совокупности с наземным, обра-
зуя радиотехнические системы. В состав радионавигационного
оборудования ЛА входят: бортовая аппаратура радиосистем
ближней (РСБН) и дальней навигации (РСДН), оборудование
радиомаячной системы посадки (СП), доплеровский измеритель
скорости и угла сноса (ДИСС), автоматический радиокомпас
(АРК).
Радиолокационное оборудование состоит из метеонавигаци-
онной радиолокационной станции (МРЛС), радиовысотомера
(РВ) и самолетных ответчиков (СО). В состав радиосвязного
оборудования входят радиостанции ближней и дальней связи,
а также аппаратура внутрисамолетной связи и регистрации.
127
Радиооборудование в совокупности с БПНК участвует в ре-
шении ряда частных задач, вытекающих из общей навигацион-
ной задачи. К ним относятся: автономный и неавтономный кон-
троль положения самолета на заданной траектории; оператив-
ная оценка безопасности полета по заданной траектории и вы-
работка при необходимости новой; коррекция данных, получае-
мых с помощью других датчиков или систем; связь и обеспече-
ние системы управления воздушным движением информацией
для организации безопасного воздушного движения. При реше-
нии общей п частных задач навигации радиотехническое обору-
дование используется комплексно, т. е. одна и та же задача
решается с помощью различных радиотехнических средств.
Контроль положения самолета осуществляется с использова-
нием практически всего бортового радиооборудования: РСБН,
ДИСС, СП, АРК» метеолокатора, радиовысотомера, радиостан-
ций ближней и дальней связи. Для оперативного контроля безо-
пасности полета по траектории применяются бортовые радио-
локаторы, СП, РВ, радиолокационные ответчики, радиоевлзное
оборудование, а также наземные радиолокационные и навига-
ционные средства УВД. Коррекция данных, полученных с по-
мощью нерадиотехнических датчиков, осуществляется с по-
мощью бортовой аппаратуры РСБН, ДИСС, РСДН. Связь и
обмен информацией с системами УВД обеспечиваются бортовы-
ми средствами радиосвязи и радиолокационными ответчиками.
Такое многократное использование радиооборудования ЛА и
дублирование решений одних и тех же задач многими радио-
средствами свидетельствует о их широких возможностях.
В основе радиотехнических методов определения положения
ЛА и параметров его движения лежат следующие физические
свойства электромагнитных колебаний (радиоволн): относитель-
ное постоянство скорости распространения радиоволн (с =
= 300 000 км/с), свойство отражения электромагнитных волн от
объектов (явление отражения); прямолинейность распростране-
ния радиоволн в однородной среде; возможность направленного
излучения и приема радиоволн; изменение частоты принимае-
мых сигналов при относительном изменении расстояния между
приемником и излучателем радиоволн.
2. РАДИОНАВИГАЦИОННОЕ И РАДИОЛОКАЦИОННОЕ
ОБОРУДОВАНИЕ
Радионавигационное оборудование самолета предназначает-
ся для выполнения навигационных задач по определению место-
положения относительно известной точки на поверхности земли,
вывода самолета на выбранную линию маршрута, обеспечения
полета по заданной траектории, вывода ЛА в нужную точку
пространства в заданное время, организации воздушного дви-
жения в районе аэродрома и обеспечения посадки.
128
Бортовое радионавигационное оборудование подразделяют
по роду решаемых им задач и полноте решения на радионави-
гационные устройства (РНУ) и системы (РНС). РНУ называют
аппаратуру, предназначенную для определения одного навига-
ционного параметра (расстояния до радиомаяка, курсового угла
радиостанции и др.). РНС называют совокупность РНУ, пред-
назначенных для решения частной навигационной задачи (опре-
деления места ЛА, посадки и т. п.).
Радионавигационные средства различают и по другим при-
знакам, например выделяют автономные и неавтономные радио-
навигационные устройства и системы. Эго деление отражает за-
висимость работы устройства от средств наземного обеспечения.
Радиотехнические системы ближней навигации (РСБН).
РСБН называют радиосистему, состоящую из радиомаяка и
бортовых радиоустройств и обеспечивающую в пределах зоны
действия системы получение информации о местоположении са-
молета путем определения на борту азимута и дальности само-
лета относительно радионавигационной точки (РЫТ), в которой
установлена антенна радиомаяка и положение которой известно
точно.
РСБН работают в диапазоне УКВ и имеют дальность дейст-
вия, определяемую практически прямой геометрической види-
мостью (дальность до 500 км при принятых в настоящее время
высотах полета). В основу навигации средствами РСБН поло-
жено измерение координат самолета в полярной системе. Поло-
жение самолета определяется наклонной дальностью D относи-
тельно маяка и азимутом фл (рис. 4.1).
Дальность измеряется при совместной работе бортового
дальномерного канала и наземного дальномерного маяка. Са-
молетный запросчик дальномера 2 излучает запросный импульс,
Рис. 4.1. Структурная схема радиотехнической
системы ближней навигации:
/ — измеритель азимута; 2— запросчик дальномера; 3 —
дальномерный маяк; 4 — азимутальный маяк
9—455
129
который принимается и возвращается обратно наземным даль-
номерным радиомаяком 3. Интервал времени At между запрос-
ным и ответным импульсом маяка, принятым на борту, опреде-
ляет дальность до маяка At = 2Dlc. Аппаратура дальномерного
канала на борту преобразует интервал времени пропорциональ-
ной дальности в напряжение постоянного тока, которое посту-
пает на измерительные приборы.
Для измерения азимута используется'излучение наземного
маяка. Антенна Ai азимутального радиомаяка 4 формирует в
пространстве диаграмму направленности излучения в виде двух
узких лепестков, которые вращаются в горизонтальной плоско-
сти с постоянной угловой скоростью и периодом Т. Когда на-
правление минимума излучения антенны Ai в процессе ее вра-
щения проходит через направление на север, всенаправленная
антенна того же маяка А2 излучает опорный сигнал «севера».
Этот сигнал принимается на самолете приемником 1, находя-
щимся в зоне действия маяка. Через интервал времени т на
борт самолета поступит второй сигнал, когда минимум излуче-
ния вращающейся диаграммы антенны А\ пройдет через
направление на самолет. Таким образом, интервал време-
ни т между принятыми на борту опорными сигналами «севера»
и сигналами от Ai позволяет определить азимут самолета отно-
сительно направления на север 360°.
Сигналы, пропорциональные азимуту и дальности, выдаются
бортовыми радиоустройствами РСБН в вычислительную систе-
му навигационного комплекса для определения отклонения са-
молета от заданной траектории полета, а также на индикатор-
ную систему. Возможна навигация самолета как непосредствен-
но по сигналам РСБН, так и данным автономных нерадиотех-
нических систем счисления пути, сигналы которых обрабатыва-
ются совместно с сигналами РСБН.
Современные РСБН обеспечивают погрешность измерения
азимута наземного радиомаяка 0,25°, дальности не свыше 200 м.
Число одновременно обслуживаемых самолетов должно быть
не более 100. В настоящее время на пассажирских самолетах
устанавливается бортовое оборудование систем РСБН-2СА,
РСБН-4, РСБН-7С и др. При полетах на международных лини-
ях в качестве бортовой аппаратуры систем ближней навигации
используются также комплексы КУРС МП-2 и КУРС МП-70,
которые предназначены для определения азимута самолета от-
носительно наземных радиомаяков типа ВОР и обеспечения вы-
полнения захода на посадку по сигналам радиомаяков систем
посадки СП-68, СП-70 и ILS.
Радиотехнические системы дальней навигации (РСДН). Они
предназначены для определения местоположения ЛА на марш-
рутах, где средства ближней навигации (РСБН) не обеспечи-
вают нужного обслуживания полетов, хотя могут быть в опре-
деленных условиях использованы и для решения задач ближней
130
навигации. С помощью совре-
менных РСДН определяют
местонахождение ЛА на рас-
стояниях 1500 км и более.
Они состоят из радиопере-
дающих устройств — опорных
станций, стационарно разме-
щенных па поверхности Земли
в точках, координаты которых
известны, и бортового оборудо-
вания. Последнее измеряет
дальности или разность даль-
ностей до опорных станций и
вычисляет текущие координа-
ты ЛА.
Рис. 4.2. Геометрические соотно-
шения в гиперболических РСДН
13 настоящее время наи-
большее распространение получили РСДН, принцип действия
которых основан на определении линий положения ЛА, для ко-
торых разность расстояний от ЛА до двух наземных станций
остается постоянной. Такие РСДН называют разнодальномер-
ными или гиперболическими. Наземное обеспечение в таких
системах состоит из трех и более станций.
Наземные радиостанции А, В и С образуют две базы ВАв и
Вас (рис. 4.2). Станция А называется ведущей, а В и С — ве-
домые. Работа всех станций строго синхронизирована во време-
ни. С помощью бортового оборудования, расположенного на
борту ЛА в точке М, измеряется время между приходом сигна-
лов, изучаемых ведущей А и одной из ведомых станций, напри-
мер В:
& t ~ — ^ам’> ^pi = С t = С (^вм ^ам) ♦
где / ом и tам —время, необходимое электромагнитным колебаниям для про-
хождения расстояний Dам и DBM\ с—скорость распространения колебаний.
Разность At определяет линию положения ЛГЦ — гиперболу
с фокусами в местах расположения наземных станций А и В,
для которой Dpi = const. Аналогичные измерения проводятся и
для сигналов другой пары станций А и С. Линией положения
ЛА для этой пары является также гипербола DP2~const. Место-
положение ЛА (точка Л1) определяется по пересечению линий
положения.
Из разностно-дальномерных РСДН широкое применение по-
лучили системы LORAN-A и LORAN-C, работающие в средне-
волновом и длинноволновом диапазонах радиоволн. Введена в
эксплуатацию глобальная межконтинентальная РСДН типа
OMEGA, работающая в диапазоне сверхдлинных волн. Назем-
ная часть системы состоит из восьми передающих станций, изу-
чающих колебания на частотах 10,2—13,6 кГц. Расстояния меж-
ду станциями 9200—11 000 км. В состав бортового оборудования
9* 131
РСДН OMEGA входят малогабаритная ЦВМ, на>которую воз-
лагаются функции измерения навигационного параметра, расчет
местоположения, контроль работоспособности бортового обору-
дования и коррекция результатов измерений других бортовых
систем ЛА.
Системы посадки (СП). Радиотехнические СП самолетов,
называемые также радиомаячными, основаны на применении
наземных радиомаяков и предназначены для обеспечения эки-
пажей и систем управления полетом информацией, используе-
мой при расчете и заходе на посадку. В соответствии с решае-
мыми задачами в радиомаячной системе посадке выделяют три
канала: глиссады, курса и маркерный (или дальности). В каж-
дый из каналов входят наземный радиомаяк и бортовое обору-
дование.
Совокупность устройств, составляющих бортовое оборудова-
ние систем посадки, предназначена для выдачи в пилотажно-на-
вигационный комплекс и на индикаторы пилотов сигналов, про-
порциональных угловым отклонениям самолета относительно
линии курса и глиссады планирования, а также для определе-
ния моментов пролета характерных точек на траектории захода
на посадку или текущей дальности до ВПП.
Как правило, бортовое оборудование СП обеспечивает сов-
местную работу с радиомаяками различных типов. Для повы-
шения надежности бортовое оборудование СП включает два
комплекта (основной и резервный), каждый из которых состоит
из аппаратуры каналов курса, глиссады и маркерного. Общей
задачей этого оборудования являются прием, усиление и преоб-
разование сигналов соответствующих наземных маяков.
В настоящее время используются несколько радиомаячпых
систем посадки: отечественная СП-50 и ее модификации
(СП-68, СП-70, СП-75) и международная JLS. Схема размеще-
ния наземного оборудования системы посадки JLS приведена на
рис. 4.3. В состав наземного радиомаячного оборудования систе-
мы входят три маркерных, курсовой и глиссадный радиомаяки.
Маркерные маяки — дальний (ДМРМ), средний (СНРМ) и
ближний (БМРМ) устанавливаются на определенных расстоя-
ниях от торца ВПП. Они излучают вверх кодированные сигна-
лы. В момент пролета самолета над маяком эти сигналы при-
нимаются бортовым маркерным приемником (МРП). По
сигналам с выхода МРП экипаж определяет тип маяка и, сле-
довательно, дальность до начала ВПП, Формирование в прост-
ранстве линий курса и глиссады планирования обеспечивается
с помощью полей излучения курсовых (КРМ) и глиссадных
(ГРМ) радиомаяков. Сигналы наземных маяков принимаются
бортовыми приемниками каналов курса (КРП) и глиссады
(ГРП) и с их выходов подаются на плановый навигационный
прибор (ПНП).
132
Рис. 4.4. Принцип работы канала
глиссады:
1 — схема сравнения напряжений 90 и
150 Гц; 2 и 3 — фильтры напряжений 90
и 150 Гц; -/ — глиссадный радиоприемник.
(ГРП)
Рис. 4.3. Размещение радиомаяков
системы посадки
В отечественных системах посадки СП-50, СП-68 устанавли-
ваются два маркерных маяка СМРМ и ДМРМ. В состав СП-70
входят два или три маркерных радиомаяка. Последние разме-
щаются в соответствии с рис. 4.3.
Принцип работы канала глиссады системы посадки. Глиссад-
ный радиомаяк (рис. 4.4) с помощью двух антенн А и В фор-
мирует в вертикальной плоскости две диаграммы излучения —
верхнюю и нижнюю. Напряжение несущей частоты, подводимое
к антеннам ГРМ, модулируется по амплитуде напряжениями с
частотами 150 и 90 Гц. В пространстве диаграммы излучения
пересекаются и образуют равносигнальную зону — глиссаду
планирования. Напряженность поля в этой зоне от верхнего и
нижнего лепестка диаграмм излучения одинакова. При полете
самолета по линии глиссады напряжения на выходе фильтров
90 и 150 Гц одинаковы и горизонтальная стрелка ПНП занима-
ет среднее положение. При отклонении вверх от линии глиссады
напряжение частоты 90 Гц на выходе ГРП становится больше
напряжения с частотой 150 Гц. Стрелка НПП отклоняется
вниз. При полете ниже глиссады превалирует напряжение с ча-
стотой 150 Гц и стрелка ПНП отклоняется вверх. Таким обра-
зом, отклонение стрелки ПНП, пропорциональное разности на-
пряжений с частотами 150 и 90 Гц, указывает пилоту направ-
ление на глиссаду.
Аналогично ведется управление по каналу курса. 1\РМ фор-
мирует равносигнальную зону в вертикальной плоскости, с по-
мощью КРП измеряются знак и отклонение от линии курса, а
результаты поступают на вертикальную стрелку ПНП. Данная
система позволяет обеспечить надежный вывод самолетов к
ВПП до высот 15—20 м. Окончательный этап посадки пилот
выполняет визуально. В настоящее время на пассажирских са-
молетах устанавливаются бортовые комплексы СП типа
КУРС-МП-2 и КУРС-МП-70.
Доплеровский измеритель скорости и угла сноса (ДИСС).
Он предназначен для определения путевой скорости и угла сно-
133^
Рис. 4.5. Принцип работы ДИСС
са самолета относительно земной
поверхности и выдачи результа-
тов в БПНК. ДИСС относится к
автономным бортовым устройст-
вам (датчикам), работающим по
сигналу, отраженному от земли.
В основу принципа действия
ДИСС заложен эффект Доплера,
который состоит в том, что если
с движущегося ЛА происходит
облучение подстилающей поверх-
ности, то отраженный сигнал
будет отличаться по частоте от излучаемого. Разность
частот излучаемого и принимаемого на борту сигналов называ-
ется доплеровской частотой. Измеренная на ЛА доплеровская
частота позволяет определить путевую скорость и угол сноса.
.Для этого высокочастотный сигнал передатчика излучается к
земле с помощью щелевой антенны, которая формирует в про-
странстве нескольких узких диаграмм излучения электромагнит-
ных волн (рис. 4.5). Современные ДИСС используют три или
четыре луча. Обычно лучи 1, 2 и 3 расположены симметрично
относительно продольной оси ЛА. В каждом луче осуществляют-
ся одновременное излучение и прием отраженных сигналов. Для
этого приемник и передатчик с помощью малогабаритных СВЧ
переключателей поочередно подключаются к каждому из вхо-
дов антенны. При приеме отраженных сигналов раздельно по
каждому лучу антенны обеспечивается высокая устойчивость
показаний ДИСС от колебаний ЛА по крену и тангажу.
Значения доплеровской частоты в каждом i-ом случае ДИСС
можно определить как
f^ = 2U7r/o/Ccos 7/,‘
где fo — несущая частота излучения передатчика; у/— угол между вектором
скорости W7 и направлением оси излучения i-ro луча ДИСС.
Как видно из рис. 4.5, углы ух зависят от угла сноса а. Для
определения Wr и а сравниваются доплеровские частоты по
трем лучам. В вычислительном устройстве путевая скорость оп-
ределяется по усредненному значению Fd\ и Fd2 от двух лучей
антенны
П7Г ={(/?dl + m'C0S a}Klt
где ТС — постоянный коэффициент; F,di и Fd2 — доплеровские частоты по пер-
вому и второму лучам антенны.
Угол сноса сх рассчитывается как
tg а — [(^дз — F"Ь /^г)] ^2>
где Кг.— постоянный коэффициент; Fdz — доплеровская частота по третьему
• лучу.
134
В современных ДИСС используется как трехлучевая, так и
четырехлучевая система измерения угла сноса и путевой скоро*
сти. Например, ДИСС-ЗП является четырехлучевой доплеров-
ской системой, а ДИСС-013 — трехлучевой. Современные ДИСС
измеряют путевую скорость ЛА в пределах 150—1300 км/ч, диа-
пазон углов сноса ±30°. Ошибки измерения путевой скорости
±0,25% и угла сноса не более ±16'. Рабочий диапазон высот
составляет 15—15 000 м, частота излучения 8800 мГц.
Бортовые автоматические радиокомпасы (АРК). Они пред-
назначены для самолетовождения по сигналам приводных и ши-
роковещательных радиостанций, а также выполнения предпо-
садочных маневров. АРК является угломерным навигационным
устройством и обеспечивает измерение курсового угла радио-
станции, т. е. угла в горизонтальной плоскости между продоль-
ной осью самолета и направлением на радиостанцию.
Основной тип АРК — средневолновый радиокомпас, устанав-
ливаемый на самолеты и вертолеты. С их помощью можно ре-
шать следующие навигационные задачи: осуществлять полет на.
радиостанцию и от нее с визуальной индикацией направления
полета; определять местоположение ЛА по пеленгам двух и бо-
лее радиостанций; производить совместно с другими системами
заход на посадку. Радиокомпас может быть использован и в
качестве резервного средневолнового радиоприемника. Совре-
менные АРК работают в международном диапазоне частот
150—1799,5 кГц.
Принцип работы АР1\ основан на использовании свойств
рамочной антенны, диаграмма направленности которой в гори-
зонтальной плоскости имеет вид восьмерки. У такой антенны
есть направления нулевого приема. Если плоскости рамочной
антенны расположить перпендикулярно направлению прихода
радиоволн от радиостанции, то напряжение на входе приемника
АРК будет равно нулю. Это позволяет путем вращения антенны,
найти направление нулевого приема относительно осн самоле-
та — пеленг радиостанции. Обычно рамка поворачивается с по-
мощью следящей системы вокруг своей оси до тех пор, пока
направление нулевого приема не совпадет с направлением на
пеленгуемую радиостанцию. В этот момент вращение прекраща-
ется и следящая система удерживает рамку в положении нуле-
вого приема независимо от эволюции самолета. Угол поворота
рамки посредством электрической дистанционной передачи сооб-
щается стрелочному индикатору. В некоторых типах АРК ра-
мочная антенна не поворачивается, а вращается ротор гонио-
метра — устройства, имитирующего поле, совпадающее по на-
правлению с полем пеленгуемой радиостанции. Так, например,
АРК-И представляет собой компас с вращающейся рамкой,
АРК-15 и АРК-22 — с неподвижной.
На рамочную антенну АРК, установленную на ЛА, кроме
поля радиоволны от пеленгуемой радиостанции, воздействует
135.
Цель
Рис. 4.6. Структурная схема метеона-
вигационного радиолокатора:
1 — антенный переключатель; 2 — антенное
устройство; 3 — блок управления антенной;
4 — синхронизатор; 5 — передатчик РЛС;
6 — приемник; 7 — индикатор дальность-
азимут
поле, переизлученное фюзеля-
жем ЛА. Соотношение между
этими полями зависит от на-
правления прихода волны, раз-
меров и конфигурации фюзе-
ляжа, места установки рамок
и других факторов. Это вызы-
вает смещение положения ну-
левого приема и ошибку в оп- -
ределении курсового угла ра-
диостанции, называемую ра-
диодевиацией. Для устранения
радиодевиации вводят механи-
ческие и электрические ком-
пенсаторы.
Самолетная метеонавигаци-
онная радиолокационная стан-
ция (МРЛС). Современная
тенденция развития МРЛС характеризуется объединением РЛС
различного назначения в одну, решающую несколько навигаци-
онных задач. Примером многофункциональной РЛС является
комбинированная метеоиавигационная станция «Гроза», уста-
навливаемая практически на всех типах пассажирских ЛА. Она
предназначена для обнаружения гидрометеообразований, опас-
ных для прохождения ЛА, а также для наблюдения на экране
индикатора радиолокационного изображения местности, лежа-
щей перед самолетом. С ее помощью можно определять угол
сноса и путевую скорость самолета на основе эффекта Доплера,
а также решать ряд других навигационных задач.
Дальность действия радиолокатора определяется мощностью
излучаемых электромагнитных колебаний, чувствительностью
приемника и зависит от высоты полета и характера наблюдае-
мой местности. В основе работы радиолокатора лежит явление
отражения радиоволн от препятствий, а также постоянство ско-
рости и прямолинейность распространения радиоволн диапазона
СВЧ.
Радиолокационная станция «Гроза» представляет собой им-
пульсную РЛС со сканирующей в азимутальной плоскости ан-
тенной и секторным индикатором типа «дальность — азимут».
Основу схемы РЛС (рис. 4.6) составляют структурные элемен-
ты, присущие любой импульсной станции: модулятор, передат-
чик, антенное устройство с блоком ее управления, антенный пе-
реключатель, приемник отраженных сигналов и индикатор.
Модулятор формирует импульсы запуска станции, которые
подаются на передатчик. В передающем устройстве с помощью
магнетрона создаются мощные СВЧ импульсы, которые по фор-
ме и длительности совпадают с импульсами модулятора. Радио-
.136
импульсы передатчика по волноводному тракту через антенный:
переключатель поступают в антенну, с помощью которой произ-
водится как излучение СВЧ энергии в пространство, так и при-
ем электромагнитных колебаний, отраженных от целей. Антен-
ный переключатель в момент излучения радиоимпульсов
автоматически подключает антенну к передающему, а при при-
еме отраженных сигналов, соответственно, к приемному устрой-
ству.
Отраженные от целей и принятые антенной радиоимпульсы
поступают в приемник, где усиливаются, преобразуются и вос-
производятся в виде яркостных отметок на экране ЭЛТ.
Координация работы всех элементов станции во времени
осуществляется импульсами синхронизации. Развертка луча на
экране индикаторной ЭЛТ начинается одновременно с СВЧ им-
пульсами передатчика. Линия развертки перемещается по экра-
ну синхронно с качанием антенны по азимуту. Благодаря это-
му на экране формируется радиолокационное изображение в
системе координат «дальность — азимут». Кроме того, импуль-
сы синхронизации запускают устройство генерации меток даль-
ности, создающих па экране ЭЛТ масштабные дуги дальности,
по которым определяется наклонная дальность до радиолокаци-
онных целей.
На некоторых самолетах, оборудованных бортовыми навига-
ционными вычислителями, с помощью РЛС может быть осуще-
ствлена коррекция текущих координат самолета.
Радиовысотомер малых высот (РВ)3 Он предназначен для
измерения истинной высоты полета ЛА над земной поверхно-
стью, т е. расстояния от земной поверхности по вертикали-до^
ЛА. С помощью таких высотомеров обычно измеряют высоту
полета самолета в диапазоне 0—1500 м.
РВ используют главным образом на заключительных этапах
полета — при заходе на посадку и посадке. Выходные сигналы
РВ, содержащие информацию о токуиаСи высоте, могут исполь-
зоваться в автоматической бортовой системе управления ЛА
для коррекции подсистемы траекторного управления при заходе
на посадку и для формирования траектории выравнивания при
посадке. Точный РВ является практически единственным ср едет -
вом для определения положения самолета в вертикальной плос-
кости и вычисления скорости снижения.
Для измерения истинной высоты передатчик 3 радиовысото-
мера (рис. 4.7) формирует высокочастотный сигнал, который с
помощью антенны направляется в сторону земной поверхно-
сти. Отраженный сигнал поступает в антенну А% и приемник
2, а затем в измеритель высоты 1. Последний создает напряже-
ние, прямо пропорциональное времени прохождения сигнала до
земной поверхности i\i=2Hjc и обратно пропорциональное вы-
соте Н. В современных РВ используется частотный метод изме-
137
Рис. 4.7. Структурная схема радио-
высотомера:
1 — измеритель высоты; 2 — приемник РВ;
3 — передатчик РВ
рения высоты. Сущность этого
метода заключается в следую-
щем. Передатчик излучает вы-
сокочастотный сигнал, частота
которого непрерывно изменяет-
ся. Отраженный сигнал, посту-
пающий в антенну Л2, отлича-
ется по частоте от излученного,
так как за время прохождения
сигнала к земле и обратно ча-
стота излучения изменилась.
В приемнике сравниваются по
частоте два сигнала — отра-
женный и генерируемый пере-
датчиком в данный момент
времени (прямой сигнал). На
выходе приемника образуется
напряжение, пропорциональное
разности частот Af = fH3H— Готр, которая, в свою очередь, пропор-
циональна времени запаздывания At и, следовательно, высоте
полета Н.
На современных пассажирских самолетах устанавливается
радиовысотомер типа РВ-5, который позволяет измерять истин-
ную высоту полета в диапазоне до 750 м. Погрешность измере-
ния по указателю высоты на высотах до 10 м не более ±0,8 м,
а на высотах от 10 до 750 м — не более 8% от измеряемой
высоты, частота передатчика 4300 мГц.
Самолетные ответчики (СО). Они работают совместно с по-
садочными и диспетчерскими наземными радиолокаторами, об-
разуя радиолокационную систему УВД с активным ответом
(или систему вторичной радиолокации). Радиолокационные си-
Рис. 4.8. Принцип действия ра-
диолокационной системы с актив-
ным ответом
стемы с активным ответом рабо-
тают, как правило, в дециметро-
вом диапазоне радиоволн и ис-
пользуют импульсное излучение.
По сигналам запроса с наземных
локаторов бортовой ответчик ав-
томатически передает им инфор-
мацию о координатах самолета,
бортовом номере и высоте полета
(рис. 4.8). Радиолокатор 1 произ-
водит запрос самолетного ответ-
чика 2. Для этого используют
трехимпульсный интервально-вре-
менной код. Запрос ведут на ча-
стоте 1030 мГц. Бортовой ответ-
чик, принимая запросные посыл-
ки, излучает ответные кодовые
138
сигналы, которые принимаются антенной радиолокатора 1. От-
ветные сигналы используют на земле для определения координат
самолета в аппаратуре 3 и для получения в аппаратуре обра-
ботки 4 дополнительной информации, поступающей с самолета
(номер борта, высота и т. д.). Вся полученная информация по-
ступает в аппаратуру отображения 5 диспетчеров УВД. Сигна-
лы высоты для передачи их по ответному каналу вводятся от
системы воздушных сигналов. Код бортового номера самолета
устанавливается пилотом на блоке управления ответчиком сог-
ласно требованиям полета.
На современных самолетах устанавливаются ответчики двух
типов: СО-63 — для работы совместно с РЛС внутрисоюзной
системы УВД СОМ-64 и СО-70 — для взаимодействия с между-
народными системами УВД.
3. РАДИОСВЯЗНОЕ ОБОРУДОВАНИЕ
Авиационное радиосвязное оборудование предназначено для.
связи экипажей ЛА между собой и с наземными диспетчерски-
ми пунктами управления воздушным движением, службами тех-
нического обеспечения при стоянке, внутренней связи между
членами экипажа, документирования служебных переговоров,,
информации пассажиров о полете и передачи в салон самолета
музыкально-развлекательных программ. Экипаж ЛА имеет по-
стоянно действующую связь с диспетчерами УВД с момента
запуска авиадвигателей до заруливания на стоянку.
Комплекс технических средств, обеспечивающих передачу
необходимой информации, называется каналом связи. Каналы
связи могут быть проводными с применением проводов, кабелей
и беспроводными — с применением электромагнитных волн.
В авиации связь с внешними корреспондентами осуществляется
по беспроводным каналам. Проводные каналы используются в
системах самолетных переговорных я громкоговорящих уст-
ройств. Условно авиационную радиосвязь можно разделить на
ближнюю и дальнюю. Ближняя связь обеспечивается команд-
ными радиостанциями ультракоротковолнового диапазона волн
( ЖТ Q /-*ИП/Гх Т ▼ i I W 3 О £> Э Г 8 т v \ ТТ О ТГ ▼ ТТ ГТГГ ГЧЛТГТТОЛлгчН TYTT ТТ Т " п ТТт ▼▼ О ТЯГ
^idliuxui ххо 1UU МХЦ/Т Дсх«аит171.71 р 1 <4П Ц11Л1V1H Да«НЩТСГ1
связи, работающими в коротковолновом диапазоне волн (часто-
ты 2—30 мГц). Средства связи самолетов в подавляющем боль-
шинстве работают в телефонном режиме. Радиообмен «земля —
(ЛППТ'Л ТТ ZzKr\r»rn О Г» И ЛГ ТТ ГТ чч т» Г» ТТ rsnr-o гу т-гпп<лг, гГЛтП'Пчг Ппттглгхт Т.Г п т г тх-r г, г.
VJU .X --мор. 1 4x71 vni
что позволяет оперативно передавать команды управления.
Командные УКВ радиостанции или станции ближней связи
устанавливаются на всех типах самолетов и предназначены для
телефонной связи экипажа с наземными пунктами управления
воздушным движением и экипажами других самолетов. Они
обеспечивают связь в пределах прямой видимости, составляю-
щей десятки или сотни километров в зависимости от высоты
139
Рпс. 4.9. Структурная схема радио-
станции:
1 — ьозбудитель; 2 — модулятор; 3 — уси-
литель мощности; 4 — согласующее уст-
ройство; 5 — приемник; 6 — детектор; 7 —
усилитель низкой частоты
ней связи с самолетами на
полета и рельефа местности.
Примерами командных само-
летных радиостанций могут
служить ультракоротковолно-
вые радиостанции «Ландыш»,
«Баклан» и «Орлан».
Радиостанции дальней свя-
зи обеспечивают радиотеле-
фонную и телеграфную связь
между ЛА и наземными пу-нк-
тами управления, удаленными
на расстояние более 5000 км.
Коротковолновая радиосвязь
используется в качестве ре-
зервной для УКВ радиосвязи,
а также для организации даль-
международных авиалиниях и при
их полетах на нижних эшелонах, когда УКВ радиосвязь невоз-
можна. На современных пассажирских самолетах устанавлива-
ются коротковолновые радиостанции дальней связи типа «Мик-
рон», «Карат», «Ядро I», «Ядро II».
Для внутрисамолетной телефонной связи между членами
экипажа применяются самолетные переговорные устройства ти-
па СПУ. Необходимая информация поступает в салоны самоле-
тов с помощью громкоговорящих устройств СГУ.
Несмотря на большое разнообразие типов радиостанций,
устанавливаемых на ЛА, все они построены по единому прин-
ципу (рис. 4.9). Речевое сообщение преобразуется с помощью
микрофона в низкочастотный электрический сигнал, который на-
зывают управляющим. Этот сигнал поступает на модулятор 2,
на который подается также напряжение с возбудителя 1. Гене-
рируемые возбудителем высокочастотные электрические колеба-
ния характеризуются амплитудой, несущей частотой и началь-
ной фазой. Воздействуя на один из этих параметров управляю-
щим сигналом звуковой частоты в модуляторе, можно изменять
амплитуду, частоту или фазу колебания по закону передаваемо-
го речевого сообщения. Этот процесс называется модуляцией.
Соответственно .различают амплитудную, частотную и фазовую
модуляции. В авиационных командных УКВ радиостанциях
наибольшее практическое применение нашла амплитудная моду-
ляция (AM). Радиостанции дальней связи используют однопо-
лосную модуляцию.
Модулированные колебания поступают в усилитель мощности
и далее через согласующее устройство в антенну А и излучают-
ся в пространство в виде электромагнитных волн.
При приеме сигналов от другой радиостанции, наземной или
самолетной, высокочастотные колебания из антенны через со-
гласующее антенное устройство поступают в приемник, который
140
предназначен для усиления сигналов заданной несущей частоты
и выделения его из шумов и помех. С выхода приемника сигнал
радиостанции поступает на детектор, который преобразует мо-
дулированный сигнал в колебания низкой звуковой частоты.
Эти колебания усиливаются в усилителе низкой частоты и посту-
пают на телефоны авиагарнитуры экипажа.
К средствам связи, используемым на борту, следует отнести
также аппаратуру магнитной звукозаписи. Магнитофоны приме-
няются на борту в двух основных целях: с помощью аварийных
магнитофонов ведется в полете контрольная запись всех перего-
воров экипажа по каналам радио- и проводной связи. Магни-
тофон является источником информационно-развлекательных
программ для обслуживания пассажиров через громкоговоря-
щие системы связи (ГСС). Для этих целей служат аварийные
магнитофоны МС-61-Б, «Марс-БМ» и бортовой «Арфа-МВ».
Большинство комплексов бортового навигационного радио-
оборудования имеет выходы низкочастотных сигналов, которые
подаются через систему коммутации и самолетное переговорное
устройство (СПУ) на телефоны авиагарнитуры экипажа. Бла-
годаря этому экипаж в процессе полета имеет возможность по-
лучать дополнительную звуковую информацию о типах и пара-
метрах наземных радиосредств, с которыми взаимодействует в
данный момент бортовое радиооборудование. С помощью систе-
мы внутрисамолетной связи экипаж может опознать позывные
наземных радиомаяков системы РСБН, РСДН, ОСП, проводных
и широковещательных станций (АРК). Например, при выпол-
нении маневра захода на посадку с помощью СП экипаж про-
слушивает кодированные сигналы маркерных и курсовых радио-
маяков.
Бортовое радиоэлектронное оборудование в системе БНК.
Пилотажно-навигационный комплекс ЛА состоит из навигацион-
ного и пилотажного комплексов, тесно связанных между собой.
Навигационный комплекс предназначен для решения на борту
навигационной задачи.
Современный автоматизированный бортовой навигационный
комплекс (БНК) представляет собой совокупность функцио-
нально связанных датчиков навигационной информации, вычис-
лительных средств, систем индикации, сигнализации и пультов
управления. БНК определяет отклонения ЛА от заданной про-
странственно-временной траектории полета и вырабатывает сиг-
налы для их устранения, которые используются в пилотажном
комплексе при управлении полетом.
Упрощенная структурная схема БНК приведена на рис. 4.10.
Главную навигационную задачу решает навигационный вычис-
литель (НВ), в который поступают сигналы от системы радио-
технических и нерадиотехнических датчиков. Уровень автомати-
зации комплекса зависит от совершенства навигационного вы-
числителя. В гражданской авиации все более широкое приме-
141
нение получают БНК, вычис-
лительная система которых
строится на базе ЦВМ. Радио-
технические и нерадиотехниче-
ские датчики используются,
как правило, комплексно, что
позволяет существенно повы-
сить точность и надежность из-
мерений.
Для счисления пути, напри-
мер в НВП, поступает инфор-
мация от нерадиотехнических
датчиков: датчиков курса
(ТКС), воздушной скорости
(СВС), инерциальной системы
счисления пути (НС), а также
от измерителя угла сноса и пу-
тевой скорости (ДИСС). В по-
лете по мере накопления по-
грешностей счисления пути пе-
Рис. 4.10. Упрощенный вариант
структурной схемы БЬ1К
риодически или непрерывно производится коррекция координат
ЛА с помощью внешних источников навигационной информа-
ции, обладающих в данный момент более высокой точностью
измерений.
В качестве корректоров используются радиотехнические си-
стемы РСБН, РСДН и ДИСС, выходные сигналы которых по-
ступают в НВ (рис. 4.10). Совместная обработка в НВ резуль-
татов измерений ИС и радиосистемы ближней навигации повы-
шает точность определения места ЛА в 2,5—3,5 раза, а перио-
дическая коррекция данных ИС с помощью ДИСС и РСДН
«OMEGA» при 10-часовом полете позволяет повысить точность
в 70—S0 раз.
В режиме посадки бортовое оборудование СП измеряет и
выдает отклонения от траектории в АБСУ и систему индикации.
Примерно с высоты 200 м в АБСУ поступают сигналы от радио-
высотомера (РВ), которые изменяют передаточные характери-
стики каналов управления самолетом и используются для умень-
шения вертикальной скорости в начале выравнивания ЛА.
Метеонавигационный локатор является вспомогательным
устройством и используется для грубой коррекции текущих коор-
динат самолета по четко различимым, легко опознаваемым на-
земным ориентирам. Координаты ориентира — дальность и ази-
мут, определенные по индикатору РЛС, вводят в НВ вручную.
Бортовое радиосвязное оборудование входит в состав БНК не-
явно, так как в контур управления полетом ЛА входит экипаж,
получающий информацию о местонахождении самолета от на-
земных диспетчеров служб УВД по каналам КВ и УКВ связи.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Автоматизация самолетовождения и управление воздушным движени-
ем. / П. А. Агаджанов, В. Г. Воробьев, А. А. Кузнецов, Е. Д. Маркович.—
М.: Транспорт, 1980. 357 с.
2. Асе Б. А., Антипов Е. Ф., Жукова Н. М. Детали авиационных
приборов. М.: Машиностроение, 1979. 232 с.
3. Боднер В. А. Авиационные приборы. — М.: Машиностроение, 1969.
467 с.
4. Боднер В. А. Приборы первичной информации. — М.: /Машино-
строение, 1981, 344 с.
5. Б р а с л и в с к и й Д. А., Логунов С. С., Пельпор Д. С. Авиа-
ционные приборы и автоматы. М.: Машиностроение, 1978. 428 с.
6. Воробьев В. Г., Кадышев И. К. Авиационные приборы управ-
ляющих систем. М.: Транспорт, 1978. 157 с.
7. В о л к о е д о в А. П., Паленый Э. Г. Оборудование самолетов. —
М.: Машиностроение, 1980. 229 с.
8. Михайлов О. Н., Козлов Н. М., Гер гель Ф. С. Авиационные
приборы. М.: Машиностроение, 1977. 416 с.
9. Радионавигационные системы летательных аппаратов / Под ред. Да-
выдова П. С. М.: Транспорт, 1980. 448 с.
10. Синдеев И. М. Электроснабжение летательных аппаратов. М.:
Транспорт, 1982.
11. С о с н о в с к и й А. А., X а й м о в и ч И. А. Радиоустройства борто-
вых навигационных и посадочных комплексов самолетов. М.: Транспорт, 1977.
216 с.
12. С о с н о в с к и й А. А., Хаимович И. А. Авиационная радионави-
гация. Справочник. М.: Транспорт, 1980. 255 с.
13. Старостин Д. Г. Радионавигационное и радиолокационное обо-
рудование самолета ИЛ-62 (ИЛ-62М) и его летная эксплуатация. М.: Ма-
шиностроение, 1977. 120 с.
14. Электрооборудование летательных аппаратов. / Под ред. Д. Э. Брус-
кина. М.: Транспорт, Высшая школа, 1978. 280 с.
ОГЛАВЛЕНИЕ
От автора.......................; ....... 3
Глава 1. Электрооборудование...................................... 5
1. Классификация электрооборудования.............................. 5
2. Авиационные аккумуляторы....................................... 6
3. Авиационные генераторы.........................................10
4. Регуляторы напряжения и защита генераторов.....................14
5. Системы распределения электрической энергии....................21
6. Авиационный электропривод ........... 27
7. Электрифицированные системы управления силовыми установками . 35
8. Противообледенительные и обогревательные устройства .... 42
9. Светотехническое оборудование..................................44
Глава 2. Приборы контроля силовых установок.......................46
1. Основные параметры контроля....................................46
2. Приборы измерения давления....................................47
3. Приборы измерения температуры.................................54
4. Приборы измерения частоты вращения............................63
5. Приборы измерения расхода топлива.............................65
6. Приборы контроля вибраций.....................................74
Глава 3. Пилотажно-навигационные приборы и системы управления . 76
1. Назначение и классификация пилотажно-навигационных приборов . 76
2. Аэрометрические приборы и системы............................ 80
3. Элементы теории гироскопических приборов.......................93
4. Датчики угловых скоростей......................................98
5. Приборы и датчики углов крена и тангажа..................... 100
6. Курсовые приборы и системы....................................107
7. Навигационные системы.........................................116
8. Системы автоматического управления полетом....................122
Глава 4. Радиоэлектронное оборудование.......................... 127
1. Основные задачи...............................................127
2. Радионавигационное и радиолокационное оборудования . . . 128
3. Радиосвязное оборудование.....................................139
Список использованной литературы.................................143
30 коп.
1
< &
V .
с ft
й‘рддйё-“~
ЭЛЕКТРОННОЕ
ОБОРУДОВАНИЕ
ЛЕТАТЕЛЬНЫХ
АППАРАТОВ
i
у
Изда тельапво << Транспорт»