


































































































































































































































































Автор: Власов К.П.
Теги: регулирование и управление машинами, процессами радиоэлектроника промышленность автоматика автоматизация теория автоматического управления издательство гуманитарный центр
ISBN: 966-8324-33-1
Год: 2007




Текст
К. П. ВЛАСОВ
Теория
автоматического
управления
Рекомендовано учебно-методическим
объединением ВУЗов Российской федерации
по образованию в области радиотехники,
электроники, биомедицинской техники и
автоматизации в качестве учебного пособия
для студентов, обучающихся по направлению
220200 «Автоматизация и управление»
Гуманитарный Центр
Харьков, 2007
УДК 62-50 (075.80)
ББК 32-065
В 58
Власов К. IL Теория автоматического управления. Учебное посо-
бие. X.: Изд-во Гуманитарный центр, 2007, 526 с.
Рецензенты: кафедра робототехники и автоматизации производст-
венных систем Санкт-Петербургского государственного
электротехнического университета «ЛЭТИ» (Россия);
доктор технических наук Л. В. Акимов, профессор кафед-
ры автоматизированных электромеханических систем
Национального технического университета «ХПИ»
(Украина)
Книга содержит основные методы анализа и синтеза авто-
матических систем управления различного класса. Приведенный
материал включает широкий круг вопросов и методик расчета ли-
нейных и нелинейных, непрерывных и дискретных, оптимальных и
адаптивных, нечетких и других систем управления.
Учебное пособие предназначено для студентов, обучающихся
по направлению 220200 «Автоматизация и управление». Его могут
использовать студенты, обучающиеся по другим направлениям и
изучающие в том или ином объеме дисциплину «Теория автомати-
ческого управления». Книга также полезна для аспирантов, препода-
вателей и специалистов, которые занимаются разработкой систем
управления различного класса.
This book contains the main methods of analysis and synthesis of automatic
control system of different classes. This material includes wide list of questions
and methods of calculating for linear and non-linear, continuos and discrete,
optimal and adaptive, unclear and other control systems.
This textbook is intended for students, learning on the speciality 220200
«Automatization and control». It may be used by students which are learning on
another specialities, also for them who learn the discipline «Theory of automatic
control» The book may be useful also for post-graduate students, scholars and
specialists, which are dealing with working out the control systems of different
classes.
Все права защищены. Никакая часть данной книги не может быть воспроизведена в
какой бы то ни было форме без письменного разрешения владельцев авторских прав. Права
на публикацию книги принадлежат издательству «Гуманитарный Центр».
ISBN 966-8324-33-1
© Власов К. П.» 2007
© «Гуманитарныйцентр»,
оформление, 2007
Оглавление
Предисловие 9
Введение 11
РАЗДЕЛ1
Линейные автоматические
системы управления 19
1. Составление уравнений движения
элементов АСУ и методы их решения 19
1.1. Математическое описание элементов
системы с помощью дифференциальных
уравнений 19
1.2. Математическое описание системы в
переменных состояния 27
1.3. Методы решения линейных
дифференциальных уравнений 30
1.3.1. Классический метод 30
1.3.2. Применение преобразования Лапласа.
Передаточная функция 36
1.4. Частотные характеристики линейных систем 42
1.5. Связь между операторами преобразования
сигналов линейной системой 46
2. Типовые звенья и структурные схемы АСУ 49
2.1. Типовые динамические звенья 49
2.1.1. Усилительное звено 50
2.1.2. Апериодическое звено первого порядка 51
2.1.3. Апериодическое звено второго порядка 54
2.1.4. Колебательное звено 5 7
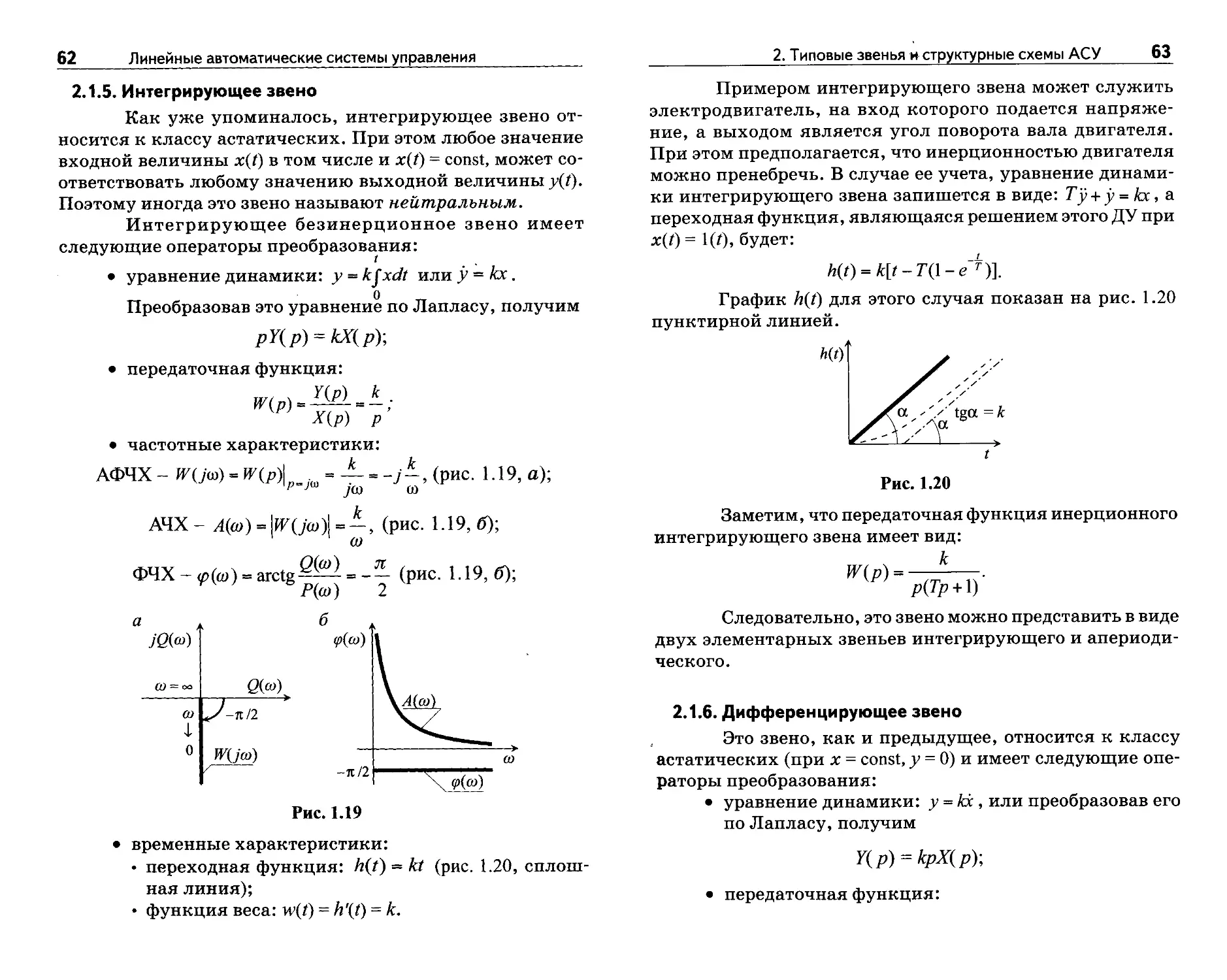
2.1.5. Интегрирующее звено 62
2.1.6. Дифференцирующее звено 63
2.2. Структурные схемы АСУ
2.2.1. Основные виды соединения звеньев
2.2.2. Правила структурных преобразований
2.2.3. Использование графов для
преобразования структурных схем
2.3. Многомерные системы управления
2.4. Управляемость и наблюдаемость
3. Устойчивость и качество
функционирования АСУ
3.1. Устойчивость АСУ
3.1.1. Переходные процессы в АСУ
3.1.2. Алгебраический критерий
устойчивости Гурвица
3.1.3. Частотные критерии устойчивости
3.2. Качество процесса управления
3.2.1. Прямые методы оценки качества
3.2.2. Косвенные методы оценки качества
4. Методы синтеза АСУ
4.1. Законы регулирования в линейных АСУ
4.2. Коррекция линейных АСУ
4.3. Параметрический синтез
устройств управления
4.4. Принципы построения инвариантных систем
4.5. Синтез модальных регуляторов
4.5.1. Синтез регуляторов состояния
4.5.2. Принципы построения
наблюдателей состояния
4.5.3. Модальный регулятор
4.6. Частотные методы синтеза АСУ
4.6.1. Логарифмические частотные
характеристики
4.6.2. Синтез АСУ с помощью
логарифмических амплитудно-
частотных характерстик
65
66
69
72
79
84
88
88
89
93
97
105
106
110
117
117
123
132
136
142
143
153
156
158
159
167
РАЗДЕЛИ
Особые линейные автоматические
системы управления 176
5. Системы с запаздыванием и
распределенными параметрами 177
5.1. Системы с запаздыванием 177
5.2. Системы с распределенными параметрами 182
5.3. Устойчивость систем с запаздыванием 187
5.4. Коррекция АСУ объектами с большим
запаздыванием 195
6. Импульсные системы
202
6.1. Математические методы анализа
зг
рункционирования импульсных систем
204
6.1.1. Разностные уравнения 204
6.1.2. Прямое z-преобразование 216
6.1.3. Обратное z-преобразование 224
6.1.4. Модифицированное z-преобразование 227
6.2. Импульсные фильтры 229
6.3. Устойчивость импульсных систем 235
6.3.1. w-преобразование 238
6.3.2. Частотные критерии устойчивости 240
6.4. Качество функционирования импульсных
систем 246
РАЗДЕЛИ!
Нелинейные автоматические
системы управления 249
7. Статика нелинейных систем 249
7.1. Основные типы нелинейных звеньев 249
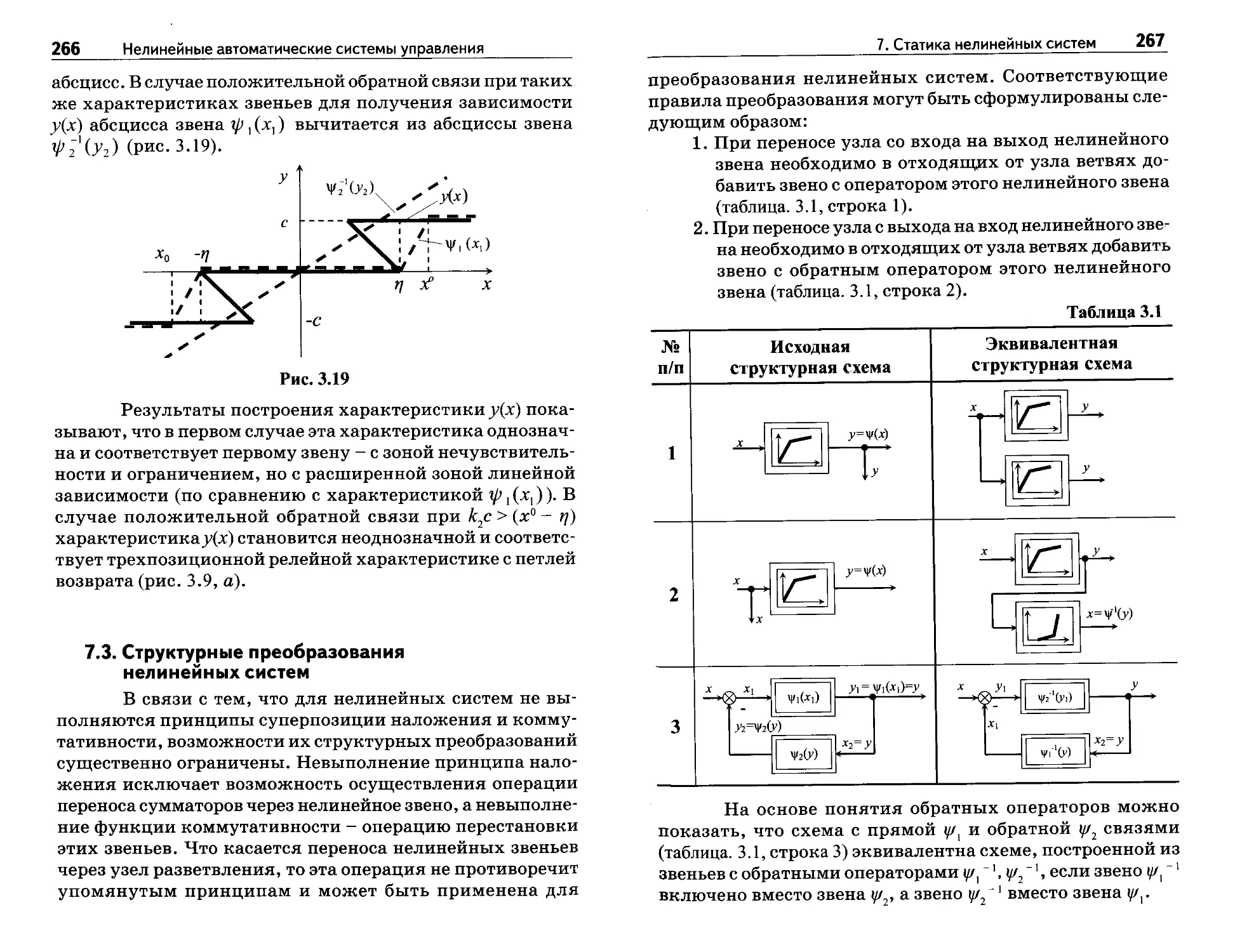
7.2. Соединение нелинейных звеньев 259
7.3. Структурные преобразования нелинейных
систем 266
8. Точные методы исследования динамических
свойств нелинейных систем 2 70
8.1. Метод припасовывания 270
8.2. Метод фазовых траекторий 273
8.2.1. Анализ линейных систем 274
8.2.2. Анализ нелинейных систем 281
8.2.3. Исследование релейных АСУ 285
8.2.4. Колебательные процессы в релейных
системах 290
8.2.5. Метод точечных преобразований 294
8.2.6. Скользящий режим 298
8.3. Устойчивость нелинейных систем 301
8.3.1. Общее определение устойчивости 301
8.3.2. Прямой метод исследования
устойчивости нелинейных систем 304
8.3.3. Условия абсолютной устойчивости
нелинейных систем 308
9. Приближенные методы исследования
динамических свойств нелинейных систем 314
9.1. Метод гармонической линеаризации 314
9.1.1. Сущность метода 314
9.1.2. Критерии устойчивости 317
9.1.3. Определение коэффициентов
гармонической линеаризации 323
9.1.4. Определение параметров
автоколебаний 326
9.2. Вибрационная линеаризация нелинейностей 331
9.3. Статистическая линеаризация
нелинейностей 337
Р А 3 Д Е ЛIV
Специальные системы управления 342
10. Оптимальные системы управления 342
10.1. Цель управления и критерий
оптимальности 342
10.2. Энергетические соотношения
при управлении, оптимальном по
быстродействию 345
10.3. Основные методы синтеза оптимальных
систем управления 349
10.3.1. Синтез оптимальных систем
с помощью вариационного
исчисления 350
10.3.2. Динамическое программирование 367
10.3.3. Принцип максимума 375
10.3.4. Синтез систем, оптимальных по
быстродействию 378
10.4. Статистическая динамика и оптимальные
фильтры 387
10.4.1. Основные характеристики
случайных функций 388
10.4.2. Прохождение случайного сигнала
через линейную систему 395
10.4.3. Расчет установившихся ошибок в
системах управления 399
10.4.4. Синтез системы управления по
минимуму средней квадратической
ошибки 402
11. Адаптивные системы управления 416
11.1. Экстремальные системы управления 418
11.1.1. Непрерывные экстремальные
системы 420
11.1.2 <Дискретные экстремальные
системы 426
11.1.3. Методы поиска экстремума в
многоканальных экстремальных
системах 433
11.2. Самонастраивающиеся системы
управления 438
11.2.1. Аналитические
самонастраивающиеся системы 439
11.2.2. Идентификация динамических
звеньев системы 449
11.3. Интеллектуальные системы управления 456
11.3.1. Самоорганизующиеся системы 457
11.3.2. Обучающиеся системы 462
11.3.3. Искусственные нейронные сети 470
12. Нечеткие системы управления
12.1. Формальная (четкая) логика
12.2. Нечеткая логика (фази-логика)
483
485
12.2.1. Основные понятия нечеткой логики 486
12.2.2. Основные операции с нечеткими
лингвистическими переменными 489
12.2.3. Правило нечетких выводов 491
12.3. Основные принципы построения нечетких
систем управления 505
12.3.1. Передаточные характеристики
управляющего устройства 509
12.3.2. Синтез нечетких систем
управления 511
12.3.3. Нечеткие нейронные сети в
системах управления 520
Рекомендательный
библиографический список 523
Предисловие
На современном этапе развития человеческого об-
щества дальнейшее его совершенствование невозможно
представить без знания законов управления во всех сферах
человеческой деятельности. В этой связи изучение основ
кибернетики, как науки об управлении, становится одним
из необходимых условий подготовки специалистов прак-
тически во всех областях знаний. Раздел кибернетики,
изучающий способы управления разнообразными техни-
ческими устройствами, технологическими процессами и
производствами, обычно называется теорией автомати-
ческого управления или технической кибернетикой. Эта
дисциплина включена практически во все учебные планы
технических вузов и фактически стала общеобразователь-
ной, как, например, физика. Поэтому издание учебной
литературы, компактно и доступно излагающей широкий
круг вопросов, связанных с анализом и синтезом разно-
образных автоматических систем управления, является,
безусловно, полезным.
Книга состоит из четырех разделов. В первом раз-
деле достаточно полно изложены основы линейной теории
автоматического управления. Особое внимание уделено
различным методам синтеза линейных систем. Материал
раздела может быть использован студентами различных
технических специальностей. В этой связи в разделе при-
ведены необходимые пояснения математических методов,
применяемых для исследования динамических процессов
в линейных системах. Второй раздел посвящен изучению
особых линейных систем, содержащих звенья с запаздыва-
нием, распределенными параметрами, а также импульсные
звенья. В третьем разделе приведены основные сведения по
расчету статических и динамических режимов нелинейных
систем. Последний, четвертый раздел, посвящен созданию
специальных (оптимальных, адаптивных, нечетких и дру-
гих) систем управления.
10 Предисловие
Для лучшего усвоения достаточно сложного мате-
риала его изложение не загромождено излишними под-
робностями. В целом, книга дает общее представление об
основных проблемах, рассматриваемых в теории автома-
тического управления и способствует получению базовых
знаний в этой области, что существенно расширяет круго-
зор специалистов.
Автор выражает признательность канд. техн, наук
А.С. Анашкину и М.К. Аникину за помощь, оказанную при
подготовке рукописи к печати.
Введение
Родственные науки объединяются фундаментальны-
ми науками высшего ранга. Например, физика охватывает
наши знания о вещах очень разных, но подчиняющихся
общим законам (в частности, законам сохранения вещества
и энергии). В процессе становления физики как науки были
выработаны два эффективных средства установления исти-
ны: математический аппарат и опыт. В качестве критерия
истины здесь, как и в любых других науках, используется
практика - реализация научных идей.
В1948 г. Н.Винер опубликовал книгу «Кибернетика,
или управление и связь в животном и машинах», в которой
показал, что можно создать еще одну науку высшего ранга.
Кибернетика - древнегреческое слово, означающее искус-
ство управления кораблем, рулевой. Платон упоминает
кибернетику как науку об административном управлении
провинциями. В 1840 г. Ампер, классифицируя науки, от-
нес ее к общественным наукам. Современная кибернетика
относится к области точных наук, широко использующих
математический аппарат и опыт. Как и физика, киберне-
тика не является наукой всех наук. Есть явления, где нет
управления, и кибернетика к ним не применима.
Чтобы отличить управляемое от неуправляемого,
обычно прибегают к понятию целесообразности, под кото-
рым понимают соответствие объекта определенному состо-
янию. Достижение этого состояния связано с воздействием
процесса управления на объект.
Управление может быть привнесено извне, а мо-
жет быть присуще самому объекту. В последнем случае
мы говорим о самоуправлении или автоматизме (от гр.
самодействующий). Кибернетика, как правило, изучает
самоуправляющиеся системы, т. е. такие, где хотя бы один
элемент является самоуправляющимся, определяющим
целесообразность управления объектом.
12___________________________________________ _
Рассматривая кибернетику как науку о целесооб-
разности выделяют ту ее сторону, которая примыкает к
философии. Здесь у кибернетики есть предшественник - те-
леология (учение о цели). Эта наука утверждает, что все в
природе устроено целесообразно и всякое развитие являет-
ся осуществлением заранее предписанных целей. Однако
кибернетическая система может ставить себе и такие цели,
которые противоречат целям системы более высокого уров-
ня, и поэтому в данном случае фатализм следует признать
несостоятельным.
Говоря о кибернетике, как о теории автоматизма,
мы выделяем другую ее сторону, примыкающую к практи-
ке, - проблему реализации поставленной цели методами
управления объектами. Нужно иметь в виду, что объекты
управления можно классифицировать по самому сущест-
венному признаку на живые и неживые. По одну сторону
грани стоит человек вместе с животными и растениями, а по
другую автомат - создание рук человеческих. Можно долго
перечислять, чем отличается человек от автомата, но не к
отрицанию этих различий сводятся идеи кибернетики, а к
поиску, исследованию аналогий между живым организмом
и техническим устройством. Заметим, что все попытки
человека в точности скопировать и воспроизвести с помо-
щью технического устройства технологический процесс,
выполняемый живым организмом, были безуспешными:
самолет летает не так, как птица, подводная лодка плава-
ет не так, как рыбы, и т. д. Отсюда следует, что если под
разумом понимать способность учиться и извлекать уроки
из опыта, адекватно реагировать на новые ситуации, то
можно утверждать, что разумные управляющие машины
могут быть созданы, но они будут выполнять свои функции
не так, как человек. Уже сейчас автоматы во много раз
увеличивают интеллектуальные возможности человека, во
многом избавляя его от рутинной работы. Поэтому будущий
мир рисуется как содружество автомата и человека. Но
надо всегда помнить, что как ни велика разница между об-
ломком камня и автоматом, она все же меньше, чем между
человеком, создавшим этот автомат, и его предком, впервые
взявшим в руки этот камень, так как человек развивается
гораздо быстрее, чем неживая природа.
Введение
13
Учитывая изложенное, уместно напомнить, что,
по А. И. Бергу, кибернетика ~ это наука об управлении в
сложных динамических системах различной природы, где
сложность понимается как наличие в системе разнородных
элементов (человек, природа, техника) и разнообразных
связей между ними (положительных, отрицательных,
прямых, обратных и др.).
В зависимости от класса объекта управления кибер-
нетика подразделяется на техническую, организационную,
экономическую, медицинскую и др.
Техническая кибернетика (или теория автома-
тического управления) - отрасль науки, изучающая тех-
нические системы с помощью идей и методов кибернетики.
Основная задача управления техническим объектом - най-
ти и реализовать в данных условиях алгоритм* ** управле-
ния, при котором выполняются требования, предъявляе-
мые к процессу. Выбор наиболее рационального алгоритма
управления на основании имеющейся информации - ярко
выраженная экстремальная задача. Таким образом, анализ
информационных процессов в системе с целью их алгорит-
мизации и синтез систем управления, реализующих этот
алгоритм, и являются задачей теории автоматического
управления.
Требованиями, предъявляемыми к управляемому
процессу, могут являться: ограничения на входные ко-
ординаты (например, различногофода допуски, ошибки,
погрешности и т. д.); экстремальные условия (например,
получение максимальной мощности, КПД, минимальной
себестоимости и т. д.); некоторые показатели качества.
Техническими средствами для реализации систем
управления являются средства получения информации
(датчики), ее передачи и обработки и средства регулиро-
вания (регуляторы, исполнительные механизмы, регули-
рующие органы).
Протекание технологического процесса или по-
ведение технического устройства характеризуются не-
* Алгоритм - предписание, определяющее содержание и последовательность операций,
переводящих исходные данные в искомый результат. При этом алгоритм должен обладать
свойствами определенности, массовости и результативности.
14
которыми переменными величинами. Если речь идет об
управлении, то процессы и устройства рассматриваются
как объект управления (ОУ), желаемое поведение ко-
торого должно быть обеспечено. Переменные, которые
характеризуют функционирование объекта управления,
называют выходными величинами у (чаще всего, это
физическая величина). Иногда их называют выходными
координатами системы (рис. 1).
и
ОУ
Рис. 1
В реальных условиях на объект управления оказы-
вает воздействие внешняя среда. Все многообразие этого
воздействия учесть невозможно. Поэтому в поле зрения
оставляют лишь величины, которые оказывают заметное
влияние на выходные координаты, их называют входными
воздействиями х. Эти воздействия подразделяются на две
группы: управляющие й и возмущающие f. Управляю-
щие воздействия обеспечивают желаемое функционирова-
ние объекта, и должны быть, прежде всего, изменяемыми.
Если таких воздействий нет, то задача управления не
имеет решения. Возмущающие воздействия препятствуют
нормальному функционированию объекта управления, и
изменить их, как правило, невозможно. Задача управления
заключается в формировании такого алгоритма (закона)
управления, при котором достигается желаемое состояние
объекта независимо от наличия возмущений.
При создании автоматических систем управления
используют два основных принципа управления: по воз-
мущению и по отклонению.
Суть принципа управления по возмущению (при-
нципа Понсе ле) состоит в том, что для уменьшения влияния
возмущения f на выходные величины объекта у осущест-
Введение
15
вляется контроль этого возмущения, и при его изменении
управление й меняют так, чтобы скомпенсировать влияние
возмущения. Функциональная схема такой АСУ показана
на рис. 2.
и
Рис. 2
ИУ - исполнительное устройство,
ЧЭ - чувствительный элемент;
УУ - устройство управления
ОУ - объект управления
Основной недостаток управления по возмущению
заключается в том, что данная система является разомкну-
той, т. е. текущее значение величины у не учитывается при
управлении объектом. Это означает, что характер управля-
ющих воздействий зависит от функционирования объекта
лишь в той степени, в какой учтено влияние возмущения f
и управления й на выходную величину у . В большинстве
случаев полная информация о таком влиянии отсутствует,
в связи с чем разомкнутая система не может обеспечить
желаемое поведение системы с достаточной точностью.
Достоинством управления по возмущению систем является
принципиальная возможность упреждающей компенсации
влияния возмущения f на функционирование объекта за
счет соответствующего управления и . В идеале выходная
величина у не зависит от f (инвариантная система). В слу-
чае необходимости изменения выходной величины у в УУ
подается дополнительный сигнал у *, который называется
задающим воздействием.
Основным признаком систем, использующих при-
нцип управления по отклонению управляемой величины
у от заданного значения у * (принцип Ползунова - Уатта),
является наличие обратной связи (ОС), которая обеспечи-
16
вает зависимость управления и (входной величины) от
управляемой (выходной) величины у (рис. 3).
Рис. 3
Отклонение управляемой величины от заданного
значения А- = у*- у может быть вызвано разными причи-
нами, в том числе и изменением задающего воздействия у *.
Наличие отклонения^ А-, измеряемого устройством срав-
нения (УС), является командой для изменения управления
и до тех пор, пока А- неснизится до допустимого значения,
в частности до нуля. Таким образом, обратная связь пред-
полагает принципиальное наличие ошибки, что является
недостатком такой системы. Кроме того, в системах с обрат-
ной связью всегда имеет место запаздывание информации о
состоянии объекта в силу его инерционности, что ухудшает
динамические показатели работы системы, и в частности,
увеличивает склонность системы к колебаниям. Однако
принцип обратной связи позволяет успешно решать задачу
управления, несмотря на некоторую неопределенность и
неточность данных о характеристиках объекта управления
и возмущениях. Это является основным преимуществом
этих систем по сравнению с системами, работающими по
возмущению.
Для улучшения динамических свойств систем
применяют комбинированное управление: сочетание ра-
зомкнутых и замкнутых систем. В этом случае сильные
возмущения в основном компенсируются по разомкнутому
контуру, а все неучтенные возмущения и ошибки, возни-
кающие из-за отсутствия полной информации о поведении
объекта, - замкнутой системой.
*’ Отклонение Д_ также называют ошибкой или сигналом рассогласования.
Введение
17
В общем случае система управления представляет
собой совокупность взаимосвязанных элементов или час-
тей, объединенных общей целью функционирования. Под
целью системы понимают достижение определенного со-
стояния ее выходных координат, которое может задаваться
извне или вырабатываться самой системой. В первом случае
система управления часто называется системой регулиро-
вания. Если в результате функционирования системы до-
стижение цели происходит без участия человека, то такая
система управления называется автоматической.
Автоматические системы управления (АСУ) мож-
но классифицировать по самым различным признакам.
В частности, по функциональным признакам АСУ можно
разделить на два больших класса - адаптивные и не-
адаптивные. В последнем случае структура и параметры
управляющего устройства в процессе функционирования
АСУ остаются неизменными, т. е. такими, какими они были
получены при расчете и наладке системы. Основой создания
таких систем служит предположение, что внешние и внут-
ренние условия работы системы изменяются в незначитель-
ных пределах, что не приводит к ее неудовлетворительному
функционированию.
Если диапазон изменения внешних и внутренних
параметров системы настолько велик, что при помощи
неадаптивной системы невозможно добиться удовлетво-
рительного ее функционирования, необходимо приме-
нять систему управления с изменяющимися свойствами.
Процесс изменения свойств системы, позволяющий ей
достигнуть оптимального в определенном смысле или,
по крайней мере, удовлетворительного функционирова-
ния в изменяющихся условиях, называется адаптацией
(приспособлением). Системы, осуществляющие процесс
адаптации, называются адаптивными или самоприспосаб-
ливающимися.
18
Классификация неадаптивных АСУ по различным
признакам, основные из которых приведены ниже.
2. По цели управления
Комбин ированные
Стабилизации
y*(t)= const
Программные
_у*(г) задана
Следящие
y*(t) произвольна
Оптимальные
y*(t) ~ extr
5. По идеализации математического описания
Классификация адаптивных систем управления по
различным признакам приведена в главе 11.
Линейные автоматические
системы управления
К классу линейных систем управления относятся
системы, процессы в которых описываются линейными
уравнениями (алгебраическими, дифференциальными,
разностными). Коэффициенты этих уравнений не зависят
ЗИП
от переменных величин, входящих в уравнение, т. е. явля-
ются постоянными либо зависящими от времени. Напри-
мер, если система уравнений описывается дифференциаль-
ным уравнением первого порядка:
и коэффициенты а0, ах и к не зависят от переменных^, у и х,
то такая система относится к классу линейных. Если хотя
бы один из этих коэффициентов зависит от переменных,
входящих в уравнение, то уравнение, а следовательно, и
система относится к классу нелинейных. Заметим, что
упомянутые коэффициенты обычно являются функци-
ей параметров системы и, следовательно, для линейных
систем эти параметры не должны зависеть от переменных
величин, характеризующих поведение системы.
1. Составление уравнений
движения элементов АСУ
и методы их решения
1.1. Математическое описание элементов системы с
помощью дифференциальных уравнений
Поведение отдельных элементов системы в дина-
мических режимах, возникающих под действием внешних
сил, и всей системы в целом обычно описывается диф
ЗИИ
ренциальными уравнениями. При составлении уравнений
20
Линейные автоматические системы управлен и я
динамики исследуемого элемента системы прежде всего
необходимо выявить физический закон, определяющий
его поведение во времени. Таким законом обычно явля-
ется закон сохранения материи (вещества или энергии),
который постулирует невозможность мгновенного пере-
хода любого физического объекта из одного состояния в
другое, поскольку для этого потребовалась бы бесконечно
большая скорость изменения состояния, что физически
нереализуемо. Кроме того, законы физики постулируют
невозможность исчезновения материи, она может только
превращаться из одного вида в другой, причем это превра-
щение тоже протекает во времени.
Пример 1.1
Составим математическое описание процесса за-
полнение ёмкости жидкостью.
Решение
Изменение объёма жидкости в ёмкости dVза время
dt можно определить воспользовавшись законом сохране-
ния вещества:
dV-(Qex-Qeblx)dt, (1.1)
где V = FH - объем жидкости в ёмкости;
Н - уровень жидкости в ёмкости;
F - площадь ёмкости, которая в общем случае может
зависеть от Н;
е, Q - объемные расходы жидкости на входе и выходе
аг вых Г
ёмкости соответственно.
Для случая F= const выражение (1.1) можно пере-
писать в виде:
(1-2)
Как видно из уравнения (1.2) величина и знак ско-
рости изменения уровня определяется разностью рас-
ходов жидкости на входе и выходе ёмкости AQ = Q — Q •
При &Q > 0 уровень жидкости в ёмкости будет повышаться,
а при А(2 < 0 снижаться.
1. Составление уравнений движения элементов АСУ..,21
Обозначим к=\!Е Тогда переписав (1.2) в виде:
получим дифференциальное уравнение, описывающее
процесс изменения уровня жидкости в ёмкости.
Пример 1.2
Составим математическое описание системы
двигатель-рабочая машина.
Решение
В соответствии с законом сохранения энергии име-
ем:
А = 4 + (1.3)
т. е. работа движущих сил Аа расходуется на преодоление
сил сопротивления Ас и изменение кинетической энергии
системы ЛЛк, вызванное изменением скорости движения.
Продифференцировав уравнение (1.3) по времени,
получим уравнение баланса мощностей
ДИН ’
где Рс =* dAc / dt - мощность, расходуемая на преодоление
сил сопротивления;
= dtsA^ / dt - динамическая мощность, характеризу-
ющая изменение запаса кинетической энергии системы.
Для системы вращающихся тел имеем:
где о - частота вращения двигателя;
к
Т V* 2 2
J = У uiri = тр - момент инерции;
/=l ~ Л -
т. - масса i-u частицы тела, удаленной от оси вращения
1 к
на расстояние г, т = д
р - приведенный радиус инерции, р2
22
Линейные автоматические системы управления
Если момент инерции зависит от угла поворота а,
е# j =fla), который, в свою очередь, зависит от времени,
dt 2 da dt
Разделив полученное уравнение на со и учтя, что
Р = Мео, запишем уравнение баланса моментов:
d(o о2 dJ
dt 2 da
Если J = const, тоМ ин= Jdcol dt. Тогда с учетом урав-
нения (1.3) уравнение движения системы двигатель-рабо-
чая машина можно записать так:
Далее необходимо определить факторы, от которых
зависят переменные, входящие в уравнение (1.4), и форма-
лизовать эти зависимости.
Движущий момент Л/, в рассмотренном примере,
зависит от поступления энергии в машину, т. е. от положе-
ния регулирующего органах и от частоты вращения со. Мо-
мент сопротивления Мс может состоять из ряда слагаемых:
часть их может быть постоянна (сила трения), другие - за-
висеть от со («вентиляторная нагрузка»), третьи - от пути,
времени и т. д. Предположим, что Л/ зависит от положения
регулирующего органа и частоты вращения, т. е. Мд(х,со) ,
а момент сопротивления - только от частоты вращения,
т. е. Мс(со) и J= const. Вид этих зависимостей определяет
тип уравнения (1.4), которое может быть отнесено к ли-
нейным или нелинейным. Если нелинейность гладкая, без
скачков, и отклонение от номинального режима работы не
очень существенно, то нелинейное уравнение можно с оп-
ределенной погрешностью заменить на линейное. При этом
существенно упрощается анализ динамических свойств
системы управления.
1. Составление уравнений движения элементов АСУ...23
Замена нелинейного уравнения линейным называ-
ется линеаризацией. При этом все нелинейные функции
переменных, входящих в уравнение движения, разлагают
в ряд Тейлора в окрестностях рабочей точки (установив-
шегося значения переменных). На том основании, что
отклонения малы, в разложении оставляют лишь члены,
содержащие отклонения в первых степенях, после чего из
полученных уравнений вычитают уравнения равновесия
(статики) и получают запись линеаризованных уравнений
в отклонениях.
В частности, нелинейная функция двух перемен-
ных F(x, у) разлагается в окрестностях рабочей точки (х0, у0)
в ряд Тейлора по формуле
у) = F(x0 + Дх, у0 + Ду) = F(x0,y0) +
9F
А V 1 / д А 3 * Г/
*У + У ~? V + V АН F(x0,yQ).
^п\\дх ду }
Линейная часть приведенного разложения оп-
ределяется лишь первыми тремя членами, остальными
слагаемыми можно пренебречь в силу малости Дх, Ду.
Эту процедуру можно интерпретировать как замену урав-
нения поверхности F(x,y) уравнением плоскости вида:
ЛДх + ВДу + С = F(x,y).
В нашем случае линеаризация функций Л/д (х, со),
Мс{со) в окрестностях состояния равновесия х = х0, со = со0
дает следующие результаты:
(х, со) = МД (х0, со0 ) + —
дХ
-ч Ж S
М (со) = М (со0) +
дсо
Асо.
о
Подставив соотношения (1.5) в уравнение (1.4) и
вычтя из полученного выражения уравнение равновесия
24 Линейные автоматические системы управления
А/ (х0,<о0) - Afc(<u0) = 0 , получим уравнение движения в
отклонениях
do) / дМ дМ \ дМ
J---+ ------------ Aft) =--- Ах.
dt \ да) да) / ,дх 0
Разделив полученное выражение на коэффициент
при АбУ и опустив знак А, перепишем его в виде:
Td) + а) - кх,
(1.6)
да)
Таким образом, уравнение движения двигателя-ра-
бочей машины (1.6), описывающее поведение этой системы
в переходных режимах, представляет собой линейное (точ-
нее, линеаризованное) дифференциальное уравнение пер-
вого порядка с постоянными коэффициентами: Т - посто-
янная времени и к - коэффициент передачи (усиления).
Заметим, что в данном случае мы учитывали толь-
ко одну энергетическую ёмкость, представляющую собой
вращающиеся части системы, в которых запасается кине-
тическая энергия. Если число таких ёмкостей в системе
равняется и, то система будет описываться диференциаль-
ным уравнением и-го порядка. Напомним, что системы,
поведение которых описывается линейными (или линеа-
ризованными) диференциальным уравнением, относятся
к классу линейных.
* * *
Линеаризация диференциальных уравнений
является обязательным этапом при составлении математи-
ческого описания элементов системы. Поэтому рассмотрим
эту процедуру более подробно.
1. Составление уравнений движения элементов АСУ...
25
Пример 1.3
Пусть объект описывается дифференциальным
уравнением второго порядка:
аоу + а}у + а2у = Ьох,
где а., Ь. - коэффициенты уравнения равные: а0 = 6; а^ = 1 Ту;
а2 ~ 5у2х; Z>0 = 8ух.
Так как коэффициенты у равнения 7) зависят от
переменных, то оно относится к классу нелиней-
ных, Линеаризуем уравнение (1.7) в окрестностях
номинального режима 6.
Решение
Подставим значение коэффициентов в (1.7):
6у + 17ур + 5ху3 = 8ух2.
(1-8)
Уравнение установившегося (статического) режи-
ма, получим, положив в (1.8) у = у = 0. Имеем: 5у2 = 8х,
откуда
у=1,26х0,5. (1.9)
Прих = х0 = 6 значениеу =у0 = 1,26 •д/б =3,1.
Для линеаризации уравнения (1.8), разложим его в
ряд Тейлора по всем переменным (у, у, у, х) в окрестностях
точки (х0, у0).
Перепишем (1.8) в виде:
F(y,y,y,x) = 6y + 17yy + 5xy3 -8ух2 = 0.
(1-10)
Тогда разложение функции F (у, у, у, х) в ряд Тейло-
ра без учета слагаемых второго и высших порядков малости
будет иметь вид:
F(y, У, У, x) = F0 +
dF
ду
Воспользовавшись выражением (1.10) и учтя что
х0 = 6; у0 = 3,1; у0 = Уо = 0, найдем значения функции Fo и
частных производных, входящих в разложение. Имеем:
= *оЛ>(5Уо -8хо) = о;
26 Л и ней н ые автоматические системы управления
др , dF
~ 6, 17у0 — 52,7,
дУ0 дУ0
= 17 у0 +15у02х0 + 8х2 = 577;
= 5у30 -16j0x0 = -148,6.
С учетом полученных результатов и опустив знак
Д, уравнение (1.9) можно записать в отклонениях от номи-
нального режима (точка х0,у0).
6у + 52,7у + 577у = 148,6х.
(1-11)
Выражение (1.11) является линеаризованным
дифференциальным уравнением, исследуемого объекта,
описываемого нелинейным уравнением (1.10)
Для оценки погрешности линеаризации в стати-
ческом режиме, определим относительную ошибку 3 по
формуле:
J н
Уо
•100, %.
Здесь у? = у0 + 0,257(х -х0) — статическое значение у, вычис-
ленное в соответствии с линеаризованным уравнением
(1.11) при у = у = 0; у - то же, но вычисленное в соот-
ветствии с линейным уравнением (1.9).
0
2
4 6 8
Рис. 1.1
10
12
1. Составление уравнений движения элементов АСУ...27
Зависимость ошибки § от величины входного воз-
действия х представлена на рис. 1.1.
Анализ зависимости д(х) показывает, что ошибка
линеаризации существенно зависит от диапазона измене-
ния входного воздействия х. При изменении х в диапазоне
. 3 < х < 10 величина ошибки не превышает 5 %.
1.2. Математическое описание
системы в переменных состояния
Математическое описание поведения систем управ-
ления во временной области может быть также выполнено
с помощью, так называемых, переменных состояния.
Под состоянием системы понимают совокупность таких
переменных г(7) Г'Р'1(/),г'2(0---v„(0J, значение которых,
наряду с входными воздействиями x(f), позволяет опре-
делить ее будущее состояние и выходные величины у (/).
Используя определенный набор переменных состояния,
можно перейти от дифференциального уравнения п-го по-
рядка, описывающего поведение системы, к системе из п
дифференциальных уравнений первого порядка**. Записав
эти уравнения в компактной матричной форме, получаем
математическую модель системы в переменных состояни-
ях, которая вполне приемлема для компьютерного анализа.
Именно последнее обстоятельство и делает целесообразным
описание динамических систем в переменных состояния
во временной области.
Рис. 1.2
Проиллюстрируем понятие переменных состояния
на примере электрической цепи, питающейся от источни-
1 Заметим, что в этом случае дифферешшальное уравнение приводится к нормальной форме Коши.
28 Линейные автоматические системы управления
ка тока i, приведенной на рис. 1.2. Заметим, что этот ток
является входным воздействием x(t).
Состояние рассматриваемой системы можно пол-
ностью охарактеризовать двумя переменными у, и v2, где
vt - напряжение ис на конденсаторе С; v2 - ток z в катуш-
ке индуктивности L. Выбор этих переменных произведен
исходя из того, что общая энергия Е в цепи RLC зависит
именно от них:
Е = O,5(Zz,2 + Си2)
Таким образом, переменные у (/) = и (?) и v (t) = z (Z)
* С ij
несут информацию о полной энергии электрической цепи
и, следовательно, о состоянии системы в текущий момент
времени /. Подчеркнем, что число переменных состояния
равно числу независимых элементов системы, накапли-
вающих энергию: в элементе L накапливается магнитная
энергия, а в элементе С — электрическая.
Используя законы Кирхгофа, можно записать:
zc + iL = z; uL + uR = uc или
(М2)
(1-13)
Здесь uR = RiL — выходная переменная системы y(f);
R - выходное сопротивление.
Запишем уравнение (1.12) и (1.13) относитель-
но переменных состояния v = ис и v - i , и учтем, что
= Ri, = Rv ;
л Lf £
(1.14)
1. Составление уравнений движения элементов АСУ...29
Решение полученной системы дифференциальных
уравнений первого порядка при известных начальных ус-
ловиях v((Z0) и v2(/0), характеризующих энергетическое со-
стояние системы, в момент времени t = / , дает возможность
найти зависимости и у2(7) при t>t^ т. е. определить
будущее поведение системы.
Заметим, что принятые переменные состояния ис
и iL не являются единственными. Всегда можно выбрать
другой набор переменных, например ис и uL. Тогда новые
переменные состояния у* и v2* будут связаны со старыми
V, и у, соотношениями:
V* = ис =v,,
*
V. ~=и, = и- Ri, = v, - Rv?.
С £>/ J м
Таким образом, в реальной системе всегда можно
образовать несколько комбинаций переменных состояния,
которые определяют энергию, запасенную в системе и, сле-
довательно, описывают ее динамику. Это дает возможность
более широкого выбора переменных состояния, в качестве
которых обычно принимают физические величины, доступ-
ные для измерения тем или иным способом.
Систему уравнений (1.14) с учетом того, что i -х
можно записать в матричной форме:
(1-15)
Матрица-столбец, состоящая из переменных состо-
яния, называется вектором состояния г.
Если в общем случае вектор входных сигналов обоз-
начить через х , то дифференциальное уравнение состояния
системы запишется в виде:
у=Ау + Вх, (116)
где А - квадратная матрица коэффициентов при перемен-
ных состояния v. (i = 1,л) размерности пхп;
В - матрица коэффициентов при входных воздействиях
х. (J = 1,ап ) размерности пхт.
30
Л и нейные автоматические системы управления
Уравнение (1.16) представляет собой компактную
форму записи системы дифференциальных уравнений
первого порядка вида:
= аа г, + ai2v2 +... + ainvn + biXxx + bi2x2 + ... + bimxm.
Таким образом, решение дифференциального
уравнения состояния (1.16) можно получить точно также,
как и решение скалярного дифференциального уравнения
первого порядка.
В общем случае выходные переменные линейной
системы у связаны с переменными состояния V и вход-
ными переменными х уравнением выхода:
у = С v + Dx,
(1-17)
где С и D - матрицы соответствующих коэффициентов.
Для рассмотренной цепи RLC уравнение выходной
переменной можно записать в виде:
y = Rv2. (1.18)
Здесь учтено, что у = uR, iL = vr В матричной форме
уравнение (1.18) можно записать в виде:
у = [0,/?]-у + [0,0]х,
V2
В общем случае множество значений, которые мо-
жет принять вектор v(f) в момент времени t, называется
пространством состояний или фазовым пространством. Бо-
лее подробно этот вопрос будет рассмотрен в разделе III.
1.3. Методы решения линейных
дифференциальных уравнений
1.3.1. Классический метод
Классическим оператором преобразования, связы-
вающим входной и выходной сигналы линейной системы,
1. Составление уравнений движения элементов АСУ.,,31
является линейное дифференциальное уравнение (ДУ) с
постоянными коэффициентами. При этом переменная,
стоящая в правой части уравнения, является входным воз-
действием х, а в левой - выходной величиной у (рис. 1.3).
В общем случае линейное неоднородное ДУ запи-
сывается в виде
«(У"' + яУ"'0 + • • + + апУ =
= V(m> + . + Ьт_хх + Ьтх
(1-19)
Из теории дифференциальных уравнений известно
что интегрирование уравнения (1.19), т. е. определение у (7)
при заданном х(0, сводится к нахождению общего интегра-
ла однородного ДУ (без правой части) и частного решения
неоднородного ДУ (с правой частью). Тогда общее решение
неоднородного ДУ запишется в виде
У(1) = Л (О + У2(0 >
где У1(0 — общее решение однородного ДУ, которое харак-
теризует свободное движение системы (без внешних воз-
действий);
~ частное решение неоднородного ДУ, которое
характеризует вынужденное движение системы под воз-
действием входной величины x(t).
Решение однородного ДУ обычно ищется в виде
экспоненты
у(0 = С<
(1-20)
где р - величина, подлежащая определению;
С-постоянная интегрирования, определяемая из началь-
ных условий.
Взяв от (1.20) производные и подставив их в (1.19),
получим
айр”Сър'+ ахрп~'С&р{ +... +ап_хр Сер‘ + апСер‘ = 0,
32
Линейные автоматические системы управления
или, сократив на Cept, имеем
«оРИ + а\РП~Х + • • •+ ап-\Р + а„=0.
(1-21)
Уравнение (1.21) называется характеристическим
уравнением ДУ (1.19), имеющим п искомых корней р и,
следовательно, п независимых решений типа (1.20). При
этом их сумма также является решением этого уравнения.
Тогда общее решение однородного ДУ будет:
п
(1-22)
Частное решение неоднородного ДУ обычно отыс-
кивается в том же виде, в каком дана правая часть, т. е. за-
висит от вида функции x(t) на входе системы.
В реальных системах входной сигнал чаще всего
является случайной функцией времени. Поэтому, чтобы
сопоставить переходные процессы в различных систе-
мах, рассматривают их динамику при так называемых
типовых входных воздействиях, в качестве которых чаще
всего применяются единичные ступенчатая и импульсная
функции.
Единичная ступенчатая функция (рис. 1.4, а)
описывает мгновенное изменение входного сигнала и обоз-
начается x(t) = 1(/) :
1(0 =
Единичная импульсная функция (рис. 1.4, б) обоз-
начается x(f) = <5(/) и описывается выражением:
1. Составление уравнений движения элементов АСУ...
33
S(0 =
оо V t = 0;
О V /#0;
при этом
□и
f 8(f)dt = 1
-00
Очевидно, что функции l(t) и <5(7) связаны между собой
соотношением 3(1) = Г (О . При подаче на вход системы ти-
пового входного воздействия вида 1(0 или 3(t) выходная
величина системы будет изменяться во времени тем или
иным образом. Это изменение и является реакцией системы
на определенное воздействие.
Если x(f) = l(z) и начальные условия нулевые (сис-
тема находится в установившемся состоянии), то реакция
системы на это воздействие называется переходной, функ-
цией или переходной характеристикой h(t). Если x(t)» 3(1)
и начальные условия также нулевые, то реакция системы
называется импульсной переходной характеристикой или
функцией веса w(t).
Функции h(t) и w(t) являются временными ха-
рактеристиками системы или кривыми разгона, и для
линейных звеньев связаны соотношением
w(/) = /z'(0. (1.23)
Пример 1.4
Пусть система управления описывается диффе-
ренциальным уравнением первого порядка
Ту + у = кх. Найти временные характеристики и
рекцию системы линейно изменяющееся входное
воздействие.
Решение
Характеристическое уравнение Тр +1 = 0 имеет
корень рх = -ИТ. Общее решение однородного ДУ име-
ет вид yx(t)~Cxe'"T. Предположим, чтох(/) = 1(0, тогда
частное решение ДУ Уг(О = С2 = const. Подставив его в
ДУ, получим С. = к. Тогда общее решение неоднородного
ДУ y(f) = Схе~' т + к . Из начальных условий у(0) = 0 на-
ходим постоянную интегрирования Сх = -к. Тогда y(t) =
"• к(\-е~1/т) и, воспользовавшись (1.23), найдем функцию
к
веса w(7) = у ечГ (рис. 1.5).
2 Теория автоматического управления
34
Линейные автоматические системы управления
Если на вход системы подается линейно изменяю-
щийся сигнал (рис. 1.6, а), имеем
При этом общее решение имеет тот же вид, что и ра-
нее уг(/) = С\ e~tlT ; а частное решение ищется в той же фор-
ме, что и правая часть ДУ, т. е. в виде линейной зависимости
.У2 W = . Подставивy2(t) в ДУ, получим С2Т + С2/ + С3 =
= kt. Откуда, приравняв коэффициенты при одинаковых
степенях переменной /, имеем С2 = к, С2Т+С3 = 0, и, следо-
вательно, С3 = -кТ. Тогда общее решение неоднородного ДУ
запишется в виде:
y(t) = CxQtlT + kt-kT
При начальных условиях у(0) = 0 найдем Сх = Тк.
Окончательно получим
y(t) = k\t-T(l-e‘/T) .
1. Составление уравнений движения элементов АСУ...35
График изменения ХО представлен на рис. 1.6, б.
Пример 1.5
Пусть объект управления описывается ДУ второго
порядка вида:
а0 У+ а1 У+ а2У = Ь0Х ’
где а0 = 0,01; ах = 0,30; а2 = 1; 6о = О,26.
Тогда уравнение объекта имеет вид:
0,01у + 0,30у + у = 0,26х.
(1-24)
Требуется построить переходную характеристи-
ку h(t).
Решение
Общее решение однородного ДУ в соответствии
(1.22) будет:
Л (О - С<.'“ + Сге" ,
где р}ир2- корни характеристического уравнения ДУ (1.24):
0,01р2+0,30/7 + 1 = о,
откуда р, = -3,8; р2 = - 26,2.
Учтя, что частное решение ДУ (1.24) при x(f) = 1(f)
равно у, (?) = Ъп = 0,26 , общее решение неоднородного ДУ
(1.24) будет:
y{t) = (0 + у2 (0 = Q-3’8' + С2е’26,2' + 0,26.
Постоянные интегрирования С, и С2 находятся из
начальных условий у(0) = у(0) = 0. Тогда имеем:
0 = С] + С2 + 0,26 I
0 = -3,8С. -26,2С, | ‘
1 м I
v
Решив полученную систему уравнений, найдем
С] = -0,304; С2 = 0,044. Таким образом, решение ДУ (1.24)
при подаче на вход скачкообразного единичного возмуще-
ния x(f) = 1(f) окончательно примет вид:
y(Z) = h(t) = 0,26 - О,ЗО4е-3,8' + 0,044е26,2'.
36 Линейные автоматические системы управления
На рис. 1.7. представлен график переходного
процесса, который практически завершается за 1 с.
У А
О 0,2 0,4 0,6 0,8 1,с
Рис. 1.7
1
1.3.2. Применение преобразования Лапласа.
Передаточная функция
Применение преобразования Лапласа позволяет
перейти от решения системы дифференциальных уравне-
ний к решению системы алгебраических уравнений. Кроме
того, отпадает необходимость специального определения
постоянных интегрирования, а общее решение неоднород-
ного ДУ при любой правой части определяется сразу, т. е.
исключается раздельное нахождение общегоу^/) и частного
у2(1) решений.
Пусть/(/) - действительная функция действитель-
ного переменного /, удовлетворяющая условиям Дирихле
(непрерывная и дифференцируемая на рассматриваемом
интервале) и равная нулю при t < 0. Будем называть эту
функцию оригиналом. Каждому оригиналу/(/) всегда мож-
но поставить в соответствие функцию F(p) комплексного
переменного p = a±ja>9 определенную как интеграл вида:
□о
F(p) = L{f(t)}=ff(t)e-pldt, (1.25)
о
Здесь L — оператор прямого преобразования Лапласа,
Правая часть (1.25) называется прямым преобразо-
ванием Лапласа функции/(7), а функция F( р) - изображе-
нием Лапласа.
1, Составление уравнений движения элементов АСУ
Таблица 1.1
37
Оригинал ХО
Изображение Лапласа F( р)
00
00
А 1(0
НО
<5(0
-iwt
+0
~Р*
b
L {d(0}= limpCOe'^ = fd(t)dt = 1
ft—>оо & -О
00
-(р+а)'
□о
J<Ot = COSCO t
2 2
+ 0)
О)
2 . ~2
4«}=
о
о
О
о
COSCO t
2 . _2
sinco t
(О
2 . _2
n\
n
Примеры изображений Лапласа некоторых функ-
ций fit) приведены в таблице 1.1.
Рассмотрим некоторые свойства преобразования
Лапласа.
1. Свойство линейности
Изображение алгебраической суммы нескольких
функций равно сумме изображений этих функ-
ций:
Н I п г 1
(1.26)
38
Линейные автоматические системы управления
Справедливость выражения (1.26) вытекает из вы-
ражения (1.25), в соответствии с которым преобразование
Лапласа представляет собой линейную операцию.
2. Дифференцирование оригиналов.
Производной от функцииf(f) соответствует разность
изображения этой функции F( р), умноженной нар,
и ее начального значения/(0):
(1-27)
Действительно, умножив (1.25) на р взяв интеграл
по частям, получим
00
pF(p) = Р$ J\t)e~P‘dt =
О
00
= -/Юе-₽'|0“ -f- e'pl f(t)dt =/(0) + L {/'(/)},
О
откуда следует (1.27).
Выполнив этот прием п раз, окончательно получим:
(1-28)
Выражение (1.28) является математической запи-
сью теоремы дифференцирования. При нулевых начальных
условиях теорема дифференцирования принимает вид
3. Изображение интеграла
Можно показать, что
L. ff(t)dt. =
О
при С = 0 .
—00
4. Интегрирование линейных дифференциальных
уравнений с постоянными коэффициентами
В соответствии со свойствами 1 и 2, ДУ в области
вещественного переменного t преобразуются в об-
ласти комплексного переменногор в алгебраическое
выражение. При этом автоматически учитываются
1. Составление уравнений движения элементов АСУ...39
начальные условия и определяются постоянные
интегрирования. Имеем
aQy{n) + ЩУ(п ° + • • • + апАу + апу =
(1-29)
Умножив ДУ (1.29) на e~pt, а затем интегрирования
его по t в пределах от 0 до <ю при нулевых начальных услови-
ях, получим это уравнение, преобразованное по Лапласу:
+ ахрпА +... + апАр + ап )Y(p) =
= (bopm +bxpmA +... + Ьт_хр + Ьт)Х(р).
Отсюда
Y(p) =
bopm + bipm~l +... + bm_\p + Ьт х _ В^Х(р)
айрп + ах рп~' +... + ап_{р + ап А(р)
(1.30)
Обозначим В(р)1 А(р) = W(p). Тогда (1.30) перепи-
шется в виде У( р) = р)Х(р), откуда
Выражение (1.31), представляющее собой отноше-
ние изображения выходной величины системы У( р) к изоб-
ражению входной величины р) при нулевых начальных
условиях, называется передаточной функцией системы.
Поскольку при исследовании динамических свойств
системы требуется определить зависимость переменных
системы в функции действительного аргумента /, возникает
обратная задача: как от изображения переменной перейти
к ее оригиналу.
Наиболее общим способом нахождения оригинала
y(t) по известному изображению У( р) является применение
обратного преобразования Лапласа:
Я0 = г’{к(р)}=
Y(p)epl dp.
40 Линейные автоматические системы управления
Здесь Z"1 - оператор обратного преобразования
Лапласа*1.
Самым простым способом нахождения оригинала по
изображению является использование таблиц, в которых
для наиболее распространенных функций действительного
переменного t приведены соответствующие изображения
(например, Таблица 1.1).
Если изображение У( р) можно представить дробно-
рациональной функцией вида
Y (р) = В(р)! А(р),
то оригинал y(t) можно найти воспользовавшись теоремой
разложения Хевисайда - Карсона:
(1.32)
где В( р) и А(р)~ полином соответственно т-й и п-й степе-
ни, причем для инерционных объектов т < п,
рк - корни уравнения А( р) = 0;
А'(р) = dA(p) / dp.
Пример 1.6
Пусть ДУ системы имеет вид
аоу + ау + а2у = kx.
Требуется найти передаточную функцию W(p) и
временные характеристики w(f), h(t) системы.
Решение
Преобразуем ДУ системы по Лапласу при нулевых
начальных условиях. Получим
(«о/’2 + aiP + аг)у(р) = кХ{р)-
Откуда передаточная функция уравнения будет
W(p) = ------.
Х\Р) аор +а}р + а2
) Заметим, что для нахождения оригинала y(f) по известному изображению Y(p), обычно
используется теорема вычетов, рассматриваемая в теории функций комплексного пере-
менного.
1. Составление уравнений движения элементов АСУ...
41
Пусть к= 1, о0 = 1,0] = 3, а2 = 2. Для нахождения фун-
кции веса w(t) воспользуемся теоремой разложения (1.32).
При этом учтем, что Х(р) = L {8(f)} = 1. Тогда
w(0- L-' {w}. £- L-1—}. с-33»
Имеем
Л(/?)=р2 + 3^ + 2 = 0; рх =-1;р2 = -2;
А’ (р) = 2р + 3; В(р) = к=\.
Тогда, подставив В(р), А’(р), рх ир2 в выражение
(1.33), получим:
Рис. 1.8
42 Линейные автоматические системы управления
Аналогичным образом можно найти переходную
характеристику Л(/),учтя при этом, что
L{l(t)} = l/p,
тогда
А(Р) = (Р2 + Зр + 2)р = 0; /?, = -1;р2 = 2;
р3 = 0; А'(р) = Зр2 + 6р + 2.
Воспользовавшись (1.32), найдем
h(t) = 0,5 + 0,5 e~2t - е~‘.
Графики зависимостей w(t) и h(t) приведены на
рис. 1.8.
1.4. Частотные характеристики линейных систем
Пусть дифференциальное уравнение системы имеет
вид
«о/”) + а1 У(п ° + • + ап-\У + апУ =
= box^+b^m-i)+... + bm_lx + bmx .
(1-34)
Воспользуемся прямым преобразованием Фурье,
которое формально можно получить из двустороннего пре-
образования Лапласа вида (1.25) прир - jco:
00
Ф {/(')} - W = f f(t) ejM dt.
-00
где Ф - оператор прямого преобразования Фурье, связываю-
щего оригинал fit) и его частотное преобразование F(Jco)
Тогда уравнение (1.34) преобразованное по Фурье
при нулевых начальных условиях запишется в виде
Обозначив полиномы, стоящие в скобках правой
и левой частей преведенного уравнения
соответственно, получим
B(ja> )Т0‘ю) = (jco), откуда
1. Составление уравнений движения элементов АСУ...43
X(jco)
B(jco)
= WU(O) •
(1.35)
Выражение (1.35) представляет собой частотную
функцию или амплитудно-фазо-частотную характеристику
системы (АФЧХ), которую можно записать в виде
W(jco) = W(jco) eJai&WUtt,)
(1.36)
где | FK(ya))| = А(а)) - амплитудно-частотная характеристи-
ка системы (АЧХ),
argWX j(o) = <р(р)) - фазо-частотная характеристика сис-
темы (ФЧХ).
Частотная функция системы (1.35) может быть
представлена и в алгебраическом виде:
W{j(o) = Л(со)е^(й>) = Р(а>) + jQ((o)9
где А(со) = |1F(»| = Р2 (ш) + Q2 (со);
= arg W (ju) = arctg .
Р(со)
В данном случае Р(со) называют вещественной час-
тотной характеристикой, a Q(co) - мнимой частотной
характеристикой.
В некоторых случаях при анализе и синтезе АСУ
используется логарифмическая частотная характеристи-
ка вида:
log W(jco) = log Л(со) +j>(£o)log е,
где log А(со) - логарифмическая амплитудно-частотная ха-
рактеристика (ЛАХ), log е = const.
В случае подачи на вход системы гармонического сигнала
х = а sin cot,
который с учетом того, чтое7"' = coscw t + jsincot, можно за-
писать в виде х*(/) = ае7“" [x(t) = 1шх*(/)], частное решение
Уравнения (1.34) отыскивается в том же виде, что и входной
Сигнал x(t):
y(t) = Aq sin (cot + <p) или y*(t) = Ao ei(v+ю,\
•)
Более подробно логарифмические частотные характеристики рассмотрены в параграфе 4.6.
44 Линейные автоматические системы управления
Подставив х* (0 и>’*(/) в уравнение (1.34) и сократив его
на ejM, окончательно получим А(jco^A^9 = B(jco)a, откуда:
—= (1-37)
a A(j(d)
Из сопоставления уравнения (1.36) с уравнением
(1.37) при со == const получим
У®)| = —; arg fV( J(O) = Ф.
а
Если со “ переменная величина, то величина Ао будет
функцией частоты, тогда Ао (со) / а = А (со). Таким образом,
амплитудно-частотная характеристика А(со) характе-
ризует усиление периодического сигнала на различных
частотах (рис. 1.9, а). Как видно из рисунка в системе могут
отсутствовать (кривая 1) или возникать (кривая 2) резонан-
сные колебания (а)р - частота резонанса). Фазо-частотная
характеристика <р(со) , характеризующая сдвиг фаз между
входным x(t) и выходнымy(t) сигналами, представлена на
рис. 1.8. б. Из рисунка видно, что с ростом частоты со запаз-
дывание выходной координаты у( О относительно входной
x(Z) увеличивается.
Геометрическое место концов вектора частотной
функции W(jco) на комплексной плоскости при изменении
частоты от нуля до бесконечности называется годографом
вектора W(jco) (рис. 1.9, в).
Рис. 1.9
1. Составление уравнений движения элементов АСУ...
45
Заметим, что в общем случае для нахождения
функции действительного переменного t при известной
ункции У(у’бо) необходимо воспользоваться обратным
преобразованием Фурье:
т(0=ф1 {y0w)}=
1
2л
00
f Y(ja))eu“da).
Введем понятие минимальнофазовой системы.
Из соотношения W(jaf) = A(co)eJ<p((0) = Р(со) + jQ(co)
следует, что частотная характеристика полностью опре-
делена, если задана любая из пар: А(со) и <р(со) или Р(со)
И 6(^)- Однако при определенных условиях существует
однозначная связь между А(со) и <р(со), а также Р(со) и Q(co).
Это позволяет упростить исследования систем, ограничи-
вая сь, например, рассмотрением только А(со) или Р(со). В
теории интегралов Фурье доказывается, что условие су-
ществования однозначной связи между частотными харак-
теристиками заключается в том, чтобы частотная функция
FF(Jco) = B(jco)IA(Jco) не имела ни нулей, ни полюсов в
нижней полуплоскости корней полиномов числителя и зна-
менателя (нули - корни полинома В( jco) = 0, следовательно,
при этом W(jco) = 0, а полюса - корни полинома A(jco) = О,
следовательно, W(Jco) = <»). Расположение корней в верхней
полуплоскости, например, для полинома третьей степени
иллюстрируется рис. 1.10*).
-а а
Рис. 1.10
Системы, которые удовлетворяют этим условиям,
называются минимально-фазовыми. Из всех возможных
сйстем с одной и той же АЧХ они дают наименьший сдвиг
фаз ср при любой частоте со.
Заметим, что не сопряженность корней р{ и р2 обусловлена наличием в полиноме мнимых
* коэффициентов.
46 Линейные автоматические системы управления
Пример1.7
Пусть динамические звенья имеют следующие
передаточные функции
„л/ . ч . TTZ Z • Ч Jw ~а О)2 — а2 . 2а>а
Wx(j<o)=\ и W2 (jco ) = А.---------—-------- + j —------,
jco + а со + а со + а
где а ~ const.
Определить к какому классу относится второе
звено.
Решение
Поскольку корень числителя W2(jco) лежит в ниж-
ней полуплоскости (со1 = -ja), второе звено принадлежит к
классу неминально-фазовых, что свидетельствует о неод-
нозначности связи между амплитудно- и фазо-частотными
характеристиками этого звена.
Убедимся в справедливости сказанного, определив
АЧХ и ФЧХ для каждого из звеньев. Имеем:
Л,(со) = 1; ^](со)=0, А2(со) = |^2(<у)| =
а2
z х 2со а
(р2(со) = arctg—— = arctg—----------Т.
Р(о>) а) -а
Анализ полученных частотных характеристик
показывает, что при одинаковых амплитудно-частотных
характеристиках звеньев их фазо-частотные характерис-
тики различны: в то время как при любых а>, <р2(со)
отлична от нуля при со* 0. Следовательно, связь между
ААсо) и Ф^со) неоднозначна и эти характеристики необхо-
димо рассматривать совместно.
1.5. Связь между операторами
преобразования сигналов линейной системой
Как было сказано ранее, оператором преобразова-
ния А называется математическое выражение, связываю-
щее входную и выходную величины системы, т. е. у = А {х}
(рис. 1.3).
Основным оператором преобразования линейно*
системы является линейное дифференциальное уравнение
1. Составление уравнений движения элементов АСУ...47
которое позволяет получить любые другие формы операто-
ров преобразования. Например, пусть система у правления
описывается ДУ первого порядка
аоУ + «1У = ьох • (1.38)
Преобразовав уравнение (1.18) по Лапласу при ну-
левых начальных условиях, найдем передаточную функ-
цию, которая также является оператором преобразования.
Имеем
Z,{aoy + a1y}= £{б0х} или (аор + a^Y(p) = b0X(p),
откуда
V • (1-з9)
Х(р) айР + ах
Преобразовав уравнение (1.38) по Фурье, можно
получить частотную функцию системы:
ТГ7/ X T(jtt>) Ь.
W0^ = -----“----• (1-40)
X(j(o) aQj(j) + a{
Сопоставив (1.39) и (1.40), найдем связь между
W(Ja>) и W{p):
W{jio) = W{p)\ . (1.41)
Л “-Г
Решив ДУ (1.38) при типовом единичном ступенча-
том возмущении x(Z) = 1 (Z) и нулевых начальных условиях,
получим переходную функцию й(/):
h I
у(О гомо= h(')= т-11"е * I-
а\ \ /
Воспользовавшись (1.39) и учтя, что при x(f) = 1(f)
имеем Z{1(/)} = 1/р и Y(p) = Н(р), получим:
Н(р) = W(p)X(p) = ,
р
тогда
h{t) = Г1 (1.42)
Р J
48 Линейные автоматические системы управления
Таким образом, выражение (1.42) связывает переда-
точную функцию с переходной функцией. При этом
W(p)=pL{h(t)}=pH(p).
Весовую функцию w(t) находим с учетом того, что
входной сигнал x(f) = = 1 '(7). Так как w(f) = то
w(/)-(&0/a0)e а° .
Воспользовавшись (1.39) и учтя, что Z{^(/)} = 1,
получим:
У(р) = f^(p) = откуда
w(t) = L-'{W(p)} (1.43)
Таким образом, соотношения (1.38) - (1.43) позво-
ляют найти любой оператор преобразования сигналов ли-
нейной системы [ДУ, W(p); W{ja>), h(f), w(/)], если известен
хотя бы один из них.
49
2. Типовые звенья
и структурные схемы АСУ
2.1. Типовые динамические звенья
Современные АСУ состоят из элементов различной
физической природы, конструктивного исполнения, ис-
точников энергии и т. д. Однако динамические свойства
этих элементов часто можно описать одним и тем же ДУ.
Положив в основу классификации динамические свойс-
тва, обычно выделяют следующие звенья: усилительное,
инерционные, колебательное, интегрирующее, дифферен-
цирующее.
1. Усилительное звено
Оператор преобразования равен к: у = кх.
2. Инерционные (апериодические) звенья первого
порядка, описывается ДУ вида: Ту + у = кх ; второго
порядка - Т*У +2Т^У + у-кх при £> 1.
3. Колебательное звено
Описывается ДУ такого же вида как инерционное
звено второго порядка, но при 0 < < 1.
В статическом режиме (при равенстве нулю всех
производных) все приведенные звенья имеют уравнение,
аналогичное усилительному звену, что свидетельствует о
наличии линейной связи между входной величиной х и вы-
ходной величиной у в статике. Поэтому все рассмотренные
звенья относятся к классу статических.
4. Интегрирующее звено
Описывается выражением
t
у - kfxdt, или у = кх.
о'
Здесь выходная величина^ будет изменяться до тех
Пор, пока входная величинах не станет равной нулю.
5. Дифференцирующее звено
Описывается ДУ вида
50 Линейные автоматические системы управления
Последние два звена не имеют однозначной связи
между входными и выходными величинами в статике,
поэтому относятся к классу астатических.
Реальные звенья могут описываться уравнением и
выше второго порядка, но формально это описание можно
заменить системой уравнений, каждое из которых имеет
порядок не выше второго, и таким образом, представить ре-
альное звено в виде звеньев 1 -5. Поэтому эти звенья обычно
называются типовыми.
Предполагается, что все звенья являются звеньями
направленного действия (т. е. выходная величина не оказы-
вает влияния на входную). Каждое звено характеризуется
уравнением движения (динамики), передаточными и час-
тотными функциями, временными характеристиками.
2.1.1. Усилительное звено
Усилительное или безинерционное звено описыва-
ется следующими операторами преобразования:
• уравнением связи между выходной х и входной у
величинами: у = кх или после преобразования по
Лапласу получим
У(р) = Щр);
передаточной функцией: W(p) = »
частотными характеристиками:
• амплитудно-фазо-частотная характеристика
(АФЧХ):
W( jco) = к (рис. 1.11, а);
• амплитудно-частотная-характеристика (АЧХ):
А{(б) = к (рис. 1.11, б);
• фазо-частотная характеристика (ФЧХ):
(р(т) = 0 (рис. 1.11, в);
временными характеристиками: переходной фун-
кцией /?(/)
x(z)=i(z) =fc (рис- 1#11» г^’ ФУнкЧией веса
w(t) = h'(f) = kS(f).
2. Типовые звенья и структурные схемы АСУ
51
а
со
к Р(щ)
в ф
Рис 1.11
2.1.2. Апериодическое звено первого порядка
Это звено относится к классу инерционных и имеет
Следующие операторы преобразования:
• уравнение динамики: а0у + аху = bt), которое обычно
записывают в виде: Ту + у = кх •
После преобразования по Лапласу уравнения дина-
мики примет вид:
(Тр + 1)У(р) = Щр),
где Т = ajax - постоянная времени; к - Ь{) la - коэффициент
передачи;
• передаточная функция:
W(p) =
Y\p) _ к
Тр + \’
• частотные характеристики:
АФЧХ - w(joj) =
к . кТсо
Т2со2 +1~ J Т2со2 +1
= P(to) + jQ(co'),
гдеР(а>), Q(p)) - вещественная и мнимая частотные харак-
теристики.
52 Линейные автоматические системы управления
На комплексной плоскости W(j<d) годограф АФЧХ
представляет собой уравнение окружности с центром, сме-
щенным по оси абсцисс на к!2 (рис. 1.12, а):
+e2(w) = ^-;
\ 2/ 4
АЧХ - А(а>) = lFK(»l = -т- к- -, (рис. 1.12, б);
л/Г2й)2+1
ФЧХ - <р(ы) = arctg — - = arctg(-wT), (рис. 1.12 в);
Р(со)
• временные характеристики:
• переходная функция
h(t) = к(1 -е~1/т), (рис. 1.12, г);
• функция веса
w(t) = h’(t) = (к/Т^е'1'1, (рис. 1.12, д).
2. Типовые звенья и структурные схемы АСУ
53
Заметим, что некоторые объекты управления ха-
рактеризуются показателями, которые являются функция-
ми не только времени, но и преобразованных координат, и
описываются уравнениями в частных производных. Такие
объекты встречаются в различных тепловых, диффузи-
онных и электромагнитных устройствах. В этом случае
зависимость переменных может носить степенной характер
и в дифференциальном уравнении может появиться слагае-
мое, содержащее переменную (временную или пространст-
венную) в дробной степени. Например, если f(f) = /“, где
1> а>— 1, но а 0, то изображение этой функции будет
Здесь произведена замена переменных pt = в, и уч-
тено, что dt = dO/p.
Интеграл в выражении (1.44) является функцией а.
В частности, можно показать, что при а = -1/2 он равен ул,
при а = 1/2 равен ул / 2, а при а = 1 равен 1. Тогда, воспользо-
вавшись (1.44), получим
-0,5+1
2 *
Таким образом, ДУ, содержащее слагаемое в дроб-
ной степени, после преобразования по Лапласу может со-
держать Jp . Тогда передаточная функция примет вид:
Передаточная функция вида (1.45) называется ирра-
циональной. В частности, при A(Jp ) = Ту[р + 1, получим
54 Линейныеавтоматическиесистемы управления
Звено с такой передаточной функцией иногда назы-
вают - полу инерционным. При этом К( р) = р)Х( р) и изоб-
ражениепереходнойфункциибудетН(р) = [£ /(T^jp +1)](1 / р).
Произведя замену переменных ур = s , найдем псевдои-
зображение H(s) = k/(Ts + l)s2, которое дает возможность
найти оригинал h(t).
На рис. 1.13 для сравнения приведены переходные
функции инерционного (кривая 1)и полуинерционного
(кривая 2) звеньев.
1Г
Л L
А(г)
к
Рис. 1.13
2.1.3. Апериодическое звено второго порядка
Это звено также относится к классу инерционных
с монотонным переходным процессом. В отличие от инер-
ционного звена первого порядка оно включает в себя не
один, а две энергетические или массовые ёмкости и имеет
следующие операторы преобразования:
• уравнение динамики Ту + 2Т£ у + у = кх (при <f> 1)
или, преобразовав его по Лапласу, имеем
(т2р2 + 2Т%р + 1)у(р)-кХ(р).
(1-46)
Характеристическое уравнение звена имеет вид:
Т2р2 + 2Т£р +1 = О,
(1-47)
2. Типовые звенья и структурные схемыАСУ
55
корни которого вещественные и отрицательные:
Разложив правую часть (1.47) на множители харак-
теристическое уравнение звена можно записать в виде:
(7> + 1)(Г2р + 1) = 0,
(1.48)
с корнями рх = - l/Tp р2 = - 1/Т2.
Сравнив (1.47) и (1.48), получим: Т2 = Т Т ; 2<fT =
= Т + следовательно, при известных Т и £ можно найти
I £
Т, пТ и. наоборот;
1 ~
передаточная функция
FF(p) =
Y(p)________к___________к_______1__
Х(р) " Т2р2 + 2Пр +1 “ (7]р +1) ’ (Т2р +1) ’
Таким образом, апериодическое звено второго
порядка можно представить в виде двух звеньев первого
порядка;
• частотные характеристики:
АФЧХ - W(J(o) =
к
(1 - Т2о)2) + j2^Ta)
к(1-Т2ш2) 2£Тшк
(1 - Т2(О2)2 + (2|Т<о)2 7 (1 - Т2ш2)2 + (2|Гсо)2
= Р(ш) + jQ(w), (рис. 1.14, а).
Заметим, что при -1/Т , = 1 и Р(а>) = 0;
АЧХ - А(<о)= . ------ (рис. 1.14, б);
J(1 - Т2(О2) + (2£Tarf
,TTV / \ ( -^То) \
ФЧХ - ip (а>) - arctg —— ,
(рис 1.14, в);
56
Линейные автоматические системы управления
• временные характеристики:
• переходная функция - h(t) = С, e'v + С2 еР2’ + к,
(рис. 1.14, г);
• весовая функция - w(z) = Clplep,t + С2р2ёР2',
(рис. 1.14, д).
Постоянные С, и С2 находят из начальных условий
/г(0) = /г'(0) = О* Окончательно получим
Рис. 1.14
2. Типовыезвенья и структуры ыеосемыАСУ
57
2.1.4. Колебательное звено
Колебательное звено отличается от предыдущего
тем, что переходный процесс носит не монотонный, а коле-
бательный характер. Это обусловлено взаимным обменом
энергии (массы) между соответствующими ёмкостями.
Примером может служить обмен магнитной и электричес-
кой энергией в цепи RLC при определенных значениях ее
параметров.
Уравнение динамики этого звена и характеристи-
ческое уравнение аналогично уравнениям (1.46) и (1.47), но
при 0 < £ < 1. При этом корни характеристического урав-
нения будут комплексные сопряженные с отрицательной
вещественной частью:
В данном случае звено второго порядка физически
нельзя разделить на более простые.
Рис. 1.15
Передаточная функция и частотные характеристи-
ки описываются теми же выражениями, что и в предыду-
и
щем случае. При этом амплитудно-частотная характерис-
тика может увеличиваться до определенной (резонансной)
частоты со , а затем снова уменьшаться (рис. 1.15, а).
58
Линейные автоматические системы управления
Переходная функция (рис. 1.15, б) при комплекс-
ных корнях характеристического уравнения (1.47) имеет
вид:
h(t)= к[1-Аеа‘
sin (art + р )
где Л = 1/^/1 -§2; р = arcsin д/1 - £2 ~ постоянные интегриро-
вания, определяемые из нулевых начальных условий.
Из изложенного вытекает, что коэффициент £
определяет характер переходного процесса для звена вто-
рого порядка. Чем больше этот коэффициент, тем меньше
склонность звена к колебаниям. При > 1 колебания отсутс-
твуют. Поэтому коэффициент х называют коэффициентом
демпфирования (нем. глушить, уменьшать).
л
При £ = 0 имеем Т у + у = 0 ; р, , = ± jco,
Ф«1/Г
и
переходная функция запишется в виде
й(7) = k [1 - COS69/].
В этом случае в системе возникают незатухающие
колебания (рис. 1.15, в), что свидетельствует об отсутствии
потерь энергии (замкнутая система). Поэтому звено вида
Т2у + у = кх называют консервативным.
Пример 1.8
Пусть динамическое звено описывается ДУ второго
порядка вида:
аоУ + а\У + а2У =
(1 -49)
Коэффициенты уравнения заданы, и равны:
ап = 0,01 а = 0,09 а = 1 к = 0,26.
Определим частотные и временные характеристи-
ки звена, описываемого уравнением (1.49).
Решение
Запишем уравнение (1.49) в виде
Тгу + 2Т£у + у = кх. (1.50)
Сравнение коэффициентов уравнений (1.49) и (1.50)
позволяет найти постоянную времени Т и коэффициент де-
2. Типовые звенья и структурные схемы АСУ 59
мпфирования В результате вычислений получим Т= 0,1с;
£ = 0,45. Так как 0 < £ < 1, то звено, описываемое ДУ (1.49)
принадлежит к классу колебательных с амплитудно-фазо-
частотной характеристикой вида:
ИД» = ~2-2-Z--•
Т2 (»2+>2^ + 1
(1-51)
Запишем W(jco) в алгебраическом виде, умножив
числитель и знаменатель (1.51), на выражение сопряжен-
ное знаменателю и подставив в него числовые значения
коэффициентов. Окончательно получим:
0.26(1-0.0 kt)2) _ . 0.023W <1 •52)
(1-0.0 ко2)2 + (0.09w)2 7 (1-0 Око2)2 + (0.09to)2 '
Годограф вектора W(j(0), построенный в соответст-
вии с (1.52), приведен на рис 1.16 (сплошная линия).
со = °° со = 0
Рис. 1.16
Амплитудно-частотная 4(a)) и фазо-частотная
у>(со) характеристики, построенные в соответствии с вы-
ражениями:
0,26
А (со) = —/"" .
7(l-0,0k>2)2 +0,09w2 ’
60
Линейные автоматические системы управления
= arctg
( -0,09со
< 1 - 0,01а>2
приведены на рис. 1.17,я, б (сплошные линии)
?(*>)
Рис. 1.17
Переходная h(t) и весовая w(f) функции определя-
ются в соответствии с выражениями:
w(r)= /?'(/) = к(а2 + со2) со ’е al sinco/,
2, Типовые звенья и структурные схемы АСУ
61
А: = 0,26;
А = - У— = 1,12;
<1-0,452
<р = arcsin -71-0,452 = 1,1.
Графики й(/) и w(Z) приведены на рис. 1.18, а, б
(сплошные линии).
Для сравнения на рисунках 1.16, 1.17 приведены
частотные, а на рис. 1.18 временные характеристики апе-
риодического звена второго порядка с монотонным пере-
ходным процессом (пунктирные линии), описываемым
ДУ: 0,01J> + 0,3j> + у = 0,26х, (см. пример 1.5). Здесь при
тех же постоянной времени Т = 0,1 с и коэффициенте пере-
дачи к = 0,26 коэффициент демпфирования х = 1,5 > 1, что и
обусловливает отсутствие в этом звене колебаний.
62 Линейные автоматические системы управления
2.1.5. Интегрирующее звено
Как уже упоминалось, интегрирующее звено от-
носится к классу астатических. При этом любое значение
входной величины x(f) в том числе и x(f) = const, может со-
ответствовать любому значению выходной величины y(t).
Поэтому иногда это звено называют нейтральным.
Интегрирующее безинерционное звено имеет
следующие операторы преобразования:
• уравнение динамики: у = kfxdt или у = кх.
„ о _
Преобразовав это уравнение по Лапласу, получим
pY( р) = кХ( р)\
• передаточная функция:
W(p) =
Y(p) к .
X(j>) ~ Р ’
• частотные характеристики:
АФЧХ - W(jw) = W(p)
P-jw
7----J-Дрис. 1.19, а);
J(D (О
АЧХ- А(а))= W(ja)) = — , (рис. 1.19, б);
w
ФЧХ - <р(аХ) = arctg---------= — (рис. 1.19, б);
Р(со) 2
Рис. 1.19
• временные характеристики:
• переходная функция: h(f) = kt (рис. 1.20, сплош-
ная линия);
• функция веса: w(t) = h'(t} = к.
2. Типовые звеньям структурные схемы АСУ 63
Примером интегрирующего звена может служить
электродвигатель, на вход которого подается напряже-
ние, а выходом является угол поворота вала двигателя.
При этом предполагается, что инерционностью двигателя
можно пренебречь. В случае ее учета, уравнение динами-
ки интегрирующего звена запишется в виде: Ту + у = кх, а
переходная функция, являющаяся решением этого ДУ при
х(/) = 1(0» будет:
h(t} = k\t - T(l - е~Ь].
График h(f) для этого случая показан на рис. 1.20
пунктирной линией.
Рис. 1.20
Заметим, что передаточная функция инерционного
интегрирующего звена имеет вид:
^(р)=
Следовательно, это звено можно представить в виде
двух элементарных звеньев интегрирующего и апериоди-
ческого.
2.1.6. Дифференцирующее звено
Это звено, как и предыдущее, относится к классу
астатических (при х = const, у = 0) и имеет следующие опе-
раторы преобразования:
• уравнение динамики: у = кх , или преобразовав его
по Лапласу, получим
Y(p) = kpX(p);
• передаточная функция:
64
Линейные автоматические системы управления
^(р) =
У(р)
Х(р)
• частотные характеристики:
• АФЧХ- FF(jco) = jko), (рис. 1.21, а);
• АЧХ- A(gj) = ксо,
(рис. 1.21, б);
• ФЧХ - <р(а>) = л / 2,
(рис. 1.21, б);
• временные характеристики:
переходная функция: h(f) = kb(t) (рис. 1.21, в,
сплошная линия). Таким образом, при подаче на
вход идеального дифференцирующего звена еди-
ничной ступенчатой функции, на его выходе полу-
чаем импульс с бесконечно большой амплитудой,
что физически не реализуемо.
а б
Рис. 1.21
Реальное (инерционное) дифференцирующее звено
описывается ДУ:
Ту + у = кх,
решение которого при x{t) = 1 (?) и нулевых начальных ус-
ловиях будет:
h(t) = (к/Т)е -,1Т.
График переходной функции этого звена h(f) пред-
ставлен на рис. 1.21, в пунктирной линией.
2. Типовые звенья и структурные схемы АСУ
65
2.2. Структурные схемы АСУ
Обычно АСУ можно рассматривать как комбинацию
динамических звеньев с определенными передаточными
функциями^.
Графическое изображение АСУ в виде совокупности
динамических звеньев с указанием их передаточных фун-
кций и связей между звеньями называется структурной
схемой. По существу эта схема представляет собой гра-
фическое изображение системы уравнений, записанных
в виде передаточных функций, и может рассматриваться
как схема прохождения и преобразования сигналов в АСУ.
В этой связи она часто называется алгоритмической.
Обозначения элементов в структурных схемах,
приведены в таблице 1.2.
Таблица 1.2
Наименование элемента
Линия передачи сигналов
Динамическое звено с одним
входом х и одним выходом^
направленного действия
Динамическое звено с двумя
входами и одним выходом
Узел или разветвление
(в месте разветвления сигнал
не делится)
Сумматор сигналов
Устройство сравнения
сигналов
Обозначение элемента
Y(P) = Щр) Хх(р) + W2+ (р) • Х2(р)
Рассмотрим основные виды соединения звеньев.
Ф) Заметим, что в звеньях структурных схем могут указываться и другие операторы преоб-
разования сигналов, например, — , fxdt, W(/) и др.)
dt J
3 Теория автоматического управления
66
Линейные автоматические системы управления
2.2.1. Основные виды соединения звеньев
1. Последовательное соединение (рис. 1.22).
> ^(р)
Рис. 1.22
Имеем
W = у(р) = w^py^p) =
= W{p)W2(pW) = W3Kt(p)X(pY
где Wжв( р) = W\( p)W2( р).
В общем случае
^КВ(Р)= ВД
1 где W3Ke( р) - эквивалентная передаточная функция;
N - число последовательно включенных звеньев.
Таким образом, передаточная функция последова-
тельно включенных звеньев равна произведению переда-
точных функций этих звеньев.
2. Параллельное соединение (рис. 1.23).
* w2(p)
Рис. 1.23
Имеем
У(р) = Y(p) + Y(p) = W\p)X(p) + W(p)X(p) =
= [ W + W2(p№p) = WJp)X(p).
В общем случае эквивалентная передаточная фун-
кция параллельно соединенных звеньев равна сумме их
передаточных функций:
2. Типовые звенья и структурные схемы АСУ 67
Пример 1.9.
Найдем эквивалентную передаточную функцию
системы, структурная схема которой приведена
на рис. 1.24.
Рис. 1.24
Решение
Воспользовавшись приведенными выше правилами
объединения передаточных функций последовательно и
параллельно соединенных звеньев, запишем
^(р) = + W4(p)]W5(p).
3. Параллельно-встречное соединение звеньев
(обратная связь ОС) (рис. 1.25).
Имеем Д = х-у - отклонение текущего значения
управляемой величины от заданного.
Рис. 1.25
Найдем передаточную функцию по каналу х—>у:
w^p}-
Имеем
Д( р) = Х(р)- Г,( р) = Х(р)- woc( p)Y( р), (1.53)
где W\(p), Woc(p) - передаточные функции прямой цепи и
цепи обратной связи соответственно.
3*
68
Линейные автоматические системы управления
С другой стороны
ад.ВД, <154)
и'.(р)
Приравняв правые части уравнений (1.53) и (1.54),
окончательно получим
W (р) = -----^\(Р)--= w (1 55)
4. Передаточные функции замкнутых АСУ.
Пусть структурная схема системы имеет вид, пока-
занный на рис. 1.26.
Рис. 1.26
Воспользовавшись приведенными ранее правила-
ми, для данной структурной схемы можно записать:
1. Передаточную функцию разомкнутой системы
W ( р), под которой понимают произведение пере-
даточных функций всех звеньев, включенных по-
следовательно в контуре обратной связи. Тогда
W(p)=W£p}W2(p)-\
[J J.
2. Передаточную функцию замкнутой системы по
управлению и
Wuy(p) =
^(Р)^(Р) ^(р)
i+w
3. Передаточную функцию замкнутой системы по
возмущению f
* В случае единичной обратной связи (Рис. 1.26) W^p) можно определить как отношение
У (р) / А (р) при нулевых начальных условиях и отсутствии внешних воздействий (/~ и = 0).
2. Типовые звенья и структурные схемы АСУ
69
№ ( , И',(Р)У,(Р) »Ж(Р)
fl PI i+вдад 1+»;(р)
4. Передаточные функции замкнутой системы по
ошибке А со стороны управления ''ид(Р) и возму-
щения WA(p)
Wu, <р) =
1
1+^р(р)’
wf, {р) = -
^2 (РХз (Р)
1 + ^р(Р)
Из приведенных соотношений можно сделать
вывод, что передаточная функция замкнутой системы
относительно любых входных и выходных координат рав-
на дроби, у которой числитель - передаточная функция
звеньев, включенных между точкой приложения входного
воздействия и точкой измерения выхода, а знаменатель
равен 1 + Wp(p\
Заметим, что в случае положительной обратной свя-
зи знаменатель имеет вид 1 - W ( р) и при | W( р) < 1| входной
сигнал усиливается.
2.2.2. Правила структурных преобразований
Если структурная схема оказывается сложной и
содержит много перекрестных связей, можно попытаться
упростить ее с помощью определенных правил. Основной
принцип преобразования структурных схем заключается в
том, что выходные величины исходной и эквивалентной схем
должны быть равны. Наиболее распространенные правила
преобразования приведены ниже в таблице 1.3.
Пример 1.10
Пусть задана структурная схема, показанная на
рис. 1.27,а. Требуется найти передаточную функ-
цию по каналу х—>у: W (р).
Решение
Применив правила перестановки сумматоров 1 и 2
и переноса узла D с выхода на вход пятого звена WАр), а
затем правило перестановки его с узлом С, получим струк-
Таблица 13
Правила
преобразования
Исходная структурная схема
Эквивалентная структурная схема
Перестановка
сумматоров
Xi
Перестановка
звеньев
Xi
Уэкв Уисх
Перестановка
узлов
У исх
У исх *^1 ^2 Х3
Перенос узлов с
выхода на вход
* ^(р)
У1 исх
У2 исх
^1(р)
УэКВ У1 исх
К1 исх(р) = *2 исх(р) = ^1(рХ1(?)
FFi(p)
Уэкв У2 исх
Таблица 13 (продолжение)
Перенос
сумматоров
с выхода на вход
УМ = Wi(p)xx(p) + х2(р)
Перенос
узлов с входа на
выход
Wx(p)
У1 исх
-------->
* ^1(р)
У2 экв У2 исх
У2 исх X]
К1исх(р)=^1(рЖ1(р)
Перенос
сумматоров с
входа на выход
УИСх(р) = ^1да1(р)+л2(р)]
Переход
к единичной
обратной связи
W *
— Уисх (р)
^сх (р)=
^(р)
1+Wx (p)W2 (р)
Х(р)
У (р) =
ЭКВ v
1 +Wx{p)W2(p)
72 Линейные автоматические системы управления
турную схему без перекрестных связей (рис. 1.27, б). Для
преобразованной схемы можно записать, передаточные
функции для отдельных блоков:
у,2(р)-, ; ’W-’W+’W;
1 + (p)W2 (р)
Тогда искомую передаточную функцию по каналу
У можно записать в виде:
W (р)-----------------W(p)
2.2.3. Использование графов для
преобразования структурных схем
Для наглядного изображения прохождения и пре-
образования сигнала в АСУ помимо структурных схем
используют графы, которые, как и структурные схемы,
представляют собой запись системы уравнений АСУ в виде
рисунка.
2. Типовые звенья и структурные схемы АСУ
73
Граф состоит из точек (узлов) и линий (ветвей),
юединяющих эти точки. Узлам и ветвям могут быть со-
юставлены некоторые величины и операторы. Если ветви
?рафа имеют стрелки, соответствующие направлению рас-
тространения сигнала, то граф называется направленным.
Рассмотрим его свойства.
а х к у=кх
1. Каждому узлу (вершине), отмеченному на графе
точкой или кружочком, соответствует некоторая
переменная рассматриваемой системы.
2. Каждая ветвь (ребро) графа, изображенная в виде
линии со стрелкой, имеет узел-начало х - входная
величина и узел-конец у - выходная величина
(рис. 1.28, а). Выходная переменная ветви получа-
ется как результат преобразования входной вели-
чины, осуществляемый оператором ветви:
У = кх,
где к - оператор (передача) ветви.
3. Если из узла выходят несколько ветвей, то
все они имеют одинаковую входную величину
(рис. 1.28, б).
4. Если к одному узлу подходит несколько ветвей, то
переменная, соответствующая этому узлу, полу-
74 Линейные автоматические системы управления
чается алгебраическим суммированием выходных
переменных ветвей (рис. 1.28, в).
Между структурной схемой и графом прохождения
сигнала имеется прямое соответствие. Прямоугольник
структурной схемы соответствует ветви, а линия передачи
сигнала соответствует узлу.
Пример 1.11
Пусть имеем две ветви, которые можно соединить
параллельно и последовательно. Найдём эквивален-
тные передачи графа для обоих случаев.
Решение
Если две ветви соединенны параллельно, (рис. 1.29, а),
то получим у = (кх + к^х = кзкх, где кзк = кх + к2- эквивалент-
ная передача графа. В общем случае совокупность парал-
лельных одинаково направленных ветвей может быть заме-
нена одной ветвью, передача которой равна сумме передач
параллельных ветвей.
Рис. 1.29
Если две ветви соединены последовательно
(рис. 1.29, б), то у = к2хх = кх кус = кэкх. В общем случае цепь
из последовательно соединенных ветвей, идущих в одном
направлении, может быть заменена одной ветвью, переда-
ча которой равна произведению передач последовательно
соединенных ветвей.
* * *
Для того чтобы отыскать любую переменную ве-
личину графа, при известных передачах всех его ветвей,
можно воспользоваться формулой Мезона.
2. Типовые звенья и структурные схемы АСУ 75
Пусть имеем граф, показанный на рис. 1.30. Введем
некоторые определения.
Узлы подразделяются на:
а) обычные узлы, имеющие как отходящие, так и под-
ходящие ветви (х2 -х5);
б) источники, имеющие только отходящие ветви (xj;
в) стоки, имеющие только подходящие ветви (х6).
Любой узел можно превратить в сток с помощью
ветви с передачей равной единице (х4 = х*). Сигнал, кото-
рый находится в источнике, является независимой пере-
менной (х().
Рис. 1.30
Путем между любыми двумя узлами графа называ-
ется непересекающаяся последовательность ветвей между
этими узлами с одним и тем же направлением стрелки.
Например, между узлами х( и х4 имеется три пути: I - х} ах4.
II - Х| bh х4. Ill - X] cdh х4
Передачей пути Р - называется произведение
передач ветвей, входящих в путь между узлами i и j. В на-
шем примере передача путей Р|4 будет следующей: Р{ = а,
Рп = bh, Рт = cdh.
Контуром называется замкнутая непересекающаяся
последовательность ветвей, ориентированная в одном и том
76 Линейные автоматическиесистемы управления
же направлении. Передачей контура L называется произ-
ведение передач ветвей, образующих контур. Для нашего
примера = т, L2 =fd, L3 = dgr, Z,4 = dhnr.
Передачей графа T - называется отношение вы-
ходной величины х к входной величине х., причем х. есть
источник, т. е. величина независимая, Г. = х}- /xt.
Для нашего случая при j = 4, i = 1 получим х4 = Т14хг
Передача графа находится по формуле Мезона
т _ ?РА _ + 4 +)(!-;,)...(1-4)]}* д1.56)
Здесь A - определитель графа;
* - знак «звездочки» обозначает, что учитываются
произведения только некасающихся (даже в точке)
контуров, число которых равно и;
Ps - передача s-го пути, число которых равно V;
А - алгебраическое дополнение s-го пути, представляю-
щее собой определитель графа А, из которого исключены
все контуры, которых касается s-й путь; (именно поэ-
тому в числителе стоит знак *). Если s-й путь касается
всех контуров, то As = 1.
Для графа, представленного на рис. 1.30 определи-
тель А в соответствии с (1.56) будет:
Поскольку должны учитываться произведения
только несоприкасающихся контуров, имеем
Д* = [1-(£ +£+£+£) + ££].
J. Лл ъ/ 1 Лл
Здесь учтено, что не касаются друг друга только
контуры 1 и 2.
2. Типовые звенья и структурные схемы АСУ 77
Алгебраические дополнения, полученные из опре-
делителя графа А*, имеют вид:
\=\-(Lt+L2 + L,) + L,L2
Ап 1 Lx, Дш 1 £r
Здесь учтено, чтопуть Р касается только контура Z4
в точке х4.
Тогда в соответствии с (1.56) передача графа от входа
х1 к выходу х4 будет:
Заметим, что при рассмотрении АСУ передачи вет-
вей, входящих в передачи путей и контуров, представляют
собой соответствующие передаточные функции.
Пример 1.12
Пусть имеем структурную схему, показанную
на рис. 1.31, а. Найдём прередаточную функцию по
каналу х~>у.
Рис. 1.31
Решение
Соответствующий граф имеет вид, показанный на
рис. 1.31,6. Здесь L =-W Р == 1 • W. = W.; А. = 1. Тогда
<1 1. 4* <1 I 1. J.
воспользовавшись формулой Мезона (1.56), получим:
Т = W(p) =
W}(p)
1-L, 1 + ^(рЖ2(р)-
Этот результат, естественно, соответствует полу-
ченному ранее для параллельно-встречного соединения
звеньев (1.55).
78 Линейные автоматические системы управления___________
Пример 1.13
Пусть структурная схема системы имеет вид,
показанный на рис. 132, а. Требуется найти пере-
даточную функцию по каналу х—
Рис. 1.32
Решение
Соответствующий граф показан на рис. 1.32,6. В
соответствии с (1.56) найдем:
А* = (1 -£,)(1 ~L2)= 1 ~(L+L2) =
= 1 + W,(WX WK + WJVY A , = 1.
2V 1 5 3 4/? 1
Тогда, воспользовавшись (1.56), получим искомую
передаточную функцию:
W.W.W.
Ж Xr
1 + W2(WW + WJV4)'
Пример 1.14
Пусть динамическое звено представляет собой
цепь RLC(рис. 1.2). Требуется найти передаточную
функцию этого звена по каналу x = i —> у = uR
Решение
Так как цепь RLC имеет две энергетические ёмкос-
ти, то оператор преобразования может быть представлен
передаточной функцией вида:
2. Типовые звенья и структурные схемы АСУ 79
ИС, (р) = т;2 2 —г, (1-57)
ху1-’ T2p2+2T§p+l,
где к,Т и £ - искомые параметры, зависящие от величин R, L
и С, Эти параметры можно определить, составив граф,
отображающий математическую модель электрической
цепи в переменных состояния (1.14):
<7-1 1
V, = -С v2+C х
y = Rv2
(1.58)
Граф, отображающий систему уравнений (1.58)
изображен на рис. 1.33, где 1/р - означает операцию интег-
Рис. 1.33
Воспользовавшись формулой Мезона (1.56), запи-
шем
R
LCp2 + RCp + V
(1-59)
Сравнив (1.57) с (1.59), получим k = R\ Т = у[ьС ;
% = O^Ry/C / L. Таким образом, модель в переменных состо-
яния в принципе может быть представлена в виде графа,
который позволяет найти оператор преобразования сигнала
в виде передаточной функции по исследуемому каналу.
2.3. Многомерные системы управления
К многомерным относятся АСУ, имеющие несколь-
ко управляемых величину. (jsl,). Это имеет место
во многих современных сложных системах.
80
Линейные автоматические системы управления
Многомерная система предполагает наличие много-
мерного объекта управления (рис. 1.34), который характе-
ризуется существованием нескольких входов (точек прило-
жения управляющих «/ и возмущающих воздействий)
и нескольких выходов (управляемых величин у). Много-
мерный объект описывается системой уравнении, которую
удобно представлять в матричной форме. Введем:
1) m-мерный вектор управляемых величин -
У,- ••• Ут
J J J т
у= у, у? - У) - ymf ;
2) ^-мерный вектор управляющих величин -
и = и
и2 ... Uj ... uk ;
3) g-мерный вектор возмущений -
где Т— операция транспонирования одностолбцовой матрицы.
ОУ
; *
Рис. 1.34
Если управляемые величины имеют разную физи-
ческую природу, то они должны входить в вектор-столбец
со своими весовыми коэффициентами, уравнивающими их
размерности. Аналогичным образом формируются векторы
управлений и возмущений.
Линеаризованные уравнения многомерного объекта
могут быть представлены в матричном виде:
Ч(Р)' У(() = Г(Р) • w (0 + s(p) f(t).
(1.60)
где q(p), г(р), s(p) - операторные матрицы;
2. Типовые звенья и структурные схемы АСУ
81
q(p) =
ЯпАр) -
<1М
• «
(р)
*цО)
г(^?) •—
s(p) -
Sm\ О)
ГМ
5,10)
S|gO)
* « •
Smg (Р)
<hi(p) -
• • •
Преобразовав (1.60) по Лапласу при нулевых на-
чальных условиях,получим
Q(p) • У(р) = R(p) • U(p) + ад • F(p). (1.61)
Умножив левую и правую части уравнения (1.61) на
обратную матрицу Q" (р), получим
W = wjp)-tf(p)+wo/(p)-F(p)5
(1.62)
где Wou(p); Wo/(p) - матрицы передаточных функций объ-
екта управления (ОУ) соответственно для управляющих
и возмущающих воздействий (рис. 1.35).
Рис. 1.35
Выражение (1.62) позволяет установить связь между
управляемыми величинами и возмущающими и управля-
ющими воздействиями объекта. Так, при /и = 3;£=2и£ = 0
уравнение (1.62) можно записать в виде:
О) = W. 1 (р)Ц (р) + Wl2 (p)U2 (р);
к2(р) = ^21(р)Ц (р)+^22(p)t/2(p); ’
Y3(p) = +
где W..( р) - передаточная функция объекта управления по
каналу и. -> у; t = Ц; / = •
82 Линейные автоматические системы управления
Если в матрице передаточных функций Wou (/?) или
^Д/Одля каждого элемента матрицы (частной переда-
точной функции) найти оригинал, то будет получена так
называемая матрица Коши (матрица весовых функций).
Например, для управляющих воздействий
w„„ (0 =
- чДО
Если в нулевой момент времени на все входы
объекта поступают управляющие воздействия , то
на основании принципа суперпозиции изменение у-й уп-
равляемой величины может быть определено с помощью
интеграла Дюамеля (4.81):
* t
У №=2. S^iry-w^t-TydT.
0
На рис. 1.35 представлена структурная схема за-
мкнутой многомерной системы управления объектом ОУ.
На схеме все указанные символы соответствуют матрицам:
у* - задающих воздействий; у(0 - управляемых (выход-
ных) величин объекта; А(0 - отклонений для каждой уп-
равляемой величины; w(z) - управляющих воздействий;
/(/) - возмущений; Wow(p) - передаточных функций объ-
екта по управлениям; Wo/(p) - передаточных функций объ-
екта по возмущениям. Кроме того, введена матрица переда-
точных функций управляющего устройства Wv (/?) = ,
которая определяет используемые законы управлениями
показывает связь между изображениями управляющих
воздействий и отклонений:
А,(р)
• • •
А„(у)
Матрица передаточных функций разомкнутой сис-
темы имеет вид
W,(p) = W„(p)W,(p).
2. Типовые звенья и структурные схемы АСУ
83
Характеристическая матрица системы имеет размер-
ность п х п:
D(p)-I + W,(p)= d^p)
где I - единичная матрица пхп, т. е. матрица, у которой все
элементы главной диагонали равны единице, а осталь-
ные — нулю.
Характеристическое уравнение системы получается
приравниванием к нулю определителя характеристической
матрицы.
Заметим, что отклонения (z = 1, 2,...,п) представ-
ляют собой некоторые абстрактные величины, знание ко-
торых полностью определяет текущее состояние системы,
т. е. являются переменными состояния.
Матрицы передаточных функций замкнутой сис-
темы по каналам: задающие У* и возмущающие f воз-
действия - выходные величины У и ошибки д , могут быть
определены из выражений
W„./p)-Wp(p)-D-(p);
W^(p) = D-(p);
W0(^) = Wo/(p)-D-(p);
(1.63)
W^(p) = -Wo/(p)-D-(p).
Полученные выражения для матриц передаточных
функций замкнутой системы позволяют найти изобра-
жения ошибок А(/?) и управляемых величин У(р). Так,
например, для матрицы изображений ошибок можно за-
писать
Д(р)'
А(Р) =
Wy.MY4p) + WfMF(p)
Пользуясь полученным выражением и взяв обратное
преобразование Лапласа можно найти оригиналы ошибок
А(7) и оценить качество функционирования многомерной
системы, а при необходимости скорректировать параметры
и структуру управляющего устройства.
84 Линейные автоматические системы управления
2.4. Управляемость и наблюдаемость
Рассмотрим и-мерное пространство состояний v ,
в котором каждому состоянию системы соответствует не-
которое положение изображающей точки, определяемое
значениями переменные состояния v ( / -1, 2,...,и).
Пусть в пространстве состояний v заданы два
множества GjCv и С2Су . Рассматриваемая система
будет управляемой, если существует такое управление
й(/)= щ ... ик
ле времени 9 которое переводит изображающую
, определенное на конечном интерва-
точку в пространстве у из подобласти в подобласть G2 •
Можно сузить определение управляемости и пони-
мать под ним возможность перевода изображающей точки из
любой области пространства состояний у в начало координат,
т. е. в точку, соответствующую нулевым отклонениям уп-
равляемых координат У/ от заданных значений у*. Система
будет полностью управляемой, если каждое состояние управ-
ляемо в этом смысле. Если невозможно подобрать управле-
ния, приводящие систему в начало координат ни из одного
возможного состояния, система полностью неуправляема.
Система считается наблюдаемой, если в формирова-
нии вектора выходных координат у участвуют все состав-
ляющие вектора переменных состояния у. Если ни одна из
составляющих вектора у не влияет на формирование выхода
системы у, то такая система ненаблюдаема.
Исходные дифференциальные уравнения многомер-
ной системы управления могут быть представлены в форме
Коши в матричной записи:
dv
dt
Ау + Bw + Е/;
(1-64)
У = Cv;
и = Dv,
где у - вектор фазовых координат размерности 1 х и (п со-
ответствует порядку дифференциального уравнения);
у - вектор управляемых (выходных) величин системы
размерности Ixm;
и - вектор управляющих воздействий размерности 1 хк;
2. Типовые звенья и структурные схемы АСУ
85
f - вектор возмущающих и задающих воздействий раз-
мерности 1 xg;
Лгхл ’
mx« ’
ентов.
- соответствующие матрицы коэффици-
От пространства состояний v перейдем к преоб-
разованному пространству состояний v * посредством
преобразования v * = R v , где R - матрица коэффициентов
размерности т х т .
Тогда вместо (1.64) будем иметь
(1.65)
Здесь использованы преобразованные матрицы
коэффициентов:
A* = RAR ;B* = RB; C* = CR D* = DR'; E* = RE
Введение новых переменных состояния посредс-
твом преобразования v * = R v приводит к эквивалентным
системам различной структуры. При некотором преобразо-
вании может оказаться, что часть управляющих величин
не входит в некоторые дифференциальные уравнения (1.64)
Или часть переменных состояния не участвует в формирова-
нии выхода у. В первом случае система будет не полностью
управляемой, во втором - не полностью наблюдаемой.
В случае не полностью управляемой системы ее ис-
ходное дифференциальное уравнение, входящее в систему
(1.64) может быть представлено в виде
dt
= АцУ, + А12у2 + Вп,
- А22у2,
dt
где Vj - вектор координат, соответствующий управляемой
86
Линейные автоматические системы управления
части системы, размерностью 1 • у;
v2 - то же, но неуправляемой части, размерности 1 (т- v).
Р. Калман показал, что размерность v управляе-
мой части системы, т. е. порядок первой группы уравнений
(1.65), совпадает с рангом следующей матрицы:
U = В,
АВ, А2В,
(1.66)
пхкп *
При v = п система полностью управляема, при
О < v < п - не полностью управляема, при у = 0 - неуправ-
ляема.
В случае не полностью наблюдаемой системы пере-
менные состояния группы не участвуют в формировании
управляемых у и управляющих и величин, а также пе-
ременных состояния группы Vj, т. е. группа v2 относится
к ненаблюдаемым переменным состояния. В этом случае
уравления системы могут быть представлены в виде:
v
dt
^2
dt
(1.67)
и = D.K.
При этом, как показал Калман, порядок v первой
группы уравнений (1.67) совпадает с рангом следующей
матрицы:
V= СТ АГСГ (АГ)2СГ
(АГ)”-1СГ
п*тп '
При v - п система полностью наблюдаема, при
О < v < п - не полностью наблюдаема; при у - 0 - нена-
блюдаема.
Пример 1.15
Определим степень управляемости и наблюдаемос-
ти систем, структурная схема которых представ-
лена на рис. 1.36.
2. Типовые звенья и структурные схемы АСУ
87
Рис. 1.36
Решение
Рассмотрим систему, изображенную на рис. 1.36, а.
Количество переменных состояния п = 3 (они обусловле-
ны наличием в системе трех энергетических ёмкостей с
постоянными времени Тъ Т2,Т3), В отсутствие управля-
ющего сигнала «2 управление Щ воздействует только на
две переменных состояния, обусловленные ёмкостями Т2
и Т3 (Д сокращается), т. е. у = 2<л = 3,и система не пол-
ностью управляема. При подаче сигнала и2 появляется
возможность воздействие и на переменную состояния обус-
ловленную ёмкостью 7] и система становится полностью
управляемой (v = п = 3).
Система, изображенная на рис. 1.36,6, не полностью
наблюдаема, так как в формировании выхода У из трех пе-
ременных состояния участвуют только две, обусловленные
емкостями - Т2 и Т3,
Таким образом, понятие управляемости системы
характеризует способность входа и (/) возбуждать все пе-
ременные состояния (фазовые координаты) р(/); понятие
наблюдаемости - способность состояния v(/) изменять
выходной сигнал у (г) .
88
3. Устойчивость и качество
функционирования АСУ
3.1. Устойчивость АСУ
Устойчивость АСУ характеризует способность сис-
темы возвращаться в состояние равновесия после исчезно-
вения внешних сил, которые вывели ее из этого состояния.
Понятие ’’устойчивость” наглядно иллюстрирует рис. 1.37,
на котором представлена физическая система шар - опор-
ная поверхность. На рис. 1.37, а, б шар находится в поло-
жении равновесия. При отклонении от этого положения в
любую сторону в первом случае (рис. 1.37, а) шар не может
вернуться в исходное положение (неустойчивое равнове-
сие), а во втором (рис. 1.37, б) - возвращается (устойчивое
равновесие). Если опорная поверхность представляет собой
горизонтальную плоскость, то шар движется по ней до тех
пор, пока действует движущая сила Fd и после ее исчезно-
вения останавливается в любой точке на плоскости (без-
различное равновесие). Такая система иногда называется
нейтральной (рис. 1 37, в).
Неустойчивое
равновесие
Устойчивое
равновесие
Fd
Безразличное
равновесие
Ограничение
Рис. 1.37
3, Устойчивость и качество функционирования АСУ 89
Говорят, что система устойчива в малом, если
констатируют лишь факт наличия области устойчивости,
но не определяют каким-либо образом ее границы. Если
границы устойчивости определены, т. е. границы области
начальных отклонений, при которых система возвращается
в состояние равновесия, известны (рис. 1.37, г), и выяснено,
что реальные начальные отклонения принадлежат этой
области, то система устойчива в большом. Когда система
возвращается в состояние равновесия при любых началь-
ных отклонениях, ее называют устойчивой в целом, т. е.
в малом и большом.
3.1.1. Переходные процессы в АСУ
В любой АСУ в результате воздействия возмущаю-
щих сил, с одной стороны, и восстанавливающего действия
управляющего устройства, с другой, возникает переходный
процесс: переход АСУ из одного состояния в другое. Рас-
смотрим различные типы переходного процесса.
Пусть АСУ описывается дифференциальным урав-
нением вида
Т2у + 2Т^у + у = кх.
(1.68)
характеристическое уравнение, которого:
Т2у + 2Т^у + у = кх
имеет корни
Как было показано ранее (п. 2.1.3,2.1.4), решение ДУ
(1.68) описывает переходной процесс y(t), характер которого
определяется коэффициентом £. Возможное расположение
корней характеристического уравнения на комплексной
плоскости р при различных значениях £, показано на
рис. 1.38. Рассмотрим переходные процессы, соответству-
ющие различным значениям £.
90
Линейные автоматические системы управления
Рис. 1.38
-1. Переходная функция h(t) при подаче на
вход единичного ступенчатого сигнала имеет вид:
h(t) = с}еР]* + с2еР2* + к, при этом корни характерис-
тического уравнения вещественные положительные
(р{2 >0) и, следовательно, lim/z(r) = oo. В данном
случае система не может восстановить равновесное
состояние, значение управляемой координаты все
больше отклоняется от заданного. Такой пере-
ходный процесс называется расходящимся моно-
тонным (апериодическим) (рис. 1.39, а), а система
неустойчивой (идет процесс накопления энергии
из внешней среды).
II. -1 < £ < 0. При этом р^2 = а ±уси, а < 0, а переходная
функция имеет вид:
й(/) = к[\ - Aeatsm(cot + ^)],
где А = 1 /д/1-£2, (р = arcsinд/1 - ^2 .
Характеристики системы те же, что и в предыдущем
случае, но переходный процесс колебательный
(рис. 1.39, б).
III. 0 < £ < 1. Переходная функция h(f) та же, что и в слу-
чае II, но при а < 0. При этом система возвращается
в равновесное состояние, а значение управляемой
координаты приближается к заданному. Такой пе-
3. Устойчивость и качество функционирования АСУ 91
реходный процесс называется сходящимся колеба-
тельным, а система устойчивой (происходит отдача
энергии во внешнюю среду) (рис. 1.39, в).
Рис. 1.39
IV. £ > 1. Переходная функция h(f) имеет тот же вид,
что и в случае I, ho/Jj 2 < 0. Характеристика системы
та же, что и в III случае, но переходный процесс моно-
тонный (апериодический) (рис. 1.39, в). На этом же
рисунке показана переходная функция при £ = 1,
V. £ = 0; р^2 = = 1/Т , h(t) = k(l - cos cot). В системе
устанавливается периодическое движение, процесс
называется колебательным незатухающим, систе-
ма находится на границе устойчивости (рис. 1.39, д).
Она является замкнутой (консервативной), авто-
номной от внешней среды.
Все рассмотренные колебания (II, III и V случаи)
относятся к классу свободных, их параметрыи <р зависят
от начальных условий, т. е. от привнесенной энергии. Для
случаев II и III функция h(t) * h(t + Т), где Т- период колеба-
ний, и следовательно, эти колебания непериодические. Пе-
риодические колебания наблюдаются только в случае V *>.
> Более подробная классификация колебательных процессов приведена в п. 8.2.4.
92 Линейные автоматические системы управления
Сопоставление корней характеристического урав-
нения на комплексной плоскости р с соответствующими
переходными процессами (рис. 1.39) показывает, что ли-
нейная система восстанавливает равновесное состояние
только тогда, когда корни характеристического уравнения
расположены слева от мнимой оси.
В общем случае условие устойчивости АСУ имеет
вид
lim y(t) - y(Q) = е,
где у(0) _ начальное значение управляемой величины;
£ = Я00) - ЯО)
- установившееся отклонение управляе-
мой величины или статическая ошибка (в случае астати-
ческой системы г = 0).
Реальные системы всегда нелинейны, однако, если
для анализа поведения системы можно произвести линеари-
зацию уравнений, то о ее устойчивости можно судить исходя
из первого метода А. М. Ляпунова:
1. Если характеристическое уравнение линеаризован-
ной системы имеет все корни с отрицательными
вещественными частями, то реальная система будет
устойчива в малом.
2. Если характеристическое уравнение линеаризован-
ной системы имеет хотя бы один корень с положи-
тельной вещественной частью, то реальная система
всегда неустойчива.
3. Если характеристическое уравнение линеаризован-
ной системы имеет хотя бы один нулевой корень или
пару чисто мнимых корней, то поведение реальной
системы не может определяться ее линеаризован-
ным уравнением. В этом случае отброшенные при
линеаризации уравнения члены высшего порядка
малости определяют поведение системы и могут
превратить ее как в устойчивую, так и в неустой-
чивую.
Таким образом, анализ устойчивости линеаризо-
ванной системы сводится к нахождению расположения
корней на комплексной плоскости, которое однозначно
определяется коэффициентами характеристического
3. Устойчивость и качество функционирования АСУ 93
уравнения. Однако не всегда можно вычислить корни
характеристического уравнения в аналитическом виде.
В соответствии с теоремой Абеля, корни уравнения выше
четвертого порядка в общем случае не могут быть найдены
аналитически в принципе. Поэтому желательно иметь та-
кие критерии, с помощью которых можно было судить об
устойчивости системы непосредственно по коэффициентам
характеристического уравнения, зависящих от параметров
Систем, и определять влияние изменяемых параметров на
расположение корней характеристического уравнения на
комплексной плоскости. Эти критерии называют критери-
ями устойчивости и подразделяются на алгебраические и
частотные.
3.1.2. Алгебраический критерий устойчивости Гурвица
Пусть дано характеристическое уравнение системы
вида
а„рп + а. рп~] + а,.рп 2 + ... + а + а = 0
при а0 > 0.
(1.70)
Гурвиц предложил алгебраический критерий*’, ко-
торый основан на построении специальных определителей
характеристического уравнения (1.70), называемых опре-
делителями Гурвица. Они составляются по следующим
правилам:
1) по главной диагонали выписывают все коэффициен-
ты от а1 до ап в порядке возрастания индекса;
2) дополняют столбцы определителя вверх от диаго-
нали коэффициентами с последовательно возраста-
ющими, а вниз - с последовательно убывающими
индексами;
3) на место коэффициентов, индексы которых больше
п и меньше О, ставят нули.
В соответствии с этими правилами, определитель
Гурвица и-го порядка для уравнения (1.70) имеет вид
} Заметим, что впервые задача отыскания алгебраического критерия устойчивости была
решена Раусом, но поскольку этот критерий был сформулирован в виде алгоритма ис-
пользование его на практике не всегда удобно.
94
Линейные автоматические системы управления
а\ а5
а0 а2 а4
= 0 а1 а3
О
О
О
(1-71)
ООО
Определители Гурвица более низкого порядка явля-
ются диагональными минорами А . Например, при п = 3
О
«о
а2
«о
2 -
«з .
5
О
а.
Поскольку в последнем столбце определителя Дл
стоят нули, за исключением ап то
п п Л-Г
Критерий Гурвица формулируется следующим
образом:
для того, чтобы АСУ была устойчива необходимо и
достаточно, чтобы все определители Гурвица
Д2, Дп
были положительными, и при этом выполнялось
условие
а0>0-
Пример 1.16
1. Пусть АСУ описывается дифференциальным
уравнением второго порядка, характеристическое
уравнение которого имеет вид: ajj1 + а}р + а2 - 0. Оп-
ределить условие устойчивости АСУ по Гурвицу.
Решение
Составим в соответствии с (1.71) определитель Гур-
вица:
ах 0
д2= 1
«0 «2
3. Устойчивость и качество функционирования АСУ 95
Тогда условия устойчивости системы запишутся в
виде:
А = а,А. = а > 0; А = а > 0; а > 0.
Поскольку ах > 0, то для выполнения условия А2 > 0,
коэффициент а2 должен быть также больше нуля. Таким
образом, для устойчивости системы второго порядка необ-
ходимо и достаточно, чтобы все коэффициенты характерис-
тического уравнения были положительными.
В случае если АСУ описывается ДУ третьего поряд-
ка, с характеристическим уравнением вида
р3 + а р2 + а2р + а = 0,
у/ X J
(1-72)
то определитель Гурвица будет
а0 а2
0 ах
Тогда, в соответствии с критерием Гурвица, для
устойчивой системы должны выполняться следующие
неравенства
<4 а3
А = а А > 0;
а0 а2
= а^2 - а0а3 > 0; А = aj > 0;
Анализ приведенных неравенств показывает, что
выполнения условия положительности всех определите-
лей Гурвица, все коэффициенты уравнения (1.72) должны
быть также положительны, но, кроме того, должно выпол-
няться неравенство: a2>aQa3 Таким образом, условие
положительности всех коэффициентов a.(i = 0,3) является
необходимым, но не достаточным условием устойчивости
рассматриваемой системы. Это утверждение остается спра-
ведливым и при порядке дифференциального уравнения
системы выше третьего (п > 3).
Заметим, что в случае, если А2 < 0 (неустойчивая
система), то учитывая зависимость коэффициентов а. от
96 Линейные автоматические системы управления
изменяемых параметров системы, необходимо эти парамет-
ры подобрать таким образом, чтобы выполнялось условие
устойчивости: а2 > aQa3.
Пример 1.17
Пусть передаточные функции звеньев замкнутой
АСУ, представленной на рис. 1.40, имеют вид
Рис. 1.40
Числовые значения параметров объекта управле
ния приняты равными TQ = 0,lc; £=0,45; ^=0,26
(см, пример 1.8). Найти числовые значения коэф
фициента передачи управляющего устройства ку
удовлетворяющего требованиям устойчивости
системы.
Решение
Найдем передаточную функцию разомкнутой сис-
темы
Wp(p)-Wo(p}Wy(p)-
куко
Т02р3 + 2Т£р2 + р •
Запишем передаточную функцию замкнутой сис-
темы по каналу х—>Д
»Пл(Р)-
1 7>' <- 2Т£р2 + р
1+»7р) Г2 р2 <-2Т£р2 + р + кук„
Характеристическое уравнение системы имеет
вид аналогичный (1.72). В нашем случае <я0 = То2 = 0,01; а, =
= 2£ То = 0,09; а2 = 1,0; а} = 0,26 к'. Согласно критерию Гур-
вица для устойчивой системы третьего порядка должно
выполняться неравенство: а. а.>апа, (см. пример 1.16).
<1 <*> V **
3. Устойчивость и качество функционирования АСУ 97
После подстановки числовых значений коэффициентов
окончательно получим ку < 34. Это неравенство и является
условием устойчивости рассматриваемой системы.
* * *
Заметим, что для характеристических уравнений
высоких степеней (п > 5) анализ влияния коэффициентов
на определитель Гурвица резко усложняется. Свободными
от этого недостатка являются частотные критерии устой-
чивости.
3.1.3. Частотные критерии устойчивости
Частотные критерии основаны на анализе располо-
жения тех или иных частотных характеристик на плоскос-
ти. При этом достигается:
1) наглядность, так как задача исследования систе-
мы любого порядка сводится к изучению плоской
кривой;
2) возможность экспериментального определения час-
тотных характеристик системы, что позволяет ис-
следовать такие системы, ДУ которых неизвестны;
3) сравнительно простой анализ влияния того или ино-
го параметра на устойчивость, а также возможность
суждения о качестве переходного процесса.
Частотные критерии можно разделить на две
группы. К первой группе относится критерий Михайлова
который обычно используется для исследования устойчи-
вости сложных систем, ко второй - критерий Найквиста,
применяемый для исследования устойчивости замкнутой
системы по частотной характеристике разомкнутой систе-
мы (используется, когда размыкание системы приводит к
существенным упрощениям частотной функции).
Критерий устойчивости Михайлова.
Пусть дано уравнение замкнутой системы
У( р) = р)Х( р),
где W(p) = В(р)/А(р) - передаточная функция замкнутой
системы.
4 Теория автоматического управления
98 Линейные автоматические системы управления
Тогда ДУ системы, преобразованное по Лапласу
можно записать в виде:
л(р)У(7?) = в(Ж(р),
где А(р) = а^рп + а}рп~{ + ... + ап р + ап - характеристичес-
кий полином п-ной степени,
В соответствии с основной теоремой алгебры этот
полином можно разложить на множители в виде:
А{р) = а^р- р^р-р^) ... {р-р),
(1-73)
где р^рг ...»р - корни характеристического уравнения
А{р) = Ь.
Выражение (1.73) действительно при любых значе-
ниях р, в частности при р =ja). Тогда (1.73) можно перепи-
сать так:
(1-74)
= a) jco -p)(jco-р) -р).
Рис. 1.41
Выражение (1.74) называется кривой Михайлова
и обычно обозначается D(j(o) = A(jco). Каждый сомно-
житель выражения (1.74) отображается на комплексной
плоскости вектором, конец которого лежит на мнимой оси
(рис. 1.41).
3. Устойчивость и качество функционирования АСУ 99
В основу критерия Михайлова положен принцип ар-
гумента: произведение комплексных чисел имеет аргумент,
равный сумме аргументов всех его сомножителей.
В нашем случае при изменении со от -оо до + оо
векторы сомножителей (jco-pj, i = \,n> поворачиваются
на угол я (рис. 1.41). Если корни лежат в левой части полу-
плоскости, то изменение угла будет положительным, если
в правой, - то отрицательным (вектор (jco -р.) поворачи-
вается против часовой стрелки в левой полуплоскости и по
часовой стрелке - в правой).
Запишем выражение (1.74) в показательной форме.
Учтем, что
(Л>-Р,)=ДеЖ’
где Al = |/со- pt|; <р. = arg(jw - р,).
Тогда
D(ja>) = A(jco) = aaA}eJlf:‘'A2eJ,f>2... Ар?1... AneJip" =
(1-75)
Из (1.75) вытекает, что изменение аргумента век-
тора Михайлова D( jco) равно сумме изменений аргумента
каждого сомножителя выражения (1.75), т. е.
п
AargD(jeo) = А<р = А</\,
Если все корни характеристического уравнения
расположены слева от мнимой оси (т. е. система устойчива),
то изменение аргумента каждого из сомножителей (jco -р.)
при изменении со от - оо до + оо ? равно + я:, а изменение аргу-
мента произведения всех сомножителей AargZ)(ja>) = + лп.
Если хотя бы один корень будет расположен в правой полу-
плоскости (система неустойчива), то изменение аргумента
вектора Михайлова AargD(jco) = + л(п - 2).
Заметим, что при изменении со от -оо до + оо кривая
Михайлова симметрична относительно оси абсцисс, что
позволяет ограничиться изучением кривой в диапазоне из-
менения со от 0 до + оо. Тогда условие устойчивости системы
по Михайлову можно записать в виде
4*
100 Линейные автоматические системы управления
AargD(»|0<<e<+oo-+«y. (1.76)
Годографы кривой Михайлова при изменении со от
0 до оо для устойчивых систем при различных значениях п
приведены на рис. 1.42.
й) —>4-оо
-J
Рис. 1.42
В соответствии с (1.76) критерий Михайлова фор-
мулируется следующим образом:
для того, чтобы замкнутая система была ус-
тойчивой, необходимо и достаточно, чтобы при
изменении со от 0 до оо вектор Михайлова D(jaj)
повернулся на угол +и —
Рассматривая расположение D{jco) на комплексной
плоскости (рис. 1.42), условие устойчивости можно сфор-
мулировать иначе: чтобы система была устойчива, необхо-
димо и достаточно, чтобы годограф вектора D(/со) прошел
на комплексной плоскости последовательно п квадрантов
в положительном направлении (против часовой стрелки),
не проходя через начало координат. Если годограф про-
ходит через начало координат, то система находится на
границе устойчивости. Расположение годографа на комп-
лексной плоскости для различных систем иллюстрируется
рис. 1.43.
3. Устойчивость и качество функционирования АСУ 101
+/
Рис. 1.43
Н, - система неустойчива,
У, - система устойчива,
ГУ - система на границе устойчивости
Критерий устойчивости Найквиста
Пусть дана замкнутая АСУ, структурная схема
которой представлена на рис. 1.44. Запишем изображение
выходной величины в виде:
П р) = рХ( р),
(1.77)
Wt(p) В{р)
\+W,(p) А{р)
где Wv(p)=
~ передаточная функция по кана-
лу х —* у замкнутой системы;
В (р)
e W1(p)*W2(p) --- - передаточная функция
Ар(р)
разомкнутой системы.
Рис. 1.44
Подставив W (р)в (1.77), можем записать
[l + ^(p)]K(p)=^(p)X(p),
102 Линейные автоматические системы управления
откуда характеристическое уравнение замкнутой системы:
1 + = о или Ар(р) + Вр(р) = 0,
где А (р) - характеристический полином разомкнутой сис-
темы п-й степени.
В реальных системах степень полинома В( р) мень-
ше степени полинома^( р) вследствие инерционности дина-
мических звеньев. Следовательно, полином {Ар( р) + Вр(р)}
имеет ту же степень, что иЛ^(р).
При р = jco. разложив соответствующие полиномы
на множители, имеем
1+и;(» =
п
Л(» А/
р
/-1
где р х. и р2~ корни уравнений A p(jco) + В (jco) = OuAp(jco) = 0
соответственно; А — вещественный коэффициент.
1.45
В соответствии с первым методом Ляпунова, за-
мкнутая система устойчива, если все корнир, лежат в левой
полуплоскости. Если разомкнутая система устойчива, то
корни р2. уравнения A (jco) = 0, тоже лежат в левой полу-
плоскости. Поскольку при делении комплексных чисел их
аргументы вычитаются, то при изменении со от -<» до +<»
Aarg[l + W (jco)] = 0. Следовательно, чтобы замкнутая система
была устойчива, необходимо и достаточно, чтобы годограф
вектора {1 + W (jco)} не охватывал начало координат при
3. Устойчивость и качество функционирования АСУ
103
изменении со от до + ©оф При со = 0 и при со -> соответс-
твенно 1 + Wp(jco) = const и 1 + lTp(jco) -> 1. Годограф вектора
{1 + JVp(jco)} представлен на рис. 1.45, а.
Если сместить ось ординат вправо на + 1, то начало
координат в новой системе совпадет с началом вектора
jco), а старое начало координат в новой системе совпадет
с точкой (—1;у0) (рис. 1.45,6).
Таким образом, критерий Найквиста можно сфор-
мулировать следующим образом: чтобы замкнутая сис-
тема была устойчива, необходимо и достаточно, чтобы
АФЧХ разомкнутой системы при изменении w от нуля
до бесконечности не охватывала точку с координатами
(- 1;/0). Заметим, что обратное утверждение является
только необходимым, но недостаточным условием неус-
тойчивости системы.
Пример 1.18
Определим вид АФЧХ при различных частотных
характеристиках разомкнутой системы.
Решение
1. Пусть разомкнутая система является апериодичес-
ким звеном второго порядка. Тогда частотную ха-
рактеристику системы можно представить в виде:
О) =
к
+ 1)(Т2 jo +1)
Если Т} = 0, то АФЧХ имеет вид, показанный на
рис. 1.46, а, если Т} ^0, то АФЧХ имеет вид, пока-
занный на рис. 1.46, б.
Поскольку АФЧХ разомкнутой системы с частотной
функцией fFp (jco) при любых Г. > 0 (z = 1, 2) не пере-
секает отрицательную полуось абсцисс, то эта сис-
тема всегда устойчива (см. также пример 1.16).
2. Пусть частотная функция разомкнутой системы
определяется выражением вида:
WP2 (» =
к
(?;>+1)(т2>+1)(т3>+1)'
104 Линейные автоматические системы управления
Годограф вектора WP (jco) представлен на
рис. 1.46, в, и при определенных параметрах, на-
пример при увеличении к, может охватить точку
(-1;/0). При этом система потеряет устойчивость.
3. Если последовательно с инерционными звеньями
включить интегрирующее звено с частотной ха-
рактеристикой Wjjco) = kJ (jco) , то умножение век-
тора АФЧХ, представленного, например, частотной
функцией Wp(jco) , на вектор IVjjco) = ~j(kj cd) с
аргументом, равным (-л/2), означает поворот всех
векторов Wp(jco) на угол —л/2 с одновременным
делением на со (рис. 1.46, г). Таким образом, АФЧХ
приближается к точке (-1;/0) и, следовательно,
включение интегрирующего звена в разомкнутую
цепь системы уменьшает запас ее устойчивости и
увеличивает склонность системы к колебаниям.
Пример 1.19
Для условий примера 1.17 проверить устойчивость
АСУ с помощью критерия Найквиста при коэффи-
циенте передачи устройства управления к = 20.
Решение
Запишем частотную функцию разомкнутой систе-
мы Wp(jco) в виде
3. Устойчивость и качество функционирования АСУ 105
WP (Ja>) = wp (p)
Tq (ja>)3 + 2^T0(jо)2 + ja)
Подставив в полученное выражение числовые зна-
чения параметров: Го = 0,1с; £ = 0,45; к0 = 0,26; к = 20, окон-
чательно получим
-0,47
0.0081tz)2 + (1-0,01й)2)2
5,2(1-0,0 let?2)
7 0.008 lew3 + й)(1 - 0,01й)2 )2 ’
Найденная зависимость позволяет построить годог-
раф Wp{j(o} (рис. 1.47). Как видно из рисунка, годограф
FKf (jet)) не охватывает точку (-1,/0), пересекая ось абсцисс
в точке (-0,57, у'0), что свидетельствует о достаточном за-
пасе устойчивости при принятом коэффициенте передачи
к =20.
У
jQ(03)
-1 -0,8 Л0,6 -0,4 -0,2 0
/ -0,2 -
I -0,4 -
0,2 Р(со)
^(»
-0,6
-0,8
Рис. 1.47
3.2. Качество процесса управления
Оценка качества процесса управления не менее
важна, чем анализ устойчивости системы, так как характер
динамики процессов в системе управления определяет ее
поведение при переходе из одного состояния (начального)
106 Линейные автоматические системы управления
в другое (конечное). В конечном итоге качество процесса
управления определяется размером динамической ошибки,
равной разности между текущим и заданным значениями
управляемой величины.
Изменение состояния АСУ возникает в результате
внешних воздействий, которые в общем случае являются
произвольной функцией времени и могут быть приложены
со стороны нагрузки, что характерно для систем стабили-
зации, или со стороны задающего воздействия - следящие
системы. В первом случае система должна минимально
реагировать на воздействие по нагрузке - инвариантная
задача. Во втором, для следящей системы, задание должно
воспроизводиться с минимальной ошибкой - ковариант-
ная задача.
Методы анализа качества процесса управления
делятся на две группы: прямые, при которых качество
процесса оценивается непосредственно по кривой переход-
ного процесса, и косвенные, оцениваемые по критериям
качества.
3.2.1. Прямые методы оценки качества
Эти методы предусматривают непосредственное
построение кривой переходного процессау(0 на основании
решения уравнения движения системы или по данным
эксперимента.
Переходный процесс устойчивой системы всегда
затухает и, в зависимости от характера затухания, под-
разделяется на монотонный и колебательный. При этом
имеется в виду, что на вход системы подано ступенчатое
возмущение/(/) = 1(/)А).
Обычно качество переходного процесса оценивается
по нескольким показателям (рис. 1.48):
Время регулирования t -время, по истечении кото-
рого отклонение управляемой величины y(f) от установив-
шегося значения у(°°) становится и остается меньше зоны
нечувствительности системы д = (0,01 -ь 0,05)у(°°)- Этот по-
казатель характеризует скорость протекания переходного
*’ В этом случае коэффициент передачи Аг по каналу f у равен у (со). Если /(/) = Л •!(/),
где А = const то к = у(оо)/ Я
3, Устойчивость и качество функционирования АСУ 107
процесса. Если кривая переходного процесса монотонна,
то этот показатель является единственным.
Время первого согласования t - время, по истече-
нии которого управляемая величина первый раз достигает
своего установившегося значения. Этот показатель также
характеризует скорость протекания процесса в начальный
период.
Рис. 1.48
1 - колебательный процесс (0 < £ < 1);
2 - монотонный процесс (£ > 1);
3 - полуколебательный процесс (£ = 1)
Перерегулирование а тах - отношение максимально-
го отклонения управляемой величины к своему установив-
шемуся значению в процентах: отах == (Аутах / )100, % .
Число перерегулирований п в течение времени t и
частота колебаний сок = 2п/Т .
Для процессов обоих типов (кривые 1 и 2
рис. 1.48) существует оценка точности работы АСУ в ус-
тановившемся режиме. Пусть при номинальном режиме
у(0) = 0, т. е. рассматриваем уравнение движения
системы в отклонениях от у*. Тогда статическая ошибка
Д(оо) = у(°°) -у(0) =Х°°)- Значение X00) можно найти, вос-
пользовавшись преобразованием Лапласа. В соответствии
с теоремой дифференцирования (1.27) имеем
= pY(p) -y(Q), или
OP
pY(p) = y(Q)+fy'(t)ep,dt.
о
(1.78)
108
Линейныеавтоматическиесистемы управления
Взяв предел от (1.78), приполучим
lim^K(p) = у(0) + limfy'(0e-₽' dt =
= ХО)+X00) - ХО) = X00),
откуда
X00) = А(°°) = limp И»
р-0
(1-79)
Выражение (1.79) является математической форму-
лировкой теоремы о конечном значении*’.
Приу*(/) = 1(Z) получим Г(р) = W(p)Y*(p) = W(p)/р, тогда
X00) = А(оо) = lim pJP(p)— = UmW(p)
р-*0 п р—*0
(1.80)
Пример 1.20
Пусть структурная схема АСУ имеет вид, пока-
занный на рис. 1.49. Передаточная функция объекта
задана:
Wo(p) =
f?p(p)«
Рис. 1.49
Найти установившуюся ошибку системы при двух
различных передаточных функциях устройства
управления: Wy^ (р) = kt; Wy2 (р) = к2/ р .
Решение
Запишем передаточную функцию замкнутой систе-
мы по каналу управляющее воздействие и ошибка Д:
(р) =
1
\^w.(p)-wy{PY
> Взяв предел от правой части выражения (1.78) при р —* оо, получим математическую
формулировку теоремы о начальном значении: у(0) = lim pY(p), где ^(0)- значение
функции у(/) при t = 0.
3. Устойчивость и качество функционирования АСУ 109
Подставив в полученное выражение соответствую-
щие передаточные функции, получим для первого и второго
случаев следующие соотношения:
(р) -
<Р) *
Воспользовавшись (1.80) найдем установившуюся
ошибку в системе для первого случая:
р-»0 1ТЛоп1
Таким образом, рассматриваемая АСУ относится
к классу статических систем, ошибка которой отлична
от нуля (рис. 1.48) и уменьшается с ростом коэффициента
передачи устройства управления к}.
Аналогичным образом найдем ошибку Д2(°°) для
второго случая:
В данном случае получим нулевую ошибку и,
следовательно, АСУ относится к классу астатических сис-
тем. Переходные функции этой системы для различных
коэффициентов демпфирования £ показаны на рис. 1.50.
Нетрудно убедиться, что рассматриваемая система (при
(р) = к2 / р), являясь астатической по управляющему
воздействию и может оказаться статической по возмущаю-
щему воздействию f. Для придания астатизма по ошибке Д и
110 Линейные автоматические системы управления
для этого канала, устройство управления следует включить
в прямую цепь последовательно с объектом управления.
3.2.2. Косвенные методы оценки качества
Эти методы обычно используют связь между пара-
метрами системы и показателями качества. К ним в час-
тности относят корневые методы, интегральные оценки и
частотные критерии качества.
1. Корневые методы
В общем случае уравнение переходного процесса
имеет вид
п
y(t).= к+^с^', (1-81)
Ml
где р- корни характеристического уравнения; с. - постоян-
ные интегрирования; k = y(<x>).
Так как корни р. входят в уравнение (1.81), то о
характере переходного процесса можно судить по их рас-
положению на комплексной плоскости. В частности, для
устойчивой системы, описываемой ДУ третьего порядка,
эти корни лежат слева от мнимой оси (рис. 1.51, а). На-
иболее медленно затухают те составляющие у(0> которые
имеют наибольшую постоянную времени Т т. е. корень
с наименьшей вещественной частью по абсолютной ве-
личине, например р{ . Чем дальше от мнимой оси
расположены корни характеристического уравнения, тем
дальше от границы устойчивости находится система и
тем выше ее быстродействие. Для оценки быстродействия
используют понятие степени устойчивости системы, под
которым понимают расстояние от мнимой оси до ближай-
шего корня характеристического уравнения. Величина/?min
может служить для оценки скорости затухания переходно-
го процесса, так как составляющая переходного процесса,
обусловленная этим корнем, затухает медленнее других.
Тогда можно записать:
y(t)» £(1 - е 7W)
Всеми остальными составляющими переходного про-
цесса можно пренебречь, так как они затухают быстрее.
3. Устойчивость и качество функционированияАСУ 111
Положив зону нечувствительности д = 0,05у =
~ 0,05/г, можно найти время регулирования /^(рис. 1.51,6).
Имеему(^)= 0,95& = k(l - или 0,05 = еОткуда,
учтя, что Tmax = l/pmin, получим:
Z-T In (1/0,05) = ЗТ .
р max - ' 7 max
Наличие комплексных сопряженных корней харак-
теристического уравнения р, = - а ± ja>. свидетельствует о
существовании колебательной составляющей в уравнении
движения системы (рис. 1.51, в):
Л(0 = Аеак‘ ^((Dkt + (p).
В этом случае для оценки скорости затухания колеба-
тельного процесса используют логарифмический декремент*)
затухания с/:
*> Декремент (лат. decrement) - уменьшение, убавление.
112 Линейные автоматические системы управления
У 2 max
Ае~аЛ sin(<wttx + <р)
Aeat(,'+Tk) sin^ + (DkTk + <p)
_ ine"*7'* = a t
Здесь учтено, что (o^ = 2л.
<у.
Введем обозначение р = уу-, тогда можно записать
J = = 2л .
л* к р.
Таким образом, чем меньше р, тем больше d, и, следова-
тельно, тем скорее затухает переходный процесс. При
<о* = 0 получим // = 0, б7=оо, и, следовательно, колебания
отсутствуют; при ак = 0 имеем р = d= 0, и, следовательно,
колебания не затухают.
2. Интегральные оценки
Они имеют целью дать общую оценку скорости за-
тухания и величины отклонения управляемой координаты
от заданного значения без определения того или другого в
отдельности.
Простейшей интегральной оценкой может служить
площадь между новым значением выходной величины
и его текущим значением у(0
(1-82)
/] = Г А(/)бЛ.
о
При этом Д(/) = уy(f) является текущей динами-
ческой ошибкой системы, представленной на рис. 1.52, а.
Для вычисления интеграла(1.82) можно воспользо-
ваться преобразованием Лапласа для ошибки системы.
00
Имеем £{Д(/)} = Д(р) = С&(f)e~p‘dt, откуда
о
Ит Д(р) = С &(t)dt = I
р о
(1.83)
3, Устойчивость и качество функционирования АСУ 113
t
Рис. 1.52
В нашем случае при у (?) = !(/); У (р) = 1/ р имеем
А(р) - - ЯО) - у - Т(р) •
Учтя, что
Г(р)=РК(р)Г(р)=^(р)/ри
К=ИтрУ(р) = ПтрУ(р)^(0),
/?—*0 р-*0
получим
Д(р) = [F(0) - W(P)]/P,
азатем, воспользовавшись (1.83), найдем/г
Недостаток интегральной оценки вида (1.82) состоит
в том, что она годится только для монотонных процессов
(рис. 1 .52, б). Если же имеют место колебания (рис. 1.52, в),
то алгебраическое сложение площадей может привести к
ситуации, когда при больших колебаниях /, = min.
В целях устранения этого недостатка на практике
чаще всего применяют квадратичный интегральный кри-
терий вида
00
I2 = fb2(f)dt
О
(1-84)
Этот критерий не зависит от знака Д(/) и, следова-
тельно, может быть применен как для монотонных, так и
для колебательных процессов.
Критерии /, и 12 являются функциями параметров
системы, изменяя которые можно минимизировать интег-
ральные оценки.
114 Линейные автоматические системы управления
-X
Существуют методы, позволяющие вычислить кри-
терий Z,, не решая ДУ системы. В частности, учитывая, что
X
А(/ш) |2 = А( jco)A(-jct)) и А(/<о) = J А(/)е''""dt, и проинтегри-
ровав I А( jw) 12 по со, получим
00 I 00
J* A(jcd) 2 da> = —J А(- jidjdcof \(t)e~ja)tdt =
^оо _(X *
00-00 00
= f f A(jQ)e'a'dQ = f Д2 (t)dt = I2.
-□о _x _oo
2л
Здесь b(jw) = A(p) = (FF(O) - FT(») /(».
J -*
Поскольку частотная функция системы W( jco) зави-
сит от параметров системы (коэффициентов усиления к и
постоянных времени А линейных динамических звеньев),
можно записать /2 e fik^Tj). Исследуя полученную зави-
симость на экстремум, можно найти значения изменяемых
параметров к. и Т., при которых удовлетворяется условие
/2 = min.
Заметим, что минимизация интегральной квадра-
тичной ошибки вида (1.84) приводит к большим перерегу-
лированиям переходного процесса (до 20 % от установивше-
гося значения^). В связи с этим применяют интегральные
критерии, учитывающие не только величину ошибки, но
и скорость ее изменения: 1
00
/3 = Г [Л2 (t) + у2Д2 (t)]dt >
—00
(1.85)
где у - весовой коэффициент, который определяет значи-
мость второго слагаемого подынтегральной функции.
В данном случае помимо ограничения на величину
ошибки А(0 налагается ограничение на скорость ее изме-
нения A(z). В результате чего мы получаем достаточно
быстрые и плавные переходные процессы.
Иногда кроме указанных ограничений учитывают и
ограничение на ускорение. Тогда интегральный критерий
принимает вид
3. Устойчивость и качество функционирования АСУ
115
Л = f [ A2 (I) + у2 А2 (Г) + у2А2(/)]^. (1.86)
-00
Подчеркнем, что все рассмотренные интегральные
оценки являются функцией параметров системы, следова-
тельно, их можно минимизировать, изменяя параметры
системы и прежде всего устройства управления.
3. Частотные критерии качества.
Эти критерии базируются на некоторых свойст-
вах частотной функции и, в силу ее связи с временными
характеристиками (см.п.1.5), позволяют судить о качестве
переходного процесса.
Например, оценка качества этого процесса по АФЧХ
разомкнутой системы производится следующим образом.
Пусть структурная схема системы имеет вид, показанный
на рис. 1.53, а. Тогда частотная функция разомкнутой сис-
темы будет
и-3
где (jo) = /(TJw +1).
Годограф вектора W {jco) для устойчивой систе-
мы представлен на 1.53, б, где величинарх характеризует
запас устойчивости замкнутой системы по модулю, а
= 2тг -ip х(со с) -запас устойчивости по фазе; со - частота
среза, при которой JV(jcoe) = 1. В хорошо демпфирован-
ных системах (при ст < 5 %)/>! = 0,1^0,5; > 30^-60 °.
Оценка качества переходного процесса может
быть также произведена по АЧХ замкнутой системы
(рис. 1.53, в). Максимальное значение АЧХ - Л/тах, соот-
ветствующее резонансной (собственной) частоте со , может
служить показателем колебательности. Чем больше Л/тах,
тем выше склонность системы к колебаниям. В хорошо
демпфированных системах Мтах
< 1,1-s-l,5. Частота, при
которой А(сос)/А(0) = 1, определяет частоту среза сос кото-
рая характеризует полосу пропускания частот. Чем шире
полоса пропускания частот, т. е. чем больше тем быст-
рее протекают переходные процессы, поэтому эта частота
может служить мерой быстродействия системы.
Существуют и другие методы оценки качества пере-
ходных процессов в системе по ее частотным характеристи-
кам. Например, учитывая, что для минимально-фазовых
систем существует однозначная связь между переходной
функцией h(t) и вещественной частотной характеристи-
кой Р(а>), можно, анализируя последнюю, получить ряд
оценок качества переходного процесса. В частности, если
Р(со) представляет собой положительную невозрастающую
3S
функцию, то перерегулирование а не превышает 18 %, если
<1Р(ш)1 da) отрицательная, убывающая по модулю, непре-
рывная функция, то имеет место монотонный переходный
процесс.
_____________________________________________117
4. Методы синтеза АСУ
Под синтезом АСУ понимают процедуру создания
Системы управления объектом, обладающей требуемыми
свойствами. Задача синтеза обычно решается исходя из
Следующих посылок: в любой АСУ можно выделить неизме-
няемую и изменяемую части (например, объект управления
ОУ и устройство управления УУ). Следовательно, для полу-
чения системы с заданными свойствами необходимо опре-
делить структуру и параметры изменяемой части системы,
иными словами, определить зависимость, связывающую
входные и выходные сигналы изменяемой части системы.
Эти зависимости называются законами управления или
регулирования.
4.1. Законы регулирования в линейных АСУ
Пусть дана АСУ, структурная схема которой пред-
ставлена на рис. 1.54. В данном случае изменяемая часть
системы УУ формирует управляющее воздействие u(t) в
зависимости от величины ошибки: А(/) =У(0-у(0-
I
I
*
ад
УУ
W0(p)
ОУ
Рис. 1.54
Зависимость, связывающая и и А, т. е. u(t) = F{A(f)},
называется законом регулирования,
В некоторых случаях в устройство управления мо-
жет подаваться информация о возмущающих воздействиях
fit) (рис. 1.54, пунктирная линия). Тогда закон регулирова-
ния примет вид
W(0 = F{A(/),X0}.
Рассмотрим линейные законы регулирования, при
которых устройства управления вырабатывают величину
118 Линейные автоматические системы управления
u(f) в функции ошибки Д(/) в соответствии со следующим
соотношением:
/ \ Z А/ \ Z /*А/ 1 d&(t) (1.87)
u(t) = k}A(t) + k2J&(t)dt + k3 ———
0
где fc. - коэффициенты пропорциональности (передачи).
1. Пропорциональный закон регулирования
(П-регулятор )
В данном случае управляющее воздействие и связано
с ошибкой Д пропорциональной зависимостью
u(f) = k{\(t).
(1.88)
При этом передаточная функция устройства управ-
лениия (пропорционального регулятора) имеет вид
Wy(p) = Wn(p) = k},
Если Wo(p) = ко, то передаточная функция замкну-
той системы по ошибке
w. (р) =
5
а установившаяся ошибка Д(°°) при подаче на вход системы
со стороны задающего воздействия ступенчатой функции
у*(/) = Л-1(f) в соответствии с (1.79) составит
Д(°°) = Нт рА(р)
= ^PWy^Y*(P>TTkk
Таким образом, статическая ошибка Д(<*>) в рас-
сматриваемой системе пропорциональна задающему
воздействию у*(/) = А и обратно пропорциональна коэф-
фициенту усиления в разомкнутой системы кр = кк{. При
этом Д (оо)^0, и следовательно рассматриваемая система
относится к классу статических.
Поскольку управляющее устройство реализуется с
помощью усилительного (безынерционного) звена, система
обладает относительно высоким быстродействием. Если
4. Методы синтеза АСУ
119
полученные характеристики системы удовлетворяют тех-
нологическим требованиям, то задача синтеза решена.
2. Интегральный закон регулирования
(И-регулятор)
Здесь управляющее воздействие формируется про-
порциональным интегралу от ошибки
t
u(t) = к2Г A(t)dl", (1.89)
О
При этом передаточная функция устройства управ-
ления (интегрального регулятора):
W(p) = WH(p) = k2/p.
Передаточная функция замкнутой системы по
ошибке при Wo(p) - ко,будет
Тогда в соответствии с (1.79),установившаяся ошиб-
ка А(<*>) по каналу у*—> А будет равна нулю.
Таким образом, рассмотренная система обладает
высокой точностью в установившемся режиме и относится
к классу астатических. Следует иметь в виду, что при реа-
лизации И-регулятора увеличивается склонность системы
к колебаниям, что обусловлено снижением быстродействия
регулятора, т.к. после нанесения возмущения в начальный
период времени значение интеграла мало.
* Заметим, что система, астатическая по задающему
воздействию^*, может оказаться статической по возмуще-
нию f. Например, при Wo/(p) = -kf Iр и/(0 = В-1(0 получим:
/с
—7ГГ W А Д0°) = Bkf /(кк2),
р + к к, J v v 0 27
т. е. имеет место статическая ошибка по возмущению.
3. Пропорционально-интегральный
закон регулирования (ПИ-регулятор)
Когда желательно сочетать в установившемся режи-
ме высокую точность интегрального регулятора с большим
быстродействием в переходном режиме пропорционального
120 Линейные автоматические системы управления
регулятора, сигнал управления формируют в соответ ствии
с выражением
Wy (Р) = ^ПИ (?) = V — = ~1Р + к1
Р Р
(1.90)
При этом передаточная функция ПИ-регулятора
, к. к.р + к.,
ffly(p) = ^ПИ (р) = £, + -7- = .——-- ,
а передаточная функция системы по ошибке при Wo( р) = к0
имеет вид:
wy.,(P) =
Р
Р + ко(к\Р + М ’
Как и в предыдущем случае Д(°°) = 0, т. е. система
относится к классу астатических. В то же время эта система
обладает достаточно большим быстродействием, так как на
начальном этапе управления она работает как П-регулятор.
В дальнейшем с течением времени преобладающее влия-
ние оказывает интегральная часть и система полностью
устраняет ошибку.
Заметим, что введение интегрирующего звена
уменьшает запас устойчивости системы, в связи с чем уве-
личивается склонность ее к колебаниям. Действительно,
представим систему с ПИ-регулятором в виде, показанном
на рис. 1.55,а (при к} = 1). Передаточная W(p) и частотная
W (jco ) функции разомкнутой системы соответственно
равны
wp(p) = w0(p)wy(P) = ^o(/?)[i+—];
\ р)
wp (jco) = Wo (jco) [ 1 - / —У
Таким образом, W(jco) состоит из двух слагаемых,
второе из которых [_/(&2поворачивает вектор
W (jco) по часовой стрелке, приближая его годограф к точ-
ке (-l;j'O) и, следовательно, запас устойчивости системы
уменьшается как по модулю, так и по фазе (рис. 1.55, 6).
4. Методы синтеза АСУ 121
Подчеркнем, что введение интегрирующего звена
в прямую цепь управления делает систему астатической
по возмущению _/*, но увеличивает склонность ее к коле-
баниям.
4. Пропорционально-дифференциальный закон
регулирования (ПД-регулятор)
Управление по производной не имеет самостоя-
тельного значения, так как в установившемся состоянии
производная ошибки равна нулю и регулирование прекра-
щается*’. Однако введение производной играет существен-
ную роль в динамических режимах, поскольку позволяет
учитывать не только наличие ошибки, но и тенденцию к
ее изменению. Имеем:
, ч , ж z х , б7Л(/)
w(Z) = k{ А(7) + k3 —у—
(1.91)
При этом W(p) = = kx + k3p, а передаточная фун-
кция по ошибке при JV0( р) = к0 имеет вид
> В связи с этим обратную связь по производной часто называют «гибкой», в отличии
от жесткой обратной связи, при которой существует функциональная зависимость
и — f (А), в частности, в случае применения П-регулятора и = кхА .
122
Линейные автоматические системы управления
* (р) =
У Д
1
1 + £о(А +^з^) ’
В этом случае Д(<*>) ф 0, т. е. система относится к
классу статических.
Введение в закон регулирования производной поз-,
воляет сформировать управляющее воздействие даже при
отсутствии ошибки на входе регулятора, что увеличивает
быстродействие системы. Кроме того, введение производ-
ной подавляет колебания в системе и ускоряет протекание
переходных процессов, т, е. улучшает качество переходного
процесса.
Убедимся в сказанном, проанализировав частотные
характеристики системы, структурная схема которой пред-
ставлена на рис. 1.56,а. Имеем W (jco)= Wo{jco)[I +jk3a)\.
Следовательно, как и в случае nrf-регулятора, частотная
функция Wp{jaf) состоит из двух слагаемых, но при этом
второе слагаемое поворачивает вектор Wp(jco) против ча-
совой стрелки, удаляя годограф этого вектора от точки
(-1; jO) и тем самым увеличивая запас устойчивости систе-
мы (рис. 1.56, б).
Рис. 1.56
4. Методы синтеза АСУ 123
5. Пропорционально-интегрально-дифференциальный
закон регулирования (ПИД-регулятор)
Здесь закон управления (1.87) реализуется в пол-
ном объеме. При этом передаточная функция устройства
управления запишется в виде:
wy(P) = №пил(р) = к,+^ + к3р.
р
(1.92)
Введение в закон регулирования интегральной час-
ти приводит к тому, что установившаяся ошибка в системе
равна нулю, и, следовательно, система относится к классу
астатических.
Поскольку вначале переходного процесса ПИ-регу-
лятор ведет себя как П-регулятор, введение производной
для этого периода улучшает качество переходного процесса
(аналогично ПД-регулятору). В дальнейшем, по мере зату-
хания переходного процесса, влияние производной падает
и основную роль начинает играть интегральная составля-
ющая (как в ПИ-регуляторе).
Подчеркнем, что при введении производной в закон
регулирования необходимо обязательно учитывать спек-
тральный состав различных помех /(/), действующих в
системе (см. п.10.4.1.). Вчастности, если предположить, что
/(/) = ^sinco^ (где (ох - высокая частота), то f'(t) = ахcoxcosco}t
и, следовательно, амплитуда производной увеличивается
в раз, что существенно снижает помехоустойчивость сис-
темы и может привести к ухудшению качества ее работы.
4.2. Коррекция линейных АСУ
Коррекция АСУ осуществляется введением в нее
корректирующих звеньев для обеспечения требуемого ка-
чества процессов управления объектом.
Существует несколько видов коррекции.
1. Последовательная коррекция (рис. 1.57)
Пусть передаточная функция скорректированной
(желаемой**) системы задана и равна FT (р). Передаточная
Один из методов построения желаемого оператора преобразования системы рассмотрен
в п. 4.6.2.
124 Линейные автоматические системы управления
функция неизменяемой части системы равна Wc(р). В этом
случае корректирующее звено с передаточной функцией
Wk (р) включается последовательно с неизменной частью
системы и определяется известными Wc(p) и W ( р): *
(1-93)
откуда
(р)=
Wc(p)
> ^(Р)
Рис. 1.57
2. Параллельная коррекция (рис. 1.58)
В этом случае корректирующее звено включается
параллельно с неизменной частью системы. Тогда можно
записать
"'„ы-ад+’Мр).
(1-94)
откуда
Рис. 1.58
3. Коррекция с помощью обратной связи
В этом случае корректирующее звено может быть
включено как в цепь обратной связи (рис. 1.59, а), так и в
главную (прямую) цепь последовательно с неизменяемой
частью системы (рис. 1.59, б).
4. Методы синтеза АСУ
125
а
Рис. 1.59
При включении корректирующего звена в цепь
обратной связи (встречно-параллельная коррекция) пере-
даточная функция по каналу х —► у будет
откуда
w ,, m(p)-^(p)
(1-95)
При включении этого звена в прямую цепь при
единичной обратной связи имеем
We(p)Wk (/>)
FKCK (р)----
“ \ + Wc(p)Wki(p)
(1-96)
откуда
(Р) =
* * *
Использование того или иного вида коррекции в ос-
новном определяется удобством технической реализации,
поскольку в линейных системах их динамические свойства
могут быть в принципе одинаковыми при любых типах кор-
ректирующих устройств.
Для получения формул перехода от корректиру-
ющих устройств одного типа к другому при одинаковых
)FK(р) необходимо приравнять правые части соответству-
126
Линейныеавтоматическиесистемы управления
ющих уравнений. Например, приравняв правые части
уравнений (1.93) и (1.95):
wQ(p)wkl(p) =
wc(p)
1 + (p)Wk3 (p) ’
найдем
Wk3 (p) =
1 - (p)
^(р)^,(рУ
Полученное соотношение связывает передаточные
функции корректирующих звеньев при последовательной
и встречно-параллельной коррекциях.
Пример 1.21
Пусть необходимо синтезировать линейные ПД- и
TIH-регуляторы, используя корректирующие зве-
нья.
Решение
ПД-регулятор можно реализовать на базе П-регу-
лятора с передаточной функцией f^n(p) = f^c(p) = ку при
помощи охвата усилителя отрицательной обратной связью
в виде апериодического звена первого порядка с передаточ-
ной функцией Wa(p) = к /(Тр + 1) (рис. 1.60). Тогда переда-
точная функция замкнутой системы запишется в виде
К____________
1 + к/. /(Г.р +1) T„p + (l + W
«/
Рис. 1.60
При достаточно большом коэффициенте усиления
(к » 1), величинами Та1к^ 1/к ,можно пренебречь. Тогда
3^ з з^
Wbu (р) “ ~ + 1 = 7~ + Т- Р = + кзР = (р)-
кл к, £
а а d
4. Методы синтеза АСУ
127
Для реализации ПИ-регулятора введем положитель-
ную обратную связь (к < 0). Тогда получим:
ку
1 - к-Л /(Тар +1)
^Ар) =
к 1 кг
= k-i+—- = k+~ = wJpy
Т. Р Р
Таким образом, система, структурная схема ко-
торой представлена на рис 1.60, может при определенных
значениях параметров динамических звеньев реализовать
как ПД- так и ПИ-законы регулирования
4. Системы подчиненного управления
Пусть объект управления представлен в виде после-
довательно включенных инерционных звеньев, выходные
координаты которых могут быть измерены. Тогда каждым
из этих звеньев можно управлять автономно, что дает ряд
преимуществ: независимость настройки контуров и воз-
можность достижения высокого быстродействия.
Рассмотрим многоконтурную систему с п контура-
ми, каждый из которых предназначещцля управления i-ou
выходной координатой объекта^., / = 1,и (рис 1.61). Посколь-
ку во внутренние контуры управления задание и подается
йз внешних контуров, все они являются последовательно
подчиненными, за исключением последнего, который назы-
вается главным. Именно поэтому рассматриваемая система
и получили название - системы подчиненного управления
(СПУ). Она была предложена Кесслером и является разно-
видностью коррекции с помощью обратной связи с коррек-
тирующим звеном, включенным в прямую цепь.
В качестве критериев качества переходного процесса
Кесслер предложил использовать величину перерегулиро-
вания (J тах и время регулирования t, которые желательно
минимизировать. Поскольку эти критерии противоречивы,
более корректной будет следующая формулировка цели
управления: достижение максимального быстродействия,
т. е. ^ = min, при перерегулировании, не превышающем
заданного значения (обычно атах < 5 %). Синтез системы,
реализующей поставленную цель, производится поконтур-
128 Линейные автоматические системы управления
но, начиная с внутреннего контура. Рассмотрим процедуру
синтеза на конкретном примере.
ГОС - главная обратная связь;
ПОС - подчиненная обратная связь;
FT .(р) - передаточная функция автономного регу-
лятора /-го контура;
р) - автономные звенья объекта управления
/-го контура;
Пример 1.22
Определить передаточную функцию устройства
управления при заданной передаточной функции
объекта управления, которая бы удовлетворяла
сформулированному выше критерию. Структурная
схема внутреннего контура системы имеет вид,
показанный на рис. 1.62. Здесь объект управления
ОУ представлен тремя последовательно вклю-
ченными звеньями, причем предполагается, что
звенья, характеризуемые постоянными времени
^/^2 ~ малоинеРЧионны€ по сравнению со звеном,
характеризуемым постоянной времени То , т. е.
") 1
Рис. 1.62
4. Методы синтеза АСУ 129
Решение
При выполнении условия Т • Т « Т + Ти , звенья
с малыми постоянными времени можно заменить эквива-
лентным звеном:
Тогда Wol( р) примет вид
(1-97)
Структура устройства управления УУ, а следова-
тельно, и вид передаточной функции JV.(p) выбирается из
следующих соображений:
1) установившаяся ошибка в системе должна быть рав-
на нулю, т. е. система должна быть астатической,
следовательно, в структуре управляющей системы
должна содержаться интегральная составляю-
щая;
2) для реализации цели управления (достижения
максимального быстродействия при атах < 5%)
желательно скомпенсировать большую постоянную
времени Т .
Сформулированным требованиям отвечает ПИ-ре-
гулятор, передаточную функцию которого можно
представить в виде:
(р)-*,+-=+v,
Р Тп
Запишем передаточную функцию разомкнутой
системы
W = (Ж, (/>) =
автоматического управления
130 Линейные автоматические системы управления
Если принять Ти = То , то большая постоянная
времени объекта управления Г будет скомпенсирована
и передаточная функция замкнутой системы по каналу
их~+ух примет вид:
W(p)
W {р)----р—
О] и
и
Обозначим
тогда
и [i — гр2,
к ~ ’’
О| И
и
О] и
Таким образом, замкнутая система описывается
линейным ДУ второго порядка, а вид переходной функции
h(t) системы зависит от величины коэффициента демпфи-
рования X.
Учитывая принятые соотношения между парамет-
рами системы и коэффициентами £и Г, получим:
и ц
к
Oj W
и
и
2П., К
О) и д
(1-98)
Известно, что при = V2/2 = 0,707 максимальное
перерегулирование атах ^4,3 <5 %, что соответствует,
требованиям к качеству переходного процесса в системе.
Подставив числовое значения £ = V2/2 в выражение (1.98)
и учитывая, что Г - То^, найдем оптимальное значение к^
в смысле достижения цели управления:
и
01
(1-99)
и
44.7^2 2*.7„
При этом передаточная функция оптимального
устройства управления:
4. Методы синтеза АСУ 131
(1100)
Т р
О] г
где ки - коэффициент передачи пропорциональной части ПИ-
регулятора, определяемый в соответствии с (1.99) пара-
метрами объекта управления;
Статическую ошибку системы можно определить,
воспользовавшись теоремой о конечном значении (1.80)
при w(/) = 1(0.
Д(оо) = lim р&(р) = limfF д(р) = 0
р—*0 р-*0 1 7
(р)=
передаточная
функция замкнутой системы по каналу их Д.
Таким образом, синтезированная система управле-
ния выходной величиной объекта управления^, относится
к классу астатических и отвечает всем требованиям сфор-
мулированным выше.
Аналогично рассчитывают остальные контуры сис-
темы, причем внутренние контуры принимают в качестве
объекта управления.
В общем случае при синтезе систем подчиненного
управления нужно руководствоваться следующими пра-
вилами.
1. Каждому звену объекта управления с большой посто-
янной времени должно соответствовать звено с обрат-
ной передаточной функцией и такой же постоянной
времени в структуре управляющего устройства.
2. Значения коэффициентов пропорциональности при
пропорциональной и интегральной частях должны
быть выбраны в соответствии с соотношениями
(1.99), (1.100).
Заметим, что если в составе объекта управления
имеется интегрирующее звено, то передаточная функция
устройства управления для реализации поставленных целей
должна содержать только пропорциональную часть, т. е.
^у1(р) = где к{ определяется выражением (1.99).
5*
132 Линейные автоматические системы управления
4.3. Параметрический синтез устройств управления
Весьма часто приходится решать задачи выбора
оптимальных параметров изменяемой части системы
(устройства управления) в смысле экстремизации при*
нятого критерия оценки качества процесса управления.
В частности, широкое применение получили относитель-
но простые пропорционально-интегральные регуляторы,
во многих случаях обеспечивающие удовлетворительное
качество работы объекта управления. Типовая структур-
ная схема такой системы представлена на рис. 1.63. Пусть
объект управления описывается звеном второго порядка с
передаточной функцией
Рис. 1.63
Как показано в предыдущем параграфе, переда-
точная функция устройства управления, реализующего
ПИ-закон регулирования может быть представлена в виде
^у(Р) =
где к.Т- искомые параметры ХМ-регулятора.
Тогда, передаточная функция замкнутой системы
по каналу f -* А (возмущающее воздействие - ошибка)
будет
(р) -
1 + »;(р)и;(р)
тХр
ТХ2Р3 + 2ШР2 + Г,(1 + кик„)р + ку„'
4. Методы синтеза АСУ 133
Изображение ошибки по Лапласу при подаче на
вход системы ступенчатого возмущения f(t) = 1(7) можно
записать в виде:
Kp) = WfMF(p) =
C2P2+CiP + CO _С№
d2p3 + d2p2 + dxp + с70 D(p) ’
(1.101)
где С(р\ D(p) - алгебраические полиномы т-ой и п-ой степе-
ни соответственно (т = 2, п = 3);
с, d. - коэффициенты полиномов. В нашем случае: cQ= Т к0;
с. = с= 0; d= к к ; d = Т (I + к кп); d=2T Т£; dA = ТТ \
1 2 О у о I у4 у 0у7 2 у (F 3 у о
В качестве критерия оценки качества функциони-
рования системы примем интегральный квадратичный
критерий 12, определяемый выражением (1.84). Учтя что
00 J +00
12 = ГД2(/># =— f|A(ycu)|2 do, (п.3.2.2), для нашего случая
о 2л
можно записать
= I A Си =--| ---------------а (О.
•ь 2;т
Подобные интегралы табулированы и при полиноме
D(jo)) третьего порядка имеем:
Подставив в полученные выражения значения ко-
эффициентов полиномов с и dокончательно получим
№
*Л2г„е<1+w - тш
(1.102)
Найденная зависимость интегральной оценки /2
от изменяемых параметров системы в принципе позволяет
исследовать его на экстремум-минимум, например, клас-
сическим способом: взяв частные производные от 12 по па-
раметрам ku и Ти и приравняв их нулю. Решив полученную
систему уравнений относительно неизвестных параметров
устройства управления, найдем их оптимальные значения
(к*, Т*), минимизирующие 12.
134 Линейные автоматические системы управления
Как показали результаты расчетов, во многих слу-
чаях поверхность I2 =<p(ki{, Г )не имеет четко выраженного
экстремумам, следовательно, задача нахождения I2 =min
практически не имеет однозначного решения. В связи с
этим для определения конкретных значений параметров
регулятора ки и Г, удовлетворяющих условию /2 = min,
применяются те или иные инженерные методы суть ко-
торых состоит в том, что значением одного из параметров
регулятора задаются, а затем, исследуя зависимость /2 как
функцию второго параметра определяют его оптимальное
значение. В частности, искомые параметры можно опреде-
лить, воспользовавшись следующим приемом. Возьмем час-
тную производную —где /2 определяется выражением
дТ„
(1.102), и, приравняв к нулю, найдем зависимость Т ~ f(k^.
Окончательно получим
Из приведенного выражения вытекает, что при
к *ко »1, единицей, стоящей в знаменателе, можно пре-
небречь, и тогда Г* , т. е. значение параметра уп-
равляющего устройства Г* при определенных условиях
практически не зависит от коэффициента передачи пропор-
циональной части регулятора ки. В связи с этим возникла
возможность автономного определения ки = к*.
Заметим, что из полученного соотношения, определяющего
квазиоптимальное значение , следует, что чем меньше
величина коэффициента демпфирования £, т. е. чем боль-
ше склонность системы к колебаниям, тем меньше должен
быть коэффициент передачи интегральной части регулято-
ра, уменьшая эту склонность.
Пример 1.23
Пусть параметры объекта управления в системе,
представленной на рис. 1.63 имеют следующие чис
ловые значения Г = 2,0 с; £= 0,5; к° = 1,2. Требуется
определить оптимальные в смысле /2 = min пара-
метры устройства управления ку и Т,
4. Методы синтеза АСУ
135
Решение
Воспользовавшись соотношением -То/^ , найдем
оптимальное значение параметра = 2,0/0,5 = 4 с. Подста-
вив числовые значения параметров объекта управления
(Г, &о) и регулятора Т* в (1.102) окончательно получим
Зависимость 12 = /(^представлена на рис. 1.64.
Ее анализ показывает, что при значениях ки > 8 интеграл
/2 становиться близок к нулю, и дальнейшее увеличение
коэффициента передачи регулятора нецелесообразно.
At
-0,051
Рис. 1.65
Приняв к =
1 и
F(p) = —, получим
и воспользовавшись (1.101) при
136
Линейные автоматические системы управления
Взяв от Д(т?) обратное преобразование Лапласа,
найдем переходную функцию по каналу f -> А , график
которой представлен на рис. 1.65.
4.4. Принципы построения инвариантных систем
В теории автоматического управления под инва-
риантными^ понимают системы, в которых выходная
величина инвариантна к внешним воздействиям, т. е. после
окончания переходного процесса ошибка системы не зави-
сит от этих воздействий. Примером инвариантной системы
может служить мостовая схема, применяемая в системах
измерения (рис. 1.66). Здесь при условии соблюдении
уравнений баланса R}R2 = R3R4 ток z в одной из диагоналей
моста не зависит от напряжения £/, подводимого к другой
диагонали.
Рис. 1.66
Для достижения полной инвариантности некоторой
координаты у.(/) относительно значения возмущающего
воздействия/^/) необходимо и достаточно, чтобы переда-
точная функция р) между внешним воздействием/?(/) и
выходной величиной объекта j/7) была тождественно равна
нулю при отсутствии прочих воздействий и при нулевых
начальных условиях. При ненулевых начальных услови-
ях ставится цель сделать тождественно равной нулю вы-
нужденную составляющую решения дифференциального
уравнения системы. При этом свободная составляющая,
Инвариант (фр. invariant) - неизменяющийся.
4. Методы синтеза АСУ 137
обусловленная ненулевыми начальными условиями, может
быть отличной от нулевого значения.
Рассмотрим систему управления с обратной связью,
структурная схема которой представлена на рис. 1.67.
Рис. 1.67
Имеем
Y(p) = W^p)F(p),
FK (р)
где И/(р) = -— , ° - передаточная функция замк-
нутой системы по каналу: внешнее воздействие/- вы-
ходная величина объекта у; W0(p), №„(p), f^oc(p) - пере-
даточные функции объекта управления, измерительного
элемента и обратной связи,соответственно.
Поскольку W0{p) и W/p) заданы, достигнуть абсо-
лютной инвариантности можно только при W (р) -> оо , т. е.
при большом коэффициенте усиления в цепи обратной свя-
зи кос, так как = 0. При этом передаточная функ-
ция по каналу у* у может и не быть равной нулю. Имеем:
W. (р)-------°^7 0С^7----,
уу 1+и;(р)и;с(Жи(р)’
тогда 1™ W * (р) =
К такому результату и стремятся при синтезе абсо-
лютно инвариантных систем, так как необходимо достичь
инвариантности выходной координаты и не потерять воз-
можности управления объектом.
Для получения большого коэффициента усиления
косу можно применять внутреннюю положительную обрат-
ную связь. При этом
138 Линейные автоматические системы управления
W (р) =--------------------в^р)А2(р)------ (1.103)
°zP l-W,(p)W2(p) Al(p)A2(p) - Bj(p)B2(p)
где W\(p) = В}(рУА{(р), W2(p) = В2(р)/А2(р) - передаточные
функции звеньев, являющихся составными частями зве-
на обратной связи (звено с передаточной функцией W}(p)
охвачено положительной обратной связью с передаточ-
ной функцией W ( р)).
Условие инвариантности сводится к равенству нулю
знаменателя выражения (1.103):
Al(p)A2(p)-Bl(p)B2(p)-Q. (1.104)
Заметим, что для выполнения условия инвариант-
ности (1.104) требуются устройства, выполняющие операцию
идеального дифференцирования. Небольшая ошибка при
этом может привести к появлению в дифференциальном
уравнении отрицательных членов и, следовательно, к потере
устойчивости. Такие системы, по определению академика
Андронова, являются «негрубыми». Таким образом, тре-
бования инвариантности и устойчивости противоречивы,
и это противоречие появляется вследствие того, что, при-
ближаясь к абсолютно инвариантной, система может стать
«негрубой».
Можно показать, что необходимое условие физи-
ческой реализуемости абсолютно инвариантной системы
заключается в том, чтобы характеристический полином
разомкнутой системы был не равен нулю, а передаточная
функция корректирующего устройства вводимого в систе-
му для достижения условий абсолютной инвариантности
имела степень полинома числителя ниже степени полинома
знаменателя.
Как уже отмечалось, для достижения инвариантнос-
ти у7 (0 относительно необходимо и достаточно, чтобы
W^p) = 0. Этого можно добиться и в системах, использую-
щих принцип управления по возмущению, для чего №^(р)
нужно представить в виде разности двух передаточных фун-
кций, одна из которых является корректирующей:
~ wo(p) - WК(р).
4. Методы синтеза АСУ
139
Тогда критерий реализуемости абсолютно инвариан-
тной системы можно интерпретировать следующим образом:
необходимым (но недостаточным) признаком физической
реализуемости и абсолютной инвариантности системы явля-
ется наличие в схеме по меньшей мере двух каналов передачи
возмущающего воздействия между начальным приложением
возмущения и той точкой, относительно которой стремятся
достичь инвариантности. Принцип двухканальности (дуаль-
ности) является основной идеей при выборе рациональной
структуры абсолютно инвариантных систем, но не заменяет
условий физической реализуемости.
В комбинированных системах управления выпол-
нение условий инвариантности требует также создания
противодействия, равного по значению и противополож-
ного по знаку возмущающему воздействию. Например,
пусть имеем двухконтурную систему стабилизации,
изображенную на рис. 1.68. Для удовлетворения условий
инвариантности относительно возмущения f требуется,
чтобы передаточная функция объекта управления W (р)
по каналу f —* у была равна передаточной функции W^( р)
по второму каналу f у включающему корректирующие
звено с передаточной функцией р), но обратна по знаку,
т. е. должно выдерживаться соотношение:
(р) - »^(р)-
Откуда
w0 (р) 1+и; (р)^о (р)
ГТГ / \ °4 7 О] V-r / «2 Г
№к (р) =
(PWo, (р)
Здесь Wo (р) (z = 1,4) - динамические звенья, входя-
щие в структуру объекта управления. Если степень полино-
ма числителя И^(р) меньше степени полинома знаменателя,
то корректирующее звено ЖА(р) физически реализуемо. Для
компенсации неучтенных возмущений в систему вводится
140 Линейные автоматические системы управления
обратная связь с передаточной функцией Woc(p) • В отличие
от систем стабилизации, использующих только обратную
связь по отклонению, системы, использующие также разо-
мкнутую цепь управления по возмущению (комбинирован-
ный принцип управления), не имеют противоречия между
условиями устойчивости и инвариантности.
Рис. 1.68
Отметим, что инвариантность системы по отноше-
нию к внешнему неизменяющемуся воздействию f = const
достигается в астатической системе первого порядка.
Действительно, для замкнутой астатической системы при
(р) = к/р имеем
pwo(p)
Р + №0 (Р)к
Г(р).
где W( р) - передаточная функция объекта управления по ка-
Из полученного выражения следует, что в соответс-
твии с (1.80) в установившемся режиме выходная коорди-
ната ХОне зависит от возмущения f = const. Аналогично
можно показать, что астатическая система второго поряд-
ка отрабатывает без ошибки любые постоянные сигналы
и любые линейные функции времени. Эти рассуждения
можно распространить на астатические системы любого
порядка.
Пример 1.24
Структурная схема следящей системы представ-
лена на рис. 1.69. Требуется определить коэффи-
4. Методы синтеза АСУ
141
циент передачи корректирующего звена Wk(p),
компенсирующего первую производную от управ-
ляющего воздействия и, при котором устраняется
скоростная ошибка, т. е.реализовать систему, ин-
вариантную по отношению к du/dt. Звенья системы
имеют следующие передаточные функции: усили-
тель - W\( р) - кх; исполнительный электродвига-
тель- W2(p) = к2/ р(Тр + из мерительное у стройс-
тво угла поворота двигателя <р — W3(p) = к3; кор-
ректирующее звено - W ( р) = kkp.
Числовые^ значения параметров звеньев ~ к} = 10;
кэ = Ю ; кл = 1 В/град; Т = 0,02с.
Z Ас • s* J х
Рис. 1.69
Решение
Найдем передаточную функцию системы по каналу
и —* Д . Учтя двухканальность подачи входного сигнала и,
можно записать:
w^p^wj^+w^p)-
I WMW2{P-)W3{P)
\+wpW) \ + wp{p)
где W ( p) = p)W2( p)W3( p) - передаточная функция разо-
мкнутой системы.
Подставив значения передаточных функций звень-
ев в полученное выражение, найдем:
^(р)=
Тр2 + р + kxk2k3
(1.105)
Дифференциальное уравнение системы, преобразо-
ванное по Лапласу имеет вид:
А(Р) = (P)U(Р) ипи
142 Линейные автоматические системы управления
(7р2+р +&]&2&3)Д(р) = Тр1 + (1 - к2к3кк )р U(p). (1.106)
.
Для того чтобы ошибка системы А была инвариан-
тна к скорости изменения управляющего сигнала w, необ-
ходимо, чтобы полином в правой части уравнения (1.106)
не содержал членов с комплексной переменной р в первой
степени, что соответствует отсутствию на входе системы
производной du/dt. Это условие выполняется при
(1 - к2к,кЛ = 0 , откуда кк
Л А- '
----=----= и, 1С.
kJa 10-1
Числовое значение кк, получено в предположении
что корректирующее звено идеально осуществляет опера-
цию дифференцирования. Так как физически такое звено
нереализуемо, то реальная инвариантная система будет
работать с точностью до г. Заметим, коэффициент пере-
дачи кк не зависит от постоянной времени Т, так как эта
величина определяет влияние ускорения d2u/dt2. В случае
если была бы поставлена задача устранить ошибку и по
ускорению в корректирующее звено необходимо было бы
ввести и вторую производную от и. Рассмотренная система,
как вытекает из (1.105), также инвариантна и к постоянно-
му управляющему воздействию w, т. е. относится к классу
астатических.
4.5. Синтез модальных регуляторов
В том случае, если все переменные состояния (п. 1.2)
известны, возникает возможность управления каждой со-
ставляющей переходного процесса где pi - i-й корень
характеристического уравнения замкнутой системы. Эти
составляющие иногда называются модами**, а управление
ими - модальным управлением.
Переменные состояния могут быть измерены с помо-
щью соответствующих средств измерения. Тогда регулятор,
состоящий из обратных связей по переменным состояния,
называется регулятором состояния. При этом качество
переходного процесса определяется расположением кор-
} Мода (лат. modus) - мера, способ.
4. Методы синтеза АСУ 143
ней р на комплексной плоскости, которое в свою очередь
зависит от коэффициентов передачи цепей обратной связи.
Если часть переменных состояния не может быть измерена,
тогда строится так называемый наблюдатель состояния
(модель объекта управления), который воспроизводит не
поддающиеся измерению переменные состояния. Наблю-
датель, выходными координатами которого являются все
переменные состояния (как воспроизведенные, так и из-
меренные) объекта управления совместно с регулятором
состояния образует модальный регулятор.
Синтез модальных регуляторов основан на мате-
матическом описании системы в переменных состояния.
При этом в частности используются такие характеристики
системы, как управляемость и наблюдаемость (п.2.3.1.).
4.5.1. Синтез регуляторов состояния
Рассмотрим полностью управляемый объект с од-
ним входом х = и , уравнения состояния которого имеют
вид, аналогичный (1.16)
v == Av + Bw.
(1.107)
Будем полагать, что все переменные состояния
v (z = 1, ri) могут быть измерены и использованы при построе-
нии регулятора состояния. Система в этом случае называет-
ся системой с полной информацией о состоянии. Линейный
закон управления, реализованный с помощью обратной
связи по всем переменным состояния, имеет вид
и = -С v
(1.108)
где С - матрица коэффициентов передачи обратной связи
размерности 1хп.
Если закон управления (1.108) используется в систе-
ме (1.107), то замкнутая система описывается следующими
уравнениями состояния:
v = [A-BC]v.
(1.109)
144 Линейные автоматические системы управления
Структурная схема объекта управления ОУ с ре-
гулятором состояния PC, составленная в соответствии с
уравнением (1.109), показана на рис. 1.70.
Проектирование регулятора состояния заключает-
ся в таком выборе матрицы коэффициентов передачи С,
чтобы были получены желаемые динамические свойства
системы. Один из методов синтеза регулятора состояния
состоит в достижении желаемого расположения на комп-
лексной плоскости корней характеристического уравнения
системы, описываемой уравнением (1.109), т. е. собствен-
ных значений матрицы замкнутой системы А - ВС . Этот
метод состоит из следующих этапов.
1. При известном математическом описании объек-
та управления составляют уравнение состояния
(1.107).
2. Вычисляют матрицу управляемости объекта (1.66)
и проверяют совпадение ранга этой матрицы с раз-
мерностью системы.
3. Вычисляют характеристический многочлен матри-
цы А по формуле
L.(A) = detUJ-А = Лп+а,Лп~1+... + а„ Л +ап, (1-110)
-/1 J rl "
где Л - независимая переменная; I - единичная матрица.
4. Если пара матриц А и В полностью управляема, то
она записывается в так называемой канонической
5. Задаются желаемым характеристическим полино-
мом замкнутой системы
4. Методы синтеза АСУ 145
£,(Л)-р"+*1р-' +
+ Ь лР + Ь
(1.111)
как разность коэффи-
6. Вычисляют компоненты канонического вектора об-
ратной связи С = |с*,
циентовполиномов(1.110)и(1.111): с* == b — a., i = l,n.
7. С помощью специальной матрицы преобразования
Р преобразуют коэффициенты матрицы С* из ка-
нонического базиса, в котором они определены, в
естественный базис, в котором записаны исходные
уравнения состояния, т. е. определяют матрицу
С = С*Р. Коэффициенты этой матрицы с. и явля-
ются коэффициентами передачи обратной связи,
при которых обеспечивается желаемое поведение
системы, соответствующее характеристическому
полиному (1.111).
Проиллюстрируем применение изложенной мето-
дики на конкретном примере.
Пример 1.25
и
3
Рис. 1.71
ТГ - тахогенератор, датчик частоты вращения 0)
с выходным сигналом
ДТ - датчик тока Z с выходным сигналом и.;
из - задающий сигнал;
и - управляющий сигнал.
Пусть объект управления представляет собой
электропривод состоящий из двигателя посто-
146
Линейные автоматические системы управления
янного тока с независимым возбуждением Д и
безынерционного тиристорного преобразователя
ТП. Принципиальная схема электропривода пред-
ставлена на рис. 1.71. Электромеханическая
Т и
м
электромагнитная Т постоянные времени заданы:
Т =0,5с;Т =0,1с. Необходимо синтезироватьрегу-
м э
лятор состояния объекта PC.
Решение
В качестве переменных состояния, однозначно
определяющих состояние объекта, примем частоту вра-
щения двигателя О) и ток якорной цепи i. Предположим
для простоты, что момент сопротивления на валу двигате-
ля М равен нулю. Тогда, учитывая что момент двигателя
Мд пропорционален току в якорной цепи i (Мд = kJ), где
k8 - коэффициент передачи двигателя при постоянном
потоке возбуждения, и8 = const) и воспользовавшись выра-
жением (1.4), уравнение движения электропривода можно
записать в виде
т do) , . z. .. _ч
J~dt=kdl' С1-112)
Учитывая, что электромеханическая постоянная
времени определяется выражением Тм =JRJk2, где7? - об-
щее сопротивление якорной цепи двигателя, перепишем
(1.112) в виде
o)f
(1.113)
В соответствии с вторым законом Кирхгофа, запи-
шем уравнение равновесия ЭДС в якорной цепи
ид = Е + Ri + L-, (1.114)
dt
где ид = kju - напряжение, подводимое к якорной цепи дви-
гателя;
&тп - коэффициент передачи тиристорного преобразова-
теля ТП;
и - управляющий сигнал на входе ТП;
Е = kQ<o - электродвижущая сила в обмотке якоря;
L - индуктивность якорной цепи.
4. Методы синтеза АСУ 147
Разделив обе части уравнения (1.114) на R и учтя
что Т,л = L/R пи=к и, запишем его в виде
j д тп 7
1 • ^тп
——ш------1 + —^и. (1 Ц5)
RT3 Т3 RT3 1 >
Уравнения (1.113) и (1.115) являются уравнениями
(Состояния рассматриваемого электропривода в скалярной
форме. Обозначив а> =v \}w.y =v 2, эти уравнения в соответс-
твии с (1.107) можно записать в виде
v = Av + Bw,
где А и В — соответствующие матрицы:
(1.116)
0
А.
дт;
о
RT
э
В соответствии с (1.66) определяем матрицу управ-
ляемости объекта (при п = 2):
0
U= В АВ
ТП
RT2
(МП)
RT3
Так как определитель матрицы (1.117) не равен
нулю (v = п = 2), то, следовательно, рассматриваемый объ-
ект является полностью управляемым.
Определим характеристический полином матрицы
А . В соответствии с (1.110) имеем
La (Л) = det л! - А = det
0
j Заметим, что в данном случае частота вращения ш одновременно является выходной ко-
ординатой системы у.
148 Линейные автоматические системы управления
Обозначив а0 = 1;
Э М
= а2, запишем
La(A ) = а^.2 + <7]Л + а2.
(1.118)
Собственные значения матрицы А (корни харак-
теристического уравнения (1.118)) равны:
Записав, в соответствии с (1.46), характеристичес-
кий полином объекта в виде
ЬА(Л) = Т2Л2 +2£П + 1,
(1-И9)
и сопоставив его с выражением (1.118), получим Т = ^/7’Э7’Л1 ;
£ = Тм/2у1ТэТм. Тогда при заданных числовых значениях Г
и 7^ получим Т = 0,22 с; = 1,12. Таким образом, коэффици-
ент демпфирования > 1 и электропривод представляет со-
бой апериодическое звено второго порядка. При этом корни
характеристического уравнения LA (Л ) = 0 - вещественные,
отрицательные и равны: = -2,82 с-1; Л2 = -7,36 с-1.
Так как объект, характеризуемый парой матриц А
и В, полностью управляемый, то эти матрицы можно пред-
ставить в канонической форме А* и В*. Рассмотрим один
из алгоритмов такого преобразования. Можно показать,
что если пара матриц А, В характеризует полностью управ-
ляемый объект, то существует невырожденная матрица Р,
с помощью которой можно преобразовать эти матрицы к
канонической форме. В частности, если уравнения состоя-
ния объекта заданы в виде (1.116), то существует следующее
преобразование подобия:
4. Методы синтеза АСУ 149
v* = Pv или у = p-'v*,
которое преобразует уравнение (1.116) к канонической
форме пространства состояний
v* = A* у + B*w
(1.120)
Здесь
А*=РАР-1; В* = РВ; (1121)
Р,А”-‘
(1.122)
гдеР1 = 0,0,...l|U-1; U
равляемости (1.66).
- матрица, обратная матрице уп-
В нашем случае, воспользовавшись (1.117), найдем
мд
RT
э
тп
тп
тп
Тогда Р] = 0,1 U
м эд
0.
и
м
о
ТП
В соответствии с (1.122), с учетом (1.116), найдем
(1.123)
а в соответствии с (1.121), получим
150 Линейные автоматические системы управления
Заметим, что элементы матриц А* и В* можно также
получить, воспользовавшись характеристическим полино-
мом (1.118). В этом случае имеем (при Т ; Т = 0,1с)
(1.124)
Подставив в (1.124) соответствующее значение коэффици-
ента а., получим тот же результат, что и ранее.
В качестве желаемого расположения на комплекс-
ной плоскости соответствующих значений at (корней ха-
рактеристического уравнения Z. - pi) замкнутой системы,
состоящей из объекта управления и регулятора состояния,
представляющего собой систему безинерцыонных обрат-
ных связей по переменным состояния, пользуются тем или
иным распределением. В частности, при использовании
распределения Баттерворта, корни характеристического
уравнения системы лежат на окружности в левой части
комплексной плоскости и находятся на одинаковом угло-
вом расстоянии друг от друга.
В нашем случае полином Баттерворта второго по-
рядка имеет вид
£м(2) =^2 + л/2а>(/ + <у02,
(1.125)
где (О0 -радиус полуокружности, на которой расположены
корни полинома Lu(X).
Обозначим: Л « р*9 V2co0 = ю02 = 62. Тогда полином
(1.125) примет вид
400 = р2 +ь1р+ь2.
(1.126)
Определим коэффициенты канонического вектора
обратной связи С* = |с* с*|, как разность между коэффици-
ентами характеристических полиномов разомкнутой (1.118)
и замкнутой (1.126) систем;
4. Методы синтеза АСУ 151
с* = Ь - а = Ь -Х/Т Т ;
2 2 2 2 ' м э ’
с* = Ьх-а^Ьу-\1Тэ
и составим матрицу коэффициентов передачи в цепях
обратной связи С = С*Р, где Р - матрица преобразования
(1.123). Имеется:
* *
2С1
м эд
О
тп
о
КТ
э
(1.127)
тп
э
2 /Т Т
/ * М 3
Коэффициенты желаемого характеристического
полинома замкнутой системы (1.126) Ьх и Ь2 выбираются
исходя из требований к качеству переходного процесса.
Например, для того чтобы величина перерегулирования
o'max не превышала 5% коэффициент демпфирования £
должен быть равен . Тогда, сравнивая коэффициенты
полиномов (1.119) и (1.125) найдем
^=5/2/271, где T = jTJ3.
Подставив в полученное выражение числовые значения Т
и £ получим
= —. —= 44,6 с'1.
270Л0Л-л/2/2
При этом искомые коэффициенты равны:
Z>, = V2w0 = V2• 44,6 = 63 с’1; b, = <и 2 = 44,62 = 1971 с"2.
X VF м Vr
Приняв R = 1 Ом; ks = \Вс/рад; ктп = 10, в соответствии с
(1.127) найдем числовые значения коэффициентов матрицы:
152 Линейные автоматические системы управления
Таким образом, знание матрицы коэффициентов
передачи обратной связи С позволяет записать закон уп-
равления (1.108) и уравнение состояния замкнутой системы
(1.109):
(1.128)
где G — (А — ВС) - матрица замкнутой системы, элементы
которой Су определяются элементами известных матриц
А,В и С
В нашем случае, эти матрицы приведены в выраже-
ниях (1.116), (1.127), что позволяет определить матрицу G
G = (A-BC) =
0
Ап.
RT3
£п
£21
(1.129)
2
-63
Воспользовавшись уравнениями (1.128), (1.129) и
учтя, что =0 , v2 =i, можно построить структурную
схему системы стабилизации частоты вращения привода
а) с помощью регулятора состояния. Эта схема может быть
использована для моделирования переходных процессов
в системе при ненулевых начальных условиях z(0) = z0 ;
0) (0) = . При нулевых начальных условиях свободное дви-
жение в системе определяется корнями характеристическо-
го у равнения (1.126)*\ которые при h =63 с"1; Ь? =1971 с~2
L м
Здесь учтено, что характеристические полиномы желаемой и синтезированной системы
совпадают.
4. Методы синтеза АСУ
153
равны рХ1 =-31,5± /31,3, что свидетельствует о наличии
колебательного затухающего переходного процесса.
Заметим, что теоретически, путем подбора коэффи-
циентов характеристического полинома (1.126), корни за-
мкнутой системы рх и р2 можно произвольно разместить в
левой части комплексной плоскости корней, что в принци-
пе позволяет обеспечить любое быстродействие системы.
Однако при этом увеличивается значение управляющего
воздействия и резко форсируется переходный процесс в
системе. Так как в реальных системах и тот и другой фактор
ограничены, то при синтезе регулятора состояния необхо-
димо выбрать тот или иной критерий качества переходного
процесса. В рассматриваемом примере таким критерием
является обеспечение величины сг„ <5 %. Часто закон
ГПаЛ
управления синтезируется таким образом, чтобы обеспе-
чить минимум квадратичной интегральной ошибки (1.84).
Существуют и некоторые другие критерии, оценивающие
качество переходного процесса конкретных систем.
4.5.2. Принципы построения наблюдателей состояния
В том случае если измерение всех переменных со-
стояния невозможно, а иногда и нецелесообразно, исполь-
зуются специальные устройства, получившие название
наблюдателей состояния. Входными величинами наблю-
дателя являются входной u(t) и выходной y(f) сигналы**,
Для примера 1.25: u(t) - управляющий сигнал на входе тиристорного преобразователя;
ХО = - частота вращения двигателя.
154 Линейные автоматические системы управления
измеренные на физическом объекте, а выходными - восста-
новленные с определенной точностью переменные состоя-
ния v . (t), т. е. оценки вектора состояния v (/), отмечаемые
знаком Эти оценки в соответствии с (1.108) поступают
на вход регулятора состояния, с выхода которого сигнал
обратной связи и{1) поступает на вход объекта управления.
Как уже упоминалось регулятор состояния с наблюдателем
называются модальным регулятором состояния, структур-
ная схема которого представлена на рис. 1.73.
ОУ - объект управления;
НС - наблюдатель состояния;
PC - регулятор состояния;
и - задающее воздействие;
А, В, С, Со, К - матрицы преобразования.
Сформулируем задачу синтеза наблюдателя состо-
яния. Пусть математическая модель объекта управления
задана в виде уравнений состояния:
V* =А* v
(1.130)
У = Cov.
(1.131)
Матрицы А,В и Со известны. Кроме того, имеется
информация о входной и и выходной у величинах объекта
управления. Требуется построить наблюдатель, который
выдавал бы оценку переменных состояния v. Имеется в
виду, что непосредственно извлечь переменные состояния
v из выражения (1.130) нельзя.
4. Методы синтеза АСУ 155
Если наблюдатель восстанавливает (оценивает)
весь вектор состояния V, то он называется наблюдателем
состояния полного порядка, а если только его часть (на-
пример, п -1), то наблюдателем пониженного порядка или
редуцированным** наблюдателем.
Структурная схема простейшего наблюдателя со-
стояния для объекта с одним входом и и одним выходом у
представлена на рис. 1.74 (жирные линии). Структурная
схема объекта управления ОУ построена в соответствии
с уравнениями (1.130), (1.31) и представляет собой абс-
трактную математическую модель той или иной степени
сложности описывающую (по крайней мере качественно)
реальные процессы в объекте. Наблюдатель состояния НС
представляет собой физическое устройство, вырабаты-
вающее оценку v вектора состояния V. На вход модели и
наблюдателя поступает реально измеренный сигнал и.
Таким образом, если начальные условия модели
объекта vQ и наблюдателя v0 одинаковы, то переходные
процессы в них будут также протекать одинаково. Необ-
ходимость определения начальных условий объекта vQ с
последующей передачей их на наблюдатель является одним
из недостатков простейшего наблюдателя. Другим его не-
достатком является функционирование по разомкнутому
циклу, что, как известно может привести к существенным
ошибкам. Эти недостатки устраняются в асимптотическом
наблюдателе состояния, в котором предусмотрена автома-
тическая оптимизация отклонения v0 от v, за счет введения
отрицательной обратной связи по ошибке Д;, = у -у, которая
через матрицу коэффициентов передачи обратной связи
наблюдателя К подается на вход интегрирующего звена
НС (рис. 1.74, тонкие линии).
Размерность наблюдателя, показанного на рис. 1.74,
равна размерности системы п. При этом уравнения состоя-
ния «-мерного наблюдателя***имеет вид:
v = Av + КДу +Bw, (1.132)
Редуцировать (лат. reducere) - упрощать.
Заметим, что выходной сигнал объекта содержит одну ненулевую переменную состояния
vw, которая может быть непосредственно подана на вход регулятора состояния. Это поз-
воляет применять наблюдатель пониженного (и - 1) порядка.
156 Линейные автоматические системы управления
или учтя, что \ =у-у, y=Cov, выражение (1.132) можно
записать в виде
v = А - КС0 v + Ку +Ви.
(1.133)
Из уравнения (1.133) следует, что варьируя элемен-
тами матрицы К , можно получить желаемое собственное
значение матрицы А - КС0 например, с целью минимиза-
ции ошибки Ду.
Методика синтеза наблюдателя состояния практи-
чески аналогична методике синтеза регулятора состояния,
изложенной выше, но при этом вместо матрицы управляе-
мости определяется матрица наблюдаемости объекта (1.67),
ранг которой позволяет сделать вывод о наблюдаемости
этого объекта.
4.5.3. Модальный регулятор
Уравнение состояния наблюдателя (1.133) соот-
ветствует случаю, когда обратная связь по управлению и
отсутствует, т. е. это уравнение собственно наблюдателя.
Для общего случая, когда регулятор состояния PC и наблю-
датель состояния НС, образующие модальный регулятор
МР, включены в замкнутый контур (рис. 1.73), уравнения
состояния системы управления объектом имеют вид:
4. Методы синтеза АСУ
157
v = Av - BCv + Bw ,
3?
v = A-KCn - ВС v + KC.v+Bw .
О Оз
(1.134)
(1.135)
Уравнение (1.134) описывает состояние замкнутого
регулятора состояния PC, а уравнение (1.135) ~ состояние
замкнутого наблюдателя НС. Эти уравнения получены из
уравнений состояния (1.107) и (1.33) с учетом того, что для
замкнутой системы управления имеют место следующие
соотношения: у ~ Cov; и = из - Су. Так как векторы состоя-
ния v и его оценки у, входящие в уравнения (1.134) и (1.135),
однозначно связаны, то при исследовании динамических
режимов в замкнутой системе эти уравнения используются
совместно.
Выясним характер свободных движений замкнутой
системы, обусловленных ненулевыми начальными услови-
ями, положив из = 0 и введя новую переменную = у - у.
Тогда уравнения (1.134), (1.135) примут вид
v = |А-ВС| v -ВСДу,
А„=|А-КС0|Д?.
(1.136)
(1.137)
Уравнение (1_. 137) получено путем вычитания (1.134)
из (1.135). Вектор Д^ характеризует точность оценки на-
блюдателем вектора состояния V при наличии в замкнутой
системе регулятора состояния. Из уравнения (1.137) сле-
дует, что ошибка Д^ не зависит от параметров (элементов
матрицы С) регулятора состояния.
Соотношения (1.136), (1.137) можно записать в
виде
ВС
А-КС0
(1.138)
Свободное движение системы (1.138) определяется
характеристическим уравнением
158
Линейные автоматические системы управления
£(Л) = det Л1 - Ао =
= det AI-A + BC-det Л1-А + КСП = О,
и *
(1.139)
Из (1.139) вытекает, что полный набор собственных
значений модального регулятора (матрицы Ао) состоит из
собственных значений системы управления без наблюда-
теля (det Al - А + ВС = 0) и собственных значений наблю-
дателя (det Al - А + КС0 = 0). Таким образом собственные
значения регулятора состояния и наблюдателя не влияют
друг на друга, что позволяет проводить синтез этих ус-
тройств независимо друг от друга. Регулятор состояния
синтезируется в предположении, что все переменные со-
стояния объекта известны (например, рис. 1.72), а затем
синтезируют наблюдатель как независимую замкнутую
систему (например, рис. 1.74).
Из уравнения (1.138) следует, что порядок характе-
ристического уравнения замкнутой системы определяется
порядком регулятора состояния и наблюдателя. Если мат-
рица А имеет размерность и, то управление с наблюдателем
полного порядка и регулятором состояния имеет порядок
2и. Так как наблюдатель обладает собственной инерцион-
ностью, то замкнутая система, использующая только регу-
лятор состояния, обладает большим быстродействием.
В заключение заметим, что применение модальных
регуляторов целесообразно в том случае, если можно пост-
роить достаточно адекватную модель объекта управления и
в то же время не удается измерить те или иные переменные
состояния.
4.6. Частотные методы синтеза АСУ
Эти методы традиционно применяются при реше-
нии задач синтеза электромеханических систем управле-
ния и основаны на связи переходной функции замкнутой
системы с ее вещественной частотной характеристикой,
которая в свою очередь связана с логарифмической амп-
литудно-частотной характеристикой L(a)). При этом
предполагается, что синтезируемая система относится к
классу минимально-фазовых.
4. Методы синтеза АСУ
159
4.6.1. Логарифмические частотные характеристики
Логарифмическая амплитудно-частотная характе-
ристика (ЛАХ) представляет собой зависимость, соответс-
гвующую двадцати десятичным логарифмам амплитудно-
частотной характеристики А(а>):
£(<w) = 201g Л(<у).
(1.140)
Здесь Цй)) - ЛАХ, измеряемая в децибелах (дб\
Напомним, что бел - это логарифмическая единица
двух одноименных физических величин, соответствующая
десятикратному увеличению этих величин. Например,
при увеличении мощности выходного сигнала Рвых(со) по
отношению к мощности входного PJcd) в десять раз имеем
Рвых(й>)/Рех(со) = 10. Тогда учитывая, что мощность сигнала
пропорциональна квадрату его амплитуды и учтя соотно-
и
:ение (1.37), можно записать:
42(g))/«2 = Л2((У) = 1О,
или после логарифмирования получим:
21g Л(а>) = 1 бел.
При этом, в соответствии с (1.140) и с учетом того,
что 1 бел = 10 дб, получим
I(w)-201gAto) = 10 дб.
В случае если Р (а>)/Р (а>) =100, аналогичным обра-
вых ед
зом можно получить £(tt>) = 20 дб и т. д.
При построении ЛАХ используется полулогариф-
мическая сетка: по оси абсцисс откладывается частота а) в
логарифмическом масштабе, а по оси ординат с равномер-
ной шкалой откладывается величина £(со) в дб. Если по оси
абсцисс откладывается не сама частота со, а ее десятичный
логарифм, то единица приращения lgty соответствует одной
декаде (дек), т. е. десятикратному увеличению частоты со.
Заметим, что использование логарифмических
частотных характеристик позволяет оперировать с более
простыми соотношениями. В частности, если частотная
функция может быть представлена в виде произведения
160 Линейные автоматические системы управления
сомножителей, то результирующая ЛАХ может быть
найдена путем суммирования ординат, соответствующих
отдельным сомножителям. Кроме того, логарифмические
кривые выполаживаются, что позволяет с большей уверен-
ностью производить кусочно-линейную аппроксимацию
этих кривых. Например, для интегрирующего звена имеем:
Л (со) = к/ш (гипербола). Тогда
£(<о) = 201g А(ф) = 201gк - 20Igco
и, следовательно, ЛАХ представляет собой прямую линию,
проходящую через точку с координатами Igco = 0 (при
a) =tt>! = 1 с-1), L(o)) = 201gАг, и имеющую отрицательный
наклон равный - 20 дб/дек. Это вытекает из того, что каж-
дое удесятирение частоты соответствует увеличению 1gto
на одну единицу и, следовательно, уменьшению L(w) на
20 дб. Точку пересечения этой прямой с осью абсцисс мож-
но найти, положив L(a)) = 0 , что соответствует значению
Л(со) = 1. Напомним, что частота, при которой выполня-
ется условие Л(со) = 1, называется частотой среза (Ос. В
рассматриваемом случае а)с = к.
В случае дифференцирующего звена А(р)) = кш и
£(со) = 201g Аг + 201gсо представляет собой прямую линию
с положительным наклоном +20 дб/дек и частотой среза
равной шс = \/к .
Аналогичным образом можно показать, что если
АЧХ объекта имеет вид: А(со) = к/(Оп, то ЛАХ этого объекта
представляет собой прямую с отрицательным наклоном
-п-20 дб/дек, а при А(а)) = ка)п прямая L(co) будет иметь
положительный наклон +п • 20 дб/дек.
Логарифмическая частотная характеристика апе-
риодического звена первого порядка имеет вид:
£(<у) = 201g А(ш) = 201g-j=L—(1-141)
yJT2a>2 +1
При этом, так называемая, асимптотическая ЛАХ
строится следующим образом. В координатах 1g со, Цо))
параллельно оси ординат проводится прямая IgcOj = const,
где со, - \/Т называется сопрягающей частотой (рис. 1.75).
Для частот меньших, чем сопрягающая, т. е. при со <со1, в
4. Методы синтеза АСУ 161
выражении (1.141) можно пренебречь первым слагаемым
под корнем. Это позволяет в диапазоне частот 0<ы <а)}
заменить зависимость (1.141) приближенным выражением:
L(a>) « 201g А:. Для диапазона частот а)} <а> <<*> в выраже-
нии (1.141) можно под корнем пренебречь единицей, что
позволяет записать:
Как было показано выше, это выражение соот-
ветствует прямой с отрицательным наклоном - 20 дб/дек,
проходящей через точку Igo) = lgcol; Z(a>) = 20IgA;. Кусоч-
но-линейная зависимость L(co) , показанная на рис. 1.75
сплошной линией и является асимптотической (прибли-
женной) ЛАХ. Действительная ЛАХ показана на том же
рисунке пунктиром.
Для апериодического звена второго порядка описы-
ваемого вуравнением (1.48) асимптотическая ЛАХ строится
аналогично изложенному выше. Воспользовавшись выра-
жением (1.46) с учетом (1.48), имеем:
Ца)) = 201g А(со) = 201g
2.-1’
(1.142)
6 Теория автоматического управления
В координатах to, L(co) (рис. 1.76, а) проведем
вспомогательные прямые а) и со =to2, где tOj = 1/7,,
со2 -1/Т2 - сопрягающие частоты. Пусть 7] > Т2. Тогда
при О <(0 <со{ выражение (1.142) можно заменить прибли-
женным Z(co)«201g&; при <а) <со2 - Ца>)«201g—; при
к
со2 <(л) <00 - L((o)«201g--. Таким образом, асимптотичес-
кая ЛАХ апериодического звена второго порядка состоит
из трех отрезков прямых: с нулевым наклоном, с отрица-
тельным наклоном - 20 дб/дек, с отрицательным наклоном
-40дб/дек. На рис. 1.76,а эта характеристика изображена
сплошными линиями. Там же пунктиром показана дейс-
твительная ЛАХ.
На рис. 1.76,6 приведена асимптотическая ЛАХ коле-
бательного звена, которое описывается тем же уравнением
(1.46), что и апериодическое звено второго порядка, но при
4. Методы синтеза АСУ
163
О < £ < 1. Эта ЛАХ представляет собой две асимптоты с накло-
ном 0 и - 40 дб/дек при сопрягающей частоте равной (О = a)Q,
где а>0 = 1/Т - частота свободных колебаний (при £ = 0).
Аналогичным образом можно построить ЛАХ для
объектов, описываемых дробно-рациональными переда-
точными функциями более высокого порядка.
Так как для минимально-фазовых систем сущест-
вует однозначная связь между переходными процессами и
амплитудно-частотной характеристикой системы, то для
оценки качества процесса управления весьма удобным
является использование логарифмической амплитудно-
частотной чарактеристики £(со). Проиллюстрируем ска-
занное на конкретных примерах.
Пусть имеем систему, состоящую из одного интег-
рирующего звена с W(p) = к/р , охваченного единичной
отрицательной обратной связью. Тогда, как было показано
выше, ЛАХ разомкнутой системы представляет собой пря-
мую с наклоном - 20 дб/дек, представленную на рис. 1.77.
Передаточная функция замкнутой системы имеет
вид
где Т() = \/k = 1/а)с.
(1.143)
6*
164 Линейные автоматические системыуправления
Из (1.143) вытекает, что рассматриваемая система
представляет собой апериодическое звено первого порядка
с переходной функцией
/?(/) = 1-е т° .
Таким образом, при пересечении ЛАХ оси абсцисс
с наклоном -20 дб/дек переходный процесс протекает мо-
нотонно. При этом как показано в параграфе 3.2.2., время
регулирования t составляет примерно ЗГ0.
Рассмотрим теперь систему с двумя звеньями, ох-
ваченными единичной обратной связью (рис. 1.78, й).
Рис. 1.78
4. Методы синтеза АСУ 165
Частотная функция разомкнутой системы будет:
Wp(j(o) =
>(7> + i)’
а соответствующая ЛАХ запишется в виде:
£(<у) = 201g к - 20Igo? - 201g +\,
(1.144)
В соответствии с (1.144) на рис. 1.78, б построена
асимптотическая ЛАХ, представляющая собой два отрезка
прямых: один с наклоном - 20 дб/дек при со <a>t, второй с
наклоном -40 дб/дек при со >сох, где сох = 1/7] ~ сопрягаю-
щая частота.
Запишем передаточную функцию замкнутой сис-
темы:
W (р) =
uyxjr 7
1+гр(р)
или
Учтя, что сос = к = \/Тй , tOj =\/Т\ , можно записать
(1.145)
В соответствии с (1.145) при ш, > 4й? величина
коэффициента демпфирования £
больше единицы, что
свидетельствует о монотонности переходного процесса
(рис. 1.78, в; кривая 1). Заметим,что при а)х =а)с и £ >1
имеем Т2ш2 < 1 и последним слагаемым в (1.144) можно пре-
небречь. Следовательно, поведение системы практически
определяется только параметрами интегрирующего звена.
При этом, как и в предыдущем примере, ЛАХ пересекает
ось абсцисс с наклоном -20 дб/дек.
В случае если <У, < 4шс, имеем £ < 1 и переходный
процесс носит колебательный характер (рис. 1.78, в; кри-
166 Линейные автоматические системы управления
вая 2), а ЛАХ пересекает ось абцисс с наклоном - 40 дб/дек
(рис. 1.76, б). При (У] = 2шс величина £ = V2/2 , а величина
максимального перерегулирования а тах составляет 4,3 %
от установившегося значения управляемой величины у (°0) .
Как отмечалось ранее, такой переходный процесс обычно
считается наиболее приемлемым (см. пример 1.22).
Таким образом, по расположению ЛАХ на плоскости
с координатами 1gсо ; L(w ) можно судить о качестве процес-
са управления. В частности:
а) для исключения колебательности переходного про-
цесса необходимо (но не достаточно), чтобы частота
среза шс соответствовала участку ЛАХ разомкнутой
системы с наклоном - 20 дб/дек. Достаточным усло-
вием отсутствия колебательности является соблю-
дение неравенства су, > 4а)с, где - первая сопря-
гающая частота, следующая за частотой среза;
б) величина времени регулирования t определяется
неравенством t >л/шс, из которого следует, что
чем выше частота среза <УС, тем быстрее протекает
переходный процесс;
в) чем шире участок ЛАХ с наклоном - 20 дб/дек, пе-
ресекающий ось абсцисс, тем ближе переходный
процесс к монотонному;
г) если ЛАХ разомкнутой системы имеет произволь-
ный вид (рис. 1.79), то вид ее низкочастотных и
высокочастотных участков незначительно влияет
на характер переходного процесса. При этом ин-
тервал низких (0 < со < сун), средних (сун < а> < сув) и
высоких (сув < со < «>) частот определяются конк-
ретными параметрами системы. Например, при
точности воспроизведения сигнала А = 0,05 и со-
отношении вещественных частотных характерис-
тик Р(сув) / Р(0) =0,2 значения <ун и <ув соответствуют
£(еун) = = 201g 1/Д = 26 дб, L(a>B)= -16 дб, что позволя-
ет выделить искомые интервалы частот (рис. 1.79).
При этом вид характеристики в интервале средних
частот определяет запас устойчивости и в значи-
тельной мере качество процесса управления.
4. Методы синтеза АСУ 167
4.6.2. Синтез АСУ с помощью логарифмических
ам п л итуд но-частотн ых характеристи к
Частотные методы синтеза АСУ подробно рассмот-
рены в работах В.В.Солодовникова и В.А.Бесекерского и
обычно включают в себя следующие операции.
1. Строится ЛАХ исходной (нескорректированной)
системы Ьс(ш) с учетом требуемого коэффициента
усиления системы к в разомкнутом состоянии.
Величина к определяется заданным значением
статической ошибки системы: А* = 1/(1 + кр). Исход-
ная система должна быть минимально-фазовой.
2. По заданным показателям качества (обычно вели-
чины о тах и t ) с учетом ЛАХ нескорректированной
системы Lc(co) строится желаемая ЛАХ скорректи-
рованной системы L (со). При этом скорректиро-
ванная система должна оставаться минимально-фа-
зовой, так как только в этом случае характеристика
LcK(a)) полностью определяет качество процесса
управления.
3. По построенным логарифмическим амплитудным
характеристикам L (ш) и L (а)) определяется ЛАХ
С СК
168 Линейные автоматические системы управления
корректирующего звена L (со). Наиболее просто Lk(co)
определяется для корректирующего звена последо-
вательного типа. В этом случае, воспользовавшись
выражением (1.93), имеем WK(p) = WcK(p)/Wc(p).
Тогда соответствующее соотношение для ЛАХ
примет вид Lk (со) = Lck (со) - Lc(co) и, следовательно,
искомую характеристику Lk(co) можно построить
путем вычитания ординат Lc(co) из ординат Lck(co).
4. По полученной ЛАХ корректирующего звена
£Дсо)определяется передаточная функция после-
довательного корректирующего звена, а также
способ его реализации. В случае необходимости
последовательное звено может быть пересчитано
с помощью соотношений (1.93)-(1.96) на эквива-
лентное параллельное звено или эквивалентную
обратную связь.
5. Строится ЛАХ реальной скорректированной систе-
мы и, в случае необходимости, используя обычные
методы анализа, определяются реальные показате-
ли качества процесса управления.
Наиболее ответственной операцией синтеза АСУ
является построение желаемой ЛАХ Lck(co) и установление
связи ее параметров с показателями качества переходного
процесса.
Р(ю)!
Рис. 1.80
4. Методы синтеза АСУ
169
Для решения этой задачи В.В.Солодовников пред-
ложил ввести типовую вещественную частотную харак-
теристику Р(а>) замкнутой системы (рис. 1.80) со следую-
щими параметрами: соп - интервал положительности ве-
щественной частотной характеристики (ВЧХ); Xi =а*з/со« ,
% 2 ” основной и дополнительный коэффициенты
наклона ВЧХ соответственно; А = о)2/о)п - основной коэф-
фициент формы. Как показывают расчеты, при 0,8,
^2^0,4 и Л ^0,5 величина перерегулирования атахв
основном определяется величиной Ртях. В этом случае ве-
личина а тах и значение времени регулирования t могут
быть определены по расчетным кривым, приведенным на
рис. 1.81. Таким образом при заданном перерегулировании
а max можно определить Ртах, а затем величину в = tponjIл
(см. рис. 1.81). При заданном значении t* соответствующая
величина оп определяется из выражения а)п = л-OA/t*.
Заметим, что отрицательная часть вещественной
характеристики также влияет на величину перерегули-
рования, изменяя его на величину Да . Это можно учесть,
положив Pmin - 1 - Pmax • Тогда по кривой (Ртяк ) ,
построенной с учетом значения Pmin (рис. 1.81), можно
найти допустимые значения Ртах и Р. = 1 - Р , при кото-
рых суммарное перерегулирование не будет превосходить
Рис. 1.81
170 Линейные автоматические системы управления
В таблице 1.5 приведены некоторые типовые зна-
чения Р1ах и соответствующие качественные показатели
замкнутой системы, определенные с помощью соотноше-
ния, связывающего вещественную частотную характерис-
Ji
lS L
тику минимально-фазовой системы Р((о) с ее переходной
функцией:
do .
О
Таблица 1.5
Число
колебаний
п
Число
колебаний
п
Определив Ртах
и можно переходить к форми-
рованию желаемой асимптотической ЛАХ разомкнутой
системы L (су). При этом обычно придерживаются следу-
С л*
ющего порядка.
1. Строится низкочастотная асимптота Рск (со) таким
образом, чтобы она имела наклон -20 дб/дек, соответствую-
щий астатической системе первого порядка, и пересекала
ось абсцисс в точке 0)х = kv, где kv - заданный коэффициент
усиления разомкнутой системы, характеризующий точ-
ность ее работы по скорости (рис. 1.82). При однократном
изломе в точке А первая сопрягающая частота определяется
соотношением ol - ke jkv, где ке -заданный коэффициент,
характеризующий точность работы системы по ускорению;
при двукратном -о{ - 2к£ /kv.
2. По известнму интервалу положительности
ВЧХ (^определяется частота среза ос так, чтобы она удов-
летворяла условию
(Ос = (0,6 4- 0,9)(У„.
4. Методы синтеза АСУ
171
Рис. 1.82
3. Строится среднечастотная асимптота с
наклоном -20 дб/дек, пересекающая ось абсцисс в точке
со = (ОС. Эта асимптота ограничивается прямыми £(о>) = £, и
/.(ft)) = -£2 при L2 = Ьх(рис. 1.82). Значение £, определяется
по расчетной кривой, связывающей величины с сгтах
(рис. 1.83р. Например, если необходимо чтобы величина
перерегулирования а тах не превышала 30%, то, воспользо-
вавшись зависимостью £,(<7^), находим числовые значения
величин Lx = 1 бдб и £2 = =-16 дб, что позволяет опре-
делить среднечастотную область ЛАХ ((t)H <(О<(Ов). Точки
А и В на асимптотах Дк(о>) и £"к(<у) сопрягаются прямой
(или ломаной) линией с наклоном кратным -20 дб/дек. При
этом ранее найденные сопрягающие частоты могут быть
несколько скорректированы.
4. Высокочастотный участок асимптотической
ЛАХ £^(со) строится с наклоном кратным -20 дб/дек та-
ким образом, чтобы он как можно ближе совпадал с ЛАХ
нескорректированной АСУ. При частотах в 5-10 раз превы-
Заметим, что величина <ттах определяется значениями Ртах и Pmin (см.Таблицу 1.5), которым
соответствуют определенные значения £(со) = £г Это обстоятельство позволяет опреде-
лить для различных значений <ттах соответствующие значения Pmax, Pmin и £( и, в конечном
итоге, построить зависимость
172
Линейные автоматические системы управления
шающих соъ влияние сигнала практически не сказывается
на переходном процессе и ЛАХ на этом участке можно не
учитывать**.
Рис. 1.83
5. Строят желаемую ЛАХ LcK((o) во всей частотной
области. При этом для обеспечения построения исполь-
зуются типовые передаточные функции, приведенные в
таблице 1.6. Там же приведены отрицательные наклоны
асимптот соответствующих логарифмических амплитуд-
ных характеристик.
Передаточные функции и ЛАХ всех четырех типов,
приведенных в таблице 1.6, полностью определяются за-
данием четырех параметров: Т\ , Т2 и Т3. Последние три
параметра определяют сопрягающие частоты <oi = 1/7] ,
i - 1,3. ЛАХ полностью определяется заданием следующих
четырех величин: коэффициента усиления в децибелах
La при частоте (О =0)} (рис. 1.82), частоты среза <осиз со-
отношения (1.146), и двух относительных сопрягающих
частот o)Jo)c и (йв1а)с . Подчеркнем, что при построении
желаемой ЛАХ L (<о) ее низкочастотные и высокочастот-
СК
‘ Так как со. = 1/Т, то область высоких частот (со > (5 10) со*), можно назвать областью
малых постоянных времени.
4. Методы синтеза АСУ 173
ные участки следует располагать как можно ближе к ЛАХ
нескорректированной системы Это позволяет упрос-
тить реализацию корректирующего устройства. При этом в
низкочастотной области совпадение £с(сэ) и£ск(со) обычно
достигается подбором коэффициента усиления желаемой
системы, а в высокочастотной - соответствующим выбором
желаемой ЛАХ.
Таблица 1.6
Тип
ЛАХ
Передаточная функция
^(р) =
Отрицательные
наклоны асимптот
в дб/дек
20-40-20-40
W, (р) =
к(Т2р + 1)1 2
р(Тхр + 1)(Т3р +1)
20 - 60 - 20 - 40
ОДр + 1)
р(Тхр + 1)(Г3р +1)2
20-40-20-60
k(T2p + V)2
р(Т]Р+ \)(Т}р+ V)2
20 - 60 - 20 - 60
При формировании желаемой ЛАХ можно также
если это способс-
min
увеличивать запасы по модулю L} и L
твует совпадению асимптот L (со) nLCK(a)) . Это обусловлено
тем, что увеличение Z] и L2 приводит к уменьшению Ртгя
и, следовательно, колебательность переходного про-
цесса уменьшается, и условие <7^ s ст* выдерживается.
6. После сформирования ЛАХ скорректированной
системы Lcic(a>) необходимо проверить выдерживается ли
требуемое значение запаса устойчивости по фазе, которое
определяется по кривой р (р ), приведенной на рис. 1.83*’.
Для этого необходимо подсчитать фазовый сдвиг в двух
1 При построении кривой тлк) используется зависимость между вещественной часто-
тной характеристикой замкнутой системы />(со) (см., например, Рис. 1.80) и частотной
функцией разомкнутой системы FK(ya>)»что позволяет построить кривые, связывающие
Р(а)) с амплитудной и фазовой характеристиками разомкнутой системы, и в конечном
итоге, найти зависимость
174
Линейныеавтоматические системы управления
крайних точках среднечастотного участка, т. е. при со =
сои со определенных для найденной желаемой пере-
даточной функции разомкнутой системы. Так, например,
для со = со и при передаточной функции типа 1 (таблица 1.6)
этот сдвиг равен
<рн = -90° - arctg а>нТ} + arctg (онТ2 - arctg а)нТ3.
Аналогично вычисляется сдвиг фаз <р при со = со .
в в
Если требуемый запас по фазе не выдержан, т. е.
= (180+<Pi) £//*, i = н,в, необходимо расширить средне-
частотный участок желаемой ЛАХ и произвести повторный
расчет.
Чтобы окончательно убедиться в приемлемости
полученной ЛАХ, можно, определив соответствующую
передаточную функцию, построить переходный процесс в
системе и проверить справедливость неравенств а тах ст* ,
t </*.
р р
После окончательного сформирования желаемой
ЛАХ, вычитают из нее ординаты нескорректированной-
ЛАХ. Полученная разностная ЛАХ соответствует переда-
точной функции последовательного корректирующего
звена. Например, при Lc(co) и £ск(со), представленных на
рис. 1.84, ЛАХ корректирующего звена L (со) ~ L (со) -
К СК
4. Методы синтеза АСУ 175
- L (со) соответствует передаточной функции вида
С
(Т2р + 1)(Т3р +1)
(Тхр + 1)(Т4р +1) ’
(1.147)
где Т. = 1/со. i = 1,4 - постоянные времени, определяемые со-
прягающей частотой (Ос.
Как отмечалось выше, последовательное коррек-
тирующее звено с передаточной функцией (1.147) может
быть заменено эквивалентным параллельным звеном или
звеном с обратной связью.
РАЗДЕЛ II
Особые линейные
автоматические
системы управления
К особым линейным системам, относятся системы,
содержащие звенья, динамические процессы в которых не
описываются обыкновенными линейными дифференци-
альными уравнениями с постоянными коэффициентами. К
таким звеньям относятся звенья с запаздыванием, реакция
которых на входной сигнал появляется через определенное
время т; звенья с распределенными параметрами, переход-
ные процессы в которых описываются дифференциальны-
ми уравнениями в частных производных, что физически со-
ответствует изменению переменных не только во времени,
но и в пространстве; импульсные звенья, преобразующие
непрерывное входное воздействие в равностоящие друг от
друга импульсы, для математического описания которых
используются разностные уравнения. Исследование систем
управления, содержащих такие звенья, имеет некоторые
особенности, которые необходимо учитывать при их ана-
лизе и синтезе.
К особым системам обычно относят и системы, со-
держащие звенья, описываемые линейными дифференци-
альными уравнениями с переменными коэффициентами,
зависящими от времени. Например, если система управле-
ния описывается дифференциальным уравнением вида
аоУ'" ’ + +... + о.., У + апу-
-Ьах‘~^Ь,х'"-»+... + Ь,_,х + Ь,х,
и все или некоторые из коэффициентов этого уравнения а(., Ь -
(z = 1, п; j = 1, т) являются функциями времени, то система
называется нестационарной, или системой с переменными
параметрами. Наиболее распространенный метод исследо-
вания таких систем носит название метода замороженных
коэффициентов, который заключается в замораживании
5. Системы с запаздыванием...
177
числовых значении переменных коэффициентов уравнения
системы в определенный фиксированный момент времени
t = # , что позволяет применять к системе методы анализа
И синтеза линейных систем с постоянными параметрами.
пне
При этом исследование системы с замороженными коэффи-
циентами должно быть последовательно произведено для
различных моментов времени t = д , лежащих в интервале
О <# < Т , где Т - время работы системы. Если во всем рабо-
чем диапазоне от 0 до Т качество системы управления ока-
зывается приемлемым, то ее считают работоспособной и при
изменении коэффициентов в исследованных пределах.
Подчеркнем, что этот метод дает правильные ре-
зультаты, если в течение переходного процесса (пока фун-
кция веса не затухнет практически до нуля) коэффициенты
уравнения системы мало изменят свое значение. Следует
отметить, что эффективность рассматриваемого метода
также зависит и от правильного выбора фиксированных
моментов времени, для которых производится заморажи-
вание коэффициентов. Необходимо так выбирать эти мо-
менты, чтобы охватить все возможные варианты значений
коэффициентов, обратив внимание на «опасные» точки, в
которых происходит значительное изменение величины
коэффициента, его знака и т.п.
5. Системы с запаздыванием и
распределенными параметрами
5.1. Системы с запаздыванием
К этим системам относятся такие, в составе кото-
рых имеется звено с чистым запаздыванием, т. е. звено у
которого выходная величина y(t) повторяет все изменения
входной величины с постоянным сдвигом во времени,
равным т.
Уравнение звена с чистым запаздыванием имеет
вид:
y(t) = x(t-T),
(2.1)
где т — время запаздывания.
178 Особые линейные автоматические системы управления
Примером звена с чистым запаздыванием может
служить обычный конвейер (рис. 2.1), реакция которого
y(t) запаздывает по отношению к входному воздействию
x(f) на время транспортирования груза т от места его подачи
на конвейер до места выгрузки. Именно поэтому время т,
иногда называют транспортным запаздыванием.
Q— - Qk
Преобразуем уравнение (2.1) по Лапласу, сделав за-
мену переменной в =t -т, откуда t =0 +т . Тогда получим
00 00
Y(p) = - r)e~pldt = Cx(0)e~pee~pld0 = в^Х^р),
О о
При этом передаточная функция звена с запазды-
ванием имеет вид
и; (р) = = е-р<. (2-2)
а его частотные характеристики - АФЧХ WT(ja>) = e~J0)T;
АЧХ Л(со) = 1; ФЧХ = -сот , представлены на рис. 2.2.
Переходная характеристика звена при х~ 1(0 имеет вид,
показанный на рис. 2.1
Заметим, что звено с запаздыванием является неми-
нимально-фазовым, так как в отличие от усилительного зве-
на с А (а) ) = 1 и^>(о))==0 звено с запаздыванием имеет сдвиг
фаз, отличный от нуля и пропорциональный времени т.
Приведенные характеристики показывают, что при
любых частотах сигнал на входе звена с чистым запаздыва-
нием передается без искажения (Д(и’) = 1), поэтому понятие
полосы пропускания частот в данном случае отсутствует.
Физически такое звено, как и дифференцирующее звено,
не может быть реализовано. Однако такие элементы как
транспортное устройство системы достаточно хорошо ап-
проксимируются этими звеньями. Кроме того, с помощью
этих звеньев в ряде случаев удается достаточно точно ап-
проксимировать объекты, описываемые линейными ДУ
высоких порядков.
Рис. 2.3
Если кривая переходной функции й(/), начиная с
момента времени t = т, мало отличается от экспоненты, а
до момента t = г ординаты ее достаточно малы (рис. 2.3), то
соответствующее приближенное значение передаточной
функции объекта можно записать в виде:
180
Особые линейные автоматические системы управления
5
а ДУ преобразованное по Лапласу:
(Тр+ \)epTY(p) = кХ(р).
(2.3)
В выражении (2.3) параметры Гит определяются
по кривой разгона с применением того или иного метода
обработки экспериментальных данных.
Заметим, что при наличии большого числа после-
довательно включенных звеньев с малыми постоянными
времени Т их можно заменить на звенья с запаздыванием
п
при т = ^7^' • Действительно, пусть система содержит п
последовательно включенных инерционных звеньев перво-
го порядка с коэффициентом передачи к = 1 и постоянной
времени Т^~т/п. Тогда эквивалентная передаточная фун-
кция будет равна:
Возьмем предел левой части приведенного выраже-
-гр
ния при п~>оо:
/ \ ~п
limf 1 + —
п i
lim
л—>00
/ 1
Здесь учтено, что lim 1 + —
a->ool а
= е . Тогда, обозначив
а = w/тр, получим результат приведенный выше.
Таким образом, передаточную функцию при доста-
точно большом числе п(п> 5-ь 10), можно аппроксимировать
звеном запаздывания с т = пТ^
В общем случае передаточная функция линейного
звена с запаздыванием имеет вид:
*Пр) = ^л(рЖ(р) =
с ?
Ар)
а соответствующая частотная функция при W (jco) =
= A(jco)e/,p(a,) и W( jco) = е будет
5. Системы с запаздыванием...
181
W(jco) = A(jco)e^(aj}-^].
(2.4)
Из выражения (2.4) следует, что для построения
АФЧХ линейного звена с запаздыванием, необходимо ха-
рактеристику W^jco) повернуть в каждой точке на угол
fy = -сот (по часовой стрелке), что приближает ее к точке
;уО), и, следовательно, наличие звена с запаздыванием
снижает запас устойчивости системы.
Заметим, что реальные переходные процессы в АСУ
йо многих случаях достаточно точно могут быть описаны,
Йак линейными ДУ высокого порядка, так и линейными
уравнениями второго порядка с запаздыванием (принцип
Йкад. Ишлинского). В этом случае передаточная функция
системы имеет вид:
к&~рх
где т, Т, £ к - параметры, подлежащие определению по экс-
периментальным данным..
Запишем W( р) в виде:
W(p) =
В(р)
а(рУр ‘
Здесь А( р)еРТ - характеристический полином.
Решение и анализ трансцендентного уравнения
А( р)егр = 0 затруднено. В связи с этим передаточную функ-
цию запаздывающего звена иногда представляют в виде
ряда Пада. Учитывая только первые два его члена, WT(p)
приближенно заменяют дробно-рациональной функцией
вида:
у,(р)-^-а°р" а'р+‘,
а0Р +а{р + 1
Заметим, что полученная передаточная функция
имеет корни числителя в правой полуплоскости, следова-
тельно, данное звено как и звено с передаточной функцией
(2.2) не является минимально-фазовым.
182 Особые линейные автоматические системы управления
5.2. Системы с распределенными параметрами
К этим системам относятся такие, в составе которых
имеется хотя бы одно звено с распределенными параметра-
ми. В отличие от звеньев с сосредоточенными параметрами,
описываемых обыкновенными ДУ (изменениями состояния
звена в пространстве в данном случае пренебрегают), звено
с распределенными параметрами (т. е. параметрами, зави-
сящими от пространственных координат) описываются ДУ
в частных производных. Это обстоятельство приобретает
практическое значение при управлении материальными
потоками, при передаче информации, например, в виде
электрического сигнала по длинным линиям и т.п. Про-
иллюстрируем сказанное.
Пример 2.1
Пусть в системе управления гидротурбиной в ка-
честве связующего элемента между резервуаром
воды и гидротурбиной используется трубопровод,
по которому протекает жидкость (рис. 2.4). Тре
буется составить структурную схему модели
Динамические процессы в трубопроводе, характе-
ризуемые двумя переменными: напором //* и расходом 0*,
описываются при некоторых допущениях уравнениями
Жуковского:
5. Системы с запаздыванием...
183
dh = _y..^l- д(1______L.iA,
дх a dt ’ дх ya dt ’
* — относительные значения напора и
* >
Но
расхода соответственно;
Н*, Q* ~ базО6ые значения Н* и Q*;
а - скорость распространения звука в трубопроводе;
g-ускорение силы тяжести;
F - площадь сечения трубопровода.
Преобразуем уравнения (2.6) по Лапласу при нуле-
вых начальных условиях. Учтя, что
00
L{h(x,t)} - fh(x,t)e p'dt = Н{р,х\
о
получим:
дх
а
5
дх уа
Продифференцируем (2.7) по х и подставим в него
(2.8):
или
дх2
7 pLH(p,x)
а
дх
5-Н(р,х) = 0.
дх2
Аналогично, исключив из (2.8) функцию Н(р,х)
получим:
184 Особые линейные автоматические системы управления
2
(2.Ю)
2
дх2
Рассматривая координату х как независимую
переменную, решим дифференциальные уравнения (2.9)
и (2.10) относительно изображений Н{р3х} и Q(p^x). Уч-
тем, что характеристические уравнения ДУ (2.9) и (2.10)
2 р2 j Р
одинаковы: к-----— = 0 *>, и имеют два корня: кх г =±—.
а ’ а
Тогда решения этих уравнений запишутся в виде суммы
двух экспонент:
Н{р,х) = А,ек'х + Л2е*2\ (2.11)
Q(p,x) = B{ek'x +В2е\ (2.12)
где Ах; А2; Вх; В2 - постоянные интегрирования, определяе-
мые из граничных условий.
Запишем уравнение (2.11) для граничных условий
х = 0, х = /:
Н(р$) = А+А, (2.13)
1.
Н( р,1)= А етр + Ае~тр, (2.14)
где т — Па — время пробега звуковой волны вдоль трубопрово-
да.
Продифференцировав (2.11) по х, и учтя (2.7), за-
пишем:
Тогда, при х = 0, получим:
44 + 4^ = --pQ(pW.
а
Подставив в полученное выражение значения к и
к2 имеем:
^1-Л2 = -уе(р,0). (2.15)
' Здесь к =----операция дифференцирования по переменной х.
дх
5. Системы с запаздыванием...185
Совместное решение уравнений (2.13) и (2.15) и дает
искомые постоянные интегрирования А} и Л2, подставив
которые в выражение (2.14) окончательно получим:
Н(р, /) = Н(р, Q)chrр - yQ(p, O)shtр (2.16)
где chrр = -----; shrр =
— гиперболичес-
кие косинус (ch) и синус (ch) соответственно.
Аналогично можно получить:
Q(p,l)~Q(p,O)chrp-^H(p,O)shrp, (2.17)
У
Обычно интересуются зависимостью значений
h(l,t) и q(lj) на выходе трубопровода от напора й(0,/) и от-
носительной степени открытия регулирующей заслонки
ц, т. е. расматривают трубопровод как объект с сосредо-
точенными параметрами**. В этом случае, исключая пе-
ременную £?(/?,0) из уравнений (2.16) и (2.17) и учтя, что
ch2rp - sh2Tp = 1, получим:
Н(р. l)chtр = Н(р. 0) - yQ(p, l)shrр.
Заменив гиперболические функции экспоненци-
альными, запишем:
Н(р,Г) = 2Н (р ,tye~рТ -Н(р,Г)е~2рТ +
+yQ(p,l)e'2pT -yQ^p,!).
(2.18)
Учтя, что обратное преобразование Лапласа от
H(p,l), Q(p,l) и е~тр равны:
L-'{H(p,V)} = ±^H(p,l)ep,dp = ;
Li{Q(p,l)}=q(l,ty,
Iй {eI/?} = 1(/-т),
уравнение (2.18) можно переписать для оригиналов в сле-
дующем виде:
Ф) Изменение переменных в пространстве целесообразно рассматривать в случае использо-
вания распределенного управления.
186 Особые линейные автоматические системы управления
/г(/,0 = 2Л(0,А-т) - й(/,/-2т) + y^(/,Z-2t) - (2.19)
Полученное уравнение связывает две искомые ве-
личины и q(l,f) в конце трубопровода с напором в его
начале Л(0,/). Чтобы сделать задачу определенной, к уравне-
нию (2.19) необходимо добавить уравнение расхода <y(Z»Z):
Ц<М = R/W,0] “ fi^ + h(l,t).
(2.20)
Совместное решение уравнений (2.19) и (2.20) поз-
воляет определить искомые значения и q(l,t) в конце
трубопровода при известных значениях напора Л(0,7) в его
начале и положение заслонки ц.
33 - звено с запаздыванием;
УЗ - усилительное звено;
БУ - блок умножения;
ФБ - функциональный блок с входом h(l,t) и
выходом f (/г) = ^/1 + /?(/,/); I, II, III, IV -
слагаемые уравнения (2.19)
Анализ уравнения (2.19) показывает, что протя-
женный трубопровод можно заменить усилительными
звеньями с запаздыванием (т.к. жидкость, в отличие от
газа, несжимаема), а произведя линеаризацию выражения
(2.20), можно применять методы анализа линейных систем
с запаздыванием.
5. Системы с запаздыванием... 187
Структурная схема модели, предназначенная для
и q(t)
т. е. для определения
определения величин h(f)
изменения напора и расхода в точке х = I (рис. 2.5), состав-
ляется на базе уравнений (2.19) и (2.20). На вход модели
подаем сигналы, пропорциональные Л(0,/) и ц, которые,
пройдя через звенья модели, преобразуются в искомые
переменные /z(/, t) и q(l,f).
Заметим, что полученный вывод о возможности
записи звеньев с распределенными параметрами звеньями
с запаздыванием вытекает из чисто физических сообра-
жений: объект с распределенными параметрами можно
представить как п последовательно включенных элемен-
тарных звеньев первого порядка, а было показано выше
(п.5.1) такие звенья можно представить запаздывающим
звеном.
5.3. Устойчивость систем с запаздыванием
В силу трансцендентности передаточной функции
звена с запаздыванием, характеристическое уравнение за-
мкнутой системы будет также трансцендентным, и поэтому
алгебраические критерии устойчивости непосредственно
использованы быть не могут. В то же время, частотные
критерии Михайлова и Найквиста могут быть обобщены и
на случай систем с запаздыванием. В этом случае исполь-
зуется уравнение Эйлера: e~JCOT= coscot -jsincor.
Критерий Михайлова
Пусть имеем систему (рис. 2.6), включающую звено
с запаздыванием: Wr(p) = е~рт, а остальная часть системы
описывается линейными ДУ без запаздывания и имеет
передаточную функцию: РК = В(р)/А(р).
Рис. 2.6
Запишем передаточную функцию замкнутой сис-
темы по каналу у*—> у:
188
Особые линейные автоматические системы управления
^у(р) =
В(р)е'рт
А(р) + В(р)е^
(2-21)
Воспользовавшись (2.21), запишем характеристи-
ческий полином системы: D(p) = Л(р) + В(р)е~, и, поло-
жив р = jo , - уравнение кривой Михайлова:
D(jo) = A(jo) + B(jo)e jmT.
(2.22)
Критерий Михайлова для систем с запаздыванием
формулируется практически также, как и для линейных
систем без запаздывания: для того, чтобы линейная систе-
ма, включающая звено с запаздыванием, была устойчива,
необходимо и достаточно, чтобы годограф вектора Михай-
лова D(jco) при изменении со от нуля до бесконечности,
л
нигде не обращаясь в нуль, повернулся на угол + п—, где
п - степень полинома А(р). 2
Рассмотрим некоторые примеры применения кри-
терия Михайлова к исследованию устойчивости систем с
запаздыванием.
1. Пусть B(Jco) = с = const. Поделив выражение (2.22)
на с, получим:
= В</-"1 - А *(>«) + е * ,
С
(2.23)
где А * (jo) = —-—-.
На рис. 2.7 отдельно построены годографы векторов,
входящих в выражение (2.23).
Анализ размещения годографов на комплексной
плоскости (рис. 2.7, а) показывает, что если годограф кри-
вой Л*( jo) не пересекает окружность единичного радиуса
и проходит последовательно п квадрантов, то и годограф
D*(jo) проходит квадранты в той же последовательности.
Таким образом в соответствии с критерием Михайлова все
корни уравненияZ>( р) = 0 лежат в левой полуплоскости, и,
следовательно, система устойчива. Если годограф A*(jo) не
отвечает сформулированным требованиям (рис. 2.7, б), то
система с запаздыванием будет неустойчива для любых т.
5. Системы с запаздыванием... 189
Рис. 2.7
При т = О система называется предельной, а кривая
Михайлова принимаем вид
£)*(» = Л*(» + 1.
(2.24)
Рис. 2.8
Из (2.24) вытекает, что годограф Михайлова
представляет собой вспомогательную кривую A*(ja>)
смещенную на комплексной плоскости на единицу впра-
во (рис2.8), что эквивалентно смещению оси ординат на
единицу влево (точка О]). Таким образом, расположение
кривой A *(ja> ) относительно нового начала координат О,
позволяет судить об устойчивости предельной системы:
190 Особые линейные автоматические системы управления
для того чтобы система была устойчива вспомогательная
кривая Л*(jco) должна охватывать точку Ог
2. Рассмотрим случай, когда предельная система
устойчива, а кривая т4*(усо) пересекает окружность еди-
ничного радиуса в точке к (рис. 2.9, а). Частота при
которой произошло пересечение двух годографов (e~ja)T и
Л*(усо)), называется критической. Если время запазды-
вания т = тк таково, что сок - тк = я - у/к, то, как следует из
рисунка, |Р*(7бо^)| = 0 и система находится на границе
л -ip k
устойчивости. При этом rk =----, и следовательно, для
того, чтобы кривая Михайлова ^охватывала начало коор-
динат, необходимо выполнение условия т< г.
К
Рис. 2.9
Таким образом, в рассматриваемом случае, для
того, чтобы система была устойчива, необходимо и до-
статочно, чтобы вектор A* (jco) при изменении со от 0 до оо
последовательно проходил п квадрантов в положительном
направлении и кроме того выполнялось условие т < т.
Заметим, что если годограф вектора А*( jco) пересе-
кает окружность единичного радиуса дважды (рис. 2.9, б),
то имеем две критические частоты со. и со. и два критичес-
5. Системы с запаздыванием...
191
ких времени тк и тк. В этом случае дополнительное условие
устойчивости имеет вид: т < тк Для случая изображенного
на рис. 2.9,6, имеем у/ > y/km'vi со к > сок и следовательно
= 2
3. Рассмотрим более общий случай, когда полином
B(jco) # const. В этом случае соотношение (2.22) записыва-
ется в виде:
к
* min
D(Ja>) = А(ш)еШш) + В(а))е^(<и)-шт]
Рис. 2.10
Построив зависимости частотных характеристик
Л(со) и В(со),можно показать, что:
а) если кривые А(о) и В(со) не пересекаются (рис. 2.10, а),
то устойчивость системы при любых временах за-
паздывания полностью определяется устойчивос-
тью предельной системы;
б) если кривые А(со) и В(а)) пересекаются (рис. 2.10, 6),
то система будет устойчивой, если предельная сис-
тема устойчива и выполняется условие
192
Особые линейные автоматические системы управления
где т w +
&
JA(cok) и ~ аРгУменты комплексных чисел Afjco) и
B{ j(O) при частоте со = со^ которая соответствует
точке пересечения кривых.
в) если кривые Л(а>) и В{со) пересекаются дважды и
в случае устойчивой предельной системы, необ-
ходимым и достаточным условием устойчивости
является неравенство
т < т. .
k min,
где г, . соответствуёт со.
к min у к max*
Критерий Найквиста
Этот критерий, обобщенный для систем с запазды-
ванием, формулируется также как и для линейных сис-
тем: для того, чтобы замкнутая система была устойчива,
необходимо и достаточно, чтобы годограф вектора АФЧХ
разомкнутой системы W(jco) при изменении частоты от
нуля до бесконечности не охватывал точку (-1 ;jO).
Пусть частотная функция разомкнутой системы
имеет вид представленный на рис. 2.6,
(2.25)
В соответствии с критерием Найквиста, для ус-
тойчивой предельной системы (т = 0) годограф вектора
частотной характеристики для разомкнутой системы
W (jco) = Wjjco) не должен охватывать точку (-1; у’0).
В случае наличия запаздывания (т > 0) частотная
характеристика разомкнутой системы, в соответствии с
(2.25), получается перемножением частотных характерис-
тик W^jco) и W(jaf) = ei0,T. Эта процедура заключается в
повороте каждого вектора WJJid) на угол ( - tor). При этом
возможны следующие случаи.
1. Пусть предельная система устойчива и годограф век-
тора WJJaj) не пересекается с окружностью единич-
ного радиуса (рис. 2.11, а). В этом случае замкнутая
5. Системы с запаздыванием... 193
система будет устойчива при любом запаздывании,
так как никакой поворот любых векторов WJJco) на
любой угол не приводит к охвату точки (— 1у'О).
Рис. 2.11
2. Если имеет место пересечение упомянутых харак-
теристик (рис. 2.11, б), то при повороте вектора
ОКна угол (ж - у/к) где if/k=a)kTk характеристика
Wp{j(o) = 1Ул( jco)e~7a,t попадает в точку (-l;j'O),
т. е..система окажется на границе устойчивости.
Следовательно, для того, чтобы система была
устойчивой, необходимо ввести дополнительное
условие
* '"к
“)к
Заметим, что если частотная функция разомкнутой
системы, более сложная, чем (2.25), например:
7Теория автоматического управления
194 Особые линейные автоматические системы управления
Ax{j<o)ej(1>r л-A2{ja))e~j(i}T J
то исследование устойчивости целесообразно проводить
при помощи критерия Михайлова.
Пример 2.2
Пусть передаточная функция разомкнутой систе-
мы с запаздыванием имеет вид
Гр(р)-Гя(Р)'^(р)-----з------------ер\ (2.26)
aGp + ахр +а2р + а3
Числовые значения параметров составляют:
aQ ~ 0,01с3; а} = 0,09с2; а2 = 0,5с; а3 = 1,0; кп = 1,6. Тре-
буется определить критическое значение величи-
ны запаздывания Т =Т к, определяющей границу
устойчивости.
Решение
Построим частотную характеристику разомкнутой
предельной системы. Воспользовавшись (2.26), имеем
1,6
0,01(y<w)3 +0,09(7<w)2 +0,5(jto) + l
Годограф вектора представленный на
рис. 2.12, свидетельствует об устойчивости предельной
системы. Пересечение кривой с окружностью
единичного радиуса происходит при критической частоте
(Ок = 4.6 с"'. Следовательно, для того чтобы замкнутая сис-
тема, содержащая звено с запаздыванием Wt (р) = е"рт, была
устойчива, должно удовлетворяться неравенство
Здесь величина грк была определена из соотношения
Заметим, что при arg W(Jco ) > л, точка пересе-
чения годографов FF(j(o) и всегда будет лежать во
втором квадранте комплексной плоскости, т. е. годограф
W(j(o) при любом значении т будет охватывать точку
(-1, j0) и, следовательно, дополнительное условие устойчи-
вости не выполняется.
5. Системы с запаздыванием...
195
5.4. Коррекция АСУ объектами
с большим запаздыванием
Для многих технологических процессов: в метал-
лургической, химической, горной, транспортной и других
отраслях промышленности, характерным признаком яв-
ляется существенное время запаздывания (до нескольких
десятков минут) реакции объекта (изменения выходной
величины у) на изменение управляющего воздействия и.
Как показывают расчеты при определенной величине отно-
ения времени запаздывания объекта т к его постоянной
времени То (например, при То Т > 0,5) эффективность зако-
нов управления, рассмотренных в предыдущей главе, резко
снижается из-за большой статической (П, ПД-законы) или
динамической (И, ПИ, ПИД-законы) ошибки, а в некоторых
случаях система может потерять устойчивость. В связи
с этим были разработаны специальные (неклассические)
законы управления: пропорционально-интегрально-раз-
ностный (ПИР-закон) и пропорционально-интегральный
до предыстории (ПИП-закон). В отличии от классических
законов управления, использующих только информацию
об отклонении управляемой величины у от заданного ее
значения у* (Д =у* - у), здесь используется также априор-
ные сведения об управляемом объекте, на базе которых в
Классический закон управления (1.87) вносится определен-
ная коррекция. В случае параллельной коррекции переда-
точную функцию скорректированного закона управления
(р) можно записать в виде
✓
f96 Oco6bfe линейные автоматические системы управления
Wy4p)-W6(p)+WK(P),
(2.27)
где (р), Wk (р) - передаточные функции базового регуля-
тора и корректирующего звена.
Обычно в качестве базового принимается ПИ-регу-
лятор с передаточной функцией (1.90), которую в данном
случае удобно записать в виде
где к ,Т - параметры настройки ПИ-регулятора.
(2.28)
Для сокращения времени переходного процесса
t и снижения его колебательности (сокращения числа
перерегулирований) скорость нарастания интегральной
составляющей управляющего воздействия мдолжнаумень-
шаться с течением времени. В простейшем случае этим тре-
бованиям отвечает корректирующее звено с передаточной
функцией
WK(p)--^L-e'PT‘> (2.29)
ТуР
где к*, тк - параметры настройки корректирующего звена.
С учетом (2.28) и (2.29) выражение (2.27),для пропор-
ционально-интегрально-разностного закона регулирова-
ния (ПИР-регулятор) можно записать в виде
W" (Р) = ky + A- (1 - kK • )ю. (2.30)
ТУР
Для иллюстрации сказанного на рис. 2.13 приведена
переходная функция u(f) ПИР-регулятора (сплошная линия)
при подаче на него входного сигнала ошибки Д(/) = !(/).
Пунктирными линиями показаны составляющие этойфун-
кции: 1 - пропорциональная; 2 - интегральная (tgа —:ку1Т^’,
3 - интегральная составляющая с запаздыванием (tg
(л-/?) = -ку kjTy ,кк< 1). Как вид но из рис. 2.13при t >ткско-
рость роста управляющего сигнала снижается, что, как ука-
зывалось выше, улучшает качество переходного процесса.
5. Системы с запаздыванием...
197
Пример 2.3
Рис. 2.13
Найти параметры ПИР-регулятора, предназначен-
ного для стабилизации температуры в металлур-
гической печи. Структурная схема АСУ представ-
лена на рис. 2.14. Передаточная функция объекта
управления имеет вид
(2.31)
Рис. 2.14
Числовые значения параметров (2.31), определенные
по кривой разгона, составляют k = 1.0; Т =80 с;
т = 28 С.
О
198 Особые линейные автоматические системы управления
Решение
Соотношение динамических характеристик объекта
tJTq = 0.35 < 0.5 в принципе позволяет применять стандар-
тный ПИ-регулятор. Для удобства расчетов аппроксимиру-
ем передаточную функцию запаздывающего звена рядом
Пада (2.5).
аор2 - а}р +1 65,Зр2-14р + 1
а0р2 + а1р + 1 65,3/?2 + 14р + 1
Тогда передаточная функция объекта управления
(2.31) запишется в виде
65,3/ -,4р.!----------
° (80р + 1)(65,3/?2+14/? + 1)
Определим параметры ПИ-регулятора (к, Т) с пе-
редаточной функцией (2.28) при kK=Q, обеспечивающие
минимум колебательности переходного процесса, которая
характеризуется отношением о 2/о где о а 2 - величина
предыдущего и последующего перерегулирования. Как
показали расчеты, наименьшее соотношение О 2/а х =0,16
достигается при значениях параметров ПИ-регулятора:
к = 1,7, Г = 50 с. При этом время регулирования t состав-
ляет 350 с. Кривая переходного процесса y(t), полученная
на модели при подаче на вход объекта ступенчатого возму-
щенияД?) = А 1(1), представлена на рис. 2.15 (кривая 1).
0,4-
0,2-
100
300 400
Рис. 2.15
5. Системы с запаздыванием...
199
Дальнейшее улучшение переходного процесса про-
изводится путем введения корректирующего звена (2.29),
параметры которого можно определить путем постановки
вычислительного эксперимента. Обработка полученных
результатов позволила найти оптимальные значения
параметров корректирующих звеньев: кк - 0,19; тк = 21с.
Кривая скорректированного переходного процесса при-
ведена на рис. 2.15 (кривая 2). Исследование модели ПИР-
регулятора показывает, что оптимальные его параметры
в основном определяются соотношением то/То .Сравнение
кривых переходного процесса свидетельствуют о том, что
введенное корректирующего звена позволяет существенно
улучшить качество переходного процесса. В частности,
колебательность процесса уменьшилась примерно на по-
рядок в результате чего переходный процесс практически
стал монотонным. Кроме того реализация ПИР-закона ре-
гулирования позволила почти в два раза сократить время
регулирования.
* * *
В случае применения пропорционально-интеграль-
ного по предыстории закона регулирования (ПИП-регуля-
тор) передаточная функция корректирующего звена имеет
вид
Wk{p)~-ky\kx +
w0(p) = wspW0(p)
(2.32)
kvk2~ параметры настройки корректирующего звена;
Wo (у?) - передаточная функция объекта с запаздыванием.
Передаточная функция скорректированного уст-
ройства управления в соответствии с (2.27) и с учетом (2.28)
и (2.32) имеет вид
w^p)=ky \-k{Wo{p^^lTP\\-k2Wo{py) .
(2.33)
200 Особые линейные автоматические системы управления
Структурная схема АСУ с ПИП-регулятором пред-
ставлена на рис. 2.16.
Рис. 2.16
1 - объект управления;
2 - ПИ-регулятор;
3,4 - корректирующие звенья;
5 - ПИП-регулятор
Анализ структурной схемы (рис 2.16) показывает
что управляющее воздействие и формируется как алгебра-
ическая сумма двух составляющих: иб - составляющая на
выходе ПИ-регулятора; ик - составляющая звеньев парал-
лельной коррекции. Введение составляющей ик ослабляет
пропорциональную и интегральную части базовой состав-
ляющей (kt и к2 меньше единицы) при t >то. Последнее ус-
ловие обеспечивается введением звена 4, представляющего
собой модель объекта управления. Таким образом, ПИП-
регулятор обеспечивает высокий уровень управляющего
воздействия и = иб при t < т 0 и плавное снижение этого
уровня при t >т 0(и — и6 — иу Как и в случае применения
ПИР-регулятора, реализация ПИП-закона управления
улучшает качество переходного процесса и увеличивает
запас устойчивости по амплитуде и фазе по сравнению с
ПИ-регулятором. Кроме того настройка параметров кор-
ректирующего звена Л] и к2 в силу лицейной их связи с про-
порциональной и интегральной составляющими выходного
сигнала корректирующего звена 3, осуществляется сравни-
тельно просто. К основным недостаткам ПИП-регулятора
можно отнести необходимость достаточно точного знания
5. Системы с запаздыванием... 201
математической модели объекта, что в ряде случаев вызы-
вает определенные затруднения.
Таким образом, введение запаздывающих звеньев в
структуру параллельного корректирующего звена позволя-
ет существенно улучшить качество переходных процессов
в АСУ объектами с существенным запаздыванием.
202
6. Импульсные системы
Системы, в которых, по крайней мере, между дву-
мя непрерывными её элементами формирования сигнала
производится не непрерывно, а прерывисто, относятся к
классу дискретных систем.
Процесс преобразования непрерывного сигнала в
дискретный называется квантованием (дискретизацией).
Различают три основных вида квантование:
1) квантование по времени. При этом выделение зна-
чений сигнала х(/) происходит в определенные рав-
ностоящие моменты времени t = пТ, где Т- период
(шаг) квантования по времени; п- 1 ,<х> (рис. 2.18, а).
Системы, в которых реализуется этот вид квантова-
ния, называются импульсными. Если те или иные
параметры импульсов пропорциональны величине
сигнала x(t), то такой вид квантования относится к
классу линейной дискретизации сигнала.
а б
х м X
Рис. 2.18
2) квантование по уровню. При этом величина сигнала
x(t) изменяется только тогда, когда x(t) проходит
через один из уровней квантования х. (рис. 2.18, б).
Разность (х — x._t) называется шагом квантования
Дх. Такой вид квантования имеет место в релейных
элементах, например, с трехпозиционной безпет-
левой характеристикой. Системы, использующие
такие элементы в принципе относятся к классу
нелинейных и называются релейными. Методы
исследования таких систем будут рассмотрены в
следующем разделе.
6. Импульсные системы 203
3) одновременное квантование по времени и по уров-
ню^ при котором значения сигнала x(f) фиксируется
в равностоящие дискретные моменты времени, но
их величина округляется до ближайшего уровня х
(рис. 2.19). Такой вид квантования имеет место при
табулировании функции, использовании цифровых
машин и т.п. Системы, использующие этот вид
квантования называются цифровыми или релейно-
импульсными.
Рис. 2.19
Таким образом, в зависимости от способа кванто-
вания сигналов дискретные системы подразделяются на
импульсные, релейные и цифровые, а под линейной импуль-
сной системой автоматического управления понимается
система, которая кроме звеньев, описываемых обыкно-
венными линейными дифференциальными уравнения-
ми, содержат звено, реализующее линейное квантование
сигнала по времени. Заметим, что цифровые системы уп-
равления при малом шаге квантования по уровню сигнала
Дх, соизмеримом с приборной погрешностью измеритель-
ного устройства, могут рассматриваться как импульсные.
Следовательно, к таким системам применимы методы
исследования динамических режимов, разработанные для
импульсных систем.
Замечено, что процесс регулирования для инерцион-
ных систем существенно облегчается, если перемещение ре-
гулирующего органа производить не непрерывно, а импуль-
сно (дискретно), наблюдая во время паузы за результатами
действия импульса. Изменение параметров импульса приво-
дит к изменению средней скорости перемещения регулиру-
ющего органа, что эквивалентно изменению коэффициента
204 Особые линейные автоматические системы управления
передачи этого органа. Кроме того, импульсные системы поз-
воляют реализовать многоканальные системы управления,
радиолокацию и др.) Основной смысл введения импульсного
управления заключается в освобождении измерительного
устройства регулятора от нагрузки на выходе. Это позволяет
применить более точное и тонкое измерительное устройство
с обеспечением в то же время достаточной мощности управ-
ляющего воздействия. Так как в дискретных системах, по
сравнению с непрерывными, в принципе происходит потеря
информации об изменениях сигнала, то можно ожидать
снижения точности функционирования системы. Однако
при достаточно малом шаге квантования и при сравнительно
медленно меняющихся сигналах, снижение этой точности
несущественно. Кроме того, процедура дискретизации сиг-
нала сопровождается отфильтровыванием высоких частот,
увеличивая помехозащищенность системы, а применение
вместо непрерывных устройств цифровых преобразователей
позволяет существенно снизить приборную погрешность.
Таким образом, суммарная точность функционирования
дискретной системы, по сравнению с непрерывной, может
существенно повыситься.
6.1. Математические методы анализа
функционирования импульсных систем
6.1.1. Разностные уравнения
Основным математическим аппаратом для описа-
ния импульсных систем служат разностные уравнения
(уравнения в конечных разностях). Неоднородные линей-
ные разностные уравнения имеют вид:
Л0Дту(и7) + Л 1Дт ху(пТ) + ... + Л Д'” У(пТ) + ... +
+ Л Ду(пТ) + Ау(п Т) =
m -1 J х z nr v z
= BQtfx(nT) + Bltf-lx(nT) + ... + BAe~jx(nT) + ... + J
+ B^xlnT), i = 0,m; j = 0/.
Здесь x(nT) - входной сигнал системы, определяемый для
дискретных моментов времени t — пТ, п = 0,оо. Так как
6. Импульсные системы
205
Т= const, mo функция х(пТ) является функцией цело-
численного аргумента п и называется решетчатой
функцией;
у(пТ) - выходной сигнал системы, свойства:которого
аналогичны х(пТ);
А., В - постоянные коэффициенты разностного
уравнения;
\'у(пТ) - конечная разность i-го порядка.
yt
пТ («+1)У (п+2)Г f
Рис. 2.20
Проиллюстрируем сказанное. Пусть, например,
функция y(t) изменяется так, как показано на рис. 2.20.
Первая разность этой функции равна Ду(и7) = у[(п + 1)7] ~
—у(пТ)„ т. е. равна длине отрезка 11', где 11* — геометричес-
кая интерпретация первой разности (см. рис. 2.20). Заме-
тим, что при Т —»• 0 первая разность функции y(t) стремится
к ее дифференциалу.
Вторая разность представляет собой разность пер-
вых разностей:
Д2у(и7) = Ду [(и 4-1)7]- ДЯ«Л =
=Я(и + 2)71 -Я0» + 1)7] -Ж» + 1)Л +у(пТ) =
= у[(п + 2)7] - 2у[(п + 1)7]
т. е. равна длине отрезка 2'2", где 2'2" = 1Г - 22' - геометри-
ческая интерпретация второй разности.
В общем случае f-тая разность (при t = nT) будет
равна:
206 Особые линейные автоматические системы управления
А‘у(пТ) = 'у[(« + 1)7] - Д; 'у(пТ).
Последовательно понижая порядок разности,
можно представить разность любого порядка в виде алгеб-
раической суммы функции y(f) для различных моментов
времени.
Можно показать, что в этом случае:
Ь‘у(пТ)= У (-1/ • с; [(„ + i - *)Т], (2.34)
Я)
где Ск =---'----число сочетаний из i элементов по к.
' k!(i - к)!
Например, воспользовавшись формулой (2.34),
определим вторую разность и введя относительное вре-
мя t-nT/T=n, положив z = 2. Окончательно получим:
С2° = С2 = 1; С2 = 2 и Д>(и7) =у[(и + 2)7] - 2у[(п + 1)7] +у(пТ),
что совпадает с результатом полученным выше.
Применив линейное преобразование (2.34) ко всем
членам разностного уравнения и введя относительное время
Т = (пТ/Т) = п, запишем его в виде:
а^п + т) + аху(п + ml) + ... + а у(п + m-i) +
+ ••• + flM> + 1) + =
(2.35)
= Ь^(п + 7) + ... + bfx(n).
Можно показать, что коэффициенты уравнений
(2.33) и (2.35) связаны следующим соотношением:
Заметим, что если в разности уравнении (2.35) коэф-
фициент ат = 0, то, в отличие от дифференциальных урав-
нений, можно понизить его порядок, заменив п + 1 = к.
Решение однородного разностного уравнения (2.35)
прих(/) = 0, описывающее свободное движение импульсной
системы, ищется в виде показательной функции
y(Z) = z'.
(2.36)
где: z - число подлежащее определению;
6. Импульсные системы
207
После подстановки (2.36) в (2.35) получим:
+ a.z(n + m °+ ... + а + °+ a z” = 0.
i т - 1 т
Сократив (2.37) наг", имеем:
ап^”+аЗт 1}+...+а,^т ° +...+а .z + a -0.
0 1 I m-i т
(2.37)
(2.38)
Уравнение (2.38) называется характеристическим
уравнением разностного уравнения (2.35), решение которого
и дает искомые числа z. Пусть корни характеристического
уравнения равны z (z = 1, т), тогда получаем т независимых
решений типа (2.36). Следовательно, решение уравнения
(2.35) может быть представлено в виде суммы вида:
Я«) = C}z}n + с2 Z2n + .
'.zn + ... + С z ”,
ii т т ’
(2.39)
где С — произвольная постоянная, определяемая из начальных
условий (i = 1, m ).
Корни характеристического уравнения z. в общем
случае комплексные числа, которые могут быть пред-
ставлены в виде: z. = A.eJ<pi. Тогда уравнение (2.39) можно
записать в виде:
у(и)=2С/4п^'"-
/=1
(2.40)
Из выражения (2.40) вытекает, что при модулях
комплексных чисел z меньше единицы все свободные
составляющие затухают, т. е. система устойчива. Таким
образом условие
z.\ = mod z. = А.
I 1 I I
(2-41)
является условием устойчивости импульсных систем,
которое можно сформулировать следующим образом: все
корни z. характеристического уравнения (2.38) должны
быть расположены на комплексной плоскости корней z
внутри круга единичного радиуса (рис. 2.21).
208Особые линейныеавтоматические системыуправления
урааиеиия«(и#) переходный шровдеес может иметь шяерахо-
jp^teeaa/ei или колебательный характер.
Доаи» гшльейное однородное рамюелшое уравнение
второго аорядка е лостоянными каяффш&иешнл-
Xя + 2) + ар(п + 1) + а^п} = 0.
(2.42)
Требуется найти его решение.
Запишем характеристическое уравнение выраже-
ния (2.42):
z2 + az + а = 0.
* лт
(2-43)
I 2
а а
Корни уравнения равны: zl2 = —^-±J-^--a2 .Тогда
в соответствии с (2.39) решение разностного уравнения
будет иметь вид:
х(н) = Cizln + С2 z2n,
где С} и С2~ постоянные величины, определяемые из началь-
ных условий: при t =0 х(п) =х(0); х(п + 1) = х(1)
Подставив начальные условия в полученное реше-
ние, имеем:
6. Импульсные системы 209
х(0) = С] + С2
откуда
х(1) — C\ZX + С2^2
, _ z2x(0) - х(1)
i ~ ’
z2-zt
, х(1) - x(0)z,
2 = •
z2-zt
Допустим, что корни характеристического урав-
нения равны: zx = - 0,1; z2 = - 0,5. Пусть при импульсном
возмущении начальные условия будут: х(0) = 0; х(1) = 0,4.
Тогда постоянные величины равны: С, = 1, С2 = - 1, и реше-
ние уравнения примет вид:
х(п) = ( - 0,1)" - ( - 0,5)"
График изменения решетчатой функции х(п) при
объекте управления, описываемом уравнением первого
порядка, представлен на рис. 2.22,а.
а *
х(л)
Рис. 2.22
При zx = 0,1; z2 = 0,5 и тех же начальных условиях
получим: С, = - 1, С2 = 1. Тогда х(и) = (0,5)” - (0,1)" и пере-
ходный процесс, представленный на рис. 2.22,6, носит апе-
риодический характер.
210 Особые линейные автоматические системы управления
Пример 2.5
Решим систему разностных уравнений с правой
частью
х(п + 1) + х(п) = Ьму(п), (2.44)
У<п + 1) + а12у(л) = Ь0^с(п). (2.45)
Решение
Исключим переменную х из приведенной системы
уравнений. Для чего запишем уравнение (2.45) для и + 1
интервала:
у(п + 2) + а12у(и + 1) = b02x(n + 1). (2.46)
Из уравнений (2.45) и (2.46) определим х(п) и х(п + 1)
и, подставив найденные значения в (2.44), окончательно
получим:
у(п + 2) + (1 + а 12)Я« + 1) + (а12 - Ъ^у(п) = 0. (2.47)
Уравнение (2.47) решается также, как и в предыду-
щем примере.
Заметим, что если а12 = 601Z>02, то произведя замену пе-
ременных п + 1 - к, уравнение (2.47) можно записать в виде:
у(к + 1) + (1 + а12) у(к) = 0. Полученное уравнение является
разностным уравнением первого порядка, т. е. порядок
исходного уравнения (2.47) понизился.
Пример 2.6
Рассмотрим импульсную систему автоматическо-
го управления температурой в печи, функциональ-
ная схема которой представлена на рис. 2.23.
Рис. 2.23
Уравнения отдельных звеньев, системы имеют
вид.
6. Импульсные системы 211
7. Уравнение объекта управления (ОУ):
(2.48)
где в - отклонение температуры печи 0п от её заданного
значения в *;
п 7
<р - перемещение регулирующего органа (РО), управляюще-
го расходом подаваемого энергоносителя q;
То, kQ - постоянная времени и коэффициент передачи
объекта соответственно.
2. Уравнение регулирующего органа совместно с
исполнительным механизмом (ИМ):
= (2-49)
dt ' ’
где U — напряжение, подводимое к двигателю исполнитель-
ного механизма;
кх - коэффициент передачи.
3. Функционирование импульсного регулятора (ИР),
реализующего широтно-импульсную модуляцию
(см п.6.2), описывается следующими уравнениями:
и = с- sign 0(0
и = о
при
при
n<,t <п + у
п + у <п + \
(2.50)
у = ки • 0(п) = ки • 0(п) • sign 0;
(2.51)
Здесь с = const; t = tIT;
T - период квантования;
у = t /Т— относительная оширина импульса;
t — длительность импульса;
ки - коэффициент передачи импульсного элемента.
Решение
Для определения значений переменных в началь-
ные моменты периода квантования Т проинтегрируем урав-
нения (2.49) с учетом (2.50) внутри и-го периода. Имеем
d(p = k{*T-Udt = к{-Т-с*sign0(t )dt . (2.52)
212 Особые линейные автоматические системы управления
Интегрируя (2.52) при п s t < п +у , получим:
<p(j ) = <p(ri) + kl-T-c- sign 6(n)J* di =
n
= <p(ri) + a • (F - ri) • sign 0(n),
где а =кх’Т • с; (р(п) — значение <р в начале п-го периода.
Интегрируя (2.52) при п+у ^1 < и +1, найдем:
п+у
<р(Г) = <р(п) + k}-T-c-sign0(ri)• f di =
п
(2.54)
= <p(ri) + a-y sign 0(ri) = <p(n + y).
Из (2.54) следует, что исполнительный механизм
играет роль запоминающего устройства, так как значение
p(i) остается постоянным на протяжении всей паузы и
равным (р(п + у). Изменение координат системы U(f) тл.<р(1)
иллюстрируется на рис. 2.24.
Заметим, что при достаточно малых периодах кван-
тования Т движение исполнительного механизма может
приобрести практически непрерывный характер, что поз-
воляет производить расчет обычными методами линейной
теории управления.
Значение (рЦ) для конца и-го и, следовательно, на-
чала^ + 1)периоданайдем,подставив(2.51)в(2.54)иучтя,
что [sign#(n)]2 = + 1:
(р(п + 1) = + ак (2.55)
С учетом того, что У = —, уравнение объекта можно
записать в виде: Т
О
II
(2.56)
Известно, что ре:
ение уравнений первого порядка
с правой частью:
6. Импульсные системы 213
ищется в виде:
p(x)dx
где С — постоянная интегрирования.
В нашем случае у = 0; х = Т ; р(х) = /3; q(x) =
=- к0/5(р (7); С=0(п). Тог да решение уравнения (2.56) после
преобразований примет вид:
«(Г)<)х*-<уггСу®#И. (2.57)
Вычислим значение 0(f) в конце и-го (или начале
(и + 1) периода). При этом учтем, что переменная <p(f) в
интервале от и до (и + у) описывается уравнением (2.53),
а в интервале от (и + у) до (и + 1) - уравнением (2.54).
Тогда подставив в (2.57) 1 = и + 1, после интегрирования и
преобразований окончательно получим:
0(и + 1) = 0(п)-е & -к0 х(1-е~^)-<р(п)-
-коки-а-(1-е~р)-0(п).
(2.58)
Здесь учтено, что при у « 1 значение е^у ~ 1 + Р • у.
214 Особые линейные автоматические системы управления
Систему полученных разностных уравнений
первого порядка (2.55) и (2.58) запишем в виде:
<р(п +1) - <р(п) = а • ки • 0(п); (2.59)
#(« + !)+ к0 -ки -а(1 -е -е & -0(п) =
в
= -^о • (1 - ) • ^(«)-
(2.60)
Эта система решается аналогично рассмотренной
в примере 2.5. Исключив из уравнений (2.59) и (2.60)
переменную после преобразований окончательно
получим следующее уравнение движения импульсной
системы:
0(n + 2)+fko-ku-a-(l-e^)-e^-1]-0(и + 1) +
+е'^ ’0(п) = 0.
(2.61)
При этом характеристическое уравнение системы
имеет вид:
z1 + -ки - а-(1 - е р -11 -z + e р = 0.
\z и*
Обозначив а, = к-к а• (1 -е'^)-ef -1, а = е ? ;
I 0 u V / 7 2 7
найдем корни z
При этом решение уравнения (2.61) запишется
в виде: в{п) = C^z* + C^z” где Cj и С2 - произвольные
постоянные определяемые из начальных условий: 0(0) = 0О;
0(1) = 0,
При заданных параметрах системы к}, ки, То, Т,
с, у - можно найти числовые значения а = к{ Тс ; = —,
а, следовательно, и коэффициентов а1 и а2 и корнейz|? z°.
На рис. 2.25 построены переходные характерис-
тики системы 0(и) по каналу расход энергоносителя
q{f) — отклонение температуры в печи при следующих па-
раметров ее звеньев: £0= 10 °С/рад; кх = 5-10“4 рад/В; То = 100
с; Т=1,5 То; с = 100В; у = 0,05. Значение коэффициента
6. Импульсные системы 215
передачи импульсного регулятора принималось рав-
ным: ки} = 12-Ю 4 В/°С; ки2 = 25-Ю’4 В/°С; к{3 - 50-Ю’4 В/°С.
Для всех трех случаев начальные условия принимались
одинаковыми: 0(0) = 0; 0(1)= 12 °C. Заметим что величи-
на 0(1) вычисляется путем решения уравнения объекта
(2.48) на первом интервале квантования по времени.
Рис. 2.25
Приведем результаты расчета для второго варианта
при ки~к . После подстановки числовых значений пара-
метров в уравнение (2.61), получим
0(п + 2)- О.640(и +1)+ О.220(н)= 0.
Корни характеристического уравнения:
z2 - 0.64z + 0.22 = 0,
комплексные сопряженные:
z1>2 = 0.32 ± /0.35,
216 Особые линейные автоматические системы управления
и следовательно, переходной процесс имеет колебательный
характер. Произвольные постоянные для принятых
начальных условий, равны Cj = - 16,8; С2= 16,8. Тогда
уравнение решетчатой переходной функции запишется в
виде
0(«) = 16.8 [(0.32-;0.35)Г-(0.32 + ;0.35)Г' .
Решетчатая функция, соответствующая полученной
зависимости в(п) приведена на рис. 2.25,6. Сопоставление
зависимостей 6(п), приведенных на рис. 2.25,а,б,в
показывает, что увеличение коэффициента передачи
импульсного регулятора увеличивает склонность системы
к колебаниям. Во всех случаях условия устойчивости
выполняются ( z, < 1). В случае, если zt & 1, необходимо
решить задачу параметрического синтеза, т. е. подобрать
такие параметры изменяемой части системы (Т, с, у, ku),
при которых она была бы устойчивой.
Рассмотренный метод ре
ения разностных урав-
И
нений относится к классическим. Более эффективным
методом решения этих уравнений является метод, исполь-
зующий так называемое z-преобразование, играющее для
анализа дискретных систем ту же роль, что и преобразова-
ние Лапласа для линейных систем.
6.1.2. Прямое z-преобразование
Запишем последовательность ординат функции x(f)
для дискретных моментов времени t = пТ, п = 0, оо в виде:
00
х * (f) = У x(f)d(t - пТ),
п-0
(2.62)
где d(t - пГ) =
0, V
<5(«П
t # пТ\
Ч t = пТ.
Выражение (2.62) формализует запись решетчатой
функции х*(/), представленной на рис. 2.26.Преобразуем
(2.62) по Лапласу:
6. Импульсные системы 217
00
А*(р)- (x*(t)e~p,dt.
о
Так как 8{t - пТ) = 0 при t пТ, то значение интегра-
ла на этих отрезках времени равно нулю и, следовательно,
вместо x(t)e~р1 можно подставитьх(пТ)е~рпТ' а затем вынести
его из-под интеграла. С учетом сказанного, имеем:
А* (р) = y.fx(t)d(t - nT)ep‘dt =
п-0 о
= 2 х{пТ)е~рпТ[ d(t - nT)dt.
п-0 о
(2.63)
00
Так как - nT)dt = 1 по определению, то выра-
жение (2.63) можно записать в виде:
(2.64)
Рис. 2.26
Поскольку правая часть уравнения (2.64) представ-
ляет собой дискретную функцию целочисленного элемента
п, то знак дискретности * может быть опущен.
Выражение (2.64) введено Я. 3. Цыпкиным и носит
название дискретное преобразование Лапласа или D-npe-
образование: Х( р) = D{x(nT)}. Заметим, что функциях(пТ),
как и в случае преобразования Лапласа, должна тождест-
венно равняться нулю при п < 0.
218 Особые линейные автоматические системы управления
Обозначим рТ= q. Тогда eq = z является комплекс-
ным числом и выражение (2.64) можно записать в виде:
00
X(z) = У x(nT)z~” =Z {х(пГ)}.
(2.65)
Функция X(z) комплексного аргумента z получен-
ная в соответствии с (2.65) носит названием-преобразование
решетчатой функции х(пТ).
Пример 2.7
Найти z-преобразования некоторых решетчатых
функций:
1) единичной ступенчатой -х(пТ) = ЦпТ), представ-
ленной на рис. 2.27,а;
2) экспоненциальной -х(пТ) = е~апТ(рис. 2.27, б);
3) линейной - х(пТ) = пТ(рис. 2.27, в).
а
Рис. 2.27
Решение
. а
Найдем z-преобразование для всех трех случаев,
воспользовавшись выражением (2.65).
1. Для единичной ступенчатой функции можно записать
00
И“0
6. Импульсные системы 219
Правая часть полученного выражения представляет
собой сумму бесконечно убывающей геометрической про-
грессии со знаменателем z~ Тогда получим:
2. Для экпоненциальной функции справедливо
я=0
В данном случае знаменатель геометрической про-
грессии равен e“a7z-1. Тогда получим:
3. Для линейной функции получим
00
{Znl}= у nTz~n = Tz’1 + 2Tz~2 +... + nTz~n +... =
и=0
Выражение в скобках, стоящее в правой части полу-
ченного уравнения, представляет собой разложение бинома
Ньютона вида (1 - z~ ’)-2. Тогда можно записать:
Z{nT} = Tz\\-z'y =
Заметим, что во всех рассмотренных примерах ко-
эффициенты при общем члене ряда, представляет собой
оригинал решетчатой функции х(пТ).
* * *
Сформулируем основные свойства z преобразова-
ния.
1. Свойство линейности, вытекает из определения.
(2.66)
Это свойство позволяет применять z-преобразова-
ния к каждому члену разностного уравнения.
220 Особые линейные автоматические системы управления
2. Теорема сдвига (смещение аргумента в области
оригинала на t = тТ).
Пусть t=T. Найдем z-преобразование решетчатой
функции х(пТ + 7). Имеем:
Z{x(nT + Г)} = У х(пТ + T)z~n = |Л = п +1| =
и»0
= zV x(kT)z~k = zV x(kT}z~k - zx(0) = z[X(z) - x(0)].
(-1
В общем случае получим:
Соотношения (2.66) и (2.67) позволяют получить z-преобра-
зование разностных уравнений.
(2.67)
Пример 2.8
Пусть система описывается разностным уравне-
нием второго порядка:
х(п + 2) + а{х(п + 1) + а^п) - 0.
Требуется найти его z-преобразование.
Решение
Воспользовавшись свойством линейности (2.66),
запишем:
Z{x(n + 2)} + a Z{x(n + 1)} + cLZ{x(n)} = 0.
<1*
На основании теоремы сдвига (2.67), перепишем
полученное выражение ввиде:
z2 [X(z) — х(0) —х(1 )z ’] + afLXfz) -х(0)] + a^(z) = 0.
Откуда:
X(z) = Z{x(n)} =
x(0)z2 + [a]X(0) + x(l)]z
z2 + axz + a2
6. Импульсные системы 221
Подчеркнем что, применение z-преобразования для
.решения разностных уравнений (как и применение преоб-
разования Лапласа для решения дифференциальных урав-
нений) позволяет алгебраизировать разностные уравнения
и автоматически учесть начальные условия.
3. Теорема запаздывания (смещение аргумента в
области оригинала в сторону t = - тТ).
Иногда разностные уравнения записывают, ис-
пользуя смещения в сторону запаздывания. Например,
«обозначив п + т'= к, разностное уравнение, рассмотренное
в примере 2.8 (при т = 2) можно переписать его в виде:
х(к) + ci'Xfk - 1) + а2х(к - 2) = 0.
В общем случае, учтя, что к - т = п, имеем:
-т -л
со —1
x(nT)z~n + x(nT)z~n
п-0
-т
X(z) + Vx(-nT)z"
П-1
Так как при пТ < 0 х(пТ) = 0 по определению, то
второе слагаемое в квадратных скобках равно нулю. Тогда
окончательно получим:
Z {x[(k-m) T]}=z~ mX(z). (2.68)
4. Теорема о конечном значении.
Конечное значение функции х(пТ) равно:
(2.69)
Для доказательства справедливости приведенного
выражения найдем z-преобразование первой разности:
Z{x[(n + 1)7] -х(пТ)} —
= z[x(z) -х(0)] - X(z) = (z-ОДг) - zx(0).
(2.70)
222 Особые линейные автоматические системы управления
С другой стороны z-преобразование этой же разно-
сти можно записать следующим образом:
Z{x[(n+ 1)7] - х(пТ)} =
к
lim V {*[(« + 1)Г] - х(пТ)} z~n.
(2-71)
Приравняв правые части, уравнений 2.70 и 2.71 и
взяв от обеих частей предел при г—>1, получим:
Здесь учтено, что limz ” = 1 и произведено сокра-
z-»l
щение подобных членов в фигурных скобках. Взяв пре-
дел от полученного выражения, окончательно получим:
lim[(z — l)Jf(z)] = х(°°) 9 что и требовалось доказать.
5. Теорема о начальном значении:
Начальное значение функции x(t) равно конечному
значению ее z-преобразования X(z):
x(0) = lim^(z). (2.72)
z—>00
Действительно, по определению имеем
00
X(z) - V x(nT)z~" = х(0) + x(T)z-1 + x(2T)z’2 +...
п=0
Взяв предел от этого выражения при z —* оо полу-
чим выражение (2.72).
6. Импульсные системы 223
6.1.3 Обратное z-преобразование
Нахождение оригинала x(wТ) по известному z-преоб-
разованию Jf(z) называется обратным z преобразованием:
Эта операция осуществляется следующими спосо-
бами:
1. За счёт использованием таблиц прямого и обрат-
ного ^-преобразования. Фрагмент такой таблицы представ-
лен ниже.
Решетчатая функция
х(пТ)
1(и)
Таблица 2.1
Z{x(nT)}X(z)
z
z — 1
Tz
(z -1)2
-апТ
sin /ЗпТ
cos flnT
-апТ
Z
„~аТ
z-e
z sin fiT
z2 - 2z cos flT +1
z(z - cos ДГ)
z2 - 2z cos fiT +1
(l~e-ar)z
(z - l)(z - e~aT )
2. Разложением z-преобразования X(z) в ряд по сте-
пеням z~1 в окрестностях рабочей точки z0 = 0.
Так как из определения z-преобразования следует,
что коэффициент при z ~ п разложения в ряд функции X(z)
равен значениюх(пТ), то, воспользовавшись соотношением
(2.65) и записав z-преобразование в виде ряда, получим:
224 Особые линейные автоматические системы управления
00
AT(z) = V x(nT)z~” =
л«0
(2.73)
= х(0) + x(T)z 1 + x(2T)z 2 +
+ x(nT)z п + ...
Коэффициент при общем члене ряда (2.73) и являет-
ся искомой функцией х(пТ).
Пример 2.9
Решение
Пусть X(z) =
Необходимо найти х(пТ).
Представим X(z) в виде ряда, для чего, воспользо-
вавшись правилом деления многочленов, поделим z2 на
(1 -^)2:
z2: (z2— 2z + 1) = 1 + 2z 1 + 3z 2 + ... + (n + l)z " + ...
Тогда можно записать:
X(z) = Г[1 + 2z-1 + 3z~2+ ... +(и+ l)z-”+ ...],
откуда x(n T) = (n + Y)T.
3. Общим методом нахождения оригинала базиру-
ется на том, что ряд вида (2.73) относится к ряду Лорана.
Известно, что коэффициент этого ряда С приз-" вычис-
ляется по формуле:
<f X(z)z"~ldz = Z1 {X (z)}
(2.74)
Выражение (2.74) является обратнымz-преобразова-
нием, аналогичным обратному преобразованию Лапласа.
Воспользовавшись (2.74), можно показать, что в
случае, еслиЛ(г) является дробно-рациональной функцией,
г ч B(z)
т. е. X[z)= —т-т, где B(z) и z4(z)-алгебраические полиномы,
4(z)
причем степень полинома B(z) меньше степени полинома
A(z), то оригинал х(пТ) можно найти по формуле:
6. Импульсные системы 225
х(иТ) =
(2.75)
где: zk - корни характеристического уравнения A(z) = 0;
N -общее количество корней того же уравнения;
Л* (z) ” производная полинома A(z) по z.
Выражение (2.75) является аналогом теоремы разло-
жения Хевисайда-Карсона используемой для нахождения
оригинала в операционном исчислении.
Пример 2.10
Пусть z-преобразованиерешетчатой функции х(п)
задано в виде, полученном в примере 2.8.
Z{x(«)} =
x(0)z2 + |дх(0) + x(l)]z
z2 + axz + a2
(2.76)
Примем, что числовые значения коэффициентов
равны: ai = - 1; а2 = 3/16, а начальные условия:
х(0) = 0; х(1) = 2. Найдем реакцию системы х(п) на
импульсное возмущение, обусловленное ненулевым
начальным условием.
Решение
Подставим числовые значения параметров в выра-
жение (2.76), получим:
2z
z2 -z + 3/16
Корни характеристического уравнения A(z) = z2-
— z + 3/16 = 0, равны: zf = 0,75; z2 = 0,25. Заметим, что так как
|z| < 1, то limx(n) = 0 и, следовательно, система устойчива.
Воспользовавшись теоремой разложения (2.75),
получим:
х(п) = У B(<Zk} znk--------zf +---------z". (2.77)
' ^(2z2-1) 2 V >
Здесь коэффициенты при z." представляют собой
постоянные величины Сп, которые после подстановки
числовых значений z} и z2 равны: Ct = 4, С2 = - 4. Тогда вы-
ражение (2.77) примет вид:
автоматического управления
226 Особые линейные автоматические системы управления
х(п)= C\z" + C2z2 = 4Г(о,75)Г -(0,25/
Рис. 2.28
(2.78)
Переходный процесс в системе, построенный в со-
ответствии с выражением (2.78), представлен на рис. 2.28.
Здесь кривая 1 представляет собой график весовой функции
w(f) непрерывной системы, описываемой дифференциаль-
ным уравнением второго порядка, а решетчатая функ-
ция 2 - график дискретной весовой функция w(h) для той
же системы.
Заметим, что обычное z-преобразование позволяет
определять значения х(п) по известному X(z) только для
дискретных моментов времени t = пТ\ где Т= const.
6.1.4. Модифицированное z-преобразование
Если необходимо определять величину x(Z) в любой
момент времени, то пользуются модифицированным z-npe-
образованием, которое имеет вид:
00
Х(и,£) = г{х[(и + £)Г]}= 2 x[(n + £)T]z-", (2.79)
«“О
где х[(и + е)7] - решетчатая функция, сдвинутая относи-
тельно момента времени пТна величину гТ (О < г < 1).
Пусть, например, х[(п + s)7] = (п + е)Т -дискретная
прямая, смещенная на время еТ(рис. 2.29). Модифициро-
ванное z-преобразование этой прямой найдем, воспользо-
вавшись (2.79) и данными таблицы 2.1.
6. Импульсные системы
227
х[(и+£)7]
Рис. 2.29
00
X(z,E)=\(n + E)Tz-n =
/7 = 0
Нахождение оригинала модифицированного
z-преобразования производится аналогично обратному
z-преобразованию рассмотренному выше. Так как величи-
на £ - const, то соответствующие сомножители могут быть
вынесены за знак интеграла (2.74). Например, если
_-агТ
ТО
Z’{r(z,£)}= eaET-Z~x
(2.80)
Здесь второй сомножитель представляет собой
обычное обратное z-преобразование которое можно най-
ти, воспользовавшись таблицей 2.1. Тогда оригинал вы-
ражения (2.80) запишется в виде дискретной смещенной
экспоненты:
„~апТ „~а(п+еХ
х\п1 ) = е 'в = е .
Заметим, что в случае запаздывающей функции
х(«Т-£7), ее z-преобразование находится с помощью теоре-
мы запаздывания (2.68). Имеем
8*
228 Особые линейные автоматические системы управления
х(пТ- £Т) = х[(и + е)Т- (к + 1)Т].
(2.81)
Здесь Т = т - время запаздывания; £=к + 1- е;
£=0,1,2,....
Взяв z-преобразование от левой и правой частей
выражения (2.81) с учетом (2.68), получим:
X(z,|) = z'(t+1)^(z,£); к = 0,1,2,.... (2.82)
Например, прик= О и, следовательно, £=(!-£)<!, выра-
жение (2.82) примет вид
X(z^)-z-'X(z,£)
и, если
то, воспользовавшись таблицей 2.1 и учтя соотношение
(2.68), получим:
х[(и-£)Т]=е‘а(иЧ)Г.
Выражение (2.82), являющееся z-преобразованием
запаздывающей функциих(пТ-т), может быть использовано
при анализе и синтезе дискретных систем, содержащих
звенья с запаздыванием.
6.2. Импульсные фильтры
Импульсным фильтром или разомкнутой им-
пульсной цепью называют устройство, состоящие из пос-
ледовательно включенных импульсного элемента (ИЭ) и
непрерывной части (НЧ) (рис. 2.30).
Рис. 2.30
6. Импульсные системы 229
Импульсный элемент предназначен для дискрети-
зации сигналов во времени. Заметим, что в соответствии
с теоремой Котельникова, непрерывный сигнал можно
полностью (без потери информации) восстановить по его
дискретным значениям, если интервал дискретности
Т £ Д = 7г/со ,
max'
где сотах-максимальная частота гармоники, присутствую-
щей в непрерывном сигнале.
Если Т > п/со^ то высокочастотные составляющие
восстановить нельзя, т. е. дискретная система отфильтро-
вывает высокие частоты и, следовательно, обладает повы-
шенной помехоустойчивостью.
Идеальные ИЭ преобразуют непрерывный сигнал
в последовательность импульсов, типа 8-функции, вели-
чина которых (интеграл) пропорциональна непрерывному
сигналу x(t) в момент времени t = пТ. В реальных системах
ИЭ формируют импульсы разнообразной формы, которые
характеризуются определенными параметрами. Изменение
параметров импульсов в функции входного воздействия x(t)
называют импульсной модуляцией^.
К основным видам модуляции прямоугольных им-
пульсов относятся:
б
Рис. 2.31
1. Амплитудно-импульсная модуляция (АИМ)
(рис. 2.31, а). Этот вид модуляции характеризуется посто-
* Модуляция (лат. modulatio) - мерность, размеренность.
230
Особые линейные автоматические системы управления
явным периодом квантования Т = const и длительностью
(шириной) импульса tu = const. Амплитуда импульса Н про-
порциональна величине входного сигнала x(t) в дискретный
момент времени t = лТ, т. е. Н = кх(пТ), где к - коэффициент
пропорциональности.
2. Широтно-импульсная модуляция (ШИМ)
(рис. 2.31, б). Этот вид модуляции характеризуется: пос-
тоянными периодом квантования (Т = const) и абсолютной
величиной амплитуды импульса Н= c sign%(n7); с = const.
Ширина импульса tu пропорциональна абсолютному зна-
чению входного сигнала x(f) в момент времени t = nl\ т. е.
tu = £| x(nt) | , где к - коэффициент пропорциональности
Кроме рассмотренных видов модуляций существует
время-импульсная/которая подразделяется на частотно-
импульсную (Т - var) и фазо-импульсную ((р = var, где (р -
сдвиг импульса относительно начала периода п Т). Эти виды
модуляции применяются в основном в радиотехнике.
Классическими представителями импульсных
элементов, наглядно иллюстрирующими их функциони-
рование является падающая дужка и ключ**.
1. Падающая дужка, реализующая АИМ (рис. 2.32, а).
В результате вращения эксцентрика 1 с постоянной часто-
той 69, падающая дужка 2 совершает движение «вверх-
вниз», прижимая на определенное время t стрелку из-
мерительного прибора 3 к потенциометру 4. При этом с
выхода импульсного элемента снимается сигнал х(пТ),
пропорциональный положению стрелки относительно ну-
левого значения величины х(/). По мере удаления стрелки
от нулевого положения амплитуда импульсного сигнала
увеличивается. Вращение экцентрика осуществляется
синхронным двигателем 5.
2. Ключ, реализующий АИМ (рис. 2.32, б). Ключ 6
при вращении эксцентрика 1 замыкается на определенное
время t с периодом повторения т = —, где со - частота
вращения двигателя 5. Импульсный сигнал х(пТ) снимается
с потенциометра 4.
1 В современной практике эти импульсные элементы заменены технически более совер-
шенными. Однако простота и наглядность функционирования падающих дужек и ключей
делает их рассмотрение методически целесообразным.
6. Импульсные системы
231
Рис. 2.32
3. Падающая дужка, реализующая ШИМ (рис. 2.33).
Отличие этого устройства от устройства представленного на
рис. 2.32,а заключается в том, что падающая дужка 2 имеет
вырез, а потенциометр заменен двумя контактными плас-
тинами 4. Благодаря вырезу на дужке время замыкания
цепи (длительность импульса f) будет пропорциональна
отклонению стрелки измерительного прибора 3 от нулевого
положения в ту или иную сторону. При этом амплитуда
импульса остается постоянной.
Определим математический оператор, связываю-
щий входную x(t) и выходную у(/) переменные импульсного
фильтра (рис. 2.30).
Рис. 2.33
Известно, что входная и выходная переменные в
непрерывных системах связаны между собой интегралом
Дюамеля (см.п. 10.4.2):
232
Особые линейные автоматические системы управления
у(7) = f w(ff)x(t - &)d0
О
где w(0) - функция веса непрерывного звена.
Интеграл Дюамеля можно записать и в дискретной
форме:
у(пТ)= V w(kT^xfnT -кТ\
или более компактно:
Л
(2.83)
Найдем z-преобразование от выражения (2.83), для
чего воспользуемся теоремой свертки, доказательство ко-
торой базируется на теореме запаздывания. Пусть имеем
Z{fx{kT)} = F/z); Z{f2(nT)} = F2(z).
Запишем произведение правых частей приведенных
уравнений в виде:
4(0^20-
га
Учтя, что в соответствии с теоремой запаздывания
z ‘F2(z) = Z {/2(иТ - АТ)}, получим
5,(z)F2(z) - V ft (кТУ£ f2 (пТ - kT)z- -
Го л* О
м«=0 СТ
-zl^f^kT^nT-kT^.
00
. _ п
00
-П
Учтя, чтоДиТ) = 0 при и <0, получим, что: f2(nT -
- кТ) = 0 при, к>п. Следовательно, верхний бесконечный
предел суммы, стоящей в фигурных скобках, можно заме-
нить на конечный равный п. Тогда получим:
6. Импульсные системы 233
Л
(2.84)
Выражение (2.84) является математической форму-
лировкой теоремы свертки в дискретном виде*’.
Возьмем z-преобразование от выражения (2.83).
Тогда с учетом (2.84), получим: Z{yn} = Z{wk} Z[xn к}. Обоз-
начив Zywk }= V w^z-* = FF*(z), можно записать:
(2.85)
Выражение (2.85), при условии что x(t) = 0, t < 0,
представляет собой дискретную передаточную функцию.
В случае подстановки в (2.85); z-epT\p= =el0>T, получим
дискретную частотную функцию W*(e>a>T), позволяющую
производить частотный анализ дискретных систем.
Пример 2.11
Пусть непрерывная часть импульсного фильтра
представляет собой интегрирующее звено с пере-
даточной функцией W( р) = к/p. Требуется найти
дискретную передаточную функцию импульсного
фильтра IV* (z).
Решение
Найдем функцию веса непрерывной части систе-
мы:
w(t) = L~l{W(p)} =L-l{k/p}=k
При этом дискретная весовая функция представ-
ляет собой ступенчатый дискретный сигнал: Ч = к(пТ)
аналогичный представленному на рис. 2.27,а, но с амп-
литудой равной к. Тогда имея в виду, что в соответствии с
таблицей 2.1 Z , получим
Аналогичная теорема для непрерывных функций имеет вид:
о
/
234 Особые линейные автоматические системы управления
Z {&(«?)} =
Это выражение и представляет собой искомую передаточ-
ную функцию импульсного фильтра (ИФ), которая является
дискретным оператором преобразования двух последова-
тельно включенных элементов: импульсного элемента (ИЭ)
и непрерывной части (НЧ) (рис. 2.34).
Рис. 2.34
Подчеркнем, что дискретная передаточная функ-
ция последовательно включенных непрерывных звеньев
не равна произведению дискретных передаточных функ-
ций этих звеньев, т.к. для этого требовалось бы иметь им-
пульсные элементы перед каждым непрерывным звеном.
Поэтому для нахождения передаточной функции сложной
дискретной системы необходимо свести всю непрерывную
часть в одно непрерывное звено, на входе которого стоит
один импульсный элемент (рис 2.34).
6.3. Устойчивость импульсных систем
Для облегчения анализа функционирования слож-
ной импульсной системы ее следует привести к виду, пред-
ставленному на рис. 2.34. Пусть дискретная передаточная
функция импульсного фильтра W* (z) известна. Тогда
передаточная функция замкнутой системы с единичными
отрицательной обратной связью будет:
Воспользовавшись полученным выражением, мо-
жем записать K(z) = W*(z)X(z), что позволяет найти ориги-
нал, выходного сигнала:
6. Импульсные системы 235
у(пТ) - Z 1 {У(г)}.
Известно, что для устойчивой системы необходимо
и достаточно, чтобы выполнялось следующее условие:
lim Д(иТ) = £,
(2.86)
где А - (у* — у) - величина рассогласования (для астатичес-
ких систем е = 0).
Для нахождения у(пТ) воспользуемся теоремой
разложения (2.75):
N
п _ Х-т п
k “ Л ^kZk ’
(2.87)
где zk - корни характеристического уравнения замкнутой
системы: 1 + PF* (z) = 0; N - количество корней этого
уравнения (k= 1,7V);
2?(z) / к
—- дискретная передаточная функция
системы;
- постоянные величины; п - относительное
дискретное время.
Из выражения (2.87) следует, что для устойчивой
системы, отвечающей требованию (2.86), необходимо чтобы
выполнилось условие:
= mod z
(2.88)
Рассмотрим условия устойчивости импульсных
систем, описываемых разностными уравнениями первого
и второго порядков.
Пример.2.12
Найдем условия, при которых импульсная систе-
ма, описываемая разностным уравнением первого
порядка у(п +1) + аху(п) = 0, будет устойчива. Ре
шим ту же задачу для случая когда уравнения сис-
темы имеет вид: у(п + 1) + аху(п) + а2у(п) = 0.
236 Особые линейные автоматические системы управления
Решение
Запишем характеристическое уравнение системы
для первого случая: z + a, = 0. Корень этого уравнения
z = - а.. Тогда в соответствии с (2.88) условие устойчивости
системы примет вид: | а{\ < 1.
Во втором случае характеристическое уравнение
системы имеет вид:
z2 + a.z + а. = О,
1 4*
(2.89)
Тогда условие устойчивости |z.| < 1, i = 1, 2 можно
разбить на три условия:
1. z < 1; 2. z >-1;
1 X-
где z. — корни уравнения (2.89).
3. mod z.< 1,
Первые два условия должны выполняться в случае
вещественных корней уравнения (2.89), третье - в случае
комплексных сопряженных.
В общем случае корни характеристического урав-
нения (2.89) равны:
Тогда условия устойчивости для всех трех случаев
запишутся в виде:
J2
— -я2 < 1, откуда 1 + ах + а2 > 0. (2.90)
4
2. z2 =—л—> “ h откуда 1 — ах 4- а2 > 0. (2.91)
3. При 4а2 > а\
Модуль комплексного числа z(. (z = 1,2) равен:
6. Импульсные системы 237
Тогда в соответствии с условием (2.88), условие ус-
тойчивости будет: а/г < 1 или
1 - аг > 0. (2.92)
Таким образом, условия(2.90)-(2.92) являются усло-
виями устойчивости импульсной системы второго порядка
при любых типах переходного процесса.
6.3.1. W-п реобразование
Так как непосредственный анализ влияния коэф-
фициентов разностных уравнений на корни характерис-
тического уравнения выше четвертого порядка в принципе
невозможен, а третьего и четвертого порядков достаточно
громоздок, то для облегчения решения задачи целесо-
образно воспользоваться такими критериями, которые
позволяют непосредственно по коэффициентам уравнения
судить об устойчивости системы. С этой целью используют
w-преобразование, которое позволяет непосредственно при-
менять известные критерии устойчивости непрерывных
линейных систем.
При применении w-преобразования окружность
единичного радиуса на комплексной плоскости z отобража-
ется на мнимую ось комплексной плоскости w (рис. 2.35).
Рис. 2.35
Для этого используется следующая подстановка:
1 + w ч z -1
z =----, откуда w =--.
1-w z+1
(2.93)
238 Особые линейные автоматические системы управления
Выражение (2.93) на границе области устойчивости
при z = е1и>т = е’ш*, где tw* = соТ, (рис. 2.35, а), примет вид:
(2-94)
Имея в виду, что eJ<a* = cos со* + jsin со*, и умножив
числитель и знаменатель правой части выражения (2.94) на
число сопряженное знаменателю, окончательно получим
(2.95)
1 + COSCO*
Здесь 2 = tgO,5co* - так называемая относительная псевдо-
частота (при малых частотах; tg 0,5со*й 0,5со*).
Из (2.95) вытекает, что при изменении частоты со*
от -л до + п псевдочастота 2 принимает все значения от —<х>
до + оо, а комплексная величина w движется по оси мни-
мых от -/’оо до + /со. Эта ось, отображающая окружность
/ft) * v о
z = е на плоскости z, и является границей устойчивости
на плоскости w (рис. 2.35, б). Заметим, что прямая w = jk яв-
ляется конформным отображением (образом) окружности
z = eJ(oT. Таким образом, для устойчивой системы корни ее
характеристического уравнения после подстановки в него
преобразования (2.93) должны лежать на комплексной
плоскости и’ слева от оси мнимых. Это и позволяет для
w -преобразованных дискретных передаточных функций
W*(w) использовать обычные критерии устойчивости, при-
меняемые для непрерывными линейных систем.
Пример 2.13
Пусть характеристическое уравнение импульсной
системы имеет вид z2 + axz + а2 = 0. Требуется опре-
делить условия устойчивости.
Решение
После подстановки в характеристическое уравнение
системы выражения (2.93), получим:
[(1 + w)/(l - w)]2 + [(1 + w)/(l - w)] + а = О,
J м
или после преобразований:
6. Импульсные системы 239
(1 — а + a.) w2 + 2(1 — а?) w + 1 + а, + а7 — 0.
В соответствие с критерием Гурвица (см. п. 3.1.2)
для устойчивости системы второго порядка необходимо
и достаточно, чтобы все коэффициенты уравнения были
положительны. Тогда имеем:
Эти результаты совпадают с результатами, полу-
ченными ранее при непосредственном (более громоздком)
анализе корней характеристического уравнения (при-
мер 2.12).
6.3.2 Частотные критерии устойчивости
Для анализа устойчивости импульсных систем мо-
гут быть использованы классические частотные методы,
применяемые в линейной теории управления.
Ранее было введено обозначение: рТ~ = ед = z,
что позволяет записать lF*(z) = W*{eq) = W*(q) = B*(q)/A*{q).
Тогда для замкнутой импульсной системы (рис 2.34) харак-
теристическое уравнение l+IP*(z) = 0, опуская индекс «ф»
и учтя, что z = е\ можно записать в виде
1 + W*{eq) = 0,
(2.96)
где W*(eq) - дискретная передаточная функция разомкнутой
ситемы {импульсного фильтра).
В соответствии с условием устойчивости |z | < 1,
корни уравнения (2.96) qk должны лежать в левой полу-
плоскости комплексного переменного q = (ос±/ш)Г =
Это утверждение вытекает из условия (2.88). Имеем
< 1 и, следовательно, для выполнения
этого условия величина а* должна быть отрицательной, а
корни qk jspnmBbi лежать на комплексной плоскости q слева
от оси мнимых.
240 Особые линейные автоматические системы управления
Заметим, что так как sin = sin (<w* + htm), то корни
уравнения (2.96) qk = a*±ja>* (m = 0), лежащие в левой по-
луплоскости ограниченной прямыми + jit и - jit: (рис 2.36),
принято называть главными. При этом остальные корни
(т = 1,2...) будут также лежать в левой полуплоскости, так
как величина а* остается отрицательной. Следовательно,
для определения устойчивости системы достаточно иссле-
довать расположение на комплексной плоскости только
главных корней.
Трансцендентность характеристического уравне-
ния (2.96) свидетельствует о целесообразности использова-
ния частотных критериев для определения устойчивости
системы.
Аналог критерия Михайлова
В основу этого критерия как и для непрерывных
систем положен принцип аргумента. Пусть дискретная
передаточная функция разомкнутой системы имеет вид:
FK*((j) = B*(q)/A*(q). Тогда уравнение (2.96) можно записать
в виде:
D*(q) = A*(q) + B*(q) = 0.
(2.97)
j(ok
a? •
Область
устойчивости
Рис. 236
Для устойчивой системы, т. е. такой когда ни один
главный корень q. уравнения (2.97) не лежит на комп-
лексной плоскости q в правой полу по лосе, ограниченной
прямыми ± jit, изменение аргумента/)*^) при обходе этой
полуполосы по замкнутому контуру L, - Ь4 должно равнять-
6. Импульсные системы 241
ся нулю (рис. 2.36). Это положение соответствует принципу
аргумента Коши.
Изменение аргумента D*(q) при обходе по замкну-
тому контуру правой полуполосы можно записать в виде:
AargZ)*(?) = Aii 4-Д^ + Д^ + ДЛ/
где Д£ - изменение аргумента комплексной функции D*(q)
при обходе контура на участке Lt (z = 1,4):
Д, = Д, arg£>*(jjj») при
= Д2 arg D * (q)
Д^ = Д3 arg D * (q)
д£4 = д4 arg D * (?)
при
при
при
-7Г £ +JT •
О00 .
+7Г SW* S —Л •
оо sa* s О
Так как при обходе контура L-L^ вектором D*(q)
каждой точке на участке контура L2 с положительным
аргументом + (р соответствует точка на участке L. с отри-
цательным аргументом ~(р, то, Д, + Д, = 0* Изменение
аргумента на бесконечно удаленном участке контура L3
(при +л £й>* s -л ), составит:
(2.98)
к^ = Д3 arg D * (q) = -2лт
где т — степень полинома D*(q).
Убедимся в справедливости (2.98). Представим ха-
рактеристический полином системы в виде:
*
(2.99)
т - I т
При достаточно большой вещественной части
комплексного числа q = a* + jto* ъсема членами полинома
(2.99), за исключением первого можно пренебречь, т. е.
lim D*(q) = ааечт. Тогда при движении по участку контура
«*-►00 и
L3 комплексное число q изменится от значения а* + jit до
а*-уя, а аргумент функции/)*^) = аоечт= a<£a*meJa>*m на-2/пл,
что и требовалось доказать.
242 Особые линейные автоматические системы управления
Так как для устойчивой системы должно выдержи-
ваться условие A arg D*(q) = 0, то с учетом сказанного можем
записать: А( arg D*(q) = A arg D*(jco*)-2x:m = 0, откуда:
AargZ)*(/со*) = 2лт, при —со <> + я.
(2.100)
Выражение (2.100) и является условием устойчивос-
ти импульсной системы, в соответствии с которым критерий
Михайлова можно сформулировать следующим образом:
для того, чтобы замкнутая импульсная система была ус-
тойчива, необходимо и достаточно, чтобы годограф вектора
£>*( уш*) при изменении 69* от 0 до + л, нигде не обращаясь в
нуль, прошел на комплексной плоскости в положительном
направлении последовательно 2т квадрантов.
В случае применения w-преобразования харак-
теристический полином замкнутой системы Z)*(w) при
w=jk превращается в кривую Михайлова D*(y2), которая
для устойчивой системы при изменении 2 от 0 до + go пос-
ледовательно в положительном направлении проходит т
квадрантов (так как 2 = а>*/2), т. е. имеем полную аналогию
с критерием Михайлова, применяемым для линейных не-
прерывных систем.
Аналог критерия Найквиста
Обобщение критерия Найквиста на импульсные
системы производится также, как и для критерия Михай-
лова. Но при этом рассматривается не кривая Михайлова
D*(jc9*), а характеристический полином замкнутой сис-
темы 1 + FF*(jco*). Формулировка критерия Найквиста
для импульсной системы аналогична формулировке этого
критерия для непрерывных систем: для того чтобы за-
мкнутая импульсная система была устойчива, необходимо
и достаточно, чтобы АФЧХ разомкнутой системы W*(jco*)
при изменении со* от 0 до + л не охватывала точку (-1, у'0).
В случае использования w-преобразования формулировка
рассматриваемого критерия отличается от приведенного
выше тем, что при со* =JA псевдочастота 2 изменяется от
0 до оо.
Пример 2.14
Пусть дана система автоматического управле-
ния, структурная схема которой представлена
6. Импульсные системы 243
на рис 2.37. Требуется проверить устойчивость
системы.
Передаточные функции звеньев заданы и имеют
вид:
1. Объекта управления:
Рис. 2.37
2. Исполнительного механизма:
к~,
z > — —
3. Импульсного пропорционального регулятора, ре-
ализующего АИМ:
и
— коэффициент передачи импульсного элемента.
Решение
Запишем передаточную функцию непрерывной
части системы
W{p) = W^p)W2(p)Wu(p) = £ где к = кхк2ки.
Т2р(Т{р + \)
Введя безразмерные величины:
где Т - период квантования импульсного элемента, получим:
W(q) =
244 Особые линейные автоматические системы управления
Найдем корни характеристического уравнения ра-
зомкнутой системы, решив уравнение q(q + Р^) = 0, откуда
^ = о,?2 = -Д.
Функцию веса w(/) = Z {FF(#)} найдем, воспользо-
вавшись теоремой разложения:
Последовательность функций веса для дискретных
моментов времени t = nTзапишется в виде:
w(7) = w(n) = кР2 (1 - е ^°"),
где fl0 = flxT.
При этом Z{w(ri)}, найденное по таблице 2.1, бу-
дет:
Z{w(n)} = W*(z) =
Заменив z на (а* = 0), найдем частотную функ-
цию разомкнутой системы:
Предположим, что числовые значения параметров
г
системы равны:PQ~Р2~\\к- 1. Подставив эти значения в
6. Импульсные системы 245
выражение W( jco*), можно построить годограф частотной
характеристики разомкнутой системы при изменении со*
If
Л Sj
от нуля до + п (рис. 2.38). Как видно из рисунка годограф
fK*(j<o*) не охватывает точки ( - 1 ,у'О), что свидетельствует
об устойчивости системы.
6.4. Качество функционирования
импульсных систем
Для оценки качества работы импульсных систем
используются как прямые методы, заключающиеся в не-
посредственном построении кривой переходного процесса,
так и косвенные. В первом случае по кривой переходного
процесса определяются его параметры. В частности, в
случае колебательного процесса (рис. 2.39) определяются:
время регулирования t (при заданной зоне нечувствитель-
ности ± &), величина максимального перерегулирования
, пеРи°Д колебаний Тк
Для апериодических процессов основным парамет-
ром, характеризующим переходный процесс в системе,
является время регулирования t .
А У(пТ)
Рис. 2.39
Пример 2.15
Пусть непрерывная часть системы (рис. 2.40)
представляет собой интегрирующее звено. Тогда,
246 Особые линейные автоматические системы управления
как было показано ранее (пример 2.11), дискретная
передаточная функция импульсного фильтра (ИФ)
будет:
Ж* (z) =
где k = kku; ки, ки - коэффициенты передачи непрерывной час-
ти системы и импульсного элемента соответственно.
Требуется найти время регулирования t
Рис. 2.40
Решение
При подаче на вход импульсного фильтра единич-
ной ступенчатой функции у*(и) = 1(и), z-преобразование
которой имеет вид F*(z) = Z - , можно записать:
Найдем оригинал у(п)^ разложив K(z) в степенной
ряд путем деления числителя kz1 на знаменатель (z — I)2.
Окончательно получим:
K(z) = Л[1 + 2z” + 3z’2 +... + (« + l)z" + ...].
(2.101)
Коэффициент ряда (2.101) при z п является иско-
мым оригиналом:
у(п) = к(п +1).
Здесь у(п) - дискретная прямая, сдвинутая в сто-
рону опережения.
При замыкании импульсного фильтра единичной
отрицательной обратной связью (рис. 2.40), получим:
6. Импульсные системы
247
Обозначив 1 + к= еа, можно записать:
(2.102)
По таблице z-преобразований (таблица 2.1) можно
найти оригинал второго сомножителя, стоящего в правой
части уравнения (2.102):
Z’1 [_ 0 е )z | = ] _ -ап
1 (z-e““)(z-l) Г
J к
Тогда, учтя, что выражение ---------= 1 (в чем
еа(1-е~а)
можно убедиться, подставив в него вместо е“, величину
1 + к), и применив теорему сдвига, окончательно полу-
чим:
(2.103)
Z-1{y(z)}=y(«)=[l-e-“(',+1)l
Рис. 2.41
Выражение (2.103) соответствует экспоненциаль-
ному переходному процессу (рис. 2.41), построив который
можно определить время регулирования t при заданной
зоне нечувствительности 3.
248 Особые линейные автоматические системы управления
При использовании косвенных методов оценки
качества процесса управления, можно, как и в случае не-
прерывных систем, ввести понятия запасов устойчивости
и степени колебательности, определяемых на основании
анализа расположения частотной характеристики разо-
мкнутой системы относительно точки (- 1, у'О). Можно
также пользоваться аналогами интегральных оценок:
00 00
Л = 2 [И00) - ?(«)]; Л = J [у(°°) - Я«)]2 •
л*0 л*0
(2.104)
Первая сумма отражает величину пропорциональ-
ную площади между текущим значением отклонения
управляемой переменнойу(и) и установившимся его значе-
нием X оо) и применяется для оценки качества монотонных
переходных процессов, вторая - отражает ту же площадь,
но для квадрата отклонений Х«) отХ 00 ) и применяется для
оценки качества как монотонных, так и колебательных
процессов. Заметим, что для астатических систем устано-
вившаяся ошибка равна нулю и выражение (2.104)
СО
принимает вид: J2 = V у\п) •
Для улучшения качества функционирования диск-
ретных систем управления можно пользоваться методами
как непрерывной, так и импульсной коррекции. В первом
случае в непрерывную часть системы обычно вводятся
дополнительные обратные связи, во втором - дополнитель-
ный импульсный фильтр, преобразующий определенным
образом входные импульсы.
Нелинейные автоматические
системы управления
К классу нелинейных систем управления относятся
системы, содержащие хотя бы одно звено, параметры ко-
торого зависят от переменных величин, характеризующих
поведение системы. Характерной особенностью нелинейной
системы является резкое изменение ее параметров при из-
менении переменных величин, вплоть до скачкообразного
типа. Это обстоятельство обуславливает неэффективность
линеаризации нелинейных зависимостей путем их разло-
жения в ряд Тейлора, в виду невозможности обеспечения
удовлетворительной точности аппроксимации. В связи с
этим возникает необходимость применения специальных
методов анализа и синтеза нелинейных систем, основные
из которых рассматриваются ниже.
7. Статика нелинейных систем
7.1. Основные типы нелинейных звеньев
В системах управления встречаются различные
типы нелинейностей, которые можно характеризовать со-
ответствующей нелинейной функцией у(х), связывающей
входную х и выходную у величины нелинейного звена в ста-
тическом режиме. При этом будем считать, что имеет место
одномерная нелинейность, т. е. переменная у представляет
собой функцию только одной переменной х. Заметим, что
если параметры нелинейного звена зависят от скорости
изменения выходной величины или от более высоких ее
производных, то такая нелинейность проявляется только
в переходных режимах, в связи с чем ее относят к классу
Динамических.
Нелинейные звенья можно классифицировать по
различным показателям: симметрии, гладкости, одно-
значности характеристик. Рассмотрим каждый из этих
Показателей.
250 Нелинейные автоматические системы управления
Симметрия
Для нелинейных характеристик можно указать два
типа симметрии:
а У' б . У
Рис. 3.1
1) если функцияу(Х) удовлетворяет условию
У(х) = у(-х),
(3-1)
то такую характеристику называют симметричной относи-
тельно оси ординат или четно-симметричной (рас. 3.1, а).
При однозначной зависимости такие характеристики могут
быть представлены следующим рядом:
У(х) =
ОС
где С2- постоянные коэффициенты;
2) если функция у(х) удовлетворяет условию
у(х) = -Я-Д (3.2)
то характеристику называют симметричной относительно
начала координат или нечетно-симметричной (рис. 3.1,6).
При однозначной зависимости v(x) такие характеристики
могут быть представлены следующим рядом:
00
Характеристики, не удовлетворяющие ни одному
из приведенных условий относятся к несимметричным.
В ряде случаев путем перемещения координат
несимметричные характеристики могут быть приведены
к симметричным. Например, для характеристики
7. Статика нелинейных систем 251
(рис. 3.2, а) можно путем подстановки Xj = xQ + х hj^ = у0 + у
получить нечетно-симметричную характеристику у(х)
(рис. 3.2, б). Структурная схема, соответствующая рас-
смотренному преобразованию координат приведена на
рис. 3.2, в. Заметим, что здесь нелинейный элемент, в от-
личие от линейного, обозначен двойной рамкой.
Гладкость
Если в любой точке характеристики^^) существует
производная dy/dx, то такая характеристика относится к
гладким. Если на характеристике имеются изломы, в ко-
торых производная dy/dz имеет разрыв, то характеристика
относится к ломанным. Большую группу ломанных харак-
теристик составляют кусочнолинейные характеристики.
Ф f
Рис. 3.3
Примером гладкой характеристики может служить
кривая намагничивания электрической машины Ф(г‘в), где
Ф, iB - магнитный поток и ток возбуждения соответственно
252 Нелинейные автоматические системы управления
(рис. 3.3, сплошная линия), которая путем соответствующей
аппроксимации может быть сведена к ломаной кусочно-ли-
нейной характеристике (рис. 3.3, пунктирная линия).
Однозначность
Если к каждому значению х соответствует одно
определенное значение у то характеристика является
однозначной. Если таких значений у несколько (в зависи-
мости от предшествовавшего режима), то характеристика
относится к классу многозначных. При этом число воз-
можных значений у может лежать в пределах от двух до
бесконечности. Примерами однозначных характеристик
могут являться характеристики, приведенные на рис. 3.1.
Примеры многозначных звеньев будут приведены ниже.
Рассмотрим наиболее распространенные нелиней-
ные звенья, характеристики которых при некоторых до-
пущениях симметричны относительно начала координат и
могут быть достаточно хорошо представлены кусочно-ли-
нейными кривыми. Иногда эти звенья называют типовыми.
1. Звенья с однозначными непрерывными характе-
ристиками. К ним относятся:
X
Рис. 3.4
Звено с зоной нечувствительности Т). Характерис-
тика такого звена приведена на рис. 3.4, а. Такими характе-
ристиками обладают некоторые электронные, магнитные,
гидравлические усилители в области слабых входных
сигналов |х| < у. Простейшей механической моделью зоны
нечувствительности звена является система соединения
двух валов с пружинным возвратом ведомого вала в ней-
тральное положение при наличии участка свободного хода
(люфта) в системе передачи (рис. 3.4, б).
7. Статика нелинейных систем 253
Формализованную запись характеристики, изоб-
раженной на рис. 3.4, можно представить следующим
образом.
(3.3)
Звено с ограничением (насыщением). Характе-
ристика этого звена показана на рис. 3.5,а. Подобными
характеристиками обладают практически все усилители,
ограниченные по мощности в области больших входных
сигналов х > х°. Примером простейшей механической
модели ограничения является система соединения двух
валов через упругую пружину при наличии системы упоров
в системе ведомого вала (рис. 3.5, б), Характеристика этого
звена описывается следующим уравнением
V
с sign х V
(3-4)
Здесь sign х =
+1 V х а: 0;
-1 Vx<0.
Рис. 3.5
Звено с ограничением и зоной нечувствительности.
Многие нелинейные элементы, используемые в АСУ, обла-
дают как зоной нечувствительности, так и ограничением
254
Нелинейные автоматические системы управления
выходного сигнала (рис. 3.6.) и описываются следующим
уравнением
го v X <: Г);
У = 4
к(х -rf) V х° > х > ту;
к (х + >7) V - х° > х > -t)',
с sign х V х > х°.
(3-5)
Звено описываемое выражением (3.5) представляет
собой достаточно общий случай однозначной непрерывной
нелинейности.
I
I
о
Г) х
Рис. 3.6
2. Звенья с однозначными
разрывными характеристиками
К ним относятся:
Релейное трехпозиционное звено без петли возвра-
та (гистерезиса). Однозначная разрывная характеристика
этого звена показана на рис. 3.7,а.
П *
Рис. 3.7
Формализованная запись этой характеристики
имеет вид:
У~
'с sign х V х > /у;
IО V х < г}.
(3-6)
7. Статика нелинейных систем 255
При анализе и синтезе различных релейных систем
часто используются идеализированные двухпозиционные
реле, уравнение которого можно получить, если в выраже-
нии (3.6) положить /у = 0. Тогда получим
У = С sign х.
(3-7)
Характеристика этого звена представлена на
рис. 3.7,б.
Аналого-цифровой преобразователь без петли
возврата. К числу нелинейных звеньев с однозначными
разрывными характеристиками относится звено со ступен-
чатой характеристикой, преобразующее аналоговую вели-
чину в дискретную с квантованием по уровню. Примером
такой характеристики может служить характеристика,
приведенная на рис. 3.8, формализованное выражение
которой может быть записано в виде
у = Е(х - 0.5 sign х)
где под Е(£) понимается целая часть £ = X — 0.5 sign х.
Рис. 3.8
3. Звенья с двузначными характеристиками.
К ним относятся: трехпозиционное реле с пет-
лей возврата, характеристика которого приведена на
рис. 3.9,а. Как видно из рисунка, на участках -rj < х < -nnj
и тг/ < х <Г) (при -1 < т < 1), трехпозиционная характерис-
тика неоднозначна, так как переход от у = 0 к у = ±с проис-
ходит при х = ±т;, а возврат - при х = ± тц. Эту зависимость
можно выразить соотношением:
256 Нелинейные автоматические системы управления
У =
с sign х V х >
О V х < тт).
(3-8)
При использовании (3.8.) необходимо иметь в виду,
что на участках, указанных выше, величина у имеет два
значения. Классическим примером звена с трехпозицион-
ной релейной характеристикой является поляризованное
реле с переключающейся контактной группой.
-Г) -mt]
I I J
mt] t]
Рис. 3.9
В случае, если положить т = - 1, то получим двух-
позиционную петлевую релейную характеристику с ши-
риной петли равной 2rj. Типичным представителем звена
с такой характеристикой является обычное электромаг-
нитное реле, напряжение срабатывания которого Uс всег-
да больше напряжения возврата Ue. При этом(/с - U=2tl.
Заметим, что релейная характеристика, представленная на
рис. 3.9,а, позволяет получить любой вид характеристик
этого типа. Например, положив т = 1 получим идеальную
трехпозиционную релейную характеристику (рис. 3.7, а),
а при= 0 - идеальную двухпозиционную (рис. 3.7, 6).
4. Звенья с многозначными характеристиками.
Наиболее распространенными представителями
этих нелинейных звеньев являются звенья с зазором {люф-
том), часто встречающиеся в механических передачах. Ме-
ханическая модель такого звена представлена рис. 3.10,а.
Характеристика, отражающая зависимость между поло-
7. Статика нелинейных систем
257
жениями ведущего х и ведомого у валов, представлена на
рис. 3.10,6. Из рисунка видно, что каждому положению
ведущего валах соответствует множество положений ведо-
мого вала у, лежащего пределах, ограниченных прямыми
1 и 2. Выбор того или иного из возможных значений у обус-
ловлено максимальным или минимальным отклонением у,
предшествовавшим рассматриваемому моменту времени.
Рис. 3.10
Характеристиками типа люфт обладают помимо
механических систем с зазорами, механические систе-
мы с сухим трением, модель которых представлена на
рис. 3.10,в. Здесь вращающий момент х~М уравновеши-
вается моментом пружины Мп. При достижении момента
Л/п величины, равной моменту трения Мт (Мп = Мт = у),
начинается движение выходного вала у. При изменении
направления вращения х движения выходного вала у на-
чинается после изменения момента пружины на величину
2у. Описанному режиму работы механической системы с
сухим трением соответствует характеристика приведенная
на рис. 3.10,6.
Рассмотренные типовые звенья безусловно не
Исчерпывают разнообразие звеньев нелинейных систем.
Среди звеньев как линейных, так и нелинейных систем
Особое место занимает множительное звено. Если на его
^Теория автоматического управления
258 Нелинейные автоматическиесистемыуправления
входы подаются независимые сигналы, то наличие такого
звена не нарушает линейности системы, так как при этом
выполняется принцип суперпозиции. Структурная схема
перемножения независимых сигналов у = хх} показана на
рис. 3.11,а.
а
X
у = хх1
Рис. 3.11
Если сигналы х и хх зависимы, то даже при линейности
всех остальных звеньев система становится нелинейной.
Пример получения нелинейного звена с четно-симмет-
ричной параболической характеристикой у = кх2 показан
на рис. 3.11,6, в. Такие характеристики встречаются при
исследовании экстремальных систем управления (гл.И).
Рис. 3.12
С помощью множительного звена и простых нели-
нейных звеньев (типа двухпозиционного релейного) может
быть получено нелинейное звено, обладающее нечетно-сим-
метричной параболической характеристикой. Структурная
7. Статика нелинейных систем
259
схема такого звена и его характеристика представлены на
рис. 3.12,а,б. Подобные звенья применяются при реализа-
ции систем оптимальных по быстродействию (гл. 10).
Таким образом, применение множительного звена
и других функциональных преобразователей в принципе
позволяет получить нелинейные звенья с заданными ста-
тическими характеристиками.
7.2. Соединение нелинейных звеньев
В нелинейных системах преобразование сигнала
описывается в общем случае дифференциальными или
интегральными нелинейными уравнениями и может быть
выражено некоторым достаточно сложным оператором
преобразования Л
ЯО = л{с(о}. (3.9)
В некоторых случаях преобразование сигнала нели-
нейным звеном может быть представлено в виде последова-
тельного воздействия линейного динамического оператора,
например, в виде передаточной функции Ж(р), и нелинейно-
го оператора у/, описывающего статическое преобразование
сигнала нелинейным звеном. В зависимости от последова-
тельности действия линейного и нелинейного операторов
имеет место различное преобразование сигналов. Эквива-
лентные схемы, соответствующие двум видам преобразо-
вания входного сигнала х(/), представлены на рис. 3.13,а,б.
В общем случае yj/) # > принцип коммутативности
(перестановки) не выдерживается и, следовательно, при
последовательном соединении нелинейного статического
и линейного динамического звеньев их перестановка недо-
пустима. Исключение составляет звено с запаздыванием:
W(р) = е~^, перенос которого через нелинейное статическое
звено у/(х) не изменяет свойств нелинейной системы.
При рассмотрении статики нелинейных систем,
сигналы х и у не зависят от времени, а линейное звено мо-
жет рассматриваться как усилительное с коэффициентом
Усиления FF(O) = A^n объединяться с нелинейным стати-
ческим звеном.
9*
260 Нелинейные автоматические системы управления
у, (t) = Л, {<()}= у [l_| {tr(p) L [х(0]}]
У2(О = Л,{х(/)}= L' Ир).£[ч> [40] ]}
Рис. 3.13
Рассмотрим некоторые виды соединений нелиней-
ных статических звеньев. При этом полагаем, что звенья
являются направленными и что соединение звеньев не
меняет их характеристик.
1. Последовательное соединение
нелинейных звеньев.
При последовательном соединении п нелинейных
звеньев (рис. 3.14) выходная величина одного звена явля-
ется входной величиной другого, т. е.
х,+1 =Л =V> <(*,)> i = ^,n.
(3.10)
где t - оператор преобразования i-го нелинейного звена.
Рис. 3.14
Решая совместно п нелинейных уравнений вида
(3.10), получим для последовательного соединения п зве-
ньев следующую нелинейную функцию, выражающую
характеристику у(х):
Xх) = К(*) = vn {v’.-i - |Vi (*)]}. <зл1)
Определение общей характеристики у(х) может
быть сведено к нахождению п - 1 раз эквивалентных ха-
7. Статика нелинейных систем
261
рактеристик двух последовательно соединенных звеньев и
определениюу/х^у/х,), и т. д. доу/х,) = у(х).
Путем построения эквивалентных характеристик
для конкретных случаев можно убедиться в том, что при
изменении последовательности соединений звеньев резуль-
тирующая характеристика в большинстве случаев изме-
няется, т. е., как уже упоминалось, перестановка звеньев
недопустима.
Пример 3.1
Найдем характеристику последовательно соеди-
ненных звеньев, одно из которых имеет зону нечувс-
твительности у, = ^(хД а другое - ограничение
У2=У2(х^} при различной последовательности их
соединений (рис. 3.15, а, б). Характеристики у}(х})
иу2(х2) заданы графически (рис. 3.15, в).
Решение
Графическое построение эквивалентной характе-
ристики ^i2(xi) = ^[^iC^i)]^ У2(х1) п₽и соединении зве-
ньев по схеме, приведенной на рис. 3.15, а показано на
рис. 3.15, в. При построении используются четыре квад-
ранта: в первых двух приведены исходные зависимости
ф {(х{) и^>2(х2); в третьем квадранте приведена вспомога-
тельная прямая (ВП), с помощью которой удобно осущест-
влять переход от осиу2во втором квадранте к такой же оси
в четвертом квадранте. В последнем и построена искомая
зависимостьу2(х(). Аналогичные построения (рис. 3.15, г)
выполнены для варианта соединения звеньев, приведен-
ного на рис. 3.15, б.
Из приведенных построений видно, что в обоих
случаях получили эквивалентное звено с зоной нечувс-
твительности и ограничением. Однако значения выход-
ной величины, соответствующие ограничению выходной
величины уэ и зоне нечувствительности на входе хэ ока-
зываются различными. В первом случае они совпадают
со значениями для исходных нелинейностей :у=с; х=г]9 а
во втором - существенно отличаются: у =с- гц x=r]/kr При
с второе соединение эквивалентно разрыву цепи.
262
Нелинейные автоматические системы управления
а
* * *
Заметим, что при последовательном соединении
двух нелинейных звеньев с прямым у и обратным у/ ~1 опера-
торами преобразования может оказаться, что результирую-
7. Статика нелинейных систем
263
щая характеристика окажется линейной с коэффициентом
передачи равным единице. Такое соединение звеньев назы-
вается взаимно обратным и перемена местами этих звеньев
не изменяет общей характеристики системы. Подчеркнем,
что это свойство справедливо только для монотонных не-
линейных характеристик, не имеющих горизонтальных и
вертикальных участков, т. е. значение производной dyldx
не должно быть равным ни нулю, ни бесконечности.
2. Параллельное соединение нелинейных звеньев.
При параллельном соединении как линейных, так
и нелинейных звеньев на их входы подается один и тот же
входной сигнал, выходные величины алгебраически сум-
мируются. Таким образом выходная величина у равна:
у = /(*) = >. ft W.
(3.12)
Из выражения (3.12) следует, что характеристика
параллельного соединения п нелинейных звеньев может
быть получена путем непосредственного суммирования со-
ответствующих ординат составляющих характеристик.
Пример 3.2
Найдем характеристику параллельного соедине-
ния двух нелинейных звеньев с зоной нечувстви-
тельности (рис. 3.16, а), характеристики которых
У| =V> 1W и у2 =1р 2(х) приведены на рис. 3.16,6.
Здесь h<h„u k<k„.
Решение
На рис. 3.16,в построена результирующая характе-
ристика для случая, когда сигналы у, иу2 положительны.
Уравнение этой кусочно-линейной характеристики (отрез-
ки прямых 1,2,3) можно записать в виде:
О V 0 s х s г){;
у= V гц <х^2;
kx + d х>Т]2.
(3.13)
где k = к}+к2; d = -(Ay;, + к/] 2).
264
Нелинейные автоматические системы управления
Рис. 3.16
На рис. 3.16,г приведена результирующая харак-
теристика для случая, когда сигналы уt иу2 имеют разные
знаки: у} > 0 ; у2 < 0. Уравнение результирующей характе-
ристики (отрезки прямых 1,2,3) запишется в виде аналогич-
ном (3.13), но при этом величина к ~ (к} - к2) < 0, а постоянная
d-(k2rf2 - kxrQ > 0. Заметим, что при кх = к2 величина к = 0 и
прих > ?}2 жмеему = d= const, т. е. характеристика соответс-
твует звену с зоной нечувствительности и ограничением.
3. Параллельно-встречное
соединение нелинейных звеньев.
Структурная схема для этого случая представлена
на рис. 3.17. Здесь звено с характеристикой ^(х,) включено
в прямую цепь, а звено ^2(х2) в цепь обратной связи, которая
может быть отрицательной или положительной. Соответс-
твенные уравнения замкнутой цепи имеют вид
х^х±у2; у = у,=х2. (3.14)
Для построения результирующей характеристики
у(х) параллельно-встречного соединения звеньев, необхо-
димо уравнение (3.14) рассматривать совместно с характе-
ристиками и (х).
I I X*
7. Статика нелинейных систем
265
Рис. 3.17
Пример 3.3
Построим характеристику звена с зоной нечувс-
твительности и ограничением у = ^(хД охвачен-
ного отрицательной или положительной жесткой
обратной связью: у2 = 2 (х2 ) ” ^2Х29 г^е “ коэффи-
циент передачи. Структурная схема соединения
аналогична представленной на рис. 3.17.
Решение
Результирующая характеристика, построенная
графическим путем для случая отрицательной обратной
связи, приведена на рис. 3.18. Заданные характеристики
звеньев, включенных в прямую и обратную цепи показаны
на рисунке пунктирными линиями.
Рис. 3.18
Для получения зависимости у(х) необходимо в со-
ответствии с (3.14) алгебраически сложить абсциссы зави-
симостей ф 1 (Xj) и ф 21 (у2) = х2 = у2 / к2, где ф 21 - обратный
оператор преобразования второго звена. При отрицательной
обратной связи построение результирующей характеристи-
ки у(х) выполнено путем суммирования соответствующих
266 Нелинейные автоматические системы управления
абсцисс. В случае положительной обратной связи при таких
же характеристиках звеньев для получения зависимости
у(х) абсцисса звена V11 (xi) вычитается из абсциссы звена
Уг'М (₽ис- 3-19)-
Рис. 3.19
Результаты построения характеристики у(х) пока-
зывают, что в первом случае эта характеристика однознач-
на и соответствует первому звену - с зоной нечувствитель-
ности и ограничением, но с расширенной зоной линейной
зависимости (по сравнению с характеристикой 2 (jq )). В
случае положительной обратной связи при к2с > (х° - г/)
характеристикау(х) становится неоднозначной и соответс-
твует трехпозиционной релейной характеристике с петлей
возврата (рис. 3.9, а).
7.3. Структурные преобразования
нелинейных систем
В связи с тем, что для нелинейных систем не вы-
полняются принципы суперпозиции наложения и комму-
тативности, возможности их структурных преобразований
существенно ограничены. Невыполнение принципа нало-
жения исключает возможность осуществления операции
переноса сумматоров через нелинейное звено, а невыполне-
ние функции коммутативности - операцию перестановки
этих звеньев. Что касается переноса нелинейных звеньев
через узел разветвления, то эта операция не противоречит
упомянутым принципам и может быть применена для
7. Статика нелинейных систем
267
преобразования нелинейных систем. Соответствующие
правила преобразования могут быть сформулированы сле-
дующим образом:
1. При переносе узла со входа на выход нелинейного
звена необходимо в отходяпщх от узла ветвях до-
бавить звено с оператором этого нелинейного звена
(таблица. 3.15 строка 1).
2. При переносе узла с выхода на вход нелинейного зве-
на необходимо в отходящих от узла ветвях добавить
звено с обратным оператором этого нелинейного
звена (таблица. 3.1, строка 2).
Таблица 3.1
На основе понятия обратных операторов можно
показать, что схема с прямой и обратной у/2 связями
(таблица. 3.1, строка 3) эквивалентна схеме, построенной из
звеньев с обратными операторами \ “1, если звено у/1"1
включено вместо звена , а звено ул 1 вместо звена ш .
& 1
268 Нелинейные автоматические системы управления
Действительно, записав уравнение замкнутой цепи
ввиде: у =ip,(Xj) =ip, [х -гр 2 (у)]илш/, (у) = х -гр 2 (у), после
элементарных преобразований получим:
у = 1р'2'[х-1р;\у)'].
(3.15)
Выражение (3.15) соответствует эквивалентной
структурной схеме, приведенной на рис. таблица. 3.1,строка 3.
Таким образом, введение обратных операторов
дает возможность сформулировать еще одно правило пре-
образования, справедливое как для линейных, так и для
нелинейных структурных схем.
3. В системе с отрицательной обратной связью можно
менять местами звенья, включенные в цепи прямой
и обратной связи, с заменой операторов звеньев на
обратные.
Пример 3.4
Для системы, состоящей из прямого и усилитель-
ного звена с коэффициентом передачи ку, охва-
ченного гибкой обратной связью в виде последо-
вательно включенных дифференцирующего звена
Wd(p) - к^р с и нелинейного звена у1 =ф (у2)
(рис. 3.20, а), требуется найти эквивалентную
схему с обратными характеристиками.
а
Рис. 3.20
7. Статика нелинейных систем 269
Решение
Применив сформулированное выше правило (таб-
лица. 3.1), получим эквивалентную схему, приведенную на
рис. 3.20, б.
Нелинейные характеристики и у/(у2) могут
быть описаны кусочно-линейными зависимостями:
«У v у, ^у10;
У2 = V '(У,) = • ау0 + fi(y,-у,,) V у, >у10;
~аую + 0(У - У,») V У\>~У\о>
'у/« v у г *«У10;
У “ Ж) = У» + (у - «У»)/fi V у 2 > ау10;
-Уо +(у -«Уо)/^ v у2 > -ау10.
Здесь аир- угловые коэффициенты соответствующих отрезков
прямых;
у10 - координата точки стыковки отрезков прямых.
Из приведенных зависимостей следует, что при
«-—►0 и >оо характеристика у} (у2) переходит в зависи-
мость уг = с sign у2, с =У1О (рис. 3.7, а).
Так как реализация интегрирующего звена осу-
ществляется точнее, чем дифференцирующего, эквивален-
тная схема (рис. 3.20, б) предпочтительнее, чем исходная
(рис. 3.20, а).
270
8. Точные методы
исследования динамических
свойств нелинейных систем
Для исследования динамических свойств нелиней-
ных АСУ существует целый ряд методов, которые можно
подразделить на две большие группы:
1. Точные методы, которые имеют строгое математи-
ческое обоснование. К ним относятся метод припа-
совывания, фазового пространства, математичес-
кого моделирования и некоторые другие.
2. Приближенные методы, которые не имеют строгого
математического обоснования, но дают результат
практически удовлетворяющий разработчика. За-
метим, что применение этих методов требует обяза-
тельной экспериментальной проверки. Наибольшее
распространение из приближенных методов полу-
чил метод гармонической линеаризации.
8.1. Метод припасовывания
Основная идея метода заключается в применении
кусочно-линейной аппроксимации при решении нелиней-
ных задач. При этом нелинейная характеристика с сущест-
венной нелинейностью заменяется кусочно-л инейной. Для
каждого из линейных интервалов записывают дифферен-
циальное уравнение и его решение, с входящими в него
постоянными интегрирования. Приравнивая те значения
координат и их производных в конце предыдущего и начале
последующего интервалов, которые не изменяются скач-
кообразно, находят числовые значения постоянных интег-
рирования, что дает возможность построить переходный
процесс в системе и оценить его динамические свойства.
Обычно нелинейные АСУ состоят как из линейных
звеньев, так и из нелинейных. Поэтому можно выделить
отдельно линейную и нелинейную части системы.
Пусть имеем АСУ с релейным управляющим уст-
ройством (нелинейная часть НЧ), имеющим трехпозици-
онную идеальную характеристику (рис. 3.7, а).
8. Точные методы исследования динамических свойств». 271
Предположим, что линейная часть (ЛЧ) системы
имеет передаточную функцию вида:
Структурная схема системы представлена на рис. 3.21.
Уравнение, описывающее движение замкнутой
системы в различных зонах нелинейной характеристики
(I, II, III), имеет вид:
Ту" + у' = ки. (3.16)
Тогда для первой зоны (и = 0) это уравнение запи-
шется в виде:
Ту" + у' = 0, при - Tj <у < т], (3.17)
для второй зоны (и = w0), с учетом отрицательной обратной
связи, в виде:
Ty"+y' = -ku,npuy>fj, (3.18)
для третьей зоны (и = -w0) :
Ту” + у’ = ки0, при у < -tj.
(3-19)
Решение дифференциального уравнения, соответс-
твующего той или иной зоне, позволит отслеживать изме-
нение выходной переменной y(t) в этой зоне. Как только
величинау попадает в другую зону, фиксируется значение
272 Нелинейные автоматические системы управления
переменных у иу', которые являются конечными для иссле-
дуемой зоны и начальными для новой зоны, описываемой
своим дифференциальным уравнением. Решение этого
ДУ характеризует движение системы в новой зоне и т. д.
до достижения устойчивого состояния (равновесия или
периодического колебания).
Предположим, что при t = t= O система находится в
точке «а» иприэтому = уа;уа'=0(рис. 3.22). Это состояние
системы соответствует П-й зоне, следовательно, система
описывается уравнением (3.18). Интегрируя это ДУ, полу-
чим:
(3.20)
Ty' + y = -kuQt + С,.
Рис. 3.22
Ре
II
ение неоднородного дифференциального урав-
нения (3.20) имеет вид :
у = С2еп' - kuot + С,,
(3.21)
где рх = —l/Т корень характеристического уравнения Тр+
+ 1=0; Сх, С2 - постояные интегрирования, которые оп-
ределяются из начальных условий.
При /0= 0 имеем:
У = Уа =С2+С}
У =Уа= Р\С2-кий=0
(3.22)
8. Точные методы исследования динамических свойств... 273
Решение системы (3.22) и дает искомые Сх и С2. Под-
ставив числовые значения С, и С2 в (3.21), можно построить
переходной процессy(f) в зоне II (рис. 3.22). Попав в точку
* б», находим уб = rj и уб'. Эти значения являются конечными
значениями для второй зоны и начальными для первой.
Последовательно интегрируя уравнение (3.17) для первой
зоны получим
Ту'+у=С3; у = С4ер'1+Су
(3.23)
Подставив в уравнения (3.23) значения уб и у'б при
/ = 0, найдем постоянные интегрирования С3, С4 и строим
кривую переходного процесса в зоне 7, вплоть до достиже-
ния точки «в» (рис. 3.22). В этой точке также фиксируются
значения ув и у которые являются начальными для тре-
тьей зоны, описываемой уравнением (3.19). Решение этого
уравнения, найденное аналогично решению уравнения
(3.18), позволяет построить кривую переходного процесса
для III зоны. Расчеты продолжаются до тех пор, пока зави-
симость y(t) не будет удовлетворять условию:
lim y(t)
/-*00
где С — значение i-той постоянной интегрирования в п-
ом интервале времени {для приведенного примера i - 7,
п = 4).
Заметим, что рассмотренный метод исследования
динамического режима нелинейных АСУ достаточно гро-
моздок и требует большого объема вычислений. Однако
применение компьютерных технологий позволяет решить
Эту проблему.
8.2. Метод фазовых траекторий
Этот метод может быть использован для исследо-
вания динамических режимов как линейных, так и нели-
нейных систем.
Известно, что состояние системы, описываемой
Дифференциальным уравнением я-ного порядка, полно-
274
Нелинейные автоматические системы управления
стью определяется значениями в каждый момент времени
управляемой величины у и п-\ ее производных**. Это дает
возможность представить в некотором и-мерном пространс-
тве состояние системы отдельной точкой, называемой изоб-
ражающей точкой. Процесс изменения состояния системы
представляется в этом случае как движение изображающей
точки по некоторой траектории, называемой фазовой тра-
екторией.
Начальные условия системы определяют начальное
положение изображающей точки в л-мерном пространст-
ве, которое называется фазовым пространством или
пространством состояний. Совокупность фазовых траек-
торий, найденных для всевозможных начальных условий,
составляет фазовый портрет системы.
В том случае, когда систему можно описывать
уравнением второго порядка, фазовое пространство пре-
вращается в фазовую плоскость с координатами у и у', на
которой можно наглядно изобразить фазовые траектории
у' = f(y) и проанализировать поведение системы.
8.2.1. Анализ линейных систем
Для иллюстрации метода фазовых траекторий
рассмотрим линейную систему, описываемую дифферен-
циальным уравнением второго порядка
Гу" + 2£Ту'+у = кх,
Отбросив правую часть получим однородное диф-
ференциальное уравнение
Гу" + 2£Ту'+у = Q, (3.24)
характеристическое уравнение которого имеет вид
7>2 + 2£7>+у = 0. (3.25)
Для получения зависимости у = f(y) обозначим
yr = dy/dt = z. Тогда однородное уравнение (3.24) можно за-
писать в виде:
+) Напомним, что эти величины являются переменными состояния, рассмотренными в
п.1.2.
8. Точные методы исследования динамических свойств... 275
У' - dz/dt = - (2£Tz + уУ/Т2
Из полученного уравнения исключаем перемен-
ную t. Имеем:
dz dz dy dz
dt dy dt dy
откуда:
dz _ ~^Tz + у
dy Tz
(3.26)
Решение дифференциального уравнения (3.26),
связывающего две текущие координаты системы у иу'= z,
и является уравнением фазовой траектории z = fly). Иными
словами уравнение (3.26) является уравнением фазовой
траектории в дифференциальной форме.
Рассмотрим следующие случаи.
1. Коэффициент демпфирования £ =0. Тогда корни
характеристического уравнения (3.25) будут мни-
мыми, pl2 = ±jco, со = 1/Т и решение однородного
уравнения (3.24) будет:
'у = 24sin(<o/ +(рУ
у' = z = Аси cos(cot +(р\
(3.27)
где А и (р постоянные интегрирования, определяемые из на-
чальных условий.
Система представляют собой уравнения фазовой
траектории в параметрической форме, где параметром
является переменная t. Для получения уравнения фазовой
траектории в явном виде необходимо исключить параметр t.
Возведя уравнения в квадрат, а затем просуммировав их,
окончательно получим:
/ z2 1 (3.28)
А2 А2со2
Уравнение (3.28) является уравнением фазовой
траектории в явном виде и представляет собой семейство
эллипсов, величина полуосей которых равна Л и Асо, т. е.
определяется начальными условиями (рис. 3.23, а).
276 Нелинейные автоматические системы управления
I
т
Рис. 3.23
В рассматриваемом случае производная dz/dy для
всех точек фазовой плоскости имеет вполне определенное
значение, которое вычисляется в соответствии с уравнени-
ем (3.26) при £ = 0:
dz у
dy T2z
(3.29)
В точке у - 0, z = 0 производная dz/dy представляет
собой неопределенность. Эта точка называется центром,
который охватывается замкнутыми фазовыми траектори-
ями. Эти траектории позволяют построить зависимость у (t)
и оценить характер свободной составляющей переходного
процесса (рис. 3.23, б).
Отметим следующие свойства фазовых траекторий:
а) направление движения изображающей точки по
ЗЕ
азовой траектории должно соответствовать знаку
скорости изменения управляемой величины у. При
dy/dt > 0 движение изображающей точки всегда бу-
дет происходить в сторону увеличения}/, т. е. слева
направо, а при dy/dt < 0 - справа налево;
б) касательные к фазовым траекториям в точке с ор-
динатой z = 0 пересекает ось абсцисс под прямым уг-
лом, т. к. из уравнения (3.29) имеем: dz/dy\z^ = оо,
следовательно tgy/ = оо, — (рис. 3.23, а).
2. Корни характеристического уравнения (3.25) комп-
лексные сопряженные с отрицательной веществен-
ной частью {0 < £ < 1) имеем:
8. Точные методы исследования динамических свойств...
277
a z^
Рис. 3.24
В этом случае решение однородного уравнения (3.24)
имеет вид:
dy
f
(3.30)
dt
Уравнения (3.30) являются уравнениями искомой
фазовой траектории в параметрическом виде. Можно по-
казать, что уравнение фазовой траектории в явном виде
представляет собой логарифмическую спираль, наматы-
вающуюся на начало координат (рис. 3.24, а). Изменяя
начальные условия, можем получить семейство фазовых
Траекторий и построить переходный процесс (рис. 3.24, б),
усобая точка, лежащая в начале координат, в которую схо-
дятся все фазовые траектории, носит название устойчивого
фокуса (точка равновесия).
278 Нелинейные автоматические системы управления
3. То же, что и вариант 2, но вещественная часть кор-
ней положительна (-1 < £ < 0): pt 2 = + а ±/со.
Рис. 3.25
В этом случае уравнения фазовой траектории в па-
раметрической форме имеют вид:
у = Ае* sin(co/ + <р)
(3.31)
Фазовые траектории, построенные по уравнениям
(3.31) для различных начальных условий, представляют
собой выходящие из начала координат разматывающиеся
логарифмические спирали (рис. 3.25, а). Соответствую-
щий расходящийся переходный процесс представлен на
рис. 3.25,6. Особая точка, лежащая в начале координат
называется неустойчивым фокусом.
8. Точные методы исследования динамических свойств... 279
4. Корни характеристического уравнения (3.25) вещес-
твенные отрицательные, (£ > I):
В этом случае решение однородного уравнения (3.24)
имеет вид:
(3.32)
Как и в предыдущих случаях, уравнения (3.32) яв-
ляются уравнениями фазовой траектории в параметричес-
ком виде. Можно показать, что помимо уравнений (3.32)
решениями уравнения (3.26) является уравнения z = рху,
z = р2у . Тогда фазовый портрет имеет вид, представлен-
ный на рис. 3.26, а. Анализ фазового портрета показы-
вает, что все фазовые траектории стягиваются к началу
координат, что соответствует сходящемуся монотонному
переходному процессу. В отличие от точек центра и фокуса
в данном случае производные dztdy в точке равновесия име-
ют вполне определенное значение, равное рх = -(бг + /3).
Эта точка носит название устойчивого узла.
5. То же, что и вариант 4, но при <?<-!. Тогда получим
Аз = («-£)> О и решение однородного ДУ (3.24)
запишется в виде
'у = С,ер>' + С2ер>‘
У' = Qp^Pt' + С2р2еР2‘
(3.33)
Фазовые траектории в данном случае выходят из на-
чала координат (рис. 3.26, б), что соответствует расходяще-
муся монотонному переходному процессу. Точка в начале
координат соответствует точке неустойчивого равновесия
и называется неустойчивым узлом.
280 Нелинейные автоматические системы управления
Рис. 3.26
Общие выводы
Фазовый портрет дает возможность произвести ана-
лиз поведения системы, получив следующие данные:
1) тип переходного процесса - колебательный (слу-
чаи 2, 3), монотонный (случаи 3, 4);
2) в случае колебательного процесса - величину и ко-
личество перерегулирований;
3) сведения об устойчивости системы: при фазовых
траекториях сходящихся в начало координат систе-
ма устойчива, при расходящихся - неустойчива.
Для получения более полных сведений о динами-
ческих режимов работы системы может быть построена
кривая переходного процесса y(t), например следующим
образом. Известно, что
Пусть имеем фазовую траекторию, приведенную на
рис. 3.27,а. Разобьем ось абсцисс на участки Ду для каждо-
го из которых определим у’ср = zcp . Тогда время изменения
координаты у на величину Ку. будет А?. = Ду. / z . Зная ДЛ
и соответствующее ему Ду (/= 1,2, ...) можно в координа-
тах у нанести точки z (z = 1,2, ...), по которым построить
переходной процесс (рис. 3.27, б). Чем меньше шаг Ду, тем
точнее построение.
8. Точные методы исследования динамических свойств... 281
8.2.2. Анализ нелинейных систем
Запишем уравнение движения нелинейной систе-
мы в неявном виде: у" = Р(у,у^), или, учтя, что = z в виде
системы уравнений первого порядка:
z' = F(y,z)..
y' = z..
Здесь - F — нелинейная функция.
Поделив (3.34) на (3.35) получим:
dz F(y,z) Ml(y,z)
dy z M2(y,z)
(3.34)
(3.35)
(3.36)
Уравнение (3.36) является дифференциальным
уравнением фазовой траектории в неявном виде. Если пра-
вая часть этого уравнения заданна аналитически и интеграл
берется, то найдя зависимость z =/(у) получают уравнение
фазовой траектории в аналитическом виде. Если нет, то
пользуются теми или иными приемами графического ин-
тегрирования. Одним из таких приемов является метод
изоклин, сущность которого заключается в построении
кривых (изоклин), представляющих собой геометрическое
место точек фазового портрета, на котором угол наклона
касательных к фазовым траекториям постоянен. Примером
изоклины может служить ось абсцисс, которую фазовые
282 Нелинейные автоматические системы управления
траектории пересекают под прямым углом. Заметим, что в
выражении (3.36), характеризующем наклон касательной
к фазовой траектории в данной точке, присутствуют три
неизвестных: у, z, z ' = dzldy. Тогда, задавшись определен-
ным значениемzj, например, zy-N9 получим уравнение с
двумя неизвестными, что на фазовой плоскости^ О z и дает
искомую изоклину. Эта изоклина пересекается фазовыми
траекториями с постоянным углом наклона у равным:
= arctgz^' = arctg/V = const.
Задаваясь различными значениями 7V можно по-
строить семейство изоклин для конкретного уравнения
фазовой траектории, заданного в дифференциальном виде
(3.36). Интегральная кривая z=f(y) фазовой траектории
для заданных начальных условий строится с помощью от-
резков прямых, направленных в соответствие с наклоном
определяемым изоклинами.
Пример 3.5
Пусть имеем консервативную систему (<f = 0),
описываемую уравнением
7У'+у = 0.
Требуется построить фазовый портрет системы
с помощью метода изоклин.
Решение
Воспользовавшись (3.26), запишем уравне-
ние фазовой траектории в дифференциальной форме:
dz
dy
При этом уравнение изоклины имеет вид:
W = -
или
2
Таким образом, изоклины в данном случае пред-
ставляют собой семейство прямых с угловым коэффици-
ентом, зависящим от принятого N = zr. При N = ±©о и N = 0
изоклины совпадают с осями координат z и у соответственно
(tyz= 0; у, = 7г/2). Построив для разных ТУсемейство изоклин,
можно построить фазовые траектории для различных
8. Точные методы исследования динамических свойств... 283
начальных условий, которые будут представлять собой
семейство эллипсов вложенных друг в друга (рис. 3.28).
Рис. 3.28
Пример 3.6
Пусть система описывается нелинейным уравне-
нием
у" + уу' + у = 0.
Требуется построить фазовый портрет систе-
мы.
Решение
Учтя, чтоу' = г перепишем уравнение системы в
виде:
откуда
dz
dt
= - (z + 1)_у.
Произведя замену — = — - z, запишем уравнение
dt dy
фазовой траектории в дифференциальной форме:
dz
dy
(z + 1)у
Для построения фазовой траектории воспользуемся
методом изоклин. Уравнение изоклины найдем, положив
dzldy = N. Тогда можно записать:
(z + l)y у Nz
N =---------, откуда z =---------, у =-----.
z y + N z + 1
Таким образом, изоклина представляет собой гипер-
болу со смещенными асимптотами (рис. 3.29). При у-> -N
получим:
284 Нелинейныеавтоматическиесистемы управления
limz = lim
00
и, следовательно, уравнение первой асимптоты гиперболы
запишется в виде: у = -N.
При z -» -1 имеем
Г zN
limy = lim-----
и уравнение второй асимптоты будет: z = -1.
Л-173 W=0.36 W=-0,36 7V=-1.73
Рис. 3.29
На рис. 3.29 построены изоклины для некоторых
числовых значений N. Так как dz/dy = N= const, то любая
8. Точные методы исследования динамических свойств...285
фазовая траектория пересекает изоклину в любой точке
под одним и тем же углом, y/^arctgM Например, любая
фазовая траектория при У= 1 будет пересекать изоклину
z —г под углом 45°.
У + 1
Построение фазовых траекторий для заданных на-
чальных условий производится следующим образом. Пусть
начальная изображающая точка лежит на определенной
изоклине, которую фазовая траектория пересекает под
углом у/о, а ближайшую изоклину - под углом у/. Тогда от-
резок фазовой траектории между изоклинами можно при-
ближенно заменить прямой выходящей из начальной точки
со средним углом наклона: у/ ~ (у/о + до пересечения
с упомянутой ближайшей изоклиной. Точка пересечения
принимается за начальную и аналогично описанному выше
строится следующий отрезок прямой и т. д. Построение бу-
дет тем точнее, чем большее количество изоклин нанесено
на
азовой плоскости.
Заметим, что при начальных условиях z> -1, пе-
реходный процесс y(f) представляет собой незатухающие
колебания, а прии < -1 - убывающую монотонную кривую:
limy(0 = оо. При z = -l фазовая траектория сливается с
асимптотой и переходной процесс протекает с постоянной
скоростью.
8.2.3. Исследование релейных АСУ
Эти системы относятся к классу существенно нели-
нейных и обычно исследуются методом фазовой плоскости.
При использовании этого метода структурная схема систе-
мы разбивается на линейную и нелинейную части, причем
предполагается, что линейная часть системы удовлетвори-
тельно описывается дифференциальным уравнением вто-
рого порядка. Проиллюстрируем сказанное на конкретном
примере.
Пусть имеем автоматическую систему стабили-
зации температуры в сушильном шкафу, передаточную
функцию которого можно представить в виде:
Wg~ kJ(Tp + \).
286 Нелинейныеавтоматическиесистемы управления
Измерение температуры производится с помощью
чувствительного элемента, например, термопары с пере-
даточной функцией:
W (р) = к .
чэv * 7 чэ
Регулирование температуры достигается за счет
изменения подачи воздуха в сушильную камеру, путем
изменения положения заслонки, приводимой в движение
исполнительным механизмом с электроприводом, переда-
точная функция которого имеет вид:
W (п) = к /р.
имх * 7 UM *
Структурная схема системы приведена на рис. 3.30.
На схеме приняты следующие обозначения: uQ- текущее
напряжение пропорциональное температуре 0 в сушильном
шкафу; w* — напряжение пропорциональное заданному
значению температуры; ид ~ напряжение, подводимое к
двигателю исполнительного механизма.
Запишем передаточную функцию линейной части
(ЛЧ) системы:
wm(p) = к/(Тр2 + р),
где к = к к к .
о чэ им
Соответствующее дифференциальное уравнение в
операторной форме будет;
U(p) = Wm(p)Ud(p) или (Тр2 + p)U(p) = kUd(p),
8l в области вещественного переменного это уравнение
примет вид:
8. Точные методы исследования динамических свойств...287
Ти" + и' = кид (3.37)
Запишем уравнение нелинейной части (НЧ), пред-
ставляющей собой трехпозиционное релейное устройство,
выполняющее функцию регулятора (рис. 3.7 сг9 при с = г0):
V и s
ud = F{u)= JM
(3.38)
V и >
V и < -г].
При замыкании системы отрицательной нелиней-
ной обратной связью уравнение движения замкнутой сис-
темы можно получить, подставив (3.38) в (3.37):
Ти" + и'= - kF (и).
(3.39)
Знак «минус» в правой части (3.39) учитывает от-
рицательную обратную связь.
Воспользовавшись выражением (3.38), уравне-
ние (3.39) можно представить в виде трех уравнений
(см. п. 8.1)
I. Ти"+и'=0,
V |w|< 7;
II. Ти" + и' + ки0 = О, V и > rj;
III. Ти” + и' — ки0 = 0, V и < — у.
Обозначив у ~ и, dy/dt = z, построим фазовый порт-
рет системы в координатах z,y с помощью метода изоклин
(рис. 3.31).
Рис. 3.31
288
Нелинейные автоматические системы управления
Заметим, что уравнение I действительно для беско-
нечной полосы, ограниченной прямыми линиями у = /у, у =
= - г/. Эти линии называются линиями переключения, так
как при упомянутых значениях у = ± г] происходит вклю-
чение реле в ту или другую сторону. Отсюда вытекает, что
уравнение II действительно для части фазовой плоскости,
лежащей справа от линии переключения^ = rj, а уравнение
III - для части, лежащей слева от линии у = - 7.
Найдем уравнения изоклин для каждой области
фазовой плоскости.
Для области I в соответствии с уравнением I име-
ем:
Tz’ + z = 0, или T(dz!dy)z + z = 0, откуда dz/dy = - 1/Т.
Полученное уравнение является уравнением фазо-
вой траектории в дифференциальной форме, которое после
интегрирования примет вид:
z = -{y/T) + Cv (3.40)
где С} - постоянная интегрирования, определяемая из на-
чальных условий.
Таким образом, фазовые траектории в области I
представляют собой семейство параллельных прямых с
углом наклона <р - arctg(-1 / Т). Следовательно, вся область I
представляет собой изоклину, так как угол наклона любых
зе
разовых траектории здесь одинаков.
Для области II в соответствии с уравнением II име-
ем:
Tz' + z + kuQ = 0, откуда dz/dy = - (z + ku^/Tz. (3.41)
При dz/dy = N получим уравнение изоклины:
z = - Ьо/(1 + 77V).
(3-42)
Правая часть уравнения (3.42) постоянна и зави-
сит от принятой величины N. Таким образом, изоклины
представляют собой семейство прямых, параллельных оси
абсцисс.
8. Точные методы исследования динамических свойств... 289
Для нахождения угла наклона фазовых траекторий
при пересечении их с изоклинами проанализируем урав-
нение (3.42). Для II области имеем:
1) при N= 0, у = arctgN = 0 и уравнение изоклины z =
=—ки0 совпадает с уравнением фазовой траекто-
рии;
2) при N = ±с^, у/ = ±л/2 и изоклина z = 0 совпадает с
осью абсцисс;
3) при N> 0, 0 <4/< л/2 и фазовые траектории пересе-
кают изоклины z = С = const (0 > С > -ки0 при у > h) с
положительным коэффициентом наклона;
4) при N < О О > у/ > -л/2 и фазовые траектории пере-
секают изоклины z = С = const (С> О и С < -ки0 при
у > h) с отрицательным коэффициентом наклона.
Аналогичным образом находится уравнение изок-
лины для области III: z = kuj(\ + TN) и строятся соответству-
ющие траектории для этой области (рис. 3.31).
Для рассматриваемого случая уравнение фазовой
траектории можно получить и аналитически, решив урав-
нение (3.41) путем разделения переменных и последующего
интегрирования. Для области II имеем:
После интегрирования этого уравнения получаем
уравнение фазовой траектории:
Аналогично, можно найти уравнение фазовой
траектории для области III:
(3-44)
Постоянные интегрирования С2 и С3 определяются
из начальных условий. Напомним, что при переходе фазо-
вой траектории из одной зоны в другую, конечное состояние
системы в момент переключения (у = ± rj) для предыдущей
зоны является начальным условием для последующей.
W Теория автоматического управления
290 Нелинейные автоматические системы управления
Найденные в явном виде уравнения фазовых тра-
екторий (3.40), (3.43) и (3.44) дают возможность построить
фазовый портрет системы аналитическим методом.
8.2.4. Колебательные процессы в релейных системах
Исследование колебаний в линейных системах,
обычно сводится к изучению процессов в колебательном
звене, описываемым линейным дифференциальным урав-
нением второго порядка: 72yn + 2T^v, + <y-Ax(Z), при £ <1.
(см. п.3.1.1)
Напомним что, в линейных системах могут возни-
кать вынужденные колебания, которые происходят под
действием внешнего колебательного, в частности пери-
одического воздействия x(Z), и собственные колебания,
возникающие в автономных системах, т. е. при х(г) = О. В
последнем случае колебания возникают за счет ненулевых
начальных условий которые физически соответствуют мгно-
венной подпитке системы энергией. Собственные колебания
в линейных системах называются также свободными, т.к.
система продолжает движение без внешних воздействий.
Заметим, что характер собственных колебаний зависит
от конкретного значения коэффициента демпфирования
£ При £=0 запасенная энергия в системе сохраняется и в
ней возникают свободные периодические (незатухающие и
нерасходящиеся) колебания: у = ?lsin(tt>Z + (р), где А и (р ~ пос-
тоянные интегрирования (амплитуда и фаза колебаний),
определенные из начальных условий. Такая система назы-
вается консервативной замкнутой системой. Если 0<£ <1 в
системе возникают свободные непериодические затухающие
колебания; если -1 <£ < 0, то свободные непериодические
колебания будут расходящимися. В первом случае система
отдает энергию во внешнюю среду, а во втором - она пот-
ребляет энергию из внешней среды. И та, и другая системы
относятся к классу диссипативных^, в которых происходит
убыль или пополнение энергии.
В зависимости от конкретного значения коэффи-
циентом демпфирования £ колебания могут быть сходя-
щиеся (0 < £ < 1), расходящиеся (- 1 < £ < 0), периодические
и
L_d h—J
1 Диссипация (лат. dissipatio) - рассеивание.
8. Точные методы исследования динамических свойств... 291
В теории нелинейных колебаний, к которым отно-
сятся колебания в релейных системах, исследуется интег-
ралы дифференциальных уравнений следующего вида:
Fy" + w(y',y,t) = О,
где ц/ - нелинейная функция в неявном виде.
В случае возникновения периодического колеба-
тельного процесса изображающая точка на фазовой плос-
кости перемещается по одной и той же замкнутой кривой.
Например, при линейной системы при £=0 этой кривой
является эллипс (рис. 3.23, а). Характер движения и фа-
зовый портрет нелинейных систем гораздо разнообразней,
чем линейных. Здесь возможно наличие одного или даже
нескольких замкнутых контуров, которые называются пре-
дельными циклами. Как и точка равновесия линейных сис-
тем (фокусы, узлы), предельные циклы могут быть устой-
чивы и неустойчивы. В первом случае фазовая траектория
навивается на предельный цикл, во втором - свивается.
Примером нелинейной системы с так называемым
жестким режимом возбуждения колебаний является
обычные часы с маятником, фазовый портрет движения
которого приведен на рис. 3.32. Здесь состояние равновесия
(у = у' =0) устойчиво и окружено неустойчивым предель-
ным циклом (часы не пойдут, если отклонить маятник в
пределах этого цикла). Если изображающая точка будет
находиться вне неустойчивого цикла, то фазовые тра-
ектории будут стягиваться к устойчивому предельному
циклу и в системе возникнут устойчивые периодические
колебания, которые носят название автоколебаний. При
этом компенсация расхода энергии происходит за счет ее
подвода из внешних источников (в нашем примере упругая
энергия пружины или потенциальная энергия свободно
подвешенной гири).
В общем случае автоколебаниями называются
устойчивые собственные периодические колебания не-
линейной системы при отсутствии внешних воздействий
(внешняя связь остается только в виде подвода энергии),
частота и амплитуда которых зависит от внутренних па-
раметров системы.
10*
292 Нелинейные автоматические системы управления
Подчеркнем, что в линейных системах параметры
собственных колебаний А и ср зависят от начальных усло-
вий, поэтому эти колебания относятся к классу свободных,
а в нелинейных - не зависят от них, и следовательно,
автоколебания относятся к классу несвободных. Частота
колебаний и определяется как для линейных, так и для
нелинейных систем, параметрами системы.
Заметим, что если точка равновесия, находящаяся
в начале координат, является неустойчивой и предельный
цикл существует, то при включении системы в ней ус-
танавливается определенный режим автоколебаний при
любых начальных условиях. Такой режим возбуждения
колебаний называется мягким. Примером таких систем
могут служить системы, в которых используются релейные
элементы с петлевыми характеристиками.
Рассмотрим случай, когда в качестве управляю-
щего устройства системы рассмотренной выше (рис. 3.30),
используется реле, с двухпозиционной петлевой релейной
характеристикой (рис. 3.33).
Фазовый портрет системы строится с помощью урав-
нения (3.37), которое в данном случае можно представить в
виде двух уравнений для II и III зоны: II. Ти” + и' + ки0 = 0 и
III. Ти" + и' - кий = 0 уравнение для / зоны отсутствует, так
как отсутствует зона нечувствительности.
8. Точные методы исследования динамических свойств...
293
Рис. 3.33
В соответствии с характеристикой реле (рис. 3.33)
его переключение производится: а) при движении слева
направо на прямой^ = z > 0; б) при движении справа нале-
во на прямой у = -г/; z < 0. На фазовой плоскости (рис. 3.34)
линии переключения нанесены пунктиром. Фазовый пор-
трет системы имеет расходящиеся траектории при малых
начальных значениях координат z, у и сходящиеся - при
больших. Границей сходящихся и расходящихся траекто-
рий является замкнутый контур (предельный цикл).
Рис. 3.34
Равновесное состояние системы z ~у = 0 неустойчиво. Ко-
лебательный процесс устойчив, т. е. система работает в
режиме автоколебаний.
Рассмотрим случай, когда управляющим устройс-
твом является трехпозиционный релейный элемент с пет-
лей возврата (рис. 3.35, а).
294
Нелинейные автоматические системы управления
Здесь, в зависимости от соотношений параметров
системы г] и т, (0 < т < 1), переходной процесс в ней может
носить либо характер затухающих колебаний, обуслов-
ленных наличием зоны нечувствительности, либо авто-
колебаний, обусловленных петлей возврата. То значение
коэффициента т, при котором возникает предельный
цикл, называется критическим (т = тк). Воспользовавшись
уравнением фазовых траекторий для соответствующих зон
(3.40), (3.43) и (3.44) можно построить эти траектории для
начальных условий у = + rj,z = 0 и у = - ц,г = 0 (рис. 3.35, б).
Абсцисса пересечения фазовых траекторий для П-й и I зоны
(или III и I) и дает искомое значение ткг}.
В случае идеального двухпозиционного реле усло-
вие равновесия физически невыполнимо и в окрестностях
точки z = у = 0 возникнут колебания с бесконечно малой
амплитудой и бесконечно большой частотой. В реальных
системах и тот, и другой параметры колебаний конечны,
что обусловлено идеализацией дифференциального уравне-
ния движения системы. Здесь определяющую роль играют
отброшенные производные более высокого порядка (третье-
го и выше). Поэтому анализ поведения такой системы с
помощью метода фазовой плоскости непригоден, и для
ее исследования применяют другие методы, в частности,
метод гармонической линеаризации.
8.2.5. Метод точечных преобразований
Этот метод заключается в последовательном рас-
смотрении положения изображающей точки на линии
переключения.
8. Точные методы исследования динамических свойств... 295
Пусть в качестве управляющего элемента исполь-
зуется двухпозиционное реле с петлевой характеристикой
(рис. 3.33), и объект управления описывается линейным
дифференциальным уравнением второго порядка. Тогда,
по аналогии с (3.39) уравнение системы можно записать в
виде:
Ту" + у'= kF(y);
(3.45)
где F(y) = ±и0 = const, а линии переключения на фазовой плос-
кости изображаются полупрямымиу = ±т].
Запишем ДУ фазовой траектории, положив Т = 1 с,
k = 1 с~1 и учтя, чтоу' = г, у" = z't =z z'. Тогда имеем:
dz г-/ \ dz F(y)-z
-^z + z = F(y) или —= —
dy dy z
После разделения переменных и интегрирования
получим:
(3.46)
Для точки (рис. 3.46) при t = 0, имеем:
7 = - s - F(y) In |5-F(y)| + С{.
(3-47)
Определив из (3.47) постоянную интегрирования Ct
и подставив ее в (3.46), получим:
y = ri + s-z + F(y) In
s ~ F(y)
z - F(y)
(3.48)
Уравнение (3.48) и есть уравнение фазовой траек-
тории в явном виде. Запишем это уравнение для точки
A (—t], —и):
~Т] + 5+V - In
1 + 5
иди
(3-49)
Выражение (3.49) задает положение точки А в
зависимости от положения точки В. Зная 5 можно вычис-
лить v. Заметим, что если s = |п|, то имеем замкнутый цикл
(рис. 3.36), т. е. система находится в режиме автоколеба-
296 Нелинейные автоматические системы управления________
ний. Параметры автоколебаний могут быть вычислены
путем решения уравнения (3.49). После потенцирования
уравнения (3.49) имеем:
e2'/ + s+u = (1 + s)/(l - и) или (1 — v)eue2'/= (1 + 5)e-s (3.50)
Обозначим правую и левую части полученного урав-
нения соответственно ^,(v) и w2(s). Эти функции называются
функциями точечного преобразования.
J 5(^,5)
А Т}
Рис. 3.36
Уравнение (3.50) моно решить графически. Если
графики функции у/}(у) и i//2(s). имеют точки пересечения,
т. е. есть решение, то в системе имеют место колебания с ам-
плитудой^^. Для качественного исследования функции у/,
и у/2 определим их граничные значения для v = s = 0hv = 5=1.
Имеем: у/,(0) = е2’ > 1; у/2(0) = 1; ^,(1) = 0; ^/2(1) = 2е~ 0.73. От-
сюда вытекает, что графики кривых и y2(s) обязатель-
но пересекутся (рис. 3.37). При этом в точке пересечения
кривых «о» s = v, т. е. имеем замкнутый цикл и, следова-
тельно, в системе существуют колебания. Для выявления
их устойчивости возьмем точку «а» на кривой y/2(s). Через
полуколебание имеем z = v{ <sx, т. е. колебания затухают,
следовательно, колебания - сходятся к предельному цик-
лу. Для точки «б» - колебания будут расходиться к этому
циклу (у2 > s2). Таким образом предельный цикл устойчив
и колебания системы представляют собой автоколебания,
параметры которых можно найти следующим образом.
8. Точные методы исследования динамических свойств...297
Рис. 3.37
Амплитуду автокодебаний утах можно получить, вос-
пользовавшись уравнением (3.48). Например, при F(y) = 1
и у =Ут!а, z = 0 (см. рис. 3.36) с учетом начальных условий
в точке В: у(0) = Ц* z(0) = s :=zma)t, окончательно получим:
V ~Л + Zmax + ’П12тах “
Период автоколебаний Т находится путем реше-
ния исходного дифференциального уравнения движения
системы, например, при Т-к = F(y) = 1 имеем:
у"+ у'+ 1 = 0, или zt' + z = ~\.
После интегрирования получим: z = С2е~' - 1. Учтя,
что при t = 0, z = z^ определим постоянную интегрирования
С2 = zmax + 1. Окончательно получим:
Так как при t = Т /2 величина z = -z , можно за-
а / max’
писать:
-z = (z + 1)е V2-!, или (l~z )/(1 + z ) = e~TJ2.
max v max 7 ’ v max7 4 max7
Логарифмируя последнее выражение окончательно
получим:
Т = 21п
а
max
max
Метод точечных преобразований целесообразно
применять при наличии в системе автоколебаний, так как
он дает возможность не только построить фазовый портрет
298 Нелинейные автоматические системы управления
системы, но сравнительно просто определить параметры
автоколебаний.
8.2.6. Скользящий режим
Рассмотрим простейшую релейную систему
(рис. 3.38), линейная часть которой представляет собой ас-
татическое звено второго порядка. Если^(г) = О, Рх(у{) = k{y^
то, положив у* = 0 и учтя что при этом у j = -у - F2(z), имеем
линейную консервативную систему (£=0), описываемую
уравнениями: у" = х; х = - ку, или
(3-51)
у" + кху = Ъ,
Рис. 3.38
В этой системе под действием внешнего импульсно-
го возмущения возникают свободные незатухающие коле-
бания, амплитуда которых зависит от начальных условий.
Фазовая картина при этом представляет собой семейство
эллипсов, вложенных друг в друга (рис. 3.23, а). В случае
релейной системы при Fx(y) = csigny = ±си учетом того, что
у” = (dzldy)z> уравнение (3.50) перепишется в виде:
(dz!dy)z ± с = 0, или zdz ± cdy = 0.
После интегрирования последнего выражения по-
лучим уравнение фазовой траектории
(z2/2) ± су = С,,
(3.52)
где Cj - постоянная интегрирования, определяемая из на-
чальных условий.
8. Точные методы исследования динамических свойств...299
В соответствии с уравнением (3.52) фазовые траек-
тории будут замкнутыми кривыми, образованными отрез-
ками парабол, вершины которых перемещаются на оси аб-
сцисс в зависимости от начальных условий (рис. 3.39, а).
Z
Рис. 3.39
При наличии зоны нечувствительности: = О,
при [yj < 7 величина z в этой зоне равна z = yj2Cx = const,
т. е. фазовые траектории на бесконечной полосе фазовой
плоскости I представляют отрезки прямых, параллель-
ных оси абсцисс (рис. 3.39, б). В случае трехпозиционной
характеристики с петлей возврата в системе возникают
расходящиеся колебания (рис. 3.39, в).
Во всех рассмотренных случаях релейная система
функционирует неудовлетворительно, т. к. в ней возникают
свободные незатухающие или расходящиеся колебания,
параметры которых зависят от начальных условий.
Для коррекции этой системы с целью получения
удовлетворительного режима ее функционирования можно
ввести корректирующие звенья, в частности, звено F' (z).
300 Нелинейныеавтоматические системы управления
Если на вход нелинейного элемента Fx (у) дополни-
тельно подать сигнал F2(z) = k^z, то для идеальной двухпо-
зиционной характеристики получим
Рис. 3.40
Переключение реле, как и ранее будет производить-
ся при ух = у + = 0, и, следовательно, уравнение линии
переключения будет z = -у/ к2, т. е. эта линия не будет сов-
падать с осью ординат. Уравнение фазовой траектории при
этом остается прежним (3.52), но вследствие упреждающего
переключения процесс будет затухающим. Например, при
движении системы из точки 1 (рис. 3.40) переключение про-
исходит в точке 2, т. е. при скорости изменения координа-
ты у меньшей, чем при переключении, происходящем при
у = 0, и эта скорость продолжает уменьшаться. При попа-
дании изображающей точки на отрезок линии переключе-
ния АВ фазовые траектории будут подходить к ней с обеих
сторон (точка 3) и, следовательно, изображающая точка не
может уйти с этой линии. Но она не может и остаться на
ней, т.к., например, для точки 3, z<0, и, следовательно,
изображающая точка будет двигаться влево, но уже не по
8. Точные методы исследования динамических свойств... 301
фазовой траектории, а по линии переключения. Этот режим
работы получил название скользящего. Так как переключе-
ние реле не могут производиться мгновенно, скользящий
режим реализуется не в виде плавного скольжения по ли-
нии переключения, а в виде вибраций малой амплитуды и
большой частоты вокруг линии переключения.
Учтя z = у , перепишем уравнение линии пере-
ключения в виде: £2у' + у = 0. Решение этого уравнения
у = С2е“Р1Г прир{ = - l/fc2, характеризует процесс движения
по линии переключения, определяемый только коэффици-
ентом передачи корректирующего звена к2.
Подчеркнем, что в рассматриваемом случае линия
переключения не являются фазовой траекторией. Если
же на входе релейного элемента сформировать сигнал так,
чтобы линия переключения совпадала с фазовой траекто-
рией аОб, движение по которой происходит в направлении
точки равновесия О, то скользящий режим исключается.
Можно показать, что при этом время переходного процесса
минимизируется (см. главу 10).
8*3. Устойчивость нелинейных систем
8.3.1. Общее определение устойчивости
Определение устойчивости системы, приведенное
в п.3.1, применимо как к линейным, так и к нелинейным
системам. Однако понятие «устойчивость» является более
в
ироким. Рассмотрим этот вопрос более подробно.
Предположим, что система дифференциальных
уравнений, описывающая поведение исследуемой систе-
мы, приведена к нормальной форме Коше, т.е._ описана в
переменных состояния (см.п. 1.2):
У,= ^>У1>У2’-Уп\ * = !>«>
(3.53)
где у - переменные, определяющие состояние системы в
каждый момент времени.
Правые части уравнений (3.53) представляют собой
заданные функции времени t и величина у.. Если правые
части уравнений (3.53) не зависят явно от времени, то это
302 Нелинейные автоматические системы управления
означает, что на систему не действуют никакие внешние
возмущения /^(/), а все действующие силы зависят только
от состояния системы, т.е. являются внутренними. Такие
системы называются автономными. Если в правых частях
уравнений (3.53) явно зависят от времени лишь внешние
возмущения, то система стационарна. Если кроме того
рункциями времени являются и некоторые внутренние
параметры системы, то она относится к классу нестаци-
онарных. Из сказанного выше вытекает, что любая авто-
номная система стационарна, но стационарная система
автономна лишь в том случае, когда на нее не действуют
никакие внешние возмущения.
Каждой совокупности начальных условий у.(0), со-
ответствует определенное движение системы, определяемое
решением уравнений (3.53). Выберем из всех возможных
движений системы какое-нибудь одно и условимся назы-
вать его невозмущенным (по Ляпунову). Всякое другое
движение, отличное от невозмущенного, назовем возму-
щенным. Подчеркнем, что и те и другие движения опреде-
ляются одними и теми же ДУ (3.53), решенными для раз-
личных начальных условий, выбираемых произвольно.
Воспользуемся определением устойчивости по Ля-
пунову: невозмущенное движение называется устойчивым
по отношению к заданному движению системы у *(/),... у*(/),
если при любом сколь угодно малом 8 > 0, существует такое
положительное число 3 = <5(е), что все возмущенные движе-
ния, для которых в любой начальный момент времени Z
У/(0) - X (0) < <5,
i = 1, п,
(3.54)
при любом t > удовлетворяют условию
У* (0) - У, (0) < £
(3.55)
Невозмущенное движение называется асимптоти-
чески устойчивым, если существует такое положительное
число 8, что все возмущенные движения, для которых при
любом t = t0, выполнены неравенства (3.54), асимптотичес-
8. Точные методы исследования динамических свойств... 303
ки*> стремятся к^1 евозмущенному движению при /—► оо,
т.е. для всех z = 15я
lim
/-*00
* 1 **ч
х (0 - х (0 = °
(3.56)
Если существует хотя бы одно такое число е > О,
что при любом сколь угодно малом <5 > 0 существует возму-
щенное движение, удовлетворяющее условию (3.54), но не
удовлетворяющее неравенствам (3.55), то невозмущенное
движение является неустойчивым.
Проиллюстрируем сказанное, воспользовавшись
изображением движения системы в фазовом пространс-
тве. Для наглядности ограничимся фазовой плоскостью,
положив п = 2. При этом примем, что невозмущенному
движению соответствует состояние покоя, т.е. нахождение
изображающей точки в начале координат. Невозмущенное
движение устойчиво, если все возможные фазовые траекто-
рии начинающиеся внутри окружности достаточно малого
радиуса 3 не выходят из окружности сколь угодно малого
радиуса £ ^ О (рис. 3.41, а).
Рис. 3.41
Невозмущенное движение асимптотически устой-
чиво, если все возможны фазовые траектории, начинаю-
щиеся внутри окружности радиуса <5 стремится к началу
координат (£ = 0) при Z —> оо (рис. 3.24, а; 3.26, а). Невозму-
щенное движение неустойчиво, если существуют фазовые
траектории, начинающиеся как угодно близко к началу
Ф) Асимптотический (гр.asymptotes) - неограниченно приближающийся, но несовпадающий.
304 Нелинейные автоматические системы управления
МИИ**Ъ*я*ч*ч»^
координат, выходящие за пределы некоторой фиксирован-
нои окружности с радиусом г >.
Заметим, что в отличие от линейных систем, одна и
та же нелинейная система может быть устойчива в одних
режимах и неустойчивой в других (рис. 3.32). Поэтому
нельзя говорить об устойчивости нелинейной системы в
целом, можно только говорить об устойчивости различных
движений этой системы.
8.3.2. Прямой метод исследования
устойчивости нелинейных систем
Этот метод, предложенный А.М. Ляпуновым, часто
называют вторым методом Ляпунова***, который основан на
обобщении представлений, связанных с положением равно-
весия материальной точки в консервативном силовом поле.
Из теоретической механики известно, что точки минимума
потенциальной энергии являются положениями устойчи-
вого равновесия материальной точки, а точки максиму-
ма - положением неустойчивого равновесия. Основная идея
второго метода Ляпунова состоит в нахождении такой фун-
кции координат фазового пространства системы \,(z = 1,и),
которая была бы аналогична потенциальной энергии поко-
ящейся материальной точки в обычном пространстве.
Введем следующие определения.
1. Функция К(2р...2и) называется знакопостоянной,
осли она имеет один и тот же знак всюду в неко-
торой области, содержащей начало координат,
за лсключением некоторых точек, в которых она
равна нулю.
2. Знакопостоянная функция, равная нулю лишь в
начале координат, называется знакоопределенной:
определеняо-положительной или определенно-от-
рицательной, в зависимости от знака.
Для любой определенно-положительной функции
К(2р...Аи) уравнение
4) В случае, если в качестве невозмуяиенного движения рассматривается состояние равно-
весия системы, соотношение (3.56) принимает вид (1.69).
Первый метод Ляпунова см.п.ЗЛ.1.
8. Точные методы исследования динамических свойств... 305
К(2р..Ли) = С,
где С — параметр, изображает однопараметрическое се-
мейство замкнутых поверхностей в п-мерном фазовом
пространстве*^.
При этом вблизи начала координат поверхность,
соответствующая любому достаточно малому значению С,
находится целиком внутри области, ограниченной любой
поверхностью, которой соответствует большее значение С.
При С —> 0 поверхность стягивается в начало координат.
Например, при п = 2, из рассмотрения фазового портрета
(рис. 3.42) вытекает, что если при любом движении сис-
темы изображающая точка на фазовой плоскости может
двигаться вблизи начала координат только внутри любой
замкнутой области, ограниченной кривой К(Лр..Ли) = С, или
по ее границе и не может выходить за пределы этой области,
то система устойчива (рис. 3.42, а).
Рис. 3.42
Если же изображающая точка может двигаться
рблизи начала координат только внутрь любой облас-
ти — система асимптотически устойчива (рис. 3.42, б). При
этом, если изображающая точка движется внутрь области
F(Ap...A ) = С, то определенно-положительная функция
Г(Л^2) убывает и, следовательно, ее полная производная по
времени отрицательно. Если же изображающая точка дви-
Жется по кривой H(2p..J.n) = С, то эта производная равна нулю.
Обобщая приведенные рассуждения на движение
Системы в n-мерном фазовом пространстве приходим к
* При п > 3 геометрическая интерпретация этих поверхностей невозможна. Такие поверх-
ности носят название гиперповерхностей.
306
Нелинейные автоматические системы управления
выводу, что полная производная функции Г(Я1?...Ли) знако-
постоянна отрицательна, если изображающая точка может
двигаться только внутрь любой поверхности V= С или по
ней, и определенно-отрицательна, если изображающая
точка может двигаться только внутрь этой поверхности.
При этом для любой определенно-отрицательной функции
К(Лр...Л ) ее полная производная в рассмотренных случаях
будет положительной.
Изложенное позволяет сформулировать следующие
две теоремы Ляпунова.
1. Если дифференциальные уравнения возмущенного
движения таковы, что можно найти знакоопреде-
ленную функцию V полная производная которой
по времени
dV АЭГ al
dt дЛ. dt
(3.57)
в силу этих уравнении знакопостоянна и имеет
знак, противоположный знаку функции V, или
тождественно равна нулю, то невозмущенное дви-
жение устойчиво.
2. Если дифференциальные уравнения возмущенного
движения таковы, что можно найти знакоопреде-
ленную функции V , полная производная которой
(3.57) знакоопределена и имеет знак, противополож-
ный знаку функции F, то невозмущенное движение
асимптотически устойчиво.
Рассмотренный метод оценки устойчивости позво-
ляет найти достаточные условия устойчивости^, любых
нелинейных систем, если определена функция Ляпунова
Г(2р...Ап). К сожалению, общих рекомендаций для нахожде-
ния этой функции для произвольных систем не существует.
Поэтому в случае наличия в системе нелинейных звеньев,
рассмотренных в главе 7 приходится прибегать к так назы-
ваемому «методу счастливых комбинаций», рассчитывая
на интуицию и удачу.
1 Заметим, что невыполнение этих условий не является необходимыми для потери устой-
чивости движения системы.
8. Точные методы исследования динамических свойств...307
Пример 3.7
Пусть дифференциальные описывающие движение
системы, имеют вид:
^7 = "(У1 - @У2 )0 - аУ12 - ЬУ2);
at
= ~(У2 + «71)0 - аУ\ - ьу1у
Коэффициенты уравнений а,р,а,Ь - положи-
тельные постоянные.
Требуется найти функцию Ляпунова V.
Решение
Нетрудно видеть, что если удовлетворяется не-
равенство ау2 + byl < 1, то в качестве функции Ляпунова
можно принять функцию V = ау[ + fly\.
Действительно функция V включает все перемен-
ные, определенно положительна и, кроме того, ее произ-
водная
dV dy2
= 2<z^ ТГ + 2^ “Т
at at at
= -2(1 - ayl - byl\ayl + fiy22)
отрицательна, если 0_fl7i ~^У2)>^ , т.е. выполняется
О о
неравенство аух + by2 < 1.
Так как уравнение ay2 + by2 - С (С = const) является
уравнением эллипса, то при С =1 движение системы устой-
. dV л
чиво, ибо --< 0 и фазовые траектории сходится в нача
dt
ло координат. Движение вне этого эллипса неустойчиво.
Сам эллипс представляет сбой неустойчивый предельный
цикл.
Этот пример, иллюстрирует редкий случай «счаст-
ливой комбинации», когда не только находится функция
Ляпунова, но и определяется область, внутри которой со-
стояние равновесия остается устойчивым.
*
308 Нелинейные автоматическиесистемы управления
Несмотря на отсутствие общей методики нахож-
дения функций Ляпунова, сам Ляпунов дал один способ
построения функции И(Яр.../1и) для широкого круга нелиней-
ных задач с несущественной нелинейностью. Этот способ
заключается в том, что уравнения, описывающие поведение
системы, сначала линеаризуются. После этого функция V
пишется в виде квадратичной формы с неопределенными
коэффициентами:
п
U-1
(3.58)
Коэффициенты а., определяются из условия:
dV A dV дЛк А ,2
— = > —; -=-А) Лк
dt fa дХк dt
(3.59)
где А — произвольная постоянная.
Подставляя в формулу (3.59) выражения произ-
дУ
водных----, полученные дифференцированием формулы
дХк
(3.58) и выражения производных Х'к из линеаризованных
уравнений движения системы и сравнивая коэффициенты
при одинаковых членах XX в левой и правой частях равенс-
тва, получаем алгебраические уравнения для определения
коэффициентов а . Подставив найденные коэффициенты
а в выражение (3.58), находим функцию Ляпунова V для
линеаризованных уравнений движения системы. Эта фун-
кция была использована Ляпуновым для определения ус-
ловий устойчивости движения линеаризованной системы,
которые сформулированы в п.3.1.1.
8.3.3. Условия абсолютной
устойчивости нелинейных систем
Абсолютной устойчивостью называется устой-
чивость положения равновесия в целом, т.е. при любых
начальных отклонениях для любой формы нелинейной
характеристики '//(А), принадлежащей какому-либо опреде-
ленному классу. Необходимость исследования абсолютной
8. Точные методы исследования динамических свойств... 309
устойчивости возникает в связи с тем, что в некоторых
случаях нелинейная характеристика звена является неста-
бильной и может быть охарактеризована только опреде-
ленной областью.
Наиболее разработанными являются методы ис-
следования абсолютной устойчивости для характеристик
у/(Д), заключенных между двумя прямолинейными лу-
чами, проходящими через начало координат в первом и
третьем квадрантах и имеющими угловые коэффициенты
Кп А:(рис. 3.43). Характеристики, удовлетворяющие этому
ограничению, будем называть характеристиками прина-
длежащими сектору (К, к).
Рис. 3.43
Рассмотрим нелинейную систему, структурную
схему которой можно привести к виду, показанному на
рис. 3.44. Пусть известна частотная функция линейной
части системы и задано значение параметра К,
который является некоторым предельным параметром
нелинейной характеристики произвольно распола-
гающейся в заданной области.
Рис. 3.44
** Предполагается, что линейная часть систем устойчива.
310
Нелинейные автоматические системы управления
Необходимо определить, обеспечивается ли абсо-
лютная устойчивость данной системы для любой характе-
ристики у/(Д), удовлетворяющей условиям:
0 £ К при Д # 0;
Д И (3.60)
1/>(Д) = 0 при Д = 0.
Для решения поставленной задачи румынский уче-
ный В.М.Попов предложил использовать метод частотных
характеристик** сформулировав следующий частотный
критерий определения абсолютной устойчивости: для того
чтобы нелинейная система, была абсолютно устойчива,
достаточно, чтобы при заданных Ж (уга) и К существовало
такое конечное действительное число а, при котором для
всех а> > 0 выполнялось неравенство:
Re[(l + ja(oW„{j(o) + 1/к]> 0. (3.61)
Запишем частотную характеристику линейной
части системы в виде
WJlU(o) = P((o) + jQ^).
Подставив это выражение в неравенство (3.61),
имеем
Re {(1 + jao>)[P(o>) + jW)]+ 1 / 7С}=
= P(w) - aajQtaj) +1 / К > 0,
или, введя видоизмененную частотную характеристику
линейной части системы:
1К*(» = Р*(<У) + /е*((у),
где Р (й>) = Re (jco);
*
Q = a) Im WA (jco),
получим
Р* (ш) - aQ*(a)) + — > 0. (3.62)
Этот метод позволяет решать задачу, избегая построения функций Ляпунова.
8. Точные методы исследования динамических свойств... 311
Уравнение Р*(а>) - aQ* + \!К = 0 является уравнени-
ем прямой в координатах проходящей через точку
действительной оси Р* с абсциссой Р* = -1/К и имеющей
угловой коэффициент наклона 1 / ОС (рис. 3.45, а).
Критерий имеет удобную геометрическую фор-
мулировку: нелинейная система абсолютно устойчива,
если в плоскости FK (jco) = P*(w) + jQ* (со) можно провес-
ти прямую, проходящую через точку (-1 /К; 0), так чтобы
частотная характеристика WJjcd) лежала справа от этой
прямой (рис. 3.45, а).
В.М.Попов установил, что неравенство (3.60) явля-
ется также достаточным условием устойчивости при А—>оо.
Таким образом, для определения абсолютной устой-
чивости по методу Попова необходимо построить видоизме-
ненную характеристику JF (jco), определить К из условий
(3.60) и через точку (-1 /К\ 0) на вещественной оси провести
некоторую прямую так, чтобы характеристика FF(jco) ле-
жала справа от этой прямой. Если такую прямую провести
нельзя, то это значит, что абсолютная устойчивость для
данной системы невозможна (рис. 3.45, б), Величина а, свя-
занная с угловым коэффициентом, при этом определяется
из условия (3.62) так, чтобы при известных параметрах
системы неравенство соблюдалось для всех частот.
Подчеркнем, что так как критерий Попова исполь-
зует частотную характеристику линейной части системы,
то практическое его применение для решения задачи об
абсолютной устойчивости нелинейной системы является
достаточно эффективным.
312
Нелинейные автоматические системы управления
Пример 3.8
Пусть частотная функция нелинейной части не-
линейной системы имеет вид
Т (jco) +2Щ;бо) + 1
Определить при каких значениях К система будет
абсолютна устойчива, если характеристика нели-
нейного элемента лежит в секторе (О, К)\
Решение
Найдем видоизмененную частотную характеристи-
ку линейной части системы. Окончательно получим
(jco) = Re (jco) + jco Im №л (jco) = P(co) + jcoQ(co) =
(1-ГУ) 2$Tco2
~ (1 - Т2со2)2 + (2Т£со)2 J (1 - Т2со2)2 + (2^(о)2 ’
Из приведенного выражения вытекает, что при лю-
бых со мнимая часть характеристики W*(jco) отрицательна,
т.е. эта характеристика располагается на комплексной
плоскости в нижней полуплоскости (рис. 3.46). При часто-
тах со = 0 и со = 1 она имеет общие точки с характеристикой
Рис. 3.46
1 Здесь arctg к- 0 (рис. 3.43)и соответствующая границе сектора совпадает с осью абс-
цисс.
8. Точные методы исследования динамических свойств... 313
Касательная к кривой jy*(/ct>)B начале координат
проходит под углом (р к вещественной оси, величина ко-
торой равна:
. аЮ(а>}
<р = arctg lim-------
= arctg 2£ /Г.
При этом кривая W*(ja)) лежит на комплексной
плоскости правее этой касательной, что позволяет провести
прямую Попова через точку (-1/7С,у0), под некоторым углом
Р (рис. 3.46). Система абсолютно устойчива при всех К и для
всех однозначных нелинейных характеристик, принадле-
жащих сектору (0,оо). При этом arctg А:
котором должна лежать нелинейная характеристика огра-
ничивается первым и вторым квадрантом плоскости ^(Л).
Например, в этом секторе располагается характеристика
нелинейного звена с ограничением (рис. 3.5, а).
= 0; и сектор в
314
9. Приближенные методы
исследования динамических
свойств нелинейных систем
9.1. Метод гармонической линеаризации
9.1.1. Сущность метода
Метод гармонической линеаризации нелинейнос-
тей основан на предположении о том, что в замкнутой
нелинейной системе устанавливается режим автоколеба-
ний с неизвестными амплитудой и частотой. При этом все
переменные, характеризующие движение такой системы
являются периодическими функциями времени и могут
быть разложены в ряд Фурье. Полагая, что линейная часть
системы является низкочастотным фильтром, ограни-
чиваются первыми членами этого ряда, что существенно
упрощает расчеты.
Представим нелинейную АСУ в виде линейной (ЛЧ)
и нелинейной (НЧ) частей (рис. 3.47). Здесь ЛЧ - объект уп-
равления (ОУ), а НЧ — управляющее устройство (УУ).
Запишем уравнения линейной и нелинейной частей
системы:
(3.63)
x = F(y). (3.64)
W = В(р1 _ передаточная функция линейной части
системы; В(р), А(р) - полиномы т-ной и п-ной степени
соответственно
F(y) ~ нелинейная функция.
Требуется установить факт отсутствия или наличия
автоколебаний. В случае наличия последних определить
их амплитуду а и частоту со = 2nlTa> где Та - период коле-
баний.
Строго говоря, автоколебания имеют несинусои-
дальную форму, но так как по условию линейная часть
является низкочастотным фильтром, то в первом прибли-
жении можно предположить, что у = asinco/.
9. Приближенные методы исследования... 315
Рис. 3.47
Заметим, что принятое допущение корректно при выпол-
нении условия А(со2УА(а)1) < 1, гдеА(со1) и А(со3) - амплитуды
первой и третьей гармоник ряда Фурье соответственно.
Тогда с учетом выражения (3.64) можно определить ¥(р)
для различных нелинейных функций F(y). Например, в
случае, если нелинейная характеристика представляет
собой двухпозиционное реле с петлевой характеристикой
(рис. 3.48), то при подаче на его вход гармонического сиг-
нала на выходе получаем прямоугольные импульсы той
же частоты, но со сдвигом на время т, величина которого
зависит от ширины петли у .
Разложим выходную переменную нелинейного
элемента, x(f), являющуюся периодической функцией вре-
мени, в ряд Фурье.
п
x(f) = У (Ак sin hoot + Вк cos knot) f
где (О - частота первой гармоники.
(3.65)
Коэффициенты гармонического ряда (3.65) опреде-
ляются по формулам:
о ~
2я
Гx(cot)da>t; Ак = х(а> f) sin ка> da> t
о п о
Вк= — f x(cot) cos ko)tda>t.
316 Нелинейные автоматические системы управления
Заметим, что если нелинейная характеристика сим-
метрична относительно начала координат, то постоянная
составляющая Во в разложении (3.65) отсутствует.
Так как линейная часть системы является низко-
частотным фильтром, то в разложении (3.65) можно ограни-
читься первыми тремя членами. Тогда, учтя, что у = asinw/,
у' = acocoscot и, следовательно, sincot = у/a, coscot = у'/асо, и
положив Во = 0, получим:
х(/) =
а аа) dt
Обозначив q(a) = —L; q.(а) = —!
а а
можно записать:
+ (3-66)
О) at
Дифференциальное уравнение (3.66) по форме по-
добно линейному дифференциальному уравнению, но с
коэффициентами, зависящими от искомых величин а и со.
Последнее обстоятельство и отражает нелинейный харак-
тер зависимости х = F(y).
9. Приближенные методы исследования... 317
Именно линейная форма записи (3.66) позволяет
назвать этот прием гармонической линеаризацией, а коэф-
фициенты q(a) и qx(a) - коэффициентами гармонической
линеаризации.
Преобразовав (3.56) по Лапласу, получим:
Х(р) =
?(«) +
?i(a)
(У
Р Y(p).
(3.67)
Заметим, что выражение в квадратных скобках
уравнения (3.67) можно трактовать как передаточную фун-
кцию нелинейного гармонически линеаризованного звена.
Тогда можно записать:
W(P,a,a>) =
н
q(a) + Р
(1)
(3.68)
При замыкании системы отрицательной обратной
связью в соответствии с уравнениями (3.63), (3.67) и (3.68)
получим:
Г(р) - W(p)X(p) = -W(p)^p,a,a)Y(p).
С учетом того, что №л(р) = В(р)/А(р), уравнение
движения замкнутой системы (при отсутствии внешних
воздействий) примет вид:
[Л(^) + В(р)Ж(Ла,со)]У(7?) = 0.
(3.69)
Воспользовавшись выражениями (3.68), (3.69), мож-
но записать характеристическое уравнение системы:
D(p) = А(р) + В(р) q(a) +
(3.70)
а)
9.1.2. Критерии устойчивости
Линейная форма записи уравнения движения (3.66)
позволяет применить для исследования нелинейных сис-
тем методы, разработанные в теории линейных систем. В
частности, для этой цели широко используются частотные
и алгебраические критерии устойчивости.
318 Нелинейные автоматические системы управления
Применение критерия Михайлова
Напомним, что уравнение кривой Михайлова имеет
вид:
D (jto) = а0 (jm)n + + ... + ап_ 1 (jco) + ап =
= Р(т) +JQ(a>),
где P(a)),Q((o) - вещественная и мнимая части комплексной
переменной D(ja)).
В случае наличия пары чисто мнимых корней ха-
рактеристического уравнения D(p) = 0, в системе возникают
незатухающие колебания. В этом случае кривая Михайлова
проходит через начало координат (кривая 1, рис. 3.49). В
частности для системы, движение которой описывается
выражением (3.69), уравнение кривой Михайлова имеет
вид:
D(» = А( j(o) + B(ja>)
(3-71)
где: со - текущее значение частоты;
Q - искомая частота колебаний замкнутой системы.
Рис. 3.49
Представим выражение (3.71) как сумму вещест-
венной и мнимой частей:
D(jco) = P(co,a,Q.) +jQ(co,a,Q.).
(3.72)
9. Приближенные методы исследования,.. 319
Из (3.72) следует что для того чтобы характерис-
тическое уравнение системы имело чисто мнимые корни,
т. е. кривая Михайлова проходила на комплексной
плоскости через начало координат, должны одновременно
выполняться следующие условия.
P(<y,a,Q) = 0; 0(fi),a,Q)-O. (3-63)
Учитывая, что текущее значение частоты в начале
координат со совпадает с частотой колебаний системы Q и
обозначив обозначив амплитуду колебаний а = А, условия
(3.73) можно записать в виде:
P(4Q) = 0; g(4Q) = 0. (3-64)
Соотношения (3.74) дают возможность установить
факт отсутствия или наличия колебаний и в последнем слу-
чае найти числовые значения искомых величин А и £2. Если
система уравнений (3.74) имеет решение в положительных
вещественных числах, то в физической системе существует
периодическое движение. Если такое решение отсутствует,
то периодическое движение не возникает.
Для исследования устойчивости колебательного
процесса, т. е. для установления факта возникновения
автоколебаний, поступают следующим образом: увеличи-
вают амплитуду А на величину Да. Тогда кривая Михай-
лова вследствие изменения параметров уравнения (3.71)
отклонится от начала координат в ту или иную сторону.
Если она отклонится в положение 2 (рис. 3.49), то попа-
даем в устойчивую зону и колебания будут затухать, если
в положение 3 - расходиться. Таким образом, в первом
случае система возвращается в первоначальное положе-
ние, а во втором - нет. Следовательно для возникновения
устойчивого периодического движения необходимо, чтобы
при увеличении амплитуды колебаний (А + Да) кривая
Михайлова отклонялась в положение 2. Аналогичным
образом можно показать, что при уменьшении амплитуды
колебаний (А - Да) устойчивые колебания в системе воз-
никают при смещении кривой Михайлова в положение 3.
Это геометрическое условие можно выразить и в аналити-
ческом в виде:
320
Нелинейные автоматические системы управления
dP.dQ
да да)
да) да
Здесь частные производные, взятые от выражений
Р(а,а)) и Q(a,a)), берутся в точке а = А и а) = Q.
Применение критерия Найквиста
Воспользовавшись соотношениями (3.63) и (3.68),
запишем выражения для частотных характеристик ли-
нейной и нелинейной частей системы, представленной на
рис. 3.41.
TJZZ- Л S{jCO) Т7/7- . ч z ч .
(J0) = АГсо) ’ = + (3.75)
X. tZ X
Так как критерий Найквиста использует частотные
функции разомкнутой системы, то частоты внешних воз-
мущений со и искомая частота колебаний Q совпадают, что
позволяет в выражении (3.73) их сократить. Тогда АФЧХ
разомкнутой системы примет вид:
Wp{jco,а) = Wjjco) Wu{a) =
B{jco )
A{jco) +jq^
В соответствии с критерием Найквиста колебатель-
ный процесс в системе возникает в случае, если годограф
вектора W(jco9a) пройдет через точку (- 1, j’0). Запишем
это условие в виде:
W{jco) W(a) = - 1 (3.76)
*>* п
Условие (3.66) можно переписать в виде:
W„{j,a>) =
1
WH {а)’
(3.77)
Уравнение (3.77), предложенное Гольдфарбом, поз-
воляет определить искомые А и Q. В частности, построив от-
дельно частотную характеристику линейной части Wj^jco) и
обратную частотную характеристику ее нелинейной части
с отрицательным знаком (рис. 3.50, а) можно найти точку
их пересечения на комплексной плоскости, которая дает
искомые значения со = Q; а = А. Значения Q и А определя-
ются по отметкам со. и а на соответствующих кривых. Если
кривые не пересекаются, то периодическое решение отсутс-
9. Приближенные методы исследования... 321
твует и, следовательно, колебание в системе не возникают.
Заметим, что в случае, если qjd) = 0, характеристика-FF (а)
сливается с осью абсцисс (рис. 3.51, б).
Можно показать, что если точки характеристики
-HWH(d) с меньшими значениями амплитуды охватыва-
ются линейной частотной характеристикой Ж(усо), то
есть ах < а2 (рис. 3.50, а, #), и имеются точки пересечения
этих характеристик, то в системе возникают устойчивые
колебания (автоколебания). Действительно, пусть годограф
частотной характеристики разомкнутой системы Wp(jco,а)
при а = А проходит через точку (-1 ,у 0) (рис .3.51). Тогда для
системы работающей в режиме устойчивых колебаний при
а = А + Ла этот годограф должен пересечь ось абсцисс справа
от точки ( “ 1 ,у0), т.е. система должна попасть в устойчивую
область, что приводит к затуханию колебаний ( Ла —>0).
Следовательно, при увеличении амплитуды а, абсолютное
значение WH(A + Ла), а вместе с ним и W (jco, А + + Ла) =
= WJjco)Wh(A + Да), должно уменьшаться. При этом зна-
чение \/Wn(A + Ла) увеличивается, что и отражает сформу-
лированный выше признак устойчивых колебаний. Ана-
логичную картину получим при а = А - Ла. В этом случае
колебательный процесс также будет сходиться к а = А, но
6 другой стороны.
Другой способ исследования устойчивости коле-
баний сводится к непосредственному анализу смещения
годографа Wp (jco,а) относительно точки ( - 1, у'0), при добав-
лении и вычитании приращения Ла к амплитуде колебаний
Теория автоматического управления
322 Нелинейные автоматические системы управления
А. В частности, при смещении годографа W (ja),a), пока-
занном на рис. 3.45, колебания сходятся в точку ( -1 ,j’O),
что свидетельствует об их устойчивости.
Рис. 3.51
Применение критерия Гурвица
Напомним, что условие устойчивости линейной
системы по Гурвицу записывается в виде: А >0, i = 1, п ,
а0>0, где А. - определитель Гурвица; а0 - коэффициент
при высшей производной дифференциального уравнения
движения системы (п. 3.1.2).
В случае, когда предпоследний определитель Гур-
вица Ап ! равен нулю, система находится на границе устой-
чивости и в ней возникают колебания.
Для гармонической линеаризованной системы
коэффициенты ее характеристического уравнения зависят
от частоты су и амплитуды а колебаний. Тогда при прочих
постоянных параметрах условие возникновения колебаний
в системе можно записать в виде
Ди_1(а,су) = 0. (3.78)
Таким образом необходимо найти а и со, удовлетво-
ряющие условию (3.78). Так как имеем два неизвестных, то
для решения задачи необходимо иметь второе уравнение,
которое можно получить, представив характеристическое
уравнение стстемы в виде соответствующем наличию пары
чисто мнимых корней (периодический режим).
9. Приближенные методы исследования... 323
Например, пусть дано характеристическое уравне-
ние для системы третьего порядка:
а{р3 + aj)2 + ajj + а3 = 0.
При рХ 2 = ± j(o это характеристическое уравнение
можно записать в виде:
(р2 + со2) (<?/’ + b{) = aj}3 + bj)2 + aQco2p + a>2bl = 0.
Здесь: b = а, а со2 = а,; (O2b = av откуда со2 = aJ а или в об-
I 1 1 J яД 1 f
щем случае:
О)2 = ап! ап2 =fla,oj). (3.79)
Решение системы уравнений (3.78) и (3.79) дает
искомые а = А и со = Q. Если это решение является вещест-
венным и положительным, то в системе имеет место неза-
тухающий колебательный процесс.
Исследование устойчивости колебаний проводится
аналогично предыдущему: если при А + Аа, А > 0, а при
А - Аа, А < 0, имеем устойчивое периодическое решение,
(автоколебания). В остальных случаях получим неустой-
чивые колебания: либо сходящиеся при а—>0, либо расхо-
дящиеся при а —»со.
9.1.3. Определение коэффициентов
гармонической линеаризации
Использование любого критерия устойчивости для
определения А и Q требует знания передаточной функции
нелинейной части системы, определяемой выражением
(3.68), а следовательно, знания коэффициентов гармони-
ческой линеаризации q(a) и q}(a).
В качестве примера найдем коэффициенты гармо-
нической линеаризации q(a) и q\a) для трехпозиционной
релейной характеристики с петлей возврата (рис. 3.52).
Пусть на вход релейного элемента подается гармони-
ческий сигнал: у - asm cot. Тогда, в соответствии с рис. 3.52,
имеем: q = a sin а(; mq = a sin а2 = a sin (л - а2). Откуда:
sin а, =q! а
sin(7T-a2) = mq! а.
(3.80)
324 Нелинейные автоматические системы управления
Коэффициент гармонической линеаризации q(a)
находится следующим образом.
Л 1 2л 2 а2
q(a)= — = — Г x(ctrf)sintt>fc7<yf =— f csincotdwt =
а ла 4 ла •>
О at
= ——[cos а, - cos а, 1= — Гсоэ(л: - а,) + cos а. 1
лаL J ла*- -*
Учтя, что cos а = -у 1 - sin2 а , и воспользовавшись
соотношениями (3.80), получим:
?(«) =
(3.81)
Выражение (3.81) позволяет определить коэффи-
циент гармонической линеаризации q(a) для различных
релейных характеристик. Например при q = 0 релейная
характеристика, представленная на рис. 3.52 принимает
вид, показанный на рис. 3.53, а. При этом коэффициент
гармонической линеаризации
9. Приближенные методы исследования... 325
ла
При т = ± 1 характеристики релейных элементов
представлены на рис. 3.53, б, в. Коэффициенты гармони-
ческой линеаризации q(a) для обоих случаев одинаковы
и равны
q(a) = ^с..
ла У а
а xt б
т=-1
Рис. 3.53
Аналогично найдем второй коэ
ициент гармони-
ческой линеаризации нелинейности qx(a\ представленной
на рис. 3.52. Имеем:
q} (я) = — = — f x(to)cosco/ • dot =
v 7 а ла J v 7
о
a2
С c ’ cos cot * dot = ^Tsin a, - sin a. 1
J ла1- lJ
Учтя соотношение (3.80), окончательно получим:
/А 2СГЬ 1А
ла
(3.82)
326 Нелинейные автоматические системы управления
Воспользовавшись выражением (3.83)-(3.85) можно
определить значение коэффициента q. (а) для других релей-
ных характеристик. В частности, для релейного элемента с
петлевой двухпозиционной характеристикой (рис. 3.53, в)
получим
4с?;
^(°) = -—7
ла
Для релейных элементов с характеристиками
представленными на рис. 3.53, а, б коэффициент qx(a) - 0.
Заметим, что коэффициент qx(a)<Q в том случае когда
характеристика релейного элемента имеет петлю возврата,
обуславливающую запаздывание в этом элементе.
Подставив полученные q(a) и qx(a) в выражение пе-
редаточной функции соответствующих релейных элемен-
тов, получим конкретное выражение этой функции.
9.1.4. Определение параметров автоколебаний
Рассмотрим методику определения частоты и
амплитуды автоколебаний, возникающих в нелинейной
системе на конкретном примере.
Пример 3.9
Пусть имеем систему управления тепловым режи-
мом в сушильном шкафу, функциональная схема
которой представлена на рис. 3.54.
Здесь ИМ - исполнительный механизм (серводви
гатель с заслонкой); ОУ - объект управления (су
9. Приближенные методы исследования...327
шильный шкаф); ЧЭ - чувствительный элемент
(термопара).
Передаточные функции звеньев линейной части
системы имеют вид:
и;, (р) = 4,.
Р Тйр + \
В качестве управляющего устройства использует-
ся трехпозиционный релейный регулятор, петлей
возврата которого можно пренебречь. Требуется
установить факт наличия колебаний, исследовать
их на устойчивость и определить параметры А и со.
Решение
Запишем уравнение движения линейной части
системы в отклонениях:
(Т0р2 +р) Y(p) = kX{p), k = kkk3. (3.83)
Уравнение трехпозиционного гармонически линеа-
ризованного релейного регулятора (при тп ** 1) имеет вид:
X{p}=WH{p^,a)Y{p),
(3.84)
( п\
где: Wtt (р, (о, а) = q(a) + — р - передаточная функция не
[ со J
линейной части (НЧ) системы.
Учитывая, что в нашем случае q{(a) = 0, имеем:
4с п
па V а
(3.85)
Воспользовавшись выражениями 3.83 - 3.85, за-
пишем уравнение замкнутой системы с отрицательной
обратной связью:
[T^+p + kq(a)\Y{p) = b.
В соответствии с алгебраическим критерием устой-
чивости Гурвица.
_ 1 — Д1 — «1 — 1 > 0, а{) — Го > 0.
328 Нелинейные автоматические системы управления
Таким образом, в рассматриваемой системе, описы-
ваемой уравнением второго порядка, колебания возникнуть
не могут, что обусловлено наличием зоны нечувствитель-
ности элемента. Этот вывод совпадает с полученным в
главе 8.
Учтем инерционность исполнительного механизма.
Тогда передаточная функция ИМ примет вид:
где: Ти - электромеханическая постоянная времени серводви-
гателя.
При этом уравнение линейной части будет:
[ W + (Го + ту +р] Y(p) = kX{p).
Замкнув систему отрицательной обратной связью,
и обозначив TJ"u = Т2, TQ+ Ти = Тр запишем характеристи-
ческое уравнение замкнутой системы системы:
Тгр* + Т}р2+р + kq(a) = 0.
(3.86)
Предпоследний определитель Гурвица:
Запишем условия возникновения колебаний в сис-
теме:
Л2 = T-T2kq(a) = 0.
(3.87)
откуда
(3.88)
Из полученного выражения (3.88) найдем амплиту-
ду колебаний а. Обозначив 4с72& / л = b и возведя в квадрат
обе части уравнения, получим биквадратное уравнение:
Т}аА - Ь2а2 + b2q2 = 0,
9. Приближенные методы исследования... 329
решив которое, имеем:
Ь2 ± у/b* - 4Т2Ь2г}2
а
2
(3.89)
Как вытекает из (3.89), найденное решение имеет
физический смысл только при условии: b > iTfl, которое
можно записать
т 2Т2кс (3.90)
Л <
JOJ
Полученное неравенство (3.90) и есть условие воз-
никновения колебаний с амплитудой а = А.
Частота колебаний со определяется из уравнения:
ап_$о2 = ап, или в нашем случае при п = 3 имеем: <у2 - а3 /а},
где в соответствии с (3.86): а, = Г; а3 = kq(a). Тогда с учетом
(3.85), получим:
Полученное выражение имеет физический смысл
при а > у.
Таким образом из соотношений (3.88) и (3.91) нахо-
дим искомые а = А и со = Q.
330 Нелинейные автоматические системы управления
Для установления
•Е
акта наличия автоколебаний
необходимо проверить устойчивость полученного периоди-
ческого решения. Для этого в соответствии с (3.84) построим
график q(a) (рис. 3.55).
Воспользовавшись выражением (3.87) получим:
#(а) = Тх Т2к = const. Пересечения прямой q(A) и кри-
вой q(a) имеет место при q(A) < #max (рис. 3.55). При этом
точки 1 и 2 соответствуют двум корням (ар а2) уравнения
(3.87). Проверим устойчивость полученных решений (А =
и А = а2), воспользовавшись выражением (3.87). Для этого
к А добавим и вычтем Да. При А = а} (точка 1) получим сле-
дующие варианты:
1) если а = аг + Да, то как видно из рис. 3.55 величина
q(a) растет и, следовательно, определитель Д2 в
соответствии с (3.87) становится отрицательным,
что свидетельствует о наличии расходящихся ко-
лебаний;
2) если а = -Аа, то величина q(a) уменьшится, следо-
вательно, Д2 > 0, и колебания будут затухать. Таким
образом, решение Л = ар характеризует режим не-
устойчивых колебаний. Аналогичный анализ пока-
зывает, что решение А = а2 (точка 2) характеризует
режим устойчивых колебаний, что свидетельствует
о наличии в системе автоколебаний, амплитуда
которых равна а2. Подставив найденное А = а2 в
(3.91) найдем частоту автоколебаний со - Q. Следо-
вательно, при выполнении условия (3.90) в системе
имеют место автоколебания с параметрами А и Q.
Выражение (3.90) позволяет находить соотноше-
ние параметров рассматриваемой системы, при которых
возникают автоколебания. Учтя, что 71 = ТпТ кТ=Тл+Т
’ 2 0 и 1 0 и
запишем (3.90) в виде:
/ГТ1 m х 2ТТЛС
(Т + Тп) < ——— или
т >
2Т0кс - Jtrj
(3.92)
Тогда условие отсутствия автоколебаний в систе-
ме третьего порядка (п = 3) при релейном управляющем
устройстве с трехпозиционной идеальной релейной харак-
теристикой можно записать, поменяв знак неравенства в
выражении (3.92).
9. Приближенные методы исследования...331
9.2. Вибрационная линеаризация нелинейности
В случае воздействия на нелинейную часть системы,
работающей в режиме автоколебаний с частотой со = Q и
амплитудой а ~ А внешних медленно меняющихся сигналов
y^ty под которыми понимают сигналы удовлетворяющие
условию: у0(/+ Г)-у0(/) « уо(О, в системе возникают не-
симметричные автоколебания и в разложении функций
x(t) в ряд Фурье, появляется постоянная составляющая Во,
отличная от нуля (рис. 3.56)*\
Рис. 3.56
Так как внешний сигнал изменяется медленно,
то в течение одного периода автоколебаний Та его можно
считать постоянным и равным у0. Тогда уравнение нели-
нейной части системы можно записать в виде:
= В + q(a)ya +
(о dt
где: уа = у - Уо = а sintz)/- периодическая составляющая
входного сигнала y(t);
у0- квазипостоянная составляющая этого сигнала;
а, со — амплитуда и частота автоколебаний соответс-
твенно.
} Заметим, что в случае несимметрии нелинейной характеристики х = F(y) относительно
начала координат несимметричные автоколебания могут возникнуть и при отсутствии
внешних воздействий.
332 Нелинейные автоматические системы управления
Коэффициенты гармонической линеаризации q(a)
и qAa) определяются аналогично рассмотренному выше
(п. 9.1.3). Можно показать, что для нелинейного элемента
с трехпозиционной релейной характеристикой с петлей
возврата коэффициент q{(a) не зависит от величины у0 и
определяется по формуле (3.82), а коэффициент q(a) опре-
деляется следующим выражением:
q(a) =
(mrj - у0)2
(^ + Уо)2
(3.93)
2
2
В случае идеальной двухпозиционной релейной
характеристики (рис. 3.56) эти коэффициенты равны:
2
q{a) = 4е
9,(a)-0.
(3-94)
2 5
При этом величина постоянной составляющей на
выходе релейного элемента Во (рис. 3.56) определяется из
следующего соотношения:
। 2л
Во = —J x(o)t)da)t =
2тг J
0
0
«2
Уо
Учтя, чтоу0 = asinttj (рис. 3.56) получим а, = arcsin
Аналогично: а
Тогда:
2 = arcsin
а
во = -тг arcsin = Ф(у0),
71 С1
где Ф(у0) - так называемая функция смещения.
(3.95)
9. Приближенные методы исследования... 333
Таким образом, если рассматриваемый релейный
элемент находится в режиме автоколебаний, то при подаче
на его вход медленно меняющегося сигнала уо(О на выходе
получаем составляющую сигнала x(t) в виде х0 = BQ = Ф0(у0)
изменяющуюся в соответствии с (3.95) (рис. 3.57).
Ф(Уо)=М
Уо
Рис. 3.57
Функция Ф(у0) является достаточно гладкой кривой
и представляет собой квазистатическую характеристи-
ку релейного элемента по каналу у() , которую можно
подвергнуть обычной линеаризации. В результате этого
нелинейное звено можно представить в виде усилительного
звена с коэффициентом усиления k , равным:
(3.96)
При этом уравнение движения системы относитель-
но медленно меняющегося воздействия можно записать в
следующем виде:
М (р) + В( р)кн ] У( р) = ки А (р)Г( р)
где: р) = В( р) / А ( /?) - передаточная функция линейной
части системы;
F(p) = L{fit)};
ft) - внешнее, медленно меняющееся воздействие, прило-
женное к замкнутой системе.
Структурная схема системы может иметь вид,
показанный на рис. 3.58. Здесь внешнее воздействие ft)
приложено со стороны задания ft) =y*(t). Переменная на
334 Нелинейные автоматические системы управления
выходе линейного звена содержит помимо медленно ме-
няющегося сигнала у0(/) высокочастотную составляющую
уа = a sin (Dt, которая отфильтровывается линейной частью
системы. Таким образом можно считать, что медленно
меняющиеся сигналы проходят через релейный элемент
с коэффициентом передачи равным ка, в то время как для
автоколебательного контура передаточная функция этого
элемента равна
и; (а, со, р) = q(a) + •
со
-------
г* W —f-----------►
у*(0
Рис. 3.58
Jo
cot*
Рис. 3.59
Здесь величины, q(a) и qt(a), кв для идеального двупози-
ционного релейного элемента (рис. 3.56), определяется
соотношениями (3.94), (3.96).
9. Приближенные методы исследования... 335
Аналогичным образом определяется функция
смещения Ф(у0) для других типов нелинейностей. На-
пример, для нелинейности с зоной нечувствительности
(рис. 3.59, а) функция смещения имеет вид, показанный
на рис. 3.39, б.
Анализ зависимостей, приведенных на рис. 3.57 и
3.59, б показывает, что для медленно меняющегося сигнала
Уо(О э
JIIH
ект сглаживания существенен. При этом значи-
тельно повышается точность работы системы. Можно по-
казать, что аналогичный эффект имеет место и при других
типах нелинейных характеристиках
Этот эффект называется вибрационной линеариза-
цией или вибрационным сглаживанием нелинейностей при
помощи возбуждения автоколебаний в системе. Поэтому
функцию Ф(у0) иногда называют сглаженной нелинейной
характеристикой. Заметим, что эффект сглаживания нели-
нейности можно получить и при вынужденных колебаниях,
но при этом возникает необходимость иметь специальный
генератор колебаний.
Изложенное позволяет сформировать необходимое
условие возникновения эффекта вибрационного сглажива-
ния нелинейностей:
0) »0)а
а О max
(3.97)
где й)а- частота автоколебаний в нелинейной системе;
- максимальная частота внешнего сигнала fit).
U Шал х z
Для проверки выполнения условия (3.97), а также
для оценки уровня вибраций, возникающих в системе обя-
зательно определяются числовые значения частоты соа и
амплитуды а автоколебаний. При этом используется один
из методов рассмотренных ранее.
Эффект вибрационного сглаживания нелиней-
ностей используется при проектировании высокоточных
систем с целью исключения отрицательного влияния на
качество работы системы таких негативных факторов как
наличие зоны нечувствительности, люфта, петли и т.п.
В качестве иллюстрации, рассмотрим систему уп-
равления штурвалом самолета, в которой, для уменьшения
336 Нелинейные автоматические системы управления
влияния сухого трения в приводе штурвала, применен
релейный усилитель, возбуждающий автоколебания в
локальной системе. Функциональная схема системы при-
ведена на рис. 3.60, на котором пунктиром выделена упо-
мянутая локальная система.
Амплитуда а и частота а) автоколебаний перемен-
ной в локальной системе подбирается такой, чтобы они не
воспринимались корпусом самолета. Приведенная система
может рассматриваться как следящая за произвольно мед-
ленно меняющимся внешними сигналамиf вызывающи-
ми отклонение самолета от заданного курсау*. В соответс-
твии с методикой изложенной выше, для данной системы
находят значения а, со и Ф(А). Далее производят обычную
линеаризацию функции смещения, т. е. заменяют нели-
нейную гладкую зависимость Ф(А) линейной: Ф(А)= к L
К полученному уравнению присоединяют уравнения всех
остальных звеньев системы (самолета, штурвала и др.)) и
рассчитывают всю систему как линейную. При этом уже не
обращают внимания на наличие автоколебаний в локаль-
ном контуре, так как они учтены при определении эквива-
лентного коэффициента усиления этого контура
9. Приближенные методы исследования... 337
9.3. Статистическая линеаризация нелинейностей
Если в состав системы управления, находящейся
под воздействием случайных сигналов и помех, входит
элемент с нелинейной характеристикой, то для анализа
ее работы обычно используют приближенные методы, ос-
нованные на статистической линеаризации нелинейности.
Идея этого метода сводится к тому, что нелинейный
элемент заменяется статистически эквивалентным линей-
ным с передаточной функцией №сэ(р) так, чтобы средне-
квадратичное значение разности процессов в нелинейной
и линеаризованной системе было наименьшим**.
y* = F(<p)
Рис. 3.61
Постановка задачи поясняется схемой (рис. 3.61)
для случая безынерционного нелинейного элемента НЭ.
Требуется определить эквивалентный коэффициент пере-
дачи этого элемента ксэ.
Ошибка преобразования входного сигнала <p(t) ли-
неаризованным элементом будет
А(0 = У * (!) - у(0 = У * (0 - ксэ<р('),
а дисперсия*** ошибки
где A/[AZ] - математическое ожидание квадрата центри-
рованной случайной величины Л ;
1 Т
/? (0) = lim — J =Jч>1 2P(<p)d<p = D
сия входного сигнала;
= сг - диспер-
1 Более подробно статистические методы расчета рассмотрены в главе 10 п. 10.4.1.
} Дисперсия (лат. dispersus) - рассеяние.
338 Нелинейные автоматические системы управления
P(fp)& - плотность распределения вероятности и сред-
нее квадратическое отклонение входного сигнала <p(t)
соответственно; Т
^(0) = л/ [у *0Ж01 = {.im— f т*(0<р(0^ =
х L 21 J_T
= F {<pypP(fp)dtp = гу^ -корреляционный }момент случай-
ных величин у* = F(<p) w <р .
Найдем экстремум 2)д , взяв производную по ксэ от
выражения (3.98):
д D
—= -2Я . (0) + 2*=Л/0) - О,
дк
сэ
откуда статистически эквивалентный коэффициент уси-
ления будет:
(3.99)
к Мо>
гэ ~ ---
Так как — 2 > 0, то найденное значение ксз дает
минимум дисперсии DA.
Величина DAmjn определится после подстановки
(3.99) в (3.98):
d -Rm л’*(0)
п ’,( ’’ Л,(0)
Пример 3.10
Дана замкнутая система управления, изображен-
ная на рис. 3.62.
Требуется определить дисперсию выходной величи-
ны у, обусловленную влиянием помехи f имеющей
1 Корреляг^ия (лае. correlatio) - взаимосвязь, соответствие.
9. Приближенные методы исследования... 339
спектральную плотность^ Sf(a)) =
этом полагаем и = 0.
. При
Решение
В статистической динамике доказывается, что лю-
бой закон распределения случайной величины, поданный
на вход линейной цепи, преобразуется таким образом, что
закон распределения выходной величины приближается
к нормальному.
Таким образом, можно считать, что на вход нели-
нейного элемента подан сигнал с плотностью нормального
распределения вероятности:
Р(р)=
2
0
где №<? - матеметическое ожидание (среднее значение) ве-
личины Р.
Учтя, что уравнение идеальной двухпозиционной
релейной характеристики имеет вид:
F(<p) = У* = с sign <р =
при <р > О
при ср < О,
найдем корреляционный момент (0) при т = 0.
00
Ry*<p (°) = / с sign Р
—со
<pd<p =
Так как
X
См. п. 10.4.1.
340 Нелинейные автоматические системы управления
то получим:
v (0) =
Учтя, что 7/(0)= <7^
и воспользовавшись (3.99),
найдем статистически эквивалентный коэффициент уси-
ления:
Ry-* (Q) _ с 2
сэ 2/(°)
(3.100)
Частотная передаточная функция замкнутой сис-
темы по каналу/ —» у будет
1 + j(t)T
т (»2 + j(0 + кксэ
Заметим, что при и = 0 <р = У и кс = До ).
Для нахождения дисперсии выходной величины
у(0можно воспользоваться формулой Парсеваля (4.86).
Тогда, учтя соотношение между спектральными плотнос-
тями выходного сигнала у и помехи/(4.84), получим:
СО
S (a>)da> =
—ОО
и/ (»2 sf (a>)da> =
dco
Т + № + кксз
Интеграл Z2 табулирован и для нашего случая ра-
вен:
2кк
(3.101)
Тогда после подстановки значения из (3.100) в
(3.101) и преобразований получим окончательное значение
квадратической ошибки выходной величены у(/) , обуслов-
ленной влиянием помехи /(/:
„ 41л.
О = -2!—:—
у Акс
9. Приближенные методы исследования...341
Статистическая линеаризация безынерционных
нелинейных элементов может быть основана не только на
минимизации дисперсии ошибки Л = у*-у (рис. 3.61), но
и на других критериях. В частности, находит применение
линеаризация, основанная на выполнении равенства ма-
тематических ожиданий и дисперсии истинной и аппрок-
симирующей случайных функций.
Оу. (3.102)
В этом случае
к
сэ
Замечено, что
лучшее приближение получается
в случае, если в качестве величины к взять среднее
арифметическое величин ксэ вычисленных по формулам
(3.99), (3.102).
Для линеаризации инерционных нелинейных эле-
ментов могут быть использованы приближения с помощью
более простых линейных преобразований для нормально рас-
пределенного сигнала или для сигнала и его производной.
РАЗДЕЛ IV
Специальные
системы управления
10. Оптимальные системы управления
Под оптимальной системой управления понимается
система, которой тем или иным способом приданы наилуч-
шие качества в каком-либо определенном смысле.
Вообще говоря, любая научно-обоснованная систе-
ма является оптимальной, так как, выбирая ту или иную
систему, мы, тем самым, предпочитаем ее другим. Оцен-
ка функционирования системы производится с помощью
вполне определенных и всегда наличествующих критериев
оптимальности, без которых обоснованный выбор систе-
мы был бы невозможен.
Задачей теории оптимальных систем управления
является определение в общем виде законов управления
объектом, которые дают возможность судить о том, что
можно и чего нельзя достигнуть в реальных условиях.
Классической постановкой такой задачи является задача
определения оптимального в определенном смысле алго-
ритма управления при наличии полной априорной инфор-
мации (математическое описание, включая ограничения,
накладываемые на любые координаты системы) об объекте
управления, а также достаточно строгой математической
as
рормулировки цели управления.
10.1. Цель управления и критерий оптимальности
В качестве цели управления каким-либо объектом
можно рассматривать выполнение определенных требо-
ваний, предъявляемых к системе управления. Такими
требованиями могут быть ограничивающие условия,
налагаемые на выходные координаты (например, допус-
ки на изготавливаемые изделия, ошибки стабилизации
управляемой величины), экстремальные условия (напри-
10. Оптимальные системы у прав л ен ия 343
мер, максимальная мощность или коэффициент полезного
действия, минимальные потери энергоресурсов) и некото-
рые показатели качества (например, содержание вредных
компонентов в конечной продукции).
Следует отметить исключительную сложность за-
дачи строгой формализации цели управления. Дело в том,
что любая система управления входит как подсистема в
систему управления более высокого уровня. В принципе
при формировании критерия необходимо учитывать фак-
торы, определяющие поведение систем более высокого
уровня, вплоть до социально-экономических факторов
глобального масштаба. Но такой подход в чистом виде
вследствие огромного количества локальных требований
(часто противоречивых), предъявляемых к переменным и
определяющих эффективность работы системы, фактичес-
ки означал бы отказ от поставленной задачи.
Более плодотворна идея приближенного учета вли-
яния верхних уровней управления путем введения соот-
ветствующих коррекций в выражение, характеризующее
эффективность работы системы на конкретном уровне
управления. В частности, при добыче или обогащении по-
лезных ископаемых выгодно получить максимальный вы-
ход товарного продукта, но при этом неизбежно ухудшается
его качество, что не соответствует интересам потребителя. В
этом проявляется антагонизм между локальным и глобаль-
ным критериями. Сформулировав критерий как максимум
продукта заданного качества и не зная строгого обоснова-
ния заданного показателя качества, можно учесть требо-
вания потребителя. Другим примером противоречивых
интересов могут быть интересы поставщика и потребителя
электроэнергии. Если для потребителя электроэнергии
важна активная часть потребляемой мощности (компенса-
ция реактивной мощности - это дополнительные заботы),
то производителю необходимо учитывать и реактивную
ее составляющую (так как она влияет на величину потерь
электроенергии в сетях). Поэтому в качестве одного из
контролируемых показателей, по которым производятся
расчеты за электроэнергию, обязательно используется
коэффициент мощности.
344
Специальные системы управления
В общем случае при поиске формализованного (ма-
тематического) выражения для критерия оптимальности
обычно руководствуются следующими соображениями:
• Критерий, прежде всего, должен отражать эконо-
мические показатели или величины с ними свя-
занные.
• Для конкретной системы должен учитываться толь-
ко один критерий. В случае многокритериальной
задачи целесообразно синтезировать глобальный
критерий как определенную функцию от частных
критериев.
Критерий должен быть связан с управляющими воз-
действиями, в противном случае он бесполезен.
Критериальная функция должна иметь подходя-
щую форму. Желательно пользоваться критери-
альной функцией, имеющей один экстремум. К
нежелательным формам критериальной функции
относятся неоднозначные функции, имеющие раз-
рывы, локальные экстремумы и т.п.
• Информация, необходимая для формирования кри-
терия, не должна быть избыточной. Это позволяет
максимально упростить систему измерительных
устройств и повысить надежность функциониро-
вания системы в целом.
Если целью управления является достижение мак-
симальной точности (например, стабилизации, слежения),
критерием может служить средняя квадратическая ошибка
в виде, аналогичном (1.84):
Q=fy2(t)dt
о
(4.1)
где y(t) - отклонение управляемой величины от заданного
значения;
Т - время наблюдения; t - текущее время.
Если требования предъявляются не только к основ-
ной координате, но и к другим показателям (например, к
скорости и ускорению ее изменения), критерий оптималь-
ности чаще всего задается в виде аддитивного интеграль-
ного критерия вида
10. Оптимальные системы управления 345
где у, --- заданные весовые коэффициенты, учитывающие
значимость i-го показателя
В выражениях (4.1) и (4.2) вместо t, вообще говоря,
может быть любой другой физический параметр: например,
если ставится задача получения минимума неравномер-
ности распределения температур в объеме V, то место t
займет V.
В общем случае критерий, оценивающий оптимизи-
руемый процесс, зависит от состояния системы, характери-
зуемого векторами выходных у - (уиу2 —Уп)> задающих у ,
возмущающих/ и управляющих и воздействий, а также
времени t. Тогда
о
В классической задаче об оптимальном управлении,
сформулированной А. А. Фельдбаумом, требуется найти та-
кое управление й(t), удовлетворяющее условию и
(й принадлежит области допустимых управлений), и соот-
ветствующее движение y(t), чтобы при переходе системы из
состояния у0 в состояние УТ минимизировалось выражение
(4.3), в котором векторы у* и f полагаются неизменными и
поэтому не учитываются. В частном случае, при F = 1 полу-
чим Q = T . Тогда, если требуется реализовать цель Q = min,
получаем задачу о максимальном быстродействии.
10.2. Энергетические соотношения при
управлении, оптимальном по быстродействию
Работа объекта управления при определенном,
например номинальном, режиме возможна только тогда,
когда энергия, запасенная в нем, соответствует этому ре-
жиму. Например, работа двигателя с постоянной скоростью
О) = возможна только тогда, когда кинетическая энер-
гия, запасенная в его вращающихся массах, соответствует
этой скорости. Если такого соответствия нет, то координата
системы о будет изменяться.
346
Специальные системыуправления
Увеличивая подводимую мощность, можно уско-
рять процесс изменения запасенной энергии в системе и
тем самым ускорять изменение управляемых координат
до заданного значения. Однако увеличение мощности
ограничено возможностями объекта управления, а также
мощностью источника питания. Следовательно, задача
состоит в поиске оптимальных законов управления для
конкретных объектов.
Пусть объект описывается линейным дифференци-
альным уравнением первого порядка (например, обмотка
возбуждения электрической машины постоянного тока)
Т у + у = ки,
где Т — постоянная времени; к — коэффициент усиления.
Решение этого уравнения при скачкообразном из-
менении управляющего воздействия и = и0
• 1Г/](рис. 4.1, а)
и нулевых начальных условиях имеет вид
y(f) = £п0(1 - е ,/г).
а
и0
Зависимость y(t) представлена на рис. 4.1,6. Можно
показать, что заштрихованная площадь пропорциональ-
на количеству энергии, запасенной в системе. Например,
если к источнику напряжения U - Uo подключается элек-
трическая цепь R - L , то
10. Оптимальные системыуправления 347
00
О
С другой стороны, количество энергии А, запасен-
ной в индуктивности Z, равно
Так как (70 = const, то величина А пропорциональна
площади S . При этом площадь S2 пропорциональна полез-
ной работе, совершаемой на активном сопротивлении R .
Форсировку переходного процесса можно’ полу-
чить, увеличивая подводимое напряжение (управляю-
щее воздействие) до U = С/тах (рис. 4.2, а). Если в момент
достижения У=УХ (точка а) уменьшить U до , то
управляемая координата у сразу примет установивше-
еся значение ух (рис. 4.2, б). Это обусловлено тем, что
количество энергии, запасенное к моменту времени t}
, равно тому, которое необходимо для работы в устано-
вившемся режиме у = ух , так как можно доказать, что
. По истечении интервала управление прекра-
тить нельзя, его нужно поддерживать на уровне UQ,
чтобы удерживать у = у^ .
Рис. 4.2
348 Специальные системы управления
В случае, если объект является апериодическим
звеном второго порядка (например, электрическая цепь
R- L-С), то описанный порядок управления (рис. 4.3, а,
ступенчатая функция 1) не приводит к равенству площадей
5\ и 53 (рис. 4.3, б кривая 2).
Можно показать, что при любых параметрах объекта S3 > .
Это приводит к избытку запасенной энергии, а переход-
ной процесс будет происходить с перерегулированием
(рис. 4.3, б, кривая 1). В случае, если производить пере-
ключение несколько ранее, в момент t2, соответствую-
щий равенству Sj = S3, то при этом координата у < ух и
переходной процесс будет продолжаться (рис. 4.3, кривая
2). Траектории 1 и 2 не являются оптимальными, хотя и
10. Оптимальные системы управления 349
обеспечивают большее быстродействие по сравнению с
переходным процессом, полученным при отсутствии фор-
сировки (кривая 4).
Управление координатой у можно осуществить и
другим путем. Дадим объекту запас энергии несколько
больший, чем требуется при режиме у = . При подходе
к Уъ (точка а) отнимем этот излишек путем подачи отрица-
тельного управления U = -С7тах. К моменту окончания управ-
ления энергия и координата должны быть равны заданным
значениям (рис. 4.3, кривая 3). При этом переходной процесс
является оптимальным и заканчивается за конечное время.
Таким образом, для оптимального управления объектом,
описываемым дифференциальным уравнением второго по-
рядка, управление должно один раз менять знак.
Продолжая аналогичные рассуждения для объектов,
описываемых линейными уравнениями более высокого по-
рядка, придем к выводу: количество смен знака управляю-
щего воздействия зависит от порядка дифференциального
уравнения и равно п -1, где п - порядок уравнения. Это по-
ложение носит название теоремы об и интервалах или (п -1
) переключениях. Отыскание моментов переключения уп-
равлений и является задачей, которую необходимо решить
для создания системы, оптимальной по быстродействию.
Заметим, что если характеристическое уравнение
системы имеет комплексные корни, то число переключений
управления зависит от начальных условий и может быть
большим, чем п -1.
10.3. Основные методы синтеза
оптимальных систем управления
Наиболее широкое распространение получили ме-
тоды синтеза, использующие классическое вариационное
исчисление, динамическое программирование и принцип
максимума.
Вариационное исчисление целесообразно приме-
нять к задачам, в которых области изменения y(t) и й(/)
не содержат ограничений и являются непрерывными, что
имеет место при малых отклонениях величин у и и от
установившихся состояний.
350 Специальные системы управления
Метод динамического программирования и при-
нцип максимума применяются, когда области векторов
y(f) и w(z) замкнутые, а коэффициенты векторов y(t) и
u(j) могут быть кусочно-непрерывными функциями и на-
ходиться на границах этих областей.
Каждый из упомянутых методов сопровождается
различными приемами доведения задачи до численного
решения, что во многих случаях, особенно для систем вы-
сокого порядка, представляет весьма трудную задачу даже
при наличии решения в принципиальном виде.
10.3.1. Синтез оптимальных систем
с помощью вариационного исчисления
Фундаментальным понятием вариационного исчис
ления является функционал и, под которым понимают пере-
менную величину, значение которой определяется выбором
одной или нескольких функций. Например, функционалом
v является длина кривой /, соединяющей две заданные
точки А и В, расположенные на плоскости хОу, так как эта
величина определяется выбором функцииу(х), описываю-
щей кривую, проходящую через эти точки, т. е.
V {я*)} =1 {у(*)} = f f \]l + y2dx.
(Л5)
Другим примером функционала v может служить
критерий эффективности системы Q, определяемый, в
частности, выражением (4.1), который зависит от вида
функции y(f), описывающей переходные процессы в сис-
теме управления:
т
г>{у(О}= 2{у(0}=fy2(t)dt.
о
В общем случае зависимость, характерную для
функционалов, можно сформулировать следующим обра-
зом: функцииу(х) соответствует число о, определяющее
значение функционала. Напомним, что для обычной фун-
кции у(х) числу х соответствует число у, определяющее
значение функции.
10. Оптимальные системы управления 351
Вариационное исчисление изучает методы иссле-
дования функционалов на максимум и минимум. Соот-
ветствующие задачи называются вариационными. К ним,
прежде всего, относятся три классические задачи.
1. Задача о брахистохроне (см. пример 4.1).
2. Геодезическая задача, в которой требуется опреде-
лить линию наименьшей длины /, соединяющую
две заданные точки на некоторой поверхности
<p(x,y,z) = Q.
3. Изопериметрическая задача, в которой требуется
найти уравнение замкнутой линии заданной длины
£, ограничивающей максимальную площадь S. Эта
вариационная задача была решена еще в Древней
Греции: такой замкнутой линией оказалась окруж-
ность.
Заметим, что в последних двух задачах экстре-
мум функционала ищется при определенных условиях
= 0,Л = const}. Поэтому такие задачи называются
задачами на условный экстремум.
Методы решения вариационных задач весьма
сходны с методами исследования функции на максимум
и минимум. В частности, если функционал, например,
достигает экстремума при у(7) = уэ(/)» то вариация
функционала dQ, под которой понимают линейную часть
его приращения по отношению к приращению функции
y(t), равна нулю, то есть
<>е{л(о}-о.
Здесь уз(1) - это функция, принадлежащая к некоторому классу
функций, при которой значение функционала Q достига-
ет экстремума.
Именно поэтому функция yit) называется экстре-
малью функционала Q{y(t)}.
В теории вариационного исчисления доказывается,
что если функционал задан в виде
Z1
Q=fF(y,y,t)dt,
>0
(4.4)
352 Специальные системы управления
то экстремаль функционала y(t,C},C2), где СИС2 - постоян-
ные интегрирования, определяемые из граничных условий
y(Z0), XQ’ является решением уравнения Эйлера:
-------------------- 0 или F-- = 0,
ду dt ду-------------у dt
Проиллюстрируем методику решения вариацион-
ных задач на одном классическом примере.
В 1696 г. Я. Бернулли опубликовал задачу о линии
быстрейшего ската (задача о брахистохроне),
которая формулируется следующим образом: оп-
ределить уравнение траектории, соединяющей две
заданные точки А (0,0) и В (у}), не лежащие на
одной вертикальной прямой (рис. 44) и обладающие
тем свойством, что материальная точка, поме-
щенная в точку А, скатится по этой траектории
в точку В за кратчайшее время t.
(4.6)
Решение
Известно, что скорость движения материальной
точки при свободном падении
где S - путь; g - ускорение свободного падения,
Интегрируя (4.6) и учтя, что dS = д/(б&)2 +(^)2
получим
(ЛЯ)
10. Оптимальные системы управления 353
при граничных условиях у(0) = 0;y(xt) = у}.
Сравнивая правые части уравнений (4.4) и (4.7),
можно записать
Подставив найденное значение/7в (4.5), после пре-
образований и интегрирования получим первый интеграл
Эйлера в виде
Введя параметр а и полагая у = ctga, получим
у(а) =;——5— = -^-(1 -cos2a).
2
Учитывая, что
dx = — = —------da
у ctg а
после интегрирования можем записать
где Q,C2 — постоянные интегрирования, определяемые из
граничных условий.
Полученные зависимости у(а) и X66) являются
уравнениями циклоиды в параметрической форме и пред-
ставляют собой искомую экстремаль функционала (4.7).
Вариационную задачу можно обобщить и на случай,
если функционал зависит от нескольких функций одной и
той же переменной I:
*0
В этом случае, варьируя одну из функций у,(/) и
оставляя все остальные неизменными, получаем функцио-
нал, зависящий от одной исследуемой функции. Функция
yt(f), реализующая экстремум функционала Q, должна в
этом случае удовлетворять уравнению Эйлера. Таким об-
разом, для любой функции у;(1), имеем
12 Теория автоматического управления
354
Специальные системы управления
z = \,п.
(4.9)
Решение системы уравнений (4.9) дает семейство
искомых экстремалей y( (z).
Вариационная задача обобщается также и на слу-
чай, когда в подынтегральную функцию входят производ-
ные высших порядков, т. е. функционал Q имеет вид:
6
6=jF(y,y,y,...,y(/),r)^ (4.10)
при заданных граничных условиях у(,)(/0) и у(,)(/j),
/-0,7-1.
Можно показать, что в этом случае экстремаль
функционала находится как решение уравнения Эйлера-
Пуассона
(4.Н)
Если в функционал (4.10) входит несколько функ-
ций у, (/), то экстремали определяются решением системы
уравнений Эйлера-Пуассона.
Вариационные методы применимы также к реше-
нию задач на условный экстремум. Пусть задан функци-
онал вида (4.8) и дополнительные уравнения
(Р^У\--Уп,У\,-Уп^ = ^, j = т<п, (4.12)
называемые уравнениями связи.
Подобные задачи встречаются при синтезе систем
автоматического управления. В них обычно задаются кри-
терий в виде функционала и система уравнений, описыва-
ющая объект, и требуется найти min (2 при условии (4.12).
Такие задачи решаются сведением их к безусловному экс-
тремуму. Для этого вводится вспомогательная функция
т
7 = 1
(4.13)
где — неопределенные множители Лагранжа.
10. Оптимальные системы управления 355
Для функции F* решают систему уравнений Эйле-
ра, аналогичную системе (4.9). Эта система дополняется
заданными уравнениями связи (4.12). Таким образом, п
уравнений Эйлера и т уравнений связи позволяют опре-
делить т + п неизвестных y,(Z) и ХД/).
Если в функционал (4.8) входят также высшие про-
изводные, то систему уравнений Эйлера заменяют системой
уравнений Эйлера-Пуассона типа (4.11).
Заметим, что уравнения связи могут иметь и интег-
ральную форму, например,
j = 1, т.
(4.14)
zo
В
этом случае вспомогательная функция имеет
вид:
т
где - неопределенный множитель Лагранжа, равный кон-
станте.
Применение вариационного исчисления для ре-
шения задачи синтеза оптимальныхсистем управления
проиллюстрируем на примерах.
Пример 4.2
Пусть критерий оптимальности имеет вид
00
+ (4Л6
О
где Yi и у2 - весовые коэффициенты, учитывающие значи-
мость скорости и ускорения переходного процесса.
Первое слагаемое подынтегрального выражения
(4.16) запрещает длительное существование от-
клонения выходной координаты от заданного зна-
чения, а последующие - длительное существование
больших значений производных. Поэтому миниму-
му интеграла (4.16) соответствуют достаточно
быстрые и плавные переходные процессы. Заметим,
что в случае необходимости минимизации мощнос-
ти управления в подынтегральное выражение (4.16)
12*
356
Специальные системы управления
вводят квадратичные члены вида у//2.
Синтезируем оптимальную систему в смысле ми-
нимума критерия Q.
Решение
Для нахождения экстремали функционала вида
(4.16) составим и решим уравнение Эйлера-Пуассона (4.11).
При F = у2 ! У2 + У2 У2 имеем
= 2(^-7, 7+У2У4)) = 0.
(4.17)
Характеристический полином Н(р) дифференци-
ального уравнения (4.17) можно записать в виде
Я(р) = 1-у1р2+у2/ =
= О +^хР +^2/?2)(1 ~ехР +°2Р2) =
= M(p)N(p),
(4.18)
где М(р) и N(p) - полиномы второй степени соответст-
венно с корнями в левой и правой полуплоскостях.
С учетом требований устойчивости при нахождении
экстремали необходимо учитывать только корни уравнения
М(р) = 0. Тогда
А,2 = (-^ * № - 402 )/102 < о,
и уравнение экстремали (при 0? > 40,) примет вид
1.
у = CtePl‘ + С2еР2'. (4.19)
Постоянные интегрирования находятся из началь-
ных условий: у(0) = уо; у(0) = у0.
Как вытекает из (4.19), уравнение экстремали пред-
ставляет собой решение дифференциального уравнения
второго порядка, например, вида
Т2 у+ %Ту+ у = 0. (4-20)
Таким образом, синтез оптимальной в смысле ми-
нимума выражения (4.16) системы управления приводит к
получению переходных процессов, являющихся решением
дифференциального уравнения второго порядка вида (4.20).
10. Оптимальные системы управления 357
Воспользовавшись выражением (4.18) и сравнивая коэф-
фициенты полиномов при одинаковых степенях, можно
определить параметры этого уравнения:
т2-02=^у~2;
гт 2^
Рис. 4.5
Пусть объект управления (рис. 4.5) представляет
собой интегрирующее звено с передаточной функцией
^о(Р) = к0 / р . Тогда характеристическое уравнение за-
мкнутой системы можно записать в виде
WW+1=0>
г*
где 1^*(р) и W*(p) - обратные передаточные функции объ-
екта и устройства управления соответственно.
Так как оптимальному переходному процессу со-
ответствует система, описываемая уравнением (4.20), то,
сравнивая полученное характеристическое уравнение с
характеристическим уравнением дифференциального
уравнения (4.20), имеем
+1=«(гу+2|тР+1), <4-21)
где а - любое число отличное от нуля.
Из (4.21) следует, что W*(p) должна представлять
собой полином первого порядка. Тогда
W'.(p) —V----------—-
и; (р) аоР+«1
358 Специальные системы управления
Коэффициенты ай и а} находят, приравнивая ко-
эффициенты при одинаковых степенях в (4.21). Оконча-
тельно
Wy (р) =
где Г = 77(2£); ку = 1/(2к0<*Т).
Таким образом, знание параметров объекта к0 и
весовых коэффициентов у( и у2, а следовательно и величин
Т и S, , позволяет синтезировать управляющее устройство,
при котором минимизируется критерий (4.16). Заметим,
что если весовой коэффициент у2, а следовательно и Т
задать сколь угодно малым, то время переходного процес-
са будет также сколь угодно малым, но при этом величина
коэффициента усиления к , а следовательно, и управление
и должны быть сколь угодно большими. Это обусловливает
при выборе весовых коэффициентов в выражении (4.16) не-
обходимость учета ограничений, налагаемых не только на
величины у и у, но и на и.
Описанная методика синтеза оптимальной системы
управления была предложена А.М.Летовым и получила
название аналитического конструирования оптимальных
регуляторов.
В том случае, когда порядок характеристического
уравнения реальной системы превышает порядок характе-
ристического уравнения желаемой системы, оптимальная
система физически не реализуема, так как не реализуемы
идеальные дифференцирующие звенья. В связи с этим огра-
ничиваются параметрическим синтезом системы заданной
структуры. Для этого определяют зависимость принятого
критерия Q от изменяемых параметров системы, а затем
отыскивают значения параметров, при которых Q = min .
Таким образом, вариационная задача сводится к задаче
отыскания экстремума функции нескольких переменных
(изменяемых параметров системы).
10. Оптимальные системы управления
359
Пример 4.3
Имеем следящую систему заданной структуры
(рис. 4.6), описываемую дифференциальным уравне-
нием второго порядка, в котором для улучшения
качества переходного процесса исполнительный
механизм охвачен жесткой отрицательной об-
ратной связью по скорости. Требуется определить
оптимальное значение коэффициента обратной
связи koc, при котором критерии
QO 00
Q = f(y +yiy2)dt = min , и g2 = J*y2<Л = min .
о о
Рис. 4.6
Решение
Экстремаль функционала Qx является решением
уравнения Эйлера (4.5) при F = у2 +у ху2. Имеем:
ду dt ду
= 2(У - У,У) = 0 ’
или У-у\У = 0 .
Характеристическое уравнение полученного диф-
ференциального уравнения будет
Я(р) = 1 - ухр2 = (1 + - уУр) = 0.
Исходя из требований устойчивости при нахожде-
нии экстремума учитываем корни только первого сомно-
жителя. Тогда = - /1 и уравнение экстремали имеет
вид:
ух(У) = С-ер'‘, <4-22)
где С - постоянная интегрирования.
360 Специальные системы управления
Заметим, что уравнение экстремали соответствует
решению ДУ вида Ту + у - 0 с характеристическим уравне-
нием Тр+1 = 0 , где Т— постоянная времени. Таким образом
экстремалью функционала Q. является экспонента с пос-
v 1/2
тояннои времени 1 =ух .
Уравнение экстремали функционала Q2 получим,
положив в (4.22) ух = 0. Тогда, приняв начальное значение
координаты j>(0)= 1 > можно записать
У2(') =
Г CVr<0
1 0V/>0,
L. 7
т. е. в данном случае экстремаль представляет собой
ступенчатую функцию.
Так как объект управления описывается дифферен-
циальным уравнением второго порядка переходные про-
цессы минимизирующие функционалы и Q2 физически
нереализуемы. Поэтому можно лишь определить величины
изменяемых параметров системы (в нашем случае к ), при
которых переходной процесс максимально приближался
бы к оптимальному. Для решения этой задачи запишем
дифференциальное уравнение системы. Имеем
^) =
JW_
1+^(р)’
где Wp (р) =
К
Тр + 1 + кхкос
^2
Р
Тогда дифференциальное уравнение системы при-
мет вид:
Ту+ (У + кхк0С)у+ коу = кои,
где к = к.к^
О 12
Пусть входной сигнал меняется скачком от и до 0,
тогда, полагая у(0) = 1; у(0) = 0 и обозначив р = (1 + к.к^)/ кг
и а0 =Т / к0, получим:
аоу + аху + у ==0. (4.23)
10. Оптимальные системы управления 361
Определим значения Q} и Q2 через коэффициенты
дифференциального уравнения. Для этого умножим (4.23)
поочередно на у и у. Тогда получим
ао УУ + «1УУ + / =0
+ а\У2 + УУ =°
(4-24)
Вычислим следующие интегралы, учтя при этом,
что у(°°) = У (°°)= О
ОО 00
/у№ = я>|о ~fy2dt = - би = -би;
о о
2
V2
/ УУ& = fydy= —т- = 0-
0 л 2
Тогда после интегрирования системы уравнений
(4.24) получим:
Отсюда
Тогда
00
2 = J (у2 + У1 y2}dt = Q2 + y,Q„ =
О
2^,(1 + ^)
Для нахождения к , соответствующего = min,
запишем:
362
Специальные системы управления
Щ _1 (а0 + У1)^о_ 0
дкос к0 (\ + к{кос)2
Отсюда оптимальное значение к :
Коэффициент кос , соответствующий Q2 = min (при
У1 =0), будет
Пусть Т= 0.5с; кх ~ 200; к2 = 0.25 1/с; к0 = к} • кг = 50 1/с;
о
0.5
50
= 0.01 с2.
Оценку Q. находим, задаваясь у,. Потребуем, чтобы
переходной процесс приближался к экспоненте с постоян-
ной времени 0,1 с, тогда у1 = 0,01 с2, а
к =—(50V(k02-l) = 0.03.
ос, 200
Для оценки Q2 получим
к = — (50>/(йЙ -1) = 0.02.
ос2 200
Качество переходного процесса определяется ко-
эффициентом демпфирования £, который в нашем случае
равен
t _ Д1 _ 1+ к\кос
2.yJk^T
Подставляя числовые значения к , имеем для пер-
вого случая £ = 0,7, а для второго £, = 0,5.
Перерегулирование при £ = 0,7 не превышает 5%,
а при £ = 0,5 достигает 20 % , т. е. выбор кос по критерию Q}
дает меньшее перерегулирование, чем по Q2. Дальнейшее
увеличение у 1 еще больше увеличивает к . и, следователь-
но, £. При этом уменьшается перерегулирование, но увели-
чивается время переходного процесса (рис. 4.7).
10. Оптимальные системы управления 363
Рис. 4.7
Таким образом, при заданной структуре объекта
мы не можем реализовать оптимальный переходной про-
цесс в чистом виде, минимизирующий критерий Qx и (?2,
при любых кос. Это обусловленно инерционностью объекта
управления, что оставляет возможность реализации про-
цесса лишь близкого к оптимальному.
Методику решения вариационной задачи на услов-
ный экстремум проиллюстрируем на конкретном примере.
Пример 4.4
Найти оптимальную по быстродействию кривую
изменения частоты вращения двигателя постоян-
ного тока независимого возбуждения при отработ-
ях, наложенных на нагрев двигателя:
т
q = f Ri2dt Л.
Здесь Т - время перемещения двигателя;
о - частота вращения;
А - допустимые тепловые потери;
iu R - ток и сопротивление якоря.
364 Специальные системы управления
Решение
Математически поставленная задача формулирует-
ся следующим образом: найти экстремаль функционала
I at = min
о
(4-25)
при наличии уравнении связи в виде
(4-26)
О О
Таким образом, имеем задачу на условный экс-
тремум, для решения которой составим вспомогательную
функцию
2 2
(4.27)
Запишем уравнение движения двигателя при неиз-
менном потоке возбуждения Ф = const и отсутствии момента
сопротивления Мс = 0 :
da) J .
J-----Л/= Ki; i----------а). (4.28
dt К V ’
м
Здесь J - момент инерции, приведенный к валу двигателя;
М - момент двигателя;
д
См - электромашинная постоянная.
Тогда (4.27) можно записать в виде:
м
Экстремаль функционала (4.25) с учетом (4.26) на-
ходят, решая уравнение Эйлера
9
О
О
Откуда
10. Оптимальные системы управления 365
Л3______1
2LK ~ 2ЛпК
(4.29)
^*3 *
Интегрируя (4.29), найдем уравнение экстремалей
С учетом уравнения (4.28) запишем
(4.30)
СО “ 14“ Ci.
К 2LKK К 1
М VMM
(4.31)
Таким образом, оптимальное в смысле быстродейс-
твия управление двигателем при выполнении условий
(4.26) осуществимо при линейном законе изменения тока
и изменении со по параболическому закону.
Постоянные интегрирования С} и С2 и постоянный
множитель Х.о определяются из граничных условий
со(0) = 0; co(T) = 0; z(O)-zo; z(T)--z0> (432>
соответствующих началу разгона и окончанию торможе-
ния. Подставив (4.32) в (4.30) и (4.31) окончательно запи-
шем
4^м
(4.33)
Значения /0 и Т найдем с помощью уравнений связи
(4.26) и соотношений (4.30)-(4.33). После интегрирования
получим
гп-2> TRil
q = J Ridt ---— = Л;
о 3
(4-34)
<рй = Г codt =
о
KMi0T2
6J
(4.35)
366 Специальные системы управления
Решив совместно (4.34) и (4.35), определим
(4.36)
Подставив (4.33) с учетом (4.36) в (4.30) и (4.31),
найдем в окончательном виде закон изменения тока /(/) и
скорости <у (t) при оптимальном режиме в функции времени
(рис. 4.8). Так как управление двигателем постоянного тока
обычно производится изменением напряжения на зажимах
якоря С/, то воспользовавшись вторым законом Кирхгофа
для якорной цепи двигателя
Я
(4.37)
и уравнениями i(f) и о» (?), можно найти зависимость U (t).
Так как зависимость i(t) линейная, а 0)(1) параболическая,
то U (/) тоже будет изменяться по параболе (рис. 4.8).
Я
Рис. 4.8
Если управлять двигателем, контролируя выход-
ные координаты ср и со, то, исключив из уравнений z(z) и
<o(t) переменную t, получим зависимость z(<w), подставив
которую в (4.37), найдем зависимость £/(со). Кроме того, для
учета знака i i необходимо также производить непрерывное
измерение угла поворота (р. Окончательно
С7 (а>, У>) = 7в\ (В2 ~ 2ш) sign(^0 - 2^) + кеш ’
(4.38)
10. Оптимальные системы управления 367
где Вх
RA
( 9АК2М \
4<p0RJ2 )
1/3
Как вытекает из (4.38), для реализации оптималь-
ного алгоритма требуется нелинейный регулятор.
10.3.2
инамическое программирование
В основе метода динамического программирова-
ния лежит принцип оптимальности, сформулированный
Р. Веллманом для широкого круга задач. Согласно этому
принципу, оптимальная стратегияуправления не зависит
от «предыстории» системы, а определяется ее состоянием
в настоящий момент времени и целью управления.
Поясним метод динамического программирования
на простом примере управления объектом, движение кото-
рого характеризуется уравнением первого порядка
(4.39)
-г = Л Су> м),
at
где и и у - единственные управление и координата систе-
мы, причем на и наложено ограничение в виде uEQ(u).
Предполагается, что при этом координата у также
не выходит за границы допустимых значений.
Пусть заданы граничные условия у(0) = у0; у(Т) = ут
и требуется минимизировать функционал вида
Q-jF0(y,u,t)dt.
о
(4.40)
Прежде всего дискретизируем задачу, т. е. прибли-
женно заменим непрерывную систему дискретной. Этот
этап является неизбежным при подготовке решения задачи
на компьютере, и, в то же время существенно упрощает
процедуру поиска оптимального управления.
Запишем уравнение (4.39) в конечных разностях,
разбив интервал Т на N равных участков длительностью
A = T/JV:
у[(*.1)а]-ИМ)_л[^а)я(м)1
368 Специальные системы управления
или
ук+}-Ук = <4-41)
где f(yk,uk) = f0(yk,uk)b .
Заменим интеграл (4.40) суммой
г» V п \ п( \ (4.42)
2= \F(yk,uk) + <p(yN\
кЗ}
где F(yk,uk) = F0(yk,uk)& .
В выражении (4.42) выделено последнее слагаемое
суммы (p(yN) при Л = N , так как оно не зависит от управ-
ления, ибо при t Т процесс управления заканчивается и
Wjy = 0.
Теперь задача состоит в определении последователь-
ных значений управляющих воздействий ик(к = 0, jV — 1 ),
минимизирующих сумму (4.42) при условии (4.41) и огра-
ничении иЕА(и). Таким образом, вариационная задача
свелась к задаче нахождения минимума функции многих
переменных.
Метод динамического программирования дает
возможность свести эту операцию к последовательности
минимизаций функции одной переменной. Для этого при-
меняется прием, заключающийся в движении от конца
процесса (t = Т) к его началу (/ = 0).
Допустим сначала, что рассматривается момент
времени tN_} = A(7V-1). Все значения ик, кроме последне-
го, уже каким-то образом были осуществлены и при этом
получили определенные значения ул,_], соответствующие
моменту времени t . Согласно принципу оптимальности,
воздействие uN_t не зависит от «предыстории» системы и
определяется лишь состоянием системы, характеризуемым
величиной yN.[ и целью управления. На последнем участке
траектории (от tN1 до tN ) величина tNвлияет на те члены
суммы (4.42), которые относятся к этому участку, т. е.
Qn-\ ~ F{yN_\,uN_x)+ <p(yN}.
10. Оптимальные системы управления 369
Пользуясь (4.41) при к = N-1, запишем полученное
выражение в виде
Qn-\ “ )+ Ф [.У/V-l + ’UN-l ) .
(4-43)
Так как целью управления является минимизация
Q, то это условие необходимо выдержать и для рассматрива-
емого участка. Обозначим min , = S>, .. Как видно из
(4.43), значение SN_ j зависит от состояния системы в момент
т. е. от yN_i. Тогда
Sw-i(yw.i)“ min Qn-\ =
= min f?(jAf_1,ww_1)+^r^_1+/(yyv_1,wy_1)'
В данном случае для определения нужно произ-
водить минимизацию QN_X только по одному переменному
uN{. Выполнив эту операцию, получим 5ЛГ_1 в виде функции
от . Эту функцию необходимо запомнить в компью-
тере перед переходом к последующим стадиям решения.
Перейдя к предпоследнему участку траектории (от f до
tNj, получим
Qn~2 =F^-2,My-2)+F^-l.^-l)+(P(№) . (4.44)
Пользуясь снова принципом оптимальности, можем
сказать, что лишь значение j\_2 и цель управления (мини-
мизация QN~2) определяют оптимальное управление uN_2 и uNи
на рассматриваемом участке траектории. Но минимум по
uN_{ и, следовательно, само оптимальное значение uN_} = u*N_{
уже были найдены для каждого возможного значения y7V_l.
Это позволяет с учетом того, что первое слагаемое (4.44) не
зависит от uN_}, а два вторых равны Q записать
^-2<Х-2) = min Qn-2 =
uN-\ S2(w)
ну_2ео(м)
С учетом (4.41) при к = N—2 получим
370
Специальные системы управления
^-2(^-2)= min {F(№-2>M/V-2)}+
wv_2S2(u)
+ У.\:-2 + f (у N-2’UN-1) J
(4.45)
Минимизация здесь производится также по одному
переменному w . При этом определяются оптимальное зна-
X V "
u*N_2 и минимум функции QN_2,
чение управления
равный
5. Значение S заносится в память компьютера, a SN_}
стирается. Как u*N_2, так и SN_2 являются функцией yN_2 •
Продолжая аналогичным образом, получим рекуррентную*)
формулу вида
sNSyN-k)= min {F(yN_k,uN_k) +
uN.kSi(u)
(4.46)
N-k+}
Выражение (4.46) называется уравнением динами-
ческого программирования в дискретной форме.
Важно отметить, что оптимальное управление u*N_k
минимизирует все выражение в фигурной скобке (4.46), а не
одно лишь первое слагаемое FNk. Стратегия, в которой каж-
дое значение uN_k выбиралось бы путем оптимизации лишь
соответствующего слагаемого FN , не является оптималь-
ной, так как не учитывает конечной цели управления.
Вычисляя по формуле (4.46) последовательно значе-
ние S^_k и соответствующие u*N_k, получим, наконец, зна-
чение управляющего воздействия, требуемое в начальный
момент времени w*(0) и минимальное значение критерия
эффективности 5(0). На этом процедура отыскания опти-
мального управления заканчивается.
Весь процесс решения без затруднений переносится
на объект управления, описываемый дифференциальным
уравнением любого порядка с любым числом выходных
координат системы и управляющих воздействий. Нужно
лишь заменить скаляры у, и в выражении (4.46) векторами
У, и, а функцию f- вектор-функцией f .
* Рекуррентный (лат. recurrens) - возвращающийся. Здесь: каждое последующее значение
, определяется через предыдущее .
/V Я /V Я '
10. Оптимальные системы управл е н и я
371
Как показал А.М. Летов, уравнение динамического
программирования может быть записано и в непрерывной
форме.
Учитывая, что левая часть выражения (4.46) не
зависит от управления, величину S можно перенести
в правую часть под знак минимума. Тогда (4.46) можно
записать в виде
(4.47)
Произведя предельный переход при Ду —* 0 и учтя,
что Ду = /(у, и}, запишем (4.47) в непрерывной форме:
min
и&2(и)
-0.
(4.48)
Для получения минимума выражения, стоящего в
квадратных скобках, в уравнении (4.48), его нужно продиф-
ференцировать по управлению. Тогда условие минимума
(4.48) можно заменить системой уравнений
/ ч dS(y)
F(y,u)+ —г~ Л.У’«) = 0;
dy
dF (,У>и ) + df (у, и) dS(y) = 0
ди ди dy
(4.49)
Решение системы (4.49) позволяет найти зависи-
мость w = #>(y), при которой реализуется оптимальное
управление в смысле минимизации критерия (4.40). Для
этого сначала из второго уравнения системы (4.49) опреде-
ляется величина dS(y)/ dy, а затем искомая зависимость
w = (р(у).
В случае, если система имеет п выходных координат
и г управлений и = их,...иг
, имеем
F(y,i/)+
min «
i/S2(w)
(4.50)
372
Специальные системы управления
или
FV’M)+ У——Z(j>«) = 0;
м fy
у dF(y,u) t А Л dS(y) д/\у,й) 0
# ди} fa fa dyt dUj
(4.51)
Система уравнений (4.51) является наиболее рас-
пространенной формой записи уравнений динамического
программирования в непрерывной форме. Заметим, что
функция 5( у) должна быть непрерывной и дифференци-
руемой по yi. При этом dS(y}/dyi играет ту же роль, что и
неопределенный множитель А. в вариационной задаче на
условный экстремум, уравнения dy.Jdt ~ анало-
гичны уравнениям связи.
Пример 4.5
Пусть требуется провести трубопровод энергоно-
сителя между пунктами ОиТ таким образом, что-
бы стоимость прокладки была минимальной. Это
статическая вариационная задача. Так как про-
кладка осуществляется на участке территории,
ограниченном по различным причинам, и матема-
тическое описание местности отсутствует, то
для решения задачи целесообразно воспользоваться
рекуррентным соотношением (4.46).
Решение
Разобьем путь между О и Г на несколько горизон-
тальных и вертикальных участков с интервалом А, т. е.
дискретизируем задачу (рис. 4.9). Стоимость строитель-
ства на каждом участке F N_k можно подсчитать заранее
с помощью топографической карты и другой априорной
информации. На рис. 4.9 эта стоимость приведена в услов-
ных единицах.
Решение задачи начинаем с конечного пункта Т
(точка 7V). В точку N можно попасть за один последний шаг
либо из точки либо из ^-1. Заметим, что из каждой из
этих точек можно попасть в точку N только одним способом,
т. е. на последнем шаге имеем единственное управление
10. Оптимальныесистемы управления 373
uN_}. Примем, что в связи с окончанием строительства в
точке N затраты в этой точке минимальны и равны нулю,
т. е. <р (у ) = 0. Тогда в соответствии с (4.43) получим
z = l,2.
min
uN..^b(u)
о
Рис. 4.9
Таким образом можно определить затраты на пос-
леднем участке и записать их в память компьютера (на
рис. 4.9 численное выражение затрат указано в кружках).
Перейдем к предпоследнему участку строительства (от
точек N -2 до N-1). Из точек N}-2 и 2V3~2, как и ранее,
есть только один путь в точку 7V-1, а для точки N2~2 та-
ких путей, а следовательно, и управлений уже два.
Вычислим затраты на предпоследний шаг с учетом затрат
на последний:
374 Специальные системы управления
S^-Fiy^l + S,^-15 + 10= 25;
-2) + S^_,-16 + 8-24;
sn2-i- mm{F(y_2,wjV2) +
2 w^.2es(«) 2 2
Ин
+ ‘S/V|-lL)'’jV2-2 + ./(Xw2-2’WW,-2)1} =
[18 + 10 = 281
min 1 1 = 26.
и^-2^(и) 18 + 8 = 26 I
Полученные результаты заносятся в память ком-
пьютера. Заметим, что путь из точки N2~2 в точку N, ми-
нимизирующий затраты Qn_2 , соответствует управлению,
при котором трубопровод прокладывается в точку N2~i, а
путь через точку У,-1 исключается из дальнейшего рас-
смотрения.
Аналогично, переходя к последующим точкам,
минимизируем на каждом шаге величину QN_k, отбрасывая
неоптимальные траектории. Попав, наконец, в точку О и
двигаясь от нее к точке N, найдем траекторию, оптималь-
ную для всего трубопровода (на рис. 4.9 выделена сплошной
линией).
Исключение неоптимальных траекторий по мере
движения от Т к О существенно упрощает расчет по срав-
нению с методом простого перебора траекторий (в нашем
случае количество арифметических операций уменьшается
более чем на порядок).
Пример 4.6
Пусть объект управления описывается уравнением
вида
<fy L Г/ ч
— = ay + bu = f(y>u).
at
Найти управление и, при котором минимизирует-
ся функционал
Q =fF(y>u)dt =f(y2 + yu2}dt.
о о
10. Оптимальные системы управления 375
В данном случае второе слагаемое в подынтеграль-
ном выражении функционала учитывает требова-
ние ограничения управления как по величине, так
и по мощности.
Решение
Воспользуемся уравнениями Веллмана (4.49). Для
рассматриваемого примера эти уравнения примут вид
у1 + ум2 + (ay + Ьи)—— = 0;
dy
(4.52)
dS
2yu + т— = 0.
dy
Исключив dS/dy, получим уравнение
byu2 + lyayu - by2 = 0,
решив которое относительно и, найдем
а а2 1
b \ Ь2 у
Здесь решение со знаком минус перед корнем отбро-
шено как не отвечающее требованиям устойчивости.
Для нахождения минимального значения критерия
воспользуемся вторым уравнением системы (4.52)
где у^, у0 - заданные граничные значения выходной коорди-
наты у
10.3.3. Принцип максимума
Принцип максимума был обоснован в работах
Л.С.Понтрягина и его учеников как необходимый и до-
статочный признак оптимального процесса для линейных
систем управления и необходимый для нелинейных.
Хотя принцип максимума был выведен самостоя-
тельно, позже было доказано, что между ним и принципом
376
Специальные системы управления
оптимальности Веллмана существует прямая связь. Для
упрощения выкладок выведем принцип максимума, вос-
пользовавшись уравнением Веллмана (4.50). Введем новую
координату
т
y^Q= fF(y,u)dt;
о
dy0
—p- = F(y,u) = fQ(y,u).
Тогда у = у0,ух,...,у„-, f =
(4.50) можно переписать в виде
и уравнение
= °,
(4.53)
где dS(y)/dy0 =1.
Учтем, что тах(- у ) = -min( у ). Тогда (4.53) примет
вид
max
ы6Й(и)
/=0
dS(y) n
_ /0(Л«) > - 0-
дУ,
(4-54)
Обозначим гр, = -dS(y')/dyi, тогда
и (4.54) запишется в виде
п
max > tpifi = max тр- f = 0,
wGQ(w)
(4.55)
где ip ' f — скалярное произведение двух векторов.
Выражение (4.55) и есть математическая запись
принципа максимума Понтрягина.
Заметим, что при применении метода динамичес-
кого программирования (в непрерывной форме) необхо-
димо предварительно найти функцию S(y), что связано
с громоздкими операциями, в частности, с решением
дифференциальных уравнений в частных производных.
Для применения принципа максимума необходимо знать
10. Оптимальные системы управления
377
значение вектора ip, которое можно найти значительно
проще, решив так называемые сопряженные уравнения
-JLL=—i = 0,n
dt dyi
(4.56)
Систему уравнений (4.56) можно получить, взяв
полную производную функции многих переменных S(y).
Действительно, учтя, что ip t = -dS(y)/ dyt, имеем:
dip, _ d 9S(y) _ A d dS(y) (fyj
dt dt dyt dyj dyt dt
W-f
П дУ>
Часто уравнения (4.55) и (4.56) записывают в более
компактной форме, обозначая скалярное произведение
векторов Ц) и f (у, w ) через Н:
max Н(гр,у,и) = 0,
(4.57)
dtpt дН
dt dyt
п п
Учитывая, что Н = V ipjfi = 1р1
тт i=0 i=0
водную от Н по ул, можно записать
dyt = дН
dt dtpj
(4.58)
dy,
dt
, и взяв произ-
(4.59)
Система уравнений (4.58)-(4.59) представляет собой
канонически сопряженную систему типа известной из ме-
ханики системы уравнений Гамильтона:
М_дА
dt ~~ д£’ dt~ дР’
где А - полная энергия системы, затрачиваемая на переме-
щение тела на расстояние I; Р - импульс силы.
378
Специальные системы управления
Таким образом, функцию //можно интерпретиро-
вать как энергию (или мощность) системы, которая вво-
дится в нее с помощью управления и , а функции ул - как
импульсы, задающие направление движения.
Отметим, что при выводе принципа максимума из
уравнений Веллмана предположение о непрерывности и
дифференцируемости функции 5(у) остается в силе. Од-
нако если условие = -1 заменить более слабым условием
0, то принцип максимума, как это сделал Понтрягин,
можно вывести без каких-либо предположений о функции
S( у), что значительно расширяет круг задач, решаемых с
помощью этого принципа.
В общем случае принцип максимума формулиру-
ется следующим образом: для получения оптимальной
системы управления в смысле достижения минимума
функционала Q необходимо существование таких ненуле-
вых непрерывных функций у/0(/), у/ (t), являющихся
решением системы сопряженных уравнений (4.58), что
при любом t, находящемся в заданном интервале 0<t<T,
величина Н как функция переменных иг в заданной
области их допустимых значений достигает максимума
согласно условию (4.57).
10.3.4. Синтез систем, оптимальных по быстродействию
Для синтеза систем, обеспечивающих максимальное
быстродействие, наиболее целесообразно применять при-
нцип максимума. Сформулируем задачу в общем виде.
В и-мерном пространстве в момент времени t = 0 за-
дан вектор состояния объекта у0 и его конечное состояние
уТ при t=T. Объект описывается линейными дифферен-
циальными уравнениями:
dt
i = 0, п.
j = 1, г.
На управление наложены ограничения и, &и/т!а,
Критерий оптимальности по быстродействию, т. е-
при F(y,u) - 1, имеет вид
10. Оптимальные системы управления 379
т
о
Требуется найти такое управление й (О, при кото-
ром время перехода объекта Т из состояния у0 в ут мини-
мально.
Предполагается, что (у, w ) определены для любых
значений у ЕЙ(у), соответствующих области управления
wEQ(w). Кроме того, функции yj(y3w) непрерывны и диф-
ференцируемы по всем переменным у. Управление может
принадлежать к классу кусочно-непрерывных функции,
содержащих разрывы первого рода.
Так как F=f = 1, то с учетом того, что в общем
случае у/0< 0, первое слагаемое суммы в уравнении (4.55)
< 0. Тогда уравнение (4.55) для рассматриваемой задачи
можно представить в виде
п
max i f s 0 или max Н(гЬ^ .
(4.60)
Порядок решения задачи следующий:
1. Составляют функцию Гамильтона Н, равную ска-
лярному произведению векторов f и гр , т. е.
п
Z=1
2. Берут частные производные Н по и , которые
приравнивают нулю. Из полученной системы урав-
нений находят ы , максимизирующие функцию Н
согласно условию (4.60). В случае линейной зависи-
мости 7/ от и.частная производная дН/ди^ является
функцией одной или нескольких составляющих
вектора . При этом для достижения положитель-
ного максимума Н необходимо, чтобы
U; = Ujmax Sign
(4.61)
где signt/', (t) =
+ 1 V VI, >0;
|-1 V ^,<0-
380 Специальные системы управления
Таким образом, в данном случае управляющее воз-
действие при смене знака ^.(0) изменяется скачкообразно
от + мтах до -wmax или наоборот. Момент смены знака назы-
вается моментом переключения*
3. Для нахождения вспомогательной функции у/. (/),
определяющей управление, в частности согласно
(4.61), составляют и решают систему сопряженных
уравнений (4.58).
4. В случае замкнутой системы ищут зависимость
управления от контролируемых координат сис-
темы, соответствующих оптимальной траекто-
рии: и = ф(у). При этом моменты переключения
определяются автоматически при отклонении
фактической траектории от оптимальной. В случае
разомкнутой системы устанавливают количество
изменений знака у/ (0, т. е. число корней функции
(0. Моменты переключения могут быть найдены
методом стыковки решений дифференциальных
уравнений со знакопеременной правой частью. При
этом в конечном итоге получают систему п транс-
цендентных уравнений с «—Неизвестными момен-
тами переключения Zz(z = l,«), решение которой
возможно только численными методами. Исключе-
ние составляют системы, характеристическое урав-
нение которых имеет кратные нулевые корни.
Пример 4.7
Пусть объект управления задан следующими
уравнениями:
или
(4.62)
Если положить, что у} = у2 = D, и = F, то
приведенная система уравнений описывает дви-
жение материальной точки с массой т= 1, свобод-
но и без трения движущейся по горизонтальной
прямой (с координатами I - путь, v - скорость) и
снабженной двигателем,развивающим силу F = та,
где а = у2.
Найти оптимальное управление и*, обеспечиваю-
10. Оптимальныесистемыуправления 381
щее максимальное быстродействие системы при
переходе ее из произвольного начального состояния
Уо в конечное равновесное состояние УТ. На управ-
ление наложено ограничение \и\ < и .
1 ’ шах
Решение
Составим функцию Гамильтона:
+f2y/2=y2^l + uy/2.
Так как функция //линейна по отношению к и, то
в соответствии с (4.61) имеем
и* = и sign ил.
max ° ' 2
(4.63)
Для определения у/2, а с ле довательно и w*, составим
и решим систему сопряженных уравнений:
dip. дН _ dip? дН
-------- 0; —— =---------- -гр.
dt dv. dt du,
Интегрируя их, найдем
где С, С2 - постоянные интегрирования.
Поскольку функция y2(t) обращается в нуль один раз
при / = С2 / Q, то в соответствии с (4.63) управление w* имеет
одну перемену знака (два интервала управления). Так как
начальные условия для функций у. (/), а следовательно, и
постоянные С} и С2 неизвестны, то использование принципа
максимума дает только качественное представление об из-
менении управляющего воздействия - одно переключение.
Для определения количественных характеристик необхо-
димо определить моменты переключения t и окончания
управления Т. Для этого необходимо решить уравнения
системы (4.62), правая часть которых в соответствии с (4.63)
знакопеременная:
Л = ±мшах • (4-
Интегрируя (4.64), получим
382
Специальные системы управления
(4.65)
Исключив из (4.65) время Z, найдем уравнение фа-
зовой траектории движения системы у2 = <р (yj.
Пусть, например, материальная точка при t = zo = О
находится в точке В (рис. 4.10). Для быстрейшего пере-
мещения ее из этой точки в точку О необходимо вначале
разогнаться с максимальным ускорением (м = + wmax), а за-
тем затормозить с максимальным замедлением (w = -wmax).
Соответствующие фазовые траектории ВА и АО приведены
на рис. 4.10.
Рис. 4.10
Заметим, что при любых координатах точки В
управление должно обеспечивать попадание материаль-
ной точки на фазовую траекторию, входящую в начало
координат (АОА^. Именно на этой траектории происходит
смена знака управления, и поэтому она носит название
линии переключении. Уравнение этой линии при подходе
материальной точки в точку О (t = Т) слева и справа от оси
ординат (и = ±wmax) находится из (4.65):
10. Оптимальные системыуправления 383
(4.66)
Здесь при определении постоянных интегрирования
Ct и С2 учтено, что в точке О (при t=T) координаты систе-
мы ух(Т) и у2 (Т) равны нулю. Выражение (4.66) является
уравнением параболы, лежащей в разных квадрантах в
зависимости от знака у2. Знак минус ставится при у2 > 0,
знак плюс - при у2 < 0.
Нетрудно показать, что уравнение фазовой траек-
тории для режима разгона также является параболой, но
с постоянными С} и С2, зависящими от начальных условий
^(/0) и y2(Q. В общем случае фазовый портрет системы
представляет собой семейство парабол, различающихся
произвольными постоянными (рис. 4.10).
Таким образом, для перемещения материальной
точки из точки В в точку О необходимо осуществить движе-
ние по траектории ВАО (разгон - смена знака управления -
торможение). Как видно из фазового портрета, в области /
управление должно быть положительным (у2 растет), а в
области II - отрицательным (у2 падает). Линия переключе-
ния и является границей, разделяющей области I и II. Зная
уравнение этой линии и состояния системы у{ и у2, можно
определить знак управления.
Запишем уравнение линии переключения (4.66) в
виде
(У1, У2) = 2w у, + у! sign У2 = 0.
1 1шл
(4-67)
Из (4.67) следует, что если начальные значения ух
и у2 таковы, что изображающая точка не лежит на линии
переключения, то для области имеем -1 <р (уг, у2) < 0, а для
области II <р (у!, у2) > 0. Тогда в случае замкнутой системы
уравнение управляющего устройства примет вид
U = - Mmax Si8nP ( У> ’ У2)-
(4.68)
Таким образом, реализация даже такой простейшей
замкнутой системы требует наличия функционального
преобразователя, вычисляющего в соответствии с (4.67)
384
Специальные системы управления
величину ф(у}, у2), и релейного исполнительного элемента,
выдающего управляющий сигнал в соответствии с (4.68).
В случае разомкнутой системы моменты переклю-
чения находятся методом припасовывания решений диф-
ференциальных уравнений. Например, воспользовавшись
граничными условиями для точек В и О: yx(tQ) = - у0; у2
(О = о и ух (7) = у2 (Т) = 0, уравнения (4.65) можно записать
в виде
^l(Zo)“+ ~ ^0 + + ^21 "" Ло’
У 2 ('о) “ +Wmax^0 + Q1 “ Ф
(4.69)
7|(Г)--^Г! + С|2Т+СИ-О,
У2(Л = -Итах7 + С12 =0-
где Сп, С12 и C2i, С22 - постоянные интегрирования на первом
(разгон) и втором (торможение) интервалах управления.
Так как координаты системы и у2 непрерывны,
можно произвести стыковку решений на границе первого
и второго интервалов управления (точка Л):
и А + С * = — и А + Сп.
max 1 И max 1 12
(4.70)
где tv Т - моменты смены знака и окончание управления со-
ответственно
Решая совместно систему уравнений (4.69) и (4.70),
можно определить постоянные интегрирования и момен-
ты времени tx и Г. Окончательно получим Сп = 0; С21 = -у10;
С12 = С22 = -^Т2\ T=2tx,tx~ y/у^/и^ . Таким об-
разом, управление объектом можно осуществлять с помо-
щью программного устройства, подающего команду на из-
менение знака управления в момент времени t = tx.
Пример 4.8
Для условий примера 4.4 учесть ограничения по
току двигателя i £ zmax
10. Оптимальные системы управления 385
Решение
Так как на координату системы оптимальной по
быстродействию наложены ограничения, то для нахожде-
ния алгоритма оптимального управления двигателем це-
лесообразно применять принцип максимума. Представим
уравнение движения двигателя (4.28) в виде
d(o!dt = KjU=ki=f{', k = KJJ‘, dtp !dt = со = f2, <p = y2.
К этим уравнениям добавим условие ограничения
на нагрев (4.26), которому соответствует уравнение вида
« . Ri2 = Л.
dt 3
Заметим, что величины a),<p,Q2 являются коорди-
натами системы yt(i = 1,3), а сила тока i - управляющим
воздействием и.
Составим функцию Гамильтона для рассматрива-
емой системы:
н = + ViRi1- (4.71)
Для нахождения вспомогательных переменных у/.
запишем сопряженные уравнения
_ ЭЯ _ = = ^1=-—= 0
dt да) 2’ dt д<р ' dt ду3
Интегрируя эти уравнения, получим
У'з = С3’ ^2 = Cv = C2L (4.72)
Так как у/ = const, a RP - существенно положитель-
ная величина, то согласно принципу максимума значение
у/3 может быть в частности принято равным = + 1. Тогда
(4.71) примет вид
Н = у/ ki + у/ло + Ri2.
A
Для определения зависимости i(f), при кото-
рой максимизируется величина Н, решим уравнение
дН / di =)р {к + 2Ri = 0, откуда
2R •
(4.73)
13 Теория автоматического управления
386 Специальные системы управления_____
Подставив (4.72) в (4.73), получим
(4.74)
где С4 = С}к / 2R; С5 = С/ / 27?.
Таким образом, управление и = i является, как и в
матрице 4.4, линейной функцией времени (4.74). Однако в
нашем случае необходимо учесть ограничение, накладыва-
емое на ток двигателя. Тогда закон изменения управления
примет вид
max
max
V z(z) < zmax,
v z(0siraax;
(4-75)
где i(t) - ток, определяемый в соответствии с (4.74).
Заметим, что в связи с ограничением тока двигате-
ля для полного использования машины по нагреву можно
увеличить угол наклона прямой /(/) по сравнению с прямой
i^t), рассчитанной методом вариационного исчисления без
учета ограничений по току (рис. 4.11). При незначительных
углах поворота вала двигателя ограничение по нагреву
можно вообще не учитывать, и тогда закон изменения тока
будет носить релейный характер:
ZV) = zmax signy, (/).
Рис. 4.11
ТО^Оптимальные системы управления
387
Для расчета конкретного алгоритма управления не-
обходимо определить числовые значения моментов времени
t{ и Г(рис. 4.11). Сотой целью к системе сопряженных урав-
нений присоединяют уравнение объекта с учетом закона
изменения тока (4.75) и уравнений связи, учитывающих ог-
раничения по нагреву Q2 А при заданном перемещении (pQ.
Интегрируя полученную систему уравнений, можно найти
неизвестные tx и Т, что позволяет построить оптимальные
законы изменения тока и частоты вращения двигателя.
10.4. Статистическая динамика
и оптимальные фильтры
Во многих случаях характер сигналов, действую-
щих в системе управления, является случайной функцией
времени. Примером такой системы может быть система
регулирования напряжения генератора, нагрузка которого
зависит от включения и отключения многих потребителей
электрической анергии. Другим примером могут служить
транспортные средства, перемещающиеся по рельсовым
путям, на которые воздействуют случайные возмущения
со стороны нагрузки: уклоны и состояние рельсов, порывы
ветра и др. Третий пример - следящие системы, на вход
которых, кроме полезного сигнала, обычно поступает и
помеха. Причем оба сигнала носят, как правило, случай-
ный характер.
Случайные сигналы (помехи), возникающие в ре-
зультате действия внешних и внутренних возмущений,
могут оказывать существенное влияние на работу автома-
тической системы, что обусловливает необходимость ко-
личественной оценки и минимизации этих влияний, путем
отфильтровывания помех, т. е. необходимость решения
оптимизационной задачи. При этом в качестве критерия
оптимальности может быть использована величина средней
квадратической ошибки, определяемой в соответствии с вы-
ражением вида (4.1). Решение упомянутых задач и рассмат-
ривается в разделе, получившем название статистической
динамики, которое в качестве основного математического
аппарата использует теорию случайных функций.
13*
388
Специальные системы управления
10.4.1. Основные характерстики случайных функций*1
Напомним, что случайной функцией называется
функция X(f), которая в результате опыта может принять
тот или иной вид, неизвестно заранее, какой именно. Про-
цессы, описываемые случайными функциями, называются
случайными или стохастическими. Реализацией случай-
ной функции называется конкретный (неслучайный) вид,
принимаемый функцией в результате опыта. На рис. 4.12
приведено семейство таких реализаций.
При фиксированном значении t = случайная фун-
кция x(f) превращается в случайную величину х, которая
может принимать различные значения х,, х2>... х.... хп. Сово-
купность значений случайной функции при t = называ-
ется ее сечением.
Основные характеристики случайных функций
аналогичны характеристикам случайных величин, но в от-
личие от последних являются не числами, а функциями.
Математическим ожиданием случайной функ-
ции х(/) называется неслучайная функция mx(t), которая
при каждом значении аргумента t равна математическому
ожиданию соответствующего сечения случайной функции
(рис. 4.12):
mx(t) = M[X(t)].
Рис. 4.12
3 При изложении этого раздела пр ед полегаете я, что читатель знаком с основными момен-
тами теории вероятности.
10. Оптимальные системы управления
389
Корреляционной (или автокорреляционной)
функцией случайной функции x(t) называется неслучайная
функция двух аргументов Rx(t,t +т ) , которая при каждой
паре значений t, t +1 равна корреляционному моменту
соответствующих сечений случайной функции х(/).
о о
Rx(t4 + T) = M[X(t)-X(t + T)\
О
где X(t) = X(t)- mx(t) центрированное значение случай-
ной функции.
Если аргументы корреляционной функции совпа-
дают, т. е. 0, то она обращается в дисперсию соответс-
твующего сечения случайной функции.
о
7?x(/,/ + T)|T_o = M[jf2(O] = A(O-
На практике часто встречаются процессы, протека-
ющие во времени приблизительно однородно и имеющие
вид непрерывных случайных колебаний вокруг некоторого
среднего значения, причем ни средняя амплитуда, ни ха-
рактер этих колебаний не обнаруживают существенных
изменений с течением времени. Такие случайные процессы
называются стационарными. Примером стационарного
случайного процесса может являться процесс колебания
напряжений в электрической сети.
В общем случае случайная функция x(t) называется
стационарной, если все ее вероятностные характеристики
не зависят от времени. Если в качестве таких характе-
ристик используется только математическое ожидание,
дисперсия и корреляционная функция, то условия стаци-
онарности формулируются следующим образом:
m(t) = т= const; D(t) = D= const; R(t,t+r) = Rr(r\
Корреляционная функция R^f) характеризует связь
между сечениями, находящимися друг от друга на рассто-
янии т. При т = 0 корреляционная функция максимальна и
равна дисперсии, а с увеличением т связь между сечениями
стационарной случайной функции становится слабее.
390
Специальные системы управления
Рис. 4.13
На рис. 4.13 приведены корреляционные функции
стационарных процессов различной внутренней структуры,
но с одинаковой дисперсией D. Так как корреляционная
функция является четной, то графики R (т) симметричны
относительно оси ординат. Колебания корреляционной
функции указывают на скрытую периодичность процесса
(кривая 1). Если процесс не содержит периодической со-
ставляющей, то корреляционная функция имеет вид 2 или
3. При этом чем больше высокочастотных составляющих
содержит процесс, тем быстрее уменьшается связь между
сечениями с увеличением т.
Важным свойством стационарных случайных про-
цессов является представительность единственной реали-
зации достаточной продолжительности, знание которой
позволяет определить вероятностные характеристики
исследуемого процесса. В этом случае говорят, что случай-
ный процесс является эргодическим. При этом справедливо
следующее соотношение
1 I
= тх (0 = f x(f>dt = fxf <4-76)
МА rr>
Из (4.76) вытекает, что для эргодического процесса
среднее значение случайной функции x(t), вычисленное по
одной реализации на интервале [- Т,Т] при Т —* <», равно
среднему значению этой же функции, вычисленной по мно-
жеству реализаций. ЗдесьДх,/) - плотность распределения
случайной величины в сечении, взятом для момента време-
10. Оптимальные системы управления 391
ни Заметим, что для стационарного случайного процесса
=flx) и mx(t) = Шх.
Корреляционная функция стационарного случай-
ного процесса, обладающего свойством эргодичности, оп-
ределяется по формуле
о о
Rx 0 = f *0*0 + (4-77)
у7
Связь между двумя случайными сигналами, рапи-
мер, между входным х(/) и выходныму(х) сигналами систе-
мы, характеризуется взаимной корреляционной функцией
о о
А (/,/ + г) = Y(t + т)], которая для стационарных
эргодических случайных процессов определяется по фор-
муле
1 Т
^(т) = Нт—- f x(t)-y(t + r). (4.78)
г-ю 2T •
у7
Пример 4.9
Предположим, случайная функция X(t) задана
совокупностью двенадцати реализаций, приведен-
ных на рис. 4.14. Там же приведена зависимость
математического ожидания вычисленного
как среднее значение случайной величиныХв соот-
ветствующем сечении. Требуется найти корреля-
ционную функцию случайного процесса.
Решение
Анализ экспериментальных экспериментально сня-
тых реализаций (рис. 4.14) показывает, что математическое
ожидание тх и дисперсия Dx меняются незначительно, что
позволяет, учитывая ограниченное число реализаций,
отнести рассматриваемую случайную функцию к классу
стационарных с т = - 0,02 и D = 0,236. Для построения
-X" X
корреляционной функции случайного процесса найдем
корреляционные моменты К. между z-м и /-м сечениями
случайной функции X(t) по формуле
392
Специальные системы управления
0,4 0,8 0,2 1,6 2,0 2,4
Рис. 4.14
Вычислив значение корреляционного момента для
различных т = tj - tt и усредняя полученные значения
К., для одинаковых г получим числовые значения корре-
ляционной функции R(f) для стационарного случайного
процесса X(t) (рис. 4.15). Найденные дискретные значения
корреляционной функции можно аппроксимировать ка-
ким-либо аналитическим выражением. Обычно в качестве
аппроксимирующей зависимости выбирается функция вида
где d jfti -параметры, подлежащие определению, например,
по способу наименьших квадратов.
Рис. 4.15
10. Оптимальные системы управления 393
Распределение дисперсий (или мощностей) по
частотам, входящим в состав стационарной случайной
функции X(t) характеризует спектральная плотность
Sx(co)9 которая прямым преобразованием Фурье однозначно
связана с корреляционной функцией /?х(т):
со
(4.79)
—00
Подставив в (4.79) значение корреляционной функ-
ции, определяемой выражением (4.77), найдем:
ОО
о о
о
о
2
= lim
*(»
Таким образом, спектральная плотность случайного
процесса 5х(й>) является функцией частоты и пропорцио-
нальна мощности (квадрату амплитуды) случайного сигна-
ла. Поэтому ее часто называют энергетическим частотным
спектром.
Для определения Rx(r) по известной Sx(со) можно
воспользоваться обратным преобразованием Фурье
n/_\ 1 (4.80)
—00
Выражения (4.79) и (4.80) свидетельствуют об од-
нозначной связи между Rx(t) и 5х(со) . Поэтому для харак-
теристики случайного процесса достаточно знать одну из
этих функций.
Пример 4.10
Построить график спектральной плотности
стационарного случайного процесса Х(1), если его
корреляционная функция R (т)=
Аналогичным соотношением связаны взаимные спектральная плотность и корреляцион-
ная функция (4.78).
394 Специальные системы управления
Решение
Найдем Sx(<o) , воспользовавшись (4.79):
v 00
—00
Здесь учтено, что e~ja> |г=0= 1 и J*д(т}с1т = 1. Гра-
фик Sx(co) представляет собой прямую, параллельную
оси абсцисс (рис. 4.16, а). Это свидетельствует о том, что
рассматриваемый случайный сигнал X(f) содержит все
частоты от - оо до + оо с одинаковой средней мощностью.
Такой сигнал носит название «белый шум».
Определим среднюю мощность (дисперсию) этого
сигнала, для чего воспользуемся выражением (4.80) при
т= 0. Получим
- оо
00
No)
00
со =
-00
—ОО —00
Таким образом, для получения сигнала типа «бело-
го шума», требуется источник бесконечной мощности, что
физически неосуществимо.
Заметим, что в силу инерционности высокие часто-
ты отфильтровываются любыми физическими объектами.
Поэтому представляет интерес определение характерис-
тик случайного сигнала с ограниченным спектром частот
max
max.
___________________10. Оптимальные системы управления 395
Воспользовавшись обратным преобразованием
Фурье (4.80) и формулой Эйлера: eJ,m = cos сот + j sin сот, и
учтя, что интеграл от нечетной функции в симметричных
пределах равен нулю, можем записать:
п ( \ 1 “7 кт -l WsincOmaxT
R (т ) = — | N cos сотс/со =------
2л: J лт '
^тах
При этом дисперсия случайного сигнала
D = R (о)= lim
' ' г-»0
N sin <z> т
_______Шал
лт
О)
max .
Таким образом требуемая мощность источника
энергии случайного сигнала^/), спектральная плотность
которого представлена на рис. 4.16, б ограничена полосой
пропускания частот а>тах
10.4.2. Прохождение случайного сигнала
через линейную систему
Предварительно найдем связь между произволь-
ным сигналом х(0> поданным на вход линейной системы с
передаточной функцией W(p)9 и сигналому(0,
снимаемым
с выхода системы (рис. 4.17, а).
Рис. 4.17
396
Специальные системы управления
Представим сигнал x(f) в виде серии прямоугольных
импульсов продолжительностью Ат и амплитудой х =х(г),
где т = /Ат (рис. 4.17, б). При достаточно малом Ат реакцию
объекта на каждый /-й импульс можно приближенно заме-
нить реакцией объекта на импульсную функцию Л.8(/), где
А =хЛт- мощность импульса. Реакция объекта на 8-функцию
известна и равна импульсной переходной характеристике:
w(0 = z-W/>)].
Тогда при подаче на вход объекта сигнала А 8(Z - г)
выходной сигнал
у (t - т.) = w(Z~ т.)А. ~ w (t - т.) х(т.)Ат.
Здесь учтено, что /-я реакция объекта существует
только при t > т.
Реакцию объекта на серию импульсов, поданных
на вход объекта, можно записать в виде
п п
xi)x(Ti)Дт•
i=0 z=0
Переходя к пределу при Ат —>0, имеем
I
у(0 =Jw(t- r)x(r)dr, (4.81)
о
а, произведя замену переменных t - т = в, можем записать
t
ЯО = J и<0)х(/ - 0)dO. (4.82)
о
Выражения (4.81) и (4.82) представляют собой раз-
личные формы записи интеграла Дюамеля или свертки
функций w(Z) и x(f).
Пример 4.11
Найти реакцию объекта (рис. 4.18, а) с весовой фун-
кцией w(t) = —е
на прямоугольный импульс дли-
тельностью Ти и амплитудой Аи = 1 (рис. 4.18, б).
Решение
Реакцию объекта Х0 можно найти, воспользовав-
шись выражением (4.81). При 0 < t < Ти имеем
10. Оптимальные системы управления
397
Рис. 4.18
Аналогичным образом найдем ХО при t > Т:
Таким образом, при подаче импульсов на вход
объекта, представляющего собой апериодическое звено
первого порядка, на его выходе получаем пилообразный
сигнал (рис. 4.18, в).
В общем случае при подаче на вход линейного
объекта случайного сигнала x(f) с корреляционной фун-
кцией 7? (т) соотношения (4.81) и (4.82) дают возможность
определить связь между корреляционными функциями
выходногоХ0 и входного x(t) сигналов.
Пусть х(/) представляет собой стационарный эрго-
дический случайный сигнал. В силу линейности преобра-
зования сигнал Х0 будет обладать теми же свойствами. Так
как для установившегося режима (t = оо)
ХО = Jw(0)x(7 - 0)t70
о
и при t < 0 w(/9) = 0, то в соответствии с соотношением (4.77),
запишем
398
Специальные системы управления
R (т)= lim
y(Oy(t + r)dt
. / со ос
= lim—С dtГ w(0)x(t - 0)d0 j* w(if)x(t+ т — t])dt).
T 00 -T —oo -00
00 00
7?y(r)= f f w(0)w(t])Rx(t + 0 - r])dOdt).
—00 -00
(4.83)
Полученное соотношение устанавливает связь меж-
ду корреляционными функциями входного и выходного
сигналов в интегральной форме. Более простое соотноше-
ние можно получить между спектральными плотностями
этих сигналов, взяв прямое преобразование Фурье от вы-
ражения (4.83). Тогда
00
-00
00
=J*J*J*w(0)w(t])Rx(r + 0- t))e~JmT d()dr)dr =
-00
= f w(0) d0 / w(tj) e~JWI dt)£ Rx (r + 0 - rj) dr =
—00 —00 —00
= W(-jco)W(jco)Sx(co).
Окончательно
Sy(co) = | W(jco) |2 5 (co).
(4.84)
Таким образом, по известным R (т) и S (со), а также
известным динамическим характеристикам объекта с
помощью соотношений (4.83) и (4.84) можно найти харак-
теристики случайной функции на выходе системы (задача
анализа). Эти соотношения в принципе позволяют также
выбрать параметры динамической системы таким образом,
чтобы минимизировать влияние случайных воздействий
10. Оптимальныесистемь|управления 399
на функционирование систем (задача синтеза оптимальной
системы).
Рассмотрим два важных случая прохождения
случайного сигнала через линейную систему.
1. Статистическое дифференцирование. При по-
ступлении случайного сигнала на вход дифферен-
цирующего звена с частотной функцией W(jco) = jco
имеем
S (со) = со2 S (со).
4->
В случае двойного дифференцирования Sx(co) ум-
ножается на со4 и т. д. Таким образом, высокочастотные
составляющие, содержащиеся в случайном сигнале, в
данном случае усиливаются значительно сильнее, чем
низкочастотные. Это всегда нужно иметь в виду при вводе
в систему корректирующего дифференцирующего звена. В
случае существенного уровня высокочастотных помех ввод
этого звена может не привести к улучшению динамических
свойств системы, а, наоборот, даже ухудшить их.
2. Статистическое интегрирование. При поступ-
лении сигнала на вход интегрирующего звена с
частотной функцией W(jco) = 1/jco спектральная
плотность сигнала на его выходе
Sy(co) = SX(co)/ co2.
В данном случае высокие частоты ослабляются
(отфильтровываются) интегрирующим звеном и выходной
сигнал получается более сглаженным.
10.4.3. Расчет установившихся ошибок
в системах управления
Замкнутая система автоматического управления
(рис. 4.19) может находиться под воздействием случайного
управляющего сигнала u(t) и помехи^/) с известными R (т)
и R/r). В этом случае точность работы системы обычно оце-
нивается величиной средней квадратической ошибки сгд.
400
Специальные системы управления
Решим задачу в общем виде для различных уело-
вии:
1. Пусть u(j) является случайным стационарным сиг-
налом с S (со), = 0. В этом случае спектральная
плотность ошибки Д согласно (4.84)
= I W I2S»-
где = 1/ [1 + WQ{jco)W{jco)} - частотная функция
замкнутой системы по ошибке;
WQ(jco),Wv(jco) - частотные функции объекта и устройс-
тва управления соответственно.
Для нахождения корреляционной функции ошибки
возьмем обратное преобразование Фурье от спектральной
плотности:
00
R, ОО =
Так как при т = 0 корреляционная функция слу-
чайного сигнала равна его дисперсии, т. е. Лд(0) = £)д, то в
соответствии с (4.85) можно записать
д “ Т- f •
7 тт J
(4.86)
Выражение (4.86) носит название формулы Парсе-
валя.
Средняя квадратическая ошибка
(4-87)
10. Оптимальные системы управления 401
Заметим, что величина DA может быть вычислена
и через корреляционные функции в соответствии с фор-
мулой (4.83), однако пользоваться формулой (4.86) гораздо
проще.
2. Пусть w(/) = 0, a f(t) - случайный стационарный
процесс с Sf(co). Тогда аналогично предыдущему
имеем
Syo) = \WJJco) \2 Sf(co),
где Wf^jco) - частотная функция по возмущению, равная:
(]<$ ) ---------------.
Далее, воспользовавшись соотношениями (4.86) и
(4.87), можно вычислить дисперсию и среднюю квадра-
тическую ошибку <тд, обусловленные помехами f.
3. Пусть на систему действуют одновременно два не-
зависимых сигнала u(t) nf(t). Тогда, воспользовав-
шись принципом суперпозиции (система линейна),
можем записать
°Д “ ^Д “ ^Ди + ^Д/ -
Wu, (7^)Г \ (") + О) Sf (со) dco.
В случае, если у (/) и f(f) коррелированы, то можно
показать, что подынтегральное выражение в формуле для
Од примет вид
^д(") = Кд(»|2^(")+^д(» Sf(co)
(4.88)
+Wu,(-jco)Wf&(jco)Suf(co) + W^j^W^-j^S^co),
где Suf(co) и (со) - взаимные спектральные плотности
управляющего u(t) и возмущающего fit) сигналов.
402
Специальные системыуправления
10.4.4. Синтез системы управления
по минимуму средней квадратической ошибки
Если на систему управления действует полезный
сигнал и помеха, то возникает задача расчета оптимальной
системы, сводящей к минимуму результирующую ошибку,
количественная оценка которой производится с помощью
средней квадратической ошибки:
1 Т
= Db = R^o) = lim—J Д2(7)Л = min-
(4.89)
Достижения цели (4.89) можно добиться, опреде-
лив либо оптимальные параметры системы при заданной
ее структуре (параметрический синтез), либо не только
параметры, но и структуру системы (структурно-парамет-
рический синтез).
Параметрический синтез системы
В этом случае обычно принимают следующий по-
рядок расчета:
1. По экспериментально снятым реализациям u(z) и
f(t) определяют корреляционные функции полезно-
го сигнала и помехи Ru(r) и Rfic), а затем, с помощью
преобразования Фурье, находят соответствующие
спектральные плотности. В частности,
00
-00
или, учитывая, что R (т) четная функция, a e~J(az =
= COS (OT—jsinCOT, получим
5М (со) = J* Ru (т) cos (ordr .
2. Находят частотные функции замкнутой системы
по ошибке со стороны управления и возмущения
^иД(» и
3. В соответствии с соотношением (4.88) определяют
спектральную плотность ошибки 5л(со).
4. По формуле Парсеваля (4.86), вычисляют диспер-
сию ошибки как функцию параметров звеньев
10. Оптимальные системы управления 403
системы ccz, где az - как правило, коэффициенты
передачи и постоянные времени звеньев, z = 1,и .
5. Числовые значения изменяемых параметров нахо-
дят, решая систему уравнений
где j ~ изменяемые параметры системы; j = т < п .
6. Подставив значения найденных параметров в вы-
ражение £>д (б/j,..., airап), получают минимальное
значение дисперсии D^min и средней квадратической
ошибки сгА = Если сгА . < аА , то задача
синтеза решена. Если это условие не выполняется,
то следует изменить структуру управляющего уст-
ройства, т. е. решить задачу структурно-парамет-
рического синтеза.
Пример 4.12
Система слежения за движущейся целью, подвер-
женнаявоздействию помех (р работает по функ-
циональной схеме, представленной на рис. 4.20. В
случае отклонения цели от линии визирования
возрастает рассогласование в = вх~ 02, которое
подается на вход усилителя У и далее через фильтр
Ф на тахометрический привод ТП. Последний раз-
ворачивает визир В с датчиком (фотоэлемент,
локатор) до совпадения с направлением на цель.
Тахометрический привод состоит из усилителя
У(, двигателя Д, редуктора Р и тахогенератора
ТГ с передаточными функциями соответственно
ч',,(Р) = к,. Ч'.Ср} = + I). I^p(Р) = к,1р и
FF ( р) — к . Передаточная функция этого привода
имеет вид
^ТП(Р) = ^з(Р) =
Р(ТЛР +1) + рк кЛк„ ’
При достаточно сильной обратной связи по скоро-
сти двигателя (к? —> оо) можно записать
404 Специальные системыуправления
к к,
ктгР Р
где к = к /к .
3 р тт
Передаточные функции усилителя У и фильтра
Ф можно представить в виде W}(p) = kx и W2( р) =
= к2 /(Т2р + 1) соответственно.
Рис. 4.20
Определим значение коэффициента усиления
системы, при котором минимизируется ошибка
слежения в соответствии с (4.89). Все остальные
параметры системы заданы.
Решение
Найдем статистические характеристики входных
сигналов 9(1) и (p(t), необходимые для решения задачи, из
следующих соображений. Пусть цель движется со скоро-
стью, изменяющейся по случайному закону (рис. 4,21).
Подобный сигнал иногда называют типовым входным
сигналом следящей системы. Здесь Q - угловая скорость
движения цели, которая сохраняет постоянное значение
в течение некоторых интервалов времени t. Заметим, что
рассматриваемый сигнал Q (t) соответствует кусочно-линей-
/
ной аппроксимации кривой 0t(/) = fQ(t)dt. Корреляционная
о
функция подобного сигнала при заданных математичес-
ких ожиданиях A/[Q1 = 0, A/[Q2] = Z)O имеет два значения:
Т&Оптимальные системы управления 405
• при моментах времени t и t + т, относящихся к од-
ному интервалу времени t.,
R^t) = M[Q(t) Q(t + т)] = Ж] = Da,
• при моментах времени t и t + т, относящихся к раз-
ным интервалам, Т?2(т) = 0, так как произведения с
положительным и отрицательным знаком в этом
случае равновероятны.
Если положить, что вероятность нахождения мо-
ментов времени / и / + т в одном интервале равна р , а в
разных интервалах р2 = 1 - рх, то
ВД = Р^1(т) +P2R2^ =P1RST)-
В соответствии с законом распределения Пуассона
вероятность отсутствия перемены знака скорости (к = 0) на
интервале т k
д-р(*)-^е-Л'|4.0=е-л',
к\
где X - среднее число перемен знака скорости в единицу вре-
мени; Х = \/Т; Т = М[?г].
Следовательно,
R(t) = М(т) = DaP.
Воспользовавшись преобразованием Фурье, имеем
406 Специальные системы управления
Для нахождения ошибки в определении угла по-
лученную спектральную плотность скорости необходимо
проинтегрировать, что эквивалентно ее делению на со2.
Тогда
Заметим, что S# соответствует нестационарному
случайному процессу, так как
D
(co)dco
00
Однако так как рассматриваемая система является
астатической, то она инвариантна к величине возмущения
и имеет ошибки только по скорости и более высоким про-
изводным, относительно которых процесс стационарен. Это
позволяет использовать полученную спектральную плотность
при расчете динамической ошибки системы.
В качестве помехи рассмотрим шумовое напря-
жение датчика со средним квадратическим отклонением
М[(р2] =D^b полосе частот Д/ = 2fc, ~ частота среза.
Спектральная плотность в этой полосе соответствует помехе
типа белого шума Sj(co) = N. Величину N можно найти из
соотношения
Л
Ndco = J Ndf = N2fc
-fc
откуда N^D?/ &f.
Считая, что полезный сигнал ^(7) и помеха <р (/) не
коррелированы, найдем спектральную плотность ошибки
0(f) в соответствии с выражением (4.88)
s„ =
(<0)
1 + Jco)2
1 + W( j(o)
(4.90)
S, И =
= (w) + (co),
где W(jco) = W (jco) W (jco) W (jco) - передаточная функция
•I * V?
разомкнутой системы.
10. Оптимальные системы управления 407
Рассмотрим вначале составляющую плотности
ошибки, определяемую полезным сигналом. После подста-
новки значений (со) и W(jco) в первое слагаемое уравнения
(4.90) получим
(<°) =
2ТРО
(у2(1 + су2Т2)
^2 О)2 + №
Т2 (jw)2 + jw +к
где к = к к к — общий коэффициент усиления разомкнутой сис-
I И-Z
темы.
С учетом соотношений
т2(»2 +> I2 = \jco I21 + 1 I2 = СУ2(- Т22(»2 + 1),
(1 + огГ2) = | Tjco + 1 |2
окончательно получим
2Л)йГ-Т22(»2+1
ТТ2 (»3 + (Г + Т2 )(»2 + (1 + kT)jco + к
Проинтегрировав Se3 (со) по всем частотам, найдем
дисперсию ошибки, вызванную полезным сигналом:
ее, ~ 2Л J
грал вида I = —f
2л A(J(d)
9 do);
Интегралы I табулированы. В нашем случае при
п = 3 имеем
где а = ТТ; а
V 1
= Т+ Т.; а. = 1 + кТ; а = к; Ъ = 0; Ъ = -ТI2;
408 Специальные системы управления
Тогда
ТР21(Т + Т2 + кТ2)
"• к(Т + Т2 + кТ2)
Рассмотрим теперь слагаемое SAco). После подста-
новки S (со) и W(jco) во второе слагаемое уравнения (4.90)
получим
(«0 =
k2N
T2(J(o)2 + jd) + к
2
Проинтегрировав Sg (со) по всем частотам, найдем
дисперсию ошибки, обусловленную помехой:
'А--
k2NI,,
Тогда
Из полученной формулы вытекает, что кН численно
равно эквивалентной полосе пропускания частот Д/, при по-
даче на вход рассматриваемой системы помехи типа белого
шума. Обычно Д/^ > Д/э, что позволяет производить интегри-
рование S', (со) по всем частотам.
Таким образом, суммарная дисперсия ошибки
, _п JPQ(T + T2 + kT2) kN
е ев, щ + + кТ2) 2
Для получения оптимального значения коэффици-
ента усиления необходимо исследовать полученное выра-
жение на минимум.
Пусть имеем следующие значения параметров: PQ =
= 4град2/с2; Т=5с; Т2 = 0,1 с; &2 = 34,4; к2 = 0,035 град/(В*с);
= 500 Гц; а* = 0,167 град; S^(co) = #= = PJNfv = 0,167V500 =
= 5,6*10-5 град2/Гц. В нашем случае Т» Т2, что позволяет
пренебречь малыми величинами и записать
10. Оптимальные системы управления
409
* kN
'e~De =-7Т +
Дифференцируя это выражение по А; и приравняв
полученный результат нулю, получим
*
дРв
дк
^Л-о,
откуда
4£>,
ОПТ
• = 66 с ’.
При этом д/э = 66/2 = 33 Гц < 500 Гц = Л/^ .
Значения средней квадратической ошибки по углу,
вычисленные по точной и приближенной формулам, соот-
ветственно
2 _ 5-4(0,1 + 5 + 66-0,Г) 66-5,6-10
в~ в~ 66(5-0,1-665) + 2
= 0,0029; ов = 0,054°;
i *\2 п* 4 66-5,6 10-5 пппп,
«) = £>* = — +--------------= 0,0027; ов =
оо 2
= 0,0525°,
опт
практически совпадают, что свидетельствует о корректнос-
ти принятых допущений. Учитывая, что коэффициент уси-
ления разомкнутой системы к = кхк2к2, найдем оптимальное
значение коэффициента усиления усилителя к}
----—-----=55 В/град.
34,4-0,035
Структурно-параметрический синтез системы
(задача оптимальной фильтрации Винера).
В данном случае перед системой ставится задача
преобразовать входной сигнал u(t) так, чтобы на ее выходе
воспроизводилась величинау*(/), связанная с u(t) некоторой
формулой преобразования
410 Специальные системы управления
£{>>*(/)} =Я(р)£{М(0}, (4.91)
где L{y*(t)} uL{u(t)} - преобразованные по Лапласу функции
y*(t) и u(f); Н( р) - оператор преобразования.
При Н(р)= l/р, например, имеем задачу интегриро-
вания входного сигнала, при Н(р) =р - задачу дифферен-
цирования, при Н(р) = ерт - задачу упреждения (предска-
зания), при Н(р) = 1 - задачу воспроизведения (обычная
следящая система).
Постановка задачи поясняется рис. 4.22. Здесь I ка-
нал- желаемое преобразование u(t) согласно (4.91); II ка-
нал - преобразование u(t) оптимальной системой Wom(ja))
при наличии помех fit). При этом ошибка системы А(/) =
= у (/) —y*(t) должна удовлетворять цели управления (4.89).
Эта задача иногда носит название оптимальной фильтра-
ции входного сигнала т. е. систему можно рассматри-
вать как оптимальный фильтр помех, поступающих на ее
вход.
II
Рис. 4.22
Прежде чем решать поставленную задачу, найдем
связь между корреляционными функциями входного x(f)
и выходного y(t) сигналов, действующих в линейной ди-
намической системе. Запишем выражение для взаимной
корреляционной функции этих сигналов в виде:
(4.92)
Воспользовавшись соотношением (4.82), полу-
чим
1 Заметим, что Лк(т ) - 7? (-т), т.е. взаимная корреляционная функция несимметрична
относительно от ординат.
10. Оптимальные системы управления 411
R„ W= fe tfJ* ~ ^dtS w(0)xO - e)de
-T -00
или (поменяв порядок интегрирования)
00
Jt„(r).J->v(eX(r-e)dft (4.93)
—00
Полученное выражение носит название уравнения
Винера-Хопфа.
Для решения интегрального уравнения (4.93) при-
меним преобразование Фурье. Окончательно
S (со) = W(Jco)S (со). (4.94)
Заметим, что уравнение (4.94) позволяет найти
частотную функцию системы по экспериментально снятым
реализациям входного и выходного сигналов, т. е. без актив-
ного вмешательства в процесс.
Воспользовавшись выражениями (4.82) и (4.93) с
учетом равенства
Д(0 = у* (0 - y(t),
дисперсию ошибки (4.89), можно записать в виде
D, = lim
А
-00
оо
= Ryt(p)-2fw(0)Ry,v(O)dO +
—00
(4-95)
00
+f fw(0)w(tj)R^ (в - ri)dOdrj.
-00
Произведем замену переменной в - rj = I и учтем,
что <р (/) = u(t) + f(t). Тогда
«•Я=+
Rfi) = Л,(Я) < ЯЛ) I RJJ.) +
Заметим, что, так как определенным корреляцион-
ным функциям соответствуют определенные спектральные
412
Специальные системы управления
плотности, приведенные соотношения остаются справедли-
выми и для соответствующих спектральных плотностей.
Из выражения (4.95) следует, что оптимальная весо-
вая функция w(О, соответствующая минимуму дисперсии
ошибки 7)д, зависит только от вида корреляционных функ-
ций полезного сигнала и помехи и ее определение является
вариационной задачей, где Рд{и’(/)} - минимизируемый
функционал.
Винер показал, что необходимое и достаточное усло-
вие минимизации D& = о д , которое должно быть наложено
на весовую функцию, заключается в том, чтобы она была
решением интегрального уравнения Винера-Хопфа вида
(4.96)
—00
Тогда в соответствии с (4.94)
(4-97)
Оптимальная частотная функция WonT(jco), опре-
деляемая из (4.97), в общем случае оказывается нереали-
зуемой в смысле устойчивости. Это можно показать на
простейшем примере. Пусть u(t) и f(t) не коррелированы
и S’(су) = 1. Тогда с учетом того, что Sp(<o) = Su(co) + S'/со),
получим о / \
ОПТ ( /со) “
Поскольку величина 1 + S (со) существенно положи-
тельна, то ее можно разложить на два комплексных множи-
теля, один из которых будет иметь корни в нижней полу-
плоскости, что является признаком неустойчивости систе-
мы. В этой связи для отыскания f^onT( jco), удовлетворяющей
условию устойчивости, применяют искусственный прием,
заключающийся в разложении знаменателя (4.97) на ком-
плексные множители: S (со) = | iff(jco)2\ = y/(jco)i//(-jco). Тогда
(4.97) можно представить в виде
10. Оптимальные системы управления 413
В этом случае, как показал Винер, реализуемая
оптимальная передаточная функция имеет вид
^опт (JO>) =
(4.98)
где B(j(o)= f jMdt,
Пример 4.13 -°0
1
ejU)ldco.
На вход следящей системы поступает управ-
ляющий сигнал со спектральной плотностью
Su(co) = 1/(1+ со2) и помеха типа белого шума с
Sf(co) = с2, причем u(t) иf(t) некоррелированы. Требу-
ется найти оптимальную в смысле минимума <7Л
частотную функцию системы W^jco).
Решение
Так как для следящей системы желаемый оператор
преобразования Н(р)~ 1 и, следовательно, у*(/) =w(0? то
учитывая что <р (/) = u(t) + /(/), можно записать
sy.,^ = s., ./“-) = +5./“) - s№-
s (ш) - S (и) - S» + Sim),
Г J
здесь учтено, что для некоррелированных сигналов
5/со) = Sfu(co) = 0.
Подставив в полученные выражения известные
спектральные плотности, получим
Разложим последнее выражение на сопряженные
множители
S/0M OV(-»
1 + >
1->
и вычислим в соответствии с (4.98):
£(/) = — Г b^Le^‘da) =
2я i
414
Специальные системы управления
1 “ (1 - ja))eJ<ald(O
2л i (1 + «у2 )(71 + c2 - jioc)
1 ” ej(0,da>
2л "L (1 + j(o)(\l\ + c2 - j(oc)
Разложив подынтегральную функцию на простые
дроби, получим
(4.99)
-------. - - —------------eJ0,'da)
(с + \1\ + с2 )(71 + с2 - ja) с)
Для вычисления B(jaj) в соответствии с (4.98) необ-
ходимо взять прямое преобразование Фурье от функции
/?(/), которая, в свою очередь, является обратным преобра-
зованием Фурье от подынтегральной функции, стоящей
в квадратных скобках выражения (4.99). Следовательно,
B(ja)) будет равно этому подынтегральному выражению.
Исходя из условий реализуемости W {jid), отбрасываем
слагаемые подынтегральной функции, имеющие корни в
нижней полуплоскости. Тогда
1
1 + JCO ’
5(yw)=p3(rK>'^ =
о
1
С + л/1 + С2
а искомая передаточная
ункция примет вид
0U» =
В(»_____________1________
(с + Vi+c2)(Vl + c2 + j(»c)
или
^|1Т О)--—
О" +
10.1Оптимальные системы управления 415
Таким образом, оптимальный фильтр в данном
случае представляет собой апериодическое звено первого
порядка, с параметрами, определяемыми спектральной
плотностью помехи St(co) = с2.
* * *
В заключение заметим, что решение задачи опти-
мальной фильтрации может быть также произведено с по-
мощью фильтра Калмана. При этом предполагается, что на
вход системы поступает аддитивная смесь управляющего
воздействия w(0, являющегося гауссовским марковским
случайным процессом, и помеха f(t), представляющая
собой гауссовский «белый» шум, не коррелированный с
сигналом u(t). Физически реализуемый линейный оператор
замкнутой системы, при котором процесс y(t) на выходе
системы является оптимальным по критерию минимума
средней квадратической ошибки, находится по специаль-
но разработанному алгоритму. Этот алгоритм достаточно
громоздок и, в частности, связан с решением дифферен-
циального уравнения Риккати, для чего, как правило,
требуется применять численные методы с использованием
компьютерных технологий. В конечном итоге, алгоритм
Калмана дает тот же результат, что и алгоритм Винера,
но, в отличие от последнего, позволяет синтезировать оп-
тимальные фильтры не только для установившегося, но и
для переходного режимов при нестационарных входных
воздействиях.
416
11. Адаптивные системы управления
В большинстве случаев проектирование системы
управления производится в предположении, что стати-
ческие и динамические свойства объекта управления и
всех элементов системы известны, не зависят от измене-
ний внешних условий и постоянны во времени. Однако в
действительности характеристики объекта и некоторых
элементов системы бывают известны лишь приближенно,
так как они изменяются в результате физического старе-
ния и под действием внешних условий. Благодаря запасам
устойчивости система управления, спроектированная для
определенных расчетных характеристик, может удовлет-
ворительно управлять объектом и в том случае, когда его
фактические характеристики несколько отличны от рас-
четных. Однако если статические и динамические свойства
системы изменяются в широком диапазоне, то управление
объектом с помощью простейшей системы с постоянными
параметрами и структурой может оказаться неудовлетво-
рительным либо вообще невозможным вследствие потери
устойчивости. Для таких случаев необходимы системы
управления с изменяющимися свойствами.
Процесс изменения свойств системы, позволяющий
ей достигнуть наилучшего или, по крайней мере, удовлет-
ворительного функционирования в изменяющихся усло-
виях, называется адаптацией. Системы, осуществляющие
процесс адаптации, называются адаптивными (самопри-
спосабливающимися) системами.
Характерным признаком адаптивных систем явля-
ется отсутствие полной априорной информации об объекте
управления, внешних возмущениях и граничных условиях,
т. е. адаптивной системе присущ индетерминизм (неопре-
деленность). Функционирование системы направлено на
раскрытие неопределенности, т. е. на нахождение такого
состояния, при котором реализуется цель управления. Рас-
крытие неопределенности может обеспечиваться благодаря:
избыточности системы, логичности ее действий, прогнозиро-
ванию ее состояния и анализу накапливаемой информации
с целью самообучения.
11. Адаптивные системы управления 417
Оптимальное, в известном смысле, функционирова-
ние адаптивной системы может рассчитываться на основе
информации о состоянии системы. Такие системы назы-
ваются аналитическими. Если же оптимальный режим
работы определяется в результате поиска условий экстре-
мума критерия эффективности, то системы называются
поисковыми. В этом случае система как бы ставит серию
экспериментов и извлекает из них данные, необходимые
для улучшения своего поведения.
Изменение состояния системы можно производить
за счет контролируемых изменений управляющих воздейс-
твий, параметров и структуры системы.
Адаптивные системы классифицируются в зависи-
мости от объема этих изменений на:
• экстремальные - только управляющие воздейс-
твия;
• самонастраивающиеся - управляющие воздейс-
твия и параметры системы;
• самоорганизующиеся - управляющие воздействия,
параметры и структура системы;
• обучающиеся - управляющие воздействия, парамет-
ры и структура системы, алгоритм функционирова-
ния, а в случае самообучения и целевая функция.
Два последних класса систем, обладающих способ-
ностью к обучению и использованию человеко-машинного
интерфейса**, в какой-то мере имитирует поведение чело-
века и поэтому часто называются интеллектуальными.
По способу осуществления контролируемых изме-
нений адаптивные системы подразделяются на пассивные,
в которых эти изменения осуществляются по заранее раз-
работанной программе, и активные, в которых контро-
лируемые изменения заранее не определены, а диктуются
сложившейся ситуацией.
Наконец, как и любые другие автоматические сис-
темы, адаптивные системы могут работать по замкнутому
и разомкнутому циклам. В первом случае производится
анализ действия контролируемых изменений, а во вто-
ром - не производится.
..... —
Интерфейс - система связей, предназначенная для обмена информацией между структу-
рами.
14 Теория автоматического управления
418 Специальные системы управления_____________________
Заметим, что наиболее совершенными являются
аналитические активные замкнутые обучающиеся системы.
11.1. Экстремальные системы управления
Задачей экстремальных систем управления (ЭСУ)
является обеспечение в известном смысле наилучшего
статического режима работы объекта. При этом предпола-
гается обязательное наличие экстремальной зависимости
критерия эффективности Q, по крайней мере, от одного уп-
равляющего воздействия и. В худшем случае знание лишь
того, что такой экстремум существует, может служить
достаточной априорной информацией для построения ЭСУ.
Таким образом, если статическая характеристика Q = f(u)
имеет экстремум, то ЭСУ должна вывести и удержать ра-
бочую точку в глобальном экстремуме.
Рис. 4.23
Примером объекта с экстремальной характеристи-
кой может служить топочная установка энергетического
блока. Здесь статическая характеристика по каналу расход
воздуха на горение и - температура топочных газов Q имеет
экстремум-максимум при определенном и = и*. При и < и*
имеем неполное сгорание топлива, при и > и* - избыток
воздуха. И в том, и в другом случае температура топочных
газов снижается (рис. 4.23, кривая 1). При изменении либо
расхода либо качества подаваемого топлива значение и,
при котором g* = max, изменяется (кривые 2, 3 рис. 4.23).
Задача ЭСУ в данном случае сводится к изменению расхода,
воздуха до значений, обеспечивающих наилучшие условия
сгорания топлива, т. е. к отслеживанию координат экстре-
мальной точки Q*,
и*, которые изменяются (дрейфуют) во
времени.
11. Адаптивные системы управления 419
Q
Рис. 4.24
Другим примером объекта с экстремальной стати-
ческой характеристикой может служить измельчительный
агрегат, подготавливающий твердое топливо для топочной
установки. В данном случае выходная производительность
агрегата Q зависит от массы твердого в нем, которая может
изменяться за счет изменения поступления материала в
агрегат и (производительности на входе). Эта зависимость
имеет экстремум (рис. 4.24, кривая 1), причем участок
ОА кривой 1 соответствует устойчивому режиму работы
(в установившемся режиме входная и выходная произво-
дительности равны), а участок АВ - неустойчивому, при
котором увеличение входной производительности и > w*
может привести к “завалу” агрегата и полной его остановке.
Изменение качества твердого топлива (размер, твердость
и др.) приводит к дрейфу точки экстремума (рис. 4.24, кри-
вые 2, 3), и следовательно, для достижения цели управле-
ния Q = шах целесообразно применять ЭСУ.
Рис. 4.25
В некоторых случаях экстремальная характерис-
тика объекта может быть сформирована искусственно. На-
пример, для многих технологических установок качество
14*
420 Специальные системы управления
конечной продукции зависит от их производительности.
При этом реализационная стоимость продукта Q , с одной
стороны, растет пропорционально его количеству G, а с
другой - падает за счет ухудшения качества К (рис. 4.25).
Результирующая кривая = C\G ~С2Кп (здесь С}, С2 - ве-
совые коэффициенты; п — показатель степени) имеет явно
выраженный экстремум.
Экстремальные системы можно классифици-
ровать по различным признакам, в частности: по ха-
рактеру сигналов ЭСУ подразделяются на непрерыв-
ные и дискретные (шаговые); по числу управляющих
воздействий - на одно-, двух- и многоканальные; по
способу формирования поискового сигнала - с непос-
редственным измерением производной, с запоминани-
ем экстремума, с внешним поисковым сигналом и др.
Остановимся на принципах построения и функци-
онировании некоторых ЭСУ.
11.1.1. Непрерывные экстремальные системы
Наиболее широкое применение получили поис-
ковые одноканальные экстремальные системы, которые
используют одно управляющее воздействие. Это, помимо
относительной простоты реализации, позволяет значитель-
но улучшить динамические показатели качества работы
системы, и значительно расширить класс объектов, для
которых применение ЭСУ является эффективным.
Достаточной информацией для функционирования
таких ЭСУ является знание величины или, по крайней
мере, знака производной , где Q=flu), экстремальная
du
статическая характеристика объекта управления.
В качестве примера рассмотрим систему дизель - ге-
нератор (Д - Г), работающую параллельно с энергосисте-
мой. Целью управления этой установкой является макси-
мизация ее КПД (£?=/?—> шах) в условиях нестабильности
зависимости rj = f(q) , где q = u - расход топлива, подавае-
мого к дизелю. Какой бы ни была функция г/ = экстре-
мальное значение rj будет достигнуто при —- - 0. Поэтому
11. Адаптивные системы управления 421
для обеспечения цели управления необходимо вычислить
текущее значение q и ту' и осуществлять управление так,
чтобы величина производной ц' стремилась к нулю.
Рис. 4.26
Возможный вариант функциональной схемы ЭСУ
представлен на рис. 4.26. Информация о входной мощности
Р , пропорциональной расходу топлива q , и о выходной
мощности генератора Р дает возможность непрерывно
измерять КПД установки п =Р J Р . Дифференцирование
ex
величин ту и g по времени с помощью дифференцирующих
звеньев (ДЗ) и последующим делением производных ту; и q't
дает величину, пропорциональную ту' , которая подается на
исполнительный механизм (ИМ). Последний в соответствии
со знаком и величиной ту' изменяет расход подводимого топ-
лива до тех пор, пока не будет достигнуто равенство ту' = О
(рис. 4.27). В рассматриваемой системе скорость изменения
величины q пропорциональна величине ту' , т. е.
v = q'= к ту',
1 t и * (г
(4.100)
где ки — коэффициент передачи исполнительного механизма.
В том случае, если определяется только знак про-
изводной ту', исполнительный механизм движется в ту или
Другую сторону с постоянной скоростью v , т. е.
(4.101)
где U = sign ф = sign {ту' + <5 sign у} - Функция переключения’,
422 Специальные системы управления
sign^ - единичная функция, знак которой определяется знаком
функции
& — зона нечувствительности экстремального регулятора.
и* #
Рис. 4.27
Пример 4.14
В функциональной схеме ЭСУ (рис. 4.28) объект
управления ОУ можно представить в виде двух
последовательно соединенных звеньев: нелинейного
безынерционного звена (НЗ) линейного звена (ЛЗ).
Рис. 4.28
Уравнение НЗ приближенно можно записать в па-
раболической форме
Q = -kau\
(4.102)
а дифференциальное уравнение ЛЗ имеет вид:
(4.103)
где kQ и Т - коэффициент усиления и постоянная времени
объекта управления.
_____________________11. Адаптивные системы управления 423
Исполнительный механизм системы (ИМ) пред-
ставляет собой интегрирующее звено, описываемое
уравнением
(4.104)
Экстремальный регулятор ЭР функционирует на
основании информации о знаке производной в соот-
ветствии с выражением (4.101).
Определить динамические показатели работы
системы.
Решение
Перепишем (4.103) с учетом (4.102) в виде
г dd du
0 du dt
+ 0 = - kQu2.
Тогда с учетом (4.104) и (4.101) имеем
r.fcvn-^ + 0=-^w2.
0 “ 0 du 0
АХ 1 К0 К
Обозначив-------= -----— = b , получим
Т<,КЛ Т„КЛ
<4.Ю5)
du
Заметим, что полученное уравнение представляет
собой уравнение фазовой траектории в координатах и$ .
Общее решение уравнения вида (4.105) при v = +v0
ищется в виде
где С - постоянная интегрирования.
После двойного интегрирования по частям выраже-
ния, стоящего в квадратных скобках, получим, уравнение
разовой траектории 0 (и) в явном виде.
(4.106)
где С определяется из начальных условий и(0) = и0 и 0(0) = 0О:
424
Специальные системы управления
(4.107)
В соответствии с (4.106) на рис. 4.29 построена фазо-
вая траектория, характеризующая движение системы на
фазовой плоскости с координатами в,и.
После пересечения фазовой траекторией 0(и),
обозначенной на рис. 4.29 пунктирными линиями, стати-
ческой характеристики Q(u) координата 6 начинает умень-
„ d0
шаться и, следовательно, знак производной — станет
du
отрицательным. При 0|0'| > <5 sign v (точка w01,$01) функция
переключения U= {#' + <5 sign v меняет свой знак на проти-
воположный и экстремальный регулятор в соответствии с
(4.101) подает команду на реверс исполнительного механизма.
Уравнение фазовой траектории сохраняет тот же вид, но так
как в данном случае v0 < 0, то коэффициенты а и b в уравне-
ниях (4.106) и (4.107) меняют свой знак, а в уравнении (4.107),
кроме того, вместо в0 и и0 следует подставить $0| и w0|. В точке
мо2’^о2снова произойдет реверс и так далее. Предельный цикл,
показанный на рис. 4.29 сплошными линиями, характеризует
установившиеся симметричные автоколебания в системе.
Имея фазовую траекторию и предельный цикл,
можно определить качественные показатели работы
системы, к которым относятся потери на поиск**, время
Иногда потери на поиск, обусловленные автоколебаниями в зоне экстремума, называют
потерями на рыскание.
11. Адаптивные системы управления 425
выхода в зону экстремума и параметры автоколебаний. В
последнем случае помимо периода автоколебаний Г опреде-
ляется размах колебаний как управляющего воздействия Aw
(зона поиска на входе), так и показателя качества \в (зона
поиска на выходе). Из рис. 4.29 видно, что Aw — |wj + |w2| и
A# — | вх | - 110J. Так как скорость исполнительного механиз-
ма в соответствии с уравнением (4.104) равна kv. где v = ±v0,
то период автоколебаний можно найти по формуле:
Aw
Т =----.
Vo
Потери на поиск Р определяются как разность
между экстремальным (в нашем случае Q* = 0) и сред-
ним Q значениями критерия на выходе объекта и харак-
теризуют точность работы ЭСУ. Так как автоколебания
симметричны, то величина потерь Р = 0,5(1^| + |02|).
Время выхода в зону экстремума Т определится как
сумма времен, за которые система проходит определенные
участки фазовой траектории:
N
UQi+\
Л о ’
где N - количество участков фазовой траектории до выхо-
да на предельный цикл.
W0/
В
Заметим, что аналогичные результаты можно полу-
чить, определяя поведение выходной координаты во време-
ни. Учитывая, что в соответствии с (4.104) и = ± к nJ + w0, и
подставляя это выражение в (4.106), получим зависимость
#(/), которая также позволяет установить качественные
показатели работы системы (рис. 4.30).
Рис. 4.30
426 Специальные системы управления
11.1.2. Дискретные экстремальные системы
Непрерывные экстремальные системы обладают
сравнительно низкой помехозащищенностью. Например,
если при движении к экстремуму на характеристику Q(u)
накладываются высокочастотные помехи, то система будет
совершать ложные реверсы, что значительно ухудшает ее
динамические свойства.
С целью повышения помехозащищенности приме-
няют дискретные ЭСУ шагового типа, в которых значение
экстремального показателя Q измеряется дискретно, через
определенные интервалы времени А/, называемые шагами.
В зависимости от результатов сравнения величин Q в на-
чале и в конце каждого шага, осуществляют изменение уп-
равляющего воздействия и в соответствии с алгоритмом
и ' — и + \uU ,
и+1 п и+1 ,
(4.108)
где Uй+1 = sign(AQrt +d)signt/w - функция переключения на
п + 1 —м шаге квантования по времени;
ип и и„+] - величина управляющего воздействия на п-м и
п + 1 -м шаге квантования по времени соответственно;
Аи - величина изменения управляющего воздействия на
каждом шаге квантования по времени;
\Qn - приращение критерия на п-м шаге;
6 - зона нечувствительности регулятора.
Нетрудно заметить, что при сравнительно большой
величине Дм обеспечивается достаточно надежное измере-
ние приращения критерия эффективности, что способствует
повышению быстродействия и помехозащищенности систе-
мы, но приводит к увеличению потерь на поиск. Величина
шага квантования по времени Az ограничена: при очень
большом шаге в системе могут появиться ошибки, обуслов-
ленные временным дрейфом статической характеристики
£?(«); при слишком малом
аге на правильность работы
ti
системы помимо запаздывания информации о выходных
показателях, обусловленного инерционностью объекта,
могут также оказывать влияние высокочастотные помехи.
Таким образом, оптимальные величины Ди и Д/ выбир"
ются, исходя из конкретных условий работы системы.
11. Адаптивные системы управления 427
Рис. 4.31
Рассмотрим дискретную ЭСУ, функциональная схема
которой представлена на рис. 4.31. Здесь для повышения по-
мехозащищенности систем величина Q, пропорциональная
критерию эффективности объекта управления ОУ, подается
на вход блока усреднения БУ, который выдает среднее за шаг
Д/я значение критерия (2 и подает его на вход устройства
сравнения УС и в блок памяти БП. С выхода УС снимается
сигнал пропорциональный разности АО =О - Q
г г ^иср ср,И- I
В соответствии со знаком этой разности формируется тем
или иным способом управление w, например, по алгоритму
(4.108). При этом на каждом шаге квантования AZ импуль-
сный элемент ИЭ подает импульсный сигнал на вход испол-
нительного механизма ИМ, который изменяет управление на
величину Aw в ту или иную сторону. Изменение координат
Q(t) и w(Z) безынерционной ЭСУ, работающей в соответствии
с алгоритмом (4.108), показано на рис. 4.32.
Рис. 4.32
428 Специальные системы управления_____________________
Для повышения быстродействия системы целесооб-
разно применять стратегию поиска при переменном шаге
управления Дп. В частности, можно так сформулировать
критерий эффективности, чтобы при переходе в зону не-
допустимых режимов работы объекта управления проис-
ходила смена его знака, например, с положительного на
отрицательный. Тогда при Q<0 шаг квантования может
быть равным Дп2, а при Q > 0 - равным Ди(, причем Дм, < Дп2.
Последнее условие обеспечивает сокращение времени вы-
хода системы в зону допустимых режимов без увеличения
потерь на поиск. Алгоритм поиска экстремума для этого
случая запишется в виде:
и , = и + ЬиЛГ . + LuJJu,,
я+1 п 1 л+1 2 я+Р
где U1 + U1 “U — функция переключения:
и'п+1 = 0,5(1 + sign£„ )sign( Д2Я + d)signt/„;
UL = °, 5(1 - signCJsign(Ag„ + <5)signC7„.
Дальнейшее сокращение времени выхода в зону
экстремума может быть получено, за счет того, что шаг
квантования Aw при выходе из зоны Q < 0 остается равным
большему его значению Aw3 до тех пор, пока рабочая точка
на статической характеристике Q(u) не сместится за точку
экстремума, т. е. до первого отрицательного приращения
А£Л После этого поиск экстремума осуществляется с ма-
лым значением шага Awr
Пример 4.15
Пусть объект управления ОУ можно представить
в виде двух последовательно включенных звеньев:
линейного инерционного звена с запаздыванием ЛЗ
и нелинейного безинерционного НЗ (рис. 4.33). Нели
нейное звено объекта описывается параболической
зависимостью вида
Q ~ ^0 + + ^2^1 э
(4.109)
где av а2- коэффициенты изменяющиеся во времени.
_____________________11. Адаптивные системы управления__429
Рис. 4.33
Требуется определить динамические показатели
работы систем, использующей в качестве управ-
ляющего устройства дискретный экстремальный
регулятор ЭР, функционирующий в соответствии
с алгоритмом (4.108)
При этом предполагается, что с целью уменьшения
времени переходного процесса исполнительный
механизм ИМ работает в импульсном режиме,
который характеризуется ступенчатым измене-
нием величины управляющего воздействия в начале
каждого шага квантования по времени. Такой ЭР
иногда называют шаго-импульсным.
Решение
Введем новую переменную в = - 0*, где 6* - величи-
на промежуточной переменной q, при которой достигается
экстремум критерия эффективности Q*. Эта величина опре-
деляется из выражения-----—- = + 2а20* = 0, откуда
дО
0* _ _ (4.110)
Подставив (4.110) в (4.109), окончательно получим
(4.1И)
2
а
где = ап- ; = а.
° 0 4<э2 2 1
Найдем зависимость 0(f) за время =
где tn, tn_} - текущее время в конце и начале и-го шага со-
ответственно.
430 Специальные системы управления
Пусть в конце (п - 1)-го шага координаты объекта
управления равны: и = и 0 = 0 (рис 4.34). В течение
времени запаздывания т зависимость 0(f) определяется из
уравнения
ТО +0 = ип_{
(4.112)
Решение (4.112) при ненулевых начальных условиях
0(0) = 0 имеет вид
0 (/) = wn_Jl - ег |+влЧег •
(4.113)
Подставив в (4.113) t = т можем записать
»(г ) -+ К, -О...) (1 - е * ) -0,., + Ав/,
где АО „ - приращение координаты 0 за время т (рис. 4.34)
Аналогичным образом определяется зависимость
0(t) для промежутка времени (А/ -Т ):
11. Адаптивные системы управления 431
е + л»;)+ (0-'+ Лв;)][1 -е г' • (4'114)
где ил = ип_х + Ап
Приращение координаты в за время / = (А/-т)
определяется вторым слагаемым правой части уравнения
(4.114) и обозначено на рис. 4.34 А077.
Полученные соотношения позволяют построить
кривую переходного процесса в системе и определить по-
тери на поиск.
Пусть параметры объекта управления имеют
следующие значения Г=300с, т = 420с; Z?o = 2,2; Z>2 = -0,05.
Параметры экстремального регулятора выбираются из
следующих соображений. Величина шага квантования
по уровню управляющего воздействия Ап принимается из
условий надежного измерения приращения критерия &Q
при допустимых потерях на поиск. Например, при Ап = 1,5
минимальное изменение критерия Q в зоне экстремума
при статическом режиме (Ап = и Q* = = b{}) составит
Ag = Q* - Q(Au) =2,2 - 2,09 = 0.11, что составляет примерно
5% от Q*. Шаг квантования по времени А/ выбирается
исходя из обеспечения устойчивости движения системы
в области экстремума, для чего должно выполняться не-
равенство А/>т. Для обеспечения надежного изменения
выходной координаты в шаг квантования определяется
л:
А/ = т + сТ ,
где с - коэффициент, обычно с = l-s-2.
Положив с = 1,5, получим А/= 420 + 1,5*300 = 870с.
Зона нечувствительности экстремального регу-
лятора д зависит от характеристик технических средств,
реализующих регулятор, и в нашем случае принимается
равной 0,05.
Воспользовавшись соотношениями (4.108), (4.111),
(4.113), и (4.114) можно построить зависимость п(/) и Q(t)
(рис. 4.35), характеризующую процесс выхода системы
в зону экстремума при заданных начальных условиях
432 Специальные системы управления
м(0) = - 12.8. При этом, как видно из рис. 4.35, время выхода
в зону экстремума (до первого отрицательного приращения
критерия Д(? за время Д/) составляет Т = 7.8-103 с.
В
Рис. 4.35
Потери на поиск Р в зоне экстремума (режим авто-
колебаний, при t > Тъ)9 определяемые как разность между
максимальным значением критерия эффективности 0* = Ь()
и его средним значением за период автоколебаний £>ср мож-
но найти воспользовавшись соотношением, определяющим
потери на и-ном шаге квантования по времени
л-e’-^fem
гдeQ(t)onpeдeляemcяypaвнeнuямu(^A\3)nputn_{ +т,
(4.114) при tn_y +Т < t £ tn с учетом уравнения (4.111).
Тогда потери на поиск будут
где N — число шагов за период автоколебаний T=N*At вы-
ходной координаты системы Q.
В нашем случае при N - 6 величина Р = 0.089, что состав-
ляет 4% от максимального значения критерия, что вполне
допустимо.
11. Адаптивные системы управления 433
11.1.3. Методы поиска экстремума в
многоканальных экстремальных системах
Случай, когда критерий эффективности Q является
ЭЕ
функцией одного управляющего воздействия и , наиболее
распространен. Однако, если этот критерий зависит от не-
скольких управляющих воздействий, то дальнейшее повы-
шение эффективности функционирования системы может
быть получено за счет применения многоканальных ЭСУ.
Рассмотрим наиболее распространенные методы
поиска экстремума критерия Q как функции нескольких
управляющих воздействий.
1
Рис. 4.36
1. Метод Гаусса - Зайделя, или метод покоординат-
ного восхождения (спуска), заключается в после-
довательном приближении к экстремуму путем
поочередного варьирования каждого управляющего
воздействия до тех пор, пока не будет достигнут
экстремум критерия Q. Характерная особенность
метода - необходимость стабилизации всех входных
переменных, кроме варьируемого. Процесс поиска
экстремума по методу Гаусса - Зайделя в случае
434 Специальные системы управления
зависимости критерия Q от двух управляющих воз-
действий иллюстрируется рис. 4.36 (траектория 1).
Функция Q = /(u15w2) представлена здесь линиями
равных значений критерия Q. = const. Движение,
параллельное осям координат, происходит до тех
пор пока не будет достигнут частный экстремум,
при котором dQ/ ди. = 0. Это условие выполняется
в точке касания прямой, параллельной оси коорди-
нат, с одной из линий равных значений критерия.
Из рис. 4.36 видно, что путь изображающей точки к
экстремуму далеко не кратчайший, поэтому время
поиска относительно велико. С ростом числа уп-
равляющих воздействий эффективность поиска
резко снижается.
2. Метод градиента отличается от предыдущего тем,
что движение изображающей точки к экстремуму
(рис. 4.36, кривая 2) производится в направлении
вектора градиента:
Ап -9Q - dQ - dQ
gradg = i--+12---+... + ik-,
du{ du2 duk
где i - единичные векторы в k-мерном пространстве.
В точке экстремума значение grad£) = 0 и движение
изображающей точки прекращается. При исполь-
зовании метода градиента длина траектории сущес-
твенно меньше, чем при методе Гаусса - Зайделя.
Однако, необходимость непрерывно определять гра-
диент функции Q требует больших затрат времени,
что делает этот метод малоэффективным.
3. Метод крутого восхождения (наискорейшего спус-
ка) предложен Боксом и Уилсоном. Сущность этого
метода заключается в том, что направление вектора
градиента!., найденного в начальной точке состо-
яния объекта исследования, определяет направ-
ление движения в Л-мерном пространстве до тех
пор, пока частная производная dQ/dL взятая по
этому направлению, не обратится в нуль. В этой
точке вновь определяется направление градиента и
происходит движение этого вектора до обращения
11. Адаптивные системы управления 435
в нуль частной производной критерия Q, по ново-
му направлению, и так до тех пор, пока система
не выйдет в зону экстремума критерия Q (рис. 4.36
траектория 3). Этот метод, обладая достоинствами
метода градиента, выгодно отличается от него тем,
что не требует непрерывного определения величины
и направления градиента критерия Q.
Все три метода поиска рассмотренные выше, пре-
дусматривают получение информации о производных
критерия эффективности по направлению движения к
экстремуму. В реальных условиях эта информация мо-
жет быть получена по дискретным результатам измере-
ния величины Q. При этом изменение управляющих
воздействий и производится с шагом квантования Дм ,
величина которого определяется конкретными условиями.
При применении метода Гаусса - Зайделя выбор
направления первого шага Дм (из точки Ц ) осуществля-
ется случайным образом. Если при поиске экстремума-
максимума приращение критерия Д0 = Q - Qo > 0, то дви-
жение продолжается в том же направлении, если Д^ < О
- направление меняется на противоположное (происходит
реверс). Смена знака Д(2. свидетельствует о прохождении
частного экстремума критерия эффективности по выбран-
ному управлению и необходимости смены варьируемого
управления. Далее процедура повторяется до достижения
зоны экстремума.
При поиске экстремума функции 0(м1?м2) с по-
мощью метода градиента градиент этой функции должен
определяться на каждом шаге квантования факторов Дм .
Это требует определения, хотя бы в первом приближении,
зависимости Q = например, в виде линейного по-
линома: Q = 60
Ьхщ + Ь2и2. При этом, коэффициенты Ь} и
Ь2 являются составляющими градиента, определяющими
направление движения.
При применении метода Бокса - Уилсона процесс
поиска отличается от описанного выше тем, что движение
изображающей точки в направлении вектора градиента
(ЭД продолжается вплоть до смены знака приращения кри-
терия Q. Затем определяется новое направление движения,
и процесс повторяется до выхода в зону экстремума.
436 Специальные системы управления
При практической реализации классические мето-
ды поиска экстремума, рассмотренные выше, претерпели
существенные изменения.
«2 Л
Рис. 4.37
Одним из специальных методов является симп-
лекс-метод^. Напомним, что под симплексом понимают
простейший выпуклый многогранник в ^-мерном про-
странстве. Правильным ^-мерным симплексом называется
многогранник, у которого все вершины находятся на одина-
ковом расстоянии от центра, а длина всех ребер одинакова.
В двухмерном пространстве симплекс - это равносторонний
треугольник. Рассмотрим применение симплекс-метода
при поиске экстремума в объекте с двумя управляющими
воздействиями и} и w2 (рис. 4.37). Пусть точка А - исход-
ная точка поиска. Делаются пробные движения с таким
расчетом, чтобы проекция симплекса на плоскость и.Ои2
образовала правильный треугольник abc. В каждой вер-
шине треугольника измеряются значения экстремального
параметра, которые затем сравниваются между собой.
Заметим, что этот метод разработан и применен для решения задач линейного програм-
мирования. Его обобщения допустимы при возможности корректной линеаризации целе-
вой функции и (или) учета ограничений, налагаемых на переменные.
11, Адаптивные системы управления 437
Пусть, например Qa < Qc < Qb. В этом случае на стороне
треугольника Ьс, противоположной вершине а, строится
новый треугольник а'Ьс при помощи только одного шага,
сделанного по направлению перпендикуляра, опущенного
из точки а на сторону Ьс. Далее снова происходит сравнение
значений Q. Если Qc < Qb < Qa , то происходит движение по
направлению к с' и т. д. По своей идее этот метод близок к
методу градиента, но не требует вычисления производной
в каждой точке траектории, что значительно уменьшает
время поиска. Для уменьшения амплитуды автоколебаний
вокруг экстремальной точки можно уменьшить величину
шага при приближении к точке экстремума.
Все рассмотренные методы поиска экстремума
относятся к классу детерминированных. При сложной
зависимости критерия э
ЗШЕ
ективности от управляющих
воздействий («овраги», «гребни», «ямы» и т.п.) поиск
глобального экстремума этими методами может быть за-
труднен. Плодотворными оказываются случайные методы
поиска, основанные на алгоритмах, в которых порядок
вычисления частных производных случаен.
К случайным методам поиска можно отнести ал-
горитм перебора всех возможных значений управляющих
воздействий (метод сканирования), когда каждое последу-
ющее положение рабочей точки выбирается случайно. Все
положения, в которых система уже побывала, исключают-
ся из рассмотрения, и запоминаются только управляющие
воздействия, соответствующие наилучшему значению
критерия Q. К основным недостаткам этого метода отно-
сится возможность возникновения аварийной ситуации,
а также большая длительность поиска. Например, для
г управляющих воздействий с т уровнями квантования
существуют тг возможных состояний. Для ряда случаев
число этих состояний, а, следовательно, и время поиска
весьма велики.
Несколько совершеннее метод чисто случайного
поиска, впервые нашедший свое приложение в гомеостате
Эшби, устройство которого будет рассмотрено ниже. Систе-
ма из начального состояния совершает случайное пробное
движение, направление которого равновероятно с любым
438
Специальные системы управления
другим. В запоминающем устройстве хранится значение
критерия 0, соответствующее начальному состоянию сис-
темы. Далее производится сравнение критерия в новом
положении с исходным. Если случайное перемещение
привело к успеху (в смысле приближения к экстремуму),
то осуществляется рабочий шаг в том же направлении и
случайный поиск производится из нового положения. Если
положение ухудшилось, то пробное движение начинают
снова из исходного положения. Для увеличения быстро-
действия системы применяется сочетание метода случай-
ного поиска с методом крутого восхождения. При этом из
исходной точки совершают не одно, а несколько случайных
пробных движений, по которым находят приближенное
значение градиента. Затем осуществляется движение в
направлении градиента до изменения знака приращения
и вновь производится несколько случайных пробных дви-
жений, вычисляется новое значение градиента и т. д. до
выхода в зону экстремума.
Заметим, что методы случайного поиска особенно
нп»
ективны для многоканальных (три и более управлений)
ЭСУ.
11.2. Самонастраивающиеся системы управления
Задачей самонастраивающихся систем управления
(СНС) является обеспечение в известном смысле наилучше-
го статического и динамического режимов работы объекта
управления. При этом предполагается, что помимо уп-
равляющих воздействий w(f) возможно также изменение
некоторых параметров (обычно коэффициентов усиления
и постоянных времени отдельных звеньев), влияющих на
динамические процессы в системе.
Реализация цели управления Q = extr в СНС обычно
осуществляется с помощью поисковых или аналитических
(беспоисковых) алгоритмов. В первом случае изменение
параметров системы СНС происходит на основании реакции
системы на поисковые воздействия, т. е. в этом случае она
представляет собой сочетание экстремального регулятора
и корректирующего устройства, осуществляющего за счет
11. Адаптивные системы управления 439
изменения параметров системы компенсацию влияния вне-
шних и внутренних возмущений на свойства системы. Во
втором случае СНС производят контролируемые изменения
параметров устройства управления с помощью вычисли-
тельных операций, использующих в качестве исходной
информации наблюдаемые воздействия и параметры систе-
мы, измеряемые системой измерительных устройств, т. е.
для своей успешной работы аналитические СНС нуждаются
в гораздо большей априорной информации по сравнению
с поисковыми, но не требуют больших затрат времени на
поиск, что дает возможность реализовать СНС даже при
сравнительно быстрых изменениях свойств системы.
11.2.1. Аналитические самонастраивающиеся системы
Функциональная схема аналитической СНС (рис. 4.38)
состоит из основного контура с выходной координатой уо(О
и контура самонастройки. Основной контур включает в себя
объект управления (ОУ), состоящий из трех динамических
звеньев (/, II и III) и устройства управления (УУ). Предпо-
лагается, что при отключении контура самонастройки
основной контур может работать как обычная система авто-
матического управления, в которой контролируемые изме-
нения параметров не имеют места. Нахождение уравнения
устройства управления без учета связи между параметрами
управляющего устройства и внешними и внутренними
изменениями системы составляют так называемую зада-
чу первичной оптимизации. В результате решения этой
задачи определяется оптимальная или идеальная модель
системы (структура и параметры идеального управляющего
устройства). Примерами решения таких задач могут слу-
жить задачи синтеза оптимальных систем, рассмотренные
в предыдущей главе.
Контур самонастройки включает в себя элементы
основного контура (в частности, звено объекта управле-
ния I, динамические характеристики которого подвержены
заранее непредсказуемым изменениям) и корректирующее
вычислительное устройство (КУ), вырабатывающее уп-
равляющее воздействие и (Z) в виде изменения параметров
440 Специальные системы управления
устройства управления (УУ) или введения дополнительного
воздействия и(/) в цепь основного контура. Управление
и (t) вырабатывается на основе имеющейся априорной и
текущей информации о внешних и внутренних условиях
работы системы, критерия эффективности, определяющего
цель управления, и критерия самонастройки, характеризу-
ющего отклонение действительных характеристик системы
от заданных.
следующих функциональных элементов: анализаторов
внешних и внутренних условий 1 и 2, определяющих соот-
ветственно текущие характеристики внешних воздействий
/о(О и изменяемой части системы, и вычислителей 3 и 4.
Первый вычислитель решает задачу первичной оптимиза-
ции, второй - вырабатывает управляющие воздействия в
контуре самонастройки.
Работа КУ организована следующим образом. Вы-
числитель 3 по выбранному критерию эффективности,
заданным ограничениям и информации, поступающей на
его вход от анализаторов 1 и 2, определяет оптимальные
динамические характеристики системы и выбранные для
их количественного описания параметры и управления.
11. Адаптивные системы управления
441
Оптимальные значения параметров сравниваются с те-
кущими их значениями, которые выдает анализатор 2.
Получаемые при этом сигналы рассогласования, харак-
теризующие отклонения действительных характеристик
системы от оптимальных, поступают в вычислитель 4,
вырабатывающий управляющий сигнал и (t) , который
воздействует на УУ, стремясь изменить динамические ха-
рактеристики основного контура так, чтобы они, с точки
зрения принятого критерия самонастройки, незначительно
отличались от оптимальных. Тут решается так называемая
задача вторичной оптимизации. Если действительные
характеристики не отличаются от оптимальных, сигналы
рассогласования равны нулю и контролируемые изменения
в системе не производятся.
Таким образом, в аналитической СНС (рис. 4.38)
контур самонастройки вырабатывает управляющее воз-
действие ис (?) в зависимости от внешних и внутренних
условий работы системы.
«с (О
и(0
КУ
ОУ
Рис. 4.39
Некоторые СНС используют информацию только о
внешних воздействиях (рис. 4.39). В этом случае анализатор
2 отсутствует и настройка производится по разомкнутому
циклу. В процессе работы под влиянием внешних воздейс-
твий свойства объекта изменяются, в связи с чем его переда-
точная функция WQ(p) будет отличаться от исходной .
Если СНС предназначена для стабилизации динамических
свойств системы, то должно выполняться условие
(4.115)
1 + ^у(р)^0(р)
где ff^(p) — передаточная функция замкнутой системы;
442
Специальные системы управления
Wy(p) - передаточная функция управляющего устройс-
тва.
Для выполнения условия (4.115) необходимо, чтобы
^y(p)^o(p) = w;(p)^ou(p).
Тогда
wy(p)~
wyu (р)№“ (р)
№0(р)
(4.116)
Условие (4.116) выполняется приближенно, пос-
кольку задача получения полной информации о возмуща-
ющих воздействиях и определения их влияния на пара-
метры объекта в полном объеме практически решена быть
не может. Подобные системы применяются в некоторых
автопилотах, учитывающих изменение таких внешних
воздействий, как давление и температура окружающего
воздуха, скорость и направление ветра и др.
Примером системы, самонастраивающейся по дина-
мическим характеристикам объекта, может служить СНС
(рис. 4.40), в которой управляющее устройство, включенное
в основной контур системы, представляет собой последова-
тельное соединение желаемой модели прямой цепи (М) и
обратной модели объекта управления (ОМ) с передаточными
функциями И^Ср) и И^ом(р) . Задача цепей самонастройки
состоит в том, чтобы, вычислив текущие динамические ха-
рактеристики объекта (анализатор 2), найти и затем ввести
в управляющее устройство параметры обратной модели
(вычислитель 4). При этом передаточная функция прямой
цепи основного контура
1Г(р) 1ГМ^(р)^(р).
а с учетом того, что в результате самонастройки ^ом(р) =
= И^'(р), имеем Ж(р) = Wu(p). Таким образом, рассмотрен-
ная СНС стабилизирует желаемые динамические свойства
системы. Однако ошибки, которые могут возникать в цепях
самонастройки, не компенсируются системой и потому она
относится к классу разомкнутых.
11. Адаптивные системы управления 443
Рис. 4.40
В случае определения динамических характерис-
тик цепи, включающей помимо объекта управления (ОУ)
управляющее устройство (УУ), ошибка самонастройки
at
формируется по замкнутому циклу (вычислитель 4) на
основе сравнения текущих значений параметров прямой
цепи, выдаваемых анализатором 2, и известных параметров
желаемой модели (М) разомкнутой системы (рис. 4.41).
Ошибка цепей самонастройки может быть также
получена при сравнении текущих координат эталонной
модели ум(0 и системы у(0 • ® отличие от предыдущей
системы, где ошибки цепей самонастройки образуются при
сравнении параметров, в данном случае сравниваются теку-
щие значения выходных переменных модели и системы.
Рис. 4.41
Рассмотрим еще один способ стабилизации динами-
ческих характеристик системы, реализуемый путем введе-
ния глубокой отрицательной обратной связи. Структурная
схема СНС для этого случая представлена на рис. 4.42, а.
444 Специальные системы управления__________________________
Передаточную функцию системы после несложных струк-
турных преобразований (рис. 4.42, б) получим в виде
W(p) =
Wy(p)W0(p)
l + kWy(p)W0(p)
[1+^м(р)1
(4.П7)
где №0(р), ^у(р)^м(Р)г> “ передаточные функции соот-
ветственно объекта управления, управляющего устрой-
ства и эталонной модели;
к- коэффициент усиления цепи обратной связи.
Рис. 4.42
Нетрудно убедиться, что при к -> оо правая часть
выражения (4.117) стремится к WM(p). В пределе
W(P)=WM(P). (4.118)
В реальных системах величина к ограничивается
условиями устойчивости системы и равенство (4.118) вы-
полняется лишь приближенно.
Контуры самонастройки по замкнутому циклу в
значительной степени устраняют недостатки разомкнутых
аналитических СНС: необходимость достаточно точной
реализации вычислительного алгоритма; зависимость
критерия самонастройки от методических погрешностей,
11. Адаптивные системы управления 445
допущенных при определении этого алгоритма; нарушение
исходных предпосылок в постановке задачи и т.п.
При синтезе цепей самонастройки по замкнутому
циклу необходимо выделить изменяемые (настраиваемые)
параметры bt, сформулировать критерий самонастройки
Qc, который должен зависеть от Ь-, выбрать метод поиска
экстремума Qc и лишь затем переходить к определению
алгоритма функционирования СНС.
Пример 4.16
Пусть имеем СНС, у которой ошибка цепей само-
настройки вырабатывается на основе сравнения
выходных координат эталонной модели уM(t) и
системы y(t) (рис. 4.43). Допустим также, что
выполняются условия квазистационарности, и
поэтому объект (неизменяемая часть системы),
управляющее устройство (изменяемая часть) и
эталонную модель можно описывать передаточ-
ными функциями WQ( р), Wy( р) и WM( р). Требуется
синтезировать корректирующее устройство, со-
стоящее из цепей самонастройки параметров bi
и работающее по замкнутому циклу.
Решение
В качестве критерия эффективности самонастройки
примем точность работы системы
£>(/) = е2(/)-» min ,
(4.119)
где z(t) = уM(t) - y(t) - величина отклонения текущего значе-
ния выходной координаты y(t) от желаемого значения
У» (О-
Для реализации цели управления (4.119) при-
меним градиентный метод, полагая, что критерий
Q является функцией изменяемых параметров и
существуют такие значения 6*, при котором Q имеет
неизвестный экстремум. Алгоритм поиска &* основан
на необходимом условии экстремума функции: в точке
экстремума частные производные ^=- должны быть
dbt
равны нулю (gradg = O). Если это не так, то значение
446 Специальные системы управления
L dQ л
bi должно изменяться до тех пор, пока условие — = 0
не будет выполнено. В простейшем случае уравнение,
определяющее изменение настраиваемого параметра во
времени, может быть записано в виде
db‘ _ к д^Ь‘^ (4.120)
dt dbt ’
где к - коэффициент пропорциональности, к >0 при
Q* = max и к < 0 при Q* = min.
Запишем передаточную функцию основного кон-
тура системы:
W(p) =----------------
l + FFy(p)FF0(p)
(4.121)
(4.122)
Тогда
y(t) = L ' {W(p)U(p)} .
Имея в виду, что W(t), y(t) и е(/) зависят также
от величин настраиваемых параметров bt, и учтя (4.119),
найдем
82(6,,/) Эс2(6,.,0
86,. 86,.
(4.123)
_ Э[ум(/)-у(6,.,/)]2 _ dyjb^t)
86. ( } дЬ
I I
Взяв частную производную по 6, от (4.122), запи-
шем
ММ) = [ 81Г(р,6.)
86, | 86,.
(4.124)
Воспользовавшись (4.121), получим
11. Адаптивные системы управления__447
W^P,bt>
д№(р,Ь^
дЬ,
W0(p) bWy(p,bt)
[UW^b^p)]2 dbi
(4.125)
Подставив (4.123) в (4.120), при к < 0 имеем
dbt
£
dt
= 2ke{bi, t) ^y^bi—
‘ az>.
Il
(4.126)
Выражение (4.126) с учетом (4.124) и (4.125) описы-
вает алгоритм самонастройки системы и позволяет выбрать
структуру корректирующего устройства.
Рис. 4.43
В схеме СНС (рис. 4.43) вычислитель 1 корректиру-
ющего устройства КУ имеет структуру, соответствующую
передаточной функции, определяемой выражением (4.125):
(р) = (р) >а блок 2 и блок умножения 3 функционируют
согласно (4.126). Так как идеальное значение параметра
b - медленно меняющаяся функция времени, то исполни-
тельные элементы 2 корректирующего устройства выбраны
здесь в качестве интеграторов с W2 (/?) = 2kl р . Чем больше
коэффициенты передачи исполнительных элементов к , тем
выше скорость самонастройки. Значение к ограничивается
448 Специальные системы управления
скоростью изменения параметров b, при которой наруша-
ются условия квазистационарности, положенные в основу
синтеза контура самонастройки.
* * *
При наличии в системе существенных случайных
помех /(/) для нахождения экстремума целевой функции
Q применяют помехозащищенные алгоритмы поиска, в ча-
стности, алгоритм стохастической аппроксимации. При
этом термин аппроксимация означает, что параметры b
находят приближенно. Как и в методе градиента, условием
экстремума целевой функции Q будет grad£2(fy) = 0, но так
как 0(6f) определяется в обстановке помех, то значению
Ь. = Ь* должно соответствовать условие A/{gradg} = 0, где
М- математическое ожидание.
Идея этого метода может быть проиллюстрирована
на простейшем примере вычисления какой-либо величи-
ны z с помощью реального прибора, имеющего погреш-
ность. Пусть z* - истинное значение измеряемой величины,
г,. - последовательность измеренных значений величины z,
f - ошибка измерения (аддитивная помеха). Тогда z = z* +f.
и задача стохастической аппроксимации формулируется в
виде М [z -z*] = 0. Известно, что наилучшим приближением
к величине z* является среднее арифметическое п измере-
1 п
нии: z
п
Перепишем это выражение в виде
п-1
“ a 1
п п
(4.127)
п
п
/ J 1 п
Н п
Из (4.127) видно, что предыдущая оценка измеря-
емой величины z* x входит в оценку z* с весом (п -1)/и, а
новое измеренное значение zn имеет вес Мп , т. е. с ростом
числа измерений влияние новой информации уменьшается.
Это основная идея, которой руководствуются при работе
системы в условиях помех: чем больше накоплено данных,
тем меньшие изменения в окончательный результат долж-
11. Адаптивные системы управления 449
ны вносить новые измерения. С учетом сказанного уравне-
ние, определяющее скорость изменения настраиваемого
параметра, можно записать в виде
dt
(4.128)
Выражение (4.128) носит название алгоритма сто-
хастической аппроксимации и отличается от детерми-
нированного градиентного алгоритма (4.120) только тем,
ЙИП
что коэффициент к должен быть убывающей функцией
времени (например, k(t} = \!t при /^1). Это приводит к
тому, что с течением времени, т. е. с приближением к точке
экстремума, скорость изменения параметра bi уменьшается
даже при наличии существенного уровня помех. Можно
показать, что при / -* оо алгоритм (4.128) с вероятностью
р=\ обеспечивает движение Ь. к Z>*. Для контроля дрей-
фа статической характеристики 0(6,-) после достижения
экстремума производят непрерывное (или дискретное)
dQ
измерение частных производных , естественно, с поме-
хами. При существенном их значении, превышающем зону
нечувствительности, вновь начинается поиск экстремума
функции Q(bt) и т. д.
11.2.2. Идентификация динамических звеньев системы
Дальнейшее совершенствование самонастраиваю-
щихся систем может быть осуществлено за счет определения
математической модели объекта в процессе его функциони-
рования. Эта процедура носит название идентификации (от
лат. - отождествлять), под которой понимают установление
соответствия распознаваемого предмета (объекта) своему
образу (математическому описанию). Совершенным средс-
твом получения уравнений статики являются эксперимен-
тальные методы, основанные на обработке опытных данных
(например, по методу наименьших квадратов), собранных
непосредственно на действующем объекте. Динамические
свойства линейного объекта, описываемые временными
или частотными характеристиками, определяются также
по экспериментальным данным.
15 Теория автоматического управления
450 Специальные системы управления
Принципиально наиболее простой является иден-
тификация объекта, основанная на физической сущности
частотного метода. Известно, что при подаче на вход
линейного объекта гармонических воздействий, представ-
ленных рядом
п
x(t) = У Вк sin ко) t,
№1
(4.129)
на выходе формируется сигнал y(t) , который можно пред-
ставить аналогичным рядом
п
y(t) = У ВхЛ(к<у)8ш[дСО t - .
К = 1
(4.130)
Здесь Вк - коэффициенты гармонического ряда;
А(ка>), (р(ка>) — значения амплитудной и фазовой часто-
тных характеристик объекта на частоте ко, где о) -
частота первой гармоники.
Экспериментальное определение Л(ксу),^(кбо) произ-
водят следующим образом. На вход исследуемого объекта
подают гармонические колебания x(f) = Вк sin коз t, а на вы-
ходе объекта измеряют частоту и фазу колебаний выходной
переменной y(Z). Тогда, как следует из (4.129) и (4.130),
отношение амплитуды выходного сигнала к входному оп-
ределяет значение амплитудно-частотной характеристики
Л(кту)для данной частоты коз, а фазовый сдвиг - значение
фазы (р(ка>). Полученные значения амплитуд и фаз для
различных частот входного сигнала позволяют построить
частотную характеристику объекта
W (jco) = А(коз)е JV{K0>\
Применение рассмотренного метода в условиях нор-
мального функционирования объекта весьма ограничено,
так как подаваемые на вход гармонические сигналы могут
привести к недопустимым режимам работы установки.
Кроме того, чтобы исключить переходные составляющие
реакции объекта на пробные сигналы, время наблюдения
должно быть значительным, что увеличивает время экс-
перимента.
11. Адаптивные системы управления 451
Использовав богатые по спектральному составу
пробные сигналы типа ступенчатой или импульсной фун-
кции, можно резко сократить длительность эксперимента.
Наиболее простой метод состоит в том, что на вход объекта
подается импульсное возмущение достаточно малой про-
должительности. Этот сигнал рассматривается как (5-фун-
кция (с точностью до постоянного множителя а ). Тогда,
воспользовавшись интегралом Дюамеля
y(t)=Jx(t-0)w(0)d09
можно записать
у(/) - 0)w(0)d0 = aw(t) ?
где w(/) - искомая весовая функция.
(4.131)
Вместо импульса на вход объекта можно подавать
ступенчатый сигнал x(t) - а *1(^), реакция на который с
точностью до постоянного множителя а
является пере-
ходной функцией h(t).
Заметим, что перед проведением эксперимента по
определению временных характеристик объект на время
эксперимента следует как можно тщательнее изолировать
от различных возмущений, а перед началом каждого опыта
необходимо обеспечить установившийся режим. Экспери-
мент может считаться успешно законченным, если в объекте
реализуется новый установившийся режим, который в
зависимости от особенностей конкретных динамических
свойств объекта характеризуется постоянством значения
выходной величины либо постоянством ее производных.
Визуальный анализ полученных временных характери-
стик обычно позволяет в первом приближении найти форму
записи дифференциального уравнения объекта. Напри-
мер, наличие колебательной составляющей во временной
функции свидетельствует о том, что характеристическое
уравнение имеет, по крайней мере, два комплексных кор-
ня, а если после окончания переходного процесса скорость
изменения выходной величины отлична от нуля, то объект
обладает интегрирующими свойствами.
15*
452 Специальные системы управления
Весовая функция vv(Z) в принципе может быть
найдена и при произвольных сигналах на входе и выходе
объекта. Тогда задача сводится к решению интегрального
уравнения вида (4.131). Однако при наличии шумов это
выражение малопригодно для определения функции веса,
так как основанные на нем методы вычисления w(t) не
удовлетворяют условиям помехоустойчивости.
Действительно, пусть к объекту приложено не
только входное воздействие х(/), но и помеха f(t). Тогда,
воспользовавшись (4.131) и используя принцип суперпо-
зиции, имеем
(4.132)
Здесь wx (9) и wf (9) — весовые функции объекта по отноше-
нию к сигналам x(f) и f (/) соответственно.
Определить wx(t) из выражения (4.132) практичес-
ки невозможно, поскольку второй член в правой части этого
выражения является источником погрешности, оценка
которой неизвестна.
Указанного недостатка лишены статистические
методы определения весовой функции, основанные на ре-
шении интегрального уравнения Винера-Хопфа (4.93):
00
О
(4.133)
Такие методы позволяют по корреляционной фун-
ЗЮ
кции сигнала на входе Rx (г ) и взаимной корреляционной
функции между выходным и входным сигналом R (т) найти
весовую функцию w(t). В данном случае при любом коли-
честве помех, некоррелированных с входным сигналом x(t),
уравнение (4.133) остается справедливым. Действительно,
если умножить обе части выражения (4.132) на x(t-0),
а затем усреднить их на всем интервале наблюдения и
учесть, что второе слагаемое будет после этой операции
будет содержать взаимную корреляционную функцию не-
коррелированных сигналов х(/) и f(t), равную нулю, то
в конечном итоге получим выражение (4.133).
11. Адаптивные системы управления 453
Решение уравнения (4.133) обычно сводится к ре-
шению системы алгебраических уравнений, формируемых
путем замены интеграла суммой и выделения дискретных
значений подынтегрального выражения в моменты вре-
мени = рА . Здесь - 0,п , где п ~Т / Д ; Т - интервал
наблюдения; Л - интервал дискретности^ Эта система
п + 1 уравнений имеет вид
w(z)7?x(/z -l)t
(4.134)
Неизвестными являются дискретные значения w(z)
импульсной переходной характеристики и’(/). Вычисли-
тельные алгоритмы для решения системы уравнений высо-
кого порядка вида (4.134) достаточно разработаны и могут
быть реализованы с помощью современных компьютерных
технологий. Аналитическое решение функции и7(/) может
быть найдено путем обработки дискретных значений w(z) ,
например, по методу наименьших квадратов.
Определение весовой функции значительно упро-
щается, если на вход объекта подать искусственный сигнал
типа белого шума, корреляционная функция которого име-
ет вид Rx (т) = Nd (т). Подставив это выражение в уравнение
(4.133), запишем
00
Ryx(r) =J*Nd(r - 0)w(O)dO = Nw(t) .
о
Из приведенного соотношения следует, что при по-
даче на вход объекта сигнала типа белого хпума функция
веса w(Z) с точностью до постоянного множителя совпадает
со взаимной корреляционной функцией R (т).
Если корреляционные функции заданы в виде
аналитических выражений, то можно воспользоваться
соотношением (4.94)
(4.135)
0D
Здесь S (o) = J*RJj^e^ dt - взаимная спектральная плот-
-со
} Величину А обычно выбирают исходя из теоремы Котельникова (см. п. 6.2).
454 Специальные системы управления
ность между выходным и входным сигналами;
ос
- частотная характеристика
объекта; »
S- <“ > " № - ^Р^а, ,««-
ного сигнала.
Как вытекает из уравнения (4 Л 35), для определения
FF(jo)) = Р(со) + jQ{(o) по известным Sx(p))3 Syx(a)) нужно
воспользоваться следующими соотношениями:
ReLV")
Р((У) =
Im FS»'
5
5(ф)
Из всех рассмотренных методов идентификации
объектов исследования наиболее распространенными в
силу простоты реализации являются методы определения
временных характеристик h(t) и w(t) . Однако, когда ак-
тивное вмешательство (подача импульсного или единич-
ного входного сигнала) в ход процесса невозможно или
недопустимо, привлекают статистические методы, бази-
рующиеся на решении интегрального уравнения (4.133).
При этом необходимой и достаточной информацией для
определения весовой функции объекта w(f) является зна-
ние корреляционных функций Rx (г ) и R (т) .
Остановимся еще на одном вопросе. Оптимизация
динамического состояния системы при полной иденти-
фикации объекта неизбежно приводит к затягиванию
процесса самонастройки. Поэтому для повышения быстро-
действия стремятся использовать частичную информацию
которая, несмотря на свою неполноту, дает достаточное
представление об изменении динамики системы. Методы
определения таких частичных характеристик получили
название методов косвенной идентификации. Известны,
например, методы косвенной оценки коэффициента демп-
фирования £ через частоту колебаний а>. В частности для
затухающих колебательных процессов можно исполь-
1 /ГТТ
зовать зависимость а) = — J1 - § , причем частоту О) можно
11. Адаптивные системы управления
455
подсчитывать через число перемен знака весовой функ-
ции за определенный постоянный интервал времени Д/
(рис. 4.44). Интервал Л/ подбирается так, чтобы при за-
данном значении коэффициента демпфирования в него
укладывался бы один период колебаний, что соответству-
ет двум переменам знака весовой функции. Уменьшение
или увеличение числа перемен знака приводит в действие
управляющее устройство, которое подстраивает те или
иные параметры системы (обычно коэффициент усиления)
таким образом, чтобы восстановить две перемены знака за
время А/.
Более эффективным с точки зрения быстродействия
является способ оценки £ с помощью подсчета числа пере-
ходов через уровни Ду выходного сигнала у(/) за заданный
интервал времени Д^ (рис. 4.44).
Рис. 4.44
В качестве косвенной оценки динамических свойств
системы может также служить величина амплитуды авто-
колебаний на выходе системы, зависящая от коэффициента
усиления разомкнутой системы. Отклонение амплитуды
от заданного значения служит сигналом рассогласования,
который отрабатывается системой.
Как уже упоминалось во многих случаях, для
нормального функционирования самонастраивающихся
систем необходимо знание характеристики внешних воз-
действий. Так как эти воздействия, поступающие на вход
456 Специальные системы управления
системы, обычно являются заранее непредсказуемыми
функциями времени, то для возможности самонастройки
в таких условиях необходимо выполнение условия ква-
зистационарности характеристик воздействия, т. е. эти
характеристики должны изменяться незначительно за
время, необходимое для их вычисления.
Анализ характеристик внешних воздействий
обычно производится на основе одного из двух предполо-
жений.
1. Это воздействие может рассматриваться как задан-
ная аналитическим выражением функция времени.
Например, если внешнее воздействие х(/) аппрок-
симируется полиномом w-го порядка вида
т
то в системе должны быть предусмотрены устройст-
ва автоматического определения коэффициентов
полинома at. Обычно эти коэффициенты подбира-
ются по методу наименьших квадратов.
2. Внешнее воздействие является случайной функ-
цией времени с определенными статистическими
характеристиками: корреляционной функцией,
спектральной плотностью и др.), которые в подав-
ляющем большинстве случаев находятся путем
обработке экспериментально полученных реали-
заций, в частности, по методике рассмотренными
в примерах 4.9 и 4.12.
В заключение подчеркнем, что знание текущих
статических и динамических свойств объекта управления
позволяет внести необходимые коррективы в эталонную
модель и более обоснованно решать задачи первичной и
вторичной оптимизации.
11.3. Интеллектуальные системы управления
К интеллектуальным системам относятся системы,
способные к «пониманию» поведения объектов управления,
работающих в изменяющихся условиях. Главным отличи-
11. Адаптивные системы управления 457
тельным признаком интеллектуальных систем является
использование современных информационных технологий
для получения, хранения и системной обработки знаний с
целью реализации своих функций при управлении слож-
ными объектами. Характерными особенностями сложных
объектов управления, в частности, являются: отсутствие
математической модели, связывающей входные и выход-
ные переменные объекта; нестационарность, стохастич-
ность и распределенность параметров.
Интеллектуальные системы управления (ИСУ)
технологическими объектами должны обладать, помимо
способности к обучению и адаптации, умением эффективно
рункционировать в составе человеко-машинных систем с
гибкой структурой и иметь высокую устойчивость к пов-
реждениям и неполадкам, т. е. обладать так называемой
живучестью. В известной мере к этим системам можно
отнести самонастраивающиеся системы, корректирующие
устройства которых можно рассматривать как структуру,
выполняющую роль «учителя» управляющего устройства,
включенного в основной контур (рис. 4.38). Ещё с большей
уверенностью к интеллектуальным системам можно отнес-
ти самоорганизующиеся и обучающие системы, обладаю-
щие большой изменчивостью основных характеристик.
Рассмотрим принципы построения этих систем.
11.3.1. Самоорганизующиеся системы
По своей первоначальной структуре самооргани-
зующаяся система может представлять набор элементов,
связанных случайным образом. В дальнейшем при внешних
возмущениях в них образуются устойчивые отрицательные и
положительные обратные связи, подобно тому, как в природе
происходит приспособление живых организмов к различным
внешним условиям.
Классическим примером технического устройства,
имитирующего адаптационные свойства живых организмов,
служит гомеостат Эшби. Он представляет собой совокуп-
ность четырех одинаковых блоков - Б4 (рис. 4.45), каж-
дый из которых содержит подвижный электромагнит,
458 Специальные системы управления
поворачивающийся под действием токов, протекающих
по его четырем обмоткам.
Рис. 4.45
Угол поворота каждого из электромагнитов от
некоторого нулевого положения является выходной коор-
динатой z, соответствующего блока. На магнитах жестко
закреплены указательные стрелки, которые одновремен-
но являются движками потенциометров, что позволяет
преобразовывать механические перемещения магнитов в
электрический сигнал.
Каждый из полученных электрических сигналов
передается на обмотки остальных трех магнитов через
потенциометры с коэффициентами передачи а так, что
передаваемый сигнал может изменяться по величине и по
знаку. Кроме того, каждый блок имеет цепь собственной
обратной связи, коэффициент передачи а которой также
может меняться по величине и знаку. Таким образом,
гомеостат характеризуется наличием всех возможных
связей между блоками. Поведение такой системы можно
представить уравнениями:
111 Адаптивные системы управления 459
— ^41Z1 ’^42^2 ' ^43^3 “’“^44Z4*
Здесь коэффициенты Яу определяют долю выходного сигнала
j-го блока, передаваемого на вход i-го блока, причем Яу 1.
Цель работы гомеостата заключается в автома-
тическом поиске устойчивого состояния, т. е. такого по-
ложения подвижных электромагнитов, при котором ни
одна из связанных с ним стрелок не достигает крайнего
положения. При нарушении устойчивости по любой при-
чине (изменение параметров системы и даже обрыв какой-
нибудь цепи) включается устройство управления, которое
изменяет коэффициенты передачи Яу до тех пор, пока не
будет найдена такая их комбинация, при которой ни одна
из подвижных систем не будет достигать своих крайних
положений. Заметим, что при^ =0 изменяется также
структура системы.
Гомеостат Эшби имеет ряд принципиальных осо-
бенностей, которые существенно отличают его от других
систем. В первую очередь, следует отметить избыточность
структуры гомеостата, достигаемую за счет того, что каж-
дый из настраиваемых коэффициентов Яу может принимать
несколько значений и общее количество всех возможных
комбинаций коэффициентов достигает четырёхсот тысяч.
Исследования гомеостатических систем, проведенные
Эшби, позволили ему сформулировать так называемый
закон необходимого разнообразия, который гласит, что
разнообразие состояний управляющей системы должно
быть не меньше разнообразия состояний управляемого
объекта. Иными словами, размерность множества состоя-
ний объекта должна быть меньше размерности множества
состояний устройства управления. Только в этом случае
самоорганизация системы может привести к желаемому
результату. Закон необходимого разнообразия указывает
460 Специальные системы управления
общую тенденцию решения задачи так же, как, например,
утверждение, что сложные задачи просто не решаются или
сложные объекты требуют сложного управления и т.п.
Другая важная особенность гомеостата состоит
в случайном характере поиска устойчивого состояния.
Скачкообразное изменение автоматически настраиваемых
коэффициентов осуществляется до тех пор, пока не бу-
дет достигнута устойчивость рассматриваемой системы.
Случайный поиск придает гомеостату важнейшее свойс-
тво - способность целенаправленно добиваться нужного
результата при отсутствии априорной информации о свойс-
твах системы и условиях ее работы. Поскольку целью в
данном случае является отыскание устойчивых состояний,
то свойство целенаправленного поведения системы назвали
ультраустойчивостью.
Экспериментальные исследования, проведенные
на моделях, подтвердили универсальность и исключитель-
но высокую надежность (живучесть) гомеостатических
систем. Например, гомеостат Эшби находил устойчивое
состояние и при различных дополнительных условиях, не
предусмотренных при его конструировании. В частности,
устойчивое состояние было найдено при жестком соеди-
нении двух подвижных магнитов друг с другом, т. е. при
изменении первоначальной структуры системы.
Гомеостатические системы были применены для
автоматизации процессов конструирования автоматичес-
ких систем управления. Как правило, часть структуры и
параметров проектируемой системы строго детерминиро-
вана и не подлежит изменению (например, характеристика
объекта управления, исполнительного двигателя и т.п.).
Поэтому задача проектировщика сводится к синтезу ста-
билизирующих и корректирующих устройств, которые
в совокупности с детерминированной частью системы
должны обеспечить заданные статические и динамичес-
кие свойства. Задача определения передаточной функции
стабилизирующих и корректирующих звеньев может быть
решена компьютерным методом с помощью гомеостатичес-
кой системы, автоматически подбирающей параметры этих
звеньев в соответствии с поставленными требованиями.
11. Адаптивные системы управления 461
Пример 4.17
Определить передаточную функцию Wk(p) кор-
ректирующего устройства, предназначенного для
подавления автоколебаний в релейной системе,
структурная схема которой представлена на
рис. 4.46. Передаточные функции отдельных звеньев
системы заданы:
wi (р) = ; w3 (р) =
(Р) =
5
где Т} = Т2 = 1,0 с; Т3 = 0,1 с; k}= k2 = k3 = 1.
Рис. 4.46
Решение
Осуществим автоматический синтез корректирую-
щего устройства с помощью модели простейшей гомеоста-
тической системы, состоящей из двух блоков и подклю-
ченной параллельно релейному элементу и звену с W\(p).
На вход второго блока гомеостата подается сигнал Л (0 , а
выходной сигнал этого же блока z2 (t) поступает на вход
релейного элемента. После включения гомеостата за пять
циклов его работы (по 40 с каждый) были получены значе-
ния коэффициентов ап = а12 = а21 = а22 = -1.
Уравнение корректирующего устройства (гомео-
стата) в данном случае имеет вид
z2 Z( z2 + ,
откуда передаточная функция по каналу ух —* z2
будет
Wk{p) =
р(р + 2) ’
462_____Специальные системы управления
На рис. 4.47 кривой 1 представлен переходный
процесс в нескорректированной релейной системе при
единичном ступенчатом изменении входного сигнала w(Z),
а кривой 2 - переходный процесс в скорректированной
системе при том же возмущении.
Рис. 4.47
11.3.2. Обучающиеся системы
Системы, предназначенные для целенаправленного
совершенствования структуры и алгоритмов действия на
основе анализа накапливаемой в процессе функциони-
рования информации, относятся к классу обучающихся
автоматических систем.
Под обучением обычно понимают процесс выработ-
ки в некоторой системе той или иной реакции на внешние
сигналы путем многократного воздействия на систему
и внешней корректировки. Внешняя корректировка,
или, как ее часто называют, поощрение или наказание,
осуществляется обучающей системой, которой известна
желаемая реакция на определенное внешнее воздействие.
Самообучение отличается от обучения отсутствием вне-
шней корректировки. Кроме того, в процессе функциони-
рования такой системы могут меняться и цели управления.
Типичным представителем систем такого вида является
человеко-машинная система, которая относится к классу
сложных динамических образований, состоящих из вза-
имосвязанных элементов различной природы: человек,
коллектив людей, технические устройства и их комплексы,
природные компоненты и т.п., и с разным качеством свя-
зей: прямые, обратные, положительные, отрицательные,
жесткие, гибкие и др.
11. Адаптивные системы управления 463
Обучение решению задач может осуществляться
двумя существенно различными методами. Первый состо-
ит в сообщении обучаемому алгоритма решения задачи.
Можно считать, что человек, определяя структуру автомата
или разрабатывая программу для управляющей машины,
обучает ее решению задачи указанным методом. К задачам
этого типа можно отнести задачи, например, отыскания
наиболее эффективного алгоритма поиска экстремума
показателя качества посредством перебора ряда заранее
заданных алгоритмов и выбора того из них, который при
данной ситуации дает максимальный эффект.
Этот метод бесполезен для задач, которые мы умеем
решать интуитивно, хотя алгоритм решения нам неиз-
вестен. Например, мы можем отличать женское лицо от
мужского, буквы, написанные разным почерком, и т.п. В
этом случае эффективен второй метод, который основан на
обучении с помощью примеров. Типичным представителем
систем, обучающихся этим методом, являются системы
распознавания образов. Заметим, что, усвоив некоторое ог-
раниченное число распознаваемых объектов, обучающаяся
система приобретает способность правильно распознавать
и новые объекты того же класса.
Рассмотрим некоторые принципы построения сис-
тем распознавания образов. Наблюдаемую в данный момент
ситуацию будем называть объектом. Группа различных
объектов, характеризуемая определенной совокупностью
признаков, свойственных объектам только данной группы,
называется образом. Так, если к признакам, по которым
устанавливается образ, отнесены черты человеческого
лица, то образом для группы лиц может быть женское или
мужское лицо, лицо ребенка или взрослого, русского или
грузина, но, например, не образ группы лиц, живущих в
данном доме.
Признаки, по которым устанавливается образ,
называются информативными. Помимо информативных
любой объект имеет множество других признаков, не су-
щественных для опознания образа. Так, для выделения
мужского лица не информативны цвет волос, глаз и т. д.,
но для выделения лица блондинов, брюнетов ит. д. эти
464 Специальные системы управления
признаки информативны. Одна из основных трудностей
при распознавании образов состоит в том, что очень часто
информативные признаки не могут быть полно и точно
описаны на математическом, логическом или каком-либо
другом подобном языке, хотя известно, что они существу-
ют, так как наблюдатель достаточно уверенно и с малой
вероятностью ошибки их обнаруживает.
Распознавание образов при обучении показом ос-
новано на преобразовании данных наблюдения над объек-
тами в совокупности чисел и на обработке этих чисел по
специальным алгоритмам. Для этих операций полезным
оказывается понятие метрического пространства. Каждому
признаку (не только информативному) можно приписать
некоторое число, не совпадающее с числами, приписан-
ными другим признакам. Тогда всей совокупности # при-
знаков объекта будет соответствовать совокупность чисел,
которые можно рассматривать как координаты некоторой
точки в //-мерном пространстве признаков. Таким образом,
каждый объект в данном пространстве отображается точ-
кой, а образ - совокупностью точек, обладающих общими
информативными признаками. Если удалось выполнить
отображение признаков в пространстве так, что различным
образам соответствуют непересекающиеся области, внут-
ри которых точки расположены достаточно близко друг
к другу, и между этими областями могут быть проведены
разделяющие их гиперплоскости, то решение задачи рас-
познавания образа облегчается.
К сожалению, проблема построения пространств
признаков, в которых гипотеза разделимости образов по-
верхностями оказывается справедливой, не имеет общего
решения. Во многих же задачах образы взаимно проникают
друг в друга, делая невозможным построение гиперповер-
хности. Но тем не менее на основе гипотезы разделимости
удалось построить алгоритмы для опознания букв, цифр
и других символов.
Рассмотрим один из известных алгоритмов распоз-
навания - пандемониум. Это одна из первых машин, пост-
роенных для распознавания образов. Согласно упрощенной
схеме пандемониума (рис. 4.48), образ 4 характеризуется
совокупностью величин х ~ ) в пространстве призна-
11. Адаптивные системы управления 465
ков X, воспринимаемых системой датчиков Д (рецепторов).
Области, соответствующие двум образам, могут оказаться
разделенными сложной поверхностью (рис. 4.49, а), что
затрудняет построение алгоритма распознавания. Поэтому
предварительно с помощью вычислительных устройств ВУ
(z = 1, N) производят построение спрямляющего пространс-
тва Y , на которое отображается пространство признаков X.
С этой целью вычислительные устройства вырабатывают
некоторые функции состояния датчиков y.t = / (xt, х2, .,., xN),
причем функции / выбираются так, чтобы множество
точек утЕУ в пространстве У, соответствующих одному
образу, попало в область Д , а соответствующих другому
образу - в область В2 (рис. 4.49, б), и между областями В} и
В2 можно было бы провести разделяющую гиперплоскость:
ВУ1
У)
%1
Рис. 4.48
Если такая гиперплоскость существует и построена,
то для любой точки Вх линейная форма S' будет иметь один
знак, а для области В2 - противоположный. По этому знаку
можно судить, к какому из двух классов образов принадле-
жит показанный объект.
466 Специальные системы управления
Функция S образуется путем суммирования выхо-
дов усилителей с переменными коэффициентами усиления
к. (рис. 4.48), а затем поступает в решающий блок РБ,
выявляющий знак S и выдающий в соответствии с этим
знаком код образа. Этапу распознавания предшествует
этап обучения, который заключается в том, что оператор
показывает пандемониуму серию образов и контролирует
правильность его ответов. Если пандемониум ошибся, то
оператор подает сигнал на управляющее устройство УУ.
Число ошибок за некоторый промежуток Т представляет
собой некоторую функцию F(k^ к},.,., к . Предполагается,
что эта функция имеет минимум в пространстве К. Так как
функция F заранее неизвестна, то
УУ осуществляет поиск
ее экстремума, т. е. УУ, по существу, является многока-
нальной экстремальной системой.
Рис. 4.49
Заметим, что пандемониум действует, исходя из
того, что задача построения пространства признаков X, в
котором справедлива гипотеза разделимости образов, ре-
шена. На практике, однако, воспринимаемые рецептором
входные величины не вполне соответствуют информатив-
11. Адаптивные системы управления 467
ным признакам и, следовательно, не гарантируют выпол-
нения гипотезы разделимости.
Примером попыток преодоления этой трудности
является построение в 1958 г. Розенблатом классифициру-
ющей машины, названной им перцептрон (лат. - воспри-
ятие). Перцептрон был задуман как модель восприятия
изображений системой зрения живого организма. Подобно
тому, как зрительный образ воспринимается по элементам
рецепторами сетчатки глаза, в перцептроне восприятие
объекта осуществляется группой элементов S, называемых
также рецепторами (рис. 4.50). Каждый из рецепторов
может находиться в возбужденном либо невозбужденном
состоянии. Для преобразования пространства рецепторов
в перцептрон введена группа ассоциативных элементов А.
Так как для построения разделяющих поверхностей тре-
буемый закон преобразования неизвестен, то связи между
рецепторами иА-элементами устанавливаются случайно.
Каждый из рецепторов может быть подключен к данному
A-элементу или со знаком плюс (возбуждающая связь)
или со знаком минус (тормозящая связь) или вообще не
подключен. A-элемент работает как сумматор с порогом:
он возбуждается, если сумма сигналов, поступающих
к нему от рецепторов, превысит некоторую величину.
Выходы A-элементов через усилители У с переменными
коэффициентами Л передаются в сумматор Значения
Л устанавливаются в процессе обучения.
Рие. 4.50
468 Специальные системы управления_____________________
Разобьем все рецепторы на две группы - возбужда-
ющую и тормозную в зависимости от знака связи с A-эле-
ментами. Если в первой группе / элементов, а во второй т ,
то в некоторый дискретный момент времени п имеем:
/ т
<г(п) = Уя1(.(л)х1(.(и)- Ул27(л)х2у(я) = J-Х, (4-136)
W 7=1
где индексами 1/ отмечены рецепторы первой группы, а ин-
дексами 2j — второй.
Если > V (а > 0), то система относит изображение
к одному образу (например, на выходе решающего блока РБ
Л = 1 » Уг “ ° )’ если » то - к другому ( = 0, у2 = 1).
Этапу распознавания предшествует период обуче-
ния, который сводится к выбору коэффициентов усиления
Л/(у). Величины А фиксируются на таких минимальных
значениях, при которых для объектов данного образа раз-
ность (4.136) имеет требуемый знак и величину. Это обеспе-
чивает наиболее широкий охват объектов данного образа.
Перцептрон далеко не всегда в состоянии вырабаты-
вать понятия или определения, которые совпадают с пред-
ставлениями оператора. Это вполне понятно: при построе-
нии его конструктор, не зная точно, какой должна быть
внутренняя структура машины и пытаясь воспроизвести
схему зрительного аппарата, хотя и она не была известна
ему во всех деталях, понадеялся на удачный случай (пер-
воначальный выбор связей) и на то, что процесс обучения
в какой-то степени выправит ошибки.
Исследования показали, что возможности пер-
цептрона весьма ограничены. Например, при различении
прямоугольников вытянутых а горизонтальном и верти-
кальном направлениях, количество ошибок достигало
6% , при различении произвольно расположенных окруж-
ностей и прямоугольников разных размеров - 33%, а при
различении прямоугольников и эллипсов - 50%. Иными
словами, первая задача решалась удовлетворительно,
вторая - плохо, а при решении третьей перцептрон прак-
тически не работал.
Рассмотренные распознающие устройства - панде-
мониумы и перцептроны относятся к классу специализи-
11. Адаптивные системы управления__469
рованных систем, которые, вообще говоря, являются мало-
эффективными. Однако, дальнейшее их развитие привело
к созданию так называемых нейронных сетей, которые
решают подобные задачи значительно эффективнее.
Поиски эффективных способов обучения систем рас-
познавания образов привели к разработке целого ряда ориги-
нальных методик, из которых особый интерес представляет
метод потенциальных функций. Здесь при показе некото-
рой точки х , принадлежащей к образу X, компьютер стро-
ит поверхность, соответствующую некоторой функции F.
Для всех показанных точек, принадлежащих одно-
му образу, строятся такие функции и затем суммируются.
В результате для каждого из образов получают потенци-
альные поверности, каждая из которых имеет вершину
над областью, принадлежащей соответствующему образу.
Геометрическая интерпретация построения функций при
двух признаках jq и х2 иллюстрируется рис. 4.51. При
показе новой точки после сравнения значений ее потен-
циальных функций, определяемых поверхностями I и
II, точку относят к тому образу, для которого значения
потенциальной функции оказались большими. Заметим,
что метод потенциальных функций, предложенный в 60-х
годах прошлого столетия, по существу является предшест-
венником нечеткой логики, основные положения которой
рассмотрены в следующей главе.
470 Специальные системы управления
Из изложенного выше следует, что распознавание
образов представляет собой первую и важную ступень обра-
ботки информации, получаемой нами при помощи органов
чувств и приборов. Вначале мы распознаем предметы, за-
тем ~ отношения между предметами, а также между пред-
метами и нами, т. е. ситуации. Наконец, мы распознаем
изменения этих ситуаций, т. е. явления. Именно это дает
возможность обнаружить закономерности и прогнозиро-
вать на их основе дальнейший ход явлений и их развитие,
что существенно облегчает задачу управления сложными
системами.
11.3.3. Искусственные нейронные сети
Под искусственными нейронными сетями подразу-
мевают вычислительные структуры, состоящие из большо-
го количества однотипных элементов (нейронов), каждый
из которых выполняет относительно простые функции, а
вся сложность и гибкость функционирования в основном
определяется связями между нейронами. Такой подход,
иногда называемый коннекционизмом (англ, connection
- связь), предполагает, что широкие возможности систем
связи компенсируют бедность выбора элементов, их ма-
лую надежность и возможность разрушения части сети.
Процессы, происходящие в искусственных нейронных
сетях, иногда ассоциируют с процессами, происходящими
в нервной системе живых организмов, что и послужило
причиной возникновения этого термина*!
Первые нейронные сети (НС) предназначались для
решения задач классификации и распознавания образов.
Дальнейшее развитие НС позволило расширить область
применения нейросетевого подхода, в частности, он начал
применяться для решения задач управления. Здесь наибо-
лее широкое распространение получали многослойные НС
прямого распространения (многослойные перцептроны), в
которых элементарным преобразователем является искус-
Ф) По аналогии с функционированием живых организмов возник и термин «генетическое
программирование», под которым понимают методику создания компьютерных про-
грамм для задач, алгоритм решения которых априори неизвестен, например, для задачи
нахождения глобального экстремума функции нескольких переменных, к которой сводят-
ся многие задачи синтеза АСУ.
11. Адаптивные системы управления 471
ственный нейрон, представленный на рис. 4.52. Матема-
тическое описание этого нейрона имеет вид:
5 = > 7ixi + й
(4.137)
У = F(s)
где У i — весовые коэффициенты;
п - число входов в нейрон;
b - постоянное смещение;
F(s) — передаточная функция нейрона, иногда называемая
функцией активации, в качестве которой обычно исполь-
зуется так называемая сигмоидальная функция вида:
(4.138)
> Yi
Рис. 4.52
Как вытекает из (4.138) выходная переменная
нейрона лежит в пределах от 0 до 1 (при -оо < 5 < оо )? а сам
нейрон обладает свойством усиливать слабые сигналы
сильнее, чем большие, так как последние соответствуют
областям аргумента, где сигмоид F(s) имеет пологий
наклон. Это свойство предотвращает насыщение нейронов
от больших сигналов.
Нейронная сеть состоит из ряда связанных между
собой нейронов, обычно образующих несколько слоев. На
472 Специальные системы управления
рис. 4.53 приведена простейшая двухслойная нейронная
сеть. Заметим, что нейроны входного слоя сети (синапсы**),
служащие лишь для размножения сигналов, при опреде-
лении числа слоев не учитываются.
Входной Скрытый Выходной
СЛОЙ слой слой
Рис. 4.53
Чтобы нейронная сеть могла решить поставленную
задачу ее необходимо предварительно обучить. Сущность
обучения состоит в настройке весовых коэффициентов
нейронов при показе примеров из обучающей выборки.
Эффективность использования нейронных сетей устанав-
ливается так называемыми теоремами о полноте, смысл
которых сводится к тому, что любая непрерывная функция
на замкнутом неограниченном множестве может быть при-
ближенно выражена функциями, полученными, нейронны-
ми сетями. Таким образом НС являются универсальными
аппроксиматорами.
Основным алгоритмом обучения многослойных пер-
цептронов (МСП), используемых в системах управления,
является алгоритм обратного распространения. При этом
НС обучается воспроизводить зависимость, заданную набо-
ром из N пар точек ; i = 1, Af), с минимизацией средней
квадратической ошибки:
** Синапс (гр. synapsis) - соединение, связь.
11. Адаптивные системы управления 473
<4-,39)
i=\
где УPi - выход НС при поступлении на ее вход xz (i = 1, N),
рассчитанный в соответствии с принятой активационной
функцией нейрона, например, вида (4.138), при а =
Наиболее распространенным алгоритмом обучения,
является алгоритм, реализующий градиентный метод
поиска минимума выражения (4.139). При этом оптимизи-
руемыми переменными являются весовые коэффициенты
yiJk - z-ый коэффициент j-го нейрона в £-ом слое. Помимо
градиентного метода разработан ряд более эффективных,
в смысле быстродействия, алгоритмов поиска экстремума
функции (4.139). Однако, все они предназначены для поиска
локального экстремума, в связи с чем, для увеличения веро-
ятности нахождения глобального экстремума необходимо
проводить обучение несколько раз с разными начальными
весами нейронов или пользоваться специальными алгорит-
мами, предназначенными для решения задач глобальной
оптимизации.
Кроме многослойных перцептронов в системах
управления находят применение двухслойные радиаль-
ные нейронные сети (РНС), представляющие собой двух-
слойную нейронную сеть. Первый слой этой сети состоит
из так называемых радиальных нейронов, описываемых
соотношением:
(4.140)
где z j - выходной сигнал j -го нейрона;
х — входной сигнал сети, подаваемый на каждый нейрон
рассматриваемого слоя;
bj.Cj - постоянные параметры, которые могут настра-
иваться в процессе обучения.
Часто в качестве функции (4.140) используется
функция Гаусса.
474
Специальные системы управления
<р(з) = е
(4.141)
Второй слой РНС осуществляет преобразование
выходных сигналов. В частности, если выходной сигнал
сети скалярная величина, то этот слой состоит из одного
нейрона, осуществляющего вычисление средневзвешенно-
го значения выходных сигналов первого слоя
(4.142)
где у t - весовые коэффициенты, числовое значение которых
получено в процессе обучения;
п - число нейронов первого слоя;
N - число элементов обучающей выборки.
Допустим, что обучающая выборка состоит из ?V- пар
значений (х., у.) . В простейшем случае при обучении фор-
мируется радиальный слой из п = N нейронов с параметра-
ми Cj (в соответствии с (4.140)), а параметры второго слоя
у. выбираются из условия соответствия выходной величи-
ны НС z; заданному значению у.. С целью упрощения НС
разработаны также алгоритмы обучения, в которых число
радиальных нейронов уменьшено, т. е. п < N.
Для реализации динамических операторов преоб-
разования сигнала в НС используется элемент запаздыва-
ния (задержки) на г -шагов, который обозначим V ~г. На
рис. 4.54 приведена возможная структура нейросетевого
дискретного динамического оператора, описываемого
уравнением:
Л = , X,..! ; y._t, у,._2 ,...у^),
(4.143)
где (р — функция, реализуемая многослойным перцептроном.
Таким образом, использование в нейронных сетях
элементов запаздывания V ~г позволяет реализовать раз-
нообразные динамические звенья устройства управления с
произвольными гладкими статическими характеристика-
ми. в соответствии с выбранным алгоритмом управления.
11. Адаптивные системы управления 475
Рис. 4.54
Рассмотрим некоторые системы с нейросетевым
управлением.
1. Последовательная схема нейросетевого управле-
ния приведена на рис. 4.55. Обученная нейронная
сеть (НС), на вход которой поступает информация
о контролируемых возмущениях f , стремится
воспроизвести обратную динамику объекта управ-
ления (ОУ). При этом обеспечивается равенство
задающего у* и выходного у сигналов системы
управления, работающей по замкнутому циклу.
Рис. 4.55
Обучение НС может производиться разными спосо-
бами. В частности, при обучении в процессе функциони-
476 Специальные системы управления
рования системы НС настраивается таким образом, чтобы
сигналошибки А (рис. 4.55, пунктирная линия) был сведен
к минимуму. Другой способ обучения предполагает введе-
ние в систему дополнительной нейронной сети НСэ (эмуля-
тора), которая выполняет имитационное моделирование
ОУ (рис. 4.56). При этом эмулятор может использоваться
как для определения математической модели ОУ, так и для
обучения управляющей НС.
2. Параллельная схема нейросетевого управления
приведена на рис. 4.57 (сплошные линии). В данном
случае НС исполняет роль корректора выходного
сигнала управляющего устройства иу. При этом
на вход ОУ подается скорректированный сигнал
и = г/ + и .
У нс
Рис. 4.57
Обучение НС может производиться по схеме с об-
ратной связью (рис. 4.57, пунктирная линия). После за-
вершения обучения нейронная сеть принимает участие в
управлении объектом вплоть до нового цикла обучения.
11. Адаптивные системы управления
477
3. Схема нейросетевого управления с обратной связью
представлена на рис. 4.58. Здесь нейронная сеть
выполняет функцию управляющего устройства в
замкнутой системе. Достоинством этой системы яв-
ляется способность обеспечивать высокое качество
управления при нестационарности ОУ.
Рис. 4.58
Для обучения НС, функционирующих в замкнутых
системах могут быть применены системы с эмулятором.
Пример 4.18
Пусть объект управления представляет собой тех-
нологический аппарат, производящий разделение
исходного продукта на отдельные компоненты,
различаемые по определенному признаку. В част-
ности, для разделения угольной мелочи на низко-
зольные {концентрат) и высокозольные {отходы)
конечные продукты обычно используется флотаци-
онная машина, на вход которой поступает уголь-
ная пульпа*), характеризующаяся следующими
контролируемыми переменными: производитель-
ностью Qn, концентрацией твердого компонента
С, зольностью исходного угляА^. Разделение уголь-
ных частиц на концентрат и отходы происходит
благодаря свойству одних частиц {концентрата)
прилипать к воздушным пузырькам и всплывать
на поверхность, а других {отходов) - оставаться в
воде. Этот процесс и называется флотацией {англ,
всплытие), на ход которого решающее влияние
оказывают реагенты вспениватель и собиратель,
добавляемые в пульпу. Меняя расходы этих реаген-
тов {qa, q6) можно управлять процессом разделения
исходного угля на концентрат и отходы. В качес-
тве выходных переменных, характеризующих ко-
нечные продукты разделения. Обычно принимается
Жидкость (вода) с находящимися в ней во взвешенном состоянии твердыми частицами
(мелким углем размером до 0,5 мм).
478
Специальные системы управления
зольность концентрата Ad и отходов Ad.
Помимо перечисленных входных переменных {Qn, Сп,
А») на разделительный процесс существенное вли-
яние оказывает целый ряд параметров {например,
фракционный и гранулометрический составы ис-
ходного угля), учесть которые не представляется
возможным. Это обуславливает индетерминизм
объекта и делает создание достаточно точной его
математической модели практически неразреши-
мой задачей. Именно в этом случае эффективно
применение нейросетевых систем управления, на-
пример, использующих эмулятор для выполнения
имитационного моделирования объекта управ-
ления (рис. 4.56). При этом адекватность модели
устанавливается по реализациям входных x{f)
и выходных y(f) переменных процесса. Реализуем
имитационную модель объекта с помощью допол-
нительной нейронной сети (НСэ), используя данные
промышленного эксперимента.
Решение
Так как теоретическое обоснование выбора необхо-
димых и достаточных свойств нейронной сети при решении
задачи управления конкретным объектом пока отсутству-
ют, то практически единственной возможностью получения
результата является испытание различных сетей и сравне-
ния результатов моделирования. В ходе проведения вычис-
лительных экспериментов было исследовано около ста ты-
сяч различных вариантов конфигурации сети. В результате
установлено, что наиболее точная модель получается при
реализации эмулятора трехслойной сетью с 5 входами (gn,
С , Ad, qa, е?б). При этом количество перцептронов в первом
слое равно восьми, во втором - пяти, в третьем - одному.
Каждый перцептрон реализует скалярную функцию век-
торного аргумента вида (4.137) с функцией активации вида
(1.138). Структурная схема сети приведена на рис. 4.59.
Для обучения нейронной сети эмулятора (выбора
значений весовых коэффициентов у., i = 19 5 ) лучшим оказал-
ся градиентный метод, использующий алгоритм обратного
распространения ошибки. В качестве последней была при-
нята ошибка имеющихся экспериментальных данных.
11. Адаптивные системы управления 479
Вход Первый слой Второй слой Выход
л---ч г--------------------ч (---------------------ч (--------------------ч
Рис. 4.59
Адекватность модели оценивалась параметрами
регрессии, определяющими наклон а и смещение /3 ли-
нии регрессии в координатах эксперимента хэ - модель
а а также тесноту линейной связи, характе-
ризуемую коэффициентом корреляции г . При точном сов-
падении выходов (А*, А^) эксперимента и модели значения
параметров составляют: а = 1, /? =0 (рис. 4.60, пунктирная
линия). В нашем случае были получены следующие расчет-
ные значения параметров регрессии: а =0,94 , (3 =0,43 ,
г = 0,97 (рис. 4.60, сплошная линия), что указывает тесную
связь выходами модели и объекта.
6 7 8 9 10
Рис. 4.60
480 Специальные системы управления
Таким образом малые изменения выходов объекта
адекватно отражаются в выходах нейронной сети, что яв-
вляется доказательством ее высокого качества.
* * *
Нейросетевые системы управления, обладая целым
рядом достоинств, не лишены и некоторых недостатков, к
основным из которых относятся:
1) остановка процесса обучения НС (нахождение оп-
тимальных значений весовых коэффициентов) в локальном
минимуме критерия эффективности, что приводит к необ-
ходимости применения алгоритмов глобальной оптимиза-
ции, и, следовательно, к увеличению времени обучения;
2) невозможность введения в нейронную сеть апри-
орной информации о системе, так как необходимую инфор-
мацию НС получают только в процессе обучения;
3) отсутствие достаточно полной теоретической
базы, позволяющей обоснованно выбрать тип и структуру
НС, что обуславливает необходимость применения алгорит-
мов самоорганизации и, следовательно, к дополнительным
затратам времени.
Отмеченные недостатки в ряде случаев приводят к
нежелательному увеличению времени обучения. В связи с
этим разработка компьютерных технологий, повышающих
быстродействие нейросетевых управляющих устройств
является актуальной задачей.
В качестве иллюстрации применения нейронных
сетей для целей управления рассмотрим автоматическую
систему управления ориентированием подвижного про-
мышленного робота в пространстве. Подвижный робот
используется для выполнения некоторых технологических
операций в тех местах, где по каким-то причинам не могут
работать люди (высокие температуры, загазованность,
запыленность и т.п.). Робот перемещается на колесах,
приводимых в движение электродвигателями, и имеет
возможность поворачивать в любую сторону и разворачи-
ваться на месте.
Для обеспечения перемещений робота по промыш-
ленному помещению он оборудован системой навигации,
11. Адаптивные системы управления 481
построенной на основе распознавания образов различных
участков помещения. На теле робота установлено около двух
десятков лазерных датчиков, определяющих расстояние
до объектов на пути робота. Датчики ориентированы в про-
странстве под углом 15° относительно друг друга, охватывая
угол примерно в 270° относительно передней части робота.
Любое промышленное помещение, в котором пе-
ремещается робот, может быть разделено на ряд типовых
объектов (рис. 4.61): коридор (КО), перекресток (ПР), Т-
образный перекресток (ТПР), левый поворот (ЛП), правый
поворот (ПП), тупик (ТП), левый угол (ЛУ), правый угол
(ПУ). Для распознавания образов объектов промышленного
помещения в системе навигации робота используется трех-
слойная нейронная сеть. Первый слой (входной) и второй
(внутренний) имеют количество нейронов, соответствующее
числу датчиков на теле робота. Третий (выходной) слой име-
ет число нейронов, соответствующее числу образов, которые
должен распознавать робот ( в нашем случае восемь).
Рис. 4.61
Согласно схеме системы навигации робота (рис. 4.62)
сигналы с лазерных датчиков, характеризующие расстоя-
ния до ближайших объектов, нормируются и подаются на
входной слой нейронной сети. Далее сигналы проходят по
слоям сети, преобразуясь в соответствии с функциями пе-
реключения нейронов. В результате на нейронах выходного
слоя появляется некоторая комбинация сигналов, которая
расшифровывается декодером, принимающим решение об
опознании полученного образа того или иного объекта.
16 Теория автоматического управления
482
Специальные системы управления
ДАТЧИКИ U8) (19
БЛОК НОРМИРОВАНИЯ
Входной слой
2 ) Выходной слой ( 7
Внутренний слой
19
18
19
18
ДЕКОДЕР
ОБРАЗ
Рис. 4.62
Описанная нейронная сеть обучается при помо-
щи специальных тестов, во время которых производится
сравнение выдаваемых нейронами комбинаций сигналов
с требуемыми для правильного распознавания образов.
После того как количество получаемых ошибок сводится
к минимуму, нейронная сеть готова к работе в составе сис-
темы навигации робота.
Центральная система управления робота, имеющая
задание на произведение каких-либо действий в той или
иной части промышленного помещения, на основании ин-
формации о местонахождении робота, получаемой от систе-
мы навигации, принимает решение о направлении движе-
ния и подает управляющие сигналы на электродвигатели
колес робота. В результате обеспечивается возможность
перемещения робота по производственному помещению без
участия оператора, который только дает роботу задание на
выполнение тех или иных операций.
483
12. Нечеткие системы управления
Традиционный подход к постановке и решению
задач управления основывается на предположении, что
математическая модель объекта и цель управления этим
объектом известны и однозначно определяют алгоритм
функционирования управляющего устройства. Однако,
в силу принципа несовместимости, согласно которому
сложность системы и точность, с которой ее можно описать
традиционными математическими методами, противоречат
друг другу, построить адекватную модель удается далеко
не всегда. В этом случае строгие и однозначные процедуры
синтеза алгоритмов управления неприменимы. Именно
поэтому возникла необходимость в разработке нового ма-
тематического аппарата, позволяющего решать задачи уп-
равления и принятия решений в обстановке, когда объект
и условия его функционирования недостаточно изучены, а
модель объекта и цель управления слабо формализованы.
Такой аппарат и был предложен американским математи-
ком Л. Заде, основы которого были сформулированы в ста-
тье “Fuzzy Sets” (1965 г.), название которой на русский язык
чаще всего переводят как нечеткие множества (fuzzy - англ,
размытый, мутный). Теория нечетких множеств, возник-
шая на стыке классической теории множеств и формальной
логики, нашла практическое применение при построении
сложных систем управления.
12.1. Формальная (четкая) логика
Введем некоторые определения.
Понятие - это результат отражения в сознании че-
ловека общих свойств (признаков) группы предметов или
явлений, которые существенно необходимы для опреде-
ления рассматриваемой группы. Суждение - это имеющее
смысл языковое выражение или форма мысли, в которой
посредством понятий что-либо утверждается об опреде-
ленном объекте. Умозаключение — это вывод суждения из
других суждений, называемых посылками. Простейшим
умозаключением является силлогизм. Силлогизм - это
16*
484 Специальные системы управления
умозаключение, состоящее из двух посылок (суждений)
и вывода.
Пример 4.8
Рассмотрим следующий силлогизм,
1-я посылка: если А, то В;
2-я посылка: если В, то С,
Определим содержание вывода.
Решение
Из первой посылки следует, что если есть множест-
во А, то множество В есть в любом случае. В свою очередь,
если есть множество В, то и множество С также есть в любом
случае. Отсюда следует вывод: если есть множество А, то
имеет место и множество С.
Пусть конкретная форма рассматриваемого силло-
гизма имеет вид:
1-ая посылка : все студенты (А) являются отлични-
ками (В);
2~ая посылка : все отличники (В) учатся в вузах (С);
Вывод: все студенты (А) учатся в вузах (С);
Формально этот силлогизм ничем не отличается от
рассмотренного выше, но содержание посылок неправиль-
но (ложно), а вывод, полученный логически корректным
путем правильный (в других случаях может быть и непра-
вильный). Следовательно, чтобы опровергнуть полученный
вывод, необходимо проанализировать посылки и, если они
ложны, то нет необходимости проверять правильность са-
мого доказательства.
В 40-х годах XIX в. английский ученый Дж. Буль
предложил каждому суждению в зависимости от его содер-
жания присвоить либо истинное значение, обозначив его
цифрой 1, либо ложное - 0, и в дальнейшем оперировать
именно понятиями «истинно» и «ложно», отвлекаясь от
внутреннего содержания самого суждения. Функцио-
нальные построения, связанные с четкими логическими
операциями над суждениями, служат предметом булевой
алгебры, базовыми логическими операциями которой яв-
ляются:
12. Нечеткие системы управления 485
1. Отрицание - это суждение С, которое истинно тог-
да и ^только тогда, когда посылка А ложна (запись
С —А читается так: «С равно не Л»).
2. Конъюнкция (лат. связь) двух суждений А и В - суж-
дение С, которое истинно тогда и только тогда, когда
А и В истинны (запись А кВ, читается: «А и В»).
3. Дизъюнкция (лат. разобщение) двух суждений А и
В - суждение С, которое истинно в том случае, когда
истинно хотя бы одно из этих суждений (запись А
v В, читается: «А или В»).
В булевой алгебре логические операции чаще всего
описываются с помощью таблиц истинности, основные из
которых представлены в Таблице 4.1. В предпоследнем
столбце таблицы приведены значения логической функ-
ции, называемой импликацией (лат. - сплетение), которая
представляет собой суждение С, которое ложно тогда и
только тогда, когда А истинно, а В ложно (запись А—>В,
читается: «Если Л, то В»). Последний столбец Таблицы4.1
свидетельствует о том, что эта логическая операция может
быть также выражена с помощью базовых операций «от-
рицание» и «дизъюнкция».
Таблица 4.1
Л в л ЛлВ Л vB А^В Л vB
0 0 1 0 0 1 1
0 1 1 0 1 1 1
1 0 0 0 1 0 0
1 1 0 1 1 1 1
12.2. Нечеткая логика (фази-логика)
4
Идея нечеткой логики заключалась в том, чтобы
принадлежность элементов к тому или иному множеству
определять не в виде однозначных ответов типа «да» или
«нет» (или логических булевых переменных 1 и 0), а пос-
редством ответов типа: «может быть», «вероятнее всего» и
т. п., или с помощью коэффициентов истинности, которые
486 Специальные системы управления
могут принимать любые значения между 1 и 0. В частнос-
ти, 30-летнего человека можно отнести и к молодым и к
немолодым категориям (множествам) людей, полагая,
например, что он относится с вероятностью 0,65 к моло-
дым, а с вероятностью 0,35 к немолодым. Такой подход к
описанию множества элементов, безусловно, расплывчат,
но позволяет использовать строгие математические проце-
дуры теории множеств для формализации качественных
словесно выраженных знаний о свойствах объекта и для
составления четкой процедуры получения умозаключений
из нечетко заданных исходных условий. Этот подход пре-
доставил возможность математически оперировать такими
часто встречающимися размытыми характеристиками как,
например, «очень много», «много», «немного», «мало»,
«очень мало».
Совокупность методов математического описания
нечетких множеств и формализация получения логических
выводов из таких же предпосылок и получила название
нечеткой или фази-логики.
12.2.1. Основные понятия нечеткой логики
К базовым понятиям фази-логики относятся «не-
четкое множество» и «лингвистическая переменная».
Известно, что классическая (четкая) теория мно-
жеств является разделом математики, изучающим общие
свойства множеств, понятие которых не определяется, а
лишь поясняется на примерах (множество книг на полке,
множество точек на прямой и т. д.). То, что данный элемент
х принадлежит множеству X записывают в виде хЕ:Х.
Факт принадлежности элемента х к множеству М, которое
является подмножеством базисного множества X, опре-
деляется с помощью функции принадлежности
которая для четких множеств принимает значения 1, если
элемент х принадлежит множеству М, и 0, если не прина-
длежит ему, т. е.
(4.144)
^^Нечеткие системыуправления 487
Если под переменной х понимать, например, темпе-
ратуру воздуха, а под множеством М отрицательные числа,
то единичная ступенчатая функция будет характеризовать
четкое множество отрицательных температур М, которое
условно можно назвать «мороз» и графически изобразить
в виде зависимости //1(х)(рис. 4.63).
Нечеткое множество, в отличие от четкого, харак-
теризуется непрерывной функцией принадлежности Ц2(х),
которая может принимать любые промежуточные значения
от 0 до 1, отображая все значения базисного множества
X в этом интервале и устанавливая каждому значению х
степень его принадлежности к нечеткому множеству М,
которое в общем случае может быть записано в виде:
Для рассматриваемого случая множество М можно
представить как нечеткое множество температур в преде-
лах [- 5, 5 , которое можно назвать размытым термином
«холод ».
Функции принадлежности, характеризующие не-
четкие множества, могут быть заданы аналитически или
графически и чаще всего носят нелинейный характер,
но на практике аппроксимируется кусочно-линейными
зависимостями, основные из которых представлены на
рис. 4.64.
488 Специальные системы управления
Последняя функция принадлежности, описыва-
ющая четкое множество содержащее всего одну пару:
1C*i )ьгДе Дл/C*i) 1
называется синглтоном.
4палт1кжт.
Xj X
Рис. 4.64
Лингвистической переменной называют перемен-
ную, которая задана на количественной шкале базисной
переменной х и принимает значение в виде слов или сло-
восочетаний. Отдельные значения лингвистической пере-
менной, называемые лингвистическим термом, задаются
не в виде конкретного числа, а с помощью функций прина-
длежности. Другими словами каждому терму соответствует
определенное нечеткое множество.
Рис. 4.65
Например, если температура в жилом помещении
характеризуется такими нечеткими понятиями как: «хо-
лодно» - X, «прохладно» - П, «норма» - Н, «тепло» - Т,
«жарко» - Ж, то совокупность М этих пяти значений
рассматривается как лингвистическая переменная, при-
нимающая эти значения. Эта переменная полностью
определена, если заданы множество термов и множество
соответствующих функций принадлежности (рис. 4.65).
12. Нечеткие системы управления 489
Заметим, что вместо абсолютных значений базисных
переменных х часто используют их нормированные зна-
X — х
чения хн. В нашем случае хн =---, при х() = 20° С.
12.2.2. Основные операции с нечеткими
лингвистическими переменными
Для определения логических операций с лингвис-
тическими переменными может быть использована Таб-
лица истинности 4.1, описывающая операции над четкими
логическими переменными. Анализ данных этой таблицы
позволяет записать следующие соотношения для базо-
вых четких логических операций и их схемные аналоги
(рис. 4.66).
1. Отрицание А = 1~ЦА ; = {0,1}. Здесь лампа Л
тухнет при включении реле и размыкании контакта
А (рис. 4.66, а).
Рис. 4.66
2. Конъюнкция А л В = Здесь лампа за-
горается при включении двух реле (/*л = =1) и
одновременном замыкании двух контактов А и В
(рис. 4.66, б).
3. Дизъюнкция, A v В = }. Здесь лампа
загорается при включении одного из двух реле
или обоих вместе (дл = 1,дд = 0 ; = 0,дв = 1,
дл=дй = 1)и соответственно замыкании контакта
А или В или обоих вместе (рис. 4.66, в).
490 Специальные системы управления
По аналогии с рассмотренными четкими логически-
ми операциями для нечеткой логики можем записать:
1. Нечеткое отрицание (фази-дополнение) терма А
в виде:
(х) = 1 - (х),
(4.145)
Функции принадлежности термов А и А могут
иметь вид, представленный на рис. 4.67 сплошной и пунк-
тирной линиями соответственно.
2. Нечеткую конъюнкцию (фази-пересечение) двух
лингвистических термов А и В, заданных функци-
ями принадлежности р,А(х) и (рис. 4.68), в
виде нечеткого терма С, функция принадлежности
которого определяется выражением:
(4.146)
Рис. 4.68
12. Нечеткие системы управления 491
3. Нечеткую дизъюнкцию (фази-объединение) двух
лингвистических термов А и В, заданных функци-
ями принадлежности (х) и (х) (рис. 4.69) в
виде нечеткого терма С, функция принадлежности
которого определяется выражением:
(4.147)
Заметим, что понятие нечетких операций может
быть распространено и на случай нескольких исходных
лингвистических термов.
12.2.3. Правило нечетких выводов
Главной операцией нечеткой логики является про-
цедура нечеткого вывода с помощью которой из нечетких
условий получают приближенное решение. Эта процедура
основана на операции импликации, используемой в четкой
логике (табл. 4.1) и образующей сложное высказывание
из двух высказываний посредством логической связки,
соответствующей союзу «ЕСЛИ ..., ТО ...». Из таблицы
истинности вытекает, что Л В = A vB. Учтя, что А = 1 - А,
получим: А В = (1 - A)v В.
Полученные выражения можно применить и для
нечетких множеств, но при этом они должны быть запи-
саны в виде функции принадлежности:
492 Специальные системы управления
Из выражения (4.146) следует, что операция дизъ-
юнкции соответствует правилу максимизации и, следова-
тельно, имеем:
= max {[1 - (х)] (4.148)
Из таблицы истинности 4.1 также вытекает, что
если посылка А и сама импликация А-+ В истинны, то
и вывод В истинен. Эта логическая связь выражается с
помощью правила замены, позволяющего перейти от ис-
тинной посылки А и истинного высказывания: «ЕСЛИ...,
ТО...» к истинному значению вывода В. При этом А рас-
сматривается как малая посылка, а высказывание Л —* В
{«ЕСЛИА, ТО В») как большая.
Таким образом, логическая функция, описываю-
щая правило замены, может быть представлена в виде:
В= Ал(А^ В) = Ал(Ау В).
(4.149)
Заметим, что функция истинности выражения
(4.149) совпадает с четкой логической конъюнкцией: А кВ
(табл. 4.1).
Пример 4.19
Пусть имеем следующие высказывания:
А: (х > 4) и В: (х > 2),
где х - целые, положительные нечетные числа.
Найти значения х, при котором вывод В исти-
нен.
Решение
Объединим приведенные выражения их истинной
импликацией:
«ЕСЛИ х>4, ТО х>2».
Используя выражение (4.149), можно убедиться в
том, что для х = 1 и х = 3 истинность вывода В: (х > 2) равна
нулю (то есть В ложно, так как ложно А), а для х 5 - еди-
нице (то есть В истинно, так как А и А —* В - истинны).
Таким образом, правило замены (4.149) устанавливает ис-
12. Нечеткие систем ь i у прав л е н и я 493
тинность вывода В лишь в случае истинности посылки А и
импликации (Л —> В). Поэтому, умозаключение, получен-
ное с помощью правила (4.149) является более осторожным,
чем простая импликация А —* В . В этом можно убедиться,
сравнивая функции истинности импликации (А —> В) и
конъюнкции (А л В) и учтя, что функции истинности ко-
нъюнкции и правила замены совпадают.
* * *
Изложенное выше позволяет сформулировать сле-
дующее правило четкого логического вывода: функция ис-
тинности вывода В равна максимальному значению функ-
ции истинности конъюнкции посылки А и импликации
(А—> В). Тогда, учтя, что операция конъюнкции соответст-
вует правилу минимизации, можем записать:
(4.150)
Распространение алгоритма логического четкого
вывода (4.150), полученного для высказывания А —► В, на
нечеткие множества сталкивается с определенными труд-
ностями. Сложность формализации словесного правила
«ЕСЛИ ..., ТО ...» применительно к нечетким множествам
заключается в том, что множества А и В, фигурирующие
в импликации, определены для большинства случаев на
разных базисных множествах. Например, в задачах уп-
равления подмножество больших значений управляемой
величины А может принадлежать базисному множеству Y
всех значений этой величины, а подмножество малых зна-
чений управляющего воздействия В - базисному множеству
Uвсех значений этих воздействий (рис. 4.70).
Рис. 4.70
494 Специальные системы управления___________________
Четкое множество «ЕСЛИ..., ТО ...» образуется из
упорядоченных числовых пар или кортежей (у, w), которые
относятся к новому базисному множеству, называемому
декартовым произведением Р множеств А и В: Р = Ах В .
Это множество может быть использовано для описания
взаимосвязи между множествами^ и В, элементы которого
принадлежат разным базисным множествам. Эти взаимосвя-
зи описывают с помощью так называемого отношения, кото-
рое представляет собой множество R , являющееся подмно-
жествомР (1? С Р) и образующееся по определенному прави-
лу Rw из элементов А и В . Поясним сказанное на примере.
Пример 4.20
Пусть заданны два четких множества:
А = {jw2}={10’ 2°}’
(4.151)
В = {w15 и2, }= {10, 20, 30},
для которых в качестве правила служит четкое
предписание:
Требуется найти такое четкое отношение между
множествами А и В.
Решение
Воспользовавшись (4.151), составим новое множе-
ство Р:
Р = А х В =
— (.У1 ’ ^2 )’ (.У1 ’ W3 )’ (.У 2 ’ ^1 0^2 ’ ^2 )’ (j^2 ’ "з
= {(10;10),(10;20),(10;30),(20;10),(20;20),(20;30)}.
В общем виде декартово произведение Р двух четких
множеств А и В можно записать так:
Р=АхВ=
%у,и)\у€;А,и^В
Отношение R , удовлетворяющее неравенству
(4.152) будет выглядеть следующим образом:
R = {(10; 10), (20; 10), (20;20)}_
12J-le4eTKHecHCTeMbi управления
495
Полученное отношение можно представить в виде
таблицы с соответствующими функциями принадлежности
jaR равными 0 или 1 (табл. 4.2).
Таблица 4.2
у 10 20 30
10 1 0 0
20 1 1 1
В общем случае четкое отношение R между четкими
множествами А и В может быть записано так:
R = «)] е А,и е Б},
flR (у, и) — V?0j “ функция принадлежности пар
(у; Р = Ах В к подмножеству R, образованному по
определенному правилу Ryu . В нашем случае R = {у > и} •
* * *
Между четкими множествами могут быть не
только четкие, но и нечеткие отношения. Например,
нечеткое отношение (множество) пар реальных чисел
(у и), которые приблизительно равны между собой, можно
представить с помощью следующей непрерывной функции
принадлежности:
I
Эта функция может быть записана в виде:
=1, V(y-u)=0;
V(y-u)«l;
V(y-w)»l.
В данном случае правило Ryu имеет смысл «при-
близительно равны».
496 Специальные системы управления
Нечеткие отношения могут существовать и
между нечеткими множествами, Например, между мно-
жествами:
иВ = 4w,jMe(w)] u&J
нечеткое отношение (новое множество) имеет вид:
R = {[(У,«), PR(y,м)](у,w)GP},
(4.153)
где/и R\y\u ) - функция принадлежности, характеризующая
одновременную принадлежность обоих элементов у, и,
образующих пары (у; и), к множеству R
Функцию принадлежности, входящую в выраже-
ние (4.153), можно определить по формуле аналогичной
ази-пересечению (4.146), т. е. с помощью процедуры ми-
нимизации.
/гЛ(у,м) = тш
(4.154)
Выражение (4.154), называемое оператором Мам-
дани является самой распространенной процедурой для
определения функции принадлежности juR(y,u),
Заметим, что существует несколько десятков пра-
вил, преследующих ту же цель, что и оператор Мамдани.
Например, кроме оператора (4.154) находит также приме-
нение оператор Заде:
Дя(у,«) = max{min[^(y),/zB(y)],[l -д/у)]}.
Наиболее наглядно правило замены выражается
с помощью оператора фази-импликации, предложенного
Геделем.
|у/в(г/), V fiА (у)> цв (и).
(4.155)
Пример 4.21
Пусть функции принадлежности управляемой
величины Yи управляющего воздействия Uимеют
12. Нечеткие системы управления 497
вид, представленный на рис. 4.71. Необходимо най-
ти функцию принадлежности характе-
ризующую взаимосвязь между переменными у и и.
Решение
Составим декартово произведение Р = Y х U , вос-
пользовавшись данными, приведенными на рис, 4,69,
U М1) (л щ ) U «1)
р= U «2)U м2)(т3«2)-
М3 ) (у2 «3 ) (Уз U3 J
Цл(у)
1,0
0,5
У*=Уз
НлОО А
1,0 -
0,5
к, и2
Рис. 4.71
w, и
Применив оператор Мамдани (4.154) к каждой
паре (у. и) множества Р, можно найти числовые значения
liK(y, и). При этом необходимо учесть, что для конкретного
значения управляемой величины у = у*, оператор (4.154)
ограничивает цв(и) сверху на уровне цЛ{ у*). Например,
пусть у* =у3. Тогда дД у*) = 0,5 (рис. 4.69) и, следовательно,
величина цв(ц) будет ограничена сверху величиной 0,5, что
соответствует правилу замены Гв = А л (Л -» В)1, то есть
истинность вывода В не может превышать истинности по-
17 Теория автоматического управления
498 Специальные системы управления
сылки А. В соответствие с изложенным искомая функция
принадлежности будет:
//д(у* и)= 0.25; 0.5; 0.5 .
В общем случае:
0.25 0.25 0.25
/'/У «) =
0.75
0.5
1.0
0.5
0.5
0.5
(4.156)
Если воспользоваться
правилом Геделя (4.143),
рункция принадлежности примет вид:
VR(y, и)
0.25
1.0
0.5
0.25
1.0
0.5
0.25
1.0
1.0
(4.157)
Сравнение матриц (4.156) и (4.157) показывает,
что в последнем случае размытость ситуации несколько
уменьшается.
* * *
Обобщая результаты, полученные в рассмотренном
примере, можно записать общий алгоритм определения
функции принадлежности управляющего воздействия
р,в (w), аналогичный правилу замены (4.150) и справедли-
вый для любого^:
Дв(«) = max {min[/</y),/<B(y,i/)] },
(4.158)
В частном случае при у = у* алгоритм (4.158) упро-
щается и принимает вид аналогичный (4.154):
Цв*(и) ~ 1^к(У*уи) = min
(4.159)
На рис. 4.72 проиллюстрировано определение
функции принадлежности правила: «ЕСЛИ ..., ТО...», с
помощью метода максимина, согласно которому функция
принадлежности вывода В ограничивается сверху функ-
цией принадлежности посылки А при у = у*. Заметим, что
определение функций принадлежности /7fl. (и) для заданного
_________________________12. Нечеткие системы управления 499
значенияу = у* называется процедурой фазификации. Здесь
от четкого значения у*, воспользовавшись функцией прина-
длежности у)переходим к нечеткой зависимости рА( у*)
и далее к нечеткому множеству U с функцией принадлеж-
ности рв*(и)* Функция дает возможность найти тем
или иным способом конкретное значение управляющего
воздействия w* = и, т. е. перейти от нечеткого множества U
к четкому значению w*. Эта процедура называется дефази-
фикацией и может быть выполнена, например, по методу
центра тяжести по формуле:
(4.160)
Рис. 4.72
Процедура определения функции принадлежности
нечеткого правила: «ЕСЛИ..., ТО...», например, по формуле
(4.159), и объединение нескольких таких правил, связан-
ных союзом «ИЛИ» называется инференц-процедурой и
осуществляется согласно фази-объединению (4.147) путем
максимизации функций принадлежности объединяемых
правил. Тогда результирующая функция принадлежности
примет вид:
(4.161)
= max|min^ (у*),Цв. (w)|,
где j = \,п, п- количество объединяемых правил «ЕСЛИ
ТО..»;
17*
500 Специальные системы управления
P'Aj ( >>*)- значение функции принадлежности посылки А
j-ого правила при у-у*\
[Ав (и)- функция принадлежности вывода В j-ого правила;
(w) - функция принадлежности вывода В j-ого прави-
ла, ограниченная (усеченная) сверху на уровне ( у*).
Пример 4.22
Пусть множество В задано на базисном множес-
тве U лингвистическими переменными: отри-
цательное отклонение от нормы - О, норма - Н,
положительное отклонение от нормы - П, с со-
ответствующими функциями принадлежности:
^bSu^9 ^bSu^^b^u^9 заданными графически*^
(рис. 4.73, а).
а М о н п
и
6 FM О Н П
и
в М^д
u* v и
Рис. 4.73
> Заметим, что так как функции принадлежности обычно трактуются как вероятности при-
надлежности лингвистической переменной к тому или иному терму, то целесообразно,
чтобы эти функции для соседних термов удовлетворяли условию:/Л. + [Л =
12, Нечеткие системы управл е н и я
501
Требуется найти результирующую функцию при-
надлежности ЦЬр (и) следующего выражения:
«ЕСЛИ А* = {у1,Дл.(71)} И Вн = {и,цВн (м)}
ИЛИ £ = {у2,Дл. (у2)} И ВП= {и,цВп (и)}
ТО С = {и,ЕВр («)}»•
Решение
Применим инференц-процедуру, воспользовавшись
выражением (4.161), т. е. используя процедуру Максимина.
На рис. 4.73, а, б показаны процедуры минимизации двух
конъюнкций, ограниченных сверху. В результате получе-
ны две функции принадлежности fiA*hB (w) и (w).
Для получения результирующей функции принадлежнос-
ти /лВр (и) (рис. 4.71, в), эти функции соединяются союзом
«ИЛИ» с помощью процедуры максимизации. Конкретное
числовое значение w = w*, соответствующее результирую-
щей функции принадлежности, можно найти по формуле
(4.160).
Пример 4.23
Пусть на вход устройства управления поступает
сигнал рассогласования Л(7) - А( и какая-либо его
характеристика Д2 (скорость, ускорение и т. п.).
При этом Aj и Д2 (А ) С А) представлены функция-
ми принадлежности // Л(Д7 J, / » \/1, приведенными
на рис. 4.74,а, б. Здесь термы О, Н, П имеют то же
содержание, что и в предыдущем примере.
Алгоритм нечеткого управления представлен сле-
дующими четырьмя правилами:
1. ЕСЛИ А. = О И А, = П, ТО и = П;
2. ЕСЛИ А] = О И А2 = Н, ТО и = Н;
3. ЕСЛИ Aj = Н И А2 = П, ТО и = П;
4. ЕСЛИ А, = Н ИЛИ А, = Н, ТО и = Н.
Требуется найти результирующую функцию при-
надлежности /Л в (и).
502 Специальные системы управления
Рис. 4.74
Решение
Пусть измеренные значения A/Z) равны: А* = -0,7;
А* = -0,4. Так как функции принадлежности // (А) заданы,
« I
то можно найти их конкретные значения // (А*), т. е. про-
вести процедуру фазификации (рис. 4.74). Для проведения
инференц-процедуры посылки «ЕСЛИ ...» первых трех
правил, содержащих внутри союз «Л», определяются с
помощью процедуры нечеткой конъюнкции (4.146):
= т™{Л,(АГ).1и.„(А?)
= min {0.7, 0.4}= 0.4.
Аналогично
^(А*,Д*)= min{0.7, О.б}= 0.6;
12. Нечеткие системы управления
503
//^(А*,А*)= min{0.3, 0.4} =0.3.
Посылка последнего правила, содержащая союз
«ИЛИ» определяется с помощью процедуры нечеткой ди-
зъюнкции (4.147):
- max {//JA*), //Лн(А*)}
= max -[О.З, О.б}= 0.6.
Воспользовавшись правилом Мамдани (4.159):
Мм) = min {//л (у*), МВн(и)}
определим функции принадлежности, характеризующие
нечеткие импликации, определяемыечетырьмя правила-
ми приведенными выше. Здесь j = 1,4 - номер правила,
i = О, Н, П - лингвистическая переменная. В соответствие
со сказанным, имеем:
= min
= min {/z/Af ,А*),
= min {^ (Af ,А*), рВп(и)},
= min {^(Af,A*), цВн(и)}-
Функции принадлежности (и), характеризую-
щие нечеткие множества управляющих воздействий (и Е В)
приведены на рис. 4.75, а.
Так как функции принадлежности (А*,А*) заданы
конкретными числовыми значениями (0,4; 0,6; 0,3; 0,6),
которые меньше единицы, то операции минимизации соот-
ветствуют усеченные исходные функции принадлежности
//^(w) (рис. 4.73, а). Таким образом, процедура фазификации
сигналов А* = -0,7; и А* = -0,4 завершена. Следующим эта-
пом является инференц-процедура, объединяющая те или
иные функции //
в соответствии с выражением (4.161):
504 Специальные системы управления
Цвр (м) = max WB- (“)
F j L J
A
u*
Рис. 4.75
Например, посылки «ЕСЛИ...» правил 1 и 3 можно
объединить союзом «ИЛИ», так как выводы этих правил
аналогичны {и = П). При этом результирующая функция
принадлежности , найденная путем максимизации
функций [лв. ид., представлена на рис. 4.73,6. Резуль-
тирующее четкое значение управляющего воздействия
и = и* находится с помощью процедуры дефазификации,
например, в соответствии с выражением (4.160). Заметим,
что при объединении правил 2и4(дй> = и .) результиру-
ющее значение и* равно нулю. '
12. Нечеткие системы управления
505
12.3. Основные принципы построения
нечетких систем управления
Функциональная схема нечетких систем управления
(НСУ), реализующих концепцию Мамдани, представлена на
рис. 4.76. Согласно этой концепции нечеткое управляющее
устройство (УУ) вырабатывает четкое однозначное управ-
ляющее воздействие и*. Здесь вся исходная информация
о стратегии управления хранится в базе правил условного
логического вывода «ЕСЛИ ...,
ТО ...» и базах функций
принадлежности (ФП) сигнала ошибки //Л(Д*) и управля-
ющего воздействия рв(и\ которые формируются на основе
тщательного изучения объекта управления (ОУ) и целевой
функции (критерия управления) путем анкетного опроса
высококвалифицированных специалистов - экспертов.
В блоке нормирования фиксированные значения
составляющих векторного сигнала о
ибки А* -у* — у нор-
мируются умножением на соответствующий масштабный
коэффициент: А* = • А*. Блок фазификации выдает зна-
чения функции принадлежности посылок //^(А*), соответ-
свующих фиксированным значениям всех составляющих
векторного сигнала ошибки А*.
Основным блоком устройства управления являет-
ся блок инференц-процедуры, в котором вырабатываются
нечеткие логические выводы в соответствии с исходными
правилами, сформулированными экспертами с помощью
союзов «И», «ИЛИ», т. е. с помощью операций минимизации
и максимизации соответственно. При этом частные посылки
объединяются в общую посылку, затем для каждого правила
по алгоритму Мамдани определяется истинность заключе-
ния, которая не может быть больше результирующей истин-
ности общей посылки данного правила. В этом же блоке с
помощью операции максимизации производят объединение
частных выводов в общий вывод, которому соответствует
результирующая функция принадлежности рв (ин).
В блоке дефазификации по методу центра тяжести
вычисляется фиксированное значение нормированного уп-
равляющего воздействия w*, которое затем денормируется
путем умножения его на соответствующий масштабный
коэффициент.
506 Специальные системы управления
Рис. 4.76
12. Нечеткие системы управления
507
Помимо управляющего устройства, реализующего
концепцию Мамдани, используются УУ, реализующие кон-
цепцию Сугено. В этом случае конкретные значения управ-
ляющего воздействия Uj вычисляются как алгебраические
функции входных переменных: Д/5/ = 0,/и.
(4.162)
где Ct - постоянные коэффициенты, устанавливаемые экс-
пертами для вывода каждого j-го правила, сформулиро-
ванного не для лингвистических переменных {например О,
Н, П), а в виде полинома (4.162).
При этом исключается необходимость дефазифика-
ции по методу центра тяжести, а четкое значение результи-
рующего управляющего воздействия w*, соответствующее
фиксированным значениям Д*, вычисляется как средне-
взвешенная величина:
(4.163)
где рА* = //^(Д*) - значение функции принадлежности всей
посылки j-ого правила, соответствующее всем значениям
Д*
Объединение составных частей посылки, соеди-
ненных союзом «И», «ИЛИ» производится также, как и
в методе Мамдани с помощью процедур минимизации и
максимизации.
Формула (4.162) соответствует алгоритму Сугено
первого порядка. Часто применяют алгоритм Сугено ну-
левого порядка:
UJ = Соу
"I" Ci ' Ч" Сп * 4й •»« Ч" СГ
(4.164)
где Су - четкое значение управляющего воздействия, задан-
ного в виде синглтонов {с# 1} при формулировке исход-
ных логических правил.
508
Специальные системы управления
Пример 4.23
Пусть имеем пять лингвистических значений
переменной А (посылок А), заданных в форме фун-
кций принадлежности //ДА) и представленных
на рис. 4.77. Здесь ОБ, ОМ, Н, ПМ, ПБ - термы оз-
начающие «отрицательные большие (ОБ) и малые
(ОМ) отклонения»; «норма (Н)»; «положительные
малые (ПМ) и большие (ПБ) отклонения».
База правил сформулирована следующим образом:
1. ЕСЛИ А = ОБ, ТО щ = с01 = -5;
2. ЕСЛИ А = ОМ, ТО щ = сп? = -2.5;
3. ЕСЛИ А = Н, ТО щ = = 0;
4. ЕСЛИ А = ПМ ТО 2.5;
5. ЕСЛИ А = ПБ, ТО и< = с(К = 5 .
Здесь Cqj — постоянные величины, заданные экспертами.
Требуется определить результирующее управляю-
щее воздействие и*.
Рис. 4.77
Решение
Допустим, что фиксированное значение А = А* = 1,2,
тогда в результате процедуры фазификации находим значе-
ние функции принадлежности рА (А*) для всех пяти посылок
А. (рис. 4.77). В результате получим:
М1*’ - °"8: д*> - о-2-
12. Нечеткие системы управления
509
Общий вывод В, т. е. четкое значение управляющего
воздействия w*, определяется по формуле (4.63):
и
12.3.1. Передаточные характеристики
управляющего устройства
Из изложенных принципов построения и функ-
ционирования НСУ следует, что нечеткое управляющее
устройство ФР (фази-регулятор) представляет собой бе-
зынерционный нелинейный преобразователь с одним
или несколькими входными и выходными сигналами. На
структурных схемах его обычно обозначают прямоуголь-
ником с двойной рамкой, внутри которого символически
изображают функции принадлежности (рис. 4.78).
Для придания безынерционному фази-регулятору
необходимых динамических свойств, вытекающих из тре-
бований к НСУ, к нему часто присоединяют ПИД-регулятор
с тремя каналами: пропорциональным «П», интегрирую-
щим «И» и дифференцирующим «Д» (рис. 4.78). При этом
в базе правил ФР в качестве входных переменных помимо
сигнала ошибки А должны фигурировать интеграл Д2 и
производная А3 этого сигнала по времени.
Передаточные свойства фази-регулятора, без ди-
намических составляющих можно описывать с помощью
нелинейных статических характеристик. Например, пусть
линейный пропорциональный регулятор с коэффициентом
510 Специальные системы управления
передачи кх: и(/) = кх • Д(7) , можно приближенно заменить
в виде следующих пяти правил:
1. ЕСЛИ Д = ОБ, ТОи = ОБ;
2. ЕСЛИ Д = ОМ, ТОи = ОМ;
3. £СЛЯД=Н, ГОм = Н;
4. ЕСЛИ Д = ПМ, ТО и = ПМ;
5. ЕСЛИ Д = ПБ, ТОи = ПБ.
А
(4.165)
ОБ
Рис. 4.79
Если предположить, что входная переменная А
принимает только четкое значение (синглтоны), то базе
правил (4.165), связывающей и и А, будет соответствовать
нелинейная статическая характеристика и =/( Д) пятипози-
ционного реле (рис. 4.77, кривая 1). Если же правила (4.165)
реализуются в фазе-регуляторе с выполнением процедур
фазификации, то статическая характеристика и = /(Д)
принимает более плавный вид (рис. 4.77, кривая 2). Причем
форма характеристики зависит как от формы и взаимного
расположения функций принадлежности входной перемен-
ной Д, так и от конкретных методов инференц- процедуры
и дефазификации.
12. Нечеткие системы управления 511
12.3.2. Синтез нечетких систем управления
Прежде всего отметим, что в теории нечеткого
управления еще многое предстоит обосновать и система-
тизировать. Действительно, в сравнении с традиционной
теорией автоматического управления здесь отсутствуют
строгие математические методы синтеза, оценки качества,
устойчивости и др.) Пока для этих сложных нелинейных
систем единственным способом исследования является мо-
делирование. При этом качество и эффективность функци-
онирования НСУ в значительной мере зависят от квалифи-
кации экспертов. Тем не менее, несмотря на разнообразие
подходов к созданию нечетких систем и на преобладание
эвристических приемов формализации задач нечеткого
управления, можно выделить последовательность процедур
синтеза этих систем.
1. Предварительное изучение объекта управления, его
традиционной модели и опыта его эксплуатации.
2. Выбор наблюдаемых (измеряемых) выходных пере-
менных у. и управляющих воздействий zc, опреде-
ление пределов их изменения и выбор масштабных
нормировочных коэффициентов.
3. Определение лингвистических переменных у ими
их функций принадлежности, соответствующих от-
дельным термам. При этом необходимо учитывать,
что количество, форма и взаимное расположение
функций принадлежности оказывают весьма сущес-
твенное влияние на качество управления.
4. Формулирование на основе интервьюирования
и анкетирования экспертов логических правил
(«ЕСЛИ»), определяющих алгоритмы управ-
ления. При этом полезна совместная работа экспер-
тов по объекту управления и по фази-управлению.
В случае необходимости корректируют функции
принадлежности, принятые на предыдущем этапе.
Правила с одинаковым выводом объединяют с по-
мощью союза «ИЛИ» в одно правило.
5. Проверка сформулированных выше правил на пол-
ноту, непротиворечивость и избыточность. В слу-
чае двух входных переменных у и у составляется
1
512
Специальные системы управления
таблица правил, устанавливающих соответствие
между лингвистическими значениями входных и
выходных переменных.
6. Выбор операторов импликации и инференц-проце-
дуры, а также метода дефазификации.
7. Программирование всех функций принадлежнос-
ти, правил и процедур объединения посылок как
для отдельных правил «ЕСЛИ..., ТО...», так и всех
правил между собой.
8. Проведение исследования функционирования нечет-
кой системы управления путем вычислительного эк-
сперимента с использованием четкой или нечеткой
модели объекта управления и оценка устойчивости
и качества функционирования нечеткой системы
управления. Для технической реализации модели
нечеткого управляющего устройства используют
программные языки высокого уровня, а также раз-
личные стандартные функциональные блоки.
Пример 4.24
Пусть объектом управления является смеситель-
водонагреватель (рис. 4.80).
Подогрев воды производится водонагревателем
ВН, снабженным источником тепла Н (нагрева-
12. Нечеткиесистемыуправления 513
тель). В смеситель С поступает горячая и холод-
ная вода, температура смеси которой в должна
поддерживаться на заданном уровне 0* с помощью
регулирующего органа 3 {заслонки), перемещаемого
исполнительным механизмом ИМ. Требуется опре-
делить базу правил нечеткой системы управления
температурой воды, на выходе смесителя.
Решение
Примем в качестве входной величины фази-регу-
лятора ФР сигнал рассогласования Д = 0* - 0, а в качестве
управляющего воздействия и - скорость перемещения за-
dL
слонки — . Входную А и выходную и величины будем ха-
dt
рактеризовать функциями принадлежности //£(Д)
графики которых показаны на рис. 4.81, а, б. Обозначения
термов на этом рисунке такое же, как и на рис. 4.77 (термы
«ОС» и «ПС» означают среднее отрицательное и положи-
тельное отклонения соответственно). Количество термов,
форма и взаимное расположение функций принадлежности
определяется экспертами. В данном случае для улучшения
точности и динамических показателей системы плотность
расположения функций принадлежности в середине диа-
пазона изменений А выбрана большей, чем по краям.
Стратегию управления объектом можно сформули-
ровать в виде следующей базы правил.
ЕСЛИ А = ПБ,
ЕСЛИ А = ПС,
ЕСЛИ L = ПМ,
ЕСЛИ А = Н,
ЕСЛИ А = ОМ,
ЕСЛИ А = ОС,
ЕСЛИ А = ОБ,
ТО и — ПБ
ТО и = ПС
ТО и = ПМ
ТО и = ОМ
ТО и = ОС
ТО и = ОБ
(4.166)
Из-за наличия инерционности объекта в системе
управления могут возникать нежелательные колебания,
которые особенно существенны при малых расходах воды q.
С целью демпфирования колебаний можно использовать
514 Специальные системы управления
дополнительный входной сигнал пропорциональный q,
подав его на вход фази-регулятора. При этом расширенную
базу правил можно представить в виде таблицы 4.3, где
расход q описывается четырьмя термами (термы ОМ, ОС,
ОБ отсутствуют, так как направление потока воды не ме-
няет свой знак), функции принадлежности которых
представлены на рис. 4.81,а (пунктиром).
-15 -8-3038 16 Д/С
о 0,05 0,1 м3/с
б ^ВА
ОБ ОС ОМ ПМ ПС ПБ
Рис. 4.81
В эту таблицу сведены 28 правил вида:
«ЕСЛИД = а: И q = b., ТО и = с..»,
где ai и by - лингвистические значения входных переменных
объекта А и q;
су ~ лингвистическое значение управляющего воздействия
и, соответствующие i-му столбцу и j-ой строке табли-
цы 4.3.
IZHeqeiKMe системы управления 515
Таблица 4.3
q . Д. ОБ ОС ОМ н ПМ ПС ПБ
ПБ ОБ ОБ ОС н ПС ПБ ПБ
ПС ОБ ОС ОМ ПМ ПС ПБ
ПМ ОС ОМ ом н ПМ ПМ ПС
Н ОМ Н н J-J Н ПМ
База правил (4.166), составленная без учета исполь-
зования сигнала пропорционального расходу q соответству-
ет среднему значению расхода q = ПС. Большему значению
q = ПБ соответствуют большие управляющие воздействия w,
а меньшему - q = ПМ - меньшие значения и. База правил,
представленная таблицей 4.3, дает возможность, используя
ту или иную концепцию, синтезировать нечеткую систему
управления.
Пример 4.25
С помощью нечеткой логики синтезировать систе-
му оптимизации газового режима горизонтального
конвертера (рис. 4.82).
Рис. 4.82
Решение
Как известно, при продувке сульфидных распла-
вов в горизонтальных конвертерах 1 образуется значи-
тельное количество газов, содержащих диоксид серы
(SO2). Образующиеся конвертерные газы удаляются через
напыльник 2, очищаются от пыли в пылевой камере 3 и
подаются на производство серной кислоты. Разрежение в
напыльнике, необходимое для улавливания газов, созда-
ется дымососом 6 с электроприводом 7. В силу конструк-
тивных особенностей газового тракта, между горловиной
конвертера и напыльником имеется зазор, через который
516 Специальные системы управления
в зависимости от разрежения, создаваемого дымососом
происходит либо подсос воздуха, который разбавляет газы
в газоходе 5, что нежелательно с точки зрения производс-
тва серной кислоты, либо выбросы газов в атмосферу цеха,
что недопустимо с точки зрения экологии и охраны труда.
Избыток газа сбрасывается через газоход 4 в атмосферу.
Таким образом, имеется следующая задача управления:
поддерживать разрежение в газовом тракте конвертера на
уровне, исключающем как чрезмерное разбавление газов
подсасываемым воздухом, так и выбивание газов из-под
напыльника в помещение цеха.
Количество газов, образующихся в ванне конверте-
ра, определяется расходом воздуха, подаваемого в конвер-
тер. Расход дутья Vнепрерывно измеряется, так же, как и
разрежение в газовом тракте конвертера Р.
Сложность управления газовым режимом конвер-
тера заключается в том, что не существует технических
средств, позволяющих зафиксировать и количественно
оценить факт выброса газов в атмосферу или подсоса воз-
духа под напыльник. Данные явления могут быть зафикси-
рованы лишь визуально
оценками типа «сильно»,
и описаны лингвистическими
«слабо» и т.п.
Рис. 4.83
12. Нечеткиесистемыуправления
517
Указанная проблема может быть решена примене-
нием системы нечеткого управления, позволяющей опери-
ровать экспертными оценками. Характер газоудаления Y
можно описать пятью термами: конвертер сильно выбрасы-
вает газы СГ; конвертер выбрасывает газы Г; нормальное
газоудаление Н; подсос воздуха П; сильный подсос воздуха
СП, - ставя им в соответствие конкретные количественные
оценки измеряемых параметров: расхода дутья V и раз-
режения в газовом тракте Р. Будем считать, что режиму
нормального газоудаления соответствуют некоторые опти-
мальные значения (V иР ). Разбив интервал возможного
v опт опт7
изменения параметров на пять термов, получим функции
принадлежности, представленные на рис. 4.83.
Учитывая, что выбивание газов из-под напыльника
происходит при большом количестве газов и при недоста-
точном разрежении, а подсос воздуха - при малом количес-
тве газов и при большом разрежении, запишем следующие
правила оценки характера газоудаления, соединяемые
союзом ИЛИ:
«ЕСЛИ V = ПБ
«ЕСЛИ V = ПМ
«ЕСЛИ V = Н
«ЕСЛИ V = ПБ
«ЕСЛИ V = ПМ
«ЕСЛИ V= Н
«ЕСЛИ V = ОМ
«ЕСЛИ V = Н
«ЕСЛИ V = ОБ
«ЕСЛИ V = ПБ
«ЕСЛИ V = ОМ
«ЕСЛИ V = ПМ
«ЕСЛИ V = ПМ
«ЕСЛИ V = Н
«ЕСЛИ V = ОМ
«ЕСЛИ V = ОБ
«ЕСЛИ V = Н
«ЕСЛИ V = ОМ
«ЕСЛИ V = ОБ
ЯР = Н
ЯР = ОМ
ЯР = ОБ
ЯР = ПМ
ЯР = Н
ЯР = ОМ
ЯР = ОБ
Г ТО У=Г»;
ЯР = Н
ЯР = ОБ
ЯР = ПБ
ЯР = ОМ
ЯР — ПМ
н ТОУ=Н»;
ЯР = ПБ
ЯР = ПМ
ЯР = Н
ЯР = ОМ
ЯР = ПБ
ЯР = ПМ
ЯР-Н
Ь ТО Y= П»;
518 Специальные системы управления
«ЕСЛИ У=ПБ ЯР = ОБ
«ЕСЛИ ПБ ИР - ОМ
«ЕСЛИ И-ПМ ИР = ОБ
«ЕСЛИ V = ОБ ИР = ПБ
«ЕСЛИ V = ОМ ИР = ПБ
«ЕСЛИ V= ОБ ИР = ПМ
ь ТО У=СГ»;
ТО Y = СП»,
Приведенные правила логического вывода можно
представить в виде таблицы базы правил (табл. 4.4).
Таблица 4.4
Оценка расхода дутья V Оценка разрежения Р
ПБ ПМ н ом ОБ
ПБ Н г сг СГ
ПМ п г СГ
Н п п н г г
ОМ СП п п н г
ОБ СП СП п п н
Дальнейший синтез системы производим в сле-
дующей последовательности. Запишем аналитические
выражения для функций принадлежности расхода дутья
и разрежения. Например, при треугольном виде функций
принадлежности fl (и) (рис. 4.83) выражения для них при
V_ j И* £ И пт будут иметь вид
(4.167)
где V* - измеренное значение параметра.
Выражения, подобные (4.167), записываются для
всего диапазона изменения расхода дутья и разрежения в
газовом тракте конвертера.
12. Нечеткие системы управления 519
Фазификацию произведем по методологии, изло-
женной выше. Используя выражение:
н.(Г*; Р*) = min {д.(К*); д.(Р*)},
I С- I
получим пять функции принадлежности для различных
оценок характера газоудаления. Истинной оценкой счи-
таем ту, которой соответствует максимальная функция
принадлежности
//*(У) = шах {//(И*; Р*)}.
Значение управляющего воздействия определим
воспользовавшись алгоритмом Сугено нулевого порядка
(4Л64). Предусмотрим пять фиксированных вариантов
управления АР.:
• при сильном подсосе - уменьшить разрежение на
при подсосе - уменьшить разрежение
= Лот - °Ричем < Д^-г;
на
при нормальном газоудалении - разрежение не ме-
при выбросе газов - увеличить разрежение на
при сильном выбросе газов - увеличить разрежение
на ДР2 (м* = Ропт + ДР2), причем АР, < АР,.
Конкретное значение управляющего воздействия
определяется как средневзвешенная величина:
Р*)
Управляющий сигнал и* реализуется изменением
производительности дымососа, меняющего тем самым
разрежение в газовом тракте.
Описанный алгоритм можно осуществить програм-
мно на управляющей машине либо микроконтроллере.
Для настройки алгоритма на реальный объект требуется
промышленный эксперимент с привлечением в качестве
520 Специальные системы управления
экспертов обслуживающего персонала конвертера для
увязки правил логического вывода с измеренными на
объекте данными. После настройки модели и проверки ее
адекватности подобная система может работать без участия
человека либо во взаимодействии с ним как взаимообуча-
ющаяся человеко-машинная система.
12.3.3. Нечеткие нейронные сети в системах управления
Основным достоинством систем с нечеткой логикой
является способность решения задач, описанных на язы-
ке близком к языку, используемому при общении между
людьми. Однако при построении обычных нечетких систем,
рассмотренных выше, в качестве исходной информации
используются данные, которые определяются специа-
листами-экспертами. В частности, перечень термов для
входных и выходных переменных, набор нечетких правил
«ЕСЛИ....ТО...», форма и параметры функции принадлеж-
ности каждого терма, алгоритм нечеткого вывода и др.)
задаются экспертами. Следовательно, исходные данные в
значительной мере являются субъективными и не всегда
адекватно отражают поведение реальной системы. Для
устранения этого недостатка, эффективно использование
нечетких многослойных нейронных сетей, в которых слои
выполняют функции элементов системы нечеткого вывода.
Нейроны нечеткой сети характеризуются набором парамет-
ров, настройка которых производится в процессе обучения,
как в обычных обучающихся системах, рассмотренных в
предыдущей главе.
В качестве примера рассмотрим нечеткую нейрон-
ную сеть (рис. 4.84), построенную на базе концепции Сугено
и использующую алгоритм нулевого порядка (4.164). Эта
сеть состоит из четырех слоев, каждый из которых выпол-
няет определенные функции.
Слой 1 осуществляет процедуру фазификации. Функ-
ции принадлежности Д/у(х ) (z == 1, т; j = 1,и) соответствуют
посылкам z-ых нечетких правил для j-го входного воздейст-
вия, а настраиваемыми параметрами этого слоя являются
параметры упомянутых функций принадлежности.
12. Нечеткие системы управления 521
Слой 2 производит вычисление функции прина-
длежности для всех посылок нечетких правил. Этот слой
не имеет настраиваемых параметров.
Слой 3, состоящий из нейронов, осуществляет
взвешенное суммирование S и суммирование S2 выходных
сигналов^ слоя 2. Настраиваемыми параметрами этого слоя
являются весовые коэффициенты С..
Слой 4 реализует процедуру дефазификации, вы-
числяя выходную величину сети у = /52, которая, в ча-
стности, может представлять собой управляющее воздей-
ствие, подаваемое на вход объекта управления.
Рис. 4.84
В процессе обучения нечеткой нейронной сети
определяются оптимальные значения изменяемых (на-
страиваемых) параметров. При этом в качестве критерия
522
Специальные системы управления
оптимальности чаще всего используется средняя квадра-
тическая ошибка, минимальное значение которой можно
найти воспользовавшись одним из методов поиска экстре-
мума многих переменных, например, методом градиента.
Следует отметить, что в том случае, если выбор
исходных правил функционирования нечеткой нейронной
сети неадекватно описывает поведение исследуемой систе-
мы, процесс обучения не приведет к желаемому результату.
В этом случае применяются адаптивные нечеткие систе-
мы, корректирующие исходный набор правил в процессе
работы системы, т. е. реализующих режим самообучения
нечетких нейронных систем.
Подчеркнем, что нечеткие системы, вообще, и не-
четкие нейронные сети, в частности, целесообразно приме-
нять для управления сложными и большими объектами,
полную информацию о состоянии которых по тем или иным
причинам получить не удается. Если это не так, то более
предпочтительным оказывается реализация традиционных
систем управления.
523
Рекомендательный библиографический список
Основной
1. Бесекерский В.А. Теория систем автоматического управле-
ния / В.А. Бесекерский, Е.П. Попов. М.: “Профессия”, 2004.
747с.
2. Воронов А.А. Основы теории автоматического управления.
М. - Л.: Энергия, 1965, 4.1, 423с. 1966, 4.2, 372с. 1970, Ч.З,
328с.
3. Иващенко Н.Н. Автоматическое регулирование. Теория и
элементы систем. М.: Машиностроение, 1973. 606с.
Дополнительный
1. Александров А.Г. Оптимальные и адаптивные системы. М.:
Высшая школа, 1989. 262с.
2. Власов К.П. Специальный курс по теории автоматического
управления. X.: Харьковский политехнический институт,
1974. 198с.
3. Власов К.П. Теория автоматического управления / К.П. Власов,
А.С. Анашкин. СПб.: Санкт-Петербургский горный институт,
2003. 103с.
4. Власов К.П. Теория автоматического управления (особые, дис-
кретные и нелинейные системы) / К.П. Власов, М.К. Аникин.
СПб.: Санкт- Петербургский горный институт, 2006. 99с.
5. Галушкин А.И. Теория нейронных сетей. Кн.1. М.: ИРПЖР,
2000. 415с.
6. Голубь А.П. Системы управления электроприводами / А.П.
Голубь, Б.Н. Кузнецов, И.А. Опрышко, В.П. Соляник. К.:
УМК ВО, 1992. 376с.
7. Заде Л. Понятие лингвистической переменной и его приме-
нение к принятию приближенных решений. М.: Мир, 1976.
368с.
8. Интеллектуальные системы автоматического управления /
под ред. И.М. Макарова, В.М. Лохчена. М.: Физматлит, 2001.
576с.
9. Круглов В.В. Нечеткая логика и искусственные нейронные
сети/В.В. Круглов, М.И. Дли, Р.Ю. Годунов. М.: Физматлит,
2001. 224с.
10. Лукас В.А. Основы фази-управления. Екатеринбург: Ураль-
ская горно-геологическая академия, 2000. 76с.
11. Лукас В.А. Теория автоматического управления. М.: Недра,
1990. 416с.
524
12. Методы исследований и организация экспериментов / под ред.
К.П. Власова. X.: Гуманитарный центр, 2002. 256с.
13. Мирошник И.В. Теория автоматического управления. Ли-
нейные системы. СПб: Питер, 2005. 333с.
14. Олейников В.А. Основы оптимального и экстремального
управления / В.А. Олейников, Н.С. Зотов, А.М. Пришвин.
М.: Высшая школа, 1969. 331с.
15. Первозванский А.А. Курс теории автоматического управле-
ния. М.: Наука, 1986. 615с.
16. Попов Е.П. Теория линейных систем автоматического регу-
лирования и управления. М.: Наука, 1989. 496с.
17. Попов Е.П. Теория нелинейных систем автоматического ре-
гулирования и управления. М.: Наука, 1988. 255с.
18. Ройтенберг Я.Н. Автоматическое управление. Учебное посо-
бие. 3-е изд. перераб. и доп. М.: Наука, 1992. 576с.
19. Солодовников В.В. Основы теории и элементы систем автома-
тического регулирования / В.В. Солодовников, В.Н. Плотни-
ков, А.В. Яковлев. М.: Машиностроение, 1985. 536с.
20. Справочник по теории автоматического управления / под ред.
А.А. Красовского М.: Наука, 1987. 711с.
21. Теория автоматического регулирования. Учебное пособие для
вузов / под ред. Ю.М. Соломенцева. М.: Машиностроение,
1992. 286с.
22. Теория автоматического управления / под ред. А.В. Нетуши-
ла. М.: Высшая школа, 1972. 432с.
23. Тэрано Т. Прикладные нечеткие системы / Т. Тэрано, К. Асаи,
М. Сучено. М.: Мир, 1993. 368с.
24. Усков А. А. Интеллектуальные системы управления на основе
методов нечеткой логики / А.А. Усков, В.В. Круглов. Смо-
ленск: Смоленская городская типография, 2003. 177с.
25. Фельдбаум А. А. Основы теории оптимальных автоматических
систем. М.: Наука, 1966. 539с.
26. Филипс Ч. Системы управления с обратной связью / Ч. Фи-
липс, Р. Харбор. М.: Лаборатория базовых знаний, 2001.
616с.
27. Фрадков А.Л. Адаптивное управление в сложных сис-
темах. М.: Наука, 1990. 292с.
28. Цыпкин Я.З. Теория линейных импульсных систем. М.:
Физматгиз, 1963. 311с.
Учебное пособие
Власов Константин Петрович
Теория автоматического управления
Theory of automatic control
Ответственный
редактор:
Выпускающий
редактор:
Дизайн и
компьтерная верстка:
Абраменко
Иван Григорьевич
Шипилова
Ольга Алексеевна
Гончарова
Елена Владимировна
Свидетельство ДК №2009 от 10.11.2004
Подписано в печать 24.01.2007.
Формат 60x90,1/16. Печать офсетная.
Усл. печ.л. 32,9. Тираж 1500 экз. Заказ № 7-114.
Издательство
Институт прикладной психологии
«Гуманитарный Центр»
61166, Украина, Харьков,
отдел продаж (057) 719-52-40,
e-mail: huce@kharkov.ua
Изготовление фотоформ и печать
ОАО «Харьковская книжная фабрика «Глобус»,
61012, г. Харьков, ул. Энгельса, 11
Для заметок:
Для заметок:
Для заметок